/


































































































































































































































































Text
Глава первая
ЭЛЕМЕНТЫ ЭЛЕКТРИЧЕСКОЙ СИСТЕМЫ, РАСЧЕТ
РЕЖИМОВ РАЗОМКНУТЫХ СЕТЕЙ
1.1. Схемы замещения линий электропередачи
и трансформаторов
Схемы замещения элементов электрических систем под-
робно рассмотрены в [1, 2]. Сети современных электри-
ческих систем обычно трехфазные. Будем рассматривать
расчеты симметричных установившихся режимов, при ко-
рых используется расчетная схема одной фазы.
Все пассивные элементы электрических систем — воз-
душные н кабельные линии электропередачи, трансфор-
маторы и автотрансформаторы, установленные на подстан-
циях, а также реакторы и устройства продольной или попе-
речной компенсации — будем предполагать линейными.
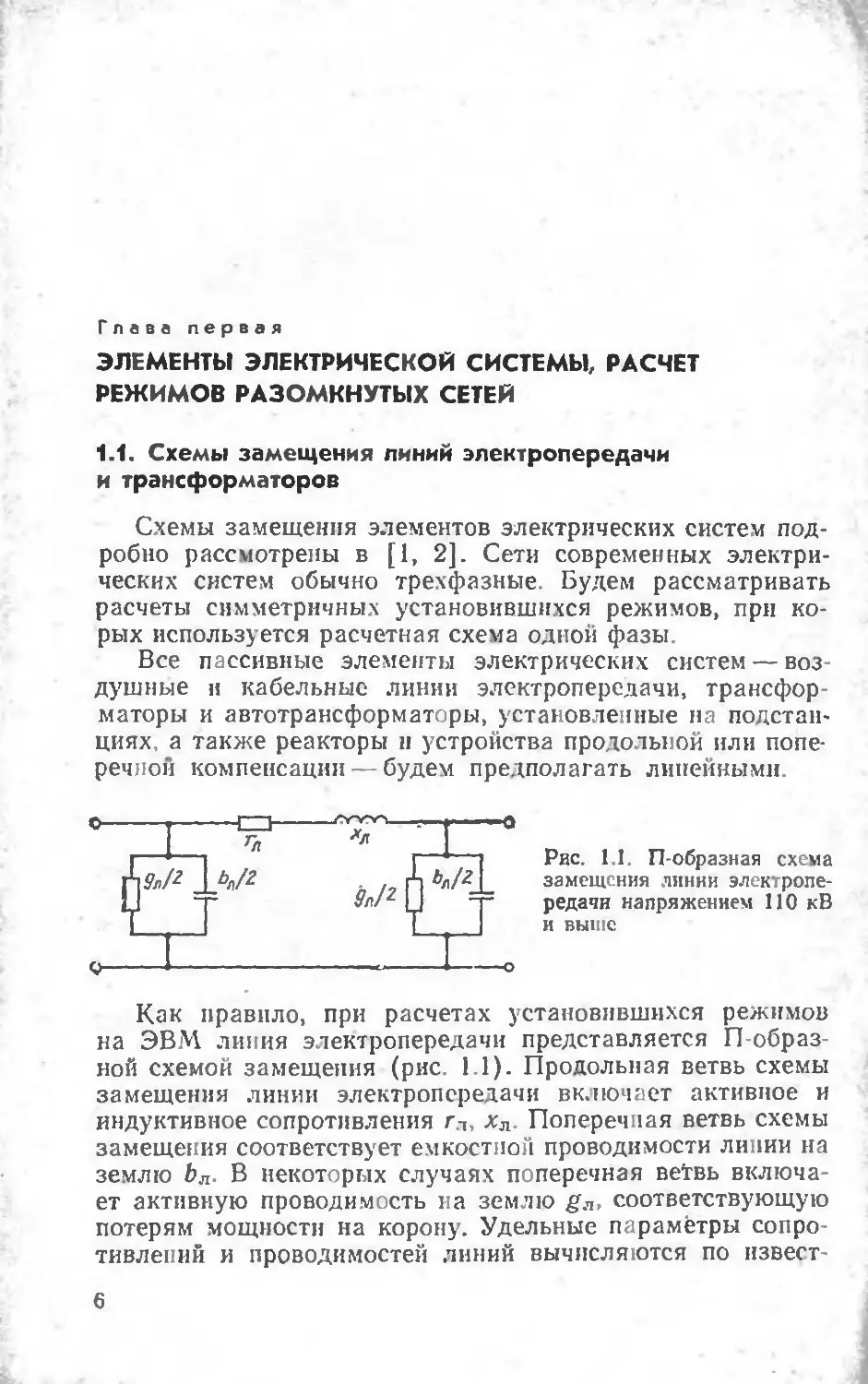
Рис. 1.1. П-образная схема
замещения линии электропе-
редачи напряжением ПО кВ
и выше
Как правило, при расчетах установившихся режимов
на ЭВМ линия электропередачи представляется П-образ-
ной схемой замещения (рис. 1.1). Продольная ветвь схемы
замещения линии электропередачи включает активное и
индуктивное сопротивления гл, хл. Поперечная ветвь схемы
замещения соответствует емкостной проводимости линии на
землю Ьл. В некоторых случаях поперечная ветвь включа-
ет активную проводимость на землю g.4, соответствующую
потерям мощности на корону. Удельные параметры сопро-
тивлений и проводимостей линий вычисляются по извест-
6
ным формулам, использующим справочные данные. Если
линия имеет длину более 300 км, то при определении со-
противлении и проводимостей ее схемы замещения необ-
ходимо учитывать значения поправочных коэффициентов,
отражающих влияние равномерной распределенности па-
раметров вдоль линии. При расчетах дальних линий элек-
тропередачи иногда используют схемы замещения в виде
пассивных четырехполюсников.
Рис. 1 2 Схемы замещения трансформаторов и автотрансформаторов
7
Для трансформаторов и автотрансформаторов обычно
используется Г-образная схема замещения (рис. 1.2), па-
раметры которой определяются по каталожным данным.
Поперечная ветвь в Г-образной схеме замещения тран-
сформатора соответствует потерям мощности в стали. При
расчетах режимов электрических систем потери в стали
трансформаторов учитываются в виде отбора мощности
(рис. 1.2,6, в) либо постоянной поперечной проводимостью
(рис. 1.2,а). Во всех современных программах расчетов
установившегося режима схема замещения электрической
системы не приводится к одной ступени напряжения, при
этом учитываются комплексные коэффициенты трансфор-
мации. Последнее соответствует предположению, что схема
замещения трансформатора (рис. 1.2,г) состоит из Г-об-
разной схемы и идеального трансформатора. Последний не
имеет сопротивлений и магнитных потоков рассеивания,
поэтому отношение напряжений на его зажимах постоянно
и равно
w = (11)
При наличии линейных регуляторов (последовательно
включенных трансформаторов) их ЭДС пересчитывается в
комплексный коэффициент трансформации (1.1).
Активные элементы в электрических системах — это ис-
точники тока, соответствующие нагрузкам потребителей и
генераторам электрических станций. При расчетах уста-
новившихся режимов электрических систем, как правило,
учитываются нелинейные характеристики источников тока.
Установившиеся режимы электрических систем с нелиней-
ными источниками тока описываются нелинейными алгеб-
раическими уравнениями — нелинейными уравнениями ус-
тановившегося режима. Возможные способы задания не-
линейных источников тока — нагрузок потребителей и
генераторов электрических станций — при расчетах уста-
новившихся режимов сложных электрических систем рас-
смотрены в § 1.2, 1.3.
1.2. Задание нагрузок при расчетах режимов
электрических сетей и систем
Параметры пассивных элементов электрической сети —
линий и трансформаторов — принимаются постоянными,
т. е. эти пассивные элементы рассматриваются как линей-
ные. Активные элементы схем замещения электрических се-
8
тей и систем — нагрузки и генераторы — представляются в
виде линейных или нелинейных источников тока. В зависи-
мости от способа задания нагрузок и генераторов уравне-
ния установившегося режима линейны или нелинейны.
Способы представления нагрузок и генераторов при рас-
четах режимов зависят от вида сети и целей расчета.
ZH=-^V7»',=const । Sn=PH+jdH = const
a) S)
9
const
U
S^P^-JUjU) I I(q)
г) t)
Рис. 1.3. Способы задания нагрузки
Нагрузка задается постоянным по модулю и фазе током
(рис. 1.3,а)
/H=/H'+//U"=const (1.2)
Такая форма представления нагрузки принимается во
всех расчетах распределительных сетей низкого напряже-
ния 6’<1 кВ. Как правило, так же задается нагрузка в
сельских и фабрично-заводских сетях среднего напряжения
t/^35 кВ. В распределительных сетях источниками пита-
ния являются шины низкого напряжения районных под-
станций. Как правило, предполагается, что ток в этих уз-
лах неизвестен. При задании нагрузки в виде постоянного
тока в узле установившийся режим описывается системой
линейных алгебраических уравнений, подробно рассмотрен-
ной в ТОЭ. Особенность этих уравнений установившегося
режима электрических сетей в том, что, как правило, от-
сутствуют ЭДС в ветвях, а в нагрузочных узлах заданы ис-
точники тока.
Задание постоянного тока при расчетах питающих се-
тей приводит к очень большим погрешностям и не является
допустимым.
9
Нагрузка задается постоянной мощностью Ра=const,
Q„=const, т. е.
Sn=PH+/QH=const, (1.3)
при расчетах установившихся режимов питающих и иногда
распределительных сетей среднего напряжения (рис. 1.3,6).
В питающих сетях SH=const задается при неизвестном
напряжении в узле. Это значит, что в узле задан нелиней-
ный источник тока, зависящий от напряжения узла:
Л, = S/IU* = (Р„ - jQJ/U* = var. (1.4)
При использовании (1.3) или (1.4) уравнения устано-
вившегося режима питающей сети нелинейны. Задание по-
стоянной мощности нагрузки соответствует многолетней
практике эксплуатации электрических сетей и систем. Одна
из причин задания S’H:=const в том, что экономические
расчеты осуществляются за полученную электроэнергию.
С другой стороны, этот способ задания нагрузки является
достаточным для электрических систем, полностью обеспе-
ченных устройствами регулирования напряжения. В этих
системах на электроприемниках поддерживается постоян-
ное напряжение вследствие широкого использования тран-
сформаторов и автотрансформаторов с регулированием
напряжения под нагрузкой, а также за счет оснащения нере-
гулируемых трансформаторов на существующих подстан-
циях линейными регуляторами или последовательными ре-
гулировочными трансформаторами (ПРТ). Кроме того,
широко используются средства местного регулирования на-
пряжения (управляемые батареи конденсаторов, синхрон-
ные двигатели и т. д.). В этих условиях при изменениях ре-
жима напряжение на нагрузке практически не меняется и
полная мощность нагрузки остается постоянной.
В действительности у потребителей не обеспечивается
поддержание постоянного напряжения. В этом случае зада-
ние постоянной мощности нагрузки потребителей приводит
к ошибкам при расчетах установившихся режимов пита-
ющих сетей. Ошибка тем больше, чем больше отличаются
напряжения потребителей от номинального.
При расчетах распределительных сетей среднего напря-
жения, если задают SH=const, то при определении потоков
мощности в линиях предполагают напряжение во всех уз-
лах равным номинальному. Это значит, что в узле задан
линейный источник тока, не зависящий от напряжения
10
узла:
Г -- /Си 4.
/ = -=———-—const
* н г г г] uvhbi.
— UHOM ‘-'ном
(1.5)
При (1.3) и (1.5) уравнения установившегося режима в
распределительных сетях линейны. Фактически задание по-
стоянной мощности нагрузки в предположении, что напря-
жение в узле равно номинальному, эквивалентно заданию
постоянного тока, т. е. (1.3) и (1.5) эквивалентны (1.2).
Нагрузка представляется постоянной проводимостью
или постоянным сопротивлением (рис. 1.3,в):
Ун = £„—/&H = const или Z,»= гн + /Хн = const. (1.6)
Такой способ эквивалентен заданию статических харак-
теристик нагрузки в виде квадратичных зависимостей от
напряжения:
и = (1.7)
Уравнения установившегся режима при (1.6) или (1.7)
нелинейны. Задание постоянной проводимости нагрузки
используется при расчете электромеханических переход-
ных процессов.
Статические характеристики нагрузок по напряжению
(рис. 1.3,г) более полно отражают свойства нагрузки, чем
задание постоянного тока, мощности или проводимости, и
не приводят к усложнению расчетов. Во многих случаях
эти характеристики не известны и возможно применение
лишь типовых. Учет статических характеристик по напря-
жению оказывает существенное влияние на результаты
расчета послеаварийных установившихся режимов, когда
напряжение сильно отличается от номинального.
Статические характеристики нагрузки по частоте долж-
ны учитываться при расчетах послеаварийных установив-
шихся режимов, в которых имеет место дефицит мощности
и частота отличается от номинальной. Такие расчеты уста-
новившихся режимов учитывают изменение частоты и при-
меняются для управления устройствами регулирования час-
тоты и противоаварийной автоматики.
На рис. 1.4 приведены статические характеристики по
напряжению для различных способов задания нагрузки.
Прямая /, параллельная оси напряжений, — Рн, QH=const;
квадратичная парабола 2—yH=const; кривые 3, 4—типо-
вые статические характеристики. При задании постоянной
проводимости нагрузки QH ближе к типовой статической
11
Рис. 1.4. Статические характерис-
тики по напряжению для различ-
ных способов задания нагрузки
мере движения электровоза)
характеристике, чем при Р„,
Qn=const, а Рн—наоборот.
При применении устройств
регулирования под напря-
жением (РПН) £/ц~ const
и полная мощность нагруз-
ки постоянна.
Нагрузка представляет-
ся случайным током (рис.
1.3,д) при расчетах электри-
ческих систем с большой
долей электротяговой на-
грузки. Электрифицирован-
ный транспорт — это специ-
альный вид нагрузки, у ко-
торой во времени (по
меняются значение и место
подключения. Такая нагрузка представляется в виде /(<?),
где q — случайная величина. Подобные расчеты применя-
ются для анализа режимов электрических систем Восточ-
ной Сибири и в особенности для систем электроснабжения
БАМа. При этих расчетах учитывается несимметричный
или несинусоидальный характер нагрузки.
1.3. Представление генераторов при расчетах
установившихся режимов
Для синхронного генератора простейшая схема заме-
щения и соответствующая ей векторная диаграмма приве-
дены на рис. 1.5.
Напряжение на шинах генератора меньше его ЭДС,
т. е. U<Eq. Сопротивление генератора и его ЭДС учитыва-
ются при расчетах переходных процессов. В расчетах ус-
тановившихся режимов электрических сетей и систем гене-
ратор, как правило, представляется источником тока, под-
ключенным к шинам генераторного напряжения.
Источники тока, соответствующие генераторам электри-
ческих станций, могут задаваться при расчетах на ЭВМ
установившихся режимов следующим образом.
Постоянные мощности Pr=cosnt, Qr=const. Задание
постоянной активной мощности соответствует реальным
условиям работы генераторов в электрической системе с
учетом действия системы регулирования частоты. Задание
постоянной реактивной мощности не соответствует реаль-
ному управлению в электрической системе, так как на ге-
12
нераторах нет регуляторов реактивной мощности. Задание
Qr=const часто бывает необходимо при расчетах устано-
вившихся или оптимальных режимов, например в тех слу-
чаях, когда Qr необходимо принять равным его предель-
ному значению. Обычно для узлов генерации при фиксиро-
ванных Рг и Qr неизвестны модуль и фаза напряжения уз-
ла Ur и бг (либо действительная и мнимая составляющие
напряжения Ur' и Ur").
Рис. 1.5. Схема замещения (а) и векторная диаграмма (б) синхронного
генератора
Постоянные активная мощность и модуль напряжения
Pr=const, (7r=const. В этом случае переменными явля-
ются, как правило, реактивная мощность и фаза напряже-
ния. Узлы со свободной реактивной мощностью при Рг=0
соответствуют синхронным компенсаторам, а при Рг=#=0 —
генераторам. Такие узлы называют балансирующими по
реактивной мощности. Задание постоянного модуля напря-
жения при Q=var соответствует реальным условиям рабо-
ты генераторов или синхр иных компенсаторов с регуля-
торами напряжения, поддерживающими (7r=const.
Постоянные модуль и фаза напряжения t7r=const,
6r=const. В таком узле переменные — это активная и ре-
V активная мощности, т. е. Pr=var, Qr=var. Этот способ
задания исходных данных соответствует узлу, одновремен-
но балансирующему по активной и реактивной мощностям
и базисному по напряжению. Такой узел будем называть
балансирующим.
Введение балансирующего узла—это допущение1, вы-
званное особенностью нелинейных уравнений установивше-
гося режима. Эта особенность состоит в том, что невоз-
1 В этом «одно нз отличий линейных уравнений, где исполь-
зование балансирующего узла — не допущение, и его выбор не влияет
на результат расчета.
13
можно точно задать мощности во всех узлах, удовлетворя-
ющие условию баланса Р в системе, так как потери мощ-
ности не могут быть точно определены до расчета устано-
вившегося режима.
При расчетах установившихся режимов, а также при их
оптимизации возможно задание нескольких балансирую-
щих узлов. Каждый из них соответствует станции, ведущей
по частоте, т. е. принимающей на себя небалансы активной
Таблица I. I
Рид
узла
Заданы
Неизвестны
Примечание
Н
а
г
Р
У
з
к
а
Рц< Qu
Я> Ьн
U, S (или U', U")
Г
е
н
е
Р
а
т
о
Р
Рг. Qr
Рг, Ur
(У Г,
Ur, 8Г (или Ur', Uг”)
Qr, 8Г (или Qr, Uг', Ur")
Рг. Qr
Отличается знаком
от Ри, Qu—const для
нагрузки
Балансирующий по
Q узел
Баланс ирующий
узел
мощности и поддерживающей при этом постоянную часто-
ту в системе. Введение одного или нескольких балансиру-
ющих узлов соответствует предположению о том, что час-
тота в электрической системе постоянна. Учет изменения
частоты, при котором в системе отсутствуют балансирую-
щие узлы (шины бесконечной мощности), ниже не рас-
сматривается.
Способы задания исходных данных в узлах приведены
в табл. 1.1. В качестве переменных при решении уравнений
установившегося режима можно использовать: 1) модули
и фазы напряжений в узлах U и б; 2) вещественные и мни-
мые составляющие напряжений U' и U".
14
1.4. Расчет режима линии электропередачи при заданной
мощности нагрузки
Задано напряжение в конце линии £72=const. Извест-
ны (рис 1.6,а) мощность нагрузки S2, напряжение U2, со-
противление и проводимость линии Zi2=rt2-j-jx 2, &12?Надо
определить напряжение Lf\, мощности в конце и в начале
продольной части линии S*2> S”2, потери мощности ASi2,
мощность в начале линии Si Для проверки ограничений по
нагреву иногда определяют ток в линии ZI2.
Рис 1 6 Схема замещения линии (а) и вект рные диаграммы напряже-
ний (б и в)
Расчет состоит в последовательном определении от кон-
ца линии к началу неизвестных мощностей и напряжений
при использовании первого закона Кирхгофа и закона Ома.
Будем использовать мощности трех фаз и линейные напря-
жения Емкостная мощность трех фаз в конце линии
-»«,. = 3<£»ф = -£7ЛА,. (1.8)
15
Мощность в конце продольной части линии по первому
закону Кирхгофа
£ = <L9>
Потери мощности в линии
5к2
as,, = з/2 z„ - угг z„. (1.Ю)
—1 —12—12 I/,2 —
Ток в начале и в конце линии одинаков. Мощность в
начале продольной части линии больше, чем в конце:
SH = SK 4- AS,,, (1.П)
где ASj2 — потери мощности в линии.
Линейное напряжение в начале линии по закону Ома
равно
— S*KZ
t/i = У.+ /3/„Z„ = (1.12)
— — — — — 2
Емкостная мощность в начале липин
= (М3)
Мощность в начале линии
<114>
Задано напряжение в начале линии U\=const. Извест-
ны (рис. 1.6,а) S21 (71, Zi2=ri2-Hxi2 и bi2- Надо определить
(7s_. Si2K, Sj2H, ASJ2, Si.
В данном случае невозможно, как в предыдущем слу-
чае, по выражениям (1.8) — (1.14) последовательно от кон-
ца линии к началу определить неизвестные токи и напря-
жения по первому закону Кирхгофа и закону Ома, так как
(72 неизвестно. Нелинейное уравнение узловых напряжений
для узла 2 имеет следующий вид:
У,А(U) -S-JUf. (1.15)
Это уравнение можно решить и найти неизвестное на-
пряжение (72, а затем найти все мощности по выражениям
(1.8)-(1.Г1), (1.13), (1.14). Способы решения нелинейных
уравнений узловых напряжений будут рассмотрены в гл. 3.
Можно осуществить расчет аналогично первому случаю
в два этапа.
16
1-й этап. Предположим, что
и.=ит, (1.16)
и определим потоки и потери мощности аналогично выра-
жениям (1.8—1.11), используя (1.10):
С")
(1.18)
^., = 5^,,/^; (1.19)
.£=.£,+ Д£«- <L20>
2-й этап. Определим напряжение U2 по закону Ома, ис-
пользуя поток мощности , найденный на первом эта-
пе. Для этого используем закон Ома в виде (1.12), но вы-
разим ток_/12 через _S“s и Ut:
U.-U.-Vb!ttZlt = U1-S;“Z1,/yi*. (1.21)
Потоки мощности на первом этапе определены прибли-
женно, поскольку в (1.17) и (1.19) вместо U2 использовали
i/ном. Соответственно напряжение U2 на втором этапе так-
же определено приближенно, так как в (1.21) использу-
ется приближенное значение jS^2, определенное на первом
этапе.
Возможно итерационное повторение расчета, т. е. по-
вторение первого и второго этапов для получения более
точных значений мощностей и напряжений. Как правило,
при проведении расчетов вручную, а не на ЭВ/М такое уточ-
нение не требуется.
1.5. Падение и потеря напряжения в линии
На рис. 1.6,6 приведена векторная диаграмма для ли-
нейных напряжений в начале и в конце линии Ui и U2.
Падение напряжения — геометрическая (векторная) раз-
ность между комплексами напряжений начала и конца
линии. На рис. 1.6,6 падение напряжения — это вектор
АВ, т. е.
ЙВ = — U2 = (1.22)
Сахалинская
областная
библиотека
2—6189
17
Продольной составляющей падения напряжения ДС/Гг
называют проекцию падения напряжения на действитель-
ную ось или на напряжениеU2t ДУ* = АС.
Поперечная составляющая падения напряжения W12 —
это проекция падения напряжения на мнимую ось: 5УГг =
= СВ.
Таким образом
- С4 = КЗ/13Z12 = ДУ* + /8У*. (1.23)
Потеря напряжения — это алгебраическая разность
между модулями напряжений начала и конца линии. На
рис. 1.6,6 —U2=AD. Если поперечная составляющая
Й/*2 мала (например, в сетях U^. 110 кВ), то можно при-
ближенно считать, что потеря напряжения равна продоль-
ной составляющей падения напряжения.
Расчет режимов электрических сетей ведется в мощно-
стях, поэтому выразим падение напряжения и его составля-
ющие через потоки мощности в линии.
Известны мощность и напряжение в конце линии (рас-
чет напряжений в начале линии по данным конца). Выра-
зим ток в линии /12 в (1.23) через мощность в конце про-
дольной части линии SK и напряжение Уг, т. е. подставим
——— 12
в (1.23)
= (Ь24)
В результате получим
1 iv \ _ Р\2Г1Я + Q12XW
----£-----fo+rtJ-----------— +
+ = (1.25)
Приравняв в (1.25) действительные и мнимые части,
получим выражения продольной и поперечной составляю-
щих падения напряжения по данным конца линии:
^12v12 — 12
<4
(1.26)
(1.27)
18
Напряжение в начале линии
(1.28)
где иг известно; ДГ7}г. 8^12 определяем из (1.26) и (1.27).
Соответственно модуль и фаза напряжения в начале
линии
и, = У (Уг+д№)!+№)!; (1-29)
Л//к
tg6 =------. (1.30)
г/2 + Д^2
Определение напряжения в начале линии по данным
конца по выражениям (1.28), а также (1.26) и (1.27) экви-
валентно использованию закона Ома.
Известны мощность и напряжение в начале линии (рас-
чет напряжения в конце линии по данным начала). Напра-
вим U\ по действительной оси, т. е. примем, что U\ = U\
(рис. 1.6,в). На рис. 1.6,в изменилось положение осей по
сравнению с рис. 1.6,6. Продольная составляющая падения
напряжения ДС/Н12 = ВС' — это проекция падения напряже-
ния на действительную ось или на U\. Поперечная состав-
ляющая падения напряжения 6Г/”2=ДС'— это проекция
падения напряжения на мнимую ось. Один и тот же вектор
падения напряжения АВ проектируется на различные оси.
Поэтому
ДГ712 Д^12> 8£7|2
Если выразить ток в линии Лг через известные в данном
случае мощность в начале продольной части линии _^”2И
ГД, то получим выражения, аналогичные (1.26), (1.27):
Д^ = —!2 12 12 ; (1 .31)
8t/& = Р»*».~(?ЁГ». (1.32)
Напряжение в конце линии
£/, = £/,-(1.33)
где Ut известно; ДС/"2, &/“ определяются (1.31), (1.32).
2*
19
Модуль и фаза Г72 равны
U, = /(tf.-W+W; (1.34)
*пн
tg5 =--(1.35)
Определение напряжения в конце линии по данным на-
чала по выражениям (1.33), а также (1.31), (1.32) экви-
валентно применению закона Ома в виде (1.21).
1.6. Расчет разомкнутой сети (в два этапа) при заданных
мощностях нагрузки и напряжении источника питания
Расчет двух линий в два этапа аналогичен расчету, опи-
санному в § 1.4 для одной линии. Известны (рис. 1.7,а)
мощности нагрузок S/t (& = 2; 3), сопротивления и прово-
димости линии Zki=rhj+jXkj и bk/ 23), напряже-
ние источника питания U\— напряжение в начале линии
12. Надо определить неизвестные напряжения в узлах Uk
(k=2\ 3), потоки и потерн мощности в линиях S^, S^,
AS/tJ 23), а также мощность источника питания
Sb
Именно такой способ задания данных наиболее часто
встречается в расчетах режимов питающих сетей. Узел 1—
балансирующий. В этом узле заданы модуль и фаза напря
жения, а неизвестны активная и реактивная мощности, т. е.
t/i=const, S!=var.
Расчет можно осуществить методом итераций пли по-
следовательных приближений. Каждая итерация или шаг
состоит из двух этапов.
1-й этап. Принимаем все напряжения в узлах равными
t/ном и определяем по первому закону Кирхгофа потоки и
потери мощности в линиях от последней нагрузки к источ-
нику питания при
14 = k = 2; 3. (1.36)
Определим — iQ*s3' AS!3, *$"з по выражениям, анало-
гичным (1.17) — (1.20), далее, используя первый закон Кирх-
гофа, аналогично определим потоки и потерн мощности
в линии 12— iQK , 5х, Д5.„ SK .
20
't-й. этап 5ц S*j при Uk~UmM
2-й этап UK по 8^
Рис. 1.7. Иллюстрация расчета в два этапа для двух линий и разветв-
ленной сети
При расчете линии 12 используем выражения (1.17),
(1.19), (1.20), а первый закон Кирхгофа для узла 2 (рис.
1.7.Й), аналогичный (1.18), имеет следующий вид:
где 5гн — мощность в начале линии 23. Это выражение со-
впадает с (1.18), но включает в правой части кроме на-
грузки S2 еще мощность в начале линии 23 S211 (рис. 1.7,а).
Найденные на первом этапе потоки и потери мощности
в линиях приближенные, так как определены при (1.36).
2-й этап. Определим по закону Ома напряжения в уз-
лах от источника питания к последней нагрузке. Будем ис-
цользовать потоки мощности, найденные на первом этапе.
’По данным начала Ux и S” по выражениям (1.31) —
(1.33) определим напряжение в конце линии 12 U2. Затем
аналогично по данным начала U2 и S" найдем напряже-
ние U3. 4 ? й .
Все напряжения Ь\ найдены неточно, так как исполь-
зовались приближенные значения мощностей в линиях,
Для уточнения можно сделать второй шаг, т. е. повторить
21
оба этапа, и т. д. Как отмечалось в § 1.4, при расчетах
вручную, а не на ЭВМ такое уточнение обычно не исполь-
зуется.
Расчет любой разомкнутой сети с одним источником пи-
тания при заданных мощностях нагрузок и напряжения ис-
точника питания может осуществляться в два этапа анало-
гично расчету двух линий. На первом этапе при (1.36) по
первому закону Кирхгофа определяются потоки мощностей
в линиях. Расчет ведется от нагрузок в конце линий к ис-
точнику питания (рис. 1.7,6). Последовательность расчета
линий, например, может быть следующей: 45; 34; 36; 23\
78; 27; 12.
На втором этапе по закону Ома определяются напряже-
ния в узлах Uk последовательно от источника питания к
нагрузкам в конце линий. Используются потоки мощности
первого этапа н выражения, аналогичные (1.31)— (1.33),
т. е. расчет ведется по данным начала.
Последовательность расчета напряжений в узлах для
схемы на рис. 1.7,6 может быть, например, следующей: Г72,
и,, и„ иъ. U., U„ иа.
_Л ' > ’ _*> _б * _« ’ _в
1.7. Определение токов, потоков и потерь мощности
в линии при известных напряжениях на ее концах
Расчет установившихся режимов сложных электричес-
ких систем методом узловых напряжений состоит в опреде-
лении напряжений узлов и определении токов, потоков и
потерь мощности в ветвях. Напряжения узлов Uh опреде-
ляются в результате решения системы уравнений узловых
напряжений. Методы решения этих уравнений подробно
рассмотрены в гл. 2, 3. Определение Uk для сложных сис-
тем даже при применении ЭВМ — трудоемкая задача, тре-
бующая значительных затрат машинного времени. После
того как напряжения всех узлов Uh найдены, можно легко
определить для каждой ветви ток по закону Ома, а также
потоки и потери мощности. Фазный ток в продольной части
линии (рис. 1.8,а) по закону Ома равен
'« = (137>
где Uh, Uj — линейные напряжения узлов k и /; Z/tj=
=rkj+jXhj — сопротивление ветви /г/; Y_k! = — проводи-
мость ветви kj.
22
Рис. 1 8 Схема замещения линий электропередачи для расчета токов,
потоков и потерь мощности
Ток, в начале линии kj, т. е. текущий от узла k к узлу /
ток /л)л,, по первому закону Кирхгофа равен
/_Шм = Lh+%, = + y^VtiibMki, (1.38)
где I'ckj — фазный емкостный ток в начале линии kj;
b(k)kj — емкостная проводимость на землю линии kj,
b(k)kj=b0l/2 (см. § 1.1).
Ток в конце линии kj, т. е. подтекающий к узлу / от
узла k ток /(ЛЛ , равен
'</>»/ 0 39)
Мощность трех фаз в начале продольной части линии
kj, т. е. текущая по продольной части линии от узла k к
узлу j (рис. 1.8,6), равна
з;-vw; =^-да;- ('-40)
Мощность в конце продольной части линии kj, т. е. под-
текающая по продольной части линии от узла k к узлу /,
23
равна
Л=и,/;,=у,<1Л1>
Потери мощности в продольной части линии kj, т. е.
в сопротивлении Z/</, равны разности потоков мощности в
начале и в конце линии, т. е.
(>-42)
В последнем выражении учтено, что произведение ком-
плексно-сопряженных чисел равно квадрату их модуля.
Мощность в начале линии kj, текущая от узла k к узлу
/, можно получить из (1.38):
Мощность в конце линии kj, т. е. подтекающая к узлу /
от узла k, в соответствии с (1.39) равна
*/<>/• = =4 (£~Ж+"’А>*г <144>
Потери мощности в линии kj ASkf включают как потери
в продольной части линии Z^, так и реактивную мощность,
генерируемую в начале и в конце линии. Потери AS^/ мож-
но определить как разность потоков мощности в начале и
в конце линии kj, т. е.
ч - $<)) Ч = (£» - •£,) -
(1.45)
Если просуммировать эти выражения для всех ветвей
сложной системы, то можно получить выражение для сум-
марных потерь мощности электрической системы.
В тех случаях, когда в схеме замещения линии учиты-
вается и активная проводимость на землю g(h)kj или g^tj
(рис. 1.8,в), в выражениях (1.38), (1.39), (1.43) — (1-45)
следует -i-jb^hj или +/Ь(ЛМ заменить на комплексные про-
водимости на землю Yk(hn=gwkj+jb(k)kj или
=g(3)kj+jb(j)kj- Расчет установившегося режима методом
узловых напряжений на ЭВМ включает определение токов,
потоков и потерь мощности для каждой линии по приведен-
ным выше выражениям.
24
Глава вторая
ЛИНЕЙНЫЕ УРАВНЕНИЯ УЗЛОВЫХ НАПРЯЖЕНИЙ
И МЕТОДЫ ИХ РЕШЕНИЯ
2.1. Схемы электрических систем, линейные и нелинейные
уравнения установившегося режима
Схемы электрических систем и их элементы. Электри-
ческая система — частный случаи электрической цепи.
Схемой замещения (или просто схемой) электрической
цепи называют графическое изображение электрической
цепи, показывающее последовательность соединения
участков и отображающее свойства рассматриваемой
электрической цепи. Электрическая цепь и соответственно
ее схема содержат ветви, узлы и в общем случае кон-
туры.
Ветвью называют участок электрической цепи, в кото-
ром в любой момент времени ток имеет одно и то же зна-
чение.
Узлом называют место соединения двух или большего
числа ветвей. Одной из ветвей, соединяющихся в узле, мо-
жет быть источник тока.
Контур — это любой замкнутый путь, проходящий по
нескольким ветвям. Если схема электрической цепи не со-
держит контуров, то она называется разомкнутой. Схема,
содержащая хотя бы один контур, называется замкнутой.
В теории цепей различают так называемые устрани-
мые узлы и контуры. Устранимый узел — это такой, в ко-
тором соединяются только две ветви, устранимый контур
образуется только двумя ветвями. Такие узлы и контуры
можно легко устранить, применяя известное положение
о последовательном и параллельном соединениях, если в
число ветвей, соединяющихся в данном узле, не входят
нелинейные источники тока [3]. В дальнейшем будем го-
ворить о неустранимых узлах и контурах.
Элементы электрических схем делятся на активные и
пассивные.
Пассивные элементы схем замещения (сопротивления и
проводимости) создают пути для прохождения электриче-
ских токов. Пассивные элементы (ветви) электрических
систем обычно разделяют на продольные и поперечные.
Поперечные пассивные элементы — это ветви, вклю-
ченные между узлами схемы и нейтралью, т. е. узлом,
имеющим напряжение, равное нулю. Продольные — это
ветви, соединяющие все узлы, кроме узла с напряжением,
25
равным нулю, т. е. продольные ветви не соединены с ней-
тралью. Продольные ветви включают активные и индук-
тивные сопротивления линий электропередачи и обмоток
трансформаторов, емкости устройств продольной компен-
сации и т. д. Поперечные пассивные элементы соответст-
вуют проводимостям линий электропередачи на землю, ре-
акторам и конденсаторам, включенным на землю, и т. д.
В некоторых случаях потери в стали трансформаторов
представляются в схеме замещения как поперечные про-
водимости.
Активные элементы схем замещения — источники ЭДС
и тока. Для них наиболее характерным является то, что
они определяют напряжения или токи в точках присоеди-
нения этих элементов в соответствующей цепи независи-
мо от ее остальных параметров. Источники ЭДС в расче-
тах электрических систем используются редко. Поэтому
ниже в основном речь будет идти об источниках тока.
Под источником тока в расчетах электрических систем
понимают активные элементы схемы, соответствующие на-
грузкам потребителей и генераторов электрических стан-
ций. Именно эти активные элементы потребляют и гене-
рируют мощность.
«Линейные и нелинейные уравнения установившегося
режима. Основными параметрами рассмотренных выше
пассивных элементов электрических цепей являются со-
противление г, индуктивность L и емкость С. Для просто*
ты изложения нс будем учитывать взаимную индуктив-
ность. Параметры цепи почти всегда в той или иной сте-
пени зависят от тока и напряжения. Сопротивление г ме-
няется при изменении тока, поскольку при этом изменя-
ется температура проводника. Емкость конденсатора мо-
жет зависеть от напряжения, а индуктивность катушки —
от тока. Однако во многих случаях эта зависимость на-
столько слабая, что ею можно пренебречь и считать па-
раметры пассивных элементов цепи не зависящими от то-
ка и напряжения. В этих случаях характеристики элемен-
тов электрической цепи (зависимости напряжения от тока
в сопротивлении г, заряда от напряжения на конденсато-
ре с емкостью С, потокосцепления от тока катушки с ин-
дуктивностью L) являются прямыми линиями. Такие эле-
менты цепи называются линейными. В линейных элемен-
тах сопротивление г, емкость С и индуктивность L посто-
янны, т. е. нс зависят от тока и напряжения этих элемен-
тов. В теоретической электротехнике, как правило, рас-
четы установившихся режимов ведутся при нс мсняющих-
26
ся по модулю и фазе источниках тока. Установившиеся
режимы цепей, содержащих только линейные пассивные
элементы и постоянные, не изменяющиеся по модулю и
фазе источники тока, описываются линейными алгебраи-
ческими уравнениями — линейными уравнениями устано-
вившегося режима. Такие цепи называются линейными
электрическими цепями. Этот случай соответствует расче-
ту установившихся режимов электрических систем при за-
дании постоянных по модулю и фазе токов нагрузки по-
требителей и генераторов во всех узлах электрической
системы.
Если параметры пассивных элементов электрической
цепи существенно зависят от тока или напряжения, т. е.
характеристики этих элементов нелинейны, то и сами та-
кие элементы называются нелинейными. В теоретической
электротехнике электрическая цепь, содержащая хотя бы
один нелинейный элемент, называется нелинейной.
В расчетах установившихся режимов электрических
систем нелинейность пассивных элементов, как правило,
не учитывается. В этом смысле продольная часть схемы
замещения всегда линейна. В то же время при расчетах
установившихся режимов электрических систем учитыва-
ются нелинейные характеристики источников тока. Нели-
нейность источников тока соответствует заданию в узлах
нагрузки потребителей или генераторов с постоянной
мощностью либо заданию нагрузки се статическими ха-
рактеристиками, определяющими зависимость мощности
от напряжения. Установившиеся режимы электрических
систем с нелинейными источниками тока описываются не-
линейными алгебраическими уравнениями — нелинейными
уравнениями установившегося режима.
2.2. Уравнения узловых напряжений
Установившимся режимом электрической цепи при по-
стоянных источниках тока и напряжения называют такое
состояние, при котором ток в любой ветви и напряжение
в любом узле остаются неизменными в течение сколь угод-
но длительного времени [4].
Установившийся режим электрических систем и цепей
рассчитывают при различных способах задания исходных
данных в зависимости от физической сути и цели расчета.
В настоящей главе будем рассматривать наиболее часто
встречающийся и наиболее простой случай. Известны па-
раметры всех пассивных элементов электрической цепи,
27
т. е. вес сопротивления и проводимости. Кроме того, зада-
ны постоянные значения источников тока во всех узлах,
кроме одного — балансирующего, и все ЭДС, а также на-
пряжение одного узла — базисного. Надо определить на-
пряжения п узлов и токи в т ветвях.
В общем случае базисный и балансирующий узлы мо-
гут не совпадать. Как правило, при расчетах режимов
электрических систем предполагают, что эти узлы совпа-
дают. В дальнейшем для простоты изложения будем счи-
тать, что базисным и балансирующим является один и
тот же узел (п-|-1), который для краткости будем назы-
вать балансирующим.
Число независимых уравнений по первому закону
Кирхгофа равно числу независимых узлов п. Уравнение
первого закона Кирхгофа для (п-{-1)-го узла является
следствием уравнений для остальных п узлов и не входит
в число независимых уравнений.
Если в качестве неизвестных принять п узловых на-
пряжений, то установившийся режим можно описать толь-
ко узловыми уравнениями, вытекающими из первого зако-
на Кирхгофа и закона Ома. Уравнения узловых напряже-
ний следуют из первого закона Кирхгофа, если все токи
в ветвях выразить через узловые напряжения и проводи-
мости ветвей. Число уравнений узловых напряжений рав-
но числу независимых узлов п. При этом напряжение од-
ного из узлов, (п-М)-го, может быть задано произволь-
но и, в частности, принято равным нулю.
Решив п уравнений узловых напряжений с п неизвест-
ными, определим напряжения всех узлов. Затем вычислим
токи в ветвях, которые однозначно определяются из зако-
на Ома через известные напряжения узлов. Такой! путь
эффективнее, чем решение системы т уравнений первого
и второго законов Кирхгофа для определения т незави-
симых токов в ветвях, так как число ветвей в электриче-
ских системах, как правило, значительно больше числа
узлов.
Уравнения узловых напряжений при напряжении ба-
лансирующего узла С/б=О для сети постоянного тока, на-
пример, из четырех узлов можно записать в следующем
виде:
У„£/1+У1Д,+ У1Д. = Л; )
у.Д+у^+ЛА^ (2.1)
ЛА+у.А+ЛА =Л. J
28
где Ik — ток /г-го узла; Uh — неизвестное узловое напряже-
ние, т. е. напряжение между /г-м узлом и балансирующим,
совпадающим с базисным; Ykj (при k=/=j)—взаимная
проводимость узлов k и /; У/<л— собственная проводимость
узла k. Взаимная проводимость узлов / и k равна взятой
с обратным знаком сумме проводимостей ветвей, соединя-
ющих эти узлы. Если между двумя узлами ист ветви, то
соответствующая взаимная проводимость равна нулю. Ес-
ли узлы k и / соединены одной ветвью с сопротивлением
7.1 и проводимостью У/, то
У^=-У/=-1///- (2.2)
Собственная проводимость Л-го узла Ykk равна сумме
проводимостей всех ветвей, соединенных с узлом k (в их
число входят и ветви, соединяющие узел с нулевым на-
пряжением с узлом Л). Если таких ветвей нет, то собст-
венная проводимость узла Ум равна сумме всех взаимных
проводимостей Ykj, взятой с обратным знаком. Пусть с уз-
лом k соединено т ветвей, тогда
т я + 1
= (2-3>
/=1 /=1
где (п-|-1) —общее число узлов в сети, из которых п не-
зависимы.
Для рассматриваемой сети из четырех узлов, напри-
мер,
1=2
При расчетах режимов электрических систем задаю-
щий ток Ц. равен алгебраической сумме источников тока,
подключенных к узлу k. Источники тока, соответствующие
генерации или потреблению, имеют разные знаки. При
наличии в цепи источников ЭДС в ток Л-го узла /Л входит
алгебраическая сумма произведений ЭДС ветвей, соеди-
ненных с узлом k, на проводимости этих ветвей.
Иногда в литературе (2.1) называют уравнениями уз-
ловых потенциалов [4, 5].
Будем использовать матрицу собственных и взаимных
проводимостей узлов
'Уц
Y Уд
1 11 1 13
У У
1 22 *23
У У
1 32 -* 33 -1
(2.4)
29
и вектор-столбцы токов в узлах I и узловых напряже-
ний U
(2-5)
Учитывая правило умножения матриц, систему урав-
нений узловых напряжений (2.1) можно записать в мат-
ричной форме следующим образом:
YyU=l. (2.6)
Для цепи переменного тока узловые напряжения, то-
ки в узлах, собственные и взаимные проводимости уз-
лов— комплексные величины. Если аналогично (2.4) и
(2.5) использовать матрицу собственных и взаимных про-
водимостей узлов Yy с комплексными элементами Ул/, а
также вектор-столбцы фазных токов в узлах I и узловых
междуфазных напряжений U с комплексными элемента-
ми Ik и Uh, то систему уравнений узловых напряжений
для цепи переменного тока можно записать в матричной
форме: ’
YyU--=|/3~I. (2.7)
В справедливости этого матричного выражения легко
убедиться, если принять во внимание правило умножения
матриц с комплексными элементами.
При решении на ЭВМ уравнения узловых напряжений
для сети переменного тока, как правило, приводятся к си-
стеме действительных уравнений порядка 2п, где п — чис-
ло независимых узлов. Для этого представляют матрицы
и вектор-столбцы с комплексными элементами в виде
сумм матриц и вектор-столбцов с действительными эле-
ментами (при этом надо в виде такой суммы представить
каждый комплексный элемент и учесть правило сложения
матриц):
Yy = Gy-/By;
U = U,4-jU,/;
Подставив (2.8) в (2.7), получим
(Gy —/Ву) (U' + /U") = ГЗ (!' -J- Д").
(2-8)
(2.9)
30
Запишем отдельно действительные и мнимые матрич-
ные слагаемые в последнем уравнении:
GyU'4-ByU" = ] ЗТ; (2.10)
—ByU' + GyU" = ]/3‘Г'. (2.11)
Таким образом, систему уравнений узловых напряже-
ний для цепи переменного тока можно записать в .матрич-
ном виде следующим образом:
(2.12)
Выражение (2.12) как раз и является системой дейст-
вительных уравнений порядка 2п и содержит 2п неизвест-
ных действительных и мнимых составляющих узловых на-
пряжений (Uk, Ui").
Уравнения узловых напряжений при напряжении ба-
лансирующего узла иб#=0 для сети постоянного тока из
четырех узлов можно записать в следующем виде:
ад + УМ + Y13U3 + У, = Л;
ад 4- у2 А 4- у, а 4- у 2 А = /2;
ГзА 4- УМ 4- УМ 4- У3 А = /,;
УМ 4- у4 а 4- у4 А 4- у4 А = /4.
(2.13)
Полная система уравнений узловых напряжений, ана-
логичная (2.13), может быть записана в .матричном виде
для сети постоянного тока из (п4-1)-го узла следующим
образом:
YyrUE = I£, (2.14)
где YyS — полная матрица узловых проводимостей поряд-
ка (п4-1); 11', — вектор столбцы токов в узлах и на-
пряжений узлов порядка (п4*1).
Сумма всех токов в узлах равна нулю. Полная матри-
ца узловых проводимостей является симметрической и вы-
рожденной, если не учитываются проводимости на землю.
Вырожденность полной матрицы YyS следует, напри-
мер, из (2.3). Полная система уравнений узловых напря-
жений (2.13) или (2.14) линейно зависима; независимыми
являются лишь п уравнении.
Уравнения (2.13) или (2.14) решаются обычно следу-
ющим образом. Один из узлов системы, например (п+
4-1)-й, принимается за балансирующий. Напряжение в
этом узле (7я+| предполагается известным, а ток 1п+\ ра-
31
вен сумме токов остальных п узлов. Токи в остальных п
узлах заданы, а напряжения неизвестны. Вместо вырож-
денной системы с полной матрицей YyJ: (2.13) или (2.14)
решается система п независимых уравнений узловых на-
пряжений с неполной матрицей ¥у. Эту систему уравнений
узловых напряжений с неполной матрицей получают из
(2.13) или (2.14) отбрасыванием последней строки и за-
писывают в виде, когда известные слагаемые (7бУлб в ле-
вой части переносятся вправо, т. с.
y„i/i+у, jj,+Y„u, = - у,А; 1
У „и, + у.Л+уйу, - /, - у Л; <2|5>
У*и,+у,а+уму, - _ Yxufl, J
или в матричном виде
YyU = I—\6U6, (2.16)
где k-и элемент вектор-столбца Уб(7б равен т. с.
y<fJ6 = У„ 1/б
У* и<>
(2-17)
Если в системе уравнений узловых напряжений учесть,
что Ум в соответствии с (2.3) можно выразить аналогич-
но, например
У1б=-Ум—У.2- У.з,
то (2.15) можно переписать в виде
У х х - и6)+(иг - иб)+У13 (Us -0^ = 1^ |
Уг1 (^ - Ц>)+у к - <4) + у к 04 - иб) = /2;
У31 +у» (и, - и<)+Лз <и3 - иб) = /3. I
Будем использовать вектор-столбец (U—U6), k-й эле-
мент которого равен разности напряжений /г-го и балан-
сирующего узлов, т. с. для электрической системы из че-
тырех узлов
L —U6 =
^х-^б
иа-иб
(2J8)
Тогда уравнения узловых напряжений при U6=/=0
(2.15) в матричной форме будут иметь вид
Yy(U—U6) = l.
(2-19)
32
Рассмотренное выше уравнение (2.6) —это частный
случай (2.19) при U6=0.
Изменим напряжение балансирующего узла и всех ос-
тальных узлов на одно и то же значение при заданных
токах в узлах. В этом случае не изменяются разности на-
пряжений между узлами. Ток в ветви, соединяющей два
узла, равен разности напряжений между узлами, умно-
женной на проводимость ветви. Соответственно при из-
менении напряжений всех узлов на одно и то же значе-
ние в линейной цепи не изменятся токи в ветвях, потоки
мощности и потери в ветвях, а также суммарные потери
в цепи.
Можно показать, что напряжения в узлах, токи в вет-
вях и т. д. не зависят от того, какой узел линейной элек-
трической цепи выбирается в качестве балансирующего
по току, так как сумма токов во всех (л-f-l) узлах равна
нулю. Поэтому выбор балансирующего узла, а также его
напряжения (например, £7б=0 или (7б=/=0) не оказывают
влияния на результат расчета установившегося режима
линейных электрических систем. В этом смысле линейные
уравнения узловых напряжений (2.6) и (2.19) эквива-
лентны.
Для нелинейных уравнений установившегося режима
выбор балансирующего узла и его напряжение оказыва-
ют влияние на результат расчета режима. Поэтому при
нелинейных задающих токах в узлах уравнения (2.6) и
(2.19) не эквивалентны. При расчетах установившегося ре-
жима электрических систем используются уравнения уз-
ловых напряжений (2.19), так как обычно в качестве ба-
лансирующего узла применяется станция, ведущая по ча-
стоте, напряжение которой, конечно, не равно нулю (см.
гл. 3).
Для сети переменного тока система уравнений узловых
напряжений может быть записана в виде комплексной си-
стемы порядка п, аналогичной (2.16):
YyU = /3I-Yct76, (2.20)
где Y6t/6— вектор-столбец, йй элемент которого равен
УЛбС7б [см. (2.17)].
Используя (2.8), можно записать (2.20) в виде систе-
мы действительных уравнений порядка 2л, аналогичной
(2.12), например при (7б"=0, следующим образом:
Г Gy
L-By
иб’
U6.
(2-21)
3—6189
33
где вектор-столбцы gcJJc и beU6 имеют вид, аналогичный
(2.17), т. е. k-ii элемент этих векторов соответственно ра-
вен gktUb и —^лб^б; gh6, bkQ — активные и реактивные
взаимные проводимости узлов k и б.
Матрица собственных и взаимных проводимостей узлов
Yy играет важную роль в расчетах установившихся режи-
мов электрических систем. Обычно в качестве исходных
данных для расчетов установившихся режимов электриче-
ских систем задают сопротивления продольных ветвей
(линий электропередачи, трансформаторов и т. д.), про-
водимости на землю (проводимости линий электропереда-
чи, реакторов и т. д.), а также информацию о топологиче-
ской схеме (схеме соединения) электрической системы.
Информация о топологической схеме, как правило, содер-
жит номера узлов, соединенных ветвями. Элементы мат-
рицы проводимостей Yy рассчитываются на ЭВМ. Такой
расчет очень прост и состоит в определении взаимных про-
водимостей и в вычислении собственных проводимостей,
равных взятой с обратным знаком сумме взаимных прово-
димостей для ветвей, соединенных с данным узлом.
Матрица собственных и взаимных проводимостей сим-
метрическая, т. е. Важнейшим свойством матри-
цы Yy является очень большое количество нулевых эле-
ментов. Как отмечалось выше, если узлы не соединены
между собой ветвью, то их взаимная проводимость равна
нулю. В электрической системе каждый узел связан лишь
с небольшим количеством соседних узлов. Пусть, напри-
мер, в электрической системе из 100 узлов первый узел
связан с десятью другими. Тогда в первой строке и в пер-
вом столбце матрицы Yy десять ненулевых проводимо-
стей, а остальные девяносто равны нулю. Как правило,
большинство узлов в электрических системах соединены
со значительно меньшим количеством узлов, чем десять.
В большинстве отечественных и зарубежных программ
расчета установившегося режима предполагается, что пре-
дельное число ветвей в 1,5 раза больше числа узлов. Это
означает, что с помощью программы можно рассчитывать
режимы систем, содержащих, например, не более 300 уз-
лов и 450 ветвей. С учетом симметричности матрицы не-
обходимо запомнить столько ненулевых взаимных прово-
димостей, сколько ветвей в электрической системе, и
столько собственных узловых проводимостей, сколько уз-
лов в системе. Информация о топологической схеме, как
правило, требует столько машинных слов оперативной па-
мяти, сколько ветвей в системе.
34
Из сказанного легко убедиться, насколько меньше па-
мяти требуется для запоминания ненулевых элементов
матрицы Yy в сравнении с тем случаем, когда пришлось
бы запоминать все элементы этой матрицы, число кото-
рых равно л2. Возможность использовать наличие нуле-
вых элементов в матрицах уравнений является важнейшим
свойством, которое надо учитывать при сопоставле- .
иии различных методов расчетов установившихся режи-
мов. В заключение отметим, что уравнения узловых на-
пряжений нашли очень широкое применение при расчетах
установившихся режимов сложных электрических систем
на ЭВМ [6].
2.3. Метод Гаусса
Точные и итерационные методы. Методы решения ли-
нейных уравнений установившегося режима можно разде-
лить на две группы: точные (или прямые) и итерацион-
ные (или приближенные).
Точными или прямыми методами называются такие,
которые в предположении, что все вычисления ведутся
точно (без округлений), позволяют получить точные зна-
чения неизвестных в результате конечного числа опера-
ций. Практически все вычисления ведутся с округления-
ми, поэтому и значения неизвестных, полученных точным
методом, будут содержать погрешности. Из точных мето-
дов ниже рассмотрим метод Гаусса и решение линейных
уравнений установившегося режима с помощью обратной
матрицы.
Итерационными (приближенными) методами называ-
ют такие, которые даже в предположении, что вычисления
ведутся без округлений, позволяют получить решение си-
стемы уравнений лишь с заданной точностью. Точное ре-
шение системы в случае применения итерационных мето-
дов может быть получено теоретически как результат бес-
конечного итерационного процесса. В данной главе рас-
смотрим два итерационных метола: простую итерацию и
метод Зейделя. Эти методы не всегда сходятся при реше-
нии линейных уравнений установившегося режима.
Метод последовательного исключения (метод Гаус-
са)— о^дип из наиболее распространенных способов ре-
шения систем линейных алгебраических уравнений [7, 8].
Если точно выполнить все действия метода Гаусса, то по-
лучим точное решение системы. Алгоритмы, с помощью
которых может быть реализован метод Гаусса, различны.
3*
35
Рассмотрим один из них — алгоритм единственного деле-
ния (или алгоритм с обратным ходом [8]). Запишем си-
стему трех уравнений узловых напряжений (2.1) в следу-
ющем виде:
у1ДЧ-у1АЧ-УЛ = Л;
У^ + У^+УА
у3д+у3А+Узз^8
= Л;
= Л-
(2.22)
Пусть Упт^О (ведущий элемент) либо в противном
случае переставим уравнения так, чтобы это условие вы-
полнялось. Разделим первое уравнение системы (2.22) на
Ун и получим
V 14“612(72_Ь^13^3=^1»
(2.23)
где Ьц=Уц/У„ (/=2,3); bi = h/Yn.
Теперь, пользуясь уравнением (2.23), можно исклю-
чить неизвестное U\ из второго и третьего уравнений си-
стемы (2.22). Для этого исключения нужно умножить
уравнение (2.23) на У21 и У31 и вычесть результаты соот-
ветственно из второго и третьего уравнений системы
(2.22). В результате получим систему двух уравнений
с двумя неизвестными
(2.24)
где коэффициенты У^'Л /Р вычисляются по формулам
(*. / = 2, 3); /Р = /»-Г*А-(2-25)
Из системы (2.24) можно также исключить перемен-
ную (7г» как исключили U\ из системы (2.22). Для этого
разделим коэффициенты первого уравнения системы
(2.24) па ведущий элемент УгР и получим
^“Ь^гз^з—^2,
(2.26)
где
у(1) /(I)
'23 _ Z2
у(1) * " у(1)’
7 22 7 22
Затем умножим (2.26) на У^Р и вычтем результат из
второго уравнения системы (2.24). При этом получим
уравнение
rW. = /?’ или U, = А.
(2.27)
36
где
rg> = УЙ’ - Y$b„. I? - - YJ>,. (2.28)-
Таким образом, система (2.22) приведена к эквива-
лентной системе с треугольной матрицей
(2.29)
l/3 = 6s. .
Из системы (2.29) последовательно найдем значения
всех трех неизвестных:
С/8 = Ь^\ 1
У, = 6,-6, A; I (2.30)
У> = 6.-6>А-Ь1А- J
Решение по методу Гаусса распадается на два этапа:
прямой ход — приведение системы (2.22) к эквивалент-
ной системе (2.29) с треугольной матрицей;
обратный ход — вычисление неизвестных в соответст-
вии с (2.30). Аналогично (2.23) — (2.30) можно осущест-
вить прямой и обратный ходы метода Гаусса при решении
системы линейных уравнений узловых напряжений любо-
го порядка [7, 8].
При расчете установившегося режима матрица узло-
вых проводимостей симметрическая. Соответственно мат-
рицы систем, вычисляемые при реализации метода Гаус-
са [например, системы (2.24)], также симметрические.
Это обстоятельство можно использовать для экономии па-
мяти [7]. Кроме того, вследствие симметричности элемен-
тов матрицы Yy количество арифметических операций мо-
жет быть сокращено почти вдвое при реализации тех ва-
риантов метода Гаусса, когда ведущие элементы
выбираются на диагонали.
Общее количество арифметических действий в методе
Гаусса несколько меньше п3, где п — число неизвестных.
Машинное время, необходимое для выполнения арифме-
тических операций метода Гаусса, пропорционально кубу
числа неизвестных.
При, расчете режима сети переменного тока по методу
Гаусса на ЭВМ система комплексных уравнений, как
правило, заменяется эквивалентной системой действитель-
ных переменных порядка 2п, где (М-1)—число узлов в
системе (2.12).
37
Достоинство метода Гаусса состоит в том, что при его
применении гарантируется получение решения в резуль-
тате выполнения определенного числа арифметических
операций, причем число необходимых операций определя-
ется только порядком системы п. В этом состоит преиму-
щество метода Гаусса и других точных методов перед
приближенными, или итерационными. Для последних чис-
ло необходимых арифметических вычислений зависит не
только от порядка системы, но и от заранее неизвестного
количества шагов, за которое сойдется итерационный про-
цесс.
Недостаток метода Гаусса состоит в необходимости
пересчитывать матрицу коэффициентов системы уравне-
ний. Для расчета сложных электрических систем эффек-
тивное применение метода Гаусса невозможно без исполь-
зования специальных методов, учитывающих слабую за-
полненность матрицы узловых проводимостей. К сожале-
нию, такой учет алгоритмически достаточно сложен и,
кроме того, его применение не полностью устраняет недо-
статки метода Гаусса, связанные с необходимостью ис-
пользования большой памяти ЭВМ при расчетах режи-
мов сложных электрических систем. Подробнее этот во-
прос рассмотрен в гл. 4.
Замечание 1. При реализации метода Гаусса осущест-
вляется построчный контроль всех вычислений с помощью
контрольных сумм, представляющих собой суммы элемен-
тов строк матрицы исходной системы (2.22), включая сво-
бодные члены. Если над контрольными суммами в каж-
дой строке выполнять те же операции, что и над осталь-
ными элементами этой строки, то при отсутствии ошибок
в вычислениях элементы столбца контрольных сумм рав-
ны суммам элементов соответствующих преобразованных
строк. Это обстоятельство используется для контроля
прямого хода (7].
Для контроля обратного хода параллельно с системой
(2.22) решается контрольная система, отличающаяся
только правыми частями. Иными словами, в контрольной
системе те же коэффициенты, что в системе (2.22), но сво-
бодные члены заменены на контрольные суммы. Решение
контрольной системы должно отличаться от решения ис-
ходной системы (2.22) на единицу [7].
Замечание 2. Схема последовательного исключения
неизвестных Гаусса позволяет одновременно решать лю-
бое количество систем с одинаковыми коэффициентами
при неизвестных и различными столбцами свободных чле-
38
нов. В этом случае элементы эквивалентной системы с
треугольной матрицей (2.29) не меняются и необходимо
для каждого столбца свободных членов лишь вычислить
соответствующий ему столбец в правой части эквивалент-
ной системы (2.29). Именно так решаются система (2.29)
и контрольная система, отличающиеся свободными чле-
нами. Это обстоятельство можно эффективно использо-
вать при расчете оптимальных режимов электрических си-
стем, а также при определении матрицы собственных и
взаимных сопротивлений узлов.
2.4. Расчет с помощью матрицы собственных и взаимных
сопротивлений узлов Zy
Использование обратной матрицы для решения систе-
мы линейных алгебраических уравнений не эффективно с
вычислительной точки зрения при большом количестве не-
известных. Применение обратной матрицы может быть це-
лесообразно в тех случаях, когда одна и та же система
решается очень большое количество раз с различными
правыми частями. Рассмотрим использование обратной
матрицы на примере уравнений узловых напряжений.
Решение уравнений установившегося режима с по-
мощью обратной матрицы при напряжении балансирую-
щего узла, равном нулю. Для определенности рассмотрим
систему действительных уравнений узловых напряжений
третьего порядка (2.1) для сети постоянного тока. Как от-
мечалось в § 2.2, эта система может быть записана в мат-
ричном виде
YyL) = I, (2.31)
где Yy — матрица собственных и взаимных проводимостей
узлов; I — вектор-столбец свободных членов (токов в уз-
лах); L) — вектор-столбец узловых напряжений, который
необходимо определить в результате решения системы
(2.31); Uk (k=l, 2, 3)—элемент вектор-столбца; U — на-
пряжение k-ro узла при напряжении балансирующего уз-
ла, равном нулю.
Матрица собственных и взаимных проводимостей уз-
лов Yy — не особенная, т. е. ее определитель не равен ну-
лю. Это положение известно, начиная со времен Кирхго-
фа. Математическое доказательство невырожденности мат-
рицы узловых проводимостей удалось получить сравни-
тельно недавно (см. библиографию в [6]). Для всякой
неособенной матрицы существует обратная. Обратной к
39
матрице Yy называют такую матрицу
Yy-i=Zy, (2.32)
что YyZy=ZyYy=E, (2.33)
где Е— единичная матрица:
’1 0 0
Е = 0 1 0 (2.34)
0 0 1
Матрицу Zy называют матрицей собственных и взаим-
ных сопротивлений узлов. Умножим обе части матрично-
го уравнения узловых напряжений (2.31) слева на обрат-
ную матрицу Yy-,=Zy и получим
ZyYyU=ZyI (2.35)
или, учитывая (2.35),
U=ZyI. (2.36)
Формула (2.36) дает решение уравнения узловых на-
пряжений (2.31) с помощью обратной матрицы Zy.
Решение уравнений узловых напряжений с помощью
обратной матрицы при напряжении балансирующего уз-
ла, не равном нулю, определяется выражением
U—U6=ZyI (2.37)
или U=U6+Zyl, (2.38)
где Uo — вектор-столбец, каждый элемент которого равен
напряжению балансирующего узла, т. е.
Г^1
иб
К J
При расчете режимов электрических систем перемен-
ного тока напряжения узлов определяются по выраже-
нию, аналогичному (2.38), в котором все матрицы и век-
тор-столбцы состоят из комплексных элементов:
u = u6+/3zyL (2-39)
Это соответствует тому, что напряжения узлов, токи в
узлах, а также элементы матрицы Zy — комплексные ве-
личины в случае расчета режима системы переменного то-
ка. Обычно напряжение балансирующего узла принима-
40
ется равным действительной величине. Поскольку это не
обязательно, для общности в (2.39) вектор-столбец Ue>
каждый элемент которого равен напряжению балансиру-
ющего узла, записан как комплексный.
Матрица собственных и взаимных сопротивлений уз-
лов Zy, обратная по отношению к матрице собственных и
взаимных проводимостей узлов Yy, используется при мно-
гократных расчетах режимов электрических систем и осо-
бенно при расчетах коротких замыканий. Обычно матри-
ца собственных и взаимных сопротивлений узлов опреде-
ляется с помощью метода единичных токов. В соответст-
вии с этим методом собственное сопротивление первого
узла Zu и взаимные сопротивления первого и всех
остальных узлов Zj/ равны напряжениям в узлах элек-
трической системы при напряжении балансирующего
узла, равном нулю, и задании единичного тока в узле 1 и
токов, равных нулю, во всех остальных узлах, кроме ба-
лансирующего. Таким образом, узловые сопротивления
Zi} (/=1,2,3) равны узловым напряжениям, полученным
при решении уравнений узловых напряжений при зада-
нии единичного тока в узле 1, т. е.
= 1;)
YaUt + Y„U, + YaUs = 0-, 1 (2.40)
Y,tUt + Y„U. + Y„U, = Q. I
Соответственно узловые сопротивления Z2j и Z3j опре-
деляются из расчета установившегося режима при зада-
нии единичного тока в узлах 2 или 3.
Легко убедиться, что метод единичных токов есть не
что иное, как обычно используемый в вычислительной ма-
тематике метод определения обратной матрицы. Обраще-
ние матрицы сводится к решению трех систем уравнений
вида (2.40) с тремя неизвестными. Все эти системы име-
ют одну и ту же матрицу коэффициентов Yy и отличаются
лишь столбцами свободных членов I. Как отмечалось в
Замечании 2 § 2.3, решение этих трех систем по методу
Гаусса можно объединить, рассматривая одновременно
три столбца свободных членов. Эффективность такого
объединения очевидна, поскольку при решении системы
по методу Гаусса основные вычисления необходимо про-
водить над матрицей коэффициентов системы [6, 7].
41
При определении обратной матрицы Zy но методу еди-
ничных токов уравнения узловых напряжений, аналогич-
ные (2.40), можно решить не только по методу Гаусса, но
и с помощью итерационных методов, например по Зен-
делю.
Определение обратной комплексной матрицы можно
осуществить решением системы действительных уравне-
ний шестого порядка, полученных в результате замены
комплексных уравнений узловых напряжений системой
действительных уравнений удвоенного порядка (2.12).
