/







































































































































































































































































































Text
В. В. Васин, Б.М. СТЕПАНОВ
СПРАВОЧНИК-ЗАДАЧНИК
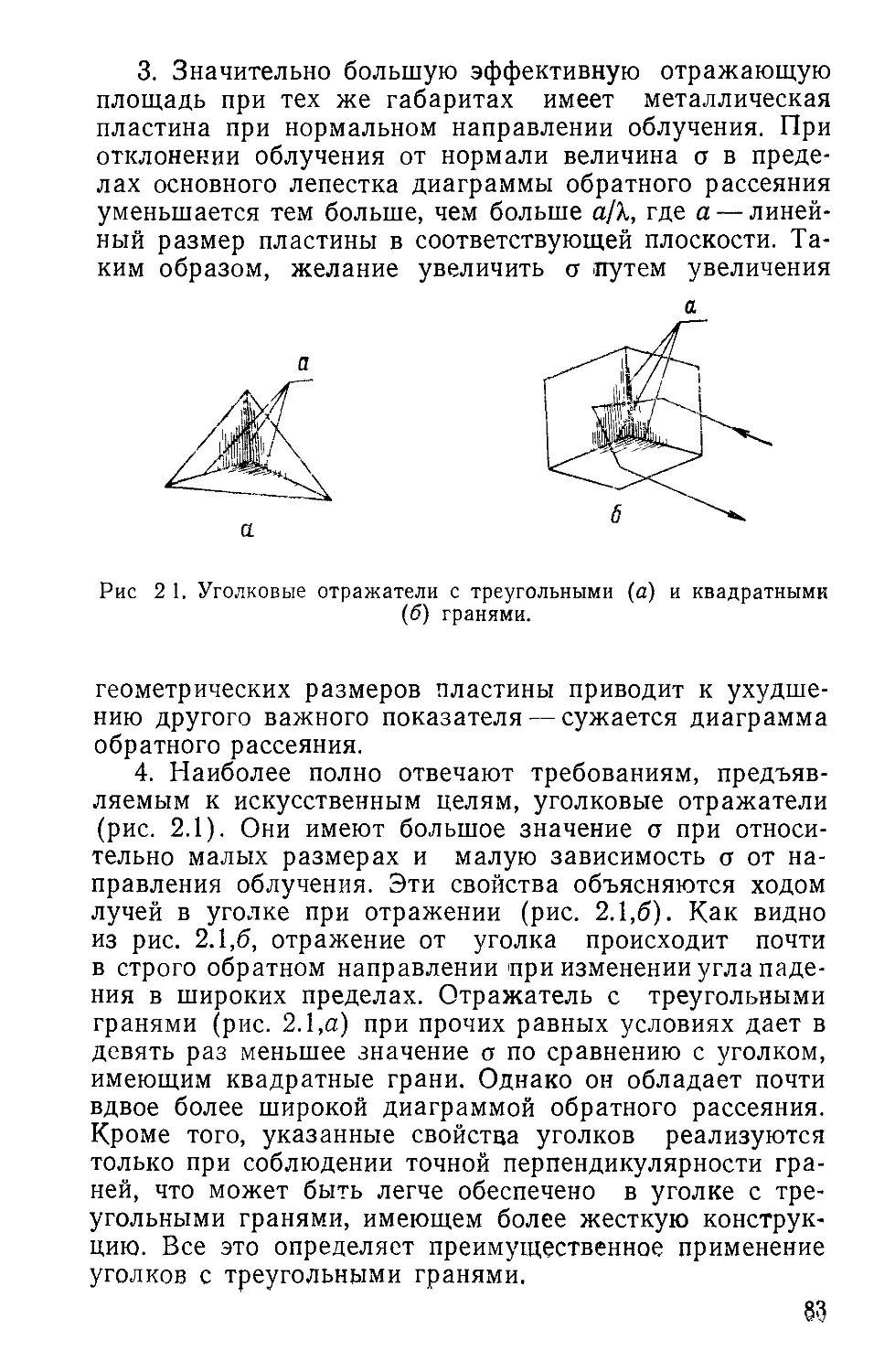
ПО РАДИОЛОКАЦИИ
В. В. Васин, Б. М. Степанов
СП РАВОЧ Н И К-ЗАДАЧ Н И К
ПО РАДИОЛОКАЦИИ
Scanned & DJVUed
Москва «Советское радио» 1977
6Ф2 4
В 19
УДК 621 396 9
Васин В. В., Степанов Б. М. Справочник задачник по ра
диолокапии М, «Сов радио», 1977, 320 с
Книга представляет собой расширенное и переработанное
издание «Задачника по радиолокации», вышедшего в 1969 г
В новом издании материал предыдущей книги значительно
переработан, увеличено число задач, включены новые главы
по индикаторным и цифровым выходным устройствам, защите
от помех, приведены расширенная классификация радиолока
ционных средств и характеристики методов их работы Книга
завершается обширной библиографией по радиолокации и
смежным вопросам Справочный материал, охватывающий все
основные вопросы современной теории радиолокации, приво-
дится с пояснениями, что позволяет в ряде случаев использо-
вать «Справочник-задачник» как самостоятельное учебное по
собие Задачи помогают усвоить методику расчета основных
показателей РЛС и иллюстрируют их взаимосвязь
Книга будет полезна студентам радиотехнических спе-
циальностей, инженерно-техническим работникам, занимаю-
щимся эксплуатацией радиолокационных устройств, и лицам
смежных специальностей
Редакция литературы по вопросам
космической радиоэлектроники
30402-009
В 046(О1)-77
7-76
© Издательство «Советское радио», 1977 i.
Предисловие
Настоящий справочник-задачник является пособием
по радиолокации и предназначен для широкого круга
читателей. В книге рассмотрены основные вопросы со-
временной теории и техники радиолокации: принципы
и методы измерения координат целей, характеристики
радиолокационных целей, параметры радиолокационного
обзора, обнаружение сигналов, дальность действия ра-
диолокационных станций (РЛС), их разрешающая спо-
собность и точность измерения координат целей, выход-
ные устройства и помехозащищенность РЛС.
Основная часть пособия содержит изложение прин-
ципов действия радиолокационных устройств и их
составных частей. Здесь приведено большое количество
формул, связывающих между собой различные показа-
тели радиолокационных станций. Формулы сопровожда-
ются пояснительным текстом, что позволяет использо-
вать их для ориентировочных расчетов даже и не радио-
специалистам. Приведенные справочные данные дают
возможность определять потенциальные значения важ-
нейших показателей радиолокационных станций различ-
ного типа, а также оценивать влияние реальных условий
распространения радиоволн и учитывать техническое
несовершенство реальной аппаратуры.
В книге приведена методика расчета основных тех-
нических показателей станций по предъявленным к этим
станциям требованиям. Эта методика иллюстрируется
числовыми примерами, поясняющими противоречивость
требований к выбору значений отдельных технических
показателей радиолокационных станций.
В каждой главе имеются задачи различной степени
трудности. Для части задач приведены подробные реше-
ния, остальные задачи имеют только ответы.
Книга снабжена обширной библиографией, пользу-
ясь которой читатель может получить более подробные
сведения по интересующим его вопросам.
3
К основным рекомендуемым пособиям относятся:
«Радиолокационные устройства» под ред В. В. Григо-
рина-Рябова, «Теоретические основы радиолокации» под
ред. В. Е. Дулевича, «Теоретические основы радиолока-
ции» под ред. Я. Д. Ширмана, книга М.. И. Финкель-
штейна «Основы радиолокации».
Приводимые в книге значения характеристик радио-
локационных средств являются гипотетическими и слу-
жат для иллюстрации теоретических соотношений.
Работа по подготовке книги была распределена меж-
ду авторами следующим образом: введение и главы 1, 3,
4, 5, 10 написаны Б. М.. Степановым, главы 2, 6, 7,
8, 9 —В. В. Васиным; глава И написана совместно.
Авторы выражают искреннюю благодарность профес-
сорам А. И. Дымовой и М.. И. Финкельштейну, доцентам
М.. Е. Альбацу, В. Б. Бинштоку, А. М.. Бонч-Бруевичу,
Г. В. Обрезкову и канд. техн, наук В. С. Сперанскому
за многочисленные советы и замечания, сделанные
в процессе подготовки книги к изданию.
ВВЕДЕНИЕ
1. Радиолокацией называется область радиоэлектрони-
ки, назначением которой является использование отра-
жения, переизлучения или собственного излучения ра-
диоволн различными объектами для обнаружения этих
объектов, измерения их координат и параметров движе-
ния, а также для оценки свойств объектов. Эта область
техники, зародившаяся в конце 30-х годов, в настоящее
время находит широчайшее применение — от систем
обеспечения мягкой посадки космических аппаратов до
устройств измерения скорости движения автомашин, от
комплексов противоракетной обороны до миниатюрных
карманных приборов для защиты от грабителей.
2. Объекты радиолокационного наблюдения (или, как
их обычно называют, цели) могут быть аэродинамиче-
скими (самолеты, вертолеты), баллистическими или кос-
мическими (искусственные спутники Земли, головки бал-
листических ракет), наземными и надводными (автома-
шины, танки, корабли), а также иметь естественное про-
исхождение (участки земной и водной поверхности, об-
лака, планеты).
3. Основные преимущества радиолокационных методов
получения информации об объектах наблюдения опреде-
ляются:
— возможностью вести наблюдения в любое время
суток, через облака, дождь и туман;
— большой дальностью действия;
— возможностью измерения параметров движения
целей с высокой точностью.
4. В радиолокации используется несколько методов
получения информации о целях. Наиболее распространен-
ным является метод активной'радиолокации, основанный
на облучении целей радиоволнами и приеме отраженных
радиосигналов. Устройства активной радиолокации мо-
гут быть совмещенными и разнесенными. В первом слу-
чае радиопередатчик, предназначенный для облучения
5
целей, и радиоприемник, служащий для приема отражен-
ных сигналов, располагаются в непосредственной близо
сти и обычно входят в состав одной радиолокационной
станции. Во втором случае точки излучения и приема
радиоволн располагаются на удалении друг от друга.
Активную радиолокацию с разнесенными точками из-
лучения и приема радиосигналов называют также полу-
активной радиолокацией.
В радиолокации часто используется метод активного
ответа, который характеризуется применением ретранс-
ляторов или ответчиков, устанавливаемых на объектах
наблюдения и предназначенных для приема облучающих
цель радиоволн и излучения ответных кодированных ра-
диосигналов.
Радиолокация, использующая прием собственного ра-
диоизлучения целей, носит название пассивной радиоло-
кации.
5. С помощью радиолокационных устройств можно
решить следующие задачи:
— обнаружить присутствие объектов наблюдения
(целей);
— измерить их пространственные координаты (даль-
ность, угловые координаты, высоту над поверхностью
Земли и др );
— определить скорости изменения координат и аб-
солютные скорости движения целей;
— определить производные координат целей по вре-
мени более высокого порядка;
— выявить траектории движения целей на интервале
наблюдения и прогнозировать их;
— оценить некоторые свойства обнаруживаемых це-
лей (размеры кораблей или летательных аппаратов,
структуру облаков или поверхности планет и др.);
— определить государственную принадлежность на-
блюдаемых целей.
6. Радиолокационными станциями (РЛС) или радиоло-
каторами называются технические средства получения
радиолокационной информации. Основными составными
частями РЛС являются:
— радиопередатчик, предназначенный для формиро-
вания сигналов, зондирующих пространство;
— антенное устройство, предназначенное для излу-
чения и приема радиоволн;
6
— радиоприемник, предназначенный для селекции,
усиления и необходимого преобразования сигналов, не-
сущих информацию о целях,
— выходное устройство, позволяющее представить
Имеющуюся информацию о целях в виде, удобном для
получателя (электронно-лучевой индикатор или преоб-
разователь электрических сигналов приемника в код,
используемый в электронной цифровой вычислительной
машине);
— управляющее устройство, предназначенное для
создания управляющих электрических сигналов, опреде-
ляющих вид излучаемых колебаний и их периодичность,
а также характер обработки принятых сигналов в при-
емнике и выходном устройстве.
7. По назначению радиолокационные станции можно
разделить на следующие основные группы [41, 43, 72,
94—96, 99, 102, 115].
Наземные РЛС:
1) станции управления воздушным движением
в районе аэродрома;
2) станции посадки самолетов;
3) станции обзора летного поля;
4) станции обнаружения воздушных целей и наведе-
ния на них истребителей;
5) станции обнаружения баллистических ракет и ис-
кусственных спутников Земли и слежения за ними.
6) станции целеуказания, используемые для выбора
цели при стрельбе зенитной артиллерии или зенитными
управляемыми ракетами;
7) станции орудийной наводки и наведения зенитных
управляемых ракет;
8) станции разведки движущихся наземных целей,
предназначенные для наблюдения за передвижением
войск и техники противника в прифронтовой полосе на
на поле боя;
9) загоризонтные станции обратного рассеяния, пред-
назначенные для обнаружения низколетающих самоле-
тов и запусков баллистических ракет как наземными
установками, так и с подводных лодок и кораблей;
10) метеорологические станции, предназначенные для
измерения скорости и направления ветра на различных
высотах; определения интенсивности, формы, направле-
ния и скорости перемещения ливневых и грозовых оча-
гов; обнаружения зон инверсий температуры и влажно-
7
сти, а также зон повышенной турбулентности; оператив-
ного наблюдения за тайфунами, торнадо, шквалами.
Корабельные РЛС:
1) навигационные станции, обеспечивающие корабле-
вождение и позволяющие, в частности, определять
истинный курс и истинную скорость корабля;
2) станции, обеспечивающие вход, выход и маневри-
рование в узостях (например, в портах, проливах
и т. п.), а также предотвращающие столкновения кораб-
лей в плохих метеоусловиях и ночью;
3) станции наблюдения за воздушной обстановкой;
4) станции обнаружения надводных и низколетящих
целей кораблей, самолетов, ракет;
5) станции обнаружения баллистических ракет и
искусственных спутников Земли и слежения за ними.
Самолетные и ракетные бортовые РЛС:
1) радиолокационные дальномеры, используемые сов-
местно с оптическими и инфракрасными прицелами для
точного измерения дальности целей;
2) станции перехвата и прицеливания, используемые
для обнаружения целей, осуществления сближения с ни-
ми и атаки, а также для выхода из атаки;
3) бортовые станции управляемых ракет, используе-
мые для управления полетом ракеты при выводе ее в точ-
ку встречи с целью;
4) радиолокационные взрыватели, предназначенные
для подрыва боевого заряда при нахождении ракеты
вблизи цели;
5) радиолокационные прицелы, предназначенные для
обнаружения воздушных целей, атакующих данный са-
молет, и управления стрельбой по этим целям;
6) станции предупреждения об облучении самолета
радиолокационными станциями противника;
7) самолетные панорамные станции, предназначенные
для получения изображения земной поверхности, над
которой пролетает самолет;
8) станции бокового обзора, предназначенные для
наблюдения земной поверхности при высокой разрешаю-
щей способности по угловой координате.
9) радиолокационные высотомеры, предназначенные
для точного измерения истинной высоты полета само-
лета;
10) станции измерения скорости полета самолета;
11) станции, предназначенные для предупреждения
8
экипажа самолета о грозовых образованиях, зонах повы-
шенной турбулентности атмосферы, а также о наземных
препятствиях (горы, высокие сооружения и т. п.);
12) станции дальнего обнаружения надводных и низ-
колетящих целей.
Появление компактных твердотельных генераторов
микроволнового диапазона в сочетании с общей микро-
миниатюризацией конструкции аппаратуры привели
к созданию малогабаритных РЛС самого различного на-
значения. Так, например, имеются РЛС для:
— измерения скорости движения пресса без контак-
та с движущимся объектом;
— измерения скорости корабля при швартовке;
— измерения вибраций корпуса самолета с точно-
стью порядка 10~5 м;
— определения амплитуды и частоты вибраций
ультразвуковой головки сварочного агрегата.
8. Любая РЛС характеризуется следующими показа-
телями:
— назначением;
— размерами области пространства, в пределах ко-
торой осуществляется наблюдение целей (зона обзора),
— временем, требующимся для осмотра заданной
зоны обзора (период обзора);
— измеряемыми координатами целей и их производ-
ными по времени;
— точностью измерения координат;
— разрешающей способностью;
— эксплуатационной надежностью;
— помехозащищенностью.
Зона обзора РЛС ограничивается максимальной и
минимальной дальностью обнаружения целей, а также
секторами обзора в горизонтальной и вертикальной пло-
скостях.
Измеряемыми координатами целей чаще всего явля-
ются их дальность и две угловые координаты — азимут
и угол места; широкое применение находят также изме-
рения высоты полета целей,, радиальной составляющей
их скорости, угловых скоростей их перемещения в гори-
зонтальной и вертикальной плоскостях.
При оценке точности измерений, осуществляемых
с помощью РЛС, обычно принимают во внимание лишь
случайные составляющие ошибок. В качестве характе-
9
ристик точности чаще всего используют Среднеквадрати-
ческое значение или дисперсию ошибки измерения.
Разрешающая способность РЛС характеризует воз-
можность раздельного наблюдения целей, которые раз-
личаются значениями координат или их производных.
Так, разрешающая способность РЛС по дальности опре-
деляется тем минимальным расстбянием между двумя
целями, имеющими одинаковые угловые координаты и
скорость перемещения, при котором эти цели еще на-
блюдаются раздельно. Разрешающая способность по
угловой координате определяется минимальным углом
между направлениями на две цели из точки располо-
жения РЛС, при котором еще возможно раздельное на-
блюдение этих целей. Иногда разрешающую способность
РЛС характеризуют элементарным разрешаемым объе-
мом, размеры которого определяются таким образом,
что две цели, находящиеся в центрах соседних элемен-
тарных объемов, наблюдаются раздельно. Если расстоя-
ние между целями меньше размера элемента разреше-
ния, то эти цели воспринимаются радиолокационной
станцией как одна.
Эксплуатационной надежностью РЛС называется
свойство выполнять возложенные на нее функции в ре-
альных условиях эксплуатации. Обычно эксплуатацион-
ную надежность станции характеризуют (вероятностью
безотказной работы в течение заданного времени или
средним значением времени работы между двумя после-
дующими отказами.
П омехозащищенностью называется способность РЛС
сохранять свои тактические показатели при воздействии
помех. Для оценки помехозащищенности не выработано
единого критерия. В самом общем виде можно сказать,
что из двух РЛС та обладает более высокой помехоза-
щищенностью, у которой при прочих равных условиях
воздействие помехи вызовет меньшее ухудшение такти-
ческих показателей.
9. Показатели каждой РЛС определяются ее техниче-
скими характеристиками. К основным техническим харак-
теристикам РЛС относятся:
— вид и параметры излучаемых колебаний (закон
модуляции, временные показатели и т. д.);
— способ обработки сигналов в приемнике;
— несущая частота или длина волны излучаемых
колебаний;
10
— средняя и пиковая мощность излучения;
— форма и ширина диаграммы направленности
антенны, а также значения эффективной площади антен-
ны и ее коэффициента усиления;
— закон перемещения в пространстве диаграммы на-
правленности антенны;
— время облучения точечной цели;
— чувствительность приемного устройства;
— способ выдачи выходных данных РЛС.
10. В соответствии с решаемыми задачами различают
радиолокационные станции обнаружения, точного изме-
рения дальности или угловых координат, распознавания
целей, выявления их траекторий и т. д. В настоящее вре-
мя получают широкое распространение многофункцио-
нальные РЛС [81, 88, 102], которые позволяют одновре-
менно или последовательно решать различные задачи.
В зависимости ют возможности одновременного наблю-
дения только одной или многих целей РЛС подразделя-
ются на одноцелевые и многоцелевые [89, 119].
11. По виду зондирующих (облучающих цели) сигна-
лов станции активной радиолокации могут быть
разделены на две большие группы: РЛС с импульсным
и непрерывным излучением.
Представителями импульсных РЛС являются:
— некогерентные импульсные станции;
— когерентно-импульсные станции с большой скваж-
ностью;
— когерентно-импульсные станции с малой скважно-
стью;
— станции с внутриимпульсной частотной модуля-
цией;
— станции с внутриимпульсной фазовой манипуля-
цией.
В РЛС с непрерывным излучением могут использо-
ваться:
— немодулированные незатухающие колебания;
— частотно-модулированные 1колебания;
— непрерывные шумоподобные сигналы.
Принцип действия и характеристики РЛС с перечислен-
ными зондирующими 'Сигналами рассмотрены ниже.
Главными достоинствами импульсных РЛС являются
простота измерения дальности до цели, в том числе и
при наличии многих целей, и несложность использова-
ния одной антенны для приема и передачи. К недостат-
11
кам импульсных РЛС относятся необходимость приме-
нения больших пиковых мощностей излучаемых колеба-
ний и сложность измерения скорости цели, особенно
с высокой точностью.
РЛС с непрерывным излучением позволяют:
— эффективно различать цели путем селекции по
скорости;
— однозначно измерять скорость в широком диапа-
зоне ее возможных изменений;
— измерять очень малые расстояния;
— работать при относительно малой мощности из-
лучения.
К недостаткам РЛС с непрерывным излучением сле-
дует отнести сложность развязки .приемного и передаю-
щего трактов, а также сложность выходных устройств,
особенно при необходимости вести наблюдение за мно-
гими целями по нескольким параметрам.
12. В зависимости от числа одновременно используе-
мых независимых радиолокационных каналов РЛС под-
разделяются на одноканальные и многоканальные РЛС
с несколькими каналами могут быть частотно-многока-
нальными, пространственно-многоканальными и про-
странственно-частотно-многоканальными.
Частотно-многоканальными называют станции, в ко-
торых имеются несколько передатчиков, работающих на
различных частотах, и столько же приемников, настро-
енных на соответствующие частоты. Сигналы излучают-
ся и принимаются в пределах одной и той же диаграм-
мы направленности антенны, т е можно считать, что
излучение и прием всех сигналов производятся в одной
точке пространства. Отдельная цель облучается одно-
временно на нескольких частотах. Выходные сигналы ка-
налов обрабатываются совместно.
Пространственно-многоканальные РЛС имеют не-
сколько точек приема и излучения сигналов, которые
разнесены в пространстве. Пространственно-многока-
нальная станция характеризуется наличием нескольких
независимых диаграмм направленности антенны. Излу-
чение и прием сигналов осуществляются на одной ча-
стоте Для излучения зондирующих сигналов может
быть использован один общий передатчик, но приемные
каналы обязательно должны быть различными.
Пространственно-частотно-многоканальные РЛС име-
ют несколько смещенных друг относительно друга в про-
12
странстве диаграмм направленности антенны и в преде-
лах каждой диаграммы излучается своя частота (или
несколько частот). При использовании многоканальных
РЛС по сравнению с одноканальными увеличивается
излучаемая мощность (при прочих равных условиях),
возрастают дальность действия и точность измерения
координат (при заданной суммарной мощности излуче-
ния), повышается помехозащищенность станции.
13. Радиолокационные сигналы могут последователь-
но подвергаться трехкратной обработке. При первичной
обработке, предназначенной для обнаружения цели и
определения ее координат, источником информации
являются высокочастотные радиосигналы, поступившие
в приемник радиолокационной станции за время одного
облучения цели В результате первичной обработки
принятые сигналы фиксируются с помощью индикатор-
ных устройств того или иного вида, а также кодируют-
ся. т е преобразуются в форму, удобную для их даль-
нейшей обработки и передачи по каналам связи
При втопичной обработке используются сигналы, по-
лученные в течение нескольких периодов обзора радио-
локационной станции Эта обработка имеет целью повы-
сить достоверность информации, уменьшить влияние
естественных и искусственных (помех Вторичная обра-
ботка позволяет также расширить объем получаемой
информации путем вычисления скорости и курса цели
или ее траектории
Третичная обработка представляет собой совместную
обработку сигналов, поступающих от нескольких ра-
диолокационных станций (предполагается наличие Ра-
диолокационной системы). Функциональное взаимодейст-
вие средств, образующих систему, создает гораздо более
широкие технические возможности, чем простое сумми-
рование этих средств По существу образование системы
органически взаимодействующих радиолокаторов созда-
ет новое качество при выделении полезной информации
[54, 116, 117]. Так, имеет место резкое увеличение поме-
хозащищенности и пропускной способности РЛС в си-
стеме, возрастание их дальности действия и точности
измерения координат целей.
14. Судя по иностранным источникам [43, 50, 71,
94—96], основными тенденциями развития радиолокаци-
онной аппаратуры являются:
13
— усложнение формы зондирующих сигналов, в ча-
стности использование шумоподобных сигналов;
— использование антенн с электронным сканирова-
нием, в том числе широкое использование активных фа-
зированных антенных решеток;"
— применение цифровых методов фильтрации сигна-
лов;
— объединение РЛС с ЦВМ с целью обеспечения
адаптации характеристик РЛС применительно к кон-
кретной быстро меняющейся обстановке;
— снижение веса и габаритов аппаратуры путем вне-
дрения микроминиатюризации.
Г л а в a 1
ФИЗИЧЕСКИЕ ОСНОВЫ РАДИОЛОКАЦИИ
Основные справочные данные
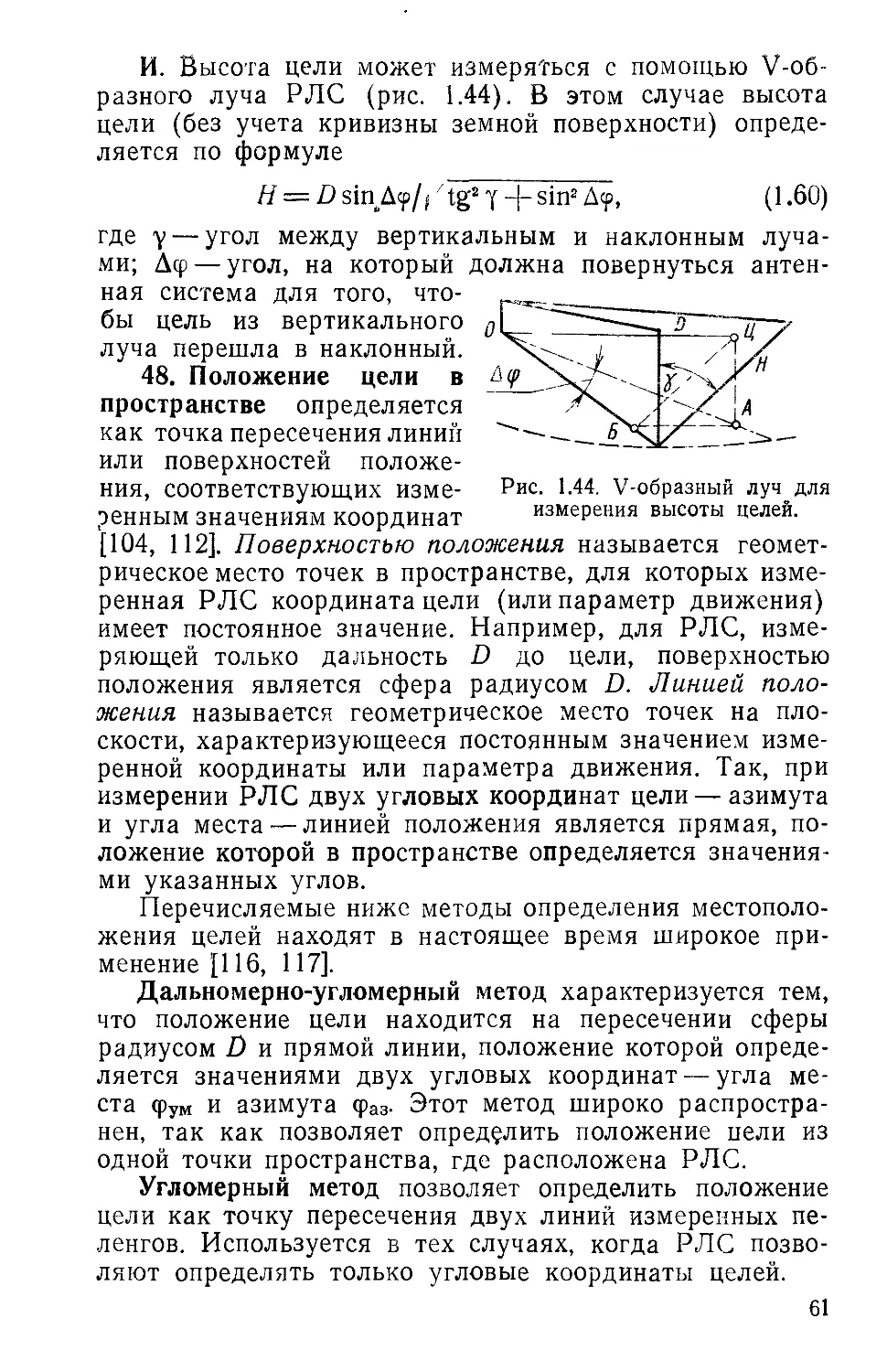
1. Как правило, для определения пространственного
положения целей используются сферическая или цилин-
дрическая системы координат [22]. На рис. 1.1
х, у, z являются ортогональными осями координат. На-
чало координат — точка
О — соответствует положе-
нию РЛС, точка М — поло-
жению цели в пространстве,
а точка L — проекции цели
на горизонтальную пло-
скость хОу. К сферическим
координатам наблюдаемой
цели относятся: D — ради-
ус-вектор (в радиолокации
дальность до цели), фаз—
долгота (в радиолокации
азимут), фум — угол места,
дополняющий полярное
расстояние 0 до 90°. Ци-
Рис. 1.1. Системы измерения
координат.
линдрические координаты: аппликата z (в радиолока-
ции высота цели Я) и полярные координаты фаз — ази-
мут и р — расстояние от начала координат до проекции
цели на горизонтальную плоскость хОу (в радиолока-
ции — горизонтальная дальность).
2. При использовании средств активной радиолокации
в предположении постоянства скорости и прямолинейно-
сти распространения радиоволн дальность до цели D
однозначно связана с временем распространения (вре-
менем запаздывания) радиоволн tD от РЛС до цели и
обратно
D = 0,5 ctD.
Здесь с — скорость распространения радиоволн, прини-
маемая обычно равной 300 000-км/с. Действительное зна-
чение скорости распространения радиоволн в вакууме
составляет 299 792±0,4 км/с. Скорость распространения
радиоволн над земной поверхностью изменяется случай-
ным образом в зависимости от метеоусловий. Отноше-
ние средпеквадратического значения изменения этой
15
скорости к ее среднему значению можно приблизительно
считать равным 5 • 10-5.
3. Методы измерения дальности подразделяются на
амплитудные, частотные и фазовые в зависимости от
того, какой из параметров принимаемых радиосигналов
играет основную роль при измерении времени распро-
странения радиоволн.
Рис. 1.2. Схема импульсного дальномера.
4. Среди РЛС с амплитудным методом измерения
дальности наибольшее распространение получили им-
пульсные станции [99]. Принцип их действия иллюстриру-
ется схемой на рис. 1.2. Генератор высокой частоты,
управляемый импульсным модулятором, генерирует ко-
роткие высокочастотные импульсы с заданным периодом
повторения.
Генерируемый сигнал может быть записан следую-
щим образом:
Цген (0 = U о COS [(о / 4“фо)
при /о<^/о + Ти,
где to — начало отсчета на временной оси, совпадающее
с началом импульса; ти — длительность импульса; Uo—
амплитуда колебаний; ф0— начальная фаза колебаний.
На время излучения каждого импульса антенна под-
соединяется к генератору с помощью антенного переклю-
чателя; все остальное время антенна подключена к при-
емнику. Отраженные от цели сигналы после преобразо-
вания в приемнике поступают к выходному устройству,
где путем сопоставления моментов излучения зондирую-
щего импульса и приема отраженного измеряется время
запаздывания tD. Синхронность импульсных процессов
в передатчике РЛС и измерительном устройстве обеспе-
чивают управляющие сигналы синхронизатора.
16
5. В качестве выходного устрой-
ства в импульсной РЛС может быть
использована электронно-лучевая
трубка с амплитудной или яркост-
ной отметкой [99]. Развертка луча
по экрану трубки, как правило, осу-
ществляется с постоянной ско-
ростью. Работа схемы развертки
синхронизирована с работой пере-
датчика РЛС (рис. 1.3). Если на
экране трубки расстояние между
изображениями излученного и отра-
женного импульсов равно I (рис.
1.4), скорость развертки ура3в, то
Id= ^/^разв-
От синхргни^пкра
| Схема развертки
От приемника. |
Рис. 1.3. Выходное
устройство импульс-
ного дальномера с
электронно-лучевой
трубкой.
(1-2)
6. В качестве выходного устройства импульсного даль-
номера может быть использовано и автоматическое счет-
ное устройство [117, 124]. Принцип действия подобного
устройства иллюстрирует рис. 1.5,а; эпюры напряжения,
поясняющие работу устройства, приведены на рис. 1.5,6.
Импульсами синхронизатора запускается генератор
строба, который вырабатывает управляющий импульс
Излученный.
Рис. 1.4. К импульсному методу измерения дальности:
а — эпюры напряжения; б — изображение на экране трубки.
(строб) £7стр длительностью Тстр = 2Е)макс/е (здесь
Омаке — максимальное значение измеряемой дальности).
Этот строб отпирает вентиль, через который к счетчику
поступают масштабные импульсы [7ИМ от специального
калиброванного генератора. Время распространения ра-
17
диоволи tD определяется числом Мш масштабных им-
пульсов, заключенных в интервале времени между излу-
чением зондирующего импульса и приемом отраженного
(^с):
где Лш — период следования масштабных импульсов.
Рис. 1.5. Автоматическое счетное устройство для импульсного даль-
номера:
а — схема устройства; б — эпюры напряжений.
18
Данные от счетчика импульсов поступают в схему
памяти ЦВМ. Съем данных счетчика производится в те
моменты времени, когда приходят отраженные от цели
сигналы: импульс напряжения Uc воздействует на гене-
ратор считывания, который импульсом Uc4 отпирает
вход схемы памяти ЦВМ. В памяти ЦВМ могут быть
данные о дальности всех обнаруженных целей в диа-
Рис. 1.6. Схема дальномера с шумоподобным сигналом.
пазоне от 0 до 7)Макс- В конце каждого рабочего цикла
РЛС генератор строба посылает команду «сброс»
(^сбР) в счетчик импульсов.
7. Для импульсных дальномеров диапазон однознач-
ного измерения дальности определяется периодом следо-
вания Гц излучаемых импульсов
А7)ОдН^ 0,5сТи. (1.3)
8. Амплитудный метод измерения дальности может
быть реализован и при непрерывном излучении. Схема
на рис. 1.6 иллюстрирует вариант построения подобного
устройства [71, 99, 117]. Генератор незатухающих коле-
баний модулируется по амплитуде шумовым напряже-
нием иш (£). Зондирующий сигнал имеет вид:
«ген(0 =Щ1 +kUm (/)] COS (©/ + ф0),
где Uq—амплитуда незатухающих колебаний; k — коэф-
фициент пропорциональности.
19
Модулированные высокочастотные колебания излу-
чаются в пространство и используются для облучения
целей. Отраженный сигнал поступает в приемник, на
выходе которого выделяется огибающая сигнала t7np(O-
Для обработки сигнала используется коррелятор — уст-
ройство, предназначенное для перемножения выходного
сигнала приемника и задержанного шумового напряже-
ния Um(t—Тз) и интегрирования результата умножения
за время наблюдения Тн:
Гн
t/кор = а Г и „г (/) иш (t - TS) dt, (1.4)
О
где а — коэффициент пропорциональности.
Задержка в линии т3 может плавно изменяться. Вы-
ходное напряжение коррелятора измеряется. В зависи-
мости от Тз выходное напряжение коррелятора изменя-
ется случайным образом (рис. 1.7). При достаточно мед-
ленном изменении т3 (время наблюдения Ти много боль-
ше времени корреляции тКОр модулирующего шума)
с большой вероятностью можно утверждать, что при
т3~/р
(1-5)
выходное напряжение коррелятора будет иметь выброс,
резко превышающий остальные. Следовательно, по зна-
Рис. 1.7. Напряжение на выхо-
де коррелятора дальномера.
ляционной функцией (см.
чению величины т3 при ма-
ксимуме выходного напря-
жения коррелятора можно
определить время запазды-
вания отраженного от цели
сигнала.
Основное преимущество
рассмотренного принципа
измерения дальности состо-
ит в использовании шумопо-
добного сигнала, обладаю-
щего одногорбой автокорре-
гл. 6). Кроме того, подобный
сигнал труднее разведать противнику, так как сигнал
похож на собственный шум разведывательного прием-
ника.
Диапазон однозначного измерения дальности авто-
корреляционным измерителем принципиально не огра-
ничен.
Недостатки описанного технического решения:
20
— трудность модуляции высокочастотных колебаний
напряжением, изменяющимся в широких пределах;
— трудность создания линий с плавно изменяемой
задержкой;
— длительность процесса измерения в широком диа-
пазоне дальностей.
9. Определение дальности может быть основано на ис-
пользовании зависимости амплитуды отраженного сигна-
ла от расстояния между РЛС и целью. Как известно,
амплитуда отраженного сигнала на входе приемника
активной РЛС обратно пропорциональна квадрату даль-
ности до цели: Uc=klD2. Коэффициент пропорциональ-
ности k зависит от параметров РЛС, затухания радио-
волн в среде и характеристик цели; его значения могут
претерпевать очень большие изменения даже для данной
РЛС. Но если говорить, например, о дистанциометриро-
вании в радиовзрывателях авиационных ракет [35, 72],
то поглощением радиоволн можно пренебречь ©следст-
вие малости расстояний, а отражающие свойства целей
можно считать приближенно постоянными. Таким обра-
зом, значение коэффициента k поддается предваритель-
ной оценке и определение дальности может базироваться
на измерении амплитуды сигналов:
D = VkJU[. (1.6)
Основным достоинством рассмотренного метода явля-
ется простота его реализации, особенно, если не требу-
ется измерять дальность цели в относительно широком
диапазоне, а достаточно зафиксировать достижение не-
которого конкретного значения дальности.
Недостатком метода является низкая точность оценки
дальности.
10. Радиолокационное устройство автоматического со-
провождения по дальности (АСД) позволяет непрерывно
измерять и выдавать текущее значение дальности опре-
деленной «сопровождаемой» цели. Устройство АСД
представляет собой замкнутую систему автоматического
регулирования, в которой отслеживается значение того
параметра сигналов, который Однозначно связан с даль-
ностью.
11. При импульсном излучении система АСД отсле-
живает непосредственно значение времени запаздывания
отраженных от цели сигналов. Принцип действия им-
пульсного дальномера с автоматическим сопровождени-
21
ем целей иллюстрируется схемой, изображенной на
рис. 1.8. Приемопередающая часть является обычной
для импульсной РЛС. В качестве выходного устройства
используется система АСД; к ней поступают сигналы
с выхода приемника. Принципиально важными элемента-
ми системы АСД являются: временной различитель, схе-
ма временной задержки и генератор селекторных им-
Рис. 1.8. Схема импульсного дальномера с автоматическим слеже-
нием за сигналом.
пульсов [99, 116, 117]. Временной различитель предна-
значен для сравнения положения на временной оси
принимаемых импульсных сигналов и пары селекторных
импульсов, формируемых специальным генератором.
22
На рис. 1.9 изображены эпюры импульсных напряже-
ний синхронизатора (£/СИн), приемника (t7np) и генера-
тора селекторных импульсов (£/сел1 и С7сеЛ2).
Несовпадение во времени середины принятого сигна-
ла и оси симметрии селекторных импульсов (рис. 1.9,а)
приводит к изменению выходного напряжения временно-
го различителя ч(^вр); величина и знак изменения
Рис. 1.9. К работе системы автосопровождения по дальности:
а — сдвиг по времени между сигналом и селекторными импульсами; б — точ-
ное слежение.
определяются временным рассогласованием А/. В режи-
ме слежения за целью напряжение через контакт 2
реле захвата поступает к сдеме временной задержки,
которая обеспечивает запуск (£/зап) генератора селек-
торных импульсов. Изменение £/В1р вызывает изменение
задержки /Сел запускающих импульсов (7зап, в результате
чего изменяется положение селекторных импульсов на
временной оси. Система АСД обеспечивает слежение
23
оси симметрии селекторных импульсов За серединой при-
нимаемых сигналов (рис. 1.9,6). При этом выходное на-
пряжение временного различителя можно считать про-
порциональным дальности до цели
С7вр—
(1-7)
Для предварительного совмещения селекторных им-
пульсов с сигналом цели служит система поиска по
дальности. В режиме поиска управляющее напряжение
поступает к схеме временной задержки от генератора
поиска через контакт 1. Это напряжение заставляет се-
Рис 1 10 Схема частотного дальномера
лекторные импульсы перемещаться по оси дальности
(времени) от Dmm до £>Макс- Как только один из селек-
торных импульсов ([/Сел2) совпадает с сигналом цели,
срабатывает схема совпадения, управляющая работой
реле захвата. Реле захвата отключает генератор поиска
от схемы временной задержки и подключает к ней
временной различитель; начинается автоматическое сле-
жение за целью.
Специфические особенности и характеристики систе-
мы АСД рассмотрены в работах [15, 53, 57, 59, 116, 117].
12. При частотном методе определения дальности
РЛС излучает непрерывные колебания с частотной мо-
дуляцией. Время распространения определяется путем
измерения разности частот излучаемых колебаний и от-
раженного сигнала. Схема частотной дальномерной РЛС
приведена на рис. 1.10. Антенна передатчика излучает
частотно-модулированные колебания. На рис.. 1.11, а
сплошной линией показано изменение частоты излучае-
мых колебаний по симметричному пилообразному зако-
24
ну. На временных интервалах
+ /о + (2и+ 1) Гм/2
«ген (/) — /Л С OS [2lt (/ мин/ -j- fмм) ~F Ф °]
и на интервалах
/о + (2/г + 1) Гм/2^ /<^ /о+ (« +1) Гм
«ген (/) = Uo COS [2тг (/макс/ — /гЛ/м/Гм) 4" <?<>],
где Uo— амплитуда колебаний, Д/м=/макс—/мин — макси-
мальное изменение частоты, Тм— период модуляции;
/г = 0, 1, 2, 3, ...
Рис. 111 К частотному измерению дальности:
а — изменение во времени частоты излучаемых и принимаемых колебаний;
б — разностная частота
Изменение частоты отраженного сигнала характери-
зуются тем же законом, но смещенным по оси времени
на tD (пунктирная линия на рис. 1.11,а). Принятые и
излучаемые колебания подаются в смеситель, на выходе
которого образуется разностная частота /р. График, ха-
рактеризующий изменение /р во времени, приведен на
рис. 1.11,6. После усиления колебания с разностной ча-
стотой подводятся к анализатору частоты. Если время
запаздывания tD много меньше периода модуляции Тм,
а разностная частота много больше частоты модуляции
25
(f.p>*FM), то с достаточной точностью справедлива фор-
мула [99, 117, 124]
(1.8)
Для дальности до цели соответственно получим
D = cTM4^. (1.9)
Интервал однозначного измерения дальности равен
ДГ)одн=еТм/4. (1.10)
Если в зоне облучения РЛС одновременно находятся
несколько целей, то на входе приемника одновременно
существуют сигналы с разными частотами — каждой це-
ли соответствует своя разностная частота. После смеси-
теля возникнут колебания не только с основными раз-
ностными частотами, но и с комбинационными. Однако,
если опорное напряжение мген(0» поступающее от пере-
датчика, во много раз превышает напряжение wnp(/)
входных сигналов, то влиянием комбинационных частот
можно пренебречь.
Измерение разностных частот и определение дально-
сти до целей осуществляется с помощью анализатора
частоты. Анализаторы бывают одноканальные и много-
канальные. Одноканальный анализатор включает как
основные элементы узкополосный фильтр и индикатор-
ное устройство (например, лампочку или стрелочный
прибор). В процессе измерения фильтр должен пере-
страиваться в диапазоне возможных значений разност-
ной частоты. Преимущество одноканального анализатора
состоит в простоте реализации, основной недостаток —
длительность процесса измерения в диапазоне частот
[99, 116, 117, 124].
Многоканальный анализатор имеет набор частотных
каналов, одновременно перекрывающих требуемый ча-
стотный диапазон. Основное преимущество этого техни-
ческого решения состоит в резком сокращении длитель-
ности измерения.
К достоинствам частотных дальномеров с непрерыв-
ным излучением следует отнести простоту измерения
очень малых расстояний (до единиц сантиметров) и при-
менение передатчиков относительно малой мощности
(как у всех станций с непрерывным излучением). Основ-
ные недостатки рассмотренных РЛС свойственны всем
станциям с непрерывным излучением: желательность
26
использования двух антенн,
ухудшение чувствительно-
сти приема вследствие попа-
дания в приемный тракт не-
которой доли излучения пе-
редатчика, подверженной
случайным изменениям. Спе-
цифическим недостатком
является требование весьма
высокой линейности измене-
ния частоты для одновре-
менного наблюдения за не-
сколькими целями [124].
13. При наличии только
одной цели (например, в ра-
диовысотомерах) может быть
частотная модуляция (рис. 1.
Рис. 1.12. Синусоидальное изме-
нение частоты излучаемых ко-
лебаний.
применена синусоидальная
«ген (/) — Uo COS (fK31it 4- фо) = Uа COS [2tlfot -|-
—|- (Д/М/2ГМ) sin —|— фо] »
где Fm=1./Tm — частота модуляции, Тм— период моду-
ляции. В этом случае разностная частота изменяется по
синусоидальному закону. Среднее значение модуля раз-
ностной частоты | fр| С(р однозначно связано с дальностью
до цели [29]:
П = сТмИр|ср/4Л/м. (1.11)
14. Частотный дальномер с непрерывным излучением
может быть использован для автоматического слежения
за целью по дальности [117].
Высокочастотная часть станции включает передат-
чик, предназначенный для генерации непрерывных ча-
стотно-модулированных колебаний, и описанную в п. 12
схему высокочастотной обработки принятого сигнала.
От смесителя колебания иСм(0 с разностной частотой
f,p поступают к системе АСД. Одна из возможных схем
системы АСД изображена на рис. 1.13. Ее входным эле-
ментом является узкополосный фильтр, перестраивае-
мый в нужном диапазоне с помощью мотора. При поиске
цели по дальности перестройка фильтра осуществляется
от схемы поиска, которая через контакт 1 реле захвата
питает мотор перестройки. При попадании сигнала раз-
ностной частоты в полосу фильтра начинает поступать
27
напряжение к схеме управления реле захвата; схема
поиска отключается и к мотору перестройки через кон-
такт 2 подводится управляющее напряжение от систе-
мы АСД.
Собственно система АСД содержит узкополосный
фильтр, генератор стандартных импульсов, измеритель
частоты импульсов, схему сравнения и потенциометр от-
Система АСД
Схема поиска |
Рис. 1.13. Система АСД для частотного дальномера.
работки. Генератор стандартных импульсов вырабатыва-
ет импульсы напряжения постоянной амплитуды и дли-
тельности; частота следования Ги этих импульсов опре-
деляется частотой f,p колебаний, образующихся на выхо-
де фильтра (FH=fp). Измеритель частоты импульсов вы-
рабатывает напряжение, пропорциональное частоте Ги.
Следовательно, напряжение UD на выходе измерителя
пропорционально дальности до цели
Ud=D. (1.12)
Это напряжение <в схеме сравнения сопоставляется с на-
пряжением UR, подводимым от потенциометра отработ-
ки. Ползунок потенциометра отработки перемещается
синхронно с перестройкой фильтра. В зависимости от
знака разности напряжений UD—UR мотор соответст-
вующим образом перестраивает фильтр. Таким образом
при перемещении цели система АСД непрерывно под-
страивает фильтр под частоту fp сигнала, а напряжение
UD характеризует дальность до цели.
15. Фазовые методы определения дальности основаны
на измерении разности фаз излучаемых волн и прини-
28
маемых отраженных сигналов. Схема простейшего фа-
зового дальномера изображена на рис. 1.14. Излучаются
немодулированные незатухающие колебания
«ген (0 = t/o COS ((O0t фо) ГфИ Ч) < ОО.
В фазовом детекторе осуществляется сравнение фаз при-
нятого сигнала и излучаемых колебаний. С учетом фа-
зового сдвига фотр волны
при отражении от цели и
сдвига фаз ф0, образующе-
гося при прохождении сиг-
налов по тракту РЛС, ре-
зультирующая разность фаз
указанных колебаний будет
равна
Дф=4лОД,+ф0тр + фо> (1-13)
где X — длина волны зонди-
рующего сигнала. Отсюда
видно, что разность фаз Аф
зависит от дальности до
Рис. 1.14. Схема простейшего
фазового дальномера.
цели.
Этому простейшему методу свойственны два суще-
ственных недостатка. Во-первых, результат измерения
включает неизвестную величину ф0Тр, во-вторых, очень
мал диапазон однозначного измерения дальности:
А/^одн — Х/4
(1-14)
при условии, что диапазон однозначного измерения фазы
равен л.
16. Диапазон однозначного измерения дальности фа-
зовым методом можно резко увеличить, если применять
амплитудную модуляцию излучаемых колебаний низкой
частотой F = cjK; здесь Л — длина волны низкочастотных
колебаний. В этом случае
«ген (/) — Uй (1 —Ш С OS Q/ItFf) С OS ((O0t —ф0).
Сравнение фаз излученных и принятых колебаний про-
изводится на частоте модуляции. Изменением фазы при
отражении от цели на частоте F можно пренебречь,
а аппаратурный сдвиг фаз учесть при калибровке стан-
ции. Тогда
Аф=4л1)/Л=4 л/ХО/с, (1.15)
D— (с/4лР) Аф. (1.16)
29
Диапазон однозначного определения дальности опре-
деляется не высокой, а низкой частотой, следовательно,
А£>оДн=Л/4. (1.17)
17. Более перспективными следует считать двухчастот-
ные фазовые дальномеры [99]. В подобных РЛС
(рис. 1.15), с помощью двух генераторов создаются не-
затухающие колебания на двух близких частотах fi и f2,
которые затем излучаются в пространство. Принятые
отраженные от цели сигналы усиливаются каждый
в своем тракте и поступают к смесителю I. На выходе
Рис. 1.15. Схема двухчастотного фазового дальномера.
этого смесителя образуется напряжение разностной ча-
стоты wc(fi—fz)- Аналогично с помощью обоих генерато-
ров и смесителя II формируется опорное напряжение
разностной частоты wOn(/i—Д). Напряжения wc(/) и
Won(0 подводятся к фазовому детектору, где сравнива-
ются их фазы. Выходное напряжение ЙфД фазового де-
тектора позволяет определить дальность до цели. До-
пуская, что фазовые сдвиги при отражении одинаковы
вследствие малой разности частот, а также, исключая
путем калибровки влияние аппаратурных фазовых сдви-
гов, можно определить дальность до цели
Р-=сЛфр/4л(Л-/2), (1-18)
где Афр — разность фаз опорного напряжения и сигнала
на разностной частоте, измеряемая фазовым детектором.
Диапазон однозначного измерения дальности равен
АРОДн=с/4(Л-/2). (1.19)
Общими достоинствами фазовых дальномеров всех
типов является относительная простота собственно из-
30
мерительного устройства и высокая точность измерении.
Применительно к двухчастотному методу и методу с ам-
плитудной модуляцией достоинством является большой
диапазон однозначного измерения дальности. Фазовым
дальномерам свойственны все недостатки, присущие
устройствам с непрерывным излучением (см. п. 12). Спе-
цифическим недостатком фазовых дальномеров является
невозможность измерений при одновременном облучении
двух и большего числа целей.
18. При выборе частоты, на которой производится
измерение в фазометрических дальномерах, приходится
учитывать противоречи-
вые требования1 умень-
шение этой частоты по-
зволяет расширить диа-
пазон однозначного изме-
рения дальности, но при
этом одновременно сни-
жается точность измере-
ния. Для того чтобы и
диапазон однозначного
измерения был широк, и
точность измерения до-
статочно высока, приме-
няют многошкальные дальномеры с несколькими зна-
чениями рабочих частот [58, 117].
19. Фазовые дальномеры могут работать в режиме
автоматического слежения за целью. Подобная система
изображена на рис. 1.16 В тракт усиления сигнала
включен механический фазовращатель, управляемый
с помощью двигателя. К двигателю подводится усилен-
ное напряжение от фазового детектора. В такой системе
фазовращатель непрерывно компенсирует фазовый сдвиг
сигнала относительно опорного напряжения. Угол пово-
рота ротора фазовращателя пропорционален разности
фаз колебаний и, следовательно, дальности до цели.
С двигателем отработки может быть связан указатель
дальности цели. Скорость вращения ротора фазовраща-
теля пропорциональна радиальной скорости цели [117].
20. Определение угловых координат целей в радиоло-
кации основывается на использовании приемных антенн
направленного действия. В принципе направленность
действия приемной антенны определяется тем, что в за-
висимости от направления прихода радиоволны изменя-
31
ется распределение фаз поля в раскрыве антенны. Сле-
довательно, любой путь создания антенны направленного
действия может быть назван фазовым. Но обычно, гово-
ря о методе пеленгации, имеют в виду способ использо-
вания сигналов, образующихся на выходе антенны.
В соответствии с этим методы измерения угловых коор-
динат можно подразделить на амплитудные, частотные,
фазовые и амплитудно-фазовые в зависимости от того,
какой параметр выходного сигнала антенны играет ос-
новную роль при измерении. Частотные методы пока не
находят практического применения и в данной работе не
рассмотрены.
21. Угломерное (пеленгационное) устройство включа-
ет приемную антенну, приемник, в котором производятся
какие-либо преобразования принятого сигнала, и изме-
ритель, позволяющий произвести отсчет координаты
К основным характеристикам пеленгационного устрой-
ства относятся: пеленгационная характеристика ПВЫх(ф),
представляющая собой зависимость математического
ожидания выходного напряжения пеленгатора от на-
правления ср прихода радиоволн, и пеленгационная чув-
ствительность 5Пел, равная крутизне пеленгационной ха-
рактеристики устройства в направлении пеленга цели,
т. е. при ф = фц.‘
<$пел ~ ! dUвых
(1-20)
22. Амплитудные методы измерения угловых коорди-
нат характеризуются тем, что определение координаты
связано с оценкой амплитуды на выходе приемной ан-
тенны. Из них в радиолокации в основном находят при-
менение метод максимума и равносигнальный метод.
23. При пеленгации по методу максимума приемная
антенна плавно поворачивается (ее ось при этом изме-
няет положение в пространстве) и отсчет пеленга цели
производится в тот момент, когда амплитуда выходного
сигнала достигает максимума. Пеленгационная характе-
ристика при использовании метода максимума повторя-
ет диаграмму направленности приемной антенны
Пвых(ф) =^(ф),
(1-21)
где F(ф) —диаграмма направленности приемной антен-
ны по напряженности поля, k — коэффициент пропор-
циональности.
32
Рис 1 17 Схема
пеленгатора по
максимуму.
Схема простейшего пеленгатора по максимуму при-
ведена на рис. 1.17. При работе с таким пеленгатором
оператору необходимо следить за показаниями двух при-
боров (измерителя выходного напряжения и указателя
угла ср) и сопоставлять их во времени. В [15, 22, 57, 112,
116, 117, 124] рассмотре-
ны пути автоматического
съема угловых координат
при использовании этого
метода.
Достоинства метода
максимума состоят в про-
стоте его реализации и
приеме наибольшего по
амплитуде сигнала в мо-
мент пеленга. Основной недостаток заключается в низ-
кой точности, так как пеленгационная чувствительность
вблизи максимума диаграммы направленности стремит-
ся к нулю.
24. Равносигнальный метод пеленгации требует прие-
ма сигнала либо одновременно двумя антеннами с раз-
несенными в пространстве диаграммами, либо одной
антенной при двух различных, положениях в простран-
стве ее диаграммы направленности. Пеленг цели опре-
деляется по положению антенного устройства в тот мо-
мент, когда амплитуды обоих принимаемых сигналов
становятся равными.
Равносигнальный метод по сравнению с методом пе-
ленгации по максимуму позволяет существенно повысить
точность измерения угловых координат и достаточно
просто осуществить автоматическое слежение за целью
по угловым координатам.
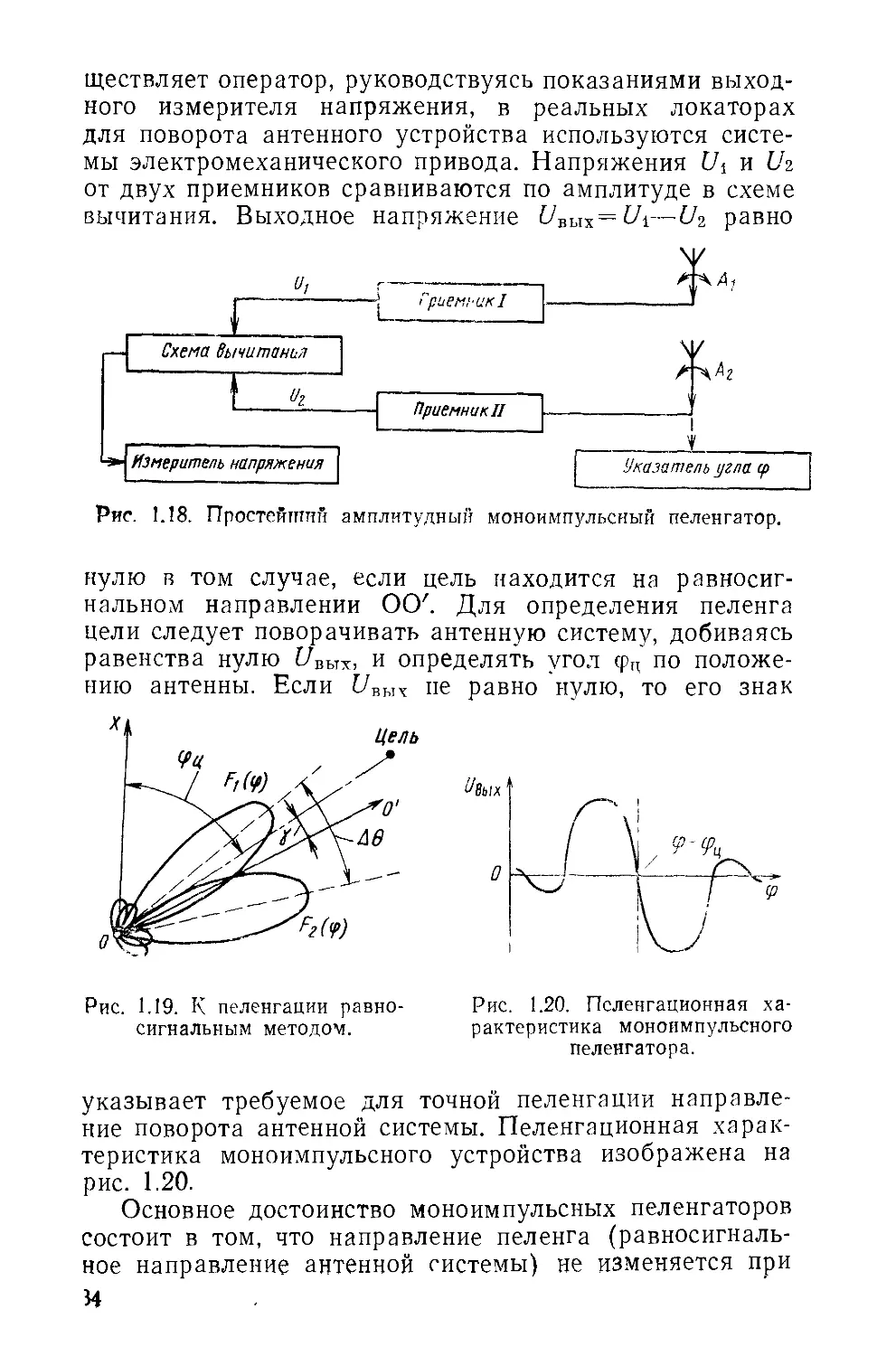
25. Примером реализации равносигнального метода
определения угловых координат являются амплитудные
моноимпульсные пеленгаторы [99, 116, 117, 124].
Схема простейшего моноимпульсного устройства для
пеленгации в одной плоскости приведена на рис. 1.18.
В моноимпульсном пеленгаторе сигнал одновременно по-
ступает в две приемные антенны, диаграммы направлен-
ности Л (ср) и /7, (ср) которых смещены друг относительно
друга на фиксированный угол АО (рис. 1.19). Механи-
чески обе антенны представляют собой единое целое и
поворачиваются одновременно на один и тот же угол.
В простейшем случае поворот антенной системы осу-
33
ществляет оператор, руководствуясь показаниями выход-
ного измерителя напряжения, в реальных локаторах
для поворота антенного устройства используются систе-
мы электромеханического привода. Напряжения Ui и U2
от двух приемников сравниваются по амплитуде в схеме
вычитания. Выходное напряжение 6вых = £Л—U2 равно
Рис. 1.18. Простейший амплитудный моноимпульсный пеленгатор.
нулю в том случае, если цель находится на равносиг-
нальном направлении 00'. Для определения пеленга
цели следует поворачивать антенную систему, добиваясь
равенства нулю Uвых, И определять угол срц по положе-
нию антенны. Если Пвых не равно нулю, то его знак
Рис. 1.20. Пеленгационная ха-
рактеристика моноимпульсного
пеленгатора.
Рис. 1.19. К пеленгации равно-
сигнальным методом.
указывает требуемое для точной пеленгации направле-
ние поворота антенной системы. Пеленгационная харак-
теристика моноимпульсного устройства изображена на
рис. 1.20.
Основное достоинство моноимпульсных пеленгаторов
состоит в том, что направление пеленга (равносигналь-
ное направление антенной системы) не изменяется при
34
флуктуациях амплитуды принимаемых сигналов. Но
приведенному простейшему варианту моноимпульсного
пеленгатора свойственны серьезные недостатки: равносиг-
нальное направление изменяется при флуктуации пара-
метров усилительных трактов, а пеленгационная чувст-
вительность (и, как показано в гл. 7, точность измере-
ния) зависит от абсолютного значения амплитуды
принимаемых сигналов: чем меньше амплитуда, тем
меньше чувствительность.
Рис. 1.21. Схема суммарно-разностного амплитудного моноимпульс-
ного пеленгатора, измеряющего одну координату.
Второй из отмеченных недостатков устранен в сум-
марно-разностных моноимпульсных пеленгаторах, где
образуется не только разность сигналов, но и их сумма.
Напряжение суммарного сигнала используется для
автоматической регулировки усиления (АРУ) приемни-
ков. Схема суммарно-разностного моноимпульсного пе-
ленгатора изображена на рис. 1.21. Можно считать, что
у суммарно-разностного пеленгатора система АРУ под-
держивает пеленгационную чувствительность постоян-
ной при изменениях амплитуды сигналов.
Такого же эффекта можно добиться применением
в моноимпульсном пеленгаторе приемников с логариф-
мическими амплитудными характеристиками и выходной
схемы вычитания. При этом
^Bbix^lg Hi— lg H2=lg(^l/^2)
и пеленгатор также оказывается нечувствителен к флук-
туациям амплитуд входных сигналов.
26. Реальные схемы суммарно-разностных пеленгато-
ров [70] существенно отличаются от приведенной на рис.
1.21. В реальных схемах сложение и вычитание сигналов
осуществляются на высокой частоте в кольцевых мостах
35
(КМ). Это практически исключает влияние нестабиль-
ностей трактов на равнооигнальное направление.
При пеленгации с помощью двух антенн в одной
плоскости принимаемые сигналы на выходе антенн
(рис. 1.19) равны
U1 (/) =. kFг (0,5Дб — у) cos wt,
и2 (/) = kF(0,5 ДО 4~ Y)cos
где k — коэффициент пропорциональности; у — угол
между равносшнальным направлением и направлением
на цель; ДО—угловой разнос парциальных диаграмм на-
правленности.
Соответственно суммарный и разностный сигналы
имеют вид:
«сум (/) k [Л (0,5ДО;— у) F2 (0,5ДО у) cos со/],
«разн (/) = k [Fi (0,5Д6 — у) — FE-(O,5A6 Y) cos со/].
После преобразования на промежуточную частоту, на
которой происходит основное усиление, суммарный и раз-
ностный сигналы сравниваются в фазовом детекторе:
U*A=F* (0,5ДО - у) - F/ (О.5Д6 -]-у). (1.22)
При у = 0 и идентичных диаграммах направленности име-
ет место равенство [/фД=:0.
Второе отличие реальных схем от простейших состо-
ит в одновременном использовании четырех антенн для
пеленгации цели в двух плоскостях (рис. 1.22). При
определении азимута цели сравнивают суммарный сиг-
нал антенн А и Г с суммарным сигналом антенн Б и В,
в результате чего образуется напряжение вида (ца +
Рис. 1.22. Схема суммарно-разностного амплитудного пеленгатора
для определения двух угловых координат.
36
+ ur) — («б + «в). Для определения угла места Цели сум-
мируют сигналы антенн А и Б и вычитают из них сум-
марный сигнал антенн Г и В:
(wa + Мб) — (мг + мв).
Соответственно в приемнике имеются три канала проме-
жуточной частоты: два канала для двух разностных
сигналов и третий — для суммарного сигнала ма + «б +
+ мв + мг. Суммарный сигнал используется для автома-
тической регулировки усиления всех каналов. В двух
фазовых детекторах перемножаются разностные сигна-
лы с суммарным. На выходе фазовых детекторов обра-
зуются напряжения U&3 и L/yM. Изменение этих напря-
жений в зависимости от углов поворота ср и 0 антенны
относительно цели в двух плоскостях отображаются пе-
ленгационными характеристиками, подобными изобра-
женным на рис. 1.20.
27. Используя рассмотренные амплитудные пеленга-
торы весьма просто создать систему автоматического со-
провождения цели по направлению (АСН). При авто-
матическом слежении за целью равносигнальное на-
правление антенны непрерывно ориентируется на цель,
система АСН непрерывно выдает данные об угловых
координатах цели. Для автосопровождения цели тре-
буется лишь подвести выходные напряжения к двигате-
лям, управляющим поворотом антенной системы. При-
менительно к схеме на рис. 1.18 слежение возможно
только в одной плоскости, выходное напряжение от схе-
мы вычитания (после необходимого усиления) нужно
подвести к двигателю отработки. В схеме на рис. 1.22
имеются два выходных напряжения U&3 и [7ум, которые
должны управлять двумя независимыми двигателями
отработки: в канале азимута и в канале угла места
[52, 70].
28. В основе фазовых методов измерения угловых ко-
ординат лежит сравнение фаз сигналов, образующихся
на выходе приемных антенн. Схема простейшего моно-
импульсного фазового пеленгатора изображена на рис.
1.23. Для пеленгации в одной плоскости используются
две антенны Д и Л2 (рис. 1.24). Принятые сигналы
Ui(t) =kFt (у) cos со/,
«2 (/) = kF2 (у) cos (со/—Аф),
37
где Агр = 2rt (cz/a) sin ф — фазовый сдвиг принятых коле-
баний из-за различия путей распространения волн от
цели до антенн, поступают к усилителям высокой часто-
ты (УВЧ), которые осуществляют нормировку амплиту-
ды колебаний, например, путем амплитудного ограниче-
ния. В одном из каналов имеется фазовращатель,
изменяющий фазу колебаний на 90°. Усиленные высоко-
частотные сигналы поступают к фазовому детектору,
Рис. 1.23. Схема простейшего фазово-
го пеленгатора.
Рис. 1.24. К пояснению прин-
ципа фазовой пеленгации.
выходное напряжение которого является функцией угла
прихода волны. Если расстояние между антеннами нена-
правленного действия равно а, длина волны принимае-
мых колебаний Л, угол прихода волны ср (рис. 1.24), то
с учетом действия фазовращателя пеленг цели опреде-
ляется следующим соотношением:
ср = arcsin (лА'ф/2ла). (1.23)
Выходное напряжение фазового детектора состав-
ляет
t/вых (<р) =£ sin[(2ла/А.) sin ср], (1.24)
для малых значений ф<^10°
t/вых (<р) sin (2ласр/Х). • (1-25)
Определение пеленга цели можно осуществлять дву-
мя путями: либо отсчитывать угол по показаниям
измерителя напряжения, либо поворачивать антенную
систему до тех пор, пока выходное напряжение не ока-
жется равным нулю, что соответствует равенству нулю
и угла ср, и отсчитывать пеленг по положению антенны.
При изменениях ср в широких пределах пеленгационная
характеристика неоднозначна (рис. 1.25). Устранение
38
неоднозначности пеленга может быть достигнуто приме-
нением антенн направленного действия. Ширина диа-
граммы направленности каждой антенны не должна пре-
вышать Дфодн- Диапазон однозначного измерения угла
может быть принят равным
Лфодн—%/2о,
(1-26)
если диапазон однозначного измерения фазы составляет
л. Уменьшение базы пеленгатора позволяет увеличить
диапазон однозначного измерения угла при одновремен-
ном пропорциональном уменьшении точности пеленга-
ции. Недостаток системы состоит в том, что неста-
бильность фазовых сдвигов в
каналах усиления приводит
к смещению равнофазного на-
правления антенны и, следова-
тельно, к ошибкам пеленгации.
29. От указанного недо-
статка свободен фазовый мо-
ноимпульсный суммарно-раз-
ностный пеленгатор, схема
которого применительно к пе-
ленгации в одной плоскости
^вых
Рис. 1.25. Пеленгационная
характеристика фазового пе-
ленгатора.
приведена на рис. 1.26. От антенны сигналы подво-
дятся к кольцевому мосту (КМ), на выходе которого
образуются сумма и разность принятых сигналов. При
этом жестко фиксируются аппаратурные фазовые сдви-
ги высокочастотных колебаний, влияющие на образова-
ние разностного сигнала, и стабилизируется направле-
ние, соответствующее равенству фаз принимаемых сиг-
налов и нулевой амплитуде разностного сигнала
[59, 70].
Суммарный и разностный сигналы усиливаются дву-
мя идентичными усилителями высокой частоты (УВЧ).
Разностный сигнал дополнительно сдвигается по фазе
Рис 1.26. Схема фазового моноимпульсного суммарно-разностного
пеленгатора для измерения одной угловой координаты.
39
на 90°. Затем оба сигнала подводятся к фазовому де-
тектору. При изменении направления прихода волны вы-
ходное напряжение фазового детектора изменяется по
синусоидальному закону (см. рис. 1.25 и формулу
(1-24)).
В рассмотренной схеме изменение фазовых сдвигов
в каналах усиления приводит лишь к изменению кру-
тизны пеленгационной характеристики в точке пеленга.
Рис. 1.27. Схема пеленгатора с коническим сканированием.
В реально используемых РЛС фазовые суммарно-
разностные пеленгационные устройства строятся так же,
как и амплитудные в соответствии со схемой на рис. 1.22.
Сопровождение цели по направлению будет произво-
диться автоматически, если напряжение [7фД, образую-
щееся на выходе фазового детектора (рис. 1.26), ис-
пользовать для управления двигателем, который пово-
рачивает антенны [52, 70].
30. Амплитудно-фазовые методы измерения угловых
координат характеризуются тем, что в них используется
зависимость от углового положения цели не только
амплитуды сигнала на выходе антенны, но и его фазы.
Примером амплитудно-фазового пеленгатора являет-
ся [59] система с коническим сканированием (рис. 1.27).
