/



































































































































Author: Беклемишев Д.В.
Tags: геометрия топология математика линейная алгебра аналитическая геометрия алгебра точные науки
ISBN: 5-9221-0691-0
Year: 2006




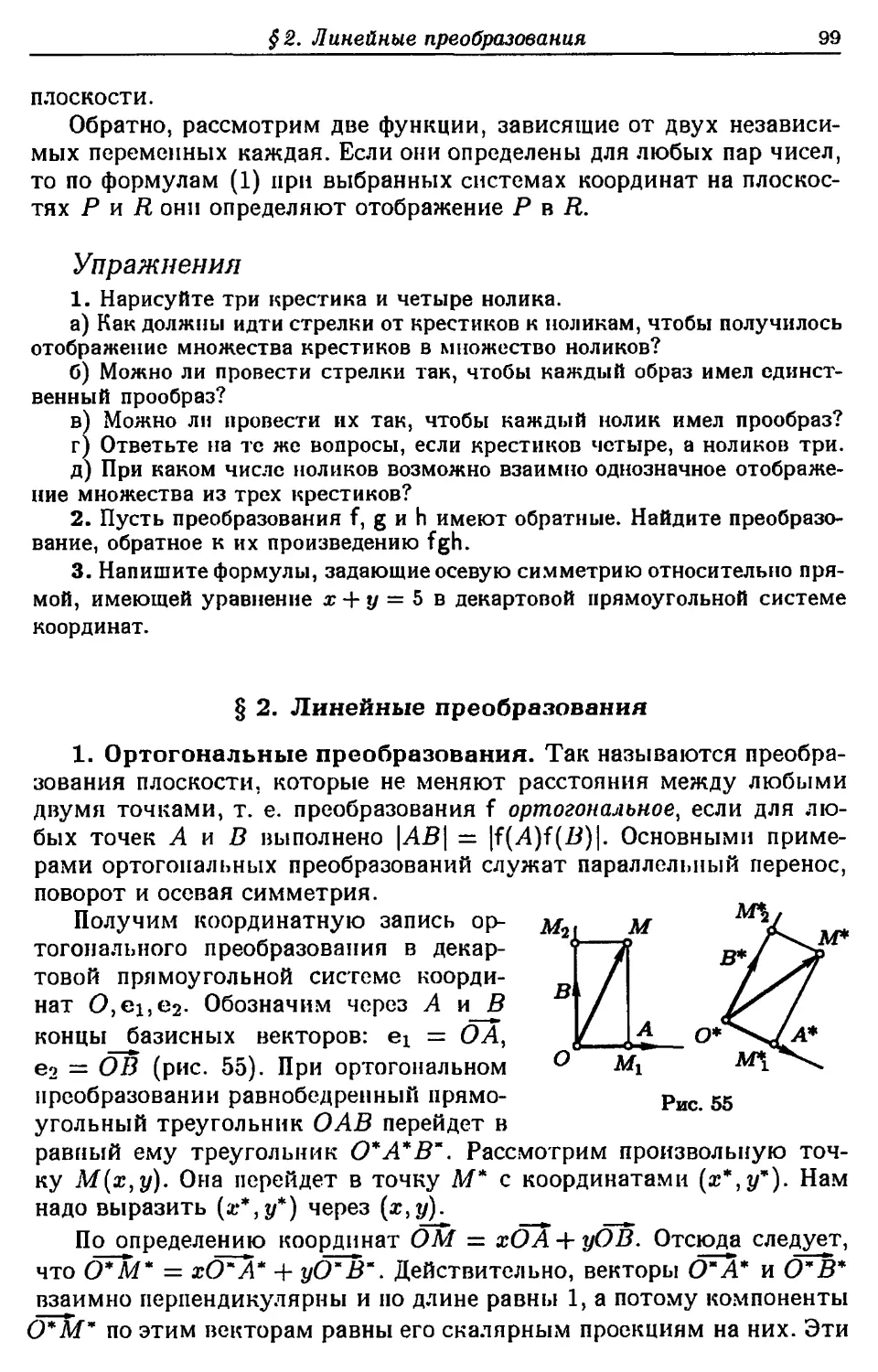
Text
Д.В. БЕКЛЕМИШЕВ
КУРС АНАЛИТИЧЕСКОЙ
ГЕОМЕТРИИ
И ЛИНЕЙНОЙ АЛГЕБРЫ
ИЗДАНИЕ ОДИННАДЦАТОЕ, ИСПРАВЛЕННОЕ
Рекомендовано Министерством образования
Российской Федерации в качестве учебника
для студентов высших учебных заведений
МОСКВА (
ФИЗМАТЛИТ
2006
УДК 514
ББК 22.151
Б 42
Беклемишев Д. В. Курс аналитической геометрии и линейной
алгебры: Учеб. для вузов. — 11-е изд., испр. — М.: ФИЗМАТЛИТ, 2006. —
312 с. - ISBN 5-9221-0691-0.
В учебнике излагается основной материал, входящий в объединенный курс
аналитической геометрии и линейной алгебры: векторная алгебра, прямые и
плоскости, линии и поверхности второго порядка, аффинные преобразования,
системы линейных уравнений, линейные пространства, евклидовы и унитарные
пространства, аффинные пространства, тензорная алгебра.
Настоящее издание существенно переработано. Изменения в основном
направлены на улучшение изложения, но сделано много добавлений.
Рекомендовано Министерством образования Российской Федерации в
качестве учебника для студентов высших учебних заведений.
Табл. 2. Ил. 55. Библиогр. 23 назв.
ISBN 5-9221-0691-0
© ФИЗМАТЛИТ, 2006
© Д. В. Беклемишев. 2006
ОГЛАВЛЕНИЕ
Предисловие 8
ГЛАВА I. ВЕКТОРНАЯ АЛГЕБРА
§ 1. Векторы 9
^Предварительные замечания (9). 2.Определение вектора (9). 3.0
другом определении вектора (10). 4. Линейные операции (11). 5.
Линейная зависимость векторов (13). 6. Базис (16).
§ 2. Системы координат 17
1. Декартова система координат (17). 2. Деление отрезка в заданном
отношении (18). 3. Декартова прямоугольная система координат (19).
4. Полярная система координат (19). 5. Цилиндрические и сферические
координаты (20).
§ 3. Замена базиса и системы координат 21
1. Изменение базиса (21). 2. Изменение системы координат (22). 3.
Замена декартовой прямоугольной системы координат на плоскости (22).
§ 4. Скалярное, смешанное и векторное произведения 24
1. Скалярное произведение (24). 2. Ориентация прямой, плоскости и
пространства (27). 3. Площадь ориентированного параллелограмма,
объем ориентированного параллелепипеда (29). 4. Смешанное
произведение (30). 5. Выражение векторного и смешанного произведения
через компоненты сомножителей (32). 6. Детерминанты второго и
третьего порядков (33). 7. Условия коллинеарности и
компланарности (35). 8. Площадь параллелограмма (Зв). 9. Двойное векторное
произведение (37). 10. Бнортогопальпый базис (37). 11. О векторных
величинах (38).
ГЛАВА II ПРЯМЫЕ ЛИНИИ И ПЛОСКОСТИ
§ 1. Общее понятие об уравнениях 40
1. Определения (40). 2. Алгебраические линии и поверхности (42).
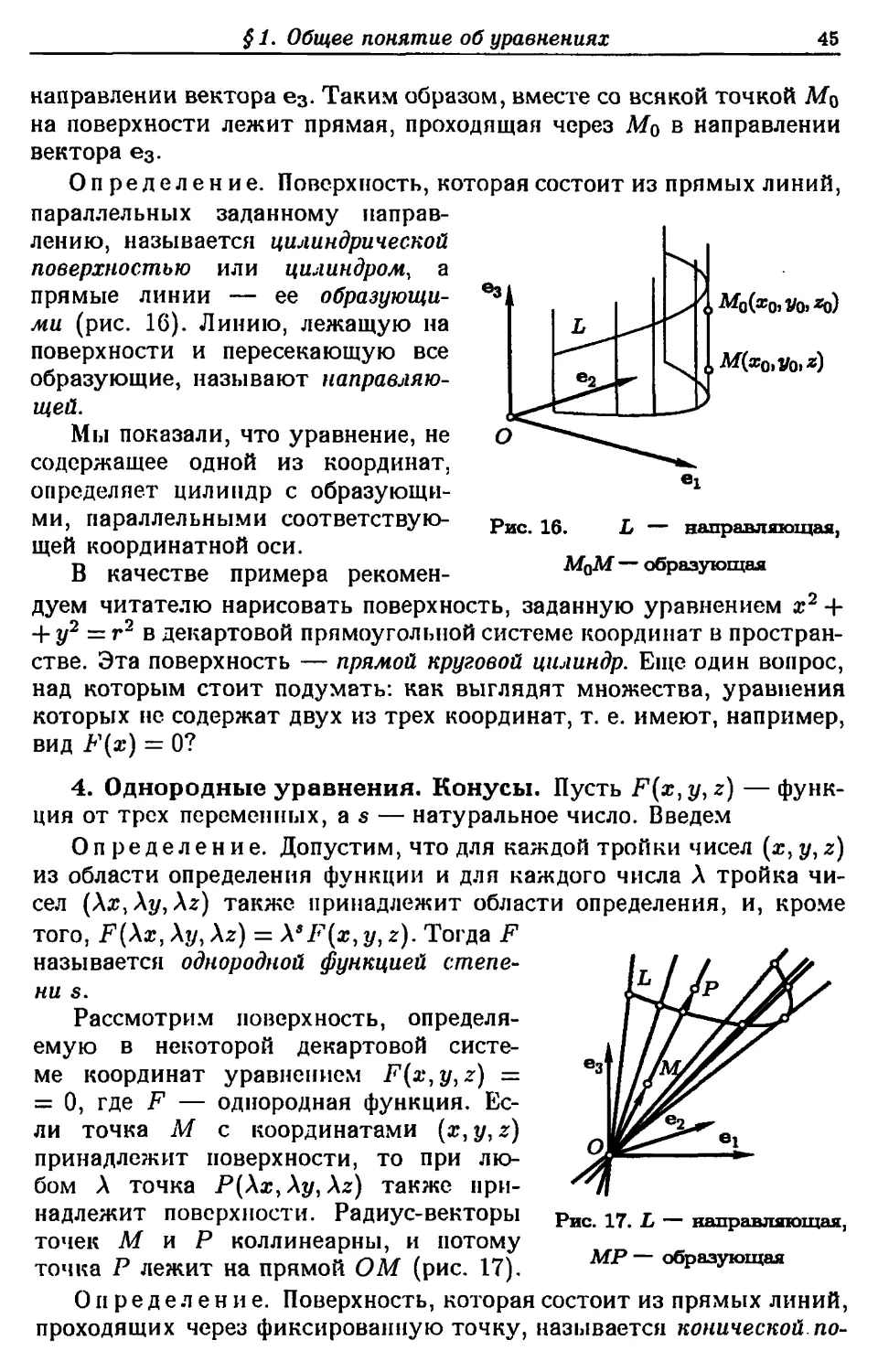
3. Уравнения, не содержащие одной из координат (44). 4. Однородные
уравнения. Конусы (45).
§ 2. Уравнения прямых и плоскостей 46
4
Оглавление
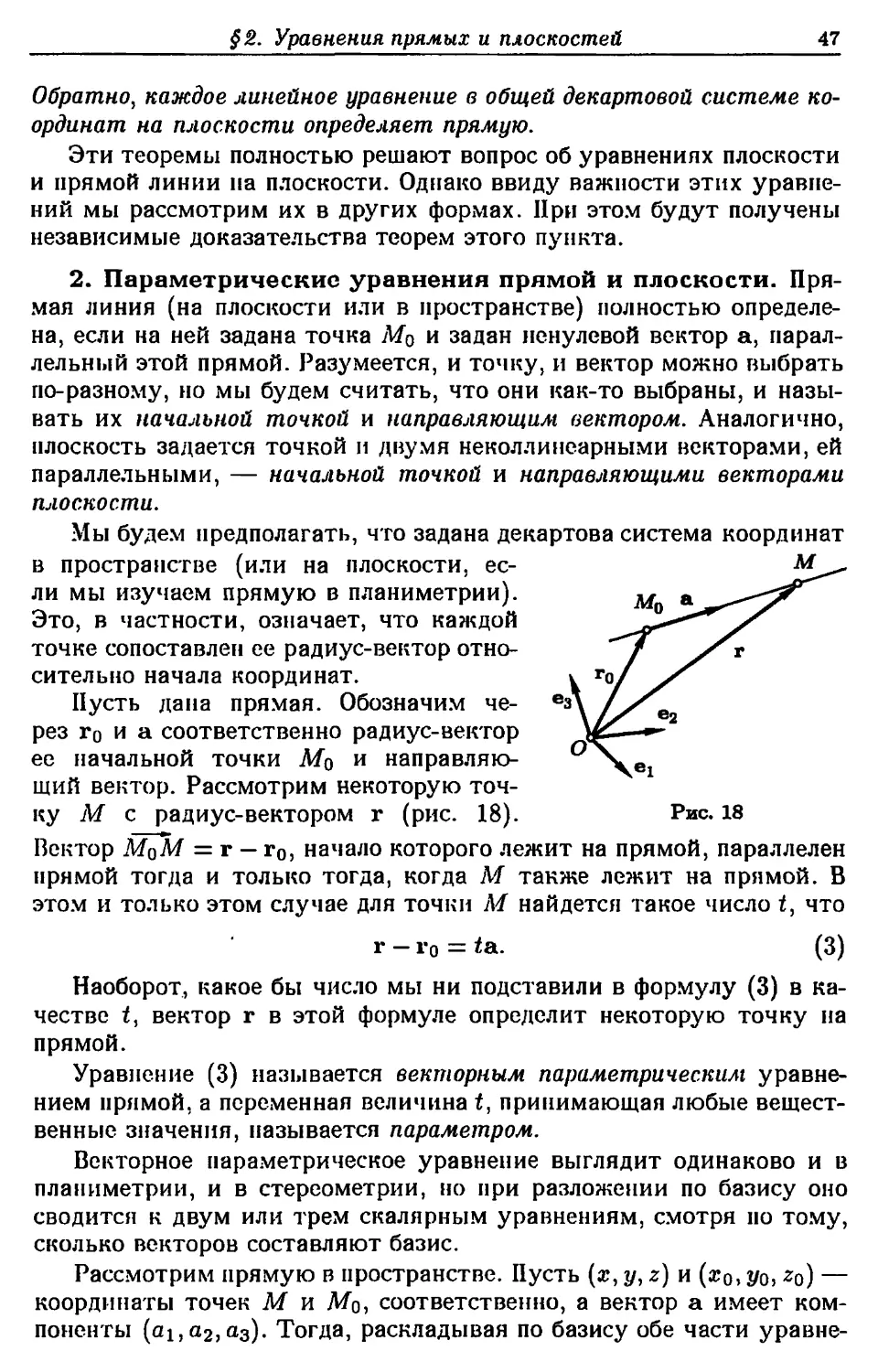
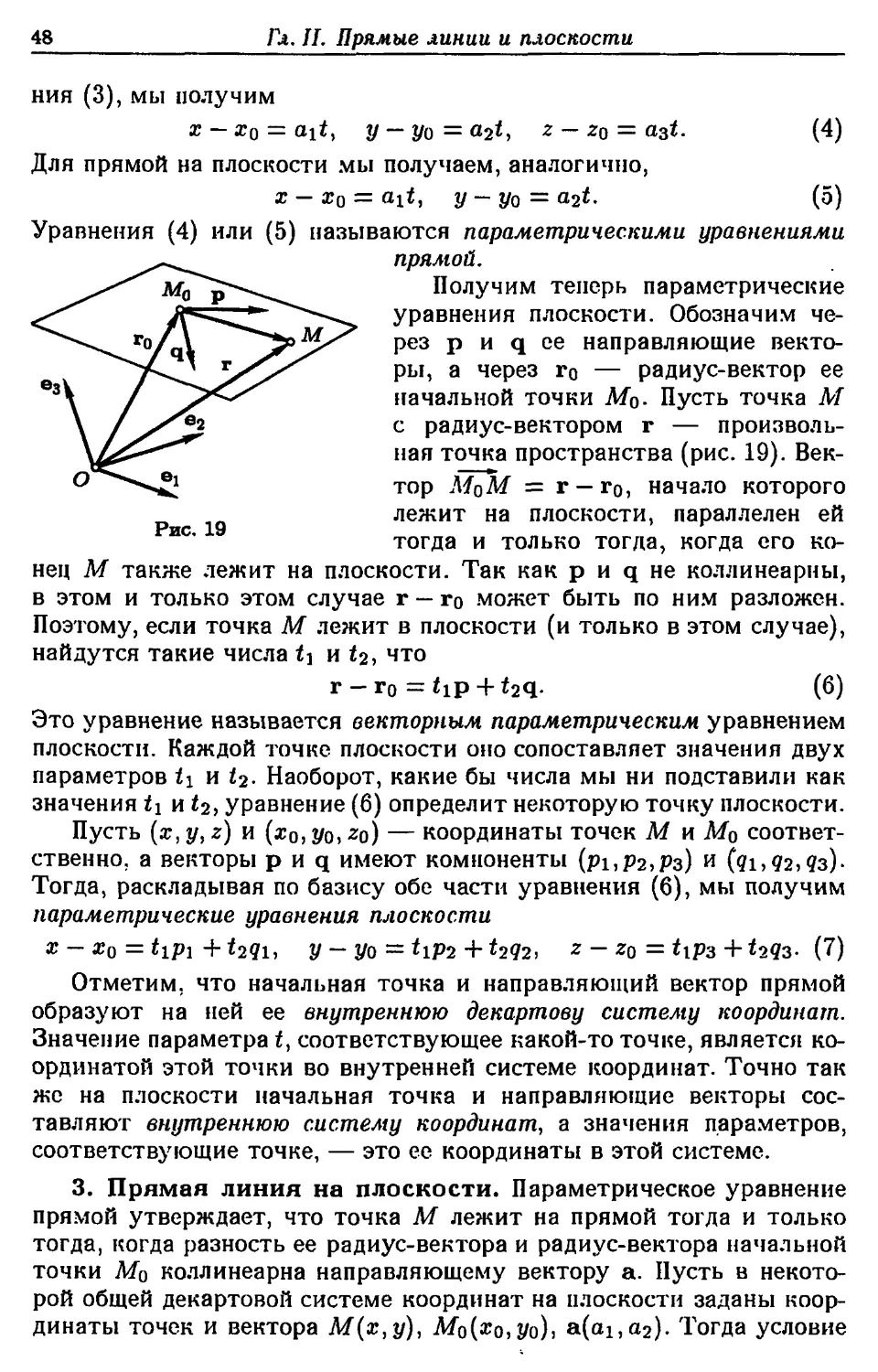
1. Поверхности и линии первого порядка (46). 2. Параметрические
уравнения прямой и плоскости (47). 3. Прямая линия на
плоскости (48). 4. Векторные уравнения плоскости и прямой (50). 5.
Параллельность плоскостей и прямых на плоскости (52). 6. Уравнения
прямой в пространстве (54).
§ 3. Основные задачи о прямых и плоскостях 56
1. Уравнение прямой, проходящей через две точки (56). 1. Уравнение
прямой, проходящей через две точки (56). 3. Параллельность прямой и
плоскости (56). 4. Полупространство (57). 5. Расстояние от точки до
плоскости (58). 6. Расстояние от точки до прямой (58). 7. Расстояние
между скрещивающимися прямыми (59). 8. Вычисление углов (60).
9. Некоторые задачи на построение (60). 10. Пучок прямых (62). 11.0
геометрическом смысле порядка алгебраической линии (63).
ГЛАВА III. ЛИНИИ И ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА
§ 1. Исследование уравнения второго порядка 65
§ 2. Эллипс, гипербола и парабола 69
1. Эллипс (69). 2. Гипербола (73). 3. Парабола (76).
§ 3. Линия второго порядка, заданная общим уравнением .... 79
1. Пересечение линии второго порядка и прямой (79). 2. Тип
линии (80). 3. Диаметр линии второго порядка (80). 4. Центр линии
второго порядка (81). 5. Сопряженные направления (84). 6.
Главные направления (85). 7. Касательная к линии второго порядка (85).
8. Особые точки (86).
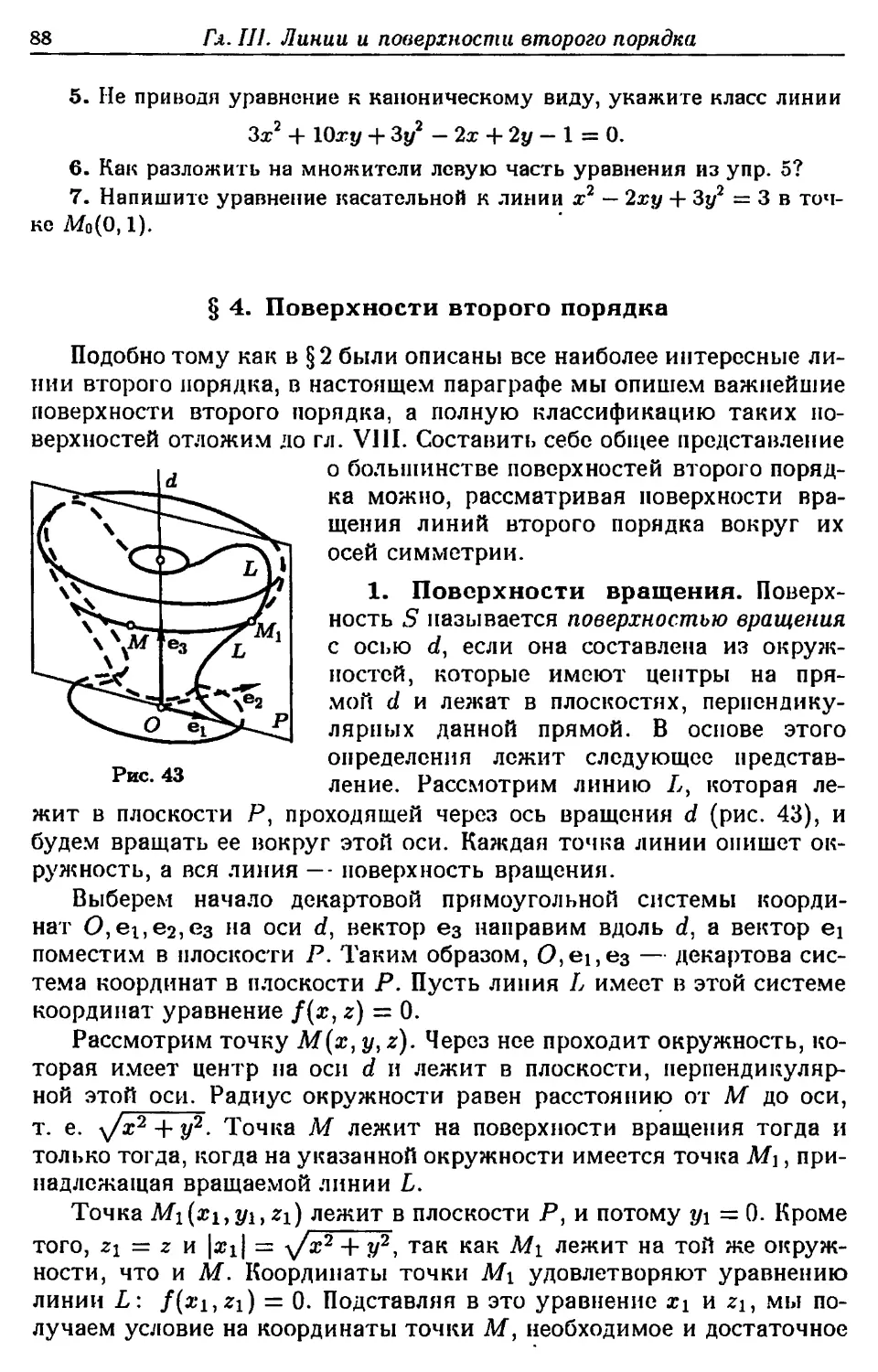
§ 4. Поверхности второго порядка 88
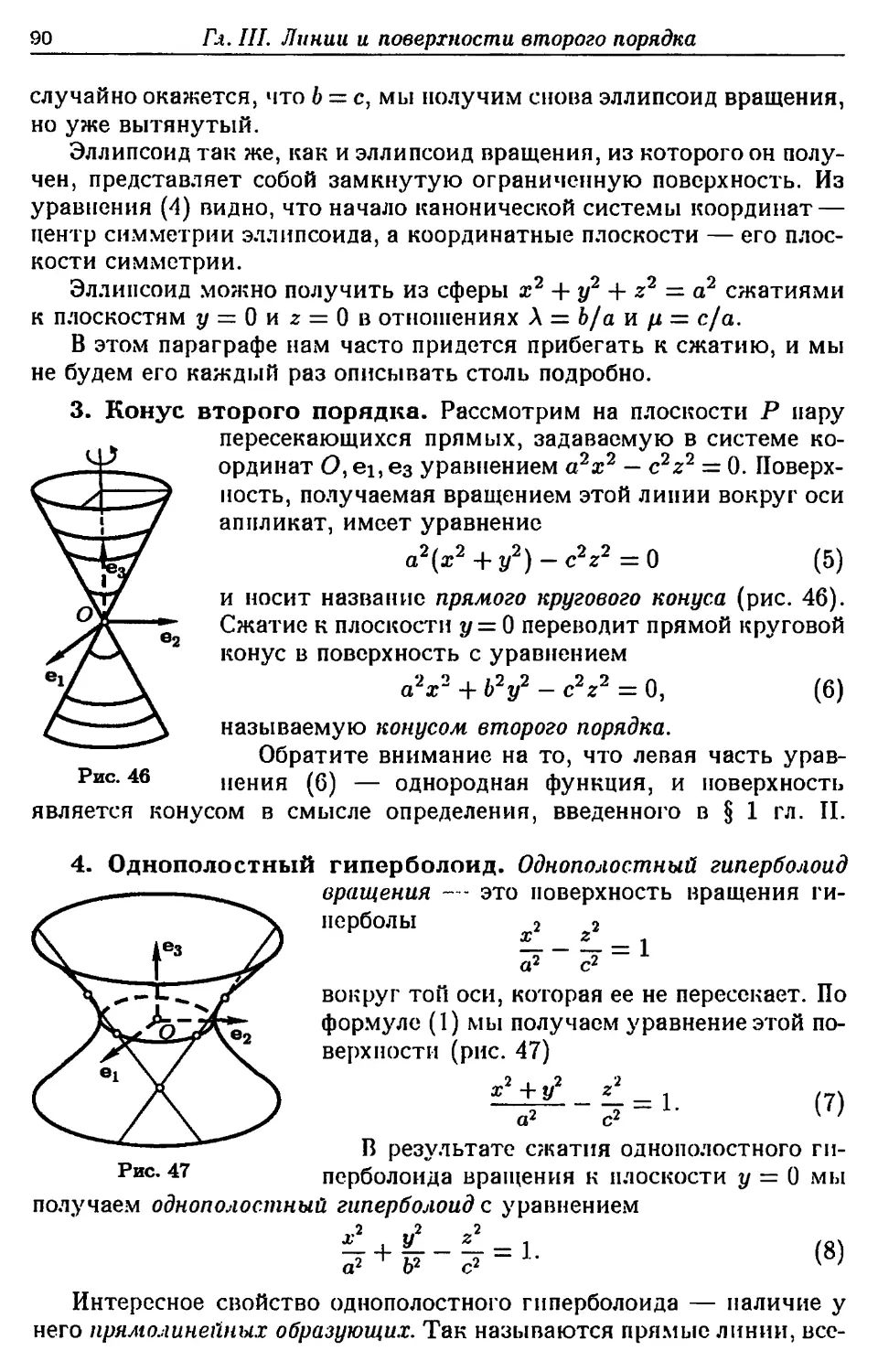
1. Поверхности вращения (88). 2. Эллипсоид (89). 3. Конус второго
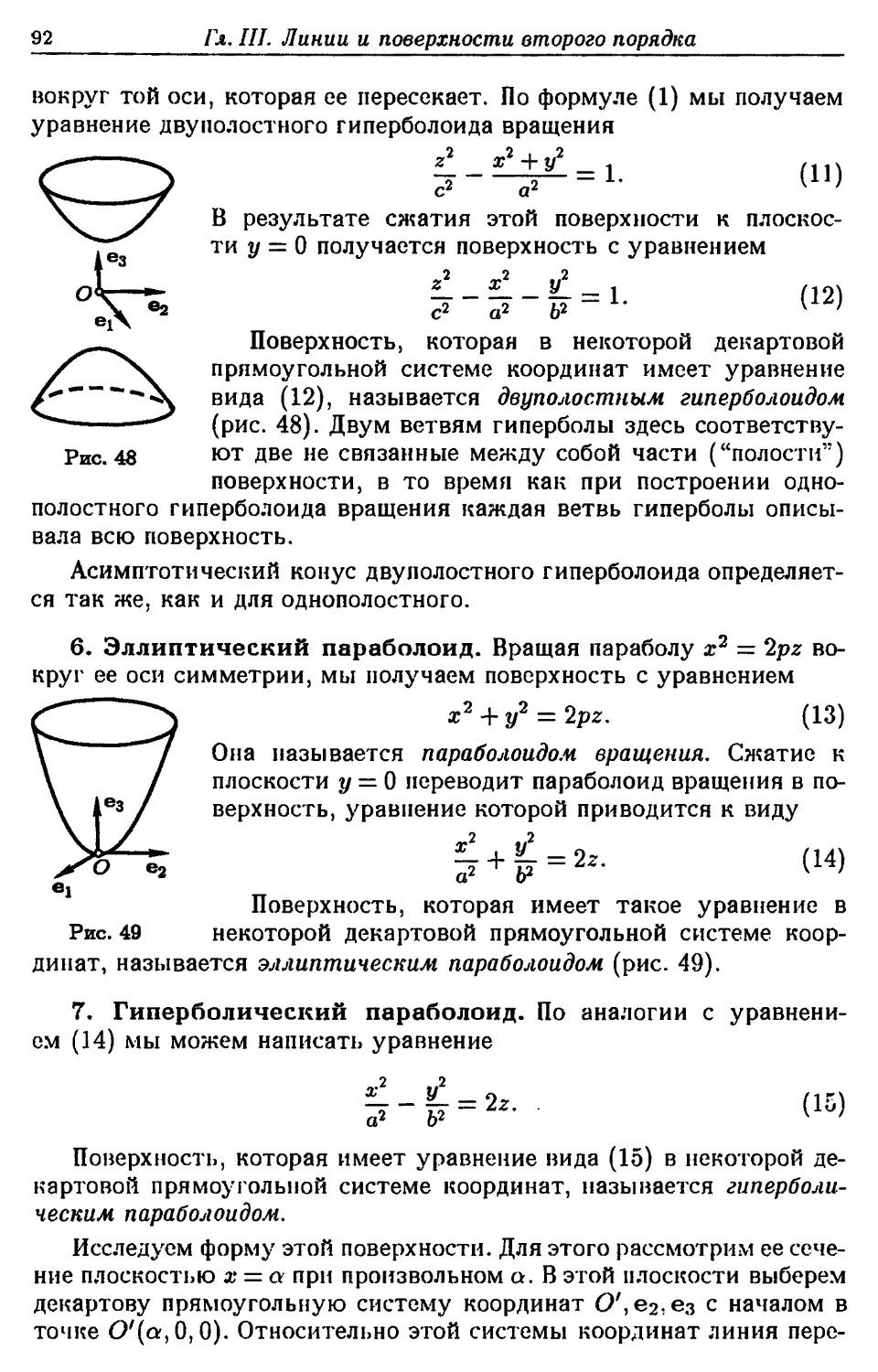
порядка (90). 4. Однополостный гиперболоид (90). 5. Двуполостный
гиперболоид (91). 6. Эллиптический параболоид (92). 7.
Гиперболический параболоид (92).
ГЛАВА IV ПРЕОБРАЗОВАНИЯ ПЛОСКОСТИ
§ 1. Отображения и преобразования 95
1. Определение (95). 2. Примеры (95). 3. Произведение
отображений (96). 4. Координатная запись отображений (98).
§ 2. Линейные преобразования 99
1. Ортогональные преобразования (99). 2. Определение линейных
преобразований (100). 3. Произведение линейных преобразований (102).
4. Образ вектора при линейном преобразовании (103).
§ 3. Аффинные преобразования 106
1. Образ прямой линии (106). 2. Изменение площадей при
аффинном преобразовании (107). 3. Образы линий второго порядка (109).
4. Разложение ортогонального преобразования (ПО). 5. Разложение
аффинного преобразования (111).
Оглавление
5
ГЛАВА V. МАТРИЦЫ И СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
§ 1. Матрицы 114
1. Определение (114). 2. Транспонирование матриц (115). 3.
Некоторые виды матриц (116). 4. Сложение и умножение на число (116).
5. Линейная зависимость матриц (117).
§ 2. Умножение матриц 120
1. Символ ^2 (!20). 2. Определенней примеры (121). 3. Свойства
умножения матриц (123). 4. Элементарные преобразования.
Элементарные матрицы (125). 5. Вырожденные и невырожденные матрицы (127).
6. Обратная матрица (129).
§ 3. Ранг матрицы 132
1. Определение (132). 2. Основные теоремы (133). 3. Ранг
произведения матриц (134). 4. Нахождение ранга матрицы (135).
§ 4. Детерминанты 136
1. Определение детерминанта (136). 2. Единственность
детерминанта (139). 3. Существование детерминанта. Разложение но
столбцу (140). 4. Свойства детерминантов (142). 5. Формула полного
разложения (143).
§ 5. Системы линейных уравнений (основной случай) 146
1. Постановка задачи (146). 2. Основной случай (148). 3. Правило
Крамера (148). 4. Формулы для элементов обратной матрицы (149).
§ 6. Системы линейных уравнений (общая теория) 149
1. Условия совместности (149). 2. Нахождение решений (152). 3.
Приведенная система (152). 4. Общее решение системы линейных
уравнений (155). 5. Пример (155).
ГЛАВА VI. ЛИНЕЙНЫЕ ПРОСТРАНСТВА
§ 1. Основные понятия 158
1. Определение линейного пространства (158). 2. Простейшие
следствия (160). 3. Линейная зависимость (160). 4. Базис (161). 5. Замена
базиса (164). 6. Ориентация пространства (165).
§ 2. Линейные подпространства 166
1. Определения и примеры (166). 2. Сумма и пересечение
подпространств (168).
§ 3. Линейные отображения 172
1. Определение (172). 2. Координатная запись отображений (174).
3. Изоморфизм линейных пространств (176). 4. Изменение матрицы
линейного отображения при замене базисов (177). 5. Канонический
вид матрицы линейного отображения (177). 6. Сумма и произведение
отображений (177).
§ 4. Задача о собственных векторах 179
1. Линейные преобразования (179). 2. Умножение преобразований (180).
3. Инвариантные подпространства (181). 4. Собственные
подпространства (183). 5. Характеристическое уравнение (184). 6. Свойства собст-
Оглавление
венных подпространств (186). 7. Комплексные характеристические
числа (187). 8. Приведение матрицы преобразования к диагональному
виду (188). 9. Приведение матрицы преобразования к треугольному
виду (190).
§ 5. Линейные функции 192
1. Определение функции (192). 2. Линейные функции (192). 3.
Сопряженное пространство (194).
§ 6. Квадратичные формы 196
1. Билинейные функции (196). 2. Квадратичные формы (198). 3. Ранг
и индекс квадратичной формы (202). 4. Полу тора линейные
функции (205).
§ 7. Теорема Жордана 207
1. Георема Гамильтона-Кэли (207). 2. Корневые подпространства (208).
3. Строение корневого подпространства (209). 4. Теорема
Жордана (212). 5. Приведение к жордановой форме (213).
ГЛАВА VII ЕВКЛИДОВЫ И УНИТАРНЫЕ ПРОСТРАНСТВА
§ 1. Евклидовы пространства 216
1. Скалярное произведение (216). 2. Длина и угол (217). 3.
Выражение скалярного произведения через координаты сомножителей (218).
4. Ортогональные базисы (219). 5. Ортогональные матрицы (220).
6. Ортого- пальное дополнение подпространства (221). 7.
Ортогональные проекции (222). 8. Метод ортогонализации (223). 9. Q/i-разло-
жение (224). 10. Объем параллелепипеда (224).
§ 2. Линейные преобразования евклидовых пространств 226
1. Преобразование, сопряженное данному (226). 2. Самосопряженные
преобразования (228). 3. Изоморфизм евклидовых пространств (231).
4. Ортогональные преобразования (232). 5. Сингулярное
разложение (233). 6. Полярное разложение (236). 7. Сингулярные числа
линейного преобразования (237).
§ 3. Функции на евклидовых пространствах 239
1. Линейные функции (239). 2. Преобразование, присоединенное к
билинейной функции (240). 3. ОртонормированныЙ базис, в котором
квадратичная форма имеет диагональный вид (241).
§ 4. Понятие об унитарных пространствах 243
1. Определение (243). 2. Свойства унитарных пространств (245). 3.
Самосопряженные и унитарные преобразования (246). 4. Эрмитовы
формы в унитарном пространстве (247).
ГЛАВА VIII. АФФИННЫЕ ПРОСТРАНСТВА
§ 1. Плоскости 249
1. Аффинное пространство (249). 2. Плоскости в аффинном
пространстве (251).
§ 2. Общая теория линий и поверхностей второго порядка .... 252
Оглавление 7
1. Закон преобразования коэффициентов (252). 2 Линии второго
порядка на плоскости (255). 3. Ортогональные инварианты (256). 4
Поверхности второго порядка (257).
Г Л А В А IX ОСНОВЫ ТЕНЗОРНОЙ АЛГЕБРЫ
§ 1. Тензоры в линейном пространстве 263
1. Вводные замечания (263). 2. Обозначения (263). 3.
Определение и примеры (265). 4 Линейные операции (268). 5. Умножение
тензоров (269). 6. Свертывание (270). 7. Транспонирование (272).
8. Симметрирование и альтернирование (273). 9. Замечание (274).
10. Симметричные и антисимметричные тензоры (275)
§ 2 Тензоры в евклидовом пространстве 277
1 Метрический тензор (277). 2 Поднятие н опускание индексов (277).
3. Евклидовы тензоры (278).
§ 3. Поливекторы. Ннешнпе формы 281
]. р-векюры (281). 2. Относительные инварианты (283). 3. Внешние
формы (284). 4. Внешнее умножение (285).
Указания и ответы к упражнениям 289
Предметный указатель 302
Список литературы 306
ПРЕДИСЛОВИЕ
Эта книга отражает многолетний опыт преподавания
соответствующего курса в Московском физико-техническом институте.
Особенности подготовки студентов МФТИ вызывают необходимость
ускоренного изложения курса математики, по объему
приближающегося к университетскому. В связи с этим аналитическая геометрия
излагается так, чтобы на простом и доступном материале
подготовить студента к изучению линейной алгебры. Собственно линейной
алгебре, т. е. теории линейных пространств, предпослана большая
глава о системах линейных уравнений и матрицах Ее цель — дать
читателю исследование систем линейных уравнений, независимое от
методов линейной алгебры. В этой же главе собраны и другие
сведения, необходимые для дальнейшего.
Настоящее издание существенно отличается от предыдущих.
Добавлена теорема о приведении матрицы линейного преобразования к
треугольному виду, параграфы о теореме Жордана и о сингулярном
разложении матрицы. В настоящем издании улучшены некоторые
доказательства и исправлены погрешности предыдущего. Более
подробное представление о строении книги можно получить из оглавления.
Мне хочется с благодарностью отметить то влияние, которое
оказали на эту книгу преподаватели кафедры высшей математики
МФТИ, больше других все, читавшие лекции по курсу аналитической
геометрии и линейной алгебры. Особенно я благодарен проф.
А.А. Абрамову, проф. Л.А. Беклемишевой, чл.-корр. РАН Л.Д.
Кудрявцеву, проф. В.Б. Лидскому, акад. Л.В. Овсянникову, проф. С.С. Рыш-
кову, проф. С.А. Теляковскому.
ГЛАВА I
ВЕКТОРНАЯ АЛГЕБРА
§ 1. Векторы
1. Предварительные замечания. Первые главы этой книги
можно рассматривать как продолжение школьного курса геометрии.
Известно, что каждая математическая дисциплина основывается па
некоторой системе не доказываемых предложений, называемых
аксиомами. Полный перечень аксиом геометрии, так же, как и
обсуждение роли аксиом в математике, можно найти в книге Н.В.
Ефимова [5]. (Цифры в квадратных скобках означают ссылки на список
рекомендуемой литературы, помещенный в конце книги.)
Мы не ставим себе целью изложение логических основ предмета и
потому просто опираемся на теоремы, доказываемые в курсе
элементарной геометрии. Равным образом мы не пытаемся дать определения
основных геометрических понятий: точки, прямой, плоскости.
Читатель, интересующийся их строгим введением, может обратиться к
той же книге Н.В. Ефимова, мы же просто будем считать, что эти и
другие введенные в школьном курсе математики понятия известны
читателю.
Предполагаются также известными определение вещественных
(действительных) чисел и их основные свойства. (Строгая теория
вещественного числа приводится в учебниках математического
анализа.) Будет широко использоваться то обстоятельство, что при
выбранной единице измерения каждому отрезку можно сопоставить
положительное вещественное число, называемое его длиной. Едини-
цу измерения длин мы будем считать выбранной раз и навсегда и,
говоря о длинах отрезков, не будем указывать, какой единицей они
измеряются.
2. Определение вектора. Понятие вектора также известно из
школьного курса, но лучше напомнить основные факты, с ним
связанные. Пару точек мы называем упорядоченной, если про эти точки
известно, какая из них первая, а какая — вторая.
Определение 1. Отрезок, концы которого упорядочены,
называется направленным отрезком или вектором. Первый из его концов
называется началом, второй — концом вектора. К векторам
относится и нулевой вектор, у которого начало и конец совпадают.
Направление вектора на рисунке принято обозначать стрелкой,
над буквенным обозначением вектора тоже ставится стрелка, напри-
10
Гл. I. Векторная алгебра
мер АВ (при этом буква, обозначающая начало, обязательно пишется
первой). В книгах буквы, обозначающие векторы, набираются
полужирным шрифтом, например а. Нулевой вектор обозначается 0.
Расстояние мегкду началом и концом вектора называется его
длиной (а также модулем или абсолютной величиной). Длина вектора
обозначается |а| или \АВ\.
Векторы называются коллинеарными, если существует такая
прямая, которой они параллельны. Векторы компланарны, если
существует плоскость, которой они параллельны. Нулевой вектор считается
коллипеарным любому вектору, так как он не имеет определенного
направления. Длина его, разумеется, равна нулю.
Определение 2. Два вектора называются равными, если они
коллинеарны, одинаково направлены и имеют равные длины.
Из этого определения вытекает, что, выбрав любую точку А', мы
можем построить (и притом только один) вектор I-A'jB'I, равный
некоторому заданному вектору \АВ\, или, как говорят, перенести
вектор \АВ\ в точку Л'.
3. О другом определении вектора. Понятие равенства
векторов существенно отличается от понятия равенства, например, чисел.
Каждое число равно только самому себе, иначе говоря, два равных
числа при всех обстоятельствах могут рассматриваться как одно и
то же число. С векторами дело обстоит по-другому: в силу
определения существуют различные, но равные между собой векторы. Хотя
в большинстве случаев у нас не будет необходимости различать их
между собой, вполне может оказаться, что в какой-то момент нас
будет интересовать именно вектор АВ, а не равный ему вектор А*В'.
Для того чтобы упростить понятие равенства и снять некоторые
связанные с ним трудности, иногда идут на усложнение определения
вектора. Мы не будем пользоваться этим усложненным
определением, но сформулируем его. Чтобы не путать, будем писать "Вектор"
(с большой буквы) для обозначения определяемого ниже понятия.
Определение 3. Пусть дан направленный отрезок.
Множество всех направленных отрезков, равных данному в смысле
определения 2, называется Вектором.
Таким образом, каждый направленный отрезок определяет
Вектор. Легко видеть, что два направленных отрезка определяют один
и тот же Вектор тогда и только тогда, когда они равны согласно
определению 2. Для Векторов, как и для чисел, равенство означает
совпадение.
Из начального курса физики хорошо известно, что сила может
быть изображена направленным отрезком. Но она не может быть
изображена Вектором, поскольку силы, изображаемые равными
направленными отрезками, производят, вообще говоря, различные
действия. (Если сила действует на упругое тело, то изображающий ее отре-
§1. Векторы
11
зок не может быть перенесен даже вдоль той примой, на которой он
лежит.)
Это только одна из причин, по которой наряду с Векторами
приходится рассматривать и направленные отрезки. При этих
обстоятельствах применение определения 3 осложняется большим числом
оговорок. Мы будем придерживаться определения 1, причем по
общему смыслу всегда будет ясно, идет речь об определенном векторе или
на его место может быть подставлен любой, ему равный.
В связи со сказанным стоит разъяснить значение некоторых слов,
встречающихся в литературе. Вместо определения 2 можно ввести
для векторов другое определение равенства, согласно которому
векторы равны, если они равны но длине, лежат на одной прямой и
направлены в одну сторону. В этом случае вектор не может быть перепесен
в любую точку пространства, а переносится только вдоль прямой, на
которой он лежит. При таком понимании равенства векторы
называются скользящими векторами. В механике сила, действующая на
абсолютно твердое тело, изображается скользящим вектором.
Можно для векторов не давать никакого особого определения
равенства, т. е. считать, что вектор характеризуется, помимо длины и
направления в пространстве, еще и точкой приложения. В этом
случае векторы называются приложенными. Как уже упоминалось, сила,
действующая на упругое тело, изображается приложенным вектором.
Если нужно подчеркнуть, что равенство векторов понимается в
смысле определения 2, то векторы называются свободными.
4, Линейные операции. Так называются сложение векторов и
умножение вектора на число. Напомним их определения.
Определение. Пусть даны два вектора а и Ь. Построим равные
им векторы АВ и ВС. Тогда вектор АС называется суммой
векторов а и b и обозначается а + Ь.
Заметим, что, выбрав вместо В другую точку, мы получили бы
другой вектор, равный вектору АС.
Определение. Произведением вектора а на вещественное
число а называется вектор Ь, удовлетворяющий следующим условиям:
а)|Ь| = |а||а|;
б) b колли неарен а;
в) Ь и а направлены одинаково, если а > 0, и противоположно,
если а < 0.
(Если же а = 0, то из первого условия следует b = 0.)
Произведение вектора а на число а обозначается аа.
Приведенное определение определяет вектор аа не единственным
образом, но все удовлетворяющие ему векторы равны между собой.
В курсе средней школы были выведены основные свойства
линейных операций. Перечислим их без доказательства.
12
Гл. /. Векторная алгебра
Предложение 1. Для любых векторов a, b и с и любых чисел а
и f) выполнено:
1) a-j-b = b + a {сложение коммутативно),
2) (а Н- Ь) + с = а + (Ь + с) {сложение ассоциативно)]
3) а + 0 = а;
4) вектор (—1)а противоположный для а: а+ (— 1)а = 0;
5) (а/?)а = а(/?а);
6) (а + /?)а = аа + /?а;
7) or(a + b) = аа+аЪ;
8) la = a.
Вектор (—1)а обозначается —а. Разностью векторов а и b
называется сумма векторов а и —Ь. Она обозначается а — Ь. Если b + х =
= а, то х = a — b (рис. 1). В этом смысле вычитание — операция,
сопоставляющая паре векторов разность первого и второго, — есть
л операция, обратная сложению, и мы не считаем
У^\ его отдельной операцией. Точно так же мы не
**/ >^-Ъ выделяем деление вектора на число а, так как
/ \ его можно определить как умножение на а"1.-
/ \ Из определения произведения вектора па
а число прямо следует
р - Предложение 2. Если а ф О, то любой
вектор Ь, коллинеарный а, представим в виде b =
= ±(|b|/|a|)a. Знак + или — берут, смотря по тому, направлены а
и b однаково или нет.
Применяя линейные операции, можно составлять суммы
векторов, умноженных на числа: c*iai + ог2ао 4- ...Н-а*а*. Выражения
такого вида называются линейными комбинациями. Числа, входящие в
линейную комбинацию, называются ее коэффициентами. Свойства,
перечисленные в предложении 1, позволяют преобразовывать
линейные комбинации по обычным правилам алгебры: раскрывать скобки,
приводить подобные члены, переносить некоторые члены в другую
часть равенства с противоположным знаком и т. д.
Предложение 1 дает в некотором смысле полный набор свойств:
любые вычисления, использующие линейные операции, можно
производить, основываясь на них и не обращаясь к определениям. Это
будет иметь для нас принципиальное значение в гл. VI.
Линейные комбинации обладают следующим очевидным
свойством: если векторы ai, ...,ад. коллинеарны, то любая их линейная
комбинация им коллинеарна. Если же они компланарны, то любая их
линейная комбинация им компланарна. Это сразу следует из того, что
вектор аа коллинеарен а, а сумма векторов компланарна слагаемым
и коллинеарна им, если они коллинеарны.
Множество называется замкнутым относительно некоторой
операции, если для любых элементов множества результат применения
этой операции принадлежит данному множеству.
§1. Векторы
13
Определение. Множество векторов, замкнутое относительно
линейных операций, называется векторным пространством. Если
одно векторное пространство является подмножеством другого, то оно
называется его подпространством.
Таким образом, можно сказать, что множество всех векторов,
параллельных данной прямой, и множество всех векторов,
параллельных данной плоскости, являются векторными пространствами.
Чтобы различать эти два тина векторных пространств, их
называют соответственно одномерными и двумерными пространствами.
Помимо упомянутых, существуют еще два векторных
пространства: нулевое или нульмерное, состоящее только из нулевого вектора,
и трехмерное — множество всех векторов пространства.
Нулевое пространство является подпространством для каждого
другого, и каждое векторное пространство является
подпространством для трехмерного.
5. Линейная зависимость векторов. Мы будем говорить, что
вектор b раскладывается по векторам ai,...,a/., если он представим
как их линейная комбинация: найдутся такие коэффициенты, что Ь =
= /?iai -f •-. + Pk^-k- Вполне может случиться, что какой-то вектор
раскладывается по данной системе векторов, и при этом коэффициенты
разложения определены неоднозначно. Например, если аз = а3 +ао,
то вектор b = —а3 раскладывается так же, как b = —аг — а2 или
b = а3 — 2ai — 2а2 и т. д. Посмотрим, с чем это связано.
Нулевой вектор раскладывается по любой системе векторов: мы
получим нулевой вектор, если возьмем линейную комбинацию этих
векторов с нулевыми коэффициентами. Такая линейная комбинация
называется тривиальной.
Определение. Система векторов ai,...,afc называется линейно
независимой, если нулевой вектор раскладывается по ней
единственным образом.
Иначе говоря, система векторов линейно независима, если
только тривиальная линейная комбинация этих векторов равна нулевому
вектору, или, подробнее, если из равенства a-iai -f ... + <*k&k = 0
следует, что ai = ... = <*k = 0.
Система векторов ai, ...,а/с линейно зависима, если нулевой вектор
раскладывается по ней не единственным образом, т. е. если найдутся
такие коэффициенты ai,...,ajt, что aiai -f ••• + о^а* = 0, но не все
они равны нулю: а\ + ... 4- огк ф 0.
Рассмотрим свойства линейно-зависимых и линейно-независимых
систем векторов.
• Если среди векторов ai, ...,а* есть нулевой, то такая система
линейно зависима. Действительно, рассмотрим линейную комбинацию,
в которую 0 входит с коэффициентом 1, а остальные векторы с
нулевыми коэффициентами. Эта линейная комбинация нетривиальна и
равна нулевому вектору. В частности,
14
Гл. I. Векторная алгебра
• Система, содержащая один вектор, линейно зависима, если он
нулевой.
• Если к линейно зависимой системе аь...,а* прибавить какие-
то векторы bi,...,b5) то полученная система векторов будет
линейно зависимой. В самом деле, к имеющейся равной 0 нетривиальной
линейной комбинации векторов а1,...,а& можно прибавить векторы
bi,...,bt5 с нулевыми коэффициентами.
Таким образом,
• Если в системе векторов какая-то часть линейно зависима, то
вен система обязательно линейно зависима.
Отсюда от противного следует, что
• Любая часть линейно независимой системы линейно независима.
П редло?кение 3. Если вектор х раскладывается по системе
векторов ai,...,afc, то это разложение единственно тогда и только
тогда, когда система векторов линейно независима.
Действительно, пусть существуют два разложения х = aiai -f •••
... + а* а* их — /?iai + ... + А-а*. Вычитая их почленно одно из
другого, мы получим (e*i - 0\)a.\ -f ... -f (a^ — @к)*к = 0. Если векторы
линейно независимы, отсюда следует, что ot\ — 0\ = 0, ..., о^ — 0k = О,
т. е. оба разложения совпадают.
Обратно, если векторы линейно зависимы, существует их
нетривиальная линейная комбинация, равная нулевому вектору: orjai + ...
... + affray = 0. Мы можем прибавить ее к имеющемуся разложению
х = ftai + ... -f 0kSLk и получить новое разло?кепие х по тем же
векторам: х = (ai + A)»i + ... -f (ctk + 0k)a.k- Предложение доказано.
Предложение 4. Система из к > 1 векторов линейно
зависима тогда и только тогда, когда один из векторов
раскладывается по остальным.
Доказательство. Пусть система векторов ai,...,a& линейно
зависима, т. е. существуют такие коэффициенты c*i,..., tv/*, что
aiai + ... + от-а/с = 0, и, например, ai отличен от нуля. В этом случае
мы можем разложить ai но остальным векторам:
Обратно, пусть один из векторов, например, аь разложен по
остальным векторам: ai = #»**:> + ••• + 0k&k- Это означает, что линейная
комбинация векторов ai,...,a& с коэффициентами —1,А>, —,0k равна
нулевому вектору. Предложение доказано.
Понятие линейной зависимости будет играть большую роль в
дальнейшем изложении, но сейчас мы могли бы обойтись без него ввиду
простого геометрического смысла, который имеет это понятие.
Теорема ]. Система из одного вектора линейно зависима тогда
и только тогда, когда это - нулевой вектор.
Система из двух векторов линейно зависима тогда и только
тогда, когда векторы коллинеарны.
§1. Векторы
15
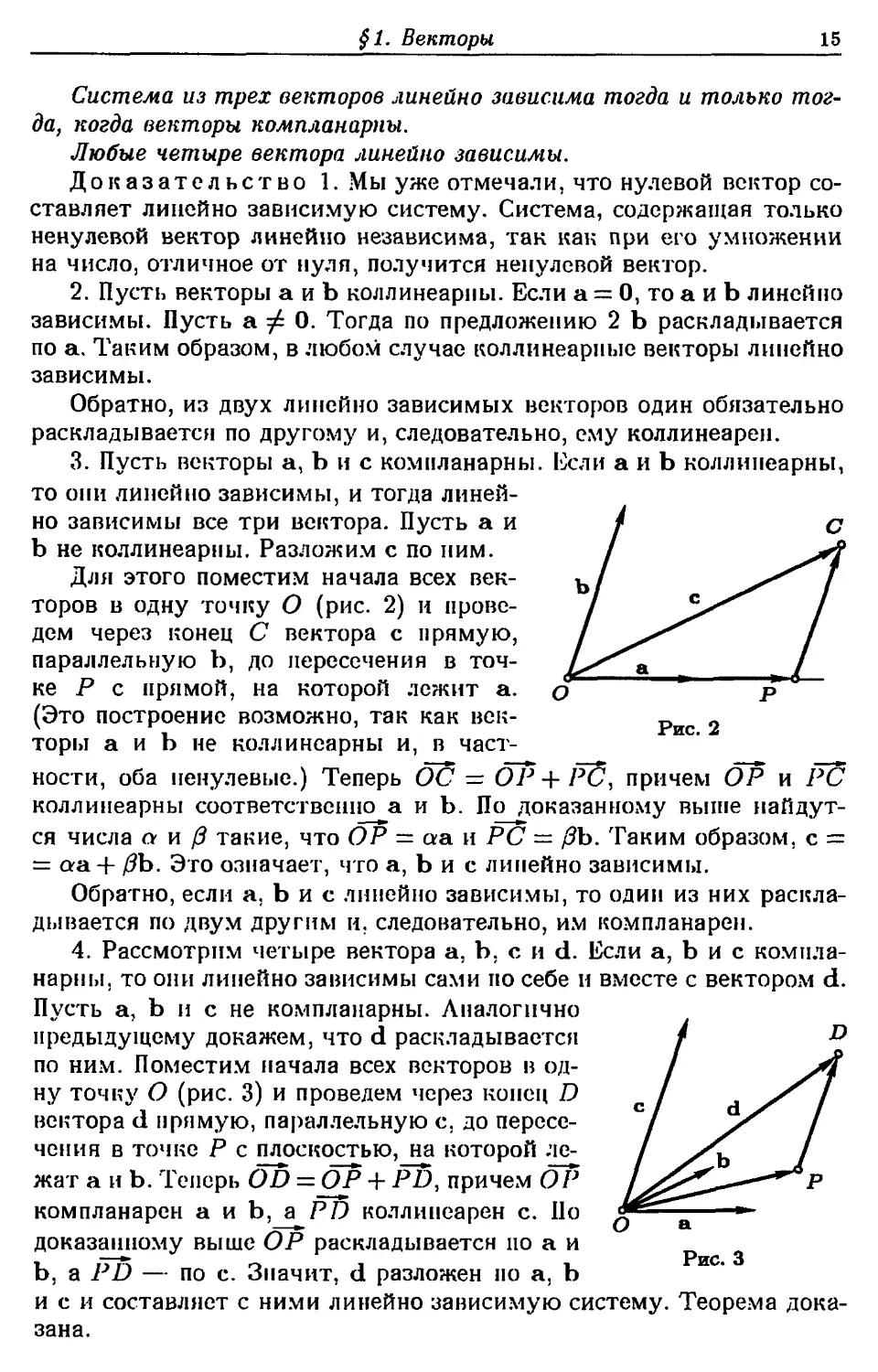
Система из трех векторов линейно зависима тогда и только тог-
да, когда векторы компланарны.
Любые четыре вектора линейно зависимы.
Доказательство 1. Мы уже отмечали, что нулевой вектор
составляет линейно зависимую систему. Система, содержащая только
ненулевой вектор линейно независима, так как при его умножении
на число, отличное от нуля, получится ненулевой вектор.
2. Пусть векторы а и Ъ коллинеариы. Если а = 0, то а и b линейно
зависимы. Пусть а ф 0. Тогда по предложению 2 b раскладывается
по а. Таким образом, в любом случае коллинеариые векторы линейно
зависимы.
Обратно, из двух линейно зависимых векторов один обязательно
раскладывается по другому и, следовательно, ему коллинеарен.
3. Пусть векторы a, b и с компланарны. Если а и b коллинеариы,
то они линейно зависимы, и тогда
линейно зависимы все три вектора. Пусть а и
b не коллинеариы. Разложим с по ним.
Для этого поместим начала всех
векторов в одну точку О (рис. 2) и
проведем через конец С вектора с прямую,
параллельную Ъ, до пересечения в
точке Р с прямой, на которой лежит а.
(Это построение возможно, так как
векторы а и b не коллинеариы и, в
частности, оба ненулевые.) Теперь ОС = ОР + Р&, причем ОР и PC
коллинеариы соответственно а и Ь. По доказанному выше
найдутся числа а и /3 такие, что ОР — аа и PC = /?b. Таким образом, с =
= аа + 0Ъ. Это означает, что a, b и с линейно зависимы.
Обратно, если a, b и с линейно зависимы, то один из них
раскладывается по двум другим и, следовательно, им компланарен.
4. Рассмотрим четыре вектора а, Ь. с и d. Если a, b и с
компланарны, то они линейно зависимы сами но себе и вместе с вектором d.
Пусть a, b и с не компланарны. Аналогично
предыдущему докажем, что d раскладывается
по ним. Поместим начала всех векторов в
одну точку О (рис. 3) и проведем через конец D
вектора d прямую, параллельную с, до
пересечения в точке Р с плоскостью, на которой
лежат а и Ь. Теперь OD = OP + PD, причем ОР
компланарен а и b, a PD коллинеарен с. Но
доказанному выше ОР раскладывается но а и
b, a PD — по с. Значит, d разложен по a, b
и с и составляет с ними линейно зависимую систему. Теорема
доказана.
Рис. 2
16
Гл. I. Векторная алгебра
6. Базис. В конце п. 4 было дано определение векторного
пространства. Введем следующее
Он редел ей и е. Базисом в векторном пространстве называется
упорядоченная линейно независимая система векторов такая, что
любой вектор этого пространства по ней раскладывается.
Из теоремы 1 сразу вытекает, что
• В нулевом пространстве базиса не существует.
• В одномерном пространстве (на прямой линии) базис состоит из
одного ненулевого вектора.
• В двумерном пространстве (на плоскости) базис —
упорядоченная пара неколлинеарных векторов.
• В трехмерном пространстве базис — упорядоченная тройка
некомпланарных векторов.
Требование упорядоченности означает, что, например, в случае
плоскости а, Ь и b, a — два разных базиса.
Так как векторы базиса линейно независимы, коэффициенты
разложения по базису для каждого вектора пространства определены
однозначно. Они называются компонентами или координатами вектора
в этом базисе.
Таким образом, если е3, в2, ез — базис трехмерного пространства,
то по формуле а = а\е\ + ао«2 + азез каждому вектору сопоставлена
единственная упорядоченная тройка чисел а1,с*2,<*з и каждой
тройке чисел — единственный вектор. Аналогично, вектор на плоскости
имеет две компоненты, а на прямой — одну.
Компоненты пишутся в скобках после буквенного обозначения
вектора, например а(1,0,1).
В аналитической геометрии геометрические рассуждения о
векторах сводятся к вычислениям, в которых участвуют компоненты этих
векторов. Следующее предложение показывает, как производятся
линейные операции над векторами, если известны их компоненты.
Предложен ие 5. При умножении вектора на число все его ком-
поненты умножаются на ото число. При сложении векторов
складываются их соответствующие компоненты.
Действительно, если а = <*iei + <*2е2 + аз^з, то
Да = A(oriei + а2«2 + <*з«з) = (Aai)ei -J- (Aa-2)e2 4- (Аа3)ез.
Если а.= oriei + а2е2 + <*зоз и b = р\&\ + /?2е2 + /?зо.з, т0
а + b = (aioi + a2e2 4- a3e3) + (ftei + &«2 + Рз^з) =
= Ы + P\ )ci + (a2 + /?2)o2 + (*з + #з)е3.
Для одномерного и двумерного пространств доказательство
отличается только числом слагаемых.
§2. Системы координат
17
Упражнения
1. Докажите, что точка С лежит на отрезке АВ тогда и только тогда,
когда существует число Л Е [0,1] такое, что для любой точки О
выполнено ОС = ЛОЛ + (1 — Х)ОВ. Если Л дано, то в каком отношении точка С
делит отрезок АВ1
2. Дан правильный шестиугольник ABCDEF, \АВ\ = 2. Найдите
координаты вектора АС в базисе АВ, AD.
3. В некотором базисе на плоскости заданы координаты векторов а(1,2),
Ь(2,3) и с(—1,1). Проверьте, что а и Ь линейно независимы, и найдите
координаты с в базисе а, Ь.
4. Даны три точки Л, В и С. Найдите такую точку О, что О А -f
-f ОВ + ОС = О. Решив аналогичную задачу для четырех точек, докажите,
что в треугольной пирамиде отрезки, соединяющие вершины с центрами
тяжести противоположных граней, пересекаются в одной точке.
§ 2. Системы координат
1. Декартова система координат. Фиксируем в
пространстве точку О и рассмотрим произвольную точку М. Радиус-вектором
точки М по отношению к точке О называется вектор ОМ. Если в
пространстве кроме точки О выбран некоторый базис, то точке М
сопоставляется упорядоченная тройка чисел — компоненты ее радиус-
вектора.
Определение. Декартовой системой координат в пространстве
называется совокупность точки и базиса.
Точка носит название начала координат. Прямые, проходящие
через начало координат в направлении базисных векторов,' называются
осями координат] первая — осью абсцисс, вторая — осью ординат,
третья — осью аппликат. Плоскости, проходящие через оси
координат, называются координатными плоскостями.
Определение. Пусть дана декартова система координат
О, е),в2,ез. Компоненты х,у, z радиус-вектора ОМ точки М
называются координатами точки М в данной системе координат:
ОМ = aroi -f ye«2 + ze%.
Первая координата называется абсциссой^ вторая— ординатой, а
третья — аппликатой.
Аналогично определяются координаты на плоскости и на примой
линии. Разумеется, точка на плоскости имеет только две координаты,
а на прямой линии — одну.
Координаты точки пишут в скобках
после буквы, обозначающей точку. Например,
запись А(2,1/2) означает, что точка А имеет
координаты 2 и 1/2 в ранее выбранной декартовой ^ ех
системе координат на плоскости (рис. 4). рис. 4
IS
Гл. I. Векторная алгебра
М*ъУ\ъ*д
Координаты точки, как и компоненты вектора, — величины
безразмерные. В частности, они не зависят от выбранной единицы
измерении длин. В самом деле, раскладывая векторы в теореме 1, мы
сводили дело к разложению вектора по коллинеарному с ним
ненулевому вектору. А в этом случае компонента равна отношению длин,
взятому с определенным знаком (предложение 2).
Легко видеть, что при заданной системе координат координаты
точки определены однозначно. С другой стороны, если задана
система координат, то для каждой упорядоченной тройки чисел
найдется единственная точка, имеющая эти числа в качестве координат.
Система координат на плоскости определяет такое ?ке соответствие
между точками плоскости и парами чисел. Задание системы
координат на прямой линии сопоставляет каждой
точке вещественное число и каждому
числу — точку.
Рассмотрим две точки А и В,
координаты которых относительно некоторой
декартовой системы координат О, е1,е2,ез
соответственно x\,yi,z\ и ж2,У2, zi-
Поставим себе задачу найти компоненты
вектора АВ. Очевидно, что АВ = ОВ — О А
(рис. 5). Компоненты радиус-векторов О А
и ОВ равны (a?i,yi,2Ti) и (я2,У25-г2) по
определению координат. Из предложения 5 § 1 следует, что АВ имеет
компоненты (х2 — х\,у2 — 2/i, *2 — 2i)- Этим доказано следующее
Предложение 1. Чтобы найти координаты вектора, нужно из
координат его конца вычесть координаты его начала.
2. Деление отрезка в заданном отношении. Найдем
координаты точки М на отрезке АВ, которая делит этот отрезок в
отношении АД*, т. е. удовлетворяет условию
?2i2/2>*2)
Рис. 5
\АМ\
\МВ\
-, А>0,
/г>0
(рис. 6). Это условие можно переписать в
виде ___ т
fiAM = ХМ В. (1)
Обозначив через (xi,3/i,2i) и (x<i*yi,z<£)
соответственно координаты точек А и В,
а через (ж, у, z) координаты точки М, разложим обе части равенства
по базису, причем компоненты векторов AM и MB найдем по
предложению 1. Тогда
Рис. 6
[л{х - xi) = Х(х2 - *), 1*{у - У\) - ЦУ2 - У), /л(г - *i) = \{z2 - z).
§2. Системы координат
19
Из этих равенств можно найти ж, у и z, поскольку А + // ф 0:
„ — /Ц*1 + Аж2 _ /uyi + Лг/2 ^ __ Р*\ + Аг2 ,9ч
*~ А + А* ' У- А + к ' *~ А + /и * ^
Если в формулах (2) мы будем считать одно из чисел А или р
отрицательным, то из равенства (1) увидим, что М находится на
той же прямой вне отрезка АВ. деля его в отношении |A//i|. Поэтому
из формул (2) можно найти координаты точки, делящей отрезок в
заданном отношении как внутренним, так и внешним образом.
На плоскости и на прямой линии задача о делении отрезка
решается точно так же, только из трех равенств в (2) остается
соответственно два и одно равенство.
3. Декартова прямоугольная система координат. Общие
декартовы системы координат используются реже, чем специальный
класс таких систем — декартовы прямоугольные системы координат.
Определение. Базис называется ортонормированным, если его
векторы попарно ортогональны и по длине равны единице. Декартова
система координат, базис которой ортонормирован, называется
декартовой прямоугольной системой координат.
Нетрудно проверить, что координаты точки относительно
декартовой прямоугольной системы координат в пространстве по
абсолютной величине равны расстояниям от этой точки до соответствующих
координатных плоскостей. Они имеют знак плюс или минус в
зависимости от того, лежит точка по ту же или по другую сторону от
плоскости, что и конец базисного вектора, перпендикулярного этой
плоскости.
Аналогично находят координаты точки относительно декартовой
прямоугольной системы координат на плоскости.
4. Полярная система координат. Декартовы системы
координат — не единственный способ определять положение точки при
помощи чисел. Для этого используются многие другие тины
координатных систем. Здесь мы опишем некоторые из них.
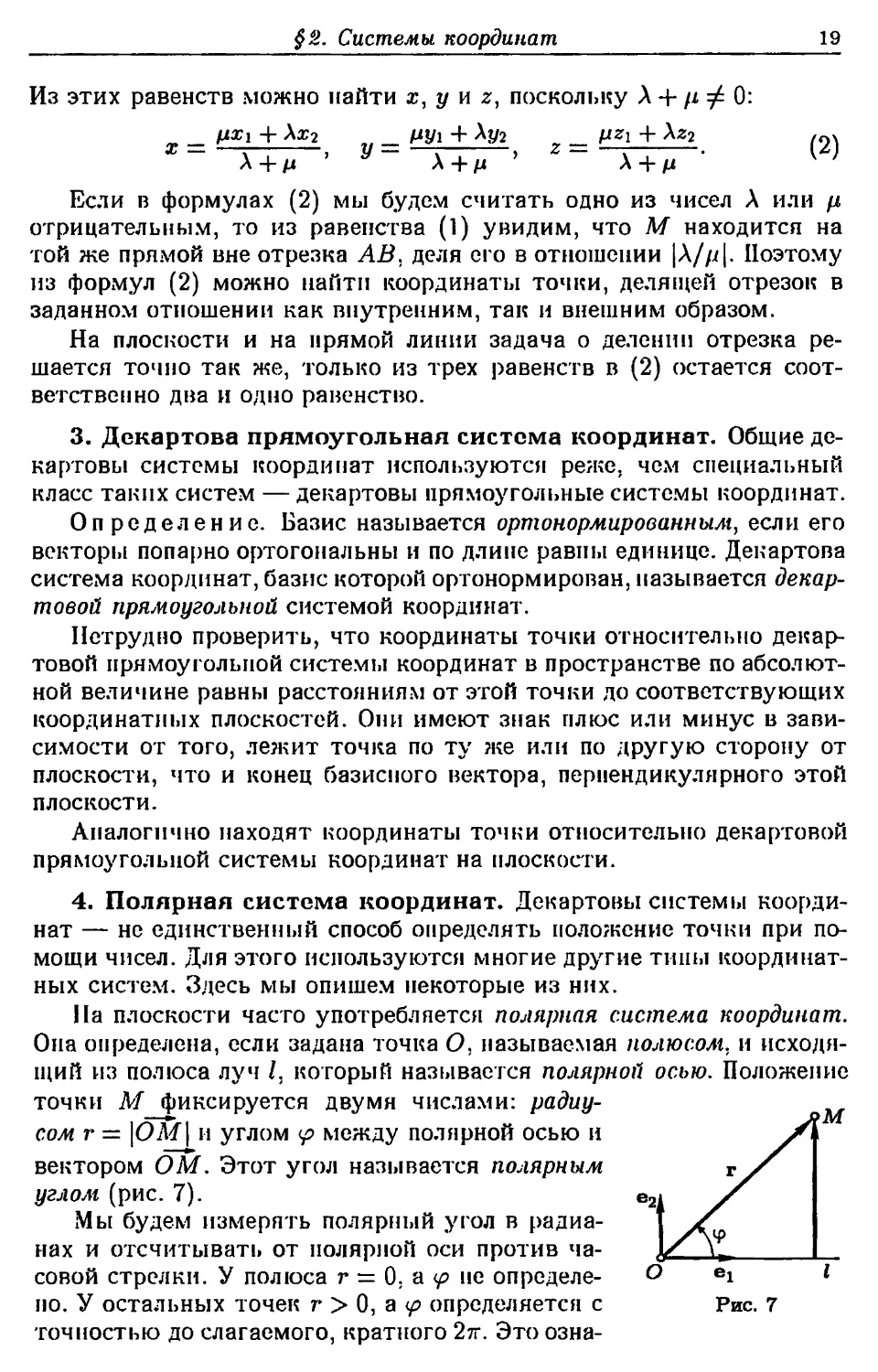
Па плоскости часто употребляется полярная система координат.
Она определена, если задана точка О. называемая полюсом, и
исходящий из полюса луч /, который называется полярной осью. Положение
точки М фиксируется двумя числами:
радиусом г = \ОМ\ и углом <р между полярной осью и
вектором ОМ. Этот угол называется полярным
углом (рис. 7).
Мы будем измерять полярный угол в
радианах и отсчитывать от полярной оси против
часовой стрелки. У полюса г = 0. а <р не определе- ° ei
по. У остальных точек г > 0, а <р определяется с Рис. 7
точностью до слагаемого, кратного 27г. Это озна-
20
Гл. L Векторная алгебра
чает, что пары чисел (г, у?), (г, у? + 27г) и вообще (г, у> -f 2Лг7г), где к —
любое целое число, представляют собой полярные координаты одной
и той же точки.
Иногда ограничивают изменение полярного угла какими-нибудь
условиями, например, 0 ^ <р < 2ъ или —7г < <р ^ тг. Это устраняет
неоднозначность, но зато вводит другие неудобства.
Пусть задана полярная система координат и упорядоченная пара
чисел (г, у?), из которых первое неотрицательно. Мы можем
сопоставить этой паре точку, для которой эти числа являются полярными
координатами. Именно, если г = 0. мы сопоставляем полюс. Если же
г > 0, то паре (г,<р) ставим в соответствие точку, радиус-вектор
которой имеет длину г и составляет с полярной осью угол у?. При этом
парам чисел (г,(р) и (ri,y?i) сопоставляется одна и та же точка,
если г = ri, а <р — tp\ — 2тгк, где к — целое число.
Выберем на плоскости декартову прямоугольную систему
координат, поместив ее начало в полюс О и приняв за базис векторы ei и
е2 длины 1. направленные соответственно вдоль полярной оси и под
углом 7г/2 к ней (угол отсчитывается против часовой стрелки). Как
легко видеть из рис. 7, декартовы координаты точки выражаются
через ее полярные координаты формулами
х = rcos(p, у = rsin<p. (3)
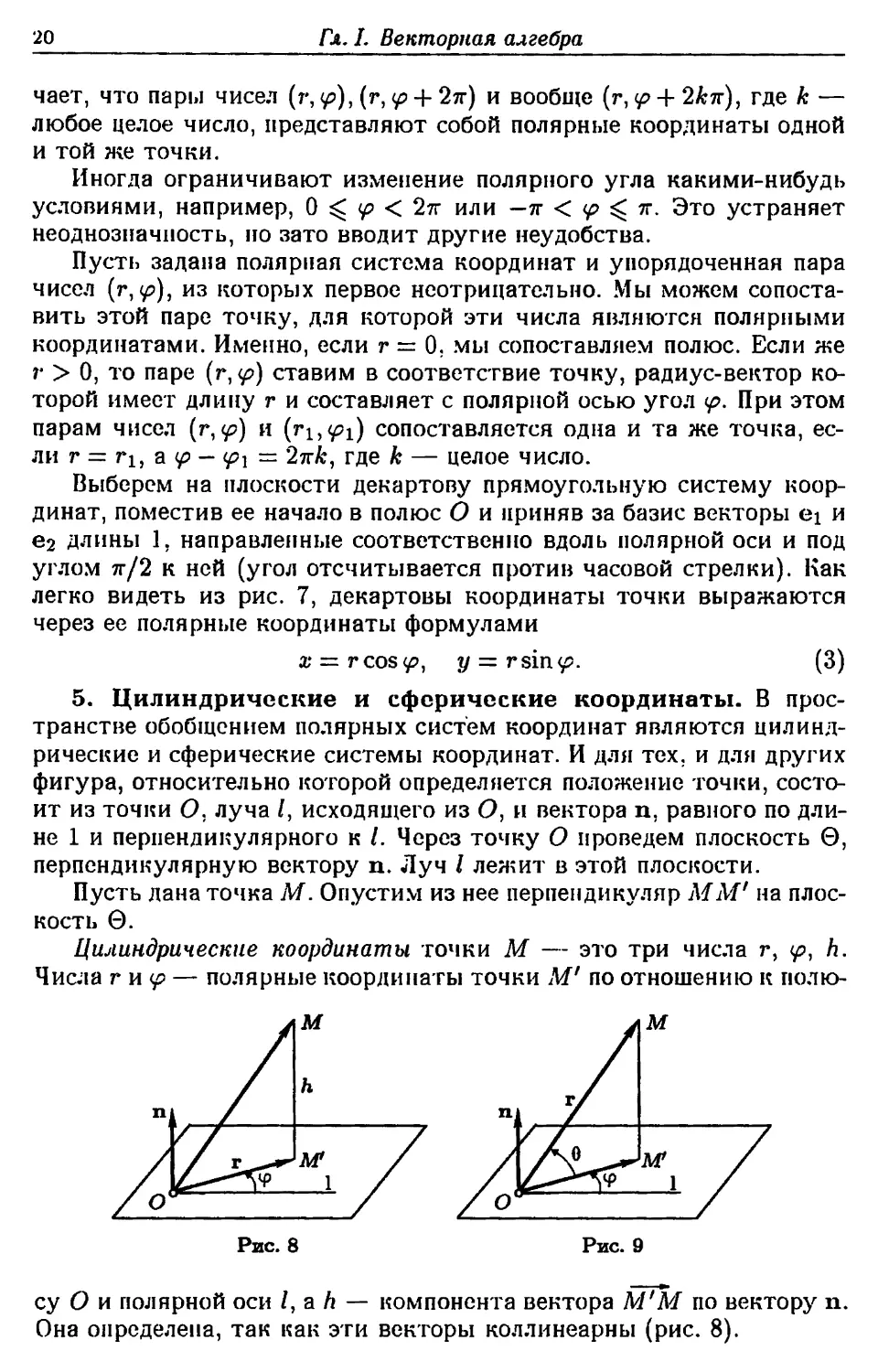
5. Цилиндрические и сферические координаты. В
пространстве обобщением полярных систем координат являются
цилиндрические и сферические системы координат. И для тех, и для других
фигура, относительно которой определяется положение точки,
состоит из точки О, луча /, исходящего из О, и вектора п, равного по
длине 1 и перпендикулярного к /. Через точку О проведем плоскость 0,
перпендикулярную вектору п. Луч / лежит в этой плоскости.
Пусть дана точка М. Опустим из нее перпендикуляр ММ* на
плоскость 9.
Цилиндрические координаты точки М — это три числа г, <р, h.
Числа г и<р — полярные координаты точки М' по отношению к полю-
Рис. 8
Рис. 9
су О и полярной оси /, a h — компонента вектора М'М по вектору п.
Она определена, так как эти векторы коллинеарны (рис. 8).
§3. Замена базиса и системы координат 21
Сферические координаты точки — три числа (г, <ру0). Они
определяются так: г = |ОМ|. Как и для цилиндрических координат, (р —
угол вектора ОМ' с лучом /, а 0 — угол вектора ОМ с плоскостью в
(рис. 9).
Упражнения
1. Дан параллелограмм О ABC. В нем \ОА\ = 2, \ОС\ == 3, угол АОС
равен 7г/3. Найдите координаты точки В в системе координат О, ОС, СМ.
2. Даны три точки A(x\1yi)1 Я(#2, уг), С(хз,уз). Найдите координаты
вершины Z> параллелограмма ABCD.
3. Нарисуйте па плоскости множества точек, полярные координаты
которых связаны соотношениями: а) г = 2/cosip; б) г = 2cos<£.
4. Пусть О, /, п — сферическая система координат. Введем декартову
прямоугольную систему координат О, ei, ег, п, где ej направлен вдоль /, а
угол 7г/2 от ej к 02 отсчитывается в сторону возрастания полярного угла.
Напишите формулы, выражающие декартовы координаты через
сферические.
§ 3. Замена базиса и системы координат
1. Изменение базиса. До сих пор мы предполагали, что
рассматривается один базис. Однако выбор базиса ничем не ограничен,
и принципиальное значение имеет задача о нахождении компонент
вектора в одном базисе по его компонентам в другом базисе. При
этом положение нового базиса относительно старого должно быть
задано, а именно должны быть известны компоненты новых базисных
векторов е'1? е2 и е'3 в старом базисе ei,e2,e3. Пусть*)
е[ = а\е\ + а?е2 + а?е3,
е'2 = а\ох + ale2 + a^e3, (1)
e3 = a£ei + a|e2 + a?5C3.
Произвольный вектор а разложим по базису o\.Q2,e':i:
а = а[е[ + а2е2 + а3ез-
Компоненты этого же вектора в старом базисе обозначим аг1,а2,^з-
Раскладывая каждый член предыдущего равенства по базису ci, е2, е3,
в силу предложения 5 § 1 имеем
с*1 = а\а[ + а\а2 + а\а'г,
а2 = а(а[ + а\а'2 + aga£, (2)
огз = af ai + а*2*а2 -f а%а'3.
*) Здесь для удобства один из индексов мы располагаем сверху. Это не
показатель степени. Например, а\ читается "а один-три".
22
Гл. I. Векторная алгебра
Соотношения (2) и являются решением нашей задачи. Если нас
заинтересует выражение новых компонент через старые, то надо будет
решить систему уравнений (2) относительно неизвестных а'^о^, аз-
Результат будет иметь такой же вид, как (2), только коэффициентами
будут компоненты старых базисных векторов в новом базисе.
Точно тем же способом получаются формулы, связывающие
компоненты вектора в разных базисах на плоскости. Вот они:
а1=а[а'1 + а\а'2,
а<> = а{а[ + а\а'2*
Коэффициенты в формулах (2) можно записать в таблицу:
а\ а\ а\
а? а*2 а?
(4)
'1 «2 "3
Она называется матрицей перехода от базиса е1,е2,ез к базису
ei! e2i вз- В ее столбцах стоят компоненты векторов e'1? ео, с!$ в старом
базисе.
2. Изменение системы координат. Рассмотрим теперь две
декартовы системы координат: старую О, ei, в2, ез и новую О'. е[, е'2. е^.
Пусть М — произвольная точка, и координаты ее в этих системах
обозначены (x,y,z) и (x'.y'.z'). Поставим себе задачу выразить х, у
и z через х', у1 и z', считая известным положение новой системы
относительно старой. Оно определяется координатами (а^а^ а^) точки О'
в системе координат О, О1,ео,ез и компонентами векторов е'^е'^Сз,
составляющими матрицу перехода (4).
Радиус-векторы точки М относительно точек О и О' связаны
равенством ОМ — ОО1 +0'М, которое мы можем записать в виде
ОМ=бб' + х'с[ + у'е2 + z'e'3, (5)
так как х'. г/ и z1 — компоненты О'М в базисе e'^e^eg. Разложим
каждый член равенства (5) но базису ei,e2,ea, имея в виду, что
компоненты векторов ОМ и ОО1 равны координатам точек М и О',
которые мы обозначили (я, у, z) и (ао,<*о>ао)* Мы получим
х = а\ + а\х' Н- а\у' + a\z*',
y = al+alx'+aly' + a23z'y (6)
г = а% + а\х' + а\у' 4- a\z'.
Равенства (б) представляют собой закон преобразования
координат точки при переходе от одной декартовой системы координат в
пространстве к другой такой же системе.
3. Замена декартовой прямоугольной системы координат
на плоскости. Формулы перехода от одной декартовой системы
координат па плоскости к другой получаются из (6), если там оставить
§3. Замена базиса и системы координат
23
(7)
только первые два равенства и в них вычеркнуть члены с г':
х = а\х' + а\ъ/ + al,
у-а\х' + а%у' + а£.
Рассмотрим частный случай, когда обе системы координат
декартовы прямоугольные. Через <р обозначим угол между векторами ei и
e'j, отсчитываемый в направлении кратчайшего поворота от е\ кв2.
Тогда (рис. 10)
е\ = cos <р ei + sin <р е2,
е2 = cos (<р ± ~)ei -f sin (<р ± ^)е2.
В разло?кепии о2 ставится знак плюс, если кратчайший поворот
от 0]_ к е!2 направлен так же. как кратчайший поворот от е^ к е2,
т. е. если новый базис повернут относительно старого на угол <р. Знак
Рис. 10. Два случая взаимного расположении ортонорми-
рованных базисов на плоскости
минус в разложении е'2 ставится в противоположном случае, когда
новый базис не может быть получен поворотом старого.
Поскольку cos (<p± —J = ^Fsin^, sin f^±-j = ±cosv?, получаем
x = x' cos РТУ* sin P + <*о,
(8)
у = x1 sin (p ± y* cosip + as,
причем при повороте системы координат берутся верхние знаки.
Упражнения
1- Выведите формулы замены базиса и замены системы координат на
прямой линии. Как меняются координаты точек прямой, если при
неизменном начале координат длина базисного вектора увеличивается вдвое?
2. Пусть О' — середина стороны ЛВ треугольника ОАБ. Напишите
формулы перехода от системы координат О, СШ, О А к системе
координат О', О'О, О'В.
3. Дана декартова система координат О, ci, ег, е3. Как расположена
относительно нее система координат О', e^e^ej, если формулы перехода
имеют вид х = 1 — у' — z', у = 1 — х' — z\ z = 1 — х' — у\
24
Гл. /. Векторная алгебра
§ 4. Скалярное, смешанное и векторное произведения
1. Скалярное произведение. Иод углом между векторами мы
понимаем угол между векторами, равными данным и имеющими
общее начало. В некоторых случаях мы будем указывать, от какого
вектора и в каком направлении угол отсчитывается. Если такого
указания не сделано, углом между векторами считается тот из углов,
который не превосходит я\ Если угол прямой, то векторы называются
ортогональными.
Определение. Скалярным произведением двух векторов
называется число, равное произведению длин этих векторов на косинус
угла между ними. Если хоть один из векторов нулевой, то угол не
определен, и скалярное произведение по определению равно нулю.
Скалярное произведение векторов а и b обозначается (а, Ь) или ab.
Таким образом, мы можем написать
(а,Ъ) = |а||Ъ|совр,
где (р — угол между векторами а и Ь.
Необходимо подчеркнуть следующее принципиальное
обстоятельство: скалярное произведение может быть определено только
после того, как будет выбрана определенная единица измерения длин
векторов. Иначе приведенное выше определение не имеет смысла.
Скалярное умножение имеет следующие очевидные свойства.
• Коммутативность: для любых а и b выполнено (а,Ь) = (Ь,а).
• (а, а) == |а[2 для любого вектора а.
• Скалярное произведение равно нулю тогда и только тогда, когда
сомножители ортогональны или хотя бы один из них равен 0.
• Векторы ортонормированного базиса удовлетворяют равенствам
(ei,ei) = (е2,е2) = (е3,е3) = 1,
(ei,e2) = (e2,e3) = (e3,ei) =0.
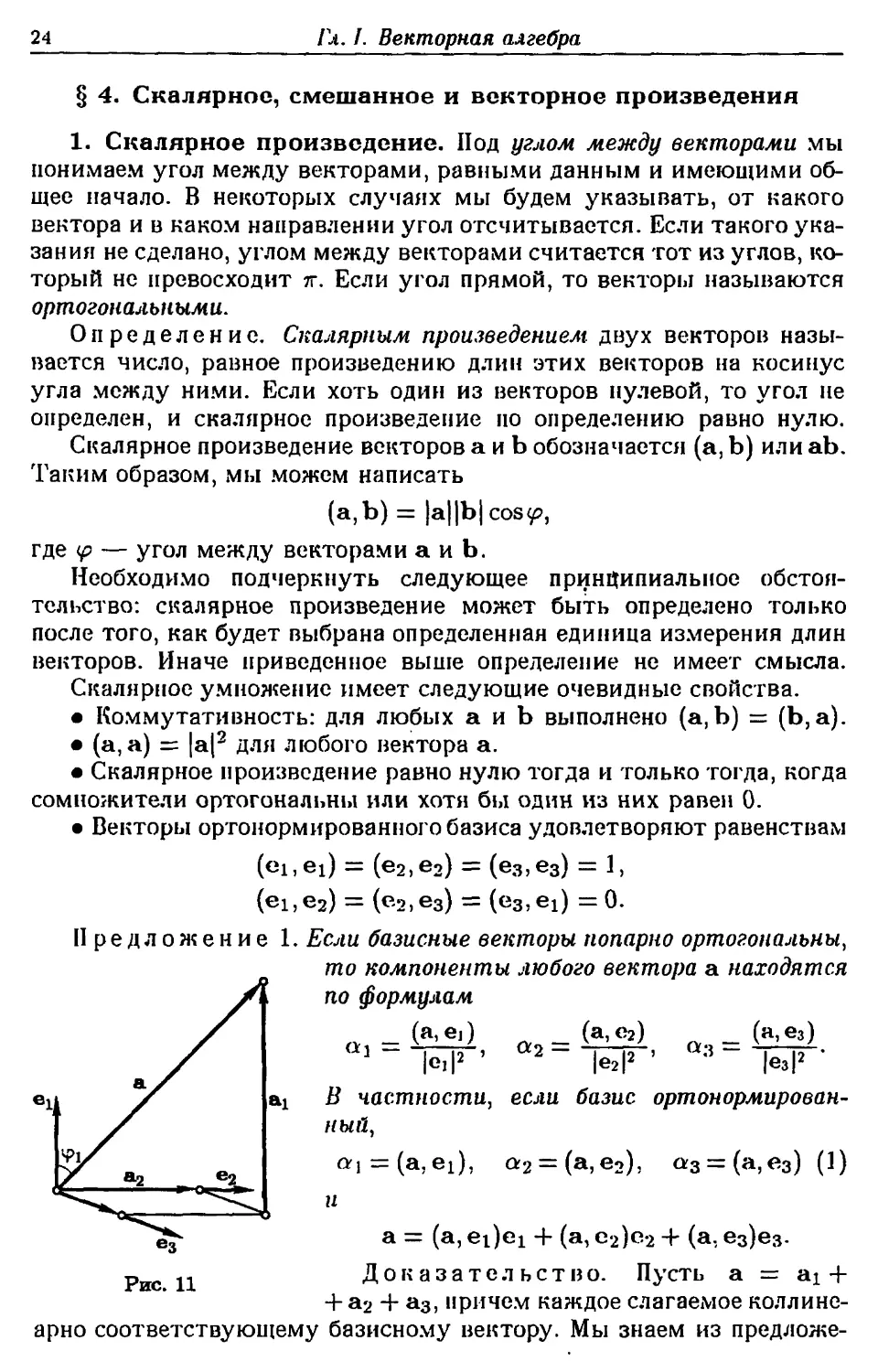
Предложение 1. Если базисные векторы попарно ортогональны,
то компоненты любого вектора а находятся
по формулам
(a, ej)
ttl = hP
2 Ыг '
В частности,
ный.
если базис ортонормирован-
ori = (a,ei), a2 = (a,e2), а3 = (а,е3)(1)
а = (a, ei)ei + (а, е2)е2 + (а, е3)е3.
Доказательство. Пусть а = ах +
+ а2 + а3, причем каждое слагаемое коллине-
арно соответствующему базисному вектору. Мы знаем из предложе-
§4- Скалярное, смешанное и векторное произведения 25
ния 2 § 1, что а\ = ±|ai[/|ei|, где выбирается знак ■+ или — в
зависимости от того, одинаково или противоположно направлены ai
и ei- Но, как видно из рис. 11, ±|ai| = |a|cos<pi, где <р\ — угол
между векторами а и ei- Итак, а\ = |a|cos^i/|ei| = (a,ei)/|ei|2.
Аналогично вычисляются и остальные компоненты.
Определение. Косинусы углов между вектором а и базисными
векторами декартовой прямоугольной системы координат
называются направляющими косинусами этого вектора.
Направляющие косинусы — это компоненты вектора а0 = а/|а|.
Их отличительная особенность состоит в том, что сумма их
квадратов равна квадрату длины а0, т. е. 1 (см. ниже формулу (3)).
Предложение 2. Для любых векторов a, b и с и любых чисел а
и (3 выполнено равенство
(аа + /?Ь, с) = а(а, с) + /?(Ъ, с).