Возможно применение специальных методов обращения
комплексных матриц, использующих блочную структуру
выражения (2.12) [7].
Поскольку матрица собственных и взаимных проводи-
мостей узлов симметрическая, то и обратная матрица соб-
ственных и взаимных сопротивлений узлов также симмет-
рическая. Последнее справедливо как для действитель-
ных, так и для комплексных матриц Zy.
Достоинства и недостатки расчета линейных уравне-
ний установившегося режима с помощью матрицы собст-
венных и взаимных сопротивлений. Как отмечалось выше,
матрица узловых проводимостей содержит очень много
нулей, т. е. Yy слабо заполнена. Большое количество ну-
мДей в этой матрице определяется тем, что если узлы k и /
нс связаны между собой, то взаимная проводимость этих
узлов Ykj равна нулю. В то же время в матрице собствен-
ных и взаимных сопротивлений узлов Zy нет нулевых
элементов, т. е. эта матрица полностью заполнена. Отсут-
ствие нулевых элементов в матрице существенно понижа-
ет эффективность ее использования при расчетах устано-
вившихся режимов электрических систем. Применение
этой матрицы для расчетов режимов сложных электриче-
ских систем с большим количеством узлов приводит к не-
обходимости применения специальных методов эквивален-
тирования (см. гл. 4), требует использования ЭВМ с боль-
шой оперативной памятью либо увеличивает время расчетов
за счет многократного использования внешней памя-
ти. Указанные недостатки вытекают из необходимости оп-
ределять и, главное, запоминать матрицу Zy, в которой
нет нулевых элементов.
Применение обратной матрицы для решения действи-
тельной системы порядка п>4 требует много времени и
редко употребляется на практике. Применение формул
Крамера для решения линейной системы нецелесообраз-
42
но уже при ir>3 [7]. Соответственно применение матри-
цы Zy для выполняемого лишь один раз расчета устано-
вившегося режима менее эффективно, чем исключение
Гаусса, даже без учета нулевых элементов в матрице уз-
ловых проводимостей.
Практика расчетов режимов электрических систем при-
водит к необходимости многократного расчета режимов
для одной и той же электрической системы при изменении
токов в узлах либо при незначительных изменениях схе-
мы соединения и параметров электрической сети. В таких
многократных расчетах режимов применение матрицы Z,
имеет важное преимущество, которое состоит в возможно-
сти быстрой корректировки матрицы, учитывающей не-
большие изменения схемы соединений или параметров
сети. Разработаны эффективные методы такой быстрой
корректировки матрицы Zy. Применение матрицы Zy эф-
фективно при расчетах режимов электрических систем с
тяговой нагрузкой, а также при расчетах токов короткого
замыкания.
2.5. Простая итерация и метод Зейделя
Точные методы решения системы линейных уравнений
установившегося режима сложных электрических систем
при большом числе неизвестных могут оказаться трудно
реализуемыми. При расчетах режимов сложных электри-
ческих систем метод исключения Гаусса и тем более при-
менение обратной матрицы может привести к необходи-
мости использования большого объема памяти ЭВМ или
недопустимой длительности расчетов. В этих условиях
для расчета установившегося режима иногда удобнее ис-
пользовать приближенные или итерационные методы, ча-
сто называемые методами последовательных прибли-
жений.
Простая итерация — простейший из итерационных ме-
тодов. Рассмотрение простой итерации важно для пони-
мания сути применения итерационных методов расчета
установившихся режимов электрических систем. Для оп-
ределенности вначале ограничимся рассмотренной выше
системой уравнений третьего порядка (2.22).
Предполагая, что диагональные коэффициенты Уй#=0
(i= 1,2,3), разрешим первое уравнение системы (2.22) от-
носительно (71, второе — относительно U2, а третье — от-
носительно U3.
43
Тогда получим систему, эквивалентную (2.22):
bltU, + btiU,+b,; ]
U, = bnU,+ bJJ,+b,; I (2.41)
^3 — МЛ + ^32^2 4-feS, J
где
bk/=—YkilYkk при k^=j\ bk=IklYkh\ ft, i,j= 1,2,3. (2.42)
Зададим начальные значения неизвестных LG(0), Uiw,
t/3(0)- Подставляя эти значения в правые части системы
(2.41), получим первые приближения £Л(1), (7г(|), ^з0). Вы-
числение первого приближения неизвестных соответствует
первому шагу итерационного процесса. Полученные пер-
вые приближения могут быть таким же образом использо-
ваны для получения вторых, третьих и т. д.; (i-f-l)-e при-
ближения неизвестных можно получить, используя значе-
ния переменных, полученных на предыдущем, Лм шаге:
Uy+'t-bJ^ + bJJ^ + b.-, ]
У/+'> =
<Л<‘+,> = bnu,<‘> + bjj.<‘l+b,. J
Введем матрицу и вектор-столбцы
(2.43)
Диагональные элементы матрицы В равны нулю, т. е.
bhk=0, а недиагональные элементы (т. е. bkj при ft=#j)
совпадают с коэффициентами систем (2.41) или (2.43).
Учитывая правило умножения и сложения матриц, систе-
му (2.41) можно записать в матричной форме:
U = BU-j-b. (2.44)
Аналогично итерационное выражение (2.43) можно за-
писать в матричном виде:
и(Ж)=ви<*)+Ь. (2.45)
Элементы матрицы В — безразмерные величины, а
элементы вектора b имеют размерность напряжений.
Итерационный процесс, определяемый выражением
(2.43) или (2.45), называется простой итерацией.
Для сети переменного тока комплексные уравнения уз-
ловых напряжений представляются в виде системы дей-
ствительных уравнений. Затем к полученной системе дей-
44
ствительных уравнений применяется метод простой итера-
ции. В принципе возможно применение простой итерации
по выражению (2.43) или (2.45) к комплексным числам.
При практических расчетах на ЭВМ такой путь; как пра-
вило, не используется.
Итерационные методы дают возможность получить по-
следовательность приближенных значений неизвестных,
сходящуюся к точному решению системы. Если элементы
матрицы В удовлетворяют определенным условиям, то
процесс простой итерации сходится к точному решению
системы U при любом начальном значении U(o>. Сходи-
мость к решению означает, что
lira = U. (2.46)
/-♦00
Таким образом, точное решение получается лишь в ре-
зультате бесконечного итерационного процесса. Всякий
вектор U(,), определяемый на i-м шаге, является прибли-
женным решением системы (2.22). Вектор погрешности
этого приближенного решения равен
e(O=U—U<*>- (2.47)
При практических расчетах точное решение системы
неизвестно и о погрешности решения судят не по е(Л, а по
разности между значениями переменных на t-м и (i-j-l)-M
шагах, т. е. по вектору поправок
ди<‘>=и(Ж)—geo. (2.48)
Часто считают, что итерационный процесс сошелся, ес-
ли поправки для всех переменных меньше наперед задан-
ной величины е, т. е. при
|Д^>|<е, k= !,...,п, (2.49)
где п — порядок решаемой системы.
В общем случае это не всегда верно [7]. О сходимости
следует судить не только по поправкам Д(7л, но и по не-
вязкам. Невязка для первого уравнения системы (2.22),
соответствующая значению напряжений на i-м шаге
(72(,), W>, равна результату подстановки этих напряже-
ний в первое уравнение системы, т. е.
p1(O=y1If/IO)4_y12/72(O_py13f/3(/)_/I. (2.50)
Повязка уравнений узловых напряжений соответству-
ет небалансам тока в узлах.
45
Если подставить в (2.50) U\, U2t &з— точное решение
системы (2.22), то невязка pi равна нулю. Более того, в
этом случае равны нулю и невязки рг, рз для второго и
третьего уравнений системы (2.22). Если итерационный
процесс еще не сошелся (t/i<°, U2(i\ 4/з<0— приближенное
решение), то невязки pi(Z), р2(/), рз0) не равны нулю. Чем
дальше значения напряжений Uk<i} от решения, тем боль-
ше небаланс тока. Вектор невязок, т. е. небалансов то-
ка, равен результату подстановки вектора U™ <в систему
(2.22), т. е.
₽<'»=
Р/‘>'
р/> =ууй(/) —I,
р/>
(2.51)
где Yy и I — матрица и вектор-столбец системы (2.22).
Если итерационный процесс сошелся, то все p*(i) должны
быть меньше наперед заданной величины, т. е.
1рл<«|<6, k=\,...,n. (2.52)
Подробнее вопросы анализа сходимости итерационных
методов рассмотрены в гл. 5.
Метод Зейделя, который, как правило, отличается
более быстрой сходимостью, получил значительно боль-
шее распространение, чем метод простой итерации. Ме-
тод Зейделя представляет собой незначительную моди-
фикацию простой итерации. Основная его идея в отличие
от простой итерации заключается в том, что найденное
(i-f-l)-e приближение (k—1)-го напряжения C7a_i<*+1)
сразу же используется для вычисления следующего k-ro
напряжения 6V'+1>. Иными словами, полученное (Z-H)-e
значение напряжения U\ сразу же используется для вы-
числения (i-f-l)-го значения напряжений U2, U3 и т. д.
Таким образом, для системы (2.22) итерационный про-
цесс метода Зейделя описывается следующим выраже-
нием:
у,('+>> = + bt,us<‘> +А А‘'> +А; 1
=АД<‘+’1 +АЛ7'’+А; г С2-53)
+б„1А<'+,) +А-)
По методу простой итерации (i-|-l)-e приближение
k-ro напряжения £А(‘+1) для системы n-го порядка вычис-
ляется по следующему выражению:
Uk^>J%bkJU^ + 2 bkjU^ + bk. (2.54)
j=l /=*+1
46
По методу Зейдсля (/'4-1)-е приближение k-ro напря-
жения вычисляется так:
k— 1 п
W‘+,)+ 2 (‘2.55)
1-1 i-k+i
Можно показать, что метод Зейделя эквивалентен про-
стой итерации (2.45), но с другой матрицей и другим век-
тором. Для этого представим матрицу В в виде суммы
двух матриц:
В=В14-В2, - (2.56)
где в матрице Bi равны нулю элементы, лежащие на диа-
гонали и выше ее, а в матрице В2— элементы, лежащие
на диагонали и ниже ее. Для системы третьего порядка
(2.22)
ООО 0 blS
В. = 0 0 , Вг = 0 0 biS (2.57)
.ь31 ь„ 0_ ООО
Учитывая правила умножения и сложения матриц,
итерационный процесс Зейделя (2.53) можно записать в
матричном виде следующим образом:
U (<•+!)= В! B2U<O4-b,
где
U'i+1) =
(//+’)
uji+,y
U<‘>
£/,<*>
(У/)
(2.58)
Перенесем в (2.53) первое слагаемое из правой части
в левую и получим
(Е—B1)U<‘+,)=B2U(‘>+b. (2.59)
Умножим последнее выражение слева на матрицу
(Е—Bi)-1 и получим выражение итерационного процес-
са Зейделя в матричном виде:
U(W)= (Е- В,)-1 B2U<->+(E—ВО-'Ь. (2.60)
Из ’(2.60) очевидно, что метод Зейделя эквивалентен
простой итерации (2.45), но с матрицей, характеризую-
щей итерационный процесс,
3=(Е— В,)-^
(2.61)
47
и вектор-столбцом
з=(Е—BI)-*b.
(2.62)
При расчете установившегося режима методом Зейде-
ля элементы матриц, входящих в правую часть выраже-
ний для матрицы 3 и вектора з (2.61), (2.62), определя-
ются аналогично (2.42). Сходимость метода Зейделя оп-
ределяется свойствами матрицы 3, характеризующей ите-
рационный процесс, аналогично тому, как сходимость
простой итерации определялась свойствами матрицы В.
Как правило, метод Зейделя надежнее и быстрее сходит-
ся, чем метод простой итерации. Более надежная сходи-
мость означает, что метод Зейделя сходится в тех слу-
чаях, когда сходится простая итерация, и может схо-
диться, когда простая итерация расходится. Теоретически
из этого правила возможны исключения [6]. При расче-
тах режимов электрических систем не встречались такие
случаи, /когда сходимость методов Зейделя оказывалась
менее надежной и быстрой, чем для простой итерации.
Кроме того, метод Зейделя требует несколько меньшей
памяти, чем простая итерация, так как необходимо пом-
нить только один вектор переменных. Действительно, при
решении по Зейделю, например, уравнений узловых на-
пряжений сразу после вычисления (i-f-l)-e приближение
k-ro узлового напряжения засылается в то место
оперативной памяти, где ранее хранилось i-e приближе-
ние При использовании простой итерации необхо-
димо помнить два вектора узловых напряжений, соответ-
ствующих i-му и (1‘4-1)-му шагам.
Алгоритмическая реализация метода Зейделя столь
же проста, как и простой итерации. Единственное изме-
нение в алгоритме расчета состоит в засылке вычисленно-
го Uk{i+i) в то место памяти, где ранее хранилось
В сравнении с точными методами процесс Зейделя при
сходимости за число шагов, меньшее п, обладает теми
же преимуществами с точки зрения времени расчета, что
и простая итерация.
Поскольку метод простой итерации не имеет никаких
преимуществ перед методом Зейделя, при практических
расчетах установившихся режимов в электрических си-
стемах на ЭВМ всегда используется метод Зейделя, а не
простая итерация.
Если метод Зейделя сходится быстро, т. е. если для
решения системы n-го порядка требуется менее п шагов,
то при расчете на ЭВМ получим выигрыш во времени в
48
сравнении с точными методами, например с методом
Гаусса. Это вытекает из того, что число арифметических
операций, необходимых для одного шага метода Зейделя,
пропорционально л2, а общее число арифметических опе-
раций, например, в методе Гаусса пропорционально п3.
Приведенное соотношение числа операций справедливо
для расчетов установившегося режима, если не учитыва-
ется слабая заполненность матрицы узловых проводи-
мостей.
В то же время и в случае учета слабой заполненности
этих матриц метод Зейделя, если сходится быстро, тре-
бует меньше времени ЭВМ, чем точные методы.
Важное достоинство метода Зейделя состоит в просто-
те алгоритма и в удобстве его реализации на ЭВМ. Этот
метод особенно эффективен с точки зрения требуемой па-
мяти при расчетах установившихся режимов, если учиты-
вается слабая заполненность матрицы узловых проводи-
мостей. В этом случае в памяти ЭВМ следует хранить
только ненулевые собственные и взаимные проводимости
узлов. Как отмечалось в § 2.2, число не равных нулю
•взаимных узловых проводимостей равно числу ветвей
электрической системы. Поэтому при итерационном расче-
те режима сети постоянного тока с (л-Н)-м узлом и тп
вет.вями необходимо помнить п собственных и m взаим-
ных узловых проводимостей. При применении, например,
метода Гаусса необходимо помнить элементы треугольной
матрицы, т. е. п2/2 элементов. Экономия памяти при ис-
пользовании метода Зейделя становится тем существен-
ней, чем больше узлов содержит электрическая система.
Применение специальных методов учета слабой заполнен-
ности матрицы узловых проводимостей при решении урав-
нений установившегося режима точным методом несколь-
ко уменьшает преимущество метода Зейделя с точки зре-
ния необходимого объема памяти ЭВМ. Однако такой
учет алгоритмически не л<рост и даже при его применении
метод Зейделя все равно требует меньше .памяти ЭВМ.
Вопросы экономии памяти играют важную роль при
сопоставлении различных методов расчета режимов
(см. гл. 4).
Отметим, что всякий сходящийся итерационный метод
обладает саыоисправляемостъю, т. е. отдельная ошибка,
допущенная при расчете, не отражается на его результате,
так как результат шага, на котором допущена ошибка,
можно рассматривать как новое начальное приближе-
ние. Кроме того, погрешности округления в итерационных
4—6189
49
методах оказываются значительно меньше, чем в методе
Г аусса.
Указанные выше преимущества метода Зейделя с точ-
ки зрения <памяти и времени расчета относятся только к
случаю быстрой сходимости итерационных методов. Во
многих случаях при расчетах сложных электрических си-
стем метод Зейделя сходится медленно. Поэтому для эф-
фективного применения метода Зейделя при расчете уста-
новившихся режимов сложных электрических систем не-
обходимо ускорение сходимости с помощью ускоряющих
коэффициентов. Подробнее вопросы ускорения сходимо-
сти рассмотрены в гл. 5.
Существенный недостаток метода Зейделя — его мед-
ленная сходимость или даже расходимость при расчете
электрических систем с устройствами продольной компен-
сации, с трехобмоточными трансформаторами, когда со-
противление обмотки среднего напряжения очень мало, а
также при расчетах предельных и неустойчивых режи-
мов.
2.6. Примеры решения линейных уравнений узловых
напряжений
Пример 2.1. Составим уравнения узловых напряжений
в виде (2.20) и (2.21) для электрической сети, схема за-
мещения которой приведена на рис. 2.1.
Схема рис. 2.1 состоит из трех линий электропереда-
чи, генераторных узлов 2 и нагрузочного узла 3. Со-
противления линий следующие: ZI2=10+ /20 Ом, Zi3=
= 154-/30 Ом, Z23= Ю4-/25 Ом. Узел 1 принят в каче-
стве балансирующего, его напряжение (71 = (/б=115 кВ.
Заданные токи в узлах 2 и 3 соответственно равны, кА:
/, = /.'+//." = j7= (-0.4199 4- /0.2099):
=-4= (0.2624-/0,1575).
V &
Если определять трехфазные мощности, МВт, Мвар, в
узлах по выражению 5л=уЗ UnoMIk, то 52=86.6025+
4-/51,9615; S3=—138,5641— / 69,2820.
По заданным сопротивлениям ветвей вычисляем их
проводимости, Ом •*, по формулам (2.2), (2.3) Ykj=
50
=—l/Zki- Ykk=-ZYkJ:
Y„ = - (YIS+ла); Ум = - (У18+у..);
У12 = —0,024-/0,04; У18 = —0,0133 /0,0267;
У2Я = — 0,0138 + /0,0345; Угг = 0.0338 — /0,0745;
Уяя = 0,0271-/0,0612.
Рис. 2.1. Схема замещения
сети из трех узлов
Матрица Yy для трехузловой сети:
Yy = Gy —/Ву.
Для схемы рис. 2.1 матрица проводимостей
= Г 0,0338 — 0,01381 _ • Г 0.0745 — 0,0345'
-у [ — 0,0138 0,0271J 0,0345 0,0612
Вектор задающих токов для данной схемы
' 0,2624 . 1
—0,4199 Г Vr
'—0,1575'
0,2099 ‘
Вектор узловых напряжений
и =
’<Л''
А'.
Вектор Yet/б для данной схемы с учетом задания
напряжения в базисном узле (7б=115 кВ:
YA =
'ten - /М*4 1=_ Г(0,02—/0,04) 115
.tesi - /М ^6 J L (0.0133 - J 0,0267)415
4*
51
Запишем систему узловых напряжений в виде (2.21):
ёи ё»» Ьц Ь>з~ — // ёп^б
Ssi -b„ ёзЗ Ьез Ьзз ёп Ьзз ёзз и- — 1 ^3~ 7' — —btlU6
—bat Ьзз ёзг ёзз - J 7'J _—b3lU6 _
(2.63)
Если подставить значения активных и реактивных со-
ставляющих проводимостей, узловых токов и базисного
напряжения, то получим в матричном виде
0,0338 —0,0138
0,0138 0,0271
0,0745 0,0345
0,0345 —0,0612
0,0745 —0.0345'
—0,0345 0,0612
0,0338 —0,0138
—0,0138 0,0271
"L//"
U3'
U2"
LW'J
- 0,2624' —0,4199 —0,1575 0,2099 _ - —0,02-115" —9,0133.115 0,04-115 0,0267-115 _
или в виде системы уравнений
0,0338(7/—0, ,(’138(7. '+0,0745(7/'—0,0345(7/'=2,5624;
—0,0138(7/+0,0271US'—0,0345(//'+0, 0612U3" = 1,1096,
—0,0745(7+0,034517/4-0,0338(7/'—0.0138(7/'=—4,7575,
0,0345(7/—0,0612(7/—0,0138(7,"+0,0271(7/' =—2,8606.
(2.64)
Пример 2.2. Запишем систему уравнений установив-
шегося режима из примера 2.1, изменив матрицу коэф-
фициентов следующим образом:
Ву Gy'
Gy —By.
Определим напряжения в узлах, решив записанную си-
стему .по методу Гаусса (§ 2.3).
Это построение матрицы удобно с точки зрения реше-
ния полученных уравнений итерационными методами
(§ 2.5), сходимость которых улучшается, если диагональ-
ные элементы при неизвестных значениях напряжений
больше всех остальных элементов в строке.
52
В этом случае уравнение (2.21) запишется так:
Ву Gy] FU" ] = Г Г 1 _ Г бм U6'
A -ByJ[u'J U"J '
(2.65)
Система уравнений (2.64) примет вид
0,0745(7/'—0,0345(73"+0,0338(7/—0,0138(7/=2,5624;
—0,0345(7/'+0,0612(7/'—О,0138574-0,027 Ш3'= 1,1096;
0,033857'—0,0138С/а"—0,0745(7/ +0,034557=—4,7575;
—0,0138574-0.027157'+-0,034557—0,0612L/3'=—2,8606.
(2.66)
После исключения U2,r получим систему уравнений
(7/'—0,4631(7/'4-0,4537(7/—0,1852(7/=34,3946;
0,0452(73"+0,0019(7/+0,0207(73'=2,2962;
О,OU 1957'—0,089857 +0,0408(7/ =—5,920;
0,0207(7/ '4-0,0408(7/—0,0638(7.'=—2,3860.
Далее исключим неизвестное U3":
_ 0,4631(73" + 0,4537(7/ — 0,1852(7/ = 34,3946;
U3" + 0,0420(7/ + 0,4580(7/ = 50,8909;’
— 0,0899(7/ +- 0,0399(7/ = — 6,0165;
0,0399(7/ —0,0733(7/ = —3,4376.
Затем исключим U'2 и систему уравнений (2.66) при-
ведем к эквивалентной системе с треугольной матрицей:
(7/' _ 0,4631(7/ + 0,4537(7/ — 0,1852(7/ = 34,3946;
(7 /' 4- 0,042(7/ +0,4580(7/ =50,8009;
(7/ — 0,4438(7/ = 66,9244;
—0,0556(7/ =—6,1079.
Из этой системы последовательно найдем значения не-
известных:
(7/ = 115,6777 кВ; (7/ = 109,8543 кВ; ] /о сс .
8 3 I (2.66а)
(7/'= 0,2325 кВ; [[(7/'=—4,3708 кВ. J
При решении системы (2.66) на ЭВМ с точностью до
семи значащих десятичных цифр получены следующие
значения напряжений, которые отличаются от приведен-
ных выше на погрешность округления:
U'2= 115,7188 кВ; (7'3= 109,9964 кВ;
(7"2=0,2612 кВ; (7"3=—4,3362 кВ.
53
Пример 2.3. Определить напряжения узлов для схемы
рис. 2.1 по данным примера 2.1 методом обратной мат-
рицы.
Активные и реактивные составляющие узловых напря-
жений будем определять аналогично примеру 2.2 из вы-
ражения, которое следует из (2.65):
(2.67)
где и'б и и"б — векторы, каждый элемент которых ра-
вен U'g или и"б, т. е. действительной или мнимой состав-
ляющей С/б.
Можно показать, что (2.67) эквивалентно (2.65) [6].
Обратную матрицу вычислим с помощью метода, основан-
ного на последовательной перестановке элементов столб-
цов неизвестных и правых частей в системе линейных ал-
гебраических уравнений [8].
Будем использовать, как и в примере (2.2), матрицу
коэффициентов в системе (2.66). Обратная матрица будет
’14,6714 7,9953 7,1491 4.2623'
Бу Gy1~l_ 7,9953 18.0109 4,2623 8,5753
G —в] 7,1491 4.2623 —14,6714 —7,9953
4,2623 8,5753 —7,9953 —18,0109
Составляющие на<пряжсний узлов по выражению, ана-
логичному (2.67), равны
“14,6714
7,9953
7,1491
_ 4,2623
18,0109 4,2623 8,5753
4,2623 —14,6714 —7,9953
8,5753 —7,9953 —18,0109’
“ 0,2624 “
—0,4199
—0,1575]
0,2099 _
’ 0,2612“
_ —4,3362
115,7187
_ 109.9964 _
Таким образом, U'z= 115,7187 кВ; £/"2=0,2612 кВ;
и'з= 109,9964 кВ; £/"з=—4,3362 кВ, т. е. полученные зиа-
54
чения напряжений отличаются от результатов примера
2.2 на погрешность округления.
Пример 2.4. Определим напряжения в узлах, решая
методом простой итерации уравнения узловых напря-
жений для сети, схема замещения которой приведена на
рис. 2.1, и используя данные примера 2.1.
Систему уравнений (2.64) будем использовать в виде
(2.66). Эту систему (2.66) приведем к виду, удобному
для итерации:
= 0,4631 С/3" —0,4537 LV-bO, 1852 ^'+34,3946; А
Т/8" = 0,5637 Z72" 4-0.2255LV-0,4428 ty+18.1307; (
Z// =0,4537 Ut" —0,1852 С/3" +0,4631 LV+63.8591; [
U3Z=—0,2255 Ua" +0,4428 4-0,5637 [// +46,7418. J
(2.68)
Принимаем начальные приближения действительных
и мнимых составляющих узловых напряжений:
"34,3946 "
18,1307
63,8591
46,7418 _
4,8596 "
—5,7723
114,8001
108,7488 _
Полученные новые значения узловых напряжений под-
ставляем в правую часть (2.68) и т. д.
Дальнейший расчет произведен на ЭВМ. Результаты
расчета итерационного процесса при заданной точности по
напряжениям е=±10 5 t/HOM=0,001 кВ приведены в
табл. 2.1.
Результаты расчетов совпадают с результатами при-
меров 2.2 и 2.3 с точностью до погрешности округления
55
Пример 2.5. Определим напряжения в узлах, решив
методом Зейделя уравнения узловых напряжений для се-
ти, схема замещения которой приведена на рис. 2.1, и
используя данные примера 2.1.
Систему (2.64) будем использовать в виде (2.68),
удобном для итерации, аналогично методу простой ите-
рации в примере 2.4.
Таблица 2.1
Номер итерации кВ кВ и2- кВ U'. кВ о
0 0 0 ПО но
1 4,8644 —5,7745 114,7987 108,7516
’46 ’ 0.261*8 —4,3369 115,7188 109,9963
47 0,2608 —4,3358 115,7191 109,9960
48 0,2611 —4,3361 115,7183 109.9969
Принимаем начальные значения узловых напряжений:
Ч/г"<0> - " 0
(Уз"'0» 0
по
110 _
Первое приближение U"2 определим из 1-го уравне-
ния системы (2.68):
=0-0+0,4631 - 0 — 0,4537-110+0,1852-110+
+34,3946=4,8596.
Подставим U"2^\ U"^, U'2(°\ во 2-е уравнение
системы (2.68):
{У"3(,)=0,5637-4,8596+0-0+0,2255- ПО—0,4428-110+
+ 18,1307=—3,0329.
Аналогично подставим в 3-е уравнение U"2™,
U'2<°\ и получим
=0,4537 - 4,8596—0,1852 • 3,0329+0 • 110+
+0,4631 • 110+63,8591 = 117,5666.
И, наконец, подставив ^'з(0) в
последнее уравнение, определим
U'^=—0,2255 • 4,8596+0,4428 • 3,0329+0,5637Х
X117,5666+0-110+46,7418= 110,5753.
56
Дальнейший расчет произведен на ЭВМ. Результаты
расчета итерационного процесса при заданной точности по
напряжениям е=±10~5 ^ном=0,001 кВ приведены в
табл. 2.2.
Таблица 2.2
Номер нтерацнв U2’ кВ U3' кВ и2- кВ и' кВ О
0 0 0 ПО но
1 4,8644 —3,0323 117,5673 110,5779
7 0,2616 —4,3360 11*5,7185 109,9962
8 0,2614 —4,3361 115,7187 109,9964
Результаты расчетов совпадают с результатами приме-
ров 2.2.—2.4 с точностью до погрешности округления. Из
табл. 2.1 и 2.2 видно, что метод Зейделя сходится значи-
тельно быстрее, чем метод простой итерации.
Более подробно примеры решения линейных уравне-
ний узловых напряжений рассмотрены в [9].
Глава третья
нелинейные уравнения установившегося режима
И МЕТОДЫ ИХ РЕШЕНИЯ
3.1. Нелинейные уравнения установившегося режима
Расчет установившегося режима электроэнергетических
систем возможен только итерационными методами. Расче-
ты установившихся режимов начали осуществляться на
ЭВМ с конца 50-х годов. Для этих расчетов использова-
лось большое количество различных методов при
различных формах записи уравнений установивше-
гося режима и при выборе разных переменных.
Опубликовано очень большое количество работ, по-
священных расчетам установившегося режима на ЭВМ
(см., например, [6]). В настоящее время накоплен до-
статочно большой опыт практических расчетов установив-
шихся режимов на ЭВМ и исследовательских разработок
по их усовершенствованию и сопоставлению. Этот опыт,
отраженный в гл. 8, убедительно показывает, что наибо-
57
лее эффективно применение нелинейных уравнений узло-
вых напряжений, которые следует решать методом Нью-
тона или Зейделя, а в случае плохой сходимости — по па-
раметру. Соответственно в гл. 3 рассмотрены нелинейные
уравнения узловых напряжений и указанные выше методы
их решения.
Нелинейные уравнения узловых напряжений описыва-
ют установившийся режим электрической системы при за-
дании нелинейных источников тока (§ 1.2, 1.3). В схеме
замещения электрической системы нелинейным источни-
кам тока соответствуют генераторы с постоянной мощ-
ностью либо нагрузки потребителей, заданные статиче-
ской характеристикой или постоянной мощностью. По-
стоянная мощность нагрузки потребителя или генератора
задается в виде узлового тока
W = s^/уз uk\ (3.1)
где Sfc* = const — постоянная мощность трех фаз Л-го
узла; Uк* — сопряженный комплекс междуфазного напря-
жения /г-го узла; lk(U)—нелинейный источник тока, за-
висящий от напряжения.
Если мощность нагрузки потребителя задана статиче-
ской характеристикой, то нелинейный источник тока оп-
ределяется следующим выражением:
/ (Th-
-- |Лз7у 1/зТу
(3.2)
где Qk(U)—статические характеристики актив-
ной и реактивной нагрузок k-ro узла.
Нелинейные уравнения узловых напряжений при за-
дании постоянной мощности нагрузки потребителей и ге-
нераторов в узлах для системы переменного тока из че-
тырех узлов запишем в виде, аналогичном (2.15):
ЛА+Л А + ЛА = s\iu>* -ЛА 'I
+y„u2 4- ЛА = S*/U* - Y_a6U6- 1 (3.3)
4- ЛА+ЛА = S*/U*-Ys(p6. J
В матричной форме уравнения узловых напряжений
имеют вид, аналогичный (2.20):
¥уи = /ЗТад~1<& (3.4)
58
где Yy — комплексная матрица собственных *и взаимных
узловых проводимостей; ЦЦ) — вектор-столбец задающих
токов, k-ii элемент которого определяется выражением
(3.1); УбЬб — вектор-столбец, Лг-й элемент которого равен
УлбС/б;~^Г—заданное напряжение балансирующего узла.
Каждое из записанных уравнений (3.3) соответствует
балансу комплекса тока в узле. Поэтому будем называть
(3.3) и (3.4) уравнениями узловых .напряжений в форме
баланса токов. Система трех комплексных уравнений уз-
ловых напряжений (3.4) может быть заменена системой
из шести действительных уравнении, аналогичных (2.12).
Три действительных уравнения соответствуют балансу
вещественных составляющих токов в узлах, а три — ба-
лансу мнимых составляющих.
Уравнения (3.3) записаны для трех независимых уз-
лов, чв каждом из которых заданы Р и Q нагрузки. В си-
стему (3.3) не входит уравнение балансирующего (чет-
вертого) узла.
Если один из узлов — балансирующий по реактивной
мощности, то его уравнение баланса мнимых составляю-
щих токов не входит в число независимых уравнений уз-
ловых напряжений. В общем случае .может быть не один,
а несколько балансирующих узлов. После решения систе-
мы независимых уравнений все Рг и Qr для балансирую-
щих узлов и Qr для узлов, балансирующих по Q, опреде-
ляются из уравнений баланса токов для этих узлов, -не
входящих в число независимых уравнений узловых напря-
жений.
Часто используются уравнения узловых напряжений в
форме баланса мощности, которые можно получить, если
каждое уравнение баланса токов (3.3) умножить на со-
пряженный комплекс напряжения соответствующего узла.
Узловые уравнения баланса мощности для системы пере-
менного тока из четырех узлов можно записать следую-
щим образом:
(^ A + +У„С/3 + У1б£7б) = 1
(Y^U, + Y2ZU2 4- Yi3Us 4- Y2A) = Ss*; (3.5)
U3* + YKUa + КM 4 Y Л) = S3*. ’
Систему (3.5) можно записать в матричной форме сле-
дующим образом:
ида„ауи+Ш)=5*. (3.6)
59
где 1)дИаг—диагональная матрица, k-i\ диагональный эле-
мент которой равен сопряженному комплексу напряже-
ния k-ro узла; S* — вектор-столбец сопряженных мощно-
стей <в узлах, /г-н элемент которого равен заданной сопря-
женной мощности k-ro узла.
Матричное уравнение узловых напряжений в форме
баланса мощностей (3.6) можно получить в результате
умножения матричного уравнения баланса токов (3.4)
слева на диагональную матрицу О*Дцаг. Чтобы получить
алгебраическое уравнение баланса мощностей, необходи-
мо уравнение баланса токов умножить на сопряженный
комплекс напряжения узла.
Нелинейные уравнения установившегося режима в са-
мой общей форме можно записать в виде системы неяв-
ных функций
W(X, Y)=0, (3.7)
где W — вектор-функция; X и Y — вектор-столбцы зави-
симых и независимых параметров режима.
Эти уравнения связывают между собой параметры
установившегося режима электрической системы. Часть
параметров режима задана (независимые переменные).
Обозначим вектор-столбец независимых переменных при
расчете установившегося режима Y. Остальные (зависи-
мые) переменные могут быть найдены из уравнений уста-
новившегося режима. Обозначим вектор-столбец зависи-
мых переменных X. Число зависимых переменных X* рав-
но числу уравнений установившегося режима. Это озна-
чает, что вектор-функция W и вектор-столбец X имеют
одинаковый порядок. В зависимости от постановки задачи
и способов задания исходных данных в состав векторов
независимых в зависимых переменных Y и X могут вхо-
дить разные параметры режима.
Разделение параметров режима на зависимые и неза-
висимые переменные играет .важную роль при оптимиза-
ции режимов, при определении предельных по статиче-
ской апериодической устойчивости режимов и при иссле-
довании существования и единственности решения урав-
нений установившегося режима.
При расчетах установившегося режима вектор незави-
симых переменных задан, т. е. Y=const. Нелинейную си-
стему уравнений установившегося режима можно запи-
сать в следующем виде, -вытекающем из (3.7) при Y=
=const:
W(X)=0
(3.8)
60
Число уравнений в этой системе равно числу зависи-
мых переменных х, т. е. равно порядку вектора X. В ре-
зультате решения уравнений установившегося режима
(3.8) можно найти все зависимые .переменные х.
Выше рассматривались нелинейные уравнения узло-
вых напряжений. Уравнения установившегося режима
(3.7) или (3.8) могут быть записаны и в виде нелинейных
контурных уравнений [6]. Все методы, рассматриваемые
в гл. 3, могут использоваться и в этом случае. Однако
нелинейные контурные уравнения оказались менее эф-
фективными при расчетах и оптимизации режимов на
ЭВМ, чем уравнения узловых напряжений.
3.2. Применение метода Гаусса и матрицы Zy для решения
нелинейных уравнений узловых напряжений
Итерационные методы. Точных методов, пригодных для
решения нелинейных алгебраических уравнений, не су-
ществует. Система нелинейных уравнений узловых напря-
жений в форме баланса токов обладает следующей осо-
бенностью. Эта система уравнений линейна слева и нели-
нейна в правой части. Сравним линейные уравнения
узловых напряжений (2.15) и нелинейные (3.4). Левые
части их одинаковы и равны произведению матрицы про-
водимостей узлов на вектор-столбец переменных — напря-
жений узлов. Именно в этом смысле нелинейная система
уравнений узловых напряжений в форме баланса токов
линейна слева. Нелинейность системы (3.4) состоит толь-
ко в наличии нелинейных правых частей. Физически эта
особенность определяется тем, что все параметры схемы
замещения электрической системы линейны, кроме источ-
ников токов Ik(Uk)- Иногда говорят, что продольная часть,
схемы замещения линейна, а поперечная нелинейна. По-
скольку система уравнений узловых напряжений нелиней-
на лишь в правой части, для ее решения можно применить
метод Гаусса и матрицы Zy (§ 2.3, 2.4).
Метод Гаусса при расчете нелинейных уравнений уз-
ловых напряжений можно использовать на каждом шаге
итерационного процесса, считая систему нелинейных
уравнений узловых напряжений линейной на данном ша-
ге. Зададимся начальными приближениями узловых на-
пряжений, т. е. зададимся начальным приближением век-
тор-столбца переменных U(0). Определим правые части в
нелинейной системе уравнений узловых напряжений в
форме баланса токов (3.3) или (3.4), т. е. вычислим эле-
61.
менты вектор-столбца при [/Л=£Д(°>:
Л (<Л<°>) j(U)(0,= Л(^2(0)] 5 1 “|/Г Г 1 1 с: I с: 1с: ‘% I»?3 о * © * 'о * 1 1 1^ >^= 1 1 <£>
Полагаем, что токи в узлах постоянны и определяют-
ся начальными приближениями узловых напряжений.
Тогда уравнения узловых напряжений (3.3) превраща-
ются в систему линейных алгебраических уравнений с
правыми частями, вычисляемыми из (3.9):
у,д + ад+ад = уз7, ((/,<»>);
+ /3 7, (У,<•>); >
(3.10)
В матричной форме линейную систему (3.10) можно
записать следующим образом:
VyU =/3 2(и<’>).
(З.П)
Решая систему (3.11), определяем первое приближе-
ние напряжений узлов ^з(1)- Далее переходим
ко второму шагу, т. е. определяем правые части (3.9) при
значениях узловых напряжений, равных их первым приб-
лижениям:
£(U<'>) =J(U<'>) —-(3.12)
Затем найдем второе приближение узловых напряже-
ний, решая линейную систему с той же матрицей Yy, и
так далее до тех пор, пока процесс не сойдется. При
этом каждый шаг итерационного процесса состоит в опре-
делении I(U(/) и решении системы линейных уравнений
аналогично (3.11) и (3.12):
Г(и<‘>) = ци<'>) _ ' ад, (3.13)
YyUi‘+'> = /ЗТ(и<‘>). (3.14)
где i — номер шага.
€2
Для решения линейной системы уравнений узловых
напряжений (3.14) на каждом шаге итерационного про-
цесса целесообразно использовать метод исключения по
Гауссу. В этом случае система комплексных уравнений
заменяется на действительную, аналогичную (2.10). Для
эффективного решения линейных уравнений установив-
шегося режима по Гауссу необходимо учитывать слабую
заполненность матрицы узловых проводимостей (см.
гл. 4).
Матрица Zy может использоваться для решения на
каждом шаге" итерационного процесса линейных алгеб-
раических уравнений (3.14). Напомним, что матрица соб-
ственных и взаимных сопротивлений узлов обратна по
отношению <к матрице узловых проводимостей, т. е.
Zy = Yy“‘. (3.15)
На каждом шаге итерационного процесса узловые на-
пряжения определяются по выражению, аналогичному
(2.34),
U<‘’+1 = Пб-Н 3ZyI_(U4 (3.16)
где 11б — вектор-столбец, каждый элемент которого ра-
вен напряжению балансирующего узла; I(U’>)—вектор-
столбец задающих токов, определяемых на (i-f-l)-M приб-
лижении узловых напряжении, три этом Л-й элемент .вск-
тор-столбца 1(U(O) равен
Расчет установившегося режима по выражению (3.16)
быстро сходится, так как представляет собой применение
точного метода решения линейной системы уравнений с
помощью обратной матрицы к решению системы уравне-
ний узловых напряжений (3.3) или (3.4) с нелинейной
правой частью. Основное достоинство расчета установив-
шегося режима с помощью узловых сопротивлений —
быстрая сходимость. Однако существенным недостатком
этого метода является необходимость определять и, глав-
ное, запоминать матрицу Zy, в которой нет нулевых эле-
ментов. Применение этого метода для расчетов режимов
сложных электрических систем с большим количеством
узлов практически невозможно без специальных методов
эквивалентирования и, кроме того, требует использова-
ния ЭВМ с большой оперативной памятью либо увеличе-
ния времени расчетов за счет многократного использо-
вания внешней памяти.
63
Расчет установившегося режима с помощью собствен-
ных и взаимных сопротивлений может оказаться эффек-
тивным в тех случаях, когда он проводится для одной и
той же системы очень большое количество раз. Кроме
того, применение матрицы Zy эффективно для расчетов
установившихся режшов электрических систем с тяговой
нагрузкой, а также в расчетах токов короткого замыка-
ния.
Расчет установившегося режима при решении на каж-
дом шаге итерационного процесса линейной системы
(3.14) по методу Гаусса требует столько же шагов, сколь-
ко расчет, использующий узловые сопротивления, но <при
меньшей необходимой памяти ЭВМ и меньшем количест-
ве арифметических операций. К недостаткам метода мож-
но отнести некоторые усложнения программы расчета.
Последнее приводит к тому, что в ряде случаев нельзя
заранее сказать, хватит ли памяти ЭВМ для расчета ре-
жима данной сети по методу Гаусса. Основное преимуще-
ство применения на -каждом шаге итерационного процесса
метода Гаусса перед использованием обратной матрицы
состоит в повышении эффективности расчета за счет уче-
та слабой заполненности матрицы Yy. Поэтому (примене-
ние этого итерационного процесса предпочтительнее ис-
пользования матрицы Zy.
Решение на каждом шаге линейной системы уравне-
ний узловых напряжений по методу Гаусса не нашло
применения в расчетах установившихся режимов, по-
скольку такой способ не имеет никаких преимуществ по
сравнению с расчетом установившегося режима по методу
Ньютона (см. § 3.4).
3.3. Применение метода Зейделя для решения
нелинейных уравнений узловых напряжений
Метод Зейделя и простая итерация могут применяться
для решения нелинейных уравнений узловых напряжений
в форме баланса токов (3.3) аналогично тому, как они
применялись для решения линейной системы алгебраиче-
ских уравнений (2.43) и (2.53) или (2.54) и (2.55). Все
различие состоит в том, что вместо постоянных (величин
bk в итерационных процессах (2.54) или (2.55) при ре-
шении нелинейных уравнений узловых напряжений (3.3)
необходимо использовать нелинейные токи в узлах. По
-методу простой итерации (i-J-l)-e приближение напряже-
•64
нпя k-ro узла определяется следующим выражением:
£7Л(‘+') = ?Л(Ц<‘'>, t7a(‘>............ =
где ••• • "Л— нелинейная функция, опреде-
ляющая итерационный процесс простой итерации.
Если использовать вектор-функцию <p(U), k-н элемент
которой равен <рл(О), то вектор-столбец узловых напря-
жений по методу простой итерации определяется с по-
мощью следующего итерационного процесса, записанно-
го в векторной форме:
<р(ий)
Ч (£/>. ....
?,(£//>, ..........
?,(£/’>. £/2(I)...
JW
un^)
(3.18)
Метод Зейделя отличается тем, что найденное прибли-
жение узлового напряжения сразу же используется для
определения напряжений других узлов. Итерационный
процесс Зейделя определяется выражением, аналогичным
(2.55):
где_?за(^х</+1>’ ••• • ^k-У’ Un^— нелинейная функ.
ция, описывающая итерационный процесс Зейделя.
При решении уравнений установившегося режима на
ЭВМ обычно используется метод Зейделя как обладаю-
щий 'более надежной и быстрой сходимостью, чем про-
стая итерация. В расчетах на ЭВМ система комплексных
уравнений узловых напряжений (3.4) заменяется дейст-
вительной системой, аналогичной (2.12). Соответственно
по методу Зейделя определяются вещественные и мнимые
5—6189
65
составляющие напряжений узлов, т. е.
= <?' (£/(/+1), и'ЧМ).........U'(i+I),
k T3*v j i ’ k 1 ’
U'a\ u"10)-
fe+l’ fe+l n n '*
U''U+n ” nj'<l+l\ u"a+l\..., U'a+1),
ft 1 J k—J ’
£/"<‘+,) t/(0 . U'u\ u"ii})
k-l ’ fe+l fe+l n n
(3.20)
где —мнимая и действительная части нелине ной
функции y3k (3.19), списывающей итерационный процесс Зей-
деля.
Расчетные выражения метода Зейделя легко полу-
чить, если разделить мнимую и действительную состав-
ляющие в правой части выражения (3.19). Если исполь-
зовать вектор-функцию <р3 (Uj, k-ii элемент которой ра-
вен ?3fc(U), то можно записать итерационный процесс
Зейделя в векторной форме, аналогичной (3.18).
Сходимость метода Зейделя к решению нелинейных
уравнений установившихся режимов медленная. В значи-
тельной степени это связано с особенностями матрицы
собственных и взаимных проводимостей узлов, т. е. со
свойствами линейной системы узловых напряжений. Ус-
ловия сходимости и ее скорость -при решении линейных
уравнений узловых напряжений по методу Зейделя оп-
ределяются свойствами матрицы 3, характеризующей ите-
рационный процесс [см. (2.60), (2.61)]. Сходимость при
решении нелинейных уравнений узловых напряжений за-
висит от свойств вектор-функции <р3 (U) определяющей
итерационный процесс Зейделя. Нелинейность уравнений
установившегося режима существенно замедляет сходи-
мость метода Зейделя -и даже приводит к расходимости
при определении режимов, близких к предельным.
В практических расчетах установившихся режимов на
ЭВМ необходимо использовать ускорение сходимости ме-
тода Зейделя. Наибольшее распространение здесь полу-
чило применение ускоряющих коэффициентов, или метода
неполной релаксации. Использование ускоряющих коэф-
фициентов сводится к следующему. Обозначим
значение напряжения /г-го узла, определенное на (i-[-1)-m
шаге по обычным итерационным формулам (3.19). Уско-
ренное (г-Н)-е приближение значения напряжения А-го
66
узла определяется .по формуле
£7</+1> = и(0 -Н((//+,) —£Л(,) ) =(/° 4-/Д(/,+,), (3.21)
_/гуск _ft..cK 1 — k —ftycK7 —fcj-ск —ft 4 7
где Д(/1+*> =f7^/+,)—^jcK —поправка по напряжению
А-го узла на (г'+1)-м шаге; / — ускоряющий коэффи-
циент.
Значение напряжения, вычисленное с ускорением,
U(/+,) принимается в качестве исходного при расчете
следующего, (i+2)-ro шага.
В случае /=1 выражение (3.21) сводится к =
— т. е. неускоренный итерационный процесс соот-
ветствует случаю, когда ускоряющий коэффициент t при-
нимается равным единице.
Вопросы исследования и ускорения сходимости метода
Зейделя кратко рассмотрены в § 5.1. Метод Зейделя
медленно сходится и в ряде случаев расходится (в расче-
тах установившихся режимов электрических систем с уст-
ройствами продольной компенсации, с трехобмоточными
трансформаторами или автотрансформаторами с очень
малым сопротивлением обмотки среднего напряжения и
для электрических систем с дальними линиями электро-
передачи и сильной неоднородностью параметров. Метод
Зейделя также плохо сходится либо расходится в расче-
тах режимов, близких к предельным, либо при определе-
нии режимов, неустойчивых «по статической апериодиче-
ской устойчивости.
Метод Зейделя нашел широкое применение в расчетах
установившихся режимов в СССР на современных ЭВМ,
а также за рубежом, в особенности при использовании
ЭВМ первого и второго поколений. Основное достоинство
метода в том, что он легко программируется и требует
малой памяти ЭВМ. Недостаток метода—в медленной
сходимости.
3.4. Метод Ньютона
Решение нелинейных алгебраических и трансцендент-
ных уравнений методом Ньютона. Его основное достоин-
ство состоит в том, что при сравнительно несложной схе-
ме вычисления он обладает быстрой сходимостью. Метод
Ньютона универсален и пригоден для решения обширного
класса нелинейных уравнений.
5*
67
Рис. 3.1. Сходящийся итераци-
онный процесс по методу Нью-
тона
Идея метода Ньютона со-
стоит в последовательной за-
мене на каждой итерации не-
линейной системы уравнений
некоторой линейной, решение
которой дает значения неиз-
вестных, более близкие к ре-
шению нелинейной системы,
чем исходное приближение.
Поясним идею этого метода
на примере решения уравне-
ния
w(X)=Q. (3.22)
Решение данного уравнения X— это точка, в кото-
рой кривая ш(Х) проходит через нуль (рис. 3.1). Зада-
дим начальное шриближение Х(0>.
Заменим уравнение (3.22) в окрестности точки Х(0>
линейным уравнением
w (ЛГ(°)) 4- ^-(Х<°))(Х—Х<°>) =0,. (3.23)
левая часть которого представляет собой два первых чле-
на разложения функции w(X) в ряд Тейлора. Решим ли-
нейное уравнение (3.23) и определим поправку ДХ(1) к
начальному приближению:
ДАР) = АР) — А<°) =-----°)} . (3.24)
За новое приближение неизвестного принимаем
АР > = А<°) 4- ДАР > = А<°)-------а'(Х(0)) . (3.25)
д а)
<Х(0))
ол
Аналогично определяются следующие приближения:
АР+’) = Az(z) -р ДАР'+’) = АР')
дзз
дХ
(3.26)
(Х(‘))
Итерационный процесс сходится, если функция яу(Х)
становится близкой к нулю. Сходимость считается достиг-
нутой, если невязка (или небаланс) меньше заданной,
т. е. при
|ю(А'<’>) |<е. (3.27)
68
Отмстим, что контроль сходимости (По поправке ДХ<‘>
может привести к неверным результатам.
Дадим геометрическую интерпретацию метода Ньюто-
на (см. рис. 3.1). Один шаг метода Ньютона сводится к
замене кривой ш (X) на прямую w (Х<°>) + — (Х<°>) (X —
__Х<°>), которая является касательной к этой кривой в
точке Х=Х(0). Поэтому метод Ньютона называют также
методом касательных. Приближение X(f+I> есть точка пе-
ресечения касательной к кривой ш(Х) в точке Х=Х с
осью X.
Рассмотрим решение по методу Ньютона системы дей-
ствительных нелинейных алгебраических уравнений
^(*0 Л21 Х3)=0,
'А(А\. А'г> Аг3) = О,
^з (A j, Af2, А 3) = 0.
(3.28)
Если ’использовать вектор-столбец X и вектор-функ-
цию W(X), где
*11 *’) 1
Х= Xs , W(X)= Xs, Xs)
_*S_ *2» *3) _
(3.29>
то систему (3.28) можно записать в матричном виде:
W(X)=0.
(3.30}
Пусть Х1«», Х2<°>, Хз(0) — начальные приближения не-
известных. Заменим каждое из нелинейных уравнений
(3.28) линейным, полученным разложением в ряд Тейло-
ра. Например, первое уравнение после линеаризации бу-
дет иметь следующий вид:
d&’j
дХ,
(%,<“>, Х,т ’Х„<°>) (X, — Х,^>) +
ЭХ,
X,m.'X^>)(X,-Xs^) = 0. (3.31)
G9»
Запишем матрицу Якоби, т. е. матрицу производных
системы функций по переменным Xk:
дисд да1j dii>t
ахг дХ2 дХ3
aw аа;2 аа-2 dwn
ах “ Ml дХ2 дХ3 • (3.32)
а*.'з а*'з а^’з
дХ2 дХ3_
Тогда систему линеаризованных уравнений
писать в матричном виде следующим образом:
можно за-
W (Х<°)) + (Х<° >) (X — Х<°>) = 0. (3.33)
Эта система линейна относительно поправок ДХ*(1,=
—Хл(1) — Xkw. Предположим, что матрица Якоби dW/dX
не вырождена, т. е. ее определитель не равен нулю.
Решим линейную систему (3.33) и определим поправ-
ки, например, .по методу Гаусса. Затем найдем первое
при б лиженяе переменных:
ХО^Х^+ДХО). (3.34)
Каждый шаг итерационного процесса состоит в реше-
нии линейной системы
-^-(ХЙ)ДХ(‘ + ,> = — W(X<‘)) (3.35)
и определении следующего приближения неизвестных:
X<i+,>=X<f>+AX</+,>. (3.36)
Часто итерационный процесс Ньютона записывают в
“матричной форме:
Х('+’> = Х<‘*> — (Х(')]"1 W (Х<'>). (3.37)
Эта запись ни в коем случае не предполагает, что по
методу Ньютона вычисляется обратная матрица
[5W/5X]-1 и затем умножается на вектор W(X<‘>). По-
правки ЛХ^+1> всегда определяются в результате решения
линейной системы (3.35) по Гауссу (или в некоторых
случаях по методу Зейделя), а выражение (3.37) исполь-
зуется для удобства записи и анализа итерационного
процесса Ньютона. Контроль сходимости осуществляется
по вектору невязок, т. с. условие
(3.38)
должно выполняться для всех невязок (небалансов).
70
Решение узловых уравнений баланса мощности. Запи-
шем уравнение узловых напряжений в форме баланса
мощностей для k го узла в следующем /виде:
Г0 задц. (з.зэ>
-Sk- - ------/=1
В этом выражении для удобства записи слагаемое
YkcUcUk* внесено под знак S, причем балансирующему
узлу" присвоен номер n-j-l. Функция ws^lJ) соответству-
ет небалансу мощности в /г-м узле. Для того чтобы опе-
рировать с вещественными величинами, выделим *в урав-
нении (3.39) действительные и мнимые части.
Принимаем
^(и) = ^(1Д и'Э-Ь/Ч/и', и”),
где и7, U" — вектор-столбцы действительных и мнимых
составляющих напряжений;»)» , шо —соответственно He-
балансы активных и реактивных мощностей в узле k.
В качестве переменных при решении уравнений уста-
новившегося режима могут использоваться: 1) модули и*
фазы напряжений в узлах U и б; 2) вещественные и мни-
мые составляющие напряжений U' и U". Тогда уравне-
ния баланса активной и реактивной мощностей k-ro узла
можно записать следующим образом:
п+1
= Л - g« А2 + S K<W + <4'Ч") gtt+
к J=l
l*k
+ (Uk'UP - Uk"U/) bkil = 0, (3.40>
п+1
wob =о* - 6»Л2 +21- W - gti +
/=1
Mft
+ (L//£//+£//'{//') 6ft/] = 0. (3.41>
Уравнения бачпанса мощностей для k-ro узла при пе-
ременных U, б можно получить из (3.39) в следующем
виде:
п+1
wp =Pk — gkk^k Uk <S Uj(gk}cos^ki — (3.42)>
к /=1
7k
П-j-l
™Qb = Qk~ bkkUk* — 2 Uf (bkjcos 6ft/ + gkj sin skj), (3.43)
fek
где 6й/=бл — 6,, k= 1,..., n.
Таким образом, если во всех узлах заданы активные
и реактивные мощности, то получена система, состоящая
из 2и уравнений с 2/г неизвестными, где п — число неза-
висимых узлов системы. Матрицу производных dW/dX
пр.и .использовании переменных U' и U" можно разбить
•на матрицы-клетки:
<3WP
dW dU' <3U"
дХ L duz dW<> <5U"
(3-44)
где
dwP Г d^pk
dU' “ L ffJf J ’
dWQ Г d^Qk -
dir ~ L ^/'.
dWp Г д®р
____ _ ____
dU" ~ [дУ/'
0WQ Г d^Qk
dU" ~ L & {"
— матрицы-клетки частных производных небалансов ак-
тивной и реактивной мощностей по* активным и реактив-
ным напряжениям узлов.
Все матрицы-клетки производных в уравнении (3.44)
квадратные, и порядок их равен п. Если для узла заданы
•активная мощность Рк и модуль напряжения этого узла
Uk, то в системе уравнений узловых напряжений вместо
уравнения баланса (3.41) будет уравнение
^=t//2+№.
(3-45)
Число уравнений узловых напряжений (3.40), (3.41),
(3.45) в этом случае тоже равно 2«. Все матрицы клетки,
входящие в матрицу Якоби dW/dX, квадратные, и поря-
док их п. Отличие от (3.44) состоит в том, что для узлов
с заданными Рл и Uk в матрицу Якоби вместо производ-
ных реактивных небалансов но активным и реактивным
напряжениям узлов будут входить .производные (3.45) по
Uk и Uh", т. е. вместо
и
dUf
dieQt.
будут входить соответственно 2Uk и 2Uh".
72
В качестве 'переменных в расчетах установившегося
режима на ЭВМ обычно выбирают модули и фазы напря-
жений узлов Uh и dh- В этом случае
" дЫр dWP
dW _ dU дь
дХ ~~ dWQ dWQ
dU d&
(3.46)
т. е. элементы матрицы Якоби — это частные производ-
ные небалансов активной и реактивной мощностей по мо-
дулям и фазам напряжений узлов. Если активные « ре-
активные мощности заданы во всех узлах, то число урав-
нений узловых ’напряжений баланса мощности в число
переменных Uh и 5* равны 2zz. Все матрицы-клетки в
(3 46) квадратные, и порядок их п. Если в узле k заданы
Pk и Uh, то уравнение баланса реактивной мощности й-го>
узла не входит в систему уравнений узловых напряже-
ний (см. § 3.1), a Qfc — в число зависимых переменных,
определяемых при решении уравнений узловых напряже-
ний. Для узлов, балансирующих по Q, в матрицу Якоби
(ЗЛ6) не входят производные disDqJdUj и dw /(fy. В этом
случае матрица-клетка dWq/dU — квадратная, порядок ее
меньше п на число узлов, балансирующих по Q. Матри-
ца-клетка дУ^/дЬ— прямоугольная, в ней п столбцов, а
количество строк меньше п на число узлов, балансирую-
щих по Q.
Определитель матрицы Якоби (якобиан) уравнений
установившегося режима <в форме баланса мощности
(3.46) при задании на генераторах Рг и t/r равен сво-
бодному члену характеристического уравнения переход-
ных процессов в электрической системе, если выполня-
ются определенные условия (см. § 7.1). Это обстоятель-
ство может эффективно использоваться для анализа ста-
тической апериодической устойчивости в ходе расчета
установившегося режима по методу Ньютона.
Решение уравнений узловых напряжений баланса то-
ков методом Ньютона осуществляется аналогично приве-
денному 'выше. При записи уравнений узловых напряже-
ний в форме баланса токов в узлах аналогично (3.39)
»/4(!У) = ф— (3-47)
—Л
73
Уравнение баланса активного и реактивного токов при
использовании переменных U', U" легко получить, раз-
делив (3.47) на действительную и мнимую части:
(3.48)
л + 1
W7 + МА" +
/=1
л-hl
+У! bkрг - =о,
7=1
n + 1
+в*Л" + ^SkiU,"—- - 0- <3.49>
7=1
Элементы матрицы Якоби — это (Производные актив-
ных и реактивных небалансов токов по активным и реак-
тивным напряжениям узлов (либо по модулям «и фазам
напряжений), т. е.
- dW/, dW/, '
dw, ди' <?U"
lx” = <№/lt dWfll
dU' dll"
Все недиагональные элементы матриц-клеток в (3.50)
постоянны, т. е. не. зависят от напряжений. Каждый из
них равен активной или реактивной узловой проводимо-
сти, т. е. соответствующему элементу матрицы коэффи-
циентов системы действительных уравнений узловых на-
пряжений в форме баланса токов (2.12). В этом легко
убедиться, если продифференцировать активные и реак-
тивные небалансы, т. е. (3.48), (3.49).
Равенство педиагональиых элементов в матрицах-клет-
ках (2.12) и (3.50) следует из того, что система уравне-
ний балансов тока линейна слева и нелинейны лишь ее
правые части. Диагональные элементы матриц-клеток
•матрицы Якоби (3.50) зависят от напряжения именно
вследствие нелинейности правых частей в системе урав-
74
нении баланса токов, т. е. из-за нелинейности задающих
токов S*/(yWk) в (3.47), точнее, из-за нелинейности их
действительных и мпимых составляющих в (3.48), (3.49).
Для линейных узловых уравнений баланса токов (т. е.
при заданных токах в узлах, 2*=cons0 диагональные
элементы матриц-клеток в (3.50) тоже постоянны и не
зависят от напряжений. Таким образом, для линейных
уравнений баланса тока матрица Якоби (3.50) равна
матрице коэффициентов системы действительных уравне-
ний баланса токов (2.12). В этом случае система линей-
ных уравнений, решаемая на первом шаге методом Нью-
тона при начальных приближениях напряжений узлов,
равных нулю, совпадает с уравнениями (2.12):
При решении линейных уравнений баланса токов ме-
тод Ньютона сходится за один шаг, т. е. совпадает с
решением линейных уравнений узловых напряжений по
Гауссу. При решении нелинейных уравнений узловых на-
пряжений в форме баланса токов метод Ньютона очень
близок к решению на каждом шаге 'итерационного про-
цесса линейных уравнений узловых напряжений по Гаус-
су. Отличие лишь в том, что диагональные элементы мат-
риц-клеток Якоби зависят от напряжений и изменяются
на каждом шаге итерационного процесса. Это изменение
диагональных элементов учитывает нелинейность урав-
нений установившегося режима. Именно вследствие уче-
та нелинейности можно считать, что применение метода
Ньютона с точки зрения сходимости лучше, чем решение
на каждом шаге итерационного процесса линейных урав-
нений узловых напряжений по Гауссу (или с помощью
матрицы Z ).
Область применения метода Ньютона для расчетов
установившихся режимов на ЭВМ в СССР и за рубежом.
Этот метод не мог претендовать на практическое приме-
нение в задачах расчета сетей до использования ЭВМ из-
за трудоемкости вычисления матрицы производных. Ши-
рокое применение для расчетов установившихся режимов
на ЭВМ метод Ньютона получил с 60-х годов.
В матрице производных систем уравнений установив-
шегося режима столько же нулевых элементов, ско. ько
их в матрице Yy. Поэтому в расчетах режимов на ЭВМ
на каждом шаге метода Ньютона можно эффективно ис-
75
пользовать способы компактной записи матрицы лроиз-
водных, как и при решении системы (2.12). Важнейшие
преимущества метода Ньютона в расчетах установивших-
ся режимов на ЭВМ — быстрая квадратичная сходимость и
возможность учета слабой заполненности матрицы произ-
водных. Эффективно применение метода Ньютона для
расчета установившихся режимов при их комплексной оп-
тимизации.
Таким образом, метод Ньютона в расчете установив-
шегося режима сходится значительно быстрее и надеж-
нее метода Зейделя, а также, как правило, быстрее и на-
дежнее, чем при использовании матрицы Zy или решении па
каждом шаге линейных уравнений узловых напряжений.
Метод Ньютона требует столько же памяти ЭВМ, сколько
при решении на каждом шаге линейных уравнений узло-
вых напряжений по Гауссу, т. е. больше, чем по методу
Зейделя, но значительно меньше, чем при использовании
матрицы Zy.
Сравнение методов расчета установившегося режима
подробно рассмотрено в § 8.1, 8.2. Простая итерация ме-
нее эффективна, чем расчет по Зейделю, а решение на
каждом шаге линейных уравнений узловых напряжений
методом Таусса менее эффективно, чем расчет методом
Ньютона. В свою очередь применение матрицы Zy еще
менее эффективно, чем решение на каждом шаге линей-
ных уравнений методом Гаусса. Следовательно, наибо-
лее целесообразно решать нелинейные уравнения устано-
вившегося режима методом Зейделя или Ньютона, а при
плохой сходимости или расходимости — методом по па-
раметру, использующим на каждом шаге метод Ньютона
(см. § 3.6).
3.5. Примеры решения нелинейных уравнений
установившегося режима
На каждом шаге итерационного процесса по Гауссу
будем решать не комплексную систему (3.4), а систему
действительных уравнений
’ Г (Цй) '
_ I" (u<‘>)] _[-ь(
В„] ги'</+1)'
g6 Ue
’б Ц}.
(3-52)
Эту систему легко получить, выделив в (3.4) действи-
тельные и мнимые части.
Gy Ly
— By Gy-
= ]/з
ve
Итерационный процесс с помощью матрицы Zy опреде-
ляется комплексным выражением (3.16) либо эквивалент-
ным ему действительным выражением
[U" (z+’\
иб".
В/Г1 ri'(u(i))
Gy] '
(3.53)
При расчетах на ЭВМ обычно используется действи-
тельное выражение (3.53). При ручных расчетах удобно
использовать (3.16).
Пример 3.1. Запишем нелинейные уравнения узловых
напряжений в форме баланса токов при переменных U',
U" для сети на рис. 2.1, используя данные (примера 2.1 с
той разницей, что «в узлах 2, 3 заданы мощности генера-
тора >и нагрузки.
Установившийся режим данной сети описывается си-
стемой двух комплексных уравнений:
(^fas /^2’)
.(§32 /^32)
(#23 —/М
(§33 /^зз).
.t/3, + A,z.
^2 /Qa
?з — jQa
U*’ - A" _
(^зб—УМ (Уб 4~ Уь ’).
или при разделении на действительные и мнимые части
(при U6"=0, U6=U6'=U6).
-gJJi+Sau,' + b„u;' + bjj," = -
§2(Уб'
e.-Vi +g, Д'+W'+W'ЦЙТУУ -8Л
^зУ 2 ^23^3 4“ §зУt ' ~f~ §23(^3” =
(3.54)
^32^2 ^ЗЗ^з "Г §32^3'4" §зУз
_______ ?3 ‘ 3” ОУз' If rj
” f '3"24-^3,a 'r&j6 6‘
Пример 3.2. Выполним два итерационных шага по ме-
тоду Гаусса для уравнений узловых напряжений в фор-
77
ме баланса токов при переменных U', U" для сети на
рис. 2.1, используя данные примера 2.1 при заданных
трехфазных мощностях в узлах 2 и 3, соответственно
равных, МВ-А
S2=P2+/Q2=28,8675+/-17,3205;
S7=P3+/Q3=—46,1880 — /-23,0940.
Система нелинейных уравнений узловых напряжений
в форме баланса токов (3.54) для сети на рис. 2.1 запи-
сана в примере 3.1. Подставим в систему (3.54) значе-
ния проводимостей и мощностей в узлах и запишем ее в
виде, аналогичном (2.66).
Начальные приближения: L/2,(°)=L/3,<°)=110 кВ,
[У2,,(°)=[/3"(0)=0.
Система уравнений узловых напряжений на первом
шаге совпадает с системой (2.66) в примере 2.2.
Результаты расчетов примера 2.2 и первого шага реше-
ния нелинейной системы уравнений (3.54) совпадают, т. е.
