/


Author: Кисель В.А.
Tags: электротехника компьютерные технологии технология древесины связь цифровые устройства издательство связь
Year: 1979




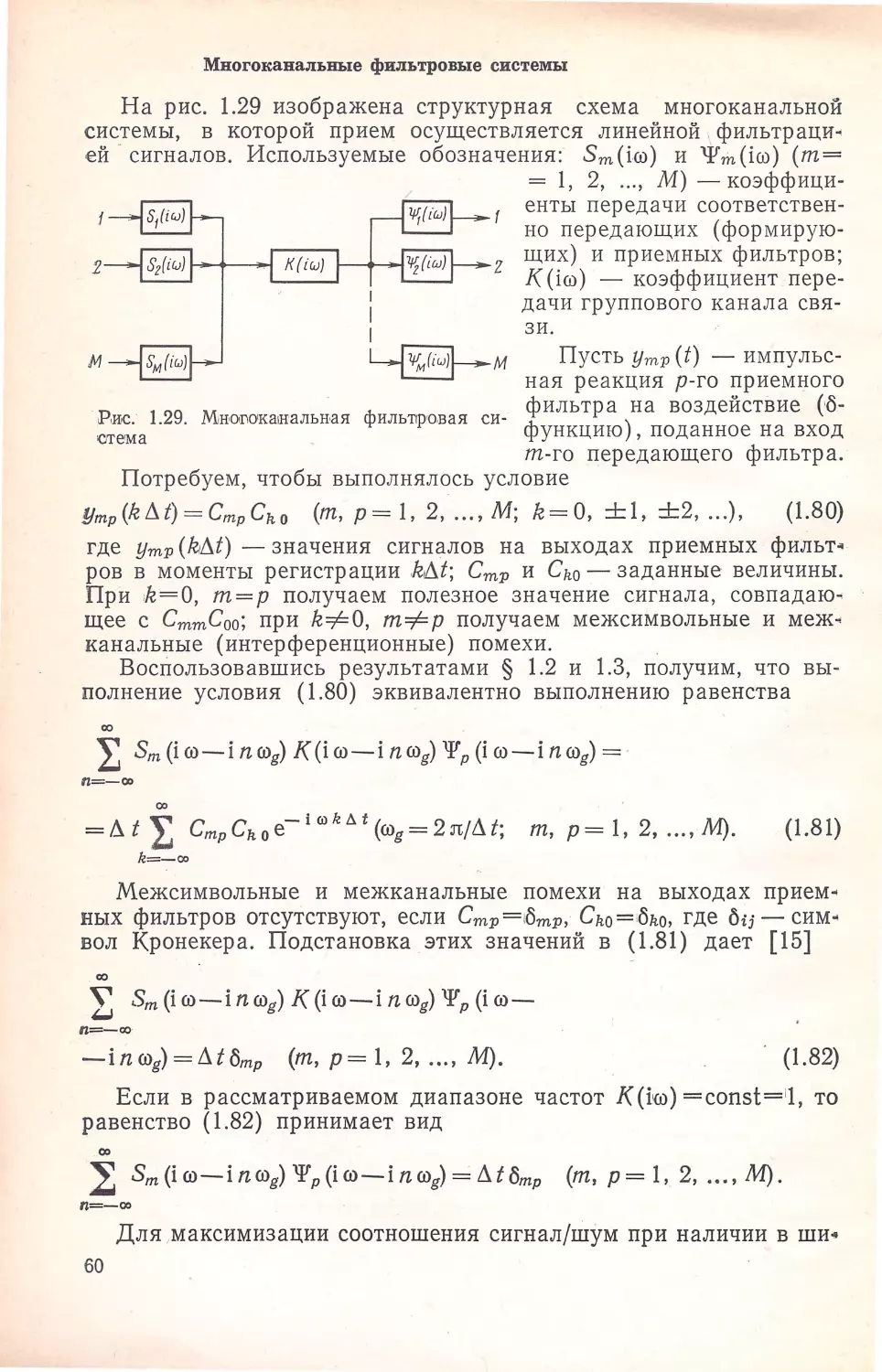
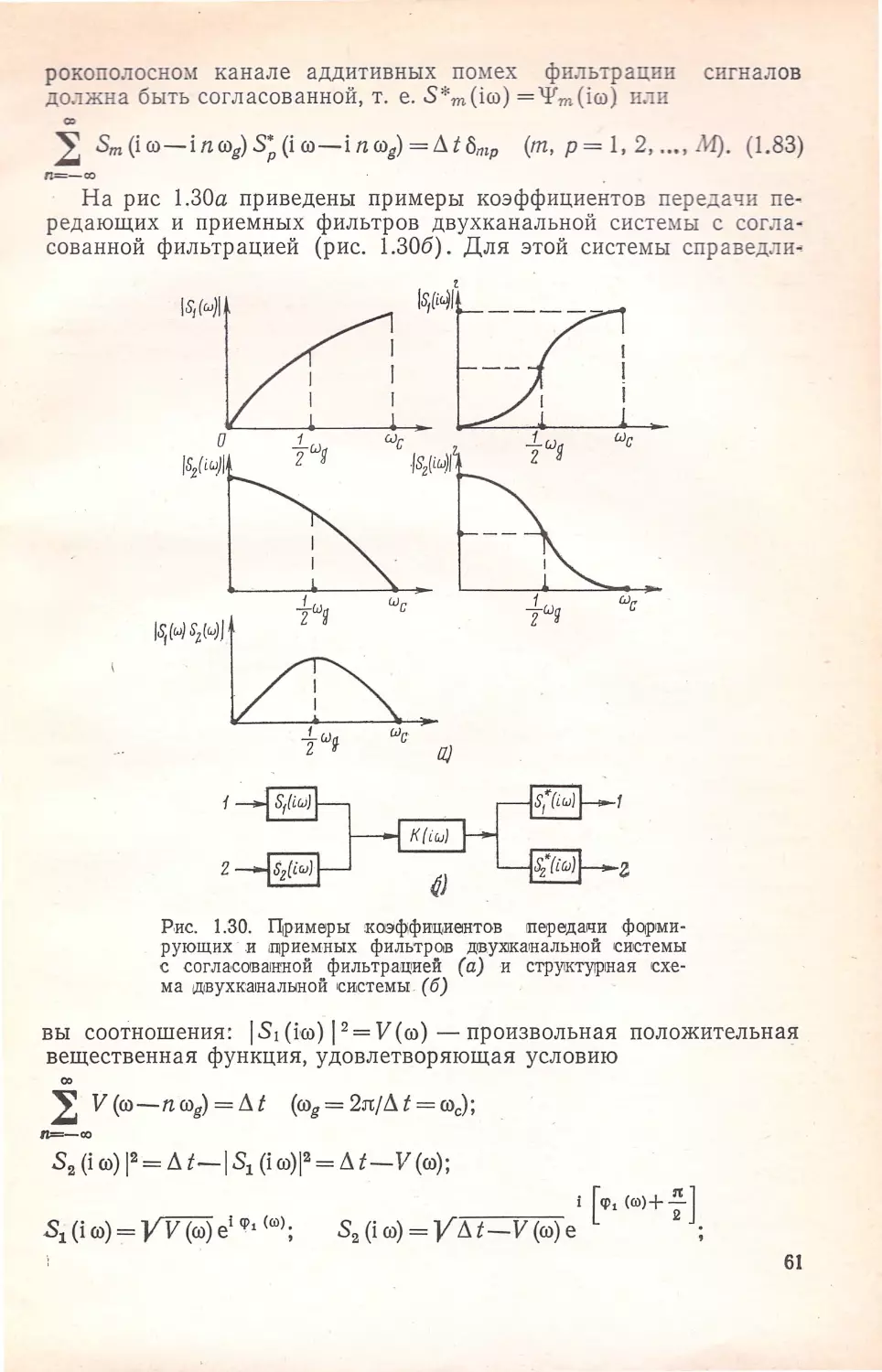
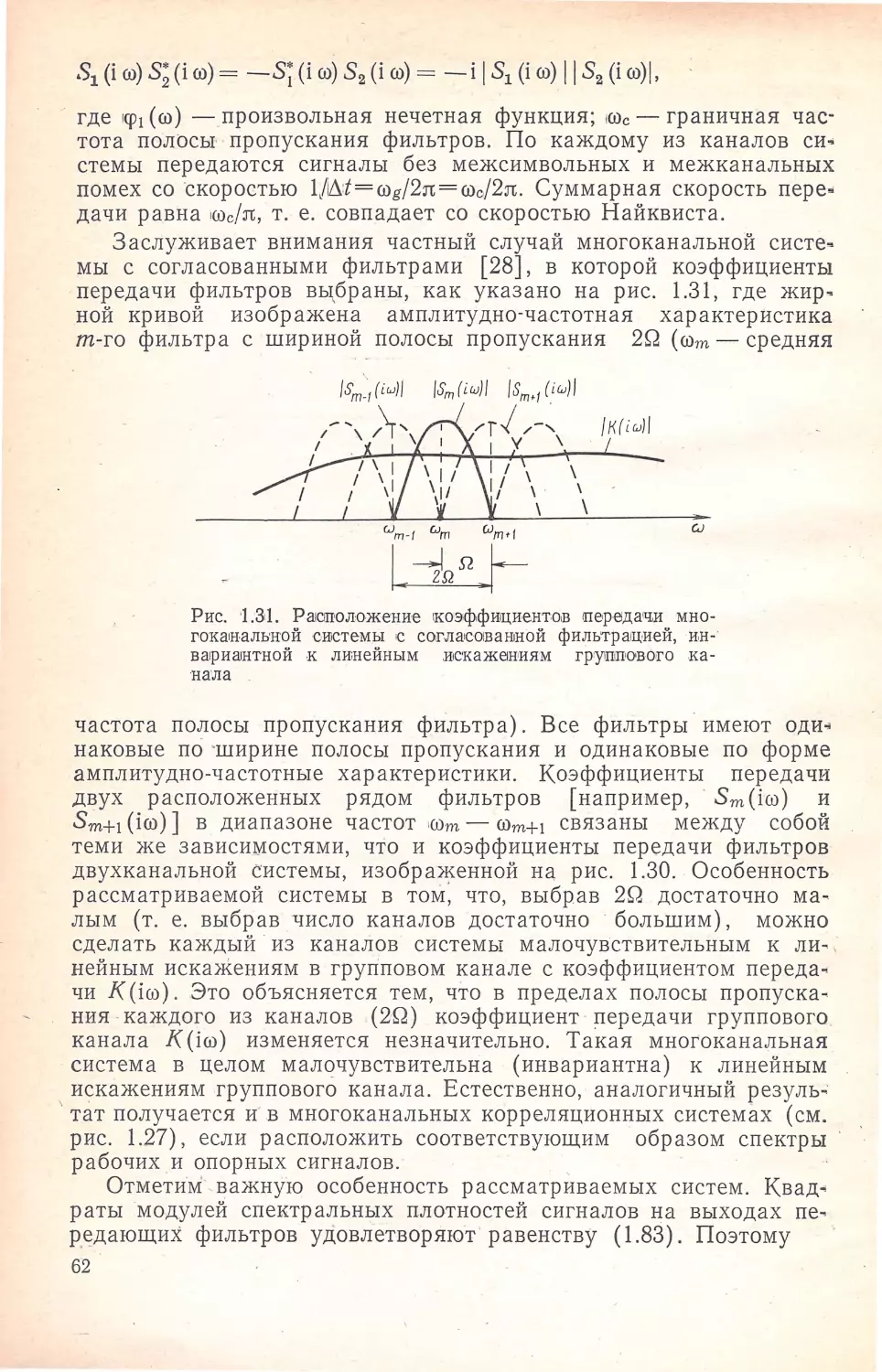
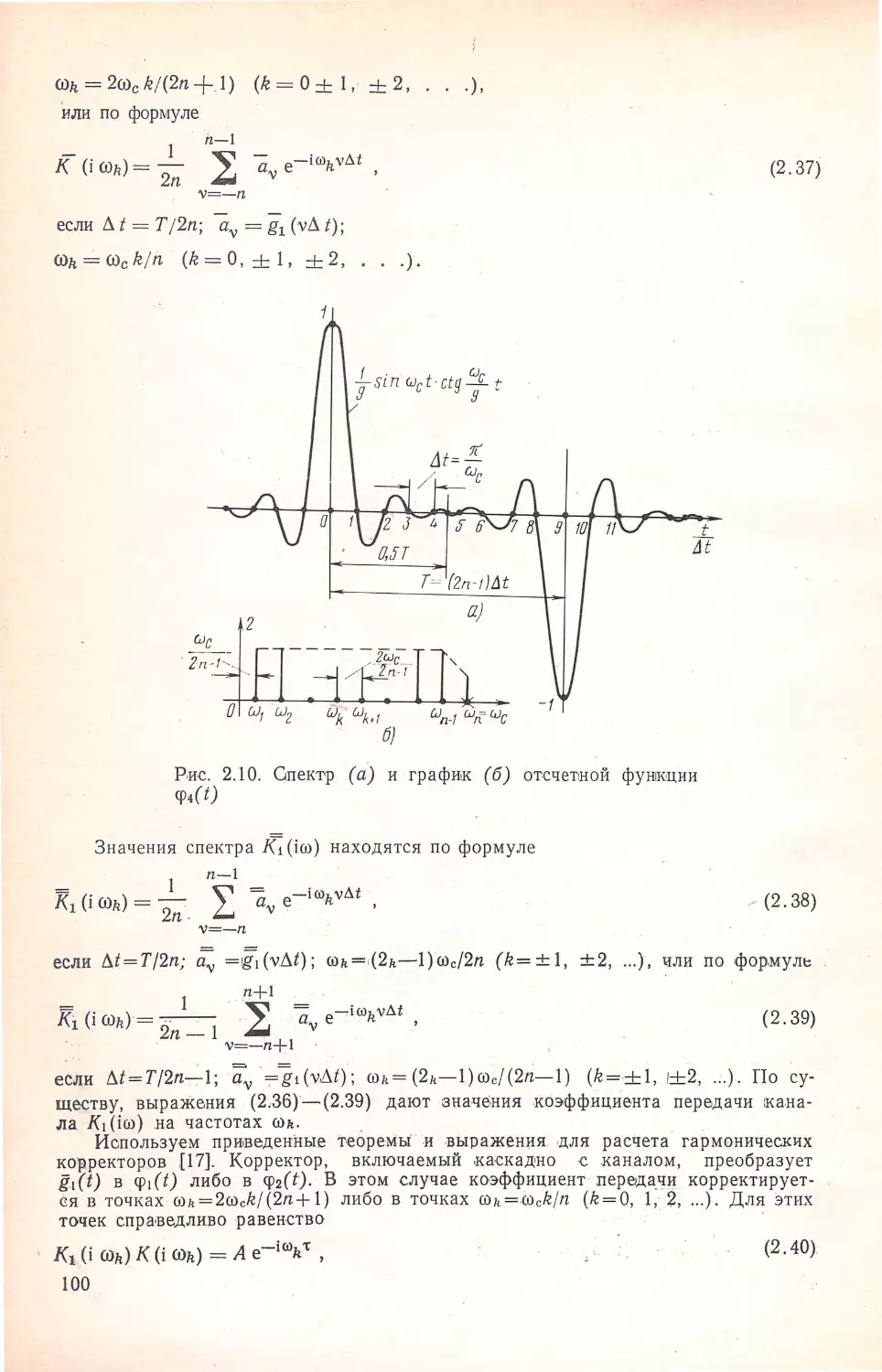
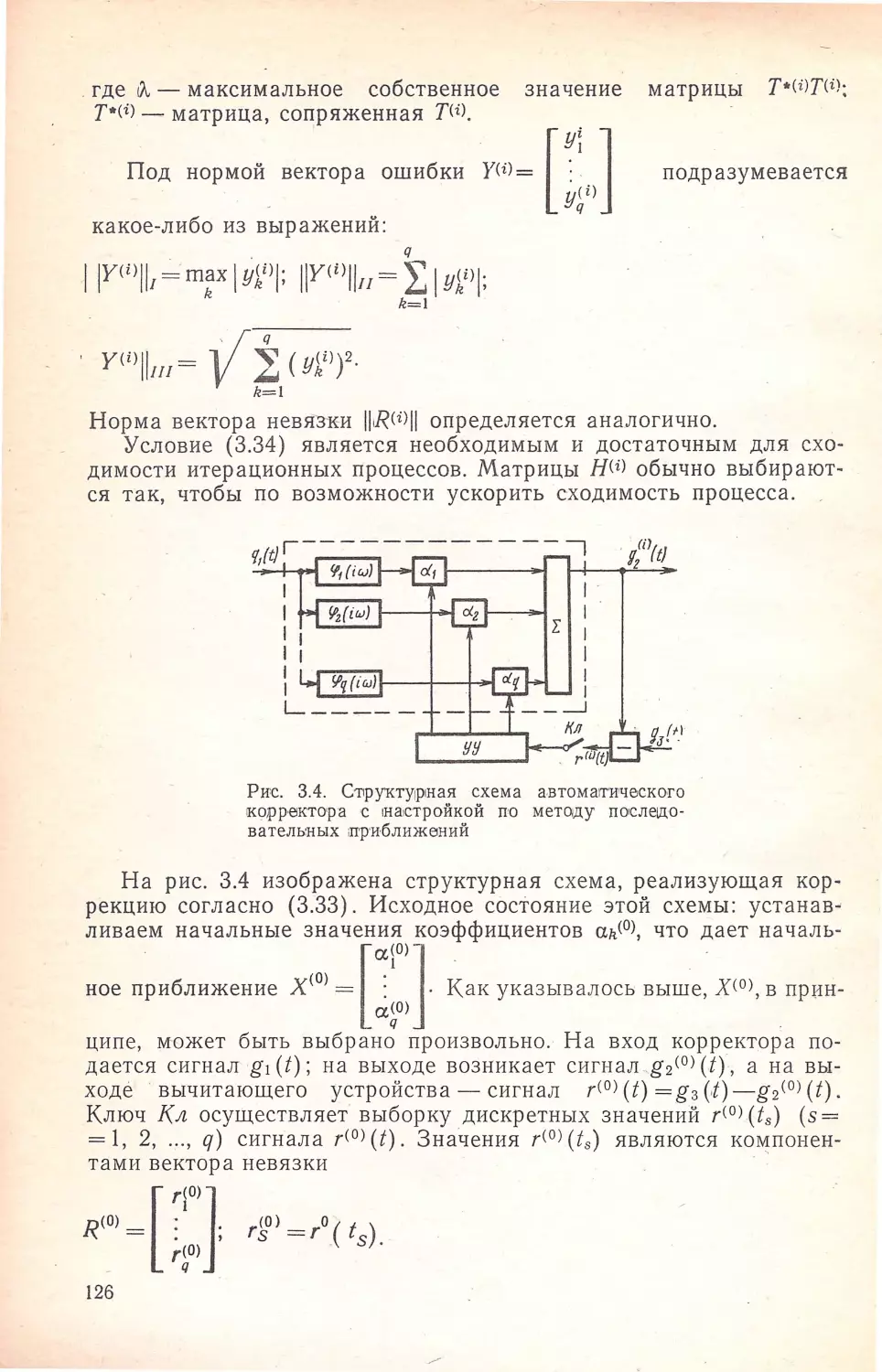
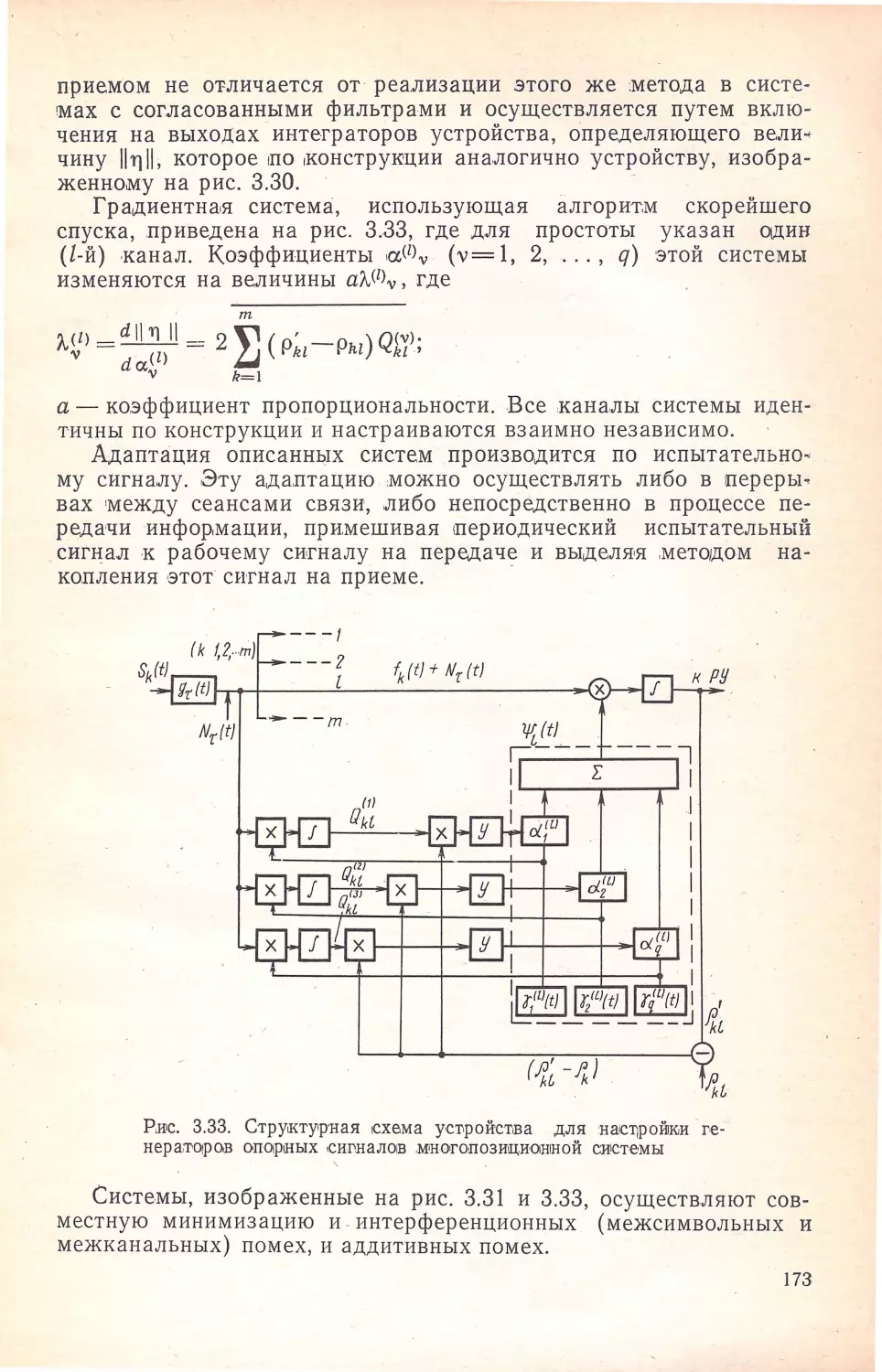
Text
.л ,*>. -- —• — -5- - -
СИНТЕЗ ГАРМОНЙНЕСКИХ КОРРЕКТОРОВ ДЛЯ ВЫСОКОСКОРОСТНЫХ СИСТЕМ связи
В. А. КИСЕЛЬ
СИНТЕЗ
ГАРМОНИЧЕСКИХ
КОРРЕКТОРОВ
ДЛЯ ВЫСОКОСКОРОСТНЫХ
СИСТЕМ
связи
07Б129
37.1
К44
УДК 621.372.55:681.327.8
Кисель В.А.
К44 Синтез гармонических корректоров для высокоско-
ростных систем связи.— М.: Связь, 1979.— 252 с., ил.
1 р. 80 к.
Рассматриваются вопросы устранения интерференционных помех в
высокоскоростных многоуровневых системах, работающих по частотно-
ограниченным каналам. Излагается теория гармонических корректоров
временных и частотных характеристик каналов связи.
Книга предназначена для научных работников, специализирующихся
в области высокоскоростной передачи сигналов.
30401—092
К-----------102—79
045(01)—79
3701000000
ББК 37.1
6Ф0.1
© Издательство «Связь», 1979 г,
ПРЕДИСЛОВИЕ
Использование достижений теории оптимального приема сигна-
лов, теории помехоустойчивости и надежности, теории преобра-
зования и кодирования, новых методов синтеза цепей и т. д. при-
вело в последние годы к существенному росту эффективности сис-
тем связи. Тем не менее дальнейшему увеличению скорости пере-
дачи данных в реальных частотно-ограниченных коммутируемых
каналах связи с искажениями (рассеянием во времени), а также
в параметрических каналах препятствует наличие интерферен-
ционных (межсимвольных) помех, которые не могут быть устра-
нены на основе существующих теорий. Это выдвигает перед раз-
работчиками комплексную проблему борьбы с межсимвольными
помехами в высокоскоростных системах связи, которая распадает-
ся на два относительно самостоятельных направления:
1. Синтез сигналов с финитным спектром для высокоскорост-
ной многоуровневой (в общем случае —• многопозиционной) пере-
дачи по частотно-ограниченным каналам. Эти сигналы оптималь-
ны в том смысле, что их использование в корректированных ка-
налах, в принципе, устраняет межсимвольные помехи, вызывае-
мые неизбежной интерференцией многоуровневых сигналов с рез-
ко ограниченным по ширине спектром при их высокоскоростной
передаче (при скоростях, приближающихся к теоретическому пре-
делу — скорости Найквиста).
2. Синтез регулируемых корректоров, позволяющих оператив-
но («вручную» либо автоматически) скомпенсировать все виды ли-
нейных собственных и перекрестных искажений временных и час-
тотных характеристик (либо совокупности некоторых параметров)
каналов многократных систем связи и произвольным характером
селекции сигнала на фоне шумов.
Первое из указанных направлений рассмотрено в настоящей
монографии в гл, 1. Полученные результаты важны для построе-
ния многоуровневых высокоскоростных систем передачи дискрет-
ной информации, использующих стандартные телефонные каналы.
Однако в равной степени они пригодны для радиоканалов с ин-
тегральными методами приема, так как указывают общие требо-
вания, которым должны удовлетворять финитные спектры сигна-
лов на входах решающего устройства либо приведенные характе-
ристики частотно-ограниченных каналов связи так, чтобы в мо-
менты принятия решений устранялись межсимвольные помехи при
неизбежной интерференции сигналов, передаваемых, с высокими
скоростями.
3
Второе направление является комплексным и распадается на
несколько самостоятельных частей, таких, как общая теория по-
линомных (в частности, гармонических) корректоров; алгоритмы
автоматической коррекции дискретных сигналов на фоне шумов;
гармонические корректоры с обратной связью; совместная мини-
мизация собственных и перекрестных искажений каналов много-
кратных систем связи. По этой причине вопросы синтеза адаптив-
ных корректоров освещены в гл. 2—4.
Спецификой вопросов синтеза автоматических корректоров яв-
ляется то, что, хотя эти вопросы и носят четко выраженный «цеп-
ной» характер, они, однако, не могут быть решены на основе су-
ществующих методов синтеза цепей с сосредоточенными или рас-
пределенными параметрами (методов синтеза классических фазо-
вых и амплитудных корректоров, корректоров Боде и т. д.), по-
скольку указанные методы не учитывают принципиально нового
требования, предъявляемого к автоматическим корректорам, —
возможности автоматической минимизации заданной целевой
функции (погрешности). Главную роль в теории таких корректо-
ров играет синтез алгоритмов автоматической коррекции, и этому
вопросу в гл. 3 и 4 уделяется основное внимание.
Актуальность и общая практическая значимость проблематики
и результатов синтеза гармонических корректоров подтверждают-
ся, например, следующими фактами. Применение автоматической
коррекции в сочетании с различными видами модуляции позво-
лило осуществить в стандартном телефонном канале (полоса час-
тот 300—3400 Гц) передачу информации последовательными мето-
дами в 1964 и 1965 гг. со скоростями соответственно 6800 и
9600 бит/с и последнее время — со скоростью порядка 12 000 бит/с
[1—4]. В системах без коррекции относительная скорость переда-
чи многоуровневых дискретных сигналов (кодовых комбинаций)'
не превышает 0,3—0,5 Бод/Гц полосы пропускания канала, в то
время как при использовании сигналов без межсимвольной интерн
ференции совместно с коррекцией линейных искажений скорость
приближается к предельно возможной (скорости Найквиста),
равной 2 Бод/Гц.
Хорошо известно, что приемниками, обеспечивающими мини-
мально возможную величину средней вероятности ошибки, когда
принятый сигнал искажается как случайными помехами, так и
межсимвольной интерференцией, являются нелинейные приемники,
основанные на сложном решении [5—8].
Тем не менее линейные оптимальные приемники, главной
частью которых являются гармонические корректоры, обеспечи-
вают хорошее приближение к оптимальному решению. Кроме того,
гармонические корректоры входят как составная часть и в опти-
мальные нелинейные приемники, например в приемники с ре-
шающей обратной связью, в приемники максимального правдо-
подобия и др. [5—8]. С другой стороны, приемники с гармониче-
скими корректорами (автоматическими или адаптивными) сущест:
венно проще нелинейных приемников. По указанным причинам
4
разработка гармонических корректоров различных типов являет-
ся в настоящее время одной из центральных тем исследований спе-
циалистов в области теории и техники высокоскоростных систем
связи [1—8].
Естественно, вопросы, рассмотренные в настоящей книге, не
ограничиваются только коррекцией интерференционных помех в
системах передачи данных. Они в равной степени относятся и к
коррекции искажений в широкополосных системах связи с различ-
ными видами частотного и временного уплотнения, к коррекции
линейных искажений в телевизионных системах, в видеотелефон-
ных системах и др.
СПИСОК ЛИТЕРАТУРЫ
1. Lucky R. W. Automatic Equalization for Digital Communication.—«BSTJ»,
1965, v. 44, p. 547—588, April.
2. Rudin H. R. A Continuously Adaptive Equalizer for General-purpose Commu-
nication Channels.'—«BSTJ», 1969, v. 48, N 6, p. 1865—1884.
3. Niessen C. W., Willim D. K. Adaptive Equalizer for Pulse Transmission.—
«IEEE, Transactions on Com. Techn.», 1970, v. COM-18, N 4, p. 377—395.
4. Lucky R. W., Saiz J., Weldom E. F. Principles of Data Communication.—
New York, Me. Graw-Hill Book Co., 1968, 433 p.
5. Lucky R. W. A Survey of the Communication Theory Literature: 1963—1973.—
«IEEE Trans. Inform. Theory», 1973, v. 19, N 6, p. 725—739.
<6. Messerschmitt D. G. A Geometric Theory of Intersymbol Interference. Part I:
Zero-Forcing and Decision-Feedback Equalization.—«BSTJ», 1973, v. 52, N 9,
p. 1483—1520.
7. Messerschmitt D. G. A Geometric Theory of Intersymbol Interference. Part II:
Performance of the Maximum Likelihood Detector.—«BSTJ», 1973, v. 52, N 9,
p. 1521—1540.
8. Falconer D. D., Magee Jr. F. R. Adaptive Channel Memory Truncation for
Maximum Likelihood Sequence Estimation.—«BSTJ», 1973, v. 52, N 9,
p. 1541—1562.
Глава 1
УСЛОВИЯ ОТСУТСТВИЯ ИНТЕРФЕРЕНЦИОННЫХ
ПОМЕХ В ВЫСОКОСКОРОСТНЫХ
МНОГОУРОВНЕВЫХ СИСТЕМАХ С ЧАСТОТНО-
ОГРАНИЧЕННЫМИ КАНАЛАМИ
1.1. Задачи, решаемые в главе
В настоящее время основной объем цифровой информации пе-
редается по существующей сети стандартных каналов тональной
частоты (СКТЧ) (телефонные каналы, среди которых исполь-
зуются, главным образом, каналы проводной и радиорелейной свя-
зи с ЧМ). Эти каналы относятся, как известно, к помехозащищен-
ным каналам (в СКТЧ, удовлетворяющих нормам МККТТ, уро-
вень аддитивного шума более чем на 30 дБ ниже уровня полезно*
го сигнала). Согласно Шеннону скорость передачи дискретной ин-
формации в таких каналах может достигать 30 000—50 000 бит/с
[2]. Однако в действительности скорости передачи на порядок ни-
же указанных величин. Главным ограничивающим фактором по-
вышения скорости передачи в СКТЧ является чрезмерно высокий
уровень интерференционных помех, который для скоростей, при-
ближающихся к скорости Найквиста, намного превосходит уровень
полезного сигнала. Поэтому проблему синтеза высокоскоростных
систем связи, предназначенных для работы по СКТЧ, принято раз-
бивать на две относительно самостоятельные части: 1) получение
по возможности большой скорости передачи путем устране-
ния, в первую очередь, межсимвольной интерференции в предполо-
жении, что аддитивный шум в канале пренебрежимо мал, и
2) повышение достоверности передачи за счет снижения влияния
аддитивных шумов.
Необходимо оговориться, что основной резерв повышения эф-
фективности использования пропускной способности СКТЧ дает
решение именно первой части проблемы. Как показали исследова-
ния отечественных и зарубежных специалистов, при поэлементном
приеме вероятность ошибки в СКТЧ без учета второй части проб-
лемы, т. е. без принятия специальных мер защиты от влияния ад-
дитивных шумов, сравнительно мало зависит от скорости пере-
дачи и составляет величину порядка Poin= 10~3-н10~5, что для ря-
да случаев вполне приемлемо.
6
Суть решаемых в главе вопросов сводится к следующему.
Однозначное восстановление многоуровневых импульсных сиг-
налов (АФМ. сигналов или кодовых комбинаций) при их переда-
че через частотно-ограниченную систему (канал) возможно лишь
в случае, если реакция g(t) этой системы на одиночный много-
уровневый сигнал (кодовый , многоуровневый импульс) u(t) об-
ладает свойством отсчетности (селективности):
g (k А /) =
1, k = 0;
О, k=± 1, ±2,...,
(1.1)
где А/— интервал следования импульсов. Выражение (1.1) из-
вестно как критерий Найквиста [7, 8, И—27, 39]. Поэтому в гла-
ве определяются сквозные частотные характеристики систем, удов-
летворяющих условию (1.1). Системы такого типа будем называть
отсчетными фильтрами, а соответствующие им сигналы со свойст-
вом (1.1) —отсчетными сигналами или функциями. Условие (1.1)
является универсальным в том смысле, что ему должны удовлет-
ворять системы с различными методами обработки принятого мно-
гоуровневого сигнала, например системы, использующие метод
однократной пробы (метод укороченного контакта), системы с ин-
тегральными методами приема (метод накопления в форме интег-
рального приема, взаимокорреляционный и автокорреляционный
приемы, прием на согласованный фильтр). Во всех перечислен-
ных системах для устранения межсимвольной интерференции при
высокоскоростной работе по частотно-ограниченным каналам сиг-
нал на выходе приемника (выход приемного фильтра, выход ин-
тегратора или согласованного фильтра) должен обладать свойст-
вом (1.1).
Вопрос об определении характеристик отсчетных фильтров иг-
рает основную роль как в теоретическом, так и в практическом
плане, поскольку позволяет оценить возможности частотно-огра-
ниченных систем связи с точки зрения высокоскоростной передачи
многоуровневых дискретных сигналов (независимо от вида ис-
пользуемой в канале модуляции). Этот же вопрос является осно-
вополагающим и для высокоскоростных систем с временным де-
лением каналов.
Исследования настоящей главы пригодны для синтеза сигна-
лов и взаимокорреляционных или автокорреляционных функций,
обладающих свойством (1.1), поэтому их можно использовать для
построения скоростных систем передачи многоуровневых сигналов
с интегральной обработкой сигналов на приеме. Таким образом,
исследования главы относятся не только к помехозащищенным
каналам (СКТЧ), но и к каналам с большим уровнем шумов (ра-
диоканалов), в которых используется интегральная обработка сиг-
налов.
Под высокоскоростными в дальнейшем подразумеваются сис-
темы, для которых
Zc</m<2/c, (1.2)
7
где /те=1/Д/—скорость передачи многоуровневых сигналов (ко-
довых импульсов); fc — ширина полосы пропускания системы. Сле-
дует подчеркнуть, что применение отсчетных фильтров обеспечи-
вает скорость передачи, приближающуюся к теоретическому пре-
делу— скорости Найквиста, равной двум многоуровневым кодо-
вым импульсам в секунду на ГГц полосы пропускания системы,
что эквивалентно удельной скорости передачи двоичных сигналов,
превышающей 2 бит/с. Например, при передаче в СКТЧ четырех
уровней эквивалентная скорость передачи двоичных сигналов со-
ставляет свыше 9000 бит/с (с выделением одной боковой полосы
частот), а при передаче восьми уровней — свыше 12 000 бит/с, т. е.
удельная скорость передачи равна примерно 3—4 бит/с на 1 Гц.
1.2. Передача сигналов по низкочастотным
каналам. Оптимальные отсчетные фильтры
Низкочастотные отсчетные фильтры
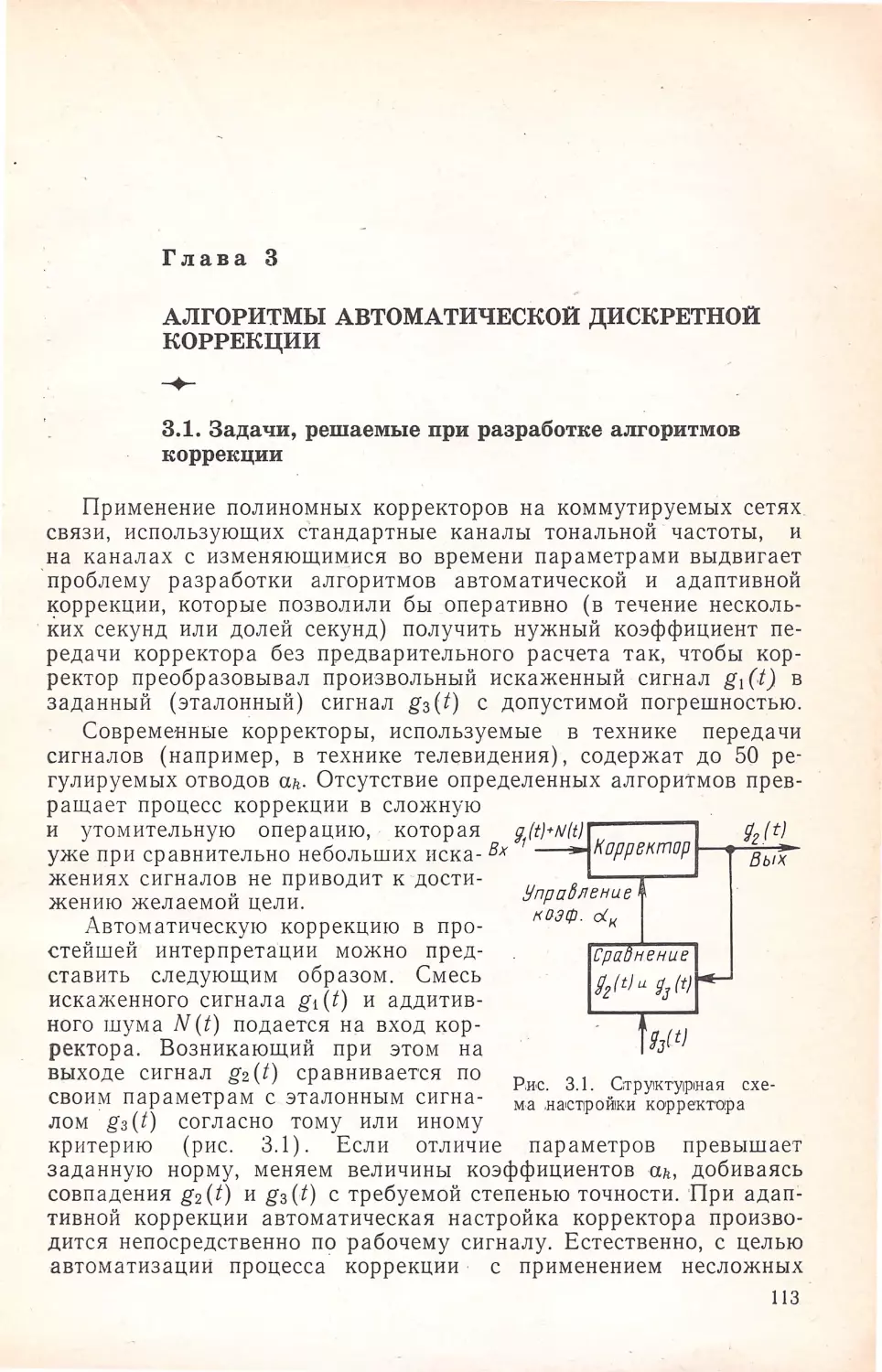
Первоначально будем считать, что система связи (канал) эк-
вивалентна фильтру низкой частоты (рис. 1.1). Положим, что
u(t)
K(icj)
Рис. 1.1. Упрощенная эквива-
лентная схема канала связи
«(0=6(0 —функция Дирака, тогда g(t) —импульсная реакция:
g(o=v- ко®)
2л J
где Д(1м)—комплексный коэффициент передачи отсчетного
фильтра.
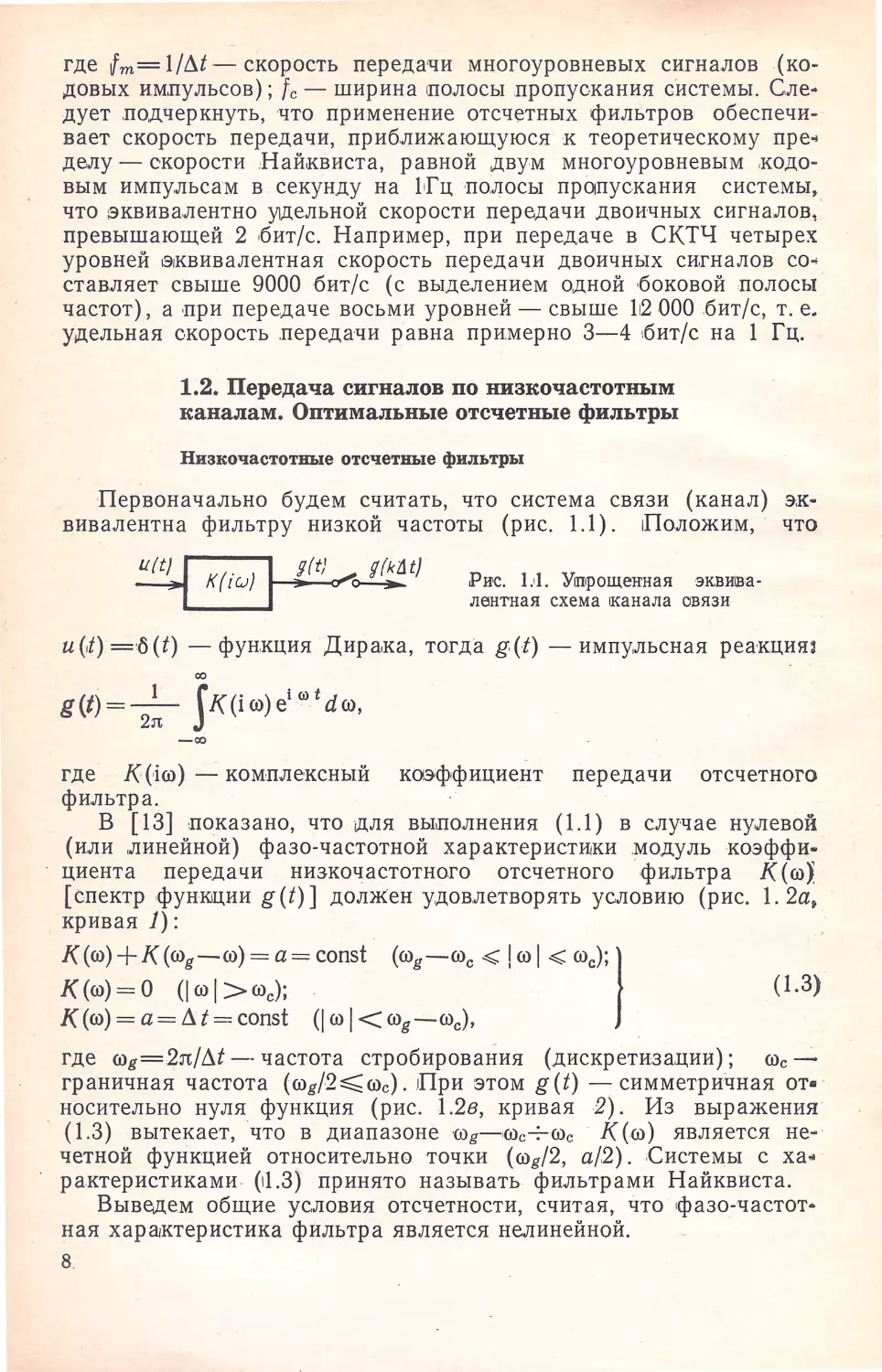
В [13] показано, что для выполнения (1.1) в случае нулевой
(или линейной) фазо-частотной характеристики модуль коэффи-
циента передачи низкочастотного отсчетного фильтра Д(ю)
[спектр функции g(t)] должен удовлетворять условию (рис. 1.2а,
кривая 1):
Д(®) + Д(®2—®) = а = const (®g—wc < I со | < ис);
(1-3)
Д(®) = 0 (|®|>®с);
Д(®) = а = А/= const (|®|<®g—®с),
где ®g=2n/At— частота стробирования (дискретизации); ®с —
граничная частота (®й/2^й)с). При этом g(t) —симметричная от»
носительно нуля функция (рис. 1.2s, кривая 2). Из выражения
(1.3) вытекает, что в диапазоне ®g—мсЧ-®с Д(®) является не-
четной функцией относительно точки (®g/2, а/2). Системы с ха-
рактеристиками (il.3) принято называть фильтрами Найквиста.
Выведем общие условия отсчетности, считая, что фазо-частот-
ная характеристика фильтра является нелинейной.
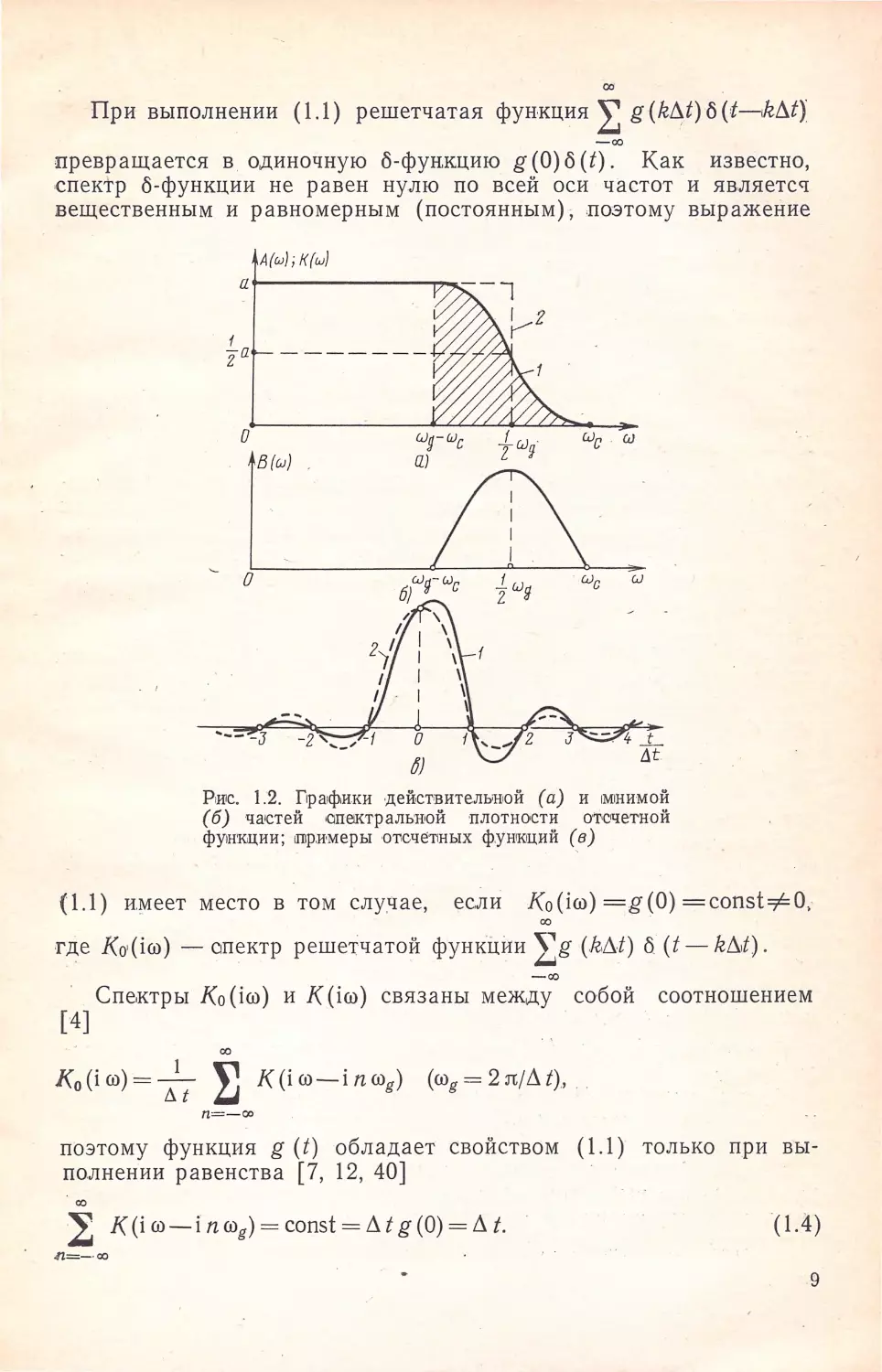
00
При выполнении (1.1) решетчатая функция g (k\t) б (/—i&V)
превращается в одиночную б-функцию g(0)6(t). Как известно,
спектр б-функции не равен нулю по всей оси частот и является
вещественным и равномерным (постоянным), поэтому выражение
Рис. 1.2. Графики действительной (а) и мнимой
(б) частей спектральной плотности отсчетной
функции; примеры отсчетных функций (в)
(1.1) имеет место в том случае, если Ko(ico) =g(0) =const^O,
оо
где Xo(ico) — спектр решетчатой функции Vg (kAt) б (t— kAt).
Спектры Ko(i®) и K(ico) связаны между собой соотношением
[4]
/<o(i®) = -^y K(iсо —in(og) (со? = 2л/Дt),
п——00
поэтому функция g (/) обладает свойством (1.1) только при вы-
полнении равенства [7, 12, 40]
2 K(i® — i п cog) = const = Д t g (0) = Д t. (1.4)
п=— 00
9
Спектральная плотность Ко(ico) получается путем сдвига (перено-»
са) по шкале частот и последующего суммирования спектральной
плотности К(1м). Нетрудно видеть, что равенство (1.4) выполняет-
ся в том случае, если комплексный коэффициент передачи К(1м)
обладает свойствами:
Л(м) + Д(м„—со) = а = const, 1,
В (м) = В (ag—м) J
Д(м) = В(м) = 0 (|м|>мс),
< I СО | < С0с,
a —At),
(1.5)
А (со) = а = const,
В(м) = О
(|м|<мй —мс)
или
K(iи) + К*(i®g — iffi) = a=const (®g—мс < |м| < мс),
K(i®) = a (|®|<®g—юс),
где А (м) и В (м) — соответственно действительная и мнимая час-
ти К(1м); К* (ко)—функция, сопряженная К(1м)*>. При этом
g(t) —несимметрическая функция (рис. 1.2s, кривая 2). Согласно
выражениям (1.5)( в диапазоне Mg—мсч-мс А (м.) является нечет-
ной функцией относительно точки >(мг/.2, а/2) (рис. 1.2а, кривая
1), а В (а) является четной функцией относительно частоты <аё/2.
(рис. 1.26).
Выражения (1.3) получаются из (1.5) как частный случай, ес-
ли В(м)—0 (Os^ |м| ^мс). Использование низкочастотных систем
с характеристиками (1.3) и (1.5) позволяет передавать импульсы
со скоростью fm=ag/2n, которая находится в пределах
(1.6)
что совпадает с (1.2).
Максимальная скорость /т=мс/л достигается в случае, когда
Mg/2 = MC. Этот случай согласно ;(1.5) соответствует широко из-
вестному идеальному фильтру низких частот (рис. 1.2а, кривая 2),
коэффициент передачи которого в диапазоне 0 — Mg/2 равен по-
стоянной величине, а вне этого диапазона тождественно равен ну-
лю. Импульсная реакция такого фильтра описывается выражени-
ем
g (t) = sin 0,5 м^ Z/0,5 Mg t
и обладает свойством (1.1) при минимально возможном интерва-
ле Д/=л/мс.
Как следует из (1.5), если мй/2<мс, существует бесконечное
множество отсчетных фильтров, реакции которых g(t) обладают
свойством (1.1) при одном и том же интервале At. Поэтому &
каждом конкретном случае, исходя из потребностей практики,,
целесообразно выбирать из указанного множества те характерно-»
тики, которые являются оптимальными в том или ином смысле.
*> Здесь и в дальнейшем * означает комплексное сопряжение.
10
Оптимальный отсчетный фильтр для систем с натуральной
дискретизацией
При передаче импульсных сигналов через фильтр с характе-
ристиками '(1.3) или (1.5) необходимо дискретизировать реакцию
g(t) строго в моменты времени th=kAt (k—0, ±1, ±2). Такую
дискретизацию будем в дальнейшем называть идеальной. В этом
00
случае дискретизирующая функция if (^) имеет вид ^(0= б(^—
— со
—k\t), где 6(0 — функция Дирака.
В реальных системах связи из-за неидельного фазирования
задающих генераторов передачи и приема возникает девиация
моментов дискретизации. По указанной причине дискретизация
реакции g(t) производится не в моменты времени th=k\t, а в мо-
менты времени th —k\t+x (k=0, ±1, ±2, ..*.), где т—’случай-
ная величина, изменяющаяся в пределах — А//2^т^А//2. При
этом дискретизирующая функция >f(t) принимает вид f(t) =
00
= 8 (it— 'kftt— т). Указанную дискретизацию будем называть
-00
натуральной либо естественной.
Считаем, что т не зависит от k, т. е. в процессе дискретизации
некоторой конкретной реакции g.(t) величина т не меняется, а из-
меняется при переходе от одной реализации g(t) к другой. Из-за
девиации моментов дискретизации возникает «временной» дискрет-
ный шум, который воспринимается системой связи в виде последо-
вательности импульсов с амплитудами
«(k А ^+т)=g (k &+x)—g (k =
^(T)-l, k = 0;
g(k&t+x), k^O,
k= ± 1, ±2,..
Средняя мощность этой последовательности равна
At/2
S= J p (т) E (t) d x, (1.7)
-St/2
где p (x) — плотность вероятности величины т:
Д i/2
J р (т) d т = 1,
— At/2
-Е(т) = ^(М/Ч-тН^т)-1^ 2^(АД/ + т). (1.8)
k=—со k=—оо
fe=/=O
Определим коэффициент передачи 7C(ia>) отсчетного фильтра,
для которого средняя мощность S временного дискретного шума
при заданной плотности вероятности р(х) принимает минимально
возможное значение. Такой фильтр в дальнейшем называется
•оптимальным, так как он максимально устойчив к девиации фазы
11
тактовой частоты. Использование оптимального отсчетного фильт-
ра позволяет минимизировать шум, возникающий за счет неиде-
ального фазирования дискретных систем связи.
Поставленная задача решается в частотной области [24].
Спектр одной реализации дискретного временного шума можно-
представить в виде
Лш(' ®)=
уч , i (со-пшл т
у д(1со—ni®g)e —а
i со т
(1.9)-
(в правой части опущен множитель 1/А/, не имеющий принцип
пиального значения).
На основе равенства Парсеваля с учетом (1.6) и (1.9) для
Е (т) получим
fflg/2
£(т) = J |Лш(ico)I2dm =
0
V2
J |tf(ico)eiaT +
/С (i co—ni®g)ei(“ “e) T—a\2 dm.
(1.Ю)’
Перед интегралом в этом выражении опущен множитель, не
имеющий принципиального значения. Верхний предел интегриро-
вания юё/2 выбран на том основании, что |Km(i®|2 — четная пе-
риодическая функция с периодом mg. При записи Е (т) учтено, что
на отрезке [0, mg/2] все слагаемые вида 7<(iw—nicog)e1(M
равны нулю в силу (1.5) и (1.6), если п^2, —il.
Подставив выражение (1.10) в (1.7) и изменив порядок интег-
рирования по независимым переменным со и т, приходим к выра-
жению S=Si + S2, где
“с А t/2
S1= f dm С р(т) | /((i со) е‘ “ т— а\2 dt; (1.11)»
6 — Д t/2
“g/2 Д t/2
S2= f dm J p(r)|2<(ico)eifflT4-
< -д</2
4-7<(i® — icog)e‘0°_“й)т—cz|2dr (coc =mg—cocY (1-12)'
Из (1.5) вытекает, что в диапазоне | со | тс' комплексный коэф-
фициент передачи отсчетного фильтра не зависит от частоты и
имеет единственное возможное значение, равное
К(i и) = а = const (|<о| < со'). (1.13>
По этой причине
“с Д t/2
Sx = 2а2 d со J р (т) (1 — cos со т) d т.
0 -At/2
12
Таким образом, Si не влияет на процесс минимизации средней
мощности S «временного» шума.
Найдем условие минимума 5г. Учитывая (1.5) и принимая во
внимание, что К* (icog—ico)=K(ico—icog), запишем S2 в следующей
форме:
“g/2
S2= J J(co)dco,
где обозначено
A t/2
/(©) = ( р(т) |/C(ico) е‘“т(1 — e-ifiV) +
- At/2
+ a[ei-(“-tMt-l]|2dT.
Поскольку Z(co)>0 (cog/2^ |co| ^co/), .минимум S2 будет до-
стигнут в случае, если /(со) принимает минимально возможное
значение для каждой частоты со отрезка [©Л cog/2], Задача мини-
мизации J (со) является вариационной, и ее решение находится из
условия [3] 67(со)=0, где б/(со) —вариация J(и), вызванная бес-
конечно малой вариацией K(ico). Воспользовавшись указанным
условием, после соответствующих преобразований, которые в си-
лу их громоздкости опущены, окончательно приходим к выраже-
нию
К (i со) = м.1 + Т (j.<0).-Т (i cog) - Ф. (j со - i cog)] (1.14)
2-ip(i©g)-r(i<0g) 2 8)''
где
At/2
ф (i co) = J p (t) e~1 “ T d t. (1-15)
—At/2
Выражение (1.14) определяет оптимальный коэффициент пере-
дачи отсчетного фильтра в диапазоне со/—0,5cog. С целью нахож-
дения оптимального /((ico) в диапазоне 0,5cog—сос воспользуемся
выражением (1,5), которое справедливо во всем диапазоне 0—сос,
включая диапазон 0,5cog—сос. Из этого выражения вытекает
]((ico) = ?[1+t|,(i co)-^(icog)-cp(ico-ieog)] (q/2<H<(0)) (u6)
2 — C0g) — 4>*(i cog) v 8 11 c/ 4 '
что по форме совпадает с (1.14).
Если взять действительную часть К(ico), то получим коэффи-
циент передачи фильтра Найквиста с нулевой фазой, у которого
средняя мощность временного шума также принимает минималь-
ное значение. Подчеркнем, что полученные решения удовлетво-
ряют (1.5).
Для нахождения /((ico) согласно выражениям (1.14) и (1.16)
необходимо знать функцию ф (ico), которая является комплексным
13
спектром плотности вероятности временного шума р(т). В реаль-
ных системах связи, используемых на практике, закон распределе-
ния р(т) обычно неизвестен и его необходимо измерять экспери-
ментально, что затрудняет вычисление TC(ico). Поэтому целесооб-
разно определить квазиоптимальный коэффициент передачи
фильтра Найквиста, который дает близкое к минимально возмож-
ному значение мощности временного шума при произвольных за-
конах распределения р(т).
В нормально функционирующих системах связи величина де-
виации моментов выборки т невелика по сравнению с интервалом
следования импульсов Ы (большие значения т маловероятны).
Для таких систем амплитуды импульсов «временного» дискретно-
го шума в силу малости т можно записать в виде е(&А£+т) =
=xg'(kht), где g'(kh.t') —значения первой производной (скорость
изменения) импульсной реакции g(t) в моменты времени k\t (k—
=0, ±1, ±i2,...). Соответственно энергия этого шума опреде-
ляется выражением
Д(т) = ^ [gWO]2-
(1-17)
Минимум Е (т) получится в том случае, если скорость изменения
импульсной реакции фильтра Найквиста в моменты времени &А(
(fe=iO; ±11; ±2;... минимальная, в частности равна нулю. Фильтр
с таким свойством, по существу, является квазиоптимальным, так
как обеспечивает близкое к минимальному значение средней мощ-
ности S (1.7) для любых р(т) при условии, что т — достаточно
малая величина. Исходя из сказанного задача синтеза квазиопти-
мального коэффициента передачи фильтра Найквиста сводится к
определению K(ico), минимизирующего энергию шума (1.17).
Воспользовавшись теоремой о квадратичном эффекте решетча-
той функции [4], получим
05 00
S = J ]
fe=—оо —(Og/2 “
2
+ (со — nCOg)B((O — nCOg)] d(i).
ncog)A(co—ncog)4-
(1.18)
Поскольку выполняется неравенство (1.6), правую часть выра-
жения (1.18) запишем в виде
05 Wg/2
S |g'(AA/)|2 = ^ J J[(co)dco,
fe=—со — (0g/2
где
J (со) = {со А (со) — [A t—А (со)] (сог—со)}2 + {со В (со) ф-В (со) (cog—со) }2.
14
Минимум этого выражения может быть найден путем дифферен-
цирования /(и) по Д(со) и В (со) и приравнивания нулю получен-
ного-результата. Проделав указанные операции, приходим к ана-
а>
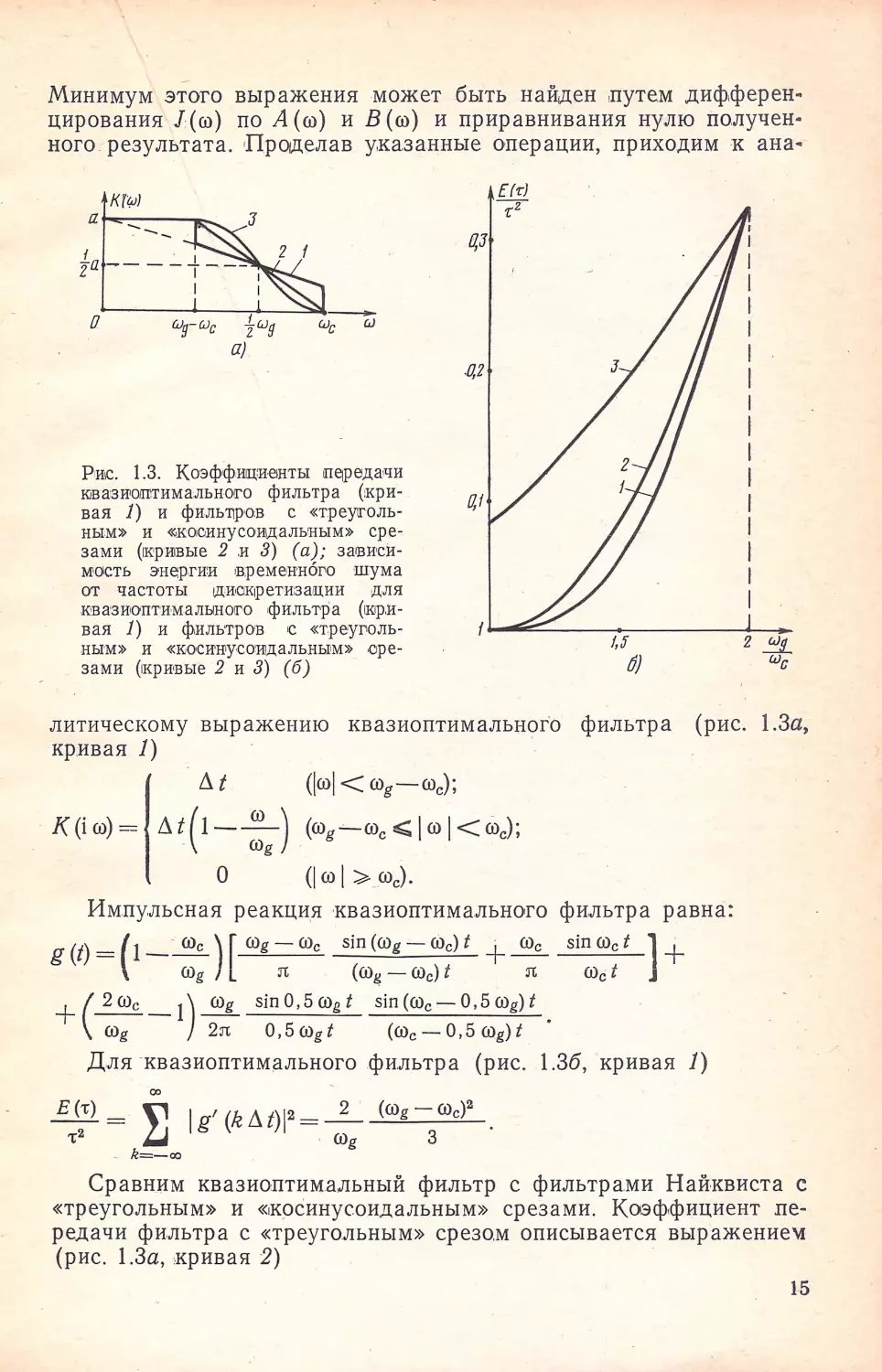
Рис. 1.3. Коэффициенты передачи
квазиоптимального фильтра (кри-
вая 1) и фильтров с «треуголь-
ным» и «косинусоидальным» сре-
зами (кривые 2 .и 3) (а); зависи-
мость энергии временного шума
от частоты дискретизации для
квазиетгтимального фильтра (кри-
вая 1) и фильтров с «треуголь-
ным» и «косинусоидальным» сре-
зами (кривые 2 и 3) (б)
фильтра (рис. 1.3а,
литическому выражению квазиоптимального
кривая /)
K(i со) =
М
О
(|со| < cog—сос);
(со^—сос < | со | < сос);
(| со | > сос).
Импульсная реакция квазиоптимального фильтра равна:
)’ cog — сос sin(cog — (£>c)t । сос sin сос / 1
Я (COg — С0с) t Л С0с t J
cog sin 0,5 COg < sin (coc-—0,5 COg) /
2л 0,5cOg< (coc — 0,5 cog)t
£(/) = (1—
\ COg
। / 2 C0c। \
\ ®g /
Для квазиоптимального фильтра (рис. 1.36, кривая 1)
= |£'(*М12
feS-co
2 (COg - СОс)3
COg 3
Сравним квазиоптимальный фильтр с фильтрами Найквиста с
«треугольным» и «косинусоидальным» срезами. Коэффициент пе-
редачи фильтра с «треугольным» срезом описывается выражением
(рис. 1.3а, кривая 2)
15
K(ico) =
A t
дф
0
(0 < | co | <cog —coc);
CO — (COg — COc)
COc — (COg — COc)
(I ® I >«c),
(COg—coc<|co|<coc);
(1.19)
а импульсная реакция — выражением
__ sin 0,5 COg t sin (coe — 0,5 cog) Z
0,5 cog t (coc — 0,5 cog) t
Для этого фильтра (рис. 1.35, кривая 2)
£(т) 2 сГ 1 ,, . , .13 ч
~ = 3(1-».)Ш8 I ~ (' ~т> + т <"« “ “'•> ] ~ <“« - ) +
~Ь~~~ <Ш,-Ме). ,
COg 3
где
COg
m =---------------.
С0с — (COg — сос)
В пределе, подставив в (1.19) cog=2coCl получим идеальный ФНЧ
. (А/ (0 < I со | < сос);
К О со) = v 11 с/’
1 0 (|со|>сос),
для которого (рис. 1.36, кривая 3)
Е(т) 1 2
-— = —со2.
т2 12 S
Из рис. 1.36 следует, что квазиоптимальный фильтр обеспечивает
определенный выигрыш в величине £(т)/т2 по сравнению с иде-
альным фильтром и фильтром с «треугольным» срезом.
В технике связи наряду с фильтром с «треугольным» срезом
используется также фильтр с «косинусоидальным» срезом
(рис. 1.3а, кривая 3):
К(1со) =
'А/ (0 < | со | < сог—сос);
A t /. , л со — (сой — сос)
2 \ 2 Дсо
0 (|со|>сос),
(cog—сос < |со| < сос); (1.21)
где Асо = сос-cog. У этого фильтра импульсная реакция
g(() =
sin 0,5 COg t r cos Д co t
Допустим, что импульсные сигналы передаются со скоростью
^т=сос/2л, т. е. cog=coc. Рассмотрим фильтр, коэффициент переда-
чи которого имеет треугольную форму («треугольный» фильтр
16
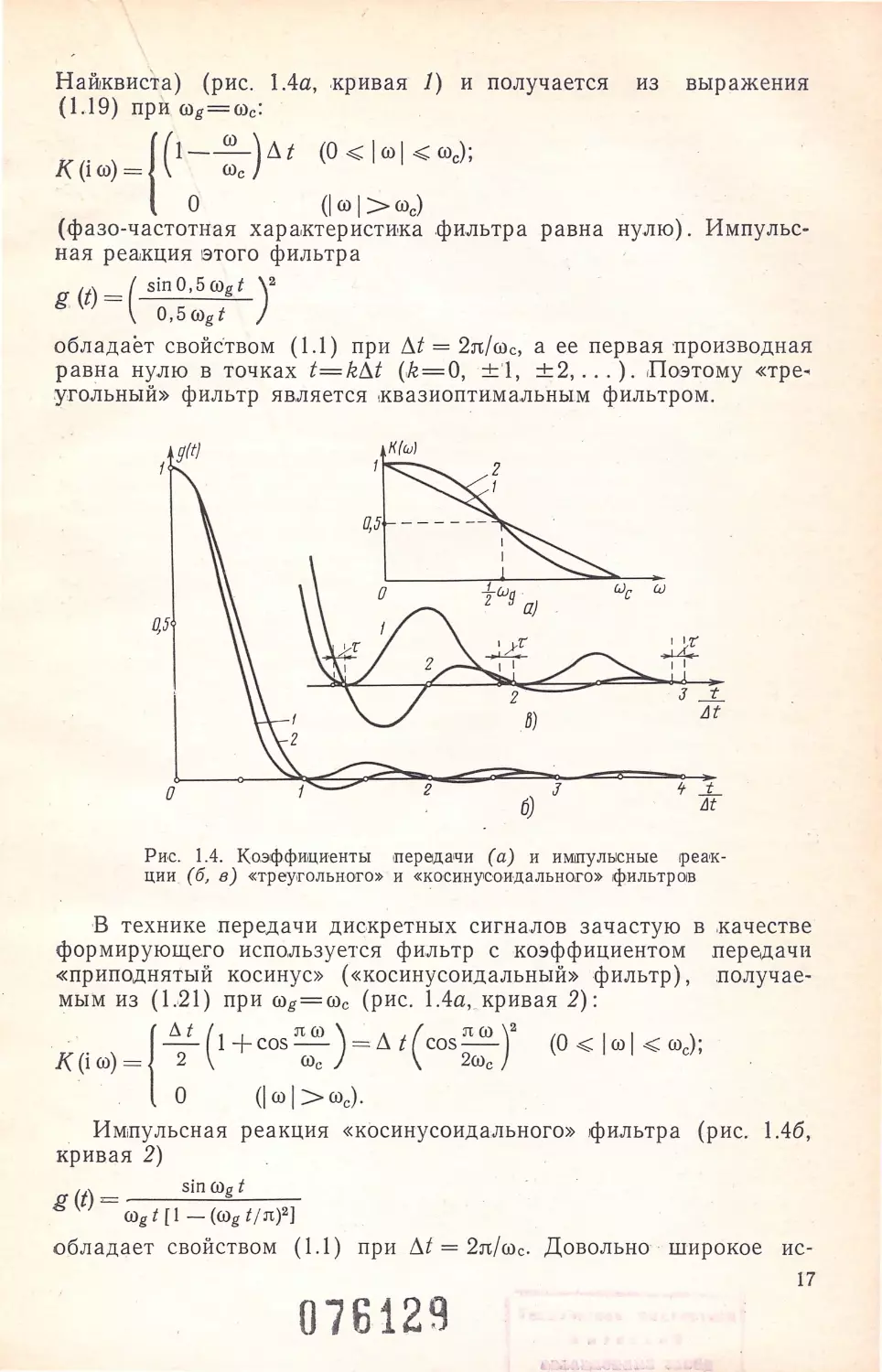
Найквиста) (рис. 1.4а, кривая 1) и получается из выражения
(1.19) при сог=сос:
Д' (i со) =
(О < |со| < сос);
О (|оэ|>сос)
(фазо-частотная характеристика фильтра равна нулю). Импульс-
ная реакция этого фильтра
g (t) =
sinO,5cog/ \2
0,5 G)g t J
обладаёт свойством (1.1) при А/ — 2л/сос, а ее первая производная
равна нулю в точках t=k\t (й=0, ±1, ±2,...). Поэтому «тре-
угольный» фильтр является квазиоптимальным фильтром.
Рис. 1.4. Коэффициенты передачи (а) и импульсные (реак-
ции (б, в) «треугольного» и «косинусоидального» фильтров
В технике передачи дискретных сигналов зачастую в качестве
формирующего используется фильтр с коэффициентом передачи
«приподнятый косинус» («косинусоидальный» фильтр), получае-
мым из (1.21) при cog=coc (рис. 1.4а, кривая 2):
Л(1о) =
f Д , я в \ . , / л со \2
----- 1 + cos--------- ) = A tl cos------
2 \ сос J \ 2ас ]
(О < | со | с сос);
О
(|®|>сос).
Импульсная реакция «косинусоидального» фильтра (рис. 1.46,
кривая 2)
,,, sin co» t
g (О =--------------------
cog/[l — (WgZ/л)2]
обладает свойством (1.1) при = 2л/сос. Довольно широкое ис-
17
076129
пользование «косинусоидального» фильтра объясняется тем, что
величина побочных выбросов импульсной реакции этого фильтра
вне интервала [—А/, Д£] меньше, чем у импульсных реакций дру-
гих фильтров Найквиста (например, меньше, чем у «треугольно-
го» фильтра, как это видно из рис. 1.46). Однако в моменты вре-
мени kAt (k—0, ±1, ±2,...) первая производная импульсной
реакции «косинусоидального» фильтра не равна нулю. Поэтому
использование косинусоидального фильтра не обспечивает полу-’
чения минимума энергии «временного» шума. На рис. 1.4в для
удобства сравнения импульсные реакции «треугольного» и «коси-
нусоидального» фильтров даны в увеличенном масштабе (^А/)«
Из этого рисунка видно, что при девиации моментов выборки на
достаточно малую величину т амплитуды мешающих импульсов
«временного» шума для треугольного фильтра (кривая 1) значи-
тельно меньше, чем для «косинусоидального» фильтра (кривая 2).
Таким образом, использование фильтров с «косинусоидаль-
ным» срезом с точки зрения минимизации энергии «временного»
шума является нецелесообразным, так как они уступают не толь-
ко квазиоптимальным фильтрам, но и фильтрам с «треугольным»
срезом. .Подчеркнем, что отсчетный фильтр, уменьшающий энер-
гию шума, вызванного девиацией фазы тактовой частоты, одновре-
менно уменьшает и энергию шума, вызванного девиацией величи-
ны тактовой частоты.
