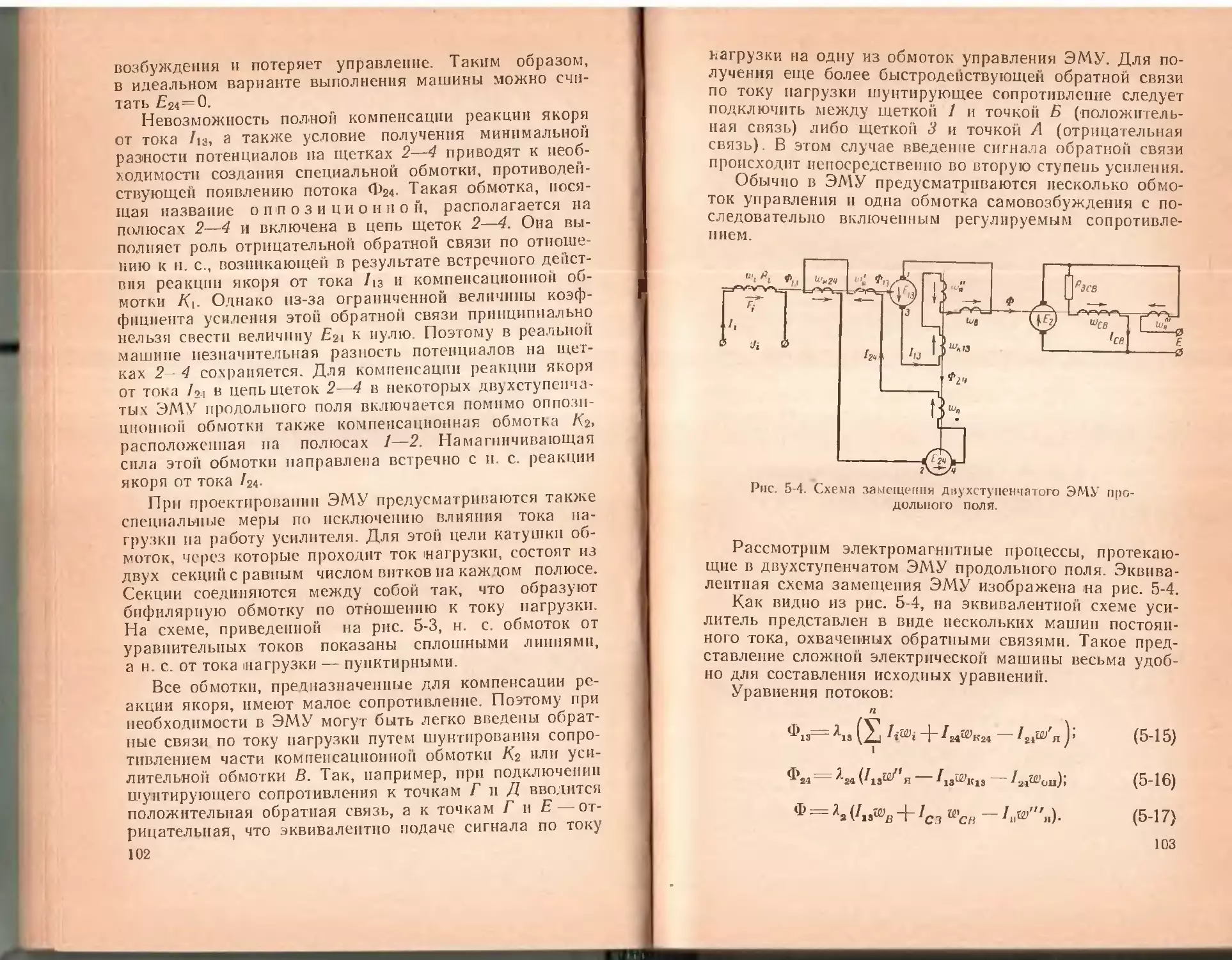
/














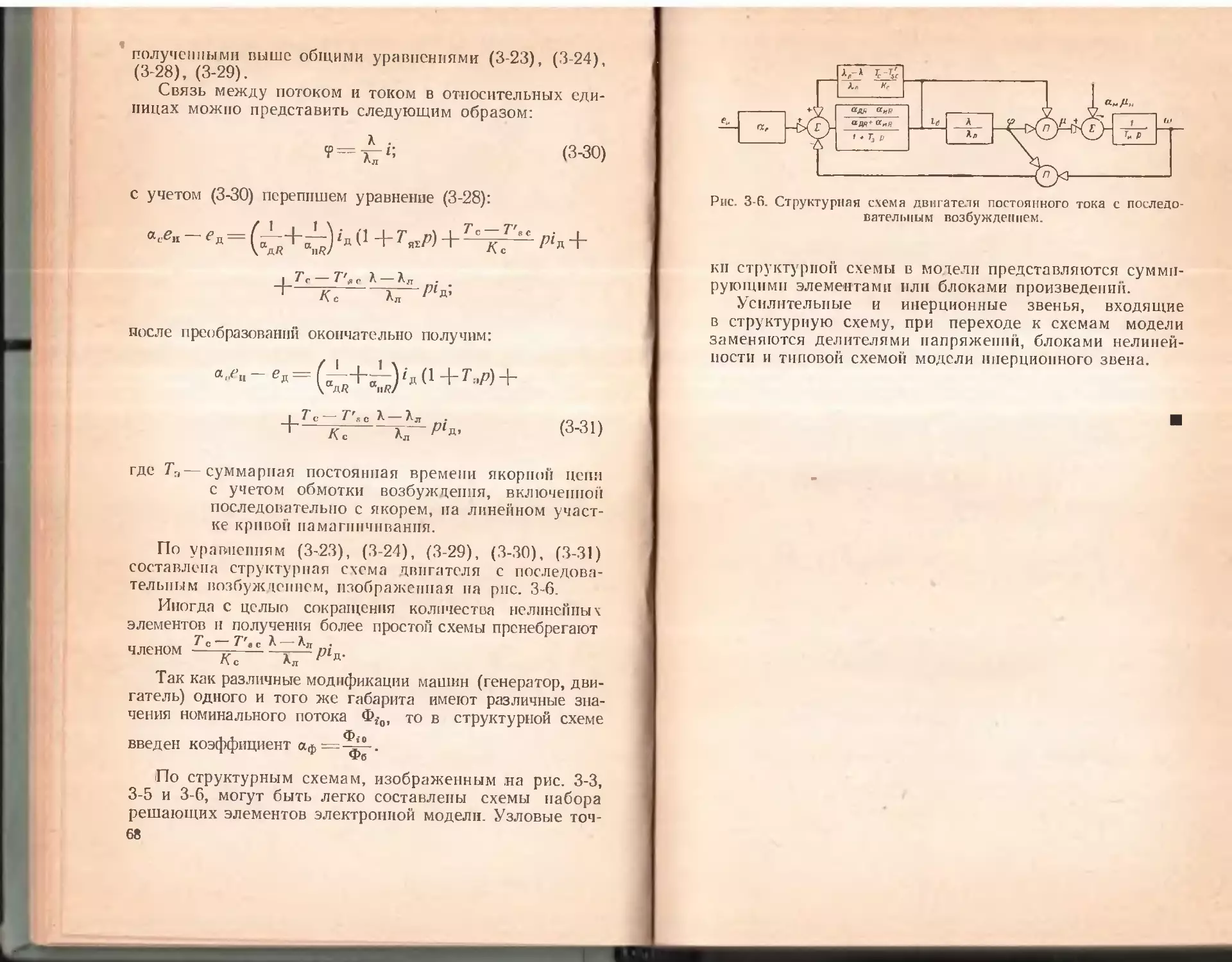

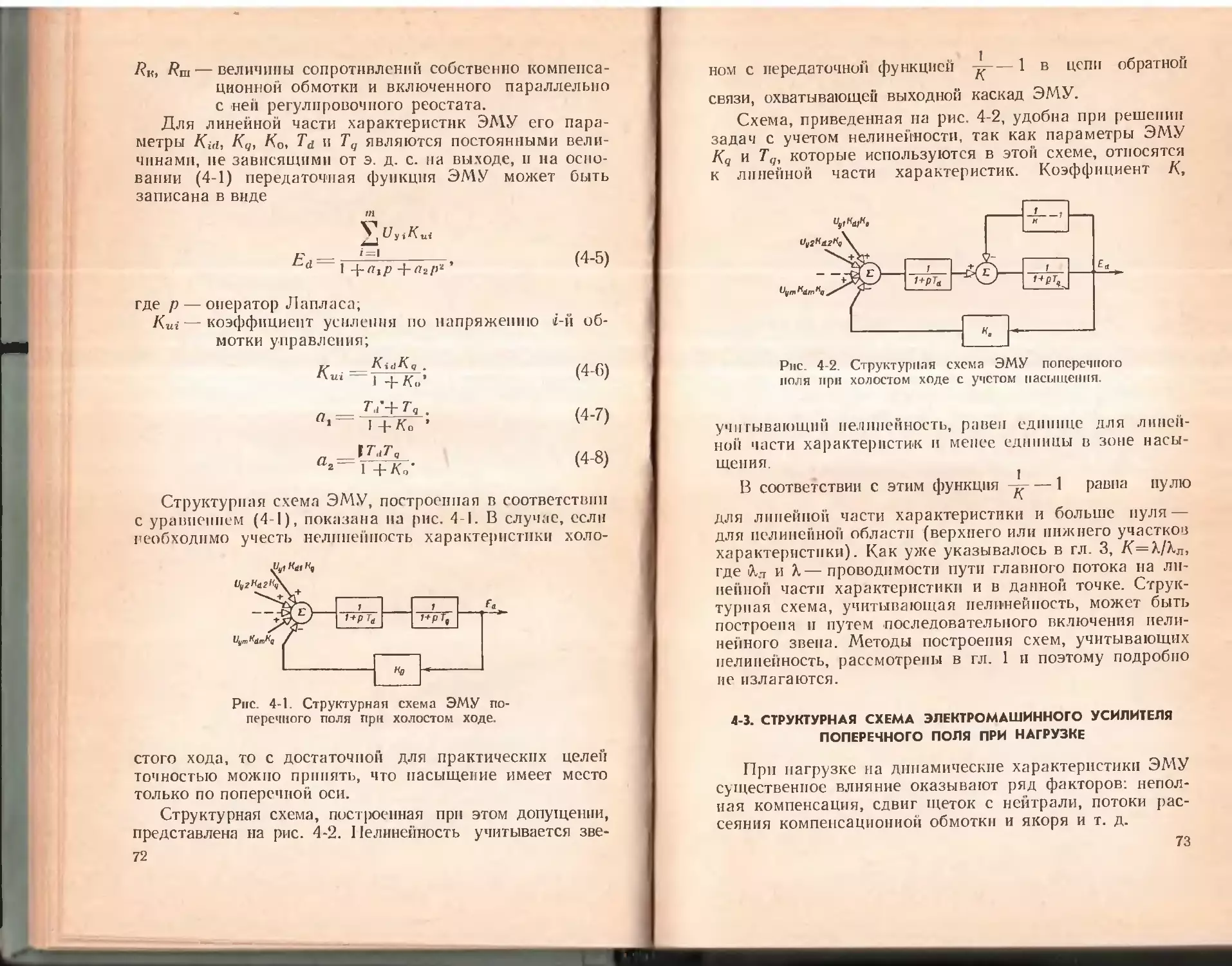

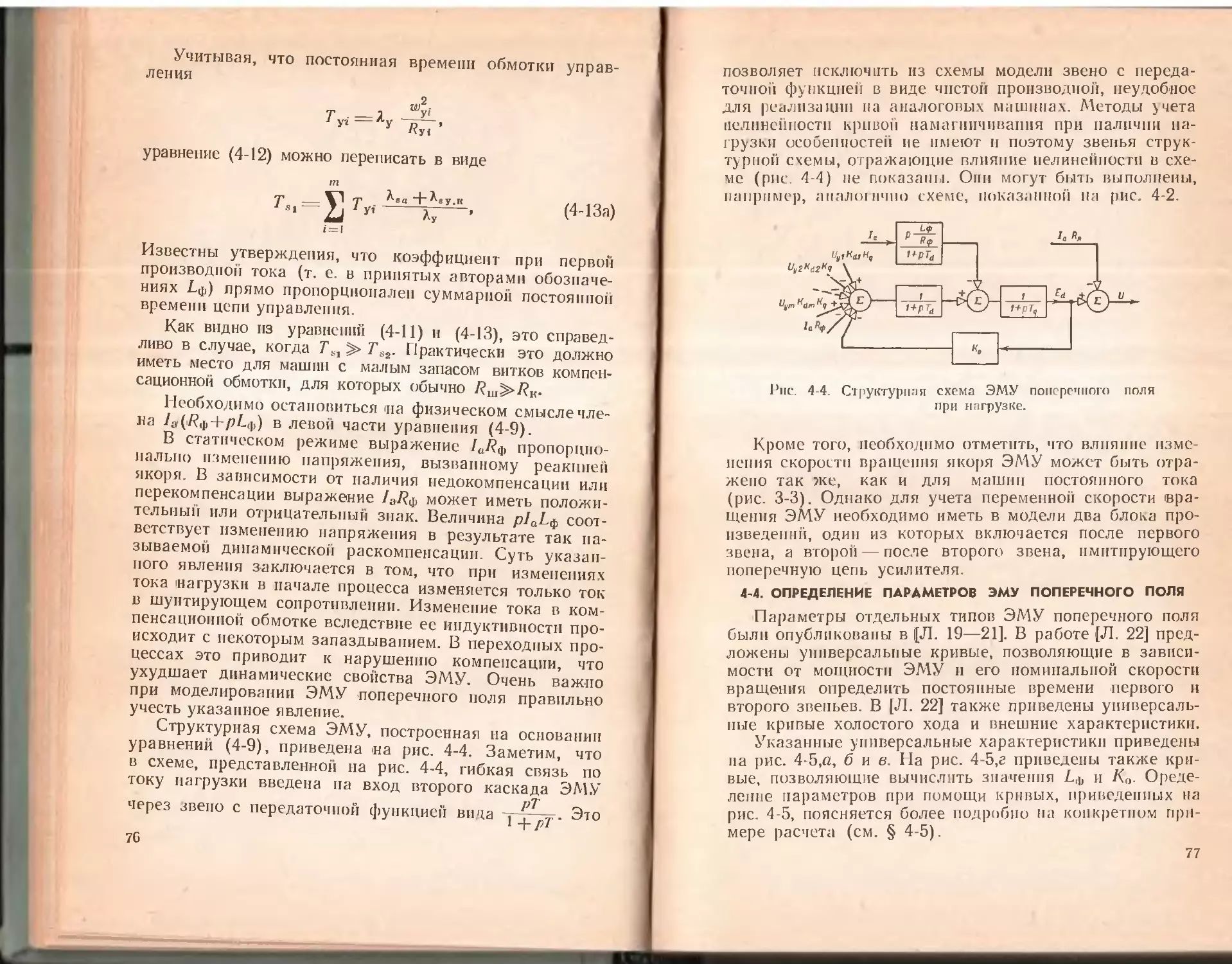
































Author: Дунаевский С.Я. Крылов О.А. Мазия Л.В.
Tags: инженерия автоматика математическое моделирование электромеханика промышленные предприятия
Year: 1966




Text
С. Я. Дунлевскии
О.АКрылов
Л. В. Мазил
м
П1 одел и рован не
элементов
электромехлнических
систем
С. Я. ДУНАЕВСКИЙ,
О. А. КРЫЛОВ,
Л. В. МАЗИЯ
Моделирование
элементов
ЭЛЕКТРОМЕХАНИЧЕСКИХ
СИСТЕМ
ИЗДАТЕЛЬСТВО «Э Н Е Р Г И Я->
МОСКВА 1966 ЛЕНИНГРАД
УДК
Д 83
В книге излагается комплекс вопросов, свя-
занных с математическим моделированием
систем электромеханики. Основное внимание уде
лено детальному математическому описанию ди-
намических свойств элементов этих систем, пра-
вильное представление о которых при модели-
ровании является одним из основных факто-
ров, определяющих точность воспроизведения
реальных процессов на математической модели.
Кинга рассчитана на инженерно-техниче-
ских работников промышленных предприятии,
научно-исследовательских, проектных н конст-
рукторских организации, занимающихся разра-
боткой и исследованием электромеханических
систем автоматизированных электроприводов и
автоматизацией производственных процессов. Ее
могут также использовать студенты втузов
в качестве учебного пособия по курсам основ
электропривода и устройств автоматики.
Дунаевский Соломон Яковлевич,
Крылов Олег Алексеевич,
Мазия Лев Вениаминович
Моделирование элементов электромеханических систем
ДА.—Л., изд-во «Энергия», I9G6, 304 с. с плл.
3-3-9
196-66
Редакторы: Л. А. Садовский, М. А. Комар
Техн, редактор Н. С. Мазурова
Сдано в набор 28,111 1966 г. Подписано к печати 27/VI 1966 г.
Бумага типографская № 2, 84X108' зг
Т-07189 Печ. л. 15,96 Уч.-изд. л. 15,1
Тираж 6500 экз. Цена 88 коп. Заказ 2337
Московская типография № 10 Главполиграфпрома
Комитета по печати ври Сонете Министров СССР.
Шлюзовая наб., 10.
ПРЕДИСЛОВИЕ
В настоящее время методы математического моде-
лирования получают широкое распространение при
проектировании электромеханических систем. Однако
техническая литература, посвященная изложению мето-
дов пос; роения моделирующих устройств, сравнительно
бедна.
Предлагаемая работа имеет целью частично воспол-
нить этот пробел; основное внимание уделено в пей
вопросам моделирования элементов электромеханиче-
ских систем. “
Книга состоит из 13 глав и приложения, в которое
сведен справочный материал.
Глава 1 посвящена обзору основных вопросов мате-
матического моделирования.
В гл. 2, 3, 4, 5 рассмотрено моделирование магнитно-
связанных контуров, машин постоянного тока, электро-
машинных усилителей поперечного и продольного по-
лей.
В гл. 6 рассмотрено моделирование средств стабили-
зации систем регулирования.
В гл. 7 рассматривается моделирование магнитных
усилителей.
Главы 8 и 9 содержат моделирование машин пере-
менного тока синхронных и асинхронных.
В гл. 10 рассматривается моделирование электриче-
ских схем с вентилями.
3
В гл. 11, 12 и 13 в качестве примеров рассмотрено
моделирование следящих систем и некоторых систем
современного электропривода.
Основными материалами для книги послужили ра-
боты, которые выполнялись авторами в течение ряда
лет в лабораториях Всесоюзного научно-исследователь-
ского института электромеханики (ВНПИЭМ).
Все замечания и пожелания авторы просят направ-
лять по адресу: Москва, Ж-1М, Шлюзовая наб., 10,
изд-во «Энергия».
ОГЛАВЛЕНИЕ
Предисловие ...................................., . 3
Введение ................................................. 8
Глава первая
Метод структурного математического моделирования
1-1. Описание метода......................................11
1-2. Схемы электронных моделей основных типовых звеньев . 14
1 3. Преобразования структурных схем ..... 23
1 4 Составление блок-схемы электронной модели . 32
1-5. Выбор масштабных коэффициентов..................... 36
Глава вторая
Моделирование магнитно-связанных контуров
2-1. Моделирование магнитно-связанных контуров с учетом
рассеяния п нелинейности кривой намагничивания . 40
2-2. Моделирование магнитно-связанных контуров с прибли-
женным учетом рассеяния..............................47
2 3 Моделирование процессов возбуждения с учетом вихре-
вых токов . . ................52
Глава третья
Моделирование электрических машин постоянного тока
3-1. Общие сведения ......................................38
3 2. Структурная схема генератора постоянного тока . 58
3-3. Структурная схема двигателя постоянного тока . 65
Глава четвертая
Моделирование электромашинных усилителей поперечного поля
4 I. Электромашипный усилитель поперечного поля как эле-
мент системы регулирования...............................70
4 -2. Структурная схема электромашинного усилителя попереч-
ного поля при холостом ходе ............................ 70
4 3. Структурная схема электромашинного усилителя попереч-
ного поля при нагрузке . .....................73
5
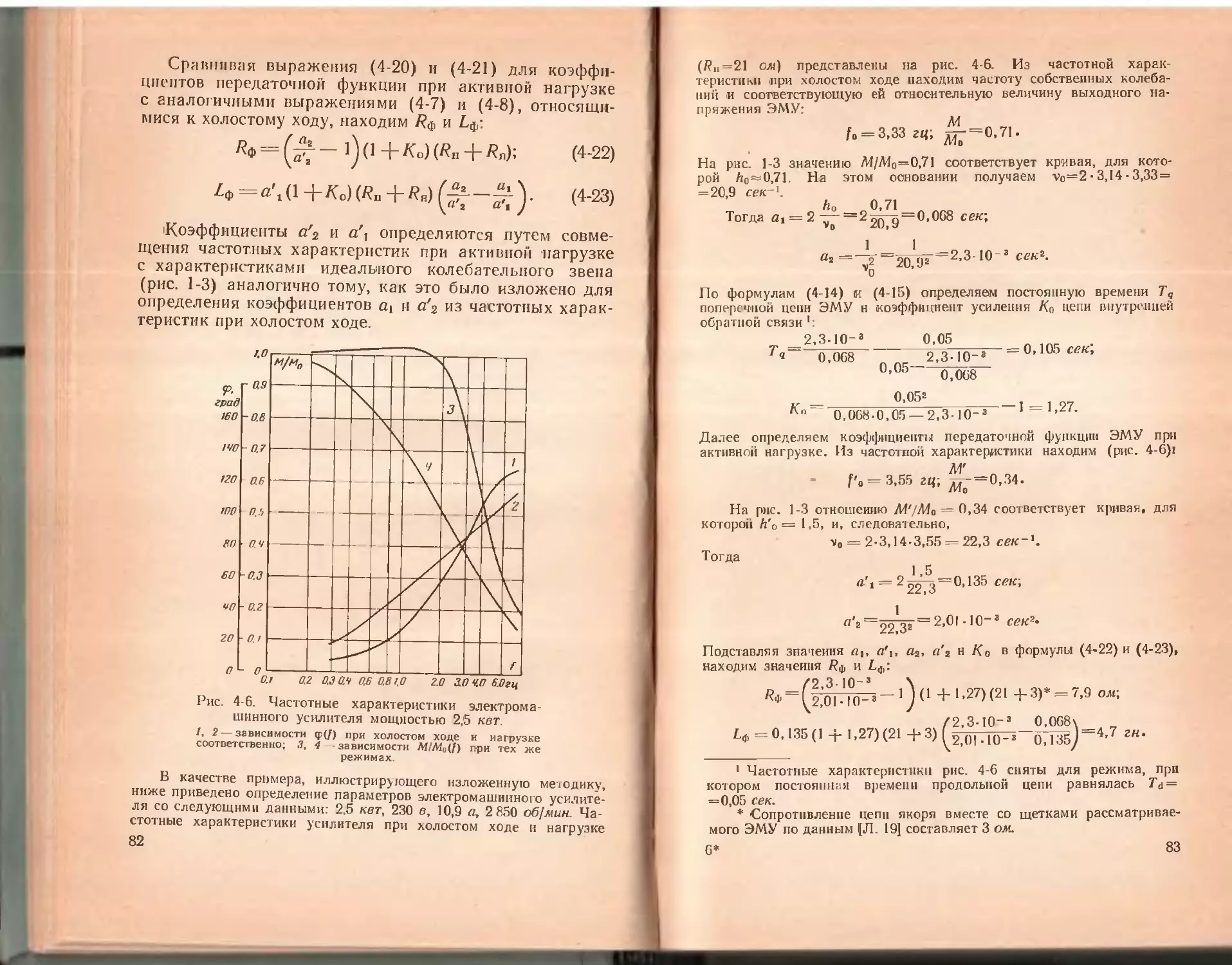
4-4. Определение параметров ЭМУ поперечного поля 77
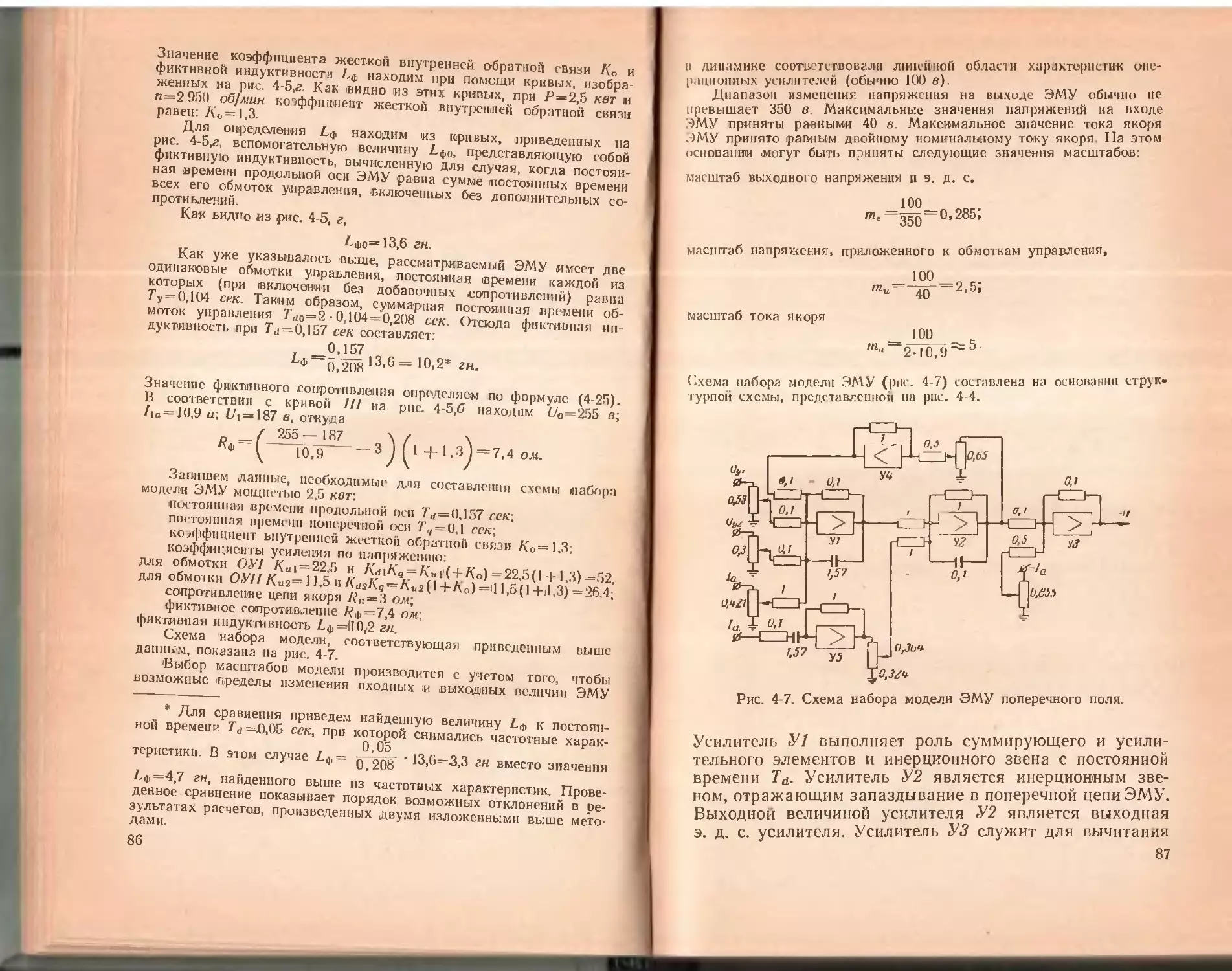
4-5. Схема набора модели ЭМУ поперечного поля 85
4-6. Составление структурной схемы ЭМУ поперечного поля
по уравнениям его электрических и магнитных цепей 88
Глава пятая
Моделирование электромашиииых усилителей продольного
поля
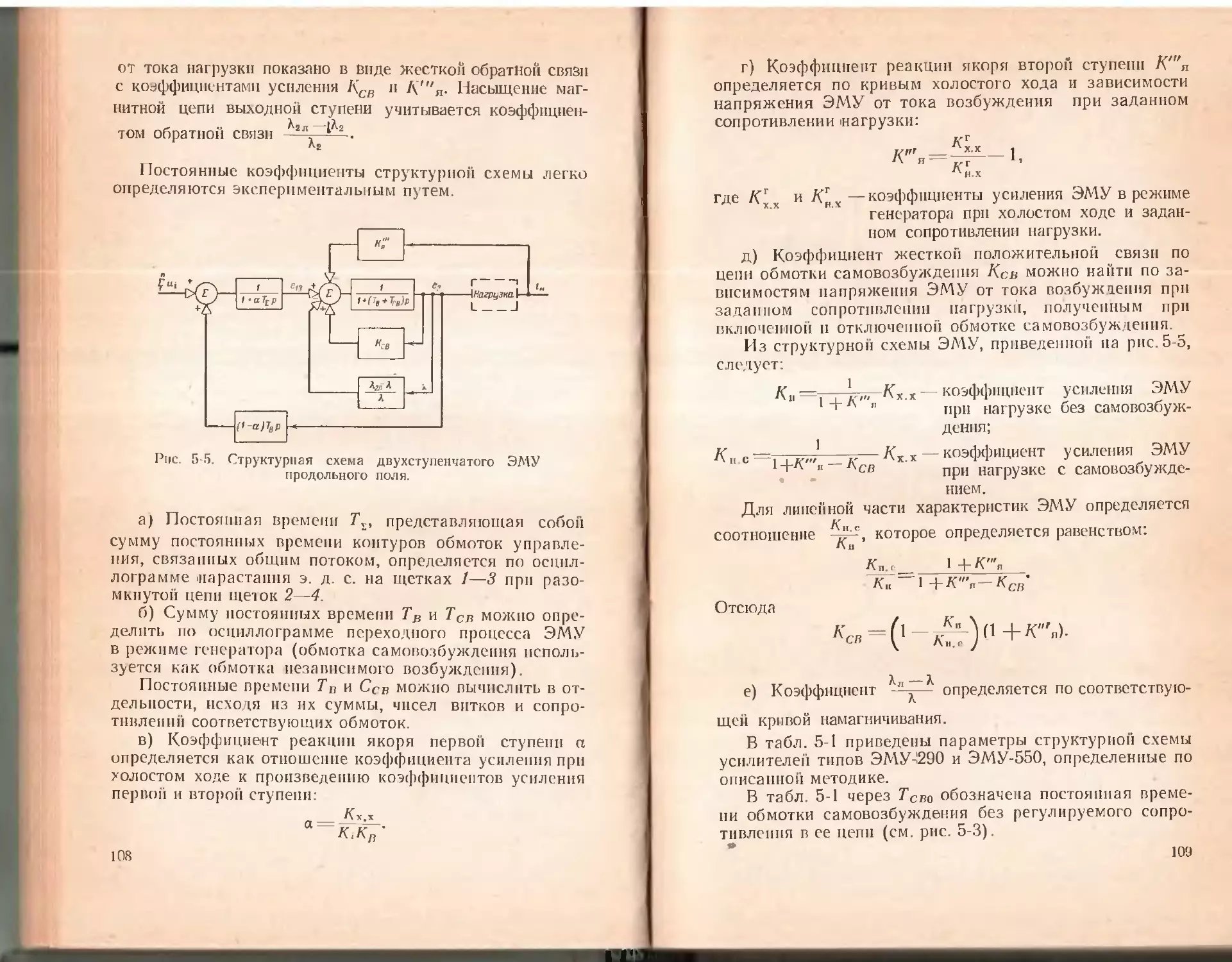
5-1. Назначение электромашиииых усилителей продольного поля 95
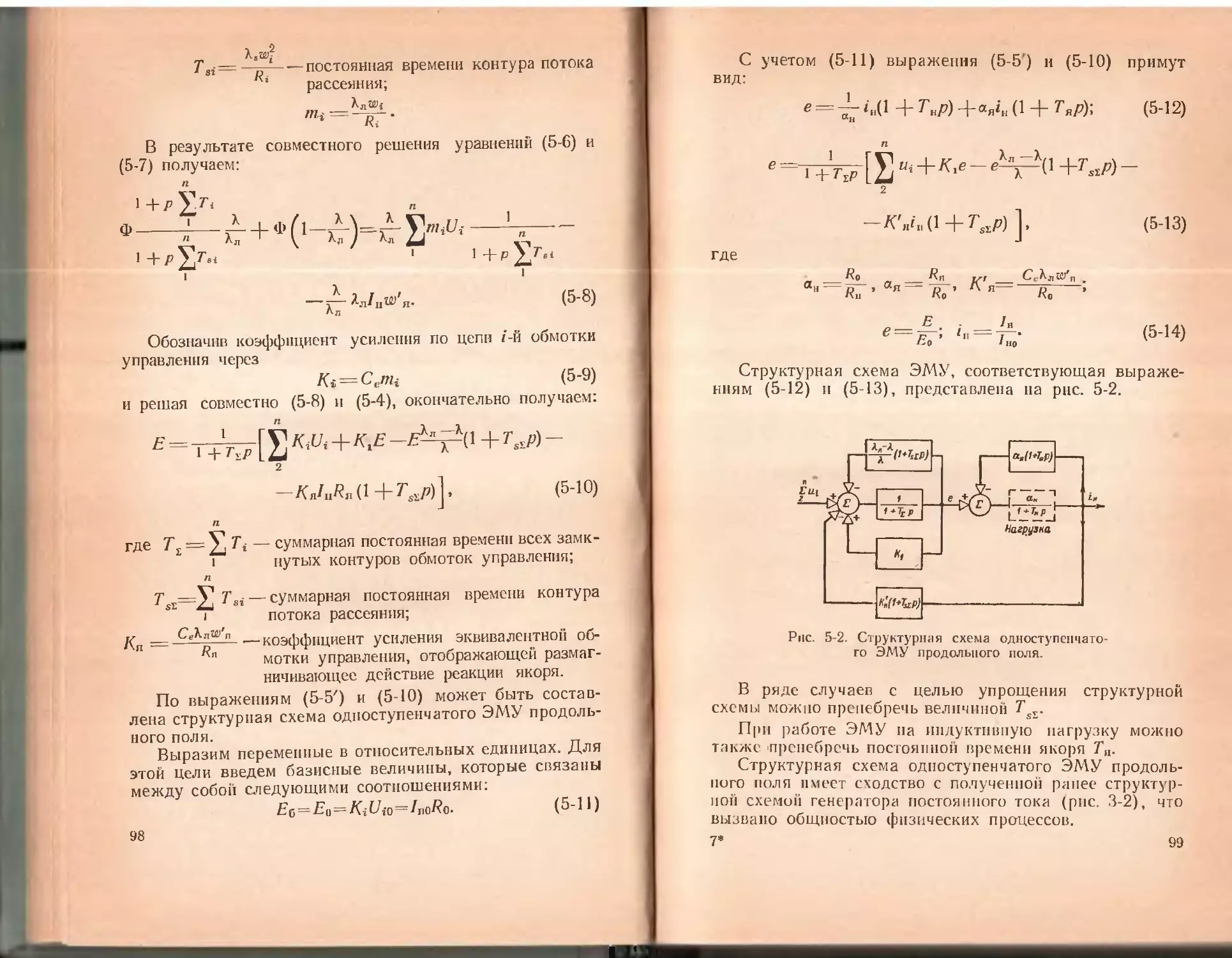
5-2. Структурная схема одноступенчатого ЭМУ продольного
поля................................. .... .95
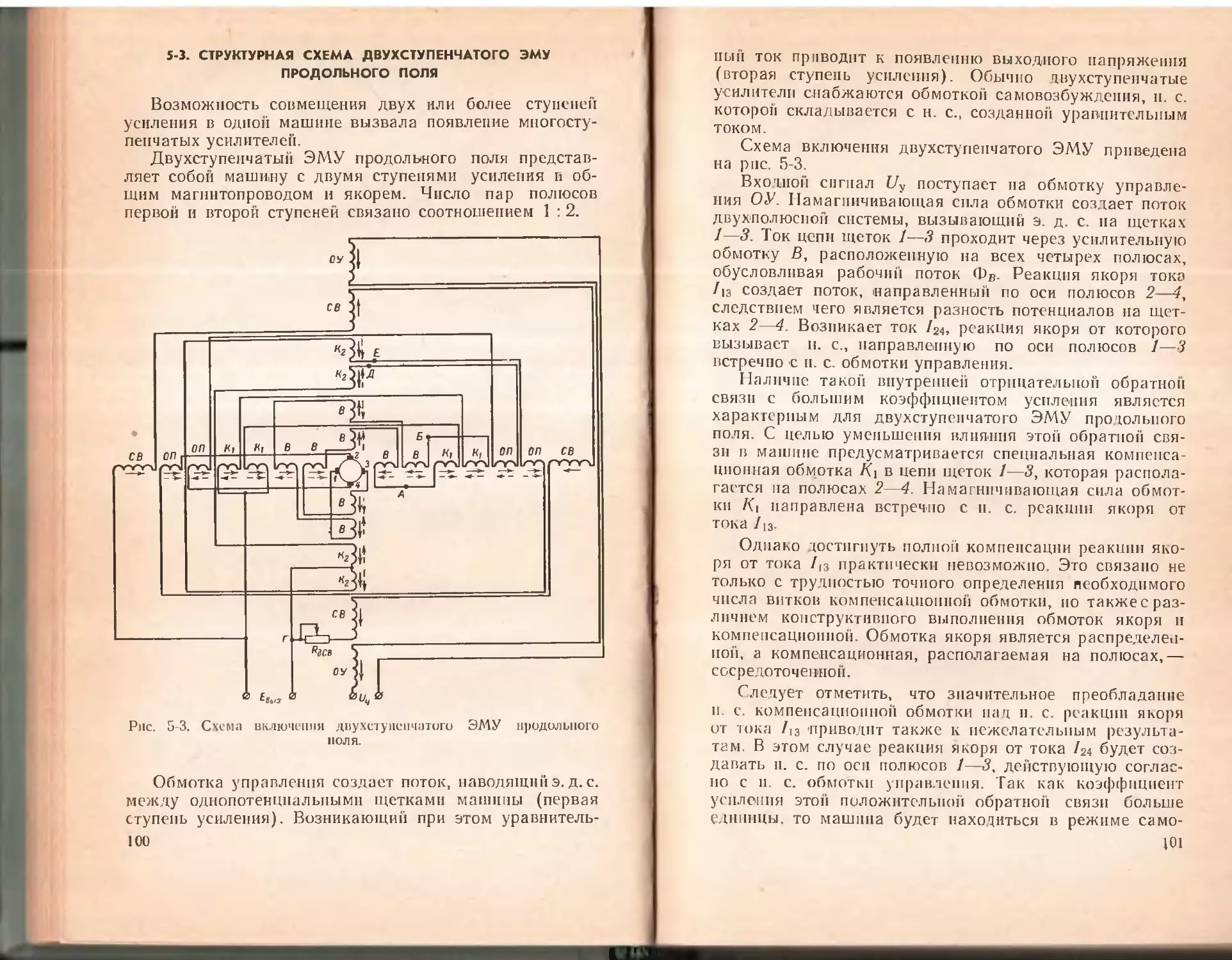
5-3. Структурная схема двухступенчатого ЭМУ продольного
поля.................................................199
5-4. Структурная схема трехступенчатого ЭМУ продольного
поля . .....................111
Глава шестая
Моделирование стабилизирующих устройств
6-1. Общие принципы моделирования стабилизирующих
устройств ... . . 118
6-2. Структурная схема и схема электронной модели стабили-
зирующего трансформатора напряжения..................119
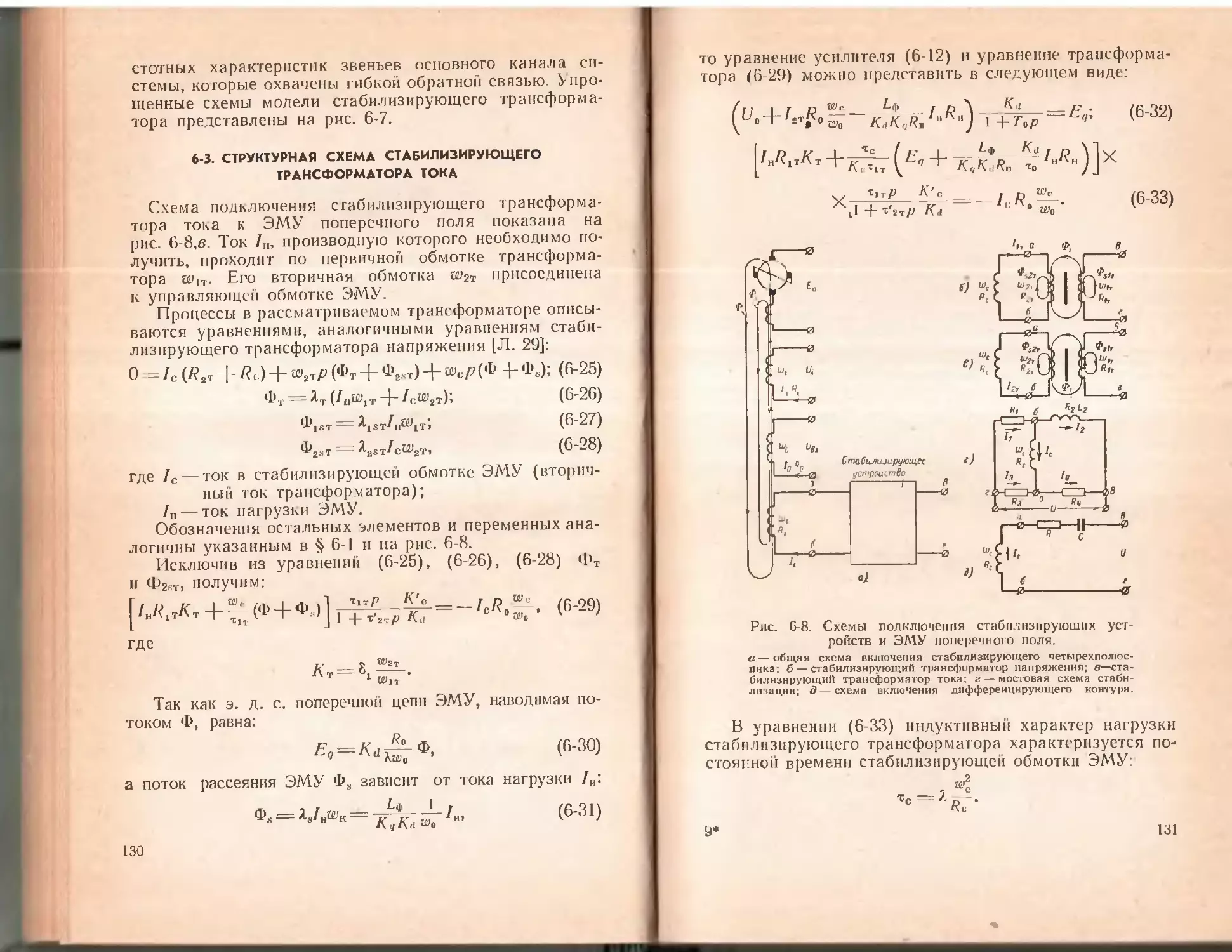
6-3. Структурная схема стабилизирующего трансформатора
тока . - 189
6-4. Структурная схема стабилизирующего моста ... 132
6-5. Структурная схема дифференцирующего контура RC, при-
соединенного к обмотке управления усилителя 134
Глава седьмая
Моделирование магнитных усилителей
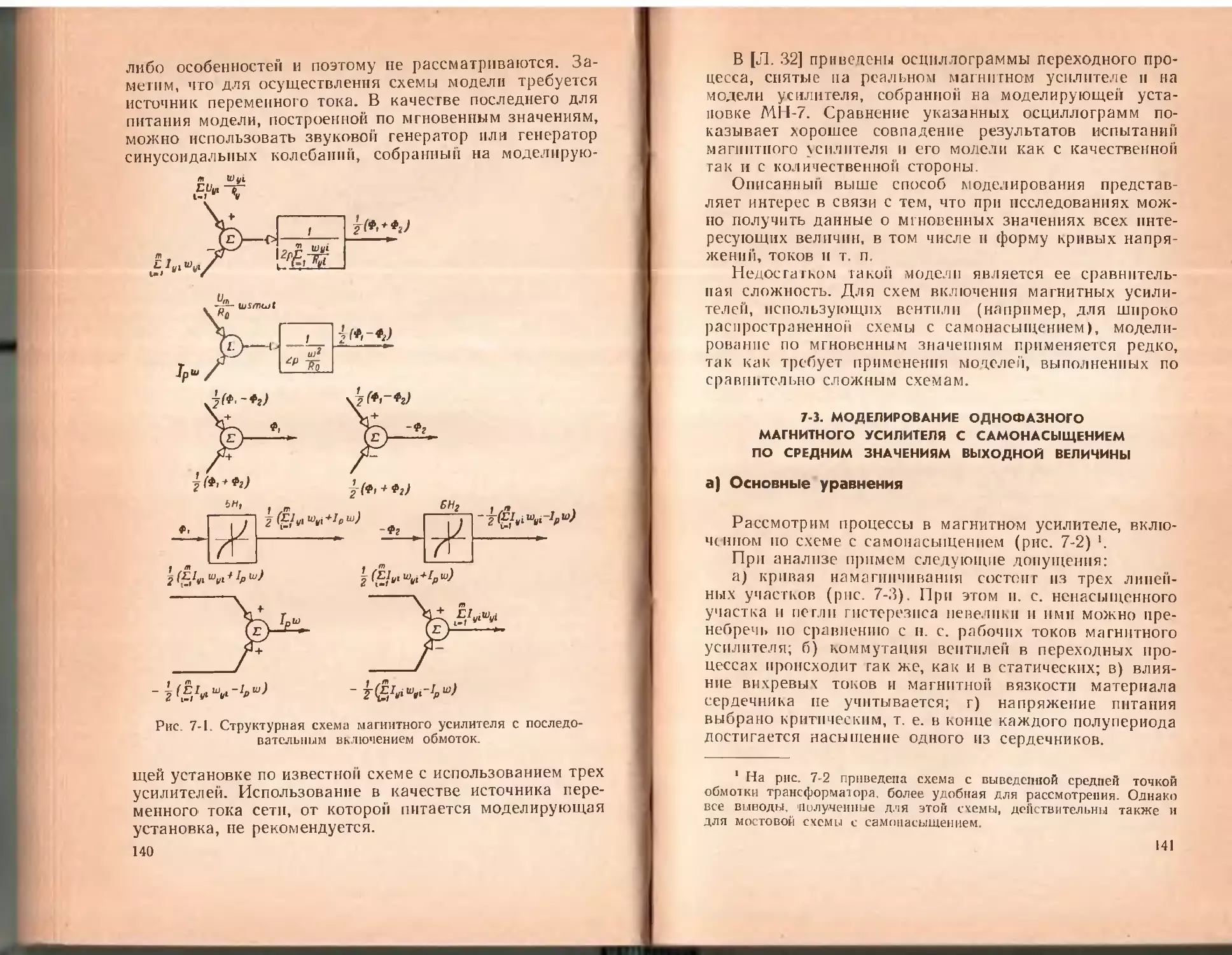
7-1. Методы исследования магнитных усилителей па электрон-
ных моделях ...........................136
7 2. Моделирование магнитного усилителя по мгновенным зна
ченням переменных ... 138
7-3. Моделирование однофазного магнитного усилителя с са-
монасыщением по средним значениям выходной величины 141
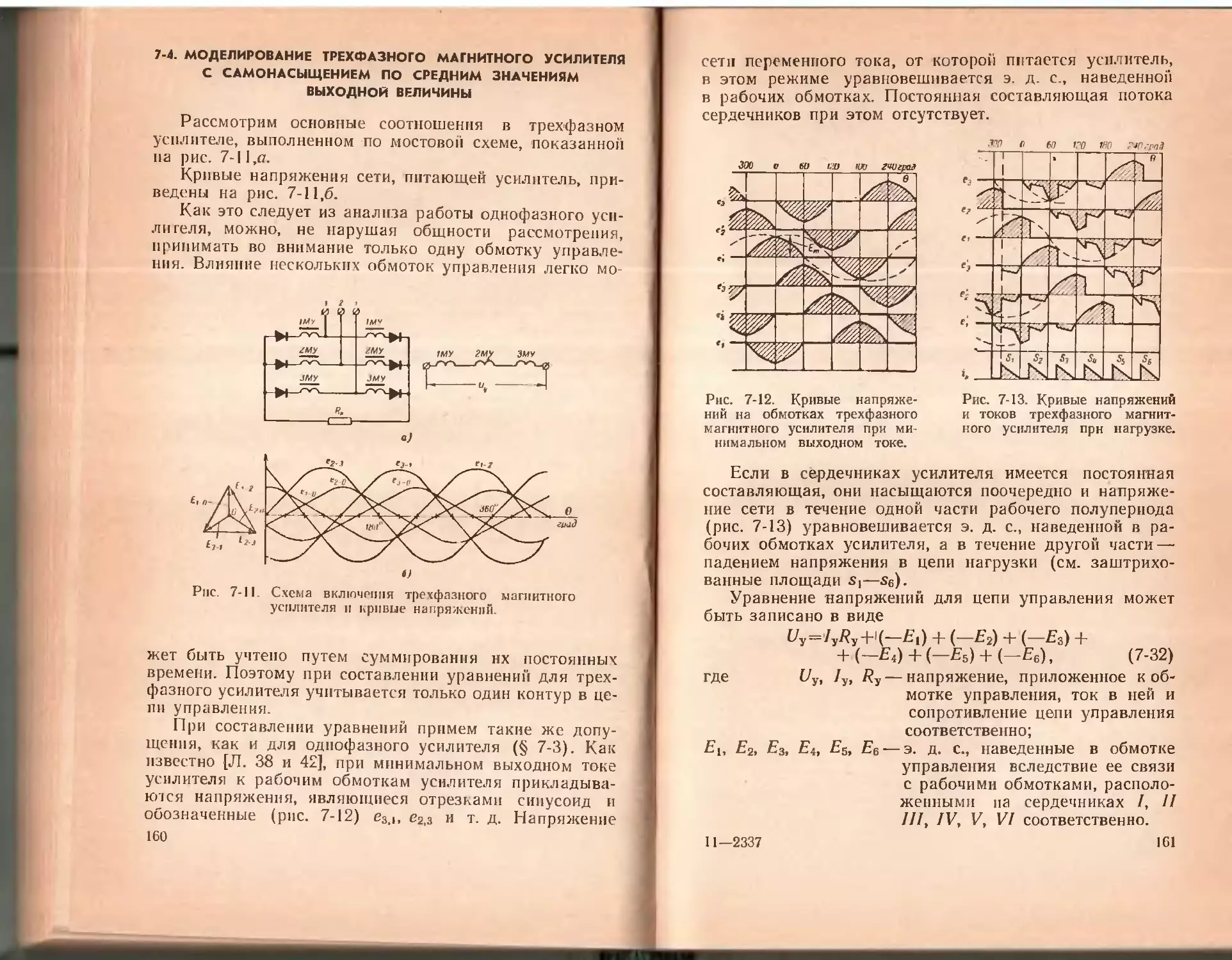
7-4. Моделирование трехфазного магнитного усилителя с са-
монасыщением по средним значениям выходной величины 160
7-5. Определение параметров магнитных усилителен 166
Глава восьмая
Моделирование синхронных машин
8-1 Общие принципы моделирования электрических машин пе-
ременного тока ................ 169
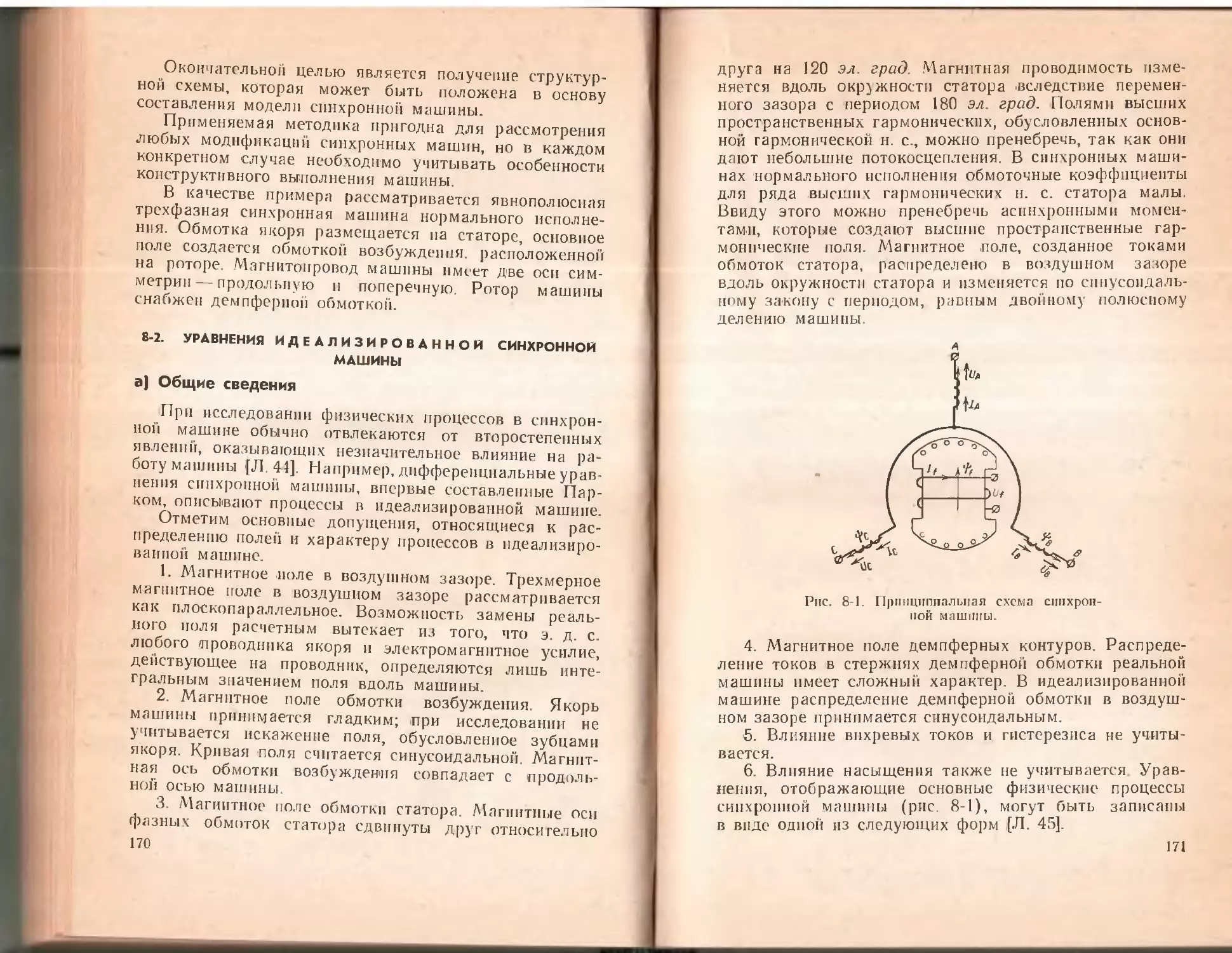
8 2. Уравнения идеализированной синхронной машины 170
8-3. Система относительных единиц . . .179
8-4. Учет насыщения синхронной машины 184
8-5. Структурная схема синхронного генератора 187
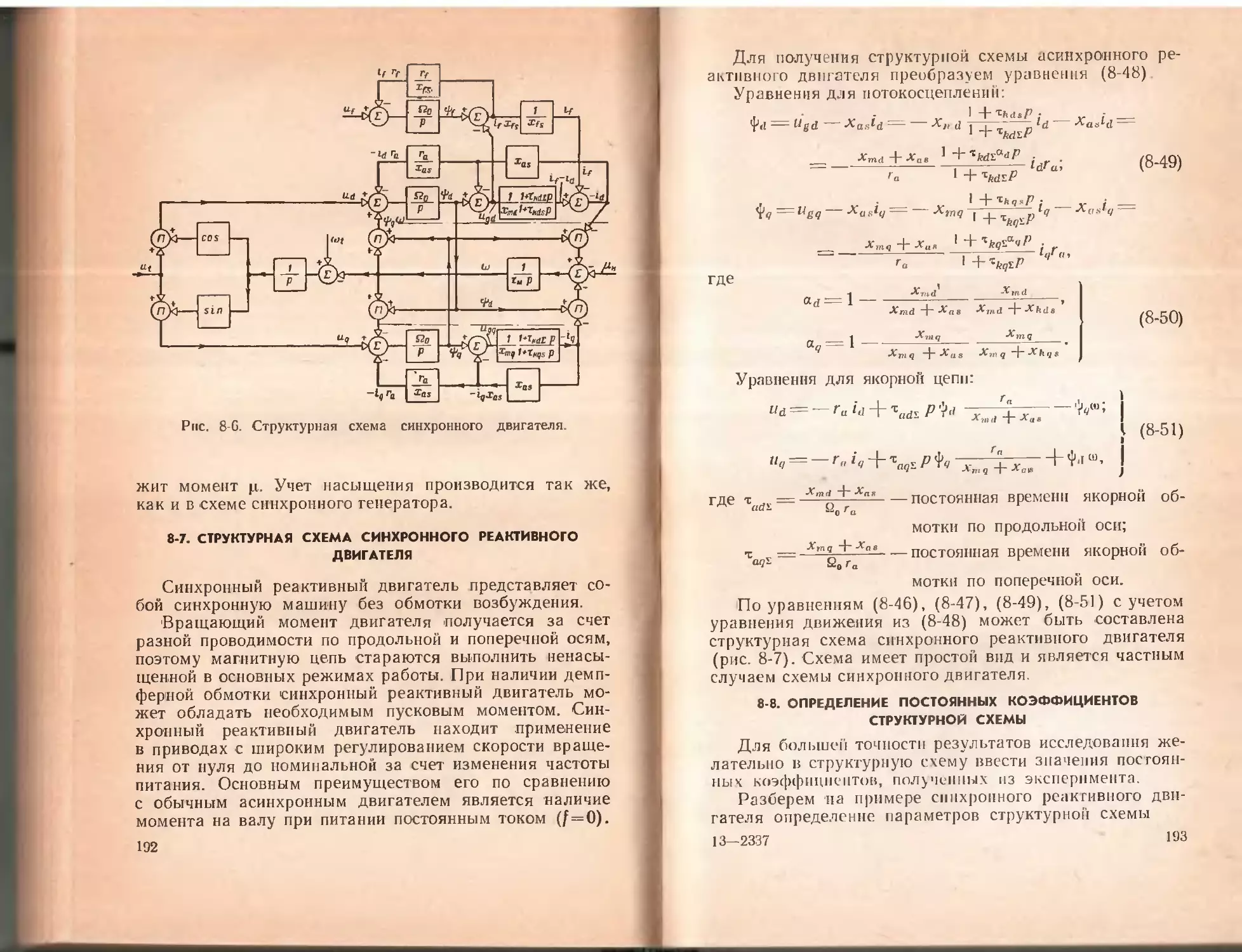
8-6. Структурная схема синхронного двигателя 189
6
8-7. Структурная схема синхронного реактивного двпгатепя 192
8 8 Определение постоянных коэффициентов структурной
схемы . . .....................193
8-9. Структурная схема параллельной работы синхронных
машин.................................... . 198
8-10 Структурная схема шагового синхронного двигателя 203
Глава девятая
Моделирование асинхронных двигателей
9-1 Структурная схема двухфазного асинхронного двигателя 207
9 2 Упрощенная структурная схема асинхронного двигателя,
основанная на моделировании семейства механических ха-
рактеристик . 212
Глава десятая
Моделирование электрических схем с вентилями
10 1 Моделирование неуправляемых вентилей .