В частности, (аа, с) = а(а, с) и (а + Ь, с) = (а, с) + (Ъ, с).
Доказательство. Если с = 0, то утверждение очевидно.
Пусть с ф 0. Примем с за первый вектор базиса, а остальные выберем
ортогонально к нему и между собой. Число (аа + /?Ь, с)/|с|2 — первая
компонента вектора аа + /?Ь. Точно так же (а, с)/|с|2 и (Ь,с)/|с|2 —
первые компоненты векторов а и Ь. Согласно предложению 5 § 1
(аа + /Я», с)/|с|2 = а(а, с)/|с|2 + /?(Ь, с)/|с|2.
Отсюда прямо получается доказываемое равенство.
Легко показать, что такая же формула справедлива и для
линейной комбинации любого числа векторов. Используя коммутативность
скалярного умножения, мы получаем тождество
(а,/?Ъ +7с) =/?(а, Ъ) + 7(а, с).
Теорема 1. Если базис ортонормировашшй, то скалярное
произведение векторов а и Ь выражается через их компоненты (ai, a2, аз)
и (/?ь/?2,/?з) по формуле
(а,Ь) = а1/?1+а2/?2 + а3/?з. (2)
Действительно, подставим вместо а его разложение и
воспользуемся предложением 2:
(а, Ь) = (aiei + <*2е2 + а3е3, Ь) = ori(ei, Ь) + а2(е2, Ь) + а3(е3, Ъ).
Теперь доказываемое следует из формулы (1).
Отметим, что требование ортонормированности базиса очень
существенно. В произвольном базисе выражение скалярного
произведения через компоненты гораздо сложнее. Поэтому в задачах,
связанных со скалярным произведением, чаще всего используются
ортонормированные базисы.
Если почему-либо все ?ке надо вычислить скалярное произведение
в неортонормированном базисе, следует перемножить разложения
сомножителей по базису и. раскрыв скобки, подставить в полученное
26
Гл. I. Векторная алгебра
выражение известные скалярные произведении базисных векторов.
Теорема 1 позволяет выписать выражение длины вектора через
его компоненты в ортонормированном базисе
а также выражение косинуса угла между векторами
cos <р =
(а,Ь)_
<*Ф\ + а2/32 + аз/Зз
(3)
(4)
Nlbl ^а? + <*2+«2 >/#+#+#'
Используя формулу (3), мы можем вычислить расстояние между
точками, если заданы их координаты в декартовой прямоугольной
системе координат. В самом деле, пусть точки Aw В имеют
координаты (х,у, z) и (si,3/i,2i). Тогда расстояние между ними равно
\АВ\ = >/(*i-*)2 + (yi-y)2 + (*i-*)2. (5)
Скалярное умножение тесно связано с понятием проекции
вектора. Слово "проекция" употребляется в двух смыслах. Введем
соответствующие определения.
Пусть задан вектор А В и некоторая прямая /. Опустим из точек А
и В перпендикуляры на прямую и
обозначим их основания А* и В* (рис. 12).
Вектор А'В' называется (ортогональной)
векторной проекцией вектора А В на
прямую / и обозначается YLptAB.
Из определения сразу следует, что
векторные проекции равных векторов
на параллельные прямые равны между
собой.
_ лп Пусть е — ненулевой вектор на
пригоне. 12 _ ,__ тт£>/
мой /. Тогда А'В' = ае при
некотором а. Представим АВ в виде АВ = АГВ" = ae + b и заметим, что
вектор b = В'В" ортогонален е. Поэтому после скалярного
умножения на е получаем (AB,g) = а(е,е). Находя отсюда а, имеем
/
/
у
/
^
е
0
V
В"
1
(Л^е)
Пр,АВ =
е.
(б)
Хотя на вид это выражение зависит от е, фактически оно не меняется
при замене е любым ненулевым вектором Ае, коллинеарным е.
Проекцию А'В1 можно представить в виде
(АЕ.е) с
1*1 N
и заметить, что (Ai?,e)/|e| — это компонента А'В' но вектору е° =
= о/|е|. Так как |е°[ = 1, компонента по абсолютной величине рав-
§4- Скалярное, смешанное и векторное произведения 27
на длине А'В'. Она положительна, если направление А'В' совпадает
с направлением о, и отрицательна в противоположном случае.
Величина (АВ,е)/\с\ не меняется при замене с на соиаправленный
вектор Ас, А > 0, и меняет знак при замене е на противоположно
направленный вектор.
Прямая линия называется направленной прямой (употребляются
также термины ориентированная прямая и ось), если на ней указано
определенное направление. Подробнее это определение
рассматривается в начале п. 2. ___
Определение. Число {АВ,е)/\е\ называется скалярной
проекцией вектора АВ на ось /, определяемую вектором о (или на вектор е),
и обозначается Пр/УП? или ПреЛБ.
Из определении следует, что llp^B = \AB\cos<p, где <р — угол
между АВ и е. Компоненты вектора в ортонормированном базисе
равны его скалярным проекциям на оси координат.
2. Ориентация прямой, плоскости и пространства. Выше
мы дали определение ориентированной прямой (оси). Скажем о нем
подробнее, с тем чтобы аналогично ввести определение
ориентированной плоскости и ориентированного пространства.
Все базисы (ненулевые векторы) на прямой разделяются на дна
класса: векторы из одного класса направлены одинаково, а векторы
из разных классов направлены противоположно. Говорится, что
прямая ориентирована или что на ней задана ориентация, если из двух
классов базисов выбран один. Базисы выбранного класса называются
положительно ориентированными или положительными.
Задать ориентацию можно, указав какой-либо базис и считая
положительно ориентированными все базисы того же класса. Однако то,
что прямая ориентирована, не означает, что на ней выбран какой-то
определенный базис.
Два базиса на плоскости называются одинаково ориентированны-
ми, если в обоих базисах кратчайший поворот от первого вектора ко
ie3
«1
е2 ex
а 6
Рис. 13. Левый базис (а), правый базис (6)
второму производится в одну сторону, и противоположно
ориентированными в противном случае. На рис. 10, а базисы ориентирова-
ез
28
Гл. I. Векторная алгебра
ны одинаково, а на рис. 10, б— противоположно. Если фиксировать
какой-то базис, то любой другой ориентирован с ним либо одинаково,
либо противоположно, и, таким образом, все базисы распадаются на
два класса: любые два базиса одного класса ориентированы
одинаково, базисы разных классов ориентированы противоположно.
Опрсделение. Плоскость ориентирована, если из двух классов
базисов на ней выбран один класс.
Ориентацию можно задать, выбрав базис и считая
положительно ориентированными все базисы одного с ним класса. Но, конечно,
задание ориентации не предполагает выбор определенного базиса.
В планиметрии часто ориентируют плоскость, считая
положительными те базисы, у которых кратчайший поворот от первого вектора
ко второму производится против часовой стрелки. Для плоскости в
пространстве это соглашение не имеет смысла, так как видимое
направление поворота зависит от того, с какой стороны смотреть на
плоскость. Но если выбрать одно из полупространств,
ограничиваемых плоскостью, и смотреть на повороты именно из него, то класс
базиса определяется видимым направлением поворота.
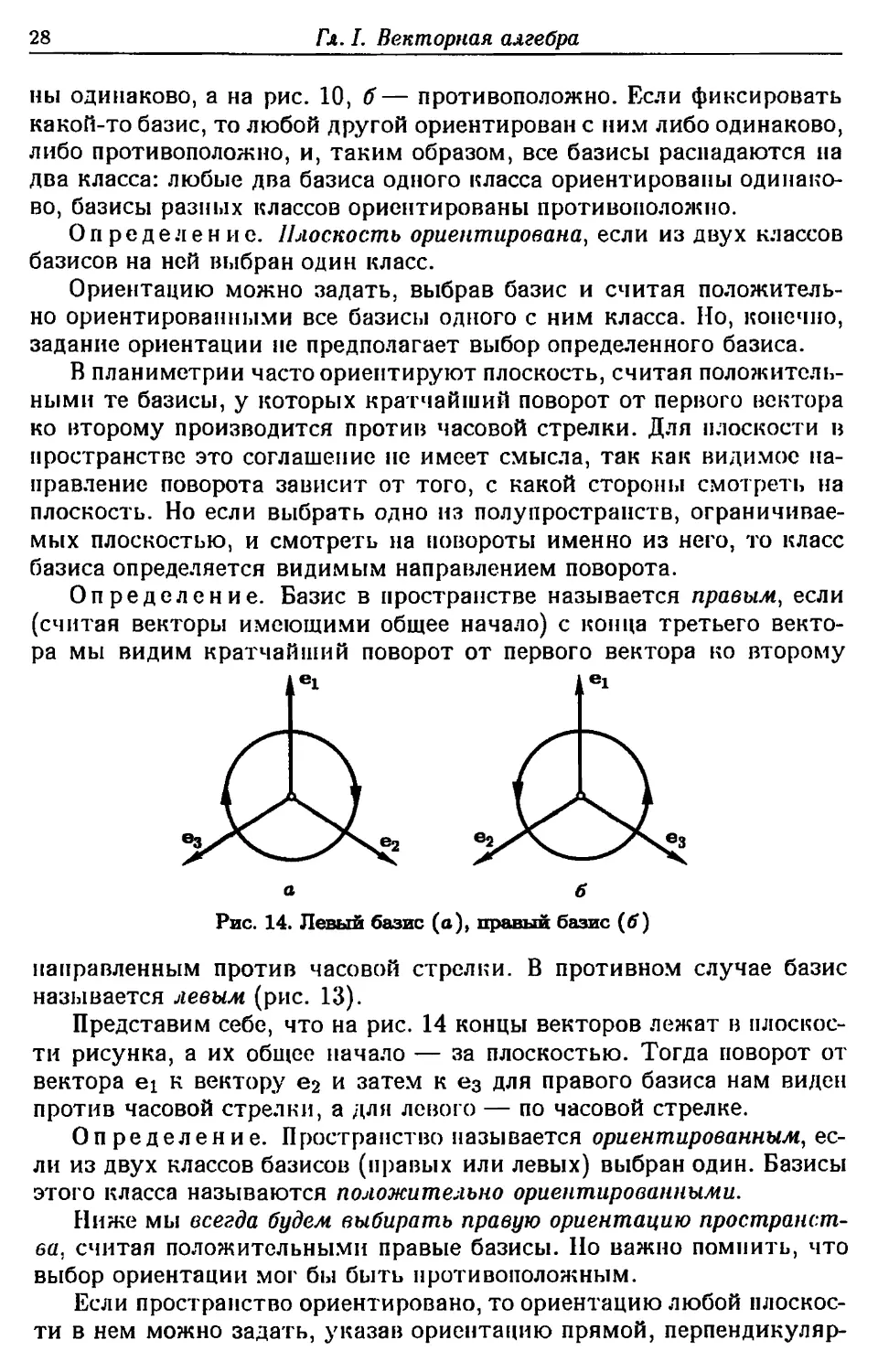
Определение. Базис в пространстве называется правым, если
(считая векторы имеющими общее начало) с конца третьего
вектора мы видим кратчайший поворот от первого вектора ко второму
о б
Рис. 14. Левый базис (а), правый базис (б)
направленным против часовой стрелки. В противном случае базис
называется левым (рис. 13).
Представим себе, что на рис. 14 концы векторов лежат в
плоскости рисунка, а их общее начало — за плоскостью. Тогда поворот от
вектора ei к вектору е2 и затем к е3 для правого базиса нам виден
против часовой стрелки, а для левого — по часовой стрелке.
Определение. Пространство называется ориентированным,
если из двух классов базисов (правых или левых) выбран один. Базисы
этого класса называются положительно ориентированными.
Ниже мы всегда будем выбирать правую ориентацию
пространства, считая положительными правые базисы. Но важно помнить, что
выбор ориентации мог бы быть противоположным.
Если пространство ориентировано, то ориентацию любой
плоскости в нем можно задать, указав ориентацию прямой, перпендикуляр-
§4- Скалярное, смешанное и векторное произведения 29
ной этой плоскости. При этом положительным базисом a, b на
плоскости считается такой, который вместе с положительным базисом п
на прямой составляет положительный базис пространства а, Ь,п.
Это — внешний способ задания ориентации. Говорится, что
ориентация плоскости определяется нормальным вектором п.
Аналогично, в ориентированном пространстве можно внешним
образом задать ориентацию прямой линии. Для этого нужно задать
ориентацию плоскости, перпендикулярной этой прямой.
Положительным базисом на прямой будет такой базис, который вместе с
положительным базисом плоскости составляет положительный базис
пространства.
3. Площадь ориентированного параллелограмма, объем
ориентированного параллелепипеда. Если прямая
ориентирована, то длине ненулевого вектора на ней можно приписать знак:
считать длину положительной, если вектор ориентирован положительно,
и отрицательной в противоположном случае. Именно так мы
приписываем знак длине векторной проекции, когда определяем скалярную
проекцию. Обобщим это определение.
Рассмотрим параллелограмм, построенный на двух векторах так,
что две его смежные стороны являются векторами с общим началом.
Параллелограмм называется ориентированным, если пара векторов,
на которой он построен, упорядочена. На ориентированной
плоскости параллелограмм считается полоя^ительно или отрицательно
ориентированным, смотря по тому, как ориентирована определяющая его
пара векторов.
На ориентированной плоскости принято считать площадь
ориентированного параллелограмма числом со знаком: она равна площади
параллелограмма (положительна), если параллелограмм
ориентирован положительно, и равна той же площади со знаком минус, если
отрицательно. Мы будем обозначать площадь ориентированного
параллелограмма, построенного на векторах а и Ь, через 5±(а,Ь).
Рассмотрим теперь параллелепипед, построенный на трех
векторах так, что три его ребра, исходящие из одной вершины,
являются векторами с общим началом. Параллелепипед называется
ориентированным, если эти три ребра упорядочены. В ориентированном
пространстве ориентация параллелепипеда положительна или
отрицательна смотря по тому, какую тройку образуют векторы, на которых
он построен.
В ориентированном пространстве объем ориентированного
параллелепипеда — число со знаком: об7>см положительно
ориентированного параллелепипеда считается положительным, а отрицательно
ориентированного — отрицательным.
При выбранной нами правой ориентации пространства
положительными считаются объемы ориентированных параллелепипедов,
построенных на правых тройках векторов.
30
Гл. I. Векторная алгебра
4. Смешанное произведение. Если пространство
ориентировано, мы можем ввести
Определение. Смешанным произведением векторов a, b и с
(в данном порядке) называется число, равное объему
ориентированного параллелепипеда, построенного на этих векторах, если они не
компланарны, и равное нулю, если компланарны.
Смешанное произведение векторов a, b и с обозначается (а,Ь,с).
При перестановке сомножителей в смешанном произведении,
самое большее, может измениться только ориентация тройки векторов.
Поэтому абсолютная величина смешанного произведения не зависит
от порядка сомножителей. Для любых векторов a, b и с мы получаем,
сравнивая ориентации троек векторов (см. рис. 14),
(а, Ь, с) = (с, а, Ь) = (Ь, с, а) = -(Ь, а, с) = -(с, Ь, а) = -(а, с, Ь). (7)
Следующее предложение устанавливает связь между скалярным
произведением и смешанным произведением.
Предложение 3. Каковы бы ни были векторы b и с, найдется
единственный [не зависящий от а) вектор d такой, что при любом а
выполнено равенство
(a,b,c) = (a,d). (8)
Доказательство Докажем сначала существование вектора d,
а потом установим, что такой вектор возможен только один. Пусть
векторы b и с коллинеарны. Тогда при любом а векторы a, b и с
компланарны и (а,Ь,с) = 0. Поэтому мы можем положить d = 0.
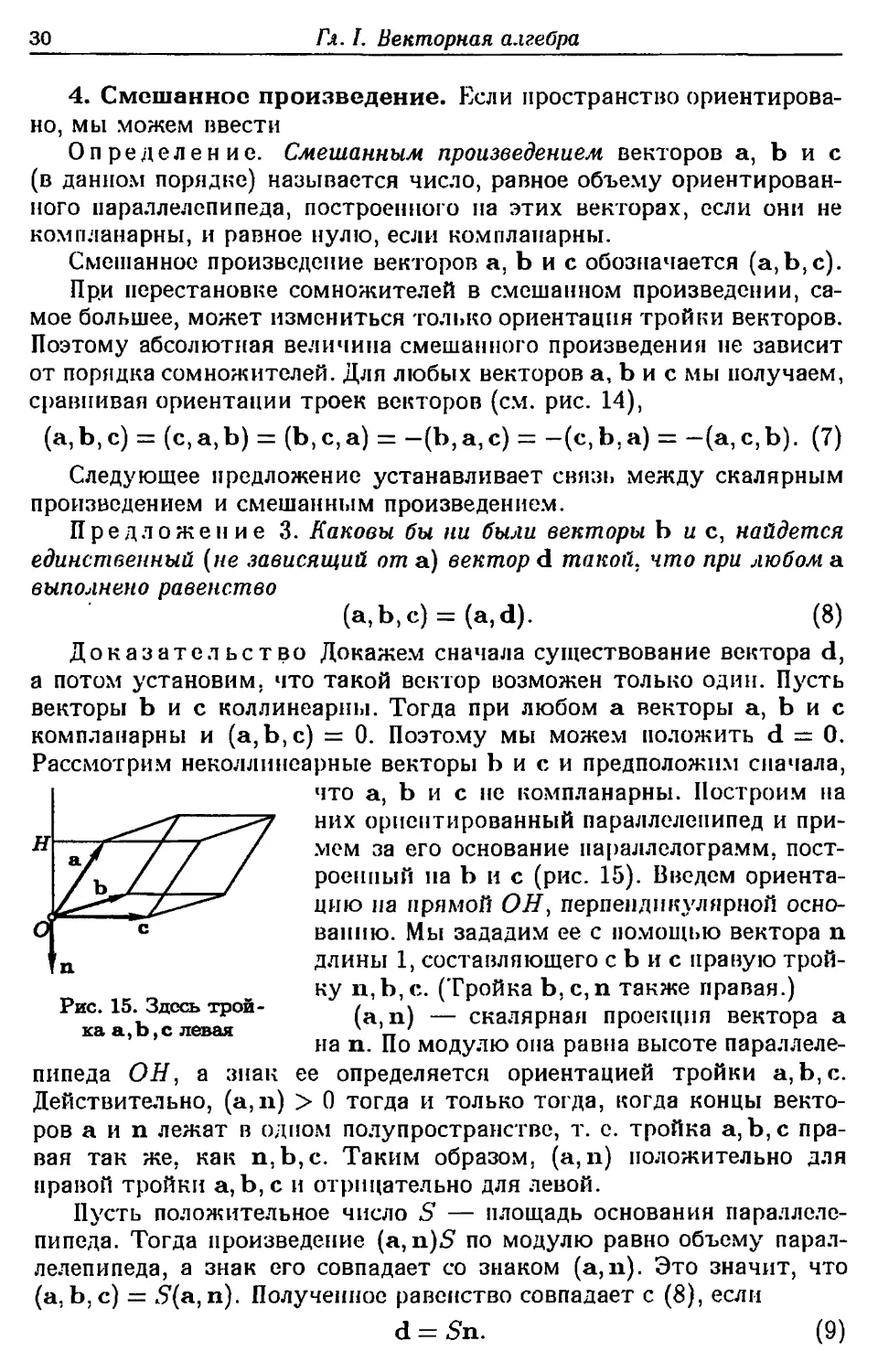
Рассмотрим неколлинеарные векторы b и с и предположим сначала,
что a, b и с не компланарны. Построим на
них ориентированный параллелепипед и
примем за его основание параллелограмм,
построенный па b и с (рис. 15). Введем
ориентацию на прямой ОН, перпендикулярной
основанию. Мы зададим ее с помощью вектора п
длины 1, составляющего с b и с правую трой-
ку п. Ь, с. (Тройка Ь, с, п также правая.)
хл^Ъ^ва^' (а,п) ~~ скаляРнаи проекция вектора а
' ' на п. По модулю она равна высоте
параллелепипеда ОН, а знак ее определяется ориентацией тройки а,Ь,с.
Действительно, (а,п) > 0 тогда и только тогда, когда концы
векторов а и п лежат в одном полупространстве, т. е. тройка а,Ь,с
правая так же. как n,b,c. Таким образом, (а, п) положительно для
правой тройки а, Ь, с и отрицательно для левой.
Пусть положительное число S — площадь основания
параллелепипеда. Тогда произведение (а, п)5 по модулю равно объему
параллелепипеда, а знак его совпадает со знаком (а,и). Это значит, что
(а, Ь.с) = 5(а, п). Полученное равенство совпадает с (8), если
d = Sn. (9)
§4* Скалярное, смешанное и векторное произведения 31
Осталось рассмотреть случай, когда Ьи сне коллинеарны, а а,
b и с компланарны. В этом случае а лежит в плоскости векторов b
и с и, следовательно, ортогонален вектору d, вычисленному по
формуле (9). Поскольку (а, Ь, с) = 0 и (а, п) = 0, вектор (9) удовлетворяет
равенству (8) и в этом случае. Итак, мы нашли вектор, который
удовлетворяет (8) при любом а и определяется только но b и с.
Допустим, что для фиксированных b и с нашлось два вектора di
и d2 таких, что для любого а выполнено (а, Ь, с) = (a, di) и (а, Ь, с) =
= (a, d2). Отсюда следует, что (a, di) = (a, d2) или (a, di - d2) = 0.
Поэтому вектор di — d2 ортогонален каждому вектору пространства
и, следовательно, равен нулевому вектору. Это доказывает, что
вектор d, определяемый формулой (8), может быть только один.
Предложение полностью доказано.
Опишем еще раз, как вектор d определяется по b и с.
1. Если b и с коллинеарны, то d = 0.
2. Если Ьисне коллинеарны, то:
а) |d| = S = |b||c|siny>, где (р — угол между b и с;
б) вектор d ортогонален векторам b и с;
в) тройка векторов b,c,d имеет положительную ориентацию.
При нашем выборе ориентации пространства — это правая тройка.
Определение. Вектор d, определенный перечисленными выше
условиями, или, что то же, формулой (8), называется векторным
произведением векторов b и с.
Подчеркнем, что векторное произведение, как и смешанное,
определено только для ориентированного пространства. Разумеется,
необходим так?ке выбор единицы измерения длин.
Векторное произведение векторов b и с обозначают [Ь,с] или
b х с. Используя это обозначение, мы можем записать формулу (8) в
виде
(а,Ь)с) = (а,[Ь,с]). (10)
Благодаря этому равенству смешанное произведение и получило свое
название.
Пример 1. Пусть ei,e2,o3 — правый ортонормированный базис.
Тогда при выбранной нами правой ориентации пространства
[c2,e3] = ei, [e3loi] = c2, [ei,e2] = c3. (11)
Если fi,f2,f3 — левый ортонормированный базис, то
[f2,f3] = -fb [fs,fi] = -f2, [fi,f2] = -fs.
Предложение 4. Векторное умножение антикоммутативно,
т. е. для любых векторов [Ь, с] = -[с, Ь].
Действительно, если (a,b,c) = (a,d), то
(a,c,b) = -(a,d) = (a,(-d)).
Получим теперь свойство линейности смешанного и векторного
произведений по каждому из сомножителей. Применяя иредложе-
32
Гл. I. Векторная алгебра
ние 2 к скалярному произведению (Aai -f j/a2,[b, с]), мы получим
(Аа2 + /ха2, Ь, с) = A(ai, b, с) + ^(а2, Ь, с). (12)
Из равенств (7) следуют аналогичные тождества для остальных
сомножителей. Например, для второго сомножителя
(а, ЛЬх + /ib2, с) = А(а, Ьг, с) + /u(a, Ь2, с). (13)
Действительно, мы можем переставить интересующий нас
сомножитель на первое место, раскрыть скобки, а затем выполнить обратную
перестановку.
Предложение 5. Для любых векторов bi, b2 и с и любых чисел А
и р имеет место равенство
[Abi + pb2, с] = А[ЬЬ с] + р\Ъ2, с].
В самом деле, правой части формулы (13) можно придать вид
(а,А[Ььс]) + (а,//[Ъ2,с]).
Поэтому по предложению 2 получаем
(a, [Abi + //b2l с]) = (а, А[ЪЬ с] + р[Ъ2, с]).
Так как это верно для любого вектора а, мы можем, выбрав орто-
нормированный базис ei, с2, е3, подставить на место а
последовательно каждый вектор этого базиса. В силу предложения 1 мы получим
равенство всех компонент векторов [Abi + /*Ь2. с] и A[bi, с] + /х[Ь2,с],
а отсюда и равенство векторов, которое нам нужно было доказать.
Линейность векторного произведения по второму сомножителю
можно получить из свойства антикоммутативности.
5. Выражение векторного и смешанного произведения
через компоненты сомножителей. Если заданы разложения
векторов а и b по векторам некоторого базиса в1,е2,ез, то мы можем
раскрыть скобки:
[а, Ъ] = [(cnei + а2е2 + а3е3), (ftei + 02е2 + #зе3)] =
= {а\02 - a2/?i)[ei, е2] + (а203 - а3/?2)[е2, е3] +
+ (азЛ-а1/?з)[е3>е1]. (И)
Здесь использовалась антикоммутативность векторного умножения
и то, что векторное произведение двух одинаковых сомножителей —
нулевой вектор. В примере 1 были сосчитаны попарные векторные
произведения векторов ортонормированного базиса. Поэтому из
формулы (14) следует
Теорема 2. В положительно ориентированном
ортонормированием базисе векторное произведение выражается через компоненты
сомножителей формулой
[а,Ь] = (а20з ~ <*3/?2)ci + {<*з0\ - <*\0г)*2 + (<*i/?2 - <*20i)e3. (15)
Если базис ориентирован отрицательно, перед правой частью этой
формулы следует поставить знак минус.
§4- Скалярное, смешанное и векторное произведения 33
Избежать постоянной заботы об ориентации базисов можно двумя
способами. Можно договориться при правой ориентации
пространства, если не оговорено противное, использовать только правые базисы.
Такого соглашения мы и будем придерживаться.
Нторой способ состоит в том, чтобы не фиксировать заранее
ориентацию пространства, а выбирать ее так, чтобы используемый базис
был ориентирован положительно. При таком подходе векторное
произведение всегда вычисляется по формуле (15), но приходится
следить за тем, как векторное произведение направлено. Этот подход
принят, например, в литературе по физике.
Теорема 3. Смешанное произведение векторов a, b и с
выражается через их компоненты (ог1,а2,аз), (/?ь,#2>/?з) и (7ь72>7з) в
произвольном базисе в1,е2,ез по формуле (a,b,c) = (c*i/?273 + c*2j#37i +
+ ПГ3&72 "" азА>71 - <*2/?i73 - ai/?372)(ei,e2,e3).
Для доказательства заметим, что (а, Ь,с) = (с, [а, Ь]) и умножим
скалприо обе части равенства (14) на вектор с = 71^1 + 72^2 + 7зез-
Мы получим
(а,Ъ, с) = 7i(«2/?з - а3А)(еь [е2,е3]) +
+ 7з(аз/?1 - tti/%)(e2, [e3,ej) + 73(^1^2 - a2/?i)(e3, [еье2]).
(Слагаемые, содержащие смешанные произведения с одинаковыми
сомножителями, мы не выписываем, так как они равны нулю.) Отсюда,
учитывая равенства (7) и приводя подобные члены, получаем
нужный нам результат.
6. Детерминанты второго и третьего порядков. Найденные
нами формулы достаточно громоздки. Для их более компактной
записи употребляются детерминанты (или определители) второго и
третьего порядков.
Рассмотрим четыре числа а1}а2,/?ь/?2- Из них можно составить
таблицу, называемую матрицей второго порядка:
II?: s II-
Число c*i/?2 — c*2fi\ называется детерминантом этой матрицы или
детерминантом второго порядка и обозначается
I <*1 ос2\
I А А Г
Теперь выражение векторного произведения в правом ортонорми-
рованном базисе перепишется так:
<*2 а3
02 03
ei +
а3 <*i
0з 01
е2 +
<*1 <*2
01 02
Из компонент трех векторов можно составить таблицу— матрицу
34
Гл. I. Векторная алгебра
третьего порядка
Число
«1
А
72
А
7з
А А
7i 72
+ (*2
А
7з
или, что то же самое,
аг
А
72
А
7з
-а2
А
71
называется детерминантом этой
третьего порядка и обозначается
«1 #2
1 71 72
По теореме 3 в новых обозначениях
(а,
Ь,с) =
1 <*i «2
1 71
72
<*з
А
7з
А 1
71 |
+ <*з
А I
7з J
+ <*з
матрицы
<*з
А
7з
<*з
А
7з
(еь
А
71
А
71
или
А
72
»
А
72
»
детерминантом
еа.ез). (16)
В частности, в правом ортонормированном базисе
I e*i «2 е*з I
(а,Ъ,с) = А А А • (17)
I 71 72 7з I
При помощи теоремы 2 и определения детерминанта можно
получить следующее выражение векторного произведения через
компоненты сомножителей в правом ортонормированном базисе:
I ei e2 е3 I
[а,Ь]= <*i а2 а3 . (18)
I А А А I
Детерминанты тесно связаны с системами линейных уравнений,
решения которых удобно записывать с их помощью. Этим мы
займемся в гл. V, а сейчас дадим только геометрическую иллюстрацию.
Пусть дана система из трех уравнений
aix + biy + ciz = d\,
«2^ + Ь2у + с2г = d2,
агх + 63у + c3z = d3.
Выберем в пространстве некоторый базис и рассмотрим векторы
a(ai,a2,a3), b(61,62,63), с(сьс2,сз) и d(di,c?2, rf3). Тогда система
является координатной записью векторного равенства
яа + уЬ + zc = cL (19)
§4- Скалярное, смешанное и векторное произведения, 35
Поэтому решение системы ж,т/, z — коэффициенты разложения d
по a, b и с. Мы можем быть уверены, что система имеет
единственное решение, если a, b и с не компланарны, т. е. (а, Ь, с) ф 0.
Предположим, что это условие выполнено, и найдем решение. Для этого
умножим обе части равенства (19) скалярно на векторное
произведение [Ь,с]. Мы получим я(а, Ь, с) = (d, b, с), и, следовательно, х
равен отношению детерминантов
d\ d<i dz
и
62
c2
63
сз
«1
C\
a>2
b2
Co
аз
6з
сз
Аналогично находятся и остальные неизвестные.
Остановимся на следующих свойствах детерминантов. Из
равенств (7) следует, что детерминант меняет знак при перестановке
каких-либо двух строк матрицы. Формула (12) означает, что
\а'г + ра!{
Ьг
с\
Аа'о
Ъ2
С2
\а'3 + ра%
сз
= А
а\
bi
с\
Ь2
С2
«3
сз
+ А*
h
с\
62
с2
Ьг
сз
7. Условия коллинеарности и компланарности. Начнем со
следующего полезного предложения.
Предложение 6. Каков бы ни был базисеье2,ез, попарные
векторные произведения базисных векторов линейно независимы.
Докажем это от противного. Рассмотрим равенство
А[е2, е3] + А*[е3, ei] + */[еь е2] = 0
и допустим, что какой-нибудь коэффициент, пусть для
определенности А, отличен от нуля. Умножив обе части равенства скалярно на ei,
мы получим А(в1,е2,ез) = 0. Полученное противоречие доказывает
наше предложение.
Следующие предложения дают условия на компоненты векторов
в произвольном базисе, необходимые и достаточные для
компланарности или коллинеарности векторов.
Предложение 7. Равенство нулю детерминанта матрицы из
компонент трех векторов необходимо и достаточно для
компланарности векторов.
Это сразу следует из формулы (16), поскольку (ei,e2,e3) ф 0.
Предложение 8. Пусть (аьо^аз) и (/?ь/?2,/?з) -~ компоненты
векторов а и Ъ в некотором базисе. Векторы aub коллинеарны тогда
и только тогда, когда
а 2 <*з
а г <*i
OL\ Of2
= 0.
(20)
36
Гл. /. Векторная алгебра
= 0.
Достаточность условия очевидна: из равенств (20) по формуле (14)
следует обращение в нуль [а, Ь]. что равносильно коллинеарности
векторов. Заметим, что мы пользуемся формулой (14), которая
справедлива для произвольного базиса. Наоборот, из обращения в нуль [а,Ь] и
формулы (14) мы можем вывести (20), так как в силу предложения 6
векторы [е2,с3], [ез,ei] и [ei,e2] линейно независимы.
В планиметрии признак коллинеарности двух векторов дает
Предложение 9. Обращение в нуль детерминанта матрицы из
компонент двух векторов на плоскости необходимо и достаточно для
коллинеарности этих векторов.
Для доказательства будем считать, что плоскость помещена в
пространство и базис в этой плоскости дополнен третьим вектором
до базиса в пространстве. Тогда векторы a(c*i,a2) и Ь(/?1,/?г) на
плоскости имеют компоненты (ai,a2,0) и (/?ь/?2>0) относительно
базиса в пространстве. Применяя предложение 8, получаем условие
c*i с*2
Остальные два детерминанта равны нулю, так как аз = /?з = 0.
8. Площадь параллелограмма. Бели в пространстве заданы два
неколлинеарных вектора, имеющих общее начало, то площадь
параллелограмма, построенного на этих векторах, может быть найдена
через их компоненты в ортонормированном базисе по формуле
S = |[а, Ъ]| = >/(а2/?з - а3&)2 + (*зА - <*iA02 + (*i A " <*2/?i)2-
(21)
Еще одно выражение для площади параллелограмма мы получим, если
заметим, что
|[a,b]|2=|a|2|b|2sinV=N2|b|2(l-cosV)-
В результате i |a|2 (ab)
Ь " | (а,Ь) |Ъ|2
Найдем теперь площадь ориентированного параллелограмма на
ориентированной плоскости. Можно считать, что ориентация
плоскости определена вектором п, перпендикулярным плоскости и
составляющим правую тройку с положительным базисом на плоскости.
Более того, будем предполагать, что |п| = 1.
Пусть дан ориентированный параллелограмм, построенный на
векторах аиЬ. Рассмотрим скалярную проекцию Прп[а,Ь].Так как [а,Ь]
и п коллинеарны, проекция по модулю равна |[а, Ь]|, т. е. площади
параллелограмма. Она положительна, если [а,Ъ] и п сонаиравлены, и
отрицательна в противном случае. Но вектор [а, Ь] сонаправлен с п,
если пара векторов a, b на плоскости ориентирована положительно.
Поэтому Прп[а, Ь] равна площади ориентированного
параллелограмма, построенного на а и Ь. По определению проекции
5±(а,Ь) = (п,а,Ь)
(22)
§4- Скалярное, смешанное и векторное произведения 37
(напомним, что |п|= 1). На плоскости выберем произвольный (не
обязательно положительный) базис еь е2. Примем п за третий базисный
вектор и выразим смешанное произведение через координаты
сомножителей:
10 0 1 I
S±(a,b) = ai а2 0 (еье2,п).
I Л А 0 |
Вычисляя детерминант, находим, что он равен e*i/?2 — с*2/?ь и
получаем окончательное выражение
5±(а|Ь) =
£ g 5±(elfea). (23)
Эта формула сходна с формулой (16). По существу это та же
формула, написанная для двумерного пространства. Если еь е2 —
положительный ортонормированный базис, то
S±(a,b) = aij82-a2ft. (24)
Для площади неориентированного параллелограмма в
ортонормированием базисе мы получаем формулу
S=|ai/J2-ar2A|, (25)
которая следует и из (21).
9. Двойное векторное произведение. Выражение [а, [Ь,с]]
называется двойным векторным произведением. Докажем, что
[а,[Ь,с]]=(а1с)Ь-(а,Ь)с. (26)
С этой целью выберем правый ортонормированный базис в1,е2,ез
так, чтобы ei был коллинеарен Ь, а е2 был компланарен b и с. Тогда
b = /?еь с = 7iei + 72^2 и а = c*iei + a2e2 + агз©з- Отсюда
получаем [Ъ,с] = 0у2е3 и
[а, [Ь, с]] = -e*i/?72e2 + a2/?72«i.
С другой стороны,
(а,с)Ь = (aj7i + а272)/?еь (а,Ь)с = <*iP(7xei + 72в2).
Разность правых частей двух последних равенств совпадает с
найденным выше двойным векторным произведением. Это заканчивает
доказательство.
10. Биортогональный базис. Дадим следующее
Определение. Базис, составленный из векторов
с* = [°2,e3] * __ [o3,ei] ^ _ [ex,e2j
1 ~~ (ei,e2,e3)5 '2 ~~ (oi,e2le3)' 3 (еье2,е3)'
называется взаимным или биортогоналъным для базиса С1,е2|сз.
Из предложения 6 вытекает, что ej, e2, eg не компланарны и
действительно образуют базис. Название "биортогональный" связано с тем,
38
Гл. I. Векторная алгебра
что векторы обоих базисов, имеющие разные номера, ортогональны:
(ei,e]) = 0 при i ф j. Кроме того, (е*,е*) = 1 для всех г.
Нетрудно проверить, что ортонормированный базис совпадает со
своим взаимным.
Предложение 10. Если е*, ej, ej — базис, взаимный с ei, е2, ез,
то произвольный вектор а раскладывается по этим базисам так:
а = (a, e?)ei + (а, е*2)с2 + (а, вз)е3, (27)
а = (a, ei)ej + (а, е2)е5 + (а, е3)е£. (28)
Чтобы доказать (27), умножим равенство а = aiei 4- «2^2 + а3е3
скалнрно сначала на ej, затем на е2 и на eg. Мы получим c*i = (a, ej),
а2 = (а,ез), а3 = (а,ед). Аналогично доказывается равенство (28).
Предложение 11. Если e^e^ej — базис, взаимный с в1,е2,ез,
то базис ез*,е2*,ез*. взаимный с е*,е2,ез, совпадает с е1,е2,ез«
Действительно, равенство (28), написанное для базиса е*,е2,ез,
имеет вид
а = (a, о\) е}* + (а, е£) е*2* + (а, е*3) е*3*.
Подставляя сюда вместо а последовательно ei, е2 и ез и учитывая,
что (о,-, е]) = 0 при i ф j, a (e,-, ej6) = 1, получаем ei = ej*, e2 = е^* и
Числа (a,ei), (а,с2) и (а, ез) однозначно определяют вектор а с
помощью векторов базиса ei,C2,e3. Они называются ковариантными
координатами вектора а в базисе е1,е2,ез- По отношению к
базису е1,е*,,Сз — это обычные координаты вектора. Обычные
координаты, чтобы подчеркнуть их отличие от ковариантных координат,
называют контрвариантными координатами.
11. О векторных величинах. П приложениях математики
часто рассматриваются величины, изображаемые векторами: силы,
скорости, моменты сил и т. д. Векторам, изображающим такие
величины, приписывается размерность. Не вдаваясь в существо дела, мы
ограничимся изложением формальных правил действий с
размерностями.
С формальной точки зрения, размерность — это одночлен,
составленный из какого-то набора символов. Такие одночлены
перемножаются и делятся, как обычные одночлены. Имеют место следующие
правила действий с векторными величинами.
• Модуль векторной величины имеет ту же размерность, что и
сама величина.
• Складывать векторные величины можно только в том случае,
когда их размерности совпадают. При этом размерность суммы та
же, что и у слагаемых.
• При умножении векторной величины на скалярную их
размерности неремно?каются.
§4- Скалярное, смешанное и векторное произведения 39
• Скалярное, векторное и смешанное произведения имеют
размерность, равную произведению размерностей сомножителей. Это
легко следует из первого правила, определений скалярного и векторного
произведений и формулы (10).
Для того чтобы изобразить векторную величину на чертеже, мы
должны условиться о масштабе: сколькими единицами длины
(например, см) мы будем изображать одну единицу данной размерности
(например, км, м/с, Н).
Если в векторном произведении сомножители имеют размерность
длины, то произведение имеет размерность площади. Масштаб для
изображения единиц площади выбирается так, чтобы одна единица
площади изображалась одной линейной единицей. При этом длина
векторного произведения будет численно равна площади
параллелограмма, построенного на сомножителях.
Поскольку единица длины у нас выбрана и не меняется, указанное
соглашение ни к каким противоречиям привести не может. Однако
оно не так безобидно, как может показаться. Именно, два
математика, пользующиеся этим соглашением, но разными единицами длины
(например, француз, пользующийся сантиметрами, и англичанин —
дюймами), для одних и тех же векторов нарисуют несовпадающие
векторные произведения. Как связаны длины этих произведений,
если дюйм равен примерно 2,5 см?
Упражнения
1. Пусть в некотором базисе скалярное произведение вычисляется по
формуле (2). Докажите, что базис ортонормированный.
2. Используя свойства скалярного умножения, докажите, что высоты
произвольного треугольника пересекаются в одной точке.
3. Найдите сумму векторных проекций вектора а на стороны заданного
правильного треугольника.
4. Построены векторы, перпендикулярные граням произвольного
тетраэдра, равные по длине площадям этих граней и направленные в стороны
вершин, противоположных граням. Докажите, что сумма этих векторов
равна О.
5. Дан трехгранный угол. Используя свойства векторного
произведения, найдите выражение какого-либо из его двугранных углов через
плоские углы.
G. Пусть дан положительный базис на ориентированной плоскости
такой, что |ei| = 2, |ег| =3и (ei,e2) = 2. Найдите площадь ориентированного
параллелограмма, построенного на векторах а(1,2) и Ь(2,1).
7. При каком условии на матрицу перехода от одного базиса к другому
оба базиса ориентированы одинаково? Вопрос поставлен как для плоскости,
так и для пространства.
8. Какова размерность векторов взаимного базиса e*,C2,eJ, если
векторы базиса е1,ег,ез измеряются в сантиметрах?
ГЛАВА II
ПРЯМЫЕ ЛИНИИ И ПЛОСКОСТИ
§ 1. Общее понятие об уравнениях
1- Определения. Начнем с простого примера. Пусть в
пространстве задана декартова прямоугольная система координат.
Рассмотрим сферу радиуса г, центр которой находится в точке Р с
координатами (а, 6, с). Сфера — множество всех точек, отстоящих от
центра на одно и то же расстояние г. Обозначим через (#, у, z)
координаты некоторой точки М и выразим через них равенство \РМ\ = г:
\/(х - а)2 + (у - б)2 + (z - с)2 = г. (1)
Возводя в квадрат обе части равенства, мы придадим ему более
удобную форму
(*-a)2 + (t,-6)2+(z-c)2 = r2. (2)
Очевидно, что это равенство выполнено для всех точек сферы и
только для них, и, следовательно, его можно рассматривать как запись
определения сферы при помощи координат. Равенство (2)
называется уравнением сферы в рассматриваемой системе координат.
Приведем пример из геометрии на плоскости. Графиком
функции / называется линия L, состоящая из точек, координаты которых
связаны соотношением у = f{x). Если нас интересует в первую
очередь линия, а не функция, мы можем встать на другую точку зрения
и считать, что соотношение у = f(x) есть уравнение линии L.
Вообще, под уравнением множества S в некоторой системе
координат следует понимать выражение определения множества S через
координаты его точек, т. е. высказывание, верное для координат всех
точек множества и неверное для координат точек, ему не
принадлежащих.
Чаще всего уравнение представляет собой равенство, записанное
математическими символами, но это вовсе не обязательно: оно может
быть словесным описанием, перечислением и т. д. Например,
высказывание "обе координаты точки — рациональные числа" мы будем
считать уравнением соответствующего множества в какой-либо
заранее выбранной системе координат. Это должно звучать естественно
для читателя, знакомого со способами задания функций.
Часто уравнению множества точек в планиметрии можно придать
вид F(x, у) = 0, а в стереометрии — вид F(x, г/, z) = 0, где F —
функция соответственно двух или трех переменных. Уравнение сферы (2)
§1. Общее понятие об уравнениях
41
имеет такой вид, если не замечать то несущественное
обстоятельство, что член г2 написан в другой части равенства.
Может случиться, что уравнение какого-либо множества удобнее
записать в виде неравенства. Например, шар, ограниченный сферой
с уравнением (2), имеет уравнение
(*-a)2 + (y-6)2 + (z-c)2<r2.
Однако напрасно было бы надеяться разделить множества на такие,
которые задаются равенствами, и такие, которые задаются
неравенствами. Действительно, равенство
Ф(х, у, z) = F[x% у, z) - \F(x, у, z)\ = 0
задает то же множество, что и неравенство F(x,y,z) ^ 0.
Следует подчеркнуть зависимость уравнения от системы
координат. При изменении системы координат меняются координаты точки,
а потому уравнения одного и того же множества в разных системах
координат, вообще говоря, различны.
Обучаясь математике, мы знакомимся с логическими и
математическими правилами, но которым из одного верного высказывания
можно получить другое верное высказывание. Строгое изучение этих
правил относится к специальной науке — математической логике.
Мы же, формулируя приведенные ниже предложения, просто будем
считать, что такие правила известны. Естественно поэтому, что о
доказательстве этих предложений не может быть речи.
• Если Ps и Рт — уравнения множеств S и Г, то уравнение
пересечении Sf\T есть высказывание, состоящее в том, что Ps и Рт
верны одновременно. Такое высказывание обозначается Ps Л Рт.
В случае, когда Ps и Рт — равенства, содержащие координаты
точки, Fs{x,y,z) =0 и Ft(x,v,z) = 0, уравнение пересечения есть
система уравнений
Fs(*,y,*) = 0, FT(x,y,z) = Q.
• Если Ps и Рт — уравнения множеств 5 и Г, то уравнение
объединения SUT — высказывание, состоящее в том, что из Р$
и Рт верно хотя бы одно. Такое высказывание обозначается Ps V Рт.
В случае, когда Ps и Рт — равенства, содержащие координаты
точки, Fs(x7 у, z) = 0 и Ft(x, У, z) = 0, уравнение объединения можно
написать в виде
Fs(x,y,z)FT{xyyyz) = 0.
• Если Ps и Рт — уравнения множеств S и Т и 5 есть
подмножество Т, то из Ps следует Рт.
• Множества S и Т совпадают тогда и только тогда, когда их
уравнения эквивалентны, т. е. из Ps следует Рт, а из Рт следует Ps.
Проиллюстрируем два последних утверждения. Уравнения (1) и (2)
эквивалентны. Переходя от (2) к (1), мы можем не ставить двойного
42 Гл. II. Прямые линии и плоскости
знака перед корнем, так как г ^ 0. Наоборот, уравнение
z - с = v'r2 -(х- а)2 - (у - б)2 (3)
не эквивалентно уравнению (2). Действительно, хотя возведением в
квадрат можно получить (2) из (3), при извлечении корня из (2) мы
получаем
z — с = ±>/г2 — (х — а)2 — (у — б)2.
Это означает, что равенство (2) выполнено не только для точек,
удовлетворяющих (3), но и для точек, удовлетворяющих уравнению
z-c=-y/r*-(x-ay~-(y-by. (4)
Уравнение (2) следует также и из (4). Таким образом, уравнения (3)
и (4) определяют части сферы — "верхнюю" и "нижнюю" полусферы.
Иногда два последних утверждения считают определениями
отношений "следует" и "эквивалентно" для уравнений.
2. Алгебраические линии и поверхности. Изучение
произвольных множеств точек — задача совершенно необъятная. В этом
пункте мы определим сравнительно узкий класс множеств, все еще
чересчур широкий для того, чтобы быть подробно изученным.
Определение. Алгебраической поверхностью называется
множество точек, которое в какой-нибудь декартовой системе координат
может быть задано уравнением вида
Агхк V1 zmi + ... + А5хк'у1' zm* = 0, (5)
где все показатели степени — целые неотрицательные числа.
Наибольшая из сумм *) &i +1\ ■+■ mi,..., ks -f ls + ms называется степенью
уравнения, а также порядком алгебраической поверхности.
Это определение означает, в частности, что сфера, уравнение
которой в декартовой прямоугольной системе координат имеет вид (2),
является алгебраической поверхностью второго порядка.
Определение. Алгебраической линией на плоскости
называется множество точек плоскости, которое в какой-нибудь декартовой
системе координат может быть задано уравнением вида
Aizk*tf*+...+ A9xk4f' =0, (6)
где все показатели степени — целые неотрицательные числа.
Наибольшая из сумм fci -Hi,...,fc5-f ls называется степенью уравнения,
а также порядком алгебраической линии.
Легко видеть, что алгебраическая поверхность не обязательно
является поверхностью в том смысле, который мы интуитивно придаем
*) Разумеется, здесь имеется в виду наибольшая из сумм, фактически
входящих в уравнение, т. е. предполагается, что после приведения подобных членов
найдется хотя бы одно слагаемое с ненулевым коэффициентом, имеющее такую
сумму показателей. Это же замечание относится и к определению порядка
алгебраической линии, приводимому ниже.
§1. Общее понятие об уравнениях
43
этому слову. Например, уравнению х2 + у2 + z2 + 1 = 0 не
удовлетворяют координаты ни одной точки, уравнение
{х2 + у2 + z2)[(x - I)2 + (у - I)2 + (* - I)2] = О
определяет две точки, уравнение у2 + z2 = 0 определяет линию (ось
абсцисс). Такое же замечание надо сделать и об алгебраических
линиях. Читатель сам сможет найти соответствующие примеры.
Приведенные определения имеют существенный недостаток.
Именно, не известно, какой вид имеет уравнение поверхности в
какой-нибудь другой декартовой системе координат. Если же
уравнение и имеет в другой системе координат уравнение вида (5), то
порядок какого из этих уравнений мы будем называть порядком
поверхности? Те же вопросы возникают и об алгебраических линиях.
Ответом служат следующие теоремы.
Теорема 1. Алгебраическая поверхность порядка р в любой
декартовой системе координат может быть задана уравнением вида (5)
порядка р.
Теорема 2. Алгебраическая линия порядка р на плоскости в
любой декартовой системе координат может быть задана уравнением
вида (6) порядка р.
Обе теоремы доказываются одинаково. Докажем, например,
теорему 2. Для этого перейдем от системы координат 0,ei,e2, о
которой шла речь в определении, к произвольной новой системе
координат 0',е[,е'2. Старые координаты х.у связаны с новыми
координатами х*', у' формулами (7) §3 гл. I:
х = а\х' + а\у' + aj, у - а\х' + а\у' + а\. (7)
Чтобы получить уравнение линии в новой системе координат,
подставим в ее уравнение F(x, у) = 0 выражения х и у через х1 и у'. При
умножении многочленов их степени складываются. Поэтому (а\х* +
+ а2У* + ао)к — многочлен степени к относительно х' и у', а
(a2xf + alyf + аоУ "'" многочлен степени /. Таким образом, каждый
одночлен вида Ахку* есть многочлен степени к + / относительно х1
и г/. Степень суммы многочленов не выше максимальной из
степеней слагаемых. (Она окажется ниже, если члены с максимальными
степенями уничтожатся.)
Итак, мы доказали пока, что алгебраическая линия в любой
декартовой системе координат может быть задана уравнением G(x'y у1) = О
вида (6), причем степень многочлена G(x\ у') не больше степени
многочлена F(x,y), т. е. степень уравнения не повышается. Нам осталось
доказать, что степень уравнения не может и понизиться, а потому не
меняется при переходе к другой системе координат.
Это легко доказать от противного. Действительно,
G(x\ у') = F(a\x' + а\у* + а£, а\х' + а\у* + а2,).
Поэтому, если мы подставим в G(x\ у') выражения х' и у' через х и у,
44
Гл. П. Прямые линии и плоскости
полученные решением уравнений (7), мы получим многочлен F(x,y).
Если бы степень G была меньше степени F, это означало бы, что
при переходе от системы координат О', е^, е'2, е^ к системе О, еь в2, ез
степень уравнения повысилась, чего, как мы видели, быть не может.
Порядок алгебраической линии — первый встретившийся нам
пример инварианта. Вообще, инвариантом называют всякую величину,
не меняющуюся при изменении системы координат. Только
инвариантные комбинации величин (коэффициентов, показателей и т. д.),
входящих в уравнение линии или поверхности, характеризуют ее
геометрические свойства, не зависящие от ее расположения
относительно системы координат. Какой геометрический смысл имеет порядок
линии, мы увидим в конце главы.
Замечание. Свойство неизменности порядка не относится к
различным уравнениям, которые линия или поверхность могут иметь
в одной и той же системе координат. Хотя такие уравнения и
эквивалентны, среди них могут быть уравнения различных степеней и
даже не получаемые приравниванием многочлена нулю. Действительно,
следующие три уравнения задают окружность радиуса 1 в декартовой
прямоугольной системе координат:
лЛ2 + у2 = 1, х2 + у2 - 1 = 0, (х2 + у2 - I)2 = 0.
Принято считать, что эквивалентные уравнения вида (6),
имеющие разные степени, задают разные алгебраические линии (хотя
соответствующие мЕюжества точек и совпадают). Например, говорят,
что последнее из приведенных выше уравнений задает "сдвоенную
окружность". Основания для такой терминологии и удобства, из нее
вытекающие, в точности те же, что и в случае привычного читателю
термина "кратный корень" квадратного уравнения.
Теперь мы можем указать основной предмет курса
аналитической геометрии. Это — исследование линий и поверхностей первого
и второго порядка, которые доступны для изучения средствами
элементарной алгебры.
Однако перед этим полезно рассмотреть некоторые более общие
уравнения. Мы будем говорить о линиях и поверхностях.
Формулирование их общих определений не входит в пашу задачу. Читатель,
который любит, чтобы все было точно определено, может под ними
понимать соответственно алгебраическую линию и поверхность,
однако все результаты имеют место и в более общем случае.
3. Уравнения, не содержащие одной из координат.
Рассмотрим частный случай уравнения поверхности F(x, у, z) = 0, когда левая
часть уравнения не зависит от одной из переменных, например, от г,
и уравнение имеет вид F(x,y) = 0. Пусть точка Мо(х0,уо,г0) лежит
на поверхности. Тогда все точки с координатами ж0, 2Ль z при любых z
также лежат на поверхности. Легко заметить, что все точки с
координатами такого вида заполняют прямую, проходящую через М0 в
§1. Общее понятие об уравнениях
45
М0(х0,у0,зъ)
M(x0iy0iz)
Рис. 16. L — направляющая,
MQM — образующая
направлении вектора ез- Таким образом, вместе со венкой точкой Мо
на поверхности лежит прямая, проходящая через Мо в направлении
вектора е3.
Определение. Поверхность, которая состоит из прямых линий,
параллельных заданному
направлению, называется цилиндрической
поверхностью или цилиндром, а
прямые линии — ее
образующими (рис. 16). Линию, лежащую на
поверхности и пересекающую все
образующие, называют
направляющей.
Мы показали, что уравнение, не
содержащее одной из координат,
определяет цилиндр с
образующими, параллельными
соответствующей координатной оси.
В качестве примера
рекомендуем читателю нарисовать поверхность, заданную уравнением х2 +
+ у2 = г2 в декартовой прямоугольной системе координат в
пространстве. Эта поверхность — прямой круговой цилиндр. Еще один вопрос,
над которым стоит подумать: как выглядят множества, уравнения
которых не содержат двух из трех координат, т. е. имеют, например,
вид F{x) = О?
4. Однородные уравнения. Конусы. Пусть F(x,y,z)
—функция от трех переменных, as — натуральное число. Введем
Определение. Допустим, что для каждой тройки чисел (я, у, z)
из области определения функции и для каждого числа А тройка
чисел (Ая, Ay, \z) также принадлежит области определения, и, кроме
того, F(\xt Ay, \z) = \sF{x, y, z). Тогда F
называется однородной функцией
степени s.
Рассмотрим поверхность,
определяемую в некоторой декартовой
системе координат уравнением F(x,y, z) =
= 0, где F — однородная функция.
Если точка М с координатами (я, у, z)
принадлежит поверхности, то при
любом А точка Р(Аж,Ау, \z) также
принадлежит поверхности. Радиус-векторы
точек М и Р коллинеарны, и потому
точка Р лежит на прямой ОМ (рис. 17).
Определение. Поверхность, которая состоит из прямых линий,
проходящих через фиксированную точку, называется конической по-
Рис. 17. L — направляющая,
MP — образующая
46
Гл. II. Прямые линии и плоскости
верхностью или конусом. Прямые линии называются ее образующими,
а точка — вершиной конуса (рис. 17). Линию, лежащую на
поверхности, не проходящую через вершину и пересекающую все образующие,
называют направляющей.
Мы доказали, что уравнение F{x, у, z) — О, где F — однородная
функция, определяет конус с вершиной в начале координат.
Упражнения
1. В декартовой прямоугольной системе координат даны точки -А(1,0)
и 5(4,0). Напишите уравнение множества точек, отстоящих от В вдвое
дальше, чем от Л.
2. Каждое из двух уравнений системы (х — 2)2 + у2 = г2, (х + 2)2 + у2 =
= г2 в декартовой прямоугольной системе координат определяет
окружность. Вычитая одно уравнение из другого, мы получим следствие этой
системы х = 0. Как геометрически истолковать этот результат?
Рассмотрите случаи г = 3 и г = 1.
3. Составьте уравнение цилиндра с направляющей, заданной системой
уравнений х2 + у2 + z2 = 1, х + у + z = 1, и образующей, параллельной
вектору е*.
4. Напишите уравнение конуса с направляющей, заданной системой
уравнений х2 + у2 = 4, z = 1, и с вершиной в начале координат.
§ 2. Уравнения прямых и плоскостей
1. Поверхности и линии первого порядка. Уравнение первой
степени, или линейное уравнение, связывающее координаты точки в
пространстве, имеет вид
Ax + By + Cz + D = 0, (1)
причем предполагается, что коэффициенты при переменных не
равны нулю одновременно, т. е. А2 + В2 ■+■ С2 ф 0. Аналогично,
линейное уравнение, связывающее координаты точки на плоскости, — это
уравнение
Ах + Ву + С = 0 (2)
при условии А2 + В2 ф 0.
В школьном курсе доказывается, что в декартовой прямоугольной
системе координат уравнения (1) и (2) определяют соответственно
плоскость и прямую линию на плоскости. Из теорем 1 и 2 § 1
следует, что то же самое верно и в общей декартовой системе координат.
Точнее, имеют место следующие теоремы.
Теорема 1.5 общей декартовой системе координат в
пространстве каждая плоскость может быть задана линейным уравнением (1).
Обратно, каждое линейное уравнение в общей декартовой системе
координат определяет плоскость.
Теорема 2. В общей декартовой системе координат на
плоскости каждая прямая может быть задана линейным уравнением (2).
§2. Уравнения прямых и плоскостей
47
Обратно, каждое линейное уравнение в общей декартовой системе
координат на плоскости определяет прямую.
Эти теоремы полностью решают вопрос об уравнениях плоскости
и прямой линии на плоскости. Однако ввиду важности этих
уравнений мы рассмотрим их в других формах. При этом будут получены
независимые доказательства теорем этого пункта.
2. Параметрические уравнения прямой и плоскости.
Прямая линия (на плоскости или в пространстве) полностью
определена, если на ней задана точка М0 и задан ненулевой вектор а,
параллельный этой прямой. Разумеется, и точку, и вектор можно выбрать
по-разному, но мы будем считать, что они как-то выбраны, и
называть их начальной точкой и направляющим вектором. Аналогично,
плоскость задается точкой и двумя неколлинеарными векторами, ей
параллельными, — начальной точкой и направляющими векторами
плоскости.
Мы будем предполагать, что задана декартова система координат
в пространстве (или на плоскости,
если мы изучаем прямую в планиметрии).
Это, в частности, означает, что каждой
точке сопоставлен ее радиус-вектор
относительно начала координат.
Пусть дана прямая. Обозначим
через г0 и а соответственно радиус-вектор
ее начальной точки Mq и
направляющий вектор. Рассмотрим некоторую
точку М с радиус-вектором г (рис. 18). Рис. 18
Вектор М0М = г — г0, начало которого лежит на прямой, параллелен
прямой тогда и только тогда, когда М также лежит на прямой. В
этом и только этом случае для точки М найдется такое число ty что
г - г0 = *а. (3)
Наоборот, какое бы число мы ни подставили в формулу (3) в
качестве t, вектор г в этой формуле определит некоторую точку на
прямой.
Уравнение (3) называется векторным параметрическим
уравнением прямой, а переменная величина £, принимающая любые
вещественные значения, называется параметром.
Векторное параметрическое уравнение выглядит одинаково и в
планиметрии, и в стереометрии, но при разложении по базису оно
сводится к двум или трем скалярным уравнениям, смотря но тому,
сколько векторов составляют базис.
Рассмотрим прямую в пространстве. Пусть (я, у, z) и (#о> 2/о> zo) —
координаты точек М и Мо, соответственно, а вектор а имеет
компоненты (ai,a2,a3). Тогда, раскладывая по базису обе части уравне-
48
Гл. И. Прямые линии и плоскости
ния (3), мы получим
х -х0 = aity у — г/о=а2*, г - z0 = atf. (4)
Для прямой на плоскости мы получаем, аналогично,
х - я0 = <М, y-yo — a^t. (о)
Уравнения (4) или (5) называются параметрическими уравнениями
прямой.
Получим теперь параметрические
уравнения плоскости. Обозначим
через р и q ее направляющие
векторы, а через го — радиус-вектор ее
начальной точки М0. Пусть точка М
с радиус-вектором г —
произвольная точка пространства (рис. 19).
Вектор MqM = г —го, начало которого
лежит на плоскости, параллелен ей
тогда и только тогда, когда его
конец М также лежит на плоскости. Так как р и q не коллинеарны,
в этом и только этом случае г — го может быть по ним разложен.
Поэтому, если точка М лежит в плоскости (и только в этом случае),
найдутся такие числа U и 1%, что
г-г0 = *ip-M2q. (6)
Это уравнение называется векторным параметрическим уравнением
плоскости. Каждой точке плоскости оно сопоставляет значения двух
параметров t\ и ^2- Наоборот, какие бы числа мы ни подставили как
значения t\ и *2> уравнение (б) определит некоторую точку плоскости.
Пусть (х, г/, г) и (ж0, уо> zo) — координаты точек МиМ0
соответственно, а векторы р и q имеют компоненты (рьР2,Рз) и (?1,92,?з).
Тогда, раскладывая по базису обе части уравнения (6), мы получим
параметрические уравнения плоскости
Х-Х0= *ipi + *2?1, У ~ УО = tip2 + *2?2, Z-Z0= tXp3 + *2tf3- (?)
Отметим, что начальная точка и направляющий вектор прямой
образуют на ней ее внутреннюю декартову систему координат.
Значение параметра £, соответствующее какой-то точке, является
координатой этой точки во внутренней системе координат. Точно так
же на плоскости начальная точка и направляющие векторы
составляют внутреннюю систему координат, а значения параметров,
соответствующие точке, — это ее координаты в этой системе.
3. Прямая линия на плоскости. Параметрическое уравнение
прямой утверждает, что точка М лежит на прямой тогда и только
тогда, когда разность ее радиус-вектора и радиус-вектора начальной
точки Mq коллинеарна направляющему вектору а. Пусть в
некоторой общей декартовой системе координат на плоскости заданы
координаты точек и вектора М(х,у), Мо(яо,Уо)5 a(ai,a2). Тогда условие
§2. Уравнения прямых и плоскостей
49
коллинеарности может быть записано в виде равенства
= 0.
X — Хо
«1
У-2/0
<*2
(8)
Поэтому имеет место
Предложение 1. В любой декартовой системе координат на
плоскости уравнение прямой с начальной точкой Мо(хо,уо) и
направляющим вектором а(а1,аг) может быть записано в виде (8).
Уравнение (8) линейное. Действительно, после преобразования оно
принимает вид а2я — а\у + (aiy0 — а2хо) = 0, т. е. Ах -f By -f- С = 0,
где А = а2, В = -ai и С = с^уо - аг^о»
С другой стороны, при заданной системе координат для
произвольного линейного многочлена Ах + By + С, Л2 4- Я2 ф 0, найдутся
такая точка Мо(а:о-2/о) и такой вектор a(ai,a2), что
Ах + £у + С =
X — Хо
У-Уо
at
(9)
Действительно, выберем числа xq и уо так, чтобы Axq ■+■ /iy0 + С = 0.
В качестве таких чисел можно взять, например,
-АС -ВС /inv
*0=Ff¥» У0=А?ТВ1- (]0)
Если С = -Ах0 - By0i то Лаг + By + С = А(х - х0) + Я(у - уо), т- е-
выполнено равенство (9) при сь = А, а\ = —7?. Итак, мы получили
Предложение 2. Вектор с координатами (—В,А) можно
принять за направляющий вектор прямой с уравнением (2) в общей
декартовой системе координат, а точку (10) за начальную точку.
Следствие. Если система координат декартова прямоугольная,
то вектор п(Л, В) перпендикулярен прямой с уравнением (1).
Действительно, в этом случае (а. п) = —ВА + АВ = 0.
Заметим, что из предложений 1 и 2 вытекает теорема 2.
Пусть в уравнении прямой Ах ■+■ By + С = 0 коэффициент В
отличен от нуля. Это означает, что отлична от
нуля первая компонента направляющего
вектора, и прямая не параллельна оси ординат. В этом
случае уравнение прямой можно представить в
виде
у = кх + Ъу (11)
где к = -А/В, а Ь = —С/В. Мы видим, что к
равно отношению компонент направляющего
вектора: к = а2/а\ (рис. 20).
Определение. Отношение компонент
направляющего вектора а2/а\ называется угловым коэффициентом
прямой.
Угловой коэффициент прямой в декартовой прямоугольной
системе координат равен тангенсу угла, который прямая образует с осью
а(-1/2,1/2)
Рис. 20. fc=-l.
Прямая у=— аН-1/2
50
Гл. II. Прямые линии и плоскости
абсцисс. Угол этот отсчитывается от оси абсцисс в направлении
кратчайшего поворота от ei к е2 (рис. 21).
Положив х = О в уравнении (11),
получаем у = Ь. Это означает, что свободный член урав-
а(-1/2 1/2) нения Ь является ординатой точки пересечения
прямой с осью ординат.
Если же в уравнении прямой В = 0 и ее
уравнение нельзя представить в виде (11), то
обязательно Л ф 0. В этом случае прямая
параллельна оси ординат и ее уравнению можно
Рис. 21. fc=tg<p=-l. придать вид х = х0, где xq — -С/А — абсцис-
Прямаяз/=-ж+ / са точки пересечения прямой с осью абсцисс.
4. Векторные уравнения плоскости и прямой.
Параметрическое уравнение плоскости утверждает, что точка М лежит на
плоскости тогда и только тогда, когда разность ее радиус-вектора и
радиус-вектора начальной точки Mq компланарна направляющим
векторам р и q. Эту компланарность можно выразить и равенством
(r-r0,p,q) = 0. (12)
Вектор п= [p,q] — ненулевой вектор, перпендикулярный плоскости.
Используя его, мы можем записать уравнение (12) в виде
(r-r0,n) = 0. (13)
Уравнения (12) и (13) называют векторными уравнениями
плоскости. Им можно придать форму, в которую не входит радиус-вектор
начальной точки. Например, положив в (13) D = -(г0,п), получим
(p,n) + D = 0. (14)
Для прямой на плоскости можно также написать векторные
уравнения, аналогичные (13) и (14),
(г-г0)п) = 0 или (г,п) + С = 0.
Первое из них выражает тот факт, что вектор г — г0
перпендикулярен ненулевому вектору п, перпендикулярному направляющему
вектору а, и потому коллинеарен а.
Предложение 3. Пусть x,y,z — компоненты вектора г в
общей декартовой системе координат. Тогда скалярное произведение
(г —го,п) при пф 0 записывается линейным многочленом Ах +
+ By + Cz + D (А2 + В2 + С2 ф 0).
Обратно, для любого линейного многочлена найдутся такие
векторы г0 и пф 0, что в заданной общей декартовой системе
координат Ax + By + Cz + D = (r-r0,n).
Первая часть предложения очевидна: подставим разложение
вектора г но базису в данное скалярное произведение:
(arei + уе2 + *е3 - г0, п),
§2. Уравнения прямых и плоскостей
51
раскроем скобки и получим многочлен Ах + By + Cz + D, в
котором D = — (г0,п) и
A = (ei,n), # = (е2,п), С=(е3,п). (15)
Л, В и С одновременно не равны нулю, так как ненулевой вектор п
не может быть ортогонален всем векторам базиса.
Для доказательства обратного утверждения найдем сначала
вектор п из равенств (15), считая Л, В и С заданными. Из
предложения 10 §4 гл. I следует, что
п_ А[е2,е3] | flfe.ei] ( С[еие2] ,щ
(oi,e2,e3) (oi,e2,e3) (еье2,ез)*
Вектор г0 должен удовлетворять условию D = —(г0,п). Один из
таких векторов можно найти в виде r0 = An. Подставляя, видим,
что —А(п, п) = I), откуда г0 = -£>п/|п|2.
Итак, мы нашли векторы п и г0 такие, что линейный многочлен
записывается в виде
a?(ci,п) + у(е2, п) + ф3,п) - (г0,п),
который совпадает с требуемым (г — го,п).
Заметим, что из доказанного предложения вытекает теорема 1.
Предложение 4. Если система координат декартова
прямоугольная^ то вектор с компонентами А, В, С является нормальным
вектором для плоскости с уравнением Ах + By + Cz + D = 0.
Это сразу вытекает из формул (15) и предложения 1 §4 гл. I.
Рассмотрим вектор а = c*iei + c*ie2 + Q3G3 в общей декартовой
системе координат 0,ei,e2,e3. Очевидно, что (а,п) = ai(ei,n) +
-fa2(e2,ii) + аз(ез,п). Теперь из формул (15) следует, что
(a, n) = Aai + Ва-2 4- Саз-
(Заметьте, что в общей декартовой системе координат числа Л, В,
С, вообще говоря, не являются координатами вектора п, и скалярное
произведение не записывается как сумма произведений
одноименных компонент, но (а,п) выглядит так же, как и в прямоугольных
координатах.) Теперь очевидным становится следующее
Предложение 5. Вектора с компонентами аьа2,аз в общей
декартовой системе координат параллелен плоскости с
уравнением Ах + By + Cz ■+■ D = 0 тогда и только тогда, когда
Ааг + Ва2 + Са3 = 0. (17)
Следствие. Любые два неколлинеарных вектора,
удовлетворяющие уравнению (17), можно принять за направляющие векторы
плоскости.
Предложение 5 нетрудно доказать и непосредственно,
рассматривая координаты вектора, параллельного плоскости, как разности
соответствующих координат двух точек, лежащих в плоскости.
Постарайтесь сделать это.
52
Гл. II. Прямые линии и плоскости
Все, сказанное о плоскостях, почти без изменений может быть
сказано и о прямых на плоскости. В частности, имеет место
Предложение 6. Вектор а с компонентами а\,а2 в общей
декартовой системе координат параллелен прямой с уравнением Ах +
■+■ By -f- С = 0 тогда и только тогда, когда
Aai + Ва2 = 0. (18)
Действительно, ori, a2 должны быть пропорциональны
компонентам — В, А направляющего вектора прямой.
Векторное уравнение прямой линии в пространстве может быть
написано в виде
[г-г0,а] = 0. (19)
Здесь а — направляющий вектор прямой, а го — радиус-вектор ее
начальной точки. В самом деле, это уравнение, как и векторное
параметрическое, выражает коллинеарность векторов г0 и а.
5. Параллельность плоскостей и прямых на плоскости.
Ниже, говоря о параллельных прямых или плоскостях, мы будем
считать, что параллельные плоскости (или прямые) не обязательно
различны, т. е. что плоскость (прямая) параллельна самой себе.
Предложение 7. Прямые линии, задаваемые в общей
декартовой системе координат уравнениями
Ах + Ву + С = 0, AiX+Bxy + d^ 0,
параллельны тогда и только тогда, когда соответствующие
коэффициенты в их уравнениях пропорциональны, т. е. существует такое
число А, что
Ах = АЛ, Вг = AS. (20)
Прямые совпадают в том и только том случае, когда их уравнения
пропорциональны, т. е. помимо уравнения (20) выполнено (с тем же X)
равенство
d = АС. (21)
Доказательство. Первая часть предложения прямо следует из
того, что векторы с компонентами (—В, А) и (—В\, Ai) —
направляющие векторы прямых.
Докажем вторую часть. В равенствах (20) и (21) А ф 0, так как
коэффициенты в уравнении прямой одновременно нулю не равны.
Поэтому, если эти равенства выполнены, уравнения эквивалентны и
определяют одну и ту же прямую.
Обратно, пусть прямые параллельны. В силу первой части
предложения их уравнения должны иметь вид Ах ■+■ By + С = 0
и \(Ах + By) + С\ = 0 при некотором А. Если, кроме того,
существует общая точка М0(хо, уо) обеих прямых, то Ах0 ■+■ Вуа + С =
= 0 и Х(Ах0 ■+■ Ву0) + Ci = 0. Вычитая одно равенство из другого,
получаем С\ — АС, как и требовалось.
§2. Уравнения прямых и плоскостей
53
Предложение 8. Плоскости, задаваемые в общей декартовой
системе координат уравнениями
Ax + By + Cz + D = Q, Агх + Вгу + C\z + Dx = 0,
параллельны тогда и только тогда, когда соответствующие
коэффициенты в их уравнениях пропорциональны, т. е. существует такое
число А, что
Ах = \А, Вг = АВ, Ci = АС. (22)
Плоскости совпадают в том и только том случае, когда их
уравнения пропорциональны, т. е. помимо уравнений (22) выполнено (с тем
же А) равенство
Di = XD. (23)
Доказательство. Если плоскости параллельны, то их
нормальные векторы пищ коллипеариы, и существует такое число А, что
П! = An. В силу уравнений (15) А\ = (ei,ni) = A(ei,n) = \А.
Аналогично доказываются и остальные равенства (22). Обратно, если
равенства (22) выполнены, то из формулы (16) следует, что ni = An.
Это доказывает первую часть предложения. Вторая его часть
доказывается так ?ке, как вторая часть предложения 7.
Условия (20) выражают не что иное, как коллинеарность векторов
с компонентами {А, В) и (А\,В\). Точно так же условия (22)
означают коллинеарность векторов с компонентами [А, В, С) и (-Ai,jBi,Ci).
Поэтому согласно предложениям 9 и 10 §3 гл. I условие
параллельности прямых на плоскости можно записать в виде
А В
Аг Вх
а условие параллельности плоскостей
= (
э,
— в виде
=
А В
Ах Bi
(24)
= 0.
(25)
В С \_\ С А
Вг d | " | С, Аг
Предложению 7 можно придать чисто алгебраическую
формулировку, если учесть, что координаты точки пересечения прямых —
это решение системы, составленной из их уравнений.
Предложение 9. При условии (24) система линейных уравнений
Ах + By + С = 0, А\х + Вгу + Ci = 0
не имеет решений или имеет бесконечно много решений (в
зависимости от С и С\). В последнем случае система равносильна одному
из составляющих ее уравнений. Если же
А В
А, Вг
то при любых С и С\ система имеет единственное решение (яг, у).
Разумеется, это предложение можно доказать и непосредственно
и отсюда получить условие параллельности прямых. Исследованием
произвольных систем линейных уравнений мы займемся в гл. V.
9*0,
54
Гл. II. Прямые линии и плоскости
6. Уравнения прямой в пространстве. Прямая линия в
пространстве может быть задана как пересечение двух плоскостей и,
следовательно, в общей декартовой системе координат определяется
системой уравнений вида
Ax + By+Cz + D = 0, Aix + Biy + Cxz + Di=Q. (26)
Пересечение плоскостей — прямая линия тогда и только тогда, когда
они не параллельны, что согласно (25) означает, что хоть один из
детерминантов отличен от нуля:
В С
Bi Су
С
Су
А
Ау
А
Ау
В
By
фО.
(27)
Разумеется, систему (26) можно заменить на любую, ей
эквивалентную. При этом прямая будет представлена как пересечение двух
других проходящих через нее плоскостей.
Вспомним параметрические уравнения прямой (4). Допустим, что
в них ни одна из компонент направляющего вектора не равна нулю.
Тогда
t =
X — Xq
j
t=^
Oil
t =
Z-Zp
аз '
и мы получаем два равенства
У-Уо _ z- го
X — Хо
Oil
Z — Zq
а3
(28)
(29)
OL2 СГз
или, в более симметричном виде,
х — хо __ у — у о _ z - zp
Q] CX2 схг
Уравнения (28) представляют прямую как линию пересечения двух
плоскостей, первая из которых параллельна оси абсцисс (в её
уравнение не входит переменная #), а вторая параллельна оси ординат.
Если обращается в нуль одна из компонент направляющего
вектора, например, а\, то уравнения прямой принимают вид
х = ХОш У^_У1 = 1^Л, (30)
а2 аз
Эта прямая лежит в плоскости х = xq и, следовательно, параллельна
плоскости х = 0. Аналогично пишутся уравнения прямой, если в нуль
обращается не аь а другая компонента.
Когда равны нулю две компоненты направляющего вектора,
например, а\ и с*2> то прямая имеет уравнения
х = х0у у = уо- (31)
Такая прямая параллельна одной из осей координат, в нашем
случае — оси аппликат.
Важно уметь находить начальную точку и направляющий
вектор прямой, заданной системой линейных уравнений (26). По
условию (27) один из детерминантов отличен от нуля. Допустим для
§2, Уравнения прямых и плоскостей
55
определенности, что АВ\ — А\В ф 0. В силу предложения 9 при
любом фиксированном z система уравнений будет иметь единственное
решение (ж, у), в котором жиг/, разумеется, зависят от z. Они —
линейные многочлены от z: х = ot\z + /?ь у = a-2z -f /?2.
Не будем доказывать этого, хотя это и не трудно сделать. Для
ясности, заменяя z на ty получаем параметрические уравнения прямой
Первые две координаты начальной точки прямой Mo(/?i,/?2>0)
можно получить, решая систему (26) при значении z = 0.
Из параметрических уравнений видно, что в этом случае
направляющий вектор имеет координаты (а^аг, 1). Найдем его
компоненты в общем виде. Если система координат декартова прямоугольная,
векторы с компонентами (Л.В,С) и (-Ai, jBi,Ci) перпендикулярны
соответствующим плоскостям, а потому их векторное произведение
параллельно прямой (26), по которой плоскости пересекаются.
Вычисляя векторное произведение в ортонормированном базисе, мы
получаем компоненты направляющего вектора
в с
Вг d
»
С А
Сх Ах
»
А В
Ai Bx |
П р е д л о ж е н и е 10. Вектор с компонентами (32) есть
направляющий вектор прямой с уравнениями (26), какова бы ни была декартова
система координат.
Доказательство. Согласно предложению 5 каждый ненулевой
вектор, компоненты которого (ai,a2,a3) удовлетворяют уравнению
Aai -+- Вс*2 + Cfa3 = 0, параллелен плоскости с уравнением Ах + By +
+ Cz -+• D = 0. Если, кроме того, он удовлетворяет уравнению Aic*i -f-
+ i*ta2 + Cia3 = 0, то он параллелен и второй плоскости, т. е. может
быть принят за направляющий вектор прямой. Вектор с
компонентами (32) ненулевой в силу неравенства (27). Непосредственно легко
проверить, что его компоненты удовлетворяют обоим написаЕшым
выше условиям. На этом доказательство заканчивается.
Упражнения
1. Найдите параметрические уравнения прямой с уравнениями
а: + у -f z = 4, я - у + 3z = 0.
2. Найдите параметрические уравнении плоскости х — 2у + Зг = 1.
3. Найдите координаты точки пересечения прямых с уравнениями х =
= 1 — £, у = I + £, 2 = 1— £ и я = 3J — 1, у = 2t — 2, z = l + t. Какое значение
параметра соответствует этой точке на каждой из прямых? Как
установить, что прямые пересекаются, не находя точки пересечения?
4. Напишите уравнения плоскости, в которой лежат прямые из упр. 3.
5. Напишите параметрические уравнения прямых, заданных
векторными уравнениями:
а) [г,а] = Ь, (а,Ь) = 0;
56
Гл. II. Прямые линии и плоскости
б) (г, щ) + £>i = 0, (г, п2) + D2 = О, (п,, п2) = О.
13 задаче б)не слишком трудно получить решение и без условия (nj, пг) =
= 0. Попробуйте сделать это.
§ 3. Основные задачи о прямых и плоскостях
1. Уравнение прямой, проходящей через две точки. Пусть
в пространстве задана общая декартова система координат и две
точки М\ и М2 с координатами (ei,2/i,zi) и {x2iy2,z2). Чтобы написать
уравнение прямой М\М2, примем М\ за начальную точку, а МхМ2
за направляющий вектор. Этот вектор не нулевой, если точки не
совпадают. По формуле (29) § 2 мы получаем
Х-XI _ у- у\ = Z-Z\ цч
*2 —Х\ У2 - У1 22 - 21 *
Если в этих равенствах какой-либо из знаменателей равен нулю, то
следует приравнять нулю соответствующий числитель.
В планиметрии задача решается также. Отличие только в том, что
координаты точек теперь (xy}yi) и [х2уу2), и МЬ1 получаем по
формуле (8) §2
х-х\ У-У1
х2 - a?i 2/2 - У\
= 0.
2. Уравнение плоскости, проходящей через три точки.
Пусть Л/1? Мо и М3 — не лежащие на одной прямой точки с
координатами (Ei,yi,2i), {x2,y2iz2) и (х3,г/з,*з) в общей декартовой
системе координат. Выберем Мх в качестве начальной точки, a М\М2
и М1М3 в качестве направляющих векторов. Тогда по
формулам (12) §2 и (16) §4 из гл. I получаем уравнение плоскости
= 0. (2)
X — Хх
х2 — х1
Хз — Х\
У-У\
У2-У1
Уз ~ У\
Z — Zx
Z2-Zx
*з-*1
3. Параллельность прямой и плоскости. Пусть известен
направляющий вектор прямой а(а1,а2,о:з), а плоскость задана одним
из уравнений (г — г0, п) = 0 или (г — г0, р, q) = 0. Прямая параллельна
плоскости (а возможно, и лежит в ней) тогда и только тогда, когда
соответственно (а, и) ~ 0 или (a,p,q) = 0. Если плоскость задана
линейным уравнением Ах + By -f- Cz -f D = 0, то по предложению 5 § 2
условие параллельности —
Асхх + Ва2 + Саз = 0. (3)
Пусть прямая задана системой уравнений
Ахх + Вху + Cxz + Dx = 0, А2х + В2у + C2z + D2 = 0.
§ 3. Основные задачи о прямых и плоскостях
57
Тогда по предложению 10 §2 условие (3) переписывается в виде
Bi
В2
С2
+ В
С2
Ах
А2
+ С
Ах
А2
Вх
В2
= 0,
или
А В С
Ах Вг Сх
А2 В2 С-2
= 0.
(4)
Легко проверить, что все приведенные здесь условия являются не
только необходимыми, но и достаточными.
Из формулы (4) следует, что три плоскости пересекаются в
одной точке тогда и только тогда, когда коэффициенты их уравнений
удовлетворяют условию
А В С \
Аг Вх С, \ф0. (5)
А2 В2 С2 I
Действительно, это неравенство означает, что прямая, по которой
пересекаются две плоскости, не параллельна третьей.
4. Полупространство. Пусть даны плоскость Р и определенный
ее нормальный вектор п. Полупространством, определяемым Р и п,
называется множество точек М таких, что для некоторой точки Mq
на плоскости вектор М0М составляет с п угол, не больший 7г/2.
Если г — радиус-вектор точки М, а г0 — точки Mq, to
определение полупространства, эквивалентно неравенству (г — r0,n) ^ 0. Это
неравенство и есть уравнение полупространства.
Нетрудно проверить, что определение полупространства не
зависит от выбора точки М0. Действительно, если A/i(ri) — другая точка
плоскости, то вектор а = ri — го лежит в плоскости,
перпендикулярен п, и мы имеем
(г - п,п) = (г - го - а,п) = (г - г0,п).
Мы получим уравнение полупространства в координатной форме,
если вспомним, что согласно предложению 3 §2 выражение (г — го, п)
в координатах записывается линейным многочленом Ах + By + Cz -f
-f- D. Итак, полупространство в декартовой системе координат
задается линейным неравенством
Ах + By + Cz + D ^ 0.
Обратно, любое такое неравенство можно записать как (г — го, n) ^ 0,
откуда сразу видно, что оно задает полупространство.
Плоскость Р и вектор пу = —п задают другое полупространство
с уравнением (г — ro,ni) ^ 0 или (г — го,п) ^ 0. Его назовем
"отрицательным'5, в отличие от "положительного" полупространства (г—
— г0, п) ^ 0. Однако такое наименование условно — оно определяется
58
Гл. II. Прямые линии и плоскости
выбором вектора п. Изменение направления этого вектора
равносильно умножению уравнения плоскости на (—1). При этом
"положительное" полупространство становится "отрицательным", и наоборот.
Вот. однако, факт, не зависящий от выбора направления
нормального вектора: если Mi(x\,y\,z\) и М2(аг2,2/2**2) Две точки, не
лежащие в плоскости, то результаты подстановки их координат в левую
часть уравнения плоскости Ах\ -f Ву\ -f Cz\ Л- D и Ах^ + Ву2 +
-\-Cz2 + D имеют один знак тогда и только тогда, когда точки
лежат в одном полупространстве.
Для решения задач бывает полезно следующее замечание: если
точка А/о(*о, уо, *о) лежит на плоскости, то точка с координатами х0+
■+■ А, уо + В, *o + С лежит в "положительном" полупространстве.
Иначе говоря, вектор с координатами А, В, С направлен в
"положительное" полупространство. Это легко проверяется подстановкой.
Вполне аналогично сказанному о полупространствах мы можем
определить, что такое полуплоскость, и доказать, что
неравенство Ах + By ■+■ С ^ 0, связывающее декартовы координаты точки на
плоскости, определяет полуплоскость. Вторая полуплоскость,
ограниченная прямой Ах + By + С = 0, задается неравенством Ах ■+■ By +
Точки Mi(xi,y\) и М2(х2,У2) лежат по одну сторону от прямой
тогда и только тогда, когда {Ах\ + Ву2 + С){Ах2 + Ву2 + С) > 0.
5. Расстояние от точки до плоскости. Пусть дана плоскость
с уравнением (г —гр,п) = 0 и точка М с радиус-вектором R.
Рассмотрим вектор МоМ = R — г0, соединяющий начальную точку
плоскости с М (рис. 22). Расстояние от точки до плоскости равно
модулю его скалярной проекции на
вектор и, т. е.
|(R-r0jn)|
h =
(б)
Рис. 22
Если в декартовой прямоугольной
системе координат точка М имеет
координаты (Х,У, Z), то равенство (6)
запишется согласно предложениям 3 и 4 § 2 так:
у/А* + В2 + С2 ' ( }
6. Расстояние от точки до прямой. Если прямая задана
уравнением [г - г0, а] = 0, то мы можем найти расстояние h от точки М
с радиус-вектором R до этой прямой, разделив площадь
параллелограмма, построенного на векторах R — г0 и а, на длину его основания
§3. Основные задачи о прямых и плоскостях
59
(рис. 23). Результат можно записать
формулой
Для прямой в пространстве мы не будем
получать координатной записи этого
выражения.
Рассмотрим прямую на плоскости,
заданную уравнением Ах 4- By -f С = О в
декартовой прямоугольной
системе координат. Пусть Мо(жо,Уо) —
начальная точка прямой, а М{ХУ Y) — некоторая Рис. 23
точка плоскости. В качестве направляющего вектора возьмем
вектор а(-£,Л). Из формулы (25) §4 гл. I следует, что площадь
параллелограмма равна S = \{Х — х0)А — (У — уо)(—В)\. Тогда по
формуле (9) § 2 5 = \АХ + BY + C\ и
Легко заметить также, что для нахождения расстояния от точки
до прямой на плоскости можно воспользоваться формулой (С), считая,
что п — нормальный вектор прямой.
7. Расстояние между скрещивающимися прямыми. Пусть
прямые р и q не параллельны. Известно, что в этом случае
существуют такие параллельные плоскости Р и Q, что прямая р лежит в Р, а
прямая q лежит в Q. (Если уравнения прямых г = ri + аг* и г = Г2 +
4- ао*, то плоскость Р имеет начальную точку ri и направляющие
векторы ai и аг. Аналогично строится плоскость Q.) Расстояние h
между Р и Q называется расстоянием между прямыми р и q. Если р и q
пересекаются, то Р и Q совпадают и
А = 0.
Для того чтобы найти
расстояние А, проще всего разделить объем
параллелепипеда, построенного на
векторах Г2 — rj,ai и аг, на площадь его
основания (рис. 24). Мы получим
h _ |(r2 -ri,ai,a2)
"~ |[ai,aa]|
Рис. 24
Знаменатель этой дроби отличен от нуля, поскольку прямые не
параллельны.
Предложение I. Прямые линии с уравнениями г = ri + а.\1 и
г = Г2 + а2< пересекаются тогда и только тогда^ когда А = 0, т. е.
(г2 - ri,aba2) = 0, [аьа2] ф 0.
60
Гл. II. Прямые линии и плоскости
8. Вычисление углов. Чтобы найти угол между двумя
прямыми, следует найти их направляющие векторы и вычислить косинус
угла между ними, используя скалярное
произведение. При этом следует иметь в
виду, что, изменив направление одного из
векторов, мы получим косинус смежного
угла.
Для нахождения угла между прямой
и плоскостью определяют угол в между
р 25 _ _ направляющим вектором прямой и
Vl нормальным вектором плоскости.
Если векторы выбрать так, чтобы cos0 ^ 0, и взять О ^ в ^ 7г/2, то
искомый угол дополняет в до тг/2.
Угол между плоскостями находят как угол между их
нормальными векторами.
Полезна бывает формула для угла между прямыми линиями на
плоскости, заданными уравнениями у = kix + 6Х и у = к2х + Ь2 в
декартовой прямоугольной системе координат. Обозначим через <р угол
между прямыми, отсчитываемый от первой прямой ко второй в том
же направлении, в котором производится кратчайший поворот от
первого базисного вектора ко второму. Тогда tg<p можно найти как
тангенс разности углов, которые прямые составляют с осью абсцисс. Так
как тангенсы этих углов равны угловым коэффициентам прямых, мы
получаем
Конечно, эта формула не имеет смысла, когда знаменатель дроби
обращается в нуль. В этом случае прямые перпендикулярны.
Действительно, согласно предложению 1 §2 векторы с компонентами (1, fci)
и (1,к2) — направляющие векторы прямых, и их скалярное
произведение равно 1 + кгк2. Мы получили
Предложение 2. Для перпендикулярности прямых с угловыми
коэффициентами к\ и к2 в декартовой прямоугольной системе
координат необходимо и достаточно выполнение равенства 1 + k\k2 = 0.
9. Некоторые задачи на построение, а) Перпендикуляр
из точки на плоскость. Проекция точки. Если (г — го, п) = 0 —
уравнение плоскости и дана точка М с радиус-вектором R, то прямая
с уравнением г = R-Mn проходит через М и перпендикулярна
плоскости. Решая совместно уравнения прямой и плоскости, найдем
ортогональную проекцию М на плоскость. Из (R — r0 + <u,n) = О
находим t и подставляем в уравнение прямой. Мы получим радиус-
вектор проекции
». — те (К.-го,п)
ij-R—w~
Обратите внимание на структуру этой формулы: из радиус-векто-
§3. Основные задачи о прямых и плоскостях 61
pa R вычитается проекция R —го на нормальный вектор плоскости.
Из этих соображений можно было получить ответ.
б) Перпендикуляр из точки на прямую. Пусть прямая задана
уравнением [г —г0, а] = 0 и дана точка М с радиус-вектором R.
Вектор р = [R — го,а] перпендикулярен плоскости, проходящей через
прямую и точку М. Если точка не лежит на прямой, то р ф 0, и
вектор [а, р] = [a, [R — го, а]] также ненулевой и перпендикулярен а и
р. Следовательно, он лежит в указанной плоскости и
перпендикулярен прямой. Итак, получено уравнение
r = R-M[a,[R-r0,a]]
перпендикуляра, опущенного из точки М на заданную прямую.
Применив формулу двойного векторного произведения, вы
заметите, что [а,р] коллинеарен разности вектора R — г0 и его проекции
на вектор а. Задачу можно было решить, заметив это свойство
направляющего вектора перпендикуляра.
в) Уравнение проекции прямой на плоскость. Его просто
получить, если не требуется находить направляющий вектор и
начальную точку. Пусть заданная плоскость имеет уравнение (г,п) +
•+-£> = 0, а прямая — уравнение [г —г0,а] = 0, причем [а,п] ф 0.
Тогда плоскость (г —г0,а, п) = 0 проходит через прямую
перпендикулярно заданной плоскости. Таким образом, проекция прямой
может быть задана системой из двух уравнений:
(г - г0, а, п) = 0, (г, n) + D = 0.
Направляющий вектор проекции Ъ — проекция а на плоскость.
Она получается из а вычитанием из него его проекции на нормаль:
i (а>п)
|п|2
За начальную точку может быть принята точка пересечения
проектируемой прямой с плоскостью, если она существует, или же проекция
начальной точки прямой.