Максимизация отношения сигнал/шум в отсчетном фильтре
Пусть в канале, эквивалентном отсчетному фильтру, действует
аддитивная помеха (белый шум). Отношение сигнал/шум на вы-
ходе канала описывается выражением
где Q — — p/C(ico) |2cZ<o = Jg2(/)d/— энергия импульсной реак-
О —оо
ции отсчетного фильтра; No'—спектральная плотность белого шу-
ма.
Определим отсчетный фильтр, максимизирующий величину h.
Поставленная задача эквивалентна задаче [8, 41]: определить
функцию g(t), удовлетворяющую (1.1), для которой
g(O)/Q = max. (1-22)
При ограничении Q = const такая функция максимально вытянута
в момент отсчета /=(). Поскольку функция g,(t) нормирована по
мощности, искомая функция g(t), максимизирующая (1.22), бу-
18
дет функцией, принимающей при t-О максимально возможное
значение из всех отсчетных функций с энергией Q.
Если нормировать функцию g(t) по значению g(0) и считать,
что g'(0)= const, то в силу (1.22) искомая функция будет функ-
цией с минимально возможной энергией. Поэтому задача макси-
мизации h эквивалентна задаче: минимизировать выражение
о> «с
J (ico)|2dco = J | А2 (со) + В2 (со) | d со = min (1-23)
о о
при ограничении g(0)=const и при выполнении (1.1). Здесь
А (со) и В (и) — действительная и мнимая части К. (ico); сос —
граничная частота.
Поскольку В (со) не влияет на величину g(0), для получения
минимума в (1.23) необходимо прежде всего положить В(со)=0
для всех со, что дает
“с
j А2 (со) d со = min. (1-24)
о
Так как g(t) удовлетворяет (14), в силу (1.4) должно вы-
полняться равенство
А/ = А(со—ncog) (cog = 2n/A/). (1-25)
П=—со
Правая часть этого равенства является периодической функцией
с периодом cog, поэтому разобьем ось частот на отрезки
-L(Z_l)cog<co<-^cog (Z= 1,2,3,...). (1.26)
Допустим, что скорость передачи сигналов кратна скорости
Найквиста cde=mcog, где т — целое число (скорость Найквиста
равна л/сос).
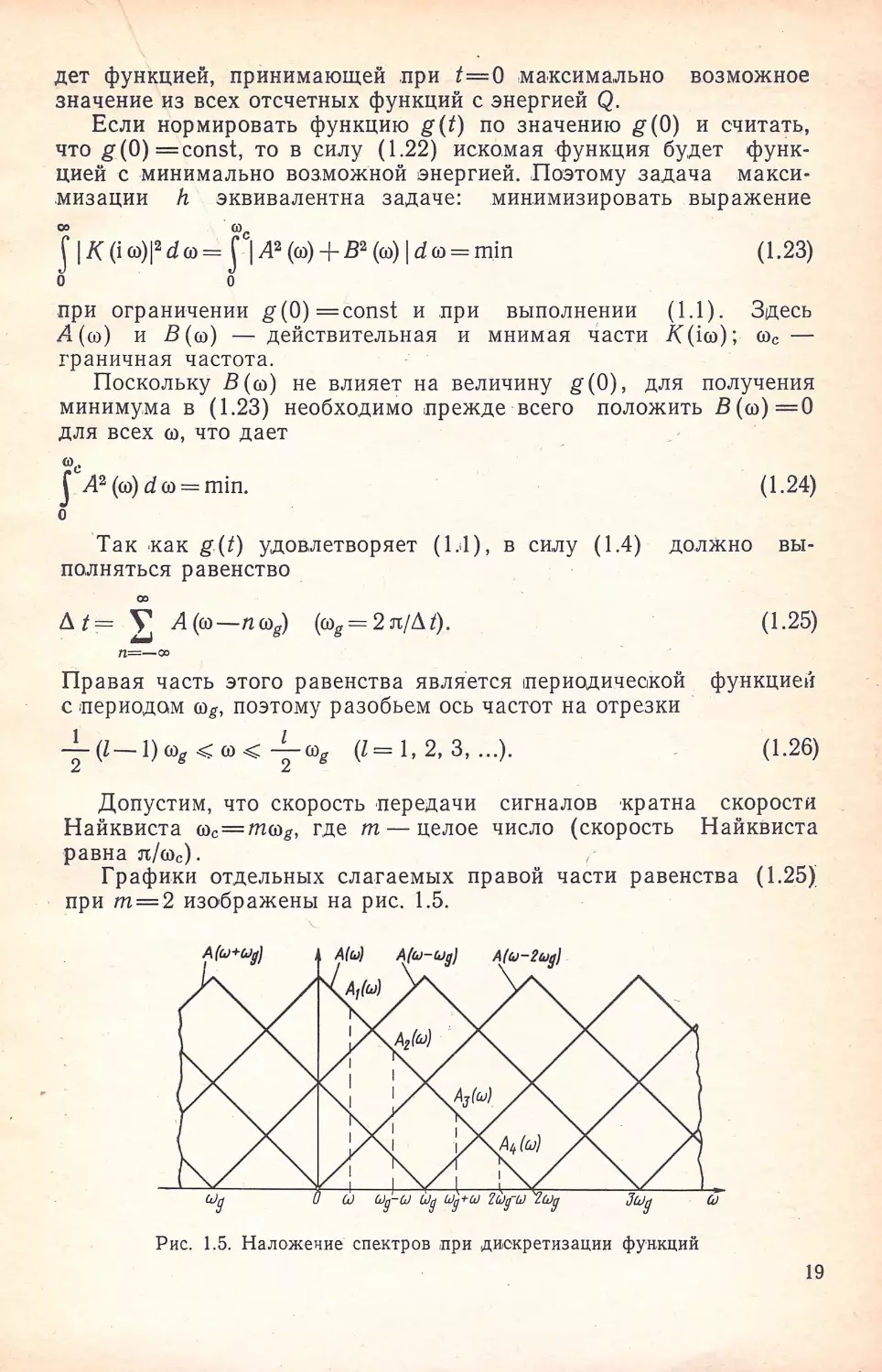
Графики отдельных слагаемых правой части равенства (1.25)
при т — 2 изображены на рис. 1.5.
Рис. 1.5. Наложение спектров при дискретизации функций
19
Выражение (1.24) с учетом (1.26) для рассматриваемого слу-
чая запишется в виде
“g/2 2т
J V (®) d со = min, (1-27)
О /=1
где At = А (I — нечетное); At = A 0 — чет-
ное); O^cosg:
Для получения минимума в (1.27) необходимо, чтобы подын-
тегральное выражение принимало минимальное значение на каж-
дой частоте диапазона 0со cog/2, поэтому выражение (1.27) эк-
вивалентно выражению
2т
(®) — m*n-
i=i
Равенство (1.25) с учетом (1.26) преобразуем в равенство
2т
у;А(со)=д/.
Z=1
Таким образом, задача свелась к определению условного экст-
ремума функции многих переменных с учетом линейных ограниче-
ний. Решение будем искать, используя метод множителей Лагран-
жа.
Введем неопределенный множитель X и рассмотрим функцию
2tn+1 переменных [3]
2т Г 2т
Г(ЛХ, Л2,..„ Л2т, Х) = 2Л»~А £Л(«)~^ .
1=1 Lz=i
Эта функция принимает минимальное значение, если выполняется
система 2т+1 уравнений
dF dF dF dF
сМДсо) dT2(co) d42m(co) dX
с неизвестными ЛДсо), Л2(со), ..., Л. После вычислений получим
Л1(<о) = Л2(со) = ...=Л2т(со) = 4£- О-28)
Проведя подобное доказательство для скорости, не кратной ско-
рости Найквиста, запишем общие условия, которым должен удов-
летворять спектр Л (со), максимизирующий отношение сигнал/шум
[23]:
1) сос = т <Bg + б ^/п=1,2,3,...; O<6<-^-cog^;
л(в)__ЛЦ_
2m-|-l [ (пcog—б < |со.| < ncog + 6); («= 1, 2, ..., m),
20
Л (®) = -AL(„Wg__ffig + 8 < I®I < nag-6); (n= 1, 2, ..., m);
2m
A (a) = 0 (| ® | > ®c).
Если 6 = 0, то
A (“) = (I® I <®c); (m=l,2, ...);
2m
Д(а) = 0 (|®|>ac),
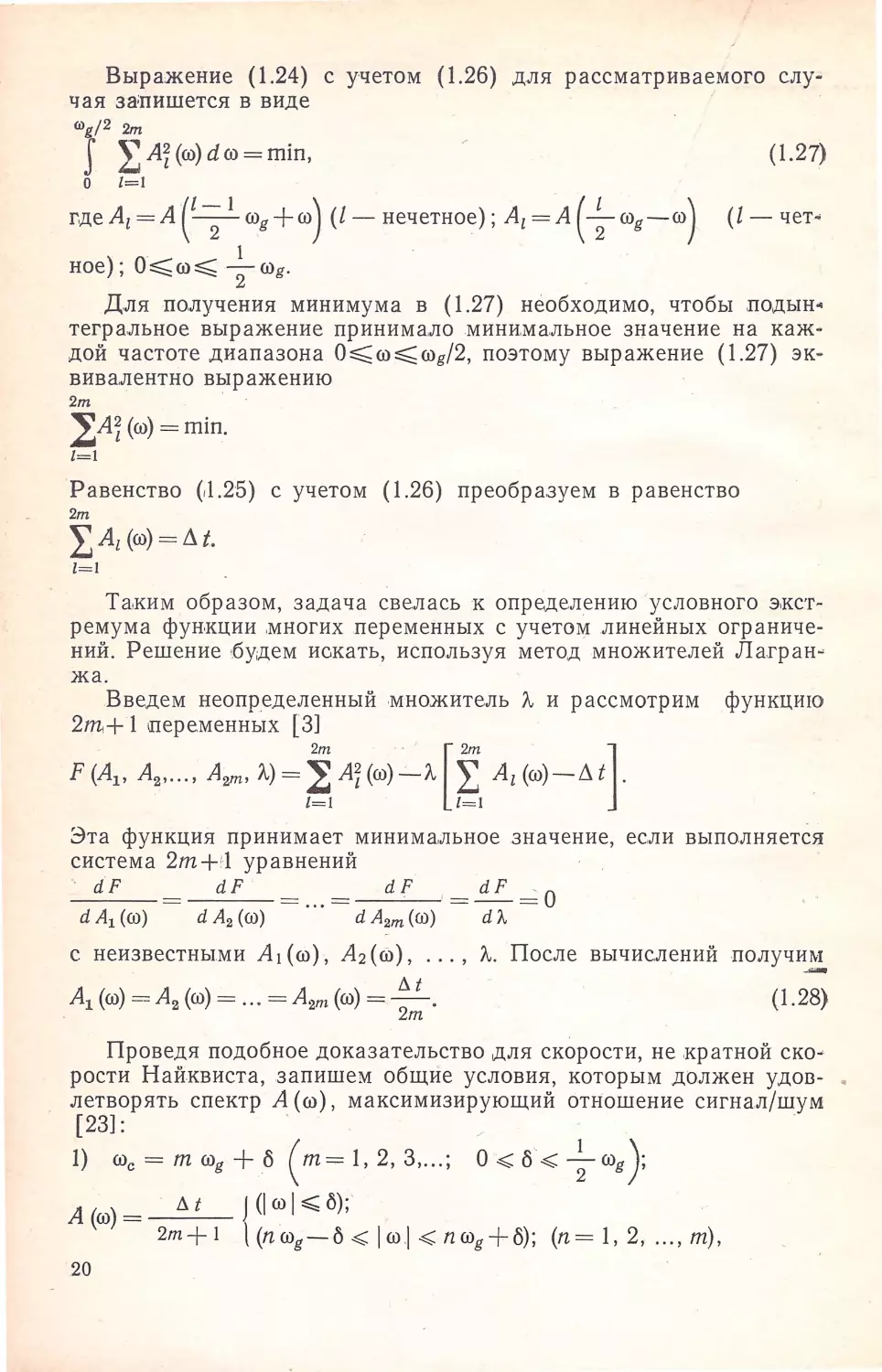
Рис. 1.6. Коэффициенты передачи отсчетных
фильтров, максимизирующих отношение сиг-
нал/шум для различных скоростей передачи
что совпадает с (1.28). Примеры приведены на рис. 1.6а.
2) ®c = m®g + 0,5®g4-6 (m = 0, 1, 2,...; О < 6 < 0,5®g);
А (®) = Д//(2т + 1) (| и | < 0,5 ®g—6);
(п ®g — 0,5 ®g + 6 < | ® | < п ®g + 0,5 ®g—6);
(n= 1, 2..m);
A (w) = Д //(2m+ 2) ^n®g + 0,5®g—6< | w | <n®g + 0,5®g + 6);
(n = 0, 1,2, ..., m);
A (co) = 0
(I® I > ®c)-
21
Если 6 = 0, то
Л (со) = A//(2m+1) \
(т — 0, 1, 2, ...);
Л(со) = 0 (|со|хос).
Примеры приведены на рис. 1.66.
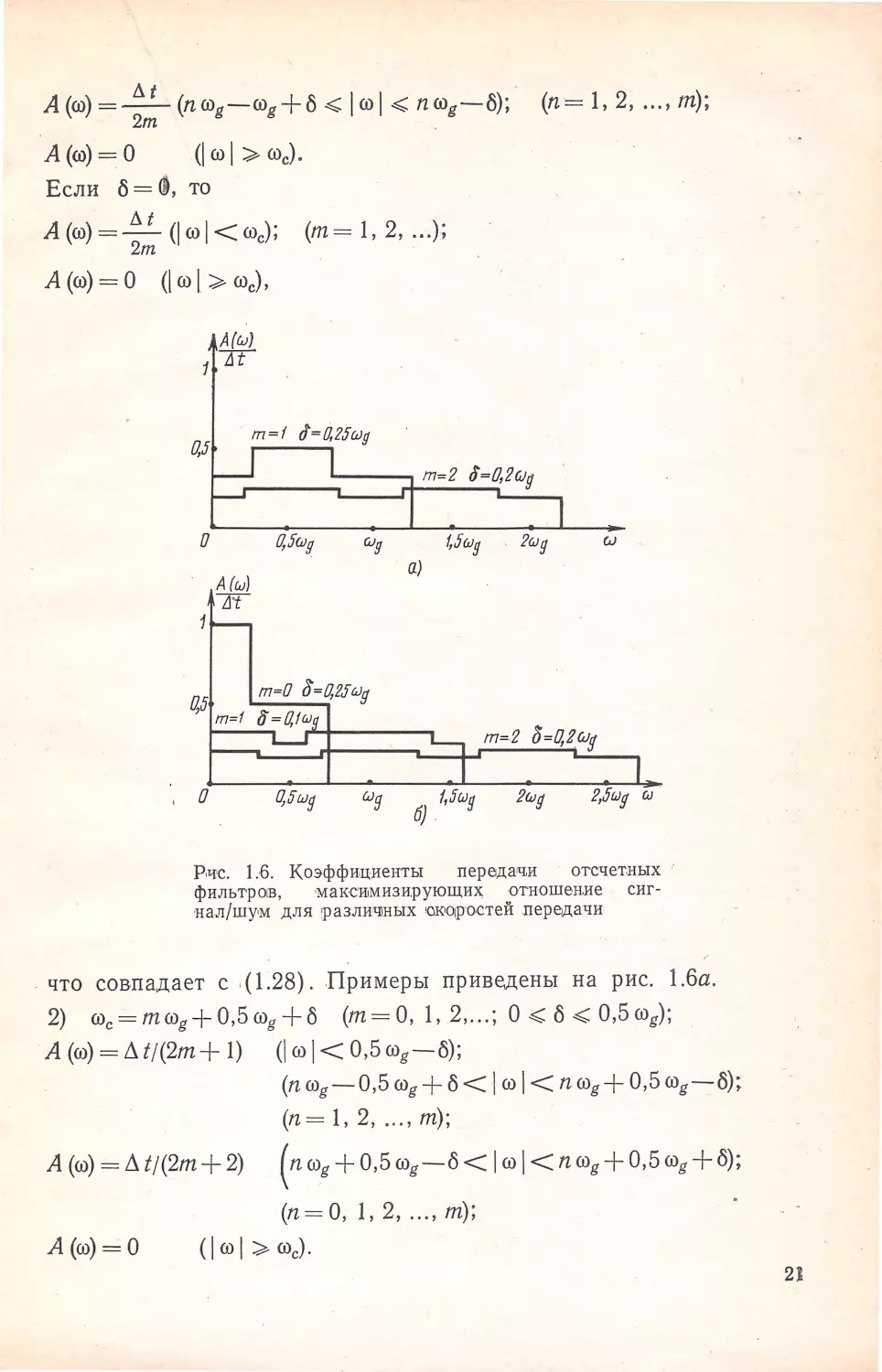
(кривая 1) и фильтра, максимизирующего отношение
сигнал/шум (кривая 2)
На рис. 1.7 приведен пример импульсной реакции отсчетного
фильтра (кривая 2), максимизирующего отношение сигнал/поме-
ха, для частного случая, когда <oc=0,5cog-|-6; 0^6г^0,5сог:
,л SIH 0,5 (£>at , „г \ ,
<7 = л / C0S (®с — °’5 ®й) Л
0,5 (Og t
Для сравнения на этом же рисунке приведена импульсная реак-
ция идеального ФНЧ с частотой среза cog/2.
Минимизация межсимвольных помех для скоростей передачи
выше скорости Найквиста
Как следует из (1.5), если скорость передачи выше скорости
Найквиста (сог>2<вс), условие (1.1), в принципе, не выполняется,
т. е. межсимвольная помеха не может равняться нулю. Опреде-
лим поэтому оптимальный коэффициент передачи фильтра [либо
его импульсную реакцию §(/)], обеспечивающего при скоростях
передачи выше скорости Найквиста минимальную энергию меж-
символьных помех
fl l£(*W = min
\ A t ТС J
k=—оо
k=&
22
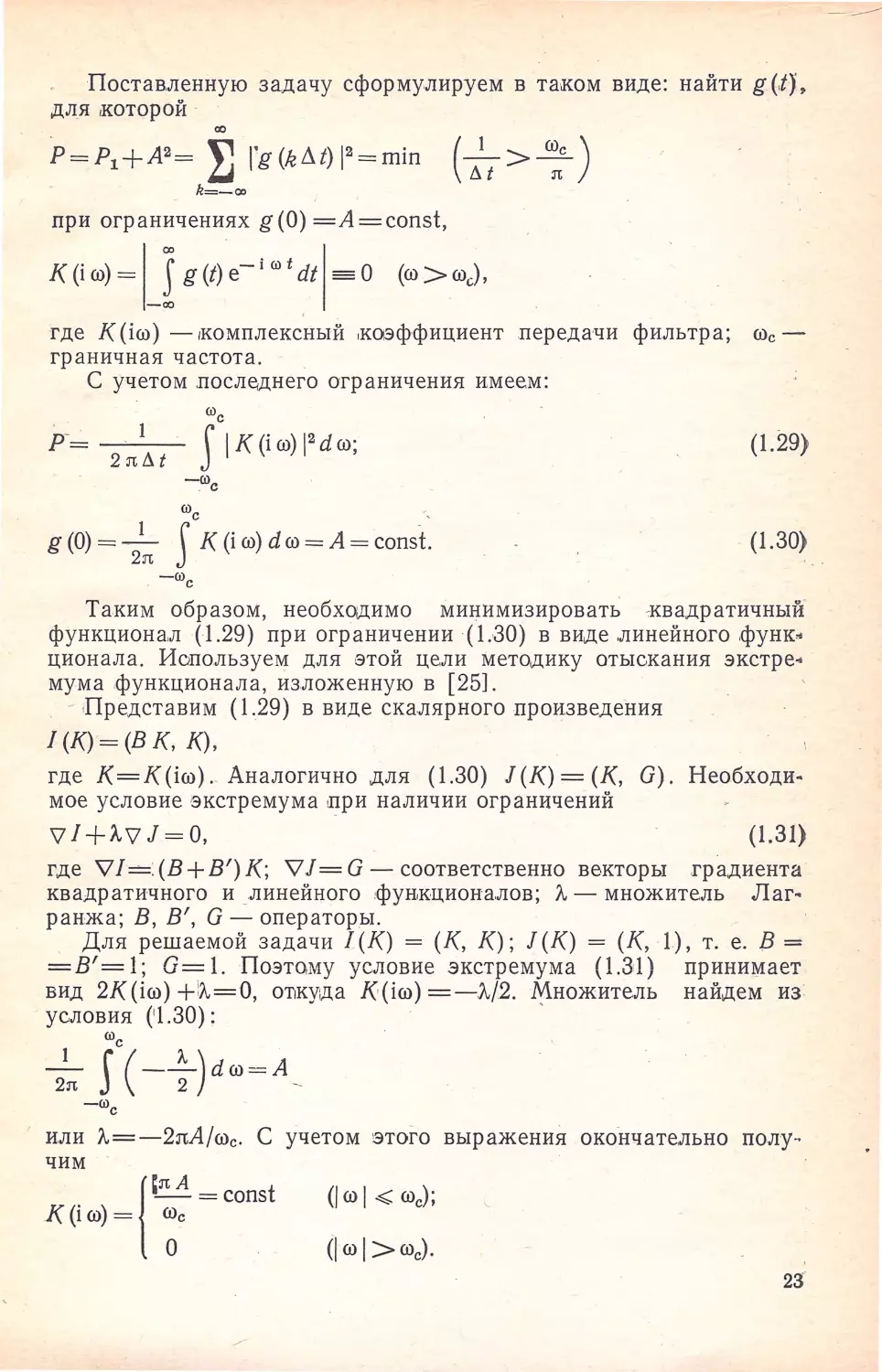
Поставленную задачу сформулируем в таком виде: найти g(/J,
для которой
со
Р = Л + Д2= V ^(^A0P = min (-у>-М
\ 1st л /
k=—оо
при ограничениях g(0) =А = const,
K(i®) =
(“>®c)>
= 0
1
2 n A t
(1-29)
(1.30)
где Д(1со)—комплексный коэффициент передачи фильтра; сос—
граничная частота.
С учетом последнего ограничения имеем:
“с
- J | К (i со) |2 d со;
-“с
“с
g (0) = J Д (i со) с/ со = А = const.
-"с
Таким образом, необходимо минимизировать квадратичный
функционал (1.29) при ограничении (1.30) в виде линейного функ*
ционала. Попользуем для этой цели методику отыскания экстре*
мума функционала, изложенную в [25].
Представим (1.29) в виде скалярного произведения
цю=(вк, к),
где Д=Д(1со). Аналогично для (1.30) 7(Д) = (Д, G). Необходи-
мое условие экстремума при наличии ограничений
V/ + AvJ = 0, (1.31)
где V/=(B + BZ)K; V/=G— соответственно векторы градиента
квадратичного и линейного функционалов; Л—.множитель Лаг-
ранжа; В, В', G — операторы.
Для решаемой задачи 7(Д) = (Д, Д); /(Д) — (К, 1), т. е. В =
=В'=1; G=l. Поэтому условие экстремума (1.31) принимает
вид 2Д (ico) + А = 0, откуда Д(]со) =—Л/2. Множитель найдем из
условия (1.30):
“с
da — A
-ие
или К——2пА/ас. С учетом этого выражения окончательно полу-
чим
K(ia) =
= const
®c
0
23
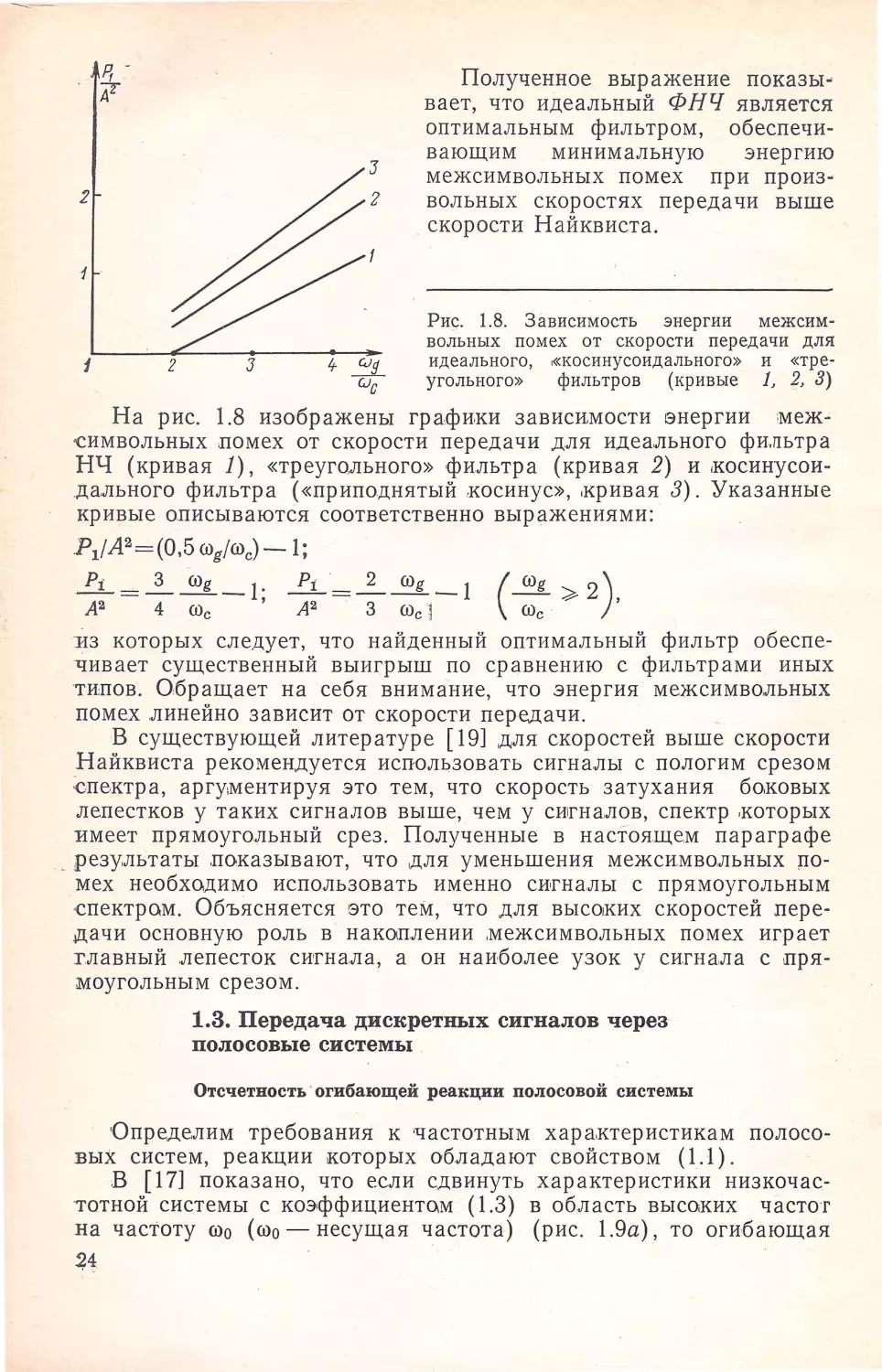
Полученное выражение показы-
вает, что идеальный ФНЧ является
оптимальным фильтром, обеспечи-
вающим минимальную энергию
межсимвольных помех при произ-
вольных скоростях передачи выше
скорости Найквиста.
Рис. 1.8. Зависимость энергии межсим-
вольных помех от скорости передачи для
идеального, «косинусоидального» и «тре-
угольного» фильтров (кривые 2, 3)
На рис. 1.8 изображены графики зависимости энергии меж-
•символьных помех от скорости передачи для идеального фильтра
НЧ (кривая 7), «треугольного» фильтра (кривая 2) и косинусои-
дального фильтра («приподнятый косинус», кривая 3). Указанные
кривые описываются соответственно выражениями:
Р1/Л2=(0,5 cog/®c)—1;
_ 3 р 2 j o')
A2 4 coc Л2 3 cocl \ ®c /’
из которых следует, что найденный оптимальный фильтр обеспе-
чивает существенный выигрыш по сравнению с фильтрами иных
типов. Обращает на себя внимание, что энергия межсимвольных
помех линейно зависит от скорости передачи.
В существующей литературе [19] для скоростей выше скорости
Найквиста рекомендуется использовать сигналы с пологим срезом
спектра, аргументируя это тем, что скорость затухания боковых
лепестков у таких сигналов выше, чем у сигналов, спектр которых
имеет прямоугольный срез. Полученные в настоящем параграфе
результаты показывают, что для уменьшения межсимвольных по-
мех необходимо использовать именно сигналы с прямоугольным
спектром. Объясняется это тем, что для высоких скоростей пере-
дачи основную роль в накоплении .межсимвольных помех играет
главный лепесток сигнала, а он наиболее узок у сигнала с пря-
моугольным срезом.
1.3. Передача дискретных сигналов через
полосовые системы
Отсчетность огибающей реакции полосовой системы
'Определим требования к частотным характеристикам полосо-
вых систем, реакции которых обладают свойством (1.1).
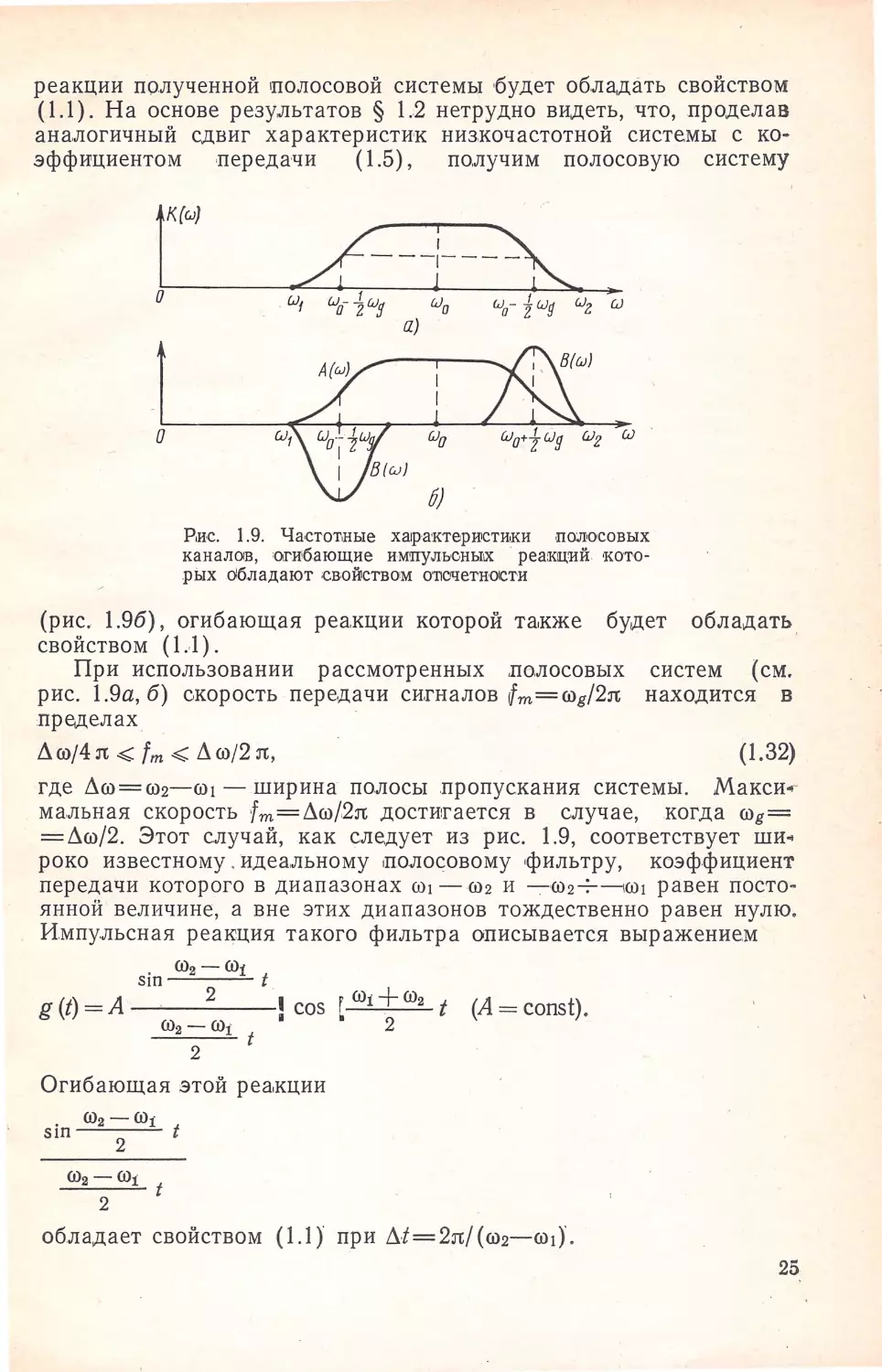
В [17] показано, что если сдвинуть характеристики низкочас-
тотной системы с коэффициентам (1.3) в область высоких частот
на частоту <в0 («о — несущая частота) (рис. 1.9а), то огибающая
24
реакции полученной полосовой системы будет обладать свойством
(1.1). На основе результатов § 1.2 нетрудно видеть, что, проделав
аналогичный сдвиг характеристик низкочастотной системы с ко-
эффициентом передачи (1.5), получим полосовую систему
Рис. 1.9. Частотные характеристики полосовых
каналов, огибающие импульсных реакций кото-
рых Обладают свойством отсчетности
(рис, 1.96), огибающая реакции которой также будет обладать
свойством (1.1).
При использовании рассмотренных полосовых систем (см.
рис. 1.9а, б) скорость передачи сигналов fm—ag/2n находится в
пределах
Дсо/4 л с fm < Дсо/2 л, (1.32)
где Ди = И2—сот — ширина полосы пропускания системы. Макси-
мальная скорость /т=Ди/2л достигается в случае, когда
=Дю/2. Этот случай, как следует из рис. 1.9, соответствует ши-
роко известному. идеальному полосовому фильтру, коэффициент
передачи которого в диапазонах он— сиг и —ю2-7—icoi равен посто-
янной величине, а вне этих диапазонов тождественно равен нулю.
Импульсная реакция такого фильтра описывается выражением
. — (О-
sin'--о----;
g (/) = А-----------1 cos 1 (Д = consf).
со2 — cOj 2
2
Огибающая этой реакции
. ®2 —®1 ,
sin—
сс>2 — <01 t
2
обладает свойством (1.1) при Д/==2л/(со2—®i).
25
Из сопоставления выражений (1.6) и (1.32) вытекает, что для
полосовых систем, огибающая реакций которых обладает свойст-
вом (1.1), относительная скорость передачи импульсов (т. е. ско-
рость передачи на единицу ширины полосы пропускания) в 2 ра-
за меньше по сравнению с низкочастотными системами, реакции
которых обладают свойством (1.1). Таким образом, использование
указанных полосовых систем не позволяет получить высокую от-
носительную скорость передачи, равную скорости передачи в низ-
кочастотных системах.
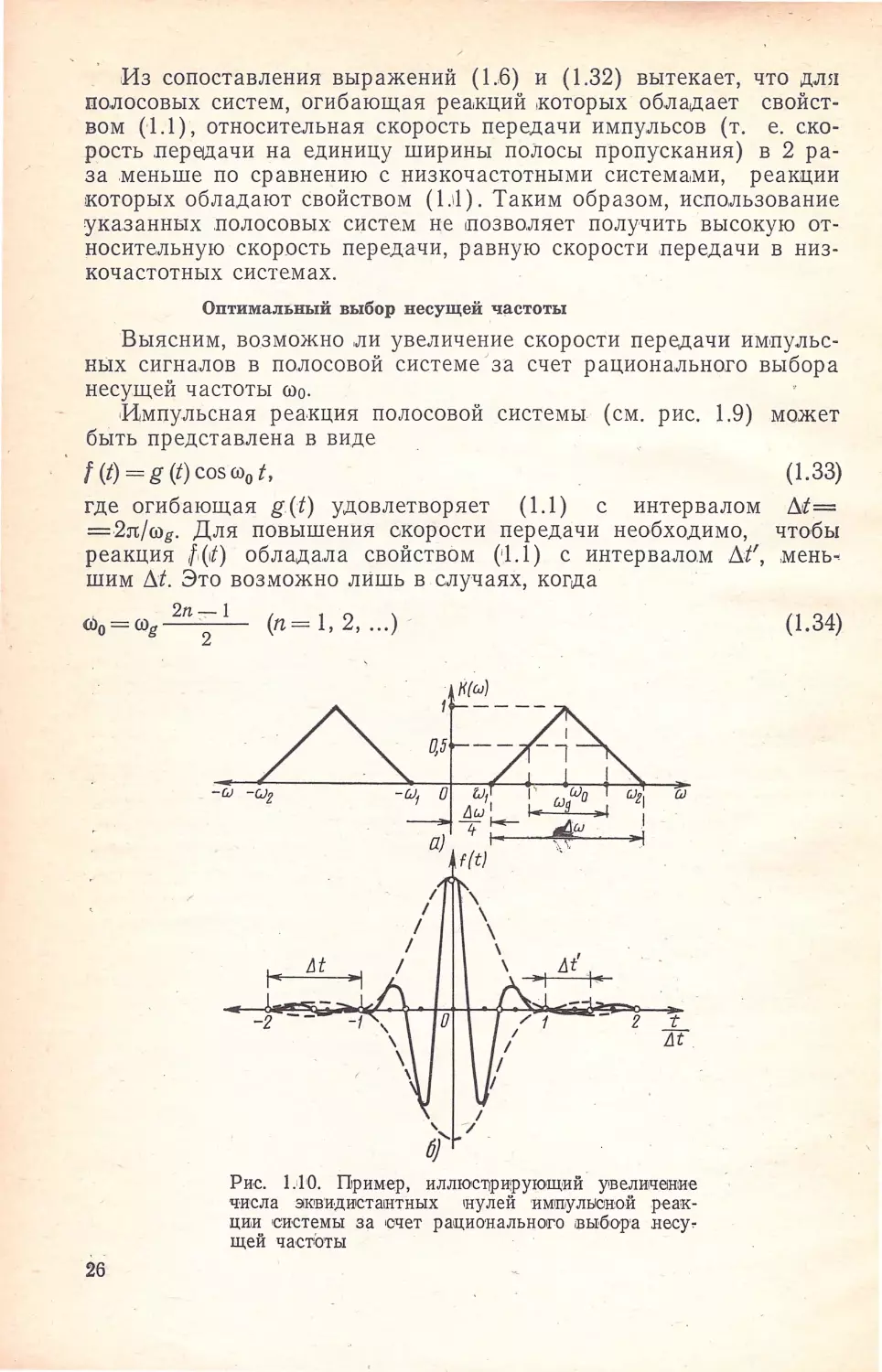
Оптимальный выбор несущей частоты
Выясним, возможно ли увеличение скорости передачи импульс-
ных сигналов в полосовой системе'за счет рационального выбора
несущей частоты о>о.
Импульсная реакция полосовой системы (см. рис. 1.9) может
быть представлена в виде
/ (0 = £Wcosco0/, (1.33)
где огибающая g.(t) удовлетворяет (1.1) с интервалом Л£=
=2л/со§. Для повышения скорости передачи необходимо, чтобы
реакция обладала свойством (4.1) с интервалом А/', мень-
шим АЛ Это возможно лишь в случаях, когда
(«=1.2, ...) (1.34)
Рис. 1.10. Пример, иллюстрирующий увеличение
числа эквидистантных нулей импульсной реак-
ции системы за счет рационального выбора .несу-
щей частоты
26
или
cog = 2(0° (п=1, 2, ...).]
е 2/1—1 ' J
В этих случаях
М (О, й = ±1, ±2, ...,
где Д//=Д//2 = л/сой. Системы, в которых несущая выбрана со-
гласно (1.34), позволяют передавать импульсные сигналы со ско-
ростью в 2 раза больше, нежели системы, у которых только оги-
бающая реакции обладает свойством (1.1). Увеличение скорости
достигается за счет того, что используются не только эквидистант-
ные нули огибающей реакции, следующие через интервал Д/, но
и те из нулей заполнения, которые расположены между нулями
огибающей на интервалах Ы'=Ы12.
Пример \f(t) с треугольной спектральной плотностью дан на
рис. 1.10а, где юй = Дю/2; со0 = ЗДю/4. Аналитическое выражение
для/ (/) имеет вид (рис. 1.106)
//а д® „ а -тс л ,/sin0,5Лю/ \2
f (t) = cos 0,75 Д ю t1-------- .
2л \ 0,5Дю/ )
Допустим, что несущая частота выбрана исходя из условия
и0 = -^-(1 + т), (1-35)
где т — 0, 1, 2, 3, ..., Z принимает только нечетные значения
независимо от т: 1= 1, 3, 5, ... При этом
/(^Д/) = 0; I (£ = ± 1, ±2, ...);
/(&Д/±т') = 0 J (136)
/(0)=1;
/(±т') = 0,
где 'т/=л)//2юо. Пример реакции /(/) для /п=1, 1=1 дан на
рис. 1.11а.
Через систему, в которой несущая частота юо выбрана соглас-
но (1.35), можно осуществить передачу двух взаимно независи-
мых импульсных последовательностей 5<1>(А:Д/) и S<2>(kkt), сдви-
нутых на время т', причем каждая последовательность передается
со скоростью 1/Д/ (рис. 1.116). Общая скорость передачи 2/ДЛ
Структурная схема такой системы дана на рис. l.il 1в. Положив в
(1.35) il=tn=l, приходим как частный случай к системе, рассмот-
ренной в [18]. Согласно (1.35), если I + т = Л1>2, то одна и та
же функция /(/) удовлетворяет (1.36) с разными значениями х',
так как одно и то же число М можно получить разными наборами
I и т. Кроме того, если М — нечетное, то вычисления по форму-
лам (1.34) и (1.35) дают одинаковые значения юо. Из вышеизло-
женного вытекает, что рациональный выбор несущей частоты по-
27
зволяет удвоить скорость передачи импульсных сигналов в поло-
совых системах.
Рассмотрим систему, составленную из полосового канала с ко-
эффициентом передачи Кп(ico), демодулятора, включенного на
Рис. 1.11. Сигнал, используемый для параллельной пе-
редачи (а); последовательности импульсов со взаимным
сдвигом (б); структурная схема системы для передачи
двух независимых последовательностей импульсов (в)
выходе канала, и фильтра с коэффициентом передачи /Сф (1®)
для выделения низкочастотного сигнала (рис. 1.12а). На демоду-
лятор подается частота ®о. Считаем, что g(it)—импульсная ре-
акция этой системы. Определим, при какой форме Дп(1м) реак-
ция обладает свойством (1.1).
Используя положения теории амплитудной модуляции, можно
показать, что условие (1.1) выполняется в том случае, если спра-
ведливо равенство
[Кп (i ® — i 0,5 ®g — i Q) + Л* (i w0 — i 0,5 ®g i Q)] (0,5 i ®g —i Q) 4-
[/Cn (i ® + 0,5 ®g + i Q) + (i ®0—i 0,5 ®g —i Q)] /Сф (0,5 i ®g + i Q) =
— a = const (0 < | £21 < 0,5®g),
28
где частота ®g должна удовлетворять неравенствам:
О,5(со2—®0) < 0,5 ®g < ®а—®0, ®а—и0 > ®0—сох;
0,5 (соо—сох) < 0,5 ®g < ®0—©х, ®0—®х>®2—®х.
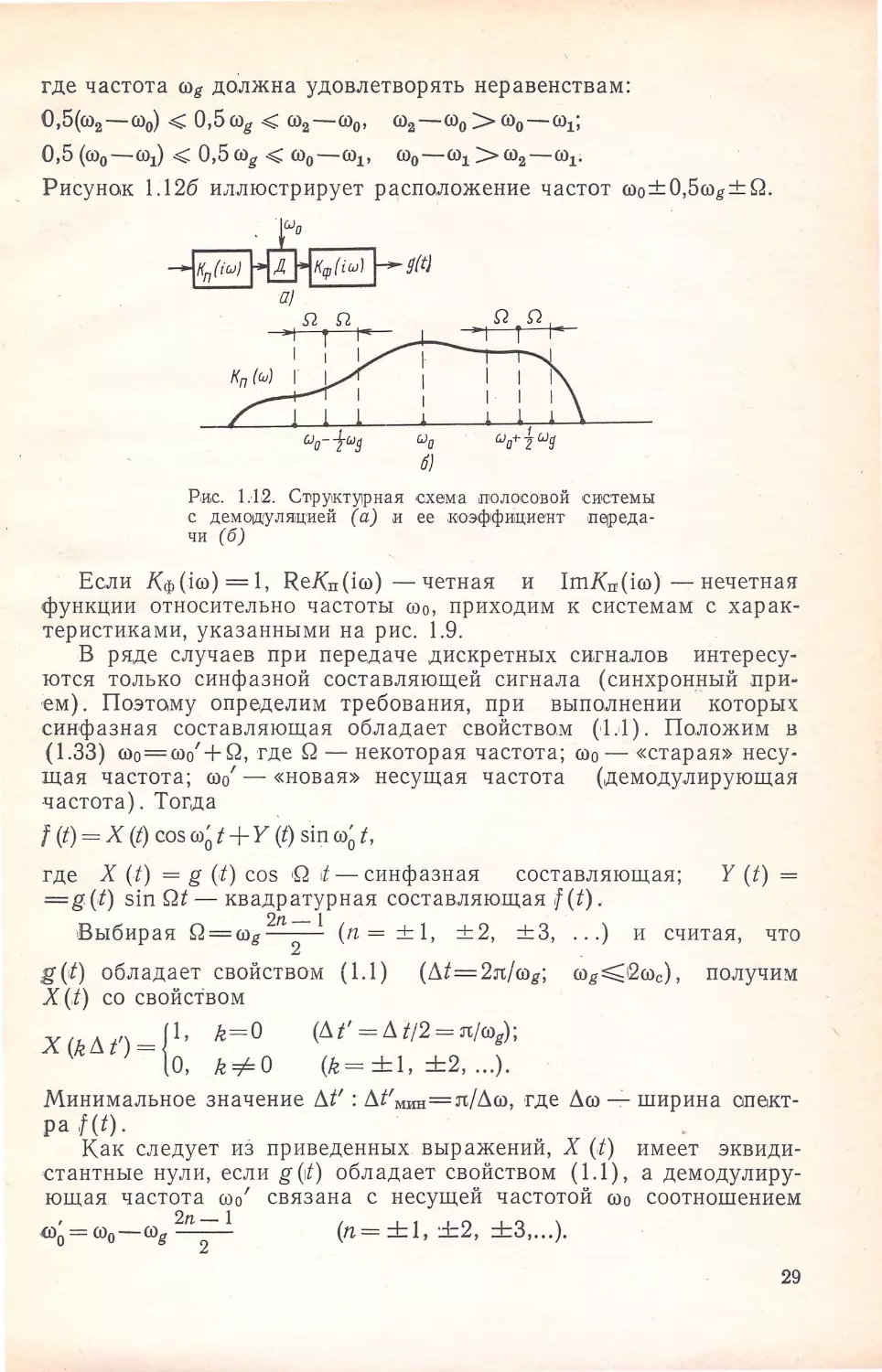
Рисунок 1.126 иллюстрирует расположение частот ®o±O,5®g±Q.
Рис. 1.12. Структурная схема полосовой системы
с демодуляцией (а) и ее коэффициент переда-
чи (б)
Если Кф(1со) = 1, ReKn(io))—четная и Im/Ca(i®)—нечетная
функции относительно частоты ®0, приходим к системам с харак-
теристиками, указанными на рис. 1.9.
В ряде случаев при передаче дискретных сигналов интересу-
ются только синфазной составляющей сигнала (синхронный при-
ем). Поэтому определим требования, при выполнении которых
синфазная составляющая обладает свойством (1.1). Положим в
(1.33) ®о=®о/ + П, где Q — некоторая частота; ©о — «старая» несу-
щая частота; ®оЛ— «новая» несущая частота (демодулирующая
частота). Тогда
/ (/) = X (/) cos и't + У (t) sin и't,
где X (/) = g (/) cos И it — синфазная составляющая; У (t) =
— g(t) sin — квадратурная составляющая f(t).
2п__1
Выбирая Q = ®g—-— (n = ±1, ±2, ±3, ...) и считая, что
g(i) обладает свойством (1.1) (A^=2n/®g; ®g^2®c), получим
X(i) со свойством
X(kM') =
k=0
(Xt' = A//2 = л/fflg);
(£=±1, ±2, ...).
Минимальное значение Af : А^МИн=л/А®, где А® — ширина спект-
ра/(i).
Как следует из приведенных, выражений, X (/) имеет эквиди-
стантные нули, если g(\t) обладает свойством (1.1), а демодулиру-
ющая частота ®oz связана с несущей частотой ®о соотношением
4 = ®о—“g (« = ±1, ±2, ±3,...).
29
Для того чтобы X(t) обладало свойством (1.36), т. е.
Х(М/) = 0; | (й = ±1, ±2,...);
Х(0) = 1; Х(±т')=0,
необходимо £2 выбрать из условия ,Q = 0,5®g (Z + т) (т = 0, 1, 2,
3, I принимает нечетные значения независимо от яг), а х'— из
условия т/=л//2Й.
Разделение перекрывающихся реакций, спектр которых
не содержит нулевых частот
Определим требования к частотным характеристикам полосо-
вых систем, реакции которых в целом (а не только огибающие)
обладают свойством (1.1). Эти требования позволяют указать об-
щие условия безошибочного разделения реакций полосовых сис-
тем на произвольную равномерную последовательность импуль-
сов, а также указать возможные скорости передачи импульсов^
при которых выполнимо безошибочное разделение [И].
Пусть g(t)—некоторая реакция, спектральная плотность ко-
торой K(ico) существует на отрезке [coi, ©2], вне которого она тож-
дественно равна нулю. Найдем Л(1®), для которых выполняется
(1.1) при заданном интервале стробирования At. По аналогии с
§1.1 получим, что (1.1) имеет место в том случае, если
GO
A0(i©) = --^— A(i®—ni©g)= 1 = const Ф 0, (1.37>
П=—co
где Ло(1®) —спектральная плотность решетчатой функции g(k\t).
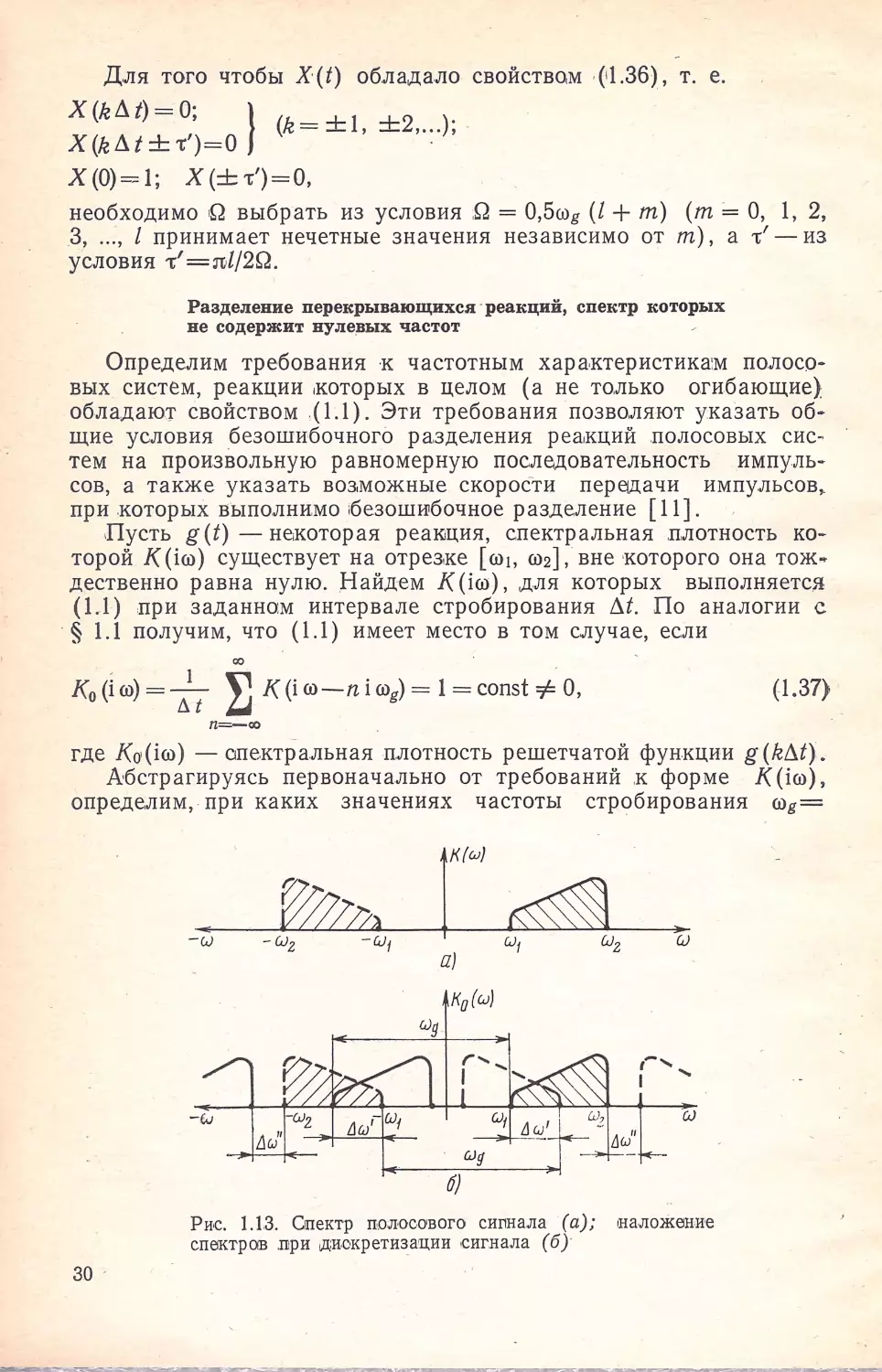
Абстрагируясь первоначально от требований к форме X(i®),
определим, при каких значениях частоты стробирования ®g=
Рис. 1.13. Спектр полосового сигнала (а); наложение
спектров при дискретизации сигнала (б)
30
=2n/&t, в принципе, возможно перекрытие (взаимное наложение)
сдвинутых спектров K(i«—raicog). Перекрытие спектров является
необходимым условием выполнения (1.1). Действительно, если
спектры /C(io>—raicog) для разных п (га=0, ±1, ±2, ...) взаимно
не перекрываются, то существуют области, в которых Ko(ico) =0
и равенство (1.37) не выполняется. Сказанное поясняется рис. 1.13.
Для наглядности на рис. 1.136 пунктиром изображены те части
Xo(ico), которые получены путем сдвига по оси со части спектраль-
ной плотности K(ico), находящейся в области отрицательных час-
тот (рис. 1.13а, пунктирная кривая). Фазо-частотные характерис-
тики на этих рисунках не указаны. В областях До/ спектры
K(i®—nicog) взаимно перекрываются (накладываются), а в об-
ластях Дм" — не перекрываются, т. е. в областях Дсо" имеем
Xo(i®)=0. Для выполнения равенства (1.37) необходимо выби-
рать частоту ©g так, чтобы отсутствовали области Дсо".
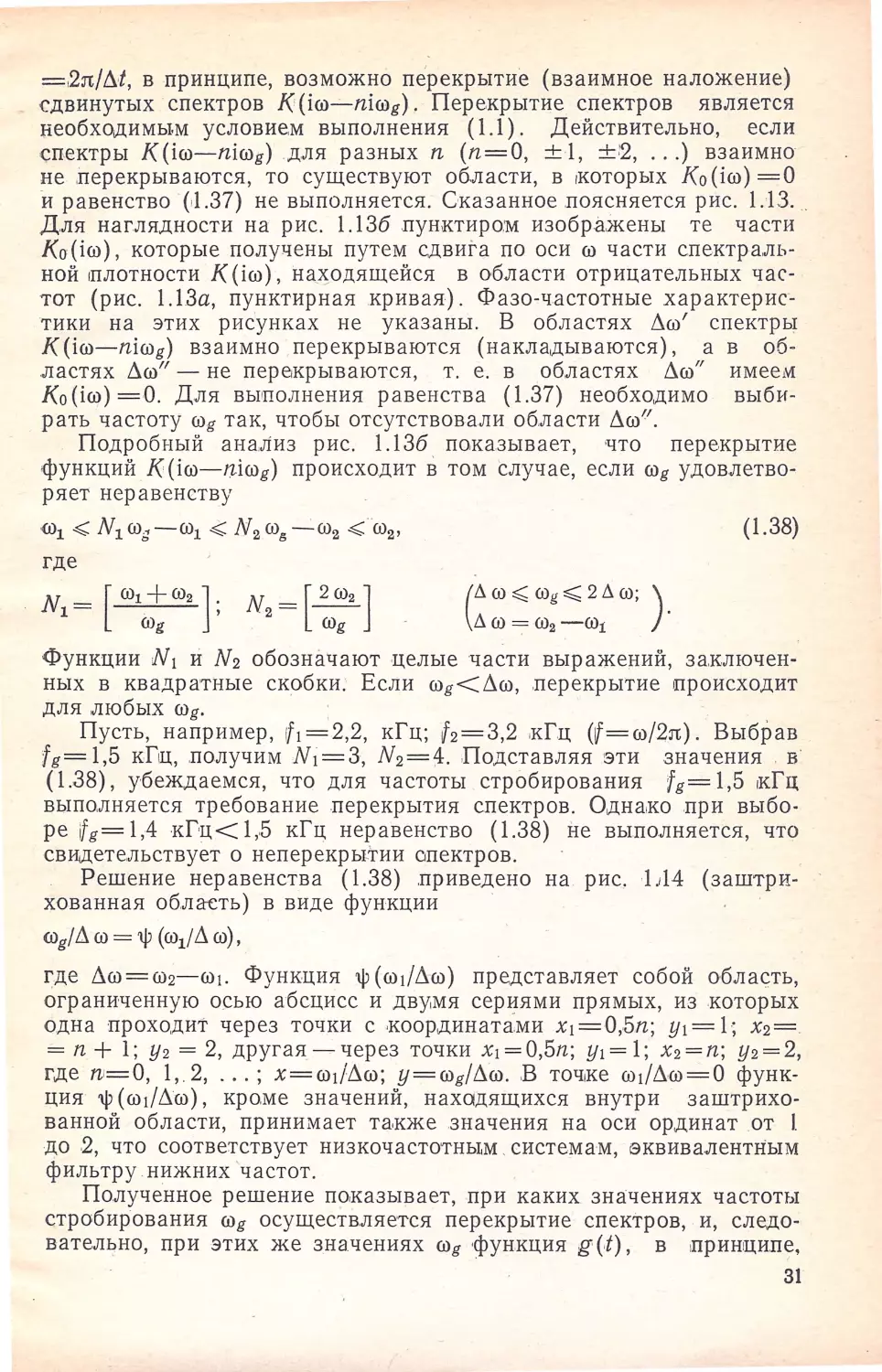
Подробный анализ рис. 1.135 показывает, что перекрытие
функций K(ico—nicog) происходит в том случае, если сой удовлетво-
ряет неравенству
(О1<Л\со3—< TV2 со,—®2 < со2, (1.38)
где
(01 ~4~ ®2
'Д со (Og С 2 Д со;
,Д со = со2 —С01
Функции Ni и Л^2 обозначают целые части выражений, заключен-
ных в квадратные скобки. Если сог<Дсо, перекрытие происходит
ДЛЯ ЛЮбЫХ COg.
Пусть, например, /1 = 2,2, кГц; /2=3,2 кГц (^=со/2л). Выбрав
fg=l,5 кГц, получим #1=3, #2=4- Подставляя эти значения в
(1.38), убеждаемся, что для частоты стробирования fg= 1,5 кГц
выполняется требование перекрытия спектров. Однако при выбо-
ре jfg=l,4 кГц<1,5 кГц неравенство (1.38) не выполняется, что
свидетельствует о неперекрытии спектров.
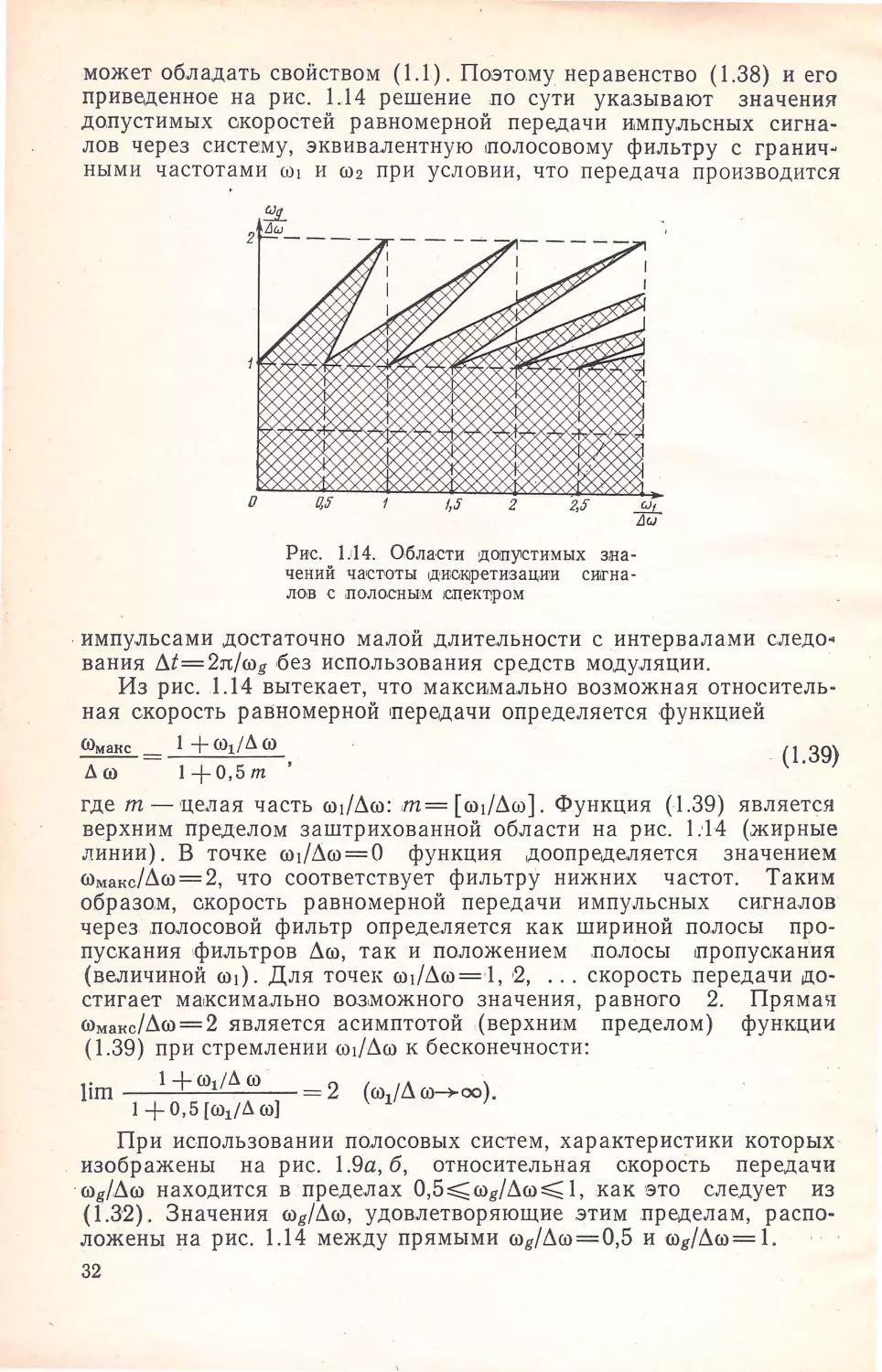
Решение неравенства (1.38) приведено на рис. L14 (заштри-
хованная область) в виде функции
сой/Д со = ф ((ox/A со),
где Дсо = cos—сон Функция ф (coi/Aco) представляет собой область,
ограниченную осью абсцисс и двумя сериями прямых, из которых
одна проходит через точки с координатами xi = 0,5ra; r/i = 1; х2=
= п+ 1; у2 = 2, другая —через точки Xi = 0,5га; z/i = l; х2 = п; у2 = 2,
где га—0, 1, 2, ... ; х=со1/Дсо; г/=сой/Дсо. В точке coi/Aco=0 функ-
ция ф(со1/Дсо), кроме значений, находящихся внутри заштрихо-
ванной области, принимает также значения на оси ординат от 1
до 2, что соответствует низкочастотным. системам, эквивалентным
фильтру нижних частот.
Полученное решение показывает, при каких значениях частоты
стробирования cog осуществляется перекрытие спектров, и, следо-
вательно, при этих же значениях cog функция g(t), в принципе,
31
может обладать свойством (1.1). Поэтому неравенство (1.38) и его
приведенное на рис. 1.14 решение по сути указывают значения
допустимых скоростей равномерной передачи импульсных сигна-
лов через систему, эквивалентную полосовому фильтру с гранич-
ными частотами coi и ®2 при условии, что передача производится
Рис. 1.14. Области допустимых зна-
чений частоты дискретизации сигна-
лов с полосным спектром
импульсами достаточно малой длительности с интервалами следо-
вания А/=2л/юг без использования средств модуляции.
Из рис. 1.14 вытекает, что максимально возможная относитель-
ная скорость равномерной передачи определяется функцией
(Омаке 1 + tOj/Д (О / j здх
Д И 1 -(-0,5 пг
где т — целая часть ®i/A®: т= [®1/Дсо]. Функция (1.39) является
верхним пределом заштрихованной области на рис. 1.14 (жирные
линии). В точке ®i/A® = 0 функция доопределяется значением
й)макс/Дсо=2, что соответствует фильтру нижних частот. Таким
образом, скорость равномерной передачи импульсных сигналов
через полосовой фильтр определяется как шириной полосы про-
пускания фильтров А®, так и положением полосы пропускания
(величиной Ю1). Для точек ®1/Д®=1, 2, ... скорость передачи до-
стигает максимально возможного значения, равного 2. Прямая
ймакс/А® = 2 является асимптотой (верхним пределом) функции
(1.39) при стремлении ®i/A® к бесконечности:
Пт—1 +®1/Д м— = 2 (а/Д (о->оо).
1 +0,5 [м^Д®]
При использовании полосовых систем, характеристики которых
изображены на рис. 1.9а, б, относительная скорость передачи
®g/A® находится в пределах 0,5^®g/A®^l, как это следует из
(1.32). Значения ®g/A®, удовлетворяющие этим пределам, распо-
ложены на рис. 1.14 между прямыми ®g/A® = 0,5 и ®g/A®=l.
32
Из сравнения выражения (1.39) с выражением (1.32) и из
рис. 1.14 следует, что в полосовых системах может -быть достиг-
нута скорость передачи, значительно большая (до 2 раз) скоро-
сти, получаемой в системах, характеристики которых изображены
на рис. 1.9а, б.
Как упоминалось выше, перекрытие спектров необходимо, но
недостаточно для того, чтобы реакция g(t) обладала свойством
(1.1), т. е. чтобы выполнялось равенство (1.37). Подробный ана*
лиз равенства (1.37) показывает, что оно выполняется в случае,
если K(i®) удовлетворяет следующим требованиям (этот анализ
здесь не приводится в силу его громоздкости).
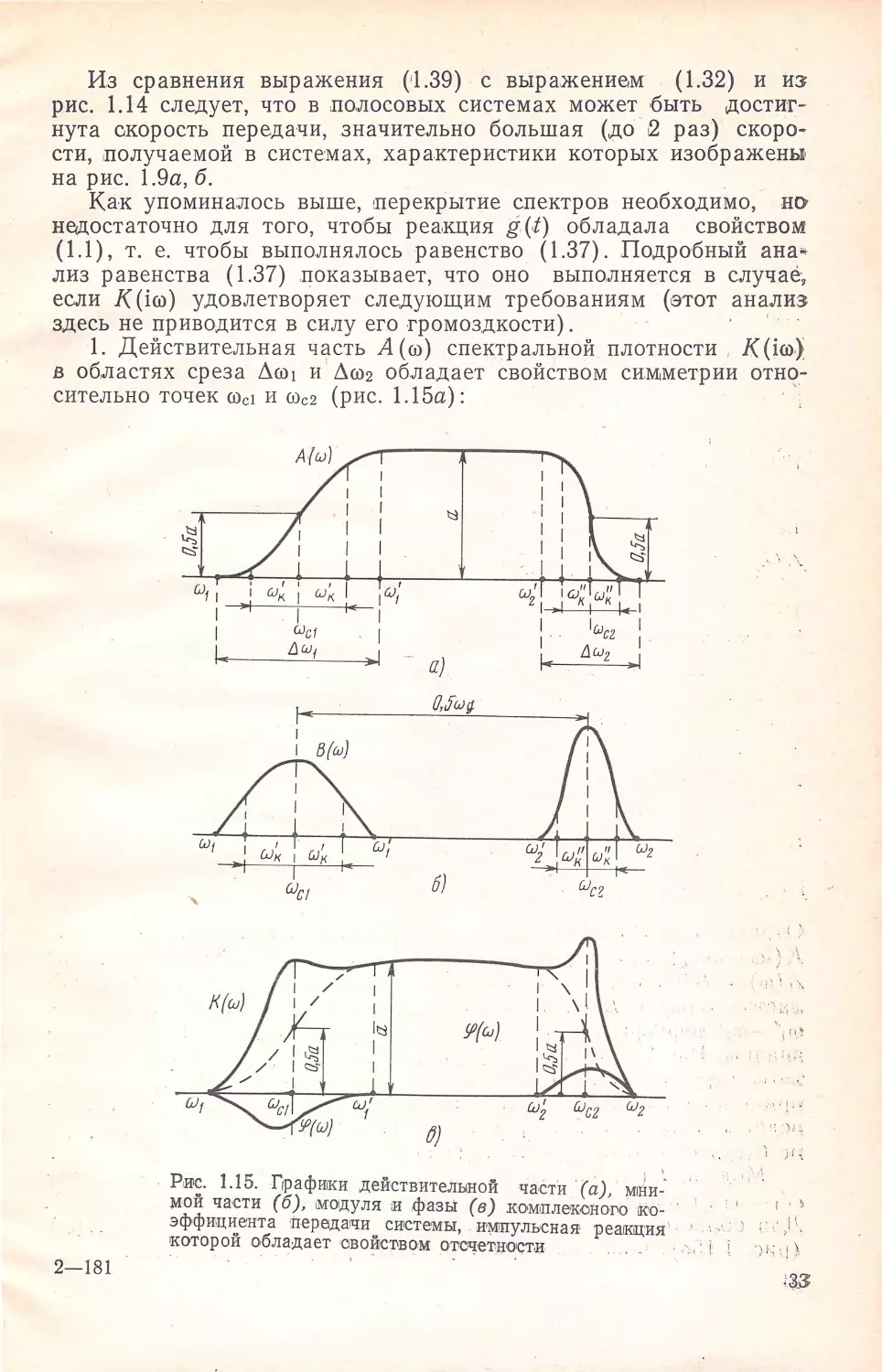
1. Действительная часть 4 (со) спектральной плотности К (ico)
в областях среза А он и Д®2 обладает свойством симметрии отно-
сительно точек coci и ®с2 (рис. 1.15а):
Рис. 1.15. Графики действительной части (а), мйи-
мой части (б), модуля и фазы (в) комплексного ко-
эффициента передачи системы, импульсная реакция < ’ •
которой обладает -свойством отсчет-н-ости ( 1 •ш--'-
33
2—181
Л (“ci + ®л) А~А (tt>cl—а>д) = const = а;
Л (e)c!!4-fi£)+yl (сос2 —со") = const = а,
где
<°ci — 2 Ni “g> Л\ — [(сох + со2)/соё];
“c2 = "^_^2“g> ^2= [2со2/со^];
1
А со < a>g < 2 Л со;
е>к и со/'— любые частоты, удовлетворяющие требованиям:
(1-40)
Hl< vAmi’
А сох = N1 cog—2 сох;
| | < щр А ®2> A co2 = 2 co2—N2 cog.
‘В диапазоне со/—сог' функция Л(со) равна постоянной величи-
не:
А (со) = const = а (ф' < |со ] < со'),
где
<oj = ^cog—сох; co'=M2cog—со2. (1-41)
Для точек cod и соС2 имеем А (сод) =А (сосг) =0,5а.
2. Мнимая часть В (со) спектральной плотности 7((ico) в облас-
тях среза Acoi и Асог четна относительно точек сод и соС2 (рис.
1.156):
В (®сх + <) = В (®С1—(| < I < -у- А сох) ;
В (со) = 0 (®; С |со] с'со').
Отрезки Acoi и Дсог являются областями перекрытия спектров
J<(ico—inco,g) при стробировании g(f). Естественно, поведение
Л (со) и В(ф) в областях Acoi и Асог взаимонезависимо. В этих об-
ластях Л (со) и В (со) не являются однозначными. В диапазоне
«о/—со27 перекрытия спектров нет, поэтому А (со) и В (со) одно-
значны. Расстояние между точками сод и сосг равно половине час-
тоты «стробирования cog=2(coC2—®д). Перечисленные требования
принципиально необходимы. Невыполнение любого из них при-
ведет к невыполнению равенства (1.37), в результате чего g(t)
не будет обладать свойством (1.1).
Модуль К (со) спектральной плотности Д(1со) в диапазоне
®'i — со'2 совпадает с А (со), т. е. К (со) — А (со) = а (со'^со^со'г).
Для областей Acoi и Дсог при В(со)=И=О Д(©) отличается от Л(со)
(рис. 1.15в). Фазовая характеристика <р(со) спектральной плотно-
;34
сти 7<(ico) в диапазоне ©/—©г' равна нулю (либо линейна), а в
областях Дол и Д©2 нелинейна, если В(©)=#0: ср(а>) =arctg
(coisClo) sCco//i, coS^C
(©i^|© =С©г) (см.
Л(со) =4(co) (coi=£^|gj
I co I =Coj2) . В частном случае при В (со) = О
рис. 1.15в, пунктирные линии) ср(©)=0;
| <С02).
Типичным для рис. 1,15в является то, что в диапазоне со/—©г'
Л(©) не зависит от частоты и равен постоянной величине, при
этом ср (©) = 0; в областях Д©1 и Д©2 К (и) и <р(©) имеют доволь-
но сложный характер. При изображении 4(ю) и В(ю), а также
при записи вышеприведенных требований линейная составляющая
фазы, вызывающая сдвиг g(£) во времени, не учитывалась.