10 2. Моделирование схем с управляемыми вентилями . . 219
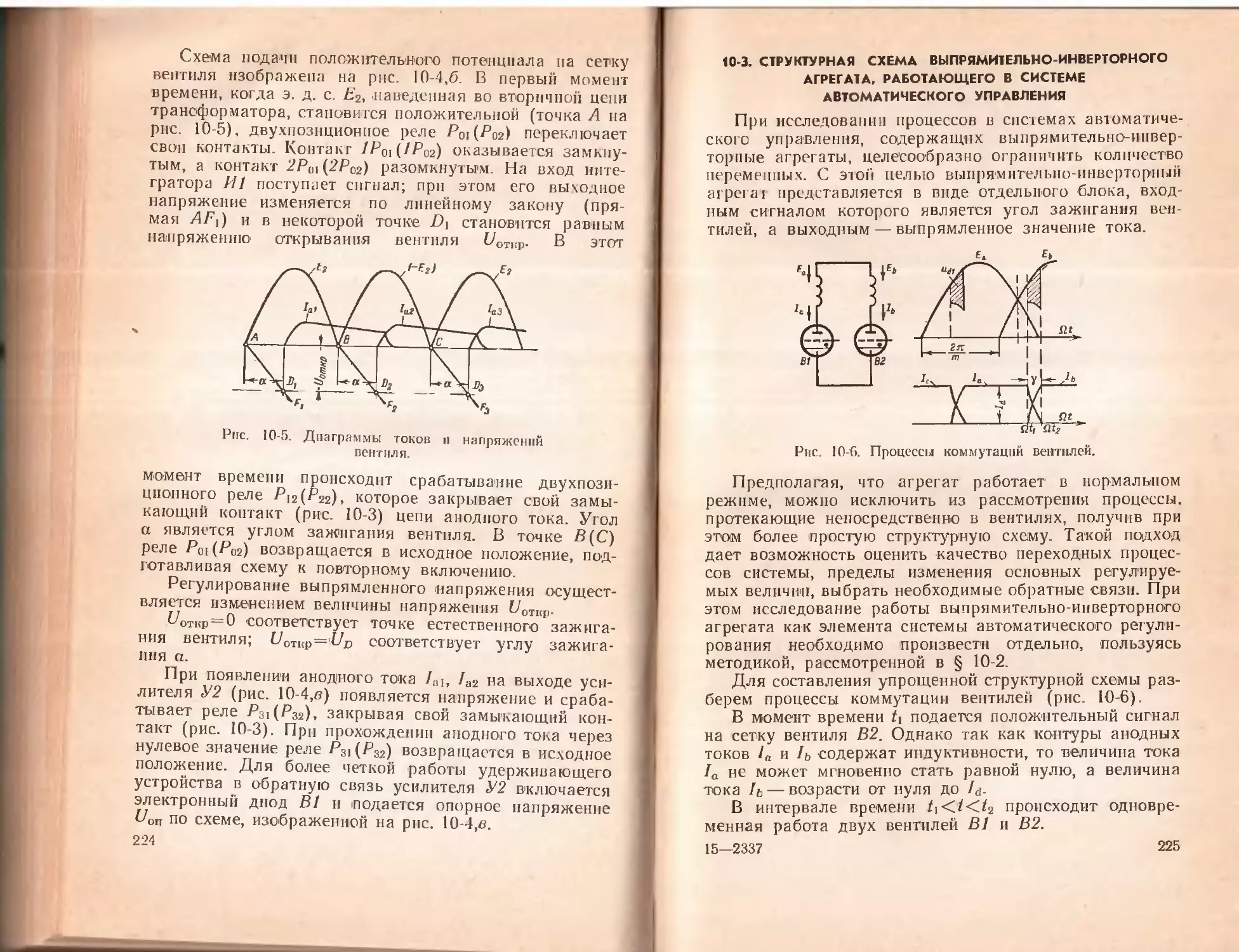
10-3. Структурная схема выпрямительно-инверторного агрега-
та, работающего в системе автоматического управления 225
Глава одиннадцатая
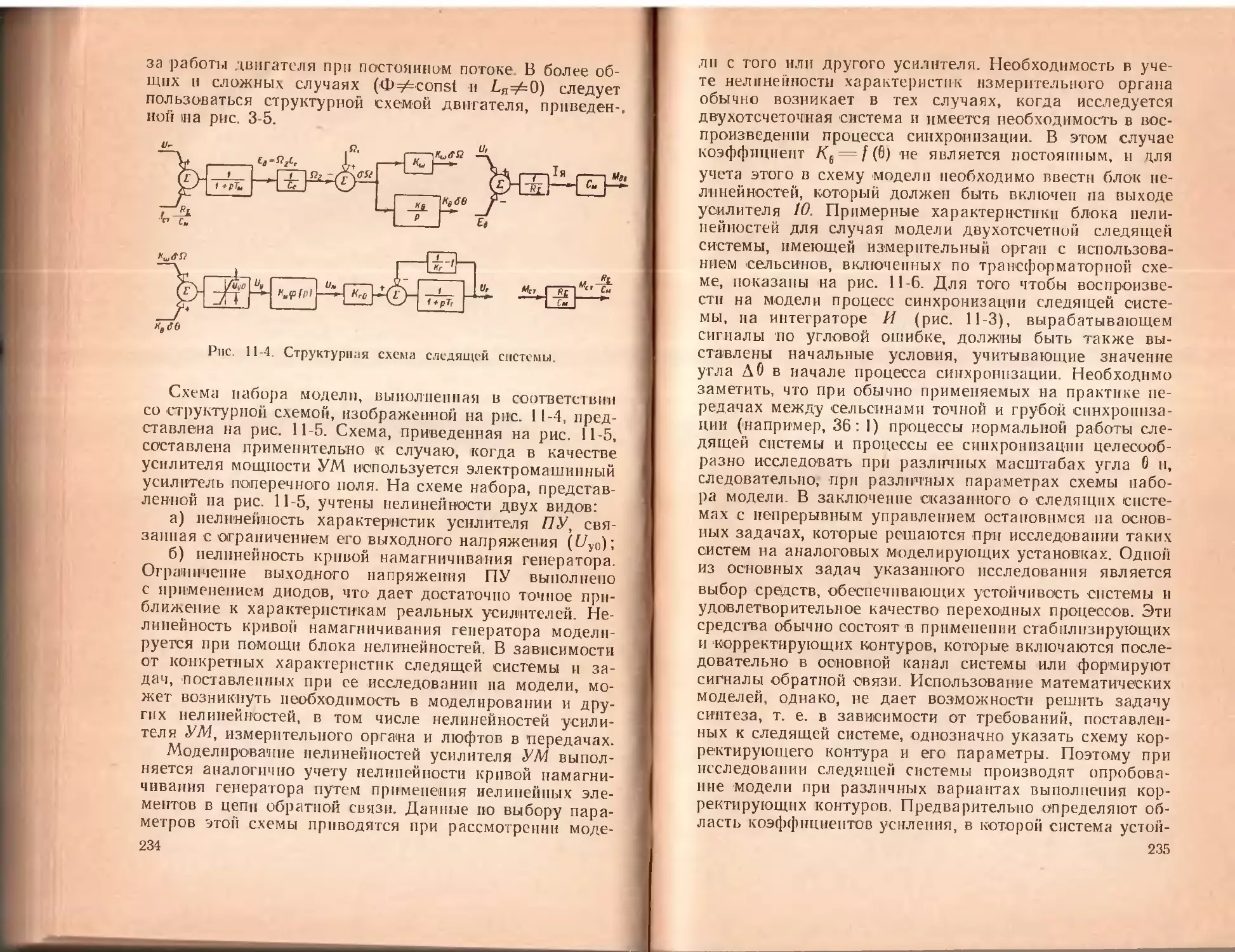
Моделирование следящих систем
11 1. Применение математического моделирования для иссле-
дования следящих систем ..... 228
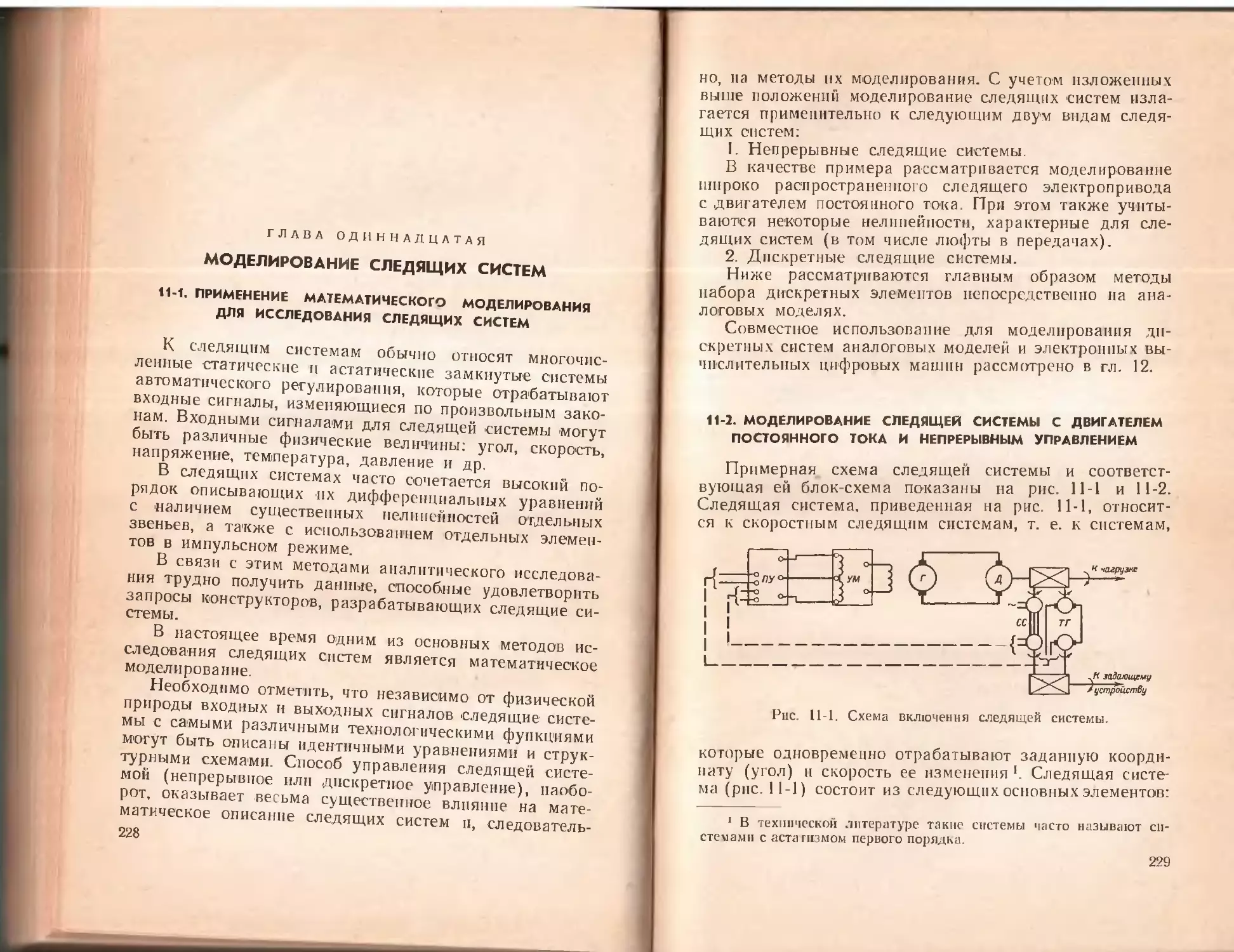
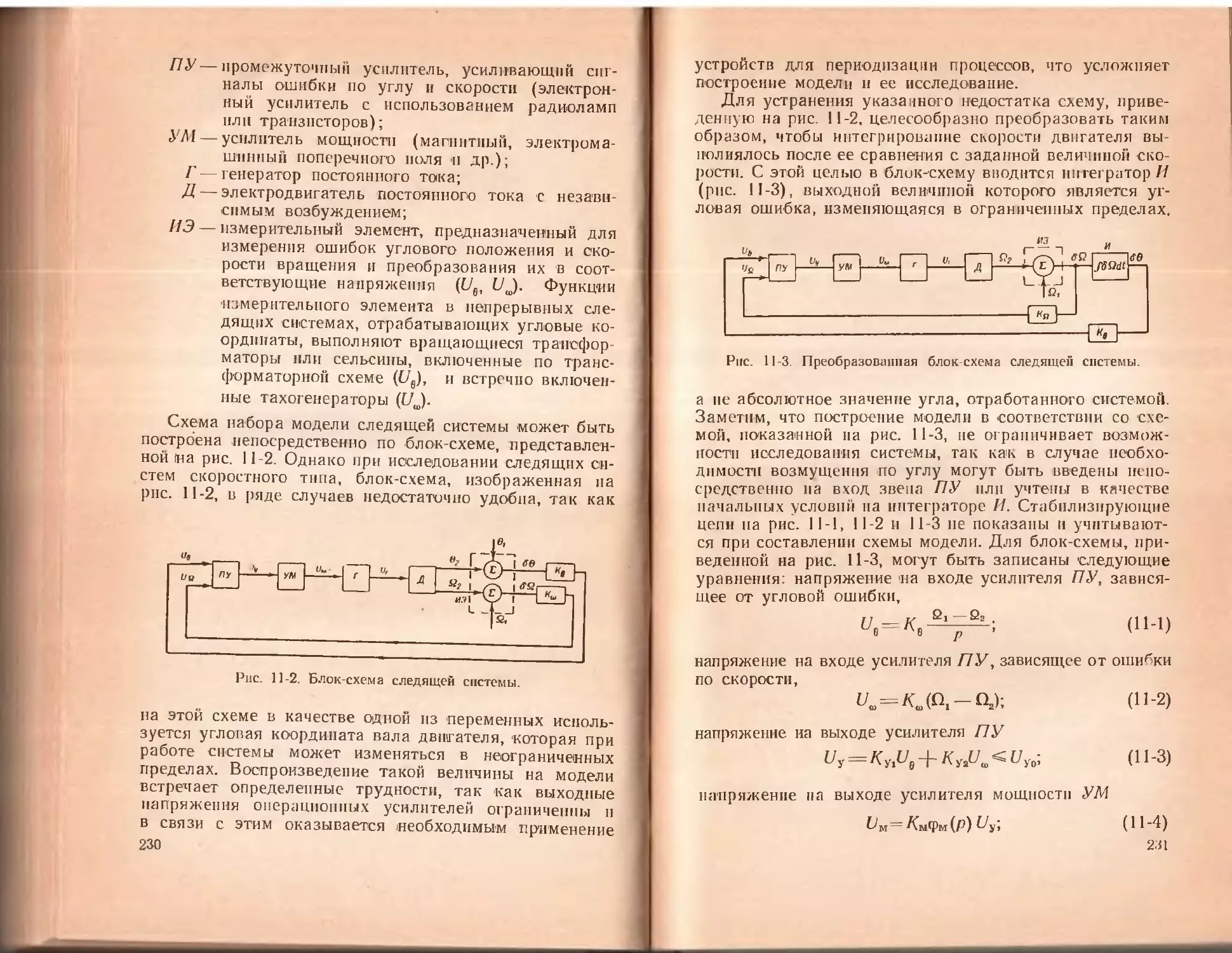
11 2. Моделирование следящей системы с двигателем посто-
янного тока и непрерывным управлением .... 229
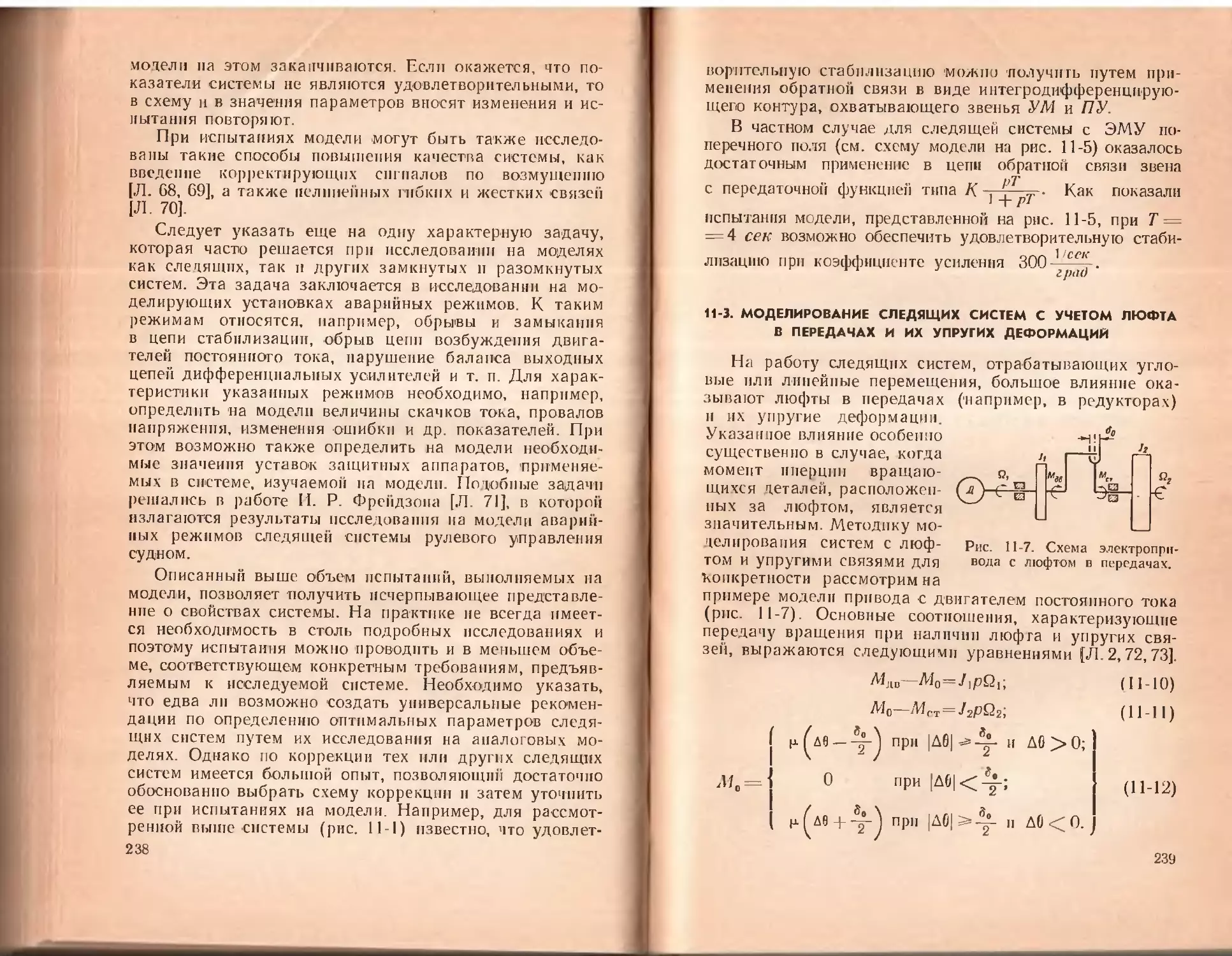
11-3. Моделирование следящих систем с учетом люфта в пе-
редачах и их упругих деформаций 239
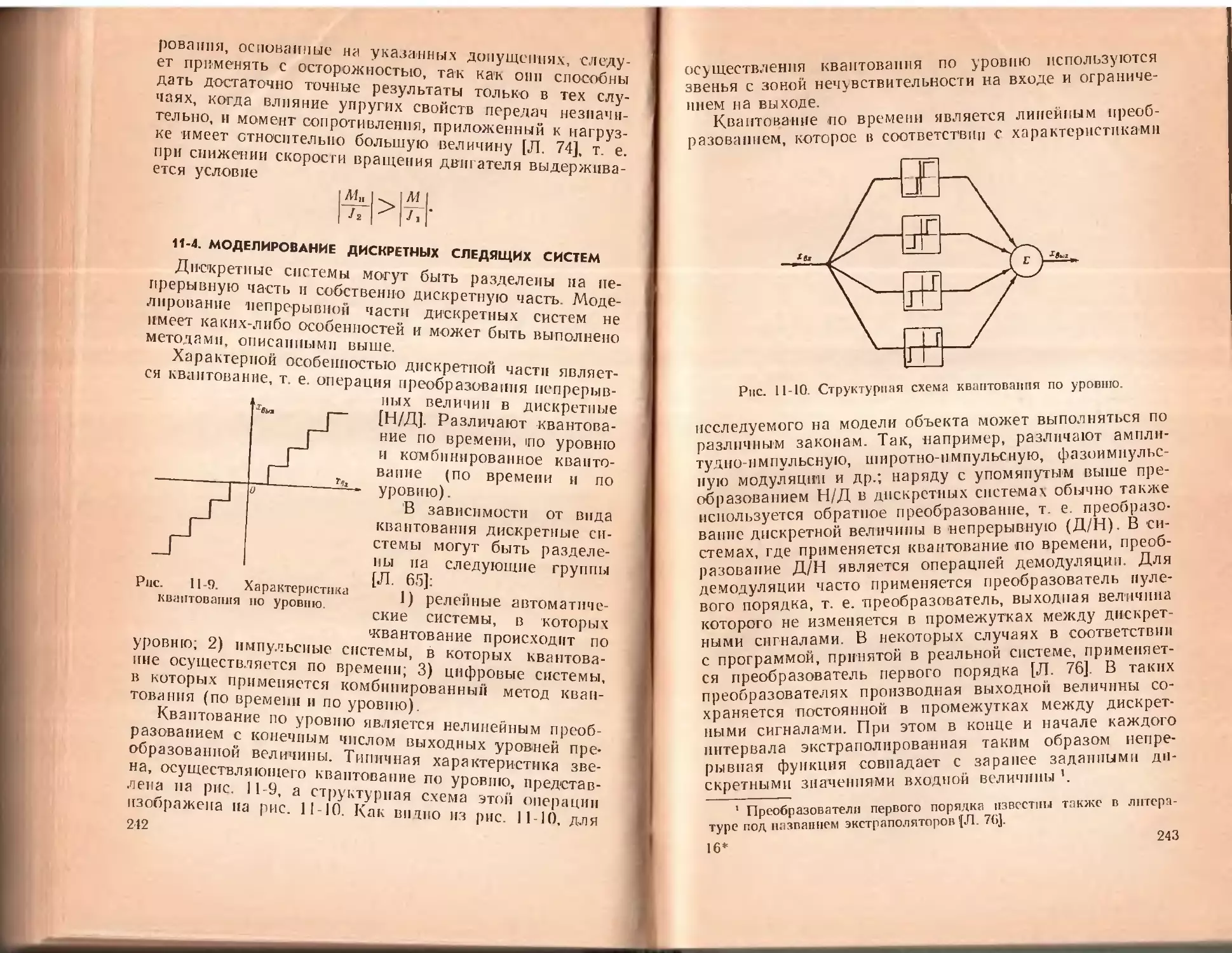
11 4. Моделирование дискретных следящих систем 242
Глава двенадцатая
Моделирование системы генератор — двигатель
на постоянном токе
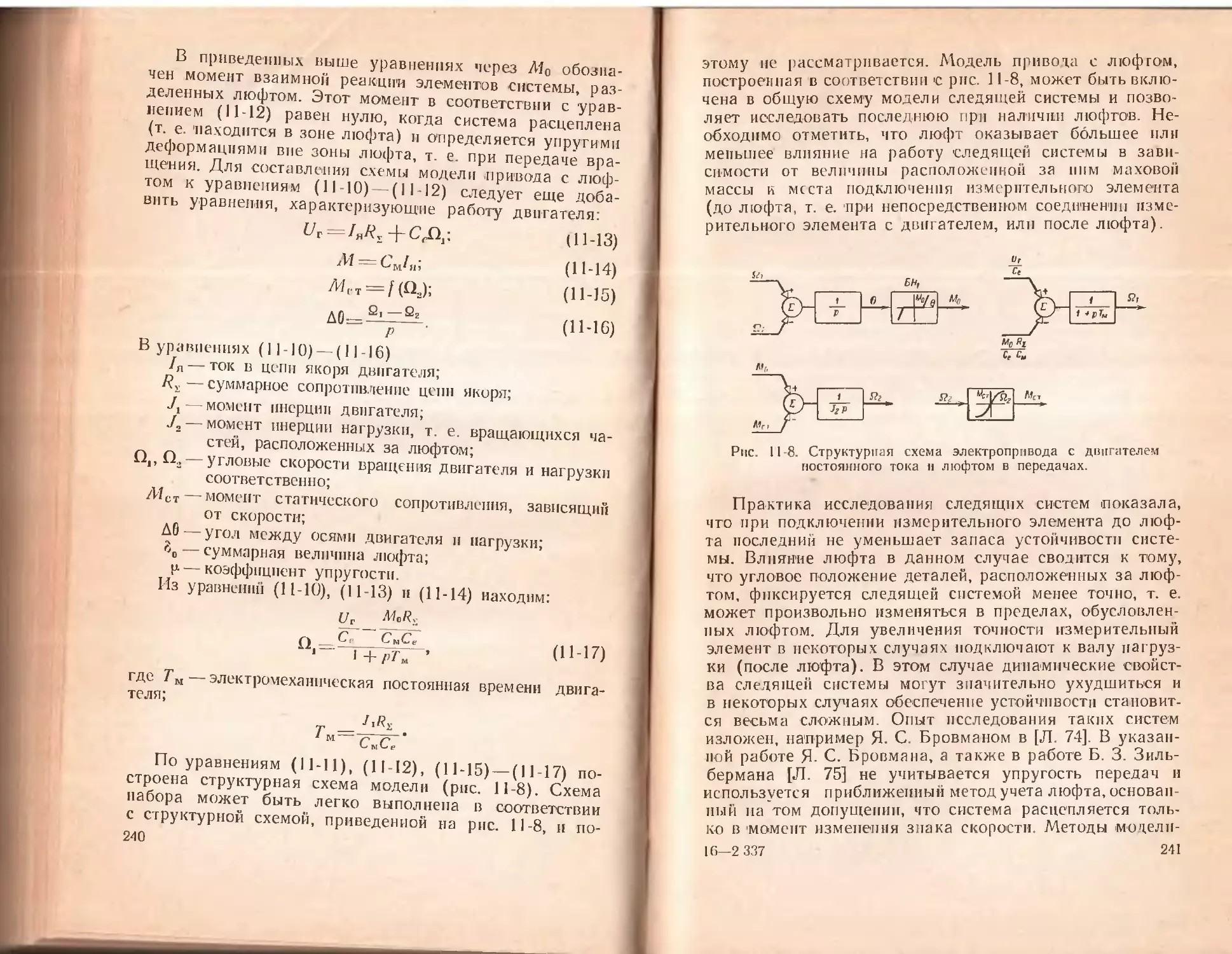
12-1. Структурная схема системы ... .... 249
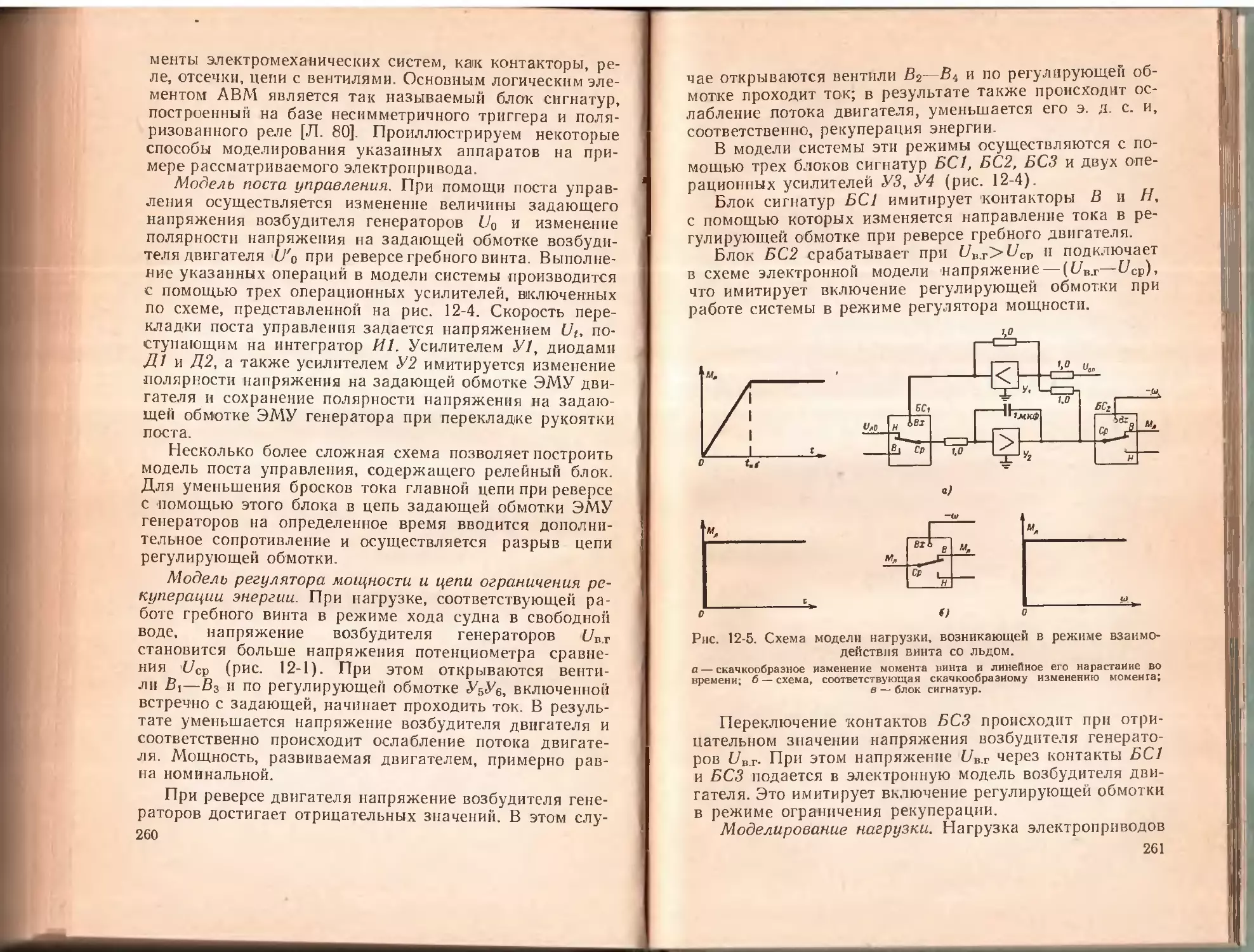
12-2. Исследование режимов работы системы 258
Глава тринадцатая
Моделирование процессов управления в системах
автоматизации с управляющими вычислительными машинами
13 1 Блок-схема комплексной аналого-цифровой вычислитель-
ной установки.........................................271
13-2. Моделирование процессов управления механизмами кле-
ти блюминга . . . . ... 276
Приложение ...........................................293
Литература .................. . 3QQ
ВВЕДЕНИЕ
При разработке и проектировании современных си-
стем электромеханики, представляющих собой в боль-
шинстве случаев сочетание электропривода со сложной
системой управления и регулирования, возникает необ-
ходимость в решении ряда сложных расчетных вопросов.
К таким вопросам в порядке их возрастающей сложно-
сти относятся, например, определение кривых переход-
ных процессов, исследование влияния параметров от-
дельных звеньев на устойчивость и качество переходных
процессов, оценка целесообразности введения в схемы
различных обратных связей, анализ поведения системы
управления при возникновении в ней аварийных режи-
мов, определение допустимых отклонений параметров и,
наконец, решение вопросов, связанных с синтезом систе-
мы и оптимизацией ее структуры и параметров. Анали-
тическое исследование требует проведения весьма тру-
доемких расчетов и даже в простейших случаях для
линейных систем не позволяет получить исчерпывающие
ответы на указанные выше вопросы. При наличии в си-
стемах нелинейных элементов, зазоров в передачах, пе-
ременных параметров и других усложняющих расчеты
факторов возможности аналитических методов исследо-
вания еще более ограничены.
Современные моделирующие устройства позволяют
с достаточной точностью имитировать любые передаточ-
ные функции, нелинейные статические характеристики,
8
функции нескольких переменных, их произведения и ча-
стные.
Моделирующие установки также позволяют со срав-
нительно небольшой затратой времени выявить влияние
отдельных параметров на характеристики системы.
Однако для того чтобы модель достаточно точно соот-
ветствовала реальному объекту, необходимо правильно
отобразить на ней характеристики элементов системы
регулирования, т. е. заложить в модель правильные дан-
ные.
В реальных машинах, аппаратах и приборах имеют-
ся внутренние обратные связи, которые значительно
усложняют математическое описание этих элементов.
Пренебрежение внутренними связями отдельных эле-
ментов может привести к грубым ошибкам, например,
в определении устойчивости системы в целом.
Примерами получившего некоторое распространение
неправильного изображения элементов являются; пред-
ставление ЭМУ поперечного поля в виде двух апериоди-
ческих звеньев без обратных связей по выходному на-
пряжению и току; представление магнитного усилителя
без учета возмущений со стороны цепи питания; непра-
вильная оценка влияния индуктивности нагрузки на ди-
намические характеристики магнитного усилителя с вы-
ходом на постоянном токе и др.
В качестве конкретных приборов рассмотрено также
моделирование следящих систем, электропривода по-
стоянного тока по схеме генератор — двигатель (Г—Д)
с ограничением по току, системы автоматического
управления клети блюминга с применением управляю-
щей вычислительной машины и др. Моделирование ука-
занных объектов рассматривалось с позиций структур-
ных методов, которые имеют ряд положительных ка-
честв. К ним относятся возможности сравнения характе-
ристик (статических, переходных, частотных) реальных
элементов с их моделями. Опыт работы авторов под-
9
тверждает, что такое сравнение позволяет значительно
повысить достоверность результатов моделирования.
Преимуществами структурного метода также является
большая наглядность модели, в которой сохраняются
все основные черты исследуемых физических процессов,
ряд удобств при замене отдельных звеньев системы
реальными регуляторами и т. п.
При рассмотрении конкретных примеров авторы
стремились осветить различные способы подготовки за-
дач для их решения на аналоговых машинах.
При этом учитывалось, что во многих случаях целе-
сообразно совмещать структурные преобразования
с аналитическими, исключая при подготовке задачи
часть переменных, не представляющих интерес для вы-
полняемого исследования.
Удельный вес преобразований, выполненных либо
структурными, либо аналитическими методами, может
быть различным, в зависимости от характера задачи
и особенностей моделирующей установки, на которой
производится решение
При изложении методов моделирования в ряде раз-
делов книги приводятся выводы выражений для переда-
точных функций, что оказалось необходимым для пред-
ставления передаточных функций в форме, наиболее
удобной для моделирования структурными методами.
Это представлялось авторам целесообразным с методи-
ческой стороны, для обеспечения цельности изложения.
В некоторых случаях преобразования уравнений выпол-
няются с целью получения выражений, наиболее удоб-
ных при определении параметров отдельных структур-
ных звеньев.
ГЛАВА ПЕРВАЯ
МЕТОД СТРУКТУРНОГО МАТЕМАТИЧЕСКОГО
МОДЕЛИРОВАНИЯ
1-1. ОПИСАНИЕ МЕТОДА
Математическое моделирование является способом
отражения внутреннего содержания исследуемого объек-
та или характеристик изучаемого явления, основанным
на использовании математического описания (математи-
ческой модели) происходящих реальных физических
процессов Цель математического моделирования со-
стоит в определении количественных соотношений меж-
ду отдельными параметрами реального обьскта путем
изучения функциональных зависимостей, содержащихся
в математической модели.
Математическое моделирование может быть произ-
ведено численным методом, с помощью автоматической
цифровой вычислительной машины пли посредством
аналоговой вычислительной машины — моделирующей
установки (АВМ). Преимуществами моделирования па
аналоговых машинах являются сравнительно меньшая
сложность оборудования, большая скорость решения, воз-
можность подключения реальной аппаратуры, простота
в обслуживании и наглядность процессов. Однако эф-
фективность применения АВМ в значительной степени
зависит от того, насколько эти установки целесообразно
используются, в частности от того, насколько совершен-
на методика, которая применяется при подготовке зада-
чи для ее решения на АВМ. Ниже освещаются различ-
ные методы такой подготовки.
Следует указать на возможность двух различных
подходов к решению задач.
И
В первом случае АВМ используется для чисто мате-
матического моделирования исследуемой системы диф-
ференциальных уравнении без отражения в модели
реальной структуры объекта. Во втором случае АВМ
используется для построения структурной модели, пред-
ставляющей собой аналог, решающие элементы которо-
го соединены между собой в соответствии со структурной
схемой исследуемой системы [Л. 1].
При использовании структурного метода модель си-
стемы представляется в виде блоков, имитирующих ра-
боту отдельных физических узлов (электрических ма-
шин, усилителей, стабилизирующих устройств и т. д.),
причем каждый блок выполняется из моделей типовых
динамических звеньев.
Таким образом, структурное моделирование предпо-
лагает воспроизведение структуры объекта и его эле-
ментов, которые представляются комбинацией элемен-
тарных звеньев.
Теория автоматического регулирования различает
следующие типовые элементарные звенья: усилительное,
дифференцирующее, интегрирующее, апериодическое,
колебательное, запаздывающее. Свойства и особенности
каждого из перечисленных элементарных звеньев де-
тально изучены и широко освещены в литературе по
автоматическому управлению.
Целесообразность применения структурных моделей
связана с тем, что при исследовании на АВМ сохраняет-
ся структура исследуемого объекта и поэтому на модели
легко воспроизводится изменение отдельных параметров,
способов включения различного рода стабилизирующих
устройств, выбор обратных связей, необходимых для
получения определенного качества переходного процес-
са системы.
При моделировании желательно, чтобы сохранялись
основные внутренние и внешние связи и направления
входных и выходных сигналов системы. Кроме того,
весьма удобно, когда изменение параметра системы
(коэффициента усиления, постоянной времени и др.)
на модели осуществляется изменением коэффициента пе-
редачи не более чем одного-двух решающих устройств.
Для решения задачи на АВМ исходная система
уравнений должна быть преобразована к виду, наиболее
удобному для исследования на модели [Л. 2].
12
Произвольное решение исходной системы уравнении
па ЛВМ не всегда приводит к получению электронной
модели, удовлетворяющей указанным требованиям. При
этом структура модели в общем случае может не со-
ответствовать структуре изучаемого объекта.
Построение модели по структурной схеме дает воз-
можность полностью воспроизвести связи, имеющиеся
в реальной системе.
Отметим некоторые дополнительные преимущества
моделей, построенных на основе структурных схем: при
наборе решающих элементов можно использовать стан-
дартные схемы моделей элементов электропривода и
других электромеханических устройств и моделей типо-
вых динамических звеньев; удобна проверка правильно-
сти набора отдельных узлов модели, так как переходные
характеристики каждого типового звена известны:
имеется возможность замены части модели реальной
аппаратурой; на структурной схеме наглядно видны
значения параметров отдельных звеньев, что дает воз-
можность упростить модель за счет исключения звеньев
с малыми параметрами.
Применение структурного метода требует наличия
библиотеки стандартных схем отдельных электромеха-
нических устройств, построенных па основе достаточно
полного математического описания протекающих в них
процессов
Структурные схемы элементов должны быть универ-
сальными с точки зрения применения в исследованиях
различного типа электромеханических устройств и удоб-
ными для их соединения. Кроме того, в структурных
схемах необходимо учитывать ряд специфических требо-
ваний: сокращение числа решающих элементов модели,
по возможности исключение дифференцирующих эле-
ментов, обеспечение устойчивой работы модели.
В качестве параметров структурной схемы использу-
ются постоянные времени и коэффициенты усиления, ко-
торые обычно легко определяются экспериментально.
В этом случае все входные и выходные величины
звеньев структурной схемы имеют одинаковую размер-
ность или являются безразмерными
Коэффициенты структурной схемы, полученные экспе-
риментальным путем, имеют несомненное преимущество
по сравнению с расчетными.
13
Результаты решения задачи на электронной модели
с экспериментальными коэффициентами значительно
ближе отражают физические процессы реального
объекта.
Это определяется прежде всего следующими факто-
рами:
а) неточностью расчетных формул (в особенности
выражения для индуктивностей магнитно-связанных
контуров);
б) отклонениями параметров реальной машины или
аппарата от расчетных данных, возникающими в про-
цессе производства;
в) различного рода допущениями, принятыми при
составлении дифференциальных уравнений.
Второстепенные факторы, имеющие место в каждом
реальном элементе системы автоматического управле-
ния, не учтенные с целью сокращения решающих уси-
лителей, все же вносят дополнительные ошибки при
моделировании. Коэффициенты уравнений, полученные
экспериментальным путем, являются усредненными и
в определенном диапазоне частот позволяют уменьшать
ошибки. Более подробные рекомендации по составлению
структурных схем и их преобразованиям, а также неко-
торые другие вопросы, связанные с подготовкой задач
для моделирования, излагаются в следующих парагра-
фах.
1-2. СХЕМЫ ЭЛЕКТРОННЫХ МОДЕЛЕЙ
ОСНОВНЫХ ТИПОВЫХ ЗВЕНЬЕВ
Элементарное звено описывается уравнением связи
входного и выходного сигналов. Из-за однотипности
дифференциальных уравнений связи различных по
конструктивному исполнению и принципу действия эле-
ментов число типовых звеньев также является ограни-
ченным.
Каждое элементарное типовое звено обладает сле-
дующими свойствами: I) оно является однонаправлен-
ным, т. е. управляющий сигнал проходит в одном на-
правлении от входа к выходу; 2) подключение к выходу
элементарного звена последующих звеньев не изменяет
его передаточной функции; 3) дифференциальное урав-
нение связи, характеризующее данное элементарное зве-
но, имеет порядок не выше второго.
14
Ниже рассматриваются основные типовые звенья,
а соответствующие им схемы электронных моделей све-
дены в табл. 1-1.
Усилительное звено. Связь двух величин между со-
бой, выраженная алгебраическим уравнением, представ-
ляет усилительное звено.
Передаточная функция имеет вид:
К,
(Ы)
где ХВ1,гх-— входной и выходной сигналы;
К—коэффициент усиления звена.
Усилительное звено не является частотно-зависимым.
Выходной сигнал по фазе совпадает с входным сигна-
лом, а по модулю в К раз больше входного во всем
спектре частот:
ч пых =<рих;
М„,^=КМп, (1-2)
где гр, М—'фаза и модуль сигнала.
Коэффициент усиления К в общем виде представляет
нелинейную функцию.
На электронной модели усилительное звено с по-
стоянным коэффициентом усиления воспроизводится ре-
шающим усилителем с активным сопротивлением на вхо-
де и в цени обратной связи
где Ro — сопротивление цепи обратной связи;
7?вх —входное сопротивление.
В случае нелинейной функции К в модели использу-
ются специальные блоки нелинейности.
Дифференцирующее звено. Звенья, выходная величина
которых определяется скоростью изменения входной, на-
зываются дифференцирующими.
1 Приведенные в § 1-2 выражения для передаточных функций
решающих усилителей записаны с точностью до знака.
15
о
Таблица 1-1
№ п/п. Наименован не звена Передаточная функция Схемное изображение
1 Усилительное
Делшпель Линейный 5лсн
напряжения усилитель нелинеинЯти
2 Дифференцирую'
щее
3 Интегрирующее
4 Апериодическое
2337
Колебательное
К
1 + 2h0Tp + Тгрг
6
Запаздывающее
_Т 1 — 0,5рТ
Ке ~ 1 + 0,5^7-
1
1 - 0,5рТ + -]2 РТ1
1+0,5рТ +^-р^
В системах автоматического управления подобные
звенья часто встречаются в визе гибких обратных свя-
зен .
Уравнение дифференцирующего звена:
(1-3)
где Т—постоянная времени;
рdfdt — символ дифференцирования;
Выражения для фазы и модуля имеют вид:
?вых — ?вх "2•
(1-4)
лгвых=тивх.
Электронная модель дифференцирующего звена
представляет собой решающий усилитель с конденсато-
ром С во входной цепи и активным сопротивлением /?0
в цени обратной связи, определяющим постоянную вре-
мени Т=ROC.
Работа такого усилителя недостаточно устойчива
из-за существенного влияния высокочастотных помех.
В комплект аналоговых вычислительных машин иногда
включаются специальные блоки дифференцирования.
Однако в практических задачах операция дифференци-
рования используется весьма редко, а формирование
сигналов, содержащих производную, осуществляется
схемным решением без введения блоков дифференциро-
вания.
Интегрирующее звено. Выходная величина интегри-
рующего звена определяется интегралом от входной ве-
личины:
d’5)
A DX / Р
Выражение для фазы п модуля имеет вид:
?вых == ?вх 2 ’
^1вых--- Л1вх
1
ТО'
(1-6)
18
Интегрирующее звено па электронной модели выпол-
няется в виде решающего усилителя, в цепи обратной
связи которого включается конденсатор емкостью С,
а на входе — активное сопротивление RBX.
Постоянная времени
Т=\RBKC.
Апериодическое (инерционное) звено. Для апериоди-
ческого звена форма уравнения связи имеет вид:
трХъых -ф- А вых — КАфх;
А'Вг.,х_ К
-А их 1 Тр
(1-7)
Фаза и модуль определяются по формулам
9вых= <рпх— arctgOr;
А^еых — 7И
К
/I +(гер
(1-8)
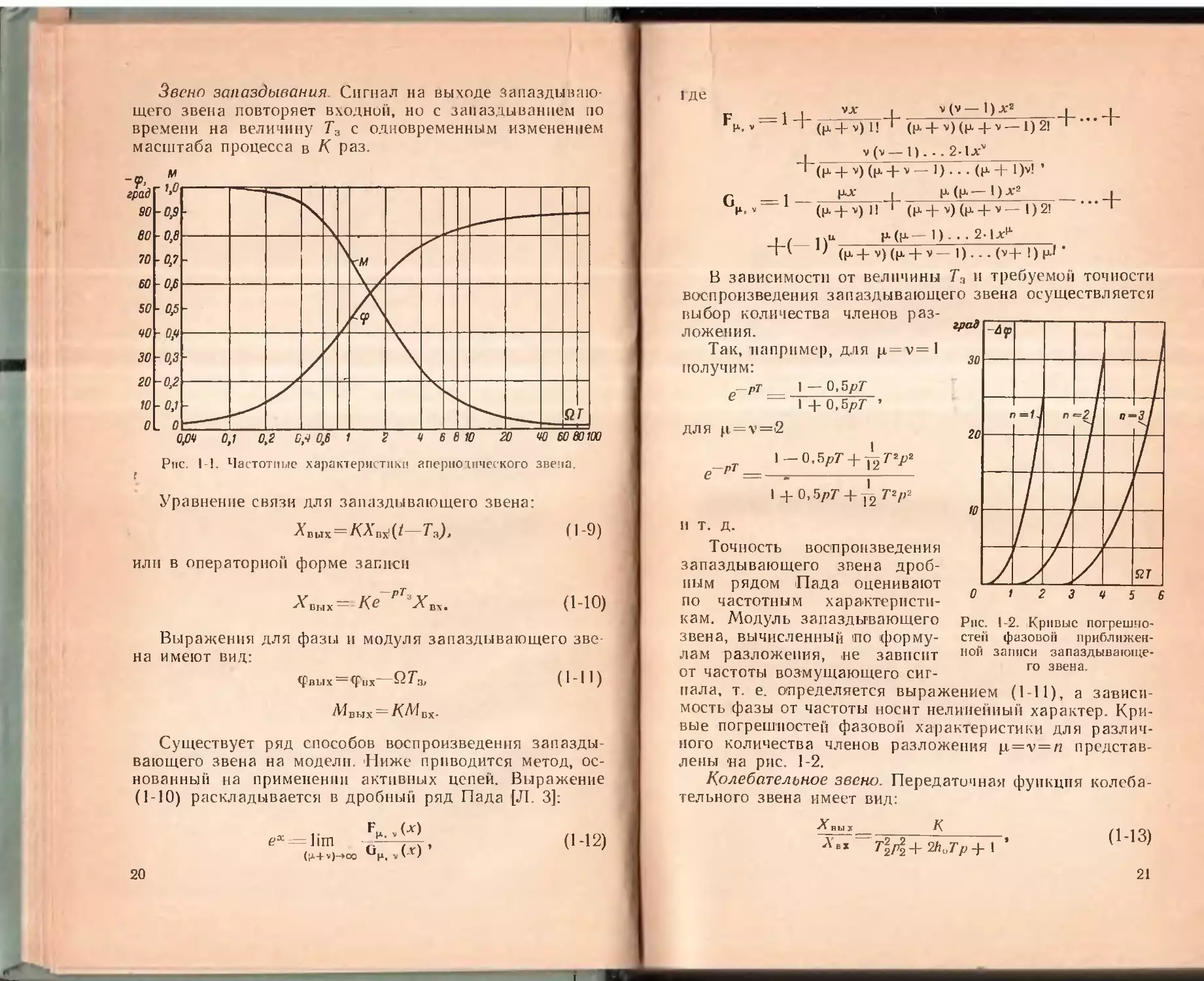
Кривые зависимости фазы и модуля от частоты при-
ведены на рис. 1-1. Апериодическое звено можно осу-
ществить на решающем усилителе с активным сопротив-
лением на входе Z?I1V, в котором цепь обратной связи
представляет собой параллельное соединение конденса-
iopa С и активного сопротивления — До:
R„ .
R их ’
К
RoC = T.
Такое представление апериодического звена обычно
связано с применением интегрирующего усилителя,
охваченного жесткой отрицательной связью.
Для воспроизведения апериодического звепа на элек-
тронной модели достаточно очного решающего усилите-
ля. Однако иногда в структурной схеме требуется иметь
не только выходную величину, но и ее первую производ-
ную для формирования сигнала гибкой обратной связи.
В этом случае апериодическое звено набирается на трех
решающих усилителях. Па входе первого суммирующего
усилителя снимается сигнал производной выходной ве-
личины. Таким образом удается избежать применения
специальных шфференцпрующпх блоков.
2* 19
Звено запаздывания. Сигнал на выходе запаздываю-
щего звена повторяет входной, но с запаздыванием по
времени на величину Т3 с одновременным изменением
масштаба процесса в К раз.
Qfi4 0,1 0,2 0,4 0,6 1 2 4 6 в 10 20 40 60 80100
Рис. 1 ! Частотные характеристики апериодического звена,
г
Уравнение связи для запаздывающего звена:
Хвых — /(А'вх|(/—Т 3),
(1-9)
или в операторной форме записи
в„х= ке рТ*Х^
(МО)
Выражения для фазы и модуля запаздывающего зве-
на имеют вид:
гРлых = <Г'11х—(1-11)
(Иных — КМ вх.
Существует ряд способов воспроизведения запазды-
вающего звена на модели. 'Ниже приводится метод, ос-
нованный на применении активных цепей. Выражение
(1-10) раскладывается в дробный ряд Пада [Л. 3]:
еа = lim
(р.4 Д~>О0
, (-*) ’
(1-12)
20
I де
Fp.
vx
(р + '“) 1!
у (у — 1) xa
(Р + у) (р. + у — 1) 2!
= 1 +
. у (у — I)... 2- lxv
Т(р + “) (Р + “ — О • • • (Iх + !)“! ’
р _______ 1________Р-*______I_______Р (Р I) х-_________
Н. » (р-|-У) 1! “Г (р+у) (р +у — 1)2!
+(-l)U
р.(р.—1). . . 2-1х|х
(р+',)(р + у-1).-.(у+ 1) Р»
В зависимости от величины Тя и требуемой точности
воспроизведения запаздывающего звена осуществляется
нала, т. е. определяется выражением (1-11), а зависи-
мость фазы от частоты носит нелинейный характер. Кри-
вые погрешностей фазовой характеристики для различ-
ного количества членов разложения n=v=n представ-
лены на рис. 1-2.
Колебательное звено. Передаточная функция колеба-
тельного звена имеет вид:
__________К_______
вх ^2^2 “Ь р -J- 1
(1-13)
21
где Т — условная постоянная времени;
Ло— относительный коэффициент затухания.
Частный случай выражения (1-13) соответствует от-
носительному коэффициенту затухания /io=0 и харак-
теризует процесс без затухания колебаний.
Звено с передаточной функцией
-Увых К Л -141
называют консервативным или резонансным звеном.
В этом случае величина
Т = —
где Йо — частота незатухающих колебаний.
а)
Рис. 1-3. Частотные характеристик!!
а амплитудные.
22
Запишем выражении для фазы п модуля колебатель-
ною звена:
. 2h..TQ
?ВЫХ --- Увх arctg у______ J-2Q2 >
(1-15)
А1ЕЬ1х = 7ИВХ г
К( 1 — Т^‘У- + (2ht,TSy
Частотные характеристики колебательного звена для
различных коэффициентов затухания показаны на
рис. 1-3.
п юального колебательного звена.
и фазовые.
к
23
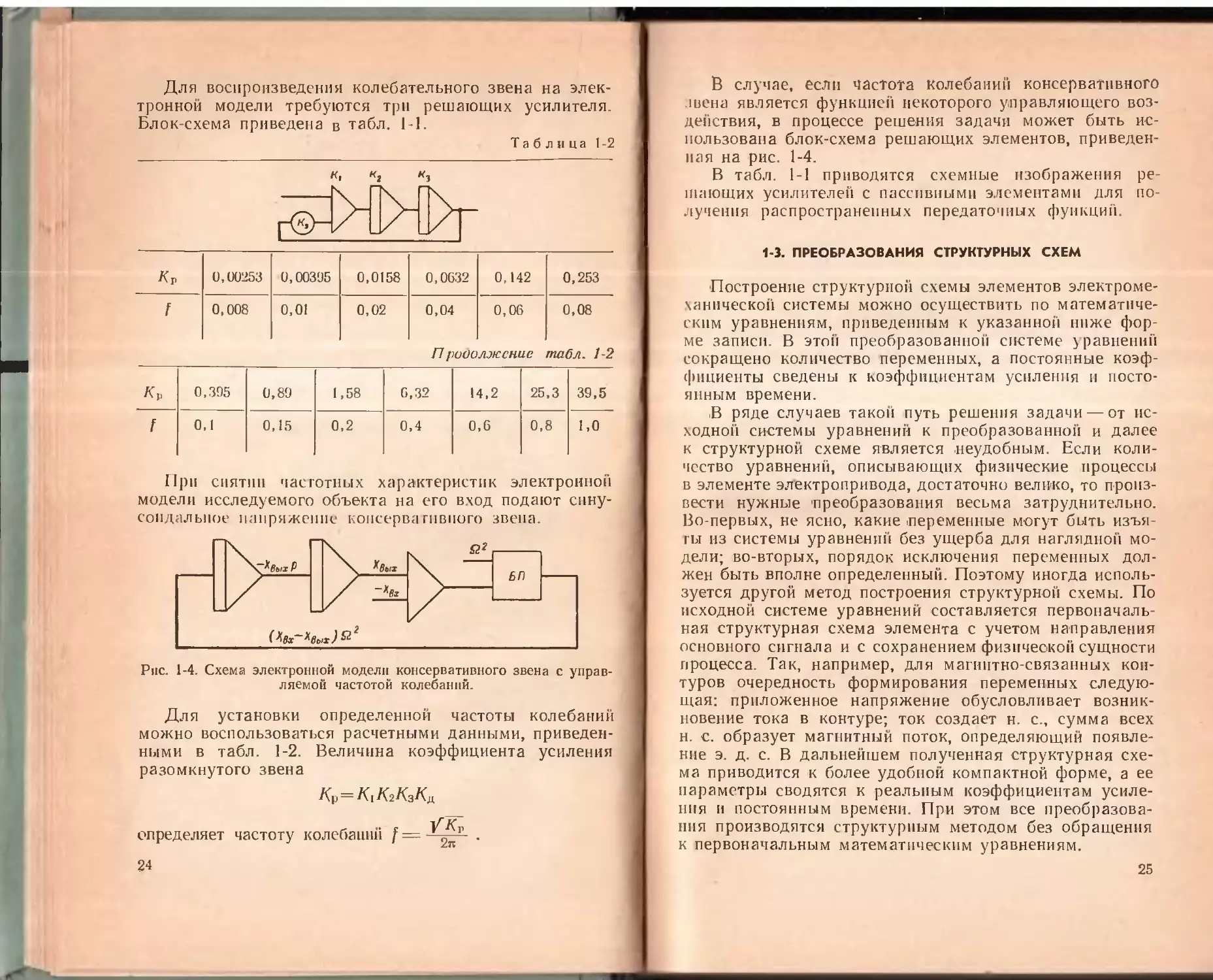
Для воспроизведения колебательного звена на элек-
тронной модели требуются три решающих усилителя.
Блок-схема приведена в табл. 1-1.
Таблица 1-2
Кр 0,00253 0,00395 0,0158 0,0632 0,142 0,253
г 0,008 0,01 0,02 0,04 П робо 0,06 лжсние 0,08 табл. 1-2
КР 0,395 0,89 1,58 6,32 14,2 25,3 39,5
f 0,1 0,15 0,2 0,4 0,6 0,8 1,0
При снятии частотных характеристик электронной
модели исследуемого объекта на его вход подают сину-
соидальное напряжение консервативного звена.
Рис. 1-4. Схема электронной модели консервативного звена с управ-
ляемой частотой колебаний.
Для установки определенной частоты колебаний
можно воспользоваться расчетными данными, приведен-
ными в табл. 1-2. Величина коэффициента усиления
разомкнутого звена
К1>=К1К2КзКЯ
определяет частоту колебаний f —
2л
24
В случае, если частота колебаний консервативного
звена является функцией некоторого управляющего воз-
действия, в процессе решения задачи может быть ис-
пользована блок-схема решающих элементов, приведен-
ная на рис. 1-4.
В табл. 1-1 приводятся схемные изображения ре-
шающих усилителей с пассивными элементами для по-
лучения распространенных передаточных функций.
1-3. ПРЕОБРАЗОВАНИЯ СТРУКТУРНЫХ СХЕМ
Построение структурной схемы элементов электроме-
ханической системы можно осуществить по математиче-
ским уравнениям, приведенным к указанной ниже фор-
ме записи. В этой преобразованной системе уравнений
сокращено количество переменных, а постоянные коэф-
фициенты сведены к коэффициентам усиления и посто-
янным времени.
В ряде случаев такой путь решения задачи — от ис-
ходной системы уравнений к преобразованной и далее
к структурной схеме является неудобным. Если коли-
чество уравнений, описывающих физические процессы
в элементе электропривода, достаточно велико, то произ-
вести нужные преобразования весьма затруднительно.
Во-первых, не ясно, какие переменные могут быть изъя-
ты из системы уравнений без ущерба для наглядной мо-
дели; во-вторых, порядок исключения переменных дол-
жен быть вполне определенный. Поэтому иногда исполь-
зуется другой метод построения структурной схемы. По
исходной системе уравнений составляется первоначаль-
ная структурная схема элемента с учетом направления
основного сигнала и с сохранением физической сущности
процесса. Так, например, для магнитно-связанных кон-
туров очередность формирования переменных следую-
щая: приложенное напряжение обусловливает возник-
новение тока в контуре; ток создает н. с., сумма всех
н. с. образует магнитный поток, определяющий появле-
ние э. д. с. В дальнейшем полученная структурная схе-
ма приводится к более удобной компактной форме, а ее
параметры сводятся к реальным коэффициентам усиле-
ния и постоянным времени. При этом все преобразова-
ния производятся структурным методом без обращения
к первоначальным математическим уравнениям.
25
Правила преобразования структурных схем подроб-
но рассмотрены А. С. Шаталовым [Л. 4]. Ниже мы озна-
комимся с некоторыми необходимыми для практической
работы схемами п способами их преобразования.
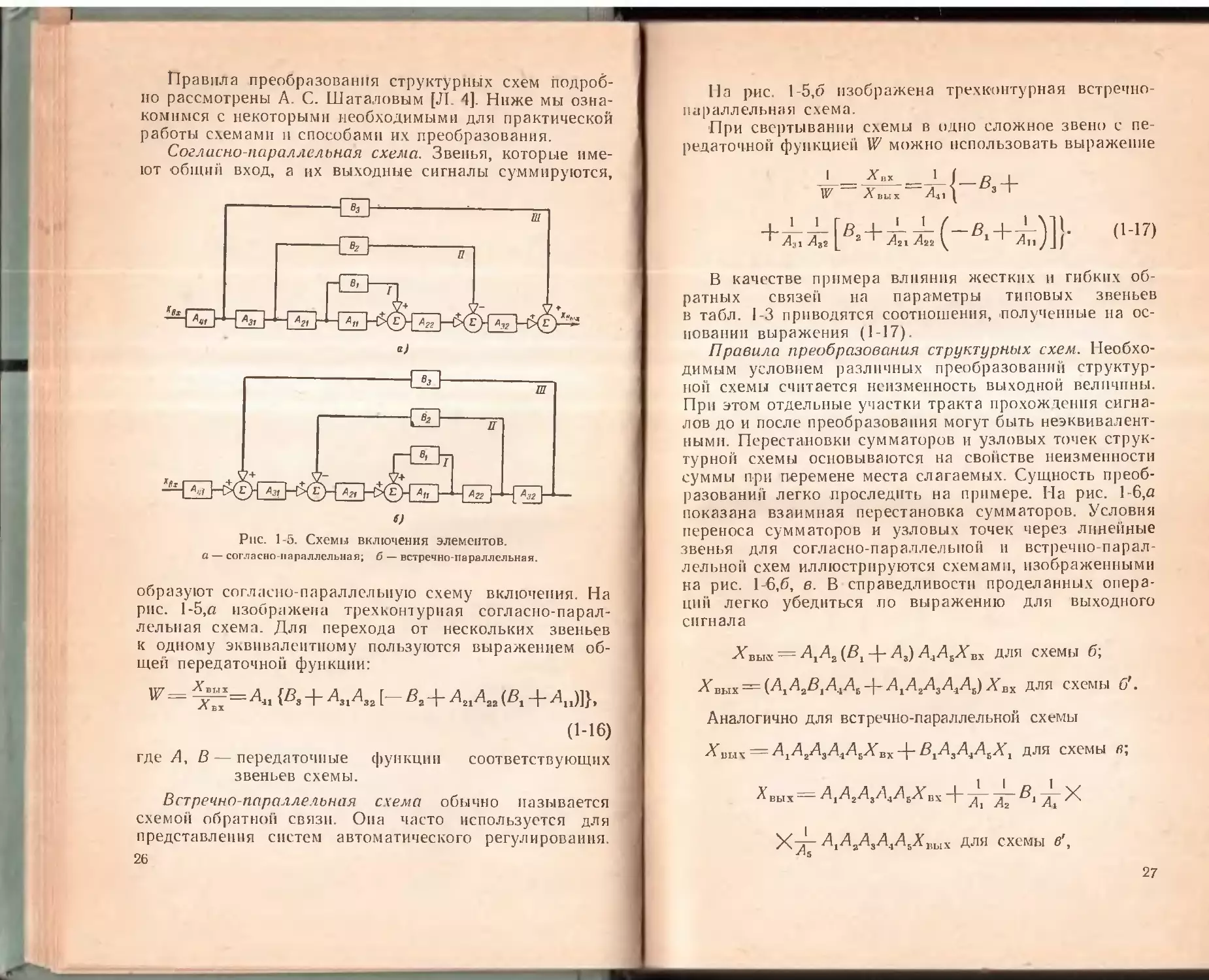
Согласно-параллельная схема. Звенья, которые име-
ют общий вход, а их выходные сигналы суммируются,
Рис. 1-5. Схемы включения элементов.
а — согласно-параллельная; б — встречно-параллельная.
образуют согласно-параллельную схему включения. На
рис. l-5,fi изображена трехконтуриая согласно-парал-
лельная схема. Для перехода от нескольких звеньев
к одному эквивалентному пользуются выражением об-
щей передаточной функции:
АЛа +А>)]}.
(Мб)
где Л, В — передаточные функции соответствующих
звеньев схемы.
Встречно-параллельная схема обычно называется
схемой обратной связи. Она часто используется для
представления систем автоматического регулирования.
26
Ila рис 1 5,6 изображена трехкоитурная встречно-
параллельная схема.
При свертывании схемы в одно сложное звено с пе-
редаточной функцией W можно использовать выражение
1 X ВХ 1 | D
ТГ-" АЦ 3
4. 1 —Г# j-_L JL (-^в -I—-W-
(Ы7)
В качестве примера влияния жестких и гибких об-
ратных связей на параметры типовых звеньев
в табл. 1-3 приводятся соотношения, полученные на ос-
новании выражения (1 17)
Правила преобразования структурных схем. Необхо-
димым условием различных преобразований структур-
ной схемы считается неизменность выходной величины.
При этом отдельные участки тракта прохождения сигна-
лов до и после преобразования могут быть неэквивалент-
ными. Перестановки сумматоров и узловых точек струк-
турной схемы основываются на свойстве неизменности
суммы при перемене места слагаемых. Сущность преоб-
разований легко проследить на примере. На рис. 1-6,а
показана взаимная перестановка сумматоров. Условия
переноса сумматоров и узловых точек через линейные
звенья для согласно-параллельной и встречно-парал-
лельной схем иллюстрируются схемами, изображенными
на рис. 1-6,6, в. В справедливости проделанных опера-
ций легко убедиться по выражению для выходного
сигнала
Хвысс== АА(А + А) АА^вх для схемы 6;
Arnbix = (AAAAA +ААААА) Авх для схемы б'.
Аналогично для встречно-параллельной схемы
АГВых = ААААААГвх-|-ААААА для схемы в;
А'вых = А,АгА,А4АЛвх + J- -А J- X
Х4-АААААА.ых для схемы в',
27
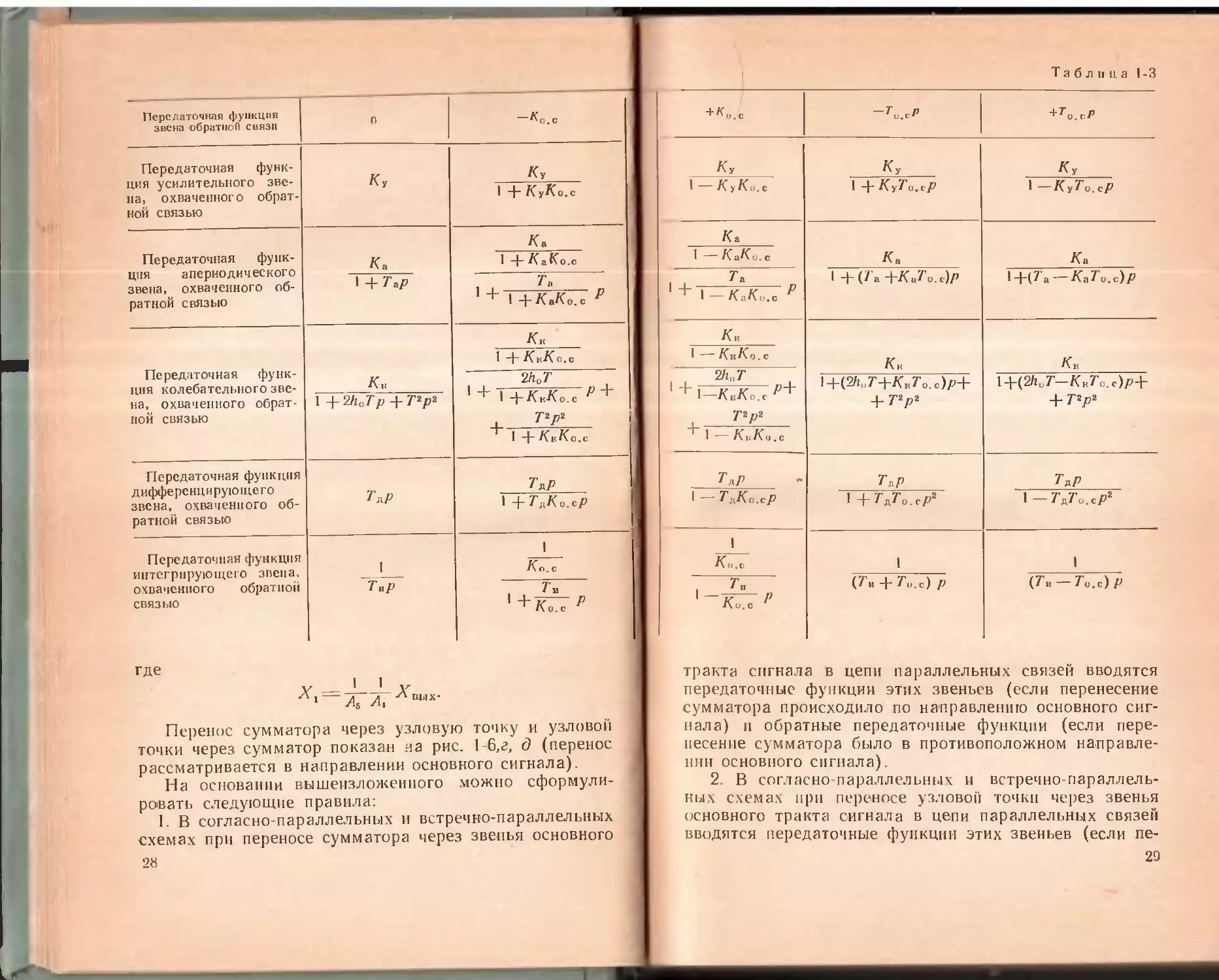
Передаточная функция звена обратной связи 0 ^О.С
Передаточная функ- ция усилительного зве- на, охваченного обрат- ной связью Ку Ку 1 4“ КуКо.с
Передаточная функ- ция апериодического звена, охваченного об- ратной связью Ка ка 1 + /( аКо.с
1 + Т ар Га ‘ + 1 -ЬКаКо.е Р
Передаточная функ- ция колебательного зве- на, охваченного обрат- ной связью к« Кк 1 4~ о.с 2Л„Г 1 + 1 +КкКо.С Р + + т:_£ . ; 1 + КкКо.с
1 +2hoTp +Тгрг
Передаточная функция дифференцирующего звена, охваченного об- ратной связью ТдР Гл/2 ( 1 + ГдК О.сР 1
Передаточная функция интегрирующего звена, охваченного обратной связью где Перенос сумматс точки через сумматс рассматривается в н На основании вт ровать следующие 1. В согласно-пар схемах при переносе 28 1 1 1 Кп.С
Т И Р ' * L у * а Л, DL,X‘ )ра через узловут тр показан на рис аправлении основ )1шеизложе11ного травила: аллельных и встр i сумматора чере Г» ’ +Ко.е Р о точку и узловой 1 6,г, д (перенос кого сигнала), можно сформули- ечно-параллельных а звенья основного
Таблица 1-3
"** 6. с +То cP
Ку Ку Ку
1— КуКо.с 1 + КуТ и.сР 1 КуТ О.сР
Кь 1 — КаКо.с кл Кь
Га ' + 1 -КаКо.с Р 1 + (Га +КиГо с)/’ 1 “Ь(7 а — КаТо.с) Р
Кк 1 КкКг) . с Кк Кк
2/г п Z" 1 + 1-К.Ло.с р+ Г2/?2 + 1—КьКо.с 1+(2Л Г-|-КкГ0.с)л,+ + Г2/,2 1 -\-(2hvT—Кн? о. с)р4~ + т2р2
ГдЛ 1 - ГлКо.сР Т лР 1 + Г дГ0. ср2 г яР 1 — ГдГо.сР2
1 я ,t 1 1
т„ к Р Л о. с (Т’и + Т и.с) р ( Т И Та . с ) Р
тракта сигнала в цепи параллельных связей вводятся
передаточные функции этих звеньев (если перенесение
сумматора происходило по направлению основного сиг-
нала) и обратные передаточные функции (если пере-
несение сумматора было в противоположном направле-
нии основного сигнала).
2. В согласно-параллельных и встречно-параллель-
ных схемах при переносе узловой точки через звенья
основного тракта сигнала в цепи параллельных связей
вводятся передаточные функции этих звеньев (если пе-
29
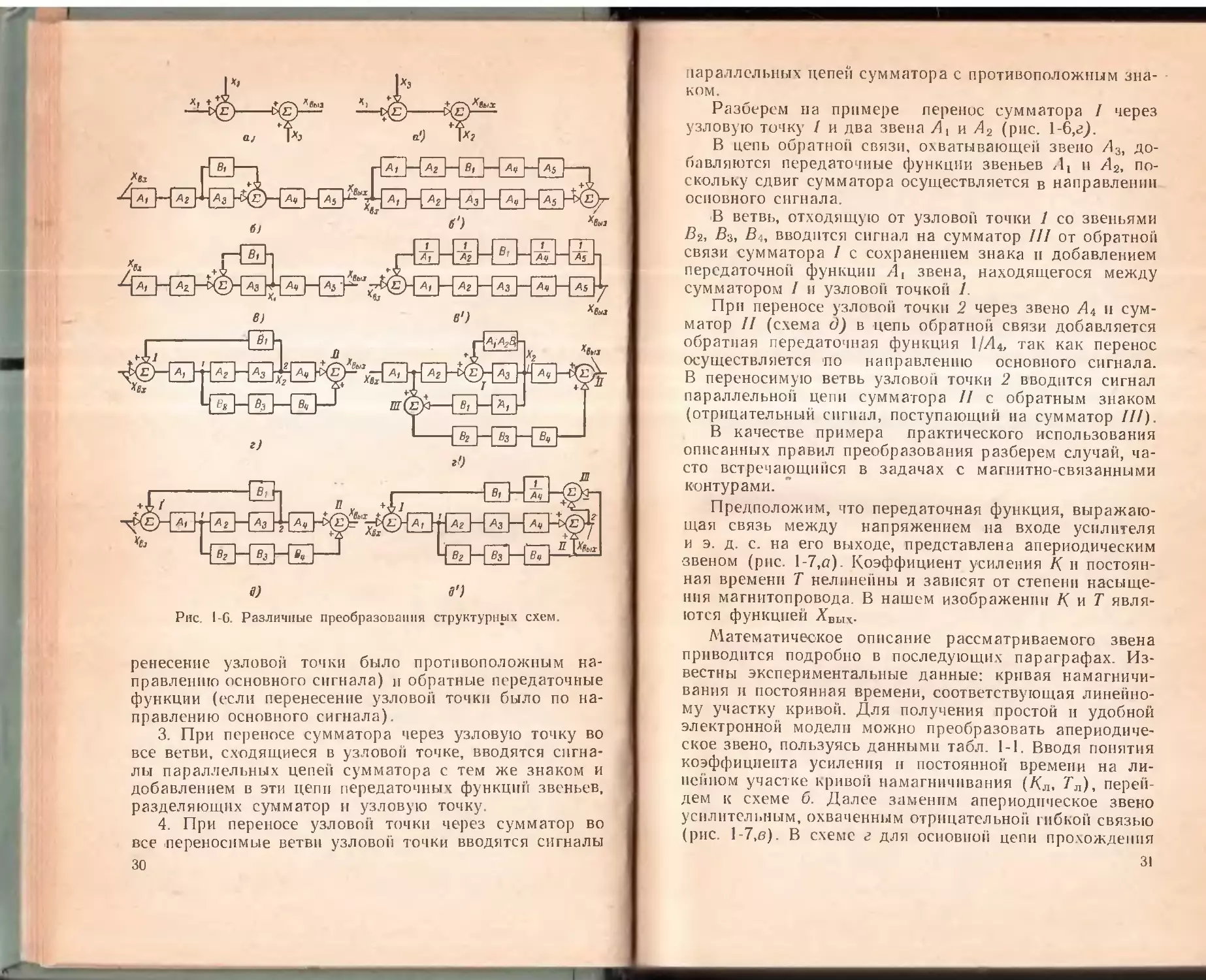
Рис. 1-6. Различные преобразования структурных схем.
ренесение узловой точки было противоположным на-
правлению основного сигнала) п обратные передаточные
функции (если перенесение узловой точки было по на-
правлению основного сигнала)
3. При переносе сумматора через узловую точку во
все ветви, сходящиеся в узловой точке, вводятся сигна-
лы параллельных цепей сумматора с тем же знаком и
добавлением в эти цепи передаточных функций звеньев,
разделяющих сумматор и узловую точку.
4. При переносе узловой точки через сумматор во
все переносимые ветви узловой точки вводятся сигналы
30
параллельных цепей сумматора с противоположным зна-
ком.
Разберем на примере перенос сумматора / через
узловую точку / и два звена At и А2 (рис. 1 6,г).
В цепь обратной связи, охватывающей звено /3, до-
бавляются передаточные функции звеньев п А2, по-
скольку сдвиг сумматора осуществляется в направлении
основного сигнала.
В ветвь, отходящую от узловой точки / со звеньями
Бг, Вз, В4, вводится сигнал на сумматор III от обратной
связи сумматора / с сохранением знака и добавлением
передаточной функции /1, звена, находящегося между
сумматором / и узловой точкой 1.
При переносе узловой точки 2 через звено А4 и сум-
матор // (схема д) в цепь обратной связи добавляется
обратная передаточная функция 1//14, так как перенос
осуществляется по направлению основного сигнала.
В переносимую ветвь узловой точки 2 вводится сигнал
параллельноп цепи сумматора II с обратным знаком
(отрицательный сигнал, поступающий на сумматор III).
В качестве примера практического использования
описанных правил преобразования разберем случай, ча-
сто встречающийся в задачах с магнитно-связанными
контурами.
Предположим, что передаточная функция, выражаю-
щая связь между напряжением на входе усилителя
и э. д. с. на его выходе, представлена апериодическим
звеном (рис. 1-7,а). Коэффициент усиления К и постоян-
ная времени Т нелинейны и зависят от степени насыще-
ния магнитопровода. В нашем изображении К и Т явля-
ются функцией Хвых.