г) Общий перпендикуляр к двум скрещивающимся прямым.
Пусть прямые с уравнениями г = ri +
-Mai и г = г2-Ма2 не параллельны,
т. е. [аьа2] ф 0. Вектор р = [аьа2]
перпендикулярен обеим прямым.
Следовательно, плоскость
(г-гьаь[аьа2])ггО (11)
проходит через первую прямую и общий
перпендикуляр к обеим прямым (рис. 26),
а плоскость
(г-г2,а2,[аьа2]) = 0 (12)
О
Рис. 26
62
Гл. II. Прямые линии и плоскости
— через вторую прямую и общий перпендикуляр. Поэтому общий
перпендикуляр можно задать системой уравнений (11), (12). Чтобы
найти его начальную точку, можно решить совместно уравнение
первой прямой и плоскости (12). Направляющий вектор — [аьа2].
10. Пучок прямых. Пучком прямых на плоскости называется
множество прямых, проходящих через фиксированную точку —
центр пучка. Пусть Л\х + В\у + С\ = О и А2х 4- В2у 4- С2 = 0 —
уравнения двух прямых, принадлежащих пучку. Тогда уравнение
a{Aix + Biy+d) + /3{А2х + В2у + С2) = 0 (13)
при условии а2 ■+■ 02 ф О называется уравнением пучка прямых.
Основанием для этого служит
Предложение 3. При любых а и /3 (а2 4- /З2 ф 0) уравнение (13)
определяет прямую линию, принадлежащую пучку. Обратно, уравнение
каждой прямой из пучка представимо в виде (13).
Докажем сначала, что коэффициенты при переменных в
уравнении (13) не равны нулю одновременно. Для этого перепишем его в
виде
(a;4i + (ЗЛ2)х + {аВх + (ЗВ2)у + {аСх + 0С2) = 0.
Допустим, что &А\ + /ЗА2 = 0 и аВх + /ЗВ2 = 0. Так как прямые
пересекаются, А\В2 — А2В\ ф 0 и из предложения 9 § 2 вытекает, что
значения а = 0, 0 = 0 единственные, которые удовлетворяют этим
двум равенствам. Но эти значения мы исключили. Таким образом,
уравнение (13) определяет прямую линию.
Обозначим через х0, уо координаты центра пучка. По условию
Агх0 + Вгу0 + d = 0, Л2ж0 + В2у0 + С2 = 0,
а потому #о, Уо удовлетворяют уравнению (13), и прямая проходит
через центр пучка.
Вторая часть предложения будет доказана, если окажется, что
через любую точку, отличную от центра пучка М0, проходит прямая
линия с уравнением вида (13). Легко проверить, так ли это.
Рассмотрим точку Mi(xuyi)} отличную от Мо, и обозначим
и = A\x\ + Biyi + Сь v = А2хх + B2yi + С2.
Так как наши прямые имеют только одну общую точку, числа и и v
одновременно не равны нулю, и мы вправе положить а = —г», /3 = и.
При таких значениях а и /3 координаты точки Mi удовлетворяют
уравнению (13). Это означает, что соответствующая этим значениям
прямая пучка проходит через M\t и предложение доказано.
Заметим, что каждая пара чисел а и 0 (а2 + /?2 ф 0) определяет
в пучке единственную прямую, но каждой прямой соответствуют
бесконечно много пропорциональных между собой пар чисел.
Если нам известны координаты центра пучка, то уравнение пучка
можно написать в виде
а(х - х0) + 0{у - Уо) = 0,
§3. Основные задачи о прямых и плоскостях
63
положив, что пучок определяется прямыми х — xq = О и у — уо = 0.
Впрочем, и без того очевидно, что это — уравнение произвольной
прямой, проходящей через М0.
Посмотрим на уравнение пучка прямых с несколько более общей
точки зрения. Систему из уравнений прямых, определяющих пучок,
можно рассматривать как уравнение центра пучка. Поэтому
уравнение каждой прямой пучка есть следствие этой системы. Теперь наш
результат можно сформулировать так.
Предложение 4. Если система линейных уравнений имеет
решение, то некоторое линейное уравнение является ее следствием
тогда и только тогда, когда оно есть сумма уравнений системы,
умноженных на какие-то числа.
Мы доказали это предложение для частного случая систем из двух
уравнений с двумя неизвестными. В общем виде оно вытекает из
результатов гл. V о системах линейных уравнений. Другими
геометрическими интерпретациями этого предложения являются пучки и
связки плоскостей.
Пучком плоскостей называется множество плоскостей,
проходящих через фиксированную прямую — ось пучка. Уравнение пучка
плоскостей имеет вид
а{Ахх + Вху + Ciz + Di) + р{Л2х + В2у + C2z + D2) = 0,
где а2 + /?2 ф 0, а в скобках стоят левые части уравнений двух
различных плоскостей пучка.
Связкой плоскостей называется множество плоскостей,
проходящих через фиксированную точку — центр связки. Уравнение связки
плоскостей имеет вид
a(Atx + Bxy + dz + Dx) + j3{A2x + B2y + C2z + D2) +
+ y{A3x + B3y + C3z + D3) = 0,
где a2 + /32 + 72 ф 0, а в скобках стоят левые части уравнений
плоскостей связки, имеющих центр своей единственной общей точкой.
Предоставим читателю самостоятельно вывести эти уравнения,
если он пожелает.
11. О геометрическом смысле порядка алгебраической
линии. Пусть на плоскости дана алгебраическая линия L,
имеющая в декартовой системе координат уравнение
Axxklyl1 + ... + Asxk°yl* = 0. (14)
Рассмотрим произвольную прямую с параметрическими
уравнениями
x = xo + ait, y — yo-\-o.2t. (15)
Найдем точки пересечения L и прямой линии. Они будут
известны, если мы найдем соответствующие им значения параметра t. Это
будут те значения, при которых х и у, выраженные по форму-
64
Гл. II. Прямые линии и плоскости
лам (15), удовлетворяют уравнению (14). Подставим (15) в (14):
Ax(xQ + ai*)*l(!to + a2t)il + ... + А,(яг0 + <М)*'(Уо + a2<),e = 0. (16)
Раскрывая скобки в каждом члене, мы получим многочлены
относительно t степеней A*j -Mi,..., ks + /5. Их сумма будет многочленом,
степень которого не выше, чем максимальная из степеней слагаемых.
Но максимальное из чисел к\ 4-1\,..., ks + ls — это порядок линии L.
Поэтому степень уравнения (16) не превосходит порядка линии.
Может, конечно, случиться, что все коэффициенты этого
уравнения равны нулю, и оно представляет собой тождество. Если
исключить этот случай, то число корней уравнения и. следовательно, число
точек пересечения не превосходит порядка линии. Мы доказали
Предложение 5. Число точек пересечения алгебраической
линии с прямой, которая на ней не лежит целиком, не превосходит
порядка линии.
Существуют линии, которые ни с одной прямой не имеют в
принципе возможного числа точек пересечения, равного порядку линии.
Примерами могут служить линии с уравнениями х2-\-у2 = О или
(х2 + у2)2 - 1 = 0.
Пример. Архимедова спираль — линия с уравнением г = atp в
полярной системе координат — пересекает каждую прямую,
проходящую через полюс, в бесконечном числе точек. Следовательно, она
не является алгебраической линией.
Упражнения
1. И декартовой прямоугольной системе координат даны координаты
вершин треугольника Л(20, —15), В(—16,0) и С(—8,6). Найдше
координаты центра и радиус окружности, вписанной в треугольник.
2. Начало координат лежит в одном из углов, образованных прямыми
с уравнениями А\Х + В\у+С\ =0 и А2Х + £fey -f Сч = 0. При каком
необходимом и достаточном условии на коэффициенты уравнений этот угол
острый?
3. Составьте уравнение прямой, проходящей через начало координат и
пересекающей прямые с уравнениями х = 1 4- 2£, у = 2 -Ь 3i, z = — t и х = At,
у = 5 - 5*, z = 3 + 2Ь.
4. В декартовой прямоугольной системе координат найдите координаты
центра и радиус сферы, проходящей через точку Л(0,1,0) и касающейся
п юскостей с уравнениями х + у = 0, х — у = 0 и x + y + 4z =0
5. В декартовой прямоугольной системе координат даны координаты
вершин треугольника А(1,2,3), £(1,5,-1) и С(5,3, -5). Найдите коорди-
на!ы центра окружности, описанной около треугольника.
6. Напишите уравнения прямой, которая параллельна прямой г = г0 +
+ а0* и пересекает прямые г = ri + &i* и г = гг + a2i.
ГЛАВА III
ЛИНИИ И ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА
§ 1. Исследование уравнения второго порядка
В общей декартовой системе координат линия второго порядка
может быть задана уравнением*)
Ах2 + 2Вху + Су2 + 2Dx + 2Еу + F = 0, (1)
в котором коэффициенты А, В и С не равны нулю одновременно.
Исследуем множество точек, которые ему удовлетворяют, не
предполагая заранее, что хоть одна такая точка существует. С этой целью
мы будем менять систему координат так, чтобы уравнение стало
возможно проще. С самого начала можно считать систему координат
декартовой прямоугольной, так как при переходе к прямоугольной
системе координат общий вид уравнения (1) не изменится.
При повороте базиса декартовой прямоугольной системы
координат на угол (р старые координаты точки ж, у будут связаны с ее
новыми координатами xf,yf формулами (8) §3 гл. I
х — х1 cos <р — у1 sin <р, у = х' sin <р -\-yf cos (p.
В новых координатах уравнение (1) примет вид
А(х' cos <p — y' sin (р)2 + 2B(xf cos (p — у' sin ip) x
х (ж'sin у? 4- у'cos у?) + С(х'sin<p + yfcos<p)2 -f ... = 0.
Здесь многоточием обозначены члены первой степени
относительно я', г/ и свободный член, которые нет необходимости выписывать.
Нас будет интересовать член с произведением х'у' в преобразованном
уравнении. В невыпнсанные члены это произведение не входит, и мы
подсчитаем, что половина коэффициента при х'у' есть
В' = —A sin (p cos (p + i?(cos2 ip — sin2 <p) + С sin (p cos (p.
Если В=0. то поворачивать систему координат не будем. Если же В ф
ф 0, то выберем угол <р так, чтобы В' обратилось в нуль.
Это требование приведет к уравнению
2В cos 2<p={A- С) sin 2<p. (2)
Если А = С, то cos 2<р = 0, и можно положить (р = 7г/4. Если же А ф С,
то выбираем (р = - arctg ——— . Для нас сейчас важно то, что хоть
*) Коэффициенты при произведении переменных и при их первых
степенях обозначены 2Я, 2D и 2Е, так как ниже часто будут употребляться
половины этих коэффициентов.
66
Гл. III. Линии и поверхности второго порядка
один такой угол обязательно существует. После поворота системы
координат на этот угол линия будет иметь уравнение
Л V2 + СУ2 + 2D'x' + 2£У + F' = 0. (3)
Выражения для коэффициентов уравнения (3) через
коэффициенты (1) подсчитать не трудно, но это не нужно. Теперь коэффициент
при произведении переменных равен нулю, а остальные члены мы
по-прежнему считаем произвольными.
Сформулируем следующее вспомогательное
Предложение 1. Если в уравнение (3) входит с ненулевым ко-
эффициентом квадрат одной из координат, то при помощи
переноса начала координат вдоль соответствующей оси можно обратить в
нуль член с первой степенью этой координаты.
В самом деле, пусть, например, А' ф 0. Перепишем (3) в виде
А1 (х'> + Щ-J + 5) + СУ2 + 2ЯУ + F' - ^ = 0.
Если мы сделаем перенос начала координат, определяемый
формулами х" = х' + D'/A'y yf' — у*, то уравнение приведется к виду
А!х"2 + Су"2 + 2ЯУ + F" = 0,
как и требовалось.
А. Предполо?ким, что А'С ф 0, т. е. оба коэффициента отличны от
нуля. Согласно предложению 1 при помощи переноса начала
координат уравнение приведется к виду
А!х"2 + СУ'2 + F" = 0. (4)
Могут быть сделаны следующие предположения относительно
знаков коэффициентов в этом уравнении.
А1. А!С > 0 — коэффициенты А! и С" имеют один знак. Для F"
имеются следующие три возможности.
Ala. Знак F" противоположен знаку А1 и С1. Перенесем F" в
другую часть равенства и разделим на него. Уравнение примет вид
г"2 и"2
-^ + V-tr = h (5)
а
Ь2
где а2 = — F"/A\ Ь2 = —F" /О. Можно считать, что в этом
уравнении а > 0, Ь > 0 и а ^ Ь. Действительно, если последнее условие не
выполнено, то можно сделать дополнительную замену координат
** = г/", у*=*". (6)
Определение. Линия, которая в некоторой декартовой
прямоугольной системе координат может быть задана уравнением (5) при
условии а ^ 6, называется эллипсом, уравнение называется
каноническим уравнением эллипса, а система координат — его канонической
системой координат.
При а = 6 уравнение (5) есть уравнение окружности радиуса а.
Таким образом, окружность — частный случай эллипса.
§ 1. Исследование уравнения второго порядка
67
А1б. Знак F" совпадает с общим знаком Л" и С". Тогда аналогично
предыдущему мы можем привести уравнение к виду
х"2 и"2
Этому уравнению не удовлетворяют координаты ни одной точки.
Уравнение, которое приводится к каноническому виду (7),
называется уравнением мнимого эллипса.
А1в. F" = 0. Уравнение имеет вид
aV'2 + cV = 0. (8)
Ему удовлетворяет только одна точка х" — 0, у" = 0. Уравнение,
приводящееся к каноническому виду (8), называется уравнением пары
мнимых пересекающихся прямых. Основанием для этого названия
служит сходство с приведенным ниже уравнением (10).
А2. А'С < 0 — коэффициенты А' и С имеют разные знаки.
Относительно F" имеются следующие две возможности.
А2а. F" ф 0. В случае необходимости, делая замену (6), мы
можем считать, что знак F" противоположен знаку А'. Тогда уравнение
приводится к виду
— - у— - 1 (9)
О* б2 ' К ]
где а2 = -F"/A'y б2 = F"/C.
Определение. Линия, которая в некоторой декартовой
прямоугольной системе координат может быть задана уравнением (9),
называется гиперболой, уравнение называется каноническим уравнением
гиперболы, а система координат — ее канонической системой
координат.
А2б. F" = 0. Уравнение имеет вид
ах
-сУ'2 = 0. (Ю)
Его левая часть разлагается на множители ах" — су?' и ах" ■+■ су" и,
следовательно, обращается в нуль тогда и только тогда, когда равен
нулю хоть один из сомножителей. Поэтому линия с уравнением (10)
состоит из двух прямых. Эти прямые пересекаются в начале
координат, и мы имеем, таким образом, пару пересекающихся прямых.
Б. Допустим теперь, что А'С = 0, и, следовательно, один из
коэффициентов А' или С равен нулю. В случае необходимости, делая
замену (б), мы можем считать, что А' = 0. При этом С ф 0, так как
иначе порядок уравнения был бы меньше двух. Используя
предложение 1, мы приведем уравнение к виду
Су"2+ 27)V' + F" = 0.
Б]. Пусть D' ф 0. Сгруппируем члены следующим образом:
СУ'2 + 2Я'(*"+|1)=0.
68
Гл. III. Линии и поверхности второго порядка
Перенесем начало координат вдоль оси абсцисс в соответствии с
формулами перехода хщ = х" 4- F"/2D*', у* — у". Тогда уравнение примет
вид
С'У2 + 2DV = О,
или
у*2 = 2рх% (11)
где р = —D' /О. Мы можем считать, что р > О, так как в противном
случае можно сделать дополнительную замену координат,
изменяющую направление оси абсцисс: х = —ж*, у = у*.
Определение. Линия, которая в некоторой декартовой
прямоугольной системе координат может быть задана уравнением (11) при
условии р > О, называется параболой, уравнение называется
каноническим уравнением параболы, а система координат — ее канонической
системой координат.
Б2. Допустим, что D* = 0. Уравнение имеет вид C'yf'2 -f- F" ~ 0.
Относительно F" есть следующие три возможности.
Б2а. CF" < 0 — знаки С и F" противоположны. Разделив на С",
приведем уравнение к виду
у"2-а2 = 0. (12)
Левая часть уравнения разлагается на множители у" +а и у" — а.
Обращение в нуль каждого из них определяет прямую линию. Эти
прямые параллельны, и, таким образом, уравнение определяет пару
параллельных прямых.
Б2б. OF" > 0 — знаки С" и F" совпадают. Разделив на С",
приведем уравнение к виду
у"2 + а2 = 0. (13)
Этому уравнению не удовлетворяют координаты ни одной точки.
Уравнение, приводящееся к каноническому виду (13), называют
уравнением пары мнимых параллельных прямых.
Б2в. F" = 0. После деления на С" уравнение принимает вид
у"2 = 0. (14)
Это уравнение эквивалентно уравнению у" = 0, и потому определяет
прямую линию. Уравнение, приводящееся к каноническому виду (14),
называется уравнением пары совпавших прямых.
Соберем вместе полученные результаты.
Теорема 1. Пусть в декартовой системе координат задано
уравнение второго порядка (1).
Тогда существует такая декартова прямоугольная система
координат, в которой это уравнение принимает один из следующих
девяти канонических видов:
i)£ + £ = i; 2)£ + £ = -i; 3)«V4cV = 0;
§2. Эллипс, гипербола и парабола
09
4)J-j£ = l; 5)а2*2-сУ = 0; 6)у2=2ря;
7)у2-а2 = 0; 8)у2 + а2 = 0; 9) у2 = 0.
В соответствии с этим существуют семь классов линий второго
порядка: 1) эллипсы; 3) точки (пары мнимых пересекающихся
прямых); 4) гиперболы; 5) пары пересекающихся прямых; 6) параболы;
7) пары параллельных прямых; 9) прямые (пары совпавших прямых).
Уравнению 2) мнимого эллипса и уравнению 8) пары мнимых
параллельных прямых не удовлетворяет ни одна точка.
Упражнения
1. Приведите к каноническому виду уравнение
За;2 + Юху + Зу2 - 2х + 2у - 9 = 0.
2. Приведите к каноническому виду уравнение
9х2 - 24ху + 16у2 - 34* - 38у - 9 = 0.
3. Какого класса линию может определять уравнение второго порядка,
если его левая часть раскладывается в произведение линейных мночленов?
4. При каком условии на его коэффициенты уравнение второго
порядка в декартовой прямоугольной системе координат является уравнением
окружности?
5. Система координат удовлетворяет условиям |ei| = \е-г\ = 5, (ei,e2) =
= 7. Какая линия определяется в этой системе координат уравнением х2 +
+ у2 = 1?
6. Докажите, что сумма коэффициентов А + С в уравнении (1) не
меняется при переходе от одной декартовой прямоугольной системы координат
к другой такой же системе.
§ 2. Эллипс, гипербола и парабола
В предыдущем параграфе мы познакомились с классификацией
линий второго порядка. Геометрические свойства только трех классов
линий не являются очевидными. Ими мы сейчас займемся.
1. Эллипс. Напомним, что мы назвали эллипсом линию, которая
в некоторой декартовой прямоугольной системе координат
определяется каноническим уравнением
_2 .2
при условии a J> b > 0.
Из уравнения (1) следует, что для всех точек эллипса \х\ ^ а и
|у| ^ 6. Значит, эллипс лежит в прямоугольнике со сторонами 2а и 26.
Точки пересечения эллипса с осями канонической системы
координат, имеющие координаты (а,0), (—а,0), (0,6) и (0. — 6),
называются вершинами эллипса. Числа а и 6 называются соответственно
большой и малой полуосями эллипса.
70
Гл. III. Линии и поверхности второго порядка
м,
—а\
К
ь
*"^
О
м
)а
м2
В каноническое уравнение входят только квадраты координат.
Поэтому, если координаты (ж, у) какой-либо точки М ему
удовлетворяют, то ему удовлетворяют и
координаты {-х,у), (ж,-у) и (-я,-у) точек Мь
М2 и М3 (рис. 27). Отсюда вытекает
Предложение 1. Оси канонической
системы координат являются осями
симметрии эллипса, а начало канонической
системы — его центром симметрии.
Внешний вид эллипса проще всего
описать сравнением с окружностью радиуса а с центром в центре
эллипса: х2 + у2 =: а2. При каждом х таком, что \х\ < а, найдутся две
точки эллипса с ординатами ±Ьу/1 - х2/а2 и две точки
окружности с ординатами ±а^/1 — х2/а2. Пусть точке эллипса соответствует
точка окружности с ординатой того же знака. Тогда отношение
ординат соответствующих точек равно Ь/а. Итак, эллипс получается из
окружности таким сжатием ее к оси абсцисс, при котором ординаты
Рис. 27
Рис. 28. Здесь Ь/а-1/2 рис. 29
всех точек уменьшаются в одном и том же отношении Ь/а (рис. 28).
С эллипсом связаны две замечательные точки, называемые его
фокусами. Пусть но определению
с2 = а2- Ь2 (2)
и с ^ 0. Фокусами называются точки F\ и F2 с координатами (с, 0)
и (—с, 0) в канонической системе координат (рис. 29).
Для окружности с = 0, и оба фокуса совпадают с центром. Ниже
мы будем предполагать, что эллипс не является окружностью.
Отношение
_ с
а
(3)
называется эксцентриситетом эллипса. Отметим, что е < 1.
Предложение 2. Расстояние от произвольной точки М(хуу),
лежащей на эллипсе, до каждого из фокусов (см. рис. 29) является
§2. Эллипс, гипербола и парабола
71
линейной функцией от ее абсциссы х:
r1 = |FiAf| = a-ex, r2= \F2M\ = a + ex. (4)
Доказательство Очевидно, что г\ = (х — с)2 + у2. Подставим
сюда выражение для у2, найденное из уравнения эллипса. Мы
получим
&V
г? = х2 - 2сх + с2 + Ь2 -
1 а'
Учитывая равенство (2), это можно преобразовать к виду
г2 = а2-2сх+с-^ = (а~-ех)2.
а2
Так как х ^ а и 6 < 1, отсюда следует, что справедливо первое из
равенств (4): г\ = а — £я. Второе равенство доказывается аналогично.
Предложение 3. Для того чтобы точка лежала на эллипсе,
необходимо и достаточно, чтобы сумма ее расстояний до фокусов
равнялась большой оси эллипса 2а.
Необходимость условия очевидна: если мы сложим равенства (4)
почленно, то увидим, что _ _.
П + г2 = 2а. (5)
Докажем достаточность. Пусть для точки М(х,у) выполнено
условие (5), т. е. t .
у/{х - с)2 + У2 = 2а - у/(х + с)2 + у2.
Возведем обе части равенства в квадрат и приведем подобные
члены:
хс + а2 = ау/{х + с)2 + у2. (6)
Это равенство также возведем в квадрат и приведем подобные члены,
используя соотношение (2). Мы придем к равенству Ь2х2 + а2у2 =
= а2Ь2, равносильному
уравнению эллипса (1).
С эллипсом свйзаны две
замечательные прямые, называемые
его директрисами. Их уравнения
в канонической системе
координат (рис. 30)
(7)
—а/г
х —
х —
Рис. 30
е е
Директрису и фокус, которые лежат по одну сторону от центра,
будем считать соответствующими друг другу.
Предложение 4. Для того чтобы точка лежала на эллипсе,
необходимо и достаточно, чтобы отношение ее расстояния до фокуса к
расстоянию до соответствующей директрисы равнялось
эксцентриситету эллипса е.
Докажем это предложение для фокуса F2(—с, 0). Пусть М{х,у) —
произвольная точка эллипса. Расстояние от М до директрисы с урав-
72
Гл. III. Линии и поверхности второго порядка
нением х = — а/е по формуле (9) §3 гл. II равно
б?2 = \х + - = - (ех + а).
Из формулы (4) мы видим теперь, что r^jd^ = е.
Обратно, пусть для какой-то точки плоскости г2/с?2 = £> т. е.
v4* + c)2 + t/2 = e(* + |).
Так как £ = с/а, это равенство легко приводится к виду (6), из
которого, как мы знаем, следует уравнение эллипса.
Выведем уравнение касательной к эллипсу, заданному
каноническим уравнением. Пусть Мо(х0ууо) — точка на эллипсе и у0 ф 0.
Через Мо проходит график некоторой функции у = f(x), который
целиком лежит на эллипсе. (Для уо > 0 это график f\{x) = 6^/1 — х2/а2,
для г/о < 0 — график /2{х) = —Ьу/1 —х2/а2. Не уточняя знака у0)
обозначим подходящую функцию /(#).) Для нее выполнено тождество
*2, ш*»2 _ i
Дифференцируем его по ж:
а2 ^ Ь2
Подставляя х = х0 и /(яо) = j/o, находим производную от / в точке ж0,
равную угловому коэффициенту касательной:
Теперь мы можем написать уравнение касательной:
Ь хо, ч
У-Уо = -^-(*-*о).
Упрощая это уравнение, учтем, что &2£'о + а2у2 = а2&2> так как М0
лежит на эллипсе. Результату можно придать вид
ххо ууо _ , /йч
При выводе уравнения (8) мы исключили вершины эллипса (а, 0)
и (—а,0), положив т/0 / 0. Для этих точек оно превращается,
соответственно, в уравнения х = а и х = —а. Эти уравнения определяют
касательные в вершинах. Проверить это можно, заметив, что в
вершинах х как функция от у достигает экстремума. Предоставим
читателю проделать это подробно и показать тем самым, что уравнение (8)
определяет касательную для любой точки Мо(яо>2Л>) на эллипсе.
Предложение 5. Касательная к эллипсу в точке Мо(жо>Уо)
есть биссектриса угла, смежного с углом между отрезками,
соединяющими эту точку с фокусами.
§2. Эллипс, гипербола и парабола
73
Доказательство Нам надо сравнить углы (pi и у?2>
составленные векторами F\Mq и F2M0 с
вектором п, перпендикулярным
касательной (рис. 31). Из уравнения (8)
находим, что п(х0/а2,уо/Ь2), и потому
#0 /
Уо.
Рис. 31
(^Мо,п)=^(х0-с) + ^уо =
- Xqc а — езсо
а2 а
Используя (4), мы получаем отсюда, что cos <pi = l/(a|n|). Аналогично
находим cos^>2 = l/(a|n|). Предложение доказано.
2. Гипербола. Гиперболой мы назвали линию, которая в
некоторой декартовой прямоугольной системе координат определяется
каноническим уравнением
(9)
Ъ2
Рис. 32
Из этого уравнения видно, что для всех точек гиперболы |х*| ^ а,
т. е. все точки гиперболы лежат вне
вертикальной полосы ширины 2а (рис. 32).
Ось абсцисс канонической системы
координат пересекает гиперболу в точках
с координатами (а, 0) и (—а,0),
называемых вершинами гиперболы. Ось
ординат не пересекает гиперболу. Таким
образом, гипербола состоит из двух не
связанных между собой частей. Они
называются ее ветвями. Числа а и b
называются соответственно вещественной и мнимой полуосями
гиперболы.
В точности так же, как и для эллипса, доказывается
Предложение 6. Для гиперболы оси канонической системы
координат являются осями симметрии^ а начало канонической
системы — центром симметрии.
Для исследования формы гиперболы найдем ее пересечение с
произвольной прямой, проходящей через начало координат. Уравнение
прямой возьмем в виде у = kx, поскольку мы уже знаем, что
прямая х = 0 не пересекает гиперболу. Абсциссы точек перечеиия
находятся из уравнения
б2
ab
Поэтому, если б2 — а2к2 > 0, то
х-± = =.
у/Ь2 - а2к2
Это позволяет указать координаты точек пересечения (ab/v, abk/v) и
74
Гл. III. Линии и поверхности второго порядка
(—ab/v, —abk/v), где обозначено v = (б2 — a2k2)ll2. В силу симметрии
достаточно проследить за движением
первой из точек при изменении к (рис. 33).
Числитель дроби ab/v постоянен, а
знаменатель принимает наибольшее
значение при к = 0. Следовательно,
наименьшую абсциссу имеет вершина (а,0).
С ростом к знаменатель убывает, и х
растет, стремясь к бесконечности, когда к
рис# зз приближается к числу Ь/а. Прямая у =
= bx/а с угловым коэффициентом Ь/а
не пересекает гиперболу, и прямые с большими угловыми
коэффициентами ее тем более не пересекают. Любая прямая с меньшим
положительным угловым коэффициентом пересекает гиперболу.
Если мы будем поворачивать прямую от горизонтального
положения по часовой стрелке, то к будет убывать, к2 расти, и прямая будет
пересекать гиперболу во все удаляющихся точках, пока не займет
положения с угловым коэффициентом — Ь/а.
К прямой у = —bx/а относится все, что было сказано о у = Ьх/а:
она не пересекает гиперболу и отделяет прямые, пересекающие ее, от
не пересекающих. Из приведенных рассуждений вытекает, что
гипербола имеет вид, изображенный на рис. 33.
Определение. Прямые с уравнениями у = bx/а и у = —bx/а в
канонической системе координат называются асимптотами
гиперболы.
Запишем уравнения асимптот в виде Ьх — ау = 0 и bx + ay = 0.
Расстояния от точки М(х,у) до асимптот равны соответственно
, \Ъх-ау\ , \Ьх + ау\
у/а*+Ь* у/а2 + 62
Если точка М находится на гиперболе, то Ь2х2 — а2у2 = а262, и
_|ЬУ-аУ|_ aW
hl"2- 02 + 62 -rf+F"
Предложение 7. Произведение расстояний от точки гиперболы
до асимптот постоянно и равно а2Ь2/(а2 ■+■ б2).
Отсюда следует важное свойство асимптот.
Предложение 8. Если точка движется по гиперболе таи, что
ее абсцисса по абсолютной величине неограниченно возрастает, то
расстояние от точки до одной из асимптот стремится к нулю.
Действительно, хотя бы одно из расстояний hx или Л2 при этих
условиях должно неограниченно возрастать, и, если бы предложение
было неверно, произведение не было бы постоянно.
Введем число с, положив
<? = а2 + Ь2 (10)
§2. Эллипс, гипербола и парабола
75
и с > 0. Фокусами гиперболы называются точки F\ и F2 с коорди-
Рис. 34. С2=а2+62 Рис. 35. г2-Г! = 2а; г{-г£=2а
натами (с, 0) и (—с, 0) в канонической системе координат.
Отношение е = с/а, как и для эллипса, называется
эксцентриситетом. У гиперболы е > 1.
Предложение 9. Расстояния от произвольной точки М(х,у)
на гиперболе до каждого из фокусов следующим образом зависят от ее
абсциссы х:
гх = \FXM\ = \а - ех\, г2 = \F2M\ = \а + ех\. (11)
Доказательство этого утверждения почти дословно совпадает с
доказательством предложения 2, и мы не будем его
воспроизводить. Заметим, что равенства (11) можно подробнее записать так:
для правой ветви гиперболы (х ^ а)
гх = ех — а, г2 = ех ■+■ а;
для левой ветви гиперболы (х ^ —а)
гх = а — ех, г2 = — ех — а.
Итак, для правой ветви г2 — п = 2а, а для левой ветви г\ — г2 =
= 2а. В обоих случаях
|r2-ri| = 2a. (12)
Предложение 10. Для того чтобы точка М лежала на
гиперболе, необходимо и достаточно, чтобы разность ее расстояний до
фокусов по абсолютной величине равнялась вещественной оси
гиперболы 2а.
Необходимость условия уже доказана. Для доказательства
достаточности условия его нужно представить в виде
yj{x - с)2 + у2 = ±2а + у/{х + су + у*.
Дальнейшее отличается от доказательства предложения 3 только тем,
что нужно воспользоваться равенством (10), а не (2).
Директрисами гиперболы называются прямые, задаваемые в
канонической системе координат уравнениями
х=±, * = --. (13)
ее '
Директрисы лежат ближе к центру, чем вершины, и,
следовательно, не пересекают гиперболу. Директриса и фокус, лежащие по одну
сторону от центра, считаются соответствующими друг другу.
76
Гл. III. Линии и поверхности второго порядка
Предложение 11. Для того чтобы точка лежала на гиперболе,
необходимо и достаточно, чтобы
отношение ее расстояния до
фокуса к расстоянию до
соответствующей директрисы равнялось
эксцентриситету € (рИС. 36).
Доказательство повторяет
доказательство предложения 4.
Докажем, например, необходимость
условия для фокуса /*2(—с, 0).
Пусть М'(х,у) - точка гиперболы.
Расстояние от М1 до директрисы с уравнением х = —а/е но
формуле (9) § 3 гл. II равно . . .
d! = \х + - = - \ех + а\.
I е I e
Из формулы (11) мы видим теперь, что г'/d' = е.
Уравнение касательной к гиперболе в точке Мо(х0,у0), лежащей
на ней, выводится так ?ке, как соответствующее уравнение (8) для
эллипса. Оно имеет вид
а2 Ь2 ' ^ '
Предложение 12. Касательная к гиперболе в точке М0(х0,уо)
есть биссектриса угла между отрезками, соединяющими эту точку с
фокусами.
Доказательство почти не отличается от доказательства
предложения 5. Рекомендуем читателю полностью провести доказательства
этого и остальных утверждений, здесь сформулированных, но не
доказанных для гиперболы.
3. Парабола. Параболой мы назвали линию, которая в некоторой
декартовой прямоугольной системе координат определяется
каноническим уравнением
у2 = 2рх (15)
при условии р > 0.
Из уравнении (15) вытекает, что для всех точек параболы х ^ 0.
Парабола проходит через начало канонической системы координат.
Эта точка называется вершиной параболы.
Форма параболы известна из курса средней школы, где она
встречается в качестве графика функции у = ах2. Отличие уравнений
объясняется тем, что в канонической системе координат по сравнению с
прежней оси координат поменялись местами, а коэффициенты
связаны равенством 2р = а"1.
Фокусом параболы называется точка F с координатами (р/2,0) в
канонической системе координат.
Директрисой параболы называется прямая с уравнением х = — р/2
в канонической системе координат (PQ на рис. 37).
§2. Эллипс, гипербола и парабола
77
Предложение 13. Расстояние от точки М(х,у), лежащей на
параболе, до фокуса равно
«•=*+!• (1б)
Для доказательства вычислим квадрат расстояния от точкиМ(я, у)
до фокуса по координатам этих точек: г2 = (х —
— р/2)2 + 2/2 и подставим сюда у'2 из
канонического уравнения параболы. Мы получаем
Отсюда в силу х ^ 0 следует равенство (16).
Заметим, что расстояние от точки М до
директрисы по формуле 9 § 3 гл. II также равно
d=x + P~.
Рис. 37. r—d
Отсюда вытекает необходимость
следующего условия.
Предложение 14. Для того чтобы
точка М лежала, на параболе, необходимо и достаточно, чтобы она была
одинаково удалена от фокуса и от директрисы этой параболы.
Докажем достаточность. Пусть точка М(х,у) одинаково удалена
от фокуса и от директрисы параболы:
Лн?
+ у» = * + |.
Возводя это уравнение в квадрат и приводя в нем подобные
члены, мы получаем из него уравнение параболы (15). Это заканчивает
доказательство.
Параболе приписывается эксцентриситет е = 1. В силу этого
соглашения формула г
i=e
верна и для эллипса, и для гиперболы, и для параболы.
Выведем уравнение касательной к параболе в точке М0{х0, у0),
лежащей на ней. Пусть уо Ф 0. Через точку Мо проходит график
функции y — f[x), целиком лежащий на параболе. \дтоу—\/2рх или же у =
= —у/2рх, смотря по знаку г/о) Для функции f(x) выполнено
тождество lf{x))2 = 2рх, дифференцируя которое имеем 2f(x)ff(x) = 2р.
Подставляя х = х0 и /{xq) = уо, находим /'(#о) = р/уо- Теперь мы
можем написать уравнение касательной к параболе
У-Уо = ~{х-х0).
Уо
Упростим его. Для этого раскроем скобки и вспомним, что у§ = 2рх0.
Теперь уравнение касательной принимает окончательный вид
УУо=р{х + хо). (17)
78
Гл. III. Линии и поверхности второго порядка
Заметим, что для вершины параболы, которую мы исключили,
положив t/o ф 0, уравнение (17) превращается в уравнение х = 0, т. е.
в уравнение касательной в вершине. Поэтому уравнение (17)
справедливо для любой точки на параболе.
Предложение 15. Касательная к
параболе в точке Mq есть биссектриса
угла, смежного с углом между отрезком,
который соединяет Мо с фокусом, и
лучом, выходящим из этой точки в
направлении оси параболы (рис. 38).
Доказательство Рассмотрим
касательную в точке Мо(х0,уо). Из
уравнения (17) получаем ее направляющий
вектор v(yo>p). Значит. (v,ei) = уа и
cos (pi = yo/|v|. Вектор FM0 имеет компоненты х0 — р/2 и t/o, а потому
(FAfo, v) = а?оЗЛ> - | 2/о + РУо = Уо (х0 + |).
Но [/''Mol = хо + р/2. Следовательно, cos tp2 — yo/|v|. Это заканчивает
доказательство.
Заметим, что \FN\ = \FM0\ (см. рис. 38).
Упражнения
1. Докажите, что вершины гиперболы и точки пересечения ее асимптот
с директрисами лежат на одной окружности.
2. Фокус эллипса (гиперболы или параболы) делит проходящую через
него хорду па отрезки длины и и v. Докажите, что сумма l/u + l/v
постоянна.
3. Выведите уравнение эллипса, гиперболы и параболы в полярной
системе координат, приняв за полюс фокус, а за полярную ось — луч, лежащий
на оси симметрии и не пересекающий директрису, соответствующую
данному фокусу.
4. На плоскости нарисованы эллипс и парабола вместе с их осями
симметрии. Как с помощью циркуля и линейки построить их фокусы и
директрисы? Тот же вопрос относительно гиперболы, у которой нарисованы
асимптоты. (Задача построения осей симметрии и асимптот решается на
основании материала §3.)
5. Пусть и и v — длины двух взаимно перпендикулярных радиусов
эллипса. Найдите сумму 1/«2 + l/v2.
6. Найдите кратчайшее расстояние от параболы у2 = 12а: до прямой х —
-у + 7 = 0.
7. Докажите, что отрезок касательной, заключенный между
асимптотами гиперболы, делится пополам точкой касания.
8. В уравнение касательной к эллипсу (8) в качестве xQ и у0 подставлены
координаты точки, лежащей не на эллипсе, а вне эллипса. Как расположена
получившаяся прямая?
9. Из точки на директрисе проведены две касательные к параболе.
Докажите, что они взаимно перпендикулярны, и отрезок, соединяющий точки
касания, проходит через фокус.
§3. Линия второго порядка, заданная общим уравнением 79
§ 3. Линия второго порядка, заданная общим уравнением
1. Пересечение линии второго порядка и прямой.
Рассмотрим линию второго порядка, заданную общим уравнением
Ах2 + 2Вху + Су2 + 2Пх + 2Еу + F = О (1)
в декартовой системе координат, и исследуем пересечение этой линии
с произвольной прямой
x = zo + at, y = yo + PL (2)
Значения параметра t, соответствующие точкам пересечения,
должны удовлетворять уравнению, получаемому подстановкой (2) в (1):
А{х0 + at)2 + 2В{х0 + at)(yo + /И) + С{у0 + /Й)2 +
+ 20(*о + «0 + 2Щи> + /Й) + *, = 0. (3)
Раскрывая скобки и приводя подобные члены, мы получим уравнение
Pi2 + 2Qt + Я = 0, (4)
в котором
Р = Ла2 + 22?а/?+С7?2, (5)
Q = {Ах0 + Вуо + D)a + (£*0 + Суо + E)fa (6)
или, при другой группировке слагаемых,
Q = (Аа + В0)го + (Ва + С/?)и> + Da + Ер. (7)
Свободный член — это значение многочлена при t = О, т. е.
Я = 4*2 + 2Бх0?уо + Су5 + 2Л*0 + %Яуо + F = 0. (8)
Вообще говоря, уравнение (4) квадратное, имеет не больше двух
корней, и прямая пересекает линию или в двух точках, или в одной
точке (кратные корни), или не пересекает ее (комплексные корни).
Но возможны "исключительные" прямые, для которых Р = 0, т. е.
Aa2 + 2/ia/? + C/?2 = 0, (9)
и, следовательно, уравнение (4) является линейным. В этом случае
оно имеет один корень при Q ф 0, а при Q = 0 либо выполнено
тождественно (если и R = 0), либо не имеет решений. Следовательно,
"исключительные" прямые или пересекают линию в единственной
точке, или лежат на ней целиком, или не имеют с ней общих точек.
В равенство (9) не входят координаты начальной точки прямой.
Кроме того, оно остается справедливым, если умножить а и Р на
общий ненулевой множитель.
Определение. Направление, определяемое вектором,
компоненты которого удовлетворяют уравнению (9), называется
асимптотическим направлением линии второго порядка.
80
Гл. III. Линии и поверхности второго порядка
2. Тип линии. Выясним, сколько асимптотических направлений
может иметь линия второго порядка. Обозначив
6 =
А В
В С
сформулируем следующее
Предложение 1. Линия второго порядка имеет два
асимптотических направления, если S < О, одно, если 6 = 0, и ни одного, если 6>0.
Доказательство. Рассмотрим несколько случаев.
1) Пусть А = С = 0. Тогда В ф О и 8 = -В2 < 0. Уравнение (9)
имеет вид 2Ва/3 = 0, и ему удовлетворяют векторы (1,0) и (0,1).
2) Пусть С ф 0. Тогда вектор (031) не является решением этого
уравнения, и каждое решение можно задать угловым
коэффициентом к = /?/а, удовлетворяющим уравнению Ск2 + 2Вк + А = 0.
Дискриминант этого уравнения равен В2 — АС — —S. Следовательно, оно
имеет два вещественных корня при S < 0, один корень при S = 0 и не
имеет вещественных корней при S > 0.
3) Случай А ф 0 исследуется аналогично случаю 2, только нужно
рассматривать не угловой коэффициент, а отношение а//?.
Поскольку разобранные выше случаи исчерпывают все
возможности, предложение доказано.
От противного нетрудно проверить, что и обратно число
асимптотических направлений определяет знак S.
Мы определили асимптотические направления при помощи
аналитического условия (9). Поэтому в принципе при изменении системы
координат асимптотическое направление могло бы перестать быть
асимптотическим, или, наоборот,
обыкновенное направление стать асимптотическим. Из
геометрического смысла асимптотических
направлений видно, что в действительности
асимптотические направления не зависят от
выбора системы координат.
Используя канонические уравнения, легко
проверить, что эллипс не имеет
асимптотических направлений, парабола имеет одно, а
гипербола — два асимптотических направле-
Рис- 39 ния (рис. 39). Поэтому линии второго порядка
называются линиями гиперболического, параболического или
эллиптического типа, смотря по тому, имеют они два, одно или не имеют ни
одного асимптотического направления.
Для линий гиперболического типа S < 0, для параболического
типа S = 0, а для эллиптического S > 0.
3. Диаметр линии второго порядка. Назовем хордой любой
отрезок, концы которого лежат на линии, а остальные точки на ней
§3. Линия второго порядка, заданная общим уравнением 81
не лежат. Таким образом, хорда не может иметь асимптотического
направлении.
Предположим, что рассматриваемая линия второго порядка
имеет по крайней мере одну хорду. Это-
му условию удовлетворяют эллипсы,
гиперболы, пары пересекающихся прямых,
параболы и пары параллельных прямых. [^>^ ^\£*о^
Фиксируем какое-нибудь неасимнто-
тическое направление и исследуем
множество середин хорд, имеющих это
направление. Если начальная точка Рис 40
Мо(яО)Уо) секущей (2) находится в
середине хорды, то корни уравнения (4) равны по абсолютной величине
и отличаются знаком (рис. 40). Это будет так в том и только том
случае, когда Q = 0. Используя (7), мы получаем, что середины хорд
направления1") (а,/?) лежат на прямой
{Аа + В0)х + (Ва + С$)у + Da + Е/З = 0. (10)
Определение. Прямая (10) называется диаметром линии
второго порядка, сопряженным направлению (с*,/?).
Стоит обратить внимание на то, что диаметром называется вся
прямая. Это не означает, что середины хорд заполняют ее целиком.
Так может быть, но возможно также, что множество середин хорд
есть, например, отрезок или луч.
Конечно, остается сомнение, действительно ли уравнение (10)
определяет прямую: не окажутся ли в нем коэффициенты при
переменных оба равными нулю? Допустим, что это так, т. е.
Аа + В/3 = 0, Ва + С/3 = 0.
Умножим первое из этих равенств на а, второе — на /3 и сложим. Мы
получим равенство (9), которое по предположению не имеет места.
Следовательно, уравнение (10) определяет прямую.
4. Центр линии второго порядка. Обозначим левую часть
уравнения (1) через Ф(#,у) и введем
Определение. Точка 0(яо,уо) называется центром линии
второго порядка Ф(х,у) = 0, если для любого вектора а (с*,/?) выполнено
равенство ф^ + а> уо + до = ф(Хо _ а> ^ _ до. (11)
По видимости, это определение зависит от выбора системы
координат, так как в нем участвует не линия, а многочлен, стоящий в
левой части ее уравнения. Допустим, что координаты (хо,уо) точ~
ки О в некоторой системе координат удовлетворяют уравнению (11).
*)Мы обозначаем направление компонентами ненулевого вектора,
имеющего это направление. Ясно, что а и /3 интересуют нас с точностью до общего
множителя.
82
Гл. III. Линии и поверхности второго порядка
Будут ли ее координаты (2о>2/о) в другой системе координат
удовлетворять равенству того же вида для многочлена Ф(ж, у), задающего ту
же линию в новой системе координат? Легко видеть, что это так,
потому что многочлен Ф так и выбирается, чтобы для координат любой
точки выполнялось равенство Ф(ж.у) = Ф(ж,у). Нам остается
только выписать это равенство для точек, получаемых из О сдвигом на
векторы а и —а.
Ниже мы докажем, что в том случае, когда линия содержит хоть
одну точку, центры линии и только они являются ее центрами
симметрии. Однако понятие центра несколько более общее: линии,
являющиеся пустыми множествами, имеют вполне определенные
центры, хотя говорить об их центрах симметрии смысла нет. Например,
каждая точка прямой у = О является центром линии с
уравнением у2 + 1 = 0.
Получим систему уравнений для координат центра. С этой целью
напишем подробнее равенство (11). Его левая часть равна
А{х0 + а)2 + 2В{х0 + а)(у0 + /?) +
+ С(у0 + Р)2 + 2D{xQ + <*) + 2Е{у0 + /3) + F.
Правая часть отличается от левой только знаками у а и /3. Поэтому
при вычитании Ф(жо — <*, ,у0 — /?) из Ф(х0 + а, уо + /3) уничтожаются
все члены, кроме тех, в которые а и /3 входят в первой степени, а
члены с первыми степенями удвоятся. После упрощений мы получаем
(Ах0 + Ву0 + D)a + {Вх0 + Су0 + Е)/3 = 0. (12)
Но равенство (11), а вместе с ним и равносильное равенство (12)
имеет место при любых а и /?, в частности, при'а = 1, 0 = 0 и при
а = 0, /? = 1. Отсюда следует, что координаты (я0, Уо) центра должны
удовлетворять системе уравнений
Ах0 + Ву0 + D = 0, тх
Вхо + Суо + Е = 0. (L6)
Легко видеть, что и обратно, если справедливы равенства (13), то,
умножая их на произвольные числа а и /3 и складывая, мы получим (12),
а тем самым и (11).
Исследуем, обязательно ли существуют центры у линии второго
порядка, а если они существуют, то сколько их и как они
расположены. Система уравнений (13) согласно предложению 9 §2 гл. II имеет
единственное решение тогда и только тогда, когда
А В
В С
<* =
Ф О- (14)
Таким образом, условие S ф 0 необходимо и достаточно для того,
чтобы линия второго порядка имела единственный центр.
Линии второго порядка, имеющие единственный центр,
называются центральными.
§3. Линия второго порядка, заданная общим уравнением 83
Полученное условие показывает, что центральными являются
линии эллиптического и гиперболического типов.
Условие S = 0 характеризует нецентральные линии. Это — линии
параболического типа. При условии 6 = 0 система (13) либо не имеет
решения, либо равносильна одному из составляющих ее уравнений
(предложение 9 §2 гл. II). Это значит, что нецентральная линия либо
не имеет центра (парабола), либо ее центры заполняют прямую
линию (пары параллельных прямых, вещественных и мнимых, и нары
совпавших прямых).
Предложение 2. Если линия второго порядка не является
пустым множеством и имеет центр 0(ясьУо)> то он — ее центр
симметрии.
В самом деле, рассмотрим произвольную точку линии М(х,у) и
докажем, что симметричная ей относительно О точка Mi(x-[, yi)
также лежит на линии. Точка М\ определяется равенством ОМ\ = —ОМ.
Если (а, 0) — координаты вектора ОМ , то х = х0 + а, у = у0 + /?, a
xi = xq — а, yi = уо — 0- Теперь ясно, что в силу (11) из Ф(х,у) = О
следует Ф(а:1,у1) = 0. Предложение доказано.
Предложение 3. Если линия содержит хотя бы одну точку и
имеет центр симметрии О(яо>2/о), то О является центром.
Доказательство. Рассмотрим пересечение линии с прямой,
проходящей через О, приняв эту точку за начальную точку прямой.
Имеются две возможности:
1) Точка О лежит на линии. Пусть прямая имеет
неасимптотическое направление. Тогда О — единственная точка пересечения, так
как иначе с учетом симметрии точек пересечения было бы не
меньше трех. Следовательно, уравнение (4) имеет кратный корень t = 0,
откуда вытекает Q = 0. Итак, координаты точки О удовлетворяют
равенству (12) при любых а и 0, соответствующих неасимптотическим
направлениям. Выберем два различных неасимптотических
направления (а,/?) и (а*',/?') и рассмотрим равенства
{Лх0 + Ву0 + D)a + (Вх0 + Су0 + Е)0 = 0,
{Ах0 + Вуо + D)a' + {Вх0 + Су0 + Е)0' = 0
как систему уравнений с коэффициентами а,/?,с*',/?', причем (а/?' —
— а'Рф о). Мы получаем равенства (13), как и требовалось.
2) Точка О не лежит на линии. Если прямая пересекает линию
в точке А/, которой соответствует значение параметра tx ф 0, то
существует симметричная точка пересечения со значением
параметра -*i. Тогда Pt\ + 2Qti + Я = 0 и Pi{ - 2QU + R = 0, откуда
следует Q = 0.
Таким образом, если линия имеет точки пересечения с двумя
различными прямыми, проходящими через О, то, как и выше, мы можем
получить равенства (13) для координат О. Докажем, что такие
прямые обязательно найдутся. Действительно, в противном случае все
84
Гл. III. Линии и поверхности второго порядка
точки линии лежат на одной прямой. Согласно теореме 1 § 1 линии
только двух классов обладают этим свойством: пары совпавших
прямых и пары мнимых пересекающихся прямых. Но и для того, и для
другого класса все центры симметрии принадлежат линии, что
противоречит сделанному предположению. Предложение доказано.
5. Сопряженные направления. Направление (а',/?'),
определяемое диаметром, сопряженным направлению (а,/?), называется
сопряженным направлению (а,/?). Компоненты (а',/?'), направляющего
вектора диаметра (10) согласно предложению 6 §2 гл. II
удовлетворяют условию
[Аа + В0)а' + {Ва + С 0)13' = 0 (15)
или
Ааа' + В(а'0 + а/?') + Cfiff = 0. (16)
В последнее выражение пары чисел (а,/?) и (а',/?') входят
симметричным образом. Поэтому имеет место
Предложение 4. Если направление (а',/?'), сопряженное с (а,/?).
Рис. 41
не является асимптотическим, то сопряженным для (а',/?') будет
направление (а,/?) (рис. 41).
Возникает вопрос, при каких условиях направление,
сопряженное какому-нибудь направлению (а,/3) может оказаться
асимптотическим. Это легко выяснить. Из равенства (15) следует, что в
качестве а' и /?' можно выбрать соответственно — (J3a + C/?) и (Ла +
+ В(3). Подставим это в уравнение (9) для асимптотических
направлений:
А{Ва + С(3)2 - 2В(Ва + С(3)(Аа + ВР) +
+ С(Ла+#/?)2 = 0.
После преобразований получаем (АС — В'2) х
х(Ла2 + 2Baf3 + С/32) = 0. Поскольку исходное
направление не асимптотическое, это
произведение может обратиться в нуль только за счет
первого сомножителя. Мы получаем
Предложение 5. Если линия не централь-
_> АО п пая (S = 0), то для любого направления (а,/?)
ные направления у сопряженное направление — асимптотическое
параболы (рис. 42). Если линия центральная (S ф 0). то
§3. Линия второго порядка, заданная общим уравнением 85
направление, сопряженное любому направлению, не
асимптотическое.
6. Главные направления. Если диаметр перпендикулярен
хордам, которым он сопряжен, то он является осью симметрии
рассматриваемой линии. Введем следующее
Определение. Направление (а,/?) и направление (а',/?')
сопряженного ему диаметра называются главными направлениями, если
они перпендикулярны.
Если система координат декартова прямоугольная, то для
главного направления компоненты (а, в) должны быть
пропорциональны коэффициентам уравнения (10), т. е. должно существовать такое
число А, что Ла + В/? = Аа, Ва + С? = А/?. (17)
Исключая Л, мы получаем уравнение для а и /?:
(А - С)а(3 -f В(Р2 - а2) = 0. (18)
Если положить а = cosy?, /? = sin у?, то уравнение (18)
превратится в уравнение (2) § 1, которое, как мы видели, обязательно имеет
решение относительно (р. Поэтому имеет место
Предложение 6. Каждая линия второго порядка имеет хотя бы
одну пару главных направлений.
Более подробное исследование уравнения (18) показывает, что
либо эта пара единственная, либо каждая пара перпендикулярных
направлений является главной. Последний случай имеет место,
когда Л = С, В = 0. При этом уравнение линии приводится к одному
из канонических видов: х2 + у2 = а2, х2 + у2 = —а2 или х2 + у2 = 0.
В двух последних случаях линия не имеет хорд, и результат лишен
геометрического смысла.
7. Касательная к линии второго порядка. Как известно,
касательной к какой-либо линии называется предельное положение
секущей, когда хорда стягивается в точку. Выведем уравнение
касательной к линии второго порядка, заданной уравнением (1). Дадим
предварительно следующее
Определение. Особой точкой линии второго порядка
называется ее центр, который лежит на линии.
Особыми точками являются: точка пересечения пары
пересекающихся прямых, единственная точка пары мнимых пересекающихся
прямых и каждая точка пары совпавших прямых. В особой точке
касательная не определена. Если точка лежит на прямой, входящей в
состав линии, то касательная в этой точке совпадает с прямой.
Исключив эти случаи, мы фактически ограничиваемся рассмотрением
касательных к эллипсам, гиперболам и параболам.
Рассмотрим точку Мо(#о,?Уо)> лежащую на линии L, и прямую с
начальной точкой М0, заданную уравнением (2). С нашей точки
зрения, приведенное выше определение касательной означает, что урав-
86
Гл. HI. Линии и поверхности второго порядка
нение (4), определяющее точки пересечения L и прямой, имеет два
совпадающих корня.
Так как начальная точка принадлежит L, в уравнении (4) Я= О,
и один из его корней равен нулю. Корни совпадают, если и второй
корень равен нулю, для чего необходимо, чтобы Q = 0. Если при этом
окажется, что и Р = 0, то прямая принадлежит линии второго
порядка. Этот случай мы исключили, и потому уравнение имеет кратный
корень t = 0 в том и только том случае, когда Q = 0. Мы
рассматриваем равенство Q = 0 как условие, определяющее направляющий
вектор касательной:
{Ахо + Ву0 + D)a + (Вх0 + Су0 + Е)0 = 0. (19)
Так как Af0 не особая точка, обе скобки здесь одновременно в
нуль не обращаются, и условие (19) определяет а и /3 с точностью
до общего множителя. Точка М(х,у) лежит на касательной тогда и
только тогда, когда вектор MqM коллинеарсп а(л,/?), т. е. его
координаты х — xq и у — уо удовлетворяют тому же условию, что и (а,/?):
(Ах0 + Ву0 + D)(x - ж0) + {Вх0 + Су0 + Е)(у - у0) = 0. (20)
Это и есть уравнение касательной к линии L в точке Мо, лежащей
на линии. Уравнение (20) можно записать и иначе, если заметить, что
координаты М0 удовлетворяют уравнению (1) и, следовательно,
{Ах0 + Ву0 + D)x0 + (Вх0 + Су0 + Е)у0 + Пх0 + Ey0 + F = Q.
Прибавляя это равенство к (20) и группируя слагаемые, получим
окончательное уравнение
Аххо + В{ху0 + х0у) + Сууо + D(x + х0) + £(у + у0) + F = 0. (21)
8. Особые точки. Напомним, что особая точка линии второго
порядка — это ее центр, лежащий на линии. Исследуем, при каких
условиях линия второго порядка имеет особую точку. Для
координат (ж0, Уо) особой точки должны быть справедливы равенства
Ах0 + Ву0 + D = 0, Вхо + Су0 + Е = 0,
Лаг§ + 2ВхоУо + Cyg + 2D*0 + 2Ду0 + F = 0.
Умножим первое из них на xq, второе на уо и вычтем из третьего.
Мы получим эквивалентную систему уравнений
Ах0 + Вуо + 1) = 0,
Вх0 + Суо + Е = 0, (22)
Dx0 + Ey0 + F = Q.
Выберем какой-нибудь базис в пространстве и рассмотрим
вспомогательные векторы р(.4, £?,£>), q(B,C,E) и r(D,E,F). Равенства (22)
представляют собой координатную запись векторного равенства
яоР + Уоа = -г. (23)
§3. Линия второго порядка, заданная общим уравнением 87
Отсюда следует, что при наличии особой точки векторы р, q и г
компланарны, и потому
А В D
Д = | Б С Ё
D E F
= 0. (24)
Если линия центральная, то векторы р и q не коллинеариы, и
условие компланарности (24) равносильно существованию
разложения (23), т. е. существованию решения системы (22). Мы получили
Предложение 7. Центральная линия имеет особую точку
тогда и только тогда, когда Д = 0.
Итак, сочетание S < 0, Д = 0 характеризует пары
пересекающихся прямых, a J > 0, Д = 0 — пары мнимых пересекающихся прямых.
Рассмотрим нецентральные линии. Для них существует центр,
хотя бы не являющийся особой точкой, тогда и только тогда, когда
Д = 0. В этом (и только этом) случае векторы р и q коллинеарны.
Действительно, так как 6 = 0, по предложению 9 §2 гл. II, если система
уравнений (13) имеет решение, она равносильна одному из
составляющих ее уравнений: либо коэффициенты и свободный член одного из
уравнений равны нулю, либо коэффициенты и свободные члены обоих
уравнений пропорциональны. Тогда Д = 0 независимо от г. В любом
случае существует прямая, каждая точка которой — центр.
Обратно, пусть для нецентральной линии Д = 0. Докажем, что р
и q коллинеарны, что равносильно совместности уравнений центра.
Действительно, в противном случае г по ним раскладывается, и
согласно (23) существует особая точка. Она — центр, р и q
коллинеарны, и мы получаем противоречие.
Предложение 8. Для нецентральных линий условие Д = 0
равносильно существованию прямой, каждая точка которой — центр.
Итак, сочетание S = Д = 0 характеризует пары параллельных
прямых (вещественных, мнимых или совпавших).
Из предложений 7 и 8 следует, что равенство Д = 0 является
инвариантным: оно не может измениться при переходе к другой системе
координат.
Упражнения
1. Линия второго порядка описана около параллелограмма, если его
вершины лежат на линии, а остальные точки на ней не лежат. Докажите, что
такая линия обязательно центральная, и центр ее совпадает с центром
параллелограмма.
2. На плоскости нарисованы эллипс, гипербола и парабола. Как с
помощью циркуля и линейки построить их оси симметрии и асимптоты
гиперболы?
3. Докажите, что сумма квадратов длин хорд, лежащих на сопряженных
диаметрах эллипса, постоянна.
4. Не приводя уравнение к каноническому виду, найдите центр и
асимптоты гиперболы Зх + Юху + Зг/2 — 2х Ч- 2у — 9 = 0.
88
Гл. III. Линии и поверхности второго порядка
5. Не приводя уравнение к каноническому виду, укажите класс линии
Зх2 + Юху + Зу2 - 2х + 2у - 1 = 0.
6. Как разложить на множители левую часть уравнения из упр. 5?
7. Напишите уравнение касательной к линии х2 — 2ху + Зу2 = 3 в
точке М0(0,1).
§ 4. Поверхности второго порядка
Подобно тому как в §2 были описаны все наиболее интересные
линии второго порядка, в настоящем параграфе мы опишем важнейшие
поверхности второго порядка, а полную классификацию таких
поверхностей отложим до гл. VIII. Составить себе общее представление
о большинстве поверхностей второго
порядка можно, рассматривая поверхности
вращения линий второго порядка вокруг их
осей симметрии.
1. Поверхности вращения.
Поверхность S называется поверхностью вращения
с осью d, если она составлена из
окружностей, которые имеют центры на
прямой d и лежат в плоскостях,
перпендикулярных данной прямой. В основе этого
определения лежит следующее
представление. Рассмотрим линию L, которая
лежит в плоскости Р, проходящей через ось вращения d (рис. 43), и
будем вращать ее вокруг этой оси. Каждая точка линии опишет
окружность, а вся линия — - поверхность вращения.
Выберем начало декартовой прямоугольной системы
координат 0,ег,в2,ез на оси d, вектор ез направим вдоль d, а вектор ei
поместим в плоскости Р. Таким образом, 0,в1,ез — декартова
система координат в плоскости Р. Пусть линия L имеет в этой системе
координат уравнение f(x, z) = 0.
Рассмотрим точку М(ж, у, z). Через нее проходит окружность,
которая имеет центр на оси d и лежит в плоскости,
перпендикулярной этой оси. Радиус окружности равен расстоянию от М до оси,
т. е. у/х2 + у2. Точка М лежит на поверхности вращения тогда и
только тогда, когда на указанной окружности имеется точка М\,
принадлежащая вращаемой линии L.
Точка Mi(xi>yiyzx) лежит в плоскости Р, и потому у\ = 0. Кроме
того, z\ — z и |a?i| = у/х2 + у2, так как Mi лежит на той же
окружности, что и М. Координаты точки М\ удовлетворяют уравнению
линии L: /(x'i,zi) = 0. Подставляя в это уравнение х\ и z\, мы
получаем условие на координаты точки М, необходимое и достаточное
§4- Поверхности второго порядна
89
для того, чтобы М лежала на поверхности вращения 5: равенство
f(±y/x^y*yz)=0 (1)
должно быть выполнено хотя бы при одном из двух знаков перед
корнем. Это условие, которое можно записать также в виде
f(s/x*T7,z)f(-\/xTTy>,z)=0, (2)
и является уравнением поверхности вращения линии L вокруг оси d.
2. Эллипсоид. Рассмотрим поверхности, которые получаются
при вращении эллипса вокруг его осей симметрии. Направив век-
а б
Рис. 44. Сжатый (а) и вытянутый (б) эллипсоиды вращения
тор ез сначала вдоль малой оси эллипса, а затем вдоль большой оси,
мы получим уравнения эллипса в следующих видах:
2 2
-+- = 1
а* + с* '
а2 ^ с2
= 1.
(Здесь через с обозначена малая полуось эллипса.) В силу
формулы (1) уравнениями соответствующих поверхностей вращения будут
•л ~2 „ъ j_ „2
(3)
а* + с2 '
5+^=i о.».
Поверхности с такими уравнениями называются соответственно
сжатым и вытянутым эллипсоидами вращения (рис. 44).
Каждую точку М(ж, у, z) на сжатом эллипсоиде вращения сдвинем
к плоскости у = О так. чтобы расстояние
от точки до этой плоскости уменьшилось в
постоянном для всех точек отношении Л <
< 1. После сдвига точка попадет в
положение М'{х' ,y',z'), где х* = ж, у' = Ат/, г' = z.
Таким образом, точки эллипсоида вращения
переходят в точки поверхности с уравнением
хп и'2 zn
а2 ^ б2 ^ с2 '
(4)
Рис. 45
где 6 = Да. Поверхность, которая в некоторой декартовой системе
координат имеет уравнение (4), называется эллипсоидом (рис. 45). Если
90
Гл. III. Линии и поверхности второго порядка
случайно окажется, что b = с, мы получим снова эллипсоид вращения,
но уже вытянутый.
Эллипсоид так же, как и эллипсоид вращения, из которого он
получен, представляет собой замкнутую ограниченную поверхность. Из
уравнения (4) видно, что начало канонической системы координат —
центр симметрии эллипсоида, а координатные плоскости — его
плоскости симметрии.
Эллипсоид можно получить из сферы х2 + у2 -f z2 = а2 сжатиями
к плоскостям у = 0иг = 0в отношениях Л = b/а и /л = с/а.
В этом параграфе нам часто придется прибегать к сжатию, и мы
не будем его каждый раз описывать столь подробно.
3. Конус второго порядка. Рассмотрим на плоскости Р пару
пересекающихся прямых, задаваемую в системе
координат 0,еьез уравнением а2х2 — c2z2 = 0.
Поверхность, получаемая вращением этой линии вокруг оси
аппликат, имеет уравнение
а2(х2 + У2)-с2г2=0 (5)
и носит название прямого кругового конуса (рис. 46).
Сжатие к плоскости у = 0 переводит прямой круговой
конус в поверхность с уравнением
aV + &V-c2z2 = 0, (6)
называемую конусом второго порядка.
Обратите внимание на то, что левая часть урав-
Рис. 46 нения (6) — однородная функция, и поверхность
является конусом в смысле определения, введенного в § 1 гл. И.
4. Однополостный гиперболоид. Однополостный гиперболоид
вращения —- это поверхность вращения
гиперболы
х г -
~7а ~~ 75 ~
вокруг той оси, которая ее не пересекает. По
формуле (1) мы получаем уравнение этой
поверхности (рис. 47)
(7)
х2 +у2
±г = 1.
Рис. 47
а* с'
В результате сжатия однополостного
гиперболоида вращения к плоскости у = 0 мы
получаем однополостный гиперболоид с уравнением
2 2 2
a2 T Ь2 с2
(8)
Интересное свойство однополостного гиперболоида — наличие у
него прямолинейных образующих. Так называются прямые линии, все-
§4- Поверхности второго порядка
91
ми своими точками лежащие на поверхности. Через каждую точку
однополостного гиперболоида проходит две прямолинейные
образующие, уравнении которых можно получить следующим образом.
Уравнение (8) можно переписать в виде
Рассмотрим прямую линию с уравнениями
Ч=-1) -4-1).
где А и /г — некоторые числа (А2 + /г2 ф 0). Координаты каждой точки
примой удовлетворяют обоим уравнениям, а следовательно, и
уравнению (8), которое получается их почленным перемножением. Поэтому
каковы бы ни были А и /i, прямая с уравнениями (9) лежит на од-
нополостном гиперболоиде. Таким образом, система (9) определяет
семейство прямолинейных образующих.
Второе семейство прямолинейных образующих определяется сие-
*(м)-*(-0.
*(=-!)-"0 + 8-
Покажем на примере, как найти образующие, проходящие через
данную точку поверхности. Рассмотрим поверхность х2 -f у2 — z2 =
= 1 и точку Мо(1,1,1) на ней. Подставляя координаты Мо в
уравнения (9), мы получаем условия на А и р: 2A = 2р и 0-А = 0/i.
Первое из них определяет А и р с точностью до общего множители,
но только с такой точностью они и нужны. Подставляя эти
значения в (9), получаем уравнения прямолинейной образующей
ж + z = 1 + г/, х- z—\-y.
Она проходит через Мо, так как Аи/i так и выбирались, чтобы
координаты Мо удовлетворяли этой системе. Аналогично, подставляя
координаты Мо в (10), находим условия на А' и //: 2pf = 0и 2р! = 0.
Коэффициент А' можно взять любым ненулевым, и мы приходим к
уравнению второй образующей: х = г, у — 1.
Если вместе с гиперболой мы будем вращать ее асимптоты, то
они опишут примой круговой конус, называемый асимптотическим
конусом гиперболоида вращении. При сжатии гиперболоида вращении
его асимптотический конус сжимается в асимптотический конус
общего однополостного гиперболоида.
5. Двуполостный гиперболоид. Деуполостный гиперболоид ера-
щения — это поверхность, получаемая вращением гиперболы
92
Гл. HI. Линии и поверхности второго порядка
вокруг той оси, которая ее пересекает. По формуле (1) мы получаем
уравнение двуполостного гиперболоида вращения
4-^=i. do
с2 а2
В результате сжатия этой поверхности к
плоскости у = 0 получается поверхность с уравнением
2 2 2
с2 а2 б2
(12)
Поверхность, которая в некоторой декартовой
прямоугольной системе координат имеет уравнение
вида (12), называется двуполостным гиперболоидом
(рис. 48). Двум ветвям гиперболы здесь соответству-
Рис. 48 ют Две не связанные между собой части ("полости")
поверхности, в то время как при построении одно-
полостного гиперболоида вращения каждая ветвь гиперболы
описывала всю поверхность.
Асимптотический конус двуполостного гиперболоида
определяется так же, как и для однополостного.
6. Эллиптический параболоид. Вращая параболу х2 — 2pz
вокруг ее оси симметрии, мы получаем поверхность с уравнением
x2 + y2 = 2pz. (13)
Она называется параболоидом вращения. Сжатие к
плоскости у = 0 переводит параболоид вращения в
поверхность, уравнение которой приводится к виду
„2 ,.2
Ь+Ь=2*' (14)
Поверхность, которая имеет такое уравнение в
Рис. 49 некоторой декартовой прямоугольной системе
координат, называется эллиптическим параболоидом (рис. 49).
7. Гиперболический параболоид. По аналогии с
уравнением (14) мы можем написать уравнение
2 2
2- _ «L = 2z.
а* б2
(15)
Поверхность, которая имеет уравнение вида (15) в некоторой
декартовой прямоугольной системе координат, называется
гиперболическим параболоидом.
Исследуем форму этой поверхности. Для этого рассмотрим ее
сечение плоскостью х = а при произвольном а. В этой плоскости выберем
декартову прямоугольную систему координат 0',в2,ез с началом в
точке О'(а,0,0). Относительно этой системы координат линия пере-
§4- Поверхности второго порядка
93
сечения имеет уравнение
-М-
z~h)-
(1(5)
Эта линия — парабола, в чем легко убедиться, перенеся начало ко
ординат в точку О" с координатами (0, а2/{2а2)). (Координаты этой
точки относительно исходной системы координат 0,е1,е2}ез в
пространстве равны (а, 0, а2/(2а2)).)
Точка О", очевидно, является вершиной параболы, ось параболы
параллельна вектору е3, а знак минус в левой части равенства (16)
означает, что ветви параболы направлены в сторону,
противоположную направлению ез- Заметим, что после переноса начала координат
в точку О" величина а не входит в уравнение параболы, и,
следовательно, сечения гиперболического параболоида плоскостями х = а
при всех а представляют собой равные параболы.
Будем теперь менять величину а и проследим за перемещением
вершины параболы О" в зависимости от а. Из приведенных выше
координат точки О" следует, что эта точка перемещается по линии с
уравнениями 2
X п
Z=2*> У = °
в системе координат 0,ei,e2,e3. Эта линия — парабола в
плоскости у = 0. Вершина параболы находится в начале координат, ось
симметрии совпадает с осью аппликат, а ветви параболы направлены в
ту же сторону, что и вектор е3.
Теперь мы можем построить
гиперболический параболоид
следующим образом: зададим две
параболы и будем перемещать одну из
них так, чтобы ее вершина
скользила но другой, оси парабол были
параллельны, параболы лежали во
взаимно перпендикулярных
плоскостях и ветви их были
направлены в противоположные стороны.
При таком перемещении
подвижная парабола описывает
гиперболический параболоид (рис. 50).
Предоставим читателю проверить, что сечения
гиперболического параболоида плоскостями с уравнениями z = а при
всевозможных а — гиперболы. Эти сечения нарисованы на рис. 51.
Гиперболический параболоид, как и одноиолостный гиперболоид,
имеет два семейства прямолинейных образующих (рис. 52).
Уравнения одного семейства —
Рис. 50. ОВ — неподвижная
парабола, KLM, NOP и QRS — разные
положения подвижной параболы
Ч;-?) = "• <■(: + {)-««
94
Гл. III. Линии и поверхности второго порядка
Рис. 51
Рис. 52
Выводятся эти уравнения так же, как и уравнения
прямолинейных образующих однополостного гиперболоида.
Упражнения
1. Докажите, что линия пересечения поверхности второго порядка с
плоскостью, которая целиком на ней не лежит, есть алгебраическая линия
не выше второго порядка. Сколько общих точек могут иметь прямая и
поверхность второго порядка?
2. Найдите уравнение и определите вид поверхности, получаемой
вращением вокруг оси аппликат прямой линии:
а) ж = 1 + *, у = 3 + t, z = 3 + *; б) х = 1 + t, y=l + t, * = 3+1.
3. Докажите, что прямолинейные образующие гиперболического
параболоида, принадлежащие одному семейству, все параллельны какой-то
одной плоскости.
4. На гиперболическом параболоиде с уравнением (15) лежат
параболы у = О, х2 = 2а2z и х = 0, у2 = — 262г. Пусть точки А\ и В\ на первой
параболе и точки Аъ и Вг на второй все находятся на одинаковом
расстоянии от плоскости z — 0. Докажите, что прямые А\Въ, А\Аг, В\Аг и В\В2
являются прямолинейными образующими.
5. Найдите проекцию линии пересечения двуполостного гиперболоида
—яг2 + у2 — z2 = 1 и конуса 5а?2 — Зу2 + 4г2 = 0 на плоскость 2 = 0.
6. Докажите, что никакая плоскость не пересекает эллиптический
параболоид по гиперболе.
ГЛАВА IV
ПРЕОБРАЗОВАНИЯ ПЛОСКОСТИ
§ 1. Отображения и преобразования
1. Определение. Под отображением плоскости Р в плоскость Я
понимают закон или правило, по которому каждой точке плоскости Р
сопоставлена некоторая определенная точка на плоскости Я. Мы
будем пользоваться обозначением f: Р -> Я. Если потребуется указать,
что точке А на плоскости Р соответствует точка В на плоскости Я,
мы будем писать В =f{A). В этом случае точка В называется образом
точки А, а точка А — прообразом точки В.
Подчеркнем, что совсем не обязательно каждая точка
плоскости R является образом какой-либо точки. Вполне может оказаться,
что множество всех образов не совпадает с R.
Если для некоторого отображения плоскости Р и R совпадают, то
такое отображение называется преобразованием плоскости. Этот вид
отображений целесообразно выделить, так как преобразования
обладают некоторыми свойствами, которыми не обладают отображения в
общем случае.
Разумеется, можно говорить об отображениях произвольных
множеств, а не обязательно плоскостей, но в этой главе, за исключением
некоторых примеров, мы будем заниматься только отображениями
плоскостей.
2. Примеры.
Пример 1. Рассмотрим в пространстве две плоскости Р и R
и сопоставим каждой точке плоскости Р основание
перпендикуляра, опущенного из этой точки на плоскость Я. Так будет определено
отображение, называемое ортогональным проектированием. При
ортогональном проектировании, вообще говоря, каждая точка
плоскости R имеет единственный прообраз. В одном случае ортогональное
проектирование резко меняет свои свойства. Именно, если плоскости
взаимно перпендикулярны, то не ка?кдая точка в R имеет прообраз,
а только точки, лежащие на линии пересечения плоскостей. Зато у
каждой из этих точек бесконечно много прообразов: они заполняют
перпендикуляр к Я, восстановленный из нее.
Пример 2. Преобразованиями являются известные читателю
параллельный перенос, поворот, осевая симметрия и гомотетия.
Пример 3. Рассмотрим прямую р и зададим число Л > 0. Из
произвольной точки М плоскости опустим перпендикуляр на прямую р
96
Гл. IV. Преобразования плоскости
и обозначим его основание через N. Образ f(M) точки М определим
ЛМ соотношением ЩМ) = XNM. Если
точка М принадлежит/?, то положим f(M) =
= М (рис. 53). Так построенное преобра-
' ' зование f называется сжатием к прямой р
в отношении Л. (Если уточнено, что А > 1,
преобразование можно называть растя-
M2=f(Af2)
о
N Ь(м\ жениеА*-)
] ^ 1} Мы уже пользовались сжатием к пря-
Mjl мой в § 2 гл. III, когда изучали фор-
му эллипса. Аналогичное преобразование
ис* пространства — сжатие к плоскости —
применялось в §4 гл. III для описания формы поверхностей второго
порядка.
Пример 4. Выберем на каждой из плоскостей Р и R декартову
прямоугольную систему координат и сопоставим точке с
координатами х и у на плоскости Р точку с координатами х* = х2 — у2 и у* = 2ху
на плоскости Я. Нетрудно убедиться, решая эти уравнения
относительно х и у> что каждая точка плоскости R имеет два прообраза, за
исключением начала координат, которое имеет один прообраз.
Пример 5. Зададим точку О на плоскости Р и сопоставим
каждой точке, отличной от О, такую точку f(M), что
бцм) = arctslpM| m
\ом\
Положим f (О) = О. При этом каждой точке плоскости сопоставляется
единственная точка внутри круга радиуса 7г/2 с центром в точке О.
Каждая точка, лежащая внутри круга, имеет единственный прообраз,
а точки, не лежащие внутри круга, не имеют прообразов.
Пример 6. Можно сопоставить каждой точке плоскости
основание перпендикуляра, опущенного из этой точки на прямую р, а
каждой точке на р — саму эту точку. При этом каждой точке любой
прямой, перпендикулярной р, сопоставляется одна и та же точка.
Пример 7. Можно сопоставить каждой точке на плоскости Р
одну п ту же точку на плоскости R.
Пример 8. Тождественным преобразованием плоскости Р
называется преобразование, сопоставляющее каждой точке плоскости эту
же точку.
3. Произведение отображений. Результат последовательного
выполнения двух отображений называется их произведением или
композицией. Точнее, вводится следующее
Определение. Пусть даны отображения f: Р —)• R и g : R —>
-> S. Отображение h, сопоставляющее точке Л на плоскости Р
точку g(f(>!)) на плоскости 5, называют произведением отображения f
§1. Отображения и преобразования
97
на отображение g и обозначают gf. Отображение, которое делается
первым, пишется справа.
Подчеркнем, что для того, чтобы существовало произведение двух
отображений, нужно, чтобы плоскость, в которую отображает первое
из них, совпадала с плоскостью, которая отображается при втором.
Для двух преобразований одной плоскости это условие выполнено.
Разумеется, произведение отображений зависит от порядка
сомножителей, т. е. gf не совпадает с fg. Оба произведения определены
только тогда, когда f: Р -¥ R, a g: R-± P. При этом gf —
преобразование плоскости Ру a fg — преобразование плоскости R. Зависит
от порядка сомножителей и произведение преобразований, хотя оба
произведения являются преобразования- f(e(A))
ми той же плоскости. et <х^ *° eflW) ^°
Действительно, пусть g —
параллельный перенос плоскости на вектор a, a f — А "j£f
гомотетия с центром в точке О. Из рис. 54
видно, что f(g(4)) отлично от g(f(4)). Рис.54
Рассмотрим свойства умножения для преобразований плоскости.
Эти свойства с соответствующими изменениями могут быть
перенесены на отображения, но мы займемся только преобразованиями.
Умножение преобразований ассоциативно. Это значит, что для
любых трех преобразований f, g и h выполняется равенство
(fg)h=f(gh).
Действительно, для любой точки А преобразование fg переводит
точку h(A) в точку f(g(h(^))), а преобразование f переводит
точку g{h(A)) в ту же точку f(g(h(>l))).
Если мы обозначим через е тождественное преобразование
плоскости, то для любого преобразования f выполнено
f e = ef = f.
Таким образом, тождественное преобразование играет ту же роль по
отношению к умножению преобразований, как число 1 по отношению
к умножению чисел.
По определению при любом отображении f: Р -> R каждая точка
плоскости Р имеет только один образ. Примеры 4 и 6 показывают, что
точка плоскости R может иметь много прообразов, а в примерах 5, 6
и 7 не каждая точка плоскости R имеет прообраз, т. е. служит образом
какой-либо точки.
Определение. Отображениеf: Р —>• Rназывается взаимно
однозначным, если каждая точка плоскости R имеет прообраз, и притом
только один.
Разумеется, это определение распространяется на
преобразования. Отображения, рассмотренные в примерах 2 и 3, взаимно
однозначны, а в примерах 4-7 — нет.
98
Гл. IV. Преобразования плоскости
Пусть дано преобразование f плоскости Р. Каждой точке А из Р
оно сопоставляет ее образ f{A). Теперь попробуем, наоборот,
точке f (А) сопоставить точку А. Такое соответствие удовлетворяет
определению преобразования в том и только том случае, когда каждая
точка плоскости является образом некоторой точки, и притом только
одной. Это равносильно взаимной однозначности f.
Определение. Обратным преобразованием для взаимно
однозначного преобразования f плоскости Р мы назовем такое
преобразование f , что f1(f(A)) = А для каждой точки А плоскости Р.
Очевидно, что определение обратного преобразования равносильно
соотношению f_1f = е, где е — тождественное преобразование.
Совпадающие точки должны иметь совпадающие образы,
поэтому 4f~l{f{A))) =^И) или f(f-1(£)) = В для любой точки В на
плоскости. Это может быть записано как ff_1 = е. Отсюда, в частности,
следует, что преобразование f_1 имеет обратное (и потому взаимно
однозначно), и этим обратным является f.
Предложение 1. Пусть преобразования fug плоскости Р
взаимно однозначны. Тогда их произведение fg взаимно однозначно,
Действительно, по условию существуют f l и g *. Поэтому
определено произведение (fg)(g~xf ). В силу ассоциативности
умножения преобразований его можно записать как f(gg"'1)f""1- По
определению обратного преобразования это равно fef"1 = ff_1 = е. Этим
доказано, что fg имеет обратное преобразование нужного вида. Но
существование обратного преобразования для преобразования fg
равносильно его взаимной однозначности. Предложение доказано.
4. Координатная запись отображений. Пусть нам задано
некоторое отображение f: Р -> R. По определению это означает, что
задан закон, по которому каждой точке А на плоскости Р
сопоставлен ее образ А* = f(A) на плоскости R. Если мы выберем на
плоскости Р систему координат 0,ei,e2, а на плоскости R систему
координат <5,РьР2> т0 точка А будет определена парой чисел (#,у), а
точка А* — парой чисел (х*,у*). Следовательно, при выбранных
системах координат на плоскостях Р и R отображение сопоставляет паре
чисел (ж,у) пару чисел (х*,у*). Таким образом, задать отображение
при выбранных системах координат все равно, что задать две
функции, каждая из которых зависит от двух независимых переменных:
х~ = (р(х,у), у* = ф(х,у). (1)
Координатной записью мы пользовались в примере 4.
Подчеркнем, что системы координат на плоскостях Р и R никак не
связаны между собой: точка Q может не совпадать с образом точки О,
а векторы рь р2 с образами векторов еье2.
При координатной записи преобразования достаточно выбрать
одну систему координат, так как и точка, и ее образ находятся на одной
§ 2. Линейные преобразования
99
плоскости.
Обратно, рассмотрим две функции, зависящие от двух
независимых переменных каждая. Если они определены для любых пар чисел,
то по формулам (1) при выбранных системах координат на
плоскостях Р и Я они определяют отображение Р в R.
Упражнения
1. Нарисуйте три крестика и четыре нолика.
а) Как должны идти стрелки от крестиков к ноликам, чтобы получилось
отображение множества крестиков в множество ноликов?
б) Можно ли провести стрелки так, чтобы каждый образ имел
единственный прообраз?
в) Можно ли провести их так, чтобы каждый нолик имел прообраз?
г) Ответьте на те же вопросы, если крестиков четыре, а ноликов три.
д) При каком числе ноликов возможно взаимно однозначное
отображение множества из трех крестиков?
2. Пусть преобразования f, g и h имеют обратные. Найдите
преобразование, обратное к их произведению fgh.
3. Напишите формулы, задающие осевую симметрию относительно
прямой, имеющей уравнение х + у — 5 в декартовой прямоугольной системе
координат.
§ 2. Линейные преобразования
1. Ортогональные преобразования. Так называются
преобразования плоскости, которые не меняют расстояния между любыми
двумя точками, т. е. преобразования f ортогональное, если для
любых точек А и В выполнено \АВ\ — \f{A)f(B)\. Основными
примерами ортогональных преобразований служат параллельный перенос,
поворот и осевая симметрия.
Получим координатную запись
ортогонального преобразования в
декартовой прямоугольной системе
координат 0,ei,e2- Обозначим через А и В
концы базисных векторов: ех = ОА,
е2 = О В (рис. 55). При ортогональном
преобразовании равнобедренный прямо- рис 55
угольный треугольник ОАВ перейдет в
равный ему треугольник 0*А*Вх. Рассмотрим произвольную
точку М(х,у). Она перейдет в точку М* с координатами (я*,у*). Нам
надо выразить {х*,у*) через (ж,у).
По определению координат ОМ = хОА + уОВ. Отсюда следует,
что О*М* = хОжА* -f уОжВя. Действительно, векторы ОжА* и ОщВ*
взаимно перпендикулярны и но длине равны 1, а потому компоненты
0*М* по этим векторам равны его скалярным проекциям на них. Эти
100
Гл. IV. Преобразования плоскости
проекции равны проекциям ОМ на ei,e2, что видно из равенства
соответствующих треугольников. Теперь мы можем написать
ОМ* = Об* + (ГМ* = ОСТ + хСГА* + уСГВ\ (1)
Обозначим через tp угол между ОМ* и ei. Поскольку |0*А*| = 1,
координаты этого вектора в базисе еь е2 равны (cosy>,siny>).
Тогда перпендикулярный вектор единичной длины 0*В* имеет
координаты (^fsiny?, ±cos(p), причем верхние знаки берутся в том случае,
когда пара векторов 0*А* и 0*В* ориентирована так же, как ei,e2.
Координаты точки О* обозначим через (ci,c2).
Теперь мы можем разложить все члены равенства (1) по базису:
х* = xcos<p^ysin<p + ci, ф)
у* = х sin <р ± у cos <р + с2. ^ '
Итак, доказано
Предложение 1. Произвольное ортогональное преобразование в
декартовой прямоугольной системе координат записывается
формулами (2), где (р — угол, на который поворачивается первый базисный
вектор, a ci и с2 — координаты образа начала координат. При этом
выбираются верхние знаки, если образы базисных векторов
ориентированы так же, как и сами эти векторы, и нижние знаки в
противоположном случае.
Пример 1. Параллельный перенос на вектор с сопоставляет
точке М с координатами (х,у) в некоторой декартовой системе
координат точку М* с координатами
х* = х + си 2/*=у + с2,
где ci и с2 — координаты с.
Пример 2. Напишем уравнения поворота плоскости на угол у?
вокруг некоторой точки, приняв эту точку за начало декартовой
прямоугольной системы координат. В этом случае О = О* и,
следовательно, ci = с2 = 0. Должны быть выбраны верхние знаки. Итак,
х* = xcos<p — ysintp, у* = х sin <р + у cos <p.
Пример 3. Рассмотрим осевую симметрию относительно
некоторой прямой. Примем ось симметрии за ось абсцисс декартовой
прямоугольной системы координат. Тогда точка М(х, у) переходит в
точку М* с координатами
х* = х, у* = -у.
Здесь с\ = с2 = 0 и (р ~ О при нижних знаках в формулах (2).
2. Определение линейных преобразований. Основным
объектом для нас будет более широкий класс преобразований,
включающий в себя ортогональные преобразования.
Определение. Преобразование f плоскости Р называется
линейным, если на Р существует такая декартова система координат, в
§2. Линейные преобразования
101
7*0. (4)
которой f может быть записано формулами
ущ = а2х + Ь2у + С2. ^ ]
Взаимно однозначное линейное преобразование называется
аффинным преобразованием.
Подчеркнем, что в определении линейного преобразования, вовсе
не требуется, чтобы коэффициенты в формулах (3) не обращались в
нуль одновременно. Они могут быть любыми. Однако имеет место
Предложение 2. Для того чтобы преобразование, задаваемое
формулами (3), было взаимно однозначным, необходимо и достаточно,
чтобы l ,
«1 &1
Таким образом, аффинное преобразование определяется
формулами (3) при условии (4).
Доказательство. Наше утверждение вытекает по существу из
предложения 9 §2 гл. И. Нам нужно узнать, при каком условии каждая
точка плоскости имеет единственный прообраз. Формулы (3)
связывают координаты (ж*,у*) точки М* и координаты {х,у) ее
прообраза. Их можно рассматривать как систему линейных уравнений для
нахождения х и у, и эта система имеет единственное решение при
любых свободных членах х* — с\ и у* — с2 (а значит, при любых х*
и у") тогда и только тогда, когда выполнено условие (4).
Как видно из предложения 1, ортогональные преобразования
являются линейными. Проверка условия (4) показывает, что они
аффинные. Рассмотрим другие примеры.
Пример 4. Рассмотрим сжатие к прямой (пример 3 § 1) и
примем эту прямую за ось абсцисс декартовой прямоугольной системы
координат. Легко видеть, что в такой системе координат сжатие с
коэффициентом А записывается формулами
х* = х, у* = At/.
Сжатие к прямой — аффинное преобразование.
Пример 5. Проектирование на прямую (пример 6 § 1) в такой
декартовой прямоугольной системе координат, для которой эта
прямая — ось абсцисс, записывается формулами
х* = х, у* = 0.
Это — линейное, но не аффинное преобразование.
Пример 6. Для записи уравнений гомотетии не существенно,
чтобы система координат была прямоугольной, но уравнения
проще, если начало координат поместить в центр гомотетии. По
определению гомотетии с коэффициентом А вектор ОМ переходит в
вектор ОМ* = АОМ. Если О — начало координат, координаты точек М
и М* будут связаны равенствами
х* = Ах, у* = Ат/.
102
Гл. IV, Преобразования плоскости
Гомотетия — аффинное преобразование.
Пример 7. Преобразование, сопоставляющее каждой точке
плоскости одну и ту же точку С, записывается формулами х* = с\, у* = с2,
где ci и С2 — координаты точки С. Оно линейное, но не аффинное.
Определение аффинного преобразования содержит упоминание о
некоторой определенной системе координат, и заранее не известно,
будет ли преобразование записываться формулами вида (3) в какой-
либо другой системе координат. Устраним это сомнение.
Предложение 3. В любой декартовой системе координат,
линейное преобразование задается формулами вида (3).
Доказательство. Пусть преобразование задано
равенствами (3) в системе координат 0,ei,e2. Перейдем к системе координат
0'>ei>G2- ^aK мы знаем, старые координаты точки М(х,у)
выражаются через новые координаты (ж', у*) по формулам (7) §3 гл. I:
х = aiz/4-/?it/ + 7b t/ = <*2z' + /W + 72. (5)
Для образа М* точки М нам нужно будет, наоборот, выразить
новые координаты (ж'*,т/*) через его старые координаты (ж*,г/*). Они
выражаются такими же формулами, разумеется, с другими
коэффициентами:
я'* = Ai** + (Л1У* + ии г/* = \2х* + р,2у* + v2. (6)
Нам требуется найти выражение новых координат (ж'*,г/'*)
точки М* через новые координаты (х'у}/) точки М. С этой целью
подставим в равенства (6) значения ж* и у* из формул (3):
х'* = Ai(aiff + Ьху + ci) -f /ii(а2х + b2y -f c2) + v\,
г/щ = A2(aiz + 6]T/ + c{) -f fi2{a2x -f b2y + c2) + v2.
Для нас важно, что правые части этих равенств — многочлены
степени не выше 1 относительно хну:
хы =Аух + lhy + Си зЛ = Л2х + В2у + С2. (7)
Подставив сюда выражения х и г/ по формулам (5), мы найдем
искомую зависимость:
ж'* = Д^ог!*1 + 0ц/ + 71) + Bi(a2«' + /W + 72) + Си
У** = A2{axxf + /?ц/ + 7i) + Я2(аг2*' + М + 72) + С2.
Мы видим, что правые части этих равенств — многочлены степени
не выше 1 относительно х1 и г/. Это нам и требовалось доказать.
Заметим, что аффинные преобразования выделяются из линейных
требованием взаимной однозначности, которое не зависит от системы
координат. Поэтому без дополнительных проверок мы можем быть
уверены, что формулы, задающие аффинное преобразование в новой
системе координат, удовлетворяют условию (4).
3. Произведение линейных преобразований.