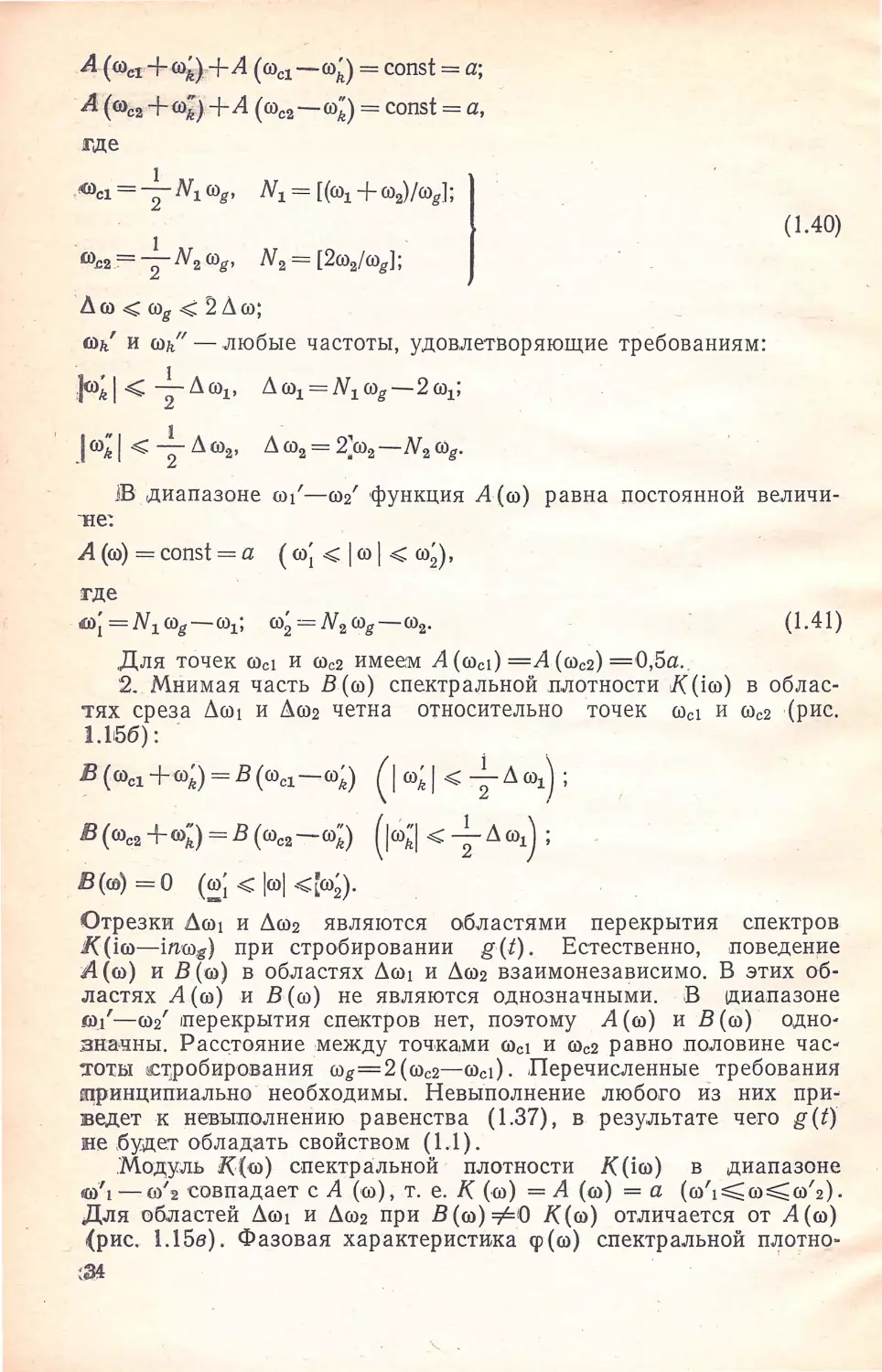
Рассмотрим несколько примеров. На рис. 1.16а, б приведенью
модуль Л(©) и соответствующая ему временная функция g(t), об-
ладающие свойством (1.1) при ©§= 1,5Дм. Фазовая характеристи-
ка ср (ю) предполагается линейной и в рассуждениях не учитывает-
2*
Рис. 1.16. Пример коэффициента передачи (а) и! .
импульсной реакции (б) полосовой системы, со ху,,? STB
свойством отсчетности; наложение спектров' при’
дискретизации (в) ,г" ? 1 f--'<
35Vj
ся, т. е. В(со)=0. Наложение спектров Д(со—ncog) при стробиро-
вании g(t) изображено на рис. 1.1 бе. На этом рисунке спектр
Л (со) заштрихован, а спектры Д (и — n<cog) (и = ±1, ±2, ...) изо-
бражены пунктиром.
Аналитическое выражение для g(t) имеет вид
/л П7г-Дсо Го sin 1,5 Д со t sin 0,75 Д со t sin 0,25 Д со t~
g (Г) = 0,75-- 2--------------------------------— .
л L 1,5ДсоГ 0,75ДсоГ 0,25ДсоГ
Правая часть этого выражения обращается в нуль при /=.
= £л/1,5Дсо (k = ±1, ±2, ...), g (/) обладает свойством (1.1) при
Д/=л/1,5Дсо.
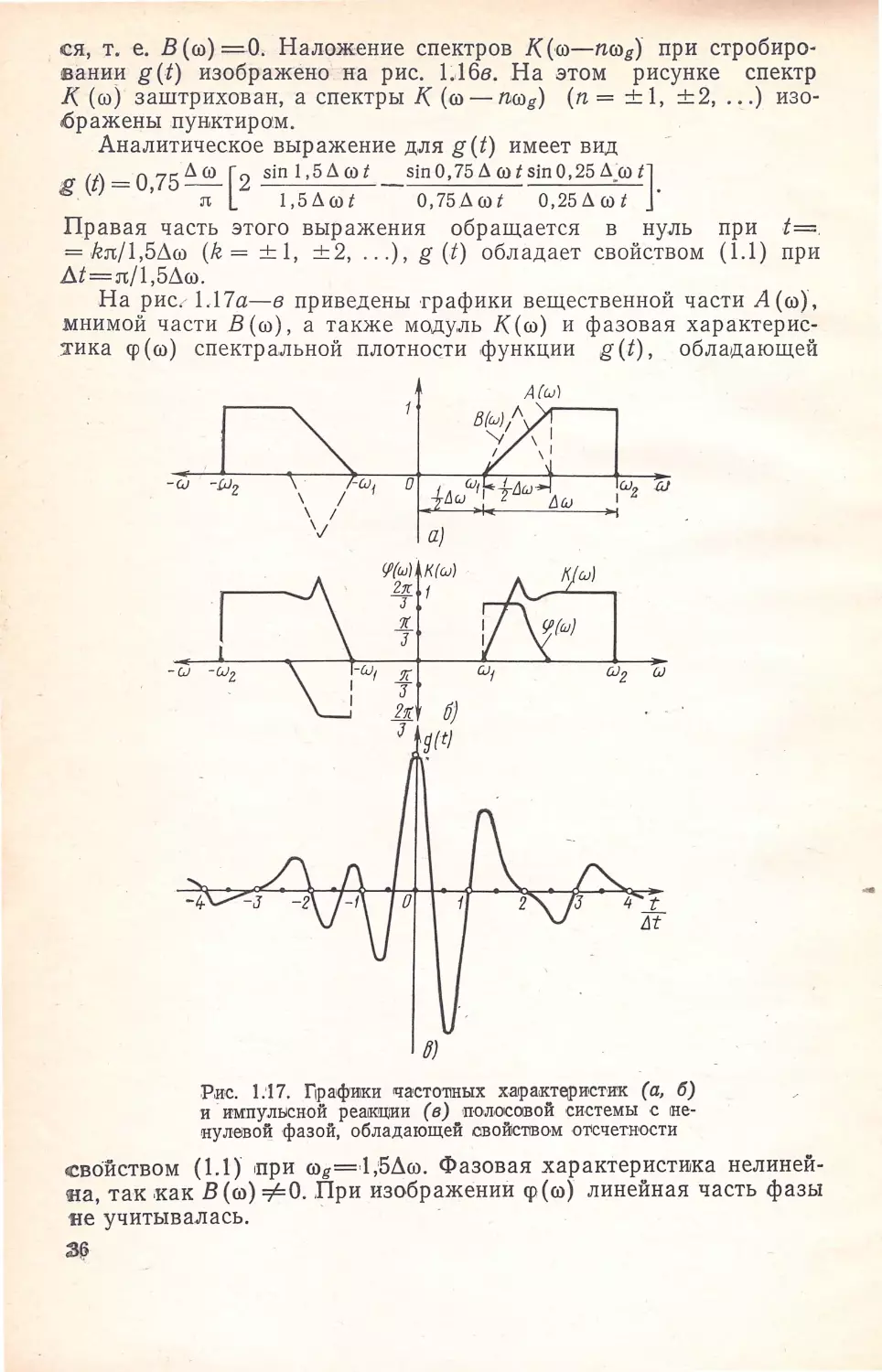
На рис. 1.17а—в приведены графики вещественной части А(<о),
мнимой части В (со), а также модуль Д(со) и фазовая характерис-
тика ср (со) спектральной плотности функции g(t), обладающей
в)
Рис. 1.17. Графики частотных характеристик (а, б)
и импульсной реакции (в) полосовой системы с не-
нулевой фазой, обладающей свойством отсчетности
свойством (1.1) при сй£=1,5Дсо. Фазовая характеристика нелиней-
на, так как В (со) =И=0. При изображении ф (со) линейная часть фазы
не учитывалась.
36
Функция g(f) равна:
§(?) = 0,25 —
л
с sin 1,5 Л со t г, sin 0,75 Д со t sin 0,25 Д со t
6---------------3---------------------------
1,5Дсо? 0,75Дсо? О,25Дсо?
• а -те л J sin0,125 Дсо? VI
—sin 0,75 А со? -------------- ) .
\. 0,125 Д со? J J
Рисунки 1.16 и 1.17 наглядно показывают, что возможно по-
строение полосовых систем с нулевой либо ненулевой фазовой ха-
рактеристикой (без учета линейной составляющей), реакции ко-
торых обладают свойством (1.1). При этом частотные характерис-
тики систем принципиально отличаются от характеристик, изобра-
женных на рис. 1.9.
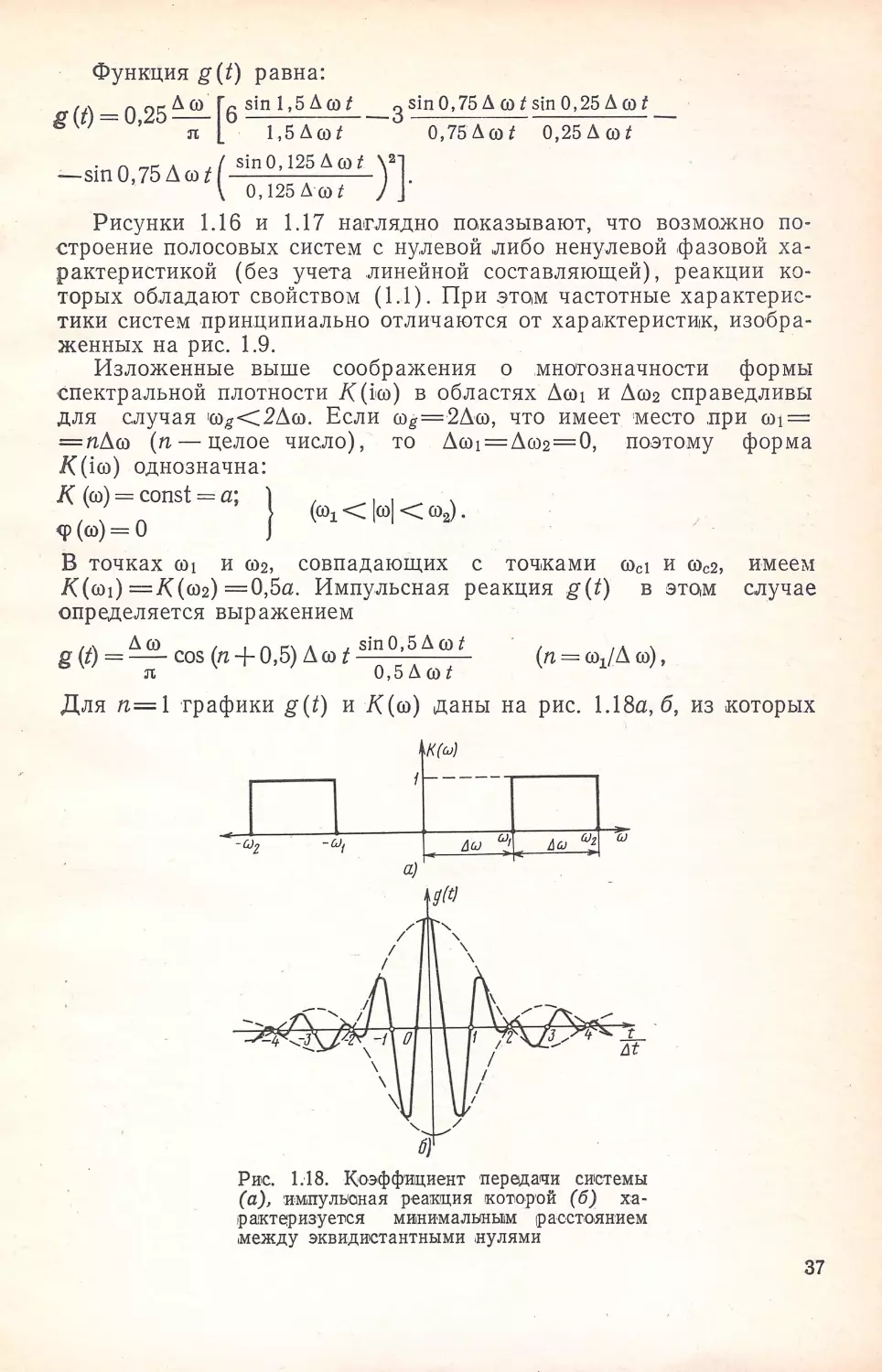
Изложенные выше соображения о многозначности формы
спектральной плотности Д(1со) в областях Ассц и Асог справедливы
для случая cog<2Aco. Если cog=2Aco, что имеет место .при coi=
поэтому форма
= пАсо (п— целое
/((ico) однозначна:
К (со) = const — а; 1
<р (со) = 0 J
В точках ®i и ©г,
X(coi) =/((со2) = 0,5а. Импульсная реакция g(?)
ЧИСЛО), ТО АсО1 = АсО2 = 0,
соа).
совпадающих с точками
С0с1 И С0с2, имеем
в этом случае
определяется выражением
-л Д со / , а е\ л , sin 0,5 Д со ? / , * ,
g (?) =---- cos (n 4~ 0,5) А со ?------ (п = соф А со),
л 0,5 Д со ?
Для п—\ графики g(?) и /((со) даны на рис. 1.18а, б, из которых
Рис. 1.18. Коэффициент передачи системы
(а), импульсная реакция которой (б) ха-
рактеризуется минимальным расстоянием
между эквидистантными нулями
37
представляет собой неравнобочную
1), а импульсная реакция которого
следует, что g'(f) обладает свойством (1.1) при минимальном ин-
тервале Д^=)2л/со§=л/А(о.
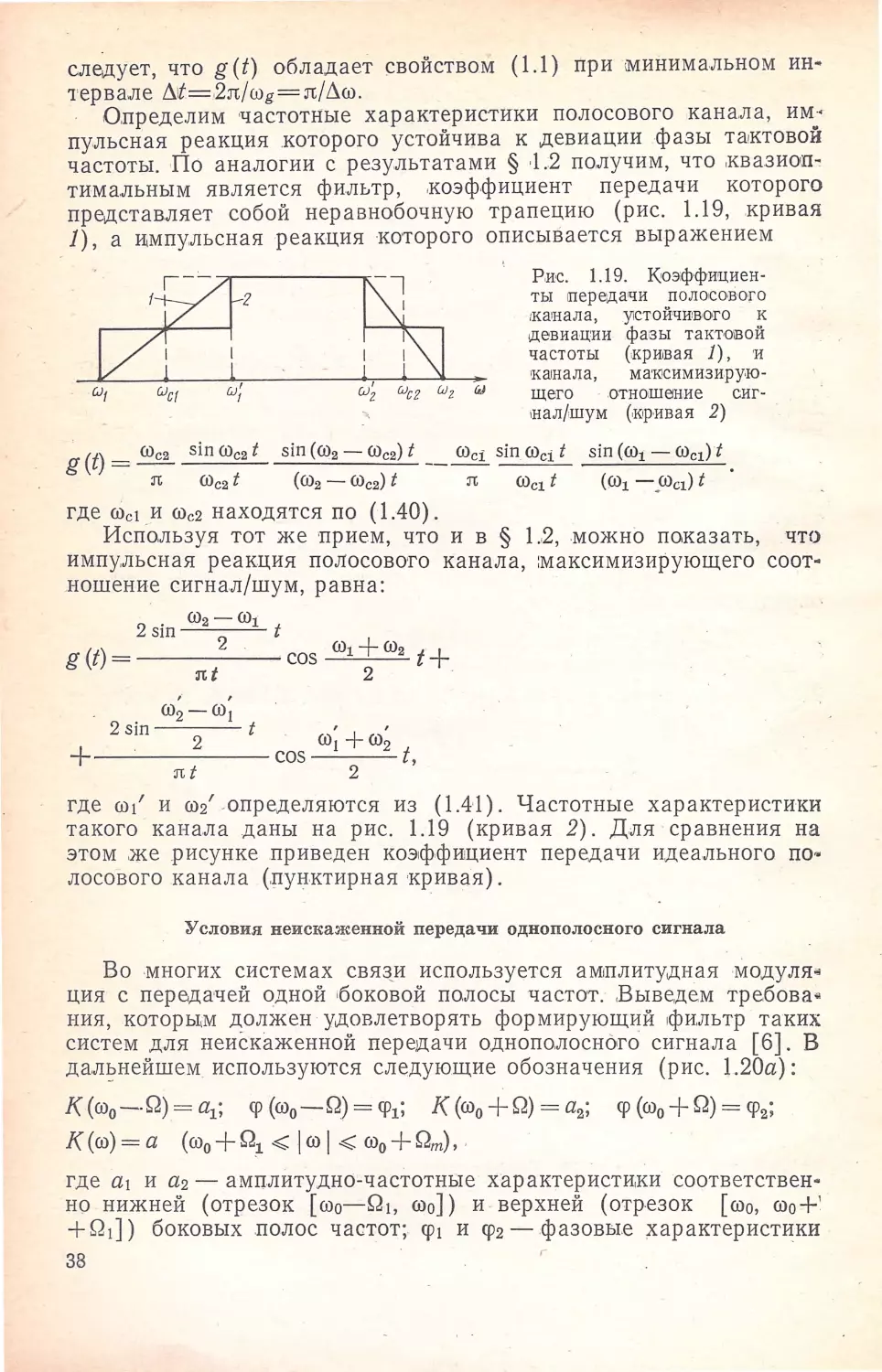
Определим частотные характеристики полосового канала, им-
пульсная реакция которого устойчива к девиации фазы тактовой
частоты. По аналогии с результатами § 1,2 получим, что квазиоп-
тимальным является фильтр, коэффициент передачи которого
трапецию (рис. 1.19, кривая
описывается выражением
Рис. 1.19. Коэффициен-
ты передачи полосового
канала, устойчивого к
девиации фазы тактовой
частоты (кривая 1), и
канала, максимизирую-
’ щего отношение сиг-
нал/шум (кривая 2)
0)с2 sin (0с2 sin (сс>2 — сОег) sin ®ci t sin (C0j — ©ci)
Л (0c21 (0)2 — (0c2) t я (Dcl t (C01 — (Dei) t
где (Dei и (0c2 находятся no (1.40).
Используя тот же прием, что и в § 1.2, можно показать, что
импульсная реакция полосового канала, максимизирующего соот-
ношение сигнал/шум, равна:
£(0
<о2 —(Oj
2 sm--------t
--------------cos
nt
(Di (02
2
(ol —(0,
2 sin —------ t
2
nt
(11, + (02
COS-------------
2
где м/ и a2' определяются из (1.41). Частотные характеристики
такого канала даны на рис. 1.19 (кривая 2). Для сравнения на
этом же рисунке приведен коэффициент передачи идеального по-
лосового канала (пунктирная кривая).
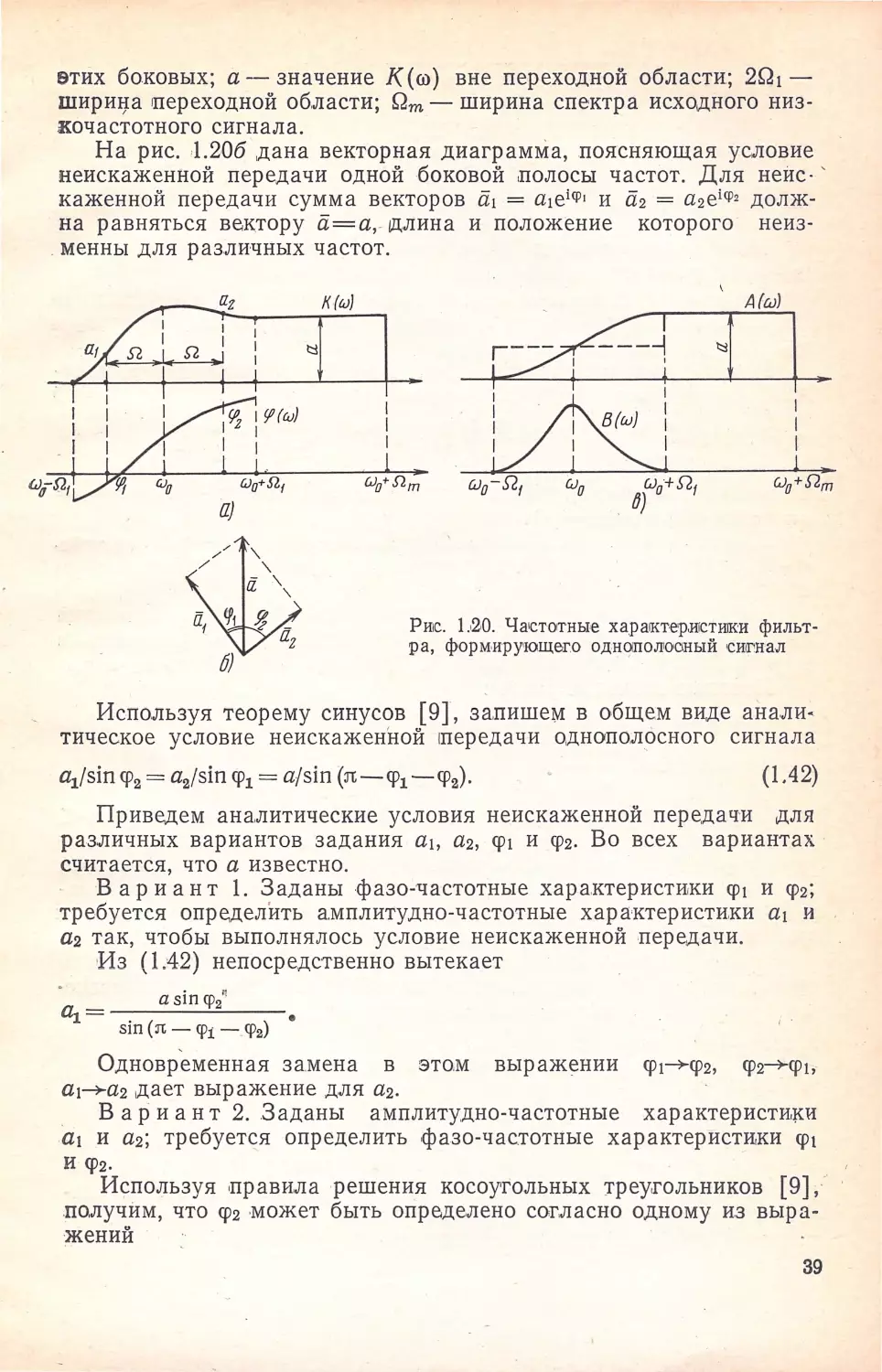
Условия неискаженной передачи однополосного сигнала
Во многих системах связи используется амплитудная модуля*
ция с передачей одной 'боковой полосы частот. Выведем требова-
ния, которым должен удовлетворять формирующий фильтр таких
систем для неискаженной передачи однополосного сигнала [6]. В
дальнейшем используются следующие обозначения (рис. 1.20а):
Д(®0—й) = ах; (р (соо—Q) = ф!; Д ((оо + й) = а2; ф (м0 + й) = ф2;
Д (®) = а (м0 Й-l < | (о | < (оо + йт),
где а\ и аг — амплитудно-частотные характеристики соответствен-
но нижней (отрезок [о>о—Й1, ©о]) и верхней (отрезок [®о, ®о+’
+ Й1]) боковых полос частот; ф1 и фг — фазовые характеристики
38
этих боковых; а — значение Х(со) вне переходной области; 2Q1 —
ширина переходной области; QTO — ширина спектра исходного низ-
кочастотного сигнала.
На рис. 1.206 дана векторная диаграмма, поясняющая условие
неискаженной передачи одной боковой полосы частот. Для неис-
каженной передачи сумма векторов d\ = ащ'ч» и az = aze.1^2 долж-
на равняться вектору а=а, длина и положение которого неиз-
менны для различных частот.
Используя теорему синусов [9], запишем в общем виде анали-
тическое условие неискаженной передачи однополосного сигнала
Cj/sin ф2 = a2/sin фх = a/sin (л—срх—<р2). (1.42)
Приведем аналитические условия неискаженной передачи для
различных вариантов задания ai, az, <pi и фг. Во всех вариантах
считается, что а известно.
Вариант 1. Заданы фазо-частотные характеристики tpi и фг;
требуется определить амплитудно-частотные характеристики а\ и
az так, чтобы выполнялось условие неискаженной передачи.
Из (1.42) непосредственно вытекает
_ a sin <p2'-_
sin (л — <рх — ф2)
Одновременная замена в этом выражении фг->ф2, ф2~>фь
а\-+й2 дает выражение для az.
В а р и а нт 2. Заданы амплитудно-частотные характеристики
а\ и az', требуется определить фазо-частотные характеристики ф]
И ф2.
Используя правила решения косоугольных треугольников [9],
получим, что фг может быть определено согласно одному из выра-
жений
39
Ф2 = 2 arctgV (a + ai-aa)(ai+^-^) ; =
r (aa-ia2) (aa2—• ax)
— 9 яге «in 1/^ (a +ai — дг) (ai + a2—a) _
r 4aa2
= 2 arc cos 1/ (a + ai + a^a + a^~ai)....
r 4aa2
Если в приведенных выражениях заменить ф2->фь ai->a2(.
a2->-ai, получим выражение для определения фь
Вариант 3. Заданы амплитудно-частотная и фазо-частотная
характеристики для одной боковой полосы частот, например а2 и
Ф2, требуется определить ai и фь
Используя те же правила, что и в предыдущем варианте, полу*
ним, что ф1 может быть найдено согласно одному из выражений
1 Пэ SIH CPs 1 . Г --- & L 1
Ф2 = arc tg —-—— =--------ф2 + arc tg —- ctg — ф3 .
a — a2 cos <p2 2 2 [a2-|-a 2 J
Значение a,\ находится из выражений a,\ = ]/а22 + а2—2а2асозф2=1
— a sin фг/sin (л—ф1—ф2).
Замена в этих выражениях а2->аь ф2->фь фг-^фг»
Я1^а2 дает выражения для определения а2 и ф2 по известным at
и фь
В а р и а нт 4. Заданы амплитудно-частотная характеристика
одной боковой полосы частот и фазо-частотная характеристика
другой боковой, например а2 и фь Требуется определить at и ф2.
Искомые значения равны:
Ф2 = л—фх—ф; 0^ = 02 sin фз/sin фр
, . a sirup,
где ф = arc sin---хт__.
а2
Если a2^a, то ф<л/2 и имеет лишь одно значение; если а2<
<а, то: 1) ф имеет два значения ф1 и ф2 при азшф1<а2, причем
ф2=л—фь 2) ф имеет одно значение (ф=л/2) при азтф1=а;
3) ф не существует при азй1ф1>а2. Как и ранее, заменив в при-
веденных выражениях ai->a2, a2->ai, ф1-кр2, ф2->Фь приходим к
выражениям для определения а2 и ф1 по известным а\ и фь
Кроме условия (1.42), которым можно пользоваться только
при ф1=т^0, фгт^О, справедливы также более общие аналитиче-
ские условия неискаженной передачи:
а2со3ф2 + а1созф1^а; j(|Q|<Qi);
ах sin фх = а2 sin ф2 )
& (®) = ® (®0 I ® I ®о Н~ ^т)-
(1.43)
Из этих выражений вытекает, что действительная Л(со) =
= асоэф и мнимая В(со)=азшф части комплексного коэффи-
циента передачи формирующего фильтра должны иметь вид, ука-
занный на рис. 1.20в, т. е. формирующий фильтр, по существу^
является вышерассмотренным полосовым фильтром Найквиста.
40
Поэтому все свойства фильтра Найквиста справедливы и для
фильтра, формирующего однополосный сигнал. Так, на основе ре-
зультатов § 1.2 можно сказать, что соотношение сигнал/шум бу-
дет максимальным для формирующего фильтра с характеристи-
кой, указанной на рис. 1.20s пунктиром.
Выражения (1.42) и (1.43) справедливы для случая, когда фаза
несущей частоты на передаче совпадает с фазой несущей на прие-
ме. Если разность фаз этих несущих равна а, то для получения
условий неискаженной передачи во всех полученных выражениях
необходимо заменить epi на <pi—кх и фг на фг—а.
Расширение теории передачи Найквиста
Выше получены частотные характеристики систем, импульсные
реакции которых обладают свойством отсчетности (1.1). Опреде-
лим теперь частотные характеристики систем, импульсные реак-
ции которых обладают обобщенным свойством отсчетности:
g(kM) = ch (£ = 0, ±1, ±2, ...), (1.44)
где Ck — произвольные заданные величины, с которыми должны
совпадать значения g’(MZ) при заданном АЛ
Представим левую и правую части выражения (1.44) в виде
ОО 00
£(/) 2 Stf—М/) = 2 ch6(t—kM).
k——00 k= 00
Взяв преобразование Фурье от обеих частей этого выражения, по-
лучим
- СО -1 со
/C(ico)0 cog6(ico —i&cog) = cfe е~1 “ л ; (<Bg = 2n/AZ),
k=—00 J k=—00
где 0 обозначает операцию свертки. Вычислив свертку, оконча»
тельно получим
Оо оо
2 K(ia—ikag) = M cfte~iMftAi. (1.45)
&=—00 k=—00
Это выражение устанавливает требования к комплексному ко-
эффициенту передачи системы, импульсная реакция которой обла-
дает обобщенным свойством отсчетности (1.44).
Рассмотрим частные случаи.
1. Условия отсутствия межсимвольных помех (первый Крите»
рий Найквиста) (1.1) требуют, чтобы Со = 1, са.=О (&=±1, ±2, ...)
или
со
2 Л (ico—i&cog) = A/ = const,
Л=— оо
что совпадает с (1.4) и (1.37).
41
2. Условия отсутствия искажений длительности импульсов тре-
буют, чтобы
/2k — 1 g\ 2 Аг ___ — , k = 0, k=V, 2 0, £=0=0, A#=l, k= — 1, ±2, ±3, ... (1.46)
Введем =i/C(i<o) gi(kM) 4г е ункцию gi(f)=g(t—М/2) со спектром , Д t 1 со 2 . Тогда условия (1.46) принимают вид —, £ = 0, k=l; 2 0, k^=l; k= — 1, ±2, ±3, ... 7<i(i®) = (1.47)
Подставив лучим эти значения в (1.45) и заменив K(ico) на /Ci (ico), по-
К(iсо—ikcog)(— l)k = A/cos ю-^-
(1.48>
Выражение (1.48) известно как второй критерий Найквиста [26].
3. При одновременном отсутствии межсимвольных помех и
искажений длительности импульсов имеем [26]
1, k = 0;
А = ±1;
О, k = ±2, ±3,..,
В этом случае на TC(ico) накладывается условие
оо
yj A(ico —i2£(0g)
k==—00
(1.49)
(1.50>
1 + cos - ) (<0g = 2n/A /),
которое получается из (1.45) заменой на А//2 и подстановкой
вместо Ch соответствующих значений (1.49).
Таким образом, условие (1.45) позволяет с единых позиций
получить первый и второй критерии Найквиста, а также условие1
одновременного отсутствия межсимвольных помех и искажений
длительности импульсов.
Отсчетные фильтры и восстановление сигналов
по их дискретным значениям
Свяжем теорию отсчетных фильтров с вопросами восстановлевия заданно-
го ансамбля функций по их мгновенным значениям. В теории передачи сигна-
лов фундаментальную роль играет теорема Котельникова (теорема выборок),;
согласно которой произвольная частотно-огтраииченная функция f(t), спектр ко-,
торой не содержит частот выше <вс, может быть представлена рядом fl, 2, 5]
42
г(,)=Е
f(kbt)
sin coc (t — A A t)
coc (/ —kM)
(1.51)
Особенность' этого ряда в том, что его коэффициентами являются значения
функции f(t), отсчитанные с интервалом дискретизации А/=л/<вс. В [1] и др.
показано, что если интервал дискретизации больше л/шс, то ряд (1.51) воспро-
изводит исходную функцию f(t) с некоторой погрешностью, которая возрастает
с увеличением интервала дискретизации.
Покажем, что произвольная (не обязательно частотно-ограниченная) функ-
ция f(t) может быть представлена рядом, аналогичным ряду Котельникова
(1.51) с произвольным интервалом дискретизации Ат (Лт^А/), при условии,
sin сос,(t — k A t)
что элементарные функции ---------—--- заменены некоторыми, определен-
С0с [t — k&t)
ным образом выбранными функциями v(t—ААт).
Составим для f(t) ряд:
ОО
ftt) = £/(Mt)v(/-Mt), (1.52)
-- 00
где Ат — произвольная заданная величина. Определим, при каких v(/—йДт)
это разложение является справедливым.
Взяв преобразование Фурье от обеих частей (1.52), приходим К выражению
F (i со) = v (i со) У f (k Ат) е~А1иЛт ,
------------------00
где F(ico) и v(ico) — спектры f(t) и v(t).
Поскольку
оо оо
2 Н£дт) е-1шАЛг = — 2 f (ico — AiWg),
--00 —со
где сог=2л/Ат,
F (i со) = v (i со) У F (i со —- k i cog)
-------------------------00
или
, Ат К (i со)
•V (i со) = ---------------------------
00
2 F (‘ м — k i cog)
(1.53)
(1.54)
Проанализируем v(ico). Принимая во внимание, что^ГОш—^icog) =
= 2 f[iw—(k—n)icog] (га — произвольное), из (1.53) или (1.54) получим
2 v (i со — k i cog) = Ат = const.
(1.55)
Как показано в § 1.2, если спектр некоторой функции v(t) удовлетворяет
(1.55), то она неизбежно обладает свойством (1.1):
43
v (i со) =
fl, t = 0;
v (t) = I (1.561
10, t = k&r, k=£0, k = ±l, ±2, . . . V '
Из этого вытекает, что для (разложения F(t) в ряд (1.51) при произвольном за-
данном Дт необходимо в качестве v(t—kbt) использовать импульсные реакции
отсчетного фильтра с (коэффициентом передачи (1.54), который в общем случае
зависит как от Дт, так и от спектра функции f(7).
В частном случае, если
|F(i®)|=0 (|(0|>С0е)
(<в0 — граничная частота), то, выбрав Дт^Д/=л/юс, из (1.54) получим, что
v(ico) является коэффициентом передачи идеального фильтра низкой частоты:
ДТ, |C0|<C0g/2;
0, | <о | > C0g/2 (<йё = 2л/Дт, fflg/2 = сос),
импульсная реакция которого описывается выражением
sin 0,5 t
v(t) =----------£-
0,5cog t
и обладает свойством (1.56). Идеальный фильтр низкой частоты представляет
собой частный случай отсчетного фильтра. В итоге ряд (1.52) совпадает с ря-
дам (1.51). В этом случае форма v(t) не зависит от исходной функции f(t).
Определим (Оптимальную функцию v(t), для которой ряд (1.52) в среднем
наилучшим образом (в смысле квадратичного критерия) воспроизводит функ-
ции из заданного класса. Рассмотрим некоторую функцию fm(t) со спектром
fm(ico), принадлежащую заданному классу (вещественных функций конечной
энергии. Составим для fm(t) ряд (1.52). Если v(ico) не
то этот ряд представляет fm(t) с погрешностью, которую
.удовлетворяет (1.54)/
оценим величиной
2
Дт = J /т(0— 2 /т(^Дт)т(/ —АДт)
k=—оо
1
— ~-v(ico) У Fm(i®—Ai®g)
AT
2
d о.
k=--00
Усредним Дт по всему классу функций
dt =
1 ‘
= — f {| Fm (i со) |2 — v (i со) С (i со) — v* (i со) С* (i со) +
+ I v (i cd) I2 (i <»)} d a>,
где |Fm(ico)|2 — усредненный
квадрат модулей спектральных плотностей
Fm(ico); C(ico) — усредненная
функция выражений
5) >, Лп(К0—
' k=-00
— kia>s)- D(ico) — усредненная
1
функция выражений
У Fm (i®—feicog) I2;.
k=---ОО
pm — некоторые весовые коэффициенты.
Найдем. оптимальное выражение для v(ico), минимизирующее погрешность
Д. Минимум Д достигается в том случае, если 6Д=О, где 6Д — бесконечно ма-
лая вариация погрешности Д, вызванная бесконечно малой (Вариацией функции
v(ico). Исходя из этого условия окончательно получим v(ico) = С* (ico)/D (ico).
Минимальное значение усредненной (погрешности равно
1 (
Дмин = — f {|Лп(1®)12
2л J (
-----00
I C(i со) I2)
D (ico) J
d а.
д — ^2 pm —
44
Экспериментальное моделирование импульсных реакций
отсчетных фильтров
Для приведения характеристик реальных систем связи, не обладающих
свойством (1.1), к характеристикам отсчетных фильтров могут использоватася
различные линейные корректоры. Однако, как показали экспериментальные ис-
следования, наиболее просто это выполняется с помощью гармонических кор-
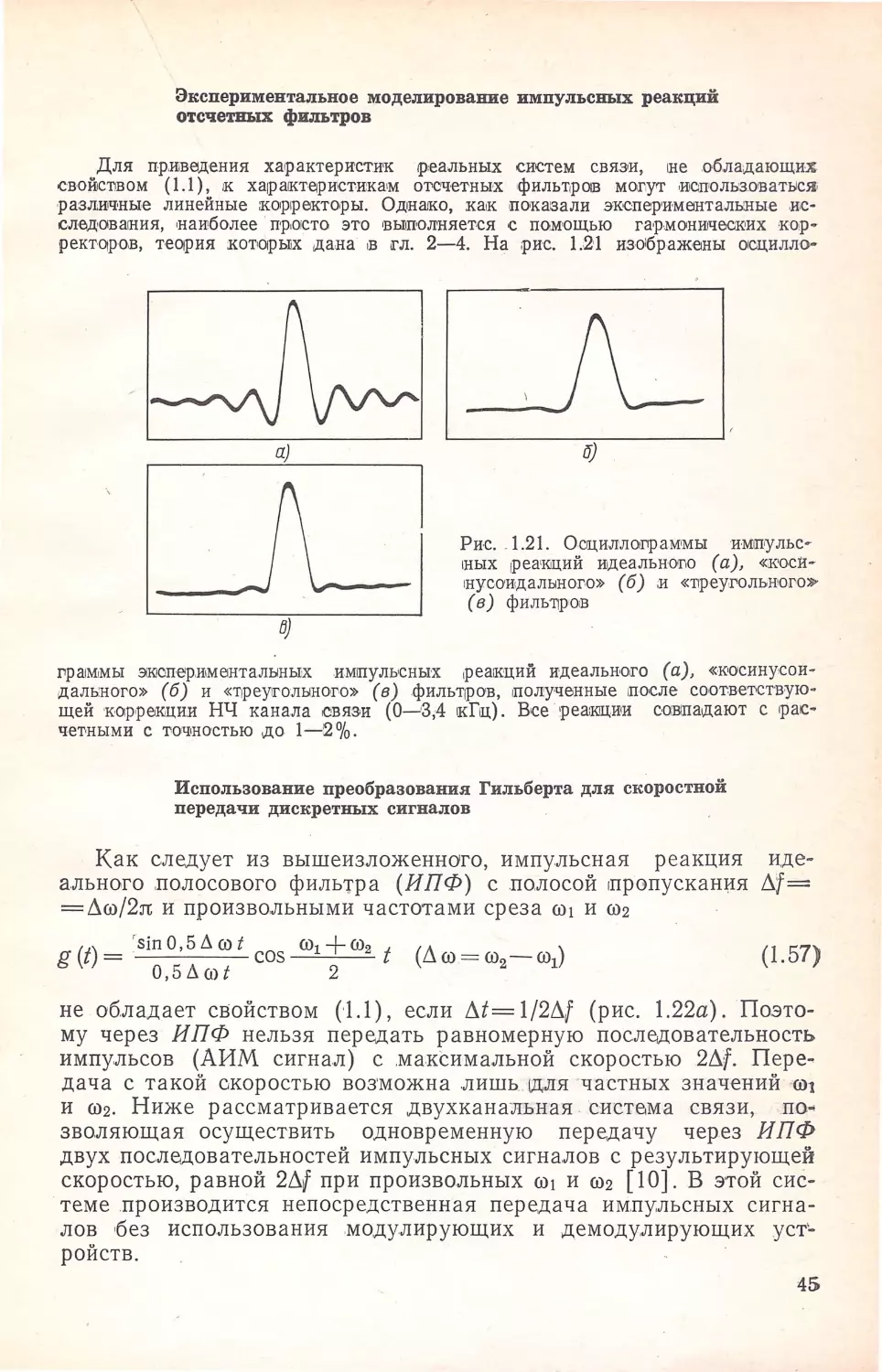
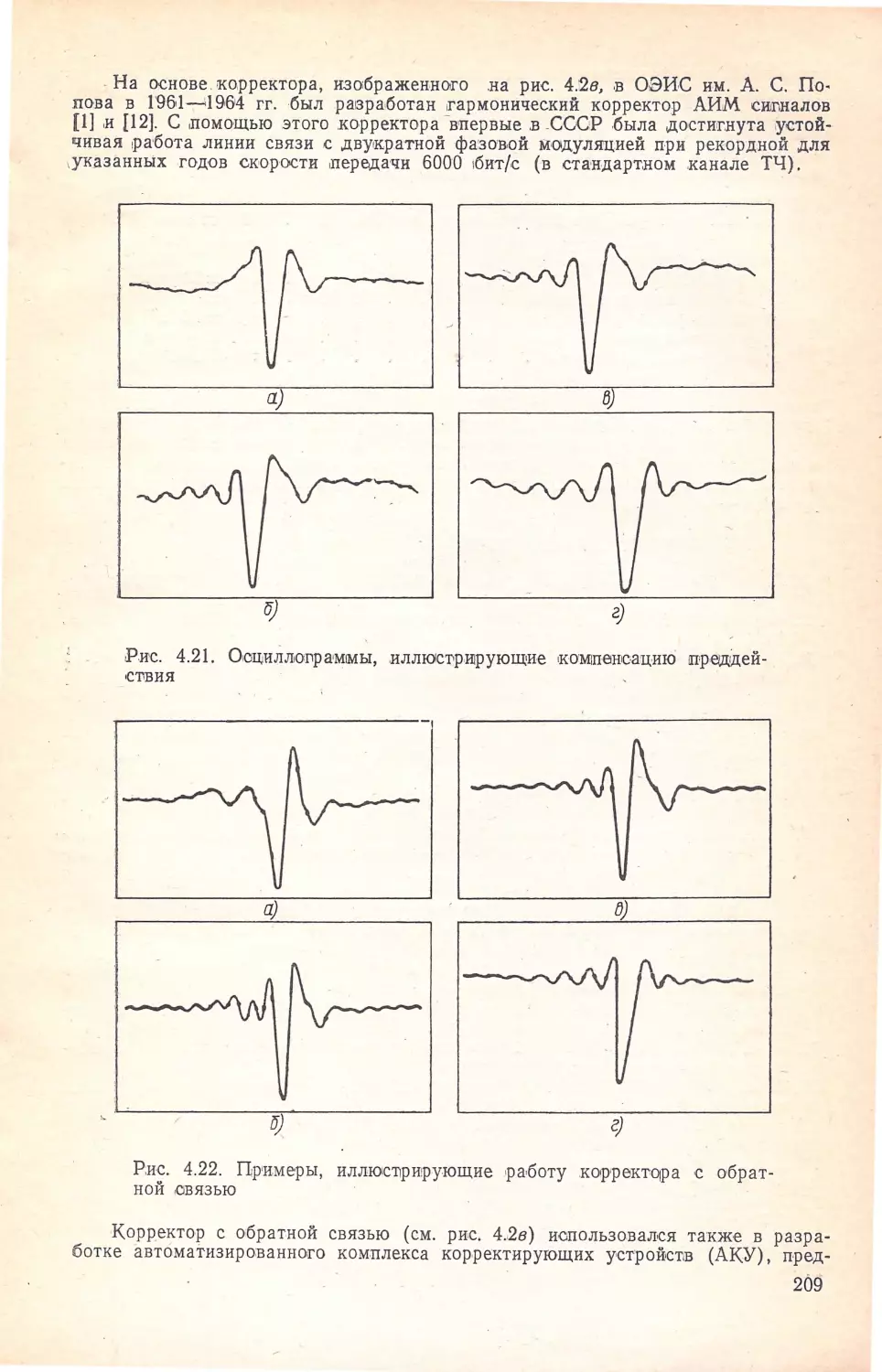
ректоров, теория которых дана в гл. 2—4. На рис. 1.21 изображены осцилло-
граммы экспериментальных импульсных реакций идеального (а), «косинусои-
дального» (б) и «треугольного» (в) фильтров, полученные после соответствую-
щей коррекции НЧ канала связи (0—3,4 кГц). Все реакции совпадают с рас-
четными с точностью до 1—2%.
Использование преобразования Гильберта для скоростной
передачи дискретных сигналов
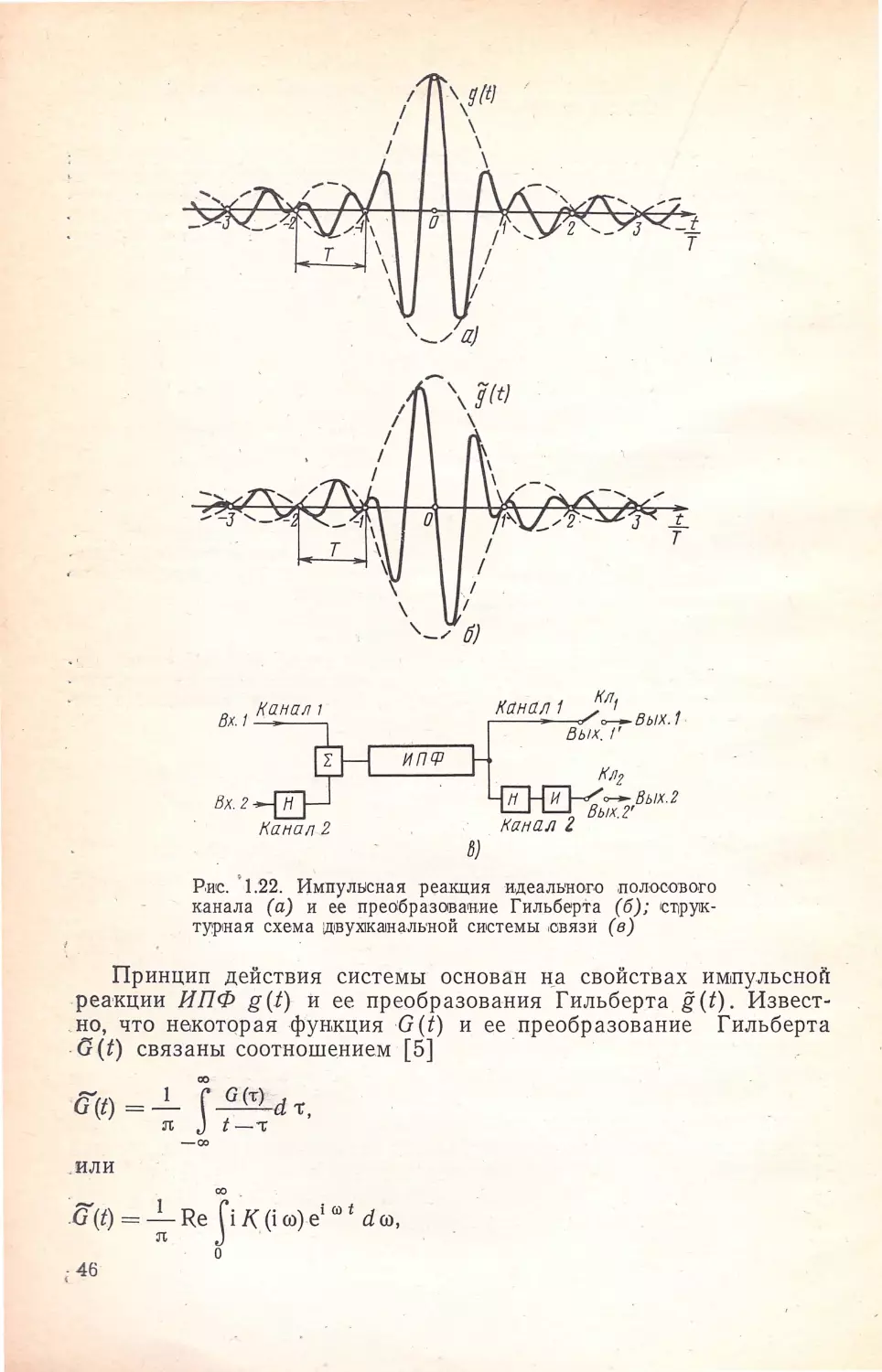
Как следует из вышеизложенного, импульсная реакция иде-
ального полосового фильтра (ИПФ) с полосой пропускания Af=
=Д.(£>/2п и произвольными частотами среза он и а)2
/,\ sin0,5 Д со t со, -4- COg j /л \ /1
g(0 = о 5До)/ 2 (Д® = и2—coj (1.57)
не обладает свойством (1.1), если At—l/2hf (рис. 1.22а). Поэто-
му через ИПФ нельзя передать равномерную последовательность
импульсов (АИМ. сигнал) с максимальной скоростью 2&f. Пере-
дача с такой скоростью возможна лишь для частных значений g>i
и ©2. Ниже рассматривается двухканальная система связи, по-
зволяющая осуществить одновременную передачу через ИПФ
двух последовательностей импульсных сигналов с результирующей
скоростью, равной 2А/ при произвольных ®i и соц [Ю]. В этой сис-
теме производится непосредственная передача импульсных сигна-
лов без использования модулирующих и демодулирующих уст-
ройств.
45
Рис. 1.22. Импульсная реакция идеального полосового
канала (а) и ее преобразование Гильберта (б); струк-
турная схема двухканальной системы связи (в)
Принцип действия системы основан на свойствах импульсной
реакции ИПФ g(t) и ее преобразования Гильберта g(f). Извест-
но, что некоторая функция G(i) и ее преобразование Гильберта
G(t) связаны соотношением [5]
G(f) =—
или
.0(0 = J-Re Ji A"(i da,
о
;46
где K(ico) — спектральная плотность функции G(t). Воспользовав-
шись этими соотношениями, получим преобразование Гильберта
от импульсной реакции ИПФ (рис. 4.226)
~ _sinO,5A^s.n
0,5Д(о/ 2 4 '
Преобразование Гильберта от g(t) дает функцию g(t) со зна-
ком минус:
Л t •—— тг
—00
Кя(1со) = Я =
Функции g(t) (1-57) и g(f) (1.58) обладают свойствами:
а (Ь Т) = / 1 ’ k = °’
(О, ^>0, £ = ±1, ±2, ... (7=1/Д/),
g (kT) = O (для всех k).
Учитывая это свойство, рассмотрим работу двухканальной систе*
мы дискретной передачи, приведенную на рис. 1.22s. Здесь Н —
преобразователь Гильберта, т. е. фазовращатель с фазовой харак-
теристикой, не зависящей от частоты и равной л/2 для диапазона
®i—®2- Коэффициент передачи преобразователя Гильберта равен:
i ((£>!<&)< <а2);
—i (—со2 < со <—coj.
Блок И — инвертор с коэффициентом передачи — 1; блок ИПФ—
идеальный полосовой фильтр, эквивалентный некоторому каналу
связи. Ключи Кл\ и Кл2 работают синхронно и синфазно с часто-
той fm=l/7’=A/ и осуществляют выборку поступающих на них
сигналов в моменты времени kT.
Передача импульсных сигналов через такую систему осуществ-
ляется следующим образом. Пусть на вход канала 1 в некоторый
момент времени kT подано воздействие в виде прямоугольного
импульса амплитуды С и длительности т, намного меньшей интер-
вала 7'(т<^7). При этом на выходе 1' возникает сигнал Cg(1), а
на выходе 1 — одиночный импульс амплитуды С. На выходе 2'
появится сигнал Cg (t), а на выходе 2 в силу соотношения (1.59)
импульсный сигнал не возникнет. Аналогично при подаче на вход
канала 2 импульсного воздействия импульсный сигнал появится
только на' выходе канала 2; на выходе канала 1 сигнал не возник- '
нет.
Из вышеизложенного следует, что каналы 1 и 2 взаимонеза-
висимы в моменты времени kT: воздействия, подаваемые на вход )
канала 1 в некоторые моменты времени kT, появятся только на
выходе канала 1 также в некоторые моменты времени kT-, воз-
действия, подаваемые на вход канала 2 в моменты времени kT,
появятся только на выходе канала 2. Взаимный переход инфор-
мации из каналов 1 и 2 в указанной системе отсутствует. Поэтому
47
через такую систему можно передавать информацию одновремен-
но по каналам 1 и 2 без взаимной интерференции. По каждому
из каналов информация передается в виде последовательности
амплитудномодулированных импульсов со скоростью fm=l/T=\f,
для которых т<Г (Т — длительность импульсов), причем ско-
рость передачи не зависит от положения частот оц и сог и опре-
деляется только их разностью. Скорость передачи для системы в
делом равна Q&f. Данная система при замене ИПФ на ИФНЧ сов-
ладает с системой, приведенной в [22].
Допустим, что в описанной системе вместо ИПФ используется
некоторый полосовой фильтр с коэффициентом передачи T’C(ico).
Определим требования, которым должен удовлетворять ЛДсо) так,
чтобы импульсная реакция канала и ее преобразование Гильбер-
та обладали свойством (1.59).
Для решения поставленной задачи образуем вспомогательные
дискретные функции:
--ОО
<h(kT) = ^[g(kT) + ig(kT)].
-----------00
Спектры этих функций соответственно равны:
00
“) = f S п -1 g & Г)] е- мт ,
--00
00
^2(i®) = -^-^(^) + ^(^)]e-ifflfer.
--00
Функции Д1(ш) и /С2(1<ю) связаны с Д(1со) соотношениями:
Ki (i со) = £ К+ (i со—и i сос),
—оо
К2 (i со) = О n ‘ ®с).
— 00
где ®с=2л/7’; K+(ico) и К-(ico) —правая и левая части функции
Д(1со), расположенные соответственно в области положительных
и отрицательных частот.
При выполнении (1.59) имеем:
G1(kT) = G2(kT)=l = const (А = 0);
,G1(^T)=G2(^) = 0 k=±l, ±2, ...),
поэтому
(i со) = const;
48
/С2 (i ®) = const (для всех со)
или
00
/<+(i со—п i сос) = const;
—со
00
^j№(ico—п i сос) = const (для всех со).
--00
Эти требования выполняются, если действительная Л (со) и мни-
мая В (со) части К (ico) обладают свойством (рис. 1.23а, б):
Рис. 1.23. Графики действительной (а) и
мнимой (б) частей, модуля и фазы (в)
комплексной передаточной функции поло-
сового канала со свойством отсчетности
Л (со) = а = const (со2—сос < | со | < сох + сос);
Л (сох 4- coft) + Л (сох + сос + coh) = а = const;
В (со) = ОТ(со2—сос С | со | < сох + сос);
B(cox+coft)=— B^ + cOe + coJ, (1.60)
где coh — некоторая частота, удовлетворяющая неравенству
49
О < (f)h < ®2——®с ^®с = 2л/Т; -i-A® < ®c < A®^.
При написании данных выражений не учитывалось постоянное за*
паздывание.
Модуль К(®) и фазовая характеристика <р(®) спектральной
плотности K(i®) приведены на рис. 1.23s. Если -®c=®2—®ь то
®2—®i—®с—0 и единственно возможной формой K(i®) является
форма коэффициента передачи идеального полосового фильтра.
В системе передачи, изображенной на рис. 1.22s, вместо ИПФ
можно использовать фильтр, коэффициент передачи которого удов-
летворяет (1.60). Для максимизации соотношения сигнал/шум этот
фильтр должен обладать характеристиками
' 0,5 а
а
Д(®) =
0,5 а
(®1<|®|<®2—®с);
(®2—®с < |®| < ©j + coe);
(®1 + ®с<|® |<®2);
В (®) = 0.
Из сравнения рис. 1.9 и 1.23 вытекает, что если огибающая ре*
акции полосовой системы обладает свойством (1.1), то эта же
реакция обладает и свойством (1.59) при условии, что At=T.
Система, изображенная на рис. 1.22, осуществляет передачу
дискретных сигналов через синхронные полосовые каналы, харак*
теристики которых не меняются с течением времени. Покажем,
что использование преобразователя Гильберта позволяет переда-
вать дискретные сигналы непосредственно и через несинхронные
каналы. Рассмотрим систему, изображенную на рис. 1.24, в кото*
Рис. 1.24. Структурная схема приемни-
ка, работающего по несинхронному ка-
налу
рой КД — квадратичные детекторы, Допустим, что канал являет-
ся несинхронным, т. е. фазовая характеристика канала с течением
времени меняется на некоторую частотнонезависимую величину
Фо- Коэффициент передачи такого канала можно представить в
виде Кнс(1и) =К(тю)ен<₽», где K(i®) — коэффициент передачи син-
хронного канала (без учета фо); И— коэффициент передачи пре*
образователя Гильберта.
Квадрат аналитической огибающей импульсной реакции канала
описывается выражением g2o(t)==gz(B)K-g2(t') • Форма g2o(0
не зависит от фо- Если g(t) и g(t) обладают свойством
(1.59), то g2o(O обладает свойством отсчетности (1.1) при
50
At=T. Поэтому в системе рис. 1.24 можно передавать однополяр-
ные дискретные сигналы непосредственно через несинхронный ка-
нал со скоростью 1/Т, которая в 2 раза меньше скорости переда-
чи в системах с синхронным каналом (см. рис. 1.22 в) и совпада-
ет со скоростью передачи по синхронным каналам с характеристи-
ками, изображенными на рис. 1.9.
1.4. Минимизация межсимвольных помех
в системах с интегральными методами приема
Системы с корреляционным приемом
Распространим результаты § 1.1 и 1.2 на системы с интеграль-
ной обработкой принимаемого сигнала.
Структурная схема корреляционного приемника изображена на
рис. 1.25. Используемые обозначения: S(t) — рабочий (информа-
Рис. 1J25. Корреляционный приемник
ционный) сигнал со спектром S (i<o); W (£) —опорный (эталонный)
сигнал длительности At со спектром Т (ico):
Y(f) = 0 (/<—At/2-, t>At/2). (1.61)
Интегрирование ведется на отрезке [—А/,/2; А//2].
В широкополосном канале без линейных искажений S(t)~
= Т (/), поэтому возможна передача сигналов со скоростью l/At
без межсимвольных (интерференционных) помех. В реальных ка-
налах имеется рассеивание во времени, вызываемое многолучево-
стью, ограничением рабочей полосы частот, линейными искаже-
ниями и т. д. В таких каналах S(t)y^y¥(t), в результате чего воз-
никают межсимвольные помехи, величины которых определяются
соотношением
(2*4-1) Д1/2
y(kAt) = [ S{tyi/(t~kAt/dt (6=^0; 6 = ±1, ±2, ...). (1.62)
(2k--1) At/2
Условие отсутствия межсимвольных помех можно записать в
виде
y(kAt) =
1, k = 0;
О, k^O, Л=±1, ±2, ...
(1-63)
Определим требования, которым должен удовлетворять спектр ра-
бочего сигнала S(t) при заданном спектре опорного сигнала W(t),
так, чтобы выполнялось условие (1.63). Эту задачу решим в об-
щем виде, не накладывая на опорный сигнал никаких ограничений,
кроме (1.61).
51
С учетом (1.61) заменим в (1.62) пределы интегрирования на
бесконечные, что дает
z/(£A/) = ?3(/)Т(/—kAf)dt = — fs(ico)T*(ico)eira*A‘cZco.
J 2л J
-00 -00
Обозначим К (Ico) =5 (ico) Т* (ico), тогда у{kAt) можно рассмат-
ривать как дискретные значения некоторой функции y(t) со спект-
ром F (ico):
00
У (О = (i ®) е1 “ 4 d со.
— оо
Очевидно, что для выполнения условия (1.59) функция y(t) долж-
на обладать свойством отсчетности (1.1), что возможно только в
том случае, если спектр этой функции удовлетворяет равенству
(1.4), т. е.
F(ico—incog) = A/ (сой = 2л/А/), (1.64)
П=— со
ИЛИ
V S(ico — i п ®g) T* (i co—incog) = A/. (1.65)
n=—00
Полученное равенство является решением поставленной задачи,
т. е. указывает, каким образом должны быть связаны между со-
бой спектры рабочего и опорного сигналов так, чтобы выполня-
лось условие (1.63). Из этого равенства следует, что межсимволь-
ные помехи в корреляционном приемнике отсутствуют, если
спектр 77(ico) =5 (ico)XF* (ico) удовлетворяет первому критерию Най-
квиста. Поэтому, задаваясь E’(ico), удовлетворяющим (1.64) или
(1.4), можно по спектру опорного сигнала определить спектр ра-
бочего сигнала S (ico) =K(ico)/4r* (ico) и наоборот.
Как видно из вышеизложенного, если скорость передачи сигна-
лов меньше скорости Найквиста (cog<2coc), где сос-—граничная ча-
стота спектра сигнала S (/), существует бесчисленное множество
пар рабочих и опорных сигналов, удовлетворяющих (1.63), так как
при этом существует бесчисленное множество F (ico), удовлетворя-
ющих (1.64). Если уже cog>2coc, то для Т (/), имеющих конечную
энергию, не существует пар рабочих и опорных сигналов, удовле-
творяющих (1.63).
В частном случае, положив
Т(А = Р (-А^2<^<Д^2)>
U (О (/>А//2, /<—А//2)
или 4r(ico) = — sin ад -^-.получим из (1.62), (1.63) и (1.65)
52
(2&4-1) At/2
S(t)dt =
(24-1) At/2
1,
0,
k = 0;
k=±l, ±2,...,
(1.66)
и
00 2 sin (co — k (Og) —
SS (i co—i k ®g)----------------------= A t
V s’ (co-Acog)
k=--00
(1-67)
или 5 (ico) =®E (ito) /2 sin co -~
, где E(ia) —произвольный спектр,
удовлетворяющий (1.64).
Выражения (1.66) и (1.67) известны как третий критерий Най-
квиста [27]. По существу, третий критерий Найквиста позволяет
определить рабочий сигнал, использование которого устраняет
межсимвольные помехи в высокоскоростных системах с приемом
по методу накопления.
Приведем ряд примеров, иллюстрирующих изложенный мате-
риал. Пусть Ис^®г^2мс, что соответствует случаю высокоскоро-
стной передачи. Здесь <ос— граничная частота спектра рабочего
сигнала: |S(ico)|=0 (|со|>«вс) Допустим, что сигналы передают-
ся с максимально возможной скоростью (скоростью Найквиста):
®g = 2icoc. Спектр F(i®) определяется в этом случае однозначно:
E(i®) = A^ (|со|<сос); |F.(i®)|^0 (|<о|>сос).
Выбрав в качестве опорного сигнала ЧДД прямоугольный им-
пульс единичной амплитуды и длительности At, получим из (1.67)
S (i со) =
о А Ц2 sin и (0 < | со |
(I ® I > ®с)
(рис. 1.26, кривая /).
Если выбрать в качестве опорного «треугольный» импульс еди-
ничной амплитуды и длительности At, получим
S (i со) =
(соAt/2)2 /f 1 —cosсо
0
(0 < |co| < coc);
(I ® | > ®c)
(рис. 1.26, кривая 2).
Для скоростей, меньших скорости Найквиста, спектр S (io)
определяется неоднозначно. Например, положив cog=®c и выбрав
спектр F(ico) вида «приподнятый косинус»
F (ico) = A/fcos-Я(Й.Л (|со|<сос),
\ 2(0с /
для прямоугольного опорного сигнала получим (рис. 1.26, кри-
вая 3)
53
3 (i co) =
co A Z c^g coA/
4 4
0
(0 < I co I < coc);
(| co | > coc).
Как вытекает из приведенных рисунков, при скоростях, близ-
ких к предельной скорости, спектр рабочего сигнала резко изме-
няется в области граничной частоты >сос; если же скорость переда*
чи существенно ниже предельной скорости, спектр рабочего сигна*
ла имеет пологий скат в области граничной частоты.
Рис. 1.26. Спектр рабочего сигнала при прямоуголь-
ном опорном сигнале (кривая /), «треугольном»
опорном сигнале (кривая 2) и опорном сигнале
«приподнятый косинус» (кривая 3)
Оценим помехоустойчивость системы с корреляционным при-
емником, в которой спектры рабочего и опорного сигналов связа-
ны соотношением (1.65).
В реальных условиях сигнал на входе приемника X(t) пред-
ставляет собой смесь полезного сигнала S(t) и аддитивной поме-
хи1 N(t) (см. рис. 1.25). На выходе приемника имеем
A t/2
J X (t) T (t) dt = a-\-b,
—At/2
At/2
где a= J S(()'4f(t)d(t) = y(0) — полезный сигнал; b =
—At/2
A t/2
= C Nfiyyttydt — помеха.
—At/2
При высокоскоростной передаче отношение сигнал/шум с уче-
том межсимвольных помех равно h=aj V Р1+Р2, где ?! — энергия
со
аддитивной помехи; Р2= V У2 (М() — энергия межсимвольных
k=—00
k=£0
1 Здесь и в дальнейшем предполагается, что соответствующий аддитивному
шуму процесс N(t) является стационарным гауссовским процессом с нулевым
средним.
54
помех; a=z/(O)—значение полезного сигнала в момент регист-
рации.
Если спектры рабочего и полезного сигналов связаны между
собой соотношением (1.65), то в силу (1.63) Р2=0, поэтому h =
-а/УР,.
Таким образом, отношение сигнал/шум на выходе корреляци-
онного приемника при высокоскоростной передаче определяется по
той же формуле, что и в случае низкоскоростной передачи, когда
нет взаимного наложения передаваемых сигналов. Иными словами,
если выполняется условие (1.63), помехоустойчивость узкополос-
ного канала определяется только аддитивным шумом так же, как
и помехоустойчивость широкополосного канала.
Распростаним результаты § 1.3 на системы с корреляционным
приемом. Определим связь между 5 (ico) и T (ico) исходя из ус-
ловия
(2Л+1) Д4/2
z/(M/) = J kkt)dt = Ch (£ = 0, ±1, ±2,...), (1.68)
(2k—1) ДС/2
где Си — заданные величины.
После ряда преобразований, аналогичных вышеприведенным,
выражение (1.68) с учетом (1.61) приобретает вид
ОО
^(А:А/) = — f/’(ico)ei“feAicZco = Cfe (£ = 0, ±1, ±2, ...),
2л J
— со
где у (t) — функция со спектром F(ico) —S (ico)W* (ico). Поскольку
это выражение не отличается по форме от выражения (1.44), по
аналогии с (1.45) можно записать
2 Е (i со—i ncog) = А / J Cfte-i(oAAf
п=—ОО k=—оо
(cog = 2 л/A f)
или
оо оо
V S(ico—i«cOg)¥*(ico—incog) = AZ 2 • О-69)
П=—оо k=—оо
Полученное выражение определяет связь между спектрами рабо-
чего и опорного сигналов с учетом выполнения условия (1.64). По-
ложив в (1.68) и (1.69) С\ = 1(й=0), Ск=0 (£=7^=0, £=±1,
±2, ...), приходим к выражениям (1.63) и (1.65).
Из сопоставления выражений (1.69) и (1.45) вытекает, что,
заменив в выражениях (1.48) и (1.50) /((ico) на 77(ico) =
=S (ico)W* (ico), получим соответственно условия отсутствия иска-
жений длительности импульсов и условия одновременного отсутст-
вия межсимвольных помех и искажений длительности -Импульсов
в системах с корреляционным приемом.
55
Нетрудно видеть, что, заменив во всех выражениях § 1.2 /((ico)
на f’(ico) =S(ico)4f*(ico), получим формулы, позволяющие опреде-
лить связь между спектрами рабочего и опорного сигналов, ис-
пользование которых в корреляционных системах уменьшает по-
меху, вызванную девиацией моментов выборок (девиаций периода
интегрирования), увеличивает отношение сигнал/шум в корреля-
ционном приемнике при одновременном устранении межсимволь-
ных помех и уменьшает межсимвольные помехи при скоростях пе-
редачи выше скорости Найквиста.
Многоканальные корреляционные системы
В многоканальной системе с корреляционным приемом (рис.
1.27) рабочие сигналы Sm(t) со спектрами Sm(ico) (m=l, 2, ..., М)
одновременно передаются в одном канале со скоростью 1/Д/(Д/—
заданный интервал). На
Рис. 1.27. Многоканальная система с кор-
реляционным приемом
Л4-входы многоканального
корреляционного приемника
поступают рабочие сигналы
Sm(T) и подаются заданные
опорные сигналы ТтСО со
спектрами 4rm(ico)- Сигналы
Tm(i) — конечной длитель-
ности: ЧГт(0=0 (^<—Д//2,
/>Д^/2), где Д/ — период
интегрирования.
Найдем, какая связь
должна быть между Sm(ico) и 4rm(ico) так, чтобы выполнялось
условие
Утр д 0=m+J ’ (0 (t-k Д 0 d t=Стр Ch0
(2k—1) M/2
{m, p=l, 2.....Л1; fc=0, ±1, ±2,...), (1.70)
где Cmp и Cfeo — заданные величины; z/mp(M0—значения сигна-
лов на выходах корреляционного приемника в моменты регистра-
ции kAt. При £=0, т=р получаем полезное значение сигнала, ко-
торое должно совпасть с CmmC00; при &=/=0, т^=р получаем меша-
ющее значение сигнала (межсимвольные и межканальные поме-
хи), которые должны совпасть с СтрСы-
После ряда преобразований выражения (1.70) получим
0° со
2 -SOT(ico — incog) Т* (ico—incog) =Д t У CmpChoe~1 “*-Л z
п=—ОО
(<ой=2л/Д/, т, р=1, 2.....Л4).
(1-71)
56
(1-72)
Это равенство указывает связь между спектрами рабочего и
опорного сигналов с учетом выполнения (1.70).
Для отсутствия межсимвольных и межканальных помех на
ЛЬвыходах корреляционного приемника необходимо и достаточно,
чтобы
Стр = 6mpj
Ck о — 5/г о>
где 8ц — символ Кронекера (бг3-=1 при i=j; бг3=О при г=И=/)->
Подстановка (1.72) в (1.71) дает
2 5m(ico — i r? cog) Д'* (i со—i пcog) = A18тр (т, р = 1, 2, ..., М). (1.73)
П=—со
Полученное равенство представляет собой, по существу, обобщен-
ный критерий Найквиста для систем с многоканальным корреля-
ционным приемником.
Изменим форму записи равенства (1.73).
Обозначим
со
V sm (i со—i п COg) V* (i со — i п cog) = Go (i co).
n=— 00
Функция Go (ico) — периодическая с периодом ®g, имеющая чет-
ный модуль и нечетный аргумент, поэтому G0(ico) полностью оп-
ределяется на отрезке (0, cog/2). Разобьем положительную ось
частот на неперекрывающиеся полосы
0,5(<?—l)cog < со < 0,5дсоё (q= 1, 2, 3, ...).
Спектры Sm(ico) и 4% (ico) в пределах каждой полосы будем
рассматривать как отдельные функции, которые обозначим соот-
ветственно через Smq и Тогда равенство (1.73) можно запи-
сать в виде бесконечной системы уравнений
со
,s''' (L74)
. «=1
В реальных каналах спектры рабочих сигналов Sm(ico) всегда
ограничены некоторой частотой сос. Поэтому бесконечная система
уравнений (1.74) превращается в конечную. Задавшись спектра-
ми опорных сигналов, из этой системы можно определить спектры
рабочих сигналов при условии, что определитель системы уравне-
ний не обращается в нуль. Подчеркнем, что решение системы
(1.74) существует только при =£7сос-
На рис. 1.28 приведены примеры графиков спектров рабочих и
опорных сигналов для случая Л4 = 2, ®g=coc (сос—граничная частота
канала, т. е. граничная частота спектров рабочих сигналов). В ка-
честве опорных выбраны сигналы:
57
Рис. 1.28. Графики спектров опорных и рабочих сигналов
двухканальной корреляционной системы
ч^) =
(О <t < А//2);
(—Af/2<7<0);
(|/|>Д*/2);
^={J
(—А^/2);
(Н| > А//2).
Спектры рабочих сигналов найдены с помощью уравнений (1.74).
Согласованная фильтрация
Пусть на вход приемника, представляющего собой линейный
фильтр с коэффициентом передачи К(ico), поступают сигнал S(t)
со спектром 5 (ico) и аддитивный шум N(t) с энергетическим
спектром JV(co). Отклик приемника на сигнал S(t) в некоторый
момент времени Т равен
V(T) = _L JS(ico)K(ico)eiaTdco.
—со
Известно [29], что максимум отношения сигнал/шум
9=V(T)/r^,
со
где Pi= — f N(со) l-K(ico) |2dco достигается при
2л J
о
X(ico) = C S*(iе~1 иг
v W (со)
(1.75)
(С=const). В этом случае имеем:
(1-76)
58
y(7) = — f S (1 M-— da = A = max.
V ' 2n J W((0)
—co
Определим, для какого спектра 5(ico) энергия межсимвольных по-
мех на выходе согласованного фильтра равна нулю:
р2= £ |У(Т+ М012 = 0, (1.77)
k=—00
Л=#0
где V(T+kAt) = -^ JV(cp)e’“ftA,dco,
— со
V(co) = C|S(ico)|W(co). (1-78)
Для выполнения (1.77) необходимо и достаточно, чтобы
17(7, + ^А0 = |Л’ А = 0;
\ |0, k^O, k = ±l, ±2,...,
что выполняется при
2 У(со—псоё)=ДА/ (cog = 2n/AZ). (1-79)
П=—00
Как показано в § 1.2 и 1.3, если /cog^2coc [сое— ширина спектра
S(im), т. е. ширина спектра У(со)]., то существует бесчисленное
множество У (со), удовлетворяющих (1.79). Поэтому всегда можно
выбрать У(со)>О и далее с учетом (1.78) и (1.75) получим:
S (i со) | = р/(®)Л/((о)/С ;
К(ico) | = ]/CV(coW(co) .
Фазовые характеристики icpi (со) и ср2 (со) сигнала и фильтра —
произвольные, но такие, что epi (со) +'ср2(со) =—соГ.
Отношение сигнал/шум (1.76) для найденных характеристик
сигнала и фильтра принимает вид
/ СО
7макс ~ (®) w •
Если cog>2coc, то равенство (1.77), в принципе, не выполняется.
Однако, выбрав в качестве У (со) характеристику фильтра, най-
денную в § 1.2, получим характеристики сигнала и согласованного
фильтра, обладающие тем свойством, что энергия межсимвольных
помех на выходе согласованного фильтра будет минимально воз-
можной. Очевидно, что, использовав в качестве V (со) характери-
стики отсчётного фильтра, синтезированные в § 1.2, получим ха-
рактеристики сигнала и согласованного фильтра, минимизирую-'
щие энергию помехи, вызванной неидеальной синхронизацией.
59
Многоканальные фильтровые системы
На рис. 1.29 изображена структурная схема многоканальной
системы, в которой прием осуществляется линейной фильтраци-
ей сигналов. Используемые обозначения: Sm(i®) и Ym^co) (m=
= 1, 2, ..., Л4) — коэффици-
Рис. 1.29. Многоканальная фильтровая си-
стема
енты передачи соответствен-
но передающих (формирую-
щих) и приемных фильтров;
K(ia) — коэффициент пере-
дачи группового канала свя-
зи.
Пусть г/тр(0 — импульс-
ная реакция р-го приемного
фильтра на воздействие (6-
функцию), поданное на вход
т-го передающего фильтра.
