/




Text
в. Л. БОДНЕР
ИгДиНЗЗНАКОпАй
owha лёнина
buEHI.O ВОЭДЗШИАЙ
ШЙпГпЕИпАЯ АН АДМИИ
ИМЕНИ ПРОСРЕССОЙЛ
НЕ HidHOBCHOTD
Анализ
основных схем
регулирования
автоматических
ВИШ
Выпуск
221
ТРУДЫ
КРАСНОЗНАМЕННОЙ
ОРДЕНА ЛЕНИНА
ВОЕШШ-ВОЗДЭШНОМ
ИН1ИГЧ ’КОЙ ЛХАДЕМИМ
ИпЛЕНк. ПРООЭЕССОСА
не жунзвсного
В. А. БОДНЕР
Анализ
основных схем
регулирования
автоматических
виш
,'Т пе впг I3T
Выпуск
221
СОДЕРЖАНИЕ
1. Введение и постановка задачи............................ . 3
I- Основные уравнения
2. Уравнения движения........................................... 5
3. Некоторые замечания о схемах автоматических регуляторов постоянной
скорости.............................. .........-............... 9
4. О приближенном решении нелинейных диференцнальных уравнений 10
П. Поаеденне автоматического ВИШ при отсутствии
внешних возмущающих сил
5. Автоматический ВИШ простой схемы........................... 12
6. Автоматический ВИШ, схема которого содержит чувствительный эле-
мент по ускорению •..................................--••• 18
7. Автоматический ВИШ, схема которого содержит обратную связь 22
Ш. Поведение автоматического ВИШ при наличии
внешних возмущающих сил
8. Общие соображения . . . . .................................. 20
9. Действие сил любой формы на систему с линейной характеристикой . 27
10. Периодические возмущающие силы . . . . ........ 33
11. Интегральное уравнение регулируемой системы .... . 37
12. Заключение....................................... ... 38
Литература...............................-...................40
Разр. к печ- 3/VII 1947 г. 21/а печ. л. 2,58 авт. л. Изд. № 137. Зак. № 353.
Г-04179 Типо-литография ВВИА имени проф. Н- Е. Жуковского.
1. Введение и постановка задачи
В первичных двигателях, которые сами по себе не обладают доста-
точной автоматической устойчивостью (а иногда вообще неустойчивы)
против изменения скорости вращения, применяются автоматические ре-
гуляторы постоянной скорости. Эти регуляторы особенно необходимы
в тех системах, которые работают наиболее эффективно пои определен-
ных скоростях вращения, как например, винтомоторная группа самолета.
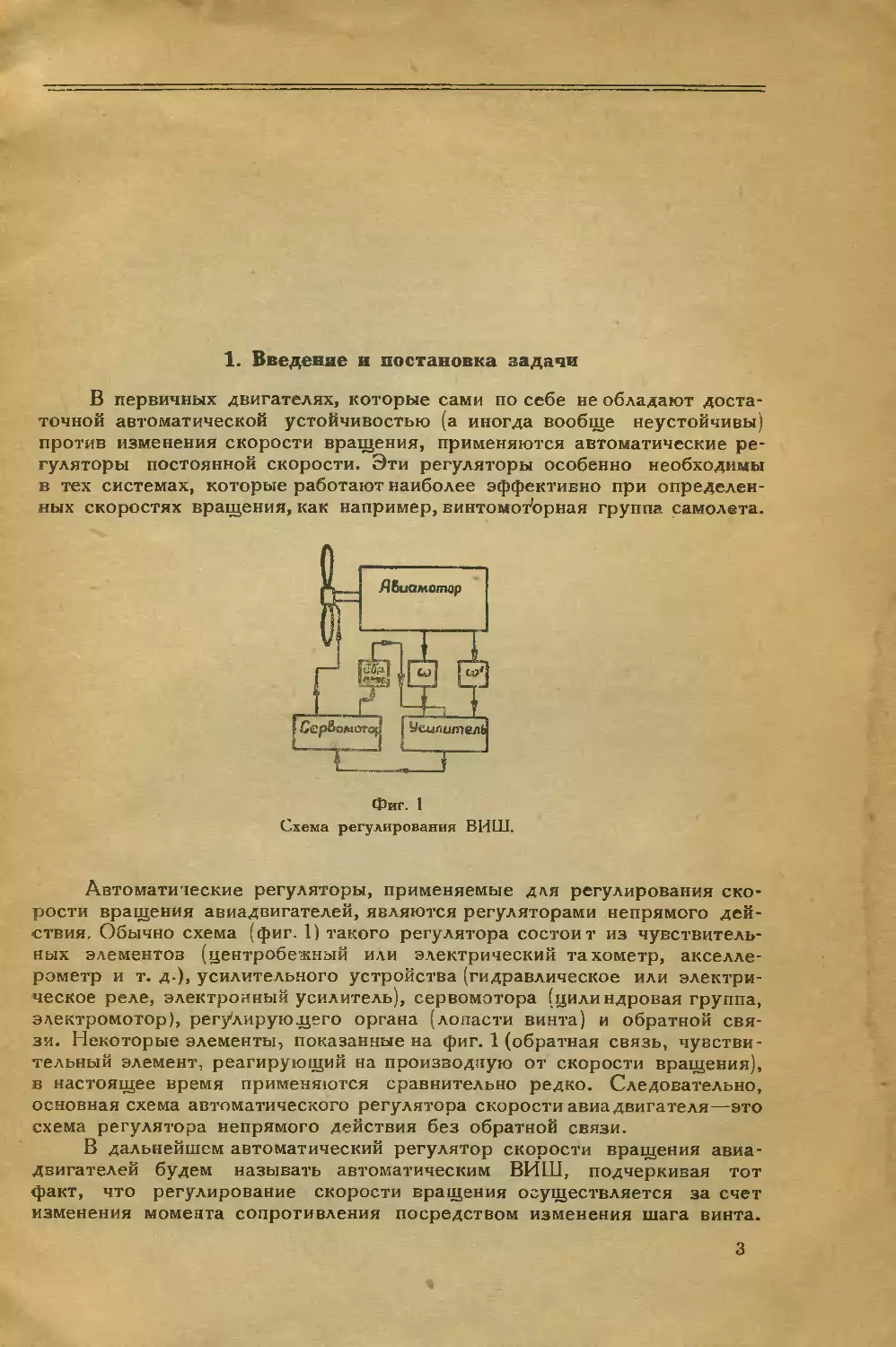
Фиг. 1
Схема регу пирования ВИШ
Автоматические регуляторы, применяемые для регулирования ско-
рости вращения авиадвигателей, являются регуляторами непрямого дей-
ствия. Обычно схема (фиг. 1) такого регулятора состоит из чувствитель-
ных элементов (центробежный или электрический тахометр, акселле-
рометр и т. д-), усилительного устройства (гидравлическое или электри-
ческое реле, электронный усилитель), сервомотора (цилиндровая группа,
электромотор), регулирующего органа (лопасти винта) и обратной свя-
зи. Некоторые элементы, показанные на фиг. 1 (обратная связь, чувстви-
тельный элемент, реагирующий на производную от скорости вращения),
в настоящее время применяются сравнительно редко. Следовательно,
основная схема автоматического регулятора скорости авиадвигателя—это
схема регулятора непрямого действия без обратной связи.
В дальнейшем автоматический регулятор скорости вращения авиа-
двигателей будем называть автоматическим ВИШ, подчеркивая тот
факт, что регулирование скорости вращения осуществляется за счет
изменения момента сопротивления посредством изменения шага винта.
3
Особенностью регулирования скорости вращения авиадвигателя
является то, что регулятор воздействует не на момент, развиваемый
авиадвигателем, а на момент, потребный на вращение винта (момент со-
противления). В случае винтомоторной группы самолета этот способ
регулирования является наиболее экономичным, не говоря уже о не-
обычайной эффективности его ввиду того, что момент сопротивления
пропорционален квадрату скорости вращения винта.
Применяемые до настоящего времени схемы автоматических регу-
ляторов скорости вращения работали удовлетворительно, хотя они не
содержат обратной связи или чувствительных элементов, реагирующих
на производные от скорости вращения. Объясняется это тем, что авиа-
двигатели, нагруженные винтами, являются саморегулируемыми в отноше-
нии скорости вращения (за исключением области весьма малых скоро-
стей вращения), поэтому при небольших возмущениях скорость вращения
их остается ограниченной в определенных пределах. Однако в связи
с возрастанием скорости вращения, мощности и приемистости авиадви-
гателй, а также в связи с увеличением диапазона скоростей самолета эти
автоматические регуляторы перестают удовлетворять предъявляемым к
ним требованиям. Автоматические винты с такими регуляторами оказы-
ваются или недостаточно устойчивыми (появление автоколебаний и ра-
скрутка винта) или недостаточно эффективными (недопустимо большие за-
бросы оборотов).
Это характерное противоречив, присущее автоматическим ВИШ
простой схемы (схему ВИШ будем называть простой в том случае,
если в ней отсутствует обратная связь или чувствителные элементы, ре-
агирующие на производные от регулируемой величины), находит поло-
жительное разрешение при применении иных схем регулирования, в
частности, схем с обратной связью (электрогидравлический ВИШ VDM
на моторе BMW-801). Можно также получить разрешение упомянутого
противоречия применением схем регулирования, в которых чувствитель-
ный элемент реагирует не только на скорость вращения, ню и на про-
изводные от нее. Опыты, проведенные в Райтфилд [1], показали весьма
большую эффективность винтов, в которых чувствительный элемент реа-
гирует на угловую скорость и ее производные.
Винтомоторная группа самолета находится под действием непрерыв-
ных внешних возмущений. Так как допустимые отклонения оборотов
авиадвигателя от равновесных в различных условиях полета должны-
быть возможно меньшими, то возникает задача такого выбора парамет-
ров авторегулируемой системы, при котором она возможно слабее бу-
дет реагировать на внешние возмущения. Устойчивость или неустойчи
вость в смысле Ляпунова такой системы еще не является решающим
критерием пригодности ее в эксплоатации. Как правило, все существу-
ющие автоматические ВИШ являются устойчивыми в смысле Ляпунова
(за исключением некоторых режимов полета, как например, взлет, пи-
кирование, автоколебания, вызванные сухим трением, и т.д.), однако на
современных мощных моторах они оказываются малоэффективными (боль-
шие забросы оборотов). Следовательно, необходимо формулировать за-
дачу устойчивости автоматического ВИШ поиному, с учетом внешних
возмущающих сил. Такая формулировка задачи устойчивости динамичес-
ких систем дана Н. Моисеевым [2].
В этой работе будет дан теоретический анализ новых схем авто-
матических ВИШ, в которых применены обратная связь и диференци-
рование (схемами с диференцированием будем называть такие схемы,
4
в которых в усилительное устройство подаются импульсы, пропорцио-
нальные регулируемой величине и ее производным) и будет показано
преимущество этих схем по сравнению с применяемыми в настоящее
время. Кроме того, будет рассмотрено поведение автоматического ВИШ
под действием внешних возмущающих сил. В результате анализа будет
указан метод выбора параметров автоматических ВИШ новых схем с
точки зрения устойчивости и слабого реагирования на внешние возму-
щающие силы.
I. ОСНОВНЫЕ УРАВНЕНИЯ
2. Уравнения движения
Рассмотрим схему per улирования автоматического ВИШ, показан-
ную на фиг. 1. Эта схема, кроме обычных элементов, включает обрат-
ную связь и чувствительный элемент, реагирующий на угловое уско-
рение. Вместе с тем можно осуществить такую схему, в которой про-
изводная (или производные) от угловой скорости вращения будет
получена искусственным путем. Поведение авторегулируемой системы,
состоящей из авиадвигателя (и винта), самолета, серзомотора (вклю-
чая и лопасти винта), чувствительных элементов и обратной связи
(в общем случае изо дромной) будем характеризовать следующими коор-
динатами: скоростью вращения винта л>, углом установки лопасти ф,
скоростью полета V и координатой Z, характеризующей действие чув-
ствительных элементов и обратной связи.
Уравнения движения авиадвигателя (и винта), сервомотора и са-
молета возьмем такими же, как и в предыдущих работах [3,4]. Пере-
пишем эти уравнения
[D - 2&i) w Ci ф + /, z> — f(t) (2.1)
где D ф = F (z) (D + 2%) г/ — — /4ф = ® (Z), (2-2) (2.3)
; 9? - 2 w х О _ _ _L г - k , dp —— •
dt I ° ° \хо d)J I d«> ’ 1 I = k хо щ80 др I г/0 дк ’ I дф
284 = с ( . дсх D” да\ р D2 * * г/% 7 г/0s кто 4— 5 ' 2ае да \
т \ 2 vd k0 S д\) т % Хо \ р D2 г/% да т >.'% дф ’ I m Sir* Ло '
1 — приведенный к оси винта момент инерции, р — плотность воздуха,
Di — диаметр винта, р (X, ф) — коэфициент мощности винта, а (X, ф) —
коэфициент тяги, М—момент, развиваемый авиадвигателем, Д М —
приращение момента, вызванное, например, изменением положения дрос-
селя, X—относительная поступь винта, (t)—внешние силы, действу-
ющие на самолет, Ш— масса самолета, Сх — коэфициент лобового сопро-
тивления, S—несущая поверхность самолета. Величины с нулевыми
индексами Хо> <»0, . . ., Хо соответствуют установившемуся режиму, а
величины без индексов V7, . ., X— отклонения от соответствующих
величин.
Под z следует подразумевать величину, пропорциональную им-
пульсам от чувствительных элементов и обратной связи, т- е.
z = £ ek(D)Dk i(D] Ф, (2.4)
л=о
где 1(D)— коэфициент обратной связи, являющийся в общем случае,
функцией оператора диференцирования D, (D) — коэфициенты, характе-
ризующие реагирование чувствительных элементов. Эти коэфициенты
вследствие динамических погрешностей измерительных устройств, будут
являться функциями D. Если все коэфициенты ek(D) (К= 0, 1, 2...)