Доказательство предложении 3 было основано на том, что результат подстановки
§2, Линейные преобразования
103
многочленов степени не выше 1 в многочлен степени не выше 1
оказывается таким же многочленом. Это же обстоятельство лежит в основе
следующего предложения.
Предло?кение 4. Произведение линейных преобразований
является линейным преобразованием. Произведение аффинных
преобразований — аффинное преобразование.
Доказательство Пусть заданы линейные преобразования f и
g и выбрана система координат. Тогда координаты точки f(M)
выражаются через координаты точки М формулами
х* = aiaj + bxiz + ci, у* = а2х + Ь2у + с2, (8)
а координаты точки g(f(M)) через координаты точки f(M)
формулами
*** =<*!**+ецГ + Д, y**=d2**+e2y*+/2*. (9)
Подстановка равенств (9) в (8) выражает координаты g(f(M)) через
координаты М. В результате подстановки мы получаем многочлены
степени не выше 1, что и доказывает первую часть предложения.
Для доказательства второй части достаточно вспомнить, что по
предложению 1 §1 произведение двух взаимнооднозначных
преобразований взаимно однозначно.
Предложение 5. Преобразование, обратное аффинному
преобразованию, также является аффинным.
Если преобразование f записано уравнениями (3), то
координатная запись его обратного преобразования получается решением
уравнений (3) относительно х и г/. Для того чтобы решить эти уравнения,
умножим первое из них на 62, второе — на 6] и вычтем одно
уравнение из другого. Мы получим (агЬ2 — а2Ь{)х = 62(я* — сх) — &i(y* — с2).
Из условия (4) следует, что х — линейный многочлен от ж* и у*.
Выражение для у получается аналогично.
4. Образ вектора при линейном преобразовании.
Рассмотрим вектор М\М2. Если координаты точек Mi и М2 в системе
координат О, ei,e2 обозначить соответственно х\, у\ и х2, у2, то
компоненты вектора будут равны х2 — хх и у2 — у^. Пусть формулы (3) задают
преобразование f в выбранной системе координат. Тогда образы М2
и М* точек М2 и М\ имеют абсциссы
ж* = а}х2 + 6it/2 + cb x*x = аххх 4- biyi + d.
Следовательно, первая компонента вектора М^М^ равна
х2 - х*х - а\[х2 - xi) + Ьг(у2 - yi).
Аналогично находим вторую компоненту этого вектора
у*2-у\- а2{х2 - хх) + b2(y2 - г/i).
Обратим внимание на то, что компоненты М*М% выражаются
только через компоненты МХМ2, а не через координаты точек М\
104
Гл. IV. Преобразования плоскости
и М2 по отдельности. Два равных вектора имеют одинаковые
компоненты и, следовательно, при линейном преобразовании перейдут в
векторы, компоненты которых также одинаковы. Итак, мы получаем
Предложение 6. При линейном преобразовании равные
векторы переходят в равные векторы. Компоненты a*, ol\ образа вектора
выражаются через его компоненты а\,а2 формулами
"1 = «1*1+{1*2. (Ю)
а2 = а2ах + 02<*2-
Если быть точным, говорить об образе вектора при
преобразовании f неправильно: преобразование отображает точки, а не
векторы. Точнее было бы сказать, что f порождает преобразование f
множества векторов. Но ниже мы, тем не менее, будем
придерживаться не совсем точной, но более удобной и общепринятой
терминологии — говорить, что преобразование f переводит вектор а
в вектор а* и обозначать последний через f(a).
Из формул (10) вытекает, что для линейного преобразования f при
любых векторах а и b и любом числе А
f(a+b)=f(a) + f(b),
f(Aa)=Af(a). [ '
Докажем, например, первое из этих равенств. Пусть 7i и 7г —
компоненты вектора f(a + b). Тогда
7* = Mori + ft) + bi(or2 + А), 72 = Mai + Pi) + Ы*2 + А>),
где аьа2 и /?i,/?2 — компоненты векторов а и Ь. Отсюда
it = (ait*! + 6ю2) + (а,А + Ьг/32) = а\ + /?*,
72 = («2^1 + Ь2а2) + (а2Р\ + Ъ2(32) = а*2 + р\.
Это — координатная запись доказываемого равенства. Второе из
равенств (11) доказывается аналогично.
Из равенств (11) следует, что при линейном преобразовании f
линейно зависимые векторы переходят в линейно зависимые.
Действительно, как легко видеть, f(0) = 0. Тогда любое соотношение
вида Аа+ /ib = 0 влечет за собой Af(a) + /if(b) = 0.
Если преобразование аффинное, то линейно независимые векторы
переходят в линейно независимые. В самом деле, в противном случае
из равенства Af (a) + /if (Ъ) = 0, А2 + р? ф О, при обратном
преобразовании мы получили бы Аа-h/ib = 0.
Следующее предложение устанавливает геометрический смысл
коэффициентов в формулах, задающих линейное преобразование.
Нредло?кение 7. Пусть преобразование f записано в системе
координат 0,ei,e2 формулами (3). Тогда с\ и с2 — координаты
точки f(O), а а\,а2 и Ь\,Ь2 — компоненты векторов f(ei) и f(e2) в
системе координат 0,ei,C2.
§2. Линейные преобразования
105
Для доказательства подставим в формулы (3) значения х = О
и у = 0 координат точки О и увидим, что координаты f (О) равны ci
и с2.
Подставим в формулы (10) координаты вектора ei а\ = 1, а2 =
= 0 и найдем aj = ai, a2 = a2. Следовательно, f(ei) имеет
компоненты ai и а2. Так же доказывается, что компоненты f(e2) равны &i и 62.
Предложение 8. Иаковы бы ни были три точки L,M,N, не
лежащие на одной прямой, и три точки £*,М* и N*, существует
единственное линейное преобразование f такое, что L* = f(L), M* =
= f(M) u ЛГ* = f(N). ^mo преобразование аффинное тогда и только
тогда, когда точки L*, М* и N* также не лежат на одной прямой.
Доказательство Векторы LM и LN не коллинеарны.
Следовательно, L, LM, LN — декартова система координат. Пусть ci,c2 —
координаты L*, а ai, a2 и bi,&2 — компоненты векторов L*Mж и L*N*
в этой системе координат. Формулы
х* = а\х + biy + сь У* = «2^ + ^22/ + с2
определяют линейное преобразование f, которое, как легко видеть,
обладает требуемым свойством. При этом согласно предложению 7,
коэффициенты в формулах однозначно определены.
Условие (4), равносильное аффинности преобразования,
необходимо и достаточно для того, чтобы векторы L*M* и L*N* были не
коллинеарны, т. е. L*, М* и N* не лежали на одной прямой. Предложение
доказано.
Заметим, что в том случае, когда преобразование f аффинное,
точка f(O) и векторы f(ei) и f(e2) могут быть использованы как система
координат. Дли этой системы координат имеет место
Предложение 9. При аффинном преобразовании f образ М*
точки М в системе координат f(0),f(ei),f(e2) имеет те же
координаты, что и точка М в системе координат 0,ej,e2.
Доказательство. Равенство ОМ = xei + ye2 означает, что
х,у — координаты М в системе координат 0,ei,e2. Подействовав
преобразованием f на обе части этого равенства, мы
получаем f(0)f(M) = zf(ei) + 2/f(e2), которое означает, что х иу —
координаты М* в системе координат f(О),f(ei),f(e2).
Упражнения
1. Являются ли аффинными преобразования, задаваемые формулами:
а) х* = х + у - I, у* = х - у + 1;
б) х* = х - у - 1, у* = -х + у + 1.
2. Найдите образ прямой х — у = 2 при преобразовании а) из упр. 1.
3. Докажите, не прибегая к формулам (1), что ортогональное
преобразование взаимно однозначно.
4. Точка А называется неподвижной точкой преобразования f, если
f(A) = А. Найдите неподвижные точки преобразования а) из упр. 1.
106
Гл. IV. Преобразования плоскости
5. Докажите, что линейное преобразование, не являющееся
тождественным, либо имеет единственную неподвижную точку, либо имеет прямую,
состоящую из неподвижных точек, либо не имеет их совсем.
6. Как изменятся формулы, задающие линейное преобразование, если
начало координат перенести в неподвижную точку, не меняя базисных
векторов?
7. Линейное преобразование в системе 0,ei,e2 задано формулами (3).
Какими формулами оно задается в системе координат:
а)0,е2,е1; б) 0,е,,2е2?
8. Докажите, что линейное преобразование, задаваемое в декартовой
прямоугольной системе координат формулами
х* = х cos v? + У sin v?, у* = х sin <p — у cos y>,
— осевая симметрия. Найдите уравнение оси симметрии.
9. Может ли случиться, что произведение двух линейных
преобразований аффинное, если одно из них не аффинное?
10. Пусть аффинное преобразование в декартовой прямоугольной
системе координат задано формулами
х* = х + Ъу + ci, у* =ах + съ.
Найдите векторы, ортогональные их образам.
11. Дан треугольник с вершинами л4(1,0), В(—1/2,1) и С(—1/2, — 1).
Найдите преобразование, переводящее каждую вершину в середину
противоположной стороны.
12. Докажите, что преобразование из упр. 8 есть произведение осевой
симметрии f относительно оси абсцисс и поворота g на угол <р вокруг начала
координат. Какое преобразование получится, если f и g перемножить в
другом порядке?
§ 3. Аффинные преобразования
1. Образ прямой линии. В этом параграфе мы изучим
геометрические свойства аффинных преобразований. Ниже f обозначает
аффинное преобразование, записываемое в декартовой системе
координат 0,еье2 формулами
х* = aiz + &i2/ + cb у* z= a2X + b2y + c2 (1)
при условии | ai fci
Рассмотрим на плоскости прямую линию с уравнением г = г0 +
+ а/. и найдем ее образ при преобразовании f. (Под образом прямой
понимается множество образов ее точек.) Радиус-вектор образа Мж
произвольной точки М можно вычислить так:
ОМ* = бф) +f (б)ЪГ = с + f (r).
/0. (2)
Здесь с — постоянный вектор Of (О), а г -- радиус-вектор точки М.
Согласно (11) §2 мы получаем
OA7" = c + f(r0)+f(a)t. (3)
§3. Аффинные преобразования
107
Так как f — аффинное преобразование и а ф 0, то а перейдет в
вектор f(a) ф 0, и уравнение (3) является уравнением прямой линии.
Итак, образы всех точек прямой г = г0 4- а* лежат на прямой (3).
Более того, преобразование f определяет взаимно однозначное
отображение одной прямой на другую, так как при сделанном здесь
выборе начальных точек и направляющих векторов точка М* имеет на
прямой (3) то же значение параметра t, что и точка М на исходной
прямой. Отсюда мы получаем
Предложение 1. При аффинном преобразовании:
прямая линия переходит в прямую линию;
отрезок переходит в отрезок;
параллельные прямые переходят в параллельные.
Для доказательства второго утверждения достаточно заметить,
что отрезок прямой состоит из таких точек, у которых значения
параметра удовлетворяют неравенству вида ti ^.t ^.t2. Третье
утверждение следует из того, что при аффинном преобразовании коллинеар-
ные векторы переходят в коллинеарные.
Предложение 2. При аффинном преобразовании отношение длин
параллельных отрезков не изменяется.
Доказательство Пусть отрезки АВ и CD параллельны. Это
значит, что существует такое число Л, что АВ =_\СР. Образы
векторов АВ и CD связаны той же зависимостью А*ВЖ = XCD*. Отсюда
\CD\ \CD*\
Следствие. Если точка С делит отрезок АВ в некотором
отношении А, то ее образ С* делит образ А*В* отрезка АВ в том же
отношении А.
2. Изменение площадей при аффинном преобразовании.
Для начала рассмотрим ориентированный параллелограмм.
Выберем общую декартову систему координат O,oi,e2 и обозначим через
(РьРг) и (<ji, <?2) компоненты векторов р и q, на которых он построен.
Площадь параллелограмма мы можем вычислить, пользуясь
формулой (23) §4 гл. I:
S± = S±(p,q) = (pi?2 -P20i)S±(ei,e2).
Пусть аффинное преобразование f записывается в выбранной
системе координат формулами (1). Из предложения 9 §2 следует, что
векторы f(p) и f(q) имеют в базисе f(e!),f(e2) те же компоненты (pi,p2)
и (<7ь</2)> что и векторы р и q в базисе ei,e2. Образ параллелограмма
построен на векторах f(p) и f(q), и площадь его равна
SI = S±(f(p),f(q)) = (РгЯ2 -p2gi)5±(f(ei),f(e2)).
Вычислим последний множитель. По предложению 7 § 2
координаты векторов f(ei) и f(e2) равны соответственно (ai)a2) и (61}62).
108
Гл. IV. Преобразования плоскости
(4)
Поэтому S±(f(ei),f(e2)) = (ai62 - a2b1)S±{cuo2) и
S± = (РШ - P2gi){aib2 - a26i)5±(ebe2).
Отсюда мы видим, что
£± = | «1 6i
S± J a2 &2
Таким образом, отношение площади образа ориентированного
параллелограмма к площади этого параллелограмма одинаково для всех
параллелограммов и равно a\b% — а2Ь\.
Отсюда следует, что данный детерминант не зависит от выбора
системы координат, в которой записано преобразование, хотя он
вычисляется по коэффициентам, зависящим от системы координат. Эта
величина — инвариант, выражающий геометрическое свойство
преобразования.
Из формулы (4) видно, что отношение площади образа
неориентированного параллелограмма к его площади равно
^V^^la^s-a^xl. (5)
Если агЬ2 — а26х > 0, то ориентации всех ориентированных
параллелограммов сохраняются при преобразовании, а если а\Ь2 — а26х < О,
то для каждого ориентированного параллелограмма ориентация
образа противоположна его ориентации.
Займемся теперь площадями других фигур. Каждый треугольник
может быть дополнен до параллелограмма, площадь которого равна
удвоенной площади треугольника. Поэтому отношение площади
образа треугольника к площади этого треугольника удовлетворяет
равенству (5).
Каждый многоугольник может быть разбит на треугольники.
Следовательно, формула (5) справедлива и для произвольных
многоугольников.
Мы не будем здесь касаться определения площади произвольной
криволинейной фигуры. Скажем лишь, что в тех случаях, когда эта
площадь определена, она равна пределу площадей некоторой
последовательности многоугольников, вписанных в рассматриваемую
фигуру. Из теории пределов известно следующее предположение:
если последовательность Sn стремится к пределу 5, то
последовательность SSn, где S постоянное, стремится к пределу 8S. На основании
этого предложения мы заключаем, что формула (5) справедлива в
самом общем случае.
В качестве примера найдем выражение площади эллипса через его
полуоси. В §2 гл. II мы доказали, что эллине с полуосями а и 6 может
быть получен сжатием окружности радиуса а к прямой, проходящей
через ее центр. Коэффициент сжатия равен Ь/а. В примере 4 §2 мы
получили координатную запись сжатия к прямой ж* = ж, у* = Лу.
Детерминант из коэффициентов в этих формулах равен А, т. е. в нашем
§3. Аффинные преобразования
109
случае Ь/а. Таким образом, отношение площади эллипса к площади
круга равно Ь/а, и эта площадь равна S = (Ь/а)жа2. Окончательно
имеем
S = тгао.
3. Образы линий второго порядка. Мы видели, что прямая
линия переходит в прямую. Это частный случай следующего
предложения.
Предложение 3. Аффинное преобразование переводит
алгебраическую линию в алгебраическую линию того же порядка.
В самом деле, пусть линия L в декартовой системе координат
0,ei,e2 имеет алгебраическое уравнение порядка р. Согласно
предложению 9 §2 образы всех точек линии L при аффинном
преобразовании f имеют в системе координат f(0),f(ei),f(c2) те же
координаты, что и их прообразы в системе координат 0,ei,e2. Следовательно,
координаты образов в системе f(0),f(ei),f(e2) связаны тем же
алгебраическим уравнением порядка р. Этого достаточно, чтобы сделать
нужное нам заключение.
Из предложения 3, в частности, следует, что линия второго
порядка при аффинном преобразовании перейдет в линию второго
порядка. Мы докажем более сильное утверждение. Именно, в теореме 1
§ 1 гл. III линии второго порядка были разделены на семь классов.
Мы увидим, что класс линии сохраняется при аффинном
преобразовании. На этом основании классы линий, перечисленные в указанной
теореме, называются аффинными классами. Итак, докажем
Предложение 4. Линия второго порядка, принадлежащая к од-
ному из аффинных классов, при любом аффинном преобразовании
может перейти только в линию того же класса. Каждую линию второго
порядка подходящим аффинным преобразованием можно перевести в
любую другую линию того же аффинного класса.
Доказательство. Линию мы назовем ограниченной, если она
лежит внутри некоторого параллелограмма. Легко видеть, что при
аффинном преобразовании ограниченная линия должна перейти в
ограниченную, а неограниченная — в неограниченную.
1) Эллипс — ограниченная линия второго порядка. Кроме эллипсов
ограничены только линии, состоящие из одной точки, т. е. пары
мнимых пересекающихся прямых. Поскольку эллипс ограничен и состоит
больше, чем из одной точки, он может перейти только в эллипс.
2) Гипербола состоит из двух отдельных ветвей. Это свойство
можно сформулировать так, что будет ясна его неизменность при
аффинных преобразованиях. Именно, существует прямая линия, не
пересекающая гиперболу, но пересекающая некоторые ее хорды.
Из всех линий второго порядка только гиперболы и пары
параллельных прямых обладают этим свойством. У гиперболы ветви не
прямые линии, и потому при аффинном преобразовании она может
перейти только в гиперболу.
110
Гл. FV. Преобразования плоскости
3) Парабола— неограниченная линия второго порядка, состоящая
из одного непрямолинейного куска. Этим свойством не обладают
никакие другие линии второго порядка, и потому парабола может
перейти только в параболу.
4) Если линия второго порядка представляет собой точку (пару
мнимых пересекающихся прямых), прямую (пару совпавших
прямых), пару пересекающихся или пару параллельных прямых, то из
доказанных ранее свойств аффинных преобразований следует, что эта
линия не может перейти в линию никакого другого класса.
Докажем вторую часть предложения. В теореме 1 § 1 гл. III
канонические уравнения линий второго порядка написаны в декартовой
прямоугольной системе координат и содержат параметры а, Ь,... Если
мы откажемся от нормировки базисных векторов, то сможем
произвести дальнейшие упрощения канонических уравнений и привести
их к виду, не содержащему параметров. Например, замена
координат х' = х/а, у1 =. у/b переводит уравнение эллипса х2 /а2 4- у2/Ь2 = I
в уравнение х'2 -Ь у12 = 1, каковы бы ни были а и 6. (Последнее
уравнение не есть уравнение окружности, так как новая система координат
не декартова прямоугольная.)
Читатель без труда покажет, что канонические уравнения линий
второго порядка переходом к подходящей системе координат могут
быть преобразованы в уравнения:
1)«2 + I/2 = 1; 2)Ж2 + </2 = 0; 3)*2-у2 = 1; 4) х2 - у2 = 0;
5) у* = 2*; 6) у2 -1 = 0; 7) у2 = 0.
Такую систему координат мы назовем аффинной канонической
системой координат.
Из предложения 9 § 2 следует, что аффинное преобразование,
которое совмещает аффинные канонические системы координат двух
линий одного аффинного класса, совмещает и эти линии. Это
заканчивает доказательство.
4. Разложение ортогонального преобразования.
Теорема 1. Каждое ортогональное преобразование
раскладывается в произведение параллельного переноса, поворота и, возможно,
осевой симметрии.
Доказательство. Пусть f — ортогональное преобразование и
ААВС — равнобедренный прямоугольный треугольник с прямым
углом А. При преобразовании f он перейдет в равный ему
треугольник АА*В*С* с прямым углом при вершине А*. Теорема будет
доказана, если, производя последовательно параллельный перенос р,
поворот q и (в случае необходимости) осевую симметрию г, мы сможем
совместить треугольники ABC и А*В*С*. Действительно,
произведение rqp — аффинное преобразование так же, как и f, а аффинное
преобразование однозначно определяется образами трех точек, не
лежащих на одной прямой. Поэтому rqp совпадает с f.
§3. Аффинные преобразования
111
Итак, переведем А и А* параллельным переносом р на вектор АА*
(если А = А*, то р — тождественное преобразование). Затем
поворотом q вокруг точки А* совместим р(В) с В* (возможно, и это
преобразование окажется тождественным). Точка q(p(C)) либо совпадает
с С*, либо симметрична ей относительно прямой АХВ*. В первом
случае цель уже достигнута, а во втором потребуется осевая симметрия
относительно указанной прямой. Теорема доказана.
Следует иметь в виду, что полученное разложение ортогонального
преобразования не однозначно. Более того, можно поворот или
параллельный перенос разложить в произведение осевых симметрии,
произведение параллельного переноса и поворота представить как один
поворот и т. д. Мы не будем уточнять, как это сделать, а выясним
следующее общее свойство всех таких разложений.
Предложение 5. При любом разложении ортогонального
преобразования в произведение любого числа параллельных переносов,
поворотов и осевых симметрии четность числа осевых симметрии,
входящих в разложение, одна и та же.
Для доказательства рассмотрим на плоскости произвольный базис
и проследим за изменением его ориентации (направления
кратчайшего поворота от ei к е2) при осуществляемых преобразованиях.
Заметим, что поворот и параллельный перенос не меняют ориентацию ни
одного базиса, а осевая симметрия меняет ориентацию любого
базиса. Поэтому, если данное ортогональное преобразование меняет
ориентацию базиса, то в любое его разложение должно входить нечетное
число осевых симметрии. Если же ориентация базиса не меняется, то
число осевых симметрии, входящих в разложение, может быть только
четным.
Определение. Ортогональные преобразования, которые могут
быть разложены в произведение параллельного переноса и
поворота, называются ортогональными преобразованиями первого рода, а
остальные — ортогональными преобразованиями второго рода.
Ортогональное преобразование в декартовой прямоугольной
системе координат записывается формулами (1) § 2. При верхних
знаках коэффициентов у у в этих формулах детерминант,
составленный из коэффициентов, равен -fl, а при нижних знаках он равен —1.
Отсюда и из формулы (4) следует
Предложение 6. Ортогональное преобразование первого рода
записывается в декартовой прямоугольной системе координат
формулами (1) §2 с верхними знаками у коэффициентов при у, а ортогональное
преобразование второго рода — с нижними знаками.
5. Разложение аффинного преобразования. Мы видели,
насколько аффинное преобразование может изменить плоскость:
окружность может перейти в эллипс, правильный треугольник — в
совершенно произвольный. Казалось бы, никакие углы при этом
сохраниться не могут. Однако имеет место следующее.
112
Гл. IV. Преобразования плоскости
Предложение 7. Для каждого аффинного преобразования
существуют две взаимно перпендикулярные прямые, которые переходят
во взаимно перпендикулярные прямые.
Для доказательства рассмотрим какую-либо окружность. При
данном аффинном преобразовании она перейдет в эллипс. Каждая ось
эллипса — множество середин хорд, параллельных другой оси. При
аффинном преобразовании хорда перейдет в хорду, параллельность
должна сохраниться, а середина отрезка переходит в середину его
образа. Поэтому прообразы осей эллипса — отрезки, обладающие тем же
свойством: каждый из них есть множество середин хорд окружности,
параллельных другому отрезку. Такие отрезки непременно
являются двумя взаимно перпендикулярными диаметрами окружности. Это
то, что нам требовалось: существуют два взаимно перпендикулярных
диаметра окружности, которые переходят во взаимно
перпендикулярные отрезки — оси эллипса.
Стоит отметить один особый случай: окружность при аффинном
преобразовании может перейти в окружность. В этом случае то же
рассуждение проходит с любыми двумя взаимно
перпендикулярными диаметрами окружности-образа. Очевидно, что при этом любые
два взаимно перпендикулярных направления остаются
перпендикулярными.
Определение. Два взаимно перпендикулярных направления
называются главными или синугулярными направлениями
аффинного преобразования f, если они переходят во взаимно
перпендикулярные направления.
Теорема 2. Каждое аффинное преобразование раскладывается в
произведение ортогонального преобразования и двух сжатий к двум
взаимно перпендикулярным прямым.
Доказательство аналогично доказательству теоремы 1.
Рассмотрим аффинное преобразование f и выберем равнобедренный
прямоугольный треугольник ABC так, чтобы его катеты АВ и АС были
направлены вдоль главных направлений преобразования f. Обозначим
через А*, В* и Сщ образы его вершин. Сделаем такое ортогональное
преобразование g, при котором g(A) = А*, а точки g(B) и g(C) лежат
соответственно на лучах А*В* и А*С*. (Этого легко добиться, как и
в теореме 1, параллельным переносом, поворотом и осевой
симметрией.)
Пусть A = \A*B*\/\A*g{B)\, a fi = \A*C*\/\A*g(C)\. Тогда сжатие Pl
к прямой А* С* в отношении А переведет g(B) в px(g(B)) = В* и
не сдвинет точек А* и g(C). Аналогично, сжатие р2 к прямой А*В*
переведет g(C) в p2(g(C*)) = С* и не сдвинет точек прямой АЩВ*.
Это означает, что произведение p2Pig переводит точки Л, В и
С в точки А*, В* и С* так же, как и заданное нам
преобразование f. Согласно предложению 8 §2 имеем p2Pig = f, как и требовалось.
§3. Аффинные преобразования
113
Упражнения
1. Найдите площадь треугольника, если его стороны лежат на прямых
с уравнениями х — у + 1 = О, х + у — 1 = 0 и 2х + у = 2 в декартовой
прямоугольной системе координат.
2. Пусть при аффинном преобразовании точки Л, В и С перешли в
точки А*, В* и С*. Докажите, что точка пересечения медиан Л ABC перейдет
в точку пересечения медиан АА*В*СЖ.
3. Будем говорить, что аффинное преобразование растягивает вектор а
в а раз, если |а*| = а|а|. Для преобразования, заданного в декартовой
прямоугольной системе координат формулами
х* = Ах + 7у, у* = 8х + у,
найдите векторы, для которых растяжение:
а) максимально; б) минимально.
4. Пусть прямая касается линии второго порядка. Докажите, что при
произвольном аффинном преобразовании образ прямой касается образа
линии.
5. Докажите, что вершины ромба, описанного около эллипса, лежат на
его осях симметрии.
6. Представьте как произведение двух осевых симметрии:
а) параллельный перенос на вектор а;
б) поворот на угол <р вокруг точки О.
7. Представьте сжатие к оси абсцисс декартовой прямоугольной
системы координат как произведение сжатия к другой прямой и параллельного
переноса на а(0, а).
ГЛАВА V
МАТРИЦЫ И СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
§ 1. Матрицы
1. Определение. Мы будем называть матрицей размеров т x n
совокупность тп чисел, расположенных в виде таблицы из m строк
и п столбцов:
II а\ а2 - «п II
I '2 2 2 II
«1 °2 - <
Числа, составляющие матрицу, мы будем называть элементами
матрицы. Если число строк в матрице равно числу столбцов, то матрица
называется квадратной, а число строк — ее порядком. Остальные
матрицы носят название прямоугольных.
Можно дать и такое определение матрицы. Рассмотрим два
множества целых чисел I = {1, 2,...,т} и J = {1, 2,...,п}. Через I x J
обозначим множество всех пар вида (i,j)7 где г Е /, a j E J. Матрицей
называется числовая функция на / х J, т. е. закон, сопоставляющий
каждой паре (г, j) некоторое число aj.
Для читателя, знакомого с программированием, заметим, что
матрица — это в точности то же, что и двумерный массив.
Две матрицы называются равными, если они имеют одинаковые
размеры, и равны их элементы, стоящие на одинаковых местах.
Рассматривая произвольные матрицы, мы будем обозначать их
элементы буквами с двумя индексами. Если оба индекса расположены
внизу, то первый из них обозначает номер строки, а второй — номер
столбца; если один из индексов расположен сверху, как в написанной
выше матрице, то этот индекс обозначает номер строки. Не следует
путать верхние индексы с показателями степени.
Матрицу размеров 1 х п, состоящую из одной строки, мы будем
называть строкой длины п или просто строкой. Матрицу
размеров т х 1 называют столбцом высоты т или просто столбцом.
Столбцы и строки мы будем обозначать полужирными буквами.
Часто бывает удобно записывать матрицу как столбец из строк
§1. Матрицы
115
или как строку из столбцов. Пусть
ai =
»2 =
а\
ап =
Тогда написанную в начале матрицу можно записать в виде
|| ai a2 ... а„ ||.
Аналогично, если а1 =
же матрица записывается в виде
1«1
ат = || af ... а™ ||, то та
Рассмотрим матрицу А размеров т х п и выберем
какие-нибудь г номеров строк *i,...,tr и s номеров столбцов jb...,j5>
причем будем предполагать, что номера выбраны в порядке
возрастания: ii < г*2 < ... < гг и ji < j2 < ••• < Js- Матрицу Л1 размеров г х s,
составленную из элементов Л, стоящих на пересечении выбранных
строк и столбцов, мы назовем подматрицей матрицы Л. Итак,
А' =
3\
"h - ~3,
Если матрица квадратная, то мно?кество тех ее элементов а\,
у которых номер строки равен номеру столбца, называется главной
диагональю или просто диагональю матрицы.
2. Транспонирование матриц. Рассмотрим матрицу
an ai2 — ain
021 <*22 ••■ «2n
ат\ am2 ••• О-тп
из m строк и п столбцов. Ей можно сопоставить матрицу В из п
строк и га столбцов по следующему правилу. Элементы каждой
строки матрицы А записываются в том же порядке в столбцы
матрицы £, причем номер столбца равен номеру строки. Эту матрицу
an «21 •■■ «mi
ai2 «22 ••• ат2
а.\п в2п ••• а,тп
называют транспонированной по отношению к Л и обозначают АТ.
Переход от А к Ат называют транспонированием.
lie Гл. V. Матрицы и системы линейных уравнений
Видно, что г-я строка В состоит из тех же элементов в том же
порядке, что и г-й столбец А. Ясно также, что (АТ)Т = А.
Определение транспонированной матрицы можно записать в виде
тпп равенств, связывающих элементы матриц А и В:
bij = aji (г = l,...,m, j = l,...,n).
3. Некоторые виды матриц. Введем определения некоторых
часто употребляемых видов матриц. Все матрицы предполагаются
квадратными.
1. Матрица А называется симметричной или симметрической,
если АТ = А. Для такой матрицы atj = aJt- при всех г и j —
элементы, расположенные симметрично относительно главной диагонали,
равны.
2. Матрица А называется кососимметричной или
антисимметричной^ если АТ =—А. Для такой матрицы a,j = — ay,- при всех г и j —
элементы, расположенные симметрично относительно главной
диагонали, отличаются знаком. Диагональные элементы равны нулю.
3. Матрица А называется верхней треугольной, если ее элементы,
расположенные ниже главной диагонали, равны нулю: a,j = 0 при г >
> j. Аналогично определяется нижняя треугольная матрица: a,j = О
при г < j.
4. Матрица А называется диагональной, если у нее равны нулю все
недиагональные элементы: а# = 0 при г ф j.
Другие частные виды матриц будем определять по мере
необходимости.
4. Сложение и умножение на число. Пусть А и В —
матрицы размеров т х п. Мы можем сопоставить им третью матрицу С
размеров т х п, элементы которой сц связаны с элементами а^ и 6,j
матриц А и В равенствами
Cij = aij+bij (t=l,...,m, j = l,...,n). (1)
Определение. Матрица С, определяемая по А и В
формулой (1), называется их суммой и обозначается А + В.
Определение. Матрица С, элементы которой c,j равны
произведениям элементов aij матрицы А на число а, называется
произведением А на а и обозначается аА. Мы имеем
Cij^aaij (i = l,...,m, j=l,...,n). (2)
Из свойств сложения и умножения чисел легко вытекает
Предложение 1. Для любых матриц А, В,С и любых чисел а
и 0 выполнены равенства
А + В = В + А, (А + Я) + С = А + (Д + С),
а(А + В) = а А + аЯ, (а + /3)А = а А + /ЗА,
{а0)А = а{0А).
Матрица, все элементы которой равны нулю, называется нулевой
матрицей. Если О — нулевая матрица размеров т х п, то для любой
§1. Матрицы
117
матрицы тех же размеров
Матрицу (—1)А называют противоположной матрице А и
обозначают —А. Она обладает тем свойством, что
А + (-Л) = О.
Сумма матриц В и —А называется разностью матриц В и А и
обозначается В — А.
Мы видим, что сформулированные выше свойства линейных
операций с матрицами совпадают со свойствами линейных операций с
векторами, перечисленными в предложении 1 §1 гл. I.
Используя линейные операции, мы можем составлять из матриц
одинаковых размеров А\,...>Ак и чисел а\,...,ак выражения вида
агА} + ... + акАк.
Такие выражения называются линейными комбинациями матриц.
Если какая-то матрица представлена как линейная комбинация других
матриц, то говорят, что она по ним разложена.
Пример 1. Пусть pi,..., pk — столбцы одинаковой высоты п.
Тогда столбец q той же высоты по ним разложен, если при некоторых
коэффициентах аь...,а^
q = <*iPi + ."-i-<u-p*,
или, в более подробной записи,
~ах
Pt
Pi
+ ... + а*
Pi
Pk
В силу определения линейных операций это матричное равенство
равносильно п числовым равенствам
q1 = а,р}+ ... + <**;>£,
gn=aiP? + ... + offcpJJ.
5. Линейная зависимость матриц. Какова бы ни была
система матриц фиксированных размеров т х п, нулевая матрица тех
же размеров раскладывается по этим матрицам в линейную
комбинацию с нулевыми коэффициентами. Такую линейную комбинацию
называют тривиальной. Как и для векторов, введем следующее
Определение. Система матриц Ai,...,Ak линейно независима^
если нулевая матрица раскладывается по ней однозначно, т. е. из
а1А1 + ... + акАк = 0 (3)
следует а\ — ... = ак = 0. В противном случае, т. е. если существуют к
чисел c*i, ...,a/e, одновременно не равных нулю и таких, что выполнено
равенство (3), система матриц называется линейно зависимой.
118 Гл. V. Матрицы и системы линейных уравнений
Пример 2. Столбцы
ei =
е2 =
еп =
И)
(в столбце с,- на г-м месте стоит 1, а остальные элементы равны
нулю) являются линейно независимыми. Действительно,
равенство aiei + ... + апеп = о можно записать подробнее так:
ari
+ <*2
+ ... + <*„
II ° 1
0
1 х
«1 1
«2
1 Q"
1 ° II
0
1 0 1
Отсюда видно, что а\ = а2 = ... = ап = 0.
Это равенство показывает также, что произвольный столбец
высоты п может быть разложен по столбцам ei, ...,en. Действительно, в
качестве коэффициентов линейной комбинации нужно взять
элементы раскладываемого столбца.
Определение. Квадратная матрица порядка п, состоящая из
столбцов (4): "10 0
о 1 ..! о
Е =
о о
1
называется единичной матрицей порядка п или просто единичной
матрицей, если порядок известен.
Строки единичной матрицы отличаются от ее столбцов только
формой записи. Итак, мы можем сформулировать
Предложение 2. Столбцы (строки) единичной матрицы
линейно независимы и обладают тем свойством, что каждый столбец
(строка) с тем же числом элементов раскладывается по ним.
Укажем несколько свойств линейно зависимых и линейно
независимых систем матриц. Эти свойства были доказаны в § 1 гл. I для
векторов, и доказательства совпадали с приводимыми ниже.
Предложение 2. Система из к > 1 матриц линейно зависима
тогда и только тогда, когда хотя бы одна из матриц есть линейная
комбинация остальных.
В самом деле, пусть система линейно зависима. По определению
выполнено равенство вида (3), где хотя бы один коэффициент отличен
от нуля. Допустим для определенности, что это а\. Тогда мы можем
представить первую матрицу как линейную комбинацию
л а2 л
Ai = А*>
§1. Матрицы
119
Обратно, если одна из матриц разложена по остальным, то это
разложение преобразуется к виду (3), где один из коэффициентов равен 1.
Предложение 4. Если некоторые из матриц А\,...,Ак состав-
ляют сами по себе линейно зависимую систему, то вся
система Л1,...,Л/с линейно зависима.
Действительно, пусть существует нетривиальная линейная
комбинация некоторых из матриц системы, равная нулевой матрице. Если
мы добавим к ней остальные матрицы с нулевыми
коэффициентами, то получится равная нулевой матрице нетривиальная линейная
комбинация всех матриц.
В частности, если в систему матриц входит нулевая матрица, то
система линейно зависима.
Предложение 5. Любые матрицы, входящие в линейно
независимую систему матриц, сами по себе линейно независимы.
В самом деле, в противном случае мы пришли бы к противоречию
на основании предыдущего предложения.
Предложение 6. Если матрица В разложена по линейно
независимой системе матриц А\,...,Аь, то коэффициенты разложения
определены однозначно.
Действительно, пусть мы имеем два разложения
В = aiAj + ... + akAh и В = /Mi + - + АЛ*.
Вычитая одно разложение из другого, мы получаем
о = (<*1 - AMi +... + К - fa)Ak.
Матрицы А\,...уАк линейно независимы, значит, а,—/?,- = 0 для
всех i = !,...,&. Итак, коэффициенты обоих разложений совпадают.
Упражнения
II 1 2 3
1. Дана матрица 4 5 6
|| 7 8 9
а) Выпишите подматрицу, расположенную в строках 1 и 3 и
столбцах 1 и 3.
б) Сколько квадратных подматриц второго порядка имеет данная
матрица?
в) Сколько всего подматриц она имеет?
2. Даны матрицы А =
1 2 3
4 5 6
г в = \
1 2 3 II
5 6
| 8 9 |
Можно ли сложить матрицы:
а) А и В; б) АТ и В; в) А и Вт; г) Ат и Вт?
3. Даны матрицы А =
!| 1 1
12
• БН
| 2 1 1
-11
' С=\
\ 4 3 1
15
120 Гл. V. Матрицы и системы линейных уравнений
Вычислите матрицу 2Л + ЗБ — С.
4. С какими коэффициентами раскладывается матрица
D =
по матрицам А и В и С из предыдущей задачи?
1 3
5. Можно ли разложить матрицу
7 9
по матрицам:
а) А и В из задачи 3,
б) А и В и С из задачи 3?
6. Являются ли линейно независимыми строки
а = || 1 2 3 4 ||, Ь=||2 3 4 5||, с = || 3 4 5 6 ||?
7. Убедитесь, что классы матриц, определенные в п. 3, замкнуты
относительно операций сложения и умножения на число.
§ 2. Умножение матриц
1. Символ ]Г\ Прежде чем двигаться дальше, остановимся на
обозначениях. В математике часто приходится рассматривать суммы
большого числа слагаемых, имеющих сходный вид и отличающихся
только индексами. Для таких сумм принято следующее обозначение.
п
Символ V^ , после которого стоит некоторое выражение, содержащее
к=1
индекс к, обозначает сумму таких выражений для всех значений
индекса от 1 до п, например,
п п
Х% =ai + a2-h... + an, X/**^* = а1& + ... + <*п0п-
Индекс к называется индексом суммирования. Разумеется, в качестве
индекса суммирования может быть употреблена любая другая буква.
На указанный символ и следующее за ним выражение можно
смотреть как на скобку, содержащую п однотипных слагаемых.
Следующие формулы являются другой записью вынесения
множителя за скобку и группировки слагаемых:
J>ft = af>, (1)
k=zl k = l
fc=l
(2)
fc=l
fc=l
Если имеется выражение, зависящее от двух индексов,
принимающих значения 1,...,п и 1,...,т, мы можем просуммировать снача-
§2. Умножение матриц
121
ла по одному из них, а затем полученные суммы — по-другому:
п m
£U>)-
t=i j=i
(Скобки обычно не пишутся.) Эта двойная сумма содержит
слагаемые, соответствующие всевозможным парам значений индексов.
Если мы запишем Р^ для всех г = 1,..., п и j = 1,..., т в виде матрицы,
то сумма в скобках равна сумме элементов г-й строки, а во внешней
сумме складываются результаты для всех строк.
То же самое число мы, конечно, получим, если сначала сложим
элементы по столбцам, а затем просуммируем полученные суммы для
всех столбцов. Поэтому
п т т п
££^-= ££*;• («)
i=ij=i j=\ i=i
2. Определение и примеры. Рассмотрим сначала строку а с
элементами аг (г = 1,..., п) и столбец b с элементами bj (j= 1,..., n).
Существенно, что в а и в b число элементов одинаково.
Произведением а на b называется число, равное сумме произведений элементов с
одинаковыми номерами, т. е.
ab = а\Ь\ + ... + апЬп.
Пусть теперь дана матрица А размеров т х п и матрица В
размеров п х р. Матрицы таковы, что длина строки (число столбцов) первой
матрицы равна высоте столбца (числу строк) второй. Умножим
каждую строку А на каждый столбец В. Полученные тр произведений
запишем в виде матрицы С размеров шхр. Именно, каждый
столбец С составим из произведений всех строк А на соответствующий
столбец матрицы В. Любая строка С состоит из произведений
строки А, имеющей тот же номер, на все столбцы В. Таким образом,
элементы матрицы С для всех г = 1,..., т и j = 1, ...,р равны
п
fe=l
Определение. Матрицу С, элементы которой выражаются
через элементы матриц А и В по формулам (4), назовем
произведением А на В и обозначим АВ.
Определение произведения матриц формулируется более сло?кно
и выглядит менее естественно, чем определение суммы. Однако из
дальнейшего читатель увидит, что именно такое определение
оказывается полезным в целом ряде вопросов.
Как легко заметить, если матрицу В записать как строку из
столбцов, то произведение АВ запишется как строка из столбцов так:
АВ = А\\Ъг ...ЪР\\ = \\АЪ1...АЪР\\. (5)
122 Гл. V. Матрицы и системы линейных уравнений
Действительно, для получения j-ro столбца произведения мы
умножаем последовательно все строки А на столбец Ь^.
Аналогично, строки АВ — произведения строк А на матрицу В:
АВ =
1 al
1 **ttl
N3 =
II
I aiB
| &тВ
Приведем несколько примеров.
Пример 1. Матрица А размеров га х п умножается на столбец х
высоты п
Лх =
а\ .
а\ .
- <
■■ <
п
Л
а\хг + ... + а1пхп
a\xl + ... + а*яп
afx1 + ... + а%хп
Это столбец высоты т. В обратном порядке эти матрицы при тф\
перемножить нельзя: произведение хА не определено.
Правую часть последнего равенства можно записать также и как
линейную комбинацию столбцов матрицы А (пример 1 §1). Это
показывает, что столбец Ах есть линейная комбинация столбцов
матрицы А с коэффициентами, равными элементам столбца х:
Ах = #iai + ... + хпап.
Пример 2. Произведение строки длины т на матрицу В
размеров т х п будет строкой длины п:
\хх ..
61 .
ъ\ ■
ъу .
■■ Ч
■■ bl
■■ С
= £^UX>*'„I
t=l
Пример 3. Произведение столбца высоты га на строку длины п
есть матрица размеров га х п:
«1
Cln =
xla\
9
arai
хтах
х1а,2
о
X~Q2
хта2
х1ап
х2ап
II р и м е р 4. Пусть А — матрица размеров т х п, е,- — г-й
столбец единичной матрицы порядка га, а ej — j-й столбец единичной
матрицы порядка п. Тогда qJAgj — матрица размеров 1x1с эле-
§2. Умножение матриц
123
ментом а;
еМе^||0...1...0|
«и
«21
<1\п
Я2п
«ml
Xij .
Предложение 1. j-й столбец матрицы АВ есть линейная
комбинация столбцов матрицы А с коэффициентами равными
элементам j-го столбца матрицы В.
i-я строка матрицы АВ есть линейная комбинация строк
матрицы В с коэффициентами, равными элементам г-tf строки матрицы А.
Оба утверждения доказываются одинаково. Докажем первое. Мы
видели, что 1-й столбец произведения есть произведение А на г-й
столбец В (формула (5)). Но произведение матрицы А на столбец — это
линейная комбинация столбцов А с элементами второго сомножителя
в качестве коэффициентов (пример 1).
3. Свойства умножения матриц. Умножение матриц не
коммутативно. Если А матрица размеров т х п, то оба произведения АВ
и В А определены только в том случае, когда В имеет размеры п х т,
т. е. такие же. как АТ. При этом АВ — квадратная матрица
порядка m, a BA — порядка п. Итак, о равенстве АВ = В А может идти
речь, только если А и В — квадратные матрицы одного порядка. Но
и в этом случае равенство выполнено далеко не всегда. Например,
1 1 1 II
| 0 0 |
II о о |
11
=
111
0 0
'
0 0 ||
1 1 1 II
II 1 1
|| 0 0
=
[0 0 II
1 1 II
Если какие-нибудь две матрицы А и В удовлетворяют равенству
АВ = ВА, то они называются перестановочными. Перестановочные
матрицы существуют. Например, единичная матрица порядка п
перестановочна с любой квадратной матрицей того же порядка:
АЕ = ЕА = А. (6)
Вообще, если определены произведения BE и ЕС, то
ВЕ = В и ЕС = С.
Предоставим читателю самостоятельно проверить это в качестве
упражнения на умножение матриц.
Равенства (б) выражают важное свойство единичной матрицы,
которому она обязана своим названием. Если бы какая-нибудь другая
матрица Е1 обладала этим свойством, мы имели бы Е'Е = Е и Е'Е =
= Е', откуда следовало бы Е — Е'.
Очевидно, что произведение нулевой матрицы О (справа или
слева) на любую другую матрицу равно нулевой матрице:
АО = О', ОВ = О".
124 Гл. V. Матрицы и системы линейных уравнений
(Размеры матриц О, О' и О", возможно, различны.)
Предложение 2. Умножение матриц ассоциативно, т. е. если
определены произведения АВ и (АВ)С, то определены ВС и А(ВС),
и выполнено равенство (АВ)С = А(ВС).
Действительно, пусть размеры матриц А.ВиС
соответственно равны гпа х пау тв х пв и тс х пс- Если АВ определено, то
пд = тв, и матрица АВ имеет размеры тд х пд. Поэтому, если
определено (АВ)С, то пв = тс- Матрица АВ состоит из элементов
^2aikhi (г = 1,...,тд; / = 1,...,пв)
к=1
и, следовательно, элементы (ЛБ)С имеют вид
ПВ /ПА \
J=l \Л=1 /
Q* (г = 1,...,шд; 5 = 1,...,пс). (7)
Поскольку п^ = тс, определено произведение ВС. Его элементы
«в
Y1 ЬьЮ* (* = 1,...,тв; s=l,...,nc).
/=i
Так как га л = to#, определено произведение А(ВС) с элементами
^А /^ \
Х,а*'* I 2ZbklCls ) (i=1'-'m^ s=l,...,nc). (8)
*=i \/=i /
В силу формул (1) и (3) выражения (7) и (8) совпадают, и наше
утверждение доказано.
Предложение 3. Умножение матриц дистрибутивно по
отношению к сложению: если имеет смысл выражение А(В+С), то
А(В + С) = АВ + АС, если имеет смысл выражение (В + С)А, то
{В + С) А = В А + С А.
Обе части предложения доказываются одинаково. Докажем
первую из них. Очевидно, что В и С должны иметь одинаковые
размеры т х п, а А — размеры рх т (р может быть любым). Выпишем
элементы матрицы А(В -f С) через элементы А, В и С:
т
$3««(fci + ctf) (* = 1,...,р; i = 1, ...,«)•
Раскроем скобки в каждом слагаемом и сгруппируем члены:
то то
»=1 1=1
Эти суммы равны элементам матриц АВ и АС, стоящим в строке с
номером s и столбце с номером j. Утверждение доказано.
Из формулы (1) следует такое свойство умножения матриц:
§2. Умножение матриц
125
Предложение 4. Если произведение АВ определено, то при
любом числе а , А „ч , .ч „ Л, п.
а(ЛВ) = {аА)В = А{аВ).
Предложение 5. Если определено произведение АВ, то
определено и произведение ВТАТ и выполнено равенство
(АВ)Т = ВТАТ.
Доказательство. Пусть матрицы А и В имеют,
соответственно, размеры тхпипхр. В матрице АВ на пересечении г-й строки
и j-ro столбца стоит элемент
п
Y^aikbkj («=l,...,m; j = l,...,p). (9)
j-я строка матрицы Бт состоит из элементов Ь^-,..., Ьп<?-, а г-й столбец
матрицы Лт — из элементов ац> ...,а;п. Поэтому произведение ВТАТ
определено, и в нем на пересечении j-й строки и г-ro столбца стоит
элемент п
^2bkjaik (j = l,...,p; i=l,...,m).
*=i
Он совпадает с элементом (9), а индексы г и j принимают в
обоих выражениях одни и те же значения. Этим предложение доказано.
Последовательно применяя доказанную формулу, мы получим
(A1A2...Akf = Al...AUT-
4. Элементарные преобразования. Элементарные
матрицы. В этом пункте впервые появляются элементарные
преобразования матриц. Они играют большую роль в теории матриц и широко
используются в вычислениях.
Определение. Мы назовем элементарными преобразованиями
строк матрицы следующие преобразования:
1) умножение строки на число, отличное от нуля;
2) прибавление одной строки к другой строке.
Аналогично определяются элементарные преобразования
столбцов матрицы. Все, сказанное ни?ке об элементарных преобразованиях
строк, переносится на элементарные преобразования столбцов.
Следующие более сложные преобразования получаются
последовательным применением нескольких элементарных преобразований:
а) прибавление к одной строке другой строки, умноженной на
число, в частности, вычитание одной строки из другой;
б) перестановка двух строк.
Покажем, как эти преобразования сводятся к элементарным на
примере матрицы, состоящей из двух строк а и Ь. Если в матрице
есть еще строки, не участвующие в преобразованиях, они
переписываются без изменения:
126 Гл. V. Матрицы и системы линейных уравнений
а)
б)
а
b
а
b
~*
-»
аа
b
->
a + b II
ь II
аа
b + аа
->
->
a + b
b-a-b
=
a
b + aa
=
II a+b
—a
j
->•
b
—a
->
b
a
-
Эти два типа преобразований также часто относят к числу
элементарных. При описании длинных последовательностей элементарных
преобразований мы будем включать в последовательность
преобразования этих двух типов, не разлагая их на элементарные.
Возможность вычитать одну строку из другой и отличие
числового множителя от нуля имеют следующее принципиальное значение:
элементарные преобразования обратимы. Это значит, что перейдя от
матрицы А к матрице В последовательностью элементарных
преобразований, с помощью другой последовательности мы сможем
вернуться от В к А.
Каждое элементарное преобразование строк матрицы А
размеров /и х п равносильно умножению А слева на некоторую
квадратную матрицу S порядка т. При этом S не зависит от Л, а полностью
определяется преобразованием, которое она осуществляет.
Именно, пусть Si — матрица, получаемая из единичной
матрицы Е порядка т заменой г-й единицы на диагонали на число А ф 0.
Тогда матрица S\A отличается от А тем, что ее г-н строка
умножена на А. Пусть 5*2 — матрица, которая отличается от Е заменой на
единицу нулевого элемента на пересечении г-й строки и j-ro столбца.
Умножение А слева на S-> равносильно прибавлению j-й строки к г-й.
Оба утверждения доказываются одинаково. Докажем второе.
Рассмотрим строку матрицы S2A с номером к ф г\ Согласно
предложению (1), эта строка — линейная комбинация строк А с
коэффициентами равными элементам fc-й строки Е. Это значит, что в
линейную комбинацию входит (с коэффициентом 1) только Ar-я
строка А, и потому Ar-я строка S2^ равна ft-й строке А. Для г-й строки
положение другое: в линейную комбинацию входят г-я и j-n строки
с коэффициентами 1. Значит, г-я строка S2^ равна сумме г-й и j-й
строк А.
Пример 5.
1
0
1 0
1 I
а
с
a b
с d
а
Хс
а
с + а
Ь
Xd
Ъ
rf+6
Те матрицы, умножение на которые осуществляет элементарные
преобразования, называются элементарными матрицами.
Последовательное выполнение нескольких элементарных
преобразований строк осуществляется умножением слева на произведение со-
§2. Умножение матриц
127
ответствующих элементарных матриц, причем множитель, который
соответствует преобразованию, сделанному позже, стоит левее.
Легко найти матрицу 5, умножение на которую производит
заданную последовательность элементарных преобразований строк: надо
осуществить эту последовательность элементарных преобразований
над единичной матрицей. Это видно из равенства SE = £.
Элементарные преобразования столбцов сводятся к умножению
матриц аналогично. Разница состоит в том, что множители
помещаются справа, а не слева от преобразуемой матрицы, и эти множители
получаются из единичной матрицы подходящего порядка
элементарными преобразованиями ее столбцов, а не строк.
5. Вырожденные и невырожденные матрицы. Квадратная
матрица называется вырожденной, если ее строки линейно зависимы.
Вырожденной будет, например, матрица, имеющая нулевую строку,
или матрица, имеющая две одинаковых строки. Примером
невырожденной матрицы является единичная матрица (предложение 2 § 1).
Предложение 6. Элементарные преобразования строк
переводят линейно независимые строки в линейно независимые, а линейно
зависимые — в линейно зависимые. Точно так же при элементарных
преобразованиях столбцов сохраняются линейная зависимость и
независимость столбцов.
Докажем это предложение для строк. Пусть строки ai,a2,...,an
линейно независимы, и мы прибавили, допустим, первую строку ко
второй. Рассмотрим произвольную линейную комбинацию
полученных строк, равную нулевой строке:
aiai + a2(ai + а2) + ... + ornan = (<*i + <*2)ai + a2a2 + ... + <*nan = o.
Так как исходные строки линейно независимы, а\ + <*2 = 0, а2 =
= 0, ..., ап = 0. Отсюда следует, что а\ также нуль, и система строк,
полученная прибавлением одной строки к другой, линейно
независима. Сохранение линейной независимости системы строк при
умножении г-й строки на число А ф 0 доказывается аналогично.
Пусть теперь строки линейно зависимы. Вспомним, что
последовательности элементарных преобразований обратимы. Если мы из
линейно зависимой системы строк с помощью элементарных
преобразований получили линейно независимую, то обратный переход должен
переводить линейно независимую систему в линейно зависимую, что
невозможно.
Доказательство предложения для столбцов не отличается от
приведенного.
Следствие. Элементарные преобразования строк переводят
невырожденную матрицу в невырожденную, а вырожденную матрицу —
в вырожденную.
Предложение 7. Элементарные преобразования строк
сохраняют линейные зависимости между столбцами. Элементарные пре-
128 Гл. V. Матрицы и системы линейных уравнений
образования столбцов сохраняют линейные зависимости между
строками.
Доказательство. Матрица А — ||аь ...,ап|| после
элементарного преобразования строк переходит в матрицу 5Л, где S —
соответствующая элементарная матрица. Столбцами матрицы SA будут
Sai,...,San. Пусть в матрице А столбцы связаны линейной
зависимостью Qiai + ... + <Xn&n — о. Умножая это равенство на 5, мы
получаем точно такую же зависимость ме?кду столбцами преобразованной
матрицы: aiSaj + ... -f anS3Ln = о.
Доказательство для элементарных преобразований столбцов
аналогично.
Предложение 8. Каждая невырожденная матрица с помощью
элементарных преобразований строк может быть превращена в
единичную матрицу.
Доказательство. Пусть дана невырожденная квадратная
матрица А порядка га. Обозначим ее строки ai,...,an. В первой строке
обязательно есть элемент, отличный от нуля, так как в противном
случае матрица имела бы строку из нулей и была бы вырожденной.
Пусть этот элемент имеет номер «i, т. е. расположен в .si-м столбце.
Разделим первую строку на этот элемент. В преобразованной
матрице элемент в позиции (l,si) будет равен 1. После этого для всех
i = 2,..., п вычтем из г-й строки первую строку, умноженную на а,м.
Так преобразованную матрицу обозначим Л^\ Ее si-й столбец — это
первый столбец единичной матрицы: все его элементы равны нулю,
за исключением первого элемента, равного 1.
С каждой из остальных строк будем поступать таким же
образом. Пусть после очередного преобразования получена матрица АУ*\
у которой столбцы с номерами si,..., s* — первые к столбцов
единичной матрицы; (к -f 1)-я строка матрицы А^ отлична от нуля, так как
А^ получена элементарными преобразованиями из А и,
следовательно, не вырождена. При этом элементы строки с номерами si,..., s^ —
нули, а значит, не равен нулю другой элемент. Пусть его номер Sfc+i.
Делим строку на него и вычитаем ее с подходящими множителями
из остальных так, чтобы превратить Sk+i-й столбец в к -f 1-й столбец
единичной матрицы. Получается матрица А^+1^.
После того, как будет произведена последовательность
преобразований с n-й строкой, все столбцы полученной матрицы А^п\ будут
различными столбцами единичной матрицы (1-й, 2-й,..., n-й столбцы
единичной матрицы стоят на местах si,...,sn)- Одновременно
строки А^ являются различными строками единичной матрицы (при
всех i в г-й строке на $,-м месте стоит единица, а остальные
элементы равны нулю). Переставляя строки, мы можем расположить их в
естественном порядке. Это закончит преобразование исходной
матрицы А в единичную при помощи элементарных преобразований строк.
§2. Умножение матриц
129
Метод преобразования матрицы, примененный при
доказательстве, называется методом Гаусса, точнее "методом Гаусса-Жордана с
выбором ведущего элемента по строке". Различные варианты метода
Гаусса широко применяются в вычислительной практике.
Предложение 9. Матрица иевырождена тогда и только тогда,
когда она раскладывается в произведение элементарных матриц.
Доказательство. Пусть матрица А невырождеиа. В силу пред-
ложения 8 найдутся такие элементарные матрицы Ti, ...,7м, что
Тм...ТгА = Е. (10)
Так как последовательности элементарных преобразований
обратимы, существуют элементарные матрицы Si, ...,5лг, для которых
SiS2... SnE ^ А.
Отбрасывая множитель Е, мы получаем требуемое разложение.
Обратно, последняя формула показывает, что произведение
элементарных матриц получается элементарными преобразованиями
строк из единичной матрицы, которая невырождена. Поэтому,
согласно следствию из предло?кения 6 оно невыро?кдено.
Предложение 10. Столбцы квадратной матрицы линейно
независимы тогда и только тогда, когда матрица невырождена.
Действительно, элементарными преобразованиями строк мы
превращаем единичную матрицу, столбцы которой линейно независимы,
в матрицу А. По предложению 7 столбцы матрицы А также линейно
независимы. Обратно, пусть столбцы матрицы А линейно
независимы. Это значит, что транспонированная матрица Аг иевырождена.
и по предыдущему ее столбцы — строки матрицы А — линейно
независимы, т. е. А невырождена.
Иначе предложение 10 можно сформулировать так.
Следствие. Матрица А иевырождена тогда и только тогда,
когда невырождена ее транспонированная АТ.
6. Обратная матрица. Введем
Определение. Матрицу X назовем обратной для матрицы А.
если ХЛ = АХ = Е, где Е — единичная матрица.
Вспомним, что две матрицы могут быть перестановочны только
в том случае, если они обе квадратные матрицы одного и того же
порядка. Поэтому иметь обратную может только квадратная матрица.
Предложение 11. Если у матрицы А существует обратная, то
она единственна.
Это легко проверяется от противного. Допустим, что их нашлось
две: Хг и Х2. Тогда Хх = Хг(АХ2) = (ХХА)Х2 = Х2.
Предложение 12. Матрица имеет обратную тогда и только
тогда, когда она невырождена.
Доказательство. Вернемся к формуле (10) и объединим в ней
все элементарные матрицы в один множитель X. Мы можем утверж-
130 TU. V. Матрицы и системы линейных уравнений
дать таким образом, что для любой невырожденной матрицы А
существует матрица X такая, что ХА = Е. Докажем, что X
удовлетворяет также и второму равенству в определении обратной матрицы.
Для этого заметим, что X невырождена как произведение
элементарных матриц, и потому для нее существует такая матрица У, что
YX = Е. Рассмотрим произведение У{ХА) = У. При другой
расстановке скобок мы видим, что (УХ)А = А. Поэтому У = А, и равенство
У А" = Е переписывается как АХ = Е.
Нам осталось доказать, что выро?кденная матрица не имеет
обратной. Пусть матрица А вырождена, т. е. существует нулевая
линейная комбинация ее строк Aiai + ... + Anan = о, причем А^ + ...
... + А^ ф 0. Тогда согласно предложению 1 произведение ненулевой
строки v = ||АЬ ..., Ап|| на матрицу А — нулевая строка: \А = о.
Если матрица А имеет обратную X, мы можем умно?кить на X справа
обе части этого равенства: vAX = оХ. Таким образом, v = о, что
противоречит определению v. Это заканчивает доказательство.
Обратную к матрице А принято обозначать А~г. На символ -1
в обозначении обратной матрицы можно смотреть как на показатель
степени. Для квадратной матрицы А целая положительная степень Ак
определяется как произведение матрицы А самой на себя к раз.
Положительная степень (А~г)к матрицы Л-1 считается отрицательной
степенью А~к матрицы А. По определению пулевой степенью любой
квадратной матрицы называется единичная матрица того же
порядка. При этом определении для невырожденной матрицы АкА1 = Ак+1
при любых целых к и /.
Получим основные свойства обратной матрицы.
• Из определения прямо видно, что (Л-1)-1 = А.
• (АВ)-Х = Б-М""1, так как
{AB)(B~l A"1) = А(ВВ'1)А"1 = АА-1 = Е.
. Из А~1А = Е% получаем АТ(А"1)Т= Е. Поэтому (Лт)-1= (Л-1)7.'
Опишем способ вычисления обратной матрицы. Именно, если
элементарными преобразованиями строк мы обратим матрицу А в
единичную, то те же преобразования переведут единичную матрицу в
матрицу Л-1, так как для соответствующих элементарных матриц
из формулы (10) имеем Тм---Т]Е =: Тм—Т\ = А"1.
Эти вычисления могут быть оформлены так: составим матрицу I)
размеров п х 2и, приписав к матрице А справа единичную матрицу.
Элементарными преобразованиями строк преобразуем D так, чтобы
обратить ее левую половину в единичную матрицу. Тогда правая
половина превратится в матрицу А"1.
Теорема 1. Пусть А — невырожденная матрица порядка п.
Тогда любой столбец высоты п раскладывается по столбцам А, причем
коэффициенты разложения однозначно определены.
Доказательство. Действительно, если матрица Л невырожде-
§ 2. Умножение матриц
131
на, то у нее существует обратная, и мы можем написать
равенство b = АА~1Ъ. Из него видно, что столбец b получается
умножением матрицы А на столбец Л_1Ь и, следовательно, является
линейной комбинацией столбцов матрицы А.
Для доказательства последнего утверждения достаточно
вспомнить, что столбцы невырожденной матрицы линейно независимы, и
сослаться на предложение 6 §1.
Применяя теорему 1 к транспонированной матрице, мы получаем
Следствие. Пусть А — невырожденная матрица порядка п.
Тогда любая строка длины п раскладывается по строкам А, причем
коэффициенты разложения однозначно определены.
Упражнения
1. Пусть аффинные преобразования f и g в некоторой системе координат
записаны, соответственно, формулами
Г х* =aia?-f-&it/, Г х* =c\x + d\y,
\ t/*=a^ + 62y, | у* =c7x + d2y.
Докажите, что произведение f • g запишется такими же формулами, причем
матрица коэффициентов будет равна
О] 6]
С«2 62
с\ di
с? d2
2. Пусть ||2|| — матрица размеров 1x1с элементом 2. Верно ли, что:
а) ||2||
3. Пусть ai....,ari — столбцы матрицы A, a b\...,bn — строки
матрицы В. Убедитесь, что Ti
II 1 1
2
1 3
=
2
4
6
; б)
1 1 |
2
1 3
11*11 =
1 2 II
4
J 6 J
4. Верно ли, что для любых двух квадратных матриц одного и того же
порядка:
а) (А + В)2 = А2 + 2АВ + В2; б) (Л + В)2 + (А - В)2 = 2(Л2 + В2)?
5. Рассмотрим матричное уравнение X2 -f E = О.
а) Проверьте, что матрица
" 0 -1
1 О
/ =
удовлетворнет этому уравнению. Как объяснить это в терминах задачи 1?
б) Найдите все решения этого уравнения среди вещественных матриц
второго порядка.
6. Сопоставим каждому комплексному числу z = a -f Ы матрицу
A(z)
-Ь
a
Проверьте, что выполнены равеЕк:тва A{z\) -f Л(гг) = Aizi+z^), A(z) =
= AT(z), А(гг)А{г2) = A{ztz2), A(z~l) = A~\z).
132 Гл. V. Матрицы и системы линейных уравнений
7. Найдите обратную для матрицы
II 1 О О II
1 1 2 .
I 1 1 3 ||
8. Разложите матрицу из упр. 7 в произведение элементарных.
§ 3. Ранг матрицы
1. Определение. Введем
Определение. Пусть в матрице А существует линейно
независимая система из г строк, и нет линейно независимой системы из
большего числа строк. Тогда мы будем говорить, что строчный ранг
матрицы А равен г. Нулевая матрица не содержит никакой
линейно независимой системы строк, и ее строчный ранг по определению
равен нулю.
Аналогично определяется столбцовый ранг матрицы. Он равен ri,
если есть линейно независимая система из г\ столбцов, и нет линейно
независимой системы из большего числа столбцов. Столбцовый ранг
нулевой матрицы по определению равен нулю.
Предложение 1. Система из г строк линейно независима тог-
да и только тогда, когда в этих строках найдется невырожденная
подматрица порядка г.
Доказательство. 1°. Пусть г строк линейно зависимы.
Рассмотрим произвольную подматрицу порядка г, расположенную в этих
строках. Если строки линейно зависимы, то также линейно зависимы
(с теми же коэффициентами) и отрезки этих строк, составляющие
подматрицу, и подматрица является вырожденной.
2°. Обратное утверждение докажем по индукции. Одна строка
линейно независима, если она не нулевая. В этом случае она содержит
ненулевой элемент, составляющий невырожденную подматрицу
порядка 1.
Пусть теперь даны г линейно независимых строк. Первые г — 1 из
них также линейно независимы, и по предположению индукции
содержат невырожденную подматрицу порядка г— 1. Пусть л,..., jr-i
— номера столбцов этой подматрицы. Рассмотрим отрезок r-й
строки, расположенный под подматрицей, т. е. составленный из элементов
с номерами ji, ...,jr-i- По следствию из теоремы 1 §2 этот отрезок
раскладывается в линейную комбинацию строк подматрицы.
Коэффициенты этой линейной комбинации обозначим аь ...,ar_i.
Теперь будем рассматривать полные строки. Вычтем из последней
строки линейную комбинацию предыдущих с теми же
коэффициентами Q'i, ...,ar_i. Это обратит в нуль л,..., jV-i-й элементы ?'-й строки,
но не всю строку, так как строки линейно независимы. Таким
образом, в преобразованной г-й строке есть ненулевой элемент а'', и его
§3. Ранг матрицы
133
номер j отличен от номеров ji,..., jV-i-
В преобразованной матрице рассмотрим столбцы, имеющие
номера ji,.., jr-г, j- (Мы для удобства пишем j на последнем месте,
хоти в действительности столбцы располагаются в порядке
возрастания номеров.) Легко видеть, что эти столбцы линейно независимы.
Действительно, пусть
«laj, + ... + ar^18Ljr_l + asij = о (1)
их нулевая линейная комбинация. Тогда для последних элементов
столбцов QfjO + ... -f orr-10 -f aaj = 0. Так как aj ф 0, отсюда
следует а = 0, и мы получаем Qislj1 4- ... + arr_ la,-^, = о. Если бы среди
коэффициентов этой линейной комбинации были отличные от нуля,
то столбцы с номерами ji,...,jr-i были бы линейно зависимы. Это
противоречило бы тому, что исходная подматрица порядка п — 1
невырождена. Таким образом, все коэффициенты в (1) равны нулю, и
столбцы с номерами j\, ...,jr-bi линейно независимы. Отсюда
следует, что составленная ими подматрица порядка г невырождена.
Невырождена соответствующая подматрица и в непреобразован-
ной матрице, так как элементарными преобразованиями мы
превратили ее в невырожденную матрицу. Это заканчивает доказательство.
Определение. В матрице А размеров га х п подматрица
порядка г называется базисной, если она невырождена, а все квадратные
подматрицы большего порядка, если они существуют, вырождены.
Столбцы и строки матрицы А, на пересечении которых стоит
базисная подматрица, называются базисными столбцами и строками А.
В силу предложении 1 базисные столбцы и строки линейно
независимы.
Определение. Рангом матрицы называется порядок базисной
подматрицы или, иначе, самый большой порядок, для которого
существуют невырожденные подматрицы. Ранг нулевой матрицы по
определению считают нулем.
Отметим два очевидных свойства ранга.
• Ранг матрицы не меняется при транспонировании, так как при
транспонировании матрицы все ее подматрицы транспонируются, и
при этом невырожденные подматрицы остаются невырожденными, а
вырожденные — вырожденными.
• Если А' — подматрица матрицы А, то ранг А' не превосходит
ранга А, так как любая невырожденная подматрица, входящая в А',
входит и в А.
2. Основные теоремы. Из предложения 1 прямо следует
теорема о ранге матрицы:
Теорема 1. Ранг любой матрицы равен ее строчному рангу и ее
столбцовому рангу.
Действительно, если строчный ранг А равен г, то в Л найдется
линейно независимая система из г строк, а значит, и невырожденная
134 Гл. V. Матрицы и системы линейных уравнений
подматрица порядка г. Если при этом есть р > г различных строк Л,
то они линейно зависимы, и любая подматрица порядка р в них
вырождена. Столбцовый ранг равен строчному рангу АТ, значит, и
рангу АТ, а потому — рангу А.
Таким образом, мы видим, что все три определения на самом деле
определяют одно и то же число, и впредь не будем их различать.
Будем говорить ранг матрицы и обозначать его Rg A.
Из теоремы о ранге матрицы мы получаем теорему о базисном
миноре, на которую существенно опирается все дальнейшее изложение.
Слово "минор" означает "детерминант подматрицы". В частности,
базисный минор — это детерминант базисной подматрицы. О
детерминантах будет речь в следующем параграфе, а здесь это слово можно
воспринимать просто как составную часть названия теоремы.
Теорема 2. Каждый столбец матрицы раскладывается в
линейную комбинацию ее базисных столбцов.
Доказательство. Каждый из базисных столбцов, разумеется,
раскладывается по базисным: для этого достаточно взять его самого
с коэффициентом 1, а остальные с нулевыми коэффициентами.
Пусть теперь slj — не базисный столбец. Базисные столбцы
обозначим через atl, ...,а,г. По теореме о ранге матрицы любые r-f 1
столбцов линейно зависимы, и найдутся такие коэффициенты, что
aia,-, + ... + nrra,-r + aa,- = о.
При этом мы можем быть уверены, что а ф О, так как иначе это
равенство означало бы линейную зависимость базисных столбцов. Деля
на а, мел получаем нужное нам разложение.
Следствие. Каждая строка матрицы раскладывается по ее
базисным строкам.
3. Ранг произведения матриц. Согласно предложениям 6 и 7
§ 2 элементарные преобразования не меняют столбцового ранга.
Таким образом, справедливо
Предложение 2. Ранг матрицы не меняется при элементарных
преобразованиях.
Отсюда и из предложения 9 §2 прямо следует
Предложение 3. Если матрица А невырождена и определены
произведения АВ и С А, то RgAB ~ Kg В и RgCA = RgC.
В общем случае имеет место
Предложение Л. Ранг произведения двух матриц не
превосходит рангов сомножителей.
Доказательство. Пусть определено произведение АВ.
Рассмотрим матрицу D, составленную из всех столбцов матриц А и АВ.
Так как АВ подматрица, Rg АВ ^ Rg£>.
По предложению ] § 2 столбцы АВ — линейные комбинации
столбцов А. Легко видеть, что приписывание к матрице линейной комбина-
§3. Ранг матрицы
135
ции ее столбцов не меняет ранга матрицы. Действительно, не менян
ранга, элементарными преобразованиями столбцов мы можем
обратить приписанный столбец в нулевой, а добавление нулевого столбца
не создает новых невырожденных подматриц. Отсюда следует, что
RgD = Rg А Итак, KgAB ^ RgA
Аналогично доказывается, что Rg АВ ^ R,g В. Для этого надо
составить матрицу D1 из всех строк матриц В и ЛВ.
4. Нахождение ранга матрицы. Введем
Определение. Матрица размеров т х п называется упрощенной
(или имеет упрощенный вид), если некоторые г ее столбцов являются
первыми г столбцами единичной матрицы порядка m и, в случае т >
> г, ее последние т — г строк — нулевые.
Предложение 5. Каждую матрицу с помощью элементарных
преобразований строк можно превратить в упрощенную матрицу.
Доказательство. Если матрица нулевая, то она уже
упрощенная (г = 0). В общем случае применим метод Гаусса. В предложении 8
§2 мы превратили квадратную невырожденную матрицу
элементарными преобразованиями строк в единичную матрицу. Это — частный
случай доказываемого предложения. То обстоятельство, что матрица
невырождена, использовалось, когда мы в очередной строке
преобразованной матрицы находили ненулевой элемент.
В общем случае ненулевой элемент может не найтись, т. е.
очередная строка окажется нулевой. Все встречающиеся нулевые строки
будем переставлять на последние места и будем продолжать
преобразования так, как при доказательстве предложения 8 §2.
Преобразования закончатся, когда будут исчерпаны все
ненулевые строки. При этом несущественно, квадратная матрица или нет.
Конечно, может случиться, что некоторые столбцы не будут
превращены в столбцы единичной матрицы, но это нам и не требуется. Пусть
всего в столбцы единичной матрицы преобразовано г столбцов. Если
остались строки ниже r-й, они нулевые, иначе преобразования можно
продолжить. Предложение доказано.
Пусть мы привели матрицу Л к упрощенному виду, и в
упрощенной матрице А', столбцы а^,...,а.,г \j\ < ... < jr) превращены в
столбцы единичной матрицы ei,...,er. Можно считать, что а^ —у е/.
для всех к = 1, ...,г. Это достигается перестановкой строк.
Рассмотрим упрощенную матрицу А'. В ней есть невырожденная
подматрица порядка г, а невырожденных подматриц большего
порядка, очевидно, нет. Следовательно, ранг матрицы равен ?% а
подматрица базисная.
Из этого следует, что Rg^ — г, так как ранг не изменился при
элементарных преобразованиях. За базисную подматрицу в А можно
136
Гл. V. Матрицы и системы линейных уравнений
принять подматрицу, расположенную в столбцах с номерами ji,..., jr
и строках, которые после перестановок попали на места 1, ...,гв
упрощенной матрице. Это видно из того, что, преобразуя матрицу, мы не
прибавляли к пересекающим ее строкам никаких строк, которые ее
не пересекают.
Таким образом, если мы не знали ранга матрицы и ее базисной
подматрицы, то приведя ее к упрощенному виду, мы их определим.
С другой стороны, имеет место
Предложение 6. Какова бы ни была базисная подматрица
матрицы А элементарными преобразованиями строк можно привести А
к такому упрощенному виду, в котором базисные столбцы будут
первыми столбцами единичной матрицы.
Действительно, небазисные строки можно обратить в нулевые,
вычитая из них подходящие линейные комбинации базисных. После
этого можно превратить базисную подматрицу в единичную так, как
это было сделано в предложении 8 §2. (Элементарные преобразования
производятся, конечно, над полными строками.)
Упражнения
1. Дана матрица А ■
12 3
Л 5 6 .
7 8 9 у
а) Найдите ее ранг и какую-либо базисную подматрицу.
б) Найдите коэффициенты разложения иебазисной строки по базисным
строкам и небазисиого столбца но базисным столбцам.
в) Прибавьте в матрице вторую строку к первой и убедитесь, что
линейная зависимость между столбцами осталась прежней.
г) Сколько всего базисных подматриц в этой матрице?
2. Квадратная матрица порядка п имеет нулевую подматрицу
порядка п — 1. Оцените ранг матрицы.
3. Пусть А — матрица с элементами а;;, t = 1, ...,m; j = 1, ...,п и RgA =
= 1. Докажите, что найдутся числа c*i,...,am и /3i,...,/3n, не все равные
нулю, такие, что atJ = aif$j для всех г и j.
4. В матрице ранга г отмечены г линейно независимых строк и г
линейно независимых столбцов. Докажите, что на их пересечении стоит
невырожденная подматрица. Покажите на примере, что утверждение не верно,
если число отмеченных строк меньше г.
5. Докажите, что для любых матриц А и В одинаковых размеров ранг
суммы не больше суммы рангов.
§ 4. Детерминанты
1. Определение детерминанта. Мы будем говорить, что на
множестве квадратных матриц порядка п задана числовая функция, если
каждой матрице из этого множества сопоставлено некоторое число.
Примерами могут служить две часто употребляемые функции:
§4- Детерминанты
137
след матрицы — функция, сопоставляющая каждой квадратной
матрице сумму ее диагональных элементов ац + ... + апп;
евклидова норма матрицы — функция, сопоставляющая каждой
матрице квадратный корень из суммы квадратов всех ее элементов.
Во многих вопросах необходимо уметь определить, вырождена
данная матрица или нет. При этом полезна такая функция от
матрицы, которая равна нулю для вырожденных матриц, отлична от
нуля для невырожденных и при этом сравнительно просто вычисляется.
Для матриц второго и третьего порядка такими функциями являются
их детерминанты, уже известные нам.
Определение. Числовая функция / на множестве всех
квадратных матриц порядка п называется детерминантом {или
определителем) порядка п, а ее значение на матрице А —
детерминантом Л, если она обладает следующими тремя свойствами.
1. Какую бы строку матрицы мы ни взяли, функция является
линейным однородным многочленом от элементов этой строки. Для г-й
строки матрицы А это значит, что
f(A) = к\ац + ft2a,-2 + ... +Ana,-n, (1)
где Ai,.--, An — коэффициенты, не зависящие от элементов г-й
строки ati,'...,ajn, но зависящие от остальных элементов матрицы.
2. Значение функции на любой вырожденной матрице равно нулю.
3. Значение функции на единичной матрице равно 1.
Детерминант матрицы А обозначается del Л или, если нужно
выписать элементы матрицы, прямыми линиями по бокам матрицы.
Рекомендуем читателю проверить, что известные нам
детерминанты второго и третьего порядков удовлетворяют приведенному
определению. Для матрицы порядка 1, состоящей из одного элемента,
детерминантом является этот элемент.
Когда определение состоит из условий, которым должен
удовлетворять определяемый объект, заранее не ясно, выполнимы ли эти
условия, т. е. существует ли объект, им удовлетворяющий. Кроме
того, если такой объект существует, то не ясно, однозначно ли он
определен этими условиями. Ниже мы докажем существование и
единственность детерминанта.
Miii докажем также, что для любой невырожденной матрицы
детерминант отличен от нуля. Однако сначала необходимо изучить
условия, определяющие детерминант.
Условие 1 выражает свойство линейности детерминанта по
строке. Его равносильную формулировку дает следующее
Предложение 1. Функция f на множестве квадратных
матриц порядка п обладает свойством линейности по строке тогда и
только тогда, когда для каждой строки произвольной матрицы А
выполнено следующее: если эта строка есть линейная комбинация ар +
138
Гл. V. Матрицы и системы линейных уравнений
+ /?q, строк р и q, то
f(A)=af(Ap) + 0f(Aq), (2)
где матрицы Ар и Aq получены из А заменой этой строки на р и q.
Доказательство. 1°. Пусть функция / обладает свойством
линейности по строке (1). Если г-н строка А есть линейная комбинация
ap-f/?q. то при любом к элемент а,-* этой строки равен apk + 0qk>
где pk и (J* — соответствующие элементы строк р и q. Следовательно,
/(Л) = Ai(api + /?<h) + ... + М<*/>» + /?g„).
Группируя члены, мы получим
/(Л) = a{hipi + ..♦ + hnPn) + /?(fti tfi + ... + Ая9п).
Здесь Лх, ...,ЛП ие зависят от элементов г-й строки, и потому
AiPi + .-.+ Лпрп = /(Лр) и /гхдх + ... + Лп</п = f(Aq).
Таким образом, получено равенство (2).
2°. Докажем обратное. Возьмем г-ю строку матрицы А и разложим
ее в линейную комбинацию строк единичной матрицы
e»i©i + ... + а,пеп.
Последовательно применяя равенство (2), получаем отсюда
ДЛ) = ацДЛг) + ... + агпДЛп),
где матрицы Л1} ..., Лп получены из Л заменой г-й строки на
соответствующую строку единичной матрицы. Они не зависят от
элементов г-й строки Л, а потому значения / на данных матрицах также
не зависят от этих элементов. Предложение доказано.
Сформулированное в предложении 1 свойство также называют
свойством линейности по строке и часто формулируют в виде двух
отдельных утверждений.
• Множитель, общий для всех элементов строки, может бглть
вынесен за знак детерминанта.
• Если какая-либо из строк матрицы А есть сумма двух строк, то
det Л равен сумме детерминантов матриц, получаемых из А заменой
этой строки на каждое из слагаемых.
Разумеется, если строка матрицы представлена как линейная
комбинация ахрх 4-... + &sPs любого числа s строк, то
det Л = с*! det Л х + ...+ a5det Л5, (3)
где Лх,... As — матрицы, получаемые из А заменой рассматриваемой
строки соответственно на рх,-..}р*.
Предложение 2. Если к некоторой строке матрицы прибавить
другую ее строку, умноженную на число, то детерминант матрицы
не изменится.
§4- Детерминанты
139
Доказательство. Пусть в матрице Л мы заменили г-ю
строку аг- на строку аг- + Да,, г ф j. Тогда по свойству линейности
детерминант полученной матрицы Л' равен
det A' = det A Н- Adet Aj,
где матрица А/ получается из А заменой г-й строки па j-ю. В эту
матрицу строка а/ входит дважды: на г-м и на j-м местах. Поэтому
матрица вырожденная, и det Aj = 0. Итак, det Л = det A*.
Предложение 3. Если две строки матрицы поменять местами,
то ее детерминант умножится на (—1).
Доказательство. Пусть матрица А1 получается из А
перестановкой г-fi и j-й строк. Выполним следующую последовательность
преобразований матрицы А. не меняющих детерминанта в силу
предложения 2:
=
аг + а,-
-а;
~*!
а;
-а,-
а,
Rj
-Н
аг- + a j
ai
~"Ч
Детерминант последней матрицы равен детерминанту А и отличается
только знаком от детерминанта матрицы А'.
Свойство, выраженное предложением 3, носит название
антисимметрии детерминанта по строкам. В дальнейшем нам потребуется
Предложение 4. Пусть некоторая функция f на множестве
квадратных матриц линейна по строкам, и для матриц, имеющих
две одинаковые строки, ее значение равно нулю. Тогда на всех
вырожденных матрицах ее значение равно нулю.
Доказательство. Пусть А —- произвольная вырожденная
матрица. Если строк больше одной, и они линейно зависимы, то одна
из строк есть линейная комбинация остальных. Допустим для
определенности, что строка ai разложена по а2,....ап с
коэффициентами а2, ...,ап. Тогда последовательно применяя формулу (2), получаем
/(Л)=а2ЛЛ2) + ... + ап/(Лп),
где матрицы Л2,...,ЛП получены из А заменой первой строки на ее
2-ю, ...,п-ю строки. Каждая из них имеет две одинаковых строки, и
потому f(A{) = 0, г = 2,...,?/. Отсюда /(Л) = 0, как и требовалось.
2. Единственность детерминанта. Начнем с того, что с
помощью известных нам свойств детерминанта вычислим детерминанты
элементарных матриц.
Если матрица S\ получена из единичной умно?кением какой-либо
строки на число А ф 0. то deti't — AdetF = Л, согласно свойству
линейности детерминанта по строке. Если матрица 52 получена из
140 Гл. V. Матрицы и системы линейных уравнений
единичной матрицы прибавлением одной строки к другой, то из
предложения 2 видно, что dct 5г = deti? = 1. Таким образом, имеет место
Предложение 5. Если существуют две функции d\ ud-2,
удовлетворяющие определению детерминанта, то для любой элементарной
матрицы di(S) = с/2(5).
Кроме того, легко проверить, что для любой матрицы А и любой
элементарной матрицы 5 выполнено равенство
dei(SA) = det5det.A. (4)
Действительно, достаточно вспомнить, что SA получается из А тем
же элементарным преобразованием, что и 5 из Е. Отсюда для матриц
первого типа det(5i^) = Adet А. Поскольку det5i — К равенство (4)
справедливо. Точно так же, для матриц второго типа deilS^A) =det A
и det 52 = 1.
Теперь может быть доказана
Теорема 1. На множестве квадратных матриц порядка п не
может быть более одной функции, удовлетворяющей определению
детерминанта.
Доказательство. Пусть существуют две такие функции d\
и с?2- Докажем, что d\(A) = d2{A) для любой квадратной матрицы А.
Если А — выро?кденная матрица, то но определению d\{A) =
= d2(A) = 0.
Рассмотрим невырожденную матрицу А. По предложению 9 § 2
она может быть разложена в произведение элементарных матриц.
Последовательно применяя формулу (4), мы получаем
c/1H) = c/1(51...5^ = rf1(5i)c/1(52...5iV) = ... = d1(51)...c/1(5N).
Аналогично, d2(A) = </2(5i)... cfeOSW)- Теперь из предложения 5
следует di(A) = d2{A)i как и требовалось.
Вместе с доказательством теоремы, мы получили важную
формулу: если невырожденная матрица А разложена в произведение
элементарных матриц, то
deti4 = detSi...detStf. (5)
Отметим, что детерминант элементарной матрицы либо равен
числу Л ф О, либо равен единице, т. е. в любом случае отличен от нуля.
Из равенства (5) тогда следует
Предложение 6. Если матрица невырожденная, то ее
детерминант отличен от нуля.
Следствие. Для того чтобы матрица была вырожденной,
необходимо и достаточно, чтобы ее детерминант был равен нулю.
3. Существование детерминанта. Разложение по столбцу.
Минором матрицы называется детерминант какой-либо ее квадратной
подматрицы. В частности, вводится
Определение. Пусть а^ — элемент матрицы А порядка п,
расположенный в г'-й строке и j-м столбце. Назовем дополнительной
подматрицей этого элемента матрицу Д-j порядка п — 1, получаемую из
§4- Детерминанты
141
А вычеркиванием г-й строки и j-vo столбца. Дополнительным
минором элемента агу назовем число dij= det Dij.
Разумеется, говорить о дополнительном миноре имеет смысл
только в том случае, если детерминант порядка п — 1 существует.
Теорема 2. На множестве квадратных матриц произвольного
порядка определен детерминант.
Докажем это методом полной индукции по порядку матрицы.
Начало индукции трудностей не вызывает, так как мы знаем, что
известные нам детерминанты второго и третьего порядка обладают
нужными свойствами.
Предположим теперь, что на множестве матриц порядка 7г — 1
детерминант существует, и построим на множестве матриц порядка п
функцию следующим образом. Фиксируем произвольно номер
столбца j и произвольной матрице А порядка п сопоставим число
п
/дл) = Х>,-(-1)*+Ч,, (б)
/с=1
где dkj -•• дополнительный минор элемента akj в матрице А.
Дополнительные миноры существуют в силу предположения индукции.
Докажем, что функция (б) удовлетворяет трем условиям, входящим в
определение детерминанта.
1. Выберем произвольную строку (пусть ее номер i) и покажем,
что выражение в правой части формулы (6) есть линейный многочлен
относительно элементов этой строки. В самом деле, при к = г
слагаемое a,-j(—1),+J'dfj содержит элемент a,j из г-й строки. Коэффициент
при нем не зависит от элементов г-й строки, так как эта строка в
подматрицу Dij не входит. В остальных слагаемых (при г ф к)
множитель akj не принадлежит г-й строке, а dkj — линейный многочлен
от элементов г-й строки. Теперь свойство линейности по строке для
функции fj следует из того, что сумма линейных многочленов —
линейный многочлен.
2. Докажем, что для вырожденных матриц fj равна нулю. В
силу предложения 4 и уже доказанной линейности по строке для
этого достаточно проверить, что fj{A) = О для произвольной матрицы,
имеющей две одинаковые строки. Пусть в матрице А строки с
номерами г и / одинаковы (/ > г). Тогда в сумме (б) могут быть не
равны нулю только два слагаемых, так как при к ф г и к ф I
дополнительная подматрица Dkj содержит одинаковые строки, и потому
минор dkj равен нулю. Итак,
fj(A) = (-1У+1а^ + (-l)'+4-*i-
Учтем, что a\j — ay ввиду совпадения строк. Тогда
fs(A) = (-l)4((-l)4i + (-1)4"). (7)
Дополнительные подматрицы Dij и Dij состоят из одинаковых
элементов, но отличаются порядком строк: в каждой из них оста-
142 Гл. V. Матрицы и системы линейных уравнений
лась одна из двух одинаковых строк, но в Dy она стоит на г-м
месте, а в D{j — на (/ — 1)-м. Переставим в матрице Д-j строку с
номером / — 1 на г-е место, не нарушая взаимное расположение остальных
строк. Для этого меняем ее последовательно местами с (/ — 2)-й, (/ —
— 3)-й, ...> г-й строками. Потребуется (/ — 2) — (i — 1) = / — г — 1
перестановок. Отсюда следует, что dij = (—l)'"1""1^-. Подставив это
в равенство (7), мы увидим, что fj(A) = 0.
3. Рассмотрим fj{E), где Е — единичная матрица порядка п.
В этом случае в сумме (6) только одно ненулевое слагаемое
/,(£) = (-l)'+4i-
Но Djj — единичная матрица порядка п— 1, и ее детерминант
равен 1. Отсюда fj{E) = 1, как и требовалось. Теорема доказана.
В силу теоремы 1 функции fj при всех j совпадают, и мы можем
написать: п
detA = ^2akj(^l)k^dkJ. (8)
Правая часть этой формулы — линейный многочлен от
элементов j-ro столбца, следовательно, имеет место
Предложение 7. Детерминант обладает свойством
линейности по столбцам.
4. Свойства детерминантов. Используя формулу (8)
разложения детерминанта по столбцу, мы можем найти коэффициенты в
формуле (1).
Предложение 8. Иаков бы пи был номер строки г, детерминант
матрицы А порядка п вычисляется по формуле
п
deti4 = 52<»y(-l)'+4i, (9)
i=i
где d^ — дополнительный минор элемента а,-у.
Доказательство. Для того чтобы найти коэффициент hj
при a,j в формуле (1), сгруппируем все члены в этой формуле,
кроме интересующего нас, и обозначим их сумму через q. Тогда
det A = hjdij + q.
Аналогично мы можем преобразовать разложение по j-му столбцу:
det Л = al-i(-l)f+J'dt-y + r.
По определению hj не зависит от элементов г-й строки, а q содержит
все ее элементы кроме aty. Точно так же, при всех к в
дополнительную подматрицу Dkj не входит j-й столбец, и, следовательно, dkj не
зависит от a,j. В частности, dij не зависит от ay. Отсюда же видно,
что и г не зависит от этого элемента.
Заметив это, обозначим через А0 матрицу, которая получена из
матрицы А заменой элемента ay на 0, и увидим, что det-Ло = q
§4- Детерминанты
143
и det Ao — г. Учтем это при вычислении детерминанта матрицы А\,
отличающейся от А заменой элемента atj на 1:
del Аг = hj + г = (-lj'+'dy + г.
Отсюда получается нужное значение для hj.
Предложение 9. Для любой квадратной матрицы
det A = det^T.
Для доказательства определим функцию от матрицы А
равенством f(A) = del A7\ Но предложению 7 эта функция линейна по
столбцам Лт, т. е. по строкам А. Если матрица А вырождена, то
вырождена и АТ (согласно следствию из предложения 10 § 2), и потому
f{A) = det AT = 0. Наконец, Ет = Е, а значит, f(E) = det ET = det £ =
= 1.
Таким образом, / удовлетворяет всем условиям в определении
детерминанта, что и заканчивает доказательство.
Из предложения 9 следует равноправность строк и столбцов.
Именно, если справедливо какое-либо утверждение о детерминантах,
касающееся строк матриц, то верно и аналогичное утверждение,
касающееся столбцов, и обратно. Поэтому известные нам свойства
детерминантов можно переформулировать для столбцов.
Предложение 10. Столбцы матрицы линейно зависимы, тогда
и только тогда, когда матрица вырождена и детерминант ее равен
нулю.
Если переставить два столбца матрицы, то ее детерминант
умножится на (—1).
Если в матрице к одному из столбцов прибавить другой,
умноженный на число, то детерминант ее не изменится.
Предложение 11. Для любых двух квадратных матриц одного
порядт detAB = detAdetB.
Доказательство. Пусть матрица А невырождена. Разложим
ее в произведение элементарных матриц. Тогда АВ = Si...SnB.
Последовательно применяя формулу (4). получим
det АВ = det Si... det Sn det В.
Теперь из формулы (5) следует нужное утверждение.