В этой системе узкая диаграмма направленности шири-
ной 0о,5 вращается вокруг равносигнального направле-
ния 00'; ось диаграммы описывает конус с половинным
углом при вершине А0 (рис. 1.28). Если цель не нахо-
дится на равносигнальном направлении, то амплитуда
принимаемого сигнала изменяется при вращении диа-
40
граммы направленности.
Приемник предназначен для
воспроизведения изменений
амплитуды сигнала. При от-
носительно небольших зна-
чениях ширины диаграммы
направленности (0о,б^8 ...
... 10°) и существенно мень-
ших значениях отклонения
у цели от равносигнального
направления можно считать,
что амплитуда принимае-
мого сигнала модулирована
по косинусоидальному закону:
Рис. 1.28. К работе пеленгато-
ра с коническим сканирова-
нием.
£/с = t/0 [1 + ya cos (fat - Фц)J. (1.27)
Здесь а — коэффициент пропорциональности, определяе-
мый крутизной пеленгационной характеристики в точке
у = 0; Qa — угловая скорость вращения диаграммы на-
правленности; Фц—фаза модуляции, определяемая на-
правлением отклонения цели от оси антенны 00'
(рис. 1.28).
На рис. 1.29,а изображе-
но изменение амплитуды
t/вых (0 сигнале на выходе
приемника, причем за нача-
ло отсчета принят мбмент
4, в который диаграмма на-
правленности занимает
верхнее положение (точка
А на рис. 1.28). С помощью
схемы выделения сигнала
ошибки из выходного на-
пряжения приемника выде-
ляется его переменная со-
ставляющая
Рис. 1.29. Эпюры напряжения
в пеленгаторе с коническим
сканированием:
а — выходное напряжение приемни-
ка: б —сигнал ошибки.
«ош (0 = t/ош COS (йа/—Фц) . (1.28)
Амплитуда сигнала ошибки зависит только от абсолют-
ного значения угла у
Uom=ky, (1.29)
так как с помощью системы АРУ среднее значение Uo
напряжения на выходе приемника поддерживается по-
41
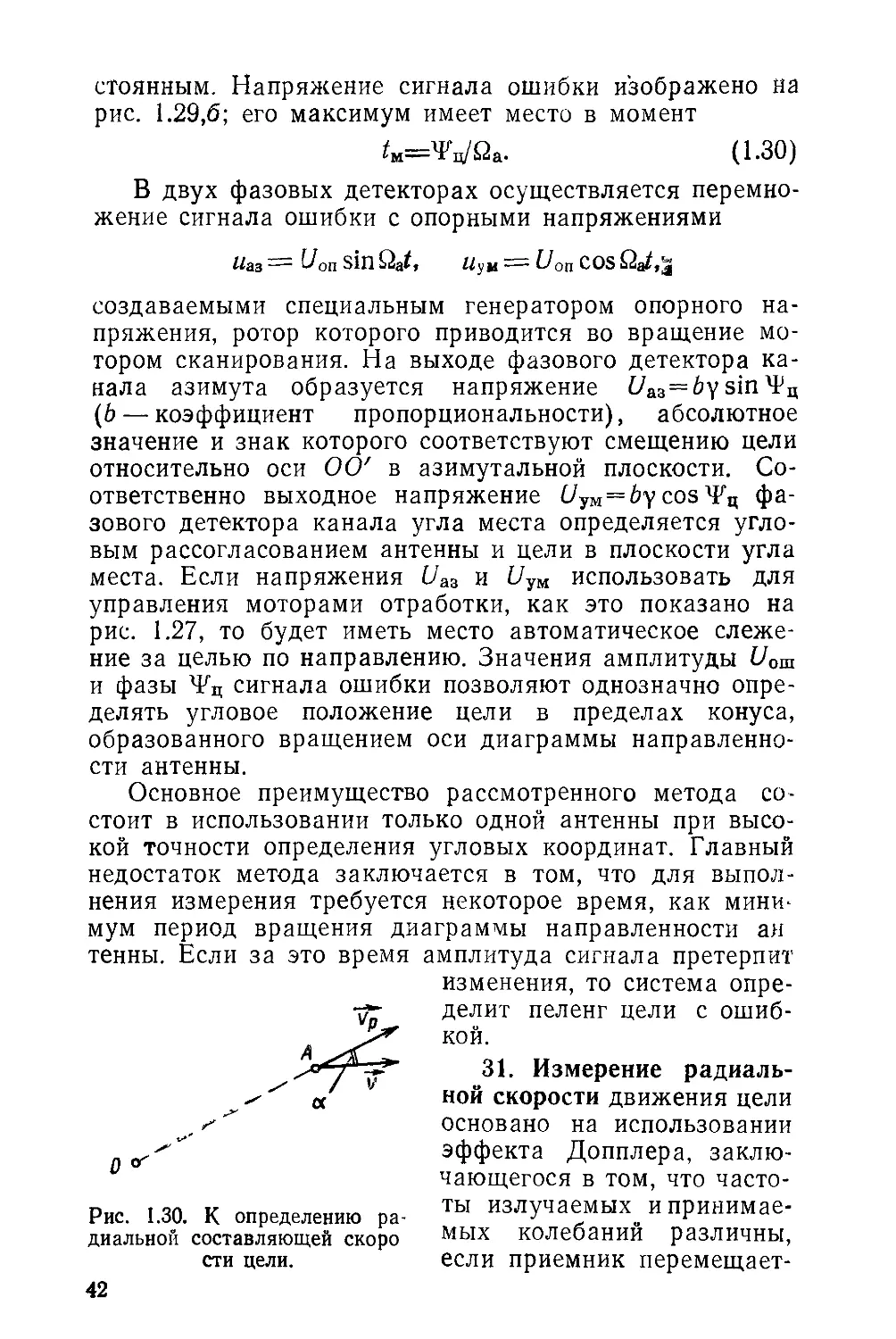
стоянным. Напряжение сигнала ошибки изображено на
рис. 1.29,6; его максимум имеет место в момент
/М=фц/Йа. (1.30)
В двух фазовых детекторах осуществляется перемно-
жение сигнала ошибки с опорными напряжениями
Z/аз — Uon S1H Пум :—- Uon COS
тенны. £сли за это время
Рис. 1.30. К определению ра-
диальной составляющей скоро
сти цели.
создаваемыми специальным генератором опорного на-
пряжения, ротор которого приводится во вращение мо-
тором сканирования. На выходе фазового детектора ка-
нала азимута образуется напряжение t7a3 = 6y sin Ч^ц
(b — коэффициент пропорциональности), абсолютное
значение и знак которого соответствуют смещению цели
относительно оси 00' в азимутальной плоскости. Со-
ответственно выходное напряжение (7ум = 6у cos'Р'ц фа-
зового детектора канала угла места определяется угло-
вым рассогласованием антенны и цели в плоскости угла
места. Если напряжения U&3 и /7ум использовать для
управления моторами отработки, как это показано на
рис. 1.27, то будет иметь место автоматическое слеже-
ние за целью по направлению. Значения амплитуды Uoal
и фазы сигнала ошибки позволяют однозначно опре-
делять угловое положение цели в пределах конуса,
образованного вращением оси диаграммы направленно-
сти антенны.
Основное преимущество рассмотренного метода со-
стоит в использовании только одной антенны при высо-
кой точности определения угловых координат. Главный
недостаток метода заключается в том, что для выпол-
нения измерения требуется некоторое время, как мини-
мум период вращения диаграммы направленности ан
“ амплитуда сигнала претерпит
изменения, то система опре-
делит пеленг цели с ошиб-
кой.
31. Измерение радиаль-
ной скорости движения цели
основано на использовании
эффекта Допплера, заклю-
чающегося в том, что часто-
ты излучаемых и принимае-
мых колебаний различны,
если приемник перемещает-
42
ся относительно источника излучения [99, 116, 117, 124].
Пусть в точке О находится передатчик (рис. 1.30).
в точке А — приемник, движущийся со скоростью v.
Тогда частоты излучаемых fo и принимаемых fnp коле-
баний связаны соотношением
fnp= f. (1 _ - (»/<:)•]•.•,' (1.31)
здесь flp = flcosa — радиальная составляющая скорости
движения точки А относительно точки О; v — модуль
скорости движения цели; с—скорость света.
При условии v<^c справедлива приближенная фор-
мула
(1-32)
Величина
fov^c=v^K=Fn (1.33)
представляет собой допплеровское смещение частоты
сигнала, а радиальная составляющая скорости цели вы-
ражается очевидным равенством
Up=FH% (1 34)
Для того чтобы воспользоваться указанным методом
определения радиальной скорости, необходимо иметь
автономные высокостабильные генераторы, настроенные
на одинаковую частоту, в точках передачи и приема ко-
лебаний. Сравнение частоты принятых колебаний с ча-
стотой эталонного генератора позволит определить доп-
плеровский частотный сдвиг.
32. В радиолокации, где чаще всего используются от-
раженные от цели сигналы, значение допплеровского сме-
щения приближенно удваивается. Допустив, что пере-
датчик и приемник расположены в одной и той же точ-
ке О, а движущаяся со скоростью v цель в точке А
(рис. 1 30). получим, что частота принимаемых отра-
женных сигналов равна
fnP=-fo(l- Рр/г)/П + Ур/г). (1.35)
При справедливо более простое соотношение
U^fo(l-v2pp/r), (1.36)
откуда допплеровское смешение частоты равно
FH = 2f0fnM=2p,p/%, (1.37)
а радиальная скорость —
t),p = 0,5FjA. (1.38)
43
33. Для измерения допплеровских частотных сдвигов
у отраженных сигналов используются когерентные радио-
локационные станции [99, 116, 117], характеризующиеся
когерентностью излучаемых колебаний. Колебания назы-
вают когерентными, если на интервале их наблюдения
существует функциональная связь одной какой-либо ча-
сти колебания с любой другой ее частью. Для обеспе-
чения когерентности частота колебаний и их начальная
фаза либо должны быть постоянными, либо изменяться
детерминированно. Любые случайные изменения частоты
и начальной фазы колебаний нарушают их когерентность.
Если передатчик радиолокационной станции создает мо-
нохроматическое колебание
«пер(0 ~^oCOS ((Оо/Д-'ро) ПрИ 0<^<^ОО,
то отраженный сигнал на входе приемника
«ПР (0 = £7пр COS [®о (/ — У + фо + фотр],
где tD=2Dlc==l (Do—vpt)/c — время запаздывания отра-
женной волны; D — текущая дальность до цели; Do —
дальность до цели в момент начала отсчета при / = 0;
фотр — изменение фазы волны при отражении от цели.
Два рассмотренных колебания являются когерентными.
Разность фаз излучаемых и принимаемых колебаний
равна Аф =—сор^и + фотр-
Если фазу фотр считать постоянной, что справедливо
при медленных флуктуациях цели, то разность фаз Аф
окажется детерминированной функцией времени:
Аф = 2ур(оо//с +const. (1.39)
Сопоставление двух указанных колебаний позволит
выделить допплеровскую частоту QH=2up(OoM сигнала и
определить радиальную составляющую скорости цели.
34. Когерентное радиолокационное устройство с не-
прерывным излучением изображено на рис. 1.31. Пере-
датчик создает незатухающие колебания с частотой fo,
которые облучают цель. Отраженный сигнал, имеющий
частоту fo=tEH, через приемную антенну поступает
к смесителю. На выходе смесителя образуются колеба-
ния с допплеровской частотой. Они проходят через уси-
литель доппплеровских частот (УДЧ) и воздействуют
на измеритель частоты. На рис. 1.31 в качестве измери-
теля используется устройство, включающее амплитуд-
ный ограничитель, схему формирования стандартных
44
импульсов напряжения (импульсы имеют постоянные
амплитуду и Длительность), следующих с частотой Ед,
и счетчик импульсов.
Существенным недостатком рассмотренного радиоло-
катора является его низкая чувствительность.
Рис. 1.31. Простейший измеритель допплеровской частоты.
Рис. 1.32. Супергетеродинный измеритель допплеровской частоты.
35. Супергетеродинный приемник позволяет получить
более высокую чувствительность приемного тракта. Это
связано с тем, что уровень шумов кристаллического сме-
сителя меньше в области относительно высокой промежу-
точной частоты. Схема радиолокатора изображена на
рис. 1.32. Основное усиление сигнала имеет место на про-
межуточной частоте. С помощью второго преобразования
частоты (гетеродин II и смеситель II) выделяется доп-
плеровская частота Ед.
36. В ряде практических применений необходимо
знать не только модуль, но и знак допплеровского сме-
щения частоты. Для решения второй задачи используют-
ся дискриминаторы нулевых биений [117] (рис. 1.33). Ди-
скриминатор подсоединяется к выходу усилителя проме-
жуточной частоты (см. схему на рис. 1.32).
45
Дискриминатор нулевых биений содержит два вторич-
ных смесителя (А и Б). К одному из смесителей напря-
жение гетеродина II подводится непосредственно,
а к другому — чер.ез фазовращатель с поворотом фазы
гетеродинирующего напряжения на 90°. Это приводит
Рис 1 33 Дискриминатор нулевых биений
к тому, что в зависимости от знака допплеровского сме-
щения частоты в УПЧ (fnp+^д или frap—напряжения
на выходе смесителей оказываются сдвинутыми по фазе
на ±90°. Так, если на выходе смесителя А имеем щ(1) =
= U cos Q4Z, то во втором канале после смесителя Б по-
лучим u2(t) =U cos (Йд/+90о).
Фазу напряжения щ(/) дополнительно изменяют на
90° с помощью второго фазовращателя. В результате
этих преобразований напряжения u\(t) и подво-
димые к фазовому детектору, оказываются в фазе или
в противофазе в зависимости от знака допплеровского
смещения частоты сигнала. Таким образом, полярность
напряжения ивъ1Х на выходе фазового детектора указы-
вает знак допплеровского смещения частоты и, следо-
вательно, знак радиальной скорости:
при /7ВП\>0 скорость ур>0,
(1-40)
при £7вы\<0 скорость ур<0.
Модуль допплеровского смещения определяется с по-
мощью параллельного измерительного канала (рис.
1.32).
37. Общим недостатком измерителей с непрерывным
излучением является трудность борьбы с просачиванием
в приемник части излучаемой мощности. Амплитуда и
46
фаза проникающего сигнала подвержены случайным из-
менениям, поэтому его следует рассматривать как поме-
ху, снижающую качество работы аппаратуры. От ука-
занного недостатка свободны импульсные когерентные
радиолокационные станции.
Рис 1 34 Ксиерентно-импульсная РЛС с фазируемым когерентным
гетеродином.
38. На рис. 1 34 изображена схема псевдокогерентной
импульсной РЛС с фазируемым когерентным гетероди-
ном. Особенность станций такого типа состоит в том, что
импульсы высокочастотного генератора некогерентны:
Ur(t) = £/rCOS ((Оо/тг—Фгп) При О^/п^Ти,
где tn — время, отсчитываемое от начала n-го периода
повторения; фгп — фаза я-го импульса, являющаяся ве-
личиной случайной, ти — длительность импульса.
Эти импульсы фазируют колебания когерентного ге-
теродина
Икг (/) — Uкг COS (н>кг//г фкгп), 0 tn Ти.
Когерентный гетеродин вырабатывает высокостабильные
колебания на промежуточной частоте ((оКг = соПр), ис-
пользуемые в качестве опорных при обработке сигнала
в фазовом детекторе. Длительность существования
этих колебаний равна или несколько превышает время
запаздывания сигналов, отраженных от цели, находя-
щейся на максимальной дальности действия РЛС. Как
показано на схеме рис. 1.34, в канале преобразования
47
сигнала и канале фазирования когерентного гетеродина
используются колебания одного и того же высокоча-
стотного гетеродина. На выходе усилителя промежуточ-
ной частоты сигнал может быть записан в виде
«с (t) = U с cos [ (©о—©иг) /п±Од (п— 1) —
2D0(00/C фгп “Нфигп]
при (п~ОГи+Ти,
где (омг — частота высокочастотного местного гетероди-
на: фМгп — начальная фаза этого гетеродина в п-й пе-
риод.
Рис. 1.35. К работе когерентно-импульсной РЛС:
л — сигналы неподвижной цели на выходе фазового детектора; б — сигналы
движущейся цели
На выходе фазового детектора образуются видеоим-
пульсы, амплитуда которых зависит от сдвига по фазе
Дф (см. п. 33) между напряжением сигнала и опорным
напряжением. Если цель неподвижна, то этот фазовый
сдвиг постоянен и постоянна амплитуда U импульсов
напряжения на выходе фазового детектора (рис. 1.35,а).
Абсолютное значение амплитуды импульсов зависит
от значения разности фаз: £7= C/MaKc|cos Дф|, где
7/макс — максимально возможное значение амплитуды
видеоимпульсов от данной цели. При 0,5л^Дф^—0,5л
импульсы имеют положительную полярность; для
1,5л ;>Дф;>0,5л их полярность становится отрицатель-
48
ной. Если А-ф = 0,5тс или —0,5л, то амплитуда видеоим-
пульсов равна нулю.
При движении цели относительно РЛС огибающая
видеоимпульсов на выходе фазового детектора оказы-
вается промодулированной по синусоидальному закону
(рис. 1.35,6):
Пфд=(7маКс sin2n/7M(n—1)ТИ, (1.41)
где п — порядковый номер импульса, Ем — частота мо-
дуляции. (Замечания о значении частоты модуляции см.
в п. 40).
Рис. 136. Когерентно-импульсная РЛС с умножением частоты задаю-
щего генератора.
39. Примером истинно когерентной импульсной РЛС
является станция, схема которой изображена на
рис. 1.36. В станциях такого типа задающий высокоста-
бильный генератор работает, например, на частоте, рав-
ной промежуточной частоте fo=ifnp приемника. Для соз-
дания зондирующего сигнала колебания задающего ге-
нератора умножаются по частоте в п раз, усиливаются
по мощности и проходят через каскад импульсной мо-
дуляции.
В качестве высокочастотного гетеродина приемника
используется схема умножения частоты задающих коле-
баний в п—1 раз. При обработке принятых сигналов
в фазовом детекторе в качестве опорных используются
49
колебания задающего генератора. Для обеспечения ко-
герентности такой станции необходимо, чтобы задающий
генератор характеризовался высокой стабильностью соз-
даваемых колебаний по частоте и фазе.
40. Особенность когерентно-импульсных станций со-
стоит в том, что линейная зависимость между доппле-
ровской частотой Рд и частотой Ем амплитудной моду-
ляции импульсных сигналов на выходе фазового детек-
тора имеет место лишь при выполнении условия [124]
(1.42)
F 0,5F и,
Рис 1.37. Зависимость частоты амплитудной модуляции FM импульс-
ных chi налов на выходе фазового детектора от допплеровского сме-
щения Ря.
где Ги — частота следования импульсов РЛС. При воз-
растании допплеровского смещения FA частоты сигнала
изменение частоты FM амплитудной модуляции выход-
ных видеоимпульсов происходит по симметричному пи-
лообразному закону (рис. 1.37). Таким образом,
диапазон однозначно измеряемых допплеровских ча-
стот равен 0,5Еи. Если быстродвижущиеся цели наблю-
даются с помощью РЛС сантиметрового диапазона, то
для однозначного измерения их скорости необходимо
использовать большие значения частоты следования
импульсов (десятки и сотни килогерц). РЛС с большой
частотой следования импульсов называют станциями
с малой скважностью. (Скважностью Q называется отно-
шение периода следования импульсов РЛС к их дли-
тельности: ф = 7и/ти.)
У станции с малой скважностью отношение Тщ/ти—
— 2 ... 5. Недостатком подобных станций является ма-
лый диапазон однозначного измерения дальности. Для
обеспечения однозначного измерения дальности необхо-
димо использовать РЛС с достаточно большим перио-
50
дом следования импульсов, которые называют станция-
ми с большой скважностью. Для этих станций отноше-
ние Ти к Гц составляет тысячи.
41. При использовании когерентно-импульсных РЛС
движущаяся цель воспринимается как неподвижная, если
допплеровская частота кратна частоте следования им-
пульсов РЛС
Гд=^и, (1.43)
где k — целое число. В этом случае амплитуда импуль-
сов на выходе фазового детектора постоянна.
Из (1.37) и (1.43) следует, что движущаяся цель
воспринимается как неподвижная при выполнении сле-
дующего равенства (рис. 1.30):
(2и/Х) cos а=ЛГи. (1.44)
При заданной скорости v движения цели значения углов
а, для которых справедлива формула (1.44), называют-
ся «слепыми». При заданном направлении движения
Рис. 1.38. Обработка видеоимпульсов при изменении периода следо-
вания импульсов Ти-
а — схема обработки б — ее частотная характеристика
51
цели относительно линии РЛС — цель формула (1.44)
позволяет определить «слепые» значения скорости по-
лета цели.
Наличие «слепых» скоростей является существенным
недостатком импульсных когерентных РЛС. Одним из
путей борьбы со «слепыми» скоростями является измене-
ние (вобуляция) периода следования импульсов РЛС.
Так, например, период следования импульсов может по-
следовательно принимать два значения Л и TV Для
обработки видеосигналов, образующихся на выходе фа-
зового детектора такой РЛС, может быть использовано
устройство, изображенное на рис. 1.38,а [116]. В этом
устройстве имеется схема вычитания видеоимпульсов.
К одному ее входу подводится напряжение от фазового
детектора и$д, задержанное на время 7\ или Т2 с по-
мощью коммутируемых линий задержки. Сигналы, при-
ходящие в течение интервала Л между импульсами, за-
держиваются на время Т2; сигналы же, принятые за
интервал Т2, задерживаются на время Л. Переключа-
тель (П) переводится из одного положения в другое
с частотой следования импульсов.
Ко второму входу схемы вычитания подводится по-
ловина суммы и$д и этого же напряжения, задержан-
ного на время Т\ + Т2. При верхнем положении переклю-
чателя выходное напряжение равно
f/выДО =0,5^/фд(0 +0,5[7фд^—Ti—Т2)-~
—Т1);
при нижнем положении указанного переключателя —
= 0,5С7фд (/) +0,5С7фД(К- Л—т2}~
£7фд (t Т2).
Амплитудно-частотная характеристика рассмотренно-
го устройства обработки определяется выражением [116]
Ф (F) = 2 [1,5 — cos 2nFT\ — cos 2itFT2 -|-
+ 0,5 cos 2itF(7\+ ?,)]’••.
На рис. 1.38,6 приведена амплитудно-частотная xa-
рактергстика для 7'i/7,2 = 6/7. При Ti=/=T2 существенно
уменьшается число «слепых» скоростей и увеличивается
расстояние по частотной оси между нулевыми значения-
ми амплитудно-частотной характеристики. Для сравне-
ния на рис. 1.38,6 пунктирной линией изображена зави-
52
симость отношения частоты FM амплитудной модуляции
сигналов на выходе фазового детектора к ее максималь-
ному значению Гммакс от допплеровской частоты при
условии постоянства периода следования импульсов РЛС
(7^ = 72); каждое нулевое значение этого графика соот-
ветствует «слепой» скорости цели.
Рассмотренные выше импульсные когерентные стан-
ции могут быть названы станциями с внутренней коге-
рентностью. Они обладают высокими чувствительностью
и помехозащищенностью, позволяют надежно разделять
движущиеся и неподвижные цели, а также измерять
с большой точностью допплеровский частотный сдвиг
сигналов. К недостаткам этих станций относятся их от-
носительная сложность и необходимость обеспечения
высокой стабильности всех гетеродинов, используемых
в станции.
42. Можно выделять допплеровские частоты сигналов
с помощью более простых некогерентных станций, в ко-
торых используется внешняя когерентность сигналов. Схе-
ма некогерентной импульсной станции приведена на
рис. 1.39,а. Передатчик создает некогерентные высокоча-
стотные импульсы. В приемнике нет опорного напряже-
ния, когерентного с излучаемыми зондирующими сигна-
лами. После смесителя промежуточной частоты включен
амплитудный детектор, который, исключая высокочастот-
ное заполнение принятых сигналов, уничтожает и всю
информацию, связанную с этим заполнением. В некоге-
рентной станции может быть использована лишь та
информация, которая заложена в огибающей сигналов.
В качестве выходного устройства некогерентных им-
пульсных станций чаще всего используются электронно-
лучевой индикатор.
Однако, если в такой станции сделать добавление
в виде искусственной линии с регулируемой задержкой
сигналов на промежуточной частоте, подключаемую че-
рез переключатель К (рис. 1 39,а), то образуется РЛС
с внешней когерентностью Пусть в пределах диаграммы
направленности антенны РЛС одновременно находятся
цель, движущаяся с радиальной скоростью vv, и прак-
тически неподвижный объект, например облако
(рис. 1.39,6). Сигнал от неподвижного объекта может
быть использован для выделения допплеровской частоты
сигнала цели. На рис. 1.39,6 цель и облако находятся на
различных дальностях и их сигналы в приемнике не сов-
53
падают во времени. Если в тракте усиления по проме-
жуточной частоте имеется линия задержки на время
/о = 2(/)2—Dr) {с, то задержанный сигнал цели wc(0 сов-
падает с сигналом от облака «Обл(0- Эти сигналы коге-
рентны; их можно записать следующим образом:
ис (0 = Uс cos [(ш0 zt Йд) 1фс],
(1.45)
#обл (0 Dобл COS (<OqZ —фобл)-
Рис. 1.39. РЛС с внешней когерентностью:
а — схема станции; б — образование опорного напряжения.
54
В результате биения двух сигналов в УПЧ2 возник-
нет амплитудная модуляция результирующего колебания
допплеровской частотой £}д. Эта частота существует
в сигнале, образующемся на выходе детектора; ее мож-
но отфильтровать и измерить.
Основным недостатком РЛС с внешней когерентно-
стью являются низкая чувствительность и плохая поме-
хоустойчивость против шумовых помех. Объясняется это
тем, что накопление сигнала происходит после нелиней-
ного элемента — детектора, который существенно ухуд-
шает отношение сигнал/шум (см. гл. 4).
Рис. 1.40. Сигналы неподвижных (А, Б) и движущихся (В, Г) целей
на экране электронно-лучевого индикатора с амплитудной отметкой.
43. Выделение допплеровского частотного сдвига сиг-
налов может быть использовано не только для измере-
ния радиальной скорости целей, но и для различения
движущихся целей и неподвижных. Если импульсные сиг-
налы, образующиеся на выходе фазового детектора в им-
пульсных станциях с внутренней когерентностью или на
выходе амплитудного детектора в импульсных станциях
с внешней когерентностью, подвести к электронно-луче-
вому индикатору с амплитудной отметкой, то по виду
отметки можно различить, какая цель движется, а какая
неподвижна. Отметки неподвижных целей (А и Б на
рис. 1.40) представляют собой огибающую импульсов по-
стоянной амплитуды. Движущиеся же цели характери-
зуют импульсами с изменяющейся огибающей, их отмет-
ки как бы заштрихованы по высоте (В и Г на рис. 1.40).
Часто в РЛС используются схемы селекции подвиж-
ных целей, предназначенные для отфильтровывания сиг-
55
налов неподвижных целей. Описание этих схем дано
в гл. 10.
44. В РЛС применяются системы автоматического сле-
жения за целями по скорости (системы АСС). Существу-
ют два типа систем АСС — с частотно-следящим филь-
тром и с синхронно-фазовым следящим фильтром [53,
59, 117].
Рис. 1.41. Система автоматического слежения по скорости с частот-
но-следящим фильтром.
45. Схема АСС с частотно-следящим фильтром изо-
бражена на рис. 1.41; она представляет собой систему
автоподстройки частоты гетеродина по принимаемому
сигналу. После ограничения по амплитуде сигнал с ча-
стотой fc (например, после усилителя промежуточной
частоты) поступает к смесителю I; к этому же смесителю
подводятся колебания fr от управляемого гетеродина.
Сигнал разностной частоты fr—fc подается к узкополос-
ному фильтру с резонансной частотой f0 и к частотному
дискриминатору, настроенному на ту же частоту f0. Если
разность fr—fc отлична от частоты f0, то на выходе ча-
стотного дискриминатора образуется управляющее на-
пряжение t/ynp, полярность и величина которого соответ-
ствуют расстройке. Это напряжение через управляющий
элемент воздействует на гетеродин и изменяет его ча-
стоту таким образом, чтобы выполнялось равенство
fr-fc = fo. (1.46)
56
Узкополосный фильтр пропускает сигнал той цели,
за которой осуществляется слежение; этот сигнал под-
водится к выходному устройству, и может использовать-
ся как для обнаружения цели, так и для измерения ее
угловых координат. Узкая полоса пропускания фильтра
позволяет отфильтровывать сигналы других целей. Если
нужно измерять частоту сигнала селектируемой цели,
то это можно сделать, используя смеситель II, с помо-
щью которого суммируются по частоте колебания гете-
Рис. 1.42. Система автоматического слежения по скорости с синхрон-
но-фазовым следящим фильтром.
родина и сигнала, прошедшего через фильтр. С точно-
стью до ошибки следящей системы частота /вых равна
частоте сигнала. Измеритель частоты, позволяющий оп-
ределить радиальную скорость цели, может входить в со
став выходного устройства.
Для того, чтобы ввести разностную частоту /г — /с
в полосу захвата частотного дискриминатора, что необ-
ходимо для начала автоматического слежения, исполь-
зуется схема поиска. Вначале пилообразное напряжение
£7П поступает от схемы поиска к управляющему элемен-
ту (переключатель К в положении /) и гетеродин пере-
страивается в пределах всего’ рабочего диапазона. Как
только разностная частота попадает в узкополосный
фильтр на выходе фильтра образуется напряжение, ко-
торое воздействует на схему поиска; переключатель К
переходит в положение 2, схема поиска отключается
и начинается автослежение.
57
46. Система ACC с синхронно-фазовым следящим
фильтром изображена на рис. 1.42; она представляет со-
бой фазовую систему автоподстройки частоты. Система
работает на второй промежуточной частоте fnp2- Входной
сигнал, имеющий частоту fc = f-a-pl±Fa, преобразуется по
частоте с помощью синхронного гетеродина и смеси-
теля II. Частота колебаний, вырабатываемых синхрон-
ным гетеродином, выбирается из условия
fr2=fnpl—fnp2-
(1.47)
Замкнутая цепь системы автоматического регулиро-
вания содержит смеситель II, фазовый детектор, фильтр
допплеровских частот, усилитель и синхронный гетеро-
дин. К фазовому детектору подводятся напряжения от
Рис. 1.43. К косвенным мето-
дам определения координат
целей.
смесителя II и генератора
стабильных по частоте и фа-
зе колебаний. Первое напря-
жение изменяется с частотой
^ттр? ±Гп, а частота второго
точно равна fnp2- Выходное
напряжение ПфД фазового
детектора в каждый момент
времени пропорционально
косинусу разности фаз срав-
ниваемых напряжений. На-
пряжение Пфд проходит че-
рез фильтр допплеровских
частот, усиливается и ис-
пользуется для управления фазой колебаний, вырабаты-
ваемых синхронным генератором. Управление происходит
так, чтобы свести к нулю разность фаз колебаний, под-
водимых к фазовому детектору. Можно считать, что
начальная фаза входного сигнала изменяется с доппле-
ровской частотой, а начальная фаза опорного напряже-
ния, создаваемого стабилизированным гетеродином, стро-
го постоянна. Поэтому напряжение на выходе фазового
детектора следящей системы изменяется с допплеров-
ской частотой и соответственно изменяет частоту син-
хронного гетеродина. После фильтра допплеровских ча-
стот на выходе усилителя получается напряжение [7ВЬ1Х,
изменяющееся с частотой Гд.
Преимущество фазовой системы автоподстройки по
сравнению с частотной состоит в отсутствии статической
58
ошибки измерения частоты (т. е. Д/изм = 0 при =
= const).
47. Большое значение в радиолокации имеют косвен-
ные измерения, сводящиеся к вычислению значений тех
или иных величин по измеренным значениям других ве-
личин.
А. Две РЛС А и Б измеряют одновременно дальность
до цели Ц: DA и Db (рис. 1.43). Для плоскости АБЦ
справедливо
срА = arccos (D2A + d2 — D2b) l'2DAdt (1.48)
= arccos (p2b -]-d2 — D2 J/2Dbd. (1.49)
Здесь d — базовое расстояние двух РЛС.
Б. Две РЛС измеряют угловую координату цели:
у и (?ь. Для плоскости АБЦ справедливо
Da = d sin ?£/sin (?л + ?£), (1.50)
D£-=dsin^/sin(^ + ^). (1.51)
В. Текущая дальность D может быть выражена через
ее радиальную скорость ур
t
D = D0~ ^Vp(U, (1.52)
^0
где Do — дальность до цели в момент t = to.
Г. Радиальная скорость цели может быть определена
дифференцированием дальности как функции времени:
vv = dD (t) fdt. (1.53)
Именно так поступают, например, при использовании
в РЛС систем автоматического сопровождения целей по
дальности (АСД).
Д. Среднее значение радиальной скорости цели за ин-
тервал наблюдения At равно
Урср=|(£г-А)М (1.54)
причем At = tz—ti, D< и D2 — значения дальности до цели,
определенные в моменты времени ti и Б.
Е. Полная скорость движения цели
и— У&р-\-игг, (1.55)
59
где от = — тангенциальная составляющая скорости
цели; D — дальность до цели, й? — угловая скорость ли-
нии визирования цели.
Ж. Угловая скорость линии визирования цели может
быть определена дифференцированием соответствующей
измеряемой угловой координаты как функции времени
Для измерения угловой скорости обычно используется
гиротахометр — гироскопический прибор, внешняя рамка
карданова подвеса которого жестко скрепляется с плат-
формой антенны, осуществляющей автоматическое сле-
жение за целью по угловым координатам [72, 112].
В процессе слежения на внутреннюю рамку гироскопа
действует момент, пропорциональный угловой^ скорости
линии визирования цели Д?. Под воздействием гироско-
пического момента внутренняя рамка поворачивается на
некоторый угол а, пропорциональный Это перемеще-
ние передается на потенциометрический датчик, выход-
ное напряжение t/вых которого характеризует угловую
скорость линии визирования цели и по знаку, и по вели-
чине
(/>ЫХ = Ш. (1.56)
Угловая скорость линии визирования цели может
быть также определена через разность допплеровских
частот F^i и сигналов, принимаемых двумя близко
расположенными антеннами:
Qf = l\Fv-F„\/2d, (1.57)
где d—базовое расстояние между антеннами.
3. Высота цели Н над горизонтальной плоскостью,
проходящей через место расположения наземной РЛС,
определяется дальностью D до цели и углом места <рум,'
под которым наблюдается цель:
Н=£) sin фум. (1.58)
С учетом кривизны Земли высота цели по нормали
к земной поверхности определяется приближенной фор-
мулой
H=D sin фУм+D2/2Яэ, (1.59)
где — эквивалентный радиус Земли при нормальной
рефракции радиоволн, равный приблизительно 8500 км.
60
И. Высота цели может измеряться с помощью V-об-
разного луча РЛС (рис. 1.44). В этом случае высота
цели (без учета кривизны земной поверхности) опреде-
ляется по формуле
H — D sin Дф/| ztg2 у sin2 Дер,
(1.60)
где у — угол между вертикальным и наклонным луча-
ми; Дф — угол, на который должна повернуться антен-
ная система для того, что-
бы цель из вертикального
луча перешла в наклонный.
48. Положение цели в
пространстве определяется
как точка пересечения линий
или поверхностей положе-
ния, соответствующих изме- Рис. 1.44. V-образный л уч * для
ренным значениям координат измерения высоты целей.
[104, 112]. Поверхностью положения называется геомет-
рическое место точек в пространстве, для которых изме-
ренная РЛС координата цели (или параметр движения)
имеет постоянное значение. Например, для РЛС, изме-
ряющей только дальность D до цели, поверхностью
положения является сфера радиусом D. Линией поло-
жения называется геометрическое место точек на пло-
скости, характеризующееся постоянным значением изме-
ренной координаты или параметра движения. Так, при
измерении РЛС двух угловых координат цели — азимута
и угла места — линией положения является прямая, по-
ложение которой в пространстве определяется значения-
ми указанных углов.
Перечисляемые ниже методы определения местополо-
жения целей находят в настоящее время широкое при-
менение [116, 117].
Дальномерно-угломерный метод характеризуется тем,
что положение цели находится на пересечении сферы
радиусом D и прямой линии, положение которой опреде-
ляется значениями двух угловых координат — угла ме-
ста фум и азимута фаз- Этот метод широко распростра-
нен, так как позволяет определить положение пели из
одной точки пространства, где расположена РЛС.
Угломерный метод позволяет определить положение
цели как точку пересечения двух линий измеренных пе-
ленгов. Используется в тех случаях, когда РЛС позво-
ляют определять только угловые координаты целей.
61
Дальномерный метод применяется в гех случаях, ког-
да РЛС позволяют измерять только дальность. Поло-
жение цели определяется точкой пересечения трех сфер
или окружностей, центры которых совпадают с местами
расположения трех РЛС, а радиусы равны измеренным
Рис. 1.45. Разностно-дальномер-
ный метод определения местопо-
ложения целей.
дальностям Di, D%, D3.
Разностно-дальномер-
ный метод основан на
использовании линий по-
ложения, представляю-
щих собой гиперболы,
параметром которых яв-
ляется разность расстоя-
ний до двух радиолокаци-
онных станций; точки рас-
положения РЛС являются
фокусами гипербол. Для
определения положения
целей используются две
пары радиолокационных
станций (рис. 1.45), создающих два семейства пересе-
кающихся гипербол. Измерение дальности до цели пер-
вой парой РЛС (7 и 2) позволяет определить одну из
типербол, проходящую через цель и характеризуемую
параметром
ДА =Di—А=const.
(1.61}
Две другие станции (3 и 4) используются для опре-
деления второй гиперболы, проходящей через ту же цель,
но имеющую параметр
ДА=А—А = const. (1.62)
Точка пересечения двух указанных гипербол и опре-
деляет местоположение цели на плоскости.
Суммарно-дальномерный метод базируется на исполь-
зовании линий положения, представляющих собой эл-
липсы; параметром этих эллипсов является постоянство
суммы расстояний до двух РЛС, располагающихся в фо-
кусах эллипсов. Каждая пара РЛС дает свое семейство
эллипсов. Местоположение цели определяется точкой пе-
ресечения эллипсов, принадлежащих различным парам
РЛС.
49. В подавляющем большинстве современные радио-
локационные станции работают на ультракоротких вол-
нах (длина волны Z от 1 до 300 ... 400 см, частота /
62
от 75 до 30 000 МГц). Эти волны распространяются поч-
ти прямолинейно, и поэтому не позволяют обнаруживать
цели, расположенные в области так называемой «радио-
тени», образующейся из-за кривизны земной поверхно-
сти. На рис. 1.46 показаны границы обнаружения целей
в вертикальной плоскости с помощью радиолокационной
станции УКВ диапазона, помещенной в точке А земной
поверхности.
Рис. 1.46. Зона обнаружения РЛС УКВ
°макс—максимальная дальность действия РЛС
В настоящее время создаются загоризонтные радио-
локационные станции (ЗГ РЛС) в диапазоне коротких
радиоволн (Х=10 ... 50 м, f=6 ... 30 МГц). Эти вол-
ны, отражаясь от ионосферы, огибают Землю, что позво-
ляет облучать цели, находящиеся за горизонтом, и при-
нимать отраженные ими сигналы [63, 79, ПО, 130].
Различают два типа ЗГ РЛС: обратного и прямого
рассеяния.
Станции, использующие обратное рассеяние, работа-
ют следующим образом (рис. 1.47). Зондирующий сиг-
нал передатчика РЛС, излученный под небольшим углом
8 к горизонту, распространяется прямолинейно до одного
из слоев ионосферы. Отразившись от ионосферы в точке
А волна направляется к земной поверхности, где проис-
ходит вторичное отражение в сторону ионосферы и т. д.
Расстояние D ск по земной поверхности от точки излуче-
ния волны до точки ее возвращения к Земле после одно-
кратного отражения от ионосферы называют дально-
стью скачка. В зависимости от значений угла 8 и высоты
отражающего слоя дальность скачка изменяется от
1500 до 3500 км.
63
Если распространяющаяся волна встретит на своем
пути цель Ц, то возникает отраженная волна, распро-
страняющаяся тем же путем, но в обратном направле-
нии (пунктирная линия на рис. 1.47).
Обработка отраженного сигнала позволяет оценить
расстояние до цели по ломаной линии ОАЦ и азимут
цели. Зная угол 8, под которым излучаются радиоволны,
и высоту Яи отражающего ионизированного слоя можно
по расстоянию £>ц рассчитать дальность Z)3 до цели по
Рис. 1.47. Распространение сигналов при использовании загоризон-
тальной РЛС с обратным рассеянием.
проекции траектории луча на земную поверхность. Гра-
фики для подобного пересчета приведены на рис. 1.48.
Для измерения дальности используется импульсный
режим работы передатчиков РЛС. Частота следования
зондирующих импульсов, определяемая условием одно-
значного измерения дальности, не должна превышать
нескольких десятков герц. Для обеспечения измерения
азимута целей применяются антенны направленного дей-
ствия и, в частности фазированные антенные решетки.
Особенностью ЗГ РЛС является большой уровень
помех естественного происхождения, на фоне которых
принимаются полезные сигналы. К помеховым сигналам
относятся отражения от ионосферы, земной поверхно-
сти, гидрометеоров, всякого рода частиц космического
происхождения. Для повышения помехозащищенности
приема используются когерентные РЛС с внешней и
внутренней когерентностью и схемами фильтрации по
64
допплеровскому частотному смещению. Как правило,
в ЗГ РЛС используется высокостабильный задающий ге-
нератор колебаний, с помощью которого создается сетка
стабильных рабочих частот в диапазоне, например, от 3
до 50 МГц [79].
Рис 1 48. Зависимость между дальностью Dl( до цели, определяемой
загоризонтной РЛС с обратным рассеянием, и дальностью D3 по
земной поверхности; Нл — высота отражающего ионосферного слоя.
В ЗГ РЛС прямого рассеяния передатчик и прием-
ник разнесены далеко на поверхности Земли (рис. 1.49).
Излученная волна, встречающая после отражения от
ионосферы цель, изменяет несколько траекторию и, про-
должая распространяться дальше, после отражения от
ионосферы попадает к приемнику (сплошная линия на
рис. 1.49). Прямой сигнал от передатчика (штриховая
линия на рис. 1.49) либо не достигает приемника, либо
попадает в приемник очень сильно ослабленным. Для
обработки полезных сигналов’и выделения их на фоне
помех в приемнике с помощью высокостабильных ге-
теродинов создается когерентное опорное напряжение.
Высокочастотное напряжение гетеродинов синхронизи-
руется с колебаниями, создаваемыми передатчиком
ЗГ РЛС, с помощью сигналов службы единого времени.
65
РЛС прямого рассеяния позволяет фиксировать на-
личие цели и определить ее азимут из точки приема.
Для определения дальности до цели используют много-
позиционные радиолокационные станции, в состав кото-
рых входит один передатчик и несколько разнесенных
в пространстве приемников. Дальность при этом опреде-
ляется угломерным методом (см. п. 48). В станциях
прямого рассеяния могут использоваться как импульс-
ные, так и непрерывные зондирующие сигналы.
Рис. 1.49. Распространение сигналов при использовании загори-
зонтной РЛС прямого рассеяния.
50. При использовании радиолокационных систем
с активным ответом [89, 95, 99, 109] роль запросчиков мо-
гут играть РЛС обнаружения целей или специальные
радиопередатчики.
Система называется совмещенной, если роль запро-
счика выполняет РЛС обнаружения. Достоинства совме-
щенной системы заключаются в относительной простоте
используемой аппаратуры (дополнительно к РЛС не-
обходимо иметь только ответчики); в высокой разреша-
ющей способности системы по угловым координатам,
определяющейся тем, что РЛС обычно имеют узкий луч;
в простоте сопоставления и привязки сигналов ответчи-
ков и отраженных от целей сигналов. К недостаткам
совмещенной системы следует отнести, во-первых, не-
нужное излучение сигналов ответа при каждом облуче-
нии цели радиолокационной станцией, что приводит и
к демаскированию своих целей и к перегрузке выходных
устройств РЛС, и, во-вторых, необходимость установки
на каждом объекте наблюдения целого комплекта ответ-
66
чиков, которые должны работать на всех возможных
частотах запроса.
В автономных системах с активным ответом сигналы
запроса посылаются специальным приемопередатчиком,
работа которого синхронизируется РЛС. Преимущество
автономной системы перед совмещенной состоит, преж-
де всего, в возможности унификации ответчиков. Вто-
рым преимуществом систем этого типа является возмож-
ность включения аппаратуры только на то время, когда
необходимо ее использовать. Основной недостаток авто-
номных систем — низкая разрешающая способность по
угловым координатам, так как запросчики, как правило,
имеют антенны неболыпх размеров с широкой диаграм-
мой направленности.
Рис. 1.50. Схема запросчика активной радиолокационной системы.
Комбинированные системы отличаются тем, что за-
прос осуществляется одновременно сигналами РЛС и
автономного запросчика; ответчик срабатывает только
при получении обоих запрашивающих сигналов, совпа-
дающих по времени. При некотором усложнении аппа-
ратуры комбинированные системы обладают основными
преимуществами как автономных, так и совмещенных
систем.
51. На рис. 1.50 приведена функциональная схема
автономного запросчика. Сигналы запроса, как правило,
кодируются; в тракте передатчика имеется специальное
кодирующее устройство. Высокочастотные импульсы за-
прашивающего сигнала излучаются на частоте /зап, а от-
ветные сигналы приходят на другой частоте /отв. Разнос
частот запроса и ответа существенно повышает защи-
щенность системы от помех естественного и искусствен-
67
кого происхождения. Применение импульсного режима
работы позволяет использовать одну антенну и для пе-
редачи и для приема.
Сигналы ответчика поступают в приемник, предназ-
наченный для усиления колебаний и выделения их оги-
бающей £7вых- Далее имеется дешифратор ответа, по-
зволяющий проверить правильность кодирования при-
нятых сигналов; к выходному устройству приходят сиг-
налы С/отв, характеризуемые вполне определенным ко-
дом. Кодирование обычно [99, 109] осуществляется по
количеству импульсов в группе, их длительности и вре-
менному положению.
Рис. 1.51. Схема ответчика активной радиолокационной системы.
52. Устройство ответчика поясняет схема, изображен-
ная на рис. 1.51. Принимаемые антенной сигналы за-
проса с частотой /Зап поступают в приемник, а затем —
к дешифратору запросных сигналов для проверки пра-
вильности кода. От дешифратора управляющие импуль-
сы напряжения Uynp поступают к схеме кодирования
ответных сигналов, которая воздействует на передатчик
ответчика. Ответ осуществляется автоматически после
приема сигнала запроса; частота ответных сигналов
/отв отлична от частоты запроса /зап-
Перед излучением очередного ответного импульса
приемник ответчика запирается на время парализации
Тпар, что позволяет избежать самовозбуждения устрой-
ства. Для ограничения средней мощности передатчика
ответчика используется схема АРУ, уменьшающая уси-
ление приемника при увеличении частоты запрашиваю-
68
щих сигналов. При уменьшении усиления приемника
сигналы запроса, поступающие от более удаленных за-
просчиков, не вызывают срабатывания дешифратора от-
ветчика, в результате чего частота ответных сигналов не
превышает заданного уровня.
Кодирование ответных сигналов позволяет переда-
вать дополнительную информацию о целях, на которых
устанавливаются ответчики. На рис. 1.51 показан ввод
дополнительных данных в схему кодирования ответных
сигналов. Указание о требуемой информации может со-
держаться в коде запрашивающего сигнала.
53. При одновременной работе нескольких запросчи-
ков с одним ответчиком вероятность получения ответа
каждым запросчиком становится меньше единицы. Ве-
роятность Ротв получения ответа, частота F3an следова-
ния запросных импульсов от отдельного запросчика,
время ГПар запирания приемника ответчика после каж-
дого излученного сигнала и максимальное число тМакс
запросчиков, с которыми может взаимодействовать один
ответчик, связаны следующей формулой [109, 117]:
Шмакс = [1 "Ь Р отв (Т'пар^7зап 1) ]/7)отв7'пар7''зап' (1.63)
54. В системах пассивной радиолокации используют-
ся радиосигналы, излучаемые радиопередатчиками,
установленными на целях (например, передатчики
искусственных помех), а также обусловленные естест-
венным тепловым радиоизлучением различных объектов
[17, 56, 82].
Средства пассивной радиолокации характеризуются
меньшими возможностями получения данных о целях,
чем активные радиолокаторы. Путем прямых измерений
в пассивной радиолокации осуществляется обнаружение
целей и определение их угловых координат. Для этого
используются узкие диаграммы направленности антен-
ных устройств. Находят применение амплитудные (см.
п. 22—24) и фазовые (п. 28) методы измерения угловых
координат.
Для оценки дальности используются косвенные ме-
тоды, в частности угломерный метод (формулы (1.50) и
(1-51)). В самолетных станциях применяется метод
определения дальности до целей по измеренному значе-
нию угла места фум, под которым наблюдается цель, и
известной высоте Н полета самолета:
D = ///cos фум. (1-64)
69
При известных значениях дальности до цели D и ши-
рины 0О,5 диаграммы направленности антенны пеленга-
ционного устройства можно определить тангенциальную
vT составляющую скорости цели
uT = Z)0o,5/^c, (1.65)
где tc — время пересечения целью диаграммы направ-
ленности антенны пеленгатора.
55. Среди средств пассивной радиолокации широкое
применение находят радиотеплолокаторы (РТЛ) [17, 56,
82, 112], которые позволяют:
— обнаруживать и определять угловые координаты
излучающих объектов;
— решать задачи морской и воздушно-космической
навигации;
— осуществлять всепогодную астронавигацию;
— вести всепогодное обнаружение источников тепло-
вой энергии;
— проводить неконтактное измерение распределения
температур объектов и исследование их внутренней
структуры.
Отличительными особенностями РТЛ являются
абсолютная скрытность работы, относительная дешевиз-
на и надежность аппаратуры.
Из средств РТЛ наиболее широко используются ра-
диосекстанты и бортовые устройства для обзора земной
поверхности.
56. Основными элементами РТЛ являются антенное
устройство, приемник (радиометр) и выходное индика-
торное устройство. Тепловое радиоизлучение по своей
структуре аналогично собственным шумам приемника.
Информативными параметрами принимаемых сигналов
являются направление их прихода и средняя мощность.
Направление прихода оценивается с помощью антенн
направленного действия. Назначением радиометра явля-
ется фиксация возрастания средней мощности при прие-
ме сигналов целей.
Радиоизлучение целей принимается в сантиметровом
и миллиметровом диапазонах волн. Спектральная плот-
ность сигналов очень мала и для увеличения мощности
сигнала на входе приемника приходится применять весь-
ма широкую полосу пропускания высокочастотных эле-
ментов.
70
57. Схема компенсационного радиометра приведена на
рис. 1.52. Она содержит усилитель высокой частоты
(УВЧ), амплитудный детектор, мостовую схему и
фильтр нижних частот (ФНЧ). После усиления высо-
кочастотные колебания подводятся к амплитудному де-
тектору. Полезный эффект заключен в постоянной со-
ставляющей выходного напряжения [7= детектора, ко-
торая отфильтровывается с помощью ФНЧ и измеряется
Рис. 1.52. Схема компенсационного радиометра.
в выходном устройстве. Для устранения влияния собст-
венных шумов приемника применяется компенсация
в мостовой схеме той части выходного напряжения t/=,
которая обусловлена внутренним шумом. Компенсирую-
щее напряжение t/комп подводится к одному плечу мо-
ста, а выход детектора соединен с другим его плечом.
Достоинствами компенсационного радиометра явля-
ются его высокая чувствительность и относительная про-
стота устройства. Серьезный недостаток прибора заклю-
чается в неустойчивости компенсации собственного шу-
ма, нарушающейся при изменении коэффициента уси-
ления тракта.
УВЧ,
+ (i)
uc(t)
От
антенны
,, Коррелятор
Схема
умножения
I________________________________________
\и=
|---------=*•
К Выходному
~ J устройству
ФНЧ
УВЧ2
У'с(^ + и2Ш^
Рис. 1.53. Схема корреляционного радиометра.
58. Корреляционный радиометр (рис. 1.53) включает
два идентичных высокочастотных канала УВЧ1 и УВЧг,
в которых присутствует один и тот же полезный сигнал
«с (0 и независимые собственные шумы «щДО и «2ш(0-
С выхода усилителей высокой частоты напряжения по-
71
ступают к коррелятору, состоящему из схемы умноже-
ния и фильтра нижних частот. На выходе имеем
т ФНЧ
У = А С [и'с (0 + «,ш (01 [и'с (/)+«,,»(/)]<«, (166)
6
где k — коэффициент пропорциональности; ТфНЦ — по-
стоянная времени фильтра нижних частот.
Недостатком корреляционного радиометра является за-
висимость выходного напряжения от изменения фазовых
сдвигов сигналов в усилителях.
Рис. 1.54. Схема модуляционного радиометра.
59. Наиболее распространенными являются модуля-
ционные радиометры. Их особенность состоит в том, что
принимаемый сигнал модулируется по амплитуде сразу
же после антенны, там, где собственные шумы приемника
можно считать отсутствующими (рис. 1.54). В результате
при приеме полезного сигнала на нагрузке амплитудного
детектора существует составляющая напряжения, изме-
няющаяся с частотой FM. Эта составляющая отфильтро-
вывается узкополосным усилителем и подводится к син-
хронному детектору; опорное напряжение Uon для син-
хронного детектора создается тем же генератором, с по-
мощью которого осуществляется модуляция сигнала.
Модуляционный радиометр имеет несколько меньшую
чувствительность, чем компенсационный, но зато эта чув-
ствительность значительно более стабильна во времени.
Задачи
1.1. Каким дальностям до целей соответствует время запазды-
вания отраженных сигналов I мкс, 1 мс, 1 с, 1 мин?
1.2. Для измерения дальности используется электронно-лучевая
трубка с линейной разверткой На какой интервал по дальности
сместится отметка цели, характеризуемая временем запаздывания
60 мкс, если вследствие нестабильности работы длина разверткц
изменяется от 100 до 95 мм?
1.3. В электронно-лучевом индикаторе дальности (с линейной
разверткой) случайные изменения длительности развертки дости-
гают ±5 мкс. В каких пределах лежат изменения измеряемой даль-
ности?
1.4. Считая среднее расстояние между Луной и Землей равным
385 000 км, определить максимальное значение частоты посылок
импульсов передатчиком РЛС при однозначном измерении дально-
сти до Луны?
1.5. В момент противостояния Венеры и Земли расстояние
между ними составляет приблизительно 40 млн. км. Какова абсо-
лютная и относительная погрешность измерения дальности до Вене-
ры, если ошибка измерения времени запаздывания составляет 1 мс?
1.6. РЛС обнаружения воздушных целей имеет максимальную
дальность действия 300 км Определить скорость развертки, если
длина шкалы дальности равна 150 мм.
1.7. С самолета, летящего на высоте 10 км, производится на-
блюдение земной поверхности. Считая траекторию распространения
радиоволн прямолинейной, определить протяженность участка зем-
ной поверхности, находящегося в радиолокационной тени холма вы-
сотой 100 м. Наибольшее удаление самолета от вершины холма
составляет 300 км.
1.8. Насколько близко к наземной аэродромной РЛС могуг
располагаться местные предметы, высота которых не превышает
10 м, если РЛС должна обнаруживать самолеты под минимальным
углом места 1°? Высота центра антенны над поверхностью Земли
равна 2 м.
1.9. РЛС обнаружения имеет дальность действия 20 км. Каково
наибольшее число т отраженных сигналов, принимаемых станцией
за время облучения цели, равное 1,2 мс (предполагается, что даль-
ность измеряется однозначно)?
1.10. Период следования Та импульсов РЛС в несколько раз
меньше максимального времени /л запаздывания отраженных сиг-
налов. Чему равно время запаздывания сигналов tDязп, измеряе-
мое такой станцией?
1.11. Цель удалена от РЛС на 75 км. Какую дальность до
цели покажет индикатор станции, если период следования импуль-
сов равен 300 мкс?
1.12. На экране индикатора дальности имеются отметки двух
целей. Время запаздывания сигналов одной из них превышает
период Ти следования импульсов РЛС и ее дальность указывается
неправильно. Небольшое изменение частоты следования импульсов
РЛС (например, на 10%) позволяет установить, какая из отметок
занимает ложное положение, а какая •— правильное. Объясните это.
1.13. В РЛС с симметричным пилообразным законом изменения
частоты колебаний Fm=100 Гц, AfM=105 Гц, а дальность обна-
руженной цели 300 км. Чему равна разностная частота сигнала
в приемнике?
73
1.14. Как отразится наличие допплеровского частотного сдвига
отраженных сигналов на значении разностной частоты в частотном
радиолокационном дальномере при симметричном пилообразном за-
коне изменения частоты излучения? Для определенности принять,
что цель приближается к РЛС.
1.15. Как при наличии неизвестного допплеровского сдвига
частоты отраженных сигналов в частотной РЛС с симметричным
законом модуляции обеспечить точное измерение и дальности и ско-
рости цели?
1.16. Частота излучаемых колебаний частотного дальномера из-
меняется по синусоидальному закону
f=fo+O,5AfM cos Q№t.
Как изменяется разностная частота в приемнике дальномера, если
дальность до цели постоянна? При каких условиях можно использо-
вать подобное дальномерное устройство? Предполагается, что время
запаздывания отраженных сигналов много меньше периода частот-
ной модуляции (^о<СГм).
1.17. При использовании двухчастотного фазового дальномера
разность фаз колебаний, подводимых к фазовому детектору, состав-
ляет 36°; дальность до цели равна 30 км. Определить разность
частот дальномера.
1.18. Определить применительно к условиям предыдущей зада-
чи максимально возможные значения рабочих частот дальномера,
если относительная стабильность генераторов равна 10~8, а допу-
стимые ошибки измерения дальности не должны превышать 5%.
1.19. Можно ли использовать двухчастотный фазовый дально-
мер при наличии двух или нескольких целей?
1.20. Определить наивысшую частоту синусоидальной модуля-
ции незатухающих колебаний фазового дальномера, если макси-
мальная измеряемая дальность равна 100 км.
1.21. Во сколько раз изменится выходное напряжение фазового
детектора в дальномере фазового типа, если частота модуляции
незатухающих колебаний равна 750 Гц, а дальность цели увели-
чилась с 16,7 до 33,4 км?
1.22. При пеленгации целей по методу сравнения амплитуд
сигналов используются две антенны с круговыми диаграммами на-
правленности (рис. 1.55). Выходное напряжение приемного устрой-
ства пропорционально отношению амплитуд принятых сигналов.
Найти пеленгационную характеристику угломерного устройства
в пределах угла хОу.
1.23. Применительно к условиям предыдущей задачи опреде-
лить пеленгационную чувствительность Зпел угломерного устройства.
Определить размеры рабочей зоны пеленгатора при допустимом из-
74
менении пеленгационной чувствительности в /0 раз и максимальном
значении угла ф, равном 70°.
1.24. Показать, что при коническом сканировании иглообразно-
го луча малым значениям углового отклонения цели от равносиг-
нального направления соответствует пеленгационная характеристика
вида
<7вых(у)=^[1+ау cos (йа^—Тц)],
где у — угол между осью вращения луча 00' (равносигнальным
направлением) и направлением на цель; Йа — угловая частота ко-
нического сканирования; Чтц — фаза поворота луча, характеризую-
щая направление отклонения цели от оси 00'; k — коэффициент
пропорциональности; а — постоянная величина, пропорциональная
Рис. 1.55. Диаграммы направленности антенн при пеленгации по ме-
тоду сравнения амплитуды.
пеленгационной чувствительности устройства для равносигнального
направления. Принять, что ширина луча 0о,5 и угол Д0 отклонения
максимума луча от оси вращения достаточно малы (составляют
единицы градусов), а угол у много меньше указанных углов, т. е.
у<^0о,5 и у<А0.
1.25. Определить разность фаз колебаний при измерении угло-
вой координаты фазовым методом, если расстояние между прием-
ными антеннами равно 75 см, длина волны 25 см и угол ф = 5°.
1.26. Применительно к условия^ предыдущей задачи определить
ширину диаграммы 0О,5 направленности на уровне 0,5 (по мощно-
сти) приемных антенн, при которой обеспечивается однозначности
измерения угловой координаты целей фазовым методом.
1.27. Найти пеленгационную характеристику £7ВЫх(ф) фазового
угломерного устройства (по выходу фазового детектора) прц изме-
75
нении угла цели от 0 до 25°. Длина волны равна 10,2 см, расстояние
между антеннами 58 см. Указать диапазон однозначности.
1.28. Определить допплеровское смещение частоты сигналов,
отраженных от движущегося в направлении РЛС человека, если
скорость движения лежит в пределах от 2 до 5 км/ч, а длина вол-
ны РЛС равна 3 см. Какие требования должны быть предъявлены
к стабильности высокочастотного генератбра РЛС, если допустимы
уходы частоты не более 20% от измеряемого допплеровского сме-
щения?
1.29. Рабочая волна наземной РЛС обнаружения самолетов
равна 10 см. Допплеровский сдвиг частоты отраженных сигналов
равен 5 кГц. Что можно сказать о скорости v полета обнаруженного
самолета?
1.30. Цель сначала двигалась прямо на РЛС, а затем направ-
ление ее движения изменилось. Допплеровская частота отраженного
сигнала изменилась при этом в полтора раза. На какой угол изме-
нилось направление движения цели?
1.31. Когерентно-импульсная РЛС наблюдения за искусствен-
ными спутниками Земли работает на волнах длиной 10 см при дли-
Рис. 1.56. К определению
закона изменения ради-
альной скорости цели.
тельности импульсов 20 мкс. Обнаружит
ли РЛС спутник, движущийся прямо на
нее с радиальной скоростью 8 км/с, если
полоса пропускания приемника согласо-
вана с длительностью излучаемых им-
пульсов (А/пр = 1/Ти) ?
1.32. Самолетная РЛС (А,=3,2 см),
обеспечивает селекцию целей по скоро-
сти. Определить ширину спектра доппле-
ровских частот сигналов, отраженных
от поверхности земли, если сектор об-
зора РЛС составляет +30р от оси са-
молета, скорость полета 1000 км/ч и вы-
сота полета меньше дальности действия
РЛС.
1.33. Самолет на малой высоте про-
летает с путевой скоростью v в стороне
от наземной РЛС. Определить закон
изменения радиальной скорости цели, если траектория полета уда-
лена от РЛС на расстояние Z (рис. 1.56).
1.34. Применительно к условиям предыдущей задачи определить
конечную дальность цели для времени сближения t = 2 мин, если
начальная дальность Do= 100 км, у = 800 км/ч, 7=10 км.
1.35. Имеется наземная РЛС, измеряющая высоту самолетов.
Оценить радиус г участка вокруг РЛС, в пределах которого зем-
76
ную поверхность можно считать плоской для фум = 5...45°. Плос-
ким будем называть такой участок поверхности, в пределах которо-
го поправка на кривизну Земли не превышает 5% от истинного
значения высоты самолета. Эквивалентный радиус Земли принять
равным 8500 км.
1.36. Определить угол места цели, если при дальности 200 км
от наземной РЛС истинная высота равна 15 км. Эквивалентный
радиус Земли принять равным 8500 км.
1.37. В частотном радиолокационном дальномере для выделения
разностной частоты имеется только один фильтр, настроенный на
частоту /ф. Полоса пропускания фильтра Д/ф много меньше воз-
можного диапазона изменения частот:
Д/ф <Cfp макс—fp мин.
Как можно обеспечить в такой станции измерение дальности целей
во всем рабочем диапазоне от £>Мин до ймакс?
1.38. Имеется наземная радиолокационная станция с вращаю-
щимся вокруг вертикальной оси плоским вертикальным лучом; из-
меряются дальность и азимут целей. Какие данные можно полу-
чить с помощью этой станции о целях, перемещающихся по на-
земной или водной поверхности?
1.39. Имеются две РЛС А и Б, измеряющие угловые коорди-
наты целей и используемые для определения их местоположения.
Если одновременно в осматриваемом пространстве имеется п целей,
то какое количество целей укажет система? Как можно устранить
неоднозначность?
1.40. Определить угол поворота V-образного луча (рис. 1.44)
при измерении высоты самолета, равной 10 км, для дальности 100 км
и угла у = 45°.
1.41. Реальные плоские лучи имеют конечную ширину в гори-
зонтальной плоскости и для улучшения наблюдения низколетящих
самолетов при использовании в РЛС V-образной диаграммы ее со-
ставляющие (вертикальный и наклонный лучи) раздвигают на не-
который угол |3. Как в этом случае нужно пользоваться формулой
(1.60)?
1.42. Показать, что поправка на высоту цели, определяемая
кривизной Земли, равна A.H = D2I2R3, где R3 — эквивалентный ра-
диус Земли с учетом рефракции радиоволн.
1.43. Показать, что двухантенное пеленгационное устройство
позволяет определять угловую скорость цели при условии измере-
ния допплеровских частот сигналов в каждой точке приема:
2<р = AI Ли - Лх2 1Ж
Предполагается, что база антенн d ничтожно мала по сравне-
нию с дальностью до цели D.
77
1.44. Максимальная скорость сближения самолетов может до-
стигать 2000 км/ч. Как нужно выбрать частоту следования импуль-
сов самолетной когерентно-импульсной РЛС для обеспечения одно-
значной селекции целей по допплеровской частоте? Как это скажет-
ся на измерении дальности цели? Длина волны РЛС равна 3 см.
1.45. Наземная когерентно-импульсная станция обнаруживает
воздушные цели, летящие со скоростью 1000 км/ч. Определить «сле-
пые» направления полета целей в секторе углов от 0 до 90°, если
частота следования импульсов РЛС равна 400 Гц и длина волны
10 см.
1.46. При использовании наземной когерентно-импульсной стан-
ции для обнаружения воздушных целей заранее известно, что цели
могут перемещаться со «слепыми» скоростями и по «слепым» на-
правлениям. Каким образом можно обеспечить наблюдение всех
целей на фоне отражения от местных предметов?
1.47. Самолеты движутся точно на наземную когерентно-им-
пульсную станцию. Для каких условий полета движущуюся цель
нельзя отличить от неподвижной? Частота следования импульсов
РЛС равна 300 Гц, длина волны 1,5 м, максимальная скорость
сближения 2000 км/ч, а минимальная — 200 км/ч; считать, что даль-
ность до цели намного превышает высоту ее полета.
1.48. В чем принципиальный недостаток фазового метода изме-
рения угловой координаты, иллюстрируемого формулой (1.23)? Как
можно устранить этот недостаток?
1.49. Каким принципиальным недостатком характеризуется ме-
тод измерения угловых координат, основанный на коническом ска-
нировании диаграммы направленности антенны? Какая система
пеленгации свободна от такого недостатка?
1.50. Определить пределы изменения задержки строб-импульсов
радиолокационной системы АСД, если поиск целей по дальности
осуществляется в пределах от 500 до 5000 м.
1.51. Определить, какому изменению дальности соответствует
перемещение строб-импульсов автодальномера за один период сле-
дования импульсов РЛС при поиске цели. Максимальное измене-
ние задержки строб-импульсов равно 40 мкс, частота следования
импульсов 2000 Гц, время поиска 1 с.
1.52. В системе АСН при использовании конического сканиро-
вания оказались перепутанными провода, в результате чего ази-
мутальное опорное напряжение подано в канал отработки угла ме-
ста, а угломестное — в канал отработки азимута. Объяснить, как
будет работать система?
1.53. Определить частоту сигнала ошибки в РЛС с коническим
сканированием, если излучатель антенны вращается со скоростью
3000 об/мин
78
1.54. Объяснить, как скажется на работе системы АСН с ко-
ническим сканированием изменение скорости вращения облучателя
антенны?
1.55. В амплитудной суммарно-разностной системе АСН переме-
нили местами провода, соединяющие усилители разностных сигналов
с фазовыми детекторами каналов. Как поведет себя система?
1.56. Радиовысотомер с частотной модуляцией имеет два рабо-
чих диапазона: 0... 120 м и 0...1200 м. Предполагая, что значение
разностной частоты одинаково для максимальных высот обоих диа-
пазонов, девиация частоты для первого диапазона равна 40 МГц,
а частота модуляции не меняется при переключении диапазонов,
определить девиацию частоты для второго диапазона.
1.57. На самолете установлена РЛС с частотной модуляцией,
используемая для определения расстояний до препятствий на
трассе полета. Определить ошибку в измерении дальности, если
скорость полета самолета 1000 км/ч, девиация частоты излучаемых
сигналов 2 МГц, период модуляции О,СН с, среднее значение часто-
ты излучения 400 МГц.
1.58. Считая допустимыми ошибки оценки дальности до цели
с помощью загоризонтной РЛС обратного рассеяния ДР^0,О5Рл,
где Da — дальность по лучу, указать пределы изменения Dn, в ко-
торых эту дальность можно считать равной дальности D3 по зем-
ной поверхности. Принять высоту отражающего ионизированного
слоя равной 400 км.
1.59. При распространении коротких волн различие времени А/
прохождения волной пути ЗГ РЛС — ионосфера — цель и обратно
измеряется долями миллисекунд. Определить наибольшее изменение
измеренной дальности ДР цели, если Д/^0,25 мс.
1.60. Для обнаружения самолетов на фоне неподвижных объ-
ектов используется наземная когерентно-импульсная РЛС, у кото-
рой после фазового детектора включен электронно-лучевой индика-
тор с амплитудной отметкой. Что нужно сделать в такой станции
для обеспечения надежного обнаружения целей на фоне дипольных
отражателей или дождевых капель, перемещающихся относительно
РЛС с радиальной скоростью ор? Длина волны РЛС равна X.
79
Глава 2
РАДИОЛОКАЦИОННЫЕ ЦЕЛИ
Основные справочные данные
1. Основными характеристиками радиолокационных
целей являются:
— эффективная отражающая площадь цели и закон
ее распределения;
— спектр флуктуаций амплитуды (мощности) отра-
женного сигнала;
— спектр флуктуаций фазового фронта отраженного
сигнала;
— особенности траектории движения цели.
2. Эффективной отражающей площадью цели назы-
вается фиктивная поверхность площадью о, являющаяся
изотропным и не поглощающим энергию переизлучателем,
которая, будучи помещена в точку цели, создает у антен-
ны РЛС такую же плотность потока мощности, как и ре-
альная цель.
Эффективная отражающая площадь цели характери-
зует отражающие свойства цели. Эти свойства зависят
от длины волны РЛС, материала, размеров и конфигу-
рации цели и от направления облучения. Точный учет
каждого из этих факторов в отдельности практически
невозможен, и эффективная отражающая площадь явля-
ется величиной, обобщенно учитывающей их совместное
влияние на интенсивность сигнала, отраженного целью.
Эффективная отражающая площадь цели может быть
определена по формуле
о = 4-п/)2 PpjjQ /рц> (2 —
где D — дальность до цели; ррлс — плотность потока
мощности отраженного сигнала у антенны РЛС; рц —
плотность потока мощности зондирующего сигнала у цели.
Плотность потока мощности рассчитывается по фор-
муле
р = Р6/4л£>2,
где Р — мощность излучаемого (переизлучаемого) сиг-
нала, G — коэффициент направленного действия антен-
80
НЫ (цели). Другой вид формулы (2.1):
о = 4т:/)2£'2рЛС /£2ц> (2.2)
где £рлс, Ец — напряженности электрического поля
вблизи РЛС и цели соответственно.
3. По методу определения эффективной отражающей
площади все цели можно разделить на элементарные и
сложные. Эффективная отражающая площадь элементар-
ных целей может быть определена аналитически. Такой
расчет возможен лишь для ограниченного числа объектов
простейшей формы, выполненных из однородного идеаль-
но отражающего материала. Примерами элементарных
целей могут служить металлические шар, лист, вибратор,
уголковые отражатели и некоторые другие тела. Эффек-
тивная отражающая площадь сложных целей может быть
определена только экспериментально и описана статисти-
чески. К сложным целям относится подавляющее боль-
шинство реальных целей.