Потребуем, чтобы выполнялось условие
ymp(k\f) = CmpCk0 (т, р=1, 2, ...,М; k = Q, ±1, ±2, ...), (1.80)
где ymp(kAt)—значения сигналов на выходах приемных фильт-
ров в моменты регистрации kAt\ Стр и Сь0 — заданные величины.
При k=Q, т=р получаем полезное значение сигнала, совпадаю-
щее с СттС00; при k^=0, т=/=р получаем межсимвольные и меж-
канальные (интерференционные) помехи.
Воспользовавшись результатами § 1.2 и 1.3, получим, что вы-
полнение условия (1.80) эквивалентно выполнению равенства
00
Sm(i®— incog) /((i®—in®g)Tp(i® — in®g) =
n=—00
co
= Д / У СтрСкое~!“АЛ‘(®г = 2л/Д^; m, p = 1, 2, ..., M). (1.81)
k=-00
Межсимвольные и межканальные помехи на выходах прием-
ных фильтров отсутствуют, если Cmp=i6mp, См=8ьо, где 6ij —сим-
вол Кронекера. Подстановка этих значений в (1.81) дает [15]
ОО
V Sm(i ®—in®g) К(i ®—i п®g) Yp (i и—
—ina>g) = At8mp (tn,p=l,2.....M). (1-82)
Если в рассматриваемом диапазоне частот K(i®) =const=l, то
равенство (1.82) принимает вид
2 Sm(ira—in®g) 4^0®—i«®g) = \t8mp (m,p=i,2........M).
n=—00
Для максимизации соотношения сигнал/шум при наличии в ши-
60
рокополосном канале аддитивных помех фильтрации сигналов
должна быть согласованной, т. е. 5*m(ico) =4'm(i®) или
—iп®g)S*p (i a—ina>g) = Ai6mp (m, p= 1, 2,M). (1.83)
n=— CO
На рис 1.30a приведены примеры коэффициентов передачи пе-
редающих и приемных фильтров двухканальной системы с согла-
сованной фильтрацией (рис. 1.306). Для этой системы справедли-
Р-ис. 1.30. Примеры коэффициентов передачи форми-
рующих и приемных фильтров двужанальной системы
с согласованной фильтрацией (а) и структурная схе-
ма двухканалыной системы, (б)
вы соотношения: |Si (ico) |2 = V(со)—произвольная положительная
вещественная функция, удовлетворяющая условию
ОО
2 V(®—n<ag) = A/ (cog = 2л/At = сос);
П=—СО
<S2 (i со) |2 = A t— | (i со)]2 = A t—V (и);
1 Г<Р1 (И)+у
S1(i®) = /V>)ei'₽1(B); S2(i®) = /A/—У(и)е L
61
(i ®) s; (i со) =-s; (i co) S2 (i co) = -i I (i co) 11S2 (i со)|,
где iq>i (co) —произвольная нечетная функция; сое — граничная час-
тота полосы пропускания фильтров. По каждому из каналов си-
стемы передаются сигналы без межсимвольных и межканальных
помех со скоростью l/lA:/=cog/2n=coc/2jt. Суммарная скорость пере-
дачи равна icoc/л, т. е. совпадает со скоростью Найквиста.
Заслуживает внимания частный случай многоканальной систе-
мы с согласованными фильтрами [28], в которой коэффициенты
передачи фильтров выбраны, как указано на рис. 1.31, где жир-
ной кривой изображена амплитудно-частотная характеристика
m-го фильтра с шириной полосы пропускания 2Q (wm — средняя
Рис. 1.31. Расположение коэффициентов передачи мно-
гоканальной системы с согласованной фильтрацией, ин-
вариантной к линейным .искажениям группового ка-
нала
частота полосы пропускания фильтра). Все фильтры имеют оди-
наковые по ширине полосы пропускания и одинаковые по форме
амплитудно-частотные характеристики. Коэффициенты передачи
двух расположенных рядом фильтров [например, Sm(i(o) и
Зто+1 (ico) ] в диапазоне частот ат-—сот-н связаны между собой
теми же зависимостями, что и коэффициенты передачи фильтров
двухканальной системы, изображенной на рис. 1.30. Особенность
рассматриваемой системы в том, что, выбрав 2Q достаточно ма-
лым (т. е. выбрав число каналов достаточно большим), можно
сделать каждый из каналов системы малочувствительным к ли-
нейным искажениям в групповом канале с коэффициентом переда-
чи K(ico). Это объясняется тем, что в пределах полосы пропуска-
ния каждого из каналов (2Q) коэффициент передачи группового,
канала K(iw) изменяется незначительно. Такая многоканальная
система в целом малочувствительна (инвариантна) к линейным
искажениям группового канала. Естественно, аналогичный резуль-
тат получается и в многоканальных корреляционных системах (см.
рис. 1.27), если расположить соответствующим образом спектры
рабочих и опорных сигналов.
Отметим важную особенность рассматриваемых систем. Квад-
раты модулей спектральных плотностей сигналов на выходах пе-
редающих фильтров удовлетворяют равенству (1.83). Поэтому
62
(i ®)|2 d co = A t Q = const,
-00
т. e. энергии указанных сигналов одинаковы и не зависят от
Sm(i®) (»г=1, 2.... Л4). Следовательно, с точки зрения загрузки
группового канала безразличен выбор формы частотных характе-
ристик формирующих фильтров {естественно, в предположении,
что при выборе удовлетворяется равенство (1.83)]. Для корреля-
ционных систем (см. рис. 1.27) этот вывод несправедлив.
Выбор оптимального опорного сигнала в системах
с корреляционным приемом
Выражение (1.65) позволяет, задавшись опорным сигналом
V (0, определить рабочий сигнал S(t), исходя из условия отсутст-
вия интерференционных помех на выходе интегрального приемни-
ка (см. рис. 1.25). Однако это выражение не отвечает на вопрос,
как оптимальным образом выбрать опорный сигнал. Поэтому по-
дойдем к вопросу выбора опорного сигнала с позиций максимиза-
ции отношения полезного сигнала к энергии аддитивной помехи
на выходе корреляционного приемника.
При выполнении (1.65) отношение сигнал/шум равно
h = y^)lVK
где z/(0)—значение полезного сигнала; Pi— энергия аддитивной
помехи:
At/2 At/2
P1 = bi = J J K\t, 0)T(0)W(t)dQdt>0, (1.84)
—At/2—At/2
A t/2
b = J N(f)4(t)dt
—At/2
{черта над соответствующим выражением означает статистическое
усреднение по всем реализациям аддитивного шума N(i)]. Здесь
Д(^, 0)=Дф).У(0) — положительно определенное симметричное
ядро, имеющее смысл функции корреляции шума N(t).
Если выполняется (1.65), то у(0) = 1 = const и для максимиза-
ции /г необходимо минимизировать Рр Поскольку Pt зависит от
iW(/), найдем опорный сигнал из условия получения минимума
Pi. Чтобы эта задача имела смысл, минимум Pi необходимо искать
при условии, что энергия сигнала конечна:
At/2
J T2(Z)t# = const. (1.85)
—At/2
Итак, мы пришли к классической вариационной задаче минимиза*
ции квадратичного функционала (1.84) при ограничении (1.85).
Известно [3], что квадратичный функционал принимает стационар-
63
ные значения, если Чг(/) удовлетворяет однородному интеграль-
ному уравнению [32]
At/2
%¥(/)= J K(t, 0)T(0)d0. (1.86)
—At/2
где iA. •— множитель Лагранжа.
Для нахождения оптимального сигнала Т (0 необходимо вы*
числить собственные функции полученного уравнения и выбрать из
них ту, которая имеет наименьшее собственное значение А, т. е.
дает минимум Р\. При использовании данного подхода, однако,
нужно учитывать следующее. У некоторых квадратичных функцио-
налов собственные функции могут и не соответствовать минимуму
функционала, например, если ядро K(t, 0)—вырожденное, то
п.
К(А'0)=2 «т('0)₽т(О-В этом случае любая функция ЧД/),
т=1
ортогональная на отрезке [—Д^/2, Д//2] ко всем функциям ат(0.
либо ко всем функциям обращает квадратичный функцио-
нал (1.84) в ноль и в то же время может и не являться его собст-
венной функцией. Вырожденные ядра получаются, например, если
помеха N(t) — детерминированная. Другим примером может слу-
жить помеха N(t), имеющая случайный характер, но такая, что
можно выбрать сигнал ЧДД, ортогональный на отрезке
[—Д^/2, At/2] ко всем реализациям N(t). Для этих частных ситуа-
ций ядро функционала (1.84) является положительно полуопреде*
ленным. Подобные ситуации, в силу их тривиальности, в дальней-
шем не рассматриваются.
Решим рассмотренную задачу на основе локально-оптимального
синтеза, для чего будем считать, что
т
^^ = ^ahFh(t), (1.87)
k=i
где Fk(t) — ортонормальные на отрезке [—Д//2, Д^/2] базисные
функции. Такое представление опорного сигнала превращает
квадратичный функционал (1.84) в положительно определенную
квадратичную форму
т
Л= 2 АЫа*а*’ О-88)
г, k=l
где
____ дг/2
Ahi = At Ah, Ah = у Fk (0 N (t) dt (k = 1, 2, ..., tn).
—At/2
Ограничение (1.85) эквивалентно ограничению
«2 = const. (1.89)
A=1
64
Итак, мы пришли к задаче минимизации квадратичной формы
(1.88) при ограничении (1.89). Полное решение таких задач дает
спектральная теория квадратичных форм (приведение квадратич-
ных форм к главным осям). Не останавливаясь на особенностях
этой теории, которая хорошо разработана и изложена в матема-
тической литературе, например в [3, 30, 31], укажем общий по-
рядок нахождения оптимальных коэффициентов ah (k—\, 2, ..., /и),
минимизирующих Р{.
1. Определяем характеристические числа ж(й=1, 2, ..., ту
(спектр) и соответствующие им собственные векторы Lh(k~\r
2... т) матрицы А, составленной из элементов Ащ. Числа %k яв-
ляются корнями характеристического (векового) уравнения
|х£ — Л|=0, где Е— единичная матрица: |-|—определитель
разности матриц. Векторы Lk удовлетворяют уравнению ALk=
= XhLh (Lk — вектор-столбец).
2. Выбираем вектор Lk с минимальным характеристическим
числом хмин. Компоненты этого вектора и являются оптимальны-
ми искомыми коэффициентами ak (&=1, 2, .... т), минимизирующи-
ми максимум Рь причем величина этого минимизированного мак-
симума равна Хмин-
В общем случае квадратичная форма Рх имеет т собственных
взаимно ортогональных и нормированных по длине векторов^,
сводящих максимумы Рх к минимально возможным значениями
равным характеристическим числам. Наряду с оптимальным век-
тором (е характеристическим числом хМин) остальные собственные
векторы также представляют интерес, так как позволяют получить
набор взаимно ортогональных оптимальных опорных сигналов
Т(7), использование которых в многопозиционных системах при-
ведет к минимизации влияния аддитивных помех на передачу мно-
гопозиционных сигналов.
Несмотря на то что локально-оптимальный синтез не дает тех.
предельных оптимальных форм эталонных сигналов, которые полу-
чаются с использованием интегрального уравнения (1.86), пред-
ставление сигналов в виде полиномов (1.87) оправдывается сооб-
ражениями простоты их практической реализации и простоты вы-
числения этих сигналов. Указанные представления важны в осо-
бенности при синтезе адаптивных систем с интегральным приемом,,
а именно систем, в которых формы эталонных и рабочих сигналов
меняются при изменении характера искажений и шумов в канале',
связи. В таких системах сигналы должны описываться полиномами:
(1.87), а в генераторах этих сигналов необходимо предусмотреть-
возможность регулировки коэффициента ah (k=\, 2, ..., щ). Оче-
видно, что алгоритмами оптимальной адаптации (алгоритмами
подбора оптимальных аь) должны быть алгоритмы приведения Pt
к главным осям (в частности, динамическое программирование)..
В настоящее время разработаны различные вычислительные-
алгоритмы приведения квадратичных форм к главным осям [31]..
Однако согласно закону инерции квадратичных форм конечный:
результат, т. е. спектр формы, не зависит от способа его получения..
3—181 65.
Это подчеркивает оптимальность и единственность указанного
выше конечного результата определения искомых коэффициен-
тов ак-
Примеры синтеза опорных сигналов
Представим аддитивный шум N(t) на отрезке [—Д(/2, Д^/2] в
в виде канонического разложения [34]:
N(t)= 2
k=--ОО
(рассматриваются стационарные шумы с нулевым средним, что,
впрочем, не нарушает общности рассуждений). При этом ядро
уравнения (1.86) (корреляционная функция шума) имеет вид
Л (Л е)= 2 (1.90)
k=—00
тде clk-z^k-—дисперсия коэффициента Zk- Считаем, что разложе-
ние ортогональное, т. е. функции ^(/) ортонормальны на отрезке
([—Д(/2, At/2] (разложение Карунена — Лоэва) [34]
Д4/2
—Д4/2
С учетом (1.90) решением интегрального уравнения (1.86) яв-
ляется любая функция £ь(7) с характеристическим числом, равным
<г2ь. Поскольку в общем случае последовательность {<А, k=A,
2, ...} не имеет наименьшего числа, а только ограничена снизу
нулем, то в качестве оптимального сигнала Т(7) необходимо выб-
рать ту функцию lh(t) из базисных функций ортогонального кано-
нического разложения,, которой соответствует допустимое значение
gi2h- В итоге получим Pi=<j2&.
Базисные функции канонического ортогонального разложения
удовлетворяют интегральному уравнению [34]
At/2
J /С(^, e)gft(0)d0=Afegfe(O, (1.91)
—At/2
которое идентично уравнению (1.84). Это подчеркивает, что опти-
мальный эталонный сигнал Т (0 действительно должен совпадать
«сводной из базисных функций канонического ортогонального разло-
жения шума N(t). Полученные результаты указывают на связь
«синтеза оптимальных эталонных сигналов для систем с интеграль-
ным приемом с каноническими разложениями случайных процес-
сов. Приведем ряд примеров синтеза оптимальных опорных сиг-
налов.
Примд) 1. Пусть N (/) — белый шум с бесконечным спектром и средней
мощностью на единицу ширины полосы й/о(0^а>/2я^оо), т. е.
6.6
K(t, 6) = ^8(t-9),
где 6(1) — дельта-функция. Для такого процесса любая система ортонормаль-
ных функций Z,k(t) дает каноническое разложение, так как любые функции
удовлетворяют уравнению (1.91). Для всех этих функций o2h=^h=No/2. Таким
образом, в случае белого шума с бесконечным спектром равноценен выбор в-
качестве ^(t) любой функции из произвольной ортонормальной на отрезке
[—At/2, At/2] системы функций.
Пример 2. Шум N (1)— белый с ограниченным частотой сос спектром, так
что
No sin G)c (t — 6)
Л1(Л °) = ^Г
i-0
Рис. 1.32. Графики волновых сферои-
дальных функций
Для простоты считаем, что N0/2=‘l.
Оптимальный сигнал 't'(t) должен удовлетворять уравнению (1.86), кото-
рое принимает вид
sin coc (t — 6)
хти= —WB-
Jt/2 п('~0)
Решением этого уравнения являются, как известно, волновые сфероидаль-
ные функции, образующие для любых А1>0 и сос>0 счетную бесконечную по-
следовательность ортонормальных на отрезке [—At/2, At/2] функций То(7)„.
y¥i(t), Т2(7), ... с характеристическими числами Л0>Л1>Л2 Первая функция—
То(1) —описывает сигнал с максималь-
ной избирательностью по частоте, т. е.
сигнал, спектр которого максимально
сжат в заданном частотном диапазоне
[35, 36]. Однако оптимальный опорный
сигнал Т (1) описывается, в отличие от
сигнала с максимальной избирательно-
стью по частоте, не первой волновой сфе-
роидальной функцией, а функцией, кото-
рой соответствует по возможности малое
значение Ла. Величина Р4 при этом бу-
дет равна Ла. В канале без интерферен-
ционных помех величина 1/Ла равна от-
ношению сигнал/шум. Важным свойст-
вом волновых сфероидальных функций
является то, что значения Ла резко умень-
шаются с ростом k, если k>acAt/n.
Этим свойством и необходимо пользо-
ваться при выборе оптимальных опорных сигналов. На рис. 1.32 приведены гра-
фики функций Та (О (6=0, 1, 2, 3) для со СЛ1/2=4 (Ло = О,995; Л1=0,912; Л2=0,519;
Л3=0,110).
Отметим одну особенность волновых сфероидальных функций.
Известно, что
J |Tft(co) l2d®
J |Tfe(«)l2d®
где Ta (co) —спектр Та (/). Это свойство показывает, что для больших k спект-
ры функций Та (0 сосредоточены вне диапазона [—шс, юс] и выбирать Ла
сколь угодно малой величины нельзя.
3* 6#
Пример 3. Пусть N(t) — белый шум с полосным спектром.
Для этого случая получим
Д4/2
f [sin(°2 (^ — 9) sin сог (t — 0)
2л J [ t — 6 f-0
—A«/2
¥ (0)d0,
где Wo — плотность шума; Wi и в2 — нижняя и верхняя граничные частоты
спектральной плотности. Из этого уравнения, положив ct>i = O, приходим как
частный случай к примеру 2.
Пример 4. Шум W(Z) — стационарный в широком смысле случайный про-
цесс с дискретным гармоническим спектром
п
N (0 = 2 cos z sin 0.
k=i
где ^2k = r\2k = <yk/2, а средние случайных величин Zu и г|а и всех их взаимных
корреляций равны нулю; a>k—k(i>i. — заданные частоты.
Шум N(t) является наложением гармонических колебаний со случайными
/~ т- 2 2
амплитудами I/ дь + 'Пь и фазами arctg — .
г ёй
Корреляционная функция шума имеет вид
п „2
SO/(
— cos<ofttf-0). (1.92)
k=i
2л
Считаем, что \t=q----- (q — любое целое число).
С01
Поскольку в данном примере К И, 9) — вырожденное ядро уравнения
Я(1.86), то любая функция 4r('Z)=cos со*./, где k — n+m+\ — .произвольное це-
лое положительное число, обращает функционал (1.84) в нуль. Однако допу-
стим, что «запрещен» выбор в качестве опорных сигналов 'V(t) отрезков гар-
монических функций с частотами, большими а>п- Решая интегральное уравнение
<(1.87), получим, что его собственными функциями являются отрезки косину-
соид Ч^Д!) =icos((Bfti+p) с характеристическими числами %ь=о2й.Л//4 (й=1,
2, .... п) (фаза <р — произвольная). Поэтому оптимальным будет сигнал, пред-
ставляющий собой отрезок косинусоиды с наименьшей дисперсией о2*. При этом
Результаты рассмотренного примера можно существенно обобщить. Пусть
корреляционная функция процесса N(t) периодическая с периодом Д/.
Разложив эту корреляционную функцию в ряд Фурье на отрезке [—Д//2,
At/2], приходим к выражению, аналогичному (1.92), в котором п=оо, а о2ь/2
имеют смысл коэффициентов Фурье. Поэтому для таких процессов оптималь-
ными опорными сигналами будут отрезки косинусоид, которым соответствуют
наименьшие значения коэффициентов Фурье.
Пример 5. Известно [33], что коэффициенты Фурье
1 %/2 /2л 2л \
йь = -— I N (t) ( cos k -— t -4- sin k -— t dt
A t J ' \ А г1 Д t У
«стационарного гауссовского процесса W(7) становятся статистически независи-
мыми, когда Д1-»-оо. Для процесса с .нулевым средним случайная величина Zk
имеет нулевое среднее, а ее дисперсия о4 удовлетворяет соотношению
limAf o2k = W(f),
Д t —>00
k -*• оо
(38
где W(f) — энергетический спектр процесса; — — частота, Гц.
А£->оо Д/
k—>00
Таким образом, ряд Фурье (в обозначениях [33])
00
S! 2л 2л \
cos — t sin — / I [ — Д Z/2 Z Д t/2\
--00
является каноническим разложением процесса N(t) [34]. Воспользовавшись по-,
лученными выше результатами, можно сделать вывод, что для больших Д1 вы-
бор отрезков гармонических функций в качестве опорных сигналов 'V(t) бли-
зок к оптимальному, если частоты этих функций совпадают с частотами, на ко-
торых энергетический спектр шума имеет наименьшее значение.
Выбор опорного сигнала в виде части рабочего сигнала
Значение полезного сигнала на выходе корреляционного при-
емника (см. рис. 1.25) определяется выражением
At/2
а = у (0) = С S (/) ¥ (/) dt,
-At/2
где At— время интегрирования. Известно [37], как максимум это-,
го выражения достигается при W (t) =S(t). Как оговорено в § 1.4,
опорный сигнал ¥(0 —конечной длительности At. Поэтому в слу-
чае высокоскоростной передачи опорный сигнал может быть ра-
вен лишь части рабочего сигнала:
¥(() = Р^’ I—Л^2 < (1.93)
[О, (/>А//2, /<—А//2).
С другой стороны, для устранения межсимвольных помех спектры
рабочего и опорного сигналов должны быть связаны между собой
равенством (1.65). Определим, каким требованиям должен удов-
летворять спектр рабочего сигнала, так, чтобы при выборе ¥(7)
согласно (1.93) выполнялось равенство (1.65). В этом случае ос-
новная часть рабочего сигнала, расположенная на отрезке [—AtJ2,
At/2], ортогональна ко всем остальным частям рабочего сигнала,
расположенным на отрезках
[(2k~ 1)А//2, (2£+l)AZ/2] (£=/=0, k = ±1; ±2, ...).
При выполнении (1.93) имеем
Д t
" sin (со — v) ——
¥(ico) = fS(iv)2--------------dv,
J co —V
— oo
где S(iv) —спектр S(t). Подстановка этого спектра в (1.65) дает
00 sin (со — v) —
F (i со) = S (i со) f.S(iv)2-------— dv, (1.94)
J СО — V
69
где ^(ico) —произвольная функция, удовлетворяющая (1.64). По-
лученное выражение позволяет определить спектр рабочего сигна-
ла, обладающего вышеуказанными свойствами.
Недостаток изложенного приема в том, что, выбрав спектр ра-
бочего сигнала S(t) согласно (1.94) и устранив тем самым интер-
ференционные помехи, мы не будем гарантированы в том, что при
этом достигнут максимум отношения сигнал/шум (для аддитивных
шумов), поскольку для достижения максимума указанного отно-
шения необходимо, чтобы рабочий сигнал минимизировал квадра-
тичный функционал (1.84) при ограничении (1.85) [с заменой
Д'(7) на 3(7)]. Последнее требование с учетом (1.94) в общем
случае не всегда выполняется.
Синтез спектров сигналов, ортогональных с временным сдвигом
Под сигналами, ортогональными с временным сдвигом, подразу-
мевается класс сигналов f(t— kAt) (k — 0, ±1, ±2, ...) со свойст-
вом
со
J f(f)f(t—k At) dt =
--00
Co = const U = 0);
0 (k=?=0, k=±l, ±2
(1.95)
где At — заданный интервал. Например, известно, что этим свой*
1. SIH С0С (t kAt) ГПЛТ
ством обладают функции вида --------—----—так как 138]
COq (t — k Д
[— (£ = 0);
Г sin <вс (t — kAf) sin ис t _ ®c
_J act ~ 0 (A = 0, A=±l, ±2,...),
(Д t = n/coc).
Укажем простой способ синтеза сигналов, ортогональных с
временным сдвигом, основанный на использовании сигналов со
свойством отсчетности, рассмотренных в настоящей главе.
Обозначим через В(т) корреляционную функцию:
В(т)= ]f(t)f(t~r)dt.
—со
Спектр /С(ю) корреляционной функции Д(т) равен: 7<(®) =
= | /7(1со) |2, где F(ia>)—спектр f(t).
Для выполнения (1.95) необходимо, чтобы В (т) удовлетворяла
первому критерию Найквиста (1.1)
В(«ДО = (1 ("=0);
(0 («=^0; п = ±1, ±2, ...),
что возможно, если /((to) удовлетворяет равенству (1.4)
К(® —na>g) = At
(®g = 2 л/Д/).
(1.96)
70
Таким образом, функции вида f(f—kM) (\k=0, ±1, ±2, ...)
образуют класс ортогональных функций, если квадрат модуля
спектра функции f(t) удовлетворяет (1.96).
Из изложенного вытекает, что
F (i со) = е1 ф (и) ,
где ср (со) —произвольная нечетная функция; К(ш) —произвольная
положительная четная функция, удовлетворяющая (1.96).
СПИСОК ЛИТЕРАТУРЫ
1. Турбович И. Т. Метод близких систем и его применение для создания ин-
женерных методов расчета линейных и нелинейных радиотехнических си-
стем. М.: АН СССР, 1961.
2. Каналы передачи данных. М.: Связь, 1970.
3. Курант Р., Гильберт Д. Методы математической физики. Т. I, М.—Л.; Гос-
издат технико-теоретической литературы, 1951.
4. Цыпкин Я. 3. Теория линейных импульсных систем. М.: Госиздат физико-
математической литературы, 1963.
5. Голдман С. Теория информации. М.: И.-Л., 1957.
'6. Кисель В. А. О требованиях к характеристикам фильтра, формирующего
однополосный сигнал. — Электросвязь. 1968, № 12, с. 76—77.
7. Кисель В. А. О коррекции частотных характеристик по импульсной реак-
ции. — В кн.: Труды конференции, посвященной 70-летию изобретения ра-
дио. Киев: Техшка, 1966, с. 5—12.
8. Кисель В. А. Выбор оптимальных характеристик фильтров для систем ди-
скретной связи. — В кн.: Методы математического моделирования и тео-
рия электрических цепей. Киев: Институт кибернетики АН УССР, 1967,
вып. 4, с. 51—63.
9. Бронштейн Н. Н., Семендяев К. А. Справочник по математике. М.: Госиз-
дат технико-теоретической литературы, 1957.
10. Кисель В. А. Об использовании преобразования Гильберта при передаче
дискретных сигналов через полосовые каналы. — В кн.: Отбор и передача
информации. Киев: Паукова думка, АН УССР, 1969, вып. 19, с. 58—62.
11. Кисель В. А. О передаче импульсных сигналов через полосовые системы. —
Радиотехника. 1972, т. 27, № 2, с. 36—45.
12. Кисель В. А. Дискретный синтез корректирующих цепей: Автореф. дис. на
соиск. учен, степени канд. техн. наук. Одесса, 1967.
13. Nyquist Н. Certain Topics in Telegraph Transmission Theory.'—«А1ЕЕ,
Trans.», 1928, April, v. 47, p. 617—644.
14. Gibby R. A., Smith J. W. Some Extention of Nyquist’s Telegraph Transmission
Theory.—«BSTJ», 1965, September, v. 44, p. 1487—1510.
15. Smith J. W. A Unified View on Synchronous Data Transmission System De-
sign.—«BSTJ», 1968, March, v. 47, p. 273—300.
16. Croisier A., Pierret J.-M.D. The Digital Echo Madulation.—«IEEE, Trans.»,
1970, August, v. COM-18, N 4, p. 367—376.
17. Sunde E. D. Theoretical Fundamentals of Pulse Transmission., Part I.—
«BSTJ», 1954, May, v. 33, N 3, p. 721—788.
18. Bennet W. R., Feldman C. R. H. Prevention of Interpulse Interference in
Pulse Multiplex Transmission. U. S. Patent N 2719189.
19. Bennet W. R., Davey J. R. Data Transmission. New York, Me. Grow-Hill
Book Co., 1965.
20. Schnidman D. A. A Generalized Nyquist Criterion and an Optimum Linear
Receiver for a Pulse Modulation System.—«BSTJ», 1967, November, v. 46,
N 9, p. 2163—2177.
21. Schiifiler W. Der Echoentzerrer als Model eines Ubertragungkanals.—«NTZ»,
1963, B. 16, Heft 3, S. 155—163.
71
22. Kettel E. Ein automatischer Optimisator fur den Abgleich des Impulsentzer-
rers in einer Datenubertragung.— «AEU», 1964, May, B. 18, Heft 5, S. 271—
278.
23. Xocgho Тосно, Хината Такаси. Синтез сигналов, с ограниченной полосой ча-
стот для передачи без межсимвольных искажений. Обобщение отсчетной
функции. —• Денси цусин гаккай ромбунси: 1971, № 5, с. 283—290.
24. Кисель В. А. Оптимальный фильтр Найквиста для систем с натуральной
дискретизацией. — Электросвязь. 1972, № 8, с. 62—67.
25. Френке Л. Теория сигналов. М.: Советское радио, 1974.
26. Риккерт де Ку, Ван-дер-Вюрф. О некоторых расширениях теории передачи
телеграфных сигналов Найквиста. — ТИИЭР. 1969, № 3, с. 144—145.
27. Пасупатхи. Третий критерий Найквиста. — ТИИЭР. 1974, № 7, с. 204—205.
28. Chang R. W. Synthesis of Band-Limited Orthogonal Signals for Multichan-
nel Data Transmission.—«BSTJ», 1966, v. XIV, N 10, p. 1775—1796.
29. Варакин Л. E. Теория сложных сигналов. М: Советское радио, 1970.
30. Гантмахер Ф. Р. Теория матриц. М.: Наука, 1967.
31. Березин И. С., Жидков Н. П. Методы вычислений. Т. I. М.: Наука, 1966.
32. Кисель В. А. Синтез оптимальных сигналов для систем с интегральным
приемом. — Радиотехника. 1975, № 3, с. 6—12.
33. Фано Р. Передача информации. Статистическая теория связи. М.: Мир,
1965.
34. Мидлтон Д. Введение в статистическую теорию связи. Т. I. М.: Советское
радио, 1961.
35. Кисель В. Д. Синтез радиосигналов с максимумом энергии на заданном от-
резке времени или в заданной полосе частот. — Радиотехника и электрони-
ка. 1971, № 12, с. 2243—2253.
36. Функции с двойной ортогональностью в радиоэлектронике и оптике. США.
1961—1968 гг. Перевод и научная обработка М. К. Размахнина и
В. П. Яковлева. М.: Советское радио, 1971.
37. Зюко А. Г., Коробов Ю. Ф. Теория передачи сигналов. М.: Связь, 1972.
38. Хургин Я. И., Яковлев В. П. Финитные функции в физике и технике. М.:
Наука, 1971.
39. Lucky R. W., Saiz J., Weldon E. J. Principles of Data Communication. New
York, Me. Graw-Hill Book Co., 1968, 433 p.
40. Тамм Ю. А., Садовский В. Б. Спектральные методы оценки качества пере-
дачи цифровых сигналов. М.: Связь, 1974.
41. Кисель В. А., Зюко В. А. Синтез рабочих сигналов, максимизирующих от-
ношение сигнал/шум и минимизирующих мощность интерференционных по-
мех при корреляционном приеме. — В кн.: Труды учебных институтов свя-
зи. Л.: 1976, вып. 78, с. 21—28.
Глава 2
ОБЩАЯ ТЕОРИЯ ГАРМОНИЧЕСКИХ
КОРРЕКТОРОВ
2.1. Основные положения
Одним из главных путей повышения качества работы систем
связи является использование регулируемой коррекции, которая
обеспечивает с высокой степенью точности оперативную («руч*
72
ную, автоматическую, либо адаптивную) компенсацию произволь-
ных искажений частотных характеристик каналов и формы пере-
даваемых сигналов (в частности, совокупности некоторых пара*
метров каналов или сигналов) на фоне аддитивных помех. На-
пример, именно с помощью адаптивной коррекции в настоящее
время достигается наибольшая скорость передачи дискретной ин-
формации (свыше 9000 бит/с) в стандартном канале тональной
частоты, поскольку регулируемая коррекция наиболее просто ре-
ализует оптимальные характеристики, о которых речь шла в
гл. 1.
Рис. 2.1. Структурные схемы
полигамных корректоров па-
раллельного (а) и последова-
тельного (б) типов; структур-
ная схема гармонического кор-
ректора без обратной свя-
зи (в)
Коэффициент передачи адаптивного корректора произвольной
полиномной структуры (рис. 2.1а, б) описывается выражением
п
#(i®) = ^a^(i®) (cosF),
о
где {qofe(ico)} (k = 0, 1, 2, ..., и)—система функций линейнонеза-
висимых и имеющих тенденцию к полноте на заданном частотном
множестве F; ак—-регулируемые параметры, изменение которых
позволяет получить требуемую частотную зависимость K(ia>).
k
Для рис. 2.16 фк (i®) = П (1и). Соответствующий выбор
v= 1
{фь (ico)} дает тригонометрические корректоры с неравномерным и
равномерным (гармоническим) расположением отводов по длине
линии задержки, а также корректоры, коэффициент передачи ко-
торых описывается полиномами Чебышева (первого и второго
73
рода) [16. 20] и Лягерра [25]. Наибольшее распространение по-
лучили гармонические корректоры и синтезаторы [5—15, 19, 20,
22, 24—33, 35—37] (рис. 2.1е), у которых
т1
/((ico) = е~' “П1 лг afee-i А*,
где At — запаздывание сигнала между ближайшими отводами ли-
нии. Достоинство гармонических корректоров в том, что с их по-
мощью легко осуществить коррекцию как частотных, так и непо-
средственно временных (импульсных и переходных) характери-
стик линейных объектов произвольного вида.
В настоящей главе изложены вопросы общей теории гар-
монических корректоров, охватывающие, главным образом, методы
расчета корректоров по временным и частотным характеристикам
каналов связи.
2.2. Дискретизация сигналов с ограниченным
спектром
Оптимальное представление сигнала с ограниченным
спектром усеченным рядом Котельникова
Гармонические (дискретные) корректоры с обратной или бе»
обратной связи рассчитываются и настраиваются по мгновенным
значениям gi(t0+'kAt) (А=0, ±1, ±2, ...) (рис. 2.2) импульсной
реакции каналов связи gi(t), которая в простейшем случае явля-
Рис. 2.2. Импульсная реакция канала gi(t) и ее
решетчатая функция gi(t0+kAt)
ется низкочастотным сигналом с практически ограниченным спект-
ром. Поэтому ниже рассмотрен ряд вопросов теории дискретиза-
ции сигнала с ограниченным спектром, исходя из условия получе-
ния требуемого эффекта, коррекции искажений частотно-ограни-
ченных каналов по их временным (импульсным) характеристикам.
74
Пусть g\(t) —функция времени со спектром G{(i®), ограни*
ченным частотой
|Gi(ito)|^0 (|со|>сос).
Разложим g\(t) в ряд Котельникова [21]
00
£i(0~J]£i(*o+£A/)
-00
sin сос [/ — (f0 4- # А /)]*)
СОс [Z — (Zq 4~ k А /)]
(2.1)
при выполнении условий:
1) спектральная плотность ряда (2.1) равна спектральной
плотности функции gi(/) всюду на отрезке [—мс, сос], включая
граничные точки ±toc, следовательно, знак соответствия ~ мож-
но заменить знаком равенства;
2) разложение должно быть осуществлено так, чтобы коэффи-
циенты gi(t0+<kAt) убывали с максимально возможной скоростью,
т. е. ряд сходился с максимальной скоростью и при k конечном
(например, аппроксимировал gi(O на 1[—<мс, сос] на-
илучшим образом.
Невыполнение указанных условий ведет к неоправданному ус-
ложнению процесса коррекции из-за необходимости учитывать
большое число членов ряда (2.1) и к уменьшению точности кор-
рекции, в особенности на краях диапазона.
Разложим G[ (1и) в ряд Фурье на отрезке [—а>с, toe]
GJico) — VGfeeiffiW (Д/ = л/сос),
-CO
где G_fe=A/g'i(^о'+^ЛО (&=0, ±1, ±2, ...). Обозначим:
G(ito)= е-110'"^^);
G1(ito) = ^Gfee+ifflAAt
(2.2)
(2.3)
Известно, что ряд Фурье сходится всюду в промежутке |<о| <?сос,
если функция непрерывна в указанном промежутке:
G1(ito) = G1(i®) (|со|<сос). (2.4)
Рассмотрим поведение ряда (2.2) в точке скачка функции
G] (ico) для следующих случаев (/0 не учитывается: to=O').
1. IG^ico)! имеет разрыв в точке <о&; arg G[ (ico)—непрерыв*
ная функция (||со|<1сос).
Ряд Фурье такой функции сходится в точке со&. к значениям мо-
дуля и аргумента
G1 (i toft)| = 0,5 dGJi (oft + 0)| H-IG^ifflfe—0)|}, arg G± (i coft) = arg G (ico).
*) Знак соответствия ~ показывает, что спектральные плотности правой и
левой частей равны при всех со, за исключением некоторых точек.
75
|, arg Gx (itofe) =21_%
cos ——21
2
2. Аргумент спектральной плоскости Gi (ico) имеет разрыв в
точке сол, a | Gx (ico) | —непрерывная функция (|ко| <ис).
Этот случай представляет наибольший интерес, ибо раскрывает
одну из особенностей сходимости ряда Фурье комплексной функ-
ции, которая заключается в том, что ряд Фурье комплексной функ-
ции с разрывом аргумента сходится к значениям
|GX (i coft)| = Gx (i coft) cos -<?1~фа
где icpx = arg ОДгад+О), <p2 = arg Gj (icofe—0).
Разрыв фазы приводит к изменению амплитуды спектральной
составляющей сол. Погрешность амплитуды зависит от величины
скачка фазы <pi — ф2, и при чрх—i<p2=nn (n=l, 3, 5, ...) | (icoft) | =0,.
т. е. составляющей сол нет в спектре G(ico). Для четных п (п=0, 2,
4, ...) | Gi (icoft) | = | Gx (icos) | и искажения амплитуды составляю-
щей (ofe отсутствуют.
3. Модуль и аргумент Gx(ico) имеют разрывы в точке сол. Ряд
Фурье такой функции сходится в точке сщ к значениям
|ёх (i <nft)| = -у {|GX (i cofe + 0)] + |GX (i wft-0)|}-
arg Gl(i Ю;г) = Д1±ч£.
4. Пусть G^ico) непрерывна на отрезке [—ис, toe]• При этом
равенство (2.4) выполняется для всех значений | со | <сос, за ис-
ключением граничных точек ±1®с, в которых ряд Фурье сходится
по модулю и аргументу к значениям | Gi (i<oc) | =] G) (ia>e) cos <pe | >
arg G[ (icoc) —0, где крс=arg Gx (icoc). Таким образом, только при вы-»
полнении граничного условия
Фе = arg Gx (i сос) = 0 (2.5)
и при отсутствии в Gx (ico) рассмотренных разрывов справедливо
равенство Gi (ico) = Gi (ico) (|co | ^сос) и знак ~ заменяется в (2.2)
знаком равенства.
Любую функцию Gj (ico), непрерывную на отрезке [—toe, ®с],
можно преобразовать так, чтобы она удовлетворяла (2.5), умно-
жив ее на е1и/°, где t0=—фс/юс. Ряд Фурье полученной функции
Gx(ito) = Gx(ito)ez“‘“ = yGfteiMAAf (2.6)
— оо
сходится всюду на отрезке [—icoc, сос] - Определив Gi (ico) через-
Gi (ico) (2.3) и взяв обратное преобразование Фурье от обеих
частей полученного выражения, приходим к ряду Котельникова-
(2.1), который точно представляет исходную функцию gift).
Покажем теперь, что при выборе to согласно (2.6) значения ре-
шетчатой функции gi (t0+kAt) при росте k убывают с максималь-
но возможной скоростью, следовательно, ряд (2.1) сходится с
максимально возможной скоростью и при заданных значениях
76
k(—n^k^m) частная сумма ряда наилучшим образом аппрок-
симирует g\(t).
При разложении Gi (ico) в ряд Фурье ее действительная часть
А (со) = | G1 (ico) | cos<p(co) представляется рядом по косинусам, а
мнимая часть В (со) — | G] (йсо) | sin <р(со)—рядом по синусам:
Л (со) = V Ak cos k A t co; В (co) = V Bh sin k A t co
о i
—Gk + G_*, Bh—Gk—G~k).
Функции A (ico) и -S(co) непрерывны на отрезке |,co| Осос и удо-
влетворяют граничным условиям: Л(сос) =Л(—соо), В (<сос) —
=В(—сое) =0. Следовательно, коэффициенты Ak убывают не менее
чем со скоростью \Jk2, а коэффициенты Bk — со скоростью»
1Д3[12]. Коэффициенты Gk убывают со скоростью не менее 1/&2,
ибо Gfe= (Лд + Вй)/2 и Gft=(Aft—Bfe)/2. Граничное условие для
В (со) выполняется только при выборе t0 согласно (2.6), в про-
тивном случае В(®С)=/=В(—icoc) =И=0, следовательно, коэффициенты
Bk убывают со скоростью IJk и скорость убывания Gfe уменьшает-
ся до 1/k, т. е. в k раз. В силу соотношения (2.2) рассуждения О’
скорости убывания коэффициентов Gk справедливы и для значений
решетчатой функции gx(t0+kAt). Изложенные соображения пока-
зывают, что правильный выбор параметра <t0 увеличивает скорость
убывания значений g\ (t0+kAt) не менее чем в k раз, поэтому ука-
занное свойство следует учитывать при осуществлении процесса
выборки функций с ограниченным спектром.
Отметим одну особенность рассмотренного оптимального стро-
бирования. Поскольку коэффициенты ряда (2.1) g\(t0+kAt) убы-
вают на бесконечности со скоростью 1./&2, а огибающие функций
sin (Oe(f-fo-m A/) /т = о 1 2 )
<ос (t — t0 — m\t)
1
уб
ывают со скоростью —
(t=kAf), то при t достаточно большом
(/->оо)ряд (2.1) асимптотически описывается функцией
sin ®с (t —/0)
®с (7 — /0)
(D— некоторая постоянная), нули которой расположены равно-
мерно в точках Zo+'feA^- Поэтому можно сказать, что оптимальное
стробирование подразумевает такой выбор tQ, при котором строби-
рование осуществляется в нулях функции gi (t) при t достаточно
большом.
Очевидно, если g\(t) -—четная функция относительно некоторо-
го момента времени t'-, то необходимо выбрать t0=t', что обеспечи-
вает оптимальное стробирование.
Выбор основного отсчетного импульса
Расчет и настройка гармонических корректоров осуществляют-
ся по дискретной реакции g^to + kAt) без учета /0, т. е. по спект-
77
.ральной плотности Gt (ico) функции gi (t+'t0) (запаздывание to не
корректируется). Гармонический корректор компенсирует искаже-
ния частотной характеристики Cr^iico) во всем диапазоне частот
О—Юс, включая точку <вс только в том случае, если G (ico) удов-
летворяет граничным условиям по фазе (2.5).
В связи с этим возникает вопрос о правильной нумерации дис-
кретной импульсной реакции gJ/o + M/), который можно сформу*
лировать в следующей форме. Пусть задана конечная последова-
тельность чисел ай.(^ = 0, 1, 2, ..., п), о которых известно, что они
являются мгновенными значениями функции gift). Необходимо
пронумеровать эту последовательность, т. е. определить, какое из
значений ah равно gi(/0), giGo+AZ), gi(A)—ДО и т. д. так, чтобы
при этом выполнялось требование (2.5). В основном задача сво-
дится к нахождению значения gi(to), которое называется основным
отсчетным значением (или основным отсчетным импульсом).
Анализируя спектр дискретной реакции gi(t0+k&t), можно
убедиться, что для выполнения (2.5) необходимо в качестве основ-
ного отсчетного значения выбрать (fy + lJ-S импульс, где «1 — чис*
п
ло корней алгебраического полинома Рх (х) =~ZakXh, по модулю
k=0
меньших единицы, (т. е. расположенных в комплексной плоскости
z внутри окружности единичного радиуса) |[7, 8, 21, 31]. Считаем,
что полином Pi(x) не содержит корней, расположенных на окруж-
ности единичного радиуса, что соответствует случаю | Gx (iia>) |
(|со|^сос) (см. далее).
Заметим, что основной отсчетный импульс, выбранный соглас-
но сформулированному правилу, не всегда имеет максимальное
значение. Максимальный из импульсов является отсчетным
только при сравнительно небольших неравномерностях амплитуд-
но-частотных и фазо-частотных характеристик сигнала gift). На-
пример, максимальное значение дискретного сигнала tZ-^1,82;
«о = 2,7; ах = 1 равно 2,7, в то время как за отсчетный следует при-
нять импульс а_1=1,82, так как все корни полинома Р](х) =
= 1,82 + 2,7х+х2 расположены вне круга единичного радиуса. Сле-
довательно, отклик необходимо перенумеровать, положив а0=1,82;
«1=2,7; а2='1;
Легко показать, что если —n/2<argGi (ico) <л/2, то
К1>£И+М- (2.7)
1
Это неравенство может быть использовано для определения ос-
новного отсчетного импульа а0 в случае небольших неравномерно-
стей фазовой характеристики сигнала gift). Можно также пользе-
00
ваться неравенством | а0| > |afi] (/гФ 0), при выполнении кото-
рого всегда выполняется (2.7).
78
На рис. 2.3а, в, д, ж даны примеры осциллограмм импульсных реакций
канала ЙЧ, резко ограниченного по полосе передаваемых частот. Яркие точки
соответствуют интервалам Котельникова, в которых осуществляется выборка
дискретных значений gi(kht). Осциллограммы отличаются только положением,
моментов выборки.
На рис. 2.36, г, е, з соответственно изображены дискретные реакции, полу-
чаемые при различных положениях моментов выборки. Оптимальное положение.'
моментов выборки дано на рис. 2.3<5. При t достаточно большом (практически.
д4
-3-2-1
-4* 11
I 2 । 4 8 8 10 12 14 16 18
07
Мкм) +
/У 13 15 17
'-5-11 J-7О 12 4 56789/0*/2,»’/б’
е)
3
«о
0)
^(к^) ,
-4-3-2-7 .It.,. t . , , /
’ '0123450189 11 13 15 77
Рис. 2.3. Осциллограммы импульсных реакций низкочастотных ка-
налов
при 7>(бЧ-7),Д7) моменты выборки попадают в нули импульсной .реакции g\(t).
Как видно из сравнения осциллограмм, при неоптимальном положении момен-
тов выборки (см. рис. 2.3а, в) требуется в 2—3 раза большее число выборок
для описания импульсной реакции.
В ряде случаев выбор моментов дискретизации производится таким обра-
зом, чтобы получаемое при этом основное отсчетное значение ао совпадало с
максимумом реакции. Сравнение рис. 2.3а и д показывает, что такой выбор не
является оптимальным. На рис. 2.3йс дана осциллограмма сигнала, неравномер-
ность фазо-частотного спектра которого не превышает ±п/2. Воспользовавшись
79
неравенством (2.7), нетрудно найти основное отсчетное значение а,о=1,3 (см.
рис. 2.3з), которое, однако, не совпадает с максимальным значением, рав-
ным 2,1.
Критерий корректируемое™ канала по импульсной реакции
К корректирующему устройству предъявляется требование:
обеспечить коэффициент передачи K(ico), «обратный» коэффициен-
ту передачи канала Ki (ico) в заданном диапазоне частот (в частно-
сти, в диапазоне 0—юс) с точностью до. заданных величин модуля
.и запаздывания
К (i со) = -----е“1 “ т (°—®с);
^l(ico) (Л = const, т = const).
Канал не корректируем в строгом смысле, если его коэффици-
ент передачи обращается в нуль на какой-либо частоте диапазо-
на 0—©с, поскольку в этом случае корректор должен обеспечить
бесконечно большое усиление. Поэтому требование | (ко) | =#0
является необходимым и достаточным условием корректируемое™
канала. При невыполнении данного требования речь может идти
только о приближенной коррекции.
Перейдем от частотного критерия корректируемости канала к
критерию временному, т. е. исходя из решетчатой функции
g\(k&t)=ah (& = 0, ±1, ±2) импульсной реакции канала опреде-
лении, не обращается ли его коэффициент передачи в нуль
(| © | =£7©с, Л/=л/©с, сое — граничная частота канала).
Считаем, что решетчатая функция (h&t) конечна, а^=
=gi(i&At)=O (&>m, k<g—п). Вычислив спектр этой функции,
нетрудно видеть, что он обращается в нуль, если хотя бы для
т
одного из корней Ал уравнения хп у akxk =0 имеет место равен-
ство |iXfe| =1 [7].
Таким образом, временной критерий корректируемости канала
сформулируем в следующем виде [7, 31]: канал, дискретный отклик
которого конечен, является корректируемым в том случае, если
алгебраический полином, составленный из отсчетных значений им-
пульсной реакции, не имеет корней, по модулю равных 1, т. е. рас-
положенных в комплексной плоскости на окружности единичного
радиуса.
Ряд алгебраических приемов по определению наличия корней
на окружности единичного радиуса дан в '[7].
2.3. Аналитические методы расчета гармонических
корректоров без обратной связи
Частотная область
1В частотной области расчет схем корректоров проводится исходя из извест-
ного коэффициента передачи корректируемого объекта Ki (ico) = |/G (ico) |e1(₽i<“>
.80
(coi^ | co I ^coa). Гармонический корректор в пределе представляет собой беско-
нечную линию задержки с коэффициентом передачи (без учета вносимого кор-
ректором запаздывания)
СО
K(ico) = £ (2.8)
— оо
Задача корректора состоит в компенсации с заданной степенью точности не-
равномерности |Л1(1ю) | и нелинейности срр(с£>), что возможно при
д е—1<Р1 (со)
К (i W) = । К1 (i ю), е~1ИТ (®х < ] со | < со2),
где А и т — некоторые постоянные.
Если coi = —иг, о)2 = о)с (ico) |—четная, a cpi (со)—нечетная функции,
то [12]
। рС д gi [—Ф1 (со)—сот'+со^Д/]
= J |Kx(i <о)|
—ч.
(2.9)
где А/ = л/сОс; т'=<Р1(й)с)/(0е.
Такой выбор х' эквивалентен вычитанию из cpi(co) линейной фазы сот', что
устраняет разрыв результирующей фазовой характеристики канала и корректо-
ра в точках ±0)с. Поскольку у реальных каналов |Ki(ico):| и <pi (со) непрерыв-
ны на [—о)с, сое], указанное вычитание увеличивает скорость убывания коэффи-
циентов аь в k раз.
Физически реализуемые корректоры содержат конечное число ад, что при-
водит к необходимости рассматривать усеченные ряды
—
Это обусловливает погрешность г](ico)п1т1 = К(1<х>)—которая в силу
экстремальных свойств коэффициентов Фурье является минимальной в смысле
“с
квадратичного критерия i)i= j Н(>ш)п1Ш, )l*(io))nimi dci)=min. Запаздывание Т,
-“с
вносимое каналом и корректором, равно П1Д£+т'.
Качество работы корректора оценивается величиной погрешности корректи-
рования s(io>) =Ае~1ит—7<i(ico)K(i(o)n1m1 f|o)[^coc), где Ae-1“t и
K(io))n,m1 Ki(ico) — комплексные коэффициенты передачи идеального канала и
системы «канал4-корректор», либо величиной интегральной погрешности
“с
t]= j р (со) g (i <о) g*(i со) dco, (2.10)
-“с
где р(со) — неотрицательная весовая функция. Поскольку т| (ico) nimt Ki (ico) =
= B(ia), нетрудно видеть, что расчет согласно (2.9) дает минимальную величи-
ну г] только в каналах, для которых | ЛА (ico) |2р(со) =const (|со| ^сос)- Косинус-
ный корректор, компенсирующий неравномерность |Ki (ico) |, описывается коэф-
п,
фициентом передачи K(ico)mi=a04-2 aftcos^coAZ (ni=mi), где
k=\
1
«ft = ——
2сис
|(i co)Г1 e-ico^fd®.
81
Изложенный метод расчета отличается простотой, однако для каналов с
произвольными искажениями он не обеспечивает получения минимума величи-
ны т]. Когда этот минимум необходим, значения а;, определяются из уравнений
Во Bi В2 . , -ВП1+т1
В± Bq Bi В2 . * ъ
• . . В^ Bq В^ B2 . . .
............................'
Bi . . .Bi Bq Bi
_Bnl+m1- • Bi- • • B1B» _
где
a0
“c “c
Bh = J p (co) I Kt (i co) |2 e~iakst; Dh= J p (co) K\ (i co) K2 (i co) e-iffl*Af d co.
-®c ~“c
В результате минимизируется интегральная погрешность (2.10), в которой
g(i<o) =Ka(i(o)—Ki (ico)K(ico) П1 mlt где K2(ico) — заданный коэффициент пере-
дачи.
(Рассмотрим теперь общий случай, когда коэффициент передачи канала
Ki(ico) задан на произвольном отрезке [ссу, со2]. Расчет корректора путем разло-
жения [Ki'(ico)]-1 в ряд Фурье на отрезке [coi, со2] приводит к комплексным а*,
если Ki(i®) не удовлетворяет условиям: 1) |Ki(i<o)| — четная функция относи-
тельно точки Wo=iO,'5(coi + co2) ; 2) arg Kii(ico) — нечетная функция относительно
соо; 3) ш2+Ш1=а(ы2—coi), где и=0, 1, 2, ... С целью получения вещественных
ак функцию Ki (ico) заменим новой функцией Kr(ico), заданной на отрезке
[<ozi, <oz2] (cozi<0]), coz2^®2, которая удовлетворяет условиям: 1) <ozi+i<bz2=
=n(coz2—.cozi) (я=0, 1, 2, ...); 2) |Ki(iw) | — четная функция относительно точ-
ки cozo=0,S(cozi+icoz2); 3) arg Ki (ico) — нечетная функция относительно точки
«о'о; 4) Ki(ico) —Ki!(ico) (со^шгСсОг).
Для уменьшения Остаточной величины ту функция Ki (ico) вне отрезка
[coico2] должна являться аналитическим продолжением функции Ki(ico), т. е.
модуль и аргумент Ki(ico), а также ее производные (по крайней мере, первая
производная) не должны претерпевать скачков на частотах coi и со2. По
2(1 (ко) определяем а к из выражения (2.9).
Характеристики каналов связи, как правило, не задаются аналитически, а
задаются в виде таблицы значений, которые они принимают в равноотстоящих
точках cov=coc/m (v=0, 1, 2, ..., т). Компенсация искажений в этих точках
т
осуществляется корректором с коэффициентом передачи1 K(ico)= V
—т
где
«А =
—ico feAt
е V
г / / т 771
где x-v =XV ; cpz_v =—<pv ; Cpv = <pv —v~ ; xv , <pv — значения модуля и
фазы корректируемого канала. Число корректирующих отводов аь. равно 2т + 1.
1 (В тех случаях, когда с помощью гармонического корректора воспроизво-
дятся не только значения функции, но и значения ее N производных, необходи-
мо воспользоваться результатами работы [14], в которой предложен метод по-
строения интерполяционных тригонометрических полиномов с кратными узлами.
82
Знак S'- показывает, что два крайних члена суммы взяты с весом 0,5. В случае
косинусного корректора выражение для упрощается:
. т ,
1 V1 1 , л
ай =------ у — cos k v-
m х, m
v=o v
Запаздывание, вносимое системой «канал+гармонический корректор», равно
mAt+<р т /<Вс.
Временная область
Использование бесконечных матриц Теплица. Во временной области задача
корректирующего устройства состоит в преобразовании импульсной реакции
gift) в реакцию gz(t), совпадающую с требуемой точностью с сигналом задан-
ной формы gs(t). В дальнейшем будем интересоваться формой этих сигналов,
а не их положением во времени.
Пусть спектры сигналов g\(t) и gKt) ограничены .по протяженности часто-
той со с. Представим gi(t) рядом (2.1), в котором обозначим gi(kht+t0) =ак.
Дискретизация g\(t) с частотой сос/л дает последовательность импульсов
{cis} (k = 0, ±1, ±2, ...), состоящую из основного отсчетного импульса а0 и се-
рии мешающих, из которых одну группу импульсов, предшествующих основно-
му, принято называть преддействием сигнала, а другую группу, следующую пос-
ле основного, — последействием. Сигнал gi(t') также представим рядом (2.1) с
коэффициентами g's(£A£-H'o.) = Cft, где t'o определяется по аналогии с to- Сово-
купность Ck дает последовательность {с/,} (k='0, ±1, ±2, ...). Корректор пре-
образует {а к} в {с&}. При полной коррекции неравномерности амплитудно-ча-
стотной и нелинейности фазо-частотной характеристик канала имеем ga(t) =
= Cosincoc//<Oe/, т. е. {ck} =.с0, Ck=0 (k=^=0). В этом случае задача корректора
сводится к компенсации импульсов преддействия и последействия. Поэтому
корректор можно уподобить некоторому линейному дискретному или импульс-
ному фильтру, пропускающему определенный импульс из заданной последова-
тельности {ак} и подавляющему остальные импульсы.
Определим неизвестные коэффициенты cq, гармонического корректора по
заданным {ak} и {с/,}.
Корректор последействия и корректор преддействия. Сигналы gi(t) и gs(t)
на входе и выходе корректора связаны интегралом свертки
t
«зОТ = J" —T)dT, (2.11)
-00
где f{x) — импульсная реакция корректора. Считая, что gi(t) не содержит
преддействия, и учитывая, что коэффициент передачи гармонического корректо-
ра описывается рядом (2.8), получим из (2.11) бесконечную треугольную систе-
му уравнений |[6] 1[а+]Х[а]=[с] или
а0
Я1 я0
а2 аг а0 X
где [а] и i[c] — бесконечные матрицы-столбцы; [а+] — бесконечная нижняя тре-
угольная матрица Теплица (нули в матрице |[а+] не выписываются). Искомые
коэффициенты равны [a]=.[4+]-1Xi[c], где [А+]—1 — матрица, обратная
Ia+]: [4+]-1Х{о+]=[£], [£] — единичная матрица.
83
И+Г’ =
Для существования решения необходимо и достаточно, чтобы [А+]-1 сущест-
вовала. Формально если ао=£0, то i[a+] имеет обратную [А+]-1, которая являет-
ся нижней треугольной матрицей Теплица:
Ао
Ах Ао ,
А2 . А1 . .Ад
где Ak определяются из рекуррентных соотношений
A£_ma/n+ • • • + Аа_j Й!Айя0 = 0 (^ = 0, 1, 2, . . .). (2.13)
Укажем некоторые 'Особенности обращения бесконечных матриц, которыми
они отличаются от матриц конечных размеров [2, 9, 23].
1. Если i[a] — бесконечная матрица:
[а] =
а11 а12 • • •
Й21 а22 • • •
и матрица (а]-1 обратна [а]: [a]x|[a]-1=(E], где [Е] — единичная матрица, то в
общем случае [а]’1 Xit«]=/= ИХ|[а]_b т. е. закон коммутативности матрицы [а] со
своей .обратной [а]~1 [2] в общем случае для бесконечных матриц несправедлив.
Матрица [а]-1, удовлетворяющая уравнению
[а] X [ар1 = [Е], (2.14)
называется правосторонней обратной.
Матрица -1[а], удовлетворяющая уравнению
-1[а] Х[а] = [Е], (2.15)
называется левосторонней обратной к матрице [а].
Матрица [А]-1, удовлетворяющая как ур-нию (2.14), так и ур-нию (2.15)
[я]Х[А]-1=[А}-1Х1[а]=[Е], называется двусторонней обратной.
2. Бесконечные матрицы обращаются неоднозначно.
Существует множество (конечное или бесконечное) матриц .[а]-1, -1|[а], [А]-1,
размерность которого ((число линейнонезависимых обратных матриц) или ко-
нечно, или бесконечно. Действительно, если [А]-1 — двусторонняя обратная, то
матрица [AJ-'+^Ao] будет обратной к [а] : (;[А]_1+^[Ао]) Х(а]={Е], где [Ао] —
двусторонний нуль-делитель матрицы [а]: [Ао]X(а]=|[а]Х1[Ао]=0 (k — любое ве-
щественное или комплексное число).
Кроме двусторонних нуль-делителей, матрица [а] может иметь левосторон-
ние °[а] и правосторонние [а]0 нуль-делители, удовлетворяющие равенствам
°[а]Х|[а]=0; [а]Х1[а]°=0, но (а]Х°[а]¥='О; [а]°Х[а]#=0.
'Наличие нуль-делителей говорит о неоднозначности обращения матрицы
[а]. Совокупность нуль-делителей образует множество нуль-делителей матрицы
[а]. Как правило, при обсуждении вопроса обращения бесконечных матриц не-
посредственно интересуются не размерностью множества обратных матриц, а
размерностью множества нуль-делителей, ибо размерность множества обратных
матриц однозначно определяется размерностью множества нуль-делителей.
Из множества обратных матриц нас интересуют только матрицы, удовлет-
воряющие условию физической реализуемости корректора. Под требованием
«физическая реализуемость» подразумевается следующее: 1) вещественность
коэффициентов .передачи по отводам корректора при вещественных а>, и ел;
СО
2) существует |аь|, следовательно, |а/<|-»-0 при й->-±оо. При выполнении
---ОО
84
указанных требований можно построить физически реализуемый (а значит, ко-
нечный по числу отводов) корректор, выполняющий с заданной точностью по-
ставленную задачу коррекции. С учетом указанных особенностей рассмотрим
обращение матрицы [а+]. Для удобства будем считать, что число мешающих
импульсов конечно: «а = 0 при й<0, k>m. Матрица [а+] при ао^О имеет бес-
конечное множество левосторонних обратных _1[а+] и одну правостороннюю
обратную [а+]-1, которая совпадает с [Л+]-1. Из соотношения (2.13) следует
что коэффициенты А к образуют возвратную последовательность порядка т.
Обозначим через 0s .(А=1, 2, ..., т) корни уравнения
ао aix И- а2х2 + • • • 4“ атхГП = 0- (2.16)
Пусть Р1У=1₽2=5^ ... =#Рт. Тогда
/ 1 /IV /IV
А = Л — +Я — + . . .+С — , (2.17)
\ Pl / \ Р2 J \Рт /
где А, В, .... С находятся из системы уравнений:
Л + В+ . . .+С = Л0;
Эта система всегда разрешима относительно неизвестных А, В, С, ибо ее
определитель (определитель Вандермонда) не равен нулю. Очевидно, |Aь. |->0
при й->оо, если
Рй > 1 (для всех k), (2.18)
т. е. корни уравнения (2.16) расположены в комплексной плоскости z вне круга
единичного радиуса. Из (2.17) следует, что при выполнении (2.18) существует
СО со
У, |ал|, если существует V | ск |.
--СО -ОО
Требования (2.18) являются необходимым и достаточным условием суще-
ствования матрицы И+}-1, удовлетворяющей условию физической реализуемо-
сти. Если число дискретных значений аь бесконечно, то для существования мат-
рицы [А+]-1, удовлетворяющей условию физической реализуемости, необходимо
00
и достаточно, чтобы нули функции F(z'), определяемой рядом F(z) = У
--------------------------------------------------------------------00
располагались .в плоскости z вне круга единичного радиуса.
Коэффициенты Ak определяются из соотношений (2.13), (2.17) или вычис-
ляются по формулам
а± а2 а3 .. . .
Ak = (— 1)* (— V+1 а° ai °3 • •
= (-!)*
1 V+1
— A k,
ао /
(2.19)
где As — определитель k-ro порядка. Физически реализуемые корректоры со-
держат конечное число, отводов (mi — заданное число). Поэтому
бесконечную систему уравнений (2.12) заменяем .конечной с треугольной матри-
цей [a+Jm, порядка mi. Вычисление обратной матрицы производится
аналогично вычислениям бесконечных матриц по ф-ла.м (2.13, 2.17, 2.19). Про-
цесс ограничения бесконечной системы уравнений иллюстрируется схемой
85
Замена бесконечных матриц [а+] и [а] конечными приводит к погрешности, т. е.
вместо отсчетных значений сТО1+ь ст j+г, ст1+з, ... и т. д. получаются значения
8ь е2, «з, и т. д. Матрица значений |[е] определяется из равенства [а+]т, х
Х[а]т, =[е]. Матрица [a+]mi имеет в общем случае размеры ooXmi+'l. При
конечном числе элементов аь(ак—0, k>m) матрицы |[а+]ОТ1 и [s] конечны и
имеют соответственно размеры mXmi+1, mXl. При полной коррекции Сь = 0
(fe=A0), поэтому значения е< указывают величины погрешностей, возникающих
в точках mi + i (!=1, 2, ...). В точках fe=l, 2, ..., имеем с^ = 0. Кроме того,
при полной коррекции ал.=А*, что упрощает расчет корректора. Согласно (2.17)
|<и|->-0, если выполняется (2.18). Нетрудно видеть, что в этом случае ]8(|->-0,
поэтому, выбирая mi соответствующим образом, можно «вести | е, | к наперед
заданным сколь угодно (малым значениям.
Допустим теперь, что сигнал gift) не содержит последействия: ак=0
(Л>0). Повторяя операции и рассуждения, выполненные при анализе корректо-
ра последействия, применительно к корректору преддействия, получим
(2.20)
или |[а_]Х[а]=|[с], где [а_] — нижняя треугольная матрица, составленная из от-
счетных значений В силу идентичности уравнений (2.12) и (2.20) анализ,
проделанный для корректора последействия, справедлив также для корректора
преддействия при замене в соответствующих выражениях аь, и сь. на а_к,
Q-k И C-k-
Одновременная коррекция преддействия и последействия. Корректор пред-
действия и последействия описывается матричным уравнением, вытекающим не-
посредственно из (2.11) [9]:
: 1
&ТП • • -#2 #1 #0 1 а-п а_2
• • • #2 #1 #о в-1 а-п а-1
Я 772 • • -а2 а1 #0 X t е 1 о а0
CLm • • • #2 ai до a—i • * -а_п «1
#772 • • • а2 а1 ао a—i а—п а2
I ’ I
t ; t
С—2
С-1
со
С1
с2
I 1
I
86
или (а]Х[а]=(с], -откуда [<х]=(а]-1Х[с]. Матрица т бесконечна во -все стороны
и -содержит т значащих нижних и п значащих -верхних диагоналей (по числу
элементов ак, отличных от нуля); [а] и [с] — матрицы-столбцы, бесконечные в
обе стороны.
Исследуем обращенные матрицы [а]. Обозначим через Hh бесконечную -мат-
рицу, у -которой элементы /г-й поддиагонали равны единице, а все остальные
элементы равны нулю (0). Например,
Если
т
= (2,21)
—п
т
— алгебраический полином относительно х, то [а] —матричный полином
—п
относительно Н, обладающий формально свойствами полинома f(x).
Матрицу [Л]-1, обратную (а], будем искать в форме
об
мг’=
-ОО
(2.22)
Особенности обращения -матрицы [а] следующие.
Ч. Матрица [а] имеет бесконечное множество линейнонезависимых левосто-
ронних обратных -1(а] и бесконечное множество линейнонезависимых право-
сторонних обратных |[а]-1. Множества нуль-делителей °-[а] и ,[а]° также бесконеч-
ны, причем размерность этих -множеств бесконечно велика.
2. Множество матриц (Л]-1 конфигурации (-2.2-2) бесконечно. Множество
нуль-делителей (Л]° также -бесконечно, -однако -размерность -множества конечна и
определяется величинами тип.
3. Матрица [а] имеет единственную двустороннюю обратную, удовлетворяю-
щую требованию физической реализуемости, если полином f(x) (2.21) не имеет
корней, равных -по модулю единице. Коэффициенты такой матрицы -вычис-
ляются в следующем порядке. -Пусть > — -корни полинома (2.21),
расположенные в комплексной плоскости -внутри круга единичного -радиуса;
31, |32, Р™ — ко-рни, -расположенные вне круга единичного радиуса. Фактори-
зуем матрицу [а] относительно единичной окружности
[а] = Q1Q2 >
п п
гдеС^^П (Я°-Я~Ч-) = У dkH~k-,
i=l /г=0
т т
= П 1 - #°) = J ^нк.
i=l k=0
87
Определим Qi-1 и Qs-1:
ОО 00
q?1 = 2 <зг' = X EhHh ’
О о
где
W1 = я°; W1 =
Коэффициенты Dk и Ek находятся из соотношений (2.13), (2.17), (2.19) при за-
мене ak на dk и е&. Перемножая Qi-1 и Q2-1, получим ряд Лорана по степеням
матрицы Н, коэффициенты которого являются искомыми коэффициентами ys=
ОО
Описанный прием формально не отличается от возведения полино-
i=0
ма f(x) в степень —4 на окружности единичного радиуса комплексной плоско-
сти г.
Корректор, рассчитанный согласно приведенной методике, при точном пре-
образовании последовательности {а^} в {с*} требует бесконечно большого за-
паздывания входного сигнала. Бесконечно большое запаздывание возникает
из-за требования полной коррекции преддействия. Поскольку такая задержка
не может быть реализована, преддействие корректируется приближенно, причем
величина задержки сигнала определяется желаемой точностью корректирования.
Корректор, осуществляющий, приближенную коррекцию преддействия при. точ-
ной коррекции последействия, описывается уравнением [9]
или [а] X [а] = i[c] (Z — число корректируемых точек преддействия), откуда
,[а]=|[А]-1ХИ, где [А]-1 — матрица, обратная [я].
Особенности обращения матрицы [а] следующие.
4. Матрица .[S] имеет бесконечное множество как левосторонних, так и пра-
восторонних обратных. Множества нуль-делителей °[й] и [я]0 также бесконечны.
2. Множество матриц |[А]-1 бесконечно. Размерность (множества конечна и
равна тХп.
3. Матрица (я] имеет единственную двустороннюю обратную [А]-1, удовлет-
воряющую условию физической реализуемости, только в том случае, если число
корней полинома (<2.21), по модулю меньших единицы, равно п, а число корней,
по модулю больших единицы, равно т [по числу импульсов преддействия и пос-
ледействия в дискретном отклике gi(kAt)].
Из данного свойства вытекает, что если полином (2.21) имеет п корней,
расположенных в плоскости z -внутри круга единичного радиуса, и т корней,
расположенных вне круга единичного радиуса, то в качестве основного импуль-
са я0 следует принять («+1)-й импульс, перед которым расположено п импуль-
сов преддействия и после которого следует т импульсов последействия. При-
веденное правило нумерации значений ak совпадает с аналогичным правилом,
данным в § (2.2 настоящей главы. Правило справедливо не только при расчете
корректоров с помощью бесконечных матриц, но и при расчетах корректоров с
использованием -матриц конечных размеров.
Элементы матрицы {А]-1 находятся из соотношений:
-Aji = EjD0 ; Aj2 = EjDx -ф- Ej_^ Do;
•А;з = EjD2 -ф- Ej_! Oi + Ej_2 Do
и т. д. (/ •— номер строки; k — номер столбца). Элемент яо расположен всег-
88
да .на главной диагонали матрицы [а]. Если отсчетный импульс а0 выбран со-
гласно указанному правилу, матрица [й] имеет обратную, удовлетворяющую ус-
ловию физической реализуемости. В противном случае матрица [й] не имеет об-
ратной, даже если полином (2.21) не содержит корней, по модулю равных еди-
нице (отличие от матрицы [а]).
.Рассмотрим случай, когда число отводов корректора а& конечно, например
—Бесконечная матрица-столбец коэффициентов а;, превращается в
конечную, а из бесконечной матрицы [а] .вырезается квадратная матрица раз-
мером rii + mt + 1:
За счет ограничения числа отводов возникает погрешность, причем погреш-
ности корректирования преддействия и последействия, вообще говоря, различ-
ны: [е]' = (а]' X [а]; [е]" = 1[а]" X (а]; [е]' и |[е]" — матрицы погрешностей преддей-
ствия и последействия. Отметим, что матрица [а]' составлена только из эле-
ментов преддействия, а матрица [а]" — только из элементов последействия. Вы-
шесказанное поясняется рис. 2.4 (рассматривается случай полной коррекции).
—•—•— «—».
-2-10 1 2
£г е" е"
ЦП..../ г /
I тр2 mp3 t/At
С"
Рис. 2.4. Дискретный сигнал на выходе корректора
В rii точках получается полная коррекция преддействия, а в mi точках — пол-
ная коррекция последействия. В остальных точках возникают погрешности
е'А и e,"k*X
Метод факторизации z-изображения импульсной реакции канала. При рас-
чете гармонических корректоров принимаются во внимание равномерные ди-
скретные значения входных и выходных сигналов. Поэтому для такого расчета
*> Полная коррекция иногда называется «коррекцией по нулям» (zero-
forcing) .
89
может быть применен метод z-преобразования [1, 4], являющийся модифика-
цией дискретного преобразования Лапласа. Вместо непрерывных сигналов бу-
ОО ОО
дем оперировать их z-изображениями: ё1(г) = ^акгк; g2(z) = ^lbkzh; g3(z) =
-----------------------------------------------00 -00
00
(z=e~pAf), где bb=g2(k&t). Аналогично z-преобразование коэффи-
-00
циента передачи гармонического корректора без учета вносимого запаздывания
имеет .вид
т1
л(г)==2ahzk (2-23)
~ni
На единичной окружности комплексной плоскости z функции gv (z) совпа-
дают со спектральными плотностями Gv (ico) дискретных сигналов g v (kAt)
‘{k*=Q, ±1, ±2, ...) с точностью до множителя At:Atgv (z) = Gv(ico) |z=e-1®A(
(v—1, 2, 3). Следовательно, gv (z) однозначно определяют исходные непрерыв-
ные сигналы gv (t) (v=!l, 2, 3) только в моменты времени kAt. В общем случае
существует бесконечное множество непрерывных сигналов с одинаковыми z-изо-
бражениями. Однако если спектры сигналов ограничены некоторой частотой
<0о то, выбирая Д£=л/(ОС, получим z-изображения, однозначно описывающие
исходные сигналы во все моменты времени. В этом случае z-изображения при
z = e-1<oAi совпадают со спектральными плотностями сигналов на отрезке
[—n/At, л/At].
Коэффициент передачи корректора, преобразующего gi(z) в gs(z), ра-
вен [8]
K(z) = ^(z)/gl(z). (2.24)
Определим ак по заданным gi(z) и ga(z). Представим правую часть выражения
(2.24) в виде ряда по положительным и отрицательным степеням z. С этой
целью разложим 'llgi(z) в ряд Лорана на окружности единичного радиуса {45]:
1 "
—-y.bhzh, (2.25)
где
1 X zk~ldz 1 X dz
Л-* = Ъй'9) 81(z) (-k=1> 2> 3, . . ф g (z)zft+i
Л Г2
(k= 1, 2, 3, . . .).
Интегралы берутся в комплексной плоскости z по окружностям (либо замкну-
тым контурам) Г1 и Г2 с центром в точке 0, причем радиусы окружностей
|Л| ,и |Л| должны удовлетворять требованию 1< |Г11 < | Рмин|; |Лмакс|<
<|/"я|<11, где Рмин — минимальный по модулю из полюсов l/g\(z), располо-
женных вне круга единичного радиуса; |ХМакс| — максимальный по модулю
из полюсов, расположенных внутри круга единичного радиуса.
Ряд (2.25) сходится, если gi(z) не имеет нулей на окружности единичного
радиуса, что эквивалентно выполнению условия корректируемости канала
| Gi(ko) | = |Ki (ко) | =^=0(|со| г^Юс). В дальнейшем предполагается, что это усло-
вие выполняется.
Таким образом,
оо оо
К (Z) = g„ (г) 2 hkZk = 2 hhZk , (2.26)
—оо —оо
90
00 CO
где cv hv+k. Этот ряд также сходится, если 2| су |<°°> поэтому, заме-
<V=—оо —со
нив его конечным полиномом степени »i + nii(—получим искомый
коэффициент передачи корректора (2.23), для которого ак~Вк-
Сигнал на выходе корректора
т -' _
ft (z) = gi (г) J? hkzk
—п1
отличается от gs(z) на величину погрешности ^](z)=gs(z)—g2(z), которая в си-
лу сходимости ряда (2.26) стремится к нулю при ni, т^оо. Выбирая п\ и mi
соответствующим образом, можно свести r\(z) к наперед заданной величине.