[//'(’) = _ 4,3708 кВ, £//<’> = 109,8543 кВ,
С/2"( ’> = 0,2325 кВ, t//< ’> = 115,6777 кВ.
(3.55)
Второй шаг. Подставим (3.55) в правые части (3.54)
и получим линейную систему уравнений узловых напря-
жений на втором шаге:
+ 0,074567/' (2> — 0,0345t/3"<2> + 0,0338t//(2) —
— 0,0138t/3'(2> = 2,5624;
— 0,0345672"<2) +0,0612[/3//<“> — 0,0138£7я'<2>
+-0,0271 £//= 1,1096;
+ 0,0338С//'<2) — 0.0138С73"<2> — 0,0745[/г'<2> +
(3.56)
+ 0,03456/3'(2> = —4,7575;
— 0,0138У"<г) + 0,0271673" <2> 0,0345С//(2> —
— 0,0612С//С2» = — 2,8606.
Приводим систему (3.56) к эквивалентной с треуголь-
ной матрицей:
—0,4631С/2"(г> + 0,4537(73"(г>— 0,1852£7Я'<2> = 34,2255;
С//'<2>+0,042t//(2>+0,4580(7/(2> = 50.6726: I
Us44 — 0,4438t/s'<a> = 66,8587; |
67а,(2) = 109,4993. *
(3-57)
78
Из системы (3.57) последовательно определяем зна-
чения U3'& U2'^, U3"^ и С72"<2>:
U8"(«) = —4,3272 кВ; t/3'<2) = 109,4993 кВ; 1
Ut"W = 0,2882 кВ; £//<*> = 115,4545 кВ. J (3,58)
Второй итерационный шаг решения нелинейной систе-
мы уравнений (3.54) закончен. Расчет установившегося
режима сети на pine. 2.1 на ЭВМ сошелся с точностью по
напряжениям е=0,001 кВ за пять шагов. Значения неиз-
вестных на каждом шаге (приведены в табл. 3.1.
Таблица 3.1
Номер итерации С/" кВ 2 и” кВ 3 ’ и', кВ 1 U' кВ О
1 0,2612 —4,3361 115,7187 109,9981
2 0,2766 —4,1019 115,4138 109,6616
3 0,2697 —4,1296 115,4181 109,6534
4 0,2708 —4,1277 115,4167 109.6499
5 0,2708 —4,1277 115,4167 109,6499
Пример 3.3. Выполним два итерационных шага по ме-
тоду матрицы Zy для сети на рис. 2.1, используя данные
примера 3.2. Начальные приближения £//«>)=£/3'(0)=
= 110 кВ, £/2,,(О)=[;з"(О, = 0. Определим первое приближе-
ние токов в узлах:
= ?8,8675~р 17,3205 = 0,2624—/-О,1575 кА,
/ЗД((7<»>)= ~45,'88|f0',23,°94 = - 0.4199 + /-0,2099 кА.
Будем использовать уравнение, аналогичное (3.53), с
той же матрицей, что и .в примере 2.3.
Обратная матрица:
-14,6714 7,9953 7,1491 4,2623’
Г», °, - = 7,9953 18,0109 4,2623 8,5753
LG, -в,1 7,1491 4,2623 — 14,6714 — 7,9953
- 4,2623 8,5753 — 7,9953 — 18,0109
Значения узловых напряжений на первом шаге
что и в примере 2.3:
[//Ч') = _4,3362 кВ; (7/(4 = 109,9964 кВ;
£/;'() = 0,2612 кВ; £//(’)= Ц5,7187 кВ.
те же,
(3.59)
79
Определим задающие токи в узлах с учетом (3.59):
ГЗ_/г(£Л‘))=
28,8675—/-17,3205
(115,7187 —/-0,2612)
= 0,2498-/0,1491 кА,
V34(p*))=
— 46,188+ /-23,094
(109,9954 + /-4,3362)
= —0.4110+/-0,2261 кА.
Определим значения узловых напряжений на втором
шаге:
Us'&
-u3w _
- 0"
0
115
-115-
14.6714 7,9953 7,1491
7,9953 18,0109 4,2623
7.1491 4,2623 —14,6714
- 4,2623 8.5753 —7,9953
4,2623" 0,2498"
8,5753 — 04110
— 7,9953 — 0,1491 '
— 18,0109- - 0,2261-
[/3"(2)=—4,1019 кВ; [/з,(2)= 109,6601 кВ;
£//'(2)=0,2766 кВ; U2'™= 115,4138 кВ.
Расчет установившегося режима сети ла рис. 2.1 на
ЭВМ сошелся с точностью по напряжениям е=0,001 кВ
за пять шагов. Значения неизвестных па каждом шаге
приведены в табл. 3.2.
Т аб ли ца 3.2
Номер итерации С/''. кВ 2 и2- кВ у" кВ 3 V'. кВ
1 0,2622 —4.3352 115,7180 109.9955
2 0,2768 —4,1014 115,4136 109,6593
3 0,2697 —4,1299 115,4172 109.6522
4 0,2702 —4,12*4 115,4165 109,6504
5 0,2702 —4,1286 115,4164 109,6503
Сравнение примеров 3.3 и 3.2 подтверждает, что ите-
рационные процессы с применением на каждом шаге ме-
тодов Гаусса и обратной матрицы Zy совпадают.
Пример 3.4. Выполним один шаг по методу Зейделя для
уравнений узловых напряжений при .переменных U', U"
для сети на рис. 2.1, используя данные примера 3.2.
80
Для улучшения сходимости запишем уравнения балан-
са токов -в форме, аналогичной примерам 2.4, 2.5, 3.2, 3.3.
Систему (3.54) запишем в виде, удобном для итерации»,
следующим образом:
f/2"(i) = 0,4631£73"<°> - 0.4537(7/ <°> -}-
387,48327/(0>+232,48997/4») 3()
+ 0,1852(7/<°» +
(//'(*) = 0,5637(7/'(’) + 0,2255(7/<°) — 0,4428(7/1°) -|-
- 754,7058' /(») —377,35297/' ®)_ 24 дд lg.
(7/s+7/'s)
(£/3'a + L'3"2)
U '(’) = 0,4537(72"(’» + 0,4631(7/1°) — 0,1852<7a"<,> —
387,4832’'a''<x) —232.48997a'(0) , C1
• * ll r\ ll I LL. 11 °
(<//s + t/2"s)
U/<*) = 0,5637(7/1’» —0,2255(7/7’) + 0,4428(7/'!’) —
— 754,70587э^Ч) 4- 377.35297/(0) 5Q 171б
(7/2 + f//'2)
Зададим начальные приближения:
(72'(о)= (73'<°)= 110 кВ; (72"<°)= (73"<°>=0.
Определим первое приближение:
(7/'<’» = 0,4631 - 0 — 0,4537-110 -}-0,1852-110 +
д- —832‘100 + 23?'48"-.°_ , зо 8725 = 4,8601 кВ;
1 110» + 0а г
(73"<D=—3,0325 кВ; (//<))= 117,4067 кВ; (73,(»=
= 110,2981 .кВ.
Определим значения вещественных и мнимых состав-
ляющих небалансов тока в узлах 2 и 3:
wt„ =0,0338-117,4067 4-0,0745-4,8601— 0.0138 -110.2981 +
. о Q345.з оз25 _ 28,8675-117,4067+ 17,3205-4,8601 _ 9 3 =
’ ’ 117,40672 + 4,8601s
= 0,3562 кА;
w,,, = —0,0924 кА; пч , = 0,1476 кА; ю,, = — 0,0215 кА.
3 2 3
Расчет установившегося режима для сети на рис. 2.1
методом Зейделя по программе «Сеть» сошелся с точно-
стью по напряжениям е=0,001 кВ за девять шагов. Ре-
зультаты расчета следующие: (7/= 115,415 кВ; (72"=
6—6189
8В
= 0,272 кВ; U'3= 109,644 кВ; U3"=—4,126 кВ, что сов-
падает с точностью до погрешностей округления с ре-
зультатами примеров 3.2, 3.3.
Пример 3.5. Решим по методу Ньютона систему урав-
нений узловых напряжений в форме баланса мощностей
при переменных U., 6 для сети на рис. 2.1, используя дан-
ные примера 3.2.
Систему нелинейных уравнений узловых напряжений
(3.42), (3.43) можно записать для узла 2 следующим об-
разом:
Р2—g22^22— br2[cos62(^23 cos63+/?23sin63) +
+ sin62 (&2з sin63—b23 cos63) ] U3—
— UiUctgze cos62—&2б sin62) =0; (3.60)
Q2 — 622f/22— t72[cos62(fe23 cos63 — g23 sin63) +
+sin62 (g 3 cos63+623 sin63) ] U3 —
—U2U6(g26 sin62+d26 cos62) =0. (3.61)
Аналогичные уравнения можно записать -и для узла 3.
Подставив численные значения, получим
28,8675—0,0338 [/224-U2[cos62(0,0138 cos63+
—|-0,0345 sin63) +sin62 (0,0138 sin63 —
—0,0345 cos63) ] U3+ U2 115 - 0,02 cos62 —
— U2 115 -0,04 sin62=0;
—46,1880—0,0271 t/32+ t/3[cos63 (0,0138 cos62+
+0,0345 sin62) 4-sin63 (0,0138 sin62 — 0,0345 cos62) ] U2 —
—115-0,0267 i/3sin63-f-[/3 115-0,0133cos63=0;
17,3205—0,7448 t/22+£72[cos62 (0,0345 cos63 —
—0,0138 sin63) +sin62 (0,0138 cos63+
+0,0345 sin63) ] U3+115- 0,02 U2 sin62+
+t/2 115-0,04 cos62=0;
—23,094—0,0611 (732+ U3 [cos63 (0,0345 cos62 —
—0,0138sin62)+s n63(0,0138cos62+
+0,0345 sin62)] <72+0,0133-115 6’3 sind3+
+ U3 115 • 0,0267 cos63=0.
Начальные 'приближения: t72<°>=t/3(O)= 110 кВ, б2(0)=
=63(0)=0.
B2
W(X(°)) =
Элементы вектора небалансов:
wp2= 28,8675-0,0338-1102+1102 cos 0(0,0138-cos 0) +
+110-115-0,02 cos 0=39 8675 МВт; wP3=~38,8730 МВт;:
WQ2= 17,3205—0,0745-1102+ 1102 cos 0 (0,0345- cos 0) +.
+ 110-115-0,02 sin 0+110-115-0,04 cos 0=
= 39,3205 Мвар; wQ3=—8,4090 Мвар.
Вектор небалансов, МВт, Мвар:
39,8675"
— 38,8730
39,3205 ’
- —8,4090-
Элементы матрицы Якоби для системы (3.60), (3.61)?
можно записать так:
= — [cos 62 (g23 cos 63 + b23 sin 63) + sin 62 (g23 sin 63 —
— b23 cos 83) ] U3 — 2U2g22 — C76g26cos 62 + O’6fe26 sin 62;
= ~Ua [cos 68 (g32 cos 6. + b32 sin 62) + sin 63 (g32 sin 62 —
— b32 cos 62)J.
Остальные частные производные определяются по ана-
логичным выражениям.
Для данного примера на первом шаге
= 110 cos 0 (0,0138 cos' 0 + 0,0345 sin 0) +
+ sin 0 (0,0138 sin 0 — 0,0345 cos 0) — 2 • 110-0,0338 +
+ 115-0,02 cos'0—115-0,04 sin 0 = —3,6169 МВт/кВ.
Аналогично вычисляются -и остальные частные произ-
водные.
Матрица Якоби имеет следующий .вид:
Г—3,6169 1,5169 —923,4500 417,4500"
417,4500 —755,2050
419,8590 —166,8590
— 166,8590 335,1040-
1,5169
1,5169 —2.9134
— 7,9950 3,7950
. 3,7950 —6,5985
dW(X(°))
дХ
6*
83;
—3,6169 1,5169 —923 4500 417,4500"
1,5169 —2,9134 417,4500 —755,2050
—7,9950 3,7950 419,8590 —166,8590
3,7950 —6,5985 —166,8590 335,1040-
Систему линеаризованных уравнений на первом шаге
можно записать в матричной форме:
~ 39,8675’
—38,8730
39,3205
----8,4090-
Ьдб3(Ч J
Решим эту систему уравнений по Гауссу и определим
поправки AL++ Д£/3<1), Д62(,)> Дб3(1):
Д63(1)=—0,0385 рад=—2,2038°; Д(/3(,>=0,1158 кВ;
Д62<‘)=+0,0027 рад=+0,1565°; АС72<»)=5,9383 кВ.
Первое приближение переменных:
63(1)=0—2.2038°=—2,2038°; (73(,)= 110+0,1158=
= 110.1158 кВ; 62О)=0+0,1565°=0,1565°; 1/2<,>=110+
+5,9383=115,9383 кВ.
Первый шаг итерационного процесса окончен. Даль-
нейший расчет выполнялся на ЭВМ по программе
«Б-6/77» при заданных максимально допустимых активном
и реактивном небалансах мощности 0,1 МВт и 0,1 Мвар.
Результаты расчетов на каждом шаге приведены в
табл. 3.3.
Таблица 3.3
Номер итерации U», кВ &1. град У3, кВ #», град
0 ПО 0 ПО 0
1 115,9154 0,1604 110,0982 —2,2019
2 115,4420 0,1327 109,7589 —2,1498
3 115,4150 0,1352 109,7210 —2,1553
4 115,4150 0,1352 109,7210 —2,1553
Сравнение примеров 3.5, 3.2, 3.3 и 3.4 показывает, что
конечные результаты расчетов совпадают с точностью до
погрешностей округления. Примеры подтверждают, что
метод Ньютона сходится быстрее, чем методы Зейделя,
обратной матрицы, а также применения метода Гаусса на
каждом шаге.
34
3.6. Методы по параметру
Методы по параметру необходимо использовать в расче-
те установившегося режима в тех случаях, когда расходит-
ся метод Ньютона. Ряд модификаций метода по параметру
определяется следующей итерационной формулой:
Х<‘+’) = Х<1> —
dW(X('))l-1
(3.62)
L д X
где
дХ
— обратная матрица Якоби при Х=
= X<i); W(X() — вектор-функция небалансов мощности
в узлах при Х=Х^‘>; X(i\ Х<‘+1) — значения вектора перемен-
ных на i-м и (t-f-l)-M шагах итерационного процесса; t —
параметр, причем
При /=1 (3.62) совпадает с (3.37), т. е. итерационный
процесс (3.62) совпадает с мето ом Ньютона. Применение
(3.62) соответствует умножению поправок ДХ, определяе-
мых при решении линейной системы (3.35), на параметр t.
В этом смысле методы по параметру (3.62) можно рас-
сматривать как ускорение метода Ньютона, т. е. (3.62)
аналогично (3.21) и параметр t аналогичен коэффициенту
ускорения t в (3.31).
В самом общем случае методы по параметру могут ис-
пользовать любые способы перехода от системы уравнений
установившегося режима, решение для которой известно,
к той, которую необходимо решить.
В общем случае систему уравнений установившегося
режима можно записать в виде (3.7). Предположим, что
итерационный процесс не сошелся при значении независи-
мых параметров Y=Y, т. е. при решении системы*
W(X, ¥)=0. (3.63)
Пусть известно решение уравнений установившегося ре-
жима Х<°> при значении неизвестных параметров Y=Y<0),
т. е. (Х<°), ¥<°>) удовлетворяют системе уравнений
W(X, Y«°))=0. (3.64)
Методы по параметру заключаются в замене (3.63) на
систему
W(X,Yj)=0, (3.65)
где t — действительный параметр, подбираемый так, чтобы
1 Y—конкретное значение вектора независимых параметров.
85
при i=0 формула (3.65) совпадала с системой (3.64), ре-
шение которой известно, при t=\—с системой (3.63), ре-
шение которой требуется определить.
Простейший метод по параметру — метод последова-
тельных интервалов — был предложен Л. А. Круммом.
Метод последовательных интервалов (как и другие моди-
фикации методов по параметру) фактически соответствует
утяжелению режима и решению па каждом шаге утяжеле-
ния уравнений установившегося режима. Суть этого мето-
да в следующем. Пусть известен установившийся режим
(X >>, Y<°)). Разделим отрезок Y—Y<°> для всех компонент
вектора Y на несколько последовательных интервалов. На
каждом интервале будем решать систему уравнений уста-
новившегося режима
W(X, Y<°)-H(Y—Y<°>))=0, (3.66>
где параметр / определяется длиной выбираемых интерва-
лов.
При решении (3.66) в качестве начального приближения
вектора X будем использовать его значение, полученное
при расчете установившегося режима на предыдущем ин-
тервале. Система (3.66) —частный случай (3.65).
Методы по параметру следует применять в качестве
наиболее надежных по сходимости. Поэтому при каждом
изменении параметра t (на каждом интервале) целесооб-
разно использовать метод Ньютона, который быстро и на-
дежно сходится, если начальное приближение достаточно
близко к решению. Применение, например, метода Зейде-
ля на каждом интервале нецелесообразно, так как в ряде
случаев метод Зейделя может расходиться в расчете уста-
новившегося режима, как бы близко к решению ни было
начальное приближение (см. § 5.2).
Методы по параметру различаются способом выбора L
При расчете установившихся режимов для выбора пара-
метра t эффективно применение аналитических выраже-
ний, использующих вторые производные ——(см § 5.4).
дХjdX i
Другие методы решения нелинейных уравнений (сведе-
ние решения систем нелинейных алгебраических уравнений
к решению систем дифференциальных уравнений, контур-
ные уравнения, коэффициенты токораспределення, проек-
тивный метод и т. д.) не нашли применения в многолетней-
практике расчетов установившихся режимов на ЭВМ.
Представляется, что их использование не может быть эф-
фективно в сравнении с лучшими из методов, описанных
«6
выше. Отметим, что решение уравнений установившегося
режима с помощью интегрирования дифференциальных
уравнений можно интерпретировать как непрерывный ана-
лог метода по параметру. При этом не видно преимуществ,
возникающих из-за перехода от алгебраических уравнений
к дифференциальным.
3.7. Расчет потоков и потерь мощности в сети
Потоки мощности в продольной части линии (см.
рис. 1.8,а) можно определить по выражениям (1.40), (1.41).
Например, из (1.40) следует
PJ, = уы'Л, + УЗуГ/й; (3.67)
(&i = i'k, - YWi< (3.68)
где Pf], Qfe/ — активные и реактивные мощности в начале
линии; Zfe/, l’ki и Uk, Uk—вещественные и мнимые состав-
ляющие тока в линии kj и напряжения узла k соответст-
венно.
Составляющие тока в линии kj можно определить:
4 - - ру (у; - - ру- М - и,’) ьк1-, (3.69>
4 = рг - У/) 4 - ys W ~ u'i) g». (З-70)
где gkj, bki — активные и реактивные составляющие вза-
имных узловых проводимостей.
В отличие от (1.37) и (1.40) в (3.69), (3.70) использу-
ется не проводимость ветви kj, а взаимная узловая про-
водимость, которая противоположна по знаку проводимо-
сти ветви. Выражения, аналогичные (3.67), (3.68) для
Pkjv, QkjK, следуют из (1.41). Эти выражения получаются,
если заменить Ukf, Uh" в (3.67), (3.68) на (7/, U".
Потери мощности в активном и индуктивном сопротив-
лениях линии, т. е. в ее продольной части, равны разности
потоков мощности в начале и в конце линии (см. рис. 1.8).
Суммарные потери мощности в продольной части электри-
ческой сети можно определить, просуммировав потери мощ-
ности в продольной части всех линий, т. е. по выражению:
(3.71)
87
где суммирование ведется по всем ветвям сети. Суммар-
ные потери мощности в сети, т. е. в ее продольной и попе-
речной частях, ASX определяются аналогично (1.45) и по-
лучаются в результате добавления к (3.71) реактивной
мощности, генерируемой в емкостных проводимостях
линий.
Часто используется выражение потерь мощности в виде
квадратичной формы от узловых напряжений. Потери
мощности равны разности между мощностями генераторов
и нагрузок в узлах. Если для генерирующего узла мощ-
ность и ток принимаются со знаком плюс, а для нагрузоч-
ного— со знаком минус, то потери мощности в сети с
(«+1)-м узлом определяются так:
л-t-l п -Р1
- 3 5* ” S I (3.72>
Л=1 ft = i
Подчеркнем, что ASX— это суммарные потери в про-
дольной и поперечной частях сети.
В матричном виде (3.72) можно записать следующим
образом:
№ = (3.73>
где Its* — вектор-строка сопряженных узловых токов по-
рядка (п+1); U2—вектор-столбец комплексов узловых на-
пряжений порядка (n-f-l).
Уравнение узловых напряжений, учитывая правила дей-
ствия с матрицами, можно записать в следующем виде:
]<3^ = и\У;У£. (3.74>
Если подставить (3.74) в (3.73), то потери мощности
можно вычислять по следующей формуле:
AS, = АРе + jAQi = и;Л;.уЕиЕ, (3.75>
где индекс «т» означает транспортирование матрицы;
¥ух — полная комплексная матрица узловых проводимо-
стей порядка ( п+1); — вектор-столбец комплексов на-
пряжений узлов (п-|-1)-го порядка; (п+1) —число узлов
в электрической системе; индекс * означает, что элементы
вектор-строки UT* и матрицы Y*T,ys соответственно равны
£4* и ]%•*.
Выражение в правой части (3.75) называется квадра-
тичной формой от напряжений.
88
Если обозначить Yy£=G£—jB2, Uys—т0 из
(3.75) получим следующие выражения для потерь актив-
ной и реактивной мощностей:
= и;£<ад+v«g£u"; (з.7б)
д<?Е = и' в,и:+и" ви;.'. (3.77)
* it лл Лл 1 Лл it лл ' *
В (3.76), (3.77) опущен индекс транспортирования у
матриц Gv и Bs в силу их симметричности. В (3.76), (3.77)
потери определяются как квадратичные формы от актив-
ных и реактивных составляющих напряжений узлов.
Если использовать полную матрицу собственных и вза-
имных сопротивлений узлов Z2 порядка (п-|-1), то из (3.73)
получим аналогично (3.75) выражение потерь в виде квад-
ратичной формы от токов в узлах
ASr =_i;jZL IE. (3.78)
Выразив в (3.78) токи в узлах через мощности в узлах
^т£^диаг£>
2е — p/g- (Ццизге) ’ Sr,
получим следующее выражение потерь:
ASv
(3.79)
где ST2—вектор-строка комплексов узловых мощностей по-
рядка (n-f-l); Sv* — вектор-столбец сопряженных узловых
мощностей порядка (л-f-1); (U^,^)-1 —диаго-
нальные матрицы порядка («4-1), k-й элемент которых
равен соответственно Uh~l и ({///)-1.
Пример 3.6. Для схемы рис. 2.1 вычислим токи, потоки
и потери мощности по связям при исходных данных, при-
веденных в примере 3.2, и значениях напряжений узлов,
определенных в примере 3.5.
Модули и фазы напряжений узлов: (/i = 115 кВ; U2=
= 115,415 кВ; {/3=109,721 кВ; 61=0; б2=0,1352°; 63=
=—2,1553°.
Активные и реактивные составляющие напряжений, кВ:
Z7!'=115; {//=115,4146; {//=109,6434; {//'=0; {//'=
= 0,2723; {//'=—4,1264.
Взаимные проводимости узлов, 1/Ом: gi<>=—0,02;
^12=—0,04; £1з=— 0,0133; 613=—0,0267; £23=—0,0138;
Z»23=—0.0345.
89
Рис. 3.2. Распределение
токов и мощностей в се-
ти из трех узлов
Примем направления токов и потоков мощности в соот-
ветствии с рис. 3.2. Вычислим токи по связям, кА, исполь-
зуя следующие выражения, вытекающие из (1.37):
/;2 = -^=-[(115 —115,4146)-0,02 + (О — 0,2723)-0,04] =
V 2
= — 0,0111;
[(115-115,4146) .0,04 — (0 - 0,2723) -0,021 =
I з
= +0,0064;
/;3 = 0,1047; = -0,0509; 7^= 0,1336; 7» = —0,0799.
Определим перетоки мощности, МВт и Мвар, по (3.67)
и (3.68) и по аналогичным выражениям, соответствующим
(1.41). При принятых обозначениях в (3.67), (3.68) и (1.41)
потоки мощности S". и S^. всегда имеют одинаковый
знак. Этот знак положителен, если мощность течет от узла
k к /, как в линиях 13 и 23 на рис. 3.2, и отрицателен, если
поток мощности направлен от узла j к k, например в линии
12 на рис. 3.2:
Р“2 = |/3 [ 115 (- 0,0111) + 0 • 0.0064J = —2,208;
РЪ = ) '3[ 115,4146 (—0,0111) + 0,2723-0,0064] = —2,2129;
Q]*2= /3]0(—0,0111)—115-0,0064] = —1,2765; -
Qi2 = |<3]0,2723(— 0,0111)— 115,4146-0,0064] = — 1 2863;
% = 20,861; PKl3 = 20,2528; Q'}3 = 10,1315; Q?3 = 8,9110;
% = 26,6692; 7^3 = 25,9426; = 16,0364; (&= 14,2198.
Определим потери активной и реактивной мощности в
каждой ветви и суммарные потери, МВт и М ар:
90
ДР1а=РГ2—Р112 = —2,208 —(—2,2129) = 0,0049; ДР13=0,6082;
ДРМ e 0,7266; ДР£ = 0,0049-J-0,6082 + 0,7266 = 1,3397;
AQit = Q?2 - (&==-! ,2765 — (- 1,28 63) = 0,0098;
AQ13= 1,2205;
= 1,8166; AQr = 0,0098 + 1,2205 + 1,8166 = 3,0469.
Пример 3.7. Для схемы рис. 2.1 вычислить потери по
формулам (3.76) и (3.77).
1. Вычислим собственные проводимости узлов, 1/Ом:
£п =—(£12+^13) =—(—0,02—0,0133) =0,0333;
=_(fcI24-bI3) =— (—0,04—0,0267) =0,0667;
i)22^= 0,0/4t>; £зз=0.0271; £>зз=0,0612.
2. Составим матрицы:
£>п —
£22=0,0338;
~gn git gl3 - 0,0333 —0,0200 —0,0133-
Gr = gil git gi3 = —0,0200 0,0338 —0,0138 ;
-£>31 g t £>n 6J2 gas- oil —0,0133 0,0667 —0,0138 0,0271- —0,0400 —0,0267'
Bv = £>л b2, -^3i &зз ^23 ^33- = —0,0400 —0,0267 0,0745 —0,0345 . —0,0345 0,0612.
3. Векторы 1 и;= J/ и U£" 115 115,4146 .109,6434 имеют сл ; иГ = едующий вид: 0 0,2733 • _ —4,1264 .
4. Определим потери активной мощности, МВт:
ДРЕ=] 115 115,4146 109,6434] X
0,0333 —0,0200 —0,01331 Г П5
> —0,0200
.—0,0133 —0,0138
" 0,0333 —0,0200
+ ]0 0,2723 —4,1264] —0,0200 0,0338
.—0,0133 —0,0138
0,0338 —0,0138 • 115,4146 +
0,0271J L 109,6434.
—0,01331
' 0
0,2723 =fll5 115,4146 109,6434]
— 4,1264.
0,0271 J
0,0629]
L—0,1509.:
91
0,0494 1
-b JO 0,2723 —4,1264]
0,06661 = 0,8447 4-0,4949= 1,3396.
—0,1156
5. Вычислим потери реактивной мощности, Мвар:
AQv = IH5 115,4146 109.6434JX
0,0667 —0,04 —0,0267
115
—0,04
L—0,0267
0,0745 -0,0345
—0,0345 0,0612
115,4146
109,6434.
Г 0,0667
4- [0 0,02729 —4,1264] —0,0400
—0,0267
0,0400
0,0745
—0,0345
—0,0267
—0,0345
0,0612
0
0,2729
.—4,1264.
= [115 115,4146 109,6434]
0,1264'
0,2157
.0,3421.
0,0993
4-J0 0,2729 — 4.1264JX
0,1626
.—0,2619.
1,92194- 1,1251 =
= 3,0470.
Значения потерь активной и реактивной мощности со-
впадают с результатом примера 3.6.
Глава четвертая
РАСЧЕТЫ РЕЖИМОВ СИСТЕМ БОЛЬШОЙ СЛОЖНОСТИ
4.1. Учет слабой заполненности матриц
Общие положения. При расчетах установившихся режи-
мов электрических систем большой сложности необходимо
применять специальные методы экономии памяти ЭВМ и
повышения быстродействия расчетов. Такие расчеты не-
возможны без учета слабой заполненности матриц, экви-
валснтировапия, разделения на подсистемы, разделения
уравнений и т. д. Эти вопросы достаточно сложны, и им
посвящено очень большое количество статей и книг (см.
92
ю—17])- В то же время отсутствует их изложение в.
единой терминологии и с единой точки зрения. Подробное
рассмотрение и сопоставление различных способов расче-
та режимов систем большой сложности и описание соот-
ветствующих алгоритмов выходит за рамки данной книги
и, по нашему мнению, представляет интерес только для
специалистов, занимающихся усовершенствованием мето-
дов расчета режимов или разработкой математического
обеспечения. В данной главе приведены основные идеи, ис-
пользуемые для повышения эффективности расчета режи-
мов систем большой сложности, которые целесообразно по-
нимать всем инженерам, связанным с расчетами устано-
вившихся режимов па ЭВМ. Ниже кратко рассмотрена
суть наиболее важных методов экономии памяти ЭВМ и по-
вышения быстродействия расчетов режимов: учет слабой
заполненности матриц, эквивалентировапие, разделение на
подсистемы, разделение уравнений, разложение на тре-
угольные матрицы и элиминативная форма.
Учет слабой заполненности матрицы Yy — это наиболее-
эффективный способ экономии памяти и времени расчета
установившегося режима. Такой учет надо применять в
первую очередь, и лишь если после такого учета не хва-
тает памяти ЭВМ, надо использовать эквивалентирование,
разделение на подсистемы, разложение на треугольные
матрицы и т. д.
Линейные алгебраические уравнения, встречающиеся
при решении задачи расчета установившихся режимов,,
имеют следующие характерные особенности: матрица ко-
эффициентов систем симметричная; в большинстве случа-
ев матрица коэффициентов системы уравнений является
слабозаполненной, т. е. содержит большое число нулевых
элементов, расположение которых произвольно. Такие
матрицы называются слабозаполненным-и [10] или разре-
женными [11].
Если узлы k и / не соединены непосредственно друг с
другом, то взаимная проводимость УЛ7=0. В сложных
электрических системах узел k соединен не со всеми ос-
тальными узлами, а лишь с некоторыми из них. Поэтому
большинство взаимных проводимостей (элементов матри-
цы Yy) равно нулю, т. е. Yy слабо заполнена. Так, число-
ненулевых элементов в матрице узловых проводимостей
для сложных схем замещения электрических систем с ко-
личеством узлов п составляет примерно 4/г, т. е. п2—4/г
элементов этой матрицы равны нулю [8].
93
Непосредственное применение стандартных программ
решения линейных уравнений в расчетах установившихся
режимов нецелесообразно. Эффективность расчетов сильно
повышается, если учитывать наличие нулевых элементов в
матрице Yy. В этом случае, с одной стороны, экономится
память ЭВМ, так как запоминаются лишь ненулевые эле-
менты матрицы Yr, с другой стороны, уменьшается количе-
ство выполняемых операций, так как не производятся
арифметические действия с нулевыми элементами. Ни одна
современная программа расчета установившегося режима,
использующая метод Гаусса, Ньютона или Зейделя, не
может быть эффективна, если в ней не предусмотрен учет
слабой заполненности матриц коэффициентов.
,\’чет слабой заполненности Yy осуществляется алгорит-
мически очень просто при применении метода Зейделя
(или простой итерации). Для этого надо при вычислении
(/4-1)-го приближения напряжения /г-го узла по
выражению (2.55) выполнять арифметические действия
лишь с не равными нулю взаимными проводимостями узлов.
Это легко сделать, используя информацию о топологической
схеме сети, т. е. о том, с какими узлами соединен узел k.
Учет ненулевых элементов при решении уравнений ус-
тановившегося режима точными методами более сложен.
В этом случае надо использовать, например, метод Гаусса
при запоминании и обработке только ненулевых элементов.
При решении методом Гаусса появляются новые ненулевые
элементы. Например, при переходе от системы из трех
уравнений к системе из двух уравнений коэффициент Узг(1)
может быть не равным нулю, хотя взаимная проводимость
Г32 равна нулю. Так будет, если >'31 и bv> не равны нулю.
Заранее трудно предусмотреть, сколько новых ненулевых
элементов появится при реализации метода Гаусса. Именно
поэтому требуемая для расчета установившегося режима
память ЭВМ нс может быть выражена только через число
узлов электрической системы. Необходимая для расчета
установившегося режима память ЭВ/М определяется не
только порядком системы, по и расположением ненулевых
элементов *. Поэтому не всегда можно заранее точно пре-
дусмотреть, может ли быть рассчитан установившийся
режим данной электрической системы с помощью такой
програ м мы.
‘ При решении системы поря ка п для запоминания всех элемен-
тов матрицы коэффициентов требуется п2 машинных слов оперативной
памяти.
‘.91
Учету ненулевых элементов при решении систем линей-
ных алгебраических уравнений со слабозаполненными мат-
рицами посвящено значительное количество работ [11]^
Большое внимание уделено этому вопросу и в литературе,,
посвященной расчетам установившегося режима на ЭВМ
[6, 10, 12, 14]. Фактически задача сводится к такой записи
уравнений установившегося режима, при которой ненуле-
вые элементы матрицы узловых проводимостей будут
сгруппированы так, чтобы в ходе решения системы линей-
ных уравнений появилось как можно меньше новых нену-
левых элементов. Расположение ненулевых элементов мат-
рицы Yy определяется способом нумерации узлов электри-
ческой системы. Это легко проиллюстрировать с помощью»
матрицы присоединения узлов электрической сети. Элемен-
ты квадратной матрицы присоединения узлов состоят из
нулей и единиц (для приводимых ниже рассуждений знак
единиц не имеет значения). Если узел /г соединен с узлом
/ (т. е. то на пересечении /г-й строки и j-ro столб-
ца стоит единица. На диагонали матрицы присоединения
узлов находятся единицы. Иными словами, матрица присо-
единения узлов отличается от матрицы Yy тем, что все-
ненулевые элементы Yy заменены единицами.
Наиболее простым и эффективным при применении ме-
тода Гаусса является способ нумерации узлов, при котором
матрица присоединения узлов приводится к ленточной
форме.
Матрицей в ленточной форме называют такую, у кото-
рой ненулевые элементы расположены в виде «ленты»-
вдоль главной диагонали матрицы (рис. 4.1). Такая форма
записи матрицы Yy эффективна для графов с цепочечной
или близкой к ней структурой [12].
Будем называть степенью узла 1 число ветвей, присо-
единенных к этому узлу [12]. Первый номер присвоим
узлу с минимальной степенью. Если таких узлов несколько,,
выбираем любой из них. Далее в порядке возрастания но-
меров уже пронумерованных узлов нумеруем смежные с
ними непронумерованные узлы, причем нумерацию ведем
в порядке возрастания их степеней.
Это один из наиболее простых и эффективных при при-
менении метода Гаусса способов нумерации узлов. Этот
способ нумерации легко реализовать па ЭВМ. Для каж-
1 Степенью вершины графа называют число ребер, опирающихся:
па эту вершину.
9S
лого узла подсчитывается степень, т. е. число других узлов,
с которыми он соединен. Узлы нумеруются в соответствии
со степенями. Номер узла тем больше, чем с большим ко-
личеством других узлов он соединен [6, 12]. Такой способ
нумерации узлов приводит к существенному сокращению
числа новых ненулевых элемен-
тов, возникающих в процессе ис-
ключения по Гауссу.
Существуют многочисленные
способы нумерации узлов и уче-
та слабой заполненности матри-
цы Yy. Используя методы теории
графов, можно с помощью специ-
альных алгоритмов определять
оптимальную с точки зрения эко-
номии памяти и уменьшения чис-
ла операций нумерацию узлов. В
то же время простые способы
нумерации узлов, например при-
веденный выше, достаточно эф-
фективны и их оптимизация ча-
сто несущественна. Еще раз под-
черкнем, что возможность такого
учета составляет важнейшее пре-
имущество методов Гаусса и
Ньютона при решении линейных
и нелинейных уравнений устано-
вившегося режима в сравнении с
использованием матрицы соб-
ственных и взаимных сопротивлений узлов, в которой нет
нулевых элементов. Ни одна современная программа рас-
чета установившегося режима методом Гаусса или Нью-
тона не может быть эффективна без учета слабой запол-
ненности матриц.
Рассмотренные ниже способы эквивалентирования и
разделения электрических систем на подсистемы особенно
эффективны в сочетании с учетом слабой заполненности
матриц.
«2
Рис. 4 1. Нумерация узлов,
приводящая матрицу при-
соединения узлов к ленточ-
ной форме
4.2. Эквивалентирование при расчетах установившихся
режимов
Пусть схема анализируемой электрической системы со-
держит «4-1 узел. Диспетчеру надо проанализировать из-
менения режима при увеличении нагрузки в нескольких
96
близко расположенных узлах. Это изменение нагрузки ока-
жет влияние не на всю электрическую систему, а лишь на
ее часть, допустим, из пи узлов, где Пп<н-|-1. Практичес-
кий опыт расчетов и анализа режимов в электрической си-
стеме во многих случаях позволяет с той или иной сте-
пенью точности определить эту часть системы. Естественно,
что в рассматриваемом случае целесообразно заменить всю
электрическую систему из п+ I узла на эквивалентную из
Пн узлов, содержащую только те узлы, для которых необ-
ходимо проанализировать изменения параметров режима.
Затем надо рассчитать установившийся режим только экви-
валентной системы из «л узлов. Эффективность такого
эквпвалентирования состоит в уменьшении числа узлов
рассчитываемой электрической системы. В результате
уменьшается количество решаемых уравнений установив-
шегося режима и переменных в них. Соответственно умень-
шаются требуемая намять и время расчета на ЭВМ, упро-
щается анализ режима электрической системы.
Для того чтобы определить параметры эквивалентной
системы, необходимо осуществить соответствующие расче-
ты на ЭВМ. Схема считается эквивалентной, если в резуль-
тате расчета ее режима определяются те же значения на-
пряжений оставшихся в ней узлов, что и при расчете исход-
ной системы, т. е. до эквпвалентирования. Остальные узлы
исключаются, и напряжения в них не могут быть определе-
ны в результате расчета эквивалентной схемы. Обычно при
эквивалентировании предполагается, что в качестве актив-
ных элементов схема содержит только задающие токи; все
ЭДС ветвей предполагаются предварительно замененными
эквивалентными задающими токами.
Приведем расчетные выражения для матрицы проводи-
мостей узлов эквивалентной системы. Число независимых
узлов исходной системы и порядок матрицы Yy равны п.
В эквивалентной системе содержится Пи независимых уз-
лов При эквивалентировании исключается щ узел, где
щ=п—пи.
Разобьем матрицу проводимостей и вектор-столбцы уз-
ловых напряжений и задающих токов па блоки, соответ-
ствующие эквивалентной системе и исключенной части. За-
пишем уравнение узловых напряжений (2.6), используя
блочные матрицы и вектор-столбцы:
(4.1)
7—6189
97
В этом уравнении YH н — матрица собственных и взаим-
ных проводимостей узлов эквивалентной системы; Un, In—
вектор-столбцы узловых напряжений и задающих токов
эквивалентной системы; Uj, 1Ь Уц включают узловые про-
водимости, напряжения и задающие токи исключаемых уз-
лов; YI п состоит из взаимных проводимостей узлов, ухо-
дящих в эквивалентную и исключаемую системы. Это —
проводимости ветвей, соединяющих узлы эквивалентной и
исключаемой систем. Если записать (2.6) в виде двух мат-
ричных уравнений
L.u,+L„U„ =2„
Хи 1Уг Xn IlLfll = Jn,
(4-2)
то из первого уравнения можно выразить вектор-столбец
напряжений исключаемых узлов через вектор-столбец на-
пряжений эквивалентной системы:
U( = YH4h -YinUH). (4.3
Если подставить последнее выражение во второе из
уравнений (4.2), то получим уравнение узловых напряже-
ний только для эквивалентной системы:
Хп Ди1 (L Хи|Уи)4" Хи иУн “'Jn*
Перенесем первое слагаемое в правую часть этого урав-
нения и получим
<Х„,, -- Y„ ,Хп'Y, „) и„ - Y„ , Yn' I,. (4.4)
Последнее перепишем в матричном виде, аналогичном
уравнению узловых напряжений (2.6):
Y^U,, = 1_„. (4.5)
Таким образом, матрица узловых проводимостей и век-
тор-столбец задающих токов эквивалентной системы опре-
деляются следующими выражениями:
Yy.SK = Y1,„-Y1IIYl7'Yll„ (4.6)
2» =_!>.-In .I?1!,- (4.7)
Последние слагаемые правой части выражении (4.6) и
(4.7) отражают влияние исключенной части па напряже-
ния узлов эквивалентной системы.
98
При расчетах установившихся режимов сложных элек-
трических систем используются специальные программы
эквивалентирования, реализующие определение _Yy>3K и
15К по выражениям, например, (4.6), (4.7).
~ В основе рассмотренного простейшего способа эквива-
лентирования фактически лежит метод обычного исключе-
ния переменных. Легко убедиться, что исключение только
одного узла по выражениям (4.3) — (4.5) совпадает с ис-
ключением ио Гауссу напряжения этого узла из системы
уравнений узловых напряжений.
Более сложные способы эквивалентирования необходи-
мо использовать для того, чтобы добиться совпадения при
расчете эквивалентной и исходной систем не только напря-
жений, но и потерь мощности. Такие способы эквивалепти-
рования всегда приводят к некоторой ошибке в определе-
нии потерь мощности и недостаточно разработаны для их
практического применения при расчетах установившихся
режимов. Особо важными и более сложными являются
вопросы эквивалентирования электрических систем при
расчетах переходных процессов.
В настоящее время разрабатываются методы эквива-
лентирования при расчетах оптимальных режимов, кото-
рые играют важную роль при оптимизации на нескольких
ступенях иерархии, например в питающих и распредели-
тельных сетях.
4.3. Разделение на подсистемы и разделение уравнений
Разделение на подсистемы эффективно используется
при расчетах установившихся режимов сложных электри-
ческих систем. Идея такого разделения состоит в том, что-
бы рассчитать режим системы по частям. Многочисленные
методы такого расчета по частям (или диакоптики) опи-
саны в работах Г. Крона. У пас в стране этим методам уде-
ляется также значительное внимание (см. библиографию
к [14, 15]).
Разделение электрической системы на части использу-
ется для экономии оперативной памяти ЭВМ и сокращения
времени расчета. Основное отличие разделения на подсис-
темы от эквивалентирования состоит в следующем. При
эквивалентировании рассчитывается установившийся ре-
жим только эквивалентной системы. Напряжения исклю-
ченных узлов не определяются. При разделении на подсис-
темы определяются напряжения всех узлов электрической
7*
99
системы. Эффективность разделения па подсистемы состо-
ит в том, что для каждой подсистемы решается меньшее
количество уравнений с меньшим числом неизвестных, чем
без такого разделения. Именно поэтому достигается эко-
номия оперативной памяти ЭВМ, так как в оперативной
памяти можно осуществлять расчет лишь для каждой под-
системы, запоминая результаты этого расчета во внешней
памяти. Такой путь позволяет увеличить объем рассчиты-
ваемых электрических систем и в ряде случаев уменьшить
время расчета. При разделении электрической системы,
например, на две подсистемы напряжения каждой из них
определяются: а) пассивными и активными элементами
своей подсистемы; б) влиянием пассивных и активных эле-
ментов другой подсистемы. Предположим, что электричес-
кую систему с точки зрения повышения эффективности
расчета целесообразно разделить па две подсистемы I и II.
Установившийся режим этих подсистем описывается соот-
ветственно первым и вторым уравнениями (4.2). Влияние
пассивных и активных элементов подсистемы II и се напря-
жения на подсистему I определяется вторым слагаемым
в левой части первого уравнения (4.2). Как отмечалось
выше, в это матричное слагаемое входят проводимости
ветвей, соединяющих узлы подсистем I и II. Аналогично
влияние подсистемы I на напряжения подсистемы II опре-
деляется первым слагаемым во втором уравнении (4.2).
Возможны разные способы расчета установившегося
режима при разделении электрической системы на части.
Например, при использовании точных методов решения
можно определить вектор-столбец узловых напряжений под-
системы II Иц, решив линейную систему (4.5) или (4.6).
Затем надо подставить Нц в уравнение установившегося
режима ni дсистемы I, т. е. в первое уравнение (4.2), и оп-
ределить из этого уравнения Ui, например, по методу Га-
усса. Такой путь эффективнее, чем определение Ui с по-
мощью обратной матрицы по выражению (4.3).
Разделение на подсистемы эффективно и при исполь-
зовании итерационных методов, например метода Зейделя.
Полагаем, что узловые напряжения подсистемы II извест-
ны (например, равны начальным приближениям), и опре-
делим по методу Зейделя узловые напряжения подсистемы
I из первого уравнения (4.2). Затем предположим, что уз-
ловые напряжения подсистемы I равны только что найден-
ным, и определим по методу Зейделя узловые напряжения
подсистемы II из второго уравнения (4.2). На этом закан-
100
чивается один полный шаг итерационного расчета. Затем
снова определим (Д при только что вычисленном значении
Un и т. д. Возможна и другая организация итерационного
процесса. Например, можно не заканчивать расчет напря-
жений данной подсистемы по Зейделю, а сразу переходить
к расчету следующей и т. д. Разделение на подсистемы, как
и эквивалентирование, может эффективно использоваться
не только в случае применения матрицы собственных и
взаимных узловых проводимостей, но и при расчете уста-
новившегося режима с помощью матрицы собственных и
взаимных сопротивлений узлов (2.31) или (2.33).
При разделении на подсистемы отдельно рассчитыва-
ется режим в каждой подсистеме и, кроме того, определя-
ются граничные переменные, т. е. параметры режима гра-
ничных линий или узлов, которые принадлежат к двум или
более подсистемам. Способы разделения па подсистемы мо-
гут быть различны, выбирать наиболее эффективное раз-
деление на подсистемы можно с помощью ЭВМ.
Разделение па подсистемы и эквивалентирование фак-
тически соответствуют записи матрицы Yy в блочной фор-
ме, т. е. разделению ее на блоки или подматрицы. Расчет
режима при этом требует операций лишь с этими подмат-
рицами. Различие между эквивалентировапием и разделе-
нием на подсистемы в том, что разделение осуществляется
так, что большинство подматриц состоит из нулей. Напри-
мер, разделение на подсистемы целесообразно осуществить
так, чтобы подматрица Yiii = Yi 1 в (4.1) состояла только
из нулей. В этом случае выражения . (4.2) существенно
упрощаются и можно независимо рассчитывать подсисте-
мы I и II. Такое разделение возможно лишь в частном слу-
чае, когда две подсистемы не связаны друг с другом, но
питаются от одного балансирующего узла. В более слож-
ных случаях подсистемы связаны друг с другом через гра-
ничные ветви или узлы.
Покажем, что при разделении на подсистемы сети на
рис. 4 2.а матрица присоединения сети приводится к блоч-
но-диагональной форме. Матрицей в блочно-диагональной
форме называют такую, которая состоит из матриц-клеток
(или блоков), расположенных по диагонали. Разделим схе-
му соединения на три изолированные подсистемы (рис.
4.2,6). Для этого разделим схему по узлу 12. Этот узел на-
зывается граничным. Пронумеруем узлы первой подсисте-
мы в произвольном порядке (кроме граничного узла), за-
тем узлы второй и третьей подсистем. Граничные узлы ну-
Ю1
меруются в последнюю очередь. На рис. 4.2,в приведена
матрица присоединения узлов в блочно-диагональной фор-
ме. Здесь ненулевые элементы матрицы присоединения
сгруппированы в отдельные квадратные матрицы-клетки
(блоки), расположенные вдоль диагонали. Справа и снизу
(т. е. в последнем клеточном столбце и последней клеточ-
ной строке) они окаймляются ненулевыми элементами, не
вошедшими в эти клетки (для схемы рис. 4.2,а это эле-
Рис. 4.2. Разбивка на подсистемы, приводящая матрицу присоединения
узлов к блочно-диагональной форме
S)
менты, соответствующие связям узла 12 со всеми осталь-
ными узлами). Решение системы уравнений с такой мат-
рицей можно свести к независимому решению подсистем,
которым соответствуют матрицы-клетки, расположенные
вдоль главной диагонали, и решению некоторой линейной
системы уравнений для узлов, не вошедших в эти системы
(для узла 12 рис. 4.2,а). Эта система уравнений называ-
ется системой границы и получается после исключения всех
переменных подсистем из уравнений этих узлов. Такой
способ нумерации узлов в литературе иногда называют
разбивкой на естественные и искусственные подсистемы
[16].
Кибернетическое (функциональное) моделирование при-
меняется для повышения эффективности расчетов режимов
за счет снижения порядка решаемой системы уравнений
[15]. При этом используются функциональные характерис-
тики, т. е. зависимости одних переменных от других. Эти
102
характеристики получают как с помощью исключения пе-
ременных, так и другими способами — методами наимень-
ших квадратов, статистики и т. д. Функциональные харак-
теристики— это способ функционального представления,
т. е. способ замены переменных при расчетах режимов. Ки-
бернетическое моделирование — это разделение на подси-
стемы плюс эквивалентирование в сочетании с использова-
нием функциональных характеристик и с возможностью
изменения алгоритмов расчета (видов эквивалентирования,
разделения на подсистемы и выбора характеристик).
Разделение (раздельное решение) уравнений, связы-
вающих активные мощности—фазы напряжений (Р—6) и
реактивные мощности—модули напряжений (Q—U), при-
меняется для повышения эффективности метода Ньютона
[17].
Простейший способ разделения уравнений состоит в
том, что все элементы матриц-клеток dWp/dU и dWo/dfi в
(3.46) принимаются равными нулю. В этом случае система
линейных уравнений, решаемых на каждом шаге методом
Ньютона, разделяется на две системы действительных урав-
нений порядка п. Одна из них содержит только параметры
Р—6, другая—только Q—U. Этот вариант метода Нью-
тона требует в 4 раза меньшего объема памяти для матри-
цы Якоби (в оперативной памяти решается только одна
из разделенных систем). Полная экономия памяти будет
составлять 35—40%, объем вычислений на один шаг на
10 %« меньше, чем для метода Ньютона без использования
разделения [17].
Разработаны способы решения разделенных уравнений
с постоянными матрицами. В этом случае время расчета
на один шаг примерно в 5 раз меньше, чем для метода
Ньютона без разделения, ив 1,5 раза больше, чем для ме-
тода Зейделя. Методы с разделением для практически при-
емлемой точности расчета болыпнх систем требуют от двух
до пяти шагов [17]. Они дают хорошее приближение после
одной или двух итераций. Конечно, их сходимость не быст-
рее, чем для метода Ньютона без разделения уравнений.
При расчете режимов систем с плохо обусловленной мат-
рицей Якоби метод Ньютона с разделением может расхо-
диться в тех случаях, когда метод решения сходится при
решении без разделения уравнений. Таким образом, раз-
деление может уменьшить надежность сходимости [6].
103
4.4. Разложение на треугольные матрицы, элиминативная
форма и другие методы
Разложение на треугольные матрицы. В результате
прямого хода по Гауссу исходная линейная система узло-
вых напряжении
YyU=J (4.8)
преобразуется в систему с верхней треугольной матрицей,
с единичной диагональю, В и новым вектором правых
частей
BU = Ь. (4.9)
Обратный ход соответствует определению U в резуль-
тате решения (4.9). Система (4.9) подробнее записана в
виде (2.29). Треугольная матрица В и новый вектор правых
частей b получаются из матрицы Y и вектора I с помощью
линейного преобразования с нижней треугольной матри-
цей L [11, 18]. Иными словами, прямой ход соответствует
следующим линейным преобразованиям Yy в В и 1 в Ь:
_LYy = B; (4.10)
1Л = Ь. (4.11)
Из (4.9) и (4.11) следует, что
L-’BU = I. (4.12)
Из сравнения (4.12) и (4.8) очевидно, что матрицу уз-
ловых проводимостей Yy можно представить в виде произ-
ведения треугольных матриц (разложение или триангуля-
ция матрицы):
Yy = L ’В, (4.13)
где В — верхняя треугольная матрица с единичной диаго-
налью; L-1 — нижняя треугольная матрица, обратная к L.
Если решить систему узловых уравнений (4.8) для той
же сети, но при других токах в узлах, т. е. при других пра-
вых частях I, то в (4.9) В не изменится, а изменится лишь
новый вектор правых частей Ь. Новое значение вектора
правых частей можно определить, решив линейную систе-
му, следующую из (4.11):
L 'Ь=Т, (4.14)
где L-1 — нижняя треугольная матрица, обратная к L.
104
Прямой ход при решении системы (4.8) с другой пра-
вой частью I соответствует решению (4.14), а обратный
ход — решению (4.9) с новым вектором правых частей Ь,
определенным из (4.14).
При многократных расчетах режимов для каждого зна-
чения токов £ вместо того, чтобы заново решать (4.8), эф-
фективнее определить новый преобразованный в прямом
ходе векюр правых частей, решив (4.14), а затем осу-
ществить новый обратный ход, решив (4.9). Таким обра-
зом, при многократных расчетах вместо решения (4.8) эф-
фективнее решать две системы (4.14) и (4.9) с треуголь-
ными матрицами.
Если исходная матрица полная, то разложение ее па
треугольные сомножители требует столько же памяти что
и хранение обратной матрицы. Поскольку в электрических
сетях матрица Yy слабо заполнена, при разложении на тре-
угольные матрицы кроме ненулевых взаимных и собствен-
ных проводимостей требуется хранение только ненулевых
элементов, возникающих при исключении по Гауссу.
Элиминативная форма обратной матрицы (двойная фак-
торизация)— это представление обратной матрицы в виде
произведения элементарных нижней и верхней треугольных
матриц, в которых не равны пулю только один столбец или
строка. На основании (4.13)
Zy = Y-1 = B~’L.
Представив В~* и L в виде произведения элементарных
матр ц и Lft, запишем Zy в элимпнативной форме:
Zy — В, ... В„_ L„ ... L L , (4 15)
где Вл—элементарная верхняя треугольная матрица с еди-
ничной диагональю, не равными пулю наддиагональными
элементами в k-h строке и остальными нулевыми элемен-
тами; — элементарная нижняя треугольная матрица, ее
диагональные элементы равны единице во всех столбцах
за исключением k-ro, в котором элементы, лежащие на
диагонали и под ней, не равны нулю, остальные элементы
Lfe равны нулю.
Элементарная нижняя треугольная матрица соответ-
ствует исключению k-ro неизвестного в прямом ходе Гаус-
са, Вл — определению k-ro переменного в обратном ходе.
Ненулевые элементы L* и Bft определяются по выражепи-
105
ям, используемым в прямом и обратном ходах по Гауссу
(§ 2.3) [10, 11, 18].
Если исходная матрица заполнена, то соответствующие
части ненулевых столбцов в элементарных матрицах не
имеют нулевых элементов. Поскольку Yy слабозаполнена,
в ненулевых столбцах много нулевых элементов.
При решении систем с несколькими правыми частями
при элимипативной форме представления обратной мат-
рицы требуется столько памяти, сколько при расчете пер-
вого режима по методу Гаусса с оптимально упорядочен-
ным исключением.
Разложение на треугольные матрицы можно применять
и для решения систем с заполненными матрицами. Элими-
нативная форма особенно эффективна именно для решения
систем со слабозаполнепными матрицами, т. е. для учета
нулевых элементов.
Разложение на треугольные матрицы и элиминативная
форма Zy эффективно применяются для расчетов режима
систем большой сложности. Следует отметить, что исполь-
зование элимипативной формы предъявляет очень высокие
требования к качеству программирования.
Замечание о матричных и топологических методах рас-
чета установившихся режимов электрических систем.
Матричными иногда называют такие методы расчета, ког-
да используются операции с матрицами (сложение, умно-
жение, обращение и т. д.). При этом фактически предпола-
гается использование стандартных подпрограмм, реализу-
ющих операции с матрицами. При расчете сложных элек-
трических систем такие матричные методы не эффективны
как с точки зрения требуемой памяти, так и с точки зрения
времени расчетов на ЭВМ. Одна из основных причин этой
неэффективности состоит в том, что обратные матрицы (на-
пример, матрица собственных и взаимных сопротивлений
узлов) не содержат нулевых элементов. В то же время ис-
пользование матриц весьма важно для компактной записи
уравнений установившегося режима, анализа и усовершен-
ствования методов решения этих уравнений. Запись урав-
нений установившегося режима в матричной форме не
предполагает обязательного использования операций с мат-
рицами и в особенности трудоемкой операции обращения.
Для эффективного решения уравнений установившегося ре-
жима необходим учет нулевых элементов в соответствую-
щих матрицах.
Каждой электрической цепи или каждой топологичес-
кой схеме цепи можно поставить в соответствие граф цепи.
106
Иногда использовалось понятие топологических методов
расчета режимов или параметров систем (узловых сопро-
тивлений, коэффициентов токораспределеиия и т. д.). Эти
методы использовали теорию графов и возможность свести
расчет к логическим операциям по определению деревьев
графа сети, т. е. расчет режима представляется как после-
довательность операций или преобразований графа цепи.
Расчет режима электрической системы или определение ее
параметров действительно можно осуществить как резуль-
тат такой последовательности логических преобразований
графов. В то же время такие методы для расчетов устано-
вившихся режимов сложных электрических систем не наш-
ли широкого применения. В настоящее время необходимо
указать па графы лишь как на средство наглядного пред-
ставления топологических свойств систем уравнений со
слабозаполненными матрицами. В соответствие каждой
системе уравнений, решаемых при расчете установившегося
режима, можно поставить граф. В частном случае это мо-
жет быть граф электрической цепи. Использование в этом
случае теории графов — это определенная интерпретация,
которая позволяет более просто указать ряд дополнитель-
ных возможностей при решении уравнений установивше-
гося режима.
Глава пятая
СХОДИМОСТЬ И ЕЕ УСКОРЕНИЕ
5.1. Сходимость решения уравнений установившегося
режима
Общие положения. Для эффективного использования итерацион-
ных методов и получения практических рекомендаций по их примене-
нию необходимо исследование свойств этих методов [19], наиболее
важными из которых являются существование, единственность и схо-
димость решения, а также связь этих вопросов с апериодической устой-
чивостью режима и чувствительностью решения. Одним из основных
свойств итерационных методов является их точность. Анализ точности
итерационных методов не имеет смысла без определения точности мате-
матического моделирования в целом. В гл. 5—7, 12 приведены резуль-
таты исследования указанных свойств итерационных методов.
Некоторые аспекты этой проблемы рассматривались еще в работах
А А. Горева, П. С. Жданова, В. А Веникова, И. М. Марковича,
107
С. А. Совалова, X. Ф. Фазылова, Л. В. Цукерника и в более поздних
работах, указанных в списке литературы к [6, 13, 17—29].
Расчеты установившегося режима на ЭВМ производятся при опре-
делении допустимых и оптимальных режимов [13, 20], при расчетах
потерь мощности и электроэнергии, при проверке устойчивости, а также
при проектировании электрических сетей, анализе надежности и во
многих других задачах. Практика этих расчетов привела к необходи-
мости исследования существования, единственности и сходимости ре-
шения уравнений установившегося режима и связи этих вопросов
с устойчивостью режима. Эти вопррсы не возникали в инженерной
практике при расчетах режимов без применения ЭВМ. В первый период
исследования этих вопросов отсутствовали не только единая термино-
логия, но и понимание их сути и взаимосвязи. Уже с конца 50-х годов
в первую очередь появилась необходимость ускорения и исследования
сходимости расчетов установившегося режима [6, 17]. Начиная с 1966г.
в отечественной технической литературе появились первые работы по
исследованию существования, единственности и сходимости решения
уравнений установившегося режима и связи этих вопросов с устойчи-
востью режима. В течение десятилетия было опубликовано большое
количество отечественных работ и некоторое количество зару-
бежных, посвященных отдельным из указанных выше вопросов.
Определенный итог этих работ был приведен в [6]. В настоя-
щее время накоплен значительный опыт в результате аналитиче-
ского исследования для простых систем и расчетного исследования на
ЭВМ для сложных систем. В то же время аналитическое решение
указанной проблемы, т. с. ее решение в общем виде для сложной элек-
троэнергетической системы, не получено. Количество статей, посвящен-
ных данным вопросам, существенно уменьшилось, хотя отдельные авто-
ры продолжают работать над аналитическими или расчетными иссле-
дованиями [21—24]. Следует отметить, что основные результаты по
рассматриваемым вопросам получены у нас в стране, и некоторые за-
рубежные публикации, появляющиеся в последнее время, повторяют
эти результаты.
Исследование и понимание основных результатов, полученных при
исследовании существования, единственности и сходимости решения
уравнений установившегося режима сложных электрических систем,
а также связи этих вопросов с апериодической статической устойчиво-
стью необходимы для эффективного осуществления расчетов установив-
шихся режимов на ЭВМ Материал, приведенный в гл. 5—7, необходим
для использования и понимания основных результатов исследований
указанных свойств итерационных методов расчета установившихся ре-
жимов. Суть указанных вопросов, их физический и расчетный смысл
должны быть понятны каждому инженеру, связанному с расчетами
установившихся режимов на ЭВМ или с использованием результатов
этих расчетов в инженерной практике. Используемые в общем виде
108
терминология, основные понятия и тем более полученные результаты
трудны для изложения и понимания. В то >же время это необходимо
для широкого круга ннженеров-элекгроэнергетиков. Для понимания
студентами и инженерами сложных вопросов теории расчетов режимов
электрических систем необходимы иллюстрации на простых примерах,
позволяющих попять их физический и расчетный смысл. В гл. 5—7 при-
водятся иллюстрации сходимости, существования и единственностн ре-
шения уравнений установившегося режима и связи этих вопросов
с устойчивостью режима на про-
стейшем примере линии только г \Z
с * реактивным сопротивлением,
а также даны иллюстрации бо-
лее сложных случаев. Рис. 5.1. Схема замещения сети
Сходимость существующих постоянного тока из двух узлов
методов расчета установившихся
режимов бывает или очень медленной, или совсем не обеспеченной при
расчетах систем напряжением 500 кВ и выше либо режимов, близких
к пределу по статической устойчивости. Исследования сходимости ре-
шения важны для сокращения времени расчетов на ЭВМ. для повы-
шения их надежности и эффективности. Применение самой мощной
ЭВМ нс может помочь в случае расходимости итерационного метода.
Поэтому исследование сходимости является очень важным и при при-
менении мощных современных вычислительных машин, используемых
в отечественной и зарубежной практике. Таким образом, понимание
результатов исследования существования, единственности и сходимо-
сти решения и особенно понимание сути указанных вопросов необхо-
димо для эффективного осуществления расчетов установившихся ре-
жимов на ЭВМ и, в первую очередь, для расчетов систем напряжением
500 кВ и выше, для режимов, близких к предельным по апериодиче-
ской статической устойчивости, а также для оценки апериодической
устойчивости системы.
Простейший из итерационных методов — простую итерацию —- рас-
смотрим на примере решения нелинейного уравнения узловых напря-
жений нагрузочного узла 2 сети постоянного тока из двух узлов
(рис. 5.1)
&22 (^2— ^l)— --- ц • (5.1)
где ^22 — собственная проводимость узла 2; U\, U2 — напряжения узлов
/ и 2; Р2—мощность нагрузки в узле 2. которая в данном случае не
равна мощности в узле /ив линии.
Уравнение (5.1) для сети постоянного тока аналогично уравнению
(1.15) для сети переменного тока.
Мощность Рз, проводимость £22 и напряжение U\ заданы. В ре-
зультате решения уравнения (5.1) надо найти зависимое переменное
U2. Это легко сделать, решив квадратное уравнение (5.1). Паша цель —
109
проиллюстрировать на примере уравнения (5.1) метод простой итера-
ции. Для этого запишем уравнение установившегося режима (5.1)
в виде /
= (5.2)
Я22^2
Зададимся начальным приближением £7а<°> и, подставив его в пра-
вую часть уравнения (5.2), получим новое значение напряжения
в узле 2:
-----^77= ?('-',<’!)• (5-3)
Подставим теперь в правую часть уравнения (5.3) вместо (/2(0)
значение f/2(1> н получим следующее значение напряжения:
С/2<3>=Ф(£/2(2)). (5.4)
Повторяя этот процесс, получим последовательность значений на-
пряжения в узле 2:
С/2с+‘)=ф({/2(0)1 Где t=0, I, 2, ... (5.5)
Эта последовательность называется итерационной.
Уравнения установившегося режима могут иметь различную фор-
му и включать разные переменные. Обозначим через х зависимое пере-
менное, определяемое в результате решения уравнения установивше-
гося режима (5.1), и еще раз поясним идею простои итерации.
Предположим, что уравнение установившегося режима можно за-
писать в виде, аналогичном (5.2):
а-=Ф(х). (5.6)
Возьмем начальное приближение х<°> и будем строить последова-
тельность чисел {х<°}, определенных с помощью итерационного метода:
х<'+1>=ф(х<'>), где 1=0, 1, 2, ... (5.7)
Для того чтобы пояснить причины сходимости пли расходимости
метода, приведем геометрическую интерпретацию простой итерации. На
рис. 5.2 приведены кривая е=ф(х) и прямая е=х. Решение х уравне-
ния (5.6) —это абсцисса точки пересечения М кривой е=ф(х) и прямой
е=х. Двигаясь от точки At0) с координатами х(0), ср(х(0)), построим лома-
ную линию Л(0>, В<1), Л(|>, В(2), Д(2), ... Отрезки ломаной линии попере-
менно параллельны осям Ох, Ое. Точки А(0), Л1’>, Л,2>,... лежат на кривой
е=ф(х), а точки В<2>, ... — иа прямой е=х. Последовательные
приближения неизвестного х равны х<°>, х(|), х(2>, ... На рис. 5.2 кривая
е=ф(х) в окрестности решениях—пологая, т. е. |дф/дх|< 1, и процесс
итерации сходится. Если [дф/<)х|>I, то процесс итерации будет расхо-
диться (рис. 5.3). В этом случае как бы ни было близко начальное
приближение, итерационный процесс не сходится к решению.
НО
Рис. 5.2. Сходящийся процесс
простой итерации
Рис. 5.3. Расходящийся про-
цесс простой итерации
Рисунки 5.2, 5.3 показывают,
что сходимость простой итера-
ции (5.6) определяется значением
производной cty/dx. Более того,
знак этой производной определя-
ет характер итерационного про-
цесса— монотонный или колеба-
тельный. При монотонной сходи-
мости все поправки Дх<о=х<£+1>—
—х<£> одного знака, при колеба-
тельной— знаки Дх(,) различны.