Математическое описание рассматриваемого звена
приводится подробно в последующих параграфах. Из-
вестны экспериментальные данные: кривая намагничи-
вания и постоянная времени, соответствующая линейно-
му участку кривой. Для получения простой и удобной
электронной модели можно преобразовать апериодиче-
ское звено, пользуясь данными табл. 1-1. Вводя понятия
коэффициента усиления и постоянной времени на ли-
нейном участке кривой намагничивания (Кл, Лп), перей-
дем к схеме б. Далее заменим апериодическое звено
усилительным, охваченным отрицательной гибкой связью
(рис. 1-7,в). В схеме г для основной цепи прохождения
31
сигнала Мы получим постоянный коэффициент усиления
Кл, а нелинейный характер процессов учтен жесткой
отрицательной связью. Окончательная схема е является
более удобной по сравнению с первоначальной. Нели-
нейным является один параметр — коэффициент обрат-
ной связи, который легко пересчитывается по кривой
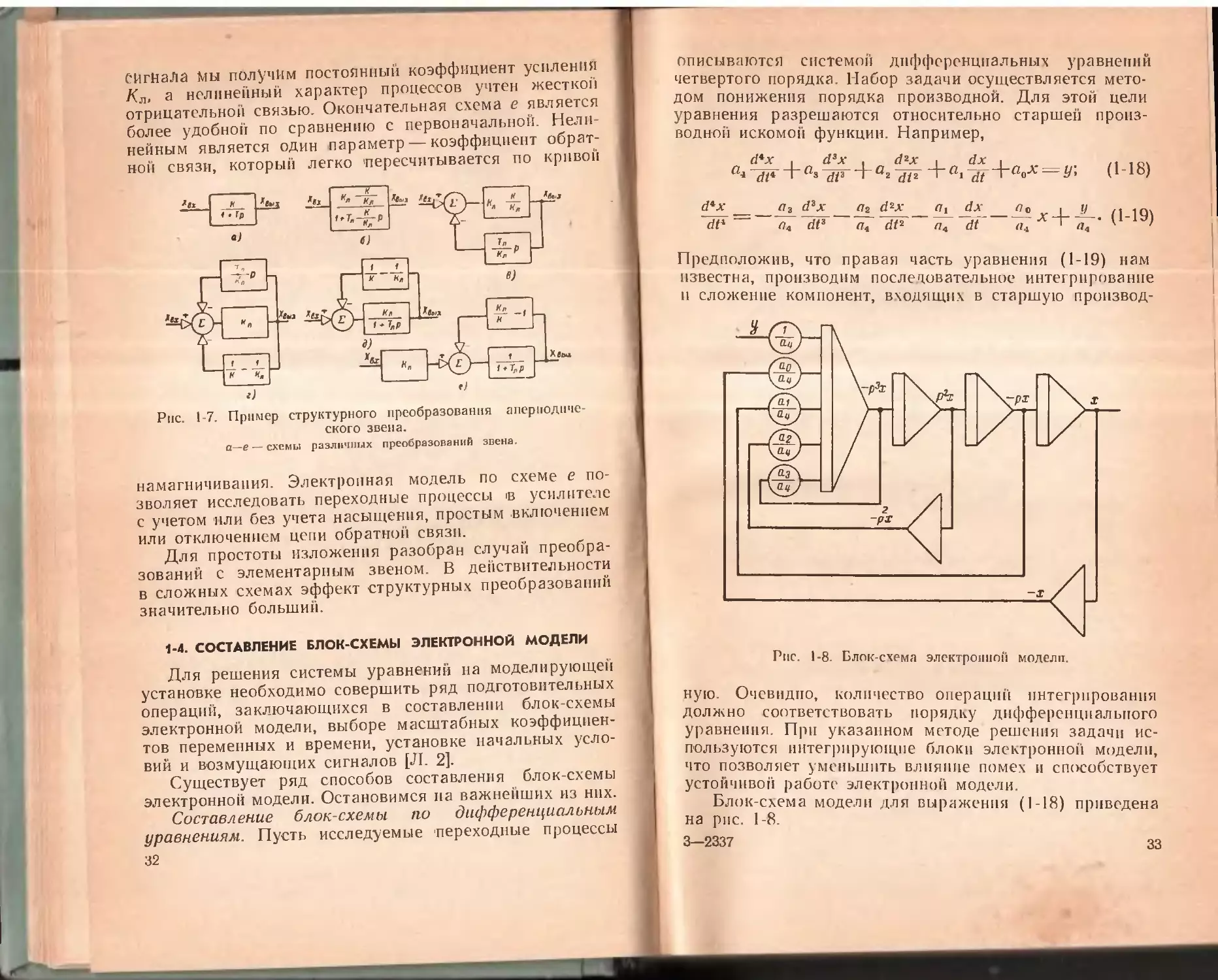
Рис. 1-7. Пример структурного преобразования апериодиче-
ского звена.
а—е — схемы различных преобразований звена.
намагничивания. Электронная модель по схеме е по-
зволяет исследовать переходные процессы в усилителе
с учетом или без учета насыщения, простым включением
или отключением цепи обратной связи.
Для простоты изложения разобран случай преобра-
зований с элементарным звеном. В действительности
в сложных схемах эффект структурных преобразований
значительно больший.
1-4. СОСТАВЛЕНИЕ БЛОК-СХЕМЫ ЭЛЕКТРОННОЙ МОДЕЛИ
Для решения системы уравнений на моделирующей
установке необходимо совершить ряд подготовительных
операций, заключающихся в составлении блок-схемы
электронной модели, выборе масштабных коэффициен-
тов переменных и времени, установке начальных усло-
вий и возмущающих сигналов [Л. 2].
Существует ряд способов составления блок-схемы
электронной модели. Остановимся на важнейших из них.
Составление блок-схемы по дифференциальным
уравнениям. Пусть исследуемые переходные процессы
32
описываются системой дифференциальных уравнений
четвертого порядка. Набор задачи осуществляется мето-
дом понижения порядка производной. Для этой цели
уравнения разрешаются относительно старшей произ-
водной искомой функции. Например,
d*x . d3x . d2x i dx i
^4 "i jp 1" j/2 г +fiox — У' (118)
d*x аз d3x a2 d2x at dx й® . у /i iq\
rfF*- ~dt~ ~a2 V
Предположив, что правая часть уравнения (1-19) нам
известна, производим последовательное интегрирование
и сложение компонент, входящих в старшую пропзвод-
Рпс. 1-8. Блок-схема электронной модели.
ную. Очевидно, количество операций интегрирования
должно соответствовать порядку дифференциального
уравнения. При указанном методе решения задачи ис-
пользуются интегрирующие блоки электронной модели,
что позволяет уменьшить влияние помех и способствует
устойчивой работе электронной модели.
Блок-схема модели для выражения (1-18) приведена
на рис. 1-8.
3-2337 33
Метод графов. При составлении блок-схемы элек-
тронной модели актуальным всегда является вопрос со-
кращения необходимого оборудования для решения за-
дачи. Предлагаемый метод, основанный на применении
графов распространения сигналов, позволяет в доста-
точно простой форме получить удобную блок-схему с ми-
нимальным количеством решающих усилителей. ЛАетод
графов можно использовать при составлении блок-схе-
мы электронной модели как непосредственно по диффе-
ренциальным уравнениям, так п по передаточным функ-
циям.
Порядок построения графов определяется правилами,
сформулированными Беккером в (Л. 5]'.
Рассмотрим построение графа распространения сиг-
налов по заданной передаточной функции. В качестве
примера возьмем передаточную функцию запаздываю-
щего звена:
Y I — 0,5^7 + Л
вых _ _________1 * * * .
A“s |+0,5/77-+/2
(1+0,5/77+ /т7=) =
= (1 - 0,5/27 +1 ргт^ Хвх. (1-20)
Перепишем (1-20) таким образом, чтобы исключить
дифференцирование входного сигнала:
1 Преобразования графов и использование их для математиче-
ского моделирования рассмотрены также в книге Л. Робишо,
М. Буавера и С. Робера «Направленные графы и их приложение
к электрическим сетям и машинам», «Энергия», 1964.
34
г)
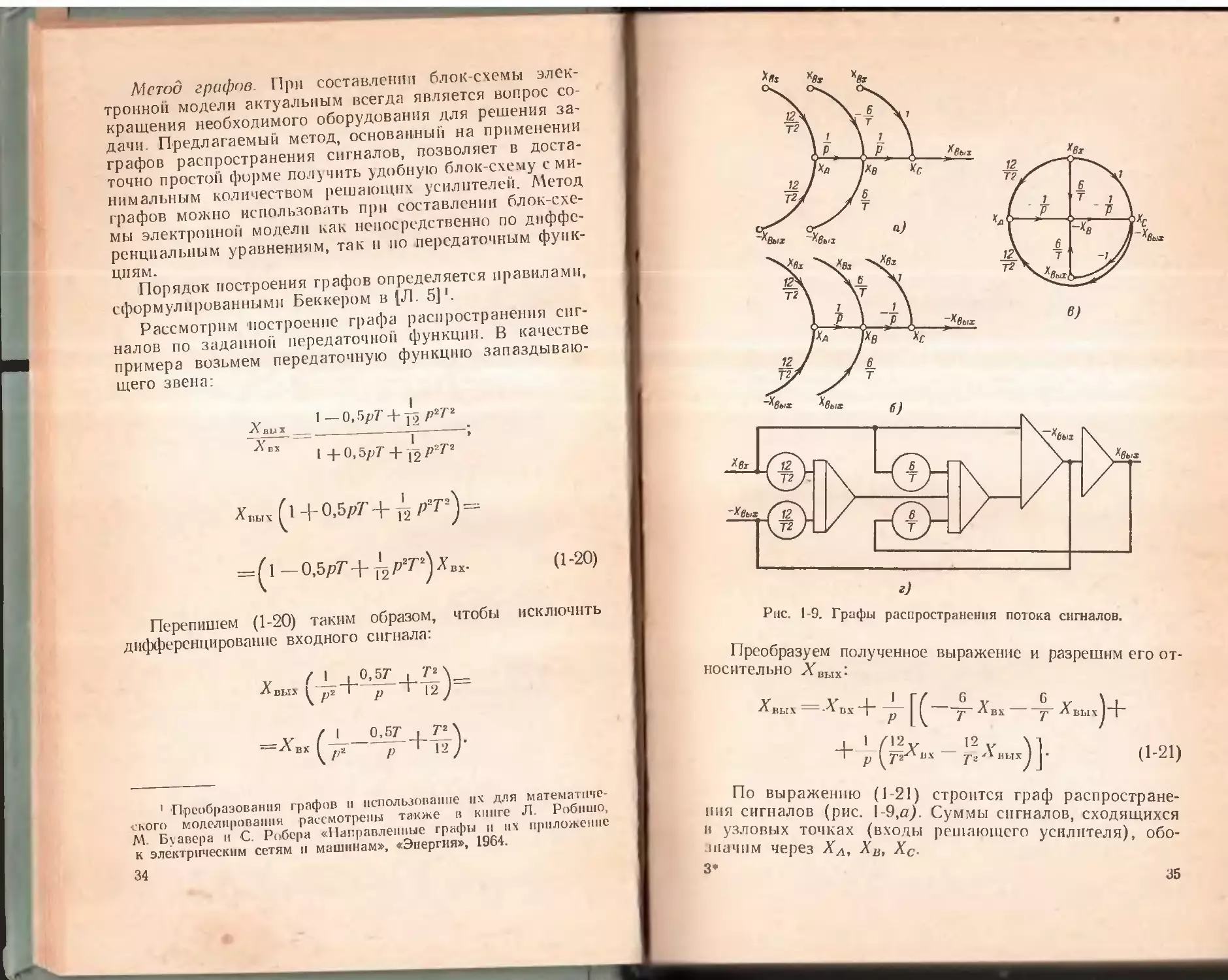
Рис. 1-9. Графы распространения потока сигналов.
Преобразуем полученное выражение и разрешим его от-
носительно zYBbIX:
Ар.ых = А их у~ Хвх----у- XBB14j-f~
_Ь_^^7’^ВХ уг A Husj j • (1-21)
По выражению (1-21) строится граф распростране-
ния сигналов (рис. 1-9,я). Суммы сигналов, сходящихся
в узловых точках (входы решающего усилителя), обо-
значим через Хл, Хп, Хс.
3* 35
В дальнейшем строится граф распространения сиг-
налов с учетом инвертирования знака переменной на
выходе решающих усилителей (рис. 1-9,6). После пер-
вого интегрирования происходит инвертирование сигна-
ла на входе второго интегратора Хв, сигнал на входе
сумматора сохраняет свой знак +ХС, а на выходе полу-
чаем инвертированный сигнал —А'ВЬ1Х.
Объединив однотипные полюсы, получаем граф рас-
пространения сигнала (рис. 1-9,в), по которому произ-
водится построение блок-схемы электронной модели.
Она состоит из четырех делителей напряжения и четы-
рех решающих усилителей, охваченных отрицательными
обратными связями (рис. 1-9,г).
Структурный метод. Составление блок-схемы элек-
тронной модели по структурной схеме системы автома-
тического управления не вызывает особых затруднений.
Это связано с тем, что структурная схема представляет
собой комбинацию типовых элементарных звеньев,
охваченных обратными связями. Схемы электронных
моделей основных типовых звеньев рассмотрены в § 1-2
и сведены в табл. 1-1.
На основании данных табл. 1-1 можно непосредствен-
но по структурной схеме объекта перейти к составлению
электронной модели.
1-S. ВЫБОР МАСШТАБНЫХ КОЭФФИЦИЕНТОВ
Перед набором задачи на электронной модели произ-
водится выбор масштабов каждой из переменных си-
стемы уравнений. Смысл преобразований заключается
в следующем: максимальные значения переменных элек-
тронной модели в течение переходного процесса должны
быть такими, чтобы решающие усилители работали
в линейной зоне. Значения машинных переменных свя-
зываются с физическими переменными масштабными
коэффициентами:
Xi — tn,Xi,
где Xi — значение машинной переменной;
mi — масштабный коэффициент.
Величина масштабного коэффициента определяется:
__ (зс;)маис 1
(^Оивкс (Х()нацс
36
где 1—машинная единица, для большинства математи-
ческих машин непрерывного действия 1 = 100 в.
Для получения желаемой длительности 'Переходного
процесса выбирается масштаб времени решения задачи:
t= tn it.
При этом получаются:
/П(>1 — ускоренный процесс решения;
= 1 —процесс решения в натуральном масштабе вре-
мени,
nii<_ \ —замедленный процесс решения.
Рассмотрим пример записи уравнения первого по-
рядка в машинных переменных.
Пусть дано уравнение
Л ^-+^=кхвх; (1-22)
выбираем значения масштабных коэффициентов:
A'i = llliXi,
^ВХ == ^BX^Bxi
(1-23)
t — mtt.
Подставив выражение (1-23) в (1-22), получим:
или
Как видно из полученного выражения (1-24), мас-
штаб по времени приводит к изменению физических по-
стоянных времени: при ускоренном процессе решения
постоянные времени уменьшаются, при замедленном —
увеличиваются.
ЛАасштабы переменных можно изменять непосредст-
венно на структурной схеме исследуемой системы.
Рассмотрим этот способ на примере системы, кото-
рая представлена двумя апериодическими звеньями,
охваченными жесткой п гибкой отрицательной связью
(рис. 1-10, а).
Указанная система характеризуется значениями пере-
менных z/BX, и0, ulf иг, и3, и*. Так как на электронной мо-
37
дели эти переменные представляются как пвх, и0, ttlt us,
и3, ttu то в структурную схему должны быть введены
масштабные коэффициенты (рис. 1-10,6).
Нетрудно заметить особенности составления струк-
турной схемы с учетом выбранных масштабов:
I. Постоянные времени должны быть разделены на
масштаб по времени.
2. Коэффициенты усиления и коэффициенты обрат-
ных связей умножаются на масштаб выходной величины
и делятся на масштаб входной величины.
3. Суммирование сигналов всегда производится
в одном масштабе (на структурной схеме сигналы гиб-
кой и жесткой обратной связи приведены к масштабу
входного сигнала). Для каждой переменной можно про-
извольно выбрать масштабный коэффициент, но число
степеней свободы должны быть меньше количества 1 пе-
ременных на величину сигналов, приходящих к сумми-
рующей точке.
Поясним вышесказанное конкретным 'примером
(рис. 1-10,6/ Предположим, что рассматриваемая си-
стема выполнена без параллельных ветвей (отсутствуют
гибкая и жесткая обратные связи). Тогда, выбрав зна-
чения масштабных коэффициентов mnx, т0, т{, т2, тз,
получим изменение соответствующих машинных перемен-
ных в желаемом диапазоне.
В системе с параллельнымгДветвями после расчета не-
обходимых значении масштабных коэффициентов можно
задать определенные пределы изменения переменных «вх,
п0, и,, иг, и3, и4. Однако сигналы обратных связей, при-
ходящие к сумматору, и результирующий сигнал на его
выходе получаются произвольными. Преобразуя рассмат-
риваемую структурную схему (рис. 1-10,в), можно заме-
тить, что в ней отсутствуют масштабные коэффициенты
т0, т3, ш4. Из выбранных шести масштабных коэффи-
циентов независимыми являются лишь три: mBX, пц, т2.
Следовательно, ограничение величины шести машинных
переменных можно осуществить только тремя масштаб-
ными коэффициентами.
1 При выборе масштабных коэффициентов и коэффициентов пе-
редач учитываются также особенности работы и свойства конкрет-
ных блоков аналоговых машин (Л. 1, 2].
38
в)
Рис. 1'10. Выбор масштабных коэффициентов па базе
структурной схемы.
Для уменьшения количества блоков делителей на-
пряжения при выборе масштабных коэффициентов стре-
мятся, чтобы величины вида
„ т, mt
w ' 71
Wo I i
К m2 nit
Лг/»1 Л
представляли собой одно из возможных соотношений
решающих усилителей.
39
которын весьма
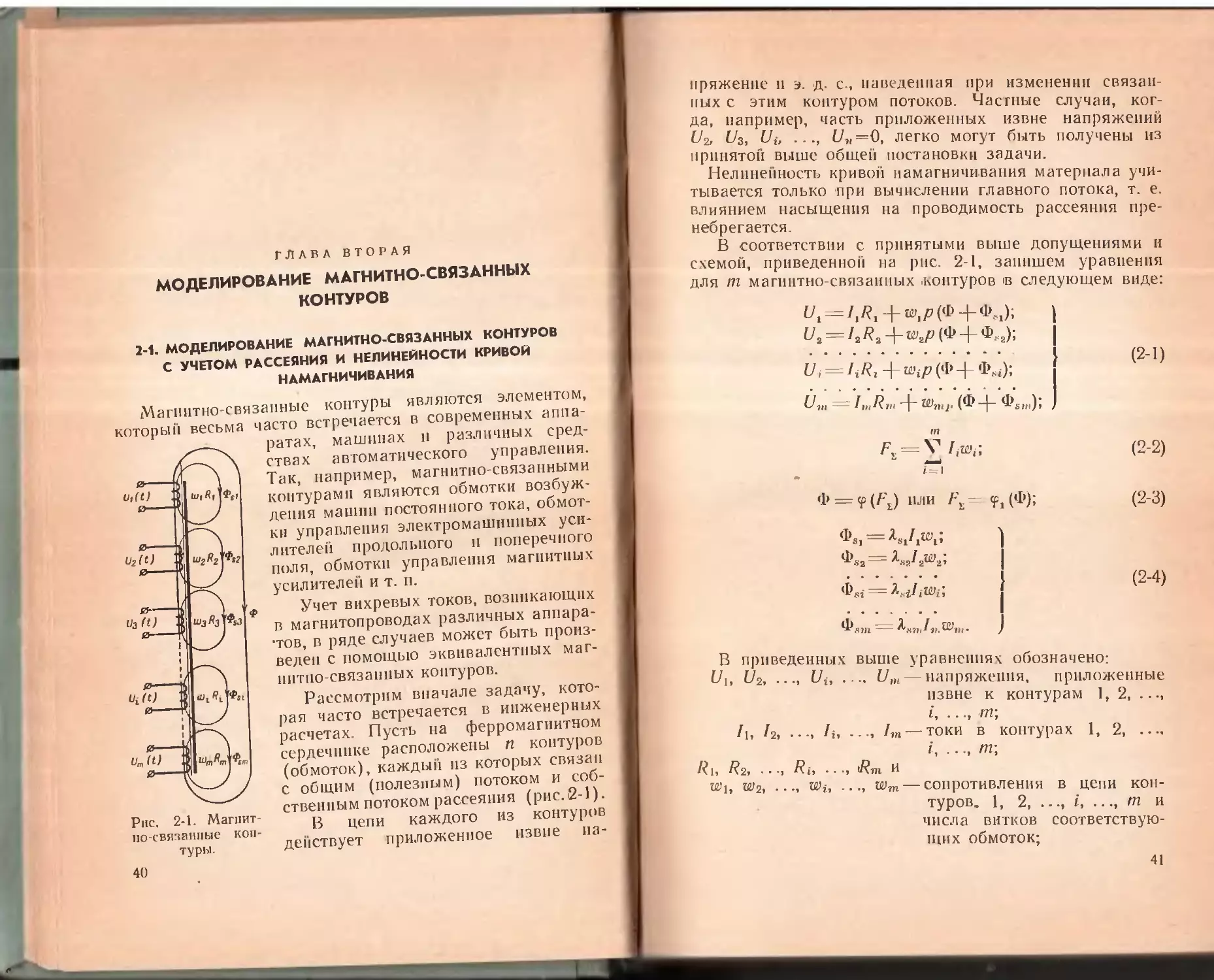
Рис. 2-1. Магнит-
но-связанные кон-
туры.
ГЛАВА ВТОРАЯ
МОДЕЛИРОВАНИЕ МАГНИТНО-СВЯЗАННЫХ
КОНТУРОВ
2-1. МОДЕЛИРОВАНИЕ МАГНИТНО-СВЯЗАННЫХ КОНТУРОВ
С УЧЕТОМ РАССЕЯНИЯ И НЕЛИНЕЙНОСТИ КРИВОЙ
НАМАГНИЧИВАНИЯ
Магнитно-связанные контуры являются элементом,
асто встречается в современных аппа-
ратах, машинах п различных сред-
ствах автоматического управления.
Так, например, магнитно-связанными
контурами являются обмотки возбуж-
дения машин постоянного тока, обмот-
ки управления электромашннпых уси-
лителей продольного и поперечного
поля, обмотки управления магнитных
усилителей и т. п.
Учет вихревых токов, возникающих
в магнитопроводах различных аппара-
тов, в ряде случаев может быть произ-
веден с помощью эквивалентных маг-
нитно-связанных контуров.
Рассмотрим вначале задачу, кото-
рая часто встречается в инженерных
расчетах. Пусть на ферромагнитном
сердечнике расположены п контуров
(обмоток), каждый из которых связан
с общим (полезным) потоком и соб-
ственным потоком рассеяния (рис.2-1).
В цепи каждого из контуров
действует приложенное извне иа-
40
пряжение п э. д. с., наведенная при изменении связан-
ных с этим контуром потоков. Частные случаи, ког-
да, например, часть приложенных извне напряжений
U2, Ui, =0, легко могут быть получены из
принятой выше общей постановки задачи.
Нелинейность кривой намагничивания материала учи-
тывается только при вычислении главного потока, т. е.
влиянием насыщения на проводимость рассеяния пре-
небрегается.
В соответствии с принятыми выше допущениями и
схемой, приведенной на рис. 2-1, запишем уравнения
для т магиптно-связанпых .контуров 'В следующем виде:
+^(Ф+^);
и2 = {2 R2 + W2P (ф +
......................... (2-1)
и ^р(Ф+Ф8;);
= imRm -f- (Ф-]- Ф6,„); .
F^V/д; (2-2)
i = l
Ф = <f (Fj.) пли Fs =. <рж (Ф); (2-3)
Фз^ЧЛ'л;
Фа2 —
...................... (2-4)
Ф« = ^Ли4;
Флтп ^xn/lv.^m •
В приведенных выше уравнениях обозначено:
Ult U2, ..., Ui, . .. U,n — напряжения, приложенные
извне к контурам 1, 2, ...,
i, ..., m;
/1, /2, А. -• , 1т — токи в контурах 1, 2, ....
I, .. , т\
Rl, R2, • • > Ri, • . • , Rm И
Wj, w2, ..., wit .... wm — сопротивления в цепи кон-
туров. 1, 2, ..., t, ..., т и
числа витков соответствую-
щих обмоток;
41
К Xsi, %.s2. • •.., Xsin — магнитные проводимости
путей главного потока и по-
токов рассеяния, связанных
с контурами 1, 2, i, т
соответственно;
р — символ дифферецировапия.
Заметим, что в уравнениях (2-1) не используются
индуктивности и взаимные индуктивности. Практика
показала, что для решения на моделирующих установ-
ках форма записи, приведенная выше, является более
удобной.
На основании уравнений (2-1) — (2-4) схема модели
может быть получена несколькими различными мето-
дами. Возможно, например, построение модели по
исходным уравнениям без их совместного аналитиче-
ского преобразования, исключения отдельных перемен-
ных и т. д. В этом случае уравнения (2-1) решаются от-
носительно производных и модель будет состоять из
ряда интеграторов, соединенных прямыми п перекрест-
ными обратными связями. Нетрудно убедиться, что
построенная таким образом модель будет сравнительно
сложной и недостаточно наглядной.
Целесообразнее исходные уравнения преобразовать
так, чтобы в них в качестве параметров использовались
постоянные времени и другие физические величины, до-
статочно наглядные и поддающиеся непосредственным
измерениям. Удобнее всего предварительно составить
структурную схему, отдельные звенья которой имели бы
самостоятельный физический смысл, а их характеристи-
ки и передаточные функции могли быть сопоставлены
с характеристиками реальных звеньев машин, аппара-
тов или систем, которые имитируются на модели.
Модель, построенную из звеньев, имеющих самостоя-
тельный физический смысл, называют структурной
моделью, а методы построения таких моделей — струк-
турными методами моделирования.
Как уже указывалось в предисловии и в гл. 1, в на-
стоящей работе методы структурного моделирования
будут широко использоваться.
Воспользуемся этим методом в данном случае.
Исключив из уравнений (2-1) — (2-4) потоки рассея-
ния, после несложных преобразований находим выра-
жения для н. с. каждого из контуров:
42
и «7 рФ
1 +p7\i R, 1 + p7’,i ’
^2 R, р<1>
1 + />Пг Rz I + рТ^ '
Wi ^«7 рФ
1 + рГч Ri 1 + рТч ’
(2-5)
и —— 2
Rm Wm рФ
~1+рТ am Rm 1 + pT sin
через TSI, TS2,...»Tsi,..., Tgm обозначены постоянные
времени контуров, связанных с потоками рассеяния:
2 2
Wi W9 ...
7*.. = 7\г=^;...;/> =
2
_ = Zs^;...;Tsm = Zs„(-^-. (2-6)
Ki Кт
По уравнениям (2-2), (2-3) н (2-5) построена структурная
схема, приведенная на рис. 2-2,а. В этой схеме символами
1’„, Ёг,..., 2г,. .., Sn обозначены сумматоры; БН —
блок нелинейностей, на котором набирается кривая на-
магничивания. Входными величинами на с семе рис. 2-2
являются напряжения U\, U2 и т. д., выходными — н. с.
Ilwl, l2w2, .. , магнитный поток Ф и др. Структурную
схему, изображенную на рис. 2-2,«, целесообразно пре-
образовать таким образом, чтобы в передаточные функ-
ции отдельных звеньев входили постоянные времени
отдельных контуров, вычисленные для линейных участ-
ков кривой намагничивания. Для этого уравнение (2-3)
перепишем в виде
Ф = Х^£, (2-За)
где — магнитная проводимость для главного потока,
соответствующая линейной части кривой намаг-
ничивания;
43
k < 1—коэффициент, учитывающий нелинейность кривой
намагничивания, т. е.
* = (2-7)
Заменив на схеме замещения поток Ф через его зна-
чение согласно (2-За) и принимая во внимание, что
w?
X
° Яг г’
и>..
(2-8)
...
з _____И_______т
А0 О ---------- 1 nil
*\тп
где То Т2, ..Tit .... 7„— постоянные времени отдель-
ных контуров, вычисленные для линейной части
кривой намагничивания,
структурную схему магнитно-связанных контуров
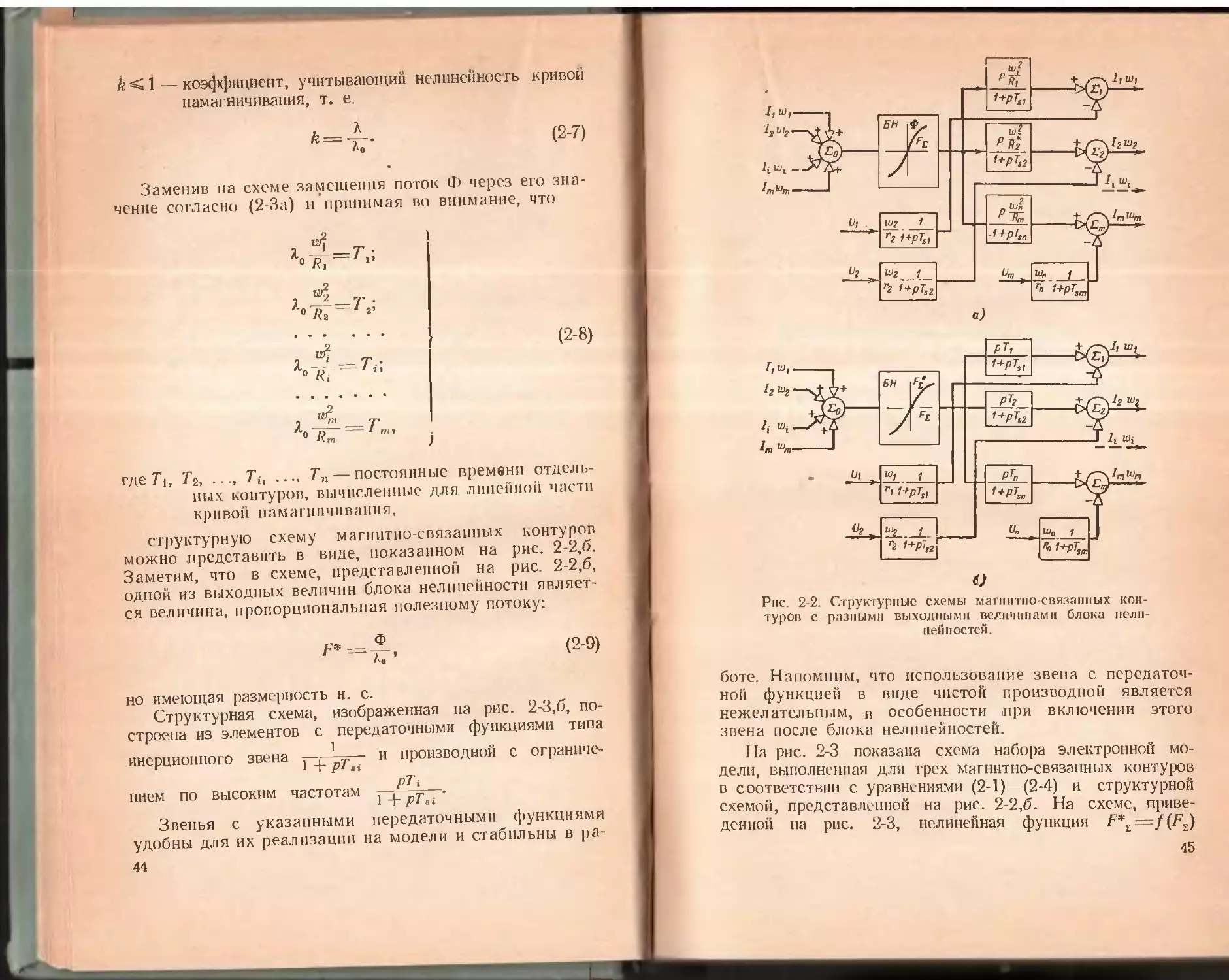
можно представить в виде, показанном на рис. 2-2,6.
Заметим, что в схеме, представленной на рис. 2-2,6,
одной из выходных величин блока нелинейности являет-
ся величина, пропорциональная полезному потоку:
(2-9)
ио имеющая размерность н. с.
Структурная схема, изображенная на рис. 2-3,6, по-
строена из элементов с передаточными функциями типа
инерционного звена
1
1 + рТч
пнем по высоким частотам
и производной с ограниче-
pTi
\+pT.i ’
Звенья с указанными
передаточными функциями
удобны для их реализации на модели и стабильны в ра-
44
Рис. 2-2. Структурные схемы магнитно связанных кон-
туров с разными выходными величинами блока нели-
нейностей.
боте. Напомним, что использование звена с передаточ-
ной функцией в виде чистой производной является
нежелательным, в особенности при включении этого
звена после блока нелинейностей.
На рис. 2-3 показана схема набора электронной мо-
дели, выполненная для трех магнитно-связанных контуров
в соответствии с уравнениями (2-1) (2-4) и структурной
схемой, представленной на рис. 2-2,6. На схеме, приве-
денной на рис. 2-3, нелинейная функция
45
аппроксимирована кусочно-линейной (усилитель У/). Если
необходимо кривую намагничивания представить более де-
тально, то следует воспользоваться специальными бло-
ками нелинейностей, имеющимися в комплекте моделирую-
щих установок. Усилители У2, УЗ и У4 выполняют опе-
рации дифференцирования и суммирования в соответствии
с уравнениями (2-5), т. е. соответствуют звеньям вида
РЛ
1 + P'Pni
Рис. 2 3. Схема набора модели магнитно связанных контуров
и сумматорам S.; в структурной схеме, приведен-
ной на рис. 2-2,6.
Усилитель У5 используется как инвертор, необходи-
мый для получения правильных знаков переменных
в модели
Усилители Уб, У7 и УЗ воспринимают входные сиг-
налы (7Ь U2 н U3 и вырабатывают на выходе промежу-
точные переменные, равные:
I 7PJ (/А — 101
1 1Ш1 '/V Ri 1 + ’
1 ТО) ( 1)\ — w2 Uz .
*2^2 \lJf r2 1 4" pT’
I ТО) ( п\ — w3 u3
1 3^3 \”f Rs 1 + P?'.3 ’
В случае, если часть контуров замкнута накоротко и,
следовательно, приложенные к ним извне напряжения
46
равны нулю, схема модели может быть упрощена. Так,
например, при У2=^з=|б (рис. 2-4) из схемы исклю-
чаются усилители У7 и У8 н сопротивления на входе
усилителен У? и УЗ, к которым приложены промежу-
точные переменные i2w2(p) и /3ау3(р).
Схема модели также упрощается, если при исследо-
ваниях нет необходимости в записи токов или пропор-
циональных им н. с. iitWii(p), »2№2(р), 1з^з(р) В этом
случае усилители У2, УЗ и У4 могут быть заменены
одним усилителем. Аналогичная схема используется
в § 2-3 при рассмотрении модели процессов возбужде-
ния с учетом вихревых токов.
2-2. МОДЕЛИРОВАНИЕ МАГНИТНО-СВЯЗАННЫХ КОНТУРОВ
С ПРИБЛИЖЕННЫМ УЧЕТОМ РАССЕЯНИЯ
Как видно из описанных выше схем, моделирование
магнитно связанных контуров требует применения зна-
чительного количества усилителей и осуществляется
сравнительно сложными схемами. Между тем в боль-
шинстве практических случаев рассеяние невелико и
поэтому его влияние можно учитывать приближенно.
Ниже будет рассмотрено два метода составления
структурных схем, в которых рассеяние учитывается
приближенно.
Первый из этих методов исходит из предположения,
что постоянные времени рассеяния для всех контуров
равны некоторой усредненной величине. Второй метод
предполагает, что все магнитно-связанные контуры
образуют общий поток рассеяния.
Переходим к составлению модели по первому методу.
Усредненное значение постоянной времени рассеяния
можно принять равным;
у- Ai-j-A;+ • • +А1+ - --ЬТ(2-10)
В связи с тем, что в большинстве случаев постоянные
времени рассеяния значительно меньше постоянных
времени главного потока, ошибки по абсолютному зна-
чению будут невелики, а качественный характер процес-
сов при использовании уравнения (2-10) будет передан
правильно
47
Заменив в структурной схеме, приведенной на рис. 2-2,6,
ДS1, TS2, ... , TSi,.. ., Tsm на Ts, можно все блоки с пере-
даточными функциями типа —, — объединить в один
блок
1 + рТ tt
с передаточной функцией
1 + рТ,
где
m
Тв = £ Ti — сумма постоянных времени всех конту-
ров.
Аналогично могут быть объединены н блоки суммато-
ров 2,, Ег,..., в один сумматор, на вход которого
действует сигнал, равный:
tn
VI w*
‘ Ri
Y ___ 1
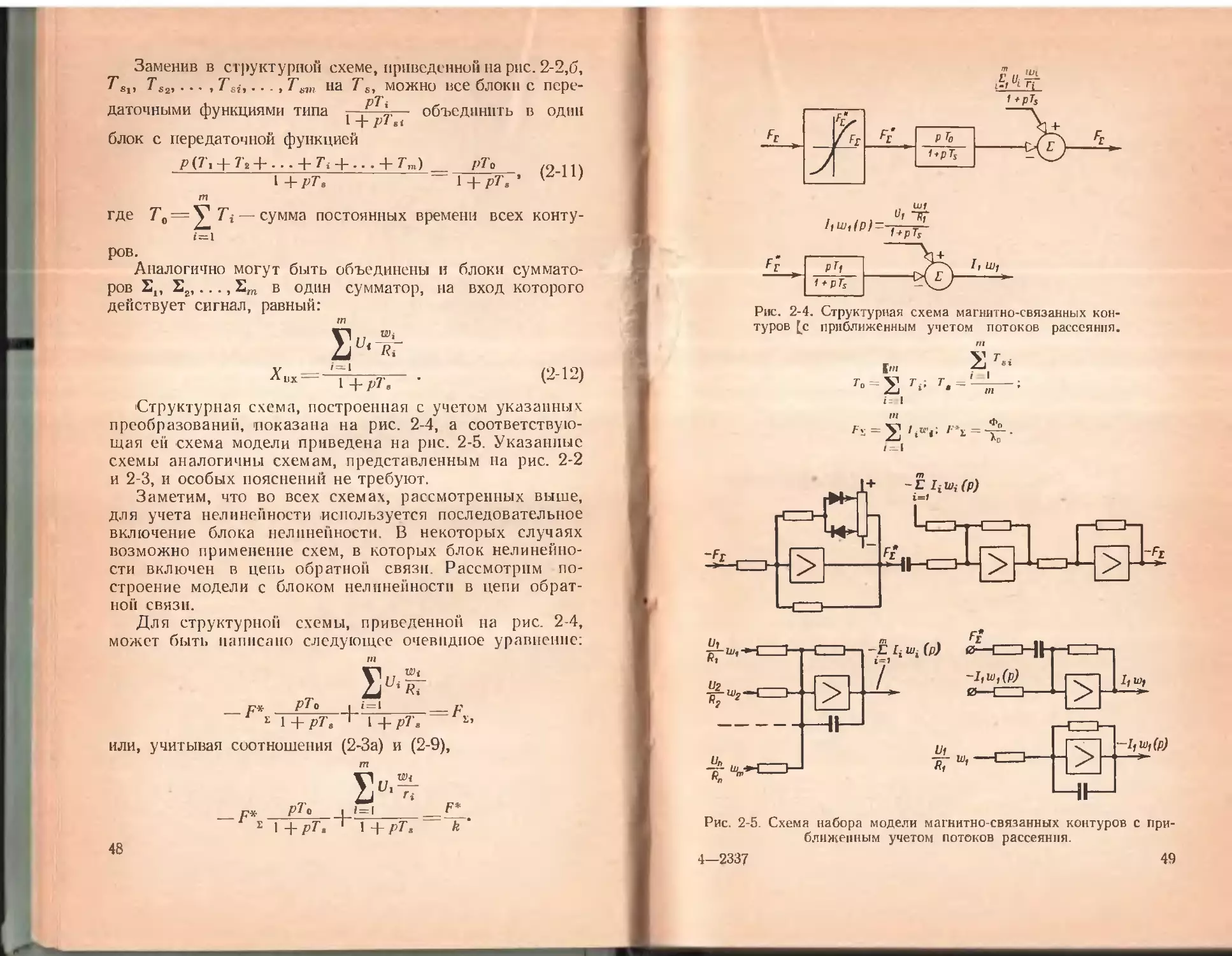
Структурная схема, построенная с учетом указанных
преобразований, 'показана на рис. 2-4, а соответствую-
щая ей схема модели приведена на рис. 2-5. Указанные
схемы аналогичны схемам, представленным на рис. 2-2
и 2-3, и особых пояснений не требуют.
Заметим, что во всех схемах, рассмотренных выше,
для учета нелинейности используется последовательное
включение блока нелинейности. В некоторых случаях
возможно применение схем, в которых блок нелинейно-
сти включен в цепь обратной связи. Рассмотрим по-
строение модели с блоком нелинейности в цепи обрат-
ной связи.
Для структурной схемы, приведенной на рис. 2-4,
может быть написано следующее очевидное уравнение:
m
__р* РТь I 1 = 1_________Р
* 1 + pTs^ \+рТ.
или, учитывая соотношения (2-За) и (2-9),
р* рТ» I <=|_______= Р*
1 1 + рТ,' 1 + pl\ k‘
48
Рис. 2-4. Структурная схема магнитно-связанных кон-
туров [с приближенным учетом потоков рассеяния.
Рис. 2-5. Схема набора модели магнитно-связанных контуров с при-
ближенным учетом потоков рассеяния.
4—2337
49
Последнее выражение удобнее всего преобразовать, доба-
вив к правой и левой части по F*.
После несложных преобразований находим:
III
11 + PIT, + Го)1 = £ -
Х = 1
+ (2-12а)
На рис. 2-6 показана структурная схема, составлен-
ная в соответствии с уравнением (2-12).
Рис. 2-6. Структурная схема
магнитно-связанных контуров
с нелинейностью в цепи обрат-
ной связи.
Для того чтобы не ис-
пользовать звенья с переда-
точной функцией в вице чи-
стой производной, в схеме,
представленной па рис. 2-6,
введен сумматор на вход
которого подан сигнал об-
ратной связи через звено
с передаточной функцией
1 + I’Ts -V
-j—;—Чф—Характер ne-
1+д(7, + Г0) 1 1
линейности, которая исполь-
зуется в схеме, приведенной
па рис. 2-7, иллюстрируется
кривыми, изображенным и
на рис. 2-8.
В случае определения на
модели потока можно без
большой погрешности пренебречь членом pTs в числителе
выражения t j (рис. 2-6). В этом случае струк-
турная схема существенно упрощается: она может быть
изображена инерционным звеном, охваченным отрицатель-
ной обратной связью через звено ----1.
Переходим к составлению структурной схемы по
второму методу. Уравнения (2-1) — (2-4) для этого слу-
чая могут быть переписаны в виде
50
u i = + wiP (ф+фЛ;
[72^Л/?2 + №гр(Ф + Ф8);
Ui = Л/?г + ®,Р (Ф 4- Фь);
Un= IiiRn -\~wnP (ф + фЛ: *
^z = У h^i,
1 = 1
ф=^г;
ф5=^Л-
(2-la)
(2-2a)
(2-За)
(2-4a)
Умножив каждое из уравнений (2-1а) на W^Rt и сложив
их почленно, найдем:
Ёу<я-=Ё'‘“’‘+М/,1'1,+ф-)
;=i i=i i=i
или в соответствии с (2-За) и (2-4а)
п п 2 ,г
г.£ л^т+’.^тг^+тЕ^-
/ -I i=l f=l
п О
SW~-
— =Т0 (постоянная времени главного
i = l
п о
г» wy
потока на линейном участке) и Zs V — = TS (то же для
1=1
потоков рассеяния), перепишем приведенное выше урав-
нение в виде
’.Хи<й-=т+т''1’+7'^-
Прибавив к правой и левой частям последнего уравне-
ния выражение <1>(1+рЛ), после несложных преобразо-
ваний получим уравнение, совпадающее с (2-11) и,
4* 51
Рис. 2-7. Характеристики блока не-
линейности.
следоватслыю, соответствующее структурной схеме,
изображенной на рис. 2-6.
Таким образом, оба рассмотренных метода приводят
к модели одной и той же структуры.
С количественной стороны модели, построенные по
первому и второму методам, могут отличаться за счет
разных значений посто-
янной времени Ts. По-
следняя должна быть
определена для кон-
кретных объектов ли-
бо экспериментально,
либо расчетным путем,
на основе анализа кар-
тины распределения
потоков рассеяния.
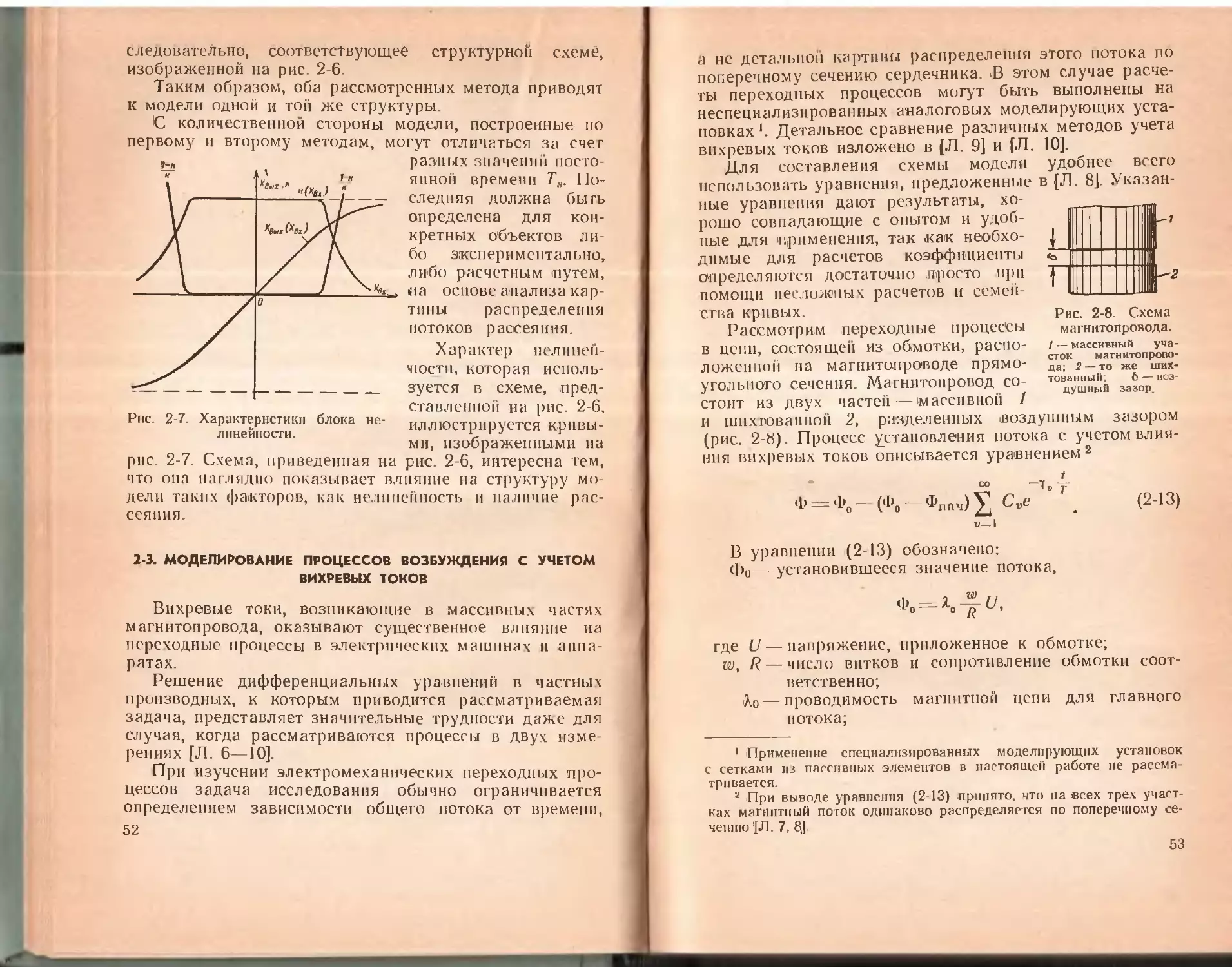
Характер нелиней-
ности, которая исполь-
зуется в схеме, пред-
ставленной на рис. 2-6,
иллюстрируется кривы-
ми, изображенными па
рис. 2-7. Схема, приведенная на рис. 2-6, интересна тем,
что опа наглядно показывает влияние на структуру мо-
дели таких факторов, как нелинейность и наличие рас-
сеяния.
2-3. МОДЕЛИРОВАНИЕ ПРОЦЕССОВ ВОЗБУЖДЕНИЯ С УЧЕТОМ
ВИХРЕВЫХ ТОКОВ
Вихревые токи, возникающие в массивных частях
магнитопровода, оказывают существенное влияние на
переходные процессы в электрических машинах и аппа-
ратах.
Решение дифференциальных уравнений в частных
производных, к которым приводится рассматриваемая
задача, представляет значительные трудности даже для
случая, когда рассматриваются процессы в двух изме-
рениях [Л. 6—10].
При изучении электромеханических переходных про-
цессов задача исследования обычно ограничивается
определением зависимости общего потока от времени,
52
а не детальной картины распределения этого потока по
поперечному сечению сердечника. В этом случае расче-
ты переходных процессов могут быть выполнены на
неспециализированных аналоговых моделирующих уста-
новках *. Детальное сравнение различных методов учета
вихревых токов изложено в {Л. 9] и [Л. 10].
Для составления схемы модели удобнее всего
использовать уравнения, предложенные в {Л. 8]. Укачан-
ные уравнения дают результаты, хо-
рошо совпадающие с опытом и удоб-
ные для применения, так как необхо-
димые для расчетов коэффициенты
определяются достаточно .просто при
помощи несложных расчетов и семей-
ства кривых.
Рассмотрим переходные процессы
в цепи, состоящей из обмотки, распо-
ложенной на магнитопроводе прямо-
угольного сечения. Магнитопровод со-
стоит из двух частей—массивной 1
и шихтованной 2, разделенных воздушным зазором
(рис. 2-8). Процесс установления потока с учетом влия-
ния вихревых токов описывается уравнением1 2
Рис. 2-8. Схема
магннтопровода.
/ — массивный уча-
сток магнитопрово-
да; 2 — то же ших-
тованный; 6 — воз-
душный зазор.
-Т„ --
<1> = <1»0 — (фо — фляч) Сve
v~\
(2-13)
В уравнении (2-13) обозначено:
Фо — установившееся значение потока,
Фо = ^о-^С/.
где U — напряжение, приложенное к обмотке;
w, R — число витков и сопротивление обмотки соот-
ветственно;
7,0— проводимость магнитной цепи для главного
потока;
1 Применение специализированных моделирующих установок
с сетками из пассивных элементов в настоящей работе не рассма-
тривается.
2 При выводе уравнения (2-13) принято, что на всех трех участ-
ках магнитный поток одинаково распределяется по поперечному се-
чению |(Л. 7, 8].
53
Фнач — значение потока при /=0;
Т — постоянная времени общего потока,
-г э ц,г
где о — коэффициент рассеяния (о31);
С„,у„— коэффициенты, зависящие от формы магнито-
провода п его геометрических размеров, удельного элек-
трического сопротивления материала сердечника, числа
витков обмотки и других данных.
Коэффициенты Св и у\ являются функцией парамет-
ра и, причем
" =-----А* » х (2-14)
2w2p^_+_j
где 11п — средняя длина линии магнитной индукции в мас-
сивной части магнитопровода, см;
р — удельное сопротивление материала массивной
ом-см2
части магнитолровода------ (для сталей, при-
СМ
меняемых в электротехнических изделиях, р =
= (2-н5)
а, b — размеры поперечного сечения сердечника, см.
Для многонолюсных электрических машин параметр
а рассчитывается на пару полюсов {Л. 9].
Па рис. 2-9 приведена зависимость Cr,(ci) при
коэффициентах рассеяния п=1,2 и о=1,0.
При других коэффициентах рассеяния значения С»
п у,, могут быть найдены ио следующим формулам:
!-(»->)-
а г <7„-(1 cos q„) sinful’ (2’15)
Q4[Q„ (=-!)+----^7^--------]
Ь = (2-1G)
где qv — корни трансцендентного уравнения:
(а — 1) ?2 2 -n ~Ь-С - = а. (2-17)
и 1 COS ' 7
54
В большинстве практических случаев 0=1,14-1,2 и
поэтому кривыми рис. 2-9 можно пользоваться, не про-
водя дополнительных расчетов. Известны также методы
экспериментального определения коэффициентов Cv
и Yl. [Л. 11].
Рис. 2-9. Кривые для определения коэффициентов
Cv н у„.
Переходим к построению схемы модели. Заметим, что
t
-т„ у
члены типа Cve , входящие в уравнение (2-13), могут
быть представлены на модели звеньями с передаточной
функцией, равной:
7-
Р^Г т
I»
т
55
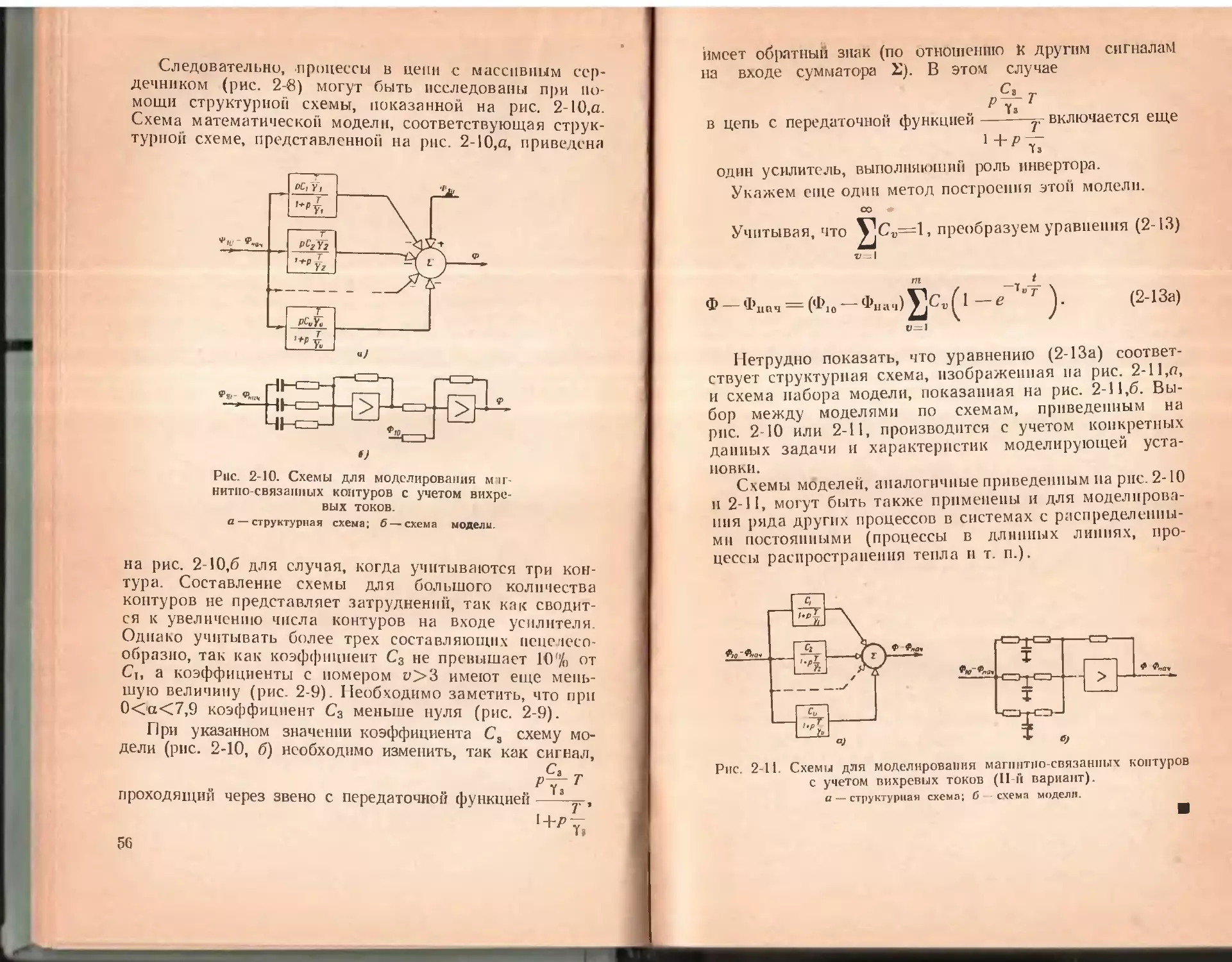
Следовательно, процессы в цени с массивным сер-
дечником (рис. 2-8) могут быть исследованы при по-
мощи структурной схемы, показанной на рис. 2-10.cz.
Схема математической модели, соответствующая струк-
турной схеме, представленной на рис. 2-10,а, приведена
Рис. 2-10. Схемы для моделирования маг-
нитно-связанных контуров с учетом вихре-
вых токов.
а — структурная схема; б— схема модели.
на рис. 2-10,6 для случая, когда учитываются три кон-
тура. Составление схемы для большого количества
контуров не представляет затруднений, так как сводит-
ся к увеличению числа контуров па входе усилителя.
Однако учитывать более трех составляющих нецелесо-
образно, так как коэффициент С3 не превышает 10% от
Ст, а коэффициенты с номером р>3 имеют еще мень-
шую величину (рис. 2-9). Необходимо заметить, что при
0<а<7,9 коэффициент С3 меньше нуля (рис. 2-9).
При указанном значении коэффициента С3 схему мо-
дели (рис. 2-10, 6) необходимо изменить, так как сигнал,
С3
Т
проходящий через звено с передаточной функцией —^-=-,
Ч-Ду
I»
56
имеет обратный знак (по отношению К другим сигналам
на входе сумматора X). В этом случае
С3 т
р т
в цепь с передаточной функцией--------включается еще
• + Р ~z~
I 3
один усилитель, выполняющий роль инвертора.
Укажем еще один метод построения этой модели.
СО *
Учитывая, что ^Сг=1, преобразуем уравнения (2-13)
XI—1
m
Ф — Фцач = (Фдо — Фнач) 1
ti~l
(2-13а)
Нетрудно показать, что уравнению (2-13а) соответ-
ствует структурная схема, изображенная на рис. 2-11,о,
и схема набора модели, показанная на рис. 2-11,6. Вы-
бор между моделями по схемам, приведенным на
рис. 2-10 или 2-11, производится с учетом конкретных
данных задачи и характеристик моделирующей уста-
новки.
Схемы моделей, аналогичные приведенным па рис. 2-10
и 2-11, могут быть также применены и для моделирова-
ния ряда других процессов в системах с распределенны-
ми постоянными (процессы в длинных линиях, про-
цессы распространения тепла и т. п.).
Рис. 2-11. Схемы для моделирования магнитно-связанных контуров
с учетом вихревых токов (II-н вариант)
а—структурная схема; б схема модели.
ГЛАВА ТРЕТЬЯ
МОДЕЛИРОВАНИЕ ЭЛЕКТРИЧЕСКИХ МАШИН
ПОСТОЯННОГО ТОКА
3-1. ОБЩИЕ СВЕДЕНИЯ
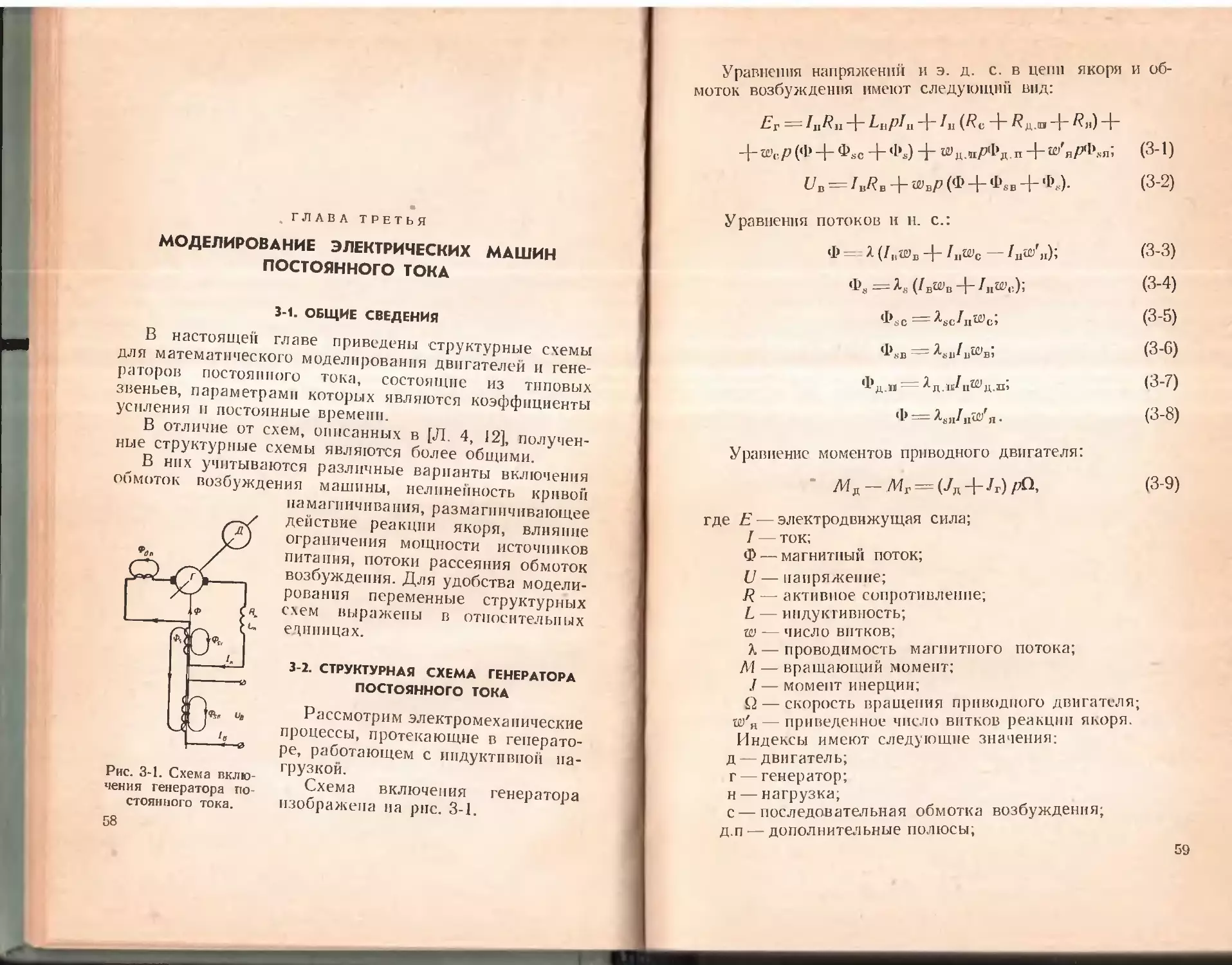
Рис. 3-1. Схема вклю-
чения генератора по-
стоянного тока.
В настоящей главе приведены структурные схемы
для математического моделирования двигателей и гене-
раторов постоянного тока, состоящие из типовых
звеньев, параметрами которых являются коэффициенты
усиления и постоянные времени.
В отличие от схем, описанных в [Л. 4, 12], получен-
ные структурные схемы являются более общими.
В них учитываются различные варианты включения
обмоток возбуждения машины, нелинейность кривой
намагничивания, размагничивающее
действие реакции якоря, влияние
ограничения мощности источников
питания, потоки рассеяния обмоток
возбуждения. Для удобства модели-
рования переменные структурных
схем выражены в относительных
единицах.
3-2. СТРУКТУРНАЯ СХЕМА ГЕНЕРАТОРА
ПОСТОЯННОГО ТОКА
Рассмотрим электромеханические
процессы, протекающие в генерато-
ре, работающем с индуктивной на-
грузкой.
Схема включения генератора
изображена на рис. 3-1.
58
Уравнения напряжений и э. д. с. в цепи якоря и об-
моток возбуждения имеют следующий вид:
Ег = fuRn-}-LHpIu /„ (/?с -|- /?д.п + Я,.) +
—}~Wf p (*!• Ф.чс -|-,1,4!) 4" ИУц н/Д’д.п-Ь^я/’Ф.чя! (3-1)
UB = IBRB 4- wBp (Ф 4- Фвв 4- (3-2)
Уравнения потоков и н. с.:
Ф -- (/iiiBj 4- Л1^с — hiw >i)> (3-3)
Фа = As (/вжв 4- /„йУс); (3-4)
Ф8с = ^scAii°c> (3-5)
Ф«в — (3-6)
Фд.п == ^д. н/п® н.п» (3-7)
* = Wn^«. (3-8)
Уравнение моментов приводного двигателя:
Л1„-Л4г = (/д4-Л)рП, (3-9)
где Е — электродвижущая сила;
I — ток;
Ф — магнитный поток;
V — напряжение;
R — активное сопротивление;
L — индуктивность;
w — число витков;
X — проводимость магнитного потока;
М — вращающий момент;
J — момент инерции;
Q — скорость вращения приводного двигателя;
ш'я — приведенное число витков реакции якоря.
Индексы имеют следующие значения:
д — двигатель;
г — генератор;
н — нагрузка;
с — последовательная обмотка возбуждения;
д.п — дополнительные полюсы;
59
в — возбуждение;
я — якорь:
s — рассеяние;
О — номинальный режим;
и—источник питания.
В приведенных уравнениях
£=£Д2Ф; Мг=£мФ/н, (3-10)
где kP, kM — постоянные коэффициенты.
Обозначим:
^.яЕ-^я+/?я.п4-/?с; (3-11)
^г.я! 4~ ^д.п 4“ 4" ^£Я.с>
где
Lfn == "я, ^'Д.В==^д.11г<Уд ц» ^-SC ==
= ЯвсИ^,, Ls)1(: = Л^'яаус. (3-12)
Преобразуем уравнение (3-1) с учетом (3-3) — (3-8),
(3.11), (3-12) к следующему виду:
= Л1 (Лп + Яг я1) + (Ln -ф- £г я£) р!н 4-
(3-13)
где
и2
Т' — I с •
1 SC --------------------- ЛНС р >
£с = (Л 4с 4" 4) р“---постоянная времени обмотки по-
с следовательного возбуждения;
Л'с ~ К Л — коэффициент усиления обмотки
последовательного возбуждения.
Решая совместно уравнения (3-2) —(3-6), получим:
U‘ X = ф <’ + т’"1 + *С(1 + Г..Р) +
+ +Г..Р), (3-14)
60
где
^ = «,. + ^4-^)^
— постоянная времени обмотки возбуждения;
И)2
Tsb= (^SB 4" М
(3-15)
(3-16)
— постоянная времени рассеяния обмотки возбуждения;
7\в = *
в
^Rb
(3-17)
Лл — проводимость цени рабочего потока машины на ли-
нейном участке кривой намагничивания;
j __Фо
Л0 — 'р**
г о
Для того чтобы выходные и входные величины
звеньев структурной схемы были связаны между собой
лишь коэффициентами усиления и постоянными време-
ни, запишем уравнения (3 9), (3-13), ('3-14) в относи-
тельных единицах.
В качестве базисных величин переменных примем
их номинальные значения:
= 17Во =/и0/?и, Ф1 = Ф0, 7|Л = /Ео, ЕгЪ
= ДГо> £\==^о’ 7Иг1 = 7Иг0 = СмФо/по, 7Ид1 = Л1д0.
В соответствии с уравнениями (3-2), (3-3), (3-10) базис-
ные величины связаны между собой следующими соотно-
шениями:
aPU Ф» = А Дг > (S'18)
Л в» /. во в Лои)в 5 XowB Лс20
где af = /’резо/Т’во — отношение н. с. результирующей
и обмотки возбуждения.