Если же матрица А порядка п вырождена, то Rg^ < п. Из
предложения А § 3 тогда следует RgAB < п. Значит, произведение АВ
также вырождено и det АВ равен нулю так же, как и det Л det В.
5. Формула полного разложения. Здесь мы получим формулу
полного разложения детерминанта порядка п, представляющую его
как многочлен от элементов матрицы.
Введем предварительно некоторые определения. Мы будем
называть перестановкой чисел 1,.... п эти числа, написанные в каком-либо
144 Гл. V. Матрицы и системы линейных уравнений
определенном порядке. Например, из чисел 1 и 2 образуются две
перестановки: 1, 2 и 2, 1. Перестановку чисел 1, ...,п обозначим ?'i, ...,гп.
Число г& виновно в нарушении порядка в перестановке г'х,..., гп,
если оно стоит левее меньшего числа: k < s, но г* > г,. Например, при
п = 4 в перестановке 2, 4, 3, 1 числа 2 и 3 виновны каждое в одном
нарушении порядка, а число 4 — в двух. Итак, общее число
нарушений порядка в перестановке равно четырем. Число всех нарушений
порядка в перестановке г1}...,гп мы обозначим N(ii, ...,гп).
Перестановка называется четной, если 7V(?i, ...,гп) — четное чис-
и нечетной в противном случае.
Докажем формулу полного разложения:
ло
det
«п
air
«nl
-1)
N(ill...tin)
aiiiflaia—ani,,
(10)
= E <■
(«l,...,«n)
Сумма в правой части равенства берется но перестановкам. Это
означает, что каждой перестановке чисел 1,..., п соответствует слагаемое.
Слагаемое для перестановки fj, —, г„, составляют так: берут из 1-й
строки 21-й элемент, из 2-й строки — г2-й элемент и т. д. и
перемножают их. В результате в произведение входит по одному и только по
одному элементу из каждой строки и каждого столбца. Произведения
складываются со знаками, определяемыми четностями
соответствующих перестановок.
Формулу (10) мы докажем по индукции. Пусть при п = 2 дана
матрица
an ai2
«21 «22
Двум перестановкам 1, 2 и 2, 1 отвечают, соответственно,
слагаемые {—l)N(lt2)ana22 и (—I)^2,1^ai2a2i. Их сумма равна ацагг—
— «12«2ь т. е. как раз детерминанту данной матрицы.
Допустим, что формула верна для матриц порядка п — 1, и
докажем ее для произвольной матрицы А порядка га. Напишем
разложение det А по первой строке:
dcM = £(-l)*+Wi*.
(И)
fc=rl
В Ar-е слагаемое этого разложения входит множитель о1!*, равный
детерминанту подматрицы D\k- Порядок этой матрицы п — 1, и по
предположению индукции
dlk =detDlk = ]Г (-1)NV* ''"-^аз,-,..-*™.-!-
(iif...,in-i)
Здесь все номера ii,...,*n_i отличны от к, а первые индексы у
сомножителей равны 2, ...,га, так как, сохраняя старые обозначения для
элементов матрицы Л, мы должны учесть, что в D\k не входят первая
строка и Ar-й столбец.
§4- Детерминанты
145
Теперь в Аг-м слагаемом формулы (11) мо?кио внести множитель
(—l)k+laik "од знак суммы и записать это слагаемое так:
(-l)k+1alkdlk = J; (-1)^'' •»-)+fc+1alfca2,1a3l-2...a„,-„_1.
(tl>--t*«~l)
Числа A,ii,...,tn_i образуют перестановку чисел 1,.... п, причем
W(*,ti,...,in_i) - Ar(tb...,'n-i) + *- l,
так как правее fc стоит ровно А- — 1 чисел, меньших к. Следовательно,
N(k,ii, ...,in_i) имеет ту же четность, что и AT(«i,..., in-\) + к -f 1, и
мы имеем
(-1)*+Wi* = 51 (-l)W(Ml ''-,)alfca2,1a3l-2...amn_1.
В правой части этого выражения собраны все те члены из суммы
(10). которые соответствуют перестановкам, имеющим к на первом
месте. В сумму (11) входят слагаемые для любого Аг, и потому сумма
(11) содержит все члены суммы (10) и, конечно, не содержит никаких
других членов. Этим формула полного разложения доказана.
Упражнения
1. Пусть А •- квадратная матрица порядка п. Выразите detaA
через det A.
2. Пусть А •— квадратная матрица порядка 2п + 1, и АТ = —Л.
Докажите, что det A = 0.
3. Докажите, что детерминант любой треугольной матрицы равен
произведению ее диагональных элементов.
4. Вычислите
1
1
2
1
0
4
0
5
8
0
9
4
1
3
3
1
5. Матрица А порядка п содержит нулевую подматрицу размеров m х /с,
причем m -f к > п. Докажите, что det A = 0.
6. Пусть матрица Р порядка п разделена на 4 подматрицы так:
Р =
1 А
1 °
в I
о J
Здесь Л и С — квадратные матрицы порядков к и п — А;, а О — нулевая
матрица размеров (п — к) х к. Докажите, что det Р = det Л det С
7. К каждому элементу матрицы Л прибавлено одно и то же число t.
Пусть получившаяся матрица — Л(/).
а) Докажите, что det A(t) = kt -f 6, где fe и 6 не зависят от t.
б) Найдите к и 6.
8. Вычислите детерминант порядка п:
2 1 1 ... 1
-1 2 1 ... 1
-1
-1
2 1
-1 2
146 Гл. V. Матрицы и системы линейных уравнений
9. Два квадратных многочлена ах2 + Ьх + с и ах2 + (Зх + у, имеют
общий корень. Докажите, что
а
0
а
0
6
а
0
а
с
Ъ
1
/3
0
с
0
7
= 0.
10. Сколько нарушений порядка в перестановке (5, 4, 3, 2. 1)?
§ 5. Системы линейных уравнений (основной случай)
1. Постановка задачи. Систему уравнений вида
а\хг + а\х2 + ... + о.\хп = 6\
а\х1 + а\х2 + ... + а2пхп = б2, ^
afar1 + а!?1*2 + ... + а™хп = 6т
мы будем называть системой т линейных уравнений с п неизвестны-
ми ж1, ...,ягп. Коэффициенты этих уравнений мы будем записывать в
виде матрицы
Л =
называемой матрицей системы. Числа, стоящие в правых частях
уравнений, образуют столбец Ь, называемый столбцом свободных
членов.
Матрица системы, дополненная справа столбцом свободных
членов, называется расширенной матрицей системы и в этой главе
обозначается А*:
Л* =
а] а\ ... а\ Ь1
Если свободные члены всех уравнений равны нулю, то система
называется однородной.
Определение. Совокупность п чисел а1,.♦•><*" называется ре-
шением системы (1), если каждое уравнение системы обращается в
числовое равенство после подстановки в него чисел а1,...,а11 вместо
соответствующих неизвестных х1,...,хп.
Пользуясь определением линейных операций со столбцами, мы
можем записать систему (1) в виде
1а] 1
1 а?
+ .
.. + хп\
1 а" 1
<
—
1 Ь' II
1 ьт \
§5. Системы линейных уравнений (основной случай) 147
(пример 1 §1) или, короче,
a?1ai + ... + япап = Ъ,
где ai,..., ап — столбцы матрицы системы, a b — столбец свободных
членов. Отсюда сразу вытекает следующая интерпретация решения
системы линейных уравнений.
Предложение 1. Решение системы линейных уравнений — это
совокупность коэффициентов, с которыми столбец свободных членов
раскладывается по столбцам матрицы системы.
Используя умножение матриц, можно записать систему (1) еще
короче: Лх = Ъ
(пример 1 §2). Выбор обозначений определяется решаемой задачей.
Наша цель состоит в нахождении всех решений системы (1),
причем мы не делаем заранее никаких предположений относительно
коэффициентов и свободных членов системы и даже относительно числа
уравнений и неизвестных. Поэтому могут представиться различные
возможности. Система может вообще не иметь решения, как система
х1 +аг2= 1,
определяющая две параллельные прямые. Система может иметь
бесконечное множество решений, как система (п = 2, т = 1) х1 + х2 = О,
решением которой является любая пара чисел, равных но модулю и
отличающихся знаком. Примеры систем, имеющих одно-единственное
решение, в изобилии встречаются в школьном курсе.
Системы, имеющие решения, называются совместными, а не
имеющие решений - - несовместными.
Как следствие предложения 1 и предложения 6 § 1 мы получаем
Предложение 2. Если столбцы матрицы системы линейно
независимы, то система не может иметь двух различных решений: она
или несовместна, или имеет единственное решение.
Основным средством исследования и решения систем линейных
уравнений для нас будут элементарные преобразования матриц.
Причину этого показывает
Предложение 3. Элементарным преобразованиям строк
расширенной матрицы системы (L) соответствуют преобразования
системы уравнений, не меняющие множества ее решений.
Действительно, если строка матрицы А* умножается на число
Л ф 0, то преобразованная матрица является расширенной матрицей
для системы, получаемой из (1) умножением соответствующего
уравнения на Л. Если в матрице г-н строка прибавляется к j-й, то в системе
уравнений г-е уравнение прибавляется к j-му. В любом случае
преобразованная система является следствием исходной. Но элементарные
преобразования обратимы, а значит, и исходная система может быть
получена из преобразованной и является ее следствием. Поэтому
множества решений обеих систем совпадают.
148 Гл. V. Матрицы и системы линейных уравнений
2. Основной случай. В этом параграфе мы рассмотрим
основной случай, когда число уравнений равно числу неизвестных: т = п.
Кроме того, мы наложим определенные ограничения на
коэффициенты системы. Если этого не сделать, то нам придется изучать здесь,
например, и систему из одного уравнения, повторенного п раз. Мы
хотим, чтобы ни одно уравнение не было следствием остальных. Для
этого во всяком случае необходимо, чтобы ни одно из них не было
линейной комбинацией остальных (в действительности, этого и
достаточно, но мы можем не вникать сейчас в этот вопрос). В случае
т = п для линейной независимости уравнений необходимо
потребовать, чтобы матрица системы была невырожденной, или, что то же,
чтобы ее детерминант был отличен от нуля. Действительно, если одно
из уравнений — линейная комбинация остальных с коэффициентами
tti, ...,an_i, то соответствующая строка расширенной матрицы есть
линейная комбинация остальных строк с теми же коэффициентами.
То же относится и к матрице системы.
Теорема 1. Пусть дана система из п уравнений с п
неизвестными
а\х1 + а\х2 + ... + а\хп = Ь1,
а\х1 + а\х2 + ... + агпхп = б2, ^
сЦх1 + а%х2 + ... + а>п = 6П.
Если детерминант матрицы системы отличен от нуля, то
система имеет решение, и притом только одно.
В самом деле, зная предложение 1, мы можем сформулировать эту
теорему иначе. Пусть А — квадратная матрица порядка п и det А ф 0.
Тогда любой столбец b высоты п раскладывается по столбцам Л, и
коэффициенты разложения определены однозначно. Так как отличие
детерминанта от нуля равносильно невыро?кденпости матрицы, это
утверждение совпадает с теоремой 1 § 2.
3. Правило Крамера. Правилом Крамера называются формулы
для нахождения решения системы из п уравнений с п неизвестными
и детерминантом, отличным от нуля.
Для того, чтобы найти значения неизвестных, составляющие
решение, выберем произвольный номер неизвестной г и рассмотрим
детерминант матрицы, получаемой из матрицы системы заменой ее г-го
столбца столбцом свободных членов Ь :
A* =det||ai ...a;_iba1+i ...an||.
Если ж1, ...,яп -- решение, то b = х1^ + ... 4- жпап, и в силу
линейности детерминанта по столбцу
А1 = х1 del || аг... a* _i ai a2-+i ... an || + ...
...+ x% det||ai ...ai_ia2a7;+i ...an || + xn det||ai ...a,-_i an a,+i ...an ||.
§6. Системы линейных уравнений (общая теория) 149
Все слагаемые, кроме г-го, равны нулю, так как матрицы в них имеют
по два одинаковых столбца. Поэтому Аг = хг det А. Отсюда
Формулы Крамера при п = 3 мы вывели в п. 6 §4 гл. I.
4. Формулы для элементов обратной матрицы. Рассмотрим
квадратную матрицу А с детерминантом, отличным от нуля.
Правило Крамера позволяет получить формулы, выражающие элементы
обратной матрицы А~1 через элементы А. Пусть ej — j-й столбец
единичной матрицы. Заметим, что j-й столбец А~г при
произвольном j равен A~xej. Если мы обозначим его Xj, то Axj = ej.
Применим правило Крамера для нахождения г-й неизвестной в решении
этой системы: sj = A*/det А, где А* — детерминант матрицы,
получаемой из А заменой ее г-го столбца на j-й столбец единичной
матрицы. Разлагая А* по этому столбцу, мы имеем только одно слагаемое,
так как в еу только j-й элемент равен 1, а остальные равны нулю.
Следовательно, А1 = (—l)t+Jtf?, где d\ — дополнительный минор
элемента а\ в матрице А. Подчеркнем, что этот элемент стоит в позиции,
симметричной с позицией, в которой расположен вычисляемый нами
элемент х\. Окончательно, . .
х) = [ J /'. (4)
3 det Л v }
Формулы (4), как и правило Крамера, имеют некоторое
теоретическое значение, но для численного решения систем линейных
уравнений и обращения матриц применяются совсем другие методы.
Упражнения
1. Пусть числа д:1,х2,а*я попарно различны. Докажите, что при
любых уиУ1,уз найдется единственный многочлен степени не выше двух,
график которого проходит через точки с координатами (х\, уО, (#2, Уг), (#з, Уз).
2. Пользуясь формулами (4), найдите обратную для матрицы
а Ь
с d
§ 6. Системы линейных уравнений (общая теория)
1. Условия совместности. Общие определения, касающиеся
систем линейных уравнений, были введены в начале §5. Теперь мы
займемся изучением систем из т уравнений с п неизвестными. Систему
a\xl +a\x2 + ... + a^zn = б1,
afx1 + a'ix2 + ... + a;bxn — 62,
a? xx + сфх'2 + ... + a™xn = bn
150 Гл. V. Матрицы и системы линейных уравнений
мы можем кратко записать в виде
Ах = Ь. (1)
Система задается своей расширенной матрицей Аж, получаемой
объединением матрицы системы А и столбца свободных членов Ь.
Простое и эффективное условие, необходимое и достаточное для
совместности системы (1), дает следующая теорема, называемая
теоремой Кронекера-Напелли.
Теорема 1. Система линейных уравнений совместна тогда и
только тогда, когда ранг матрицы системы равен рангу
расширенной матрицы.
Иначе утвер?кдение теоремы можно сформулировать так:
приписывание к матрице А размеров га х п столбца b высоты га не меняет
ее ранга тогда и только тогда, когда этот столбец — линейная
комбинация столбцов А.
Докажем это. Если Rg^4* = Kg А, то базисный минор А
является базисным и для Аж. Следовательно, b раскладывается по
базисным столбцам А. Мы можем считать его линейной комбинацией всех
столбцов А, добавив недостающие столбцы с нулевыми
коэффициентами.
Обратно, если b раскладывается по столбцам Л, то
элементарными преобразованиями столбцов можно превратить А* в матрицу Aq,
получаемую из А приписыванием нулевого столбца. Согласно
предложению 2 §3, RgAG = RgA". С другой стороны, RgAo = RgA, так
как добавление нулевого столбца не может создать новых
невырожденных подматриц. Отсюда Kg A = Rg-A*, как и требовалось.
Предложение 1. Пусть матрица А* приведена к упрощенному
виду с помощью элементарных преобразований строк. Система (1)
несовместна тогда и только тогда, когда в упрощенную матрицу
входит строка || 0 ... О 11|.
Доказательство. Пусть рассматриваемая система не
совместна, и Rg.4* > RgA = r. В упрощенном виде матрицы А последние
га — г строк — пулевые. Последний столбец матрицы А* должен быть
базисным, и в упрощенном виде матрицы А* последний столбец —
г + 1-й столбец единичной матрицы. Поэтому г + 1-я строка этой
матрицы есть || 0 ... О 11|.
Обратно, если в матрице содержится такая строка, то последний
столбец не может быть линейной комбинацией остальных, и система
с упрощенной матрицей несовместна. Тогда несовместна и исходная
система (предложение 3 §5).
Иначе это иредло?кение можно сформулировать так.
Следствие. Система линейных уравнений несовместна тогда и
только тогда, когда противоречивое равенство 0=1 является
линейной комбинацией ее уравнений.
Равенство рангов матрицы системы и расширенной матрицы
можно выразить, понимая ранг матрицы как строчный ранг. Это приведет
§6. Системы линейных уравнений (общая теория) 151
нас к важной теореме, известной как теорема Фредгольма.
Транспонируем матрицу А системы (1) и рассмотрим систему из
п линейных уравнений
all/i + я?У2 + - + а?Ут = О,
а\у\ + а\У2 + ••• + а%1ут - 0, ^)
■ а1ьУ^. + а1У'2 + - + «™Ут = О
с т неизвестными, матрицей АТ и свободными членами, равными
нулю. Она называется сопряженной однородной системой для системы
(1). Если у -— столбец высоты гп из неизвестных, то систему (2)
можно записать как А1 у — о, или лучше в виде
УТЛ = о, (3)
где о — нулевая строка длины п.
Теорема 2. Для того чтобы система (1) была совместна,
необходимо и достаточно, чтобы каждое решение сопряженной однородной
системы (3) удовлетворяло уравнению
yTb = yi64... + tt»6m = 0. (4)
Доказательство. 1°. Пусть система (1) совместна, т. е.
существует столбец х высоты п, для которого Ах — Ь. Тогда для
любого столбца у высоты т выполнено у1 Ах = у7 Ь. Если у — решение
системы (3), то утЬ = (утА)х = ох = 0.
2°. Предположим теперь, что система (1) несовместна. Тогда
согласно предложению 1 строка ||0 ... 0 11| входит в упрощенный вид
расширенной матрицы А* = || А \ b || и, следовательно, является
линейной комбинацией ее строк. Обозначим коэффициенты этой
линейной комбинации ,yi,...,t/m и составим из них столбец у. Для этого
столбца
у'|И|Ь|| = ||0...01||
(предложение 1 § 2). Это же равенство можно расписать как два:
уТА = о и у7Ь = 1. Итак, нам удалось найти решение системы (3),
не удовлетворяющее условию (4). Это заканчивает доказательство.
В качестве примера применим теорему Фредгольма к выводу
условия параллельности двух различных прямых на плоскости. Их
уравнения составляют систему
А\х + Вг у + Сх = 0, А2х + В2у + С2 = 0.
Она не имеет решений, если существуют такие числа у\, у2, что
УхАх + у2А2 = 0, yiBi + у2В2 = 0, но yjCi -f y2C2 ф 0. Ясно, что ух
и у2 не равны нулю. Поэтому можно положить А = —у2/у\ и
записать полученное условие в виде: существует число Л такое, что А\ =
= ЛЛ2, В\ = \В2 и С\ ф \С2. В таком виде условие нам известно из
предложения 7 §2 гл. II.
152 Гл. V. Матрицы и системы линейных уравнений
2. Нахождение решений. Рассмотрим совместную систему из
т линейных уравнений с п неизвестными (1). Ранг матрицы
системы обозначим г. Поскольку ранг расширенной матрицы тоже равен
г, мы можем считать базисный минор матрицы системы базисным
минором расширенной матрицы. Элементарными преобразованиями
строк приведем расширенную матрицу к упрощенному виду
(предложение 6 §3). Наша система линейных уравнений перейдет в
эквивалентную ей систему из г линейно независимых уравнений.
Для удобства записи будем предполагать, что базисный минор
расположен в первых г столбцах. Тогда расширенная матрица
системы после отбрасывания нулевых строк примет упрощенный вид
H^Vl^l'lb'!!, а сама система
||ЯгИ'||х = Ъ'.
В развернутом виде преобразованную систему можно записать так:
х1 = 01 -(а^х'^+.-. + а^х»)
хг = Рг- К+1хг+х + ... + arnzn).
Здесь а*- —элементы матрицы Л', а Д2 —элементы преобразованного
столбца свободных членов Ь'. В левых частях равенств мы оставили
неизвестные, соответствующие столбцам выбранного нами базисного
минора, так называемые базисные неизвестные. Остальные —
небазисные— неизвестные (называемые также параметрическими)
перенесены в правые части равенств.
Как бы мы ни задали значения параметрических неизвестных,
по формулам (5) мы найдем значения базисных так, что они
вместе со значениями параметрических неизвестных образуют решение
исходной системы (1). Легко видеть, что так мы получим все
множество ее решений. Действительно, произвольное решение системы
Xq,...,Xq, Жо+1, ...5 #о удовлетворяет системе (о), и потому,
подставляя #70+1, ...,#о в правую часть этой системы, в левой мы получим
Xq, ...,£["„ т. е. формула (5) даст именно это решение.
На формулах (5) можно было бы и остановиться, но ниже мы
дадим более простое и наглядное, а также принципиально важное
описание совокупности решений системы линейных уравнений.
3. Приведенная система. Сопоставим системе линейных
уравнений (1) однородную систему с той же матрицей коэффициентов:
Лх = о. (6)
По отношению к системе (1) она называется приведенной.
Предложение 2. Пусть хо — решение системы (1). Столбец х
также будет ее решением тогда и только тогда, когда найдется
такое решение у приведенной системы (б), что х = хо +у.
Доказательство. Пусть х — решение системы (1).
Рассмотрим разность у = х — х0. Для нее Лу = Лх — Лхо — b — b = о.
§6. Системы линейных уравнений (общая теория) 153
Обратно, пусть у — решение системы (6), и х = хо -Ь у. Тогда .Ах =
= Лх0 + Ау = b + о = Ь.
Это предложение сводит задачу описания множества решений
совместной системы линейных уравнений к описанию множества
решений ее приведенной системы.
Однородная система совместна. Действительно, нулевой столбец
является ее решением. Это решение называется тривиальным.
Пусть столбцы матрицы А линейно независимы, т. е. Kg A = п.
Тогда система (6) имеет единственное решение (предложение 2 § 5)
и, следовательно, нетривиальных решений не имеет.
Предложение 3. Если xi и хо — решения однородной системы,
то любая их линейная комбинация — также решение этой системы.
Доказательство. Из Ах\ — о и Лхг = о для любых а и /3
следует Л(ах1 + /3x2) = ocAxi + ДАхг = о.
Если однородная система имеет нетривиальные решения, то
можно указать несколько линейно независимых решений таких, что
любое решение является их линейной комбинацией. Сделаем это.
Определение. Матрица 14\ состоящая из столбцов высоты п,
называется фундаментальной матрицей для однородной системы с
матрицей А размеров т х гс, если
а) AF = 0}
б) столбцы F линейно независимы,
в) каждое решение системы Лх = о раскладывается по столбцам F.
Каждый столбец фундаментальной матрицы в силу условия (а) -
решение системы.
Значит, если система не имеет нетривиальных решений, то
фундаментальной матрицы нет. Ниже мы докажем, что в остальных
случаях она существует.
Столбцы фундаментальной матрицы называются
фундаментальной системой решений.
Приписывая к матрице линейную комбинацию ее столбцов, мы не
увеличиваем ранга матрицы. Поэтому в силу условия (в)
• ранг F максимален среди рангов матриц, удовлетворяющих
условию (а).
Поэтому
• все фундаментальные матрицы имеют один и тот же ранг.
Следовательно, по условию (б)
• все фундаментальные матрицы имеют одно и то же число
столбцов.
Предложение 4. Пусть фундаментальная матрица F состоит
из р столбцов. Столбец х является решением системы Лх = о тогда
и только тогда, когда найдется такой столбец с высоты р, что
х = Fc. (7)
Доказательство. Необходимость здесь следует из условия (в)
в определении, а достаточность — из равенства A(Fc) = (AF)c = 0.
154 Гл. V. Матрицы и системы линейных уравнений
Докажем теперь, что при Rg А = г < п фундаментальная
матрица существует. Пусть сд,...,сп~г — значения небазисных
неизвестных. Перепишем формулы (5), учитывая, что для однородной
системы Ь' = 0:
= —а.
гг+1 —
1
г+1
г
г+1
:l -...-a£cn-r
= — <х'г±\ с1 — ... — Qrncn~r
(8)
Эти равенства в матричном виде совпадают с (7), если с = Цс1
...,гп-г||т, а в качестве F взята матрица
*1 =
-Л'
(9)
Таким образом, матрица (9) удовлетворяет условию (в) в определении
фундаментальной матрицы.
Каков бы ни был столбец с, произведение Fie — решение. Если в
качестве с взять j-й столбец единичной матрицы порядка п — г, мы
увидим, что j-й столбец F\ является решением. Это означает, что F\
удовлетворяет условию (a): AF\ = О.
Подматрица в последних п — г строках — единичная. Поэтому
ранг матрицы (9) равен числу столбцов, и столбцы линейно
независимы.
Мы видим, что матрица (9) удовлетворяет определению
фундаментальной матрицы. Итак, доказано
Предложение 5. Если ранг матрицы однородной системы
линейных уравнений г меньше числа неизвестных п, то система имеет
фундаментальную матрицу из п — г столбцов.
Система столбцов (9) - фундаментальная система решений. Она
называется нормальной фундаментальной системой решений.
Каждому выбору базисных столбцов А соответствует своя нормальная
фундаментальная система решений. Вообще же, имеет место
Предложение 5. Каждая система из п — г линейно независимых
решений является фундаментальной.
Действительно, матрица Р, составленная из п — г линейно
независимых решений, удовлетворяет условиям (а) и (б). Возьмем еще
произвольное решение системы (6), какую-нибудь фундаментальную
матрицу F, и составим из столбцов всех матриц матрицу V = Н-Г^ху.
§6. Системы линейных уравнений (общая теория) 155
Ранг этой матрицы равен п — г, так как все ее столбцы — линейные
комбинации столбцов матрицы F. Следовательно, столбцы матрицы
Р являются базисными в матрице V, и по теореме о базисном миноре
столбец х раскладывается но столбцам Р.
Это означает, что произвольное решение раскладывается по
столбцам матрицы Р, и последнее условие в определении фундаментальной
матрицы для нее проверено.
Для нахождения матрицы (9) достаточно привести матрицу А
системы к упрощенному виду, после чего нормальная фундаментальная
матрица выписывается без дополнительных вычислений.
4. Общее решение системы линейных уравнений. Теперь
мы мо?кем собрать воедино наши результаты — предложения 2 и 4.
'Георема 3. Если xq — некоторое решение системы (1), a F —
фундаментальная матрица ее приведенной системы, то столбец
x = x0 + Fc (10)
при любом с является решением системы (1). Наоборот, для каждого
ее решения х найдется такой столбец с, что оно будет представлено
формулой (10).
Выражение, стоящее в правой части формулы (10), называется
общим решением системы линейных уравнений. Если fi,..,,f„_r —
фундаментальная система решений, a c\i ...,сп_г — произвольные
постоянные, то формула (10) может быть написана так:
x = x0 + cifi + ...+ (П)
Теорема 3 верна, в частности, и для однородных систем.
Если хо — тривиальное решение, то (10) совпадает с (7).
Теорема 1 §5 гласит, что для существования единственного
решения системы из п линейных уравнений с п неизвестными достаточно,
чтобы матрица системы имела детерминант, отличный от нуля.
Сейчас легко получить и необходимость этого условия.
Предложение 7. Пусть А ■—- матрица системы изп линейных
уравнений с п неизвестными. Если det A = 0, то система либо не
имеет решения, либо имеет бесконечно много решений.
Доказательство. Равенство det А = 0 означает, что Rg А < п
и, следовательно, приведенная система имеет бесконечно много
решений. Если данная система совместна, то из теоремы 3 следует, что
и она имеет бесконечно много решений.
5. Пример. Рассмотрим уравнение плоскости как систему
Аг+Ву + С* + Л = 0 (12)
из одного уравнения. Пусть А ф 0 и потому является базисным
минором матрицы системы. Ранг расширенной матрицы 1, значит, система
совместна. Одно ее решение можно найти, положив параметрические
неизвестные равными нулю: у = z = 0. Мы получим х = —D/A. Так
как я = 3, г = 1, фундаментальная матрица имеет два столбца. Мы
156 Гл. V. Матрицы и системы линейных уравнений
найдем их, придав параметрическим неизвестным два набора
значений: t/ = 1, 2 = 0 и у = 0, г=1. Соответствующие значения
базисной неизвестной ж, найденные из приведенной системы, будут —В/А
и —С/А. Итак, общее решение системы (12)
II X
\ у
1 z 1
=
1 -D/A I
0
1 о 1
+ С1
1 -Я/А 1
1
1 о |
+ с2
1 ~С/А II
0
1 1 II
Выясним геометрический смысл полученного решения.
Очевидно, прежде всего, что решение || — D/A 0 0 ||т состоит из координат
некоторой (начальной) точки плоскости, или, что то же. из
компонент ее радиус-вектора. В формуле (10) решение хо можно выбирать
произвольно. Это соответствует произволу выбора начальной точки
плоскости. Согласно предложению 2 § 2 гл. II компоненты лежащих в
плоскости векторов удовлетворяют уравнению Асх\ + Всх^ + Саз = 0,
т. е. приведенной системе. Два линейно независимых решения этой
системы (фундаментальная система решений) могут быть приняты за
направляющие векторы плоскости. Таким образом, формула (13) —
не что иное, как параметрические уравнения плоскости.
Рекомендуем читателю рассмотреть систему уравнений двух
пересекающихся плоскостей и показать, что ее общее решение
представляет собой параметрические уравнения прямой.
Упражнения
1. Система линейных уравнений с матрицей А совместна при любом
столбце свободных членов тогда и только тогда, когда строки
матрицы А линейно независимы. Докажите это:
а) пользуясь теоремой Кронекера-Канелли;
б) пользуясь теоремой Фредгольма.
2. Даны векторы а и Ь, а ф 0. При помощи теоремы Фредгольма
докажите, что уравнение [а,х] = b имеет решение тогда и только тогда,
когда (а,Ь) = 0.
3. Найдите фундаментальную матрицу для системы с матрицей
II111 и-
4. Пусть || Ег | #|| — упрошенный вид матрицы однородной системы
уравнений. Найдите фундаментальную матрицу системы.
5. Пусть F — фундаментальная матрица системы линейных
уравнений Ах — 0 и строки А линейно независимы. Какая будет фундаментальная
матрица у системы: a) Fy = 0; б) FTz = О?
6. Напишите обшее решение системы с расширенной матрицей
112 3
4 5 6
| 7 8 9
1 1
1
1 J
7. Пусть матрица F размеров п х р — фундаментальная матрица
некоторой системы уравнений. Докажите, что F' будет фундаментальной
матрицей той же системы тогда и только тогда, когда найдется невырожденная
матрица Q порядка р, такая, что F' = FQ.
§6. Системы линейных уравнений (общая теория) 157
8. Рассматривается система из трех уравнений с двумя неизвестными
Убедитесь, что применение теоремы Фредюльма к этой системе
равносильно такому (геометрически очевидному) угверждению. вектор Ь
раскладывается по векторам ai и аг го!да и только тогда, когда он ортогонален
каждому векюру у, ортогональному этим векторам
9. Пусть строки матрицы А линейно независимы, F —
соответствующая фундаментальная матрица, а матрица D получена из А приписыванием
к ней снизу матрицы FT. Докажите, что D нсвырождепа.
ГЛАВА VI
ЛИНЕЙНЫЕ ПРОСТРАНСТВА
§ 1. Основные понятия
1- Определение линейного пространства. В этой книге нам
уже встречались множества, в которых были определены линейные
операции: сло?кение и умножение на число. В гл. I мы
рассматривали множество векторов (направленных отрезков), которые мы можем
складывать и умножать на числа. В множестве матриц одинаковых
размеров мы также ввели операцию сложения и операцию умножения
на число. Свойства этих операций для матриц, выраженные
предложением 1 § 1 гл. V, совпадают со свойствами тех же операций с
векторами, сформулированными в предложении 1 § 1 гл. I.
В каждом множестве линейные операции определяются по-своему,
но имеют одни и те же свойства: коммутативность и ассоциативность
сложения, дистрибутивность умножения на число по отношению к
сложению чисел и т. д. Рассмотрим еще один пример.
Пример I. Пусть *€— множество всех функций от одной
переменной, определенных и непрерывных на отрезке [0,1]. Любым двум
функциям / и д из ^ можно сопоставить их сумму, которая
принадлежит V. Вещественному числу а и функции / сопоставляется
функция а/ — произведение функции на число, которое также
принадлежит <jf. Легко видеть, что основные свойства линейных
операций те же, что для векторов и для матриц, причем роль нуля играет
функция, тождественно равная нулю.
Вспомним одну из важных задач математического анализа: по
заданной функции f(x) найти ее первообразную, т. е. такую
функцию F(x), что /*''(#) = f{x). Общее решение этой задачи, как
известно, таково: если существует хоть одна первообразная JFo, то любая
из них может быть получена по формуле F(x) = Fq(x) + С, где С —
произвольная постоянная. Заметим, что постоянная — решение
однородного уравнения F'(x) = 0. Теперь очевидно, что эта формула
сходна с общим решением системы линейных уравнений: общее
решение есть сумма одного из решений и общего решения однородного
уравнения.
Сходство здесь, конечно, не случайное. Оно следует из совпадения
алгебраических свойств операций дифференцирования и матричного
умножения но отношению к линейным операциям.
Естественно возникает необходимость исследовать множество,
состоящее из элементов какой угодно природы, в котором определены
§1. Основные понятия
159
операции сложения двух элементов и умножения элемента на число.
Эти операции могут быть определены любым образом, лишь бы они
обладали определенным набором свойств.
Определение. Множество j£? называется линейным прост-
рпнством, а его элементы — векторами, если:
задан закон {операция сложения), но которому любым двум
элементам ж и у из 5£ сопоставляется элемент из j£f, называемый их
суммой и обозначаемый х + у;
задан закон (операция умножения на число), по которому
элементу х из JSf и числу а сопоставляется элемент из J£f, называемый
произведением л на а и обозначаемый ах;
для любых элементов я, у и z из JS? и любых чисел а и ,3 выполнены
следующие требования (или аксиомы):
1) ж + у = у + ж;
2) (ж + <;) + г = ж + (г/ + г);
3) существует элемент о такой, что для каждого х из .5?
выполнено ж -Ь о = ж;
4) для любого х существует элемент —ж такой, что х + (—ж) = о;
5) а(ж + у) = ах + ау;
6) (а + /?)х = аж + /?ж;
7) а(/?х) = (а/?)ж;
8) произведение х на число 1 равно ж, т. е. 1х = ж.
Если мы ограничиваемся вещественными числами, то Sf
называется вещественным линейным пространством, если же определено
умножение на любое комплексное число, то линейное пространство Jz?
называется комплексным.
Вектор —х называется противоположным вектору ж, вектор о
называется нулевым вектором или нулем.
Мы будем обозначать векторы строчными латинскими буквами,
а числа, как правило, греческими.
Пример 2. Пусть Sf — множество всех многочленов от одной
неременной, степень которых не превосходит заданного числа 7?. Сумма
двух многочленов из У — многочлен степени не выше п и,
следовательно, принадлежит «Sf. Произведение многочлена из JS? на число
также принадлежит J£f. Аксиомы линейного пространства
выполнены и в этом случае. Роль нуля играет многочлен, все
коэффициенты которого равны нулю. JS? будет вещественным или комплексным
пространством, смотря по тому, рассматриваем мы многочлены с
вещественными или с комплексными коэффициентами.
Пример 3. Множество комплексных чисел по отношению к
обычным операциям сложения и умножения на комплексное число
будет комплексным линейным пространством. Аналогично, множество
вещественных чисел по отношению к обычным операциям является
вещественным линейным пространством.
160
Гл. VI. Линейные пространства
Пример 4. Множество комплексных чисел по отношению к
обычной операции сложения и умножения на вещественное число
представляет собой вещественное линейное пространство.
Пример 5. Существует линейное пространство, состоящее из
одного элемента. Его элемент является нулем и самому себе
противоположным. Такое пространство называется нулевыми обозначается {о}.
Операции в нем задаются равенствами о + о = о и ао = о.
2. Простейшие следствия. Из аксиом, входящих в определение,
вытекает, что может быть только один нулевой вектор и для
каждого вектора только один противоположный. Действительно, допустим,
что существуют два нулевых вектора о\ ио2. Тогда их сумма
должна быть равна каждому из них: о\ + о2 = ог = о2. Аналогично, если
какой-нибудь вектор х имеет два противоположных —xi и— Х2, то
сумма (—х\) + х + (-Х2) должна быть равна и —xi, и — я2-
Равенство о + о = о означает, что противоположным дли
нулевого вектора является он сам, а из равенства х + (—х) = о следует,
что противоположным для —х является вектор х.
Сумму векторов у и — х мы будем обозначать у — х и называть
разностью векторов у и х.
Легко видеть, что Ох = о для любого вектора х. В самом деле,
Ох = Ох + х — х = (1 + 0)х — х = о.
Отсюда вытекает, что (—\)х = — х для любого х. Действительно,
(-1)* + х = (-1 + 1)х = Ох = о.
Отметим также, что произведение любого числа на нулевой вектор
равно нулевому вектору, поскольку
ао = а(х — х) = ах — ехх = о.
Если ах = о, то либо а = 0, либо х = о. В самом деле, если а ф 0, то,
умножая равенство ах = о на а"1, получаем 1х = о.
В сказанном здесь читатель заметит мало нового: таковы же
свойства операций с векторами и с матрицами. Теперь мы видим,
что все это верно и в произвольном линейном пространстве.
Выражение вида а\Х\ + ... + а^х^, как и в предыдущих главах,
мы будем называть линейной комбинацией векторов x\,...tXk с
коэффициентами ai,...,a/c.
3. Линейная зависимость. По аналогии с соответствующими
определениями для векторов и для матриц мы можем дать
определения линейно зависимой и линейно независимой системы векторов в
линейном пространстве. Напомним, что линейная комбинация
называется тривиальной, если все ее коэффициенты равны нулю.
Определение. Система векторов в линейном пространстве S£
называется линейно независимой, если нулевой вектор
раскладывается единственным образом но этой системе векторов. Иными словами,
векторы линейно независимы, если из равенства нулю их линейной
§1. Основные понятия
161
комбинации следует, что она тривиальная. Наоборот, если
существует нетривиальная линейная комбинация, равная нулевому вектору,
то система векторов называется линейно зависимой.
В § 1 гл. I и § 1 гл. V мы получили свойства линейно зависимых
и линейно независимых систем векторов (направленных отрезков) и
матриц. При их доказательстве использовались только те свойства
линейных операций, которые совпадают с аксиомами линейного
пространства. Поэтому для систем векторов в любом линейном
пространстве имеют место те же свойства. Приведем только формулировки,
так как доказательства не отличаются от доказательств
соответствующих предложений § 1 гл. V.
Предложение ]. Система из к > 1 векторов линейно зависима
тогда и только тогда, когда хотя бы один из векторов есть линейная
комбинация остальных.
Предложение 2. Если в систему векторов входит нулевой век-
тор, то система линейно зависима.
Предложение 3. Если некоторые из векторов а1}...,а&
составляют сами по себе линейно зависимую систему, то вся
система ai,..., Uk линейно зависима.
Предложение А. Любые векторы, входящие в линейно
независимую систему векторов, сами по себе линейно независимы.
Предложение 5. Если вектор раскладывается по линейно
независимой системе векторов, то коэффициенты разложения определены
однозначно.
4. Базис. Введем
Определение. Базисом в линейном пространстве 3? мы
назовем упорядоченную конечную систему векторов, если:
а) она линейно независима;
б) каждый вектор из j£? раскладывается в линейную комбинацию
векторов этой системы.
В определении сказано, что базис — упорядоченная система
векторов. Это означает, что из одного и того же множества векторов
можно составить разные базисы, по-разному нумеруя векторы.
Коэффициенты линейной комбинации, о которой идет речь в
определении базиса, называются компонентами или координатами
вектора в данном базисе.
Векторы базиса е\,..., еп мы будем записывать в виде строки: е =
= II ei — еп ||, а компоненты £*, ...,£п вектора х в базисе е — в столбец:
II е
II £п
который назовем координатным столбцом вектора.
Теперь разложение вектора по базису можно записать в любом
162
Гл. VI. Линейные пространства
из следующих видов:
п
х = ^2?ъ = ||ci...cn|
i=l
е
г
= ее.
Из предложения 5 непосредственно следует, что компоненты
вектора в данном базисе определены однозначно.
Предложение 6. Координатный столбец суммы векторов
равен сумме их координатных столбцов. Координатный столбец
произведения вектора на число равен произведению координатного столбца
данного вектора на это число.
Для доказательства достаточно выписать следующие равенства:
х -h у = е£ + е7/ = е(£ + v), ах = <*е£ = е(а£),
где £ и г) — координатные столбцы векторов х и у. Здесь
использованы свойства умножения матриц — предложения 3 и 4 §2 гл. V.
Из предложения 6 видно, что координатный столбец линейной
комбинации векторов есть линейная комбинация их координатных
столбцов с теми же коэффициентами. Отсюда следует
Предложение 7. Векторы линейно зависимы тогда и только
тогда, когда линейно зависимы их координатные столбцы.
Предложение 8. Если в линейном пространстве существует
базис из п векторов, то любая система из т > п векторов линейно
зависима.
Доказательство. Предположим, что в пространстве
существует базис ei,...,en, и рассмотрим систему векторов /i,...,/w?
причем га > п. Каждый из векторов f\, ...,/m мы разложим по базису и
составим матрицу из их координатных столбцов. Это матрица
размеров п х га, и ранг ее не превосходит п. Поэтому столбцы матрицы
линейно зависимы, а значит, линейно зависимы и векторы f\, ..., fm.
Отсюда прямо вытекает
Теорема 1. Если в линейном пространстве есть базис из п
векторов, то и любой другой базис состоит из п векторов.
Действительно, число векторов в одном базисе не может быть
больше, чем в другом.
Теперь мы можем ввести следующее
Определение. Линейное пространство, в котором существует
базис из п векторов, называется п-мерным, а число п — размерностью
пространства. Размерность пространства ^обозначается dim-Sf.
В нулевом пространстве нет базиса, так как система из
одного нулевого вектора линейно зависима. Размерность нулевого
пространства по определению считаем равной нулю.
Может случиться, что каково бы ни было натуральное число га,
в пространстве найдется га линейно независимых векторов. Такое
§1, Основные понятия
163
пространство называется бесконечномерным. Базиса в нем не
существует: если бы был базис из п векторов, то любая система из n -f 1
векторов была бы линейно зависимой по предложению 8.
Пример 6. Множество всех векторов плоскости является
двумерным линейным пространством, а множество всех векторов
пространства, изучаемого в элементарной геометрии, — трехмерное линейное
пространство.
Пример 7. Линейное пространство столбцов высоты п имеет
размерность п. Действительно, предложение 2 § 1 гл. V по
существу означает, что столбцы единичной матрицы порядка п образуют
базис в этом пространстве, называемый стандартным базисом.
Линейное пространство столбцов высоты п называют арифметическим
n-мерным пространством.
Пример 8. Линейное пространство функций от одной
переменной t, определенных и непрерывных на отрезке [0,1], является
бесконечномерным. Чтобы это проверить, достаточно доказать, что при
любом т в нем существует линейно независимая система из т
векторов. Зададимся произвольным числом т. Векторы нашего
пространства — функции t° = 1,М2, •..3*т~1 — линейно независимы.
Действительно, равенство нулю линейной комбинации этих векторов
означает, что многочлен
а0 + axt + a2i2 + ... + Qrro»1<m~1
тождественно равен нулю. А это возможно только тогда, когда все
его коэффициенты равны нулю.
В линейной алгебре изучаются конечномерные линейные
пространства. Далее всюду, за исключением некоторых примеров, мы
будем предполагать пространство конечномерным.
В ненулевом конечномерном пространстве существует
бесконечно много различных базисов. Это видно из следующих предложений.
Предложение 9. В n-мерном пространстве каждая
упорядоченная линейно независимая система из п векторов есть базис.
Доказательство. Пусть £i,...}#n — такая система. Нам
надо доказать, что произвольный вектор у раскладывается по ней. По
предложению 8 система у, х\,..., хп линейно зависима, и найдутся
такие коэффициенты, что ау+ ос\Х\ 4- ... + апхп — о, причем а ф О, так
как иначе система х\...., хп была бы линейно зависима. Отсюда прямо
следует доказываемое утверждение.
Предложение 10. В п-мерном пространстве каждую
упорядоченную линейно независимую систему из k < n векторов можно
дополнить до базиса.
Это вытекает из того, что к такой системе можно присоединить
еще один вектор, который по ней не раскладывается. (Если бы это
было не так, система сама была бы базисом.) После присоединения мы
имеем такую же систему из к + 1 векторов и, если к Н- 1 < п, новторя-
164
Гл. VI. Линейные пространства
ем рассуждение. В конце концов мы получим п линейно независимых
векторов, в число которых входят заданные векторы.
В частности, до базиса можно дополнить любой ненулевой вектор.
5. Замена базиса. Если в n-мерном пространстве даны два
базиса ei,..., еп и е[,..., с'пУ то мы можем разложить каждый вектор
второго базиса по первому базису:
e{ = I>fej (* = l,..-,n). (1)
Компоненты <т\ можно записать в виде квадратной матрицы
а\ .
*\ .
< ■
■■ <
•• <
■■ <
Столбцы этой матрицы — координатные столбцы векторов е\,...уе'п
в базисе е. Поэтому столбцы линейно независимы, и del 5 ф 0.
Определение. Матрицу, j-й столбец которой есть
координатный столбец вектора cfj в базисе е, мы назовем матрицей перехода от
базиса е к базису е'.
Равенство (1) можно переписать в матричных обозначениях
\\e'1...c'n\\ = \\e1...en\\S,
ИЛИ
е' = eS. (2)
Это легко проверить, перемножая матрицы. Из формулы (2) мы
получаем с = e'S"1, откуда следует, что 5"1 — матрица перехода
от е' к е.
Пусть в линейном пространстве даны три базиса е, е' и е",
причем е' = eS и е" = е'Т. Подставляя е', мы получаем
е" = eST. (3)
Итак, при последовательной замене базисов матрицы перехода
перемножаются, и последующие множители располагаются правее.
Предложение 11. Пусть задан базис е. Каждая матрица S
с det 5^0 есть матрица перехода от о к некоторому базису е'.
Действительно, при det Бф 0 столбцы 5 линейно независимы и
являются координатными столбцами п линейно независимых векторов,
которые и составляют базис е'.
Выясним, как связаны компоненты одного и того же вектора х
в двух разных базисах е и е'. Пусть х = е£ и х = e'f. Подставим
в последнее равенство выражение для е' по формуле (2) и получим
х — eS£'. Итак, мы имеем разложение вектора х по базису е в двух
видах, и в силу единственности координатного столбца получаем
t=se. (4)
§1, Основные понятия
165
Подробнее эту формулу можно переписать в виде
II е
II ?
или, если выполнить умножение матриц,
*' = £<#'' («' = 1. ••■.»)• (5)
Для трехмерного пространства мы уже получили это в §3 гл. I.
6. Ориентация пространства. Понятие ориентации прямой,
плоскости и пространства в §4 гл. I основывалось на разделении всех
базисов на два класса. Произведем это разделение для вещественных
линейных пространств любой размерности.
Фиксируем некоторый базис со и обозначим через <f+(eo)
множество всех таких базисов е, что е = ео<?, det 5 > 0. Остальные
базисы отнесем к классу rfL(eo). Ясно, что для е' Е <?_(ео)
выполнено е' = с0Т, det Т < 0.
Предложение 12. Классы базисов <f+(e0) и <f_(e0) не зависят
от выбора исходного базиса ео-
Доказательство. Рассмотрим базис fo, и пусть fo Е <£+(ео),
т. е. f0 = е0Р, det Р > 0. Для каждого базиса е £ <£+(fo) имеем е = f05,
det S > 0 и е = е0Р5, где det PS = det P det S > 0. Значит, е е 4+(e0).
Отсюда следует rf+(fo) С <£+(е0).
Но е0 Е rf+(fo), так как det P"1 > 0. Поэтому, меняя местами fo и
е0, мы получаем <f+(eo) С <£+(fo), и в результате <?+(fo) = <£+(ео).
Классы <f_(fo) и ^L(eo) состоят из базисов, не вошедших
соответственно в <£+(fo) и <f+(е0), и потому также совпадают. Итак,
<f+(f0) = <f+(e0), rfL(fo) = *-(е0).
Случай, когда fo £ <?_(ео), рассматривается аналогично. При этом
оказывается, что <f+(fo) = <£-(ео) и <f-(fo) = <f+(eo).
Чтобы подчеркнуть независимость классов базисов от выбора
исходного базиса, мы обозначим их просто &\ и <?2-
О п р с д е :\ е н и е. Вещественное линейное пространство
называется ориентированным, если из двух классов базисов S\ и &2 указан
один. Базисы выбранного класса называются положительно
ориентированными.
Задать ориентацию линейного пространства можно, выбрав
некоторый базис и считая его (и все базисы одного с ним класса)
положительно ориентированным.
е*1
166
Гл. VI. Линейные пространства
Упражнения
1. Обозначим через Ei3 матрицу размеров mxnj которой элемент ни
пересечении г-й строки и j-то столбца равен 1, а остальные элементы
равны нулю. Убедитесь, что после упорядочивания эти тпп матриц образуют
базис в линейном пространстве матриц размеров га х п. (Такой базис
называется стандартным базисом данного пространства.) Каковы координаты
матрицы Л с элементами aij в стандартном базисе?
2. Докажите, что верхние треугольные матрицы порядка п образуют
линейное пространство по отношению к обычным операциям с матрицами.
Найдите размерность этого пространства и какой-нибудь базис в нем.
3. В линейном пространстве многочленов степени < 3 от
переменной 4 заданы два базиса: 1,4,42,43 и 1,4 — CL,(4 — а)2,(4 — ау. Найдите
матрицу перехода от первого базиса ко второму и с ее помощью разложение
многочлена p(t) но второму базису.
4. Как расположены друг относительно друга два базиса ci,...,en и
/i,...,/n, если матрица перехода от е к f верхняя треугольная? Докажите
из этих соображений, что обратная к верхней треугольной матрице также
верхняя треугольная.
5. Как ориентированы друг относительно друга два базиса, если: f\ =
= ei -f e2; /2 = с2 + е3; /з = е3 + е4; /4 = е4 - ei?
§ 2. Линейные подпространства
1. Определения и примеры. В обычном геометрическом
пространстве сумма векторов, лежащих в некоторой плоскости, также
лежит в этой плоскости, и умножение вектора на число не выводит
его из плоскости, в которой он лежит. Теми же свойствами
обладают векторы, лежащие на прямой линии. Для линейных пространств
обобщением плоскости и прямой служат линейные подпространства.
Определение. Непустое подмножество^' векторов линейного
пространства Sf называется линейным подпространством, если:
а) сумма любых векторов из JSf' принадлежит JS?';
б) произведение каждого вектора из JS?' на любое число так?ке
принадлежит .if'.
В силу этого определения любая линейная комбинация векторов
из 5£* принадлежит JS?'. И частности, нулевой вектор как
произведение Ох должен принадлежать JS?', и для каждого х из j£f'
противоположный вектор —х = (—\)х лежит в JSf\
Сложение и умножение на число, определенные в S£, будут
такими же операциями в его подпространстве JS?'. Справедливость аксиом
линейного пространства для .S?' прямо вытекает из их
справедливости для j£?. Таким образом, подпространство является линейным
пространством.
Пример 1. Пусть дано некоторое множество &> векторов в
линейном пространстве J£f. Обозначим через ££' совокупность
всевозможных линейных комбинаций, каждая из которых составлена из
конечного числа векторов из ^. Множество ££* является подпространством
§ 2. Линейные подпространства
167
в j£f. Действительно, если х и у принадлежат .5?', то х = Aipi + ...
...-h Л^р/. и у = /i^i + ... + //m9m, где pt-,gj е ^ (г = 1,...,*; j =
= 1, ...,m). Мы видим, что х + у = У^ Лгр,- + У^/^tfj, т. е. я + у
также является линейной комбинацией конечного числа векторов из &.
Точно так же мы видим, что ах = У^(аАг-)р;.
Так построенное подпространство JS?' называется линейной
оболочкой множества ^.
Пусть pi,...,pm -•— линейно независимая система векторов из &
такая, что каждый вектор из 9 по ней раскладывается. (Если
пространство конечномерно, то очевидно, что в каждом множестве,
содержащем ненулевые векторы, такая система найдется.)
Векторы pi,...,pm образуют базис в линейной оболочке ^. В самом деле,
каждую линейную комбинацию векторов из 9? можно представить
как линейную комбинацию векторов рь ...,рт, так как каждый
вектор из & можно разложить по рь ...,рт и подставить эти разложения
в рассматриваемую линейную комбинацию.
В частности, если SP— конечное множество векторов, мы имеем
Предложение 1. Размерность линейной оболочки множества
из т векторов не превосходит т.
Пример 2. Рассмотрим однородную систему линейных
уравнений с п неизвестными. Согласно предложению 3 § б гл. V
совокупность всех решений этой системы представляет собой
подпространство в линейном пространстве столбцов высоты п.
Каждая фундаментальная система решений этой системы
уравнений является базисом в этом подпространстве.
Пример 3. В каждом линейном пространстве множество,
состоящее только из нулевого вектора, является подпространством.
Оно называется нулевым.
П р и м е р 4. Все пространство Jjf является подпространством в J£f.
Предложение 2. Пусть 3f' — подпространство п-мерного
пространства J£f. Тогда dim JS?' ^ п. Если dimJSf' = п, то S£!
совпадает с J£?.
Действительно, любая система из m > n векторов в JS?' лежит
также и в j£f и потому линейно зависима. Пусть базис в J£f' содержит п
векторов. Тогда любой вектор из Sf раскладывается по этому базису
и, следовательно, принадлежит Sf*. Значит, JS?' совпадает с S£.
Сформулируем еще одно достаточно очевидное
Предложение 3. Пусть Sff • - подпространство n-мерного
линейного пространства j£f. Если базис еь ...,е* в S£* дополнить до
базиса ei, ...,Cfc,Cfc+i, ...,en в J^f, то в таком базисе все векторы из S£'
и только они будут иметь компоненты £k+1 = 0, ..., £п = 0.
Действительно, если для вектора х имеем £fc+1 = ... = £п = 0,
то х = £*ei + ... + ffee* и, следовательно, х G -if'. Обратно, вектор
168
Гл. VI. Линейные пространства
из _$?' раскладывается в линейную комбинацию х = £1е\ + ... + £*е/..
Она же есть разложение х по базису еь ...,еп при f*+1 = ... = £п = 0.
Заметим, что равенства £*+1 = 0, ...,£п = 0 можно рассматривать
как систему линейных уравнений, связывающую координаты
вектора х. Нетрудно доказать, что и в любом другом базисе j£?'
определяется системой линейных уравнений. Действительно, при замене базиса
старые компоненты выражаются через новые по формулам (5) § 1,
и в новом базисе система уравнений примет вид
i=l i=l
Ранг этой системы равен п — к, поскольку строки матрицы перехода
линейно независимы. Итак, мы доказали
Предложение 4. Пусть в n-мерном пространстве S£ выбран
базис. Тогда координатные столбцы векторов, принадлежащих
камерному подпространству 3f' (к <п), удовлетворяют однородной
системе линейных уравнений ранга п — к.
2. Сумма и пересечение подпространств. Рассмотрим два
подпространства JS?' и Sf" линейного пространства j£f.
Определение. Будем называть суммой подпространств S£*
и JS?" и обозначать 2? + S£" линейную оболочку их объединения
J&f'U-S?".
Подробнее определение означает, что вектор х из Sf' + Sf" (и
только такой) представим в виде х = У^<*,р,- + У^/^tfj, где векторы р,-
лежат в S£\ a qj — в S£". Обозначая написанные выше суммы через х'
и ж", мы видим, что подпространство J£f + 3£" состоит из векторов,
представимых в виде х = х1 + х", где х' Е -£?', а ж" G 3£"'.
Пусть размерности подпространств JSf' и JS^'7 равны & и /. Выберем
в этих подпространствах базисы ei,...,e* и /ь...,//. Каждый вектор
из JS?' + J£?" раскладывается по векторам ei, ...,е&, Д, ...,/j, и мы
получим базис в JSf* + 3f", если удалим из этой системы все векторы,
которые линейно выражаются через остальные. Сделать это можно,
например, так.
Выберем какой-либо базис в 3f и составим матрицу из
координатных столбцов всех векторов е\,..., е*., /i,..., //. Те векторы,
координатные столбцы которых — базисные столбцы этой матрицы, составляют
базис в Jif + JSf;.
Определение. Назовем пересечением подпространств &' и JS?"
и обозначим JSf' П -S?" множество векторов, которые принадлежат
обоим подпространствам.
Пересечение J£?'nj£?" есть подпространство. Действительно,
нулевой вектор лежит во всех подпространствах и, следовательно,
пересечение не пустое множество. Если векторы х и у лежат в 3£* Г\3?",
§2. Линейные подпространства
169
то они лежат как в S?', так и в JS?". Поэтому вектор х + у и при
любом а вектор ах также лежат и в Sf\ и в j£?", а следовательно,
ив J£f nj£f".
В конечномерном пространстве подпространства могут быть
заданы системами линейных уравнений. Тогда их пересечение
задается системой уравнений, получаемой объединением систем, задающих
подпространства.
Для s > 2 подпространств JS?1, ...,.Sf* сумма и пересечение
определяются аналогично, и полученные выше свойства переносятся на
суммы и пересечения s подпространств.
В частности, суммой подпространств J?1,...,J5f называется
линейная оболочка их объединения. Это — множество всех векторов,
нредставимых в виде суммы х\ + ... + £*, где Х{ Е !£х (г = !,...,$).
Каждый из векторов х,- может быть разложен по базису в своем
подпространстве ££х, и потому любой вектор из суммы Jfc?1,...,.^
раскладывается по системе векторов, получаемой объединением
базисов всех подпространств. Число векторов в этой системе равно
dim 3£l +...+ dimJ£?\ Поскольку векторы всех базисов в
совокупности могут быть линейно зависимыми, размерность суммы
подпространств может оказаться меньше общего числа векторов в системе:
dim(J&f1 + ... + Sfs) ^ dimJS?1 + ... + dimSfs.
Базис в сумме подпространств получается, как и при s = 2, из
объединения базисов слагаемых удалением векторов, линейно
выражающихся через остальные.
Определение. Сумма подпространств JSf1,..., S£* называется
прямой суммой, если ее размерность равна сумме размерностей этих
подпространств, т. е. имеет максимальное из возможных значений.
Если надо подчеркнуть в обозначении, что сумма прямая, то
используют знак ф.
Прибавление нулевого подпространства не меняет ни размерность
суммы, ни сумму размерностей. Но ниже мы будем считать
подпространства ненулевыми, чтобы избежать оговорок, вызванных
несуществованием базиса в нулевом подпространстве.
Предло?кение 5. Для того чтобы сумма .£f' подпространств
JS?1,...,^ была прямой суммой, необходимо и достаточно выполнение
любого из следующих четырех свойств:
а) любая система из т ^ s непулевых векторов, принадлежащих
различным подпространствам jSf (г = l,...,«s), линейно независима;
б) каждый вектор х е Л?' однозначно раскладывается в сумму
xi + ...+ я5, где ж,- е JSf (г = 1,...,«);
в) пересечение каждого из подпространств Sfl с суммой остальных
есть нулевое подпространство;
170
Гл. VI. Линейные пространства
г) объединение базисов подпространств ££% (г = 1,..., s) есть базис
Доказательство. Мы докажем, что из определения прямой
суммы следует свойство а), и каждое из свойств б), в) и г)
следует из предыдущего. Поскольку из свойства г) непосредственно
следует определение прямой суммы, это будет означать равносильность
каждого из свойств определению.
1. Докажем от противного, что из определения следует свойство а).
Допустим, что нашлась линейно зависимая система ненулевых
векторов Xi1,...iXim таких, что никакие два из них не лежат в одном и
том же подпространстве S£%. Дополним каждый из этих векторов до
базиса в его подпространстве, а в тех подпространствах, из которых
в системе векторов нет, выберем базис произвольно.
Объединение этих базисов-- система из Ar = dim JSf1 + ...+ dim J5?5
векторов. Каждый вектор из S£' раскладывается по этой системе, но
система эта линейно зависима (так как она содержит линейно
зависимую подсистему). Поэтому базис в JS?' содержит меньше, чем к
векторов, и размерность суммы меньше суммы размерностей.
2. Докажем, что из свойства а) следует свойство б). Допустим,
что б) не выполнено и некоторый вектор х представлен как сумма х =
= хх + ... + х5 и как сумма х = ух + ...Ч-у«, где x{,yi е&г {г= 1,...,в).
Тогда (а?! — у\) + ... + (xs — ys) = о. Если хоть одна из разностей
отлична от нуля, мы получаем противоречие со свойством а).
3. Докажем теперь также от противного, что из свойства б)
следует в). Не уменьшая общности, мы можем допустить, что Sf1 имеет
ненулевое пересечение с суммой J?2 4- ... Ч- Sf*. В этом случае
существует ненулевой вектор z — хх £ 3£х, нредставимый в виде суммы
ж2+ ... + £$- Но равенство х\ = х^Л- ... + я« означает, что z двумя
способами представлен как сумма векторов, выбранных по одному
из каждого JS?1.
4. Докажем, наконец, что из свойства в) следует г).
Рассмотрим систему векторов, получаемую объединением базисов
подпространств 1£% (г = l,...,s). Каждый вектор из суммы 3f' обязательно
раскладывается по этой системе, и нам остается доказать, что при
условии в) эта система линейно независима.
Сделаем это от противного. Допустим, что существует равная
нулю нетривиальная линейная комбинация всех векторов, входящих в
рассматриваемые базисы подпространств Л?г (г = l,...,s).
Сгруппируем слагаемые в этой линейной комбинации так, чтобы объединить
все слагаемые, относящиеся к одному подпространству. Мы получим
равенство вида Ж1 + ... + х5 = о, где хотя бы один вектор отличен
от нуля. Не уменьшая общности, можно считать, что это х\.
Тогда х\ = — з2 —••• — х$. Это значит, что ненулевой вектор хх е J?1
принадле?кит также сумме 3f2 + ... + Sfs. Получено противоречие со
§2. Линейные подпространства
171
свойством в). Это заканчивает доказательство всего предложения.
Отметим как частный случай свойства в), что сумма двух
подпространств прямая, если их пересечение пулевое.
Легко видеть, что при сложении подпространств можно
произвольно расставлять и убирать скобки. Это относится и к прямой
сумме. Например, (JSf! ф 5?2) Ф {S?3 ф if4) = 3?] 0 ££2 фЗ?3®^.
Если Se' С JSf;, то JSf + if" = if". В частности, для любого
подпространства ±£*' + ^" = if'.
Предложение 6. Л^я любого подпространства !£'
пространства J? найдется такое подпространство 5£'\ что S£ = if' 0 if".
Доказательство. Выберем базис еь ...,е/. подпространства if'
и дополним его до базиса пространства 5£ векторами e*+i»...,en.
Линейную оболочку е*+1,...,е„ обозначим через S^n. Из предложения 5
видно, что & = &' ф<£".
Теорема 1. Размерность суммы двух подпространств равна
сумме их размерностей минус размерность их пересечения.
Если сумма прямая, утверждение справедливо: размерность равна
сумме размерностей, а пересечение нулевое.
Пусть теперь Sfl и S£2 — подпространства с ненулевым
пересечением. Согласно предложению б найдется такое подпространство ^,
что i*2 = Лф (if1 П Sf2). Тогда З?1 + Sf2 = if1 + (if* П if2) + Л.
Отсюда видно, что Sfl+5?2=: &1 +Ж так как (if1 nif2) С Sfl.
Докажем, что S£x + Л— прямая сумма. Для этого рассмотрим
произвольный вектор z £ &l Г\Л. Из гЕ^С S?2 следует z £ if1 П
nif2, а следовательно, z Е (if1 Пif2) Пл£ Отсюда г = о, и
пересечение if1 П .># нулевое.
По определению прямой суммы dim(ifl + 5£2) = dim if1 + <ЗлтЛ.
Кроме того, dim if2 = dim(JSf1 П Л?2) -f dim Л. Вычитая эти
равенства почленно, приходим к требуемому заключению.
Упражнения
1. В линейном пространстве if заданы векторы сц, аг и а3 с
координатными столбцами
1 1
2
3
4
'
5
6
7
8
»
9 1
10
11
12
в базисе С|,е2,ез,е4. Найдите базис их линейной оболочки 5?1.
2. Найдите систему уравнений, задающую подпространство if'из упр.1.
3. Найдите какое-нибудь подпространство Ж\ которое вместе с
подпространством !£' из упр. 1 удовлетворяет условию .J2f = ^' ф *//{'.
4. Подпространство if' определено в упр. 1, подпространство if"
натянуто на векторы Ь\ и 62 с координатами 1,1,1,2 и 2,2,2,5. Найдите:
а) базис в if# + 3f"; б) базис в if' П Sf".
172
Гл. VI. Линейные пространства
5. 13 четырехмерном пространстве заданы:
а} четыре подпространства; б) пять подпространств;
в) пять ненулевых подпространств.
Может ли их сумма быть прямой?
§ 3. Линейные отображения
1. Определение. Пусть 1£ и -S? — два линейных пространства,
оба вещественные или оба комплексные. Под отображением А
пространства 5? в пространство J5? понимается закон, по которому
каждому вектору из S£ сопоставлен единственный вектор из .:Sf. Мы
будем писать А: 3£ -* Sf. Образ вектора х обозначается А(х).
Определение. Отображение А: -Sf —У -S? называется линейным.
если для любых векторов ж и у из if и любого числа а выполнены
равенства
А{х + у) = А(х) + Д(г/), А{ах) = аА(х). (1)
Следует подчеркнуть, что знак -Ь в левой и правой частях первой из
формул (1) обозначает две, вообще говоря, различные операции:
сложение в пространстве S£ и сложение в пространстве ££. Аналогичное
замечание относится и ко второй формуле.
Линейное отображение мы будем называть линейным
преобразованием, если пространства ££ и ££ совпадают.
Пример 1. Пусть Л — • фиксированное число. Сопоставим
каждому вектору х пространства j£f вектор Хх. Легко видеть, что это —
линейное преобразование.
Пример 2. При аффинном преобразовании плоскости двумерное
пространство векторов, на ней лежащих, отображается само на себя.
В силу формул (11) §2 гл. IV •— это линейное преобразование.
Пример 3. Выберем в n-мерном линейном пространстве J? какой-
нибудь базис. Это сопоставит каждому вектору его координатный
столбец и тем определит линейное отображение пространства ££ в
«-мерное арифметическое пространство (пространство столбцов).
Пусть Jz? — вещественное пространство. Сопоставляя каждому
вектору его первую компоненту в выбранном базисе, мы получаем
линейное отображение Jzf в линейное пространство вещественных
чисел.
Пример 4. Пусть С°[—1,1] и С°[0,2] — пространства функций,
непрерывных соответственно на отрезках [—1,1] и [0,2]. Сопоставим
функции f(t) из первого пространства функцию (p(s) = f{s — 1) из
второго. Это отображение, очевидно, является линейным. Пример
преобразования можно получить, если сопоставить функции из С°[—1,1]
ее первообразную F(t)y удовлетворяющую условию F(0) = 0.
Пример 5. Рассмотрим /г-мерное арифметическое
пространство <%п и прямоугольную матрицу А размеров т х п. Сопоставим
§3. Линейные отображения
173
столбцу £ G £%п столбец А£. Он имеет высоту т. Таким образом,
определено отображение &п в ^т. В силу свойств умножения
матриц это отображение линейное.
Пример 6. Отображение, сопоставляющее каждому вектору
из JS? нулевой вектор из Jfc?, является линейным. Оно называется
нулевым отображением.
В дальнейшем в этом параграфе пит будут обозначать
размерности пространства Л? и Л? соответственно.
Из определения немедленно вытекает, что при линейном
отображении линейная комбинация векторов переходит в такую же линейную
комбинацию их образов.
Нулевой вектор переходит в нулевой, поскольку А(о) = А(0х) =
= 0А(х) = о. (Обратим внимание, что нулевые векторы пространств S£
и .S? мы обозначаем одинаково.)
Из сказанного следует, что при линейном отображении линейно
зависимые векторы отображаются в линейно зависимые. Как
показывает пример 6, обратное вовсе не обязательно верно.
Предложение 1. При линейном отображении A: J$f -> J£?
линейное подпространство Sf' С J$f переходит в линейное
подпространство А{&) С J?, причем dim А(&) ^ dim JS?'.
Для нулевого подпространства утверждение очевидно.
Рассмотрим подпространство Sf' размерности к > 0. Пусть ei,...,e* — базис
в JSf'. Для любого вектора х Е Jf* имеем х = £lei + ... + £*е/. и
Л(х) = ДК1е1 + ... + ^)=^1Л(е1) + ... + ^М(еА). (2)
Это означает, что произвольный элемент множества А{!£') образов
всех векторов из JS?' есть линейная комбинация векторов A(ci),...
...,А(ск). Наоборот, каждая такая линейная комбинация, очевидно,
является образом вектора из Sf'. Итак, многкество A(Sf') —
линейная оболочка А(е\),..., A(ci<), и, следовательно, есть подпространство.
Размерность его не превосходит к в силу предложения 1 §2.
Необходимо отметить частный случай доказанного
предложения: множество образов всех векторов из JS? является
подпространством А{5£) в S£. Оно называется множеством значений отображения
и обозначается 1тп А.
Определение. Размерность множества значений отображения
называется рангом отображения.
Если ранг А равен ?п, то A(J?) совпадает с J£f, и каждый вектор
из J£? является образом некоторого вектора из Sf. Отображение,
обладающее этим свойством, называется сюрьективным отображением.
Определение. Множество векторов, отображающихся в
нулевой вектор при отображении Д, называется ядром отображения А и
обозначается КегД.
Предложение 2. Ядро есть линейное подпространство в 3f.
174
Гл. VI. Линейные пространства
Действительно, ядро не пусто: оно во всяком случае содержит
нулевой вектор. Далее, если А(х) = о и А(у) = о, то А(ах + /?у) =
= аА{х) + 0А(у) = о.
Пусть ядро А ненулевое: dim Кег А ^ 1. Тогда каждый вектор из
А{5£) имеет бесконечно много прообразов. Действительно, если у =
= А{х) и о ф х0 G Кег Л, то А(х + xq) = г/- Верно и обратное
утверждение: если какой-то вектор у Е JS? имеет хотя бы два различных
прообраза, то ядро А содержит ненулевой вектор. Действительно,
если A(xi) = Д(аг2) = у для xi ф Х2, то А(хх — х2) = о и z = х\ — х? —
ненулевой вектор в ядре.
Отображение, при котором различные векторы имеют различные
образы, называется иньективным отображением. Итак, получено
Предложение 3. Отображение инъективно тогда и только
тогда, когда его ядро - - нулевое подпространство.
Если отображение инъективно, то линейно независимые векторы
переходят в линейно независимые. Действительно, пусть образы
векторов x\,....Xk линейно зависимы: сх\А(х\) + ... + а*А(хк) = о.
Тогда А(сх\Х\ +... + akXk) — о. Отсюда для ииъективного отображения
получаем а\Х\ + ... + atkXk = о, и, следовательно, а?1,...,ж* линейно
зависимы.
2. Координатная запись отображений. Рассмотрим линейные
пространства J$f и Л? размерностей пиши линейное отображение
А: ££-+!£. Пусть ei, ...,еп —базис в S£. Тогда образ произвольного
вектора x = £lei + ... 4- £nen раскладывается в линейную комбинацию
А(х)=?А(ег) + ... + СА(еп). (3)
Значит, А(х) может быть найден по координатам ж, если известны
образы базисных векторов А{с\),..., А(еп).
Выберем также базис в пространстве JSf. Пусть это f =
= II /i ••• fm ||- Каждый из образов базисных векторов мы можем
разложить по f:
т
Р=1
Если компоненты вектора А(х) мы обозначим через т/1,...,т/т, то
равенство (3) может быть переписано так:
т
Отсюда в силу единственности разложения по базису
п
ч" = £°# (Р=1,-."»)• (4)
г=1
§3. Линейные отображения
175
Если мы составим матрицу А из чисел а?, то равенства (4) могут
быть записаны в матричной форме
V = Ai, (5)
или, подробнее,
<*:
а'
е
Здесь координатный столбец образа вектора х (в базисе f) выражен
как произведение матрицы А размеров т х п на координатный
столбец вектора х в базисе е.
Определение. Матрицей линейного отображения А: 3? —> 1£ в
паре базисов е и f называется матрица, столбцы которой (в их
естественном порядке) — координатные столбцы векторов >4(ei),..., А(еп)
в базисе f.
Формула (5) показывает, как употребляется матрица линейного
отображения для нахождения образа вектора.
Матрица линейного отображения в следующем смысле однозначно
определена: если для любого вектора х = е£ координатный столбец
образа в базисе f есть г/ = В£, то матрица В совпадает с А. Это
утверждение нетрудно проверить. Умножим матрицу В на
координатный столбец вектора е*, т. е. на г-й столбец единичной матрицы.
Произведение равно г-му столбцу В, а это и есть координатный
столбец Д(ег).
Пример 5 показывает, что при выбранных в пространствах -Sf
и Sf базисах ка?кдая матрица размеров m х n служит матрицей
некоторого линейного отображения J£? -> Sf.
Предложение 4. Ранг матрицы линейного отображения равен
рангу этого отображения.
Доказательство. Пусть ji,..., jr — номера базисных столбцов
матрицы А линейного отображения А. Тогда векторы A(ej1), ^^A{ejr)
линейно независимы и каждый из векторов А(ег) (г = 1, ...,п) по ним
раскладывается. Следовательно, мы можем разложить образ А(х)
любого вектора только по A(ejl),..., A(ejr). Таким образом, эти векторы
образуют базис в 1тД, и их число равно рангу А. Предложение
доказано.
Из этого предложения видно, что ранг матрицы линейного
отображения один и тот же, какую бы пару базисов мы ни выбрали.
Предложение 5. Сумма ранга отображения и размерности его
ядра равна размерности отображаемого пространства.
Доказательство. Согласно формуле (5) ядро отображения
определяется однородной системой линейных уравнений А£ — о с п
неизвестными. Ранг матрицы системы равен рангу отображения г.
Фундаментальная система решений этой системы состоит из d = п — г
176
Гл. VI. Линейные пространства
решений, которые являются координатными столбцами векторов,
составляющих базис в ядре.
В частности, равенство г = п необходимо и достаточно, чтобы
отображение имело нулевое ядро, т. е. было инъективным.
Таким образом, в произвольном базисе
• столбцы матрицы отображения линейно независимы тогда и
только тогда, когда отображение инъективно,
• строки матрицы линейно независимы тогда и только тогда, когда
отображение сюръективно.
Напомним, что отображение называется взаимно однозначным,
если каждый вектор у £ & является образом одного и только одного
вектора из 5£\ т. е. если оно является как инъективным, так и сюръ-
ективным. Для инъективного отображения г = п, а для сюръектив-
ного г = т. Итак, имеет место
Предложение 6. Линейное отображение А: J£? —>• J£? взаимно
однозначно тогда и только тогда, когда размерности пространств
совпадают и равны рангу отображения: n = m= Rg А.
3. Изоморфизм линейных пространств. Дадим следующее
Определение. Взаимно однозначное линейное отображение
называется изоморфизмом. Если существует изоморфизм S£ —>• Jfc?, то
линейные пространства JSf и J^f называются изоморфными.
Пример 7. Выбор базиса в n-мерном линейном пространстве S£
определяет изоморфизм Л? на n-мерное арифметическое
пространство, сопоставляющий каждому вектору его координатный столбец. Это
координатный изоморфизм.
Из предложения б видно, что два линейных пространства могут
быть изоморфны только тогда, когда их размерности совпадают.
Оказывается, это условие является и достаточным: имеет место
Теорема 1. Два вещественных пространства изоморфны тогда
и только тогда, когда их размерности равны. То же верно и для
комплексных пространств.
Нам остается проверить только достаточность условия. Она
очевидна: пусть JSf и JSf — два n-мерных линейных пространства. Если
в каждом из них выбран базис, то любая невырожденная квадратная
матрица порядка п по формуле (5) определяет линейное отображение,
которое будет изоморфизмом согласно предложению 6.
Значение теоремы об изоморфизме линейных пространств —
в следующем. Линейные пространства могут состоять из чего угодно
(столбцов, многочленов, чисел, направленных отрезков, функций) —
природа их элементов роли не играет, когда изучаются их свойства,
связанные с линейными операциями. Все эти свойства у двух
изоморфных пространств совершенно одинаковы. Если мы условимся не
различать между собой изоморфные пространства, то для каждой
размерности найдется только одно линейное пространство.
§3. Линейные отображения
177
4. Изменение матрицы линейного отображения при
замене базисов. Рассмотрим линейное отображение А: Л? -± Л?. Если в
пространствах выбраны базисы е и f, то А определяется матрицей А.
Пусть другая пара базисов е' и f' связана с е и f матрицами
перехода S и Р, и в базисах е' и f отображение А имеет матрицу А1. Наша
задача — найти связь между матрицами А и А1.
Рассмотрим произвольный вектор х пространства Л£ и его
образ у = А(х). Обозначим координатные столбцы х в базисах е и е'
соответственно через £ и £', а координатные столбцы у в базисах f и
f через г/ и -q'. Согласно формуле (4) § 1 £ = S£', -q = Рту'. Подставив
эти выражения в формулу (5), мы получаем Prf = А5£'. Поскольку
матрица перехода имеет обратную, ц1 = P~lAS£'. Но но формуле (5)
?;' = А'£'. Так как матрица линейного отображения для данной пары
базисов единственна, мы получаем
A' = P-1AS. (6)
5. Канонический вид матрицы линейного отображения.
Естественно возникает вопрос, как выбрать в пространствах Л? и Л?
базисы таким образом, чтобы матрица заданного отображения имела
возможно более простой вид.
Теорема 2. Для любого линейного отображения А: ££-±Л? ранга
г можно так выбрать базисы в Л? иЛ£, что оно будет иметь матрицу
1 Ег
О
О 1
О
(Ег — единичная подматрица порядка г, остальные элементы, если
они есть, равны нулю).
Доказательство. Поместим векторы er+i,...,en базиса
пространства Л? в КегЛ (его размерность как раз равна п — r), а
векторы ei,...,er можем выбрать произвольно. В силу такого выбора
при любом базисе в Л£ последние п — г столбцов матрицы А будут
нулевыми. Так как RgA = г. первые г столбцов должны быть
линейно независимыми. Поэтому линейно независимыми будут
векторы А{е\),..., А(ег). Примем их за первые г базисных векторов в
пространстве JSf, а остальные векторы /r+i, ...,/т этого базиса выберем
произвольно. При таком выборе первые г столбцов А будут первыми г
столбцами единичной матрицы порядка т. Это и есть вид (7).
6. Сумма и произведение отображений. Рассмотрим два
линейных отображения A: Л? -> S£ и В: Л? —> Л?. Мы назовем суммой
этих отображений и обозначим А + В отображение С : Л? -> .Sf,
определяемое равенством С(х) = А(х) + В(х) для любого х Е Sf.
Не представляет труда проверить, что С — линейное
отображение. Действительно, если в JSf и JSf выбраны базисы, координатные
столбцы векторов А(х) и В{х) запишутся через матрицы
отображений как А£ и В£. Следовательно, С(х) будет иметь координатный
178
Гл. VI. Линейные пространства
столбец Л£+ В£ = (А + В)£. Итак, сумма А + В линейных
отображений — линейное отображение, и его матрица равна сумме
матриц Ал- В.
Произведение линейного отображения А на число а определяется
как отображение В, сопоставляющее вектору х вектор аА(х).
Легко проверить, что это отображение линейное и имеет матрицу аА,
если А — матрица отображения А.
Из сказанного следует, что по отношению к введенным здесь л^ь
нейным операциям множество всех линейных отображений 5£ в .£?
представляет собой линейное пространство, которое изоморфно
линейному пространству матриц размеров т х п.
Теперь рассмотрим три линейных пространства J£?, J£?' и 3f".
Результат последовательного выполнения отображений А: 5£ -» S^1
и В: &1 -» S£" называется их произведением и обозначается ВА
(отображение, которое делается первым, пишется справа).
Разумеется, ВА отображает JS? в JS?" и является линейным отображением.
Пусть в пространствах !£, .£?' и JSf" выбраны базисы
соответственно е, f и g. Обозначим через А матрицу отображения А в базисах е
и f, а через В — матрицу отображения В в базисах f и g.
Предложение 7. Отображение В А имеет матрицу В А в
базисах eug.
Доказательство. Рассмотрим координатный столбец £
произвольного вектора из Л?. Координатные столбцы векторов А(х) и
В(А(х)) обозначим соответственно через rj и £. Тогда ту = А£ и £ =
= Вц = ВА£, как нам и требовалось.
Ранг отображения равен рангу его матрицы, а потому из оценки
ранга произведения матриц (предложение 4 §3 гл. V) следует
Предложение 8. Ранг произведения отображений не
превосходит рангов этих отображений.
Другие свойства умножении отображений тоже легко следуют из
свойств умножении матриц, и мы не будем на них останавливаться.
Пусть дано линейное отображение А: j£? -» j£?. Линейное
отображение В: J5f —> JSf назовем обрапгным для А и будем обозначать Л"1,
если ВА = Е и АВ = Е, где Е и Е — тождественные преобразования
пространств JS? и J£f. Иначе говоря, для любых х G & и у Е Sf должно
быть
В(А(х)) = х, А(В(у)) = у. (8)
Предложение 9. Линейное отображение А имеет обратное
тогда и только тогда, когда оно — изоморфизм.
Рассмотрим линейное отображение A: Sf -> -S? и выберем
базисы о и f в Sf и 5£. Пусть .4 —- матрица отображения А в этих базисах.
1°. Пусть А — изоморфизм. Тогда А — невырожденная
квадратная матрица и имеет обратную матрицу Л"1. Рассмотрим
отображение В: J5? —> -Sf, определяемое матрицей А"1 в базисах f и е. Очевид-
§4- Задача о собственных векторах
179
но, что оно удовлетворяет условиям (8), и потому является обратным
для Л.
2. Пусть Л не изоморфизм. Тогда либо г < ???., либо г < п. В
первом случае в 5£ найдется вектор и, не принадлежащий /4(jS?). Если
существует обратное отображение, мы приходим к противоречию:
и = А(А~1(и)) £ А{&). Во втором случае существует вектор z ф о,
г G КегЛ. Если существует Л"1, мы приходим к противоречию: z =
= Л""1(Л(г)) =Л-1(о) = о.
Одновременно мы доказали, что матрица обратного отображения
в базисах f и е есть А"1.
Упражнения
1. Все квадратные матрицы порядка 2 умножаются справа на матрицу
12 3
2 4 6
С =
Этим определено отображение Л пространства матриц порядка 2 в
пространство матриц размеров 2x3. Найдите:
а) матрицу этого отображения в стандартных базисах (упр. 1 § 1);
б) базис в КегЛ; в) базис в 1тЛ.
2. Какому условию должна удовлетворять матрица С размеров 2x3
для того, чтобы отображение, определенное в упр. 1, было инъективным?
Может ли оно быть сюръективпым?
3. Пусть Ск — пространство функций, имеющих к непрерывных
производных на отрезке [0,1]. Дифференцирование отображает Ск в Ск~1.
Проверьте, что это — линейное отображение. Будет ли оно:
а) инъективным; б) сюръективным?
4. Пусть Л: 3? -► ~3 и Ж- A(3f). Определим отображение А': 3? -» Л
равенством А'(х) = А(х). Докажите, что:
а) КегЛ' = КегЛ; б) RgAf = RgA; в) А' сюръективно.
5. Пусть j£? = J$fi фS£<i и х = х,\ +#2, #1 Е JSfi, #2 G J?2- Определим
преобразования Pj и Рд пространства ££ формулами Р\{х) = х\ и Рг(#) =
= а?2 (такие преобразования называются проектированиями). Докажите,
что Р! + Р2 = Е, Р,Р2 = Р2Р, = 0, P\ = Pi (1=1,2),
где О — нулевое, a E — тождественное преобразования.
6. Докажите теорему 2, приводя матрицу линейного отображения
элементарными преобразованиями строк и столбцов к виду (7).
7. Пусть Л — линейное отображение. Верно ли, что:
a) A[Sf n JSf") = Л(.5?') п Л(^,,); б) A(jgf n Sf") С A(JSf) n Л(^")?
§ 4. Задача о собственных векторах
1. Линейные преобразования. Линейное преобразование — это
отображение, которое отображает линейное пространство в то же
самое пространство. В этом параграфе мы будем заниматься
исключительно преобразованиями. Все результаты об отображениях верны
и для преобразований, но здесь должны быть сделаны существенные
оговорки, касающиеся координатной записи преобразования.
180
Гл. VI. Линейные пространства
Именно, для координатной записи отобра?кения A: 3f —> Л?
выбираются базисы в обоих пространствах !£ и JS?'. Если же
пространства JS? и JS?' совпадают, естественно пользоваться одним и тем
же базисом и для векторов, и для их образов. Поэтому вводится
следующее
О и р е л е л е п и е. Матрицей линейного преобразования А: 5£ —> S£
в базисе е = ||ei ...е.п || называется матрица, столбцы которой —
координатные столбцы векторов А(е\),..., А{еп) в базисе е.
В соответствии с этим определением формула (6) §3 для матрицы
преобразования принимает вид
A'^S^AS. (1)
Множество матриц А', получаемых из данной матрицы А по
формуле (1), уже, чем множество матриц, получаемых из той же матрицы А
по формуле (6) §3 при несвязанных между собой матрицах 5 и Р. В
более узком множестве, вообще говоря, не найдется матрицы
канонического вида (7) §3, и теорема 2 §3 не верна для преобразований.
Не следует думать, что это — случайное обстоятельство,
связанное с "неудачным" определением матрицы преобразования. Матрица
отображения задает это отображение, и потому все свойства
отображения содер?катся среди свойств его матрицы. Свойствами отобра?ке-
ния являются те свойства его матрицы, которые инвариантны, т. е.
не меняются при переходе к другой паре базисов, а остальные
описывают как бы его расположение но отношению к базисам. Теорема 2
§ 3 по существу означает, что единственным свойством отображения
является его ранг.
Линейные преобразования имеют больше свойств, чем линейные
отображения. Это связано с тем, что образ вектора лежит в том же
пространстве, и мы получаем возможность говорить о взаимном
расположении вектора и его образа. Например, приобретают смысл
вопросы о том, коллинеарен ли вектор своему образу, имеют ли ядро
и множество значений ненулевое пересечение. Для отображения Jz?
в другое пространство «Sf эти вопросы лишены смысла.
Естественно, что матрица преобразования должна иметь больше инвариантных
свойств, чем матрица отображения, а это означает, что множество
матриц, задающих преобразование в различных базисах, дол?кнобыть
уже, чем соответствующее множество для отображении.
2. Умножение преобразований. Линейные преобразования
обладают той особенностью, что произведение определено для любых
преобразований одного пространства. В частности, если А и В —
преобразования пространства j£f, то определены АВ и ВА. Эти
произведения, вообще говоря, различны. Однако может случиться, что
АВ — ВА. В этом случае говорят, что А\\ В перестановочны или
коммутируют.
Произведение АА естественно обозначить А2 и определить целую
§4. Задача о собственных векторах
181
положительную степень А по индукции соотношением Ак = АД*""1.
Нулевой степенью преобразования по определению считают
тождественное преобразование Е.
Линейное преобразование В, представленное как линейная
комбинация целых неотрицательных степеней преобразования А
aoE + аИ+... + а/,
называется многочленом от преобразования А или, точнее, значением
многочлена p(t) = а0 4- а^ 4-... + а^к на преобразовании Д, и
обозначается р(А).
Нетрудно проверить, что любой многочлен от А перестановочен
с А и что любые два многочлена от А перестановочны.
Отметим, что при нашем определении матрицы преобразования
сохраняется все сказанное о связи алгебраических операций над
отображениями с соответствующими операциями над их
матрицами. В частности, матрицей произведения ВА преобразований в
базисе е будет произведение ВА их матриц, и для произвольного
многочлена р(А) матрицей в каком-либо базисе будет матрица р(А).
3. Инвариантные подпространства. Рассмотрим линейное
пространство JS? и его линейное преобразование А.
Определение. Подпространство Sf' С 1£ называется
инвариантным относительно Л, если для каждого вектора х из Л?' образ А(х)
лежит в .£?', или, что то же, A(5f') С «£?'.
Пример 1. Рассмотрим обычное геометрическое пространство и
поворот А этого пространства на угол а вокруг заданной оси р. При
повороте вектор переходит в вектор, и, следовательно, поворот
порождает преобразование трехмерного векторного пространства.
Очевидно, что это преобразование линейное. Векторы, лежащие на оси р,
образуют одномерное инвариантное подпространство, так как для
них А(х) = х. Векторы, перпендикулярные оси р, образуют двумерное
инвариантное подпространство, так как вектор, перпендикулярный
оси. после поворота останется ей перпендикулярным.
Пример 2. Нулевое подпространство инвариантно относительно
любого преобразования.
Пример 3. Пространство &, рассматриваемое как
подпространство, является инвариантным относительно любого
преобразования.
Пример 4. Каждое подпространство является инвариантным
относительно тождественного и нулевого преобразований.
Пример 5. Ядро преобразования и множество его значений
являются его инвариантными подпространствами.
Пусть в n-мерном линейном пространстве 1£ задано линейное
преобразование Д, и пусть fc-мерпое подпространство &1 инвариантно
относительно А. Выберем в J£? базис ei,...,en так, чтобы
векторы ei,...,ejt лежали в S£'. Матрица А преобразования А может быть
182
Гл. VI. Линейные пространства
разделена на четыре подматрицы, или, как говорят, клетки:
1 л>
| А3
А2 1
М
Клетки >4i, Ло, Аз и А4 имеют размеры к х к, к х (п — &), (п — А;) х к
и (п — fc) х (п — fc) соответственно. Докажем, что Л3 = О, т. е.
элементы qJ- матрицы А равны нулю при j = !,...,& и г = к -f 1,...,п.
Действительно, первые fc столбцов матрицы Л — координатные
столбцы векторов А(с\),..., Д(е^). Так как .Sf7 — инвариантное
подпространство, эти векторы лежат в !£', и их компоненты по
базисным векторам е*+1,...,еп равны нулю.
Легко видеть, что и. обратно, если в каком-либо базисе матрица
линейного преобразования А имеет вид
1 Al
О
А? 1
А4 |
то линейная оболочка векторов ei, ...,e* инвариантна относительно А.
В самом деле, в этом случае для всех j = l,...,fe имеем A(cj) =••
= ajei + ...4- aj'e/г, и потому образ линейной комбинации
векторов в\: ...,е* есть линейная комбинация этих же векторов.
Матрицы вида (2) называют клеточпо-треугольными. Получено
Предложение 1. Матрица линейного преобразования клеточно-
треугольная тогда и только тогда, когда линейная оболочка базисных
векторов б1,...,е* — инвариантное подпространство.
Если мы поместим в инвариантное подпространство не первые к
базисных векторов, а базисные векторы с номерами р+1, ...,р+А;
при каком-то р, то повторением тех же рассуждений мы получим
для элементов матрицы А равенства а*- = 0 при j = р + L...,p+А:
и г < р+1 или г > р+k. Это значит, что в столбцах с
номерами р+1. ...,р+fc может быть отлична от нуля только квадратная
клетка порядка к в строках с теми же номерами, т. е.
расположенная на главной диагонали.
Пусть теперь S£ разложено в прямую сумму s инвариантных
подпространств JS? = S£\ ф ... ф 5£в размерностей d\,..., d$ и в качестве
базиса выбрано объединение базисов этих подпространств. Тогда в
матрице преобразования могут отличаться от нуля только элементы
квадратных клеток порядков d\t ...,ds на диагонали:
II ^i О II
II О As 1
Такие матрицы называются клеточно-диагопальными или блочно-диа-
гональнылш. Итак, имеет место
Предложение 2. Матрица линейного преобразования
является клеточпо-диагональной тогда и только тогда, когда базис есть
§4- Задача о собственных векторах
183
объединение базисов инвариантных подпространств.
Преобразование А каждому вектору из инвариантного
подпространства Jff сопоставляет вектор из .£?'. Этим определено
преобразование подпространства JS?', которое мы назовем ограничением А на ££'
и обозначим А. Для векторов из &' но определению А (ж) = А(х)>
а для векторов, не принадлежащих 5£\ преобразование А! не
определено. А' отличается от А только тем, что оно преобразует S£' в JS?',
а не JS? в Se.