сводятся к постоянным величинам (в смысле независимости от D), то
такой автоматический регулятор, как известно, называется идеальным.
Обратная связь, характеризуемая коэфициентом i(D), зависящим
от D, называется изодромной. Если i (£>) сводится к постоянной вели-
чине, то обратная связь будет жесткой. Наконец, если i (D) ЕЕ 0, то
обратная связь отсутствует.
Коэфициенты sk (D), как легко установить, имеют вид
= (25>
где s'fe — постоянные числа и Lk (D) — полиномы
Lk{D) = d0 + d1D+. - + dmDm. (2.6)
Так как наличие положительных степеней в полиноме Lk(D) при-
водит к запаздыванию (динамические погрешности), то всеми мерами
необходимо избавляться от этих степеней.
Имеется несколько методов уменьшения запаздывания в автома-
тических регуляторах и, следовательно, увеличения устойчивости авто-
регулируемых систем. Укажем здесь на метод изменения параметров,
метод диференцирования и метод обратнбй связи.
Метод непосредственного изменения параметров, реализуемый в
большинстве современных автоматических регуляторов, состоит в том,
что в полиноме.(2.6) все коэфициенты dj (J = 1,2, . . ., т] уменьшают-
ся по сравнению с d(l. Это обычно приводит к увеличению собственной
частоты измерительного устройства и к уменьшению его чувствитель-
ности. В качестве примера можно привести центробежный тахометр,
применяемый в автоматических регуляторах скорости вращения; соб-
ственная частота его выбирается настолько большой, чтобы динамиче-
ские погрешности были принебрежимо малыми. Следовательно, если
dt~^>dj (/’ = 1,2, . . ., /я), то можно получить автоматический регулятор
скорости вращения, близкий по своим свойствам к идеальному, даже
без применения обратной связи и диференцирования. Действительно,
если L (D) ~ dQ, то
Z = — о>,
&
т. е- измерительное устройство не будет вносить запаздывания в авто-
регулируемую систему.
Здесь сразу же обнаруживаются недостатки рассматриваемого ме-
тода уменьшения запаздывания- Во-первых, применение этого метода ве-
дет к понижению чувствительности измерительного устройства и, во-
вторых, этот метод позволяет уменьшить запаздывание только в изме-
рительном устройстве, но не в авторегулируемой системе в целом.
Метод диференцирования состоит в том, что в измерительном
устройстве создаются импульсы, пропорциональные регулируемой вели-
чине и ее производным. Для создания таких импульсов можно приме-
нять или чувствительные элементы, реагирующие на производные или
получить производные искусственным путем.
В последнем случае возможно применить, например, электрическое
диференцирование.
Если положить в уравнении (2.4) i (D) Е 0 и подобрать парамет-
ры измерительного устройства так, чтобы удовлетворялось условие
Е ей (£)) Dk ~ const, (2.7)
k -о
то оно не будет вносить запаздывания в регулируемую систему. Больше
того, если параметры измерительного устройства выбраны так, что
Е eft(D)D* = Q(D), (2.8)
ь о
где Q (D) — полином с положительными степенями D, то можно не
только уменьшить запаздывание, но получить искусственное демпфи-
рование авторегулируемой системы.
Метод обратной связи хорошо известен. Он сводится к тому,
что создаются соответствующим образом фазированные импульсы, про-
порциональные отклонению регулирующего органа. Для пояснения су-
щества дела возьмем частный случай уравнения (2.4) в виде
z = —°— - i (D) Ф
L(D) 7‘
(2.4')
и воспользуемся уравнением сервомотора (2.2)- Рассматривая в послед-
нем вместо нелинейной характеристики линеаризированную F (z) =-XZ,
можем написать
z = E'o m _ i(D}xz
L (£>) D
—°-w.
или z 1 4- i (D) —
L D] L (D)
Выбирая параметры чувствительного элемента и обратной связи
таким образом, чтобы
l-H(D) ~
gt
(2.9)
где Si — постоянная, получим
z = Si «,
т- e. получаем полное устранение запаздывания в измерительном устрой-
7
стве. Вместе с тем метод обратной связи, подобно методу диференциро-
вания, позволяет получить искусственное демпфирование авторегулиру-
емой системы. Для этого необходимо, чтобы gt было полиномом с по-
ложительными степенями от D. Легко понять, что это выполнимо при
условии, что коэфициент обратной связи включает отрицательные сте-
пени D достаточно высокого порядка.
Вместо уравнений (2.1), (2.2), (2.3) и (2.4) будем рассматривать
одно уравнение для одной из неизвестных функций, например, Z.
Имеем
DH (D) г + [/(£)) //(D) + 7V(D) I ek(D) D*] F (z) =
fe—О
= (D + 284) Ё ek{D) E efc(D) D^?(f), (2.10)
k —0 k=O
где
H(D) = D2 + D + aa; N(D) = c, (D + 25J 4 lt lit
= 20j 2йа; — 4ол 34 -J- /t c^.
Таким образом поведение авторегулируемой системы, включающей
авиадвигатель, винт и автоматический регулятор, описывается нелиней-
ным диференциальным уравнением (2.10) с правой частью, определяе-
мой действием на систему органов управления двигателя (сектор газа)
и внешними возмущениями.
Легко видеть, что постоянные возмущения = const и у (/) = const
не будут оказывать влияния на поведение системы с дцференцированием
и изодромной обратной связью (постоянство оборотов сохраняется до
тех пор, пока лопасти не доходят до упора), т. е. автоматический ВИШ
является изодромным регулятором скорости вращения авиадвигателя.
Свойство изодромности сохраняется также в том случае, когда в схеме
автоматического ВИШ отсутствует обратная связь (i(D) =0) и диферен-
цирование (/I = 0), хоуя в схеме в жесткой обратной связью, как и
следовало ожидать, свойство изодромности не сохраняется.
Исследование поведения авторегулируемой системы сводится к
нахождению решения нелинейного диференциального уравнения (2.10).
Точное решение этого уравнения представляет громадные трудности
Ниже будет дано приближенное решение его для некоторых частных
случаев.
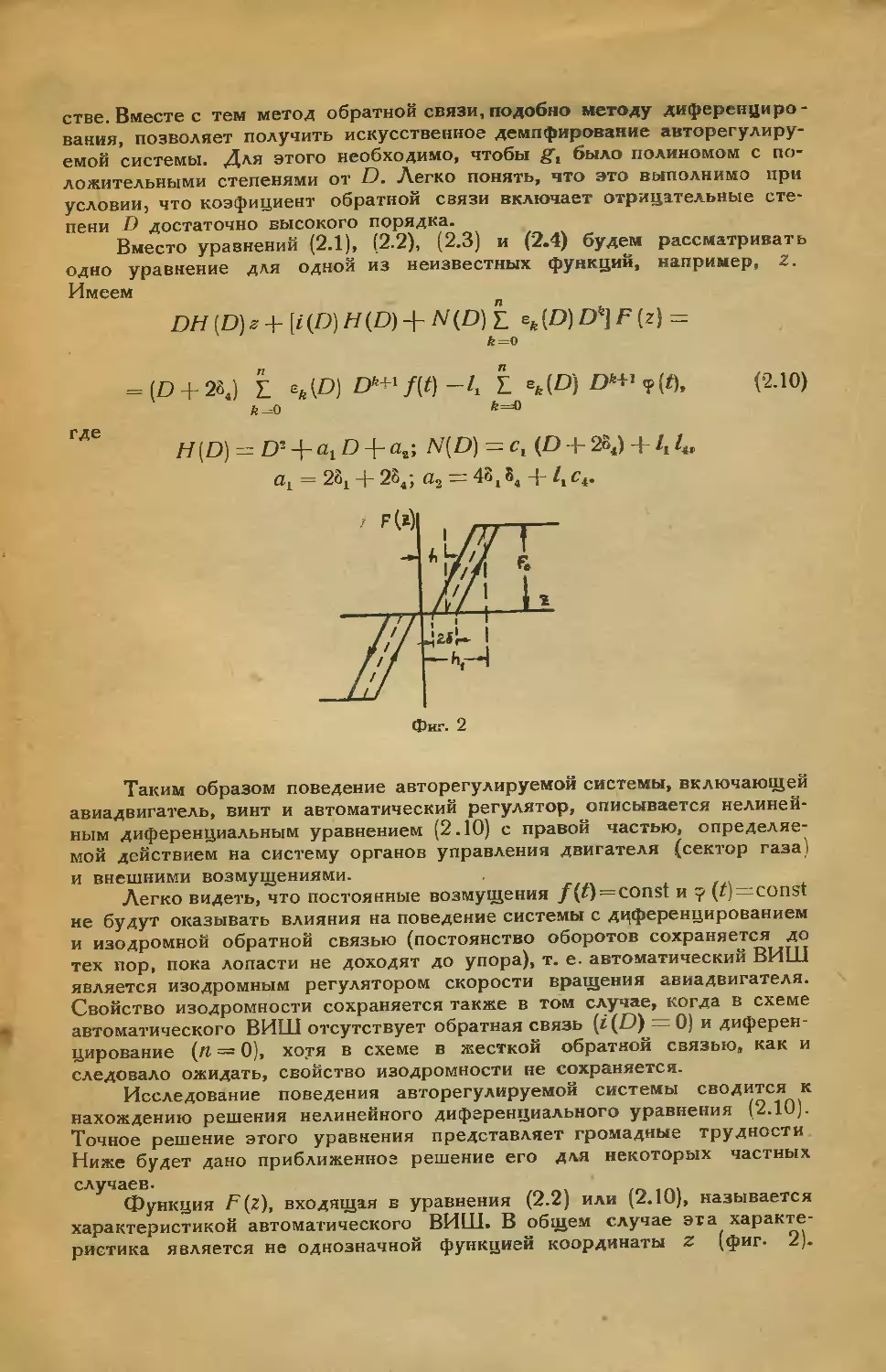
Функция F(z), входящая в уравнения (2.2) или (2.10), называется
характеристикой автоматического ВИШ. В общем случае эта характе-
ристика является не однозначной функцией координаты z (фиг- 2).
Объяснение этому факту следует искать в том, что в чувствительном
элементе (центробежном тахометре) имеется сухое трение, вследствие
чего момент сервомотора зависит не только от величины рассогласо-
вания Z, но также и от знака скорости Z. Функцию F(z) можно сде-
лать однозначной, если считать ее зависящей не только от z, но так-
же и от z, т. е. F(z, z). Подробности, касающиеся функции F\z, z),
даны в работе [4].
3. Некоторые замечания о схемах автоматических регуляторов
постоянной скорости
Прежде чем переходить к решению уравнения (2.10), рассмотрим
более детально особенности различных схем автоматических регулято-
ров постоянной скорости. Это позволит сделать некоторые общие за-
ключения об этих схемах еще до решения уравнений.
Прежде всего остановимся на вопросе об эквивалентности схем
автоматических регуляторов с обратной связью и схем с диференци-
рованием. Покажем, что наличие в схеме чувствительного элемента по
первой производной от угловой скороси вращения эквивалентно в неко-
тором смысле жесткой обратной связи.
Не вдаваясь пока в детали явления, будем интересоваться только
внешним сходством уравнений, описывающих обе схемы.
Схема автоматического ВИШ с жесткой обратной связью характе-
ризуется условиями (без учета запаздывания в чувствительном элементе)
i (D) = = const, п = 0, г0 (£)) —s0 = const.
При этих условиях уравнение (2.10) принимает вид
D (D* + a. D + а2) z + (60D2+&1D+ b.t)F(z) =
где (Z) + 2S4)e0/(^)-/1e0D<P(0,
&0 = bx = 4 at + e0 clt b2 = a2 + г0 (284 с1 + Zx ZJ.
Для схемы автоматического ВИШ с диференцированием, характе-
ризуемой условиями
Z(D)EO, Л = 1, г0{О) = г0, e1(D) = z1 (3-2)
уравнение (2.10) принимает вид
1) [D4- + ал D + а2) z-\- (b0 D- + br D + й,) F(z) =
= D (D + 28J (е0+Е1О) /(Z) - 4 D (е0 + г, D) т (t), (3.3)
где
b0 — Ei Cj, Ьг — г0 t?j -г- et (2о4 — Z, Z4); b2 = s0 (2о4 с1 -j- Z, /4). (3.4)
Из сравнения коэфициентов (3.2) и (3.4) следует, что жесткая об-
ратная связь, характеризуемая коэфициентом ilt эквивалентна в неко-
тором смысле диференцированию, определяемому коэфициентом s,.
Эквивалентность следует понимать в том смысле, что коэфициенты Ьо
и Ьг для рассматриваемых схем сходны. Это позволяет сделать заклю-
чение о том, что схему ВИШ с обратной связью можно сделать экви-
валентной в смысле колебательной устойчивости схеме ВИШ с дифе-
ренцированием. Что касается коэфициента Ь2, характеризующего апе-
риодическую устойчивость ВИШ, то его значение для схем с жесткой
обратной связью и с диференцированием различно. Для схемы с ди-
9
ферэнцированием, как следует из (3.4), коэфициент 6а остается таким
же, хак и для простой схемы, в то время как в схеме с обратной
связью он увеличивается на величину ix С1г. Следовательно, рассматри-
ваемые схемы ВИШ неэквивалентны в смысле апериодической устой-
чивости. В общем случае большей устойчивостью обладает ВИШ, схема
которого содержит обратную связь.
Следует отметить, что автоматические ВИШ с обратной связью
и с диференщ.рован.юм по разному реагируют на внешние возмущения.
Если возмущения близкие к статическим, т. е- const и w(t) =
= const, то в системе с жесткой обратной связью регулируемая вели-
чина будет принимать всякий раз новые значения, соответствующие
новым значениям f(t) и (t). В схеме с дкференцированием постоян-
ные возмущения не вызывают изменения регулируемой величины.
В том случае, когда функции f(t) и <f> (t) нарастают или убывают
быстро (например, имеют вид кратковременных импульсов), схема с
диференцированием более чувствительна к таким возмущениям. Сле-
довательно, рассматриваемые системы по разному реагируют на внеш-
ние возмущения и в этом смысле они тоже неэквивалентны.