В относительных единицах уравнение (3-18) имеет вид:
ив = т (1 + TDp) + ? (1 + TSBp) +
4-7’sb/;)—(1 -7\вР), (3-19)
61
где
. , RuW,„'kx \aWnKeQo K^w'nKrQB
я а)пЛ0 R«Rro Rra ’
д, Ru-Л'Дп \QW,,KrQo(3-°0)
Wb^o RiiRrO ^?ro
D ^,0
*\r0—7 •
J Г0
Уравнение (3-13) в относительных единицах примет
вид:
ег = — in (1 + Т„р) -|—i„ r|- Т ypiu -]——- p<f,
К го ‘ Л с
(3-21)
где
-г, ^г.я^ , ^г0
' г.ял — ’ aR Ru •
Представим уравнение (3-9) в относительных единицах
1’д — «мИгЛи/ХО, (3-22)
где ам =/ИГо//ИДо —коэффициент нагрузки приводного
двигателя;
Ты = Тм д4~аы7'м. г— механическая постоянная времени,
равная времени разгона роторов
генератора и приводного двигателя
под действием номинального момен-
та двигателя до номинальной ско-
рости вращения генератора,
rT~' J |(0] (J rj-ч J pCDpQ
/м д = ХГ; 7м г= Л1ТГ’
to = Q/Qo — скорость вращения в относительных едини-
цах.
По уравнениям (3-19), (3-21), (3-22) может быть
составлена структурная схема генератора (рис. 3-2).
При этом необходимо учесть выражение, связывающее
ток п магнитный поток генератора с его моментом, кото-
рый определяет нагрузку приводного двигателя:
tT1(p =11г,
(3-23)
а также записать в относительных единицах уравнение
для э. д с.:
e=w<p. (3-24)
62
Па структурной схеме показаны внешние возмущаю-
щие сигналы для генератора: напряжение возбуждения
ив и момент приводного двигателя ця.
Для машины с параллельным возбуждением UB=UT
или в относительных единицах:
_ иг0
11Е---- j
и во
Действие внутренних обратных связен, отражающих
влияние последовательно включенной обмотки и раз-
Рис 3 2 Структурная схема генератора постоянного тока.
магнпчивающей составляющей реакции якоря, учитыва-
ется составляющими в общей сумме эквивалентных
напряжений, приложенных к обмотке возбуждения.
Влияние нелинейности кривой намагничивания учиты-
вается отрицательной обратной связью с коэффициентом
усиления , который на линейном участке кривой
Л
равен нулю.
Принятое изображение нелинейности магнитной цепи
машины позволяет получить в основном канале инерцион-
ное звено с постоянной времени Тв, не зависящей от на-
сыщения.
'Г ___________ 'Г/
Звено —р отображает трансформаторную
с
63
связь между обмотками последовательного и независи-
мого возбуждения.
Отрицательные обратные связи с коэффициентами
7?г яе/^го и У',. яЕ характеризуют падение напряжения
в якоре.
В случае, когда генератор приводится во вращение
двигателем конечной мощности, скорость которого
Рис. 3-3. Упрощенная структурная схема генератора постоянного
тока.
может изменяться от нагрузки, необходимо пользовать-
ся полной структурной схемой, в которую включен узел
приводного устройства. Fla рис. 3-2, 3-3 такой узел
условно изображен пунктиром.
Как видно из структурной схемы, с увеличением
мощности приводного двигателя коэффициент ам умень-
шается, что соответствует меньшему влиянию электро-
магнитных процессов в генераторе на изменение его
скорости.
Для машин общепромышленного применения величины
постоянных времени T’KD, TSD, Т-е—^- - , как правило, ма-
лы, и структурная схема может быть упрощена (рис. 3-3)
за счет пренебрежения соответствующими гибкими об-
ратными связями.
64
3-3. СТРУКТУРНАЯ СХЕМА ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА
Схема включения двигателя приведена на рис. 3-4.
Уравнения напряжений и э. д. с. для цепи якоря имеет
вид:
Еа — EyWcp (Ф Ф8С -|- Ф£) 4“ ЙУд.В^д.п 4“ nP^sn 4“
+ /«^.nS + /«^4-WH, (3-25)
где /?дяг — определяется выражением (3-11) применитель-
но к двигателю;
Ек, RK, Ln напряжение, сопротивление и индуктивность
источника питания.
5 равнения напряжении цепи возбуждения, а также
уравнения потоков и н. с. идентичны приведенным выше
уравнениям (3-2) — (3-8).
Уравнение моментов:
Affl-Afn=^(/„+/u)pQ. (3-26)
Приведем уравнение (3-25) с учетом (3-3) — (3-8),
(3-10), (3 11), (3-12) к следующему виду:
Еи - er = /д (Яд.я, 4- Rn) 4- (\.я, 4- Ь„) piR 4-
4-Гс-/'.е (3.97)
А с
Индуктивность якорной цепи двигателя Ад яХ определяется
выражением *(3-12).
Как и для генератора, в качестве базисных величин
переменных принимаем их номинальные значения.
Уравнения (3-26), (3-27) в относительных единицах
принимают вид:
4-^)4-w(3'28)
Рд ' аыН11 === (7\г. д 4- ам^'м.н) Р0)г (3-29)
где
auR — ^nol^m
еп = Е1Х/Е11о э. д. с. источника питания в относи-
тельных единицах;
5—2337 65
0ke = EuolERl> — коэффициент приведения э. д. с. ис-
точника к э. д. с. двигателя;
Т | —7
I „ -L I „ ' Д.Я1 Т Р ' и
г Ад.я£
v —~r—=--------=----------Б----—постоянная времени
''"-Г'Кд.яХ Ди
' /? _
'д.ю:
якорной цепи;
ам=М,,0/МЯ0 — коэффициент приведения момента на-
грузки к моменту двигателя;
ри = /И11/Л!Но — момент нагрузки в относительных еди-
ницах;
'Т- Д^ 10
тМп = —in—’ — механическая постоянная вре-
/ИдО
меня двигателя;
_ 1 и ГО ДО
ми —
При структурном моделировании двигателя постоян-
ною тока удобно пользоваться механической постоянной
Рнс. 3-4. Схема вклю-
чения двигателя посто-
янного тока с независи-
мым возбуждением.
времени, представляющей собой
время разгона двигателя до по-
минальной скорости под дей-
ствием номинального вращающе-
го момента.
В ряде случаев пользуются
постоянной времени, равной вре-
мени пуска двигателя до номи-
нальной скорости под действием
пускового момента (см. гл. 11).
По уравнениям (л-28), (3-29)
и (3-19), (3-23), (3-24) может
быть составлена структурная
схема двигателя.
При пренебрежении постоян-
ными времени в цепях обратных
связей получаем структурную
схему, представленную на рис. 3-5.
В более простых случаях (не
учитывается связь обмотки воз-
буждения с цепью главного тока
и изменение потока возбуждения
двигателя, скорость вращения генератора принимается
постоянной и т. п.) структурные схемы могут быть по-
лучены либо из схем, приведенных в настоящей главе
GG
в качестве частных случаев, либо на основании исход-
ных уравнений, записанных с необходимыми упроще-
ниями. Построение структурных схем двигателя по-
стоянного тока по упрощенным уравнениям приведено
в гл. 11.
Параметры структурных схем легко могут быть опре-
делены экспериментально или па основании расчетного
Рис. 3 5 Упрощенная структурная схема двигателя постоянною то-
ка с независимым возбуждением.
формуляра машины. В приложении (см. табл. П-1—П-3)
приведены значения параметров структурных схем неко-
торых машин постоянного тока серии П защищенного
исполнения. При определении индуктивности якорной
цепи авторы пользовались методикой, изложенной
в [Л. 13].
В табл. П-4 приведены данные по кривым намагничи-
вания для различных габаритов машин серин П. Указан-
ные данные представлены в функции относительного потока
Ф
Фб ’
где Фб —базисный поток.
Рассмотрим структурную схему двигателя с последо-
вательным возбуждением.
Двигатель последовательного возбуждения представ-
ляет собой разновидность машины постоянного тока
с одной обмоткой возбуждения, следовательно, для со-
ставления структурной схемы можно воспользоваться
5* 67
полученными выше общими уравнениями (3-23), (3-24),
(3-28), (3-29).
Связь между потоком и током в относительных еди-
ницах можно представить следующим образом:
<3-30)
с учетом (3-30) перепишем уравнение (3-28):
ае^к f д — Zд (1 "Ь ^яг/7) Ч С цс Р^П Ч-
I _ А с А — Ал .
Г К С Ал ' д’
после преобразований окончательно получим:
«.А. - eR = (^Ч~)/д (1 4-т.,р) +
I Тс ТГлс •
~Гс Р Л'
(3-31)
где Т-,— суммарная постоянная времени якорной цепи
с учетом обмотки возбуждения, включенной
последовательно с якорем, па линейном участ-
ке кривой намагничивания.
По уравнениям (3-23), (3-24), (3-29), (3-30), (3-31)
составлена структурная схема двигателя с последова-
тельным возбуждением, изображенная па рис. 3-6.
Иногда с целью сокращения количества нелинейных
элементов п получения более простой схемы пренебрегают
Т с — Т'в с А — Лл
членом ---=—— —-—= /лд.
А с Ал
Так как различные модификации машин (генератор, дви-
гатель) одного и того же габарита имеют различные зна-
чения номинального потока Ф,-о, то в структурной схеме
введен коэффициент аф=^^-.
По структурным схемам, изображенным на рис. 3-3,
3-5 и 3-6, могут быть легко составлены схемы набора
решающих элементов электронной модели. Узловые точ-
68
Рис. 3-6. Структурная схема двигателя постоянного тока с последо-
вательным возбуждением.
кп структурной схемы в мотели представляются сумми-
рующими элементами или блоками произведений.
Усилительные и инерционные звенья, входящие
в структурную схему, при переходе к схемам модели
заменяются делителями напряжений, блоками нелиней-
ности и типовой схемой модели инерционного звена.
ГЛАВА ЧЕТВЕРТАЯ
МОДЕЛИРОВАНИЕ ЭЛЕКТРОМАШИННЫХ
УСИЛИТЕЛЕЙ ПОПЕРЕЧНОГО ПОЛЯ
4-1. ЭЛЕКТРОМАШИННЫЙ УСИЛИТЕЛЬ ПОПЕРЕЧНОГО ПОЛЯ
КАК ЭЛЕМЕНТ СИСТЕМЫ РЕГУЛИРОВАНИЯ
Электрома111ип1цып усилитель поперечного поля
(ЭМУ) является основным видом машинного усилителя,
который широко применяется в автоматизированных
электроприводах и различных системах регулирования.
Принцип действия и теория ЭМУ поперечного поля
рассмотрены во многих работах отечественных и зару-
бежных авторов [Л. 14—23}. Однако методы математи-
ческого моделирования ЭМУ почти не освещались в тех-
нической литературе.
При записи уравнении, необходимых для построения
модели ЭМУ, ниже принята математическая формули-
ровка, основанная, главным образом, па работах А. Г.
Иосифьяна 1[Л. 14, 15], В. П. Клобукова (Л. 17] и Н. М.
Якименко {Л. 18].
Методы определения параметров ЭМУ изложены
с использованием также работ Е. Л. Эттингера и Ю. Р.
Рейнгольда [Л. 19—21] и В. В. Рудакова [Л. 22].
4-2. СТРУКТУРНАЯ СХЕМА ЭЛЕКТРОМАШЙННОГО УСИЛИТЕЛЯ
ПОПЕРЕЧНОГО ПОЛЯ ПРИ ХОЛОСТОМ ХОДЕ
В режиме холостого хода электромашиннып усили-
тель (ЭМУ) можно представить в виде двух инерцион-
ных звеньев, охваченных внутренней обратной связью,
создающей па входе ЭМУ размагничивающий сигнал
Как известно, указанная обратная связь обусловлена
70
влиянием вихревых токов н гистерезиса от поперечного
потока в стали якоря, влиянием токов замедленной ком-
мутации п сдвигом щеток с нейтрали в сторону направ-
ления вращения якоря. При холостом ходе ЭМУ зависи-
мость между входными сигналами, приложенными к об-
моткам управления, и э. д. с., измеренной на выходных
зажимах, может быть записана в следующем виде:
т
£ = +/;(fd + 7^) + р3ГаТ9], (4-1)
i=l
где р — символ дифференцирования;
t/yi — напряжение, приложенное к i-i'i обмотке управ-
ления;
Kd— э. д. с., измеренная па выходных зажимах ЭМУ
при холостом ходе;
Kid — коэффициент усиления по напряжению i-й об-
мотки управления по продольной оси для иде-
ализированного ЭМУ, т. е. при Ло = 0;
(«I
Кч — коэффициент усиления по напряжению по по-
перечной оси для идеализированного ЭМУ,
= (4’3)
Ко — коэффициент усиления по напряжению в цепи
внутренней обратной связи, обусловленной по-
терями в стали якоря, замедленной коммута-
цией и сдвигом щеток;
Td— постоянная времени ЭМУ по продольной осп,
m
,4-1>
i=I
Tq — постоянная времени ЭМУ по поперечной оси;
Tyi — постоянная времени i-й обмотки управления
ЭМУ (с учетом внешнего сопротивления в ее
цепи);
Т’к.о — постоянная времени компенсационной обмотки
(при отсутствии внешних сопротивлений в ее
цепи);
71
7?к, — величины сопротивлений собственно компенса-
ционной обмотки и включенного параллельно
с ней регулировочного реостата.
Для линейной части характеристик ЭМУ его пара-
метры Kid, Кч, Ко, Td и Тч являются постоянными вели-
чинами, не зависящими от э. д. с. па выходе, п на осно-
вании (4-1) передаточная функция ЭМУ может быть
записана в виде
tn
Ed = 1 +«г/>2 ’
где р— оператор Лапласа;
KUi—коэффициент усиления по напряжению i-й об-
мотки управления;
(4-0
„ = Дс±21.
1 I +Ко ’
а = ,Г-7^
2 1 +М/
(4-7)
(4-8)
Структурная схема ЭМУ, построенная в соответствии
с уравнением (4-1), показана па рис. 4-1. В случае, если
необходимо учесть нелинейность характеристики холо-
Рпс. 4 1 Структурная схема ЭМУ по-
перечного поля при холостом ходе.
стого хода, то с достаточной для практических целей
точностью можно принять, что насыщение имеет место
только по поперечной оси.
Структурная схема, построенная при этом допущении,
представлена на рис. 4-2. Нелинейность учитывается зве-
72
ном с передаточной функцией 1 в цепи обратной
связи, охватывающей выходной каскад ЭМУ.
Схема, приведенная па рис. 4-2, удобна при решении
задач с учетом нелинейности, так как параметры ЭМУ
Kq и Тч, которые используются в этой схеме, относятся
к линейной части характеристик. Коэффициент К,
Рис. 4-2. Структурная схема ЭМУ поперечного
поля при холостом ходе с учетом насыщения.
учитывающий нелинейность, равен единице для линей-
ной части характеристик и менее единицы в зоне насы-
щения.
В соответствии с этим функция ----1 равна пулю
для линейной части характеристики и больше пуля —
для нелинейной области (верхнего или нижнего участков
характеристики). Как уже указывалось в гл. 3, Л = Х/ХЛ,
где й,л и X—проводимости пути главного потока па ли-
нейной части характеристики и в данной точке. Струк-
турная схема, учитывающая нелинейность, может быть
построена п путем последовательного включения нели-
нейного звена. Методы построения схем, учитывающих
нелинейность, рассмотрены в гл. 1 и поэтому подробно
не излагаются.
4-3. СТРУКТУРНАЯ СХЕМА ЭЛЕКТРОМАШИННОГО УСИЛИТЕЛЯ
ПОПЕРЕЧНОГО ПОЛЯ ПРИ НАГРУЗКЕ
При нагрузке на динамические характеристики ЭМУ
существенное влияние оказывают ряд факторов: непол-
ная компенсация, сдвиг щеток с нейтрали, потоки рас-
сеяния компенсационной обмотки и якоря и т. д.
73
Как показал ряд исследований, для учета указанных
факторов в уравнение (4-1) необходимо ввести члены,
пропорциональные токи и его первой производной. Учи-
тывая также активную составляющую падения напряже-
ния, уравнения ЭМУ при нагрузке записываем в виде
V - ЕЛКО - 1а (/?ф + р£ф) =
1=1
= Ed [1 -4- р (Тл + Т q) + p*TdTJ; (4-9)
U=Ed—IaRR, (4-9a)
где U—напряжение на выходе ЭМУ;
/?Ф и Ьф — соответственно фиктивные сопротивление и
индуктивность цепи якоря, отражающие
влияние тока нагрузки /„ па характеристики
усилителя;
/?„ — сопротивление цепи якоря с учетом компен-
сационной обмотки, дополнительных полюсов
н щеточного контакта.
Заметим, что уравнения (4-9) и (4-9а) могут быть
применены для составления схемы модели независимо
от вида нагрузки (активная, индуктивная, противо-
э. д. с.). При этом модель ЭМУ и модель нагрузки долж-
ны быть составлены раздельно и связаны между собой
общими входными и выходными величинами U и 1п.
Входящие в уравнение (4-9) величины 7?ф и £ф могут
быть определены экспериментально (см. § 4-3) или рас-
считаны по конструктивным параметрам. Для расчета
/?Ф и £ф могут быть использованы следующие формулы Ч
/?ф=у KlW- ~е + 2ТУ); (44°)
£ф = KfWu (1 + к„) (TS1 + TSi), (4-11)
где Kt — коэффициент усиления ЭМУ по и. с. цени
управления, т. е.
К __ дЕл
—d(X/yWyy
е — степень компенсации;
1 Уравнения (4-10) и (4-11) получены, исходя из формул для
определения параметров ЭМУ, предложенных в (Л. 17].
74
TSl, Т,2— постоянные времени, обусловленные потоками
рассеяния,
(4-13)
Wyj, i/?yi — число витков и сопротивление i-ii обмотки
управления соответственно;
Ху—проводимость пути главного потока по про-
дольной осн;
Xsa— проводимость путей
потоков рассеяния
якоря;
XsK— проводимость для по-
токов рассеяния ком-
пенсационной обмот-
ки;
Xsy.it—проводимость для по-
токов рассеяния,
связанных с компен-
сационной обмоткой
и обмоткой управле-
ния;
wa — число витков обмот-
ки якоря.
Остальные обозначения те
же, что в § 4-2.
Картина распределения маг-
нитных потоков, принятая при
записи приведенных выше
уравнений, показана на рис. 4-3.
Уравнения (4-10), (4-11),
'(4-12) и (4-13) дают возмож-
ность оценить влияние условий
работы ЭМУ на параметры 7?ф
и £ф. Так, например, из уравне-
ния (4-10) видно влияние сте-
Рис. 4-3. Распределение
магнитных потоков
в ЭМУ поперечного
поля.
пени компенсации на значе-
ние Из уравнения (4-11) нетрудно установить связь
между £ф и постоянными времени обмотки управления.
75
Учитывая, что постоянная времени обмотки управ-
ления
Т yi ---Лу
Wyl
Ryt
уравнение (4-12) можно переписать в виде
m
T„ = ^Tyi
+ ^»у.к
Лу
(4-13а)
Известны утверждения, что коэффициент при первой
производной тока (т. с. в принятых авторами обозначе-
ниях Ьф) прямо пропорционален суммарной постоянной
времени цепи управления.
Как видно пз уравнений (4-11) и (4-13), это справед-
ливо в случае, когда 7\, > Тег. Практически это должно
иметь место для машин с малым запасом витков компен-
сационной обмотки, для которых обычно
Необходимо остановиться та физическом смысле чле-
на /а(/?ф+р£-ф) в левой части уравнения (4-9).
В статическом режиме выражение пропорцио-
нально изменению напряжения, вызванному реакцией
якоря. В зависимости от наличия педокомпенсацин или
перекомпенсации выражение /аУ?ф может иметь положи-
тельный или отрицательный знак. Величина р1а^Ф соот-
ветствует изменению напряжения в результате так на-
зываемой динамической раскомпенсацип. Суть указан-
ного явления заключается в том, что при изменениях
тока та грузки в начале процесса изменяется только ток
в шунтирующем сопротивлении. Изменение тока в ком-
пенсационной обмотке вследствие ее индуктивности про-
исходит с некоторым запаздыванием. В переходных про-
цессах это приводит к нарушению компенсации, что
ухудшает динамические свойства ЭМУ. Очень важно
при моделировании ЭМУ поперечного поля правильно
учесть указанное явление.
Структурная схема ЭМУ, построенная на основании
уравнений (4-9), приведена та рис. 4-4. Заметим, что
в схеме, представленной на рис. 4-4, гибкая связь по
току нагрузки введена па вход второго каскада ЭМУ
„ , „ рТ о
через звено с передаточной функцией вида -j-j- -7. Это
I -f- pl
7G
позволяет исключить из схемы модели звено с переда-
точной функцией в виде чистой производной, неудобное
для реализации па аналоговых машинах. Методы учета
нелинейности кривой намагничивания при наличии на-
грузки особенностей не имеют п поэтому звенья струк-
турной схемы, отражающие влияние нелинейности в схе-
ме (рис. 4-4) не показаны. Опп могут быть выполнены,
например, академично схеме, показанной на рис. 4-2.
Рис. 4-4. Структурная схема ЭМУ поперечного поля
при нагрузке.
Кроме того, необходимо отметить, что влияние изме-
нения скорости вращения якоря ЭМУ может быть отра-
жено так же, как и для машин постоянного тока
(рис. 3-3). Однако для учета переменной скорости вра-
щения ЭМУ необходимо иметь в модели два блока про-
изведении, один из которых включается после первого
звена, а второй — после второго звена, имитирующего
поперечную цепь усилителя.
4-4. ОПРЕДЕЛЕНИЕ ПАРАМЕТРОВ ЭМУ ПОПЕРЕЧНОГО ПОЛЯ
Параметры отдельных типов ЭМУ поперечного поля
были опубликованы в (Л. 19—21]. В работе [Л. 22] пред-
ложены универсальные кривые, позволяющие в зависи-
мости от мощности ЭМУ и его номинальной скорости
вращения определить постоянные времени первого и
второго звеньев. В [Л. 22] также приведены универсаль-
ные кривые холостого хода и внешние характеристики.
Указанные универсальные характеристики приведены
на рис. 4-5,а, б и е. На рис. 4-5,г приведены также кри-
вые, позволяющие вычислить значения L,b и Ко. Ореде-
леине параметров при помощи кривых, приведенных на
рис. 4-5, поясняется более подробно на конкретном при-
мере расчета (см. § 4-5).
77
ос
Рис. 4-5. Универсальные характеристики электромашиииых усилителен
поперечного поля.
а —зависимости Г„. = f (Ри);------Тq = f (Рн): —
Ч У К.’у
ff —внешние характеристики ЭМУ при различных компенсациях: I. IV-при пере-
компенсации (Яш = Рш мякс): II, V —при критической компенсации. III. VI
при недокомпенсации (Яш = Яш.мпи); а-характеристика холостого хода, г
зависимость Ко, С-ф0 = f (Ра)-
Универсальные кривые, изображенные па рис. 4-5,
могут быть использованы для предварительных расче-
тов. При более высоких требованиях к точности расчетов
параметры ЭМУ необходимо определять по данным ис-
пытаний, проведенных в условиях, близки,х к рассмат-
риваемым при моделировании.
Для определения параметров ЭМУ по эксперимен-
тальным данным целесообразно использовать метод
частотных характеристик совместно с осцпллографпрова-
ппем переходных процессов в отдельных цепях и расче-
тами по статическим характеристикам. Постоянные вре-
мени первого каскада усиления и цепи компенсационной
обмотки ЭМУ определяются из осциллограмм пли ча-
стотной характеристики. Коэффициент усиления Ка так-
же определяется из частотной характеристики первого
звена ЭМУ.
Постоянная времени T,i вычисляется по формуле
(4-4); постоянная времени поперечной цепи Тч п коэф-
фициент усиления цепи обратной связи определяют-
ся из частотной характеристики ЭМУ при холостом
ходе. Для этого указанная характеристика сопостав-
ляется с семейством частотных характеристик идеаль-
ного колебательного звена, что будет изложено ниже.
Предваригельно из уравнений (4-7) и (4-8) находим:
Т„ — — —I* ; (4-14)
4 а, _ «S '
Td - «7
•т«2
* fi
Ко-1. (4-15)
«1/.1 — «2 '
Таким образом, при известных значениях параметров
передаточной функции Ф и а2 и постоянной времени Tj
по уравнениям (4-14) и (4-15) могут быть найдены зна-
чения Т„ и Ко- Для определения Oi и о2 частотная ха-
рактеристика перестраивается в функции относитель-
ной величины частоты f/f0, где f0 — частота, при кото-
рой сдвиг фаз равен 90°. Перестроенная таким образом
характеристика совмещается с семейством частот-
ных характеристик идеального колебательного звена
рис. (1-3).
Выбрав на рис. 1-3 кривую, наиболее близко совпа-
дающую с экспериментальной, находим значения коэф-
80
фпциепта затухания /?,, (значения /;о на рис. 1-3 указаны
как параметр семейства кривых).
На основании найденных таким образом величин йп
и f„ параметры передаточной функции подсчитываются
г.о формулам
= (4-16)
= (4-17)
vo
где v0 = ^-=2irf0, сек'1.
J о
Величины фиктивного сопротивления 7?ф и фиктивной
индуктивности £ф также могут быть определены частот-
ным методом путем сравнения частотных характеристик
ЭМУ при холостом ходе и при активной нагрузке, как
это излагается ниже. Предварительно найдем переда-
точную функцию ЭМУ при активной нагрузке.
Подставив в (4-9) и (4-9а) значение тока, равное
lu=U/Rtl, после преобразований получим:
т
где
/<'„« = —----—r---------Кий (4-19)
Ru 4- R„ + т
1 +Ко+ R„+Rn
а’г = --------• (4-21)
1 + Л'о + /?„+’/?„
Таким образом, при активной нагрузке передаточная
функция ЭМУ, так же как и при холостом ходе, описы-
вается уравнением колебательного звена. Однако коэф-
фициенты передаточной функции ЭМУ при нагрузке
имеют другие значения, чем при холостом ходе, так как
зависят от /?ф и Ьф.
6—2337 81
Сравнивая выражения (4-20) и (4-21) для коэффи-
циентов передаточной функции при активной нагрузке
с аналогичными выражениями (4-7) и (4-8), относящи-
мися к холостому ходу, находим и L$,:
= j>)(1+^o)(/?h + ^); (4-22)
\w 2 /
£ф=<(1 +tfo)(/?u +/?я)<-^—(4-23)
\ 14 2 1 J
Коэффициенты c'2 и a'j определяются путем совме-
щения частотных характеристик при активной нагрузке
с характеристиками идеального колебательного звена
(рис. 1-3) аналогично тому, как это было изложено для
определения коэффициентов at и а'2 из частотных харак-
теристик при холостом ходе.
Рис. 4 6. Частотные характеристики электрома-
шинного усилителя мощностью 2,5 кет.
1, 2— зависимости qp(/> при холостом ходе и нагрузке
соответственно; 3, 4 — зависимости при тех же
режимах.
В качестве примера, иллюстрирующего изложенную методику,
ниже приведено определение параметров электромашннного усилите-
ля со следующими данными: 2,5 кет, 230 в, 10,9 а, 2 850 об/мин Ча-
стотные характеристики усилителя при холостом ходе и нагрузке
82
(₽п=21 ол) представлены на рис. 4-6. Из частотной харак-
теристики при холостом ходе находим частоту собственных колеба-
ний и соответствующую ей относительную величину выходного на-
пряжения ЭМУ:
fo — 3,33 зц; 0,71.
На рис. 1 3 значению Л1/Л4о=О,71 соответствует кривая, для кото-
рой й0 ~ 0,71, На этом основании получаем v0=2 • 3,14 - 3,33 =
=20,9 сек-1.
йо 0,71
Тогда at = 2 — =22Q-g=0,068 сек;
1 1
аг =—2-=2Q~g7=2,3-10~3 сек2.
’о
По формулам (4 14) и (4-15) определяем постоянную времени Tq
поперечной цени ЭМУ н коэффициент усиления Ко цепи внутренней
обратной связи
2,3.10-a 0,05
0.068 2,3-10-’ — О.Юлс/’Д,
0,05 0,068
_ 0,05в___________
Кп ' 0,068-0,05 — 2,3-10-’ 1 — 1,27.
Далее определяем коэффициенты передаточной функции ЭМУ прн
активной нагрузке. Из частотной характеристики находим (рис. 4-6)i
Го = 3,55 гц; ^=0,34.
На рис. 1-3 отношению Л47Л4о = 0,34 соответствует кривая, для
которой й'о = 1,5, и, следовательно,
v0 = 2-3,14-3,55 = 22,3 сек-'.
Тогда
1,5
a' , = 2 Г)Г = 0,135 сек;
д'г=22 з»= 2,01 -10~ ’ сек2-
Подставляя значения a't, аг, а'г н Ко в формулы (4-22) и (4-23),
находим значения и £ф:
/2,310-’ \
^^('2,01-10—’-1/1 +'>27)(21 +3)* * = 7,9 ом;
/2,3-10-’ 0,068\
= 0,135(1 + 1,27) (21 +3) ^2,о|.То--»~67135)=4,7 гн‘
1 Частотные характеристики рнс. 4-6 сняты для режима, при
котором постоянная времени продольной цепи равнялась Та =
=0,05 сек.
* Сопротивление цепи якоря вместе со щетками рассматривае-
мого ЭМУ по данным [Д. 19] составляет 3 ом.
6* 83
Следует заметить, что при использовании для опреде-
ления и £ф частотных методов необходимо распола-
гать достаточно точными частотными характеристиками.
Объясняется это тем, что в формулы (4-22) п (4-23) входят
разности близких чисел ^-—1 и . Следователь-
г а'г а'г а',
но, сравнительно небольшие неточности в вычислении ве-
личин а2, а\ и а'2 могут дать существенные ошибки
при определении £ф и в особенности R,it. Это сопротивление,
как это нетрудно доказать, пропорционально разности
квадратов собственных частот колебании при холостом
ходе и нагрузке. Поэтому если не представляется воз-
можным определить коэффициенты йь «2, ci'i и о'г с точ-
ностью до 1—2%, то /?ф целесообразнее определясь по
спрямленным внешним характеристикам ЭМУ.
Уравнение внешней характеристики ЭМУ найдем, по-
ложив в (4-9) и (4-9а) р=0:
= + (4-24)
где £/0—напряжение на выходе ЭМУ при /(1=0, т. е. при
холостом ходе;
^—напряжение на выходе ЭМУ при !а=1а\
Из (4-24) находим:
= (4-25)
\ 1 а 1 J
Ток /ai следует выбирать близким к номинальному зна-
чению. Вычисление /?ф по формуле (4-25) пред-
ставляется целесообразным также и потому, что при
этом возможно оцепить влияние уровня выходного на-
пряжения ЭМУ па величину Так, например, из кри-
вых, приведенных па рис. 4-5,6, видно, что для переком-
кенспроваиного ЭМУ значение Дф весьма существенно
зависит от уровня 'напряжения на выходе ЭМУ. Напри-
мер, значение /?ф, вычисленное по кривым II и V
(рис. 4-5,6), имеет не только различную величину, но и
разный знак. Для режима недокомпенсации зависимость
от уровня напряжения менее существенна (см. кривые
III и VI на рис. 4-5,6), и при определении параметров
ЭМУ в этом случае можно принимать некоторое усред-
ненное значение Дф. Заметим также, что при отсутствии
достаточно точных значений коэффициентов передаточ-
84
noii функции а], а2, а'\ и й'2 значение Дф можно оцепить
по скачку тока в цепи управления при подключении па-
грузки к возбужденному ЭМУ. Определение £ф по этому
методу см., например, в [Л. 23].
4-5. СХЕМА НАБОРА МОДЕЛИ ЭМУ ПОПЕРЕЧНОГО ПОЛЯ
Ниже будет рассмотрено определение параметров
ЭМУ при помощи универсальных кривых и составление
схемы набора модели.
Рассмотрим в качестве примера моделирование ЭМУ мощностью
2,5 кет, некоторые данные которого были приведены в § 4-4. Уси-
литель имеет две одинаковые обмотки управления (a)j = tc2—
=3 000 витков).
В цени первой обмотки дополнительное сопротивление отсут-
ствует, п сопротивление ее цент, равное сопротивлению обмотки,
составляет 820 ом. Последовательно со второй обмоткой включено
дополнительное сопротивление 780 ом. Постоянные времени обмо-
ток определяем, пользуясь кривыми, приведенными на рис. 4-5,я.
Для Р=2,5 кет, л=3 000 об/мин находим удельную индуктив-
ность /./ш2—0,095 • 10“4 гн/виток2, откуда £=9,5 • 10 г>(3 000)2=85,5 гн-.
85,5
Гу 1 = 82о = 0,104 сек\
85,5
780 4-820' °'053 сгк
и, следовательно, постоянная времени продольной оси ЭМУ.
Тл = Tyi + Ту2=0,104 + 0,053 = 0,157 *.
Постоянная времени поперечной оси ЭМУ согласно кривым, пред-
ставленным на рис. 4-5,а, составляет 7",=0,1 сек. Коэффициенты
усиления определяем, пользуясь универсальной кривой холостого
хода (рис. 4-5,в). Крутизна кривой холостого хода в ее линейной
части составляет:
140—G0
24-1 Н~~6,15 в/ав.
Коэффициенты усиления по напряжению:
для обмотки управления ОУ1
иц „ 3 000 „ _
Kui == ТС/ -Rj 6,15 820 22,5,
для обмотки управления ОУ11
„ „ 3 000
= —6,15 ! 600 —11.5.
* При вычислении 74 постоянная времени цепи компенсацион-
ной обмотки не учитываласьввиду ее малости (по данным (Л. 19] опа
составляет 0,003- 0,004 сек).
85
Значение коэффициента жесткой внутренней обратной связи Ко и
фиктивной индуктивности 7-ц находим при помощи кривых, изобра-
женных на рис. 4-5,г. Как видно из этих кривых, при Р=2,5 кет и
п=2 950 об/мин коэффициент жесткой внутренней обратной связи
равен: Л'с = 1,3.
Для определения £,), находим из кривых, приведенных на
рис. 4-5,г, вспомогательную величину £ф0, представляющую собой
фиктивную индуктивность, вычисленную для случая, когда постоян-
ная времени продольной ооп ЭМУ равна сумме постоянных времени
всех его обмоток управления, включенных без дополнительных со-
противлений.
Как видно из рис. 4-5, г,
£фо=13,6 гн.
Как уже указывалось выше, рассматриваемый ЭМУ имеет две
одинаковые обмотки управления, постоянная времени каждой из
которых (при включении без добавочных сопротивлений) равна
Гу = 0,104 сек. Таким образом, суммарная постоянная времени об-
моток управления Т,(о=2 0,104 = 0,208 сек. Отсюда фиктивная ин-
дуктивность при Тц = 0,157 сек составляет:
0,157
£ф—у 208 13.G = 10,2* гн.
Значение фиктивного сопротивления определяем по формуле (4-25).
В соответствии с кривой Ш на рис. 4-5,6 находим Дв=255 в;
/1О=10,9 а; £71 = 187 в, откуда
/ 255—187 \ / \
/?Ф — f ~-[уд----— ЗН1-)-1,3)=7,4 ом.
Запишем данные, необходимые для составления схемы набора
модели ЭМУ мощнетыо 2,5 кет:
постоянная времени продольной оси Т,1 = 0,157 сек:
постоянная времени поперечной оси Т,,=0.1 сек;
коэффициент внутренней жесткой обратной связи До =1,3;
коэффициенты усиления по напряжению:
для обмотки ОУ/ Kui=22,5 и Д<лЛ'в = ДМ1‘( +До) =22,5(1 +1,3) =52,
для обмотки ОУ// Ku2=H,5 и КггКд—Kuztj +Л’с)=4 1,5(1 +4,3) =26.4,
сопротивление цепи якоря Дя=3 ом;
фиктивное сопротивление Дф = 7,4 ом;
фиктивная индуктивность £ф =110,2 гн.
Схема набора модели, соответствующая приведенным выше
данным, показана на рис. 4 7.
'Выбор масштабов модели производится с учетом того, чтобы
возможные пределы изменения входных и выходных величин ЭМУ
* Для сравнения приведем найденную величину £ф к постоян-
ной времени Та =.0,05 сек, при которой снимались частотные харак-
0.05
тернстикн. В этом случае £ф = q 208 ’ 13,6=3,3 гн вместо значения
£ф=4,7 гн, найденного выше из частотных характеристик. Прове-
денное сравнение показывает порядок возможных отклонений в ре-
зультатах расчетов, произведенных двумя изложенными выше мето-
дами.
86
и динамике соответствовали линейной области характеристик сше-
р.щиопных усилителей (обычно 100 в)
Диапазон изменения напряжения на выходе ЭМУ обычно не
превышает 350 в. Максимальные значения напряжений на входе
ЭМУ приняты равными 40 в. Максимальное значение тока якоря
.ЭМУ принято равным двойному номинальному току якоря На этом
основании могут быть приняты следующие значения масштабов:
масштаб выходного напряжения п э. д. с.
1°0
,п’ 350 °’285’
масштаб напряжения, приложенного к обмоткам управления,
масштаб тока якоря
100
т-‘ 2~f0,9~5
Схема набора модели ЭМУ (рис. 4-7) составлена на основании струк-
турной схемы, представленной па рис. 4-4.
Рис. 4-7. Схема набора модели ЭМУ поперечного поля.
Усилитель У1 выполняет роль суммирующего и усили-
тельного элементов и инерционного звена с постоянной
времени Тй. Усилитель У2 является инерционным зве-
ном, отражающим запаздывание в поперечной цепи ЭМУ.
Выходной величиной усилителя У2 является выходная
э. д. с. усилителя. Усилитель УЗ служит для вычитания
87
из э. д. с. составляющей что необходимо для опре-
деления выходного напряжения ЭМУ. Усилитель У4
служит инвертором, изменяющим знак э. д. с. в цепи
жесткой внутренней обратной связи.
Усилитель У5 вырабатывает сигналы гибкой обрат-
ной связи по току нагрузки.
Выставленные па схеме модели рис. 4-7 коэффициен-
ты усиления и другие параметры подсчитаны нижесле-
дующим образом. Коэффициент усиления У/ по каналу
обмотки управления ОУ1:
„ тг 0,285
Ко 1Кч=-9-ё-52 = 0,50.
То же по каналу обмотки управления ОУП-,
те 0,285
К1г = ~ 26,4 = 0,3.
Коэффициент усиления У/ по каналу тока:
„ ,пЕ п 0,285
Kia— — с 7,4 = 0,421.
’"а •->
Коэффициенты усиления У2 и УЗ (но основному каналу) в соот-
ветствии со структурной схемой ^приняты равными единице. Коэффи-
циент усиления УЗ но каналу тока /о
Коэффициент усиления УЗ принимается равным коэффициенту уси-
ления Ко, так как входные и выходные величины указанного уси-
лителя в соответствии с уравнениями и структурной схемой явля-
ются напряжениями, измеряемыми в одном и том же масштабе. Па-
раметры усилителя У5 выбраны исходя из того, что его переда-
точная функция должна быть равна:
„0,285
л-10,2—=-
' о
, те
{,L^
l+Z'T’d 1+/>0,157
/«,57
I + />0,157'
Остальные элементы схемы набора модели пояснении не требуют.
4-6. СОСТАВЛЕНИЕ СТРУКТУРНОЙ СХЕМЫ ЭМУ ПОПЕРЕЧНОГО
ПОЛЯ ПО УРАВНЕНИЯМ ЕГО ЭЛЕКТРИЧЕСКИХ
И МАГНИТНЫХ ЦЕПЕЙ
При исследовании современных быстродействующих
систем регулирования возникает необходимость более
точного учета особенностей элементов этих систем, чем
обычно принимается при аналитических расчетах.
Ниже приведена запись уравнений, более полно опи-
сывающих переходные процессы в ЭМУ поперечного
88
поля, ii рассмотрено представление ЭМУ па модели
в соответствии с указанными уравнениями.
Построение модели без решения исходных уравнений
относительно передаточной функции дает точное опре-
деление передаточной функции ЭМУ, но является
весьма трудоемкой задачей и приводит к громоздким
выражениям, которые неудобны для их представления
па модели.
В соответствии с распределением магнитных потоков,
показанных па рис. 4-3, процессы в ЭМУ поперечного
поля могут быть описаны следующими уравнениями:
^У1 — /У1^У1 + (^d + ‘1’sy.K + Ф«а)!
= /угКу2 + ЬУугР (4’d + Ф«У.К + Ф«а)5
fVji = /yi^?yi ~Ь wy,iP ('I’d -|-Ф^у.к ^’sa)-
Умножая каждое из приведенных выше уравнений для
обмоток управления на соответствующие отношения
w/R и складывая полученные при этом уравнения, на-
ходим общее уравнение цепей управления:
т т т 2
(4-2G>
1=1 1=1 1
Уравнение баланса напряжений в поперечной цепи:
Eq=lqRq-\-wqp^q. (4-27)
Уравнение баланса напряжений в цепи компенсационной
(1а - 7к) Rw = /к/?к + W/7 (<I>d + Ф.чу.к + Фза + Фцк). (4-28)
Уравнения, связывающие н. с. и магнитные потоки:
Ф?=Я9/^; (4-29)
‘I’d = ^d
т
V iyi Wy.^(/aWa—/ K Wk)
.1=1
—«о ф9;
(4-30)
(4-31)
•I’slt-----^лк7 K^ni
Ф«У.К --^sy.K
Ф«а —
(4-32)
(4-33)
89
Уравнения для э. д. с. вращения:
Ed=C4>q; (4-34)
Eq=CO>d. (4-35)
В уравнениях (4-26) — (4-35) обозначено:
(7У1, L'Y2,..., Uyi — напряжения, прило-
женные к обмоткам
управления;
/У1, Ла*- • • 1 Л» — токи в обмотках
управления;
w>a,.. , wyi; /?у>, /?1г,..., RVi — числа витков и соп-
ротивления цепей
обмоток управле-
ния соответственно;
Eq— э. д. с. на щетках
2-4, расположен-
ных в поперечной
цепи;
Ed— э. д. с. на щетках
1-3, равная э. д. с.
на выходе ЭМУ;
Iq — ток в поперечной
цепи ЭМУ;
1К — ток в компенсационной обмотке;
1п — ток в цепи нагрузки;
<b,i—полезный поток по продольной оси;
<1>,; — полезный поток по поперечной оси;
kd— 'проводимость пути полезного потока по про-
дольной оси;
kq — проводимость пути полезного потока по попе-
речной цепи;
^«к — проводимость пути потока рассеяния компен-
сационной обмотки;
кау.к — проводимость пути потока рассеяния, сцеплен-
ного с компенсационной обмоткой и обмотками
управления;
ksa—проводимость пути потока рассеяния якоря,
сцепленного с лобовыми частями обмоток
управления;
— 'величина сопротивления, шунтирующего ком-
пенсационную обмотку;
Rk, wk — величина сопротивления компенсационной об-
мотки и ее число витков соответственно;
90
С — коэффициент пропорциональности между по-
током и соответствующей ему э. д. с. враще-
ния;
cto—-коэффициент жесткой внутренней обратной
связи, возникающей за счет потерь в стали яко-
ря от потока, действующего по поперечной оси,
а также замедленной коммутации и сдвига
щеток по направлению вращения;
wa — число последовательно включенных витков
якоря.
В приведенных уравнениях при определении проводи-
мостей учитываются коэффициенты, характеризующие
распределение н.с. по окружности якоря. Значения этих
коэффициентов приведены, например, в [Л. 19]. Состав-
ление модели непосредственно по уравнениям (4-26) —
(4-35) является неприемлемым, так как приводит к слож-
ным и неудобным для практики схемам. Определение из
указанных уравнений передаточной функции и ее исполь-
зование для построения модели также не может быть
рекомендовано, так как связано с громоздкими аналити-
ческими преобразованиями. Удобнее всего из уравнений
(4-26) — (4-35) исключить часть переменных и при моде-
лировании вместо исходных десяти уравнений исполь-
зовать три-четыре уравнения. Применив этот прием, ис-
ключим из уравнений (4-26) — (4-35) Ф<^, Ф„ Ф6К, Фяя,
Фяу.к, и /7 и после преобразований получим следую-
щие три уравнения:
т
v?уо я) рРу
i=l________________________________________
1 рР у.к
рР*а!а
------; (4-36)
т
У /у.и’у. —(Zo wa— JkWk)
F — Kf
1 +Ko<
(4-37)
, , тч
1 +^1 +к
91
fKwK
Ruj
,“Юи /?ш +RK (1 +
1 + P (7"ек +
-рГк(1 +Г7,5)|у-р7.у,,
/y.Wyj
(4-38)
+ Л>у.1<)
В уравнениях (4-36) — (4-38) обозначено:
Лча, 7 sk, Т’ву.к, Гшк, Т'у к — постоянные времени, обус-
ловленные связью обмоток
ЭМУ с потоками рассеяния
и равные:
• т __1 к
’ £К~ ‘к Яш+Я,
_____j Wk . т _____ , U>QWB
sy.K— Л-n.K /?ш+«к’ уш.к —
Рис. 4-8. Структурная схема ЭМУ поперечного поля,
составленная по уравнениям (4-36) —(4-38).
92
7 у.к------^-SJ’.K
7’J0—суммарная постоянная времени обмоток управления,
=i
Тк — постоянная времени цепи компенсационной обмотки;
w2K
Т ___ 1 ___к
к— а Кш+Кк’
Tq — постоянная времени поперечной цепи;
Ко — коэффициент усиления по напряжению в цепи внут-
ренней обратной связи;
a.,CA,wo .
К"= Rg ’
Г 7 1,1
Рис. 4-9 Преобразованная структурная схема ЭМУ по-
перечного поля.
93
Kf— коэффициент усиления ЭМУ по н. с.,
Структурная схема ЭМУ, построенная по уравнениям
(4-36) — (4-38), показана на рис. 4-8.
Использование схемы, изображенной на рис. 4-8, при на-
боре на аналоговой модели затруднительно, так как ука-
занная схема содержит передаточные функции, в которых
порядок числителя выше порядка знаменателя ^типа
ДТ'С 1 -f~ РТд)\ г-г с «
i-j-r—_ - I. Путем несложных преобразовании структур-
1 । Р‘ у.к у
ную схему можно привести к виду, более удобному для
решения (рис. 4-9).
Параметры, необходимые для построения модели по
схемам, приведенным па рис. 4-8 л 4-9, могут быть опре-
делены иа основании испытании отдельных звеньев ЭМУ
и расчетов, выполненных по конструктивным данным
усилителя.
Необходимо заметить, что в большинстве практиче-
ских случаев можно ограничиться применением более
простой модели, набранной по схеме, представленной на
рис. 4-4 и требующей для своего осуществления мень-
шего количества усилителен.
Выбор той или иной схемы для моделирования ЭМУ
поперечного поля должен решаться в зависимости от
конкретных значений частоты среза системы, в которой
используется усилитель.
ГЛАВА ПЯТАЯ
МОДЕЛИРОВАНИЕ ЭЛЕКТРОМАШИННЫХ УСИЛИТЕЛЕЙ
ПРОДОЛЬНОГО ПОЛЯ
5-1. НАЗНАЧЕНИЕ ЭЛЕКТРОМАШИННЫХ УСИЛИТЕЛЕЙ
ПРОДОЛЬНОГО ПОЛЯ
ЭМУ продольного ноля находит применение в элек-
троприводах как промежуточный усилитель. Характер-
ным для него является значительная мощность выход-
ного сигнала наряду с большим коэффициентом усиле-
ния и относительно высоким быстродействием. В настоя-
щее время создано несколько видов ЭМУ различной мо-
дификации [Л. 24].
Для структурного анализа наиболее целесообразно
классифицировать ЭМУ по числу ступеней усиления.
Ниже рассматриваются схемы одноступенчатых, двух-
ступенчатых и трехступенчатых ЭМУ продольного поля.
5-2. СТРУКТУРНАЯ СХЕМА ОДНОСТУПЕНЧАТОГО ЭМУ
ПРОДОЛЬНОГО ПОЛЯ
Обычный электромашинпый генератор независимого
возбуждения имеет свойства одноступенчатого ЭМУ про-
дольного поля.
Наиболее характерными признакми ЭМУ является
наличие нескольких обмоток управления, одна из ко-
торых связывается с его выходными зажимами, вы-
полняя роль положительной обратной связи. Сопро-
тивление обмотки самовозбуждения ЭМУ выбирается
больше критического, в отличие от генераторов парал-
лельного возбуждения, где сопротивление обмотки само-
возбуждения ниже критического.
95
Рис. 5-1. Схе-
ма включения
одноступен-
чатого ЭМУ
продольного
поля.
Положительная обратная связь ЭМУ с коэффициен-
том усиления, .несколько меньшим единицы, позволяет
обеспечить нормальный процесс управления и значитель-
но повысить усиление входного сиг-
нала.
Магнитная система ЭМУ выпол-
няется обычно ненасыщенной в ра-
бочей области для обеспечения
большего коэффициента усиления.
Рассмотрим электромагнитные
процессы, протекающие в ЭМУ, схе-
ма включения которого изображена
па рис. 5-1.
В качестве примера рассматри-
вается ЭМУ, работающий па индук-
тивную нагрузку. Число обмоток
управления произвольное и равно п.
Предполагается, что все обмотки
управления сцеплены с рабочим по-
током Ф и общим потоком рассея-
ния Ф8. Заметим, что учет собствен-
ных потоков рассеяния обмоток при-
водит к неоправданному усложне-
нию структурной схемы ЭМУ. По-
этому с достаточной степенью точ-
ности можно считать что <!»*<=().
Уравнения потоков:
Ф = (5-1)
।
= (5-2)
।
Уравнения напряжений и э. д. с.:
и i = liRi + ^,/;(Ф + Фв); (5-3)
£ = СеФ; (5-4)
£ = (1 +Л.^) + /я/?я(1 + (5-5)
где Я, Я8 — магнитные проводимости контуров, сцеп-
ленных с потоками Ф и Фв;
96
Uit It, Ri, Wi — напряжение, ток, сопротивление и
число витков i-й обмотки управления;
Е, Ra~э. д. с., ток и сопротивление якоря
ЭМУ;
/,„ RH — ток и сопротивление в цепи нагрузки;
Гн= и Тя = -^—постоянные времени цепи нагрузки и
1\н Ап
якоря;
w'„— эквивалентная обмотка управления,
введением которой учитывается раз-
магничивающее действие реакции
якоря.
Падением напряжения якорной цепи, а также реакцией
якоря от тока самовозбуждения /, можно пренебречь ввиду
их незначительной величины. При этом уравнения (5-1) и
(5-5) примут вид:
п
Е = Л./?н (1 + Ткр) + I„RK (1 + Т„р). (5-5')
Уравнение (5-3) применительно к обмотке самовозбуж-
дения можно представить к<у<
ЕдЧ^ + ш.рСФ + Ф.), (5-3')
поскольку
Rn < Rl И Lnpl, < w,p(Ф + Фе).
Решая уравнения (5-1'), (5-2) и (5-3) относительно Д,
получаем:
п п
* О Т,=
1 1
п
= '"Vi - (5-6)
I
п п п
ф (I+)+ф/^^ЧгЕ m‘Vi’ (5’7)
I 1 I
(Хл + „
где / ----=------постоянная времени t-и обмотки
управления, соответствующая ли-
нейному участку кривой намагни-
чивания с проводимостью Ял;
7—2337
97
~rT
постоянная времени контура потока
рассеяния;
В результате совместного решения уравнений (5-6) и
(5-7) получаем:
Обозначив коэффициент усиления по цепи i-й обмотки
управления через
К^Сепц (5-9)
и решая совместно (5-8) и (5-4), окончательно получаем:
Е=T+W[ S +к >Е 1 + Л.₽) -
2
-Кл7пЯл (!+?>)], (5-10)
11
где = Х Л — суммарная постоянная времени всех замк-
1 путых контуров обмоток управления;
п
TsZ=£ Tsi — суммарная постоянная времени контура
1 потока рассеяния;
Кп = п--------коэффициент усиления эквивалентной об-
”п мотки управления, отображающей размаг-
ничивающее действие реакции якоря.
По выражениям (5-5') и (5-10) может быть состав-
лена структурная схема одноступенчатого ЭМУ продоль-
ного поля.
Выразим переменные в относительных единицах. Для
этой цели введем базисные величины, которые связаны
между собой следующими соотношениями:
E(j=Eu=KiUio=fnoRo- (5-И)
98
С учетом (5-11) выражения (5-5') и (5-10) примут
вид:
е = i /«‘(1 + Т>~Р) +«Я*Н (1 + Тяр); (5-12)
е =т+ЫЁ щ+к'е - ^тг-Х(1 -
2
-К',Л(1+7» ], (5-13)
где
__Ко _____ Kn JZ! __ СиХлК/п .
“и В > ®я р ’ А я В >
АН Ао Ао
Структурная схема ЭМУ, соответствующая выраже-
ниям (5-12) п (5-13), представлена па рис. 5-2.
Рис. 5-2. Структурная схема одноступенчато-
го ЭМУ продольного поля.
В ряде случаев с целью упрощения структурной
схемы можно пренебречь величиной TsT.
При работе ЭМУ па индуктивную нагрузку можно
также пренебречь постоянной времени якоря Ти.
Структурная схема одноступенчатого ЭМУ продоль-
ного поля имеет сходство с полученной ранее структур-
ной схемой генератора постоянного тока (рис. 3-2), что
вызвано общностью физических процессов.
7* 99
5-3. СТРУКТУРНАЯ СХЕМА ДВУХСТУПЕНЧАТОГО ЭМУ
ПРОДОЛЬНОГО ПОЛЯ
Возможность совмещения двух или более ступеней
усиления в одной машине вызвала появление многосту-
пенчатых усилителен.
Двухступенчатый ЭМУ продольного поля представ-
ляет собой машину с двумя ступенями усиления н об-
щим магннтопроводом н якорем. Число пар полюсов
первой и второй ступеней связано соотношением 1 : 2.
Рис. 5-3. Схема включения двухступенчатого ЭМУ продольного
ноля.
Обмотка управления создает поток, наводящий э. д. с.
между однопотенцпальпымп щетками машины (первая
ступень усиления). Возникающий при этом уравнитель-
100
иый ток приводит к появлению выходного напряжения
(вторая ступень усиления). Обычно двухступенчатые
усилители снабжаются обмоткой самовозбуждения, и. с.
которой складывается с н. с., созданной уравнительным
током.
Схема включения двухступенчатого ЭМУ приведена
на рис. 5-3.
Входной сигнал U? поступает па обмотку управле-
ния ОУ. Намагничивающая сила обмотки создает поток
двухполюсной системы, вызывающий э. д. с. па щетках
1—3. Ток цепи щеток 1—3 проходит через усилительную
обмотку В, расположенную на всех четырех полюсах,
обусловливая рабочий поток Фв. Реакция якоря тока
/1з создает поток, направленный по оси полюсов 2—4,
следствием чего является разность потенциалов па щет-
ках 2—4. Возникает ток /24, реакция якоря от которого
вызывает н. с., направленную по оси полюсов /—3
встречно с п. с. обмотки управления.
Наличие такой внутренней отрицательной обратной
связи с большим коэффициентом усиления является
характерным для двухступенчатого ЭМУ про юлыюго
поля. С целью уменьшения влияния этой обратной свя-
зи в машине предусматривается специальная компенса-
ционная обмотка К\ в цепи щеток 1-—3, которая распола-
гается па полюсах 2—4. Намагничивающая сила обмот-
ки /<1 направлена встречно с п. с. реакции якоря от
тока /13.
Однако достигнуть полной компенсации реакции яко-
ря от тока /(з практически невозможно. Это связано не
только с трудностью точного определения необходимого
числа витков компенсационной обмотки, по такжес раз-
личием конструктивного выполнения обмоток якоря и
компенсационной. Обмотка якоря является распределен-
ной, а компенсационная, располагаемая на полюсах,—
с ос р елото ч е иной.
Следует отметить, что значительное преобладание
п. с. компенсационной обмотки над н. с. реакции якоря
от тока /13 'приводит также к нежелательным результа-
там. В этом случае реакция якоря от тока /24 будет соз-
давать и. с. по осп полюсов /—<?, действующую соглас-
но с п. с. обмотки управления. Так как коэффициент
усиления этой положительной обратной связи больше
единицы, то машина будет находиться в режиме само-
Ю1
возбуждения и потеряет управление. Таким образом,
в идеальном варианте выполнения машины можно счи-
тать £24=0.
Невозможность полной компенсации реакции якоря
от тока 71з, а также условие получения минимальной
разности потенциалов па щетках 2—4 приводят к необ-
ходимости создания специальной обмотки, противодей-
ствующей появлению потока Ф24. Такая обмотка, нося-
щая название оппозиционной, располагается на
полюсах 2—4 и включена в цепь щеток 2—4. Она вы-
полняет роль отрицательной обратной связи по отноше-
нию к н. с., возникающей в результате встречного дейст-
вия реакции якоря от тока I\z и компенсационной об-
мотки К\. Однако из-за ограниченной величины коэф-
фициента усиления этой обратной связи принципиально
нельзя свести величину £21 к нулю. Поэтому в реальной
машине незначительная разность потенциалов на щет-
ках 2 4 сохраняется. Для компенсации реакции якоря
от тока /2., в цепь щеток 2—4 в некоторых двухступенча-
тых ЭЛАУ продольного поля включается помимо оппози-
ционной обмотки также компенсационная обмотка £2,
расположенная па полюсах 7—2. Намагничивающая
сила этой обмотки направлена встречно с н. с. реакции
якоря от тока 724.
При проектировании ЭМУ предусматриваются также
специальные меры по исключению влияния тока на-
грузки на работу усилителя. Для этой цели катушки об-
моток, через которые проходит ток нагрузки, состоят из
двух секций с равным числом витков на каждом полюсе.
Секции соединяются между собой так, что образуют
бифилярпую обмотку по отношению к току нагрузки.
На схеме, приведенной на рис. 5-3, н. с. обмоток от
уравнительных токов показаны сплошными линиями,
а н. с. от тока тагрузки — пунктирными.
Все обмотки, предназначенные для компенсации ре-
акции якоря, имеют малое сопротивление. Поэтому при
необходимости в ЭМУ могут быть легко введены обрат-
ные связи по току нагрузки путем шунтирования сопро-
тивлением части компенсационной обмотки К2 или уси-
лительной обмотки В. Так, например, при подключении
шунтирующего сопротивления к точкам Г и Д вводится
положительная обратная связь, а к точкам Г и £ — от-
рицательная, что эквивалентно подаче сигнала по току
102
нагрузки на одну из обмоток управления ЭМУ. Для по-
лучения еще более быстродействующей обратной связи
по току нагрузки шунтирующее сопротивление следует
подключить между щеткой 1 и точкой Б (положитель-
ная связь) либо щеткой 3 и точкой А (отрицательная
связь). В этом случае введение сигнала обратной связи
происходит непосредственно во вторую ступень усиления.
Обычно в ЭЛ1У предусматриваются несколько обмо-
ток управления п одна обмотка самовозбуждения с по-
следовательно включенным регулируемым сопротивле-
нием.
Рис. 5-4. Схема замещения двухступенчатого ЭМУ про-
дольного поля.
Рассмотрим электромагнитные процессы, протекаю-
щие в двухступенчатом ЭМУ продольного поля. Эквива-
лентная схема замещения ЭМУ изображена на рис. 5-4.
Как видно из рис. 5 4, па эквивалентной схеме уси-
литель представлен в виде нескольких машин постоян-
ного тока, охваченных обратными связями. Такое пред-
ставление сложной электрической машины весьма удоб-
но для составления исходных уравнений.
Уравнения потоков:
п
<^*13== (^4 “Ь Я ] ’ (5-1 5)
^24 ^24 Я Лэ^КЦ Лг1^<Л1)>
(5-16)
Ф (/13юв/сз Inw ,,). (5-17)
103
Размагничивающее действие реакции якоря от токов
/24, Лз, Л1 учитывается введением эквивалентных обмоток
с числом витков w'n, ш"я, w'"„.
Учет 'потоков рассеяния ведет к неоправданному ус-
ложнению структурной схемы двухступенчатого ЭМУ;
поэтому при рассмотрении ЭМУ как элемента системы
автоматического регулирования целесообразно прене-
бречь потоками рассеяния. Получаемая в этом случае
структурная схема достаточно проста, и построенная
по иен модель позволяет получить характеристики,
близкие к характеристикам реальной машины.
Уравнения напряжений п э. д. с.:
С7г-+ ш17;Ф13, (5-18)
Л,з = Лз^з + Р'1’ + (“'"я — (5-19)
£24=~ 731^31 + (^я — /;Ф13~ (5-20)
= 7св Rcn + WCB Р®- (5-21)
При составлении уравнений (5-18) — (5-21) сделаны
следующие допущения, обычно принимаемые при анали-
тических расчетах [Л. 24]:
I. В ЭМУ имеет место прямолинейная коммутация.
Реакция коммутационных токов отсутствует. Такое допу-
щение вполне приемлемо, особенно для ЭМУ с дополни-
тельными полюсами.
2. Индуктивность дополнительных полюсов мала по
сравнению с индуктивностью обмоток усилительной,
компенсационной, оппозиционной п якоря.
3. Электромашии'пый усилитель выполнен симметрич-
ным как в части магнитных, так и электрических цепей.
Необходимо заметить, что учет асимметрии не вызы-
вает существенного усложнения схемы модели, но яв-
ляется достаточно неопределенной задачей.
Уравнение (5-19) с достаточной степенью точности
можно представить следующим образом:
^з = 7А + ^Рф, (5-19)
так как (w,rn—^К13)
Выражения потоков и э. д. с. связаны между собой
соотношениями
£13 С„Ф„; (5-22)
104
Е21 =СгФ24; (5-23)
£' = С,.Ф. (5 24)
Решая совместно уравнения (5-15), (5-18), (5-20),
(5-22), (5-28) относительно токов /; и /24, получим:
п п
^з [1 + Щ Л +Гя.кУ]= (1+^4
' 1 1
(5-25)
Ai3w?
где Т3= —-r------постоянная времени i-й обмотки управ-
1 ления;
Kt = —*3^‘Сс---коэффициент усиления по цепи i-й об-
мотки управления;
^24ШОП
Т„а = п —постоянная времени цепи оппозиционной
21 обмотки;
К(>и=^2^°п"("г —коэффициент усиления по цепи оппози-
24 цпопиой обмотки;
________M3(w'„ — wK2,)<?,. .
Л я.к — и »
Х|3(ш'„ — wIi24)a
Л24
Уравнение (5-1G) с учетом (5-19) и (5-20) можно запи-
сать в следующем виде:
гГ1 5 [W'„Ce (Т) ®к1зСе,т, (ш 'п и,к1з)и,1з
21— =*[ RI3 13 Rl3 13 /?13 Р
Принимая во внимание, что поток Ф24 в уравнении
(5-16) выражается через разность сравнимых величин
(величина <1>24 значительно меньше величины потоков
обмоток якоря компенсационной и оппозиционной, взя-
тых в отдельности), можно с достаточной для практики
степенью точности приравнять пулю выражение (5-26).
При этом не происходит грубого нарушения описания
физической сущности процессов, так как переменная Ф24
не исключается целиком из системы уравнений ЭМУ.
105
В уравнении (5-26) сохраняется член
/V011*1*21
С учетом указанного выше можно записать:
КоцЕ21
| 7 п ______ХгДДОп ДОв1з)Се
“г аГпр) ~~
^21 (ДО Я-ДО«13)ДОВ г? ^-24 (ДО л - ДОк2<1)ДОоп р су7\
----------5 п P^IS- (О-Z/ )
R13---------------------------------------------К21
Совместное решение уравнений (5-25) и (5-27) дает
окончательный результат:
^13— ] тъа/,[+ а KjPEi] • (5-28)
1
где /п = л2Л-^-----постоянная времени цепи усилительной
13 обмотки, соответствующая линейному
участку кривой намагничивания;
^2лДОиСс _
Ав = -—----- коэффициент усиления по й,епи усили-
тельной обмотки для линейного участка
кривой намагничивания;
А-п
Аип 4-А'п.к/С’в.и 3
pH _______ Х2, (И)"п — Ш„13)С,
А я. к —--------------------
Для составления структурной схемы второй ступени
усиления преобразуем уравнения (5-17), (5 19), (5-21),
(5-24), принимая во внимание, что проводимость цепи
магнитного потока выходной ступени Хг зависит от насы-
щения :
Е* 1 +(7в+7св)р[7<в£1з + ^св Ег
-W<"h-^~V-X2]> (5-29)
^2лДО^в
где Тсв = -^------постоянная времени цепи обмотки само-
св возбуждения соответствующая линей-
ному участку кривой намагничивания;
106
сн
^2л^сз Се
Асв = —н---------коэффициент усиления по цепи обмотки
самовозбуждения для линейного участ-
ка кривой намагничивания;
__ "пСе. г> £ао
Для того чтобы в структурной схеме были единичные
коэффициенты усиления по цепи прохождения основного
сигнала, перепишем уравнение (5-28) следующим обра-
зом:
/<п^з=г+7Др[а/<п2^ + (1 -“)гв^1- <5-3°)
Выразим переменные уравнений (5-29) и (5-30) в относитель-
ных единицах. В качестве базисных величин примем:
Даб Дао»
т 7 Его
где аЛ\Дв= Кх,х — коэффициент усиления ЭМУ по цепи
i-й обмотки управления при холостом
ходе:
г ___ г Его,
' н.б ‘но — ’
В относительных единицах выражения (5-29) и (5-30)
имеют вид:
^з=т+л.а/, (5-31)
1 ( I rz- rrtfr • ^-2 Л-^-2 \
= 1+(7’н4-7’св )р В * * * * 13 + — я'" J ’
(5-32)
По выражениям (5-31) и (5-32) составлена структур-
ная схема двухступенчатого ЭМУ продольного поля, изо-
браженная на рис. 5-5.
На схеме ступени усиления представлены в виде двух
инерционных звеньев, охваченных гибкой обратной
связью, с помощью которой учитывается влияние урав-
нительного тока /13 через магнитно-связанный контур
щеток 2—4 на величину потока управления.
Действие обмотки самовозбуждения и реакции якоря
107
от тока нагрузки показано в виде жесткой обратной связп
с коэффициентами усиления 1\св и Насыщение маг-
нитной цепи выходной ступени учитывается коэффпциен-
•_> ^2 л М-2
том обратной связи —=—-—
Лг
Постоянные коэффициенты структурной схемы легко
определяются экспериментальным путем.
Рис. 5-5. Структурная схема дпухступенчатого ЭМУ
продольного поля.
а) Постоянная времени Тъ, представляющая собой
сумму постоянных времени контуров обмоток управле-
ния, связанных общим потоком, определяется по осцил-
лограмме .нарастания э. д. с. на щетках 1—3 при разо-
мкнутой цепи щеток 2—4.
б) Сумму постоянных времени Тв и ТСв можно опре-
делить по осциллограмме переходного процесса ЭМУ
в режиме генератора (обмотка самовозбуждения исполь-
зуется как обмотка независимого возбуждения).
Постоянные времени Тв и Сев можно вычислить в от-
дельности, исходя из их суммы, чисел витков и сопро-
тивлений соответствующих обмоток.
в) Коэффициент реакции якоря первой ступени а
определяется как отношение коэффициента усиления при
холостом ходе к произведению коэффициентов усиления
первой и второй ступени:
Кх.х
Л •
108
г) Коэффициент реакции якоря второй ступени К'" я
определяется по кривым холостого хода и зависимости
напряжения ЭМУ от тока возбуждения при заданном
сопротивлении 'нагрузки:
H.Y
где х и х — коэффициенты усиления ЭМУ в режиме
генератора при холостом ходе и задан-
ном сопротивлении нагрузки.
д) Коэффициент жесткой положительной связи по
цепи обмотки самовозбуждения КСв можно найти по за-
висимостям напряжения ЭМУ от тока возбуждения при
заданном сопротивлении нагрузки, полученным при
включенной и отключенной обмотке самовозбуждения.
Из структурной схемы ЭМУ, приведенной на рис. 5-5,
сл1 1ует:
/<П
успленпя ЭМУ
без самовозбуж-
-Ксв
усиления ЭМУ
с самовозбужде-
— коэффициент
при нагрузке
дения;
— коэффициент
при нагрузке
нием.
Для линейной части характеристик ЭМУ определяется
соотношение которое определяется равенством:
Ли
Отсюда
Кп.< . 1 + /С"П
М. ~ 1 +К"’я-Ксв'
А'с»=(|-лД-)П+'<"'")•
е) Коэффициент определяется по соответствую-
щей кривой намагничивания.
В табл. 5-1 приведены параметры структурной схемы
усилителей типов ЭМУ-290 и ЭМУ-550, определенные по
описанной методике.
В табл. 5-1 через ТСво обозначена постоянная време-
ни обмотки самовозбуждения без регулируемого сопро-
тивления в ее цепи (см. рис. 5-3).