Если сохранить обозначения, введенные выше, то нетрудно
заметить, что в базисе еь...,<^ подпространства J£?' матрицей
ограничения А! является клетка А\ матрицы (2).
Инвариантные подпространства преобразования А тесно связаны
с преобразованиями, перестановочными с А. Эту связь описывает
Предложение 3. Если преобразования А и В перестановочны,
то ядро и множество значений одного из них инвариантны относи-
тельно другого.
Доказательство. 1°. Если х £ КегД, то А(х) = о, и потому
В(А{х)) = о. Тогда А(В(х)) = о, а значит, В{х) е Ker A
2°. Если х G 1тД то существует вектор z такой, что х = A(z).
Тогда В(х) = B(A(z)) = Л(В(г)). Это означает, что S(x) G Im A
4. Собственные подпространства. Мы найдем
подпространство, инвариантное относительно заданного линейного
преобразования А если найдем преобразование, перестановочное сДи
имеющее ненулевое ядро. Перестановочны с А прежде всего многочлены
от Л и, в частности, простейшие из них — линейные. Умножив при
необходимости линейный многочлен па число, напишем его в виде
А-ХЕ.
Определение. Если для числа Л подпространство Кет(А — \Е)
ненулевое, то Л называется собственным значением преобразования,
а подпространство — собственным подпространством,
соответствующим (или принадлежащим) собственному значению Л.
Отметим один важный частный случай. Если преобразование А
имеет ненулевое ядро, то это ядро — собственное подпространство,
соответствующее собственному значению Л = 0. Ограничение А на
этом инвариантном подпространстве — нулевое преобразование.
Если вектор х лежит в собственном подпространстве, то для
него (А — ХЕ)(х) = о или А(х) — ХЕ(х) = А(х) — Хх = о и, окончательно,
А(х) = Хх. (4)
Отсюда следует
Предложение 4. Ограничение преобразования на собственном
подпространстве является или нулевым преобразованием, или
гомотетией: оно умножает каждый вектор этого подпространства па
собственное значение.
184
Гл. VI. Линейные пространства
Пусть нам каким-то образом удалось найти собственные
значения преобразования А. Тогда для нахождения собственных
подпространств нужно для каждого собственного значения Л составить
систему линейных уравнений
(А - \Е)£ = о, (5)
где А - - матрица преобразования в некотором базисе о.
Фундаментальная система решений системы (5) состоит из координатных
столбцов векторов, составляющих базис собственного
подпространства. В развернутом виде система (5) записывается так:
(a}-A)£1+a^2 + ... + <e=05
a?€1 + (a5-A)*2 + ... + a£ei=0l ,,,
Определение. Вектор х называется собственным вектором
преобразования Д соответствующим (или принадлежащим)
собственному значению Л, если: 1) х ф о\ 2) А(х) = \х.
Определение означает, что собственные векторы — это непулевые
векторы собственных подпространств.
Предложение 5. Собственные векторы и только они
являются базисными векторами одномерных подпространств, инвариантных
относительно А.
Доказател ьство. 1°. Пусть вектор х собственный, а у
принадлежит одномерному подпространству J?' с базисом х. Тогда у = ах
и А(у) = аА(х) = аХх. Значит, А(у) лежит в !£*.
2°. Пусть х — базис инвариантного подпространства JS?'. Тогда
А(х) лежит в .£?' и раскладывается по базису: А(х) = Ах. Так как
х ф о, он собственный.
Следствие. В собственном подпространстве через каждый
вектор проходит одномерное инвариантное подпространство.
Предложение 6. В г-м столбце матрицы линейного
преобразования все элементы вне главной диагонали равны нулю тогда и только
тогда, когда i-й базисный вектор собственный. В этом случае
диагональный элемент столбца — собственное значение.
Действительно, если базисный вектор е,- собственный, то Д(е,) =
= Ае,-, и поэтому г'-й элемент координатного столбца вектора А(с{)
равен А, а остальные элементы равны нулю. Остается вспомнить, что
координатный столбец /4(ez) есть г-й столбец матрицы
преобразования. Обратное утверждение доказывается аналогично.
5. Характеристическое уравнение. Выберем базис и
обозначим через А матрицу линейного преобразования А в этом базисе.
Тогда преобразование А — АЕ имеет матрицу А — \Е, и согласно пред-
§4- Задача о собственных векторах
185
ложению 5 §3 его ядро отлично от пуля тогда и только тогда, когда
det (Л - ХЕ) - det
-Л
а\ ... а\
ol\ a\-\ ... а*
-А
= 0. (7)
"1 "2
Равенство (7), рассматриваемое как условие на Л, называется
характеристическим уравнением матрицы А, а его корни —
характеристическими числами матрицы А.
Разумеется, в вещественном пространстве в качестве
множителей допускаются только вещественные числа, и собственные
значения должны быть вещественными. Н соответствии с этим имеет
место
Теорема 1. В комплексном пространстве все корни
характеристического уравнения и только они являются собственными
значениями. В вещественном пространстве то же справедливо для
вещественных корней характеристического уравнения.
Левая часть характеристического уравнения представляет собой
многочлен степени п. Действительно, согласно формуле полного
разложения (10) §4 гл. V детерминант равен алгебраической сумме
произведений, в каждое из которых входит по п элементов матрицы.
Содержат Л только элементы, стоящие на главной диагонали.
Существует одно произведение
(а{-А)(а*-А)...«-А), (8)
в котором все сомножители содержат Л. Если в какое-нибудь другое
произведение вошел сомножитель aj (1ф j), то в пего не могут войти
сомножители (а\ — А) и (or?- — Л). Поэтому каждый член суммы,
кроме (8), содержит Л в степени не выше, чем п — 2. Раскрывая скобки
в выражении (8), выпишем два члена со старшими степенями Л:
(_i)»An + (-i)n-Vi + *\ + - + О*1'1-
Эти же члены будут старшими во всем многочлене. Свободный
член многочлена равен его значению при Л = 0, а это значение равно
det(yl - 0Е) = det А. Таким образом,
det{A-\E) = {-l)n\n + {-l)n-l\n-*^a\ + ... + detA. (9)
i=i
Этот многочлен называется характеристическим многочленом
матрицы А. Остальные его коэффициенты находить не будем, так
как они нам не потребуются. Многочлен степени я, как известно, не
может иметь больше, чем п различных корней и всегда имеет хотя
бы один комплексный корень. Если мы рассматриваем вещественное
пространство, то может случиться (при четной размерности), что
характеристическое уравнение не имеет ни одного вещественного кор-
186
Гл. VI. Линейные пространства
ня, и, следовательно, линейное преобразование не имеет собственных
значений и собственных подпространств. Примером может служить
поворот плоскости.
В комплексном пространстве и в вещественном пространстве
нечетной размерности каждое линейное преобразование имеет хоть
одно собственное значение и хоть одно собственное подпространство.
Предложение 7. Если А и А1 — матрицы линейного
преобразования А в разных базисах, то характеристические многочлены этих
матриц совпадают.
Доказательство. Согласно формуле (1) мы имеем
det(A' - \Е) = det{S^AS - \S~lS) = det S"1^ - XE)S =
= det(A - XE) det S*1 det S = dot(A - XE).
Из этого предложения следует, что мы можем назвать
характеристический многочлен матрицы А характеристическим
многочленом преобразования А.
Коэффициенты характеристического многочлена являются
инвариантами, связанными с преобразованием. В частности, детерминант
матрицы преобразования не зависит от выбора базиса. Другим
важным инвариантом является коэффициент а\ 4- ... + а£ при (—А)п-1,
называемый следом матрицы или следом преобразования. Он
обозначается trA или tr A
С помощью теоремы Внета из (9) нетрудно установить, что след
матрицы равен сумме всех корней ее характеристического
многочлена, а детерминант -- произведению корней.
6. Свойства собственных подпространств. Взаимное
расположение собственных подпространств описывает
Теорема 2. Сумма собственных подпространств является
прямой суммой.
В силу предложения 5 §2 это равносильно утверждению:
собственные векторы а?1,...,ж„ принадлежащие попарно
различным собственным значениям Ai,...,Ae, линейно независимы.
Для доказательства рассмотрим преобразования S,- = {A — A,-F)
для всех г = l,...,s и образы векторов x\,...,xs при этих
преобразованиях. Для любых i и j имеем
Bi(xj) = A{xj) - Xixj = (А,- - Xi)xj. (10)
Таким образом, Bi(xj) ф о при i ф j, a 6,-(я,-) = о. Допустим, что один
из векторов раскладывается но остальным, например,
Х\ = ОС'УХп + ... + OtsXs.
Подействуем на обе части равенства преобразованиями вг,...,б,.
Вектор xi в левой части равенства перейдет в отличный от нуля
вектор (Ai — A2)...(Ai — Х8)х\> а произвольное слагаемое atjXj (j = 2,..., s)
в правой части равенства перейдет в
aj(xJ - Л2)---(А^ - Xj)...{Xj - Xs)xjy
§4- Задача о собственных векторах
187
т. е. в нулевой вектор. Поэтому вен правая часть равенства
перейдет в нулевой вектор. Полученное противоречие заканчивает
доказательство теоремы.
Пусть А0 — корень многочлена р(А). Напомним, что кратностью
корня До называется самое большое число s, при котором многочлен
мо?кет быть представлен в виде р(Х) = (Л — A0)5pi(A), где р\(Х) --
некоторый многочлен. Корни кратности I называются простыми.
Теорема 3. Пусть собственное значение Л0 преобразования А
есть корень характеристического многочлена кратности s. Тогда
размерность соответствующего собственного подпространства не
превосходит s.
Доказательство. Пусть корню Л0 соответствует собственное
подпространство размерности к. Выберем там базис ci,..., е* и
дополним его векторами е*+1, ...,еп до базиса в пространстве jSf. Первые к
столбцов матрицы А преобразования А в этом базисе определяются
предложением 6:
1 Ао .
0 .
0 .
1 0 .
.. 0
.. Ао
.. 0
.. 0
В
с
Здесь В и С — какие-то подматрицы, занимающие п — к столбцов.
Раскладывая детерминант матрицы А — \Е последовательно по
каждому из первых к столбцов, мы получаем
det(/l - ХЕ) = (Ао - \)к det(C - АЯ).
Отсюда но определению кратности к ^ s. Теорема доказана.
Собственному значению кратности s может принадлежать
собственное подпространство размерности, меньшей, чем s. Например,
читатель может проверить, что линейное преобразование двумерного
пространства, задаваемое матрицей
1 1
О I
имеет собственное значение кратности 2 и одномерное собственное
подпространство.
7. Комплексные характеристические числа. Допустим, что
у линейного преобразования А вещественного линейного
пространства Sf характеристический многочлен имеет комплексный (не
вещественный) корень А. Поскольку коэффициенты многочлена
вещественны, комплексно сопряженное число А также будет корнем
многочлена. Имеет место
Предложение 8. Ларе комплексно сопряженных корней
характеристического многочлена преобразования А вещественного прост-
188
Гл. VI. Линейные пространства
ранства соответствует ненулевое инвариантное
подпространство S£*, обладающее тем свойством, что оно не содержит собственных
векторов, а через любой его вектор проходит двумерное инвариантное
подпространство. _
Доказательство. Числа Л и Л являются корнями
вещественного квадратного трехчлена t2 + pi + q (в котором р = — (А + А), а
q = АА). Рассмотрим линейное преобразование В = A2 -\-pA+qE и
подпространство ££' = Кег В. По предложению 3 Sff инвариантно.
Докажем, что j£f' — ненулевое подпространство. Если в
некотором базисе А имеет матрицу А, то матрицей преобразования В
будет Л2 Л-рА + qE. Эта матрица вещественна, но_раскладывается на
два комплексных мно?кителя: В — (А — ХЕ)(А — ХЕ). Отсюда det В =
— ЛоХ{А — ХЕ) det (Л - АЕ) = 0, так как det(^ — ХЕ) = 0, и мы видим,
что ядро В ненулевое.
JS?' не содержит собственных векторов. Действительно, если для
некоторого вектора х выполнено А(х) = рх, то В(х) = р2х + ррх +
+ qx = (/i2 + p/i + д)ж. Так как квадратный трехчлен не имеет
вещественных корней, /i2 + р/х + g ф 0, и поэтому из 6(ж) = о следует х = о.
Вектор х не может быть собственным.
Пусть теперь х — ненулевой вектор из ££'. Рассмотрим
подпространство J5?" — линейную оболочку векторов х и А(х). Это
подпространство инвариантно. В самом деле, пусть у = аж +/?Д(#) —
вектор из 3f". Тогда А(у) = аА(х) +0А2(х). Так как В(ж) = о, мы
находим, что А2(х) = —рД(ж) — дж, и потому Д(у) = аД(ж) — /?рД(ж) -
— fiqx. Значит, А(у) раскладывается по ж и Д(ж),т. е. принадлежите.
Итак, линейная оболочка векторов х и А(х) — инвариантное
подпространство. Ясно, что его размерность не больше двух. Если бы она
равнялась 1, то подпространство содержало бы собственный вектор,
чего, как мы видели, быть не может. Предложение доказано.
Рассмотрим корни характеристического многочлена. Если среди
них найдется вещественный, то существует собственное
подпространство, а значит, и одномерное инвариантное подпространство.
Если найдется не вещественный корень, то найдется двумерное
инвариантное подпространство. Поэтому имеет место
Следствие. Любое линейное преобразование ненулевого
вещественного пространства имеет или одномерное, или двумерное
инвариантное подпространство.
8. Приведение матрицы преобразования к диагональному
виду. Из предложения 6 вытекает
Предложение 9. Матрица преобразования А в базисе еь...,е„
является диагональной тогда и только тогда, когда все базисные век-
торы собственные. В этом случае диагональные элементы
матрицы — собственные значения.
Для произвольного линейного преобразования может не сущест-
§4- Задача о собственных векторах
189
вовать базиса из собственных векторов (пример в конце п. 6). Если
такой базис существует, то мы будем говорить, что матрица
преобразования приводится к диагональному виду, а преобразование
называют диагонализуемым или преобразованием простой структуры.
II р е д л о ж е н и е 10. Преобразование А пространства J? диагона-
лизуемо тогда и только тогда, когда 5? совпадает с суммой
собственных подпространств А.
Доказательство. Если 5£ совпадает с суммой собственных
подпространств, то в Jz? есть базис из собственных векторов, так
как сумма собственных подпространств прямая, и объединение их
базисов — базис в .£f. Обратно, если есть базис из собственных
векторов, то каждый вектор раскладывается по собственным векторам,
и потому принадлежит сумме собственных подпространств.
Следующее предложение дает простое, но важное достаточное
условие диагонализуемости преобразования.
Предложение 11. Если преобразование n-мерного
пространства ££ имеет п попарно различных собственных значений, то оно диа-
гопализуемо.
Действительно, соответствующие этим п собственным значениям
собственные подпространства расположены так, что их сумма
прямая. Самое меньшее, каждое из них имеет размерность 1, и потому
размерность суммы не может быть меньше, чем п. Значит, сумма
собственных подпространств должна совпадать с J£?.
Условие в предложении 11 не является необходимым. Например,
если все элементы диагонали одинаковы (в частности, для
тождественного и нулевого преобразований), то каждый ненулевой вектор
будет собственным, и в каждом базисе матрица преобразования
будет диагональной.
Предложению 11 можно придать следующую форму.
II ре дложе н ие 12. Если все характеристические числа
матрицы А попарно различны, то существует невырожденная матрица S
такая, что матрица S~1AS диагональная. Если матрица А
вещественна, а ее характеристические числа попарно различны и
вещественны, то существует такая вещественная матрица S.
Теорема 4. Линейное преобразование А пространства Jf диа-
гонализуемо тогда и только тогда, когда оно удовлетворяет
уравнению р[А) = О, где p(t) — некоторый многочлен без кратных (а для
вещественного пространства и комплексных) корней. При этом все
собственные значения преобразования — корни многочлена.
Доказательство. 1°. Пусть А диагонализуемо. Это значит,
что JS? раскладывается в сумму собственных подпространств, и
каждый вектор х представим в виде суммы х = х± -f... -f х$ собственных
векторов, принадлежащих различным собственным значениям Ai,...
..., А5. Рассмотрим многочлен p(t) = (t — Xi)...(t — А5) и покажем, что
преобразование R = р(А) = (А - \уЕ)...(А — XSE) нулевое. Действи-
190
Гл. VI. Линейные пространства
тельно, согласно (10) (A — \{E){xj) = (Xj — A,)#j, и потому
K(*i) = (Ai - А1)...(А,- - Ai)...(Ai - А,^ = о.
Отсюда вытекает, что /?(я) = /?(#i) 4-...+ R(xs) = о для любого ж.
2°. Обратно, пусть А удовлетворяет уравнению р(А) = О, в
котором р(*) = (£ — си)...(/ — ог5). Разло?ким функцию l/p(J) на
элементарные дроби:
p(t) t — c*i *'* £ — a5
После приведения к общему знаменателю получим тождество
1 = Ы<)+ - + *(<)>
где <7t(0 = 0iP(L)/(t — огг) — произведение /?,- на многочлен,
получаемый из p(t) вычеркиванием множителя t — а,-. Подставим в это
тождество преобразование А вместо переменной t: E=q\(A) + ... + qs(A).
Подействуем обеими частями полученного равенства на
произвольный вектор х. Мы получим х = хх + ... + х8, где Х{ = qi{A)(x).
Вектор Х{ ф о тогда и только тогда, когда он собственный,
a а,- — соответствующее собственное значение. Действительно,
(A — c\iE)(xi) = /3(р(А)(х) = о. Таким образом, произвольный
вектор пространства разложен в сумму собственных векторов. Это
равносильно тому, что Jz? раскладывается в сумму собственных
подпространств.
9. Приведение матрицы преобразования к треугольному
виду.
Теорема 5. В комплексном линейном пространстве для
каждого линейного преобразования существует базис, в котором матрица
преобразования — верхняя треугольная.
В вещественном пространстве то же утверждение справедливо,
если все корни характеристического многочлена преобразования
вещественны.
Заметим, что диагональные элементы треугольной матрицы —
корни ее характеристического многочлена. Поэтому условие во
второй части теоремы необходимо.
Доказательство. Если в n-мерном пространстве у
линейного преобразования А существует собственное значение А. то
найдется (п — 1)-мерпое инвариантное подпространство j£fn_i.
Действительно, dim 1гд(Д — АЕ) = п — dim Кег (А — АЕ) ^ п — 1.
Инвариантным будет любое (п — 1)-мерное подпространство JS?n_i,
содержащее \т(А — АЕ). так как если х Е JSfn_i, то А(х) можно представить
в виде суммы (А(х) — Хх) + Хх, причем А(х) — Хх Е 1гп(Д — АЕ) С
С JSf„-i и A*€J?„-i.
Поместим в Jfn-i первые 7/ — 1 базисных векторов. Так как J£?n_i
инвариантно, первые п — 1 элементов последней строки матрицы А
преобразования будут равны нулю. Мы можем свободно
распоряжаться первыми п — 1 базисными векторами, не выводя их из 3fn-i-
§Jf. Задача о собственных векторах
191
Применим те же соображения к ограничению преобразования А на
-£?n-i- Мы получим J£?n-2 С -Sfn-ь и поместив туда первые п — 2
базисных векторов, сделаем равными нулю элементы (п — 1)-й строки,
лежащие ниже диагонали.
Продол?кая далее те же рассуждения, мы получим цепочку
инвариантных подпространств
JSfiC...CJ?„-2CJ?„-i, (И)
причем ех G J^i; еье2 G JS?2; •••; ei,...,en_i G J^n-i- Матрица
преобразования в таком базисе будет треугольной.
В комплексном пространстве на каждом этапе существование
собственного значения сомнений не вызывает. В вещественном
пространстве мы предполагаем, что все корни характеристического
многочлена вещественны.
Докажем, что в этом случае ограничение А' преобразования А на
каком-либо инвариантном подпространстве 5£' имеет только
вещественные корни характеристического многочлена. Допустим, что у А!
существует пара_ комплексно сопряженных корней Л и А, и
обозначим р = — (А + Л) и q = АА. Согласно предложению 8 найдется
ненулевой вектор х G -i?', такой, что (А* + рА' + qE')x = о. Так как
А'(х) = А(ж), мы имеем (A2 -f pA + qE)x = о. Это означает, что
матрица В преобразования А2 + рА + qE вырождена. Но В = А2 + рА -f
+ qE = (А - АЬТ)(А - А£). Поэтому из dot В = 0 следует det(A - А£) =
= 0, что противоречит условию теоремы. Таким образом, и в
вещественном пространстве при наших предположениях на каждом этапе
построения базиса существование собственного значения
гарантировано.
Упражнения
1. Докажите, что каждое подпространство, лежащее в Кег А, и каждое
подпространство, содержащее ImA, инвариантно относительно А.
2. Докажите, что сумма и пересечение инвариантных подпространств
инвариантны.
3. Докажите, что размерность подпространства j£?', определенного в
предложении 8, — четное число.
4. Пусть A: .$f -» J£f. Докажите, что j£? = Ker A® Im А тогда и только
тогда, когда Кег А2 = Кег А.
5. Пусть .if = КегАф ImA. Какой вид имеет матрица
преобразования А в базисе е, если ei, ...,er G 1тД acr+i,...,cn€ Ker A?
6. Пусть х и у --- столбцы высоты п. Докажите, что det(E-f хут) =
= 1 +хту.
7. Найдите собственные значения и собственные подпространства
преобразования, заданного матрицей
II 3 -2 б ||
-2 6 3 .
6 3-2
192
Гл. VI. Линейные пространства
8. Каждой квадратной матрице порядка п сопоставляется ее
транспонированная матрица. Этим определено преобразование Т пространства
матриц. Найдите его собственные значения и собственные подпространства.
Докажите из этих соображений, что каждая матрица однозначно
представляется как сумма симметричной (Ат = А) и кососимметричной (Ат — —А).
9. Пусть А и В — квадратные матрицы одного порядка и det А ф 0.
Докажите, что характеристические многочлены матриц АВ и В А совпадают.
10. Пусть А диагонализуемо. Докажите, что ограничение А на любом
инвариантном подпространстве также диагонализуемо.
11. В исходном базисе преобразование А задано матрицей
II 1 "2 ~2
А = 4 7 6
II _1 -1 1
Найдите какой-либо базис, в котором его матрица А' — верхняя
треугольная и напишите эту матрицу.
§ 5. Линейные функции
1. Определение функции. Мы будем рассматривать линейное
пространство ££, вещественное или комплексное. Слово "число",
употребленное без уточнения, означает комплексное число для
комплексного пространства и вещественное число для вещественного.
Определение. Будем говорить, что на линейном
пространстве S£ задана функция f от одного вектора, если каждому вектору х Е
G & сопоставлено число f(#), а также, что задана функция g от двух
векторов, если каждой упорядоченной паре векторов я, у из J£?
сопоставлено число g(x,y).
Функции на бесконечномерных пространствах, элементы которых
сами являются функциями, называют функционалами.
Пусть пространство j£f имеет размерность п. При выбранном
базисе каждому вектору х из J£? сопоставлены п его компонент f1,...,^.
Напомним, что в математическом анализе функцией от п
переменных называют закон, который ставит в соответствие некоторое
число каждому упорядоченному набору из п чисел £*,.••»£",
входящему в определенную совокупность таких наборов. Таким образом, при
выбранном базисе функция f на линейном пространстве jSf задается
функцией от п переменных, определенной на множестве
всевозможных наборов £*, ...,£п. Если базис изменится, тому же вектору х
будут соответствовать новые компоненты, и, следовательно, прежняя
функция f будет задана новой функцией от п переменных.
2. Линейные функции. Введем
Определение. Функция f на линейном пространстве JS?
называется линейной, если для любых х и у из ££ и любого числа а
выполнены равенства
Цх + у) = f (*) + %), Цах) = аЦх). (1)
§ 5. Линейные функции
193
Читатель может заметить, что линейная функция на
пространстве 5£ не является новым для него объектом. Это в точности то ?ке
самое, что линейное отображение J£? в одномерное арифметическое
пространство.
Пример 1. Функция, сопоставляющая каждому вектору число О,
линейная. Функция, сопоставляющая всем векторам одно и то же
число, отличное от нуля, не линейная, так как для ка?кдой линейной
функции f(o) = 0.
Пример 2. Рассмотрим геометрическое пространство
векторов — направленных отрезков. Выберем в нем некоторый
фиксированный вектор а. Каждому вектору х можно сопоставить число
С = (а, х). Ясно, что равенства (1) выполнены, и мы имеем линейную
функцию.
Пример 3. Пусть в ?г-мерном пространстве JS? выбран базис е.
Сопоставим каждому вектору х его ?-ю компоненту в базисе е.
Очевидно, что это соответствие — линейная функция на JSf. Мы
обозначим ее р*. Так может быть построено п функций р1, ...,рп. Конечно,
они зависят от того, какой базис в S£ был выбран.
Пример 4. Рассмотрим пространство ^функций, определенных
и непрерывных на отрезке [0,1] (пример 1 §1). Пусть v
—фиксированная функция из €6. Тогда каждой функции и из ^f можно сопоставить
число !
C = Jv(t)u(t)dL
о
Нетрудно проверить, что это соответствие — линейный функционал.
Еще один линейный функционал на том же пространстве '6 мы
получим, если сопоставим каждой функции и ее значение в нуле «(0).
Рассмотрим n-мерное линейное пространство JS? и выберем в нем
базис ei,...,en. Значение линейной функции f на векторе х может
быть выражено через координаты этого вектора £*, ...,£п:
f(х) = f(^ех + ... + Сеп) = &(ei) + ... + «nf («»)•
Числа f(ei), ...,f(en) не зависят от вектора х, а определяются
только функцией f и базисом. Мы доказали следующее
Предложение 1. Каждая линейная функция на n-мерном
линейном пространстве в произвольном базисе о задается линейным,
однородным многочленом „, ч ., „„
от координат вектора в этом базисе. Коэффициенты многочлена
<pi (рп равны значениям функции па базисных векторах.
Значения функции f на векторах базиса е удобно называть
компонентами пли коэффициентами функции f в базисе е. Матрица
линейного отображения л-мерного пространства в одномерное имеет
размеры 1 х п, т. е. это — строка длины п. Предоставим читателю
проверить, что это строка ||pi ..-¥>« ||- Формула (2) в матричном виде
194
Гл. VI. Линейные пространства
записывается так:
f(z) = |l?i-Y>»ll
е
с
= v>£- (3)
Каждая строка ср ио формуле (3) определяет линейную функцию.
В самом деле, <р(£ + г}) = <р£ + <рт} и <р(а£) = <*<£>(£)•
Формула (6) § 3 выражает матрицу отображения в новых базисах
через его старую матрицу и матрицы перехода к новым базисам. Так
как в одномерном арифметическом пространстве базис фиксирован
раз и навсегда, для линейной функции эта формула принимает вид
<р' = *S. (4)
Здесь <р — строка коэффициентов функции в базисе е, а (р' —-
строка ее коэффициентов в базисе е' = eS. Разумеется, формулу (4) легко
получить и непосредственно. Действительно, <р\ = f(ej) = (рач для
любого г. Координатный столбец <т, вектора е(- есть г-й столбец матрицы
перехода S. Отсюда прямо следует (4).
3. Сопряженное пространство. В §3 введены определения
линейных операций для линейных отображений. В применении к
линейным функциям эти определения формулируются так.
Определение. Суммой линейных функций f и g называется
функция h, значение которой для любого вектора х определяется
равенством h(x) = f{x) +g(x). Произведением линейной функции f на
число а называется функция g, значение которой на векторе х
определяется как g(x) = arf(#).
Предложен ие 2. Пусть fug — линейные функции, а <р и ф —
их строки коэффициентов в некотором базисе е. Тогда сумма f+
+ g — линейная функция, и ее строка коэффициентов равна (р + ф.
Для произвольного числа а произведение af — линейная функция, и ее
строка коэффициентов есть а<р.
Докажем первую часть предложения. Вторая часть доказывается
аналогично. Для произвольного вектора х значения функций
записываются как f(х) = <р£и g(x) = ф£. Тогда значение суммы f -f g на том
же векторе равно ц>£ + ф£ = (<р + ф)£. Это показывает, что f + g -—
линейная функция со строкой коэффициентов <р + ф.
Предложение 3. Множество J£?* всех линейных функций на
n-мерном линейном пространстве 5? по отношению к введенным
выше линейным операциям представляет собой n-мерное линейное
пространство.
Действительно, существует взаимно однозначное отображение
множества J£?* на множество строк длины ?г, причем сумме
функций соответствует сумма строк, а произведению функции на число —
произведение ее строки на это число. Поскольку аксиомы линейного
§5. Линейные функции
195
пространства выполнены для операций со строками, они будут
выполнены и для операций в J£?*. Следовательно, J£?* — линейное
пространство, изоморфное пространству строк длины п.
Определение. Линейное пространство JSf* всех линейных
функций на линейном пространстве ££ называется сопряженным для 1£.
Выберем базис е в пространстве 5£ и рассмотрим линейные
функции р* (г = 1,..., п), определяемые равенствами р*(ж) = £*, где £* — г-я
координата вектора х (пример 3). Это означает, что
р*'ы = {?; litJ- (ij = \,...,n),
(5)
или, иначе, строка коэффициентов функции р* есть г-я строка
единичной матрицы. Отсюда легко следует, что функции р1,...^" линейно
независимы. Так как пространство J£?* n-мерное, эти функции
составляют в нем базис.
Определение. Базиср1, ...,рп вJS?",определяемый формулой (5),
называется биортогональным или взаимным базису ei,...,en
пространства J£?.
Строка ||^1 ...^п|| раскладывается по строкам единичной
матрицы с коэффициентами <pi,..., <рп. Поэтому элемент f пространства &щ
со строкой коэффициентов ||^i ...^n|| имеет разложение
f = <Pi?x + ... + <PnPn. (6)
Введем столбец р, составленный из функций рг. Теперь разложение (6)
можно переписать в матричной форме:
f = 1191-^nl
РП
= ет>- (7)
Таким образом, строка координат элемента f £ JS?* во взаимном
базисе р совпадает с его строкой коэффициентов в исходном базисе t\,..., еп
пространства 5?. Если для пространства J£?* придерживаться
соглашения писать компоненты вектора в столбец, а базисные
векторы в строку, то формулу (7) следовало бы написать в виде f =
т т
Пусть в Sf базисы е и е' связаны равенством е' = с,9. Найдем
матрицу перехода между их взаимными базисами р и р'. Для
этого напишем формулу (4) в виде (4) § 1, решив ее относительно
старых коэффициентов и транспонировав, чтобы записать
коэффициенты в столбец. Мы получим ^
<р = [ь ) <р .
Отсюда видно, что матрицей перехода от базиса р к базису р' в
пространстве J?* будет матрица (5_1)т. Значит, базисы связаны
формулой р' = рт(5~1)г. Если вернуться для пространства J£?* к записи
196
Гл. VI. Линейные пространства
элементов базиса в столбец, связь базисов примет вид
Р = 5р'. (8)
Пространство JS?* — такое же линейное пространство, как и
любое другое, и, следовательно, имеет сопряженное пространство Jz?**,
элементы которого — - линейные функции на Л?*.
Предложение 4. Пространство 5£ж* может быть
отождествлено с Sf.
Доказательство. Фиксируем определенный вектор х из 5? и
сопоставим каждому элементу f E 5£ж число Цх). Таким образом,
х можно рассматривать как функцию на .if*. Эта функция
линейная. Действительно, (f 4- g)(x) = f(x) + g(x), и, следовательно, х
сумме функций сопоставляет сумму чисел, сопоставляемых слагаемым.
Аналогично, равенство (crf){x) = ai(x) означает, что произведению f
на а вектор х сопоставляет произведение а на число,
сопоставленное f. Итак, х можно отождествить с некоторым элементом JSf**.
При этом сумма и произведение на число для векторов из 5£
совпадают с их суммой и произведением на число, если их понимать как
функции на -£?*. Это очевидно. Например, для суммы это равносильно
равенству f[х + у) = f(x) + f(у).
Теперь мы видим, что Jzf может быть отождествлено с
подпространством в JS?""\ Но dim JS? = dim J£f* = dim &ж*, и
подпространство совпадает со всем пространством.
Упражнения
1. Может ли для линейной функции на линейном пространстве J$f для
всех х G Sf выполняться: a) f(x) > 0; б) f(x) ^ 0?
2. Пусть а — фиксированный вектор плоскости. Сопоставим каждому
вектору х площадь ориентированного параллелограмма, построенного на х
и а, или 0, если векторы коллинсарны. Проверьте, что эта функция линейна,
и найдите строку ее коэффициентов в базисе е2,е2, если а = ас] +/3е2.
Изменив базис, проверьте формулу (4).
3. Пусть к — натуральное число. Сопоставим каждому многочлену
степени не выше п значение его fc-й производной в точке а. Проверьте, что
этим определена линейная функция. Найдите ее координатную строку в
базисах: а) 1,М2,...,£П; б) i,(£-a),(t-a)2,...,(*-a)n.
4. Пусть ej,..., en G S£ и р1,..., рп 6 -2** — пара биортогональных базисов.
Докажите, что для любого х Е Sf и для любого f E Jzf* выполнено х =
= pl(x)Cl + ... + pn(z)cn и f = f^Op1 + ... + f(en)pn.
§ 6. Квадратичные формы
1. Билинейные функции. Введем следующее
Определение. Билинейной функцией или билинейной формой на
линейном пространстве 5£ называется функция b от двух векторов
§6. Квадратичные формы
197
из if, линейная по каждому из своих аргументов, т. е.
удовлетворяющая (для любых ж, у и z и любого числа а) равенствам
b(x + y,z) = Ь(х,г) + Ь(у,г), Ь(ах,у) = ab(z,y),
Ь(ху у + z) = Ь(х, у) + Ь(ж, 2r), b(x, ay) = nb(ar, у).
Пример 1. Паре векторов на плоскости сопоставим скалярное
произведение. В силу известных свойств скалярного произведения
это — билинейная функция.
Пусть о =: ||ei ...en|| — базис в -£?. Если £' и rf (г, j = 1,..., п) —
координаты векторов х и у, то значение билинейной функции Ь на
этой паре векторов может быть вычислено согласно (1) так:
п п
b{x,y) = b(J2?ei> I>'ei) =Е^Ь(е,,еД
*=1 j=l i,j
или, окончательно,
*(*,») = £Ду*У- (2)
Здесь п2 чисел 0ц — b(e{,Cj) (значения билинейной функции па
всевозможных парах базисных векторов) называются ее
коэффициентами в базисе е. Их записывают в виде квадратной матрицы порядка п:
II /?11 /?12 ... Ля ||
D I /?21 ^22 •.. /?2к
II Ail /?п2 ". Am II
Эта матрица называется матрицей билинейной функции в данном
базисе. Как легко проверить умножением матриц, равенство (2) можно
написать в матричном виде:
Ь(х,у)=?Вг,. (3)
Матрица билинейной функции в следующем смысле однозначно
определена: если значение Ь{х,у) для любой пары векторов получается по
формуле (3) с помощью матрицы С\ то С = В, т. е. элементы С —
значения b на парах базисных векторов. Действительно, в этом случае
мы имеем A"j = 6(e,-,ej) =ofCej, где щ и е, — столбцы единичной
матрицы. Пример 4 §2 гл. V показывает, что Aj равно элементу с^
матрицы С
При замене базиса матрица билинейной функции, разумеется,
меняется. Получим закон ее изменения. Пусть £' и т/' — координатные
столбцы векторов х и у в базисе е' = eS. Тогда £ = S£' и ?/ = 5?/'. Но
формуле (3) имеем Ь(х,у) = {S£')T B{Sti') = £'(STBS)ri'. Поскольку
матрица В' функции Ь в базисе с' однозначно определена,
В' = STBS. (4)
198
Гл. VI. Линейные пространства
Перемножая матрицы, мы получим выражение для элементов В1
#; = Х>М&< (U = i,...,n), (5)
в котором <т* — элементы матрицы перехода 5.
Билинейная функция Ь называется симметричной, если для любой
пары векторов Ь(хуу) = Ь(у,х).
Если билинейная функция симметрична, то Ь(е,-,е^) = b(ej,ei) для
любых г и j, т. е. /?у = fiji.
Таким образом матрица В билинейной функции симметрична.
Обратно, пусть билинейная функция имеет симметричную
матрицу. Тогда, поскольку матрица размеров 1 х 1 не меняется при
транспонировании,
Ь(х, у) = {еВг1)Т = VTBT$. = т,тВ<- = Ь{у, х).
Мы доказали
Предложение 1. Билинейная функция симметрична тогда и
только тогда, когда симметрична ее матрица.
2. Квадратичные формы.
О п р е д е л е н и е. Квадратичной формой или квадратичной
функцией на линейном пространстве JS? называется функция к, значение
которой на любом векторе х определяется равенством к(х) = Ь(х,х),
где Ь — симметричная билинейная функция.
Пример 2. Скалярное произведение векторов — симметричная
билинейная функция. Соответствующая квадратичная функция
сопоставляет вектору квадрат его длины.
Но заданной квадратичной форме к однозначно определяется
соответствующая симметричная билинейная функция Ь. Действительно,
пусть хну— произвольные векторы. Тогда
к(х + у) = Ь(х + у, х + у) = Ь(х, х) + Ь(ж, у) + Ь(уу х) + Ь(у, у).
Отсюда, используя Ь(у,х) = Ь(х,у)> получаем
6(*,y) = ±(k(* + y)-k(*)-k(y)),
и значение Ь на любых векторах выражается через значения к.
Матрицей квадратичной формы называется матрица
соответствующей билинейной функции.
Согласно (3) мы имеем следующее выражение значения
квадратичной формы через координатный столбец вектора:
к(х)=ев& (с)
или, в развернутом виде,
k(*) = 5>i^- (7)
§6. Квадратичные формы
199
Правая часть формулы (7) — однородный многочлен второй
степени относительно £*, ...,£п. (Собственно, слово "форма", когда-то
употреблявшееся значительно шире, означает "однородный многочлен".)
Приведенная запись этого многочлена содержит подобные члены: при
i ф j члены Pij£%£* и ftji&C совпадают. Поэтому после приведения
подобных членов (7) принимает вид
Цх) = /?п(^)2 + 2012ее + /?22(£2)2 + 2/Згг^е + - (8)
Определение. Квадратичная форма к в базисе е имеет
диагональный вид, если в этом базисе
к(*) = Х>,(П2, (9)
т. е. ее матрица является диагональной.
Теорема 1. Для каждой квадратичной формы к существует ба-
зису в котором она имеет диагональный вид.
Доказательство. Пусть В — матрица квадратичной формы к
в каком-либо базисе. Применим к матрице В последовательность
элементарных преобразований, которую для удобства описания
разобьем на ряд шагов. На первом шаге возможны два случая.
1) Основной случай: /Зп ф 0. Если это так, вычитаем первую
строку, умноженную на подходящие множители (/?н//?ц для г-й строки),
из всех ле?кащих ниже строк и вычитаем первый столбец,
умноженный на те ?ке множители, из всех столбцов правее него. В результате
матрица В перейдет в матрицу В\ вида
II ег 0 ... 0 II
: с, • "0|
II о II
где С\ — симметричная матрица порядка п — 1.
2) Особый случай: /Зц = 0. Здесь имеются две возмо?кности.
а) fin = 0 для всех г = 2,..., п. При этом матрица уже имеет нужный
вид (10).
б) Найдется г, для которого /Зц ф 0. При этом делается
вспомогательное преобразование: если /Зц ф 0, то г-я строка переставляется с
первой, и t-й столбец переставляется с первым; если же /Зц = 0, то
г-н строка прибавляется к первой и г-й столбец прибавляется к
первому. В преобразованной матрице оказывается (З'п ф 0. После
вспомогательного преобразования матрица приводится к виду (10) так же,
как и в основном случае.
200
Гл. VI. Линейные пространства
Пусть в результате к шагов мы получили матрицу
Вк =
El
0
...
о
0
£к
О
ск
(11)
Здесь Ck - симметричная матрица порядка п — Аг, а через е^, ...,£*
обозначены левые верхние элементы матриц С», полученных на
предыдущих шагах.
Следующий. (Аг + 1)-й шаг состоит в такой последовательности
элементарных преобразований последних п — к строк и последних
п -к столбцов матрицы Вк, которая равносильна применению
преобразований первого шага к матрице С*. В результате мы получаем
матрицу Вк+\. имеющую тот же вид с большим на I значением к.
После (?? — 1)-го шага матрица Cn_i имеет порядок 1 и не ну?кда-
ется в преобразовании. В результате матрица В будет превращена в
диагональную матрицу
В'-
Разумеется, если исходная матрица нулевая или нулевой окажется
какая-либо из матриц С\., то в дальнейших преобразованиях
необходимости нет, так как матрица уже диагональная. Это равносильно
тому, что на всех следующих шагах имеет место особый случай а).
Важно заметить, что после каждого элементарного
преобразования строк осуществлялось такое же элементарное преобразование
столбцов. Если элементарное преобразование столбцов равносильно
умножению преобразуемой матрицы справа на матрицу 5а, то то же
преобразование строк равносильно умножению слева на матрицу Sj
(п. 4 §2 гл. V).
В результате всей последовательности элементарных
преобразований мы получаем матрицу В' = S7BS, где S = Si...Sn —
произведение всех матриц, осуществляющих элементарные преобразования
столбцов.
Мы доказали, таким образом, что матрица /i' является матрицей
квадратичной формы к в базисе с', который связан с исходным
базисом е матрицей перехода S. 'Георема доказана.
Доказательство дает способ выписать матрицу перехода S к
базису, в котором квадратичная форма имеет диагональный вид. Для
этого нужно попутно с преобразованиями матрицы В делать все
элементарные преобразования со столбцами единичной матрицы. В конце
единичная матрица превратится в произведение всех элементарных
матриц, т. е. в нужную нам матрицу 5.
§6. Квадратичные формы
201
При приведении квадратичной формы к диагональному виду
можно воспользоваться методом выделения квадратов. Покажем его на
примере. Пусть задана квадратичная форма
Ф)=2(^)2+4^е+щ2)2+4^3+5(*3)2.
Заметив, что коэффициент при (£*)2 отличен от нуля, соберем вместе
все члены, содержащие £*:
щ?)2+2*ч2]+зк2)2+лее+5(^3)2.
Дополним выражение в квадратных скобках до квадрата суммы,
прибавив и вычтя 2(£2)2:
аде*)2+чее+(en - щ2?+щу+*ее+цег.
Теперь к(х) = 2[(£* + £2)]2 + к'(х), где к' — квадратичная форма,
значения которой зависят только от £2 и £3:
ь'(х) = (е)2+ч2е+че)2-
К ней можно применить тот же прием:
к'(*) = К3 + 2£3)2 + «3)2.
Итак
k(o.-)=2(ei)2+(a2+(?)2.
где
Последние формулы задают преобразование координат при переходе
к базису, в котором квадратичная форма имеет диагональный вид.
В методе выделения квадратов также возможен особый случай,
когда в квадратичную форму не входят квадраты координат, а
входят только произведения. Допустим, что с ненулевым
коэффициентом 2/?i2 входит произведение £1£2. Рекомендуется замена координат
*'=?+?, *3 = ?-?. ?=? (<>2).
После этой замены в квадратичную форму войдут члены 2j#i2(£1)2 —
— 2/?i2(f2)2, и выделение квадратов может быть продолжено.
При доказательстве теоремы 1 была предложена определенная
последовательность элементарных преобразований. В основном случае
метод выделения квадратов только формой записи отличается от
приведения с помощью этой последовательности преобразований. Но
полезно иметь в виду, что можно использовать любую
последовательность элементарных преобразований при единственном условии:
после каждого элементарного преобразования строк должно выполняться
то же элементарное преобразование столбцов.
Диагональный вид квадратичной формы в вещественном
пространстве мы будем называть каноническим, видом, если элементы е* па
диагонали могут быть равны только 1, —1 и 0. В комплексном
202
Гл. VI. Линейные пространства
пространстве диагональный вид квадратичной формы канонический,
если числа на диагонали могут равняться только 1 или 0.
Теорема 2. Для каждой квадратичной формы существует базис,
в котором она имеет канонический вид.
Для доказательства будем исходить из диагонального вида
квадратичной формы и сделаем следующее преобразование. Если какой-
либо из диагональных элементов е* отличен от нуля, то разделим k-ю
строку и £-й столбец матрицы на у/ёк в случае комплексного
пространства и на \/|£/Г[ в случае вещественного пространства. Это
равносильно делению А-го базисного вектора на то же число. Сделав это
для всех к таких, что вк Ф 0, мы приведем квадратичную форму к
каноническому виду.
3. Ранг и индекс квадратичной формы. Существует много
базисов, в которых данная квадратичная форма имеет канонический
вид. Коэффициенты ей могли бы быть, вообще говоря, своими для
каждого из таких базисов. Однако оказывается, что они одни и те же
(с точностью до порядка их расположения), как бы мы ни приводили
квадратичную форму к каноническому виду.
Теорема 3. Ранг матрицы квадратичной формы не зависит от
базиса.
Действительно, но формуле (5) матрицы В и В' квадратичной
формы в двух базисах связаны равенством В1 = STBS, где detS ф 0.
Отсюда Kg В' — Rg BS = Kg В в силу предложения 3 §3 гл. V.
Если квадратичная форма имеет диагональный вид, то ранг ее
матрицы равен числу диагональных элементов, отличных от нуля.
Таким образом, это число не зависит от базиса.
Оп ред ел ен ие. Число не равных нулю коэффициентов в
каноническом виде квадратичной формы к называется рангом к.
Итак, ранг квадратичной формы равен рангу ее матрицы.
В комплексном пространстве все квадратичные формы одного и
того же ранга г приводятся к одному и тому ?ке каноническому ви-
ДУ (£1)2 + ••• + (fr)2* Теперь рассмотрим вещественное
пространство J$f.
О п ре д е л е н и е. Квадратичную форму к будем называть
положительно определенной на подпространстве j£f' пространства Л?, если
к(#) > 0 для любого ненулевого вектора х из 5?'. Форма к
отрицательно определена на J$f'. если к(х) < 0 для любого х ф о т S£'.
Если говорят, что квадратичная форма положительно или
отрицательно определена, без уточнения подпространства, то она обладает
таким свойством на всем j£f\
Квадратичные формы, для которых к(х) ^ 0 или к(х) ^ 0 при
любом ж, называются соответственно положительно или отрицательно
полуопредел енн ым и.
Удобно считать, что на нулевом подпространстве ка?кдая квадра-
§6, Квадратичные формы
203
тичная форма и положительно определена, и отрицательно определена
одновременно. В силу этого соглашения всегда существует (хотя бы
нулевое) подпространство, на котором квадратичная форма
отрицательно определена.
Определение. Пусть Л?^ --- подпространство максимальной
размерности среди всех подпространств, на которых квадратичная
форма отрицательно определена. Число dim JZ*~) называется
отрицательным индексом или просто индексом квадратичной формы.
Аналогично определяется положительный индекс как максимальная из
размерностей подпространств, на которых квадратичная форма
положительно определена.
Докажем так называемый закон инерции квадратичных форм.
Теорема 4. Число отрицательных и число положительных
коэффициентов в каноническом виде квадратичной формы не зависят
от базиса, в котором она приведена к каноническому виду.
Докажем сначала, что если в каком-либо базисе форма к приведена
к каноническому виду, то число коэффициентов, равных —1, равно
отрицательному индексу формы к. Пусть в базисе ль...,еп форма к
ранга г с индексом s имеет канонический вид
-(e)2 -...- (а2+(е+1)2 + -+(п2-
Обозначим через J$fi линейную оболочку векторов ei,...,ej, а через
j£?2 — линейную оболочку остальных базисных векторов. Для любого
xeSfi имеем {Я-1 = ... = £я = 0, и к{х) = -К1)2 - ... - (£>)2 < 0, если
только х ф о. Значит, к отрицательно определена па &х и ,s* ^ j.
На J£?2 форма к положительно иолуоиределениая, потому что
^ = ... =£i = о для любого х е&ч и к{х) = (fJ+1 )2 + ... + {С)2- (Форма
может равняться нулю на ненулевом векторе, если г < п.)
dimJ£?2 = n — j. Пусть существует подпространство Sf^
размерности s > j, на котором к отрицательно определена. Тогда,
поскольку сумма размерностей J£?2 и Sf^~' больше п, эти подпространства
имеют ненулевой вектор z в пересечении. Имеем k(z) < 0, так как
z G Sf^ и k(z) ^ 0, так как z E J$f2- Полученное противоречие
показывает, что j = б*. Число коэффициентов, равных -1, равно
отрицательному индексу, и потому не зависит от базиса. Число
коэффициентов, равных +1, также не зависит от базиса, так как оно равно г — s,
а ранг г и индекс s от базиса не зависят. Теорема доказана.
Следствие. Число положительных и число отрицательных
коэффициентов в любом диагональном виде квадратичной формы не
зависят от базиса.
Положительно определенные квадратичные формы имеют ранг л
и индекс 0 и приводятся к каноническому виду
(еу2+-+(п2- (12)
Отрицательно определенные квадратичные формы имеют ранг п и
204
Гл. VI. Линейные пространства
индекс п и приводятся к каноническому виду — (£*)2 — ...— (£п)2.
Положительно и отрицательно полуопределен и ые квадратичные
формы ранга г приводятся соответственно к каноническим видам
it1)3+ - + (?)', -К1)2 - •■—(Г)а-
В вещественном пространстве квадратичная форма
характеризуется двумя числами в том смысле, что все квадратичные формы,
у которых эти нары чисел одинаковы, приводятся к одному и тому
же каноническому виду. В качестве таких чисел можно взять
положительный и отрицательный индексы или же ранг, который равен их
сумме, и отрицательный индекс. Часто вместе с рангом используют
разность положительного и отрицательного индексов. Эта разность
называется сигнатурой квадратичной формы.
Отметим, что в вещественном пространстве имеет место
Предложение 2. Знак детерминанта матрицы квадратичной
формы не зависит от базиса.
Это сразу следует из формулы (5): dot В' = det B{detS)2.
Условие положительной определенности квадратичной формы дает
следующая теорема, называемая критерием Сильвестра.
Теорема 5. Для положительной определенности квадратичной
формы необходимо и достаточно, чтобы миноры ее матрицы
удовлетворяли неравенствам
Мк =
0к1 — Ркк
>0 (* = 1,...,п). (13)
Миноры вида (13) называются главными минорами матрицы.
Для доказательства вспомним преобразования матрицы
квадратичной формы, примененные при доказательстве теоремы 1.
1°. Необходимость. Если квадратичная форма к положительно
определена, то диагональные элементы ее матрицы в любом базисе
удовлетворяют условию
Ра = к(е,-) > О,
и, следовательно, при приведении матрицы к диагональному виду
особый случай не встретится. В основном случае к любой строке
может быть прибавлена только лежащая выше, а к любому
столбцу — только расположенный левее. При таких преобразованиях
главные миноры матрицы не изменятся. Но у диагональной матрицы для
положительно определенной квадратичной формы главные миноры
положительны. Поэтому они положительны и у исходной матрицы.
2°. Достаточность. Пусть все главные миноры матрицы В
положительны. В частности, Mi = /Зц > 0, и первый шаг
преобразования приводит матрицу к виду (10) с е\ > 0. Допустим, что
после к шагов мы получили матрицу Bk с положительными £i,...,s*.
§6. Квадратичные формы
205
причем не возникало особого случая. Тогда для левого верхнего
элемента матрицы Ск имеем вк+\ = M*+i/Mfc, так как главные миноры
не менялись. Поэтому Sk+i > О, на очередном шаге преобразования
имеет место основной случай и полученная матрица имеет
положительные элементы £i,....e*+i. Рассуждая так для всех к, мы придем
к доказываемому утвер?кдению.
4. Полуторалинейные функции. В комплексных
пространствах квадратичные формы используются редко. В приложениях как
правило встречаются так называемые эрмитовы формы.
Определение. Функция b от двух векторов на комплексном
линейном пространстве JSf называется полуторалинейной или
эрмитовой билинейной функцией, если для любых векторов ж, у и z и любого
комплексного числа ос
Ь{х + у, z) = Ь(ху z) + Ь(у, z), Ь(ах, у) = ab(x, у),
b{x,y+z) - Ь(х.у) + b(x,z), Ь{х,ау) = аЬ(х,у).
Отличие полуторалинейной функции от билинейной в том, что она
не линейна по второму аргументу: при его умножении на число а
значение функции умножается на комплексно сопряженное число а.
Перечислим основные свойства этих функций. Доказываются они
так же, как соответствующие свойства билинейных функций. Ниже
черта над буквой, обозначающей матрицу, будет обозначать замену
всех элементов матрицы комплексно сопряженными числами.
Если в J£f выбран базис, то значение полуторалинейной функции
на паре векторов хну может быть выражено через координаты этих
векторов формулой ^_
В называется матрицей полуторалинейной функции. Ее элементы
равны значениям Ь на парах базисных векторов: fiij = Ь(е»,е^).
При замене базиса£ матрицей перехода S матрица В заменяется
на матрицу В1 = ST BS.
Полуторалинейная функция Ь называется эрмитово
симметричной, если для любой пары векторов b(x,y) = Ь(у,х). Для этого
необходимо и достаточно, чтобы в любом базисе элементы матрицы этой
функции удовлетворяли условиям /3{j = (3ji. Это равносильно
условию ВТ = В на матрицу полуторалинейной функции. __
Определение. Матрица В, для которой Вт = В, называется
эрмитовой матрицей.
Элементы эрмитовой матрицы, симметричные относительно
главной диагонали, комплексно сопряжены: fa = fiji, в частности,
элементы на главной диагонали вещественные: /Зц = ~0й.
О п ре деление. Функция к на комплексном линейном
пространстве называется эрмитовой формой, если к(х) = Ь(х,х) для некоторой
эрмитовой симметричной полуторалинейной функции Ь.
206
Гл. VI. Линейные пространства
Для заданной эрмитовой формы к можно так выбрать базис, что
ее матрица будет иметь канонический вид: диагональная матрица
с элементами 1, —1 или 0 на диагонали. При этом для эрмитовых
форм справедлив закон инерции: в матрице канонического вида число
элементов на диагонали, равных 0, 1 и —1, не зависит от базиса, в
котором форма имеет канонический вид.
Таким образом, эрмитовы формы по свойствам ближе к
квадратичным формам в вещественном пространстве, чем к квадратичным
формам в комплексном пространстве.
Упражнения
1. Значение билинейной функции b в некотором базисе записано как
многочлен от координат £' и rf векторов хну:
ь(х, у) = ?rf + tW - ЧЧ+4W + з*У + *У.
Напишите матрицу этой билинейной функции, если пространство:
а) трехмерное; б) четырехмерное.
2. Как изменится матрица билинейной функции из упр. 1, а), если
перейти к базису: е\ = е\ + ег; е'2 = ег + ез; е'г = ез?
3. Напишите матрицу квадратичной формы (£!)2 +£!£2 + (£2)2-
4. Приведите к каноническому виду квадратичную форму с матрицей:
II 1 2 3 || II 1 2 3 II
а) 2 4 5 ; б) 2 4 5 II ;
У 3 5 8 II || 3 5 9 ||
и найдите матрицу перехода к каноническому базису.
5. Нуль-пространством симметричной билинейной функции Ь
называется множество векторов х таких, что для всех у выполнено Ь(х,у) = 0.
Проверьте, что это — линейное подпространство. Как связана его
размерность s с рангом Ь? Какой будет матрица функции Ь в базисе, последние $
векторов которого лежат в нуль-пространстве?
6. В n-мерном пространстве заданы т квадратичных форм. При каком
условии существует базис, в котором они все могут быть представлены как
многочлены от первых к < п координат вектора?
7. Пусть А — квадратная матрица порядка п и ранга г. У квадратичной
формы с матрицей АТА определите: а) ранг; б) индекс.
8. Квадратичная форма с матрицей В положительно определена тогда
и только тогда, когда найдется верхняя треугольная матрица Я, det, R ф 0,
такая, что В = RTR. Докажите это.
9. Дана квадратичная форма к. При каком условии найдется ненулевой
вектор х, для которого к(х) = 0?
10. Какому необходимому и достаточному условию должны
удовлетворять главные миноры отрицательно определенной квадратичной формы?
11. Может ли матрица положительно определенной квадратичной
формы иметь неположительный диагональный минор? (Минор называется
диагональным, если главная диагональ его подматрицы находится на главной
диагонали матрицы.)
§ 7. Теорема Жордана
207
§ 7. Теорема Жордана
1. Теорема Гамильтона-Кэли. Так называется следующая
теорема, справедливая как для комплексных, так и для
вещественных матриц.
Теорема 1. Если р(Х) = det(A — ХЕ) — характеристический
многочлен матрицы А, то р(А) = 0.
Доказательство. Если Л не является характеристическим
числом матрицы Л, то матрица (А — ХЕ) имеет обратную, элементы
которой можно вычислить по формулам (4) § 5 гл. V. Следовательно,
где В(Х) — матрица с элементами bjj(X) = (—l)*+J"rfJ(A), а
множители d\ являются минорами порядка п — 1 матрицы (А — ХЕ) и,
следовательно, многочленами от Л степени, не большей п—1. Поэтому
Ьц{\) = ьЪ + \ь}3 + ... + \п-%-1.
Так как линейные операции с матрицами определены поэлементно,
В{Х) = Во + ХВг + ... + Хп~1Вп.и
где Bk -•- матрица с элементами Ь^ (к = 0,...,п — 1). Равенство (1)
можно переписать в виде (А - ХЕ)В(Х) = det(A — XE)E, или
{А - ХЕ){В0 + ХВХ + ... + А""1 Л„_0 = р{Х)Е. (2)
Обозначим коэффициенты характеристического многочлена
через ао.аи...,ап. Тогда
р{Х)Е = а0Е + ХахЕ + ... + ХпапЕ.
Раскроем скобки в левой части равенства (2) и приравняем матрицы,
стоящие при одинаковых степенях X. Это законно, так как
равенство (2) имеет место для всех Л и но существу означает, что равны
друг другу две матрицы, а значит, равны все их соответствующие
элементы, являющиеся многочленами от A. iMbi получим
АВ0 - а0Е,
Л/?1 - Во = ахЕ,
АВ2 - Вх = a2£,
^4£n-i — Вп-2 = au-iE,
— Вп_] = cinE.
Умножим первое из этих равенств на А0 = Е, второе — на А,
третье — на А2 и т. д., последнее на Ап и сложим все равенства
почленно. Тогда справа мы получим р(А) — результат подстановки А
в характеристический многочлен, а слева — нулевую матрицу, так
как все слагаемые взаимно уничтожатся. Это заканчивает
доказательство.
208
Гл. VI. Линейные пространства
Следствие. Каждое линейное преобразование А линейного
пространства 5£ удовлетворяет своему характеристическому
уравнению р(А) = О.
2. Корневые подпространства. Рассмотрим n-мерное
комплексное линейное пространство J&? и его линейное преобразование А.
Характеристический многочлен преобразования p(t) раскладывается
на множители в общем случае так:
p(t) = {-l)n(t - А,)А-'(< - А2)Ч..(< - А,)*'.
Именно ради возможности такого разложения мы предполагаем
пространство комплексным. Если характеристический многочлен
линейного преобразования вещественного пространства имеет только
вещественные корни, то все следующие ниже результаты
справедливы и для такого преобразования.
Рассмотрим рациональную функцию 1/р(/) и разложим ее на
элементарные дроби. Для наших целей разложению удобно придать вид
p(t) (f-Ai)*i '" (I-A,)**'
После приведения к общему знаменателю мы получаем тождество
1 = Ы*)+ ••• + *•(<)>
где qi{i) — многочлен, равный произведению fi(t) на многочлен,
получаемый из p(t) вычеркиванием множителя (t — А,-)*1:
«<«> = « с-•■•-•'■
Подставим в полученное тождество преобразование А вместо t:
F=Qi + ...+ Q.. (3)
Преобразования Qi = qi(A) обладают тем свойством, что
QiQj = 0 при гфз. (4)
Действительно, в произведение qi{t)qj(t) входят все множители,
содержащиеся в разложении p(t), и при подстановке преобразования А
это произведение превращается в нулевое преобразование.
Умножая (3) на Qi и используя (4), мы получим для любого г — 1, ...,s
Qi = QiQi- (5)
Теперь мы можем разложить пространство J5? в прямую сумму.
Действуем обеими частями равенства (3) на произвольный вектор х:
*= Q,(*) + ...+ Q,(*). (в)
т. е. х = х\ + ... + х9. где Х{ = Qi(x) 6 Qt(J£f). Разложение такого
вида единственно. Действительно, допустим, что х = уу + ... + */*, где
У( 6 Qi{Sf) (i = 1, ...,$). Это значит, что найдутся такие векторы ^,
что yi = Qi(zi). Теперь, действуя на обе части равенства
§ 7. Теорема /Иордана
209
преобразованием (?,-, мы получаем Qi(x) = Qi{zi) в силу свойств (4)
и (5), т. е. Х{ = у,-, как и требовалось.
Равенство (6) означает, что 3f — сумма подпространств Q,-(j£f),
а единственность разложения равносильна тому, что сумма прямая:
Jf=Qi(Sf)e-..®Q,{Sf). (7)
По предложению 3 §4 подпространства <?,-(JSf) инвариантны. Они
называются корневыми подпространствами. Обозначим их через .^
(г = 1,...,«). Мы доказали
Предложение 1. Каково бы ни было линейное преобразование А
комплексного пространства J&?, это пространство раскладывается в
прямую сумму корневых подпространств преобразования А.
Ниже мы покажем, как разложить корневое подпространство в
прямую сумму инвариантных подпространств, но сначала докажем
Предложение 2. Jfi = Кег (А — А,- Е)к* для любого i.
Доказательство. В произведение (t — Xj)kiqi(t) входят все
множители, составляющие характеристический многочлен. Поэтому из
теоремы Гамильтона Кэли следует, что (А — А,-£)*•(?,■ = О. Это
означает, что для любого x'G^ выполнено {А — XiE)ktQi(x) = о, т. е.
Qi{x) е Кет{А-\{Е)к\ O.-(JSf) С Кег [А - А,-Е)*\
С другой стороны, пусть ж G Кег (А — AjE)**. В каждое
преобразование Qj при j ^ i входит множитель (А — A,-E)fc', обращающий х
в нуль. Поэтому формула (6) для такого х имеет вид х — Qi(x).
Значит, х £ Ot(J$f), и поэтому Кег (А - А,-Е)*' С Qt(j£f). Предложение
доказано.
Следствие. Собственное подпространство принадлежит
соответствующему корневому подпространству:
Кег (A -XiE) С. JTj.
Действительно, если (А — А,-Е)(я) = о, то и (A— At-F)fc,"(a?) = о.
В силу предложения 2 формула (7) может быть написана так:
JSf= Кег(А-А1Е)*1ф...еКег(А-А,Е)*\ (8)
3. Строение корневого подпространства. Рассмотрим одно
корневое подпространство J^t- и ограничение преобразования (А —
— XiE) на нем. Обозначим это ограничение через В. Индекс i для
краткости будем пропускать. Предложение 2 означает, что Bkl = О.
Преобразования, некоторая степень которых равна нулевому
преобразованию, называются нильпотентными.
Итак, рассматривается комплексное линейное пространство X и
его нильпотентпое преобразование В.
Вк(х) = о для любого х, но вполне может случиться, что для
какого-то х при h < к будет Bh[x) = о. Число h такое, что Bh(x) = о,
210
Гл. VI. Линейные пространства
но Bh~l(x) ф о называется высотой вектора х. Векторы высоты 1
составляют ядро В, т. е. собственное подпространство А. Пусть т —
максимальная среди высот всех векторов. Она называется
показателем нильпотентности преобразования. Ясно, что т ^ к.
Подействовав на обе части включения B{JXf) С Ж
преобразованием В*"1, мы видим, что Bh(,XT) С Bh~l(X) для любого h и
{о} = ВШ(Х) С Вт~1(ЛГ) С ... С B(Jt) С X.
Обозначим через 1/h пересечение Bh{J(f) с собственным
подпространством Ксг В. Из предыдущих включений следует
{о} = Гт С Г"1"1 С ... С Г1 С Ксг В.
Выберем в Кег В базис следующим образом: базис в ^т~1
дополним до базиса в -у/т~2, полученный базис дополним до базиса -у/т~3
и т. д. В результате получится базис е?,...,^ в Кег 6, обладающий
тем свойством, что векторы из любого Ун раскладываются только
по тем векторам базиса, которые лежат в Ун.
Пусть базисный вектор e*j лежит в У}\ но не в ^Л+1. Тем самым
он принадлежит к Bh{Jf), и существует вектор е§ такой, что е° =
вектор мы назовем k-м присоединенным к c*j. Вообще,
вектор
е<. = ВЛ-'(е*) (/ = 1 Л) (9)
называется /-м присоединенным к е°. Из формулы (9) видно, что
B{elJ) = Bh-l+l{e$) = clr1.
Таким образом, по е" определена цепочка векторов е^,е], ...,е^,
удовлетворяющая равенствам
В(е})=е], В(е]) = е],..., В(е$) = е$~1. (10)
Такие цепочки векторов называются жордановыми цепочками. Самые
длинные цепочки начинаются с векторов из ут~1 и имеют длину т.
Если е? £ 7'1, то он — единственный вектор в своей цепочке.
Bh+1(ej) = B(ej) = о. Поэтому из (9) следует, что /-й
присоединенный вектор имеет высоту / + 1.
Обозначим через е систему векторов, получающуюся
объединением всех жордановых цепочек, начинающихся с векторов е\,...,с^.
Предложение 3. Система векторов е является базисом в Ж.
Доказательство. 1°. Линейную независимость системы е
нетрудно проверить индукцией по числу векторов в системе.
Действительно, если в системе один вектор, то он собственный, и
утверждение очевидно.
Пусть любая система из я собственных и присоединенных к ним
векторов линейно независима при условии, что входящие в нее
§ 7. Теорема Жордана
211
собственные векторы линейно независимы. Рассмотрим
произвольную систему такого вида, содержащую s + 1 векторов, и какую-
нибудь линейную комбинацию векторов этой системы, равную
нулю. Покажем, что она тривиальная. Для этого подействуем на нее
преобразованием 8. В силу формул (10) мы получим равную нулю
линейную комбинацию этой же системы, но содержащую меньше
векторов, так как все собственные векторы перейдут в нуль.
По предположению индукции все коэффициенты последней
линейной комбинации равны нулю. Но это — коэффициенты исходной
линейной комбинации, стоящие там при присоединенных векторах.
Значит, исходная комбинация могла содержать ненулевые
коэффициенты только при собственных векторах. Собственные векторы
линейно независимы, и потому ни одного ненулевого коэффициента нет.
2°. Докажем, что каждый вектор х из Ж можно разложить по
системе е. Сделаем это с помощью индукции по высоте вектора х.
Высоту 1 имеют собственные векторы. Они раскладываются по
базису е?,...,с^, составляющему часть системы е.
Пусть утверждение доказано для векторов высоты ^ h.
Рассмотрим произвольный вектор х высоты h + 1. Для него вектор Bh(x)
собственный и принадлежит Bh{.%). Следовательно, Bh{x) 6 Vh• Пусть
dim Ун = р. По построению базиса в Кег В векторы е?,..., е£ — базис
в 7/Л, и Bh(x) раскладывается по этим векторам. Все они имеют /i-e
присоединенные, и потому
Bh{x) = alBh{e\) + ... + apBh{chp).
Это означает, что вектор у = х - о^е\ — ... — аре£ удовлетворяет
равенству Bh(y) = о, т. е. имеет высоту ^ /г. Но предположению
индукции у раскладывается по системе е. Отсюда сразу получается
разложение х по этой системе.
Базис е, построенный в предложении 3, называется жордановым
базисом корневого подпространства Ж, а объединение жордановых
базисов всех корневых подпространств — жордановым базисом в J£f.
Векторы ?кордановой цепочки, начинающейся се-, — часть жор-
данова базиса и, значит, линейно независимы. Поэтому они — базис
в их линейной оболочке Щ. Такое подпространство ^J называется
циклическим. Если х G Vj, то в силу формул (10)
В{х) = В(а0е{] + ахе] + ... + ahc)) = сце? + ... + ане)'х € «J.
Следовательно, ^ инвариантно относительно б. Так как В —
ограничение преобразования (А — Х(Е) на <&= ,#i, то циклическое иод-
пространство инвариантно также и относительно А.
Действительно, А{х) = В{х) + XiX е Vj.
Жорданов базис корневого подпространства — объединение
базисов циклических подпространств. Поэтому мы получаем
212
Гл. VI. Линейные пространства
Предложение 4. Если В — нильпотентное преобразование
пространства X, то Ж распадается в прямую сумму
циклических относительно В подпространств. Их число равно
размерности d собственного подпространства Кег В.
4. Теорема Жордана. Из предложений 1 и 4 прямо следует
Предложение 5. Если в комплексном пространстве Jz? задано
линейное преобразование А, то ££ ■■-- прямая сумма инвариантных
относительно А циклических подпространств. Их число равно общему
числу всех цепочек в жордановом базисе пространства Jf, т. е. <1\ -|
... + dSi где с/,- = dim Кег (А - Л,Е).
Жорданов базис пространства JS? -- объединение базисов
инвариантных подпространств, и по предложению 2 §4 матрица
преобразования А в этом базисе клеточно-диагональная. При этом диагональные
клетки этой матрицы являются матрицами ограничений А на
соответствующих подпространствах. Поэтому, если мы хотим получить
вид матрицы преобразования в жордановом базисе, мы должны
сначала написать матрицу ограничения А на циклическом
подпространстве.
Пусть циклическое подпространство принадлежит корневому
подпространству с собственным значением А,- и натянуто на векторы
цепочки е!?,...,е^. Мы имеем
А(4) = В(е})+А,-4 (' = 0 Л),
и по формулам (10)
A(e°j) = \{е]у А(е}) = е? + А,е],..., А(с)) = е*"1 + А,-е*.
Столбцы матрицы преобразования — это координатные столбцы
образов базисных векторов. Поэтому матрица ограничения А в
рассматриваемом базисе имеет вид
II А«
0
0
1 °
1
А,-
0
0
0 ..
1 ..
0 ..
0 .
• ° 1
' °
• 1
■ Л,- |
Матрица такого вида называется жордановой клеткой порядка h + 1
с собственным значением А,-. Клеточно-диагональная матрица, у
которой клетки жордановы, называется жордановой матрицей или
матрицей, имеющей жорданову форму.
Из всего сказанного вытекает теорема Жордана.
Теорема 2. Для любого линейного преобразования комплексного
линейного пространства существует базис (жорданов базис), в
котором его матрица имеет жорданову форму.
§ 7. Теорема Жордана
213
Жорданов базис для данного преобразования, конечно, не
единствен: базис cj,...,e3 в каждом корневом пространстве выбирается с
некоторым произволом, и присоединенные векторы по формулам (10)
определены не однозначно. Однако, как видно из построения,
корневые подпространства (и в каждом из них число собственных
векторов, с которых начинаются цепочки определенной длины)
определяются геометрически — инвариантными подпространствами
преобразования. Таким образом, жорданова форма матрицы
преобразования определена единственным образом с точностью до порядка
расположения клеток на главной диагонали.
Собственные значения клеток — это собственные значения
преобразования. При этом все жордановы клетки с одним и тем ?ке
собственным значением объединяются в одну большую клетку,
соответствующую корневому подпространству. Жорданова матрица
треугольная. Поэтому кратность собственного значения А,- равна к*,
если А,- встречается на диагонали матрицы к,- раз. Отсюда сразу
следует
Предложение 6. Размерность корневого подпространства
равна кратности его собственного значения в характеристическом
многочлене.
5. Приведение к жордановой форме. Нахождение
жорданова базиса, или, как говорят, приведение матрицы преобразования к
жордановой форме облегчается тем, что при этом нет нужды искать
корневые подпространства. Они получатся автоматически после того,
как будут построены соответствующие ?кордаповы цепочки.
Действительно, для построения цепочек достаточно найти для каждого
корня А,- его собственное подпространство и вложенные в него
подпространства У?,...У71', определяющие, с каких собственных векторов
начинаются цепочки. Согласно определению
Г{ = [А - \гЕ)1{.ЯГг) П Кег (А - А.-Е),
но тут не надо находить Jf{. Дело в том, что
{А - \iE)l{&) П Кег (А - А*Е) =
= [А - XiE)l{Xi) П Кег (А - А,£). (9)
Действительно, любой вектор х из JS? раскладывается в сумму
векторов из корневых подпространств х = х\ + ... + xs и (А — \{Е)(х) =
= У\ + -- + Ув, где yj = (А — \{E)(xj) E Jfj, так как корневые
подпространства инвариантны. При этом если Xj ф о при г ф j, то и yj ф о,
так как Кег (А — А2Е) С ,Ж{. Но этим соображениям вектор, не
лежащий в ,>f{, не может перейти в вектор из Ж\. Отсюда сразу
следует (9) и
уЛ = (А- XiB)l{Sf) П Кег {А - A.-F).
Рассмотрим в качестве примера преобразование А шестимерного
214
Гл. VI. Линейные пространства
2
0
0
0
0
0
0
1
0
0
0
0
]
0
1
0
-1
0
0
0
0
4
0
1
0
0
]
0
3
0
0
0
0
-9
0
-2
пространства, заданное в некотором базисе матрицей
А =
Нетрудно подсчитать, что характеристический многочлен А равен
(Л — 1)3(А —2)3, и, следовательно, имеются два корневых
подпространства размерности 3 ка?кдое.
Начнем с корня Aj = 1. Составим матрицу
А-Е =
Решая однородную систему линейных уравнений с этой матрицей,
находим, что собственное подпространство натянуто на векторы а\ и
ао с координатными столбцами, соответственно ац = || 0 1 0 0 0 0 ||т и
ск2 = ||000301 ||т. Собственное подпространство двумерное, а
корневое трехмерное. Значит, должен быть один присоединенный вектор.
Чтобы найти, к какому собственному вектору он присоединен, ищем
пересечение Y1 собственного подпространства с 1т(Д — £). которое
натянуто на столбцы матрицы А — Е.
Легко заметить, что четвертый столбец А — Е совпадает с <*2. Так-
как <х\ не раскладывается но столбцам А — Ь7, размерность суммы
подпространств равна 5, а сумма размерностей — 6. Значит,
пересечение одномерно, и базис в нем — а2.
Решим систему уравнений (А — Е)£ = <х2 и найдем координатный
столбец аз = || 0 0 0 1 0 0 ||т присоединенного вектора а3. После этого
жордаиов базис первого корневого подпространства построен.
Для корня А2 = 2 составляем матрицу
1
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
-1
0
0
0
0
3
0
1
0
0
1
0
2
0
0
0
0
-9
0
-3
А - ЧЕ =
1 °
0
0
0
0
о
0
-1
0
0
0
0
1
0
-1
0
-J
0
0
0
0
2
0
1
0
0
1
0
1
0
0
0
0
-9
0
-4
Из однородной системы уравнений с такой матрицей следует, что
собственное подпространство одномерно, и его базисный вектор Ь
имеет координатный столбец /3=J|1 00000 ||т. Так как корневое
пространство трехмерное, к 6 должны быть два присоединенных век-
§ 7. Теорема РНордана
215
тора. Первый присоединенный получаем из системы {А — 2Е)£ = /3.
Его координатный столбец есгь fli = ||0 О I 0 1 О ||Т Второй
присоединенный - решение системы (А — 2Е)£ = /3i Его координатный
столбец -j02 = || 0 0 0 0 1 0||т
Итак, жорданов базис состоит из трех цепочек: цепочка ai
длины 1. цепочка а->, а^ и цепочка 6. 6А, 6^ Координатные столбцы этих
векторов oliiOlo.glziPjPijPz составляют матрицу перехода S от
исходного базиса к июрданову базису Учитывая порядок, в котором
мы расположили векторы жордановых цепочек, мы можем выписать
жорданову матрицу А', коюрую пмеег А в построенном базисе В
матрице S выделены жордановы цепочки, а в матрице А1 —
соответствующие жордановы клетки*
S =
0
1
0
0
0
0
0
0
0
3
0
1
0
0
0
1
0
0
]
0
0
0
0
0
0
0
1
0
1
0
0
0
0
0
1
0
л' =
¥Т\
0
0
0
0
0
0 0
1 1
0 ]
0 0
0 0
0 0
0 0 0 II
0 0 0
0 0 0 1
2 1 0 1
0 2 1
0 0 2 |
Рекомендуем читателю проделать все описанные здесь вычисления
Упражнения
1. Сколько существует жордановых матриц, отличающихся ьрагностя-
ми характеристических чисел, числом и размерами клеток, среди матриц:
а) второго порядка, б) -ретьего порядка; в) чс1вертого порядка''
2. Напдиге жорданову форму матрицы и матрицу перехода к жорданову
базису для преобразования, заданного в исходном базисе матрицей:
1-10-1 О
1110 1/2
«О II п п 9 -1 II ' б) II ° 1 1 1 0
О 0 0 11/2
0 0 0 0 1
3
1
0
0
-1
1
0
0
0
0
2
1
-1
-1
-1
0
ГЛАВА VII
ЕВКЛИДОВЫ И УНИТАРНЫЕ ПРОСТРАНСТВА
§ 1. Евклидовы пространства
1. Скалярное произведение. Линейное пространство,
введенное в предыдущей главе, существенно отличается от множества
векторов обычного геометрического пространства тем, что в линейном
пространстве не определены понятия длины вектора и угла между
векторами. В настоящей главе мы изучим такие пространства, в
которых эти понятия определены.
В гл. I, используя длину вектора и угол, мы определили
скалярное произведение. Здесь удобнее поступить наоборот. Мы
аксиоматически определим операцию скалярного умножения, а длину и угол
определим с ее помощью. Определение скалярного умножения для
вещественных и для комплексных пространств формулируется
различно. Этот параграф посвящен вещественным пространствам.
Определение. Вещественное линейное пространство <f
называется евклидовым, если в нем определена операция скалярного
умножения: любым двум векторам х и у из £ сопоставлено
вещественное число (обозначаемое (ж,у)), и это соответствие удовлетворяет
следующим требованиям, каковы бы ни были векторы х, у и z и
число а:
1) (*,у) = (У,ж);
2) (* +у, *) = (*.*) +(У.*);
3) (ах,у) = а{х,у);
4) (ж, х) > О для всех х ф о.
Будем рассматривать п-мерное евклидово пространство £. Любое
подпространство S1 в £-- также евклидово пространство, так как
для его векторов определено то же самое скалярное умножение.
Очевидны простейшие следствия из перечисленных аксиом. Так
как (х,ау) = (ау,х) = а(у,х), имеем
[х,ау) = а(аг,у). (1)
Аналогично доказывается
(*, у+ *) = (*, у)+ (*,*)• (2)
Можно дать второе определение евклидова пространства,
эквивалентное первому.
Определение. Вещественное линейное пространство
называется евклидовым, если в нем задана положительно определенная
квадратичная форма.
§1. Евклидовы пространства
217
Из первого определения следует второе. Действительно, если в
вещественном линейном пространстве определена операция скалярного
умножения, то это — функции от двух векторов. Аксиомы 2) и 3)
и формулы (1) и (2) равносильны тому, что функция билинейная.
Аксиома 1) означает, что билинейная функция симметрична, а
аксиома 4) — что соответствующая квадратичная форма положительно
определена. Поскольку симметричная билинейная функция
однозначно определяется соответствующей квадратичной формой, обратное
утверждение столь же очевидно.
Конечно, в вещественном линейном пространстве существуем
бесконечно много положительно определенных квадратичных форм. Но
втором определении слово "задана" означает, что одна из них
выделена и играет особую роль. Нулем называть ее основной квадратичной
формой.
Пример 1. Для векторов геометрического пространства
скалярное произведение двух векторов определено как произведение их длин
на косинус угла между ними. Так, определенная операция
скалярного умножения обладает нужными свойствами, но зависит от выбора
единицы измерения длин. Поэтому, если такая единица выбрана,
векторы геометрического пространства образуют трехмерное евклидово
пространство в определенном здесь смысле.
Пример 2. В n-мерном арифметическом пространстве мы можем
ввести скалярное умножение, сопоставив столбцам £ и rj число
*Tn = ey + ...+rv, (з)
где через £' и rf обозначены элементы столбцов. Используя
свойства умножения матриц, читатель без труда может проверить, что все
условия, входящие в определение, выполнены. Иначе можно было бы
сказать, что в качестве основной квадратичной формы выбрана та,
которая в стандартном базисе арифметического пространства
(состоящем из столбцов единичной матрицы) имеет канонический вид.
Пример 3. В пространстве функций, непрерывных на
отрезке [0,1], можно ввести скалярное произведение по формуле
1
(f,9) = lf(t)g(t)dt.
О
Аксиомы 1)-4) вытекают из известных свойств определенных
интегралов.
2. Длина и угол. В соответствии с формулами §4 гл. I введем
Определение. Назовем длиной вектора х и обозначим \х\
число \/(х,х). Углом между векторами х и у назовем каждое число <р.
удовлетворяющее условию
"""-йЙ- (4)
218
Гл. VI1. Евклидовы и унитарные пространства
В силу аксиомы 4) длина вектора — вещественное
неотрицательное число, причем она равна нулю тогда и только тогда, когда вектор
нулевой. С определением угла дело обстоит несколько сложнее. Нам
предстоит доказать, что выражение в правой части равенства (4) но
абсолютной величине не превосходит единицы. Это следует из
неравенства
(ж, у)2 <£ (х,аг)(у,у), (5)
связываемого с именами Шварца, Коши и Буняковского. Ниже мы
получим это неравенство как следствие из теоремы 1.
Еще одно важное неравенство, называемое неравенством
треугольника.
\х + У\^\*\+\у\ (6)
следует из неравенства Коши-Бупнковского:
(х + у, х + у) = И2 + 2(х, у) + |у|2 ^ \х\2 + 2\х\\у\ + |у|2 = (|*| + |у|)2.
Знак равенства имеет место, если (я,у) = |з||у|, т. е. если угол
между я и у равен нулю, и только в этом случае. Неравенство (6) для
векторов — направленных отрезков — означает, что длина стороны
треугольника меньше суммы длин остальных его сторон.
Векторы хну называются перпендикулярными или
ортогональными, если (я, у) = 0. Это условие выполнено, если хоть один из векторов
нулевой. Если оба вектора ненулевые, то по формуле (4) угол между
ними равен 7г/2.
Предложение 1. Только нулевой вектор ортогонален каждому
вектору пространства.
Действительно, если (х.у) = 0 для всех у, то, положив у = я,
получим (ж, х) = 0, что возможно только при х = о.
3. Выражение скалярного произведения через координаты
сомножителей. Если в евклидовом пространстве выбран базис с,
то скалярное произведение векторов х и у, как и значение любой
билинейной функции, выражается по формуле (3) § 6 гл. VI через
координатные столбцы £ и ?/ этих векторов:
(*,!/) =€ТГЧ. (7)
Согласно определению матрицы билинейной функции элементы у^
матрицы Г равны скалярным произведениям (e,-,ej), т. е.
(ebci) ... (ci,cn)
Г =
(emCi) ••• (ei,en)
Эта матрица называется матрицей Грама базиса е.
Матрица Грама симметрична. По критерию Сильвестра все ее
главные миноры положительны, в частности справедливо
§1. Евклидовы пространства
219
Предложение 2. Детерминант матрицы Грама любого базиса
положителен.
Это предложение может быть обобщено следующим образом.
Теорема 1. Пусть х\,...,хк — произвольная, не обязательно
линейно независимая система векторов. Тогда детерминант матрицы,
составленной из их попарных скалярных произведений,
{xitxi) ... (xuxk)
det
(хк,хг) ... {xkixk)
положителен, если векторы линейно независимы, и равен нулю, если
они линейно зависимы.
Первое утверждение следует из предложения 2, так как линейно
независимые векторы составляют базис в своей линейной оболочке.
Докажем второе утверждение. Если векторы линейно зависимы,
то выполнено равенство o^xi +... -f akxk = о, в котором среди
коэффициентов есть отличные от нуля. Умножая это равенство ска-
лярно на каждый из векторов, мы придем к системе линейных
уравнений
<Х1(х1,хх) + ... + ак(х1,хк) = 0,
a1(xk,xi) + ... + ak(xkixk) = О,
которой удовлетворяют коэффициенты с*1,...,а*. Так как система
имеет нетривиальное решение, детерминант ее матрицы равен нулю.
Следствие. Для любых двух векторов в евклидовом
пространстве имеет место неравенство Коши-Буняковского (5), причем оно
выполнено как равенство тогда и только тогда, когда векторы
линейно зависимы.
Пусть базис е' связан с базисом е матрицей перехода S. Тогда
формула (4) §6 гл. VI переписывается в виде
r' = STI\9, (8)
показывающем связь матриц Грама двух разных базисов.
4. Ортогональные базисы. Базис, в котором основная
квадратичная форма имеет канонический вид, называется ортонорми-
рованным базисом. Так как она положительно определена, матрица
Грама ортонормированного базиса единичная: (е,-,еу) = 0 при г ф j
и (е,-,ег-) = 1 (i,j = 1,...,7?). Это значит, что векторы
ортонормированного базиса попарно ортогональны, а по длине равны единице.
Для ортонормированного базиса формула (7) имеет вид
(*,у)=£Т17 = £У + ... + С*Л (9)
Предложение 3. п попарно ортогональных ненулевых
векторов Ах,...,ЛП в n-мерном евклидовом пространстве составляют ба-
220
Гл. VII. Евклидовы и унитарные пространства
тс. Разложение вектора по этому базису задается формулой
= £Ш»,, (10)
1=1
Действительно, матрица из произведений (h{,hj) диагональная с
ненулевыми элементами на диагонали. Из теоремы 1 следует, что
1ц 1>„ составляют базис.
Пусть х = o\hi + ...+ ocnhn. Умножая это равенство скалярно на
любой из Л,-, находим, что а,- = (#,ftt-)/|ftt-|2, что равносильно (10).
Пазис из ортогональных векторов называется ортогональным
базисом.
Вычислим (х,х) с помощью формулы (10). Поскольку {h{yhj) = 0
при / ф j, получаем равенство Нарсеваяя
M'=t(-W-- (")
*=i ' '
5. Ортогональные матрицы. Рассмотрим два ортонормирован-
ных базиса е и е' = eS. Тогда в формуле (8) Г' = Г = Е\ и формула
принимает вид
STS=E. (12)
Наоборот, если выполнено условие (12) и исходный базис ортонорми-
рованный, то мы получаем Г' = Е, и новый базис также ортонорми-
рованный.
Определение. Матрица, удовлетворяющая условию (12),
называется ортогональной матрицей.
Как мы видели, ортогональные матрицы и только они могут
служить матрицами перехода от одного ортонормированного базиса к
другому. Равенство (12) равносильно равенству
P^S-1. (13)
Из свойств обратной матрицы теперь следует, что
SST = Е. (14)
Это означает, что матрица 57 также является ортогональной.
Обозначив элементы матрицы S через <rj, мы можем написать
равенства, равносильные (12) и (14):
Впрочем, первое из равенств можно получить непосредственно
из (У), если вспомнить, что столбцы матрицы перехода —
координатные сюлбцы новых базисных векторов в старом базисе.
§1. Евклидовы пространства
221
Произведение SU двух ортогональных матриц S и U —
ортогональная матрица. Действительно, (SU)T = UTSr = U~1S~l = (SU)~].
Вычисляя детерминант обеих частей равенства (12), мы
получим (detS)2 = l. Значит, для ортогональной матрицы detS=l или
det5= -1.
Рекомендуем читателю проверить, что любая ортогональная
матрица порядка 2 имеет один из двух видов
cos q — sin a
sin a cos a
cos a sin a
sin a — cos а
(i6)
6. Ортогональное дополнение подпространства. Пусть £' —
Ar-мерное подпространство в //-мерном евклидовом пространстве £.
Определение. Ортогональным дополнением подпространства £'
называется множество всех векторов, ортогональных каждому
вектору из £'. Это множество обозначается £'
/■!
Предложение 4. Ортогональное дополнение k-мерного
подпространства в n-мерном пространстве есть (п — к)-мерное
подпространство.
Доказательство. Пусть cii, ...,а* — базис в £'. Вектор ж лежит
тогда и только тогда, когда
в<Г'х
(x,al)=0,...,{x,ak) = Q. (17)
Действительно, если х £ £fX, то равенства (17), разумеется,
выполнены. Обратно, при выполнении этих равенств х ортогонален любому а
из £', поскольку
к к
(x,a)=(x,J2xi(li) =5^Ai(xlaf) = 0.
*=i
»=i
Выберем в £ортонормированный базис и обозначим через aj,...
..., a J1 компоненты вектора at- (г = 1,..., к) в этом базисе, а через £ ,...
...,£" — компоненты вектора х. Условия (17) запишутся тогда в виде
однородной системы из к линейных уравнений с п неизвестными:
<*№+... + <*&» =Q.
Ранг матрицы системы равен к, поскольку ее строки - строки из
компонент векторов а\,.... а* — линейно независимы. Таким образом,
множество £,L определяется однородной системой линейных
уравнений ранга к, и потому является (п — &)-мерным подпространством.
Предложение доказано.
222
Гл. VII. Евклидовы и унитарные пространства
Рассмотрим (^'х)± — ортогональное дополнение ортогонального
дополнения подпространства &'. Каждый вектор из &' ортогонален
каждому вектору из £'х. Поэтому £' С (<f'±)±. Но dim(<f'±)-L = n -
- (п - *) = к. Итак, (cf'-1)-1 = <?'.
Очевидно, что £' и ^,± не имеют общих ненулевых векторов,
а сумма их размерностей равна п. Отсюда следует
Предложение 5. Евклидово пространство — прямая сумма
любого своего подпространства и его ортогонального дополнения.
Два подпространства <?' и <?" называются ортогональными,
если «f" С <Г'Х. Тогда и <f' С <Г"Х. так как (х,у) = 0, если х Е <f' и
У G <?".
7. Ортогональные проекции. Так как & — S1' (В*?'1, каждый
вектор х Е & однозначно раскладывается в сумму векторов х\ Е S1
и х-2 Е ^,_L. Вектор х\ называется ортогональной проекцией х на <?'.
Легко видеть, что х2 — ортогональная проекция х на <f'х.
Найдем ортогональную проекцию х на <?' в предположении, что
в <?' задан некоторый ортогональный базис /ti,...,/i*. Дополним этот
базис до ортогонального базиса в пространстве <?, присоединив к
нему произвольный ортогональный базис /ifc+i,..., hn из <?'х. Так как
сумма <f' и <f'х прямая, искомое разложение вектора х единственно,
и мы, группируя слагаемые в формуле (10), получаем
Если А? = 1, проекция имеет вид х\ = ((я,Л)/|/*|2)/1, и мы видим, что
правая часть формулы (18) — сумма проекций на ортогональные
одномерные подпространства, натянутые на h\,..., ft*. Так же
истолковывается формула (10), а значит, равенство Парсеваля (11) является
обобщением теоремы Пифагора.
Из {хих2) = 0 следует \х\2 = \xi + x2\2 = |zi|2 + |*2|2 ^ l^'il2-
Длина \х2\ ортогональной проекции х на S,L обладает следующим
свойством минимальности, обобщающим теорему о длине
перпендикуляра и наклонной из элементарной геометрии.
Предложение 6. Пусть х\ •••- ортогональная проекция х на £'.
Тогда для любого вектора у Е <f', отличного от х\, выполнено
\х2\ = \х - ;ci| < \х- у\.
Доказательство. Обозначив х\ — у через z, имеем
\х - у\2 = \хг +х2- у\2 = |* + х2\2 = (- + х?>z + хз) =
= \z\*+2{x3,z) + \x2\*.
Но (г. аго) = 0, так как z Е <f', и, следовательно, \х — у\2 = \х2\2 + \z\2.
Отсюда непосредственно вытекает доказываемое утверждение.
§1. Евклидовы пространства
223
8. Метод ортогонализации. Формула (18) служит основой
метода, позволяющего произвольный базис евклидова пространства
преобразовать в ортогональный, а затем в ортонормированный. Этот
метод называется методом ортогонализации [рама-Шмидта.
Пусть в <? задан некоторый базис Д,..., Д- Положим h\ = Д.
Затем из вектора Д вычтем его ортогональную проекцию на линейную
оболочку hi и положим Ii2 равным полученной разности:
Отметим, что ho раскладывается по Д = h\ и Д, причем /i2 Ф о, так
как в противном случае Д и Д были бы пропорциональны.
Будем продолжать таким же образом. Допустим, что построены
попарно ортогональные ненулевые векторы hi,...,ft*, причем для
любого i ^ к вектор }ц раскладывается но Д ,•••»/»• Положим
ЛЛ+1=Л+1»^1Л±11МЛ,. (19)
Вектор Л/c+i — проекция Д+i на ортогональное дополнение линейной
оболочки /ii,..., /г*, и потому ортогонален всем hi при г < Аг + 1.