С точки зрения разрешающей способности сложные
цели, в свою очередь, могут быть разделены на точечные
и распределенные.
Точечными называют такие цели, линейные и угловые
размеры которых значительно меньше элементов разре-
шения РЛС по дальности и угловым координатам, а раз-
ность радиальных скоростей их крайних точек много
меньше элемента разрешения по скорости. Примерами то-
чечных целей могут служить самолеты и корабли на боль-
ших удалениях от РЛС, искусственные спутники. Распре-
деленными целями называют такие, для которых указан-
ные выше соотношения не выполняются. Распределенные
цели могут быть поверхностными (земная и водная по-
верхность) и объемными (облака пассивных отражате-
лей дождевые облака, туман, дождь, снег).
4. Элементарные цели на практике широко использу-
ются в качестве пассивных ответчиков при испытании
радиолокационной аппаратуры, средств имитации назем-
ных и морских объектов, средств создания пассивных
помех, маскирующих различные цели. В некоторых слу-
чаях к элементарным целям могут быть отнесены также
головки баллистических ракет, ИСЗ и космические ко-
рабли.
Для пассивных ответчиков и маскирующих отража-
телей наиболее характерны большая эффективная отра-
81
жйюЩая площадь и широкая диаграмма обратного рас-
сеяния (диаграммой обратного рассеяния называют за-
висимость эффективной отражающей площади от на-
правления на облучающую РЛС, у которой передатчик
и приемник совмещены). В табл. 2.1 приведены значения
ТАБЛИЦА 21
Характеристики рассеяния простых геометрических тел
Тип отражателя Эффективная отражающая площадь, м2 Ширина диаг- раммы обратно го рассеяния на уровне 0,5 град
Расчетная формула Максимальное значение
}. = 3 см Х=Ю см
Полуволновой вибра- тор длиной /=Х/2 Металлический шар диаметром 55 4}. Квадратный металли- ческий лист2) площадью S = а1 4=0,86)2 sin4 ч»1) °- ~4~ 4тса* 3 Х2~ 0,77-10-8 0,78^ 14 - Ю^а4 8,6-Ю-з 0,78^ш 1,26-10‘За4 ~6">° Диаграмма об- ратного рассея- ния является сферой ЗОП/а
Уголковый отражатель
с треугольными гра- нями (рис. 2. 1, а)») 4па* 3 ~ Зк» 4,6-10»а4 0,42-10»а4 60°
с квадратными граня- ми (рис. 2 1,6)8) 12па* 3_ 42,3-108а4 3,78.108а4 35°
Металлический конус4) а = Тсй2 tgi —
1) <р —угол между направлением облучения РЛС и осью вибратора.
2) Направление облучения нормально к поверхности листа.
s) а —длина ребра.
4) Направление об тучения совпадает с осью конуса, а—радиус основания а—угол
при вершине.
этих показателей для наиболее распространенных видов
элементарных целей. Из данных таблицы можно сделать
следующие выводы:
1. Эффективная отражающая площадь полуволново-
го вибратора имеет для радиолокационного диапазона
весьма малую величину, которая, кроме того, резко за-
висит от ориентации вибратора относительно направле-
ния облучения. Для создания маскирующего эффекта
требуется большое количество отражателей.
2. Металлический шар при обладает посто-
янной эффективной отражающей площадью, не завися-
щей ни от длины волны, ни от направления облучения,
но величина сг при практически приемлемых размерах
шара мала — она равна площади его поперечного сече-
ния.
82
3. Значительно большую эффективную отражающую
площадь при тех же габаритах имеет металлическая
пластина при нормальном направлении облучения. При
отклонении облучения от нормали величина сг в преде-
лах основного лепестка диаграммы обратного рассеяния
уменьшается тем больше, чем больше а/Х, где а — линей-
ный размер пластины в соответствующей плоскости. Та-
ким образом, желание увеличить сг путем увеличения
Рис 2 1. Уголковые отражатели с треугольными (а) и квадратными
(б) гранями.
геометрических размеров пластины приводит к ухудше-
нию другого важного показателя — сужается диаграмма
обратного рассеяния.
4. Наиболее полно отвечают требованиям, предъяв-
ляемым к искусственным целям, уголковые отражатели
(рис. 2.1). Они имеют большое значение сг при относи-
тельно малых размерах и малую зависимость сг от на-
правления облучения. Эти свойства объясняются ходом
лучей в уголке при отражении (рис. 2.1,6). Как видно
из рис. 2.1,6, отражение от уголка происходит почти
в строго обратном направлении при изменении угла паде-
ния в широких пределах. Отражатель с треугольными
гранями (рис. 2.1,а) при прочих равных условиях дает в
девять раз меньшее значение or по сравнению с уголком,
имеющим квадратные грани. Однако он обладает почти
вдвое более широкой диаграммой обратного рассеяния.
Кроме того, указанные свойства уголков реализуются
только при соблюдении точной перпендикулярности гра-
ней, что может быть легче обеспечено в уголке с тре-
угольными гранями, имеющем более жесткую конструк-
цию. Все это определяет преимущественное применение
уголков с треугольными гранями.
Один уголковый отражатель переизлучает энергию
в пределах только одного квадранта. Объединяя уголки
в октеты, можно получить искусственную цель, переиз-
лучающую энергию в любых направлениях.
5. Условиями, при которых цели можно считать точеч-
ными, являются:
при разрешении по дальности —
/ц<б(П), (2.3)
при разрешении по угловым координатам —
/ц < 8 (?аз) D; /ц < 6 (?ум) D, (2.4)
при разрешении по скорости —
6 (^p)D/up, (2.5)
где /ц — наибольший размер цели; 6(D) —разрешающая
способность по дальности; 6(ф)—разрешающая способ-
ность по угловым координатам; 6(ир)—разрешающая
способность по радиальной скорости.
Рис. 2.2. К определению характеристик двухточечной цели.
Точечные цели практически не увеличивают длитель-
ности отраженного сигнала и не изменяют ширины его
спектра по сравнению с сигналом, отраженным от цели,
являющейся геометрической точкой. Условия (2.4) и
(2.5) показывают также, что понятие точечной цели не
является абсолютным. Цель, являющаяся точечной на
большом расстоянии, на достаточно малой дальности та-
ковой уже не будет.
6. Простейшей моделью сложной точечной цели яв-
ляется цель, состоящая из двух изотропных переизлуча-
телей, соединенных неотражающей штангой размером
84
/ц (рис. 2.2). Сигнал, переизлученный такой целью, на
большом расстоянии D от нее имеет вид:
е=Ер sin (со/—2лЕД + б) (2.6)
где
Ер= ]/E2i -рЕ22 -p2EiE2 cos 2ф (2.7)
— амплитуда напряженности суммарного поля; Elf Еъ —
амплитуды напряженности полей, создаваемых каждым
переизлучателем;
2хр=(4jt74/Z) sin ср (2.8)
— сдвиг по фазе между векторами Е\, Е2; 2ti:D/Z —
фазовый сдвиг, обусловленный расстоянием;
3 = arctg ( ; tg ф) (2.9)
— фазовый сдвиг вектора Ер по отношению к вектору
Eq гипотетического изотропного переизлучателя, распо-
ложенного в центре цели.
Амплитуда напряженности суммарного поля при из-
менении направления облучения может меняться при
Е\ = Е2—Е от нуля (при 21р=(2&+1)л) до 2Е (при
2ф = 2^л). Это соответствует изменению эффективной от-
ражающей площади от 0 до 4<У1, где сц— эффективная
отражающая площадь каждого переизлучателя.
Среднее значение сг эффективной отражающей пло-
щади может быть найдено при усреднении квадрата
выражения (2.7) по углу ф в интервале 0... 2л, в ре-
зультате чего имеем
сг = 2 си.
При этом ширина лепестка диаграммы обратного рас-
сеяния по нулевому уровню находится из условия
2 - фО = [2 (k + 1) + 1] тг - (2k 4- 1) л 2л.
Учитывая (2.8), получим
0о~фо2—Фо1—7,/2/ц. (2.10)
Поверхность равных фаз рассматриваемой модели цели
не является сферой, как для одного изотропного источ-
ника, и описывается уравнением
б—2n£>A=const. (2.11)
85
Сечения таких эквифазных поверхностей показаны на
рис. 2.3.
7. Закон распределения амплитуд сигналов, отражен-
ных от различных реальных сложных целей (самолета,
корабля, облака искусственных отражателей), по резуль-
татам многих экспериментов хорошо совпадает с распре-
делением Релея
/гл и f V* \
—exp —,
° и \ и J
(2.12)
где о2!/ — дисперсия ортогональных составляющих ам-
плитуды отраженного сигнала.
Рис. 2.3. Сечение экви-
фазных поверхностей
двухточечной цели (Е2>
>£i).
Рис. 2.4. Спектр флуктуаций ам-
плитуды сигнала, отраженного от
самолета.
Если среди многих отражающих элементов сложной
цели имеется один, дающий стабильное и интенсивное
отражение, то закон распределения амплитуд близок
к обобщенному закону Релея:
w (U) =
U
и2 + А2
2а2и
(2-13)
где А — амплитуда стабильной составляющей;
I0(AU/2(j2u)—модифицированная функция Бесселя пер-
вого рода нулевого порядка.
Спектр флуктуаций амплитуды отраженного
сигнала является сплошным и имеет наибольшую интен-
сивность в диапазоне от нуля до десятков герц. На
рис. 2.4 приведен типичный спектр флуктуаций ампли-
туды сигнала, отраженного от самолета.
§6
8. Закон распределения эффективной отражающей
площади, соответствующий (2.12), имеет вид
о; (о) = о-1 ехр(— о/о), (2.14)
где о — среднее значение эффективной отражающей пло-
щади. В табл. 2.2 приведены значения о различных целей
для сантиметрового диапазона волн [99, 124].
ТАБЛИЦА 2.2
Среднее значение эффективной отр аж а ю щей площади
типовых целей
Наименование цели а, м2
Реактивный истребитель 5...8
Реактивный бомбардировщик 15...20
Большой четырехвинтовой пассажирский самолет 30...50
Большой реактивный пассажирский самолет 20...25
Крылатая ракета 0,3...0,8
Головка баллистической ракеты 1...10-3
Транспорт малого тоннажа (50...200 т) 50...250
Транспорт^среднего тоннажа (1 000. ..10 000 т) 3 000... 10 000
Транспорт большого тоннажа (>10 000 т) >10 000
Траулер 750
Крейсер 14000
Катер 100
Малая подводная лодка в надводном положении 140
Рубка подводной лодки 1
Человек 0,5...1,2
9. Вероятность того, что случайная величина будет не
меньше выбранной расчетной величины стр определяется
из интегрального закона:
00 _
Р (о> ор) — J w (о) da = exp (— ор/а). (2.15)
ст
р
10. Флуктуации фазового фронта отраженного сигнала
приводят к ошибкам пеленгации цели. Ошибкой пеленга-
ции для направления облучения ср является угол Дер меж-
ду нормалью к эквифазной поверхности (2.11) в точке
(ср, D) и нормалью к эквифазной поверхности изотропно-
го источника (расположенного в точке О рис. 2.2), про-
ходящей через эту же точку. Из рис. 2.2. следует
tg(A?) = ^- (2.16)
87
На рис. 2.5 приведен спектр флуктуаций фазового
фронта сигнала, отраженного от самолета, причем угло-
вые флуктуации (угловые шумы) пересчитаны в линей-
ные отклонения путем умножения на дальность и взято
их среднеквадратическое значение. Видно, что спектр
этот также низкочастотный, как и спектр амплитуд.
Рис 2.5. Спектр угловых шумов самолета.
11. Цель считают распределенной, если ее размеры
превышают соответствующий элемент разрешения РЛС.
Для поверхностной цели таким условием является
5Ц»6(5), (2.17)
а для объемной —
РЦ»6(У), (2.18)
где 5Ц и Уц—площадь и объем цели; 6(5), 6(7) —эле-
менты разрешения РЛС по площади и объему.
12. Сигналы, отраженные распределенной целью, так
же флуктуируют по амплитуде и фазе, как и сигналы
сложной точечной цели. Причинами флуктуаций являют-
ся хаотическое относительное перемещение отдельных
отражателей, изменение их количества при сканирова-
нии антенны, нестабильность частоты РЛС. Закон рас-
пределения амплитуды сигнала от такой цели близок
к релеевскому. Среднее значение эффективной отража-
ющей площади распределенной цели находится как сум-
ма средних значений всех элементарных отражателей,
попадающих в элемент разрешения РЛС 6(5) или 6(V).
При расчетах ст вводится понятие удельной эффективной
отражающей площади равной произведению эффек-
тивной отражающей площади сч одного отражателя на
плотность отражателей п (количество отражателей, при-
ходящееся на единицу площади или объема распределен-
ной цели):
Оф SSS
(2-19)
88
Среднее значение эффективной отражающей площади
распределенной цели находятся по формулам
7—аопов8(5) (2.20)
для поверхности цели и
a = aoo68(V) (2.21)
для объемной цели, причем Попов и оооб — соответствен-
но удельные отражающие площади поверхностей и
объемной целей.
В некоторых случаях для характеристики поверхност-
ных целей наряду с удельной эффективной отражающей
площадью вводится понятие коэффициента обратного
отражения у [106, 116, 124], который представляет собой
эффективную отражающую площадь, отнесенную к про-
екции элемента разрешения 6(5) на плоскость, перпен-
дикулярную падающему лучу:
у = а/8 (S) sin<p = а0 пов/sincp,
где ф — угол облучения цели (см. рис. 2.10).
При использовании коэффициента обратного отраже-
ния формула (2.20) приобретает вид:
а = (*S) sin (2.20)
13. Характер отражения от поверхности суши зави-
сит от степени ее шероховатости, определяемой отноше-
нием h/K, где h — высота неровностей. При Zz>X/8 sin ф
поверхность следует считать шероховатой, при
<0/8 sin ф — гладкой.
Шероховатые поверхности характеризуются слабой
зависимостью коэффициента обратного отражения от
угла облучения ф, а зависимость от ф их удельной отра-
жающей площади близка к закону Ламберта:
Цо пов = По пов MaKcSin ф,
где Попов макс — максимальное значение для ф = 90°.
На рис. 2.6 приведены зависимости у=Иф) для неко-
торых видов шереховатой земной поверхности.
В сантиметровом диапазоне даже при очень малых
углах облучения (ф<3°) гладкими поверхностями могут
считаться лишь асфальтовые и бетонные покрытия и
спокойная водная поверхность. Такие поверхности отра-
89
жают энергию зеркально и коэффициент обратного отра-
жения возрастает при увеличении ср.
На рис. 2.7 приведены зависимости y = f(cp) для бе-
тонного и гравийного покрытия дорог, а также для пес-
чаной почвы, занимающей промежуточное положение
между шероховатыми и гладкими поверхностями [106,
113,124].
Рис. 2.6. Коэффициент обратного отражения для различных видов
земной поверхности (%=3 см):
/ — молодой лес; 2 — почва, покрытая сухой травой (высота 2,5 см, март);
Рис. 2.7. Коэффициент обратного отражения:
бетонное покрытие;--------гравийное и шлаковое покрытие;
— •------- • — — песчаная почва
14. При отражении от неспокойной морской поверх-
ности удельная эффективная отражающая площадь зави-
сит от многих факторов: от угла облучения ср, от частоты,
от вида поляризации, от высоты волн, от направления
ветра. На рис. 2.8 приведены зависимости Оодов=/(ф)
90
для различных состояний моря при А,=3 см и углах <р,
больших 10°. При малых углах падения (<р<10°) харак-
тер зависимостей иной, имеется некоторый критический
угол, при котором наклон кривых меняется (см. рис. 2.9)
[99, 106].
Рис. 2.8. Зависимость удельной
отражающей площади морской
поверхности от угла падения
лучей.
Рис. 2.9. Зависимость удельной
отражающей площади морской по-
верхности от угла падения лучей:
а — спокойное море (высота волн
0,3 ... 1 м), б—умеренное волнение
(высота волн 1 . . 1,5 м).
15. Размер элемента разрешения 6(5) для импульсной
РЛС (рис. 2.10) может быть определен по формуле
8(S) = ^HD9a3/2cos<p, (2.22)
где 0аз — ширина луча антенны на уровне 0,5 в азиму-
тальной плоскости.
Для РЛС с непрерывным излучением и допплеров-
скими фильтрами
8 (S)]= W26a3A^/2o sin2 ср, (2.23)
где Д^ф — полоса пропускания допплеровского фильтра;
v—путевая скорость самолета.с РЛС.
16. Элементарными отражателями в объемных целях
при тумане, дожде и облаках являются капли воды, сфе-
рические по форме. Если %^>гк, где гк— радиус капли,
то
01=1,8.104г6кД4.
(2.24)
91
Для снежинки радиусом гСн
(Ji = 0,4 • 10Ar6CH/V.
(2.25)
В табл. 2.3 приведены значения п (число капель
в 1 м3) и оо об для тумана и облаков в зависимости от
дальности видимости.
Рис. 2 10 К расчету элемента разрешения поверхностной цели для
импульсной панорамной РЛС.
ТАБЛИЦА 2.3
Удельная эффективная отражающая плотность паров воды
Видимость, м 30 60 90 150 220 300
/2-10-4 55 20 12 6 3 2
°оеб 10-% М2 м3 13 4,8 2,8 1,4 0,7 0,5
На рис. 2.11 приведены зависимости Пооб для дождя
и зависимости от его интенсивности р и длины волны
РЛС.
17. При учете маскирующего действия пассивных от-
ражателей в виде диполей эффективная отражающая
площадь одного отражателя определяется по формулам:
максимальное значение —
Омаке — 0,86 V,
среднее значение —
а = 0,17k2.
(2.26)
(2.27)
92
18. Размер элемента разрешения по объему опреде-
ляется для эллиптического сечения луча по формуле
(рис. 2.12):
6 (V) = ЯСТи/926аз6ум/8,
(2.28)
где бум — ширина луча антенны на уровне 0,5 в плоскос-
ти угла места.
19. При отражении волн от реальных целей сложной
формы происходит деполяризация приходящих колеба-
ний — искажение поляриза-
ции отраженного сигнала по
сравнению с поляризацией
падающей волны [116, 124].
Не искажают поляриза-
цию только лишь тела сфе-
рической формы, идеально
проводящие гладкие боль-
шие (по сравнению с длиной
волны) пластины и тела, ра-
диусы кривизны которых
также значительно больше Л,.
В этих случаях при исход-
ной круговой поляризации в
отраженном сигнале меня-
ется лишь направление вра-
щения векторов поля. При
Рис 2.11. Удельная отражаю-
щая площадь дождя.
любой поляризации облуча-
ющего поля, поляризация
отраженного сигнала реаль-
ной цели будет эллиптической со случайными измене-
ниями параметров эллипса поляризации.
При эллиптической поляризации отраженного сигнала
поле у РЛС можно представить в виде двух горизонталь-
но и вертикально поляризованных составляющих.
Рис 2.12. К расчету элемента разрешения объемной цели для РЛС
обнаружения воздушных целей.
93
Если антенна РЛС излучает и принимает волны толь-
ко одной какой-либо линейной поляризации, то возника-
ют потери энергии принимаемого сигнала за счет утери
составляющей с поперечной поляризацией.
По экспериментальным данным, при облучении само-
летов линейно поляризованной волной Х=10 см, в отра-
женном сигнале появляется составляющая с поперечной
поляризацией, обусловливающая потерю энергии на
10 дБ [116, 124].
Если поле зондирующего сигнала имеет круговую по-
ляризацию, то при отражении от самолетов также возни-
кают потери, достигающие 3 дБ при ^ = 3 см и обуслов-
ленные неодинаковым сдвигом фаз ортогональных со-
ставляющих при отражении [116}.
Поляризационные свойства целей используются для
выделения сигналов от самолетов и вертолетов на фоне
мешающих отражений от гидрометеоров (см. гл. 10).
Задачи
2.1. Наземная радиолокационная станция, имеющая длину вол-
ны К= 10 см, импульсную мощность Ри = 1 МВт, чувствительность
приемника РПр мин= 10-13 Вт, эффективную площадь антенны Sa =
= 15 м2, обнаруживает цель на расстоянии D=300 км с заданными
вероятностями правильного обнаружения и ложной тревоги. Опре-
делить эффективную отражающую площадь цели о.
2.2. РЛС обнаруживает четырехвинтовой пассажирский самолет
на расстоянии 2?i=300 км с заданными вероятностями правильного
обнаружения и ложной тревоги. На каком расстоянии D2 эта же
РЛС обнаружит реактивный истребитель?
2.3. Найти количество пОтр искусственных полуволновых от-
ражателей, необходимое для подавления РЛС, наблюдающей ре-
активный бомбардировщик, при длине волны %=3см и %=10 см.
Исходить из условия, что подавление осуществляется при равен-
стве суммарной эффективной отражающей площади диполей и эф-
фективной отражающей площади самолета. Расчет о отражателя
вести по формуле (2.27).
2.4. Найти радиус шара R, сторону квадратной пластины а,
длину ребра уголкового отражателя Ь, имеющих эффективную отра-
жающую площадь при %=3 см, равную эффективной отражающей
площади крейсера.
2.5. Радиолокационная станция имеет разрешающую способ-
ность по угловым координатам б(фаз) =б(фум) =4°. Определить
максимальную дальность наблюдения D, при которой бомбардиров-
94
щик, летящий в направлении на РЛС, перестает быть для нее то-
чечной целью (принять /ц=30 м).
2.6. Самолет-бомбардировщик пролетает мимо РЛС на рас-
стоянии 10 км со скоростью 2000 км/ч. При какой разрешающей
способности по скорости б(Пр) эта цель является точечной? Прп-
щадь при %=3 см
2.7. Цель представляет собой два одинаковых изотропных то-
чечных переизлучателя, расположенных на неотражающей штанге
длиной 1Д = 10 м (см. рис. 2.2). Найти значение углов ф, при кото-
рых эта цель имеет наибольшую и наименьшую отражающую пло-
щадь при %=3 см.
2.8. Определить ширину лепестков диаграммы переизлучения
двухточечной цели в задаче 2.7.
2.9. Самолет совершает прямолинейный полет со скоростью
ц=2500 км/ч, пролетая мимо РЛС, имеющей длину волны Х=10см,
на минимальном расстоянии .0 = 50 км. Оценить частоту флуктуа-
ций амплитуды сигнала, отраженного от самолета, принимая по-
следний за двуточечную цель с /ц = 20 м.
2.10. Известно, что при маневрах самолетов угловая скорость
может достигать значений 10 ... 20 град/с, а при случайных рыска-
ниях и кренах 1 ... 2 град/с. Используя условия предыдущей зада-
чи, оценить получающуюся при этом частоту флуктуаций.
2.11. Сложная реальная цель имеет среднее значение эффектив-
ной отражающей площади о=20 м2 Вероятность того, что случай-
ное значение о превысит расчетную величину ор равна 0,9. Най-
ти Ор.
2.12. Найти вероятность того, что случайная ве.'|Нчи”а эффектив-
ной отражающей площади о превысит среднее значение с.
2.13. Известно среднее значение эффективной отражающей
площади цели о=5 м2. Найти значение оР, вероятность превышения
которого равна 0,95.
2.14. Определить эффективную отражающую площадь о для
случая наблюдения земной поверхности с помощью самолетной
панорамной РЛС импульсного типа при следующих условиях:
длина волны сигнала РЛС Х=3 см, длительность импульса ти =
= 0,5 • 10“6 с, длина раскрыва антенны в азимутальной плоскости
da = 1,5 м, дальность наблюдаемого участка 0=100 км, высота
полета //=10 км; характер наблюдаемой поверхности: а) местность,
поросшая молодым лесом; б) бетонное покрытие.
2.15. Решить предыдущую задачу, приняв 0 = 20 км.
2.16. Сохраняя необходимые условия задачи 2.14, определить о
в случае наблюдения морской поверхности при спокойном море и
при умеренном волнении.
95
2.17. Определить, на какой дальности будет обнаружена рубка
подводной лодки на фоне мешающих отражений от моря при уме-
ренном волнении, если используется панорамная РЛС с теми же
данными, что и в задаче 2.14.
2.18. Радиолокационная станция имеет данные: длина волны
Х = 3 см, ширина луча антенны 0йз = 0ум = 4°, длительность им-
пульса ти = 0,5-10-6 с, дальность обнаружения D = 30 км. Опре-
делить эффективную отражающую площадь дождя интенсивностью
/7=5 мм/ч.
2.19. Определить дальность обнаружения D реактивного само-
лета-бомбардировщика при условиях предыдущей задачи, считая,
что обнаружение возможно при равенстве отражающих площадей
самолета и дождя.
2.20. Из формулы (2.21) видно, что маскирующее действие
дождя может быть ослаблено путем уменьшения разрешаемого
объема. Это уменьшение может быть достигнуто, в частности, за
счет сужения луча антенны. Как выгоднее осуществить сужение
луча — укорочением длины волны при фиксированных размерах
антенны или увеличением этих размеров при прежней длине
волны?
2.21. Найти количество полуволновых отражателей п в 1 м3,
требуемое для маскировки самолета с о = 20 м2, наблюдаемого ра-
диолокационной станцией с данными, приведенными в задаче 2.18.
Определить и для дальностей наблюдения 30 и 10 км.
2.22. РЛС сантиметрового диапазона имеет вертикальную по-
ляризацию излучаемых колебаний. Как изменится эффективная от-
ражающая площадь самолета, если в РЛС добавить независимый
канал для приема составляющей отраженного поля, имеющей попе-
речную поляризацию?
2.23. РЛС сантиметрового диапазона имеет вертикальную по-
ляризацию излучаемых колебаний. Как изменился эффективная от-
ражающая площадь самолета при переходе к круговой поляриза-
ции при излучении и приеме?
Глава 3
РАДИОЛОКАЦИОННЫЙ ОБЗОР
Основные справочные данные
1. Радиолокационным обзором называется периодиче-
ское облучение всех точек заданной области пространст-
ва и прием сигналов тех целей, которые находятся в этой
области.
96
2. Область пространства, в пределах которой осу-
ществляются облучение целей радиолокационной стан-
цией, а также прием и обнаружение сигналов целей,
называется зоной обзора этой станции. Рис. 3.1 иллю-
стрирует зону обзора РЛС; здесь — максимальная
дальность обнаружения целей, /)мин—минимальная
дальность обнаружения, Фаз—сектор обзора по азимуту,
Фум — сектор обзора по углу места. Телесный угол об-
зора равен Йо.
3. Характеристики радиолокационного обзора в боль-
шой степени зависят от вида диаграммы направленнос-
ти антенны РЛС. Диаграммой направленности Г(фаз,
Фум) передающей антенны по полю называется график
зависимости амплитуды Е напряженности поля от на-
правления распространения волны в пространстве при
постоянном расстоянии до точек наблюдения; диаграм-
мой направленности F2((pa3, Фум) по мощности называется
график зависимости плотности мощности р излучае-
мой волны от направления распространения при посто-
янном расстоянии до точек наблюдения. Обычно опери-
руют нормированными диаграммами направленности,
для которых
^макс(фаз, фум)12^!. (3.1)
На практике бывает удобно вместо пространственной
диаграммы направленности пользоваться плоскими диа-
граммами, представляющими собой сечение поверхнос-
ти F(фаз, фум) двумя главными плоскостями, например
горизонтальной и вертикальной. На рис. 3.2 приведены
плоские диаграммы направленности Г2(0) по мощности.
Главный лепесток диаграммы направленности называ-
ют лучом антенны, в отличие от боковых лепестков.
7—755 97
Угол 0о,5 — представляет собой ширину диаграммы на-
правленности (ширину луча) по уровню половинной
мощности, а 0о — ширину диаграммы направленности
(луча) по нулевому уровню.
Антенны РЛС имеют диаграммы направленности
двух основных видов: иглообразные и веерные (плоские).
Иглообразными называются диаграммы, у которых ши-
/
-180 -30
90 180 в
о
Рис. 3.2. Диаграмма направленности антенны:
а — полярная, б — прямоугольная системы координат.
рина по уровню половинной мощности приблизительно
одинакова для обоих главных сечений (рис. 3.3,а):
баз бум* (6.2)
Веерные (плоские) диаграммы характеризуются суще-
ственным различием ширины в главных сечениях
(рис. 3.3,6), например,
баз^Сбум- (3.3)
Для диаграмм направленности, имеющих осевую или
плоскостную симметрию, ширина по уровню половинной
мощности оценивается с помощью формулы
Оо,5 = 6О°Ш, (3.4)
где к — длина волны; d — линейный размер раскрыва
антенны в соответствующей плоскости.
Ширина луча 0о,ь, эффективная площадь S и коэффи-
циент усиления по мощности G антенны существенно за-
висят от распределения поля в раскрыве антенны.
В табл. 3.1 [3] приведены характеристики диаграммы
98
CD
—<50 F(zx/a) = с ns п(тех/а) F(xh /7-т/н II j -0,5а 0 0,5а F(2x/a)=1 Закон изменения амплитуды поля (синфазный раскрыв)
а II 3 II w 3 II to а II 1 > II II II 00 I Значение параметра
110,6 — а 95,1 А а 83,2 А а 68,8 А а 73,4 А а 65,9 А а о зН 52,7 А а 50,8 А а 9О,5- Г₽аД
V уб‘и1 143,2 А а 114,6 А а • х 85,9 — а 114,6 А а 81,9 А а ”со йр 63,7 А а п yC'ZS б0, град
1 GO L 1 Со to СО —26,4 —23,6 \ |_ —15,8 —13,2 1 Уровень пер- вого бокового лепестка, дБ
SIS‘0 0,575 0,667 0,810 0,750 0,833 0,994 о Коэффициент
Зависимость параметров антенны от распределения поля
Зв раскрыве
направленности антенны, имеющей прямоугольный рас-
крыв aXb, при различных законах распределения поля,
например по размеру а. Указанный в таблице коэффи-
циент Кэ использования площади раскрыва характери-
зует соотношение между площадью раскрыва Sa антен-
ны и ее эффективной площадью S;
S = K3S& = KQab. (3.5)
Как следует из данных табл. 3.1, значения коэффициента
лежат в пределах от 1 до 0,5.
4. Радиолокационный обзор может быть одновремен-
ным (параллельным), последовательным и смешанным.
При одновременном обзоре телесный угол По зоны обзо-
ра одновременно перекрывается несколькими лучами ра-
диолокационной станции. Если ДНг— телесный угол от-
дельного луча, то
2 дй/=йо. (з.б)
Коэффициент усиления Gi по мощности отдельного лу-
ча связан с его телесным углом ДИг приближенным со-
отношением
Gi^An/^i. (3.7)
Последовательный обзор осуществляется одним лу-
чом, перемещающимся в пределах зоны обзора.
При смешанном обзоре используются несколько лу-
чей, не перекрывающих полностью зону обзора. Эта
группа лучей перемещается в пространстве для просмот-
ра всей заданной зоны. Так например, лучи перекрыва-
ют весь требуемый сектор обзора по углу места, а для
просмотра зоны по азимуту эти лучи перемещаются
Рис. 3 3. Диаграммы направленности:
а — иглообразная, б — веерная (плоская).
100
d * d
в горизонтальной плоскости и осуществляют по этой ко-
ординате последовательный обзор.
Одновременный обзор позволяет свести до миниму-
ма время, требующееся для осмотра заданной зоны и
в этом его достоинство. Недостаток этого вида обзора
состоит в сложности и громоздкости используемой аппа-
ратуры. Последовательный обзор характеризуется отно-
сительной простотой используемой аппаратуры и боль-
шим временем обзора.
5. Периодом обзора ТОбз называется время, требуе-
мое для однократного облучения всех точек зоны обзо-
ра и обеспечения возможности приема сигналов из этих
точек.
Временем облучения ТОбл точечной цели называется
время, протекающее с момента начала излучения радио-
волн в направлении данной пели до конца приема сиг-
налов от этой цели. За время ТОбл накапливается энер-
гия принимаемых сигналов, необходимая для обнаруже-
ния сигналов, оценки их параметров, разрешения и т. д.
6. При одновременном обзоре период обзора равен
времени облучения
ТОбЗ = Тобл- (3-8)
Теоретически период последовательного обзора равен
Т’обз Т'обл^максФазФум/Д^Оазб ум, (3-9)
где А/) — участок дальности, просматриваемый в каж-
дый данный интервал ТОбл; ©аз и 0уч — значения шири-
ны луча по уровню половинной мощности в горизонталь-
ной и вертикальной плоскостях.
Если за время ТОбл просматриваются цели на всей
дальности действия РЛС, то теоретически значение пе-
риода последовательного обзора равно
Лбз ==и7'облФазФум/9аз9ум. (3.10)
При определении теоретического значения периода
последовательного обзора предполагается, что время
облучения всех точек зоны обзора остается одинаковым,
а размеры реально осматриваемой области пространст-
ва точно соответствуют заданным.
7 В реальных системах обзора время облучения цели
существенно изменяется по зоне обзора (например,
вследствие изменения скорости движения луча при воз-
вратно-поступательном движении), а реальная зона об-
зора оказывается больше требуемой. В результате
101
реальный период обзора ГОбз часто оказывается сущест-
венно большим теоретически необходимого Г%бз. Отноше-
ние этих двух величин называют относительным перио-
дом обзора
^Соб3=^обз/^°об3^1- (3.11)
С учетом коэффициента Кобз формулы (3.9) и (3.10)
для реального периода обзора можно записать следую-
щим образом:
при просмотре дальности по частям отрезками AD
Тобз —: ^СобзГсбл^максФаз^ум/Д^О азбум, (3.12)
при просмотре всей дальности сразу
Т обз=КобзГ облФазФум/ОазОум- (3.13)
При пользовании формулами (3.12) и (3.13) предпо-
лагается, что значение Гобл не меняется; оно выбирается
в соответствии с требованиями накопления необходимой
энергии сигналов.
Значения величины Кобз для некоторых видов обзора
приведены в табл. 3.2.
ТАБЛИЦА 3.2
Значения относительного периода обзора Кобз
Характеристика системы обзора ф /ф аз' ум
0,5 1 1 2
Строчный обзор с линейным законом медлен- ного и быстрого движения луча 2,5 2,5 2,15
Строчный обзор с гармоническим законом быстрого движения луча и линейным — медлен- ного 2,4 2,4 2
р Винтовой обзор — — 2
л Поступательно-конический обзор — — 2,4
Спиральный обзор с гармоническим законом изменения угла — 1,75 —
8. При круговом обзоре плоским лучом (рис. 3.4) пе-
риод обзора равен
Гобз=3607йа (3.14)
или
Тобз=60/п, (3.15)
Т0бт = 6аз/йа==6аз/6°/г, - (3.16)
где Qa —угловая скорость вращения луча РЛС, град/с;
п — число оборотов луча РЛС в минуту.
102
При круговом обзоре плоским лучом ЛОбз~1.
9. Если используется секторный обзор, то при измене-
нии скорости й((р) движения луча шириной 0О>5 в преде-
лах сектора Ф
<р4-ф
ф
Ф + 00,5
( 4г- (3.18)
ф
где ср — текущее значение угловой координаты.
Рис. 3.4. Круговой обзор плоским лучом.
Рис 3 5 Винтовой обзор иглообразным лучом.
Если известно среднее значение угловой скорости йср
перемещения луча шириной Оо,5 в требуемом направле- •
нии в пределах сектора Ф, то
Гобз=Ф/ЙсР, (3.19)
Тобл = 0о,5/Пср- (3.20)
10. При винтовом обзоре иглообразным лучом
(рис. 3.5)
= 360° (фум - Оум)/йгорТ 360°Фум/йгорТ, (3.21)
IP3
Т обл—0азД2гор>
(3.22)
где Qrop — угловая скорость перемещения луча в гори-
зонтальной плоскости; ЧТ— шаг луча в вертикальной
плоскости, т. е. изменение угла места оси луча при его
повороте на 360° по азимуту; Чг=(0,5 ... 0,8) 0ум.
Рис. 3.6. Строчный обзор иглообразным лучом:
а — плавное перемещение по горизонтали, б — плавное перемещение по вер-
тикали.
11. При строчном (телевизионном) обзоре иглообраз-
ным лучом (рис. 3.6)
фб-°’50б
7’об,-=((ф"-М/’М f й?/Йб(<р), (3.23)
0,50g
ф+9б
7'0вл = f d<f/йб(?), (3.24)
<р
где Чтм— шаг луча в направлении медленного переме-
щения; Фб, Фм — секторы обзора в направлении быстро-
го и медленного перемещения луча; Qe (ф) —угловая
скорость быстрого перемещения луча; 06, 0М — угловые
размеры луча в направлении быстрого и медленного
перемещения.
Для среднего значения угловой скорости быстрого
перемещения (Qcp) при строчном (телевизионном) обзо-
ре
Тобз— (Фм 0м)Фб/Чгм<^ср,
(3.25)
Гобл —06/Qcp.
(3.26)
Ю4
12. При спиральном обзоре (рис. 3.7,а)
Т0бз> ГВр (Ф - 0,5Q0,5)/2УУ = ТррФ/2Ф, (3.27)
где Твр — период вращения луча вокруг оси ОО', прини-
маемый постоянным; Ф — половина сектора обзора;
0о,5 — ширина симметричного иглообразного луча; Т=
= (0,5 ... 0,8) 0О,5 — шаг луча.
Рис. 3.7. Обзор иглообразным лучом:
а — спиральный, б — поступательно-конический.
Угловое перемещение р луча за один оборот вокруг
оси ОО' равно:
Р=360° sin а, (3.28)
где а — угол отклонения оси луча от оси ОО'.
Угловая скорость луча
Q=(3607TBp) sin а. (3.29)
Время облучения цели при а^О,50о,5
^обл=0о,5^вр/36О° sin а. (3.30)
13. При поступательно-Коническом обзоре (рис. 3.7,6)
Гобз = Гвр (Фаз - 6o,»)/W ПрФаз/Ф,<-_ (3.31)
где ТВр — период конического вращения; Фаз — сектор
обзора по азимуту; ©0,5— ширина симметричного игло-
образного луча; Т — шаг траектории в направлении по-
ступательного движения, равный (0,5 ... 0,8) 00,5-
105
Угловая скорость луча и время облучеййЯ цеЛй соот-
ветственно находятся по формулам
360° . Фум ^0»5 QO\
Q = — sin —-—9---------♦ (3.32)
* вр
гобл = 60>5Гвр/360° sin 0,5 (Фум - Qot6), (3.33)
где ФуМ — сектор обзора по углу места.
14. При радиолокационном обзоре перемещение луча
антенны в пространстве может осуществляться либо ме-
ханическим поворотом всей антенны или какой-то ее
части (механическое сканирование), либо изменением
распределения амплитуд и фаз поля в раскрыве антенны
(электрическое сканирование). Электрическое сканирова-
ние позволяет резко увеличить скорость перемещения
луча, а также создать принципиально новые возможно-
сти обработки радиолокационных сигналов непосредст-
венно в антенно-фидерном тракте [3]. Поэтому, несмотря
на определенную сложность, антенно-фидерные системы
с электрическим сканированием получают широкое рас-
пространение [45, 116, 124].
Для электрического сканирования используются фа-
зируемые антенные решетки (ФАР), представляющие
собой систему излучателей с электрически управляемым
фазовым распределением. ФАР позволяют значительно
проще реализовать различные виды амплитудно-фазо-
вых распределений в раскрыве, чем это можно было бы
сделать в антеннах СВЧ другого типа (зеркальных, ру-
порных, линзовых и др.). В частности, ФАР позволяют
минимизировать боковые лепестки и подойти к созда-
нию антенн с оптимальными диаграммами направлен-
ности. Принципиальным недостатком ФАР является из-
менение ширины их луча при сканировании.
Существуют два способа осуществления электриче-
ского сканирования:
— частотный, при котором качание луча достигается
изменением частоты генератора, питающего многоэле-
ментную передающую антенну;
— коммутационный, при котором рабочая частота
остается неизменной, а фазы колебаний, возбуждаемых
в отдельных излучателях решетки, изменяются с по-
мощью системы управляемых фазовращателей.
15. Принцип устройства ФАР с частотным управле-
нием лучом иллюстрирует рис. 3.8. Линейная решетка
106
излучателей возбуждается бегущей волной, распрост-
раняющейся от генератора высокой частоты вдоль пи-
тающего волновода. При изменении частоты генерируе-
мых колебаний меняются электрическое расстояние меж-
ду излучателями и распределение фаз излучаемых коле-
баний.
Рис. 3.8. Схема ФАР с частотным управлением лучом.
В линии питания каждого излучателя имеются фазо-
сдвигающие устройства, создающие фиксированный
сдвиг &Ф. Если геометрическая разность длин фидера
для соседних излучателей равна расстоянию d между
ними, распределение мощности между излучателями
равномерное, питание излучателей осуществляется син-
фазно с полем волновода (т. е. Ф = 0), то направление
<Э максимума излучения решетки определяется по фор-
муле [3]:
sin@=y—X/d; (3.34)
а при переменнофазном питании излучателей (ф=л)
sin 0 = у — 0,5Z/d, (3.35)
гдек.4Т ~ V1 --(Л./2а)2 — коэффициент, характеризующий
замедление фазовой скорости v в волноводе; а — размер
широкой стенки питающего волновода; d — расстояние
между соседними излучателями. График зависимости
?=/(%/2а) приведен на рис. 3.9.
107
Рис 3.9. Зависимость коэф-
фициента у замедления фа-
зовой скорости от соотно-
шения длины волны Л и
ширины а широкой стенки
волновода.
Допустимое изменение ко-
эффициента у ограничено зна-
чениями 0,87 >Д,36. При
уменьшении у резко возраста-
ют потери мощности волны
в волноводе; увеличение у со-
пряжено с возникновением
в волноводе паразитной вол-
ны типа Т/го-
Ширина луча антенны на
уровне половинной мощности
определяется соотношением
[3]:
0o,5~arcsin (0,443A/L+
+ sin 8) + arcsin (0,443VL—
—sin 8), (3.36)
где — длина антенной решетки.
i 1ри излучении, близком к осевому, ширина луча ока-
зывается в 2,14]/Д/Л раза болыиг шипины луча при из-
лучении по нормали к репптке.
Для приближенных оценочных расчетов, при угле
отклонения луча 6<Д5° можно пользоваться следую-
щими формулами:
изменение угла отклонения луча антенны Дер пропорцио-
нально фазовому сдвигу Дф колебаний в соседних излу-
чателях:
Дср = ДфХ/2лб/;
(3.37)
минимальное значение ширины луча 0о,5мин определяет-
ся отношением рабочей длины волны к линейному раз-
меру решетки:
0
0,5миь ;
(3.38)
при отклонении луча от перпендикуляра к оси антенны
на угол 8 его ширина увеличивается по закону
0О,5=0О,5миг/СО5 8. (3.39)
16. В РЛС с частотным сканированием каждому зна-
чению угловой координаты цели соответствует опреде-
ленная частота fnp(0) принимаемых сраженных сигна-
лов. Приемное устройство должно быть мнококаналь-
ным. Если полоса пропускания AfK отдельного канала
108
и скорость изменения частоты Vf = dfmJdt заданы, то
время облучения точечной цели равно
Гобл = ЛШ. (3.40)
При изменяющейся скорости u,(f) перестройки
Т^ = f dfhfif), (3.41)
fi-
где fi, fi + AfK — начальное и конечное значения частоты
сигнала, принимаемого приемником от Z-й цели.
17. В ФАР коммутационного типа используются ком-
мутируемые фазовращатели, на выходе которых фаза
электромагнитных колебаний принимает определенные
фиксированные значения. Непрерывное изменение фазы
колебаний, как правило, не применяется из-за низкой
стабильности фазовых сдвигов и сложности управляю-
щих схем [3].
Основные способы построения коммутационных
антенн сводятся к двум следующим [3]:
а) с каждым излучателем связан набор коммутируе-
мых фазовращателей, обеспечивающих получение опре-
деленных фазовых сдвигов:
б) каждый элементарный участок антенны образо-
ван несколькими излучателями, питаемыми с различны-
ми фазами; с помощью системы коммутации осуществ-
ляется выборочное включение этих излучателей.
Расстояние d между излучающими элементами ре-
шетки выбирается из условия существования одного
главного максимума диаграммы направленности в сек-
торе обзора; при выполнении указанного условия
K/d> 1 + sin Фобз, (3.42)
где Фобз — сектор обзора в соответствующей плоскости.
Минимальное количество Ммпн дискретно-коммута-
ционных фазовращателей в антенне зависит от значений
секторов обзора в главных плоскостях и ширины луча
антенны:
Ммин = (Фаз/баз Ц- 1^ (Фум/9ум Ц- 1). (3.43)
Схема, иллюстрирующая принцип построения ком-
мутационной антенны, приведена на рис. 3.10.
18. В бортовых РЛС бокового обзора земной поверх-
ности для повышения разрешающей способности по угло-
109
вой координате применяется формирование искусствен-
ного раскрыва антенны за счет использования поступа-
тельного движения летательного аппарата. Станции та-
кого типа получили название РЛС с искусственным рас-
крывом (или с синтезированной антенной) [23, 43, 68, 97,
116,124].
Излучатели
Рис, 3.10. Схема фазированной Рис. 3.11. К принципу синтези-
антенной решетки коммутационно- рования антенны,
го типа.
При создании искусственного раскрыва используется
когерентная техника и оптимальная обработка прини-
маемых сигналов. Если, например, на самолете, летя-
щем прямолинейно вдоль оси х со скоростью v, имеется
РЛС бокового обзора, ширина луча которой равна 0О)5,
то при удалении цели от линии полета на дальность Do
(рис. 3.11) точечная цель облучается в течение времени
Т'обл = 7)о0о,5/^ (3.44)
на протяжении пути самолета
A=Do0o,5. (3.45)
Принимая 0о,5=где d& — размер антенны бортовой
РЛС, получим
L = DHd&, (3.46)
Тобл^ТЭХ/Уб/а- (3.4/)
За время приема сигналов от цели их частота fnp
изменяется вследствие допплеровского эффекта от
/изл + | Ед | макс ДО /изл— | Ед [ мак€, где
|Е д |макс '== у9о,»/А = V]d&. (3.48)
ПО
Таким образом, если применяется когерентная РЛС
с непрерывным излучением, то сигнал, принятый от це-
ли, представляет собой импульс длительностью 2’0бл
с изменением частоты
А/м = 2|/7д|макс = 2и/£/а- (3.49)
Такой импульс при оптимальной обработке (см. гл. 6,
п. 7) можно сжать во времени в /?Сж раз, причем
&СЖ==Д/:мТобл- (3.50)
Длительность сжатого импульса равна
тСж=1/Д/м=^а/2и, (3.51)
что соответствует перемещению цели относительно са-
молета вдоль линии полета на 0,5da. Следовательно, при
оптимальной обработке принимаемого сигнала две цели,
расположенные на прямой, параллельной пути самоле-
та, разрешаются при удалении на расстояние более 0,5б/а
друг от друга [23, 97, 124]. Это соответствует тому, что
ширина луча синтезированной антенны равна
6о,5с= ^а/27)о, (3.52)
а отношение ширины луча реальной РЛС к ширине луча
синтезированной составляет
Oo.s/Oo.SC = 2jDo02O,5/^- (3.53)
При удалении цели размер’ L синтезированной антен-
ны увеличивается, но ширина искусственного луча
уменьшается обратно пропорционально L, поэтому раз-
решаемое расстояние вдоль линии пути остается по-
стоянным независимо от Do и равным 0,5dZa.
Однако изменение дальности сказывается на дли-
тельности принимаемого сигнала и скорости Vf измене-
ния его частоты. На малой дальности Z)f (рис. 3.12) вре-
мя облучения ТОбл1 цели мало, а скорость изменения
частоты велика; при увеличении дальности до цели
(D2>Di) длительность сигнала ТОбл2 возрастает, а ско-
рость изменения частоты уменьшается. Для достижения
эффекта синтезирования необходимо изменять характе-
ристики оптимального фильтра в зависимости от даль-
ности до наблюдаемой цели. По аналогии с оптической
терминологией говорят, что РЛС должна фокусировать-
ся по дальности. Все приведенные выше формулы отно-
сятся к фокусированным РЛС.
111
19. При использовании когерентно-импульсной РЛС
бокового обзора можно обеспечить высокое разрешение
одновременно и по дальности (малая длительность
импульсов) и по угловой координате (синтезирование).
Схема системы оптимальной обработки импульсных сиг-
налов, принимаемых от точечной цели, приведена на
рис. 3.13. Входным элементом является фильтр, согласо-
Рис. 3.12. Зависимость частоты /пр принимаемого сигнала от даль-
ности до цели.
Рис. 3.13. Схема обработки сигналов в фокусированной РЛС
с искусственным раскрывом.
ванный с одиночным высокочастотным сигналом (см.
гл. 4, п. 17). Затем имеются Nc—1 последовательно
включенных линий задержки (ЛЗ); время задержки
каждой линии равно периоду 7И следования импульсов
РЛС, а Д/’с представляет собой число принимаемых от
точечной цели импульсных сигналов. От линий задержки
имеются отводы к сумматору. В каждом отводе есть
корректирующее звено i, с помощью которого осуществ-
ляется дополнительная задержка (фазовый сдвиг) сиг-
нала, что дает возможность суммировать все сигналы
в фазе. Время задержки сигнала в Z-м отводе равно [23]
Ti=[ (0,5Wc—0,5)2—iVT^cDo, (3.54)
112
Необходимость такой коррекций связайа с переме-
щением в пространстве приемной антенны. Обратившись
к рис. 3.11 можно видеть, что текущая дальность до це-
ли D определяется соотношением
D^[D\ + (vty]°\^ Do-f-O,5(y/)2/Do, (3.55)
где за начало отсчета времени t = Q принимается момент
расположения цели на траверсе. За период Ги следова-
ния импульсов изменение дальности составляет
ДП=О,5и2Г2и/По, (3.56)
а соответствующая задержка во времени равна
^=v2T^/cD0. (3.57)
Для i периодов следования результирующая за-
держка составит
№7\/cD0,
(3.58)
откуда и получается формула (3.54).
РЛС, в которых предусматривается подобная коррек-
ция задержки (фазы) сигналов, называются фокусиро-
ванными. На выходе сумматора фокусированной РЛС
пачка Nc принятых импульсов оказывается сжатой
в соответствии с формулой (3.51), что и обеспечивает
высокое разрешение целей по угловой координате.
20. В так называемых нефокусированных РЛС отсут-
ствует коррекция, учитывающая движение РЛС. Схема
обработки сигналов в такой РЛС отличается от изобра-
женной на рис. 3.13 схемы отсутствием корректирующих
звеньев i. При этом станция весьма существенно упро-
щается, так как для сигналов от целей на всех дально-
стях можно использовать одну и ту же систему обработ-
ки, но сокращается максимальный размер искусственно-
го раскрыва антенны, в пределах которого возможна ко-
герентная обработка сигналов; ухудшаются и возможно-
сти сжатия луча реальной антенны. Если считать, как
это обычно делается, допустимым значением изменения
фазы Дер сигналов из-за изменения дальности цели
Дф <^0,5 л, (3.59)
то справедливо следующее равенство, вытекающее из
(3.55) и (3.59),
2z(0,5L)8/22Z)o<0,5«.
(3.60)
113
Отсюда следует, что максимальный раскрыв антенны
нефокусированной РЛС оказывается равным
Днфмакс = ]/O,5Z)oZ, (3.61)
ширина сжатого луча нефокусированной РЛС
6Нфо.. = /я/2А, (3.62)
минимальное расстояние между разрешаемыми це-
лями
'Д^РазР:=УШ72, (3.63)
время облучения точечной цели
^ = (l/0FW2. (3-64)
21. РЛС с синтезированием антенны в сочетании с ко-
герентной оптической системой обработки сигналов может
рассматриваться как голографическое устройство «вос-
становления волнового фронта» [67, 71, 120].
Задачи
3.1. Луч эллиптического сечения используется для кругового
обзора. Ширина луча по азимуту 0аз. В зависимости от того, в ка-
кое место сечения луча попадет
фактическое время ее облучения
Рис. 3.14. К определению вре-
мени облучения цели.
цель (на рис. 3.14 цели и Дг),
изменяется от 0 до ТОбл макс-
Определить относительный пе-
риод обзора Добз такой системы,
если минимально допустимое вре-
мя облучения цели в 1,5 раза
Меньше Уобл макс.
3.2. Показать, что если зада-
ны средняя мощность излучения
передатчика РСр и требуемая
полная энергия сигнала на входе
приемника Ес, то при использо-
вании как импульсной РЛС, так и
станции с непрерывным излучени-
ем, требуется одинаковое время
облучения цели. Предположить,
что все прочие условия (направленность антенны, поглощение энер-
гии в тропосфере, отражающие свойства цели и т. д.) в обоих слу-
чаях одинаковы.
114
3.3. Наземная станция обнаружения самолетов имеет плоский
луч шириной 1° по азимуту. Луч вращается со скоростью б об/мин.
Определить время облучения цели Гобл и число А/с принимаемых
отраженных импульсов, если частота следования излучаемых им-
пульсов 500 имп/с.
3.4. Размер отметки точечной цели на экране индикатора ра-
диолокационной станции соответствует одному километру (/ц =
= 1км). В каких пределах может изменяться период обзора ТОбз
станции, если требуется обеспечить плавное перемещение отметок
по экрану индикатора при относительных скоростях движения це-
лей до 1000 км/ч. Предположить, что для обеспечения плавности
перемещения отметки цель не должна смещаться за период обзора
более чем на /ц.
3.5. Допустив, что для надежного обнаружения цели на фоне
шумов летчик должен трижды увидеть ее отметку, определить до-
пустимые пределы изменения периода обзора ТОбз самолетной РЛС
обнаружения. Дальность действия станции составляет 50 км; со-
кращение дальности обнаружения целей, вызванное троекратным
наблюдением их отметок, не должно превышать 0,05£>МаКс; скорость
сближения самолета с целью может достигать 2500 км/ч.
3.6. Оценить время облучения То б л точечной цели и число ;VC
принимаемых импульсов, если радиолокационная станция имеет
симметричный иглообразный луч шириной 3°, период обзора равен
2 с, частота следования излучаемых импульсов 2000 имп/с, а сек-
торы обзора по азимуту и углу места составляют 90° и 25°.
3.7. При поиске цели по дальности (в системе автоматического
дальномера) за время прохождения временных стробов дальномера
мимо сигнала цели принимаются 50 отраженных импульсов. Чему
равно время поиска на интервале 10 км, если ширина стробов со-
ответствует AZ)=100 м, а частота следования импульсов РЛС
2000 имп/с?
3.8. В РЛС используется винтовой обзор пространства. Опре-
делить период обзора ТОбз при условии, что сектор обзора по углу
места равен 60°. Обзор ведется симметричным иглообразным лучом
шириной 90 5 = 2о; частота следования импульсов 2000 имп/с; мак-
симальное число импульсов, отраженных от точечной цели, равно 20.
Определить минимальное А/с мин число принимаемых от цели им-
пульсов, если шаг луча в вертикальной плоскости составляет
О,750о,5.
3.9. В радиолокационной системе с коническим сканированием
используется луч круглого сечения (90,5=5°). Ось вращения ОО' от-
клонена от оси луча на угол О,59о,5 (рис. 3 15). Луч совершает 40 об/с.
Определить время облучения цели в течение каждого оборота
1151
луча, если принять, что цель (Ц) отклонена от оси вращения на
УГОЛ 0,500,5-
3.10. Определить, во сколько раз изменяется время облучения
точечной цели при спиральном обзоре, если используется иглооб-
разный луч шириной 5°, а угол отклонения оси луча от оси вра-
щения меняется от 2,5° до 30°.
3.11. Для просмотра зоны, угловые размеры которой равны
Фаз=360° и Фум, можно использовать круговой обзор плоским
лучом (0аз<0ум и 0ум-Фум) И
винтовой обзор симметричным
иглообразным лучом (0аз“-=9ум).
Каковы основные характери-
стики, преимущества и недостат-
ки обоих методов обзора, если
произведение угловых размеров
луча остается неизменным
(0аз0ум == Const)?
3.12. Имеется наземная РЛС
для измерения высоты обнаружи-
ваемых самолетов. В станции ис-
пользуется плоский горизонталь-
ный луч (0Ум<С0аз), перемещаю-
Рис. 3,15. Коническое сканиро-
вание диаграммы направлен-
ности.
щийся зигзагообразно. Как лучше расположить строчки обзора: вер-
тикально или горизонтально?
3.13. При выполнении строчного (телевизионного) обзора ско-
рость быстрого перемещения луча изменяется по квадратическому
синусоидальному закону:
Об(ф)=азт2 (лф/Фб).
Определить закон изменения времени облучения цели Тобл(ф) и
вычислить период обзора ТОбз для Фб=Фм=30°, 0б = 0м=3°,
‘Км— 0,8°, 00,5=2,4°, а=50 град/с (см. рис. 3.6).
3.14. Проектируется станция обнаружения подвижных целей.
Оценить период обзора ТОбз и время облучения цели Тобл для
следующих условий: минимальный путь, который совершает цель
в пределах зоны обзора РЛС, равен 500 м; максимальная скорость
движения цели 200 м/с. Необходимо получить не менее трех засе-
чек цели при пролете ею зоны обзора РЛС; угловые размеры зоны
обзора Фаз=40°, Фум = 20°, луч симметричный иглообразный шири-
ной 00,5=2°. Принять Кобз = 2.
3.15. В когерентно-импульсных РЛС с допплеровской селек-
цией целей для обеспечения разрешения по дальности применяют
временное стробирование приемного тракта. Определить период
обзора подобной станции, если длительность стробирующих импуль-
116
сов Тстр = 1 мкс, применен секторный обзор (Фаз = 60°, 0аз= 1°,
0ум=фум), время облучения точечной цели равно 0,01 с, протя-
женность просматриваемой зоны по дальности составляет 20 км.
3.16. Создаваемая самолетная радиолокационная станция долж-
на обеспечивать просмотр зоны обзора за 2 с. В каких пределах
могут лежать угловые размеры луча такой РЛС, если сектор об-
зора по азимуту равен 90°, сектор обзора по углу места 25°, а вре-
мя облучения цепи 0,01 с? Принять Кобз=1,75.
3.17. В корабельной РЛС луч антенны, совершая круговой
обзор, вращается со скоростью 6 об/мин. Оценить максимальную
дальность действия РЛС, если при ширине луча 0аз = 1° от цели
должно быть принято не менее 10 отраженных импульсов. Предпо-
лагается, что частота следования импульсов РЛС выбирается из
условия однозначного измерения дальности.
3.18. Чему равен угол поворота антенны РЛС за время, рав-
ное времени запаздывания отраженного сигнала от цели, находя-
щейся на дальности 250 км? Скорость вращения антенны равна
6 об/мин.
3.19. Определить время облучения точечной цели ®ри исполь-
зовании когерентно-импульсной фокусированной РЛС, если 0O,S=1°,
Z? = 300 км и v= 1000 км/ч. Сравнить результат расчета с временем
облучения точечной цели при использовании нефокусированной РЛС
для Х~3 см.
3.20. При использовании когерентно-импульсной РЛС с си те-
зированной диаграммой направленности и неотимальной обработ-
кой требуется обеспечить время облучения точечной цели сжатым
лучом не более 0,15 с. На какой максимальной дальности 2?макс
можно наблюдать цели, если Х=3 см, v = 20(10 км/ч’ Какова долж-
на быть частота Ги следования импульсов, если требуется накап-
ливать 100 импульсов? Будет ли при этом обеспечиваться однознач-
ность измерения дальности?
3.21. В самолетной когерентно-импульсной РЛС для обеспече-
ния допплеровской селекции целей на фоне земли используется
высокая частота следования импульсов FH = 50 000 имп/с. Оценить
время облучения точечной цели ТОбл и число Nc принимаемых им-
пульсов, если ширина луча в горизонтальной плоскости равна 2°,
осуществляется секторный обзор за 2,5 с в пределах Фаз=90°-
3.22. В аэродромной РЛС наблюдения за самолетами применяет-
ся система частотного сканирования в вертикальной плоскости; об-
зор в горизонтальной плоскости осуществляется механическим вра-
щением антенны. Каково время облучения точечной цели, если •фа-
зовый сдвиг колебаний в соседних излучателях изменяется со ско-
ростью 11 рад/с, угол поворота луча не превышает 15°, расстояние
117
между излучателями равно 10 см, длина волны Х=10 см, ширина
луча Г?
3.23. В самолетной панорамной РЛС используется электрическое
сканирование по азимуту. Каков сектор обзора РЛС, если допу-
стимое расширение луча равно 5%?
3.24. В РЛС измерения высоты летательных аппаратов приме-
няется частотная модуляция колебаний для электрического скани-
рования по углу места в секторе 15°. Каково должно быть отно-
сительное изменение длины волны, если ее начальное значение
Хо=1О см, расстояние между излучателями составляет 10 см, ши-
рокая стенка волновода а = 5,9 см, питание излучателей — перемен-
но-фазное?
3.25. В РЛС с электрическим сканированием применяется си-
нусоидальное изменение частота излучаемых колебаний f=fo+
+ Af sin Qt, где f0=3-109 Гц, Af=3-107 Гц, период модуляции
равен 1 с. Определить наибольшее и наименьшее значение времени
А/ приема сигналов от точечной цели, если полоса пропускания
одного приемного канала равна 3 МГц.
Глава 4
ОБНАРУЖЕНИЕ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ
Основные справочные данные
1. Обнаружением называется процесс принятия реше-
ния о наличии или отсутствии цели в каждом элементар-
ном разрешаемом объеме РЛС. Практически речь идет
об обнаружении радиолокационных сигналов, порождае-
мых целями, которые находятся в зоне обзора РЛС.
Проблема обнаружения возникает в тех случаях, когда
сигналы принимаются в присутствии помех искусствен-
ного или естественного происхождения. В этих условиях
передача информации связана с возможными искаже-
ниями: при наличии сигнала он может быть замаскиро-
ван помехой, а при отсутствии сигнала помеха может
быть принята за сигнал.
Обнаружение сигналов на выходе приемников РЛС
может осуществляться человеком с помощью индика-
торных устройств того или иного типа, а также автома-
тически действующими регистрирующими устройствами.
118
При обнаружении допустимы только два решения: «сиг-
нал есть» или «сигнала нет»; любые уклончивые реше-
ния исключаются.
При дальнейшем изложении вопроса предполагается,
что сигналы принимаются на фоне аддитивного нормаль-
ного белого шума. Это значит, что входное напряжение
«вх(0 приемника РЛС представляет собой сумму напря-
жения шума иш(0 и сигнала uc(t); распределение мгно-
венных значений напряжения шум'а подчинено нормаль-
ному закону; спектральная плотность M>(w) шума по-
стоянна в пределах от со = 0 до бесконечности. К поме-
хам с указанными свойствами может быть отнесен соб-
ственый шум приемника РЛС, а также (что не совсем
точно) активные шумовые помехи с равномерным спект-
ром при условии, что ширина спектра помехи Д/п пре-
восходит полосу пропускания Д/Пр приемника РЛС.
2. Радиолокационный сигнал на входе приемника ха-
рактеризуется следующими параметрами: моментом его
прихода I, длительностью ти, амплитудой U, частотой
со и начальной фазой сро- В простейшем случае импульс-
ный радиолокационный сигнал может быть записан сле-
дующим образом:
«с (/) = U cos (ш/ -f- <р0)
при 6 < t < /14- ти.
В более общем случае амплитуда, частота и начальная
фаза сигнала могут оказаться функциями времени: £/(£),
со(/), <ро(О-
3. Принимаемый сигнал называется известным точно
или полностью известным, если для каждого момента
можно указать значения его параметров. В реальных
условиях параметры принимаемых сигналов являются ве-
личинами случайными, значения которых изменяются под
воздействием многочисленных факторов (дальности меж-
ду РЛС и целью, особенностями среды, особенностями
цели и ее движения относительно РЛС и т. д.). Поэтому
реальные сигналы называют сигналами со случайными
параметрами.
4. Если сигнал действительно имеется на входе при-
емника, то решение о его наличии называется правиль-
ным обнаружением; вероятность этого решения равна
Рпо. При наличии сигнала может быть принято ошибоч-
ное решение о его отсутствии (сигнал замаскирован шу-
мом); такое решение называется пропуском сигнала и
119
характеризуется вероятностью Рп. В силу того, что оба
названные события образуют полную группу несовме-
стимых событий, справедливо равенство
Рво + Рп=1. (4.1)
5. Если сигнала нет на входе приемника, то решение
о его отсутствии называют правильным необнаружением;
ему соответствует вероятность Рпн. Ошибочное решение
о наличии сигнала в этом случае называется ложной тре-
вогой; оно характеризуется вероятностью Рлт. Оба ука-
занных события также составляют полную группу:
Рпн+Рлт=1. (4.2)
6. Если Р(С) и Р(О) априорные вероятности наличия
и отсутствия сигнала на входе приемника, то полные ве-
роятности Рпр правильного решения и Рош ошибки при
обнаружении равны
Рпр = Р(С)РП04-Р(О)Рпн> (4.3)
Рош = Р(С)Рп + Р(О)Рлт. (4.4)
Сумма полных вероятностей равна единице:
Рпр4“Рош=1. (4.5)
Из четырех условных вероятностей, характеризую-
щих всю совокупность возможных событий, в силу ра-
венств (4.1) и (4.2) независимыми являются только две;
обычно в качестве независимых используют вероятности
Рп0 правильного обнаружения и Рлт ложной тревоги.
Специфическая особенность приема именно радиоло-
кационных сигналов (например, по сравнению с радио-
связными) состоит в отсутствии большей частью досто-
верной априорной информации о наличии цели в поле
зрения РЛС в данный момент времени. Имея в виду
наибольшую неопределенность априорных сведений,
можно полагать равными априорные вероятности нали-
чия и отсутствия сигнала
Р(С) =Р(О) =0,5.
7. Для обнаружения сигналов стремятся использовать
оптимальные приемники. Наиболее употребительными
критериями оптимальности приемников при обнаружении
являются критерии идеального наблюдателя и Нейма-
на— Пирсона (оба являются частными случаями более
120
общего критерия минимума среднего риска). В соответ-
ствии с критерием идеального наблюдателя оптималь-
ный приемник минимизирует полную вероятность ошиб-
ки Рот решения при обнаружении. По критерию Нейма-
на— Пирсона оптимальный приемник должен обеспечи-
вать получение наибольшей вероятности правильного
обнаружения РПо при заданном значении вероятности
ложной тревоги Рлт.
8. Количественная оценка качества работы приемни-
ков обнаружения осуществляется с помощью характери-
стик обнаружения, представляющих собой графики зави-
симости вероятностей правильного обнаружения и лож-
ной тревоги от удвоенного отношения
q=2Ec/N0
(4.6)
энергии сигнала Ес к спектральной плотности шума No
на входе приемника. Размерность величины No совпа-
дает с размерностью энергии, поэтому параметр q часто
называют отношением сигнал/шум по энергии.
Вид характеристик обнаружения иллюстрирует
рис. 4.1. Каждому значению q отношения сигнал/шум
соответствует одна кривая
Рпо = /(Рпт). Переход из одной
точки данной кривой в другую
осуществляется изменением
порогового уровня, с которым
в приемниках сравнивается на-
пряжение, образующееся на
выходе схемы обработки
Важно подчеркнуть, что каж-
дому значению вероятности
правильного обнаружения с~
ответствует вполне определе т-
ное значение вероятности лож-
ной тревоги. Абсолютные зна-
чения каждой пары вероятно-
стей зависят от соотношения
Рис 4 1. Характеристики
обнаружения
сигнала и шума, способа обработки и других факторов
При увеличении отношения’ сигнал/шум характери-
стика обнаружения смещается влево вверх, чго (при
прочих равных условиях) соответствует либо увеличе-
нию Рпо при РЛ1= const, либо уменьшению Р^ при
Рп0 = const. Таким образом, при увеличении отношения
сигнал/шум надежность обнаружения возрастает.
121
9. Рассмотрение чисто гипотетической ситуации —
обнаружение сигнала с полностью известными параметра-
ми •— позволяет оценить теоретический предел улучше-
ния характеристик обнаружения. При обнаружении ука-
занного сигнала неизвестным является сам факт нали-
чия или отсутствия сигнала на данном отрезке времени.
При обнаружении одиночного сигнала с полностью из-
Рис. 4.2. Схема оптимального приемника для обнаружения полно-
стью известного сигнала.
вестными параметрами оптимальный приемник
(рис. 4.2) включает следующие принципиально необхо-
димые элементы: схему умножения, интегратор и поро-
говое устройство. В схеме умножения входное напряже-
ние, равное
^вх (^) = wc (/) + Иш(0 (4.7)
умножается на опорное напряжение won(0> представля-
ющее собой копию принимаемого сигнала:
^умн(0 —Ki^-BX. (t) Won (0 •
(4.8)
Результат перемножения интегрируется в течение дли-
тельности сигнала
Wbhx — К 2 Ubx (/) Won (t) dt. (4.9)
о
Выходное напряжение в момент t=xc сравнивается
в пороговом устройстве с пороговым уровнем [70 = КзР-
Величины Ki, Kz и Кз представляют собой коэффициен-
ты пропорциональности, имеющие определенную размер-
ность (если Wbx(0> wyMH(0, wBbixG) и Uq измеряются
в вольтах, то Ki и К2 имеют размерность 1/В, а Кз — В).
Абсолютные значения коэффициентов Ki, Kz и Кз могут
быть приняты равными единице. Величина |3 является
безразмерным пороговым уровнем, ее абсолютное зна-
чение равно модулю Uq.
Если Цвых(тс) >то принимается решение о нали-
чии сигнала; при wBbix(Tc)^t7o считают, что сигнала нет.
122
10. При обнаружении одиночного сигнала с полно-
стью известными параметрами характеристики обнару-
жения могут быть построены с помощью формул [42]:
Р„. = 0,5[1 НЮ)
Рлт = 0,5[1-Ф(р//2?)], (4.11)
где
' X
2
Ф (х) = —— I ехр(— Р) di — функция Лапласа;
У я J
о
7 = 2Ec///0;
EC = J u\^di (4.12)
о
— полная энергия сигнала длительностью тс, выделяе-
мая на сопротивлении 1 Ом;
(4.13)
— спектральная плотность мощности шума; — коэф-
фициент шума приемника; k — постоянная Больцмана,
равная 1,38Х 10-23 Вт- с/град. Значения порогового уровня
Р могут изменяться от —оо до +°о. Минимум полной
вероятности ошибки решения имеет место при вполне
определенном значении порогового уровня, равном
|ЗопТ = In Р (О) IP (С) + ЕСЖ (4.14)
На рис. 4.3 изображены характеристики обнаружения
сигнала с полностью известными параметрами, постро-
еннные в соответствии с формулами (4.10) и (4.11).
Характеристики обнаружения могут быть оценены и
с помощью приближенной формулы [42]:
7 = 2(/1п 1/Рлт- 1,4 + К1п 1/(1 -Рио) - 1,4)2- (4.15)
Погрешность вычислений по этой формуле не превы-
шает 15% для Рлт^0,1 и Рпо^0,9; если Рпо-И, а Рлт->
-И), то погрешность вычислений стремится к нулю.
11. Если производится обнаружение не одного, a Nc
одинаковых полностью известных сигналов, то суммарное
отношение сигнал/шум на входе приемника возрастает
в Nc раз и становится равным 7L=2MCEC/Wo, где под
Ес понимается энергия одного импульсного сигнала. При
123
определении вероятностей РПо и РЛт по рабочим харак-
теристикам следует принимать во внимание значение qv
В схеме оптимального
гии сигналов может быть
Во-первых, можно сначала
Рис 4 3 Характеристики обна-
ружения полностью известного
сигнала.
приемника накопление энер-
реализовано двумя путями,
суммировать сигналы по вы-
сокой частоте, а затем про-
изводить обработку суммар-
ного колебания. Во-вторых,
можно производить пооче-
редную обработку прини-
маемых сигналов и сумми-
ровать результат перед по-
роговым устройством.
12. При приеме одиноч-
ного сигнала со случайной
начальной фазой простей-
шая схема оптимально-
го приемника включает:
фильтр, согласованный с
принимаемым сигналом, ам-
плитудный детектор и поро-
говое устройство (рис. 4.4).