Если в точке решения |дф/дх|<
<1 н дф/дх>0, то итерационный
процесс монотонно сходится к ре-
шению (5.6). При дц/дх<0 сходимость колебательная. Пример ко-
лебательного итерационного процесса приведен на рис. 5.4. При
монотонном
ния справа
ние х. Итерационный процесс монотонно приближается к решению. При
колебательном итерационном процессе (рис. 5.4) приближения хо+*>
то больше, то меньше решения х. Итерационный процесс как бы идет
по спирали, колебательно приближаясь к решению. Отмстим, что рас-
ходящийся итерационный процесс может быть как монотонным
(рис. 5.3), так и колебательным
Рис. 5.4. Колебательный итераци-
онный процесс
итерационном процессе иа рис. 5.2 все прнближе-
от решения, т. е. все х<,+1>, больше, чем реше-
5.2. Сходимость простой итерации и метода Зейделя
при хорошо обусловленной матрице производных
В данном параграфе, рассматривая линейные и нелинейные урав-
нения установившегося режима, будем иметь в виду лишь такие расче-
ты, когда матрица узловых проводимостей и матрица производных
111
уравнений установившегося режима (матрица Якоби) хорошо обу-
словлены.
Линейные уравнения узловых напряжений для сети постоянного
тока можно решать по методу простои лини' ной итерации:
U(/+1)=BU<iy'b> (5.8)
где U — искомый вектор узловых напряжений; i — номер шага; В —
квадратная матрица; б*;=У*//У**; У*/ (при А=#/)— взаимная проводи-
мость узлов k и j, равная взятой с обратным знаком сумме проводимо-
стей ветви, соединяющей узлы k и /; У** — собственная проводимость
k-ro узла; Ь — известный вектор; если £7б=0, то bk—Ik/Ykk.
Значительно большее распространение, чем метод простой итерации,
получил метод Зейделя, который, как правило, отличается более быст-
рой сходимостью. Метод Зейделя эквивалентен простой итерации (5.8),
но с другими матрицей 3, характеризующей итерационный процесс, и
вектором з [см. (2.61), (2.62)].
Важную роль для определения необходимых и достаточных усло-
вий сходимости итерационного процесса играют понятия собственного
вектора и собственного значения матрицы [7].
Вектор V=#0 называется собственным вектором матрицы В, если
BV=XV, (5.9)
где число X — собственное значение или характеристическое число мат-
рицы В, соответствующее собственному вектору V
Из (5.9) очевидно, что а— корни характеристического уравнения
| В—ХЕ |=0,
(5.10)
где Е — единичная матрица.
Для сходимости процесса простой итерации (5.8) и метода Зейделя
при любом начальном приближении U(0) и векторе b или з необходимо
и достаточно, чтобы все собственные матрицы В или 3 были по модулю
меньше единицы. Это значит, что должно выполняться условие
| Хтпх | < 1,
(5.П)
где Ктах — наибольшее по модулю собственное значение матрицы В
или 3. Отыскание всех собственных значений матрицы В или 3 пред-
ставляет собой задачу более сложную, чем решение системы линейных
алгебраических уравнений, и поэтому неэффективно для проверки схо-
димости.
При анализе сходимости решения систем линейных алгебраических
уравнений используются три легк вычисляемые нормы матрицы В=
= М [7]:
112
п
II В ffl=maxV I bkj I (m-норма),
\ к /=1
п
II В I t= max S \bkf I (/-норма),
\
I n
Bilfe=l/ S 4/(Л-ь°рма),
/,
(5.12)
где m — норма матрицы, равняется наибольшей из сумм абсолютных
величин элементов одной строки матрицы; I — норма наибольшей из
сумм абсолютных величин элементов одного столбца матрицы; k —
норма равняется корню из суммы квадратов элементов матрицы.
Для сходимости линейных процессов простой итерации и Зейделя
при любом начальном приближении U<0) и векторе b или з достаточно,
чтобы любая из указанных норм матрицы В была меньше единицы.
Иными словами, должно выполняться любое из условий
(5.13)
Каждое из условий (5.13) только достаточное, но отнюдь не необхо-
димое для сходимости простой итерации или метода Зейделя. Несоблю-
дение любого из условий (5 13) еще не значит, что итерационный про-
цесс расходится. Выполнение же любого из этих условий означает, что
простая итерация (5.8) и метод Зейделя сходятся. Проверка достаточ-
ных условий сходимости может быть легко осуществлена до непосред-
ственного расчета.
Скорость сходимости простой итерации или метода Зейделя опре-
деляется наибольшим по модулю собственным значением ктах матри-
цы В или 3.
Процесс простой итерации (5.8) или метод Зейделя имеет монотон-
ный характер, если наибольшее по модулю собственное значение мат-
рицы В или 3 действительное, и колебательный характер, если ком-
плексное.
Достаточные условия сходимости простой итерации и итерации по
Зейделю не выполняются для линейных уравнений узловых напряже-
8—6189
на
ний. Поэтому с помощью достаточных условий не может быть провере-
но наличие сходимости решения этих уравнений.
Используя положительную определенность действительной матрицы
узловых проводимостей Yy пассивной однородной сети, в которой нет
отрицательных проводимостей ветвей, мох<но доказать сходимость про-
цесса итерации по Зсйделю при решении линейных уравнений узловых
напряжений для однородной сети.
Уравнения узловых напряжений неоднородной электрической систе-
мы из п независимых узлов представляют систему комплексных урав-
нении л-го порядка. Если бы матрица коэффициентов системы ком-
плексных линейных уравнений являлась эрмитовой и положительно
определенной, то процесс Зейделя при решении этой системы сходился
бы. Одиако матрица Yy неоднородной сети не является эрмитовой Все
же, используя свойства матриц Yy, можно доказать, что процесс ите-
рации по Зсйделю сходится при решении линейных уравнений узловых
напряжений 1 для неоднородной сети, не имеющей емкостной проводи-
мости на землю, и продольной емкостной компенсации, превышаю-
щей 100 %.
Нелинейные уравнения установившегося режима для сети пере-
менного тока могут быть записаны в виде баланса токов в узлах (см.
§ 3.1):
YyU = |/3£(U)-Y6f76, (5.14)
где Y, — матрица узловых проводимостей: U — вектор напряжений
узлов; Yof/e — вектор-столбец, Л-й элемент которого равен Ut>—
заданное напряжение балансирующего узла; 1(11)—вектор задающих
токов в узлах, зависящих от напряжения.
При заданных мощностях в узлах задающий ток в Л-м узле равен
[см. (3.1), (3.2)]
!k (U) = /3 Uk* и I (U) = Uk(U)l = [Sfe* Uk*].
В случае нелинейного процесса простой итерации
и(Г+1)=<Г(и(П); (5.15)
проверку достаточных условий сходимости можно производить с по-
мощью матрицы М = [|р*/Н, где Ц*/— наибольшие значения частных
производных действительной пли мнимой составляющей функции по
действительным или мнимым составляющим узловых напряжений U/,
1 Все сказанное выше о сходимости решения линейных уравнений
узловых напряжений справедливо и для линейных контурных уравне-
ний [6].
114
Uj". Элементы матрицы М (т. е. ц*/) равны соответственно
max | д(рц'IdUf |; max 1дф*7д£//' 11
max J dtfn"/dUf |; max | dy^'/dU" ].
Для сходимости нелинейного процесса простои итерации (5.15) при
любом начальном приближении 1К°> достаточно, чтобы любая из норм
матрицы М была меньше единицы [7]. Это следует из принципа сжи-
мающих отображений [7]. В расчете установившегося режима по ме-
тоду узловых напряжений, использующему узловые проводимости,
/zi-норма матрицы М незначительно больше единицы, если в схеме
отсутствуют емкостные проводимости на землю и продольная емкостная
компенсация, превышающая 100 %. При наличии емкостей в схеме
/n-норма матрицы М увеличивается. Следовательно, достаточные усло-
вия сходимости решения уравнений узловых напряжений, использую-
щих узловые проводимости, не выполняются и с их помощью не может
быть проверена сходимость нелинейного процесса простой итерации.
При исследовании сходимости решения нелинейных уравнений узло-
вых напряжений для режимов, далеких от предельных по апериодиче-
ской устойчивости, и для сетей с хорошо обусловленной матрицей Yy
можно пренебречь нелинейностью, вызванной заданием мощностей
в узлах. Поэтому можно на практике принять, что нелинейный процесс
итерации по Зсйделю для неоднородной сети, не содержащей емкост-
ных проводимостей на землю и продольной емкостной компенсации,
превышающей 100 %, сходится для указанных режимов и сетей.
Ускорение сходимости по методу Зейделя. Наибольшее распростра-
нение для ускорения расчета установившегося режима получило исполь-
зование ускоряющих коэффициентов. Ускоренное (i-j-l)-e приближение
значения напряжения k-ro узла ^j/уск определяется по формуле
(3-21):
г/р'+в — //(О __//(«) х_>/<*) 4-/av</+,>
уск уск **'_£ иЛуск’ уск > >
где = — ^^уск—поправка в напряжении k-го узла на
(/4-1)-м шаге; t — ускоряющий коэффициент.
Ускоренное значение напряжения //^уск принимается в качестве
исходного при расчете следующего, (i + 2)-ro шага.
Процесс итерации по Зенделю, использующий ускоряющие коэффи-
циенты 0</<2 для систем с положительно определенной матрицей Yy,
называется методом неполной релаксации. Этот процесс эквивалентен
простой итерации (5.8), но с другой матрицей Зуск- За счет выбора
ускоряющего коэффициента почти всегда можно ускорить метод Зей-
деля. Вопрос о выборе оптимального ускоряющего коэффициента (т. е.
ускоряющего коэффициента, при котором достигается наибольшая бы-
строта сходимости) для систем с любыми матрицами в общем случае
8*
115
не решен. При применении неполной релаксации для ускорения сходи-
мости решения систем линейных уравнений с положительно определен-
ными квазитрехдиагональными матрицами можно определить оптималь-
ный ускоряющий коэффициент /огт по выражению, использующему наи-
большее по модулю собственное значение матрицы 3 ск. В ходе рас-
чета установившегося режима это наибольшее по модулю собственное
значение можно определить как отношение поправок по напряжению
А-го узла на (i-J-I)-m и Z-m шагах*.
В отличие от системы уравнений, рассмотренных в [19], система
уравнений узловых напряжений нелинейна, матрица Yy неоднородной
сети нс является положительно определенной, поскольку она не эрмито-
ва и, кроме того, не может быть записана в квазнтрехдиагональной
форме [6]. Однако нелинейность системы уравнений узловых напряже-
ний при расчете режимов, далеких от предельных, для сетей с хорошо
обусловленной матрицей Yy является незначителы ой. Матрица Yy мо-
жет быть записана в форме, близкой к квазнтрехдиагональной [6]. По-
этому результаты, приведенные в [19], могут быть использованы при
ускорении расчета установившегося режима электрических систем. Это
подтверждено расчетами на ЭВМ, результаты которых приведены
в [16].
5.3. Влияние обусловленности матрицы производных
на сходимость метода Зейделя
Обусловленность матриц характеризуется числами обусловленности
[6, 19]. Непосредственный расчет этих чисел очень трудоемок. Элементы
матрицы производных уравнений установившегося режима (матрицы
Якоби) зависят как от параметров сети, так и от параметров режима.
Поэтому плохая обусловленность матрицы Якоби может быть счедст-
вием как очень сильного различия параметров сети, так и близости рас-
считываемого режима к предельному по существованию или апериоди-
ческой статической устойчивости [6].
Параметры электрической сети могут различаться в несколько со-
тен или даже тысяч раз при учете устройств продольной компенсации,
шиносоединительных выключателей либо близких к нулю сопротивле-
ний обмотки среднего напряжения трехобмоточных трансформаторов и
автотрансформаторов. В этих случаях плохо обусловлена как матрица
Y , так и матрица Якоби [6].
Как правило, плохая обусловленность матрицы может характеризо-
ваться относительной малостью определителя. Близость режима к пре-
дельному по существованию или по апериодической статической устои
чивостн соответствует приближению к нулю якобиана уравнений уста-
1 Если это отношение сойдется, то оно равно наибольшему по мо-
дулю собственному значению матрицы, определяющей итерационный
процесс.
116
повившегося режима и плохой обусл вленности матрицы Якоби [6].
При задании активных мощностей и модулей напряжений в гене-
раторных узлах при соответствующих допущениях якобиан уравнений
установившегося режима совпадает со свободным членом характери-
стического уравнения (ботсе подробно этот вопрос рассмотрен в § 7.1).
Поэтому в данном случае приближение к нулю якобиана соответствует
приближению к пределу по апериодической устойчивости. Как правило,
приближение к нулю якобиана соответствует ухудшению обусловленно-
сти матрицы dW fdX. Строго говоря, обусловленность характеризуется
нс значением определителя, а числами обусловленности. В тех случаях,
когда наибольшее по модулую собственное число матрицы dW/dX
остается конечным, приближение к пулю |oW с?Х соответствует рез-
кому ухудшению обусловленности.
Сходимость решения нелинейных уравнений установившегося режи-
ма связана с якобианом системы уравнений установившегося режима,
т. е. с условиями существования и единственности. Последнее исполь-
зуется при расчетах режимов, близких к пределу по апериодической
устойчивости.
Линеаризация уравнений установившегося режима в окрестности
решения. Систему уравнений установившегося режима будем рассмат-
ривать в виде (3.8):
W(X)=0. (5.16)
Система (5.16), как и (5.14), близка к линейной при расчете режи-
мов с малыми нагрузками, т. е. режимов, далеких от предела по стати-
ческой устойчивости; чем больше нагрузки, тем сильнее проявляется
нелинейность этой системы.
Достаточно близко к точке решения X нелинейная система алге-
браических уравнений может быть заменена линейной, для которой
наиболее разработаны аналитические методы исследования сходимости.
Действительно, в точке X система (5.16) может быть разложена в ряд
Тейлора с точностью до членов первого порядка:
—(X — X) = О,
дХ
dW(X)
где ——-------матрица Якобч при X = X.
vA
Предположим, что известно значение Хи
При этом система (5.17) может быть записана в виде системы л шейных
алгебраических уравнений
АХ=С, (5.18)
117
(5.17)
dW(X)
где
dW(X) dW(X) ~
A = ——— ; C = ——— X. (o. 19)
OX OX
Таким образом, система уравнений установившегося режима доста-
точно близко от решения X может рассматриваться как система линей-
ных алгебраических уравнений с матрицей коэффициентов А, равной
дХУ (X) -
матрице производных ——— (матрице Якобн) в точке X.
оХ
Связь сходимости с якобианом уравнений установившегося режима
в точке решения. Система линейных уравнений (5.18) может быть за-
писана следующим образом:
(Е—Е-| НА)Х -НС, (5.20)
где Н — невырожденная матрица, т. е. [Н|=5*£=0; Е — единичная матрица.
При этом система (5.18) или (5.20) часто решается с помощью
итерационного процесса:
Х"+,)=(—НА Е)Х< >4 НС. (5.21)
Обозначим
В —НА+Е; q=HC, (5.22)
и соответственно итерационный процесс можно записать в следующем
виде:
X«+’>=BX('»4-q, (5.23)
где В — матрица, характеризующая итерационный процесс.
Прн Н = const и соответственно B=const итерационный процесс
(5.21) или (5.23) называется стационарным [19]. Соответствующим
выбором матрицы Н могут быть получены любые стационарные итера-
ционные процессы. Наиболее распространенные из них—простая ите-
рация и метод Зейделя. Отметим, что итерационный процесс по Зей-
делю (5.23) прн решении линеаризованной системы (5.18) отличается
от метода Зейделя при решении нелинейных уравнений установивше-
гося режима, рассмотренного в гл. 3.
Проанализируем связь между сходимостью простой итерации н ите-
рации по Зейделю с якобианом [dW/(5X| Как известно, скорость схо-
димости итерационного процесса определяется, наибольшим по модулю
собственным числом ц матрицы В. Чтобы итерационный процесс (5.23)
сходился с любого начального приближения, необходимо и достаточно,
чтобы все собственные числа р. были по модулю меньше единицы. При
р=1 линейный итерационный процесс (5.23) расходится. Для нелиней-
ного итерационного процесса случай р = 1 не является точкой отталки-
вания, т. е. вследствие влияния членов более высокого порядка в раз-
ложении (5.17) нелинейный итерационный процесс теоретически может
118
сходиться. Однако сходимость в этих случаях будет столь медленной,
что практически итерационный процесс не будет сходиться за приемле-
мое время и в этом смысле его можно считать расходящимся. Из (5.22)
следует, что если в точке решения якобиан |dW/dX =|А =0, то ц=1.
Если якобиан системы (5.16) равен нулю в точке решения X, то простая
итерация или итерация по Зейделю не сойдется при решении системы
(5.17), так как ц=1 [3].
При выполнении условий, сформулированных в § 7.1, прохождение
якобиана через нуль соответствует пределу по апериодической стати-
ческой устойчивости. Следовательно, предельные режимы по апериоди-
ческой устойчивости не могут быть рассчитаны методом простой итера-
ции, итерации по Зейделю и т. д. Более того, чем ближе якобиан си-
стемы (5.16) к нулю, тем ближе р. к единице и тем хуже сходятся
простая итерация, итерация по Зейделю и любой стационарный итера-
ционный процесс. Обратное утверждение, вообще говоря, несправед-
ливо. Соответственно вывод о том, что при определенных условиях
предел сходимости процесса простой итерации и процесса Зейделя сов-
падает с пределом статической апериодической устойчивости электри-
ческой системы, не является справедливым. Нельзя утверждать, что
если рассчитываемый режим находится в области 0 (см. гл. 6), в ко-
торой якобиан системы (5.16) не равен нулю, то метод простой итера-
ции или итерации по Зейделю сойдется. Действительно, сходимость
может нарушаться и при появлении комплексных собственных значе-
ний ц, по модулю больших единицы. В этом случае нарушение сходи-
мости не связано с обращением якобиана в нуль.
Выше были рассмотрены стационарные итерационные процессы типа
(5.23), полученные в результате линеаризации уравнений установивше-
гося режима в точке решения. При определенных требованиях к нели-
нейному итерационному процессу его сходимость связана с якобианом
уравнений установившегося режима [6].
Для построения любого итерационного процесса решения системы
уравнений установившегося режима (5.16) эти уравнения нужно при-
вести к виду
Х=Ч:(Х), (5.24)
где <р(Х) —нелинейная вектор-функция.
Такое преобразование уравнений (5.16) можно рассматривать как
переход к другой форме уравнений установившегося режима:
W(X)=<p(X)-X=0. (5.25)
Обычно преобразования уравнений установившегося режима (5.16)
к итерационному виду (5.24) производятся так, что якобианы уравне-
ний (5.16) и (5.25) одновременно обращаются в нуль. При выполнении
этих условий и приближении к точке, в которой якобиан системы (5.16)
равен пулю, одно из собственных значений матрицы дср(Х)/дХ будет
119
стремиться к единице и сходимость итерационного процесса (5.24) бу-
дет нарушаться. Этот вывод справедлив и для метода Зейделя, исполь-
зованного в гл. 2 при решении нелинейных уравнений установившегося
режима.
Отметим, что якобианы уравнений установившегося режима в фор-
ме баланса токов и баланса мощностей одновременно обращаются
в нуль в точках решения уравнений установившегося режима [6].
5.4. Сходимость методов Ньютона, градиентного
и по параметру
Сходимость метода Ньютона при расчете установившегося режима.
Достаточное условие Канторовича сходимости метода Ньютона [7] не
выполняется при решении нелинейных уравнений баланса мощностей
или баланса токов в узлах для сети постоянного тока. Соответственно
достаточное условие сходимости метода Ньютона не выполняется и
для нелинейных уравнений установившегося режима сети переменного
тока. Более того, экспериментально обнаружены случаи расходимости
метода Ньютона при решении уравнений установившегося режима сети
переменного тока.
Условия Канторовича гарантируют сходимость метода Ньютона
при расчете установившегося режима, если якобиан системы уравнений
(5.16) нс равен нулю и начальное приближение выбрано достаточно
близко к решению. В то же время эти условия не обеспечивают схо-
димость метода Ньютона с любого начального приближения при рас-
чете установившегося режима даже в области 0, в которой якобиан
системы (5.16) не равен нулю.
Оценка Канторовича скорости сходимости метода Ньютона зависит
от нормы обратной матрицы Якоби системы уравнений установившего-
ся режима (5.16). Чем ближе якобиан системы (5.16) к нулю, тем
больше норма обратной матрицы Якоби. Соответственно если якобиан
системы близок к нулю, то метод Ньютона может не сходиться.
Подчеркнем, что несмотря на сказанное выше метод Ньютона бо-
лее надежен с точки зрения сходимости, чем метод простои итерации
или Зейделя. Метод Ньютона в ряде случаев позволяет получить ре-
шение, когда метод простой итерации или Зейделя расходится при рас-
чете установившегося режима.
Сходимость градиентных методов. При расчете установившегося
режима иногда используется градиентный метод как очень надежный
с точки зрения сходимости при плохих начальных приближениях. Как
правило, градиентный метод сводится к минимизации суммы квадратов
невязок (небалансов) уравнений установившегося режима. Иными сло-
вами, задача решения уравнении установившегося режима (5.16) сво-
дится к отысканию минимума функции
л
V(X) = 2 wk*(X). (5.26)
к—1
120
Для того чтобы в области 0 задача минимизации суммы квадра-
тов небалансов в узлах 'К(Х) имела единственное решение, достаточно,
чтобы матрица вторых производных системы уравнений установившего-
ся режима (или матрица Гессе)
()2ф о2 иг
"Р" './.*=........" (627>
С/Л иХ^иХ j
была положительно определена.
Последнее эквивалентно тому, что все собственные числа матрицы
Г(Х) положительны или все се главные миноры положительны. При
этом градиентный метод будет сходиться с любого начального прибли-
жения в области 0. Можно показать, что матрица Г(Х) не является
положительно определенной для уравнений установившегося режима
в форме баланса токов или мощностей на примере сети постоянного
тока нз трех узлов [6].
Следовательно, при минимизации (5.26) нельзя гарантировать схо-
димость к решению уравнений установившегося режима в области 0,
в которой якобиан системы (5.16) не равен нулю. Этот же вывод спра-
ведлив также для расчета установившегося режима сети постоянного
тока с помощью минимизации суммы модулей небаланса мощностей или
токов в узлах и тем более для расчетов сетей переменного тока гра-
диентными методами [6].
Если в ходе итерационного процесса определена точка X, в кото-
рой якобиан системы (5.16) равен нулю, но W(X)=£0, то эта точка
является локальным минимумом функции В этом случае с помощью
градиентного метода не будет получено искомое решение уравнения
установившегося режима.
Из последнего очевидно, что чем ближе якобиан системы (5.16)
в точке решения к нулю, тем менее'надежно и менее быстро сходится
градиентный метод при расчете установившегося режима Таким обра-
зом, аналогично рассмотренным выше методам градиентный метод мо-
жет не сходиться при расчете режима, близкого к пределу по аперио-
дической устойчивости, п замедляет скорость сходимости при прибли-
жении к этому пределу.
Сходимость методов по параметру. В тех случаях, когда при реше-
нии уравнений установившегося режима не сходится метод Ньютона
или градиентный метод, естественно применить один из методов по па-
раметру (см. § 3.6).
Итерационный процесс по параметру (3.62) является частным слу-
чаем процесса (3.27). При /=1 для всех t=0, 1, 2 ... итерационный
процесс (3.62) совпадает с методом Ньютона. В то же время метод по
параметру относится к классу градиентных методов [6], т. е. (3.62)
может рассматриваться как одна из реализаций градиентного метода.
Метод по параметру свободен от недостатка, обусловленного сложным
рельефом гиперповерхности Ч^Х), имеющим овражный характер.
121
Различные модификации метода по параметру отличаются способа-
ми выбора параметра t [(3.62), (3 65), (3.66)].
Первый способ состоит в следующем. Пусть определены Ха-,\
Х< >, ЧЧХ^-1»), ЧГ(Х<(>).
Если
Y(X<‘>)^(X<'-»). (5.28)
то принимается t—l и делается следующий шаг по методу Ньютона.
Если (5.28) не выполняется, то параметр t делится пополам и т. д.
Таким образом, один цикл решения задачи предусматривает один шаг
метода Ньютона и (W+1) -кратное вычисление ЧГ(Х<°) и Х<‘>. При
этом вектор зависимых переменных X определяется по выражению
Х(‘) = Х(‘-Ч 4-^гДХ(*-Ч, (5.29)
где V последовательно принимает значения 0, 1, 2 ... Число W долж-
но быть таким, чтобы выполнялось неравенство (5.28).
Во втором способе параметр t определяется по аналитическому вы-
ражению, использующему норму матрицы вторых производных, т. е. на
каждом шаге величина t определяется соотношениями
(5.30)
Значение определяется выражением
1
2 || W (Х(') ||
II W(X(4) || и
Ld*W (X 0)
—~
dxjdxi 1
i. i
(5.31)
где
vVgW(X<0)
dxjdxt
i. i
AXj&Xi
— нормы вектора небалансов и матрицы вторых производных.
В обоих способах в ходе итерационного процесса t выбирают, двн>
гаясь в пространстве Y по кривой, вид которой зависит от начального
приближения и параметров режима сети. Во втором способе выбора t
метод сходится, если в ходе итерационного процесса не встретилась
поверхность <5W дХ|=0. Более того, в этом случае при определенных
условиях метод позволяет получать решения, если якобиан в них равен
нулю. Поэтому второй способ выбора t эффективен в расчете предочь-
ных по апериодической устойчивости и неустойчивых режимов. Прн
помощи этого метода могут быть рассчитаны предельные и апериоди-
ческие неустойчивые режимы [6].
Более подробный анализ методов по параметру приведен в [6,
13, 20].
122
Глава шестая
СУЩЕСТВОВАНИЕ И ЕДИНСТВЕННОСТЬ РЕШЕНИЯ
УРАВНЕНИЙ УСТАНОВИВШЕГОСЯ РЕЖИМА1
6.1. Существование решения уравнений установившегося
режима
Расчет установившегося режима сложной электроэнергетической
системы сводится к решению системы нелинейных алгебраических урав-
нений. Такие расчеты осуществляются на ЭВМ с помощью итерацион-
ных методов. Часто при расчете не удается получить искомое решение
уравнений установившегося режима с помощью используемого итера-
ционного процесса. В этом случае либо искомое решение не существует
и не может быть найдено никакими другими методами, либо решение
существует, но не сходится используемый итерационный метод. В по-
следнем случае можно получить решение, если применить ускорение
сходимости, изменить начальные приближения или сам итерационным
процесс. Исследование существования, единственности и сходимости не-
обходимо при расчетах режимов на ЭВМ, в частности, для того, чтобы
уметь различать расходимость итерационного процесса и несуществова-
ние режима.
Уравнения установившегося режима, как правило, имеют несколько
решений. Задача расчета установившегося, допустимого или оптималь-
ного режима существенно упрощается, если можно показать, что в за-
данной области допустимых режимов (например, апериодически устой-
чивых) может существовать только одно решение. В этом случае прп
расчете оптимальных н послеаварнйных режимов можно не искать все
решения, а определить только одно, находящееся в области допусти-
мых апериодически устойчивых режимов. Таким образом, для эффек-
тивного осуществления расчетов установившихся режим в на ЭВМ не-
обходимо использовать результаты, полученные при исследовании су-
ществования, единственности и сходимости решения уравнений устано-
вившегося режима сложных электрических систем, а также связь этих
вопросов с апериодической статической устойчивостью.
Линейные уравнения установившегося режима электрических цепей
эффективно решаются практически со времен Кирхгофа. В то же время
работы по исследованию свойств решений этих уравнений появились
сравнительно недавно.
Существование и единственность решения системы линейных урав-
нений установившегося режима следуют из невырожденности неполной
матрицы узловых проводимостей Yy [3.6]. Невырожденность матрицы
Yy для сети постоянного тока следует из теоремы О Таусскн [6]. Су-
ществование и единственность решения линейных уравнений устаиовив-
1 Перед чтением данной главы целесообразно прочитать § 5.1.
123
шегося режима доказаны для сети переменного тока только с г, L- или
только с г, С-элементами при задании не только токов во всех узлах,
но и модулей напряжения в некоторых узлах [6].
Нелинейные уравнения установившегося режима можно записать
в виде системы неявных функций [см. (3.7)]
W(X, V)=0, (6.1)
где Y — вектор независимых переменных (регулируемых параметров ре-
жима); X — вектор зависимых переменных (нерегулируемых парамет-
ров режима); W — вектор-функция, например, небалансов мощности
или тока в узлах. Размерность вектор-функцин W [число уравнений
системы (6.1)] равна размерности вектора X.
Уравнения установившегося режима (6.1) записаны для самого
общего случая. В частном, хотя и наиболее часто используемом случае
система уравнений установившегося режима (6.1) может быть записана
в виде известных уравнений баланса м щностн в узлах сети (3.5),
(3.40) —(3.43).
В качестве независимых переменных параметров режима могут
быть заданы для части узлов ((=1, .... п') активные и реактивные
мощности, а для остальных независимых узлов (i=/i'-|-l, ...» п)—
активные мощности и модули напряжения (это узлы, балансирующие
по Q). Зависимыми переменными будут модули и фазы напряжений.
В этом случае система уравнении установившегося режима может быть
записана в следующем виде:
~ hi .......^п, .......Зп), i = 1, ..., п\ ]
Q;=f2f(<A.....Ц,. «1.....М. ............«'• I
где Pi, Qi, Ut, б,- — соответственно активные и реактивные мощности,
модули и фазы напряжения в узле i.
Система (6.2) может быть представлена в виде
Y=f(X), (6.3)
где f — вектор-функция полиномов второй степени размерности 2п.
Уравнения балансирующих узлов, в которых заданы модуль и фаза
U, а также уравнения баланса Q для узлов, балансирующих по Q, не
входят в систему (6.2). Особенность уравнений (6.2) и (6.3) заклю-
чается в том, что вектор независимых параметров Y=[/\, Q„ Z7,] яв-
ляется явной функцией от X —[<7/, б,].
Для липни только с реактивным сопротивлением х (рис. 6.1.а)
уравнение установившегося режима (6.1) —это известное уравнение
мощности, передаваемой по линии
U.U2
P = -L-?-sin«. (6.4)
X
где L/j, Ut — модули напряжений в узлах 1 и 2; Р—мощность, теку-
щая по линии, потребляемая в узле 2 и генерируемая в узле 1, б —
124
фаза напряжения в узле 2 при т. е. 6 — угол между Ui и U2.
При l/i = const, <72=const предел передаваемой мощности — посто-
янная величина, т. е.
Рнб=Щ^= const. (6.5)
и уравнение (6.4) имеет следующий вид:
P = P„6Sin6 (6.6)
Существование решения уравнения установившегося режима по-
ясним на примере уравнения (6.6), изображенного на рис. 6.1,6. Для
удобства направим активную мощность по горизонтальной оси, а угол
б — по вертикальной (рис. 6.1,6). Найти решения уравнения установив-
Рнс. 6.1. Уравнение устано-
вившегося режима для сети
переменного тока из двух
узлов
шегося режима — это значит для любого значения мощности найти со-
ответствующее ему значение угла б. Геометрически на рис. 6.1,6 реше-
ние соответствует пересечению прямой, параллельной осн б (т. е. пря-
мой P=const), с синусоидой установившегося режима (6.6). Например,
при P==/)2=const это решение соответствует точке 1 с координатами
Р2, 61 или точке 2 с координатами Р2 и б2.
Рассмотрим область d(<6<Ci, а<Р<Ь, т. е. прямоугольник, За-
штрихованный на рнс. 6.1.6 вокруг точки /. Решение уравнения уста-
новившегося режима существует в этой области, если для каждого зна-
чения Р в интервале [а, I>] существует одно пли несколько значений
б, которые совместно с Р удовлетворяют уравнению (6.6).
Геометрически существование решения для всех Р в прямоуголь-
нике d|<6<cI, а<Р<Ь означает, что любая прямая в этом прямо-
угольнике, параллельная оси б, пересечет синусоиду (6.6) хотя бы раз
внутри этого прямоугольника. Аналогичное решение существует внутри
125
прямоугольника d2<6<c2, а<Р<Ь, заштрихованного на рис. 6.1,6 во-
круг точки 2. Внутри же прямоугольника d3<6<c3, а<Р<Ь не сущест-
вует решения уравнении установившегося режима. В этом прямоуголь-
нике нн одна прямая P=const не пересекает кривую уравнения уста-
новившегося режима (6.6).
Решение существует для любого положительного значения мощно-
сти, которое меньше предела передаваемой по линии мощности Л’нб.
Для мощности Р>Рнб решения уравнения установившегося режима не
существует. Физически несуществование решения означает, что по ли-
пни с сопротивлением х при модулях напряжений на концах линии
t/] = const, t/2=const нельзя передать мощность больше предела пере-
даваемой мощности Р„б, который определяется выражением (6.6).
Существование решения в общем виде, т. е. для уравнений (6.1),
состоит в следующем. Существование решений уравнений установивше-
гося режима при заданном значении вектора независимых переменных
V 11 означает, что имеется хотя бы одно значение вектора зависимых
переменных Х(0> такое, что параметры режима Х(0> и Y< > удовлетво-
ряют уравнениям установившегося режима. Будем говорить, что точка
X, Y принадлежит множеству установившихся режимов G, если пара-
метры режима X и Y удовлетворяют уравнению установившегося ре-
жима (6.1). Обозначим Gx и Gy проекции множества установившихся
режимов G на пространства X и Y. Существование решения уравнений
установившегося режима в области Gy означает, что для каждого
значения Y, принадлежащего Gy, существует хотя бы одно значение
вектора зависимых переменных X такое, что параметры режима X, Y
удовлетворяют уравнениям установившегося режима (6.1). Иными сло-
вами, для каждого Y, принадлежащего G , существует хотя бы одно X,
принадлежащее Gy, т. е. существует точка X, Y, принадлежащая мно-
жеству установившихся режимов G Для пояснения приведенных фор-
мулировок в общем виде можно использовать рис. 6.1,6, имея в виду
следующее соответствие:
В общем виде . . Y X G Gr Gx
На рис. 6.1,6 . . Р 8 Кривая (6.6) Проекция (6.6) Проекция (6.6)
на ось Р на ось 8
Прн использовании в качестве переменных вещественных и мни-
мых составляющих напряжений при записи уравнений (3.40), (3.41)
в виде (6.2) функции fu и /2/ являются полиномами второй степени
относительно Ui' и Ui" [6].
Уравнения установившегося режима (6.2) прн использовании
U' U" представляют собой систему квадратных уравнений. Эту систе-
му можно решать итерационно, например следующим образом. Для
каждого k-ro узла можно решить соответствующую пару уравнений
(3.40), (3.41) н получить в ясном виде через радикалы выражение для
вещественной и мнимой составляющих напряжений этого узла через
126
напряжения других узлов. В этих выражениях под знаком корня будут
находиться дискриминанты, представляющие собой некоторые функции
от напряжений в узлах. Положительность этих дискриминантов явля-
ется необходимым, но не достаточным условием существования реше-
ния этой системы [6, 21].
Условия существования режима в окрестности известного решения
уравнений установившегося режима можно исследовать с помощью
теоремы о существовании неявной вектор-функцни. Эта теорема приме-
нительно к расчетам установившегося режима означает следующее.
Рис. 6.2. Интерпретация теорем о
существовании решения
'Пусть имеется точка установившегося режима Х(0), Y(0>, в которой яко
дЫ (Х{°>, YtQ))
дХ
биан
не равен нулю [якобианом системы W(X, Y)
называется определитель матрицы частных производных функций к>*
по х] Тогда во всех точках Y некоторой окрестности точки Y<°> су-
ществует решение уравнения установившегося режима (6.1). В то же
время на основании теоремы о неявных функциях нельзя ничего ска-
зать о существовании х становившегося режима вис некоторой окрест-
ности точки Y<°>. Таким образом, эта теорема имеет локальный харак-
тер, т. е. формулирует условия существования режима в «малом» [6].
Па рис. 6.2,о приведена геометрическая интерпретация локальной
теоремы. Рисунок 6.2 и другие приводимые ниже рисунки условны, по-
скольку при расчетах установившихся режимов X и Y — многомерные
векторы. Окрестность точки Y<0), во всех точках которой на основании
локальной теоремы существует решение уравнений (6.1), обозначена
на рц£ 6.2,а как GH0’. Для уравнения установившегося режима линии
только с х (см рис. 6.1) эта теорема означает, что в достаточно малой
окрестности всех значений нагрузок Y, кроме точки 2, существуют ре-
жимы, т. е. существуют углы, удовлетворяющие (6.6). В точке 5
127
dP dW n
— — “г- = 0, и условия теоремы о существовании неявной функ*
do dX
ции нс выполняются. Действительно, при нагрузке, большей, чем в точ-
ке 5, режим не существует. Точка 5 соответствует Рно. Как отмечалось
выше, если точка X, Y принадлежит множеству установившихся режи-
мов G, то параметры режима X и Y удовлетворяют уравнению уста-
новившегося режима (6.1).
Для линии нз двух узлов (см. рис. 6.1,а) множеством установив-
шихся режимов G является синусоида (см рис. 6.1,6). Обозначим 6
такую область в пространстве параметров режима X, Y, во всех точках
которой функции ta*(X, Y) определены и непрерывны вместе со своими
производными первого порядка, якобиан уравнений установившегося
режима d\V/dX не равен нулю и внутри 0 есть хотя бы одна точка,
принадлежащая множеству установившихся режимов G. Проекции в
на пространства X и Y будем обозначать 0* и 0г. Аналогично Gx и
G»— проекции множества установившихся режимов G на те же про-
странства.
В локальной теореме ничего не говорится о размерах окрестности
G (0), в которой существует решение уравнений установившегося режи-
ма. Чож.чо показать, что диаметр этой окрестности не может быть
сколь угодно малым. Это Дает возможность расширить окрестность
G/°>, в которой справедлива локальная теорема.
Двигаясь в пространстве Y в любом направлении от точки Y<u>,
будем получать решения уравнений установившегося режима (6.1) до
тех пор, пока точка Х‘, Y», соответствующая решению системы (6.1), не
достигнет границы области 6. На рис. 6.2.6 приведена соответствующая
геометрическая интерпретация. Область в пространстве независимых
переменных Y, до которой расширена окрестность G <0>, обозначена 6
Эта область является проекцией множества установившихся режимов
G на пространство независимых параметров режима Y Для любого
значения параметров Y£ в этой области существует установившийся
режим X', Y‘. При непрерывном изменении независимых параметров от
Y<°> до Yz в области G>- значения параметров установившегося режима
непрерывно изменяются от Х<0), Y<°> до X , Y< Смысл этого положения
применительно к расчету установившегося режима состоит в следую-
щем Пусть внутри 0 имеется установившийся режим Х(0>, Y Тогда
точку Y(0> пространства независимых параметров Y можно окружить
замкнутой областью Gy такой, что для каждого значения Y*, принад-
лежащего G, существует установившийся режим X*. Y’ в 0- Для всех
Yf, принадлежащих границе Gy, установившийся режим Х£, Y£ принад-
лежит границе 0 [6].
6.2. Единственность решения нелинейных уравнений
установившегося режима
Единственность решения уравнений установившегося режима при
заданном значении вектора независимых переменных Y 0) означает, что
существует только одно значение вектора зависимых переменных Y<0> —
такое, что параметры режима Х(0\
установившегося режима.
Нелинейные уравнения устано-
вившегося режима имеют, как пра-
вило, несколько решений. Поэтому
задача будет заключаться в том,
чтобы исследовать единственность
решения для заданного Y при X, ле-
жащем в заданной области режи-
мов.
Указанная локальная теорема о
неявных функциях гарантирует
в некоторой окрестности точки Х<°>,
У*0», в которой якобиан системы
отличен от нуля, не только суще-
ствование режима, но и его единст-
венность [6]. Из этой теоремы сле-
дует, что каждому Y1 в некоторой
окрестности G/°> соответствует един-
ственный установившийся режим
Y<°> удовлетворяют уравнениям
Рис. 6.3. Единственность реше-
ния «в малом»
X', Y', для которого вектор зависимых переменных X принадлежит не-
которой окрестности точки Х(0). На рис. 6.3 эта окрестность обозначена
Gx<0). Таким образом, локальная теорема гарантирует единственность
только для достаточно близких режимов, т. е. единственность «в ма-
лом». Из нее не следует отсутствие для заданного значения Y« другого
режима X1, Y', для которого X1 не входит в окрестность Gx(0>.
Рассмотрим установившиеся режимы, принадлежащие области
во всех точках которой якобиан системы (6.1) не равен нулю. Если
точка X, Y, принадлежащая 6, удовлетворяет уравнениям установив-
шегося режима, то в ее окрестности справедлива локальная теорема
и имеет место единственность режима «в малом». Однако из единствен-
ности <в малом» не следует единственность режима для заданного Y
во всей области 0, т е. единственность «в большом» [6].
Единственность решения в области для (6.6) означает, что для
любого значения Р в этой области существует только одно решение,
т. е. только одно значение, удовлетворяющее уравнению установивше-
гося режима. Например, в прямоугольнике d|<6<C], а<Р<Ь (см
рис. 6.1,6) для любого значения мощности а<Р<Ь существует един-
ственное решение. Геометрически это значит, что в этом прямоугольни-
ке любая прямая P=const пересекает кривую уравнения установив-
9—6189
129
шегося режима одни раз. Аналогично единственное решение сущест-
вует и в прямоугольнике, заштрихованном вокруг точки 2.
Неоднозначность решения в области означает, что для каждого
значения Р в этой области существует несколько решении Например,
в прямоугольнике </i<6<C2. а<Р<Ь на рнс. 6.1,6 для любого Р су-
ществуют два решения. Прямая Р—Р^-^const пересекает синусоиду
установившегося режима в точках / и 2, т. е для Р2 существуют два
значения б] и б2, удовлетворяющие уравнению установившегося режи-
ма. Аналогично два решения существуют для любого значения мощно
сти в указанном прямоугольнике.
Дтя любого значения Р меньше предела передаваемой по линии
мощности существуют два решения: одно — с б<90° п второе — с б>
>90°. Чем ближе мощность к пределу передаваемой мощности по ли-
пин, тем ближе эти решения, т. е. меньше разность между их углами.
Например, при мощности Рз (см. рис. 6.1,6) разница между решения-
ми, соответствующими точкам 3 и 4, меньше, чем между решениями
для точек 1 и 2 при мощности Ро. При Р—Р,л оба решения сливаются
в одно. При предельном значении передаваемой но линии мощности
существует единственное решение — точка 5 при 6=90°. Для всех б<
<90° производная мощности но углу положительна (<ЭР йб>0), а для
всех б>90° — отрицательна. При 6=90° <?Р/дб=0, т. е. на прямой б =
= 90° находится решение уравнения установившегося режима 5, для
которого 6Р/<?б = 0. Эта прямая 6=90° делит область значений Р, б
на две. в каждой из которых существует единственное решение урав-
нений установившегося режима. Ниже этой прямой для любого значе-
ния мощности Р<РВй существует единственное решение, причем б<90°
н с1Р,дб>0 (решения /, 3 и т. д.). Выше этой прямой для любого
Р<РНб существует одно решение с б>90° п <?Р/<?б<0.
Единственность решения уравнении установившегося режима в об-
ласти 0 означает, что для любого Y из Gy существует единственное
значение X в области 6 такое, что параметры режима X, Y удовлетво-
ряют уравнению установившегося режима (6.1).
Кзк правило, исследование единственности проводится в области
0. в которой якобиан dW/<?X ие равен нулю [6]. На рис. 6.1 такой
областью является, например, прямоугольник, обведенный пунктиром.
Для уравнений (6.3), в которых Y (мощность или модуль напря-
жения)— явные квадратичные функции от X (активных и реактивных
составляющих напряжения), А И. Лазебником доказан следующий,
более сильный результат: если область 0. в которой якобиан системы
(6.3) отличен от нуля, выпукла, то в этой области для каждого зна-
чения регулируемых параметров Y (т. е. Pt, Qi, Ui) существование ре-
жима означает сто единственность [6].
Результат А. И. Лазсбннка основывается на обобщении теоремы
Ролля на случай системы квадратичных функций. Как известно, для
непрерывной и дифференцируемой функции одного переменного спра-
130
всдлява теорема Ролля, в соответствии с которой между любыми двумя
точками с равными значениями функции находится точка, где произ-
водная функции равна нулю. Если функция одного переменного явля-
ется квадратичной, то производная обращается в нуль посередине меж-
ду этими точками. В общем случае теорему Ролля нельзя обобщить
для функции нескольких переменных. Однако для системы квадратич-
ных функций многих переменных можно доказать теорему, аналогич-
ную теореме Ролля, причем роль производной здесь играет якобиан
системы. Суть этой обобщенной теоремы состоит в следующем: если
в некоторых двух точках Х(1> и Х(2) квадратичные функции (6.3) при-
нимают одинаковые значения (Y<r>=Y2))t то в середине отрезка пря-
мой, соединяющей эти точки, якобиан системы (6.3) обращается в нуль.
Если ^система (6.3) имеет различные решения, каждая пара решений
должна быть отделена одна от другой точкой на отрезке прямой меж-
ду этими решениями, в которой якобиан системы обращается в нуль.
Область называется выпуклой!, если вместе с любыми своими двумя
точками она содержит и все точки соединяющего их отрезка прямой.
Поскольку в выпуклом области любые Две точки можно соединить пря-
мой, целиком лежащей в данной области, нз этой теоремы следует, что
в любой выпуклой области, во всех точках которой якобиан системы
отличен от нуля, система уравнений установившегося режима (6.3)
может иметь лишь единственное решение. При этом система (6.3)
имеет и другие решения, однако все они лежат вне выпуклой области
О, во всех точках которой якобиан не равен нулю. При некоторых
допущениях (см. § 7.1) 0 является областью апериодически устойчивых
режимов, и только одно решение будет устойчивым, если 0 выпукла.
Прн расчетах режимов замкнутой электрической системы из трех
узлов найден контрпример, т. е. найдены три решения в области 0v
[6]. Поэтому область решений уравнений установившихся режимов
с положительными знаками якобианов в пространстве зависимых пе-
ременных, ограниченная поверхностью |dW/dX =0, может быть одно-
связной1 и нсвыпуклой. Решение сравнений установившегося режима
в этой области в общем случае не единственное.
В [8] приведено аналитическое исследование условий существова-
ния решения уравнений установившегося режима для трехузловой сети
н для многолучевой сети общего вида, а также анализируется дно-
связность области существования в пространстве активных мощностей
для трехузловой сети прн задании в узлах Р, U. В [7, 8] показано, что
на границе области существования в пространстве активных мощностей
достигают абсолютных минимумов и максимумов линейные формы
л
Л(Х. Р)= 2
=1
1 В односвязной области всякая кривая, соединяющая любые две
внутренние точки, принадлежит области, т. е. не пересекает ее границ.
9* 131
Кроме того, приведены наиболее простые соотношения, показываю-
щие наличие довольно широкой области применения эквивалентных
преобразований, известных из ТОЭ, для нелинейных уравнений устано-
вившегося режима. В [9] для трехузловон системы в пространстве
активных мощностей получены аналитические выражения для границы
области существования решения и доказана выпуклость этой области.
6.3. Предел по существованию решения и примеры
расчетного анализа существования и единственности
Результаты расчетного анализа существования и единственности
решения уравнений установившегося режима. Рассмотрим электриче-
скую цепь, изображенную на рис. 6.4,а. Узел 3 — балансирующий1
([73^110 кВ и 6з=0). В узлах 1 и 2 заданы модули напряжений
(С71=112 кВ, [72=П5 кВ) н активные мощности.
Вектор независимых переменных Y включает U\, U2, Plt Р2, его
размерность равна четырем, и пространство Y — четырех мерное. Зави-
симые параметры режима — углы напряжений Uu U2 относительно ба-
лансирующего б], 62 В качестве уравнений установившегося режима
(6.3) запишем уравнения баланса активных, мощностей в узлах сети:
₽1=МУ1. У». 1 (67.
f,(W,I
Система уравнений установившегося режима (6.7) нс включает
уравнения баланса реактивных мощностей, поскольку Qi однозначно
выражаются через Р\, Р2, U2, 6i и б2. Для простоты последующего
изложения для уравнений режима сети па рис. 6.4,а будем считать, что
вектор зависимых переменных включает только 61 и 62. Соответственно
дальнейший анализ будем проводить для двух компонент вектора
Y — Р\ и Р2, т. е. будем рассматривать сечение пространства Y плоско-
стями £/] = 112 кВ, [7^=115 кВ.
В четырехмерном пространстве параметров установившегося режи-
ма X, Y выделим точку Х(0>, Y<°>, в которой существует решение урав-
нений (6.7) н якобиан системы (6.7) отличен от нуля. Рассмотрим про-
екции на плоскости X и Y некоторой области0, ограниченной поверх-
ностью |6W/dX|=0, 'причем точка Х<0), Y(°> принадлежите. Проекция
0 на Y—0У — вся плоскость Y, так как якобиан уравнений (6.7) от Y
нс завнент [6].
На рис. 6.4,6 в плоскости зависимых переменных 61 и 62 показана
проекция поверхности (О, на которой |dW/<?X|=0. Эта проекция пред-
ставляет собой четыре прямые, обозначенные на рис. 6.4,6 как 60 х1,
60 х2, 6Ох3. 60/.
1 Напомним, что балансирующим называем узел, балансирующий
по току и базисный по напряжению.
132
Рис. 6.4. Проекция области 6 на пространство зависимых переменных
для радиальной сети из трех узлов
Из уравнении?! (6.7) легко находится аналитическое выражение
для прямых оО^. дв* и 60^. Пространство X разделено
прямыми 60^ на четыре параллелограмма1 * * , обозначенные на рис. 6.4. б
6j, б”, О’”, 0^V. Когда точка Х^ лежит внутри параллелограмма
Од или 0yV, якобиан системы (6.7) меньше нуля, если же Х^ принад-
лежит параллелограмму 0^ или 0”1, то |6W/dX | > 0. Область Оу , в
которой якобиан больше нуля, не односвязная, а состоит из двух вы-
пуклых областей 0^. 0^н.
В дальнейшем пространство X вследствие периодичности тригономет-
рических функций sin и cos будем рассматривать только в пределах па-
раллелограммов 0^ , б”, о”1, 0>У, поскольку зависимые параметры ре-
жима входят в уравнения баланса мощностей (6.1) в виде аргументов
sin и соз.
1 Ниже всегда будем иметь в виду периодичность 0_т и д8х в
пространстве углов X. Например, точки Lr и 1'х (рис. 6.4,б) различа-
ются на 360°.
133
Отображение линий 00 v на плоскость Y с ном щью уравнений
(6.7) показано на рнс. 6.5. Прямые дВх имеют четыре точки пересе-
чения, обозначенные на рис 6.4 6 как 1х, 2Х, Зх, 4Х. На плоскости Y
отображения этих точек обозначены соответственно 1у, 2у, Зу, 4у.
Выберем точку 1.x в качестве отправной и обойдем область Од
по ломаной /д—2Х—Зх—1Х—1х. Эта ломаная в плоскости Y отобра-
Рнс. 6.5. Область су-
ществования Gr урав-
нений установившего-
ся режима
зится на замкнутую кривую 1у—5у—2у—Зу—бу—4у—1у (рис. 6.5).
Обходя границу области Од по пути 1'х—2Х—Зу—4'х—1'х, получим
в плоскости Y отображение этого пути в виде />—7 у—2у—Зу—8у 4у—
*~1у Отображения границ областей Од и Од'' дают в плоскости
Y соответственно кривые 1у—7у—2у—Зу—8у—4у—1у и /»—5у 2у Зу
—6у~^у-1у.
Как показали расчетные исследования, точки, лежащие внутри
областей 0у н Од11, отображаются в одну и ту же область на
134
плоскости Y— Gy1, ограниченную контуром /у—7у—2}—Зу—8V——1г-
Соответствснно точки, лежащие внутри областей ©V и 0{\ ото-
бражаются в одну и ту же область плоскости Y—Gy”, ограниченную
контуром /у—5-,—2у—Зг—бу—4У—/у. Все пространство зависимых па-
раметров X отображается на плоскость независимых параметров Y
в область, ограниченную кривой 1 —Ту—2>—Зу—6}—4у—/у. Иными
словами, отображение X и Y принадлежит объединению Gy1 и Gy".
Область существования решения уравнении установившегося режима,
являющаяся этим объединением и приведенная на рис. 6.5, односвязна.
Здесь идет речь об односвязаности области существования решений
независимо от знака якобиана.
В [22, 23] аналитически получена область существования Gy, при-
веденная на рис. 6.5. Более того, в [22, 23] приведено аналитическое
условие, нрн котором Gy для сети на рис. 6.4,а пеодносвязна.
Для определения количества решений для каждого Y, т. е. для ото-
бражения Y<« на плоскость X, для сети на рис. 6.4,а можно, например,
воспользоваться графическим решением уравнений (6.7). В [25] приве-
дены решения уравнений установившегося режима, соответствующие
различным значениям Pi и Р$ для сети па рис. 2.1. Режимы, соответст-
вующие одному и тому же вектору независимых переменных су-
щественно различны в зависимости от того, в какой из областей 0^
они находятся.
Число решений уравнений (6.7) определяется значениями компо-
нент вектора Y<o. Ниже дана зависимость числа решений уравнений
(6 7) от выбора вектора Y<« [25]:
Число ре- Выбор вектора Y<*>, т. е Y<*> задан
шепий
0“ Вне замкнутой области Gy^JGy11
1 В точках /у, 2у, Зу, 4у или на кривых (/у—7у—2у),
(Зу—бу—4у)
2 В открытой области Gy—GylflGy11 или на прямых
(/у—4у), (2у—Зу)
3 На кривых (/у—5 у—2у), (Зу—8у—4у)
4 В открытой области Gy*f|Gyl>
Примечание. (J— символ объединения. Q—символ пересечения. Область
gJw заштрихована на рис. 6-3,в.
Многочисленные расчеты всех неоднозначных решении для данного
примера позволяют сделать вывод о том, что решения, соответствую-
щие данному Y *> и лежащие в областях 0х и ОдУ, а также решения,
лежащие в областях 0^ и Оу11, характеризуются равными по модулю
и противоположными по знаку величинами |dW/c)X [25]. Этот факт
может быть использован для отыскания всех решении уравнений уста-
новившегося режима.
Режимы замкнутой электрической сети из трех узлов, когда в узлах
1 п 2 заданы модуль напряжения и активная мощность, анализпрова-
135
лись в [6, 25]. Область 0^ решений уравнений установившихся ре-
жимов с положительными знаками якобианов в пространстве зависи-
мых переменных, ограниченная поверхностью |dW/dX|=0,— односвяз-
мая и нсвыпуклая. Решение уравнении установившегося режима в этой
области в общем случае не единственно. Для уравнений установивше-
гося режима трсхузловой электрической системы в зависимости от па-
раметров сети и режима возможно существование трех решений с по-
ложительным знаком якобиана в односвязной области пространства за-
висимых переменных 0^, ограниченной кривой |c>W/dX|=0. Из этих
трех решений лишь одно соответствует устойчивому режиму, удовлет-
воряющему техническим ограничениям по напряжению, нагреву и т. д.
Прн этом точки из 0^ отображаются на обобщенную многолистную
область G . В области G»- имеются две так называемые точки развет-
вления и О2. Обход точки разветвления по любой замкнутой кривой
в плоскости Y приводит к переходу с одного листа многолистной по-
верхности на другой и, следовательно, к переходу от одной ветви мно-
гозначной функции X=f(Y) к другой [25]. Область неодносвязна, по-
скольку в ней существуют две точки, при которых уравнения устано-
вившегося режима (6.7) не имеют решения с положительным знаком
якобиана [6].
Для сложных сетей среди нескольких решений, полученных в опи-
санных в [6] расчетах слабо нагруженных режимов, т. е далеких от
поверхности, на которой |c>W/c?X =0, лишь одно соответствовало ре-
жиму с допустимыми уровнями напряжений В расчетах сильно на-
груженных режимов (близких к поверхности, на которой |dWF<3X|=0)
были получены два решения, определяющие режимы с допустимыми
уровнями напряжений.
При расчетах сложных сетей и задании в качестве исходных данных
активных мощностей н модулей напряжений для узлов электростанций,
Р и Q для нагрузочных узлов было найдено лишь одно решение, опре-
деляющее апериодически устойчивый режим, допустимый по техниче-
ским ограничениям.
При задании в качестве исходных данных Р и Q в нагрузочных
и станционных узлах для сложных электрических систем были найде-
ны два решения, соответствующие статически апериодически устойчи-
вым режимам, удовлетворяющим техническим ограничениям.
Предел по существованию решения уравнений установившегося ре-
жима Для линии на рис. 6.1,о установившийся режим 5 на рис. 6.1,6 —
это режим, предельный по существованию решения [26, 27]. При утя-
желении по мощностям от режима 1 при Р>Ркъ решение уравнения
установившегося режима перестает существовать. Предел передаваемой
мощности РПб естественно называть пределом по существованию ре-
шения. Режим 5 прн Р = РПб и 6 = 90° — это режим, предельный по су-
ществованию и по апериодической статической устойчивости. Предел по
апериодической устойчивости наступает прн утяжелении по углам в
136
равен 90°. Предел по существованию решения наступает нрн утяжеле-
нии ПО МОЩНОСТЯМ при Р=Рнб-
Пределом по существованию решения уравнений установившегося
режима на данном пути утяжеления следует называть такие значения
независимых параметров режима, при которых существует решение
уравнений установившегося режима и прн дальнейшем ма ом измене-
нии которых по данному пути утяжеления такое решение не сущест-
вует. Предел по мощности — частный случай предела по существованию.
Якобиан уравнений установившегося режима в точке, предельной
по существованию решения, всегда равен нулю [27]. С достаточной
степенью точности предельным по существованию решения уравнений
установившегося режима можно считать режим полученный на послед-
нем шаге утяжеления при сходящемся итерационном процессе метода
ио параметру.
Для замкнутой сети из трех узлов, как и для сети на рис. 6.4,6,
при проведенных в [25] расчетах на любом из путей утяжеления пре-
дел по существованию решения уравнений установившегося режима
наступает не позже предела по апериодической статической устойчи-
вости. Более подробно взаимосвязь пределов по существованию реше-
ния и 'по апериодической статической устойчивости рассмотрена в гл. 7.
Задача ввода в область существования решения уравнений устано-
вившегося режима возникает, если решение установившегося режима не
существует. Как отмечалось выше (см. гл. 5), если не существует реше-
ния уравнений установившегося режима, то метод по параметру сой-
дется к точке локального экстремума, в которой якобиан |dW/dX| ра-
вен нулю. При этом необходимо так изменить значения независимых
параметров режима Y, чтобы решение уравнений установившегося ре-
жима5, существовало. Если в состав вектора независимых переменных
Y входят только активные и реактивные мощности, решение уравнений
установившегося режима можно получить, изменив нагрузку в узлах
на значение небалансов. В более общем случае задача ввода в область
существования может решаться изменением всего вектора Y, т. е. изме-
нением регулируемых комплексных коэффициентов трансформации,
фиксированных модулей напряжений узл в и т. д. При этом функция
4е минимизируется одновременным изменением всех компонент вектора
Y, а не только изменением компонент вектора X, как это делается прн
расчете установившегося режима. Увеличение модулей напряжений
в узлах приводит к расширению области существования решения урав-
нений установившегося режима и, меняя модули напряжений, можно
решить задачу ввода режима в область существования [6]. Для реше-
ния задачи ввода в область существования при расчетах установив-
шихся, допустимых и оптимальных режимов представляется целесооб-
разным использовать методы второго порядка. Эффективное примене-
ние этих методов требует вычисления параметров, определяемых в ходе
итерационного процесса [6].
137
Глава седьмая
СВЯЗЬ СУЩЕСТВОВАНИЯ, сходимости
И ЧУВСТВИТЕЛЬНОСТИ РЕШЕНИЯ СО СТАТИЧЕСКОЙ
УСТОЙЧИВОСТЬЮ1
7.1. Существование решения и апериодическая статическая
устойчивость режима
Методы исследования статической устойчивости современных слож-
ных электрических систем можно разделить на две группы. К первой
группе относятся приближенные методы исследования, позволяющие
определять условия апериодической статической устойчивости системы,
т. е. определять режимы, устойчивость которых не может нарушаться
апериодически [12, 28, 29]. Методы второй группы предназначены для
анализа статической устойчивости с учетом самораскачивания и тре-
буют адекватного учета переходных процессов во всех динамических
элементах системы, включая устройства регулирования [28]. Методы
этих двух групп взаимно дополняют друг друга. Применение упрощен-
ных методов позволяет существенно сузить диапазон режимов системы,
для которых следует проводить уточненные расчеты, и тем самым су-
щественно уменьшить объем исследования. Таким образом, вопросы
анализа апериодической статической устойчивости электроэнергетиче-
ских систем представляются весьма актуальными.
Обычно исследование апериодической статической устойчивости
того или иного режима системы состоит из двух этапов: 1) расчета
исследуемого установившегося режима и 2) расчета свободного члена
характеристического уравнения ап по результатам первого этапа [28].
В ряде отечественных работ предлагается полностью или в значитель-
ной степени совместить эти два' этапа с. целью упрощения и ускорения
расчетов [6, 12, 29].
При расчете на ЭВМ установившихся режимов сложных электри-
ческих систем широкое применение нашел метод Ньютона. На каждом
шаге вычислительного процесса по методу Ньютона вычисляется матри-
ца коэффициентов линеаризованных уравнений установившегося режи-
ма (матрица Якоби). Поскольку ап является определителем системы
линеаризованных уравнений переходных процессов в исследуемой си-
стеме при р=0, при определенных условиях он может совпадать с опре-
делителем матрицы Якоби (см. библиографию к [6]).
Расчеты установившихся режимов, как правило, ведутся при пред-
положениях и способах задания исходных данных, отличных от исполь-
зуемых при анализе статической устойчивости. Поэтому важной являет-
ся оценка ап при расчете установившихся, а также допустимых и опти-
мальных режимов сложных электрических систем с помощью программ,
1 Перед чтением данной главы целесообразно прочитать § 5.1.
138
реализующих метод Ньютона. Такая оценка ап при расчете установив-
шегося режима по методу Ньютона реализована во многих промыш-
ленных программах, широко применяемых на практике [13, 20]. Исполь-
зование этих программ позволяет достаточно просто и обоснованно
определить параметры предельного по апериодической устойчивости
режима по якобиану, вычисляемому при расчете установившегося ре-
жима и соответствующему ап. Применение этих методов основано на
приведенных в гл. 7 результатах исследования взаимосвязи сходимости
итерационных процессов при расчете установившихся режимов н устой-
чивости этих режимов.
Статическая устойчивость — это способность системы восстанавли-
вать исходный режим после малого его возмущения или режим, весьма
близкий к исходному (если возмущающее воздействие не снято) [28].
Иными словами, статическая устойчивость — это способность электри-
ческой системы при малом отклонении ее параметров возвращаться
к режиму с исходными значениями указанных выше параметров.
Строгое решение задачи проверки статической устойчивости уста-
новившегося режима требует: I) составления линеаризованных диффе-
ренциальных уравнений малых колебаний для всех элементов системы
и их регулирующих устройств; 2) составления характеристического
уравнения и проверки знаков его корней, т. е. проверки знаков действи-
тельных корней и действительных частей комплексных корней харак-
теристического уравнения. Напомним, что корни характеристического
уравнения — это собственные числа матрицы системы дифференциаль-
ных уравнений. Система статически устойчива, если все действитель-
ные корни и действительные части комплексных корней характеристи-
ческого уравнения отрицательны. Наличие хотя бы одного комплексного
корня с положительной действительной частью соответствует возникно-
вению самораскачивання, т. е. колебательного процесса с нарастающими
амплитудами. Если нет комплексных корней с положительными действи-
тельными частями, но имеется хотя бы один положительный действи-
тельный корень, то нарушение устойчивости имеет форму апериодиче-
ского ухода от исследуемого режима, т. е. нарушается статическая
апериодическая устойчивость.
Анализ статической апериодической устойчивости предполагает, что
в электрической системе не может возникнуть самораскачивапис, т. е.
ие .может быть комплексных корней характеристического уравнения
с положительной действительной частью.
Анализ знаков корней характеристического уравнения требует их
вычисления и является весьма трудоемким. Поэтому часто анализируют
статическую апериодическую устойчивость по изменению знака свобод-
ного члена характеристического уравнения. Такой анализ состоит
в определении изменения знака свободного члена при ухудшении (утя-
желении) режима, начиная с заведомо устойчивого режима. При ухуд-
шении (утяжелении) заведомо устойчивого режима прохождение через
139
нуль свободного члена характеристического уравнения соответствует
пределу статической апериодической устойчивости. При проверке ста-
тической апериодической устойчивости в более строгой математической
формулировке надо следить не за изменением знака свободного члена
характеристического уравнения, а за изменением знака отношения выс-
шего члена и свободного члена характеристического уравнения. В основ-
ном дальнейший материал этой главы посвящен анализу статической
апериодической устойчивости.
Свободный член характеристического уравнения ап — определитель
матрицы системы линеаризованных уравнений переходных процессов
в исследуемой системе. При определенных условиях ап может совпа-
дать с определителем матрицы Якоби уравнении установившегося ре-
жима. Необходимость выполнения этих условий связана с тем, что рас-
четы установившихся режимов, как правило, ведутся при предположе-
ниях и способах задания исходных данных, отличных от используемых
при анализе статической устойчивости. Контролируя выполнение усло-
вий, при которых ап равен якобиану, для анализа статической устой-
чивости на ЭВМ на каждом шаге утяжеления можно применять рас-
чет установившегося режима по методу Ньютона.
Из сопоставления строк матрицы Якоби с уравнениями переход-
ных процессов в электрической системе следует, что якобиан системы
уравнений установившегося режима электрической системы практиче-
ски совпадает со свободным членом характеристического уравнения ап
для этой системы (с погрешностью, обусловленной заменой конечных
значений коэффициентов усиления АРВ по отклонению напряжения Kw
на бесконечные, т. е. на только в том случае, если система
содержит шины бесконечной мощности и при этом прн расчете устано-
вившегося режима выполняются следующие условия:
1) для генерирующих узлов в качестве независимых переменных
заданы Р н U;
2) узлы нагрузок вводятся теми же статическими характеристика-
ми, что и при расчете статической устойчивости:
5) в качестве балансирующего узла выбраны шины бесконечной
мощности, т. е. узел, напряжение которого по модулю и частоте не-
изменно [6]. Этот вывод справедлив и при задании в качестве зависи-
мых переменных U', U".
Если хотя бы одно из этих условий не выполняется, то по якобиа-
ну уравнений установившегося режима системы нельзя судить об апе-
риодической устойчивости этого режима. Например, если для генери-
рующего узла при расчете матрицы Якоби в качестве независимых пе-
ременных задать Р и Q, то относящиеся к этому узлу две строки мат-
рицы будут соответствовать уравнениям переходных процессов в малых
отклонениях для генератора, регулирование возбуждения которого осу-
ществляется по отклонению реактивной мощности с бесконечно боль-
шим коэффициентом усиления. В этом случае, поскольку такое регули-
140
рование возбуждения реально не существует, по якобиану уравнений
установившегося режима можно судить только о «расчетной устойчи-
вости», т. е. q существовании решения исследуемой системы уравнений,
а не о статической устойчивости реальной электрической системы [6].