Если подходить к вопросу о роли обратной связи или диферен-
цирования с более общей точки зрения, то, как было указано выше,
применение этих устройств преследует одну цель — уменьшение запаз-
дывания в регулируемых системах и, следовательно, увеличение их
динамической устойчивости.
4. С* приближенном решении нелинейных дифе; м унциальных
уравнений
При исследовании устойчивости авторегулируемых систем с од-
ним регулируемым параметром задача сводится к нахождению реше-
ния нелинейного диференциаль ного уравнения типа (2.10) или урав-
нения более общего типа
Н^0)г + Р(О)Р{г)^ £м-(О)Л(^, (4.1)
п- 1
где
HL (D) = Dn -4- aDt П~1 + . .. + P'D\ = b° Drn+ . . . + bm,
N,W) = Toz.^+... + Ip;,
— внешняя возмущающая сила, F(z}— заданная функция своего
аргумента.
Нахождение общих решений этого уравнения представляет боль-
шие трудности- Здесь будем искать только периодические решения
этого уравнения в предположении, что правая часть равна нулю, т. е.
будем рассматривать уравнение
(D)z+P{D) F(z) =0. (4.2)
I
Несмотря на то, что периодические движения в авторегулируемой
системе рассматриваемого типа нежелательны, они могут иметь место -
Если известны условия, при наличии которых возникают автоколеба-
ния, то нетрудно составить представление о путях устранения их.
10
Для нахождения периодических решений уравнения (4.2) можно
воспользоваться одним из приближенных методов (метод Пуанкаре и
др.). Можно, например, искать решение в виде ряда
z~ У, (a* sin k cos k vt), (4.3)
k=0
разлагая также в ряд Фурье функцию F {z}. Мы воспользуемся част-
ным случаем этого метода, взяв в ряде (4.3) только первую гармонику.
Этод метод решения по идее близок, с одной стороны, к методу
Ван-дер-Поля, а с другой, — к методу Пуанкаре. Дальнейшую разработку
метода можно найти в работах Крылова и Боголюбова [5], Котельнико-
ва [6], Булгакова [7] и др-
Решение уравнения (4.2) будем искать в виде
z = asinv^, (4.4)
где а и v — постоянные, подлежащие определению. Разлагая функцию
F{z) F (a sin d) в ряд и ограничиваясь первой гармоникой, найдем
F(a sin *7) — Fj (a) sin d + Ft (a) cos vZ, (4.5)
где F1[a) и F2 (a) — коэфициенты Фурье функции F(asinv£). Вычисле-
ние этих коэфициентов для некоторых частных случаев характеристики
F (г) дано в работе [4].
Подставляя выражения (4-4) и (4.5) в уравнение (4.2) и сравнивая
коэфициенты при sin d м cosd, получим два уравнения для определения
двух неизвестных а и v
- Ф1а Х2 Ф] g,
Ф12 xi + х2 = Ф2
где
F. (a) F2 (а) . ~ .
хг = -1-—; х2 = —фг = Ф, ( - , а„^2, ап , >);
а а
Ф2—Ф2 (• ’ '» «л-з, «л-1, v),
Фх — Фц (' •, Ьщ—2 > t>т, v) ; Ф12 — Ф±2 ( ' ‘ '» 3 , t)m -1 , '*)•
Решим уравнения (4.6) относительно Х1 и Х2. Получаем
= ф.,а>,.+Ф1Фп = f (v) =
Отсюда можно определить амплитуды а и частоты v автоколе-
баний. Если при решении этих уравнений не получим вещественных
значений частот и амплитуд, то это будет обозначать, что автоколебания
отсутствуют.
Аналитическое решение уравнений (4.7) возможно только в про-
стейших случаях. Графическое решение, которое в дальнейшем будет
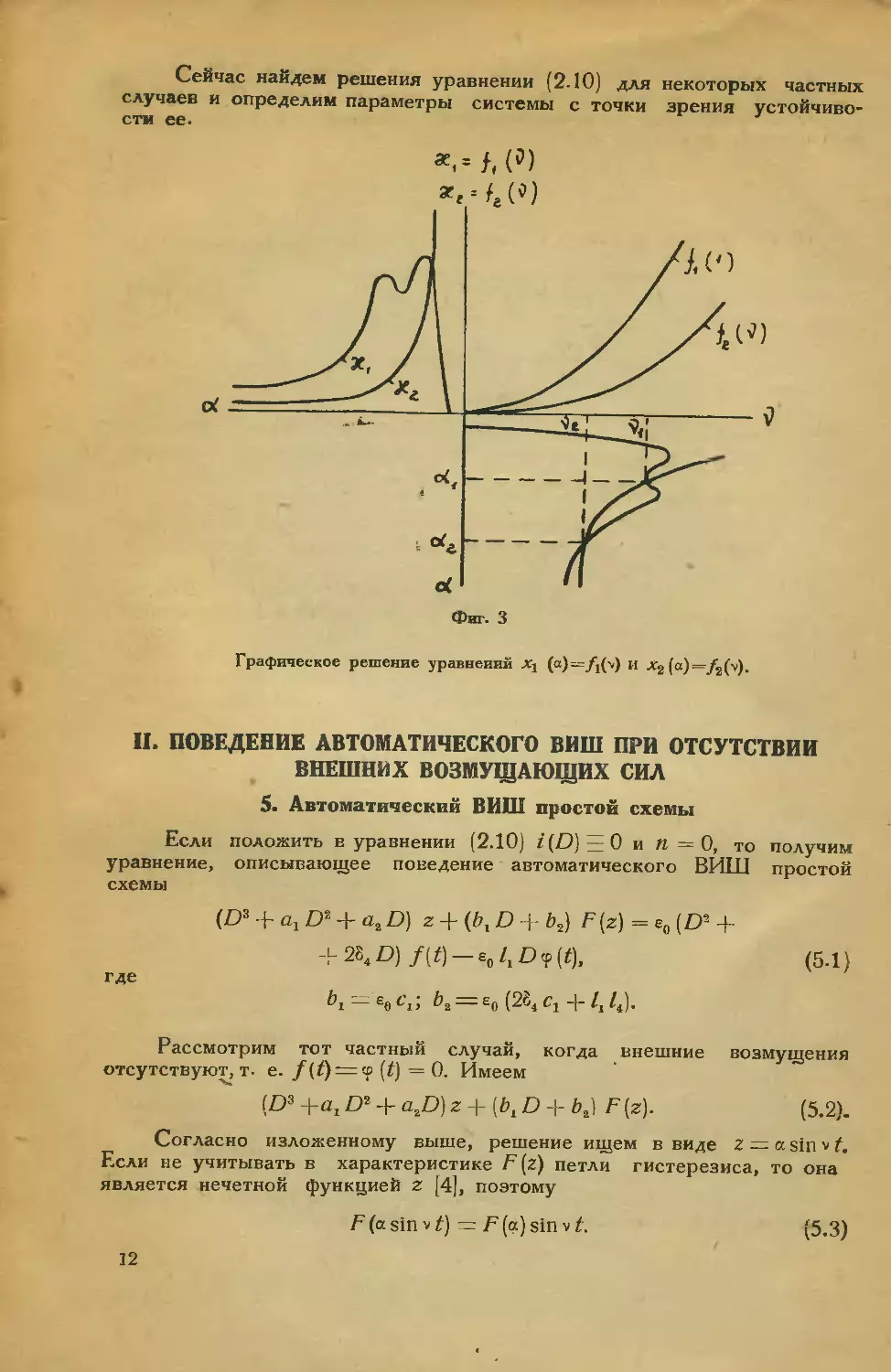
применяться, дано на фиг. 3. Точки пересечения кривых a = lrii(v) и
a_(р2 (v), построенных на основании уравнений X, (a) — (v) и х2 (а) =
— дают частоты (отсчитываемые по оси v) и амплитуды
(отсчитываемые по оси а) автоколебаний. Если эти кривые не пере-
секаются, то автоколебания будут отсутствовать.
11
Сейчас найдем решения уравнении (2.10) для некоторых частных
случаев и определим параметры системы с точки зрения устойчиво-
сти ее.
Графическое решение уравнений Xj (“)=/]('') и *2 (a)=/2(v).
II. ПОВЕДЕНИЕ АВТОМАТИЧЕСКОГО ВИШ ПРИ ОТСУТСТВИИ
ВНЕШНИХ ВОЗМУЩАЮЩИХ СИЛ
5. Автоматический ВИШ простой схемы
Если положить в уравнении (2.10) 1(D) 0 и п = 0, то получим
уравнение, описывающее поведение автоматического ВИШ простой
схемы
(D3 + Й1 О2 + й2О) z + (&, D + й2) F(z) = е0 (О2 +
-l284D)
(5-1)
где
— se > — so (2^4 G + It 1^ -
Рассмотрим тот частный случай, когда внешние возмущения
отсутствуют, т. е. /(0 = ф(0 =0. Имеем
(Z?3 +«, ZF + a2D) z + (bLD + b2] F(z). (5.2).
Согласно изложенному выше, решение ищем в виде z — a. sin v t.
Если не учитывать в характеристике F (г) петли гистерезиса, то она
является нечетной функцией z [4], поэтому
F(asinv/j = F(a)sinv£. (5.3)
12
Подставляя это в уравнение (5-2), получим после сравнение
коэфициентов при cos v t и sin v t
-v’+«2v + V^- = O и -a1V= + &a -^- = 0.
a a
(5.4)
Из этих уравнений находим
частоту v и амплитуду а автоколебаний
asb3__
b2-axbx ’
Fia) _ a, a3
a bx
Вещественные значения v и a возможны
b2>ax Ьх
(5.5)
(5-6)
только при условии
(5-7)
или, если подставить сюда значения величин ах, Ьх и Ь2
1Х 1Х 2б4 с4.
(5.8)
Так как в общем случае 284(>0; сг>0; /4 > 0 и то
последнее неравенство никогда не может быть выполнено. Следовательно,
в автоматическом ВИШ простой схемы при сделанной идеализации
(отсутствие петли гистерезиса в характеристике F {z} и отсутствие
динамических погрешностей в чувствительном элементе) автоколебания
будут отсутствовать. Это своеобразное положение, когда регулируемая
система с регулятором непрямого действия без обратной связи
оказывается устойчивой, послужило причиной всеобщего распростране-
ния автоматических ВИШ простой схемы.
Автоматические ВИШ простой схемы вполне удовлетворяли усло-
виям практики до тех пор, пока приемистость мотора и его мощность
были ограничены, а скорость самолета менялась незначительно (малые
ускорения). Однако резкое увеличение мощности и приемистости мотора
привело к тому, что изменение скорости (ускорение) достигло значи-
тельной величины. Для того чтобы уменьшить забросы оборотов,
вызванные ускорением, пришлось пойти на увеличение скорости переста-
новки лопастей, а это, как известно, привело к уменьшению колебательной
устойчивости автоматического ВИШ. Таким образом, с целью уменьшения
забросов оборотов, следует увеличивать скорость перестановки лопастей,
однако при этом возможно появление автоколебаний. Это противоречие
является характерным для автоматического ВИШ простой схемы:
увеличение апериодической устойчивости системы всегда связано с
уменьшением колебательной устойчивости ее и наоборот.
В автоматическом ВИШ возможны апериодические неустойчивые
режимы, которые являются более опасными, чем режимы автоколебаний.
Эти режимы, характеризуемые неограниченным нарастанием скорости
вращения, получили наименование раскрутки винта.
Как известно [4], режим раскрутки наступает в том случае, если
не выполняется условие апериодической устойчивости
Ь2 > 0 (5.9)
13
или, в раскрытом виде
(4 4 Cj) е, о.
(5.9')
Учитывая то, что в рабочем диапазоне скоростей полета и углов
установки лопастей величины 2о4, Cv Z4 и положительны, а величина
/, — отрицательна, приходим к выводу, что при некоторых режимах
полета может появиться раскрутка винта (при работе винта на месте
Z, = 0, поэтому раскрутка не может иметь места).
Представляется возможным указать опасные режимы работы винта
и режимы полета, при наличии которых раскрутка винта наиболее
вероятна. Из выражения (5.9') следует, что раскрутка винта возможна
в тех случаях, когда величины 284 и Сг малы, а величины Zt и Z4 вели-
ки. Подставляя значения величин Zv с1г 284 и /4 в выражение (5.9'),
найдем
А р [£= /д$ _ да_да • ^ + Х (с >0
I т Xe n[ S \<?Х oty дУ dty) °\. i0 2 dv /tty
или
/с + М i>0. (5.Ю)
X,S \dX dty d\ tty / \ 2 dv / tty
На нормальных режимах все величины, входящие в (5.10), кроме
дВ да
—— и ----, положительны, поэтому, как следует из винтовых харак-
дк дк
теристик р (X, ф) и а (X, ф), раскрутка винта наиболее вероятна на малых
углах установки лопастей и при больших значениях относительной
поступи X. Отсюда становится ясным, почему раскрутка винта чаще
всего бывает при взлете (малые углы установки) и при пикировании
(большое X).
Конструктивные параметры винта, самолета и мотора тоже ока-
зывают влияние на раскрутку винта. В частности, в определенных
D2
пределах увеличение отношения----, т.е. отношения квадрата диаметра
5
винта к несущей поверхности самолета, увеличивает вероятность появ-
ления раскрутки.
До сих пор предполагалось, что характеристика ВИШ является
однозначной функцией своей координаты. В действительности могут
иметь место случаи, когда эта функция становится многозначной. Как
было указано, это происходит потому, что в чувствительном элементе
всегда имеется сухое трение. Вместе с тем неточное изготовление
золотника центробежного регулятора, его перекосы и заедания, а также
загустевание масла в золотнике могут явиться причиной появления
неоднозначности в характеристике F(z] (петля гистерезиса). В электро-
механических ВИШ неоднозначность в характеристике появляется вслед-
ствие того, что остановка электромотора происходит только через не-
которое время после разрыва контактов регулятора. Сейчас будет пока-
зано, что при достаточно большой величине сухого трения большой
ширине петли гистерезиса) в системе могут появиться автоколебания.