109
Коэффициенты обратных связей /С"л, Кси, а могут
различаться для отдельных машин одного и того же
тина; поэтому приведенными значениями указанных ко-
эффициентов можно пользоваться как ориентировочны-
ми, требующими уточнения в каждом конкретном слу-
чае.
Таблица 5-1
Лох- р ВЫХ' К8ГП г,. сек Г в. сек тсв- сек гсво- сек *"‘п «св а
ЭМУ-290 16 0,45 0,15 0,1 0,5 0,2 0,8 0,6
ЭМУ-550 45 0,25 0,14 0,06 0,63 0,15 0,7 1
Сравнение частотных характеристик реальных усили-
телей и их мотелей (рис. 5-6) подтверждает возможность
допущений, принятых для получения простой и удобной
структурной схемы ЭМУ.
Рис. 5-6. Частотные характеристики ЭМУ-550 с само-
возбуждением.
Нагрузка активная: КсВ~ 0>7: K///n=0,15; Т% = 0,25 сек;
Tq = 0,14 сек; = 0,068 сек; а = 1;----------моделирова-
ние; -----------------------эксперимент.
по
5-4. СТРУКТУРНАЯ СХЕМА ТРЕХСТУПЕНЧАТОГО ЭМУ
ПРОДОЛЬНОГО ПОЛЯ
Сигнал, поступающий на вход трехступепчатого
ЭМУ, проходит последовательно три каскада усиления.
Строго говоря, трехступенчатый ЭМУ продольного
поля не является только усилителем продольного поля,
так как он совмещает в себе и усиление по поперечной
оси [Л. 26].
Рассмотрим физические процессы, протекающие
в усилителе, схема включения приведена на рис. 5-7.
Входным сигналом первой ступени усиления является
напряжение С/у, прикладываемое к обмотке управления
ОУ. Поток, созданный этой обмоткой, наводит э. д. с.
вращения па щетках 1—3 (первая ступень усиления).
Намагничивающая сила реакции якоря от тока цепи
щеток 1—3 создает поперечный поток, возбуждающий
разность потенциалов на щетках 2—4 (вторая ступень
усиления). Намагничивающая сила от тока /24, проходя-
щего через обмотку возбуждения усилителя В, образует
четырехполюсную магнитную систему, создающую вы-
ходную э. д. с. (третья ступень). Для того чтобы избе-
жать влияния размагничивающего действия реакции
якоря от тока /24 на поток управления, в ЭМУ преду-
смотрена компенсационная обмотка К. Намагничиваю-
щая сила этой обмотки направлена согласно н. с. обмот-
ки управления ОУ.
Обычно н. с. компенсационной обмотки несколько
превосходит и. с. реакции якоря от тока /24- Настройка
компенсации осуществляется подбором шунтирующего
сопротивления
На выход усилителя 'Подключена обмотка самовоз-
буждения СВ, выполняющая роль положительной обрат-
ной связи.
Настройка цепи самовозбуждения осуществляется
с помощью сопротивления св, причем суммарное со-
противление цепи устанавливается несколько выше кри-
тического.
Так же как и в двухступенчатом усилителе, можно
вводить обратную связь по току нагрузки без использо-
вания обмоток управления, создавая искусственно элек-
трическую асимметрию. Так, например, включением
111
шунтирующего сопротивления к точке Б и щетке 2 вво-
дится положительная обратная связь непосредственно
па третью ступень усиления; включением сопротивления
к щетке 4 и точке А—-отрицательная связь. Для введе-
ния обратной связи па первую ступень усиления шунти-
рующее сопротивление подключается к точкам Б и Г
(положительная связь) или к точкам А и Г (отрица-
тельная связь).
Рис 5-7. Схема включения трехсту-
пенчатого ЭМУ продольного поля.
Катушки обмоток К и В, через которые проходит ток
нагрузки, состоят из двух секций с равным числом вит-
ков на каждом полюсе. Секции соединяются между со-
бой таким образом, чтобы получилась бифилярпая об-
мотка по току нагрузки.
Рассмотрим электромагнитные процессы, протекаю-
U2
щие в трехступепчатом ЭМУ продольного поля, экви-
валентная схема замещения которого представлена па
рис. 5-8.
Электромашинный усилитель представлен в виде трех
машин 'постоянного тока, охваченных обратными свя-
зями.
Уравнения потоков:
Л
Ф13 = Z13 [£ — ЛХя V’ (5-33)
Рис. 5-8. Схема замещения трехступеичатого ЭМУ продольного поля.
Ф = X\l2iwB-\-lCBwCB —
(5-35)
Влияние реакции якоря от токов /24, /13, /п сведено
к эквивалентным обмоткам с числом витков w'R, w"R,
W я-
Учет потоков рассеяния приводит к значительным
усложнениям структурной схемы и поэтому не рассмат-
ривается.
Уравнения напряжений и э. д. с.:
8—2337
Uг — “Ь ®1/7ф1з!
(5-36)
113
£13 /13/?;з + ^"я/Л’24; (5-37)
£'2i = /2i^2i + “jbP<1’; (5-38)
^св = ^св^св “Ь wcbP^' (5-39)
/'21Як + ^\з =(/21-/'J>?nr.K- (5-40)
При составлении уравнений (5-36) — (5-39) приняты те
же допущения, что и для двухступенчатого ЭМУ. Выра-
жения потоков и э. д. с. связаны между собой соотно-
шениями
^is = Cc<I«ls;
£м-=с,фм;
£ = С.Ф.
(5-41)
(5-42)
(5-43)
Решая совместно уравнения (5-33), (5-36), (5-38), (5-40)
и (5-41) — (5-43), получаем:
Е —-------
13 \+Е-р
КгЕ,-К'пЕ21-уТварЕ
(5-44)
Х13ш^
где Тi= —-------постоянная времени t-обмотки управ-
ления;
Гк=р- , я-------постоянная времени контура комнен-
11 ш’“ сацнонной обмотки;
Тв = —£------постоянная времени обмотки возбуж-
дения В, соответствующая линейному
участку кривой намагничивания;
ч
T’E=V Т, -|-Тк—суммарная постоянная времени обмо-
1 ток, связанных потоком Ф -
X, w С
Ki — - -*- ‘--коэффициент усиления по цепи t-й
обмотки управления;
ш'к = аук
Rm.к
Rk 4“ Rui.k’
да'я —w'K = w'n.K;
К'п.к = ^1зW —коэффициент усиления цепи эквива-
лентной обмотки якоря w'„ и компен-
сационной обмотки;
114
_ ___а^я,..
в wB ;ХЛ '
Решение уравнений (5-34), (5-37), (5-42) относительно
/13, Ф21 приводит к следующему результату:
(5'45)
где К"л = *21
Rn
w''2
'Т'П ____ ] я
7 Я— 24 Т?24
коэффициент усиления второй сту-
пени;
постоянная времени второй ступени
усиления.
Для составления структурной схемы третьей ступени
усиления ЭМУ преобразуем уравнения (5-35), (5-38),
(5-39), (5 43), принимая во внимание насыщение магнит-
ной системы выходной ступени:
1 +(ТВ + ТСВ)Р ^'"яЛ,/?о +
+ ДСВД-Ц^Д], (5-46)
где Ав— —т,—-—коэффициент усиления по цепи оо-
21 мотки возбуждения В для прямо-
линейного участка кривой намагни-
чивания;
KCIS — —р--—коэффициент усиления по цепи об-
св мотки самовозбуждения для прямо-
линейного участка кривой намагни-
чивания;
Д'"п
Ro
TCD^-^—постоянная времени цепи обмотки
св самовозбуждения для прямолиней-
ного участка кривой намагничивания;
Для того чтобы в основном канале прохождения сиг-
нала присутствовали единичные коэффициенты усиления,
преобразуем уравнения (5-44) и (5-45):
8* 115
где
(^1Э^''яАв) — у + Тър [А"яЛ'в У}
I
-К'п кК"я(КиЕ^ + ТвК'п.кКг'яе ], (5-47)
^^Я.К ^-13
®в Х-’Г
^лШвС,
—R^~
--- Е Я.IO
(£1SK"„KB)
i
1 + 7’"я Р
(КВЕ„).
(5-48)
а К '
В Б
При записи уравнений (5-46) — (5-48) в относитель-
ных единицах удобно воспользоваться следующими ба-
зисными величинами, связанными соотношениями
tj _________ Ег-iC _ ZE\, leRo
Ui° — к< ~~KiK''nKB~KiK"KKB’
(5-49)
где Ег> — Ев номинальная э. д. с. 1ВЫХОД1ЮЙ ступени ЭМУ;
/п = /о — 'Поминальный ток нагрузки ЭМУ.
С учетом выражения (5-49) уравнения (5-46) — (5-48)
примут вид:
п
р.з = 1+1/1/) - К'„.иК"аем + ЛЛ’я.кГ'я б ]; (5-50)
1
! +Г/п/,е21;
(5-51)
е 1 + (7’в + Тсв) р [₽м A"«'«+ACDe "х е . (5-52)
По (5-50)—(5-52) составлена структурная схема
трехступенчатого ЭМУ продольного поля (5-9).
Постоянные коэффициенты структурной схемы легко
получить экспериментальным путем.
а) Постоянная времени представляющая собой
сумму постоянных времени контуров обмоток, связанных
общим потоком управления, определяется по осцилло-
граммам нарастания э. д. с. па щетках 1—3 при разо-
мкнутой цепи щеток 2—4.
б) Постоянная времени Тп определяется по осцилло-
граммам нарастания э. д. с. па щетках 2—4 при скачко-
образном приложении э. д. с. Ек.
ПО
в) Постоянные времени Тв, Тсв и коэффициенты уси-
ления Ксв, *л + определяется так же, как и для
двухступенчатого ЭМУ продольного поля.
Рис. 5-9 Структурная схема трехступепчатого ЭМУ
продольного поля.
г) Зная коэффициенты усиления первой и второй сту-
пеней Кг и К"я в отдельности, а также коэффициент
усиления первых двух звеньев в рабочем режиме K{_J} =
легко определить выражение К'я.кК''я-
j/t isn ___<
А я 1(А Я--1 •
Л1-И
Структурная схема представлена в виде трех инер-
ционных звеньев, воспроизводящих три ступени усиления
ЭМУ. Постоянными времени этих звеньев соответственно
являются Т *— суммарная постоянная времени контуров
связанных потоком управления; Т"п—постоянная вре-
мени поперечной цепи; Тв+Тсв — суммарная постоян-
ная времени обмоток, создающих рабочий поток, равная
Тп+Тсв- Обратные связи с коэффициентами К'„.кК"я,
ТвК'я.кК"яР отображают влияние цепи щеток на поток
управления, а для выходного каскада и второго каскада
двухступенчатого ЭМУ аналогичны: коэффициенты К'"л
и Ксв характеризуют действие реакции якоря и обмот-
ки самовозбуждения. Насыщение выходного каскада
учитывается коэффициентом ---, .
ГЛАВА ШЕСТАЯ
МОДЕЛИРОВАНИЕ СТАБИЛИЗИРУЮЩИХ УСТРОЙСТВ
6-1. ОБЩИЕ ПРИНЦИПЫ МОДЕЛИРОВАНИЯ СТАБИЛИЗИРУЮЩИХ
УСТРОЙСТВ
В системах электропривода выходные цепи стабили-
зирующего устройства обычно присоединяются ко входу
электронного, магнитною пли электромашинкою усили-
теля. В зависимости от вита усилителя изменяется ха-
рактер нагрузки стабилизирующего устройства. Однако
в аналитических расчетах обычно используется переда-
точная функция стабилизирующего устройства, работаю-
щего на активную нагрузку, так как учет индуктивного
характера нагрузки связан со значительным усложне-
нием расчетов. В ряде случаев такое допущение приво-
дит к неверным качественным результатам, поскольку
не всегда можно считать, что стабилизирующее устрой-
ство состоит из детектирующих звеньев.
Для получения электронной модели стабилизирую-
щего устройства необходима структурная схема, в кото-
рой постоянные коэффициенты зависят только от пара-
метров этого устройства. В этом случае представляется
возможным легко изменять коэффициенты передачи мо-
дели при отыскании параметров гибких обратных свя-
зей, обеспечивающих оптимальные процессы системы.
Взаимное влияние усилителя и стабилизирующего
устройства, имеющее место вследствие наличия индук-
тивной связи, желательно учитывать в структурной
схеме отдельным звеном; при этом сама схема должна
оставаться неизменной независимо от вида усилителя и
режима его работы.
Рассмотрим структурные схемы стабилизирующих
устройств, работающих на индуктивную нагрузку, ко-
118
торые удовлетворяют указанным требованиям. Предло-
женные структурные схемы могут быть применены для
построения электронных моделей. При этом стабилизи-
рующее устройство используется для электромашинных
усилителей поперечного поля и продольного поля, маг-
нитный усилитель, генератор и т. д. В рассмотренных
примерах в качестве усилителя принят ЭМУ поперечного
поля.
6-2. СТРУКТУРНАЯ СХЕМА И СХЕМА ЭЛЕКТРОННОЙ МОДЕЛИ
СТАБИЛИЗИРУЮЩЕГО ТРАНСФОРМАТОРА НАПРЯЖЕНИЯ
Для получения структурной схемы стабилизирую-
щего трансформатора следует рассмотреть совместную
систему уравнений трансформатора и усилительного эле-
мента [Л. 27].
Рис. 6-1. Схема включения стаби-
лизирующего трансформатора на
одну из обмоток усилительного
элемента.
/ — стабилизирующий трансформатор;
2 — обмотки управления усилительного
элемента.
На рис. 6-1 представлена схема включения стабили-
зирующего трансформатора напряжения на одну из
обмоток управления усилителя. Физические процессы
119
в рассматриваемой схеме описываются следующей си
стемой уравнений. Уравнение цепи первичной обмотки
стабилизирующего трансформатора можно выразить
в виде
U\t=I 1т^?1т + WiTp (Фт +Ф1ят) , (6-1)
Un— напряжение, приложенное к обмотке;
/1т — ток в цепи первичной обмотки трансформа-
тора;
Wit — число витков первичной обмотки трансфор-
матора;
/?|Т — активное сопротивление первичной пени;
Фт, Ф1.чт — рабочий поток и поток рассеяния первичной
обмотки.
В уравнение цепи вторичной обмотки стабилизирую-
щего трансформатора входят следующие составляющие-
падение напряжения в активных сопротивлениях вторич-
ной обмотки /?2т и обмотки управления усилителя Rc, на-
грузкой которой служит стабилизирующий трансформа-
тор; э. д. с., возникающая при изменении потока Фт и
потока рассеяния вторичной обмотки Ф2,;Т; э. д. с., воз-
никающая в обмотке управления при изменении рабо-
чего потока усилителя Ф и потока рассеяния обмоток
управления Ф, (коэффициент связи между обмотками
управления принят равным единице).
Уравнение цепи вторичной обмотки стабилизирую-
щего трансформатора имеет вид:
О = /2т (/?2т +^?с) + <ФтР (Фт + Фгвт) + wcp (Ф + Ф. ),
(6 2)
где /2т— ток в цепи вторичной обмотки трансформа-
тора;
w2T — число витков вторичной обмотки трансформа-
тора;
wc — число витков стабилизирующей обмотки уси-
лителя.
Величины рабочего потока и потоков рассеяния
трансформатора определяются н. с. обмоток и соответ-
ствующими проводимостями X:
‘1’т == (Лт®1Т “Ь 42ТИ>2Т); (6-3)
-- ^iST^iT^lTl (6-4)
4*JST == (6*5)
120
Уравнения цепей основной (за чающей) w0 и осталь-
ных обмоток управления усилителя имеют следующий
вид:
+ ™оР (ф + фЛ, (6-6)
= (6-7)
где (7ВХ п Ut— напряжения на задающей и /-и обмотках
управления;
/0, h, Ro, Rt — токи н сопротивления задающей и i-ii
обмоток управления.
Рабочий поток Ф определяется разностью потока Ф1т
создаваемого и. с. обмоток управления, и размагничи-
вающего потока Ф2, обусловленного действием внутрен-
них обратных связей усилителя:
(|)='Ф|—Ф2. (6-8)
Величина потока Ф( определяется суммой н. с. обмоток
управления:
(6-9)
где X — проводимость потока управления.
Поток Ф2 также выражается через н. с., приведенную
к задающей обмотке:
Ф2=Х/ос^о> (6-10)
где /Ос— эквивалентный ток, приведенный к задающей
обмотке, создающий размагничивающий по-
ток Ф2.
Исключив из уравнений (6-6), (6-7), (6-9) /0 и /<, по-
лучим:
(6-11)
121
Введем следующие обозначения:
1
п 2 п
o jV^L V
шо^~ко’ 2j/?- —Zj ’’
i I
2 П
я Ё’*+--=7'-
1
где Uo — напряжение на задающей (основной) обмотке
с учетом действия внутренних и внешних
обратных связен;
Ко, Кг — коэффициенты усиления усилителя по напря-
жению по цепям задающей и i-й обмоток;
to, Т1 — постоянные времени задающей (основной)
и t-й обмоток;
То — суммарная постоянная времени обмоток управ-
ления усилителя (кроме стабилизирующей
обмотки).
Тогда выражение (6-11) может быть представлено
в следующем виде:
=^»(1 +Т.Р). (6-12)
Исключим из уравнений (6-1), (6-3), (6-4) Фв и Ф1ЯТ:
[71Т = 7,Т/?1Т-|- (Атщ'т-)- Я18Т^т)р/1Т-]-Ятщ1ТшгТ/2Лт,
НЛП
6\т — Лт^?1Т (1 -ф~ zitP) *ф- 2Т, (6-13)
где т1Т— - + A|"W—постоянная времени первичной об-
1 мотки стабилизирующего транс-
форматора.
Исключим из уравнений (6-2), (6-3), (6-5) Фт и Ф2ЯТ:
0 = /2т (/?„ -ф- /?с) + P-t®2t -ф- ^2st®2t) р/2т -ф-
-ф'^тИ’1тК’2тР/it ф“ WcP (Ф -ф" Фи), (6-14)
122
или
0== /,Т (^?2т “Ь Rc) (1 4~ х г?р) 4“ ЯтШ]ТШ2Т/?/1Т -|~
4-йУсР(Ф+ФЛ (6-15)
где тгт =
_т + Aj,T ^2 — постоянная времени вторичной об-
^2Т 27 мотки стабилизирующего транс-
форматора;
г _ /?2Т
Z 21 — Х2Т R2i+ Rc-
(6-16)
Из уравнений (6-13) и (6-15) исключаем /1Т:
fl — / //? ipifl w,-tWiT п (1 + 'Г1т/?)° + ^тР) —
C'jt—/2т («гт+Кс) Лт R2t+RcP W,Tw2,
K~R^~P J
“' <ф । >1ТХ (Ы7)
Xl /?1т
Обозначим:
Т , £ ___ т
1 A-lsT + ’ 2 ^2лТ + Лт’
(6-18)
где 8, и 8„ — коэффициенты связи между обмотками ста-
билизирующего трансформатора.
Из (6-1-1), (6-16) и (6-18) имеем:
W2T х .
1 т
1 w1T ”
. WjTt02T
Лт~^Г“
г W1T <Ч
Т /?2T+Rc_ 2 ш2т 2
(6-19)
Принимаем во внимание, что
£ =/( Ф
1 °Лш0
И
1 АхОсШо____ 1 Rc'^B 1
Ко Ro Ко Rc Roa)c с К с
где £) — э. д. с. на выходе первого каскада усили-
теля;
123
X<i Rc постоянная времени стабилизирующей обмотки
усилителя;
R с Wo__ Л о
Ro w с /С с9
Кс— коэффициент усиления усилителя по напряже-
нию по цепи стабилизирующей обмотки.
Тогда уравнение (6-17) можно записать в следующем
виде:
+ (Е t + СсФя) 2£lL + 21i£)=
А с мт
— _Ко_ [ 1 +(Т1Т +т'гт)р , (I — 51S2)T1Tt'2TJy2-|
2" ° Ш» Х'е [ “"Г-------~.
(6-20)
где
Л'с=Лс ТТГвг
KcWc ___£ _
tc С’
^t==Cii^j-^—коэффициент усиления по напряжению ста-
1Т бплпзнрующего трансформатора.
Используя уравнения (6-12) и (6-20), легко составить
структурную схему узла усилитель — стабилизирующий
трансформатор (рис. 6-2), а затем и схему набора ре-
шающих элементов электронной модели.
В структурной схеме (рис. 6-2) используется обще-
принятая передаточная функция стабилизирующего
трансформатора с активной нагрузкой:
®Т ~~ ~1<2г + Rc 1 +(т,т+т2т)р+Р(1— 8=)т1тт2т/;'^ • <6’21)
Здесь принято
=,б2;
влияние индуктивного характера нагрузки учтено звеном
12-1
На схеме отражено, что индуктивность нагрузки
трансформатора определяется суммой рабочего потока
усилителя и потока рассеяния управляющих обмоток.
Из приведенной схемы следует, что передаточные
функции звеньев стабилизирующего трансформатора не
зависят как от параметров и числа звеньев основного
канала системы, так и от нагрузки усилителя. Указан-
ная структурная схема может быть применена для по-
строения электронной модели в случае работы стаби-
Рнс. 6-2. Структурная схема узла усилитель — стабилизирующий
трансформатор.
лизирующего трансформатора в системе с электрома-
шинным усилителем поперечного поля и продольного
поля, магнитным усилителем и т. п.
В том случае, когда потоком рассеяния <Тц можно
пренебречь (в магнитных усилителях), схема принимает
более простой вид. В ЭМУ поперечного поля величину
потока рассеяния считают пропорциональной току на-
грузки [Л. 28] Структурная схема, изображенная на
рис. 6-2, может быть использована также тля общего
случая, когда поток рассеяния Ф,5 определяется суммой
и. с. нескольких обмоток.
В качестве примера, иллюстрирующего влияние
индуктивного характера нагрузки стабилизирующего
трансформатора на переходный процесс, рассмотрим
совместную работу трансформатора с ЭМУ поперечного
поля Структурная схема узла ЭМУ поперечного поля —
стабилизирующий трансформатор представлена на
рис. 6-3.
В соответствии с указанной структурной схемой была
собрана электронная модель электромашинного усили
125
теля типа ЭМУ-110, к выходным зажимам которого
присоединен стабилизирующий трансформатор типа
ТС-144-110*.
Вторичная обмотка трансформатора подключалась
на одну из обмоток управления ЭМУ.
Рис. G-3. Структурная схема узла ЭМУ поперечного поля — стаби-
лизирующий трансформатор.
Ниже приводятся параметры ЭМУ и стабилизирую-
щего трансформатора:
т0 = 0,005 сек\ 7(0 = 0,291; тк = 0,04 сек-, То = % -ф-тк =.
= 0,045 сек-, т9 = 0,49 сек\ 7(v = 66; /(О = 0,254; т1Т =
— 0,19 сел'; тгТ = 0,283 сек-, 8,-5,, — 0,906; =
= 0,091 re/г; Л"с = 2,59; 7(т = 0,682; да, т = 2620; w2T =
= 1970; рабочий воздушный зазор трансформатора 8Р =
= 3 мм.
Исследовалась работа ЭМУ в режиме холостого хода
(рис. 6-5).
* Технические данные стабилизирующих трансформаторов
ТС 72-60 и ТС-144 НО приведены в приложении П-5 и па рис. П-1.
120
Для рассматриваемого случая система уравнении
узла ЭМУ — стабилизирующим трансформатор имеет
следующий вид:
6/рез = Пвх-0,254Да-П2Т;
0,045/?/:, = 0,291 Upe3 — Eq-, №рЕа=ЪЬЕч — Еа;
£/д= 1,02^-1-0,314/^; С/'1Т = 6,1Да 4-1/д;
0,00967p-’U2T = 0,19pt/,1T — П2Т —0,473/Х72. (6-22)
Введя масштабные коэффициенты
Еа = ЮЁа‘, = t/1T=10t7'1T; / = 0,П, (6-23)
получим систему уравнении в машинных переменных, по
которой составлена схема набора решающих элементов
электронной модели (рис. 6-4).
Рис. 6-4. Схема электронной модели узла ЭМУ-НО—стабилизи-
рующий трансформатор TC-144-1I0.
На модели узла ЭМУ — стабилизирующий трансфор-
матор были сняты частотные характеристики, которые
сравнивались с аналогичными кривыми реальной си-
стемы Как видно из рис. 6-5, эти кривые имеют доста-
точно близкое совпадение. Следует отметить, что в слу-
чае пренебрежения индуктивным характером нагрузки
трансформатора, т. е. при тс = 0 (на модели это имити-
ровалось разрывом цепи С7Д), система оказывается не-
устойчивой (рис. 6-6).
Полученный результат позволяет сделать выводы
о необходимости проверки в каждом конкретном случае
возможности пренебрежения индуктивностью нагрузки
127
стабилизирующего трансформатора. Отметим, что при
решении задачи на моделирующей установке учет индук-
тивности нагрузки связан с весьма незначительным
усложнением схемы модели: добавляется один сумми-
рующий усилитель.
Рис. С-5. Частотные характеристики узла ЭМУ—стабилизирую-
щий трансформатор.
--------характеристики, полученные на модели;------эксперименталь-
ные характеристики; ЭМУ-100; т„ = 0,905 сек-, /<у = 0,291; tK=0,04 сек;
Т„ = \ + тк = 0,045 сек; тс = 0,49 сек; Ку = 66; Ко = 0,254;
ТС-144-110; т1т = 0,19 сек; т2т = 0,283 сек; 5,= 5я=0,906; тс = 0,091 сек;
Кс = 2,59; Кт = 0,682; tu1T = 2 620; и’2т = I 970; 5=3 мм.
Когда индуктивность нагрузки трансформатора не
учитывается, его передаточная функция может быть
также представлена в виде трех звеньев — днфферсн
цпрующего и двух инерционных:
(7’11Р + 1)(7’1гр+1)
(6-24)
Электронная модель, соответствующая уравнению
(G-24), может быть получена путем применения спосо-
бов моделирования дробно-рациональных передаточных
функции.
Во многих схемах электропривода первичная обмотка
стабилизирующего трансформатора присоединяется
128
к якорю электрической машины. В том случае, когда
модель машины содержит переменную производную
э. д. с. якоря, являющуюся входной переменной стаби-
Рис. G-G. Кривые переходною про-
цесса.
-------при тс =0;---при тс =
= 0,091 сек.
лизирующего трансформатора, модель последнего упро-
щается, так как отпадает необходимость в операции
дифференцирования. Существенное упрощение схемы
модели может быть получено за счет пренебрежения по-
токами рассеяния стабилизирующего трансформатора.
Возможность такого допущения зависит как от величины
потоков рассеяния (от величины зазора), так и от ча-
Рпс. 6-7. Схемы упрощен
пой электронной модели
стабилизирующего
трансформатора
2Т
К' „ :
R‘c‘ — t1T + т2т.
9—2337
129
стотных характеристик звеньев основного канала си-
стемы, которые охвачены гибкой обратной связью. Упро-
щенные схемы модели стабилизирующего трансформа-
тора представлены на рис. 6-7.
6-3. СТРУКТУРНАЯ СХЕМА СТАБИЛИЗИРУЮЩЕГО
ТРАНСФОРМАТОРА ТОКА
Схема подключения стабилизирующего трансформа-
тора тока к ЭМУ поперечного поля показана на
рис. 6-8,в. Ток производную которого необходимо по-
лучить, проходит по первичной обмотке трансформа-
тора wlT. Его вторичная обмотка го2т присоединена
к управляющей обмотке ЭМУ.
Процессы в рассматриваемом трансформаторе описы-
ваются уравнениями, аналогичными уравнениям стаби-
лизирующего трансформатора напряжения [Л. 29]:
О = /с (А*2т -ф- /?с) -ф- <®2тР (Фт -ф- Ф2.чт) -ф~ <®сР(Ф "k 'I’s); (6-25)
Фт = Я,т(/„ау1Т4-/саугТ); (6-26)
Ф1кт = (6-27)
Ф2вт =х (6-28)
где /с — ток в стабилизирующей обмотке ЭМУ (вторич-
ный ток трансформатора);
/„— ток нагрузки ЭМУ.
Обозначения остальных элементов и переменных ана-
логичны указанным в § 6-1 и на рис. 6-8.
Исключив из уравнений (6-25), (6-26), (6-28) <1»т
и Ф2кт, получим:
где
Так как э. д. с. поперечной цепи ЭМУ, наводимая по-
током Ф, равна:
£'«=^Я7ф. <м°)
а поток рассеяния ЭМУ Ф„ зависит от тока нагрузки
Ф,= 7н, (6-31)
/\qt\d *^0
130
то уравнение усилителя (6 12) и уравнение трансформа-
тора (6-29) можно представить в следующем виде:
,+т-.г-=£"’ (М2’
j__Lc_ ( р I __— IR Yl v
'/мД "1 то н<") р
(6-33)
Т|тР К'с _ _______ [ р Wr
J + z'iTp к,I с 0 w0
Рис. G-8. Схемы подключения стабилизирующих уст-
ройств и ЭМУ поперечного поля
а — общая схема включения стабилизирующего четырехполюс-
ника; б — стабилизирующий трансформатор напряжения; в—ста-
билизирующий трансформатор тока; г — мостовая схема стаби-
лизации, д — схема включения дифференцирующего контура.
В уравнении (6-33) индуктивный характер нагрузки
стабилизирующего трансформатора характеризуется по-
стоянной времени стабилизирующей обмотки ЭМУ:
У*
131
Уравнению (6-32) соответствует рассмотренная ранее
структурная схема ЭМУ. По уравнению (6 33) состав-
лена структурная схема, изображенная на рис. 6-9 Как
к в предыдущем случае, в основу этой схемы положена
передаточная функция стабилизирующего Трансформа-
тора тока, работающего на активную нагрузку. Она
Рис. 6-9 Структурная схема стабилизирующего
трансформатора тока, подключенного к обмотке
усилителя
выражается произведением передаточных функций диф-
ференцирующего и инерционных звеньев. Индуктивность
нагрузки представлена звеном t(./KcTit-
6-4. СТРУКТУРНАЯ СХЕМА СТАБИЛИЗИРУЮЩЕГО МОСТА
Рассмотрим схему включения стабилизирующей
обмотки усилителя в диагональ уравновешенного моста,
показанную на рис. 6 8,г. Выходным сигналом мостовой
схемы является напряжение U, входным —ток в стаби-
лизирующей обмотке усилителя /г. В плече моста, кото-
рым обычно служит обмотка возбуждения одной из ма
шин системы электропривода, проходит ток /2, в осгаль
ных плечах — токи /ь /3, /4.
Запишем исходную систему уравнений:
/,=44-4;* ’ )
/,=-44-4;
t/=/i/?J4-/2/?2(14-7\p);
и = ДЯ, 4- (Ф+ф.4 4- icRc +
(6-34)
132
где /?ь /?2, /?4 — сопротивления плеч моста;
— постоянная времени обмотки воз-
буждения машины.
Обозначения остальных элементов схемы и пара-
метров аналогичны указанным в §6-1.
11з условия, что в установившемся режиме /с=0, сле-
дует:
Лз I
Ri -Р Rz Rз -р R-i Р
(6-35)
Исключая из уравнении (6-34) /2, /3, h, получим:
(Ф + Ф,) р 1 +^-'гР + U = /с (7?г + Rt + /?сР) ^-Х
/2 *
х[1 + Г.р(1+д,4'+м)]' <М6>
где Т'2—Тг — постоянная времени цепи обмотки
1 + 2 возбуждения, включенной в плечо
моста.
Решая совместно уравнения (6-30), (6-31) и (6-36),
получим:
( £.,+ V АЛ.) Ц-7—р + ^]х
Г'2р Кс 1
Л / R> \ Kt , Rt + Rt~
1 -pn^jj + Лг+д4+кср J Р+ Rc
= /с/?0£. (6-37)
Уравнению (6-37) соответствует структурная схема,
представленная на рис. 6-10. В полученной схеме влия-
ние индуктивности стабилизирующей обмотки усилителя
„ tc 1 -р Т'^р
на переходный процесс учитывается звеном ---уг— Р-
Обычно /?!, /?2^|/?з, Ri, что позволяет упростить по-
стоянные коэффициенты, входящие в уравнение (6-37).
Структурная схема ЭМУ, как и в предыдущем слу-
чае, остается неизменной.
В отличие от схем стабилизации с трансформаторами
для получения отрицательной гибкой обратной связи
полярность включения стабилизирующей обмотки усили-
теля по отношению к задающей обмотке должна быть
противоположной.
133
6-5. СТРУКТУРНАЯ СХЕМА ДИФФЕРЕНЦИРУЮЩЕГО КОНТУРА
RC, ПРИСОЕДИНЕННОГО К ОБМОТКЕ УПРАВЛЕНИЯ УСИЛИТЕЛЯ
Во многих системах электропривода в качестве ста-
билизирующего элемента используется конденсатор,
включенный в пень одной из обмоток управления усили-
Рнс. 6-10. Структурная схема стаби-
лизирующего моста, подключенною
к обмотке управления усилителя
теля [Л. 30] (рис. 6-8,с?). Для этой цепи можно записать
следующее уравнение:
[U-w.p (Ф + Ф„)] ICR, (6-38)
1 + ZRcP
где
Из уравнений (6-38), (6-30) и (6-31) получим:
Гд-^Р(д, + 7Г^^/н/?1Л1х
L Ас АдАцКи J J
W KcJRW?' (6-39)
1 + TRCP Ao 0 Wo ' ’
По уравнению (6 39) составлена структурная схема,
показанная на рис. 6-11.
Для формирования управляющего сигнала иногда
применяют гибкую обратную связь, полученную путем
замыкания одной из обмоток управления ЭМУ пли маг-
нитного усилителя на конденсатор. Для этого случая
134
структурная схема, изображенная на рис. 6-11, остается
неизменной, причем сигнал на входе стабилизирующей
цепи (7=0.
Рассмотренные структурные схемы стабилизирую-
щего трансформатора напряжения, стабилизирующего
трансформатора тока, мостовой схемы стабилизации,
контура -RC достаточно полно отображают работу ука-
занных элементов в цепях обратных связей систем элек-
тропривода с электромашпнными и магнитными усили-
телями
Рис. 6 11. Структурная схема стаби-
лизирующего контура RC, подклю-
ченного к обмотке управления уси-
лителя.
По структурным схемам могут быть построены мате-
матические модели узла усилитель — стабилизирующее
устройство. В случае необходимости сокращения числа
решающих элементов модели следует проверить возмож-
ность упрощения структурной схемы за счет пренебреже-
ния индуктивностью стабилизирующей обмотки усили-
теля
ГЛАВА СЕДЬМАЯ
МОДЕЛИРОВАНИЕ МАГНИТНЫХ УСИЛИТЕЛЕЙ
7-1. МЕТОДЫ ИССЛЕДОВАНИЯ МАГНИТНЫХ УСИЛИТЕЛЕЙ
НА ЭЛЕКТРОННЫХ МОДЕЛЯХ
Магнитные усилители получили широкое распро-
странение в современных автоматизированных электро-
приводах и системах регулирования, и задача правиль-
ного отображения их динамических свойств является
весьма актуальной.
Следует указать на следующие основные методы мо-
делирования магнитных усилителей: 1) по мгновенным
значениям переменных с использованием в цепях мо-
дели переменного тока; 2) по средним значениям пере-
менных.
Кроме того, при моделировании систем управления и
регулирования, содержащих магнитные усилители, при-
меняется совместное исследование математической мо-
дели изучаемой системы с физической моделью реаль-
ного магнитного усилителя.
По первому методу в качестве выходной величины
рассматриваются мгновенные значения выходных токов
или напряжений. При этом выходная величина усили-
теля представляется на модели напряжением перемен-
ного или выпрямленного тока.
Модель магнитного усилителя, построенная по мгно-
венным значениям переменных, позволяет изучать все
величины, характеризующие протекание физических про-
цессов (например, форму кривых тока в обмотках
отдельных сердечников, обратные напряжения на вен-
тилях и т. п.), и даст сравнительно полное представле-
ние о работе магнитного усилителя в статических н ди-
намических режимах.
136
Недостатком этого метода являются сравнительно
сложные схемы мотелей, а также возникающая в боль-
шинстве случаев необходимость вести моделирование
в ненатуральном масштабе времени.
По второму наиболее распространенному методу мо-
делирования осуществляется на постоянном токе, что
особенно удобно в тех случаях, когда выходной величи-
ной реального магнитного усилителя является среднее
значение выпрямленного тока.
В технической литературе, относящейся к периоду до
50-х годов, принималось, что структурная схема магнит-
ного усилителя может быть представлена инерционным
звеном. Более поздние исследования показали, что такое
представление правильно только в ограниченном диапа-
зоне частот. При исследовании магнитного усилителя
в более широком диапазоне частот необходимо учиты-
вать явление чистого запаздывания, свойственное аппа-
ратам, работающим па несущей частоте. Для учета чи-
стого запаздывания обычно используется дискретная
форма преобразования Лапласа.
Ниже при подготовке уравнении для составления схе-
мы модели используется как дискретная форма преоб-
разования Лапласа, так и методы непрерывного ана-
лиза.
Как указывалось выше, возможно также использо-
вать сочетание методов математического и физического
моделирования. В этом случае в математическую модель
исследуемо! системы включается магнитный усилитель,
являющийся физической моделью реального магнитного
усилителя. При этом физическая модель магнитного уси-
лителя должна соответствовать известным критериям
подобия, которые применительно к магнитному усили-
телю рассмотрены, например, в [Л. 31].
В связи с ограниченностью объема настоящей работы
ниже рассматривается моделирование магнитных усили-
телей только по первому н второму методам; наиболь-
шее внимание при этом уделяется моделированию по
второму методу, позволяющему наиболее просто и срав-
нительно точно представить магнитный усилитель на
модели.
По первому методу рассматривается моделирование
матоитного усилителя с последовательным включением
обмоток [Л. 32].
137
По второму методу рассматривается моделирование
однофазных и трехфазных магнитных усилителен с само-
насыщением.
Моделирование магнитных усилителей, включенных
по другим схемам, может быть выполнено методами,
принципиально не отличающимися от рассматриваемых
ниже. С некоторыми из этих методов читатель может
познакомиться по опубликованным в технических жур-
налах работам, ссылки на которые приведены в тексте.
7-2. МОДЕЛИРОВАНИЕ МАГНИТНОГО УСИЛИТЕЛЯ
ПО МГНОВЕННЫМ ЗНАЧЕНИЯМ ПЕРЕМЕННЫХ
Рассмотрим моделирование магнитного усилителя
с последовательным включением обмоток переменного
тока и активной нагрузкой.
Уравнение рабочей цепи усилителя:
(7 = /1,/?0-|-гег^ (Ф, — Ф2). (7-1)
Уравнения цепей управления:
^у2=/уЛуа + ^4/(ф1 + ф=): (7-2)
U у ш= 7 у т К у 14 -ф- №у>» (Ф) + 4>г)-
Уравнения кривой намагничивания:
для первого сердечника
т
ф, = /( X; (7-3)
/=1
для второго сердечника
ф2 = f ( У Лiwyi — fVw ) • <7'4)
/=1
В уравнениях (7-1) —(7-14) обозначено:
(7 = (/макс since/—напряжение сети переменного тока,
от которой питается усилитель;
138
/7У1, t/ys,. . . , Uym— напряжения, приложенные к 1-й,
2-й,... zn-й, обмоткам управления
соответственно;
/р — ток в рабочих обмотках, равный то-
ку в цепи нагрузки;
Ли Ла> - • • , /ут— ток11 в 1-й, 2-й, .... т-й обмотках
управления соответственно;
RB— сопротивление рабочей цепи, равное
сумме сопротивлений обмоток и на-
грузки;
/?п, Ry2, - • • , Rym — сопротивление цепей 1-й, 2-й,... ,/тг-й
обмоток управления соответственно;
иуУ1, .......Wy,„ — числа витков 1-й, 2-й, . . . , tn-i\ об-
моток управления соответственно;
w — число витков рабочей обмогкп;
Ф,, Ф2- магнитные потоки в первом и вто-
ром сердечниках соответственно (без
учета потоков рассеяния).
Уравнения (7-2) после несложных преобразований могут
быть приведены к одному уравнению:
т т т о
Ё Ё '••***+Ё & л <*+*>• <7-2а>
1=1 1=1 <=1
Уравнение (7-1) перепишем в виде
После интегрирования (7-1 а) и (7-2а) и совместных
преобразований полученных выражений находим:
т т
i=I
Ф> ф’-— /1>ау] dt- (7-6)
Ко
На основании уравнений (7-3) — (7-6) построена струк-
турная схема модели (рис. 7-1). Схема набора модели,
а также выбор масштабов переменных не имеют какпх-
139
либо особенностей и поэтому не рассматриваются. За-
метим, что для осуществления схемы модели требуется
источник переменного тока. В качестве последнего для
питания модели, построенной по мгновенным значениям,
можно использовать звуковой генератор или генератор
синусоидальных колебаний, собранный на моделпрую-
Рис. 7-1 Структурная схема магнитного усилителя с последо-
вательным включением обмоток.
щей установке по известной схеме с использованием трех
усилителей. Использование в качестве источника пере-
менного тока сети, от которой питается моделирующая
установка, не рекомендуется.
140
В [Л. 32] приведены осциллограммы переходного про-
цесса, снятые па реальном магнитном усилителе и на
модели усилителя, собранной на моделирующеп уста-
новке МН-7. Сравнение указанных осциллограмм по-
казывает хорошее совпадение результатов испытаний
магнитного усилителя и его модели как с качественной
так и с количественной стороны.
Описанный выше способ моделирования представ-
ляет интерес в связи с тем, что при исследованиях мож-
но получить данные о мгновенных значениях всех инте-
ресующих величин, в том числе в форму кривых напря-
жений, токов и т. п
Недостатком такой модели является ее сравнитель-
ная сложность. Для схем включения магнитных усили-
телей, использующих вентили (например, для широко
распространенной схемы с самонасыщением), модели-
рование по мгновенным значениям применяется редко,
так как требует применения моделей, выполненных по
сравнительно сложным схемам.
7-3. МОДЕЛИРОВАНИЕ ОДНОФАЗНОГО
МАГНИТНОГО УСИЛИТЕЛЯ С САМОНАСЫЩЕНИЕМ
ПО СРЕДНИМ ЗНАЧЕНИЯМ ВЫХОДНОЙ ВЕЛИЧИНЫ
а) Основные уравнения
Рассмотрим процессы в магнитном усилителе, вклю-
ченном по схеме с самонасьпценнем (рис. 7-2) *.
При анализе примем следующие допущения:
а) кривая намагничивания состоит из трех линей-
ных участков (рис 7-3). При этом и с. ненасыщенного
участка и петли гистерезиса невелики и ими можно пре-
небречь ио сравнению с и. с. рабочих токов магнитного
усилителя; б) коммутация вентилей в переходных про-
цессах происходит гак же, как и в статических; в) влия-
ние вихревых токов и магнитной вязкости материала
сердечника не учитывается; г) напряжение питания
выбрано критическим, т. е. в конце каждого полупериода
достигается насыщение одного из сердечников.
1 На рис. 7-2 приведена схема с выведенной средней точкой
обмотки трансформатора, более удобная для рассмотрения. Однако
все выводы, полученные для этой схемы, действительны также и
для мостовой схемы с самонасыщением.
141
Цепь управления описывается уравнением
Uу -- /у у W
/ б/ф] । t/Ф2
(7-7)
Следуя [Л. 33], перепишем (7-7) в средних за некоторый
n-i'i полупернод величинах:
67 у in)^==7y '2fwy (ДФу1 („J -|- ДФрг (п))- (7-8)
Уравнение (7-8) получено интегрированием (7-7) в пред-
положении, что /г-н полупернод является управляющим
для сердечника I и рабочим для сердечника П. Так как
Рис. 7-2. Схема вклю-
чения однофазного
магнитного усилителя
с самонасыщепнем.
Рис. 7-3. Кривая на-
магничивания.
в течение каждого полуперпода достигается насыщение
одного из сердечников, то изменения потоков в рабочем
и предшествовавшем ему управляющем полупериодах
равны:
ДФу, ------- ^^1'2(71 + 1)- (7"9)
Из (7-8) и (7-9) находим:
67у (п) = 7У (п)6?у Ц- 2wyf (ДФр (п) ДФр (n+i))- (7-8а)
В (7-8а) индексы, показывающие номер сердечника,
опущены, так как указанное уравнение может быть
отнесено как к первому, так и ко второму сердечнику.
Основываясь на приведенных выше положениях, рас-
смотрим динамику магнитного усилителя с самонасыще-
нием для двух случаев, отличающихся относительной
длительностью переходных процессов [Л. 41].
142
6) Длительный переходный процесс
Для переходных процессов, длительность которых
значительно превышает продолжительность периода пи-
тающем сети, можно принять:
<ДФр (,„). (7-10)
Используя соотношения (7-9) и (7-10) и опуская
индексы, соответствующие номеру полуперпода, перепи-
шем уравнение (7 8а) в виде
t/y = /y/?y+tey^ (АФУ). (7-11)
Если усилитель имеет несколько обмоток управления,
то уравнения, аналогичные (7-11), должны быть за-
писаны для каждой из обмоток:
^y1=/y1^y. + ^ jz (дф);
t/y2=/y2/?y24-№y2i
O/yi =/у;/?у»4~ bUji (ДФ);
(7-11а)
Z7y,„ = /у,„/?у,„ 4- ws,„ ~ (ДФ),
где ЛФ — приращение потока, связанного
с обмотками управления (без учета
рассеяния);
(7У.-, — средине за полупериод значения на-
пряжения, приложенного к i-ii обмот-
ке управления и тока в ней;
i=l, 2, 3, ..., т — номер обмотки управления.
Уравнения (7-11) и (7-11а) имеют совершенно опре-
деленный физический смысл. В стационарном (точнее,
квазистационарном) режиме работы усилителя про-
цессы, протекающие в каждом последующем периоде,
полностью повторяют процессы предыдущего периода.
При этом в конце каждого полупериода сердечники уси-
лителя поочередно насыщаются, и, как указывалось
выше, суммарное приращение потока за целый период
равно нулю, а изменения потока за рабочий и предше-
143
ствовавшпп ему управляющий полуперподы равны по
абсолютной величине. Среднее значение э. д. с., наведен-
ной в обмотках управления в стационарных режимах,
равно нулю. В переходном режиме равенство абсолют-
ных величин изменений потоков (рабочего и управляю-
щего) в пределах каждого периода сохраняется, но зна-
чения приращений потоков в рабочих полупериодах для
двух следующих друг за другом периодов уже различно.
Среднее значение э. д. с., наведенной при длитель-
ном переходном процессе, в соответствии с уравнением
(7-10) равно:
= (ММ-
Воспользовавшись ^приведенными выше соотношениями, найдем вы-
ражение для передаточной функции магнитного усилителя Величи-
ны приращения потока за управляющий и рабочий полуперподы
равны по абсолютной величине (см. уравнение (7-9)]. Это позволяет
определить величину приращения потока за управляющий полу-
период из уравнения для рабочей цепи.
Пренебрегая шадепием напряжения от тока намагничивания,
находим приращение потока в виде
о,
ДФ=— I U*cd8, (7-12)
о
где 0, — угол насыщения;
U*c — мгновенное значение напряжения сети, питающей усилитель.
Используем также следующее очевидное соотношение;
0s
jl?*ed0 +у U*,.dQ = Ucn, (7-13)
о
где Uc — среднее за полупериод значение напряжения сети, питаю-
щей усилитель.
Следует заметить, что при анализе динамики элементов, рабо-
тающих па несущей частоте, соотношения, аналогичные (7-14), в ря-
де случаев позволяют получить выражение для передаточной функ-
ции, не накладывая при этом каких-либо ограничений па форму
кривой питающего напряжения.
Так как
J U*cdQ-(U + IRt)n, (7-14)
0,
где U, 1 — средние за полупернод значения напряжения на на-
грузке и тока нагрузки;
144
R =Rp,-|-RB — суммарное сопротивление рабочей обмотки и выпря-
мителей (в прямом направлении),
то на основании (7-13) — (7-15)
I г 1Л— U — 1R.
ДФ = -^Г<) ^d0 =------------2^------<7-15>
и
где f = <i> 2п— частота изменения тока.
Подставив из (7-15) значение ДФ в (7-11а), найдем:
wy2 U —Uc + IR, . |
(Да } (7-10)
1
i U — U1 IR. I
U,i=Iv,Ryi+p-~------------~2f-----)
где р символ дифференцирования.
Чтобы получить окончательные результаты в наиболее удобной
и общей форме, в приведенные выше уравнения целесообразно
ввести величину суммарной н. с. Для этого каждое из уравнений
(7 16) умножим па WyJRyi и просуммируем правые и левые части
уравнений соответственно:
т
w¥i
т о
W'yl Р
+ 2f
U'-iR. V/ . V шу'
Х w ~ 2j/yiWyi +L/?yi 2f W •
b:| 7 — 1
Заметим, что
т
I у j Г(У у i — F у ,
i = l
где Гу — суммарная н. с. обмоток управления; перепишем затем
приведенное выше уравнение в виде
т
1=1
wyi р с — !Re _
Ryi 2f ш
10—2337
145
Для построения модели усилителя необходимо также знать его
статическую характеристику (рис. 7-4) и передаточную функцию
нагрузки. Статическая характеристика усилителя может быть вы-
ражена в виде
(7-18)
(7-19)
U=f(Fy) или fy=<p(t/)
Передаточную функцию нагрузки запишем в виде
/=(7у(р),
где у(р) оперативная проводимость.
Для активной нагрузки у(р) = 1//?; для активно индуктивной
R+L/>'
На основании уравнении (7-17) н (7-18) построены структурные
схемы, необходимые для моделиропаппя усилителя.
Схема, приведенная на
дифференцирующих звеньев
рис. 1-7,а. выполнена с применением
с передаточной функцией в виде «чи-
стой» производной. Применение этой
схемы для бодьшпнсгва моделирую-
щих установок является нецелесооб-
разным, так как использование лвснь
ев, реализующих «чистую» производ-
ную, встречает ря i затруднений.
Применение такой < темы в особенно
стп нежелательно в случаях, когда
дифференцирующее звено включается
на выходе блока нелинейности, вы
полненного па основе кусочно-линей-
ной аппроксимации
Дифференцирование кривой на-
пряжения с разрывами первого рола
приводит к возникновению сравни-
тельно больших напряжений, которые
усилителен и нарушение нормальной
Рис. 7-4. Статические ха-
рактеристики магнитного
усилителя
могут выгнать насыщение
работы моде'Hi.
Па рис. 7-7,6 показана
м е 11 с и и ем 1 п i тегр и р у ющего
ограничивается необходимостью
Необходимо также учесть, что передаточные функции, структур-
ные схемы п схемы моделей наиболее удобно строить с использо-
ванием таких обобщенных параметров, как постоянные времени и
коэффициенты усиления. Для нелинейных цепей целесообразно
в структурных схемах использовать постоянную времени для одного
из линейных участков характеристики, а нелинейность статической
характеристики учитывать при моделировании при помощи безынер-
ционных функциональных преобразователей.
Для построения структурной схемы с обобщенными параметра-
ми перенесем начало координат в точку О' (рис. 7-4) с координа-
тами U' и Г/ и примем, что на левой ветви характеристики усили-
теля (т. с. при Fy<F1z) напряжение на выходе усилителя неизмен-
но (см. пунктирную линию на рис. 7-4) Для современных
усилителей изменение напряжения на левой ветви характеристики
невелико и в большинстве случаев нм можно пренебречь.
146
структурная схема, выполненная с нри-
звена. Применение этой схемы также
дифференцирования величины
Для правой ветви характеристики уравнение (7-14) запишем
в виде следующей зависимости:
17-(/'=Л'Л'л(Гу+Л'), (7-19')
где U' — минимальное значение выходного напряжения усилителя;
K=tga -наклон статической характеристики усилителя на линей-
ном участке;
К—безразмерный коэффициент, учитывающий нелинейность
статической характеристики усилителя (примерный вид
зависимости Л'=)(7>) приведен па рис. 7-4);
Fy' — и. с., соответствующая абсциссе точки пересечения про-
должения линейной части характеристики с прямой
U—U' (рис. 7-4).
Исключая из (7-17) и (7-18) Fy, находим:
„ । VI wyi Р U°-IR' .
ZjRyt Uii'rZjRyi % w
z=i i=i
Hl 2
r. _U-U’ , VI ^vi P U ,72(n
+ fy A'K, +2j/?yi 2f w‘ (72o)
i = i
Для составления модели магнитного усилителя уравне-
ние (7-20) удобнее переписать в виде
tn
у; i+дт’ у о (t/c - =
i=]
= (U-U')^-^ + (U-U')(1+pTV0), (7-21)
где —
Kyi
Kul Wyi
yi ~ 2f ai
т
— коэффициент усиления по напряжению
на линейной части характеристики
для z-ii обмотки управления;
— постоянная времени in обмотки управ-
ления (на линейной части характери-
стики);
Tyo = \'Tyi— суммарная постоянная времени цепи
1Т1 управления (для линейной части ха-
рактеристики);
U0 = KnF'y—отрезок на оси ординат, образованный
ее пересечением с продолжением ли-
нейной части характеристики (рис. 7-4).
Структурная схема магнитного усилителя, построен-
ная по уравнению (7-21), представлена па рис. 7-7,е,
а соответствующая ей схема модели изображена на
рис. 7-7,г.
10* 147
При построении схем, приведенных на рис. 7-7,в и г,
в выражении pTyo(Uc — ir, — U'), величиной U' пренебре-
гают, т. е. возмущения, вызванные изменением параметров
характеристик, во внимание не принимаются.
Влияние интуитивности цепи нагрузки учитывается
включением на выходе модели инерционного звена,
а также наличием гибкой обратной связи по току цепи
нагрузки. Учет в схеме модели индуктивности нагрузки
не вносит усложнений, так как инерционное звено мо-
жет быть выполнено при помощи включения емкости
в цепь обратной связи выходного усилителя (см. пунк-
тирные линии на рис. 7-7,г).
Следует указать, что моделирование магнитного уси-
лителя с индуктивной нагрузкой описанным методом мо-
жет дагь достаточно точные результаты в том случае,
когда в схеме предусмотрен так называемый нулевой
вентиль (включение нулевого вентиля — см. пунктирные
линии на рис. 7-2); последний создает обходную цепь
для разряда энергии, запасенной в индуктивности на-
грузки, и обеспечивает примерную идентичность харак-
теристик усилителя при активной и индуктивной на-
грузках.
На практике нулевой вентиль широко применяется,
так как при его отсутствии характеристики усилителя
при индуктивной нагрузке существенно ухудшаются.
Схемы, представленные на рис. 7-7,в, г, удобны для
моделирования, так как передаточные функции отдель-
ных звеньев схем выражены через коэффициенты усиле-
ния и постоянные времени усилителя па линейном
участке и не содержат чистых производных. Звенья
с передаточной функцией типа \~^f 1,е ,|УПСТВ1|тель-
ны к помехам, и их набор и представление в математи-
ческих электронных моделях различных типов не вызы-
вает затруднений. Необходимо заметить, что уравнение
(7-12) и схемы, приведенные на рис. 7-7, могут быть
также применены и для моделирования магнитных уси-
лителей, включенных по схемам с внешней обратной
связью и параллельным или последовательным включе-
нием обмоток. Для того чтобы в каждом отдельном слу-
чае модель достаточно точно отражала исследуемый
магнитный усилитель, необходимо располагать достаточ-
но точными значениями коэффициентов усиления и по-
148
стоянных времени, свойственных рассматриваемой схеме
включения. Например, при вычислении постоянной вре-
мени Гуо Для схемы с параллельным включением обмо-
ток необходимо также учитывать цепь рабочих обмоток.
В случае, если рассматривается работа усилителя
только на линейном участке его характеристики (Л'=1),
уравнение (7-21) можно использовать для определения
передаточной функции магнитного усилителя, непосред-
ственное использование которой для построения мотели
в некоторых случаях весьма удобно.
Рассмотрим, во-первых, передаточную функцию уси-
лителя при активной нагрузке. Положив в (7-21) 1 = U]R
и К=1, найдем для отклонений ((7о=О и t/'=0):
(7-21 а)
где т; — р —к. п д. рабочей цепи усилителя.
функцию усилителя при индуктивной
положив в (7-19)
- ।
Передаточную
нагрузке найдем,
R + pL'
После преобразований получим для отклонений:
(7-216)
Следует заметить, что в частном случае при идеальных
вентилях и малом сопротивлении обмоток усилителя
(Re—0, '*1=1) уравнение (7-21,6) принимает вид:
149
Как видно из (7-21 в), при малых потерях в цепи рабо-
чих обмоток влияние индуктивности нагрузки может
быть учтено введением в передаточную функцию звена
i Ц. • '^'Р11 А’=1 (когда не учитывается нелинейность
характеристики усилителя) модель магнитного усили-
теля целесообразно строить по уравнениям (7-21 а)—
(7-21в). В связи с простои структурой этих уравнений
пояснений по составлению указанной мотели не при-
водим.
в) Переходный процесс малой длительности
В общем случае уравнения (7-11) и (7-11а) не могут
быть применены.
Для решения уравнения (7-8) в случае, когда дли-
тельность переходного процесса невелика, необходимо
иметь зависимость между током управления на /гм
интервале приращением потока, связанного с обмот-
кой управления, и напряжением на выходе усилителя.
Приращение потока
дф=дфп(и)4-дфР2(п),
пли с учетом (7-9)
ДФ = ДФ|(2 (п) — ДФР2 {„+1). (7-22)
Для определения Д<1> воспользуемся выражением для
среднего за рабочий полуперпод значения выходного на-
пряжения:
где интегрирование производится в пределах /г-го рабо-
чего полупериода.
Выполнив интегрирование, получим:
П(„) =UC („) — 2/щДФр („), (7-23)
где — среднее за /г-н полуперпод значение выход-
ного напряжения;
Пс(„) — среднее за л-й полупериод значение напряже-
ния сети, питающей усилитель.
Аналогично для п-Н-го полупериода
^(n+i) —- Uс («+>) 2/щДФр (7-23а)
150
Вычитая (7-23а) из (7-23), находим:
77(„) — U(т>+1) — (и) (п+1) —
— 2/w (ДФр (71) — ЛФр (п+1))-
Из последнего уравнения определим приращение потока и
подставим в (7-8а):
(п) — Ц (n)Ry 1^0 <»> — (п + 1) (Цп) ^(п + 1))]-
(7-24)
Уравнения, аналогичные (7-24), могут быть записаны
для каждой из обмоток управления.
Рассматривая усилитель с т обмотками управления,
имеем:
^У1 (»)=Л'1 о )/?>т +V Х
X 1^с ( n) (п + 1) ' (U(п) ^(п + 1))]’
^у2(п)=Л2(п)/?у2+~Х
X Рс (п) — t/e (п + 0 (^(п) ^(п+1))|»
f7yni (п) — Iуп> (п)^уш ш X
X [Uc (п) — (п+1) — ((/(„) — Цп+п)]- (7-24а)
Умножив каждое из уравнении (7-24а) на wyi/Ryi и
сложив все уравнения, получим:
^yi(n)^= J]/yi(n)®yi +
i=l f = l
| P((„)-Pe(„ + l)-(P(„)-P(.. + l))yi
"I- w Ra
i=l
(7-246)
Для решения разностного уравнения (7-246) приме-
ним теорему упреждения и запаздывания [Л. 33, 37]:
^(«+1)—^-Ап)^л
(п+1) = С
fyi (v i)^4.
(7-25)
где q — оператор дискретного преобразования Лапласа.
151
Так как напряжение на нагрузке в л-м полу периоде
зависит от суммарной и. с. цепи управления в (п—1)-м
полупериоде, то статическая характеристика усилителя
будет иметь вид:
tn
V lyj (и
/=1
где С — статический коэффициент усиления, в[ав.
На основании (7-25) последнее уравнение может быть
переписано в виде
т
(7-26)
I ..I
Из уравнений (7-246), (7-25) и (7-26) после преобразо-
ваний находим:
т
У Uyi (n)Kul
~i"t т т I
i = l I 1
tn
+------------------^4-------------• (7-27)
i=l i I
где Kui — коэффициент усиления по напряжению z-й об-
мотки управления, равный:
Первый член правой части (7-27) позволяет опреде-
лить поведение магнитного усилителя при возмущениях,
действующих со стороны обмоток управления, второй
член — при изменениях напряжения сети, питающей уси-
литель. Для наглядности определим на основании (7-27)
реакцию усилителя на указанные выше возмущения,
предполагая, что они действуют одновременно. Учнты-
152
вал, что изображение единичного возмущения равно
~67 р находим на основании (7-27) после перехода
от изображении к оригиналам:
т
t/(,.) = Vt/^u£(l - е°") +[7° е“ <"+'>, (7-28)
X =1
где U°t и Ц° —отклонения управляющего напряжения и
среднего значения напряжения сети соот-
ветственно;
(7-29)
На рис. 7-5 п 7-6 даны
ния на выходе магнитного
уравнению (7-19).
кривые изменения напряже-
уеилптеля, построенные по
Рис 7-5. Переходный
процесс при возму-
щении по каналу це-
пи управления маг-
нитного усилителя.
Рис. 7-6. Переходный
процесс при нзмеиеинп
напряжения сети, пи-
тающей магнитный уси-
литель.
Как видно из кривых, действие управляющего напря-
жения вызывает изменение выходного напряжения че-
рез '/? периода, а изменение напряжения сети приводит
к немедленному изменению выходной величины. При
этом напряжения па выходе магнитного усилителя изме-
няются по ступенчатым функциям, огибающие которых
являются экспоненциальными функциями (см. кривые
на рис. 7-5 и 7-6).
153
Рис. 7-7. Схемы для моделирования
магнитного усилителя в области низ-
ких частот управляющих сигналов.
а —«структурная схема с примененном
дифференцирующих звеньев; б — то же
с применением интегрирующего звена;
в го же с применением апериодического
тлена в основном канале: г схема на-
бора модели.
На этом основании модель, соответствующая уравне-
нию (7-28), может быть получена, например, из схемы,
приведенной на рис. 7-7,в, при условии квантования по
времени сигналов, действующих в отдельных цепях мо-
дели, и введения запаздывания в цепь передачи сигна-
лов управления.
Для квантования по времени можно использовать
вибраторы или поляризованные реле, обмотки которых
154
о
в)
Рис. 7-8. Структурные схемы магнитною
усилителя в случае переходных процессов
малой длительности для возмущений.
а — действующих в цепях управления; б, в — со
стороны напряжения питания.
питаются узкими импульсами напряжения. Возможен
также другой, практически более удобный метод по-
строения модели, основанный на использовании блоков
постоянного запаздывания.
Рассмотрим сначала составление модели для случая,
когда возмущения действуют со стороны обмотки управ-
155
ленпя. В этом случае на основании (7-27) передаточная
функция может быть записана в виде
__ е~ч
т т
Vc„K., 1 +
1 1--\
X—-------------------—---------(7-30)
Как видно из уравнения (7-30), структурная схема маг-
нитного усилителя при возмущениях со стороны обмотки
управления может быть построена в виде звена с за-
паздыванием, охваченного положительной обратной
связью (рис. 7-8,а). Схема набора, соответствующая
структурной схеме, представленной на рис. 7-8,о, при-
ведена на рис. 7-9,а для случая, когда включена одна
обмотка управления.
О
Рис. 7-9. Схемы набора модели маг-
ннтного усилителя в случае переход-
ных процессов малой длительности
для возмущений.
а — действующих в цепях управления;
б —со стороны напряжения питания.
156
Как это видно из структурной схемы (рис. 7-8,а),
при наличии нескольких обмоток управления может
быть использована аналогичная схема набора. Из-
меняется только число входных сигналов и величина
т
У kui . На рис. 7-10 показаны кривые переходных
г = |
процессов, построенные по оспцпллограмме, которая снята
на модели (рис. 7-9,а) для магнитного усилителя (Л.33].
Ниже приводятся основные данные указанного усилителя:
Число витков рабочей обмотки.................... w - 3 800
То же обмотки управления.............................. — I 100
Рабочее напряжение.............................. (7С = 200 в
Частота питающего тока.......................... f = 50 гц
Материал сердечника .............................. лента 5ОНП,
0,05 мм.
Рис. 7-10 Кривые переходных про-
цессов в магнитном усилителе с са-
монасыщением.
---------- —расчетные кривые;
--------кривые, снятые на модели
Модель магнитного усилителя испытывалась при сле-
дующих трех значениях коэффициентов усиления, соот-
ветствующих различным величинам сопротивлении пепи
управления:
Ku-6,92 =2):
Au =17,3 =5);
157
=34,6 (кв-^-=Ю).
Осциллограмма, показанная па рис. 7-10, снималась при
Л,(=6,92.
Моделирование производилось в ненатуральном мас-
штабе времени. Время запаздывания было выбрано рав-
ным то/2=0,1 сек\ масштаб по времени составлял таким
образом: 0,01 : 0,1 = 1 : 10.
Как видно из кривых, приведенных на рис. 7-10, мо-
дель достаточно точно воспроизводит характер кривых,
полученных расчетом в соответствии с уравнением
(7-28). (Расчетная кривая показана на рис. 7-10 пункти-
ром.) Искажения в начальной части кривой переходного
процесса определяются полосой пропускания блоков за-
паздывания БПЗ-2.
При испытаниях модели были также сняты частот-
ные характеристики при трех указанных выше коэффи-
циентах усиления. Характеристики показали хорошее
совпадение с кривыми, приведенными в [Л. 33].
Переходим к случаю, когда возмущения действуют
со стороны напряжения сети.
В соответствии с (7-27) передаточная функция в этом
случае равна:
(7-31)
Как видно из последнего уравнения, структурная схе-
ма магнитного усилителя при возмущениях со стороны сети
158
может быть представлена в виде двух детектирующих
звеньев. Передаточная функция одного из этих звеньев
т
1—е~», а другого ——-----------------. Второе из указанных
/—I
звеньев охвачено положительной обратной связью через
звено запаздывания е~ч (рис. 7-8,6). Однако схема, по-
казанная иа рис. 7-8,6, неудобна для моделирования, так
как требует применения двух блоков запаздывания. Бо-
лее удобной для моделирования является схема, изобра-
женная на рис. 7-8,б. Соответствие между исходным
уравнением (7-31) и структурной схемой, представленной
на рис. 7-8,в, легко показать, записав выражение для ее
передаточной функции.
Схема набора модели магнитного усилителя для слу-
чая возмущений со стороны питающей сети показана
на рис. 7 9,6
Изложенная выше методика разработана примени-
тельно к усилителю с активной нагрузкой.
Как было указано выше, методика, разработанная
применительно к усилителю с активной нагрузкой, мо-
жет быть применена для случая активно-индуктивной
нагрузки в том случае, когда в схеме усилителя преду-
смотрен нулевой вентиль достаточно малого сопротив-
ления. Влияние индуктивной составляющей нагрузки
можно учесть более точно, используя формулы, предло-
женные в [Л. 39]. Однако применение формул [Л. 39]
при разработке схемы математической модели магнит-
ного усилителя едва ли является целесообразным, так
как требует весьма существенного усложнения схем мо-
делей.
Включение пулевого вентиля показано на рис. 7-2
пунктиром. В этом случае на выходе схем моделей, при-
веденных на рис. 7-7,г и 7-9,6, для учета индуктивности
нагрузки следует включить инерционное звено с посто-
янной времени цепи нагрузки.
159
7-4. МОДЕЛИРОВАНИЕ ТРЕХФАЗНОГО МАГНИТНОГО УСИЛИТЕЛЯ
С САМОНАСЫЩЕНИЕМ ПО СРЕДНИМ ЗНАЧЕНИЯМ
ВЫХОДНОЙ ВЕЛИЧИНЫ
Рассмотрим основные соотношения в трехфазном
усилителе, выполненном по мостовой схеме, показанной
па рис. 7-11,<7.
Кривые напряжения сети, питающей усилитель, при-
ведены на рис. 7-11,6.
Как это следует из анализа работы однофазного уси-
лителя, можно, не нарушая общности рассмотрения,
принимать во внимание только одну обмотку управле-
ния. Влияние нескольких обмоток управления легко мо-
Рпс. 7-11. Схема включения трехфазного магнитного
усилителя п кривые напряжений.
жет быть учтено путем суммирования их постоянных
времени. Поэтому при составлении уравнений для трех-
фазпого усилителя учитывается только один контур в це-
пи управления.
При составлении уравнений примем такие же допу-
щения, как и для однофазного усилителя (§ 7-3). Как
известно [Л. 38 и 42], при минимальном выходном токе
усилителя к рабочим обмоткам усилителя прикладыва-
ются напряжения, являющиеся отрезками синусоид и
обозначенные (рис. 7-12) е3>1, е2.з и т. д. Напряжение
160
сети переменного тока, от которой питается усилитель,
в этом режиме уравновешивается э. д. с., наведенной
в рабочих обмотках. Постоянная составляющая потока
сердечников при этом отсутствует.