Для ограниченных по спектру сигналов непрерывная погрешность коррек-
2 sin wc (t — k Д t)
Цй,---------——----- , где ца — коэффициенты ряда
CDc (/ — k i±t)
--00
1КХ).
Вычисление коэффициентов hk 'существенно упрощается, если наложить на
т
gi(z) ограничения: 1) g\(z)— полином степени п+т : gi(z) = 7, акгк-, 2) gt(z)
—п
содержит п корней, модуль которых меньше единицы, и т корней, модуль ко-
торых ‘больше единицы (соответственно числу отрицательных и положительных
степеней z). Корни на единичной окружности отсутствуют.
Разложение функции l/gi(X) в ряд Лорана эквивалентно решению урав-
нения
K(z)gl(z)=l. (2.27)
Здесь R(z) — бесконечный ряд Лорана, поскольку полиномиальное уравнение
(2.27) не может быть разрешено в полиномах конечной степени. Заметим, что
уравнение (2.27) формально решается неоднозначно. Для полинома степени,
например, N существует система из Д+1 линейнонезависимых рядов, образую-
щих базис, и бесконечное множество рядов, являющихся линейной комбинацией
^+l
этого базиса: Р — У АъРк, где Pi, Р2, .... Рк— базисные ряды, удовлетворяющие
*=1
(2.27); Ai, А2, ..., Ак, ... — любые числа, полиномы или ряды по степеням z та-
W+1
кие, что V Дк= 1. Введем дополнительное ограничение, которое позволило бы
А=1
вычислить К(г) однозначно. Этим ограничением является требование физиче-
ской реализуемости рассчитываемой схемы корректора'. Факторизуем полином
gi(z) относительно окружности единичного радиуса gi(z) = Qi(z)Q2(z), где
п п
Qi(z)—полином по отрицательным степеням z: Ql(z) = '^dkZ~h=B П (1 —
1
т
—XaZ-1); Qafz) — полином по положительным степеням z: Q?(z) = V е^гй =
о
т
=П (z—₽s)i —корни полинома gi(z), расположенные внутри круга единич-
1
ного радиуса; р/, — корни, расположенные вне круга единичного радиуса; В —
некоторый коэффициент. С учетом факторизации l/gi(z) = Q~[ (z)Q-12(z), где
91
00
Q~'i(z) и ф-^ф-ряды, обратные Qi(z) и Qz(z): Q~lt(z) =^Dkzh\ Q~}z(z) =
о
00
=^Елг\ Коэффициенты Dк и Ek находятся из рекуррентных соотношений (2.13)
о
при замене Ak и аь соответственно на E)k(dk) и Ек(ек)- Перемножив Q-1ii(z)
СО
и Q-12(zZ получим ряд Лорана с искомыми коэффициентами Лл=^ Ei+kDi.
1=0
Описанный прием формально совпадает с процессом вычисления матрицы
[А]-1, обратной [а], как это дано в предыдущем разделе настоящей главы.
Частные случаи: 1. Корни полинома gi(z) расположены внутри единичной
окружности. В результате h_k = a~k=E>k и мы приходим к корректору преддей-
ствия. 2. Корни полинома gi(z) расположены вне единичной окружности. Это
дает корректор последействия, у которого ak = hk — Ek.
Укажем еще один способ определения йд [1-5]. Умножим числитель и зна-
менатель (2.25) на zn и разложим полученный результат на сумму элементар-
ных дробей вида
zn = X f V AhZ~x л- V Bh
zn gi(z) am 1—Zjz—
\«=1 k=l
Каждая из элементарных дробей далее разлагается в ряд по формуле геомет-
рической др оррессии:
Ауг 1
1 — Xfe z~1
xv2_(v+i);
В итоге получим
(2.28)
Si (г)
(2.29)
где
, « 1 т Ц
A-v = —b 2> ' • °’
а™ "1 ат "1 Рг
Коэффициенты hv и hv связаны соотношением hv—h'v_n.
Корректор с коэффициентом -передачи (2.23) вносит постоянное запаздыва-
ние x=n.iEt, из чего следует, что в общем случае погрешность корректирования
r\(z), определяемая величинами tii и пгь связана с временем т обратной зави-
симостью. Уменьшение погрешности -корректирования при заданном сигнале
gi(z) приводит к увеличению запаздывания выходного сигнала и наоборот. Ну-
левая погрешность получается при т—оо. Этот вывод соответствует случаю на-
личия в полиноме gi(z) корней, по модулю меньших единицы (%л); если поли-
ном содержит только корни, по модулю большие единицы (Рь), величина т
равна нулю и не изменяется при изменении погрешности -корректирования.
92
Для ak справедлива также формула
aft =
2<вс Gi(i®)
(2.30)
позволяющая при необходимости находить ад приближенно, используя методы
приближенного гармонического анализа. Эта формула вытекает из разложения,
являющегося обобщением ряда Котельникова (2.1)
ОО
g3 w =
----------------00
(2.31)
которое справедливо для произвольных сигналов gi(t) и gz(t) с одинаковыми
по протяженности спектрами, ограниченными частотой я/АЛ Подобным соотно-
шением связаны сигналы на входе и выходе гармонического корректора при
бесконечно большом числе отводов «ь. Взяв преобразование Фурье от обеих ча-
стей (2.31), непосредственно получим (2.30).
В изложенных методах значения П[ и mi определяются на последнем этапе
расчета, исходя из требуемой погрешности корректирования. Рассмотрим спо-
соб расчета, который позволяет вычислить значения коэффициентов аь при.
фиксированных п\ и mb исходя из условия получения минимума суммарной
квадратичной погрешности (энергии) уклонения выходного сигнала корректора
;g2(X) от сигнала заданной формы g-i(z)-.
Ч = ТГ- Ф Ч (г) Ч ( z ’) = У (bk — cft)2 = min,
Г —00
где q('z)=K('z)^i(z)— g>(z); K(z) — коэффициент передачи корректора (2.23);
Г — контур единичной окружности |z|=l. Искомый полином К(г), минимизи-
рующий г], найдем из условия равенства нулю приращения т], вызванного бес-
конечно малой вариацией K(z). После соответствующих преобразований при-
ходим к системе уравнений [11]
go gi gz • • gn+m a~nt
gi go gi gz • •- •
• • • gi go gi • •
gl X «-1 = d—\
gl ... gtgo gi «0 do
£n-\-m * * *
где gi = 5j ak-iah’ ah-'Ch-
k tl
Пример. На основе ф-л (2.28) и (2.29) в табл. 2.1 даны в общем виде вы-
ражения для коэффициентов а& гармонического корректора, преобразующего
сигнал gi(z) с двумя мешающими импульсами в сигнал gs(z) = i. Кроме того,,
даны выражения для коэффициентов Ць позволяющие вычислить погрешность
чСО-
Рассчитаем корректор для случая a-1 = 0,8; ао=2,4; ai = l; ni=3; mi=4. По
табл. 2.1 находим: «о=О,625; Oi=—0,312; «2=0,156; «з=—0,078; «4=0,039;
«_!=—0,25; а-2=0,1; а_3=—0,04; ц5=0,039; р4=0,016; р_3=—0,016; ц_4=
= 0,032. Максимум |ч(ХМ =0,039.
93
CO
Исходный сигнал Значение коэффициентов
1 2
а_1 z-1 + «о + агг 1 а± (а — Р) р* (k = 0,1,2, . . ., mJ а-*-а1(а-Р) (£=1,2 nJ
а_2 z~2-j-a±z-j-а0 X*+1 — %2+' ао (^i + ^-г) (k = 0, 1,2, . . ., nJ «fe = 0 (для всех k)
(1 4-£) Л* a~k^ а0 (£ = 0, 1,2 nJ a,h = 0 (для всех £)
Таблица 2.1
Значение коэффициентов Примечание
3 4
?3- 1 о 7 ? •? ч г И а о “я । - 3« + Iй ± f - + 11 1 И £ + Т НЙ i £ ' Г* Я 5Я 4- Я . 3 « . • “, =° > -; - -° /ИхЛх—число отводов корректора — do ± у «о — 4а-1 а1 1Л= 2М 111 <1; IPI >1
Н_(П1+2) — а—2 а-п, Н_(П1+1) = а2 а-(П1+1) + + а-1 а-П1 р._£ = 0 (k = 0, 1, 2 — a_i ± flL]— 4а0а_2
а1,2 2а0
Xj = л 2 = Л
co
сл
1 2
я0 -f- a±z -j- a2z* 1 a/i (Pi — Pa) «a X / 1 1 \ X t ₽2+* ^2+1 /1 (A = 0, 1, 2 mJ a_k = 0 (для всех k)
fej- 1 “ft= (£ = 0, 1, 2 %) a_k = 0 (для всех k)
Окончание табл. 2.1
3 4
НШ1+2 = а2агп — ax ± j/" Я] — 4a0a2
Hm1+i = «2 ami-1 + am ₽I’2~ 2fl2
fife = 0 (k = 0, 1,2, . , ., mr) Pl — ?2 = P
Расчет корректоров по последовательности импульсных
реакций при их взаимной интерференции.
Теоремы отсчетов для периодических частотно-ограниченных
сигналов
Ранее шла речь о расчете корректоров по дискретным значениям импульс-
ной реакции канала, т. е. по дискретным значениям сигнала, возникающего на
выходе канала при подаче на его вход одиночного воздействия в виде функции
Дирака 6(t). В реальных условиях на вход канала подается- не одиночное воз-
а) t
4 , I
t
б)
Рис. 2.5. Однополярная (а) и двухполярная (б)
последовательности 6-функций
а)
Рис. 2.6. Отклик канала на однополярную (а) и двухполяр-
ную (б) последовательности 6-функций
действие, а однополярная или двухполярная последовательность 6-импульсов
(функций Дирака) (рис. 2.5). Соответственно на выходе канала. возникают пе-
риодические последовательности импульсных реакций gi(t) и gi(t) (рис. 2.6).
Если корректор компенсирует • искажения одиночной реакции, то, естественно,
он будет компенсировать и искажения последовательности реакций при любом
96
интервале следования Т. Однако обратное утверждение, строго говоря, неспра-
ведливо, так как коррекция периодической последовательности не соответствует
коррекции одиночной реакции (в особенности для Т, меньших длительности
реакции). Объясняется это тем, что в силу фактора повторения спектр перио-
дической последовательности отличается от спектра одиночной реакции. Поэто-
му рассмотрим, какой получится результат коррекции характеристик канала,
если осуществляется компенсация искажений периодической последовательно-
сти импульсных реакций канала при произвольно заданном интервале Т.
Спектры однополярной и двухполярной последовательностей 6-импульсов —
дискретные и равномерные и содержат гармоники соответственно с частотами
ak=2nk/T (k=0, 1, 2, ..J_ и <о& = 2л(2й—1)/Т (/г=1, 2, ...). Спектры К\ (i<o) и
/Ci (ico) реакций gi(t) и gi(t) — дискретные и ограничены частотой среза кана-
ла (Ос-
Для одиночной реакции gi(t), являющейся функцией с ограниченным спект-
ром, справедлива теорема отсчетов (теорема Котельникова) (2.1). Укажем ана-
логичные теоремы для реакций git) и gi(t). Согласно основной теореме отсче-
тов [3], если gi (I) —периодическая функция с периодом Т (рис. 2.6а) и все
коэффициенты Фурье для нее, начиная с n-го, равны нулю, то
§1(0 = ^§i(^M<Pi (t—kbt),
(2.32)
где
1 , сос 1 г» ч? 2сос |
sin “е‘ cosec 2^1 +21cos л J:
(0с = Л/Д /; \t — Т/2п 1.
Спектр Ф1(0 — дискретный и содержит я+1 гармоник (включая нулевую). Рас-
стояние между спектральными составляющими равно 2шс/(2га +1); амплитуда ну-
левой гармоники равна 1, амплитуды остальных гармоник равны 2 (рис. 2.7).
Таким образом, gi(t) однозначно определяется 2п+1 отсчетными значениями,,
взятыми с интервалом At
Видоизмененная теорема отсчетов гласит: если п-я гармоника спектра gift)
не содержит синусоидальной составляющей, то
4-181 о7
п-1
gi(0 = ^h(k^t)4>2(t — k^ t),
—n
(2.33)
где
1 СОл 1 / ' G)p \
<p2 (t) = г—- sin coc t ctg —-t = — 1 —{—2 д cos—-kt ; сос=л/Д/; At=T/2n
2/2 2/2 2/21 tl I
\ 1 /
[последний член суммы (k=n) берется с весом 0,5]. Расстояние между гармони-
ками спектра функции фг(7) равно йс/я; амплитуды нулевой и n-й гармоник
равны 1, остальных гармоник — 2 (рис. 2.8).
Рис. 2.8. Спектр (а) и график (б) отсчетной функ-
ции фаСО
Следует отметить, что приведенные формулировки теоремы отсчетов экви-
валентны, ибо одна и та же функция gi(t) может быть представлена как в
форме (2.32), так и в форме (2.33). Форма (2.32) справедлива при любом по-
ложении моментов выборки kAt; форма (2.33) справедлива для произвольной
gi(t) только в том случае, когда положение моментов выборки kAt совпадает
с максимумами я-й гармоники, что и обеспечивает равенство нулю синусоидаль-
ной составляющей этой гармоники. Выбирая соответствующим образом положе-
ние .моментов kAt, .всегда можно представить gi(t) в форме (2.33).
По аналогии с изложенными теоремами для знакочередующихся периодиче-
ских функций (рис. 2.66) сформулируем следующую теорему: если gi(t) —
знакочередующаяся периодическая функция с периодом Т, причем спектр этой
функции не содержит гармоник выше я-й, то [17]
п—1
FiW = 2^1(M/)(₽3(z“AAZ)’ (2,34)
—п
где
1 WC г, Л* Л
ФзЮ=—sin cosec — t= -^ — $k-\)t-,^=Tt, At=—.
98
Спектр функции ф3(7) содержит только .нечетные гармоники Wk=(2&—1)юс/2п
частоты Wcl2n (рис. 2.9). Согласно этой теореме знакочередующаяся функция
gi(t) полностью описывается 2п отсчетными значениями, взятыми с интервалом
At
Рис. 2.9. Спектр (а) и график (б) отсчетной функции
фзСО
Если п-я гармоника спектра gi(t) не содержит синусоидальной составляю-
щей, то
п—1
£1(0 = 0ф4(^ —(2.35)
-(л-1)
где
ф4 (0 = -7 sin сос t ctg --1 = 2—-- \ cos (2k — 1) --- t;
2n—1 2/г—1 2n — 1 2n — 1
C0c = л/Д t; A t = T/(2n — 1)
(последний член суммы берется с весом, равным 0,5) (рис. 2.10).
Указанные формулировки теоремы эквивалентны, т. е. одна и та же знакоче-
редующаяся функция gi(t) может быть представлена либо в форме (2.34), ли-
бо в форме (2.35). Форма (2.34) справедлива при произвольном положении мо-
ментов выборки AAt форма (2.35) справедлива в том случае, когда положение
моментов выборки йД( совпадает с максимумами и-й гармоники, что легко вы-
полняется.
Значения спектра 7<i (icOk) определяются по формуле
1 п
К1 ° “й) = 2^+7- 2 e~ia^'A(, (2.36)
v=—п
если A t = Т/(2п 4-1); ~av = (vA f);
4:
99
СОй = 2(Dck/(2n-j-l) (k = O±l, ±2, . .
или по формуле
1 "-1
Л(1СОй)= — 2 ave~ifflftVAf •
v=—n
если A t = T/2n\ av = g± (vA f);
ah = (i)ck/n (6 = 0, ±1, ±2, . . .).
(2.37)
Рис. 2.10. Спектр (а) и график (б) отсчетной функции
ф/О
Значения спектра Ki (ico) находятся по формуле
1 п~'
Kj (i Ий) = — У av е-! , (2.38)
2п .4-*
v=—п
если М=Т12п; av =igi(vA/); gu—(2&—1)сос/2/г (&=±1, ±2, ...), или по формуле
п+1
Ki(i®ft) = -------- У e-ifflfe^f , (2.39)
” 1 V=-n+l
если At = T/2n— 1; av =gi(yAt)-, wft= (2й—1)шс/(2п—1) (6 = ±1, i±2, ...). По су-
ществу, выражения (2.36)—'(2.39) дают значения коэффициента передачи кана-
ла Ki(ico) на частотах <оь.
Используем приведенные теоремы и выражения для расчета гармонических
корректоров [17]. Корректор, включаемый каскадно с каналом, преобразует
gi(t) в Ф1(0 либо в ФгбО- В этом случае коэффициент передачи корректирует-
ся в точках <вл=2сос6/(2ге+1) либо в точках с0й = с0с6/л (6 = 0, 1, 2, ...). Для этих
точек справедливо равенство
Ki (i ил) К (i ®й) = A e-ifflfeT , (2 40)
100
где Xi (кн) и Л0<йл) — соответственно значения коэффициента передачи ка-
нала и корректора на частота» Шк! Лит — некоторые постоянные. В дальней-
шем для удобства расчета полагаем т=0, 4=1.
Аналогично при преобразовании gi(t) в <р3(7) или в коррекция харак-
теристик .канала производится в точках а>ь=(2й—1)<ос/п либо в точках <ва =
= (2k—1)а>с/2п—1 (k = \, 2, ...), для которых выполняется (2.40). В (2.40) не-
обходимо добавлять вес 0,5 на частотах, для которых спектральные составляю-
щие <р v (t) (v=l, 2, 4) уменьшены вдвое. Как следует из (2.40), преобразова-
ние gi(t) в <Р1(7) или в ФгбО, а также, преобразование gift) в ф3(7) или в
возможно только .в том случае, когда спектры Ki(ico) и Ki(i®) не обра-
щаются в нуль на частотах он.
Расчет корректора, преобразующего gift) в q>i(7), выполняется в таком по-
рядке. Воспользовавшись (36), определяем значения коэффициента передачи
2шс
канала Ai(ico) на частотах <в,, =--—;v, затем вычисляем значения коэффи-
v 2п -ф-1
диентов передачи по отводам линии сх/. по формуле
aft=2^44 £ ММ 'е %М*(-п<й<п).
v=—п
Значения Uh могут быть вычислены также из
системы уравнений [17, 36]
(2.41)
При расчете корректора, преобразующего gift) в <раСО> пользуемся выра-
жением
aft=^r £ ’е i<Bv*Af (—
v=—п
где Ai(icov) определяется согласно (2.37). Естественно, коэффициенты а* в
этом случае .можно найти из системы уравнений, аналогичной (2.41), в которой
отсутствует?значение ап.
Расчет коэффициентов корректора, преобразующего gift) в про-
изводится по формуле
1
ад = — £ [^1 С “v )]“' e-ic% ш (—ntg.ks^n—1),
v=—n
101
где Ki(icov ) используем из (2.38). В случае преобразования gi(t) в quV) ко-
эффициенты Uk .вычисляются по формуле
1 п~1
aft = ----— V [Ki (i®v )]”' e-I“vftAt ( — n-f- 1 + « — 1).
Zitt - 1 «••‘г»
v=—п+1
где К\ (ifflv ) используем из (2.39).
Коэффициенты Uh могут быть найдены также, из системы уравнений типа
(2.41), в которой значения av внутри очерченной области заменяются на av
а вне этой области — на —av . Подчеркнем, что изложенные способы расчета
позволяют определить коэффициент передачи корректора, осуществляющего
точное преобразование сигналов g\(t) и gi(t) соответственно в q>i(7_), <р2(7ф
Фз(7) и <р4('О-
В практических условиях коррекцию каналов целесообразно выполнять по
сигналу gi(7) как не содержащему нулевой частоты, а качество коррекции при
этом целесообразно оценивать по gi(t), поскольку частоты гармоник спектров
этих сигналов взаимно не совпадают.
1
Пример. Задан сигнал £i(0 = '/.gi(vA£)<T>i(i—мА/), где £i(—A?)=a-i=0,3;
—1
£i(O)=ao = l; £i(A7)=ai = 0,5;
1 coc
<рх (f) — — sin coc t cosec-1\ A t = n/coc.
3 3
Рассчитаем корректор, преобразующий £i(/) в qh(O- Из системы (2.41)
находим: a~i = 0)07; a0=l,21; ai = —0,59. Корректор с коэффициентом передачи
K(ico) =—0,07е‘иЛ1 +1,21—0,59е~‘“д* преобразует £1(1) в <pi(0 с нулевой по-
грешностью.
2.4. Особенности коррекции полосовых каналов
по импульсным реакциям
Постановка задачи. Обобщенная теорема отсчетов для сигналов
с полосным спектром
Полосовые каналы обладают рядом особенностей, отличающих
их от каналов НЧ. Поэтому не все результаты предыдущих разде-
лов могут быть использованы для коррекции искажений полосовых
каналов. Сказанное подчеркивает необходимость разработки само-
стоятельной теории синтеза корректоров импульсных характерис-
тик полосовых каналов связи.
Пусть (ico) и gj (/) — комплексный коэффициент передачи и
импульсная реакция полосового канала с частотами среза coi и
<о2- Считаем, что |K1(ico)|=0 (|щ|>и2, |co|<coi). В случае
идеального полосового канала, в котором отсутствуют амплитуд-
ные и фазовые искажения, имеем:
Кг (i«) | = const;
срх (со) = arg Ki (ico) = сот + ^ л (k = 0, ±1, ±2,...) (сох <|'co|<co2)j
sin (°2 Ю1 (t — т)
gl (0 = g3 (0 =-----------------------------c°s 1 9—- (t — т) •
СО2 — (Dj .
(2.42)
102
В реальных каналах содержатся как амплитудные, так и фа-
зовые искажения, поэтому импульсная реакция gi(t) такого кана-
ла существенно отличается от £з(0- Корректор, включаемый на
выходе канала, должен преобразовать gi(t) в gzlt) [см. (2.42) ] с
допустимой погрешностью, в результате чего будут скомпенсиро-
ваны все виды линейных искажений, имеющихся в канале.
Поставим задачу коррекции в более общей формулировке [13].
Пусть gift) —произвольный сигнал, спектр которого К] (io) отли-
чен от нуля только на некотором отрезке i[||o)i[, ]1сог|], ((Oi¥=0).
Требуется преобразовать сигнал gi(t) в сигнал заданной формы
gs(t) со спектральной плотностью Лз(1(о), которая также отлична
от нуля только в диапазоне «ц — сог. Подразумевая в этой форму-
лировке под ё'з(0 импульсную реакцию идеального полосо-
вого канала, приходим к задаче коррекции характеристик полосо-
вого канала.
При выполнении ограничений: 1) |/G(ico)| и | К3 (по) | — чет-
ные функции, arg Kj (ко) и arg Л3 (ico) —нечетные функции относи-
тельно точки icoo = 0,5(.<х>1-+-1СО2); 2) со2 + ®1=1й(со2—(01), k — любое
целое число — преобразование gi(/) в g3(Z) осуществляется обыч-
ным гармоническим корректором (см. рис. 2.1s). Если k— нечет-
ное число, расчет корректора производится непосредственно по
дискретным значениям gi(MZ) и g3(M0 в полной аналогии с кор-
рекцией низкочастотных сигналов |[Д^=л((о2—®i)]. В общем слу-
чае, когда указанные ограничения не выполняются, для преобразо-
вания gi (t) в g3 (t) используется полосовой гармонический коррек-
тор (рис. 2.11) с коэффициентом передачи [13]
Рис. 2.11. Структурная схема гармониче-
ского корректора полосовых каналов
т i
7C(ico) = e-iffln‘At ^айе-‘вАД< (со, <со| < со2), (2.43)
—
где ak = a'k+Ha"k-, Н — коэффициент передачи преобразователя
Гильберта (фазовращателя с фазовой характеристикой, равной
л/2, и единичной амплитудной характеристикой в диапазоне
(01 — (02):
103
гт • ( i («л < со С со,);
Н = 1 sign со = v 1 2/’
( —i (—со2 < со < —сох);
Д/=2л/(|<02—(01). В дальнейшем множитель е-1<0П2Л/, характеризу-
ющий запаздывания выходного сигнала во времени, не учитыва-
ется.
Неизвестными в (2.43) являются коэффициенты >а\ и а"ь,
которые определим по заданным gift) и gift) либо по /Ci(ico) и
Лз(ко).
Входной gift) и выходной gift) сигналы корректора связаны
между собой соотношением
gi ft) = £ < gl ft — k A t) + V ak gx ft — k A t), (2.44)
—nl —nl
где gi ft) — преобразование Гильберта:
g, ft) = — f gl d x = Re — i i /(i (i co) e1 “ * d co.
n J t — T nJ
— 00 (Dx
Спектральная плоскость (ico) функции gift) равна Ki (ico) —
=HK.ifw). Потребуем, чтобы сигнал gift) совпадал c gift) за-
данной степенью точности.
Представим gift) в виде ряда
СО СО
Й'з(О = ^а^1(г‘ —^Ai) +V a"kgi(t — kM), (2.45)
--00 --00
где А/=2л/(<02—'coi); a'k, a"k — некоторые коэффициенты. Выра-
жение (2.44) является частной суммой данного ряда.
Определим, при каких ограничениях разложение (2.45) право-
мочно. Ответ на этот вопрос является одновременно ответом и на
вопрос о возможности коррекции полосового канала с помощью
корректора, изображенного на рис. 2.11.
Взяв преобразование Фурье от обеих частей выражения (2.45),
после соответствующих упрощений получим:
a'k = Re Fh, а" = Jm Fk,
где
«2
Fh =---------f Кз°ю) ei(0^Atrfco.
co2 —C01 J (ico)
Таким образом, для выполнения (2.45) коэффициенты a'k и а"ь
должны находиться как действительная, и мнимая части коэффи-
циентов Фурье функции F(ico) =Кз(!'®),//С1,(гю). Поэтому в случае,
когда F(ico) удовлетворяет условиям Дирихле на отрезке [код, сог].,
разложение (2.45) правомочно и является сходящимся. . •
104
При выполнении указанных ограничений ряд (2.45) сходится, в
силу чего ограничим его членами — пх и ть считая а\=а"л=0
(&<—«1, k~>mx), что приводит к частной сумме вида (2.44), ко-
торая совпадает с исходным рядом с некоторой погрешностью. Со-
ответствующим выбором —m и mi можно свести эту погрешность
к требуемому значению.
Ряд (2.45), по существу, является обобщением широко исполь-
зуемой теоремы отсчетов для сигналов с полосным ограниченным
спектром [3], так как позволяет представить один заданный сиг-
нал в виде взвешенной суммы запаздывающих значений другого
заданного сигнала и его преобразования Гильберта.
В случае сигналов с узкой относительной шириной спектра
АП=Аю/®о<С1, Аи=®2—Юь i®o= (®i + ®2),/2 преобразование Гиль-
берта можно заменить дифференцированием, интегрированием с
изменением полярности сигнала, задержкой сигнала во времени с
изменением его полярности, а также рядом других операций. На-
пример, при использовании дифференциатора или интегратора с ко-
эффициентами передачи соответственно Ад = 1®/®о, Аи = 1®о/® полу-
чим преобразователь Гильберта с максимальной относительной
неравномерностью модуля коэффициента передачи ДА= (Амане—
—АМин)/А0=АП (®isC |м| sC®2), где Амане. Амин, Ао — максималь-
ное, минимальное и среднее значения модуля коэффициента пере-
дачи. Звено задержки с коэффициентом передачи А3=—e_i“/a« реа-
лизует преобразователь Гильберта с максимальной абсолютной
ПОГреШНОСТЬЮ фазы Аф—фмакс—фмпн~АП (®j^^ ]® | sS^®2) J фмакс»
Финн — максимальное и минимальное значения фазы преобразова-
теля.
Метод ^-преобразования
Известно [3], что сигнал с ограниченным спектром однозначно
определяется своими дискретными значениями и дискретными зна-
чениями его преобразования Гильберта, поэтому
Л ®
03 sin--(t— k Л t)
gitf) = VgAkM) —---------------COs^±^(/-£A/) +
A® “ 2
-oo —— (t — M t)
A ®
°° sin--(t — kht)
+ V gi (k A 0 --------sin (t - A A /).
— CO —— (t k^t)
[A/ = 2n/(w2—®x)]. (2.46)
Сигнал £з(0 записывается в аналогичной форме.
Под /i-изображением непрерывных сигналов g\(t) и £з(0 будем
подразумевать пределы, к которым сходятся ряды
105
h^z) = zk, h3 (z) = h^~> zk (z = e~~ p ,
-00 -00
где Afe(1)=gi(M/)—Hgi^kAt)-, hiS2>=g2(kAf)—Hg2(kAt). Выражения
hk, в дальнейшем называемые функциональными числами, обла-
дают свойствами: 1. Если А=а + НЬ — функциональное число (а и
b — вещественные числа), то | А | = ]Аа2+Ь2—модуль, а ср=
= arctg bja— угол функционального числа (при изменении знака
со угол ф также меняет знак на противоположный) A=|A|eH<₽=
= \А | cos ф + Я|А | sirup. 2. Для функциональных чисел А = а + НЬ
и B = c-srHd справедливы операции:
н (ч>
A + B = (a + c) + H(b + d)', АВ = |А| |В| е 1 А в) =
— ас—bd + H (bc + ad.)- срл, <рв—углы А, В\
|5|
При выполнении операций следует учитывать, что Н2=—1;
\)Н=—Н.
На единичной окружности z = e-i“At комплексной плоскости z
функции h\ (z) иЛз(г) совпадают на отрезках [—1со2,—icoi], [coi, со2]
соответственно со спектральными плотностями Л) (ico) и К3 (ico)
сигналов gi(O и£3(0 с точностью до множителя—Д/=л/(со2—<01),
т. е. 7Cv(ico) = — Д7/г v (z) (v=l, 3). Из этого вытекает, что сигналы
£1(0 и £з(0 однозначно определяются своими Л-изображениями.
Замена hvk=gv (W) — Hgv (kAt) на hfy\=gv (kAt) — ig v (kAt)
приводит к тому, что hv (z) на единичной окружности превращает-
ся в ряд Фурье, совпадающий с Kv (ico) только на отрезке [icoi, <о2]
(на отрезке [—;со2, —coj совпадения нет). Поэтому hWh можно по-
лучить из коэффициентов ряда Фурье спектральной плотности
(ico) заменой i на Н.
По аналогии, Л-изображение коэффициента передачи корректо-
ра (2.43) имеет вид K(z) = akZh- Преобразование hi (z) в ft3(z)
возможно, если
Я(г)=Л3(г)/Л1(2). (2.47)
Поскольку K(z)—полином, a hz(z)jhi (z)—рациональная
функция от z, равенство (2.47) в общем случае выполняется лишь
приближенно.
Для нахождения K(z) необходимо ft3(z)//i](z) разложить в ряд
Лорана на окружности |z| = l. Получаемый при этом ряд будет
сходящимся, если /itfz) не содержит нулей на единичной окружное
сти, что возможно в случае, когда | (ico) | =Н=0 (со^ |со| =^со2).
В качестве K(z) берем отрезок полученного ряда.
106 ,
Согласно изложенному при использовании /г-преобразования
расчет корректора полосных сигналов формально аналогичен рас-
чету корректора низкочастотных сигналов с использованием г-пре-
образования.
Теоремы отсчетов для сигналов с полосным ограниченным
по протяженности дискретным спектром
Теоремы отсчетов для периодических сигналов с ограниченным низкочастот-
ным спектром даны в § 2.2. Докажем теперь теоремы отсчетов для сигналов с
дискретным полосным спектром, т. е. для сигналов, спектр которых состоит из
конечного набора дискретных равноотстоящих частот, не начинающихся с нуля.
Теоремы позволяют точно восстановить сигнал по конечному числу значений
сигнала и его преобразования Гильберта. Эти теоремы могут быть использованы
при гармоническом анализе и синтезе, а также при расчетах дискретных си-
стем, например при расчете (или настройке) гармонических корректоров.
Теорема I [18]. Если f(t) — сигнал со спектром, содержащим W дискрет-
ных равноотстоящих частот <Вк=1Шн+А£2 (й = 0, 1. N—1) (рис. 2.il2a):
N—1
f (О = 2 ak cos (COS t + <pA),
k=0
где i(Oh, Q — произвольные частоты, то
№
N— 1 sin — (t — q At) N~1 * *
/ (0 = V f(q a t)--—------------cos tt>H + c°B (t — <? a t) + V* д 0 x
<7=0 Wsin — (t — q A t) q=o
NQ
sin —— (t — q At)
2 (0H 4- (oB
X ------—----------sin-H-^- B- (t-qAt), (2.48)
Л’ sin (t — q At)
где Q — расстояние между частотами спектра f(t)-, аь и <рл — амплитуды и
фазы этих частот; <он — наинизшая частота; cob=[<dh+ (IV— 1)Й] — наивысшая
частота; |Д/=2л/Д1й; f(qAt) — дискретные значения преобразования Гильберта
от f(t):
N— 1
~(0 = — 2 ah sin (C0ft t + <рй).
4=0
Согласно данной теореме сигнал f(t) со спектром, содержащим N дискрет-
ных равноотстоящих частот, полностью определяется своими N равноотстоящи-
ми дискретными значениями и N равноотстоящими дискретными значениями
•преобразования Гильберта.
Выражение (2.48) может быть преобразовано к виду
№
"Хд1 ________ sin — (t — q A t)
I »> - s V —ъ---------------"» —»4 '> - T«
<7=0 N sin (t — q A t)
где
/5 = /(<7Д1); = f(qAt); 4q= arcig-Ц: .
107
Докажем справедливость сформулированной теоремы. Рассмотрим случай,
когда — нечетное. Пронумеруем частоты спектра f(t), как указано на рис.
2.126, и будем считать, что спектр f(t) содержит частоты ®s = coo+^Q (k = 0,
±1, ..., i±n), где icoo = С<Он+®в)/2. С учетом сказанного:
f (t) = е'“°* £ Ak eikat + e-i(0°‘ ;
—n —n
n n
- i ~(t) = eiffl°( £ Ah eikQt - e-‘“»f e~iW2!
—n —n
где
. ah *<Рь ,» ak — i<₽b N — 1
А=те = —e *; »= —
(ak, <{>k — произвольные числа, не обладающие относительно ы0 какой-либо
симметрией). Из этих выражений получим
п
Р(Г)=У<Ак eift£2f ,
—п
где
Рис. 2.12. Дискретный полос-
ный спектр при несимметрич-
ной (а) и симметричной (б)
нумерациях частот
опжш
“н а)
“1ЦШШМ
* а>н и
Рис. 2.13. Спектры компози-
ционных функций (а, б), от-
личающиеся амплитудой пер-
вой и последней частот
Согласно формулам тригонометрической интерполяции [3]
, 2п . 2л .
1 —1 — kq
Лл ""'V L f (?Л/)е N (д^ = 2л/№> ^ = 2re-|-1),
Л <7=0
поэтому
2п п
F(t) = ^P(qM)— V eiM
<7=0 k=—n
108
Учитывая тригонометрическое тождество
2«+ 1
n n sin —-— Q x
2 e.ikSlx = 1 4~ 2 £ cos kQx =-------
—n 1
2
Q
sin — x
приходим к выражению
№
sin-y (t — qbt)
f (/) - i~(/) = J [/ (<7 Д 0 - i f (7 A 01=------------------е‘“«
9=0 N sin (t — q AZ)
Выделяя действительную часть этого выражения, в итоге получим (2.48), что и
требовалось доказать. Случай, когда N — четное, доказывается аналогично.
На рис. 2.13а изображен амплитудный спектр композиционных функций:
№
sin —— t
2
Q
N sin — t
NQ
sin —— t
2
Q
Nsin— t
2
®H 4~ ®B ,
cos-----------1;
2
COh 4“ ®B
sin-^—/,
а на рис. 2.7 и 2.9 — огибающие этих функций, т. е. функции
NQ
sin---- t
2 1 coc
-------------= — sin (0c t cosec — t
Q-----------N N
N sin — t
I NQ \
I C0c = —— ; T = 2n/Q ]
для N — нечетного (W=2n+il = ll, см. рис. 2.7) nN — четного (7V=2n=10,
см. рис. 2.9).
Теорема II. Если f(t) — сигнал co спектром, содержащим N дискретных
равноотстоящих частот (А=0, 1, 2, ..., N—1), аде юн и Q — произ-
вольные частоты, причем комплексные амплитуды наинизшей и наивысшей ча-
стот одинаковы, то
Q(N — 1) ,
N-2 sin----- (t — q&t)
2 2 G)u + C0r
f (q A 0---------------------cos--------(t — q A t) 4-
<7=0 (A7_i)tg — (t-qM)
Q (N— 1)
7V-2 sin------(7A/)
4~2~(<?AZ)-------------Q---------Sin—— (2,49)
,=0 (A7-1)tg — (t-qbt)
где
109
2л 2л
(/V—1)й сов —со„
Выражение (2.49) может быть записано также в форме
N—2 _______
W = v у ty-f*
<7=0
где
Й(Л1 — 1)
sin------- (t — <? ДО
----------------cos
(W-1)tg^-(Z-?AO
tt*H ~|~ Ц>В
2
(t-qbt)-4h ,
^ = /(?Д0; fq =T(qM);
Tfe = arctg .
Доказательство теоремы II аналогично доказательству теоремы I и поэтому
не приводится. При доказательстве теоремы II используется тождество
V'^ = l+2y'cosWx = -^^-
г 4J й
где знак S' показывает, что крайние члены суммы берутся с весом 0,5. Сигнал,
удовлетворяющий теореме II, полностью определяется —1 значениями f(qkt)
и N—1 значениями На рис. 2.135 изображен амплитудный спектр ком-
позиционных функций:
Q(W—1)
sin--------- t
2 сон + сов ,
-------------COS--------t-
Й 2
(tf-l)tg — t
Q.(N — 1)
sin-------1
2
-----------sin
Й
(W— l)tg— f
tt>H ~l~
2
а на рис. 2.8 и 2.10 — огибающие этих функций, т. е. функции
Й(/У — 1)
sin--------- t
2 1 , С0с
--------------=------- sin шс t ctg----t.
Й N — I N—1
(>V— 1) tg —
(®С = Й(Л'—l)/2; Т = 2п/Й),
для N — нечетного (N=2n+1 = 11, см. рис. 2.8) и N — четного (7V = 2«=1O,
см. рис. 2.10).
Рассмотрим предельный случай, когда N-+oo при фиксированных частотах
ая и <йв. В этом случае Й->0 и мы приходим к сигналу f(t) со сплошным
спектром, существующим на отрезке [сон, о>в]. Принимая во внимание, что й =
= (<Ов—<оя)/(Л1—1).и изменяя пределы суммирования в выражении (2.48), получим
Vi1 N — 1 2
f (0 = llW-----——---------- X
q=—n ft sin ——-— (t — q ДО
2(W — 1) v 4
ПО
п1
<?=—п
. WB — (Он
A sin -------(t — q AZ)
2(N— 1) V 4 ’
. Wh 4“ ®b ,, . ,.
sm---- 2.- (t — q A 0,
(2.50)
где n1 = n = (N— l)/2 при N— нечетном;
n = N/2, nx = Nl2 — 1 при N — четном.
Учитывая, что1
lim
N С0в — (Он
sin ---- --------(t — q A t)
У—1 ° 4 ’
sin
СОв —
-В---н-(/-?А0
. (Ов— (О„
N sin---------(t — q А /)
2 (У — 1) ' 4 '
2я 2п N — 1
A t = lim — = lim----------------
NO. (Ов — (0H Л’
®в — Ин ,, .
—2--? д О
2л
СОв — ®н
2
и переходя к пределу (У->оо) в выражении (2.50), получим выражение, ана-
логичное выражению (2.46), составляющее содержание теоремы отсчетов для
сигналов со сплошным полосным спектром (при этом необходимо изменить обо-
значения (Он на (01 и (оВ1,на (о2) .[33].
Нетрудно видеть, что ряд, аналогичный ряду (2.46), является пределом
также для выражения (2.49) при У->оо.
СПИСОК ЛИТЕРАТУРЫ
1. Волгин Л. Н. Элементы теории управляющих машин. М.: Советское ра-
дио, 1962.
2. Гантмахер Ф. Р. Теория матриц. М.: Наука, 1967.
3. Голдман С. Теория информации. М.: ИЛ, 1951.
4. Джури Э. Импульсные системы автоматического регулирования. М.: Госиз-
дат физико-математической литературы, 1963.
5. Игнатьев Н. К. Синтез амплитудно-частотной характеристики по коэффи-
циентам ее разложения в ряд. — Электросвязь. 1960, Xs 1, с. 3—10.
6. Кисель В. А. Применение бесконечных матриц при расчете корректирующих
схем, использующих звенья идеального запаздывания. — В кн.: Труды
учебных институтов связи. Л.: 1962, вып. 13, с. 42—62.
7. Кисель В. А. Критерий корректируемости канала связи по импульсному от-
клику. •— В кн.: Труды учебных институтов связи. Л.: 1963, вып. 17,
с. 142—150.
8. Кисель В. А. Методика расчета корректора канала связи по импульсному
отклику. — В кн.: Труды учебных институтов связи. Л.: 1963, вып. 18,
с. 114—120.
9. Кисель В. А. К расчету гармонических корректоров с помощью бесконеч-
ных матриц. — В кн.: Труды учебных институтов связи. Л.: 1964, вып. 19,
с. 106—116.
10. Кисель В. А. К расчету гармонических корректоров двух видов. — В кн.:
Труды учебных институтов связи. Л.: 1964, вып. 20, с. 140—149.
11. Кисель В. А. Оптимальный расчет гармонического корректора. — В кн.:
Труды учебных институтов связи. Л.: 1965, вып. 27, с. 177—187.
12. Кисель В. А. Элементы расчета гармонических корректоров. — Электро-
связь. 1964, № 7 с. 46—53.
13. Кисель В. А. Коррекция полосовых каналов по импульсным реакциям. —
В кн.: XXII Всесоюзная научная сессия, посвященная Дню радио. Секция
общей радиотехники. М.: Связь, 1966, с. 126—133.
111
14. Кисель В. А., Кицул И. В. О тригонометрическом интерполировании с крат-
ными равноотстоящими узлами. — В кн.: Труды учебных институтов связи.
Л.: 1965, вып. 24, с. 169—176.
15. Кисель В. А. Об одном методе расчета гармонического синтезатора по вре-
менным характеристикам сигнала. — Электросвязь. 1967, № 7, с. 62—70.
16. Кисель В. А., Одесский В. Я. Построение и анализ ортогонального коррек-
тора чебышевского типа. — В кн.: Методы отбора и преобразования ин-
формации. Киев: Наукова думка АН УССР, 1967, вып. 6, с. 87—97.
17. Кисель В. А. Расчет гармонических корректоров по периодической последо-
вательности взаимноперекрывающихся импульсных реакций. •— В кн.: От-
бор и передача информации. Киев: Наукова думка АН УССР, 1968, вып. 16,
с. 152—164
18. Кисель В. А. Теоремы отсчетов для функций с дискретным полосовым
спектром. — В кн.: Труды учебных институтов связи. Л.: 1968, вып. 39,
с. 41—48.
19. Кисель В А., Крухмалев В. В. Синтез гребенчатых фильтров с изоэкстре-
мальными характеристиками на линиях задержки без обратной связи. —
Радиотехника и электроника. 1968, № 10, с. 1799—4807.
20. Кисель В. А., Лев А. Ю., Одесский В. Я. Оценка сложности гармонического
и чебышевского корректоров фазо-частотных характеристик трактов первич-
ных групп. — В кн.: Труды. Центральный научно-исследовательский инсти-
тут связи. Киевский филиал. Киев: 1968, вып. 1, с. 13—20.
21. Лев А. Ю., Кисель В. А. Об оптимальном представлении сигнала с ограни-
ченным спектром усеченным рядом Котельникова. — Электросвязь. 1967,
с. 25—32.
22. Беркович Д. А., Лев А. Ю. Система коррекции стандартных каналов то-
нальной частоты с автоматической настройкой. М.: Связь, 1972.
23. Кук Р. Бесконечные матрицы и пространства последовательностей. М.: Гос-
издат физико-математической литературы, 1960.
24. Стрижевский Н. 3. Коррекция произвольных линейных искажений в трак-
тах телевизионного вещания. М.: Связь, 1966.
25. Нудельман П. Я. Полиномные синтезаторы частотных и временных харак-
теристик. М.: Связь, 1975.
26. Linke J. W. A Variable Time-Equalizer for Video-Frequency Waveform Cor-
rection.—«Proc. 1ЕЕ», 1952, v. 99, Illa, N 18, p. 427—435.
27. Gutsche H. Ein Echoentzerrer zur Entzerrung von Fernsehsignalen in Vids-
ofrequenzbereich.—«NTZ», 1964, H. 17, N 6, S. 280—282.
28. Amoroso F. Further History of the Tapped Delay Line Pulse Shaper.—«IEEE,
Trans, on Inform. Theory», 1965, v. II—11, July, p. 450.
29. Kaliman H. E. Transversal Filters.—«Proc. IRE», 1940, July, v. 28, p. 302—
310.
30. Schiissler W. Der Echoentzerrers als Modell eines Ubertragungskanals.—
«NTZ», 1963, N 3, S. 155—163.
31. Lytle D. W. Convergence Criteria for Transversal Equalizers.—«BSTJ», 1968,
v. 47, N 8, p. 1775—1800.
32. Rupprecht, W. Verallgemeinter Verzweigungsnetzwerke zur Entzerrung von
Kanalen fur die digitale Dateniibertragung.—«NTZ», 1968, N 6, S. 316—322.
33. Гоноровский И. С. Радиотехнические цепи и сигналы. М.: Советское ра-
дио, 1971.
34. Di Toro М. J. Communication in Time-Frequency Spread Media Using Adap-
tive Equalization.—«Proc, of the IEEE», 1968, v. 56, N 16, p. 1653—1679.
35. Кисель В. А. Дискретный синтез -корректирующих цепей. Автореф. дне. на
соиск. учен, степени канд. техн. наук. Одесса, 1967.
36. Bernd Meister. An Application of the Coley—Turkey Algotith to Equalizati-
on.—«IBM. Journal of Research and Development», 1968, v. 12, N 4, p. 331 —
334.
37. Lucky R. W. Automatic Equalization for Digital Communication.—«BSTJ»,
1965, v. 44, N 4, p. 547—588.
112
Глава 3
АЛГОРИТМЫ АВТОМАТИЧЕСКОЙ ДИСКРЕТНОЙ
КОРРЕКЦИИ
3.1. Задачи, решаемые при разработке алгоритмов
коррекции
Применение полиномных корректоров на коммутируемых сетях
связи, использующих стандартные каналы тональной частоты, и
на каналах с изменяющимися во времени параметрами выдвигает
проблему разработки алгоритмов автоматической и адаптивной
коррекции, которые позволили бы оперативно (в течение несколь-
ких секунд или долей секунд) получить нужный коэффициент пе-
редачи корректора без предварительного расчета так, чтобы кор-
ректор преобразовывал произвольный искаженный сигнал gi(t) в
заданный (эталонный) сигнал £з(/) с допустимой погрешностью.
Современные корректоры, используемые в технике передачи
сигналов (например, в технике телевидения), содержат до 50 ре-
гулируемых отводов ah- Отсутствие определенных алгоритмов прев-
ращает процесс коррекции в сложную
и утомительную операцию, которая
уже при сравнительно небольших иска- Вх
жениях сигналов не приводит к дости-
жению желаемой цели.
Автоматическую коррекцию в про-
стейшей интерпретации можно пред-
ставить следующим образом. Смесь
искаженного сигнала gi(/) и аддитив-
ного шума N (t) подается на вход кор-
ректора. Возникающий при этом на
выходе сигнал £г(0 сравнивается по
своим параметрам с эталонным сигна-
лом g3(t) согласно тому или иному
критерию (рис. 3.1). Если отличие
Рис. 3.1. Структурная схе-
ма .настройки корректора
параметров превышает
заданную норму, меняем величины коэффициентов ак, добиваясь
совпадения gi(t) и g3(t) с требуемой степенью точности. При адап-
тивной коррекции автоматическая настройка корректора произво-
дится непосредственно по рабочему сигналу. Естественно, с целью
автоматизаций процесса коррекции с применением несложных
113
технических средств алгоритмы подбора а/г (алгоритмы адаптации)
должны сводиться к последовательности однотипных простейших
операций.
В настоящей главе излагаются разнообразные алгоритмы, поз-
воляющие синтезировать корректоры с автоматической настройкой
по различным критериям. Все алгоритмы соответствуют дискрет-
ной (точечной) коррекции, при которой сигналы g2('O и £з(0 сов-
падают с требуемой степенью точности в дискретные моменты вре-
мени ts: gilts) =g3(ts) (s=l, 2, ...).
В общем случае критерий совпадения не задан. Непосредствен-
ный выбор той или иной погрешности (степени точности, целевой
функции) в качестве критерия совпадения (меры близости) сиг-
налов определяется специфическими требованиями решаемой тех-
нической задачи и всецело зависит от особенностей функциониро-
вания конкретных систем связи и способов приема сигналов. По
этой причине в главе рассматриваются критерии близости, такие,
как квадратичный, суммарный абсолютный, суммарный обобщен-
ный, ц-критерий, критерий Чебышева, критерии, требующие точно-
го совпадения заданных параметров выходного и эталонного сиг-
налов (в частности, критерии, требующие точного совпадения зна-
чений сигналов в заданные моменты времени) и др. Целесообраз-
ность рассмотрения алгоритмов обусловлена потребностями прак-
тики.
Исходя из разнообразия критериев близости, в основу алгорит-
мов автоматической коррекции положен разнообразный математи-
ческий аппарат, адэкватный сущности процесса коррекции: итера-
ционные алгоритмы решения полиномиальных уравнений и систем
линейных уравнений, методы минимизации многомерных выпук-
лых функций, ряд свойств сигналов и т. д.
В реальных каналах связи коррекция производится неизбежно
на фоне аддитивных шумов. С учетом шумов алгоритмы коррек-
ции можно разделить на две группы: 1) алгоритмы, обеспечиваю-
щие, несмотря на наличие шума N(t), преобразование сигнала
g\(t) в сигнал g3(t) (шум является помехой процессу коррекции),
и 2) алгоритмы, минимизирующие совместно и искажения пере-
даваемых сигналов, и влияние аддитивных шумов, например сов-
местная минимизация и межсимвольных искажений и аддитивных
шумов. Алгоритмы первой группы используются при коррекции
частотных характеристик каналов связи по их временным (импуль-
сным, переходным) характеристикам. Алгоритмы второй группы
применяются в скоростных системах передачи дискретной инфор-
мации. В главе даются алгоритмы как первой, так и второй групп.
В дальнейшем принят следующий порядок: первоначально изложе-
ние алгоритмов ведется без учета шумов; далее указывается, ка-
ковы будут изменения в конечных результатах при наличии шу-
мов. Все алгоритмы соответствуют коррекции по зондирующим им-
пульсам, в качестве которых могут использоваться как специаль-
ные испытательные, так и непосредственно рабочие сигналы, по-
114
скольку именно такая коррекция позволяет компенсировать, в
принципе, произвольные искажения сигналов или каналов.
Следует подчеркнуть, что вопросам синтеза автоматических кор-
ректоров в настоящее время уделяется все возрастающее- внима-
ние, что подтверждается многочисленными публикациями на эту
тему [19, 25—50].
3.2. Итерационные алгоритмы коррекции на основе
z-преобразования (коррекция дискретных сигналов
на бесконечной оси времени)
Общие сведения
Считаем, что моменты времени ts, в которые производится кор-
рекция, выбраны равномерно: ts=sAt (s=0, ±1, ±2, ...) (At—
интервал дискретизации). Введем обозначения: g'i(z), g2(z), ga(z),
K(z) —z-преобразования непрерывных сигналов gi (/), g2(t), £з(0
и коэффициента передачи корректора:
£i(z)= Vafez\
--------00
K(z) =
-------00
00 CO
£2(z) = V bhzk, gA^ = y. chzk,
AbJ «dart
— oo —00
g2 (z) = к(z) gi (z) (z = e-pAi),
(3.1)
где ak, bk и Ck— дискретные значения сигналов gi(t), g2(t) и g3(Z)
в моменты времени kAt. Корректор с коэффициентом передачи
K(z) представляет собой линию задержки с бесконечно большим
числом отводов аь-
В терминах z-преобразования задача автоматической коррек-
ции дискретных сигналов формулируется в следующем виде: не
вычисляя K(z), путем экспериментальных регулировок коэффици-
ентов ak. подобрать их значения по заданным сигналам gi(z) и
£з(г) таким образом, чтобы выполнялось равенство
gt(z) = g8(z). (3.2)
Указанная постановка задачи соответствует коррекции сигна-
лов на бесконечной дискретной оси времени. Как будет показано
ниже, эта постановка задачи удобна тем, что позволяет сравни-
тельно просто оценить влияние величины искажений сигналов и
воздействия помех на процесс автоматической коррекции.
Полученные результаты, строго говоря, справедливы для кор-
ректоров с бесконечно большим (практически с достаточно боль-
шим) числом отводов аь- Однако эти же результаты, естественно,
справедливы приближенно и для корректоров с конечным числом
коэффициентов ан-
115
Коррекция сигналов в случае малых фазо-частотных искажений
Общие положения. Для K(z) с учетом (3.2) формально спра-
ведливо соотношение1 {2, 3]
00
л (2) = =g3 (?) у (-1)* А (?), (3.3)
Si (г)
/г=0
где 8i (z) =gi (г) — 1. Ограничим этот ряд некоторым членом У:
K(N) (?) = g3 (?) Г (- 1)А 8? (?) = [1 -(-1)"+* еГ* (?)]. (3.4)
tJ gi (z)
Л=0
При подаче на вход корректора с коэффициентом передачи
JCW(z) сигнала gi (z) на его выходе возникает сигнал
Ф =gi (z) (?) = g3 (?) [1 -(-1)"+’ еГ1 (?)]. (3.5)
абсолютная погрешность (уклонение) которого по сравнению с
требуемым сигналом g3(z) равна:
8 Г’ (?) = g^ (?) -gs (2) = g3 (2) (- 1)N+1 еГ' (2). (3.6)
Относительная погрешность находится из выражения
Л(ЛГ,(и) = ^- = (-1Г1еГ1(г) (3.7)
ga(z)
и не зависит от сигнала g3(z). Очевидно, что K<JV+1)(z) =
= Ж)(?)—e2W(z).
Из выражений (3.3) — (3.7) вытекает следующий алгоритм под-
бора коэффициентов ад[2, 3]: 1. Устанавливаем начальные значе-
ния afe(°) = cft или K(°)(z) =g3(z). 2. Коэффициенты щД) для i-ro
шага настройки определяются соотношениями а/ДЭ-аД-1)—
—еД"» (i=l, 2, 3, ...)
или
Д(г)(2) = К(г-1)(2)-8Г“1) (г), (3.8)
где 8/Д-1>—дискретные значения погрешности 82(i-1)(z) =g2(i-1)(2) —
—g3(z); g2(i-1)(z) =g1(z)K6-1)(z). Полагая в этих формулах по-
следовательно i=l, 2, 3, ..., после N шагов получим выражения
AW(z), g2(JV)(z) и e2(JV)(2)> совпадающие с выражениями (3.4) —
(3.6). Предлагаемый алгоритм настройки корректора заключается
в многократном изменении коэффициентов ан на величину разно-
сти выходного и эталонного сигналов. Эти изменения производят-
ся шагами, что и объясняет название алгоритма.
Описанный алгоритм требовал установки начальных условий
№'>z=g3(z). Рассмотрим алгоритмы, которые отличаются от опи-
1 В основе соотношения лежит правило суммирования геометрической про-
грессии 1/(1+х) = 1—х+х2—х3+ ...
116
санного измененными начальными условиями. Допустим, что в ка-
честве начальных условий мы приняли (z) = 1, т. е. аь(0)=0
(й=#=0), а0(0)=:1- После N шагов получим:
„(IV) . g3 (г) — [g.3 (г) — gl (г)] — ( — 1^ f (г) _
gi (г)
(г) = ^(г)-[^з(г)-^(г)] (-l)^(z); (3’9)
4"’ (2) = (- if+1 [£3 (г) (г)] f (г).
Предположим теперь, что начальные условия выбраны произ-
вольно: AW(z) =g(z) или а&=йл, где g’(z)—произвольная функ-
ция с дискретными значениями а^. Осуществляя настройку со-
гласно (3.8), после N шагов приходим к выражениям:
Л™ (2) = [ 1 -(- if+1 еГ1 (z)] + (- if [£ (zj-g3 (z)] eftz); '
gl (г)
g2N) (z) - g3 (z) [ 1 -(- if+* er+I (z)] + (- if [£ (Z)-g3 (z)J 8? (z). .
(3.10)
Пример. Применим алгоритм (3.8) для сигналов g1(z)=0,27z-I + l+0,3z;
gi(z)='l. Здесь ei(z) = 0,2z-1 + 0,3.
Исходное состояние: а.ь<°>=0 (6=/=0); а0(°)=1; e2(0)(z) = 0,2z-1+O,3z. Первый
шаг: а1<1>=—0,2; а0(1>=1; а/1>=—0,3; e2(1)(z) =—e2i(z)=—(0,04z~2+0,12 +
+0,09z2). Второй шаг: а<2>_2—0,04; а<2>~1 = —0,2; ао<2>=1,12; а1<2>=—-0,3; а2<2) =
= 0,09; e2<2’(z) = ei(3)fz) = 0,008z-3+0,036z-4-0,054z+0,027z3. Третий шаг:
а<3)~з=—0,008; аО)-2 = 0,04; а(3>_1=—0,236; a0<3>=il;12; а/3)=—,0,354; а2<3> =
= 0,09; a3<3>=—0,027; e2<3)(z) = — e4i(X)=0,0016z-4+0,0096z-2+0,0216+0,0216z2+
+0,0081z4.
Максимум e2<3>(z) приблизительно равен 0,022, поэтому погрешностью
e2<4>(z) можно пренебречь, что позволяет прекратить процесс коррекции на дан-
ном шаге.
После осуществления предельного перехода N-^co в выражени-
ях (3.4) — (3.6), а также в выражениях (3.9) и (3.10) нетрудно
заметить, что если
lime^(z) = 0, (3.11)
ТО
lira
gl (z)
limgf’(z) = g8(z);
lim e<N> (z) = 0
т. e. процесс настройки сходится (обеспечивает получение требу-
емого результата). Стремление е-^Дз) к нулю (^-^-oo) является
необходимым и достаточным условием сходимости описанных ал-
горитмов.
Из выражений (3.4) — (3.6), (3.9) и (3.10) вытекает, что ско-
рость сходимости процесса коррекции определяется только сиг-
налом gi(z) (величиной 8i(z)) и не зависит от сигнала g3(z).
117
Анализ сходимости алгоритма. Укажем ограничения, накладываемые на
спектральную плотность Gi(iw) сигнала gi(z), при выполнении которых выше-
описанные алгоритмы обеспечивают сходимость процесса коррекции.
Условие (3.11) выполняется, если
lim | (i со) | = О
(Д1 —оо),
(3.12)
что может иметь место только цри |er(ico) | = |Gi(ico)—4|<1, где ejico) —
спектральная плотность si(z).
Допустим, что фазовые искажения в Gi (ico) отсутствуют, т. е. arg Gi (ico) =
=0 (здесь и в дальнейшем линейный фазовый сдвиг не учитывается). При этом
если модуль i|Gi(iico)| плотности Gi (ico) не обращается в нуль, то, выбирая
амплитуду сигнала gi(z) соответствующим образом, всегда можно добиться,
чтобы | gi (ico) | < 1. Это свидетельствует о сходимости алгоритмов коррекции.
Проанализируем сходимость при наличии фазовых искажений в спектре
G^ico). Первоначально предположим, что неравномерность .модуля Gi(ico) от-
сутствует: Gi>(ico) =сге1<Р<<1>), где а — модуль; ср(со) — фаза Gi(ico). Укажем гра-
ницы ср (со), для которых |ei(ico) | <1. Так как 8i (ico) =ае'Ф(«>—1, то |ei(ico)| =
— У1+а2—2acoscp(<o). Максимальное значение |е±(ico) |, при котором нарушает-
ся сходимость алгоритмов, равно единице. Из этого условия получим срмакс,(со) =
а
= arc cos —. Таким образом, алгоритмы обеспечивают сходимость процесса кор-
рекции,. если фаза сигнала gi(z) удовлетворяет ограничению |ср(со)| <
Рис. 3.2. Предельные зна-
чения фазы сигнала в за-
висимости от модуля спект-
ра сигнала
нала не обращается в нуль. Эти
< | arccos—| =срМаке (со). При а=0 достига-
ются максимально возможные значения
срмакс=± л/2 (рис. 3.2), поэтому алгоритмы,
в принципе, могут обеспечить сходимость кор-
рекции только для сигналов gi(z), фаза кото-
рых находится в пределах
— л/2 < ср(со) < л/2. (3.13)
Эти пределы справедливы и для сходимости
коррекции в случае произвольных сигналов, у
которых max | Gi (ico) | <а и | Gi(ico) | О
(|со| ^л/|Д0-
Изложенные соображения показывают, что
для расширения пределов по фазовой характе-
ристике величина а должна быть возможно
малой, поэтому сигнал gi (z) необходимо умень-
шать по амплитуде.
Итерационные алгоритмы обеспечивают
сходимость процесса коррекции, если фаза
входного сигнала находится в пределах (3.13),
а модуль спектральной плотности этого сиг-
алгоритмы, по существу, можно применять при
малых фазо-частотных искажениях.
СО
Спектр Gi(ico) запишем в виде Gi(ico)=5. ase-i“'!Ai (|-со | ^л/iA/)', поэтому
00
( a_k — о;г) sin k CoA t
cp (co) = arctg----------—----------------------------------
a0 + (aft 4- a_k) cos k CoA t
1
(3.14)
118
Считаем, что
ОО
^|аь + а_А| <°°. (3.15)
1
кроме того, считаем, что | Gi (ico) =И=0. Из (3.;14) получим, что если
00
I ао I > | ak + a_k |, (3.16)
1
то<р(и) находится в пределах (3.13).
Неравенства (3.15) и (3.16) являются условиями, показывающими возмож-
ность применения итерационных алгоритмов для коррекции дискретного сигна-
00
ла gi(z). Эти неравенства выполняются одновременно, если ]ао]>5и|ал|, по-
k=—00 k=£0
этому данное неравенство можно также рассматривать как- критерий сходимо-
сти процесса коррекции.
Оценим влияние неравномерности фазового спектра на скорость сходимости
процесса коррекции. Скорость сходимости определяется числом шагов N, кото-
рые необходимо выполнить для того, чтобы максимум модуля е1я+1(1со) не
превышал заданной величины
max | (1 со) | ?,
где Eiw+1(ico) — спектральная плотность относительной погрешности корректи-
рования (3.7).
Пусть <р(со) лежит в некоторых пределах tfa0: —вср(со) ==:0 (0<л/2). Оп-
ределим, при каком значении а модуль погрешности | е, (ico) | принимает мини-
мально возможное значение, что обеспечивает оптимальную по быстроте сходи-
мость процесса настройки. Максимум | Si (ico) | достигается на границах участка
—0-Т-+.0 при ср(ю) = !±0, поэтому max|ei(ico) | =У 1 + а2—2а cos 0. Анализ на
экстремум (минимум) дает
min max | sx (i со) | = | sin 0 | = У1 —a2, a = cos0. (3.17)
С увеличением границ cp(co) скорость сходимости процесса коррекции умень-
шается, поскольку min max |iei(ico) | увеличивается. В пределе при 0 = ±л/2
(т. е. а=0) имеем min тахфв11(1со)1| = 1 и сходимость алгоритма нарушается.
Требования увеличения скорости сходимости процесса коррекции и преде-
лов по фазовой характеристике являются противоречивыми, так как с ростом
пределов ф(со) скорость настройки уменьшается и наоборот.
Выражения (3.17) позволяют также ответить на вопрос: какой должна
быть взаимосвязь модуля |ОД1со).| и фазы ср(со) так, чтобы алгоритм обеспе-
чил максимальную скорость сходимости процесса настройки корректора? Для
ответа на этот вопрос необходимо в (3.17) заменить а на | Gt (ico) | и 0 на
ф(и) : | Gi(ico) | = cos ср(со); | ei(ko) | = | sin ср(со) | = У 1—| G^ico) |. В этом
случае | si (ico) | является минимально возможной величиной для теку-
щей частоты ш при заданной фазо-частотной характеристике ср (со). На-
пример, положим ф,(со) =—0,25л sin со (линейный фазовый сдвиг не учитывает-
ся), тогда (рис. 3.3): | Gi(ico) | =cos(0,25л sin со]; |ei(ico) | = |sin [0,25л sin со]|. Из
Приведенного примера вытекает, что при отклонении фазо-частотной характери-
стики ср(со) от линейной в некоторой области частот наличие завала амплитуд-
но-частотной характеристики |Gi(i.co])| в этой же области частот улучшает схо-
димость процесса коррекции.
Помехоустойчивость процесса коррекции. В процессе настройки схема кор-
ректора подвергается действию помех. Под помехами мы будем подразумевать
неточную установку коэффициентов as(i> или суммирование некоторого мешаю-
щего сигнала с входным сигналом gi(z). Поскольку в конечном итоге действие
119
помех выражается в неточной установке считаем, что все помехи пере-
считаны к коэффициенту передачи К<’>(z), а сигнал g\(z) не подвержен дейст-
вию помех.
Оценим влияние одиночной помехи на процесс настройки гармонического
корректора1. Пусть на JVrM шаге настройки на корректор с коэффициентом пе-
редачи (3.4) воздействует помеха, меняющая >fz) на величину
т](г) : i) (z) = K<-Ni'> ,(z) + t](z). Продолжая настройку согласно (3.8), после
Л шагов получим K/Ni +M(z) = K<-Ni +W+(—1)^еЛ(г)г|(г). Проанализируем дан-
ное выражение. Как упоминалось выше, при правильно выбранных пределах
ф(со) имеем limei^('z) = 0 (Аг-»-оо), следовательно,
limK<'V‘+x>(z) = K(z) = ^y) (Л-*<х>).
gi (г)
Таким образом, при воздействии одиночной помехи погрешность не возрастает
с увеличением числа шагов настройки (в системе нет размножения ошибок).
Рис. 3.3. Графики фазы сигнала (а), модуля спектра сигнала (б) и мо-
дуля погрешности спектра сигнала (в), для которых достигается маиси-
мальная скорость сходимости настройки корректора
Допустим теперь, что на систему воздействовал, ряд помех f|i(z), r^fz), ....
т]ц (г) соответственно на Ni, N2, .... шагах настройки (Ni<N2<. .. <N ^).
После шагов получим К1(?гц.)fz) = K(Mp,+^|X)fz)+ (—l)^i е^1 (г)щ(г) +
+ (—(z)^z(z) + • • +'(—1)*ц (z)rl u (z)> гДе \\ = N^ —TVi + %^ ; Л2=
=N |.—Nz+X,, и т. д. (счет X,. ведется после шага 7V„ ). Очевидно,
ц
lim^(—l)^-ie1^i('z)r|ifz)=O (%и ->оо), если lim gAi^fz) = O (Х^-э-оо), поэтому
i=l
lim (z)=K(z) (X^-^-oo). Вывод: при воздействии на систему конечно-
го числа помех r]i(X)< W2), т1ц (z) настройка корректора в пределе не на-
рушается.
Рассмотрим теперь общий случай, когда помехи воздействуют на схему
корректора в течение всего процесса настройки. Коэффициент передачи .коррек-
тора для m-го шага настройки в этом случае равен
m
К*"1) (г) = К{т} (г) + 2 ( - 1 )т~п ^~п (г) Пп (г), (3.18)
п=0
где К<т>(г) — коэффициент передачи корректора для т-го шага при отсутст-
вии помех; г]п(г) — помеха, действующая на га-м шаге настройки. Обозначим
т
M(z) =^j(—1)"‘-"81’"-"(г)т]п(z). Оценим суммарную погрешность Л4(г) при
п=0
гя->-оо. Оценку проведем в частотной области, т. е. при с=е-1“д‘. Допустим,
1 В дальнейшем рассматриваются детерминированные помехи.
120
что модули погрешностей rjn(z) лежат в некоторых пределах 0^ | r|n(z) | С ?
00
(г=е-’“Ле, |со| Сл/Д/), тогда max|Al(ico) | |ei (ico) | П = Е —-
~0 l—i gi(iM)l
Аргумент M(i«) для дайной частоты со может принимать любое значение, по-
скольку на аргументы погрешностей T]„(ico) ограничения не накладываются. С
учетом сказанного предельные значения для Ki(ico) определяются выражением
Ki (i co) = lira K{m} (i co) = К (i co) + MMaKC (i co), (3.19)
m—®
где К(ico) — коэффициент передачи корректора при отсутствии помех;
e>v (и)
Ломакс (' ®) = 5 J _ | 61 (j а) | I (3 • 20)
у (со) — произвольная функция.
Согласно (3.20) ЛТМакс!(ко) зависит как от 5 (точность настройки), так и от
ei(ico). Например, если |ei(ico) | близок к 1, погрешность 7ИМакс (1со) сильно
возрастает даже при малом значении Таким образом, суммарная погрешность
Ммаке'Осо) может достигать больших значений, хотя каждый шаг настройки
выполняется с малой погрешностью.
Из (3.19) получим значения для амплитудно-частотной |7<r(ico)| и фазо-
частотной ср, (со) характеристик коэффициента передачи Ki (ico) при наличии
помех:
| Ki (i со) | « | K(i со) | ± -—-у—- ;
1 — I 61 (1 СО) I
_____________I_____________
{1—lei (i co)|}|tf(i со) |
<Р1 (®) = ф (СО) ± arcsin
где |/((ico) | и ф(со) — амплитудно-частотная и фазо-частотная характеристики
коэффициента передачи корректора при отсутствии помех.
Итерационный алгоритм для произвольных фазо-частотных
искажений
Обоснование алгоритма. В настоящем параграфе излагается
итерационный алгоритм, позволяющий осуществить автоматиче-
скую коррекцию в принципе при произвольных фазовых искаже-
ниях дискретных сигналов [6, 28].
Запишем K(z) в виде
(,) = £з(г) = g3 (z)g~i (г)
£i(z) gi(z)'g1(z)
где gi(z)—ряд, сопряженный ряду gi(z): gi (z) = gi (z~‘) =
00
= ahZ~k. Обозначим Z?i (z) =gi (z)gi (z)— 1, тогда
----00
Z( (2) = -fgf1 g- = g3 (z) ix (Z) X (- 1/ E\ (Z).
k=0
Ограничим этот ряд некоторым членом N:
(2) = g3 (z) gi (z) У (— 1)* 5, (г) = ga (г) £ (г) -—( gg g1—
Li 14-£i(z)
k=0
(3.21)
12 b
Если подать сигнал gi(z) на вход корректора с коэффициентом
передачи (3.21), на выходе возникнет сигнал
g(2N} (z) = gl (г) К (г) = g3 (г) [ 1 - (- l)N+‘ £?+* (z)], (3.22)
абсолютная и относительная погрешности которого соответствен-
но равны:
£Г,(г) = ^,(г)-^з(г) = (-1)Лг^+1(г)^3(г); . (3.23)
Aw (2) = = (_ 1)^+1 (г). (3.24)
ёз (г)
Из (3.21) — (3.23) получим
tf(2V+1) (г) = (г)-lx (г) E<2N) (г). (3.25)
Выражение (3.25) лежит в основе следующего алгоритма кор-
рекции: 1. Исходное состояние (начальные значения): а/40)=Ай,
где Ah — коэффициент при zk произведения gi(z) и g's(z):
К(0) (z) =g\ (z)g3 (z). 2. Коэффициенты Для ii-го шага настройки
корректора определяется соотношениями
a(i) = a(i-l)_
R. К К ,
где — коэффициенты при zh произведения gx (z) E2<’_1) (z):
7<(O(2) = ^-l)(2)_-(2)£(i->)(2);
=g{2~" (2)~g3(Z)-,
После N шагов получим 7<W(z), g2W(z) и ^2W(Z)> совпадаю-
щие соответственно с выражениями (3.21), (3.22) и (3.23).
Описанный алгоритм заключается в многократном изменении
коэффициентов си на величину разности выходного сигнала кор-
ректора и эталонного сигнала, пропущенных через устройство с
коэффициентом передачи gi(z).
Пример. Пусть требуется откорректировать сигнал gi(z) =—0,3 + 0,9z+0,3г2,
приблизив его к сигналу §з(г)*=1-
1. Исходное состояние:
Л(0) (?) = ft (?) ёз (?) = О,3г~2 + 0,9г-1 - 0,3.
Выходной сигнал g2<°>(z) и погрешность £2(0)(-г) равны:
g<0) (г) = ё1 (г) Л(0) (г) = — 0,09г~2 + 0,99 — 0,09г2;
£(0) (г) = g<°> (г) - g3 (г) = — 0,09г~2-0,01—0,09 г2.
2. Первый шаг настройки
Л(1) (г) = Л<0) (г) -gj (г) £<0) (г) = 0,027 г”4 + 0,08\г~3 + 0,276 г~2 +
4-0,909г-‘ —0,276 —0,081 г —0,027 г2.
Определяем погрешность
Ер(г) = 0,0081 г~4 4-0,0018 г“2 4-0,016 4-0,0018 г»+ 0,0081 г*.
122
В силу малости этой погрешности прекращаем процесс коррекции, считая,
что К(г)=К^(<г).
Сходимость и помехоустойчивость алгоритма. Согласно (3.23) для сходи-
мости алгоритма необходимо и достаточно, чтобы lim£2<N>('z) = 0 или
lim£’iw+1('z)=0 (JV-»-oo). Это свидетельствует о том, что сходимость алгоритма
определяется только входным сигналом gi(z).
Спектральная плотность погрешности Ei(z) равна Ei (со) = | Gi(ico) |2—1,
где | Gi (ico) |2 — квадрат модуля спектральной плотности сигнала gi(z). Счи-
таем, что модуль Gi(ico) нормирован по максимуму: max| GJico) | =1. Если
gi(z) удовлетворяет условию корректируемое™ | Gii(ico) | =Н=0 (|со | то
тах|£]((о) | <1, поэтому lim£rN'+1(co) =0 (JV->-oo) и алгоритм сходится.
Допустим, что условие корректируемое™ не выполняется, т. е. модуль
|Gi(ico) | обращается в нуль на некоторой частоте on. При этом
max|Ei(co) |<?1 (<о^=сол); max|£i(co) | = 1 (<»=<£>&) и lim£iN'+I(<o)=0 (co=H=coft);
limEiw+1 (co) =‘l (<o = an, N-*-oo). Из данных выражений вытекает, что алгоритм
обеспечивает сходимость коррекции во всем диапазоне частот | со за
исключением тех частот, на которых не выполняется условие корректируемое™.
Функция £1(<о) не зависит от фазо-частотной характеристики сигнала gi(z), по-
этому скорость сходимости алгоритма определяется только модулем спектраль-
ной плотности входного сигнала.
Оценим влияние помех на настройку корректора.
Допустим, что на корректор воздействовал ряд помех r]i(z), r\z(z), ...,
r]4(z) соответственно на N2, шагах настройки (М1<М2<...<1Уц).
Г N +Л. 1
а
После X шагов получим £(Nji+W(z) =gi(z)g3(z) (—l)hEik(z) +Н(z) ,где
fe=0
и
H(z)=^ (__________1*4 Eyt (z)'^t(z)', хУг(г) находится из выражения f}i(z) =
<=1
— gi(z)ga(z)'Vi(z) и характеризует помеху T\i(z). Очевидно, lim H(z) — 0
(Х->-оо), т. е. воздействие на корректор ряда помех не нарушает процесса на-
стройки.