Будем искать, как и раньше, решение уравнения (5.2) в виде
z — asxnvt, но при разложении в ряд Фурье функции F(asinvZ) получим
14
отличный от нуля коэфициент не только при sin v t, но и при COSv^.
Произойдет это потому, что при наличии петли гистерезиса функция
F{z) уже не будет нечетной. Таким образом
F (a sin v f] ~ FT (а) sin v t + F2 (a) cos v t.
Подставляя это в уравнение 1,5.2), получим
Ьг %! — b} v х, = ar F
bt v х, + х, = Ч (>5—е2),
где
_F2(a)
, х2 -
а а
(5-П)
(5.12)
Из уравнений (5.12) находим
а = (b*+ fll bi—- ft (v), (5.13) b\ + b\ F
Д(а).=-5И = а - । ~ b J ЪМ = (5.14) -) Ь'\ V2
где fi (•<•) и f<> (v) — сокращенные обозначения правых частей выражении
(5.13) и (5.14).
Рассмотрим сначала случай работы мотора на земле. В этом слу-
чае, как легко видеть, а2 = Ь2 = 0, поэтому уравнения (5.13) и (5.14)
принимают вид
Л
(5.13->
Л (а)
а
а
Г
(5.14")
Исключив из этих уравнений частоту v, найдем уравнение для
определения амплитуд автоколебаний
f.i'a) _ F\ (о)
•> ч
а Д/ а-
или, так как
f2(a)
43 Fo
то
Л(«)=^-, (5.15)
1634^% „
где f, = -----i--—. ото уравнение может быть решено аналитически
тс2
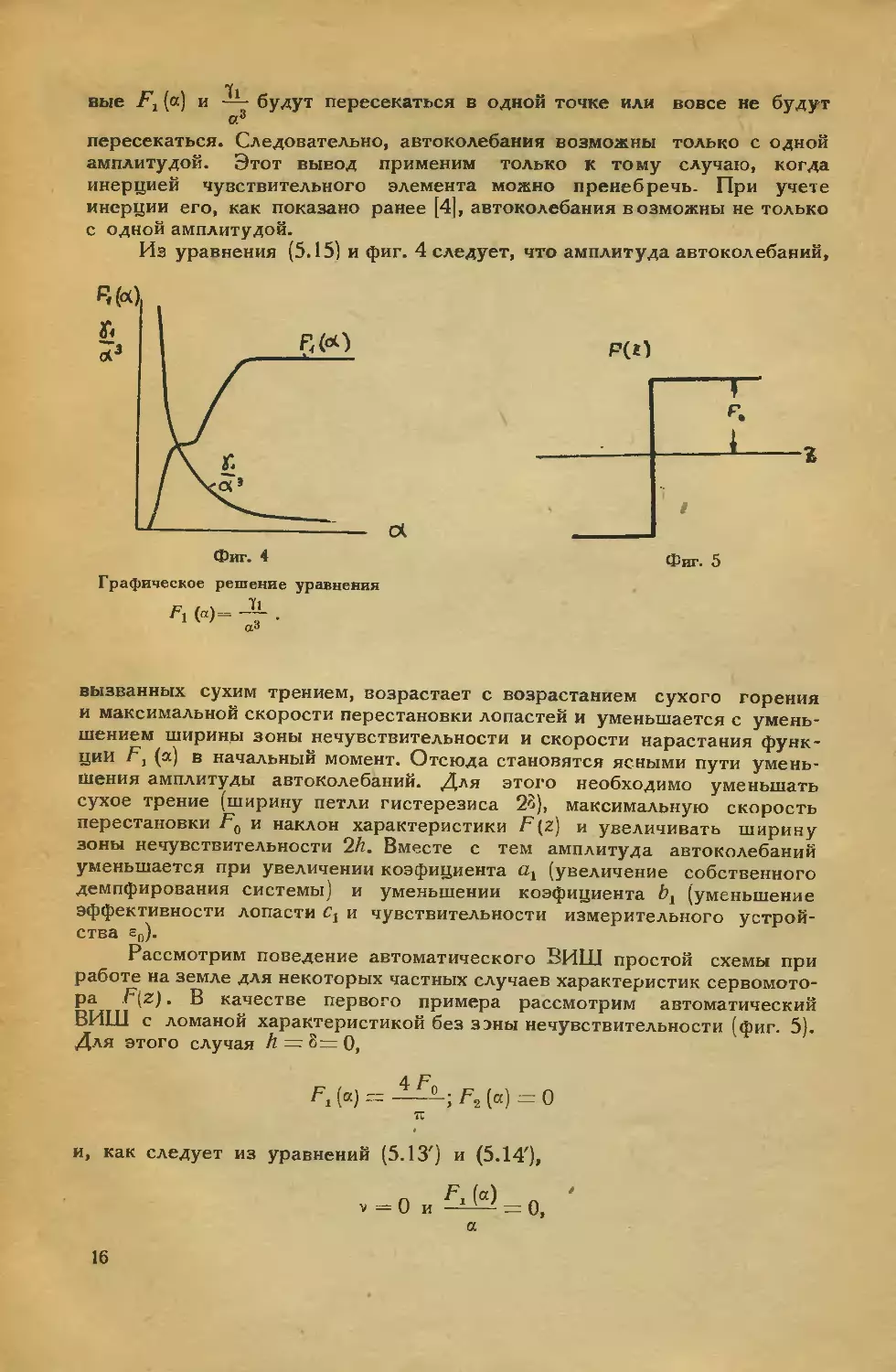
или графически. .4а фиг. 4 дано графическое решение его. Для этого
правая и левая части уравнения (5.15)построены в функции координа-
ты а. Значения к, соответствующие точкам пересечения кривых fx(a)
и —, будут искомыми амплитудами. Как следует из фиг. 4, кри-
а3
15
вые Fr (а) и — будут пересекаться в одной точке или вовсе не будут
а3
пересекаться. Следовательно, автоколебания возможны только с одной
амплитудой. Этот вывод применим только к тому случаю, когда
инерцией чувствительного элемента можно пренебречь- При учете
инерции его, как показано ранее [4], автоколебания возможны не только
с одной амплитудой.
Из уравнения (5.15) и фиг. 4 следует, что амплитуда автоколебаний,
Р(Н
Фиг. 5
вызванных сухим трением, возрастает с возрастанием сухого горения
и максимальной скорости перестановки лопастей и уменьшается с умень-
шением ширины зоны нечувствительности и скорости нарастания функ-
ции F, (я) в начальный момент. Отсюда становятся ясными пути умень-
шения амплитуды автоколебаний. Для этого необходимо уменьшать
сухое трение ^ширину петли гистерезиса 23), максимальную скорость
перестановки Fo и наклон характеристики F(2) и увеличивать ширину
зоны нечувствительности 2Л. Вместе с тем амплитуда автоколебаний
уменьшается при увеличении коэфициента аг (увеличение собственного
демпфирования системы) и уменьшении коэфициента (уменьшение
эффективности лопасти Сх и чувствительности измерительного устрой-
ства е0).
Рассмотрим поведение автоматического ВИШ простой схемы при
работе на земле для некоторых частных случаев характеристик сервомото-
ра F(z). В качестве первого примера рассмотрим автоматический
ВИШ с ломаной характеристикой без зоны нечувствительности (фиг. 5).
Для этого случая h — 8—0,
^(«)-^
и, как следует из уравнений (5.13') и (5.14'),
v =0
' = о,
и
я
16
т. е. автоколебания невозможны. Однако, достаточно небольшого сухо-
го трения в чувствительном элементе, чтобы появились автоколебан ия.
Это будет видно из следующего примера.
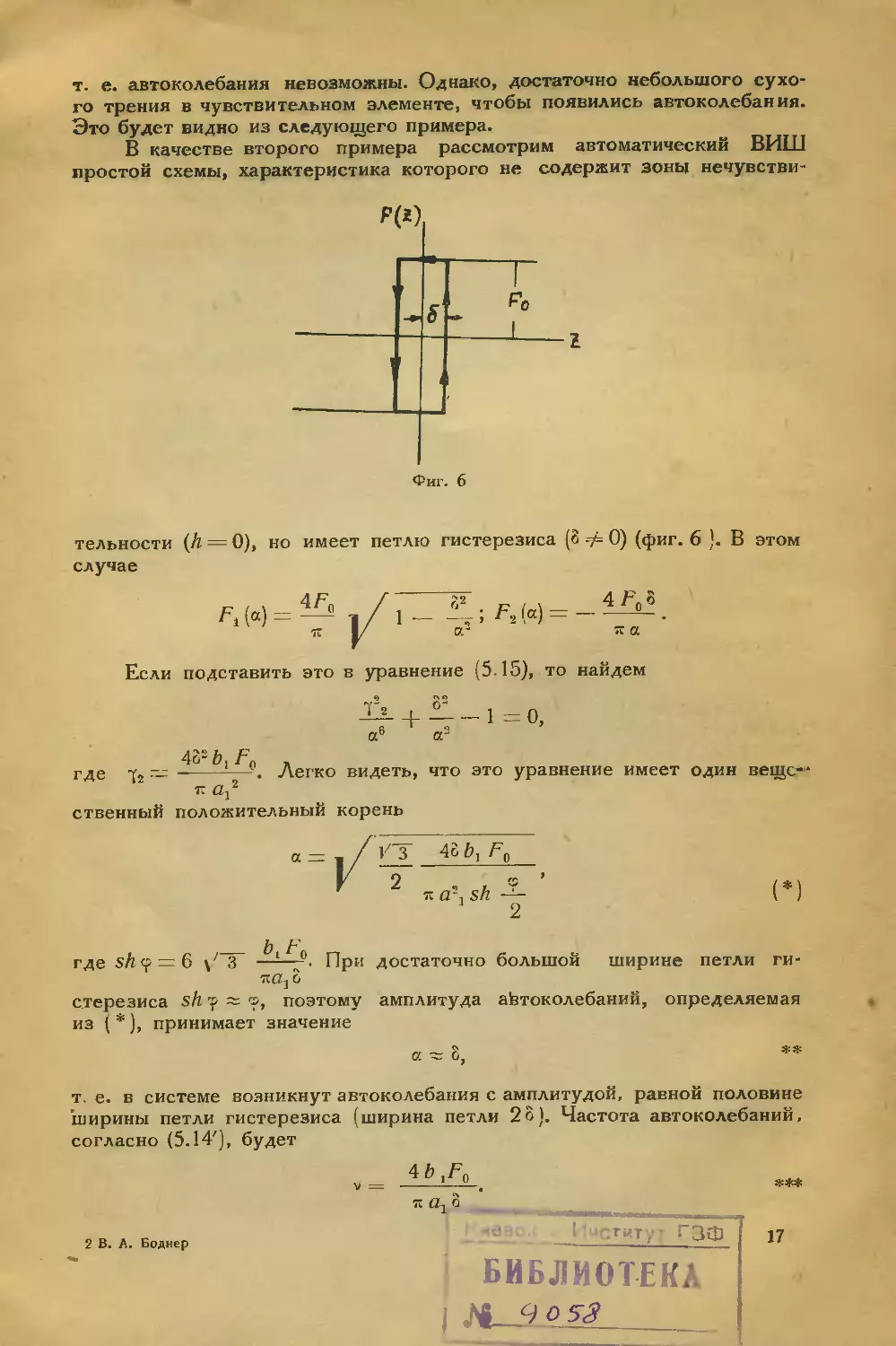
В качестве второго примера рассмотрим автоматический ВИШ
простой схемы, характеристика которого не содержит зоны нечувстви-
тельности (Il = 0), но имеет петлю гистерезиса (8 =f= 0) (фиг. 6 ). В этом
случае
4Л
F, (а) = —
4F08
Если
подставить это в уравнение (5.15), то найдем
Т1
а6
— —1=0.
о
а"
48‘- b, .
где -у2 —---------'• Легко видеть,
К <2j2
ственный положительный корень
что это уравнение имеет один веще-*
а —
/ V 3 48 Ьл Ло
г 2 , , ®
я а~л sh —
2
__ b р
где sh<? = 6 \z 3 —1—1*. При достаточно большой ширине петли ги-
стерезиса sh р ~ ®, поэтому амплитуда автоколебаний, определяемая
из ( * ), принимает значение
а ~ 6.
т. е. в системе возникнут автоколебания с амплитудой, равной половине
ширины петли гистерезиса (ширина петли 28). Частота автоколебаний,
согласно (5.14'), будет
2 В. А. Боднер
я Oj 8 _
•' Н'СТцту- ГЗФ
библиотека
I Ji ____________
17
На основании изложенного приходим к следующим выводам:
1. Автоматический ВИШ простой схемы при отсутствии петли
гистерезиса в характеристике сервомотора (и при отсутствии динами-
ческих погрешностей в чувствительном элементе) является колебательно
устойчивым. Наличие петли гистерезиса может привести к появлению
автоколебаний. Выше указаны пути уменьшения амплитуды автоколеба-
ний.
2. На некоторых режимах полета (взлет, пикирование и др.)
автоматический ВИШ может стать апериодически неустойчивым. Соот-
ветствующий режим получил наименование раскрутки винта.
3. Увеличение колебательной устойчивости ВИШ можно достигнуть
за счет уменьшения: 1) сухого трения в чувствительном элементе,
2) скорости перестановки лопастей и 3) эффективности лопасти, как
регулирующего органа и увеличения: 1) зоны нечувствительности,
2) собственного демпфирования.
4) Увеличение апериодической устойчивости ВИШ (уменьшение
вероятности появления раскрутки) можно достигнуть за счет увеличения:
Г) скорости перестановки лопастей, 2) эффективности лопасти, как
регулирующего органа, 3) чувствительности измерительного устрой-
ства и уменьшения ширины зоны нечувствительности.
Следовательно, автоматические ВИШ простой схемы, обладающие
достаточной колебательной устойчивостью, склонны к раскрутке и на-
оборот, если они обладают достаточной апериодической устойчивостью,
то подвержены автоколебаниям. В этом состоит основной недостаток
винтов простой схемы.