Согласованным называется
фильтр, коэффициент передачи /С(/со) которого есть ве-
личина, комплексно-сопряженная спектру S (/со) сигнала.
Импульсная переходная характеристика согласованного
фильтра с точностью до постоянного множителя являет-
ся зеркальным отражением входного сигнала на оси
Риг 4.4. Схема оптимального приемника для обнаружения сигнала
с неизвестной начальной фазой.
времени. Такой фильтр обеспечивает максимальное от-
ношение пикового значения напряжения сигнала к сред-
неквадратическому значению напряжения шума. Опти-
мальный приемник, схема которого приведена на рис. 4.4,
может быть назван амплитудным обнаружителем.
124
Характеристики обнаружения сигнала с неизвестной
начальной фазой описываются приближенной формулой
[42]:
7-2 (KMW) + 1/(1 - Рип) - 1,4)2 . (4.16)
Погрешность вычислений по формуле (4.16) не пре-
вышает 15% при Рл^О.1, Pno^0,9.
Рис 4 5 Графики зависимости от-
ношения q сигнал/шум от вероят-
ности правильного обнаружения
Рпо для полностью известного
сигнала (--------) и сигнала с не-
известной начальной фазой
(--------), построенные при при
Р ЛТ = 0,1.
При заданных значениях вероятностей Рпо и Рлт для
обнаружения сигнала с неизвестной начальной фазой
требуется большее значение отношения сигнал/шум, чем
для обнаружения сигнала с полностью известными па-
раметрами. Это различие мало при большой вероятно-
сти правильного обнаружения и малой вероятности лож-
ной тревоги. Но при уменьшении РПо и росте РЛт разли-
чие требуемых значений величины q может стать весьма
существенным. Для примера на рис. 4.5 приведены гра-
фики зависимости q-=f(Pno) для сигнала со случайной
начальной фазой и сигнала, известного точно [42].
13. Если принимается последовательность Nc импульс-
ных сигналов со случайной начальной фазой, ю на вы-
бор схемы приемника, а следовательно и на характери-
стики обнаружения, существенно влияет наличие взаи-
мосвязи фаз отдельных сигналов. Пачку импульсных
сигналов называют когерентной, если в пределах всей
пачки имеет место определенная функциональная зави-
симость фазы колебаний от времени. При этом началь-
ная фаза принимаемых сигналов может являться неиз-
вестной случайной величиной, но между начальными фа-
зами отдельных высокочастотных импульсов имеется
функциональная связь.
Принцип устройства оптимального приемника для
обнаружения пачки одинаковых когерентных импульсов
иллюстрируется рис. 4.6. В приемнике имеются: фильтр,
125
Согласованный с отдельным импульсным сигналом; Ди-
нин задержки с Nc—1 отводами; сумматор напряжений,
образующихся на отводах линии задержки; пороговое
устройство. Если период следования импульсных сигна-
лов равен Ти, то общая задержка линии равна
(Nc—1)7И. В момент окончания пачки импульсов на вы-
ходе сумматора имеет место наибольшее значение отно-
шения сигнал/шум, характеризуемое суммарной энергией
Рис. 4.6. Схема оптимального приемника для обнаружения пачки
когерентных импульсов одинаковой амплитуды и длительности.
пачки импульсов. Характеристики обнаружения коге-
рентной пачки импульсов со случайной начальной фазой
определяются соотношением (4.16), в котором q=qv
14. Пачку импульсных сигналов называют некогерент-
ной в том случае, если начальные фазы отдельных им-
пульсов статистически независимы. Рис. 4.7 характеризу-
ет принцип устройства оптимального приемника для об-
наружения пачки некогерентных импульсных сигналов.
В приемнике имеются: фильтр, согласованный с одиноч-
ным импульсным сигналом; амплитудный детектор; ре-
циркулятор [66, 116], используемый для накопления ви-
деоимпульсов; пороговое устройство. Рециркулятором
называется схема, включающая усилитель импульсных
сигналов, охваченный положительной обратной связью
с задержкой на период следования Ти импульсов; про-
изведение коэффициентов передачи Ку усилителя и Длз
линии задержки несколько меньше единицы (КуКЛз<
<1). Рециркулятор играет роль накопителя продетекти-
рованных импульсных сигналов. Из-за того, что коэффи-
циент передачи рециркулятора меньше единицы, накоп-
ление импульсов происходит неоптимальным образом и
поэтому схема на рис. 4.7 является квазиоптимальной.
126
В момент окончания пачки импульсных сигналов
отношение сигнал/шум на выходе рециркулятора имеет
максимальное значение; сравнение максимального вы-
ходного напряжения с пороговым уровнем позволяет
принимать решение о наличии или отсутствии сигнала.
Суммирование импульсных сигналов происходит после
нелинейного элемента — детектора, который ухудшает
соотношение сигнал/шум на выходе по сравнению с этим
соотношением до детектора.
Рис. 4.7. Схема оптимального приемника для обнаружения пачки
одинаковых некогерентных импульсов.
После системы обработки результирующее отноше-
ние сигнал/шум некогерентной пачки импульсов оказы-
вается меньшим, чем у когерентной (при одинаковой
суммарной энергии сигналов на входе приемника). Ука-
занное сокращение результирующего отношения сиг-
нал/шум некогерентной пачки по сравнению с когерент-
ной возрастает при увеличении Nc, и при Nc^> 1 его
можно считать пропорциональным ]/ Nc. При Ус<^10
это сокращение относительно невелико и для РПо~0,9 и
Лит<0,1 составляет не более 50 . . . 60%.
Для Л%>>1 и при выполнении условия
Ус > [/2(ln(l/^T)- 1,4) 4-У2(1п(1/(1-Тпо))- 1,4)]*
характеристики обнаружения сигналов с неизвестной
начальной фазой могут быть определены с помощью при-
ближенной формулы [42]
<7 = 2 [/21п(1//>лт)-2,8 +)
+ ]/ 21п(1/(1 -Р,ю))-2,8]. (4.17)
Ошибка вычислений при указанных допущениях не пре-
вышает 2 дБ,
127
15. При узкополосных сигналах, характеризующихся
тем, что ширина спектра Afc сигнала очень мала по срав-
нению с несущей частотой f0, сумму сигнала и шума
можно представить как единое колебание с изменяю-
щимися амплитудой и начальной фазой
Ивх(0 =^(Oc°s[®o^ + <p(Ol- (4.18)
В общем случае информация о полезном сигнале
содержится и в огибающей U (/) ив фазе ср(^) резуль-
тирующего колебания. Но иногда можно считать, что
информация сосредоточена либо в огибающей, либо
в фазе суммарного колебания.
Рис. 4.8. Схема квазиоптимального фазового обнаружителя
Если сигнал во много раз превышает шум и по энер-
гии (д>>1), и по амплитуде (амплитуда Uc сигнала
много больше среднеквадратического значения ош на-
пряжения шума в полосе приемника), то амплитудный
обнаружитель, схема которого приведена на рис. 4.4,
обнаруживает сигнал со случайной фазой почти так же
хорошо, как с помощью схемы, изображенной па
рис. 4.2, обнаруживается полностью известный сигнал.
Можно считать, что при 7^>1 и Uc^>om основная инфор-
мация о сигнале заключена в огибающей колебания
^вх (0 •
Если же ис<^(5ш, хотя благодаря тому, что вре-
мя накопления энергии сигнала велико, то основное
информационное значение приобретает фаза ср(0 ре-
зультирующего колебания и в этом случае целесообраз-
но использовать фазовый обнаружитель.
Схема квазиоптимального фазового обнаружителя,
предназначенного для обнаружения полностью известно-
го сигнала, дана на рис. 4.8. Обнаружитель включа-
ет: широкополосный усилитель, полоса пропускания ко-
торого во много раз превышает эффективное значение
спектра А/с~1/тс сигнала, что позволяет избежать иска-
жений усилителем фазы смеси сигнала и шума; идеаль-
128
ный двусторонний ограничитель; схему умножения
ограниченного напряжения на опорное wOn(Q напряже-
ние; интегратор, осуществляющий интегрирование за
время длительности тс сигнала; пороговое устройство.
Если при обнаружении полностью известного сигнала
с помощью оптимального приемника (рис. 4.2) требуется
энергия сигнала Ес для обеспечения заданных вероят-
ностей Рпо и Рлт, то при использовании фазового обна-
ружителя для получения того же эффекта потребуется
увеличить энергию сигнала до 4Ес/л. При столь незна-
чительном увеличении энергии входного сигнала фазо-
вый обнаружитель обладает весьма существенным пре-
имуществом— для поддержания постоянными характе-
ристик обнаружения при его использовании не требуется
регулировать пороговый уровень UQ в случае изменения
усиления приемника, как это было необходимо делать
в схеме на рис. 4.2.
16. Если принимаемый сигнал характеризуется слу-
чайными изменениями не только фазы, но и амплитуды,
то имеет место дальнейшее ухудшение характеристик
обнаружения по сравнению с полностью известным сиг-
налом. Предполагая, что закон распределения началь-
ной фазы сигнала равномерный в пределах от 0 до 2л,
а распределение амплитуды подчинено закону Релея,
т. е.
w (U) = №2с) exp (- (4.19)
где п2с — средний квадрат напряжения сигнала, можно
получить [42]:
7 = 2[1п(1/Рлт)/1п(1/РП0)- 1]; (4.20)
где 7 = 2ЕсЖо определяется средним значением энергии
сигнала
На рис. 4.9 приведены характеристики обнаружения,
построенные по формуле (4.20). При большом значении
вероятности правильного обнаружения и малой вероят-
ности ложной тревоги для обнаружения флуктуирующе-
го сигнала требуется значительно большая его энергия,
чем для обнаружения сигнала с известной амплитудой.
Схемы приемников, оптимальных при обнаружении
сигнала со случайно изменяющимися фазой и амплиту-
дой, в принципе не отличаются от тех, которые исполь-
зуются для приема сигнала со случайной начальной фа-
зой (см., например, рис. 4.4).
9-755 129
17. При обнаружении пачки Л% когерентных импуль-
сов с флуктуирующими начальной фазой и амплитудой
можно рассчитывать характеристики обнаружения по
формуле (4.20), принимая при этом отношение сиг-
нал/шум равным
7 = = 2УСЕС/Уо,
(4.21)
где Ес — средняя энергия одного импульса.
Рис. 4.9. Характеристики обнаружения сигнала со случайно изме-
няющимися амплитудой и фазой.
18. При обнаружении пачки Л% некогерентных импуль-
сов с дружно флуктуирующими амплитудами при yVc^l
справедлива приближенная формула [42]:
= (2/РП0) /дГс /Лп(1/Рлт)-2,8, (4.22)
где характеризует среднюю суммарную энергию пач-
ки. Ошибка расчета по формуле (4.22) не превышает
15% при Рпо>0,9, Рлт<0,1.
19. В реальных условиях обнаружения сигналов обыч-
но оказываются неизвестными и направление прихода ра-
диосигналов, и время их прихода и даже точное значе-
ние частоты (из-за наличия допплеровского частотного
130
сдвига, вызываемого перемещением цели относительно
РЛС). Каждая из перечисленных величин непрерывно
изменяется и может принимать любые значения в пре-
делах их возможного диапазона. Однако при анализе во-
просов обнаружения сигналов предполагают, что указан-
ные величины могут принимать лишь конечное число т
дискретных значений или, как говорят, сигнал может
иметь т дискретных положений.
Рис 4 10 Схема оптимального приемника для обнаружения и рас-
познавания сигналов.
Возникает задача не только фиксировать факт при-
сутствия сигнала на входе приемника, но и указать, ка-
кой именно из возможных сигналов присутствует. Такая
задача называется обнаружением и распознаванием сиг-
налов. Оптимальное приемное устройство при обнаруже-
нии и распознавании становится многоканальным.
Оптимальная процедура обработки при обнаружении
и распознавании сигналов сводится к сравнению между
собой выходных напряжений каналов и определению
наибольшего из них. Считается при этом, что на входе
приемника существует сигнал, соответствующий каналу
с наибольшим выходным напряжением. На рис. 4.10 изо-
бражена более простая (квазиоптимальная) схема обра-
ботки, включающая т каналов. В каждом канале есть
схема оптимальной обработки i-ro сигнала wCi(0>’ вы'
ходное напряжение t7BbIX/ этой схемы сравнивается с по-
роговым уровнем Uq. Превышение порогового уровня
131
в Z-м канале (£/ВЬтхг>^о) фиксируется соответствующим
индикатором и воспринимается как наличие сигнала
в этом канале. В сумматоре имеет место суммирование
превышений порогового уровня во всех каналах:
т
[4 = 2
i=i
Суммарное напряжение Uv может быть использовано
для обнаружения сигнала. При U, = 0 считают, что сиг-
нала нэт, а если L\’>0, то фиксируется наличие сигна-
ла. Данные о том, какой именно сигнал обнаружен,
получают с помощью канальных индикаторов.
20. Если допустить, что все сигналы uCi(t) равнове-
роятны, ортогональны (ортогональными называются сиг-
налы, которые удовлетворяют условию
(0 «с/ (/) dt — 0
при имеют одинаковую энергию Ес и наблюда-
ются на фоне нормального белого шума, то при т^Ю
для нахождения требуемого отношения q сигнал/шум
по заданным значениям вероятностей Рио и можно
воспользоваться приведенными выше формулами, если
заменить в них вероятность ложной тревоги РЛт на
Р.^!т. Так, например, при обнаружении одиночного сиг-
нала с флуктуирующими фазой и амплитудой, могущего
занимать одно из т положений, следует воспользоваться
формулой (4.20), введя в нее /Дт/m вместо Рлт. После
такой замены получим
q = 2 [(In (1 /Рлт) Д- Inm)lIn (1 /Рпо) - 1]. (4.23)
В формулы, определяющие значения q, вероятность
ложной тревоги входит под знаком логарифма, поэтому
и от числа возможных значений т также берется лога-
рифм. Следовательно, увеличение необходимой энергии
сигнала, связанное с его распознаванием, оказывается
не очень существенным даже при весьма большом т.
21. В приведенных выше схемах оптимальных приемни-
ков указывались только те элементы, которые принципи-
ально необходимы для обработки смеси сигнала и шума.
Помимо этих элементов в реальном приемнике могут быть
132
использованы, например, усилители и преобразователи
частоты, не имеющие принципиального значения при об-
работке сигналов, но обеспечивающие получение необхо-
димых технических показателей приемника (уровень на-
пряжения или мощности выходного сигнала, индикация
этого сигнала и т. д.). В качестве примера на рис. 4.11
приведена весьма распространенная схема радиолока-
Рис. 4.11. Схема реального радиолокационного приемника, исполь-
зуемого для обнаружения и распознавания сигналов (измеряются
азимут и дальность целей).
ционного приемника, используемого при обнаружении
целей и определении их дальности и азимута. Обнару-
жение производится по пачке некогорентных импульсных
сигналов с флуктуирующими начальной фазой и ампли-
тудой.
От антенны принятые сигналы поступают к усилите-
лю высокой частоты (УВЧ), затем преобразуются по
частоте и подводятся к усилителю промежуточной ча-
стоты (УПЧ). УПЧ обеспечивает основное усиление сиг-
налов и одновременно играет роль квазисогласованного
фильтра — полоса пропускания фильтра согласуется
с шириной спектра сигнала. Именно здесь, на входе
фильтра, и должно быть обеспечено требуемое отноше-
ние сигнал/шум. После УПЧ включен амплитудный де-
тектор, принципиально необходимый элемент при обра-
ботке сигналов с неизвестной начальной фазой. Видео-
усилитель играет вспомогательную роль, усиливая сиг-
налы по напряжению или по мощности. Включенная на
выходе электронно-лучевая трубка (ЭЛТ) одновременно
выполняет функции накопителя импульсных сигналов,
порогового и индикаторного устройств. От видеоусили-
теля импульсные сигналы подводятся к управляющему
электроду трубки, модулируют интенсивность электрон-
ного пучка. В трубке применена развертка по дальности
D и азимуту фаз (рис. 4.12). Таким образом, отметка
133
Рис 4 12. Картина на экра-
не электронно-лучевого ин-
дикатора приемника РЛС
при обнаружении и распоз-
навании сигналов.
цели, имеющей координаты D\
и фазь занимает на экране
трубки вполне определенное
положение, характеризующее-
ся точкой А на рис. 4.12. Яр-
кость свечения этой точки про-
порциональна мощности, дли-
тельности и числу принимае-
мых импульсов, т. е. энергии
пачки сигналов, принятых от
цели при каждом ее облуче-
нии.
Для фиксации отметки на
экране трубки необходимо,
чтобы яркость этой отметки
превысила некоторое мини-
мальное значение. Это позволяет реализовать в трубке
функцию сравнения с порогом.
Если рисующее пятно на экране индикатора имеет
размер б/п, а размеры участка, на котором могут созда-
ваться отметки, составляют Д и L2 (рис. 4.12), то общее
число т неперекрывающихся положений отметки на
экране индикатора равно
т = ЛД2/Л (4.24)
Таким образом экран электронно-лучевой трубки заменя-
ет т индикаторов многоканальной системы обнаружения
и распознавания сигналов, принципиальная схема кото-
рой изображена на рис. 4.10. Именно это значение вели-
чины т следовало бы принимать во внимание, вычисляя
требуемое отношение q сигнала к шуму при обнаруже-
нии и распознавании сигналов.
22. Широкое применение находит цифровое или ди-
скретное накопление при обнаружении сигналов, когда
суммирование энергии заменяется счетом числа импуль-
сов превысивших пороговый уровень [62, 66, 116, 124].
При дискретной обработке непрерывное напряжение
смеси сигнала и шума преобразуется в дискретную фор-
му путем разбиения (квантования) на дискретные зна-
чения и по амплитуде, и по времени. Наиболее широко
используется двоичное амплитудное квантование, при
котором выходное напряжение может иметь только два
значения: единицу или нуль, — в зависимости от того
превысило или не превысило заданный пороговый уро-
134
вень напряжения смеси сигнала и шума. Квантование
по времени заключается в том, что каждый раз при пре-
вышении обрабатываемым напряжением порогового
уровня формируется стандартный импульс с заданными
значениями формы, амплитуды и длительности.
Если амплитуда сигнала превышает эффективное
значение напряжения шума и правильно выбран поро-
говый уровень, то имеется большая вероятность того,
что стандартные импульсы будут создаваться в те мо-
менты времени, когда на вход приемника поступают
отраженные сигналы.
Рис. 4.13. Схема двоичного накопителя.
Рис. 4.13 иллюстрирует устройство двоичного нако-
пителя. Напряжение с выхода приемника поступает
к схеме квантования, включающей пороговое устройство
и генератор стандартных импульсов. Сформированные
стандартные импульсы напряжения подводятся к мно-
гоканальной схеме, каждый канал которой включает се-
лектор дальности, счетчик импульсов и генератор им-
пульсов цели. Каждый селектор пропускает в соответст-
вующий канал импульсы, которые по своему временному
положению соответствуют отраженным сигналам, при-
ходящим с определенного интервала дальности А£> =
= Л)г+1—Di. Указанный интервал дальностей целесооб-
разно выбрать равным разрешению по дальности РЛС,
Все вместе селекторы обеспечивают пропускание сигна-
лов с необходимого участка дальности действия РЛС.
Пусть при однократном облучении точечной цели
число отраженных импульсных сигналов равно Nc. Срав-
нение числа k квантовых импульсов, прошедших через
135
соответствующий канал, с Nc позволяет решать задачу
обнаружения пачки. Решение о наличии цели принима-
ется в том случае, если за Nc циклов работы РЛС будет
зафиксировано не менее п квантованных импульсов (так
называемый метод «п из Nc»). В тех случаях, когда счет-
чик фиксирует п или большее чисдо прошедших импуль-
сов, подается команда генератору импульсов цели, кото-
рый вырабатывает импульсное напряжение, используе-
мое для фиксации наличия цели.
Рис 4 14 Графики потерь при дискретном накоплении, построенные
пРи ^ios = °’5’ Дтп = 10" Ь-
Если вероятность превышения порога суммой одного
сигнала и шума равна Рпо, а при наличии только шума
вероятность превышения порога Рлт, то вероятности пра-
вильного обнаружения Р[юХ и ложной тревоги PTrL при
обнаружении пачки Nc сигналов оказываются равными
[Н61
= 2 С\^по(!-Рпо) с , (4.25)
k=n
' • е-26)
k=n
где ChNc —число сочетаний из Nc по k.
Требуемое значение отношения сигнал/шум по
энергии при дискретной обработке несколько больше,
чем при некогерентном и тем более когерентном накоп-
лении сигналов. Для каждого значения Nc существует
136
оптимальное значение попт~1,5 jA/Vc, которое минимизи-
рует проигрыш по энергии при дискретном накоплении.
На рис. 4.14 приведен график [116], характеризующий
потери адискр дискретного накопления (уменьшение от-
ношения сигнал/шум) по сравнению с когерентным на-
Рис. 4.15. Характеристики обнаружения при дискретном накоплении:
Wc = 9, -----• —ЛГС = 19, огибающая пачки подчиняется закону
(sin х)!х.
Рис. 4.16. Графики потерь в детекторе.
137
коплением сигналов при и, — Иопт,' на этом же графике
пунктирная линия характеризует потери при некогерент-
ном (последетекторном) накоплении.
Для упрощения устройства дискретного накопления
часто используют квазиоптимальные алгоритмы обнару-
жения «п из т», где т существенно меньше числа Nc
импульсов в пачке. Это приводит к возникновению до-
полнительных потерь при использовании дискретного на-
копления. На рис. 4.15 приведены в качестве примера
характеристики обнаружения для квазиоптимальных ал-
горитмов (т<^А^с)-
Приближенно дополнительные потери при квазиоп-
тимальной дискретной обработке можно оценить сле-
дующим путем. Вводится отношение рс = Л/'с//п и затем
по графику на рис. 4.14 для п=1 учитываются потери,
имеющие место при алгоритме обработки «1 из рс».
23. В большинстве элементов приемного тракта имеет
место уменьшение отношения сигнал/шум на выходе по
сравнению с его значением на входе, т. е.
(2ЕсЖ)вх>(2ЕсЖ)вЫх. (4.27)
Это уменьшение отношения сигнал/шум принято назы-
вать потерями при обработке. Потери выражают либо
в разах:
а£ = (2Ес/#о)вх/(2Ес/#о)вых,
(4.28)
либо в децибелах.
Если в приемнике имеется п элементов с потерями,
то суммарные потери тракта равны
п
- Па-
(4.29)
Для того чтобы обеспечить обнаружение сигналов с за-
данными вероятностями РПо и Рлт при использовании
реального приемника следует иметь на входе отношение
сигнал/шум в а2 раз больше значения q, определяемого
по одной из формул (4.10), (4.11), (4.15) — (4.17), (4.20),
(4.22) или по графикам на рис. 4.3, 4.9, 4.14.
Ниже перечислены основные виды потерь [99, 106,
117]:
а) потери аа в антенне, возникающие вследствие из-
менения амплитуды принимаемых сигналов при скани-
138
ровании антенны. В среднем можно принять аа~1,5
[Н71;
б) потери «вч в высокочастотном тракте, вызываемые
затуханием энергии сигналов в фидерах и антенных ком-
мутаторах. В среднем авч~ 1,6;
в) потери ар из-за расстройки Д/р частоты сигнала
относительно резонансной частоты фильтра приемника
ар=£/с(О)/г/с(Д[Р), (4.30)
где Uc (0)—амплитуда сигнала на выходе фильтра при
точной настройке; £/с(Д/р) — амплитуда сигнала при рас-
стройке Д[р.
Предполагается, что расстройка не превышает поло-
вины полосы пропускания фильтра приемника;
г) потери адет в детекторе характеризуются графика-
ми на рис. 4.16. На этом рисунке q± представляет собой
требуемое для обнаружения
суммарное отношение сиг-
нал/шум по энергии, Nc — чи-
сло импульсных сигналов,
между которыми дробится
суммарная энергия. Потери
в детекторе в большой степе-
ни зависят от соотношения
сигнала и шума на входе де-
тектора 7вх; при 7вх^> 1 потери
стремятся к нулю. Именно
этим определяется зависимость
Идет не ТОЛЬКО ОТ yvc, но и от
результирующего значения q„_.
При приближенных расчета?
пренебрегают и используют усредненную характеристику
потерь в детекторе (рис. 4.17), для которой q„ 100; :.,4
д) потери «ко, вызванные заменой оптимального
фильтра в приемнике квазиоптимальным фильтром, со-
гласованным со спектром сигнала только по полосе про-
пускания. Значения коэффициента ако приведены
в табл. 4.1 [118], где Д/ф — полоса пропускания фильтра
по половинной мощности; ти — длительность импульса
по половине максимального значения напряжения;
е) потери аву в видеоусилителе также могут оцени-
ваться с помощью данных табл. 4.1. Для этого нужно
139
1 2 йб 10 Z 4 6100Z. 461000 Nc
Рис. 4.17. Усредненная ха-
рактеристика потерь в де-
текторе.
зависимостью а от а..
ТАБЛИЦА 4.1
Отношение сигнал/шум для различных фильтров
в приемном тракте
Радиоимпульс Фильтр Л^ф 'и а ко
Прямоугольный Идеально-прямоуголь- ный 1,37 1,21
Я Г ауссов 0,72 1,26
Г ауссов Я 0,44 1,0
Прямоугольный Одиночный резонансный контур 0,4 1,24
Два резонансных кон- тура 0,613 1,14
» Пять резонансных кон- туров 0,672 1,12
определить значение произведения длительности видеоим-
пульса ти на полосу пропускания Д^ф видеоусилителя,
увеличить полученное значение в два раза и считать, что
2Д/7 фТц — Д/фТи'
Затем в соответствии с найденным значением Д/фТп по
табл. 4.1 определить величину аВу=аК0;
Рис. 4.18. Характеристики потерь
при суммировании видеоимпуль-
сов с помощью рециркулятора.
ж) фильтр приемника
может оказаться несогла-
сованным с сигналом и по
полосе пропускания. Оп-
ределение коэффициента
потерь a^f, вызванного
этой причиной, можно
производить следующим
образом. Определяется
отношение полосы пропу-
скания фильтра Д?ф к
ширине спектра сигна-
ла
Рд^-Д/ф/Д/с при (4.31)
PAf = д/с/Д/ф при Д/ф < Д/с;
(4.32)
по заданному числу импульсов в пачке Nc определяется
эффективное число импульсов, характеризуемое дробле-
140
нием одиночного сигнала
шумом:
Л^э=рд/Лтс. (4.33)
По графику усредненных по-
терь в детекторе (рис. 4 17)
определяются потери в де-
текторе а'дет для N3 сигна-
лов и а"дет для Nc сигна-
лов. Коэффициент потерь
определяется как частное
полученных значений
= а дет/Л дет» (4.34)
Рис. 4.19. Нарастание вероят-
ности обнаружения цели Рпо?
за п периодов обзора.
з) потери асум в сумми-
рующем устройстве типа
рециркулятора, определя-
ются нелинейностью харак-
теристики сумматора. Если Nc сигналов одинаковой ам-
плитуды Uc суммируются с весовым множителем е-7 ,
то результирующее напряжение
yvc-l
УЕ = (7е 2 e~‘'<AWe.
й=0
(4.35)
На рис. 4.18 приведены графики, характеризующие
аСум в зависимости от Nc и значения весового множи-
теля е~т;
и) потери в индикаторе аИвд, возникающие при ис-
пользовании для наблюдения отметок целей электронно-
лучевых трубок с яркостной отметкой. Происхождение
этих потерь связано с различием времени накопления
в индикаторе полезных сигналов и шума. Методика
определения аИНд совпадает с описанной в п. ж), причем
вместо коэффициента рд^ следует использовать величину
Ч^разв 4”
Рразв =----------------
vpa3Bni
(4.36)
где Цразв — скорость перемещения рисующего пятна по
экрану индикатора, dn— диаметр пятна, ти — длитель-
ность импульсного сигнала;
141
к) потери оператора аОп, связанные с тем, что для
фиксации оператором отметки цели на экране индикато-
ра должно иметь место некоторое превышение яркости
отметки над шумовым фоном. В среднем можно при-
нимать аОп=1,5;
л) потери аас при автоматическом съеме данных,
объясняющиеся тем, что отсчет выходного напряжения
производится не в тот момент, когда сигнальная со-
ставляющая достигает своего максимума. Можно счи-
тать, что аас~2 [117].
24. При решении ряда практических задач (например,
при определении максимальной дальности действия РЛС)
полезно использовать коэффициент различимости Лр,
представляющий собой отношение энергии ECi одного
импульсного сигнала к спектральной плотности No шума
при условии обнаружения пачки из Nc импульсов с ве-
роятностями Рпо и Рлт:
£р = ЕС1Ж (4.37)
Оценка значения Лр может быть произведена по формуле
^=ж~Па;’ (4-38)
1=1
где q определяется по одной из формул (4.15), (4.16),
(4.20) либо по графикам на рис. 4.3 и 4.9, как если бы
принимался только один сигнал, а в числе потерь сле-
дует учитывать и потери в детекторе (для некогерент-
ных РЛС).
25. При использовании п периодов обзора для обна-
ружения цели результирующая вероятность правильного
обнаружения Рпо£ возрастает по биноминальному за-
кону
РП1>Е = 1 - (1 - -Р-»)". (4.39)
где Рпо — вероятность правильного обнаружения при од-
ном облучении цели. Зависимость Рпо z = f (Рпо, п) харак-
теризуется графиками на рис. 4.19. Если от одного пе-
риода обзора к другому вероятность правильного
обнаружения изменяется, то
Р^^’-ПО-Рпо/). (4.40)
/=1
142
где Pa0l— значение вероятности правильного обнаруже-
ния цели за /-й период обзора.
26. Приведенные в данной главе соотношения приме-
нимы и в условиях наблюдения сигналов на фоне актив-
ных шумовых помех, приближающихся к нормальному
случайному процессу с равномерным спектром в преде-
лах полосы, превышающей полосу пропускания прием-
ника РЛС. Для расчета отношения спектральной плотно-
сти мощности помехи к энергии сигнала на входе прием-
ника при подавлении РЛС можно использовать рассмо-
тренные характеристики обнаружения. При этом следует
задаваться значениями вероятностей Рцо и Рлт, при ко-
торых радиолокационная станция оказывается нерабо-
тоспособной. В качестве таких значений можно прини-
мать, например,
а) Рпо=0,9; РЛт=0,1;
б) />„0=0,1; Рлт=10-5 ... 10-7.
Задачи
4.1. Проанализировать зависимость полной вероятности ошиб-
ки Рош при обнаружении цели от значений априорных вероятностей
наличия Р(С) и отсутствия Р(О) этой цели, если:
а) Рпо^О.99 и Рлт—0,01;
б) Рпо=0,9 и РЛт=0,01;
в) РПо = 0,99 и РЛт = 0,1.
4J. Приняв, что априорные сведения о наличии цели отсутству-
ют (Р(С) = Р(О) — 0,5), вероятность правильного обнаружения
Рпо цели может лежать в пределах от 0,9 до 0,99 и вероятность
ложной тревоги РЛт—от 0,01 до 0,1, указать значения РПо и РЛт,
соответствующие:
а) максимальной вероятности принятия правильного решения
при обнаружении цели;
б) максимальной вероятности ошибки,
4.3. Пояснить физически смысл ситуации, соответствующей
обнаружению сигнала с полностью известными параметрами, Како-
во практическое значение анализа ситуации?
4.4. Определить вероятности правильного обнаружения и лож-
ной тревоги при обнаружении полностью известного сигнала, если
пороговый уровень (3=10, отношение сигнал/шум q=20.
4.5. Выбор относительного порогового уровня по формуле
(4.14) соответствует обеспечению минимума полной вероятности
ошибки при обнаружении; произвольное увеличение или уменьше-
ние порога приводит к возрастанию полной вероятности ошибки.
143
Убедиться в этом, рассчитав характеристики обнаружения для
£7 = 20, Р(С)=Р(О)=0,5 и р = ропт, ₽ = 0,2₽опТ, ₽ = 5ропт.
где |3опт вычисляется по формуле (4.14).
4.6. Пользуясь характеристиками обнаружения приемника
(рис. 4.3), оценить требуемые значения отношения сигнал/шум q
при обнаружении полностью известного сигнала. Принять значения
вероятности правильного обнаружения равными 0,5; 0,9 и 0,99,
а вероятности ложной тревоги — 10-3 и 10~6.
4.7. Оценить требуемое увеличение отношения сигнал/шум при
переходе от обнаружения полностью известного сигнала к обна-
ружению сигнала с неизвестной фазой и флуктуирующей амплиту-
дой. Принять РПо=0,9 и 0,99; Рлт=10~4 и 10-8.
4.8. Оценить, насколько незнание начальной фазы сигнала за-
ставляет увеличить отношение сигнал/шум при Рпо = 0,5; Рлт = 0,1
и РПО = 0,99, Рлт = 10~5.
4.9. Пояснить физический смысл значения вероятности ложной
тревоги применительно к обнаружению цели на экране электронно-
лучевого индикатора с яркостной отметкой в системе координат
дальность — азимут.
4.10. Пояснить физический смысл модели радиолокационного
обнаружения, характеризующейся возможностью обнаружения сиг-
нала в одном из «т» дискретных положений.
4.11. Осуществляется обнаружение сигнала с флуктуирующей
амплитудой и неизвестной начальной фазой; индикатор дальность—
азимут с яркостной отметкой. Определить требуемое отношение
сигнал/шум, если Рпо = 0,9, РЛт = 10~3 и на экране индикатора рас-
полагаются 10 000 элементов разрешения (100 X 100).
4.12. Имеется самолетная когерентно-импульсная радиолокаци-
онная станция с допплеровской фильтрацией сигналов, используе-
мая для наблюдения земной поверхности. При пролете мимо то-
чечной цели в отдельный фильтровой канал попадает Nc отражен-
ных импульсов. Что представляет собой сигнал, по которому
производится обнаружение цели, каковы его основные показатели,
как нужно выбрать полосу фильтрующих каналов, чтобы обеспечи-
валась оптимальная фильтрация?
4.13. Какие параметры принимаемых сигналов и почему нужно
считать неизвестными в общем случае обнаружения цели?
4.14. Определить требуемое значение отношения сигнал/шум q
и коэффициент различимости kp, если нужно обеспечить обнаруже-
ние цели когерентно-импульсной РЛС при РПо = 0,95 и Рлт = 10~4
по пачке из 2500 импульсов. Произведение всех коэффициентов по-
терь принять равным 10.
4.15. Определить суммарные потери в импульсной некогерент-
ной радиолокационной станции при приеме 20 прямоугольных им-
144
пульсов и использовании индикаторного выходного устройства.
Резонансная характеристика усилителя промежуточной частоты
гауссовой формы, а полоса пропускания в три раза шире оптималь-
ной (А/опт = 1/ти); произведение скорости развертки на длитель-
ность импульсов иРазвТи в 10 раз меньше диаметра пятна dn.
4.16. Какими мерами можно было бы уменьшить потери в им-
пульсной некогерентной станции? Насколько это могло бы улучшить
результат применительно к условиям задачи 4.15?
Рис. 4.20. Схема устройства для автоматического съема координат.
4.17. Где и каким образом накапливаются сигналы от цели
в импульсной некогерентной станции с индикаторным выходным
устройством при яркостной отметке?
4.18. В импульсной когерентной РЛС используется система
автоматического съема координат, содержащая потенциалоскоп,
узкополосный фильтр и амплитудный детектор (рис. 4.20). Импульс-
ные сигналы НПр, образующиеся на выходе приемника, записыва-
ются на мишени потенциалоскопа; например: вертикальная разверт-
ка — развертка дальности D,
(рис. 4.21). Считывание осуще-
ствляется горизонтальными
строками. Таким образом, при
считывании образуется ампли-
тудно-модулированный сигнал
(рис. 4.22,а) на частоте филь-
тра, содержащий информацию
о дальности и угловой коор-
динате цели. Где в такой си-
стеме осуществляется накопле-
ние сигналов и как вычислить
потери, если считать фазовый
детектор приемника и иотен-
циалоскоп устройствами ли-
нейными (по передаче соот-
ношения сигнал/шум)? Съем
а горизонтальная — азимута <раз
Рис. 4 21. К записи сигналов на
мишени потенциалоскопа.
145
координат осуществляется один раз за длительность пачки
импульсов Гс; форма выходного напряжения, поступающего от
амплитудного детектора к системе съема данных, показана на
рис 4.22,6.
4.19. Рассчитать потери в РЛС с непрерывным излучением и
частотной модуляцией колебаний. Считать, что в станции исполь-
зуется многоканальный спектроанализатор, резонансные характери-
стики соседних фильтров которого пересекаются на уровне 0,7 по
напряжению. Спектр сигнала согласован с резонансной характери-
стикой фильтра по форме и полосе. Потери в индикаторе принять
равными 1,5
Рис. 4 22 Сигналы на выходе устройства автоматического съема ко-
ординат.
4.20. Имеется радиолокационная станция, работающая в режи-
ме кругового обзора. Путем изменения мощности излучения РЛС
вероятность правильного обнаружения цели за одно облучение мо-
жет быть сделана равной 0,5 или 0,7 при Рлт = 10-4. В каком из
режимов работы потребуется меньшая суммарная энергия сигнала,
если нужно обнаруживать цель с вероятностью правильного обна-
ружения не менее 0,94? Потерями в тракте РЛС пренебречь и для
расчета необходимого отношения сигнал/шум воспользоваться фор-
мулой (4.20).
4.21. Определить различие по энергетическим показателям схе-
мы логической обработки типа «4 из 4» и схемы «3 из 4» при
Nc—9, Рпо=0,9, Рлт = 2- ю-3.
4.22. Сопоставить требуемые значения отношения сигнал/шум
при использовании логической схемы обработки типа «3 из 4» и
системы с некогерентным накоплением пачки импульсов для Рао =
=0,9, Рлт = 2’10"3 и Nc— 9. Потерями в тракте пренебречь, за
146
исключением потерь в детекторе для системы с некогерентным на-
коплением.
4.23. Имеется трехканальная трехчастотная радиолокационная
станция с двумя вариантами вторичной обработки сигналов: сум-
мирование выходных напряжений приемников всех трех каналов
(U[ + U2+ U3) и перемножение выходных напряжений (£Л£72£73). Ка-
ковы вероятности правильного обнаружения и ложной тревоги си-
стемы, если значения этих вероятностей в каждом канале равны
Рио И Рдт?
4.24. Сравнить по требуемым энергетическим затратам одно-
канальную некогерентную РЛС и трехканальную трехчастотную
станцию с суммированием выходных напряжений каналов при ус-
ловии, что результирующие значения вероятностей правильного об-
наружения и ложной тревоги в обоих случаях одинаковы и равны
£по = 0,95 и />лт = Ю~3. Обнаруживаются сигналы со случайной
начальной фазой и флуктуирующей амплитудой. Использовать фор-
мулы, полученные в предыдущей задаче.
4.25. В некогерентной импульсной РЛС флуктуирующие по
амплитуде сигналы обнаруживаются с вероятностями правильною
обнаружения РПо = 0,88 и ложной тревоги Рлт = 10~5. Каково долж-
но быть превышение спектральной плотности активной шумовой
помехи в приемнике над спектральной плотностью собственного
шума для того, чтобы вследствие действия помехи вероятность
ложной тревоги возросла до 0,1? Потери в приемном тракте счи-
тать неизменными.
4.26. Для накопления видеоимпульсов часто используются ре-
циркуляторы (рис. 4.7). Для нормальной работы схемы произве-
дение коэффициентов передачи Ку усилителя и Клз линии задержки
должно быть меньше единицы (КуКЛз<1). Почему нельзя допу-
стить выполнения равенства КуКлз=Р
4.27. В РЛС, используемой для обнаружения целей, приме-
няется электронно-лучевой индикатор с яркостной отметкой. При
постоянстве периода обзора Т0бз и периода следования импульсов
Ти можно использовать несколько шкал дальности от ДШк мин до
Дшк макс. Как нужно выбрать время послесвечения тПс в экрана
трубки и длительность Тразв развертки дальности для обеспечения
наилучших условий наблюдения отметок целей на экране индика-
тора.
4.28. В импульсном радиолокационном дальномере используется
система автоматического поиска и захвата цели по дальности. При
поиске цели строб-импульсы дальномера со скоростью иСТр пере-
мещаются по оси времени. Напряжение с выхода приемника и один
из строб-импульсов подводятся к схеме совпадения, после которой
включено накопительное устройство. Автомат захвата цели сраба-
147
тывает, если отношение суммарной накопленной энергии Е v сиг-
нала к спектральной плотности No шума приемника превысит зна-
чение а.
Определить максимальное значение скорости перемещения
строб-импульсов, если известно, что длительности прямоугольных
импульсов сигналов и стробов одинаковы (ти=Гстр), период следо-
вания импульсов равен Ти, отношение энергии одного сигнала
к спектральной плотности шума равно Ь. Потерями в тракте об-
работки пренебречь.
4.29. Каковы потери при дискретном накоплении для А'с = 25
и алгоритме обработки — «3 из 5» по сравнению с когерентным
накоплением. Принять
= РлтГ=Ю-«.
4.30. Оценить требуемое отношение энергии сигнала к спект-
ральной плотности шума при дискретном накоплении для опти-
мальной обработки пачки с Ус = 25. Принять
РЛТЕ = Ю-.
Глава 5
ДАЛЬНОСТЬ ДЕЙСТВИЯ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ
Основные справочные данные
1. Максимальной дальностью действия РЛС называ-
ется наибольшее расстояние между станцией и целью,
на котором сигналы цели обнаруживаются с заданными
вероятностями РПГ) правильного обнаружения и РЛт лож-
ной тревоги.
На максимальной дальности действия РЛС отноше-
ние энергии Eci одного принимаемого сигнала к спек-
тральной плотности No шума приемника равно коэффи-
циенту различимости kv (см. гл. 4 п. 24):
^cJNo-k-p.
2. Если используются отраженные от цели сигналы,
то в свободном пространстве максимальная дальность
действия импульсной РЛС определяется формулой
п ____ 1 / ^РЛС^пер^пп0 ,r п
Ммакс— у Wk^kT.kp ’
где Рпчс— импульсная мощность передатчика РЛС;
ти — длительность излучаемых импульсов, СПер — макси-
148
мальное значение коэффициента усиления антенны пере-
датчика; Snp — эффективная площадь антенны приемни-
ка; о — среднее значение эффективной отражающей пло-
щади цели; &=1,38- 10~23 Вт-с/град—постоянная Больц-
мана, То — абсолютная температура приемника, —
коэффициент шума приемника. На рис. 5.1 приведены
графики, характеризующие значения коэффициента шу-
ма малошумящих усилителей высокой частоты.
Рис. 5.1. Зависимость коэффициен-
та шума от частоты принимаемого
сигнала.
а — для ламп бегущей волны; б — для
усилителей на туннельных диодах; в -
для параметрических усилителен.
Z 4- 6 810Г.ГГц
3. При использовании в РЛС для излучения и приема
радиоволн одной антенны будут одинаковыми значения
коэффициента усиления при приеме и передаче Gnp=
= Опер, а также значения эффективной площади антенны
Эффективная площадь антенны S и коэффициент ее
усиления по мощности G связаны соотношением
S~VG/4ji,
где % — длина волны РЛС.
Если известно значение эффективной площади S
антенны РЛС, то
В тех случаях, когда задается значение коэффициен-
та усиления G антенны РЛС, следует пользоваться фор-
мулой
4. Формулы (5.1) — (5.3), строго говоря, определяют
дальность действия РЛС лишь в направлении максимума
диаграммы направленности антенны РЛС. Если значе-
ние коэффициента различимости Лр выбирается с учетом
изменения амплитуд сигналов в пачке при сканировании
антенны, т. е. учитывается коэффициент потерь аа
(см. гл. 4 п. 23), то указанные формулы справедливы
при расположении целей в пределах некоторой части
диаграммы направленности антенны.
Более полно дальность действия РЛС с учетом на-
правленности антенны позволяет оценить зона видимости
[80]. Зона видимости станции представляет собой по-
Рис 5 2 Зона видимости РЛС-
£>в — дальность обнаружения цели Ц,
положение которой характеризуется
углами (ра3 и срл н относительно на-
правления Оу максимума диаграммы
направленности антенны
Рис 5 3. Диаграмма видимости
трехлучевои РЛС в вертикаль-
ной плоскости
верхность, характеризую-
щуюся тем, что при рас-
положении цели в любой
точке этой поверхности
отношение энергии Eci
одиночного принимаемого сигнала к спектральной
плотности No шума приемника оказывается рав-
ным коэффициенту различимости kp. Можно опреде-
лить зону видимости и как поверхность, в каждой точке
которой цель обнаруживается с заданными значениями
вероятностей правильного обнаружения и ложной тре-
воги. Считают, что цели, находящиеся внутри зоны ви-
димости, обнаруживаются радиолокационной станцией,
а за пределами этой зоны цели обнаружены быть не
могут.
Если Е(сраз, срум)—нормированная диаграмма на-
правленности антенны по напряженности поля, фаз,
фум — углы, определяющие направление на цель отно-
сительно некоторого начала отсчета, то зона видимости
-^в (фаз, фум) может быть представлена следующим об-
разом (рис. 5.2):
Е)в(фаз, фум)—D макс Е (фаз, фум)-
(5.4)
150
Часто пользуются диаграммами видимости, пред-
ставляющими собой сечение поверхности £>в(<Раз, Фум)
какой-либо плоскостью, проходящей через направление
Максимума излучения. На рис. 5.3 показана диаграмма
видимости трехлучевой радиолокационной станции
в вертикальной плоскости.
При пермещении в пространстве диаграммы направ-
ленности антенны аналогичным образом перемещается
и зона видимости РЛС. Применительно к обзорной РЛС
можно считать, что зона видимости совпадает с зоной
обзора.
Рис 5 4 Схема, характеризующая разнесение в пространстве точек
излучения и приема радиоволн.
5. Дальность действия РЛС может быть выражена
через среднюю мощность излучения Рс<р передатчика и
параметры зоны обзора:
макс —
PcpW? 0
4п;2о&ш&7’о&рУс ’
(5.5)
где ТОбз — период обзора заданной зоны; Qo— телесный
угол обзора; Nc — число накапливаемых сигналов при
однократном облучении.
6. Точки излучения и приема радиоволн могут быть
разнесены в пространстве (рис. 5.4). При этом макси-
мальное значение произведейия дальности /)пер от пере-
датчика до цели и Drop от цели до приемника определя-
ется формулой
/ П П \ __ 1 / ^РЛС^и^пер^пр0 Н . - оч
(Ь'перЬ'пр)макс— J/ --64^0^--------
151
7. В активной радиолокации на цель устанавливают
ретранслятор или ответчик, которые принимают сигналы
запроса, посланные радиолокационной станцией или спе-
циальным запросчиком, и посылают ответные радиосиг-
налы [99, 109].
Максимальная дальность действия по каналу запро-
са равна
Г ^>3РЛСт3и^3пер5°пр
и макс — у 4nkomkP’0kop
по каналу ответа —
Z то по
- __ РЛСТ Ии пер°пр
и макс у 4nk3mkT30k3p
В формулах (5.7) и (5.8) дополнительные верхние
индексы характеризуют: з — параметры запросчика, о—
параметры ответчика.
Теоретическая
диаграмма
Реальная диаграмма
Рис 5 5 Влияние земной поверхности на диаграмму направленности
антенны РЛС в вертикальной плоскости.
8. У наземных РЛС метрового диапазона вследствие
отражения радиоволн от земной поверхности возникает
резкое искажение диаграммы видимости в вертикальной
плоскости по сравнению с тем, что имело бы место в сво-
бодном пространстве (рис. 5.5). При малых углах ме-
ста фуМ, пренебрегая потерями энергии радиоволн из-за
поглощения в тропосфере, диаграмму видимости РЛС
в вертикальной плоскости можно представить следую-
щим образом
.Ов (ср^ м) — 2 sin F (фу м) £)макс» (5.9)
где Н& — высота центра антенны РЛС над земной по-
верхностью; F(TyM)—нормированная диаграмма на-
правленности антенны по полю в вертикальной плоско-
сти для свободного пространства; £)Макс— максималь-
ная дальность действия РЛС в свободном пространстве.
152
Вблизи поверхности Земли (в нижней части первого
лепестка диаграммы видимости) максимальная даль-
ность действия РЛС приближенно равна
^макс 3--------X F ^уМ) ^макс-
(5.10)
9. При поглощении энергии радиоволн в тропосфере
на ограниченных участках (меньших £>Макс) максималь-
ная дальность действия оценивается по формулам:
—0,055 I —0,1155 I
Омаке и = Омаке Ю п = ОмаксС
(5-И)
или
-0.05
Омаке п == Омаке 10 = ОмаксС
S
=‘ ,(5.12)
где ОМакс п — дальность действия с учетом поглощения;
ОМакс — дальность действия при отсутствии поглощения;
<5П— коэффициент поглощения, характеризующий умень-
шение плотности потока энергии распространяющейся
волны в децибелах на километр; бЕг — коэффициент по-
глощения на I-м участке трассы; 1г— длина i-го участка
трассы, в километрах.
На рис. 5.6 и 5.7 приведены графики, позволяющие
оценить значения коэффициента поглощения в различ-
ных атмосферных условиях [1].
При поглощении энергии на всей дальности действия
РЛС имеет место следующее соотношение:
ч/ —0,055 D
П _______1/ РЛС и пр in п макс п. /с 1 о\
Рмакс п — Г 1 ° 1
Уравнение (5.13) трансцендентное, не имеющее ана-
литического решения. Его можно решить графоаналити-
ческим путем. Введя замену переменных ОМакс п/ОМакс=
= х, а = 0,05бпОмакс п, получим новое уравнение: 1g х =
—ах. Решение уравнения определяется точкой пересе-
чения двух графиков: #i = lgx, yz=—ах. На рис. 5.8,а
приведен график функции 1g х. Нанося на него линию
(ах) для конкретного значения коэффициента а, можно
найти сокращение дальности действия х. Оценка мак-
симальной дальности действия может производиться и
153
Рис. 5.6. Зависимость коэффициен-
та поглощения энергии радиоволн
от длины волны и вида гидроме-
теоров:
-------- дождь 1 — очень слабый
(0,2 мм/ч), 2 — слабый (1 мм/ч); 3 —
средний (4 мм/ч), 4 — сильный
(16 мм/ч);---— туман- 5 — видимость
600 м, 6 — видимость 130 м, 7 — види
мость 30 м.
с помощью графиков, при-
веденных на рис. 5.8,6, где
по оси абсцисс отложена
дальность без учета погло-
щения, а по оси ординат —
дальность при поглощении.
Параметром является ко-
эффициент поглощения.
10. При использовании ультракоротких волн даль-
ность действия РЛС ограничивается кривизной земной
поверхности. Так называемая предельная дальность дей-
ствия РЛС для стандартной атмосферы равна
Рпред= 130(///а-Ь/
(5.14)
ffn, дБ/км
Рис. 5.7. Зависимость ко-
эффициента поглощения
энергии радиоволн в кис-
лороде (Ог) и парах во-
ды (Н2О) от длины
волны.
где Яа — высота антенны РЛС над поверхностью Зем-
ли; Яц — высота цели. Все величины выражаются в ки-
лометрах.
Задачи
5.1. Формулы (5.2) и (5.3) определяют дальность действия
РЛС в свободном пространстве Объяснить, почему в одной из этих
формул длина волны стоит в числителе подкоренного выражения,
а во второй — в знаменателе? Объяснить физический смысл зави-
симости между дальностью действия и длиной волны РЛС.
154
5.2. На какой высоте Н должен лететь самолет, снабженный
станцией обнаружения низколетящих целей, для того чтобы была
полностью использована максимальная дальность действия РЛС
-Омаке = 200 км? Высота полета целей — не менее 50 м.
5.3. Рассчитать максимальную дальность действия Омакс
в свободном пространстве наземной радиолокационной станции,
характеризующейся следующими данными:
Ррлс=1 МВт» ти=1 мкс- SneP = Snp^15 м2,
а = 10 м2, km = 20»
/гр = 25, Л — 10 см.
Температуру приемника принять равной 300°К.
5.4. Оценить максимальную дальность действия РЛС Омаке п,
данные которой приведены в задаче 5.3, с учетом поглощения энер-
гии радиоволн в дожде интенсивностью 16 мм/ч до высоты 5 км и
в парах воды и кислороде до высоты 30 км. Угол наклона оси луча
РЛС к горизонту принять равным Г.
5.5. До какого предела Пмакс целесообразно увеличивать даль-
ность действия наземной станции обнаружения самолетов, если
максимальная высота полета целей составляет 30 км? Поглощение
в атмосфере не учитывать.
5.6. Пояснить характер зависимости дальности действия РЛС
от длины волны при условии, что все остальные технические ха-
рактеристики РЛС и метеоусловия остаются постоянными.
5.7. Радиолокационная станция имеет два режима кругового
обзора: 3 оборота или 15 оборотов в минуту при всех прочих рав-
ных условиях. Насколько и почему изменится максимальная даль-
ность действия такой станции в свободном пространстве при ра-
боте в разных режимах? ’
5.8. Самолетная РЛС с учетом поглощения энергии радиоволн
в тропосфере должна иметь дальность действия 40 км. Какова
должна быть ее дальность D в свободном пространстве, если Х =
— 2 см и учитывается поглощение в дожде интенсивностью 4 мм/ч
и в кислороде воздуха на всей дальности действия станции?
5.9. Показать, что независимо от работы РЛС в непрерывном
или импульсном режимах, параметром передатчика, влияющим на
дальность действия станции, является средняя мощность генерируе-
мых колебаний.
5.10. Какой характер имеет зависимость Ррлс = /(Х) требуемой
мощности передатчика РЛС от ее длины волны при заданной даль-
ности действия станции в свободном пространстве и постоянных
значениях прочих технических показателей? Почему?
155
5.11. Какова дальность обнаружения D наземной радиолока-
ционной станцией искусственного спутника Земли, летящего на вы-
соте 300 км над земной поверхностью?
5.12. Каково значение коэффициента различимости kp в само-
летной РЛС с непрерывным излучением при следующих значениях
параметров: дальность обнаружения целей в свободном простран-
стве 40 км,
А = 2 см, £ш = 20, о = 5 м2, 5Пр = 5Пер=0,5 м2,
/эрлс = 50 Вт, То = 300°К , iic: Т’обл = 2 мс.
5.13. Какова дальность D приема ответных сигналов ретранс-
лятора (без учета поглощения энергии радиоволн при распростране-
нии) при следующих значениях параметров ретранслятора:
^рлс-1 Вт, тс=1 мкс, Gnep=5
и запрашивающей станции:
Snp=0,5 м2, yfeni=20, £р=25, То=ЗОО°К?
5.14. Определить дальность D обнаружения источника актив-
ного излученця радиолокационной станцией, если этот источник из-
лучает среднюю мощность 1 Вт в полосе 1 МГц и имеет коэффи-
циент усиления антенны Ga = 5, а РЛС характеризуется следующи-
ми данными:
5Пр=0,5 м2, £ш=30, ?о=300°К, £р=67,
среднее время облучения цели основным лепестком диаграммы на-
правленности антенны Гобл = 0,5 мс, полоса пропускания приемника
Д/др = 1 МГц. Коэффициент поглощения энергии радиоволн при-
нять равным бп=0,2 дБ/км.
5.15. Используется полуакгивная система наведения ракет на
цель (цель облучается радиолокационной станцией, а аппаратура
ракеты принимает отраженные сигналы). Построить график зави-
симости максимального расстояния захвата сигналов цели ракетой
от расстояния между РЛС и целью при следующих значениях пара-
метров РЛС: РИзл=200 кВт, ти=1 мкс, Gnep=500, сг=10 м2,
А, = 3 см; аппаратуры ракеты: Gnp = 100, ^ш = 25, kv —10. Поглоще-
ние энергии радиоволн в тропосфере не принимать во внимание.
5.16. Найти значения угла места фмакс и фМИн, соответствую-
щие максимумам и минимумам диаграммы направленности антенны
наземной РЛС в вертикальной плоскости, если Яа = 6 м, л = 2 м.
5.17. Оценить дальность D действия РЛС метрового диапазона
для фум = 0,5°, если высота подъема антенны равна 5 м, длина
волны — 4 м, а дальность действия в свободном пространстве —
200 км.
156
5.18. Дальность действия корабельной РЛС в свободном про-
странстве составляет 50 км. Какова дальность действия Da этой
станции при сильном тумане (видимость 30 м) на всей дальности,
если А=3 см?
5.19. Коэффициент поглощения энергии радиоволн не превы-
шает 0,1 дБ/км. В каких Пределах может изменяться дальность
действия D РЛС в свободном пространстве, если допустимое со-
кращение дальности из-за поглощения не должно превышать 25%?
5.20. Проектируется наземная РЛС. Требуется практически ис-
ключить влияние отражения от земной поверхности на диаграмму
видимости станции. Какое условие должно быть выполнено для
удовлетворения этого требования?
5.21. При указании дальности действия РЛС нужно обязатель-
но приводить соответствующие ей значения вероятности правиль-
ного обнаружения и ложной тревоги. Почему недостаточно указать
значение только одной из указанных вероятностей, например ве-
роятности правильного обнаружения?
5.22. Для обнаружения самолетов используется РЛС децимет-
рового диапазона (А = 0,3 м). Максимум диаграммы направленно-
сти антенны РЛС в свободном пространстве был бы расположен
горизонтально. Определить ширину 0о нижнего лепестка диаграммы
видимости РЛС с учетом влияния Земли при условии, что высота
центра антенны над поверхностью Земли составляет 5 м; ширина
основного лепестка диаграммы направленности антенны в свободном
пространстве равна 14°.
5.23. Применительно к условиям предыдущей задачи опреде-
лить дальность D обнаружения самолета, летящего на высоте 100 м
над земной поверхностью, если дальность действия РЛС по ана-
логичному самолету в свободном пространстве составляет 125 км.
Принять, что ТДфум) «F(O) = 1.
5.24. Сравнить между собой дальности действия £>i и D2 двух
наземных радиолокационных станций, предназначенных для обнару-
жения воздушных целей. Первая станция имеет один симметричный
плоский луч, ширина которого в вертикальной плоскости составляет
0ум, а в горизонтальной 0аз; предполагается, что 0уМ^>0аз.
Станция имеет один передатчик с импульсной мощностью
^РЛС* Вторая станция является n-канальной и имеет п независи-
мых лучей. Ширина каждого луча второй станции в вертикальной
плоскости равна 0ум/п, а в горизонтальной — 0аз. Суммарная мощ-
ность излучения второй станции равна ^рлс> мощности пере-
датчиков в отдельных каналах одинаковы. Значения остальных
параметров обеих станций одинаковы.
157
5.25. Насколько изменится дальность действия некогерентной
импульсной РЛС при уменьшении периода следования ее импульсов
в три раза?
5.26. Станция была спроектирована для работы с импульсами
длительностью ти при числе импульсов в пачке ЛГС=2О. Как изме-
нится дальность действия РЛС, если длительность импульсов умень-
шится в три раза?
Рис. 5.8. Графики для оценки сокращения дальности действия РЛС:
а — график функции lg X, *=£>макс пД>макс; Омакс п - дальность действия
с учетом поглощения; б — график, характеризующий сокращение дальности
действия из-за поглощения радиоволн.
5.27. При постоянной эффективной площади антенны изменяет-
ся длина волны РЛС с 5 до 10 см. Насколько изменится дальность
действия РЛС? Считать, что в РЛС в качестве усилителя высокой
частоты используется лампа бегущей волны.
5.28. В направлении РЛС один за другим на дистанции 100 м
летят несколько однотипных самолетов. Насколько дальность обна-
ружения группы больше дальности обнаружения одиночного само-
лета, если ти = 2 мкс?
158
5.29. Самолетная панорамная РЛС имеет дальность действия
300 км по кораблю с сг=5000 м2. Какова дальность действия £>м
этой РЛС по берегу моря, представляющему собой ровную необ-
работанную почву, если ширина луча по азимуту равна 1°, дли-
тельность импульсов — 1 мкс, высота полета •— 10 км?
Глава 6
РАЗРЕШАЮЩАЯ СПОСОБНОСТЬ
Основные справочные данные
1. Реальная разрешающая способность РЛС по ка-
кой-либо координате а может быть представлена в виде
6(а) 8 (а)пот + 2 8 (аЬ
t=i
уа8(а)пот, (6.1)
где б(а)пот — потенциальная разрешающая способность,
определяемая формой сигнала и отношением энергии
сигналов и шума; 6(а)г-— ухудшение разрешающей спо-
собности в t-м узле устройства обработки сигнала; п—
количество узлов устройства обработки сигнала;
уа= 1+2 8(а)//5(а)пот (6.2)
/=1
— коэффициент ухудшения потенциальной разрешаю-
щей способности по параметру а.
Обычно наибольшие ухудшения вносит выходное
устройство, поэтому можно принять
6(a)—6(a) пот + 6(a) ву, (6.3)
Ya 1 —f— 8 (л)ву/0 (я)пот.
(6.4)
При использовании в выходных устройствах элек-
тронно-лучевых трубок и потенциалоскопов наибольшее
ухудшение разрешающей способности вносится за счет
конечных размеров пятна на экране (мишени)
8 (а)ву =
(6-5)
159
где dn — диаметр рисующего пятна; Ма — масштаб шка-
пы по параметру а.
При автоматическом съеме координат в устройстве,
сопрягающем РЛС с цифровой вычислительной маши-
ной, реальная разрешающая способность определяется
ценой интервала эталонных (счетных) импульсов. Более
подробные сведения о влиянии выходных устройств на
реальную разрешающую способность приведены в гл. 8
и 9.
2. При приближенной оценке потенциальной разре-
шающей способности обычно считают отношение энер-
гий сигналов и шума большим и пренебрегают шумовой
составляющей выходного напряжения по сравнению
с сигнальной. При этом условии и некоторых других
упрощающих допущениях потенциальная разрешающая
способность условно может быть оценена по критерию
Релея шириной сигнальной функции, определенной на
уровне 0,5 от максимума [99, 124].
3. При разрешении по дальности сигнальная функция
имеет вид
S (t)-= qk0(x), (6.6)
где
?=2Ес/У0, (6.7)
^°(т)=^—Re j* ис (/) u*c (t — т) dt (6.8)
6
— автокорреляционная функция входного сигнала (нор-
мированное значение), представляющая выходной сиг-
нал оптимального фильтра при совпадении частоты сиг-
нала с резонансной частотой фильтра;
«с (0 = F (/) ехр (/W)
— выходной сигнал в комплексной записи;
и*с (/ — т) = F* (ф— х) ехр /со (t — т)]
— опорный сигнал, комплексно-сопряженный входному;
—комплексная амплитуда входного сигнала;
F* (t—т)—комплексная амплитуда сопряженного опор-
ного сигнала; Тн — интервал наблюдения.
160
Практическое значение имеет модуль автокорреляци-
онной функции
К.W = 2^7 Ре рwг:* ((-dt’ (6-9)
6
представляющий огибающую выходного сигнала опти-
мального фильтра.
4. Для сигнала в виде импульса с прямоугольной оги-
бающей
К0(т)=Р ~1г1/Хи при |т|<ти, (б10)
{ 0 при | т | > ти.
Ширина Ко (т) на уровне 0,5 равна 21 т0>81 = ти.
Величина потенциальной разрешающей способности
по дальности
5 (В)пот = 0,5с 21 т0>81 = 0,5сти. (6.11)
Если принять ширину спектра сигнала
Д/с т-1,
1 и
ТО
6(D) пот 0, 5с/Д/с. (6.12)
5. Для сигнала в виде импульса гауссовой формы
Ко (т) = ехр ( — 0,5у2т2), (6.13)
где у = & = M2 (f) = Уте /ти'— коэффициент, "харак-
теризующий скорость изменения огибающей и равный
эффективной ширине спектра сигнала Д/с, причем
ОО I оо
№(D=
—ОО I —оо
6(f) —спектральная плотность комплексной амплитуды;
Ти — ширина импульса сигнала, отсчитываемая на уров-
не 0,46.
Ширина Ко(х) на уровне 0,5 равна
21 т0)81= 2У21п2/у^ 1,3ти.
Величина потенциальной разрешающей способности
по дальности равна
6 (Рпот) =0,66сти=1,15с/Д/с. (6.14)
161
6. Для сигнала в виде импульса гауссовой формы
с внутриимпульсной-линейной частотной модуляцией
/Со (т) — ехр (— 0,5у2т2) ехр (— 0,562т;2/у2), (6.15)
где Ь = Асом/2ти— коэффициент, характеризующий ско-
рость изменения частоты; A(oM = 2jrAfM — девиация часто-
ты. Ширина Ко(т) на уровне 0,й равна
21 То,6 Н 2у 1/2^2//^+^ - 1 >3ти/^сж,
где
kcx == ]/"1 "ф" 62/у* = |/"1 -1— (Д/мТИ)2 ~ Д^М^И (6.16)
— коэффициент сжатия по длительности
Величина потенциальной разрешающей способности
по дальности равна
6(D) ПОТ — 0,66сти/.£сж=0,66с/А/м, (6.17)
7. При разрешении по скорости сигнальная функция
имеет вид:
S (со) = qKo (Дсо),
где
Гн
Ко (A<°) = 2jT“ Re Uc (t, co) U*c (t, CO -{- Дсо) di
6
— нормированная автокорреляционная функция входно-
го сигнала по частоте (условный термин, принятый по
аналогии с временной автокорреляционной функцией).
Ее модуль представляет зависимость амплитуды сигнала
на выходе фильтра от расстройки Асо при т=0.
8. Для сигнала в виде импульса с прямоугольной оги-
бающей модуль автокорреляционной функции по частоте
имеет вид
К.(Дш) = У-|^. (6.18)
Его ширина на уровне 0,5 —
21 Асоо.б | =7,6/ти-
Потенциальная разрешающая способность по скоро-
сти равна
8(Ур)пот=.3,8(?/соти 0,6Я/т;й. (6.19)
162
§. Для сигнала в виде импульса гауссовой формы со-
ответственно имеем
Ло(Асо)=ехр (—Асо2 */8у2), (6.20)
2 | Аа>о,« | = 8,3/тн>
3(ур)пот = 4,15г?/<оти = 0,66Л/тн. (6.21)
10. При совместном разрешении по дальности и ско-
рости сигнальная функция имеет вид:
5 (/, ад) = qKo (у, Д«),
где
/Со (т, Д«>) = Re J Uc (/, ш) и*с (t — т; и 4“ ^ш) &
о
— смешанная автокорреляционная функция по времени
и частоте (нормированное значение). Модуль смешан-
ной автокорреляционной функции д- ' гауссова импуль-
са с линейной частотной модуляцией имеет вид:
/С (т, Дю) = ехр ( —к0,5у®тг) ехр . (6.22)
Вид /Со(т, Асо) показан на рис. 6.1. Форма сечения
этой функции горизонтальной плоскостью на уровне 0,5
от максимума показана на рис. 6.2. Сечение является
эллипсом, повернутым на угол а по отношению к оси т,
причем
tg 2а=6/|[0,25 — (у4+62) ]. (6.23)
Диаметры эллипса, совпадающие с осями т и Асо, опре-
деляют разрешающую способность по времени (дально-
сти) и частоте (скорости) при раздельном разрешении
по этим параметрам. Размах эллипса по оси т определя-
ет разрешение по времени при неизвестной частоте. Он
равен
21 то,51 = 1,3ти
и
6 (/}) пот^ОДб^Ти.
Размах эллипса по оси Асо определяет разрешение по
частоте при неизвестном времени прихода. Он равен
2 ] Д(о0,51 = 4)/21п 2 уУ 1 -j-62/Y4 = 8,3^»/^
и
8 (Ур)пот —- 4,15д kcx. / <отн = 0,66я£сж / ти. (6.24)
163
К0(т,Лш),
Рис. 6.1. Вид поверхности Дсо) для одиночного сигнала.
Рис. 6.2. Сечение поверхности /Со(т, Дсо) горизонтальной плоскостью.
164
Сечения поверхности К0(т, Дсо) плоскостями Aco=const
представляют собой зависимости амплитуды выходных
сигналов оптимального фильтра от времени при задан-
ных расстройках Дсо частоты входного сигнала относи-
тельно резонансной частоты фильтра (рис. 6.3). Сечения
плоскостями r=const представляют собой зависимость
амплитуды на выходе оптимального фильтра от рас-
стройки Дсо в заданный момент времени т (рис. 6.4).
Рис. 6.3. Сечения поверхности Ко(х, Дсо) плоскостями Aco=const.
Рис. 6.4. Сечение поверхности Ко(х, Дсо) плоскостями T=const.
165
11. Для сигнала а виде панки из Л'(- когерентных им-
пульсов гауссовой формы и одинаковой амплитуды мо-
дуль смешанной автокорреляционной функции будет:
к — sin (0>54соГи (7VC — I р | ))
Л0Л?с (х , Д<») — Nc sin (о.БДсоТ'и) *
X ехр ( - 0,5уЧ2) ехр (— , (6.25)
где т'=рТи±х, р=0, ±1, ±2,..., ±Л^с-
Сечение этой поверхности плоскостью, параллельной
плоскости (т', Дев), на уровне 0,5 от максимума, показа-
но на рис. 6.5, а на рис. 6.6 приведены ее сечения плоско-
стями А(о=0 и т'=0.
Рис. 6.5. Сечение смешанной автокорреляционной функции для пач-
ки когерентных импульсов:
/ — площади неопределенности пачки; 2 — эллипс неопределенности одиночно-
го импульса.
Для сигнала в виде пачки из Nc когерентных импуль-
сов разрешающая способность по дальности определяется
по формулам для одиночного импульса, а разрешающая
способность по скорости
б (Ур) пот = лс/шЛ^с 7и = 0,5ЛЖГи. (6.26)
12. Для сигнала в виде пачки некогерентных импуль-
сов разрешающие способности по дальности и скорости
определяются по формулам для одиночного импульса.
166
13. Потенциальная разрешающая способность по угло-
вым координатам для обзорной РЛС рассматривается
аналогично разрешению по дальности и при аппрокси-
а
Рис. 6.6. Сечения смешанной автокорреляционной функции для пачки
из JVC = 5 когерентных импульсов:
а — плоскостью До>=0; б — плоскостью т'=0.
мации диаграммы направленности гауссовой кривой
равна
6(ф)ПОт=1,30о>5, (6.27)
а при прямоугольной аппроксимации
6(ф)пот:=0о,5> (6.28)
где 0о,5 — ширина диаграммы направленности антенны
в плоскости разрешения на уровне 0,5.
Задачи
6.1. Необходимо обеспечить потенциальную разрешающую спо-
Сфбность РЛС по дальности б(£))пот = 50 м. Какова должна быть
167
длительность ти немодулированных импульсов с прямоугольной и
[ауссовой огибающей?
6.2. Во сколько раз уменьшится амплитуда выходного сигнала
оптимального фильтра, если наблюдение производится не в момент
т = 0, а в момент т=0,5ти? Решить задачу для входных немодули-
рованных импульсов с прямоугольной и гауссовой формой оги-
бающей.
6.3. Относительное запаздывание двух одинаковых разрешаемых
сигналов равно 1,4ти. Определить относительную величину а — ми-
нимума огибающей суммарного сигнала на выходе оптимального
фильтра — при немодулированных импульсах прямоугольной и гаус-
совой формы на входе.
6.4. Требуется обеспечить потенциальную разрешающую спо-
собность на дальность 6(D) =5 м, причем с точки зрения нужной
дальности длительность сигналов должна быть не менее 10 мкс.
Удовлетворяются ли одновременно эти требования при применении
немодулированных импульсов? Если нет, то сигнал какого вида
следует выбрать для удовлетворения этих требований?
6.5. Какова должна быть длительность сигнала ти РЛС (Х =
= 3 см), при которой обеспечивается разрешение самолета на фоне
пассивных помех (отражателей), если самолет летит в направлении
на РЛС со скоростью 1Е=800 км/ч, а отражатели перемещаются
попутным ветром со скоростью до=30 км/ч.