Кроме того, он раскладывается по Д,...,Д+Ь так как для любого i ^ к
вектор h{ раскладывается по Д,...,Д. Отсюда следует, что ft/.+i ф о:
поскольку иначе векторы Д,..., Д+i оказались бы линейно зависимы.
После того как будет преобразован последний вектор Д, мы
получим ортогональную систему из п ненулевых векторов.
Итак, нами построен ортогональный базис h. От него мо?кно
перейти к ортонормированному базису е из векторов е* = Л,-/|Л»| (г =
= 1, ...,п). Это называется нормировкой базиса h.
Посмотрим на матрицу перехода S от базиса h к базису f. Из
равенства Д = h\ и формулы (19) видно, что Д при любом j
раскладывается по /ii,..../ij, причем его координата по hj равна 1. Поэтому
элементы матрицы перехода о-j равны пулю, если они ниже главной
диагонали (при i > j). и единице при г = j. Таким образом, эта
матрица — верхняя треугольная (п. 3 §1 гл. V) с единицами на главной
диагонали.
Пусть базис е получен нормировкой базиса h. Тогда h = eD,
где D — диагональная матрица с положительными элементами на
диагонали. Если f = hS, то f = eDS, причем, как легко видеть,
матрица R = DS — треугольная, как и S, и ее диагональные
элементы положительны, хотя, возможно, и не равны единице. Теперь
мы можем сформулировать
Предложение 7. Если ортогональный базис h получен ортого-
пализацией базиса f, то матрица перехода S от h к f верхняя
треугольная с единицами на диагонали. Если базис е получен нормировкой
22-1
Гл. VII. Евклидовы и унитарные пространства
базиса h, то матрица перехода R от е к f верхняя треугольная с по-
ложительными диагональными элементами.
3 а м с ч а и и е. По существу, метод ортогонализации — метод ири-
ведения положительно определенной квадратичной формы к
диагональному виду. Метод, примененный при доказательстве теоремы 1
§ Г5 гл. VI, в случае положительно определенной формы отличается
юлько порядком выполнения элементарных операций.
9. ^72-разложение. Так называется следующее разложение
матрицы на множители, часто используемое в приложениях.
II ре дл ожеи ие 8. Если матрица А невырождена, то она может
быть представлена в виде произведения А = QR. где Q —
ортогональная, a R верхняя треугольная матрица, причем диагональные
элементы R положительны.
Доказательство. Будем рассматривать столбцы А как
координатные столбцы векторов ai,...,an в ортонормированном базисе g
евклидова пространства. Так как А невырождена, эти векторы
составляют базис а. При этом А — матрица перехода от g к а, т. е.
а = g/1. Пусть е — ортонормироваииый базис, полученный ортогона-
лизацией и нормировкой базиса а. Тогда а= еД, и но предложению 7
матрица R верхняя треугольная с положительными диагональными
элементами. Кроме того, так как базис е ортонормироваииый, е = gQ,
где матрица Q ортогональная. Из двух последних равенств следует
а = gQR. Сравнивая это с равенством а = gA получаем QR = А.
10. Объем параллелепипеда. Рассмотрим к линейно
независимых векторов Д.....Д в n-мерном евклидовом пространстве. Под
к-мерным параллелепипедом {/i,...,/*}, построенным на них, мы
будем понимать множество всех их линейных комбинаций с
коэффициентами а,-, 0 ^ а,г ^ 1 (г = 1..... к). Векторы Д...., Д назовем ребрами
параллелепипеда. Если ребра упорядочены, параллелепипед
называется ориентированным.
Параллелепипед {/i,...,/fc-i} естественно назвать основанием
параллелепипеда {Д,...,Д}, а высотой, соответствующей этому
основанию, назовем длину |Л*| ортогональной проекции Д* вектора Д на
ортогональное дополнение линейной оболочки Д,..., Д-ь
Объем одномерного параллелепипеда {/} мы определим как длину
его единственного ребра: V{f} = |/|, а объем к-мерного
параллелепипеда \'"{Д,...,Д} определим по индукции как произведение объема
основания на высоту. При таком определении объем параллелепипеда
может оказаться зависящим от порядка, в котором записаны ребра,
но из полученной ниже формулы (20) для объема мы увидим, что в
действительности такой зависимости нет.
Если ребро Д ортогонально остальным ребрам, то /?* = Д и
Г{Д Д} = V{fi Д—]}|Д|- Отсюда легко заметит!,, что объем
§1, Евклидовы пространства
225
прямоугольного параллелепипеда (у которого ребра попарно
ортогональны) равняется произведению длин ребер.
Рассмотрим п-мерный параллелепипед {/i,...,/n}- Применяя к
/ь—,/п процесс ортогонализации, мы заменяем очередной вектор
его проекцией на ортогональное дополнение линейной оболочки
предыдущих векторов и в результате строим n-мерный прямоугольный
параллелепипед {Аь ...,АП}5 имеющий тот же объем.
Матрица Грама Г/> системы векторов h\, ..., А„ — диагональная с
элементами |Ai|2, •••, \hn\'2 "а диагонали. Поэтому
V{fu -.., fn} = V{hu ..., An} = |/*i|-|An| = v^tlT.
Пусть S — матрица перехода от hi,...Jin к /i,...,/n. Согласно
предложению 7 det5 = 1, и потому det Vj = det (SM\S) = detr^. Итак,
V{fu--.Jn}=\/tetTJ- (20)
Пусть е — произвольный базис, a F — матрица из координатных
столбцов векторов /i,...,/n в этом базисе. Эта матрица — матрица
перехода от е к f. Поэтому Г/ = FTTeF. Отсюда в силу (20)
n/b.-./n} = |detF|N/diTr7=:|detF|y{e1,..Men}.
В частности, для ортонормированного базиса е
V{/b...J/„} = |dctn
Если евклидово пространство ориентировано (п. б § 1 гл. VI), мы
определим объем n-мерного ориентированного параллелепипеда как
его объем со знаком плюс, если его ребра составляют
положительно ориентированный базис, и со знаком минус в противном случае.
Тогда для положительно ориентированного ортонормированного
базиса мы имеем V±{fi,..., fn} = det F, а в общем случае
V±{/i>...J/„}=detFV±{e1>...Jen}. (21)
Формулы этого пункта были получены нами для п = 2,3 в §4 гл. I.
Упражнения
1. Проверьте, что в пространстве многочленов степени $С 2 скалярное
произведение можно определить формулой
1
М = fp(t)Q{t)dt.
-i
а) Составьте матрицу Грама базиса 1,£, t2.
б) С помощью матрицы перехода найдите матрицу Грама базиса
1, (*-1), (i-1)2.
в) Найдите угол между многочленами t? 4- 1 и t -f i.
226
Гл. VII. Евклидовы и унитарные пространства
2. Подпространство евклидова пространства задано в ортонормирован-
ном базисе уравнением £* + £2 + £3 + £4 = О- Найдите ортонормированный
базис в этом подпространстве.
3. Пусть dimef = 4 и S* С £ задано в ортонормированном базисе
системой
6 + Ь + 6 = 0, 6 + £з + 6 = 0.
Найдите:
а) базис в (f'х;
б) ортогональную проекцию на &' вектора || 1 2 3 4||т.
4. Допустим, что все элементы ортогональной матрицы порядка п
равны между собой по абсолютной величине.
а) Чему равна абсолютная величина элемента такой матрицы?
б) Докажите, что такие матрицы существуют, если п = 2*, где к —
натуральное число.
5. Найдите фД-разложение матрицы:
"111
2 3
; б)
1 l 3
2 4
1 1 г
1 II
~3
-1 ||
6. В четырехмерном евклидовом пространстве трехмерный
параллелепипед построен на векторах, имеющих в ортонормированном базисе
координатные столбцы || 1 1 - 1 О ||т, || 1 1 1 - 1 ||Т и || 1 1 1 1 ||Г. Найдите объем
параллелепипеда.
§ 2. Линейные преобразования евклидовых пространств
1. Преобразование, сопряженное данному. Все сказанное
в предыдущей главе о линейных преобразованиях линейных
пространств остается, конечно, в силе и для евклидовых пространств. С
введением скалярного произведения преобразования приобретают
новые свойства подобно тому, как векторы приобретают длину.
Определение. Линейное преобразование А* евклидова
пространства называется сопряженным преобразованию Л, если для любых
векторов х и у имеет место равенство
(А(х),у) = (х,А*(у)). (1)
Допустим, что данное преобразование А имеет сопряженное А\
Выясним, как связаны матрицы преобразований А и А" в некотором
базисе е. Обозначим эти матрицы через Л и Лж, а координатные
столбцы векторов х чу через £ и ?у. Тогда равенство (1) можно переписать
в координатной форме (Л£)ТГ?/ = £тГЛ*т7, где Г — матрица Грама
базиса е. Выполнив транспонирование, получаем
eATTrJ=e^A*v. (2)
Это равенство показывает, что левая и правая части (1) являются
билинейными функциями, а .4ТГ и ГА* — матрицы этих функций в
базисе е. Если значения функций равны при любых х и ?у, то матрицы
§2. Линейные преобразования евклидовых пространств 227
этих функций равны. Поэтому
АТТ = ГА\ (3)
Итак, матрицы преобразований А и А* связаны соотношением (3). В
частности, если базис ортонормированный,
А*=АТ. (4)
Предложение 1. Каждое линейное преобразование евклидова
пространства имеет единственное сопряженное преобразование.
Для доказательства выберем ортонормированный базис е и
рассмотрим линейное преобразование 6, матрица которого в базисе е
равна АТ. Подставим В вместо А* в определение (1). Это приведет к
очевидному равенству для матриц (A£)T-q = £т(Лтт/). Таким
образом, В является сопряженным для А. Если бы имелось два
преобразования, сопряженных одному и тому же Л, то в силу (4) их матрицы
совпадали бы. Предложение доказано.
Поскольку (Ат)т = Л, из формулы (4) вытекает, что
(А')' = А. (5)
Для любых двух преобразований А и Б из (АВ)Т = ВТАТ получаем
(АВ)Ж = В*А*. (6)
Из той же формулы (4) следует, что характеристические
многочлены А и А* совпадают. Следовательно, собственные значения
преобразований и их кратности одинаковы.
В качестве приложения понятия сопряженного преобразования
дадим геометрическое истолкование теоремы Фредгольма для
системы Лх = b из п уравнений с п неизвестными. Для этого рассмотрим
гс-мерное евклидово пространство и ортонормированный базис в нем.
Каждый столбец будет координатным столбцом некоторого вектора,
а матрица А — матрицей линейного преобразования Л.
Система совместна, если существует такой вектор х, что А(х) = 6,
т. е. Ь принадлежит множеству значений 1тЛ преобразования Л. С
другой стороны, сопряженная однородная система Лту = о
равносильна условию Л*(у) = о, т. е. является системой уравнений для
Кег Л*. Таким образом, теорема Фредгольма эквивалентна
следующему утверждению: 6 Е 1тЛ тогда и только тогда, когда (6, у) = О для
любого у £ Кег Л*. Мы приходим к такой ее формулировке:
Предложение 2. Множество значений преобразования А
совпадает с ортогональным дополнением ядра его сопряженного
преобразования:
1тЛ = (КегА*)х.
В гл. V мы доказали теорему Фредгольма (для более общего
случая), но и эта ее формулировка легко проверяется. Действительно,
условие у G (1тА)1- по определению означает, что (А(х),у) = 0 для
любого х. Это то же самое, что и (я, А* (у)) = 0, и выполняется для всех
228 Гл. VII. Евклидовы и унитарные пространства
х тогда и только тогда, когда А*(у) = о. Таким образом, у е (Im Д)х
равносильно у Е Кег А*.
2. Самосопряженные преобразования. Линейное
преобразование А евклидова пространства называется самосопряженным, если
А = Аж. Это равносильно тому, что (А(х),у) = (х, А(у)) для любых х
и у. Из формулы (4) следует
Предложение 3. Преобразование является самосопряженным
тогда и только тогда, когда его матрица в ортонормированном
базисе симметрична.
Собственные значения и собственные подпространства
самосопряженных преобразований обладают рядом важных свойств, к
изучению которых мы переходим. Ниже нам дважды придется
воспользоваться следующими замечаниями: ограничение А' самосопряженного
преобразования А на любом инвариантном подпространстве является
самосопряженным. Собственный вектор ограничения является
собственным и для преобразования. Оба утверждения очевидны. Они сразу
следуют из соответствующих определений и того, что А'{х) = А(х)
для тех векторов, для которых определено А.
Теорема 1. Все корни характеристического многочлена
самосопряженного преобразования вещественны.
Доказательство. Допустим, что самосопряженное
преобразование А имеет не вещественный корень характеристического
многочлена. Тогда согласно предложению 8 §4 гл. VI существует
двумерное инвариантное подпространство &1, не содержащее собственных
векторов А. Обозначим через А' ограничение А на &'.
Поскольку А' — самосопряженное преобразование, в ортонормированном
базисе оно будет иметь симметричную матрицу
II а & \\
II >в т II"
Характеристический многочлен этой матрицы Л2 — (а + 7)^ +
+ (cry — Р2) имеет дискриминант (а + у)'2 — 4(сгу — /З2). Последнее
легко преобразуется в (а — 7)2 + 4/?2. Следовательно, дискриминант
неотрицателен, характеристический многочлен имеет
вещественный корень, а преобразование А! — собственный вектор, что
противоречит выбору подпространства <f'. Теорема доказана.
Доказанное утверждение допускает следующую матричную
формулировку.
Предложение 4. Если А — вещественная симметричная
матрица, то все корни уравнения det(A — ЛЬ1) = 0 вещественны.
Теорема 2. Собственные подпространства самосопряженного
преобразования попарно ортогональны.
Теорема равносильна следующему утверждению.
Если собственные векторы самосопряженного преобразования
принадлежат различным собственным значениям, то они ортогональны.
§2. Линейные преобразования евклидовых пространств 229
Докажем его. Пусть А(х) = \х и А(у) = /и/, причем А ф р,. Тогда
(Л(аг),у) = А(х,у).
Но иначе можно получить
(Д(х),у) = (х,ЛЫ)=/^(^,2/).
Из этих двух равенств следует (Л — р){х, у) = 0, откуда (х, у) = О, как
и требовалось.
Теорема 3. Если подпространство §* инвариантно
относительно самосопряженного преобразования Д, то ортогональное
дополнение <?'х этого подпространства — также инвариантно
относительно А.
Доказательство. Нам дано, что для каждого х из S' образ А(х)
также лежит в <?'. Поэтому {А(х),у) =: 0 для любого у Е <?/Х. Но для
самосопряженного А это равносильно (х,А(у)) = 0, и,
следовательно, А(у) G <f/X, как и требовалось.
Теперь мы можем доказать основную теорему о самосопряженных
преобразованиях.
Теорема 4. Пусть А — самосопряженное преобразование
евклидова пространства &. Тогда в & существует ортонормированный
базис из собственных векторов А.
Доказательство. Обозначим через JS? сумму собственных
подпространств преобразования А и докажем, что она совпадает с <£.
Сумма собственных подпространств - инвариантное подпространство.
Действительно, если вектор х раскладывается в линейную
комбинацию собственных векторов (принадлежащих каким бы то ни было
собственным значениям), то его образ раскладывается по ним же.
Из теоремы 3 следует, что ортогональное дополнение Sf также
инвариантно. Допустим, что подпространство J2?x ненулевое и
рассмотрим ограничение А* преобразования А на J$fx. Это -
самосопряженное преобразование, и потому оно имеет вещественные
характеристические числа и, следовательно, хоть один собственный вектор.
Этот вектор собственный и для А и должен лежать в J£f. Так как
он ненулевой, в J5fx он лежать не может. Полученное противоречие
показывает, что J£fx — нулевое подпространство, и J$f совпадает с <f.
Поскольку сумма собственных подпространств — прямая сумма,
требуемый базис в & можно выбрать как объединение ортопормиро-
ванных базисов собственных подпространств. Этот базис будет орто-
нормированным, так как векторы базиса, лежащие в разных
собственных подпространствах, ортогональны но теореме 2.
Доказанная теорема допускает такую матричную формулировку.
Предложение 5. Если А -— симметричная матрица, то
существует ортогональная матрица S такая, что S~lAS -—
диагональная матрица.
230
Гл. VII. Евклидовы и унитарные пространства
Действительно, матрица А задает самосопряженное
преобразование в ортонормированном базисе. В качестве S можно взять матрицу
перехода от этого базиса к базису, построенному в теореме 4.
Для теоремы 4 справедлива обратная теорема.
Предложение 6. Если существует ортонормированный базис из
собственных векторов линейного преобразования А евклидова
пространства^ то А самосопряженное.
Действительно, в таком базисе матрица преобразования
диагональная, а потому симметричная. А = А* но предложению 3.
Приведем геометрическую характеристику самосопряженного
преобразования. В теореме 2 § 3 гл. IV мы рассматривали, в
частности, аффинное преобразование плоскости, состоящее в сжатии
(растяжении) по двум взаимно перпендикулярным направлениям.
В n-мерном евклидовом пространстве обобщением такого
преобразования будет сжатие по п попарно перпендикулярным направлениям.
Выберем ортонормированный базис так, чтобы его векторы имели
данные направления. Тогда каждый базисный вектор е* перейдет в
ему пропорциональный вектор А,е,-, где А,- — коэффициент сжатия.
По предложению 6 преобразование будет самосопряженным.
Обратно, самосопряженное преобразование с положительными
собственными значениями является сжатием по п попарно перпендикулярным
направлениям. Нулевому собственному значению соответствует уже
не сжатие, а проектирование, а отрицательному собственному
значению — произведение сжатия и симметрии.
Рассмотрим теперь нахождение базиса, существование которого
доказано в теореме 4. Выбрав некоторый (удобнее, если
ортонормированный) базис составляем матрицу Л преобразования. Находим
корпи ее характеристического многочлена det(/l — А/£) и для каждого
корня —- базис в собственном подпространстве как
фундаментальную систему решений системы (Л — \Е)£ = о. Для простых корней
единственный вектор базиса следует пронормировать, а для кратных
корней полученный базис нужно ортогонализовать и нормировать.
Для практического решения вычислительных задач по ряду
причин применяются совсем другие методы. Изложение этих вопросов
не входит в нашу задачу. Поясним, однако, одну из таких причин на
простом примере. Допустим, что мы производим вычисления с
округлением, учитывая два десятичных знака после запятой, и нам нужно
найти характеристические числа матрицы
II 1 °'03 II
II °'03 1 Г
При выбранной точности истинное характеристическое уравнение
А2 — 2А + 0,9991 = 0 будет воспринято как А2 — 2А + 1 = 0, и мы
найдем Х[ = Af, = 1. Однако умножение матрицы на столбцы ||1 1||т
§2. Линейные преобразования евклидовых пространств 231
и ||1 — 1||т показывает, что на самом деле характеристическими
числами являются Ai = 1,03 и Л2 = 0,97.
3. Изоморфизм евклидовых пространств. Два евклидовых
пространства £ъ£ называются изоморфными, если существует
взаимно однозначное линейное отображение А: &^>Ж, при котором
(А(х),А(у)) = (х,у) (7)
для любых х и у из <?. Такое отображение называется изоморфизмом
евклидовых пространств.
Таким образом, термин "изоморфизм" имеет различные значения
в зависимости от контекста. Если речь идет о евклидовых
пространствах, то при изоморфизме помимо линейности требуется
сохранение скалярного произведения.
Для того чтобы два евклидовых пространства были изоморфны,
разумеется, необходимо, чтобы были равны их размерности.
Действительно, в противном случае они не изоморфны даже как линейнью
пространства. Оказывается, что этого и достаточно.
Теорема 5. Любые два евклидовых пространства одной
размерности изоморфны. Евклидовы пространства разных размерностей не
изоморфны.
Для доказательства первого утверждения выберем в каждом из
рассматриваемых пространств <£и£ по ортопормированному базису.
Отображение А: &'-* S зададим, сопоставляя вектору х Е
^вектор А(х) £<f, имеющий те же координаты. Матрица этого
отображения единичная, поэтому А будет взаимно однозначным. Из
формулы (9) § 1 следует, что при таком отображении сохраняется скалярное
произведение.
Интересно отметить, что условие (7) очень сильное. Из него
следует, что А — линейное отображение и, более того, инъективно.
Действительно, рассмотрим произвольный вектор х из <?и произвольное
число а. Скалярный квадрат вектора А{ах) — аА(х) можно записать в
виде (А(ах).А(ах)) - 2а(А(ах), А(х)) + а*(А(ж),Л(ж)). Учитывая (7),
видим, что это равно (ах,ах) — 2а(ах,х) + а~(х,ж), т. е. пулю.
Таким образом, А(ах) = аА(х). Аналогично доказывается, что А(х +
+ У) = А(х)+А{у).
Далее, пусть х Е Кег Д, т. е. А(х) = о. Это значит, что (А(х), А(х)) =
= 0 и, в силу (7), что (х,х) = 0. Таким образом, ядро А нулевое и А
инъективно.
В общем случае А не взаимно однозначно, но если dim £ = dim <?, то
из dhn<f= Kg А но предложению б §3 гл. VI следует, что А является
изоморфизмом. Мы доказали
Предложение 7. Произвольное отображение евклидова
пространства в евклидово пространство той же размерности является
изоморфизмом, если оно сохраняет скалярное произведение.
232 Гл. VII. Евклидовы и унитарные пространства
4. Ортогональные преобразования. Преобразование А
евклидова пространства <f называется ортогональным, если оно сохраняет
скалярное произведение, т. е. если условие (7) выполнено для любых
векторов из £. Из предложения 7 следует, что ортогональное
преобразование является изоморфизмом & на себя.
Предложение 8. Если преобразование ортогонально, и только в
этом случае, сопряженное ему преобразование является обратным к
нему.
Действительно, по формуле (7) имеем (х,А*А(у)) = (я,у), или
(х, А*А(у) - у) = 0. Это означает, что вектор А* А{у) — у ортогонален
любому вектору пространства и, следовательно, является нулевым.
Поскольку равенство А*А{у) = у выполнено для всех у,
преобразование А*А является тождественным, что равносильно доказываемому
утверждению. Обратно, из равенства А* А = Е легко получить (7).
Предложение 9. Преобразование ортогонально тогда и только
тогда, когда его матрица в любом ортонормированием базисе
является ортогональной.
Это прямо следует из формулы (4) и предложения 8.
Предложение 10. Для двух ортонормированных базисов е uf
найдется единственное ортогональное преобразование А, для
которого А{е{) = fi (i= 1,...,м).
Доказател ьство. Преобразование, переводящее е в f,
существует и единственно: его матрица в базисе е состоит из координатньш
столбцов векторов /i,...,/n B базисе е. Преобразование является
ортогональным, так как его матрица в ортонормированном базисе
ортогональная (она же служит матрицей перехода от е к f).
Предложение 11. Собственные значения ортогонального
преобразования по абсолютной величине равны единице.
Действительно, для любого собственного вектора х мы имеем
{А{х),А{х)) = Х2(х,х) и {А{х),А{х)) = {х,х). Отсюда А2 = 1.
Предложение 12. Если &' — подпространство, инвариантное
относительно ортогонального преобразования А> то его ортогональное
дополнение <?'х также инвариантно относительно А.
В самом деле, ортогональное преобразование взаимно
однозначно, и потому переводит каждое подпространство в подпространство
той же размерности. Так как £' инвариантно, имеем А{&') = <£". Если
х £ <?', а у е &f±, то 0 = (х, у) = (А(х), А(у)). Таким образом, А(у)
принадлежит (Д(^/))±. Но из А{£') = £' следует Д(<Г')Х = <f/X. Поэтому
А(у) £ <?f±, как и требовалось.
Теорема 6. Пусть А — ортогональное преобразование п-мерпого
евклидова пространства <f. Тогда £ ■■■- прямая сумма попарно
ортогональных одномерных и двумерных подпространств, инвариантных
относительно А.
§ 2. Линейные преобразования евклидовых пространств 233
Для доказательства воспользуемся индукцией. Для пространств
размерностей 1 и 2 утверждение очевидно. Предположим, что мы
доказали теорему для пространств размерностей & — 1 и Лг — 2, и
докажем ее для Ar-мерного пространства. Но следствию из предложения 8
§4 гл. VI в £ существует или одномерное, или двумерное
инвариантное подпространство £\. Его ортогональное дополнение £f —
инвариантное подпространство размерности к — 1 или к — 2. К
ограничению преобразования А на <£j" мы применим предположение индукции.
Подпространства <?2, ••-, <£п, на которые распадается $[, инвариантны
относительно А.
dim<f = dim£\ + dim<gf. По предположению индукции dim<f{~ =
= dim<f2 + ••• -f dim<frn. Таким образом, для подпространств <?3, ...,£т
размерность суммы равна сумме размерностей, и, следовательно,
сумма прямая. Теорема доказана.
Выберем в каждом из подпространств <fi,...,<?n по ортопормиро-
ванному базису и объединим все эти базисы. Мы получим ортонор-
мированный базис в <?. Как следует из предложения 2 § 4 гл. VI,
матрица преобразования в этом базисе будет клеточно
диагональной. Одномерным инвариантным подпространствам будут
соответствовать клетки порядка 1, т. е. числа 1 или —1 на диагонали.
Двумерным подпространствам соответствуют клетки порядка 2. Каждая
такая клетка — матрица ограничения А' преобразования А. Так как
базис ортонормирован, она ортогональна и имеет вид (16) § 1 при
некотором а.
Из двух матриц (16) § 1 вторая матрица симметрична. Если А1
имеет такую матрицу, то оно не только ортогональное, но и
самосопряженное, и потому имеет собственный вектор. Как вытекает из
предложения 8 §4 гл. VI, двумерные инвариантные
подпространства не содержат собственных векторов, а значит, матрицей А! будет
первая из матриц (16) — матрица поворота плоскости на угол а.
Такое представление матрицы ортогонального преобразования
известно как разложение преобразования на плоские вращения, так как
каждому двумерному подпространству соответствует поворот, и эти
повороты могут осуществляться последовательно. Надо, однако,
помнить, что в общем случае имеются собственные подпространства
с собственными значениями 1 и —1.
5. Сингулярное разложение. Пусть Л матрица размеров
ту. п. Тогда АТА — квадратная матрица порядка п. Рассмотрим
матрицу Ат А как матрицу линейного преобразования «-мерного
арифметического пространства со стандартным скалярным
произведением.
Так как матрица симметрична, преобразование самосопряженное,
и найдется такой ортонормированиый базис, в котором матрица
преобразования имеет диагональный вид. При этом мы можем унорядо-
234
Гл. VII. Евклидовы и унитарные пространства
чить базисные векторы так, чтобы собственные значения
располагались в неубывающем порядке: Ах ^ А2 ^ ... ^ А„. Обозначим через Q
матрицу перехода к такому базису из собственных векторов
преобразования. Q — ортогональная матрица, и QT — ее обратная.
Возвращаясь к матричной точке зрения, мы получаем
Предложение 13. Для любой матрицы А размеров тхп
найдется такая ортогональная матрица Q, что
QTATAQ = Л, (8)
где Л — диагональная матрица порядка п
A = diag(Ab...,An), Ах ^ А2 ^ ... ^ Ап.
Это простое предложение служит основой разложения матрицы А
в произведение трех матриц, которое называется сингулярным
разложением.
Рассмотрим матрицу AQ и обозначим ее столбцы gi,...,gn. Под
ортогональностью столбцов всюду далее будет подразумеваться их
ортогональность как векторов арифметического пространства
относительно стандартного скалярного произведения (х, у) = хту; нормой
столбца назовем евклидову длину соответствующего вектора, т. е.
|х| = >/(х, х).
Так как Л = (AQ)T(AQ), элемент A,j матрицы Л равен gf gj.
Если г ф j, то q[gj = \{j = 0, и столбцы ортогональны. Диагональные
элементы матрицы Л это квадраты норм столбцов: gfgz = А;.
Отсюда следует, в частности, что А,- ^ О, » = 1,..., п. Обозначим RgATA
через г. Так как собственные значения расположены в убывающем
порядке, то Х\ ^ ... ^ Аг > 0, a Ar+i = ... = An = 0. Следовательно,
gr+i = ... = gn = 0, а первые г столбцов gi, ...,gr ненулевые. Их
нормы равны
Ofi = \Д7, i=l,...,r. (9)
Пронормируем ненулевые столбцы матрицы AQ, разделив каждый
столбец на его норму. Мы получим матрицу ||Pi|0||. В ней первые г
столбцов, вошедшие в подматрицу Pi, ортогональны и нормированы.
За ними следуют п — г пулевых столбцов.
Любой набор ортогональных и нормированных векторов можно
дополнить до ортонормированного базиса. Для этого достаточно
выбрать какой-либо ортонормнрованный базис в ортогональном
дополнении линейной оболочки данных векторов. Поэтому любой набор
ортогональных и нормированных столбцов может быть дополнен до
ортогональной матрицы.
Итак, дополним матрицу Р\ до ортогональной матрицы P=||JP1|JP2||
порядка т. Кроме того, рассмотрим диагональную матрицу Dr —
§2. Линейные преобразования евклидовых пространств 235
= diag(c*i, ...,аг). При п> г дополним ее п — г нулевыми
столбцами, а при га > г дополним m — г нулевыми строками. Полученную
матрицу размеров тх п обозначим через D.
Докажем, что
AQ = PD = \\P,\P2\
1 Д.
1 °
О 1
о 1
Действительно, последние п — r столбцов произведения в правой
части нулевые, так как нулевыми являются последние столбцы D.
Первые г столбцов этого произведения получаются умножением столбцов
подматрицы Р\ на соответствующие диагональные элементы Д., т. е.
числа (9).
Умножим обе части этого равенства справа на QT, Так как Q ■-
ортогональная матрица,
A = POQT. (10)
Из полученного равенства следует, что RgA = RgD = г. Таким
образом, доказана
Теорема 7. Каждая матрица А размеров т х п и ранга г
может быть представлена как произведение (10), где Q и Р —
ортогональные матрицы порядков соответственно п и гп, D — матрица
размеров т х п, все элементы которой равны нулю, за исключением
dn = ai,...,drr = ar.
Пусть р = min{rn, n]. Элементы </ц,..., dpp матрицы D
называются сингулярными числами матрицы А. Первые г из них определяются
формулой (9), а остальные, если существуют, равны нулю.
Квадратная матрица порядка п и ранга г имеет п сингулярных чисел, из
которых г положительны.
Столбцы матриц Q и Р составляют соответственно первый и
второй сингулярные базисы матрицы А. Первый — это базис в /?п, а
второй—в /?w.
Для выяснения геометрического смысла сингулярного разложения
рассмотрим два евклидовых пространства С и М и выберем в них
ортонормированные базисы е и f. Пусть отображение А : С —> М в
этой паре базисов имеет матрицу А. Разложение А = PDQT
запишем в виде D = РТAQ. Это значит, что, переходя от е и f к первому
сингулярному базису eQ и второму сингулярному базису f P в
пространствах С и М, мы получим матрицу отображения D.
Вспомним, что согласно теореме 2 § 3 гл. VI для отображения
А : С —¥ М можно так выбрать базисы в пространствах С и М> что
матрица отображения будет иметь вид
/Л =
II Е'
О
о 1
0
236
Гл. V1L Евклидовы и унитарные пространства
Сейчас мы доказали, что, ограничиваясь ортоиормированными
базисами, можно добиться сходного результата: единичная матрица в
левом верхнем углу заменяется на диагональную матрицу с
ненулевыми сингулярными числами по диагонали.
Присмотревшись к формуле (10), можно заметить, что элементы
последних т — г столбцов матрицы Р умножаются на нулевые
элементы D. То же самое можно сказать и о последних п — г строках
матрицы QT. Значит, если мы пропустим эти столбцы и строки, как
и нулевые элементы в Д равенство не нарушится. Итак,
A=P!Dr(fi, (11)
где Qi — матрица, составленная из первых г столбцов матрицы Q.
Формула (11) называется сокращенной формой сингулярного
разложения.
6, Полярное разложение. Далее мы будем предполагать
матрицу А квадратной: т = п. Вернемся к формуле (10) и перепишем
ее, вставив два сомножителя, произведение которых равно
единичной матрице: А = (PQT)(QDQT). При такой расстановке скобок мы
разложили А в произведение ортогональной матрицы U = PQT и
симметричной матрицы S = QDQT. Корни характеристического
многочлена матрицы S неотрицательны - это сингулярные числа
матрицы А. Мы показали, таким образом, что произвольную квадратную
матрицу А можно разложить в произведение А = US ортогональной
и симметричной матриц, причем характеристические числа
симметричной матрицы неотрицательны. Такое разложение называется
полярным разложением.
Конечно, можно поступить несколько иначе: написать А =
= (PDPT)(PQT). Это приводит нас к полярному разложению А =
SiU, где ортогональный сомножитель расположен справа. Отметим,
что в обоих случаях ортогональная матрица одна и та же: U = PQ1,
симметричные матрицы различны, по их характеристические числа
совпадают.
Геометрическую интерпретацию полярного разложения мы
получим, если будем рассматривать матрицы как матрицы линейных
преобразований в некотором ортопормированиом базисе евклидова
пространства.
Теорема 8. Каждое линейное преобразование А евклидова
пространства можно разложить в произведение ортогонального и
самосопряженного преобразований: А= US или А = Si U. При этом
собственные значения и того и другого самосопряженного преобразования
неотрицательны —- они равны сингулярным числам преобразования
А. Базис из собственных векторов S -•• первый сингулярный базис А;
базис из собственных векторов Si — второй сингулярный базис А.
§ 2. Линейные преобразования евклидовых пространств 237
7. Сингулярные числа линейного преобразования
Рассмотрим дробь
. (А*А(х), х)
Р(*) = ,g|a ■
Если £:, ...,£п — координаты вектора х в ортонормированиом базисе
е из собственных векторов преобразования А*А (т. е. в первом
сингулярном базисе А), то А*А(х) = Ai£*ei + ... + An£nen и
,Т) _ Ml1)8+ ■■■ +Ап(€я)2
/ч'~ CT + .-. + te")2 ■
Если здесь заменить все собственные значения на максимальное A1;
то дробь не уменьшится и станет равной Ai. Поэтому всегда р(х) ^ А^
Аналогично легко получить, что р(х) ^ Ап.
Но, с другой стороны,
(А(х),А(х))_\А(х)\*
Р(Х,~ \х\* " |*|2 -
Как мы видели, эта величина заключена между минимальным и
максимальным собственными значениями Ап и Aj, а они равны
квадратам сингулярных чисел ап и c*i. Поэтому
\А(х)\
Неравенство показывает, что максимальное сингулярное число c*i —
максимальное отношение, в котором может измениться длина
вектора при преобразовании А. При этом, как легко видеть, для первого
вектора в\ первого сингулярного базиса |A(ei)| = orijei| = а\.
Аналогичный смысл имеет аЛ.
Если х — собственный вектор преобразования А с собственным
значением /i, то \А(х)\ = \fi\\x\. Поэтому очевидно, что модули
собственных значений |/*i|, ..., \цп\ преобразования А заключены между
его минимальным и максимальным сингулярными числами:
<*п ^ |/ii| ^<*ь t = 1,...,л.
Для выяснения геометрического смысла сингулярных чисел
рассмотрим линейное преобразование А евклидова пространства и его
полярное разложение А = US. Найдем образ единичной сферы, т. е.
множества с уравнением |аг| = 1, при преобразовании S. В
ортонормированиом базисе из собственных векторов преобразования S
вектор у = S(x) имеет координаты rf — at-f*, где £' — координаты
вектора х. Будем, как и выше, считать, что c*i ^ a2 ^ ... ^ аг > 0 и
ar+i = ... = ап = 0. Тогда £г = rf/оч при 1^ги ^ =0 при j > г.
Из |аг| = 1 следует тогда, что
£i^Ul; rf = 0 (j>r).
»=i '
238
Гл. VJL Евклидовы и унитарные пространства
Таким образом, при г = п преобразование S переводит единичную
сферу в эллипсоид, а при г <п — в область r-мерного пространства,
ограниченную эллипсоидом. Преобразование U не меняет полуосей
этого эллипсоида. Поэтому на сингулярные числа преобразования А
можно смотреть как на полуоси эллипсоида, в который А переводит
единичную сферу, считая соответствующие полуоси нулевыми, если
размерность снижается.
Упражнения
1. В базисе е с матрицей Грама Г преобразование А имеет матрицу Л;
А =
-1 -2
3 4
а) Найдите матрицу сопряженного преобразования.
Найдите собственные подпространства:
б) преобразовании А; в) преобразования А*,
2. Докажите, что собственные подпространства преобразований А и Д*,
принадлежащие разным собственным значениям, ортогональны. Проверьте
этот результат для упр. 1.
3. Найдите все линейные преобразования, которые являются как
ортогональными, так и самосопряженными.
4. Сколько существует ортонормированных базисов из собственных
векторов данного самосопряженного преобразования, если у его
характеристического многочлена: а) нет Рфатных корней; б) есть кратные корни?
в) Возможен ли неортогональный базис из собственных векторов
самосопряженного преобразования?
5. Найдите матрицу перехода S к ортонормированному базису из
собственных векторов преобразования, заданного в ортонормированном базисе
матрицей
А =
2 1
1 2
1 1
и напишите матрицу А' преобразования в найденном базисе.
6. Ортогональное преобразование, заданное матрицей
0
1
0
0
0
0
тН
0
0
0
0
1
-1
0
0
0
в ортонормированном базисе, разложите в произведение двух вращений во
взаимно перпендикулярных двумерных подпространствах.
7. Получите полярное разложение преобразования, заданного в
ортонормированном базисе матрицей:
а)
б)
s/2
О
1
х/2
8. Получите сингулярное разложение преобразования, заданного в
ортонормированном базисе матрицей из упр. 7, б).
§3. Функции на евклидовых пространствах
239
§ 3. Функции на евклидовых пространствах
1. Линейные функции. Выбор базиса в линейном
пространстве 5£ устанавливает изоморфизм между S£ и его сопряженным -£?*.
В этом пункте мы покажем, что для ?1-мерного евклидова
пространства <f существует такой изоморфизм, не зависящий от базиса.
Определение. Если для линейной функции f на евклидовом
пространстве найдется вектор а такой, что f(x) = (a,x) для любого х, то
функция называется регулярной, а вектор а — ее присоединенным
вектором. Говорят также, что функция присоединена к вектору а.
Как легко видеть, ка?кдому вектору присоединена некоторая
регулярная линейная функция (см. пример 2 §5 гл. VI).
Выберем в евклидовом пространстве базис е и выразим в нем
связь координатного столбца а вектора а и строки коэффициентов tp
его присоединенной функции f. Для произвольного вектора х
f(*) = (а, х) = атГ£
С другой стороны, f(a;) = v>£, и потому <р = атГ, или
fT = Га. (1)
В ортонормированном базисе эта формула выглядит особенно
просто: fT = а, т. е. коэффициенты регулярной функции равны
координатам ее присоединенного вектора.
Вспомним, что коэффициенты линейной функции в базисе е — это
ее координаты в базисе р, биортогональном базису с. Отсюда следует,
что равенство (1) можно рассматривать как координатную запись
линейного отображения Г пространства <f в его сопряженное & * в паре
базисов е и р. Так как Г — квадратная невырожденная матрица, это
отображение взаимно однозначно.
В пространстве ёж пока не введено скалярного умножения. Но мы
можем ввести его по формуле (f,g) = (T-1(f), r_1(g)). Тогда
отображение Г будет изоморфизмом евклидовых пространств.
Этот изоморфизм не зависит от базиса, так как соответствие,
сопоставляющее вектору его присоединенную функцию, записывается
формулой f(ar) = (a,ar) в не зависящем от базиса виде. Как следствие
мы получаем
Предложение 1. В конечномерном евклидовом пространстве
каждая линейная функция является регулярной.
Замечание. В бесконечномерном пространстве подобное
предложение было бы неверно. В примере 3 § 1 введено скалярное
произведение в пространстве функций, определенных и непрерывных на
отрезке [0, 1]. По отношению к этому скалярному произведению из
двух линейных функционалов, рассмотренных в примере 4 §5 гл. VI,
первый является регулярным, а второй, как можно доказать, нет.
Не зависящий от выбора базиса изоморфизм между
пространствами S и <f* позволяет отождествить эти пространства. С подобным
240 Гл. VII. Евклидовы и унитарные пространства
обстоятельством мы встречались, когда отождествляли
пространство 5£ и его второе сопряженное 3f**. Отождествление евклидова
пространства с его сопряженным (или линейной функции с ее
присоединенным вектором) является общепринятым.
Рассмотрим векторы р1,...,/?", отождествляемые с элементами
р1,..., рп базиса, биортогоналыюгобазису е. Из формулы (5) §5 гл. VI
следует, что они удовлетворяют условию
е. *>-{!: £*
Отсюда нетрудно вывести, что при п — 3 биортогональный базис,
определенный нами в §4 гл. I, совпадает с биортогональным базисом,
определенным в §5 гл. VI. Это же выясняет происхождение термина
"биортогональный".
2. Преобразование, присоединенное к билинейной
функции. Пусть Ь -- билинейная функции на евклидовом пространстве <£
С помощью скалярного произведения ей может быть сопоставлено не
зависящим от выбора базиса образом некоторое линейное
преобразование.
Определение. Линейное преобразование А называется
присоединенным к билинейной функции Ь, если для любых векторов х и у
из ^выполнено равенство
Ь{х,у) = (х,А(у)). (2)
Предложение 2. Каждая билинейная функция имеет одно-
единственное присоединенное преобразование.
Доказательство. Пусть А — матрица преобразования А в
некотором базисе е. Тогда (х,А(у)) = £ТГАт], где Г — матрица Грама
базиса е, а £ и т? — координатные столбцы х и у. Отсюда видно,
что (#, А(у)) — билинейная функция с матрицей ГЛ. Если значения
двух билинейных функций равны для любых х и у, то их матрицы
совпадают. Поэтому если у функции Ь существует присоединенное
преобразование, ее матрица В равна ГА. Отсюда
А = Г~1В. (3)
Это означает, что билинейная функция не может иметь больше
одного присоединенного преобразования: если оно существует, то его
матрица равна Г"1 В.
Докажем существование присоединенного преобразования. Для
этого достаточно проверить, что преобразование с матрицей (3)
является присоединенным. Подставим А = Т~1В в (х,А(у)) = £тГ71г/.
Мы получим (х,А(у)) = £'l B-q = b(x.y). Предложение доказано.
Одновременно мы получили связь (3) между матрицами
билинейной функции ее присоединенного преобразования. Для ортонормиро-
§3. Функции на евклидовых пространствах
241
ванного базиса связь особенно проста — эти матрицы совпадают:
А = В. (4)
Отсюда и из предложения 3 §2 мы получаем
Предложение 3. Для симметричных билинейных функций и
только для них присоединенное преобразование является
самосопряженным.
Преобразование, присоединенное к симметричной билинейной
функции, называют присоединенным также к соответствующей
квадратичной форме.
3. Ортонормированный базис, в котором квадратичная
форма имеет диагональный вид. Установленная выше связь
между квадратичными формами и самосопряженными преобразованиями
позволяет доказать две важные теоремы.
Теорема ]. В евклидовом пространстве для каждой
квадратичной формы существует ортонормированный базис, в котором она
имеет диагональный вид.
Теорема почти очевидна: базисом, существование которого
утверждается, является ортонормированный базис из собственных
векторов самосопряженного преобразования, присоединенного к
квадратичной форме. В нем В = А и А — диагональная матрица.
Следующая теорема является по существу другой формулировкой
теоремы 1.
Теорема 2. Пусть в линейном пространстве Sf заданы две
квадратичные формы к и h, причем h положительно определенная. Тогда в
Sf существует базис, в котором обе формы имеют диагональный вид.
Для доказательства введем в J5? скалярное произведение, приняв h
за основную квадратичную форму. По отношению к этому
скалярному произведению ортонормированными будут те базисы, в которых h
имеет канонический вид. По теореме 1 для формы к существует
ортонормированный базис, в котором она имеет диагональный вид. Это
и есть базис, существование которого мы доказываем.
Замечание. Если пространство J£? евклидово, то теорема 2
остается, конечно, справедливой. Уже существующее скалярное
произведение оставляется без внимания, а для доказательства вводится новое
скалярное произведение при помощи формы h. Найденный базис,
вообще говоря, не будет ортонормированным но отношению к старому
скалярному произведению.
Чтобы привести две квадратичные формы к диагональному виду
в одном и том же базисе, можно сначала привести к каноническому
виду форму h и найти матрицу К' формы к в полученном базисе.
Этим будет осуществлен переход к базису, ортонормированному по
отношению к вспомогательному скалярному произведению. Линейное
преобразование, имеющее ту же матрицу А"', является
присоединенным к форме к. Следует найти его ортонормированный базис из соб-
242
Гл. VII. Евклидовы и унитарные пространства
ственных векторов, вычисляя скалярное произведение по формуле (9)
§ 1. В этом базисе матрица формы h будет по-прежнему единичной, а
матрица К" формы к будет диагональной.
Тот же результат можно получить и иначе. Пусть К и Я —
матрицы квадратичных форм в исходном базисе е. Матрица II является
матрицей Грама базиса е для вспомогательного скалярного
произведения. Поэтому преобразование, присоединенное к форме к в базисе о,
имеет матрицу А — Н~1 К. Напишем его характеристический
многочлен беЦН-1 К - Щ в виде dct[H'x{K - ЛЯ)]. Так как det II"1 ф О,
характеристическое уравнение имеет те же корни, что и уравнение
det(A - ЛЯ) = 0, (5)
называемое обобщенным характеристическим уравнением. Для
каждого из его корней система уравнений собственного
подпространства (Я""1 А' — \Е)£ = о эквивалентна системе
(А-ЛЯ)£ = о.
Для каждого корня фундаментальную систему решений такой
системы уравнений надо ортогонализовать и нормировать, находя
скалярное произведение по формуле (7) §1 с матрицей Грама Я.
Объединяя все так полученные ортонормированные базисы собственных
подпространств, мы получаем базис е'. Он ортонормирован относительно
вспомогательного скалярного произведения, и потому форма h в нем
имеет канонический вид. Так как он состоит из собственных
векторов преобразования, присоединенного к к, эта форма будет иметь
диагональный вид в базисе е'.
Упражнения
1. В пространстве многочленов степени ^ 3 скалярное произведение
зададим так же, как в упр. 1 § 1. Линейная функция f сопоставляет
многочлену p(t) его свободный член р(0). Найдите вектор (многочлен),
присоединенный к этой линейной функции.
2. Линейное преобразование А присоединено к билинейной функции Ь.
К какой билинейной функции присоединено его сопряженное
преобразование А"?
3. В базисе е билинейная функция имеет матрицу В. Найдите
матрицу ее присоединенного преобразования, если Г — матрица Грама базиса е;
!| 2 1 1
| 1 2
I 1
г =
111
1 2
4. Докажите, что значение квадратичной формы к(х) на векторе х
длины 1 заключено между наименьшим и наибольшим собственными
значениями ее присоединенного преобразования, и эти границы достигаются на
соответствующих собственных векторах.
5. Квадратичная форма задана в ортонормированном базисе
многочленом 3(^2 + 3(£2)2 + 3({3)2 - 2£^2 - 2*1*3 - 2£2*8. Найдите матрицу
перехода к ортонормированному базису, в котором она имеет диагональный
вид, и ее вид в этом базисе.
§4- Понятие об унитарных пространствах
243
6. Пусть к и h — квадратичные формы и h положительно определена.
Существует ли базис, в котором к имеет канонический, a h диагональный
вид?
7. Приведите пример двух квадратичных форм, которые:
а) не приводятся к диагональному виду в одном и том же базисе;
б) приводятся к диагональному виду в одном и том же базисе, но ни
одна из них не является ни положительно определенной, ни отрицательно
определенной.
8. Найдите матрицу перехода к базису, в котором квадратичные
формы к(х) = (С1)2 - 2^£2 + (£2)2 и h(*) = 17К1)2 + 8*1*2 + (£2)2 обе имеют
диагональный вид, а также их вид в этом базисе.
9. Докажите, что для того, чтобы для двух непропорциональных
квадратичных форм в двумерном пространстве существовал базис, в котором
они обе имеют диагональный вид, необходимо и достаточно, чтобы
среди их линейных комбинаций нашлась положительно определенная форма.
Насколько здесь существенно предположение о размерности пространства?
§ 4. Понятие об унитарных пространствах
1. Определение. В этом параграфе мы покажем, как
определяется скалярное произведение в комплексных линейных пространствах.
При этом мы не приводим доказательств, поскольку их можно
получить незначительным видоизменением доказательств
соответствующих предложений о евклидовых пространствах. Договоримся, что
черта над буквой, обозначающей матрицу, означает замену всех
элементов матрицы на комплексно сопряженные.
Рассмотрим комплексное линейное пространство & и
предположим, что мы каким-то образом сопоставили каждой упорядоченной
паре векторов х\\у число (ж, у). Оказывается, что естественные
аксиомы, определяющие скалярное произведение в евклидовых
пространствах, выполнены быть не могут. Действительно, пусть х —
ненулевой вектор. В нашем пространстве определено умножение на
комплексное число, и мы можем взять вектор ix, где i — мнимая единица.
Если скалярное произведение линейно по каждому сомножителю, то
имеет место равенство
(ix,ix) = -(*,*).
При положительном произведении справа произведение слева
отрицательно. Таким образом, выбирая в качестве скалярного
произведения векторов значение билинейной функции, мы не можем
рассчитывать, что длина вектора будет вещественна.
Поэтому в комплексном пространстве вводятся другие
определения скалярного произведения. В одном из них заменяют аксиому 4
более слабым требованием: из того, что (х.у) = 0 для всех х,
вытекает у = о (иначе говоря, ортогональное дополнение пространства J5f
есть нулевое подпространство). Комплексное линейное пространство,
244 Гл. VII. Евклидовы и унитарные пространства
в котором так определено скалярное произведение, называется
комплексным евклидовым пространством. Такие пространства
используются сравнительно редко. Гораздо чаще в приложениях встречаются
так называемые унитарные пространства.
Определение. Комплексное линейное пространство J$f
называется унитарным (или эрмитовым) пространством, если задан закон,
сопоставляющий каждым двум векторам ж и у из if комплексное
число (я,у), называемое их скалярным произведением, и этот закон
удовлетворяет следующим аксиомам, каковы бы ни были векторы х,
у и z и число а:
1) (ж,у) = (у,х), т. е. при перестановке сомножителей скалярное
произведение заменяется на комплексно сопряженное число;
2) {ах,у) = а(х,у):
3) (* + У,г) = [x,z) + (y,z)\
4) (х,х) > 0. если хф о.
Заметим, что для любого вектора (х,х) = (ж, ж), и потому
скалярный квадрат вектора — вещественное число. В аксиоме Л) требуется,
чтобы оно было положительным для хф о.
Из аксиом 1) и 2) вытекает правило вынесения числового
множителя от второго сомножителя в скалярном произведении. Как легко
проверить, для любых комплексных чисел Аи/i выполнены равенства
Ш = Хд, (ГТ70 = а + д. (1)
В силу первого из этих равенств
(а?, сху) = (at/, x) = a(t/, x) = a(t/, ж),
и окончательно
{х,ау) = а{х,у). (2)
Раскрытие скобок при сложении во втором сомножителе происходит
без замены па сопряженное. Согласно второму из равенств (1)
(я, y + z) = {у + г, ж) = (у, ж) + (г, ж) = (у, ж) + (г, ж) = (ж, у) + (ж, г).
Это показывает, что унитарное пространство можно определить
как комплексное линейное пространство, в котором задана
положительно определенная эрмитова форма.
Длина вектора и угол между векторами определяются теми же
формулами, что и в евклидовом пространстве. Длина вектора
вещественна, неотрицательна и равна нулю только для нулевого вектора.
Угол, вообще говоря, комплексный.
Отметим, что неравенство Кош и Буняковского пишется так:
[*,*){у,у) ^ (*,у)(у,я) = 1(*>г/)12-
Пример 1. Комплексное линейное пространство комплексных
столбцов высоты п становится n-мерным унитарным пространством,
если определить скалярное произведение по формуле
§4- Понятие об унитарных пространствах
245
Действительно, по этой формуле имеем также
При помощи равенств (1) теперь можно получить (£, г)) — (ту,^).
Аксиомы 2) и 3) следуют из свойств умножения матриц. Далее,
(*, $=её+-+ге = к112+-+in2,
а следовательно, скалярный квадрат неотрицателен и равен нулю
только для нулевого столбца.
Пример 2. Одномерное унитарное пространство можно
построить следующим образом. Рассмотрим в качестве множества
векторов векторы обычной плоскости. Сложение векторов определим, как
обычно, по правилу параллелограмма.
Для того чтобы определить произведение вектора на комплексное
число, выберем некоторый (пусть, для определенности, ортонорммро-
ванный) базис ei,e2. Произведением вектора х с координатами £},£?
на число Л = а -f if) мы назовем вектор с координатами а£! — /?£2
и a^+jSf1. Смысл этого определения следующий: вектору х
соответствует комплексное число ^ + г£2. Произведением Лх называется
вектор, соответствующий произведению чисел \(£1 + г£2). Заметим,
что при сложении векторов складываются соответствующие
комплексные числа.
Проверим аксиомы линейного пространства. Аксиомы,
относящиеся к сложению векторов, разумеется, выполнены, так как тут
обычные векторы складываются обычным образом. Аксиомы,
относящиеся к умножению вектора на число, вытекают из свойств
сложения и умножения комплексных чисел. Таким образом, мы имеем
комплексное линейное пространство. Размерность его равна 1, так
как каждый вектор х равен (£*■ -f i£2)<*i, где f * + г£2 — комплексное
число, определяемое вектором х. Базисом является вектор ej.
Скалярным произведением векторов х = Aei и у = /ioi назовем
число АД. Не представляет труда проверить, что такое скалярное
умножение удовлетворяет аксиомам унитарного пространства.
Унитарная длина вектора (1 + z)oi равна >/2. Скалярное
произведение (oi,e2) = (ei,iei) = —г, даже если по отношению к обычному
скалярному произведению эти векторы и перпендикулярны.
2. Свойства унитарных пространств. Все доказанные выше
свойства евклидовых пространств с небольшими изменениями
переносятся на унитарные пространства.
Скалярное произведение выражается через координаты
сомножителей в базисе е но формуле
(*»у) = ZTVv,
где Г - - матрица Грама базиса о, или, иначе, матрица основной
эрмитовой формы. Ее элементы —скалярные произведения всевозможных
246
Гл. VII. Евклидовы и унитарные пространства
пар базисных векторов. Поскольку (е,-5е^) = (ej,e»). матрица Грама в
унитарном пространстве удовлетворяет условию
Гт = Г. (3)
Напомним, что при условии (3) матрица называется эрмитовой.
В конечномерном унитарном пространстве существует
ортонормированный базис, векторы которого попарно ортогональны, а по
длине равны 1. Такой базис можно получить из произвольного базиса
методом ортогонализации. В ортонормированном базисе скалярное
произведение выражается формулой
Ортогональное дополнение подпространства и ортогональные
проекции вектора в унитарном пространстве определяются так же, как в
евклидовом, и имеют те же свойства. Разумеется, нужно не забывать
следить за порядком сомножителей в скалярном произведении.
Матрица перехода от одного ортонормированного базиса в
унитарном пространстве к другому такому же базису должна удовлетворять
равенству
SrS=E. (4)
Это означает, что S = 5Т, а отсюда следует
SST = Е.
Оп ре деление. Матрица, удовлетворяющая равенству (4),
называется унитарной.
Применяя равенства (1) к формуле полного разложения
детерминанта, мы получаем, что detS = del 5. Теперь из (4) следует
det(Sr5) = del ST det S = det SdetS = | det S\2 = 1.
Таким образом, детерминант унитарной матрицы — комплексное
число, по модулю равное 1.
В теореме 5 §4 гл. V мы видели, что для каждого линейного
преобразования комплексного линейного пространства существует ба
зис, в котором его матрица - верхняя треугольная. Легко видеть, что
ортогонализации такого базиса не выводит его векторы из
подпространств (11) §4 гл. V. Поэтому справедлива
Теорема 2. Для каждого линейного преобразования унитарного
пространства существует ортонормированный базис, в котором его
матрица — верхняя треугольная.
3. Самосопряженные и унитарные преобразования.
Преобразование унитарного пространства называется самосопряженным,
если для любых векторов х и у выполнено равенство
(А(х),у) = (х,А(у)).
Из этого определения вытекает, что преобразование является са-
мосопря?кенным тогда и только тогда, когда его матрица в любом
ортонормированном базисе эрмитова.
§4- Понятие об унитарных пространствах
247
Собственные значения (а значит, и все характеристические
числа) самосопряженного преобразования вещественны. Действительно,
если А(х) = Аж, то (А(х),х) = \(х,х) и (я, А(х)) = \(х,х).
Следовательно, Л = Л.
На самосопряженные преобразования унитарных пространств без
изменений переносятся теоремы 2-4 §2.
Заметим, однако, что обращение теоремы 4 §2 — предложение б
§2 — на унитарные преобразования не переносится: эрмитова
матрица должна иметь вещественные числа на главной диагонали, а потому
не всякая диагональная матрица эрмитова.
Преобразование унитарного пространства такое, что
(А(*),А(У)) = (*,У)
для любых векторов х и г/, называется унитарным преобразованием.
Преобразование унитарно тогда и только тогда, когда его матрица в
любом ортонормированном базисе унитарная.
Собственные значения унитарного преобразования по модулю
равны единице.
Каждое унитарное преобразование имеет ортонормированиый
базис из собственных векторов. Этим унитарные преобразования
отличаются от ортогональных преобразовании евклидова пространства.
4. Эрмитовы формы в унитарном пространстве.
Рассмотрим в унитарном пространстве нолуторалинейную форму Ь.
Преобразование А этого пространства называется присоединенным к форме Ь,
если Ь(х,у) = (хуА(у)) для любых векторов х и у. В
ортонормированном базисе матрица присоединенного преобразования совпадает с
матрицей, комплексно сопряженной матрице полуторалинейной
формы Ь. Отсюда следует, что преобразование, присоединенное к
эрмитовой форме, является самосопряженным. Теперь аналогично
теореме 1 § 3 мы можем заключить, что для эрмитовой формы в
унитарном пространстве найдется ортонормированиый базис, в
котором она имеет диагональный вид с вещественными числами на
диагонали.
Для двух эрмитовых форм, из которых одна положительно
определенная, найдется базис, в котором они обе имеют диагональный
вид.
Упражнения
1. В двумерном унитарном пространстве дан ортонормированиый базис
и векторы а и 6, координаты которых в этом базисе соответственно 1 -ft,
1 — г и —«, 2 — 2«.
а) Найдите их длины и косинусы углов между а и 6 и между Ь и а.
б) ОртогонализуЙте эту пару векторов.
2. Напишите какую-нибудь эрмитову матрицу порядка 3 и какую-
нибудь унитарную матрицу порядка 2.
248 Гг. VIL Eeh шдовы и унитарные пространства
3. Докажите, что корни характеристического уравнения вещееiвенной
ортогональной матрицы (в том числе и комплексные) по модулю равны 1
4. Найдите ортонормированный базис из собственных векторов и
матрицу преобразования в эюм базисе дли преобразования Д заданного в ор-
тоиормировашюм базисе матрицей
II ° г II
-i 0 '
Является ли преобразование самосопряженным, унитарным?
5. Найдите орюнормированный базис из собственных векюров
унитарного преобразования, заданного в орюнормированиом базисе матрицей
COS у? — 8Н1<£
sin ip cos 9
ГЛАВА VIII
АФФИННЫЕ ПРОСТРАНСТВА
§ 1. Плоскости
1. Аффинное пространство. П гл. I мы считали известным из
школьного курса понятие обычного геометрического пространства и
ввели определение вектора как упорядоченной пары точек. В гл. VI и
гл. VII были изучены многомерные векторные пространства. Теперь
мы можем дать аксиоматическое определение точечного
пространства любой размерности.
Рассмотрим гс-мерное вещественное линейное пространство ££ и
дадим следующее
Определение. Множество S? называется n-мерным аффинным
пространством, а его элементы точками, если задан закон,
сопоставляющий каждой упорядоченной паре его элементов А и В
единственный вектор из JS? (который мы обозначим АВ) так, что:
1) для любой точки Л из У и любого вектора х £ Л? существует
единственная точка В такая, что АВ = х: эта точка будет
обозначаться Р(А,х);
2) для любых трех точек А. В и С выполнено АВ + ВС = AS.
.¥ называется пространством векторов пространства «5*\ а его
элементы — векторами из У.
Чтобы установить соответствие с привычными определениями,
заметим, что первое требование соответствует возможности
отложить произвольный вектор от любой точки, а второе — определению
сложения векторов.
Приведем простейшие следствия из определения аффинного
пространства.
а) Для любых ДЕ*ух точек А и В АА 4- АВ — АВ. Поэтому вектор,
соответствующий паре совпавших точек, является нулевым
вектором. Отсюда для любой точки А имеем Р(А,о) = Р(А,АА) = А.
б) Второе требование для точек А, В, А дает АВ + ВА = АА,
откуда А В = —В А.
в) Для любых четырех точек А, В, А', В' справедливо
равенство АА -f АВ — АЧЗ' -f IFb. Поэтому равенство АВ = А1в1
выполнено тогда и только тогда, когда выполнено равенство А1 А — В'В. Это
свойство соответствует определению равенства векторов из § 1 гл. I.
250
Гл. VIII. Аффинные пространства
Пример. Исходя из линейного пространства JS? можно
построить аффинное пространство. Для этого возьмем в качестве множества
точек S? мно?кество векторов пространства J$f и сопоставим каждой
паре векторов х и у вектор ху — у — х. Легко проверить, что оба
условия из определения выполнены. Интуитивно это означает следующее:
представим себе векторы из J5f как направленные отрезки, исходящие
из одной точки. Тогда точками 5? мы будем считать концы наших
векторов.
Определение. Аффинные пространства У и 5?1 называются
изоморфными, если существует такое взаимно однозначное
отображение f: У ->• У1 и такой изоморфизм F: Sf -> 3ff, что для любых
двух точек выполнено f(A)f(£) = F(AB).
Могут быть изоморфны только аффинные пространства одной
размерности. Для двух пространств разных размерностей не найдется
изоморфизма F.
Если для изоморфизма f известен образ f(А) какой-то одной
точки А и задан изоморфизм F, то отображение f однозначно определено.
Действительно, образ любой точки В может быть найден по форму-
ne<p{B) = P(1(A),F(AB)).
С другой стороны, как бы мы ни задали образ А* точки А и
изоморфизм векторных пространств F, этим путем мы получим изомор-
физм^: У -> S?1. Действительно, если В \\С — произвольные точки,
то A*f{B) = F{AB) иАтЦС) = F(AC). Поэтому
Щцд) =АЧ{С) -АЧ{В) = F{AC) - F{AB) = F{BC).
Отсюда вытекает
Предложение 1. Любые два аффинных пространства одной
размерности изоморфны. Изоморфизм однозначно определяется заданием
образа одной точки и изоморфизма соответствующих пространств
векторов.
Исследуем аффинные преобразования — изоморфизмы
пространства У на то же пространство. Для этого предположим сначала, что
изоморфизм F — тождественное преобразование. Зададимся
образом А* некоторой точки А и рассмотрим преобразование f,
определяемое равенством {(В) = Р(А*, АВ) для любой точки В. Если
обозначить {(В) = В*, то предыдущее равенство означает, что А*В* = АВ,
а это эквивалентно равенству ВВЩ = ААЖ. Итак, образ каждой
точки получается из нее сдвигом на один и тот же вектор АА*. Такое
преобразование естественно назвать параллельным переносом.
Если мы предположим. чтот"(Л) = А для некоторой точки Ауг F —
невырожденное линейное преобразование, то преобразование
аффинного пространства будет задано формулой ЦВ) = Р(АУ F{AB)).
Таким образом устанавливается взаимнооднозначное соответствие
между невырожденными линейными преобразованиями И? и аффинными
§1. Плоскости
251
преобразованиями, оставляющими неподвижной точку А.
Нетрудно доказать, что произвольное аффинное преобразование
есть произведение параллельного переноса и преобразования,
имеющего неподвижную точку.
Определение. Аффинное пространство называется точечным
евклидовым пространством, если его пространство векторов
евклидово. В этом случае расстоянием между точками А и В называется
длина вектора АВ.
Трехмерное точечное евклидово пространство совпадает с
пространством, изучаемым в элементарной геометрии, если в последнем
фиксировать единицу измерения длин.
Декартовой системой координат в аффинном пространстве
называется совокупность точки О и базиса е пространства if. Если в У
задана система координат О, е, то каждой точке А из У взаимно
однозначно сопоставляется упорядоченный набор из п чисел, а именно
координаты вектора О А в базисе о. Эти числа называются
декартовыми координатами точки, а столбец из них — ее координатным
столбцом. Эти определения фактически повторяют определения из
гл. I, и потому основные утверждения и формулы оттуда
справедливы и для любых аффинных пространств. В частности:
координатный столбец вектора АВ равен разности координатных
столбцов точек В и А]
координатный столбец точки Р{А,х) равен сумме координатных
столбцов точки А и вектора х.
Формулы замены координат точки при изменении системы
координат выводятся и выглядят так же, как и соответствующие
формулы из §3 гл. I.
2. Плоскости в аффинном пространстве. Пусть в аффинном
пространстве У заданы точка Aq и 6-мерное (к > 0)
подпространство J$f' в его пространстве векторов S£. Множество 5?' всех
точек вида P{Aq, х), где х Е JS?', называется к-мерной плоскостью в У.
Точка Л0, разумеется, лежит в плоскости. Мы назовем ее начальной
точкой, а подпространство У1 — направляющим подпространством.
Любая точка плоскости А = Р{А$,х) может быть принята за ее
начальную точку. Действительно, любая точка В = Р(Ар, у) предста-
вима в виде В = Р{А,у — х), так как АВ =г AqB — A0A. Наоборот,
P{Atz) = P(A0tz + x).
Не представляет труда доказать, что 6-мерная плоскость
является 6-мерным аффинным пространством.
Предложение 2. Если в У выбрана декартова система
координат, то к-мерная плоскость может быть задана системой
линейных уравнений ранга п — к. Обратно, множество точек, координаты
которых удовлетворяют совместной системе ранга п — к,
является к-мерной плоскостью.
252
Гл. VIII. Аффинные пространства
Доказательство. Если £0 — координатный столбец начальной
точки, то по определению столбец £ = V + £о является координатным
столбцом точки плоскости тогда и только тогда, когда rj --
координатный столбец вектора из направляющего подпространства. По
предложению 4 §2 гл. VI в этом случае rj должен удовлетворять
однородной системе ранга п — к вида Urf = 0. Следовательно, столбец £
удовлетворяет системе U£ = (3, где /3 = 1/£о- Вторая часть
предложения следует из теоремы 3 §6 гл. V.
Общее решение системы линейных уравнений дает
параметрические уравнения (п — г)-мерной плоскости, в которых
фундаментальная система решений -— базис в направляющем подпространстве, а
частное решение неоднородной системы — начальная точка.
(п — 1)-мерная плоскость называется гиперплоскостью. Она
задается одним линейным уравнением aif] + ••• 4- <Хп€п = 0. Одномерная
плоскость называется прямой линией. Она может быть задана
параметрическими уравнениями вида £ = £ о + **?.
Упражнения
1. В некоторой декартовой системе координат четырехмерного
аффинного пространства плоскость задана системой уравнений
€1+^ + <3 + <4 = 1,
Напишите ее параметрические уравнения (найдите начальную точку и
базис в направляющем подпространстве).
2. а) Что может представлять собой пересечение двух плоскостей?
б) В n-мерном аффинном пространстве оцените размерность плоскости,
получаемой как пересечение плоскостей размерностей ki и fo-
3. Докажите, что в аффинном пространстве любые две прямые лежат
в некоторой трехмерной плоскости.
§ 2. Общая теория линий и поверхностей второго порядка
В этом параграфе мы возвращаемся к геометрии трехмерного
точечного пространства, которой были посвящены первые главы книги.
Настоящий параграф может изучаться независимо от § 1. Он
содержит применение результатов, полученных для квадратичных форм
евклидова пространства, к исследованию произвольной линии или
поверхности второго порядка.
1. Закон преобразования коэффициентов. Мы начинаем с
рассуждений, одинаково пригодных для линий второго порядка на
плоскости и поверхностей второго порядка, и потому не будем
фиксировать размерность п -■- она равна 2 или 3 в зависимости от того,
какой случай иметь в виду. (В действительности читатель сможет
заметить, что многое здесь справедливо для любых размерностей.)
§ 2. Общая теория линий и поверхностей второго порядка 253
И линии, и поверхности мы будем называть поверхностями, чтобы
не делать большого числа оговорок.
Рассмотрим произвольное уравнение второго порядка
п п
£ cajCe + 2 Х>оГ + аоо = 0, (1)
1*7 = 1 t = l
связывающее координаты точек на плоскости или в пространстве,
причем о точках, которые ему удоЕ*летворнют, не будем предполагать
ничего, даже того, что такие точки существуют. Если мы изменим
систему координат и подставим в (1) выражение старых координат
через новые, то мы получим новое уравнение (также второго порядка
согласно теоремам 1 и 2 § 1 гл. II). Мы будем говорить, что
уравнение перешло в новое уравнение, или, что то же самое, что
преобразовались его коэффициенты.
Получим закон, по которому преобразуются коэффициенты
уравнения. Напомним, что замена системы координат распадается на
перенос начала координат и изменение базиса. Если мы изменим базис
при неизменном начале координат, то старые координаты выразятся
через новые по формуле п
fc=l
где а\. — элементы матрицы перехода от старого базиса к новому.
Подставляя это в уравнение (1), получаем
J2 a,;4<7f£'Y + 2 Y, "«<&'* + Qoo = О
ij,k,l i,k
с коэффициентами
afkl = Yla^(7kcri^ «fco = 52^0^, a'oo = <*oo. (2)
Если мы перенесем начало координат в точку с координатами рг
(1 ^ г ^ п), оставив базис без изменения, то старые координаты
выразятся через новые по формуле _
Подстановка в уравнение (1) дает
^а0(^+р1*)(^Ч^)+2^а10(?Чр1")+а0о = 0,
»J »
или
Y^<*ij?Zj+ ^*Л?р* + £V) + 2^tt<0? + af00 = о.
Отсюда
Sij = ctij, ai0 = ^2 ctikpk + or.-o, (3)
k
254
Гл. VIII. Аффинные пространства
так как суммы У^а^'р7' и Y^<*tj£V отличаются только
обозначением индексов суммирования. Выражение для свободного члена 5оо
нам не потребуется.
Формулы (2) и (3) выражают искомый закон преобразования
коэффициентов уравнения. Обсудим его.
Члены второй степени в уравнении (1) образуют однородный
многочлен второй степени. Мы видим, что его коэффициенты не
меняются при переносе начала координат, а при замене базиса преобразуются
как коэффициенты квадратичной формы. Поэтому многочлен
£
(4)
«нее
как квадратичную форму. Назовем ее малой
Из сказанного вытекает
Ранг и сигнатура малой квадратичной
формы (4) не меняются при изменении декартовой системы координат.
Получим закон преобразования в другой форме, позволяющей
доказать инвариантность еще двух чисел. Рассмотрим однородный
многочлен второй степени от п + 1 неременных
можно рассматривать
квадратичной формой.
Предложение 1.
Е «^ = Е ач??+2 Е а*°?? + а°<*°«° • (5)
Левая часть (1) получается из (5) при £° = 1.
Многочлен (5) можно рассматривать как координатную запись
квадратичной формы при некотором выборе базиса в (n -f 1)-мерном
пространстве. Назовем эту квадратичную форму большой
квадратичной формой. Ранг и сигнатура этой квадратичной формы не
изменятся, если перейти к другому базису с произвольной матрицей
перехода 5 порядка п + 1, но нам потребуются матрицы перехода, имеющие
специальный вид. Выпишем его при п = 2:
е
е
1 О О
л-1
*i
ah
'О °1 <?2 || || £"
Тут переменная £° не меняется, а для i
Л
*?
о*
#0.
€' = Ё<&'* + <&/0-
(6)
(7]
fc=i
Если положить £° = £'° = 1, а £' (?' = 1,..., п) интерпретировать как
декартовы координаты точки n-мерного пространства, то в (7) записано
самое общее преобразование декартовой системы координат.
Итак, мы доказали
Предложение 2. Ранг и сигнатура большой квадратичной
формы (5) не меняются при замене декартовой системы координат.
§2. Общая теория линий и поверхностей второго порядка 255
Поверхность, определяемая уравнением (1), не изменится, если
умножить левую часть уравнения на какой-либо отличный от нуля
множитель. При этом ранги большой и малой квадратичных форм не
изменятся, а сигнатуры могут изменить только знак (если
множитель отрицательный). Отсюда следует
Теорема 1. Четыре числа —ранги и модули сигнатур большой и
малой квадратичных форм — являются инвариантами поверхности
второго порядка.
Обозначим ранг и модуль сигнатуры малой квадратичной
формы соответственно через г и а, а ранг и модуль сигнатуры большой
квадратичной формы — через ЛиЕ.
2. Линии второго порядка на плоскости. В теореме 1 § 1
гл. III мы показали, что любое уравнение второго порядка на
плоскости за счет выбора декартовой прямоугольной системы координат
может быть приведено к одному из девяти канонических видов. В
соответствии с этим имеется девять классов уравнений второго
порядка.
Составляя матрицы большой и малой квадратичных форм для
канонических уравнений, мы можем непосредственно усмотреть
значения г, (г, й и Е, соответствующие каждому классу. Единственное
затруднение возникает в случае параболы. Матрица большой
квадратичной формы для ее канонического уравнения имеет вид
О -р О
-р О О
О 0 1
Чтобы найти ЛиЕ, выберем матрицу перехода
Мы получим
S =
STAS =
1 -1
1 1
0 0
1 -2р
0
0
0 ]
0
1
0
2р
0
0
0
1
и обнаружим, что R = 3 и Е = 1. Матрица S не имеет вида (6), по R
и Е не меняются при произвольной замене базиса.
Выпишем канонические виды уравнений второго порядка на
плоскости вместе со значениями рангов и модулей сигнатур в табл. 1.
Из теоремы 1 видно, что уравнениям одного класса соответствует
один и тот же набор инвариантов, а из табл. 1, что наборы
инвариантов, соответствующие уравнениям разных классов, различны. Таким
образом, имеет место
Теорема 2. Аффинный класс уравнения второго порядка с двумя
переменными однозначно определяется числами г, Я, а и Е.
256
Гл. VIII. Аффинные пространства
Кроме того, мы видим, что значение г = 2 характеризует
центральные линии, а их разделение на линии эллиптического и
гиперболического типов определяется значением и. Значение R < 3
соответствует "распавшимся" линиям, в состав которых входят
вещественные или мнимые прямые. Это было установлено в §3 гл. Ill в связи
с геометрическим смыслом определителей 6 \л А. Сейчас мы в
состоянии посмотреть на них с более общей точки зрения.
Таблица 1
Название
Эллипс
Мнимый эллипс
Пара мнимых
пересекающихся прямых
Гипербола
Пара пересекающихся
прямых
Парабола
Пара параллельных прямых
Пара мнимых
параллельных прямых
Две совпавшие прямые
Каноническое
уравнение
«,)7«2 + (€2)2Л2 = 1
(07«а + К2)7ь2 = -1
«2tt!)2+W=0
(е1)2/*2 - (eW = 1
а2(е>)2-б2(е2)2 = о
(е2)2 = 2Ре
(£2)2 = а2
(е2)2 = -«2
(ег = о
R
3
3
2
3
2
3
2
2
1
Е
1
3
2
1
0
1
0
2
1
г
2
2
2
2
2
1
1
1
1
<т
2
2
2
0
0 :
1
1 |
1
1
3. Ортогональные инварианты. Вместе с малой квадратичной
формой мы можем рассматривать ее присоединенное
преобразование. Если пользоваться только прямоугольными системами
координат, то матрица малой квадратичной формы совпадает с матрицей
присоединенного преобразования. Поэтому коэффициенты ее
характеристического многочлена не меняются при замене одной
декартовой прямоугольной системы координат другой такой же системой.
Определение. Величины, не меняющиеся при замене одной
декартовой прямоугольной системы координат на другую декартову
прямоугольную систему, называются ортогональными (или
евклидовыми) инвариантами.
Итак, с линией связаны два ортогональных инварианта
1\ = ац + Q22: h =
a i2
С*22
In — это знакомый нам детерминант S. При произвольных заменах
координат его величина меняется, но знак (или обращение в 0)
остается инвариантным. Об 1\ речь шла в упр. 6 § 1 гл. III.
Замена базиса (6) имеет специальный вид, по если прямоугольная
§2. Общая теория линий и поверхностей второго порядка 257
система координат меняется на прямоугольную, то матрица
Л
"\
(8)
'1 ^2
ортогональная, и ее детерминант равен 1 или —1. В этом случае
детерминант матрицы перехода 5 в формуле (б) также равен ±1. При
замене базиса (6) детерминант матрицы большой квадратичной
формы умножается на (detS)2, т. е. остается неизменным. Мы получили
еще один ортогональный инвариант уравнения второго порядка —
известный нам детерминант А, записанный несколько иначе:
I «00 «10 «20
^3 = «10 «11 «12
I «20 «12 «22
Легко видеть, что матрица перехода в формуле (6) ортогональна
тогда и только тогда, когда ортогональна матрица (8) и &Ъ = сг2 = О,
т. е. ортонормированный базис заменяется на ортонормированный,
а перенос начала координат не производится. При этом
коэффициенты характеристического многочлена матрицы большой квадратичной
формы не изменятся. Итак, коэффициенты при А2 и —А
«00 +«11 +«22, (9)
«И
«21
«12
«22
«00
«10
«10
«11
«00
«20
«20
«22
(10)
не меняются при ортогональной замене базиса и, возможно, меняются
при переносе начала координат. Величины такого типа называются
семиинвариантами (т. е. полуинвариантами). Вычитая из (9) и (10)
соответственно 1\ и /2, мы получаем семиинварианты а0о и
К =
«оо
«10
«10
«11
+
«00
«20
«20
«22
Впрочем, то, что а0о — семиинвариант, видно и из формул (2).
Значения полученных здесь инвариантов и семиинвариантов
позволяют найти коэффициенты в канонических уравнениях, и потому
определяют линию второго порядка с точностью до положения на
плоскости. Следует, однако, помнить, что эти величины связаны с
многочленом второго порядка, а не с линией. Они меняются
очевидным образом, если уравнение умножить на отличное от нуля число.
4. Поверхности второго порядка. Пусть уравнение (1)
связывает координаты точки в трехмерном пространстве. В этом пункте
мы покажем, что существует такая декартова прямоугольная система
координат, при переходе к которой уравнение принимает один из 17
канонических видов.
В качестве базиса такой системы координат выберем тот
ортонормированный базис, в котором малая квадратичная форма имеет
258
Гл. VIII. Аффинные пространства
диагональный вид. Таким образом, мы будем исходить из уравнения
Aitf1)2 + А2(£2)2 + А3(£3)2 + 2а10е + 2а20£2 + 2а30£3 + а00 = 0 (11)
и запомним, что уже выбран определенный ортормированный базис.
На коэффициенты уравнения не накладывается никаких
ограничений, за исключением того, что Ai, А2 и Аз не обращаются в нуль
одновременно. Дальнейшие упрощения определяются следующим
вспомогательным предложением.
Предложение 3. Если в уравнение (11) входит с ненулевым
коэффициентом квадрат одной из координат^ то при помощи
переноса начала координат вдоль соответствующей оси можно обратить в
пуль член с первой степенью этой координаты.
Это доказывается так же, как и предложение 1 § 1 гл. III.
Нам будет удобно рассмотреть отдельно несколько случаев,
соответствующих различным значениям инвариантов г, <т, й и Е.
1. Пусть г = 3. Это равносильно тому, что ни одно из Ai, А2 и Аз
не равно нулю. Тогда в силу предложения 3 начало координат можно
перенести в такую точку, что уравнение (11) примет вид
Aitf1)2 + А2(£2)2 + Hf? + /* = 0. (12)
1Л. Условие R = 4 равносильно тому, что свободный член ц в (12)
не равен нулю. Разделив на него, получим
-^e)2-^(e)2-^(f)2=i. аз)
1Аа. Пусть Е = 4. Это означает, что Ai, A2, Аз и р одного знака,
коэффициенты в уравнении (13) отрицательны, и оно приводится к
каноническому виду ^3)2
Это уравнение называется уравнением мнимого эллипсоида. Ему не
удовлетворяет ни одна точка.
1А6. Если Е = 2, а а = 3, то общий знак Ai, A2, Аз противоположен
знаку р. Коэффициенты в (13) положительны, и уравнение
приводится к каноническому виду
а2 & ^ с*
Поверхность — эллипсоид.
1Ав. При Е = 0 и <т = 1 знак одного из собственных значений
(можно считать, при необходимости изменяя нумерацию базисных
векторов, что это Аз) противоположен знаку двух других (Ai и А2) и
совпадает со знаком р. В уравнении (13) два положительных и один
отрицательный коэффициент. Поверхность — однополостный
гиперболоид с каноническим уравнением
(£41 .(£)!_ (£)1 = 1
а* ^~ Ъ> с2
§2. Общая теория линий и поверхностей второго порядка 259
1Аг. Пусть теперь X) = 2, а — 1. Знак одного из собственных
значений (считаем, что Ai) противоположен знаку двух других и
противоположен знаку /л. Теперь в уравнении (13) два отрицательных и
один положительный коэффициент. Оно приводится к виду
Ю1 - (§!£ - (££ = 1
а2 б2 с2
и определяет двуполостный гиперболоид.
1Б. Пусть R = 3. При г = 3 это равносильно /* = 0. Уравнение (12)
однородно, и всегда Е = а.
1Ба. При а = 3 все собственные значения имеют один знак, и
уравнение (12) может быть записано в виде
а2 "*" б2 "*" с2 ^~
Оно называется уравнением мнимого конуса. Поверхность состоит из
одной точки.
1 Бб. Если (т=1, то одно из собственных значений отличается
знаком от двух других. Уравнение приводится к каноническому виду
#)*(?)* ку
а2 ^ Ь2 с2
Поверхность называется конусом второго порядка.
2. Пусть теперь г = 2. В уравнении (11) одно из собственных
значений равно нулю. Не уменьшая общности, мы можем считать,
что Аз = 0. Используя предложение 3, приведем (11) к виду
Aitf1)2 + А2(£2)2 + 2с*зо€3 + "оо = 0. (14)
(Начало координат переносится вдоль осей £1 и £2.) Выпишем
детерминант матрицы большой квадратичной формы для уравнения (14):
аоо 0 0 азо
0 Ai 0 0
0 О А2 О
азо 0 0 0
= -a§0AiA2. (15)
Условие Я = 4 в силу равенства (15) равносильно азо ф 0.
2Л. Пусть R = 4. Сгруппируем члены в уравнении (14):
А1(^)2 + Л2(а2 + 2азо(^+^) = 0.
Отсюда видно, что переносом начала координат вдоль оси £з-
уравнение можно преобразовать в
Ai(?)2 + A2(?)2 + 2a30? = 0.
Далее есть две возможности в соответствии со значением а.
260
Гл. VIII. Аффинные пространства
2Аа. а = 2. Тут Ai и А2 одного знака, и, в случае необходимости,
заменяя базисный вектор ез на —ез, мы приведем уравнение к виду
(?)2 , (?)2 _ 7р
Это — каноническое уравнение эллиптического параболоида.
2А6. с = 0. В этом случае Ai и А2 имеют разные знаки, и уравнение
приводится к каноническому виду
(?)2 (?)а_2»
(Тут также может потребоваться изменение направления е3.) Это
уравнение определяет гиперболический параболоид.
2Б. Пусть R = 3. Тогда с*зо = 0, и левая часть уравнения не
содержит координаты £3. В соответствии со сказанным в § 1 гл. II это
означает, что уравнение определяет цилиндр, образующие которого
параллельны базисному вектору ез, а направляющая определяется в
плоскости векторов ei и е2 уравнением (14) при а3о = 0:
Ai(e1)2 + A2(e2)2 + a00 = 0. (16)
Уравнение (16) на плоскости может определять одну из пяти
центральных линий второго порядка. Им соответствуют пять
цилиндров, которые это уравнение может определять в пространстве:
эллиптический цилиндр, гиперболический цилиндр, пара
пересекающихся плоскостей (направляющая — пара пересекающихся прямых), пара
мнимых пересекающихся плоскостей (поверхность состоит из прямой
линии, направляющая — точка, т. е. пара мнимых пересекающихся
прямых) и, наконец, мнимый эллиптический цилиндр (пустое
множество, направляющая — мнимый эллипс). Канонические уравнения
этих поверхностей приведены в табл. 2.
3. Рассмотрим случай г = 1. В уравнении (11) имеем А2 = Аз = 0,
a Ai ф 0. Переносом начала координат вдоль оси £х уравнение
приводится к виду , - 0 0 « , ч
У A! tf1)2 + 2а20£2 + 2азо£3 + "оо = 0. (17)
ЗА. Допустим, что а20 4- а§о Ф 0. Тогда мы можем сделать поворот
базиса вокруг вектора ci:
t -S, t - v , < - v
где v = y/alo + азо- Теперь (17) принимает вид
А1(^,1)2Н-2<,2 + аоо = 0. (18)
Переносом начала координат вдоль оси £'2 преобразуем (18) в
уравнение Ai(£/;1)2 -f 2v£"2 = 0, которое приводится к каноническому виду
{&н1? = Ы"\ Р>0-
§2. Общая теория линий и поверхностей второго порядка 261
(При необходимости можно изменить направление е^.) Это уравнение
параболического цилиндра.
ЗБ. Если с*2о = с*зо = 0, то уравнение (17) сводится к
Ai(£l)2 + "oo = 0
и приводится к одному из трех последних канонических видов.
На этом классификация поверхностей второго порядка
заканчивается. Ее результаты приведены в табл. 2.
Т а б л и ц а 2
Название
Мнимый эллипсоид
Эллипсоид
Однополосшый
гиперболоид
Двуполостный
гиперболоид
Мнимый конус
Конус
Эллиптический
параболоид
Гиперболический
параболоид
Эллиптический цилиндр
Мнимый эллиптический
цилиндр
Гиперболический
цилиндр
Пара пересекающихся
плоскостей
Пара мнимых иересекаю-
плоскостей
Параболический цилиндр
Пара параллельных
плоскостей
Пара мнимых
параллельных плоскостей
Пара совпавших нлоскос-
плоскостей
Каноническое уравнение
а2 "Г 62 "Г с2
tf1)2 . (Z2)2 . tt4)2.
в2 -*" 0 -*" «Д -1
U1)2 , tt2)2 К3)2 _ .
а2 б2 с2
К1)2 К2)2 (*3)2 1
а2 б2 с2
U1)2 (£2)2 (£3)2
а2 62 "Г с2
К1)2 К2)2 (^)2_0
а2 "*" б2 с-2
1^+^£,2€»
а2 Ь2 *
U1)2 «2)2_осЗ
"15 5Г - *
U1)2 , К2)2 _ .
а2 "*" Ь2
К1)2 .(€2)2_ ,
а? ^ 9 ~
{?? (е2)2 _i
а2 б2
к1)2 к2)2
а2 б2
К1)2 .К2)2 _0
а2 "*" Ь2
(е1)2 = 2Р^2
К1)2***2
KI)a = -«2
К!)2 = о
"л 1
4
4
4
4
3
3
4
Л
3
3
3
2
о
3
2
2
1
е"]
4
2
0
2
3
1
2
0
1
3
1
0
2
1
0
; 2
г
г
3
3
3
3
3
3
2
2
2
2
2
9
2
1
1
1
1
<Т
3
3
1
1
3
1
2
0
2
2
0
П
2
1
1
1
1
2G2
Гл. VIII. Аффинные пространства
Из теоремы 1 и табл 2 следует
Теорема 3. Аффинный класс уравнения второго порядка с тремя
переменными однозначно определяется числами г, R, <т и X).
Упражнения
1. Приведите к каноническому виду уравнение
2(f)2 - 3(f)2 _ 2\/3£Ч2 - 4£^3 + 4\/3£2£3 + 50£3 = 80.
2. Fie приводя уравнение к каноническому виду, определите класс
поверхности второго порядка
U1)2 + Ч 1£2 + 6£Ч3 - (£2)2 + 2$2?3 + 4(£3)2 -} 2*1 = 0.
3. При каких значениях параметра а поверхность с уравнением
tf')2 + (*2)2 + (?У + Mi1? + ее + CV) + 4a = О
является эллипсоидом7
ГЛАВА IX
ОСНОВЫ ТЕНЗОРНОЙ АЛГЕБРЫ
§ 1. Тензоры в линейном пространстве
1. Вводные замечания. В предыдущих главах мы
рассматривали в линейных или евклидовых пространствах различного рода
объекты: линейные преобразования, билинейные функции и т. д.
Изучение каждого объекта основывалось на определении, которое
формулировалось без участия базиса. Например, линейное
преобразование определялось как такое отобра?кение пространства в то же
пространство, которое удовлетворяет определенным условиям ((1) §3
гл. VI). Таким образом, изученные нами объекты существуют и в
принципе могут быть изучены без введения базиса. Для
обозначения таких объектов мы будем пользоваться термином
геометрический объект.
Хотя геометрический объект и существует независимо от базиса,
бывает удобно, выбрав некоторый базис, задать объект относительно
этого базиса при помощи упорядоченной системы чисел -
компонент объекта. Например, выбор базиса устанавливает взаимно
однозначное соответствие между линейными преобразованиями и
квадратными матрицами. Элементы матрицы линейного преобразования
можно считать компонентами линейного преобразования в
рассматриваемом базисе. Неизменность объекта при замене базиса приводит
к изменению компонент.
Во всех встречавшихся случаях мы могли вычислить компоненты
объекта в одном базисе через его компоненты в другом базисе и
через элементы матрицы перехода от первого базиса ко второму. Такая
зависимость называется законом преобразования компонент
геометрического объекта.
В этой главе мы рассмотрим важный класс геометрических
объектов, называемых тензорами. Закон преобразования их компонент
таков, что новые компоненты являются линейными однородными
многочленами от старых компонент, а коэффициенты этих многочленов
являются произведениями элементов матрицы перехода и элементов
обратной к ней матрицы. Для того чтобы точно описать этот закон и
тем самым дать определение тензора, необходимо ввести некоторые
обозначения.
2. Обозначения. Напомним, что матрицу размеров га х п можно
определить как функцию, сопоставляющую некоторое число каждой
264
Гл. IX. Основы тензорной алгебры
паре (г, j), где г £ {1, ...,m},a j £ {1, ...,п}. Обобщим это определение.
Поскольку нам будут нужны только матрицы, аналогичные
квадратным матрицам, все индексы будут принадлежать одному и тому же
множеству {1,...,п}.
О п ре дел ей и е. s- мерной матрицей порядка п (или 6-мерным
массивом) называется функция, определенная на множестве
всевозможных наборов чисел (м,...,*",), где все числа принимают значения
из множества {1,...,п}.
Для того чтобы разъяснить термин "«-мерная матрица",
рассмотрим трехмерную матрицу с элементами ощк- При любом
фиксированном значении индекса k = fc0 элементы вида а^0 составляют
квадратную матрицу порядка п. Таким образом, вся совокупность
элементов трехмерной матрицы распадается в упорядоченный набор
из 71 квадратных матриц: ||afji||> •••? Ha*jn||- Можно представить себе
эти матрицы расположенными одна под другой в виде слоев, так что
образуется куб, разделенный на п3 ячеек, содер?кащих по одному
числу. Аналогично, четырехмерная матрица может рассматриваться как
упорядоченный набор трехмерных матриц и т. д.
Строку и столбец удобно считать одномерными матрицами: их
элементы нумеруются одним индексом.
В рассматриваемых нами матрицах не все индексы будут равно-
нравны: будут выделены два сорта индексов. Принято индексы одного
сорта писать вверху, а другого •— внизу. В принципе мы могли бы,
скажем, обозначать один сорт индексов латинскими буквами, а
другой — греческими, но принятое обозначение жестко связано со всей
системой обозначений. За расположением индексов приходится
строго следить. Если порядок индексов не установлен иначе, мы будем
считать, что нижние индексы следуют за верхними так, как если бы
они были написаны правее верхних.
Многомерные матрицы полностью выписывать сложно. Действует
следующее соглашение: буквенный индекс рассматривают как
переменную величину, принимающую значения 1,...,п, и если написано
выражение, содержащее буквенный индекс*), не являющийся индексом
суммирования, то предполагается, что написаны п таких выражений,
соответствующих каждому значению этого индекса. Когда имеется
несколько индексов, сказанное относится к каждому из них. Таким
образом, например, а*1'-*9 обозначает всю совокупность элементов
5-мерной матрицы, а запись аг^к = /3jk означает, что равны стоящие
на одинаковых местах элементы двух трехмерных матриц, т. е.