Рассмотрим общий случай, когда помехи воздействуют в течение всего про-
цесса настройки корректора. 'Коэффициент передачи корректора для m-го шага
настройки в этом случае равен
m
K!m>(z) = K<m>(z)+ V(_ l)m~n Em-n(z)i]n(z), (3.26)
n=0
где №m>(z) — коэффициент передачи корректора для /n-го шага при отсутствии
помех; r]n(z) — помеха, действующая на п-м шаге настройки.
Выражение (3.26) по характеру не отличается от аналогичного выражения
(3.18), поэтому при дальнейшем анализе /(i<m)(z) воспользуемся результатами
предыдущего параграфа. Как и ранее, считаем, что модули погрешностей r]n(z)
лежат в некоторых пределах 0—Е;.
Воспользовавшись (3.19) и (3.20), получим, что амплитудно-частотная ха-
рактеристика |Ki(iw) | и фазо-частотная характеристика ф] (со) коэффициента
передачи корректора при наличии помех находятся в пределах:
|Х.<1Ф)|-|ОШ>|±12|/1(Ш)| ;
6
ср, (со) = <р (со) + arcsin -----——- .
{l-|Ei(co)|Wiw)
Эти выражения позволяют сделать вывод о том, что влияние помех на про-
цесс настройки существенно зависит от величины £4(1(0), т. е. от величины не-
равномерности амплитудно-частотного спектра сигнала gi(z). Так, если в неко-
торых областях частот амплитудно-частотный спектр сигнала gi(z) близок к
нулю (|Ei(со) » 1), влияние помех.резко возрастает.
123
3.3. Коррекция сигналов на конечном отрезке
времени
Общий итерационный алгоритм
Используемые на практике корректоры содержат конечное
число отводов ан- Рассмотрим итерационные алгоритмы примени-
тельно к настройке таких корректоров.
В настоящем разделе излагаются алгоритмы дискретной кор-
рекции, при которой сигнал g2(t) совпадает с g3ft) в конечном
числе произвольных (не обязательно равноотстающих) моментов
времени ts(s= 1, 2, ..., q) [18]. Число точек совпадения полагается
равным числу регулируемых коэффициентов цд.
Считаем, что задан произвольный полиномный корректор с ко-
эффициентом передачи
ч
= (3.27)
6=1
На входе корректора сигнал gift), на выходе сигнал
я
gAt) = ^M), (3.28)
6=1
где
да
fhft) = -g~ [G1(i®)<ph(i®)e1“‘da, Gx (i ®)—спектр gx (/).
2л J
----00
Задачу коррекции сигналов на конечной дискретной оси време-
ни можно сформулировать в следующем виде: указать алгоритмы
автоматического подбора коэффициентов аб(&=1, 2, ..., q) из ус-
ловия выполнения равенства
gAts) = gAts) (s= 1, 2...q). (3.29)
Предлагаемые в настоящем разделе алгоритмы основаны на
итерационных методах решения систем линейных уравнений.
С учетом (3.28) и (3.29) имеем
Q
{s=1> 2> •••’7) (3-30)
6=1
или АХ=В, где
ask=fk(ts); bh = q2(ts) (s, k=l, 2.. q).
124
Если А — неособенная матрица, |Д|#=0, где | А |—определи-
тель Л, то
Х* = Д~'В. (3.31)
Здесь X* — точное решение системы (3.30).
Требование неособенности матрицы А является необходимым и
достаточным условием выполнения равенства (3.29), т. е. необхо-
димым и достаточным условием корректируемости сигнала gi(t) (в
строгом смысле) при заданной системе функций {<рл. (1о>)}.
Значения a*k(& = l, 2, ..., q), при которых строго выполняется
(3.30), неизвестны, поэтому, не производя вычисления Д-1, подбе-
рем коэффициенты аь таким образом, чтобы уравнение (3.30) вы-
полнялось с заданной степенью точности. Воспользуемся для этой
цели итерационными методами решения систем линейных уравне-
ний, которые сводятся к следующему.
Строим последовательность векторов ХЮ, Х<2>, ..., Х^\ ... по
рекуррентным формулам <[22]
Х(0 = Х(г-1)+/7(г) [В—ДХ(г-1)] (i=l, 2,...), (3.32)
где ЯЮ— некоторая последовательность матриц; Х<°> — начальное
приближение, которое в общем случае может быть произвольным.
О точности приближенного решения ХЮ системы (3.30) обычно
судят по вектору ошибки У<»)=Х*—ХЮ либо по вектору невязки
7?Ю=ДУ(г) = В—ДХЮ. С учетом вектора невязки выражение (3.32)
записывается в форме
X(i) = x<;~1)+//(i)/?(i-I>. (3.33)
Эквивалентное выражение для УЮ; УЮ=(Е—Н^А) (Е—НЧ~')А).„
...(Е—Н<Х>А) (X*—Х<0)), где Е — единичная матрица. Из этого сле-
дует, что если какая-нибудь норма матрицы Т^= (Е—НЮА) (Е—
—7/<»-1>Д)...(Е—Ж‘)Д) стремится к нулю:
||Т(,,||->0 (»-оо), (3.34)
то итерационный процесс является сходящимся, т. е. ||УЮ||->0,
||/?Ю||->0 (1->оо).
Под нормой матрицы
Г /<*> /ЮД
41 ••• llq
Цг) /(г)
L V •" J
подразумевается одно из выражений:
’ Й=1 * /=1
||’'|,’||т
125
где А, — максимальное собственное значение
7»(г) — матрица, сопряженная Т&\
Под нормой вектора ошибки УИ =
какое-либо из выражений:
матрицы Т*«)7’(*>;
подразумевается
Q
* 4=1
г 4=1
Норма вектора невязки ||l/?W|| определяется аналогично.
Условие (3.34) является необходимым и достаточным для схо-
димости итерационных процессов. Матрицы обычно выбирают-
ся так, чтобы по возможности ускорить сходимость процесса.
Рис. 3.4. Структурная схема автоматического
корректора с настройкой по методу последо-
вательных приближений
На рис. 3.4 изображена структурная схема, реализующая кор-
рекцию согласно (3.33). Исходное состояние этой схемы: устанав-
ливаем начальные значения коэффициентов аЛ что дает началь-
ное приближение Х<0> =
а<°)
L я J
Как указывалось выше, Х(о), в прин-
ципе, может быть выбрано произвольно. На вход корректора по-
дается сигнал gi(0; на выходе возникает сигнал g2(0)(0 > а на вы-
ходе вычитающего устройства — сигнал г(0) (/) =g3 (/)—
Ключ Кл осуществляет выборку дискретных значений r(0)(/s) (s =
= 1, 2, ..., q) сигнала г<°)(/). Значения r(0)(Zs) являются компонен-
тами вектора невязки
А?<0> =
’ г(°>'
г(0)
_ Q _
г(0) г° / / \
rS =г ( <s).
126
Управляющее устройство УУ выполняет операцию умножения мат-
рицы НЮ на матрицу-столбец iR<°>. На q выходах УУ возникают
напряжения Ukw (&=1, 2, q), являющиеся компонентами мат-
рицы-столбца Напряжения и^0' управляют коэффициента-
ми си(0), изменяя их величину на и^°\ что дает первое прибли-
жение
а(1) = а(0)+ы(0) (6=1, 2,
или х^=хю+нтю.
Повторяя указанный процесс г раз, получим
a(0 = a<i_1)+“V~1)(^=1>2. .... <7; t= 1, 2. ...)
или XW—XV-V+Htt-^Rtt-1), что совпадает с (3.33). В этом выра-
жении компонентами матриц Х^\ Х^~х\ Н&~1\ R^-1') являются со-
ответственно величины
В процессе коррекции для каждого шага г производится изме-
нение матрицы согласно тому или иному заранее выбранному
правилу. Если при заданной матрице А последовательность мат-
риц HW выбрана так, что выполняется (3.34), процесс коррекции
является сходящимся, т. е.
X(f)-»X*, ak^ak (fe=l,2, ...,q- i->oo);
&>( ts) (3=1,2....<7; i->oo),
где g2(i)(^s) —дискретные значения сигнала на выходе корректора
после i шагов настройки.
Для итерационных процессов, описываемых выражением (3.33),
точное решение X* (3.31) является неподвижной точкой (22]. Это
значит, что если за начальное приближение взято X*, то все после-
дующие приближения будут равны X*. С физической точки зрения
данное свойство означает следующее. Если корректор настроен,
т. е. установлены коэффициенты >а*н, то, продолжая настройку со-
гласно (3.33), мы не будем удаляться от установленных коэффи-
циентов a*k. Иными словами, продолжение настройки не приводит
к расстройке корректора.
Рассмотрим возможные итерационные алгоритмы, которые по-
лучаются из общего итерационного алгоритма при различных спо-
собах выбора матриц HW.
Простая итерация
’К простейшим итерационным процессам относятся стационарные процессы,
в которых матрицы /7<‘) не зависят от номера шага i.
Положим в (3.32) Н^1=Е для всех i, тогда
=ОХ((-1) + В (3.35)
ИЛИ
Х<‘) =x(i-I) 4-Я(1'~1>, (3.36)
где
127
Итерационный процесс, описываемый (3.35), является классическим мето-
дом последовательных приближений. Нетрудно видеть, что X<’')=Z)'X0+(£4-
+.D + D2+ ... +ЛН-1))В; У<«)=(—1)Д)ДХ*—Х<»>); £<«) = (—1) цт=В—
—AXW, откуда следует, что процесс последовательных приближений сходится,
если какая-либо норма .матрицы D .меньше единицы:
(|О||<1. (3.37)
При выполнении (3.37)
II || = ||О||г || Х<°’ || н-
II В II II II1’
1 - II о II
|| У<г> IK II D || || У('-1> || ;
lltf(Z> IK II D II II Я<‘-» II .
Данные выражения позволяют по известным матрицам D и Х<°) оценить ско-
рость сходимости процесса последовательных приближений.
Укажем простейшие достаточные признаки сходимости процесса последова-
тельных приближений [22].
Q
1) Если max V, |dsj|=p-<3, то процесс сходится и
/=1
>av — “o’
\bv~b^
(v, /= 1,2, . . ., p).
(3.38)
<7
2) Если max V
1, то процесс сходится и
Я Я q q
V=1 V=1 V—1 V = 1
(3.39)
<7
3) Если \, =р<1, то процесс сходится и
s,/=l
Я <7 q q
•
S=1 S=1 S = 1 S=1
(3.40)
Для гармонического корректора
CLq CL_। CL 2
al a0 1 • • •
al CL0 . . .
_ ... a2 ai ^0 _
Нормируя значения этой матрицы так, чтобы а0=1, получим
~ 0 a_j а_2 . . .“]
а, 0 а , . . .
-D= о -
а2 0 . . .
_... б?2 а± 0
128
Учитывая особенности матрицы D, три указанных выше достаточных усло-
Q
вия можно заменить одним условием: если |aJt|=y<l, то процесс последо-
k-=.—q, k=/=0
вательных приближений сходится, при этом в выражениях (3.38) — (3.40) необ-
ходимо заменить ц, г) и р иа у.
Настройка полиномного корректора по методу .последовательных приближе-
ний осуществляется схемой, приведенной на рис. 3.4, в которой блок У У пред-
ставляет собой коммутирующее устройство, распределяющее дискретные значе-
ния выходного сигнала r(i>(7s) по q выходам. Напряжения г<9(7я) меняют коэф-
фициенты ds<0 на величину r^(ts):
а<г'+1> = а<г> + r^(ts) (з=1,2.......<?;!=!,2, . . .). (3.41)
Если (Zss—1 (s=il, 2.. q), где ass — диагональные элементы матрицы А,
то процесс последовательных приближений относится к методу простой итера-
ции (метод Якоби). В случае гармонического корректора можно считать, что
а0— 1, поэтому настройка гармонического корректора согласно выражению (3.41)
производится по методу простой итерации.
Одношаговый циклический алгоритм
Запишем систему уравнений (3.30) в виде
X = DX + B, (3.42)
где D=E—А. В случае одношагового циклического процесса (метод Зейделя)
вычисление i-ro приближения k-к компоненты производится по формуле
k— 1 q
= S Vj (3.43)
/=1 j—k
Таким образом, t-e приближение для k-u компоненты вычисляется иа основе
полученного ранее i-ro приближения компонент ...,
Одношаговый циклический процесс может быть представлен как разновид-
ность процесса последовательных приближений, если записать выражение (3.42)
в виде
Матричная зайтись выражения (3.43) откуда следует
Х(,'> =(Е —А4)-1^(,'-1>4-(Е' —Л4)-'В. (3.45)
Полный цикл одношагового циклического процесса для системы (3.44) равноси-
лен одному шагу процесса последовательных приближений, примененного к си-
стеме
X = (Е — МП1 NX + (Е — Мр1 В, (3.46)
которая эквивалентна системе (3.44). Из (3.45) следует, что для сходимости
одношагового циклического процесса достаточно, чтобы
(Е — М)—11| || Ai || < 1 • (3.47)
В силу сказанного для оценки скорости сходимости одношагового цикличе-
ского процесса применимы те же выражения, что и для .процесса последователь-
ных приближений.
5—181 129
Одной из разновидностей одношагового циклического процесса является
метод Некрасова [22], при использовании которого система (3.30) записывается
в виде
k—1 q
V аМ X? аЫ , bfl
as = — У — «j — У — a; + —
^ahh
и последовательные приближения ведутся по формулам
*—1 q
a(i)= _ y^a(0_ у 2W (Z-J) А.
Метод Некрасова сводится к 'методу последовательных приближений, если
в выражениях (3.45)—(3.47) произвести замену:
Л4= — P~l L; N= — p-'Q,
Настройка корректора на основе одношагового циклического процесса осу-
ществляется схемой, изображенной на рис. 3.5, в которой УС — устройство
сравнения, например двухлучевой осциллограф. Регулируя последовательно ко-
эффициенты аь (k = l, 2, .... q), добиваемся совпадения сигнала gt^(t) с сигна-
лом gs(t) последовательно в точках ts (s=k = l, 2, ..., q), что соответствует од-
ному циклу настройки. Для каждого цикла при регулировке коэффициента
Рис. 3.5. Структурная схема настройки
корректора на основе одношагового
циклического процесса
добиваемся выполнения равенства gz^tij—gaftk)- Затем циклы повторя-
ются. В случае гармонического корректора аьь.— ! (для всех k), поэтому можно
сказать, что настройка гармонического корректора производится по методу Не-
красова.
При настройке корректора на основе одношаговаго процесса коэффициенты
а* регулируются последовательно в порядке возрастания их индексов k (k=\,
2, ..., q). Однако скорость сходимости процесса настройки значительно увеличи-
вается, если индекс k регулируемого коэффициента ак выбирать по одному из
нижеследующих правил [22]: <
1 Индекс k выбирается так, чтобы число ——-------;— было максимальным
I akh I
среди всех аналогичных чисел (правило Зейделя).
130
2. Индекс k выбирается так, чтобы число —------ было максимальным
I ahh |
(правило Гаусса).
3. Индекс k выбирается так, чтобы число было максимальным
(правило Сауссела).
© этих выражениях — компоненты вектора невязки. С учетом тех-
нической реализации правило Сауссела является наиболее простым. При на-
стройке корректора с использованием правила Сауссела необходимо регулиро-
вать тот коэффициент «л, которому соответствует максимальное уклонение сиг-
нала и в момент времени th. Для гармонического корректора
akk—1, поэтому по сути дела правила Зейделя и Гаусса совпадают с правилом
Сауссела.
Достоинство алгоритмов коррекции, основанных на одношаговых цикличе-
ских процессах, заключается в их максимальной простоте (с учетом технической
реализации), что выгодно отличает их от других итерационных процессов.
Групповая релаксация
Выделим некоторую группу G индексов k регулируемых коэффициентов ак
и при переходе от предшествующего приближения к последующему будем на-
страивать только коэффициенты as с индексами из выбранной группы G(AeG).
Настройку будем производить так, чтобы для моментов времени Д(/ге(3) сиг-
нал g2(i)(0 строго совпадал с сигналом gi(t):
g^(th) = gs(tk) (keG).
Нетрудно видеть, что в основе такого алгоритма настройки лежит метод
групповой релаксации [22]. Можно получить различные модификации этого ал-
горитма, задаваясь различными правилами выбора групп G. Простейшей моди-
фикацией является циклический групповой алгоритм, в котором все индексы
k разбиваются на несколько неперекрываЮщихся групп, которые по ходу на-
стройки циклически повторяются. Возможен также свободный групповой алго-
ритм, в котором допускается не только нециклическое чередование выбранных
групп индексов, но и изменение состава групп на каждом шагу.
'Как правило, алгоритмы, основанные на групповой релаксации, обеспечива-
ют более, быструю сходимость процесса коррекции, нежели алгоритмы, осно-
ванные на одношаговом циклическом процессе.
Групповые алгоритмы целесообразно применять для корректоров с большим
числом регулируемых коэффициентов иь.
3.4. Оптимизация искажений на основе суммарных
критериев
Суммарный квадратичный критерий
Степень близости сигналов g%(z) и g3(z) удобно оценивать по
величине функционала (целевой функции)
ОО
Q = ^l£2(z)—£3(2)]= 2 Wh—cJ, (3.48)
k=--00
где Ф(-), £>(•) указывают некоторые операции под соответству-
ющими сигналами или величинами. Этот функционал в дальней-
шем называется обобщенным суммарным критерием или обобщен-
ной суммарной погрешностью. По существу, функционал (3.48)
дает обобщенное уклонение дискретных сигналов на выходе кор-
5* 131.
ректора. Частными случаями обобщенного критерия являются
широко известный суммарный квадратичный критерий (суммар-
ная квадратичная погрешность или уклонение)
П= V (bh~ск)2
k=—00
и суммарный абсолютный .критерий (суммарная абсолютная пог-
решность или уклонение)
Д = У \bk~сй|.
zStas
k=—оо
Укажем алгоритмы, позволяющие настроить дискретный кор-
ректор с коэффициентом передачи
тх
= <3-49)
—п1
либо полиномный корректор с коэффициентом передачи (3.27)
таким образом, чтобы величина обобщенной погрешности Q при-
няла минимально возможное значение.
Поскольку суммарный квадратичный и суммарный абсолют-
ный критерии представляют самостоятельный интерес, первона1-
чально коротко рассмотрим минимизацию искажений дискретных
сигналов на основе этих критериев.
Здесь и в дальнейшем предполагается, что сигналы gz(tk) и
£з(6г) удовлетворяют условию абсолютной интегрируемости:
2 N<°°; 2 N<°°-
k=—CO k= 00
Большой интерес, проявляемый в настоящее время к вопросу
коррекции искажений на основе квадратичного критерия, объяс-
няется, во-первых, относительной простотой его технической реа-
лизации и, во-вторых, относительной простотой учета влияния ад-
дитивных помех на процесс настройки корректора [5, 23, 27, 30,
32].
При прохождении сигнала gi(z) через корректор с коэффици-
ентом передачи K(z) (3.49) на выходе получим сигнал g2(z)~
=gi(^)K(z)= 2 bkzk>где bk = 2 ak-tai-
k=—co i=—
С учетом этого выражения суммарная квадратичная погреш-
ность принимает вид [6]
zni+rti —i mi
+ 2 ahaA+i—2 V Dhah + A, (3.50)
i=l k——n, ~n1
132
где
00 00
Л = 2 cl>°: Bi= £ akak-i (i = 1, 2, ..., ni + ffli);
k=—oo fe=—oo
oo
Dh = £ ct at-h (—< k < mJ.
j=—co
Коэффициенты А и- Bo, равные энергии дискретных сигналов
g3(z) и g\(z), больше нуля, так как мы рассматриваем сигналы,
не равные тождественно нулю.
Погрешность q—многомерная функция второго порядка от пе-
ременных аь(-—. Поскольку при старших членах стоит
один и тот же коэффициент Во, выражение (3.50) представляет
собой уравнение многомерной параболы. Известно, что многомер-
ная парабола имеет только один экстремум. В нашем случае
q>0, поэтому парабола обращена «вверх» (положительна) и
имеет минимум, т. е. является выпуклой вниз функцией. Это свой-
ство погрешности q справедливо для любых сигналов gx(z') и
£з(?).
Проведенные рассуждения показывают, что квадратичная по-
грешность, вычисленная на выходе корректора, является много-
мерной выпуклой функцией коэффициентов передачи регуляторов
аь-
Очевидно, что свойство выпуклости погрешности q не нарушит-
ся, если вычислить q с учетом дискретной функции веса {ph} :
СО
q= Pk(bk—Ch}2, где Рй>0 для всех к. В дальнейшем вес не
k=-00
учитывается, что, однако, не нарушает общности полученных ре-
зультатов.
Для нахождения аь, минимизирующих величину q, необходи-
мо решить систему уравнений
dq/dafe = O (—n-i < k < mJ. (3.51)
Значения ah, удовлетворяющие этой системе, обозначим через
a*h- Используя свойство выпуклости погрешности q в сочетании с
известными математическими методами поиска экстремума функ-
ций многих переменных [24], ниже рассмотрим два алгоритма на-
стройки дискретных корректоров с целью минимизации суммарной
квадратичной погрешности. Первый алгоритм, называемый алго-
ритмом последовательной оптимизации, основывается на методе
сечений (оптимизация по переменной или по направлению); вто-
рой алгоритм, называемый алгоритмом одновременной оптимиза-
ции, основывается на методе скорейшего спуска (метод градиен-
та) .
Техническая реализация алгоритма последовательной оптимизации осуще-
ствляется с помощью структурной схемы, изображенной на рис. 3.6а, где ГС —
генератор эталонного сигнала gi(z); W7 — ваттметр, указывающий величину q.
133
Процесс последовательной оптимизации непосредственно заключается в вы-
полнении следующих операций:
<1. По всем регуляторам а* устанавливаем произвольные (например, нуле-
вые) начальные значения коэффициентов передачи.
Рис. 3.6. Структурные схемы, минимизации квадратич-
ной погрешности (а) и минимизации энергии эхо-сигна-
лов (б) методом сечений
2. Поочередным многократным изменением коэффициентов минимизируем
показания ваттметра W. В каждом случае при изменении конкретного регулято-
ра ал добиваемся минимального показания ваттметра W, что в силу свойства
выпуклости приводит к абсолютному (глобальному) минимуму погрешности т].
Процесс настройки является сходящимся, т. е. мы неизбежно приходим к зна-
чениям a*k, соответствующим минимуму т].
Описанный алгоритм отличается простотой, поэтому настройку
корректора можно осуществлять автоматически.
В большинстве практически важных случаев требуется откор-
ректировать сигнал gi(z) так, чтобы он наименее уклонялся от
сигнала gi(z) = c0, где с0 — произвольная, не равная нулю вели-
чина. Для этого случая структурная схема настройки корректора
упрощается и принимает вид, указанный на рис. 3.66, где Кл —
ключ, пропускающий все значения сигнала g^z), кроме Ьо. На-
стройка производится в соответствии с изложенным алгоритмом
с той лишь разницей, что регулятор а0 настройке не подвергается
(<zo=const =7^=0) .
На рис. 3.7 изображена структурная схема автоматической
системы, реализующая алгоритм одновременной оптимизации
[6].
Градиент функции погрешности т] равен
mr mt
S X
k=—п1 k=—
где ak— единичный вектор переменной ад; —компоненты гра*
диента:
В точке.т]Мин градиент равен нулю, так как его компоненты со-
гласно (3.51) обращаются в нуль. Градиент указывает направле*
134
ние и скорость быстрейшего нарастания функции для заданной
точки. Поэтому вектор, равный по величине градиенту и противо-
положный ему по знаку, указывает направление и скорость быст-
рейшего убывания функции в этой же точке. Если менять коэф-
фициенты а& одновременно таким образом, чтобы соответствую-
щий этим' изменениям вектор был противоположен градиенту, то
мы скорейшим образом достигнем минимума функции, в какой бы
исходной точке мы не находились. Движение при этом осущест-
вляется по геодезической линии (брахистохроме), которая явля-
ется линией кратчайшего расстояния или скорейшего спуска.
Для движения по геодезической линии коэффициенты ссй необ-
ходимо менять со скоростями, пропорциональными—Лй. В резуль-
тате для настройки корректора понадобится минимально возмож-
ное время. Таким образом, алгоритм, основанный на методике
скорейшего спуска, является оптимальным по быстродействию.
Указанные особенности лежат в основе принципа действия си-
стемы, изображенной на рис. 3.7. Вспомогательный корректор
Рис. 3.7. Структурная схема 'корректора,
минимизирующего квадратичную погреш-
ность методом скорейшего спуска
ВК, используемый только в процессе настройки, имеет коэффици-
ент передачи К(г) =gi(z-1). В случае гармонического корректора
K(z) = (ccfe=a_fe), где а*— дискретные значения входно-
ft
го сигнала. В этом случае вспомогательный корректор реализуем
только при конечном сигнале gi(z). На выходе ВК сигнал равен
[K(z)gi(z)—S's(2)]gi(z-1). Его дискретные значения пропорцио-
нальны величинам %&(—Коммутатор распределяет
значения А* по выходам, каждый из которых управляет работой
соответствующего регулятора, меняя его коэффициент передачи
на величину, пропорциональную —
Пример. Пусть
gl (г) = — 0,5з“1 + 1 + 0,5г;
gB (г) = 1
И
К (г) = а_! г-1 + ao+aj г1.
Согласно (3.50) r] = l,5(a2_I + a2o + a2i)~O,5a_Iai—a_1—2a0+<ai+l.
Искомые значения коэффициентов а**, удовлетворяющие (3.51), равны:
>a*-i = 0,285; а*о = О,666; «*1=—-0,285.
135
Осуществим 'настройку методом последовательной оптимизации.
11. Исходное состояние: аг30) = 0 (й#='О). Изменением а0 добиваемся мини-
мума погрешности Т], что дает ао(1) = 0,606.
2. Минимизируем г] за счет изменения си, в результате чего получим aiO)=
=—0,333.
3. Минимизируем т] изменением 'величины a~i, что приводит к результату
= 0,278.
4. Уточняем значение сцО), Значение a0(1) не уточняется, так как ao(1) = ao*.
Повторная минимизация т] за счет вариации си дает си(2,=—0,286.
На этом этапе настройку можно прекратить, поскольку си(2), совпа-
дают с di* и a*-i с хорошей степенью точности.
Описанная настройка коэффициентов си и a_i после подбора величины а0
иллюстрируется рис. 3.8, па котором для наглядности за положительное направ-
ление принято направление оси т] вниз.
Рис. 3.8. Динамика минимизации квадра-
тичной погрешности методом сечений и ме-
тодом скорейшего спуска
Минимальному значению т]мин соответствует точка М с координатами at*
и a*-i. (Последовательная минимизация происходит по кривой abed, одновремен-
ная минимизация — по кривой <и]Мин-
Суммарный абсолютный критерий
Суммарная абсолютная погрешность на выходе дискретного
корректора определяется выражением [78, 33, 34]
д= 2
—00
У ak-iai~ch
i=~nt
(3.52)
Впервые использовать суммарный абсолютный критерий пред-
ложено в [33] для коррекции малых искажений, которые удовлет-
воряют ограничению
Ы < И |.
k=—оо, k=£0
136
(3.53)
Для многоуровневых систем передачи данных значение величи-
ны суммарной абсолютной погрешности позволяет просто оценить
работоспособность системы. В случае, когда величина А меньше
половины расстояния между соседними передаваемыми уровня-
ми, неискаженный прием возможен для любых комбинаций сиг-
налов. В многомерном пространстве с координатными осями ал
выражение (3.52) описывает некоторую поверхность А. Проанали-
зируем характер этой поверхности.
Рассмотрим сечение поверхности А плоскостями Х'п, парал-
лельными координатным плоскостям. Пересечение поверхности А
с плоскостью Х'п дает кривую Ln, лежащую в Х'п, для нахожде-
ния уравнения которой необходимо в (3.52) подставить ai =
— а'г (a'i—фиксированные значения аг). В результате
со
подстановки получим Ln= ^Lkn, Lkn=\ah-n\an+bhn\, где
k=— to
ак~*а'{—Ch Очевидно, Lfen — непрерывная кусочно-
Z=—
линейная выпуклая вниз функция, так как
, ( ап + ап (<) + Lftn(aZ)
kn \ 2 / 2
где а'п и а"п—произвольные значения переменной ап-
Поскольку сумма выпуклых функций и предел последователь-
ности выпуклых функций также являются выпуклыми функциями,
то Ln-—:выпуклая функция. Таким образом, сечение поверхности
А произвольной плоскостью Х'п, параллельной любой координат-
ной плоскости Хп, всегда дает выпуклую функцию Ln, имеющую
минимум. Следовательно, поверхность А — выпуклая вниз.
Учет дискретной функции веса {рь} при вычислении суммар-
00
ной абсолютной погрешности А= уpk| bk—Сл| не нарушает свой-
k=— 00
ства выпуклости.
Для нахождения значений a*h, минимизирующих А, в данном
случае нет возможности непосредственно применить аналитичес-
кий способ отыскания экстремума функций нескольких перемен-
ных, который заключается в составлении и решении системы урав-
нений вида dAldak=^ (—поскольку А—кусочно-ли-
нейная функция с разрывными частными производными dAldak,
причем минимум А может достигаться в точке излома, в которой
частные производные претерпевают разрыв, т. е. не существуют.
Используя свойство А как выпуклой функции, определим а**,
методом сечений (последовательная оптимизация) либо методом
скорейшего спуска (одновременная оптимизация).
Последовательная оптимизация погрешности А методом сече-
ний’ реализуется с помощью структурной схемы, изображенной
на рис. 3.9a, в которой используется цепочка из линейного детек-
137
тора ЛД, интегратора и индикатора И, указывающего значение
А. Настройка корректора производится по минимуму показаний
индикатора И. В тех случаях, когда ёз(г) = Со, для минимизации
Рис. 3.9. Структурные схемы минимизации сум-
марной абсолютной погрешности (а) и миними-
зации суммы модулей эхо-сигналов (б) методом
сечений
искажений целесообразно воспользоваться системой, изображенной
на рис. 3.96, в которой ключ Кл пропускает все дискретные значе-
ния сигнала g'i(z), за исключением значения Ьо. В этом случае
суммарная абсолютная погрешность принимает вид
(3.54)
k=—оо
k=£Q
Требования Д^ид зачастую недостаточно для практических це*
лей, поскольку для повышения помехоустойчивости дискретных
систем связи необходимо максимизировать отношение
60/Д' = гпах. (3.55)
Настройка корректора по схеме рис. 3.9а приводит к выполне-
нию условия (3.55), в то время как при настройке по схеме
рис. 3.96 это условие может не выполняться. Максимизация отно-
шения (3.55) эквивалентна минимизации Д' при ограничении:
fe0=co = const. Это ограничение учитывается введением в схему
рис. 3.95 усилителя с автоматической регулировкой уровня РУ,
который в процессе настройки корректора поддерживает неизмен-
ным значение Ьо.
Одновременная оптимизация методом скорейшего спуска реа-
лизуется системой, изображенной на рис. 3.10а, в которой вектор
изменений коэффициентов ад. пропорционален длине и противопо-
ложен направлению градиента функции погрешности Д.
Градиент погрешности Д находится из выражения VA=
т1
= 2 ^ак, где Kk=dAldak (—[дифференцирование
-nf
138
sign (pk— ck) =
Д по аь производится всюду, за исключением линий излома (ре*
бер) функции Д].
Погрешность Д удобно представить в виде
А = £ (f>k~Cfe)sign(f>fe—ck) =
k=------00
£ aft_t at—cft J sign
I, bh~ cft>0;
— 1, bh~ chCO.
Рис. 3.10. Структурная схема корректора, мини-
мизирующего суммарную абсолютную погреш-
ность методом скорейшего спуска (а) и сигналы
ошибки (б, в)
Соответственно компоненты градиента выразим так:
К= £ sign
k=—n.1
Операции вычисления hi моделируются следующим образом. Уси-
литель-ограничитель УО преобразует сигнал погрешности е(г) =
СО 00
= g2(z)— gs(z)— ^(,bh—Ck)zh в сигнал ei(z.)=£ zfesign(&fe—
k=—00 k=—oo
—ck) (рис. 3.106, e), представляющий собой последовательность
139
импульсов, одинаковой амплитуды, полярность которых совпадает
с полярностью (знаком) разностей bk—Ck.
Вспомогательный корректор с коэффициентом передачи К(г) —
преобразует ei(z) в сигнал g2(z) = ei(z)^(z) =
00
= V kkZk, дискретные значения которого совпадают с Хь. В ка-
честве вспомогательного корректора можно использовать два од-
нополярных двоичных регистра сдвига либо один двухполярный
регистр.
Сигнал gs(z) через коммутатор управляет работой регуляторов
ajt, меняя их коэффициенты передачи со скоростями, пропорцио-
нальными —Ай.
Описанная система пригодна для коррекции произвольных ис-
кажений. Ее можно существенно упростить, считая, что искажения
00
невелики, т. е. выполняются условия: «0=1, |«k|Cl, IаьI <I•
k=—со
С учетом .этих условий
К = d AId ak a sign (bh—ck)
И
VA = J sign(6fe—ch)aft.
k=~nl
Полученные выражения показывают, что модули компонент
градиента равны между собой, а знаки компонент совпадают со
знаками bk—Си. Поэтому для минимизации А по методу скорейше-
го спуска необходимо все коэффициенты а менять на одну и ту
же величину, а направления изменений должны быть противопо-
ложны знакам Ьн—Си- В этом случае необходимость во вспомога-
тельном корректоре отпадает и сигнал с выхода УО (см. рис.
3.10а) непосредственно подается на коммутатор К. В итоге мы
приходим к системе, совпадающей по принципу действия с систе-
мой, предложенной в [33].
Пример. Пусть gi(z) =—0,5z+1 + 0,6z (рис. 3.11а); й'з(г)=Со#=О (с0 — про-
извольное) ; K(z~) = a-iZ-1 +1 + сиг.
Погрешность Д'(3.54) для данного примера имеет вид (рис. 3.11 в)
>
Д' = 2 1^1 = I 0,5а_[ | | а_] —0,5 | ф- | 0,6-J-ai I + I 0,6ах | .
А=—2
Минимизируем Д' методом сечений с пулевыми начальными условиями (точ-
ка с). Из рис. 3.11 следует, что для достижения Л'МИк=0,61 требуется два шага
(переход из точки с в точку Д'мин происходит по кривой cbf). Сигнал gi(z\
изо*бражен на рис. 3.116.
Видоизменим сигнал ,gi(z), считая, что gi(z)=—z-' + l+z (рис. 3.12а)..
В результате Д'=|а_1| + |а-1-—11 + |ai+11 + |а2|.
График Д' приведен на рис. 3.12, из которого видно, что Д' принимает ми-
нимальное значение, равное 2, не в одной точке, а в целой области, ограничен-
ной кривой 0, —1, М, 1.
140
Рис. 3.11. Иллюстрация минимизации сум-
марной абсолютной погрешности: искажен-
ный и откорректированный дискретные
сигналы (а, б); функция суммарной абсо-
лютной погрешности (в), достигающая ми-
нимума в одной точке
(При настройке корректора по методу последовательной оптимизации либо ПО!
методу скорейшего спуска мы можем получить любые значения cti и a~i, лежа-
щие в пределах т. е. настройка может прекратиться в
любой точке прямоугольника abed. Это происходит потому, что мы не учиты-
ваем значения &0, так как отвод ао не регулируется. Однако мы заинтересованы
не только в том, чтобы получить минимальное значение А', но также в том, что-
бы выполнялось соотношение (3.55). В связи с этим настройку следует произ-
водить так, чтобы для данного значения погрешности Д' величина Ьо >была мак-
симальной. Максимальному значению Ьо=3 <в пределах прямоугольника М, —1,
О, 1 соответствует точка М с координатами a_i = 1, ai=—1. Если стремиться
не только уменьшить А', но и увеличить &о, то настройка корректора прекра-
тится в точке а, в которой Д'=
=min, &о=тах, a*i=—1, a*-i=l.
Сигнал gz(z) равен (рис. 3.126):
gz(z)=— z2+3—z2.
Приведем некоторые дан-
ные, характеризующие воз-
можности дискретных кор-
ректоров с настройкой по
минимуму суммарной квад-
ратичной или суммарной аб-
солютной погрешности. Как
показано многими авторами,
использование дискретных
корректоров позволяет пере-
давать в телефонном канале
(полоса частот 300—3400
Гц) информацию со скоро-
стями 4800, 7200 и 9600 бит/с
[26—36, 40—44] и со скоро-
стью порядка 12 000 бит|/с
[35, 45]. Сложность коррек-
торов (число отводов линии
задержки) при этом варьи-
руется в зависимости от ка-
чества канала от 13—20 до
40—50 отводов [35, 42, 46].
Указанная сложность в на-
стоящее время является до-
пустимой. Число передавае-
мых уровней (градаций)
дискретных сигналов — от 2
до 16. Время автоматической
настройки корректоров —
порядка нескольких секунд
и может быть уменьшено до
величины порядка 100 мс [47]. Вероятность ошибки в системах с
автоматической коррекцией, работающих по стандартным телефон-
ным каналам, Г’Ош= 10~4Н-10-5. Корректоры автоматически настраи-
ваются при соотношении сигнал/шум в канале порядка 20—30 дБ
(каналы удовлетворяют нормам МККТТ), однако за счет увеличе-
141
ния времени настройки работоспособность корректоров сохраняется
и при значительном уменьшении соотношения сигнал/шум. Обзор
опубликованных работ показывает, что использование гармониче-
ских корректоров является важным фактором повышения скорости
передачи данных по сети стандартных телефонных каналов.
Рис. 3.12. Иллюстрация минимизации сум-
марной абсолютной погрешности: искажен-
ный и откорректированный дискретные
сигналы (а, б); функция суммарной абсо-
лютной погрешности (в), достигающая ми-
нимума в некоторой области
К достоинству гармонических корректоров по сравнению с
полиномными корректорами других видов (лягеровскими, чебы-
шевскими др.) следует отнести возможность реализации гармо-
нических корректоров, используемых в системах передачи данных,
не только в аналоговом, но и в цифроаналоговом и цифровом ви-
де с заменой линии задержки корректора регистрами сдвига. Это
резко упрощает реализацию корректора, так как позволяет ис-
пользовать элементы дискретной техники.
142
Условия выпуклости суммарного обобщенного критерия
Автоматическая минимизация суммарной погрешности на вы*
ходе корректора реализуется с использованием несложных техни*
ческих средств только в том случае, если эта погрешность явля*
ется выпуклой вниз функцией относительно регулируемых пара-*
метров ай. По указанной причине 'в проблеме синтеза автомата*
ческих и адаптивных корректоров 'основополагающее значение
имеет вопрос об определении выпуклости используемого критерия
близости сигналов.
Определим необходимые и достаточные условия выпуклости
со
обобщенного критерия Q= pkD(bk—сй) для произвольных сиг*
налов gi(z), gz(z) и произвольного неотрицательного веса {рй}.
Первоначально допустим, что'D(u)—выпуклая вниз функция од*
ной переменной и, обладающая тем свойством, что каждая дуга
ее лежит не выше своей хорды (рис. 3.13):
+ нх)] < £>(wx) + X[£)(п2)—D(uJ], (3.56)
где И1, и2—произвольные значения переменной и; 7.—произвольное
число, удовлетворяющее неравенству
Полагая Л(м)=«2, D(ii) = [u\, приходим
как частный случай соответственно к суммар-
ной квадратичной и суммарной абсолютной
погрешностям. Для общности считаем, что за-
дан произвольный полиномный корректор с ко-
эффициентом передачи (3.27), у которого.
&K=Vav/v(^K) (£ = 0, ± 1, ±2, ...).
Рйс. 3.13. График
выпуклой вниз
функции
Докажем, что если D(u)—выпуклая вниз функция переменной
и, то Q — выпуклая вниз функция переменных аъ. (й=1, 2,..., <7) .
С этой целью убедимся, что выражение D(bk—сй) =
<? и
—D' ^gv/v(/ft)—Ck I является выпуклой вниз функцией перемен*
_v=l J
ных a (v= 1, 2, ...,<7). Рассечем поверхность Pk, описываемую
функцией D(bk—ск) в декартовой системе координат, при помо*
щи плоскостей X'n(a'i, а'2, ..., a'n-i, ап, аД+ь с/g), параллель-
ных координатным плоскостям X(<x'i, а'2, ..., a'n-i, 0, a'n+i, a'q).
Пересечение поверхности Pk с плоскостью Х'п дает кривую Fn,
уравнение которой относительно переменной ап имеет вид
Fn ’ — F) (wn ank ~Ь bnk),
(3.57)
g
где anft = /n(4); bnk— V a(,fv(^)—cft. Если все кривые Fn, полу*
V=l,
чаемые в результате указанных сечений, выпуклые вниз, то функ*
ция D(bk—Ck) также выпуклая. Для выпуклости Fn необходимо
143
и достаточно, чтобы выполнялось условие d2Fnlda2n 0 или с уче-
том (3.57) {ank)2 d2D(u)/du2^0. Последнее условие выполняется
всегда, если d2D(u)/du2^0, т. е. если D(u) выпуклая вниз функ-
ция. Если D(u) недифференцируемая выпуклая функция, то Fn
также выпуклая, поскольку линейные преобразования координат,
имеющие место при замене w—не изменяют свойства
выпуклости кривых.
Принимая во внимание, что предел арифметической суммы вы-
пуклых функций с положительными весами дает выпуклую функ-
цию, в итоге получим, что Q—выпуклая функция переменных а
(&—1, 2, ..., <?), если D(u) выпуклая функция переменной и. До-
статочность этого условия вытекает из вышеизложенного, а необ-
ходимость доказывается следующими рассуждениями. Поскольку
обобщенный критерий должен обладать свойством выпуклости
при любом неотрицательном весе {ph}, то, выбрав
{Рь} = I i’ (т~любое),
(О, k^m
получим функцию Q—D(bm—ст), для выпуклости которой необ-
ходимо, чтобы D(u) была выпуклой функцией, что требовалось
доказать.
Учтем влияние аддитивного шума на свойства обобщенного
критерия Q. Пусть на входе корректора к сигналу g\(F) добавля-
ется случайный шумовой процесс No(t)- На выходе корректора
полный сигнал описывается выражением v(t)=g2(F)-\-N(F), где
<7 *
N(t)= V avFv(t)- Fy(F)= (т)Л^о(^—т)d%\ (т)— импульс-
V=1 —00
ная реакция блока корректора с коэффициентом передачи <pv (ico).
Обобщенная погрешность при наличии шума принимает вид
00
Q1 = 2 Ph D (bh—ch + nh) [nh = N (/ft)J.
k=------00
00
Считаем, что 2
Очевидно, что свойство выпуклости погрешности Q не нару-
шится в результате добавления к g\(t) какой-либо конкретной
реализации шумового процесса М>(0, так как такое добавление
всего лишь эквивалентно изменению входного сигнала (как дока-
зано выше, погрешность Q обладает свойством выпуклости при
произвольном входном сигнале). Следовательно, Qi для каждой
конкретной реализации шума является выпуклой вниз функцией
переменных од (&=1, 2, ...,q}. Поскольку операция статистическо-
го усреднения обобщенной погрешности эквивалентна суммирова-
нию с определенным весом значений Qi для разных реализаций
шума, то Q — выпуклая функция переменных од (Л=1,’2,
(здесь и ниже черта означает статистическое усреднение).
144
Таким образом, добавление произвольного случайного шума
на входе корректора не нарушает свойства выпуклости усреднен-
ного обобщенного критерия. Это свидетельствует о том, что мини-
мизация Q приведет к совместной минимизации уклонения диск-
ретных сигналов gi(tk) и gz(th) при наличии шума на выходе кор-
ректора.
В частном случае, когда D(u) = u2, обобщенный критерий сов-
падает с квадратичным критерием:
Qi= 2 Pk(bk~ch)2 + 2 2 Ph(pk~ch)nk+ 2 РьП2к.
k=-----00 k=-00 k=-00
Из этого выражения вытекает, что при минимизации суммар-
ной квадратичной погрешности минимизируется сумма дисперсий
шума и разности выходного и эталонного сигналов, а также их
взаимная корреляционная функция.
Отметим, что из свойства выпуклости критерия Q вытекает
принципиальная возможность построения корректора, минимизи-
рующего величину Q.
Минимизацию величины Q (или Q) практически можно выпол-
нить многими способами, например методом сечений или методом
скорейшего спуска. При использовании метода сечений в схемах
рис. 3.9 линейный детектор заменяется обобщенным детектором с
характеристикой передачи D(u) (и — входное воздействие), а при
использовании метода скорейшего спуска в схеме рис. 3.10а уси-
литель-ограничитель УО заменяется функциональным блоком, ко-
торый преобразует входное воздействие и по закону D'(u), где
О'(и)— производная D(u) по и.
Отметим основной недостаток, присущий методу сечений. Ме-
тод сечений гарантирует сходимость процесса оптимальной наст-
ройки параметров (k—\, 2,...,q), т. е. отыскание абсолютного
(глобального) минимума обобщенной, погрешности Q, если выпук-
лая функция не содержит оврагов. На-
личие оврагов, несмотря на свойство
выпуклости, затрудняет отыскание ми-
нимума погрешности. В частности, воз-
можно так называемое зацикливание,
при котором методом сечений нельзя
достичь минимума, поскольку процесс
минимизации оканчивается в некото-
рой точке, расположенной в овраге
функции. Сказанное иллюстрируется
рис. 3.14, на котором сплошными кри-
выми изображены линии одинакового
уровня, а пунктиром — овраг функции
Q. Начав поиск минимума функции
методом сечений из некоторой начальной точки, например из точ-
ки А. мы неизбежно попадаем в точку В или С, лежащую в овраге
функции, из которых уже поочередной регулировкой параметров
145
Рис. 3.14. Линии уровней
функции с неразрешимым ов-
рагом
ak нельзя достичь минимума Q. Зацикливание существенно ограни-
чивает область применения метода сечений. Для устранения зацик-
ливания необходимо одновременно менять не один, а несколько па-
раметров а^ Наличие оврагов зависит от характера функции Q и
в общем случае не является обязательным. Например, суммарная
квадратичная погрешность, в принципе, не содержит оврагов, в то
время как суммарная абсолютная погрешность может содержать
овраги.
Минимаксный критерий близости дискретных сигналов
(критерий Чебышева)
К предельному случаю обобщенного суммарного критерия от-
носится критерий Чебышева, который оценивает меру близости
сигналов gzftk) и gs(tk) по величине модуль-максимума их разно-
сти (по максимальной абсолютной погрешности) [7, 10] е=
= max|g'2(”00—-gs(tk) | = тах|йй—cft| (k=0, ±1, ±2,...). Справед-
ливость этого утверждения непосредственно вытекает из теоремы
Полна—Джексона [21]. Действительно, рассмотрим степенной
критерий (среднее степенное уклонение или погрешность)
N
Qm =1aF X \bk~ch\m
k=—00
(m>l, Noo, N—произвольное), (3.58)
который получается из обобщенного критерия при выборе D(u) —
= | и|т. Согласно теореме Полна — Джексона имеет место асимпто-
тическое равенство1 Y Qm==E(m~+co) [21], откуда вытекает, что
критерий Чебышева можно рассматривать как предельный случай
обобщенного критерия.
Степенной критерий (3.58) обладает свойством выпуклости,
так как D(u)=\u\m — выпуклая функция переменной и, посколь-
ку 0,5 (|«i + «2 |m) sC0,5 (|wi|m+ |u2|m) (m>l) (wi и и2 — про-
извольные, И1^=м2). Поэтому s — выпуклая вниз функция перемен-
ных a v (v = 1, 2, 7).
Выпуклость критерия Чебышева можно доказать также иным,
более наглядным путем, не опираясь на теорему Полна — Джексо-
<7
на. Обозначим ей=|&й—сй| = |V avfv (4)—сй|, тогда Б = тахей,
V=1
е^8й (—оо^^^оо). Нетрудно видеть, что ей— кусочно-линейная
выпуклая вниз функция переменных av (v=l, 2, ..., <7), имеющая
единственный минимум. Это свойство справедливо для всех k и
при любых значениях fv (fe) и ch. В многомерном пространстве ей
описывает некоторую поверхность Fh, которая делит все простран-
1 Это равенство показывает, что чем больше т, тем ближе Qm к мо-
дуль-максимуму разностей bk и с&.
146
ство на два полупространства H+k и Н~ь, лежащих соответствен-
но над и под поверхностью Fk. В силу выпуклости еь полупрост-
ранство H+k можно рассматривать как некоторое выпуклое тело,
ограниченное поверхностью Fk. Обозначим через Н+ тело, образо-
ванное пересечением тел H+k'. Н+= П H+k, а через F — поверх-
ность, ограничивающую Н+ снизу. Пересечение выпуклых тел дает
также выпуклое тело, поэтому Н+— выпуклое тело, ограниченное
снизу выпуклой поверхностью F.
Поверхность F образуется частями поверхностей Fk, совпадая
для фиксированного набора значений переменных av (v=l, 2,...,
q) с той поверхностью, которая лежит выше остальных. Из ска-
занного вытекает, что поверхность F описывается функцией е, сле-
довательно, е—выпуклая функция переменных dv (v=l, 2, ..., q)
(рис. 3.15). Доказанное свойство выпуклости критерия Чебышева
Рис. 3.15. Иллюстрация к доказательству выпук-
лости критерия Чебышева
справедливо для любых сигналов g\(t) и £з(0- Если е вычисляет-
ся с учетом веса e=maxpft|^2(^)— ёз('Н) | (рь>0), то наличие
веса не нарушает свойства выпуклости.
Минимизация величины 8 наиболее просто осуществляется с
использованием метода сечений и метода скорейшего спуска. Ме-
тод сечений реализуется схемами рис. 3.9, в которых интегратор и
индикатор заменены пиковым вольтметром; метод скорейшего
спуска реализуется схемой рис. 3.10, в которой перед усилителем-
ограничителем необходимо добавить ключ, пропускающий макси-
мальное по модулю значение сигнала ошибки e(z) (ключ на схе-
ме не указан). Остановимся на этой схеме несколько подробней.
Градиент функции 8 равен
т1
i=—n1 i=—nl
где Xi=ak-i&ign(bk—Ck) при условии, что модуль (&&—Ck) макси-
мален для заданного набора значений коэффициентов щ. Для на-
хождения Л, необходимо сигнал ошибки s(z) =g2(z)—gs(z) про-
пустить через устройство (ключ), выделяющее максимальное зна-
чение этой ошибки, т. е. дающее сигнал ei (z) = (bk—Ck)zk, где
bh—ck — максимальное значение e(z). На выходе У О получим
сигнал e2(z) =sign(&fe—Ck)zk, а на выходе вспомогательного кор-
147
ректора — сигнал ез(Х)= J? a.k-iSign(bk—Ck)zh, дискретные значе-
i
ния которого, совпадая со значениями Ль управляют регулятора-
ми щ, обеспечивая настройку корректора методом скорейшего
спуска.
Пример. Пусть gi(z) = 1 + 0,82 (рис. 3.16а); gs(z) = l; Л(х) = 1 +aiz+a2z+
Рис. 3.16. Иллюстрация минимизации погрешно-
сти Чебышева: искаженный и откорректирован-
ный сигналы (а, б); функция погрешности Чебы-
шева (в)
Погрешность е(г) имеет вид e(z)=gi(z)K(z)— gr3(z)=>(ai+0,8)z+i(a2+
+0,8ai)22+0,8a2z3, т. е. &i—Ci = «i + 0,8; b2—c2=a2+0,8a1; &3—c3 = 0,8a2.
Необходимо подобрать «t и «2 так, чтобы погрешность е=max| bk—Ck |
(£=1, 2, 3) приняла минимально возможное значение.
Характер е указан на рис. 3.16в, из которого видно, что е — выпуклая
вниз функция, имеющая минимум. Отыщем минимум в методом последователь-
ной оптимизации. Изменение коэффициентов «1 и а2 в зависимости от регули-
ровки иллюстрируется табл. 3.1.
Таблица 3.1
После регулиров- ки 1 2 3 4 5 6
•тЧ в в —0,44 0 —0,44 0,2 —0,55 0,2 —0,55 0,25 —0,58 0,25 -0,58 0,26
После шестой регулировки е=0,22. На этом подбор щ и а2 заканчивается,
так как дальнейшие уточнения не приводят к существенному уменьшению е.
Сигнал gi(z) = l + 0,22z—0,204z2+0,208z3 изображен на рис. 3.166.
На рис. 3.17 даны осциллограммы, иллюстрирующие работу гармонического-
корректора. Искаженный сигнал (рис. 3.17a) преобразовывался в сигнал, обла-
дающий свойством отсчетности (типа импульсной реакции идеального низкоча-
стотного фильтра: с0= 1, <+=0, k=±\, ±2, ...) и в сигнал с косинус-квадратной
148
спектральной плотностью (с0=1, Ci=c_1=0,5, с& = 0, k=±2, ±3, ...). Для этой'
цели использовался корректор с аналоговой линией задержки с 16 отводами
Яь (л1=7, /П]=8). Сигналы рис. 3.176 и в совпадают с расчетными с точностью
1—3%. Как видно из сравнения рис. 3.17а и б, корректор обеспечивает подавле-
ние мешающих импульсов в десятки раз.
Минимизация модуль-максимума интерференционных помех
в многоуровневых дискретных системах связи
Обоснование критерия коррекции межсимвольных помех.
Пусть g2(0—реакция системы «канал4-корректор» на одиноч-
ный рабочий сигнал единичной. амплитуды x(t) (единичный циф-
ровой символ). Дискретные значения этой реакции bk=gi{k\ty
(/е=^0, £=±1, ±2,...) вызывают интерференционные искажения,,
оценка которых может быть произведена на основе суммарного
квадратичного критерия
^ + (6о-1)2> (3.59)
А=#0
суммарного абсолютного критерия
A = V|M4-^o-1| (3.60)
и критерия Чебышева
e = max{... |6_2|, |6_i|, |&0— 11, 1^1, р2|, (3.61)
В выражениях (3.59) и (3.60) суммирование производится по
всем k, за исключением k—О, соответствующего основному зна-
чению принятого сигнала. Основной недостаток этих критериев в
149.
том, что получение минимума г), А или е в системах передачи циф-
ровых сигналов с помощью корректора конечной структуры не
приводит к уменьшению интерференционных искажений до мини-
мально возможных [37].
Для доказательства справедливости приведенного утверждения
рассмотрим многоуровневую цифровую систему связи, в которой
информация передается при помощи дискретных сигналов, следу-
ющих через интервал А/, причем амплитуды сигналов могут при-
нимать любое из значений 6МИн = 61, 62, ..., 6г = бмакс (I — число гра-
даций амплитуд). Прием осуществляется выборкой дискретных
значений сигнала в моменты времени k\t (k—0, ±1, ±2,...) и
сравнением этих значений с ближайшими эталонными (опорными)
величинами 61, 62, ..., 6/.
Величина межсимвольной помехи, возникающей в произволь-
ный момент времени тМ за счет интерференции передаваемых
случайных сигналов (влияние шума не учитывается), представля-
ет собой взвешенную сумму эхо-сигналов и определяется выра-
жением
|х=5>А + 6о^о-1). (3.62)
где 6ft< принимает любое из значений 6V (v=l, 2,..., I) независи-
мо от индекса k.
Анализ выражения (3.62) показывает, что максимальная цмакс
и минимальная цмин межсимвольные помехи соответственно рав-
ны:
Рмакс 6макс Ч~ Pi + 6мин
\ k / \ k /
рмин = бмакс У*, 4" р2у Н- бмин + Pi J ,
(3.63)
где бмакс и бмин —максимальная и минимальная передаваемые
градации; b+h — сумма положительных значений 6&;
k k х
сумма отрицательных значений bh (суммирование ведется по всем
*^0);
р0-1 (60-1>0);
I 0 (60-1<0);
60-1 (6о-1<0);
0 (&0—1>0).
Все значения ц находятся в пределах Цмин^щ^Цмакс-
Максимальная по модулю межсимвольная помеха ц0—тах|ц)
совпадает либо с |цмий|, либо с | цМакс| • Поэтому целесообразно
оценивать интерференционные искажения по величине
р __ fl Нмакс |> | Амане I I Имин |’> | (3 Q4)
I I Имин |> I Имин I --> I Рмакс I- J
В однополярных системах, в которых передаются, например,
150
ет выражение (3.63): Цмакс=бмакс
только сигналы положительной полярности, бМин=0, что упроща*
) Цмш1=:бмаксХ
k '
X ( 3^ ь-а,—Рг
\ k
Из изложенного следует, что при передаче дискретных сигна-
лов с амплитудами Sk—6k на приеме получим сигналы с ампли-
тудами Sz=i6fe+p,, где |ц|^р0. Межсимвольные помехи будут
минимизированы в том случае, если переданный и принятый сиг-
налы наименее отличаются по амплитуде, т. е. модуль-максимум
разности их амплитуд достигает минимально возможного значе-
ния max|Sfe—Szft|=min или тах|ц| =pi0=min. Это требование
наглядно показывает, что для оптимальной коррекции межсим-
вольных искажений, под которой будем в дальнейшем подразуме-
вать минимизацию амплитуд помех ц, необходимо минимизиро-
вать ц,о-
Рассмотрим, можно ли уменьшить значение цо путем миними-
зации величины ц, А или е. Сравним щ с т], А и е. Сравнение про-
ведем для общего случая, когда амплитуды аь в зависимости от
k имеют случайный характер. Именно эта особенность присуща
реальным радиоканалам, в которых искажения сигналов сложны
по своей структуре и не повторяются в разных каналах.
Среднеквадратичный критерий указывает энергию эхо-сигна-
лов. Недостаток этого критерия, как известно, заключается в
том, что по энергии последовательности нельзя в общем случае
однозначно определить амплитуды отдельных эхо-сигналов и, сле-
довательно, величину цо- Пользуясь т], можно дать лишь макси-
мальную границу
(А¥=0), ц0 < п | б | "|А]> (3.65)
где |б|—максимальное по модулю значение бь 62, ..., б;. Знак
равенства в этих выражениях имеет место только при п=1, где
п — число мешающих эхо-сигналов.
Среднеабсолютный критерий в общем случае также не позво-
ляет однозначно определить цо- Из (3.60) и (3.63) вытекает
Ро < I б | А. (3.66)
Знак равенства в этом выражении достигается, когда: 1) п=1;
2) бмин = —бмакс ИЛИ | б | = | бмакс — | бмин | ! В ЭТОМ Случае [1макс =
= бмаксА; Цмин== —бмаксА; | Цмакс = | Цмин| = Ц-СЬ бмаксА; 3) ВСв
bk — одного знака:
Ь°~ 1>°’ ^>0; ) (£ = ±1, ±2, ...).
&О-К0, bh<o I
Критерий Чебышева связан с ц0 неравенством
р0<«е> (3.67)
которое для п—1 переходит в равенство.
15В
При высокоскоростной передаче в реальных каналах обычно
ти>1, поэтому выражения (3.65) — (3.67) дают завышенное зна-
чение go- Сопоставляя (3.59), (3.60) и (3.61), получим nV
5г А, где знак равенства достигается при п— 1. Это выраже-
ние показывает, что А дает менее завышенную границу для р,о, не-
жели г) и е.
Таким образом, среднеквадратичный, среднеабсолютный и че-
бышевский критерии оценивают интерференционные искажения
лишь косвенно, так как по известным значениям т}, А и е в общем
случае можно лишь приближенно определить, в каких же грани-
цах находятся мгновенные значения ц межсимвольных помех.
Косвенный характер оценок и завышенные значения границ обус-
ловлены тем, что т], А и е не учитывают, каким образом.происхо-
дит суммирование мешающих эхо-импульсов в реальных каналах
связи применительно к передаче дискретных сигналов. Критерий
до свободен от этого недостатка.
Экстремальные свойства критерия ц0- Используем для компен-
сации искажений полиномный корректор с коэффициентом ПереДа-
17
чи (3.27), для которого (3.28) bk~g2(k&.t) — avfv (4). Данное
v=l
выражение с учетом (3.63) показывает, что |дМакс| и |дМин| —
многомерные функции переменных av(v=l, 2, ..., q). Определим
характер этих функций. Считаем, что
Диаке 0> бмин 0- (3.68)
Запишем |цМакс| в виде |дМакс| =Цмакс = £ £>1[£(Ш)], где
k
£)/(«) = (бмак°Ы’ Ы>°’ (3.69)
(6минн, «<0, u — g(k\t).
Функция Di (н) является характеристикой передачи линейного не-
симметричного детектора, у которого тангенсы углов наклона ха-
рактеристики для и>0 и и<0 равны соответственно бмакс и
бмин-
Из (3.69) видно, что Di(u)—выпуклая вниз функция перемен-
ной и, поэтому |дмакс|—выпуклая вниз функция переменных a
4=1, 2,..., q).
С учетом (3.63) и (3.68) представим |р,мин| в виде |дМин| =
= — Цмин=^ D2[g(k&t)], где
k
П2(и) = 1~8мини’ и>0’ (3.70)
I — «макс «<0.
Очевидно, что D2(u) = Di(—и), т. е. D2(u)—выпуклая вниз функ-
ция переменной и, а D2[g(k&t')] и |цмин|—выпуклые вниз функ-
ции переменных av 4=1, 2, ...,<?). Величина максимальной по
модулю межсимвольной помехи р,0 совпадает либо с |цмаКс|, либо
152
с |цмин|, следовательно, цо— выпуклая вниз функция перемен-
ных av (v= 1, 2, q).
Свойство выпуклости показывает, что функция ц0 не имеет под-
бойных (локальных) минимумов, а имеет один основной (глобаль-
ный) минимум, который достигается соответствующим выбором,
переменных a v (v= 1, 2, ...,</).
Расчет оптимальных значений av, доставляющих минимум ц0^
можно провести численно методами линейного программирования.
Действительно, задачу выбора оптимальных av можно сформули-
ровать в следующем виде: найти av (v=l, 2, ...,<?), для которых.
шах|ц| = p,0=min, где ц с учетом (3.63) и (3.28) линейно зависит
от av. Эта формулировка идентична задаче приближения по Че-
бышеву несовместной системы линейных уравнений без учета ог-
раничений и является одной из разновидностей задач линейного?
программирования1 [1, 20].
Рис. 3.18. Структурные схемы корректоров, миними-
зирующих модуль-максимум интерференционных по-
мех методом сечений (а) и методом скорейшего спу-
ска (б)
Однако практически минимизацию цо целесообразно осуществить с помощью-
изображенного на рис. 3.18a устройства (16]. Основные узлы этого устройства:
ГС — генератор рабочих сигналов единичной амплитуды; П — приемник, на
1 К линейному программированию аналогичным образом сводится численное-
решение задач минимизации суммарного абсолютного и чебышевского критериев.
В силу своей очевидности такая интерпретация здесь , не описывается.
153.
выходе которого получаем импульсную последовательность ... Ь_ь Ьо—1, &ь ...;
О, и D2 — детекторы соответственно с характеристиками (3.69) и (3.70); ин-
теграторы J ; схема сравнения С и индикатор И, указывающий величину щ.
Регулируя тем или иным способом коэффициенты av(v=l, 2........ q), добиваем-
ся минимального значения Цо, что свидетельствует об оптимальной компенсации
интерференционных искажений.
На рис. 3.186 изображена структурная схема корректора, автоматически
минимизирующего величину |Ло [37]. Коэффициент передачи i-ro регулятора ме-
няется на величину, пропорциональную »-й компоненте градиента р,маКс:
== Ed‘ (ц) h-'г А° (t'=i>2’ • •
k
если цМакс | |1мин |, либо на величину, пропорциональную f-й, компоненте \"г
градиента:
// d | Р-МИН I Г»' / \ £ /L А / • 1 О
Ч-= ’ = ^-°2(“)Л^д0 (‘ = 1.2...........?)>
1 k
•если | Цмин| >Цмакс. Здесь
D' , , ^макс “Ь бмин , бмакс — бмин .
1 («) =-----------+-------------Sign и;
D' I,, г.' , , , бмакс 4“ бМин , бмакс ’ бмин .
2(U)= — D^ — u) — — ---------------4-------—------signa,
где
( 1, и > 0;
sign a = Ы = Й2(ЙД/).
( — 1, и < О,
По существу, D'i(u) и D'2(u) описывают усилители-ограничители, работаю-
щие в .режиме жесткого ограничения (на схеме рис. 3.18 .узлы D'i и D'2). Уп-
равляющее устройство УУ подключает ко входам перемножающих устройств
Либо ВЫХОД Dr I (еСЛИ Цмакс>|Цмии[), ЛИбО ВЫХОД D'2 (еСЛИ | Цмин | >'Цмакс)
Функция Цо содержит ребра (грани), на которых градиент не существует. Одна-
ко для реальных систем в силу их интерционности, а также в силу того, что ре-
гулировка коэффициентов а,.. производится шагами конечной длительности, и в
силу приближенного вычисления градиента наличие ребер не представляет опас-
ности. Если удалить в рассматриваемой системе узлы, обведенные пунктиром, то
придем к системе, описанной в [32], которая минимизирует среднеквадратичную
погрешность т).
Пример. Сравним критерий ц0 с критериями т), Д и е на конкретном при-
мере.
Рассмотрим канал, в котором отклик g\(t) обладает свойствами: gi(O) =
= 1,0; gi(A0=ai; gi(k^t) = O для всех k, не равных 0 или 1. Такой отклик полу-
чается, например, при двухлучевом распространении.
Для компенсации интерференционных искажений воспользуемся гармониче-
ским корректором с коэфициентом передачи /C(ico) = 1 +aie-1|»Af. На выходе
корректора bo = 1; &i=ai+ai, &2 = aiai, остальные значения Ьь равны 0.
Допустим, что по каналу работает двоичная дискретная система, в кото-
рой передаются два уровня: 1 и 0, т. е. бмаКс = 1; бМИн=0. Возможные значе-
ния межсимвольных помех находятся согласно (3.62), где бц и 621- принимают
значения 1 и 0:
Уо =
бх 4~ 6 2 — «i 4~ 4“ ax д.
61 = «х 4-
&2 = а, а±.
154
Поскольку в общем случае at — произвольная положительная или отрица-
тельная величина, Цо должно совпадать с одним из значений I&1 + &2I, 1&11»
1621. Погрешности (3.59), (3.60) и (3.61) имеют вид:
П = («1 + Qi)2 + (а1 «J2;
Д = | ах а± | | ах аг | ;
е = max { | ах + | > I I } •
Рассчитаем корректор, т. е. определим си, нижеследующими четырьмя спо-
собами, каждый из которых соответствует минимизации какой-либо погрешно-
сти г], Д, е или Цо-
1. Минимум г) имеет место при дц/да^О, что дает
«1= — «1 / (!+«?)-
2. Значения ab минимизирующие Д, находятся из условий
ах = —‘ «х, если | ах | < 1;
си принимает любое значение между 0 и —at, если |ai|='l;
ax = 0, если | ax | > 1.
3. Минимум е получается при выполнении условия
I «I + ai I =«!«!, откуда ax = — ах/(1 -j- | а± | ).,
4. Определяем си из условия минимизации максимального из выражений
|си+Д1 + «1011; |ai+ai|; |ciiai |. Для всех четырех способов расчета по найден-
ным си вычисляем Цо- Графики зависимости р,0 от а\ даны на рис. 3.19, где
кривые 1—4 соответствуют указанным четырем способам расчета си. Естествен-
Рис. 3.19. Примеры зависимо-
сти модуль-максимума интер-
ференционных помех на выхо-
де корректора от амплитуды
и полярности эхо-сигнала при
минимизации искажений по
квадратичному (кривая 1),
суммарному абсолютному (кри-
вая 2), чебышевскому (кривая
3) и ,и-критерию (кривая 4)
но, наименьшая межсимвольная помеха получается при использовании критерия
Цо (кривая 4). Остальные критерии т], Диев общем случае не гарантируют
достижения минимума Цо- Однако при определенных значениях а\ критерии Д,
и е обеспечивают минимизацию ц0, о чем свидетельствует совпадение кривых
3 и 4 при ai>0 и кривых 2 и 4 при ai<0.
3.5. Использование алгоритмов дискретной
коррекции для минимизации искажений частотных
характеристик каналов связи
Каналы низкой частоты
Алгоритмы коррекции дискретных сигналов реализуются прак-
тически относительно несложными техническими средствами. Поэ-
тому естественной является тенденция их широкого применения
не только для коррекции формы сигналов в системах передачи
155.
-цифровой информации, но и для компенсации искажений частот-
но-ограниченных каналов связи путем дискретной коррекции их
импульсных реакций. Ниже описывается ряд способов и уст-
ройств, реализующих указанную возможность.
Рис. 3.20. Структурная схема корректора частотных харак-
теристик канала связи с настройкой корректора по им-
пульсной реакции канала
На рис. 3.20 изображена структурная схема устройства для од-
новременной коррекции амплитудных и фазовых искажений, ра-
ботающего по принципу минимизации суммарного квадратичного
уклонения импульсной реакции реального канала от реакции
идеального низкочастотного канала [14] g3 (/) — Со Sln 2я t (И—
2nfct
граничная частота канала). Генератор ГС передает в корректируе-
мый канал последовательность 6-импульсов с периодом Т = m/2fc,
где m — целое число, выбираемое так, чтобы за время Т переход-
ный процесс в канале практически окончился. Узкополосный фильтр
Ф, фазовращатель Фв, генератор тактовых импульсов Г с периодом
следования At = 1/2/с, -делитель частоты ДИ, электронный ключ Кл
и индикатор мощности W являются вспомогательными узлами, пред-
назначенными для получения суммарной квадратичной погрешно-
сти
П = 2 [£2(£Д')-£з(М/)]2= 2 ^(йА/) + |^2(О)-Со|2.
k—-ОО k=--00
/г=£0
Амплитудные и фазовые искажения канала скомпенсированы оп-
тимальным (в смысле квадратичного критерия) образом в том
случае, если ц = тт. Поэтому компенсация искажений сводится
к регулировке корректора (например, методом последовательной
оптимизации) по минимальному показанию индикатора W.
По аналогии с описанным устройством возможен также син-
тез довольно обширного класса корректоров частотных характе-
ристик с использованием других алгоритмов (например, итераци-
онных), изложенных в § 3.1—3.3 настоящей главы. Эти корректо-
156
ры здесь не приводятся, поскольку по принципу построения они
не отличаются от корректора, изображенного на рис. 3.20.
При использовании дискретных алгоритмов происходит преоб-
разование реакции канала gi (kAt) в реакцию gz (kAt), которая
удовлетворяет условию отсчетности (селективности), т. е. не содер-
жит эхо-сигналов
= й = 0; (3.71)
Естественно, возникает вопрос, как изменились амплитудная и
фазовая характеристики канала в результате указанной коррек-
ции. Этот вопрос имеет важное практическое значение для слу-
чаев, когда канал нестрого ограничен по передаваемой полосе
частот или когда частота стробирования \fg = 1/А£ меньше 2/с.
Для случая, когда преобразование g\ (kAt) в gz (kAt) осущест-
вляется корректором, коэффициент передачи которого равен от-
ношению спектров решетчатых функций gz(kAt) и g\(kAt), полу-
чим результирующий коэффициент передачи системы «канал+
корректор» в виде [4]
К2(1®) = — ---------------- (®g = 2n/AZ), (3.72)
2 KHico-ni (0g)
П=—00
где /Ci (ico) —коэффициент передачи канала [спектр gfifO] (запаз-
дывание, вносимое корректором, не учитывается). Данное выра-
жение является коэффициентом передачи отсчетного фильтра (см.
гл. 1) и имеет смысл для случая, когда ®g^2coc [случай cog>2coe
соответствует физически нереализуемой схеме корректора, т. е.
невозможно строго выполнить условие (3.71)]. Пример построе-
Рис. 3.21. Пример частотных ха-
рактеристик 'некорректированного
и откорректированного каналов
для случая, когда коррекция осу-
ществляется по импульсной реак-
ции канала
рис. 3.21, где co"c=cc»g—®с-
и фазе Ki (i®), кривые 3 и
ния K2(i®) по Ki(i®) приведен на
Кривые 1 и 2 соответствуют модулю
4— модулю и фазе K2(i®).
Выражение (3.72) показывает, что коэффициент передачи сис-
темы «каналф-корректор» приближается к коэффициенту переда-
157
чи идеального фильтра НЧ лишь при cog=2coc, в противном слу-
чае (cog<2coc) получим коэффициент передачи отсчетного фильт-
ра с нелинейной фазовой и неравномерной амплитудной характе-
ристиками в диапазоне со"с—сос (со"с=0, если cog=2coc).
На рис. 3.22 даны осциллограммы откорректированных им*
пульсных реакций, получаемых из одной и той же некоррелиро-
ванной импульсной реакции при различных соотношениях ag и
сос: cog = 2сое (а); cog = 1,8сос(б); ag = сос(в). Как следует из этих
осциллограмм, полная компенсация амплитудно-частотных и фа-
Рис. 3.22. Осциллограммы от-
корректированных импульсных
реакций канала при различ-
ных соотношениях между ча-
стотой дискретизации и гра-
ничной частотой канала
зо-частотных искажений достигается лишь при cog=2coc (импульс-
ная реакция с высокой степенью точности совпадает с реакцией
идеального низкочастотного фильтра); если же cog<2coe, нет сов-
падения откорректированных реакций с реакцией идеального
фильтра.
В технике телевидения коррекция частотных характеристик
производится не по импульсной реакции канала, а по реакции ка-
нала fi (jk&t) на определенный испытательный (контрольный) сиг-
нал S (/). Корректор преобразует/1 (МО в сигнал f2 (f), совпадаю-
щий в дискретные моменты времени с сигналом S (0: 1/2 (МО =
= S (МО (k = 0, ±1, ±2, ...). В результате такой коррекции коэф-
фициент передачи системы «канал + корректор» принимает вид
Ki (i со) 2 S(ico — ni®g)
K2(ico) =-----------—----------------- > (3-73)
СО
2 S (1 (о — п i cog) Ki (i и — n i соё)
n=—00
где S(ico)—спектральная плотность сигнала S(t). На рис. 3.23
дан пример построения K2(i<o) (кривая 3) по известным К) (ico) и
158 Ч
•S (ico) (кривые 1 и 2) (фазовые характеристики для простоты не
учитывались). В этом примере в качестве S(t) использован сиг-
нал с косинус-квадратной спектраль-
ной плотностью. Из выражения (3.73)
и приведенного примера следует,
что полная компенсация амплитуд-
ных и фазовых искажений (харак-
теристики канала приближаются к
характеристикам идеального фильт-
ра НЧ) имеет место только в слу-
чае, когда (0g=2®c и граничная ча-
стота спектральной плотности S (ico)
равна <вс. Поэтому в качестве ис-
пытательного следует выбирать сиг-
нал со спектром, ограниченным часто-
той (Ос.
Рис. 3.23. Частотные характе-
ристики .каналов при коррек-
ции по сигналу с косинус-
квадратной спектральной плот-
ностью
Полосовые каналы
Коррекция фазовых искажений. По своим свойствам характе-
ристики полосовых каналов отличаются от характеристик низко-
частотных каналов, что не позволяет механически распространять
способы коррекции искажений низкочастотных каналов на слу-
чай полосовых каналов. В связи с этим вопрос автоматической
коррекции частотных характеристик полосовых каналов по их им-
пульсным реакциям требует самостоятельного рассмотрения.
На рис. 3.24 изображен корректор [17], компенсирующий фазовые искаже-
ния полосового канала без преобразования полосового канала в низкочастот-
ный. Корректор настраивается однократно за минимально возможное время.