Рис. 7-12 Кривые напряже-
ний на обмотках трехфазного
магнитного усилителя при ми-
нимальном выходном токе.
Рис. 7-13. Кривые напряжений
и токов трехфазного магнит-
ного усилителя прн нагрузке.
Если в сердечниках усилителя имеется постоянная
составляющая, они насыщаются поочередно и напряже-
ние сети в течение одной части рабочего полупериода
(рис. 7-13) уравновешивается э. д. с., наведенной в ра-
бочих обмотках усилителя, а в течение другой части —
падением напряжения в цепи нагрузки (см. заштрихо-
ванные площади —$в).
Уравнение напряжений для цепи управления может
быть записано в виде
Uy^lyRy -H(-Ei) + (-Е2) + (-Ез) +
+ (-Е4) + (-Е5) + (-Е6), (7-32)
где Uy, /у, Ry — напряжение, приложенное к об-
мотке управления, ток в ней и
сопротивление цепи управления
соответственно;
Ei, Е2, Е3, Е^, Е5, Ев — э. д. с., наведенные в обмотке
управления вследствие ее связи
с рабочими обмотками, располо-
женными на сердечниках /, //
111, IV, V, VI соответственно.
11—2337
161
Уравнение (7-32) после его интегрирования в пре-
делах */з периода может быть также отнесено и к сред-
ним значениям токов и напряжении в цепи управления.
Ограничиваясь рассмотрением только длитель-
ных переходных процессов, примем, что средние значе-
ния э. д. с., наведенных в обмотке управления, выража-
ются через изменения потоков следующим образом:
^=-№У4(ДФ2);
= — w„.-^ (ДФ3);
Д4 = -№У^-(ДФ.);
= - шу-<(ДФЕ);
—«\4(ДФ«)’
(7-33)
где ДФ„ ДФ2, ... , ДФ0 — величины изменения потоков в
сердечниках /, II, III, IV, V, VI
соответственно.
Подставив значение э. д. с. из (7-33) в (7-32), найдем:
ПУ = /У/?У + ^У4_^ДФ1.
(7-34)
Так как сердечники всех усилителей находятся
в идентичных условиях, то абсолютные значения изме-
нения потоков в них равны, и, следовательно, (7-34)
можно переписать в виде
[/у = /у/?у + Сауу (ДФ),
(7-35)
где ДФ — изменение потока одного сердечника.
Для определения значения среднего изменения пото-
ка следует рассмотреть уравнения рабочей цепи.
162
Напряжение, приложенное к обмотке одного из сер-
дечников в интервале, когда этот сердечник пеиасыщен,
уравновешивается наведенной э. д. с.
с- ,/ф
E = ~W4T
(7-36)
Средняя величина изменения потока может быть най-
дена путем интегрирования кривых напряжения на об-
мотках усилителя аналогично тому, как это было выпол-
нено выше для однофазных усилителей. Однако выпол-
нение этих преобразований для трехфазных усилителей
оказывается значительно сложнее, чем для однофазных.
В результате особенностей коммутации вентилей в трех-
фазной мостовой схеме существует несколько областей
(режимов) работы усилителя. Значения коэффициентов
уравнений для каждой из областей существенно отли-
чаются, а для некоторых из этих областей значения ко-
эффициентов не остаются постоянными п в пределах
данной области. Поэтому определение шередаточиой
функции трехфазного магнитного усилителя в общем
случае связано со значительным усложнением применяе-
мого математического аппарата.
Наиболее подробно динамика трехфазных магнит-
ных усилителей была исследована Стормом {Л. 42].
Для случая воздействия возмущений со стороны це-
пи управления в соответствии с [Л. 42] может быть при-
нято следующее выражение для постоянной времени:
Т = ™--^ти, (7-37)
2/ w ' '
ИЛИ
T=Ty0K/n„, (7-37а)
где Ки - коэффициент усиления по напряжению для ли-
нейной части характеристики усилителя;
К—коэффициент, характеризующий нелийность
статической характеристики (см. рис. 7-4);
ти — коэффициент, зависящий от относительного
значения выходного напряжения;
7\о—постоянная времени для точки статической ха-
рактеристики, где /Опн=1.
II
163
Значения ти, (выраженные в функции относительной
величины напряжения на выходе усилителя, показаны
в виде кривой на рис. 7-14. Как видно из кривой, зна-
чение ти изменяется в 3 раза (от 2 в начальной части
кривой до -j при большом значении выходного напря-
жения) .
Таким образом, постоянная времени и коэффициент
усиления магнитного усилителя изменяются по различ-
ным законам, что являет-
Рпс. 7-14. Зависимость коэф-
фициента ти от относительной
величины выходного напряже-
ния.
ся характерной особен-
ностью многофазного
магнитного усилителя.
Поэтому рассмотренные
выше схемы моделей од-
нофазного магнитного
усилителя без соответст-
вующих коррективов не
могут быть применены
для моделирования трех-
фазного усилителя. Если
принять, что указанные
коррективы достаточно
точно передаются коэф-
фициентом ти в выраже-
нии для постоянной времени, то переходные процессы
в трехфазном магнитном усилителе можно описать сле-
дующим уравнением:
И - -4- КтиТУв U') = UyKKu + U0K. (7-38)
При записи уравнения (7-38) использованы параметры
статической характеристики усилителя U' и Uo и, так
же как для однофазного усилителя, принято, что левая
ветвь статической характеристики параллельна оси
абсцисс (см. пунктирные линии на рис. 7-4). Для малых
отклонений коэффициенты уравнения (7-38) являются
постоянными и усилитель на структурной схеме может
быть представлен инерционным звеном
Для построения модели, позволяющей исследовать
процессы при больших отклонениях, целесообразно
уравнение (7-38) преобразовать.
164
Выделив члены, не содержащие нелинейных зависи-
мостей, в результате преобразований получим:
и - U' + ТУо 4 (С7 - L)r) = UyKu + и0 -
- (и - И (4 - 1) “ г>«{ти ~~ (7’38а)
Структурная схема, построенная в соответствии
с уравнением (7-38а), представлена на рис. 7-15,а.
а)
Рис. 7-15. Схемы для моделирования трех-
фазного магнитного усилителя с самона-
сыщением в области низких частот управ-
ляющих сигналов.
а — структурная схема по уравнению (7-38а);
б — преобразованная структурная схема.
Для составления модели схема рис. 7-15,а неудобна,
так как она требует выполнения операции чистого диф-
ференцирования. Кроме того, при составлении схемы
модели необходимо учесть, что величина ти является
функцией выходного напряжения и поэтому в схеме
165
должны быть предусмотрены звенья, выполняющие
операцию умножения.
Структурная схема, выполненная с учетом этих
соображении, показана на рис. 7-15,6,
Как видно из схемы рис. 7-15,6, для построения
модели необходимо использовать блок произведения и
два блока нелинейностей. При подготовке задачи
в соответствии со схемой рис. 7-15,6 нелинейные зави-
симости — 1 и ти—1, которые выставляются на бло-
ках нелинейностей, должны быть пересчитаны в функ-
ции величины U—U'.
7-5. ОПРЕДЕЛЕНИЕ ПАРАМЕТРОВ МАГНИТНЫХ УСИЛИТЕЛЕЙ
Необходимые для моделирования параметры магнит-
ного усилителя могут быть определены: а) расчетным
путем по данным магнитного усилителя, приведенным
в каталогах и в документации завода-изготовителя;
б) на основании результатов испытания магнитного
усилптеля.
Определение параметров магнитного усилителя рас-
четным путем может быть выполнено на основании
формул, приведенных в § 7-3, и специальных пояснений
не требует. В приложении 6 приведены данные магнит-
ных усилителей серин ТУМ, которые могут быть исполь-
зованы при расчете их параметров. Указанные данные
составлены на основании каталогов ЦИНГИ электро-
технической промышленности и приборостроения №3490
и 3493.
Остановимся подробнее на вопросах, возникающих
при экспериментальном определении параметров маг-
нитных усилителей. Определение статической характе-
ристики магнитного усилителя не имеет каких-либо
специфических особенностей. Определение постоянной
времени магнитного усилителя является более сложной
задачей, чем, например, аналогичные испытания маши-
ны постоянного тока или электромашинного усилителя,
выходной величиной которых является напряжение со
сравнительно небольшими пульсациями.
Выходной величиной магнитного усилителя являют-
ся импульсы тока пли напряжения, повторяющиеся
с частотой сети. Определение среднего значения этих
импульсов в режиме синусоидальных возмущении на
166
входе усилителя и в особенности определение фазы
кривой среднего значения выходного напряжения пред-
ставляет известные трудности, так как требует спе-
циальных методов измерения.
Наиболее простым методом является осциллографи-
рованпе светолучевым осциллографом при большой ско-
рости движения фотобумаги с последующим планимет-
рированием и определением среднего значения каждого
импульса выходного тока. Применение этого метода на
Рис. 7-1G. Схема для определения частот-
ной характеристики магнитного усилителя.
практике ограничено вследствие его весьма значитель-
ной трудоемкости.
Для получения среднего значения известно также
применение генератора постоянного тока с возбужде-
нием от испытуемого магнитного усилителя. Выходной
величиной при этом методе является э д. с. генератора.
Вследствие влияния индуктивности обмотки возбужде-
ния генератора высокочастотные пульсации в кривой
э. д с. сравнительно невелики. Из полученной таким ме-
тодом частотной характеристики исключается заранее из-
вестная частотная характеристика генератора, что после
соответствующей обработки позволяет получить частот-
ную характеристику усилителя. Применение метода
с генератором постоянного тока практически не всегда
удобно, так как требует использования вращающегося
агрегата машины постоянного тока, сопротивление об-
мотки возбуждения которой должно быть близко к но-
минальному значению сопротивления нагрузки усили-
теля. В практических условиях такое сочетание не всегда
может быть обеспечено.
В качестве фильтра высоких частот удобнее всего
применить операционный усилитель, включенный по
167
схеме инерционного звена (рис. 7-16). Постоянная
времени этого звена должна удовлетворять условиям:
7'1<7’ф<Т2,
где Тф — постоянная времени инерционного звена
(фильтра);
Т\— длительность периода питающей сети;
Т2 — минимальное значение длительности периода
сети, являющейся источником сигналов низкой
частоты, подаваемых на вход испытуемого
усилителя.
Операционный усилитель является весьма гибким
аппаратом, и при его использовании выбор необходимых
значений постоянных времени и входных сопротивлений
не встречает затруднений.
Частотная характеристика магнитного усилителя
Фм.у(Ло) может быть вычислена в соответствии с выра-
жением
?м.у (/<>)— G(/<oj~’
где fj. (/’cj) — частотная характеристика совместно вклю-
ченных магнитного усилителя и операционно-
го усилителя, полученная экспериментальным
путем;
G (/<>) = - — частотная характеристика операцнон-
ф ного усилителя, включенного по схе-
ме инерционного звена.
Анализ полученной таким методом частотной харак-
теристики не встречает затруднений и легко позволяет
определить постоянную времени усилителя. Обычно
частотную характеристику снимают при активной на-
грузке усилителя и изменении значений входных и вы-
ходных переменных в пределах линейной части харак-
теристики усилителя.
В результате эксперимента находят значение постоян-
m
них времени Tyi и их сумму Т'Уо = ^ Tyi, которые яв-
i=I
ляются основными параметрами модели усилителя. Опре-
деление коэффициентов магнитного усиления производит-
ся на основании его статических характеристик.
ГЛАВА ВОСЬМАЯ
МОДЕЛИРОВАНИЕ СИНХРОННЫХ МАШИН
8-1. ОБЩИЕ ПРИНЦИПЫ МОДЕЛИРОВАНИЯ
ЭЛЕКТРИЧЕСКИХ МАШИН ПЕРЕМЕННОГО ТОКА
Создание типовой модели машины переменного тока
связано с рядом трудностей, возникающих при отобра-
жении реальных величин переменного тока в виде
напряжений постоянного тока в моделирующей уста-
новке. Непосредственное решение первоначальных урав-
нений, описывающих переходные процессы в машине
переменного тока, требует значительного количества
электронных блоков. Наличие трех и более фаз иссле-
дуемой машины приводит также к дополнительному
увеличению необходимого электронного оборудования.
В настоящее время существует ряд методов решения
рассматриваемой задачи. Например, синхронные ма-
шины наиболее часто моделируются на основе уравне-
ний, записанных в осях, неподвижных относительно
ротора данной машины (система d, q). Известны также
другие системы записи уравнений (запись в синхронно
вращающейся системе координат, в координатах, свя-
занных со статором, и др). Для отчетливого представ-
ления о преимуществах и недостатках отдельных
вариантов изображения машины переменного тока
целесообразно рассмотреть подробно различные формы
записи физических 'процессов в синхронных машинах,
представляющих собой наиболее общий случай машины
переменного тока.
Синхронная машина будет рассматриваться как
элемент системы автоматического регулирования.
169
Окончательной целью является получение структур-
ной схемы, которая может быть положена в основу
составления модели синхронной машины.
Применяемая методика пригодна для рассмотрения
любых модификаций синхронных машин, но в каждом
конкретном случае необходимо учитывать особенности
конструктивного выполнения машины.
В качестве примера рассматривается явнополюспая
трехфазная синхронная машина нормального исполне-
ния. Обмотка якоря размещается па статоре, основное
поле создается обмоткой возбуждения, расположенной
на роторе. Магнитопровод машины имеет две оси сим-
метрии— продольную п поперечную. Ротор машины
снабжен демпферной обмоткой.
8-2. УРАВНЕНИЯ ИДЕАЛИЗИРОВАННОЙ СИНХРОННОЙ
МАШИНЫ
а) Общие сведения
При исследовании физических процессов в синхрон-
ной машине обычно отвлекаются от второстепенных
явлений, оказывающих незначительное влияние на ра-
боту машины {Л. 41]. Например, дифференциальные урав-
нения синхронной машины, впервые составленные Пар-
ком, описывают процессы в идеализированной машине.
Отметим основные допущения, относящиеся к рас-
пределению полей и характеру процессов в идеализиро-
ванной машине.
1. Магнитное поле в воздушном зазоре. Трехмерное
магнитное поле в воздушном зазоре рассматривается
как плоскопараллельное. Возможность замены реаль-
ного ноля расчетным вытекает из того, что э. д. с.
любого /проводника якоря и электромагнитное усилие,
действующее на проводник, определяются лишь инте-
гральным значением поля вдоль машины.
2. Магнитное поле обмотки возбуждения. Якорь
машины принимается гладким; при исследовании не
учитывается искажение поля, обусловленное зубцами
якоря. Кривая поля считается синусоидальной. Магнит-
ная ось обмотки возбуждения совпадает с продоль-
ной осью машины.
3. Магнитное поле обмотки статора. Магнитные оси
фазных обмоток статора сдвинуты друг относительно
170
друга на 120 эл. град. Магнитная проводимость изме-
няется вдоль окружности статора .вследствие перемен-
ного зазора с периодом 180 эл. град. Полями высших
пространственных гармонических, обусловленных основ-
ной гармонической н. с., можно пренебречь, так как они
дают небольшие потокосцепления. В синхронных маши-
нах нормального исполнения обмоточные коэффициенты
для ряда высших гармонических и. с. статора малы.
Ввиду этого можно пренебречь асинхронными момен-
тами, которые создают высшие пространственные гар-
монические поля. Магнитное поле, созданное токами
обмоток статора, распределено в воздушном зазоре
вдоль окружности статора и изменяется по синусоидаль-
ному закону с периодом, равным двойному полюсному
делению машины.
Рис. 8-1. Принципиальная схема синхрон-
ной машины.
4. Магнитное поле демпферных контуров. Распреде-
ление токов в стержнях демпферной обмотки реальной
машины имеет сложный характер В идеализированной
машине распределение демпферной обмотки в воздуш-
ном зазоре принимается синусоидальным.
5. Влияние вихревых токов и гистерезиса не учиты-
вается.
6 Влияние насыщения также не учитывается Урав-
нения, отображающие основные физические процессы
синхронной машины (рис. 8 1), могут быть записаны
в виде одной из следующих форм ,[.П. 45].
171
6) Классическая форма записи уравнений
Уравнения якорной цепи:
= )
= I (8-1)
С/с = /с/? + ^Фс> j
где UA, ‘UB, Uс и 1а, 1в, 1с — напряжения и токи фаз-
ных обмоток статора;
R— сопротивление фазы;
Мгл, Чгв, Ч'с— потокосцепления фазных
обмоток;
d
l}—~dt—символ дифференциро-
вания.
Уравнение цепи обмотки возбуждения:
Uf=lfRf+pd4t . (8-2)
Уравнения цепи демпферной обмотки приведены
ниже.
Демпферная обмотка представляется в виде отдель-
ных контуров, расположенных по двум осям симметрии
машины (рис. 8-2). Для демпферной обмотки продольной
оси (п контуров)
O = p'l' id +^ndAd + ^12<Ла+ • • • + R^nd',
0==/,'l 2d + ^2idAd + ^22c/2d-|-- • ~\-R2nd^nd',
0 — Д'1 nd + RnidRd + R-n2dI2d I" • • • “H Rnnd^nd- f
(8-3a)
Для демпферной обмотки поперечной оси
Ров)
0 = ^,;1? + ^11<?Л« + ^12<7Л<7 + - • • + ^inq^nq",
О —P^2q | RziqRq “F- ^22<7^2<7 I " "4“ Rznqlmq,
(п копту-
(8-36)
0 P 1 nq Д- Rniq^q I Rnzql zq Д" • • • Д" R-nnqlnq.
где 4fnd, Ind, 4%, l-nq — потокосцепление и ток л-го
демпферного контура в про-
дольной и поперечной осях
соответственно;
172
Rnnd, Rnnq — активное сопротивление n-го
контура току этого же контура
в продольной и поперечной
осях соответственно;
Rind, Rtnqii^n)—то же t-го контура току п-го
контура в продольной и попе-
речной осях соответственно.
Уравнение для потокосцеплении:
А + АВ 'В + MaJc + М AfIf + М А ,dId +
+ MA2d^d + • • • + М And + М A 1/1? +
+ ^1А2ЧГ2Ч + ’ ‘ • + ^Anq1^
’•’в = Mba{a + Lb1 в + Мвс!с + + Мв\а!^ +
M Bnd I nd M Blgltq Ч- B^i/m "H- •
. . . fj/iqhiq',
173
’КС — + MCBfB + LCfC 4“ / / +
4“ ^C2d^2<l + • • ' + Mended + ^Cl<? Z17 4“ y^C2fl^a« 4~ • • •
• • + ^Спд^Ч'
Wf = MfAfA + ^fBfB + ^,CfC + L>'> + MildIld +
4“ 4- • • • 4~ ^fnd^nd't
4 id=Л1lrf4/, + д-i ldBiB 4- л/ ]dcic + 4-
4- Z-i</id 4“ TW12(f/zJ 4“ • • • 4“ ^rndlnd!
4 =M2dA!A 4- M2dBiB 4- M2dcic 4- M2dJif 4-
4-Ai21(1/ld 4- L„,ii2li 4“ • • • + TW2„d/ nd',
’’ =м^л 4- Af,,B/B 4- MUICIC 4- Ljq 4-
4" 7^127Z27 + • • 4" ivujiiqi
'1M = м^А1л 4- в 4- m2iiCic -[- M2iqiq 4-
+ ^-27^27 + • • 4“ znqlnq? (8-4)
где буквами L и M обозначены коэффициенты самоин-
дукции и взаимной индукции различных обмоток, причем
Млв—Л4ВЛ; M/A = MAf, M\dA = MA\d и т. д., (8-5)
поскольку рассматриваемая система линейна.
Индуктивности фазных обмоток являются периоди-
ческими функциями угла у между осью фазы и продоль-
ной осью машины.
Пренебрегая «ысшимн гармоническими, запишем:
La = /о4- Uc°s 2у;
£в = /о4-/гсо8(2т4-120°);
£c=/04-/2cos(2y4-24(P).
Для взаимных индуктивностей статорных обмоток
имеем следующие соотношения:
/И Ifl = тв 4- /2 cos (2у — 120°);
^лс = то + z2cos (2Y 4- 120°); (8-7)
М вс = то 4-4» cos 2у.
Величина ти всегда отрицательная, поскольку маг-
нитные осп фаз сдвинуты на угол, больший 90°.
/o+2/zzo=iZ,d+2AJf; (8-8)
174
где La •п Ms—индуктивность и взаимная индуктивность рассеяния, которые практически не за- висят от у.
Вза НИЯ и имные индуктивности между обмоткой возбужде- фазными обмотками статора имеют вид: ^f = ^z/dcosY-. л*вг = Л%со8(у-12(Г); (8-9) Мс/ = Л1//г,соь(у4-12(Р),
где М, ifd—взаимная индуктивность обмоток при совпа- дении их магнитных осей.
Дл* с демп взаимных индуктивностей обмоток статора ферными контурами имеем: ^,d = «^cos y; MDnd=тАПаcos (y -120°); (8-10) ^c«d = ^cos(Y + 120°)’ J
где /ид nd — взаимная индуктивность фазной обмотки статора и n-го продольного демпферного контура при совпадении их магнитных осей;
М М л„9 — тАпЧ cos (Y + 90°) = - mAnq sin у; У “ тлпЧ sin (Y - 12(?); (8-11)
М c,I9 = -"Win(Y + 120°), J
где 1ПЛ nq— взаимная индуктивность фазной обмотки статора и л-го поперечного демпферного контура при совпадении их магнитных осей.
Ура виенне цепи нагрузки: (8-12)
Ура внения мощности: полная S = 1 активная Р= уЫиии cos<p; / (8-13) реактивная Q = sin <р. '
Ура внение момента, развиваемого двигателем: Л1 = -3^7-и , (8 14)
где £2 — скорость, рад/сек.
175
Решение системы уравнений (8-1) — (8-14) сопряже-
но с большими трудностями, так как выражения для
коэффициентов самоиндукции и взаимной индукции
содержат тригонометрические функции углового поло-
жения ротора.
Поэтому при анализе уравнений сихрониой машины
оперируют не физическими токами, напряжениями, по-
токосцепленпями, а условными величинами, записан-
ными в определенной системе координат. Окончатель-
ный результат решения уравнений вновь переводится
в реальные величины.
в) Форма записи уравнений в преобразованной
системе координат
Сущность преобразования переменных заключи
в следующем: вместо переменных величин трех фаз
А В, С вводятся новые переменные, связанные со ста-
рыми линейными соотношениями. Так, например, для
токов эти зависимости следующие:
^х~ахА^Л~\~ахВ^в~^ахС^С' )
ауЛ^А 4" ауВ^В 4~ ауС?С' | 1 5)
z = агА^А 4“ агВ^В 4" агС^С ’ )
где а коэффициенты линейных преобразований;
Д, Л/, Л —токи в повой системе координат.
Для обеспечения однозначного соответствия между
старыми и новыми переменными необходимо условие
ахВ ахС
аув ауС =/=0. (8-16)
агА агВ агС
Если при этом коэффициенты линейных преобразо-
вании являются функциями времени, то необходимо,
чтобы определитель системы не обращался в нуль
в любой момент времени.
При работе машины на симметричную нагрузку, что
является наиболее частым случаем, справедливо соот-
ношение
Ла + /в + 7с~ 0.
(8-17)
176
В этом случае достаточно введения двух новых пере-
менных вместо трех.
В современной теории электрических машин приме-
няются три системы координат.
1. При анализе несимметричных режимов синхрон-
ных машин, а также переходных процессов асинхронных
машин обычно применяется система, неподвижная
в пространстве и именуемая системой координат а—р.
Ось а направлена ио осп фазы А, а ось р повернута на
90° в направлении вращения ротора.
1Д 2. Симметричные переходные процессы в синхрон-
машине наиболее удобно рассматривать в системе
Д„ чат, вращающихся вместе с ротором. Как уже
с дем лось выше, такая система носит название си-
координат d, q. Удобство такой системы занлю-
я в том, что коэффициенты дифференциальных
уравнений не содержат тригонометрических функций и
являются постоянными величинами, так как синхрон-
ная машина симметрична в магнитном отношении по
осям ,d, q.
3. При исследовании совместной работы группы
машин иногда применяется система координат, вращаю-
щаяся с постоянной синхронной скоростью. Однако
такая система записи уравнений исключает возмож-
ность построения наглядной структурной схемы. Для
случая параллельной работы, как это будет показано
ниже, удобнее записывать каждую машину относитель-
но своих осей Д q, а специфику 'параллельной работы
учитывать отдельным звеном, связывающим различные
системы координат между собой.
Наиболее распространенной системой записи из всех
применяемых является система координат d, q, имею-
щая фундаментальное значение в теории синхронных
машин. Метод двух составляющих для анализа синхрон-
ных машин был впервые предложен Блонделем и раз-
работан Парком (Л. 46]. Наиболее удобен этот метод для
синхронных машин с симметричной нагрузкой. Направ-
ление осей координат d, q совпадает с направлением
двух осей симметрии ротора.
Продольная ось d направлена вдоль оси полюсов,
а поперечная ось q повернута на 90 эл. град по отноше-
нию к продольной осп по направлению вращения ро-
тора.
12—2337 177
При составлении дифференциальных уравнении син-
хронной машины было принято:
1) положительное направление напряжений и пото-
ков, совпадающее с положительными направлениями
осей d и q\
2) положительные направления токов обмоток воз-
буждения и демпферной обмотки, совпадающие с поло-
жительным направлением осей d и q-,
В) положительные направления якорных токов, про-
тивоположные положительным направлениям осей d
и q.
Такой выбор направления для якорных токов сделан
для того, чтобы положительные токи соответствовали
перевозбужденному генератору. Указанное условие за-
дания положительных направлений переменных наибо-
лее широко распространено в американской технической
литературе. Следует отметить, что существует и ряд
других вариантов выбора положительных направлений
переменных величин. В отечественной литературе обыч-
но принимают положительные направления всех пере-
менных совпадающими с положительными .направления-
ми осей d, q.
Переписав 'уравнения (8-1) — (8-14) в системе коор-
динат d, q, получим:
Уравнения якорной цепи
Ud = — RJd + p'Vd- 'i;Q, I
^ = -ЯЛ+/^ + ''’<А )
уравнение цепи обмотки возбуждения
U{=Rfff+pW}. (8-19)
При анализе работы синхронной машины как эле-
мента системы автоматического регулирования, когда
не представляет интереса истинное значение токов
в демпферной обмотке, последняя может быть представ-
лена с достаточной степенью точности двумя эквива-
лентными контурами по продольной и поперечной осям,
ширина которых равна полюсному делению:
Ufcd -Rhd^kd | kdi 1 QQ)
U kq Rfiqi^iq ~j"~ P^ hq- J
Уравнения для потокосцеплении:
'I'd = (- Ladld + Ma!dIj + - LaJd\ (8-21)
178
- Lo4Iq) - LaJq, (8-22)
4 7 = [ ~ L}s) If j -\-LjJf,
(8-23)
4'fed= ----2^ahdld~\~^'IfkdIf-\-(Lkd — ^-h.«)^frd] “h^-fts^ftd!
(8-24)
’Г^= [-4л1„/,Л + (^-W/)<9] + (8-25)
Уравнения цепи нагрузки:
Ud = RJd + pld -XuIq
Y° a (8'2G)
U(, = Ruiq^plq +X../d-^,
ОД uu Q
где Q0 = 2Ttf0 — синхронная угловая частота.
Уравнения связи записи по двум системам:
U\ =U2 -A-U2 ; 1гя =I2 А-12 . (8-27)
A d 1 q ’ A d 1 q ' '
Уравнение активной мощности:
/э = + ад + ^Л- (8-28)
Уравнение реактивной мощности:
(2 = -ад + ад- (8-29)
Уравнение движения электропривода:
М = J ^+4 - Ч^9), (8-30)
где J — суммарный момент инерции ротора и нагрузки.
8-3. СИСТЕМА ОТНОСИТЕЛЬНЫХ ЕДИНИЦ
Полученные уравнения (8-18)—'(8-30) содержат пе-
ременные с физической размерностью. В теории син-
хронных машин уравнения обычно записываются не
в абсолютных значениях, а в относительных единицах.
Запись уравнений в относительных единицах имеет
ряд преимуществ: уравнения приобретают более про-
стой вид, что позволяет сравнивать различные синхрон-
ные машины.
Для перехода от физических величин к относитель-
ным необходимо задаться базисными значениями пере-
12* 179
менных, в долях от которых определяются относитель-
ные величины.
К основным базисным величинам относятся следую-
щие:
1) базисный ток статора, равный максимальному
значению (амплитуде) номинального фазного тока,
^а.б=|^аО>
2) базисное напряжение статора, равное амплитуде
номинального фазного напряжения,
Ua.6 — UaOt
3) базисная частота, равная синхронной угловой ча-
стоте, Qfi='Qo = 2nfn;
4) базисное потокосцепление статора, наводящее
в обмотке статора при базисной угловой частоте базис-
ное напряжение,
5)--базисное сопротивление статора, равное Za.6 =
---- Uао '
ао___~i >
1 ао
6) базисная мощность статора, равная номинальной
мощности синхронной машины.
p6=p0=3Uui„=^ua9iM-,
7) базисный момент
M6 = M0 = g-p*,
где р* — число пар полюсов синхронной машины1;
8) базисная индуктивность статора
т ___________________ г __ ^ао .
Ьа.б—т-ао —
9) базисное время, соответствующее повороту рото-
ра синхронной машины на 1 эл. рад при базисной
угловой частоте,
/ 1 - 1
6 е« 2п/0 •
1 Для ясности изложения в рассматриваемом случае принимает-
ся р*=.1.
180
Для ротора отсутствует единая оощепрннятая систе-
ма базисных величин. Существует система относитель-
ных единиц, введенная Парком, так называемые систе-
ма Xad, система НС и др. [Л. 47 и 48].
Для структурного метода анализа синхронных ма-
шин наиболее удобной является такая система, которая
дает возможность свести первоначальную машину к эк-
вивалентной с обмотками, имеющими равное число
витков.
Аналогичный способ используется в теории транс-
форматоров и вращающихся машин, когда число витков
ротора приводится к статорным виткам.
С точки зрения физической наглядности, наиболее
целесообразной следует считать такую базисную систе-
му, при которой уравнения напряжения синхронной ма-
шины сохраняют форму уравнений трансформатора
в физических величинах. В подобной системе относи-
тельных единиц существует определенная связь между
базисными величинами.
С учетом вышеизложенного произведем преобразо-
вания уравнений синхронной машины (8-18) — (8-25):
Uf (Rf Н- L]p) If----2" Mafdpld 4“ 0 4“
-]- 0 -]- Mjh dlk ,<ip;
Ud = Mafdplf - (Ra + Ldp) Id + Q£/9 +
4" Mak4QIkq MakdIkdP',
Uq — Mafd&If H£ri/d (/?a -]“ LqP) lq -ф-
4" ^lakqplh.q 4"
Uttd == Mihdplj 2 MahdidP 4" ® 4“ 0 4“
4“ 4“ LkdP) Ikd->
Ukq = 0 —]— 0 • -g- MakqIqP 4“ (Rkq 4“
4~ ^hqP) ik.4 4~ 0;
M = KMaKqlkq - Lqlq) Id -
(8-31)
( Rdld~\- -^lafdlf -Mniidlkd) Iq]-
181
Систему уравнений (8-31) представим в виде
(8-32)
182
Введем систему относительных единиц для роторной
цепи, в которой
fl f Ut. „ w„ U hd th — Wa L/fc, .
w 7 7 7 d Wk,i uut ’ '3 4 * * WhQ
if _ 2 Wf 7~ , thd ‘ aO 2 1hd . ; 2 Wkq1hq,
3 wa 3 wo I n ’ ,,i'7 * * * 11 3 / aO Шо fa o’
3 Wa SoA1d f,i _ Rn . .. 3 /ша Y Rf-
Ami! 2 >'k(i wf ND| 00 IB""'. a Rkd aO A'„o ’ J 2 \ w/ 3 f Wa \ ’ "iq— 2 Uhe ) J Az n о ’ 2Rhq. Aflo . (8-33)
Xf = 3 / _ 2 \ Wf J 8 A a о
,r0=/- noA^txO So -; co s^ 2q /
Прн этом следует иметь в виду, что
j. _ 3 wa Q0Moii_ 3 w„ QeMakd _
md~ 2 wf A\„ ’ 2’^“Л>
3 wa QeMfht_ з /ц,,, ye,(£,-f.„ \ _
2 WjWhd A„o 2 J A'u0 J
______a 3 / Wa \2S0(Z./lJ Lkrts) r
2 ’ “X — A>
_3 w„ 3/wo \22o(Z.fca-Z.fc„3 20 ,
m« 2 whg Ao0 2(10* J Aa„ XaoLaq\
(8-34)
С учетом вышеизложенного можно записать уравнения
синхронной машины в относительных единицах:
11 d = — Г Jd +/^d — Фчо>;
uq— raiq 4“ P'^q 2° + фцш;
и1=гй+р^;
,lkd— rhd^hd 4“P'piid 2^;
l‘hq = Гhqihq 4~ Ptyhq
---Л’и d ( *<Z Ч~Г7Ч- hid) x„Ki,i,
183
----^niq ( ^q~\~^hq) Xasiq,
Ф/ = x,„d ( id -|- if -|- ihd) -]- Xfsif,
ф/<<! = xmd ( id -|- if -|- ihd) -|- Xhdsikd,
^hq = Xmq (— iq -|- iA1?) -|- Xkqgihq,
ud= riJd -|- pid — a tqto',
boo btJQ
(8-35)
где
P=^did+4qiq\
Q == ^diq “I- Uq^d,
JQ„ dw .
fX — Mo dt +^Z[i 'M?’
По уравнениям (8-35) может быть построена модель
ненасыщенной синхронной машины.
8-4. УЧЕТ НАСЫЩЕНИЯ СИНХРОННОЙ МАШИНЫ
Насыщение весьма существенно влияет на характе-
ристики синхронной машины. Несмотря на сложность
исследования переходного процесса, учет насыщения
должен быть включен в рассмотрение хотя бы в при-
ближенной форме. Строго говоря, наличие нелинейности
насыщения в машине делает непригодным применение
метода разложения по двум осям, основанного на прин-
ципе суперпозиции. Тем не менее для получения резуль-
татов исследования на модели, наиболее близко совпа-
дающих с реальными, необходимо включить в рас-
смотрение эффект насыщения. Точный учет насыщения
машины представляет большую сложность. Насыщение
по одной оси связано с насьпцением по другой и наобо-
рот.
184
Существует ряд способов учета насыщения в син-
хронной машине [Л. 49, 50].
При моделировании синхронной машины задачу на-
сыщения стремятся по возможности упростить. В рас-
смотрение обычно принимают один насыщающий
фактор, зависящий от полного потока. Учет насыщения
удобно свести к сигналу обратной связи в виде нели-
нейной зависимости o='f(ug), полученной на основании
кривой холостого хода машины ‘(рис. 8-3,а), где ug—
величина, пропорциональная полному потоку машины.
Рис. 8-3. Зависимости, полученные
на основании кривой холостого хо-
да синхронной машины.
a-O=f(ug)-, a>0UJmd; 6-ug, ut-
Коэффициент отрицательной обратной связи а вво-
дится в структурную схему машины как дополнительная
н. с., учитывающая эффект насыщения магнитного по-
тока.
Для определения напряжения ug на модели должны
быть выделены переменные, соответствующие напряже-
ниям по продольной и поперечной осям:
185
(8-37)
iig у u~ -{- tr , (8-36)
где
11 gd -^nid (if — id Ц- ihd)'t
Wg<7 = Xntq ( ~ lq ’ t/l.q)-
При исследовании процессов в сложных схемах, где
требуется большое количество электронного оборудова-
вання, например для случая 'параллельной работы син-
хронных машин, учет насыщения производится более
грубым, но 'простым способом, сущность которого за-
ключается в следующем.
Для генератора в режиме холостого хода с постоян-
ной скоростью вращения справедливо соотношение
Щ w</ =xmaif. (8-38)
Таким образом, используя кривую холостого хода
(рис. 8-3,6/ можно определить хли| с помощью нелиней-
ной зависимости о=/(ехх), где ехх— напряжение хо-
лостого хода.
18G
8-5. СТРУКТУРНАЯ СХЕМА СИНХРОННОГО ГЕНЕРАТОРА
В основу построения структурной схемы синхронного
генератора положена система уравнении (8-35). При со-
ставлении структурной схемы (рис. 8-4) принималось во
внимание, что по ней будет выполнена схема набора ре-
шающих усилителей. Вследствие этого при построении
структурной схемы была принята методика, не требую-
щая применения дифференцирующих звеньев, хотя такое
представление синхронного генератора иногда не соот-
ветствует точному направлению протекающих в нем про-
цессов.
Однако полученная структурная схема не утрачивает
своей общей физической наглядности, обеспечивая
устойчивое решение дифференциальных уравнений.
Следует отметить, что при работе одного синхронного
генератора на отдельную нагрузку целесообразно при-
нять следующие допущения:
1) сопротивление якоря мало по сравнению с сопро-
тивлением нагрузки 2) переходные процессы
в якоре, обусловленные величинами pijyj, рфд, L„pid,
Lltpi,j, 1несуществепны и могут быть исключены из рас-
смотрения.
кронного генератора,
187
Влияние указанных величин при индуктивной нагруз-
ке весьма мало, а при активной нагрузке проявляется
в течение небольших интервалов времени, поэтому ими
можно пренебречь.
Необходимо иметь в виду, что для других режимов
работы синхронного генератора, в особенности для ре-
жима параллельной работы, такие допущения не могут
быть сделаны.
Принимая во внимание указанные допущения, урав-
нения для цепи (нагрузки наиболее удобно представить
в виде
г cosy 77 1 | ZE | + 7 5>ПУ 77 |Z«| Ud sin \z cosy Tf |ZH| Ut>' (8-39)
где =ardIS»7
ZH=|//?2 + ^2 ; " г JI i H (8-40)
В относительных единицах уравнение (8-39) имеет вид:
. _ cosy sin у
|z„| |z„|
. __ sin у cosy
knl |Zh| 4lh
(8-41)
где
(Структурная схема синхронного генератора, работаю-
щего на отдельную нагрузку, представлена на (рис.8-4).
Указанная структурная схема [Л. 51] является очень на-
глядной. Вертикальной штрих-пунктирной линией опа
разделяется на две части, изображающие генератор и
нагрузку. Схема генератора распадается на три гори-
зонтальные части, характеризующие процессы в конту-
рах демпферной обмотки продольной, поперечной оси и
обмотки возбуждения. Контуры продольной и попереч-
ной осей расположены соответственно в верхней и ниж-
ней частях рисунка.
Звенья, связанные с насыщением, указаны пунктир-
ными линиями.
188
Входными сигналами являются момент приводного
двигателя ц, напряжение возбуждения Uf, а также на-
пряжения ukd и икг]. В рассматриваемом варианте ukd=
=икд=0, однако в случае нескольких обмоток возбужде-
ния, расположенных по двум осям, полученная струк-
турная схема может быть использована. При этом под
параметрами демпферных обмоток следует подразуме-
вать параметры дополнительных обмоток возбуждения.
Выходной сигнал генератора ut представляет собой
огибающую фазного напряжения.
Мгновенные значения фазных напряжений опреде-
ляются по формулам
uA = udcos£lt— uqsmQt‘,
fr\i 2п\ • f 2л\
ив — ud cos f Lit — -g- J -t^sini Lit — у J; (g.42)
ur = ud cos (О/ —uq sin (£lt Y
В случае необходимости эти значения могут быть по-
лучены на модели.
8-6. СТРУКТУРНАЯ СХЕМА СИНХРОННОГО ДВИГАТЕЛЯ
Уравнения синхронной машины (8-35) лежат в основе
построения структурной схемы синхронного двигателя.
Основное различие этой схемы от структурной схемы
генератора заключается в том, что входными сигналами
для двигателя являются напряжение возбуждения и на-
пряжение якоря, а выходным — момент на валу двига-
теля.
При получении структурной схемы синхронного дви-
гателя были исключены переменные, относящиеся
к демпферным контурам (аналогичные операции можно
выполнить и для синхронного генератора).
Принимая
что имеет место для двигателя с одной обмоткой воз-
буждения по продольной оси, имеем:
fhdikd~\- P^kd-Q^ = 0',
I'hgijiq ф- ptyhq = 0.
(8-43)
189
Решая (8-43) совместно с уравнениями для потокосцеп-
лении демпферной обмотки по продольной и поперечной
осям, получим:
— — (— id
•X т d
0^7 р
. । •Xmd + -^hds
— ( iq)
•^‘md
Qorhq P
, , 4" J^hqa
+ 20rfcg
(8-44)
Совместное решение уравнений (8-37) и (8-44) дает
окончательный результат:
,(g<t--%ind (И Id) 1 I :
1 ~r^kd'~P
it, — r ( - i \ L^lUlhiP
где “постоянная времени демпферной обмотки по продольной оси; ~ ду-Vh 4 5 постоянная времени демпферной °г>'4 обмотки по поперечной оси; xkds =‘н к“—постоянная времени рассеяния 0 1"1 демпферной обмотки по продоль- ной осн; = q1'4"— постоянная времени рассеяния ° Kq демпферной обмотки по попереч- ной оси.
Поскольку уравнения для синхронного двигателя за-
писаны в системе координат d, q, жестко связанной с ро-
тором, а напряжение питания выражено в неподвижной
системе координат, в схеме необходимо иметь звено,
преобразующее входные сигналы из одной системы ко-
ординат в другую.
Смысл преобразования заключается в следующем:
Пусть напряжение питания щ (рис. 8-5) представ-
ляет собой вектор, вращающийся с угловой частотой Q,
а система координат d, q, связанная с ротором, вращает-
190
ся с угловой частотой Q. Следовательно, в каждый дан-
ный момент времени будет иметь место зависимость
Ud =ut cos 8;
ич = ut sin 8,
где
8 =
i
Д[(0,-2)Л =
о
(8-47)
Рис. 8-5. Векторная
диаграмма входных
сигналов синхронно-
го двигателя.
Уравнения
зывают между
ные системы и
(8-46) и (8-47) свя-
собой две координат-
система уравнений синхронного двигателя
имеет вид:
«d = — raid рфа
= — rtliq+фя“>;
Фс!--Xastd, Xaslq,
^f = 4gdA-xfsij.
.. __ v \ 1 +ThdaP.
Ugd---I'd) I । ,
1 T zkd'_P
U ---- r ( I \ 1 + thqsP.
Ugq A-jnq ( lq) j ।
0 = ФЛ — — p„,
(8-48)
JQ0
где tM =~^j--механическая постоянная времени.
По уравнениям (8-46) — (8-48) составлена структур-
ная схема синхронного двигателя (рис. 8-6). Штрих-
пуктирными линиями схема разделяется на три горизон-
тальные части, соответствующие уравнениям продольной
и поперечной осей и нелинейной зоны. Входными сигна-
лами схемы являются напряжения ujt ut, выходным слу-
191
Рис. 8-G. Структурная схема синхронного двигателя.
жит момент pi. Учет насыщения производится так же,
как и в схеме синхронного генератора.
8-7. СТРУКТУРНАЯ СХЕМА СИНХРОННОГО РЕАКТИВНОГО
ДВИГАТЕЛЯ
Синхронный реактивный двигатель представляет со-
бой синхронную машину без обмотки возбуждения.
Вращающий момент двигателя получается за счет
разной проводимости по продольной и поперечной осям,
поэтому магнитную цепь стараются выполнить ненасы-
щенной в основных режимах работы При наличии демп-
ферной обмотки синхронный реактивный двигатель мо-
жет обладать необходимым пусковым моментом. Син-
хронный реактивный двигатель находит применение
в приводах с широким регулированием скорости враще-
ния от нуля до номинальной за счет изменения частоты
питания. Основным преимуществом его по сравнению
с обычным асинхронным двигателем является наличие
момента на валу при питании постоянным током (/=0).
192
Для получения структурной схемы асинхронного ре-
активного двигателя преобразуем уравнения (8-48)
Уравнения для потокосцеплении:
'Pd--Hgd хаЛй == хи d i । _ L*d Xasid----------------
1 "Г TAd£/’
Xmd -|-xne 1 + 'lfeds:a<'77 ; .
i i
ra 1 +
(8-49)
’?</--Ugq xusil]----- Xmq ( + rpl4 Xas'q
Xm4 4- XuK 1 + ^kq^vP ; r
iq* a»
где
1 +
X т d
«d= 1 —
Xmd + %а8
(8-50)
Q.q ---- 1
т q
Уравнения для якорной цепи:
l/d = ~ru id + T(jd, р 6,1 -
»</ — —
а
'arp
г,
20 г,
w°; j
J (8-51)
—Нл I
П1 q i Лок8 J
— постоянная времени якорной об-
мотки по продольной оси;
— постоянная времени якорной об-
мотки по поперечной оси.
По уравнениям (8-46), (8-47), (8-49), (8-51) с учетом
уравнения движения из (8-48) может быть составлена
структурная схема синхронного реактивного двигателя
(рис. 8-7). Схема имеет простой вид и является частным
случаем схемы синхронного двигателя.
8-8. ОПРЕДЕЛЕНИЕ ПОСТОЯННЫХ КОЭФФИЦИЕНТОВ
СТРУКТУРНОЙ СХЕМЫ
Для большей точности результатов исследования же-
лательно в структурную схему ввести значения постоян-
ных коэффициентов, полученных из эксперимента.
Разберем на примере синхронного реактивного дви-
гателя определение параметров структурной схемы
13-2337 193
а] Определение параметров статорной обмотки
Постоянные времени обмоток статора по продольной
и поперечной осям определяются из соотношении
т = -** •
odI а» Га ’
аЧ* Q„ra
(8-52)
где x<i, xq — индуктивные сопротивления обмотки стато-
ра по продольной и поперечной осям, ука-
заны в паспортных данных машины.
Рис. 8-7. Структурная схема синхронного реак-
тивного двигателя.
В случае отсутствия этих данных они могут быть по-
лучены экспериментально. Один из распространенных
способов определения следующий:
К обмотке статора подводится напряжение от посто-
роннего источника, а ротор приводится во вращение
с постоянной скоростью, мало отличной от синхронной
(скорости вращения вектора внешних напряжений).
194
При наличии скольжения амплитуда тока статора
будет колебаться с двойной 'частотой 'Скольжения, при-
чем максимумы и минимумы ее будут примерно соот-
ветствовать моментам совпадения потока статора с про-
дольной и поперечной осями ротора. Измерив в эти мо-
менты времени ток статора и подводимое к зажимам
статора напряжение, можно определить индуктивные
сопротивления и хд.
Скорость ротора следует выбрать возможно ближе
к синхронной; при этом влияние демпферных контуров
будет наименьшим.
Так как обычно источник внешней э. д. с. имеет ко-
нечную мощность, то питающее напряжение не остается
постоянным, а колеблется одновременно с током стато-
ра, причем максимуму тока статора соответствует мини-
мум напряжения на зажимах и наоборот. Ха и хд будут
определяться из выражении
_____ Смокс 1ао ,
•л-d_ т 1] »
/мин L7no
__ U мнн /оо
— 1 и
л мак с и аО j
6] Определение параметров демпферных обмоток
'Расчетное определение параметров демпферных об-
моток связано с большими трудностями, так как демп-
фирующий эффект производится не только самими об-
мотками, но и массивными частями ротора. Ниже приво-
дится метод экспериментального определения данных
эквивалентных демпферных обмоток, расположенных по
продольной и поперечной осям, отображающим с доста-
точной степенью точности процессы в реальной демп-
ферной обмотке и в массивных частях ротора. Метод
основан на экспериментальном определении частотных
характеристик. Перед началом эксперимента определя-
ется положение геометрической оси одной из обмоток
статора. Для этой цели в исследуемую обмотку подает-
ся напряжение от источника постоянного тока. Для по-
вышения точности определения оси обмотки ток, прохо-
дящий через обмотку, должен иметь наибольшее воз-
можное значение для кратковременного режима. Ротор
двигателя устанавливается по полю; положение его от-
13* 195
носительно статора фиксируется. После того как ротор
двигателя закреплен в таком положении, что его про-
дольная (поперечная) ось совпадает с осью одной из
обмоток статора, снимаются частотные характеристики.
Если обратиться к структурной схеме (рис. 8-7), то
указанный режим работы отражается верхней (нижней)
частью схемы. Следовательно, если имеется зависимость
между потоком и током контура обмотки статора, то
можно определить параметры эквивалентной демпферной
обмотки по продольной (поперечной) оси
) 11 a<i
=—P'l'd (£f/ = —p'EJ,
Рис. 8-8. Схема включения
машины для снятия частот-
ных характеристик.
Пптая синусоидальным напряжением различной
частоты указанную обмотку статора и измеряя э. д. с.
£d(£,;) на другой обмотке с учетом соотношения £d=
можно построить передаточную
функцию потока ТД’И,,) от то-
ка /^(7,,).
Схема включения изобра-
жена иа рис. 8-8.
Следует подчеркнуть осо-
бенности проведения экспери-
мента.
При снятии частотных ха-
рактеристик в области низких
частот £,?(£,,) мало и сравни-
мо по величине с падением на-
пряжения от тока нагрузки иа
участке О—О' (сопротивление
пулевого провода),
искажает истинное
сигнала. Поэтому,
возможность, то
мо оецпллографпровать напря-
жение между точками OB. IB противном случае необхо-
димо пересчитывать полученные <на основании экспери-
мента величины, чтобы исключить влияние падения на-
которое
значение
есл и есть
иеобходи-
пряжения от тока нагрузки.
(Пересчет фазы и амплитуды £d(£Q), полученных из
данных опыта, производится по формулам
Edu=V+ (£i Rno, )2+ Ed (/d Roo,) cos<p, ; (8-54)
196
. Ea sin v
ч>п - arctg -=------- , -5—r,
& £d cos Ron,)
(8-55)
где С,/ц — истинное значение э. д. с. в фазе;
E.I — значение э. д. с., полученное из опыта;
IdR0O‘—падение напряжения от тока нагрузки на уча-
стке О—О';
epi—угол между Ed 11 (Л,А?о0,);
<P1I — угол между ЕЛа и /с(.
По окончании расчета строится зависимость
R.,
^md + A'ns
Ч-d
El Ra
(8-56)
Согласно структурной схеме (рис. 8-7) указанная за-
висимость имеет вид:
ф,<_1 + Wa*P
ERa l+'kdtP
(8-57)
Выражения для модуля и фазы из (8-57) имеют вид:
1 + s)2
1 +(^2)2
(8-58)
<p = arctg
1 + ad (2't/jds)2
(8-59)
Для определения tkdi и tx() по частотным характерис-
тикам необходимо задаться двумя условиями. С точки
зрения простоты расчетов такими условиями могут быть:
Л'1а^. = Л1,; (8-60)
4У=0. (8451)
197
Решая совместно (8-58) с (8-60) и (8-59) с (8-61), по-
лучаем:
(8-62)
1
2а У <*d
(8-63)
где — значение частоты, при которой Ap/dQ=0.
Однако в ряде случаев (это зависит от вида экспе-
риментальных кривых) наложение условии (8-60),
(8-61) не позволяет практически определить параметры
с большой точностью.
Так. например, если потоки рассеяния невелики, то
коэффициент ad мал и ошибка при его измерении по
кривой будет велика. Аналогично обстоит дело и с усло-
вием (8-61): если кривая tp=f(£2) не имеет резко выра-
женного экстремума, то точное значение йа по ней опре-
делить трудно.
В этих случаях удобнее наложить два условия на
фазовую характеристику. Выбираются две произволь-
ные точки (желательно, сдвинутые на декаду) с коор-
динатами £2i<pi и йгфг- Решая уравнение (8-59) относи-
тельно получаем:
>]+(-£—^г)=°- (8-М)
Для определения параметров демферной обмотки по
поперечной оси ротор закрепляется в таком положении,
что его поперечная ось совпадает с осью обмотки ста-
тора, к которой подводилось напряжение генератора
низкой частоты. Дальнейшее проведение эксперимента
аналогично описанному выше.
8-9. СТРУКТУРНАЯ СХЕМА ПАРАЛЛЕЛЬНОЙ РАБОТЫ
СИНХРОННЫХ МАШИН
При исследовании параллельной работы синхронных
машин на моделирующей установке схема набора ре-
шающих элементов имеет ряд особенностей (Л. 52].
198
Уравнения синхронной машины целесообразно свести
к следующему виду:
<Р/ = -у («/ —о»/);
Фй=-у- (“а + г Jd+«’Ф?);
Ф<? = -у- +ra‘t- “фа);
фла =-JT- (— rM Iba);
Фй<? = ’V- ( r/‘9
, , . (8-65)
Ф/---tynid~[-Xfslf,
Фа 'pn,d -^as ^'di
Ф<7 Ф»|<7 ' Xas iq,
фл’а=ф«»а + л'ла« Оиб
Ф/м? = Фик? ^hqs hiqi
Фв),d = -Xind (if — id -f- i|/, d — Js)’
Ф™<7,== Xrnq ( iq' iltq)-
P = TM p <U + ф? id — <l)d iq,
где is-—величина, пропорциональная току и завися-
щая от насыщения магнитной цепи.
Рис. 8-9. Принципиальная структурная схема спи
хроиного генератора.
Такой грубый учет насыщения диктуется большим
количеством необходимых решающих усилителей.
Окончательное изображение генератора как отдель-
ного звена системы показано на рис. 8-9. Это звено от-
199
ражает физические параметры обмотки возбуждения,
вала, нагрузки и может быть сочленено с другими звенья-
ми системы автоматического регулирования.
Переход к фазным величинам напряжении и токов
производится аналогично рассмотренному выше.
Для выбранного направления прохождения сигналов
(рис. 8-9), когда входным сигналом на нагрузке являет-
ся ток, а выходным — напряжение, представление ре-
жима холостого хода на аналоговой вычислительной
машине связано с трудностями. Имеется ряд компромисс-
ных решений для изображения режима холостого хода,
одно из которых заключается в следующем.
Выбирается наиболее подходящий масштаб времени
для уменьшения эффективного коэффициента усиления
в замкнутых контурах решающих усилителей.
Режим холостого хода рассматривается приближен-
но как режим работы на большое активное сопротив-
ление. Тогда для цепи нагрузки получаем:
= i</^x.x- (8-66)
Например, при выборе гх.х=25 относительных единиц
и соответствующем масштабе времени работа решаю-
щих усилителей становится устойчивой.
Дальнейшее улучшение может быть достигнуто, если
рассматривать режим холостого хода как режим работы
с высоким значением полного сопротивления, представ-
ляющего нагрузку (R—С), причем С может рассматри-
ваться в модели как распределенная емкость генера-
тора.
В этом случае имеем:
(8-67)
где хх.х— индуктивное сопротивление холостого хода,
отн. ед.;
гх.х — условное сопротивление холостого хода,
отн. ед.
Полученное внешнее соединение хотя и обладает
высоким коэффициентом усиления, но представляет со-
бой фильтр к высокочастотным помехам усилителей.
200
Если рассматривать приставку гхх—схх как посто-
янную часть генератора, то возможно сделать внешние
соединения с входными сигналами — токами н выход-
ными сигналами — напряжениями, что удобно при ис-
следовании режима параллельной работы генераторов.
При решении на моделирующей установке могут
быть приняты следующие значения постоянных парамет-
ров для масштаба времени 500:
гхл= 100 отн. ед.; лх.х=200 отн. ед.
Получаемый уровень помех в этом случае незначи-
телен. Оптимальное соотношение параметров холостого
хода л\х=2гхх.
На основании изложенного можно записать:
id — i d idx.xi iq—i q ^qx.x, (8-68)
где i',i, z',, — условные токи контуров якоря.
Уравнения цепи нагрузки переписываются в виде
Спецификой анализа параллельной работы синхрон-
ных генераторов является тот факт, что уравнения каж-
дой машины записаны в системе координат d, q, кото-
рые связаны с положением собственного ротора. Если
выбрать единую систему координат, например, оси d, q
первого генератора, а уравнения остальных генераторов
выразить относительно этих осей, то получится очень
сложная система записи, лишенная всякого физического
смысла. Целесообразнее пользоваться общепринятыми
структурными схемами генераторов, а внешние сигналы
этих схем ii,i, и(/, ф, ф связывать между собой для ото-
бражения параллельной работы.
Для случая двух генераторов угол 6i2 между поло-
жениями роторов будет составлять:
(8‘70)
201
Уравнения связи между двумя генераторами имеют
вид:
«<11г = «di cos 812 Д- ut/l sin 812;
«<7i2 — «di sin 812 —|~ tiqi cos 812, (8-71)
'd2i = id2cos812 — i92sin812;
trt2 sin S12cos 812, j
где u<ji2 — напряжение на обмотке якоря по продольной
оси первого генератора в системе координат
второго генератора;
id2i— ток в обмотке якоря по продольной оси вто-
рого генератора в системе координат пер-
вого генератора и т. д.
Окончательная структурная схема, включающая на-
грузку и параллельную работу двух генераторов, пока-
зана па рис. 8-10.
Для простоты изображения показан только один
сигнал вместо двух составляющих d и (/.
Рис. 8-10. Блок-схема параллельной работы синхронных генераторов.
1, 2 — синхронные генераторы; 3—шунт х—сх х; 4 — преобразователь.
В структурной схеме указаны три выключателя. В по-
ложении выключателя C—I оба генератора изолируются
друг от друга и iax =0.
Включение и выключение нагрузки от генератора 1
производится выключателем а, от генератора 2—вы-
ключателем Ь. В положении II выключателя С генера-
торы включаются параллельно.
Такой способ рассмотрения параллельной работы не
ограничивается двумя машинами и может быть выпол-
нен для любого их числа.
202
В этом случае система координат одной из машин
принимается за основу; с ней связываются системы ко-
ординат остальных машин. Если рассматривается толь-
ко режим параллельной работы, то достаточно одной
приставки (гх.х—Сх.х) для основной машины.
8-10. СТРУКТУРНАЯ СХЕМА ШАГОВОГО СИНХРОННОГО
ДВИГАТЕЛЯ
Шаговые двигатели (ШД), выпускаемые в настоя-
щее время, представляют собой синхронную машину
с постоянным потоком возбуждения. По конструктивно-
му исполнению различаются индукторные двигатели
с ферромагнитным зубчатым ротором и магнитоэлектри-
ческие двигатели с ротором в виде магнита-звезд очки.
В практических расчетах обычно пренебрегают раз-
ностью магнитных проводимостей по продольной и по-
перечной осям этих машин и демпфирующим действием
массивных частей ротора, а зависимость электромагнит-
ного момента от тока принимают линейной. С этими
допущениями уравнения для шагового синхронного
двигателя [Л. 53] имеют вид: 1
RIa — Lpla + LIqQ=Ua,
- RIq — Lplq — LIa& + V, О = Uq, j
-L-pQ-^M^-^Ig, ’
P * CT I
(8-72)
где
Z.---L,1 --Lg,
Af(T— максимальный статический синхронизирую-
щий момент при неподвижном роторе с током
фазы /ct = ^/'Z?;
U—амплитуда фазного напряжения, определяе-
мая величиной напряжения сети постоянного
тока Uo и схемой управления ШД. Например,
для двухфазного ШД при мостовой схеме пи-
тания обмоток
U = y2 Uc;
1 Уравнения (8-72) справедливы только для шаговых двигате-
лей, которые имеют возбуждение от постоянных магнитов, располо-
женных на статоре или роторе (магнит-звездочка).
203
Мп — момент нагрузки;
р* — число пар полюсов;
J — общий момент инерции, приведенный к ско-
рости вала двигателя ШД.
Положительные направления переменных относи-
тельно выбранных осей d, q сохраняются прежними.
Составляющие напряжения по осям d, q определя-
ются по формулам
Ud = U cos8;Jl
C/? = l/sin8, J
(8-73)
где б — угол между пространственным вектором резуль-
тирующего напряжения питания и продольной
осью двигателя,
8= J(Q0-Q)f//, (8-74)
б
где Qn — угловая скорость вектора результирующего на-
пряжения
Введем следующие базовые значения переменных:
ис, = и-,
Л г»
7ИС = 7ИСТ; = /б==1/об. (8-75)
Запишем уравнения (8-72) — (8-74) в относительных
единицах, учтя принятые базовые значения перемен-
ных:
— С/(Л’Д-г) Д-— cos о; |
— С (Р 4“ г) —6/ш е °> — sin 8; ।
рш = ~ iqr — р„; 1
8 = J (% — ш) d Т> ;
(8-76)
где
X ’ и ~ и ’
мП1 • ГЛ J
Ии~’лГГ’ х —р
d
d т
204
По выражению (8-76) составлена структурная схема
синхронного ШД, изображенная на рис. 8-11,о. В ряде
случаев, когда в цени обмоток ШД 'включены большие
форсировочные сопротивления, можно пренебречь вели-
Рпс. 8 11. Структурная схема синхронного шагового двигателя.
а — полная схема; б — упрощенная схема.
чинами индуктивности обмоток и э. д. с. Система урав-
нении ШД при этом получается более простои:
р ш — sin 8 — р.„, j
х } (8-77)
S J (шо — “) d т- |
о )
Упрощенная структурная схема ШД по (8-77) пред-
ставлена на рис. 8-11,6. Внешними возмущающими яв-
ляются угловая скорость гоо п момент нагрузки рп
(рис. 8-11).
Величина угловой скорости % определяется временем
переключения напряжения на обмотках ШД. При каждом
управляющем сигнале напряжение поворачивается иа оп-
ределенный угол 0] мгновенно.
205
График изменения 6 = f (т) носит ступенчатый харак-
тер (рис. 8-12). Производная угла d Q/dt — <»С1 принимает
бесконечно большое значение. Ирл моделировании время
переключения напряжения принимают конечным, т. е.
ступени зависимостей 0 = f (т) имеют некоторый наклон
Рис. 8-12.
Рис. 8 13. Схема формирования задающей
скорости.
(пунктирнаялиния парне. 8-12,а). Зависимость i»o = f(T),
соответствующая моделируемому процессу, имеет вид
узких 'импульсов с конечной амплитудой. Принятое до-
пущение несущественно сказывается па результатах рас-
чета, если ширина этих импульсов значительно меньше
их периода. Входной сигнал w0 в модели формируется
с помощью специальной электронной схемы (рис. 8 13).
Усилитель У<? воспроизводит релейную характеристи-
ку. Напряжение на его выходе и3 имеет два уровня
в зависимости от знака входного сигнала. Установка
уровня из осуществляется диодами д2 в цепи обрат-
ной связи усилителя УЗ. Частота входного сигнала (на-
клон АВ) устанавливается делителем Д1. Чтобы не
перегружать делитель Д2, выходной сигнал снимается
с усилителя У4, работающего в режиме инвертора.
Величина (о0=100 в выбирается максимальной.
ГЛАВА ДЕВЯТАЯ
МОДЕЛИРОВАНИЕ АСИНХРОННЫХ ДВИГАТЕЛЕЙ
9-1. СТРУКТУРНАЯ СХЕМА ДВУХФАЗНОГО АСИНХРОННОГО
ДВИГАТЕЛЯ
Методика составления уравнений в координатах d,
q, рассмотренная выше применительно к синхронным
машинам, может быть использована также и для асин-
хронных двигателей. Полученная система уравнений
(8-35) является общей для машин переменного тока.
Такая запись уравнений является удобной при исследо-
вании систем автоматического управления, включающей
совместную работу синхронных и асинхронных машин.
Рассмотрим некоторые другие формы записи урав-
нений асинхронных двигателей, которыми целесообраз-
но пользоваться при моделировании ряда приводов на
переменном токе.
Для двухфазных электрических машин с симметрич-
ным ротором метод двух реакций позволяет получить
наиболее простые уравнения, так как статорные обмот-
ки сдвинуты друг относительно друга на угол 90 эл. град
и их взаимное влияние отсутствет, что позволяет рас-
сматривать каждую ось машины независимо от другой.
Запись уравнений осуществляется в системе коорди-
нат а, 0, жестко связанных со статором [Л. 54].
При составлении уравнений приняты следующие до-
пущения:
1) магнитная цепь рассматривается ненасыщенной;
2) действие гистерезиса и вихревых токов не учиты-
вается;
3) форма токов и напряжений считается сину-
соидальной;
207
4) намагничивающая сила в воздушном зазоре рас-
пределена по синусоидальному закону.
Для двухфазного асинхронного двигателя с двумя
обмотками на статоре согласно принципиальной схеме
(рис. 9-1) основные уравнения имеют вид:
Уравнения статорной цепи:
О-D
+ (9'2)
Рис. 9 1. Принципиальная схема
двухфазною асинхронного двигателя.
где
U, I, R, 'И— напряжения, токи, сопротивления и по-
токосцепления статорных обмоток;
р = d{dt —символ дифференцирования.
Принятые индексы имеют следующий смысл:
и, р символизируют соответствующие обмотки;
s, г представляют собой параметры, относящиеся
к статору и ротору.
Уравнения эквивалентной цепи ротора:
o=/ar^r+^’i;r+'i-₽r«; (9-3)
0 = + (9-4)
Уравнение электромагнитного момента
Мф = '^аг~Чаг1?г. (9-5)
208
Уравнение движения
Л1ф-.И„ = .^0, (9 6)
где 7ИН — момент нагрузки;
J—момент инерции ротора и нагрузки.
Уравнения потокосцеплении:
*1 as = ^-s) Was las Was War I ar i (9-7)
4’ar = U 4- ) “'ar Jar + * Was War las 1 (9 8)
’I' ps = (^4~ ^s) w$s I$s -]-^wps Wpr /pr; (9-9)
’I ₽, = (*+ ) 4 /₽. + V₽r /₽s, (9-10)
где X — проводимость пути основного потока;
V — проводимость рассеяния;
W — число витков обмотки.
Для построения структурной схемы асинхронного
двигателя систему уравнений (9-1) — (9-10) целесообраз-
но записать в относительных единицах.
В качестве базисных величии для оси а примем:
U =U •
as as6 (911)
as Jas6 ’
где Uasr> — максимальное значение напряжения, приложен-
ного к обмотке as;
/aifi—максимальное значение тока обмотки as при
напряжении Uas6 и разомкнутых остальных об-
мотках.
Базисные величины связаны между собой следующими
соотношениями:
^as6 ^asfi as6 as6 ’ *ыо=(Ж'ХД (9-12)
где Об=Фо — синхронная угловая скорость. Уравнения в относительных единицах для контуров, расположенных по оси а, имеют вид:
и — i г | * “as as 'as Qo as’ (9-13)
'>as=-^Zas+'aJ + ^'as; (9-14)
Фаг=*(г«54Лг)+*Лг> (9-15)
14—2337
209
где
Г - х =_________-___ V - *'• •
“ *as6 ’ * + *'. ’ ‘ Х + А'. ’
i = ф = _^. ф = ^2к
ar W 1 к 'as Ф «- ’ т «г а> Ч»
as 1 as6 as6 шаГ as6
Выберем базисные значения переменных для оси [3:
Uas6 ~ ’
где Ups = Upi6—максимальное значение напряжения, при-
ложенного к обмотке [3s;
/ps = /₽s6 —максимальное значение тока обмотки [3s
от напряжения U^s5 при разомкнутых
остальных обмотках,
^psG ^₽sG -^₽s6 = ^psG ^0»
₽s6 — (* + ^s) W|s^o-
Уравнения в относительных единицах для контуров,
расположенных на оси [3, имеют вид:
u?s~^sr₽s^“ (9-16)
%s Х O₽s “Ь Z₽г) ~b (9-17)
^ = *(^ЧЧг)+ Х6г’ (9’18)
где
г Г- х ; V _ •
₽s *₽S6 ’ х~А + Х'. ’ Л«— Х + Л'.
г = К'г п — __£₽£ . ; __ /?s
х+х'. ’ KuUps6 •
L = J»_- ф =_ ФР* • ф _ V
₽r w^Jps6' л* KJP₽s6 ’ Y₽r Wpr Ku^9s6
210
Уравнения в относительных единицах для роторных
контуров имеют вид:
0 = + Р-19)
° = Vf»+l&^-^V>. (9-20)
где
г — Y Rar г ^(W?SX R?r
аГ \ шаг J *as6 ’ ₽Г J KUX^6 ’
к — 25k- к — _“k.
₽ W₽s ’ “ Was
2
e7
Запишем уравнение для электромагнитного момента
в относительных единицах:
(9-21)
где
М, К w
Уравнение движения в относительных единицах имеет
вид:
Рф Ри = Т мрь>, (9-22)
где
т J WQ
1 м = ---механическая постоянная времени
По уравнениям (9-13) — (9-22) может быть состав-
лена структурная схема двухфазного асинхронного дви-
гателя.