Следует заметить, что при расчете установившихся, допустимых и
оптимальных режимов с помощью метода Ньютона выбор как баланси-
рующих узлов, так и независимых переменных остальных узлов не свя-
зан с физическими особенностями элементов данного • узла, важного
при анализе устойчивости, а определяется построением эффективного
итерационного процесса и учетом ограничений по параметрам режима
[13, 20]. Поэтому в общем случае якобиан системы уравнений устано-
вившегося режима не будет совпадать со свободным членом характе-
ристического уравнения системы. Однако в какой бы форме ни велся
расчет установившегося режима, в конце итерационного процесса мож-
но легко вычислить якобиан, совпадающий со свободным членом ха-
рактеристического уравнения. Это может быть сделано путем незначи-
тельных модификаций программ расчета установившихся, допустимых
й оптимальных режимов или без изменения программ — путем переко-
дировки некоторой части исходной информации.
С учетом сказанного выше известные программы расчета устано-
вившихся, допустимых и оптимальных режимов (см. гл. 8 и 9) могут
эффективно использоваться и для дополнительной оценки апериодиче-
ской статической устойчивости рассчитываемого режима (§ 7.2).
Связь апериодической статической устойчивости с существованием
и единственностью решения уравнений установившегося режима опре-
деляется рассмотренной в предыдущем разделе связью между свобод-
ным членом характеристического уравнения и якобианом уравнений
установившегося режима. В точке, предельной по существованию ре-
шения, якобиан |6W/dX| всегда равен нулю. Предел по апериодиче-
ской статической устойчивости соответствует изменению знака (т. е.
прохождению через нуль) свободного члена ап. Область пространства
зависимых параметров режима X, в которой якобиан уравнений уста-
новившегося режима больше нуля, совпадает с областью его апериоди-
ческой статической устойчивости при тех же предположениях, при ко-
торых якобиан |c?W/dX| уравнений (6.7) совпадает со свободным чле-
ном характеристического уравнения ап.
Проиллюстрируем связь .между апериодической статической устой-
чивостью и существованием решения для сетей на рис. 6.1,а и 6.4,а.
Свободный член характеристического уравнения для линии на рис. 6.1,а
равен производной активной мощности по углу dP/dd. При утяжелении
от устойчивого режима 1 (см. рис. 6.1,6) будем увеличивать угол б.
При 6 = 90° свободный член dP/d$=Q. При дальнейшем утяжелении
режима (увеличении угла) знак свободного члена dP/db изменится
о положительного на отрицательный. Установившийся режим 5 при
Р=Рнб> 6 = 90° — режим, предельный по апериодической статической
устойчивости. Все установившиеся режимы при б<90° апериодически
141
устойчивы (режимы, соответствующие решениям /, 3, на рис. 6.1,6,
и т. д.). Для этих режимов dP/d&>$. Все решения при 6>90° соот-
ветствуют апериодически неустойчивым режимам (решения 4,2 и т. д.).
Предел апериодической статической устойчивости 6=90°, так как при
утяжелении по углам от устойчивого режима 1 свободный член dP/d&
проходит через нуль при этом значении угла. Предельный .по аперио-
дической статической устойчивости режим 5 характеризуется двумя
параметрами режима Р=РНб и 6=90°. Предел по апериодической устой-
чивости >6 = 90° — это значение того параметра режима, при утяжелении
которого проходит через нуль dP/db. Таким образом, пределом мы на-
зываем параметр предельного режима.
Установившийся режим 5 — это режим, предельный по существова-
нию решения. При утяжелении по мощностям от режима 1 при Р>РНб
перестает существовать решение уравнения установившегося режима.
Предел передаваемой мощности Рнб естественно называть .пределом
существованию решения. Режим 5 при Р=РНб, 6=90° — предельный по
существованию и по апериодической статической устойчивости. Предел
по апериодической устойчивости наступает при утяжелении по углам
и равен 90°. Предел по существованию решения наступает при утяже-
лении по мощностям при Р—Рнб.
Для сети на рис. 6.4,а выполняются условия, при которых |6W/6X|
равен ап. Поэтому решения, принадлежащие неодносвязной области
0^, в которой якобиан больше нуля и которая состоит из областей
’’х и “х , удовлетворяют определению апериодической статической
устойчивости [25]. Ломаные 1Х—2Х—Зх—4Х—1х и 2Х—З'х—4'х—Гх—2Х
на рис. 6.4,6 — границы области апериодической статической устойчи-
вости. При задании Р и U во всех узлах сети рис. 6.4,а область апе-
риодической статической устойчивости А и область 0^, в которой
[dW/6X| >0, определяются в пространстве X [27]. Более того, эти обла-
сти совпадают, т. е. 0 х2=А. В области 0j собственные числа матри-
цы Якоби имеют положительную вещественную часть, хотя ап больше
нуля [27]. В области 0^ собственные числа матрицы Якоби меньше
нуля. Собственные числа матрицы Якоби не определяют статическую
устойчивость, поскольку не совпадают с собственными числами диффе-
ренциальных уравнений движения системы. Важно подчеркнуть, что
режимы в 0^п (например, точка 2Ш, 2) не удовлетворяют техни-
ческим ограничениям по току в линиях [26]. Отображение области
0у на плоскости независимых параметров режима есть Gy11. Поэтому
для статически устойчивых режимов, допустимых по техническим огра-
ничениям, вектор независимых параметров Y должен принадлежать
области Gy11.
На рис. 6.4,6 и 6.5 показаны два пути утяжеления для сети на
рис. 6.4,а. Оба утяжеления начинаются с одного и того оке исходного
режима при Pj=100 МВт, Р2=200 МВт (точка 1 на рис. 6.5,6). Пер-
142
вый путь утяжеления реализуется увеличением генерации активной
мощности в узле 1 при постоянной генерации активной мощности
в узле 2 (путь 1—4), второй путь — увеличением активной мощности
генерации узла 2 при постоянной Pi в узле 1 (путь 1—5). На рис. 6.4,6
Г показаны отображения в области Bf путей 1—4 и 1—5 (см.
| рис. 6 5,6). При этом предел по существованию решения уравнений
Z6.7) совпадает с пределом по статической устойчивости.
• При задании в первом узле сети на рис. 6.4,0 Р{ и <2ь а во втором
I Узле по-прежнему Рг и П2 область 0^ изменяется и не совпадает
к с областью апериодической устойчивости [25]. Пределы по существо-
ванию решения уравнений установившегося режима при задании Q на
генераторах не совпадают с пределами по апериодической статической
устойчивости. Таким образом, пределы по существованию решения и
по апериодической статической устойчивости совпадают только в тех
случаях, когда выполняются условия, при которых [6W/dX|=nn.
। их* • *
й.‘ ~
7.2. Устойчивость и сходимость, определение предельных
по апериодической устойчивости режимов
Связь устойчивости режима с учетом самораскачивания и сходимо-
сти итерационного процесса. Как известно, режим электрической систе-
мы устойчив (с учетом самораскачивания) в том и только в том слу-
чае, когда все собственные числа матрицы А системы дифференциаль-
ных уравнений в канонической форме, описывающих переходный про-
цесс в электрической системе, лежат в левой полуплоскости. Иными сло-
вами, для устойчивости режима с учетом самораскачивания необходи-
мо и достаточно, чтобы все собственные числа X i матрицы А лежали
Д: • в левой полуплоскости. В этом случае все действительные корни ха-
W- рактеристического уравнения и действительные части комплексных кор-
ней отрицательны. Еще раз отметим, что собственные числа матрицы А
являются корнями характеристического уравнения. Как отмечалось
аз § 5.1, сходимость итерационного процесса (5.1) при расчете уста-
новившегося режима определяется собственными числами матрицы В,
•определяющей итерационный процесс. Для сходимости итерационного
процесса необходимо и достаточно, чтобы все собственные числа Ад
матрицы В были по модулю меньше единицы. Рассмотрим итерацион-
\ный процесс (5.1), матрица которого В обладает следующим свойством:
•ее собственные числа А,в получаются из собственных чисел матрицы А
с помощью дробно-линейного преобразования
(7.1)
А~
•отображающего левую полуплоскость в единичный круг (рис. 7.1). При
.этом все собственные числа матрицы А в левой полуплоскости перей-
143
дут в собственные числа матрицы В внутри единичного круга. Со-
ответственно для устойчивости режима с учетом самораскачивания не-
обходимо и достаточно, чтобы сходился итерационный процесс (5.1),
где собственные числа матриц В и А связаны дробно-линейным преоб-
разованием (7.1). В тех случаях, когда указанное выше условие (7.1)
не выполняется, сходимость итерационного процесса (5.1), определяе-
мого матрицей В, не свидетельствует об устойчивости режима и в свою
очередь расходимость итерационного процесса не говорит о его• не-
устойчивости. В то же
время при приближении
к границе области апе-
риодической устойчиво-
сти ухудшается сходи-
мость любого итераци-
онного процесса в рас-
чете установившегося
режима. Это следует из
Рис. 7.1. Отображение левой полуплоскости
в единичный круг
того, что при прибли-
жении к нулю наи-
меньшего по модулю
собственного числа матрицы dW/dX приближается к единице собствен-
ное число оператора, характеризующего итерационный процесс. Сходи-
мость итерационного процесса при расчете установившегося режима
является необходимым и достаточным условием статической устойчи-
вости режима (с учетом самораскачивания), если собственные числа
матрицы дифференциальных уравнений переходного процесса электри-
ческой системы преобразуются в собственные числа матрицы, опи-
сывающей итерационный процесс, с помощью дробно-линейного преоб-
разования, отображающего левую полуплоскость в единичный круг.
Разработан метод анализа статической устойчивости по сходимо-
сти специально организованного итерационного расчета установивше-
гося режима при связи между собственными числами, аналогичной
(7.1) [29].
Анализ апериодической статической устойчивости при расчете уста-
новившегося режима методами Ньютона и по параметру. В общем слу-
чае сходимость итерационного метода при расчете установившегося ре-
жима может быть не связана с его апериодической устойчивостью,.
Постоянство знака якобиана в форме, соответствующей ап, при непре-
рывном движении,по кривой сходящегося итерационного процесса Нью-
тона от начального приближения, соответствующего устойчивому режи-
му, является достаточным условием апериодической устойчивости рас-
считываемого режима. В связи с дискретностью итерационного процес-
са практически возможно следить за знаком якобиана не непрерывно1,
а лишь в точках, определяемых отдельными итерациями. Этот же не-
достаток характерен для обычно используемых методов утяжеления.
144
Противоположность знака якобиана в форме ап в точках решения ж
начального приближения, соответствующего устойчивому режиму, до-
статочна для апериодической неустойчивости режима. Действительно,,
если знаки якобиана в точке решения и в точке устойчивого начально-
го приближения различны, то рассчитанный режим неустойчив. Это до-г
статочное условие апериодической неустойчивости не является необхо-
димом. Из совпадения знаков якобиана в точках устойчивого начально-
го приближения и решения не следует апериодическая устойчивость-
рассчитываемого режима, так как в ходе итерационного процесса Нью-
тона знак якобиана мог дважды измениться. Таким образом, сходи-
мость метода Ньютона и апериодическая устойчивость в общем случае-
не совпадают, хотя и взаимосвязаны в рассмотренных выше случаях..
Оценка апериодической статической устойчивости установившегося ре-
жима электрической системы при расчете этого режима методом Нью-
тона может в общем случае не дать результата, поскольку: 1) итера-
ционный процесс Ньютона может разойтись при расчете устойчивого’
режима, 2) в процессе итераций может произойти двукратное изменение-
знака якобиана. Все выводы о связи апериодической устойчивости и
сходимости метода Ньютона справедливы и для других итерационных
методов, если вместо якобиана уравнений установившегося режима го-
ворить об ап.
Указанные выше случаи расходимости или-двукратного изменения’
знака якобиана практически возникают редко при применении метода^
Ньютона. Тем не менее метод по параметру при выборе параметра
с помощью матрицы вторых производных (§ 5.4) позволяет избежать,
возможного проявления указанных недостатков метода Ньютона, так
как делает1 итерационный процесс монотонным и более сходящимся..
Соответственно связь апериодической устойчивости и сходимости ме-
тода по параметру значительно более определенная, чем для метода?
Ньютона.
Определение режимов, предельных по апериодической статической:
устойчивости, по сходимости метода по параметру. Предельный по апе-
риодической устойчивости режим электрической системы определяется
последовательным изменением (утяжелением) исходного устойчивого-
режима с проверкой для утяжеленного режима критерия устойчивости
[8]. Известны следующие способы утяжеления [8]: 1) увеличение
общей нагрузки (и генерации) энергосистемы в заданных узлах сети;
2) перераспределение нагрузки между генерирующими узлами; 3) сни-
жение напряжения в заданных узлах системы. Возможна также ком-
бинация указанных способов утяжеления.
Определение предельных по апериодической устойчивости режимов
можно осуществлять известными методами последовательного утяжеле-
ния заведомо устойчивого режима при использовании метода Ньютона
или по параметру для расчета режима на каждом шаге утяжеления.-
Предел апериодической устойчивости будет отвечать изменению знака
10—6189
145;
якобиана соответствующей системы 'равнений установившегося режима
(см. § 7.1). Отметим, что утяжеление режима при использовании на
каждом шаге метода Ньютона в определенном смысле соответствует
методу последовательных интервалов или в более общем случае — ме-
тоду расчета по параметру, если считать, что выбор параметра соот-
ветствует выбору шага утяжеления.
При утяжелении по заданному направлению определяется послед-
ний режим, для которого расчет сходится. Как близко от этого режима
находится предельный? Метод по параметру при использовании (5.30),
(5.31) сходится, если в ходе итерационного процесса якобиан не равен
нулю.
Из доказательства о сходимости метода по параметру (см. § 5.4)
следует, что при достаточно малом шаге утяжеления, например соизме-
римом с точностью расчета установившегося режима, итерационный
процесс сойдется, если на пути утяжеления не будет режима, в кото-
ром якобиан равен пулю.
При сходимости к точке решения системы нелинейных уравнений,
в которой [<7W/c?X[=0, метод позволяет приблизиться к ней сколь угод-
но близко.
Предположим, что утяжеление режима осуществляется изменением
активных мощностей п станций и последним режимом, прн котором еще
получена сходимость решения метода по параметру, является режим
при Р—Р^. Дальнейшее увеличение Р(1) на ДР, где ДР — шаг утяже-
ления, приводит к «зависанию» вычислительного процесса метода по
параметру, сопровождающемуся незначительным уменьшением как мо-
дуля максимального небаланса, так и Л-нормы вектора небалансов. Прн
этом якобиан резко уменьшается, а коэффициент К в (5.30) увеличи-
вается. Выбирая шаг утяжеления ДР очень малым н соизмеряя его
с тошостью расчета установившегося режима, можно тем самым опре-
делить, насколько значения РПред близки к параметрам предельного по
апериодической устойчивости режима. Таким образом, в качестве пре-
дельного по апериодической устойчивости на заданном направлении
может быть взят последний сошедшийся по параметру режим.
Способы определения апериодически неустойчивых режимов на за-
данном пути утяжеления и примеры определения предельных режимов
приведены, например, в [б] Проведенные методом по параметру рас-
четы режимов ряда систем показали, что сходимость итерационного
процесса незначительно зависит от близости режима к предельному.
Известные программы расчета установившихся, допустимых и опти-
мальных режимов, реализующие метод Ньютона (см. гл. 8 и 9), эффек-
тивно используются как для дополнительной оценки апериодической
устойчивости рассчитываемого режима, так и для определения режи-
мов, предельных по апериодической устойчивости. Поскольку в общем
случае при расчете установившегося режима якобиан может не совпа-
дать со свободным членом характеристического уравнения, в програм-
146
мах предусмотрено вычисление в конце расчета соответствующего яко-
биана. В точке решения каждого режима возможно вычисление двух
якобианов, соответствующих свободному члену и учитывающих разные*
статические характеристики нагрузок по напряжению. Для получения
предельных и апериодически неустойчивых режимов в программах реа-
лизованы указанные выше способы утяжеления, которые могут вестись,
по любым параметрам режима.
" Информация об апериодической устойчивости, получаемая в ходе
расчета установившегося режима по методу Ньютона, может быть-
Д# эффективно использована при учете ограничений по статической устой-
чивости в процессе определения допустимых и оптимальных режимов.
Для оценки запаса статической устойчивости заданного режима,
сложной электрической системы по заданному пути утяжеления целе-
сообразно использовать m-норму вектора коэффициентов запаса по за-
данному пути утяжеления. Минимизация этой нормы определяет запас
устойчивости системы, наиболее опасный путь утяжеления и наиболее-
опасный утяжеляемый параметр режима [6J.
Приемлемым в настоящее время инженерным решением рассматри-
ваемой задачи может быть перебор конечного числа заданных путей:
утяжеления, выбранных в результате изучения конкретной схемы иссле-
дуемой сети и ее режимов. В частном случае это могут быть утяжеле-
ния по каждому в отдельности параметру из заданных независимых,
параметров режима.
7.3. Матрица чувствительности, чувствительность решения,
£ его сходимость и устойчивость режима
Сд, . При применении автоматического управления большое распростра-
4>-нение получили методы.теории чувствительности. Основное содержание-
теории чувствительности состоит в использовании в системах автома-
тического управления методов теории ошибок. Большое внимание уде-
лено реализации задач теории чувствительности на аналоговых вычис-
лительных машинах и построению соответствующих моделей чувстви-
тельности. Ряд работ посвящен реализации методов теории чувствитель-
ности на ЭВМ.
Применение матрицы чувствительности при расчете установивших-
ся режимов. Уравнения установившегося режима могут быть записаны;
в виде системы нелинейных алгебраических уравнений
W(X, D)=0, - (7.2).
где X — вектор зависимых переменных (нерегулируемых параметров)
режима; D — вектор исходных данных; W — вектор-функция, например,,
небалансов мощностей в узлах.
Компонентами вектора D являются заданные активные Р и реак-
тивные Q мощности (или напряжения) в узлах генерации, нагрузки
узлов потребления, коэффициенты трансформации трансформаторов-
10*
147
•с РПН. В самом общем случае в состав вектора исходных данных мо-
гут входить параметры схемы замещения, т. е. сопротивления линий,
трансформаторов и т. д. Компонентами вектора X могут быть модули
и фазы напряжений узлов, а также реактивные мощности узлов со
свободной Q, в которых задан модуль напряжения.
Уравнения установившегося режима (7.2) определяют неявную
-функцию X(D), т. е. неявную зависимость зависимых переменных от
исходных данных. Матрицей чувствительности называется матрица
частных производных дХ/dD Производная неявной функции опреде-
ляется по выражению [30]
дХ /<3W\-1 dW
dD~\dx) dD ’
dW „ л
где т——матрица Якоби уравнении установившегося режима;
оХ
(7.3)
0W
c)D~
ыатрща частных производных вектор-функции (7.2) по исходным данным.
Матрица частных производных дХ fdD прямоугольная н имеет
•столько же строк, сколько’ компонент имеет вектор X или W. Число
столбцов матрицы дХ/дО совпадает с размерностью вектора D.
Обозначим Хо—вектор зависимых параметров исходного заданного
режима, а X — вектор измененного режима. Соответственно Do и D —
векторы исходных данных заданного к измененного режимов. Значе-
ниям D и Do соответствуют определяемые по (7.2) векторы X—X(D)
к Xo=X(Do). Отклонение илн приращение исходных данных
AD-D D0
(7.4)
приводит к приращению вектора зависимых параметров режима
ДХ=Х—X0=X(D)— X(D0). (7.5)
Расчет установившегося режима с помощью матрицы чувствитель-
«юстн состоит в определении измененного вектора X по выражению
дХ
Х=Хо + —Ы). (7.6)
Использование (7.6) соответствует замене приращения вектор-функ-
ции (75) па дифференциал
дХ
dX=—AD. (7.7)
<?D
Фактическая замена приращения (7.5) на дифференциал (7.7) со-
ответствует линеаризации неявной функции вектора зависимых величин
от исходных данных (рис. 7.2). В некоторых случаях в теории чувстви-
тельности предлагается учитывать в (7.6) и производные более высо-
кого порядка (например, второго).
В самом общем случае в результате расчета установившегося ре-
жима определяется вектор контролируемых величин F, в состав ко-
148
торого могут входить зависимые параметры режима (компоненты X),
а также функции от них (потоки активной и реактивной мощности,
токи контролируемых линий, потери мощности). В этом случае для со-
кращения трудоемкости расчетов прн определении близких установив-
шихся режимов эффективно использование теории чувствительности.
вектора контролируемых величин на его
т. е. замена приращения
дифференциал, который определяется по выражению
dF
dF= — AD,
dD
(7.8)
dF
где -——матрица частных производных вектора контролируемых ве-
dD
дичин по исходным данным: dF и AD — дифференциал вектора контро-
лируемых величин и приращение исходных данных.
В этом случае вектор контролируемых величин, соответствующий
измененному режиму, можно определить аналогично (7.6).
dF t
F=F«+aFAD-
(7.9)
dF
dD
где Fo, F — значения F при исходном и измененном режимах;
матрица чувствительности (т е. матрица частных производных) векто-
ра контролируемых параметров по исходным данным.
В тех случаях, когда в F входят функции от зависимых парамет-
ров режима (например, потоки мощности, токи или потери мощности),
необходимо использование теории неявных функций, т. е. матрица част-
ных производных вектора контролируемых величин по исходным дан-
ным dF/dD выражается через матрицу производных уравнений уста-
новившегося режима dW/dX по выражению производной сложной
149
функции аналогично тому, как определяется градиент целевой функции
в .методе приведенного градиента [31].
Применение матрицы чувствительности рекомендуется при опера-
тивном управлении режимами для ускоренного расчета потоков актив-
ной и реактивной мощности и токов по отдельным контролируемым
диспетчером линиям, а также напряжений в узлах в случае изменения
режима по сравнению с заданным. Алгоритмы, использующие матрицы
чувствительности, представляются весьма перспективными, по опыт
практического их применения в настоящее время недостаточен [32].
Связь точности расчетов установившихся режимов со сходимостью
и устойчивостью. С помощью матрицы чувствительности по выражению
(7.7) можно определить линейную часть приращения вектора зависи-
мых параметров режима [или в более общем случае по (7 8) вектора
контролируемых параметров] при изменении режима вследствие изме-
нения исходных данных (7.4). Чувствительность решения к изменению
исходных данных фактически характеризует погрешности решения при
расчетах установившихся режимов, которые возникают за счет неточ-
ности исходных данных. Существование и сходимость решения уравне-
ний установившегося режима и его апериодическая статическая устой-
чивость связаны с погрешностями за счет неточности исходных данных
(а также с ошибками округления) прн расчетах установившихся режи-
мов электрических систем. Как значение этих погрешностей, так и су-
ществование и сходимость решения, а также апериодическая статиче-
ская устойчивость режима определяются свойствами матрицы произ-
водных уравнений установившегося режима, т. е. свойствами электри-
ческой сети и близостью ее режима к предельному по статической
устойчивости. Погрешности увеличиваются при плохой обусловленно-
сти матрицы производных уравнений установившегося режима, т. е. для
сетей с сильной неоднородностью, длинными линиями и УПК, а также
для режимов, близких к пределу апериодической устойчивости (см.
§ 6.3).
Влияние погрешностей исходных данных на решение системы ли-
нейных уравнений узловых напряжений характеризуется обусловленно-
стью матрицы узловых проводимостей Yy. Если Y хорошо обусловлена,
то решение линейной системы уравнений узловых напряжений незначи-
тельно изменяется прн малом изменении исходных данных, т. с. узло-
вых проводимостей и токов в узлах. Прн плохо обусловленной матрице
Yy решение определяется со значительно мсиыней точностью, чем точ-
ность исходных данных Сказанное выше качественно может быть при-
менено к нелинейной системе уравнений установившихся режимов, да-
леких от предела статической устойчивости. Чувствительность решения
нелинейных уравнений к ошибкам исходных данных для режимов, близ-
ких к предельным, определяется обусловленностью матрицы произ-
водных. Непосредственный расчет чисел обусловленности, которые стро-
го характеризуют обусловленность матрицы, является очень трудоемким^
150
так как требует либо определения собственных чисел, либо обращения
матрицы Yy или dW/dX.
При приближении к пределу по статической устойчивости чувстви-
тельность всех компонент решения к ошибкам исходных данных быстро
растет. В режимах, далеких от предела по статической устойчивости
прй номинальном напряжении сети, не превышающем 220 кВ, близка
к линейной зависимость относительной величины
dfk— &fk
от отклонения исходных данных. В последнем выражении dfk и А/У —
дифференциал и приращение k-й компоненты вектора контролируемых
величин.
С увеличением загрузки линий активной мощностью, а также номи-
нального напряжения уь растет и становится нелинейной. При прове-
денных расчетных исследованиях при загрузке линий, далекой от пре-
дела по статической устойчивости, вектор dF оказывается практически
равным AF.
Глава восьмая
ОПЫТ И ПЕРСПЕКТИВЫ РАСЧЕТОВ УСТАНОВИВШИХСЯ
РЕЖИМОВ НА ЭВМ
8.1. Опыт и перспективы применения методов расчета
установившегося режима за рубежом и в СССР
Опыт применения методов расчета установившегося
режима за рубежом. До появления ЭВМ и некоторое
время спустя задача расчета установившегося режима ре-
шалась с помощью расчетных столов. Первый рас-
чет установившегося режима на цифровой вы числи-
тельной машине описан в 1946 г. Описания пер-
вых практически приемлемых методов автоматическо-
го решения на ЭВМ появились в литературе в 1956—
,1957 гг. Ч Это метод Зейделя с использованием матрицы
Yy, который был эффективен для первых ЭВМ, посколь-
ку требовал минимального объема памяти. Хотя этот ме-
тод обеспечивал удовлетворительное решение многих за-
дач, сходимость была медленной и очень часто вообще
1 Библиография, соответствующая содержанию § 8.1, приведена
® [6, 17].
151
отсутствовала. Стремление преодолеть этот недостаток
привело к разработке методов с (использованием матрицы
Zy (1961—1963 гг.), сходимость которых была более на-
дежной, но при этом в случае больших систехм терялись
такие преимущества, присущие методу Зейделя с матри-
цей Yy, как малый объем памяти и высокое быстродейст-
вие. 'Примерно в то же время было показано, что очень
хорошей сходимостью обладает метод Ньютона (1959—
1961 гг.), однако с вычислительной точки зрения он был
далеко не эффективным. Разработка в середине 60-х годов
высокоэффективного алгоритма упорядоченного исключе-
ния с учетом слабой 'заполненности матрицы вызвала зна-
чительный прогресс методов расчета установившихся ре-
жимов. Одним из первых успехов в этой области было
радикальное улучшение показателей метода Ньютона по
скорости и требуемому объему памяти. Теперь этот метод
широко признан как наиболее совершенный метод расче-
та установившегося режима и повое местно применяется-в
зарубежной энергетической практике. В настоящее время
увеличение размерности задач, необходимость расчетов,
в темпе процесса приводят к появлению методов, исполь-
зующих упрощенные уравнения установившегося режима^
которые в будущем должны найти широкое применение.
Преимущества метода Ньютона в сравнении с мето-
дом Зейделя при расчете установившихся режимов на
основании зарубежного опыта в 1974 г. сформулированы
в [17] следующим образом.
Основная особенность метода Зейделя с вычислитель-
ной точки зрения состоит в том, что матрица Уу слабо за-
полнена. Число слагаемых под знаком суммы в выраже-
нии (3.19) мало, в среднем около трех для хорошо раз-
витых сетей электрических систем. В результате требуе-
мый объем памяти и число вычислений на шаге малы и
примерно пропорциональны числу узлов п. Поскольку
для сложной системы с хорошо обусловленной матрицей
число шагов имеет порядок п, полное время итерационно-
го расчета изменяется примерно как п2. С увеличением
размерности задачи удобнее пользоваться не методом
Зейделя, а методом Ньютона. Однако несомненное досто-
инство метода Зейделя заключается в очень -малом объе-
ме требуемой памяти и в возможности легко и эффектив-
но программировать этот метод.
Метод Ньютона сходится с большой точностью почти
всегда за два—пять шагов от начального приближения
152
при номинальных .модулях напряжений и фазах, равных
нулю, 'независимо от размера системы.
Наиболее распространено применение метода Ньютона
для решения уравнений баланса ’мощности и выбора в ка-
честве переменных модулей и фаз напряжений в узлах.
Для сложных систем, содержащих 'более 20 узлов, вы-
числительная эффективность метода Ньютона определяет-
ся квалифицированным программированием формирова-
ния и решения линейных уравнений с матрицей Якоби
(3.35). Для всех методов расчета установившегося режи-
ма программирование играет важную роль в быстродей-
ств1ии и экономии памяти, однако оно является опреде-
ляющим для метода Ньютона. Вычислительные возмож-
ности этого метода реализуются в полной мере только
при высоком уровне программирования.
При высококвалифицированном программировании
время расчета одного шага методом Ньютона возрастает
с увеличением числа узлов системы в среднем немного
быстрее, чем по линейному закону. Это — эмпирическая
зависимость от топологии сети и эффективности алгорит-
ма нумерации узлов. Поскольку число шагов не зависит
от размерности задачи, превосходство метода Ньютона
по скорости быстро возрастает с ростом рассчитываемой
системы. Для типичны^ больших систем время расчета
одной итерации по методу Ньютона примерно эквивалент*
но времени расчета семи итераций по методу Зейделя.
Обычно достаточно простой процесс упорядочения узлов
занимает меньше времени, чем расчет одной итерации по
методу Ньютона. Если, 'следовательно, взять в качестве
примера систему, содержащую 500 узлов, расчет которой
методом Зейделя требует 500 итераций, а методом Ньюто-
на (с большой точностью) — четырех, то выигрыш по ско-
рости в последнем случае будет примерно в 15 раз.
Требуемую память для метода Ньютона нельзя точно
предсказать, поскольку заполненность верхней треуголь-
ной матрицы, к которой приводится матрица Якоби, зара-
нее не известна. Объем памяти зависит от того, чему от-
дает предпочтение программист — экономии памяти или
уменьшению времени решения. Однако для общепринятых
в энергетических системах программ практический верх-
ний предел требуемого объема памяти для хранения и ре-
шения уравнений с матрицей Якоби составляет около
18 п машинных слов плюс коды их адресации. Для совре-
менных больших ЭВМ это увеличение памяти, например
по сравнению с методом Зейделя, не препятствует расче-
153
там очень больших систем с использованием только опе-
ративной памяти.
Опыт расчетов установившегося режима на ЭВМ в
СССР. У нас в стране накоплен многолетний опыт прак-
тических расчетов установившихся режимов »на ЭВМ. До
середины 70-х годов использовались программы для ЭВЛ1
второго поколения, написанные в кодах. В настоящее
время расчеты режимов проводятся на ЭВМ третьего по-
коления, для которых программы написаны на алгорит-
мических языках, как правило, на ФОРТРАНЕ.
На ЭВМ второго поколения более широкое распрост-
ранение нашли программы расчета установившегося ре-
жима по методу Зейделя, разработанные в Институте
электродинамики (ИЭД) АН УССР (Л. В. Цукерник,
Н. А. Качанова, В. В. Умсдьян) и в ОДУ Юга (Ю. А. Ви-
хорев, В. В. Умедьян).
Был разработан ряд программ, реализующих расчет
установившегося режима с помощью матрицы Z„ но они
оказались неэффективными [6].
Достоинства и недостатки метода Ньютона при расчете
режимов анализировались в отечественной литературе
начиная с 1953 г., когда X. Ф. Фазылов показал, что ме-
тод Ньютона обеспечивает быструю сходимость и уже
первое 'Приближение дает удовлетворительный для прак-
тики результат. Несмотря на это метод Ньютона не мог
претендовать на практическое применение в задачах рас-
чета сетей до использования ЭВМ из-за трудоемкости
вычисления матрицы производных.
В 1967 г. Л. А. Крумм показал, что для решения урав-
нений установившегося режима с учетом статических ха-
рактеристик нагрузок и генераторов при автоматическом
регулировании частоты, напряжения и мощности можно
применять только метод Ньютона. Широкое 'Применение
д 1я расчетов установившихся режимов на ЭВМ метод
Ньютона получил у нас в стране с 60-х годов благодаря
работам указанных выше авторов, а также Д. А. Арза-
масцева, В. М. Горншгейна и др.
При малой памяти ЭВМ второго поколения метод Зей-
деля оказался эффективнее, чем метод Ньютона. Послед-
ний имел преимущество лишь при плохой обусловленно-
сти матрицы Якоби.
На ЭВМ третьего поколения для сетей небольших
размеров программы по методу Зей ел я эффективнее, чем
по методу Ньютона. Эффективность метода Ньютона уси-
ливается для более мощных ЭВМ третьего поколения и
154
при увеличении размеров и сложности электрических си-
стем. , ...•.
Для! сетей среднего и большого размера, т. е. до 500
узлов, время расчета применяемых в СССР .программ по
методу -Ньютона и Зейделя примерно одинаково для си-
стем с хорошей обусловленностью при учете технических
ограничений. Это противоречит зарубежной практике, где
^ля расчетов установившихся режимов на ЭВМ третьего
поколения программы по методу Ньютона оказались су-
щественно эффективнее, чем по методу Зейделя, с точки
зрения быстроты расчета. По нашему мнению, такая раз-
ница в сравнительной эффективности программ по мето-
дам Ньютона и Зейделя объясняется параметрами ис-
пользуемых у нас ЭВМ третьего поколения, необходимо-
стью дальнейшей работы .по повышению качества
программ по методу Ньютона [формирование и решение
линейных уравнений с -матрицей Якоби (3.35)] и особен-
ностями указанных методов при проведении повторных
расчетов режима для учета технических ограничений.
Поясним подробнее особенности методов при учете
технических ограничений. Для расчета допустимого ре-
жима электрической системы, т. е. режима, удовлетво-
ряющего техническим ограничениям на контролируемые
величины (см. гл. 9), необходимо применять программы,
предназначенные для расчета оптимальных и допустимых
режимов, Б-2 или СДО (см. гл. 10). В этих программах
на каждом шаге оптимизации или ввода в допустимую
область установившийся режим рассчитывается по мето-
ду Ньютона. На практике часто учет ограничений осу-
ществляется с помощью программ расчета установивше-
гося режима по методу Ньютэна (например, 1Б-'6), не
предназначенных для такого учета ограничений. В этом
случае после окончания расчета параметры режимов,
вышедшие за допустимые пределы, фиксируются на пре-
дельных значениях и расчет установившегося режима
проводится повторно при этих зафиксированных на пре-
деле параметрах режима. Увеличение времени .при таких
повторных расчетах по методу Ньютона больше, чем по
методу Зейделя. Пусть, например, первый расчет, при ко-
тором параметры вышли за допустимые пределы, по ме-
тоду Ньютона сошелся за 4 шага, а по методу Зейделя —
за 500. Предположим, что повторный расчет при зафик-
сированных на .пределе параметрах, которые вышли за
допустимые пределы при первом расчете, ;по методу Нью-
тона сойдется за 2 шага, а по методу Зейделя — за 50.
155
В этом случае время расчета то методу Ньютона увели-
чивается на 50 %, а по методу Зейделя — только на 10 %.
При практических расчетах режимов с учетом ограниче-
ний очень часто увеличение времени по методу Ньютона,
необходимое для учета ограничений, оказывается намно-
го больше, чем то методу Зейделя. Именно 'Поэтому вре-
мя расчета то указанным выше программам, реализую-
щим методы Ньютона и Зейделя, (примерно одинаково
для сетей до 500 узлов на ЭВМ третьего поколения при
учете технических ограничений.
Опыт расчетов очень больших сетей (1000 и-более уз-
лов) неизвестен нам на данный момент. Можно предпо-
лагать, что эффективность программ по методу Ньютона
будет возрастать три улучшении параметров, используе-
мых в нашей стране ЭВМ третьего поколения, повыше-
нии качества программ, а также 'при применении про-
грамм расчета оптимальных или допустимых режимов для
учета технических ограничений.
Опыт повышения эффективности методов расчета ре-
жимов. Значительное внимание уделялось усовершенство-
ваниям при применении метода Зейделя для расчетов
уравнений установившегося режима. Описано несколько
вариантов «метода нулевого небаланса». В этом методе
используется внутренний итерационный цикл по напря-
жению узла которое подставляется в знаменатель
выражения для нелинейного задающего тока в уравнении
(3.19). Внутренний итерационный цикл для урвинемия &-го
узла длится до тех пор, пока небаланс тока не становит-
ся равным нулю. Другой способ получения нулевого не-
баланса заключается в составлении и решении двух квад-
ратных уравнений с действительными коэффициентами
относительно вещественной <и мнимой составляющих на-
пряжения /г-го узла [7/ Uk". В некоторых тяжелых слу-
чаях это улучшает сходимость, в остальном же такое ус-
ложнение расчета не оправдано.
Для того чтобы получить небаланс, равный нулю, на
каждом шаге можно решать линеаризованные квадрат-
ные уравнения, коэффициентами которых являются част-
ные производные активного и реактивного небалансов
мощности по Uk', Uk". Это частный случай метода Нью-
тона, когда в клетках, составляющих матрицу Якоби, все
недиагональные элементы приняты равными нулю.
В 1970—1973 гг. были разработаны способы «вторич-
ной коррекции». Суть ihx в том, что поправка напряжения
в k-м узле ДС/д, рассчитанная согласно (3.19), оказывает
156
влияние на поправки напряжении каждого узла /, связан-
ного с k, рассчитываемые на следующих шагах итера-
ционного процесса. Это изменение (поправки напряжения
Р можно 'учесть заранее, подставив -в 'знаменатель задающе-
I го тока в (выражении (3.19) при определении напряжения
узла j значение где МЛ,- учитывает влияние 'по-
правки напряжения в узле k на напряжение в узле /. Ал-
горитмически этот способ соответствует изменению собст-
венных проводимостей .в обычно используемом методе
Зейделя. Для большинства систем, за исключением тех,,
в которых много узлов с заданными модулями напряже-
ния, обеспечивается более быстрая и надежная сходи-
мость. Для хорошо обусловленных систем уменьшение
числа шагов по сравнению с обычным методом Зейделя
компенсируется дополнительными вычислениями. Пре-
имущество этого способа состоит в увеличении надежно-
СТИ СХОДИМОСТИ.
Для ускорения сходимости кроме использования уско-
X ряющих коэффициентов (см. § 5.2) было предпринято не-
сколько попыток разработки методов экстраполяции с
малым переменным, а не постоянным коэффициентом
(1969—1971 гг.). Например, вместо ускоряющего (коэффи-
^циейта q применяется аддитивный коэффициент, завися-
щий от Небалансов мощности в данном узле на преды-
дущих шагах [6, 17]. В этом случае -экстраполяция будет
наибольшей для узла с большим небалансом,, для которо-
го сходимость была плохой. По -сравнению с обычно ис-
пользуемыми постоянными ускоряющими (коэффициентами
1 ^.q^.2 этот способ обеспечивает более быструю сходи-
мость в ряде случаев, но не всегда, ,и дополнительные вы-
числения на каждом шаге редко оправданы. Одно и»
наиболее простых усовершенствований состоит во введе-
нии ограничений на допустимые значения поправок на-
пряжений на каждом шаге. Если эти пределы учитывают-
ся постоянно, то они не должны быть слишком мальц
•иначе замедлится сходимость хорошо сходящихся расче-
тов. Для уменьшения нелинейности целесообразно разде-
лить уравнение баланса реактивной мощности на модуль
напряжения. Эта небольшая модификация очень часто
уменьшает число шагов на единицу. При расчетах, про-
веденных в [17], выбор в качестве переменных действи-
тельных и мнимых составляющих напряжений несколько
ухудшал надежность и скорость сходимости [6, 31].
Максимально быстродействующую и надежную про-
грамму расчета по методу Ньютона можно создать вве-
15?
лением хорошей начальной оценки фаз напряжений пу-
тем расчета установившегося режима для упрощенной си-
стемы действительных уравнений узловых напряжений.
Целесообразно аналогично оценивать модуль напряжения.
Время расчета можно сократить, если использовать одну
•и ту же матрицу Якоби для двух и более шагов. Это, к
сожалению, снижает скорость и надежность сходимости.
Метод Ньютона с его квадратичной сходимостью
очень чувствителен к начальным приближениям. В неко-
торых программах расчет по Ньютон}' начинается после
одного или двух шагов методом Зейделя. Это эффектив-
но, если метод Зейделя не расходится. Совместное при-
менение методов Ньютона и Зейделя может быть эффек-
тивным в ряде случаев. Нанршмср, 'в программах «Сеть-
1000» и «Курс-1000» (см. § 8.2) имеются блоки расчетов
режима по методам Зейделя и Ньютона. Желательно до-
полнительное изучение критериев, по которым можно ав-
томатически в ходе итерационного процесса переходить с
одного метода на другой.
В большой мере эффективность метода Ньютона по-
вышается при «разделении» (раздельном решении) урав-
нений, связывающих активные мощности — фазы напря-
жений (Р — 6) in реактивные мощности — модули напря-
жений (Q—U) (см. § 4.3). Такое разделение уравнении
широко применяется в настоящее время [6, 17j.
8.2. Сравнение методов и программ расчета
установившихся режимов
Расчеты установившегося режима ятри управлении экс-
плуатацией и развитием электрических систем осуществ-
ляются чаще всех других расчетов. Эффективность этих
расчетов в значительной степени зависит от используе-
мой программы. Свойства программы определяются мето-
дом расчета и зависят от параметров ЭВМ, качества ал-
горитмического языка и транслятора и в большой степе-
ни— от квалификации программиста.
Сопоставление методов расчета. В настоящее время
разработано значительное количество программ, реали-
зующих различные методы. Нельзя однозначно ответить
на вопрос, какой метод лучше. Методы расчета облада-
ют разными свойствами для разных целей и видов расче-
та, электрических систем и режимов.
В табл. 8.1 рассмотрены основные свойства методов
расчета установившихся режимов электрических систем,
J 58
Ж®' <5
l“w Тт
pi • ^5
4 Z 4
мдимости методов расчета установившегося режима еле-
к
практически используемых при расчетах на ЭВМ, по-
скольку свойства этих методов оказывают очень большое^
pl а >в ряде случаев и решающее влияние на эффективность
I программ. Простая итерация и решение на каждом шаге
линейных уравнений по Гауссу (см. гл. 3) не рассматри-
ваются, так как каждый из этих методов соответственно-
менее эффективен, чем расчет по Зейделю или Ньютону.
Метод .по параметру использует на каждом шаге метод
Ньютона. При сходящемся итерационном процессе эти
ш методы совпадают. Поэтому все их свойства, за исключе-
нием надежности сходимости, одинаковы.
: Изучение свойств итерационных методов расчета уста-
новившихся режимов необходимо для их эффективного
применения. Сопоставление скорости и надежности схо-
дует из*аналитических и расчетных исследований. Осталь-
ные свойства методов, приведенные в табл. 8.1, отражают
многолетний опыт расчетов установившихся режимов на-
ЭВМ у нас в стране й за рубежом. Для методов Ньюто-
йЙна (и Зейделя оценки числа операций на одном шаге и.
; объема памяти, необходимого для запоминания матрицы
решаемой системы, приведены с учетом использования
слабой заполненности матрицы [17].
д Сопоставление методов расчета установившегося ре-
жима— не простая задача. Нельзя однозначно ответить
а 'допрос, какой метод лучше. Методы расчета обладают
.‘ разными^свойствами для разных целей и видов расчета,
электрических систем и режимов. Например
IK
метод Зей-
деля может быстро и надежно сходиться для одной систе-
мы, но не для другой; метод Ньютона может медленно
сходиться для некоторых режимов и систем. Каждый из
рассматриваемых методов имеет ту или иную область
применения <в зависимости от целей и видов расчета,
свойств рассчитываемого режима и электрической систе-
, мы. Область применения метода зависит в свою очередь
от параметров используемой ЭВМ. Анализ и сопоставле-
ние различных методов расчета установившегося режима
позволяют сделать следующие выводы относительно об-
ластей их применения.
На мощных ЭВМ третьего поколения метод Ньютона
более эффективен, чем метод Зейделя. При использова-
нии небольших ЭВМ третьего поколения целесообразно
применять для расчетов установившегося режима при хо-
рошей обусловленности матрицы Якоби метод Зейделя,.
при плохой обусловленности — Me i од Ньютона.
Метод Скорость сходимости Число операций на одном шаге
Зейделя Медленная Мало, п
С матрицей Ту Быстрая Велико, 4л2
Ньютона Квадратичная (как правило, быстрее, чем по методу с Zy) Для типичных больших систем вре- мя одного шага в 7 раз больше, чем ио методу Зейделя
•По параметру Квадратичная (не медленнее, чем по ме- тоду Ньютона) Почти как по ме- тоду Ньютона
Метод Простота алгоритма Основные достоинства
Зейделя Очень простой Простота алгорит- ма, очень малый объ- ем памяти, малое время одного шага
С матрицей Zy Простой Быстрый расчет при незначительных изме- нениях схемы
Ньютона Сложный алгоритм учета слабой запол- ненности матрицы Якоби Быстрая и надеж- ная сходимость, не- большой объем па- мяти при учете сла- бой заполненности
По параметру То же Наиболее надеж- ная сходимость
160
Объем памяти для матрицы системы Надежность сходимости Гибкость, универсальность
Очень мал, 2(п~1~
+т)
Очень большой
(более л2)
Ненадежная схо-
димость прн плохой
обусловленности
Надежнее, чем по
методу Зейделя
Зависит от схемы
сети и способа учета
слабой заполнение»
сти (верхний предел
обычно 18л)
То же
Надежнее, чем по
методу с Zy
Наиболее надежная
Применяется в рас-
четах нормальных
режимов
Применяется в рас-
четах режимов про-
стых схем сетей с
одним источником
питания
Эффективен при
расчетах оптималь-
ных режимов и
оценке апериодиче-
ской устойчивости
Эффективен при
расчетах оптималь-
ных режимов и
пределов по аперио-
дической статической
устойчивости
Продолжение табл. 8 1
Основные недостатки
Особенности
Область применения
Ненадежная, а в
ряде случаев медлен-
ная сходимость
Очень большой
объем памяти, необ-
ходимость вычислять
|л атрицу Zy
Сложный алгоритм
учета слабой запол-
ненности; невозмож-
но заранее указать
предельное число уз-
лов и ветвей рассчи-
тываемой системы
То же
Применяется толь-
ко с использованием
ускоряющих коэф-
фициентов 1
Для вычисления Zy
требуется л2-г-л3 опе-
раций
В каждом шаге по
Гауссу решается си-
стема линейных ал-
гебраических урав-
нений
При монотонно
сходящемся итера-
ционном процессе со-
впадает с методом
11ыотона
При хорошей обус-
ловленности. • на не-
больших ЭВМ
Может быть эффек-
тивен при очень боль-
шом количестве рас-
четов одной системы
Эффективен при
расчетах сложных си-
стем; на мощных
ЭВМ третьего поко-
ления эффективность
выше, чем на малых
ЭВМ
При расходимости
метода Ньютона, при
определении пре-
дельных по апериоди-
ческой статической
устойчивости режи-
мов
И—6189
161
В качестве наиболее надежного по сходимости следу-
ет ’использовать 'метод по параметру. Метод Ньютона »и
метод по .параметру наиболее эффективны для расчетов
установившихся режимов при их оптимизации, а также
при определении режимов, предельных ио апериодической
статической устойчивости. Применение матрицы собствен-
ных и взаимных сопротивлений Zy может быть эффектив-
но при очень большом количестве расчетов одной систе-
мы, например при учете случайного характера нагрузки.
Градиентный и .другие методы минимизации неэффектив-
ны для расчетов установившегося режима, их следует
применять для задачи ввода в область существования ре-
шения уравнений установившегося режима.
Программы расчета установившегося режима. Наибо-
лее распространены программы расчетов установившихся
режимов по методу Зейделя — «РУЭР», по методу Нью-
тона— «Б-6», «МУСТАНГ» (табл. 8.2), а также програм-
мы «Сеть-1000», «Курс-1000», в которых реализованы
расчеты по методам Зейделя и Ньютона. Программа
«Б-6» разработана во ВНИИЭ и предназначена для рас-
чета установившегося режима в каждом шаге оптимиза-
ции по реактивной мощности Q, напряжениям U и коэф-
фициентам трансформации трансформаторов /г. Програм-
ма «РУЭР» разработана в ОДУ Юга. «Курс-1000»
представляет объединение программ «Сеть-1000», эквива-
лентирования и, кроме того, позволяет работать с диалого-
вой оистемой на дисплеях. Программы «Сеть-1000» и
«Курс-1000» разработаны в ЦДУ БЭС СССР совместно с
УПЙ (блок расчета по методу Ньютона). Блок эквива-
лентирования, входящий в «Курс-1000», разработан в
ИЭД АН УССР. 'Программа «Сеть-1000» включает в себя
блоки расчетов по методам Зейделя и. Ньютона. Блок
расчета по методу Ньютона в этих программах использу-
ет специальные итерационные методы для решения ли-
нейной системы с матрицей Якоби (3.35).
Программы «Сеть-1000» и «Б-6-79» содержат блоки
для утяжеления режимов и определения пределов по ста-
тической апериодической устойчивости. Программа «МУ-
СТАНГ» разработана в ОДУ Северо-Запада для расчета
динамической устойчивости. Расчет установившегося ре-
жима осуществляется на каждом шаге расчета устойчиво-
сти, но может решаться и как самостоятельная задача.
Все эти программы отличаются хорошим сервисом и
очень высоким качеством программирования. Программы
совершенствовались в течение двух десятилетий, что при-
162
вело к их большой эффективности и шмрокохму (использо-
ванию практически во всех службах АСУ энергосистем,
в проектных и исследовательских организациях, а также
в высших учебных заведениях.
К сожалению, в известной нам отечественной литера-
туре отсутствует опыт сопоставления программ расчета
установившегося режима и их свойств. Это объясняется
сложностью такого сопоставления и не очень большим
сроком применения ЭВМ третьего поколения для расче-
тов режимов.
На ЭВМ второго поколения 'более широкое распрост-
ранение нашли программы расчета установившегося ре-
жима по методу Зейделя «1-13» и «РУЭР».
На ЭВМ третьего поколения, как отмечалось в § 8.1,
для сетей среднего и 'большого размера, т. е. до 500 уз-
лов, время расчета указанных выше программ по мето-
дам Ньютона и Зейделя примерно одинаково для систем
с хорошей обусловленностью при учете технических огра-
ничений. .
Программы, предназначенные для расчетов очень
больших систем с числом узлов до 3000, разрабатывают-
ся и внедряются в практику расчетов. Опыт их приме-
нения в настоящее время невелик.
8.3. Расчет особых режимов, учет изменения частоты
Условиями нормального режима работы трехфазной сети перемен-
ного тока являются симметрия параметров и отсутствие высших гармо-
ник тока и напряжения. Однако при работе электрических систем встре-
чаются особые режимы, не удовлетворяющие этим условиям.
Несимметричные режимы в электрических сетях могут являться
следствием различия либо сопротивлений в цепях отдельных фаз, либо
заданных фазных токов нагрузки.-
Для анализа несимметричных режимов можно применять как метод
симметричных составляющих, так и систему фазных координат. При
расчете в фазных координатах напряжения и токи в любом месте сети
содержат соответствующие фазные значения:
(8.1)
Рассмотрим уравнение режима для схемы участка трехфазной ли-
нии, каждая фаза которой характеризуется некоторым активным сопро-
.тивлением, сопротивлением самоиндукции, а также взаимной индуктив-
ностью, имеющей место между данной и двумя другими фазами. Для
164
Схема замещения участка трехфазнои линии
'Г
1 аЛ'са '
Д^а ~_la^aL
' *? . &Ub^IaZba
Ш.* '?&' Ч . w в*- -
Д(7
Рис. 8.1
*??’**?*' * ’
рассматриваемого участка линии (рис. 8.1) справедливы уравнения за-
кона Ома
(8.2)
или в , матричной форме
ди =ZiMJ, (8.3)
где AU — вектор падений напряжений аналогично (8.1) содержит ком-
плексы фазных падений напряжений Диа, ДЩ, Дис; ZLM— матрица со-
противлений участка линии в фазных координатах:
^Z-M
^aL %аЬ %ас
^ab 2bL
- ^ас ^bc ^rL
(8.4)
В уравнениях (8.2), (8.3) Zab — Zba, Zac = Zca, Zbc —Zcb.
Симметричный режим участка линии на рис. 8.1 описывается одним
уравнением
к где
ток в линии; Z — сопротивление участка симметричной линии;
ДС7 — падение напряжения в сопротивлении Z.
Для симметричного режима равны сопротивления фаз и взаимные
индуктивности между ними при симметричной системе фазных токов
может быть заменена
[1]. В * этом случае система уравнений (8.2)
одним уравнением (8.5).
Сравнивая (8.2) и (8.5), легко убедиться, что несимметричный ре-
жим участка линии на рис. 8.1 описывается системой линейных уравне-
ний 3-го порядка вместо одного уравнения для симметричного режима.
Это положение можно распространить и на сложную электрическую
165
сеть с п независимыми узлами. Режим такой сети можно рассчитать,
если решить обычные линейные уравнения узловых напряжений
AU = ZyJ_, (8.6)
где порядок векторов падения напряжения ДО, токов в узлах I и мат-
рицы собственных и взаимных сопротивлений Zy равен Зи; п—число
число независимых узлов.
При расчете несимметричного режима в фазных координатах каж-
дый элемент, например вектор узловых токов I, определяется (8.1),
т. е. содержит комплексы фазных токов. Соответственно каждый эле-
мент матрицы Zy определяется (8.4), т. е. содержит активные сопро-
тивления, а также сопротивления самоиндукции и взаимоиндукции.
Расчет несимметричного режима в фазных координатах не приме-
нялся до использования ЭВМ, так как приводил к тре> кратному уве-
личению порядка решаемой системы. В настоящее время у нас в стра-
не и за рубежом разрабатываются методы расчета несимметричных ре-
жимов на ЭВМ в фазных координатах. Наибольшее распространение
как до применения ЭВМ, так и в настоящее время получили расчеты
несимметричных режимов с помощью метода симметричных состав-
ляющих.
Сущность этого метода заключается в представлении любой трех-
фазной несимметричной системы величин в виде суммы трех симмет-
ричных величин. В общем случае при учете различных взаимных меж-
дуфазных индуктивностей, различных фазных активных сопротивлений
и сопротивлений самоиндукции применение симметричных составляю-
щих не приводит к понижению .порядка систем уравнений, решаемых
при расчете установившегося режима. Более того, в этом общем случае
приходится дополнительно определять сопротивления в симметричных
координатах. В общем случае для участка линии на рис. 8.1 метод сим-
метричных составляющих требует решения системы трех комплексных
уравнений, т. е. того же порядка, что и (8.3) в системе фазных коор-
динат.
Основное преимущество метода симметричных составляющих со-
стоит в понижении порядка решаемой системы уравнений при расчете
установившегося режима в частном, но практически важном случае,
когда равны фазные сопротивления, т. е. взаимные междуфазные индук-
тивности, а также фазные активные сопротивления и сопротивления
самоиндукции [1]. При равных фазных сопротивлениях для участка
линии на рис. 8.1 уравнение режима можно записать в следующем
виде:
ди2=
kJ
-A£Z01
ДУ02
~ ао
О
0 0'
z2 о
о £о-
(8-7)
166
* .
порядок решаемом системы понижается
где AUs — вектор падении напряжении в системе симметричных со-
ставляющих; At/ai, Д^оо> Дь ^а2, Лю— падения напряжений и
токи фазы; Z\~Zz, Zo— сопротивления прямой, обратной и нулевой по-
следовательностей, т. е. коэффициенты пропорциональности между па-
дением напряжения и током одной и той же последовательности [1].
В случае равенства фазных сопротивлений вместо системы из трех
уравнений (8.3) можно решать независимо по уравнению для каждой
последовательности,
в 3 раза. Иными словами, падения напряжения всех трех последова-
тельностей определяются в рассматриваемых условиях только токами
тех же последовательностей н, следовательно, режим определяется не
системой трех уравнений, как в общем случае, а тремя независимыми
уравнениями в (8.7).
Взаимная независимость уравнений (8.7) свидетельствует о принци-
пиальной возможности независимого расчета режимов схем, состав-
ленных из сопротивлений прямой, обратной и нулевой последователь-
ностей.
Выше рассмотрены уравнения закона Ома (8.7) для участка трех-
фазной линии, но все приведенные выше рассуждения справедливы для
уравнений установившегося режима сложной трехфазной сети, в кото-
рой, например, есть несимметричные нагрузки. Для такой сети можно
записать аналогично (8.7) уравнения узловых напряжений независимо
для каждой последовательности при напряжении базисного узла, рав-
ном нулю, в следующем виде:
Uj ==^yiji;
U 2 = Zy2^2»
Uq= ZyOJo;
Zt".'1:
' -4е3»3 LXV
spi&r * •
где U„ U2, U„,
2>
10 — векторы узловых напряжений и узловых то-
ков соответственно прямой, обратной и нулевой последовательностей; Zyl,
Zy2, Zy0—матрицы собственных и взаимных сопротивлений прямой, об-
ратной и нулевой последовательностей.
Аналогично можно записать линейные узловые уравнения устано-
вившегося режима сложной трехфазной сети с матрицей узловых про-
водимрстей Yy либо с матрицей Zy в виде трех независимых систем
узловых уравнений для каждой из последовательностей [12]. Основное
преимущество метода симметричных составляющих при расчетах на
ЭВМ заключается в возможности при равенстве фазных сопротивлений
независимо решать систему уравнений для каждой из последовательно-
стей в (8.8). Это дает возможность в 3 раза понизить порядок решае-
мой системы в сравнении с (8.6), т. е. уменьшить время расчета и тре-
буемую память.
При решении задач релейной
устойчивости энергосистем возникает необходимость в расчетах устано-
защиты, системной автоматики и
167
вившихся несимметричных режимов при коротких замыканиях, непол-
нофазных режимах и сложных видах несимметрии сети в одной или
нескольких точках. Расчеты такого типа обычно ведутся при задании
в некоторых опорных узлах комплексных ЭДС или напряжений прямой
последовательности, определяемых из предшествующего нормального
режима. Несимметричный режим находится совместным решением урав-
нений для схем прямой, обратной и нулевой последовательностей, свя-
занных в единую систему соотношениями между токами и напряжения-
ми в каждом несимметричном элементе, определяемыми конкретными
видами несимметрии.
Продольные и поперечные повреждения, а также взаимная индук-
ция имитируются введением в соответствующие ветви и узлы сети
источников дополнительных неизвестных напряжений, которые в даль-
нейшем определяются в результате решения системы уравнений.
Вектор узловых токов в выражении (8.8) можно для прямой по-
следовательности представить в следующем виде:
li=bn+lia- <8-9)
где П" — вектор узловых токов симметричного нагрузочного режима;
1[д — векторы узловых токов прямой последовательности дополнитель-
ного режима.
Уравнения вида (8.9) записываются также для схем обратной и
нулевой последовательностей. В этих уравнениях все составляющие век-
тора 1‘ равны нулю, а в векторе Iя они имеют ненулевые значения
только для узлов с поперечными повреждениями и узлов, ограничиваю-
ющих ветви с продольными повреждениями.
В результате систему уравнений (8.8) для всех последовательностей
получаем в следующем виде:
U1 = bi ill" +1?) = u** + Ь ЬЛ«
U2 = Zy2j2a;
= Z yqlpA-
(8.10)
Для определения элементов матрицы !|А, 13я, 1оя записывается до-
полнительная система уравнений, состоящая из уравнений узловых на-
пряжений прямой, обратной и нулевой последовательностей для узлов
с поперечными повреждениями и узлов, на которые опираются ветви
с продольными повреждениями. В уравнениях для нулевой последова-
тельности к таким «стыкующим» узлам относятся также все узлы вет-
вей, связанных взаимной индукцией с ветвями, в которых рассматри-
ваются продольные повреждения.
Структура полной системы уравнений узловых напряжений (8.10)
и уравнений токов в индуктивно-связанных ветвях описана в [12].
Расчеты несннусоидальных режимов выполняются методом нало-
жения Несинусоидальный режим определяется при этом как результат
168
.1
суммирования режимов, соответствующих гармоникам тока,» получен-
ным при разложении несинусоидальных токов нагрузок в гармониче-
ский ряд.Л,-
Учет изменения частоты в программах расчета нормальных и после-
аварийных режимов. В практике эксплуатации энергосистем нередко
возникают ситуации, связанные с появлением небаланса активной мощ-
ности, например при отключении генераторов, нагрузок или межсистем-
ных связей. При этом происходят значительные изменения частоты, не-
учет которых может привести к качественно неверным результатам при
анализе-послеаварийных режимов. В настоящее время уже разработаны
программы расчета установивпп хся режимов с учетом изменения ча-
стоты (В. А. Баринов — ЭНИН им. Г. М. Кржижановского, А. X. Ка-
люжный — СибНИИЭ, А. М. Конторович — ЛПИ). Они позволяют рас-
считать установившиеся послеаварийные режимы, которые возникают
после затухания переходных процессов, а также могут использоваться
для определения предельных по апериодической статической устойчи-
вости режимов электрической системы с учетом изменений частоты. Эти
программы реализуют в основном два способа учета изменения частоты.
В первом способе частота учитывается как независимая искомая пе-
ременная режима, во втором частота рассматривается как параметр,
фиксированный при расчете режима.
Учет изменения частоты соответствует отказу от допущения о на-
личии в электрической' системе шин бесконечной мощности, т. е. узла,
балансирующего по Р и Q. При учете изменения частоты предполага-
ются известными зависимости активных мощностей каждого г-го гене-
ратора от частоты Pri(<d), статические характеристики нагрузок по ча-
стоте РПг (со). Для учета изменений частоты как независимой искомой
переменной система уравнений установившегося режима (3.8) допол-
няется уравнением баланса активной мощности в балансирующем узле,
а в состав вектора зависимых параметров режима вводится частота to.
Решение уравнений установившегося режима можно осуществлять,
например, методом Ньютона. При этом если использовать модули и фа-
зы напряжений, то матрица Якоби д\№/дХ дополняется столбцом про-
изводных активных и реактивных небалансов в углах по to, а также
строкой производных небаланса активной мощности балансирующей
станции по углам и модулям напряжений остальных узлов.
Учет изменений частоты требует небольших соответствующих
изменений программы, реализующей расчет режимов по методу Ньюто-
на. Поскольку якобиан уравнений установившихся режимов при учете
изменений частоты совпадает со свободным членом ап, эти программы
можно использовать для определения пределов по апериодической ста-
тической устойчивости с учетом изменений частоты.
Алгоритм учета частоты как фиксированного параметра заключает-
ся в следующем. Зададим все параметры системы при какой-либо опре-
деленной частоте <оо> которая в общем случае может отличаться от
169
homi нальной, и выберем какой-либо узел в качестве балансирующего.
Расчет режима при заданной чахтоте, например по методу Ньютона,
описан в гл. 3. В результате расчета определяется мощность баланси-
рующего узла Рб,расч (<0о) • Эта величина может быть не равна мощно-
сти балансирующего узла Рб(соо), определенной по частотной характе-
ристике при данном значении частоты а>0- При to0 небаланс мощности
в балансирующем узле равен
АРб(Д>о) =Рб,расч((Оо)—Рб (©о) • (8.11)
Другой частоте (Oj соответствуют другие значения мощности балан-
сирующего узла . Рб,расч ('G>i) и соответственно другое значение неба-
ланса
ДРб(®1) =Рб,расч((01)—Рб(<В1). * (8.12)
В выражении (8.12) Рб,расч((01)—мощность балансирующего узла,
определенная в результате расчета установившегося режима при фикси-
рованной частоте сщ .и Pq (о>1) — мощность балансирующего узла, опре-
деленная по частотной характеристике.
Искомый установившийся режим соответствует такому значению
частоты, при котором равны мощности балансирующего узла Рб,расч (в))
и Рб(со), определенные в результате расчета установившегося режима
при фиксированной частоте и по статической характеристике. Искомый
режим соответствует равенству нулю небаланса ДРб(со) и определяется
в результате минимизации ДРб(<о) по частоте. Минимум ДРб(со) по
частоте можно найти, например, методом Ньютона.
Первый алгоритм, в котором частота рассматривается как пере-
менная системы уравнений, характеризуется лучшей сходимостью ите-
рационного процесса, менее чувствителен к исходным приближениям,
является более быстродействующим. Однако он не позволяет эффек-
тивно учесть ограничения у генераторов и действия протнвоаварийной
-автоматики.
В СибНИИЭ разработан алгоритм, являющийся комбинацией двух
описанных выше алгоритмов [33].
Глава девятая
ОПТИМИЗАЦИЯ РЕЖИМОВ
АСДУ
9.1. Оптимизация режимов электроэнергетических систем
Проблема оптимизации режимов работы энергосистем
полупила полное становление и развитие за последние 30
лет, хотя первые теоретические исследования в этой об-
ласти были начаты в Советском Союзе значительно рань-
ше. Еще тогда были установлены принципы оптимально-
170
го' распределения активных мощностей между агрегата-
ми на станциях и станциями в системе, 'базирующиеся на
сопоставлении удельных приростов расходов условного
топлива. Дальнейшему теоретическому исследованию
этой проблемы 1посвящены многие работы, анализ ко-
торых приведен в [13, 20, 34, 35]. По теоретической глу-
бине проработки данной проблемы исследования совет-
ских ученых [13, 20] опередили зарубежные исследова-
ния. Были установлены критерии оптимального распреде-
ления активных мощностей в энергосистемах при учете
влияния потерь активной мощности .в сетях и при огра-
ничении энергоресурсов, и в частности гидроресурсов, и
критерии оптимального комплексного распределения ак-
тивных и реактивных мощностей при учете затрат на ге-
нерацию активных и реактивных .мощностей. При этом
постепенно возрастала глубина учета влияния различных
факторов. Так, появились работы, учитывающие влияние
изменения модулей и фаз узловых напряжений на потери
в сетях и узловые мощности нагрузки, а также учиты-
вающие затраты на генерацию активных и реактивных
мощностей. Появился учет технических ограничений, на-
пример, по модулям и углам сдвига фаз узловых напря-
жений, по активным и реактивным мощностям станций,
токов в линиях, и, наконец, учет влияния ущерба .потре-
бителей от отклонений узловых напряжений от их номш
|нальных значений.
Уже на этапе, когда была признана необходимость
учета потерь активной мощности в сетях при оптимизации
режима, стала очевидной невозможность не только опера-
тивной оптимизации, но даже и предварительных расче-
тов оптимального режима энергосистем без применения
вычислительной техники. В связи с этим много внимания
уделялось специализированным аналоговым вычислитель-
ным устройствам, которые, однако, были вытеснены, и,
по-видимому, надолго, если не окончательно, универсаль-
ными цифровыми вычислительными машинами.