матрицы равны.
Вводится следующее новое обозначение суммирования. Пусть
написан одночлен, состоящий из букв с индексами, причем какой-то ин-
*)У нас в качестве буквенных индексов, как правило, будут применяться
буквы 2, j, /с, /, возможно, снабженные своими индексами. Буква п всегда
обозначает фиксированное число — размерность пространства.
§1. Тензоры в линейном пространстве
265
деке встречается дважды: один раз вверху, а другой раз внизу. Это
обозначает сумму членов такого вида, написанных для всех значений
повторяющегося индекса так. как если бы перед ним стоял знак 5^,
а индекс был индексом суммирования, принимающим значения от 1
до п. Если описанным образом повторяются несколько индексов, то
имеется в виду многократная сумма. Раньше мы постоянно
сталкивались с подобными суммами, но писали знак суммирования. Теперь
мы этого делать не будем. Например, формулы
п
будем писать в виде *~ t,J
f{x) = Vi?, #, = /%joW-
3. Определение и примеры. Мы рассматриваем «-мерное
вещественное линейное пространство S£.
Определение. В пространстве J$f задан тензор типа (р, q),
если ка?кдому базису сопоставлена (р +<?)-мернан матрица порядка п.
При этом, каковы бы ни были базисы с и е', соответствующие им
матрицы аг/"л/ и а7*.1""'/ должны быть связаны следующими соотно-
Jl'-Jq Jl-'Jq
тениями:
aji...jq-Tkl---Tkp<rjl---<rjqail..Aq » (Ч
где <rlj — элементы матрицы перехода от е к с', а г£ — элементы ее
обратной матрицы.
Элементы матрицы, соответствующей некоторому базису,
называются компонентами тензора в этом базисе. Число р + q называется
валентностью тензора, a q и р соответственно ковариантной и
контрвариантной валентностью.
Подчеркнем, что, несмотря на сложность суммы в правой части
формулы (1), в каждое слагаемое входит единственная компонента
тензора. Это означает, что новые компоненты являются линейными
однородными многочленами относительно старых компонент.
Сложность формулы (1) связана с выражением коэффициентов этих
многочленов через элементы матрицы перехода.
Два тензора равны, если они одного типа и имеют одинаковые
компоненты в некотором базисе. Тогда из закона преобразования
вытекает, что равны их компоненты в любом базисе.
Для любой (р+д)-мерной матрицы и любого базиса е найдется
тензор тина (р,</), который в базисе о имеет эту матрицу компонент.
Его компоненты в остальных базисах могут быть найдены с помощью
формулы (1).
Пример 1. Вектор является тензором типа (1, 0).
Действительно, если задан вектор, то каждому базису соответствует одномерная
матрица-столбец. При этом компоненты, соответствующие разным
266 Гл. IX. Основы тензорной алгебры
базисам, связаны формулой £ = S$J или £' = 5_1£:
t = rUk.
Это — закон преобразования компонент тензора типа (1,0).
Пример 2. Линейная функция на пространстве ^является
тензором типа (0,1). Действительно, если задана линейная функция, то
каждому базису соответствует одномерная матрица — строка
коэффициентов этой функции. При изменении базиса коэффициенты
линейной функции преобразуются по формуле (р* = <pS, т. е.
Тензоры типа (0,1) — векторы сопряженного пространства 3f* -
называют ковекторами.
Пример 3. Линейное преобразование пространства JS? является
тензором типа (1,1). В самом деле, если задано линейное
преобразование, то каждому базису соответствует матрица, и матрицы,
соответствующие двум базисам, связаны формулой А! = S"lAS:
«? = W-
Пример 4. Билинейная функция на пространстве j£f — тензор
типа (0,2). Если дана такая функция, то каждому базису
сопоставляется ее матрица, и матрицы билинейной функции в разных базисах
связаны формулой В* = £ГBS:
triJ = °$°ljPk,.
Следует заметить, что симметричная билинейная функция и
соответствующая квадратичная форма — один и тот же тензор, поскольку
их матрицы в любом базисе совпадают.
Пример 5. Пусть В — матрица билинейной функции ранга п в
базисе о. Сопоставим этому базису матрицу 13~1. Сделав это для всех
базисов, мы получим тензор типа (2,0). Действительно, из Bf = STBS
следует В'"1 = S-lB'l(iF)-1 = S'lB"l(S-l)T^ или
Пример 6. Число, не зависящее от выбора базиса, —-
инвариант — можно считать тензором типа (0,0).
Пример 7. Важным тензором типа (1,1) является так
называемый символ Кронекера, компоненты которого в некотором базисе
составляют единичную матрицу:
d'-\l, i = j. {1)
Формула (2) — принятое обозначение, и мы будем им ниже
пользоваться. Если интерпретировать символ Кронекера как линейное
преобразование, то это будет тождественное преобразование Е, и потому
§1. Тензоры в линейном пространстве
267
в любом другом базисе этот тензор имеет те же компоненты,
составляющие единичную матрицу. Для примера проверим это, используя
тензорную символику. Согласно закону преобразования
б'1 = 4^. (3)
Если 8* определяется формулой (2), то из п2 слагаемых в правой
части (3) равны нулю все, кроме тех, для которых к = /.
Поэтому S'j — т^а1?, а тгка^ — элементы произведения Б~ЛS. Значит,^1 =£].
Пример 8. Рассмотрим обобщение билинейной функции
—функцию F(xu...yxq) от q векторов, линейную по каждому из них, если
остальные фиксированы. Такие функции называются q-линейными
или полилинейными, если число аргументов не уточняется. Разложим
каждый из векторов но некоторому базису е. Тогда в силу
полилинейности
F(x1,...,xq) = F(ZYeili...1Qeiq)= .
где коэффициенты а^...^ = F(eili...,Cjq) играют ту же роль, что и
элементы матрицы билинейной функции. Докажем, что при замене
базиса они преобразуются как компоненты тензора типа (0,</). Для
этого рассмотрим базис с\ — сг^е^ и снова воспользуемся
полилинейностью:
или a'{i A = a}l^...a'i4akl...kq, как и требовалось.
Пример 9. Таким же способом можно построить пример
тензора любого типа (p,q). При этом полилинейная функция должна
зависеть от q векторов и р ковекторов. Значение такой функции на
векторах Xi,...,xq и ковекторах f1,...,^ можно вычислить, разложив
векторы по базису е, а ковекторы — по его биортогональному
базису р в пространстве JS?*. Напомним, что базис р1,..,^" называется
биортпогональным базису ei, ...,еп, если
р!'Ы = 4-
Если хч = £*'е&., а f7 = ^.plj, то аналогично предыдущему получаем
F(x1,...,xq,f\...,f>) = e1^... е*ч - <«*; :.Х.
где
<:i = FK-^p'' р'р)'
Вспомним, что базис р преобразуется матрицей (S~l)T, когда
базис с преобразуется матрицей 5. В тензорных обозначениях это
записывается как p'J = т£рк и проверяется так:
268
Гл. IX. Основы тензорной алгебры
Теперь подставим в <x')llm\'*jP = ^(ej^-"->ej > р'*\ •••> p'*p)
выражения новых базисных векторов через старые (для обоих базисов е и р)
и, как и в примере 8, получим закон преобразования коэффициентов,
который будет совпадать с законом преобразования (1).
Этот пример еще раз показывает, как для любой (р + ^)-мерной
матрицы и любого базиса е найти тензор типа (р, q), который в базисе
е имеет такую матрицу компонент.
4. Линейные операции. Линейные операции определены для
тензоров одного и того же тина. Именно, определим для
пространственных матриц одной размерности сложение и умножение на число
поэлементно: суммой матриц <**£"*? и Р)\[")р назовем матрицу
13l'3q "jl-Jg^^Jl-Jg' V1;
а произведением матрицы <*}11'"}р на число Л — матрицу
Предложение 1. Пусть А и В — тензоры типа (/>,<?).
Сопоставим каждому базису сумму их матриц в этом базисе. Этим будет
определен тензор типа [p,q]. Сопоставим каждому базису
произведение матрицы тензора А на число А. Этим будет определен тензор
того же типа (p,q).
Обе части предложения доказываются одинаково и по существу
вытекают из того, что правая часть формулы (1) — линейный
однородный многочлен относительно старых компонент тензора.
Приведем доказательство для первой части. При замене базиса
aii...j, -Tki-Tkp(T3i~-(T3qah-lq >
Складывая почленно эти равенства, мы получаем
/•i-.tp , oiix.ip _ i1 ipfJi Jq(nkl'kp 4- ekl'kP\
aji...jg+Pji...Jg -Г*Г-'VV"*7?*^!-Л +^!.../g h
т. е. тензорный закон преобразования дли at 1"l p 4- fit*"} P-
Тензоры, определенные в предложении 1, мы назовем,
соответственно суммой тензоров А и В и произведением А на число А.
Свойства линейных операций описываются следующим предложением.
Предложение 2. Яя отношению к операциям сложения и
умножения на число множество всех тензоров одного и того же типа (р, q)
является линейным пространством размерности пр+ч.
Предоставим читателю проверить все аксиомы в определении
линейного пространства и займемся размерностью. Выберем в j£? какой-
нибудь базис и рассмотрим тензоры, у которых одна из компонент в
данном базисе равна 1, а остальные компоненты равны нулю.
Существует ровно np+q таких тензоров, так как тензор типа (р, q) имеет пР+я
§1. Тензоры в линейном пространстве
269
компонент. Каждый тензор данного типа раскладывается, и притом
однозначно, по выбранным нами тензорам (коэффициенты
разложения равны компонентам данного тензора). Таким образом,
размерность пространства тензоров типа (р,</) равна пр+<?, и предложение
доказано.
Более того, мы построили базис в пространстве тензоров
типа (р.<?), естественным образом связанный с базисом в
пространстве $?. Напомним, что как раз таким способом мы построили
базис в сопряженном пространстве if* - пространстве тензоров
типа (0,1) -- и назвали его биортогональным исходному базису в if.
Теперь для пространства J? мы имеем бесконечную
последовательность линейных пространств, связанных с ним так же, как if*: как
только выбран базис в if, во всех этих пространствах также
появляются базисы.
5. Умножение тензоров. Пусть А — тензор типа (p,q), г В —
тензор тина (г.а). Произвольному базису е мы можем сопоставить
{p + q + r + $)-мерную матрицу, составленную из произведений
каждой компоненты А на каждую компоненту Б. Эти произведения
упорядочим, записав сначала индексы, относящиеся к Д, а затем
индексы, относящиеся к Б, так, как показывает формула
«i...tpki...*r _ ii-iPftk1...kr /р-ч
7ji-..jVi...'. - aji-..jyV../. • l°J
Предложение 3. Если каждому базису мы сопоставим
числа 7Jl""ffri определяемые формулой (5), то этим будет определен
тензор типа (р + г, q + s).
Доказательство мы проведем для случая тензоров типов (1,3) и
(0,1). В общем случае доказательство отличается только более
громоздкой записью. Выразим компоненты тензоров А \\ В в базисе о'
через их компоненты в базисе е:
Отсюда
7 jm = <* jPm ~ Тк<Г]<Гта1 Ph - TkOr.}CrmJlh,
т. е. величины yjfh преобразуются при замене базиса как компоненты
тензора типа (1,2).
Определение 1. Тензор, построенный в предложении 3,
называется произведением тензора А на тензор В и обозначается А ® В.
Пример 10. Рассмотрим две линейные функции f и h на if и
сопоставим каждой паре векторов х и у число f(x)h(y). Пусть в
некотором базисе значения функций записываются как Цх) = </?,•£' и
h(y) = pki]k, где £' и ?/А' — компоненты векторов х и у. Тогда
Ь(х,у) = ЦхЩу) = Ы{)(ркПк) = (<РН*к)?Т1к,
поскольку при перемножении многочленов каждый член одного
сомножителя умножается на каждый член другого. Итак, построенная
270
Гл. IX. Основы тензорной алгебры
нами функция Ь — произведение двух линейных функций -
билинейная функция, т. е. тензор тина (0,2). Он является тензорным
произведением тензоров, соответствующих f и h. Мы можем
написать Ь = f 0 h, или, в компонентах, Д* = ipifik-
Тензорное произведение не коммутативно. Это хорошо видно на
предыдущем примере. Пусть b* — h0f. Тогда b*{x,y) = h(x)f(y) =
= b(t/, ж), т. е. это будет другая билинейная функция, если только
функция b не симметричная. Посмотрим на то же самое с точки
зрения компонент. Конечно, у?,-/'* — №№- Это значит, что /?,-* = /?£г-:
матрицы билинейных функций отличаются на транспонирование, В* =
= В1. Они совпадают, если ц>фк — рцрк = 0 для всех i,k.
Равенство нулю всех этих детерминантов равносильно пропорциональности
коэффициентов линейных функций f и h.
И в общем случае множество чисел, являющихся компонентами
произведения тензоров, не зависит от порядка сомножителей, но
упорядочиваются эти числа по-разному в зависимости от порядка
сомножителей.
Предоставим читателю самостоятельно убедиться, что умножение
тензоров ассоциативно и дистрибутивно по отношению к сложению.
Легко заметить также, что произведение тензора на число совпадает
с произведением на тензор типа (0,0), имеющий это число в качестве
компоненты.
Предложение 4. Любой тензор типа (p,q) раскладывается в
линейную комбинацию произведений, в каждое из которых входит р
векторов и q ковекторов.
Для доказательства покажем, что произведениями требуемого
вида являются тензоры, из которых в предло?кении 2 был построен
базис в пространстве тензоров типа (p,q). Мы сделаем это для тензоров
типа (2,1), поскольку в общем случае рассуждение аналогично.
Пусть тензор Q таков, что в базисе е его компонента 0р = 1, а
остальные компоненты равны нулю. Рассмотрим векторы базиса е2, е.з
и ковектор р1, входящий в биортогональный базис. Векторы е<2 и f?3
имеют компоненты (0,1,0, ...,0) и (0,0,1,0,...,()), а компоненты ко-
вектора — (1.0,..., 0). Поэтому произведение Q — с2 0 ез 0 р1 имеет
только одну компоненту 0j3, равную 1, а все остальные его
компоненты равны нулю. Точно так же утверждение доказывается и для
остальных тензоров, составляющих базис в пространстве тензоров
рассматриваемого типа.
6. Свертывание. Рассмотрим мно?кество элементов .s-мерной
матрицы, для которых все индексы, кроме некоторых двух, имеют
фиксированные значения. Это множество образует двумерный слой —
квадратную матрицу. Таким образом, вся матрица распадается на
двумерные слои, соответствующие выбранной паре индексов. Всего
таких слоев столько, сколько комбинаций значений могут принимать
остальные 5 — 2 индексов, т. е. п5""2.
§1. Тензоры в линейном пространстве
271
Пусть А — тензор типа (р, </), причем р > 0 и д > 0, т. е. тензор
имеет как верхние, так и нижние индексы. Выберем какой-нибудь
верхний (например, первый) индекс и какой-нибудь нижний (например,
последний) и рассмотрим слои, соответствующие такой паре
индексов. Напомним, что следом квадратной матрицы называется сумма
ее диагональных элементов. Следы всех слоев образуют [p + q — 2)-
мерную матрицу, имеющую р—\ верхних \\ q — \ нижних индексов:
/fct. = «&';-,1+«К'.* + -+«&::,«• (6)
Используя тензорное обозначение суммирования, мы можем написать
oh-..ip __ ki2...ip
^jl—jq-l jl—jg-lk'
Предложение 5. Сопоставим каждому базису систему
чисел, получаемую из компонент тензора типа (p,q) вычислением
следа каждого слоя, соответствующего одному верхнему и
одному нижнему индексам. Такое соответствие определяет тензор
типа (р- 1,д-1).
Для доказательства выясним, как преобразуется указанная
система чисел при изменении базиса. Для случая, описанного формулой (6),
мы имеем
Р ji-jq-i - tt ii-i,-!* - TmiT™'2'-'T'nP(Tji-<Tjq-1(Tkal1...l4 '
Но так как т^а^ = <$т,, это выражение равно
При суммировании по индексам lq и mi равны нулю все слагаемые,
за исключением тех, для которых lq = m-i. Обозначив lq = mi = к, мы
можем написать
Это и есть доказываемый закон преобразования.
Определение. Тензор, получаемый из тензора /4 по
формулам (6), называется его сверткой по первому верхнему и последнему
нижнему индексам. Аналогично определяется свертка по любому
верхнему и любому нижнему индексам.
Подчеркнем, что для двух верхних (или двух нижних) индексов
свертка не определена.
Свертка тензора типа (1,1) по единственной паре индексов есть
инвариант — уже упоминавшийся след линейного преобразования
(см. с. 185).
Сверткой двух тензоров называется свертка их произведения по
верхнему индексу одного из сомножителей и нижнему индексу
другого. Например, образ вектора х с компонентами £г при линейном
преобразовании с матрицей а* есть свертка соответствующих
тензоров: г}к = а![€г. Значение линейной функции f со строкой
коэффициентов <pk "а векторе х с координатами £' есть свертка <р(х) = <рк£,к -
272
Гл. IX. Основы тензорной алгебры
7. Транспонирование. Транспонированием 5-мерной матрицы
но каким-либо двум индексам называется такая перестановка ее
элементов, при которой транспонируется каждый слой, получаемый
фиксированием всех индексов, кроме двух выбранных. Например, при
транспонировании матрицы а)*к по двум первым верхним индексам
она переходит в матрицу 0jJ"fc, связанную с ней равенством
ftjk = <4ik- (7)
Вообще, под транспонированием матрицы по множеству
индексов понимается результат ее последовательных транспонирований по
различным парам индексов из этого множества. По множеству из к
индексов может быть осуществлено к\ транспонирований.
Транспонирование иногда называют перестановкой индексов,
хотя, например, записи а^ и а|,- определяют одну и ту же матрицу:
в обоих случаях все индексы независимо друг от друга принимают
значения от 1 до п.
Пример 11. Пусть 71 = 2. Рассмотрим трехмерную матрицу а,-^.
Значениям 1 и 2 последнего индекса соответствуют два слоя.
Выпишем их рядом:
«in
«211
«121
«221
«112
«212
«122
«222
Транспонирование но двум первым индексам переводит эту
матрицу в fiijk = ctjik, или. в развернутом виде,
An
А21
0221
An
/?212
0122
0222
«111
«121
«211
«221
«112
«122
«212
«222
Если при более сложном транспонировании 7о*л = «/cij> то
7ш 7121
7211 7221
7112
7212
7122
7222
«111 «112
«121 «122
«211 «212
«221 «222
Предложение 6. Пусть каждому базису сопоставлена (р+<?)-
мерная матрица, полученная из матрицы тензора А типа (p>q)
транспонированием, причем переставляются только верхние (или
только нижние) индексы. Этим определен тензор В типа (p,q).
Нам достаточно доказать это для транспонирований по двум
индексам, так как любое транспонирование— результат
последовательного выполнения таких транспонирований. Кроме того, для любой
нары верхних или нижних индексов доказательство одинаково. Число и
расположение индексов, не участвующих в транспонировании, роли
не играет. Поэтому мы проведем доказательство для
транспонирования по первой паре верхних индексов, записанного в формуле (7).
Транспонируем матрицу новых компонент тензора А:
o/ijb _ /jiff _ _7 i к f, jitiAi _ _з i к 1г aiiJiki
Pi -«/ -TjJiJk^l «^ - Tjjijk^l Plx
§1. Тензоры в линейном пространстве
273
Это отличается от обычной записи закона преобразования компонент
тензора типа (3,1) только порядком сомножителей.
Определение. Тензор Б, построенный в предложении б,
называется результатом транспонирования тензора Л.
Тензоры, являющиеся произведениями двух данных тензоров в
разном порядке, получаются один из другого транспонированием.
8. Симметрирование и альтернирование. Рассмотрим
тензор Л, контрвариантная валентность которого не меньше заданного
числа 5^2. Выберем какие-нибудь s верхних индексов. Эти индексы
можно переставить s! способами, и потому существуют s\ тензоров,
получающихся из Л транспонированием по этим индексам. Сложим
все эти тензоры и разделим результат на число s\. Полученный тензор
называется результатом симметрирования А по выбранным
индексам. Его компоненты обозначаются заключением в круглые скобки
этой группы индексов у компонент тензора Л. Аналогично
определяется симметрирование но нижним индексам.
Пример J2. Симметрирование тензора типа (3,0) по первому и
третьему индексам: ....... i
a<*Wfc> =!(«•'* +а*'1).
Обратите внимание, что второй индекс, не участвующий в
симметрировании, выделен прямыми чертами.
Пример 13. Симметрирование тензора типа (1, 3) по всем
нижним индексам:
fat) = I {$kl + Я*"* + #<i + tin + foj + fib)- (8)
Снова рассмотрим тензор Л типа (р,?), где р ^ 5 ^ 2. Выберем
группу из я верхних индексов и пронумеруем выбранные индексы
числами 1,...,5. Тогда каждому тензору, получаемому из Л
транспонированием по этим индексам, будет сопоставлена некоторая
перестановка г*1,...,гв номеров 1,...,.«?. Обозначим через N(ii, ...,г5) число
нарушений порядка в ней (см. п. 6 § 3 гл. V). Напомним, что
перестановка называется четной, если число нарушений порядка в ней
четное, и нечетной в противном случае.
Транспонируя Л но выбранным индексам, мы, как и выше,
получим s\ тензоров. Сложим все эти тензоры, предварительно
умножив каждый из них на (~])iv(,i'-••'*«), где si,...,i* — перестановка,
ему соответствующая. Сумму разделим на число s\. Так
построенный тензор называется результатом альтернирования тензора Л по
выбранным индексам. Его компоненты обозначаются заключением в
квадратные скобки тех индексов, по которым производится
альтернирование.
Пример 14. Альтернирование тензора типа (3,0) но первому и
третьему индексам:
aPlil4 = l(aijk-akji).
274
Гл. IX. Основы тензорной алгебры
Пример 15. Альтернирование тензора типа (1, 3) по всем
нижним индексам:
4*<] = |(#« + #J* + &Ч - Aji - ftkj - /&*)• (9)
Пример 16. В §4 гл. VI мы отмечали, что детерминант
матрицы линейного преобразования является инвариантом. Выразим этот
инвариант при помощи тензорных операций. Пусть а*- — элементы
матрицы А преобразования А в некотором базисе е. Тогда п-крат-
ное произведение А на самого себя Д0...0Д имеет компоненты
ajiajV,,QjV Альтернируем это произведение по всем нижним
индексам, а затем свернем но всем индексам. Мы получим инвариант
[*1 *2 гп]
Докажем, что это и есть интересующий нас детерминант.
Здесь п индексов суммирования, каждый из которых принимает п
значений. Следовательно, правая часть распадается на пп слагаемых.
Каждое из этих слагаемых представляет собой сумму п\ членов,
возникающих при альтернировании. Если в наборе значений индексов
суммирования, определяющих какое-то слагаемое, есть два
одинаковых, то такое слагаемое равно нулю. Действительно, для каждого
члена в нем, взятого со знаком плюс, найдется не отличающийся член,
взятый со знаком минус. Пусть все значения индексов суммирования,
определяющие слагаемое, различны. Тогда, переставляя
сомножители в каждом члене такого слагаемого, упорядочим верхние индексы
и этим приведем его к виду ^...сЛ, причем
Всего слагаемых такого типа п\. Следовательно,
Отсюда по формуле полного разложения детерминанта Д = det А.
Если разбор этого примера вызвал затруднение, выпишите
подробно всю сумму при п = 2.
9. Замечание. Пусть имеется какое-то соотношение между
тензорами, написанное при помощи введенных нами тензорных
операций. Если выбран базис, это соотношение порождает такие же
соотношения между компонентами рассматриваемых тензоров.
Тензорные операции инвариантны в том смысле, что соотношения между
компонентами выглядят одинаково, каков бы ни был базис. Скажем,
соотношение А = х ® у -Ь z ® z, где а?, у и z — векторы, равносильно
равенству аг^ = £*jf + С'С*7' между компонентами, причем
безразлично, в каком базисе, так как во всех базисах оно выглядит одинаково.
В силу этого обстоятельства часто, говоря о тензорах, имеют в
виду их компоненты или, наоборот, говоря о компонентах, имеют
§ 1. Тензоры в линейном пространстве
275
в виду тензоры. Говорят, например, "тензор о^*" вместо "тензор,
компоненты которого в таком-то базисе равны a^V- Это не может
вызвать недоразумений и сильно упрощает речь. В дальнейшем мы
будем пользоваться подобными сокращениями.
10. Симметричные и антисимметричные тензоры.
Определение. Тензор называется симметричным по паре
индексов, если он не меняется при транспонировании по этой паре.
Результат его альтернирования но этой паре равен нулевому тензору.
Тензор симметричен по группе индексов, если он симметричен по
любой паре индексов из этой группы. В этом случае он не меняется
при любом транспонировании по индексам этой группы.
Не представляет труда убедиться, что результат
симметрирования тензора по некоторой группе индексов является тензором,
симметричным по этим индексам. Если, например, переставить любые
два нижних индекса в формуле (8), то в ее правой части изменится
только порядок слагаемых.
Определение. Тензор называется антисимметричным по паре
индексов, если он умножается на (—1) при транспонировании по этой
паре индексов, или, иначе говоря, результат его симметрирования по
ней равен нулевому тензору.
Если тензор антисимметричен по паре индексов, то равны нулю те
его компоненты, у которых совпадают значения этих индексов. Это
видно из того, что каждый слой, соответствующий этим индексам, —
антисимметричная квадратная матрица.
Тензор антисимметричен по группе индексов, если он
антисимметричен по любой паре индексов из этой группы.
Результат альтернирования тензора но нескольким индексам
антисимметричен по этим индексам. Причину этого легко понять, если
переставить какие-нибудь два нижних индекса в формуле (9): ее
правая часть изменит только знак.
Предложение 7. Антисимметричный по группе из s индексов
тензор не меняется при транспонировании по ней, если
соответствующая перестановка индексов четная, и умножается на (—1), если
нечетная.
Доказательство. Транспонирование, соответствующее
перестановке индексов г'ь ..., г5, сводится к последовательной перестановке
пар индексов. Поскольку каждая из них меняет знак всех компонент
тензора, достаточно доказать, что данное транспонирование
осуществимо за N(ii,...,i6) перестановок пар индексов.
Последнее утверждение равносильно тому, что числа 1,..., s можно
расположить в порядке п,...,г3, переставляя W(ii, ...,г3) раз соседние
числа. Докажем сначала, что числа ii,...,?, можно указанным
способом расположить в порядке возрастания. Для этого отыщем в
перестановке n,...,гв число 1 и переставим его на первое место, меняя
276
Гл. IX. Основы тензорной алгебры
местами последовательно со всеми числами, стоящими левее. Все они
больше 1, и мы переставим единицу столько раз, сколько нарушений
порядка она образует. Затем отыщем число 2 и точно так же
переставим его на второе место. При этом его придется переставить со
всеми числами, которые стоят левее него, кроме 1, а со всеми ними
оно образует нарушение порядка.
Проделаем далее то же самое со всеми числами 3, ...,s — I. Число s
окажется на последнем месте, переставлять его не надо, но и
нарушений порядка в перестановку оно не вносит. В результате будет
сделано 7V(/b ...,г5) попарных перестановок чисел, и числа окажутся
располо?кенными в порядке возрастания.
Теперь исходя из !,...,$ мы можем проделать те же перестановки
чисел в обратном порядке и получить гь...,г5. На это потребуется
также ЛГ(г'1,...,г,) перестановок соседних чисел.
Предложение 8. Если тензор симметричен по группе из s
индексов, то результат его альтернирования по этой группе индексов —
нулевой тензор.
Если тензор антисимметричен по группе индексов, то результат
его симметрирования по ней нулевой тензор.
Обе части предложения доказываются одинаково. Докажем
первую. Все s\ тензоров, которые можно получить транспонированием,
одинаковы. При альтернировании мы складываем их со знаками,
определяемыми четностями соответствующих перестановок. При этом все
слагаемые уничтожатся, так как из 6*! перестановок ровно
половина четных, а половина нечетных. Действительно, меняя местами два
первых числа в перестановке, мы изменяем ее четность (вводится или
ликвидируется ровно одно нарушение порядка). Этим
устанавливается взаимно однозначное соответствие между четными и нечетными
перестановками.
Замечание. Если индексов больше двух, равенства нулю
результата альтернирования (симметрирования) по этим индексам еще
недостаточно для того, чтобы тензор был симметричным
(антисимметричным) по ним.
Упражнения
1. Пусть 8$ линейное пространство билинейных функций,
определенных на линейном пространстве i>?, а Д — линейное преобразование
пространства &$. Докажите, что А - тензор типа (2, 2) в пространстве Sf.
2. а) Сколько компонент имеет трехвалентный тензор в четырехмерном
пространстве?
б) Сколько слагаемых содержит выражение какой-либо его компоненты
в новом базисе через компоненты в старом базисе?
3. Тензор типа (0,«) в «.-мерном линейном пространстве в базисе е
имеет компоненты е^...,-п =0, если среди значений «],...,in есть
одинаковые, и
e,-1...i.=(-l)w<<«---)
§2. Тензоры в евклидовом пространстве
277
в противном случае. Найдите компоненты этого тензора в базисе е' = eS.
4. Линейная функция f задана в базисе е строкой <р, а вектор а —
столбцом ос. Найдите матрицу тензора a ®f. Какой геометрический смысл
имеет этот тензор?
5. Сколько различных тензоров можно образовать при помощи
свертывания из тензора типа (2,2)?
6. Докажите, что тензор из упр. 3 антисимметричен по любому
подмножеству множества индексов.
7. Докажите, что для любого тензора типа (1, 1) выполнено равенство
(% к) г к
§ 2. Тензоры в евклидовом пространстве
1. Метрический тензор. Все, сказанное о тензорах в линейном
пространстве, разумеется, справедливо и в случае евклидова
пространства. Однако в евклидовом пространстве тензоры обладают
многими свойствами, которых они не имеют в линейном.
Определение. Сопоставим каждому базису евклидова
пространства матрицу Грама этого базиса. Определяемый этим тензор д^
типа (0,2) называется метрическим тензором пространства.
Как мы видели в примере 5 § 1, справедливо
Предложение 1. Сопоставим каждому базису евклидова
пространства матрицу, обратную матрице Грама этого базиса.
Это соответствие определяет тензор gtJ типа (2,0).
Определение. Тензор, построенный в предложении 1,
называется контрвариантным метрическим тензором.
Поскольку (Iwl)T = (Г71)"1 = Г"1, контрвариантный метрический
тензор симметричен: , • ..
sJ =sr -
Напишем равенство ГГ""1 = Е в тензорных обозначениях:
2. Поднятие и опускание индексов. Наличие метрического
тензора позволяет ввести в евклидовом пространстве еще две
операции над тензорами — поднятие и опускание индексов.
При опускании индекса тензору типа (р, <j), р ^ 1, сопоставляется
тензор типа (р — 1, q + 1), получаемый свертыванием данного тензора
с метрическим тензором по тому индексу, который мы хотим
опустить. При этом порядок индексов сохраняется в следующем смысле.
Мы отказываемся от соглашения, согласно которому нижние
индексы следуют за верхними. Для того чтобы отметить порядок индексов,
над каждым нижним индексом и иод каждым верхним индексом
ставится точка. Например, при опускании первого индекса у тензора а%\
мы получаем тензор дц<х[3/к = а?'к.
278
Гл. IX. Основы тензорной алгебры
В действительности эти точки расставляются не всегда, а тогда,
когда возможны недоразумения или неоднозначность в
интерпретации формул. Часто можно обойтись без них.
При поднятии индекса данный тензор сворачивается с
контрвариантным метрическим тензором по тому индексу, который следует
поднять. Результат будет тензором типа (р + 1, q — 1). Например,
поднятие первого индекса у а?'к дает а%3к = gtloc\3'ki а поднятие третьего
приводит к а'/к = gklOL'i\.
Пример i. В §3 гл. VII был введен вектор, присоединенный к
линейной функции на евклидовом пространстве. Строка
коэффициентов <р линейной функции и координатный столбец вектора а связаны
формулой <р = or Г. Переходя от матричной записи к тензорной, мы
получаем (pi = akgki- Итак, линейная функция получается из вектора
опусканием индекса. Наоборот, вектор получается из функции
поднятием индекса: а3 = gij(pi.
П р и м е р 2. К билинейной функции Ь на евклидовом пространстве
присоединено линейное преобразование Д матрица которого связана
с матрицей билинейной функции равенством А = Г-1/?. В тензорных
обозначениях это может быть переписано как
Мы видим, что тензор А получен из тензора b поднятием первого
индекса. Мы можем сказать также, что Ь получается из А опусканием
индекса, но здесь уже необходимо подчеркнуть, что при опускании
верхний индекс становится первым нижним индексом:
Pij = 9ika?j.
То, что здесь это существенно, показывает
Пример 3. В §2 гл. VII мы определили линейное
преобразование Д*, сопряженное данному преобразованию А. В произвольном
базисе их матрицы связаны равенством, которое можно переписать в
виде ГА* = (ТА)Т. Обозначим через а*- и а!-* элементы Л и Л* и
напишем это равенство в тензорных обозначениях:
9ik(xkj = gjkotf'
— после^опускания индексов один тензор получается из другого
транспонированием.
Свертывая обе части этого равенства по индексу j с тензором д1з\
мы получим 61ка*{к' = gljgik^kj или
<**!' = a'l
чтобы получить один тензор из другого, надо поднять нижний
индекс и опустить верхний.
3. Евклидовы тензоры. При изучении евклидова
пространства часто можно ограничиться только ортонормированными
базисами. При этом все формулы, связанные со скалярным произведением,
§2. Тензоры в евклидовом пространстве
279
значительно упрощаются, так как метрический тензор имеет
единичную матрицу:
9ij =
Матрица перехода от одного ортонормированного базиса к
другому ортонормированному является ортогональной, т. е. удовлетворяет
соотношению 5-1 = S71, а ее элементы связаны равенствами
°i = it. (2)
Пусть мы ограничились ортонормированными базисами. Тогда в
силу (2) закон преобразования компонент тензора имеет вид
ki,...tkp
Здесь нарушились правила тензорной символики: индексы п>—,*р в
левой части равенства верхние, а в правой — нижние. Кроме того,
пришлось написать знак ^, так как индексы суммирования Агь ...,fcp
оказались все сверху. Это признаки того, что равенство не является
инвариантным (оно верно только в ортонормированных базисах).
Формула (3) показывает, что, ограничиваясь
ортонормированными базисами, мы уничтожаем различие между верхними и нижними
индексами: и тем, и другим в законе преобразования соответствуют
одинаковые множители.
Заметим еще, что в силу (1) в ортонормированном базисе
совпадают компоненты тензоров, отличающихся друг от друга на поднятие
или опускание индекса. Мы отмечали это в гл. VII для векторов,
присоединенных к линейным функциям, и для преобразований,
присоединенных к билинейным функциям. Это легко проверяется и в любом
случае. Мы имеем, например, ctijk = 9jia'lk = Qtk> так как в сУмме
по / отлично от нуля только то слагаемое, где / = j, а в нем дц = 1.
Из сказанного следует, что, ограничиваясь ортонормированными
базисами, мы можем отождествить все тензоры, которые отличаются
друг от друга поднятием или опусканием индекса. Точнее говоря, все
тензоры, имеющие в ортонормированных базисах одинаковые
компоненты, мы объединяем в один класс и рассматриваем этот класс как
некоторый новый объект — евклидов тензор.
Определение. В евклидовом пространстве размерности п
задан евклидов тензор валентности s, если ка?кдому
ортонормированному базису сопоставлена s-мерная матрица порядка п. При этом
каковы бы ни были ортонормированные базисы е и е', элементы atl.-.*,
и a'ki kg соответствующих матриц связаны соотношением
<..^.=<" 4>V..i,- (4)
Все индексы у евклидовых тензоров равноправны, и мы пишем их
внизу. По повторяющимся индексам, как всегда, производится
суммирование.
1) * = j,
О, гфу
(1)
280
Гл. IX. Основы тензорной алгебры
Числовые величины, fie меняющиеся при переходе от одного ор-
тонормированного базиса к другому, в гл. VIII были названы
ортогональными (или евклидовыми) инвариантами. Теперь мы видим, что
это — евклидовы тензоры валентности 0.
Компоненты евклидова тензора в неортонормированных базисах
не определены. Однако для каждого евклидова тензора валентности s
можно определить эти компоненты так, чтобы получился тензор
любого типа (р, #), где p + q = s. Для этого их нужно найти, исходя из
компонент евклидова тензора в ортонормированном базисе, при
помощи закона преобразования компонент тензора типа (р, q). Таким
образом, каждый евклидов тензор порождается любым тензором из
некоторого класса тензоров. Ясно, что все тензоры этого класса
отличаются друг от друга поднятием или опусканием индексов.
Рассмотрим вектор евклидова пространства и присоединенную к
нему линейную функцию. В ортонормированном базисе их
компоненты совпадают, а в неортонормированном — различаются. В этом
случае компоненты линейной функции называются ковариантными
координатами евклидова вектора, определяемого рассматриваемым
вектором. Это — координаты вектора в биортогональном базисе.
Важным примером евклидова тензора является так называемый
дискриминантный тензор, определяемый для некоторого ортонорми-
рованного базиса равенством
*U....-n = (-l)^-'->
(где N — число нарушений порядка в соответствующей
перестановке), если все индексы различны, и £,,...»„ = 0 в противном случае. Как
мы видели в упр. 3 § 1, компоненты такого тензора преобразуются
по формуле s'i { = Sil^indeXS, что в случае ортогональной
матрицы перехода дает е\х_in = ie,-,...*» — компоненты дискриминантного
тензора одинаковы во всех ортонормированных базисах одной
ориентации с исходным и отличаются только знаком в базисах
противоположной ориентации. Для неортонормированных базисов
дискриминантный тензор доопределяется как тензор типа (0,п).
Для евклидовых тензоров определены все тензорные операции,
введенные для тензоров в § 1. Определения, а также формулировки и
доказательства свойств этих операций были бы почти дословным
повторением сказанного, и мы не приводим их. Заметим только, что для
евклидовых тензоров свертывание возможно по любой паре паре
индексов, и транспонировать, симметрировать и альтернировать можно
по любому множеству индексов. Например, если, ограничиваясь ор-
тонормированными базисами, мы отождествим квадратичную форму
с присоединенным к ней линейным преобразованием, то полученный
новый объект — евклидов тензор валентности 2 — будет иметь
инвариантную свертку (как линейное преобразование) и инвариантно
будет удовлетворять условию симметрии a»j = oyt- (как квадратич-
§ 3. Поливекторы. Внешние формы
281
ная форма). Инвариантность здесь подразумевается, конечно, только
относительно замены одного ортонормированного базиса другим ор-
тонормированным.
Упражнения
1. В базисе е метрический тензор задан матрицей Г, а тензор а;>
матрицей А:
м\
Найдите матрицы В, С и D тензоров а*", а}* и aj7c.
2. Можно заметить, что в упр. 1 детерминанты матриц А} В, С и D
совпадают, и следы В и С одинаковы. Объясните это.
3. Упростите выражение (фа^д** +Sla%glk)gks + 0™*]^*$»*.
§ 3. Поливекторы. Внешние формы
1. р-векторы. Этот параграф посвящен изучению двух
специальных классов тензоров, важных для ирило?кений.
Определение. Антисимметричный по всем индексам тензор
типа (р, 0) называется р-вектором или поливектором, если р не
уточняется. 2-векторы принято называть бивекторами.
Антисимметричный по всем индексам тензор типа (0,<?)
называется q-формой или внешней формой, если д не уточняется. Число д
называется порядком или степенью внешней формы.
Тензоры типов (1,0) и (0,1) по определению считают 1-вектором
и 1-формой.
Внешние формы пространства if можно рассматривать как
поливекторы в сопряженном пространстве if*. Поэтому свойства этих
двух классов тензоров одинаковы. В начале мы будем говорить в
основном о поливекторах.
Заметим, прежде всего, что при р > п существует только
нулевой р-вектор. Действительно, из р индексов, принимающих
значения 1,...,п, в каждой компоненте хотя бы два должны иметь
одинаковые значения. Как отмечалось в § 1, из антисимметрии следует,
что каждая компонента такого тензора равна нулю.
При р = п могут быть отличны от нуля только те компоненты,
у которых значения индексов составляют перестановку чисел 1,...,п
(иначе снова окажутся два равных индекса). Все такие компоненты
по предложению 7 § 1 выражаются через одну из них по формуле
a«i^n=(__1)N(i1>...,«n)al...n щ
р-вектор а*1—1» называется простым или разложимым, если он
представим как произведение р\ на альтернированное
произведение векторов, т. е. найдутся такие векторы х\,...:хр с координата-
Г =
1 1
1 2
А =
282
Гл. IX. Основы тензорной алгебры
ми #,...,#, что
а
*!•••* =
pUi''l..4pl-
(2)
Пример 1. Пусть £г и rf — два вектора в трехмерном
пространстве. Они определяют простой бивектор с компонентами
= *V-*V, а31=*У-*У, а12 = £У-£У; (3)
23
а
а32, а13 и а21 отличаются знаком от этих, а а11 = а22 = а33 = 0.
Выражения (3) напоминают о векторном произведении. И
действительно, если пространство евклидово, рассмотрим свертку с дис-
криминантным тензором e^k^r/^. Выпишем первую компоненту
этого ковектора в правом ортонормироваином базисе. Если г = 1, то в
сумме только два ненулевых слагаемых j = 2, к = 3 и j = 3, к = 2.
ИТЭК' ^Л*1 = emtfV + eiatfV = «23-
Аналогично иодсчитываются и остальные компоненты. Поднятие
индекса у этого ковектора дает вектор
который и является векторным произведением. Это видно из
выражения его компонент в ортонормироваином базисе.
Предложение 1. Каждый п-векгпор является простым.
Действительно, пусть дан произвольный n-вектор all'%n.
Возьмем какой-нибудь ненулевой простой n-вектор /?*i-*» = nlfj11...^
и обозначим отношение а1 -п/р1-п через А. Из формулы (1)
следует, что для всех компонент а%1~Лп == Л/?*1 —**. Положив rf = AfJ, мы
имеем а'1-'* = п!^'1^2--^ » как и требовалось.
Рассмотрим р векторов х\>.
динатных столбцов:
, хр и составим матрицу из их коор-
Я
£п
(4)
Вычислим минор этой матрицы, расположенный в строках с
номерами ц < г*2 < ... < ipi но формуле полного разложения
d*!.-^ ^ (-i)N(*i--*^;*....^.
(*i...*p)
Сравнивая это выражение с (2), мы находим те компоненты
простого р-вектора, у которых значения всех индексов попарно различны
и расположены в порядке возрастания {существенные компоненты):
ан...1', = р\ф..ш§А = d*1-*'. (5)
Остальные компоненты вычисляются по уже найденным из свойства
антисимметрии.
§3. Поливекторы. Внешние формы
283
В частности, для n-вектора имеем a1-" =det ||fj|| (пример 16 §1).
Вспомним формулу (21) § 1 гл. VII. Из нее видно, что если
пространство евклидово, а базис положительный ортонормированный, то
компонента а1—п равна объему ориентированного параллелепипеда,
построенного на векторах, составляющих данный п-вектор.
Из формулы (5) следует, что простой р-вектор является нулевым
тогда и только тогда, когда составляющие его векторы линейно
зависимы, т. е. ранг матрицы (4) меньше р.
2. Относительные инварианты. Любой n-вектор в каждом
базисе вполне характеризуется одним числом — его существенной
компонентой от1*"п. Попробуем найти закон преобразования этого числа
при замене базиса без участия других компонент n-вектора. Мы
получим
a'ln = ^...r/*y—-= £ (-1)"<'-'»)^...г?>1Л
(»1,...,*п)
или, согласно формуле полного разложения,
а'1"" = (det 5-,)а1-я = (detS)-1a1-n. (б)
Мы видим, что соответствие, относящее каждому базису
существенную компоненту n-вектора, определяет геометрический объект с
одной компонентой и законом преобразования (6). Этот объект не
тензор, так как тензор с одной компонентой должен иметь тип (0,0) и,
следовательно, быть инвариантом.
Другой пример объекта такого рода дает детерминант матрицы
из компонент тензора типа (0,2). Эта матрица В при замене базиса
преобразуется, как известно, в матрицу В' = 5хBS, и
det£'=: (detS)2det#.
Определение. В линейном пространстве задан относительный
инвариант веса г, если каждому базису сопоставлено число так, что
числа, соответствующие базисам е и е' = eS, связаны равенством
a' = (det5)rtt. (7)
Инвариант, или, как говорят, чтобы подчеркнуть отличие от
относительного инварианта, абсолютный инвариант, является
относительным инвариантом веса 0.
Аналогично формуле (6) можно показать, что существенная
компонента n-формы является относительным инвариантом веса 1.
Отметим следующие свойства алгебраических операций с
относительными инвариантами.
Предложение 2. Если а и Ь — относительные инварианты
одного и того же веса г, то их сумма — относительный инвариант
веса г.
Если а и b — относительные инварианты весов га и гь, то их
произведение — относительный инвариант веса га + п>.
284
Гл. IX. Основы тензорной алгебры
Если а — относительный инвариант веса г, то егор-я степень —
относительный инвариант веса рг.
Все три утверждения легко доказываются непосредственной
проверкой закона преобразования, и мы предоставим читателю написать
доказательство.
Подчеркнем, что сумма относительных инвариантов разных весов
не является относительным инвариантом.
Относительный инвариант называют также плотностью. Объект,
получаемый умножением тензора на относительный инвариант,
называется тензорной плотностью. Напишите закон преобразования
компонент такого объекта.
3. Внешние формы, «/-формы чаще всего представляют интерес
как полилинейные функции от q векторов (пример 8 § 1)- Для такой
функции антисимметрия означает, что ее значение меняет знак, если
поменять местами какие-нибудь два ее аргумента. Например,
функция, сопоставляющая трем векторам трехмерного евклидова
пространства их смешанное произведение, является 3-формой.
Значение «/-формы и с компонентами u>ii...iq на векторах х\, ...,xq
с компонентами «fj1, ...,£g* равно
и(хг,...,хя) =wf-l...,-,€i1-^-
Учтем, что равны нулю те слагаемые, в которых хотя бы два индекса
суммирования имеют одинаковые значения, а остальные слагаемые
сгруппируем. Пусть числа ii,...,iq расположены в порядке
возрастания, a tfcj,...,!^ — их перестановка. Тогда группу из q\ слагаемых,
в которых индексы суммирования (в каком бы то ни было порядке)
равны i*i,...,г'з, можно записать как сумму по перестановкам
Поэтому
где cfl'"%q = q\£i ...f£ . В сумму (8) входят только существенные
компоненты внешней формы — те, у которых индексы расположены
в порядке возрастания. Итак, мы имеем
Предложение 3. Значение q-формы на векторах x\,...,xq
является линейным однородным многочленом от компонент простого
q-вектора, ими определяемого.
Для фиксированного q линейная комбинация «/-форм также
является «/-формой. Поэтому при каждом q множество «/-форм — линейное
пространство. Аналогично, линейным пространством является
множество всех «/-векторов. Из формулы (8) следует, что эти два
пространства сопряжены одно другому.
§3. Поливекторы. Внешние формы
285
Построим базис пространства <у-форм. Для этого рассмотрим
базис е пространства j£f и его биортогональный базис р1,..., рп в
пространстве JSf*. 1-форма рг имеет компоненты Sk. Компоненты
произведения q различных 1-форм р*1 ® ... <g> рг« (*i < ... < iq) равны S^1 ...8%kq.
Одна из них, та, для которой ki = ц при всех / = 1,...,<?, равна 1, а
остальные равны нулю.
Альтернируем это произведение. Полученный при этом тензор
имеет компоненты ^---^V т. е. \/q\, если индексы /гь...,Агд —
четная перестановка чисел г*1, ...,iqy (— l/q\) если перестановка нечетная,
и 0, если набор нижних индексов не совпадает с набором верхних.
Введем обобщенный символ Кронекера
т. е.
{+1, fci,..., kq — четная перестановка г'ь ...,iqy
—1, fei,...,^—нечетная перестановка ii,...,tg, (9)
О в остальных случаях.
Обобщенный символ Кронекера антисимметричен также и по
верхним индексам. Действительно, как легко видеть, 8г£'г£ — q\ 6%* ...Slk".
Обозначим через е*1 •■•*« g-форму с компонентами ^V.'jf •
Предложение 4. Система q-форм е*1 —*« идя всевозможных
наборов i\ < ... < iq является базисом в пространстве q-форм.
Доказательство. Пусть u>it...iq — компоненты g-формы ш.
Рассмотрим линейную комбинацию
Найдем компоненту Я^.../* для произвольного набора ji < ... < jq:
так как в сумме только одно ненулевое слагаемое. Итак, 0 = о; и
произвольная форма и раскладывается по системе е*1 —*«. Линейная
независимость этой системы форм следует из того, что одна и только
одна из существенных компонент такой формы равна 1, а остальные
равны нулю.
Следствие. Размерность пространства q-форм n-мерного
линейного пространства равна числу сочетаний С%.
4. Внешнее умножение. Как для поливекторов, так и для
внешних форм определена операция внешнего умножения. В обоих
случаях операция определяется одинаково и имеет одни и те же свойства.
Обычно она употребляется для внешних форм.
286
Гл. IX. Основы тензорной алгебры
Определение. Пусть даны внешние формы и и в степеней р
и q. Обозначим через [и>,в] внешнюю форму степени p + q, равную
тензорному произведению и и 0, альтернированному но всем
индексам. Внешним произведением форм и и в называется (р+д)-форма
р\ q\
Пример 2. Если и1 и со2 — линейные формы с компонентами и>}
и cj|, то cj1 Л о/2 имеет компоненты
Это билинейная функция с кососимметричиой матрицей.
Тензорное умножение дистрибутивно по отношению к сложению,
а результат альтернирования суммы равен сумме альтернированных
слагаемых. Поэтому внешнее умножение дистрибутивно по
отношению к сложению: для любых форм 01, в2 одной степени и любой
формы U) , i о 1 о
{О1+е2)Ли = 01 Ло; + 02Ли.
Легко видеть, что умножение внешнего произведения на число
равносильно умножению на это число любого из сомножителей.
Рассмотрим три внешние формы cj1, u>2 и и3 степеней р, q и г и
произведение (cj1 Ли2) ЛоА Компоненты [[а;1,^;2],^3] равны
^V.-ipSl-i/l-^] = ^лУз^и^^гУ (10)
так как в силу предложения 7 § 1 внутреннее альтернирование
дает (р+g)! одинаковых членов. Понять, что здесь происходит, проще
всего на таком примере. Пусть (р и ф суть 1-формы, а и) — 2-форма.
Тогда компоненты формы [[<р, if>},u)] равны
Так как второе слагаемое антисимметрично по всем индексам, оно
отличается знаком от первого, и внутреннее альтернирование может
быть пропущено:
Точно так же внутреннее альтернирование можно пропустить и
при вычислении компонент [cj1, [cj2,u>3]]. Вместе с (10) это дает
Сравним множители, которые надо добавить, чтобы получить
внешние произведения. Они одинаковы:
(p + g + r)!(p + g)i _ (p + g+r)!(g + r)i
(Р + ЯУ-П pig! (q+r)\p\ q\r\
Из сказанного следует ассоциативность внешнего умножения
и1 Л {и2 Ли3) = (и1 Ли2) Ли3.
§3. Поливекторы. Внешние формы
287
Это позволяет нам говорить о внешнем произведении любого числа
внешних форм без упоминания о расстановке скобок. В частности,
базис в пространстве g-форм, построенный в предложении 4, состоит
из внешних произведений
б,,,"^ = р'1л...лр,У
Заметим в качестве еще одного примера, что простой р-вектор,
образованный векторами a?i,..., агр, есть их внешнее произведение.
Исследуем перестановочность внешнего умножения. Пусть в —
р-форма, а ш — «/-форма, и каждая из них разложена по
соответствующему базису. Вычисляя 9 А со, мы воспользуемся дистрибутивностью
и получим сумму
£ J2 ^....P^1...i,Pi,A...Ap'''ApJ1A...A^. (11)
»i<...<»pji<...<ig
При вычислении и А в возникнет аналогичная сумма:
£ £ ^1..^1..,р^Л...Л^Лр'1Л...Лр^. (12)
»i<...<*Pji<...<j<,
Числовые коэффициенты, разумеется, перестановочны, и вопрос
сводится к возможности переставить базисные 1-формы во внешнем
произведении р*1 Л ... Л р1" Л р*1 Л ... Л р7*. Рассмотрим компоненту этого
произведения с произвольным набором индексов Ai,..., kp+q. Она рав-
на rti...tPii-i«
*i— *р-И *
Сравним эту компоненту с соответствующей компонентой другого
произведения rji...j9*,...*p
°kt... kp+g •
Мы должны переставить каждый из р индексов г через q
индексов j. Так как обобщенный символ Кронекера антисимметричен но
верхним индексам, это вызовет умножение компоненты на (—\)pq.
Все слагаемые в (11) и (12) отличаются на этот множитель, и потому
9Аи> = {-1)р(>и>Ав. (13)
Отсюда следует
Предложение 5. При внешнем умножении внешние формы
коммутативны, если хотя бы одна из них четного порядка, и антиком-
мутативны, если оба порядка нечетные.
Упражнения
1. Функция от двух векторов в трехмерном евклидовом векторном
пространстве сопоставляет любым двум векторам х и у смешанное
произведение (а, х,у), где а — фиксированный вектор. Докажите, что ята
функция — 2-форма. Выразите ее матрицу в заданном базисе е через
координаты вектора а.
288
Гл. IX. Основы тензорной алгебры
2. Пусть fj1, ...,£п* ~~ линейно независимые векторы в n-мерном
линейном пространстве. Докажите, что бивекторы 2£££/- для всех к < I
составляют базис в пространстве бивекторов пространства j£f.
3. Пусть х\,...,хр — базис подпространства JSf' С S£. Назовем
направляющим р-вектором подпространства w = х\ Л ...Ахр.
Докажите, что*
а) вектор у лежит в j£f' тогда и только тогда, когда у Л w = 0;
б) любые два направляющих р-вектора подпространства JS?' отличаются
один от другого на числовой множитель;
в) если пространство евклидово, этот множитель равен отношению
объемов ориентированных параллелепипедов, построенных на
соответствующих базисах.
УКАЗАНИЯ И ОТВЕТЫ К УПРАЖНЕНИЯМ
ОБЩИЕ ЗАМЕЧАНИЯ
В конце каждого параграфа приведены упражнения, относящиеся к
материалу данного параграфа. Решая их, надо иметь в виду, что получение
верного ответа необходимо, но не оно является основной целью. Эта цель —
посмотреть на конкретные частные случаи общих фактов, поупражняться в
применении методов, изложенных в соответствующем параграфе. Поэтому
не все предлагаемые способы решения одинаково полезны.
Часто встречается тенденция решать задачи не теми методами, которые
в данный момент изучаются, например, в начале изучения аналитической
геометрии студент бывает склонен решать предложенные ему задачи
методами элементарной геометрии. Это бессмысленно: элементарная геометрия
уже изучена, сейчас нужно овладеть новым материалом.
Иногда есть возможность догадаться, каков должен быть ответ, а
затем проверить свою догадку. Это, конечно, прекрасно, но мало чему учит.
Сделав это, подумайте, как бы вы стали решать, если бы вам не удалось
догадаться.
Как правило, решение задач не требует длительных рассуждений или
громоздких вычислений. Если найденный вами способ решения трудоемок,
посмотрите, нельзя ли сделать задачу иначе. В некоторых упражнениях
указания приведены для того, чтобы обратить внимание читателя на тот
путь решения, который кажется автору предпочтительным. В любом
случае перед тем, как окончательно остановиться на определенном способе
решения, полезно сравнить его с другими возможными способами. После
того как решение получено, подумайте, нельзя ли получить его проще.
Ответы ко всем упражнениям приведены, но в жизни приходится
решать задачи без готовых ответов, и потому полезно выработать в себе
привычку делать проверку. Там, где это возможно, следует подставить
полученный ответ в условие задачи и убедиться, что он удовлетворяет условию.
Это, однако, не гарантирует, что найдены все возможные решения задачи.
Если полная проверка невозможна, то следует проделать частичную
проверку: удовлетворяет ли полученное решение хотя бы части условий задачи
и естественным требованиям, которым оно необходимо должно
удовлетворять (скажем, является ли вычисленная длина положительной)? Сколько
решений должна иметь задача из общих соображений? Совпадает ли
размерность найденной величины с размерностью искомой? Верна ли
найденная общая формула в простейших частных случаях?
Важно обратить внимание на обоснованность ответа. Особенно это
относится к задачам на доказательство, которые можно рассматривать как
задачи с готовым ответом. Не каждый текст, заканчивающийся словами "что
290
Указания и ответы к упражнениям
и требовалось доказать", является доказательством. Здесь трудно дать
общие рекомендации, однако, закончив доказательство, задайте себе два
вопроса: положились бы вы на это рассуждение, если бы от его результата
зависело что-то очень важное для вас, или потребовали бы
дополнительных гарантий? Если бы кто-то привел вам это доказательство, то что бы
вы возразили?
Часто ошибка в рассуждении находится там, где написано "очевидно".
Вы в этом уверены, но на чем основывается эта уверенность? Очевидные
вещи тем и хороши, что их легко доказать. Если нет полной ясности, то
копайтесь, пока ее не будет.
Приведенные ниже указания к задачам иногда имеют форму
утверждения. На такое утверждение надо смотреть как на вспомогательный
результат, который еще нужно проверить.
УКАЗАНИЯ
Глава I
§1 _ _ _ _
4. Если такая точка существует, то РА + РВ + PC = ЗРО для любой
точки Р.
§4
3. Разложите а по сторонам треугольника. Проекция линейной
комбинации равна линейной комбинации (с теми же коэффициентами) проекций
этих же векторов.
5. Заметьте, что ([а, Ь],[а, с]) = (а, [Ь, [а, с]]). Далее можно применить
формулу двойного векторного произведения. Это преобразование бывает
полезно и в других случаях.
Глава II
§2
5. Если два данных вектора не коллинеарны, то часто бывает удобно
использовать базис, составленный из этих векторов и их векторного
произведения.
§з
2. Если умножить уравнение на его свободный член, то свободный член
полученного уравнения будет положителен.
Глава III
§1
2. Члены второй степени составляют квадрат двучлена Зх — 4у. Мы не
можем положить у = Зх — 4у, х' = х, так как при этом мы перейдем к
непрямоугольной системе координат. Но замена у — (—Зх + 4у)/5,
х1 — (4х + Зу)/5 переводит прямоугольную систему в прямоугольную.
5. Так как базисные векторы равны по длине, векторы ei + ег ив] - о2
взаимно перпендикулярны. Удобно выбрать оси декартовой прямоугольной
системы координат направленными вдоль этих векторов.
Указания и ответы к упражнениям
291
§2
2. Факт очевиден, если использовать результат упр. 3. Но попробуйте
доказать это непосредственно.
5. Непосредственный подсчет не сложен, но можно ввести декартову
прямоугольную систему координат, оси которой направлены вдоль
радиусов, и сослаться на результат упр. 6 § 1 .
6. Проведите касательную к параболе, параллельную данной прямой.
§з
6. Посмотрите на упр. 4.
§4
I. Следует различать два случая: когда пересечение есть прямая, и
когда оно — пара совпавших прямых.
5. Решение. Уравнением линии пересечения является система
5х2 - Зу2 + Az2 = О, -х2 + у2 - z2 = L
Если мы исключим z (т. е. найдем его из второго уравнения и подставим
в первое), то получим уравнение х2 + у2 = 4. Это уравнение — следствие
системы, и потому определяет множество, содержащее линию пересечения.
Так как в уравнение не входит z, это множество — цилиндр с
образующими, параллельными ез. Пересекая цилиндр плоскостью 2 = 0, мы получаем
окружность с уравнением z = 0, х2 + у2 = 4, на которой лежит проекция.
Однако проекция не совпадает с окружностью. Исключая г, мы должны
были запомнить условие z2 = — 1 - х2 + у2 ^ 0. Итак, проекция — две дуги
окружности: х + у2 = 4, у2 — х2 ^ 1 на плоскости z = 0.
6. Гипербола не умещается в полуплоскости.
Глава IV
§2
8. Посмотрите, во что переходят начало координат и базисные векторы.
9. Множество образов всех точек при линейном неаффинном
преобразовании — прямая линия или точка.
II. Гомотетия с центром в точке пересечения медиан.
§з
1. Преобразуйте плоскость так, чтобы две из прямых перешли в оси
координат.
3. Искомые направления совпадают с теми, о которых идет речь в
предложении 7.
4. Обратите внимание на то, что прямая, имеющая единственную
общую точку с параболой или гиперболой, не обязательно является
касательной.
Глава V
§з
3. б) Коэффициенты разложения те же, что и в упрощенной матрице.
4. Что означает теорема о базисном миноре при Rg A = 1?
292
Указания и ответы к упражнениям
5. Элементарными преобразованиями строк обратите в нулевые все
строки, кроме отмеченных.
6. Оцените ранги матриц ||А|£||, ||Л|Л+ В\\.
§4
5. Индукция. Разложите детерминант по столбцу, не пересекающему
подматрицу.
6. При произвольном п индукция по к. Разложите по первому столбцу.
8. Используйте результат задачи 7, а).
9. Пусть общий корень L Умножим первый столбец на £3, второй —
на £2, третий — на t и все прибавим к четвертому столбцу.
§6
4. Используйте упр. 3, б) из §3 и способ построения матрицы (8) из §6.
Глава VI
§2
2. Вектор с координатами f1, £2, £3, £4 принадлежит JSf' тогда и только
тогда, когда совместна система уравнений с неизвестными а и /3:
1 1
2
3
4
\+р\
5
6
7
8
=
1 *' II
?
?
*4 II
4. Для нахождения линейных зависимостей между векторами можно
привести матрицу из их координатных столбцов к упрощенному виду с
помощью элементарных преобразований строк. Находим, что <ц, а2 и b\
линейно независимы, а 62 = -а\ аг + ЗЬь Поэтому z = а\ — аг = 4(1)2 —
4 4
-36i) принадлежит JSf' ГЦ&?".
§4
3. В инвариантном подпространстве нечетной размерности найдется
собственный вектор.
6. Пусть р(Л) — характеристический многочлен матрицы хут. Чему
равно р(—1)?
8. Т2 = Е. Отсюда следует, что Л2 = 1.
9. А'1 АВА = В А.
10. Воспользуйтесь теоремой 4.
§6
6. Если В — матрица билинейной функции, то В£ = 0 — система
уравнений ее нуль-пространства (см. упр. 5). Пересечение нуль-пространств
всех форм задается системой D£ = 0. Поместим в этом пересечении
последние п — к базисных векторов.
7. Если АТА£ = 0, то £ТАТА£ = (А£)Т{А£) = 0, и потому А£ = 0.
8. Найдется верхняя треугольная матрица S такая, что STBS = Е (см.
доказательство критерия Сильвестра).
9. Пусть k(.ri) > 0, а к(^2) < 0. Рассмотрим многочлен k{tx\ + #2) от
переменной t.
Указания и ответы к упражнениям
293
Глава VII
§1
4. б) Если вы нашли такую матрицу, то постарайтесь с ее помощью
построить матрицу такого типа вдвое большего порядка. Что это за матрицы
для п = 1 и п = 2?
5. R = QTA.
§2
6. Чтобы найти инвариантные подпространства, представьте
характеристический многочлен А4 + 1 как (А2 + л/2А + 1)(А2 — у/2Х + 1) и
воспользуйтесь предложением 8 §4 гл. VI. Второе подпространство —
ортогональное дополнение первого.
§з
7. См. задачу 9.
§4
3. Преобразование унитарного пространства, имеющее такую матрицу
в ортонормированном базисе, является унитарным.
Глава VIII
§2
2. R = 4, г = 2. Малая квадратичная форма не является ни
положительно, ни отрицательно иолуопределенной.
ОТВЕТЫ
Глава I
§1
1. \BC\I\CA\ = А/(1 - А). 2. АС(1,1/2). 3. (5, -3).
4. Точка пересечения медиан: АО = -(АВ + АС).
§2
1. (1,1). 2. D(x\ - хч + хг, У\ - У2 + Уз).
4. х = rcos<pcos0; у = rsin<pcos0; z = rsinfl.
§з
1. а = аа', # = cur' + а<ь Координаты уменьшаются вдвое.
2.х= !(-*' + у' + 1), У = - £(*' + у' - 1).
3. О' — противоположная О вершина параллелепипеда, построенного
на базисных векторах. Концы соответствующих базисных векторов
совпадают.
§4
3. (3/2)а. 5. cos0 = (cosа - cos/3 cos 7)/(sin/3 suit)- 6. -\2уД.
294
Указания и ответы к упражнениям
7. Необходимо и достаточно, чтобы детерминант матрицы был
положителен.
8. (см)"1.
Глава II
§1
1. х2 + у2 = 4. 3. х2 + ху + у2 - х - у = 0. 4. х2 + у2 = 4*2.
§2
1. я = 2 - 2t, у = 2 + £, г = t. 2. я: = 1 + 2ti - 3t2, У = ti, z = t2.
3. (2,0,2), tx = -I, t2 = 1. 4. Зя - 2y - 5z + 4 = 0.
§3
1. 0(-8,1), r = 4. 2. (Л,Л2 + BiB^CiCi < 0.
3. a; = 8t, у = 65t, г = 49t.
4. 0,(0,2,1), r, = лД; 02(o, |, |), n = ^-
U 5' 40/
6. r = ri + ai ^—- --^ + aoc.
(ao,aba2)
Глава III
§1
2. y'2 = 2,'; *' = lf±|^LL, y< = -3*+*,-^
3. Возможны: пары пересекающихся, параллельных и совпавших
прямых.
4. Л = С, В = О, D2 + Е2 > AF. 5. Эллипс с полуосями 4>/2 и Зл/2.
§2
3. Для эллипса, параболы и ближайшей к фокусу ветви гиперболы г =
= р/(1 — ecos</>). Для второй ветви гиперболы г = — р/(1 + ecos<p).
8. Прямая соединяет точки касания касательных, проведенных к линии
из данной точки.
§3
4. О ( - i, i); Зя + У + 1 = 0, х + Зу - 1 = 0.
5. Пара пересекающихся прямых.
7. я - Зу + 3 = 0.
Указания и ответы к упражнениям
295
§4
2. а) Однополостный гиперболоид х2 + у2 — 2z2 + 4z = 4;
б) конус я2 + у2 = 2(z - 2)2.
3. Для гиперболического параболоида, заданного каноническим
уравнением, нормальные векторы плоскостей ni(6, а,0) и п2(—6, а, 0).
Глава IV
§1
1. б) Да; в) нет. 2. (fgh)"1 = h^g^f-1.
3. х* = 5 — у, у* = 5 — х.
§2
I. а) Да. б) нет. 2. Прямая у = 3. 4. (1,1).
6. Свободные члены заменятся на нуль.
7. а) х* = 62о; + а2у + с2;
б) я* = сця + 2biy + ci, у* = bix + сиу + ci; у* = -а2х + 62у + -с2.
8. у = #tg-. 9. Нет.
10. В любом случае — векторы, коллинеарные е2) при a + 6 ф 0 еще и
коллинеарные (а + &, — 1).
II. ** = --*, у* = -jy.
12. Осевая симметрия относительно у = — #tg —.
§3
1. 1/3.
3. Векторы, коллинеарные вектору: а) а(3, 2); б) Ь(—2,3).
Соответствующие растяжения: а) 2л/26; б) л/26.
6. а) Ось одной симметрии перпендикулярна а, ось другой получена из
нее параллельным переносом на (1/2)а.
б) Оси обеих симметрии проходят через О, ось второй получена
поворотом оси первой на угол <р/2.
7. gf, где f: {х* = я, у* = Ау - a}, g: {х* =х, у* = у + a}; f — сжатие
к прямой у = —а/(1 — А).
Глава V
§1
1 3
7 9
2. а) Нет; б) да; в) да; г) нет; 3. 213.
4. D = (3 - 2А)Л - (1 + А)Я + АС, А произвольно. 5. а) Пет; б) нет.
1. а)
; б) 9; в) 48, не считая ее самой.
6. Нет, а = 2Ь — с.
§2
2. а) Да; б) нет. 4. а) Нет. б) да.
296
Указания и ответы к упражнениям
5. а) Матрице (—Е) отвечает центральная симметрия, а / — поворот
на 7г/2;
б)
7.
а Ь
-(а2 + 1)/Ь -а
1 О О
-1 3 -2
О -1 1
где а и&^О произвольны.
0
1
1
0 || ||
0
1 II1
1 0
0 1
0 0
0 || ||
0
I/2 II II
1
0
0
0
1
0
0 || 1
1
1 II1
1
0
0
0
1
0
0 || ||
0
2 || 1
1
1
0
0
1
1
0 ||
0
1 1
§3
1. a) Rg A = 2, базисная подматрица, например,
б) ||7 8 9|| = 2||4 5 б|| - ||1 2 3||;
= 2
1 2
3 о
1 ||
4
7
г) 9 — все квадратные подматрицы второго порядка.
2. а) Ранг не больше двух; б) Ранг не больше п/2.
3. а)
10-1-2 -3
0 12 3 4
0 0 0 0 0
б
; б) 7
9
= -3
1 1
3
5
1 |
+ 4
| |
2 ||
4
6 J
§4
l.andetA 4.46.
7. б) 6 = det A, k = /_Д—l),+J*Aj, где dij — дополнительный минор
§5
элемента atJ матрицы А.
8. (Зп + 1)/2. 10. 10.
ad — be
| d -6
—с a
I _1
! 1
II °
1 ~l
1
1 °
-1 1
0
l 1
+ c
|- -1
1 l II
—2
1
-B
En—r
§6
5. а) Не существует; б) АТ.
Указания и ответы к упражнениям
297
Глава VI
§1
1. А = y^q«j£^.
2. п(п + 1)/2. За базис можно принять матрицы Eij {i^j) стандартного
базиса пространства квадратных матриц порядка п.
1 —а а "
О 1 -2а
3.
—а
За2
-За
1
p(t) = р(а) +р/И('- а) + ip»(* ■
а)2 + -р'"(а)(* - а)3 (штрих обо-
6
значает дифференцирование по t).
4. /i раскладывается по ei; /2 раскладывается по ei,e2; /з
раскладывается по еь в2, ез; ...; /n-i раскладывается но ei, ..., еп-ь
5. Ориентированы одинаково.
1. Например, ai,a2. 2,
§2
2£2+£3 = 0,
- 3$2 + £4 = О.
3. Например, линейная оболочка векторов ез и е«.
4. а) ai,a2,bi; б) ai - a2.
5. а) Да; б) да; в) нет.
§3
а)
| 1 2 (
3
о
2 4 0 0
3 6 0 0
0 0 12
0 0 2 4
| 0 0 3 6
1 1 2 3 |
1 С
) 0 0
'
; б)
2
0
0 0 0
1
2 с
t !
-1 1
0
Г
0
2
0
-1
в)
2. Инъективно при Rg С = 2. Сюръективным быть не может.
3. а) Нет; б) да. 7. а) Нет; б) да.
§4
, где А\ — квадратная подматрица порядка г и ранга г.
7. Для Ai = 7 базис в собственном подпространстве — векторы с
координатами || 1 — 2 0 ||т и || 0 3 1||т. Для А = —7 собственный вектор с
координатами || 2 1 — 3||т.
8. Для Aj = 1 собственное подпространство — множество
симметричных матриц. Для Аг = — 1 собственное подпространство — множество ко-
сосимметричных матриц.
Ai О
О О
298
Указания и ответы к упражнениям
11- 5 =
1
1
0
1
-3
1
0 1
о !
1
L А' =
3 2 О
0 3-2
0 0 3
1. а) Нет; б) да, если f(x) = 0 для всех х.
2. ||/3<7-а<?||, где^ = 5±(еье2).
3. a) <pi = 0, t ^ к; <р{ = (i - l)...(t - к)а{~
б) <р\ = 0, г\ф к + 1; fpl+i = *!-
i>fc(a = l,...,n);
§6
l.a)
-2
0
8
5
1
4
0
3
1
1
б)
1
-2
О
О
1
1/2
4.а)($',)2 + (П2-(Г)2;
1/2
1
1
О
О
-3
О
1
1
б)(П2 + (П2--(Г)2; ^
л/2 -1 -5 II
О -1 1 II.
0 1 1 ||
5. s = п — Rgb. Последние s строк и последние s столбцов нулевые.
6. Пусть D — матрица, составленная из матриц всех форм, написанных
одна под другой. Необходимо и достаточно RgD ^ к.
7. а) г; б) 0.
9. к не является ни положительно, ни отрицательно определенной.
10. Миноры четного порядка > 0, а нечетного порядка < 0.
11. Нет.
§7
1. а) 3; б) 6; в) 14.
2. а) Л' =
1
0
0
0
1
1
0
0
0
0
2
0
0
0
1
2
, 5 =
1
1
1
1
1
1
1
0
1
1
0
0
1
0 |
0
0
б) А' =
1
0
0
0
0
1
1
0
0
0
0
1
1
0
0
0
0
0
1
0
0 1
0
0
1
1
L 5 =
1 -1
0
1
0
о
0
0
0
1
0
0
0
-1
0
2
0
1
0
-1
0
0
0
2
0
-2
Указания и ответы к упражнениям
299
1. а)
1 .
2 0 2/3
О 2/3 О
2/3 О 2/5
г>
тава VII
§1
; б)
2 -2 8/3 1
-2 8/3 -4
1 8/3 -4 32/5 |
; в) arccos л/--
2. jH-lll -If, | 111 -11 -1|Г, j||H -1 -11Г-
I. a) ||0 1 1 1||T, ||1 1 1 0|f; 6) ||1 - 1 О 1||т. 4. l/y/Z.
5.a)Q=7f
,R =
л/5
5 7
О 1
e.Ay/2.
1 л/3 у/2
2 О -л/2
1 -л/3 \П
л/б 2л/б
/2 = II О л/2
О О
§2
-л/б
л/2
л/3
2 4
О 1
Собственные подпространства А: ||1 — l||J
■з|Г
Собственные подпространства Д*: ||4 — 1||т, ||1 0||т.
3. Или тождественное преобразование, или отражение в
подпространстве <?': если х = х' + *", я' е <?', ж" € <f,J-, то А(х) = я' - ж". Если S' = {о},
то А = -Е.
4. а) 2пп!; б) бесконечно много; в) да, в случае б).
5. 5 =
ч/б
-л/3
л/3
0
-1 л/2
-1 л/2
2 л/2
,А'=\
110 0
0 10
0 0 4
6. Поворот на 5л*/4 в плоскости векторов а\,аг и поворот на тг/4 в
плоскости векторов 61,62. (Углы отсчитываютсн от а\ к аъ и от Ъ\ к 6г.)
Координатные столбцы а],02,61,62 соответственно
1
2
1 l I
-л/2
1
1 °
1
' 2
-1
0
1
1 "^ 1
1
Г 2
1
^
1
0
1
Г 2
~1 II
0
1
1 V5 1
7. а)
6)Q = 5
8. Л:
О О
О 1
л/8 1
-1 \/8
2/3
1/3
3
1/3
2/3
4
л/2
2 О
О 1
л/2
5
л/Щ л/57з II
-л/275 лА/3 |Г
300
Указания и ответы к упражнениям
§3
3 0
-1 1
1. (9 - 15fc2)/8. 2. Ъ*(х,у) = Ъ(у,х). 3.
«flT + W + fa8)2.
5.5=4=
л/6
у/3 1 л/5
О -2 л/2
-\/3 1 \/2
6. Да; 7. a) tf1)2 - (f2)2 и 2^2; б) (£*)2 и tf1)2 - (£2)2.
8. 5 = _gg I } "J I ; к(«) = 2б(г72)2, h(*) = (r/1)2 + (г;2)2.
9. Без ограничения на размерность условие только достаточно. При-
мер: (О2 и (£3)2.
_ §4 ^
1. а) |а| = 2, |6| = 3, cos(a, Ъ) = (3 + i)/6, cos(b,a) = (3 - »)/6;
б) Векторы а и Ь'(—2 — 3i/2,3/2 — t) ортогональны, Ь' = Ь —aa, a =
= (3-«)/4..i n „ . . „
; А и самосопряженное, и уни-
4. А =
тарное.
i 0
0 -1
\/2
г —г
1 1
5.4=lh'iir\4lMif.
1
vi1
^'
Глава VIII
§1
1 Xl
1 **
i *3
1 *4
=
4
-3
0
0
Г*1
1
—2
1
1 °
+ *2
1 2 1
-3
0
1
а) Пустое множество или плоскость; б) dim P ^ k\ + fo — п.
§2
i.-^+tf)2-fa,)2 = i. 4
f^-^-^+A^.
<-3 1 2,2 3 i о
£ = -=г) + — rf + 3.
2. Гиперболический параболоид. 3. —1/2 < а < 0.
Глава IX
§1
2. а) 64; б) 64.
3. е[1 in = (—l)N(M'"'*n)detS, если ii,...,in различны, и 0 в
противном случае.
Указания и ответы к упражнениям
301
4. Линейное преобразование А(х) = f(x)a имеет матрицу оир.
5. Четыре тензора типа (1,1) и два инвариаша.
§2
111
2 3
L с=
1 2 1 1
3 2
L D=\
1 1 0 |1
11
2. В — матрица преобразования, сопряженного преобразованию с
матрицей СТ. Их детерминанты и следы должны быть одинаковы. Остальные
детерминанты равны, гак как detT = 1.
3. 2а™ву
§3
II 0 а3 -а2 ||
1. (е!,е2,ез) —а3 0 а1 .
И а2 -а1 О II
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Абсцисса 17
Альтернирование 273
Аппликата 17
Асимптота 74
Базис 16, 161
-- биортогональный 37, 195
— жорданов 211
— ортогональный 220
— ортонормированный 19, 219
— положительный 27, 165
— правый, левый 28
— сингулярный 235
— стандартный 163, 166
Бивектор 281
Валентность тензора 265
Вектор 9, 10, 249
— направляющий 47
-- нулевой 9, 159
— присоединенный 210
— собственный 184
Векторы колли неарные 10
— компланарные 10
— приложенные 11
— равные 10
— свободные 11
Вершины 69, 73, 76
Высота вектора 210
Гипербола 67
Гиперболоид двунолостный 91
Гиперболоид однонолостный 90
Гиперплоскость 252
Декартова система координат 17,
251
Детерминант 137
— второго порядка 33
Диагональ главная 115
Диаметр 81
Директрисы 71, 75, 76
Закон инерции 203
Изоморфизм 176, 230, 250
— координатный 176
Инвариант 44, 266
— абсолютный 283
— евклидов 280
— евклидов (ортогональный) 256
— относительный 283
Индекс квадратичной формы 203
— суммирования 120
—, опускание 277
—, поднятие 278
Квадратичная форма 198
, канонический вид 201
диагонального вида 199
, отрицательно определенная
202
, положительно определенная
202
Ковектор 266
Композиция 96
Конус 46
— асимптотический 91
— второго порядка 90
— мнимый 259
Компоненты тензора 265
Координаты (компоненты)
вектора 17, 161
ковариантные 38, 280
контрвариантные 39
Критерий Сильвестра 204
Линейная комбинация 12, 160
тривиальная 13, 160
Линейное отображение 172
Предметный указатель
303
— преобразование 100, 172
присоединенное 240
— пространство 159
сопряженное 195
Линия алгебраическая 42
— центральная 82
— гиперболического типа 80
— параболического тина 80
— эллиптического типа 80
Массив s-мерный 264
Матрица упрощенная 135
— антисимметричная 11G
— вырожденная 127
— Грама 218
— диагональная 116
— жорданова 21.2
— квадратная 114
— клеточно-треугольная 182
— линейного преобразования 180
— нулевая 116
— обратная 129
— ортогональная 220
— перехода 164
— полуторалинейной функции 205
— противоположная 117
— прямоугольная 114
— симметричная 116
— системы 146
— — расширенная 146
— треугольная 116
— унитарная 246
— фундаментальная 153
— эрмитова 205, 246
— з-мерная 264
Матрицы перестановочные 123
— равные 114
Метод выделения квадратов 201
— Гаусса 129
—- ортогонализации 223
Минор 140
— базисный 134
— главный 204
— диагональный 206
— дополнительный 141
Направление асимптотическое 79
— сопряженное 84
Направления главные 85
— синугулярные 112
— сопряженные 84
Направляющая 45
Начало координат 17
Неизвестные базисные 152
— параметрические 152
Образующая 45, 90
Объем параллелепипеда 29, 224
ориентированного 29, 225
Ограничение преобразования 1КЗ
Определитель порядка п 137
Ордината 17
Ортогональное дополнение 221
Особая точка 85
Отображение 95, 172
— взаимно однозначное 97, 176
— нулевое 173
— сюръективное 173
Пара параллельных прямых (>к
мнимых 68
— пересекающихся прямых 07
— совпавших прямых 68
Парабола 68
Параболоид гиперболический !)2
— эллиптический 92
Параллелепипед ориентиром;!!ии,1 П
29, 224
Параллелограмм ориентирииям-
ныи 29
Параметр 47
Перенос параллельный 250
Пересечение подпространств 168
Плоскость fc-мерная 251
— ориентированная 27
Площадь параллелограмма 36
ориентированного 29
Поверхность алгебраический \1
— вращения 88
Подматрица 115
— дополнительная 140
Подпространство 13, 166
-- инвариантное 181
— направляющее 251
— корневое 209
— собственное 183
Показатель нильпотентнш- i и .40
Поливектор 281
Полупространство 57
Полюс 19
Полярная ось 19
Полярный угол 19
304
Предметный указатель
Преобразование аффинное 101,
250
— диагонализуемое 189
— линейное 100, 172
— нильпотснтное 209
— обратное 98, 178
— ортогональное 99, 232
первого рода 111
второго рода 111
— присоединенное 247
— самосопряженное 228, 246
— сопряженное 226
— тождественное 96
— унитарное 247
Преобразования перестановочные
180
Произведение векторное 31
двойное 37
— внешнее 286
— линейного отображения на
число 178
— линейных отображений 178
— матриц 116
— скалярное 24, 244
— смешанное 30
— тензоров 269
Пространство линейное 159
— арифметическое 163
- аффинное п-мерное 249
— бесконечномерное 163
— векторное 13
— векторов 249
— евклидово 216
комплексное 244
точечное 251
— нулевое 160
— ориентированное 28, 165
— унитарное 244
— эрмитово 244
Прямая ориентирован^ 27
Пучок плоскостей 63
— прямых 62
Радиус 19
Радиус-вектор 17
Разложение гголярное 236
— сингулярное 234
- QR 224
Размерность 162
Размеры матрицы 114
Разность векторов 12
Ранг квадратичной формы 202
— линейного отображения 173
Расстояние 251
Решение общее 155
— тривиальное 153
Свертка 271
Связка плоскостей 63
Сжатие к прямой 96
Сигнатура 204
Символ Кронекера 266
обобщенный 285
Симметрирование 273
Система линейно зависимая 13,
161
— координат полярная 19
— линейных уравнений 146
однородная 146
приведенная 152
— решений фундаментальная
154
Сложение векторов 159
--•• матриц 116
— тензоров 268
Собственное значение 183
Спираль Архимедова 64
Столбец высоты п 114
Строка длины п 114
Сумма подпространств 168
прямая 169
Тензор 265
— антисимметричный 275
— дискриминант ный 280
— евклидов 279
— метрический 277
контрвариантный 277
— симметричный 275
компоненты 265
Тензоры равные 265
Теорема Жордана 212
— Кронекера-Капелли 150
— о базисном миноре 134
— о размерности суммы 171
— о ранге матрицы 133
— Фредгольма 151, 227
Точка начальная 47, 251
— аффинного пространства 249
Транспонирование 115, 273
Умножение на число 11, 116, 159,
268
Предметный указатель
305
— скалярное 216
Уравнение каноническое 68, 256,
261
— множества 40
— плоскости 51
параметрическое 48
— прямой 52
параметрическое 47
— пучка прямых 62
— характеристическое 185
Фокус 70, 75, 76
Форма внешняя 281
— квадратичная 198
— эрмитова 205
Функция билинейная 196
— — симметричная 198
— однородная степени s 45
— полилинейная 267
— эрмитова билинейная 205
Характеристический многочлен
185
Хорда 80
Центр пучка 62
— линии 81
Цепочка жорданова 210
Цилиндр 45
— прямой круговой 45
Числа сингулярные 235
— характеристические 185
Эксцентриситет 70, 75, 77
Эллипс 66
— мнимый 67
Эллипсоид 89
— мнимый 258
Ядро отображения 173
р-вектор 281
— простой (разложимый) 281
д-форма 281
СПИСОК ЛИТЕРАТУРЫ
Читателю можно рекомендовать следующие подробные учебники по
аналитической геометрии.
1. Александров П. С. Курс аналитической геометрии и линейной
алгебры. — М.: Наука, 1979.
2. Ильин В. А., Позняк Э.Г. Аналитическая геометрия. — М.: Наука,
1981.
3. Постников М. Ы. Лекции по геометрии. Семестр I. Аналитическая
геометрия. — М.: Наука, 1979.
В качестве задачника рекомендуется
4. Беклемишева Л. А., Петрович А. Ю., Чубарое И. А. Сборник задач по
аналитической геометрии и линейной алгебре. — М.: Наука, 1987.
Аксиоматику геометрии можно найти в книге
5. Ефимов Н. В. Высшая геометрия. — М.: Наука, 1978.
В этой книге рассказано также и о теоретико-групповых принципах
геометрии. Изложение основ теории групп, другие сведения по общей алгебре
и дополнительный материал по линейной алгебре содержатся в учебнике
6. Мострикин А. И. Введение в алгебру. — М.: Наука, 1977.
В качестве более подробного изложения линейной алгебры
рекомендуются следующие курсы:
7. Мальцев А. //. Основы линейной алгебры. — М.: Наука, 1970.
8. Ефимов Н. #., Розендорн Э. Р. Линейная алгебра и многомерная
геометрия. — М.: Наука, 1974.
9. Ильин В.А., Позняк Э.Г. Линейная алгебра. — М.: Наука, 1984.
10. Постников М. М. Лекции по геометрии. Семестр II. Линейная
алгебра. — М.: Наука, 1979.
Обширный материал по линейной алгебре и ее приложениям содержится
в следующих монографиях:
11. Гантмахер Ф. Р. Теория матриц. — М.: Наука, 1967.
12. Хорн Р., Джонсон Ч. Матричный анализ. — М.: Мир, 1989.
Список литературы
307
Много интересных результатов собрано в книге
13. Прасолов В. В, Задачи и теоремы линейной алгебры. — М.: Наука,
1996.
Полезно ознакомиться с книгой
14. Халмош Я. Конечномерные векторные пространства. — М.: Физмат-
гиз, 1963.
Прикладные вопросы линейной алгебры рассматриваются в книге
15. Беклемишев Д. В. Дополнительные главы линейной алгебры. —
М.: Наука, 1983.
Сведения по истории можно найти, например, в книге
16. Вилейтнер Г. История математики от Декарта до середины XIX
столетия. — М.: Наука, 1966.
ГРЕЧЕСКИЙ АЛФАВИТ
А, а
альфа
Е, е
эпсилон
I, *
йота
N, v
ню
р, р
ро
ф, ф
фи
в, р
бета
z, <
дзета
К, к
каппа
2, €
кси
Е, <г
сигма
Х,х
хи
Г, 7
гамма
Н, 1?
эта
Л, А
лямбда
Оо
омикрон
Т, г
тау
У,ф
пси
Д, 6
дельта
0, в
тета
М, /1
мю
П, тг
пи
Y,v
ипсилон
Q, ш
омега
Учебное издание
БЕКЛЕМИШЕВ Дмитрий Владимирович
КУРС АНАЛИТИЧЕСКОЙ ГЕОМЕТРИИ И ЛИНЕЙНОЙ АЛГЕБРЫ
Редактор И.Б. Бартоигевич-Жагель
Оригинал-макет: A.M. Садовский
Подписано в печать 27.02.06. Формат 60x90/16. Бумага офсетная.
Печать офсетная. Усл. печ. л. 19,5. Уч.-изд. л. 27,0. Тираж 3000 экз.
Заказ № 305.
Издательская фирма «Физико-математическая литература»
МАИК «Наука/Интерпериодика»
117997, Москва, ул. Профсоюзная, 90
E-mail: fizmat@maik.ru, fmlsale@maik.ru;
http://www.fml.ru
Отпечатано с готовых диапозитивов
в ООО «Чебоксарская типография № Ь
428019, г. Чебоксары, пр. И. Яковлева, 15.
ISBN 5-9221-0691-0
9,7а5922,,10691Т
Издательская фирма
«Физико-математическая литература»
МАИК «Наука/Интерпериодика»
117864 Москва, Профсоюзная ул., 90
В ФИЗМАТЛИТБ
вышли из печати десять томов
«ТЕОРЕТИЧЕСКОЙ ФИЗИКИ»
I. Ландау Л.Д., Лифшиц ЕМ.
МЕХАНИКА
II. Ландау Л.Д., Лифшиц ЕМ.
ТЕОРИЯ ПОЛЯ
III. Ландау Л.Д., Лифшиц ЕМ.
КВАНТОВАЯ МЕХАНИКА (нерелятивистская теория)
IV. Берестецкии В.Б., Лифшиц ЕМ., Питаевскии Л.П.
КВАНТОВАЯ ЭЛЕКТРОДИНАМИКА
V. Ландау Л.Д., Лифшиц ЕМ.
СТАТИСТИЧЕСКАЯ ФИЗИКА. Ч. 1
VI. Ландау Л.Д., Лифшиц ЕМ.
ГИДРОДИНАМИКА
VII. Ландау Л.Д.У Лифшиц ЕМ.
ТЕОРИЯ УПРУГОСТИ
VIII. Ландау Л.Д., Лифшиц ЕМ.
ЭЛЕКТРОДИНАМИКА СПЛОШНЫХ СРЕД
IX. Лифшиц ЕМ., Питаевскии Л.П.
СТАТИСТИЧЕСКАЯ ФИЗИКА. Ч. 2.
Теория конденсированного состояния
X. Лифшиц ЕМ., Питаевскии Л.П.
ФИЗИЧЕСКАЯ КИНЕТИКА
Учебники, учебные пособия для ВУЗов и монографии
Ахмедиев Н.Н., Анкевич А.
Солитоны. Нелинейные импульсы и пучки (пер. с англ.)
Бахвалов Н.С., Жидков Н.П., Кобельков Г.М.
Численные методы. 3-е изд. Уч. пос. для вузов
Белавин А.А. (под ред.)
Инстантоны, струны и конформная теория ноля
Боголюбов Н.Н., Ширков Д.В.
Квантовые поля. 3-е изд., дополн.
Вайиберг С.
Квантовая теория поля. Т.1. Общая теория (пер. с англ.)
Вайиберг С.
Квантовая теория поля. Т.2. Современные приложения
(пер. с англ.)
Гантмахер В.Ф.
Электроны в неупорядоченных средах
Елютин П.В., Кривченков В.Д.
Квантовая механика с задачами
Зубарев Д.Н., Морозов ВТ., Рёпке Г.
Статистическая механика неравновесных процессов. В 2 т.
Кившаръ Ю.С., Агравал Г.П.
Оптические солитоны.
От волоконных световодов к фотонным кристаллам (пер. с англ.)
Колмогоров А.Н., Фомин СВ.
Элементы теории функций и функционального анализа
Полянин А.Д., Зайцев В.Ф., Журов A.M.
Методы решения нелинейных уравнений математической физики
и механики
Скалли М.О, Зубайри М.С.
Квантовая оптика (пер. с англ.)
Тамм И.Е.
Основы теории электричества
Цвелик A.M.
Квантовая теория поля в физике конденсированного состояния
(пер. с англ.)
Шляйх В.П.
Квантовая оптика в фазовом пространстве
Штокман Х.-Ю.
Квантовый хаос. Введение
Сивухин Д.В.
Общий курс физики.
Т. 1 Механика
Сивухин Д.В.
Общий курс физики.
Т. 2 Термодинамика и молекулярная физика
Сивухин Д.В.
Общий курс физики.
Т. 3 Электричество
Сивухин Д.В.
Общий курс физики.
Т. 4 Оптика
Сивухин Д.В.
Общий курс физики.
Т. 5 Атомная и ядерная физика
Васильев А.Н.
Ученые на монетах мира
По вопросам приобретения книг обращаться:
Издательская фирма
«Физико-математическая литература»
117997 Москва, Профсоюзная ул., 90
тел./факс (095) 334-7421, e-mail: fizmat@maik.ru