В практических расчетах с целью упрощения урав-
нений двигателя обычно принимают ряд допущений, на-
пример пренебрегают потоками рассеяния. В этом слу-
чае система уравнений принимает вид:
14* 211
На рис. 9-2 изображена структурная схема двига-
теля, составленная по системе уравнений (9-23).
9-2. УПРОЩЕННАЯ СТРУКТУРНАЯ СХЕМА АСИНХРОННОГО
ДВИГАТЕЛЯ, ОСНОВАННАЯ НА МОДЕЛИРОВАНИИ СЕМЕЙСТВА
МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК
а) Упрощенные уравнения асинхронного двигателя
В ряде случаев с целью упрощения формы записи
уравнений асинхронного двигателя пренебрегают элек-
тромагнитными 'процессами, протекающими в его об-
мотках. В такой интерпретации сохраняется одно диф-
ференциальное уравнение — уравнение движения и ста-
тические зависимости электромагнитного момента
в функции управляющего сигнала и скорости вращения
двигателя [Л. 55].
Система уравнений асинхронного двигателя имеет
вид:
ц—рп = Л1Рю.;
(9-24)
где |_1=Л4/7ИН — электромагнитный момент двигателя
в долях номинального момента;
pn=- момент нагрузки в долях номинального
момента двигателя;
io.= Q/Qc—скорость вращения ротора в долях от
синхронной скорости двигателя;
Тк—/ме/Л10—механическая постоянная времени;
У — управляющее воздействие.
Рис. 9-2. Структурная схема двухфазного асин-
хронного двигателя.
Рассмотрим структурные схемы двигателя для управ-
ляющих воздействий, представляющих собой напряже-
ние и частоту источника питания
213
6) Структурная схема асинхронного двигателя при
управлении напряжением источника питания
Зависимость вращающего момента двигателя от
управляющего напряжения и скорости вращения
отображает семейство механических характеристик
(рис. 9-3).
Рис. 9-3. Семейство механических характе-
ристик при разных напряжениях источни-
ка питания.
Значение момента как функции двух переменных
определяется по известной формуле
---------- Г—<oB(w,) ’ (9-26)
1 — <й„ (//„) + I — СО
где щ,— напряжение источника питания;
Рк=-Мк/Мо— критический момент в долях от номиналь-
ного (функция напряжения источника пи-
тания) ;
гок='Йк/Ос — скорость вращения двигателя в долях от
синхронной, соответствующая критическо-
му моменту (функция напряжения источ-
ника питания).
Для получения более точных результатов при моде-
лировании желательно воспользоваться эксперименталь-
ными характеристиками. При этом в соотношении (9-26)
вводится поправочная функция аср(ю), учитывающая
214
расхождение экспериментальных данных с теоретиче-
ской формулой
р = рк (ни) —j--------------j—. (9-27)
Г ПИИ/ J—со 1— Ок (и и) ' '
1 — Ок («и) 1 — о
Для каждой характеристики семейства определяется
нелинейная зависимость а, (со), исходя из форму-
лы (9-27).
После расчета всех поправочных коэффициентов
функций а, (со) составляется усредненная функция
Ucp (со).
Для решения практических задач обычно пользуются
упрощенным выражением для момента двигателя:
Ц=Мк(«и)₽(со), (9-28)
где
В = ----- (9-29)
I (Ш) 1 — со 1— <0 ' '
------ -I---"
1 — Ок 1 1 -О
Следует отметить, что такое представление функции
двух переменных в виде произведения двух функций
Цк(ци) и р(<о) допустимо только в случае, когда сок не
имеет резкого изменения в зависимости от напряжения
источника.
Рис. 9-4. Структурная схема асинхронного
двигателя при управлении напряжением ис-
точника питания.
По выражениям (9-24), (9-28), (9-29) составлена
структурная схема асинхронного двигателя, изображен-
ная на рис. 9-4.
215
в) Структурная схема асинхронного двигателя для
случая частотного регулирования скорости вращения
При моделировании 'семейства механических харак-
теристик асинхронного двигателя для случая частотного
регулирования (рис. 9-4) может быть применена анало-
гичная методика разделения функций двух переменных.
Зависимость электромагнитного момента двигателя от
частоты 'питания и скорости вращения выражается сле-
дующим образом:
(МО)
1 •— <°к (fn) 1 — <*>
где рк(/п) =Л4К/Л4() — критический момент в долях от
номинального (функция частоты
питания);
(Чк(А1) =й1;/йс — скорость вращения двигателя
в долях от синхронной, соответст-
вующая критическому моменту
(функция частоты питания);
ы=£2/По — скорость вращения двигателя в от-
носительных единицах.
Рис. 9-5. Семейство механических характери-
стик асинхронного двигателя при разных зна-
чениях частоты источника питания.
Следует отметить, что каждой характеристике семей-
ства (рис. 9-5) соответствует свое значение синхронной
скорости Qc-
При определении зависимости (ок=ф(/и) по экспери-
ментальным данным величина каждой характерно-
го
тики так же относится к соответствующей синхронной
скорости Q(,-.
Определение поправочной функции аер(о>) произво-
дится аналогично описанному выше.
С целью упрощения задачи выражение для электро-
магнитного момента р.=ф(/нсо) представляется в виде
произведения двух функций:
Р = Рк(М₽(ш)- (9-31)
Уравнение движения имеет вид:
Р — Рн = Т „/да,, (9-32)
где рн =/Иц//И0 —момент нагрузки;
Тм = J£ic,М(11(С//ИО — механическая постоянная времени;
ш, = <1/Ос ма1!С — угловая скорость двигателя в долях
максимальной синхронной скорости,
Ш = ш> (9-33)
/и
fn-макс — максимальная частота источника питания.
Рис. 9-6. Структурная схема асинхронного двигателя
при управлении частотой источника питания.
По уравнениям (9-31) — (9-33) составлена структур-
ная схема асинхронного двигателя, изображенная на
рпс. 9-6.
ГЛАВА ДЕСЯТАЯ
МОДЕЛИРОВАНИЕ ЭЛЕКТРИЧЕСКИХ СХЕМ
С ВЕНТИЛЯМИ
10-1. МОДЕЛИРОВАНИЕ НЕУПРАВЛЯЕМЫХ ВЕНТИЛЕЙ
Электронная модель выпрямительного устройства
должна воспроизводить вольт-амперную характеристику
вентилей.
Рис. 10-1.
Для этой цели на входе электронного усилителя или
в его обратную связь вводятся нелинейные элементы.
В качестве примера разберем наиболее простой случай
схемы однополупериодного выпрямления, приведенной
на рис. 10-1,0.
218
Зависимости £7Вых=/ (Пвх) можно получить включе-
нием вакуумного диода в обратную связь решающего
усилителя (рис. 10-1,6). Так как кристаллические диоды
в обратной связи не обеспечивают получения стабиль-
ной характеристики, то в случае применения таких дио-
дов может быть использована схема, приведенная на
рис. 10-1,в.
Наиболее распространенным случаем является по-
следовательное включение вентиля в цепь с индуктив-
ностью и активным сопротивлением. При этом схема
электронной модели может быть выполнена на одном
решающем усилителе, как это показано на рис. 10 1,г.
Более полное и подробное освещение вопроса
моделирования неуправляемых вентилей излагается
в [Л. 56—58 и др.].
10-2. МОДЕЛИРОВАНИЕ СХЕМ С УПРАВЛЯЕМЫМИ ВЕНТИЛЯМИ
При моделировании системы автоматического регу-
лирования с управляемыми вентилями обычно прини-
мают силовую часть вы-
прямительного или инвер-
торного агрегата безынер-
ционной. Мгновенное зна-
чение напряжения пере-
меного тока исключается
из рассмотрений путем
замены его средним зна-
чением выпрямленного на-
пряжения. Величина вы-
прямленного напряжения
регулируется углом от-
крытия вентилей. Такое
представление не вносит
существенной погрешно-
сти при анализе переход-
ных процессов системы ав-
томатического регулиро-
вания, но исключает пол-
ностью рассмотрение про-
цессов, протекающих непо-
средственно в вентилях.
Моделирование выпря-
мительного устройства да-
Рис. 10-2. Принципиальная схема
выпрямительно-инверторного
агрегата.
219
ет возможность оценить рабочие и аварийные режимы ра-
боты вентилей и определить параметры сглаживающего
дросселя. При этом в результате исследования могут
быть выявлены дополнительные требования к переход-
ным процессам системы автоматического регулирования.
Поэтому при проведении полного анализа системы авто-
матического регулирования необходимо иметь ясное
представление о работе выпрямительного устройства.
Ниже рассматривается методика моделирования вы-
прямптельно-|ЦЧ1верторного агрегата на примере двухфаз-
ной схемы с ртутными выпрямителями [J1. 59, 60].
Подобного рода схемы находят широкое применение
иа электровозах переменного тока со статическими пре-
образователями.
Физические процессы, протекающие в выпрямитель-
но-инверториом агрегате, изображенном па рис. 10-2,
можно описать следующей системой дифференциальных
уравнений:
Уравнения напряжений первичной цепи трансформа-
тора:
+ (10-1)
= (Ю-2)
Уравнения напряжений вторичной цепи трансформатора:
/al/?2-^ + /^B(l = (10-3)
/а2/?2 + ®2/;Ф + IdRn (1 + тир) ±Е = 0, (10-4)
где
= + (Ю-5)
— выпрямленное значение тока нагрузки;
Rs — Rai Rail
= Waj -ф- BPaai
= La/Ru — постоянная времени цепи нагрузки;
Е—э. д. с. машины постоянного тока; знак плюс
соответствует выпрямительному, а минус — ин-
верторному режимам работы агрегата.
Уравнения (10-3) и (10-4) справедливы также и при
работе выпрямительного устройства на активно-индук-
тивную нагрузку; в этом случае Е=0.
220
Уравнение потока
Ф = Л (Л [ЧУ]-/12т'|— 1^2 + /02^’2) • (10-6)
Совместное решение уравнений (10-1), (10-2)
и (10 6) относительно токов и Л2 имеет вид:
Ф(/ + 27\Р) =2wi1t? -f-/7?2(—^al+ ^32)^2, (10-7)
w?
где 7,=^-^-------постоянная времени первичной обмотки
1 трансформатора;
-> <®i -1 и-'а
/п2 = ^-.
Электродвижущую силу, наведенную во вторичной
обмотке трансформатора, можно выразить с учетом
уравнения (10 7) следующим образом:
- £3 = (- А.А + f^R3 + (Ю-8)
где Т2 = 1
постоянная времени вторичной обмоткп
трансформатора;
/?2__Т\ щ,
w?Ri Т2 W1
Подставляя значение Е2 в уравнения (10-3) и (10-4),
окончательно получим:
(- ЛиЯ2 4- /а2Я2 + ~ ~
- Л,=/?„(1 +riI/7) ^£ = J-/tllP:!(14-ril/;); (10-9)
R
U^R* - Л.гРа - =«t/) - /а=Р2 - /л. RU X
X (1 + ТпР) = (1 + Т»Р), (10-10)
aR
где
При составлении структурной схемы выпрямитель-
ного (инверторного) агрегата по уравнениям (10-9),
(10-10) необходимо учесть следующие особенности ра-
боты вентилей:
221
1) вентиль открывается, когда потенциал на его
аноде становится более положительным по сравнению
с потенциалом катода;
2) потенциал на сетке вентиля должен быть выше
потенциала зажигания;
3) если через вентиль проходит ток, то он продол-
жает оставаться открытым вне зависимости от первых
двух условий.
Таким образом, для удовлетворения перечисленных
условий в структурную схему необходимо ввести пере-
ключающие реле, число которых должно быть равно
трем на каждый вентиль. Функции реле заключаются
в замыкании пли разрыве цепей анодных токов.
Рис. 10-3. Структурная схема пыирямнтельпоинверторного агре-
гата.
Контакты реле, обусловливающих выполнение
первых двух условий, соединяются последовательно и
шунтируются контактом реле, фиксирующим наличие
анодного тока.
Структурная схема выпрямительно-инверторного
агрегата изображена на рис. 10-3.
Входными сигналами являются напряжение сети U
и э. д. с. машины постоянного тока Е, выходным — вы-
прямленный ток Id. Знаки минус и плюс перед обозна-
чением э. д. с. соответствуют двигательному или генера-
торному режимам работы машины.
222
Входной сигнал U с учетом падения напряжения на
первичной обмотке трансформатора связан с э. д. с.
на вторичной обмотке передаточной функцией вида t ~
согласно выражению (10-8). Такое предота'влен'ие э. д. с.
вторичной обмотки в структурной схеме является наи-
более простым и отражает физическую сторону про-
цесса.
В цепи анодных токов /ai и /аг находятся контакты
реле Рц(Р12), Р\2(Р22) и Р|3(Т>2з)> контролирующих вы-
полнение условий работы вентилей.
Схемы включения указанных реле приведены на
рис. 10-4.
Рис. 10-4. Схемы включения
релейных элементов.
а — схема фиксации положительно-
го потенциала анода; б — схема
подачи положительного потенциа-
ла иа сетку вентиля; в — схема
фиксации наличия анодного тока.
Для фиксации положительного значения потен-
циала анода служит двухпозиционное реле Рц(Р2\)
(рис. 10-4,а — блок сигнатур аналоговой машины). На
обмотку реле подается сигнал £7'(Р'"). Как нетрудно
заметить из структурной схемы, величина U'(U") при
закрытом вентиле представляет собой разность потен-
циалов между катодом и анодом.
При отрицательном значении U'(U") контакт
Рп (Р21) остается разомкнутым. Для положительных
значений (/(С/") контакт Рп(Р21) замкнут.
223
Схема подачи положительного потенциала па сетку
вентиля изображена на рис. 10-4,6. В первый момент
времени, когда э. д. с. £2. наведенная во вторичной цепи
трансформатора, становится положительной (точка Л на
рис. 10-5), двухпознциошюе реле Pot (Вог) переключает
своп контакты. Контакт lPot(lPo2y) оказывается замкну-
тым, а контакт 2РС1 (2Р02) разомкнутым. На вход инте-
гратора И1 поступает сигнал; при этом его выходное
напряжение изменяется по линейному закону (пря-
мая Д/д) и в некоторой точке D\ становится равным
напряжению открывания вентиля П0Т1[р. В этот
Рис. 10-5. Диаграммы токов и напряжений
вентиля.
момент времени происходит срабатывание двухпози-
цпонного реле £12 (^22), которое закрывает свой замы-
кающий контакт (рис. 10-3) цепи анодного тока. Угол
а является углом зажигания вентиля. В точке В (С)
реле Pqi(£c2) возвращается в исходное положение, под-
готавливая схему к повторному включению.
Регулирование выпрямленного напряжения осущест-
вляется изменением величины напряжения £откр.
^откр=0 соответствует точке естественного зажига-
ния вентиля; /Л>ткр='^г соответствует углу зажига-
ния а.
При появлении анодного тока /аь /аг на выходе уси-
лителя У2 (рис. 10-4,6) появляется напряжение и сраба-
тывает реле Рз1(Рзг), закрывая свой замыкающий кон-
такт (рис. 10-3). При прохождении анодного тока через
нулевое значение реле РзД/’зг) возвращается в исходное
положение. Для более четкой работы удерживающего
устройства в обратную связь усилителя У2 включается
электронный диод В1 и подается опорное напряжение
Uorx по схеме, изображенной на рис. 10-4,в.
224
10-3. СТРУКТУРНАЯ СХЕМА ВЫПРЯМИТЕЛЬНО-ИНВЕРТОРНОГО
АГРЕГАТА, РАБОТАЮЩЕГО В СИСТЕМЕ
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
При исследовании процессов в системах автоматиче-
ского управления, содержащих выпрямительно-инвер-
торные агрегаты, целесообразно ограничить количество
переменных. С этой целью выпрямительно-инверторный
arpcrai представляется в виде отдельного блока, вход-
ным сигналом которого является угол зажигания вен-
тилей, а выходным — выпрямленное значение тока.
Рис. 10-С>. Процессы коммутаций вентилей.
Предполагая, что агрегат работает в нормальном
режиме, можно исключить из рассмотрения процессы,
протекающие непосредственно в вентилях, получив при
этом более простую структурную схему. Такой подход
дает возможность оценить качество переходных процес-
сов системы, пределы изменения основных регулируе-
мых величин, выбрать необходимые обратные связи. При
этом исследование работы выпрямительно-инверторного
агрегата как элемента системы автоматического регули-
рования необходимо произвести отдельно, пользуясь
методикой, рассмотренной в § 10-2.
Для составления упрощенной структурной схемы раз-
берем процессы коммутации вентилей (рис. 10-6).
В момент времени tt подается положительный сигнал
на сетку вентиля В2. Однако так как контуры анодных
токов 1а и 1Ь содержат индуктивности, то величина тока
1а не может мгновенно стать равной нулю, а величина
тока 1Ь— возрасти от нуля до /<j.
В интервале времени Л</</2 происходит одновре-
менная работа двух вентилей В1 и В2.
15—2337 225
При правильно выбранном выпрямптельно-инвертор-
ном агрегате имеет место коммутация не более двух вен-
тилей (первая зона коммутации [Л. 61])
Нарастание и спадание токов при коммутации опре-
деляется в основном величиной реактивности вентиль-
ных цепей (активные сопротивления обмоток трансфор-
матора играют второстепенную роль). В теории ртутных
преобразователей ими как правило пренебрегают:
Еа~Еь=Х^^, (10-11)
fa+h>=hi, (10-12)
где Еа, Еь— э. д. с. вторичной обмотки трансформатора;
fa, h, — анодные токи вентилей Bl, В2-,
X — индуктивное сопротивление рассеяния
трансформатора, определяемое из опыта
короткого замыкания.
Проинтегрируем выражение (10-11) на участке О/, <
принимая hi = const:
О
—sin (0/4-аJi)] г/ n/ = 2xj d/a, (10-13)
^<1
где m — число фаз;
Y — угол коммутации.
Определим среднее значение падения напряжения, выз-
ванного коммутацией токов:
j °>5 [~sin +а+i+£)+
о
4-sin^Q/ + a-|--^—(10-14)
В результате совместного решения уравнений (10-13)
и (10-14) получаем:
= (10-15)
Выпрямленное значение напряжения с учетом падения,
обусловленного коммутацией, определяется равенством
226
иЛ = Ud0 -Vdl=-^ Um j sin + a + 4 - d Qt
— -^ XId=Uni sin ~ cos a— XId, (10-16)
где Ud0 — выпрямленное напряжение холостого хода.
Падением напряжения в дуге вентилей пренебрегаем.
Величина выпрямленного тока в случае работы агре-
гата на активно-индуктивную нагрузку и протнво э. д. с.
выражается следующим уравнением:
Ud^E IdRK(\-YTnP), (Ю-17)
где /?ц, Ти — сопротивление и постоянная времени цепи
нагрузки;
Е— противо-э. д. с. машины постоянного тока.
Знаки плюс и минус соответствуют инверторному
и выпрямительному режимам
работы агрегата.
Рис. 10-7. Структурная схема выпрямнтслыю-
инверторпого агрегата.
На основании уравнений (10-16), (10-17) легко со-
ставить структурную схему выпрямительно-инверторного
агрегата (рис. 10-7), которая достаточно проста, вклю-
чая одну нелинейную функцию и отрицательную обрат-
ную связь по току нагрузки. Реактивность X цепи вен-
тиля, входящая в коэффициент обратной связи, может
быть определена по паспортным данным трансформатора:
Y___ ак ulh г юц \
“ 100 /£.. \Wl)'
где «к — напряжение короткого замыкания, %;
t/LH, Л.п—номинальные напряжения и ток первичной
обмотки трансформатора;
и>ь, ^>а — числа витков первичной и вторичной обмоток.
15* 227
ГЛАВА ОДИННАДЦАТАЯ
МОДЕЛИРОВАНИЕ СЛЕДЯЩИХ СИСТЕМ
11-1. ПРИМЕНЕНИЕ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ
ДЛЯ ИССЛЕДОВАНИЯ СЛЕДЯЩИХ СИСТЕМ
К следящим системам обычно относят многочис-
ленные статические и астатические замкнутые системы
автоматического регулирования, которые отрабатывают
входные сигналы, изменяющиеся по произвольным зако-
нам. Входными сигналами для следящей системы могут
быть различные физические величины: угол, скорость,
напряжение, температура, давление и др.
В следящих системах часто сочетается высокий по-
рядок описывающих их дифференциальных уравнений
с наличием существенных нелинейностей отдельных
звеньев, а также с использованием отдельных элемен-
тов в импульсном режиме.
В связи с этим методами аналитического исследова-
ния трудно получить данные, способные удовлетворить
запросы конструкторов, разрабатывающих следящие си-
стемы.
В настоящее время одним из основных методов ис-
следования следящих систем является математическое
моделирование.
Необходимо отметить, что независимо от физической
природы входных и выходных сигналов следящие систе-
мы с самыми различными технологическими функциями
могут быть описаны идентичными уравнениями и струк-
турными схемами. Способ управления следящей систе-
мой (непрерывное или дискретное управление), наобо-
рот, оказывает весьма существенное влияние на мате-
матическое описание следящих систем н, следователь-
228
но, па методы их моделирования. С учетом изложенных
выше положений моделирование следящих систем изла-
гается применительно к следующим двум видам следя-
щих систем:
I. Непрерывные следящие системы.
В качестве примера рассматривается моделирование
широко распространенного следящего электропривода
с двигателем постоянного тока. При этом также учиты-
ваются некоторые нелинейности, характерные для сле-
дящих систем (в том числе люфты в передачах).
2. Дискретные следящие системы.
Ниже рассматриваются главным образом методы
набора дискретных элементов непосредственно на ана-
логовых моделях.
Совместное использование для моделирования ди-
скретных систем аналоговых моделей и электронных вы-
числительных цифровых машин рассмотрено в гл. 12.
11-2. МОДЕЛИРОВАНИЕ СЛЕДЯЩЕЙ СИСТЕМЫ С ДВИГАТЕЛЕМ
ПОСТОЯННОГО ТОКА И НЕПРЕРЫВНЫМ УПРАВЛЕНИЕМ
Примерная схема следящей системы и соответст-
вующая ей блок-схема показаны на рис. 11-1 и 11-2.
Следящая система, приведенная на рис. 11-1, относит-
ся к скоростным следящим системам, т. е. к системам,
Рис. 11-1. Схема включения следящей системы.
которые одновременно отрабатывают заданную коорди-
нату (угол) п скорость ее изменения ’. Следящая систе-
ма (рис. 11-1) состоит из следующих основных элементов:
1 В технической литературе такие системы часто называют си-
стемами с астагизмом первого порядка.
229
ПУ—промежуточный усилитель, усиливающий сиг-
налы ошибки по углу и скорости (электрон-
ный усилитель с использованием радиоламп
пли транзисторов);
УЛ1— усилитель мощности (магнитный, электрома-
шинный поперечного ноля и Др);
Г — генератор постоянного тока;
Д— электродвигатель постоянного тока с незави-
симым возбуждением;
ПЭ — измерительный элемент, предназначенный для
измерения ошибок углового положения и ско-
рости вращения и преобразования их в соот-
ветствующие напряжения (Ц, LQ. Функции
измерительного элемента в непрерывных сле-
дящих системах, отрабатывающих угловые ко-
ординаты, выполняют вращающиеся трансфор-
маторы пли сельсины, включенные по транс-
форматорной схеме (Ц), и встречно включен-
ные тахогенераторы (L7J.
Схема набора модели следящей системы может быть
построена непосредственно по блок-схеме, представлен-
ной (на рис. 11-2. Однако при исследовании следящих си-
стем скоростного типа, блок-схема, изображенная па
рис. 11-2, в ряде случаев недостаточно удобна, так как
Рис. 11-2. Блок-схема следящей системы.
на этой схеме в качестве одной из переменных исполь-
зуется угловая координата вала двигателя, которая при
работе системы может изменяться в неограниченных
пределах. Воспроизведение такой величины на модели
встречает определенные трудности, так как выходные
напряжения операционных усилителей ограниченны и
в связи с этим оказывается необходимым применение
230
устройств для периодизации процессов, что усложняет
построение модели и ее исследование.
Для устранения указанного недостатка схему, приве-
денную на рис. 11-2, целесообразно преобразовать таким
образом, чтобы интегрирование скорости двигателя вы-
полнялось после ее сравнения с заданной величиной ско-
рости. С этой целью в блок-схему вводится интегратор/7
(рис. 11-3), выходной величиной которого является уг-
ловая ошибка, изменяющаяся в ограниченных пределах.
Рис. 11-3 Преобразованная блок схема следящей системы.
а не абсолютное значение угла, отработанного системой.
Заметим, что построение модели в соответствии со схе-
мой, показанной па рис. 11-3, не ограничивает возмож-
ности исследования системы, так как в случае необхо-
димости возмущения по углу могут быть введены непо-
средственно на вход звена ПУ или учтены в качестве
начальных условий на интеграторе 7/. Стабилизирующие
цепи па рис. 11-1, 11-2 и 11-3 не показаны и учитывают-
ся при составлении схемы модели. Для блок-схемы, при-
веденной на рис. 11-3, могут быть записаны следующие
уравнения: напряжение на входе усилителя ПУ, завися-
щее от угловой ошибки,
(11-1)
напряжение на входе усилителя ПУ, зависящее от ошибки
по скорости,
(и-2)
напряжение иа выходе усилителя ПУ
(11-3)
напряжение па выходе усилителя мощности УМ
(и-4)
231
напряжение на выходе генератора
t/r— Кг.дДг | । > (П-5)
уравнение движения привода
М—МСт=}р{12; (11-6)
уравнение вращающего момента двигателя
М = См/П; (П-7)
уравнение баланса напряжений в цепи якоря
1Л.=/„/?£+СА- (П-8)
При записи приведенных выше уравнений принято, что
величины всех вращающих моментов, моментов инер-
ции, скоростей вращения и угловых координат приведе-
ны к скорости одного вала (например, вала двигателя).
Поэтому в уравнениях (11-1) (11-8) отсутствуют пере-
даточные числа редукторов.
Обозначения принятые в уравнениях (11 1) — (П-8),
приведены ниже:
/<е — крутизна измерительного органа по каналу угло-
вой ошибки, в)рад, в общем случае является пе-
ременной величиной, так как зависит от величины
угловой ошибки.
Кю — крутизна измерительного элемента по каналу
ошибки по скорости, в-сек [рад',
/\г.л — коэффициент усиления генератора по напряжению
па линепиоп части характеристики холостого
хода;
Кг— коэффициент, учитывающий при записи переда-
точной функции генератора нелинейность харак-
теристики холостого хода.
Как было указано в гл. 3, коэффициент КГ=А/Ао,
где А и Ао — значения проводимостей путей главного по-
тока в данной точке характеристики и на
ее линейной части;
•Kyi, Луг — коэффициенты усиления по напряжению
усилителя ПУ по каналам угловой ошибки
и ошибки по скорости соответственно;
Лм — коэффициент усиления по напряжению уси-
лителя УМ;
232
<Гм(Р) нормализованная переда точная функция
усилителя мощности.
Выражение для срм(р) может быть конкретизирова-
но в соответствии с применением усилителя мощности
того или 'иного типа; если, например, применяется элек-
тромашпнный усилитель поперечного поля, то звено
с передаточной функцией срм(р) может быть представле-
но на модели в соответствии с рис. 4-7;
См, С,. — коэффициенты момента п э. д. с. двигателя
соответственно'-,
—суммарное сопротивление цепи якорей ге-
нератора п двигателя;
/ — приведенное значение суммарного момента
инерции;
М вращающий момент, развиваемый двига-
телем;
Мгт— статический момент сопротивления;
Hi, Qi — угловая координата п скорость вращения
вала задатчика,
t)2, Фа угловая координата п скорость вращения
вала двигателя;
Uyo — напряжение насыщения усилителя ПУ.
Необходимые для построения модели выражения для
скорости вращения двигателя в тока якоря находим из
уравнений (11-6) (11-8):
/п=^_-_Ёл; (11-8а)
Ur М.-т/?,
О —
~ 1 + рГя
где
£’д = С,.О, — протпво-э. д. с. двигателя;
Г м = —электромеханическая постоянная времени.
Для представления на модели вращающего момента
двигателя может быть использовано уравнение (11-7).
Структурная схема следящей системы, построенная по
приведенным выше уравнениям, изображена на рис. 11-4.
Звенья структурной схемы, представленной на рис. 11-4,
имитирующие двигатель постоянного тока, построены по
уравнениям (11-6) — (11-8), которые удобны для апали-
233
(Н-9)
за работы двигателя при постоянном потоке В более об-
щих и сложных случаях (rp^const и Ля#=0) следует
пользоваться структурной схемой двигателя, приведен-,
ной iria рис. 3-5.
Рис. 11-4. Структурная схема следящей системы.
Схема набора модели, выполненная в соответствии
со структурной схемой, изображенной на рис. 11-4, пред-
ставлена на рис. 11-5. Схема, приведенная на рис. 11-5,
составлена применительно к случаю, когда в качестве
усилителя мощности УМ используется электромашипный
усилитель поперечного поля. На схеме набора, представ-
ленной па рис. 11-5, учтены нелинейности двух видов:
а) нелинейность характеристик усилителя ПУ, свя-
занная с ограничением его выходного напряжения (Пу0)-,
б) нелинейность кривой намагничивания генератора.
Ограничение выходного напряжения ПУ выполнено
с применением диодов, что дает достаточно точное при-
ближение к характеристикам реальных усилителей. Не-
линейность кривой намагничивания генератора модели-
руется при помощи блока нелинейностей. В зависимости
от конкретных характеристик следящей системы и за-
дач, поставленных при се исследовании на модели, мо-
жет возникнуть необходимость в моделировании и дру-
гих нелинейностей, в том числе нелинейностей усили-
теля УМ, измерительного органа и люфтов в передачах.
Моделирование нелинейностей усилителя УМ выпол-
няется аналогично учету нелинейности кривой намагни-
чивания генератора путем применения нелинейных эле-
ментов в цепи обратной связи. Данные по выбору пара-
метров этой схемы приводятся при рассмотрении моде-
234
ли с того нлп другого усилителя. Необходимость в уче-
те нелинейности характеристик измерительного органа
обычно возникает в тех случаях, когда исследуется
двухотсчеточная система и имеется необходимость в вос-
произведении процесса синхронизации. В этом случае
коэффициент Ke = f(6) не является постоянным, и для
учета этого в схему модели необходимо ввести блок не-
линейностей, который должен быть включен па выходе
усилителя 10. Примерные характеристики блока нели-
нейностей для случая модели двухотсчетной следящей
системы, имеющей измерительный орган с использова-
нием сельсинов, включенных по трансформаторной схе-
ме, показаны на рис. 11-6. Для того чтобы воспроизве-
сти на модели процесс синхронизации следящей систе-
мы, на интеграторе И (рис. 11-3), вырабатывающем
сигналы по угловой ошибке, должны быть также вы-
ставлены начальные условия, учитывающие значение
угла Дб в начале процесса синхронизации. Необходимо
заметить, что при обычно применяемых на практике пе-
редачах между сельсинами точной и грубой синхрониза-
ции (например, 36:1) процессы нормальной работы сле-
дящей системы и процессы ее синхронизации целесооб-
разно исследовать при различных масштабах угла 0 п,
следовательно, при различных параметрах схемы набо-
ра модели В заключение оказанного о следящих систе-
мах с непрерывным управлением остановимся па основ-
ных задачах, которые решаются при исследовании таких
систем на аналоговых моделирующих установках. Одной
из основных задач указанного исследования является
выбор средств, обеспечивающих устойчивость системы и
удовлетворительное качество переходных процессов. Эти
средства обычно состоят в применении стабилизирующих
и корректирующих контуров, которые включаются после-
довательно в основной канал системы или формируют
сигналы обратной связи. Использование математических
моделей, однако, не дает возможности решить задачу
синтеза, т. е. в зависимости от требований, поставлен-
ных к следящей системе, однозначно указать схему кор-
ректирующего контура и его параметры. Поэтому при
исследовании следящей системы производят опробова-
ние модели при различных вариантах выполнения кор-
ректирующих контуров. Предварительно определяют об-
ласть коэффициентов усиления, в которой система устой-
235
чпва без специальных мер стабилизации. Для 'Современ-
ных следящих систем значения коэффициентов, входя-
щих в эту область, значительно (в 10—100 раз) ниже
тех значении коэффициентов усиления, которые необ-
ходимы для обеспечения точности, требуемой по зада-
нию.
Затем производят выбор типа стабилизации (после-
довательная или параллельная), схемы корректирующих
устройств н точек системы, между которыми они долж-
ны быть включены. Выбор указанных выше данных мо-
жет базироваться па опыте стабилизации аналогичных
систем или на расчетах, произведенных любыми извест-
ными методами: частотных характеристик, при помощи
анализа распределения корней, с использованием стан-
дартных передаточных функций и т. д. Так как указан-
ные расчеты носят предварительный характер и имеют
целью только выяснить примерную структуру контура
п порядок величин, характеризующих его параметры, то
они могут быть 'выполнены приближенно. Так, например,
при выполнении таких расчетов можно пренебречь неко-
торыми относительно малыми постоянными времени, не
учитывать второстепенные связи п т. п. После того как
принята схема корректирующего контура, последний на-
бирается на модели и затем производится проверка ра-
боты системы.
236
При проверке определяют зависимость между пара-
метрами корректирующего контура (т. е. значениями по-
стоянных времени и коэффициентов усиления контура)
дели следящей системы.
дення; 6 — суммирующий усилитель; 7 — генератор постоянно-
ишенциомегры; П\— задание возмущений по нагрузке;
рост и.
и показателями следящей системы, к которым относят-
ся, например, предельный по устойчивости коэффициент
усиления, число колебаний при реакции на единичное
возмущение, максимальное перерегулирование, длитель-
ность переходного процесса, статическая ошибка при
Рис. 11-6. Характеристика измерительного органа двухотсчет-
ной следящей системы.
гармоническом изменении скорости задающей осп и т. д.
Полученные данные обычно представляют на плоскости
в виде семейства кривых. Если вычисленные при этом
показатели системы удовлетворяют требованиям, то вы-
бирают окончательно значения параметров и испытания
237
модели па этом закапчиваются Если окажется, что по-
казатели системы не являются удовлетворительными, то
в схему и в значения параметров вносят изменения и ис-
пытания повторяют.
При испытаниях модели могут быть также исследо-
ваны такие способы повышения качества системы, как
введение корректирующих сигналов по возмущению
[Л. 68, 69], а также нелинейных гибких и жестких связей
]Л. 70].
Следует указать еще на одну характерную задачу,
которая часто решается при исследовании на моделях
как следящих, так и других замкнутых и разомкнутых
систем. Эта задача заключается в исследовании на мо-
делирующих установках аварийных режимов. К таким
режимам относятся, например, обрывы и замыкания
в цепи стабилизации, обрыв цепи возбуждения двига-
телей постоянного тока, нарушение баланса выходных
цепей дифференциальных усилителей и т. и. Для харак-
теристики указанных режимов необходимо, например,
определить на модели величины скачков тока, провалов
напряжения, изменения ошибки и др. показателей. При
этом возможно также определить на модели необходи-
мые значения уставок защитных аппаратов, применяе-
мых в системе, изучаемой па модели. Подобные задачи
решались в работе И. Р. Фрейдзопа [Л. 71], в которой
излагаются результаты исследования на модели аварий-
ных режимов следящей системы рулевого управления
судном.
Описанный выше объем испытаний, выполняемых па
модели, позволяет получить исчерпывающее представле-
ние о свойствах системы. На практике ие всегда имеет-
ся необходимость в столь подробных исследованиях и
поэтому испытания можно проводить и в меньшем объе-
ме, соответствующем конкретным требованиям, предъяв-
ляемым к исследуемой системе. Необходимо указать,
что едва ли возможно создать универсальные рекомен-
дации по определению оптимальных параметров следя-
щих систем путем их исследования на аналоговых мо-
делях. Однако по коррекции тех или других следящих
систем имеется большой опыт, позволяющий достаточно
обоснованно выбрать схему коррекции и затем уточнить
ее при испытаниях на модели. Например, для рассмот-
ренной выше системы (рис. 11-1) известно, что удовлет-
238
верительную стабилизацию можно получить путем при
меиепия обратной связи в виде интегродифференцпрую-
щего контура, охватывающего звенья УМ и ПУ.
В частном случае для следящей системы с ЭМУ по-
перечного поля (см. схему модели на рис. 11-5) оказалось
достаточным применение в цепи обратной связи звена
с передаточной функцией типа К -д pf • Как показали
испытания модели, представленной на рис. 11-5, при Т
= 4 сек возможно обеспечить удовлетворительную стаби-
лпзацию при коэффициенте усиления 300 .
11-3. МОДЕЛИРОВАНИЕ СЛЕДЯЩИХ СИСТЕМ С УЧЕТОМ ЛЮФТА
В ПЕРЕДАЧАХ И ИХ УПРУГИХ ДЕФОРМАЦИИ
На работу следящих систем, отрабатывающих угло-
вые или линейные перемещения, большое влияние ока
зывают люфты в передачах
и их упругие деформации
Указанное влияние особенно
существенно в случае, когда
момент инерции вращаю-
щихся деталей, расположен
пых за люфтом, является
значительным. Методику мо-
делирования систем с люф-
том и упругими связями для
Конкретности рассмотрим на
(например, в редукторах)
Рис. 11-7. Схема электропри-
вода с люфтом в передачах.
примере модели привода с двигателем постоянного тока
(рпс. 11-7). Основные соотношения, характеризующие
передачу вращения при наличии люфта и упругих свя-
зей, выражаются следующими уравнениями [Л. 2,72,73].
Л1дв Мо— /ipQij
/Ио—Мст = J
ц^Д9 — при |Дб|^=-у- и ДО > 0;
0 при |Дб|<-^-;
р/дв + -^-) при |Д0|>~- и ДО<0.
(11-10)
(Н И)
(11-12)
239
В приведенных выше уравнениях через Л10 обозна-
чен момент взаимной реакции элементов системы, раз-
деленных люфтом. Этот момент в соответствии с урав-
нением (Н-12) равен нулю, когда система расцеплена
(т. е. 'находится в зоне люфта) и определяется упругими
деформациями вне зоны люфта, т. е. при передаче вра-
щения. Для составления схемы модели .привода с люф-
том к уравнениям (11-10) — (11-12) следует еще доба-
вить уравнения, характеризующие работу двигателя:
= Ш-13)
Л1=см/«; (11-14)
/И,.Т = /(О2); (11-15)
до=£1г^. (1ы0)
В уравнениях (1 1-10) — (11-16)
/л — ток в цепи якоря двигателя;
— суммарное сопротивление цепи якоря;
—момент инерции двигателя;
J2 — момент инерции нагрузки, т. е. вращающихся ча-
стей, расположенных за люфтом;
Q1; О2 — угловые скорости вращения двигателя и нагрузки
соответственно;
/Ист —момент статического сопротивления, зависящий
от скорости;
Д6 — угол между осями двигателя и нагрузки;
— суммарная величина люфта;
р— коэффициент упругости.
Из уравнений (11-10), (11-13) и (11-14) находим:
Ue
где Ты — электромеханическая постоянная времени двига-
теля;
г —_____—.
1 м с с
Ь м Ь е
По уравнениям (11-11), (11-12), (11-15) — (11-17) по-
строена структурная схема модели (рис. 11-8). Схема
набора может быть легко выполнена в соответствии
с структурной схемой, приведенной па рис. 11-8, и по-
240
этому не рассматривается. Модель привода с люфгом,
построенная в соответствии с рис. 11-8, может быть вклю-
чена в общую схему модели следящей системы и позво-
ляет исследовать последнюю при наличии люфтов. Не-
обходимо отметить, что люфт оказывает большее или
меньшее влияние на работу следящей системы в зави-
симости от величины расположенной за ним маховой
массы и места подключения измерительного элемента
(до люфта, т. е. при непосредственном соединении изме-
рительного элемента с двигателем, или после люфта).
Рис. 11-8. Структурная схема электропривода с двигателем
постоянного тока и люфтом в передачах.
Практика исследования следящих систем показала,
что при подключении измерительного элемента до люф-
та последний не уменьшает запаса устойчивости систе-
мы. Влияние люфта в данном случае сводится к тому,
что угловое положение деталей, расположенных за люф-
том, фиксируется следящей системой менее точно, т. е.
может произвольно изменяться в пределах, обусловлен-
ных люфтом. Для увеличения точности измерительный
элемент в некоторых случаях подключают к валу нагруз-
ки (после люфта). В этом случае динамические свойст-
ва следящей системы могут значительно ухудшиться и
в некоторых случаях обеспечение устойчивости становит-
ся весьма сложным. Опыт исследования таких систем
изложен, например Я. С. Бровманом в [Л. 74]. В указан-
ной работе Я. С. Бровмана, а также в работе Б. 3. Зиль-
бермана [Л. 75] не учитывается упругость передач и
используется приближенный метод учета люфта, основан-
ный па том допущении, что система расцепляется толь-
ко в момент изменения знака скорости. Методы модели-
16—2337 241
роваппя, основанные на указанных допущениях, следу-
ет применять с осторожностью, так как они способны
дать достаточно точные результаты только в тех слу-
чаях, когда влияние упругих свойств передач незначи-
тельно, и момент сопротивления, приложенный к нагруз-
ке имеет относительно большую величину [Л. 74], т. е.
при снижении скорости вращения двигателя выдержива-
ется условие
| А1„ KIM,
1'«ГИ'Г
Рис. 11-9. Характеристика
квантования но уровню.
11-4. МОДЕЛИРОВАНИЕ ДИСКРЕТНЫХ СЛЕДЯЩИХ СИСТЕМ
Дискретные системы могут быть разделены на не-
прерывную часть и собственно дискретную часть Моде-
лирование 'непрерывной части дискретных систем не
имеет каких-либо особенностей и может быть выполнено
методами, описанными выше.
Характерной особенностью дискретной части являет-
ся квантование, т. е. операция преобразования непрерыв-
ных величии в дискретные
[Н/Д]. Различают квантова-
ние по времени, то уровню
и комбинированное кванто-
вание (по времени и по
уровню).
В зависимости от вида
квантования дискретные си-
стемы могут быть разделе-
ны на следующие группы
[Л. 65]:
1) релейные автоматиче-
ские системы, в которых
'-квантование происходит по
уровню; 2) импульсные системы, в которых квантова-
ние осуществляется по времени; 3) цифровые системы,
в которых применяется комбинированный метод кван-
тования (по времени и по уровню).
Квантование по уровню является нелинейным преоб-
разованием с конечным числом выходных уровней пре-
образованной величины. Типичная характеристика зве-
на, осуществляющего квантование по уровню, представ-
лена па рис. 119, а структурная схема этой операции
изображена на рис. 11-10. Как видно из рис. 11-10, для
212
осуществленпя квантования по уровню используются
звенья с зоной нечувствительности на входе и ограниче-
нием на выходе.
Квантование по времени является линейным преоб-
разованием, которое в соответствии с характеристиками
Рис. 11-10. Структурная схема квантования по уровню.
исследуемого на модели объекта может выполняться по
различным законам. Так, например, различают ампли-
тудно-импульсную, широтно-импульсную, фазоимпульс-
ную модуляции и др.; наряду с упомянутым выше пре-
образованием Н/Д в дискретных системах обычно также
используется обратное преобразование, т. е. преобразо-
вание дискретной величины в непрерывную (Д/Н). В си-
стемах, где применяется квантование по времени, преоб-
разование Д/Н является операцией демодуляции. Для
демодуляции часто применяется преобразователь пуле-
вого порядка, т. е. преобразователь, выходная величина
которого не изменяется в промежутках между дискрет-
ными сигналами. В некоторых случаях в соответствии
с программой, принятой в реальной системе, применяет-
ся преобразователь первого порядка [Л. 76]. В таких
преобразователях производная выходной величины со-
храняется постоянной в промежутках между дискрет-
ными сигналами. При этом в конце и начале каждого
интервала экстраполированная таким образом непре-
рывная функция совпадает с заранее заданными ди-
скретными значениями входной величины ’.
' Преобразователи первого порядка известны также в литера-
туре под названием экстраполяторов ]Л. 76].
16* 243
Как видно из описанного выше, для моделирования
дискретных систем необходимо располагать специализи-
рованным оборудованием, позволяющими имитировать
па аналоговых машинах ключи, осуществляющие кван-
тование сигналов, модуляторы, экстраполирующие
Рис. II-II. Схема набора генератора
импульсов на модели.
звенья, генераторы импульсов п другие элементы ди-
скретных систем.
Известно несколько методов моделирования этих эле-
ментов. Так например, в (Л. 62, 63] предложены схемы
набора дискретных элементов непосредственно па мо-
делирующих установках без применения дополнитель-
ной внешней аппаратуры. В (Л. 67] описана специализи-
рованная приставка, позволяющая периодически изме-
рять и преобразовывать непрерывную информацию
в импульсы соответствующей амплитуды или длительно-
сти. Мы ограничимся описанием схем набора некото-
рых дискретных элементов непосредственно на модели-
рующих установках.
Генератор импульсов. Для преобразования непре-
рывно изменяющегося сигнала в последовательность
импульсов необходим источник напряжения, управляю-
щий ключами, модуляторами и другими элементами
модели. В качестве генератора импульсов могут быть
использованы, например, генератор НГПК, изготовляе-
мый предприятиями отечественной промышленности,
или схемы, набранные на аналоговой модели. Схема на-
бора генератора импульсов показана па рис. 11-1. Ге-
нератор является одновременно источником прямо-
угольных импульсов (ej) и треугольных импульсов двух
видов (е2 и е3). Примерные графики импульсов показа-
ны на рпс. 11-12. В схеме, представленной па рис. 11-11,
244
в качестве переключающего
элемента используется уси-
литель У| с ограничением
при -помощи диодов, вклю-
ченных в цепь обратной свя-
зи Интегратор набирается
па усилителе У3. Величина
опорного напряжения в цепи
обратной связи усилителя
определяет амплитуду ко-
лебаний.
Модулятор. В качестве
Рис. 11-12. График выхотио-
го напряжения генератора
импульсов.
модулятора обычно используют электронные ключи, при
помощи 'которых осуществляется преобразование непре-
рывных сигналов в квантованные. На рис. 1 l-13.cz по-
казан замыкающий электронный ключ. При отсутствии
управляющих сигналов диоды заперты опорным напря-
жением Е. Управляющее напряжение Uy периодически
открывает диоды, замыкая при этом цепь для входного
напряжения t/EX.
На рис. 11-13,6 показана схема размыкающего клю-
ча. Опа построена на аналогичном принципе, по не тре-
бует опорного напряжения.
Схема амплитудно-импульсной модуляции. Ампли-
тудно-импульсная модуляция может быть осуществлена
либо по разомкнутой, либо по замкнутой схеме.
Структурные схемы обоих вариантов устройства
для амплитудно-импульсной модуляции показаны на
рис. 11-14,а, б. Указанные схемы реализуются с при-
менением одних и тех же элементов: генератора им-
пульсов, модулятора и элемента памяти. В разомкнутой
схеме входной сигнал при помощи модулятора кван-
туется на узкие полосы и подается на вход элемента па-
мяти. На выходе устанавливаются напряжения, равные
напряжению входного сигнала в момент прохождения
данного узкого импульса и сохраняющиеся постоянными
до появления следующего импульса. Схема включения
модели для получения амплитудно-импульсной модуля-
ции показана на рис. 11-15,а. По ряду причин (наличие
тока покоя диодов, наличие сеточного тока усилителя,
тока утечки, обусловленного дефектами изоляции) в схе-
ме, изображенной па рис. 11-15,о, происходит накопле-
ние погрешностей. Несколько лучшие характеристики
245
Рис. 11-14. Блок-схемы устроп
ства для амплитудной моду-
ляции.
Рис. 11-13. Схемы
тронных ключей
« — замыкающий ключ; б —
кающий ключ.
набора э.тек-
на модели.
размы
разомкнутая схема; б —схема
тап<^>Г/7Н° связью; М - модуля-
тор. П — память; ГН - генератор
импульсов.
246
P"nk!.|j1,5' Сх™ы "а6оРа "а модетн пос
р< ователен для амплитудной моду-
ЛЯЦШ1.
«-разомкнутая схема; б-замкнутая схема.
имеют замкнутые схемы (рис. 11-15,6). При отсутствии
управляющих импульсов напряжение на выходе схемы
постоянно Интегратор при этом работает в режиме
памяти. При подаче управляющего импульса диоды от-
крываются и система благодаря жесткой обратной
Рис 11-16. Схема набора на модели преобразова-
теля для широтно-импульсной модуляции
связи переходит в режим апериодического звена. При
этом происходит сравнение выходного напряжения
с входным, что обеспечивает компенсацию погрешно-
стей, накапливающихся в течение периода.
Схема широтно-импульсной модуляции При широт-
но-импульсной модуляции непрерывные сигналы преоб-
разуются в импульсы постоянной амплитуды, длитель-
ность которых пропорциональна величине входного сиг-
нала в моменты времени, которые периодически
фиксируются. Схема, позволяющая при помощи решаю-
щих усилителен осуществить шпротно-импульсную мо-
дуляцию, показана на рис. 11-16.
Усилители <У2 и У3 работают в релейном режиме.
В работе схемы принимает участие тот или другой уси-
литель в зависимости от знака напряжения L7BX. Огра-
ничение в цепи обратной связи указанных усилителей
выполнено с помощью двух диодов, один пз которых
(Дз и Дз) включен последовательно с источником опор-
ного напряжения, а другой (Д$ и Де) присоединен непо-
средственно между входом и выходом усилителя. Такая
схема включения обратной связи уменьшает нестабиль-
ность нулевого уровня на выходах усилителей У2 и У3.
На вход усилителя У| подается напряжение от генера-
тора развертки. Последний представляет собой гепера-
247
тор треугольных импульсов, напряжение на выходе ко-
торого пропорционально времени, отсчитываемому от
некоторого фиксированного момента времени.
Входной сигнал UBX и сигнал генератора развертки
сравниваются на входах усилителей У2 и У3 (диоды /Ц
п Д2) и в момент равенства напряжений этих сигналов
происходит отключение соответствующего релейного
Рис. 11-117. Схема для набора на модели преобра пшате.ш для
амплитудно-широтной импульсной модуляции.
усилителя, и импульс на выходе схемы исчезает. В ре-
зультате этого длительность импульса па входе усили-
теля У4 оказывается прямо пропорциональной вели-
чине входного сигнала 0пк, а амплитуда определяется
настройкой релейных усилителей У2 и Уз. т. е. выбран-
ной уставкой потенциометров и П2 и величиной опор-
ного напряжения.
Схема комбинированной амплитудно-широтной моду-
ляции В дайной схеме изменение выходных импульсов
осуществляется по двум параметрам: по амплитуде им-
пульсов и по их длительности. Схема изображена па
рис. 11-17 и представляет собой комбинацию рассмот-
ренных ранее схем, изображенных па рис. 11-15 и 11-16,
п поэтому подробное описание этой схемы не приводит-
ся. Длительность импульсов определяется входным на-
пряжением J/bxi, а амплитуда — напряжением 1/пх2. На
аналогичных принципах могут быть построены схемы,
осуществляющие и другие преобразования: частотно-им-
пульсную модуляцию, число-импульсную модуляцию
преобразование кодов и т. п.
ГЛАВА ДВЕНАДЦАТАЯ
МОДЕЛИРОВАНИЕ СИСТЕМЫ ГЕНЕРАТОР—ДВИГАТЕЛЬ
НА ПОСТОЯННОМ ТОКЕ
12-1. СТРУКТУРНАЯ СХЕМА СИСТЕМЫ
В практике моделирования электромеханических си-
стем особое место занимают задачи, связанные с иссле-
дованием электроприводов постоянного тока, выполнен-
ных по схеме генератор — двигатель |(Г — Д).
Системы электропривода с различными модифика-
циями схемы Г— Д имеют широкое распространение
благодаря высокому быстродействию, возможности полу-
чения специальных механических характеристик привода
п изменению скорости вращения исполнительного дви-
гателя в широком диапазоне. Система автоматического
управления на базе схемы Г —Д допускает введение
различных обратных связей, обеспечивающих устойчи-
вую работу привода с требуемыми статическими и дина-
мическими характеристиками.
Системы Г—Д различаются: I) по способу выполне-
ния цепей возбуждения машин, которые могут либо не-
посредственно присоединяться к сети постоянного тока,
либо иметь промежуточные усилители; 2) по роду основ-
ной обратной связи, обеспечивающей регулирование то-
ка, мощности, вращающего момента или скорости по за-
данному закону.
В качестве примера рассмотрим методику исследо-
вания с помощью АВМ режимов работы системы управ-
ления гребными винтами ледокола, выполненной по схе-
ме Г Д с промежуточными усилителями в цепях воз-
249
Рис. 12-1. Принципиальная схема управления электропри-
водом гребных винтов.
Суждения генератора и двигателя и обратными связями
по току и напряжению главной цепи (рис. 12-1) *.
Схема управления электроприводом наряду с регули-
рованием скорости вращения гребного двигателя обес-
печивает поддержание постоянства мощности генерато-
ров при изменении нагрузки на винте в определенных
пределах, необходимый момент па винте в случае стопо-
рения его льдинами, ограничение рекуперируемой гене-
* В исследованиях системы наряду с авторами принимали уча-
стие инженеры Ф. Ш. Сакаев и II. Д. Сироткин.
250
раторамп энергии в процессе реверса гребного двигате-
ля и ограничение бросков тока в главной цепи при пере-
ходных процессах.
В электроприводе в качестве возбудителен генера-
торов Г|, Г2 используется машина постоянного тока ВГ,
обмотка возбуждения которой присоединена к якорю
электромашинного усилителя поперечного поля ЭМУГ.
Возбудителем гребного двигателя является электрома-
шинный усилитель продольного поля ЭМУД.
Электромашинный усилитель генераторов имеет три
обмотки управления: задающую У\У? и обмотки <У3У4
жесткой отрицательной обратной связи по напряжению
ЭМУ УЬУ6 и жесткой отрицательной связи по главному
току.
Обмотками управления ЭМУ двигателя являются: за-
дающая обмотка У\Уч, жесткой отрицательной обратной
связи по напряжению ЭМУ <У3У4 и размагничивающая
(регулирующая) УДД.
Обмотка У5У6 ЭМУ генераторов подключена к зажи-
мам обмотки дополнительных полюсов и компенсацион-
ной обмотки двигателя. Осуществляемая с ее помощью
обратная связь по току главной цепи обеспечивает огра-
ничение вращающего момента двигателя при взаимо-
действии винта со льдинами. Она также используется
в схеме регулятора мощности генераторов. Размагничи-
вающая обмотка ЭМУ двигателя включена па разность
напряжения ЭМУ возбудителя генераторов н потенцио-
метра Д? через вентили Вь В3, которые открываются,
когда напряжение ЭМУ возбудителя генераторов стано-
вится больше напряжения сравнения Ucv. Кроме того,
размагничивающая обмотка присоединена через вентили
В4, В2 к якорю возбудителя генераторов так что при из-
менении полярности В Г указанные вентили открывают-
ся. В первом случае размагничивающая обмотка обеспе-
чивает постоянство мощности генераторов, во втором
с ее помощью ограничивается рекуперируемая энергия.
Жесткие обратные связи по напряжению ЭМУ гене-
раторов и ЭМУ двигателя применены для уменьшения
остаточного напряжения усилителей.
Для обеспечения устойчивости системы используется
жесткая обратная связь по напряжению ЭМУ генерато-
ров, а также гибкие обратные связи по току главной це-
пи и по напряжению ЭА1У двигателя, В качестве д.иффе-
251
ренцнрующих устройств используются стабилизирующие
трансформаторы.
Пуск гребного двигателя производится подачей на-
пряжения на задающие обмотки ЭМУ генераторов и
ЭМУ двигателя.
Регулирование скорости вращения гребного двигате-
ля осуществляется изменением напряжения генераторов
и потока двигателя. Заданная скорость устанавливается
путем поворота ротора бесконтактного сельсина, находя-
щегося па пульте управления; выходное напряжение
сельсина выпрямляется п подается на задающую обмот-
ку ЭМУ генераторов.
Рис. 12-2. Характеристики гребного вшита и механические ха-
рактеристики привода.
/ — характеристика реверса в свободной воде; 2 — швартовая харак-
теристика; 3 — характеристика хода в свободной воде; 4 — механиче-
ская характеристика.
Реверс двигателя осуществляется изменением поляр-
ности напряжения па задающей обмотке ЭМУ двигателя.
Характеристика гребного винта лежит между двумя
граничными кривыми, одна из которых соответствует ра-
боте винта при неподвижном судне (швартовая характе-
ристика), а другая — работе винта при движении судна
в свободной от льда (чистой) воде (рис. 12-2).
При работе ледокола в ледовых условиях скорость
судна мала, н характеристика винта близка к шварто-
вой. Поминальные параметры главных машин выбирают-
252
ся в соответствии с этим наиболее тяжелым режимом ра-
боты, т. е. режимом полной мощности на швартовой ха-
рактеристике. Номинальный режим характеризуется но-
минальным током в главной цепи, номинальным напря-
жением генераторов и полным потоком двигателя.
Увеличение нагрузки иа винте (при взаимодействии
винта со льдом) приводит к уменьшению скорости вра-
щения двигателя. Ток главной цепи при этом возрастает
и увеличивается н. с. обмотки У5У6 ЭМУ генераторов,
что приводит к уменьшению напряжения генераторов.
Этим обеспечивается ограничение тока в данном режиме,
включая случай остановки винта под воздействием
льдины (так называемое заклинивание винта). Повыше-
ние нагрузки иа винте соответствует участку бв механи-
ческой характеристики привода {Л. 78].
По мере разгона судна нагрузка на гребном винте
уменьшается и скорость вращения винта увеличивается
(участок аб механической характеристики). Схема управ-
ления приводом выполнена таким образом, что про-
цесс разгона судна до номинальной скорости осуществ-
ляется при постоянной мощности турбогенераторов. При
уменьшении момента нагрузки уменьшается ток якоря
гребного двигателя и соответственно н. с. обмотки УьУв
ЭМУ генераторов. Напряжение ЭМУ генераторов увели-
чивается, превышая напряжение сравнения it/cp, устанав-
ливаемое равным поминальному напряжению этого ЭМУ.
По регулирующей обмотке У$Уб ЭМУ двигателя прохо-
дит ток, создавая и. с., действующую встречно по отно-
шению iK н. с. его задающей обмотки. Магнитный поток
гребного двигателя ослабляется, ток якоря возрастет
примерно до прежнего значения. Имеет место некото-
рое уменьшение тока и увеличение напряжения генера-
торов, характеризующее статизм регулятора мощности.
При реверсе винта в швартовом режиме момент со-
противления л скорость вращения изменяются по двум
симметричным ветвям параболы.
В случае движения судна в свободной воде характе-
ристика гребного винта (кривая / на рис. 12-2) несим-
метрична. Вследствие того, что при реверсе в свобод-
ной воде винт вращается в потоке воды, соответствую-
щем ходу судна вперед, реверсивная характеристика
имеет участок работы винта в режиме турбины. Для
осуществления реверса к винту должен быть приложен
253
момент, больший чем максимально развиваемый впи-
том в этом режиме.
В процессе реверса генераторы некоторое время
работают в двигательном режиме. Это связано с тем, что
главный ток имеет величину, большую его номинального
значения, а напряжение генераторов имеет обратную по-
лярность. Момент генераторов в этом случае ограни ш-
вается путем уменьшения главного тока за счет ослабле-
ния магнитного потока двигателя, работающего в это
время в генераторном режиме. Ослабление потока двига-
теля достигается благодаря действию размагничивающей
обмотки ЭМУ двигателя, ток по которой проходит тогда,
когда напряжение ЭМУ генераторов меняет свой знак.
Структурная схема рассматриваемой системы пред-
ставлена па рис. 12-3. В ее основу положены структурные
схемы отдельных элементов электропривода:
а) ЭМУ поперечного поля (рис. 4-4) с внешними об-
ратными связями по напряжению ЭМУ (коэффициент
а») и главному току (коэффициент «/);
б) возбудителя генераторов, представляющего собой
машину постоянного тока (рис. 3-2) с одной независимой
обмоткой возбуждения. Схема соответствует постоянной
скорости вращения машины и отсутствию потоков рас-
сеяния. Коэффициент ас имитирует балластное сопро-
тивление, включенное параллельно обмотке возбуждения
возбудителя;
в) двухступенчатого ЭМУ продольного ноля (рпс. 5-5);
г) стабилизирующего трансформатора обратной
связи по напряжению возбудителя (рис. 6-2) (потоки
рассеяния трансформатора и индуктивность стабилизи-
рующей обмотки не учитываются).
Жесткая обратная связь по току главной цепи пред-
ставлена в виде звеньев аг и (1+тд.кр). Коэффициент
обратной связи по току щ определяется .как отношение
напряжения на соответствующей обмотке управления
ЭМУ генераторов к падению напряжения в главной цепи
при заторможенном якоре двигателя и номинальном
токе:
U> и’'-«
' luR/Ku~ Ua.K [URS
Ri А'/
(12 1)
Ri + Re IiiRr Ku
254
где Ua.K — падение напряжения па дополнительных по-
люсах и компенсационной обмотке при но-
минальном токе главной цепи;
—сопротивление цепи генератор — двшатель;
Ro, Ri,Rx— сопротивления задающей обмотки ЭМУ, об-
мотки жесткой обратной связи но току и до-
бавочное сопротивление в цени этой обмот-
ки жесткой обратной связи по току;
А’о. Ki — коэффициенты усиления ЭМУ по цепям соот-
ветствующих обмоток;
тл.ц — постоянная времени компенсационной обмот-
ки и дополнительных полюсов.
Связь межд)' напряжением на обмотках возбуждения
генераторов и напряжением ЭМУ двигателя, осущест-
вляемая по цепи регулирующей обмотки, изображена на
структурной схеме в виде безынерционных звеньев щ, «2
и блоков логических элементов БС1, БС2. С помощью
последних обеспечивается включение указанной связи
при t7B.r>£/tp и t/B.r<0.
Коэффициент сц определяется как отношение прира-
щений напряжения на размагничивающей обмотке и раз-
ности напряжений якоря возбудителя генераторов и по-
тенциометра сравнения (при Г,в.г>^ср):
_______ДС г р______Rv.q___________ (19-21
1 Д(Сц.г—^ср) Ru.fi + Rep + /бз + ^вепт'
где 7?о.р, АГр, /?Вспт, Ris — сопротивления размагничи-
вающей обмотки, потенциометра сравнения, вен-
тилей и дополнительное.
Коэффициент а2 представляет собой 'отношение при-
ращения напряжения на размагничивающей обмотке
Uo.p к приращению напряжения возбудителя генерато-
ров при Ua.T<0:
_________ Ro.p (19 31
Д17в.г ~Rj^~+Re + Квонт ’ ' ’
где Rg — дополнительное сопротивление.
Жесткие обратные связи по напряжению ЭМУ гене-
раторов и ЭМУ двигателя на структурной схеме представ-
лены звеньями аи и а'и. Коэффициенты а‘и и а'и показы-
вают, какая часть напряжения ЭМУ соответствует на-
пряжению на его обмотке жесткой обратной связи. Гиб-
кая обратная связь изображена в виде передаточной
функции стабилизирующего трансформатора.
255
Возбудитель генератора
ЗМУ поперечного
ПОЛЛ
i^p
t*Tdf.
к.——-
f>l KdKq
f>lPKdK,
L^p/° Kd Kg
Kj Kg
*d
Стабилизирующий трансформатор
Рис. 12-3. Структурная схема системы
256
электродвижения гребных винтов.
17—2337
257
12-2. ИССЛЕДОВАНИЕ РЕЖИМОВ РАБОТЫ СИСТЕМЫ
Л1оделирование электропривода. Для системы элек-
тропривода ледокола характерны частые пуски и ревер-
сы. Так, например, реверс в швартовом режиме является
одним из основных рабочих режимов судна в ледовых
условиях. Поэтому при проектировании и исследовании
системы серьезное внимание уделяется рассмотрению
переходных процессов.
Процессы в электроприводе гребных винтов описы-
ваются обыкновенными нелинейными дифференциаль-
ными уравнениями высокого порядка [Л. 79]. В системе
электропривода имеются релейные элементы и нелиней-
ные обратные связи— отсечки. Нелинейными являются
характеристики намагничивания электрических машин
п кривые момента на гребном винте в функции скорости
вращения.
Современное проектирование подобной системы, как
правило, сопровождается расчетами на АВМ При моде-
лировании системы ставятся следующие задачи: 1) про-
верка выбора схемы управления электроприводом; 2) вы-
бор типа и определение параметров обратных связей,
обеспечивающих устойчивость и заданное качество пере-
ходных процессов системы; 3) выяснение влияния регу-
лируемых параметров элементов электропривода па пе-
реходные процессы в рабочих режимах (пуск, реверс,
регулирование скорости двигателя гребного впита, ре-
жимы взаимодействия винта со льдом) и в аварийных
режимах (срабатывание максимальной защиты, потеря
лопасти впита и т. п); 4) ознакомление персонала на-
ладчиков со статическими и динамическими характери-
стиками системы.
Математическое описание процессов в рассматривае-
мом элект роприводе может быть представлено в виде си-
стемы дифференциальных уравнений элементов привода.
На основании этих уравнений и структурной схемы элек-
тропривода нетрудно перейти к полной схеме электрон-
ной модели, воспользовавшись схемами моделей типовых
звеньев и передаточных функций.
Перед составлением схемы модели по одному из опи-
санных выше методов производится масштабное преоб-
разование. Масштаб времени целесообразно выбрать та-
ким, чтобы время решения составляло 150—200 сек.
258
Набор на моделирующей установке и проверка пра-
вильности решения осуществляются последовательными
этапами. Сначала набираются модели подвозбудителя и
возбудителя генераторов и модель генераторов, работаю-
щих в режиме холостого хода. Проверяется правильность
раздельной и совместной работы моделей. Затем модели-
руется цепь якоря двигателя и проверяется работа гене-
раторов при заторможенном двигателе. Далее произво-
дится набор модели возбудителя двигателя и ее автоном-
ная проверка, а затем набирается полная модель
двигателя, работа которой проверяется при изменении
напряжения возбуждения и напряжения якоря.
После отладки моделей основных элементов системы
воспроизводятся цепи стабилизирующих обратных свя-
зей и дополнительных связей между элементами, пред-
усмотренные принципиальной схемой привода.
Современные АВМ обладают достаточными логиче-
скими возможностями, чтобы моделировать такие эле-
17* 259
менты электромеханических систем, как контакторы, ре-
ле, отсечки, цени с вентилями. Основным логическим эле-
ментом АВМ является так называемый блок сигнатур,
построенный на базе несимметричного триггера и поля-
ризованного реле [Л. 80] Проиллюстрируем некоторые
способы моделирования указанных аппаратов на при-
мере рассматриваемого электропривода.
Модель поста управления. При помощи поста управ-
ления осуществляется изменение величины задающего
напряжения возбудителя генераторов Uo и изменение
полярности напряжения на задающей обмотке возбуди-
теля двигателя U'q при реверсе гребного винта Выполне-
ние указанных операций в модели системы производится
с помощью трех операционных усилителей, включенных
по схеме, представленной на рис. 12-4. Скорость пере-
кладки поста управления задается напряжением Ut, по-
ступающим на интегратор И1. Усилителем У/, диодами
Д1 и Д2, а также усилителем У2 имитируется изменение
полярности напряжения на задающей обмотке ЭМУ дви-
гателя и сохранение полярности напряжения на задаю-
щей обмотке ЭМУ генератора при перекладке рукоятки
поста.
Несколько более сложная схема позволяет построить
модель поста управления, содержащего релейный блок.
Для уменьшения бросков тока главной цепи при реверсе
с помощью этого блока в цепь задающей обмотки ЭМУ
генераторов на определенное время вводится дополни-
тельное сопротивление и осуществляется разрыв цепи
регулирующей обмотки.
Модель регулятора мощности и цепи ограничения ре-
куперации энергии. При нагрузке, соответствующей ра-
боте гребного винта в режиме хода судна в свободной
воде, напряжение возбудителя генераторов {7ВГ
становится больше напряжения потенциометра сравне-
ния (УСр (рис. 12-1). При этом открываются венти-
ли Bi—В3 и по регулирующей обмотке У5У6, включенной
встречно с задающей, начинает проходить ток. В резуль-
тате уменьшается напряжение возбудителя двигателя и
соответственно происходит ослабление потока двигате-
ля. Мощность, развиваемая двигателем, примерно рав-
на номинальной.