Рис. 3.24. Гармонический корректор фазовых искажений полосовых
каналов
159
Основные узлы корректора: ГС — генератор испытательных сигналов (б-им-
пульсов); X — корректируемый полосовой канал; АК — амплитудный коррек-
тор, компенсирующий амплитудно-частотные искажения канала; ТЧ — узел
выделения тактовой частоты, численно равной ширине полосы пропускания ка-
нала; СС — генератор считывающих сигналов; УЙ — генератор управляющих
импульсов; Н — преобразователи Гильберта; ЭК — электронные ключи. Регу-
ляторы a'k и a"h (k=l, 2, ...), сумматоры Si и S2, линия задержки и преобра-
зователь Н образуют гармонический корректор с коэффициентом передачи
ч
= + (3-74>
k=0
где H = i sign со; At=2n/Aa>; Дсо — ширина полосы пропускания канала.
(Коррекция фазовых искажений производится в два этапа: 1. Переключатели
П[, П2, П3 переводятся в положение II и регуляторы а'к настраиваются автома-
тически, исходя из условия a'k=gi (—kAt) (k=0, 1, 2, ...), где gi(t) — реакция
системы «канал + амплитудный корректор». 2. Переводим переключатели 77ь Л2,
П3 в положение I, и регуляторы а"к настраиваются, исходя из условия a"fi.=
=gv(—kht) (fe=0, 1, 2, ..., q), где gi(t) — преобразование Гильберта от gi(t).
В результате настройки имеем K(ico) =G*(ico), где Gi(ico) — спектр gi(t). Об-
щий коэффициент передачи системы «канал+амплитудный корректор -(-гармони-
ческий корректор» принимает вид K2(ia>) = Gi(ico)7<(ico) =i| Gi(ico) |2, что свиде-
тельствует об отсутствии фазовых искажений. Если амплитудный корректор
компенсирует неравномерность модуля коэффициента передачи канала, то
|Gi(ico)|=A и Кг(ico) = А2 = const (А — некоторая постоянная).
Оптимальная коррекция несинхронных каналов. Алгоритмы,
рассмотренные в предыдущих разделах, непригодны для компен-
сации искажений в несинхронных каналах, так как форма импуль-
сной реакции несинхронного канала меняется во времени. Обос-
нуем возможность оптимальной (в смысле квадратичного крите-
рия) одновременной коррекции фазовых и амплитудных искаже-
ний несинхронных каналов непосредственно по их импульсным
реакциям.
Рассмотрим случай, когда канал представляет собой полосовую
систему с частотами среза coi, <02 и комплексным коэффициентом
передачи |K1(i<o)|=0 (| и | >со2, | со | <coi). Функция ACi (ico) обла-
дает следующими свойствами: |/<i (ico) |—частотная функция, не за-
Рис. 3.25. Частотные характеристики реального (а) и
идеального (б) несинхронных каналов
висящая от времени t; cpi (и, t) =arg Ki (ico) —частотная функция,
форма которой не зависит от t, а положение меняется во времени
(рис. 3.25а): cpi(coO = cpi (со) + y(f), где cpi (со) — значение cpi (со, О
160
для некоторого фиксированного 7; y(t)—произвольная, медленно
меняющаяся функция, не зависящая от частоты со.
Корректор компенсирует нелинейность фазо-частотной харак-
теристики ф1('И, 0 и неравномерность амплитудно-частотной ха'
рактеристики |Ki(ico)|, в результате чего комплексный коэффи-
циент передачи системы «канал + корректор» приближается к ко-
эффициенту передачи идеального несинхронного полосового кана-
ла (рис. 3.256) |[11]: | Кз (ico) | = d0 = const, <р3 (со, 'О = —мт + <р0 + ..
+у(0; Кз(+)6ое'(-“т+'Ро+v(0), где т, <р0—некоторые постоянные, не
зависящие от со, t.
Обозначим через g\(t) реакцию канала с коэффициентом пе-
редачи Ki(ico), а через gs(t)—реакцию идеального полосового
канала с коэффициентом передачи K3(ico) на воздействие в виде
функции Дирака 6(0- Необходимо разработать алгоритм, кото-
рый позволил бы настроить корректор непосредственно по им-
пульсной реакции несинхронного канала таким образом, чтобы
происходило преобразование этой реакции в реакцию идеального
несинхронного канала.
Представим несинхронный канал в виде каскадного включе-
ния синхронного канала (СК) с комплексным коэффициентом пе-
редачи ^i(ico): |Ki(ico) | = |Ki(ico) |, argK(ico) =cpi(co) =<pi(co) и
идеального несинхронного канала (ИНСК) с коэффициентом пе'
редачи /С (ico) (рис. 3.26): Ki (ico) = eW> (coi^ | со | ^со2); Ki (ico) =
Канал
Рис. 3.26. Изображение реального несинхронного канала в
виде каскадного соединения синхронного канала СК и
идеального несинхронного канала ИНСК
~К\ (ico)Ki (ico). Коэффициент передачи системы «канал+коррек-
тор» равен K2(i<o)=Ki(ico)K(ico)=Ki(ico)K(ico)eW), где K(ico) —
коэффициент передачи корректора, в качестве которого исполь*
зуем полосовой гармонический корректор (3.74) .
Степень коррекции оценим по величине суммарного квадра-
тичного уклонения коэффициентов передачи Кг (ico) и K3(ico)
С02
П = ----[ | Al (i со) Д'(iсо) — cZ0е1’Фо|2cfсо, (3.75s
®2 — С01 J )
Of
откуда следует, что ц не зависит от y(t), т. е. не меняется с тече-
нием времени t. При записи т] для простоты предполагалось т=0,
что, в принципе, несущественно с точки зрения решаемой задачи.
Разложим Ki (ico) в ряд
6—181 151
Kx(i<o) = £4e-ifflW (Темсах,), (3.76)
—co
где Ak отличаются от коэффициентов Фурье, получаемых при раз-
ложении A'i(i®) в ряд Фурье на отрезке [®i, со2] заменой i на Н.
С учетом (3.75) и (3.76)
П = У ВкБ1 + (В0~с10^^(В*0~с10е-1^,
k=-----00
k#=0
где
V Ak-tat (аг = а.+На’.). (3.77)
i=-nx
Вместо погрешности ц в дальнейшем будем рассматривать пог-
решность
я= V
,,k=—00
Лу=о
которая совпадает с т] при
В0 = г/0е1ф". (3.78)
Значения d0 и ср0 обычно не задаются, поэтому можно считать, что
они выбраны так, чтобы выполнялось (3.78).
Выразим погрешность ц через дискретные значения импульс-
ной реакции несинхронного канала Обозначим через gi(O
и £2(0 импульсные реакции на выходе СК и на выходе корректо-
ра. Согласно теореме отсчетов
Г /а VI" sinO,5Aco(f-*Ai) <Bi4-co2 а л л ,
“llah cos(/ +
-00
+ У X sinO,5A(B(/_-MO_sin Ю1 + со2 _k д (3,79)
4J О,5Дсо(; — kM) 2 V 7 V
--00
где Д/=2л/Дсо; Д® = со2—®i; a.h=gi(kAt), ak=gi(kAf)—дискрет-
ные значения преобразования Гильберта от gi(B)'-
__ 2 — — 2 —
ah= ReXft; ak =---------------— JmA
(Здесь под мнимой частью подразумевается часть выражения, со-
держащая Н.) Для gitO справедлив аналогичный ряд, в котором
ак и ah заменены на ah=g\{kAt) и ah—gi^kAf), изменяющиеся во
времени.
162
Спектральная плотность /Ci(ico) функции gi(t) равна
= (®х < |®| <(оа),
-СО
где Ah = = (fife — Hah) At/2 или ak =-^-Re.Ah=akCosy(t) +
+o^siny('0> ah=~JmXfe=afecosy(0—aksiny(t). Данные выра-
жения связывают дискретные значения импульсных реакций не-
синхронного и синхронного каналов.
Реакцию g2(t) можно также представить рядом (3.79), в кото-
ром a.k и ah заменены на a'h=g2(k\t) и a'k=g2(k\t). Спектраль-
ная плотность реакции g2(t) равна
Ла (i ®) = е’7 (<) 2 Вке~‘ш*д‘(<»1<М<®а),
k=-00
где Bh имеют указанный выше смысл (3.77) и связаны с a'k и
a'k соотношениями:
a>A-Re[e17(t) Вй]; а\--=-^- Jm [ е17 (t) Bh],
из которых вытекает, что величина (а\) 2,+(й\)2 не меняется с
течением времени (для всех k).
Очевидно,
П = А 2 Ка*)2 + (^)21 (А = const).
k=--00
k=£0
Проделанный анализ показывает, что погрешность ц на выходе
корректора с коэффициентом передачи (3.74) не зависит от t, хо-
тя форма импульсной реакции канала и ее преобразования Гиль-
берта меняются с течением времени. Аналогичный вывод справед-
лив и для произвольного полиномного корректора с коэффициен-
том передачи (3.27), поэтому минимизация ц как выпуклой функ-
Ряс. 3.27. Структурная схема коррекции частотных характеристик
несинхронного канала
6*
163
ции переменных а/ и ад" может выполняться на основе таких ал-
горитмов, как метод сечений с использованием изображенного на
рис. 3.27 устройства [15].
Генератор сигналов ГС посылает ,в канал 6-импульсы с периодом Т—
= т2л/(<ог—«и), где m — целое число, выбираемое из условия, чтобы за время Т
переходный процесс в канале практически окончился. На выходе I преобразо-
вателя Гильберта Н сигнал совпадает по форме с его входным сигналом gilt),
а на выходе II сигнал gi(t) является квадратурой (преобразованием Гильберта)
входного сигнала. Электронные ключи ЭК, управляемые генератором тактовых
импульсов ГТИ, осуществляют выборку сигналов giQt) и gi(t) в моменты вре-
мени kT/m, за исключением й=0. Усредняющий индикатор И, подключенный
через сумматор к выходам квадратичных детекторов КД, указывает величину
Т|. Для оптимальной коррекции характеристик несинхронного канала необходи-
мо минимизировать показания индикатора И. В процессе настройки один из ре-
гуляторов <ik должен оставаться неизменным, в противном случае, установив
ссд = 0 для всех k, получим T]i=iO=min за счет того, что, |K(ico) | =0.
(Непосредственная минимизация искажений полосовых кана-
лов по импульсным реакциям. Обоснуем способ оптимальной кор-
рекции частотных характеристик полосовых каналов непосредст-
венно по импульсной реакции канала без использования ее пре-
образования Гильберта [12].
Исходные данные: Ki (ico) и g1 (t) — коэффициент передачи и
импульсная реакция полосового синхронного канала с граничными
частотами coi и ®2. Каска,дно с каналом включен лолиномный кор-
ректор с коэффициентом передачи (3.27). Обозначим: K2(ico) =
= Xi(iw)K(i®)—коэффициент передачи; g2(i) — импульсная ре-
акция системы «канал + корректор». Для оптимальной коррекции
необходимо, чтобы коэффициент передачи Кг (ico) реального ка-
нала наименее уклонялся от коэффициента передачи идеального
полосового синхронного канала Ks(ico) =С'е_‘“'с (®i| со | сог) с
полосой пропускания Ли = ®2—®i и импульсной реакцией
&(0=с
sin0,5 Д и (/ —т)
0,5Д®(^—т)
COS
где т и
\ п I
С — заданные постоянные.
В качестве меры уклонения Кз(1со) и K2(ico) выберем интег-
и2
ральную квадратичную погрешность т)= J* т)* (ico)r| (ioo)с7оо, где
wi
if] (i®) =К2 (i®) —Кз (i®) •
Расширим диапазон [®i, ®г] до диапазона [®/, ®2Z]> гранич-
ные частоты и/ и м2' которого выбираются исходя из следующих
требований: 1. Диапазон [®/, м2'] полностью охватывает полосу
пропускания канала: ®iz^®i; ®2/^=®2; co2z—®i/=®c^A®=
= ®2—®i; 2. ®1/®c=n-—любое целое число. В этом диапазоне
рассмотрим погрешность
164
“2
т) = J т]* (i а) т] (i a) d а, (3.80)
и;
где г] (ico) имеет указанный выше смысл при условий, что /G(ia)
задано в диапазоне [а/, ®2Z]- Поскольку |/С2(ico) | == 0 (а/^
^|®|^®1, ®2^'|® I'^W)»
“1 “2
т] = т] + р, р= J Кз(1®)|2 da + j | кз (i ®)|2cfa = const.
“1 “2.
Погрешности q и t] отличаются на постоянную р, не зависящую от
/G(ia), поэтому в дальнейшем вместо т] используется т).
оо
На основе равенства Парсеваля т] = лу [gHO—gz(t)]2dt, где
---------------------------------------00
— /л v>sinO,5acR—г) , ,, ,
£з(О = С ° , cos®0 Z—т) ,
0,5 ®с (t — т)
р=с'®с/л, ®' = -^-(®;+®') .
Свяжем т} со значениями коэффициентов аь.
Заменив в (3.80) K(i®) его выражением (3.27), получим
_ Q
1] = '£Аьак + 2^Ам akak+l~
fe=0 k, I
— 2 ^Bhak + Q (k = 1, 2, ..., q, k=£l, 1=1, 2, ..., q—k),
k=0
“2
где = f| ^(i ®) <pft (i ®)|2 d ®;
®2
Ам = Re у| ^(i ®)|2 q>ft (i w) <p*+! (i a) d ®;
и2
Bh = Re у ^(i a) /(’ (i ®) <ph (i ®) d a;
co'
Q= yK(i®)K*2(i®)d®.
165
Выразим т] через дискретные значения g2 (0 и g3(/). Для £2 (О
справедливо разложение
ОО
,,, VI <_ sin 0,5 ис Г/ — (йД/4-т)1 , г, ,, л ± । ,ог,,,
g2(/) = У. bh —— ---------------!—— С05£0П [t—(k Az + т)], (3,81)
S2V/ к О,5соср —(АД^ + т)] oi \ /J’ v >
k=—00
где &ft=g-2(W + r), Д(=л/ис.
Поэтому 7<2(ico) и т] (ico) можно записать в виде:
Рис. 3.28. Области допустимых значений
частоты дискретизации сигнала с полос-
ным спектром (а) и график зависимости
минимально возможной частоты дискрети-
зации от ширины и положения спектра
сигнала (б)
g— i со k Д t
что дает
^ = лГ(6-7)2+ £ bi
1 k=—00
(Л = const).
Таким образом, погреш-
ность Т], являясь выпуклой
функцией переменных коэф-
фициентов ан (& = 0, 1, 2, ...,
q), может быть представле-
на как суммарный квадра-
тичный эффект дискретных
значений импульсной реак-
ции полосового канала без
использования преобразова-
ния Гильберта. Проделан-
ный анализ показывает, что
коррекция синхронного по-
лосового канала по дискрет-
ным значениям его импульс-
ной реакции, в принципе, не
отличается от аналогичной
коррекции низкочастотного
канала и может осущест-
вляться с помощью устрой-
ства, изображенного на рис.
3.20, при условии, что часто-
та сос удовлетворяет выше-
166
указанным требованиям. Поскольку выбор частоты ис играет важ-
ную роль и представляет самостоятельный интерес, остановимся на
этом вопросе подробней.
Требования 1 и 2 эквивалентны выполнению неравенств
<ос£<®1- (£+1)®с>®2, (3.82)
где g=|[<Di/cbc] — целая часть дроби ®i/wc. При этом ®'i = o)cg;
®Z2 = o)c(t+1). Решение неравенства (3.82) дано на рис. 3.28а.
Заштрихованные области, соответствующие искомым значениям
®с, ограничены двумя сериями прямых:
®с _ 1 СОх # ®е _ 1 / ®t
A со k Д ® ’ Лео ' k \ Дсо
«Разрешенные» значения ис, при которых справедливо разложе-
ние (3.81), удовлетворяют неравенству
Ф1) (й=1,2,...).
1 <01 > ис > 1 / J I И1
k Д® Д® 1~|-й\ д®
(& —О, 1,2, ..., т),
(3.83)
где \т\ — [®1/Аю] —-целая часть дроби. ®i/A®, а «запрещенные»
значения ®с, при которых разложение (3.81) несправедливо, удов-
летворяют неравенству
1 ®1 а>с < 1 / j
1 4-й д® л® 1 4-й \
®i
Л а
(й = 0, 1,2, ...,m-l); (£ = m).
1 4- k \ Д ® / А ®
Функция £г(0 с ограниченным спектром имеет бесконечную
протяженность. Однако всегда можно выбрать такой интервал вре-
мени Т, вне которого значения й’гСО малы и их можно отбросить
при заданной точности описания gz(t)- -В этом случае ряд (3.81)
заменяется конечной суммой, число членов которой минимально
возможное при заданном Т, если юс определяется из выражения
иМин 1 4~ ®1/д ® /д 24)
Д ® 1 -f- /п
где m имеет указанный выше смысл, либо из выражения ®Мин=
= ®2Ж, где 7V2=[w2/Am] —целая часть дроби ®i/A®. Из этих вы-
ражений, являющихся нижней границей неравенства (3.83), сле-
дует, что ®мин->А®(®1-»-оо) (рис. 3.286). При выборе
®мин согласно (3.84) для описания g2(0 в виде конечной суммы
требуется минимальное число дискретных значений gz(k&t), от-
считанных с максимальным шагом дискретизации А/=л/®Мин-
В заключение отметим, что для функции g2(t) наряду с выра-
жением (3.81) справедливо также более общее выражение
®" — ®' , .
“ sin------(t — й Д Z) г „
gz (0 = V gz (&до —-----------------c°s ю (^—k at),
Ы ю, — ®. z
2 а-йдо
167
где <о' и со" — произвольные частоты, удовлетворяющие неравенст-
вам Co'l-^'co' sC (01; 0)2 '2-
3.6. Коррекция интерференционных помех
в многопозиционных системах с интегральным
приемом
Системы с согласованными фильтрами
Схема многопозиционной системы с согласованными фильтра-
ми изображена на рис. 3.29, где Sk(t) (k—1, 2, ..., tn) —набор
заданных рабочих сигналов со спектрами Sfe(ico); Кт (ico) —комп-
лексный коэффициент передачи параметрического канала с ли-
Р.ИС. 3.29. Многопозиционная система с согласо-
ванными фильтрами
нейными искажениями; РУ — решающее устройство; ^(lco) (1=1,
2,... ,т) — комплексные коэффициенты передачи согласованных
фильтров, реализованных по полиномной структуре:
ч
4rc(i“) = 2 “v’TvO®) (/= 1, 2,
V=1
(ico) (v= 1, 2, . . ., q; 1=1, 2, ..., m)—заданные базисные
функции; a©v —регулируемые параметры, с помощью которых до-
стигается требуемый коэффициент передачи согласованных фильт-
ров; ,NX (t) —реализация аддитивного шума со спектром Nx (ico).
При подаче на вход канала сигнала q>k(t) на iZ-м выходе системы
в момент регистрации to получим
ч
(з-85)
V=1
где
168
pW = V- f ®) [Аг (i co) sh (i co) + Хг (i <0)1 e‘ “ f° d co;
2Л J
E
E — частотное множество, охватывающее протяженность, спектра
сигнала на выходах системы.
Качество системы оценим по квадрату нормы матрицы погреш-
ностей на выходах системы
_____________ т т / q \2
nii=ii[p]'-[p]ii= 1(р;г-рЫ)2= у sk’^-pw , (з.8б)
k> 1=1 k, ;=1 \v=l /
где {рУ — матрица, составленная из элементов ip« (k, l—\, 2,
m); [p]—-заданная (эталонная) матрица, составленная из эле-
ментов ры, которые необходимо получить на выходах системы.
Черта над выражением означает усреднение по всем шумовым
реализациям.
С учетом (3.85) нетрудно видеть, что при заданных y®v (ico) и
<Sfe(ico) ||т]|| — многомерная выпуклая вниз функция переменных
«(!)v (v= 1,2,..., q\ I— 1, 2, ..., <m), не содержащая неразреши-
мых оврагов. Будем считать согласованные фильтры оптимальны-
ми, если величина [|р|| минимально возможная. Минимум ||т||| на-
ходится из условия A1211L = o (v= 1, 2, ..., q\ Z=l, 2,
Эти соотношения являются исходными при расчетах оптимальных
значений коэффициентов a®v.
Рассмотрим возможные реализации систем, минимизирующих
НрЦ на основе алгоритма последовательной оптимизации (метода
сечений) и алгоритма скорейшего спуска. Для реализации
метода сечений на выходах 1=1, 2,..., т необходимо включить
устройство, указывающее значение ||р||, что достигается, например,
с помощью изображенной на рис. 3.30 схемы. На вход канала
Кт (ico) подается пробный (зондирующий) сигнал, представляю-
щий собой периодическую последовательность рабочих сигналов
Si(Z), • • • - Sm(t), сдвинутых относительно друг друга на ин-
тервал Т [Г выбирается больше длительности каждого из ука-
занных сигналов и достаточно большим, чтобы за время Т прояви-
лись статистические свойства шума AZ(Z)]. Электронные ключи ЭК
производят одновременную выборку сигналов на всех выходах
1, 2, . . ., m в момент времени t0, затем в момент времени to+T,
.t0+2T, .. ., t0+ (tn—1)T, что дает наборы импульсов с амплитуда-
ми р'п, p'2i, р'31 . p'mi 0=1, 2, . .., m). Синхронно с этими им-
пульсами на вычитающее устройство подаются с генератора эта-
лонных импульсов ГЭИ импульсы с амплитудами рп, ргг, • • pmi
(1=1, 2, ..., tri). Индикатор И, включенный на выходе суммато-
ра через квадратичный детектор КД и интегратор, указывает ве-
личину ||т]||. Варьируя последовательно коэффициенты a®v, доби-
ваемся минимального показания индикатора И, что в силу выпук-
169
Рис. 3.30. Структурная схема устройства для -определения ||т]||
лости и отсутствия оврагов соответствует безусловной минимиза*
ции ||Т)||.
т
Для ||т]|| (3.86) справедлива форма записи ||т]|| = V тр, где
z=i
т [ q \2
т]г = V V av^ki —Рш I • Очевидно, что при заданных у vZ) (ico) и
А=1 \v=l /
Sk(ico) гр— взаимно независимые функции переменных а ^.Поэто-
му можно настраивать каналы 1, 2, ..., т взаимно независимо, для
чего на выходе каждого канала включаются КД, генератор и ин-
дикатор, указывающий величину т|г, по минимуму которой и осу-
ществляется настройка данного канала.
Минимизация ||т]|| -методом градиента требует одновременного
изменения всех коэффициентов -а^ (v=l, 2, .. ., q; I—I, 2, ...,
т) соответственно на величины, пропорциональные компонентам
градиента функции ||т]|| и противоположные им по знаку. Гра-
диент |]т]|| определяется выражением
т q
vn = V 2 Нг)Ч°’
1=1 v=l
где —компоненты градиента; a(,Z) —единичные векторы по
переменным;
т
= ЁШ1 = 2 у (p„-pM)Pff-
da" S,
Техническая -реализация системы с адаптацией по алгоритму скорейшего
спуска изображена «а рис. 3.31. На этом рисунке указан лишь один канал, по-
скольку все каналы аналогичны по конструкции и настраиваются .взаимно ,не-
170
зависимо. Как и для схемы рис. 3.30, на вход канала К x(ico) подаются перио-
дически рабочие сигналы Sk(t). На выходах электронных ключей ЭК. l-то кана-
ла получаем импульсы с амплитудами Рмм и а на выходах перемножите-
лей — импульсы с амплитудами (р';и—phi)PkiM (v=l, 2, ..., q; k=l, 2.... tri).
Рис. 3.31. Структурная схема устройства для настройки согласованных
фильтров многапозицианной системы
Эти импульсы суммируются и усредняются в накопительных устройствах У, на
Выходах которых получаем управляющие сигналы с амплитудами, пропорцио-
нальными Управляющие сигналы изменяют коэффициенты передачи регу-
ляторов а<!4, в результате чего величина ||т]11 минимизируется методом скорей-
шего спуска. Описанная минимизация является безусловной, т. е. отыскивается
глобальный минимум Цт|||, поскольку ||ч11 — выпуклая функция, не содержащая
оврагов.
Адаптивные системы с корреляционным приемом
Многопбзиционная система с корреляционным приемом изо-
бражена на рис. 3.32, где gx (Z) — импульсная реакция парамет-
рического канала с коэффициентом передачи (ico); Чгг(7) (/=
= 1, 2, ..., т) — опорные сигналы, вырабатываемые опорными
генераторами. Каждый из опорных генераторов реализован в ви-
де набора генераторов базисных сигналов у<1> (v = 1, 2, ...,
•q), выходы которых через регулируемые аттенюаторы а<^ поданы
на соответствующие сумматоры, поэтому
171
Рис. 3.32. Многотюзициояная система с корреляционными
приемниками
q
= £ a<°Y<Z)(0 (Z=l,2, ...,/n).
V=1
Изменение коэффициентов aff> позволяет получить нужную фор-
му сигналов Тг(/).
При передаче k-го сигнала Sk(t) на выходах интеграторов по-
лучим
<7
Q<v) = J [fh(t)+Nx(t)]y^(t)df,
V=1 Et
t
fk(t) = J<p'(0)^(Z-0)dO,
--------00
где Et — множество, по которому ведется интегрирование (в част-
ности, Et — множество точек отрезка [0, /о], — момент регист-
рации)1.
По аналогии с предыдущим качество системы оценим по ус-
редненному квадрату нормы матрицы погрешностей на выходах
интеграторов
m / q
1Ы = 1|[рГ-[р]||= X S avl)Qki}~Pki
k, 1=1 \v=l
где [p]z — матрица принятых параметров р'ы; [р] — эталонная'
матрица; усреднение ведется по всем шумовым реализациям *.
Выражение (3.87) по форме не отличается от выражения (3.86),
т. е. при заданных S^ft) и y^v (0 ИлII — выпуклая вниз функция
переменных a<z>v , не содержащая неразрешимых оврагов. Поэто-
му для минимизации ||р|| воспользуемся вышеуказанным методом
сечения и методом градиента.
Реализация метода сечений в системах с корреляционным
1 Вопросы статистического усреднения в адаптивных корректорах . рассмот-
рены в [39].
172
2
I . (3.87);
приемом не отличается от реализации этого же метода в систе-
мах с согласованными фильтрами и осуществляется путем вклю-
чения на выходах интеграторов устройства, определяющего вели*
чину Hrill, которое по |конструкции аналогично устройству, изобра-
женному на рис. 3.30.
Градиентная система, использующая алгоритм скорейшего
спуска, приведена на рис. 3.33, где для простоты указан один
(Z-й) канал. Коэффициенты a,Wv (v=l, 2, ... , q) этой системы
изменяются на величины где
ч.) = 1Ш=2у](рм_рм)(ЗВ>;
dav k=l
а — коэффициент пропорциональности. Все каналы системы иден-
тичны по конструкции и настраиваются взаимно независимо.
Адаптация описанных систем производится по испытательно-
му сигналу. Эту адаптацию можно осуществлять либо в переры-
вах между сеансами связи, либо непосредственно в процессе пе-
редачи информации, примешивая периодический испытательный
сигнал к рабочему сигналу на передаче и выделяя методом на-
копления этот сигнал на приеме.
Рис. 3.33. Структурная схема устройства для настройки ге-
нераторов опорных сигналов .многопозиционной системы
Системы, изображенные на рис. 3.31 и 3.33, осуществляют сов-
местную минимизацию и - интерференционных (межсимвольных и
межканальных) помех, и аддитивных помех.
173
СПИСОК ЛИТЕРАТУРЫ
1. Зуховицкий С. И., Авдеева Л. А. Линейное и выпуклое программирование.
М.: Наука, 1964.
2. Кисель В. А. Некоторые вопросы расчета и настройки гармонических коррек-
торов по сигналу. — В кн.: Методы математического моделирования и тео-
рия электрических цепей. Киев: Институт кибернетики АН УССР, 1965,
вып. 6, с. 71—91.
3. Кисель В. А. Анализ итерационного алгоритма настройки дискретного кор-
ректора. — В кн.: Теоретическая электроника. Львов: 1966, вып. 1,
с. 108—117.
4. Кисель В. А. О коррекции частотных характеристик по импульсной реак-
ции. — В кн.: Труды конференции, посвященной 70-летию изобретения ра-
дио. Киев: Технжа, 1966, с. 5—12.
5. Кисель В. А. Оптимальные алгоритмы настройки гармонических корректоров
по минимуму квадратичной погрешности. — В кн.: Методы отбора и преоб-
разования информации. Львов: Наукова думка, 1967, вып. 6, с. 71—86.
6. Кисель В. А. Дискретный синтез корректирующих цепей. Автореф. дис. на
поиск. учен, степени канд. техн. наук. Одесса: 1967.
7. Кисель В. А., Одесский В. Я. Оптимальные алгоритмы настройки полином-
ных корректоров. — В кн.: Вопросы электросвязи. Киев: Технжа, 1967,
с. 45—50.
8. Кисель В. А. Оптимальные алгоритмы настройки дискретного корректора
по минимуму суммарной абсолютной погрешности. — В кн.: Математическое
моделирование и теория электрических цепей. Киев: Институт кибернетики
АН УССР, 1957, вып. 5, с. 334—350.
9. Кисель В. А. Алгоритм настройки гармонических корректоров по импульс-
ным реакциям полосовых каналов. •— В кн.: Методы математического моде-
лирования и теория электрических цепей. Киев: Институт кибернетики АН
УССР, 1967, вып. 3, с. 3—38.
10. Кисель В. А. Оптимальные алгоритмы настройки дискретных корректоров
по минимуму максимальной абсолютной погрешности. — В кн.: Теоретиче-
ская электротехника. Львов: 1967, вып. 4, с. 23—32.
11. Кисель В. А. Алгоритм настройки гармонических корректоров для несин-
хронных каналов. — В кн.: Методы математического моделирования и тео-
рия электрических цепей. Киев: Институт кибернетики АН УССР, 1968,
вып. 2, с. 70—85.
12. Кисель В. А. Непосредственная коррекция характеристик полосового канала
по импульсной реакции. — В кн.: Труды учебных институтов связи. Л.:
1969, вып. 44, с. 75—80.
13. А. с. 285063 (СССР). Устройство для настройки фазовых характеристик
четырехполюсников и каналов связи/Кисель В. А., Лев А. Ю., Нудель-
ман П. Я.
14. А. с. 292246 (СССР). Устройство для коррекции амплитудных и фазовых
искажений каналов связи /Кисель В. А.
15. А. с. 291362 (СССР). Устройство для настройки коооекторов по импульс-
ной реакции полосового несинхронного канала/Кисель В. А.
16. А. с. 330572 (СССР). Корректор межсимвольных искажений/Кисель В. А.
17. А. с. 344594 (СССР). Фазовый корректор полосовых каналов/Кисель. В. А.
18. Березин И. С., Жидков Н. П. Методы вычислений. Т. 1. М.: Наука, 1966.
19. Беркович Д. А., Лев А. Ю. Система коррекции стандартных каналов то-
нальной частоты с автоматической настройкой. М.: Связь, 1972.
20. Ланнэ А. А. Оптимальный синтез линейных электрических цепей. М.: Связь,
1969.
21. Ремез Е. Я. Основы численных методов чебышевского приближения. Киев:
Наукова думка, 1969.
22. Фадеев Д. К., Фадеева В. Н. Вычислительные методы линейной алгебры.
М.: Физматгиз, 1960.
174
23. Кловский Д. Д. Передача дискретных сообщений по радиоканалам. М.:
Связь, 1969.
,24. Уайдл Д. Дж. Методы поиска экстремума. М.: Наука, 1967.
25. Bogert В. Р. Automatic Phase Equalizer. Pat. N 2908873. (USA), 1959.
26. Becker F. K., Holzman L. N., Lucky R. W., Port E. Automatic Equalization
for Digital Communication.—«Proc, of the IEEE», 1965, v. 53, N 1, p. 110—
112.
27. Di Toro M. J. Communication in Time-Frequency Spread Media Using Adap-
tive Equalization.—«Proc, of the IEEE», 1968, v. 56, N 10, p. 1653—1675.
28. Boyd R. T., Monds F. C. Adaptive Equalization for Multipath Channels. —
«Electronics Letters», 1970, v. 6, N 17, p. 556—558.
29. Chang R. W. Joint Optimisation of Automatic Equalization and carrier
Acquisition for Digital Communication.—«BSTJ», 1970, v. 49, N 6, p. 1069—
1104.
30. Gerscho A. Adaptive Equalization of Highly Despersive Channels for Data
Transmission.—«BSTJ», 1969, v. 48, N 1, p. 55—70.
31. Rupprecht W. Verallgemeinerte Verzweigungnuetzwerke zur Entzerrung von
Kanalen fur die Digitale Dateniibertragung.—«NTZ», Heft 6, S. 316—322.
32. Proakis J. G., Miller J. H. An Adaptive Receiver for Digital Signaling thro-
ugh Channels with Intersymbol Interference.—«IEEE, Trans. Information
Theory», 1969, v. IT—15, N 4, p. 484—497.
33. Lucky R. W. Automatic Egualization for Digital Communication.—«BSTJ»,
1965, v. 44, N 4, p. 547—588.
34. Lucky R. W. Techniques for Adaptive Equalization of Digital Communication
Systems.—«BSTJ», 1966, v. 45, N 2, p. 256—286.
35. Niessen C. W., Willim D. K. Adaptive Equalizer for Pulse Transmission.—
«IEEE, Trans. Commun. Technol.», 1970, v. 18, N 4, p. 377—395.
36. Hirch D., Wolf W. J. A Simple Adaptive Equalizer for Efficient Data Trans-
mission.—«IEEE, Trans. Commun. Technol.», 1970, v. COM-18, N 1, p. 5—11.
37. Кисель В. А. Минимизация интерференционных (помех в цифровых каналах с
эхо-сигналами. — Радиотехника. 1973, № 10, с. 28—35.
38. Lucky R. W., Saiz J., Weldon E. J. Principles of Data Communication. New
York, Me. Graw-Hill Boock Co., 1968, p. 443.
39. Rudin H. R., A Continuously Adaptive Equalizer for General-Purpose Commu-
nication Channels.—«BSTJ», 1969, v. 48, N 6, p. 1865—1884.
40. Kanal L. Survey of Automatic Equalization. In: IEEE Computers and Com-
munications Conference. Rome, New York, 1969, p. 23—33.
41. Стоянов Г. К. Фазови коррекции на телефонните канали за передване на
данни. — В кн.: Пощенски телеграфии, телефонии и радиосъобщения. Со-
фия: 1972, т. 23, № И, с. 251—253.
42. Brownlie J. D., Groves К. An Experimental 4800 bit/s Adaptively-Equalized
Modern for Switched Telephone Connections.
In: Proc. International Zurich Seminar on Digital Communications. Source
Encoding, Channel Encoding and Modulation, Digital Communication Loops.
1974, p. Hl (1)— H(l).
43. Berland J. R., Pentaux J. B. Methodes D’egalisation Automatique Pour Trans-
mission de Donnees par Moderns Utilisant une Modulation Lineaire.—«L’Onde
electrique», 1975, v. 55, N 1, p. 4—8.
44. Berland J. R., Pentaux J. B. Chix et Definition d’un Egaliseur Automatique
Adaptatif Pour Modern a 9600 Bitssec.
In: Proc. International Zurich Seminar on Digital Communications. Source
Encoding, Channel Encoding and Modulation, Digital Communication Loops.
1974, p. H5(l)—H5(6).
45. Poe W. R. Adaptive Equalization.
In: Proc. IEEE Conf. Decis. and Contr. Inch 12-th Symp. Adapt, process.
San Diego, Calif., N. Y., 1973, p. 244—246.
46. Lucky R. W. The Status of Adaptive Equalizer Technology.
In: IEEE Sumposium Digest. 1970 Canadian Symposium on Communications.
Montreal, N. Y., 1970, p. 103—104.
175
47. Schollmeier G., Koeth H. Theoretical Limits for the Settling Time -of Adapti-
ve Equalizers and the Behaviour of the Practical Equalizers. In: IEEE Jut.
Conf. Commun. Minneapolis, Minn..N. Y., 1974, N 4, p. 35D-1-35D4.
48. Sha R. T., Tang D. T. A New Class of Automatic Equalizers.—«IBM, J. Res.
and Develop.», 1972, N 6, 16, p. 556—566.
49. Данилов Б. С., Штейнбок M. Г. Однополосная передача цифровых сигналов.
М.: Связь, 1974.
50. Панкратов В. П. Фазовые искажения и их компенсация в каналах ТЧ при
передаче дискретных сигналов. М.: Связь, 1974.
Глава 4
ГАРМОНИЧЕСКИЕ КОРРЕКТОРЫ С ОБРАТНОЙ
СВЯЗЬЮ
4.1. Общие положения
По сравнению с полиномными корректорами без обратной свя-
зи принципиально новыми возможностями обладают так называе-
Рис. 4.1. Корректоры с обратной связью параллельного (а) и пос-
ледовательного (б) видов
б)
мые полиномные корректоры с обратной связью (рис. 4.4), коэф-
фициенты передачи которых описываются выражениями:
ч ч
J] aft фй (i co) a0 + У, «ft <pfe (i co)
^(ico) =--------S----------------; tf2(ico) =-------, (4.1)
1 + Pfe co) 1 + 2 Pfe Ф* (i co)
fe=i k=l
где ak, Pfe(ico) (&=1, 2, . . . , q) и ср(ico) —коэффициенты передачи
соответствующих узлов корректоров (а& и — вещественные).
Система с коэффициентом передачи Ki (ico) устойчива, если годо-
17
граф вектора^ а^срь(ico) в комплексной плоскости не охватывает
*=1
176
точку (—1,0) (0s=: |со| sCoo). Исходя из этого критерия для систе-
мы с коэффициентом передачи /С2 (ico) получим, что она устойчива,
если годограф вектора — <p(ico) (k—1, 2, ..., q) не схватывает
точку (—1,0) (0^ | со | ^оо), аде [и— корни полинома 1 +
Ч
+ $kXh.
А=1
В настоящей главе даются основы общей теории полиномных
корректоров с обратной связью. Главное внимание уделяется гар-
моническим корректорам как находящим все большее применение
на практике (рис. 4.2). Эти корректоры по сравнению с коррек-
торами без обратной связи при вдвое меньшей длине линии за-
держки обладают значительно большими корректирующими спо-
собностями.
Рис. 4.2. Гармонический корректор с простой связью (а); рас-
положение полюсов коэффициента передачи корректора в z-пло-
скости (б); корректор с комбинированной обратной связью (в)
Рассмотрим основные типы корректоров с обратной связью.
Для корректора с простой обратной связью (рис. 4.2а) отводы с
коэффициентами передачи cu (k = 0, 1, 2, ..., п) образуют пря-
мую связь корректора, отводы с коэффициентами передачи
(й=0, 1, 2, ..., п) —обратную связь. Коэффициент передачи
корректора равен
177
e-itoziAf’g afeei<oAAi
К (i CO) =--------------------
i+2 м-‘“АД‘
k=l
или ib терминах z-преобразования [2, 13, 14]
n
zn2 ahZ~k “оП(г — Vfe)
К (z) =-----, (4.2)
1+2 ₽/iz4 pn n (z—p-k)
k~1 k=i
где z = Nt — время .задержки блока линии; уч
и [и — нули и полюсы К (z). В дальнейшем множитель
гп, характеризующий постоянное запаздывание, вносимое коррек-
тором, не учитывается, поэтому
Л(г) = А^-, (4.3)
*2 \z)
где
pi = Y,ahZ~k-, Л(г)= 1+2^/.
k=0 k=l
Рассматриваемый корректор устойчив, если все полюсы ць ра-
циональной функции K(z) расположены в комплексной плоскости
z вне круга единичного радиуса, т. е. если все корни полинома
Рг(г) по модулю больше единицы (рис. 4.26) [1, 2, 6, 13—16].
Схема гармонического корректора с комбинированной обрат-
ной связью [1, 3] изображена на рис. 4.2s. Коэффициенты а\ об-
разуют прямую связь корректора, эти же коэффициенты совмест-
но с коэффициентами р\ образуют обратную связь. Коэффициент
передачи корректора без учета множителя zn равен
п
2 a'kz~k
АИ= “------------= 7+ <4-4>
,()
k=0
где Bh определяются согласно одной из нижеследующих систем
линейных соотношений:
178
или
п п
^h=^ai Рг+* = 2 a'-fe
i=0 i=0
(А = 0, 1, 2, ...; а' = |3'= 1; <ft = 0).
Сопоставляя (4.3) и (4.4), нетрудно видеть, что коэффициенты
передачи корректора с простой обратной связью и корректора с
комбинированной обратной связью .могут быть всегда уравнены
между собой, т. е. указанные корректоры эквиваленты по своим
потенциальным возможностям.
Схемы рис. 4.2, естественно, не исчерпывают всего многообра-
зия корректоров с обратной связью. Тем не менее в настоящей
главе основное внимание будет уделено именно этим схемам, так
как они являются каноническими и обладают функциональной пол-
нотой в том смысле, что позволяют моделировать произвольные
рациональные функции от z с вещественными коэффициентами,
удовлетворяющие условию физической реализации, при минималь-
ном числе регуляторов и и минимальном числе блоков ли-
нии задержки. Кроме того, они являются эквивалентами любой
другой схемы корректора с обратной связью.
4.2. Расчет корректоров с обратной связью
по временным и частотным характеристикам
каналов связи
Временная область
Корректор, компенсирующий искажения канала связи, преобразует им-
пульсную реакцию канала gi(t) в импульсную реакцию идеального канала
„ sin со,, (f — т)
g3(f) = c---
(0с (с т)
(С, т — постоянные; сос — граничная частота канала).
В терминах г-преобразования задача корректора заключается в преобразо-
вании сигнала (дискретной импульсной реакции)
т1
Si (?) = У ahZk [ak = gi (k Д t), M = л/сос]
—nt
в сигнал gi(z) = l (постоянные С и т не учитываются). Этот случай коррекции
практически .наиболее важный, поэтому ограничимся расчетом корректоров с
обратной связью, предназначенных для преобразования g\(z") в ^з(а_) = 1.
179
Исходными данными к расчету являются дискретные значения gi(kM) им-
пульсной реакции gi(t), т. е. коэффициенты ак полинома g\(z). Считаем, что
полином g’lfz) удовлетворяет условию корректируемое™ (не содержит корней,
по модулю равных единице). Значения ак нумеруются таким образом, чтобы ni
равнялось числу корней полинома gi(z), модуль которых меньше единицы, а
mi — числу корней, модуль которых больше единицы.
^Коэффициент передачи корректора, преобразующего g\(z) в gz(z) = l, ра-
вен
K(2)-g3(Z)- 1 -Р1(2)
gi (z) gi (?) Рг (Z) *
Тривиальное решение поставленной задачи получим, положив
Pi(z)=l, 1
Р2 (z) = gi(z)J
(4.7)
Как упоминалось ранее, корректор с коэффициентом передачи (4.3) удов-
летворяет условию устойчивости, если все корни полинома Pz(z) по модулю
больше единицы. Полином gi(z) в общем случае содержит как корни, модуль
которых больше единицы, так и корни, модуль которых меньше единицы. В свя-
зи с этим корректор, рассчитанный согласно (4.7), в. общем случае не будет
устойчивым. Во избежение этого недостатка поступим следующим образом
[6, 16]. Факторизуем полином. gi(z) относительно единичной окружности
gi(z) = P+(z)P~(z), вде P+(z) — полином по положительным степеням z, со-
держащий корни полинома g'i(z), по модулю большие единицы; Р~(г)—поли-
ном по отрицательным степеням г, содержащий корни, по модулю меньшие
т, п,
единицы: Р+ (z) — У, lhzK\ P-(z)=^dkz-k. Факторизацию выполним так, чтобы
*=о *==о
Ьо=1-
Возведем полином P~(z) в отрицательную степень:
СО
[/>-(г)]-1 = 2 ^z-*, (4.8)
/г=0
где
1 1 k~'
Dt = —,Dh=- — y'Didk_i(k^0,k=l,2, . . .).
do d0
Ряд (4.8) сходится, так как все корни полинома P~(z) расположены в плоско-
сти z внутри круга единичного радиуса, поэтому, ограничившись некоторым чис-
лом членов ряда, представим [P-fz)]-1 в виде полинома степени п:
п
[p-(z)]-1 = ^Dftz-\ (4.9)
k=0
С учетом изложенного
2 Dk^
Полученный коэффициент передачи соответствует устойчивому корректору,
поскольку корни полинома P+(z) по модулю большие единицы. Таким образом,
искомые значения at и fit определяются выражениями: Рл = 1л//о (6=1, 2, ...,
т^; ak=Dh (k = 0, 1, 2, ..., п).
180
Изложенный способ расчета позволяет по равноотстоящим дискретным зна-
чениям импульсной реакции канала определить коэффициент передачи коррек-
тора, преобразующего gi(t) в gs(t), в принципе, с любой степенью. точности..
Погрешность преобразования определяется погрешностью, которая возникает
при замене ряда (4.8) полиномом (4.9). Чем больше п (т. е. чем больше число'
блоков запаздывания корректора), тем меньше погрешность. Для вычисления
п «1+п
погрешности находим полином g2(z) = P~(z)''^Dkz~k — '^ibkZ~h, который опи-
k=Q k=Q
сывает дискретный сигнал на выходе корректора при подаче .на его .вход сигна-
ла gi(z)- Коэффициенты Ьк этого полинома являются дискретными значениями
выходного сигнала корректора при подаче на вход сигнала g\(f). Поэтому Ьк
указывают погрешность (уклонение) сигнала gz(t) относительно требуемого,
сигнала gz(t) для моментов времени kAt.
Корректоры с простой и комбинированной обратной связью эквивалентны, а
их коэффициенты .передачи равны .между собой, если а'к—ак/ао, Bh — ?ik (для
всех k). Воспользовавшись (4.6), находим P'n = Bn; ?>'n-i=Bn-i—P'na'i;
P/n-2=Bn_2—pn—ia'i—P'na'2 и т. д. Эти выражения .позволяют по известным
ак и [Д получить а'к и P's. Поэтому расчет корректора с комбинированной об-
ратной связью заменяем первоначально расчетом корректора с простой обрат-
ной связью, после чего переходим к корректору с комбинированной обратной
связью.
Изложенный способ расчета связан с необходимостью вычислять корни по-
линома gi(z). Ниже дается приближенный способ расчета, согласно которому
коэффициенты ah и (Д определяются из системы линейных уравнений [6]. За-
пишем выражение для gi(z) .в такой форме:
gi (z) = Р+ (г) Р- (г) = -L2—
f D^k
k=0
или
оо
g1(Z)'^DhZ~k = p+(Z). (4.10>
а=о
Считаем, что полином P~(z) нормирован относительно свободного члена:
d0='1, поэтому 1>о=1. Выражение (4.10) дает бесконечную систему уравнений,
которую разобьем на две системы уравнений.
Система уравнений I
а3 • т*
ах а2 аз • •
_ ^2 &3
или [а]" X [£>]' = [/].
(4.П)
Система уравнений II
181
а0 «1 а2 ат1 Di
а-1 а0 «1 о2 ат1 d2
о_2 «0 «1 D3
а_ 2 °-1 CLq 01 О2 X
а-П1 0-2 а-1 Оо 01
а-п1 О_2 0-1 Оо
• ® 9 9 • ••••••• ... .
а-1
о_2
а-з
или [а]Х[-О]=—(а]' (пустые места в матрицах соответствуют нулям, которые
опущены для упрощения формы записи).
Решая систему уравнений II относительно [Л], получим [£>]=—(а]-1Х[а]',
где [а]-1 — матрица, обратная [а].
Для нахождения неизвестных Dk необходимо вычислить [а]-1. Бесконечные
матрицы обращаются неоднозначно, т. е. существует множество матриц, обрат-
ных [а]. Из этого множества нас интересует матрица [а]-1, удовлетворяющая-
ограничению: ряды, составленные из строк и столбцов матрицы [а]-1, должны
быть абсолютно сходящимися. Наложенное ограничение соответствует требова-
нию физической реализуемости рассчитываемого корректора. Матрица [а] имеет
обратную с учетом указанного ограничения, если полином gi(z) содержит в
комплексной плоскости z щ корней внутри круга единичного радиуса и mi
корней вне единичного круга (по числу нижних и верхних диагоналей матри-
цы [а]). Согласно вышеоговоренному полином gi(z) удовлетворяет данному ус-
ловию, поэтому система уравнений II имеет решение, приводящее к физически
реализуемой схеме корректора.
Вычисление [а]-1 в силу ее бесконечности связано с рядом трудностей и не
может быть выполнено только линейными операциями. Заменим поэтому беско-
нечную систему уравнений II конечной системой уравнений
'«о at аг
С1 । Gq 6Z j
G___2 ___1 ^0
а2 ... ami
ai ... аП1
(4.12)
#0
а_1 а0
или [а]Х[Х]=—{с].
Размеры матрицы [а]—</Х<7; q выбирается из условия q^n.
Решая (4.12), получим [Х]=—1[а]-1|[с].
Элементы Ха матрицы ,[%] являются приближенными значениями коэффи-
циентов Dk. Степень приближения определяется величиной q; выбирая q доста-
точно большим, можно свести погрешность к любой наперед заданной величине
lim Ха->-£>а- Это выражение справедливо, если g'I(z) удовлетворяет вышеприве-
денному условию. Определив коэффициенты Ха, находим значения согласно
(4.11), подставляя вместо Dk коэффициенты Ха.
Искомые значения сса и Ра получим из соотношений:
f>k = lk/lo (£ = 1,2.......mj); ak = Kk/lo (k=l,2, . . ., re); а0 = I//o-
По известным аа и Ра при необходимости определяем а'а и Р'а.
Пример 1. Пусть
gi (О — — 0,3
sin шс (t Д t)
4-0,85
sin £ос t
(£>ct
-|-0,5
sin сос (t — Д t)
Wc (Z — Д Z)
(z 4~ Д Z)
(рис. 4.3а) или gi(z)=—0,3г-1+ 0,85 +0,5z.
182
Рис. 4.3. Примеры искаженной (а) и откорректирован-
ной (б) непрерывных импульсных реакций
Требуется рассчитать коэффициент передачи корректора
_ ао + ахг 14-а2г 2
А(2)- 1 + ₽1Z+₽2Z2 >
преобразующего gi(t) в g3(t) = sin<octl(£)ct, g3(z)=l.
Факторизуем gi(z) относительно единичной окружности: gi(z) =
—P~(z)P+(z)=\(l—0,3z->) (1 +'0,5z), P~(z)—'l— 0,3z“'; P+(z) = \ + 0,5z. Оконча-
тельно получим ao=il; ai = 0,3; a2=B,09; 0i=O,5; 02=0.
Сигнал g2(z), возникающий на выходе рассчитанного корректора при пода-
че на его вход сигнала gi(z), равен g2(z)=gi(z)K(z)='0fi27z~3+'l. Сигнал
g2(t) имеет вид (рис. 4.36)
„ sin <вс (t 4- ЗА t) sin сос t
g-2(/) = 0,027---------- -;—— '
e <ис (/-[-ЗА/)
и совпадает с g3(t) с точностью до 2,7%. При записи gift) не учтено запазды-
вание т=2ЛЛ
'Воспользуемся теперь способом приближенного расчета коэффициентов а к
и 0S. Согласно (4.12)
Г 0,85 0,5 1 rA.il ГО,31
[ — 0,3 0,8б] Х Ц2] = [ 0 ] ’
откуда находим Xi = 0,292; Т,2=1,003. Из системы (4.11) получим: Zo=0,996; Ц —
= 0,5. В итоге а0—1,004; ai=O,293; а2=0,1; 01=0,501, что совпадает с анало-
гичными значениями as и 0s, вычисленными ранее, с хорошей степенью точ-
ности.
Оптимальные способы расчета, изложенные в гл. 3 применительно к кор-
ректорам без обратной связи, справедливы и для корректоров с обратной
связью, если расчет производить в таком порядке:
1. Определяем полином P2(z), как ,это указано выше.
2. Вычисляем коэффициенты as полинома P\(z), пользуясь методикой рас-
чета корректора без обратной связи по минимуму суммарной квадратичной,
суммарной абсолютной, суммарной обобщенной и т. д. погрешностям выходного
сигнала (см. гл. 3). Коэффициенты afl рассчитываются как коэффициенты а~ь
корректора без Обратной связи. При этом полином P\(z) (с заменой as на a_ft)
рассматривается как коэффициент передачи корректора (корректора преддейст-
вия), а полином P~(z) — как входной сигнал этого корректора.
Если по условиям расчета степень п полинома Pt(z) и P2(z) ограничена и
п<т [mi — степень P+(z)], то разбиваем P+(z) на два полинома P+(z) —
= Pi+(z)P2+(z), где P2+(z) — полином степени п, все корни которого по моду-
лю меньше корней полинома Pi+(z). Выбираем в качестве P2(z) полином
P2(z)= ~ P2+(z) [Во" — свободный член полинома P2+(z)]. Составляем про-
Ло
изведение
mt—n
4-В[Ь(г)Р-(г)= £ Ahzk .
В0 *=-щ
183
Вычисляем коэффициенты а* полинома Pi(z), рассматривая его как коэффи-
циент передачи корректора без обратной связи, на вход которого поступает
сигнал с дискретными значениями Ak.
Пример 2. Пусть gt (г) =0,3z-1 +1 + 0,3z (рис. 4.4а),
-2 -1
|ау=43
О 1 2 t/At
Рис. 4.4. Примеры дискретных импульсных реакций:
а) некорректированная реакция; б) реакция, откоррек-
тированная по критерию Чебышева
1 i/Jt
„ , . _ ai г 1 ~Ь к2г 2 ___________
1 Pi г Р2 г2 Рг (г)
Определим ак и fk так, чтобы абсолютная погрешность уклонения выход-
ного сигнала g2(z) от сигнала gs(z) = l приняла минимальное значение. С этой
целью факторизуем gi(z):
gj (г) = 0,9^1+-у г^14-у- г 'j
Выбираем Р2 (z) = 1 -|- — г; ₽i= —; рг =
О о
= 0. Постоянный множитель 0,9 в расчете не учитывается. Коэффициенты ttt и
«г, для которых максимум абсолютной погрешности е принимает минимально
возможное значение 0,023, равны соответственно 0,307 и 0,078. Сигнал g2(z) изо-
бражен на рис. 4.46.
Интерполяционный расчет в частотной области
Пусть F(i(o) — заданная на отрезке [—сос, <ое] функция с четным модулем
и нечетным аргументом. Решим задачу: рассчитать гармонический корректор с
обратной связью так, чтобы для диапазона | со | выполнялось равенство
К (i со) = F (i со) = 1 . ( |(0 | <(Ое), (4.13)
Ai О ®)
где под F(ico) подразумевается функция, обратная коэффициенту передачи кор-
ректируемого канала /С(ico). Естественно, равенство (4.13) для произвольных
F(ico) может выполняться только в конечном числе точек отрезка [—сос, <ос].
Поэтому в дальнейшем речь будет идти об интерполяции заданной функции
F(ico) дробными тригонометрическими функциями A(ico).
Обозначим:
< pv = arg F (i cov ); Fv = | F (i cov ) | ;
COP
< 0 = v— (v = 0,1,2, . . ., n; n = q).
v n
При расчете целесообразно использовать нормированные значения <pv = cpv —
— (v = 0, 1, 2. п), т. e. вместо функции ср(со) = argF(ico) целесообразно
п
184
использовать функцию ср (со) = ср (ш)—сот, где T=<p(toc)/coe. Функция .ф(со) удов-
летворяет граничному условию <р(<ос)=ф(‘——0, что уменьшает погрешность
интерполяции (при этом предполагается, что B(ico) непрерывна на отрезке
[-—С0с]) •
Для узлов интерполяции <ov справедливо равенство
ico kAt
ico kAt
ake v (v = 0, ±1, ±2,
(4.14)
которое представляет собой систему из 2п+1 линейных уравнений, содержащих
п неизвестных Ра и п+1 неизвестных ак. Эта система значительно упрощается,
если воспользоваться следующим искусственным приемом. Умножим левую и
правую части выражения (4.14) на е_|ю\>?-Д4(Х=0, ±4, ±2, ..., ±п) и просум-
мируем по переменной v полученные для каждого значения X уравнения
п
Д —ico kM
? Pfee v
n n
v=—n
k=i
—ico ZAt
—ico KAt
e v
ico kAt
аде v
v=—п k=0
Знак S' показывает, что крайние члены
ным 0,5.
Принимая во внимание тождество
" --io>v (4+М At _ J 0, 0;
суммы (v= ±и) берутся
с весом, рав-
2п, Л —Л, = О,
v=—n
получим две системы уравнений.
Система уравнений 1
е
—ico kAt
е v
ф
V
1 п'
v=—n
(4.15)
(4.16)
(Решение системы
учетом (4.45)
• •> zfc £2n-f-A ^n-^k S—/i-рл).
(4.46) дает коэффициенты Pt, по которым c
найдем коэффициенты аъ-
(Рассчитанный изложенным (способом корректор обеспечивает точное воспро-
изведение заданной функции f(ico) в 2га+1 точках и приближенное воспроиз-
ведение во всех остальных точках отрезка [—сос, <ос]. Число блоков линии
задержки корректора при этом равно п.
185
После нахождения коэффициентов Ps следует проверить гармонический кор-
ректор на устойчивость. С этой целью составляется характеристический поли-
п
ном P2(z) = ^ Psz* (Ро = 1). Если корни Pi(z) лежат в комплексной плоскости
А=0
z вне круга единичного радиуса, корректор устойчив. В противном случае кор-
ректор неустойчив и заданная функция F(ico) не может быть воспроизведена
гармоническим корректором с обратной связью.
Коэффициент передачи корректора описывается выражением (4.2), однако
множитель е-1|»пД1 при составлении уравнений (4.14) не учитывался. Кроме
того, расчет производился по нормированным значениям cpv. В силу этого
argK(ioi) =argE(i(o)—сот—nA/со, так как аргумент функции Е(ко) воспроизво-
дится корректором с точностью до линейного слагаемого —(пД/+т)со.
Расчет корректора по периодической последовательности
частотно-ограниченных сигналов 1
Укажем способ расчета корректора с простой обратной связью по дискрет-
ным значениям av сигнала gi(r). Коэффициенты а& (£ = 1, 2, ..., п) находятся
из системы уравнений
I в” 1 в* 1 а • iqI : -ч СХ • , о 1 1 . 1 В | О | В а2 Oi #2 а п п—2 1 — с-1 1 1 • • 1 вс 1 вс X «1 «2 а3 ' —
а—(п—2) а—2 а—1 а0
— — — — —
_а—(п—1) а—(п-2) ' а_2 а-1 а° —
Коэффициенты рс находятся по формуле
₽A = &fe/Z>o (k =1,2...n),
f-1
а_2
а—з
(4.18)
(4.19)
Матрица, стоящая в правой части данного выражения, имеет размеры
л+4 Хл+1
Корректор, преобразующий gi(t) в <pi(7), содержит п+1 отводов, ah (k=
= 0, 1, 2, .... п; а0=1) и п отводов ра (£=1, 2, ..., п).
Расчет корректора, преобразующего gi(t) в (fzft), производится аналогич-
но. Такой корректор содержит п+1 отводов ак (й=0, 1, 2, ..., п; а0=1) и п—1
отводов рс (й='1, 2, ..., п—1). Размеры матрицы, стоящей в правой части вы-
ражения (4.19), в этом случае равны лХп+1.
При расчете корректора с обратной связью для преобразования gi(t) в
1 О смысле используемых в настоящем параграфе функций и величин
см. гл. 2.
186
ФзСО или пользуемся выражениями (4.17), (4.18) и (4.19), осуществив
предварительно следующую замену: 1) в выражении (4.17) заменяем av на
av; 2) в выражении (4.19) заменяем av на av (v — положительное) и a- v
на —av (v — положительное). j
Корректоры, рассчитанные согласно предложенным способам, осуществляют
преобразование gi(t) или gi(t) в <Pi(O, Ф2СО или в ф3(7), ф4(0 с точностью
до множителя Ьо.
Пример. Задан сигнал (рис. 4.5а)
Рис. 4.5. Примеры периодических импульсных реак-
ций:
а) некорректироваиная реакция; б) -откорректиро-
ванная реакция
2
gi (О = 2 ah Ф1 (t — k Д 0; Фх (О =
*=—2
1 С0с
— sinсосt toset —— t; At = л/О)с
5 5
где a-2=—0,2; a_i = 0,5; do=l; fli =—0,3; a2=0,3?
Необходимо рассчитать коэффициент передачи корректора с обратной
связью
2
2 afteia^
К (i со) = —------------ (а0 = 1).
1+у
А=1
преобразующего gi(t) в ф1(7) (рис. 4.56).
Составляем систему уравнений (4.17), решив которую получим ai=—0,383;
a2=0,391. Из линейных соотношений (4.19) находим Ь0=1,232; 61 =—0,423;
b2=0,562. Далее воспользуемся (4.18): ₽i=— 0,341; р2=0,457. Рассчитанный
корректор преобразует gi(t) в Ф1(О с точностью до множителя Ьо=1,232.
187
4.3. Алгоритмы компенсации искажений сигналов
на основе корректоров с обратной связью
Корректоры с простой обратной связью
Данные в гл. 3 алгоритмы автоматической коррекции дискрет*
ных и непрерывных сигналов пригодны для компенсации искаже-
ний с помощью корректоров без обратной связи, и их нельзя ис-
пользовать в случае корректоров с обратной связью. Обусловлено
это тем, что обобщенная погрешность на выходе корректора с об-
ратной связью не обладает свойством выпуклости относительно
коэффициентов Поэтому в настоящем разделе даются алгорит-
мы коррекции сигналов с применением корректоров с обратной
•связью. Изложение алгоритмов ведется для случая полной ком-
пенсации эхо-сигналов, когда gs(z) = 1.
Алгоритмы коррекции сигналов, не содержащих преддействия
или последействия. Предположим, что сигнал gi (z) не содержит
последействия:
о
Si(z) = £ akzk (ah = 0; k>0; а0=1),
k=—п
т. е. все корни полинома g'i(z) расположены в плоскости z внутри
круга единичного радиуса. Преобразование gi(z) в g3(z) = l осу-
ществляется схемой гармонического корректора (рис. 4.6), для
которого а/г=0 (&>0); осо=1; a-i =—a-iao; а_2=—a-ia_i—
—а_2ао, ... Из этих выражений вытекает простой алгоритм кор-
рекции преддействия, включающий в себя следующие операции:
1. Исходное состояние: ао=1, аь=0 (для всех k).
2. Меняя регулятор а-i, добиваемся равенства нулю сигнала
на выходе корректора для точки k=—.1, что дает a_i=—a_i<xo.
хМеняя регулятор a-г, добиваемся равенства нулю выходного сиг-
нала для точки k——2, в результате чего получим а_2=.
=— а-i a_i—а_2йо. Регуляторы а_3, а_$, ..., a_n t настраивают*
ся аналогично.
Алгоритм всегда обеспечивает сходимость процесса коррекции
после однократного подбора коэффициентов а_й, если корни по-
линома gi(z) по модулю меньше единицы. После окончания кор-
рекции получим K'(z) = 1/gi (z), где K'(z) — коэффициент переда-
чи корректора преддействия (см. рис. 4.6).
Рис. 4.7. Корректор с обратной
связью для компенсации после-
действия сигнала
188
Рассмотрим теперь случай, когда сигнал gi(z) не содержит
т
преддействия: gi(z) = V ahzh (aft = 0; &<0; а0 = 1), т. е. все кор-
ft=0
ни полинома gi(z) расположены вне круга единичного радиуса.
Преобразование сигнала gi(z) в£з(х) = 1 в этом случае целесо-
образно осуществлять гармоническим корректором (рис. 4.7), для
которого
= —= (й= 1, 2, .... m); (4.20)
а0
К" (2) =1/^(2),
где К"(z)—коэффициент передачи корректора последействия:
*"(*) = —2---- (Ро=1).
2 м
*=о
Алгоритм коррекции последействия требует выполнения таких
операций: отключение цепи обратной связи и подбор согласно
(4.20) значений коэффициентов передачи по отводам линии за-
держки, после чего замыкание цепи обратной связи. Кроме ука-
занного, возможен также алгоритм последовательной настройки
регуляторов pft, выполняемый в такой последовательности:
1. Исходное состояние: 0^=0 (р0=1).
2. Меняем значение коэффициента pi до тех пор, пока выход-
ной сигнал в точке k=\ не обратится в нуль, что дает Pi = ai/ac-
Изменяем затем значение коэффициента передачи >р2, добиваясь
равенства нулю выходного сигнала в точке k=2, в результате че-
го получим ^2==а2/ао- Аналогичным образом настраиваем регуля-
торы ₽3, ₽4, •, ₽п, добиваясь в каждом случае равенства нулю
выходного сигнала для соответствующей точки.
Алгоритм последовательного подбора коэффициентов Ра обес-
печивает сходимость процесса настройки, если все корни полино-
т—i
мов gu(z) — (Osgu^m.—1) лежат вне круга единичного
k=\
радиуса. В противном случае схема корректора в процессе на-
стройки возбуждается. Укажем на одно достаточное условие вы-
полнения наложенного ограничения. Если все значения поло-
жительны и удовлетворяют неравенству
«т< czm_i < ... < п0, (4.21)
то все полиномы g\i(z) содержат только корни, по модулю боль-
шие единицы [17].
При выполнении (4.21) настройка корректора путем последо-
вательного подбора Ра всегда приводит к требуемому результату.
Естественно, для преобразования сигнала g'i(z), не содержащего
лреддействия, в сигнал §’з(з) = 1 можно использовать схему кор-
189
ректора по рис. 4.6, для которой а_^=0, -ао=4, ai = —czicco, а2—
— —aiai—й2«о, • • • Алгоритм коррекции последействия, вытекаю^
щий из данных выражений, полностью аналогичен рассмотренно-
му выше алгоритму коррекции преддействия.
Изложенные алгоритмы отличаются простотой, однако область
их применения ограничена сигналами, не содержащими преддей-
ствия или последействия.
Общие алгоритмы коррекции сигналов. Факторизуем сигнал
m
gi (z) = у akZh, содержащий преддействие и последействие, отно-
k=—п
сительно единичной окружности: g\ (z) =P+(z)P~(z). Умножим
СО
gi(z) на некоторый ряд Q (z) = a-kZ~k так, чтобы произведение
k=0
gz(z)=gi(z)Q(z) не содержало отрицательных степеней:
m
g2(z) = ^ bkZh, где g2(z)—некоторый полином по положитель-
но
ным степеням z. Нетрудно видеть, что при сходящемся ряде Q(z)’
обязательно получим: Q (z) — 1/P~(z); g2(z) =P+(z). Таким обра-
зом, если сигнал gi(z), содержащий преддействие и последейст-
вие, преобразуется в сигнал без преддействия g2(z), то корни по-
линома g2(z) совпадают с корнями полинома gi(z), расположен’
ными вне круга единичного радиуса. Из сказанного вытекает ал-
горитм коррекции произвольных сигналов [5—9], который вклю-
чает два этапа: 1) преобразование сигнала gi(z) в сигнал без
преддействия g2(z) ==JP+(z); 2) преобразование g2(z) в g3(z) = l.
Второй этап не вызывает никаких затруднений, поскольку преоб-
разование сигнала без преддействия в сигнал g3(z) = l выполня-
ется достаточно просто согласно изложенным алгоритмам. Оста-
новимся поэтому подробнее на первом этапе.
Преобразование gi(z) в g2(z)=P+(z) осуществляется коррек-
тором без обратной связи, для которого «й==0 (&>0), т. е. кор-
ректором преддействия. Укажем возможные способы коррекции
преддействия в случае сигналов, содержащих и преддействие, и
последействие. Все способы, по существу, сводятся к коррекции
сигналов на отрицательной дискретной оси времени.
I способ. Исходное состояние: a_ft=0 (&=1, 2, ...), a0=l.
Первый шаг настройки: устанавливаем a(1)-fe= — a_h (&=1, 2, ...).
Второй шаг настройки: — a^-h (k = 1, 2, ...).
После i-ro шага имеем aPL-k—(Л=,1, 2, ...) или
(z) = A/-» (z) - g2~^ (z); g2<^) (z) = gi (z) A,»-» (z), где
a6)ft — значение коэффициента передачи k-ro отвода линии задерж-
ки после I шагов настройки; a6-i)_fe — значение сигнала на выхо-
де настраиваемого корректора для точки — k после i—1 шагов на-
стройки; Ki«(z) —коэффициент передачи корректора; g2(i-1)(g) —
сигнал на выходе настраиваемого корректора; g2-(’-1)(z)—пред-
действие сигнала g2(i~1)(z)> т- е- левая часть функции g2(i-1)(z) ,
190
получаемая из £2(’_1)(г) отбрасыванием свободного члена, а так*
же членов с положительными степенями г.
Изложенный способ является итерационно-разностным алго-
ритмом коррекции преддействия сигнала при наличии последей-
ствия.
Пример. Пусть gi (z) =0,3z~!+l + 0,4z. Первый шаг: аСЧ-^О.З; ао(,)=1;
Ki{l)(z) — 1—0,3г-1. Сигнал g2{l)(z) равен: g2{1)(z)=Si(z)^i(1)(z) =—0,09z~2+
+'0,88+4z. Второй шаг: а<2>_2=0,09; а<2>-1=—0,3; ао<2,=:1; Kim(z) = l—0,3z-1 +
+0,09z-2; g2(2)('z) = 0,027z-3+0,036z-I + 0,88+0,4z и т. д.
Как видно из примера, уже после второго шага настройки сигнал g2(2)(z)
совпадает с истинным значением сигнала g2(z)='P+(z)=ti,86+0,4z с точ-
ностью 4%.
II способ. Этот способ заключается в многократном ис-
пользовании алгоритма коррекции преддействия для сигналов без
последействия. Как указывалось выше, коррекция преддействия в
случае сигналов без последействия производится однократно. При-
менение алгоритма коррекции преддействия в случае сигналов
преддействия и последействия приводит к тому, что после одно-
кратной коррекции из-за мешающего влияния последействия пред-
действие полностью не компенсируется. Поэтому коррекцию сле-
дует повторить. Число повторений определяется исходными иска-
жениями сигналов £i(z).
Ill способ. Допустим, что на вход корректора преддействия
о
с коэффициентом передачи K'(z) = "^akZh подается сигнал
—п1
т
= \^a.kZk. На выходе корректора получим сигнал g2(z) =
—п
т 0
=^i(z)Ki (z) = bkzk, где bh— o-k-iai- Обозначим через rj
—(n+«,) i=—n,
суммарную обобщенную погрешность: D(bk), где D(u) —
k=—(n-[-n1)
произвольная выпуклая вниз функция переменной u=bk. Для
компенсации преддействия необходимо минимизировать т]. По-
грешность т) — выпуклая функция переменных поэтому для
настройки корректора целесообразно применить алгоритм после-
довательной оптимизации или алгоритм скорейшего спуска. Кор-
рекция преддействия согласно этим алгоритмам производится в
полной аналогии с компенсацией искажений дискретных сигналов
с помощью корректора без обратной связи (см. гл. 3).
Осуществив компенсацию преддействия [т. е. преобразование
£i(z) в £2(z) =P+(z)] согласно одному из описанных способов,
далее следует преобразовать сигнал P+(z) в сигнал g3(z) = l. Для
этого необходимо последовательно с корректором преддействия
включить корректор последействия (рис. 4.8). Такая схема, буду-
чи эквивалентной общей схеме корректора без обратной связи,
отличается от последней раздельной настройкой каждой из частей
191
Рис. 4.8. Какжа|дное включение корректора преддействия и
корректора последействия
схемы (корректора преддействия и корректора последействия)
согласно изложенным алгоритмам. При этом настройка коррек-
тора преддействия осуществляется многократно [в зависимости от
искажений сигнала gi(z)], а настройка корректора последейст-
вия — однократно.
Очевидно, коррекцию .можно производить и в обратном поряд-
ке, т. е. сначала откорректировать последействие, а затем пред-
действие. Преобразование £2(2) =P+(z) в gs(z) =4 целесообраз-
но выполнять корректором последействия с обратной связью (см.
рис. 4.7). Если включить последовательно, а затем объединить
схемы по рис. 4.6 и рис. 4.7, получим полную схему корректора с
обратной связью (рис. 4.9), которая настраивается следующим
образом:
Рис. 4.9. Структурная схема настройки корректора
с обратной связью
1. Исходное состояние: .цепь обратной связи отключена Рл=О
(й=1, 2, ..., п), что превращает корректор с обратной связью в
корректор преддействия.
2. Настраиваем цепи а_д (k—.l, 2, ...) согласно описанным
алгоритмам, добиваясь полной компенсации преддействия сигна-
ла g'i(z). Если настройка выполняется по III способу, использует-
ся ключ Кл%, пропускающий только преддействие сигнала, анали-
затор А и индикатор И, указывающий величину погрешности тр
Цепи а_й настраиваются по минимальному показанию индикато-
ра И на основе оптимальных алгоритмов, изложенных в гл. 3.
192
3. Скомпенсировав преддействие, получим на выходе корректо-
ра сигнал, содержащий только последействие, которое компенси-
руется с использованием изложенных ранее алгоритмов.
Корректор с комбинированной обратной связью
Остановимся на одной особенности расчета корректора с ком-
бинированной обратной связью. Из (4.5) и (4.11) вытекает, что
при а0=1 и ао=1 коэффициенты корректора, преобразующего
заданный сигнал gi(z) в g3(z) = l, равны
|3; = а, (£=1,2, ...,т), (4.22)
где аь — дискретные значения сигнала gi(z). Условие «о=1 до-
стигается нормировкой ak по отношению к ао. В этом случае рас-
чет корректора несколько упрощается, так как требуется опреде-
лить только коэффициенты а\; значения ф'ь полагаются равными
дискретным значениям последействия сигнала gi (z).
Алгоритм коррекции, вытекающий из (4.22), включает следую-
щие этапы:
1. Размыкаем обратную связь корректора и устанавливаем ко-
эффициенты согласно (4.22), после чего замыкаем обратную
связь (цепи a'k предварительно отключаем: а'ь—О).
2. Включаем и настраиваем цепи а\, добиваясь полной ком-
пенсации преддействия выходного сигнала. Настройку а'ь. выпол-
няем одним из способов I—III.
Описанный алгоритм лежит в основе способа автоматической коррекции
амплитудно-частотных и фазо-частотных характеристик каналов проводной свя-
зи по их импульсным реакциям [1, 12]. Способ реализуется с помощью изобра-
женного на рис. 4.10 устройства. Генератор ГС посылает в канал последова-
тельность импульсов с периодом, превышающим длительность переходного про-
цесса в канале и кратным периоду наивысшей частоты канала. Корректор с
комбинированной обратной связью преобразует импульсную реакцию таким об-
разом, чтобы она не содержала импульсов преддействия и последействия, что
свидетельствует о компенсации амплитудных и фазовых искажений канала свя-
Рис. 4.10. Автоматический корректор частотных
характеристик каналов связи на основе коррек-
тора с комбинированной обратной связью
7—181
193
зи. Для этого фильтром Ф1 выделяют на приемном конце тактовую частоту,
равную частоте среза канала. Затем с помощью блока ВОИ выделяют основной
положительный отсчетный импульс, максимум которого совпадает с положи-
тельным максимумом тактовой частоты, и используют его для управления бло-
ком настройки БН корректора. Мешающие импульсы распределяются, и каж-
дый из регуляторов корректора настраивается на минимум напряжения, при-
чем, .в первую очередь, ключом ЭК обрывается обратная связь в БН и регуля-
торы цепи обратной связи настраиваются путем сравнения напряжений, посту-
пающих на вход корректора, с напряжениями, поступающими из корректирую-
щих цепей. Поскольку спектр сигнала настройки ограничен нижней частотой
среза полосового канала связи, на приемной стороне искусственно добавляют
низкочастотные составляющие, формируемые гребенчатым фильтром ГФ, нели-
нейным элементом НЭ, фильтром Ф2 и блоком согласования фаз гармоник СФ.