6. Автоматический ВИШ, схема которого содержит чувствительный
элемент по ускорению
Рассмотрим более детально автоматический ВИШ, схема которого
содержит чувствительный элемент, реагирующий на ускорение (или в
схеме обеспечено получение первой производной от угловой скорости
вращения).
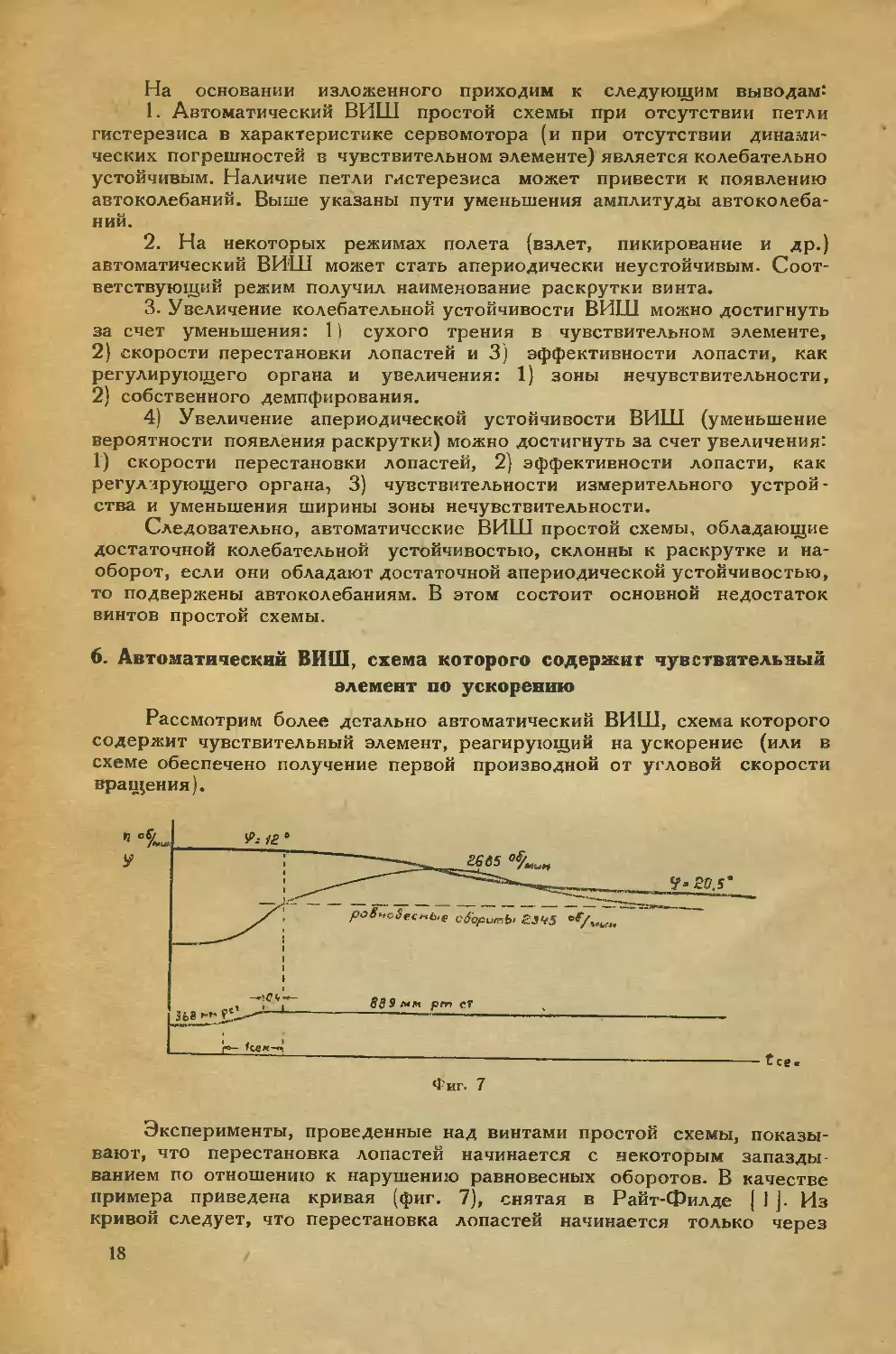
Эксперименты, проведенные над винтами простой схемы, показы-
вают, что перестановка лопастей начинается с некоторым запазды-
ванием по отношению к нарушению равновесных оборотов. В качестве
примера приведена кривая (фиг. 7), снятая в Райт-Филде { 1 ]. Из
кривой следует, что перестановка лопастей начинается только через
18
0,4 сек. после перехода оборотов через равновесные. Учитывая то, что
приемистость современных авиамоторов достаточно велика (порядка
I—1,5 сек), приходим к выводу, что заброс оборотов может сос~авить
недопустимо большую величину.
Для уменьшения забросов следовало бы увеличить скорость пере-
становки лопастей, но это приводит к уменьшению колебательной
устойчивости ВИШ.
Было.бы желательно иметь в схеме ВИШ такой чувствительный
элемент, который обеспечил бы подачу достаточно больших импульсов
в сервомотор в самом начале изменения регулируемой величины. Длг
этого чувствительный элемент должен реагировать не только на самую
измеряемую величину, но и на ее производные. В схеме автоматического
НИТИ уже достаточно первой производной от угловой скорости враще-
ния, чтобы получить вполне удовлетворительное регулирование. В даль-
нейшем будем решать задачу в предположении, что в схеме обеспечено
получение импульсов, пропорциональных первой производной.
Уравнение движения, соответствующее рассматриваемому здесь слу-
чаю, дано выше (3.3). Полагая пока, что правая часть равна нулю, бу-
дем попрежнему искать решение в виде z — a sin vt. Если, кроме того,
петля гистерезиса в характеристике отсутствует, то /'\asinv/) ~
~ F(a) sin v/ и поэтому
-v3 + =0
a
-а^ + (Ь2-Ь0^) -^- = 0
a
£(a)
или, исключив ----, получим уравнение частот
a
И + д, bt-bt- b0 а* [ s + _ 0 (6 2)
Ьо Ьо
Определив отсюда частоту и подставляя ее значение в одно из
(6.1), получим уравнения амплитчд
F(a) __ Ьг — Ьоа^ — а1Ь1+ у — — ал Ц- — 4bn ЬА ах а2
а 2 &0
Так как Ь2—а2 Ьв — а1Ь1У 0, то правая часть выражения (6.3) всегда
отрицательна. Следовательно, в автоматическом ВИШ с диференциро-
ванием автоколебания не могут иметь места (при условии, что в харак-
теристике F (z) нет петли гистерезиса). Но с подобной же картиной
мы встречались в автоматическом ВИШ простой схемы.
Интересно сравнить ВИШ простой схемы и схемы с диференци-
рованием более детально. Если для ВИШ простой схемы граница коле-
бательной неустойчивости определяется соотношением
b2 — а1Ь1^ 0, (6.4)
то для схемы с диференцированием имеем
(Ь2 — а2 Ьй — a, btf — 460 bx axa2^Q
2*
19
или
+ 2 а, а,_ (6.5
Отсюда следует, что автоматический ВИШ с диференцированием
обладает большей устойчивостью, чем ВИШ простой схемы.
При наличии петли гистерезиса в характеристике F (z) нахожде-
ние периодического решения сводится к решению двух уравнений
(в предположении, что F (z'j Fr (a) sin vt F2 (а) cos v t)
61^X14 (62 — b0^xt = ys —
(F> — Ьй v2) Xi - bi v x2 = aj v2.
Из этих уравнений находим
Л (а) _ Ж — а, Ьо} у8 + а, - Ь, а?] _ .
а Ьг^ + {Ьг-Ь^г Ь)
F\ («) __ v I (/ г ~ V5) fr* — a^—ciibi v8] __ f
а . Vv8 + (*2-60>T 2 1 J
Выше было показано, что в автоматическом ВИШ простой схемы
при достаточно большой величине сухого трения возможно появление
автоколебаний. Там же были указаны способы уменьшения амплитуды
автоколебаний, причем это последнее достигается за счет уменьшения
эффективности винта как регулирующего органа, что приводит к не-
допустимо большим забросам оборотов-
Покажем, что в схеме с диференцированием соответствующим вы-
бором параметров можно вовсе устранить автоколебания при любой
величине сухого трения. А в таком случае на скорость перестановки
лопастей и зону нечувствительности не будут накладываться никакие
ограничения, поэтому выбор их можно производить из условия допусти-
мого заброса.
Легко видеть, что автоколебания в системе возможны только при
выполнении условий
Если хотя бы одно из этих условий не выполнено, то автоколеба-
ния будут отсутствовать. Обращаясь к уравнению (6.7), видим, что
достаточно удовлетворить первому из (6. 9), взяв
V8 [(6, — 60 a,) V8 + а, — bj аг]
№-Vs)’
чтобы автоколебания вовсе отсутствовали. Так как в последнем не-
равенстве знаменатель является существенно положительной величиной,
то
(by — b0Oi)F + a^b2 — a2bi<ZS). (610}
Таким образом, если учесть, что то условие от-
сутствия автоколебаний можно представить в виде
b2 — Ь^а^О (6.11)
20
(6.12)
-или, если воспользоваться соотношением (3.4),
eo^i ei (28j сх /,/4)-<^0. (3.11)
Последнее неравенство удобно представить в следующем виде (за-
метим, что 4 < 0 и /4 > 0)
ei > G
s0 25, с,— 44
Отсюда следует, что чувствительности измерительного устройства е0
(чувствительность по угловой скорости вращения) и е, (чувствитель-
ность по угловому ускорению) каждая в отдельности выбираются, во-
обще говоря, произвольно, но их отношение должно удовлетворять
условию (6.12). Неравенство (6.12) можно упростить, если воспользовать-
ся тем, что обычно 25, (\ )>> /, Z4
ео
(6.12')
Величину 1/28, принято называть постоянной времени системы
винт—мотор. Обозначив ее через Ть, можем написать
Следовательно, автоколебания в автоматическом ВИШ с диференци-
рованием будут отсутствовать при любых условиях (при любой величине
. е,
сухого трения), если отношение — больше постоянной времени систе-
ео
мы винт—мотор. Другими словами, постоянная времени измерительного
устройства Ти = — должна быть больше постоянной времени регули-
ео
руемой системы Ть-
Все наши выводы справедливы в той мере, в какой можно пренеб-
речь динамическими погрешностями измерительных устройств. Если
учесть то, что современные центробежные тахометры, нашедшие почти
исключительное применение в автоматических ВИШ, обладают боль-
шой статической устойчивостью, а акселерометр можно выполнить с
допустимыми динамическими погрешностями, приходим к выводу, что
неравенства (6.11) или (6.12) достаточно хорошо отражают существо дела.
Сейчас рассмотрим апериодическую неустойчивость автоматичес-
кого ВИШ с диференцированием.
Изменится ли положение границы апериодической неустойчивости
ВИШ при применении чувствительного элемента по ускорению? Об-
ращаясь к условию апериодической устойчивости [4]
где х =
> 0, или
Х&2>0,
&2> 0
(6.13)
(6.13)
(6.13")
млн, наконец, в раскрытом виде
so(2^g + 44)>o.
21
замечаем, что это выражение непосредственно не зависит от коэфици-
ента е1 при первой производной. Другими словами, введение диферен-
цирования не меняет границы апериодической неустойчивости
26.G + 4/, = 0. (6.14)
Следовательно, если автоматический ВИШ простой схемы неустой-
чив 0), то введением чувствительного элемента по диференциро-
ванию его нельзя сделать устойчивым. Отсюда однако не следует де-
лать тот вывод, что введение диференцирования вообще бесполезно.
Выше было указано, что введением диференцирования можно значи-
тельно повысить колебательную устойчивость автоматического ВИШ, а
это, как известно [3], позволяет увеличить скорость перестановки ло-
пастей. Кроме того, режимы, соответствующие Ь2<^0, встречаются срав-
нительно редко. Значительно чаще автоматический ВИЩ работает на
таких режимах, когда Ь2 хотя и мало, но положительно. В этом послед-
нем случае диференцирование значительно улучшает дело. Действитель-
но, так как xb2 О 0 и Ь2 (> 0, то, выбрав —— достаточно большим, мож-
но значительно повысить устойчивость системы. Таким образом при-
менение чувствительного элемента по первой производной увеличивает-
статическую устойчивость, а это приводит к уменьшению забросов обо-
ротов.
На основании изложенного можно сделать следующие выводы в
отношении схемы автоматического ВИШ с диференцированием.
1. Автоматический ВИШ с диференцированием обладает большей
колебательной устойчивостью, чем ВИШ простой схемы. Соответствую-
щим выбором параметров его можно сделать колебательно устойчи-
вым при любых условиях. В частности колебательно неустойчивый ВИШ.
простой схемы, в котором возможно появление колебаний за счет сухо-
го трения в чувствительном элементе, можно сделать устойчивым за
счет применения дополнительного чувствительного элемента по углово-
му ускорению (или за счет диференцирования импульса основного чув-
ствительного элемента).
2. Апериодически неустойчивый ВИШ простой схемы нельзя сде-
лать устойчивым применением диференцирования.
3. Если автоматический ВИШ простой схемы устойчив (Ь2(>0),
то применение диференцирования еще в большей степени увеличивает
устойчивость. Это позволяет намного снизить забросы оборотов мотора-
7. Автоматический ВИШ, схема которого содержит обратную
связь
Автоматический ВИШ, схема которого содержит обратную связь,,
имеет ряд преимуществ. Не останавливаясь на конкретной схеме, ука-
жем, что такие ВИШ уже нашли применение в эксплоатации. Достаточ-
но указать на электрогидравлический ВИШ VDM, устанавливаемый на
моторе BMW-801. Схема этого ВИШ, как известно, содержит изод-
ромную обратную связь.
Проведем сначала анализ схемы ВИШ с жесткой обратной связью.