При реверсе двигателя напряжение возбудителя гене-
раторов достигает отрицательных значений. В этом слу-
260
чае открываются вентили В%—В4 и по регулирующей об-
мотке проходит ток; в результате также происходит ос-
лабление потока двигателя, уменьшается его э. д. с. и,
соответственно, рекуперация энергии.
В модели системы эти режимы осуществляются с по-
мощью трех блоков сигнатур БС1, БС2, БСЗ и двух опе-
рационных усилителей УЗ, У4 (рис. 12-4).
Блок сигнатур БС1 имитирует 'контакторы В и Н,
с помощью которых изменяется направление тока в ре-
гулирующей обмотке при реверсе гребного двигателя.
Блок БС2 срабатывает при UB,T>Ucr> и подключает
в схеме электронной модели напряжение — (£/в.г—Ucp),
что имитирует включение регулирующей обмотки при
работе системы в режиме регулятора мощности.
Рис. 12-5. Схема модели нагрузки, возникающей в режиме взаимо-
действия винта со льдом.
а — скачкообразное изменение момента винта и линейное его нарастание во
времени; б — схема, соответствующая скачкообразному изменению момента;
в — блок сигнатур.
Переключение контактов БСЗ происходит при отри-
цательном значении напряжения возбудителя генерато-
ров ив.г. При этом напряжение UBr через контакты БС1
и БСЗ подается в электронную модель возбудителя дви-
гателя. Это имитирует включение регулирующей обмотки
в режиме ограничения рекуперации.
Моделирование нагрузки. Нагрузка электроприводов
261
во многих случаях является сложной функцией ряда па-
раметров: времени, скорости, положения механизма. Мо-
делирование этих зависимостей требует применения
функциональных преобразователей и логических элемен-
тов.
В модели электропривода гребных винтов при иссле-
довании режимов работы в свободной воде зависимость
момента на винте от скорости его вращения (рис. 12-2)
воспроизводится с помощью блоков нелинейности
На рис. 12-5,о представлена схема моделирования
дв}х законов изменения момента нагрузки на винте в ре-
жиме его взаимодействия со льдом: 1) скачкообразного
изменения момента Л1Л на винте и 2) линейного нара-
стания этого момента во времени. Установившееся зна-
чение связано с номинальным моментом Мп через ко-
эффициент Кл: Мл=КяМи.
В случае линейного нарастания Л1л=/(/) схема вы-
полняется следующим образом. На нижний контакт бло-
ка сигнатур БС1 подается неизменное напряжение ил0,
величина которого определяет скорость нарастания мо-
мента Л1л. Максимальное значение А4Л определяется ве-
личиной опорного напряжения Ucm, с которым сравни-
вается выходное напряжение интегратора Мл. Отключе-
ние напряжения (7л0 происходит в момент времени, когда
А1Л достигает требуемого установившегося значения.
В схеме модели предусмотрен блок сигнатур БС2, с по-
мощью которого цепь регулирования А1Л разрывается
при изменении направления вращения винта. В случае
скачкообразного изменения момента Мл применяется
схема, изображенная па рис. 12-5,6.
Кривые переходных процессов в электроприводе. Не-
стационарные режимы работы системы электропривода
можно разбить на три группы: рабочие режимы, аварий-
ные режимы и режимы, применяемые при наладке.
К рабочим режимам электропривода гребных винтов
ледокола относятся процессы пуска и реверса в шварто-
вом режиме, реверс в свободной воде, работа системы
в режиме поддержания постоянства мощности и при
взаимодействии винта со льдом.
Аварийными режимами будем считать режимы, свя-
занные с заклиниванием гребного винта, срабатыванием
максимальной защиты и исчезновением напряжения
в цепях управления.
262
К наладочным режимам отнесем пуск системы: 1) при
заторможенном двигателе; 2) при постоянном потоке
двигателя.
Л1оделирование указанных режимов позволяет опре-
делить величину максимального тока главной цепи, вос-
произвести процессы изменения скорости гребного вин-
та, лапти значения токов и напряжений в отдельных
элементах схемы.
Рассмотрим наиболее характерные кривые переход-
ных процессов, полученные на модели для одной пз
действующих систем.
Рис. 12-6. Сравнение осциллограмм переходных процессов, по-
лученных на модели и в реальной системе (реверс в шварто-
вом режиме).
--------модель; —---------эксперимент.
На рис. 12-6 показана осциллограмма переходного
процесса при реверсе в швартовом режиме. Там же нане-
сены кривые, снятые с реальной системы. Сравнение кри-
вых показывает, что они совпадают с удовлетворитель-
ной для практических расчетов точностью. Максимальное
отклонение тока главной цепи, напряжения генератора и
скорости гребного двигателя в модели по сравнению с на-
турой не превышает 10% номинальных значений указан-
ных величин. Заметим, что точность работы АВМ, опре-
деленная путем сопоставления соответствующих реше-
263
ний с результатами вычислений на цифровой вычисли-
тельной машине, составляет 3—5%'.
Значительный интерес представляют результаты мо-
делирования аварийных режимов, так как многие из них
не могут быть опробованы в реальной системе привода.
Основной причиной срабатывания максимальной защиты
или автоматов, установленных в цепи главного тока-,
являются нагрузки, возникающие в процессе взаимодей-
ствия винта со льдом. Зная зависимость между моментом
сопротивления льда Мл, действующим на винт, и ско-
ростью вращения или углом поворота винта, можно по-
лучить на модели процесс изменения тока главной цепи
во времени. Когда к валу двигателя приложен дополни-
тельный момент, линейно нарастающий во времени от О
до Мя, величины максимального тока главной цепи /макс
и мощности генератора РмаКс зависят от времени дости-
жения моментом 7ИЛ установившегося значения (/Нб)-
Чем меньше это время, тем больше величина /маис
(рис. 12-7).
Рис. 12-7. Зависимость максимально-
го тока и мощности от времени нара-
стания момента Мл.
В том случае, когда к валу двигателя прикладывает-
ся скачкообразно изменяющийся дополнительный по-
стоянный момент, в главной цепи имеет место бросок
тока, пропорциональный этому моменту. Поскольку та-
кого рода возмущение приложено непосредственно к ва-
лу двигателя, инерционность цепи возбуждения генера-
торов не оказывает влияния на величину броска тока.
264
На рис 12-8 показаны кривые переходных процессов
в режиме взаимодействия винта со льдом. Вследствие
возрастания тока главной цепи напряжение ЭМУ генера-
торов становится отрицательным. Это приводит к появ-
лению и. с. размагничивающей обмотки ЭМУ двигателя.
В результате снижается поток двигателя, а ток главной
цепи увеличивается.
Аналогично могут быть получены осциллограммы из-
менения токов, напряжений и скорости вращения двига-
265
теля при действии максимальной защиты, выполненной
по различным схемам, в случае режима, возникающего
при потере лопасти винта, при аварийном отключении
питающего напряжения какого-либо элемента схемы
управления приводом и т. п.
Определение параметров цепей возбуждения электри-
ческих машин и параметров обратных связей системы.
Используя модель системы электропривода, можно сфор-
мулировагь требования к параметрам цепи возбужде-
ния генератора и двигателя. В частности, не вызывает
затруднений определение влияния па переходные процес-
сы максимального значения напряжения и нелинейности
характеристики намагничивания возбудителей, постоян-
ных времени обмоток возбуждения главных машин и
возбуди гелей и др.
Путем выбора типа обратных связей! и пх парамет-
ров можно сформировать такой процесс в системе, при
котором ток главной цепи и рекуперируемая энергия не
превышают заданных значений, а время протекания пе-
реходных процессов ограничено определенной величиной.
Выбор параметров обратных связей, с помощью кото-
рых достигается требуемое качество переходного процес-
са (отношение максимального выброса тока к номиналь-
ному току двигателя, время переходного процесса, вели-
чина отрицательного момента генераторов при реверсе
гребного впита), целесообразно производить, исходя из
семейства кривых, снятых па модели, которые отра-
жают зависимость одного из показателей качества про-
цесса от величины того или иного параметра обратной
связи.
Большой коэффициент усиления разомкнутой системы
электропривода обусловливает высокие требования к об-
ратным связям, с помощью которых обеспечивается
устойчивость системы [Л. 811. Выбор характера обратных
связей на моделирующей установке производится для
наиболее тяжелых режимов: при работе генераторов на
заторможенный двигатель и при ослабленном потоке
двигателя (работа в режиме регулятора мощности).
Для устойчивости системы необходимо прежде всего,
чтобы опа была устойчивой в режиме стопора, так как
элекгромашнппый усилитель поперечного поля, возбуди-
тель и генераторы, работающие на заторможенный дви-
гатель и охваченные обратной связью по главному току,
266
составляют замкнутый контур, который является основ-
ной частью системы.
Для выбора стабилизирующих обратных связей мож-
но использовать полученные на модели граничные кри-
вые областей устойчивости в функции двух параметров.
Методика построения областей устойчивости заключается
в следующем. Производится изменение одного из пара-
метров цепи стабилизирующей обратной связи, причем
для каждого нового значения этого параметра опреде-
ляется коэффициент обратной связи по главному току
«1 = а/чакс. при котором наступает режим автоколебаний
системы. Зная а/макс. нетрудно определить предельный
коэффициент усиления разомкнутой системы, при кото-
ром начинается режим неустойчивой работы.
Эффективным средством повышения устойчивости
рассматриваемой системы является жесткая отрицатель-
ная связь, охватывающая два первых ее звена (ЭМУ по-
перечного поля). Кривые предельных коэффициентов
усиления для различных модификаций схемы приведены
на рис. 12-9. По оси абсцисс отложена ветичина, равная
отношению н. с. обратной связи по напряжению и резуль-
тирующей и. с., по оси ординат — предельный коэффи-
циент усиления разомкнутой системы. Кривые сняты при
двух способах включения обратной связи по главному
току. В первом случае имелось в виду, что обратная
связь по главному току осуществляется с помощью
трансформатора постоянного тока ТПТ. Во втором слу-
чае предполагалось, что на обмотку управления ЭМУ
подается падение напряжения, которое снимается с до-
полнительных полюсов и компенсационной обмотки греб-
ного электродвигателя.
Для обоих способов рассмотрено влияние на устой-
чивость системы внутренних обратных связей и постоян-
ной времени нагрузки ЭМУ путем включения балластно-
го сопротивления в цепь его якоря. Как видно из
рис. 12-9, наибольший запас устойчивости дает схема
включения балластного сопротивления параллельно об-
мотке возбуждения возбудителя для случая, когда об-
мотка обратной связи по току присоединена к дополни-
тельным полюсам и компенсационной обмотке двигате-
ля (ДП + КО).
В дальнейшем исследовании параметры обратных
связей в цепи возбуждения генераторов корректируются
267
520
с целью ограничения выброса тока главной цепи и вре-
мени переходного процесса.
При моделировании режимов взаимодействия винта
со льдом выбираются параметры гибкой обратной связи
по току главной цепи, которая является эффективным
средством уменьшения выбросов тока. Чтобы эта связь
268
не вызывала колебаний системы в режиме реверса, ее
следует выполнить нелинейной, включив вентили в цепь
вторичной обмотки трансформатора ТПТ.
Затем производится выбор параметров стабилизи-
рующих цепей при работе системы в режиме регуля-
тора мощности.
В этом режиме систему можно рассматривать как
двухконтурную, потому что имеется связь между цепями
возбуждения генераторов и двигателя, осуществляемая
с помощью регулирующей обмотки. Возмущение связано
с изменением нагрузки, вызванным переходом со шварто-
вой характеристики на характеристику при свободной
воде. Двигатель привода гребного винта работает при
ослабленном потоке на прямолинейной части характери-
стики намагничивания; его электромеханическая по-
стоянная времени имеет максимальное значение.
При моделировании этого режима выбираются пара-
метры цепи гибкой обратной связи по напряжению воз-
будителя двигателя, обеспечивающие устойчивость си-
стемы.
Вполне очевидно, что с увеличением коэффициента
связи щ между напряжением регулирующей обмотки
возбудителя двигателя и напряжением возбудителя гене-
раторов для обеспечения устойчивости необходимо уси-
лить сигнал гибкой обратной связи в цепи возбудителя
двигателя. Значение коэффициента си определяется вели-
чиной статизма регулятора мощности.
Рис. 12-9. Кривые предельных коэффи-
циентов усиления разомкнутой системы.
Схема вклю- чения доба- вочного со- противления в цепи ЭМУ Отноше- ние со- противле- ний «д/«н Способ включения обратной связи по главному току
дп+ко ТПТ
Без сопротив- ления .... 0 I. >3
Последова- тельно . . . I II, па
Последова- тельно . . - 2 Из п4
Параллельно . 1 III, ша
• 0,5 Шз III*
269
Основным средством для уменьшения отрицательного
момента генераторов, возникающего в режиме реверса
системы в свободной воде, является связь по регулирую-
щей обмотке ЭМУ двигателя. Однако, как показывают
результаты испытаний реальной системы, введение та-
кой связи существенно ухудшает качество переходного
процесса: возрастает число колебаний тока главной цепи
и длительность реверса. Анализ системы на АВМ при-
водит к выводу о необходимости введения дополнитель-
ных связей, например, в виде стабилизирующего моста
в цепи возбуждения двигателя, с помощью которого
можно получить апериодическое изменение тока главной
цепи в процессе реверса, пли в виде нелинейной связи
между напряжением генераторов и напряжением на
размагничивающей обмотке ЭМУ двигателя.
Следует отметить, что на характер переходных про-
цессов наряду с корректирующими связями можно воз-
действовать выбором соотношений н. с. обмоток ЭМУ,
а также введением дополнительных инерционных или
форсирующих элементов. Так, например, если увеличить
и. с. задающей обмотки ЭМУ поперечного поля при со-
хранении отношения величины тока двигателя в режи-
ме стопора к номинальному току и включить дроссель
в цепь размагничивающей обмотки ЭМУ двигателя, то
удается снизить величину выброса тока. С помощью
АВМ легко определить указанные соотношения и выяс-
нить целесообразность введения дополнительных элемен-
тов.
В связи с тем, что число параметров, определяющих
процессы в системе при различных режимах работы, до-
статочно велико, определение их численного значения на
модели должно производиться методами многофакторно-
го эксперимента [Л. 82].
ГЛАВА ТРИНАДЦАТАЯ
МОДЕЛИРОВАНИЕ ПРОЦЕССОВ УПРАВЛЕНИЯ
В СИСТЕМАХ АВТОМАТИЗАЦИИ
С УПРАВЛЯЮЩИМИ ВЫЧИСЛИТЕЛЬНЫМИ
МАШИНАМИ
13-1. БЛОК-СХЕМА КОМПЛЕКСНОЙ АНАЛОГО-ЦИФРОВОЙ
ВЫЧИСЛИТЕЛЬНОЙ УСТАНОВКИ
Для решения многообразных технических задач все
большее применение находят комбинированные вычисли-
тельные системы, состоящие из совместно работающих
цифровых и аналоговых математических машин.
В комбинированной установке аналоговые и цифро-
вые машины образуют единый комплекс аппаратуры,
связанной через преобразователи непрерывных величин
в дискретные и дискретных величин в непрерывные,
а также через коммутаторы ввода и вывода информации
[Л. 85].
Обмен информацией между машинами осуществляет-
ся по специальным командам цифровой вычислительной
машины (ЦВМ). В подобных системах используются до-
стоинства тех и других вычислительных машин: быстро-
действие аналоговых машин при решении дифферен-
циальных уравнении п универсальность, точность, удоб-
ство реализации сложных нелинейных функции и логи-
ческих законов управления, характерные для цифровых
машин.
Применение комплексной аналого-цифровой установ-
ки для исследования процессов управления в сложных
системах автоматического регулирования, содержащих
управляющие машины, позволяет осуществить в лабора-
торных условиях работу управляющей вычислительной
271
машины (УВМ) с моделью системы в натуральном
масштабе времени, проверить алгоритмы и оценить ха-
рактеристики управляющей машины, установить необ-
ходимые информационные связи между УВМ, системой
и человеком.
Опыт применения управляющих вычислительных ма-
шин показывает, что универсальные УВМ, которые со-
держат многоканальные преобразователи и электронные
часы, вырабатывающие тактирующие импульсы для ор-
ганизации обмена информацией между УВМ и объектом,
могут быть успешно использованы в комбинированных
вычислительных установках. В частности, одна из наи-
более крупных отечественных управляющих машин типа
ВНИИЭМ-3 без каких-либо дополнительных устройств
может работать в составе аналого-цифрового комплекса
с аналоговыми математическими машинами [Л. 84].
При исследовании методами математического моде-
лирования систем управления сложными технологически-
ми процессами необходимо построение аналогов техно-
логического оборудования, электроприводов, регуляторов
и устройств автоматики, а та1кже аналогов процесса об-
работки изделия или сырья с учетом изменения его гео-
метрических размеров, веса, отдельных физико-техниче-
ских свойств.
В комбинированной установке для моделирования
указанных элементов технологического комплекса целе-
сообразно использовать аналоговые вычислительные ма-
шины, а на цифровую машину возложить функции моде-
лирования работы УВМ реальной системы, т. е. функции
управляющей машины.
Отличительная особенность модели сложного произ-
водственного процесса состоит в необходимости воспроиз-
ведения различных состояний обрабатываемого изделия,
механизмов и устройств управления, а также пере-
ходов из одного состояния в другое. С этой целью анало-
го-цифровая установка должна содержать блок програм-
много переключения модели. С помощью этого блока
можно имитировать различные режимы, включая ава-
рийные, возникающие при функционировании реального
комплекса, задавать начальные данные обрабатываемо-
го изделия и исходное состояние оборудования Функции
блока программного переключения могут быть возложе-
ны на УВМ, входящую в аналого-цифровой комплекс.
272
На рис. 13-1 представлена блок-схема комбинирован-
ной аналого-цифровой установки. Схемой предусмотрена
возможность моделирования как режимов автоматиче-
ского управления технологическим процессом посредст-
вом УВМ, так и режимов ручного управления.
Рпс. 13-1. Схема комбинированной аналоге цифровой моделирую-
щей установки.
В режиме автоматического управления информация
о моделируемом процессе считывается с аналоговых ма-
шин и преобразуется из непрерывной формы в дискрет-
ную. Управляющая вычислительная машина в соответ-
ствии с алгоритмами управления по каналам обратного
преобразования выдает на аналоговую модель управ-
ляющие воздействия.
Для возможности моделирования, режимов ручного
управления установка снабжена пультом оператора.
С пульта оператора осуществляется управление аналога-
ми отдельных механизмов и производится визуальное
наблюдение за моделируемым процессом. С этого же
пульта могут задаваться начальные условия, характери-
зующие исходное состояние механизмов и обрабатывае-
мого изделия.
Большая группа задач, решаемых на комбинирован-
ной установке, связана с исследованием проблемы уста-
новления связи между человеком, УВМ и управляемым
объектом. К числу этих задач относятся режимы обучения
УВМ при управлении моделью объекта с пульта онера-
18—2337 273
гора. Аналоге цифровая установка может также исполь-
зоваться в качестве тренажера. В этом случае УВМ
программным путем задает определенную ситуацию иа
модели и анализирует правильность действии оператора
в заданных условиях. Требуемая информация о возни-
кающей в моделируемом процессе ситуации, а также
результаты действия оператора воспроизводятся па ин-
дикаторной панели пульта ручного управления.
Вычислительные машины, управляющие мпогоагре-
гатпымп системами, обычно работают в мультипрограмм-
ном режиме, реализующем управление несколькими ме-
ханизмами посредством ряда программ с различным
уровнем приоритегности. Поскольку на УВМ комбиниро-
ванной установки возлагается совмещение функций
управляющей машины и блока программного переключе-
ния модели, мультипрограммный режим работы является
для нее основным При моделировании систем автомати-
зации с УВЛА программы управления моделями целесо-
образно выполнить в виде подпрограмм, взаимодепствне
которых осуществляется ведущей программой.
Подпрограмма управления моделью отдельного меха-
низма, как н в случае управления УВМ реальным объек-
том, состоит нв последовательности циклов снятия ин-
формации с модели, обработки полученной информации
в соответствии с принятым алгоритмом, определения не-
обходимых управляющих воздействий и выдачи управ-
ляющих воздействий.
Ведущая программа выполняет следующие функции:
1) задание мультипрограммного режима управления
механизмами (выбор управляемых в данный момент ме-
ханизмов, выбор алгоритмов управления механизмами,
частоты обращения к подпрограмме управления каждым
механизмом, требуемой точности отработки задания
п ДР),
2) включение в действие подпрограмм, осуществляю-
щих управление механизмами;
3) проверку выполнения критерия завершения дан-
ной подпрограммы управления.
Построение ведущей прогр immij УВМ комплексной
установки зависит от принятого способа (синхронного
или асинхронного) связи УВМ с объектом [Л. 83]. При
моделировании системы, построенной по принципу синх-
ронной связи, наиболее часто применяемой в управле-
274
нии непрерывными процессами, управление аналоговой
частью установки разбивается синхронизирующими им-
пульсами электронных часов на циклы равной продол-
жительности. Эти импульсы прерывают выполняемые
машиной вычисления и переводят ее к работе, связан-
ной с последовательным опросом каналов, по которым
поступает информация о величине переменных моделей,
с преобразованием поступивших сигналов в дискретную
форму, расчетом и выдачей управляющих воздействий.
После выполнения этого цикла УВМ продолжает прер-
ванные вычисления до прихода следующего синхронизи-
рующего импульса Все переключения в аналоговой ча-
сти установки, соответствующие изменению технологи-
ческой ситуации, т. е. внешних возмущающих воздеп-
ствий, параметров обрабатываемого изделия и механиз-
мов, производятся внутри цикла между синхронизирую-
щими импульсами. В ряде случаев эта часть програм-
мы может реализовываться методами случайных пспы
тапий.
При моделировании производственных процессов ди-
скретного типа, в которых отдельные механизмы, связан-
ные с технологическим процессом обработки изделия,
имеют непостоянный по времени производственный цикл,
работа УВМ с моделями по аналогии с реальной систе-
мой осуществляется по принципу асинхронной связи.
В этом случае в комбинированной установке использует-
ся система многоканального приоритетного прерывания
УВМ. Датчиками сигналов прерывания являются реле,
входящие в состав аналоговой части установки Для про-
грамм, осуществляющих функции блока программного
переключения, должны быть предусмотрены особые сиг-
налы прерывания, помимо технологических сигналов, не-
обходимых для реализации на модели алгоритмов управ-
ления При моделировании реальных алгоритмов управ-
ления, построенных по принципу асинхронной связи,
'ведущая программа несколько усложняется за счет вве-
дения в машину дополни тельных подпрограмм блока
программного переключения модели.
В качестве примера исследования на комплексной
аналоге цяфровой установке процессов управления в си
стема.х автоматизации с УВМ. выполненных по асин-
хронному принципу связи, ниже 'рассматривается систе-
ма управления механизмами клети блюминга.
18* 275
13-2. МОДЕЛИРОВАНИЕ ПРОЦЕССОВ УПРАВЛЕНИЯ
МЕХАНИЗМАМИ КЛЕТИ БЛЮМИНГА
Основные задачи УВМ в системе комплексной авто-
матизации блюминга состоят в следующем: I) обеспече-
ние высокой производительности мощного производст-
венного комплекса путем автоматизации оперативного
планирования его работы; 2) оптимизация по времени
с учетом различного рода ограничении рабочих процес-
сов механизмов; 3) осуществление самонастройки от-
дельных управляющих устройств по результатам прокат-
ки; 4) реализация программ управления механизмами
и др. [Л. 86]. Управляя клетыо, УВМ обеспечивает авто-
матическое изменение режимов работы главного привода
при изменении параметров слитка, оптимальные режимы
разгона и торможения двигателей главного привода, пе-
рестановку верхнего валка, линеек манипулятора, кан-
товку слитка в соответствии со схемой обжатии.
Весьма эффективным средством исследования подоб-
ной мшогоагрегатиой системы является комбинированная
аналого-цифровая установка, с помощью которой может
быть произведен анализ структуры потоков информа-
ции в системе, алгоритмов управления отдельными меха-
низмами, принципов реализации режимов работы УВМ
при одновременном управлении несколькими механиз-
мами, режимов обучения машины оператором и само-
обучения машины.
Применение аналого-цифровой установки в процессе
разработки автоматизированной системы управления
клетыо блюминга связано с задачей построения кибер-
нетической модели, содержащей аналоги механизмов
клети (главного привода, нажимного устройства, линеек,
кантователя и рольгангов), управляющую вычислитель-
ную машину, модель пульта оператора клети и модель
процесса изменения геометрических размеров, местопо-
ложения и скорости перемещения слитка (рис. 13-2) *.
Особенность кибернетической модели состоит в учете
взаимодействия и взаимной связи между механизмами
клети, слитком, УВМ и человеком, работающим за пуль-
том оператора, в режимах автоматического и ручного
1 Задача кибернетического моде пирования клети блюминга по-
ставлена проф. Б. М. Каганом. В разработке модели принимали
участие 3. Б. Вартанов н И Д. Сироткин.
276
управления процессом прокатки. В связи с этим матема-
тическое описание эволюции слитка и процессов в от-
дельных механизмах принимается приближенным, а ана-
логи механизмов выполняются в виде функциональных
моделей с соблюдением основных временных зависимо-
стей между управляющими воздействиями и выходными
величинами Если в ходе исследования возникает необхо-
димость детального рассмотрения процессов в том или
ином механизме, его модель строится на основе более
полного математического описания.
УВМ
внииэм-з
главный привод 5- передний рольганг
Z—нажимное устройство 6~ задний, рольганг
3-левая линейна Т~ кантователь
Ц-правая линейна
т
Модель
Главный
привод
Модель
Линеаки
манипулятора
/• * ч
123» 5678
модель
Рольганги
Модель
Кантователь
Модель
Слитон
Рис 13 2. Блок-схема модели клети блюминга.
К главному приводу / — пг п; 2 —7ГП: 3 — Вперед; 4 — Назад; 5 — ослаб
лснис потока; 6—ускорение; 7 — /°д.
К нажимному устройству: i — huy; 2 —3~ Вперед; 4 - Назад; 5 —
ослабление потока.
К линейке манипулятора: 7-глев: 2 —Znp; 3 — Глев; 4 - рпр; 5 - ле-
вый Вперед; 6 — левый; 7 — правый Вперед; 8 — правый Назад.
К рольгангам / Упер.Вперед» Упср.Пазад» Глади.Вперед»
Глади.Назад» 5—передний Вперед; 6 — передний Назад; 7 —задний Вперед;
в задний Назад.
К кантователю: 2—ЛКр; 2 — л((р; 3 —Подъем; 4 — Опускание.
К слитку /-Тпер; г-i-зад: 3 - Бпр’ 4 ~ Япр: 5 ~ «зад- 6 “«лер- 7~
гся' 8 *°сл
277
В модели клети предусмотрены основные связи, по
которым в режиме автоматического управления в реаль-
ной системе проходят сигналы от УВМ и от датчиков,
а также связи между оператором и клетыо, с помощью
которых осуществляется ручное управление и контроль
за ходом процесса.
Рассмотрим схемы моделей механизмов клети и слит-
ка, выполненных .на базе счетно-решающих элементов
аналоговых вычислительных машин. Схемы состоят из
стандартных операционных усилителей, конденсаторов,
сопротивлений, поляризованных реле и вентилей, входя-
щих в комплект серийных моделирующих установок.
Моделирование главного привода. Схема главного
привода представляет собой систему Г — Д с обратными
связями, обеспечивающими линейное изменение э. д. с.
генератора. Такой закон изменения э. д. с. позволяет по-
лучить в переходных процессах форму кривой тока глав-
ной цепи, близкую к прямоугольной. Путем схемной реа-
лизации кубичной зависимости между потоком и его
производной аналогичная форма кривой тока достигает-
ся при регулировании скорости вращения за счет изме-
нения магнитного потока двигателя [Л. 87]:
где /д.п, — величина динамической составляющей тока;
/„ ток короткого замыкания;
Гм— электромеханическая постоянная времени дви-
гателя.
Математическая модель главного привода может
быть представлена в следующем виде:
pEr = pEosign(Uy аДг) при С7у^аДг; 1
рЕг = 0 при Uy — aEp, J
рФ = /г1‘1>3 sign (Ury — рФ) при U'y |ЗФ; 1 (13-3)
рч> = 0 при с77у = р<1>; J
, £г ЙрПдФд Я— Яя (13-4)
37У Р11 д д с т ’ (13-5)
д = ^Фд/д, (13-6)
278
где L/y, U у — управляющие сигналы, поступающие от
УВМ или с пульта ручного управления;
а, р — коэффициенты, определяющие величину
установившегося значения э. д. с. генера-
тора и магнитного потока двигателя,
рЕ0— заданная скорость изменения э. д. с. гене-
ратора;
— коэффициент пропорциональности между
потоком и его производной.
Рпс. 13-3. Кривые изменения э. д. с. генера-
тора (а) п магнитного потока двигателя (б)
под действием управляющих сигналов.
Выражения (13-2) и (13-3) описывают кривые изме-
нения э. д. с, генератора Ег и потока двигателя Фд во
времени под действием управляющих сигналов Uy и Е'у
(рис. 13-3,а и б). Выражения (13-4) — (13-6) являются
известными уравнениями тока главной цепи /я и момен-
та, развиваемого двигателем, Л4Д.
2 7
Схема реализации уравнении (13-1) — (13-6) па моде-
лирующей установке представлена на рис. 13-4. Основу
схемы составляют операционные усилители У] и Уу
с большим коэффициентом передачи и диодным ограни
чением в цепи обратной связи. Напряжения на выходе
усилителей У] и У? соответствуют скорости изменения
э. д с. генератора рЕт и потока двигателя рФд и опреде-
ляются величиной опорного напряжения потенциометров
/7] и П2'.
UОги — рЕй\ 17ОП2 = Ф^.
Установившиеся значения э. д. с. генератора и потока
двигателя пропорциональны управляющим сигналам и ко-
эффициентам передачи усилителей У1 и У?.
Моделирование уравнений (13-4) — (13-6) осуществ-
ляется с помощью операционных усилителей У41 Ур и
280
блоков произведений БП[, БП2. Обратная связь по току
с отсечкой воспроизводится 'посредством потенциометров
/73 и /74 с диодными элементами.
С целью упрощения электроприводы верхнего и ниж-
него валков представлены в виде одной модели системы
Г—Д эквивалентной мощности.
Моделирование вспомогательных механизмов. Мате-
матическая модель характеристики изменения скорости
нажимного устройства, линеек манипулятора и рольган-
Рис. 13-5. Характеристика скорости и модель вспомогательного
механизма.
гов n=f(t) (рис. 13-5) может быть представлена в сле-
дующем виде:
рп. — рп0 sign (Ду — у«) при Uy ут, (13-7)
= 0 при Uy = ^n,
где Uy—управляющее напряжение, поступающее с УВМ
или пульта ручного управления;
у—коэффициент, определяющий величину устано-
вившейся скорости механизма.
В схеме модели ускорению вспомогательного меха-
низма рп соответствует выходное напряжение усилителя
Уь величина которого задается с УВМ или пульта руч-
ного управления через потенциометр П. Установившееся
значение скорости зависит от уровня входного сигнала
Uy. Путем варьирования коэффициента передачи усили-
теля У1 при постоянном опорном м входном напряже-
ниях можно получить формы кривой изменения скорости
механизма от линейной до экспоненциальной.
281
Особенность модели линеек мл...улятора (рис. 13-6)
состоит в учете сухого трения механизма (усилитель У5)
и давления слитка па линейку (усилитель У6)-
Моделирование поперечного перемещения слитка на
рольганге. Для моделирования поперечного перемеще-
ния удобно ввести понятие силы, с которой линейки
действуют на слиток, определив ее величину через де-
формацию механизма линейки:
Рис 13 6. Модель линеек
манипулятора
^л.лев— ^(^л.лев-—гсл); (13-8)
k k0 при 2лсв>гсл;
k = 0 при 2лев<гсл;
Ап.пр = k (г’л.пр — З'сл — Асл); (13-9)
k = k0 при гпр— ДСл<^сл;
/?= О при zap — Дсл^гсл,
где Дп-п, Гщ,- силы взаимодействия между слитком и
линейками;
гДев, znp — угол поворота двигателя линейки, приве-
денный к системе отсчета положения
слитка на рольганге;
282
2*сл— положение слитка на рольганге;
Всл— ширина слитка;
k—-коэффициент пропорциональности между
деформацией механизма и силой взаимо-
действия линейки со слитком.
Уравнение движения слитка представим в следующем
виде:
d с л р р г •
/Пел " "лев г чр гтр.
(13-10)
(13-11)
F тр — sign v' C:J? T]io;
signt/CJ1 = 1 при огсл>0;
signn'^ = - 1 при </Сд<0,
Рис. 13 7. Модель поперечного перемещения слитка.
где г/сл — скорость поперечного перемещения слитка;
т — .масса слитка;
7’Т|,— сила трения между слитком и рольгангом.
Соответствующая схема электронной модели пред-
ставлена на рис. 13-7.
Взаимодействие линейки и слитка моделируется с по-
мощью операционных усилителей Уб, Ув, выходное на-
283
пряжение которых пропорционально давлению на сли-
ток. До момента соприкосновения линеек со слитком
напряжение на выходе усилителен равно нулю, что до-
стигается включением диодов в цепи обратной связи.
Сила трения между слитком и рольгангом реализуется
на усилителе У3, а уравнение движения слитка—на уси-
лителе Уь Сигнал прерывания, поступающий в УВМ
в случае захвата слитка обеими линейками, формирует-
ся с помощью схемы совпадения и усилителя У7, имею-
щего релейную характеристику.
Моделирование перемещения слитка вдоль рабочей
линии. Моделирование продольного перемещения слитка
вне валков производится с учетом сил инерции и сил
Рис. 13-8. Схема электронной модели рольганга и перемещения
слитка вдоль рабочей линии.
тцения между слитком и рольгангом, а в случае захвата
слитка линейками — между слитком и линейками:
^гсл _^^'=^?тр Ртр.л» (13-12)
-^=исл; (13-13)
^тр.л^^ тр.о signal
(13-14)
sign 8 = 1 при ир — псл>0;
sign8 = —1 при ир —исл<0,
284
где vrn — скорость слитка вдоль рольганга;
Гт1,.л— сила трения между слитком н линейками;
пр — линейная скорость рольганга;
$сл— расстояние от слитка до валков.
На схеме электронной модели (рис. 13-8) скорость
движения слитка вдоль рабочей линии воспроизводится
на операционном усилителе Ув, который при имитации
периода нахождения слитка в валках работает в режиме
Рис. 13-9. Модель изменения высоты и ширины слитка при прокатке.
инерционного звена с малой постоянной времени, фикси-
руя с небольшой динамической погрешностью скорость
прокатанной или непрокатанной части слитка. Тот же
усилитель переходит в режим интегрирующего звена
в период моделирования выброса слитка из валков. При
этом решается уравнение движения слитка по роль-
гангу.
Силы трения между рольгангом и слитком, а также
между слитком и линейками реализуются соответствен-
но на усилителях У4 и У7, имеющих релейную характе-
ристику.
Величина напряжения на входе усилителя У7 зависит
от опорного напряжения потенциометра П7, которое
пропорционально давлению линейки на слиток.
Расстояние слитка от валков имитируется с помо-
щью операционного усилителя У&, который работает
в режиме интегрирующего звена, начиная с момента
285
выброса слитка из валков. При захвате слитка валками
контакты реле РВС замыкают накоротко цепь обратной
связи усилителя У8 и коэффициент передачи этого уси-
лителя становится равным нулю. Момент захвата (s = 0)
слитка фиксируется реле РЗС. Начальное положение
слитка на рабочей линии задается с помощью реле вво-
да начальных условна РНУ.
Положение, при котором валки вращаются навстречу
движению слита и захват невозможен, отображается па
модели с помощью диодной цепи 77,, Д2.
Рис. 13-10. Модель изменения длины слитка при прокатке
Моделирование буксовки слитка в валках и срыв за-
хвата 'производятся с помощью реле РБ (рис. 13-10),
которое включается по специальной команде с УВМ пли
пульта ручного управления. Замыкание контакта ре-
ле РБ приветит к срабатыванию реле РЗС и РНС, ра-
ботающих при имитации буксовки и срыва захвата
в вибрационном режиме. При этом в модели главного
привода статический ток имеет пульсирующий характер.
Различие между буксовкой и срывом захвата опреде-
ляется УВМ на основании данных о длине прокатанной
и непрокатаипоп частей слитка. Наименования реле,
установленных в схеме: РПЛ — реле схемы определения
28G
середины слитка; РБ — реле буксования; РЗС реле
захвата слитка; РВС—реле выброса слитка; РНУ—
реле ввода начальных условии; РИС реле направле-
ния движения слитка.
Моделирование процесса изменения высоты и шири-
ны слитка. В основу модели процесса изменения разме-
ров слитка (высоты и ширины) (рис. 13-9) положено
предположение, что высота прокатанной части равна
величине раствора валков, а увеличение ширины слит-
ка пропорционально обжатию; что касается высоты и
ширины непрокатаиноп части, то они остаются неизмен-
ными.
При моделировании решаются следующие логические
задачи:
а) ввод н запоминание первоначальных значений ши-
рины и высоты слитка;
б) с момента захвата слитка валками — имитация
обжатия;
в) запоминание высоты и ширины прокатанной ча-
сти слитка;
г) в случае кантовки — взаимная замена элементов
памяти, содержащих значение высоты и ширины слитка.
Четыре операционных усилителя У(—У4 в зависи-
мости от направления движения слитка работают попе-
ременно в режимах запоминающего и инерционного зве-
на. На двух усилителях, работающих в режиме инер-
ционного звена, воспроизводятся высота и ширина про-
катанной части слитка, а на двух остальных усилите-
лях, работающих в режиме запоминающего звена,—
высота и ширина непрокатаиноп части слитка. При кан-
товке функции операционных усилителей, моделирующих
высоту п ширину слитка, взаимно меняются. Выходное
напряжение усилителя У? соответствует обжатию слит-
ка |ДА. Ширина прокатанной части слитка моделируется
па основе соотношения (13-15), реализуемого на опера-
ционных блоках Уе, БГЦ, БП2, БНр.
йпр=^11пр+ДАсрп(//В), (13-15)
где qiB(//B)—нелинейный коэффициент уширения, за-
висящий от сечеияя слитка.
Моделирование изменения длины слитка при про-
катке. При моделировании процесса прокатки слитка
сделано допущение, что скорость прокатанной части
287
слитка равна окружной скорости валков. В этом случае
скорость непрокатанной части слитка, а также длина
прокатанной и непрокатанной частей слитка, оределяют-
ся следующими соотношениями:
hb
vitnp—'jjB vnp> (13-16)
^up — (13-17)
dLm|) = vnpJ/; (13-18)
/
Lu^ = L0-~bB j vnpdt, (13-19)
61.14
где ппр, vlinp — скорости прокатанной и непрокатанной
частей слитка соответственно;
пв— окружная скорость прокатных валков;
/711р, /7>шр—высота прокатанной и непрокатанной ча-
стей слитка;
Вар, #ппр—ширина прокатанной и непрокатанной ча-
стей слитка.
На электронной модели (рис. 13-10) решение приве-
денных уравнений осуществляется на двух операцион-
ных усилителях Уь У?, которые работают в режиме ин-
тегрирования в период нахождения слитка в валках и
в режиме запоминающего звена в период выброса слит-
ка из валков. Выходные напряжения этих усилителей
пропорциональны длине слитка слева и справа от валков.
Моделирование процесса кантовки слитка выполне-
но приближенно без учета динамических нагрузок и воз-
действия линеек. Момент кантовки определяется из
условия
и
где /г,.р — высота подъема крюка кантователя.
Электронная модель (рис. 13-11) состоит
рирующего и суммирующего усилителей У] и
нелинейности БН\ и симметричного триггера СТ.
При подаче с УВМ или пульта ручного управления
сигнала на кантовку напряжение интегрирующего уси-
лителя У] увеличивается и поступает на вход блока не-
линейности, на котором набрана функциональная зави-
симость высоты подъема крючьев от угла поворота вала
288
(13-20)
из интег-
Уг, блока
двигателя. На суммирующем усилителе У2, имеющем
релейную характеристику, происходит проверка выпол-
нения условия (13-20). В момент изменения знака на-
пряжения на выходе усилителя У2 переключается триг-
гер и реле РК, с помощью которого производится
коммутация в схеме модели высоты и ширины слитка.
При имитации срыва кантовки с УВМ пли с пульта
ручного управления на вход усилителя <У2 подается
дополнительное напряжение, вследствие чего напряже-
ние на выходе усилителя У2 не меняет знака и триггер
не срабатывает.
Рассмотрим работу схемы модели клети для случая
нормального режима прокатки.
С блока начальных условий на аналоговой части
комбинированной моделирующей установки вводятся
исходные геометрические размеры слитка (высота, ши-
рина, длина, продольное и поперечное положения на
рольганге). На пульте ручного управления устанавли-
ваются данные о его весе, температуре, марке стали.
Начальное положение механизмов клети принимается
произвольным. С помощью переключателя на пульте
оператора выбирается автоматический или ручной ре-
жим управления моделью клети.
По сигналу автоматическая работа УВМ
прерывает выполняемую программу и переходит к про-
грамме управления моделью клети. Управляющая вы-
числительная машина запрашивает с пульта ручного
управления установки данные о слитке и производит
расчет программы обжатии на основании портфеля за-
казов, находящегося в памяти машины.
19—2337
289
После окончания расчета УВМ выдает управляющее
воздействие на модель привода рольгангов. Напряжение
па интеграторе У& (рис. 13-8), характеризующее рас-
стояние от конца слитка до прокатных валков, начинает
уменьшаться, имитируя перемещение слитка на роль-
ганге по направлению к валкам.
Рпс. 13 12. Осциллограмма процесса прокатки при мультипро-
граммном управлении моделями главного привода и нажимного
устройства.
Далее УВМ переходит к управлению моделями ме-
ханизмов клети, выдавая управляющие воздействия
в соответствии с программой обжатия и положением
слитка на рабочей липни.
Получая информацию о величине статического тока
прокатного двигателя, УВМ фиксирует момент захвата
слитка валками, после чего выдает управляющее воз-
действие на разгон главного привода до номинальной
скорости. В период, соответствующий нахождению слит-
ка в валках, УВМ на основе данных о скорости и пара-
метрах слитка производит расчет момента выдачи сиг-
нала на торможение привода. После выброса слитка
УВМ, получив с модели главного привода сигнал пре-
рывания, выдает команду на модель нажимного устрой-
ства и на модель линеек манипулятора. Если обжатие
в следующем пропуске должно осуществляться в другом
калибре, то по сигналу УВМ в модели клети произво-
дится имитация кантовки и перемещения слитка в попе-
речном направлении линейками манипулятора.
Использование аналого-цифровой установки оказа-
лось весьма эффективным и наглядным при детальном
анализе процессов управления клетью блюминга. В ка-
290
честве примера на рпс. 13-12 представлена осциллограм-
ма переходных процессов в главном электроприводе и
приводе нажимного устройства при прокатке слитка.
На топ же осциллограмме показаны изменения пара-
метров слитка (высоты 1г, длины прокатанной части £пр,
длины непрокатанной части £Iinp и расстояния s от зад-
него конца слитка до валков). На первом участке про-
исходит пуск главного привода, который разгоняется до
скорости захвата паахвь п установка валков в первое
заданное положение hi. Начало второго участка совпа-
дает с моментом захвата слитка валками; управляющая
машина, получив сигнал прерывания, выдает управляю-
щее воз генствие на разгон главного привода Затем
в момент времени, определяемый по специальному алго-
ритму, УВМ выдает сигнал на торможение главного при-
вода.
Второй участок заканчивается выбросом слитка; при
этом в УВМ поступает сигнал прерывания. На третьем
участке слиток перемещается по рольгангам, расстоя-
ние s сначала увеличивается, а затем уменьшается; на-
жимное устройство переставляет валки в новое поло-
жение Л2; главный привод реверсируется и разгоняется
до новой скорости захвата /г.,ачи2. Участки IV, V, VI, VII
повторяют соответственно участки // ///.
Для исследования полных алгоритмов УВМ, соот-
ветствующих реальным условиям работы клети, с пуль-
та ручного управления моделью или с помощью блока
программного переключения вводятся сигналы, имити
рующие срывы захвата слитка, буксовку, срыв раската
с крючьев кантователя и т. п
На аналоге цифровой установке могут моделиро-
ваться процессы прокатки в отдельном пропуске пли
цикле, состоящем из ряда пропусков, а также процессы
работы клети с различными слитками в течение дли-
тельного периода времени.
Особенностью алгоритма управления клетью блю-
минга является непрерывное взаимодействие УВМ
с оператором. Для моделирования этого режима на ком-
бинированной установке предусмотрена приоритетность
действий человека, работающего за пультом ручного
управления. Управляющая машина выдает воздействия
в том случае, когда командоаппарат ручного управле-
ния механизмом находится в нулевом положении. В слу-
19* 291
чае сбоя машины или ситуации прокатки, не преду-
смотренной алгоритмом управления, УВМ прекращает
выдачу управляющих сигналов на отдельный механизм
или группу механизмов и включает па пульте ручного
управления соответствующие сигнальные лампы. Управ-
ляющая машина снова переходит на режим автомати-
ческого управления по специальной команде оператора.
Комбинированная установка полностью переводится па
режим ручного управления при установке переключате-
ля в положение ручная работа.
bj
зг
a:
bj
О
§
c
CO
S
\D
co
H
£
о
я
я
ф
&
я
S’
сз
Д
я 'о
S-
ф
S
л
Рч
л
Е
3 X
си
f? 2
я
а
293
Таблица П-2
294
Параметры структурной схемы генераторов серии П в защищенном
исполнении при <7= 115 в, л = 2850 off мин
Параметры структурной схемы Тип электродвигателя
П21 П22 П31 П32 П41 П42 П51 П52
Р2, кет 1,4 1,9 3,3 4,1 5,7 7,2 11,5 15
Хл аР Хо • 1,63 2,02 2,31 2,36 1,32 1,436 1,2 1,31
Тв, сек 0,243 0,337 0,359 0,538 0,116 0,129 0,172 0,183
Т вен сек 0,448 0,6 0,655 0,962 0,22 0,24 0,333 0,351
0,0318 0,044 0,0468 0,0702 0,0192 0,0215 0,0287 0,0305
ТГЯ,.'1О3, сек 1,17 1 0,5 1 ,3 0,64 0,585 0,583 0,587
0,132 0,0995 0,0995 0,0782 0,0985 0,0802 0,0915 0,0907
ЯгО, ом ........... 10,7 7,7 4,4 3,47 2,55 1,95 1,265 0,96
Л4ГО, кГ-м 0,607 0,785 1,35 1,64 2,41 3,01 4,68 5,97
0,602 0,775 0,678 0,835 0,788 0,762 0,732 0,765
К'с 0,988 0,645 0,842 0,804 0,427 0,482 0,62 0,457
К'я 0,193 0,149 0,174 0,174 0,155 0,114 0,323 0,229
Фо-10-6, мкс 0,33 0,46 0,56 0,8 0,41 0,6 0,525 0,695
Яф 0,957 0,912 1 0,987 0,955 0,975 0,915 0,827
Таблица П-3
Параметры структурной схемы электродвигателей серии П в защищенном
исполнении при И = 220 в, /7 =3 000 об!мин
Параметры структур- ной схемы Тип электродвигателя
пи П12 П21 П22 П31 П32 П41 П42 П51 П52 | П61 П02
Pz, кет . ... . 0,7 1,0 1,5 2,2 3,2 4,5 6 8 11 14 19 25
aF Х„ 2,1 3,04 2,63 3,17 2,9 2,92 1,59 1,66 1,74 1,7 1,92 1,98
Тв. сек 0,176 0,434 0,506 0,582 0,76 1,16 0.189 0,248 0,311 0,371 0,546 0,604
7 в о > сек » . • • . 0,252 0,535 0,632 0,836 0,942 1,44 0,261 0,34 0,424 0,514 0,738 0.818
Т.в, сек 0,0265 0,065 0,076 0,0872 0,113 0,174 0,038 0,05 0,0622 0,0741 0,109 0,128
ал2? 9,05 9,92 11,5 14,6 14,4 20,1 16,2 21,6 19 25,1 23,1 26,4
Ra;lr, ом ... . 5,65 3,94 2,1 1,2 0,875 0,497 0,41 0,234 0,196 0,118 0,0965 0,0648
Л1 л о 1 к Г* • м . . . 0,237 0,341 0,512 0,751 1,09 1,53 2,05 2,73 3,75 4,77 6,48 8,52
7м. т * сек . . . . 0,562 0,638 0,764 0,896 0,922 0,975 1,02 0,992 0,975 1,02 I 1,24
К'с 0,232 0,314 0,346 0,315 0,267 0,306 0,192 0,226 0,185 0,265 0,386 0,345
К'я 0,188 0,264 0,252 0,25 0,188 0,226 0,122 0,13 0,16 0.173 0,21 0,254
Ф„ 10 -6, мкс . . 0,235 0,345 0,345 0,505 0,56 0,81 0,43 0,615 0,575 0,84 0,85 1,13
Яф ND сл 1 1 1 1 1 1 1 1 1 1 1 1
Таблица П 4
Коэффициент структурной схемы =f (ф),
учитывающий насыщение магнитной цепи машины
ф Фо со о‘ о’ ю «5 О о" 00 о’ 6‘О - - Тип машины bi о о е
0 0 0,035 0,116 0.225 0,4 0.655 1.15 2.05 Пи 0,235
0 0,09 0,2 0,374 0,595 0,81 1.355 2,08 — П12 0,345
0 0,02 0,08 0,147 0,365 0,62 I 1,75 2,83 — П21 0,345
0 0,08 0,158 0,3 0,518 0,935 1,42 2,23 . П22 0,595
0 0 0,056 0,16 0,331 0,6 1,135 1,98 3,05 . П31 0,56
* 0 0 0 0,114 0,25 0,523 1,04 2 4.22 — П32 0,81
X 0,03 0,1 0,167 0,218 0,29 0,372 0,477 0.66 — П41 0,43
0 0,03 0,076 0,119 0,214 0,362 0,55 0,755 П42 0.615
0,087 0,118 0,155 0.208 0,271 0,333 0,455 0.76 1,1 П51 0,575
0 0,03 0,048 0,09 0,135 0,26 0,465 0,79 1.24 П52 0,84
0 0,05 0,094 0,145 0,27 0,442 0.647 Ы — —— П61 0,85
0 0.011 0,062 0,118 0,19 0,343 0,57 1.07 1,62 — П62 1,13
Таблица П-5
Технические данные стабилизирующих
трансформаторов [Л. 22]
Тип трансформатора ТС-72 60 TC-144-IIO
Габаритные размеры, мм 425X 260X160 425Х 420X280
Вес, кг ................ 36 125
Полное число витков первичной обмот-
ки 4 800 2 620
То же вторичной обмотки 1 100 1 970
Число витков первичной обмотки до до-
полнительного отвода 2 970 1 970
Число витков вторичной обмотки до от-
водов 800 и 935 1 630 и 1 790
Активное сопротивление первичной об-
мотки при 20° С, ом 23,2 48
То же при другой температуре .... 10,3 27
Пределы регулирования индуктивности первичной обмотки от основного поля,
гн 95—19 50—12,5
То же вторичной обмотки, гн . ... . 5—1 28—7
Пределы коэффициента трансформации . 6,0—1,67 1,61—0,622
Длительно допустимая нагрузка первич-
ной обмотки, а ........... 0,3 1,4
То же вторичной обмотки, а ...... 1,4 1,8
296
Усредненные характеристики параметров стабилизирующих
трансформаторов ТС-72 60 и TC-U44 ИО Зависимости б, е=/(Л),
где Д — величина воздушного зазора.
Рис. П-1. Усредненные характеристики па-
раметров стабилизирующих трансформато-
ров типов ТС-72-60, ТС-144-110.
А — величина воздушного зазора.
!§ Таблица П-6
с° Основные данные магнитных усилителей серии ТУЧ при /=50гц
Характеристика Тип усилите 1Я Примечанье
А1-11 | А2-11 АЗ-11 A4-1I | A5-1I
Напряжение питания, в 36 36 36 127 127 1. Число комплектов рабочих
Номинальный ток нагрузки, а . . 0,15 0,3 0,6 0,3 0,55 обмоток равно двум для всех
Сопротивление нагрузки, ом . . . 105 65 33 275 150 типов усилителей
Сопротивление рабочей обмотки, 2 Включение рабочих обмоток
ОМ 32,2 11.4 4,35 20,6 9,8 на каждом сердечнике после-
Число витков рабочей обмотки . . 1 250 850 500 1 200 800 довательное
Номинальные токи управления, а, 3. Приведенные в таблице дан-
обмотки: ные относятся к мостовой
1 н—1к 0,093 0,165 0,283 0,152 0,224 схеме включения и схеме
2н—2к 0,013 0,0178 0,0213 0,0210 0,0260 включения по рис. 7-2
Зн—Зк 0,0044 0,0057 0,0061 0,009 0,0112
4н—4 к 0,005 0,009 0,0078 0,009 0,016
5н—5к 0,005 0,009 0,0078 0,009 0,016
6н—6к 0,005 0,009 0.0078 0,009 0,016
7н— 7 к 0,005 0,009 0,0078 0,009 0,016
где н—начало и к—конец обмотки
Максимальные сопротивления, ом,
обмотки управления:
1н— 1к 3,2 1,0 0,39 1,56 0,9
2н—2к 53 54 55 77 69
Зн—Зк 154 163 190 124 128
4н—4 к 150 113 168 184 99,5
5н—5к 150 ИЗ 168 184 99,5
6н—6к 156 73 125 100 45,5
7н—7к 156 73 125 100 45,5
Продолжение табл. П-6
Характеристика
Тип усилителя
А1-11 А2-11 АЗ-11 A4-1I A5-I1
Примечание
299
Числа витков обмоток управления: 1н— 1к 70 50 30 65 50
2н—2к 50 450 400 470 430
Зн—Зк 1 500 1 400 1 400 1 100 1 000
4н—4к 1 300 900 1 100 1 100 700
5н—5к 1 300 900 1 100 1 100 700
6н—6к 1 300 900 1 100 1 100 700
7н—7к 1 300 900 1 100 1 100 1 100
Постоянные времени обмоток у прав- ления, сек: 1н—1к
2н—2к . . — — ,—.
Зн—Зк 0,228 0,227 0,327 0,378 0,398
4н—4к 0,179 0,138 0,216 0,256 0,358
5н—5к 0,179 0,138 0,216 0,256 0,358
6н—6к 0,171 0,216 0,294 0,47 0,545
7н—7к 0,171 0,216 0,294 0,47 0,545
Коэффициенты усиления по мощ- ности для обмоток управления: I н— 1к 85.4 228 382 685 1 000
2н—2к 264 342 475 730 1 120
Зн—Зк 790 1 100 1 680 2 470 2 830
4н—4к 627 640 1 160 2 050 1 780
5н—5к 627 640 1 160 2 050 1 780
6н—6к 605 990 1 560 3 060 3 900
7н—7к 605 990 1 560 3 060 3 900
ЛИТЕРАТУРА
1. Тетельбаум И. М., Электрическое моделирование, Физ-
матгиз, 1959
2. Коган Б. Я., Электронные (моделирующие устройства и их
применение для исследования систем автоматического регулирова-
ния, Физматгиз, 1959
3. Perron О., Die Lehre von den Kettenbriichen, Leipzig und
Berlin Verlag von B. G. Teubner, 11913.
4. Шаталов А. С., Структурные методы в теории управле-
ния н электроавтоматике, Госэнергонздат, 1962
5. Becker S М., То simplify analog programming try signal
how graphs, Control Engineering, 11964, IT, № 9, p. (109—111.
6. Рюдеиберг P., Явления неустановившегося режима
в электрических установках, Гостехиздат, 1933.
7. W е b е г Е., Field transients in magnetic systems, Trans.
AIEE 193)1, vol. 50, p 1234 -1247.
8. Д у н a e в с к и й С. Я., Влияние вихревых токов иа процесс
установления потока, «Электричество», 1951, № 2.
9. Мусин Е А., Сравнение различных способов учета влия-
ния вихревых токов на процесс установления потока в машине по-
стоянного тока, ЛЭТИ имени В. И. Ульянова (Лепина), вып. XL1L
I960.
10. (В г о с 1< m а п J., Linkous G., D. С mashines response to
impact excitation, Trans AIEE, 11955, vol. 74, pt. Ill, p 500—505
11. Бахвалов Ю. А., Математическое моделирование пере-
ходных процессов синхронной машины на основе экспериментальных
динамических характеристик, Нзв. вузов, Электромеханика, 1962,
№ 2
12. Боляев И. П., Математическое моделирование электрома-
шиниых схем постоянного тока, Изв. вузов. Электромеханика,
1961, № 5.
13. S п I v е 1 у (N. Р., Robinson Р, Measurement and calcu-
lation of D C. machine armature circuit inductance, Trans. AIEE,
1960, vol. 69, pt 11, p. 1228—1237.
14. Иосифьян А. Г., Общая теория амплидина, Изв. АН
Арм. ССР, т IX, 1945.
15. Иосифьян А. Г., Каган Б. М, Шереметьев-
ский Н. Н., Теория амплидино-сельсинной следящей системы,
«Электричество», 1946, № 3.
16. Иосифьян А Г., Каган Б. М., Основы следящего при-
вода, Госэнергонздат, 1954,
300
I
17. Клобуков В. П. Электромашинные усилители, Основы
автоматического регулирования, июд ред. В. В. Солодовникова, т. II,
ч 1, Машгнз, 1959.
18. Якименко II. М., Электромашпнпый усилитель как эле-
мент регулирующей системы, «Электричество», 1949, № 9.
19. Эттингер Е. Л, Рейнгольд 1О Р., Экспериментальное
исследование динамических свойств электромашинного усилителя
и определение его параметров, «Электричество», 1956, № 3.
20. Рейнгольд Ю. Р., Устойчивость электромашинного уси-
лителя с гибкой отрицательной обратной связью, «Электричество»,
1957, № 2
21. Рейнгольд IO. Р. К методике экспериментального иссле-
дования динамических свойств автоматизированного электроприво-
да, «Электричество»,1954, № 10.
22. Рудаков Н. В., Электромашинные усилители в системах
автоматики, Госэнергонздат, 1961
23. Ши пн бе ров Л. П., О передаточной функции электрома-
шиппого усилителя с поперечным полем, «Электричество», 1956,
№ 10.
24. М и х а й л о в В. С., Рос и и Е. И., Электромашинные уси-
лители продольного поля па судах, Судпромгнз, 1963.
25. Рос1ин Е. И., Оценка влияния неравенства воздушных за-
зоров .па работу электромашинного усилителя типа «рототрол», Изв.
ЛЭТИ имени В. II. Ульянова (Лепина), вып. 42 1960.
26. М а л и ш е в с к и й В. Е., Некоторые вопросы теории трех
ступенчатых электромашинных усилителей продольного поля. Тру-
ды ЦНИИМФ, вып. 14, 1958.
27. Крылов О. А., М а з и я Л. В., Моделирование стабилизи-
рующего трансформатора, «Электричество», 1962, № 7.
28. Як и м е и к о Н. М., Электромашинный усилитель как эле-
мент регулирующей системы, «Электричество», 1948, № 9.
29. К р ы л о в О А., Мазня Л. В., Структурные схемы для
математического моделирования стабилизирующих устройств элек-
троприводов, «Электротехника», 1963, № 10.
30. Рейнгольд IO. Р„ Стае в Э. Р., Передаточная функция
системы ЭМУ-Г с емкостной гибкой обратной связью по напряже-
нию усилителя, «Электричество», 1962, № 5.
31. Глухов В. П., Якубайтпс Э. А., Моделирование дрос-
сельных магнитных усилителей. Автоматика и телемеханика, т. XX,
1959, Ns 7
32. Б о я р е в и ч В. Я., Моделирование магнитного усилителя
на электронной аналоговой машине, Доклады 4-й межвузовской
конференции по применению физического и математического модели-
рования в различных отраслях техники, сб. № 3, МЭИ, 1962.
33. Л л п м а п Р А., И е г н е в и ц к и й И. Б . Быстродействую-
щие магнитные и магнитно-полупроводниковые усилители, Госэнер-
гоиздат, 1960.
34. Сторм Г. Ф, Магнитные усилители, ИИЛ, 1957.
35. Розен блат М. А, Магнитные усилители, «Советское ра-
дио», 1960.
36. Р о з е н б л а т М. А., Магнитные усилители с самоиасыще-
нием, Госэнергонздат, 1963.
37. Цы пки и Я 3., Теория импульсных систем, Физматгиз,
1958.
301
38. Стефанович Т. X., Магнитные усилители для автомати-
зации промышленных установок, Госэпергопздат, 19Ы
39 Л ь в о в Е. Л., Передаточные функции магнитного усили-
теля с самоподмагпнчиванпем с активно-индуктивной нагрузкой на
постоянном токе. Автоматика и телемеханика, т. XXV, 19(54, № 1.
40. Каминская Д. А., Ломакин В. П.. Т и ш а к о fl-
ска я Л. Е., Электронное моделирование магнитных усилителей,
Пзв. вузов. Электромеханика, 1964, № 9.
41. Д у и а е в с к и й С. Я Моделирование магнитных усилите-
лей, «Электротехника», 1965, № 12.
42. Сторм Г. Ф., Флерти С. У., Постоянная времени трех-
фазпого магнитного усилителя. Труды 1-го международного кон-
гресса федерации но автоматическому управлению, I960, т. 4.
43 Ольшевский IO. II., Применение аналоговых вычисли-
тельных машин дли расчета электрических систем регулирования,
ЦПНТП — Прпборэлектроиром. 1962.
44. Горев А. А., Переходные процессы синхронной машины,
Госэпергопздат, 1950.
45 Важ нов А. И., Основы теории переходных процессов син-
хронной машины, Госэпергоиздат, 1960.
46. Park! R. II, Two-reacliun theory of synchronous machines,
AIEE Trans., v. 48, July section, 1929, p. 716 -730.
47. Rankin A. W., Per-unit impedances of synchronous machi-
nes, ALEE Trans., vol. 64, August 1945, p, 569 573.
48. Ibid, pt II, September 1945, p. 839 841.
49. Crary В , Power system stability, John Wiley and Sons.
50. AIEE, Test code for synchronous machines, sections 1520—
1525, 1530, 1540, 1541
51. R i a z M„ Analog computer representations of synchronous
generator in voltage-regulation studies, pt 111, vol. 75, December
1956.
52. В о f f i I V., Haas V. B., Analog computer representations
of alternator for parallel operations, Jr. AIEE, Frans, pt I (Conunu-
nication and Electronics), vol. 76, May 1957, p. 153 158.
53. Ф ii а л К о в M. Н, Расчет динамических режимов шаговых
синхронных двигателей, «Электротехника», 1964, № 9.
54. Kovacs К. Р, Losung regeliingstechnischer Frageii asyn-
chroncr imd syiichroner Maschincii mil Ailalogrechnern, Regelungs-
technik, 9, Jahrgang, September 1901, II. 9.
55. Шлыков Ф. M., Моделирование электроприводов с асин-
хронными двигателями, Пзв. вузов, 1960, № 6.
56. Васильев В. Г., Зверев В. А., Электронная модель
схемы выпрямительного моста, Пзв. вузов, Электромеханика, 1961,
№ 1.
57. Зверев В. А., Электронное моделирование электрических
ценен с выпрямительными элементами. Труды ХПИ, т. 37, 1962.
58. Хлебников С. Д.. Засыпкин V С.. Моделирование
однофазных выпрямительных мостов с 'идеальными вентилями па
аналоговых вычислительных машинах, II 1в. вузов. Электромехани-
ка, 1964. № 4.
59. Якубовский В. Я., Математическая мотель выпрями-
тельного агрегата, Пзв. вузов. Электромеханика, 1963, № 10.
60. Я к у б о в с к и й В. Я., Математическая модель инвертор-
ного агрегата, «Электромеханика», 1964, № 4
302
61. Засорин С. Н., Карш Н. Л., Кучма К- Г., Черны-
шев М. А.. Ионные и электронные преобразователи. Всесоюзное
издательско-полиграфическое объединение МПС, 1961
62. Шпайдмаи М. А., Элемент широтно-импульсной моду-
ляции для исследования систем импульсного регулирования на элек-
тронной модели, «Автоматика и телемеханика», 1956. № 10.
63. LLI н а й д м а и М. V, ЛЕщелпровапне импульсных систем
автоматического регулирования, Труды конференции по теории и
применению дискретных автоматических систем, изд. АН СССР,
1960.
64. С 11 е s п и t II., D a b u I A., L с i b i Г)., Analog computer study
of sampled data systems, Application and Industry, 1959, № 1.
65. Цы и к и и Я. 3., Дискретные автоматические системы, проб-
лемы теории и перспективы развития. Труды конференции по теории
п применению декретных автоматических систем, нзд-во АН СССР,
1960.
66. С е р ж е р с - В п к т о р о в а В. С., Бесконтактное устрой-
ство шпротно-импульсной модуляции для дискретных систем авто-
матического регулирования, «Автоматика п телемеханика», 1965,
г. ХХ\ 1, № 1
67. 3 ю з н и - 3 н и ч с п к о А. А., О г а р к ов Е. Б., Импульсный
элемент шпротной и амплитудной модуляции для вычислительных
машин непрерывного действия, «Автоматика и телемеханика», 1962,
т. XXIII, № 12.
68. Терехов В. Г., Повышение динамической точности следя-
щего привода за счет введения связей по возмущению. Сб. статей
под ред. С В. Костина, Труды МАИ. вып. 113, Оборопгпз, 1959.
69. Дога поиский С. А., Компенсация возмущений в нели-
нейных системах, «Автоматика п телемеханика». 1962. т. XX111, № 6.
70. Лернер 5. Я.. Введение в теорию автоматического регули-
рования. М.Ш1П13, 1958.
71. Фрейдзоп И. Р., Метод математического моделирования
для анализа надежности систем управления, «Электричество», 1962,
№ 1.
72. Фельдбаум А. А.. Электронная мотель люфта, Авторское
свидетельство № 101953. Бюллетень изобретений № 6 за 1964 г.
73. Фельдбаум А. А., Опуфрюк С. П., Электронная мо-
дель люфта, «Автоматика и телемеханика». 1956. т. XVII. № 6.
74. Б р о в м а н Я- С., Следящий электропривод металлорежу-
щих станков, «Электричество», 1964, № 8.
75. 3 и л ь б е р м а п Б. 3., Моделирование электроприводов,
Госэпергопздат, 1962.
76. Фельдбаум А. А., Вычислительные устройства в автома-
тических системах, Физматгпз, 1959.
77. Цыпкин Я. 3., Теория линейных пмЛулкных систем, Фпз-
матгнз. 1963.
78. Алексеев В. М., Электрооборудование н электродвпже-
пие судов, Судпромгпз. 1941.
79. Фрейдзоп II. Р., Применение метода математического
моделирования при помощи вычислительных машин непрерывного
действия для анализа системы генератор - двигатель, «Электриче-
ство», 1959, № 3.
303
80. Глузберг Э. А., О логических возможностях математи-
ческих машин непрерывного действия, Вопросы теории математиче-
ских машин, сб. первый, Физматгиз, 1958.
81. Бершадский В. Л., Калашников В. К., Кряжев-
с к и й В. В , П о п о в Г А., Электропривод гребной установки атом-
ного ледокола «Ленин», «Электричество», 1959, № 10
82. Налимов В. В. Чернова И. А., Статические методы
планирования экстремальных экспериментов, «Наука», 1965.
83. Каган Б. М. и Тер Микаэлян Т. М., Решение инже-
нерных задач -на цифровых вычислительных машинах, «Энергия»,
1964.
84. Каган Б. М., Долкарт В. М., и др., Логическая орга-
низация универсальной управляющей вычислительной машины
ВНИИЭМ-3, «Электричество», 1965, № 7.
85. Kara и Б. М, Долкарт В. М, Воителев А И.,
Б рудный Б. Д., Комплексная дискретно-непрерывная установка
для исследования процессов в системах управления с цифровыми
управляющими машинами, сб. «Теория и применение дискретных
систем», изд. АН СССР, 1961.
86. Ка г а и Б. М., Управляющие вычислительные машины для
автоматизации производственных процессов, Труды IV Всесоюзного
совещания по автоматизированному электроприводу, «Энергия»,
1965.
87. Слежановский О В Электропривод реверсивных ста-
нов горячей прокатки, Мсталлургпздат, 1961
Цена 88 коп.