6.6. Самолет летит на высоте //=20 км по дуге окружности
радиусом R = 200 км с центром в точке расположения РЛС. Затем
он изменил направление и полетел прямо на РЛС. Как изменится
при этом амплитуда напряжения на выходе оптимального фильтра,
если в РЛС используются импульсы гауссовой формы длительно-
стью ти = 30 мкс, Х = 3 см, а скорость самолета о = 2000 Км/ч?
6.7. Изобразить графически характер изменения амплитуды U
выходного сигнала оптимального фильтра при приеме сигналов, от-
раженных от самолета, пролетающего над радиолокационной стан-
цией.
6.8. Определить вид и параметры сигнала, обеспечивающего
разрешение по скорости двух целей, имеющих разность радиальных
скоростей Дор = 2,5 км/ч. РЛС наблюдает цели на расстоянии
300 км и имеет Х = 10 см.
6.9. Требуется осуществить совместное потенциальное разре-
шение по дальности 15 м и по скорости 10 м/с. Необходимо выбрать
вид сигнала. РЛС работает на длине волны Х=10 см, имеет ча-
стоту посылок Еи = 400 Гц, осуществляет оптимальную фильтрацию
принимаемых сигналов.
6.10. Радиолокационная станция наблюдает два самолета, ле-
тящих на расстоянии d = 5 км цо одной прямой (рис. 6.7) ц имею-
168
щйх разндсть скоростей Да = 100 м/с. В каких пределах изменений
угла а обеспечивается одновременное разрешение по дальности и
скорости, если в РЛС обрабатываются пачки из пяти когерентных
импульсов прямоугольной формы длительностью 1 мкс, Х = 10 см
и Ки=1 кГц?
6.11. Обзорная РЛС имеет горизонтальный размер отражаю-
щего зеркала антенны da = 10 м и работает на длине волны Х =
= 10 см. Определить потенциальную разрешающую способность
РЛС по азимуту.
6.12. Обзорная РЛС наблюдает на расстоянии D = 200 км две
цели в условиях, показанных на рис. 6.7. Определить границы
изменения угла а, в которых осуществляется потенциальное раз-
решение по азимуту, если ширина луча антенны 0ао,5 = 1°.
6.13. Самолетная когерентно-импульсная панорамная РЛС имеет
боковой обзор (рис. 6.8) и наблюдает наземные цели. Дальность
до цели намного больше высоты полета. Определить потенциальную
разрешающую способность такой РЛС по азимуту при заданных
длине волны X, размере антенны da и дальности наблюдения D.
6.14. В РЛС используются импульсы ти = 1 мкс с прямоугольной
огибающей и антенна с шириной луча 00,5 = 4°. Цели наблюдаются
на индикаторе «дальность — азимут» в прямоугольных координа-
тах. Как следует выбрать предельные значения шкал дальности
Ошк и азимута ФШк аз, чтобы обеспечивались реальные разрешаю-
169
<КЙ4 Способности 6(/))=200 м и 6(сраз) = 1,56? Качество фокуси-
ровки трубки принять <2ф=4О0 (см. (8 5)).
6.15. Определить коэффициенты ухудшения потенциальной раз-
решающей способности по дальности и азимуту при условиях пре-
дыдущей задачи.
6.16. Определить реальную разрешающую способность РЛС
по дальности и азимуту, если дано: тп=3 мкс, импульсы имеют
прямоугольную форму, 0о,5=10, применен индикатор кругового обзо-
ра с диаметром экрана d3=300 мм, <2ф=300, £>шк=400 км, цель
наблюдается на расстоянии 200 км.
6.17. Определить коэффициенты ухудшения потенциальной
разрешающей способности по дальности и азимуту при условиях
предыдущей задачи. Как изменится результат, если цель при-
близится до 100 км?
6.18. В устройстве инструментального съема данных РЛС кру-
гового обзора используются эталонные импульсы для счета ази-
мута цели с периодом следования 7'э = 0,1 с. Какова реальная раз-
решающая способность РЛС по азимуту, если 7'0бз=Ю с и Оо,5 =
= 1°?
6.19. Как надо выбрать период следования эталонных импульсов
в предыдущей задаче, чтобы реализовать потенциальную разрешаю-
щую способность по азимуту?
Глава 7
ТОЧНОСТЬ ИЗМЕРЕНИЯ КООРДИНАТ ЦЕЛЕЙ
Основные справочные данные
1. Наличие помех на входе и внутри приемного уст-
ройства приводит к появлению случайных ошибок изме-
рений параметров сигнала. Точность измерений наиболее
часто характеризуют среднеквадратической ошибкой.
Закон распределения ошибок обычно является нормаль-
ным. В этом случае для пересчета ошибок из одной ка-
тегории в другую может быть использована табл. 7.1
[28, 99].
Чтобы, например, выразить квазимаксимальную
ошибку с вероятностью 0,9 (90%) через вероятную
(срединную) ошибку, необходимо умножить значение
вероятной ошибки на коэффициент, стоящий в верти-
170
ТАБЛИЦА 7.1
Таблица пересчета ошибок
Категория ошибки Вероят- ная Средне- квадрати- ческая К ва зимак симальная
80% 90% 95% 99%
Вероятная 1,00 1,48 1,90 2,44 2,91 3,81
Среднекнадратическая Квазимаксимальная 0,68 1,00 1,28 1,64 1,96 2,57
80% 0,53 0,78 1,00 1,28 1,53 2,01
90% 0,41 0,61 0,78 1,00 1,19 1,56
95% 0,34 0,51 0,65 0,84 1,00 1,31
99% 0,26 0,39 0,50 0,64 0,76 1,00
кальном столбце с графой «квазимаксимальная, 90%»
против горизонтальной графы «вероятная».
2. Факторами, влияющими на точность измерения па-
раметров сигнала, являются: отношение энергии прини-
маемого сигнала к энергии шумов, форма зондирующего
сигнала, принятый способ обработки сигнала, степень
совершенства выполнения отдельных узлов радиотехни-
ческого измерительного устройства, метод отсчета и до-
пускаемое время измерения, условия распространения
радиоволн.
3. Точность работы РЛС может быть определена экс-
периментально или расчетным путем. При эксперимен-
тальном методе многократно измеряются координаты
какой-либо эталонной цели, находятся ошибки отдельных
измерений, строится их закон распределения и вычисля-
ется среднеквадратическая ошибка.
Если измеряемая координата (параметр) а известна
с большой точностью, превосходящей предполагаемую
точность РЛС, то среднеквадратическая ошибка может
быть вычислена по формуле
о(а)=УЗ (7-1)
а систематическая ошибка — по формуле
Д(1сист = СС0 ССср» (7.2)
где Даг-=а0—си — ошибка 1-го измерения; ао — истинное
значение параметра; аг- — значение параметра, получен-
171
п
ное при z-м измерении; aCp=2ai/n — среднее значение
i=l
параметра; п — количество измерений (п^>1).
Экспериментальный метод применим к уже действую-
щей аппаратуре. При проектировании новых РЛС при-
меняют расчетный метод. Он основан на определении
отдельных составляющих общей ошибки, соответствую-
щих каждому из факторов, которые влияют на точность
измерений.
Общую ошибку измерения можно разделить на по-
тенциальную ошибку, зависящую только от формы зон-
дирующего сигнала и отношения энергии сигнал/шум, и
ошибки, вызываемые всеми остальными факторами. По-
тенциальная ошибка определяет предельную точность
работы РЛС при данных зондирующем сигнале и шумах.
4. Потенциальная среднеквадратическая ошибка изме-
рения дальности при одиночном частотно-модулирован-
ном импульсе гауссовой формы определяется как
c(D) пот — 0,5сти/£Сж (7.3)
при отсутствии частотной модуляции —
о (D)no-r = 0,5гсиД/штГ, (7.4)
где q0=2Ec/N0 — отношение сигнал/шум для точно изве-
стного сигнала.
5. Потенциальная среднеквадратическая ошибка изме-
рения частоты для немодулированных и модулированных
одиночных импульсов определяется по формуле:
Го (Д(о)пот ——.2 J/"'tc/z7o/th. (7-5)
6. Потенциальная среднеквадратическая ошибка изме-
рения радиальной скорости определяется по формуле:
с(ир) пот — О,5с]Л‘п/<7о/‘п/'си, (7.6)
где f — несущая частота зондирующего сигнала.
7. Потенциальная среднеквадратическая ошибка изме-
рения угловых координат в обзорной РЛС при аппрокси-
мации огибающей выходного сигнала гауссовой кривой
определяется по формуле:
о(?)пот = (7*7)
где 0О)5 — ширина диаграммы направленности на уровне
0,5 по мощности.
172
8. Среднеквадратические потенциальные ошибки изме-
рения дальности и скорости при одновременном их изме-
рении для одиночного частотно-модулированного импуль-
са гауссовой формы соответственно равны:
о (-О)пот=- 0,5c'Cjji/J^г 70,
° (^р)пот === 0,5^сж ~Vк[qoltrftf = 0,5Л^сж К^/^о/ити. (7.8)
При немодулированном сигнале следует принимать
^СЖ = 1 .
9. При применении сигналов в виде некогерентной пач-
ки импульсов потенциальные ошибки измерения дально-
сти и скорости определяются по тем же формулам, что
и для одиночного импульса.
10. При сигнале в виде когерентной пачки потенци-
альная ошибка измерения дальности определяется по
формуле (7.4), а ошибка измерения скорости уменьша-
ется примерно в А^с^и/ти раз по сравнению со значением
по формуле (7.6), т. е.
о(»р)пот^ 2кЖГи V ЙГ= 2kNcT„ V <7-9)
11. Результирующая реальная среднеквадратическая
ошибка измерения любой координаты а может быть
представлена в виде
а (а) = "|у о2 (а)пот с2 (а)распр “4“ 2 с2(°Ф» (7.10)
i=i
где сг(а)пот — потенциальная ошибка, рассчитанная по
приведенным выше формулам; (у(а)распр — ошибка из-за
искривления траекторий радиоволн при распростране-
нии; о (а) г — ошибка, вызванная ухудшением точности
в t-м узле РЛС, п — общее количество узлов.
Результирующую ошибку (7.10) можно представить
в виде
с (а) = 7)ас (а)пот, (7.Н)
где
г -----------------------------
71а = у 1 +[о2(а)распр+2 °’(а)']/а’(а)пот (7‘12)
/=1
— коэффициент ухудшения потенциальной точности из-
мерения.
173
Во многих случаях можно пренебречь ошибками, рас-
пространения, а из аппаратурных ошибок учитывать
только ошибки выходного устройства. Тогда
т]а — с2 (а)ву/о2и(а)пот.
(7.13)
Значения т]а могут колебаться в довольно широких пре-
делах— от единицы с долями до 10 ... 15.
12. Ошибки, связанные с условиями распространения
радиоволн, бывают систематическими и случайными. Си-
стематические ошибки возникают из-за искривления тра-
екторий радиоволн при распространении в среде с пе-
Рис. 7.1. Зависимость система-
тической ошибки измерения
дальности A(D) от высоты це-
ли Н при распространении ра-
диоволн в тропосфере с отно-
сительной влажностью 100%
(-----------) И 0% (--------).
ременным коэффициентом преломления. Случайные
ошибки возникают при наличии на пути распространения
случайных локальных неоднородностей.
На рис. 7.1 приведены зависимости систематической
ошибки измерения дальности Д(/)) от высоты Н при
Рис. 7.2. Зависимость систематической ошибки измерения дальности
A(D) от высоты цели Н при распространении радиоволн в ионосфере;
/ — частота РЛС, /о*=>7 МГц — плазменная частота.
174
распространении в тропосфере, а на рис. 7.2 — при рас-
пространении в ионосфере для различных углов места
цели фум. На рис. 7.3 и 7.4 приведены аналогичные за-
висимости для ошибок измерения угла места цели
А (фум). На рис. 7.5 и 7.6 приведены зависимости систе-
матических ошибок измерения частоты Допплера A(Ffl)
от значения несущей частоты f для высоты 30 и 300 км
при радиальной скорости цели 6 км/с.
Рис 7.3. Зависимость система-
тической ошибки Д(фум) изме-
рения угла места от высоты це-
ли Н при распространении ра-
диоволн в тропосфере с относи-
тельной влажностью 100%
Рис. 7.4. Зависимость система-
тической ошибки Л (фум) изме-
рения угла места от высоты це-
ли Н при распространении ра-
диоволн в ионосфере днем
(-----) и0%(----
(--------) и ночью (------).
Среднеквадратическое значение случайной ошибки
в измерении дальности может быть вычислено по фор-
муле:
о(О)мспр= 1,3 /ЙА, <7-14)
где а2 — дисперсия показателя преломления в неодно-
родности; d — общая длина пути распространения, do —
длина пути распространения в случайной неоднородно-
сти.
Аналогичная формула для среднеквадратического
значения ошибки измерения угла места имеет вид
° (<Рум)распР=== 1 >9 (7.15)
13. Случайные ошибки, возникающие при измерении
в самой РЛС, в большинстве случаев могут быть сведены
175
к ошибкам выходного устройства. При использовании
индикаторных выходных устройств величина ошибок за-
висит от масштаба шкалы, ее вида и метода отсчета.
При использовании механической шкалы среднеквад-
ратическая ошибка отсчета приближенно может быть
оценена по формуле:
<з(а)И1д ~ 0,15Д/Л4а,
(7.16)
где Д/— расстояние между соседними делениями шка-
лы; Л4а — масштаб шкалы по координате а (дальность,
угол, скорость);
Рис. 7.5. Зависимость система-
тической ошибки Д(Ад) измере-
ния допплеровской частоты от
несущей частоты / для цели,
летящей с радиальной скоро-
стью 6 км/с на высоте 30 км,
при относительной влажности
100% (-------) и 0% (------).
при использовании электронной шкалы
о(а)индМ0,05...0,1)Д/Ма; (7 17)
при использовании двухшкального метода отсйета —
, по грубой и точной (растянутой шкале)
а (а)ннд = ]/о2 (а)гр -ф- о2 (а)ТоЧн
(7.18)
где о (а) гр — ошибка отсчета
по грубой шкале, вы-
Рис. 7.6. Зависимость система-
тической ошибки &(Рд) изме-
рения допплеровской частоты
от несущей частоты f для цели,
летящей с радиальной скоро-
стью 6 км/с, при распростране-
нии радиоволн в ионосфере
днем (------> высота ионизи-
рованных слоев 300 км) и
ночью (-----, высота ионизи-
рованных слоев 250 км).
зываемая нестабильностью задержки; сг(а)Точн—ошибка
отсчета по точной шкале, принимаемая равной ошибке
интерполяции и определяемая по формуле (7.17).
176
При использовании Электронного визира, совмещае-
мого с меткой цели
о (а)инд — |/ о2 (а) нет-ф- °2 (а)совм —р °2 (а)ИНТ, (7.19)
где а (а) нет — ошибка, вызываемая нестабильностью ра-
боты схемы электронного визира (~0,1°/о от времени
задержки); сг(а)Совм — ошибка совмещения визира с от-
меткой цели (0,3 ... 0,5 от цены диаметра пятна на
экране); о(а)Инт — ошибка интерполяции при отсчете по
шкале устройства установки визира (0,05 ... 0,1 от цены
деления шкалы).
При использовании дискретного выходного устройст-
ва, сопрягающего РЛС с ЦВМ, среднеквадратическая
ошибка отсчета определяется по формуле
° (а)ву -- °2 (а)дискр -Ц О2 (<х)нст, (7.20)
где
с (а)дискр—Даэ/2 j/3 (7.21)
— ошибка из-за дискретности отсчета; Даэ — цена интер-
вала эталонных импульсов в электронном счетчике;
сг(а)нст—ошибка из-за нестабильности частоты следо-
вания эталонных импульсов, причем в случае стабилиза-
ции частоты кварцем
о (а) нет « (10-4 ... 10-5) а. (7.22)
Задачи
7.1. Указать вид зондирующего сигнала, обеспечивающий наи-
лучшую потенциальную точность измерений: а) только дальности;
б) только радиальной скорости; в) дальности и радиальной ско-
рости,
7.2. Точно известный сигнал в виде одиночного радиоимпульса
гауссовой формы длительностью 3 мкс и с несущей частотой
3000 МГц обнаруживается с вероятностью правильного обнаружения
Г’по=0,9 и вероятностью ложной тревоги РЛт = Ю-5. Найти по-
тенциальные среднеквадратические ’ошибки измерения дальности и
радиальной скорости.
7.3. Какую длительность сигнала в предыдущей задаче надо
выбрать, чтобы получить среднеквадратическую ошибку в измере-
нии скорости, равную 200 м/с? Какова при этом ошибка в изме-
рении дальности?
177
7.4. Какой вид сигнала следует применить, чтобы обеспечить
точность одновременного измерения дальности и скорости 50 м и
200 м/с соответственно? РЛС работает на длине волны X—10 см,
с частотой посылок Ри=4000 Гц и имеет интервал однозначного
измерения дальности 37,5 км.
7.5. Длительность импульсов, выбранная с энергетической точки
зрения, должна быть не менее 100 мкс, а потенциальная средне-
квадратическая ошибка измерения дальности не должно быть более
10 м при <?о = 34. Какое техническое решение следует применить
в этом случае?
7.6. Обнаруживается точно известный сигнал с Рпо=0,95 и
Рлт = 10~3. Как следует выбрать ширину 0о,5 луча антенны, чтобы
при пеленгации по максимуму иметь потенциальную среднеквадра-
тическую ошибку измерения угла не более 3х?
7.7. Среднеквадратическая ошибка измерения азимута каждой
из двух целей в отдельности равна 1°. Какова среднеквадратиче-
ская ошибка о (фаз) измерения угла между этими целями? Каково
ее квазимаксимальное значение при вероятности 0,95?
7.8. Определить систематическую ошибку измерения дальности
из-за искривления траектории радиоволн, если цель наблюдается
на расстоянии 300 км и высоте 20 км. Влажность воздуха 98%.
7.9. Для условий предыдущей задачи найти систематическую
ошибку в определении угла места цели.
7.10. Определить среднеквадратическую ошибку измерения даль-
ности, если на пути распространения длиной 300 км находится об-
ласть неоднородности протяженностью 3 км, а дисперсия коэффи-
циента преломления а2=1О-10.
7.11. Определить среднеквадратическую ошибку измерения угла
места для условий предыдущей задачи.
7.12. Оценить среднеквадратическую ошибку отсчета дальности
по индикатору с механической шкалой, имеющей предельное значе-
ние 400 км и интервал между делениями 12 мм. Используется труб-
ка с диаметром экрана 300 мм, коэффициент использования экрана
*э = 0,8.
7.13. Оценить результирующую ошибку измерения дальности
в задаче 7.12, если в РЛС используются импульсы гауссовой формы
длительностью 3 мкс и сигнал обнаруживается при <70=34. Опреде-
лить коэффициент ухудшения потенциальной точности.
7.14. Используя условия и данные задач 7.12 и 7.13, изменим
с целью повышения точности измерений метод отсчета — применим
двухшкальный отсчет со ступенчатой задержкой развертки с Ршк =
= 100 км. Отсчет по этой шкале ведется по электронным меткам
с интервалом 10 мм. Определить результирующую ошибку измере-
ния дальности и коэффициент ухудшения точности.
178
7.15. Как изменится ошибка измерения дальности, определен-
ная в предыдущей задаче, если отсчет по шкале £>Шк = Ю0 км про-
изводить не по электронной шкале, а совмещением измерительного
импульса (электронного визира) с отметкой цели с последующим
отсчетом по шкале потенциометра, имеющей цену деления 100 м?
Принять качество фокусировки (см. (8.5)) <2ф=300 и коэффициент
использования экрана £э=0,8.
7.16. РЛС обнаруживает цель на расстоянии 300 км. Длитель-
ность зондирующих гауссовых импульсов ти = 3 мкс, <?о = 34. Вы-
ходным устройством является преселектор с преобразователем
дальности в двоичный код. Частота следования эталонных импуль-
сов триггерного счетчика—5 МГц. Определить среднеквадратическую
ошибку измерения дальности и коэффициент ухудшения точности.
7.17. Определить частоту следования эталонных импульсов
в преобразователе дальности, обеспечивающую общую среднеквадра-
тическую ошибку измерения дальности о(Д)=15 м, если в РЛС
применяются импульсы гауссовой формы длительностью ти = 0,2 мкс
и цель обнаруживается на расстоянии £>=100 км при ^0 = 34.
Глава 8
ИНДИКАТОРНЫЕ ВЫХОДНЫЕ УСТРОЙСТВА
Основные справочные данные
1. Выходное устройство служит для преобразования
электрических сигналов, поступающих с выхода прием-
ника и несущих информацию о целях, в сигналы, вид
которых определяется характером получателя информа-
ции.
Если получателем является человек-оператор, элек-
трические выходные сигналы должны быть преобразова-
ны в световые или акустические, ибо только зрение и
слух могут быть использованы человеком при количест-
венной оценке информации. Выходное устройство, осу-
ществляющее такое преобразование сигналов, называет-
ся индикаторным устройством (индикатором).
По своему назначению индикаторы можно разделить
на два вида — индикаторы обнаружения и измеритель-
ные индикаторы. ч
179
2. Индикаторы обнаружения предназначены для
фиксации наличия цели в зоне обзора РЛС без указа-
ния точных координат. В некоторых случаях такие инди-
каторы могут указывать характер изменения расстояния
до цели (увеличение, уменьшение). Они могут выпол-
няться визуальными или акустическими. При визуальной
индикации указание цели осуществляется светосигналь-
ной лампочкой или электронно-оптическим указателем.
В последнем случае изменение ширины темного сектора
позволяет судить о характере изменения дальности.
В акустических индикаторах обнаружения указание
цели осуществляется звуковыми сигналами, прослуши-
ваемыми в телефоны. Указание характера изменения
дальности может осуществляться в этом случае, напри-
мер, изменением частоты звуковых колебаний (тона зву-
ка). Чаще всего индикаторы обнаружения выполняются
комбинированными с использованием как светосигналь-
ных, так и акустических указателей.
Индикаторы обнаружения применяются как вспомо-
гательные в некоторых типах РЛС (например, в радио-
дальномерах) наряду с измерительными выходными
устройствами, а также как самостоятельные индикаторы
в РЛС предупреждения пассивного типа и станциях ра-
диоразведки.
3. Измерительные индикаторы служат для точного из-
мерения координат целей. По количеству одновременно
измеряемых координат измерительные индикаторы мож-
но разделить на однокоординатные, двухкоординатные и
трехкоординатные.
4. Однокоординатные индикаторы бывают либо стре-
лочными, либо электронно-лучевыми. Стрелочные инди-
каторы в принципе позволяют проводить одновременное
измерение одной координаты только одной цели.
Они находят ограниченное применение в РЛС, осущест-
вляющих автоматическое сопровождение одной цели,
в качестве вспомогательных выходных устройств, служа-
щих для контроля работы и калибровки аппаратуры.
Электронно-лучевые однокоординатные индикаторы
чаще всего используются как индикаторы дальности.
В них применяется амплитудная отметка, при которой
сигнал с выхода приемника подается на отклоняющие
пластины электронно-лучевой трубки с электростатиче-
ским управлением. Амплитудная отметка позволяет су-
дить о форме сигнала, отраженного от цели, его интен-
180
сивности, характере флуктуаций и обеспечивает хорошее
накопление энергии сигналов оператором. Все это дает
возможность опытному оператору приближенно опреде-
лять вид цели, хорошо разрешать цели, вести наблюде-
ние при относительно высоком уровне шумов. Выходные
сигналы приемника имеют малую длительность и тре-
буют для неискаженной передачи широкой полосы про-
пускания индикатора. Такому требованию в полной мере
отвечает отклоняющая система электростатической труб-
ки и в меньшей степени подходит магнитная отклоняю-
щая катушка, имеющая большие индуктивность и пара-
зитную емкость. Однако трубки с электростатическим
управлением имеют худшую фокусировку, чем магнит-
ные, что снижает разрешающую способность индикатора
и в некоторых случаях точность измерения.
5. Двухкоординатные индикаторы наглядно отобража-
ют положение цели на плоскости. В подавляющем боль-
шинстве случаев эти индикаторы являются электронно-
лучевыми. В них применяется яркостная отметка, при ,
которой выходные сигналы приемника подаются на элек-
трод трубки, управляющий яркостью пятна на экране.
Экран обладает послесвечением, позволяющим сохра-
нить изображение на период обзора. Яркостная отметка
не обладает в равной мере достоинствами амплитудной
отметки, но она позволяет получить панорамное изобра-
жение воздушной или наземной обстановки и, кроме то-
го, допускает применение магнитных трубок, имеющих
лучшую фокусировку.
На плоском экране возможно осуществить отметку
как в прямоугольной, так и в полярной системах коор-
динат. Полярная система применяется только в одном
типе индикаторов — индикаторе кругового обзора
(ИКО), указывающем дальность и азимут в весьма на-
глядной форме. Однако такой тип индикатора имеет пе-
ременную разрешающую способность по азимуту, ухуд-
шающуюся к центру, поэтому в необходимых случаях
индикатор кругового обзора дополняется вторым инди-
катором «дальность — азимут» в прямоугольных коорди-
натах, на котором можно набдюдать в крупном масшта-
бе любой по желанию оператора сектор общей площади,
представленной на ИКО. Благодаря более крупному
масштабу реализуется большая точность и разрешающая
способность, а недостаток наглядности компенсируется
применением ИКО.
181
Для полного отображения пространственного распо-
ложения целей необходимо иметь минимум два двухко-
ординатных индикатора. Одна из определяемых коорди-
нат индицируется на каждом из индикаторов и служит
для сопоставления получаемых изображений. Если коор-
динатой, по которой производится сопоставление, явля-
ется дальность, то могут быть использованы индикато-
ры «дальность — азимут» (ДАЗ) и «дальность — угол
места (высота)» (ДУМ). При необходимости измерения
радиальной скорости добавляется еще индикатор «даль-
ность— радиальная скорость» (Эцр). Если связующей
координатой является азимут, то такой системой инди-
каторов могут быть индикаторы «дальность — азимут»,
«азимут — угол места» (АЗУМ), «азимут — радиальная
скорость» (АЗ ур).
6. Трехкоординатные индикаторы могут быть так на-
званы лишь условно, так как третья координата на пло-
ском экране не может быть отображена в принятой си-
стеме координат. Для воспроизведения третьей коорди-
наты используют различные искусственные приемы, до-
пускающие лишь приближенную ее оценку.
Трехкоординатные индикаторы выполняются на элек-
тронно-лучевых трубках с послесвечением и яркостной
отметкой. Они не дают наглядного, удобного отображе-
ния обстановки в трех измерениях и не обеспечивают
точного указания третьей координаты. Поэтому их при-
менение может быть оправдано только в тех случаях,
когда оператор одновременно выполняет другие функ-
ции (например, летчика) и не может вести наблюдение
по нескольким индикаторам или нет необходимости
в точном измерении третьей координаты.
7. Индикатор дальности с линейной шкалой ДЛ име-
ет амплитудную отметку и позволяет непосредственно
определить лишь одну координату — дальность.
Функциональная схема индикатора ДЛ приведена на
рис. 8.1, а эпюры, поясняющие работу ее элементов — на
рис. 8.2.
Запускающий импульс от синхронизатора (рис. 8.2,а)
подается на вход расширителя, в качестве которого ис-
пользуется чаще всего мультивибратор, работающий
в ждущем режиме. Расширитель вырабатывает два им-
пульса противоположной полярности и одинаковой дли-
тельности
7р—21?1пк/ с,
(8-1)
182
где Ршк — предельйбе значение шкалы дальности ДЛЯ
данного масштаба; с — скорость света.
Импульс отрицательной полярности (рис. 8.2,в) за-
пускает генератор пилообразного напряжения (генератор
развертки). В качестве генераторов развертки в радио-
локационных индикаторах используются либо схема,,
основанная на заряде конденсатора с очень большой
постоянной времени с последующим усилением почти
линейного напряжения малой амплитуды в усилителе,
либо схемы с линеаризацией напряжения на зарядной
емкости за счет применения обратной связи.
Рис. 8.1. Функциональная схема индикатора дальности с линейной
шкалой (ДЛ).
Генератор развертки вырабатывает пилообразный им-
пульс (рис. 8.2,6) той же длительности Тр, что и им-
пульс расширителя. После усиления напряжения раз-
вертки в усилителе (рис. 8.2,е) оно подается на одну из
пластин горизонтального отклонения трубки и на вход
фазоинвертора. С выхода фазоинвертора напряжение
развертки, имеющее обратную полярность (рис. 8.2,дас),
подается на вторую пластину горизонтального отклоне-
ния электронно-лучевой трубки. Применение фазоинвер-
тора обеспечивает симметричное питание отклоняющих
пластин, устраняющее искажения изображения и нерав-
номерность фокусировки линии равертки по ее длине.
Под воздействием напряжения развертки и сигналов
с выхода приемника (рис. 8.2,6) на экране образуется
электронная амплитудная отметка, показанная на
рис. 8.2,и, позволяющая при наличии градуированной
шкалы отсчитать дальность до цели.
183
Шкала Дальности может быть либо механической
(нанесена на защитном стекле трубки), либо электрон-
ной. Рис. 8.1 соответствует первому случаю. Для перио-
дической проверки такой шкалы необходим калибратор.
Калибратор выполняется часто в виде колебательного
контура ударного возбуждения с малым затуханием. Пе-
риод колебаний контура соответствует определенному,
Рис. 8.2. Эпюры напряжений, иллюстрирующие работу индикато-
ра ДЛ;
а — запускающий импульс; б — сигнал с выхода приемника; в — напряжение
на выходе расширителя импульсов; г — импульс засвета; д — напряжение ге-
нератора развертки; е — напряжение на выходе усилителя; ж — напряженке
на выходе фазоинвертора; з — форма напряжений при крупном (/) и мелком
(2) масштабах; и — изображение зондирующего и отраженного импульсов
на экране ЭЛТ.
184
удобному для отсчета числу километров расстояния до
цели. Контур возбуждается импульсом расширителя,
используемым для запуса развертки. Для калибровки
шкалы затухающие колебания контура в положении пе-
реключателя «калибровка» подаются на пластины вер-
тикального отклонения трубки и производится регули-
ровка длительности и амплитуды развертки в соответст-
вии с нанесенной шкалой. Более точными являются элек-
тронные шкалы и электронные отсчетные устройства
(визиры).
На время нерабочего хода развертки трубка запи-
рается постоянным отрицательным смещением. Этим
обеспечивается устранение отметок шумов и ложных от-
меток целей, сигналы которых приходят во время об-
ратного хода. Во время рабочего хода трубка отпирает-
ся («засвечивается») положительным импульсом расши-
рителя (рис. 8.2,а).
На рис. 8.2 показаны эпюры для двух масштабов
(сплошные линии соответствуют мелкому масштабу,
пунктирные — крупному).
8. Индикатор ДЛ характеризуется масштабом дально-
сти и ценой пятна в километрах.
Масштаб дальности определяется как отношение пре-
дельного значения шкалы дальности к длине шкалы
= /Лпк/Дшк (8.2)
ИЛИ
М d=D mv.1 (8.3)
где &э~0,8 — коэффициент использования экрана, da—
диаметр экрана.
Масштаб дальности наряду с другими данными (вид
шкалы и др.) характеризует точность отсчета дальности
по данному индикатору и его разрешающую способ-
ность.
Цена пятна в километрах характеризует разрешаю-
щую способность индикатора. От цены пятна зависит
также точность отсчета дальности. Цена пятна в кило-
метрах du км определяется из следующих соотношений:
du KM==Mpdn=/)iilKdn:/&3d3=.Z)inK/&3Q(f)> (8.4)
где dn — диаметр пятна; — качество фокусировки
трубки:
Q* = dd/du- (8.5)
185
Для обычно применяемых в индикаторах ДЛ трубок
с электростатическим управлением фф=150 ... 250.
Индикатор ДЛ обладает по сравнению с другими
индикаторами рядом хороших качеств, обусловленных
применением амплитудной отметки. Недостатками инди-
каторов этого типа являются невозможность одновремен-
ного наблюдения на экране за всеми целями в секторе
обзора РЛС и невозможность непосредственного отсче-
та угловых координат.
Рис. 8.3. Функциональная схема индикатора кругового обзора с вра-
щающейся отклоняющей катушкой.
Индикаторы ДЛ применяются в сочетании с индика-
торами других типов в РЛС обнаружения и наведения.
9. Индикатор кругового обзора (ИКО) имеет радиаль-
но-круговую развертку, которую можно получить двумя
способами: 1) питая отклоняющую катушку пилообраз-
ным током постоянной амплитуды и полярности и вра-
щая механически катушку на горловине трубки син7
хронно с антенной; 2) питая неподвижную отклоняющую
систему, состоящую из двух катушек, расположенных
взаимно перпендикулярно, токами пилообразной формы,
модулированными по амплитуде напряжением с часто-
той вращения антенны со сдвигом по фазе л/2.
10. В индикаторе первого типа используется магнит-
ная трубка с вращающейся синфазно с антенной откло-
няющей катушкой, питающейся пилообразным током от
схемы развертки по дальности.
Функциональная схема индикатора приведена на
рис. 8.3, а эпюры, поясняющие работу ее элементов — на
рис. 8.4.
186
Запускающий Импульс может подаваться на вход
расширителя либо через схему задержки, либо минуя
ее. Для задержки импульса используется, как правило,
фантастронная схема, обладающая достаточной стабиль-
ностью работы. (На рис. 8.4 запускающий импульс по-
Рис. 8.4. Эпюры напряжений и токов, иллюстрирующие работу инди-
катора кругового обзора;
а — запускающий импульс; б — сигнал с выхода приемника; в — импульсы на
выходе расширителя, запускающие развертку; г — импульс засвета; д — напря-
жение генератора развертки; е — напряжение развертки на выходе усилителя
мощности; ж — эпюра тока в отклоняющей системе; з — импульсы на выходе
ограничителя развертки; сплошные линии — мелкий масштаб, штриховые —
крупный.
дается на расширитель без задержки в момент /о, соот-
ветствующий моменту излучения зондирующего импульса.
Схема развертки дальности отличается от описанной
в п. 7 тем, что напряжение развертки (рис. 8.4,д) имеет
187
пьедестал и окОнечйЫм каскадом является усилитель
мощности с нагрузкой в виде отклоняющей катушки.
Потенциал сетки усилителя мощности в промежут-
ках между развертками фиксируется специальной схе-
мой. Поэтому начальный ток усилителя мощности по-
стоянен и развертка начинается всегда из одной точки
экрана.
чм?
ФС2
Рис. 8.5. Функциональная схема индикатора кругового обзора с не-
подвижной отклоняющей системой:
СЗ — схема задержки; РИ — расширитель импульсов; OP — ограничитель раз-
вертки; ГР — генератор развертки; УН—усилитель напряжения; УМ —усили-
тель мощности; СТ — сельсин-траисформатор; ФС — фиксирующая схема.
Если бы отклоняющая катушка была неподвижна, то
пятно на экране прочертило бы неподвижный радиус.
Если же отклоняющую катушку заставить вращаться
синхронно с антенной РЛС, то светящийся радиус на
экране будет вращаться также синхронно с антенной.
Согласовав направление излучения антенны и положе-
ние катушки в начальный момент и зафиксировав их
относительное положение, можно по направлению светя-
щегося радиуса на экране определять положение антен-
ны в любой момент времени.
Синхронная связь вращающегося вала антенной си-
стемы и отклоняющей катушки при помощи сельсинной
передачи (рис. 8.3) обеспечивает указание на экране
188
направления максимума излучения антенны в Каждый
момент времени. Сигналы с выхода приемника подаются
на управляющий электрод трубки и засвечивают экран
в момент своего появления. Зондирующий импульс, со-
ответствующий по времени началу развертки (моменту
времени /0), создает яркую точку в центре экрана. Им-
пульс цели, приходящий в момент времени tD, создает
отметку на удалении от центра, пропорциональном даль-
ности до цели, и на том радиусе, который соответствует
положению антенны при облучении ею данной цели. Для
отсчета расстояний на катод подаются калибрационные
импульсы отрицательной полярности, которые синхрони-
зированы с запускающим импульсом. Они вызывают на
экране появление концентрических светящихся окружно-
стей, расстояние между которыми соответствует задан-
ному числу километров (обычно 2; 10; 20 км). Азимут
цели определяют по направлению радиуса, проходящего
через отметку цели. Для этого по окружности экрана
располагают лимб, разделенный на 360°, а с центром
экрана совмещают центр вращения указательной линей-
ки— визира. Совмещая визир с отметкой цели, считы-
вают на лимбе указываемый визиром азимут- Возможно
также применение электронных меток азимута. В инди-
каторах этого типа применяются трубки, обладающие
длительным послесвечением. Обычно послесвечение вы-
бирают таким, чтобы изображение цели не исчезало
с экрана до следующего облучения ее антенной. Таким
образом, при вращении антенны на экране наблюдаются
отметки всех целей, находящихся в зоне видимости РЛС.
Переход с одного масштаба дальности на другой и
плавная регулировка масштаба осуществляются измене-
ние постоянной времени в генераторе развертки. Дли-
тельность и амплитуда развертки при этом автоматиче-
ски устанавливается при помощи ограничителя раз-
вертки.
11. Функциональная схема индикатора второго типа
приведена на рис. 8.5. Устройство и принцип работы
схемы задержки (СЗ) расширителя (РИ), генератора
развертки (ГР), усилителя напряжения развертки (УН)
аналогичны устройству и принципу работы тех же схем
в индикаторе кругового обзора с вращающейся откло-
няющей катушкой, описанном в п. 10. Эпюры, поясняю-
щие работу этих узлов, изображены на рис. 8.6.
Нагрузкой усилителя мощности УМ. является ротор-
189
V
Рис. 8.6. Эпюры напряжений и токов,
иллюстрирующие работу индикатора
кругового обзора с неподвижной от- м (
клоняющей системой; 4----^’Т
а — сигнал с выхода приемника; б — за- \ । /
пускающий импульс; в — напряжение на
выходе расширителя импульсов (РИ); г— *’
импульс засвета; д — напряжение генератора развертки (ГР); е — сигнал на
входе усилителя мощности УМ-1; ж — сигнал на входе усилителя мощности
УМ-3; з, и, к, л — токи, протекающие через отклоняющие катушки 1, 2, 3, 4;
м — изображение луча, образующего радиально-круговую развертку на экране
ИКО. Масштаб изображения токов ц ... ц условен (в действительности пе-
риод огибающих в несколько тысяч раз больше периода следования разверток).
190
ная обмотка сельсин-трансформатора СТ, вращающаяся
синфазно с антенной. Пилообразный ток, протекающий
в роторной обмотке, наводит такие же по форме токи
в двух статорных обмотках, расположенных под углом
90°. Средние точки статорных обмоток заземлены, и
каждая половина обмотки подключена к отдельному уси-
лителю мощности. В анодные цепи усилителей включены
отклоняющие катушки. Каждая пара усилителей обеспе-
чивает двухтактное отклонение луча: усилители УМ-1
и УМ-2 — в горизонтальном направлении, усилители
УМ-3 и УМ-4 — в вертикальном направлении. Когда ро-
торная катушка трансформатора отклонена на угол ср
относительно горизонтальной оси (рис. 8.5), амплитуда
пилообразного тока в катушках 1 и 2 пропорциональна
sin ср, а в катушках 3 и 4 — cos ср. При этом луч на экра-
не электронно-лучевой трубки отклоняется по радиусу
под углом ср относительно вертикального диаметра
(рис. 8.6, м}. При вращении антенны cp=Qa^, где
Qa — скорость вращения антенны, и огибающие ампли-
туд токов в отклоняющих катушках 1—2 и 3—4 соответ-
ственно пропорциональны £7М sin ср и t7M cos ср. Эпюры то-
ков, протекающих в отклоняющих катушках, показаны
на рис. 8.6,3, и, к, л (масштаб изображения условен,
так как период огибающих в несколько тысяч раз пре-
восходит период посылок и заполнение является в дей-
ствительности более плотным). Под действием этих то-
ков радиальная линия развертки на экране вращается
синхронно с антенной со скоростью Qa и при правильной
начальной ориентировке отклоняющей системы линия
развертки указывает текущее направление максимума
излучения антенны. Постоянные составляющие откло-
няющих токов путем регулировки и применения фикси-
рующих схем уравниваются, что обеспечивает положе-
ние начала развертки в центре экрана.
Преимуществом индикатора с неподвижной катушкой
по сравнению с предыдущим типом являются меньшие
ошибки определения азимута при реверсировании и
меньшая распределенная емкость отклоняющей системы
из-за отсутствия токоподводящих колец и щеток.
12. И КО характеризуется масштабом дальности, це-
ной пятна в километрах (формулы (8.3), (8.4)), масшта-
бом азимута и ценой пятна в градусах. Следует учесть,
что в ИКО для развертки дальности используется толь-
ко половина диаметра экрана, поэтому коэффициент
191
использования экрана /гэ~0,4. Цена пятна в градусах
характеризует разрешающую способность индикатора
по азимуту.
Масштаб азимута в ИКО является функцией расстоя-
ния отметки цели от центра экрана и определяется по
формуле:
Маз~ 360 /2гСГотм,
где Готм — расстояние отметки цели от центра экрана.
Умножая и деля правую часть на Мокэ<Лэ, получим
(8.6)
где ЦШк — предельное значение шкалы; D — дальность
до цели. Цена пятна в градусах для отметки цели, нахо-
дящейся на расстоянии г0Тм от центра экрана, определя-
ется по формуле
п 3 (<раз)иИд '=z (<^п 1 80° oTuTt) Л4& /МD =
= 180°с?п km/tcD = 180оОШкМ9СфО. (8.7)
Из выражения (8.7) видно, что ИКО имеет перемен-
ную разрешающую способность по азимуту в зависимо-
сти от дальности до цели. Разрешающая способность
по азимуту тем выше, чем дальше цель. Вблизи центра
экрана разрешающая способность очень низка. Повы-
сить ее можно, если запускать развертку раньше им-
пульса ’передатчика. Тогда изображения целей будут
отодвинуты от центра и разрешение по азимуту улуч-
шится.
в ико, так же как и в других двух- и трехкоорди-
натных индикаторах, применяются, как правило, трубки
с магнитным управлением, для которых качество фокуси-
ровки примерно в два раза выше, чем в электростатиче-
ских трубках. Обычно в литературе указываются значе-
ния <2ф = 300 ... 450, однако на практике они значитель-
но меньше.
13. Преимуществами ИКО по сравнению с индикато-
ром ДЛ являются: возможность наблюдения за всей воз-
душной обстановкой в зоне видимости РЛС (в наземных
РЛС обнаружения и наведения), возможность получения
панорамного условного изображения местности (в само-
летных панорамных радиолокационных станциях), воз-
можность одновременного определения двух координат—
дальности и азимута.
Недостатками ИКО являются невозможность сужде-
ния по виду отметки о характере цели (в РЛС обнару-
192
жения и наведения) и плохая разрешающая способность
по азимуту для близких целей. ИКО применяются в РЛС
обнаружения, в РЛС обнаружения и наведения (где они
дополняются индикаторами других типов), в самолет-
ных радиолокационных станциях панорамного типа.
14. Функциональная схема индикатора «дальность —
азимут» в прямоугольных координатах (ДАЗ) показана
на рис. 8.7.
Рис. 8.7. Схема индикатора «дальность — азимут» в прямоугольных
координатах.
В индикаторе применена магнитная трубка с непод-
вижной отклоняющей системой. Развертка осуществля-
ется за счет работы двух основных каналов — схемы
развертки по дальности и схемы развертки по азимуту.
Схема развертки по дальности не отличается от схемы
развертки в ИКО с вращающейся отклоняющей систе-
мой. Чтобы развертка по дальности начиналась не с се-
редины экрана, а с нижнего края его, на тех же гори-
зонтальных стержнях сердечника, на которых располо-
жены катушки дальности, помещена дополнительная
пара катушек, питаемая постоянным током и обеспечи-
вающая нужное начальное смещение пятна. Регулировка
смещения производится потенциометром, включенным
в цепь питания катушек.
Схема развертки по азимуту состоит из генератора
развертки и двух усилителей мощности, питающих две
пары отклоняющих катушек, включенных по двухтакт-
ному способу. Генератор развертки вырабатывает напря-
193
жение, являющееся функцией (линейной или синусои-
дальной) угла поворота антенны по азимуту. Антенна
может совершать как круговой, так и секторный обзор.
При круговом обзоре для развертки по азимуту исполь-
зуется часть напряжения генератора, соответствующая
заданному сектору обзора. В качестве датчика в генера-
торе развертки могут быть использованы переменный
конденсатор, круговой потенциометр или сельсины. Ро-
тор каждого из этих элементов связан с осью вращения
антенны и вращается синхронно с ней.
Переменный конденсатор допускает большие скоро-
сти вращения по сравнению с другими датчиками. Кру-
говой потенциометр наиболее прост и дешев, но имеет
меньший срок службы и вызывает помехи приему сигна-
лов в виде шумов из-за искрения при больших скоро-
стях. Сельсинная передача наиболее долговечна, не вно-
сит помех, но не допускает больших скоростей вращения
из-за ошибок при реверсировании и имеет наибольшую
сложность.
15. Индикатор типа ДАЗ характеризуется масштабом
дальности, масштабом азимута, ценой пятна в киломе-
трах и градусах.
Масштаб дальности определяется по формуле (8.3).
Масштаб азимута равен
Маз= Фаз/ЛШк = Фаз/^э^э> (8-8)
где Фаз — сектор обзора по азимуту в градусах; ЛШк—
длина шкалы азимута.
Цена пятна, выраженная в градусах, равна
б^°п=Мазб?п=Фаз/&эФф- (8-9)
В приведенных формулах следует принять 6э = 0,6 .. .0,7.
16. Преимуществом индикатора ДАЗ по сравнению
с ИКО является большая разрешающая способность по
азимуту, достигаемая за счет уменьшения сектора обзо-
ра. В ДАЗ отсутствует уменьшение разрешающей спо-
собности на малых расстояниях. Для получения данных
о всей воздушной обстановке с хорошей разрешающей
способностью в РЛС обнаружения и наведения и в ра-
диолокационных бомбоприцелах ДАЗ используется сов-
местно с ИКО.
В самолетных станциях управления стрелковым ору-
жием, где сектор обзора обычно ограничен, ДАЗ исполь-
зуется в качестве основного индикатора.
194
17. Индикатор азимута и угла места (АЗУМ) позво-
ляет измерить две угловые координаты цели. Дальность
при этом измеряется на другом индикаторе или указы-
вается на этом же индикаторе весьма приблизительно.
Индикаторы АЗУМ применяются в самолетных РЛС
поиска и прицеливания. В индикаторах этого типа на-
ходят применение как магнитные, так и электростатиче-
ские трубки. Электронный пучок в трубке индикатора
АЗУМ повторяет движение луча антенны в пространст-
ве. Такая развертка луча осуществляется двумя генера-
торами развертки — по азимуту и углу места. Эти гене-
раторы подобны генераторам развертки по азимуту в
индикаторе ДАЗ. Роторы генераторов связаны с соответ-
ствующими осями вращения антенны. Каждый из гене-
раторов развертки вырабатывает напряжение, линейно
зависящее от угла поворота антенны в данной плоско-
сти. Под действием этих напряжений (или токов) луч
в электронно-лучевой трубке движется в строгом соот-
ветствии с движением антенны. Трубка обычно заперта.
Отметка цели получается в момент облучения цели
антенной за счет отпирания трубки сигналами, подавае-
мыми с выхода приемника на управляющий электрод.
Таким образом, отметка указывает угловые координаты
цели относительно оси сектора обзора. Схему такого
индикатора можно представить себе, если в схеме инди-
катора ДАЗ (рис. 8.7) развертку по дальности заменить
разверткой по углу места.
Индикатор АЗУМ не имеет разрешающей способности
по дальности, т. е. цели, находящейся на разных дально-
стях, но на одном направлении, сливаются на экране
в одну отметку. Поэтому для разрешения по дальности
применяют селектированное отпирание приемника толь-
ко на время приема отраженного импульса цели, нахо-
дящейся на определенной дальности. Если выход прием-
ника все время подсоединен к управляющему электроду
трубки и не применяется селектирование по дальности,
то все шумы возбуждают экран в том месте, где нахо-
дится в данный момент пятно, и обусловливают низкую
помехоустойчивость.
Селектирование АЗУМ nJ дальности снижает инте-
гральный эффект воздействия шумов на экран и глаз.
Помехоустойчивость АЗУМ при этом повышается и при-
ближается к помехоустойчивости индикаторов с разверт-
кой по дальности. Но при этом теряется возможность
195
одновременного наблюдения за всеми целями, находя-
щимися в секторе обзора.
Показателями АЗУМ являются: масштаб азимута,
масштаб угла места, цена пятна в градусах по азимуту,
цена пятна в градусах по углу места. Эти показатели
могут быть определены по формулам (8.8), (8.9) для
азимута непосредственно, а для угла места — при соот-
ветствующей подстановке значений Фум и Мум вместо
Фаз И -Маз-
Рис. 8.8. Отметка «крылья»
с приблизительным указанием
третьей координаты — дально-
сти.
Рис. 8 9 Отметка «верх — низ»
с приблизительным указанием
положения цели по высоте.
18. Для приблизительного указания третьей коорди-
наты— дальности в индикаторах АЗУМ РЛС поиска и
прицеливания часто используют отметку в виде так на-
зываемых «крыльев» (рис. 8.8), когда к обычной для
АЗУМ отметке в виде точки добавляются слева и спра-
ва горизонтальные черточки. Чем ближе цель, тем длин-
нее черточки. Таким образом, размах «крыльев» прибли-
зительно обратно пропорционален дальности. На гори-
зонтальном диаметре экрана таких индикаторов нано-
сится грубая шкала дальности, с которой сопоставляется
размах крыльев для отсчета расстояния.
Другой тип отметки трех координат показан на
рис. 8.9. Основными координатами здесь являются даль-
ность и азимут (горизонтальная черточка), а третья ко-
ордината— угол места — указывается лишь качественно
вертикальной черточкой. Если вертикальная черточка на-
ходится сверху, это означает, что цель находится выше
плоскости крыльев самолета, если снизу, — то ниже
плоскости крыльев, а появление черточек и сверху и сни-
196
зу указывает на то, что цель находится в плоскости
крыльев. Рис. 8.10 поясняет принцип получения такой
отметки. Сигнал с выхода приемника поступает на управ-
ляющий электрод трубки через коммутатор Ki без за-
держки, с некоторой задержкой с первого отвода линии
задержки без коммутации и с максимальной задержкой
со второго отвода через коммутатор Коммутатор Ki
открыт только во время обзора антенной нижней полу-
Рис. 8.10 Схема получения отметки «верх — низ».
сферы. Сигнал, прошедший через него, образует нижнюю
отметку. Коммутатор К2 открыт только при обзоре верх-
ней полусферы; сигнал, прошедший через него, образует
верхнюю отметку. Сигнал, поступающий с первого от-
вода линии, проходит на управляющий электрод всегда
и образует среднюю отметку. При нахождении цели
в плоскости крыльев сигналы проходят по всем трем ли-
ниям, и образуется отметка в виде креста. Схемы фор-
мирования служат для сужения верхней и нижней от-
меток по горизонтали и удлинения их по вертикали.
19. Индикатор в совокупности с оператором является
частью системы обработки сигналов и выполняет функ-
ции порогового устройства и интегратора. В импульсных
некогерентных РЛС индикатор в совокупности с опера-
тором представляет накопитель энергии пачки импуль-
сов и шума. При отклонении условий накопления от
оптимальных возникают потери, вызывающие уменьше-
ние выходного отношения энергий сигнала и шума,
а следовательно, уменьшение дальности действия РЛС
при заданных значениях вероятности правильного обна-
ружения и ложной тревоги. Для сохранения прежнего
значения дальности действия в этих случаях следует
увеличить энергию сигнала на входе приемника. Коли-
197
чественно это увеличение определяется сомножителем
аВу, учитывающем потери в выходном устройстве в вы-
ражении для коэффициента различимости [см. (4.29) и
(4.38)]. Значение этого коэффициента зависит от мно-
гих факторов: от степени приближения интегрирования
к идеальному, от скорости развертки, от расположения
развертки и вида отметки, от внешней освещенности
экрана, от степени подготовки оператора и его физиче-
ского состояния и некоторых других причин. Таким об-
разом,
Пву — Пинд— ЦциПг; Clc Cion , (6.10)
.где аНи — коэффициент, характеризующий неидеальность
интегрирования; av — коэффициент, зависящий от ско-
рости развертки; ас — коэффициент, учитывающий усло-
вия съема информации (положение развертки, освещен-
ность и т. д.); аОц — коэффициент, характеризующий под-
готовку и физическое состояние оператора.
Определение значения аИНд производится с некоторы-
ми отличиями в зависимости от того, используется ам-
плитудная или яркостная отметка, так как физические
процессы накопления в этих случаях различны.
20. При амплитудной отметке экран трубки имеет ма-
лое послесвечение (сотые доли секунды) и накопление
производит глаз оператора, время запоминания которо-
рого составляет около 0,1 с. Если время воздействия сиг-
нала на глаз превышает время запоминания, то накоп-
ление осуществляет мозг оператора, однако такое накоп-
ление уже не является эквивалентным простому сумми-
рованию. Оно более эффективно, но для его осуществле-
ния необходимо специальное представление информации
на экране индикатора [99, 106].
Время облучения у большинства РЛС колеблется от
нескольких сотых до десятых долей секунды. При этих
условиях индикатор с амплитудной отметкой в совокуп-
ности с оператором представляет практически идеальный
накопитель, т. е. такой, который суммирует дискретные
сигналы с равными весами и не имеет потерь в интер-
валах между импульсами. Благодаря регулярности сле-
дования сигналы суммируются синхронно, занимая на
развертке практически одно и то же место, а шумы,
имеющие хаотический характер, суммируются случайным
образом. Из всего сказанного вытекает, что в реальных
условиях индикатор с амплитудной отметкой и оператор
198
обеспечивают значение коэффициента ани, близкое к еди-
нице.
Скорость развертки дальности ура3в определяет раз-
мер отметки по линии развертки. Установлено, что глаз
оператора лучше всего видит сигнал на экране, когда
отметка имеет ширину не менее 1 мм, что связано с раз-
решающей способностью человеческого зрения [92].
Рис. 8.11. Зависимость коэффициента потерь от ширины отметки на
экране.
На рис. 8.11 приведен экспериментальный график
зависимости коэффициента а» [20, 92, 99], учитывающе-
го потери за счет скорости развертки, от ширины отмет-
ки на экране А/от = УразвТи- Кривая имеет тупой минимум
при А/оит 1,2 мм.
Можно дать следующее объяснение вида кривой на
рис. 8.11. Если полезный сигнал занимает участок раз-
вертки, меньший 1 мм, то на глаз оператора с наблю-
даемого участка развертки дополнительно воздействуют
шумы, причем в тем большей степени, чем меньше дли-
на сигнала по сравнению с 1 мм. Это дополнительное
интегрирование шумов и вносит потери. Если же длина
отметки сигнала А/от близка к 1 мм, то на анализируе-
мом участке может находиться только лишь один выброс
шума, налагающийся на сигнал, и потери отсутствуют.
Увеличение потерь при А/От>А/Опт объясняется уменьше-
нием яркости изображения на экране при дальнейшем
увеличении скорости развертки.
Скорость развертки связана с масштабом дальности
Мл соотношением
Уразв — -^шк/7'р==^шкс/2ЭШк=0,5с/Л4£). (8 11)
|99
На величину коэффициента ас. учитывающего условия
съема информации с экрана, влияют: степень внешней
освещенности экрана; контраст яркостей отметки и фона
экрана; расстояние наблюдения; положение линии раз-
вертки горизонтальное или вертикальное; качество фо-
кусировки; предварительное (априорное) знание поло-
жения сигнала на развертке и т д.
Большинство из этих факторов не поддаются точно-
му количественному учету.
Повышение яркости внешнего освещения до некото-
рого предела (~0,1 нт) вызывает увеличение контраст-
ной чувствительности глаза [20, 91, 117], что позволяет
в принципе обнаруживать сигналы при меньшем отно-
шении сигнал/шум. Однако при увеличении внешней
освещенности экрана индикатора уменьшается наблю-
даемый контраст яркостей отметки сигнала и фона экра-
на, что ведет к повышению уровня порогового сигнала.
Следовательно, повышение яркости внешнего освещения
целесообразно лишь до тех пор, пока увеличение кон-
трастной чувствительности глаза идет быстрее, чем
уменьшение наблюдаемого контраста. Оптимальный
уровень внешней освещенности проще всего устанавли-
вается экспериментально [91].
Качество фокусировки не влияет на различимость,
если диаметр пятна остается менее 1 мм, что в практи-
ческих условиях всегда выполняется. При вертикальном
положении развертки коэффициент различимости уве-
личивается на 2 дБ. Зависимость коэффициента потерь
ас от числа т возможных положений сигнала (т =
^Ьшк/Д/от) показана на рис. 8.12.
Потери, связанные с оператором, возникают вследст-
вие недостаточной тренировки, утомленности и других
причин психофизиологического характера «среднего»
оператора, которого приходится принимать в расчет, по
сравнению с «идеальным» оператором, не вносящим
ухудшения в оптимальную схему обработки. Эти поте-
ри, учитываемые коэффициентом аоп по опытным дан-
ным могут быть приняты равными 2 ... 3 дБ.
21. При яркостной отметке значения коэффициентов
ас и аоп могут быть определены по тем же данным, что
и для амплитудных индикаторов. Отличие яркостного
индикатора от амплитудного заключается в том, что ин-
тегрирование осуществляется не оператором, а экраном
трубки, обладающим определенными характеристиками
20Q
Нарастания и спадания яркости свечения. На рис. 8.13
приведен типовой экспериментальный график зависимо-
сти нарастания яркости J (в относительных единицах)
от числа h повторных возбуждений. Частота возбужде-
ний— 1 Гц, яркость после первого возбуждения приня-
та за единицу. Вид кривой позволяет заключить, что для
пачки импульсов при ЛГСЗО яркостной индикатор мож-
но считать идеальным накопительным устройством
Рис. 8.12. Зависимость коэффи-
циента потерь от числа возмож-
ных положений сигнала.
Рис 8 13. Зависимость яркости
свечения экрана от числа по-
вторных возбуждений.
Значение коэффициента av вычисляется по методике,
изложенной в гл. 4 (см. (4.36)).
Все вышесказанное о наблюдаемости при амплитуд-
ных и яркостных индикаторах позволяет считать их
в первом приближении и при одинаковых условиях рав-
ноценными. Некоторое преимущество имеют амплитуд-
ные индикаторы благодаря возможности дополнительно-
го анализа формы сигнала, что определяет меньшие по-
тери за счет оператора.
22. Индикатор ухудшает потенциальную разрешаю-
щую способность РЛС из-за конечных размеров рисую-
щего пятна, увеличивающих протяженность сигналов по
разрешаемой координате а на величину
8 (а)инд == (8.12)
где du — диаметр сфокусированного пятна; Мл— масштаб
по параметру а.
Величина 6(а)инД может быть названа разрешающей
способностью индикатора по данному параметру.
201
Разрешающая способность индикатора определяется
качеством фокусировки и масштабом развертки. Укруп-
няя масштаб, можно улучшить разрешающую способ-
ность индикатора. Для повышения разрешающей спо-
собности всегда следует выбирать трубку с магнитной
фокусировкой, если этому не препятствуют ее сравни-
тельные недостатки — больший вес отклоняющих и фо-
кусирующих систем, большая сложность схемы разверт-
ки, трудность применения амплитудной отметки.
Для получения требуемой разрешающей способности
следует наряду с масштабами шкал, обеспечивающими
просмотр всего диапазона параметра, иметь шкалу круп-
ного масштаба для лучшего разрешения сигналов.
23. Индикатор ухудшает потенциальную точность
РЛС, внося дополнительные ошибки в измерения. Вели-
чина этих ошибок определяется в основном масштабом
шкалы и применяемым методом отсчета. В порядке по-
вышения точности распространенные методы отсчета рас-
полагаются следующим образом:
— отсчет по механической шкале;
— отсчет по электронной шкале;
— двухшкальный метод измерения (метод нониуса);
— отсчет путем совмещения отметки цели со специ-
альным измерительным импульсом (электронный визир);
— комбинация двух последних методов.
Механическая шкала для отсчета координат приме-
няется в тех случаях, когда нет необходимости в боль-
шой точности и когда существуют жесткие ограничения
в весе и габаритах РЛС. Примером может служить са-
молетная РЛС перехвата и прицеливания, в которой от-
счет координат по индикатору ведется только в режиме
обзора и лишь с целью выбора маневра и скорости для
вхождения в зону захвата цели, имеющую большие раз-
меры (5 ... 10 км по дальности и 20° ... 30° по угловым
координатам). Основными ошибками при таком методе
отсчета являются: 1) ошибка интерполяции положения
отметки цели между делениями шкалы (включающая и
ошибку на параллакс, возникающий из-за того, что шка-
ла, наносимая на защитном стекле трубки, не находится
в одной плоскости с отметкой цели); 2) ошибка из-за
неточности и ухода калибровки шкалы, проводимой пе-
риодически по специальному калибратору (причинами
этой ошибки могут быть и нестабильность работы ка-
либратора, и изменения питающих напряжений схем
202
развертки и трубки в промежутках между калибров-
ками).
Величина ошибки интерполяции зависит от цены де-
ления шкалы и ее среднеквадратическое значение мо-
жет быть ориентировочно принято:
о(а)интер== 0,15ДШа = 0,15Дам, (8.13)
где Д/— расстояние между делениями шкалы; Л4а —
масштаб шкалы по параметру а (дальности, угловой
координате, скорости), Дам — цена метки в единицах из-
мерения параметра а.
Это соотношение весьма приблизительно и справед-
ливо для Д/=8 ... 12 мм. При меньших значениях Д/
коэффициент в формуле должен быть увеличен до 0,3 ...
... 0,5.
Величина ошибки второго вида может быть оценена
только лишь при анализе конкретной схемы индикатора.
При отсчете по электронной шкале отпадает ошибка
на параллакс, входящая в ошибку интерполяции, и ошиб-
ка калибровки. Изменение питающих напряжений в этом
случае не сказываются на цене деления шкалы, полу-
чаемой обычно с помощью кварцевого генератора и си-
стемы делителей его частоты. Стабильность цены деле-
ния определяется стабильностью частоты кварцевого ге-
нератора и имеет порядок 10~4. Основной ошибкой
в этом случае является ошибка интерполяции. Ее сред-
неквадратическое значение можно ориентировочно оце-
нить формулой:
о(а)йнтеР=(0,05 . . 0,1)Д/Л1а = (0,05...0,1)Дам. (8.14)
В РЛС, имеющих модулятор с ионными разрядными
лампами, у которых момент поджига нестабилен, в ка-
честве генератора калибрационного напряжения приме-
няется каскад с контуром ударного возбуждения. При
такой схеме, если не принято специальных мер, стабиль-
ность электронной шкалы получается более низкой, чем
в предыдущем случае, и при определении общей ошибки
индикатора следует учитывать ошибку из-за нестабиль-
ности цены деления шкалы.
Двухшкальный метод измерения применяется обыч-
но при измерении дальности и заключается в том, что
вначале измерение ведется по ра^пертке с мелким мас-
штабом, охватывающим весь возможный диапазон из-
203
меряемой величины, и при этом положение цели опреде-
ляется лишь ориентировочно. Затем включается разверт-
ка с крупным масштабом, причем начало ее задержива-
ется в соответствии с результатом предыдущего измере-
ния, и так, чтобы отметка интересующей цели оказалась
в удобном для отсчета месте экрана.
Задержка развертки обычно осуществляется ступе-
нями с помощью импульсов, частота которых стабили-
зирована кварцем. Пример такой схемы ступенчатой за-
Запускающш!
импульс
Рис. 8.14. Функциональная схема ступенчатой задержки импульса
запуска развертки (а) и эпюры напряжений, поясняющие ее рабо-
ту (б).
Штриховые линии соответствуют измененной задержке
держки развертки показан на рис. 8.14,а, а на рис. 8.14,6
приведены эпюры напряжений, поясняющие работу этой
схемы. Отсчет ведется в два этапа: считывается даль-
ность, установленная переключателем задержки, по шка-
ле этого переключателя, а затем к полученному значе-
нию прибавляется дальность, отсчитанная по электрон-
ной шкале на экране. Ошибка измерения на первом эта-
пе определяется стабильностью кварцевого генератора
(~ 10-4) и равна
о(П)з«10-4 D3, (8.15)
где D3— дальность задержки. ' 1
204
Ошибка измерения на втором этапе является ошиб-
кой интерполяции и определяется по формуле (8.14).
Вследствие более крупного масштаба эта ошибка зна-
чительно меньше, чем при одношкальном методе отсчета.
Таким образом, результирующая ошибка при использо-
вании двухшкального метода определяется по формуле
° (-О)инд |/"<32 (£))3—J— О2 (D)HHTep*
Метод электронного визира применяется, как прави-
ло, при измерении дальности. В этом случае использует-
ся высокостабильная схема задержки, на вход которой
поступает импульс запуска развертки, а выходной задер-
жанный импульс подается на управляющий электрод
трубки. Задержанный импульс на экране высвечивает
метку, положение которой зависит от управляющего на-
пряжения схемы задержки. Отсчет дальности произво-
дится по шкале потенциометра, регулирующего управ-
ляющее напряжение, в момент совмещения измеритель-
ной метки с отметкой цели. Ошибка измерения в этом
случае в первом приближении складывается из ошибки
за счет нестабильности работы и неточности калибровки
схемы задержки, ошибки совмещения и ошибки интер-
поляции по шкале потенциометра.
Стабильность обычно применяемых схем задержки
составляет примерно 0,1% от значения задержки. Ошиб-
ка совмещения зависит от размеров пятна трубки и
обычно не превосходит (0,3 ... 0,5)dnKM.
Ошибка интерполяции по шкале потенциометра мо-
жет быть оценена по формуле'
сг(£) интер (0,3 ... 0,5) ДП шк> (8.16)
где DmK — цена деления шкалы потенциометра.
Приведенные примеры относились к измерению даль-
ности, но аналогичным образом могут быть определены
ошибки, вносимые индикатором, при измерении угловых
координат и скорости. При анализе ошибок измерения
угловых координат следует учитывать также ошибки
передачи угла поворота на .индикатор. Их величина мо-
жет быть определена при рассмотрении конкретной схе-
мы связи антенны и генератора развертки углов в инди-
каторе. Ошибка может колебаться в широких пределах
от 1 ... 1,5° при использовании обычной одноканальной
сельсинной передачи до нескольких минут при двухка-
205
нальной силовой следящей передаче с грубым и точным
сельсинами-датчиками, сельсинами-трансформаторами и
сервомотором.
Задачи
8.1. Шкала индикатора кругового обзора импульсной РЛС име-
ет предельное значение 300 км, качество фокусировки трубки фф~
«150. Определить: а) требуемую длительность Тразв прямого хода
развертки, б) допустимую частоту ^разв развертки.
8.2. Индикатор кругового обзора имеет электронно-лучевую
трубку с диаметром экрана 300 мм. Определить: а) масштаб даль-
ности MD для предельного значения шкалы 300 км, б) масштабы
азимута 7Иаз при дальности до цели, равной 1) предельной дально-
сти шкалы, 2) ее половине.
8.3. Определить оптимальную (с точки зрения обнаружения
сигнала) скорость развертки для индикатора дальности с линейной
шкалой при длительности излучаемых импульсов 3 мкс.
8.4. Индикатор дальности с линейной шкалой имеет диаметр
экрана 125 мм. Для оптимальной скорости развертки 0,4 • 106 мм/с
определить: а) масштаб дальности Md.
б) предельное значение шкалы РШк.
8.5. Индикатор дальности с линейной шкалой имеет данные:
диаметр экрана 125 мм, предельное значение шкалы 20 км, дли-
тельность импульсов 0,1 мкс. Определить значение коэффициента
потерь ас.
8.6. При условиях предыдущей задачи определить значение
коэффициента потерь ас, считая его зависящим лишь от числа воз-
можных положений сигнала на экране. Принять качество фокуси-
ровки трубки равным 200.
8.7. Используя результаты решения задач 8.5 и 8.6, опреде-
лить значение коэффициента аИНд общих потерь индикатора даль-
ности.
8.8. Индикатор кругового обзора имеет диаметр экрана с?э =
— 300 мм, качество фокусировки <2ф = 150, предельные значения
шкал 400 и 100 км. Сигнал имеет вид пачки из 10 импульсов дли-
тельностью Ти = 3 мкс. Определить значение коэффициента по-
терь а„.
8.9. Для индикатора кругового обзора с данными, приведенными
в задаче 8.8, определить значение коэффициента потерь ас.
8.10. Используя результаты решения задач 8.8 и 8.9, опреде-
лить значение коэффициента аИНд общих потерь индикатора круго-
вого обзора для предельных значений шкал 400 и 100 км:
8.11. Система индикации РЛС должна обеспечить, обнаружение
целей на расстояниях до 300 км с разрешающей способность^
206
по дальности 0,5 км. Для индикации используется электронно-лу-
чевая трубка с диаметром da~300 мм и качеством фокусировки
<2ф = 200; длительность импульсов РЛС ти = 2 мкс. Как следует вы-
брать масштабы и длительности разверток дальности, чтобы удов-
летворить поставленным требованиям? Коэффициент использования
экрана принять равным ka=Q,8.
8.12. Изобразить графически характер изменения разрешающей
способности по азимуту индикатора кругового обзора в зависимо-
сти от расстояния г отметки цели до центра экрана.
8.13. Система индикации РЛС должна обеспечить обнаружение
целей при круговом обзоре с разрешающей способностью по ази-
муту 1°. Для индикации используется электронно-лучевая трубка
с диаметром d3 = 300 мм и качеством фокусировки фф=200. Шири-
на луча антенны по азимуту 0а=О,6. Как выбрать тип индикатора
и масштабы шкал азимута, чтобы удовлетворить поставленным
требованиям?
8.14. Какой должна быть система индикации РЛС, удовлетво-
ряющая одновременно требованиям задач 8.11 и 8.13?
8.15. Найти составляющую ошибки измерения дальности за счет
индикаторного устройства при применении а) механической шкалы,
б) электронной шкалы. Предельное значение шкалы дальности
100 км, число делений шкалы 10.
8.16. Найти составляющую ошибки измерения дальности за
счет индикаторного устройства при использовании: а) ступенчатой
задержки развертки при последующем отсчете по меткам; б) сту-
пенчатой задержки развертки при последующем отсчете с помощью
электронного визира.
Индикатор в обоих случаях имеет предельное значение грубой
шкалы дальности 100 км, точной шкалы—10 км, цена ступени за-
держки— 10 км, качество фокусировки трубки — 250, коэффициент
использования экрана — 0,8. Цель находится на расстоянии 75 км,
цена меток точной шкалы в случае а — 2 км, цена деления шкалы
в случае б — 100 м.
8.17. Индикатор кругового обзора должен обеспечить обнару-
жение целей на расстоянии до 400 км с разрешающей способно-
стью по дальности 0,5 км и среднеквадратической ошибкой изме-
рения дальности 0,5 км. Для индикации используется электронно-
лучевая трубка с диаметром экрана 300 мм и качеством фокусиров-
ки 200, длительность импульсов — 2 мкс, отсчет дальности ведется
по электронной шкале с расстоянием между метками 12 мм. Как
следует выбрать масштабы дальности и предельные значения шкал
дальности, чтобы удовлетворить поставленным требованиям при ус-
ловии, что потенциальная ошибка измерения равна 0,1 км?
207
Глава 9
ВЫХОДНЫЕ УСТРОЙСТВА, СОПРЯЖЕННЫЕ С ЭЛЕКТРОННЫМИ
ЦИФРОВЫМИ ВЫЧИСЛИТЕЛЬНЫМИ МАШИНАМИ
Основные справочные данные
1. Выходные устройства этого типа так же, как и
индикаторы, в процессе обработки сигналов выполняют
функции интегратора пачки импульсов и порогового
устройства. Так как получателем информации является
ЦВМ, то вся информация после интегрирования и испы-
тания на порог преобразуется в код, используемый в ма-
шине. Выходное устройство (рис. 9.1) состоит из двух
От синхронизатора.