Для такой схемы справедливо уравнение (3.1). Если ограничиться слу-
чаем отсутствия внешних сил, то попрежнему решение можно искать
22
в виде z — a. sin 'Л. Полагая, кроме того, что петля гистерезиса в харак-
теристике F (z) отсутствует, можем написать /7(asin'4)~/-'(a) sin vt.
Подстановка этих значений в уравнение (3.1) дает
— v3 а2» 4- bLv — о,
а
- ах v2 4- (Ъ - 60v=) = 0. (7’1}
а
Эти уравнения отличаются от уравнений (6.1) только значением
коэ^ициентов Ьо, Ьх и 62, определяемых соотношениями (3.2). На ос-
новании уравнений (7.1) можно получить уравнения частот и амплитуд,
аналогичные уравнениям (6.2) и (6.3).
Легко показать, что в схеме ВИШ с обратной связью, как и в
схеме с диференцированием, при сделанной идеализации (отсутствие
петли гистерезиса) автоколебания будут отсутствовать.
Если учесть неоднозначность функции F(z), то определение а и v
сведется, как и выше, к решению уравнений (6.7) и (6.8).
Для того чтобы избавиться от автоколебаний, достаточно, как
указано выше, подобрать параметры таким образом, чтобы
Л(*)<0
или, что все равно,
Подставляя сюда значения bG, Ьг и &2 из (3.2), получим
ее Q F ~ ее [с, а2 - а, 12\ с, 4- /, /4)] < 0
или, так как ^0^>О, то
V"
(7.2).
(7.3)
(7.3').
Отсюда следует, что в автоматическом ВИШ, схема которого
содержит обратнуо связь, при учете неоднозначности в характеристике
JF(z) избавиться совершенно от автоколебаний не представляется воз-
можным, хотя по амплитуде их можно сделать достаточно малыми. Ин-
тересно заметить, что выражение (7.3) вообще не зависит от коэфици-
ента обратной связи z\.
Рассмотрим апериодическую неустойчивость схемы ВИШ с жест-
кой обратной связью. Для этого воспользуемся неравенством (6-13').
Ьг>0
или в раскрытом виде
+ s0(25.1g + Z1/J>0. (7.4).
Если это неравенство не выполнено, то ВИШ будет апериодичес-
ки неустойчивым (раскрутка винта). Сравнивая это выражение с выра-
жением (5.9'), легко заметить, что автоматический ВИШ с жесткой об-
ратной связью обладает большей статической устойчивостью по сравне-
нию с ВИШ простой схемы- Следовательно, апериодически неустойчи-
23
вый ВИШ простой схемы (ВИШ, склонный к раскрутке) можно сделать
устойчивым, выбрав достаточно большим коэфициент обратной связи-
В самом деле, если ВИШ простой схемы неустойчив, то е0 (26^ +
Выбрав величину коэфициента обратной связи z\ из условия
г\ > — —- (2о4 Cj г 44)»
«2
(7-5).
получим устойчивый ВИШ.
Теперь рассмотрим автоматический ВИШ, схема которого содер-
жит изодромную обратную связь. Для изодромной обратной связи, как
известно [9], коэфициент HD) в уравнении (2.10) имеет вид
i(D)= -l°D , (7.6),.
D + 283’
где 28., — — , 7) — время изодрома. Если 7) — 0, то 2о3 = со, z(Z?) -О
и получаем схему без обратной связи. Если 7) — ос, то 283 = 0, / (£>) = iOr
т. е. изодромная обратная связь превращается в жесткую.
Подставляя значение i (D) из (7.6) в уравнение (2.10) и палагая,
что в схеме имеется только один чувствительный элемент, реагирую-
щий на угловую скорое-ь вращения, получим
D Н(D) Z + | н(D) + е0N(D)
L D + 2о3
Г(г) =
= 30(D4-2SjD/(/)-/iecD?(4, (7.7)
где значения полиномов Н [D) и N [D) указаны выше. Рассмотрим тот
случай, когда правая часть (7.7) отсутствует. Находим
(О* + а/ D3 + а2' D2 + о/ D) z + (bor Ds + b’D2 + bs'D + b,')F(z) = 0, (7.8)
где
я,' — а, 4- 28ч; а, — а, -4- 28, а.; а~ = 23,
ьи' = i0- ьу' = ty о, + e0 g; b2 = 4 + so (2Vi + 4 4 + 2S3 n);
b3' = 233 eo(284 G 4 4 4)-
Периодическое решение уравнения (7.8), как обычно, ищем в ви-
де Z = asin.v£. Кроме того, при учете неоднозначности в характерис-
тике F(z) следует положить
F(a sin v t) Fj (a) sin v t F3(a)cos v/.
Подставляя эти выражения в уравнение (7.8), получим в результа-
те приравнивания коэфициентов при sin v t и cos vt два уравнения для
определения двух неизвестных а и v,
(F3 -ь; vs) х, + v л'>= - ь;} х2 = v2 (а/ - v2)
— — b2)xi + (b3’ — b\v2) х2 = vfa/v2 — as').
24
= Ш, (7.10)
Ограничимся здесь рассмотрением работы винта на месте. В этом
-случае 284 = с4 -- /4 = О и а3 = bz — 0. При этом условии из уравнений
7.9) находим
х _ (и) _ ^[(6/ — - fr/gj
* a
х = ^2 (°) = _ у [бр' у4 + (Д/ Ьх' - 6/ — 60' g/)v5 + а/ Ь2'] _
' а + (&,'-&/>’)’ 7 2
Автоколебания в системе будут вовсе отсутствовать при условии
fi (v) <С 0 или
(Ь/ — д0' а,') V» + ciy'bz— by'а2' <0. (7.11)
Так как обычно a,ybz—Ь/а^^О, то должно быть
Ь/ — b0' ах < 0.
Подставляя в эти два неравенства значения коэфициентов, полу-
"чим
а/ ь2 — by а2' = 283 (283е0 сх — г0 «/) < 0,
by'— Ьй' а/ = е0Су — 283z0<0. (7.12)
Из этих неравенств можно определить такие значения коэфициен-
та обратной связи z0 и коэфициента демпфирования в катаракте 283>
при наличии которых автоколебания будут отсутствовать [даже при на-
личии петли гистерезиса в характеристике F(^)J. Легко видеть, что ав-
токолебания будут отсутствовать, если
(7.13)
Отсюда следует, что для полного устранения автоколебаний при
.данном значении коэфициента обратной связи z’o коэфициент демпфиро-
вания катаракта 28а должен быть больше коэфициента собственного
демпфирования системы ах ( ~ 28]).
Апериодическая неустойчивость (раскрутка) ВИШ с изодромной
^обратной связью, как и в других случаях, определяется знаком коэфици-
ента при нулевой производной в линеаризированном уравнении, кото-
рое получается из (7.8), если в нем положить F(z) — xz. Следователь-
но, если не выполнено неравенство
68'>0
или
28^(28^ +/Л) > 0, (7.14)
то ВИШ будет апериодически неустойчивым. Сравнивая выражения
(5.9') и (7.14), легко видеть, что уравнения границы апериодической
неустойчивости в ВИШ простой схемы и в ВИШ с изодромной обрат-
ной связью одинаковы, хотя статическая устойчивость в последнем слу-
чае может быть сделана больше, чем в случае ВИШ простой схемы
25
[при выполнении условия (7.14)] . В самом деле, если условие (7.14) вы-
полнено, то
~~ = 253 (7.15)
Ь2
и, выбрав коэфициент демпфирования катаракта 2о3 достаточно большим,
получим указанное соотношение.
На основании изложенного можно сделать следующие выводы.
1. В автоматическом ВИШ, схема которого содержит жесткую об-
ратную связь, нельзя совершенно устранить автоколебания, вызванные
неоднозначностью в характеристике хотя их можно сделать доста-
точно малыми по амплитуде. Вместе с тем в такой схеме соответствую-
щим выбором коэфициента обратной связи можно получить любую ста-
тическую устойчивость, уменьшая, тем самым, забросы оборотов мотора.
2. Автоматический ВИШ, схема которого содержит изодромную об-
ратную связь, соответствующим выбором параметров можно сделать
колебательно устойчивым при любых условиях полета. С другой сторо-
ны, такой ВИШ обладает большей статической устойчивостью, чем ВИШ
простой схемы, даже при одинаковой скорости перестановки лопастей-
3. Автоматический ВИШ с изодромной обратной связью в отноше-
нии колебательной неустойчивости обладает свойствами ВИШ с дифе-
ренцированием, а статическая устойчивость его может быть не меньшей,
чем ВИШ с жесткой обратной связью. Следовательно, автоматический
ВИШ, схема регулирования которого содержит изодромную обратную
связь, является наиболее совершенным.
III. ПОВЕДЕНИЕ АВТОМАТИЧЕСКОГО ВИШ ПРИ НАЛИЧИИ
ВНЕШНИХ ВОЗМУЩАЮЩИХ СИЛ
8. Общие соображения
До сих пор предполагалось, что на винтомоторную группу само-
лета не действуют внешние возмущения и режим ее определяется вну-
тренними свойствами и начальными условиями. В действительности
она работает в условиях, когда внешние возмущающие силы оказыва-
ют значительное влияние на ее работу. На систему винт—мотор —са-
молет могут действовать различные возмущающие силы, например, аэро-
динамические силы, силы тяжести, силы, вызванные порывами ветра,,
и др. К числу внешних возмущений следует отнести также возмуще-
ния, вызванные перестановкой дросселя мощности и перенастройкой
регулятора.
В общем случае трудно указать простые закономерности, которым
подчинены эти силы. Можно, пожалуй, утверждать, что эти закономер-
ности настолько сложны, что только статистический учёт действия
сил окажется эффективным. Достаточно указать, что силы ветра труд-
но заранее предсказать по величине и направлению, а наличие различ-
ных потоков, создающих иногда периодически возмущенную атмосферу,
вообще трудно учесть. Однако здесь возможна, как нам кажется, и
разумная идеализация. Можно, например, в некоторых случаях считать,
что действующие на систему силы имеют периодический характер. Это
будет в том случае, когда самолёт находится в условиях болтанки (пе-
риодически возмущённая атмосфера). В других случаях возмущающие
силы можно представить в виде кратковременных импульсов (порыв.
26
ветра, дача и уборка газа и др.) или в виде единичной функции (по-
стоянно действующий ветер, дача или уборка газа и т. д.).
Необходимость рассмотрения поведения авторегулируемых систем
под действием внешних возмущающих сил вызывается тем, что, как
показывает опыт, устойчивость таких систем в смысле Ляпунова ещё
не является достаточным критерием пригодности их в эксплоатации.
Как правило, автоматические ВИШ почти на всех режимах устойчивы,
однако часто они оказываются малопригодными к эксплоатации из-за
сильного реагирования на внешние воздействия. Скорость вращения
авиадвигателя с такими ВИШ отклоняется на недопустимую величину
при наличии внешних возмущений. Необходимость учёта внешних воз-
мущающих сил в авторегулируемых системах указывалась неоднократ-
но. Наиболее полно этот вопрос рассмотрен у Н. Моисеева [2J.
Здесь рассмотрим поведение автоматического ВИШ при действии
на систему периодических сил простой формы, кратковременных им-
пульсов и сил типа единичной функции. Исходным будет являться вы-
веденное выше уравнение движения (2.10).
9. Действие сил любой формы на систему с линейной ха-
рактеристикой
Прежде чем рассматривать поведение ВИШ в общем случае, рас-
смотрим тот частный случай, когда характеристика JF[z) заменена ли-
нейным приближением, т. е. F(z)=xz. Хотя при таком предположении
мы не получим правильного представления о поведении системы при
больших отклонениях, но в тех пределах, где характеристика F(z)
близка к линейной, это будет справедливо.
Преобразуем уравнение (2.10). Если сделать в нем замену F(z] на
xz, а также воспользоваться соотношениями
г =, (е« + Si D)<o — i (О) ф
— xz,
то получим
{ D Н (D) - Ь х [/ (D) Н (D) + N (D) (е. + е. D)]} ш =
= Р-Н(ОД [(£ + 28JfW-Zi?(0]. (9.1)
Здесь предполагается, что обратная связь изодромная, а коэфици-
ент обратной связи имеет вид
В частном случае жесткой обратной связи следует положить
2S8=0.
Не решая уравнения (9.1), можно сделать некоторые заключения о
поведении системы. Рассмотрим, в частности, поведение системы при
действии на нее постоянного возмущения. Для простоты предположим,
что 9 (/) — 0 и /(0—/о — const.
Для автоматического ВИШ простой схемы (/' (D) = 0, е, — 0j полу-
чаем
[DH(D) + xe0N (D)] ш = D(D + %t}ft. (9.3)
3*
27
Легко видетг, что правая часть этого уравнения при сделанных
предположениях всегда равна нулю, т. е. постоянное возмущение, деи-
ст |ующее на ВИШ простой схемы, не вызывает изменения скорости
вращения, В этом смысле простая схема подобна схеме с изодромной
обратной связью.
Для схемы с диференцированием имеем
[DH(D) + х (е0 + ех D) N (£))] о> = D (D + 254)/0. (9.4)
Здесь, как и в предыдущем случае, правая часть равна нулю
(при f0 = const) и скорость вращения остается неизменной.
Для схемы с жесткой обратной связью находим
{DH (D)х Н (D) + e0N (D)]}® = (D + ix) (D +2S4)/0. (9.5)
В этом случае правая часть не обращается в ну\ь при f0 — const.