Для решения этих задач было разработано и разра-
батывается огромное количество программ, которые во
всех развитых в энергетическом отношении странах мира,
как правило, используют алгоритмический язык ФОРТ-
В настоящее время для различных задач оптимизации
режима накоплен определенный опыт разработки и сопо-
ставления методов, а также практических расчетов в
электроэнергетических системах. Наиболее часто реш а ют-
171
ся задачи оптимизации режима систем ию активной мощ-
ности и режима электрической сети, т. е. оптимизации по
U, Q и п, а также более общая задача комплексной оп-
тимизации режима электроэнергетических систем. Эти за-
дачи должны решаться, а в ряде случаев уже решаются
при оперативном и автоматическом, т. е. в темпе процес-
са, управлении режимами электроэнергетических систем
и сетей.
Накопленный опыт решения задач оптимизации режи-
ма на ЭВМ .показывает, что для этих задач наиболее эф-
фективно применение метода приведенного градиента при
расчете установившегося режима методом Ньютона [13,
20]. Именно применение метода приведенного градиента
для комплексной оптимизации режима и в основном для
оптимизации режима по (7, Q и п для задач оперативно*
диспетчерского управления в АСДУ рассмотрено в гл. 9,
10. Единой терминологии в работах по оптимизации ре-
жимов нет, и разнообразие терминологии в разных рабо-
тах велико. Терминология, используемая в гл. 9. 10, срав-
нительно устоялась. Естественно, что некоторые различия
в терминологии имеются: например, не являются обще-
используемыми даже такие термины, как «комплексная
оптимизация режима», «оптимизация по U, Q, п», «опти-
мизация по Р» и т. д.
Задачи оптимизации режимов. Оптимальное управле-
ние нормальными режимами в электроэнергетической си-
стеме заключается в том, чтобы за рассматриваемый от-
резок времени обеспечить надежное электроснабжение
потребителя электрической энергией требуемого качества
(т. е. при соблюдении требуемых ограничений) при ми-
нимальных возможных эксплуатационных затратах в си-
стеме.
Оптимизация режимов соответствует требованиям до-
стижения наибольшего народнохозяйственного эффекта
(т. е. минимума эксплуатационных затрат) и проводится
по критерию минимума расхода условного топлива при
учете ограничений по использованию отдельных видов
топлива [36]. В ’[37] отмечается, что этот критерий оп-
тимизации режимов более целесообразен, чем минимум
затрат на топливо.
Задача управления режимами электроэнергетических
систем в нормальных и аварийных условиях является по
существу единой задачей. Однако в настоящее время ог-
раниченность средств анализа и управления режимами
172
•делает необходимым их независимое рассмотрение в нор-
мальных и аварийных условиях работы. Оптимальное уп-
равление нормальными режимами достигается путем вы-
бора конфигурации схемы системы, состава включенных
в работу ее элементов, а также управления параметрами
ее режима. Исключительная сложность оптимального уп-
равления режимами определяется не только чрезвычайно
большим количеством управляемых элементов, но и тем,
Л что разные регулируемые и настраиваемые параметры
следует?поддерживать в процессе работы системы опти-
мальными на большой территории.
Оптимизация режима электроэнергетических систем
производится- 'всеми инженерами, связанными с расчета-
ми и практической реализацией функционирования элект-
рической системы. Этим занимаются проектировщики, ра-
ботники -служб режимов, диспетчеры энергосистем, опера-
j тивпый технический персонал электростанций и электро-
сетей. Во время. >эксплуатации системы для обеспечения
оптимальности ее режима имеются следующие возмож-
ности :
1) оптимальное распределение активной и реактивной
мощностей между генерирующими источниками, включен-
ными в работу;
2) оптимальный выбор включенных в работу агрегатов
. (котлов, турбогенераторов);
3) оптимальное регулирование частоты и напряже-
ния;
4) оптимизация оперативного резерва мощности в
электрической системе; " \
5) оптимизация схемы электрической системы.
Оптимизация режимов в соответствии со структурой и
принципами оперативного-диспетчерского управления
р
энергосистемами осуществляется на различных времен-
ных и территориальных уровнях [32, 36]. В данной гла-
ве рассматривается оптимизация текущего режима, т. е.
оптимизация режима за отрезок времени не более 1 ч.
Условно можно выделить три вида задачи оптимиза-
ции режимов или «три поколения», как их назвали по
аналогии с поколениями ЭВМ [34].
Первый вид — задача распределения активных мощ-
ностей, которая позволяет найти активные мощности
станций, соответствующие минимуму суммарного расхода
(стоимости) условного топлива на тепловых электриче-
ских станциях с учетом потерь в сети. Эта задача решает-
173
ся методом относительных 'Приростов, т. е. методом мно-
жителей Лагранжа.
Второй вид — задача комплексной оптимизации ре-
жима, которая позволяет находить оптимальные значения
не только активных мощностей 'Станций, но и генерируе-
мых реактивных мощностей, а также модулей и фаз на-
пряжения в узлах сети, при учете технических ограниче-
ний на параметры режима, и в частности на Р, Q гене-
раторов, модули и фазы напряжений, токи и потоки
мощности в линиях. Это задача нелинейного программи-
рования с ограничениями в виде уравнений установивше-
гося режима и нелинейных неравенств. Переменные в за-
даче этого типа непрерывны.
Третий вид — выбор оптимального состава работаю-
щего оборудования, при котором учитывается стоимость
пуска и останова агрегатов станции. Эта целочисленная
нелинейная задача, в которой часть переменных дискрет-
на, недостаточно разработана и мало применяется в на-
стоящее время.
Задача комплексной оптимизации режима состоит в
определении оптимальных значений всех параметров ре-
жима при учете технических ограничений. При комплекс-
ной оптимизации режима определяются оптимальные зна-
чения активных и реактивных мощностей генерирующих
источников, ^модулей и фаз напряжений в узлах, коэффи-
циентов трансформации при учете технических ограниче-
ний на значения модулей узловых напряжений, углов
сдвига фаз на дальних передачах, токов и потоков мощ-
ности в линиях, Р и Q генераторов и т. д.
Оптимальный режим должен быть допустимым, т. е.
удовлетворять условиям надежности электроснабжения и
качества электроэнергии, и, кроме того, наиболее эконо-
мичным среди допустимых, режимов. Условия надежности
электроснабжения и качества электроэнергии при расче-
тах допустимых режимов учитывают ограничения в виде
равенств и неравенств на контролируемые параметры
режима. Наиболее экономичный режим — это такой из
допустимых, при котором обеспечивается минимум сум-
марного расхода условного топлива (или издержек) при
заданной в каждый момент времени нагрузке потребите-
лей, т. е. при заданном полезном отпуске электроэнер-
гии.
Оптимальный режим соответствует минимальному
удельному расходу топлива (себестоимости) на полезно
отпущенный 1 кВт-ч.
174
Связь между задачей комплексной оптимизации и рас-
четом установившегося режима. При расчете установив-
шегося режима параметры режима Z делятся на задан-
ные независимые Y и неизвестные зависимые {переменные
X. Например, для генераторов заданными независимыми
переменными могут быть модули напряжения U, актив-
ные мощности Р, а неизвестными — углы поворота ротора
и реактивные мощности Q; для нагрузки заданными
независимыми переменными являются активные и реак-
тивные мощности Р и Q, а зависимыми —напряжения U
и углы 6. Обычно расчет установившегося режима со-
стоит в определении зависимых параметров режима, .ко-
торые соответствуют заданным независимым парамет-
рам. Если все независимые параметры режима (напри-
мер, Р, U генераторов, Р, Q нагрузок, U м 6 в баланси-
рующем узле) заданы, то, как правило, существует одно
решение уравнений установившегося режима в допусти-
мой области (см. гл. 6).
Расчет оптимального режима системы больше соответ-
ствует технической сути задачи. При оптимизации тре-
буется определить численные значения всех зависимых
и независимых переменных Z с учетом ограничений н|а
пределы .измемения компонент вектора Z. Обычно зада-
ют пределы изменения следующих переменных: напряже-
ний и активных -мощностей генераторов, напряжений на-
грузок, реактивных мощностей генераторов, напряжения,
активной '.и реактивной мощностей в балансирующем узле,
S токов и .потоков мощности в линиях и т. д. Оказывается,
что (имеется бесконечное число таких векторов Z, которые
удовлетворяют заданным техническим ограничениям, в то
время как обычный расчет установившегося режима, огра-
ничен ситуацией только одного такого вектора Z. В зада-
че оптимизации режима системы используются добавоч-
ные степени свободы изменения переменных. Это позволя-
ет выбрать из множества векторов такой, который обес-
печивает меньший суммарный расход (стоимость)
условного топлива.
v .-S- ’ • ‘ 4
9.2. Методы комплексной оптимизации режима
Расчет установившихся, допустимых и оптимальных
режимов. В общем виде уравнения установившегося режи-
ма записываются как
W(X, Y)=0,
где X и Y— соответственно векторы зависимых
висимых параметров режима.
(9-1)
и неза-
Я
175
1 yc GHUDilDLUVl UU1p VYIYH CVCTV T <D CTO । V J ~
нии зависимых переменных X, удовлетворяющих уравне-
нию установившегося режима (9.1), при заданных зна-
чениях независимых переменных Y. При фиксированном
векторе Y система уравнений (9.1) зависит лишь от X и
ее решение соответствует определению равного нулю ми-
нимума целевой функции
¥=М(Х), (9.2)
где и’л(Х)—уравнение установившегося режима для /г-го
узла, например уравнение баланса мощности или тока в
k-м узле.
Расчет допустимого режима электрической системы,
т. е. определение режима, удовлетворяющего техниче-
ским требованиям, имеет важное значение как подзадача
оптимизации режима и как самостоятельная задача, на-
пример при отсутствии резерва мощности. Важнейшая
цель при расчетах установившегося режима состоит в
проверке того, удовлетворяет ли рассчитанный режим
техническим ограничениям. Техническим ограничениям
должны удовлетворять модули напряжений генераторов
и нагрузки, активные и реактивные мощности генерато-
ров, токи и потоки мощности в линиях и т. д. Все величи-
ны, которые должны быть в допустимых -пределах, -назы-
вают контролируемыми. Контролируемые величины — это
зависимые и независимые параметры режима X и Y, а
также функции от них ф(Х, Y) —-например токи и пото-
ки мощности [13, 16, 20].
Режим является допустимым, если
(9-3)
где // — /-я контролируемая величина; fjmax, fjmin— наи-
большее и наименьшее значения контролируемой вели-
чины.
Расчет допустимого режима состоит в определении за-
висимых X и независимых Y переменных, удовлетворяю-
щих уравнению установившегося режима (9.1) и техниче-
ским ограничениям на контролируемые величины (9.3).
Задача ввода режима в допустимую область может
быть сформулирована как задача нелинейного програм-
мирования. Эта задача может решаться методом приведен-
ного градиента [16, 20] или методом штрафных функций
[13].
176
В .последнем методе для расчета допустимого режима
целевая функция (9.2) дополняется штрафной функцией
>
= . (9.4>
4 •
и в качестве целевой функции выступает величина
?>.W- ъ ‘ ,
Ф1 = Т + Ш=Ф+2/<;(/;-?пр/)!, (9.5>
где Kj — весовой коэффициент; /пр j — предельное значе-
ние контролируемой величины, равное наибольшему или.
наименьшему допустимому значению в (9.3).
В штрафную функцию (9.4) и целевую функцию (9.5)
входят только те контролируемые величины, для которых-
не выполняются ограничения (9.3). Это значит, что
т^О, еслире ограничение нарушено, и J(/=0, если f, на-
ходится в допустимой областй. Определение допустимого*
режима состоит в нахождении равного нулю минимума
целевой функции Ть Действительно, если Чг1=0, то
wfe(X, Y)=0 (9.6).
f/-fnp, = O. (9.7>
т. е. удовлетворяются уравнения установившегося режи-
ма и все ограничения на контролируемые величины.
При учете ограничений по методу штрафных функций'
предполагается возможность неограниченного изменения
всех контролируемых величин fj. Однако при выходе ка-
кой-либо переменной за допустимые пределы к целевой!
функции прибавляется большая величина — «штраф»,
делающая работу за пределами допустимой области не-
выгодной. При выходе за -пределы независимой перемен-
ной последняя фиксируется и соответствующее ограни-
чение не учитывается в выражении (9.4) или (9.5).
.Основное достоинство метода штрафных функций —
простота алгоритма, недостаток — замедление сходимо-
сти при приближении к границе дотустимой области [13]..
Поэтому в [13] значительное внимание уделено ускоре-
нию сходимости. Метод штрафных функций используется-
не только вШССР, но и в зарубежной практике [34, 38].
Оптимальный режим получается при совместной ми-
нимизации ЧЧ и целевой функции оптимизации И (X, Y),.
т. е.
Ч^Ч^+ЩХ, Y). (9.8)
12—6189
177"
В качестве функции И(X, Y) при оптимизации режи-
мов электрических систем обычно принимаются перемен-
ные составляющие затрат на производство электроэнер-
гии, зависящие от режима сети, т. е. расход условного
топлива на тепловых станциях. При решении более ча-
стной задачи оптимизации режима по реактивной мощ-
ности Q, напряжениям U и коэффициентам трансформа-
ции п такой функцией могут являться суммарные потери
.активной мощности в сети [13, 16, 20, 34, 36, 37, 39].
Расчет оптимального режима состоит в определении
значений зависимых и независимых параметров режима
X и Y, при которых удовлетворяются уравнения устано-
вившегося режима (9.1), технические ограничения на
контролируемые величины (9.3) и целевая функция опти-
мизации имеет наименьшее значение. Задача определения
допустимого или оптимального режима начинается с рас-
чета исходного установившегося режима. Если решение
уравнений исходного установившегося режима не суще-
ствует, то необходимо решать задачу ввода в область су-
ществования решения на первом шаге или в ходе итера-
ционного процесса определения допустимого, а также оп-
тимального режимов [6]
Для расчета оптимальных и допустимых режимов эф-
фективное применение нашел метод приведенного гра-
диента [20]. Прн использовании этого метода на каждом
шаге оптимизации изменяется вектор Y, а X определяет-
ся в результате расчета установившегося режима по ме-
тоду Ньютона. Широко используются на практике раз-
дельная оптимизация распределения активных мощностей
и оптимизация режима по Q, U, п. Последний расчет
делится на два этапа [13]: 1) расчет установившегося
режима по методу Ньютона; 2) его оптимизация по ме-
тоду наискорейшего спуска при учете ограничений в фор-
ме неравенств с помощью штрафных функций.
Проводятся также исследования по использованию
методов второго порядка для расчетов оптимальных ре-
жимов электрических систем [6]. В этом случае рассмат-
ривается объединение векторов X и Y, т. е. вводится век-
тор Z, компонентами которого могут быть как зависимые,
так и независимые параметры режима. Методы второго
порядка представляют собой итерационную процедуру ме-
тода Ньютона, примененную к градиенту функции Ч'г,
т. е. методом Ньютона решается система уравнений
d'F2/dZ=0.
(9.9)
178
r ‘
V
На каждом шаге оптимизации меняется вектор Z, т. е.
зависимые и независимые параметры режима.
•Применение метода приведенного градиента для комп-
лексной оптимизации режима. Обозначим совокупность
параметров режима вектором Z= (Zb Z2,. ..,Zm),.a co-
вс к упность уравнений установившегося режима (9.1),
связывающих эти параметры,—вектором
,W(Z)=0. (9.10)
В качестве уравнений (9.10) могут, в частности, вы-
ступать уравнения узловых потенциалов в форме баланса
мощностей или токов. Оптимизация режима возможна
при 'Наличии степеней свободы при управлении системой,,
т. е. если 2N<Zm, где т — число параметров режима,
2N — число уравнений .установившегося режима. Опти-
мальный режим должен, был ь . найден внутри допустимой
области, определяемой верхним и нижним пределами из-
менения параметров режима
max,
(9.U)
где
^пцаХ) Zmin — векторы верхних и нижних пределов для
вектора Z.
В качестве ограничений обычно выступают ограниче-
ния по модулю напряжения в узлах, активной и реактив-
ной мощностей источников и т. д.
Задача оптимизации сводится к нахождению
min/Z (Z)
Z
(9.12)
при ограничениях в виде равенств (9.10) и неравенств
(9.11). Обычно в качестве целевой функции И (Z) при-
нимаются издержки на топливо, сжигаемое на ТЭС си-
стемы.
Учет технических ограничений, на параметры режима
Z, т. е. на напряжения узлов, на активные и реактивные
мощности генераторов соответствует учету неравенств
(9.11). В ряде случаев необходим учет ограничений на
функции от параметров режима <р(Х, Y), т. е. на токи,
потоки мощности в линиях и т. д. Ограничения на пара-
метры режима Z (9.11)—частный случай более общих
ограничений (9.3) на контролируемые величины fj. Зада-
чу оптимизации можно решать и при учете ограничений
(9.3) вместо (9.11). Для простоты рассмотрим оптимиза-
цию (9.10) —(9.12).
12*
179
Задача типа (9.10) — (9.12)—задача нелинейного
лрогр амидирования. Общих методов се решения при про-
извольном виде минимизируемой функции и огра-
ничений (9.10) нет. Наиболее хорошо разработаны ме-
тоды решения задачи линейного программирования, когда
Ji(Z) и ограничения (9.10)—линейные, либо методы не-
линейного выпуклого программирования, когда И(Z) и
ограничения (9.10)—выпуклые функции Z. Если огра-
ничения не являются таковыми, то обычно возможно су-
ществование не одного, а нескольких локальных мини-
мумов функции #(Z); известные же методы не гаранти-
руют при этом нахождения глобального минимума.
Различные методы и задачи определения оптималь-
ных режимов рассмотрены в [13, 16, 20, 34, 36, 37, 39].
Методом приведенного градиента называют метод оп-
тимизации, в котором градиент определяется с помощью
теории неявных функций при разделении параметров ре
жима на зависимые и независимые.
Основные положения метода приведенного град 1ента
состоят в следующем. Необходимо минимизировать функ-
цию //(Z) с непрерывным градиентом при ограничениях
(9.10) и (9.11), т. е. решить задачу (9.10) — (9.12). Пред-
ставим в выражении (9.10) вектор -параметров режима Z
как совокупность векторов Z= (X, Y), где X — вектор
зависимых, a Y—независимых параметров режима. Чис-
ло зависимых параметров, т. е. порядок вектора X, бу-
дем всегда выбирать равным числу ура нений устано-
вишегося режима, т. е. порядку вектор-функции W. Зада-
чу оптимизации режима при учете ограничений (9.10),
(9.11) можно представить как минимизацию (неявной
«функции
tf[X(Y), Y]=//(Y)
при ограничениях
Xmfn^X(Y)^X
max.
У min Y Утах,
(9.13)
(9.14)
(9.15)
тде X(Y)—неявная функция, определяемая уравнением
установившегося режима (9.10) или (9.1); Х.тах, Утах,
Xmin, Ут,п — векторы верхних и нижних пределов для
X и Y.
Градиент неявной функции определяется следующим
образом: пусть при начальном векторе Y(0) соблюдаются
Условия (9.14) и (9.15). При Y(0) из уравнения (9.10) или
180
у
г r > *
г
( 9.1) вычисляется х=х<°> на основе метода Ньютона.
Поправки dX к вектору исходного приближения Х(0) оп-
ределяются уравнением (см. гл. 3)
dW dX = — W. .(9.16)
v* Я
''ф4?
где —матрица частных производных функций (9.10) по
дХ
д\У
компонентам вектора X; матрицы —- и W вычисляются при
Y = Y<0) и исходном приближении X = Х<0).
На основе-(9.13) вычисляется градиент
дИ_ дХ_ (9.17)
0 т ах 5Y ’
дИ дИ
дУ
dY
дХ # г . -
где---- определяется
~ 1 '> *
явной функции
5.
как матрица частных
производных не-
дУ
dW I-1 дЫ
дХ
(9.18)
а векторы
дИ
дИ^
дХ
определяются из явной зависимо-
дУ '
применять для
•сти Я(Х, Y).
Метод приведенного градиента можно
решения задачи расчета допустимого режима, сформу-
лированной как задача нелинейного программирования.
Для учета при оптимизации [вместо (9.11)] более общих
ограничений (9.3), как отмечалось выше, можно приме-
нять штрафную функцию (9.4), (9.5) или метод приве-
денного градиента. В последнем случае в целевую функ-
цию не входит штрафная функция, а на каждом шаге оп-
тимизации по методу приведенного градиента решается
самостоятельная задача нелинейного программирования,
соответствующая подзадаче учета ограничений (9.3) [20,
-34, 40]. •
Программы оптимизации режимов на ЭВМ. Для реше-
ния задачи комплексной оптимизации существует ряд про-
грамм расчета на ЭВМ. Наиболее распространенные из
них — комплекс программ, разработанных во ВНИИЭ и
•ВЦ ГТУ [13]. Методика оптимизации режима, предло-
женная в [13] и реализованная в этом комплексе про-
грамм, использует раздельную оптимизацию режима по
«активным мощностям (программы Б-2 и В-3) и оптими-
I
181
зацию режима по реактивным мощностям Q, напряже-
ниям U и коэффициентам трансформации п (программа
Б-2).
Для оптимизации распределения Р в объединенных
энергетических системах (ОЭС) применяется программа
Б-2, для оптимизации Р в районных энергетических си-
стемах (РЭУ) —программа В-3. Обе программы осуще-
ствляют оптимизацию суточного режима по Р, т. е. оп-
ределяют значения Р для каждой ступени суточного гра-
фика, соответствующие минимуму суммарного расхода
условного топлива в течение суток. Программа Б-2 опи-
сана © гл. 10.
Достаточно широко применяются программы СДО,
разработанные в СЭИ СО АН СССР [20] и предназна-
ченные для комплексной оптимизации режима. В качест-
ве цечевой функции при такой оптимизации принимает-
ся стоимость топлива на тепловых станциях. При реше-
нии более частной задачи оптимизации режима по Q, U
и п следует считать известными активные мощности всех
станций, кроме балансирующей. При этом задача сводит-
ся к минимизации активной мощности балансирующем
станции за счет изменения U, Q и п. Если не учитывать
статические характеристики нагрузки и зависимость
ущерба у потребителей из-за некачественного напряже-
ния, то минимум активной мощности балансирующей
станции соответствует минимуму потерь активной мощно-
сти в сети. Установившийся режим рассчитывается по
методу Ньютона (9.16), оптимизация—по методу при-
веденного градиента (9.17). Учет ограничений осуществ-
ляется в результате решения на каждом шаге оптимиза-
ции задачи нелинейного программирования. Следует от-
метить, что программы СДО имеют мсныние сервисные
функции, чем программы В-3 и Б-2.
9.3. Задачи оперативно-диспетчерского управления
в АСДУ
Оперативно-диспетчерское управление энергосистема-
ми разделяется на четыре временных уровня: долгосроч-
ное планирование, краткосрочное планирование, опера-
тивное управление и автоматическое управление в темпе
процесса. Долгосрочное планирование относится к перио-
ду времени месяц — квартал — год. При долгосрочном
планировании решаются задачи оптимизации режимов, а
182
также большинство задач, связанных с обеспечением на-
дежности. На уровне краткосрочного (планирования реша-
ются задачи, связанные главным образом с .подготовкой
режима энергосистемы на 'ближайшие сутки или «несколь-
ко суток. При этом рассчитывается график .нагрузки
энергосистем и отдельных электростанций, рассматри-
ваются оперативные заявки на вы.вод в ремонт оборудо-
вания, проводятся проверочные расчеты режимов.
К оперативному управлению относятся задачи, решае-
мые в течение суток и обеспечивающие: .выполнение за-
планированных режимов и их коррекцию при отклонении
реальных условий производства, распределения и потреб-
ления электроэнергии от расчетных; предотвращение воз-
никновения аварий при медленно развивающихся нару-
шениях режима; ликвидацию затянувшихся аварийных
режимов; восстановление нормальной схемы, сети и элек-
троснабжения потребителей в послеаварийных режимах;
организацию ремонтных и восстановительных работ.
При автоматическом управлении (в темпе .процесса
или в реальном времени) решаются задачи управления
текущими режимами и ликвидации аварий с помощью
местных и централизованных устройств автоматики.
Оперативное управление режимами работы энергоси-
стем (энергообъединений) организуется по иерархиче-
ской системе и имеет следующие территориальные ступе-
ни (уровни) управления: центральное диспетчерское уп-
равление (ЦДУ) ЕЭС СССР, объединенные диспетчер-
ские управления (ОДУ), диспетчерские пункты районных
энергосистем (РЭУ), пункты управления электростанций
и предприятий (районов) электрических сетей (ПЭС или
РЭС). На всех уровнях решаются задачи обеспечения оп-
тимального управления энергосистемами в нормальных
режимах и (быстрейшей линии дацит аварий.
Регулирование напряжения в электрических сетях в
первую очередь определяется тем, чтобы отклонения на-
пряжения у потребителей электроэнергии были ограниче-
ны допустимыми пределами, при которых обеспечивает-
ся эффективная работа потребителей и удовлетворяют-
ся требования надежности их работы (достаточный срок
службы). Эти условия определяют графики желательных
и предельно допустимых напряжений в центрах питания
распределительной сети и соответствуют ограничениям на
напряжения при решении задачи оптимизации режима.
Центры литания распределительной сети, имеющие соб-
ственные (местные) средства регулирования напряжения,
183
являются контрольными точками по напряжению. Кроме
того, выбираются контрольные точки по напряжению в-
узлах основной сети, поддержанием заданного графи-
ка в которых обеспечиваются требуемые уровни напря-
жения в центрах питания распределительной сети, не
имеющих собственных средств регулирования напряже-
ния.
Таблица 9.1
п/п. Перечень основных задач Долго- срочное планиро- вание Кратко- срочное планиро- вание Оператив- ное управле- ние Автомати- ческое управле- ние
1 Планировании ремонтов Е.О, Р.Э Е, О, Р.Э
2 Распределение активных мощностей Е, О, Р, Э Е. О. Р. Э Е. О. Р,Э Е, О, Р, Э-
3 Выбор (иля изменение) схемы и состава оборудова- ния Е.О, Р.Э Е. О. Р, Э Е. О, Р. Э Е, О. Р. Э
4 Определение (Или регули рование) загрузки оборудо- вания Е, О, Р,Э Е, О. Р, Э Е. О. Р. Э Е, О. Р. Э
б Определение предельно допустимых перетоков по линиям электропередачи по условиям устойчивости (или регулирование перетоков) Е.О, Р Е, О. Р Е, О, Р. Э Е, О. Р. Э>
6 Определение допустимых пределов изменения напря- жения (или регулирование напряжения) Е, О. Р, Э Е, О, Р, Э Е.О. Р. Э Е. О. Р. Э>
7 Определение (или планиро- вание) потерь электроэнер- гия (или мощности) Е. О, Р, Э Е.О. Р. Э Е, О. Р, Э Е. О, Р. Э>
Оперативный персонал обеспечивает поддержание на-
пряжения в контролируемых точках в соответствии с за-
данными графиками, это осуществляется в настоящее
время и с помощью местных устройств автоматики воз-
действием на возбуждение синхронных машин, измене-
ние коэффициентов трансформации силовых трансформа-
торов и линейных регуляторов, включение и отключение-
батарей конденсаторов. Иерархия управления проявля-
ется в том, что оперативный персонал каждой ступени
управления обеспечивает поддержание напряжения в
контрольных точках сети или участка сети, находящего-
ся в его ведении
Задачи и алгоритм управления нормальными режима-
ми, использующие расчеты установившихся, допустимых
и оптимальных режимов на разных временных и терри-
ториальных уровнях, приведены в табл. 9.1, 9.2 [32].
В табл. 9.1 приведены основные задачи управления нор-
мальными режимами, относящиеся ко всем временным.
184
185
186
уровням, и показано, на каких. территориальных ступе-
нях управления решаются эти задачи. Для территориаль-
ных 'Ступеней приняты следующие обозначения: единая
энергосистема — Е; 1
районная энергосистема
МНИМ
объединенная энергосистема — О;
— Р; энергообъект (электростан-
ция, предприятие электрических сетей)—Э. В табл. 9.1
не включены задачи прогноза нагрузки, потребления
электроэнергии и тепла, надежности оборудования, а так-
же прогноза располагаемых мощностей и составления
Г • ’
,ьЛ-.
I 1
***
№
п/п,
Функция системы управления
Количество
АСДУ, в ко-
торых реали-
зованы
функции
I к
• F
и
-
>
г
Экономическое распределение нагрузки
Автоматическое регулирование напряжения и
реактивной мощности
Анализ надежности установившихся режимов
Расчет потокораспределения в режиме непосред-
ственной связи с объектом
Оптимизация режимов электрической системы
не ис-
•баланса мощностей [32], поскольку в этих задачах
пользуются расчеты установившихся допустимых и опти-
мальных режимов. Задачи регулирования частоты и на-
стройки (или корректировки) систем автоматики и релей-
ной защиты в данной книге не рассматриваются. Кроме
того, в табл. 9.1 не включены приведенные в [32] задачи
составления баланса электроэнергии, планирования вы-
работки электроэнергии и отпуска тепла, суммарного и
удельного расходов топлива, поскольку их практическое
решение в АСДУ с применением 'методов расчета устано-
вившихся и оптимальных режимов требует дополнитель-
ных исследований.
Использование алгоритмов 1. 3, 10, 11 и тем более 12,
указанных в табл. 9.2, для автоматического управления
требует дальнейшей работы по повышению эффективно-
сти .их применения в АСДУ.
За рубежом накоплен значительный опыт оперативно-
го управления режимами, а. также управления в темпе
процесса. В [41] описываются 34 АСДУ, в которых реа-
лизованы различные задачи диспетчерского управления,
приведенные в табл. 9.3. Регулирование напряжения и
реактивной мощности включает оптимизацию по U и Q и
187
связано с 5 задачами из 24, указанных в [41]. В этой
же таблице указано количество АСДУ, в которых реали-
зована соответствующая задача. Характеристика задач,
приведенных в табл. 9.3, состоит в следующем. Экономи-
ческое распределение нагрузки — это распределение ак-
тивных мощностей по методу Лагранжа с учетом потерь
в сети (при учете ограничений в виде баланса Р для (всей
системы или для каждого узла). Автоматическое регули-
рование напряжения и реактивной мощности .подробнее
рассмотрено в гл. 10. Анализ надежности установивших-
ся режимов — это проверка послсаварийиых режимов на
выполнение режимных ограничений. Расчет потокораспре-
деления в режиме непосредственной связи с объектом —
это оценка состояния режима по данным телеизмерений,
которая дает возможность дежурному диспетчеру опре-
делить потоки мощности в электрической сети для задан-
ных условий. В некоторых случаях, особо опасных по
напряжению, с нашей точки зрения, может оказаться це-
лесообразным и анализ напряжений в темпе процесса по
данным телеизмерений. Следует отметить, что напряже-
ния, как правило, изменяются в меньшей степени при из-
менении режимов и поэтому оценка напряжений менее
важна, чем оценка потоков мощностей.
Таблица 9.3 относится к различным видам управления,
а не только к управлению в темпе процесса. Например,
анализ надежности не может быть сделан в темпе про-
цесса при современном уровне развития ЭВМ.
В большинстве случаев оптимальное управление про-
изводится отдельно по активной мощности (экономиче-
ское распределение активной нагрузки) и по реактивной
мощности (распределение реактивной нагрузки). Распре-
деление реактивной нагрузки обычно реализуется как уп-
равление без обратной связи, поскольку во многих энерго-
системах изменение распределения реактивной нагрузки
производится реже, чем активной [41]. Дальнейшее уп-
рощение экономического распределения Р получают в
том случае, когда в качестве нагрузочных ограничений
используют одно уравнение баланса—равенство нулю
алгебраической суммы генерации, нагрузки и -потерь в
сети.
Расчеты экономического распределения Р с учетом ба-
лансных ограничений по Р для каждого узла повторяют-
ся с интервалом 1—5 мин. На столь малом интервале
времени нагрузки можно считать практически постоян-
ными.
188
Корректировка элементов матрицы В (частных произ-
водных потерь активной мощности по мощности станций)»
производится при управлении в реальном времени с ин-
тервалом 15—30 мин, и лишь в периоды быстрых измене-
ний нагрузки коррекция производится чаще.
Программы комплексной оптимизации режима, т. е.
оптимизации по всем переменным Р—6 и Q—U, редко»
используются в диспетчерских центрах и по своим воз-
можностям еще весьма далеки от требований, предъяв-
ляемых при управлении в реальном времени. Из 34 ана-
лизируемых систем только в одной использовалась про-
грамма комплексной оптимизации режима. Однако необ-
ходимость в таких программах не вызывает сомнения,.,
поскольку при больших изменениях управляемых пере-
менных, например при ликвидации больших нарушению
ограничений по надежности, взаимодействие между пере-
менным Р — б и Q—U может быть весьма аильным.
Проблема заключается’в том, чтобы сделать программу'
комплексной оптимизации режима достаточно быстродей-
ствующей и надежной для автоматического управления..
Трудность задачи во многом определяется тем, что при
учете надежности число ограничений очень быстро растет..
9.4. Расчеты установившихся, допустимых и оптимальных
режимов в АСДУ
Задачи расчета установившегося, допустимого и опти-
мального режимов электрической системы используют об-
щую исходную информацию. Методика расчета, алгорит-
мы и основанные на них программы применимы для рас-
четов на всех временных уровнях и территориальных’
ступенях иерархической системы диспетчерского .управ-
ления. Расчет режимов — задача, наиболее часто исполь-
зуемая в диспетчерском управлении. Она применяется как
в качестве самостоятельной задачи, так и в качестве мо-
дулей в более сложных комплексах алгоритмов задач1
АСДУ.
Особенности решения задач расчета режимов питаю-
щей электрической сети на разных временных уровнях
и ступенях диспетчерского управления определяются
основном различиями в степени эквивалентирования и в
виде исходной информации о мощностях электростанций,
эквивалентных генераторах, нагрузках узлов потребления,
а также в форме представления результатов расчета дис-
петчеру. Расчет режимов в распределительных сетях на
ЭВМ описан в гл. 3.
189»
При долгосрочном планировании применяются методы
расчета установившихся, допустимых '.и оптимальных ре-
жимов, описанных в гл. 3, 9. Дтя расчета установившего-
ся режима применяются методы Зейделя, Ньютона и по
параметру, для комплексной оптимизации—метод при-
веденного градиента, а также раздельная оптимизация ак-
тивных мощностей и оптимизация режима по напряже-
нию, реактивной мощности л коэффициентам трансформа-
ции. При краткосрочном планировании расчеты устано-
вившегося и оптимального режимов электрической систе-
мы .применяются главным образом для разработки нор-
мальных схем и режимов работы, планирования ремон-
тов и т. п. Расчеты установившегося режима—для про-
верки осуществимости намечаемых режимов по загрузке
сети и по условиям регулирования напряжения. Расчеты
оптимальных режимов применяются в сложных случаях
для этой же цели, а также для определения оптималь-
ных напряжений в узлах, положений ответвлений регу-
лировочных трансформаторов и выбора точек секциониро-
вания сети для уменьшения отрицательного влияния не-
однородности элементов сети на экономичность ее ра-
боты.
Оперативное управление в нормальном режиме имеет
следующие основные функции: регулирование режима в
соответствии с краткосрочным (суточным) планом с кор-
рекцией его при отклонении условий работы энергосисте-
мы (энергообъединения) от предусмотренных в плане с
целью обеспечения максимальной экономичности при
удовлетворении требований надежности и качества энер-
гии; производство оперативных переключений; изменение
параметров настройки средств управления (автоматиче-
ских устройств управления нормальными режимами, ре-
лейной защиты, противоаварийной автоматики); вывод
оборудования в ремонт и в резерв и ввод в работу после
ремонта и из резерва; сбор, обработка и документирова-
ние оперативной информации о работе энергосистемы.
В расчетах наиболее достоверных режимов работы се-
ти на основании неточных телеизмерений, а также опре-
деления наличия и источников погрешностей в схеме за-
мещения сети используются алгоритмы, базирующиеся на
методах оценивания состояния и идентификации. К этим
алгоритмам относятся: собственно оценивание состоя-
ния — получение наиболее достоверных значении парамет-
ров текущего режима работы сети, детекция—выявле-
ние грубых ошибок в измерениях параметров режима се-
190
ти, идентификация — корректировка параметров матема-
тической модели сети [32, 42].
Оперативный расчет установившегося режима может
выполняться в следующих случаях: для оценки допусти-
мости предстоящего режима работы основной сети, нахо-
дящейся в управлении или ведении диспетчера при выводе
в ремонт или аварийном отключении линий электропере-
дачи или трансформаторов; для определения потокорас-
пределения при значительном изменении генерируемой
или потребляемой мощности; для выработки рекоменда-
ций по регулированию уровней напряжения в сети при
изменившихся схеме и режиме работы, в частности для
оценки генерации реактивной мощности, а также для вы-
бора ответвлений регулировочных трансформаторов при
постановке под напряжение электропередач 330—750 кВ;
для оценки допустимости режима и перераспределения
потоков мощности по межсистемным связям при выводе
в ремонт или аварийном отключении части связей или при
изменении режима энергосистем, влияющем на загрузку
межоистемных связей; для оценки потерь электроэнергии
в сети. В настоящее время очень большое значение при-
дается уменьшению потерь мощности и электроэнергии.
Современные АСДУ включают оперативный контроль вы-
работки in перетоков электроэнергии и потерь в основных
сетях, а также оперативную корректировку режимов по
активной и реактивной мощностям. Оперативный конт-
роль потерь в сетях и режимов по реактивной мощно-
сти связан с регулированием по напряжению и реактив-
ной мощности.
При оперативном управлении режимов могут приме-
няться, в частности, те же алгоритмы расчетов устано-
вившегося и оптимального режимов, что и при долгосроч-
ном и краткосрочном планировании. Вместе с тем при
оперативном управлении в ряде случаев целесообразно
применение специализированных алгоритмов, позволяю-
щих повысить надежность расчетов, а также их скорость
при -получении ориентировочных решений. Например,
ориентировочный расчет установившихся режимов в [32]
рекомендуется при оперативном управлении осуществ-
лять по линеаризованным уравнениям — с помощью мат-
рицы чувствительности, т. с. матрицы производных (см.
гл. 7). При этом приращение напряжений при изменении
параметров режима или схемы можно приближенно опре-
делить с помощью матрицы производных напряжений по
изменяемым параметрам режима или схемы. Область
191
применения матрицы чувствительности для таких расчетов
напряжений требует дополнительного исследования. Для
расчетов режимов с повышенной надежностью сходимо-
сти целесообразно применять различные модификации ме-
тода по параметру (см. гл. 3, 5). Корректировка планов
производится в случае существенных отклонений от плана.
При корректировке режима определяются расчетом откло-
нения параметров от планового задания.
Оперативная корректировка режима требует в слу-
чаях значительного отклонения нагрузок от прогноза су-
щественного 'изменения состава работающего оборудова-
ния или значительного изменения перетоков обменной
мощности диспетчером вышестоящей ступени управления.
После принятия первоначальных мер для ввода режима
в допустимую область задачей корректировки режима на
заданные моменты времени является дальнейшее повы-
шение экономичности, т. е. оптимизации режима.
9.5. Информационно-вычислительные
и диалоговые системы
Информационно-вычислительные системы (ИВС) поз-
воляют резко повысить эффективность электрических
расчетов 'в АСДУ и в том числе расчетов установившихся
и оптимальных режимов. ИВС для автоматизированного
ведения электрических расчетов в вычислительном комп-
лексе (ВК) АСДУ с использованием операционной систе-
мы ОС ЕС (ИВС «Электро») разрабатывается ВНИИЭ
и ВЦ ГТУ совместно с ЦДУ ЕЭС СССР. В разработке
ИВС участвуют организации — разработчики прикладного
математического обеспечения, в которое входят програм-
мы расчета установившихся и оптимальных режимов.
Проведена работа по унификации форм входной и выход-
ной информации; ИВС создается как система, «открытая»
для включения новых программ, удовлетворяющих уста-
новленным требованиям; предусмотрена возможность
обеспечения программной избыточности, при которой для
решения задачи данного типа могут быть использованы
несколько программ.
Информационно-вычислительные системы используют
единую информационную базу (ИБ) и обеспечивают высо-
кую степень автоматизации построения расчетных мо-
делей и решения комплектируемых задач [37].
При создании ИБ должны быть удовлетворены требо-
вания независимости программ от организации хранения
192
и (поиска -данных, использования унифицированных спо-
собов представления информации, повышения надежности
хранения данных, обеспечения коллективного доступа к
данным как из прикладных программ, так и через дисп-
леи, удобства развития ИБ в процессе эксплуатации.
В ИВС «Электро» разрабатывается специализированный
банк данных.
' ИВС «Электро» предназначена в основном для исполь-
зования в ИДУ ЕЭС СССР ;и ОДУ. С помощью ИВС
«Электро» должны решаться задачи расчета установив-
шихся режимов, оптимизации режимов электрической се-
ти, анализа статической и динамической устойчивости и
Определения запасов устойчивости, расчета объема и
уставок АЧР, расчета токов КЗ, выбора уставок релей-
ной защиты и противоаварийной автоматики, анализа
результатов расчетов установившихся режимов и устойчи-
вости, определения эквивалентных параметров электриче-
ской сети, обработки результатов контрольных измерений
и формирования на их основе моделей режима.
Технологическая структура ИВС «Электро» включает
полную (исходную) модель энергосистемы (ПМЭ), на ос-
нове которой с помощью специальных программ форми-
руются взаимоувязанные расчетные модели (РМЭ) двух
групп: для расчетов установившихся режимов и устойчи-
вости и для расчета токов КЗ. Пользователями форми-
руются несколько расчетно-базовых моделей (РБМ) выс-
шего уровня с числом узлов до 3000 (до 5000 ветвей,
1500 трансформаторов, до 600 генераторов); РБМ полу-
чаются коррекцией соответствующих РМЭ (с расчетом
нового установившегося режима) или вводом полных
данных для новой РМЭ. Методами эквивалентирования
осуществляется переход от РБМ к расчетно-оперативным
моделям (РОМ) низкого уровня (количество узлов — до
300, ветвей — до 500, трансформаторов — до 250, генера-
торов— до 75). Набор в несколько сотен РОМ создается
на основе комплекса схем различных районов (с эквпва-
леитирован-ием остальной части энергосистемы) с не-
сколькими режимами для каждой из схем.
Система управления ИВС осуществляет управление
решением задач м информационной базой. Некоторые из
прикладных программ предназначаются для работы в
пакетном режиме, другие — для работы с использованием
дисплеев при непосредственном участии человека в про-
цессе решения с обращением к ИВС в любой момент вре-
мени.
13—6189
193
Для решения основных электротехнических задач на
уровне энергосистемы в ИЭД АН УССР в операционной
системе ОС ЕС разрабатывается ИВС «Энергосистема».
В ИВС «Энергосистема» применяется универсальный
банк данных «Сетор». Предусматривается возможность
информационного взаимодействия ИВС «Энергосистема» с
ИВС более высокой ступени управления, например с ИВС
«Электро». При разработке ИВС •предусматривается не
только расширение состава решаемых задач, но и орга-
низации я информациоино-вычислительного взаимодействия
ИВС различных ступеней управления. В перспективе та-
кое 'взаимодействие будет осуществляться на основе
прямого межмашинного обмена информацией. При раз-
работке ИВС должно быть обеспечено их взаимное со-
гласование с ориентацией объединения в перспективе «в
единую информационно вычислительную систему — ИВС
АСДУ [37].
Применение диалоговых систем для расчета установив-
шихся режимов. Одним из важнейших условий эффек-
тивного функционирования ИВС является -применение
диалога пользователя и ЭВМ [43, 44], который осуществ-
ляется с помощью дисплеев.
Комплекс программ, обеспечивающих организацию
диалога, называется диалоговой системой (ДС). Програм-
мы ДС вместе с ОС ЭВМ обеспечивают формирование»
пересылку и расшифровку в ЭВМ директив, набираемых
на клавиатуре дисплея, запуск соответствующих пользо-
вательских программ, редактирование и вывод информа-г
ции на экран дисплея. Набор директив пользователя и
сообщений ЭВМ, а также правила их формирования на-
зываются «языком общения» ДС.
В общем случае ДС делятся на универсальные, рас-
считанные на решение широкого круга «информационно-
поисковых, (вычислительных и других задач, и специаль^
ные, ориентированные на (выполнение определенных, огра-
ниченных функций. Диалоговые системы, и ятользуемые
в энергетике, относятся обычно к специально-ориентиро-
ванным ДС. Это достаточно простые ДС с языками об-
щения директивного типа, ориентированные на использо-
вание функциональных клавиатур и обеспечивающие вы-
вод -информации преимущественно по инициативе операто-
ра. В основу языков общения положена «иерархическая
структура поиска нужного кадра (информации (или фазы
задачи) с помощью кадров-указателей разного уровня
(принцип «меню») [43]. В ЦДУ ЕЭС СССР разработана
194
цдла из наиболее развитых систем —ДС АСДУ. В опе^
ративно-информ анионном комплексе АСДУ ЦДУ 'исполь-
зуются две диалоговые системы: ДС мини-ЭВМ и ДС уни-
версальных ЭВМ. В ИВС «Электро» входит •специально-
ориентированная ДС, разработанная ®о ВНИИЭ и ВЦ
ГТУ. В ИВС «Энергосистема» используется вариант уни-
версальной ДС, специально модифицированной в ИЭД
АН УССР для решения электроэнергетических задач.
Все современные ИВС, применяемые в электроэнерге-
тике, содержат программы расчета установившихся ре-
жимов, рассмотреннпые ib § 8.2. Естественно, что такие
входящие в ИВС программы можно (использовать в режи-
ме диалога. Кроме того, существуют варианты этих про-
грамм (например, «Сеть-1000»), предназначенные для
автонч мной работы с дисплеями тех (Пользователей, кото-
рые еще не (вышли на современный уровень расчетов ре-
жимов и не используют ИВС.
Возможности усовершенствования методов расчета
установившихся реж imob электрических сетей в условиях
диалога пользователя м ЭВМ анализировались в КПИ
(А. Н. Скрипник, Ю. В. Щербина). При этом обеспечены
ло отношению к существующим методам .и ^программам
следующие новые возможности: расчет установившегося
режима с несколькими узлами, опорными по напряже-
нию, одновременная фиксация активной мощности, реак-
тивной мощности и модуля напряжения в любом узле за
счет освобождения дополнительных величин ® смеж 1ых
узлах; фиксация гперетоков активной .или реактивной мощ-
ности, а также модулей составляющих тока в отдельных
(в зависимости от возможностей регулирования режима)
ветвях электрической сети [45].
Глава десятая
УМЕНЬШЕНИЕ ПОТЕРЬ МОЩНОСТИ —
ОПТИМИЗАЦИЯ РЕЖИМА ПО РЕАКТИВНОЙ МОЩНОСТИ
И НАПРЯЖЕНИЮ
10.1. Оптимизация режима питающей сети по напряжению,
реактивной мощности и коэффициентам трансформации
В данной главе анализируются методы уменьшения
потерь мощности прн оптимизации режима по напряже-
нию, реактивной мощности и коэффициентам трансфор-
13*
195
мации, а также при решении других частных оптимиза-
ционных задач. Оптимизация режима электрической! сети,
т. е. оптимизация режима по ‘реактивной мощности Q, на-
пряжению U и коэффициентам трансформации п, долж-
на решаться на трех уровнях регулирования U, Q и п:
1) генераторы, синхронные компенсаторы и конденса-
торы, а также трансформаторы с регулированием под на-
грузкой;
2) контрольные точки сети, т. е. регулирование в от-
дельных районах в целом;
3) регулирование на диспетчерских центрах.
С учетом больших размеров территории СССР эта
задача у нас может решаться и на уровне ОДУ, и на
уровне мощных РЭУ.
Задача оптимизации режима электрической сети по на-
пряжению, реактивной мощности и коэффициентам транс-
формации регулируемых трансформаторов и автотранс-
форматоров состоит в определении установившегося ре-
ж 1ма электрической сети, при котором были бы выдер-
жаны технические ограничения и были бы минималь-
ными -потери активной мощности в сети.
В этой задаче минимизации потерь мощности зада-
ны значения активных мощностей электрических стан-
ций Pri, за исключением станций в узле баланса, а так-
же активные и реактивные мощности узлов нагрузки
Рш, Qhi. Учитываются ограничения — равенства в виде
уравнений установившегося режима (9.10) и ограниче-
ния—неравенства на контролируемые величины (9.3).
Оптимизация режима по U, Q и п — либо самостоя-
тельная задача минимизации потерь в тех случаях, когда
все Рп, кроме балансирующего узла, фиксированы, либо
подзадача в более общей задаче комплексной оптими-
зации режима. Она соответствует задаче нелинейного
программирования (9.10), (9.3), (9.12). Целевая функ-
ция в (9.12) —потери активной мощности в сети ДР. При
оптимизации учитываются ограничения (9.3) по напря-
жениям во всех узлах, в том числе и в узлах нагрузки,
не имеющих средств регулирования, по реактивным мощ-
ностям генерирующих источников и по коэффициентам
трансформации трансформаторов, а также по токам в
контролируемых линиях [13].
В наиболее общей постановке задача оптимизации
режима по U, Q и п соответствует определению мини-
мума активной мощности балансирующей станции Рб при
196
учете статических характеристик нагрузки и зависимо-
стей ущерба потребителей от некачественного напряже-
ния. Если учитывать статические характеристики нагрузки,
то минимум мощности балансирующей станции Р6 не
совпадает с минимумом потерь мощности в сети. В этом
случае активные мощности нагрузок PM(U) не постоянны,
а зависят от напряжения. Соответственно
Л\ N,
Р6=2 М+др- 2рг,-. (10.1)
/=1 7=1
где Аг, — число нагрузочных узлов; Лг2— число генера-
торных узлов, в которых Pr=const; ДР — потери актив-
ной мощности в сети.
При неучете статических характеристик по напряже-
нию минимумы Рб и ДР совпадают, так как в этом слу-
чае 2Pm=const. Если учитывать характеристики PM(U)r
то оптимизация режима по U, Q, п соответствует мини-
муму отпуска мощности с шин балансирующей станции
[46]. При этом представляется важной задача учета в
целевой функции ущерба, вызванного некачественным на-
пряжением на шинах потребителей электроэнергии. Од-
нако введение его в расчет до настоящего времени пред-
ставляет затруднения из-за недостаточной изученности.
Следует отметить, что во многих случаях статические
характеристики нагрузки также недостаточно известны
для их практического использования при оптимизации
режима по U, Q,n.
При комплексной оптимизации (§ 9.1, 9.2) опреде-
ляется минимум расхода (стоимости) условного топлива.
В более частном случае, когда целевая функция — потери
мощности (или мощность балансирующей станции), ком-
плексная оптимизация сводится к оптимизации режима
по U, Q, п. Последняя задача имеет важное значение,
поскольку в ряде случаев отсутствует резерв по актив-
ной мощности и оптимизация распределения активной
мощности между станциями не имеет смысла.
Оптимизация режима по U, Q и п при наличии ре-
зерва по активной мощности станции должна произво-
диться в общем процессе расчета комплексной оптими-
зации режимов энергосистемы, когда сразу определяет-
ся оптимальный режим системы по всем параметрам
(активная и реактивная мощности, напряжение и т. д.)
и с учетом всех ограничений (см. § 9.2). Методы ком-
плексной оптимизации дают более правильное решение
поставленной задачи. Программы комплексной оптими-
зации требуют значительного времени при их использо-
вании даже на современных ЭВМ в достаточно слож-
ных системах. Поэтому применяют методы раздельной
оптимизации режима; оптимизацию по напряжению, ре-
активной мощности и коэффициентам трансформации
производят после оптимизации активной мощности [13,
47].
В [47] утверждается, что анализ доказал незначи-
тельность отклонений от комплексного оптимума. К со-
жалению, обоснованность этого вывода в условиях АСДУ
не ясна. В [35] сформулированы условия, при которых
можно было бы независимо распределить активную и ре-
активную мощности и совместное распределение их не
требовалось бы. Однако определение погрешностей при
раздельной оптимизации сначала Р, а затем U, Q и п в
условиях АСДУ требует дополнительных расчетных ис-
следований.
Применение метода приведенного градиента и штраф-
ных функций для оптимизации режима по Ut Q, п ана-
логично их применению для комплексной оптимизации,
рассмотренному в § 9.2 [13].
При оптимизации все узлы, в которых мож ю изме-
нять реактивную мощность (или Рг и Qr), называются
генераторными. Эти узлы соответствуют синхронным ком-
пенсаторам либо генераторам, вырабатывающим свобод-
ную реактивную мощность (или свободные Рт и Qr).
При оптимизации генераторы с постоянной мощностью
<Pr=const, Qr=const относятся к нагрузочным узлам.
Для предупреждения затруднений с неоднозначно-
стью и нарушением условия существования решения
уравнений установившегося режима принято разделение
всех генераторных узлов на опорные и неопорные. При
расчете установившегося режима в опорных узлах задан
модуль напряжения (балансирующий узел входит в чис-
ло опорных), а в неопорных — реактивная мощность.
В соответствии с этим при оптимизации для опорных
узлов в качестве независимых переменных используются
модули напряжений, а для неопорных — реактивные мощ-
ности. Кроме того, независимыми переменными при оп-
тимизации являются действительные и мнимые состав-
ляющие регулируемых коэффициентов трансформации и',
л". Расчет делится на два этапа: 1) расчет установив-
шегося режима по методу Ньютона (определяются мо-
J98
дули и фазы узловых напряжений); 2) его оптимизация.
Для оптимизации режима используется метод приведен-
ного градиента (9.17), а для учета ограничении в фор-
ме неравенств — штрафные функции (9.4).
Учитываются штрафы за нарушение ограничений по
U для всех N независимых узлов (т. е. кроме баланси-
рующего), за нарушение ограничений по Q для всех К
опорных генераторных узлов, а также штрафы за на-
рушение предельных токов контролируемых воздушных
линий.
Минимизируемая функция имеет вид
n к L
F = ДР + 2 Шщ + 2 Шц + 2 Ш„, (10.2}
/=1 z-l Z= 1
где Шиь Ulqi, Шц — штрафные функции, вводимые при
нарушении ограничений соответственно по напряжениям
во всех узлах, по реактивной мощности в опорных гене-
раторных узлах, по токам контролируемых воздушных
линий (число таких линий равно L).
Учет ограничений, наложенных на независимые пере-
менные У/, как правило, осуществляется закреплением на
предельных значениях У«, вышедших за допустимые
пределы. Однако для напряжений в опорных узлах Ui,
также являющихся независимыми переменными, этот
способ не применяется [13], а в (10.2) для этих напря-
жений тоже учитываются штрафы. Это связано с тем»
что в случае несовместимости наложенных ограничений
при закреплении Ui нарушались бы ограничения по ре-
активным мощностям и токам генерирующих источни-
ков. Между тем перегрузка генерирующих источников
обычно недопустима, в то время как некоторые откло-
нения напряжения в большинстве случаев хотя и неже-
лательны, но могут быть допущены. Поэтому для учета
этих ограничений для напряжений опорных узлов при-
нят тот же метод, что и для зависимых переменных,—
ввод штрафных функций [второе слагаемое в правой
части (10.2)].
Пусть порядок вектора параметров режима Z равен
tn, порядок вектора зависимых параметров X—2N, где
N — число независимых узлов в сети и соответственно
2W— число уравнений установившегося режима (9.10).
Порядок вектора независимых параметров режима ¥
(или число степеней свободы при оптимизации) равен
(m—2N).
1.ОД
Можно использовать два аналитических выражения
для расчета составляющих вектора-градиента целевой
функции (9.2). Первый вариант основывается на ис-
пользовании расчетных выражений вида
dF dF
дУ “ дУ
dF ds
о dS dY ’
(10.3)
dF „ . г.
где ----— градиент неявной функции г по вектору
дУ
dF
симых переменных Y; — вектор-строка,
незави-
определяемый
dS 3W
— матрица порядка
dQt
- определяемых
dF dF \ _
dP ’ <3Q /
о
из явной зависимости F (Y); _
4 ' дУ дУ
2# (яг 2/V) частных производных —,
дУj дУ /
из]явных зависимостей ЛОО» Qz(Y); =
0S
= 1 — вектор-строка порядка 2.V частных производных F по
Л и Q/.
Можно показать, что эти производные являются мно-
жителями Лагранжа по небалансам Р и Q. Этот вектор
определяется в результате решения системы линейных
уравнений
“ JP ЗР "I Г dF -1 Г dF "1
дЪ 3U дР db
5Q 3Q dF dF
.. дй dU _ т _ <5Q_ _dU _
(Ю.4)
Матрица коэффициентов в этом уравнении является
транспонированной матрицей Якоби уравнений устаио-
dw
вившегося режима -------. Если учесть, что вектор за-
дХ
внеимьтх переменных Х= (6, U), то выражение (Ю.4)
можно переписать1:
(Ю.5)
1ХТ и
dF \ , dF
— 1 —вектор-столбцы; л и ——вектор-строки.
200
и
as
_ «Г/ЛП-. (106)
дХ )т т дХ \ дХ /
В системе уравнений (10.5) или (10.4) та же матри-
ца Якоби, что и при решении уравнений установивше-
гося режима на каждом шаге метода Ньютона. Поэто-
му при решении (10.5) можно использовать программы
расчета установившегося режима и учитывать слабую
заполненность матрицы Якоби. Именно такой способ
определения градиента по Y применяется в программах.
СДО, разработанных в [20].
Второй вариант расчета составляющих градиента Г,
---------ч _ рз], основан на выражении, аналогич-
дУ1
dX
-1 / dF
т
рассмотренныи в
ном (9.17),
dF_____dF_
dN ~ dY
dF
о * дХ
dX
dY ’
(Ю.7)
dF
где вектор —-
• dX
F(X), а матрица
ных .производных
чае градиент определяется по выражению
-1 dw
дУ
явной зависимости
определяется из
dX
--- определяется как матрица част-
неявной функции (9.18). В этом слу-
ен____dF_
ЗУ “ dV
(Ю.8)
то по-
приво-
dF / dW
0~~ дХ \ ЭХ
Если выражение (10.6) подставить в (10.3),
лучим выражение (10.8). Поэтому оба варианта
дят к одним и тем же выражениям градиента, но пер-
вый значительно эффективнее с вычислительной точки
зрения. Важным его преимуществом является возмож-
dX
ность не определять и не запоминать матрицу---.
Комплекс программ оптимизации режима по Ut Q, п
для ЭВМ подробно описан в [13, 40]. Во ВНИИЭ — ВЦ
ГТУ в 1981—1983 гг. разработана новая модификация
комплекса программ расчета установившихся и опти-
мальных по U, Q, п режимов электрической сети. Осо-
бенностью комплекса является увеличение объема решае-
мой с его помощью задачи до 600 узлов и уточнение
математической модели задачи [48].
В состав комплекса входят: программа Б-6-600 рас-
чета установившегося режима электрической сети; про-
грамма Б-2-600 расчета оптимального режима электри-
ческой сети; программа Б-3-600 расчета эквивалентных
201
характеристик электрической сети; программа Б-9-600
анализа результатов расчета электрического режима; про-
грамма Б-10-600 информационного обеспечения электри-
ческих расчетов.
В программах комплекса расчет установившегося ре-
жима производится методом Ньютона по параметру,
оптимизация электрического режима выполняется мето-
дом приведенного градиента с учетом ограничений —
неравенств с помощью штрафных функций, решение си-
стем линейных алгебраических уравнений осуществляется
методом упорядоченного исключения неизвестных с пред-
варительным выбором порядка исключения (см. гл. 4).
Для повышения надежности расчетов часть генератор-
ных узлов выделяется в качестве «опорных» по напря-
жению.
Уточнение математической модели выполнено за счет
учета потерь активной мощности на корону и учета свя-
занного продольно-поперечного регулирования напряже-
ния. При этом создается библиотека характеристик удель-
ных потерь на корону для ВЛ напряжением 330 кВ и
выше. Для одной ВЛ записываются четыре характери-
стики удельных потерь на корону (ХУПК), соответст-
вующие хорошей погоде, снегу, дождю и изморози, каж-
дая ХУПК задается полиномом от напряжения до чет-
вертой степени включительно. Расчет ХУПК произво-
дится с помощью специальной программы ВНИИЭ [48].
Связанное регулирование напряжения учитывается для
автотрансформаторов и трехобмоточных трансформато-
ров для двух типов регулирования: регулировочный
трансформатор (устройство РПН) находится в нейтрали
(первый тип) или в обмотке среднего напряжения (вто-
рой тип). В результате определяются оптимальные зна-
чения ЭДС регулировочного трансформатора, коэффици-
ента трансформации основного трансформатора и угла
включения ЭДС [48].
Как отмечалось в § 9.2, для оптимизации режима
по U, Q, п можно использовать программу комплексной
оптимизации режима СДО, если считать известными ак-
тивные мощности всех станций, кроме балансирующей.
10.2. Управление напряжением и реактивной мощностью
£ АСДУ в темпе процесса
Автоматическое регулирование напряжения и реак-
тивной мощности, осуществляемое в энергосистемах, как
правило, с помощью местных устройств, установленных
202
на электростанциях и подстанциях, призвано обеспе-
чить следующее: поддержание заданного уровня напря-
жения в контрольных точках электрической сети; пред-
отвращение повышения напряжения (например, на обо-
рудовании электропередач сверхвысокого напряжения) или
тока (генераторов и синхронных компенсаторов) с целью
обеспечения сохранности оборудования; уменьшение по-
терь активной мощности, т. с. оптимизацию режима по
U и Q с учетом заданных ограничений. Изменение на-
пряжения и реактивной мощности осуществляется плав-
но (автоматическими регуляторами возбуждения, АРВ,
установленными на синхронных машинах) или ступенями
(автоматическими регуляторами, установленными на под-
станциях и осуществляющими изменение коэффициентов
трансформации силовых трансформаторов, т. е. РПН,
оснащенными АРН, а также включением и отключением
конденсаторов и шунтирующих реакторов). Этапы внед-
рения и степень оснащенности АРВ, РПН и АРН, а так-
же более сложных автоматических систем регулирования
U и Q рассмотрены в [37].
Важные задачи выполняются при автоматическом
управлении регуляторами возбуждения сильного дейст-
вия, устанавливаемыми на мощных гидростанциях, а так-
же на мощных турбогенераторах с тиристорными возбу-
дителями. Эти регуляторы существенно повышают про-
пускную способность дальних ЛЭП переменного тока на-
пряжением 330 кВ и выше, а также решают задачи под-
держания напряжения и повышения статической и ди-
намической устойчивости. Для мощных электростанций
разработана автоматическая система, поддерживающая
заданное напряжение на шинах станций и распределяю-
щая Q между генераторами. Исполнительными органами
этой системы являются регуляторы сильного действия
генераторов.
В составе АСУ ТП мощных ГЭС, а также ГАЭС, со-
здаваемых на основе управляющих ЭВМ, предусматри-
вается решение задачи управления режимом по U и Q.
На одной из крупных ТЭС в число задач АСУ ТП вклю-
чено групповое регулирование возбуждения [37]. В со-
ставе АСУ ТП подстанций ЭВМ будут решать задачу
регулирования напряжения у потребителей, воздействуя
на изменение коэффициента трансформации трансфор-
маторов, на отключения и включения конденсаторов.
Правильный автоматический выбор режима средств ре-
гулирования U и Q в питающих сетях и координирован-
203
ное автоматическое управление ими возможно лишь при
использовании автоматизированных систем диспетчерско-
го управления. Регулирование режима питающих сетей
по напряжению и реактивной мощности целесообразно
вести на основе заранее рассчитанных графиков рабо
ты каждого регулирующего средства. Эти графики долж-
ны рассчитываться иа период краткосрочного планиро-
вания (сутки, неделя) на основе общесистемной инфор-
мации о прогнозируемых нагрузках, схеме сети и со-
стоянии оборудования. Исполнение графиков целесооб-
разно возложить на местные управляющие устройства,
которые должны быть установлены у регулирующих
средств. При развитии АСДУ должна быть предусмотре-
на автоматическая коррекция задаваемых графиков с
помощью ЭВМ и микропроцессоров. Уставки управляю-
щих устройств должны определяться расчетом на каж-
дый час суток или даже на каждые полчаса; их работа,
таким образом, должна осуществляться по времени [47].
Исследования Энергосетьпроскта, проведенные в со-
ответствии с [47], показали, что основной эффект обес-
печивается заданием соответствующих уставок децен-
трализованных автоматических устройств, определенных
в результате оптимизации по U, Q и п при краткосроч-
ном планировании режимов питающей (основной) сети.
При этом допустимо раздельное регулирование плановых
и неплановых реактивных нагрузок. При существенных от-
клонениях режима от запланированного для приближе-
ния к оптимуму целесообразна внутрисуточная, т. е. опе-
ративная, корректировка планового режима по U, Q и
« [37].
В [32] отмечается целесообразность использования
ЭВМ АСДУ высших уровней управления (диспетчерские
пункты энергосистем, ОЭС, ЕЭС) в режиме автоматиче-
ского регулирования U и Q для сетей напряжением 400—
750 кВ и выше. Оперативная корректировка режима по
напряжению в этих сетях с учетом потерь электроэнер-
гии в линиях и трансформаторах и потерь на корону
может дать значительный экономический эффект.
В ряде отечественных и зарубежных работ предла-
гается использовать при оперативной корректировке ре-
жима по U, Q и п_ линеаризацию задачи оптимизации,
т. с. применять матрицы чувствительности, которые мо-
гут быть предварительно рассчитаны [37, 40, 46].
В настоящее время оптимизация режима по U, Q, п
204
даже на современных ЭВМ в темпе процесса оказы-
вается затруднительной. Поэтому представляет интерес
применение регрессионных зависимостей для управления
режимами по U, Q, п [49]. В [49] было предложено про-
водить периодически серии расчетов на ЭВМ оптималь-
ных режимов электрической системы, на основе которых
выявляются регрессионные зависимости между парамет-
рами режима, определяющие связь между исходными
данными и решением задачи оптимизации режима по
Uf Q, п. Иными словами, регрессионные зависимости
параметров решения задачи оптимизации (регулируемых
параметров) от исходных данных представляют собой
зависимости напряжения и реактивной мощности локаль-
ных автоматических устройств от активных мощностей
станций и суммарной нагрузки системы. В соответствии
с этими зависимостями можно выбирать законы регу-
лирования и настройку локальных автоматических уст-
ройств, осуществляющих согласованное - - регулирование:
1 1
реактивной мощности и изменение коэ
ициентов транс-
формации трансформаторов (автотрансформаторов) и т.д.