От привода антенна
Рис. 9.1. Функциональная схема выходного устройства, сопрягающе-
го РЛС с ЦВМ.
частей: схемы обработки, называемой преселектором, и
преобразователя обработанной информации в код. В пре-
образователь вводятся также опорные сигналы, относи-
тельно которых производится отсчет координат. Для от-
счета дальности таким опорным сигналом является им-
пульс синхронизатора, запускающий передатчик, а для
отсчета угловых координат — импульс, соответствующий
прохождению антенной отсчетного направления.
2. В индикаторном выходном устройстве при исполь-
зовании послесвечения и яркостной отметки осуществля-
208
ется запоминание радиолокационной обстановки за пе-
риод обзора. В выходном устройстве, сопрягающем РЛС
с ЦВМ, такого запоминания не производится, оно осу-
ществляется в запоминающем устройстве ЦВМ. Такое
разделение функций позволяет лучше выполнять каждую
из них в отдельности. В принципе преселектор может
интегрировать сигналы с меньшими потерями энергии
сигналов, чем электронная трубка и оператор, а преоб-
разование в код сопровождается меньшими ошибками и
потерями в разрешении, чем отсчет и разрешение по от-
меткам на экране индикатора. Однако эти преимущества
инструментального съема данных реализуются лишь при
достаточно сложной схеме устройства.
3. Известно несколько методов первичной обработки
сигналов в преселекторе. Первая группа методов осно-
вана на интегрировании всех импульсов — и импульсов
цели, и импульсов шумов — и последующем испытании
суммарного напряжения на порог. Вследствие статисти-
ческих различий интегрирование сигналов ведется более
эффективно, чем интегрирование шумов. Это дает воз-
можность отделить сигналы от шумов при помощи по-
следующего ограничения по минимуму (порога). Такие
преселекторы можно назвать аналоговыми.
Для накопления энергии сигналов могут использо-
ваться потенциалоскопы и магнитные барабаны. В по-
тенциалоскопах развертка записывающего луча осуще-
ствляется так же, как и в обычных индикаторах типа
«дальность—азимут». Для синхронизации развертки по
дальности и азимуту преселектор связан соответственно
с синхронизатором и приводом вращения антенны.
При использовании магнитных барабанов разверткам
дальности соответствует вращение барабана, а разверт-
ка по азимуту может осуществляться за счет движения
записывающей головки по образующей.
Общим недостатком описанных интеграторов являет-
ся наличие потерь при интегрировании большого числа
импульсов вследствие насыщения. В обычных индикато-
рах потери возникают при Nc>20 ... 30, в потенциало-
скопах и магнитных барабанах — при таком же или при
несколько большем количестве импульсов [57, 117].
4. Широко распространен дискретный метод селек-
ции, при котором сигналы и шумы вначале испытывают-
ся на порог в первом пороговом устройстве, а затем про-
шедшие через порог импульсы стандартизуются по ам-
209
плитуде и длительности, интегрируются и подвергаются
вторичному испытанию на порог. Одна и?, возможных
схем такого преселектора показана на рис. 9.2. Преселек-
тор состоит из порогового устройства, генератора стан-
дартных импульсов, линий задержки со временем за-
держки, равным периоду повторения импульсов Ти, и
усилителя, выполняющего роль второго порогового
устройства. Второй порог (порог счета k) устанавливает-
ся выбором напряжения смещения Есм на сетке лампы.
Рис. 9.2. Схема преселектора дискретного действия.
На рис. 9.3 показаны эпюры напряжений в различ-
ных точках схемы, рассчитанной на обработку пачки из
5 импульсов. При совпадении во времени некоторого
числа импульсов k, которое может быть и меньше всего
числа импульсов в пачке Nc (в данном случае k — 3),
лампа сумматора отпирается и с анода ее снимается
импульс, поступающий в устройство кодирования. Шу-
мы, следующие хаотически, могут давать лишь случай-
ные ложные срабатывания. Так как суммируются
импульсы всегда одинаковой амплитуды, то можно ска-
зать, что схема как бы ведет подсчет импульсов, прошед-
ших через пороговое устройство. Если сосчитанное коли-
чество достигнет установленного порога счета k, то цель
фиксируется, в противном случае обнаружения не про-
исходит. Выбор порога счета k достигается компромисс-
ным путем. Если взять k очень малым по сравнению
с Nc, то возникает большая вероятность ложной тревоги
из-за воздействия шумов. Так, если k=\, то каждый шу-
мовой выброс будет фиксироваться как цель. Если k взять
210
большим, то возникает большая вероятность пропуска
цели, так как подавление шумами импульсов при их
прохождении через приемник в количестве, большем
чем Nc —k, приводит к пропуску цели. Этот способ обра-
ботки носит краткое наименование «k из Nc».
Рис. 9.3. Эпюры напряжений, иллюстрирующие работу преселектора
дискретного действия.
Каждому значению Nc соответствует оптимальное
значение порога счета &Опт (рис. 9.4), при котором за-
данная вероятность правильного обнаружения обеспе-
чивается при минимальном отношении энергий сигналов
и шума. Значение порога в первом пороговом устройстве
при выборе k по кривой рис. 9-4 должно выбираться из
2П
плитуде и длительности, интегрируются и подвергаются
вторичному испытанию на порог. Одна и? возможных
схем такого преселектора показана на рис. 9.2. Преселек-
тор состоит из порогового устройства, генератора стан-
дартных импульсов, линий задержки со временем за-
держки, равным периоду повторения импульсов Ти, и
усилителя, выполняющего роль второго порогового
устройства. Второй порог (порог счета k) устанавливает-
ся выбором напряжения смещения ЕСм на сетке лампы.
Рис. 9.2. Схема преселектора дискретного действия.
На рис. 9.3 показаны эпюры напряжений в различ-
ных точках схемы, рассчитанной на обработку пачки из
5 импульсов. При совпадении во времени некоторого
числа импульсов k, которое может быть и меньше всего
числа импульсов в пачке Nc (в данном случае k = 3),
лампа сумматора отпирается и с анода ее снимается
импульс, поступающий в устройство кодирования. Шу-
мы, следующие хаотически, могут давать лишь случай-
ные ложные срабатывания. Так как суммируются
импульсы всегда одинаковой амплитуды, то можно ска-
зать, что схема как бы ведет подсчет импульсов, прошед-
ших через пороговое устройство. Если сосчитанное коли-
чество достигнет установленного порога счета k, то цель
фиксируется, в противном случае обнаружения не про-
исходит. Выбор порога счета k достигается компромисс-
ным путем. Если взять k очень малым по сравнению
с Nc, то возникает большая вероятность ложной тревоги
из-за воздействия шумов. Так, если &=1, то каждый шу-
мовой выброс будет фиксироваться как цель. Если k взять
210
большим, то возникает большая вероятность пропуска
цели, так как подавление шумами импульсов при их
прохождении через приемник в количестве, большем
чем Nc —k, приводит к пропуску цели. Этот способ обра-
ботки носит краткое наименование «k из Nc».
Рис 9 3 Эпюры напряжений, иллюстрирующие работу преселектора
дискретного действия
Каждому значению Nc соответствует оптимальное
значение порога счета kom: (рис. 9.4), при котором за-
данная вероятность правильного обнаружения обеспе-
чивается при минимальном отношении энергий сигналов
и шума. Значение порога в первом пороговом устройстве
при выборе k по кривой рис. 9-4 должно выбираться из
14* 2П
Рис. 9.4. График для вы-
бора оптимального поро-
га счета.
условия получения заданной вероятности ложной трево-
ги путем последовательных приближений.
В описываемом устройстве интегрируются стандарт-
ные импульсы, соответствующие импульсам, превысив-
шим порог генератора стандартных импульсов. Поэтому
такой способ носит также название двоичного (бинар-
ного) интегрирования, так как в расчет принимаются
лишь импульсы, амплитуда которых выше порога. Из-за
того, что импульсы меньшей ам-
плитуды не учитываются, этот
способ дает несколько меньшую
эффективность накопления по
сравнению с идеальным интегри-
рованием. При числе накапли-
ваемых импульсов Nc= 10 ... 50
потери не превышают 2 дБ [51].
5. На рис. 9.5 приведена схе-
ма бинарного дискретного пресе-
лектора [106], осуществляющего
накопление k импульсов из Nc
при одновременной селекции их
по дальности. Пороговое устрой-
ство и генератор стандартных им-
пульсов имеют то же незначение,
что и в предыдущей схеме. Се-
лекторы дальности пропускают
импульсы целей, находящихся
в узких кольцах дальности. Число
селекторов равно отношению m=DmK/6(D), где DmK—
предельная дальность при данном масштабе, a 6(D)—
разрешающая способность по дальности. Селекторы от-
крываются на время At\=26(D)/c, причем отпирание их
происходит последовательно во времени от момента Л =
= 21)мин/с до Стакс=== где Dmoh—минимальная
дальность. За селекторами следуют двоичные счетчики
импульсов. При приходе на счетчик k импульсов за Nc
периодов повторения срабатывает генератор импульсов,
который выдает импульс цели в преобразователь. Опи-
санная схема характеризуется теми же соотношениями,
что и предыдущая (рис. 9.2) и хотя имеет большую
сложность, может быть во многих случаях предпочти-
тельнее.
6. Если поставить задачу фиксации прихода k им-
пульсов подряд с интервалами Ти (метод «& из k»), то
212
схему на рис. 9.2 можно упростить, заменив второе по-
роговое устройство каскадом совпадений на k входов
(на рис. 9.6 k — З). При этом импульс цели вырабатыва-
ется только при совпадении k импульсов. Наименьшие
потери в такой 'схеме имеют место также при £ = £опт,
но по абсолютной величине они сильнее зависят от чис-
ла интегрируемых импульсов. Так, при Рпо=0,5, Рлт =
= 10~5, 7Vc=10 они равны 1,7 дБ, а при NC = 2S и тех
же вероятностях возрастают до 3 дБ [51].
Рис. 9.5. Схема преселектора дискретного действия с селекцией
импульсов по дальности.
Рис. 9.6. Преселектор дискретного действия, работающего по методу
«& из k» (k=3).
7. Стандартные импульсы на выходе преселектора
«k из Nc» должны сохранять информацию о дальности
и угловой координате. На выходе преселектора может
появляться не один, а несколько импульсов. Дальность
может быть измерена по запаздыванию любого выход-
ного импульса преселектора относительно ближайшего
предшествующего импульса синхронизатора. Для фикса-
ции азимута цели из пачки импульсов должен быть вы-
делен импульс, ближайший к центру пакета. Для этого
из пачки с помощью специальной схемы выделяется пер-
213
вый импульс и импульс, соответствующий первому про-
пущенному. При таком способе фиксации значение угло-
вой координаты определяется средним из отсчетов по
выходным импульсам схемы фиксации:
Ф=(ф1+фг)/2, (9.1)
где ф! и ф2 — координаты, соответствующие импульсам
на выходах схемы фиксации.
8. Преобразователи дальности и угловых координат
строятся по одному принципу счета эталонных импуль-
сов, интервал между которыми соответствует определен-
ной дальности Д£>э или углу поворота Афэ. Сосчитанное
количество импульсов представляется затем в двоичной
системе счисления и передается в ЦВМ.
в ячейки памяти ЦВМ
Рис. 9.7. Схема преобразователя дальности.
9. На рис. 9.7 показана функциональная схема пре-
образователя дальности. Генератор эталонных импуль-
сов вырабатывает импульсы, период следования кото-
рых выбирается из условий получения заданной точно-
сти и разрешающей способности. Генератор запускается
импульсами синхронизатора. Эталонные импульсы (эпю-
ра 1, рис. 9.8) через схему совпадений проходят на счет-
чик, состоящий из цепочки триггеров. Каждый последую-
щий триггер запускается задним фронтом импульса пре-
дыдущего триггера. Процессы, происходящие в триггерах
под воздействием эталонных импульсов, показаны
на эпюрах 4 ... 7. Процессы переброса триггеров про-
214
должаются до тех пор, пока схема сброса триггеров tie
закроет своим импульсом схему совпадений в цепи гене-
ратора эталонных импульсов и не приведет в исходное
(нулевое) положение все триггеры подачей на них им-
пульса сброса. В любой момент времени (за исключе-
нием моментов переброса) на счетчике записывается
в двоичной системе количество прошедших за это время
Рис. 9.8. Эпюры напряжений, иллюстрирующие работу преобразова-
теля дальности.
эталонных импульсов. Так, например, в момент tn
(рис. 9.8) счетчик показывает число 1011, соответствую-
щее в десятичной системе 11 (за нуль принимается ма-
лое напряжение на выходе триггера, за единицу —
большое) . К этому моменту на счетчик прошло, как это
видно по эпюре /, одиннадцать эталонных импульсов.
Импульсы целей с выхода преселектора подаются на
генератор импульсов считывания, представляющий со-
бой комбинацию триггера и схемы совпадений. Импуль-
сы цели проходят на считывание через схему лишь тог-
да, когда на ее входе отсутствуют эталонные импульсы
215
и закончились переходные процессы в триггерах счетчи-
ка. Это исключает ошибки считывания, которые возника-
ют, если считывание происходит в переходные моменты.
Эталонные импульсы проходят через линию задержки и
задерживаются в ней на время переходных процессов
в счетчике. Импульс цели запускает триггер. Совпадение
задержанных эталонных импульсОв и импульса триггера
в схеме совпадений может произойти только после окон-
чания переходных процессов в счетчике. Выходной им-
пульс схемы совпадений осуществляет обратный пере-
Кодовыа диск
Импульсный
источниксвета
1ц А
вате ль кода
вд^/ичный.
код
Фотодетекторы
___________В 5лок
Прообраза- памяти-
°—---- -31 ЦВМ
Экран с щелью
Импульс цели из преселектора.
Рис. 9.9. Устройство преобразователя угловых координат.
брос триггера, подготавливая его к приходу следующего
импульса цели, и через схемы совпадений подключает
триггеры счетчика к ячейке памяти машины. При этом
в ней записывается число, представляющее значение
дальности в двоичном коде. Если появляется вторая
цель, то второй импульс считывания подключает счет-
чик во второй ячейке и т. д.
10. Устройство преобразователя угловых координат
показано на рис. 9.9. На прозрачном диске, ось кото-
рого жестко связана с приводом антенны, наносится
в виде чередования прозрачных и непрозрачных сектор-
ных участков циклический код Грея. Темные места соот-
ветствуют нулю, прозрачные — единице. Секторы распо-
ложены в кольцах, число которых равно числу разрядов
счета. Угловой размер каждого сектора равен эталон-
ному углу Дфэ- Как известно [117], код Грея позволяет
уменьшить ошибку, возникающую при считывании в мо-
менты перехода от одного сектора диска к другому. По
одну сторону диска располагается щелевой импульсный
источник света, по другую — фотодетекторы в количест-
216
ве, равном числу разрядов счетчика. Считывание кода
происходит при подаче на источник света импульса цели.
Так, при нахождении перед целью сектора 6 диска фото-
детекторы выдадут код 0101, что соответствует числу 6
(в двоичном коде 0110).
Так как в ЦВМ следует подавать информацию в дво-
ичном коде, то сигналы фотодетекторов преобразовыва-
ются в двоичный код в специальном преобразователе,
показанном на схеме.
Рис. 9.10. Схема устройства преобразования напряжения в число.
11. В некоторых случаях, когда измерение угловой
координаты не связано с вращением антенны, а вычис-
ляется по соотношению интенсивностей сигналов, приня-
тых различными каналами, выходные данные РЛС вы-
даются в виде непрерывного напряжения. Для исполь-
зования этих данных в ЦВМ их надо перевести в двоич-
ный код. На рис. 9.10 показана схема устройства, вы-
полняющего эту задачу путем преобразования напряже-
ния в пропорциональные временные интервалы, которые,
в свою очередь, преобразуются в двоичный код путем
счета эталонных импульсов, укладывающихся в интер-
вале.
Импульс цели с выхода преселектора (эпюра 7 на
рис. 9.11) одновременно запускает два генератора им-
пульсов. Один из них вырабатывает импульс постоянной
длительности То (эпюра 2), являющийся импульсом ми-
нимально возможной длительности для обоих генерато-
ров. Второй генератор под действием измеряемого на-
пряжения Цизм вырабатывает импульс длительностью
To + ^it/изм (эпюра 3). Оба импульса подаются на схему
вычитания выделяющую импульс разностной длительно-
сти тИзм=&1С/лзм (эпюра 4). Этот импульс открывает схе-
217
му совпадений для пропуска на счетчик эталонных им-
пульсов, следующих с частотой F3 и вырабатываемых
генератором импульсов (эпюры 5, 6). Число эталонных
импульсов, прошедших на счетчик, пропорционально из-
меряемому напряжению:
М == ^'эТизм== F^kiUизМ== изм- (9 2)
Считывание показаний счетчика осуществляется при
подаче на схему совпадений импульса, являющегося ре-
зультатом дифференцирования заднего фронта измеряе-
мого импульса. Для того чтобы измерение могло произ-
Рис. 9.11. Эпюры напряжений в устройстве преобразования напряже-
ния в число
водиться при любом знаке входного напряжения, на вхо-
де устройства имеются две цепи: одна для напряжения
положительного знака, а вторая — для отрицательного
с последующим инвертированием. Знак измеряемого на-
пряжения может быть подан в ЦВМ через схему совпа-
дений, управляемую напряжением инвертора.
12. Преобразование радиальной скорости цели в дво-
ичный код осуществляется путем измерения частоты
Допплера за определенный интервал времени. Напряже-
ние частоты Допплера подается на счетчик биений через
вентиль совпадений, открываемый на фиксированное вре-
мя измерения Тизм.
218
Значение радиальной скорости ур связано с подсчи-
танным количеством импульсов W формулой:
Pp=0,5cAZ/fqTиэм^^о-^, (9 3)
где fo — частота излученного сигнала; ko — константа, не
зависящая от скорости.
13. Потери в отношении энергий сигнала и шумов,
возникающие в аналоговых преселекторах, могут быть
рассмотрены аналогично индикаторным устройствам по
методике, изложенной в гл. 4 (формула (4.36),
рис. 4.17).
При применении в преселекторах потенциалоскопов
следует принимать:
dn 0,5 ... 1 мм,
Уразв —- Т.миш/71 разе 0,5сАмиш/Dшк, (9-4)
где £Миш — размер мишени, используемый для записи по
дальности; Ьшк — предельное значение дальности, на ко-
торое рассчитывается запись; 7’разв— время развертки.
Наиболее часто применяемый метод двоичного (би-
нарного) интегрирования дает результаты примерно на
2 дБ хуже, чем при аналоговом идеальном некогерент-
ном интегрировании.
14. Устройства инструментального съема данных
с аналоговыми преселекторами ухудшают разрешающую
способность по сравнению с ее потенциальным значени-
ем за счет конечных размеров записывающего луча в по-
тенциалоскопах или ширины линии записи на магнитном
носителе (в последнем случае ухудшение очень незначи-
тельно из-за высокой разрешающей способности магнит-
ной записи).
Это ухудшение может быть рассчитано по формулам
б ( Ct) ву = ^пССшк/Т-мшп (9.5)
— при применении потенциалоскопов,
8 (а)Ву —• Д/Рашк/ Lмагн (9-6)
— при применении магнитных барабанов. В этих фор-
мулах ашк — предельное значение измеряемой координа-
ты (скорости); £миш и £Магн — размеры мишени и маг-
нитного носителя, используемые для записи координаты
а; А/р—линейная разрешающая способность системы
«головка — магнитный носитель». Значения AZP могут
достигать 5 мкм. Формулы (9.5) и (9.6) справедливы
219
при условий
Л(а)э<;д(а), (9.7)
где Д(а)э — цена интервала между эталонными импуль-
сами; 6(a)—реальная разрешающая способность, опре-
деляемая по формуле (6.3). При несоблюдении условия
(9.7) реальная разрешающая способность определяется
ценой интервала эталонных импульсов.
Потенциальная разрешающая способность при ис-
пользовании дискретных преселекторов может быть реа-
лизована, если цена интервала эталонных импульсов не
превышает значения потенциальной разрешающей спо-
собности. При обратном соотношении 6(a)=A(a)9.
15. Ошибки измерения, вносимые устройством инст-
рументального съема данных, возникают в основном из-
за нестабильности частоты следования эталонных им-
пульсов и дискретности отсчетов. Применительно к из-
мерению дальности среднеквадратическая ошибка из-за
дискретности отсчетов равна
о(О)д„кр=ДО,/2]/3; (9.8)
где Д£>э = 0,5сГэ. Тогда
о (Г>)дискр ~ 0,15сТэ = 0,15с/F9. (9.9)
Ошибка из-за дискретности может быть уменьшена
применением нониусных схем счета импульсов [58]. По-
следовательность нониусных импульсов образуется пу-
тем задержки основного эталонного импульса в линии
задержки, имеющей п отводов. При этом цена нониус-
ных импульсов будет в п раз меньше цены основных эта-
лонных импульсов и ошибка из-за дискретности отсчета
уменьшится во столько же раз:
о (D) дискр ~ 0,15сТъ1п=0,15dnF9. (9.9')
Недостатком применения нониусных схем является
снижение разрешающей способности по дальности, так
как импульс следующей цели может быть принят толь-
ко после окончания серии нониусных импульсов.
Ошибка из-за нестабильности частоты эталонных им-
пульсов равна
o(D)HCT=r)o(F9)/F9, (9.10)
где o(F9)/F9 — относительное среднеквадратическое от-
клонение частоты; D — измеряемая дальность.
Если частота генератора эталонных импульсов стаби-
220
Лизирована кварцем, то можно принять, что a(F9)/Fa~
= 10~4... 10~5, и тогда
о(£>)нст= (Ю-4 ... 10~5)D. (9.11)
Результирующая ошибка, вносимая устройством ин-
струментального съема дальности, может быть рассчи-
тана по общей формуле
° (^)инстр = °8 (-^)дискр“{~ о2 (О)нСТ-
Ошибки в измерении угловых координат при инстру-
ментальном съеме возникают из-за дискретности отсчета
и могут быть определены по формуле
0 (?)инстр —О (ф)даскр:= Д<рэ/2 3, (9.12)
а при использовании нониусных схем [58]
° Ср)инстр~— с (^р)дискр~“ Д<у»/2рг3 П. (9.12')
16. Запоминание радиолокационной обстановки осу-
ществляется благодаря вторичной обработке сигналов
в ЦВМ. Сигналы целей и шумы, прошедшие через пре-
образователь в течение всего периода обзора, записыва-
ются в ячейках памяти ЦВМ. Суть вторичной обработки
заключается в вычислении вероятного положения цели
и области ее возможных уклонений в последующие циклы
обзора по данным предыдущего наблюдения и сравне-
нии результатов вычисления с получаемыми данными.
Эти вычисления ЦВМ ведет как для сигналов цели, так
и для шумовых выбросов. Вероятность попадания шумо-
вых выбросов в рассчитанную область в следующем ци-
кле обзора очень мала. Наоборот, сигналы цели, движу-
щейся относительно закономерно, всегда попадают в рас-
считанную для них область. На основании этих различий
ЦВМ отсеивает ложные цели, идентифицирует новые
сигналы, попадающие в рассчитанную область, с целями,
записанными ранее в памяти. Чем больше память ЦВМ,
тем больше сигналов (действительных и ложных) мо-
жет быть в ней записано и идентифицировано.
Задачи
9.1. В преселекторе выходного устройства РЛС используется
потенциалоскоп с размером мишени £миш = 100 мм и диаметром
записывающего луча da=\ мм. На мишени записывается сигнал
в виде пачки из 10 видеоимпульсов длительностью 1 мкс. Предель-
ное значение дальности до цели, на которое должно быть рассчи-
тано выходное устройство, DmK = 300 км. Определить коэффициент
потерь на скорость развертки а0.
221
9.2. Решить предыдущую задачу при условии, что предельное
значение дальности уменьшилось в два раза.
9.3. Решить задачу 9.1 при условии, что длительность импуль-
сов РЛС увеличилась в два раза.
9.4. Решить задачу 9.1 при условии, что диаметр записывающего
луча dn уменьшился в два раза. Сделать выводы по результатам
решения задач 9.1—9.4.
9.5. В преселекторе выходного устройства РЛС используется
магнитный барабан. Рассчитать количество п его оборотов в мину-
ту и скорость развертки дальности оразв, если предельное значение
дальности, на которую рассчитывается преселектор, составляет
£)шк = 300 км, а радиус барабана равен Гбар=100 мм.
9.6. Определить разрешающую способность по дальности пре-
селектора, в котором используется потенциалоскоп с размером ми-
шени 100 м и диаметром записывающего луча 0,8 мм. Предельное
значение записываемой дальности — 300 км.
9.7. Определить разрешающую способность по дальности пресе-
лектора, в котором используется магнитный барабан с радиусом,
выбранным из условия получения того же масштаба записи, что
и в предыдущей задаче.
9.8. Потенциальная разрешающая способность РЛС по дально-
сти составляет 0,45 км. Найти предельное значение дальности, за-
писываемой на потенциалоскопе с £миш = Ю0 мм и dn = 0,8 мм, при
которой собственная разрешающая способность потенциалоскопа
равна потенциальной.
9.9. РЛС имеет антенну с шириной луча 1°, качающуюся в сек-
торе 60° по азимуту. Запись сигналов цели производится на потен-
циалоскопе с размером мишени 120 мм и диаметром записывающего
луча 0,8 мм. Определить достижимую реальную разрешающую спо-
собность РЛС по азимуту и соответствующую ей цену интервала
эталонных импульсов в преобразователе азимута.
9.10. Выбрать оптимальный порог счета импульсов в двоичных
счетчиках преселектора, изображенного на рис. 9.5, при обработке
пачки импульсов с 2Vc = 10 и Wc = 30.
9.11. Определить число т селекторных каналов и длительность
ти селектирующих импульсов в преселекторе (рис. 9.5), требующих-
ся для обеспечения разрешающей способности по дальности 1 км
при максимальной дальности РЛС, равной 300 км.
9.12. Определить оптимальное число отводов линии задержки
в преселекторе на схеме совпадений (рис. 9.6) при 2Vc = 10.
9.13. Оценить потери в отношении сигнал/шум, вносимые ди-
скретными преселекторами (рис. 9.2 и 9.5) при числе импульсов
в пачке Nc = 10 и УС = ЗО.
222
9.14. Решить предыдущую задачу для преселектора на схеме
совпадений (рис. 9.6).
9.15. Определить частоту следования F3 эталонных импульсов
в преобразователе дальности, обеспечивающую максимальную раз-
решающую способность РЛС по дальности. В РЛС используется
импульсы длительностью ти=3 мкс, предельное значение дальности
£шк = 300 км, в преселекторе используется потенциалоскоп с£миш=
= 150 мм и с?д=1 мм.
9.16. Определить цену эталонных импульсов преобразователя
азимута, обеспечивающую среднеквадратическую ошибку из-за ди-
скретности отсчета, равную 0,5°.
9.17. Среднеквадратическая ошибка из-за дискретности отсчета
дальности в преобразователе составляет 1 км. Определить частоту
следования эталонных импульсов, при которой такая ошибка возни-
кает.
9.18. Предельное значение измеряемой дальности 300 км. Опре-
делить ошибку, возникающую из-за нестабильности частоты эта-
лонных импульсов в преобразователе дальности.
9.19. РЛС имеет потенциальную среднеквадратическую ошибку
измерения дальности 50 м, предельное значение измеряемой дально-
сти Ршк^ЗОО км. Определить частоту следования эталонных им-
пульсов F3 в преобразователе дальности, обеспечивающую ошибку
за счет выходного устройства o(D)By, равную потенциальной.
9.20. Определить количество разрядов счетчика в преобразова-
теле дальности, необходимое для получения среднеквадратической
ошибки из-за дискретности отсчета о(Д)дискр=0,5 км при предель-
ном значении дальности РШк = 200 км.
9.21. Найти среднеквадратическую ошибку измерения угловой
координаты, возникающую в преобразователе, если цена эталонного
интервала угла А(ф)э = 60.
9.22. Сектор обзора РЛС по азимуту равен Фаа=120°. Найти
количество эталонных интервалов азимута в преобразователе, обес-
печивающих среднеквадратическую ошибку преобразователя коор-
динаты, равную СУ(фаз)дискр = 1°.
9.23. Найти результирующую среднеквадратическую ошибку из-
мерения угловой координаты, если сигнал обнаруживается при
^по = 0,9 и Рлт = 10-5, ширина диаграммы направленности Оо,5=
= 1° и цена интервала эталонных .импульсов в преобразователе
Афэ=6°.
9.24. С целью повышения точности съема угловой координаты
в предыдущей задаче дополнительно применена нониусная схема
отсчета. Определить число п нониусных интервалов, обеспечивающих
ошибку преобразователя, равную потенциальной.
223
Глава 10
ЗАЩИТА РЛС ОТ ПОМЕХ
Основные справочные данные
1. Помехами называются радио- и электрические сиг-
налы, мешающие нормальной работе РЛС.
По своему происхождению помехи могут быть разде-
лены на три группы: естественные, искусственные (орга-
низованные), взаимные.
К естественным относятся космические радиоизлуче-
ния, отражения зондирующих сигналов РЛС от объектов
естественного происхождения, собственные шумы прием-
ников РЛС и т. п. Искусственные или организованные
помехи создаются умышленно с помощью специальных
технических средств и имеют целью помешать нормаль-
ной работе РЛС противника. Взаимные помехи создают-
ся при одновременной работе различных радиоэлектрон-
ных средств.
В зависимости от способа образования помех они мо-
гут быть разделены на активные и пассивные. Активные
помехи создаются источниками излучения радиоволн
(например, космические источники радиоизлучения или
передатчики помех). Пассивные помехи образуются
в результате отражения излученных передатчиком РЛС
радиоволн от различных объектов, встречающихся на
пути распространения (участков земной и водной по-
верхности, дипольных отражателей, радиолокационных
ловушек, гидрометеорологических образований и т. п.
По своему взаимодействию с полезным сигналом по-
мехи могут быть разделены на аддитивные и модули-
рующие (мультипликативные). Аддитивная помеха до-
бавляется (складывается) к полезному сигналу на входе
приемника РЛС. Примерами аддитивных помех являют-
ся сигналы передатчиков помех и собственные шумы
приемника.
При модулирующих помехах имеет место изменение
параметров самих полезных сигналов. Модулирующие
помехи возникают вследствие случайных изменений ко-
эффициента преломления среды, в которой происходит
распространение радиоволн; они вызываются флукту-
224
ациями фазы и амплитуды колебаний, создаваемых ге-
нераторами синусоидальных напряжений в РЛС; поме-
хи указанного вида могут образовываться благодаря
взаимодействию полезного сигнала с аддитивной поме-
хой в нелинейных элементах приемного устройства (воз-
никает паразитная модуляция полезного сигнала поме-
ховым). В данном пособии рассматриваются вопросы
борьбы только с аддитивными помехами.
Отвлекаясь от происхождения и способа образования
аддитивных помех, а имея в виду лишь их структуру на
входе приемника РЛС, можно указать три наиболее рас-
пространенных вида помех:
— непрерывные шумовые помехи,
— хаотические импульсные помехи,
— последовательность детерминированных импульс-
ных помех
2. Непрерывные шумовые помехи эффективно дейст-
вуют на РЛС всех назначений, работающих в любых ре-
жимах и на всех частотах. Помехи этого вида позволя-
ют маскировать полезные сигналы на временной оси (по
дальности), на частотной оси (по скорости) и по на-
правлению прихода (по угловым координатам). Можно
считать, что напряжение помехи на входе прием-
ника представляет собой стационарный эргодический слу-
чайный процесс, имеющий нормальный закон распреде-
ления мгновенных значений и равномерный частотный
спектр — так называемый нормальный гладкий шум.
Активные помехи естественного происхождения имеют
очень широкие спектры; ширину их спектра во многих
случаях можно считать бесконечно большой. Искусствен-
ные активные помехи характеризуются ограниченной
шириной Afn спектра; такие помехи приближенно пред-
ставляют собой нормальный шум с равномерным огра-
ниченным спектром.
Плотность распределения мгновенных значений по-
мехи выражается нормальным (гауссовым) зако-
ном
w (мп) = [ 1 /оп V2тс ] ехо [ — («п — Мп)2/2агп],
где Мп — среднее значение напряжения помехи, обычно
принимаемое равным нулю; о2п— дисперсия помехи, рав-
ная ее мощности, выделяемой на сопротивлении в 1 Ом
Если помеха, имеющая равномерный спектр в преде-
лах полосы Afn, характеризуется дисперсией о2п на вхо-
225
де приемника РЛС, то ее спектральная плотность равна
АГп = (ЛЖ (10.2)
Помеха называется узкополосной, если ширина ее
спектра много меньше средней частоты fQ:
Afn<fo. (Ю.З)
Функция корреляции узкополосной помехи с равно-
мерным спектром выражается формулой
k (т) = Nn^fn (зттсД/пт/яД/пу) cos «м, (Ю.4)
а ее время корреляции равно
хк=1/2А/п. (10.5)
Под временем корреляции тк здесь понимается величина
00
о
Реализации узкополосного нормального шума по ви-
ду напоминают модулированное гармоническое колеба-
ние
нп (/)== £/"(/) cos [со</— <?(£)], (10.6)
где U(t) и ф(/) — случайные медленно меняющиеся (по
сравнению с cos(o0Z) функции времени; можно сказать,
что скорость изменения огибающей и фазы колебаний
обратно пропорциональна ширине спектра помехи.
3. Хаотические импульсные помехи (ХИП) в самом
общем виде представляют собой последовательность ра-
диоимпульсов, частота заполнения, амплитуда, длитель-
ность и период следования которых, являются величи-
нами случайными. Искусственно создаваемые ХИП ха-
рактеризуются [7, 24] постоянством амплитуды и часто-
ты заполнения, случайным образом изменяются лишь
длительность импульсов и интервал между ними.
4. Последовательности детерминированных импульс-
ных помех образуются как искусственным, так и естест-
венным путем. Они представляют собой радиоимпульсы,
синхронные с зондирующими сигналами импульсной
РЛС, возникшие либо при отражении радиоволн от ка-
ких-нибудь объектов (элементов земной поверхности,
дипольных отражателей), либо созданные передатчиками
помех. Зондирующему сигналу соответствует как мини-
226
Мум Один помеховый; могут иметь место и длинные се-
рии помеховых импульсов после каждого излученного
импульса РЛС
5. Пассивные помехи (помехи, образовавшиеся в ре-
зультате отражения радиоволн от объектов искусствен-
ного и естественного происхождения) имеют высокоча-
стотное заполнение на частоте зондирующих сигналов;
различие частот помехи и передатчика РЛС может опре-
деляться только допплеровским частотным сдвигом, вы-
званным перемещением отражающего объекта относи-
тельно РЛС. Длительность помеховых импульсов зави-
сит от длительности зондирующих сигналов и размеров
отражающего объекта. хМожно лишь утверждать, что
длительность помеховых импульсов не меньше длитель-
ности полезных:
Ти>ти. (Ю.7)
Положение помеховых импульсов на временной оси
четко фиксировано и определяется расстоянием между
РЛС и отражающим объектом.
Если отражающий объект неподвижен относительно
РЛС, то амплитуда Un и начальная фаза Tn помеховых
импульсов являются величинами постоянными. При пе-
ремещении отражающего объекта относительно РЛС Un
и Лп изменяются.
Энергетический спектр флуктуаций помеховых сигна-
лов от множественных отражателей на выходе ампли-
тудного детектора может быть аппроксимирован гауссо-
вой кривой [117]:
AW)=ft,exp [_Y(f_/0)2//20], (10.8)
Т А 6 Л И Ц А 10.1
Параметры энергетического спектра пассивных помех
Гц
Отражающий объект { fo=3 ГГц fo=9 ГГц
Дождевые облака Дипольные отражали Морская поверхность при ветр' Холмы, поросшие густым лесом, при скорости ветра 32 км/ч Холмы, поросшие редким лесом, при тихой погоде 2,3 1015 1O1J 1,41• 101в 2,3-1017 3,9-1019 95 45 38 10 2,5 285 135 115 28 7
227
где y — параметр, зависящий от типа отражающего объ-
екта и метеорологических условий; f0—рабочая частота
РЛС.
В табл. 10.1 [117] приведены данные, характеризую-
щие средние значения коэффициента у, а также соот-
ветствующую ширину спектра А/цц пассивных помех на
уровне 0,1 по мощности.
Для гауссовой формы энергетического спектра нор-
мированная функция корреляции (коэффициент корре-
ляции) напряжения помехи имеет вид:
ОО
^оп(т) = (0)'~ j Nu еХР df ехР
(10.9)
Время корреляции тк флуктуаций пассивных помех
может быть определено по формуле
Тк—l/2AF0il.
Приведенные данные характеризуют энергетический
спектр Nu(i) амплитудных флуктуаций помехи. Ампли-
тудные флуктуации представляют наибольшую опасность
для некогерентных РЛС. При использовании когерентно-
импульсных станций наибольшее мешающее действие
оказывают флуктуации фазы помеховых сигналов;
в принципе в когерентной станции амплитудные флук-
туации могут быть устранены с помощью амплитудного
ограничителя. Спектр ([) фазовых флуктуаций имеет
тот же вид, что но более узкий (на 30 ... 40%).
6. Активные помехи типа последовательностей детер-
минированных радиоимпульсов характеризуются либо
постоянством значения параметров помеховых сигналов
либо их изменением по определенному закону [7, 24,
126, 136]. Как правило, длительность и форма помехо-
вых импульсов весьма близка к аналогичным характе-
ристикам полезных сигналов, но амплитуда (7П помехи
обычно много больше амплитуды Uc сигнала, а разли-
чие частот fn и /с сопоставимо с полосой пропускания
УПЧ приемника РЛС.
7. Воздействие помех ухудшает основные тактические
показатели РЛС (дальность действия, точность, разре-
шающую способность, пропускную способность). При
создании организованных помех считается, что помехи
достигают своей цели, если имеет место заданное ухуд-
228
шение показателей РЛС Минимально необходимое зна-
чение отношения мощности Рп помехи к мощности Рс
сигнала на входе приемника, при котором достигается
необходимый эффект подавления РЛС, называется ко-
эффициентом подавления /(п:
Ка— (Wc) вх мин, (10.10)
где Рп — мощность помехи в пределах полосы пропуска-
ния А/пр линейной части приемника.
Указанное соотношение мощностей помехи и сигнала
должно существовать в течение всей длительности сиг-
нала. Для каждой конкретной ситуации значение коэф-
фициента подавления может быть вычислено. Поясним
это на примере воздействия непрерывной шумовой по-
мехи на обзорную РЛС. Допустим, что характеристики
обнаружения, приведенные в гл. 4, могут быть исполь-
зованы и при оценке эффекта воздействия искусственно
создаваемых шумовых помех (Д/п>А/пр) • Считается, что
РЛС подавлена, если под воздействием помехи вероят-
ности правильного обнаружения и ложлзй тревоги ста-
новятся равными (Рпо)п, (РлтСг (см. гл. 4, п. 26); в дан-
ном случае именно достижение значений указанных ве-
роятностей является необходимым эффектом подавления.
По характеристикам обнаружения для заданного вида
сигнала определяется требуемое значение отношения q
удвоенной энергии сигнала к спектральной плотности
помехи:
7 = 2Ес/?/пД (Рпо)п, (РлтН (Ю.П)
В реальном тракте имеются потери Паг, поэтому ука-
г=1
занным значениям вероятностей должно соответствовать
большее значение отношения сигнал/помеха на входе
приемника: 2Е'с/Уи = 7П а/’ z=l (10.12)
но поэтому ЕС = АСДти; У п — Рп/А/пр, 2УсРсТиД= <7 Д а/. (10.13)
229
й коэффициент подавления оказывается равным
Kn=2Ncz^fnpfq (10.14)
t=i
РЛС будет подавлена помехой при условии, что в тече-
ние всего времени наблюдения выполняется условие
(Рп/Рс)вх>/<п, (10.15)
где (Рп/Рс)вх — реально имеющее место отношение мощ-
ностей помехи и сигнала на входе приемника.
Рис. 10 1 К уравнению радиопротиводействия.
8. Если в точке О (рис. 10.1) расположена радиоло-
кационная станция, в точке Ц — наблюдаемая цель,
а в точке ПП — передатчик помех, то условие подавле-
ния РЛС выражается уравнением радиопротиводейст-
вия:
(•РП^Рс)вх 4т:у(101/5ппСпД/ир04п; X
Е2(Д<раз» Д®у\О/аРр,'[С^РЛсД^п^2п ' ^п’ (10.16)
где упол — коэффициент, характеризующий различие по-
ляризации антенны РЛС и помехи; о — среднее значение
эффективной отражающей площади цели, прикрываемой
помехой; РПп—мощность передатчика помех; Ррлс —
мощность передатчика РЛС; Ga — коэффициент усиле-
ния антенны передатчика помех; Срлс — коэффициент
усиления антенны РЛС; Д/Пр — полоса пропускания при-
230
емника РЛС; А/п— эффективное значение ширины спек-
тра помехи; F2(q)a3, фум)—нормированная диаграмма
направленности по мощности антенны РЛС; Афаз =
==фазц—фазп, Афум = фум ц—фум и — раЗЛИЧИв УГЛОВЫХ
координат цели и передатчика помех по азимуту и углу
места соответственно; Рц — дальность до цели; £)п—
расстояние от РЛС до передатчика помех.
Формула (10.16) не учитывает поглощения энергии
радиоволн в атмосфере; предполагается, чго максимум
диаграммы направленности антенны РЛС направлен на
цель. Точки пространства, в которых выполняется соот-
ношение (10.16), образуют зону подавления РЛС. Гра-
ница зоны подавления £>цмин может быть определена,
если в соотношении (10.16) оставить знак равенства. Чем
ближе к РЛС расположена граница зоны подавления,
тем эффективнее помеха, и наоборот, помеха оказывает-
ся неэффективной, если РцМИН приближается к макси-
мальной дальности действия РЛС без помех.
9. При использовании пассивных помех условие по-
давления РЛС может быть записано следующим обра-
зом:
. °пп/°^Лп, (10.17)
где Опп — среднее значение эффективной отражающей
площади средств создания пассивных помех, располо-
женных в элементарном разрешаемом объеме (см. 2,28).
10. Известны следующие основные пути защиты ра-
диолокационных средств от воздействия помех:
— группировка в одном пункте наблюдения за целями
разнотипных РЛС, характеризующихся различными зна-
чениями основных параметров, в частности работающих
в различных частотных поддиапазонах [Н7]; этот путь
особых пояснений не требует;
— создание радиолокационных систем, в которых
предусматривается совместная обработка информации,
получаемой различными радиолокационными станциями
Г54, 117];
— повышение помехозащищенности отдельных РЛС.
11. Создание радиолокационных систем является
перспективной проблемой, которая находится в стадии
изучения. Однако, опираясь на известные уже сегодня
технические решения, можно пояснить важное положе-
ние: система, в которой предусмотрена совместная обра-
ботка информации, поступающей по нескольким радио-
23!
локационным каналам, характеризуется принципиально
иными возможностями и свойствами по сравнению с воз-
можностями и свойствами отдельных каналов, исполь-
зуемых порознь. Это положение применимо и к проблеме
борьбы с помехами. Сказанное поясняется примерами
(пп. 16—19).
12. Одноканальные пеленгаторы подвержены дейст-
вию помех, создаваемых из одной точки пространства.
Если, например, на цели, за которой следит радиолока-
ционная станция с коническим сканированием, устано-
вить передатчик помех с амплитудной модуляцией излу-
чаемых колебаний
Un (?) = Un [ 1 + ГПп COS (йп/ 4- 41)] COS (OnZ,
то при выполнении условий Qn = Qa и ®п= ®РЛС наличие
помехи приведет к весьма существенным ошибкам опре-
деления угловых координат цели [7, 24] радиолокацион-
ной станцией.
Двухканальная пеленгационная система (см. гл. 1)
практически нечувствительна к помехам, создаваемым
из одной точки пространства; исключение составляет
поляризационная помеха, при воздействии которой де-
формируется диаграмма направленности антенны РЛС
[70]. Для внесения ошибок в определение координат
цели двухканальной системой нужно создавать помехи
как минимум из двух точек пространства, что сущест-
венно затрудняет и усложняет организацию помех.
13. Перспективным направлением развития РЛС
является многочастотное излучение [33, 39, 49, 99]. В мно-
гочастотной РЛС имеются т независимых каналов из-
лучения и приема сигналов; каждая цель одновременно
облучается зондирующими сигналами на т частотах.
Принимаемые отраженные сигналы обрабатываются со-
вместно в общем для всех каналов выходном устройст-
ве. Преимущества многочастотной РЛС перед одноча-
стотной состоят в следующем; увеличивается суммарная
мощность излучения РЛС при наличии ограничений
мощности отдельного передатчика; увеличиваются даль-
ность обнаружения целей и точность измерения их коор-
динат при заданной полной мощности излучения РЛС;
резко возрастают надежность работы станции, а также
ее помехозащищенность от помех искусственного и есте-
ственного происхождения
232
Увеличение дальности обнаружения и точности изме-
рения координат целей при использовании многочастот-
ной РЛС объясняется тем, что при достаточно большом
разносе рабочих частот каналов
1А-М=ДГ>^ц, (10.18)
где /ц— линейный размер цели, сигналы в каналах ока-
зываются некоррелированными и сумма гыходных на-
пряжений (7Выхг в каналах РЛС
4^ = 2^ (10.19)
t=l
характеризуется гораздо меньшими флуктуациями в про-
цессе наблюдения движущейся цели, чем каждый из со-
ставляющих сигналов.
Этим же эффектом сглаживания флуктуаций объяс-
няется и возможность более эффективного подавления
мешающих отражений от земной и водной поверхности.
Для защиты от активных шумовых помех в много-
частотной РЛС могут быть применены различные вари-
анты совместной обработки выходных напряжений от-
дельных каналов. В литературе [34, 40, 60] описываются
следующие варианты межканальной обработки в трех-
частотной РЛС:
1) = +
2) ^вых S = (Ю.20)
3) ^выхь = ^^’-
В порядке их перечисления эти варианты обработки
характеризуются последовательным ухудшением харак-
теристик обнаружения и повышением помехозащищен-
ности РЛС. При первом варианте обработки для подав-
ления РЛС достаточно создавать помеху только на од-
ной из частот РЛС (/i, fz, или /з)', применение второго
варианта приводит к необходимости создания помех как
минимум на двух частотах из трех, так как иначе поме-
ха не пройдет на выход системы обработки; при исполь-
зовании же третьего варианта для подавления станции
необходимо создавать помехи одновременно на всех трех
частотах.
233
14. Одноканальные РЛС подвержены воздействию
помех по боковым лепесткам диаграммы направленности
антенны.
Применение двухканальной системы позволяет
исключить проникновение в РЛС по боковым лепесткам
помехи, создаваемой из одной точки пространства [38,
60, 70, 99, 116]. Схема двухканальной системы изобра-
жена на рис. 10.2.
Рис. 10.2. Схема простейшей системы компенсации боковых ле-
пестков.
Помимо основного радиолокационного канала наблю-
дения за целями используется вспомогательный компен-
сационный канал, включающий антенну ненаправленно-
го действия и приемник. Напряжения U0CH приемника
основного канала и UK компенсационного приемника
сравниваются в схеме вычитания; выходное напряжение
£7вых>0, поступающее к индицирующему устройству,
образуется только при выполнении условия
Uocn>UK. (10.21)
Начальное усиление приемников регулируется таким
образом, чтобы
КоснЖсн(?п)<^Ж При | <рп |!^> | <?гр | > (10.22)
где /Сосн — коэффициент передачи по напряжению при-
емника основного канала; Ак— коэффициент передачи
приемника компенсационного канала, 60сн(фп)—значе-
ние коэффициента усиления антенны основного канала
для направления прихода помехи срп; GK—коэффициент
усиления антенны компенсационного канала; срГр — гра-
ничное значение направления прихода радиосигналов,
начиная с которого действует система компенсации.
Для исключения перегрузок приемников при возра-
стании уровня помехи применяется АРУ по помехе, из-
меняющая одновременно усиление обоих каналов.
234
Если |фп|>|фгр| (рис. 10.3), го помеха не может
проникнуть на выход двухканальной радиолокационной
системы. Эффект работы подобной системы эквивален-
тен срезанию нижней части диаграммы направленности
основной антенны (это показано штриховой линией на
рис. 10.3,а).
Рис. 10.3. Диаграммы направленности:
а — основной антенны, б — компенсационной антенны.
Рассмотренному устройству компенсации боковых ле-
пестков свойствен существенный недостаток: при возра-
стании мощности помехи уменьшается отношение сиг-
нал/помеха в основном тракте; это может привести
к полному подавлению основного канала.
От указанного недостатка свободны системы, в кото-
рых применяется компенсация помехи в тракте усиления
высокочастотных сигналов [99, 116]. Принцип работы
компенсатора на высокой (промежуточной) частоте
иллюстрируется схемой, приведенной на рис. 10.4. В этой
системе высокочастотное напряжение помехи
Иоснп (0 = COS (сОп^Ч-фп) >
существующее в основном канале, компенсируется поме-
ховым напряжением
Wk п (0 z= Un COS (tt)n^ + фп + Л) >
23Г
вырабатываемым в компенсационном канале и имеющим
те же значения амплитуды и частоты, но сдвинутым по
фазе на л. В приемном устройстве имеются две системы
автоматического управления, одна из которых регулиру-
ет амплитуду компенсирующего напряжения, а вторая —
его фазу.
В систему автоматического управления амплитудой
компенсирующего напряжения входят амплитудные де-
текторы, включенные после усилителей промежуточной
частоты основного и компенсационного каналов. После
Рис. 10 4. Схема устройства компенсации боковых лепестков с преоб
разованием сигналов в высокочастотном тракте.
детектирования помеховых сигналов их амплитуды срав-
ниваются в схеме вычитания. В зависимости от абсолют-
ного значения и знака разности ([70Снп—^кп) выраба-
тывается управляющее напряжение Д[7а, изменяющее
усиление УПЧ компенсационного канала таким образом,
ЧТОбы ВЫПОЛНЯЛОСЬ уСЛОВИе [/Оснп=^кп-
В системе автоматического управления фазой ком-
пенсирующего напряжения сопоставляются фазы высо-
кочастотных колебаний, подводимых от УПЧ компенса-
ционного и основного каналов; последнее напряжение
предварительно смещается по фазе на л/2. Выходное
напряжение фазового детектора используется для созда-
ния управляющего напряжения Д17фд, которое воздейст-
вует на дополнительный фазовращатель, включенный
после УПЧ компенсационного канала
Под воздействием системы автоматического регули-
рования разность фаз напряжений, подводимых к фазо-
236
вому детектору, оказывается равной л/2; с учетом дей-
ствия обоих фазовращателей фазовый сдвиг колебаний
на выходе основного и компенсационного каналов со-
ставляет л. Выходное напряжение г/Вых(0 можно счи-
тать полностью очищенным от помехи, проникающей
в тракт по боковым лепесткам диаграммы направлен-
ности основной антенны.
На полезный сигнал схема компенсации воздействия
не оказывает из-за различия характеристик сигнала и
помехи. Действительно, посто-
янные времени обеих систем
автоматического управления
во много раз превышают дли-
тельность сигнала, следова-
тельно, воздействием сигнала
на системы можно пренебречь.
15. При воздействии пере-
датчика помех на отдельную
радиолокационную станцию
(РЛС1 на рис. 10.5) зона не-
определенности, в пределах ко-
торой невозможно наблюдение
целей, определяется фп. Если
создать систему из двух стан- Рис 105 к работе триангу.
ции и совместно обрабатывать ляционной радиолокацион-
получаемую ими информацию, ной системы,
то зона неопределенности со-
кращается до четырехугольника АБВГ. Триангуляцион-
ным методом может быть определено положение источ-
ника помех в пространстве.
16. Основными путями повышения помехозащищен-
ности отдельной радиолокационной станции являются:
увеличение энергетического потенциала радиолокацион-
ной станции; расширение спектра зондирующих сигна-
лов; применение методов селекции, основанных на раз-
личии значений параметров сигналов и помех; борьба
с перегрузкой приемного тракта помехами; изменение
оптимальным образом значений параметров и режимов
работы РЛС при наличии, помех (адаптация); исполь-
зование источника помех для получения необходимой
информации о цели.
17. Энергетическим потенциалом РЛС называют про
изведение ^РЛССрлст:с. Увеличение энергетического потен-
237
циала является одним из самых эффективных путей
борьбы с активными помехами.
Из формулы (10.16) видно, что увеличение члена
^рлс^р. к/А/пр (’’'С = 1/Д/пр)
приводит к уменьшению эффективности помехи (напри-
мер, увеличению минимальной дальности £)цмин прикры-
тия цели помехой) либо требует пропорционального
увеличения потенциала передатчика помех, что далеко
не всегда реализуемо.
Энергия принимаемых сигналов, используемая при
обнаружении целей п измерении их координат, может
быть выражена следующим образом:
Ее^^рлДлс^с. (10.23)
Формула (10.23) указывает на возможность повыше-
ния помехозащищенности РЛС путем увеличения числа
Ус накапливаемых сигналов при заданном энергетиче-
ском потенциале станции. Этот путь эффективен при
борьбе с непрерывными шумовыми помехами, для кото-
рых коэффициент подавления зависит от числа накапли-
ваемых сигналов (формула (10.4)). В условиях дейст-
вия шумовых помех для увеличения числа накапливае-
мых импульсов можно, например, изменять скорость
движения луча антенны РЛС вплоть до полной его оста-
новки.
18. При расширении спектра зондирующих сигналов,
например, путем частотной или фазовой модуляции по-
вышается защищенность РЛС против активных шумо-
вых и пассивных помех. На эффективность этого мето-
да защиты против активных шумовых помех указывает
формула (10.14)—коэффициент подавления возрастает
при увеличении произведения Д/прТи.
При действии пассивных помех, представляющих со-
бой отражения от диполей, расширение спектра зонди-
рующего сигнала также повышает помехозащищенность
РЛС. Это происходит в результате уменьшения элемен-
тарного разрешаемого объема РЛС при использовании
сигналов с более широким спектром; пропорционально
уменьшению этого объема сокращается мощность
пассивной помехи на входе приемника импульсной РЛС
в каждый данный момент.
238
19. При наличии поляризационных различий сигна-
лов и помех для повышения помехозащищенности РЛС
может быть использована поляризационная селекция
[4, 90, 116, 117]. Поляризация характеризует законо-
мерность пространственной ориентации вектора напря-
женности электрического (или магнитного) поля за пе-
риод высококачественного колебания. У плоских одно-
родных волн векторы напряженности электрического и
магнитного полей лежат в плоскости, перпендикулярной
направлению распространения волны. Обычно поляриза-
цию волн характеризуют по ориентации вектора Е на-
пряженности электрического поля.
Поляризация волны определяется поляризационной
диаграммой, представляющей собой проекцию кривой,
описываемой концом вектора Е, на плоскость, перпенди-
кулярную направлению распространения волны. По
виду поляризационной диаграммы различают линейную,
круговую и эллиптическую поляризацию. Наиболее
общим случаем является эллиптическая поляризация,
характеризующаяся формой эллипса, ориентацией его
осей относительно выбранной системы координат хОу
(рис. 10.6) и направлением вращения вектора Е. Форму
эллипса оценивают двояким образом. Можно использо-
вать коэффициент эллиптичности Кэл, абсолютное зна-
чение которого равно отношению малой b и большой а
полуосей эллипса:
|Яол|=6/а, (10.24)
239
а знак принимается положительным, если при наблюде-
нии от источника вдоль направления распространения
волны вектор Е вращается по часовой стрелке. Можно
пользоваться углом эллиптичности аэл, связанным с Кэл.
зависимостью
aan = arctg/CajI,
(10.25)
—л/4^аЭл^л/4. (10.26)
Знак аэл так же, как и Кэл, связан с направлением вра-
щения вектора Е.
Ориентацию эллипса поляризации определяют значе-
нием угла р, образованного осью Ох выбранной системы
координат и большой осью эллипса, причем
0^|3^л.
(10.27)
При задании проекций ех и еу вектора Е на оси ко-
ординат
eA = Excosarf,
еу — Еу cos («о/ -р А?)
(10.28)
параметры эллипса поляризации определяются следую-
щим образом:
I Г/Asin2 i —ЕхЕц sin 2(3 cos Ду Е2у cos2
V Е2Х cos2 -|- ЕхЕу sin 2р cos Ду+ Е2у sin2 ₽
Q __ 1 ягН{У 2^x^cos Ду
р__ 2 arc 1g Е2х_Е2ц
(10.29)
(10.30)
где Дф — фазовый сдвиг между составляющими напря-
женности поля ех и еу.
Любой приемный антенно-фидерный тракт может
рассматриваться как поляризационный селектор, харак-
теризующийся тем, что мощность сигнала на выходе
тракта зависит от поляризации приходящей электромаг-
нитной волны. Поляризационные характеристики антен-
но-фидерного тракта определяются поляризационной ди-
аграммой волн, излучаемых этим трактом.
Оценку фильтрующей способности поляризационных
селекторов осуществляют с помощью поляризационного
коэффициента уПоЛ, представляющего собой отношение
мощности Р сигнала, реально прошедшей через селек-
тор на вход приемника, к максимально возможному зна-
чению РМакс этой мощности, которое имело бы место
240
при точном согласовании поляризационных характери-
стик падающей волны и приемной антенны, т. е.
Упол = Р IPмакс- (10.31)
Значения поляризационного коэффициента лежат в пре-
делах от единицы до нуля.
Поляризационный коэффициент следующим образом
выражается через параметры поляризации принимаемо-
го сигнала и антенны:
1
Yпол = ~2~
1 47<сКа + (1- К2с) (1 - K2a):cos 2v
— (1 4-№с) (1+№а)
(10.32)
где Кс и Ка — коэффициенты эллиптичности сигнала и
антенны; v — угол между большими осями эллипсов по-
ляризации сигнала и антенны; знак «плюс» берется при
совпадении направлений вращения векторов Е прини-
Рис. 10.7. Зависимость поляризационного коэффициента от парамет-
ров поляризации падающей волны и антенны при одинаковых коэф-
фициентах эллиптичности волны и антенны (Кс = Ка).
маемой волны и волны, излучаемой антенной в режиме
передачи; знак «минус» соответствует различным на-
правлениям вращения.
Если приемный антенно-фидерный тракт точно согла-
сован по поляризации с полезным сигналом и плотности
потока мощности рп помехи и рс сигнала перед антенной
одинаковы, то поляризационный коэффициент равен от-
ношению мощностей Рп помехи и Рс сигнала после по-
ляризационного фильтра на входе приемника:
Упол = (-^п/^с) вх- (10.33)
На рис. 10.7 и 10.8 приведены графики, позволяющие
оценить эффект подавления помехи поляризационным
фильтром при различии их характеристик. Графики
241
позволяют определить значения уПОл как функции Кэл и
v при условии, что абсолютные значения коэффициентов
эллиптичности Кс падающей волны и Ка антенны одина-
ковы.
20. Частотная селекция может быть использована
для борьбы с помехами при различии спектров сигнала
и помехи. Возможны следующие ситуации:
— спектры сигнала и помехи не перекрываются;
— ширина спектра помехи значительно меньше ши-
рины спектра сигнала;
— спектры помехи и сигнала различны по струк-
туре.
При борьбе с шумовыми активными помехами весь-
ма эффективной является перестройка РЛС по частоте
-90° О 30° 60° 90° О
Рис. 10.8. Зависимость поляриза-
ционного коэффициента от пара-
метров поляризации падающей
волны и антенны при Лс =—Ла.
от импульса к импульсу
[14, 31, 34, 40, 99, 100,
115, 127]. При такой пе-
рестройке может быть
достигнут существенный
разнос по частотной оси
сигнала и помехи в тех
случаях, когда передат-
чик помех имеет инерци-
онную систему пере-
стройки (например, элек-
тромеханическую). Но
даже если в передатчи-
ке помех используются
современные электровакуумные приборы, позволяющие
практически мгновенно осуществлять настройку на ча-
стоту разведанного сигнала РЛС, то изменение частоты
РЛС от импульса к импульсу резко снижает эффектив-
ность помехи. При указанном законе изменения частоты
РЛС прицельные по частоте помехи (ширина спектра
помехи сравнима с полосой пропускания приемника
РЛС) закрывают от радиолокационного наблюдения
пространство только за постановщиком помех; простран-
ство же между РЛС и постановщиком помех прицельной
по частоте помехой прикрыто быть не может. Из этого
вытекает второе важное обстоятельство: нельзя скрыть
дальность постановщика с помощью помех, создаваемых
им самим. Существенно затрудняется создание индиви-
дуально-групповой защиты целей, например, путем со-
здания помех из двух точек пространства [7, 24].
242
При перестройке частоты РЛС от импульса к импуль-
су эффективны заградительные по частоте помехи; у за-
градительных помех ширина спектра должна быть не
меньше полосы перестройки частоты РЛС. Однако, это
увеличение эффективности помехи достигается ценой
увеличения мощности передатчика помех в сотни и ты-
сячи раз.
Случайное изменение частоты РЛС в широких пре-
делах позволяет существенно ослабить взаимные поме-
хи, создаваемые радиолокационными станциями одного
частотного поддиапазона. Следует подчеркнуть, что та-
кое изменение частоты позволяет улучшить и основные
показатели РЛС (дальность действия, точность измере-
ния координат).
По имеющимся данным [31, 40, 100, 111, 127], быст-
рая перестройка частоты РЛС по случайному закону
может осуществляться в диапазоне 3 ... 5% от среднего
значения частоты, с перспективой увеличения этого
диапазона до 10 ... 15%.
Если несущая частота сигналов изменяется случай-
ным образом от импульса к импульсу в пределах поло-
сы А/Рлс и плотность распределения частоты постоянна,
то математическое ожидание разности двух соседних
значений частоты равно [118]
|А-/...| = 0,5Д?рлс.
(10.34)
Эффективным путем борьбы с искусственными актив-
ными помехами является изменение частоты сканирова-
ния Qa антенн в РЛС с сопровождением целей по на-
правлению. Применяется «скрытая» частота сканирова-
ния, когда сканирование осуществляется только при
приеме отраженных сигналов.
При наложении спектра непрерывных шумовых по-
мех на спектр сигнала целесообразно применение мето-
дов оптимальной фильтрации, изложенных в гл. 4,
При фильтрации сигналов когерентно-импульсных
станций на фоне непрерывных шумовых помех приме-
няются гребенчатые фильтры [42, 66, 99, 116, 117]. Если
принимается пачка из Nc импульсов длительностью тп
с периодом следования ТИ, по полоса пропускания от-
дельного фильтра «гребенки» равна
А[гр-1/АсГи,
(10.35)
243
требуемое число фильтров —
^ф=2Ги/ти (10.36)
и суммарная полоса пропускания гребенчатого филь-
Р ДГЕгр=2/^тй. (10.37)
Отношение мощностей сигнала и помехи улучшается
гребенчатым фильтром в 0,5 Nc раз.
21. Примером использования различий в структуре
спектров сигналов и помех является схема череспериод-
ной компенсации (ЧПК),
используемая в когерент-
но-импульсных станциях
для борьбы с пассивны-
ми помехами [10, 11, ПО,
116, 117]. Схема ЧПК
приведена на рис. 10.9;
она включается между
фазовым детектором при-
Рис. 10 9 Схема череспериод- емника РЛС (рис. 1.34)
ной компенсации видеосиг- и выходным устройством.
ЧПК содержит линию за-
держки на период Тп следования видеосигналов, обра-
зующихся на выходе фазового детектора, и схему вычи-
тания Модуль коэффициента передачи такой схемы
равен
| К (/Q) | = 21 sinir/Ти (10.38)
где О = 2лЛ
Из выражения (10.38) видно, что ЧПК полностью
подавляет составляющие спектра на нулевой частоте и
на частотах, кратных частоте повторения импульсов
РЛС. Если цель неподвижна относительно РЛС (Е = 0)
и амплитуда ее импульсных сигналов постоянна, то та-
кие сигналы подавляются схемой ЧПК и на выход не
проходят
Сигналы движущейся цели, амплитуда которых пос-
ле фазового детектора промодулирована частотой FK
(см гл 1, п. 40), на выходе ЧПК имеют огибающую
^ВЫХ С — kc sin (лЕмТц), (10.39)
где kc — коэффициент пропорциональности.
Эффективное значение напряжения помехи, создавае-
мой на выходе схемы ЧПК отражением зондирующих
244
сигналов от дипольных отражателей или земной поверх-
ности, определяется значением коэффициента корреля-
ции рц(т) помехи при х=Тп:
^вых п |/4 -Рп(Ги), (10.40)
где kn— коэффициент пропорциональности.
Отношение сигпал/помеха по мощности изменяется
схемой череспериодичной компенсации в ^чпк раз, где
Кчпк = 2зт2(ЛГи)/[1 - Рп(7и)]. (Ю.41)
При двухкратной череспериодной компенсации
^2чпк '== ^sin4 (itFМТи)/[3 — 4рп (Ти) рп (27'и)]. (10.42)
22. Возможна селекция импульсных сигналов по ча-
стоте повторения. Схема селектора изображена на
рис. 10.10. Она включает в себе линию задержки на пе-
риод следования Тп=1/Рти и схему совпадения. Входные
Рис. 10.10. Схема селектора по
частоте следования импульсов
Рис 10.11. Схема селектора
импульсов заданной длитель-
ности.
импульсы воздействуют на схему совпадения непосред-
ственно (вход /) и через линию задержки (вход 2)
Выходное напряжение С7Вых образуется лишь при одно-
временном воздействии напряжений на обоих входах
схемы совпадения, поэтому через рассматриваемое
устройство проходят лишь импульсы с периодом следо-
вания Ти. Подобные схемы эффективны при борьбе, на-
пример, с хаотическими импульсными помехами
23. Для повышения помехоустойчивости может быть
использована также селекция импульсов по длительно-
сти [47]
Возможны следующие варианты:
— селекция импульсов заданной длительности;
245
— селекция импульсов заданного диапазона длитель-
ностей;
— селекция импульсов малой длительности;
— селекция импульсов большой длительности.
Селекция импульсов заданной длительности произво-
дится устройством (рис. 10, 11,), содержащим укорачи-
вающую (дифференцирующую) цепь, линию задержки
на время тСел и схему совпадения. При воздействии
входного импульса t/BX приблизительно прямоугольной
формы с длительностью ти на выходе укорачивающей
цепи образуются два коротких разнополярных импульса
Z7i, временное положение которых соответствует фронту
и срезу входного сигнала. Если ти=Тсел, то второй уко-
роченный импульс на входе 1 схемы совпадения появит-
ся одновременно с первым укороченным импульсом на
входе 2 этой схемы. В этом случае образуется выходной
импульс t/вых, фиксирующий появление на входе
импульса заданной длительности. Если Ти^Тсел, то
t/вых = 0.
Селекция импульсов, длительность которых лежит
в заданном диапазоне
Тсел l^^Tn^Tcen 2,
осуществляется с помощью устройства, схема которого
изображена на рис. 10.12.
Выходное напряжение устройства формируется схе-
мой ЗАПРЕТ; напряжение на входе этой схемы отлично
Рис. 10.12. Схема селектора им-
пульсов, длительность которых ле-
жит в заданном диапазоне.
от нуля при условии, что
имеется напряжение на
ее информационном вхо-
де 1 и отсутствует напря-
жение на запрещающем
входе 2.
ЕСЛИ Ти<Тсел 1, ТО
t/вых = 0, так как отсут-
ствует напряжение на ин-
формационном входе схе-
мы ЗАПРЕТ. При ти>
>ТСеч 2 ВЫХОДНОЙ ИМ-
пульс отсутствует из-за
действия напряжения на
запрещающем входе схе-
мы ЗАПРЕТ. И только
При Тсел 1 ^Тц^Тсел 2 ВОЗ-
246
пикает выходной импульс, так как при выполнении ука-
занного условия с выхода схемы совпадения к схеме
ЗАПРЕТ поступают импульсы Ucc в то время, когда
действие запрещающего импульса окончилось.
Селекторы импульсов малой длительности пропуска-
ют сигналы, для которых выполняется условие Ти-<Тсел.
Схема устройства изображена на рис. 10.13. Входной
Рис. 10.13. Схема селектора импульсов малой длительности.
сигнал U3X длительностью ти поступает к линии задерж-
ки и к укорачивающей цепи. На информационный вход 1
схемы ЗАПРЕТ подаются разнополярные ускороченные
импульсы напряжения Ui от укорачивающей цепи. С вы-
хода линии задержки напряжение U2 поступает на за-
прещающий вход 2 схемы ЗАПРЕТ. Особенность схемы
Рис. 10.14. Схема селектора импульсов
большой длительности.
ЗАПРЕТ в данном случае состоит в том, что она не про-
пускает импульсы положительной полярности даже при
отсутствии сигнала запрета. Если ти<Гсел, то на инфор-
мационном входе схемы ЗАПРЕТ имеется отрицатель-
ный импульс, соответствующий срезу входного сигнала,
до поступления импульса запрещающего; следовательно,
образуется выходной импульс Umax- Если же ти>тсел, то
отрицательный импульс поступает к информационному
входу при наличии импульса на запрещающем входе и
^вых = 0.
247
Селекторы импульсов большой длительности пропу-
скают сигналы, удовлетворяющие условию ти>тСел-
Схема подобного селектора изображена на рис. 10.14.
Входной импульс 17Вх поступает на один из входов схе-
мы совпадения непосредственно, а на другой — через
линию задержки. Напряжение на выходе отличается от
нуля ТОЛЬКО При условии Ти>Тсел.
24. При различии амплитуд сигналов и помех может
быть использована амплитудная селекция импульсов.
Различают следующие виды амплитудной селекции:
— выделение импульсов, амплитуда которых превы-
шает заданный уровень;
— выделение импульсов, амплитуда которых мень-
ше заданного уровня;
— выделение импульсов, амплитуда которых нахо-
дится в заданных пределах.
Рис 10 15 Схема селектора импульсов малой амплитуды.
Селектор импульсов с амплитудой, превышающей за-
данный уровень, представляет собой ограничитель СНИ-
ЗУ или ждущий генератор импульсов. При использова-
нии ограничителя форма и длительность выходных
импульсов соответствуют параметрам входного сигнала.
Если же используется ждущий генератор импульсов
(например, блокинг-генератор), то при превышении
входным сигналом порогового уровня вырабатывается
выходной импульс определенной полярности, амплитуды
и длительности.
Схема селектора импульсов малой амплитуды изо-
бражена на рис. 10.15. Входные сигналы подаются непо-
средственно па информационный вход 1 схемы ЗАПРЕТ.
К запрещающему входу 2 этой схемы входные импульсы
поступают через амплитудный ограничитель с пороговым
уровнем Uq. Таким образом, если t7BX<l7o, то на запре-
248
щающем входе схемы ЗАПРЕТ напряжение отсутствует
и входные импульсы проходят на выход устройства.
А при U3X>Uq схема ЗАПРЕТ оказывается запертой и
^ВЫХ^^О.
Схема селектора импульсов, амплитуда которых ле-
жит в заданных пределах t/oi<£7Bx< U02, изображена на
рис. 10.16. Если Отвх превышает больший пороговый уро-
вень U02, то оказывается запертой схема ЗАПРЕТ и
^вых=0. В том случае, когда амплитуда ТТх входного
сигнала меньше малого порогового уровня Uoi, выходное
Рис. 10.16. Схема селектора импульсов, амплитуда которых лежит
в заданных пределах.
напряжение отсутствует, так как нет напряжения на
информационном входе схемы ЗАПРЕТ. И только при
условии Uoi<UjiX<Uo2 имеет место напряжение на выхо-
де селектора, так как на информационный вход схемы
ЗАПРЕТ напряжение поступает, а на запрещающем вхо-
де напряжения нет.