При установившемся режиме получим увеличение скорости враще-
ния на величину
(9.6)
приводит к увеличению скорости враще-
Д% = :------2М1А---------
4 а2 + Ео (2?j4 ci + 4 4)‘
Таким образом увеличение вращающего момента авиадвигателя на
* К &М \
величину Д М I т0 = ——
ния на величину, определяемую соотношением (9-6). Из этого соотно-
шения следует, что с увеличением коэфициента обратной связи г\ ве-
личина Д<»0 возрастает, пока при не примет постоянного значе-
ния
= —/о- (9.6')
а2
Интересно заметить, что заброс оборотов, даваемый соотношени-
ем (9.6'), совпадает с забросом оборотов мотора, оборудованного вин-
том фиксированного шага. В самом деле, если на моторе установлен
винт фиксированного шага, то х = 0, т. е. сервомотор не функциони-
рует и уравнение движения (9 5) принимает вид
(О2 + a. D + а2) ш = (D + 284)/0. (9.5')
Легко видеть, что заброс оборотов будет
т. е. заброс оборотов мотора с винтом фиксированного шага такой
же, как и с автоматическим ВИШ, схема которого содержит жесткую
обратную связь при 1Л —» оо. Следовательно, автоматический ВИШ,
схема которого содержит обратную связь с большим коэфициентом
обратной связи ilt эквивалентен по своим свойствам винту фиксиро-
ванного шага.
Подсчет показывает, что автоматические ВИШ, содержащие схему
регулирования с жесткой обратной связью, не могут обеспечить пос-
тоянства скорости вращения авиадвигателя. При изменении положения
дросселя (или вообще при наличии постоянных внешних возмущений)
28
скорость вращения может измениться на 100 об/мин и более. Сле-
довательно, такие ВИШ непригодны к эксплоатации и
они не могут найти применения.
Из этого анализа видно, что без рассмотрения поведения систем
при внешних возмущениях нельзя было бы сделать заключения о не-
достатках ВИШ, содержащих схему регулирования с жесткой обрат-
ной связью.
Рассмотрим, наконец, действие постоянного возмущения на ВИШ,
схема которого содержит изодромную обратную связь с коэфициентом
(9.2). Получаем
ЭН (В) + х\-^-Н(В} + saNCD)ll о) =
D + 2о3 J)
~г'(1+ Й^)(В + 28‘)Л- м
Легко видеть, что правая часть этого уравнения при /0 — const
обращается в нуль, т. е. постоянное возмущение не вызывает измене-
ния скорости вращения авиадвигателя.
Таким образом с точки зрения постоянства регулируемой величи-
ны при действии постоянных внешних возмущений пригодными оказы-
ваются ВИШ простой схемы, схемы с диференцированием и схемы с
изодромной обратной связью. Схема с жесткой обратной связью ока-
зывается неудовлетворительной.
Теперь перейдем к рассмотрению действия сил любой формы.
Вводя в уравнении (9.1) обозначения
Н. (В) = В Н (В}+ х [г (В) И (В) + (е0 + Е1 В) Н(В)]
Л(£>) = [Р4 i (В) х] [В + 2SJ
(9-1')
символическим ме-
перепишем его
нл1^ = РЛУШ) -Рг(В)<?щ.
Для решения этого уравнения воспользуемся
тодом, переписав уравнение (9.1) в виде
Н^В) -—-%(/).- (9.8) нг (ву 1 11 1 ' на простейшие и предполагая, что
Разлагая дроби PAD) и Р. (D) Н^В) Н^В)
уравнение
Н1{Р) = 0 (9.9)
имеет только простые корни (в дальнейшем будет видно, что рассма-
триваемая система действительно имеет только простые корни), можем
написать
•= i. f®- i ч и.
* Л=1 *
29
где
ЛК)
Л'К)
—корни уравнения (9.9).
Пользуясь соотношением [8]
—J------f(t) =
J
О
получим решение уравнения (9.1') в форме
t
« = S ck ек +2 I е*( Х)[А/М-Л?К] dx, (9.11)
*=i *=iJ
о
где Ск — произвольные постоянные, определяемые по начальным усло-
виям.
Ограничиваясь в дальнейшем нулевыми начальными условиями и
полагая для простоты (t) — 0, перепишем уравнение (9.11) в виде
п t
О) = У f Ак ек^(к. (9.12)
J
Рассмотрим действие на систему сил типа
./V) = 1J £<0 />о (9.13)
И ML- t <0 t >0 (9-14)
Если подставить значения / {t) из (9.13) и (9.14) в (9.12), то получим
соответственно
Я Л V t
ш = V —* (е - 1), (9.15)
Ф (eV~l) + -ф- (е~*‘ - ***)|- (9-16)
I7* ^+а J
Выше было упомянуто, что f(t) представляет собою изменение мо-
мента вращения авиамотора, вызванное изменением положения дроссе-
ля. При быстрой перестановке дросселя мощность авиамотора нарас-
тает, вообще говоря, не мгновенно, а с некоторой скоростью.
По истечении некоторого времени, называемого приемистостью
мотора, мощность примет значение, соответствующее новому положе-
нию дроссельной заслонки. Время приемистости мотора при переста-
новке дросселя с малого газа на полную мощность составляет в сред-
нем 3—5 сек. Как известно, нарастание момента мотора при переста-
новке дросселя происходит по экспоненциальному закону. Скорость
нарастания его (собственно приемистость) определяется многими фак-
торами и, в первую очередь, моментом инерции вращающихся частей
30
и (винта), аэродинамической загрузкой винта, качеством смеси и др.
Забросы оборотов, которые всегда имеют место при перестановке
дросселя, определяются в значительной мере тем, как нарастает мо-
мент мотора. Чем быстрее нарастает момент, тем при прочих равных
условиях заброс будет больше. Для иллюстрации этого положения про-
изведен подсчет забросов оборотов при нарастании момента по зако-
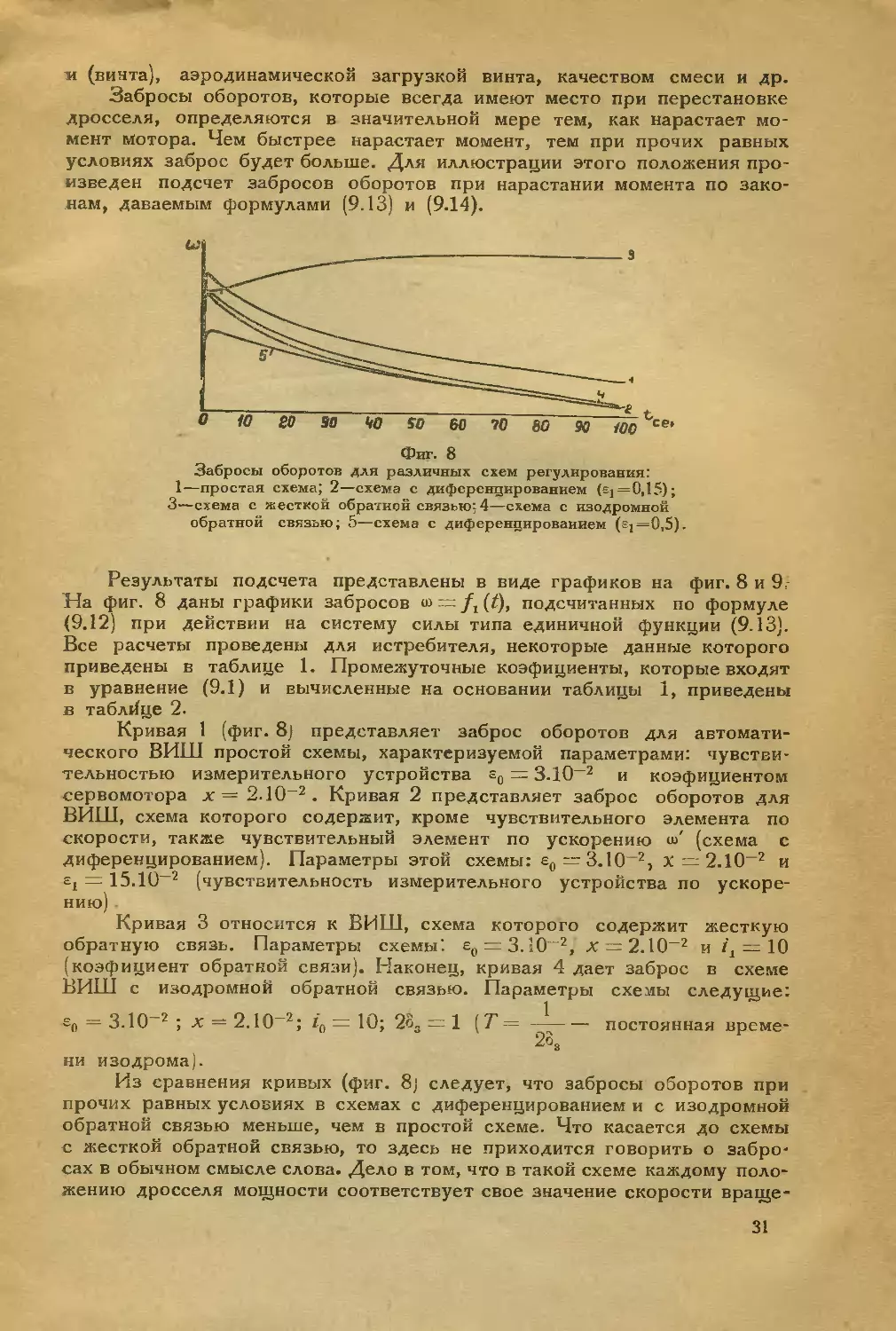
нам, даваемым формулами (9.13) и (9.14).
Забросы оборотов для различных схем регулирования:
1—простая схема; 2—схема с диференцированием (£1=0,15);
3—схема с жесткой обратной связью; 4—схема с изодромной
обратной связью; 5—схема с диференцированием (£1=0,5)
Результаты подсчета представлены в виде графиков на фиг. 8 и 9
На фиг. 8 даны графики забросов w — /, (t), подсчитанных по формуле
(9.12) при действии на систему силы типа единичной функции (9.13).
Все расчеты проведены для истребителя, некоторые данные которого
приведены в таблице 1. Промежуточные коэфициенты, которые входят
в уравнение (9.1) и вычисленные на основании таблицы 1, приведены
в таблйце 2.
Кривая 1 (фиг. 8) представляет заброс оборотов для автомати-
ческого ВИШ простой схемы, характеризуемой параметрами: чувстви-
тельностью измерительного устройства г0 — 3.10-2 и коэфициентом
сервомотора х = 2-10—2 . Кривая 2 представляет заброс оборотов для
ВИШ, схема которого содержит, кроме чувствительного элемента по
скорости, также чувствительный элемент по ускорению и/ (схема с
диференцированием). Параметры этой схемы: е0 — 3.10-2, X — 2.10-2 и
— 15.1O'2 (чувствительность измерительного устройства по ускоре-
нию)
Кривая 3 относится к ВИШ, схема которого содержит жесткую
обратную связь. Параметры схемы’. eo = 3.1O~~z, х — 2.10-2 и l\ — 10
(коэфициент обратной связи). Наконец, кривая 4 дает заброс в схеме
ВИШ с изодромной обратной связью. Параметры схемы следущие:
е0 = 3.10-2 ; X — 2.10-2; 10 = 10; 2о3 — 1 (Т =-постоянная време-
2S3
ни изодрома).
Из сравнения кривых (фиг. 8) следует, что забросы оборотов при
прочих равных условиях в схемах с диференцированием и с изодромной
обратной связью меньше, чем в простой схеме. Что касается до схемы
с жесткой обратной связью, то здесь не приходится говорить о забро-
сах в обычном смысле слова. Дело в том, что в такой схеме каждому поло-
жению дросселя мощности соответствует свое значение скорости враще-
31
ния мотора. Следует заметить, что изменение скорости вращения в схе-
ме с жесткой обратной связью, вызванное изменением положения дрос-
селя, будет того же порядка, что и заброс оборотов в простой схеме.
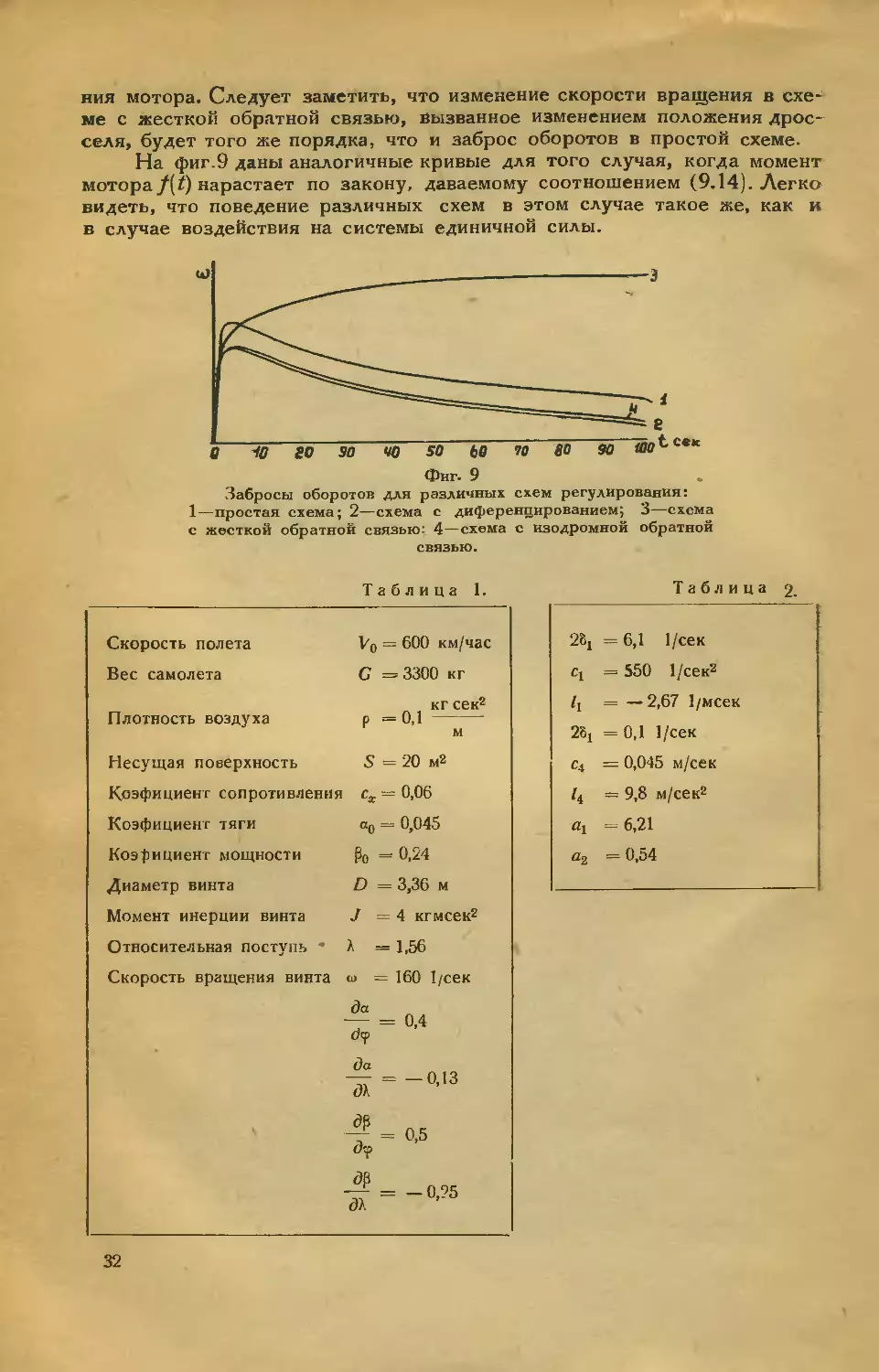
На фиг.9 даны аналогичные кривые для того случая, когда момент
мотора f[t) нарастает по закону, даваемому соотношением (9.14). Легко
видеть, что поведение различных схем в этом случае такое же, как и
в случае воздействия на системы единичной силы.