Совместное действие локальных автоматических устройств,
реагирующих на изменение местных параметров режима
(напряжений на шинах, токов в трансформаторах и от-
ходящих1 линиях, их реактивных составляющих), обес-
печивает при этом поддержание общего режима элек-
трической системы, близкого к оптимальному, с учетом
ограничений по качеству электроэнергии и условиям ра-
^ботьй оборудования. Применение такого принципа авто-
матического управления U, Q и п представляется пер-
спективным для электрических систем с высокой повто-
ряемостью режимов [32], когда справедливы регресси-
онные зависимости между параметрами режима.
В последующих разработках Рижского политехниче-
ского института предполагается управление U и Q ГЭС
и ТЭС при использовании аппаратуры промышленного
изготовления, действующей на АРВ генераторов через
специальные управляющие устройства [37, 50].
Применение регрессионных зависимостей позволяет
реализовать автоматическое управление режимами по U,
Q и п с помощью несложных вычислительных устройств
при ограниченном количестве каналов измерения и пе-
редачи информации. В [51] предлагается использовать
регрессионные зависимости как для централизованного,
так и для локального управления режимами по U, Q и п.
205
Применение регрессионных методов, впервые предложен-
ных в [49], для задачи оптимизации режима по реак-
тивной мощности, напряжению и коэффициентам транс-
формации, т. с. методика построения регрессионных за-
висимостей на базе пассивных экспериментов, приведена
в «Типовой инструкции по оптимальному управлению
потоками реактивной мощности и регулированию напря-
жения в электрических сетях энергосистем» (Союзтех-
энерго, 1982 г.). Предложенная в [51] методика ,отли-
чается тем, что в ней для построения регрессионных за-
висимостей используются методы активного эксперимента
в отличие от пассивного, который предполагается ис-
пользовать в [49] и в Инструкции. Применение методов
планирования эксперимента, т. е. построение регресси-
онных зависимостей по результатам активных экспери-
ментов, повышает вычислительную эффективность регрес-
сионного управления.
Регрессионные зависимости U, Q и п от активных мощ-
ностей станций и суммарной нагрузки системы не учи-
тывают изменения параметров сети и ее конфигурации.
При этом возникают существенные сложности в тех слу-
чаях, когда необходимо учесть изменения сети. Авторы
[51] рекомендуют использовать алгоритмы адаптации для
учета соответствующих ограниченных изменений схемы
сети при локальном управлении. В тех случаях, когда не
удается осуществить адаптацию, учитывающую измене-
ние сети, предполагается использовать централизованную
библиотеку регрессионных зависимостей, учитывающих
изменения сети. Может оказаться, что размер библио-
теки будет слишком велик и сведет на нет простоту ре-
грессионного управления.
Разрабатываются методы применения регрессионного
анализа для построения эквивалентных параметров (т. е.
для задачи эквивалентирования) в темпе процесса [52,
53]. Соотношение применения регрессионного анализа
непосредственно для управления режимами по Q и п
[49, 51] и использования статистического эквиваленти-
рования (т. с. эквивалентирования на базе регрессион-
ного анализа) требует дальнейших исследований.
За рубежом накоплен значительный опыт оперативно-
го управления режимами, а также управления в темпе
процесса. Зарубежный опыт, отраженный в [38], пока-
зывает, что автоматическое управление (т. е. в темпе
процесса) режимами по U, Q и п при использования-
программы оптимизации по этим параметрам встречает
206
существенные трудности даже на мощных ЭВМ из-за
сложности задачи, ее большой размерности и недостаточ-
ной связи вычислительного центра энергосистемы с ниж-
ними уровнями управления.
Наиболее эффективно методы оптимизации режима по
U, Q и п в темпе процесса разрабатываются во Фран-
ции и 'в США [38]. Во Франции предусмотрено три уров-
ня регулирования U_, Q и и: 1) генераторы, синхронные
компенсаторы и конденсаторы, трансформаторы с РПН;
2) контрольные точки сети (например, районные подстан-
ции), т. е. регулирование в отдельных регионах в целом;
3) национальный уровень, т. е. регулирование на диспет-
черском центре страны. Задачу оптимизации по U_, Q, п
предлагается решать в темпе процесса с помощью ЭВМ
на третьем уровне. С учетом больших территорий СССР
задача оптимизации по U, Q и п у нас должна решать-
ся на уровне ОДУ (объединенных диспетчерских управ-
лений) и на уровне мощных РЭУ (районных энергоси-
стем).
В [46, 54] предлагается минимизировать не величи-
ну потерь электроэнергии, а отпуск электроэнергии с
шин электростанций при соблюдении требований к ка-
честву и надежности электроснабжения. Такая поста-
новка задачи более обоснованна с точки зрения сово-
купного народнохозяйственного эффекта и соответст-
вует выбору в качестве целевой функции при оптими-
зации каждого текущего (мгновенного) режима не по-
терь мощности, а мощности балансирующих станций
(10.1), т. е. станций со свободной активной мощностью.
Если учитывать зависимости ущерба потребителя от на-
пряжения, то в целевую функцию надо включить сум-
марный ущерб потребителей из-за низкого качества на-
пряжения. В [46, 54] не учитываются уравнения уста-
новившегося режима (9.10), как в $ 9.2, 10.1. Особен-
ность решения задачи оптимизации по U, Q, п состоит
в моделировании отклика энергосистемы на основе экс-
перимента над режимом энергосистемы. При оптимиза-
ции с помощью соответствующих частных производных
сравниваются изменения потерь мощности, потребляемой
нагрузки, а также ущерба потребителей при регулиро-
вании V и -Q. При этом учитывается влияние на ука-
занную выше целевую функцию изменения не только на-
пряжения, но и реактивной мощности источников, коэф-
фициентов трансформации, а также активной и реактив-
207
нон мощностей нагрузок при учете их статических ха-
рактеристик по напряжению.
Информационной базой решения данных задач явля-
ются автоматизированная система планирования режимов
распределительных электросетей (АСДУ ПЭС), а также
автоматизированная система планирования режимов пи-
тающих электросетей и станций (АСДУ РЭУ) и опера-
тивно-информационный и управляющий вычислительные
комплексы энергосистем на базе мини-ЭВМ (ОИК и
УВК). Технической базой решения задач первой и вто-
рой подсистем является универсальная ЭВМ типа-
ЕС-1033 с централизованным автоматизированным бан-
ком данных. Связь ПЭС с ВЦ осуществляется по теле-
графным каналам.
В Латвийской энергосистеме, которая и до внедрения
указанной задачи имела достаточно высокий уровень экс-
плуатации средств управления режимами, названный
выше комплекс дает дополнительно экономию электро-
энергии в размере 1,5—2 % полезного отпуска в сеть.
В составе этой задачи значительную часть занимает сни-
жение потерь электроэнергии в сетях самой энергоси-
стемы [54].
Следует подчеркнуть, что в [46, 54] впервые в из-
вестной нам литературе решается задача оптимизации
режима по I/, Q и п одновременно в питающих и рас-
пределительных сетях. К сожалению, решение этой за-
дачи усложняется отсутствием достоверной информаций
о статических характеристиках нагрузки по напряжению
и зависимостях ущерба потребителей от низкого качест-
ва напряжения.
1С.З. Частные задачи оптимизации режима по Ur Q и п
Задача оптимизации режима по U, Q и п, т. е. задача1
уменьшения потерь, часто не может решаться в полном
объеме из-за отсутствия соответствующих средств регу-
лирования и управления режимов. В ряде случаев нет
резервов по Q, отсутствуют или имеются в недостаточ-
ном количестве соответствующие средства регулирования
напряжения, устройства для изменения коэффициента
трансформации под нагрузкой (РПН) или когда они
работают ненадежно в эксплуатационной практике их
стараются не использовать при автоматическом управ-
лении режимом. Поэтому в инженерной практике боль-
шое значение имеют частные задачи оптимизации ре-
208
жима по U, Q и п. Эти частные задачи также могут
и должны”решаться в АСДУ на различных уровнях вре-
менной . и территориальной иерархии диспетчерского
управления. Поэтому выше, в § 10.2, когда речь шла об
оптимальном регулироват ии U и Q, не следует считать,
что всегда надо использовать методы оптимизации ре-
жимов по U, Q и п, рассмотренные в § 10.1. Надо вести-
оптимизацию с учетом • имеющихся средств управления?
и регулирования U и Q. Решение каждой из рассмот-
ренных в данном параграфе частных-задач оптимизации
режима по U, Q и п приводит -к относительному мини-
муму потерь мощности, но является важным и целесооб-
разным в соответствующих случаях.
В [47] утверждалось, что при. ограниченной мощно-
сти вычислительных .средств,' а также с целью сокраще-
ния объема телепередач задача оптимизации режима по>
U, Q и п может быть разделена по ступеням диспетчер-
ской иерархии на следующие частные задачи: регули-
рование уровня напряжения по сети в целом или по>
отдельным ее участкам, управление потоками мощности!
в неоднородных замкнутых частях сети, размыкание се-
тей и • наивыгоднейшее распределение реактивной мощ-
ности между ее источниками. Результаты этих расчетов,
в [47] предлагалось сводить вместе и корректировать по
имеющимся ограничениям. При современном развитии:
ЭВМ и АСДУ, как правило, сведение и корректировка»
частных задач менее эффективны, чем оптимизация ре*-
жима по U, Q и и, рассмотренная в § 10.1. Ометим, что
в некоторых случаях минимум частной задачи может
приводить к увеличению потерь мощности во всей си-
стеме, т. е. условия минимумов частной и общей задач!
оптимизации режима по U, Q и п могут быть противо-
речивы. В условиях АСДУ применение любой из ука-
занных выше частных задач должно проводиться после
расчетного обоснования ее непротиворечивости и согла-
сованности с общей задачей оптимизации режима по U,
Q и п.
Подчеркнем, что при оптимизации режима по U, Q и
п система регулирования напряжения на районных под-
станциях должна предусматривать обеспечение требуемо-
го режима напряжения в распределительных сетях.
Уровень напряжения в питающей сети — это некото-
рое среднее его значение для сети данной ступени транс-
14—6189
209'
^формации в целом или какой-то сс части (вплоть до
•отдельной линии). Представление об уровне напряжения
является тем более целесообразным, что его регулирова-
ние есть одна из наиболее эффективных мер снижения
потерь активной мощности питающей сети.
Из выражения для потерь активной мощности извест-
но, что одновременное увеличение всех напряжений на
Л, %, приводит к снижению этих потерь в данной части
-сети на
ДР
(1 +0.01К)»
^ДР(1 — 0.02К),
(10.9)
л. е. приблизительно на 2/( [34, 55].
Это практически полностью характеризует положение
® электрических сетях с номинальным напряжением до
.220 кВ, для которых поэтому наивыгоднейшим является
наивысший допустимый уровень напряжения. При этом
-ограничивающими являются допустимые уровни напря-
жения по условиям работы изоляции и по условиям ре-
гулирования напряжения в распределительных сетях.
При повышении уровня напряжения в таких сетях улуч-
шаются и другие показатели работы сети. Снижаются
потери Q (приблизительно на 2Л) и увеличивается ге-
нерация Q емкостью сети. Если сеть имеет сравнитель-
но небольшую протяженность, то это может привести
к снижению необходимой суммарной мощности компен-
сирующих устройств (по условиям баланса реактивной
мощности на основе технических требований). Во многих
•случаях это одновременно приводит к некоторому (при-
близительно па /() увеличению пропускной способности
липин.
В сетях на отдельных линиях сверхвысоких напря-
.жений положительный эффект от регулирования уровня
напряжения может получиться еще более значительным.
Причиной этого является воздействие на условия воз-
никновения короны на проводах. Регулирование уровня
напряжения принципиально возможно только при нали-
чии регулирующих устройств на границах рассматривае-
мого участка сети. При этом важна одновременность
действия всех этих устройств.
В распределительных сетях повышение уровня напря-
жения приводит не только к уменьшению потерь мощ-
ности ДР, но и к росту потребляемой мощности нагру-
зок в соответствии с их статическими характеристиками
ло напряжению. Поэтому для определения целесообраз-
но
ности повышения уровня напряжения в распределитель-
ных сетях надо анализировать изменение отпуска элек-
троэнергии в сеть, т. е. изменения потерь мощности в.
сети, мощности нагрузок и ущербов потребителей от низ-
кого качества напряжения [46, 54].
Регулирование потоков мощности в неоднородных зам-
кнутых частях электрической сети изменением ком-
плексных 'коэффициентов трансформации оказывает су-
щественное влияние на потери мощности. Однородная-
сеть — такая, для которой отношение
rkj/xki=gki/bkj=r/x='const, ’ (10.10) •
и
т. е. имеет одно и то же значение для всех ветвей схемы»
замещения сети. В (10.10) а/, Xkj, gkj, bkj— активные и
реактивные сопротивления и проводимости ветви kj. В не-
однородной сети (10.10) не выполняется, т. е. отношения^
активных и реактивных сопротивлений (или проводимо-
стей) для раздичных ветвей различны.
Естественное распределение активных и реактивных,
мощностей определяется по полной схеме замещения, т. е.
по схеме с г и х в соответствии с комплексными урав-
нениями установившегося режима. Распределение мощно-
сти в сети, соответствующее минимуму потерь, называют
экономичным. Если определять потери мощности в линии
kj выражением
. Гк„ (10.11У
ном •
где Р/с/, Qkj — потоки активной и реактивной мощностей:
в линии kj; Uhom — номинальное напряжение, то легко по<-
казать, что минимуму потерь активной мощности в сети:
соответствует распределение мощностей Р и Q в сети толь-
ко с активными сопротивлениями. Это показано в [56]’
для контура из трех ветвей. Соответственно это положение
можно обобщить и на сложную цепь со многими контурами.
Можно показать, что в однородной сети естественное^
распределение мощностей совпадает с экономическим [56].
В неоднородной сети естественное ц экономическое рас-
пределения мощностей не совпадают, т. е. естественное-
распределение мощностей не соответствует минимуму по-
терь мощности. Чем больше неоднородность сети, тем боль-
ше отличаются потери мощности при естественном распре-
делении мощностей от их наименьшего значения. Управ-
лять потоками мощности в ветвях неоднородной сети мож-
14*
I
211?
«о, изменяя комплексные коэффициенты трансформации
линейных регуляторов (регулировочных трансформаторов).
Здесь прежде всего имеются в виду те участки, на кото-
рых линии разных номинальных напряжений оказываются
включенными на параллельную работу (через трансфор-
маторы «ли автотрансформаторы) при значительных тран-
зитах мощности. Регулирование режима неоднородных
замкнутых частей сети возможно только при наличии ли-
нейных регуляторов, включенных в соответствующие кон-
туры и имеющих регулируемые поперечные ЭДС.
Прн комплексной оптимизации режима (см. § 9.2) или
при оптимизации режима по U, Q и п (см. § 10.1) выби-
раются, в частности, и оптимальные значения комплексных
коэффициентов трансформации. В [55] описаны правила
определения наивыгоднейших ЭДС, т. е. упрощенный ме-
тод выбора комплексных коэффициентов трансформации,
при продольно-поперечном регулировании напряжения.
Этот упрощенный метод выбора п соответствует решению
частной задачи оптимизации режима только по п, т. е.
•опредс тению режима с наименьшими потерями при изме-
нении только п (или только потоков мощности в ветвях
замкнутых частей сети). Выбор п можно осуществлять
с помощью программ оптимизации режима по U, Q и п,
если считать независимыми переменными только п.
Согласно правилам определения наивыгоднейших зна-
чений ЭДС они включаются во все независимые контуры
данной неоднородной части сети. Практически линейные
регуляторы есть далеко не во всех контурах. Поэтому ми-
нимум потерь получается относительным, т. е. опреде-
ляется наличием линейных регуляторов. Действительные
значения ЭДС должны быть возможно более близкими
к полученным значениям. Решение задачи практически
осложняется в связи с тем, что одновременно с умень-
шением потерь активной мощности происходит увеличе-
ние потерь реактивной мощности на данном участке сети.
Это обусловлено увеличением загрузки ветвей с меньшими
активными, но с большими реактивными сопротивлениями.
Применение линейных регуляторов для получения эко-
номичного распределения мощностей оказывается эффек-
тивным, если замкнутая сеть образуется линиями разных
напряжений (например, 110 и 220 кВ), по которым про-
текают большие потоки мощностей. Для контуров из
неоднородных линий одного напряжения в [56] рекомен-
дуется настраивать сеть с помощью продольной компсн-
_212
сации, так чтобы сделать сеть однородной и получить в
ней в результате такой настройки экономическое распре-
деление потоков мощности. Для снижения потерь энергии
в неоднородных замкнутых сетях возможно включение в
рассечку линий реактора продольного включения [57, 58],
что тоже соответствует настройке сети так, чтобы она ста-
| л а$ однородной.
... размыкание сети — наиболее распространенный способ
уменьшения потерь за счет снижения влияния неоднород-
ности сетей. Задача состоит в определении таких точек
размыкания в сети, при которых достигается минимум це-
левой функции: потерь мощности или потерь электроэнер-
гии. В последнее время появляются работы, в которых в
целевой функции учитываются показатели надежности.
Уменьшать потери мощности и электроэнергии за счет
снижения неоднородности можно, размыкая как питаю-
щие, так и распределительные сети. В питающих сетях
недостаток размыкания состоит в понижении надежности.
Именно поэтому высказаны приведенные выше предло-
жения о снижении неоднородности (включением в рассеч-
ку линий реакторов продольного включения. Распредели-
тельные сети работают в разомкнутом режиме, и для этих
сетей задача выбора оптимальных точек размыкания очень
важна. Размыкание более эффективно в городских сетях,
чем в сельских. В-городских сетях графики коммунально-
бытовой нагрузки меньше зависят от сезона, точки раз-
мыкания более постоянны — проще подъезд, лучше обслу-
живание и т. д. В сельских сетях нагрузка имеет явно
'выраженный сезонный характер и точки размыкания надо
изменять каждый сезон, а иногда и чаще. Специально раз-
работанные на ЭВМ. программы определения точек раз-
мыкания в распределительных сетях нашли широкое при-
менение в эксплуатационной практике.
В питающих сетях для определения точек размыкания
можно использовать программы оптимизации режима по
V_^ Q и п (см. § 10.1). Строго оптимизировать точки раз-
мыкания контуров надо, учитывая дискретность задачи
оптимизации. Методы такого учета дискретности приме-
няются при выборе точек размыкания в распределительных
сетях. В питающих сетях приближенно можно решать эту
задачу без учета дискретности, например используя опти-
мизацию по п. В каждый контур, в котором возможно
размыкание, 1включается фиктивный трансформатор с ком-
плексным коэффициентом трансформации. Возможность
оптимизации комплексных коэффициентов трансформации
213
трансформаторов, заложенная, например, в программах:
оптимизации режима по U, Q и п, позволяет моделиро-
вать влияние поперечных ЭДС, фиктивно включенных в
контуры, в которых возможно размыкание, и определять
оптимальные точки разрыва в неоднородной сети. Опыт
применения программ оптимизации по [7, Q и п показал
их высокую эффективность для 'выбора точек размыкания.
Наивыгоднейшее распределение реактивной мощности
между ее источниками является практически наименее су-
щественным из всех четырех задач [47], поскольку в ре-
жимах больших нагрузок (когда можно ожидать наиболь-
шего эффекта) возможности изменения распределения
реактивных нагрузок оказываются весьма малыми. В ре-
жимах малых нагрузок значительного эффекта не полу-
чается. Малые возможности обусловлены несколькими
причинами. Во-первых, в режимах больших нагрузок ре-
зервы реактивной мощности оказываются сравнительно-
небольшими. Во-вторых, передача реактивной мощности,
по сети связана с заметным увеличением потерь напряже-
ния и часто ограничивается режимом напряжений. Кроме-
того, передача реактивной мощности связана с увеличе-
нием потерь активной и реактивной мощностей. Поэтому
задача распределения реактивной мощности по существу
сводится к наиболее полному использованию ближайших
к месту потребления компенсирующих устройств, т. е. к
уменьшению загрузки линий, особенно большой длины.
Оптимальное распределение Q без учета технических
ограничений можно осуществить по методу относитель-
ных приростов, т. е. по методу Лагранжа. Предположим»
что генерация реактивной мощности не связана с какими-
либо затратами. Тогда единственной целью оптимального
распределения реактивных мощностей может быть сни-
жение потерь активной мощности. Будем условно считать»
что активные мощности заданы и неизменны. Это допу-
щение является приближенным, так как изменение потерь
в сетях требует изменения активной мощности какой-либо
станции. При таком допущении потери зависят от Q [35].
Пользуясь методом Лагранжа, будем искать минимум
функции
где U7Q=Qrl + Qr2+ ... +Qrfc—QH—AQ=0 — уравнение ба-
ланса реактивных мощностей; AQ — потери реактивной
мощности; k — число источников Q. Будем также считать»
что суммарная нагрузка постоянна (QH=const), а гене-
214
рация реактивной мощности не связана с затратами, тогда
условие оптимальности запишется [35] так:
- . ' dF _ 1 о (1 _ d&Q \ _ л.
# Z dQn “ dQri \ dQrl
, I,' й • *
dF _ ЭДР I /1 dAQ
dQrk dQrk \ dQrk
отсюда
—— = const. (10.13)
I — d AQ/ dQrl 1 — d&Q/dQrk
Уравнение (10.13) .дает возможность определить реак-
тивные мощности всех источников, соответствующие мини-
муму ДР в сети. Если генерация Q связана с затратами,
то нельзя изолированно рассматривать распределение Q,
так как AQ, обусловленные протеканием Р, влияют на за-
траты, связанные с генерацией Q [35]. Если балансирую-
щий узел выбран в узле с источником Q, то для этого
узла 1 dAP/dQri==0, а следовательно, Х=0. Поэтому усло-
вия оптимального распределения Q по минимуму ДР в
этом случае будут таковы2:
(10.12)
дАР — аАР_ ~ — - ЭА— = 0. (10.14)
dQri dQr2
Расчетные выражения для определения частных произ-
водных d&PfdQri при различных допущениях приведены
в литературе (см. [34]).
Распределение реактивной мощности в сети непосред-
ственно связано со значениями напряжений. Однако опре-
деляющими оказываются не абсолютные значения напря-
жений, а их разности, т. е. падения напряжения в сети.
При учете технических ограничений для распределения Q
можно использовать градиентный метод. Компонентами
градиента являются относительные приросты потерь ДР
по реактивной мощности. После каждого шага произво-
дится проверка допустимости режима [55]. Выражения
(10.13) или (10.14) могут оказаться эффективными при
использовании мини-ЭВМ или микропроцессоров. Возмож-
ность такого использования (10.13) или (10.14) должна
быть в каждом конкретном случае обоснована расчетным
1 Изменение Q в балансирующем узле не приводит к изменению
потерь в сети.
2 В качестве балансирующего принят узел k.
215
анализом погрешности, которая возникает из-за решения
частной задачи оптимизации распределения Q вместо опти-
мизации режима по U, Q и и, рассмотренной в § 10.1.
Указанное положение относится к каждой из рассмотрен-
ных в данном параграфе четырех частных задач оптими-
зации режима по U, Q и п.
Глава одиннадцатая
МЕТОДЫ ОПЕРАТИВНОГО КОНТРОЛЯ, АНАЛИЗА
И ПЛАНИРОВАНИЯ ПОТЕРЬ ЭЛЕКТРОЭНЕРГИИ В СЕТЯХ
11.1. Задачи и методы расчета потерь электроэнергии
Очень большое значение у нас в стране придается опе-
ративному контролю, анализу и планированию потерь
электроэнергии. Расчеты потерь мощности и электроэнер-
гии в электрической сети основываются на расчетах ее
установившихся режимов. В то же время задача опера-
тивного контроля потерь мощности неразрывно связана с
задачей уменьшения этих потерь, т. е. с оптимизацией
режима по U, Q и п. Более того, при оперативном управ-
лении режимами эти задачи очень близки, а при управле-
нии в темпе процесса они совпадают.
При передаче электроэнергии с шин электростанций до-
потребителя часть электроэнергии неизбежно расходуется
на нагрев проводников, создание электромагнитных полей
и т. д. Этот расход в дальнейшем будем называть поте-
рями электроэнергии. Использование термина «потери элек-
троэнергии» требует внесения определенной ясности, так
как подобный термин ассоциируется с понятиями «потери
от брака», «потери от нарушения технологического про-
цесса» и т. д. Термин «потери электроэнергии» следует
понимать как технологический расход электроэнергии на
ее передачу [58].
В условиях возрастающей напряженности топливно-
энергетического баланса страны снижение потерь в элек-
трических сетях становится одним из важнейших источни-
ков экономии топлива. В связи с особой остротой проблемы
ЦК КПСС и Советом Министров СССР был выпущен ряд
постановлений, в которых ставятся конкретные задачи по
сокращению потерь электроэнергии в электрических сетях
и повышению качества электроэнергии. Важность пробле-
216
мы и сложность ее решения привели к тому, что специа-
листами различных.научно-иссдедовательских, проектных и
эксплуатационных организаций .разработано множество ме-
тодов .расчета потерь электроэнергии,* ксторые использу-
ются для разных целей на различных ступенях, простран-
ственно-временной иерархии при управлении эксплуата-
цией и развитием энергосистем. . .. .. • • ••
Отчетная величина потерь электроэнергии определяется
как разность между электроэнергией, отпущенной в сеть
собственными станциями, электростанциями других ве-
домств и соседними энергоуправлёниями, и реализованной
электроэнергией, вычисляемой по сумме- оплаченных сче-
тов от потребителей. ....
\ Расчетная или техническая величина потерь опреде-
ляется по известным параметрам режимов работы и пара-
метрам элементов сети, она обусловлена расходом элек-
троэнергии на нагрев проводников и создание электромаг-
нитных полей. . ' . -з
Коммерческие потери определяются как разность меж-
ду отчетными и расчетными потерями, они обусловлены не-
совершенством системы учета (неодновременностью и
неточностью снятия показаний, счетчиков, погрешностью
используемых приборов учета), неравномерностью оплаты
электропотребления, наличием неучтенных потребителей,
хищениями и т. д. . : .. • . -i : ->
Потери электроэнергии также принято подразделять на
нагрузочные и холостого хода. ; •
х Для правильного/представления об имеющихся воз-
можностях по снижению потерь электроэнергии их целе-
сообразно разделить на три составляющие .[59]:
технологически необходимый расход электроэнергии при
ее передаче в условиях оптимального режима энергоси-
стемы— оптимальные технические потери;
дополнительные потери электроэнергии при отклонении
режима энергосистемы от оптимального — дополнительные
технические потери;
коммерческие потери.
г Уровень оптимальных технических потерь зависит от
технического состояния сети и возможностей ее оптими-
зации. Конечная задача в проблеме снижения потерь элек-
троэнергии заключается в максимальном снижении до-
полнительных технических и коммерческих потерь. Умень-
шить до нуля дополнительные технические потери невоз-
можно из-за отклонений реальной схемы и режима сети
в момент реализации принятых решений от оптимальных,
217
наличия ступенчатого регулирования и зоны нечувстви-
тельности автоматических регуляторов. В настоящее вре-
мя для оценки коммерческих потерь существует единствен-
ный способ — сравнение отчетных и расчетных потерь
электроэнергии.
Следует отметить, что суммарную погрешность расчет-
ных потерь определить довольно сложно, она обусловлена
погрешностью используемых математических моделей,
ошибками в задании исходных данных и т. д. Подробнее
составляющие суммарной погрешности и оценка их влия-
ния на результаты расчета изложены в гл. 12.
При расчетах потерь электроэнергии электрические сети
разных номинальных напряжений по-разному представля-
ются в расчетных математических моделях. Поэтому сети
целесообразно разделить на четыре условные группы: си-
стемообразующие— сети 330 кВ и выше; питающие —
НО—330 кВ; распределительные сети высокого напряже-
ния— 6—35 кВ; распределительные сети низкого напря-
жения до 1 кВ.
Для удобства анализа потери электроэнергии в элек-
трических сетях принято разделять:
по физическому признаку —в линиях, трансформаторах,
реакторах, конденсаторных батареях, приборах учета элек-
троэнергии, измерительных трансформаторах и т. д.;
по причинам возникновения: в линиях — нагрузочные
и на корону, в трансформаторах — нагрузочные и потери
холостого хода;
по уровням напряжения— 1150, 750, 500, 330, 220,
154—110, 35—6 и 0,4 кВ.
Проблема снижения потерь электроэнергии является
сложной комплексной проблемой и должна решаться на
различных временных и иерархических уровнях. Времен-
ными уровнями задачи расчета потерь электроэнергии яв-
ляются1: прогнозирование (год, месяц, несколько ближай-
ших суток, сутки), планирование, оперативное управление,
управление в темпе процесса, ретроспективный анализ.
Прогнозирование выполняется для определения необ-
ходимой выработки электроэнергии. и расчета основных
технико-экономических показателей работы энергосистемы
на плановый период, определения потребностей в топливе
и гидроресурсах и расчета графика капитальных ремонтов
1 Рассмотрение вопросов перспективного планирования энергосис*
тем на срок более 5—7 лет выходит за рамки данной работы.
218
основного оборудования энергосистемы. Прогноз потерь
после внесения планирующими органами корректив, учи-
тывающих режим работы энергосистемы, становится для
нее плановым заданием.
Принципиальной особенностью задач планирования по-
терь по сравнению С задачами их прогнозирования яв-
ляется наличие для каждого уровня управления дирек-
тивно заданных плановых потерь, подлежащих распреде-
лению между нижестоящими структурными подразделе-
ниями [61]. Планируемый уровень потерь должен быть
согласован с планом мероприятий по улучшению потерь
электроэнергии в сети.
При оперативных расчетах решаются, задачи контроля
выполнения запланированного режима и корректировки
режима при-его отклонении от планового.
Д управлению в темпе процесса относятся задачи ав-
томатической корректировки текущих режимов с помощью
местных и „ централизованных устройств автоматики, по-
зволяющих уменьшить дополнительные технические потери
в сети.
Ретроспективный анализ выполняется с целью выявле-
ния очагов повышенных потерь, коммерческих потерь, а
также тенденции изменения потерь в различных элемен-
тах сети. ' ’
Потери электроэнергии можно определить суммирова-
нием потерь мощности, полученных из. расчета установив-
шегося режима. Для этого в объеме энергосистемы надо
располагать обширной информацией, сбор и переработку
которой не всегда возможно осуществить на основе имею-
щейся метрологической обеспеченности в электрических
сетях. Поэтому в зависимости от уровня эксплуатации
энергосистем, специфических условий их развития, особен-
ностей внедрения АСДУ и наличия информационного и
технического обеспечения в проектных, научно-исследова-
тельских и эксплуатационных организациях разрабаты-
вается и используется множество различных методов рас-
чета потерь электроэнергии.
В табл. 11.1 приведены перечень наиболее распростра-
ненных методов расчета потерь электроэнергии и области
их применения. Как видно из таблицы, все методы в за-
висимости от используемо]! математической модели можно
разделить на две большие группы — детерминированные и
вероятностно-статистические. Следует отметить, что пере-
численные методы имеют множество модификаций и про-
граммных реализаций.
219
Таблица ПЛ
Метод расчета Область использования
Прогнози- рование Планиро- вание Оператив- ные расчеты В темпе процесса Ретро- спектив- ный анализ потерь
Детерминированные методы
1. По времени по- РВ, PH РВ, PH — — —
терь
2. По средним на- РВ РВ — " — —
грузкам
3. По среднеквад- РВ РВ — — —
ратичным нагруз-
кам
4. По характерным ПС ПС — — ПС, РВ
режимам
5. Почасовой расчет С с с. пс с, ПС С, ПС
6. По эквивалентам РВ, PH РВ, PH РВ —— ——
7. По потере напря- PH PH — — PH
жения
Вероятностно-статистические методы
8. Регрессионный ПС, РВ, PH ПС, РВ, PH ПС, РВ, PH ПС, РВ ПС, РВ, PH
9. По интегральным характеристикам нагрузки ПС ПС С, ПС с с, пс
10. Статистической выборки РВ, PH РВ, PH — — РВ, PH
Примечание. С—системообразующие сети; ПС—питающие сети; РЕ—рас-
пределительные сети высокого напряжения; PH—распределительные сети низкого
напряжения.
Наиболее точный метод расчета потерь электроэнергии
Д1Г — это определение их по графику нагрузок, причем
расчет потерь мощности производится для каждой ступе-
ни графика. Этот метод иногда называют методом графи-
ческого интегрирования [62]. При расчете за каждый час —
это почасовой расчет потерь электроэнергии (метод 5
табл. 11.1).
Для многоступенчатого графика нагрузки с числом
ступеней L потери электроэнергии в элементе сети за год
можно определить, суммируя потери при различных режи-
мах, т. е. для каждой ступени графика нагрузки:
L
дг=Здр/д6. (И-1)
/=1
220
где Afr— длительность /-й ступени графика нагрузки;
ДРг — потери мощности в сети для Лй ступени графика на-
грузки; L — число ступеней графика нагрузки.
Достоинством метода определения потерь по графику
нагрузки является высокая точность расчетов. Отсутствие
информации о графиках нагрузки для всех узлов сети за-
трудняет практическое использование данного метода.
Использование ряда детерминированных методов опре-
деления потерь электроэнергии в сети за год Дй/ осно-
вано на расчете потерь за ограниченный интервал време-
ни АТ и умножении их на коэффициент Тэ, позволяющий
привести результат к годовому периоду [63]:
ДТГ=ДГдтТэ, (11.2}
где Д^дт — потери электроэнергий за период АТ.
При определении годовых потерь энергии необходимо
разделять год на несколько расчетных периодов. Обычно
внутри этих периодов^ графики нагрузки в узлах могут
считаться практически постоянными. В случае выделения
нескольких расчетных периодов выражение (11.2) имеет
вид • ' / '
я
ДГ = S bWinbT}h, (11.3)1
Л=1
где ДИ^дтй — потери электроэнергии за сутки периода Л;
АТэй— длительность периода Л; Н — количество расчетных
периодов.-
Одним из наиболее простых методов определения по-
терь электроэнергии является расчет по времени наиболь-
ших потерь (метод 1 табл. 11.1). Потери электроэнергии
по этому методу определяются на основании расчета ре-
жима, в котором потери мощности наибольшие (ДРНб).
Потери энергии в сети за год получаем, умножая АРНб на
время наибольших потерь т:
ДГ=Д?нбт. (11.4}
.Время наибольших потерь —это время, за которое при
работе с наибольшей нагрузкой потери электроэнергии та-
кие же, что и при работе по действительному графику на-
грузки.
Если принять в (11.2) Д7’=П> ч для режима, в кото-
ром потери мощности наибольшие,, а. Гэ=т, то. (11.2) со-
впадет с (11.4).
До широкого применения ЭВМ метод расчета по вре-
мени наибольших потерь был одним из самых распро-
страненных методов определения нагрузочных потерь в
энергосистемах. Основополагающим моментом этого ме-
тода является предположение о том, что максимальные
потери энергии в элементе сети наблюдаются в максимум
нагрузки системы, и конфигурации графиков активных и
реактивных мощностей однородны. Для определения вре-
мени наибольших потерь пользуются эмпирическими за-
висимостями, частично учитывающими конфигурацию гра-
фиков нагрузки [55, 56]. Сделанные предположения при-
водят к большой погрешности данного метода.
Для снижения погрешностей в расчетах при опреде-
лении т необходимо учитывать конфигурацию графиков
нагрузки, динамику коэффициента мощности и возможное
несовпадение максимумов активной и реактивной нагрузок
по времени в пределах суток и года. Стремление учесть
эти условия привели к разработке метода тр и tq. В этом
случае в выражении (11.4) величина АРНб представляется
состоящей из двух величин, т. е. отдельно выделяются
потери мощности от протекания по сети активной и реак-
тивной мощностей. Время наибольших потерь также пред-
ставляется двумя составляющими — временами - наиболь-
ших потерь активной и реактивной мощностей. Метод тр
и tq уточняет искомую величину потерь энергии, но при
этом требуется дополнительная информация о графиках
реактивной мощности, которые, как правило, бывают из-
вестны гораздо менее точно, чем графики Р, или вообще
не известны. Расчетное выражение для определения по-
терь электроэнергии по методу тР и tq имеет вид [63]
A^=APptp+APqtq,
(Н.5)
где АРр, APq — составляющие величины АР от проте-
кания по сети активной и реактивной мощностей; тр, tq —
время потерь от протекания активной и реактивной мощ-
ностей.
Погрешность от неучета внутрисуточной неоднородно-
сти графиков нагрузки можно снизить, используя метод
2х [61], при котором из суточного графика нагрузки вы-
деляют время потерь для максимальной и минимальной
нагрузок и рассчитывают максимальные и минимальные
потери мощности в соответствующие часы суток. Суточный
график нагрузки представляется в виде упорядоченной
диаграммы и затем заменяется эквивалентным двухсту-
пенчатым со значениями максимума и минимума нагруз-
ки. Потери электроэнергии за сутки рассчитываются по
формуле
Д W ==&Рminimi п~\~&Р тахТтах,
mtn и мак-
.15
▼ 1
йг
х тгп, ЬРтах — потери мощности в сети, определяемые-
расчетом * для часов минимума и максимума суточного
графика нагрузки; Tmzn, Ъпах— время наибольших потерь
для интервалов с нагрузками в час минимума Pmin и мак-
симума Ртах соответственно.
Определение потерь электроэнергии за расчетный пе-
риод осуществляется по формуле (11.2), где Тэ рассчи-
тывается пропорционально квадрату изменения пропуска
энергии через сеть.
При известных за расчетный период значениях актив-
ных и реактивных нагрузок узлов расчет потерь электро-
энергии может быть проведен по средним нагрузкам узло&
(метод-2 дабл. 11.1). Средняя нагрузка каждого узла опре-
деляется пр показаниям счетчиков как отношение энергии,
пропущенной через узел, к расчетному периоду. Выраже-
ние для расчета потерь электроэнергии по методу средних
нагрузок имеет следующий вид:
АГ=АРСА7,
(11-7)
где ДРС — потери 'мощности в сети при задании в узлах
средних значений нагрузок; Д71 — расчетный период, ч.
Данный метод можно использовать в сетях с относи-
тельно постоянными нагрузками. Если в (11.7) принять
ДРс=А1^дт за 1 ч, для которого рассчитаны потери мощ-
ности при задании в узлах сети средних нагрузок и Т—
= ТЭ, тогда (11.7) совпадете (11.2).
Метод среднеквадратичных, нагрузок (метод 3 табл. 11.1)
подобен методу расчета по средним нагрузкам. При этом
реальная нагрузка заменяется эквивалентной среднеквад-
, ратичной. Она может быть получена установкой на под-
станциях энергосистемы счетчиков потерь или умноже-
'^нием средней нагрузки на коэффициент формы графика.
.^Метод расчета потерь по характерным режимам (ме-
тод 4 табл. 11.1) расчетного периода разработан для бо-
лее точного определения потерь электроэнергии в питаю-
щих сетях энергосистем. Суть метода заключается в за-
мене реального процесса изменения нагрузок элементов;
сети за расчетный период несколькими характерными ре-
жимами. Обычно в качестве характерных режимов пред-
лагается принимать максимумы и минимумы сезонных на-
-
' 223J
Г* *
ггрузок при нормальной схеме работы сети, определяемые
© дни контрольных измерений. При проведении 'контроль-
ного измерения в энергосистеме регистрируется макси-
мальное количество информации о параметрах режима
.за 24 ч. . . *
При выборе расчетных периодов следует учитывать су-
лцественные изменения в топологии сети, включение и от-
ключение мощных потребителей и т. д. Внутри расчет-
ного периода графики нагрузок могут считаться прак-
тически постоянными.
В отраслевой методике [59] предлагается делить год
на три расчетных периода. В качестве характерных ре-
жимов в каждом расчетном периоде принимаются гра-
фики нагрузок в зимний максимум, рассчитанный по схе-
ме и нагрузкам предыдущего года, летний минимум теку-
щего года и графики нагрузок в зимний максимум теку-
.щего года. ... *
Для деления года на расчетные периоды прежде всего
определяется среднемесячное потребление энергии как
среднее арифметическое от энергии, потребляемой за ме-
сяцы летнего и зимнего контрольных измерений текущего
года. Потери за период с начала расчетного года, когда
месячное потребление энергии превышает среднюю вели-
чину, определяются по данным контрольного измерения
зимнего максимума прошлого года. Потери в интервале,
когда месячное потребление меньше средней величины,
рассчитываются по данным летнего измерения текущего
лода. Период, оставшийся до конца года, рассчитывается
по графику зимнего максимума текущего года.
При выделении трех расчетных периодов выражение
411.3) принимает вид
з
где AIFatvz — потери электроэнергии за сутки h-ro перио-
да; h=l соответствует потерям электроэнергии, рассчи-
танным по данным контрольного измерения в зимний мак-
симум предыдущего года; h~2 — расчет по данным лет-
него минимума текущего года; /г=3— расчет по данным
зимнего максимума текущего года; Д7\— длительность
A-го расчетного периода. ’
Данный метод положен в основу отраслевой методики
[59]. Определение потерь электроэнергии в каждом рас-
четном периоде основывается на расчете серии устано-
вившихся режимов на ЭВМ по скорректированным на-
грузкам узлов за 24 ч контрольных суток. При отсутствии
информации за каждый час суток расчеты производятся
для характерных суточных режимов с длительностью А/.
ЙВ число характерных режимов обычно включаются часы
прохождения утреннего и вечернего максимумов, ночного
минимума нагрузки. Потери электроэнергии за расчетный
период вычисляются по формуле
’ 24/Ы N
AIFat = АТ 2 ^jAPj-A/, (11-9)
Z=1 i=1
где-'А/—число элементов в схеме замещения сети; &Рц —
потери мощности в j-м элементе для /-го режима; АТ—
расчетный период; А/ — интервал между измерениями.
В условиях эксплуатации схема, режимы электропо-
требления и потери электроэнергии, вычисленные за кон-
трольные сутки, не сохраняются неизменными на протя-
жении всего расчетного периода. Для обеспечения балан-
са по потребленной или генерированной в каждом узле
реальной электроэнергии, которая фиксируется счетчиками
за расчетный период, и электроэнергии, потребленной в
узле в предположении неизменности нагрузки за расчет-
ный период, необходимо выполнить корректировку суточ-
ных графиков нагрузки.
Как утверждается в [63], практически во всех энер-
госистемах наибольшая часть потерь электроэнергии при-
ходится на время работы по графику зимнего рабочего
дня, а большая доля погрешности расчета потерь при-
ходится на определение их за суточный интервал. По-
этому значительную часть погрешности можно скомпен-
сировать, уточняя значение потерь в течение зимнего
рабочего дня и определяя эквивалентное число дней по
выражению, приведенному в [63]. В течение года потери
электроэнергии определяются по формуле
AIF=A ^дгрГэкр-рАй^дт-фТ'экр, (11.10)
где AW'atp, — потери электроэнергии от потоков ак-
тивной и реактивной мощностей за расчетный период АТ,
равный одним суткам; ТзкР, T3Kq — эквивалентное число
суток для расчета потерь от протекания активных и реак-
тивных мощностей.
Структура выражения (11.10) подобна (11.5), но при
этом слагаемые потерь в (11.5)- определяются за час наи-
больших нагрузок, а в (И. 16)—за сутки контрольного
15—6189
225
измерения. В (11.10) число эквивалентных дней опреде-
ляется по реальному графику нагрузки за контрольные
сутки, а в случае расчета по (11.8) в каждом расчетном
периоде реальным принимается его длительность, а кор-
ректируются суточные графики нагрузки.
В [62] предлагается потери электроэнергии определять
по суточным графикам характерных зимних, летних, ве-
сенних и осенних суток с выделением рабочих и выходных
дней. При этом потери электроэнергии "за- год вычисля-
ются по выражению, аналогичному (11.3):
8
ДГ= (ПЛ)
й=Г
где \W^rh — потери электроэнергии за /г-е характерные
сутки; /г=1, 2, 3, 4 — соответственно зимний, летний, ве-
сенний и осенний рабочие дни; /z=5, 6, 7, 8 — зимний, лет-
ний, весенний и осенний выходные дни.
Трудность применения данного метода заключается в
отсутствии в энергосистемах необходимой исходной ин-
формации.
Расчет потерь электроэнергии по эквивалентам или по
потере напряжения (методы 6 и 7 табл. 11.1) применяет-
ся в основном в распределительных сетях. Подробное
изложение этих методов приведено в [61, 62].
Следует отметить, что ни один из рассмотренных ме-
тодов не является универсальным и имеет свои достоин-
ства и недостатки. Поэтому для каждого конкретного
случая разрабатывается, модифицируется или выбирается
такой метод определения потерь энергии, который позво-
ляет получить результат с наименьшими затратами при
обеспечении требуемой точности расчетов.
11.2. Детерминированные методы расчета потерь
электроэнергии при оперативном контроле и анализе
Оперативный контроль и анализ потерь электроэнергии
в питающей сети позволяет получить наиболее полную ин-
формацию о потерях в энергосистеме за расчетный период,
оценить экономичность работы сети. На основании опера-
тивного анализа принимаются необходимые меры по сни-
жению потерь путем коррекции параметров режима, т. е.
изменением уровней напряжения в некоторых точках сети,
генерируемой реактивной мощности и т. д.
Практическая реализация оперативного анализа потерь
во всех сетях энергосистемы в настоящее время невоз-
226
можна из-за недостаточного числа устройств телемеха-
ники лЩхля?измерения параметров режима и ограниченно-
сти ресурсов мини-ЭВМ, обрабатывающих телеинформа-
В системообразующей сети и частично в питающей
У-
Ей4
Ш ляи .....-
информационная обеспеченность уже сейчас позволяет про-
извести оперативный расчет и контроль потерь электро-
энергии. Выполнение таких расчетов является важней-
йдиим- этапом в разработке мероприятий по снижению по-
терь < электроэнергии. Следует отметить, что выполнение
^оперативных расчетов должно производиться с минималь-
ными затратами труда.
Для более успешного решения задач оперативного
контроля и анализа потерь электроэнергии необходимо
обеспечить энергосистемы дополнительными устройствами
телеизмерений, телетайпами и аппаратурой передачи дан-
ных. Оперативный контроль и анализ потерь мощности
и электроэнергии производится раздельно для сетей раз-
ных номинальных напряжений. Для такого анализа ис-
пользуется почасовой расчет потерь мощности (метод 5
табл. 11.1), имеющий несколько методик.
1. В Иркутскэнерго и СЭИ СО АН СССР [64] впер-
вые предложен и реализован почасовой расчет потерь
мощности и электроэнергии. Основным источником ин-
формации для расчетов являются специально перерабо-
W тайная диспетчерская ведомость за прошедшие сутки, а
. также;;данные контрольных измерений. В течение суток
>потери электроэнергии резко изменяются только в неболь-
шой: части элементов электрической сети. Обычно ими
оказываются линии высоких напряжений — 330 кВ и более,
магистральные и сильно загруженные линии 220 и 110 кВ.
Они условно объединяются в линии первой группы. Эти
линии обычно снабжены приборами учета, позволяющими
контролировать активный и реактивный перетоки.
. . Наличие информации о перетоках мощности позво-
ляет производить расчет потерь в элементах первой груп-
пы за каждый час суток. Суммарные потери за сутки рас-
считываются по выражению
N 24
9
(/ = 1, 2, ..., N); I — текущий
где /— номер элемента сети (/=1, 2, ..Д'); I — текущий
час суток; Рц, Qu, Uji — соответственно активный, реак-
тивный переток и напряжение в одном из узлов /-го эле-
15*
мента за l-й час; Гц— активное сопротивение элемента
сети с учетом метеорологических условий и токовой на-
грузки в элементе / в Z-м интервале; AZ/ — интервал
между измерениями.
•В эксплуатации энергосистем широкое распростране-
ние получают оперативно-информационные комплексы на
базе мини-ЭВМ серий М, ЕС, СМ. В этих комплексах
предусмотрены ввод, первичная обработка и отображе-
ние информации о параметрах режима сети на базе те-
леизмерений. В число этих параметров могут входить
перетоки межсистемных линий связи и нагрузки элек-
тростанций. Использование для расчетов телеинформации
о параметрах режима вместо данных диспетчерской ве-
домости позволяет вводить информацию непосредственно
в ЭВМ. При этом значительно повышается оператив-
ность обработки информации и появляется возможность
оперативно производить расчеты и анализ потерь мощ-
ности и электроэнергии. Такой подход практически реа-
лизован в Латвглавэнерго для определения нагрузочных
потерь и потерь на корону в ВЛ 330 кВ в темпе про-
цесса.
Во вторую группу выделяются элементы питающей
сети ПО—220 кВ. Отличительная черта элементов этой
группы в том, что потери в них в течение довольно дли»
тельного времени мало изменяются в сравнении с эле-
ментами первой группы. Потери электроэнергии в эле-
ментах второй группы для характерных часов опреде-
ляются на основании расчетов установившихся режимов
(см. гл. 3) и рассчитываются в большинстве случаев
не чаще 1 раза в неделю для своевременного обнару-
жения изменения потерь. Особенность расчетов потерь
в элементах этой группы заключается в том, что опре-
деление нагрузок узлов производится на основании ве-
роятностно-статистических методов. По методике, пред-
ложенной Иркутскэнерго, для определения нагрузок уз-
лов вся электрическая сеть делится на ряд концентри-
рованных районов таким образом, чтобы внутри района
не было сильно загруженных элементов с большими по-
терями, длинных ВЛ и других элементов с большими
падениями напряжения. Следовательно, каждый район
представляет собой эквивалентный узел нагрузки энер-
госистемы.
Для выполнения расчетов необходима информация о
перетоках активной и реактивной мощностей по грани-
цам районов и об активных и реактивных нагрузках
-4 . fa
- ; • . ..
электростанций. По сумме перетоков рассчитывается на-
грузка районов. Электрические нагрузки узлов, входящих
в район, определяются на основании выявленных ста-
тистической обработкой регрессионных зависимостей на-
грузок узлов от нагрузки района. Коэффициенты ре-
грессионных зависимостей рассчитываются на основании
обработки контрольных измерений по энергосистеме и
обновляются после каждого контрольного измерения.
К третьей группе относятся распределительные сети
высокого напряжения. Расчет потерь электроэнергии для
этой группы производится, как правило, не чаще 1 раза
^квартал. Потери электроэнергии во всей сети за год
определяются суммированием потерь по группам эле-
ментов за расчетные периоды.
Данная 'методика показала свою эффективность в
условиях большого удельного веса сетей высокого на-
пряжения и малого .числа межсистемных связей. Сле-
дует отметить большую трудоемкость подготовительного
этапа для реализации методики. Опыт эксплуатации в
Иркутскэнерго и частично в Грозэнерго показал высо-
кую точность расчетов.
2. Развитие АСДУ и оснащение энергосистем сред-
ствами телеизмерений привели к интенсивному разви-
тию сравнительно новых методов получения оценок па-
раметров режима по данным телеизмерений. Сущность
' / метода оценивания состояния заключается в минимиза-
ции отклонения расчетных (оцененных) значений пара-
метроврежима от реальных на основании избыточных
- телеизмерений. При расчете оценок параметров режима,
т. е.- при определении напряжений и нагрузок .узлов,
перетоков мощности по ЛЭП и т. д., получают все не-
обходимые данные для расчета потерь мощности. По-
этому программы, реализующие метод оценки состояния,
могут использоваться для оперативного контроля за по-
. терями мощности и энергии в сети.
Из-за недостаточного количества телеизмерений не-
возможно рассчитать потери мощности во всей сети в
целом. В районах, наиболее обеспеченных измеритель-
ной аппаратурой (системообразующие и питающие сети),
возможен оперативный расчет потерь мощности по про-
граммам оценки состояния. Такие районы соответствуют
элементам первой группы в методике Иркутскэнерго и
СЭИ СО АН СССР. Расчеты потерь электроэнергии
методом оценки состояния дают наиболее точные резуль-
таты по сравнению с любым другим методом, основан-
229
я
ным на прогнозировании нагрузок. Результатами таких
расчетов являются реальные режимы, существующие в
сети, при этом облегчается задача анализа и выявления
очагов потерь и оперативной дооптимизации режима.
Основные трудности в использовании метода оценки
I
состояния заключаются в недостатке телеизмерений и
ограниченности ресурсов мини-ЭВМ, которые обрабаты-
вают телеинформацию.
3. Во ВНИИЭ разработана методика, позволяющая
производить почасовой расчет потерь мощности в пи-
тающих сетях энергосистемы для характерных дней рас-
четного периода с учетом колебаний нагрузки межсистем-
ных. линий. Исходными данными для расчетов являются
суточные графики активных мощностей электростанций,
нагрузок энергосистем и перетоков мощности, опреде-
ляемые по программе годового планирования выработки
электрической энергии «План-1».
Потери мощности для любого часа расчетного пе-
риода можно определить, учитывая отклонения потерь
в элементах сети в расчетном режиме от значений по-
терь в базовом режиме. Обычно в качестве базового
принимают режимы максимальной и минимальной на-
грузок в день контрольного измерения. Расчет произво-
дится по формуле
N
(11.13)
где 'АР/ — потери мощности в сети для /-го режима;
бРц — изменение нагрузки /-го узла в /-м режиме по
отношению к нагрузке базового режима; АРб — потери
мощности в базовом режиме; Oi—dAP/dPi — частная про-
изводная суммарных потерь мощности в сети при изме<
нении нагрузки f-го узла; N — число узлов, для которых
рассчитаны частные производные потерь.
Частные производные потерь мощности рассчитывают-
ся по программе ВНИИЭ Б-3 по данным двух или трех
измерений нагрузок узлов электрической сети. Получен-
ными значениями коэффициентов можно пользоваться
даже при значительных изменениях режима по сравне-
нию с исходным, но при изменениях схемы сети коэф-
фициенты необходимо пересчитывать.
Потери электроэнергии за расчетный период опре-
деляются суммированием почасовых значений потерь
мощности.
ние получил метод коэффициентов потерь, иначе
^.ЙДёмый методом матрицы В [34]. Коэффициентам
рицы В являются частные производные потерь
IS, Недостатком этого метода является трудность раз-
деления вычисленного суммарного значения потерь на
составляющие, что затрудняет анализ. Следует также
| отметить сложность математического обеспечения для
й рещения данной задачи, построенного на комплексе про-
грамм серий «А», «Б», «В» и «План», разработанных
во“внииэ, а также отсутствие опыта проведения рас-
счетов.
4. При проведении оптимизационных расчетов режи-
мов по активной мощности значительное распростране-
назы-
и мат-
по ак-
У тивной мощности, которые определяются как линейные
* функции активных генерируемых мощностей узлов. Они
вычисляются предварительно и вводятся в ЭВМ в ка-
честве исходной информации. Использование матрицы В
дает приемлемую для практики точность, однако при
включении ! или отключении какой-либо линии необхо-
димо пересчитывать все коэффициенты.
f Данный подход использован в Уральском политех-
ническом институте для разработки метода расчета по-
терь мощности и электроэнергии с использованием В-
коэффициентов. При этом нагрузки узлов энергосистемы
.^делятся на * две группы. В первую входят нагрузки элек-
тростанций и линий межсистемных связей. По этим эле-
ментам в энергосистемах оперативно может быть полу-
^Ж^чена достаточно полная информация. Во вторую группу
выделяются нагрузки остальных потребителей энерго-
системы.
Оперативный расчет потерь мощности производится
по формуле
*Fi = 2 2 (в.-ДЛ + + в,-Ж) + (11 н)
где РРj, Qi, Qj — активные и реактивные нагрузки
станций и линий межсистемных связей; Bq, Вц, B'if,
B"ij — коэффициенты, являющиеся обобщенными . харак-
теристиками сети; i — множество узлов сети, нагрузки
которых включены в число оперативных исходных данных.
Выражение (11.14) позволяет рассчитать потери элек-
троэнергии, используя в качестве исходных данных о
нагрузках только нагрузки станций и межсистемных свя-
зей, т. е. нагрузки первой группы.
231
медь ЯГ!
Определить В-коэффициенты можно через коэффици-
енты распределения нагрузок по ветвям и коэффициенты
участия потребителей в суммарной нагрузке системы.
Для учета изменения топологии сети и характера элек-
тропотребления В-коэффициенты рассчитываются отдель-
но для характерных рабочих и выходных дней каждого
расчетного периода. - |
Потери электроэнергии за год определяются сумми-
рованием почасовых значений потерь мощности. К не-
достаткам метода можно отнести сложность, отсутствие
возможности проведения структурного анализа и выяв-
ления очагов потерь. Программа, реализующая данный
подход, находится в опытной эксплуатации в ОДУ Во-
стока.
11.3. Вероятностно-статистические методы определения
потерь электроэнергии
Вероятностно-статистические методы (методы 8—10
табл. 11.1) находят все большее распространение для
целей оперативного определения и планирования потерь
электроэнергии. Уравнения регрессии позволяют устано-
вить связь между изменениями основных параметров ре-
жима и потерями мощности и энергии в электрической
сети [49, 51, 61, 62, 65].
Расчет потерь мощности на основании решения си-
стемы нелинейных уравнений установившегося режима
соответствует определению детерминированной величины
потерь при детерминированном векторе исходных дан-
ных D. Компоненты вектора D неизбежно содержат
ошибки, обусловленные неточным измерением парамет-
ров режима, погрешностями расчета параметров схемы
замещения, ошибками прогноза и т. д. В общем случае
можно считать, что компоненты вектора D являются
случайными величинами. Обозначим этот случайный век-
тор D (q). Потери мощности, являющиеся функцией от
D(z?), — тоже в общем случае случайная величина, по-
этому возможно установление связи между потерями
мощности и вектором исходных данных D(<y) в виде урав-
нения регрессии.
Обычно для описания статистических взаимосвязей
между случайными величинами используются полпноми-
альные
модели,
которые можно представить в виде1
Д/г= / (dn cf2,..., dn) = b0 +
n n Я
+ SM/+2М^/+ЗМ? + -. <11л5)
i=l *=1 t=l
i<j
где ДР'— оценка зависимой переменной уравнения ре-
А,
грессии (потери мощности); di, dj — независимые пере-
менные уравнения регрессии (факторы); bQ, bi, Ьц, ba —
фициенты уравнения регрессии; п — число факторов.
:, включаемые в уравнение регрессии, явля-
ются компонентами вектора исходных данных D. Число
их значительно меньше общего числа элементов век-
коэ
Факторы
V •
ЯП»
тора D.
Основные предпосылки для построения регрессионных
зависимостей можно сформулировать следующим обра-
зом [66, 67]:
1) функция ДР (потери мощности) в общем случае
является случайной величиной, распределенной по нор-
мальному закону;
2) факторы di в общем случае тоже случайные ве-
st
личины, но дисперсия погрешности их определения мала
по сравнению с погрешностью ДР;
3) дисперсии результатов определения ДР во всех
*7 расчетах, обусловленные действием неконтролируемых
факторов, равны друг другу. Случайные величины ре-
зультатов расчетов рассматриваются как истинные зна-
чения функции ДР, на которую наложена случайная по-
грешность, обусловленная неконтролируемыми факторами.
В результате регрессионного анализа находятся лишь
выборочные средние значения ДР. Нахождение наилуч-
ших оценок коэффициентов bi сводится к минимизации
функции:
- (др~др)2 = min. (11.16)
Решение данной задачи находится методом наимень-
- ших квадратов, в котором в качестве критерия близо-
сти^ двух функций используется следующий показатель:
сумма квадратов отклонений между известным значением
исследуемой < функции и соответствующим значением
аппроксимирующей функции должна быть минимальной.
—
1 Знаком Д обозначены значения, предсказанные аппроксими-
рующим выражением.
В 233
Регрессионные зависимости, подобные (11.15), могут
применяться и для расчета потерь электроэнергии. Точ-
ность оценки потерь мощности и энергии в зависимости
от изменения факторов di определяется числом расче-
тов, которые используются для определения коэффици-
ентов регрессии. В [65] предлагается строить регрес-
сионную модель по отчетным данным. Статистический
анализ дает удовлетворительные для практики резуль-
таты при выборке не менее 20—30 членов [68]. Это
утверждение справедливо при использовании в качестве
статистического материала для построения регрессион-
ных зависимостей отчетных данных без расчета реальных
режимов сети.
Величина погрешности отчетной информации зависит
от многих факторов. Значительные искажения вносит
несовершенство системы учета: неодновременность мо-
ментов снятия показаний счетчиков, ошибки в записях
и передаче данных, погрешность измерений параметров
режима и сети, наличие неучтенных потребителей и т. д.
Другой способ — построение регрессионной зависимо-
сти на основании статистики, полученной моделирова-
нием режимов работы электрической сети [69]. Такой
подход нашел широкое применение в ряде энергосистем.
Например, в Латвглавэнерго потери мощности в сетях
ПО кВ оцениваются в темпе процесса с помощью ре-
грессионных зависимостей, полученных в результате обра-
ботки серии расчетов на ЭВМ. Использование для по-
строения регрессионных зависимостей теории планирова-
ния эксперимента позволяет значительно сократить чис-
ло опытов и в несколько раз повысить эффективность
исследований.
Для прогнозирования и контроля за уровнем потерь
мощности целесообразно использовать уравнения регрес-
сии вида
(И.17)
Расчет потерь электроэнергии ДИ/дт за период ДГ
производится на основании суммирования почасовых зна-
чений потерь мощности и определяется по выражению
ДГ fl
/=1 «=1
234
где АЛ — значение потерь мощности в l-й час; А/ — ин-
тервал измерения, равный 1 ч; Wi — потребление элек-
троэнергии за период АТ для Z-го фактора, входящего
в уравнение регрессии; Рц — мощность i-ro фактора в
l-й час'расчетного периода.
Если получение почасовой информации затруднено, то
(11.18) можно преобразовать к виду
- п п
ДЦ7дТ = + (11.19)
i=l i = l
где Кф/ —коэффициент формы графика нагрузки для
ТгЦт-го фактора.
Выбор переменных, предварительно включаемых в ре-
грессионную зависимость, осуществляется на основании
экспертных оценок из факторов, оказывающих сущест-
венное влияние на потери. К сожалению, этот этап ра-
боты недостаточно формализован и зависит от интуи-
ции и квалификации инженера, проводящего расчеты.
Вопрос об окончательном включении фактора в регрес-
сионную зависимость решается на основании стандарт-
ных статистических процедур с использованием крите-
риев Стьюдента и Фишера. В качестве факторов можно
принять суммарную нагрузку энергосистемы, генерацию
наиболее крупных станций, межсистемные перетоки с со-
седними энергосистемами.
. к? Размах варьирования выбранных факторов опреде-
ляется на основании ретроспективного анализа диспет-
черских ведомостей, причем обязательно должно выпол-
няться условие совместимости факторов, т. е. интервал
варьирования факторов выбирается так, чтобы любые
сочетания факторов в этих интервалах были реализуемы
и не нарушались технические ограничения режима ра-
боты сети.
Точность определения потерь мощности и электро-
энергии по формулам (11.17) и (11.18) зависит от числа
факторов, включенных в уравнение регрессии, и степени
пол гнома. Результаты расчетных исследований для од-
ной $ из энергосистем ОДУ Северного Кавказа показали,
что погрешность линейной регрессионной зависимости с
использованием в качестве факторов суммарной нагруз-
ки системы при наличии значительных реверсивных меж-
системных перетоков в отдельных случаях превышает
30%. Введение в регрессионную зависимость квадратич-
ных членов снижает погрешность примерно в 3 раза.
235
Разделение суммарной нагрузки энергосистемы на на-
грузки отдельных ПЭС снижает максимальную погреш-
ность оценки потерь мощности до 3—5 % • Полученные
регрессионные зависимости позволяют с достаточной
точностью при минимальной исходной информации опе-
ративно определять суммарные потери мощности в энер-
госистеме. Для построения указанных зависимостей це-
лесообразно использовать теорию планирования экспе-
римента и применять равномерные регулярные планы
[70]. Построение квадратичных моделей дает существен-
ное уточнение суммарных потерь мощности по сравне-
нию с линейными уравнениями регрессии.
Расчет потерь электроэнергии по интегральным харак-
теристикам нагрузки (ИХН) (метод 9 табл. 11.1) позво-
ляет оценивать потери с учетом вероятностных харак-
теристик нагрузки [61], которые в сжатой и компактной
форме содержат информацию об изменениях режимов
за расчетный период. В качестве интегральных харак-
теристик нагрузок обычно используют средние значения
активной и реактивной мощностей нагрузок узлов, средне-
квадратичные отклонения этих нагрузок от их средних
значений, коэффициенты корреляции между соответст-
вующими мощностями узлов.
Расчет потерь электроэнергии ведется методом ста-
тистической линеаризации, причем статистическая мо-
дель установившегося режима представляется в виде не-
линейного преобразования для математических ожиданий
параметров установившегося режима 1
W(A1X, MY)=0, . (11.20)
и линейного преобразования корреляционных моментов
мощностей
где К(Х), K(Y) - - матрицы корреляционных моментов
независимых и зависимых параметров режима.
Недостатком такого моделирования является необ-
ходимость вычисления сложных и заполненных матриц
корреляционных моментов, что существенно снижает воз-
можность использования данного метода для расчетов
режимов реальных энергосистем.
1 W соответствует системе нелинейных уравнений устанавившегося
режима, аналогичной (3.7).
Для упрощения расчетов применяется метод, .позво-
ляющий моделировать матрицу корреляционных момен-
тов несколькими обобщенными типовыми графиками, со-
ответствующими собственным векторам матрицы корре-
ляционных моментов в порядке убывания.
дШраФики изменения параметров режима с помощью
обобщенных типовых графиков определяются по форму-
лам [71]
т~\ ) т=1
где MPit MQi, Mfr, MUt — математические ожидания со-
ответственно активной и реактивной мощностей, фазы
^и модуля напряжения Z-го узла; Гт—m-я компонента
обобщенного типового графика; ami> 4mi, \mi—весо-
вые коэффициенты; М — число обобщенных типовых гра-
фиков, участвующих в моделировании графиков на-
грузки.
После этого находятся компоненты матрицы корре-
ляционных моментов, которые используются для опреде-
ления потерь электроэнергии:
д^Р
dU :д6 s
Д7 ДР(ЛШ,.Мд) + 4-
N N
д*ЬР
сРЛР
dUidUf
где AT — интервал времени, для которого рассчитывают-
ся-потери энергии; AP(A1U, Aid)—потери мощности для
режима, соответствующего математическим ожиданиям
» <... - д*ьр
векторов модуля напряжений и фазовых углов; -------------,
»г .х ** - dUidrJ t
<Э2АР д2АР
вторые производные от
dUtddj' ddidbj
выражения для
потерь мощности, вычисленные в точке математического
ожидания параметров; K(U£, Uj), K(Ui, б/), K(6t-, бу) —
корреляционные моменты зависимых параметров; N—
Количество узлов электрической сети без балансирующего.
Основное достоинство определения потерь по ИХН
237
состоит в том, что в качестве исходной информации ис-
пользуются накопленные в энергосистеме статистические
данные. Применение типовых ортогональных графиков
нагрузки позволяет экономить машинную память, так
как необходимо хранить только три-четыре типовых гра-
фика для всей системы, а для каждого узла — коэффи-
циенты участия в образовании реального графика на-
грузки.