25. Для борьбы с помехами находит применение так-
же селекция сигналов по времени их прихода. Так, на-
пример, в импульсных РЛС, имеющих систему АСД,
применяется стробирование приемника следящими
импульсами дальномера. При этом приемник, все время
запертый, отпирается только на время прихода сигна-
лов сопровождаемой цели.
26. При попадании помех в приемный тракт РЛС
очень опасной является перегрузка усилительных и пре-
образовательных каскадов, а также индикаторных при-
249
боров. Если помеха вызывает перегрузку какого-либо
каскада, то даже при большом превышении по напря-
жению помехи сигналом выделить сигнал во многих
случаях окажется невозможным. Для борьбы с пере-
грузками используются два пути. Это применение, во-
первых, усилителей с логарифмической амплитудной
характеристикой
U вых = £1па£7вх, (10.43)
где k и а — коэффициенты пропорциональности, и, во-
вторых, быстродействующих автоматических регулиро-
вок усиления БАРУ [111, 117].
К БАРУ относятся мгновенная автоматическая регу-
лировка усиления (МАРУ), временная автоматическая
регулировка усиления (ВАРУ). Схемы БАРУ помогают
защите РЛС от импульсных помех большой длительно-
сти, непрерывных шумовых помех, а также от помех,
представляющих собой модулированные незатухающие
колебания.
27. При борьбе с искусственно создаваемыми поме-
хами большое значение имеет возможность изменять па-
раметры РЛС во время работы, приспосабливаясь к кон-
кретно существующим условиям. Так, например, в сек-
торах сильного воздействия непрерывных шумовых
помех имеет смысл уменьшить скорость обзора или
даже остановить луч РЛС, что позволит существенно
увеличить отношение сигнал/помеха и снизить тем са-
мым эффективность помехи. В ряде ситуаций при воз-
действии помех целесообразно изменять вид излученного
сигнала (например, расширить его спектр путем введе-
ния внутриимпульсной частотной модуляции), деформи-
ровать диаграмму направленности антенны (например,
для исключения проникновения помехи по боковым лепе-
сткам) и т. д. По материалам зарубежной печати (на-
пример, [37, 94—96]) видно, что перспективной считает-
ся разработка адаптивных радиолокационных станций,
имеющих автоматическое управление от ЦВМ, которое
позволяет оперативно и оптимальным образом изменять
характеристики РЛС с учетом реальной обстановки.
РЛС рассматриваются как периферийные устройства
в единой системе управления, контролируемой ЦВМ.
Задачи обзора пространства и сопровождения целей
объединяются как взаимно дополняющие друг друга
функции одной РЛС. Создание искусственных помех по,
250
Добной радиолокационной системе является весьма
сложной задачей. '
28. Следует указать на возможность защиты РЛС от
помех путем использования помеховых сигналов для ре-
шения проблем радиолокации целей. Так, например,
в РЛС можно использовать помеховые сигналы для точ-
ной пеленгации цели, на которой установлен передатчик
помех. В ряде ситуаций помеха может даже повышать
точность определения угловых координат цели и ее
дальности.
Задачи
10.1. Объяснить, почему коэффициент подавления непрерывной
шумовой помехой увеличивается при расширении спектра сигнала
(например, при использовании внутриимпульсной частотной моду-
ляции) и при неизменных остальных параметрах, в том числе дли-
тельности импульса и мощности излучения?
10.2. Потенциал радиолокационной станции возрос в 10 раз.
Как изменится при этом минимальное расстояние между РЛС и
целью, при котором еще осуществляется подавление?
10.3. Показать, что если в РЛС имеется моноимпульсная си-
стема пеленгации, то источник помех, настроенных на частоту РЛС
и имеющих произвольную амплитудную модуляцию, пеленгуется
точно.
10.4. В приемнике РЛС используется система автоматической
регулировки усиления по шумам. Определить значения вероятно-
стей правильного обнаружения РПо и ложной тревоги РЛт при на-
блюдении сигнала со случайной начальной фазой и медленно флук-
туирующей амплитудой в условиях непрерывных шумовых помех.
Спектральная плотность помехи в 30 раз превышает спектральную
плотность собственных шумов приемника. Без помех РПо=0,9 и
Рлт = 10"5. Потерями в приемнике пренебречь.
10.5. Почему коэффициент подавления для непрерывных шу-
мовых помех зависит от числа импульсов в пачке, а при воздей-
ствии имитационных импульсных помех такой зависимости нет?
10.6. Чему равно максимальное число Nc накапливаемых при
обнаружении цели импульсов, если луч РЛС остановлен, цель дви-
жется на РЛС, длительность импульсов ти, период следования Та,
скорость цели v?
10.7. Имеется волна эллиптической поляризации с параметрами
а, Кэл, Р- Определить амплитуды Ех и Еу и фазовый сдвиг Аф про-
екций вектора Е на ортогональные оси Ох и Оу.
251
10.8. Для подавления РЛС прицельной по частоте помехой
требуется мощность передатчика помех Рп- Во сколько раз возра-
стет мощность передатчика помех если- понадобится создать за-
градительную по частоте помеху при условии, что в РЛС будет
применена перестройка по частоте от импульса к импульсу? Полоса
пропускания приемника РЛС равна 2( МГц, а среднее значение раз-
ности частот двух соседних импульсов составляет 100 МГц.
10.9. РЛС излучает волны круговой поляризации. На пути рас-
пространения волн идет дождь. Допуская, что капли дождя имеют
строго сферическую форму, можно считать, что отраженная волна
также имеет круговую поляризацию. Каково значение поляриза-
ционного коэффициента уиол для отражения волны? Объяснить
физический смысл полученного результата.
10.10. Оценить эффект прохождения пассивных помех
в когерентно-импульсной РЛС с ЧПК, если период следования им-
пульсов РЛС равен времени корреляции помехи, коэффициент кор-
реляции помехи выражается формулой р(т)=ехр[—л2т2ДК2о,1].
10.11. Применительно к условиям предыдущей задачи указать
диапазон значений периода Ги следования импульсов РЛС, в пре-
делах которого помеха ослабляется по мощности схемой ЧПК не
менее чем в 50 раз.
10.12. При отражении волн от реальной цели поляризация сиг-
налов претерпевает непрерывные изменения. Оценить среднее, мак-
симальное и минимальное значения поляризационного коэффициента
Упол отраженного сигнала, если коэффициент эллиптичности изме-
няется на +50% от среднего значения Кэл. Ср = 0,5, а угол про-
странственной ориентации изменяется на ±25°. Допустить, что
антенна согласована со средними значениями поляризационных
характеристик сигнала.
10.13. В РЛС обнаружение сигнала с полностью известными
параметрами на фоне собственных шумов приемника характеризует-
ся вероятностями РПо = 0,8, РЛт = Ю"и. Как изменятся значения
указанных вероятностей при воздействии на РЛС непрерывных шу-
мовых помех, спектральная плотность которых в 6 раз превышает
спектральную плотность шумов? Принять равными значения апри-
орных вероятностей наличия и отсутствия сигнала на входе прием-
ника; усиление приемника считать фиксированным.
10.14. На импульсную РЛС воздействует многократная ответ-
ная помеха; в ответ на каждый облучающий импульс РЛС создает-
ся серия высокочастотных импульсов помехи, имеющих постоянны-
ми амплитуду, длительность, частоту следования и частоту запол-
нения. Каковы возможные пути защиты от такой помехи?
10.15. Имеются две одинаковых импульсных РЛС. Их различие
состоит лишь в том, что коэффициент усиления приемника одной
252
станции зафиксирован применительно к условиям обнаружения цели
на максимальной дальности действия, а в приемнике другой —
применена система временной автоматической регулировки усиле-
ния (ВАРУ) с тем же максимальным усилением (система ВАРУ
обеспечивает изменение коэффициента усиления приемника Кус
приблизительно пропорционально квадрату времени после излуче-
ния каждого зондирующего импульса РЛС: Кус=й/2). В чем со-
стоит различие эффекта воздействия на указанные РЛС непрерыв-
ных шумовых помех?
10.16. На входе приемника когерентной импульсной РЛС соот-
ношение средних значений мощностей сигналов, отраженных от ди-
польных отражателей и маскируемой цели, равно |3. В РЛС имеется
схема ЧПК; требуемое значение коэффициента подавления равно
Кп. Сформулировать условие, при котором пассивная помеха будет
эффективна.
10.17. Оценить коэффициент подавления Кп собственных шумов
приемника в схеме ЧПК, если полоса пропускания приемника
Afnp—1 МГц, а период следования импульсов 7^=1 мс.
10.18. РЛС с непрерывным излучением сопровождает цель по
скорости. Чему равно отношение пассивной помехи к сигналу по
мощности на выходе линейной части приемника, если А/Пр = 330 Гц,
/о=9 ГГц, цель легит перпендикулярно направлению РЛС — цель,
скорость ветра в направлении РЛС составляет 10 км/ч? Отношение
указанных мощностей на входе приемника равно 1. Считать, что
система АСС следит точно за частотой сигнала, а частотная харак-
теристика приемника имеет прямоугольную форму.
10.19. Каково значение коэффициента подавления Кп при дей-
ствии пассивных помех на некогерентную импульсную РЛС? Допу-
стить, что наблюдение ведется по электронно-лучевому индикатору
с яркостной отметкой; оператор может фиксировать на экране точ-
ки разной освещенности при различии их яркости не менее чем
на 30%; яркость отметок пропорциональна корню квадратному из
средней мощности принимаемых сигналов.
Глава 11-
МЕТОДИКА ВЫБОРА ОСНОВНЫХ ТЕХНИЧЕСКИХ
ПОКАЗАТЕЛЕЙ РЛС
Порядок выбора основных технических показателей
Анализ тактических задач, решаемых с помощью про-
ектируемой радиолокационной станции, условий ее при-
менения, учет отражающих свойств целей и кинематиче-
253
ских характеристик их движения позволяет установить
требуемые тактические показатели РЛС:
1) назначение и условия размещения аппаратуры;
2) максимальную DM&KC и минимальную Рмин даль-
ности действия;
3) секторы обзора по азимуту Фаз и углу места
Фум",
4) период обзора 70б3;
5) точность измерения координат и радиальной ско-
рости движения; среднеквадратические значения ошибок
измерения указанных величин o(D), о(фаз), о(фум),
<у(ур);
6) разрешающую способность по измеряемым вели-
чинам б(£>), б (фаз), б (фум), б(^р);
7) помехозащищенность;
8) эксплуатационную надежность.
Для определения требуемых тактических показате-
лей РЛС необходимо иметь сведения об атмосферных
условиях, в которых будет работать станция, и о наибо-
лее вероятных помехах работе РЛС. Следует учесть так-
же возможные ограничения в выборе технических пока-
зателей РЛС, например, максимально допустимых разме-
ров антенны, допустимого значения средней или
импульсной мощности.
На основании перечисленных данных можно выпол-
нить расчет основных технических показателей РЛС.
Расчет ведется, как правило, методом последовательного
приближения с неоднократным уточнением и согласова-
нием значений величин Ниже излагается примерный
порядок расчета.
1. Вид излучаемых колебаний
Одним из первых вопросов, на который нужно отве-
тить, приступая к проектированию станции, является
вопрос о виде излучаемых колебаний: непрерывные или
импульсные. РЛС с непрерывным излучением характе-
ризуются (по сравнению с импульсными) более низкой
чувствительностью, трудностями измерения и разреше-
ния по дальности; их достоинства заключаются в отно-
сительно низкой мощности излучаемых колебаний и луч-
шем качестве селекций целей по скорости.
При проектировании РЛС с импульсным излучением
необходимо решить вопрос о виде импульсных сигналов
254
(некогерентное или когерентное излучение, простые или
сложные сигналы1)). Выбор вида излучаемых колебаний
в значительной степени предопределяет основные техни-
ческие решения.
2. Длина волны
Длина волны и геометрические размеры антенны
определяют ширину диаграммы направленности антенны
РЛС. Для наиболее распространенных в настоящее
время зеркальных антенн справедливо соотношение
0О(5 «60°Ш, (И.1)
где 0о,5 — ширина диаграммы направленности по поло-
винной мощности; d& — размер раскрыва антенны в со-
ответствующей плоскости.
При заданном максимальном размере антенны реали-
зовать значение ширины луча, требуемое для обеспече-
ния желаемого разрешения, можно вариацией длины
волны. Так как реальная разрешающая способность по
угловой координате (формулы (6.1) и (6.28))
8(?)=Гт0о,8,
где —коэффициент ухудшения потенциальной разрешаю-
щей способности, то для обеспечения требуемого разре-
шения длина волны с учетом (11.1) должна быть равна
Z, = 3(?)da/6O°T< (11.2)
Значения величин 6 (ср) и da известны; значением коэф-
фициента ухудшения разрешающей способности по угло-
вой координате можно задаваться. Для большинства су-
ществующих РЛС значение колеблется в пределах
1,5 ... 3. Формула (11.2) определяет значение длины
волны Xi, при котором обеспечивается требуемая разре-
шающая способность по угловой координате.
Далее следует определить значение длины волны,
при котором обеспечивается заданная точность измере-
ния угловой координаты. Среднеквадратическое значе-
П Простыми называются такие сигналы, у которых произведе-
ние ширины спектра на длительность сигнала AfcTc~l, сложными—
такие, у которых AfcTc»l
255
ние ошибки измерения определяется формулами (7.7)
и (7.11):
° (?) =
где ^ — коэффициент ухудшения потенциальной точности.
Учитывая (11.1), из предыдущего равенства полу-
чаем
Я2 = o(<p)da ^<7/60°^. (П-3)
Если из двух рассчитанных значений длины волны М и
Х2 выбрать меньшее, то будет обеспечено выполнение
требований и по разрешению и по точности измерения
угловой координаты.
Однако на практике при определении длины волны
РЛС, как правило, приходится исходить из требований,
связанных с выбором энергетических показателей стан-
ции, определяющих дальность действия РЛС; разрешаю-
щая же способность обеспечивается постольку, посколь-
ку это оказывается возможным. С учетом поглощения
действия
энергии радиоволн в тропосфере дальность
РЛС выражается формулой (см. гл. 5, п. 9)
г, _ У _РрлсЛр£_ .„-WAaK
Омаке п— Г 1U
В эту формулу длина волны входит двояким
образом.
Во-первых, в качестве множителя в знаменателе подко-
ренного выражения, во-вторых, в качестве параметра,
определяющего значение коэффициента поглощения.
При заданных значениях величин, входящих в указан-
ную формулу, энергия сигнала является функцией дли-
ны волны:
Ррлстл = й,ЛЧ0М, (11.4)
где ki и k2 — (постоянные величины.
На рис. 11.1 приведены графики, иллюстрирующие
зависимость требуемой энергии передатчика от длины
волны. При построении графиков энергия излучения на
волне Х = 25 см (Е25) принималась за единицу и опреде-
лялось отношение Ех/Е25 с учетом поглощения энергии
в дожде интенсивностью 4 мм/ч и в кислороде на всей
дальности действия. Из рис. 11.1 видно, что для каждой
дальности действия 7)макс существует оптимальное зна-
256
чение длины волны %3, при котором требуемая энергия
излучаемых колебаний достигает минимума. Если длину
волны брать больше оптимальной (Х>Х3), то необходи-
мая энергия излучения увеличивается относительно
медленно, но при уменьшении длины волны по сравне-
нию с Хз необходимая энергия излучения возрастает
очень быстро. Так, например, для дальности действия
250 км при указанных выше условиях поглощения опти-
Рис. 11.1. Изменение энергии излучаемых колебаний в зависимости
от длины волны.
мальная длина волны равна приблизительно 6 см; при
уменьшении длины волны до 3 см энергия излучения
должна быть увеличена почти в НО раз. Наименьшая
длина волны, которую можно применять в радиолока-
ционной станции, определяется большей частью пиковой
и средней мощностью высокочастотных генераторов,
имеющихся в распоряжении конструктора. Особенно да-
леко отойти от оптимальной волны обычно не удается
из-за возрастания необходимой энергии.
Для окончательного выбора длины волны необходимо
оценить маскирующее действие гидрометеоров, завися-
щее от л. Надежное обнаружение цели в присутствии
гидрометеоров обеспечивается при условии, что эффек-
тивная отражающая площадь о в 5 ... 10 раз превы-
шает эффективную площадь элемента объемного разре-
шения гидрометеоров:
(11.5)
257
Эффективная отражающая площадь гидрометеоров
(см. 2.21) равна
6 (V) о0,
где 6(7)—элемент объемного разрешения на максималь-
ной дальности РЛС; о0— удельная эффективная отра-
жающая площадь гидрометеоров. Величина 6(7) про-
порциональна угловым размерам луча, поэтому эффек-
тивная отражающая площадь гидрометеоров связана
с длиной волны следующей зависимостью:
о£=Нг70(Я), (11.6)
где k — коэффициент пропорциональности.
Удельная эффективная отражающая площадь тоже за-
висит от Я. Нужно построить график зависимости <\(Я)
для конкретных условий и определить значение длины
волны Я4, при котором о2 составит 0,1 ... 0,2 от эффектив-
ной отражающей площади цели. Если выбрать волну
короче %4, то максимальная дальность действия РЛС
сократится и будет определяться не шумом приемника,
а маскирующим отражением радиоволн гидрометеорами.
3. Параметры системы обзора
При последовательном обзоре по угловым координа-
там связь между параметрами системы обзора характе-
ризуется формулой (3.13):
Т обз = ЯобзТ обдФумФаз/базОум,
где Гобз, Фаз, Фум задаются при проектировании.
Относительный период обзора целесообразно принять
равным среднему значению: 7<обзср^2. Из (3.13) по-
лучим
базбум/Т'обл —= К.сбз срФазФум/7'обз* (11 «7)
Равенство (11.7) позволяет определить взаимно соответ-
ствующие значения ширины луча и времени облучения
точечной цели.
Рассмотрение особенностей проектируемой РЛС по-
зволяет обычно принять решение о ширине и форме луча
и о законе его движения. Так, например, для наземной
258
РЛС обнаружения самолетов очень важно хорошее раз-
решение по азимуту, поэтому в станции этого типа целе-
сообразно использовать круговой обзор плоским лучом,
имеющим малую ширину по азимуту. В самолетной РЛС
перехвата и прицеливания, наоборот, разрешающая
способность по угловым координатам особенно важного
значения не имеет (требуемое разрешение целей обеспе-
чивается по дальности или скорости), но важна точность
измерения угловых координат; высокая точность измере-
ния обеспечивается при использовании либо моноим-
пульсной системы, либо конического сканирования луча;
в обоих случаях необходим симметричный луч, а его
ширина не особенно существенна.
Зная максимальный размер антенны и выбрав длину
волны, можно определить один из угловых размеров
луча, его меньший размер. Тогда в уравнении (11.7)
останутся только два неизвестных — второй угловой
размер и время облучения точечной цели. Такой же ре-
зультат (т. е. уравнение с двумя неизвестными) полу-
чится, если предположить равенство угловых размеров
луча (0аз=Оум). Может быть сделано предположение и
о каком-либо другом соотношении угловых размеров
луча.
Закон движенйя луча в пределах зоны обзора можно
выбрать, основываясь на специфике проектируемой
станции.
4. Энергетический баланс станции
Из формулы максимальной длительности действия
РЛС получается второе уравнение, связывающее между
собой время облучения цели и ширину луча.
Для расчета по средней мощности излучения РСр,
в предположении, что принимается один сигнал дли-
тельностью Тобл (при непрерывном излучении это совер-
шенно точно), формула дальности записывается следую-
щим образом (см. (5.13)):
Г) ______ ( T’cpZ’ofSjfS^pCT \0* Q—°’0о5п'С>макс п /Щ о\
Ь>максп— 4гсЛ2/гш/г7’0/гр* J 1U .(!..«)
Здесь значения величин DMaKCn, о, РСр заданы.
Длина волны определена расчетом. Значение коэффи-
циента шума нетрудно определить с достаточной точ-
ностью после выбора длины волны и принятия решения
25S
о типе приемника (имеется усилитель высокой частоты
или его нет; применяется ЛБВ или параметрический
усилитель и т. д.). Коэффициент различимости для одно-
го сигнала, как следует из (4.35), равен
п
k$~q Ц а//2А)с (в данном случае Nc~ 1),
z=i
где q— удвоенное отношение сигнал/шум, определяемое
по характеристикам обнаружения для заданных априор-
ных сведений о сигнале и заданных значений вероятно-
стей Рпо и Рлт- Потери в системе обработки можно оце-
нить приближенно, имея в виду основные идеи построе-
ния приемника (когерентный или некогерентный,
импульсный или для непрерывного излучения и пр.).
Для предварительного расчета можно принять, что
п
суммарные потери Д at=10. Коэффициент noi лощения
Рис. 11.2. Размеры рас-
крыва антенны.
бц(Х) определяется по таблицам
или графикам (см. гл. 5), и зна-
чение экспоненциального множи-
теля вычисляется для заданной
дальности действия РЛС.
Таким образом, в формуле
(11.8) остаются только две неиз-
вестные величины — время облу-
чения Гобл и площадь раскрыва
антенны Snp- Площадь раскры-
ва может быть выражена через
размеры антенны Ц и 12 (рис.
11.2):
£пр«0,25л/1/2. (11.9)
Если учесть соотношение (11.1), то площадь окажется
равной
5пр«2800Х2/Оа3Оум, (11.10)
причем угловые размеры должны быть выражены в гра-
дусах. Определив один из угловых размеров луча или
задавшись соотношением этих размеров, получаем зави-
симость Snp только от одного углового размера, входя-
щего в качестве неизвестного в формулу (11.7). Решая
совместно (11.7) и (11.8), получаем значения ТОбл и
угловых размеров луча 0аз и 0ум.
260
5. Характеристики импульсного излучения
Для импульсной РЛС необходимо выбрать характе-
ристики импульсного излучения: частоту следования,
вид излучения (когерентное или некогерентное), длитель-
ность и форму импульсов и их тонкую структуру (про-
стые немодулированные, фазоманипулированные, частот-
но-модулированные). Этот выбор определяется в основ-
ном требованиями к разрешающей способности и точно-
сти РЛС по дальности и скорости.
Если от РЛС не требуется разрешения целей по скоро-
сти и ее измерения, то естественно принять вначале не-
когерентный вариант РЛС. Импульсная мощность Ри,
средняя мощность РСр, частота следования импульсов
Ей и длительноть импульсов ти связаны соотношением
Р ср == Р wF иТи. (11.11)
Если в качестве генератора используется магнетрон, то
импульсная мощность является величиной заданной и
практически не изменяемой. При этом варьировать мож-
но только частоту следования и длительность импульса.
Применяя многокаскадный передатчик, можно считать
переменной величиной и Ри.
Для однозначного измерения дальности должно вы-
полняться условие:
Еи<с/2/)макс- (11.12)
Длительность импульсов выбирается, главным обра-
зом, исходя из требований разрешения по дальности.
Как следует из (6.1) и (6.11), реальная разрешающая
способность по дальности равна
5(D) =0,5уости, (11.13)
откуда
Ти=26(D)/суп. (11.14)
Если длительность импульсов, определенная из
(11.14), оказывается меньше той, которая получается
из (11.11), следует увеличить время облучения за счет
уменьшения скорости обзора или увеличения ширины
луча. Если это недопустимо из-за ухудшения точности
и разрешения по угловым’ координатам и требуемого
темпа выдачи информации, следует рассмотреть возмож-
ность перехода на более длинную волну, так как в этом
случае обычно увеличивается и располагаемая импульс-
ная мощность генератора. При этом необходимо также
261
увеличивать и размеры антенного устройства. Если же
условия работы РЛС не позволяют этого, то следует сде-
лать вывод о невозможности удовлетворить поставлен-
ные требования при некогерентном излучении простых
импульсных сигналов и необходимо применить сложные
сигналы.
Среди сложных сигналов следует отдать предпочте-
ние (если опять-таки не требуется разрешения по ско-
рости) импульсам с внутриимпульсной линейной частот-
ной модуляцией (ЛЧМ), так как по сравнению с фазо-
манипулированными импульсами их применение приво-
дит к более простой схеме РЛС [101]. При применении
ЛЧМ импульсов длительность их может быть выбрана
из соотношения (11.11), а разрешающая способность и
точность по дальности обеспечиваются выбором девиа-
ции частоты, так как на основании (6.1), (6.16), (7.3),
(7.Н)
8 (£)) — О.бстиу^/^сж, (11.15)
о (£)) — 0,5съи11о/kсж V^q, (11.16)
где Aic>K —• Д/м^и-
Значения ув и тщ можно принять равными ~10... 15,
что всегда может быть обеспечено соответствующим вы-
бором шкал выходного устройства.
Если от РЛС требуется одновременно хорошее разре-
шение как по дальности, так и по скорости, то наибо-
лее подходящим видом сигнала является импульсное
когерентное излучение. При таком виде сигнала требуе-
мая энергия облучения цели и разрешающая способ-
ность по скорости могут быть обеспечены выбором чис-
ла импульсов в пачке (см. формулы (6.1) и (6.26)),
а разрешающая способность по дальности — выбором
длительности импульсов в соответствии с (11.13). Как
известно [99, 116, 117], сигнал в виде когерентной пачки
обладает свойством неоднозначности измерений по даль-
ности и по скорости. Однозначное измерение по дально-
сти возможно лишь при соблюдении условия (11.12),
а по скорости (частоте) —при условии
Еи>2Едмакс, (11-17)
где Ри — частота посылок; Т^дмакс — максимальное зна-
чение допплеровской частоты.
Эти условия противоречивы, и противоречие это пре-
одолевается выбором высокой (по сравнению со значе-
262
нием, определяемым из (11.12)) частоты посылок с по-
следующим устранением неоднозначности одним из из-
вестных способов [99, 101].
Во всех случаях импульсного излучения число
импульсов в пачке, накапливаемых при обработке, мож-
но определить при выбранной частоте следования по
формуле
Л^с = -^'и^'обл==^и0О,5/йа- (11.18)
6. Уточнение показателей РЛС
Зная Nc, следует уточнить значение потерь в прием-
ном тракте (в детекторе, из-за несогласования полосы
пропускания, в интеграторе и т. д.) и скорректировать
значения параметров, определяющих отношение сигнала
и шума на входе приемника. Используя формулу (11.8),
нужно либо несколько изменить среднюю мощность из-
лучения, передатчика (в небольших пределах это допу-
стимо), либо пересчитать ТОбл и один или оба угловых
размера луча для нового значения коэффициента разли-
чимости &р.
Далее следует детализировать функциональные схе-
мы построения передатчика, приемника и выходного
устройства и уточнить значения потерь, выражающихся
как в уменьшении отношения сигнал/шум, так и в ухуд-
шении точности и разрешающей способности. После
оценки реальных значений соотношения сигнала и шума,
среднеквадратических значений ошибок измерения коор-
динат и разрешающей способности может возникнуть
необходимость в дополнительном пересчете основных
технических показателей РЛС или изменении первона-
чально выбранных технических решений. Например, если
в импульсной станции при однозначном измерении даль-
ности (выполнено условие (11.12)) приходится выбирать
слишком большую длительность импульсов и при этом
не выполняется важное требование разрешения целей
по дальности, то можно применить частотную модуля-
цию излучаемых импульсов и для выбранного энергети-
ческого баланса обеспечить нужную разрешающую спо-
собность по дальности. Или, если существенно ухудши-
лась разрешающая способность вследствие влияния раз-
меров пятна в индикаторе, то можно применить два
индикатора с мелким и крупным масштабом и т. д.
263
7. Применение нескольких каналов
Иногда в станциях целесообразно применить несколь-
ко параллельно работающих каналов. Расчет каждого
канала ведется независимо от других по изложенной ме-
тодике. Значения отдельных параметров в разных кана-
лах могут быть зависимыми. Так, при расчете частотно-
многоканальной РЛС (с одной диаграммой направлен-
ности) задаются вероятности правильного обнаружения
Рис. 11.3. Диаграмма направ-
ленности, образованная не-
сколькими составляющими.
и ложной тревоги для всего устройства и через них
должны быть выражены значения вероятностных харак-
теристик отдельных каналов. При разработке частотно-
многолучевых РЛС (несколько лучей с различным ча-
стотным заполнением) должна согласовываться форма
соседних лучей. Например, для создания в наземной
РЛС плоской вертикальной диаграммы косекансной
формы из нескольких парциальных лучей (рис. 11.3) не-
обходимо лучу канала 1 придать наибольшую направ-
ленность, лучу канала 2 — меньшую, 3 — еще меньшую
и т. д.
Пример расчета технических показателей
импульсной РЛС
Рассмотрим расчет технических показателей назем-
ной РЛС определения высоты полета самолетов.
Станция должна характеризоваться следующими
данными:
1) обнаруживаются самолеты, летящие на высоте до
20 км с вероятностью правильного обнаружения РПо^
^0,5 и вероятностью ложной тревоги РЛт^10~3;
2) дальность действия — 200 км, сектор обзора по
азимуту — 90°, сектор обзора по углу места — 8°;
3) точно определяются дальность и угол места целей,
а азимут оценивается приближенно;
4) среднеквадратические значения ошибок измерения
дальности— 100 м, угла места — 0,3°, азимута — 3°;
264
5) разрешающая способность по дальности — 50 м,
по углу места — 0,6°;
6) период обзора — не более 10 с;
7) среднее значение эффективной отражающей пло-
щади цели — 10 м2, закон флуктуаций отражающей пло-
щади — приблизительно экспоненциальный;
8) наибольший размер зеркала антенны не должен
превышать 5 м;
9) средняя мощность излучения передатчика не дол-
жна превышать 200 Вт, а импульсная — 200 кВт.
Выбор РЛС импульсного некогерентного типа пред-
определяется относительно малой дальностью ее дей-
ствия, требованиями довольно высокого разрешения по
дальности и отсутствием требований к измерению и
разрешению по скорости.
Для оценки длины волны РЛС прежде всего обратим-
ся к рис. 11.1, полагая £)максп = 250 км. При этом опти-
мальная длина волны равна приблизительно 6 см. При
уменьшении дл-ины волны до 4 см необходимая энергия
импульса возрастает приблизительно в два раза, что,
по-видимому, является допустимым. С другой стороны,
выбор более короткой волны позволит с меньшими за-
труднениями удовлетворить требования к точности изме-
рения угловых координат и разрешающей способности
по углам. Использовать длину волны менее 4 см неце-
лесообразно, так как потери энергии резко возрастут.
Приняв Х = 4 см, можем определить ширину луча
буМ РЛС в вертикальной плоскости (наиболее важная
характеристика луча для данной станции):
0уМ = 60°Ша = 0,48°.
С учетом ухудшения реальной разрешающей способности
по сравнению с потенциальной (определяемой шириной
луча) разрешающая способность по углу места равна
приблизительно 0,6°.
Обращаясь к формуле (11.7), получаем
0аз==3007,обл,
где время облучения ТОбл должно быть выражено в се-
кундах, а ширина луча баз в горизонтальной плоскости—•
в градусах.
Прежде чем воспользоваться формулой (11.8), опре-
деляем:
265
1) 5п£)==О,785-6ОоХ5/0аз==235Х/0аз, где 0аз — в градусах,
X — в метрах, — в квадратных метрах.
2) На волне 4 см при использовании в качестве уси-
лителя высокой частоты лампы бегущей волны можно
получить
3) Теоретически необходимое отношение сигнал/шум
на входе приемника при обнаружении сигнала с неиз-
вестными начальной фазой и амплитудой для РПо = 0,5
и Л-[Т=10~3 равно 7ср = 20 (см. рис. 4.9), потери в тракте
п
принимаем равными JJa/== 10, и коэффициент различи-
i=i
мости при Afc==l
^=0,5-20.10=100.
4) Коэффициент поглощения 6П(А) в дожде интенсив-
ностью 4 мм/ч и кислороде воздуха на волне 4 см ра-
вен приблизительно 2,7-10~2 дБ/км. Тогда
(10~°’°55пПмаксп)4 = Ю-0’2 2,7,0,01'20° —0,083.
Из (П.8) находим
Р4макс п —
РсрТобл^пр®
4п№кшкТ0кр
0,083.
Используя найденное значение Srap, получаем
Р*макс п == 4600Рср?обл°/4и^ш^Ро^р92аз-
Подставив значения остальных величин, для РСр=
= 100 Вт придем к соотношению
02аз~ 184Тобл-
Решая совместно два уравнения, связывающие 0аэ
и Тобл, получаем
Тобл —2 мс; 0аз = О,6°.
При необходимости можно произвести корректиров-
ку полученных значений. Например, можно расширить
луч по азимуту, так как ни точность измерения, ни раз-
решающая способность по азимуту существенной роли
в данном случае не играют, а размеры антенны РЛС бу-
дут уменьшены. Допустим, что 0аз = 3°, т. е. ширина луча
увеличена в пять раз при прочих равных условиях. Из
(11.7) определяем ТОбл = 10 мс (время облучения также
возросло в пять раз). При выбранных угловых размерах
266
луча (0уМ = О,48° и 0аз = 3°) площадь раскрыва антенны
3Пр=3,14 м2. Подставив это значение в формулу (11.8),
можем рассчитать необходимую среднюю мощность при
измененных значениях параметров: Рср = 500 Вт. Если
такая мощность не может быть реализована, а допу-
стимо использовать, например, только РСр = 200 Вт, то
при прочих равных условиях дальность действия РЛС
в дожде сократится приблизительно на 25%. Можно
принять меры по уменьшению потерь в тракте или по-
вышению чувствительности приемника, что позволяет
увеличить реальную дальность действия. Другим путем
является ревизия ранее принятого решения о примене-
нии простых некогерентных сигналов и переход к ис-
пользованию сложных ЛЧМ-или фазокодоманипулиро-
ванных сигналов.
Из условия однозначности определения дальности
частота следования Еи импульсов РЛС должна быть ме-
нее 750 имп/с. Примем FH=700 имп/с. Тогда для средней
мощности излучения РСр = 200 Вт, импульсной мощности
Рц=100 кВт и частоты следования импульсов Еи=
= 700 имп/с получим из (11.11) значение длительности
импульсов ти=2,85 мкс. При времени облучения цели
7’обл=Ю мс и Еи = 700 имп/с число накапливаемых им-
пульсов равно Мс = ТОбл/?и=7. Зная Nc, можно уточнить
потери в детекторе. Используя рис. 4.17, находим адет =
= 1,5.
Потенциальная разрешающая способность по дально-
сти составляет 0,5сти=430 м. В соответствии с требова-
ниями реальная разрешающая способность 6(7)) долж-
на быть равна 500 м. При правильном выборе шкал
индикатора это требование можно удовлетворить. Для
того чтобы иметь запас по потенциальной разрешающей
способности, можно уменьшить ти раза в два (до ти =
= 1,4 мкс) при соответствующем увеличении импульсной
мощности до Ри=200 кВт.
При выбранных значениях параметров требования по
точности измерений будут реализцваны. Потенциальные
ошибки по дальности и углу места равны
а (£>) -- 0,5сти'/]/26 м;
а (р) = 0ум/)/7«7 =5= 0,063°.
С учетом даже существенного ухудшения реальной точ-
ности по сравнению с потенциальными возможно.стями
267
требуемая точность измерения координат будет обеспе-
чена.
После расчета основных параметров РЛС нужно де-
тально проработать ее функциональную схему и снова
в случае необходимости, уточнить значения отдельных
параметров.
Пример расчета технических показателей РЛС
с непрерывным излучением
В данном разделе рассмотрен расчет технических по-
казателей самолетной РЛС с непрерывным излучением.
Непрерывное излучение облегчает селекцию целей по
допплеровскому смещению частоты отраженных сигна-
лов; указанное обстоятельство весьма существенно при
обнаружении движущихся целей (самолетов) на фоне
мощных отражений от земной поверхности. Применение
частотной модуляции излучаемых колебаний позволяет
измерять дальность до целей при одновременной селек-
ции по скорости.
Станция должна характеризоваться следующими дан-
ными:
1) обнаруживаются самолеты, летящие на высоте от
нескольких десятков метров до 10 км с вероятностью
правильного обнаружения РПо^>0,5 и вероятностью лож-
ной тревоги О-3;
2) дальность обнаружения целей — 40 км, дальность
прицельной стрельбы — 20 км, сектор обзора по азиму-
ту— 90°, сектор обзора по углу места — 30°;
3) точно должны измеряться азимут и угол места
обнаруживаемых целей; дальность и скорость могут оце-
ниваться приближенно;
4) среднеквадратические значения ошибок измере-
ния при поиске целей;
дальности — 500 м,
азимута — 1°,
угла места — 1°,
скорости — 5% от истинного значения;
5) среднеквадратические значения ошибок измере-
ния при прицеливании:
дальности — 500 м,
азимута — 0.Г,
угла места — 0,1°,
скорости — 5% истинного значения;
268
6) линейная величина, характеризующая разрешение
целей, не должна превышать при поиске целей 1000 м,
а при прицеливании — 50 м;
) 7) период обзора не должен превышать 2 с;
8) среднее значение эффективной отражающей пло-
щади цели— 10 м2, закон флуктуации отражающей пло-
щади— приблизительно экспоненциальный (см. гл. 2);
9) станция должна работать в условиях тумана и
Рис. 11.4. К определению
ширины луча РЛС.
дождя;
10) наибольший размер зеркала антенны не должен
превышать 1 м;
11) средняя мощность излучения передатчика не
должна превышать 50 Вт.
Прежде всего выберем длину волны РЛС. Учет по-
глощения в дожде интенсивностью 4 мм/ч и кислороде
воздуха (см. рис. 11.1) на всей
дальности действия РЛС
(40 км) показывает, что опти-
мальная длина волны лежит
между 2 и 3 см и минимум вы-
ражен нерезко. Поэтому мож-
но принять Х=2 см. Оценку
маскирующего действия ги-
дрометеоров при выбранном
значении длины волны можно
не производить, так как даль-
ность действия РЛС невелика,
а луч может быть довольно
узким и в среднем эффектив-
ная отражающая площадь ги-
дрометеоров заведомо меньше
щек площади целей.
Так как станция должна иметь режим с точным изме-
рением обеих угловых координат цели, то желательно
эффективной отражаю-
иметь луч симметричным, т. е.
баз — бум — бо,5 •
При максимальном линейном размере антенны ^аМакс =
= 1 м и длине волны Л = 2 cjvr имеем
0о,5мин — 60 X/d& макс —1,2 . (11.19)
С помощью формулы (11.7) определим зависимость
между шириной симметричного луча и необходимым вре-
менем облучения цели: 02о,5/Тобл = 27ОО град2/с.
269
График, характеризующий эту зависимость, изобра-
жен на рис. 11.4 сплошной линией.
Если исходить из требуемой разрешающей способно-
сти при обзоре [6(D) =1000 м], то ширина луча должна
быть не более
eo,5<6O°6(D)/Dмакс—1,5 .
Из (11.19) видно, что при заданных размерах зерка-
ла антенны и Х = 2 см минимальная ширина луча равна
1,2°. Следовательно, необходимое разрешение обеспечи-
вается.
Чтобы уточнить ширину луча РЛС, следует произве-
сти оценку энергетического потенциала станции. Прежде
чем воспользоваться формулой (11.8), определим:
1. Snp= 0,785d2a = 2830лг/6гв>5,
где da— диаметр зеркала антенны, м; Оо,5 — ширина сим-
метричного луча, град; X — длина волны, м.
2. Для самолетной РЛС, не имеющей усилителя вы-
сокой частоты, в диапазоне сантиметровых волн можно
принять &ш = 20.
3. Теоретически необходимое отношение сигнал/шум
на входе приемника, как и в предыдущем примере, рав-
но 20 (см. рис. 4.9), потери в тракте примем равными
П а' = 5-
Тогда коэффициент различимости при непрерывном из-
лучении равен ^р='5О.
4. Коэффициент поглощения 6П(М в дожде интенсив-
ностью 4 мм/ч и кислороде воздуха для % = 2 см равен
0,208 дБ/км. Следовательно, множитель поглощения
10 -0,05-0,208.40 _ 0,385.
Воспользовавшись формулой (11.8) без учета погло-
щения, получим
D^MSKC 8 • 1 0«РсрГобл/14^/4тгЛг^ш^71 о^р94о 5
Подставив числовые значения, придем к соотношению
0%,5=12 400 Гобл, (11.20)
где Оо,5 — выражается в градусах, а ТОбл — в секундах.
График зависимости (11.20) изображен на рис. 11.4
штриховой линией. Пересечение сплошной и штриховой
линий дает решение уравнения Oo,5 = f (ТОбл): Оо,5 = 2,2° и
270
Гобл=1,75 мс. Если учесть поглощение энергии радио-
волн и потребовать при этом обеспечения дальности дей-
ствия 40 км, то требуемое значение ширины луча соста-
вит десятые доли градуса, что невозможно реализовать.
Рассчитав параметры РЛС для /)Макс = 40 км без учета
поглощения, необходимо иметь в виду, что в реальных
условиях дальность действия станции может сократить-
ся. Можно выбрать ширину луча равной Оо,5=1,2°, что
определяется размерами антенны и длиной волны. Тог-
да при прочих равных условиях из (11.7) вытекает
Гобл = 0,533 мс, максимальная дальность действия без
учета поглощения Диаке = 54 км, а при поглощении даль-
ность действия составит 35 ... 37 км.
При выбранной ширине луча РЛС находим средне-
квадратическое значение потенциальной ошибки измере-
ния угловых координат на максимальной дальности:
с (<р) = 0,15°.
При автоматическом сопровождении потенциальная
составляющая ошибки существенно изменится, так как
более чем в 10 раз возрастет отношение сигнал/шум
(Д<^20 км). В режиме автосопровождения реальная точ-
ность измерения угловых координат определяется флук-
туациями параметров отраженных сигналов и может
быть доведена приблизительно до 0,002 дистанции, чтэ
составляет 0,11°.
Допустив, что в РЛС для режима поиска цели пре-
дусмотрен многоканальный спектроанализатор, полосу
пропускания отдельного фильтра можно согласовать со
временем облучения:
Д/ф= 1/Гобл = 1880 Гц.
Если период частотной модуляции Гм выбрать в 10 раз
больше максимального значения времени запаздывания
сигналов, то
Гм = 20Г>макс/£ = 2,67 мс.
Для обеспечения заданного разрешения по дальности
должно быть выполнено усл’овие
б (-D) ^ОДсТмА/фур/Д/м,
(П-21)
где Д/м — девиация частоты; yD — коэффициент ухудше-
ния разрешающей способности по дальности, среднее
271
значение которого можно принять равным 1,5. Из (11.21)
определяем девиацию частоты:
Д/м = 0,5(?7пмупД/ф/а(1)) = 2230 кГц.
Применительно к этим данным разность частот излу
чаемых и принимаемых колебаний при максимальной
дальности цели составит 0,1Д/м = 223 кГц. Для перекры-
тия всего диапазона разностных частот от 0 до 223 кГц
потребуется 118 фильтров, имеющих полосу пропуска-
ния 1880 Гц.
При отсутствии эффекта Допплера потенциальная
точность измерения дальности определялась бы полосой
пропускания фильтра. Из предыдущего следует, что мак-
симальная потенциальная ошибка измерения дальности
при попадании сигнала в какой-либо фильтр определя-
ется соотношением
ДГ^макс/10Г)макс = 0,5Д/ф/Д/м,
откуда Д/)макс=Ю18 м, а среднеквадратическое значе-
ние ошибки измерения дальности было бы равно
о(Г>) = ДПмакс/2/3- = 300 м.
Потенциальная ошибка такой величины вполне допу-
стима, так как реальное значение среднеквадратической
ошибки по заданию не должно превышать 500 м; запас
можно считать достаточным.
Однако эффект Допплера вызовет гораздо большую
ошибку. Если допустить, что атака целей ведется на
встречных курсах, скорость самолета-истребителя точно
известна и может быть учтена, скорость самолетов-це-
лей не превышает 1500 км/ч и случайные изменения ра-
диальной составляющей скорости цели (например,
вследствие различия относительного направления поле-
та целей) достигают половины скорости цели, т. е.
750 км/ч, то случайные изменения допплеровского ча-
стотного сдвига достигнут величины
Д/?д=2Д^р/Х = 20,8 кГц.
Это соответствует ошибке в измерении дальности до це-
ли Д£) = 3,73 км. При такой ошибке измерения дально-
сти станция может оказаться неработоспособной.
Для уменьшения влияния допплеровского сдвига ча-
стоты можно в несколько раз увеличить девиацию часто-
272
ты при одновременном пропорциональном увеличении,
полосы пропускания фильтров Ч Если увеличить Д/м
и Д/ф в 10 раз, то при той же разрешающей способности
и той же ошибке, связанной с неопределенностью поло-
жения частоты сигнала в пределах полосы пропускания
фильтра, влияние случайного допплеровского сдвига
уменьшится в 10 раз и соответствующая максимальная
ошибка составит 0,373 км. Среднеквадратическое значе-
ние ошибки измерения, вызванной допплеровским сдви-
гом, окажется равным сг(2>д) = 110 м, а полная потен-
циальная ошибка измерения дальности будет равна
a (D)s = (D)4- & (Р)д = 322 м.
В режиме прицеливания может быть использован
один перестраиваемый фильтр и система автослежения
по частоте. Выбрав полосу фильтра в 10 раз более
узкой, чем при поиске целей (Af$=188 Гц), обеспечим
необходимое повышение разрешающей способности по
дальности в режиме прицеливания. Слежение по угло-
вым координатам может быть осуществлено обычным
для моноимпульсных РЛС путем.
Решения задач и ответы
lD 1 мкс 1 мс 1 с 1 мин
D 150 м 150 км 150 000 км 9 000 000 км
1.2. 0,45.
1.3. +750 м
1.4. 0,39 Гц
1.5. Абсолютная ошибка измерения равна 150 км, а относитель-
ная составит 0,75 * 10~4%.
1.6. 75 000 мм/с.
1.7. 3,03 км.
1.8. Не ближе 460 м.
1.9. msC9
1.10. tD изм— tn—tiT где л-—наибольшее целое число, удов-
летворяющее неравенству nTa<tn.
1.11. '30 км
ч Это вызовет увеличение потерь из-за несогласования полосы
фильтра и длительности сигнала.
18—755 273.
1.12. При небольшом изменении частоты следования импульсов
для одной из целей будет сохранено условие /о<Ти; отметка этой
•цели останется неподвижной на экране индикатора при изменении
частоты следования. Для второй цели сохранится условие ^л>Ги,
но вследствие изменения Тя абсолютное значение разности изменит-
ся, что приведет к перемещению отметки, этой цели по экрану инди-
катора. Следовательно, та отметка, которая переместится при из-
менении частоты следования импульсов РЛС, занимает ложное
положение на экране индикатора.
1.13. 40 000 Гц.
1.14. В каждый данный момент частота отраженного от цели
сигнала увеличена на Ря. Разностная частота fp в течение одной
половины периода модуляции увеличена на Гд, а в течение другой—
уменьшена на эту же величину. Дальность до цели будет изме-
ряться с ошибкой, если не принять специальных мер.
1.15. Нужно осуществлять раздельное измерение разностной
частоты за каждую половину периода частотной модуляции РЛС:
за одну половину периода Fi—fp—Ря и за вторую 772=/р+^д-
Полусумма частот Ft и Fz позволит однозначно определить
дальность цели:
Д=сТя(Л+Г2)/8Д[м,
а полуразность дает возможность вычислить ее радиальную ско-
рость:
г/р = 0,25А,(/г2—Л).
1.16. Различие частот отраженных сигналов и излучаемых ко-
лебаний определяется временным сдвигом tn.
Если
Am = fo4-0,5AfMcosSMf,
то
/пр = /о + °>5Д/М COS 2М (t — tD),
/р = 0,5Д/м [cos— cos 2М (t — tD)] =
= AfMsinO,52Mfpsin2M (t — 0,5^) .
При постоянной дальности цели (tD = const) разностная часто-
та периодически изменяется; период изменения равен периоду ча-
стотной модуляции 7'M=2n/QM Разностная частота fp может быть
и положительной и отрицательной в том смысле, что fK3n периодиче-
ски то больше, то меньше /пр.
Измерительное устройство измеряет абсолютное значение раз-
ностной частоты:
I /р I = Д/м I sin 0,52м/р sin 2М (t — 0,5tD) |.
274
Среднее значение разностной частоты пропорционально даль-
ности до цели при условии, что Действительно,
°’57и
/рср^Г-1 J 4fMsinO,52M/psin2M(^ — tD)dt.
о
После замены переменных x = QM(?—tD)
fpep = 2(7’M2M)-M/MsinO,52M/I) j sinxdx =
“4йм
= 0,32Д/мsin 0,52M^ | cos x
При tD^TM имеет место ?dQm<^1, поэтому
sin 0,52m/£) 0,5QM^jr>; cos2M^p^sl; 0,5Гм— tD^Q,5T№.
Окончательно получим
fp cx>~‘^^f'tADIcTK.
Дальномер может быть применен при наличии только одной
цели, дальность которой пропорциональна среднему значению раз-
ностной частоты. Примером является самолетный высотомер.
1.17. 500 Гц
1.18. Максимальное значение частот излучения не должно пре-
вышать 1770 МГц.
Примечание. При наличии двух независимых генераторов
дисперсия случайных уходов частоты удваивается; считается, что
максимальное значение ухода частоты в три раза превышает сред-
неквадратическое отклонение.
1.19. Дальномер, схема которого приведена на рис. 1.15, позво-
ляет измерять дальность только одной цели; при наличии несколь-
ких целей он теряет работоспособность. Но если цели имеют раз-
личные скорости, то в принципе фазовый двухчастотный дальномер
может быть использован для измерения дальности нескольких це-
лей одновременно. Для этого сначала нужно разделить сигналы
целей по допплеровской частоте. Схема подобного устройства
изображена на рис. 1.
Излучаемые и принимаемые колебания смешиваются отдельно
на каждой из частот f\ и f2. После каждого смесителя ставится
набор допплеровских фильтров от Ф1 до Фп; выходы соответствую-
щих фильтров подсоединены к фазовым детекторам (ФД). Выход-
ное напряжение отдельного фазового детектора позволяет оценить
дальность до цели, движущейся с определенной скоростью.
1.20. 750 Гц.
18:
275
1.21. В 1,73 раза.
Примечание. Выходное напряжение фазового детектора
принять пропорциональным косинусу фазового сдвига подводимых
колебаний.
1.22. Пвых(ф) =а ctg ф,
тде а — коэффициент пропорциональности.
1.23. 5п(ф) =— a(l+ctg2 ф).
Рабочая зона лежит в пределах от 17 до 70°.
Рис. 1 К решению задачи 1.19.
1.24. Применительно к рис. 1.28 цель располагаем в плоско-
сти, перпендикулярной оси ОО'. Ось луча прочерчивает на этой
плоскости окружность; точка А — мгновенное положение точки пе-
ресечения оси луча с плоскостью уОх. Текущее значение угла между
осью луча и направлением на цель равно [3. Вследствие малости
углов А0 и 0О,5 имеет место приближенное равенство ОА~ОЦ~~
^OO' = D, где D — дальность цели. Из ЛАО'Ц имеем
АЦ* = (АО'У + (ЦО')2 — ЧАО'ЦО' cos \Чп — (Qt - Фц)]
или
Р = 9о,5 (1 + (Y/0o,5)2 - 2(Y/9o,5) cos (Qt - адм.
Если уС0о,5, то приближенно р = 0о,5—ycos(Q/—'Тгц).
Амплитуда выходного напряжения приемника Пвых = &Е(Р),
где Е(Р)—нормированная диаграмма направленности антенны по
полю.
-276
Разложив t/вых в ряд Тейлора в окрестности точки 0=Д0 и
ограничившись линейными членами разложения, получим
^вых = k {F( Д9) — у [^(Р)/^]₽=Д0 cos (2/ — Фц)}.
Обозначив [с/Г(^)/^]^_дд/Г (Д9) = а, приходим к искомому соот-
ношению
^вых = k' [l~a\ cos (2/ — Фц)].
1.25. 94°.
1.26. 00,5^9,55°.
1.27. £/вых(ф) =а cos (2лбЛр/Х). Диапазон однозначного изме-
рения угловой координаты равен 5°.
1.28. 37... 92,5 Гц.
1.29. и >900 км/ч.
1.30. На 48°.
1.31. Нет.
1.32. Ширина спектра допплеровских частот изменяется в пре-
делах от 0... 15 кГц до 0 ... 17,3 кГц.
1.33. Можно считать, что t>p = i>cosa,
где cos а = (Л — vt)/Vl2 (Л — у/)2, Л = VеD20 — I2.
1.34. 73 км.
1.35. г=77,5... 446 км.
1.36. 3,65°
1.37. Если требуется обеспечить выполнение условия /ф=/р =
— const для различных значений времени запаздывания сигналов
/о, то следует изменять параметры частотной модуляции AfM или
Гм- Например, изменяя период частотной модуляции в пределах от
^мин = 2Д/м/ мин//ф Д° /"макс — 2Д/м/рмакс//ф,
обеспечим попадание в единственный фильтр сигналов от целей,
расположенных в диапазоне дальностей от Е>мин до Е>маКс. В такой
системе резко возрастает время обзора пространства
1.38. С помощью указанной станции можно определить мгно-
венное положение цели, среднее значение радиальной составляющей
скорости, среднее значение тангенциальной составляющей скорости,
среднее значение абсолютной скорости по модулю и направлению.
1.39. Если лучи обеих РЛС одинаково быстро и независимо пе-
ремещаются в пределах заданных секторов ФА и ФБ, то произволь-
ные сочетания пеленгов двух станций покажут наличие и2 целей,
т. е. возникнет и(п—1) ложных отметок. Неоднозначность можно
устранить, если перемещать лучи с разными скоростями. Например,
луч станции А перемещать на свою ширину за время обзора лучом
станции Б всего заданного сектора ФБ.
1.40. 5.733.
277
1.41. Вместо угла поворота нужно ввести разность Дф—0.
1.42. Из Д АОЦ (рис. 2 на стр. 29'3) следует, что
(Н + /?э)2 = R23 4- D2 - 2R3D cos (90е + Тум)
или
Н = (/?% + D* + 2R3D sin Фум)0- R3.
Выносим R* за скобки:
Н = {[(1 + 29 sin <?уМ)/Дэ + (D/R^S - 1}.
В силу малости отношения D/R3 можно разложить полученное
выражение в ряд и ограничиться линейными членами разложения;
при этом получим
H=D sin фум+92/2Яэ.
Следовательно, &H=D2/2Ra.
1.43. Если d^.D, то можно считать направления прихода волн
в точки Л] и Лг параллельными, фазовый сдвиг колебаний в этих
точках равен
Дф = 2л;(91—Dz) Р —2nd sin ф/Х,
где 9] и 92 — расстояния между целью и точками Ai и Az- Диффе-
ренцируем обе части равенства:
dDi/dt — dD2/dt = d cos ydy/dt
или
vPi — aP2 = cos <p.
Далее,
0,5Л | ГД1 — ?д21 = dQ^ cos <p.
Отсюда
2<р = *Ид1 — Ffl2]/2dcos?.
При qi<;20o получим
2,~А|ЕД1-Едг|/2</.
1.44. Частота следования импульсов РЛС должна быть не
меньше 74 000 имп/с. При этом диапазон однозначного измерения
дальности не более 2 км.
1.45. 20°; 30°; 38°; 44°; 50°; 55°; 60°; 64°; 65°; 69°; 73°; 77°; 81°;
85,5°; 90°.
1.46. Следует периодически несколько изменять либо длину
волны РЛС, либо частоту следования импульсов.
1.47. При скорости полета, равной 810 и 1620 км/ч.
1.48. Формула (1.23) характеризует простейшую фазово-раз-
ностную систему пеленгации. Основной недостаток такой системы
состоит в том, что нестабильность фазовых сдвигов в приемных
278
каналах приводит к появлению дополнительных ошибок в измере-
нии углов координат; реально получим
Дф = 2лс/ sin ф/Х+Дф,
где Дф — меняющаяся разность фазовых сдвигов сигналов в при-
емных устройствах. В зависимости от Дф случайным образом из-
меняется направление нулевого пеленга. Этот недостаток устраняет-
ся в фазовой суммарно-разностной системе пеленгации. Ее основное
отличие состоит в том, что принятые сигналы непосредственно от
антенны поступают в кольцевой мост, где образуется суммарный
иа(^)4~Цб(0 и разностный ua(f)—«б(0 сигналы, которые затем
усиливаются в раздельных каналах и подводятся к фазовому де-
тектору. Выходное напряжение фазового детектора оказывается
.равным:
С^вых = Uоcos sin (2nd s'ln тА)»
т. е. независимо от изменения фазовых сдвигов в каналах (Дф)
направление нулевого пеленга остается неизменным.
1.49. Принципиальный недостаток конического сканирования
при измерении угловых координат состоит в том, что требуется
некоторое время (как минимум период вращения луча) для созда-
ния равносигнального направления. Если по каким-либо причинам
{например, из-за флуктуаций сигнала) амплитуда сигнала изменит-
ся за это время, то положение цели по отношению к равносигналь-
ному направлению будет определено с ошибкой. Этот недостаток
устраняется в моноимпульсных устройствах измерения угловых ко-
ординат. В этих устройствах имеется несколько точек приема ра-
диоволн (несколько антенн); для пеленгации в одной плоскости до-
статочно двух точек приема, а для пространственной пеленгации —
четыре точки. Наличие нескольких точек приема позволяет создать
«мгновенное» равносигнальное направление и тем самым исключить
влияние амплитудных флуктуаций сигнала на точность измерения
угловых координат.
1.50. Задержка стробимпульсов дальномера изменяется от 3,33
до 33,3 мкс относительно момента излучения зондирующих им-
пульсов.
1.51. На 3 м.
1.52. Равносигнальное направление антенны будет перемещать-
ся по круглому конусу вокруг направления на цель.
1.53. 50 Гц.
1.54. Изменится частота сигнала ошибки; если эта частота
выйдет за полосу пропускания селективного усилителя, то система
АСН окажется разомкнутой.
1.55. Равносигнальное направление антенны будет уходить от
цели.
279
1.56. 4 МГц.
1.57. 278 м.
1.58. Рл^ЗООО км.
1.59. ДП = 37,5 км.
1.60. Нужно компенсировать перемещение частиц фона. Для
этого частоту когерентного гетеродина следует изменить на Д/кг =
= 2ир/Х.
2.1. Для определения о используем формулу (2 1). Находим
поток плотности мощности у цели-
?Mll = PnG/4*D* = P^a/DW.
Плотность потока мощности у станции найдем из условия:
Рм РЛС*^а ^пр мин’
откуда
Рм РЛС = ^прмин/^а-
Подставляя значения рм ц и рм рлс в формулу (2.1), получаем
7 = 4тгW2P[ip МИч/^и52а = 0,45 м2.
2.2. Считаем, что в обоих случаях плотности потоков мощно-
сти должны быть одинаковы. При этом условии из формулы (2.1)
получим
Рм Ц1а1/4^Г)21 = рм Ц2°2 4гс£)22,
откуда
П1/П2 = Ка 1 рм т/бгРм иг-
Так как энергия излучения и коэффициент направленности антенны
в обоих случаях одинаковы, то плотности потоков мощности об-
ратно пропорциональные квадратам дальностей:
Рм щ/Рм цг = •О2г/^21>
а значит,
DJD*. = / О] za2; D2^=£)j/i Oi/a2-
Подставляя Oi=50 м2, 0-2=5 м2 (см. табл. 2.2), получаем
~169 км.
2.3. Для Х=3 см пОтр = 131 000 шт. Для Л=10 см n0Tp =
= 11 760 шт.
Указание: использовать данные табл. 2.2
2.4. /? = 68 м; а=1 м. Для уголкового отражателя с треуголь-
ными гранями £>=1,3 м; с квадратными гранями — £~0,76 м.
Указание использовать данные табл. 2.1 и 2.2.
2.5. £> = 430 м.
Указание: использовать формулу (2.4).
280
2.6. б(ир)^1,67 м/с. Указание: Использовать формулу
(2.5).
2.7. Сигнал, переизлученный точкой 1, отстает по фазе от сиг-
нала, переизлученного точкой 2, на угол
ф=(2л/ц sin <р) /К.
Амплитуда результирующего поля в удаленной точке равна
Ер + Е22 + 2Е,Ег cos 2ф.
При
Е] = Е2~Е имеем
Ер — Е /2(1 4- cos 2ф).
Отражающая площадь пропорциональна квадрату амплитуды
поля, поэтому
Op = 2oi (1+cos 2ф),
где О] — отражающая площадь каждого из переизлучателей. Макси-
мальное значение ор получим при ф=±£л, где £=0, 1, 2, .... При
этом (jp=4<ji и
Умакс ~ arcsin (± &А/2/ц),
Минимальное значение Ор получим при 2ф = ±(2^+1)л, где k—
=0, 1, 2, и откуда ф=±0,5 (2^+1) л. При этом ор=0 и <рМин =
= arc sin(± (2^+1)Х/4/ц).
2.8. Лепесток диаграммы при k=0 имеет максимум при угле
<Рмакс 1=0 и ширину по нулевым уровням
01 = 21 фмин| =21 arc sin (±Х/4/ц) | ~
~1,5*10_з рад—0,1".
Лепестки диаграммы при /г = ±1 имеют максимумы при углах
Умаксг = arcsin (Л/2/ц) ^1,5-10~Зрад =^=0,1°,
Умаксз — arcsin ( А/2/ц) ss — 1,5- 10рад— 0,1®.
Ширина лепестков равна
9г = ®з ~ Уминг I Тмин1 I = I ?минз I Tmhhi I ~
= arcsin (ЗА/4/ц) — arcsin (А/4/ц) =5= А/2/ц —
= 1,5-103 рад^0,Г.
Аналогично вычисляется ширина лепестков при других значе-
ниях k. В общем виде
9* = 1 ?минМ~ I ?мин(Л-1) | = | arcsin (+ (2k + 1)А/4/ц) | —
— | arcsin (+ [2(k — 1) + 1] Л./4/ц) |.
При малых значениях k и Х//Ц<С1, считая sina~a, получаем 0~
^Х/2/ц.
281
2.9. Частота флуктуаций определяется по формуле 7?фД = й/0,
где Q = v/D— угловая скорость линии визирования цели на тра-
версе; 0~Х/2/ц — ширина лепестка диаграммы переизлучения. Отсю-
да
Рф л =2и/ц/£)Х=5,6 Гц.
2.10. При маневрах ГфД=7О...14О Гц. При случайных коле-
баниях ГфЛ = 7... 14 Гц.
2.11. ор=2,1 м2. Указание: использовать формулу (2.15).
2.12. Р(а^а) = 1/е=0,37. Указание: использовать форму-
лу (2.15).
2.13. Ор~0,25 м2. Указание: использовать формулу (2.15).
2.14. Для расчета о используем формулы (2.20/), (2.22) и гра-
фики на рис. 2.6, 2.7. Предварительно определяем:
1) угол визирования <р:
sin ф—tg ф = ///£) = 0,1, ф«6°;
2) коэффициент обратного отражения для лесистой местности
(рис 2.6) равен у ——6 дБ или у = 0,25; для бетонного покрытия
(рис. 2.7) —
у — —4,4 дБ или у~4- 10~5;
3) ширину луча антенны в азимутальной плоскости:
0аз = 6О°А/(/а«1,20.
Используя формулу (2 20') и учитывая (2.22), имеем
a = 0,5ctlItg <рДбазУ.
Подставляя численные значения величин, получаем
о=1,7-104у м2.
Для местности покрытой лесом а -=- 4250 м2.
Для бетонного покрытия а =0,68 м2.
2.15. При изменении D меняются угол облучения, величина
элемента разрешения 6(5) и величины коэффициентов обратного
отражения. Используя графики на рис. 2.6 и 2.7, для
Ф=агсзт( 10/20) =30° находим:
для леса—у=—5,5 дБ (у=0,28),
для бетона — у = —32 дБ (у = 63‘ 10“5).
Подставляя численные данные в формулы (2.22) и (2.20'), полу-
чаем
для леса — а = 5 540 м2,
для бетона — а = 12,5 м2.
282
Из сопоставления этих результатов с полученными в предыду-
щей задаче видно, что увеличение угла облучения приводит к от-
носительно большему увеличению эффективной отражающей площа-
ди бетонного покрытия, что подтверждает сказанное ранее (см. п. 13)
о характере отражения от этих видов земной поверхности
2.16. Для спокойного моря (оопов = —35 дБ)—о=55 м2; при
умеренном волнении (<Топов =—50 дБ)—о=1,7 м2. Указание:
использовать графики на рис. 2.9 и формулы (2.20) и (2.22).
2.17. Принимая, что обнаружение цели возможно при равен-
стве эффективных отражающих площадей цели и моря, из формул
(2.20) и (2.22) находим
7)^60 км.
2.18. о=260 м2. Указание- использовать формулу (221),
(2.28) и график на рис. 2.11.
2.19. 7)^8 350 м. Указание: использовать формулы (2.21),
(2.28) и данные табл. 2.2.
2.20. Выразим Оо об и б(У) как функции длины волны при
фиксированных размерах антенны. Удельная эффективная отражаю-
щая площадь дождя может быть представлена как
Oqo б == MOj,
где п — число капель в единице объема; 01 — эффективная отра-
жающая площадь капли, определяемая по формуле (2.24). Можно
написать, что
СГооб = &1%-4. (*)
Учитывая, что ОазОум—(60pX/da)2, разрешаемый объем можно
представить в виде
d(V)=W. (**)
Подставляя выражения (*) и (**) в формулу (2.21), полу-
чаем для фиксированных размеров антенны
Од = = ‘ 2.
Этот результат показывает, что, уменьшая разрешаемый объем су-
жением луча за счет укорочения волны, мы не только не умень-
шаем маскирующее действие дождя, а наоборот, резко его уве-
личиваем. Если же при Х = const увеличивать размеры антенны, то
(То об остается постоянной, а разрешаемый объем уменьшается об-
ратно пропорционально d2&. В этом случае
Од — ^4(7 2а
и увеличение линейных размеров антенны в т раз уменьшает эф-
фективную отражающую площадь дождя в /п2 раз. Наиболее ра-
283
циональное уменьшение маскирующего действия дождя может быть
достигнуто одновременным увеличением длины волны и размеров
антенны.
2.21. Для дальности наблюдения D = 30 км
п30 = 0,504 • 10_3 шт/м3 или 1 отражатель в 1980 м3.
Для дальности наблюдения 10 км Пю=4,53-10-3 шт/м3 или
1 отражатель в 221 м3.
Указание: использовать формулы (2.27) и (2.28).
2.22. Эффективная отражающая площадь о пропорциональна
средней мощности отраженного сигнала (см. (2.1)). Ее значение
при включении дополнительного канала можно определить как
сумму
° = °в + °г»
где ав, а г — эффективные отражающие площади, соответствующие
вертикально- и горизонтально-поляризованным составляющим отра-
женного поля.
Используя данные п. 19 гл. 2, можем записать:
(аг/ав)дБ = Ю 1g (Зг/ав) — Ю дБ; аг = 0,1ав.
Отсюда
° = °в + °, 1 ств = 1>1°в-
Таким образом, эффективная отражающая площадь при до-
бавлении второго канала возрастет на 10%, а дальность обнаруже-
ния самолета всего на 2,5%.
2.23. Используя данные п. 19 гл. 2, можем написать, что
(°кр/°в)дБ = Ю 1g (акр/°в) = — 3 дБ,
откуда 1g (7кр/7в) = — 0,3, а“р/Гв = 0,5 и Гкр = 0,5^.
Таким образом, эффективная отражающая площадь при перехо-
де к круговой поляризации уменьшится вдвое, а дальность обна-
ружения самолета — в ^7 2 — 1,19 раз.
3.1. Кобз=1,5.
3.2. Мощность принимаемого сигнала пропорциональна мощно-
сти излучаемых колебаний /’Пр = &-Ризл.
Вследствие идентичности условий работы можно считать коэф-
фициент пропорциональности k одинаковым как для импульсной
РЛС, так и для станции с непрерывным излучением. При импульс-
ной работе
Риз л = Р срРи/Ти,
где Та — период следования импульсов; ти — длительность излучае-
мых импульсов.
284
Энергия одного принятого импульсного сигнала равна
El = kP H3a'Cn==:kP ерТи.
Для того чтобы общая энергия на входе приемника достигла Е?.,
необходимо послать к цели и принять jVc импульсов:
yV с — Ec/Ei = Ec/kP срТи.
Следовательно, для импульсной станции время облучения равно
Т'обл И —А^сТ'и ==-Ес/^^5ср)
для станции с непрерывным облучением
Р пр = kP ср,
Т'обл Н = Ес/Рпр = Ec/kPcp,
T. е. Тобл и = Тобл н-
3.3. тобл = 0,028 с, JVC = 14
3.4. 7'обз<3,6 с.
3.5. ТОбз<1,8 с.
3.6. Тобз=0,008 с, Wc = 16.
3.7. 2,5 с.
3.8. Тобз = 72 с, Nc мин 13.
3.9. 0,008 с.
3.10. В 11,46 раза.
3.11. Период обзора будет значительно больше при исполь-
зовании винтового обзора. При круговом обзоре выше точность
измерения и разрешение по азимуту, но значительно хуже по углу
места.
3.12. Если строчки обзора расположены вертикально, то луч
плавно изменяет свое положение по углу места и эта координата
цели может быть измерена точно. Если же строчки расположить
горизонтально, то будут скачки луча по углу места.
3.13. Тобл (ф) — Qo.s/a sin2 (лф/Фб) при 0,50015<ф<Ф—О,59о.->
Тобз = 27 с.
3.14. Тобз^О,83 с; То б л >0,0021 с.
3.15. 80 с.
3.16. 0аз0ум=19,7 град2, О,79°<0азгС9Оо; О,22°<0уМС25°.
3.17. 420 км.
3.18. 0,06°.
3.19. Время облучения для фокусированной РЛС равно 18,8 с,
для нефокусированной — 0,242 с. ’
3.20. .Омаке = 460 км, Еи = 666 имп/с. Однозначное измерение
дальности при О<225 км.
3.21. Гобл =0,057 с, =2850.
3.22. 0,01 с.
285
3.23. 36°.
3.24. ±7%.
3.25. Д/макс =0,142 с, Д/Мин = 0,0167 с.
4.1. а) Полная вероятность ошибки остается постоянной, рав-
ной Рош = 0,01, независимо от априорных сведений о цели:
б) РГ1=1—Рп0»РЛт, поэтому определяющей является вероят-
ность пропуска.
Р(С) 0 0,2 0,4 0,6 0,8 1
Р(О) 1 0,8 0,6 0,4 0,2 0
Р> ОШ 0,01 0,028 0,046 0,064 0,082 0,1
в) Рлт^Рп, определяющей является вероятность ложной тре-
воги.
Р(С) 0 0,2 0,4 0,6 0,8 1
Р(О) 1 0,8 0,6 0,4 0,2 0
РОШ 0,1 0,082 0,064 0,046 0,028 0,01
4.2. а) РПо=0,99 и Рлт=0,01;
б) Рпо=0,9 И Рдт = 0,1.
4.3. Прием сигналов с заранее полностью известными пара-
метрами мог бы быть возможен, если координаты цели точно из-
вестны, цель неподвижна, известны ее характеристики отражения
(т. е. известны амплитуда и фаза отраженного сигнала), распростра-
нение радиоволн происходит в пустоте, подобная цель может по-
являться в определенной точке пространства и исчезать. Задача
сводится к принятию решения о том, имеется ли цель в данный мо-
мент. Это чисто умозрительная ситуация, которая не может иметь
места в действительности. Однако ее анализ позволит оценить наи-
лучшие (потенциальные) характеристики обнаружения, что являет-
ся весьма важным для практики.
4.4. Рпо = 0,9871, РЛт = 0,0129.
4.5. См. таблицу.
При уменьшении порогового уровня существенно возрастает
вероятность ложной тревоги, а при его увеличении — вероятность
пропуска сигнала.
286
р по рп Рлт р ОШ
Ропт 0’2 ?ОПТ 5РоПТ 0,9871 0,99997 0 0,0129 0,00003 1 0,0129 0,3289 0 0,0129 0,1645 0,5
4.6.