Фиг. 9
Забросы оборотов для различных схем регулирования:
1—простая схема; 2—схема с диференцированием; 3—схема
с жесткой обратной связью: 4—схема с изодромной обратной
связью.
Таблица 1.
Скорость полета Vo = 600 км/час
Вес самолета С = 3300 кг
Плотность воздуха кг сек2 р = 0,1 м
Несущая поверхность S = 20 м2
Коэфициент сопротивления сх = 0,06
Коэфициент тяги ас = 0,045
Коэфициент мощности ₽о = 0,24
Диаметр винта D = 3,36 м
Момент инерции винта J = 4 кгмсек2
Относительная поступь • А = 1,56
Скорость вращения винта ы = 160 1/сек
да — = 0,4 dtp
да = - °-13 ОТ
дф л = °’5 ду
др = ~°>?5 оА
Таблица 2.
2Bj =6,1 1/сек
q = 550 1/сек2
Zj = —2,67 1/мсек
26 4 =0,1 1/сек
с4 = 0,045 м/сек
= 9,8 м/сек2
fij = 6,21
а2 = 0,54
32
При расчете графиков, приведенных на фиг. 8 и 9, был взят
вполне определенный режим полета, указанный в таблице 1. При дру-
гих режимах характер забросов может быть иным. В частности вос-
становление оборотов после заброса может происходить не апериодичес-
ки, как в нашем случае, а колебательно-
10. Периодические возмущающие силы
Рассмотрим полет самолета в периодически возмущенной атмосфере
(болтанка). В этом случае на самолет будет действовать периодическая
сила, которую, ради простоты, предположим синусоидальной, т. е.
<р (£).= A sin v t,
где А и > — амплитуда и круговая частота внешней силы, которые будем
считать заданными.
Если в уравнении (2.10) положить — то
H2{D)z + M(D)F(z) + P(D^(t)=0, (10.2)
где Н2 (D), М (D) и P(D) — известные полиномы от D.
Для решения уравнения (9.2) можно воспользоваться приближен-
ным методом Б. Г. Галеркина. Согласно этому методу, решение ищется
в виде
z = S a. sin (Ft — у,.), (10.3)
где a; и у t — постоянные, подлежащие определению. Они определяются
из вариационного уравнения Галеркина
t —
f°+ ' [Hz{D}z + M(D)F{z) + P{D}4{t}]lzdt, (10.4)
t,
где о г—вариация выражения (10.3), причем варьируются искомые
величины а,- и 7,-. Так как
8 z = Е 8a,. sin (id — 7,.) — S а,-87,- cos (id — 7,), (10.5)
то вследствие произвольности вариаций 8a, и 8],., получим из (10-4)
-столько уравнений, сколько неизвестных а,- и 7,-
л+ —
/ ' (/y2(D)z + 7W(D)/7(z) + P(Z))?(^)]sin(zW-7,.)rf^0,
(10.6)
/ +-
/° v [77, (7>) г + ^4 (/)) F (г)Ч-Р(й) <? (^)] cos (zvZ -^,.) = 0.
^0
В дальнейшем ограничимся только одним членом в сумме (10-3),
так как в этом случае можно дать выражения для амплитуды а и фазы 7.
'Таким образом, если учесть, что для ВИШ с диференцированием и жест-
кой обратной связью, рассмотрением которых здесь и ограничимся
Н2 (D) = D (D* + a, D + a2); М (D) = b0 D* + Ьг D + Ь2-
P(D)^ll(e0 + elD)D,
3 В. А. Боднер
33
то получим
й аг v 4- А I,(е0 Sin 7 + V е, cos 7) =
1 2 71
= — Г~ ЛЦ-Р)/^ sin (v t—7)] sin (vt— '{}dt-t
к b'
—• a v5 4- a as -f- A I, (e0 cos 7 — Sj v sin 7) —
1 If
-----f M (D) F [a sin(v t — 7)] cos (> t — 7) dt.
" b
у (Ю.7)
Если ограничиться пока характеристикой F (z} без петли гистерези-
са, то вычисления дают
1 / ' M (D] F(a sin (d-у) sin dt = Ь— Ь°''~ F (a)
w 0 v
1
— f ' M (D} F (a sin (v( — 4) cos (>/ — 7) dt = bx F (a) J
« о f
где F (a)— коэфициент Фурье функции F[asin(v£—7)].
После этого уравнения (10.7) принимают вид
aa, А 4- Л/jV (е0 sin 1 4- V ех cos 7) = (62 — b0 v2) F (a) '
— a v2 4- а а2 4- А /, (е0 cos 7 — ег v sin 7) — — b rF (a) J
или, если обозначить
m — a^2- n — b0A-bz; q = btv, p=v(v2 —as),
TO
a m 4- n F (a) = — A 1Л v (e0 sin 74 £i7 cos 7) |
ap -4- q F(a)— A (e0 COS 7 — e^sit^) J
Исключив отсюда 7, найдем
(10,8;
(10.9)
(10.9')
F=(a)-2^aF(a) +Л4а2-/?2, (10.10)
где
L _ др — тП' м = nF +/>- A2l2F (£()2 + eJS2)
/г2 4- q2 ’ n" 4- q2 ' n2 4- q2
Если в уравнении (9.10) ввести обозначение у — F(a), то
у3 — 2£ау4-Л4а“ = /?2. (10.11)
Это уравнение в координатах а и у представляет собою кривую второго-
порядка. Легко показать, что рассматриваемая кривая — эллипс В самом
деле, дискриминант
\ «24-92 /
т. е. действительно, кривая (10.11) — эллипс. В частном случае эллипс
(10.11) вырождается в пару прямых при условии = 0, т. е.
пр — mq = 0
или 0
&0 V4 4- [а, Ьг — boat — b2) F 4- а2 Ь2 = 0.
34
(Ю.12>
Это не что иное, как уравнение частот автоколебаний (6.2).
Следовательно, равенство нулю дискриминанта Dt равнозначно появлению
автоколебаний. Выше было указано, что для ВИШ уравнение (10.12)
не имеет вещественных корней, т. е. ни для какой вещественной частоты
эллипс не может выродиться в пару прямых. Это обозначает, что в
автоматическом ВИШ, характеристика которого не содержит петли
гистерезиса, невозможны вынужденные колебания с бесконечно большими
амплитудами.
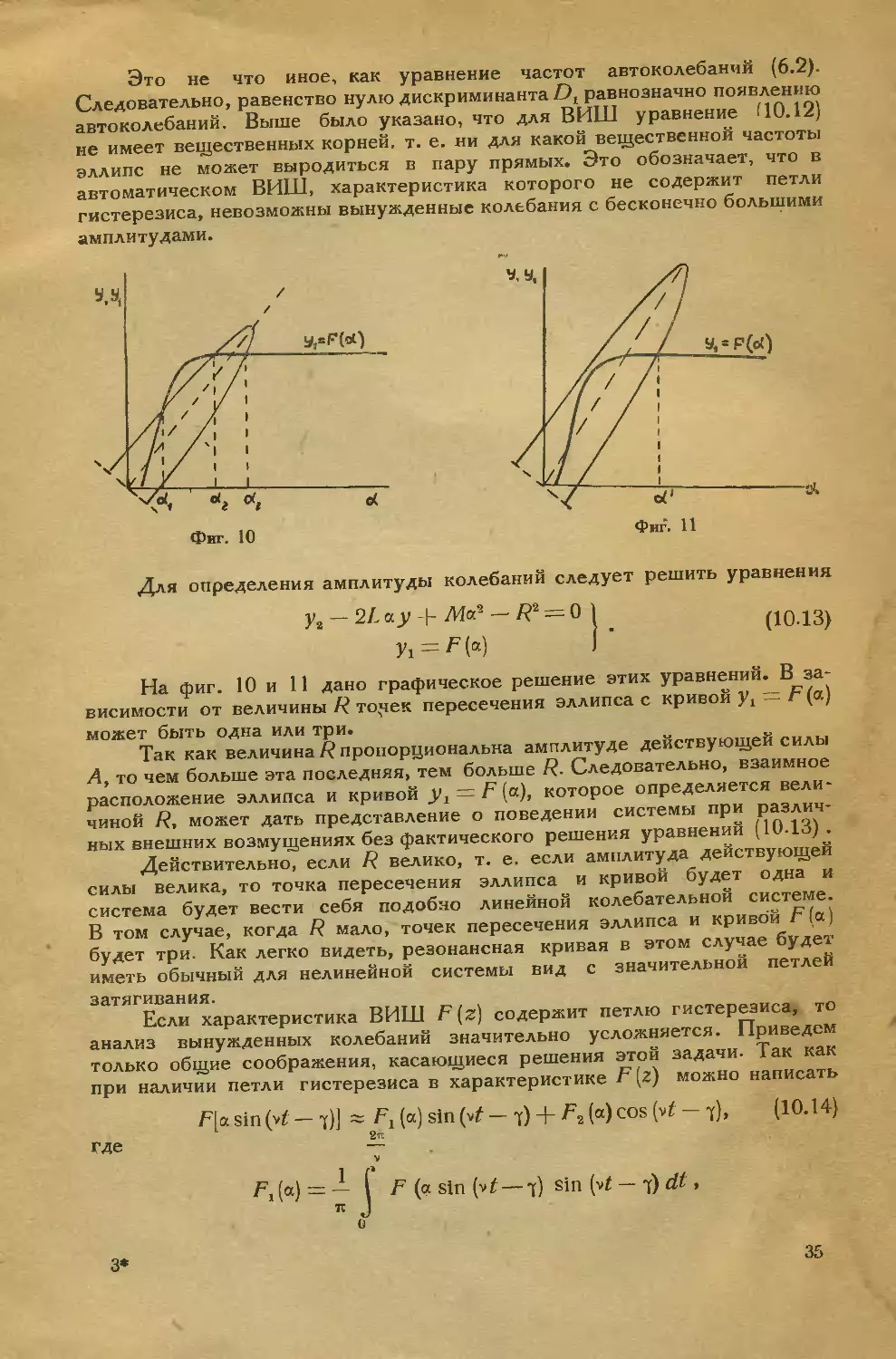
Для определения амплитуды колебаний следует решить уравнения
у2 — 27. а у + Л4а'2 — R'2 — 0
Ь = F(a)
(10.13)
На фиг. 10 и 11 дано графическое решение этих уравнений. В за-
висимости от величины R тоуек пересечения эллипса с кривой уг — F (и)
может быть одна или три.
Так как величина R пропорциональна амплитуде действующей силы
А, то чем больше эта последняя, тем больше R. Следовательно, взаимное
расположение эллипса и кривой у,= F(а), которое определяется вели-
чиной R, может дать представление о поведении системы при различ-
ных внешних возмущениях без фактического решения уравнений (10.13).
Действительно, если R велико, т. е. если амплитуда действующей
силы велика, то точка пересечения эллипса и кривой будет одна и
система будет вести себя подобно линейной колебательной системе.
В том случае, когда R мало, точек пересечения эллипса и кривой F (а)
будет три. Как легко видеть, резонансная кривая в этом случае будет
иметь обычный для нелинейной системы вид с значительной петлей
затягивания.
Если характеристика ВИШ F (z) содержит петлю гистерезиса, то
анализ вынужденных колебаний значительно усложняется. Приведем
только общие соображения, касающиеся решения этой задачи. Так как
при наличии петли гистерезиса в характеристике F (z) можно написать
где
F[asin(v£ — f)] х Ft (a) sin(>7 — 7) + F2 (a) cos <yt — к), (10.14)
2 тс
j F (a sin (v£ — i) sin (yt — 7) dt,
0
3*
35
ЛИТЕРА ТУРА
I. Н. Mccoy, Journal of the Aeronautical Sciences, July, v. 11, № 3, 19-14
2. H. Моисеев. Труды НТК ВВИА им. проф. Н. Е. Жуковского, т. 8, 1946.
3. В. Боднер. К вопросу о выборе скорости перестановки лопастей автомати-
ческих ВИШ, Труды ВВА, Вып. 124, 1944.
4. В. Боднер. Труды НТК ВВИА им. проф. Н. Е. Жуковского, т. 8, 1946.
5. Н. Крылов и Н. Боголюбов. Новые методы нелинейной механики в их при-
менении к изучению работы электронных генераторов, ч. 1, 1934.
6. В. Котельников. Продольная устойчивость самолета с автопилотом типа.
АВП-12, Труды ЛИИ, №2, 1941.
7. Б. Булгаков. Прикладная математика и механика, т. 6, вып. 6, 1942.
8. А. Лурье. Операционное исчисление. ОНТИ, М.—Л., 1938.
9. В. Лоссиевский. Автоматические регуляторы. Оборонгиз, М., 1944.