Описанному устройству свойствен недостаток, заключающийся
в том, что при больших искажениях сигнала g\ (z) не всегда га-
рантируется устойчивость корректора. В силу (4.22) после на-
стройки и замыкания обратной связи коэффициент передачи кор-
т1
ректора равен К(г) = 1/1 + £ $'kZh= 1/gi (г) (a'ft=0), где
k=i
gi(z)—полином, получаемый из gi (г) отбрасыванием членов с
отрицательными степенями г.
Корректор с коэффициентом передачи X(z) устойчив, если все
корни gi(z) по модулю больше единицы. Это требование выпол-
няется только при сравнительно небольших искажениях сигна-
ла gi(z), из чего следует, что в процессе настройки согласно опи-
санному алгоритму корректор может возбудиться. В связи с этим
при больших искажениях gi(z) настройку корректора целесооб-
разно производить по такому алгоритму:
1. Исходное состояние: цепи a'k и отключены: a'k— ₽'й=0
(для всех k). Согласно (4.22) настраиваем цепи
2. Не замыкая обратной связи производим настройку цепей
одним из способов I—III, добиваясь компенсации преддействия
сигнала на выходе корректора, после чего замыкаем обратную
связь. Поскольку цепи a'k настраиваются при отключенных цепях
р'й, схема корректора в процессе настройки не возбуждается. Од-
нако в этом случае увеличивается время настройки корректора.
Данный алгоритм лежит в основе принципа действия устройст-
Рис. 4.11. Устройство для настройки корректоров с
прямыми ,и Обратными связями разных типов
194
ва для настройки гармонических корректоров с прямыми и об-
ратными связями по импульсным реакциям каналов [9] (рис.
4.11). В этом устройстве ФНС — формирователь низкочастотных
составляющих сигнала настройки; PC — регистр сдвига; П — пе-
реключатель; И — индикатор. Остальные узлы совпадают по на-
значению с аналогичными узлами устройства рис. 4.10. Основной
отсчетный импульс ао сигнала g'i(z) с ВОН поступает на PC и че-
рез отводы регистра управляет работой ЭК, осуществляющего
дискретизацию сигнала на выходе корректора. Индикатор в зави-
симости от положения переключателя П указывает дискретные
значения сигнала на выходе корректора.
Для настройки корректора необходимо компенсировать им-
пульсы преддействия и последействия выходного сигнала. С этой
целью, устанавливая П последовательно в положения 1, 2, . . . , п,
настраиваем цепи обратной связи. Отключив обратную связь, на-
страиваем цепи прямой связи, для чего П устанавливаем в поло-
жения 0, —1, —2, ..., —п и, включая регуляторы ао, аь ..., ап,
добиваемся нулевого показания индикатора за счет изменения
коэффициентов передачи соответствующих регуляторов. При боль-
ших искажениях указанную компенсацию преддействия необходи-
мо повторить.
После настройки цепей прямой связи замыкаем цепи обратной
связи. Это исключает возможность возбуждения корректора, если
входной сигнал удовлетворяет условию корректируемое™.
Устройство, изображенное на рис. 4.11, является универсаль-
ным в том смысле, что оно пригодно и для настройки корректоров
с простой обратной связью. При этом первоначально по аналогии
с изложенным включаем и настраиваем цепи прямой связи, а за-
тем настраиваем и включаем цепи обратной связи. На рис. 4.12
изображен пример осциллограммы искаженного сигнала (рис
4.12a) и сигнала; откорректированного с помощью гармоническо-
го.корректора с обратной связью (рис. 4.125).
Рис. 4.12. Осциллограммы некорректированной (а) и откорректи-
рованной (б) импульсной реакции
Экспериментальная проверка показала, что при малых искаже-
ниях входных сигналов настройка корректора с комбинированной
обратной связью требует меньше времени, нежели настройка кор-
7* 195
ректора с простой обратной связью. .При больших искажениях по-
ложение меняется, так как корректор с комбинированной обрат-
ной связью в процессе настройки возбуждается. Поэтому перво-
начально необходимо настроить цепи а затем — цепи
4.4. Синтез регулируемых фазокорректирующих
цепей с помощью линий задержки, охваченной
обратной связью
Анализ фазовой системы в комплексной плоскости
Гармонический корректор с обратной связью может быть ис-
пользован для синтеза регулируемых фазокорректирующих цепей
с неизменной частотнонезависимой амплитудной характеристикой
[4]. Проанализируем эту возможность.
Рис. 4.13. Синтезатор фазовых характеристик на
основе линии задержки с обратной связью
В терминах ^-преобразования коэффициент передачи схемы,
изображенной на рис. 4.13, записывается в виде рациональной
функции от z
% = Р» + Рп-1 2 + Рл-2 г2 + + Pi + г'1 Рх (г)
l+P1z + P2Z2+...+Pn_1Z«-‘ гп
ПолинОм ДДг) отличается от полинома ^2(2) обратным по-
рядком следования коэффициентов [Д (&=1, 2, .. .„ п), т. е. РДг)
является транспонированным полиномом ^2(2), поэтому если —
корни P2(z') , а Уй — корни Р\ (z), ТО Ук = 1/}Цг (&= 1, 2, . . . , п).
Для устойчивости схемы необходимо, чтобы | | > 1, следова-
тельно, |уй|<1 (&=1, 2, ..., га). Таким образом, нули и полюсы t
/<(г) расположены в плоскости z соответственно внутри и вне
круга единичного радиуса (рис. 4.14а).
Очевидно, Pi (z) =гпГ>2(2-1), Ppz~v}—инверсия P2{z). На
единичной окружности имеем
196
K(i®) =
Рис. 4.14. Расположение нулей и полюсов фазовой си-
стемы в комплексной плоскости z
e-ian
<о k A t
e_ i co n A f P1 (j ю)
e— i co k A t
P2 (i ®)
где P\ (ico) =P2(—ico) = A* (ico), следовательно, |K(ico) | = 1 для
всех co,
n
Р/, sin k co A t
Фп (co) = arg К (i co) = —co n A t + 2 arctg ——----------------
n
1 У Pa. cos /г co A /
k=\
[индекс n при cpn(co) указывает на порядок системы, т. е. на число
блоков линии задержки].
Из вышеизложенного вытекает, что система с коэффициентом
передачи (4.23) является фазовой, поэтому в дальнейшем будем
называть ее фазовым гармоническим корректором.
На рис. 4.15а, б приведены фазовые характеристики
Фе (со) = —со A t + 2 arctg
р sin со A t
1 + Р cos со A t
197
Рис. 4.15. Фазо-частотные характеристики (а, б) и
характеристики ГВЗ (в) системы .первого порядка:
1-0=0; 2— 0=0,3; 3-0=0,6; 4-0 = 0,8; 5-0 = 0,9; 5-0 =
=-0,3; 7—0=—0,6; 3-0=-О,8; 9-0 = -0,9
гармонической системы первого порядка, а на рис. 4.15в—-груп-
повое время распространения
т,(<о) = Д/Г PCP + eoscoAQ_____J
L 1 + Р2 4-2p_cos со A Z
Фазовые характеристики
<р2 (со) = — 2 со Д t + 2 arctg sin m А z + Рг sin2coA/
1 + cos co Д t -f- p2 cos 2 co Д t
198
и характеристики группового времени запаздывания
т2 (со) = 2 A t
+ 2pf + р! (1 + 3₽2) cos со Д t + 2 р2 cos 2 со Д t
1 + Р? + Р2 + 2₽1 <Х + ₽2) с°з СО Д ? + 2₽2c°s 2coA/
гармонической системы второго порядка даны на рис. 4.16 и 4.17
для различных значений у; и у2-
Рис. 4.16. Фазовые характеристики системы второго порядка:
/-71=0,6 е-!Я/4> 72=0,6 е‘Я/4; 2-7,=-0,6 е~‘Я/4, у2=-0,6 е ’"/41
3—71=72=0,6; 4—7!=0,8 е~'Я/4 , 7г=0,8 е‘Я^4 ; 5—7i=—0,8, 72 =— 0,8.
Отметим основные свойства фп(со) и тп(со). Обозначим
Фп(со) =фп(со) + <nn&t, тогда:
1. Фп (® + & сос) = — Фп(/гыс—со) (сос = л/Д/).
2ис_ 2шс
2. J Фп (со) d со = 0; f фп (со) d а> = 2 сос п л.
о о
3. Фп (k СОС) = 0; ф„ (k СОС) = п. л.
4. тп(^юс + ®) = тп(Асос—со).
Гс 1 гс
5. ( тп(со)dсо = пл; ---lrn(ci))dco = «AZ.
0 0
Установим зависимость cp«(co) и тп(со) от расположения нулей
и полюсов Л(г) на комплексной плоскости z.
Для K(z) (4.23) справедлива форма записи
199
Рис. 4.17. Характеристики ГВЗ системы
второго порядка:
кривые 1—5
кривые 1—5
7—Vi=V2=0
П (1 — YfeZ-1 )
Л(г) = г"Ь1_-------------
П (г — ил)
k=i
Образуем функцию
п
П (1 — V* z~* )
k=\_____________
п
Рп П (г — Ма)
А=1
tf(z) = z"
даны
рис.
= zn
для тех же значений, что и
4.16; 6—Vi=0,6i; ?2=—0,6г;
П о—%г 1)
6=1
п
П(1 — YfeZ)
k=l
(4.25)
(4.26)
поворотом нулей и полюсов на угол
где
т£ = тье1г11Т>
Л
т. е. К (z) отличается от К (z)
Т]Л.
С учетом (4.24) — (4.26) имеехм
П(1-уье‘Д‘(“+т1“с))
К (i со) = ё~1 “ п Л4 е~1 п 4 " —---------------
/1=1
200
откуда следует:
|K(i®)|=l;
Л Л _
Фп (со) = arg Д (i со) = —пцл—con Аг’ + фп (co + i](oc);
л
Ч(со) = тп(со + г]сос).
Рассмотрим частные случаи.
л
1. т)=0,5 (поворот на 90°). При этом ти(со) =тп(со + 0,5сос).
Повернув вещественные нули и полюсы -yi, 72, Pi, Р2 системы вто-
рого порядка на 90°, приходим к системе с мнимыми нулями и по-
люсами (см. рис. 4.146). Характеристика группового времени рас-
пространения полученной системы отличается от характеристики
исходной системы лишь сдвигом на 0,5сос (кривые 3 и 6 на рис.
4.17). Л
2. ту—1 (поворот на 180°). При этом ти(со) =т,г(со + сос)- По-
ворот на 180° эквивалентен синтезу системы, нули и полюсы кото-
рой являются зеркальным отображением нулей и полюсов исход-
ной системы (считаем, что комплексные нули и полюсы образуют
сопряженные пары) (см. рис. 4.14в). В результате характеристика
группового времени сдвигается на сос. Примером могут служить
кривые Т1(со) рис. 4.15г для отрицательных и положительных ₽.
Наибольший практический интерес представляет случай, когда
нули и полюсы, лежащие в верхней полуплоскости, поворачивают-
ся на угол т]л, а нули и полюсы, лежащие в нижней полуплоско-
сти, поворачиваются на угол — (см. рис. 4.14г). Считаем, что
нули и полюсы не лежат на вещественной оси. Если на вещест-
венной оси расположены нули и полюсы четной степени кратности,
то половина нулей и полюсов переходит в верхнюю полуплос-
кость, а другая половина — в нижнюю полуплоскость. Этот слу-
чай рассмотрим на конкретном примере системы второго порядка.
Повернув соответствующим образам нули и полюсы этой системы
(см. рис. 4.15г), приходим к системе с характеристиками фазы и
группового времени ср (со) = cpi (со+йдос) +<pi (<о—%сос); т(со) =
=Т1(со+Лсос)+Т1(со—Хсос), где %=т]-|—; 0 = argpi (в радианах);
__ л
cpi (со) и Ti (со) —характеристики системы первого порядка, нуль и
плюс которой соответственно равны | pii | и |'У1|- Например, ха-
рактеристика группового времени запаздывания (кривая 1 на
рис. 4.17) может быть получена как сумма кривых первого поряд-
ка: тг(со) = Ti (со + 0,25сос) + Ti (со—0,25сос), где Л — 0,25, Ti(co) —
характеристика системы первого порядка, полюс которой равен
1/1TiI = 1,66, а нуль равен|у11 =0,6, т. е. п(со) является кривой на
рис. 4.15 для р = —0,6.
Аналогичным образом поступаем и для систем более высокого
порядка. Это позволяет построить фазовые характеристики и ха-
рактеристики группового времени распространения для систем
8—181 201
любого порядка сложности и при любом расположении нулей и
полюсов системы, если известны характеристики систем первого
порядка.
Проделанный анализ показывает, что положение всплеска груп-
пового времени замедления определяется величиной аргумента
комплексной пары корней, а величина всплеска — модулем кор-
ней. Чем ближе модуль корня к единице, тем - больше всплеск
группового времени замедления.
Расчет фазовой гармонической системы
Фазовая гармоническая система используется либо для синтеза фазовых
характеристик, либо для коррекции фазо-частотных искажений тракта передачи
систем связи. Рассмотрим итерполяционный расчет гармонической системы, ком-
пенсирующей нелинейность, заданной функции ЧЧи). В этом случае .выполняется
равенство <рп С®) +ЧГ(<в) =шт (|<о| ^(ос=л/ДО> ВДе срп!(®) — фазовая характе-
ристика корректора; т — результирующее групповое время задержки корректо-
ра и корректируемого объекта. Считаем, что У(0) =0.
Заменим Ч^м) функцией 4r=4f(i®)—<оЧг(ис)/сос, которая удовлетворяет
условию Ч',((Ос)=|0 и характеризует отклонение ЧЧ®) от линейной функции.
Для компенсации Чг(<а) необходимо выполнить равенство <₽«(<«)=—ЧЧ®), ко-
торое для конечного числа узлов интерполяции со* преобразуется в систему урав-
нений
п
У Ра Sin
k=\
-уЧЧсо*)
-sin
(l = I,2.........n).
(4.27)
Результирующее групповое время задержки корректируемого объекта и
корректора равно. nA/+4fi(i<Oc)/<ос.
Представляет также интерес расчет фазового корректора, который в за-
данных точках м, одновременно компенсирует как нелинейность фазовой харак-
теристики ЧГ(со), так и неравномерность, группового времени распространения
0(®)—</Чг(®)/о® заданного объекта. При этом фазовая характеристика и ха-
рактеристика группового времени распространения корректора должны удовлет-
ворять требованиям;
<Рп(©«) = — У (®г); I (. = j 2
= -Г0 ((J);) I
(4.28)
где _ _
~ d(Pn((Q) о(ю)= dY(to)
Т/г (0)) - d (й ' d co
Выражения (4.2'8) позволяют составить систему уравнений:
2/1
У Ра Sin р СО; А/ +
А=1 L-
2п Г 1 -
Pfe A t -|- £
— sin -у Ч1, (СО;);
Г 1 -
cos k со;А t — V (co,)
(4.29)
1
-у-0(СОг)со5-уЧЧ<В;) (1 = 1,2, . . ., п),
из которой находим искомые коэффициенты Суммарное групповое время
задержки корректируемого объекта и корректора, рассчитанного согласно
(4.29), равно 2лА/+Ч,(®с)/®с.
202'
Пример. Откорректируем фазо-частотную характеристику с нелинейностью
— л лсо
V (со) = — sin — . Для этого воспользуемся корректором второго порядка.
3 (Ос
1 2
Выберем узлы интерполяции coi=~<oC1 g>2= — <вс. Составив и решив систему урав-
нений типа (4.27), получим р,=—0,525; р3=0,149.
Убедимся, что рассчитанный корректор устойчив. С этой целью вычислим
корни pi и 112 характеристического полинома P3(z) —1—0,525z+0,149z2. Искомые
корни равны: pi.= 1,76+1,9»; ц2='1,76—1,9», т. е. | щ | = | р-21 >1, следовательно,
корректор устойчив.
Максимум суммарной характеристики ЧДсо) Ч-срДи), представляющий собой
абсолютную погрешность корректирования, не превышает 6°.
Фазокорректирующая система с неравномерным расположением
отводов
На рис. 4.18 изображена фазовая система с неравномерным расположением
отводов вдоль линии задержки. Коэффициент передачи системы равен
1 । v 1И<А
K(ico) = e-itoT----——:---------,
п
1+ S
k=\
где и t'k — время задержки, соответствующее А-му отводу линии; т —-шре-ч
мя задержки всей линии. Счет Р/, ведется от начала линии к концу, счет ал —
от конца линии к началу; аналогично th отсчитывается от начала линии, а
t'h — от конца линии.
Рис. 4.18. Фазовая система с неравномерным рас-
положением отводов
Если рл = о.ь и th = t'h, то система будет фазовой, у которой
I K(i со) | =1,
п
£ pfe Sin (0 tk
1
arg К (i ®) = — ®т + 2arctg--------------------.
1 + Pa cos ® th
k=\
8*
203
Выберем некоторое число Ai', на которое делятся все t'k без остатка:
t'k/M' = mk, ' (4.30)
где тк — целое положительное число; Д(' — наибольший общий делитель .чи-
сел t'h. В результате приходим к гармонической системе с равномерным распо-
ложением отводов по длине линии задержки с интервалом Д(' (см. рис. 4.13);
Поэтому анализ гармонической системы с неравномерным расположением отво-
дов при соответствующем выборе At' может быть проведен на основе анализа
системы с равномерным расположением отводов. Если деление (4.30) не явля-
ется точным, то анализ, естественно, будет приближенным.
Наряду с системами, изображенными на рис. 4.13 и 4.18, возможен также
синтез регулируемых фазовых систем на основе схемы, показанной на рис. 4.16,
которая будет фазовой, если ад-л = рь (k = l, 2, ..., q)\ ад=1; ср*, (ico) <р (ico) = 1.
Например, в качестве блоков с коэффициентами передачи cp.(ico) можно исполь-
зовать фазовые контуры любого порядка. Однако такие системы по универсаль-
ности (функциональной полноте) уступают системам, содержащим линию за-
держки, так как фазовые характеристики контуров нелинейно зависят от ча-
стоты.
4.5. Специальные виды корректоров с обратной
связью
Синтез произвольных комплексных периодических функций
Свойства корректоров существенно меняются, если включить
в- прямые и обратные связи те или иные добавочные четырехпо-
люсники. Рассмотрим некоторые из этих возможностей.
Особенность корректоров, реализованных по схеме рис. 4.2, в
том, что (Модуль и фаза их .коэффициента передачи, являясь пе-
Рис. 4.19. Синтезатор комплексных периодических
функций
204
риодическими функциями с периодом 2л/А(, неизбежно обладают
соответственно симметрией первого и второго рода относительно
частот (йй=Лл/А^ (& = 0, ±>1, ±2, ...). Это свойство обусловлено
тем, что в выражениях (4.2) и (4.4) ак, а'ь и — веществен-
ные числа. По этой причине корректоры рис. 4.2 нельзя исполь-
зовать для получения произвольных (не обладающих каким-либо
видом симметрии) комплексных периодических функций. Во из-
бежание указанного недостатка включим в схему корректора
рис. 4.2а добавочные цепи прямой и обратной связи (рис. 4.19),
где Н — преобразователь ('ильберта. Коэффициент передачи полу-
ченной системы описывается выражением
e-i <0 П м 2(х' + ЯjQe’ “ k ы
К (i (0) =---------------------------- (4.31)
1+2 (p;+//P;)e-iBAA 4
k=0
или в терминах /г-преобразования [7]
гп% {4 + H^k) z~k (хо + ^о) П (г ~(y'k + H Vj]
K(z) = —,
1+2(Рй + яР*) г* ( р^ + Яр") П [г+
k=0 k=i
где y'h + Hy'i,, — нули, а + — полюсы К (г).
Система с коэффициентом передачи (4.31) устойчива, если
|K+w;i=]/>;i2+|^I2>i (^= 1.2.•••>«)•
При помощи полученной системы можно моделировать произ*
вольные периодические комплексные функции частоты и для <в>
>0. У этой системы модуль и фаза K(it£>) — соответственно чет-
ная и нечетная функции относительно со=О. Рассматриваемая
система — каноническая, так как позволяет получить требуемые
характеристики при минимальном числе регуляторов и преобра-
зователей Гильберта.
Гребенчатые фильтры со смещенным положением зубьев частотной харак-
теристики. Корректор с простой обратной связью (см. рис. 4.2а) широко ис-
пользуется для синтеза рекурсивных цифровых фильтров (накопителей) [18].
Основной недостаток этих фильтров в том, что их полосы пропускания или за-
держивания равномерно располагаются на частотах coft=£n/Af (А = 0, ±1,
±2, ...), что ограничивает их возможности. Поэтому синтезируем гребенчатые
фильтры, зубья частотных характеристик .которых смещены для положительных
частот (со>0) на произвольную величину соо, а для отрицательных частот
(со < 0) — на —шо.
Очевидно, что поставленная задача не .может быть решена простой заме-
ной в выражении (4.2) частоты со на со—соо, так как эта замена приводит к
фильтру, не удовлетворяющему условию физической реализации, поскольку мо-
дуль и фаза его коэффициента передачи не обладают соответствующей симмет-
рией относительно нулевой частоты.
205
Для решения поставленной задачи заменим в (4.2) <в на со—coosignco:
К (i со) =
eitt>„AAtsign<o е—icoAAt
>+£
Й=1
ei<ooAAisigno) е—icoAAt
Учитывая, что eHx = cos х+Н sin х (х — произвольное число), после преоб-
разований приходим к выражению (4.31), в котором
^'n~k = an—k cos ®о k A t, p'k = ₽й cos ©0 k A /;
= (xn_k sin ©0 k A t, pk = рй sin ©o k A t (£=1,2, . . ., n).
(4.32)
Таким образом, смещение зубьев характеристики фильтра приводит к пере-
счету коэффициентов передачи по отводам линии задержки с применением пре-
образователей Гильберта. Это позволяет использовать для расчета фильтров со
смещенными зубьями разнообразные методы, разработанные применительно к
о'бычным гребенчатым фильтрам с несмещенными характеристиками.
Исходя из критерия устойчивости Найквиста, нетрудно видеть, что пере-
счет коэффициентов передачи по отводам > линии согласно (4.32) не нарушает
условий устойчивости синтезированного фильтра.
Нули и полюсы фильтра со смещенными зубьями связаны с нулями и полю-
сами исходного фильтра соотношениями:
?й = уй cos ©0А Z; y"k = yh sin ©0А t;
= цй cos ©0A t; p/t = цй sin со0А t
Синтезированный фильтр, естественно, не является единственно возможным.
Используя приведенный в настоящем параграфе прием, можно получить до-
статочно большое число аналогичных фильтров, исходя из существующих схем
обычных гребенчатых фильтров с несмещенными характеристиками.
Коррекция полосовых каналов. Система, изображенная на рис
4.19, в силу функциональной полноты ее коэффициента передачи
(4.32) на полуоси ©>0 (или ©<0) пригодна для компенсации
искажений полосовых каналов, если выбрать А^=2л/(м2—©i), где
©1 и ©2 — нижняя и верхняя граничные частоты канала.
Вводя в (4.31) обозначения Ай = 2/й + Ж"й, ph — p'h + Hp"h, по-
лучим
К(г) =
znyi\hZ~k
k=Q
А:=0
гп Рг (г)
Р2(г)
(4.33)
Для импульсной реакции полосового канала Л-преобразование
имеет вид Gi(z) = £ Akzk, где Ah=ah—Hah, ah=gi(kM), ah =
k=—nt
—g\ (k\t) — дискретные значения импульсной реакции и ее пре-
образования Гильберта.
Выражение (4.33) не отличается по форме от аналогичного
206
выражения (4.2), поэтому все способы расчета корректоров и ал-
горитмы компенсации искажений дискретных сигналов, изложен-
ные в § 4.2 и 4.3 настоящей главы применительно к низкочастот-
ным каналам, остаются в силе и для полосовых каналов [7]. При
этом необходимо принять во внимание, что операции с функцио-
нальными числами P + HQ (Р, Q — действительные числа) не от-
личаются от операций с комплексными числами T’ + iQ.
Корректоры с дифференцированием
в прямой и обратной связи
Для коррекции телевизионных (видео) сигналов используются
гармонические корректоры с дифференцированными эхо-сигнала-
Рис. 4.20. Корректоры с дифференцированием
в .цепях прямой и обратной связи
ми, не содержащие обратной связи [19]. В этих корректорах вы-
сокая степень компенсации .мешающих эхо-сигналов достигается
207
при достаточно большом числе блоков запаздывания линии за-
держки, что усложняет конструкцию корректора и делает его
труднорегулируемым. От указанных недостатков свободен коррек-
тор, схема которого изображена на рис. 4.20а [10]. В этом кор-
ректоре в цепях прямой и обратной связи осуществляется диффе-
ренцирование корректируемого сигнала, что повышает степень
компенсации эхо-сигналов и упрощает процесс настройки коррек-
тора по переходной характеристике канала связи.
Коэффициент передачи корректора описывается . выражением
К (i ®) =------т-----------—------------ , (4.34)
1 + i <о 2 е- j * д 4
k=\
где юс=2л/А^ — граничная частота -канала. Цепи служат для
коррекции опережающих, цепи — запаздывающих эхо-сигналов-
(k— 1, 2, . . . , п).
. Другой вид корректора с дифференцированием в прямой и
обратной связи изображен на рис. 4.206 [11]. Его коэффициент
передачи описывается выражением (4.34), если заменить ccft на
а'ь и рД на В^, где Bh связаны с а\ и рД соотношениями (4.5) —
(4.7).
В рассмотренных корректорах постоянная составляющая вы-
ходного сигнала не меняется в процессе регулировки цепей пря-
мой и обратной связи, что является положительным свойством с
точки зрения конструкции телевизионного канала.
4.6. Экспериментальные исследования
и использование корректоров с обратной связью
Проверка работоспособности корректоров проводилась с помощью изобра-
женных на рис. 4.10 и 4.11 устройств на корректоре с обратной связью (см.
рис. 4.2) с 12 блоками запаздывания (п=12). В корректоре использовалась
аналоговая линия -задержки на фазовых контурах.
Результаты эксперимента иллюстрируются осциллограммами, приведенными
на рис. 4.21 и 4.22.
Сигналы, подлежащие коррекции, изображены на рис. 4.21а и 4.22а, на
рис. 4.216 и 4.226 — сигналы после однократной, а на рис. 4.21в и 4.22в — пос-
ле двукратной настройки цепей aft, компенсирующих преддействие сигнала по
способу II (см. § 4.3). Яркие точки на интервалах Д/ даны для удобства оцен-
ки результатов коррекции. Выбор основного -отсчетного значения и положения
^моментов дискретизации производился, как указано в § 2.2 гл. 2. Сигналы на
рис. 4.21г и 4.22г получены после однократной настройки цепей обратной связи
Рь, как описано -в § 4.3.
'Рисунки 4.21 и 4.22 отличаются друг от .друга различными искажениями
исходного некорректированного сигнала. Как видно из приведенных осцилло-
грамм, двукратная настройка цепей а& обеспечивает практически полную ком-
пенсацию преддействия (с погрешностью 1—3% по отношению к максимально-
му значению выходного сигнала). Общая сумма амплитуд мешающих эхо-сиг-
налов (преддействия и последействия) уменьшается корректором более чем в
100 раз.
208
На основе, корректора, изображенного на рис. 4.2в, в ОЭИС им. А. С. По-
пова в 1961—-1964 гг. был разработан гармонический корректор АИМ сигналов
[1] и [12]. С помощью этого корректора'впервые в СССР была достигнута устой-
чивая работа линии связи с двукратной фазовой модуляцией при рекордной для
указанных годов скорости передачи 6000 ,бит/с (в стандартном канале ТЧ).
Рис. 4.21. Осциллограммы, иллюстрирующие компенсацию преддей-
ствия
Рис. 4.22. Примеры, иллюстрирующие работу корректора с обрат-
ной связью
9
Корректор с обратной связью (см. рис. 4.2в) использовался также в разра-
ботке автоматизированного комплекса корректирующих устройств (АКУ), пред-
209
назначенного для коррекции искажений каналов в системах передачи данных.
Комплекс компенсирует искажения частотных характеристик прямых и комму-
тируемых трактов, составленных из стандартных каналов тональной частоты,
удовлетворяющих рекомендациям МККТТ на телефонные каналы для вторич-
ного уплотнения системами тонального телеграфирования. Настройка комплекса
ведется по специальным зондирующим (испытательным) сигналам.
Основные данные АКУ:
количество переприемных участков по НЧ . . .6 (каналы ТЧ
300—3400 Гц)
точность коррекции в диапазоне 400—3300 Гц
по ГВЗ.............................................±300 мкс
по фазовой характеристике.......................±10°
по остаточному затуханию........................±1,5 дБ
время автоматической настройки..................... 30—40 с
время ручной настройки . . •%...................5 мин
Автоматический комплекс обеспечивает передачу сигналов с различными
видами модуляции по каналам ТЧ с 6 переприемами при скоростях 4800 и
6200 бит/с со средней вероятностью ошибки порядка 2,4-10-5.
Наряду с вышеизложенным корректор с обратной связью использовался и
в высокоскоростной аппаратуре передачи данных, работающей в стандартном ка-
нале со скоростью 9600 бит/с (модуляция — однополосная, число передаваемых
уровней — четыре).
СПИСОК ЛИТЕРАТУРЫ
1. А. с. 171026 (СССР). Устройство для корректирования амплитудно-им-
пульсных модулированных сигналов/Беркович Д. А., Кисель В. А.
2. Волгин Л. Н. Элементы теории управляющих машин. М.: Советское радио,
1962.
3. Кисель В. А. Дискретный синтез корректирующих цепей: Автореф. дис. на
1С0И0К. учен, степени канд. техн. наук. Одесса: 1967.
4. Кисель В. А. Построение фазокорректирующих цепей с помощью линии за-
держки. — Электросвязь. 1965, № 12, с. 42—50.
5. Кисель В. А. Об одном алгоритме настройки гармонических корректоров. —
В кн.:. Труды учебных институтов связи. Л.: 1966, вып. 30, с. 109—116.
6. Кисель В. А. К расчету корректоров с обратной связью по временным ха-
рактеристикам канала. — ИВУЗ. Радиоэлектроника. Киев: 1967, № 3,
с. 312—315.
7. Кисель В. А. Алгоритм настройки гармонических корректоров по импульс-
ным реакциям полосовых каналов. — В кн.: Методы математического мо-
делирования и теория электрических цепей. Киев: Институт кибернетики
АН УССР, 1967, вып. 3, с. 3—38.
8. Кисель В. А. Алгоритм настройки корректора для сигналов с произвольной
нумерацией дискретных значений. — В кн.: Электросвязь и передача дан-
ных. Киев: НТОРЭС им. А. С. Попова, 1969, с. 211—221.
9. А. с. 291372 (СССР). Устройство для настройки гармонических корректоров
с прямыми и обратными связями по импульсной реакции/Кисель В. А.
10. А. с. 294267 (СССР). Устройство для коррекции формы телевизионного сиг-
нала/Кисель В. А.
11. А. с. 287141 (СССР). Устройство для корректирования амплитудно-импульс-
ных модулированных сигналов/Кисель В. А.
12. А. с. 191643 (СССР). Способ настройки линейных корректоров в каналах
проводной связи/Лев А. Ю., Беркович Д. А., Кисель В. А.
13. Ту Ю. Т. Цифровые и импульсные системы автоматического управления.
М.: Машиностроение, 1964.
14. Цыпкин Я. 3. Теория линейных импульсных систем. М.: Госиздат физико-
математической литературы, 1963.
15. Schreiner К. Е., Funk Н. L., Hopter Е. Automatic Distortion Correction for
Efficient Pulse Transmission.—«IBM, Journal of Research and Development»,
1965, v. 9, N 1, p. 20—30.
210
16. Di Toro M. J. Communication in Time-Frequency Spread Media Using Adapti-
ve Equalization.—«Proc, of the IEEE», 1968,’ v. 56, N 10, p. 1653—1679.
17. Курош А. Г. Курс высшей алгебры. M.: Физматгиз, 1955, изд. 4.
18. Финкельштейн М. И. Гребенчатые фильтры. М.: Советское радио, 1969.
19. Обзорная информация о зарубежной технике связи. Радиосвязь, радиовеща-
ние, телевидение, 1968, вып. 4.
Глава 5
СОВМЕСТНАЯ КОРРЕКЦИЯ СОБСТВЕННЫХ
И ВЗАИМНЫХ ИСКАЖЕНИЙ КАНАЛОВ
МНОГОКРАТНЫХ СИСТЕМ СВЯЗИ
5.1. Коррекция дискретных сигналов
в многократных системах
Общая постановка вопроса
Современные системы связи содержат в общем случае п кана-
лов, каждый из которых характеризуется как собственными ли-
нейными искажениями, возникающими за счет неравномерности
частотных характеристик отдельных каналов, так и взаимными
(перекрестными или межканальными) искажениями, возникающи-
ми за счет взаимной связи (влияния) каналов. Полиномные (в
частности, гармонические) корректоры, теория которых изложена
в гл. 2—4, являясь одноканальными, компенсируют лишь собствен-
ные искажения каналов и непригодны для одновременной компен-
сации взаимных искажений. Поэтому рассмотрим расчет многока-
нальных корректоров, компенсирующих искажения дискретных
(цифровых) сигналов, передаваемых одновременно по п каналам
системы. Воспользуемся для этой цели ^-преобразованием, кото-
рое, как будет видно из дальнейшего, алгебраизирует и предельно
упрощает весь процесс расчета, сводя его к несложным операциям.
Дискретные многоканальные корректоры без обратной связи
Ориентированный граф «-канальной системы изображен на рис.
5.1а [1]. Введем обозначения: g(ii)(z) (i=il, 2, . . ., п) —- собствен-
ные импульсные реакции, характеризующие собственные искаже-
ния каналов; g(ij)(z) (i'¥=/; i, j = 1, 2, ..., «) — взаимные (пере-
крестные или межканальные) импульсные реакции, характери-
зующие искажения за счет взаимной связи каналов;
т
= 2 a^ll)zk /=1.2, ... ,п; 2 = е~р/^').
k=—n
Здесь gd“)(z)—реакция, возникающая на выходе i-ro канала, а
211
Вх. / [— ~| BbJX. iBx.l' Г* ~ K(1I) (z) ~~1 вых 1'
g<2 jfo/*. W'!вых 2'
'"f"lS®«\7Vi >"'' 'S«>xr>'(?i Ги
I /"'ЪлЯХл! I *'""и^Р<Х'“и!
м . ^^\Вых.пВхЛ\^' к(пп), Г^\Вых.п
x'^/L_____L ___T_J ^w’L____________
п-канальная система связи. п-канальный. корректор
О,]
1
2
п
4z'“
' а
Рис. 5.1. Графы многоканальной системы и многоканального кор-
ректора fa); граф идеальной (Многоканальной системы (б)
g(ii}(z)—реакция, возникающая на выходе /-го .канала, если на
вход i-ro канала подано воздействие в виде функции Дирака б(/);
при этом на вход j-го канала воздействие не подается.
Допустим, что на входы каналов системы связи поступают не-
которые дискретные сигналы xW(z) (i=l, 2, ..., п). Сигналы
z/Wfz) (i=l, 2, ..., п) на выходе каналов находятся из системы
линейных соотношений
~f/(I)(z)
_Z/("’(z)
~ g(I1) (z) . . .g{n" (2) 1 Г x(1) (z)"
............................x :
_£(In)(z) . . .^(zj L>(z)_
или в компактной форме
M = [g]X[x], (5.1)
где [х] и [г/] —матрицы-столбцы сигналов %W(z) и //(И(z); [g]-—
квадратная .матрица дискретных импульсных реакций g(ij)(z). В
дальнейшем [х] и [//] называются матричными либо векторными
сигналами, a [g] — z-изображением матричного коэффициента
передачи n-канальной системы.
212
Идеальной назовем систему, у которой
g{ll) (*) =
Atz1 (i = j=i,2, n);
0 (z=7^= j; i, /=1,2, ..., n),
(5.2)
где Ai и i/j — некоторые величины. В этом случае /M>(z) —
=4iZZixW(z) (i=l, 2, ..., n), т. е. выходные сигналы совпадают
с входными с точностью до амплитуды и сдвига во времени. Граф
идеальной системы изображен на рис. 5.16.
Матрицу с элементами (5.2) обозначим через Е. На выходе
идеальной системы имеем [z/] =Е[х]. Если [g\=£E, то многократ-
ная система вносит искажения, поскольку [у] =#£[%]. Задача кор-
рекции заключается в преобразовании векторного, сигнала [//] в
сигнал Е[х]. Для этой цели используем многоканальный коррек-
тор, ориентированный граф которого изображен на рис. 5.1а кас-
кадно с многократной системой связи. *
Пример двухканального дискретного корректора, реализован-
ного на линиях задержки с регулируемыми отводами, дан на рис.
5.2 [1, 6, 7]. Корректоры, у которых п>2, строятся по аналогич-
ному принципу.
Рис. 5.2. Двухканальный гармонический корректор без обратной
связи
Обозначим через ЛД’Дх) собственные, а через K^(z) (i^j)
взаимные (перекрестные) коэффициенты передачи каналов кор-
ректора:
213
KUi) (z) = £ a^zk (j, i=l,2.....n).
k=—n1
Укажем способ расчета, позволяющий определить КО'г>(г), т. е.
определить коэффициенты (j, 1=1, 2, ..., п\ —
по известным импульсным реакциям ^Л(г) при условии, что кор-
ректор преобразует [//] в Ё[х]. Входные и выходные векторные
сигналы корректора связаны соотношением
lQ] = [K]XU/b (5.3)
где [7] — матрица-столбец сигналов qW(z) (t=l, 2, ..., п) на вы-
ходах каналов корректора; [К] — z-изображение матричного ко-
эффициента передачи корректора:
>(11)(z) • • Л(п1> (г)’
[К] =
(5.4)
Л(Щ)
(5-5)
(5-6)
(пл)(г).
С учетом (5.1) и (5.3) Ы = [ШЫХМ-
При неискаженной передаче [7]—Е[х], поэтому z-изображе-
ние матричного коэффициента передачи дискретного многоканаль-
ного корректора должно удовлетворять условию Е [х] = [К] X
X [£] X [х] или £= [2<] X [S’], откуда
[К] = Е[^Г1 ,
где fe]1 — матрица, обратная [§].
Систему связи с п каналами можно рассматривать как неко-
торый линейный оператор с матрицей [§], который преобразует
векторный сигнал [х] в сигнал [z/]. Корректор осуществляет об-
ратное преобразование векторного сигнала [у] в сигнал Е[х], по-
этому матрица [К], описывающая корректор, обратна матрице
[g] с точностью до диагональной матрицы Е.
Согласно (5.4) и (5.5)
К(г/) (г)== AjZli
(z = 1, 2, ..., п; j — 1, 2, ..., п),
где A(z) — определитель матрицы [g]; Ajj (z) — алгебраическое
дополнение элемента gW)(z). Таким образом, для нахождения ис-
комых коэффициентов afeW)(z) (i, /=1, 2, ..., п, —n^k^nii) не-
обходимо проделать следующие операции: 1) вычислить и возвес-
ти в степень — 1 полином A(z); 2) перемножить A-1(z) и Aj,(z)X
XAjZli. Коэффициенты этих произведений являются искомыми зна-
чениями Естественно, возведение A(z) в степень —1 следует
выполнить на окружности единичного радиуса |z| = 1 в комплекс-
ной плоскости z, как это рассмотрено в гл. 2. Такое возведение
может быть выполнено только в том случае, если А (г) не содер-
жит корней, по модулю равных единице, т. е. расположенных в
плоскости z на окружности единичного радиуса. Поэтому отсут»
214
ствие в полиноме A(z) указанных корней является необходимым
и достаточным условием корректируемости многократной системы
связи в строгом смысле.
При расчете корректора, преобразующего [у] в произвольный
заданный векторный сигнал |[fe] с учетом требования отсутствия в
откорректированной системе взаимных связей между каналами не-
обходимо в выражении (5.5) заменить Е на диагональную матри-
цу Е\ с элементами (г) /(z), где -bW(z) — элементы матрицы
[&]. Если z-изображение матричного коэффициента передачи кас-
кадного соединения многократной системы и корректора должно
совпадать с заданной матрицей [/Со], z-изображение матричного
коэффициента передачи корректора находится из выражения
[Л] = И-1[Ко].
Изложенный материал показывает, что при использовании
z-преобразования в совокупности с матричным исчислением рас-
чет многоканального корректора по форме не отличается от рас-
чета одноканальных корректоров, рассмотренных в гл. 2.
Корректоры с простой и взаимной обратными связями
Описанные многоканальные корректоры относятся к корректо-
рам без обратной связи. Возможно также построение многока-
нальных корректоров с обратной связью. Пример двухканального
гармонического корректора такого типа и его ориентированного
графа дан на рис. 5.3. Цепи (&=1, 2, . . ., т; i, j—1, 2) обра-
зуют обратную связь корректора, цепи (й = 0, 1, 2, ..., m; i,
/=11, 2) —прямую связь. Собственные и взаимные коэффициенты
-передачи каналов корректора равны
ТП
2 a^z-k
^/)(г) = Ц=о---------= (г,/= 1, 2, ..., т).
k=i
В данном выражении не учитывается множитель zm, характери-
зующий запаздывание, вносимое корректором.
Приведем способ расчета многоканального корректора с об-
ратной связью по известным импульсным реакциям £(’^(z) (/, /=
= 1, 2, ..., п). Значения (г) найдем из выражения (5.6). В
этом выражении А (г) —полином, содержащий как корни, модуль
которых меньше единицы, так и корни, модуль которых -больше
единицы. Факторизуем A(z) относительно единичной окружности:
Д (г) =A+(z) A-(z); A+(z) =У a+fcz\ A~(z) = где
k k
A+(z) —полином, корни которого по модулю больше единицы;
A~(z) —полином, корни которого по модулю меньше единицы.
Факторизацию выполним так, чтобы а0+=1. Возведем A~(z) в
степень— 1 и умножим полученный результат на Ац(г). В качест-
ве коэффициентов берем коэффициенты полученного произ-
215
Рис. 5.3. Двухканалыный гармонический корректор с
обратной связью (а) и его граф (б)
ведения, а в качестве коэффициентов •— коэффициенты a+k :
Р(<\ = а+/г (для всех k). Коэффициенты обратной связи для раз-
личных каналов корректора одинаковы: Pi (г) =Д+(г). Рассчитан*
ный согласно изложенному приему корректор удовлетворяет усло-
вию устойчивости, так как все корни Pi (г) по модулю больше,
единицы.
216
На рис. 5.4а указана схема двухканального корректора со
взаимной обратной связью, а на рис. 5.46 дан его ориентирован-
ный граф. Корректоры, изображенные на рис. 5.3а и 5.4а, эквива-
лентны, если
(г\ — *(11> (г) • tf(12) h\ - ^(22) <гЙ(12> (г).
Л Q(z) ’ Д Q(z)
_ _ 1 (5.')
№21) М = ^(Н)(г) ^(2П(г) . д-(22) , , _ Д(22) (г)
Л Q(z) ’ Л Q(z) ’
т
где (?(г) = 1—K<12>(z)K(21)(z); л(11) (г) = K.W(z) =
А=0
Рис. 5.4. Двухканальный гармонический корректор с
взаимной обратной связью (а) я его граф (б)
217
= jp ₽(1V'!; ^(21)(z) = £₽fe(2)zft; 1Rz) = £ <Аг\ Здесь
_ k=0 _ k=0 _ _А?=0
K(I1)(z), /С(22)(г)—собственные, а Л(12)(г) и К(21)(г)—взаимные
коэффициенты передачи корректора рис. 5.4a.
Рассчитаем описываемый корректор, исходя из условия, что он
предназначен для компенсации искажений в двухканальной сис-
теме связи, характеризующейся дискретными импульсными реак-
циями gW>(z) (i, /=1, 2). Учитывая (5.6) и (5.7), после неслож-
ных преобразований получим
^<11>(2)=^4г; *(22)(г)=
^(2d(2)
g(11)(z)
Данные выражения позволяют определить искомые коэффи-
циенты а6)й, а<2)й, р(')й и р(2>& по известным импульсным реакциям
^)(г) (i,/=1,2).
g(22)M ;
= g(2l) (?)
g<22>(z)’
(5.8)
Алгоритмы коррекции векторных дискретных сигналов
Обобщим алгоритмы, изложенные в гл. 3 применительно к
коррекции дискретных сигналов в одноканальных системах, на
случай коррекции векторных сигналов и аддитивных помех в мно-
гократных системах связи. Векторные сигналы на входе и выходе
многоканального корректора связаны соотношением (5.3). Степень
близости выходного сигнала [g] и некоторого заданного (эталон-
ного) сигнала [с] оценим обобщенной нормой их разности ||т]|| =
= 11 [Я х {[//] +[У]}-[с] и: ИЛИ lhll= ^p(i)ft£>(.<7(i)ft-c6)ft), где
i, k
D (a) — выпуклая вниз функция, принимающая наименьшее зна-
чение при ы = 0; p^k — дискретный неотрицательный вес;. q^k и
— дискретные значения сигналов q^z и с<’)(г), образующих
векторные сигналы [7] и [с]; [У] — матрица помех на п входах.
Под оптимальной будем подразумевать коррекцию, в резуль-
тате которой достигается минимально возможное значение ||т)||.
Допустим, что коррекция осуще-
ствляется многоканальным кор-
ректором без обратной связи, z-
изображение коэффициента пере-
дачи которого описывается выра-
жением (5.4). Поскольку Z)(a) —
выпуклая вниз функция перемен-
ной и, а <?й6) в силу (5.3) и (5.4)
линейно зависят от аб'«)й, то ||т]||—выпуклая вниз функция пере-
менных аб’’)й (/, i=l, 2, ..., и; —. Поэтому минимиза-
ция ||г] || выполняется на основе структурной схемы рис. 5. 5 теми
218
Рис. 5.5. Общая структурная схема
настройки корректора
же алгоритмами, при помощи которых достигался .минимум сум-
марной обобщенной погрешности на выходе одноканального дис-
кретного корректора (см. гл. 3). В (Этой схеме на выходе коррек-
тора включается устройство, регистрирующее величину ||т]||. Ре-
гулируя [К] тем или иным алгоритмом, добиваемся получения
Л Л Имин, что приводит к оптимальной коррекции векторного сигнала
[<?]•
Согласно изложенному коррекция векторных сигналов фор-
мально не отличается от коррекции «скалярных» сигналов, как
это описано в гл. 3. Основное принципиальное отличие в том, что
во всех рассуждениях вместо скалярных величин (сигналов, ко-
эффициентов передачи и т. д.) необходимо использовать соответ-
ствующие векторы и матрицы.
Выше речь шла о корректорах без обратной связи. Остановим-
ся теперь на алгоритмах настройки многоканальных дискретных
корректоров с обратной связью. Основное внимание уделим двух-
канальному корректору со взаимной обратной связью как наибо-
лее простому.
Представим двухканальный корректор состоящим из четырех
Рис. 5.6. Структурные схемы настройки прямых свя-
зей (а) и обратных связей (б) двухканального кор-
ректора
219
корректоров с коэффициентами передачи 7<W)(z) (t, j— l, 2). При-,
нимая во внимание (5.8), настройку каждого из корректоров
XW)(z) целесообразно производить следующим образом. Размы-
каем обратную связь корректора и подаем воздействие 6((), на-
пример, на вход канала 1 корректируемой системы связи (рис.
5.6а). На вход канала 2 воздействие не подается. На выходе ка-
нала 1 получим сигнал g2(11)(z). Осуществляем настройку отводов
добиваясь получения на выходе корректора K(H)(z) сигнала
g-2(z) = l. Подав на вход канала 2 воздействие 6(0, получим на
выходе этого канала сигнал g(22)(z) (на вход канала 1 воздейст-
вие не подается). Осуществляем настройку а<22>й, добиваясь полу-
чения на выходе корректора Л((22)(з) сигнала — 1. Настрой-
ку производим на основе алгоритмов, описанных в гл. 3. Для
удобства изображения цепи и на рис. 5.6а не показаны.
Для настройки K(12>(z) замыкаем одну обратную связь, как
указано на рис. 5.66, и подаем на вход канала 1 воздействие 6(()
(на вход канала 2 воздействие не подается). Цепи сД>&, а(2)ь и
на рис. 5.65 не изображены.
Сигнал в точке А рис. 5.6 равен g's(z) =g(12)(z) +/C(12)(z)gf(11)(2)-
Настраиваем цепи добиваясь полной компенсации сигнала
g3(z) (gs(z) = 0), что дает 7^12>(г)=— g<12’(z)/7C12> (z).
Настройка /((21)(z) производится аналогично.
Таким образом, подбор требуемых значений а(’Ч и (i=l, 2)
осуществляется достаточно просто, что и является основным
преимуществом корректора со взаимной обратной связью.
5.2. Коррекция комплексного матричного
коэффициента передачи многократной системы связи
Исходные соотношения
Обоснуем возможность минимизации частотных искажений (мо-
дуля и фазы) собственных и взаимных (перекрестных) комплекс-
ных коэффициентов передачи многократной системы [2, 3, 4, 5].
Под матричным комплексным коэффициентом передачи многократной си-
стемы будем подразумевать квадратную матрицу следующего вида:
Gu(ico) . . .Gln(ico)
[G] =
-Gni (i ®)
Gnn (i ®)
где Gj&(ia)) при j=k являются собственными коэффициентами передачи, при
— взаимными коэффициентами передачи каналов системы (/, k = l, 2, ...
..., п). Коэффициенты G3fe(iw) — некоторые ограниченные по модулю функции, от-
личные от .нуля только в полосе частот 0—<ос; о>с — граничная частота кана-
лов.
На вход j-.ro канала поступает сигнал Xj(t) со спектральной плотностью
X3(i<a), ограниченной частотой ©с. Совокупность A'j(ico) (/=1, 2, .... и) образует
задающий .вектор (входной векторный сигнал)
220
[Х] =
Xi(i со)"
_Xn(i со).
На выходе /-го канала возникает отклик yj(t') «о спектральной плотностью
Yj(ico). Совокупность Yj(ico) (j—1, 2, n) образует выходной вектор
FHi(ico)
[Г] =
(| co | <coc).
Yn (i co)
Векторы [У] н [X] связаны соотношением IY]=l[G]X[XJ. Многократная система
не вносит искажений, если
Gjj (i со) = В; е-1тх7 (/=1,2......п);
GJft(ico) = O (j^k; j, k= 1,2..................n)
( I co | < coc),
(5.9)
где B3- — модуль коэффициента передачи; т,- — время задержки /-го канала.
В .неискажающей системе между каналами нет взаимной связи и каждый канал
представляет собой идеальный фильтр с граничной частотой сос, следовательно,
сигналы yj(t) отличаются от Xj(t) только амплитудой и сдвигом во времени:
yj(t)=B5Xi(t—Xj) (j=l, 2, .... п).
Поскольку реальные n-кратные системы не удовлетворяют условию неиска-
женной передачи (5.9), их характеристики необходимо корректировать, для чего
используем многоканальный корректор с матричным комплексным коэффициен-
том передачу
‘Ku(ico) . . .Kln(ico)
[К] = .....................
.Kni (' со) . . -Knn (i со)
где Кд(1со) — собственные (j=k) и взаимные (j=Y=k) коэффициенты передачи
каналов корректора (/, k = \, 2, ..., п).
В случае регулируемых полиномных корректоров собственные и взаимные
коэффициенты передачи являются обобщенными полиномами BCJft(ia>) =
т
агСг*)<рг(ico) (j, k=\, 2, .... n), где a(iki — регулируемые коэффициенты, по-
z=i
зволяющие получить нужную форму K,-A(ia>); cpz(ico) (1=1, 2, ..., т) — система
базисных функций. Пример регулируемого двукратного корректора дан на
рис. 5.7. Многократные полиномные корректоры (п>2) строятся аналогичным:
образом.
При подаче на входы корректора сигналов yj(t) (j=l, 2...... п) на выходах
возникают сигналы qj(t) (j=1, 2, ..., п) со спектральными плотностями Qj(ico),
которые образуют вектор
Qi(ico)'
[Q] =
.Qn (i со).
Очевидно, [С]=[К]Х{У]. Обозначим через [Р] матричный коэффициент передачи
каскадного включения многократной системы и многократного корректора
Pu(ico) . . .Pm(ico) ‘
[Я1 X [G] = [Р] = ....................
_Рл1(1С0) . . -Рпп (ico)
221
Рис. 5.7. |Полином1Ный двухкашалыный
корректор
где
п
Pjh (i <0) = £ K/v (i to) Gvk (i to).
v=l
Между [Q] и [X] существует
линейная связь: [Q] = [Р]Х[Х].
При неискаженной передаче
Q(ito) = В5Х5е-1иЬ (j ~
= 1, 2, и), где Bj — множи-
тель, характеризующий ослабле-
ние сигнала X3(ico); tj— запаз-
дывание этого сигнала. Из данно-
го выражения вытекает, что
(/=Л = 1,2, . . ., п),
(/ =k\ j, k= 1,2.......n).
Для простоты считаем, что
В3 = 1, tj = O для всех [X]. В этом
случае система является неиска-
жающей, если для любого [X] вы-
полняется равенство [Q] = [X].
Учитывая, что [Q] = [K]X[G]X[X],
приведенное условие можно запи-
сать в виде [Р] = [K]X[G] = Е,
где Е—единичная матрица п-то
порядка, описывающая матричный
коэффициент передачи идеальной
n-кратной системы. Если [G] —
неособенная матрица, то
= [G]-1. (5.10)
где [G]-1 — матрица, обратная [G], Требование
является необходимым и достаточным условием
системы в строгом смысле. Из (5.10) получим
неособенности матрицы [G]
корректируемости п-кратной
(iW)= _ ДМ (i со)/Д (i ®) (/, k= 1,2.п).
где Д(1со) — определитель матрицы [G]; Дь3-(1со) — алгебраическое дополнение
элемента GG*>(iro). Разложим правую часть этого выражения в обобщенный
ряд Фурье в корректируемом диапазоне частот | св | шс в предположении, что
<Pi(ico) — ортогональные на [—<ос, coj функции
Afej(i to)
Д (i (0)
где
2 «РА)Фг(>®),
*=о
“с
tik't С (i to) »
= J “7?^{lw)dC0-
-“c
Если этот ряд сходится, то, ограничив его некоторым членом т, приходим к об-
общенному полиному, коэффициенты которого равны искомым значениям
222
Выпуклость и алгоритмы минимизации обобщенной нормы
матрицы погрешностей на выходе многоканального корректора
Условия неискаженной передачи в общем случае (т — конеч-
ное) выполняются лишь приближенно. Оценку степени приближе-
ния произведем по величине погрешности
II л II ~ £ ЛЛ’
/. fe=i
(5.Н)
где
“с
J L2(со) |Pjk (iсо)—112dсо (j = k = 1, 2, ri);
-“с
“с
J А2(со) \Pjh (ico)|2dco (j=£k; j, k= 1, 2, ..., ri).
,-®c
В этих выражениях (J = k)—суммарные квадратичные
уклонения собственных коэффициентов передачи Pjk (j—k) от
единицы; т]3й. (/=#&) —суммарные квадратичные уклонения взаим-
ных коэффициентов передачи Pjk (j=£k) от нуля; L2(co) —задан-
ная весовая функция. Нетрудно видеть, что ||т)|| —квадрат нормы
матрицы ([Р]—£)[Л]:
|| п || = ||([Р]-Е) [А]||2 = || ([/С] [G] -Е) [Л]||2,
где [L] — весовая матрица, представляющая собой диагональную
матрицу n-го порядка, все элементы которой равны Л (со).
Выполним коррекцию так, чтобы величина ||т]|| приняла мини-
мально возможное значение, что приведет к оптимальной (в смыс-
ле квадратичного критерия) компенсации и собственных, и взаим-
ных коэффициентов передачи многократной системы. Проанали-
зируем погрешность ||ц||. С этой целью представим в развер-
нутом виде:
р»
S GvUiffl)X a?‘v)<Pi(i®)
V=1 1=1
wc n m
J (®) 2 Gvk о °) v> cpz (i ~
—tt>c V=1 1=1
da (j¥=k; 2,
n),
2
1 da (j = k= 1, 2, ..., ri).
Правые части этих выражений являются уравнениями тп-
мерных положительных парабол в пространстве переменных ap'd
(I = 1, 2, ..., m; /, v = 1, 2, ...,«), т. е. — выпуклые вниз
функции. Сумма выпуклых функций также выпуклая функция, по-
этому ||т]|| — выпуклая вниз функция переменных az^'v) (Z=l, 2, ...
..., т; /, v=l, 2, .. ., ri), имеющая единственный глобальный ми-
нимум. Распространим полученный результат на случай обобщен-
223
ной нормы матрицы погрешностей на выходе .многоканального
корректора, под которой будем подразумевать выражение
п
п т
11н11= 2 Wi^LMD 2 ap’v) (pjio))—ЯдОсо) da,
• • • ~ Lv=i /=i
j, fe=l Й
(5.12)
где Ljk(a) uWji — неотрицательные весовые функции и коэффи-
циенты; — заданные комплексные функции, к которым не-
обходимо приблизить собственные и взаимные коэффициенты пе-
редачи каскадного соединения многократной системы и многока-
нального корректора; Q — частотное множество, на котором осу-
ществляется коррекция; D(и) — выпуклая вниз функция перемен-
ной и. По существу, ||ц|| — взвешенная норма (погрешность) укло-
нения матрицы [Р] от заданной матрицы [J?], составленной из
элементов (ico). Если D(u) принимает наименьшее значение при
и —0, то минимизация выражения (5.12) приведет к оптимальной
(в смысле обобщенной нормы) коррекции собственных и взаим-
ных искажений многократной системы, в результате которой мат-
ричный коэффициент передачи [Р] каскадного соединения сис-
темы и корректора наилучшим образом (в смысле обобщенной
нормы) приближается к заданному (эталонному) матричному ко-
эффициенту передачи [Д].
Воспользовавшись результатами гл. 3, непосредственно полу-
чим, что ||р|( — выпуклая вниз функция в многомерном пространст-
ве переменных (Z = 1,2,..., т; j, v = 1, 2, ..., п). Для мини-
мизации ||р|| можно воспользоваться разнообразными алгоритма-
ми поиска минимума функций многих переменных, о которых речь
шла в гл. 3. Эти методы
Рис. 5:8. Структурные схемы настройки
многоканального корректора по общей по-
грешности
позволяют синтезировать
ряд корректоров, компен-
сирующих оптимальным
образом (в смысле мини-
мума ||р||, ||т]||) искаже-
ния многократных сис-
тем. Рассмотрим некото-
рые из таких корректо-
ров, минимизирующих
норму ||ц||.
На рис. 5.8 изображена
структурная схема, в которой
МС — многократная система
связи; МК — многоканальный
корректор; КД — квадратич-
ные детекторы; И — усредняю-
щий индикатор. Подадим пе-
риодически на входы системы
сигналы Xj(K) (j=l, 2, ..., п) одинаковой формы, отличающиеся друг от друга
только сдвигом во времени: —(j—1)T] (/=1, 2, ..., п), где Т больше
времени переходных процессов в каналах системы. Длительность сигналов Xj(t)
не должна превышать Т, а период повторения равен пТ. Форма сигналов выби-
224
рается таким образом, чтобы модуль их спектральной плотности совпадал с
Л(О>) ([«£>] <КОс).
п
На выходах корректора имеем <?3(7) = 2 ‘УмбО» где qiii(t) — отклик /-го
й=1
канала на воздействие Xk(t), поданное на вход /г-го канала. При k=j qjh(t)
характеризует собственные искажения j-го канала, при j^=k — искажения за
счет влияния А-го канала иа /-й канал. Сигналы qjk(t) (й=1, 2, ..., и) разнесе-
ны во времени относительно друг друга на Т подобно сигналам Xh(t) (й=1,
2, ..., п). Как оговорено выше, величина Т выбирается так, чтобы между сигна-
лами qih(t) не было интерференции.'
В случае полной компенсации собственных и взаимных искажений <73л(7) =
=Xj(t) (k=j); qjh(t) = O (k=£j; j, fe=l, 2, .... n).
n
Усредняющий индикатор И указывает величину т)'= "V тДь где
j [qjj (О — Xj (012 dt (k = /);
nT
J I qjk (012 dt
nT
При записи данного
наличии сигналов qju(t)
(5.13)
нулю при
сигналами
выражения учтено, что сигнал Xj(t) равен
(k=£j), кроме того, учтено, что между
qjk(t) (k — 1, 2, ..., п) нет взаимной интерференции.
Спектральные плотности сигналов qik(t) равны Д1(со)Р3ь()а>), где Li(co) —
спектр сигнала Xi(7). Воспользовавшись равенством Парсеваля,
деть, что т]'3л = —-т)м (j, k=l, 2, п), поэтому т)'=-— ]|т)Ц.
2л
нетрудно ви-
1
Таким образом, rf — выпуклая функция переменных (1=1, 2, .... т;
k, /=4, 2, ..., п). Для оптимальной коррекции необходимо минимизировать т/,
что целесообразно выполнить методом сечений как наиболее простым в смысле
технической реализации. В силу выпуклости, а также в силу отсутствия в функ-
ции т)' неразрешимых оврагов, метод сечений является сходящимся, т. е. мини-
мизируя показания индикатора И последовательной регулировкой коэффициен-
тов aiW, мы неизбежно приближаемся к минимально возможному значению rf,
что свидетельствует об оптимальной компенсации собственных и взаимных ис-
кажений n-кратной системы связи.
Наряду с вышеизложенным методом возможен также метол
совместной настройки коэффициентов сущность которого за-
п
ключается в следующем. Представим т] в виде т]= S т]3, где т]3=
П /=1
k=\
При фиксированных j погрешности т]^ -—выпуклые функции
одних и тех же переменных а/М (>Z= 1, 2, ..., m; v—1, 2, .. ., n)
(k — любое), следовательно, ц,- — выпуклая функция только пе-
ременных ai^v~> (Z=l, 2, m; v==l, 2, n). Для различных
j функции r)j взаимно независимы. Поэтому минимизация ц сво-
дится к раздельной минимизации функций т), (/—il, 2, .... /г),
Метод совместной настройки использован в устройстве для коррекции ис-
кажений двукратных систем связи [4] (рис. 5.9). Устройство содержит генера-
тор сигналов ГС, вырабатывающий на выходах 1 и 2 последовательности б-им-
пульсов со сдвигом на половину периода следования, двукратную систему свя-
зи ДС, двухканальный корректор ДК, электронные ключи ЭК и индикаторы,
указывающие величины:
225
Рис. 5.9. Дискретный корректор двукратных си-
стем связи
< = S <7?! & Д t) 4- [qu (0) - лр + У (k Д 0;
*=А0 k
^2 = У* ?22 0 + [?22 (0) — А]2 + У ?21
А=И=О k
Рис. 5.10. Автоматический корректор двукратных си-
стем связи
226
где А/=л/<ос (<£>с — граничная частота каналов системы); А — некоторая по-
стоянная. Фильтр Ф, генератор Г и делитель частоты следования импульсов
ДЧИ служат для получения вспомогательных импульсных последовательностей.
В результате .минимизации т)/' и достигаемой регулировкой ДД, qn(t) и
q22(t) по форме приближаются к импульсным реакциям идеального низкочастот-
ного фильтра AsiniWeCO/wct a qi2(t) и q2\(t) — к нулю.
На рис. 5.10 приведена схема автоматического корректора двукратных си-
стем связи [5]. Генератор ГС вырабатывает испытательные сигналы хДГ) и
x2(t), а генераторы Л и Г2, управляемые блоком восстановления временных
соотношений ВВС, — эталонные сигналы, с которыми сравниваются сигналы на
выходах двухканального корректора. Корректор автоматически минимизирует
величину ||т]||, определяемую выражением (5.11). Регуляторы az<’v) (Z=l, 2, ...
..., т; j, v=l, 2) меняются со скоростями, пропорциональными по величине и про-
тивоположными по направлению компонентам градиента ||т)||. Компоненты вы-
числяются корреляторами С, которые управляют регуляторами Настрой-
ка регуляторов производится по методу скорейшего спуска.
Автоматические многоканальные корректоры, у которых и>2, строятся по
аналогии с корректором, изображенным на рис. 5.10.
СПИСОК ЛИТЕРАТУРЫ
1. Кисель В. А. Многоканальные дискретные корректоры. — В кн.: Труды
учебных институтов связи. Л.: 1967, вып. 35, с. 81—90.
2. Кисель В. А. Компенсация искажений в системах двукратной связи по ква-
дратичному критерию. — В кн.: Вопросы электросвязи. Киев: Технжа, 1971,
с. 67—73.
3. Кисель В. А. Алгоритмизация настройки корректоров в системах многократ-
ной связи. — В кн.: Труды учебных институтов связи. Л.: 1970, вып. 51,
с. 95—103.
4. А. с. 273292 (СССР). Устройство для настройки корректоров/Кисель В. А.
5. А. с. 350186 (СССР). Автоматический корректор двукратных систем свя-
зи/К-исель В. А.
6. Ольшевский Н. Н. Приведенные частотные характеристики при двукратной
фазовой модуляции. •— Электросвязь. 1968, № 8, с. 39—43.
7. Kettel Е. Ubertragungssysteme mil idealer Impulsfunktion.—«Arch. Electr.
Ubertragung», 1961, H. 5, Band 15, S. 207—214.
ОГЛАВЛЕНИЕ
Стр.
Предисловие......................................................... 3
Список литературы .............................................. . 5
Глава 1. Условия отсутствия интерференционных помех в высокоско-
ростных многоуровневых системах с частотно-ограниченными
каналами ............................................................. 6
1.1. Задачи, решаемые в главе........................................ 6
1.2. Передача сигналов по низкочастотным каналам. Оптимальные отсчет-
ные фильтры.......................................................... 8
Низкочастотные отсчетные фильтры . 8
Оптимальный отсчетный фильтр для систем с натуральной дискрети-
зацией .......................................................... 11
Максимизация отношения сигнал/шум в отсчетном фильтре ... 18
Минимизация межсимвольных помех для скоростей передачи выше
скорости Найквиста................................................22
1.3. Передача дискретных сигналов через полосовые системы .... 24
Отсчетность огибающей .реакции полосовой системы..................24
Оптимальный выбор несущей частоты............................... 26
Разделение перекрывающихся реакций, спектр которых не содержит
нулевых частот.................................................30
Условия неискаженной передачи однополосного сигнала .... 38
Расширение теории передачи Найквиста............................. 41
Отсчетные фильтры и восстановление сигналов по их дискретным зна-
чениям ...........................................................42
Экспериментальное моделирование импульсных реакций отсчетных
фильтров..........................................................45
Использование преобразования Гильберта для скоростной передачи
дискретных сигналов......................................... . 45
1.4. Минимизация межсимвольных помех в системах с интегральными ме-
тодами приема . . . . .........................................51
Системы с корреляционным приемом..................................51
Многоканальные корреляционные системы.............................56
Согласованная фильтрация......................................... 5g
Многоканальные фильтровые системы.................................60
Выбор оптимального опорного сигнала в системах с корреляционным
приемом...........................................................63
Примеры синтеза опорных сигналов..................................66
Выбор опорного сигнала в виде части рабочего сигнала .... 69
Синтез спектров сигналов, ортогональных с временным сдвигом . . 70
Список литературы..............................................71
Глава 2. Общая теория гармонических корректоров ..... 72
2.1. Основные положения...............................................72
2.2. Дискретизация сигналов с ограниченным спектром...................74
2.28
Стр.
Оптимальное представление сигнала с ограниченным спектром усечен-
ным рядом Котельникова...........................................
Выбор основного отсчетного импульса..............................
Критерий корректируемости канала по импульсной реакции
2.3. Аналитические методы расчета гармонических корректоров без обрат-
ной связи.............................................................
Частотная область.................................................
Временная область.......................... . *................
Расчет корректоров по последовательности импульсных реакций при их
взаимной интерференции. Теоремы отсчетов для периодических частот-
но-ограниченных сигналов . . . ...........................
2.4. Особенности коррекции полосовых каналов по импульсным реакциям
Постановка задачи. Обобщенная теорема отсчетов для сигналов с по-
лосным спектром ......... . .
Метод й-преобразования ..........................................
Теоремы отсчетов для сигналов с полосным ограниченным по протя-
женности дискретным спектром ....................................
Список литературы................................................
Глава 3. Алгоритмы автоматической дискретной коррекции
3.1. Задачи, решаемые при разработке алгоритмов коррекции ....
3.2. Итерационные алгоритмы коррекции на основе z-преобразования (кор-
рекция дискретных сигналов на бесконечной оси времени) ....
Общие сведения . ............................................
Коррекция сигналов в случае малых фазо-частотных искажений
Итерационный алгоритм для произвольных фазо-частотных искажений
3.3. Коррекция сигналов на конечном отрезке времени..................
Общий итерационный алгоритм . . .... . .................
Простая итерация.................................................
Одношаговый циклический алгоритм.................................
Групповая релаксация ............................................
3.4. Оптимизация искажений на основе суммарных критериев ....
Суммарный квадратичный критерий.....................................
Суммарный абсолютный критерий....................................
Условия выпуклости суммарного обобщенного критерия ....
Минимаксный критерий близости дискретных сигналов (критерий Че-
бышева) .........................................................
Минимизация модуль-максимума интерференционных помех в много-
уровневых дискретных системах связи .............................
3.5. Использование алгоритмов дискретной коррекции для минимизации
искажений частотных характеристик каналов связи.......................
Каналы низкой частоты...........................................
Полосовые каналы................................................
3.6. Коррекция интерференционных помех в многопозиционных системах с
интегральным приемом . . .................................
Системы с согласованными фильтрами..............................
Адаптивные системы с корреляционным приемом.....................
Список литературы...............................................
Глава 4. Гармонические корректоры с обратной связью . . . .
4.1. Общие положения.................................................
4.2. Расчет корректоров с обратной связью по временным и частотным ха-
рактеристикам каналов связи . ... ....................
Временная область...............................................
Итерполяционный расчет в частотной области......................
Расчет корректора по периодической последовательности частотно-огра-
ниченных сигналов .......................... ...................
4.3. Алгоритмы компенсации искажений сигналов на основе корректоров с
обратной связью ....................................................
74
77
80
80
80
83
96
102
102
105
107
111
113
113
115
115
116
121
124
124
127
129
131
136
143
146
149
155
155
159
168
168
171
174
176
176
179
179
184
186
188
229
Стр.
Корректоры с простой обратной связью 188
Корректор с комбинированной обратной связью .................... 193
4.4. Синтез регулируемых фазокорректирующих цепей с помощью линий за-
держки, охваченной обратной связью ................................. 196
Анализ фазовой системы в комплексной плоскости...................196
Расчет фазовой гармонической системы.............................202
Фазокорректирующая система с неравномерным расположением отводов 203
4.5. Специальные виды корректоров с обратной связью..................204
Синтез произвольных комплексных периодических функций . . . 204
Корректоры с дифференцированием в прямой и обратной связи . . 207
4.6. Экспериментальные исследования и использование корректоров с об-
ратной связью........................................................208
Список литературы .............................................. 210
Глава 5. Совместная коррекция собственных и взаимных искажений
каналов многократных систем связи.....................................211
5.1. Коррекция дискретных сигналов в многократных системах . . . . 211
Общая постановка вопроса.........................................211
Дискретные многоканальные корректоры без обратной связи . . . 211
Корректоры с простой и взаимной обратными связями................215
Алгоритмы коррекции векторных дискретных сигналов . . . . . 218
5.2. Коррекция комплексного матричного коэффициента передачи много-
кратной системы связи . ............................ . . . 220
Исходные соотношения.............................................220
Выпуклость и алгоритмы минимизации обобщенной нормы матрицы по-
грешностей на выходе многоканального корректора ..... 223
Список литературы................................................227
ИБ № 666
ВИТАЛИИ АНДРЕЕВИЧ КИСЕЛЬ
Синтез гармонических корректоров
для высокоскоростных систем связи
Редактор В. К. Ста р'и к о в а
Художник В. С. Федоров
Художественный редактор Р. А. Казаков
Технический редактор Л. К. Грачева
Корректор Р. М. Шишкова
Сдано в набор 30/VI 1978 г. Подп. в печ. 19/IV 1979 г.
Т-03782 Формат 60x90/16 Бумага кн.-журн. Гарнитура литерат.
Печать высокая 14,5 усл. печ. л. 15,59 уч.-изд. л. Тираж 1340 экз.
Изд. № 17567 Зак. № 181 Цена 1 р. 80 к.
Издательство «Связь». Москва 101000, Чистопрудный бульвар, д. 2
Типография издательства «Связь» Госкомиздата СССР
Москва 101000, ул. Кирова, д. 40
ВНИМАНИЮ ЧИТАТЕЛЕЙ!
Издательство «Связь» в 1979 г. готовит к выпуску следующие книги:
Беляев Б. В. Работоспособность химических источников тока.—
М.: Связь, 1979 (IV кв.) — 10 л., ил. — 50 к.
Рассматриваются вопросы проектирования и эксплуатации химических
источников тока. Даются методы расчета , и измерения внутреннего Сопро-
тивления источников тока, закономерности разряда при различных усло-
виях его протекания, а также уравнения, определяющие разрядную емкость
и энергию.
Книга рассчитана на инженерно-технических работников, занимающих-
ся изучением и проектированием химических источников тока.
Данилов Ю, В., Мур дасов А. Б., Фуртиков Г. В. При-
менение ЭВМ при проектировании ГТС. — М.: Связь, 1979 (III кв.) —
8,5 л., ил. •— 45 к.
Описывается ряд программ для ЭВМ, которые позволяют автоматизи-
ровать этапы проектирования ГТС при составлении генеральных схем и
техническом проектировании. Применение предлагаемых методов на этапе
технического проектирования позволяет вычислить заказные спецификации,
сметы и кроссировочные таблицы. Приводятся программы для нахождения
оптимальных местоположений станций и узлов.
Книга предназначена для инженерно-технических работников проект-
ных организаций.
Халин Ф. М. Адресно-кодовая коммутация каналов связи. — М.:
Связь, 1979 (II кв.) — 10 л., ил. — 50 к.
Рассматривается адресно-кодовый метод коммутации дискретных ка-
налов связи как разновидность пространственно-временного метода. Опи-
сываются принципы построения адресно-кодовых, коммутаторов с поте-
рями и без потерь. Проводится расчет краевых искажений сигналов в си-
стеме коммутации. Излагаются способы коррекции сигналов и варианты
их использования в коммутационных системах. Приводятся различные ва-
рианты построения объединенных систем «уплотнение — коммутация» с
использованием адресно-кодового метода, приводится их сравнительный
анализ по объему оборудования и частоте следования импульсов в общем
и групповых трактах системы.
Предназначена для инженерно-технических работников, занимающихся
вопросами коммутации каналов.
Заказы на эти книги индивидуальные покупатели оформляют на поч-
товых открытках с указанием обратного адреса, учреждения и предприя-
тия — гарантийными письмами. Книжные магазины принимают заказы на
эти издания как твердые, гарантированные заказы.
" /£>• ' *' ’~*Ut • ' - ' — •
СИНТЕЗ ГАРМОНИЧЕСКИХ КОРРЕКТОРОВ ДЛЯ ВЫСОКОСКОРОСТНЫХ СИСТЕМ связи