Рлт io-3 IO"6
Pro 0,5 0,9 0,99 0,5 0,9 0,99
q 13 23 35 27 43 58
Для изменения вероятности ложной тревоги от Рлт до Р2Лт
требуется увеличить q приблизительно в два раза. Для повышения
вероятности правильного обнаружения от 0,5 до 0,9 или от 0,9 до
0,99 также требуется увеличить q в 1,5 ... 2 раза.
4.7.
Pro 0,9 0,99
Pjit 10"* ю-8
qQ (полностью из- вестный сигнал) 30 68
q (сигнал с неиз- вестными парамет- рами) 170 3500
7/7о 5,65 51,5
Априорное незнание параметров сигнала (особенно амплитуды)
приводит к резкому увеличению требуемого отношения сигнал/шум;
это увеличение наиболее заметно при большой вероятности Ра0
и малой Рдт.
4.8. См. таблицу на стр. 288.
Незнание фазы сказывается незначительно; требуемое увели-
чение <7 не превышает 2 и становится совсем малым при высокой
надежности обнаружения (т. е. когда Рл0 велика, а Рлт мала).
4.9. Пусть на экране индикатора располагается N площадных
элементов разрешения. Рлт представляет собой вероятность появ-
287
р гпо 0,5 0,99
р г лт 0,1 ю-5
q0 (сигнал полностью известен) 7,2 49
q (сигнал с неизвест- ной фазой) 12,2 53,6
Я/Яо 1,7 1,1
ления шумового засвета в данном элементе разрешения за один
период обзора, т. е. в среднем в данном элементе разрешения шу-
мовой засвет происходит один раз за 1/Рлт обзоров. С другой сто-
роны, Рлт определяет число элементов разрешения, засвечиваемых
на экране шумом за один период обзора; в среднем оно равно
А^Рдт. Наконец, можно говорить о среднем числе ложных отметок
в единицу времени, например в 1 с. Если разрешающая способность
по дальности равна 6(D), что на временной оси соответствует от-
резку 6f = 26(D)/c, то в среднем за 1 с засвечивается РЛт/6/ эле-
ментов разрешения по дальности следует выражать в секун-
дах).
4.10. Дальность, угловые координаты и скорость движения
цели являются непрерывными функциями времени; в общем случае
сигнал может занимать бесконечное множество положений на соот-
ветствующих координатных осях. Однако известно, что все цели, ко-
торые находятся в пределах одного элемента разрешения воспри-
нимаются станцией как одна цель. Для того чтобы две цели на-
блюдались раздельно, необходимо, чтобы различие их координат
или скорости превышало разрешающую способность РЛС. Если
допустить, что при перемещении целей они занимают дискретные
положения, соответствующие центрам объемных элементов разре-
шения, заполняющих пространство обзора, то число возможных ди-
скретных положений сигнала будет конечным. Анализ обнаружения
сигналов при таком допущении существенно упрощается, а его ре-
зультаты вполне удовлетворительны по точности.
4.11. Используем формулу (4.23), считая, что число возможных
положений сигнала на экране индикатора т=10 000:
/1п (1/10-3) 4- In 10000
q = 2 In (1/0,9) ~
1 = 306.
4.12. Полезный сигнал на выходе отдельного фильтра представ-
ляет собой синусоиду с допплеровской частотой и с изменяющейся
288
амплитудой. Максимальная амплитуда имеет место в момент окон-
чания пачки высокочастотных импульсов. Именно максимальная
амплитуда этого сигнала определяет результирующее соотношение
сигнала и шума, от которого зависят вероятностные характеристики
обнаружения (Рао и Рлт); она пропорциональна суммарной энергии
ъсей пачки из Nc принятых отраженных импульсов. Частота сигнала
лежит в пределах полосы пропускания фильтра. Сигнал характе-
ризуется случайной начальной фазой и случайными изменениями
максимальной амплитуды (из-за поглощения энергии радиоволн, из-
менения отражающих свойств и дальности цели). Полоса оптималь-
ного фильтра должна быть обратно пропорциональна длительности
сигнала:
Д^Ф«1/ТС = 1/МСТИ,
где Тп — период следования импульсов.
4.13. В общем случае неизвестны все параметры сигнала:
а) амплитуда (из-за поглощения энергии радиоволн, изменения от-
ражающих свойств и дальности цели); б) частота (из-за неизвестно-
го допплеровского частотного сдвига); в) начальная фаза (из-за
случайности момента прихода сигнала).
4.14. д = 3600; &р = 0,72.
п
4.15. JJat = 44,7.
г=1
4.16. Можно: 1. Стабилизировать мощность и частоту излу-
чаемых колебаний, что позволит приблизить к единице коэффициент
(Хвч; стабилизация частоты передатчика одновременно позволит
уменьшить полосу пропускания УПЧ и приблизить ее к оптимальной
(ад^ —И). 2. Повысить скорость развертки дальности на экране
индикатора, что позволит уменьшить аИнд. 3. Улучшить условия ра-
боты оператора, например затемнить помещение или резко повысить
яркость отметки (потенциалоскопы с видимым изображением).
4. Согласовать резонансную характеристику фильтра со спектром
сигнала, например и там и тут гауссова кривая:
аКо = 1. В результате получим
п
а/ = 6,5.
<=1
4.17. Накопление сигналов осуществляется на экране электрон-
но-лучевой трубки. Яркость точки, образующей отметку цели, уве-
личивается по мере прихода импульсов, отраженных от цели. По-
стоянная времени спадания яркости свечения экрана во много' раз
больше периода следования импульсов. Поэтому можно считать,
19—755 289
что между импульсами яркость свечения точки не уменьшается.
Максимальная яркость в момент окончания пачки импульсов и опре-
деляет результирующее соотношение сигнала и шума в системе.
4.18. Накопление сигналов осуществляется в узкополосном
фильтре, включаемом после потенциалоскопа. Полоса пропускания
фильтра должна быть согласована с длительностью сигнала (А/ф =
= 1/Тс); этот интегратор накапливает неидеально. Пользуясь гра-
фиком на рис. 4.18, для заданного числа накапливаемых импульсов
Nc нужно определить коэффициент потерь сумматора аСум. Специ-
фическими для данной РЛС являются потери съема; в момент съема
напряжение на выходе детектора, как правило, меньше максималь-
ного (рис. 4.22,6). Если допустить, что в интервале съема выходное
напряжение изменяется на 50% (от 1 до 0,5), то в среднем можно
считать уменьшение выходного напряжения равным 0,75, а коэф-
фициент потерь на съем
аас= (1/0,75)2« 1,8.
Частота сигнала, как правило, не совпадает точно с резонансной
частотой фильтра; нужно учесть коэффициент потерь ар.
Потерь в детекторе когерентной станции нет, так как детекти-
руется один суммарный сигнал, образующийся после интегратора
при д^>1. Кроме этого, нужно учесть все потери, которые явля-
ются общими для любой РЛС: аа, аВч, ако, ад^ (для усилителя про-
межуточной частоты).
4.19. Специфическими в данном случае являются потери па
несовпадение частоты сигнала с резонансной частотой фильтра и
потери съема. Если из-за расстройки частоты сигнала амплитуда
колебания изменяется от 1 до 0,7 (резонансные характеристики
пересекаются по уровню 0,7), то в среднем уменьшение амплитуды
сигналов можно принять равным 0,85 и ар= (1/0,85) 2~ 1.4. Потери
съема подробно рассматривались при решении задачи 4.18, откуда
следует аас=1,8. Потери в интеграторе и в детекторе, а также по-
тери на согласование полосы пропускания фильтра в данном случае
отсутствуют (имеется только один сигнал и согласованный фильтр).
В итоге
п
П а/=13,7.
i=l
4.20. Первый режим энергетически выгоднее в 1,5 раза, но
затраты времени при реализации этого режима — больше.
4.21. Для системы обработки «4 из 4» требуется в 1,4 раза
большее отношение сигнал/шум.
4.22. При использовании логической схемы обработки требует-
ся отношение сигнал/шум больше в 1,42 раза.
290
4.23. При суммировании сигналов вероятность правильного
обнаружения равна вероятности того, что при наличии цели будет
превышен порог хотя бы в одном приемнике. Поэтому
где Рп2 — вероятность пропуска сигнала во всех приемниках. Считая
сигналы в каналах независимыми, РпЕ = Р3П, где Рп = 1 — Рп0 — ве-
роятность пропуска в одном канале.
Поэтому Рпо£ = 1 — (1 — Рп0)3.
Применительно к вычислению вероятности ложной тревоги мо-
гут быть проведены те же рассуждения. Но так как РлтС1, то
(1 Рту 1 ЗРЛГ, Рлт$ ЗРт.
Если применяется перемножение сигналов, то
р _ рз р ____рз
Г ПО2 Г по> 'лтЕ Г ЛТ*
4.24. При использовании трехканальной РЛС энергетические
затраты теоретически в 2,7 раза меньше.
4.25. В 4 раза.
4.26. При выполнении указанного равенства рециркулятор воз-
буждается, т. е. на его выходе образуется бесконечная последова-
тельность импульсов при возникновении хотя бы одного импульс-
ного сигнала на входе; в пределах соответствующего элемента
разрешения по дальности нормальная работа устройства исклю-
чается. И так произойдет во всех элементах разрешения, в преде-
лах которых появятся импульсные сигналы.
4.27. Т'и Тлев Т'обз, Т'разв — 27)шк мин/с.
4.28. ^стр ТцЬ/Ти (й—Ь) .
4.29. Используем графики рис. 4.14. Логика «3 и 5» является
приблизительно оптимальной для т=5. Потери находятся по гра-
фику п = пОпт и составляют 2,5 дБ. Отношение pc=Nc/m=5 и для
него по графику п=1 находим дополнительные потери 5,1 дБ. Сум-
марные потери составят 7,6 дБ или в 6 раз.
4.30. При когерентном накоплении 25 импульсов в соответ-
ствии с формулами (4.20) и (4.21) получим
Ес/#0 = 0,04 ((In 106/1п 2) — 1) = 0,76.
Потери дискретного накопления (рис. 4.14, график п=п0Пт) соста-
вят 5,2 дБ, что соответствует 3,3 раза. Следовательно,
(E'c/AZ о) дискр — 2,5.
5.1. Если считать заданной эффективную площадь приемной
и передающей антенн, то при уменьшении длины волны увеличива-
ются их коэффициенты усиления. Следовательно, уменьшение дли-
291
ны волны соответствует увеличению дальности (X сТОит в Знаме-
нателе подкоренного выражения). Приняв заданными значения ко-
эффициентов усиления антенн, мы придем к обратному результату:
при G = const уменьшение длины волны связано с уменьшением
эффективной площади антенн, что приводит к сокращению даль-
ности действия РЛС (X стоит в числителе).
5.2. Я^1,73 км.
5.3. /)макс=363 КМ.
5.4. Дмакс п = 320 КМ.
5.5. Ямак с — 710 км.
5.6. Зависимость £)Макс = /(Х) имеет максимум. Существует
некоторая оптимальная для заданных условий длина волны Х0Пт,
при которой достигается наибольшая дальность действия станции.
При Х<ХОпт уменьшение дальности действия определяется преоб-
ладающим влиянием возрастающего поглощения энергии радиоволн
в тропосфере. Для Х>ХОпт преобладающим оказывается влияние
уменьшения направленности действия антенны
5.7. При медленном обзоре дальность действия больше при-
близительно в 1,5 раза.
5.8. D— 105 км.
5.9. В режиме непрерывного излучения Ризл = Рср; другие
параметры передатчика в формулу дальности не входят и DMaKCs
sf (Рср)0,25. При импульсной работе в формулу дальности входит
ряд параметров передатчика:
(П 1 \0,25
РизлхиА^с/0»5<7 а/ I
/=1 /
Число принимаемых сигналов зависит от частоты следования
: Wc = Гоблин. Так как РазлТаРи=Рср, то и при импульсном
режиме работы дальность действия зависит только от средней мощ-
ности передатчика.
5.10. Для некоторой оптимальной для данных условий длины
волны Хопт требуется минимальная мощность излучения. Если Х<
<ХОпт, то увеличивается необходимая мощность излучения вслед-
ствие преобладающего влияния поглощения энергии радиоволн
в тропосфере (быстро уменьшается экспоненциальный множитель
в формуле дальности). Для Х>ХОпт увеличение необходимой Мощ-
ности излучения объясняется преобладающим влиянием ухудшения
направленных свойств антенны (в формуле дальности быстрее
уменьшаются коэффициенты усиления антенн, чем увеличивается
экспоненциальный множитель).
5.11. D С 2260 км.
5.12. ^р=117
5.13. DC310 км
292
5.14. D~ 135 км
5.15. Максимальное значение произведения дальности РЛС —
цель и дальности ракета — цель равно 210 км2.
5.16.
¥макс> РаД 0,084 0,25 0,417 0,58 0,75 0,92 1,08 1,25 1,42
'г’чин» рад 0 0,167 0,333 0,5 0,67 0,83 1 1,17 1.33
5.17. £)~27,5 км
5.18. £)п = 35 км.
5.19. Максимальное значение дальности действия РЛС в сво-
бодном пространстве определяется точкой пересечения графиков
Рис. 2. К решению задачи 1.42.
Рис. 3. К решению задачи 5 19.
293
Омаке п — f (О макс) при заданном значении коэффициента поглоще-
ния и Омаке — 1,25ОМакс п. На рис. 3 первая зависимость изобра-
жена сплошной линией, а вторая — штриховой. Можно видеть, что
Омаке ^60 КМ.
5.20. Минимальное значение угла между осью луча РЛС и го-
ризонтальной плоскостью, проходящей через центр раскрыва антен-
ны, должно быть не меньше половины ширины луча РЛС.
5.21. Условию Рпо = const соответствует горизонтальная ли-
ния на характеристиках обнаружения. При Рао — const вероятность
ложной тревоги может лежать в пределах от 0 до 1 и, следователь-
но, нельзя заранее сказать, в каких условиях наблюдается сигнал.
Важно не только присутствие сигнала, но и отсутствие в достаточ-
ной мере шумов. При увеличении вероятности ложной тревоги сиг-
нал будет маскироваться шумом и обнаружение окажется невоз-
можным. Поэтому необходимо указать значения обоих величия:
И Рлт.
5.22. 0 = 1,72°.
5.23. £> = 51 км.
5.24. £>2/£>, ==
5.25. В 1,2 раза.
5.26. Дальность уменьшится в 1,45 раза.
5.27. Дальность уменьшится в 1,31 раза.
5.28. В 1,31 раза.
5.29. D№ = 191 км.
6.1. Для импульсов с прямоугольной огибающей ти=0,33 мкс,
с гауссовой — ти=0,25 мкс.
Указание: использовать формулы (6.11) и (6.14).
6.2. Используя формулу (6.10), для импульсов с прямоуголь-
ной огибающей получаем
^о(х)т=о/^о(х)т=0,5тй = 2.
Используя формулу (6.13) и учитывая, что у—Кл/ти, для
импульсов гауссовой формы получаем
^о(х)-с=о/Ko(x)-t=O,5i:II ~ 1’5.
6.3. Учитывая, что в зоне наложения выходных сигналов про-
исходит их геометрическое суммирование и используя формулы
(6.10) и (6.13), для разности фаз ф = 0 получаем
при импульсах с прямоугольной огибающей —
а = 2К0(т)х=0 = 0,6,
при импульсах гауссовой формы —
а = 0,9.
294
Для разности фаз ф = л в обоих случаях а = 0.
6.4. Для немодулированных импульсов с прямоугольной оги-
бающей разрешающая способность 6(D) =5 м обеспечивается при
длительности импульсов
t„ = 26(D)/c~0,33 • 10~7 с,
что не удовлетворяет второму требованию условия задачи. Поэто-
му следует применить импульсы с внутриимпульсной частотной мо-
дуляцией. Для получения 6(D) =5 м нужно, чтобы «сжатые» им-
пульсы имели длительность
Ти вых~0,33 • 10~7 с.
Отсюда коэффициент сжатия равен (см. формулу (6.16)):
^сж=Ти вх/Ти вых=300,
а девиация частоты
— &сж/ти вх ~ 3 • 107 Гц.
6.5. ти^93 мкс.
Указание: разрешение обеспечивается при 6(цр)прт^о'—V,
использовать формулу (6.21).
6.6. Частота сигнала после поворота самолета получит доппле-
ровский сдвиг, равный
2у
— 2f’ cos и,
где ур — радиальная составляющая скорости v; a = arctg (H/D).
Подставляя данные и считая cosa~l, получаем Гд~0,37 X
X Ю5 Гц. Этот частотный сдвиг является расстройкой сигнала от-
носительно резонансной частоты фильтра.
Уменьшение амплитуды равно:
= 1/ехр (-2\/8у2) ^6,9.
А
295
6.7. См. рис. 4. Пока самолет находится на большом удалении
по сравнению с высотой полета Н, допплеровский сдвиг можно счи-
тать постоянным и имеющим максимальное значение. Амплитуда
сигнала имеет величину, меньшую максимального значения в
А’о (Мда>=о/^о(А<й)д(Ю)=й = ехр (22д/8у2).
По мере приближения к РЛС допплеровский сдвиг уменьшается
пропорционально cos а, где a = arctg (HID'). В момент пролета точ-
но над РЛС Од = 0 и амплитуда сигнала имеет максимальное зна-
чение, равное При удалении самолета изменение
амплитуды имеет обратный характер.
6.8. Выясним возможность использования обычной некогерент-
ной РЛС. Для импульсов гауссовой формы условие разрешения по
скорости имеет вид
б(Ор)пот АОр
или, используя формулу (6.21),
О.ббХ/ти^С Afp.
Отсюда
Ти5гО,66Х/Аур=95-Ю-6 с.
Импульсы такой длительности в практике не применяются из-за
технических трудностей. Наиболее приемлемые решения — РЛС
с непрерывным излучением или когерентно-импульсная РЛС. В по-
следнем случае условие разрешения имеет вид (см. формулу (6.26))
0,5ЖсТи<Дур.
Отсюда можно найти необходимое число импульсов в пачке:
Л^с^0»5А/7,и^Ур:^=0,25сЛ/РДур = 36 имп.
6.9. Оценим вначале возможность применения одиночных не-
модулированных импульсов. Из формулы (6.11) для импульсов
прямоугольной формы получим необходимую длительность импуль-
са для требуемой разрешающей способности по дальности:
Ти^2<5(7))пот/с = 0,1 мкс.
Из формулы (6.19) найдем длительность импульса, необходимую
для заданного разрешения по скорости:
Ти^0,бХ/б(Ур)пот = 6 • 10-3 с.
Сопоставляя результаты, видим их несовместимость, исключающую
возможность применения такого сигнала.
296
Применение частотно-модулированных одиночных импульсов при
совместном разрешении не улучшает дела, так как разрешающая
способность по дальности определяется в этом случае той же фор-
мулой (6.11), а разрешающая способность по скорости ухудшается
при прочих равных условиях в &Сж раз.
Одним из возможных решений является применение последо-
вательности когерентных импульсов с длительностью, выбранной
с точки зрения разрешения по дальности (0,1 мкс). При этом раз-
решение по скорости может быть обеспечено выбором числа Nc
импульсов в пачке. Из формулы (6.26) имеем
jVc^0,5XFH/6(yp)noT = 2 имп.
Вторым возможным решением является применение фазокодомани-
пулированных сигналов [26, 116].
6.10. Определим вначале потенциальные разрешающие способ-
ности РЛС по дальности и скорости при одновременном разреше-
нии. По формуле (6.11) находим:
6(£>)пот = 0,15 км.
По формуле (6.26) находим:
б(Ур)пот=Ю м/с.
Условием разрешения по дальности является
d cos а^б(£))пот,
откуда
cos a 225 5 (D)nm/d = 0,03,
a arccos (0,03) = 88°50'.
Условием разрешения по скорости является:
V — уР1 = (у2 — ^1) cos а а (Ур)Пот>
откуда
COS а а (ур)пот/ (^2 ^1) = 0,1,
a arccos (0,1) = 84° 10'.
Второе условие является более жестким. Таким образом, одно-
временное разрешение по дальности и скорости обеспечивается при
0<a^84Q10'.
6.11. б (фаз) пот = 0,7°. Указание: использовать формулу
(6.28).
6.12. Условием разрешения по азимуту является:
d sin а^б(фаз)Т).
Отсюда 45° <а^13б°.
297
6.13. В данном случае потенциальная разрешающая способ-
ность по азимуту не определяется физической шириной луча
Qo.s-a/t/a [рад].
Сигналы, отраженные от целей при боковом обзоре, имеют ча-
стотную девиацию, причем частота меняется от fo+^д макс при
входе цели в луч (точка а на рис. 6 8) до /о—Лд макс при выходе
цели из луча (точка Ь), где
Fц макс ~ о^р/С ~~ SIH (0О, 5/2)! С =5: >бМ
— максимальное значение допплеровской частоты.
Таким образом, РЛС принимает частотно-модулированный сиг-
нал с девиацией частоты
А/м=2Рд макс ~2уОо,5/^.
При оптимальной обработке такой сигнал может быть сжат в &Сж
раз, где
kc ж = Д/мТвх
и Твх равно времени облучения цели:
Твх = Т)0о,з/^.
Таким образом,
kc ж = 2^00,5^)00,б/A/U = 202о,бТ)/%.
Ширина «сжатого» луча, определяющего потенциальную разрешаю-
щую способность, равна
^сж = ^(?аз)пот = ^о.з/^сж = O,5A/D0O15 = da/2D,
Полученные результаты показывают, что в когерентных РЛС
бокового обзора осуществляется «сжатие» луча, пропорциональное
дальности, а потенциальная разрешающая способность по азимуту
улучшается обратно пропорционально дальности. Весьма важным
является то свойство таких РЛС, что линейное разрешаемое рас-
стояние вдоль пути самолета остается одним и тем же на всех
дальностях и равно половине горизонтального размера антенны:
^(Опот = ^°(?аз)пот = 0>5(/а.
6.14. 2?шк^~;14 КМ, Фшк аз 140р.
Указание: при решении использовать формулы (6.3), (8.4)
и (8.9).
6.15. Yd=1 ,33, у =5:1,13. Указание: использовать формулы
*аз
(6.4), (8.4) и (8.9).
6.16. 6(D) =2,12 км, 6 (фаз) ~2°.
298
Указание: использовать формулы (6.3), (8.4) и (8.7).
6Л7. yd = 4,7, у =2. При D=I00 км: Yp = 4,7, =
таз ’аз
= 2,92.
Указание: использовать формулы (6.4), (8.4) и (8.7).
6.18. Период следования импульсов соответствует повороту
антенны на угол Лфэ = 3600Гэ/7'Обз = 3,6о, превышающих потенци-
альную разрешающую способность по азимуту, равную 6(фаз) = 1°-
Поэтому реальная разрешающая способность определяется перио-
дом следования эталонных импульсов и равна 6 (фаз )=Дфэ=3,6°.
6.19. Условием, удовлетворяющим этому требованию является
Дфэ = 6 (фаз) пот,
ИЛИ
ЭвОТа/Г о бз = 6о,5>
откуда
^э = 6о>57'обз/360°= 0,028 с.
7.2. 6(D)пот = 43,5 м, 6(Ур)=159 км/с. Указание: использо-
вать формулы (4Л5), (7.4), (7.6).
7.3. ти=2400 мкс, 6(D)пот=35 км.
7.4. Для получения заданной точности измерения дальности
следует применять сигналы с длительностью около 3 мкс (см. за-
дачу 7.2). Для измерения скорости с ошибкой 200 м/с требуется сиг-
нал длительностью 2400 мкс (задача 7.3). Таким образом, при
использовании обычных одиночных импульсных сигналов поставлен-
ные требования к точности при одновременном измерении удовлет-
ворить нельзя. Если перейти от обычных немодулированных по
частоте импульсов к сигналам с внутриимпульсной модуляцией той
же длительности, то это при одновременном измерении лишь ухуд-
шит дело, так как ошибка в измерении скорости возрастает в /г с ж
раз (см. формулы (7.6) и (7.8)). Если применить пачку некогерент-
ных импульсов, то точность измерений останется в первом прибли-
жении такой же, как при одиночном импульсе такого же вида
с энергией, равной энергии пачки (а если учесть потери энергии
при обработке пачки, то точность при переходе к пачке ухудшится)
Известным видом сигнала, который может при одновременное
измерении обеспечить высокую" точность и по дальности и по ско
рости, является когерентная пачка импульсов. При этом длитель
ность импульсов, может быть выбрана по формуле (7.4) при задан
ном <7о- Принимая <?о = 34, получаем
ти = 2 Kng0a(D)nOT/c =5=3,5 мкс.
29
Необходимая точность измерения скорости может быть обес-
печена выбором числа импульсов в пачке Nc- Из формулы (7.9)
находим
А Ктс/7о/2л:7'иа(Ур)пот= 10 имп.
7.5. Применить обычные смодулированные сигналы в этом
случае нельзя, так как подсчитанная по формуле (7.4) ошибка
равна а(£))пот = 1,45 • 103 м. Поэтому следует применить сигналы
с внутриимпульсной частотной модуляцией и последующим сжа-
тием. Коэффициент сжатия, обеспечивающий требуемую точность
может быть найден из формулы (7.3):
^сж== 0,5сти/с (7))пот 145.
7.6. 0о,5=0,5°. Указание: использовать формулы (4.15) и
(7.7).
7-7. о(<Раз) = ^ог(<Раз)1 + °г(Ч’аз)2= Ml0-
Квазимаксимальную ошибку при вероятности 0,95 найдем по
табл. 7.1:
Д(фаз)о,95=1,96а(фаз) =2,76°.
7.8. 54 м. Указание: использовать график на рис. 7.1.
7.9. 6,6'.
7.10. 39 см. Указание: использовать формулу (7.14).
7.11' . 39".
7.12. 3 км. Указание: использовать формулы (7.16) и (8.3),
учитывать только ошибку интерполяции.
7.13. Ошибка измерения слагается из систематической ошибки
распространения в тропосфере, ошибки отсчета по шкале и потен-
циальной ошибки. Из графика на рис. 7.1 следует, что системати-
ческая ошибка в самых неблагоприятных условиях не может превы-
шать 60 м, и поэтому по сравнению с ошибкой отсчета может не
учитываться. Потенциальная ошибка определяется по формуле
(7.4): (г(£))пот~43 м. Результирующую ошибку найдем по форму-
ле (7.10): а(7))«*3 км. Коэффициент ухудшения определим по фор-
муле (7.13): т]ог«70. Следует сделать вывод, что в данном случае
точность измерения целиком определяется методом отсчета — видом
индикаторного устройства.
7.14. Определим по формуле (7.18) ошибку отсчета. Предпо-
лагая, что ступенчатая задержка развертки создается с помощью
опорных двадцатикилометровых импульсов, частота которых стаби-
лизирована кварцем, имеющим относительную нестабильность 10-4,
определим ошибку из-за нестабильности задержки развертки:
O(D) гр = Ю~42?з макс.
Полагая Рзмакс = ^мак?—^ик = 300 км, получаем РГр=0,03 км.
300
Ошибка отсчета по задержанной шкале 100 км определяется
ио формуле (7,17):
(У(D) гочн ——0,417 км.
Из (7.18) следует, что ошибка за счет индикаторного устройства
равна о(О)Инд~0,42 км. По сравнению с этой ошибкой системати-
ческой ошибкой из-за искривления траектории также можно пре-
небречь. Результирующая ошибка измерения при потенциальной
ошибке 0,043 км (см. предыдущую задачу) равна o(Z))~0,44 км.
Коэффициент ухудшения равен т]о = 9,75.
7.15. Значения потенциальной ошибки и ошибки из-за неста-
бильности задержки точной развертки остаются прежними (см. за-
дачи 7.13 и 7.14): or(D)пот =0,043 км; о(Р)гр=0,03 км.
Ошибка отсчета с помощью электронного визира определяется
по формуле (7.19). Составляющую этой ошибки, вызываемую не-
стабильностью работы схемы задержки электронного визира, пред-
полагаем устраненной при калибровке, Ошибка совмещения визира
с отметкой цели равна
or(D) совм == (0,3 ... 0,5)dnAfo =
= (0,3 ... 0,5)7)Шк/^э^ф.
Принимая Лэ=0,8, получим ог(£>) СОВм=0,125 ... 0,208 км~0,2 км.
Ошибка интерполяции по шкале потенциометра электронного
визира равна а(Р)Интер= (0,05 ... 0,1)ДРШк~0,01 км.
Результирующая ошибка измерения равна
0(D) = Vo2(D)noT + о2р)гр + о2(£>)совм + винтер 0,207 км-
Коэффициент ухудшения точности равен t)d~4,82.
Сравнивая эти результаты с полученными в предыдущей задаче,
видим, что точность измерения повысилась более чем в два раза.
7.16. Результирующая ошибка определяется по формуле
«(D) = /«=(D)n0T + «!(D).y.
Значение потенциальной ошибки для указанных данных было най-
дено в задаче 7.13: о(D)Пот=0,043 км. Ошибка выходного устрой-
ства данного типа определяется по формуле (7.20). Находим со-
ставляющие этой ошибки. Ошибка из-за дискретности отсчета (фор-
мула (7.21)) равна
«(D)M„;,= 4Ds/2r3:
где Рэ = с/2Кэ=0,03 км. В итоге а (Р)ДИскр =0,009 км. Ошибка
из-за нестабильности частоты следования эталонных импульсов
301
(формула (7.22) равна а(7))нст~ (10~4 ... 10-5)D. Результирующая
ошибка равна a (D) =0,05 км, коэффициент ухудшения точности —
т]о = 1,22.
Сравнение этих результатов с полученными в задачах 7.13 —
7.15 показывает, что применение выходных устройств инструмен-
тального съема данных в принципе позволяет реализовать точность
измерений, близкую к потенциальной.
7.17. Ошибка из-за дискретности отсчета, определяемая ча-
стотой следования эталонных импульсов, может быть найдена из
соотношения
°Р)дискр = Гог(П)-о2р)пот-о2р)НСт,
а период следования эталонных импульсов (см. формулу (7.21)) —
из соотношения
4 1/;~ ___________________________
Гэ = Vo2(D) - o2(D)HCT - 0г(П)П0Т.
Определим неизвестные величины: <т(£))Пот~3 м, o(D)HCT~
— (1...10) м, (принимаем <t(D)Hct = 5 м). Отсюда Гэ—0,3'10-6 с
и Fa= 1/Гэ = 3,33 МГц. Результаты показывают, что обеспечение
необходимой точности a(D) = 15 м сопряжено с техническими
трудностями (малый период эталонных импульсов, сложности по-
строения счетчиков).
8.1. 7'разв==2 МС, Граэв^ FH^420 Гц (при длительности об-
ратного хода развертки, равного 20% от Гра3в).
8.2. Мо = 2,5 КМ/ММ, Маз1 = 0,95 град/мм, Л4аз2 = 2Л4аз1 =
= 1,9 град/мм.
8.3. Используя график на рис. 8Л1, находим, что коэффициент
потерь av достигает минимума при УразвТи=1,2 мм. Отсюда
Уразв опт= 1,2/ти=0,4 ММ/МКС.
8.4. Скорость развертки ура3в связана с масштабом дальности
Afo соотношением
уразв — ^шк/^разв — 0,5АЭ(/ЭС/Пшк = 0,5с/Мq.
Отсюда MD = 0,5с/уразв = 0,375 км/мм,
£)Шк - Л4рГшк — A/lDk3d3 = 37,5 км.
8.5. а^ — З дБ. Указание: использовать решение задачи’8.4
и график на рис. 8.11.
8.6. Определяем число возможных положений сигнала:
m=D шк/6 (D)=740,
где 6(D) определяется по формулам (6 3), (6.5), (6 11). Используя
график на рис. 8.12, находим ас~3,5 дБ.
8.7. аИПд = 8,5 дБ,
302
8.8. Для определения av вычисляем характеристику рразв (сИ
п. 23, и, ж гл. 4);
Рразв — (^разв^и 4“ ^тО/^разв^и,
где б?п^э/<3ф=2 мм; пРазв 4оо=О,О45 мм/мкс; цразв юо=О,18 мм/мкс.
Получаем рразв 4оо = 47,5, рРазв юо — 4,7.
Определяем эффективное число интегрируемых импульсов:
^эФ400 = РраЗВ400^С ~ 475 ИМП,
^эФюо Рр звюо^с — 47 имп.
Используя график на рис. 4.17s находим
“Д’ьф400 = 8 дБ; %фЮЭ = 4 дБ; aN —2 дб.
В итоге
о'Оюо — а.Уэф400 ®V ~ 6 дБ; аг)100 — аЛгэф 100 aN ~ 2 дБ-
8.9. Считаем, что ас зависит лишь от количества возможных
положении сигнала т, где
_ Фаз
т ~ ° (D) 3(?аз)’
6(£>) и 6 (фаз) определяются по формулам (6.3), (6.5), (6.11), (8.6);
Фаз = 360°, отметка цели находится на половине радиуса экрана.
Вычисляя, получим /??4oo=112OO, «с 4оо~4 дБ (по графику на
рис. 8.12), тюо=9 4ОО, ас юо~4 дБ.
Таким образом, потери за счет условия наблюдения практи-
чески не зависят от перемены масштаба дальности.
8.10. (Хинд 400= 12 дБ, (Хинд 1оо = 8 дБ.
8.11. Используя формулы (8.1) и (8.2), находим:
Л4о1 = 1,46 км/мм; Тразв 1 = 2360 мкс.
Эти параметры развертки обеспечивают обнаружение целей на
расстояниях до 300 км, но при этом разрешающая способность
индикатора
6(D)индz=^D\du= 2,19 км
хуже, чем требуемая реальная разрешающая способность РЛС
(0,5 км). Поэтому требуется иметь еще один более крупный мас-
штаб (с меньшей длительностью развертки), который обеспечит
требуемое разрешение. Из формул (6.3), (6-11) и (8.1), (8.4) на-
ходим:
М[)2 = PG-0 «PWW —
== [§(£)) — 0,5сти]^ф/с/5 =5= 0,13 км/мм,
^шк2 — ~ 31,2 КМ,
Тразвг — 2,1 • Ю 4 С.
303
Система индикации может состоять из одного индикатора даль-
ности с масштабами MDi и причем должна быть применена
задержка короткой развертки в пределах от 8 до 280 км.
8.12. См. рис 5, где гэ — радиус экрана трубки.
8.13. В данном случае могут быть применены три варианта
системы индикации: ИКО, ИКО со смещенным центром и система
Рис. 5. К решению задачи 8.12.
из двух индикаторов — ИКО и индикатор «дальность — азимут»
в прямоугольных координатах (ДАЗ). Рассчитаем реальную раз-
решающую способность по азимуту для этих вариантов.
1) ИКО.
(фаз) — ^(?аз)пот “Ь ^(?аз)инд,
^(?аз)пот?!::: ^а — ОД0, ^('Раз)инд — 360°dn/2nrOTM.
При Готм = 0,5&э^э (отметка цели на периферии экрана)
6 (фаз)инд=115°/&э<2ф=1,40,
6(фаз)=0,6о+1,4°=2о.
Это наилучшее значение разрешающей способности, которое может
быть получено при применении ИКО, и оно значительно превышает
требуемое. Таким образом, первый вариант решения не удовлетво-
ряет требованиям.
2) ИКО со смещенным центром.
При смещении центра развертки в край экрана в нужном направ-
лении в два раза укрупняется масштаб азимута и при этом
6 (фаз)инд=0,7°, 6 (фаз) = 1,3°, что также больше требуемого зна-
чения. Кроме того, в этом случае че обеспечивается непрерывный
круговой обзор.
3) ИКО и ДАЗ.
304
С помощью ИКО обеспечивается обнаружение целей при не-
прерывном круговом обзоре, а с помощью ДАЗ, имеющего малые
пределы шкалы азимута, обеспечивается нужная разрешающая спо-
собность. Используя формулы (6.3), (6.5) и (6.28), получаем вы-
ражение для требуемого масштаба азимута ДАЗ;
АГаз = Р(?аз) — §((Раз)пот]Сф/^э = 0,267 гРаА мм-
Предельное значение шкалы азимута ДАЗ найдется из соот-
ношения:
Фшк аз:=АГазАшк аз:=А1аз^э^э:=240.
Таким образом, система индикации должна состоять из двух
индикаторов: ИКО и ДАЗ.
8.14. Анализируя решения задач 8.11 и 8.13, приходим к вы-
воду, что система индикации должна состоять из индикатора кру-
гового обзора и индикатора «дальность — азимут» в прямоугольных
координатах.
ИКО должен иметь предельное значение шкалы дальности
300 км, и ДАЗ—предельные значения £)Шк = 31,2 км и Фшказ =
= 24°, причем на экране ДАЗ должно обеспечиваться воспроизве-
дение любого участка экрана ИКО путем изменения задержки раз-
вертки дальности ДАЗ и выбора сектора обзора по азимуту.
8.15. а) <т(Д)инд= 1,5 км, б) (т(£>)инд=0,5 ... 1 км.
8.16. а) Результирующая ошибка определяется по формуле
°(О)инд = ^°2(^)зФ °2(£>)инт.
где o(D)3 и о(О)инт вычисляются по формулам (8.14) и (8.15).
Принимая необходимую задержку равной 70 км и используя
данные условия, получаем
а(£))з = 0,007 км и а(/))Инт= (0,1... 0,2) км~0,15 км.
Так как <г(£>)Инт> а(£))3, то <т(£))Инд~а(О)инт = 0,15 км.
б) Результирующая ошибка определяется по формуле
»(О)иМ = Ьг(О), + »!(Д) ссвм + °г(^)инт>
где а(7))3 = 0,007 км (определена выше); а(7)) Совм= (0,3...
... 0,5)7)п1к/&э<2ф—ошибка совмещения электронного визира с от-
меткой цели; а(£))инт= (0,3 ... 0,5)Л£)м — ошибка интерполяции по
шкале визира.
Подставляя данные условия, получаем
о> (О) с о в м == 0,02 км;
o(D)инт = 0,04 км;
a (D) ИНд = 0,045 км.
305
8.17. Для обнаружения Целей на расстояниях до 400 км необ-
ходимо иметь предельное значение шкалы дальности несколько бо-
лее 400 км. Примем Ошк i = 450 км.
При этом масштаб шкалы равен (формула (8.2)):
Мд1 = 7)шк 1Мэ^э = 3,75 км/мм.
Разрешающая способность индикатора находится по формуле (8.4):
^)ИНД = = ^ШК1/^Э^Ф ~ 5,63 км,
что значительно хуже требуемого значения. Ошибка отсчета по
индикатору на основании (8.44) равна а(£))Инд = 2,25 ... 4,5 км, что
также значительно хуже требуемого значения.
Для удовлетворения требований по разрешающей способности
необходимо иметь масштаб дальности, определяемый из выражения
(см. формулу (6.3)):
б (/)) —6 (/)) пот = б (D) ИНД :=-й4о^П.
Отсюда
MDi < [5(D) — 5(Д)Пот]<2ф/^э = °-13 км/мм.
Для удовлетворения требований по точности необходимо иметь
масштаб дальности, определяемый из выражения (см. формулу
(7.Ю)):
a2(D) - о2(Д)Пот^°2Р)инД = (0,05...0,1)2AZ2M^,
откуда
MD3 < V [о2(О) — o2(Z))noT]/(0,05 . .0,1)2Д/2М = (0,408.. .0,817) км/мм.
Требования по разрешающей способности и точности удовлетво-
рятся одновременно, если индикатор наряду с масштабом Mdi бу-
дет иметь масштаб Md2, которому соответствует предельное значе-
ние шкалы
2 = ^э^эЛ1о2= 15,6 км.
При работе на масштабе Md2 необходимо применять ступенчатую
задержку развертки.
9.1. Определяем требуемую скорость развертки по формуле
(9.4): УРазв=5 • 104 мм/с. По формуле (4.36) определяем характе-
ристику Рразв~21.
Эквивалентное количество интегрируемых мишенью импульсов
равно Лгэ=рразвЛ^с=210. По графику на рис. 4.17 находим:
«о = «V — «V =4 дБ.
Э С
9.2. ат, = 3 дБ.
9.3. аг=3 дБ.
9.4. ао = 3 дБ.
306
9.5. Так как л = 60Ги, где Ри= 1/Ги = 0,5с/Пшк, то п=
= 30 000 об/мин, уРазв = 2лгбарП/60 = 3,14 • 105 мм/с.
9.6. Используем формулу (9.5): 6 (£>)прес =2,4 км.
9.7. 0,015 км.
9.8. 5>Шк = 56,25 км.
9.9. 6 (фаз) = 1.4'', Дфэ=1,4°.
9.10. Для У=10 ^опт=6,
для У=30 ^Опт = 1'2.
Указание: использовать график на рис. 9.4.
9.11. т = 300, ти~6,7 мкс.
9.12. 5 отводов.
9.13. Дискретные преселекторы, работающие по методу k из
Ус, вносят при заданных Ус дополнительные потери порядка 2 дБ
по сравнению с идеальным некогерентным накопителем. Поэтому
вначале по кривой рис. 4.117 определим потери при таком накопле-
нии: анк = аДет = 2 дБ при Ус = 10 и анк = 3 дБ при Ус = 30.
Прибавляя 2 дБ к полученным значениям, определяем потери
в преселекторе: апрес = 4 дБ при Ус = 10, и апрес = 5 дБ при Ус =
= 30.
9.14. апрес = 3,7 дБ при Ус = 10, апРес = 6 дБ при Ус=30.
9.15. Цена эталонных импульсов при этих условиях определяет -
ся соотношением (9.7): Д(£))Э«Сo(D). В то я е время Д(£))э-„-
— ОДсГэ или Д(£))э = 0,5с/F3. Отсюда F3 0,5с/8(D) или
F3 0,5с/(0,5стн -j- ^п^шк/Даиш)•
Подставляя значения величин, получаем Гэ = 43,5 кГц.
9.16. 3 град.
9.17. 45 кГц.
9.18. 0,003 ... 0,03 км.
9.19. Из условия следует, что o(Z))By = 0,05 км. Но
О(^)ву = /о2(Д)нст + °2(^)дискр- J
Используя формулы (9.9) и (9.11), получаем
а(О)ву = /(Ю-5ПШК)2+ (0,15с/Гэ)2 = 0,05 км,
откуда Гэ=0,9- 1012 Гц.
9.20. Находим цену интервала эталонных импульсов из усло-
вия
Д£)э — 2 Р3 о(^)дискр =1,73 км.
Число импульсов, прошедшее через счетчик при измерении пре-
дельной дальности У = £>ШК/Д£>ЭМ16.
Переводя N из десятичной системы в двоичную, получим число
1110100. Для его отображения в счетчике потребуется 7 разрядов.
9.211. О (ф) инстр = V (ф) дискр= 1,73°,
307
9.22. Находим цену эталонного интервала, используя формулу
(9.12):
Д<рэ = 2 УЗо(<раз)дискр 3,5*.
Число эталонных интервалов:
Л == Фаз/Афэ ~ 34.
9.23. Результирующая ошибка определяется по формуле (7.10).
Пренебрегая ошибкой распространения, получаем
0(([>) = /о2(ср)Т10т 4- аг(<р)Инстр,
где (г(ф)пот определяется по формуле (7.7), а (У(ф)инстр — по фор-
муле (9.12). Для определения q0, входящего в формулу (7.7), ис-
пользуем формулу (4.15). Получим ^0 = 34. Подставляя значения
в (7.7) и (9.12), получаем о(ф)пот = 0,097°, а(ф)инстр = 1,73,:>. Ре-
зультирующая ошибка равна (т(ф) = 1,75°.
Таким образом, результирующая ошибка определяется ошибкой
преобразователя и потенциальные возможности РЛС не использу-
ются в должной мере.
9.24. Используя формулу (9.12') и приравнивая ошибку из-за
дискретности потенциальной ошибке, находим
д(?)э/2^3'п = а(<р)
пот»
откуда
Л'=Д(?)э/2УЗа(<р)П0Т^18.
10.1. Расширяется полоса частот, которая должна быть закры-
та помехой с заданной спектральной плотностью Na, следовательно,
растет мощность помехи при неизменной мощности сигнала.
10.2. В 1,77 раза.
10.4. Рп0 = 0,086, Рлт = 10-5.
10.5. Сказываются различия в накоплении случайных шумовых
сигналов и регулярных импульсных; первые суммируются по мощ-
ности, а вторые (и полезные, и помеховые)—по амплитуде.
10.6. Nc—C4n/2vTw.
10.7. Ех = a(cos2 ₽ + №эЛ sin2 ₽)°>5,
= д (sin2 0 Д-/<2ЭЛ cos21?)°>5,
ДТ = (arctg 2/Сэл)/( 1 - №эл) sin 2?.
10.8. В 100 раз.
10.9. упол^О.
10.10. 1—рп(Ги) =0,918, т. е. эффективность помехи послеЧП1^
близка к максимальной.
10.11, ГиС0,45 мс.
308
10.12. упол ср~0,75, упол макс — 1, Упол мин~0,47 (см. рис. 10.7
и 10.8).
110.13. Рпо«0,8, Рлт = о,1.
10.14. Изменение высокой частоты сигналов по случайному
закону от импульса к импульсу, изменение частоты следования им-
пульсов РЛС, селекция по амплитуде, селекция по частоте следо-
вания (использование схемы на рис. 10.10), селекция по длительно-
сти импульсов, применение когерентности в РЛС.
10.15. В первом случае при наличии помех цель нельзя обнару-
жить на всей шкале дальности. Во втором случае цель обнаружи-
вается в диапазоне дальностей от 0 до 7)ц мин (см. п. 8).
10.16. Помеха эффективная для тех значений частоты FM
амплитудной модуляции сигналов на выходе фазового детектора,
при которых выполняется неравенство
— Pnl^J/Ssin2 (rcFM7H),
где рп(т)—коэффициент корреляции помехи; Та — период следова-
ния импульсов РЛС.
10.17. /Сп~0; шумы проходят без ослабления.
10.18. (Рп/Рс)выХ^0,5.
10.19. /Сп = 1,82; это условие необнаружения цели на фоне
пассивных помех.
СПИСОК ЛИТЕРАТУРЫ
1. Альперт Я. Л., Гинзбург В. Л., Фейнберг Е. Л. Распространение
радиоволн. М., Изд-во технико-теоретической литературы, 1953.
2. Альперт Я- Л. Распространение электромагнитных волн в ионо-
сфере. М., «Наука», 1972.
3. Антенны и устройства СВЧ. Расчет и проектирование антенных
решеток и их излучающих элементов. Под ред. Д. И. Воскресен-
ского. М, «Сов. радио», 1972. Авт.: Д. И. Воскресенский,
Р. А. Грановская, В. Л. Гостюхин и др.
4. Антенны эллиптической поляризации. Теория и практика. Сбор-
ник статей. Пер. с англ, под ред. А. И. Шпунтова. М., ИЛ, 1961.
5. Апраксин Л. В. Радиолокация планет. М., «Знание», 1966.
6. Атлас Д. М. Успехи радарной метеорологии. М., Гидрометео-
издат, 1967.
7. Атражев М. П., Ильин В. А., Марьин Н. П. Борьба с радио-
электронными средствами. М., Воениздат, 1972.
8. Бабанов Ю. Н., Родионов Я. Г., Рябков В. Ф. О развитии мето-
дов защиты систем радиосвязи от импульсных помех. — «Радио-
техника», 1967, т. 22, № 11, с. 28—36.
9. Бакмарк Н., Крим Д., Зельберг Ф. РЛС со скачкообразным из-
менением частоты. — «Экспресс-информация. Радиолокация, теле-
видение, радиосвязь», 1968, № 5, с. 1—6.
10. Бакулев П. А. Учет влияния амплитудной и фазовой нестабиль-
ности узлов радиолокаторов СДЦ на эффективность череспе-
риодного вычитания сигналов неподвижных целей. — «Труды
МАИ», 1968, № 178, с. 90—97.
11. Бакулев П. А. Радиолокация движущихся целей. М., «Сов. ра-
дио», 1964.
12. Барна А. Псевдослучайная частотная модуляция в допплеров-
ской РЛС, измеряющей параметры дальности. — «Зарубежная
радиоэлектроника», 1970, № 1, с. 24—39.
13. Бартон Д. К. Простая методика расчета характеристик обнару-
жения целей и дальности действия РЛС. — «Зарубежная радио-
электроника», 1970, № 5, с. 3—21.
14. Бартон Д. К. Характеристики радиолокационных систем — «За-
рубежная радиоэлектроника», 1966, № 3, с. 3—19.
15. Бартон Д. Радиолокационные системы. Пер. с англ. М., Воен-
издат, 1967.
16. Башаринов А. Е., Флейшман Б. С. Методы статистического по-
следовательного анализа и их приложения. М., «Сов. радио»,
1962.
17. Башаринов А. Е., Тучков Л. Т., Поляков В. М., Ананов Н. И.
Измерение радиотепловых и плазменных излучений в СВЧ диа-
пазоне. М., «Сов. радио», 1968.
310
18. Бенжамин Р. Анализ радио- и гидролокационных сигналов.
(Структура, разрешение и обработка сигналов в радио-, гидро-
локационных и других системах). Пер. с англ. М., Воениздат,
1969.
19. Блеттнер Д. Методы радиопротиводействия. — «Зарубежная ра-
диоэлектроника», 1960, № 4, с. 14—20.
20 Бортовые радиолокационные системы. Пер. с англ. Под ред.
Д. Повейсила, Р. Ровена, П. Уотермана. М., Воениздат, 1964.
21. Боек Н. Применение псевдослучайной модуляции положения им-
пульсов в когерентно-импульсных РЛС. — «Зарубежная радио-
электроника», 1970, № 6, с. 39—46.
22 Бронштейн И. Н., Семендяев К. А. Справочник по математике.
М., «Наука», 1964.
23. Буренин Н. И. Радиолокационные станции с синтезированной
антенной. М., «Сов. радио», 1972.
24. Вакин С. А., Шустов Л. Н. Основы радиопротиводействия и
радиотехнической разведки. М., «Сов. радио», 1968.
25. Вакман Д. Е. Сложные сигналы и принцип неопределенности
в радиолокации. М., «Сов. радио», 1965.
26. Варакин Л. Е. Теория сложных сигналов. М., «Сов. радио»,
1970.
27. Васин В. В., Степанов Б. М. Выходные сигналы радиотехниче-
ских устройств при оптимальной фильтрации. М., «Энергия»,
1967.
28. Вентцель Е. С. Теория вероятностей. М, Физматгиз, 1958.
29. Виницкнй А. С. Очерк основ радиолокации при непрерывном
излучении радиоволн. М., «Сов. радио», 1961.
30. Винокуров В. И., Ваккер Р. А. Вопросы обработки сложных сиг-
налов в корреляционных системах. М., «Сов. радио», 1972.
31. Вишин Г. М. Многочастотная радиолокация. М., Воениздат, 1973.
32. Волковский С. А. Радиоустройства систем управления летатель-
ными аппаратами. М., «^Машиностроение», 1972.
33. Гершкович С., Детап А. Параметры радиолокационной станции
с разносом частот. — «Вопросы радиолокационной техники», 1958,
№ 3, с. 3—19.
34. Гиллардини А. РЛС с изменяющейся несущей частотой.—
«Экспресс — информация. Радиолокация, телевидение, радио-
связь», 1970, № 6, с. 1—13.
35. Голев К. В. Расчет дальности действия радиолокационных стан-
ций. М., «Сов. радио», 1963.
36. Гоноровский И. С. Радиотехнические цепи и сигналы. М., «Сов.
радио», 1971.
37. Горохов Ю. Г., Рогалина Н. А. Корабельные РЛС обнаруже-,
ния. — «Зарубежная радиоэлектроника», 1974, № 5, с. 22.
38. Горюнов М. В. О подавлении помех, поступающих с направле-
ний боковых лепестков диаграммы направленности антенны
приемного устройства. — «Труды ГПИ», 1969, т. XXV, вып. 6,
с. 36—41.
39. Грассо Ж-, Гуаргуаглини П. Характеристики обнаружения мно-
гочастотной радиолокационной станции. — «Зарубежная радио-
электроника», 1968, № 8, с. 45—55.
40. Густафсон А., Эс Б. Характеристики радиолокационных станций
с изменяющейся от импульса к импульсу несущей частотой. —
«Зарубежная радиоэлектроника», 1965, № 4, с. 30—37.
311
41. Гуткин Л. С. Принципы радиоуправления беспилотными объек-
тами. М., «Сов. радио», 1959.
42. Гуткин Л. С. Теория оптимальных методов радиоприема при
флуктуационных помехах. М., «Сов. радио», 1972.
43. Девис Д. Методы и техника современной радиолокации. —
«Экспресс-информация. Радиолокация, телевидение, радиосвязь»,
1972, № 5, с. 1—24.
44. Дубинский Б. А., Слыш В. И. Радиоастрономия. М., «Сов. ра-
дио», 1973.
45. Жук М. С., Молочков Ю. Б. Проектирование антенно-фидерных
устройств. М., «Энергия», 1966.
46. Зубкович С. Г. Статистические характеристики радиосигналов,
отраженных от земной поверхности. М., «Сов. радио», 1968.
47. Ицхоки Я. С., Овчинников Н. И. Импульсные и цифровые
устройства. М., «Сов. радио», 1972.
48. Каценбоген М. С. Характеристики обнаружения. М., «Сов. ра-
дио», 1965.
49. Класс А. Радиолокационная станция с увеличенной дальностью
действия, использующая метод разноса частот. — «Вопросы ра-
диолокационной техники», 1958, №3, с. 35—43.
50. Климович Е. С. Радиопомехи зенитным комплексам. М., Воен-
издат, 1973.
51. Клюев Н. Ф. Обнаружение импульсных сигналов с помощью на-
копителей дискретного действия. М., «Сов. радио», 1963.
52. Коган И. М. Теория информации и проблемы ближней радио-
локации. М., «Сов. радио», 1968.
53. Комплексные системы радиоавтоматики. Под ред. Б. X. Кривиц-
кого. М., «Сов. радио», 1968. Авт.: М. П. Бобнев, Б. X. Кривиц-
кий, М. С. Ярлыков.
54- Конторов Д. С., Голубев-Новожилов Ю. С. Введение в радио-
локационную системотехнику. М., «Сов. радио», 1971.
55. Король О. Г., Черняк Р. Д. Основы радиолокации и метеороло-
гические радиолокационные устройства. Л., Гидрометеоиздат,
1971.
56. Корольков Д. В., Парийский Ю. Н., Есепкина Н. Е. Радиотеле-
скопы и радиометры. М., «Наука», 1973.
57. Коростелев А. А. Автоматическое измерение координат. М., Воен-
издат, 1961.
58. Космические траекторные измерения. Радиотехнические методы
измерений и математическая обработка данных. Под ред-
П. А. Агаджанова, В. Е. Дулевича, А. А. Коростелева. М., «Сов.
радио», 1969.
59. Кривицкий Б. X. Автоматические системы радиотехнических
устройств. М, Госэнергоиздат, 1962.
60- Крони Д., Валис П. Система подавления боковых лепестков для
основного радиолокатора. — «Зарубежная радиоэлектроника»,
1966, № 5, с. 12—30.
61. Кузин Е. В. Моноимпульсная радиолокация. М., Воениздат, 1969.
62. Кузьмин С. 3. Основы теории цифровой обработки радиолока-
ционной информации М., «Сов. радио», 1974.
63. Кук Ч. Повышение эффективности радиолокационных устройств
за счет сжатия импульсов—«Зарубежная радиоэлектроника»,
1960, № 9, с. 38—49.
64. Кук Ч., Бернфельд М. Радиолокационные сигналы. Теория и
применение. Пер. с англ. М., «Сов. радио», 1971.
312
65. Куликов Е. И. Вопросы оценок параметров сигналов при нали-
чии помех. М., «Сов- радио», 1969.
66. Лезин Ю. С. Оптимальные фильтры и накопители импульсных
сигналов. М., «Сов. радио», 1969.
67. Лейт Е. Н. Современное состояние голографии. — «Зарубежная
радиоэлектроника», 1970, № 10, с. 17—26.
68. Лейт Е. Н- Методы оптической обработки сигналов одновремен-
ным сжатием импульсов и сужением луча антенны. — «Зарубеж-
ная радиоэлектроника», 1970, № 2, с. 25—36.
69. Лейт Е. Н., Ингалс А. А. Обработка сигналов РЛС с синтези-
рованием апертуры методами голографии. — «Зарубежная радио-
электроника», 1968, № 12, с. 3—12.
70. Леонов А. И., Фомичев К. И, Моноимпульсная радиолокация.
М., «Сов. радио», 1970.
71. Мак Гиллем Ц. Д., Купер Ц. Р., Вельтман М. Б. Эксперимен-
тальная радиолокационная станция со случайным сигналом.—
«Зарубежная радиоэлектроника», 1968, № 7, с. 11—17.
72- Максимов М. В., Горгонов Г. И. Радиоуправление ракетами.
М., «Сов. радио», 1964.
73. Мевель Дж. Использование в радиолокации гидрорадиолока-
ционных методов. — «Зарубежная радиоэлектроника», 1973, № 1,
с. 3—10.
74. Мельников Ю. Н. Достоверность информации в сложных систе-
мах. М., «Сов. радио», 1973.
75. Методы помехоустойчивого приема частотно-модулированных и
фазоманипулированных сигналов. — В кн-: Технический сборник
статей. Под ред. А. С. Виницкого и А. Г. Зюко. М., «Сов. ра-
дио», 1972, с. 45—71.
76. Мильман С. Влияние атмосферы на распространение метровых
и дециметровых радиоволн. — «Радиотехника и электроника за
рубежом», 1959, № 2, с. 137—157.
77- Мильни К. Трехкоординатные радиолокационные станции со
сжатием импульсов и частотным управлением лучом. — «Зару-
бежная радиоэлектроника», 1965, № 5, с. 3—29.
78. Мищенко Ю. А. Радиолокационные цели. М., Воениздат, 1966.
79. Мищенко Ю. А. Загоризонтная радиолокация. М., Воениздат,
1972.
80. Мищенко Ю. А. Зоны обнаружения. М., Воениздат, 1963.
81. Многофункциональная импульсно-допплеровская радиолокацион-
ная станция для тактического одноместного истребителя F-15.—
«Зарубежная радиоэлектроника», 1973, № 4, с. 101.
82. Николаев А. Г., Перцов С. В. Радиотеплолокация. Л., «Сов. ра-
дио», 1964.
83. Обрезков Г. В-, Разевиг В. Д. Методы анализа срыва слежения.
М., «Сов. радио», 1972.
84. Перди Р. Ж. Обзор методов обработки радиолокационных сиг-
налов. — «Экспресс-информация. Сер. Радиолокация, телевиде-
ние, радиосвязь», 1974, № 23, с.Л—16.
85. Пересада С. А. Зенитные управляемые ракеты. М-, Воениздат,
1961.
86. Пестряков В. Б. Фазовые радиотехнические системы. М., «Сов.
радио», 1968.
87. Пестряков В. Б. Конструирование радиоэлектронной аппаратуры.
М., «Сов. радио», 1969.
313
88. Петерс Л., Веймер Ф. Радиолокационное сопровождение слож-
ных целей. — «Зарубежная радиоэлектроника», 1964, № 7,
с. 17—44.
89. Пиблз П., Берковиц Р. Многоцелевой моноимпульсный радио-
локатор.—«Зарубежная радиоэлектроника», 1969, № 10, с. 3—'17.
90. Поляризация радиолокационных сигналов. Под ред. В Е- Дуле-
вича. М., «Сов. радио», 1966. Авт.: Д. Б. Канарейкин, Н. Ф. Пав-
лов, В. А. Потехин.
91. Попов Г- П. Инженерная психология в радиолокации. М., «Сов
радио», 1971.
92. Пороговые сигналы. Пер. с англ. М., «Сов. радио», 1952.
93. Престон Г. В. Эффективность поиска радиолокационной стан-
ции, -использующей последовательный анализ отношений вероят-
ности.— «Зарубежная радиоэлектроника», 1961, № 1, с. 5—14
94. Радиолокационная техника. (Обзор по материалам иностранной
печати). Радиоэлектроника в 1970 г., вып- 3. НИИ экономики и
информации по радиоэлектронике.
95. Радиолокационная техника. (Обзор по материалам иностранной
печати). Радиоэлектроника в 1971 г., вып. 3. НИИ экономики
и информации по радиоэлектронике.
96. Радиолокационная техника. (Обзор по материалам иностранной
печати). Радиоэлектроника в 1972 г., вып. 3. НИИ экономики и
информации по радиоэлектронике.
97. Радиолокационные станции бокового обзора. Под ред. А. П. Реу-
това. М., «Сов. радио», 1970. Авт.: А. П. Реутов, Б. А. Михай-
лов, Г. С- Кондратенков, Б. В. Бойко.
98. Радиолокационные станции с изменяющейся несущей частотой. —
«Экспресс-информация. Сер. Радиолокация, телевидение, связь»,
1970, № 6, с 1—13.
99. Радиолокационные устройства (теория и принципы построения).
Под ред. В. В Григорина-Рябова. М, «Сов радио», 1970. Авт:
В. В. Васин, О. В. Власов, В. В. Григорян-Рябов, П. И. Дудник,
Б. М. Степанов.
100. Рей X. Повышение эффективности радиолокационного обнаруже-
ния целей по дальности и угловым координатам при перестрой-
ке частоты. — «Зарубежная радиоэлектроника», 1967, № 6,
с. 3—16.
101. Рихачек А. В. Упрощенный способ выбора радиолокационных
сигналов. — «Зарубежная радиоэлектроника», 1973, № 2,
с. 20—37.
102. Рихачек А. В. Систематический подход к исключению слепых
скоростей. — «Экспресс-информация. Сер. Радиолокация, теле-
видение, радиосвязь», 1974, № 29, с. 1—9.
103. Романов А. Н., Фролов Г. А. Основы автоматизации систем
управления. (Построение автоматизированных систем управле-
ния ПВО.) М., Воениздат, 1971.
104. Сайбель А. Г. Основы радиолокации. М., «Сов. радио», 1961.
105. Самсоненко С. В. Цифровые методы оптимальной обработки
радиолокационных сигналов. М., Воениздат, 1968.
106. Сколник М. Введение в технику радиолокационных систем.
Пер. с англ. М., «Мир», 1965-
107. Слока В. К. Вопросы обработки радиолокационных сигналов.
М., «Сов. радио», 1970.
108. Смирнов В- А. Введение в оптическую радиоэлектронику. М,
«Сов. радио», 1973.
314
109. Смирнов Г. Д., Горбачев В. П. Радиолокационные системы
с активным ответом. М., Воениздат, 1962.
НО. Современная радиолокация (анализ, расчет и проектирование
систем). Пер. с англ- под ред. Ю. Б. Кобзарева. М., «Сов. ра-
дио», 1969.
111. Справочник по основам радиолокационной техники. Под ред.
В. В. Дружинина. М., Воениздат, 1967. Авт.; А. М. Педак,
П. И. Баклашев, Л- Л. Барвинский и др.
112. Справочник по радиоэлектронике. Под ред. А. А. Куликовского.
Том 3. Раздел 25. Радиолокация и навигация. М., «Энергия»,
1970. Авт.: В. В. Васин, О. В. Власов, С. В. Перцов и др.
113. Степанов Ю. Г. Противорадиолокационная маскировка. М.,
«Сов. радио», 1968.
114. Супряга Н. П. Радиолокационные средства непрерывного излу-
чения. М., Воениздат, 1974.
115. Теория и техника радиолокации. Под ред. А. Г. Сайбель,
М., «Машиностроение», 1971.
116. Теоретические основы радиолокации. Под ред. Я. Д. Ширмана.
М., «Сов. радио», 1970. Авт. Я. Д. Ширман, В. Н. Голиков,
И. Н. Бусыгин и др.
117. Теоретические основы радиолокации. Под ред. В. Е. Дулевича.
М., «Сов. радио», 1964. Авт.: В. Е. Дулевич, А. А. Коростелев,
Ю. А. Мельник и др.
118. Тихонов В. И. Саатистическая радиотехника. М, «Сов. радио»,
1966.
119- Томас П. Д. Радиолокационная станция многоцелевого назна-
чения для тактического самолета. — «Зарубежная радиоэлектро-
ника», 1968, № 3, с. 3—32.
120. Тонкин А., Сэведж Дж. Применение корреляционной обработки
сигналов в радиолокационных системах. — «Зарубежная радио-
электроника», 1973, № 2, с. 41—48.
121. Тор Р. Техника сжатия импульса с большим произведением
длительности на ширину спектра. — «Зарубежная радиоэлектро-
ника», 1963, № 12, с. 31—38.
122. Тузов Г. И- Выделение и обработка информации в допплеров-
ских системах. М., «Сов. радио», 1967.
123. Фалькович С. Е. Оценка параметров сигналов. М., «Сов. радио»,
1970.
124. Финкельштейн М. И, Основы радиолокации. М., «Сов. радио»,
1973.
125. Форвард Р., Ричи Ф. Влияние внешних шумов на показатели
РЛС. — «Зарубежная радиоэлектроника», 1961, № 7, с. 29—41.
126. Фридман X. Д. Чувствительность радиотехнических систем
к воздействию помех. — «Зарубежная радиоэлектроника», 1969,
№ 5, с. 3—26.
127. Хансен В. Логика последовательной работы обзорной радио-
локационной станции с поимпульсной перестройкой частоты.—
«Зарубежная радиоэлектроника», 1969, № 4, с. 80—98.
128. Хелстром К- Статистическая теория обнаружения сигналов.
Пер. с англ. М., ИЛ, 1963.
129. Голд Б., Рейдер Ч. Цифровая обработка сигналов. Пер. с англ.,
под ред. А. М. Трахтмана. М., «Сов- радио», 1973.
130. Чернов Ю. А. Возвратно-наклонное зондирование ионосферы.
М., «Связь», 1971.
315
131. Электронно-лучевые трубки и индикаторы. Пер. с англ Под
ред. А- Я. Брейтбарт, М., «Сов. радио». Т. I-—1949, т. II—1950.
132. Электронные системы отображения информации. Пер. с англ.
Под ред. Дж. Ховарда. М., Воениздат, 1966.
133. Эпштейн Д. Дальность действия РЛС с подавлением сигналов
боковых лепестков антенны. — «Вопросы радиоэлектроники, Сер.
общетехническая», 1962, вып. 4, с. 65—68-
134. Ярлыков М. С. Оптимальный прием импульсных сигналов. М.,
ВВИА им. Н. Е. Жуковского, 1971.
135. IEEE Tech Sessions Show Refinements in radars. AMPS, MICs
and Lasers.— «Microwaves», 1971, v. 10, № 3, p, 32—34.
136. Miller B. World air defense market grows.— «Aviation Week
and Space Technology», 1971, v. 94, № 1, p. 38—42.
Готовится к выходу в свет
в издательстве
«СОВЕТСКОЕ РАДИО»
Электромагнитная совместимость радиоэлектронных
средств и непреднамеренные помехи. Сокращенный перевод
с англ. Под ред. А. И С ап г ир а. В 5-ти выпусках. Вып. 1.
Общие вопросы ЭМС Межсистемные помехи.
В книге в сжатой форме изложен обширный материал,
являющийся по сути введением в теорию и практику ЭМС
РЭА, приведен богатый справочный материал и примеры рас-
чета.
В первом выпуске дана общая характеристика состояния
проблемы ЭМС РЭС, изложен ряд направлений по решению
задач обеспечения ЭМС РЭС в США. Рассмотрены некоторые
методы расчета межсистемных электромагнитных помех, изло-
жены способы представления характеристик основных
устройств РЭС (передатчиков, приемников, антенн и пр.), не-
обходимых для оценки ЭМС.
Книга представляет собой справочно-методическое посо-
бие для инженеров-конструкторов и исследователей, разработ-
чиков радиоаппаратуры, а также специалистов, работающих
в смежных областях. Она может представить интерес для со-
трудников служб управления и эксплуатации РЭС и исполь-
зована преподавателями и студентами вузов и техникумов
в качестве учебного пособия.
ОГЛАВЛЕНИЕ
Предисловие .... ......................... 3
Введение .............................................. 5
ГЛАВА 1. ФИЗИЧЕСКИЕ ОСНОВЫ РАДИОЛОКАЦИИ
Основные справочные данные . 15
Задачи.............................................72
ГЛАВА 2. РАДИОЛОКАЦИОННЫЕ ЦЕЛИ
Основные справочные данные . 80
Задачи.............................................94
ГЛАВА 3. РАДИОЛОКАЦИОННЫЙ ОБЗОР
Основные справочные данные . 96
Задачи.............................................114
ГЛАВА 4. ОБНАРУЖЕНИЕ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ
Основные справочные данные . 118
Задачи.............................................143
ГЛАВА 5. ДАЛЬНОСТЬ ДЕЙСТВИЯ РАДИОЛОКАЦИОННЫХ
СТАНЦИЙ
Основные справочные данные . 148
Задачи............................................154
ГЛАВА 6. РАЗРЕШАЮЩАЯ СПОСОБНОСТЬ
Основные справочные данные . 159
Задачи............................................167
ГЛАВА 7. ТОЧНОСТЬ ИЗМЕРЕНИЯ КООРДИНАТ ЦЕЛЕЙ
Основные справочные данные . 170
Задачи............................................177
ГЛАВА 8. ИНДИКАТОРНЫЕ ВЫХОДНЫЕ УСТРОЙСТВА
Основные справочные данные . 179
Задачи............................................206
ГЛАВА 9. ВЫХОДНЫЕ УСТРОЙСТВА, СОПРЯЖЕННЫЕ С ЭЛЕК-
ТРОННЫМИ ЦИФРОВЫМИ ВЫЧИСЛИТЕЛЬНЫМИ МАШИ-
НАМИ
Основные справочные данные . 208
Задачи............................................221
ГЛАВА 10. ЗАЩИТА РЛС ОТ ПОМЕХ
Основные справочные данные . 224
Задачи............................................251
ГЛАВА 11. МЕТОДИКА ВЫБОРА ОСНОВНЫХ ТЕХНИЧЕСКИХ
ПОКАЗАТЕЛЕЙ РЛС
Порядок выбора основных технических показателей . . 253
Пример расчета технических показателей импульсной РЛС 264
Пример расчета технических показателей РЛС с непре-
рывным излучением . 268
Решение задач и ответы............................273
Список литературы ................................... 310
317
Васин В. В. и Степанов Б. М.
В 19 Справочник-задачник по радиолокации. М., «Сов.
радио», 1977.
320 с. с ил.
Книга представляет собой расширенное и переработанное издание
«Задачника по радиолокации», вышедшего в 1969 г. В новом издании
материал предыдущей книги значительно переработан, увеличено число
задач, включены новые главы по индикаторным и цифровым выходным
устройствам, защите от помех, приведены расширенная классификация
радиолокационных средств и характеристики методов их работы. Книга
завершается обширной библиографией по радиолокации и смежным
вопросам^ будет полезна СТудентам радиотехнических специальностей,
инженерно-техническому составу, связанному с эксплуатацией радио*
локационных устройств, и лицам смежных специальностей.
30402-009
046(01)-77
6Ф2.4
ИБ № 55
Владимир Васильевич Васин
Борис Михайлович Степанов
СПРАВОЧНИК-ЗАДАЧНИК ПО РАДИОЛОКАЦИИ
Редактор Г. В Обрезков
Художественный редактор А. Н. Алтунин
Обложка художника В. Е Карпова
Технический редактор А. А. Белоус
Корректор Л. А. Максимова
Сдано в набор 3/VIII 1976 г. Подписано в печать 20/XII 1976 г. Т-22817
Формат 84хЮ8/31 Бумага машиномелованная Объем 16,8 усл. п. л.,
16, 517 уч.-изд. л. Тираж 19 000 экз. Зак. 755 Цена 1 р. 04 к.
Издательство «Советское радио», Москва, Главпочтамт, а/я 693
Московская типография № 10 Союзполигоафпрома
при Государственном Комитете Совета Министров СССР
по делам издательств, полиграфии и книжной торговли
Москва, М-111, Шлюзовая наб., 10.