К недостаткам рассматриваемого метода следует от-
нести трудность выделения обобщенных графиков, на-
хождения собственных чисел и векторов матрицы кор-
реляционных моментов.
На основе изложенного метода в УПИ разработана
промышленная программа, которая в настоящее время
находится в опытно-промышленной эксплуатации.
Метод статистической выборки (метод 10 табл. 11.1)
предусматривает расчет потерь в достаточно предста-
вительной выборке схем и распространение полученных
результатов на всю сеть.
Суть метода заключается в определении минималь-
ного объема выборки, достаточного для определения сум-
марных потерь с заданной точностью и достоверностью. '
Вероятностный характер задачи обусловлен тем, что слу-
чайной величиной является оценка потерь электроэнер-
гии. Для расчета потерь электроэнергии в выборке мож-
но использовать любой детерминированный метод.
Объем выборки можно существенно сократить, если
рассматриваемую электрическую сеть классифицировать
по некоторому признаку, например поминальному на-
пряжению сети, характеру нагрузки и т. д. Отбор ха-
рактерных линий в выборку должен носить случайный
характер, для этого можно использовать генераторы или
таблицы случайных чисел.
Глава двенадцатая
ПОГРЕШНОСТИ ПРИ РАСЧЕТАХ УСТАНОВИВШИХСЯ
РЕЖИМОВ И ОПТИМИЗАЦИИ РЕЖИМОВ
ПО НАПРЯЖЕНИЮ И РЕАКТИВНОЙ МОЩНОСТИ
12.1. Методика определения погрешностей
Общие положения. Нередко инженеры, осуществляющие расчеты
и оптимизацию режимов на ЭВМ, и даже научные работники, разра-
батывающие методы и математическое обеспечение для указанных за-
238
tv
is
pr
Гfl
?-*
1у
ы
»•
*•
Mi-
i
* '
дач, забывают о погрешности математического моделирования на ЭВМ.
Эта погрешность при расчетах и оптимизации режима включает ошиб-
ки из-за неточного задания исходных данных, погрешности матема-
тического описания, методов расчета и округлений, а также погреш-
ность реализации при управлении режимами. Различным вопросам
исследования погрешностей при расчетах, и в основном при оптимиза-
ции режимов, посвящено большое количество статей, не имеющих еди-
ной терминологии и использующих различные методы определения
погрешностей. В данной главе приведены методика определения по-
грешности математического моделирования при управлении режимами
и результаты ее исследования. ,
Для эффектвного инженерного использования итерационных мето-
дов в расчетах режимов электрических систем необходима методика
определения погрешностей этих методов. Каждый инженер и исследо-
ватель должен согласовывать точность проводимого опыта с точностью
используемых приборов. Аналогично этому в расчетах установившихся
режимов электрических систем на ЭВМ необходимо согласовать точ-
ность математического описания (математической модели) и итерацион-
ных методов с точностью исходных данных.
внедрения математических моделей и итерационных методов . необхо-
димо определение погрешностей. При этом должны быть предусмотрены
как возможность исследования погрешностей с учетом случайного ха-
рактера исходных данных; так и различные способы приближенного
определения точности. Кроме того, определение погрешностей необходи-
мо при разработке АСУ для сопоставления математических моделей
и методов, выбора используемой ЭВМ и целесообразной точности ис-
ходной информации. _ *
Ряд важных работ по изучению точности математического моде-
лирования при управлении развитием энергетических систем выполнен
в Сибирском энергетическом институте СО АН СССР под руководством
Л. С. Беляева, А. А. Макарова, Л. А. Мелентьева и в институте мате-
матики АН Литовской ССР под руководством И. Б. Мсцкуса [72г—74].
В этих работах, а также в работах Л.. А. Крумма, Л. В. Цукерника,
В. С. Шаханова применительно к электрическим системам получены
важные выводы об использовании эталонных математических моделей
для определения погрешностей задач оптимального управления режи-
мами электрических систем.
В то же время для решения задач управления режимами необхо-
дим о л разработать и исследовать аналитические и расчетные методы
определения различных видов погрешностей, а именно: погрешностей
математической модели (математического описания) и итерационного
метода (алгоритма), погрешностей из-за неточности исходных данных
и ошибок округления и, наконец, погрешностей реализации режима
в электрической системе. Для разработки и исследования методов
определения погрешностей необходимо использовать современную ма-
В ходе разработки и
тематическую теорию ошибок и объединить рассмотренные в работах
указанных выше авторов подходы, осуществив их дальнейшее развитие
применительно к задачам расчета и управления режимами электриче-
ских систем.
Материал § 12.1 и 12.2 излагается в соответствии с [75—77];
§ 12.4, 12.5—в соответствии с [78, 79].
Используемая терминология. При количественном изучении по-
грешностей, возникающих при управлении режимами электрических
систем, очень важна возможность их раздельного анализа. Введем
терминологию, необходимую для классификации и дальнейшего ана-
лиза отдельных видов погрешностей, возникающих при расчете иа
ЭВМ режимов электроэнергетических систем.
Под математической моделью реальной энергосистемы будем по-
нимать абстрактный, формально описанный объект, изучение которого
возможно математическими методами, в том числе и с помощью ма-
тематического моделирования*. Иными словами, под математической
моделью реальной энергосистемы будем понимать совокупность соот-
ношений (например, формул, уравнений, неравенств, логических усло-
вий, операторов и т. д.), определяющих характеристики состояний энер-
госистемы в зависимости от ее параметров, управляющих и возму-
щаюших воздействий, времени и т д.
Для исследования погрешностей, возникающих на ЭВМ при управ-
лении режимами электрических систем, необходимо использовать эта-
лонные математические модели.
Под эталонной математической моделью энергосистемы будем по-
нимать такую математическую модель, свойства которой, изученные
методами математического моделирования, совпадают со свойствами
реальной энергосистемы. Свойства, изученные с помощью любой мате-
матической модели, не могут абсолютно совпадать со свойствами ре-
альной энергосистемы. Поэтому понятие эталонной математической
модели относительно. Практически при определении погрешностей
математического моделирования математические модели, используемые
в качестве эталонных, содержат некоторые допущения и имеют погреш-
ности. Математическая модель, используемая в качестве эталонной,
должна выбираться на основании экспериментов в энергосистеме и на
физических моделях с учетом инженерного опыта и интуиции. Ниже
будем называть математическую модель, используемую в качестве
эталонной, условно-эталонной математической моделью.
Погрешностью математической модели будем называть различие
в результатах, определенных по приближенной модели и математиче-
скому описанию, выбранному в качестве условно-эталонного.
1 Математическое моделирование — способ исследования различ-
ных процессов путем изучения явлений, имеющих различное физичес-
кое содержание, но описываемых одинаковыми математическими соот-
ношениями.
240
исход-
точное
хотя и
Дей-
Под методом или алгоритмом будем понимать точное задание одно-
значно определенной последовательности операций, позволяющее ре-
шать совокупность задач какого-либо класса и определяющее вычис-
лительный процесс. Это определение понятия алгоритма является не
строгим, а скорее описательным.
Эталонным методом будем называть такой, с помощью которого,
при использовании эталонной математической модели, точных
ных данных и при отсутствии ошибок округления мы получим
решение.
Понятие эталонного метода тоже является относительным,
в меньшей мере, чем понятие точной математической модели,
ствительно, итерационные методы, используемые на практике в каче-
стве эталонных, всегда имеют погрешности. Условно-эталонным мето-
- дом будем называть метод, используемый в качестве эталонного.
Большинство применяемых для определения режимов- методов рас-
чета носит итеративный характер. Прерывание итерационного процесса
на конечном числе шагов вносит погрешность, которая и является
погрешностыо~итерационного метода или алгоритма.
Таким образом, погрешность итерационного метода определяется
наперед задаваемым условием прерывания итерационного процесса и
по своей сути является погрешностью реализации многошагового про-
цесса. При определении многоэкстремальных оптимизационных задач
погрешность метода связана с определением локального, а не гло-
бального экстремума.
По мере развития теории и практики применения ЭВМ для управ-
ления эксплуатацией электрических систем используются все более
совершенные математические модели и методы. Соответственно уточ-
няются модель и метод, применяемые в качестве эталонных. В этом
случае важна возможность использовать погрешности, полученные при.
приближенных модели и методе, принятых в качестве эталонных,
в дальнейшем для определения погрешностей при более точных моде-
ли и методе, используемых в качестве эталонных.
Под параметрами режима понимаются напряжения узлов (модули
и фазы), активные и реактивные генерируемые мощности источников,
коэффициенты трансформации регулируемых трансформаторов, актив-
ные и реактивные нагрузки потребителей. В дальнейшем предполагает-
ся, что нагрузки потребителей заданы либо постоянными мощностями»
либо статическими характеристиками нагрузки в функции от напряже-
ний узлов. Совокупность параметров режима образует вектор Z.
Под расчетом установившегося режима понимается определение
комплексных значений напряжений, распределения токов и потоков
мощности в сети, вычисление комплексных значений мощностей генера-
ции в балансирующих узлах без учета ограничений на параметры ре-
жима в виде неравенств, т. е. решение векторного уравнения
w (Z, S„ (Z), ¥у) = О,
(12.1)
24»
16—6189
где W — комплексный вектор небалансов мощности в узлах сети;
S„(Z)—комплексный вектор мощностей нагрузок потребителей; Yy—
матрица узловых проводимостей.
Множество компонент вектора Z принято делить на два вектора,
вектор независимых (регулируемых) переменных Y и вектор зависи-
мых (нерегулируемых) переменных X. Компоненты X выбираются так,
чтобы при заданных значениях Y система уравнений,. описывающая
установившийся режим, была совместной и разрешаемой относительно
X. Запишем ее следующим образом
W (X, Y,SIt(Z) Yy) = Sr-Sc -S„(Z) = 0,
где Sr — комплексный в’ктор генерируемых мощностей; Sc- комплекс-
Л
ный вектор сетевых мощностей, компоненты которого SjC =
/=•1
(Sy — мощность, текущая по связи ij из узла i; п — число узлов).
Исходные данные при расчете установившегося режима образуют
параметры Y, вектор нагрузок S„(Z) и матриц Yy, определяемj о
параметрами схемы замещения сети. Исходные данные обозначим
Dy.p=(Y S,,(Z). Yy). (12.2)
Результате» расчета установившегося режима являются вектор за-
висимых параметров X и явные функции этого вектора $(Х) (потоки
активной и реактивной мощностей, токи, суммарные потери мощности
в сети и т. п.). Вектор — решение нли вектор контролируемых величин
F=[X, ч (X)]. (12.3)
Этот вектор может состоять из части компонент X и <р(Х).
Под расчетом оптимального режима при условии, что нагрузки
потребителей постоянны, понимается определение
пппЯ(Х, Y, D) (12.4)
при
W(X, D)=0; (12.5)
Xmin^X^Xm„; (12.6)
Ym,-n^Y^Ymax; (12.7)
ф/n/nS 4^ X)^(pmajr, (12 8)
где Xmax, Xmln, Утах, У min, ц>тпх, <imin — верхние и нижние допустимые
границы X, Y и ф(Х); D—исходные данные оптимизационной задачи.
При комплексной оптимизации режима целевая функция
W(X, Y, D) — это стоимость топлива, сжигаемого на тепловых стан-
циях. При оптимизации режима по напряжению, реактивной мощности
и коэффициентам трансформации целевая функция — это суммарные
242
потери активной мощности в сети. Уравнение установившегося режима
(12.5) с учетом (12.2) совпадает с (12.1). Ограничения (12.6) — (12.8)
соответствуют (9.3). Задача оптимизации (12.4)'—(12.8) аналогична
(9.12); (9.10), (9.3).
Исходными данными при расчете оптимальных режимов являются
SH(Z), Yy и вектор-функция характеристик относительных приростов
станций ’Е(Рг) (Рг — вектор активных мощностей генерации . Таким
образом ’
D=[SH(Z), Yy, E(Pr)J.
Результат расчета оптимального режима образует значение целе-
вой функции, оптимальный вектор регулируемых параметров и вектор
контролируемых параметров в оптимальном режиме.
Погрешности в определении вектора регулируемых параметров или
вектора контролируемых величин при управлении режимом электриче-
ской системы. Рассмотрим погрешности, возникающие при определении
на ЭВМ оптимального, допустимого или установившегося режима.
Сначала для простоты рассмотрим случай, когда отсутствуют
погрешности исходных данных. При этом для расчета на ЭВМ берется
точное значение вектора исходных данных D. Предположим, что на
ЭВМ используются точные математическая модель и алгоритм опре-
деления оптимального режима. Следовательно, по любому значению
я
исходных данных D определяются вектор регулируемых параметров Y
и вектор контролируемых параметров F. Иными словами, на ЭВМ
реализовано вычисление неявной вектор-функции F(D). Обозначим
F(D) точное значение вектора контролируемых параметров при значе-
нии исходных данных D. Вектор F(D) соответствует результату рас-
чета на ЭВМ в случае отсутствия погрешностей. В действительности
при вычислении вектора контролируемых параметров на ЭВМ возни-
кают погрешности вследствие неточности математической модели, алго-
ритма, ошибок округления. Влияние ошибок исходных данных будет
рассмотрено особо.
Пусть при определении режима на ЭВМ используется приближен-
ная математическая модель. Определяемый при этом вектор контро-
лируемых параметров обозначим F(D, р), где р— конечномерный
вектор параметров модели. Указание р будет означать, что вектор
контролируемых параметров F определяется при использовании при-
ближенной математической модели р. Отсутствие <в скобках параметра
р будет означать, что F определяется с помощью точной математиче-
ской модели. Обозначим вектор погрешностей результата, вызванных
использованием приближенного описания при точных исходных данных
1 В дальнейшем будем обозначать исходные данные при оптими-
зации и при расчетах установившихся режимов одной и той же бук-
вой D.
16*
243
D, отсутствии погрешности округления и точном методе расчета,
A2fn=F(D, |х) — F (О), (12.9)
При вычислении вектора контролируемых параметров, как прави-
ло, используются приближенные методы. Обозначим а вектор формаль-
ных параметров метода. Аналогично приведенному выше вектор кон-
тролируемых параметров, определенный при исходных данных D, ис-
пользовании математической модели р и применении приближенного
метода, характеризуемого вектором а, обозначим F(D, р, а). Отсут-
ствие в скобках параметра а будет означать, что при определении
вектора F использовался условно-эталонный метод. Погрешность ре-
зультата, вносимую прерыванием итерационного процесса при расчете
по D и приближенной модели, обозначим
A2a=F(D, р, a)-F(D, р). (12.10)
Как известно, на ЭВМ арифметические операции заменяются на
псевдо операции с сохранением лишь т двоичных разрядов в мантиссе
результата. При этом возникают ошибки округления, зависящие для
каждого алгоритма от разрядности ЭВМ. Вектор F, определенный при
данных D, модели р и с помощью метода а на ЭВМ с разрядной
сеткой т, обозначим F(D, р, а, т). Отсутствие в скобках параметра т
будет показывать, что вектор F определяется без ошибок округления.
Поскольку последние всегда имеют место, отсутствие в скобках т бу-
дет означать, что ошибки округления при определении F столь малы,
что ими можно пренебречь. Погреши )сть результата, вызванную
округлением на ЭВМ, обозначим
A3'=F(D, р, а, т) — F (D, р, а). (12.11)
Выше предполагалось отсутствие погрешностей исходных данных,
в действительности же они существуют и, очевидно, играют важней-
шую роль в сравнении со всеми другими видами погрешностей. Обозна-
чим D приближенное значение вектора исходных данных, используемое
при расчете на ЭВМ. Напомним, что разница между точным и прибли-
женным значениями исходных данных, т. е. между D и D, определяет
погрешность этих исходных данных. Обозначим вектор-решение, полу-
ченный по приближенной модели и по методу на ЭВМ с разрядной
сеткой т и по приближенным исходным данным D, как F(D, р, а, т).
Погрешность от неточности задания исходных данных, исследуемая на
приближенной модели и приближенным методом, обозначим
A/'=F(D, р, a, t)-F(D, р, а, т). (12.12)
Полную погрешность определения вектора контролируемых пара-
метров на ЭВМ за счет модели, алгоритма, ошибок округления и не-
точности исходных данных обозначим
S
A=F(D, g, a, t)-F(D). (12.13)
244
Используя введенные обозначения, имеем
Д = Д2„, + Д2о + Д' + Д'/ = F (D, |Л) - F (D) + F (D, |х, “) - F (D, р.)+
+ F(D, ц, t)—F(D, Н. “)+F(D, Ji, t)—F(D? И. (12.14)
Возможны и другие способы оценки полной погрешности, напри-
мер
A^F(D)-F(D)+F(D, p)-F(D) +
+F(D, ,ii, a)—F(D, |x)4-F(D, p, a, t) —
—F(D, ji, a) = Ai+Az'mH-As'a+Aa- (12.15)
В последнем выражении первое слагаемое
- Д,—F(D)t—F(D) .(42.16)
— это погрешность определения вектора контролируемых параметров F
из-за неточности исходных данных. Это погрешность при определении
вектора F на ЭВМ по условно-эталонной модели и методу без ошибок
округления, но при наличии ошибок исходных данных. Второе и третье
слагаемые в (12.15) соответствуют погрешности модели ц и погреш-
ности метода а при неточных данных.
Основная ценность выражений (12.14) или (12.15) состоит в том,
что они позволяют разделить полную погрешность на погрешности от
исходных данных, метода, модели и, наконец, округления. Исследование
каждой из указанных погрешностей представляет самостоятельную за-
дачу. Особенность выражения (12.14) в сравнении с (12,15) состоит
в том, что оно позволяет исследовать погрешность от неточности ис-
ходных данных при приближенных модели ц и методике а. Кроме
того, можно раздельно исследовать погрешности метода (12.10) и мо-
дели (12.9) Ч Если нужно определить полную погрешность при замене
условно-эталонной модели (или метода) на еще более точную, то при
использовании (12.14) не надо повторно определять для более точной
условно-эталонной модели или метода погрешности из-за неточности
исходных данных. При использовании же (12.15) приходилось бы опре-
делять Д1 заново для каждой новой точной модели или метода.
Выше рассмотрены погрешности, возникающие при определении
на ЭВМ вектора контролируемых параметров F. В результате расчета
оптимального режима на ЭВМ получаем значение F(D, р, а, т). Это
значение вектора контролируемых параметров стремятся поддерживать
в энергосистеме с помощью соответствующих регуляторов. Обозначим I
F06 значения вектора контролируемых параметров режима, которое. I
фактически установится в системе при управлении режимом. I
1 Эта особенность (12.14) не является решающим преимуществом.
Вообще говоря, сравнительная эффективность (12.14) и (12.15) зави-
сит от цели расчетного определения погрешностей.
♦
245
Погрешностью реализации будем называть
AP«..,=F(D, р, а, т)—FO6. (12.17)
Полная погрешность в определении вектора F при управлении ре-
жимом электрической системы будет
Aynp=F(D)'—F б<А + Ареал- (12.18)
Все сказанное выше справедливо и при определении вектора конт-
ролируемых параметров F при расчете допустимого или оптимального
режима электрической системы. Приведенные выражения справедливы
для любых задач, в которых по исходным данным вычисляется вектор,
непосредственно устанавливаемый на объекте управления.
Погрешности в определении целевой функции (суммарного расхода
топлива или потерь) при управлении режимом электрической системы.
Погрешность в определении целевой функции при решении задач опти-
мизации имеет свои существенные особенности и не может быть рас-
считана по приведенным выше выражениям (12.9) — (12.18).
«
Будем использовать следующие обозначения: Y(D, р, а, т)—ре-
шение задачи оптимизации режима (12.4) — (12.8) прн приближенных
исх >дных данных D, модели р, методе! а и разрядности ЭВМ т;
И [Y (D, р, а, т), D, р, а, т] — значение целевой функции при исход-
ных данных D, модели р, методе а, разрядности ЭВМ т и значении
•
вектора регулируемых параметров Y(D, р, а, т). Иными словами,
/7[Y(D, р, а, т), D, р. а, т] = min Я (Y, D, р, а, ”). (12.19)
* —
Соответственно Y(D) —это значение вектора Y, являющееся реше-
нием задачи оптимизации режима при точных исходных данных D
и отсутствии ошибок модели, метода и округления, т. е.
/7[Y(D), D] = min^(Y, D), (12.20)
Y
• — —
где J/(Y(D), D)—точное оптимальное значение целевой функции,
a //(Y(D, р, а, т), D р, а, т)—приближенное оптимальное значение
целевой функции при исходных данных D, модели р, методе а н раз-
рядности т.
Если использовать описанные выше выражения (12.14), (12 15), то
разность между точным и приближенным оптимальными значениями
целевой функции определяется как
A7(Y(D, р, а, т), D, р, а, т) — Л/(Y(D), D]. (12.21)
246
X
В то же время наибольший интерес представляет разность между
точным оптимальным значением целевой функции и тем, которое в
действительности будет иметь место при осуществляемом управлении
режимом. Эту величину обычно называют перерасходом. В наших
обозначениях перерасход определится следующим образом:
- ’ ’ f V
" =Я(¥об, D)-tf[Y(D), D],
где /7 (Yo6, D)—значение целевой функции при точных исходных дан-
ных, отсутствии погрешностей модели, метода, округления и векторе
регулируемых параметров Y06,
установленном в энергосистеме в
результате управления режимом.
Особенность нахождения по-
грешностей при решении задач
оптимизации состоит именно в
том, что погрешность определяет-
ся по выражению (12.22), а не
(12.21).
Сначала рассмотрим перера *-
ход в простейшем случае, когда
одновременно имеют место толь*
ко ошибки исходных данных и
метода. Будем считать, что ошиб-
ки модели, округлений и реализа-
ции отсутствуют. На рис. 12.1 изображены значения целевой функции
в зависимости от вектора регулируемых параметров. Для простоты
выбран случай одномерного Y.
Кривая I соответствует точным значениям целевой функции, т. е.
значениям И (У, D),' определяемым при точных исходных
условно-эталонном методе, кривая II — значениям целевой
И(У, D, а), определяемым при точных исходных данных D
женном
И (У, D,
методе
Аналогично (12.19), (12.20) обозначим
(12.22)
JU
(12.24) .
Y(D) Y(D,<x) Y(D,a)
(1225) \
MY,S)
(1223)
7 И(Y,V,ОС)
U(Y,B}a)
Рис. 12.1.
функции от
параметров
Зависимость целевой
вектора регулируемых
и
О
методе а, и, наконец, кривая Ш — целевой
данных и
функции
и прибли-
функции
а) при приближенных исходных данных D и приближенном
а.
tf[Y(D, a), D, a] = minW(V, D, a);
= min И (У, D, a).
В данном случае перерасход вследствие ошибок исходных данных
и метода равняется
H[Y(D, a), D] — Z7 [Y (D), D].
(12.23)
247
Отметим, что вследствие (12.20) выражение в правой части (12.22)
и выражение (12.23) при решении одноэкстремальных задач всегда
положительны (если не учитывать возможность нарушения ограни-
чений).
Ошибка из-за неточности исходных данных при приближенном
методе а равняется
//[Y (D, ос), D] — Я [Y (D, a), D]. (12.24)
Соответственно ошибка из-за неточности метода а при исходных
данных D равняется
/7[Y(D, a), D] — AZ[Y(D), D]. (12.25)
Справедливо следующее соотношение:
Z7[Y(D, <х), D]-tf[Y(D), D]=tf[Y(D, а), D] -
— tf[Y(D, а), D]4-/7[Y(D, а), D] — #[Y(D), D].
Последнее соотношение позволяет определить, какую часть в пол-
ной погрешности составляют перерасходы из-за неточности исходных
данных (9.24) и перерасходы из-за погрешности алгоритма (12.25),
Следует подчеркнуть, что каждый из указанных перерасходов опре-
деляется с помощью точных метода, модели при отсутствии ошибок
исходных данных и округления.
С учетом сказанного целесообразен следующий путь определения
перерасходов или погрешностей целевой функции при управлении ре-
жимами электрических систем. Полный перерасход (12.22) можно опре-
делить, используя следующее выражение:
Д" = И(Уо6. D)-/7[Y(D), D]=/7[Y(D, fl), D] - И [Y (D), D] +
J
+ tf[Y(D, p, «), D]-tf[Y(D, p), D] + #[Y(D, p, *), D]-
— Я [Y (D, p, a), D]4-//[Y(D, p, «, •=). DJ —tf[Y, (D, fl, a), D]+
+ A7(Yo6, D)-/7[Y(D, p, a, t), DJ. (12.26)
В выражении (12.26)
/7[Y(D, p), D, p]=mintf(Y, 5, p);
#(Y (D, p, a), D, p, a)= min#(Y, D, p, a);
Y
И (Y (D, p, a), D, p, a) = min /7(Y, D, p, a);
Y
J7[Y(D, p, a,
-c), D, p, a,
t)= min/7(Y,
Y
D, p, a, u).
Слагаемые в правой части (12.26) аналогичны соответствующим
лагаемым в правой части (12.14). Перерасход вследствие неточности
математической модели р, при точных исходных данных D
Л£=И[1(», (*). D]-77 [Y(D), D],
(12.27)
перерасход
в результате неточности метода
Д£ = И[У(В, fi, “). О]- И Vi (D, fl), D],
перерасход из-за неточности исходных данных при модели р и ме-
тодедах-г.,'.
Af =tf[Y(D, р, a), D] - и [Y (D, Р, а), D]
перерасход за счет округления при модели р, методе а и исходных
данных D
U ' Af=//1Y(D, fi, «, г), D]-77[Y(D, fl, a), D], (12.28)
V.- v. .;•>• » г . .
Последнее слагаемое в (12.26) соответствует перерасходу вслед-
ствие погрещности реализации
Д"л=«(Уо6, D)-H[Y(D, fi, «, 1), Ь]. (12.29)
При решении невыпуклых и многоэкстремальных задач, а также
при учете ограничений выражения, стоящие в правых частях (12.27)
и (12.28), и особенно (12.29), могут оказаться отрицательными.
Перерасход из-за погрешности исходных данных при модели р и
^методе а, а также перерасходы из-за погрешностей округления (12.28)
и реализации (12.29) могут быть определены только с помощью услов-
—
но’эталонной зависимости И(Y, D). В этом и состоит основная осо-
бенность определения погрешностей целевой функции в задачах опти-
мизации. Было бы очень полезным получить для перерасходов выра-
жение, аналогичное (12.24), которое позволяло бы исследовать, напри-
мер, погрешность из-за неточности исходных данных на приближенных
модели и методе, т. е. без использования условно-эталонных модели
. ‘?и метода. При этом применение более точных модели или метода,
используемых в качестве эталонных, оказывало бы влияние лишь
на значение перерасходов вследствие неточности модели или метода.
Последнее особенно важно с учетом постепенного усовершенствования
точных моделей и методов. К сожалению, невозможно получить вы-
ражение, позволяющее анализировать, например, перерасход из-за
ошибок данных на приближенных модели и методе без использования
условно-эталонных модели и метода.
Методика анализа полной погрешности и ее составляющих. Выра-
жения (12.14), (12.15) и (12.26) представляют полную погрешность
в определении вектора контролируемых параметров или перерасхода
249
целевой функции как точную сумму ее составляющих. Практическое
использование этих выражений связано с тем, что все составляющие
полной погрешности, исследованные на разных по точности моделях
И, различны. Например, погрешность из-за ошибок исходных данных
зависит от точности математического описания. Поэтому эту погреш-
ность при использовании точных выражений (12.14) нли (12.26) следует
определять для каждой конкретной модели ц.
При практических исследованиях составляющих полной погреш-
ности оказалось целесообразно определять различные виды погрешности
в условиях, когда имеет место только данная погрешность, а все дру-
гие погрешности отсутствуют. Например, погрешность решения от не-
точного задания D определяется как
Ad=Y(D)-Y(D); (12.30)
Д" = tf[Y(D), б} — И [У (б), б]. (12.31)
а погрешность метода, т. е. погрешность решения из-за прерывания
итерационного процесса при точных D и отсутствии других погрешно-
стей, — как
Дв= Y (б. а) — Y (б); (12.32)
A"=/7[Y (б, а). б) — И[\ (б), б]. (12.33)
Аналогично может быть записана погрешность решения от неточ-
ности математической модели:
Аи= Y(D. H)-Y(D); (12.34)
Д" = //[Y (б. ,u). б] — И [У (б). б]. (12.35)
Погрешности округления в разрядной сетке ЭВМ при расчетах
обозначим как Ат н . Эти погрешности определяются следующими
выражениями:
Дт= Y (б, г)— Y (б); (12.36)
Д" = И[\ (б. т), б] — 7/[Y (б), б]. (12.37)
Погрешность реализации полученного нз расчета вектора регули-
руемых параметров Y возникает главным образом из-за погрешности
передачи, установки, а также несовпадения времени расчета и уста-
новки значений этого вектора в электрической системе. Расчетное
исследование погрешности реализации методически ничем не отличается
от исследования влияния погрешности исходных данных на резуль-
таты расчетов установившегося режима. Прн этом моделируются си-
стематические нли случайные ошибки в установке вектора Y, а также
производится изменение нагрузок потребителей, соответствующее ошиб-
250
кам из-за неточности прогноза и задания нагрузки на момент реали-
зации оптимального режима в системе. •- ,
В результате расчетного исследования полной погрешности при
управлении режимами электрических систем по выражению (12.14)
получается полная погрешность в абсолютных единицах для каждой
компоненты вектора регулируемых параметров. Для схем большой
размерности покомпонентное определение ошибок в Y и их сопостави-
тельный анализ в абсолютных единицах малопоказательны. Исследо-
вание облегчается, если каждое из слагаемых в выражении (12.14),
имеющее одинаковый физический смысл, представлять в относительных
единицах и в дальнейшем перейти к нормам погрешностей вектора по
' --'’’у-З''' '/:
группам компонент вида
N '
или || Д || т — max | Д< |.
I
Можно анализировать нормы погрешностей при режимных расче-
тах по группам компонент, например по напряжениям узлов, баланси-
рующих по реактивной мощности, по реактивным или активным мощ-
ностям генерации, коэффициентам трансформации и т. д.
Расчетное определение полной погрешности результатов расчета
установившихся и оптимальных режимов. Из-за случайного характера
некоторых видов нагрузки потребителей и внешних воздействий на
параметры сети и режима исходные данные для расчета режимов в об-
щем случае носят случайный характер. Учет случайности информации
при моделировании режимов приводит к более полному описанию про-
текающих в энергосистеме процессов.
Обозначим случайный вектор исходных данных D(/y), где q — со-
стояние системы. Расчет установившегося режима при этом сводится
к определению случайного вектора контролируемых параметров
F[D(^] по D(<7). • _
Пусть точный случайный вектор данных — D(<y), а приближенный—
D(g). Различие между ними объясняется погрешностями определения
вида закона распределения, его числовых характеристик и т. д. Иссле-
дование погрешности при расчетах установившихся режимов по слу-
чайным исходным данным сводится к сопоставлению F[D(9)] и
F[D(9)J. Результатом такого сопоставления является случайный вектор
погрешностей Ai(q). Поскольку в настоящее время практически не-
возможно оценить реальные ошибки в задании случайных исходных
данных, определение погрешностей случайного вектора Д1(<7) не может
дать достоверных количественных результатов и пока представляет ин-
терес лишь в исследовательских целях.
В практике эксплуатации энергосистем режимы рассчитываются
по детерминированным моделям. При этом в качестве исходных дан-
ных обычно принимаются средние значения случайных параметров, вхо-
251
дящих в D(q). Пользуясь детерминированной методикой, важно оцени-
вать погрешности искомых величин, вносимые неучетом случайного ха-
рактера информации.
Пусть F[MD(g)]—вектор контролируемых величин, полученный
из детерминированного расчета по средним значениям исходных дан-
ных AID (q). Сопоставление F[D(</)] и FfAlDfi?)] будем называть ис-
следованием погрешности, вызванной неучетом случайного характера
исходных данных, При таком сопоставлении отклонение F[AfD(<?)] от
математического ожидания случайного вектора F[D(z?)] показывает
среднюю возможную ошибку, а дисперсия1 F[D(?)] определяет ожи-
даемое с некоторой вероятностью отклонение действительного режима
от полученного в результате детерминированного расчета. Эта поста-
новка позволяет получить максимально возможную информацию о по-
грешностях вектора-решения.
Более простым способом оценки погрешностей при использовании
детерминированных моделей является рассмотренное выше сопостав-
ление двух детерминированных векторов контролируемых параметров
по выражению (12.16).
Пусть D и D — точное и приближенное значения вектора исходных
данных Соответственно F(D) и F(D)—точный и приближенный век-
торы— решения. Будем называть сопоставление F(D) и F(D) иссле-
дованием ошибок в детерминированной постановке. Таким путем не-
возможно точно учесть одновременное влияние на вектор — решение
различных по величине и знаку ошибок исходных величин. Детерми-
нированный подход полезен для исследований погрешностей по так
называемому методу наихудшего случая, методу граничных испыта-
ний и т. и.
Таким образом, самым общим подходом является исследование
погрешности в вероятностной постановке. Определение погрешности,
обусловленной неучетом случайного характера исходных данных, дает
наиболее полную информацию при использовании детерминированных
моделей. Наконец, детерминированная постановка полезна для полу-
чения частичных сведений о возможной погрешности результата
расчета.
Исследование погрешностей из-за ошибок исходных данных в де-
терминированной постановке сводится к нахождению разности между
приближенным и точным векторами решения F(D) и F(D), т. е.
к определению Aj=AF по (12.16).
Для сокращения объема вычислений можно применять теорию чув-
ствительности *, т. е. упрощенную методику определения разности AF.
* Применение теории чувствительности не требует обязательного
использования условно-эталонных моделей и методов, как это предпо-
лагается в (12.16).
252
При этом вместо AF определяется дифференциал вектора dF.
Использование дифференциала dF сводится к вычислению линей-
ной части ошибки Ль Применение теории чувствительности, т. е. опре-
деление dF, менее трудоемко, чем расчет нового установившегося ре-
жима.
v Упрощенным подходом к определению погрешностей из-за неучета
случайного характера исходных данных является использование линеа-
ризации уравнений установившегося режима относительно случайных
переменных. Линеаризация зависимостей вносит искажение в искомые
погрешности, но существенно упрощает исследования. При этом задача
со случайными исходными данными может быть решена с помощью
методов, применяемых в детерминированных подходах.
12.2. Применение теории чувствительности
для определения погрешностей
Методы теории чувствительности можно применять для анализа
погрешностей, возникающих на ЭВМ при расчетах установившихся
оптимальных режимов, а также при управлении режимами электриче-
ских систем. Уравнения установившегося режима могут быть записаны
в виде системы нелинейных алгебраических уравнений (12.1) или
(12.5). Физический смысл векторов X и D в (9.5) или (7.2) рассмотрен
в § 7.2.
Предположим, что исходные данные изменились на
AD=dD = D—D, (12.38)
* J ’ ч
где D, D — точное и приближенное значения векторов исходных
данных.
Соответственно F(D) и F(D)—точный и приближенный векторы-
решения или векторы контролируемых величин, определяемые из урав-
нения установившегося режима (12.5). Погрешность вектора-решения
может быть определена как приращение вектор-функции
Ai=AF=F(D)—F(D). (12.39)
теории чувствительности (как и классической
При использовании
ошибок) обычно приращение функции (12.39) для сокращения
вычислений заменяют на ее дифференциал, который опреде-
по выражению
теории
объема
ляется
, dF
dF = — ——dD,
dD
(12.40)
dF
где TJ7
dD
водных вектора — решения F по исходным данным D.
— матрица чувствительности или матрица частных произ-
253
Фактически замена приращения (12.39) на дифференциал (12.40)
соответствует линеаризации неявной функции вектора контролируемых
величин от исходных данных Линеаризация, т е замена приращения
на дифференциал, иллюстрируется рис. 12.2. При малых AD или при
слабой нелинейности F(D) приращение AF можно считать приближенно
равным дифференциалу Линеаризация вносит искажение искомые по
грешности, но существенно упрощает их определение.
Рис. 12.2. Замена при-
ращения вектора кон-
тролируемых величин на
его дифференциал
В некоторых случаях в теории чувствительности предлагается
учитывать в (12.40) производные более высокого порядка (например,
второго). В настоящем параграфе будем рассматривать использование
производных первого порядка
Разберем подробнее два наиболее важных случая: 1) вектор-
функция W есть явная вектор-функция от вектора к жтролируемых
величин; 2) W не является явной функцией от F, но вектор-функция
F — явная функция от X, D В этих случаях по-разному определяется
матрица частных производных вектора контролируемых величин по
dF
исходным данным -—.
dD
1. Вектор-функция W есть явная вектор-функция от вектора конт-
ролируемых величин. Имени такая ситуация имеет место, если вектор
контролируемых величин совпадает, например, с вектором зависимых
переменных (нерегулируемых параметров режима).
Производная неявной функции определяется по выражению
dX
dD
/dW\-l dW
\dX ) dD'
(12.41)
Если вектор контролируемых величин F совпадает с вектором не-
регулируемых параметров режима X, то
dF дХ
dD —dD ’
(12 42)
В этом случае матрица частных производных является пря-
моугольной и имеет столько же строк, скольк< компонент имеют зек-
254
торы X или W. Число столбцов матрицы dF/dD, естественно, совпадает
с размерностью вектора D.
2. Вектор-функция W есть неявная функция относительно F, но
явная функция от X и D. В этом случае компоненты вектора контро-
лируемых величин не совпадают с компонентами вектора нерегули-
руемых параметров. В то же время компоненты вектора F явно зависят
от вектора нерегулируемых параметров режима X н вектора исходных
данных D. Пусть заданы напряжение балансирующего узла, мощности
всех узлов, кроме балансирующего, и проводимости всех линий. Зави-
симыми переменными (компонентами вектора X) будут модули и углы
напряжений узлов.
Предположим, что в вектор контролируемых величин входят по-
токи мощности в линиях. Потоки мощности не входят явно в уравнение
узловых напряжений (12.5), в то же время они определяются через
напряжения узлов (компоненты вектора X), проводимости линий и
заданные мощности в узлах (компоненты вектора исходных данных).
В этом случае потоки мощности будут явной функцией напряжений,
проводимостей линий и заданной мощности в узлах. В свою очередь
напряжения в узлах (компоненты X) являются неявными функциями
проводимостей линий н фиксированных мощностей в узлах X(D), при-
чем эти неявные функции определяются нз уравнения установившегося
режима (12.5). Таким образом, вектор контролируемых величин в рас-
сматриваемом случае есть сложная неявная функция от исходных
данных
F(X, D) = F(X(D), D). (12.43)
Последнее выражение соответствует, например, тому, что потоки
мощности являются сложной неявной функцией от проводимостей ли-
ний и заданных нагрузок в узлах
Матрица частных производных dF/dD в этом случае должна опре-
деляться по выражению производной сложной функции
dF dF
dD^dD
(12.44)
o^dX dD ’
dF I
где— —матрица частных производных, полученная в результате
dD Q
dF
дифференцирования по D явной вектор-фупкции F(X, D); ——матри-
dX
ца част1ых производных, полученная в результате дифференцирования
по X явной вектор-функции F (X, D); —матрица частных производ-
ных, определяемая в соответствии с (12.41).
* Отметим, что в число исходных данных входит напряжение ба-
лансирующего узла, а в состав вектора X—его мощность.
255
Выражение (12.44) учитывает тот факт, что компоненты вектора
X — зависимые переменные. Иными словами, при изменении исходных
данных компоненты вектора X изменяются в соответствии с уравне-
ниями установившегося режима (12.5).
Отметим, что выражение, аналогичное (12.44), использовалось прн
вычислении градиента целевой функции по вектору регулируемых пара-
метров в § 9.2 [см. (9.17)].
Дифференциал вектора F (12.40) близок к приращению AF (12.39)
лишь в тех случаях, когда вектор-функция F(D) близка к линейной
Поэтому область эффективного применения приведенных выше выра-
жений теории чувствительности должна быть обоснована эксперимен-
тальным сопоставлением ошибки и дифференциала ошибки вектора
F при изменении исходных данных. Для режим в, далеких от пре-
дела по устойчивости, и для сетей с хорошо обусловленной матри-
цей проводимостей разница между ошибкой и ее дифференциалом
Для вектора контролируемых величин не будет велика. В то же вре-
мя для режимов, близких к предельным, или для сетей с плохо
обусловленной матрицей проводимостей может потребоваться учет
d2F
вторых производных
Применение теории чувствительности возможно и для анализа
погрешностей в задачах оптимизации режимов электрических систем
[77]. При учете случайного характера исходных данных эффективно
применение статистической линеаризации.
12.3. Погрешности при расчетах установившегося режима
и потерь электроэнергии, оценка состояния
электроэнергетической системы
При расчетах установившегося режима после достаточно боль-
шого числа шагов вектор погрешности итерационного метода опре-
деляется наибольшим по модулю собственным числом матрицы или
оператора, характеризующих итерационный процесс. При расчете
установившегося режима по методу Зенделя повышение точности
расчета напряжений приводит к уменьшению небалансов мощности
в узлах. Последнее может не иметь места, если матрица Yy плохо
обусловлена.
Для оценки устойчивости решения системы линейных уравнении
узловых напряжений и матрицы узловых сопротивлений следует
использовать достаточное условие плохой обусловленности матрицы
узловых проводимостей [6]. Устойчивость решения ухудшается тем
существенней, чем больше различаются сопротивления отдельных
ветвей сети. Прн этом ухудшение устойчивости решения связано с
ухудшением сходимости расчета. Все содержание данного вывода
качественно может быть применено к нелинейной системе уравнений
256
узловых напряжений для режимов, далеких от предела статической
устойчивости; ч
Погрешность округления при решении линейных уравнений уста-
новившегося режима точным или итерационным методом соответ-
ствует эквивалентному возмущению исходных данных. Влияние оши-
бок округления на решение линейных уравнений режима намного
меньше, чем ошибок исходных данных. Для практических расчетов
этот вывод можно распространить и на нелинейные уравнения уста-
новившихся режимов, далеких от предела по статической устойчи-
вости.
'*/ Проведенные в [76] расчетные исследования погрешностей ре-
зультатов расчета установившегося режима позволяют сделать сле-
дующие выводы.
При работе приборов в своем классе точности погрешности из-
мерения уровней напряжений могут достигать: на подстанциях
110—220 кВ*—3,5%, на шинах станций — 2,75%, на подстанциях
500 кВ — 2%. Активные мощности станций могут измеряться с. по-
грешностью до 3%. Мощности активных и реактивных нагрузок
большинства трансформаторов измеряются с погрешностями, близки-
ми к 10 и 15%.
Неточности в нагрузках потребителей влияют на потоки .и сум-
марные потери активной мощности сильнее, чем ошибки в задании
параметров связей. В сетях с длинными и сильно загруженными ли-
ниями .на искомые напряжения большое влияние оказывают погреш-
ности параметров связей.
В нормальных режимах работы рассмотренных сетей за счет
совместных ошибок в исходной информации возможны предельные
погрешности: в исходных напряжениях — 3,8—5%, в потоках актив-
ной мощности — до 26%, в суммарных потерях мощности по сети —
12—14%. В ремонтных и послеаварийных режимах решение более
чувствительно к неточности исходной информации.
Основную часть полной погрешности при расчете нормальных
установившихся режимов составляют ошибки от неточности задания
исходных данных. Для напряжений эти ошибки составляют 95—96%,
для потерь активной мощности — 74—78%, для потоков активной
мощности—58—60% полной погрешности. Ошибки итерационных
Методов меньше 1% полной погрешности.
Приведенные выше значения погрешностей являются максималь-
ными (т. е. возможными с очень малыми вероятностями) при условии
работы измерительной аппаратуры в пределах класса точности. Ука-
занные погрешности могут быть уменьшены при повышении культуры
эксплуатации и использовании системы идентификации.
Исследование влияния неточного задания исходной информации
на результат расчета потерь мощности для сетей большой размерно-
сти можно эффективно осуществлять с помощью регрессионных за-
17—6189
257
внсимостей, построенных методом планирования эксперимента. При
этом уменьшается число расчетов по сравнению с методом статисти-
ческих испытаний и ранжируются исходные данные по степени влия-
ния на погрешность расчета потерь. Для ограничения числа рассмат-
риваемых факторов целесообразно использовать интегральные харак-
теристики погрешности исходной информации.
Анализ полученных регрессионных зависимостей погрешности
расчета потерь мощности от ошибок исходных данных показал, что
эти регрессионные зависимости достаточно точно описываются линей-
ным уравнением. При проведенных расчетах максимальная ошибка
линейной аппроксимации для питающих сетей не превысила 2,5'%,
а для распределительных—0,6%. Максимальная погрешность рас-
четов потерь мощности с вероятностью 0,997 не превысила 10—16%.
Наибольшее влияние на точность определения потерь в питающих
электрических сетях оказывают ошибки в задании активной нагрузки
и генерации. Из параметров схемы замещения большое влияние ока-
зывает погрешность определения активных сопротивлений. Наличие
линейной зависимости между потерями и погрешностью определения
параметров режима позволяет определить эффект, который может
быть достигнут уточнением исходных данных.
Погрешность расчетов потерь мощности из-за неточного задания
исходных данных может находиться в широких пределах, достигаю-
щих 20—30%. Наибольшее влияние в проведенных исследованиях на
эту погрешность оказывали: в питающих сетях — неточность задания
активных мощностей нагрузок и генерации, а в распределительных
сетях — неточность задания токов головного участка.
Погрешность определения потерь мощности может быть значи-
тельно снижена за счет уточнения исходных данных, используемых
в расчетах. Уменьшение ошибок прн измерении активной мощности
до 3—4%, а реактивной до 4—6%, что соответствует измерению
параметров телеизмерительными системами, снижает максимальную
погрешность расчета более чем на одну треть. Наибольший эффект
достигается увеличением точности измерений активной мощности.
Он составляет 70% общего снижения погрешности за счет уточнения
исходных данных. Использование для определения потерь мощности
исходных данных от устройств телемеханики, имеющих цифровое
воспроизведение с максимальной погрешностью 3—5% по активной
и 4—6% по реактивной мощности, позволяет снизить суммарную
погрешность расчета более чем на одну треть.
Методы оценивания состояния электроэнергетических систем
(ЭЭС) применяются для обработки результатов контрольных изме-
рений, выявления ошибочных измерений, а также для выбора состава
и топологии измерений в ЭЭС, т. е. для синтеза или проектирования
системы измерений, что позволяет обоснованно уменьшить расходы на
эту систему и повысить ее качество. Наиболее важно применение
258
оценивания состояния электроэнергетической системы для задачи ана-
лиза ее режима по данным измерений, используемой при автомати-
ческом управлении в темпе процесса, т. е. в автоматизированной
системе диспетчерского управления режимами [42].
Обозначим параметры режима (мощности станций, нагрузки, токи
и т. д.) вектором Z. Представим вектор параметров режима Z как
совокупность двух векторов: Z=(X, Y), где X — вектор зависимых,
a Y — вектор независимых параметров режима. Параметры режима
связаны между собой уравнениями установившегося режима, которые
в самой общей форме можно, записать в виде системы неявных
функций (9.1)
W(Z)=W(X, Y)=0,
(12.45)
где W — вектор-функция.
При расчете установившегося режима независимые параметры Yk
заданы. Зависимые параметры Хк определяются при расчете уста-
новившегося режима.. Число зависимых переменных Хк равно числу
уравнений установившегося режима 2N, т. е. вектор-функция W и
вектор-столбец X имеют одинаковый порядок. Если порядок вектора
Z равен т, то порядок вектора независимых параметров режима Y
равен (т—2N). В зависимости от постановки задачи содержание Y
и X может быть различным.
При изменении значений компонент вектора Y изменяются зна-
чения вектора зависимых параметров X, т. е.
X=X(Y),
(12.46)
причем эта неявная зависимость определяется уравнением (12.45),
Зависимость X(Y) становится явной, если в состав вектора Y вошли
все компоненты напряжений в узлах ЭЭС. Ниже рассматривается
именно этот случай.
Обозначим вектор контролируемых или измеряемых параметров
режима F. В состав этого вектора могут входить напряжения, токи,
перетоки мощностей по- линиям, трансформаторам и другим элемен-
там системы, мощности узлов и т. д. Иными словами, в состав F мо-
гут входить параметры режима или функции от них. Вектор изме-
ряемых параметров с учетом (12.46) можно представить в виде
неявной функции независимых параметров режима:
F(X, Y)=F(X(Y), Y)=F(Y).
(12.47)
Зависимость F(Y) явная, если Y образуют модули и фазы на-
пряжений узлов. В дальнейшем будем обозначать истинные значения
измеряемых параметров режима [т. е. определенные в результате
решения уравнения установившегося режима (12.45)] вектором F(Y),
а значения их телеизмерений на диспетчерский пункт — вектором F.
Вектор значений телеизмерений F можно представить в виде суммы
259
истинных значении измеряемых величин F(X, Y) и вектора ошибок
CF т. е.
F=F(X, Y) + 5f,
или с учетом (12.47)
F=F(Y) + ?f.
Задача оценивания состояния сводится к определению такого
вектора независимых параметров режима Y, при котором норма век*
тора ошибок gF> т. е. норма разности векторов истинных и изме-
ренных контролируемых параметров режима, является наименьшей.
Таким образом, задача оценивания состояния сводится к минимиза-
ции некоторого критерия близости нормы1 разности векторов
11Мк=Н F“ F(Y) II к- (12.48}
Для оценивания состояния ЭЭС будем пользоваться квадратич-
ной функцией
м
T=3^FA’ (12.49>
А=1
где £F^— компонента k вектора £F; Kk—весовой коэффициент, опре-
деляемый размерностью соответствующей компоненты и «доверием»
к Л-му измерению: чем более точным способом получено данное из-
мерение, тем с большим весом оно войдет в функцию <р, называемую
критерием оценивания.
Поскольку точность Л-го измерения определяется дисперсией
ошибки о2*, в качестве весового коэффициента можно выбрать
К=\/&к. (12.50>
Тогда с учетом (12.48) и (12.50) функция (12.49) примет вид
м
?=У}-7[К-Ы*)1Я, (12.51>
°*
где — компонента вектора измерений F&; f*(Y)—компонента век-
тора вычисленных значений Fft(Y).
В матричной форме функция (12.51) может быть записана как.
?=(F-F(Y))TRri (F-F(Y)),
где Rf — ковариационная матрица, на диагонали которой стоят эле-
менты гкк=п2к, индекс «т» означает транспонирование.
1 Как правило, используется 6-норма.
260
функции по компонентам вектора Y (градиент функ-
Определить минимум функции (12.51) можно, приравняв нулю
производные
ции ф):
Матрицы
0.
(12.52>
ду
5Y
dF
-— и Rf имеют столько же строк, сколько компонент в
oY
векторе F. Для умножения матриц в (12.52) необходимо транспониро-
dF dF
вать Так как зависимость F(Y) нелинейная, то матрица —~ также
dY di
зависит от Y, т. е. система уравнений (12.52) нелинейная. Для ее ре-
шения можно использовать ряд методов, в том числе и метод Ньютона.
Применение оценивания состояния уменьшает влияние погреш-
ностей исходной информации на результаты расчетов установившихся
и оптимальных режимов, но ни в коей мере не снимает необходи-
мость исследования погрешностей результатов расчетов указанных
режимов на ЭВМ. Более того, необходимо исследование полной по-
грешности результатов оценивания состояния в ЭЭС. Количественные-
характеристики влияния погрешности исходной информации на ре-
зультаты оценивания состояния ЭЭС в зависимости от параметров!
расчетной схемы ЭЭС, тяжести режима, состава и точности измере-
ния получены А. 3. Гамм, И. Н. Колосок, Г. Н. Ополевой. Опера-
тивный расчет, анализ и контроль за потерями мощности и электро-
энергии в ЭЭС целесообразно осуществлять, используя методы оценки-
состояния в сочетании с существующими способами определения
технологических потерь энергии в сети. Наибольшее влияние на по-
грешность определения потерь мощности методом оценки состояние
оказывают ошибки измерений активных мощностей и напряжений в
узлах сети. Погрешность измерения реактивных мощностей и изме-
нение дисперсии, всех измерений влияют слабее. Потери мощности
при использовании оценки состояния в зависимости от неточности
задания параметров режима могут изменяться в широких пределах,
достигающих 22—24%. Как указано в данном параграфе, для сни-
жения погрешности оперативного расчета потерь мощности необхо-
димо повышение точности измерений исходных данных.
12.4. Влияние погрешностей исходных данных на расчеты
оптимальных режимов по Ut Q и
В практике диспетчерского управления распространена оптими-
зация режима электрических систем перераспределением реактивных
мощностей генерации Qr, изменением уровней напряжения U и ко-
эффициентов трансформации 1
сводящаяся к минимизации сум-
1 В общем случае имеются в виду действительные п' и мнимые пГ
составляющие комплексных коэффициентов трансформации.-
2611
мирных потерь активной мощности АР, что является частным случаем
комплексной оптимизации режима.
Для повышения эффективности решения этой задачи важно опре-
делить возможные интервалы изменения погрешностей в задании ис-
ходных данных и оценить их влияние на точность расчетов опти-
мальных режимов и реализацию соответствующих управляющих воз-
действий в электрических системах.
Исходными данными О при расчетах и управлении оптимальны-
ми режимами по U, Qr и п, кроме накладываемых на контролируе-
мые параметры режима технических ограничений, являются парамет-
ры схем замещения элементов сети, активные и реактивные мощности
Нагрузки и генерации, а также заданные значения модулей tZ в узлах,
где они постоянны. Несмотря на ряд полученных в настоящее время
результатов исследования погрешностей в исходных данных D и
влияние их на результаты расчетов режимов? электрических систем
нельзя считать законченными, главным образом ввиду неадекватности
используемых методических подходов, приближенных математических
моделей и методов и как следствие — трудностей в сопоставлении
полученных результатов.
Ниже приводятся результаты расчетного исследования влияния
ошибок в задании исходных, данных при расчетах оптимальных по
CZ, Qr и п режимов электрических систем с использованием условно-
эталонных математических моделей и методов. Анализируемые по-
грешности исходных данных, а также их влияние представляют ин-
терес: при анализе эффективности оптимизации режима сети и про-
водимых на ЭВМ оптимизационных расчетов; при оценке погрешности
планируемых оптимальных режимов, особенно в случаях, когда ос-
новным источником информации о нагрузках являются результаты
предыдущих контрольных измерений; при исследовании результирую-
щей погрешности управления оптимальными режимами в темпе про-
цесса, т. е. на момент установки управляющих воздействий в систе-
ме, включая погрешность от прогнозирования исходных данных,
нижняя граница которой совпадает с приводимыми ниже погрешно-
стями D.
Под результатом расчета оптимального режима понимают (см.
§ 12.1) минимальное значение целевой функции ДР, оптимальный
вектор регулируемых параметров режима Y и соответствующий ему
вектор нерегулируемых параметров (зависимых переменных) X,
а также ф (X, Y) — явные вектор-функции от этих векторов, т. е.
токи и потоки мощности в линиях и т. д. Систематические и слу-
чайные ошибки в задании исходных данных D вызывают погрешность
'(перерасход Д^) в определении ДР, векторов Y и X, а также
в <р(Х, Y), т. е. приводят к возможности нарушения технических
ограничений, накладываемых на контролируемые параметры режима.
В дальнейшем будем анализировать ошибки в определении це-
левой функции и вектора регулируемых параметров Y. Погрешность
в определении вектора Y (управляющих воздействий) от неточного
задания D определяется аналогично (12.30):
Ad= Y(D)-Y(D). (12.53>
- \ ~ ‘ ’ - £ к*
* *
Точным вектором Y(D) будем считать вектор Y, обеспечивающий
—
min АР, определенный по точным данным D, при точном математи-
ческом описании режима сети, без остаточной погрешности итера-
ционного метода и ошибок округления.
Особый интерес при исследовании погрешностей представляет
разность между значениями потерь AP(Y(D), D) в приближенно
•—
найденном и действительно оптимальном режимах AP(Y(D), D) , на-
зываемая обычно перерасходом целевой функции:
Ap=AP(Y(D), D) — AP(Y(D), D). (12.54),
Влияние случайных ошибок в D на результаты оптимизационных,
расчетов определяют числовые характеристики случайных погрешно-
стей Ад • и соответствующие им характеристики случайного пере-
расхода потерь Ад. Под Ад в этом случае понимается разность,
между приближенным значением целевой функции АР, взятым из.
детерминированного расчета, и точным значением АР, соответствую-
щим случайной реализации (). Среднее значение погрешности расче-
тов характеризуется математическими ожиданиями искомого векто-
ра управляющих воздействий М(Y) и перерасхода потерь М (А^К
Важно оценить и значения предельных ошибок в Y и Ад, вероят-
ность которых обычно принимается около 0,01. Отличие этих зна-
чений от результатов детерминированного расчета является показа-
телем как степени влияния случайных ошибок в D на результаты,
оптимизационных расчетов, так и эффективности реализации де тер т-
минированно полученного Y в электрических системах.
Расчетное исследование влияния систематических и случайных?
ошибок в задании исходных данных невозможно без использования:
условно-эта лонных моделей и алгоритмов. Наличие погрешностей;
математической модели и итерационного метода может исказить, as
в ряде случаев и затруднить расчетное исследование влияния по-
грешностей в D на результаты оптимизации.
Исследование случайных погрешностей дает наиболее полную*
информацию о точности результатов расчета режимов. Детерминиро-
ванная постановка полезна при определении граничных значений?
погрешностей. Упрощенной методикой анализа точности расчетов,
установившихся режимов в детерминированной постановке является
использование дифференциала вектора-решения.
26&
Дисперсии компонент решения чувствительны к отклонениям ве-
роятностных характеристик совокупности псевдослучайных чисел от
теоретической кривой распределения. При исследовании погрешностей
результатов необходимо соизмерять точность расчета числовых ха-
рактеристик решения со значениями искомых погрешностей. Для
определения средних ошибок результатов расчета установившихся
режимов прн объеме реализаций метода статистических испытаний,
равном 300—400, необходимо использовать верхнюю оценку возмож-
ных значений.
Интервалы изменения случайных и систематических погрешностей
в задании D и причины, их вызывающие. Результирующая погрешность
в задании активных сопротивлений линий гя определяется главным
«образом неучетом влияния на гя метеорологических условий вдоль
трасс ВЛ, токовой загрузки линий и находится в пределах
—18^+22%.
Зависимость гя(1, V, tj, учитывающая изменение токовой нагруз-
ки /, температуру окружающей среды t и скорость ветра V, реали-
зована в условно-эталонной модели и использовалась при анализе
погрешностей решения задачи оптимизации режима сети из-за оши-
бок в задании гя.
Расчетный анализ выражений позволяет учесть влияние заземлен-
ных тросов и параллельных цепей прн задании индуктивных сопро-
тивлений ВЛ хя. Неучет параллельных цепей и заземленных тросов
приводит к систематическим погрешностям в задании хя, соответствен-
но равным 1—3% и —(4ч-8)%.
Удельная (на 1 км) активная проводимость линий g* соответ-
ствует потерям на корону ДРкор и при современных конструкциях
линий зависит главным образом от метеоусловий и рабочего напря-
жения. Ошибки в задании емкостных проводимостей ВЛ также обус-
ловливаются метеоусловиями вдоль трасс. Эти систематические ошиб-
ки (преимущественно отрицательные) достигают 25%.
Вариации в задании параметров схемы замещения трансформа-
торов и автотрансформаторов хт, rT, gr и Ьт вызваны, главным об-
разом, неучетом отклонения этих параметров при работе устройств
РПН, а также допусками в определении коэффициентов трансформа-
ции п. потерь и тока холостого хода ДРХ, /х, напряжения и мощно-
сти короткого замыкания UK, &Рк. С учетом допусков в определении
UK суммарная погрешность в задании хт трансформаторов может
находиться в интервале ±17%. Вариации активных сопротивлений
обмоток прн работе РПН трансформаторов не превышают диапазона
изменения коэффициентов трансформации, а погрешности гт, обус-
ловленные изменениями температуры обмоток, не превышают ±12%.
Проведенный анализ изменений хт автотрансформаторов пока-
зал, что предельные ошибки в задании хт для обмоток высокого и
низкого напряжения могут превосходить диапазон регулирования
264
• 'Таблица 12.1
'т: 'Г? т
_ __- 1 > г-
Неучитываемые факторы и причины, вызывающие
ошибки
Компонента
D
Интервалы
возможных
ошибок.
Л/
Систематические ошибки
Систематические погрешности при изме-
рении нагрузок мегаваттметрами
Зависимость гя (I, V, t)
Влияние грозозащитных тросов
Наличие параллельных цепей
Работа устройств РПН
1
Случайные ошибки
Совместные погрешности при измере-
ниях ; • ’ •
Вариации в I, t и V, а также ошибки
в длине линий
Конструктивные отклонения и ошибки в
длине линий
Изменение температуры обмоток •
Допуски в определени ДРк, Ск
Допуски в определении п
—(3»6±7)
1—2
—184- 4-22
1—3
-(4-8);
+ 13
i 1
±15
±10
±16-
± (34-4 }
±12
±10
±10
±2
напряжения. В табл. 12.1 приведены интервалы возможных случай-
ных и систематических погрешностей в. задании нагрузок потреби-
телей, параметров схем замещения элементов сети и причины, их вы-
зывающие. ,
При контрольных измерениях активные РИ и реактивные Qa на-
грузки в энергосистемах в настоящее время определяются по мега-
ваттметрам, мегаварметрам и трехфазным счетчикам, а также пере-
множением показаний амперметров и вольтметров на средневзвешен-
ный cos<p.
Результирующие погрешности измерений мощностей потребителей
при этом различные. При измерении РИ нагрузок с использованием
счетчиков погрешности находятся в пределах 0—4,5% для Ря и
—2,6% для QH, При измерении мегаваттметрами и мегаварметрами;
больших нагрузок обмоток трансформаторов и автотрансформаторов
погрешности составляют для Р« ±3,3ч—10% и для QH ±7,5ч—8,6 .
Малые мощности Qa измеряются мегаварметрами с большими ошиб-
ками; 15'% и более. Перемножение I на U и- на средневзвешенный
coscp(sin<p) приводит к погрешности при измерении Рн, Q„- равной
4- 9,0ч—19,5% и ±17,3-±—27,7%. Вероятность появления больших
погрешностей измерений мала и не превышает 1%.
265
При измерениях мощностей нагрузок случайные погрешности
Трансформаторов тока и напряжения по модулю и углу имеют мате-
матические ожидания, отличные от нуля. Кроме того, имеют место
систематические погрешности, обусловленные потерей напряжения
в кабелях. Погрешности приборов являются преобладающими состав-
ляющими в результирующих погрешностях измерения Рн н QH. Актив-
ные нагрузки измеряются с систематической отрицательной погреш-
ностью, приводящей при измерениях Рн мегаваттметрами к их зани-
жению по отношению к действительным значениям на 3,6—7%. При
измерении QH влияние систематических погрешностей слабее (см.
табл. 12.1).
Методика и оценка влияния случайных и систематических по-
грешностей в D на результаты расчетов оптимальных режимов по Ut
Q и п. Как уже отмечалось, при исследовании чувствительности ре-
шения задачи к ошибкам в задании О необходимо наличие условно-
эталонных модели и метода. В настоящее время разработан ряд
методов, позволяющих оценивать влияние случайных ошибок в ис-
ходных данных на результаты оптимизационных расчетов, а также
рассчитывать оптимальные режимы с учетом случайного характера D.
Одним из приближенных методов оптимизации режимов при слу-
чайном задании D является метод стохастической аппроксимации,
разработанный в Сибирском энергетическом институте СО АН СССР
(СЭИ СО АН СССР) и позволяющий с применением теории неявных
•функций и теории вероятностей аналитически определять числовые
характеристики решения, если известны характеристики случайного
вектора исходных данных D.
Приближенным методом определения числовых характеристик
оптимального режима следует считать и метод статистической линеа-
ризации, разрабатываемый в Новосибирском электротехническом ин-
ституте (НЭТИ). Этот метод предложено использовать для линеари-
зации (в статистн 1еском смысле) целевой функции с итеративным
определением числовых характеристик вектора Y и смещения мате-
матического ожидания целевой функции относительно результата
детерминированного расчета. Применимость этих и других приближен-
ных методов расчетного исследования влияния случайных ошибок в ис-
ходной информации требует дополнительного обоснования. Для этого
необходимо иметь условно-эталонный статистический метод, сравне-
нием с которым можно оценить свойства приближенных методов.
В качестве эталонного метода, позволяющего при заданных за-
конах распределения D получать информацию о случайных искомых
величинах решения, реализован метод статистических испытаний. Раз-
работан алгоритм и создана программа для оценки вероятностных
характеристик погрешностей вектора решения Y и соответствующих
значений Др из-за случайных ошибок в задании исходной инфор-
мации. Особенностью применения метода статистических испытаний
266
применительно к задаче анализа погрешностей расчетов оптимальных
и допустимых режимов электрических систем из-за случайных оши-
бок в задании исходной информации является то, что ошибки в за-
дании отдельных компонент вектора D в общем случае нельзя счи-
тать независимыми. Это относятся к активным и реактивным нагруз-
кам потребителей, коэффициентам трансформации и сопротивлениям
трансформаторов в схеме замещения и т. д. В программе предус-
мотрено зависимое моделирование случайных ошибок в компонентах.
D, а именно — моделирование ошибок в задании Ра и QH с функцио-
нальной связью между ними, в качестве которой используются выра-
жения, полученные из статических характеристик нагрузки узлов.
Для анализа влияния неучета случайного характера информации,
или ошибок от неточного задания D на каждом испытании вычис-
лялся перерасход ДР, для которого, как и для вектора Y и других
параметров, определялись числовые характеристики законов распре-
деления и строилась гистограмма. На каждом испытании оптимиза-
ция режима по U, Q и п вычислялась методом Ньютона второго
порядка. Пэсле каждой вариации ошибки из-за прерывания итера-
ционного процесса оптимизации и неточного соблюдения ограничений
должны быть минимальными, т. е. такими, чтобы остаточная погреш-
ность не искажала результаты эксперимента. Для достижения этого
в качестве исходного приближения задавался оптимальный режим,
соответствующий детерминированному расчету. После варьирования
D обычно требовались одна-две итерации метода Ньютона второго
порядка для дооптимизации режима.
Влияние случайных и систематических ошибок на результаты
оптимизационных расчетов для различных по конфигурации и пара-
метрам (табл. 12.2) пяти схем было оценено по разработанным
программам с учетом рассмотренных выше интервалов изменения
ошибок в задании D. Использование набора тестовых схем в табл. 12.2,
обладающих совокупностью свойств реальных электрических систем,
позволило оценить весь диапазон влияния ошибок в D на решение
данной оптимизационной задачи.
Рассмотрим влияние совместных систематических и случайных
ошибок в задании исходных данных на перерасход ДР (отнесенных
к экономии потерь). При расчетах оптимальных режимов из-за не-
учета метеорологических и режимных факторов, систематически из-
у»
меняющих гл ВЛ, возможны перерасход потерь Др до 15% их
экономии и нарушение технических ограничений: на U — до 0,6%, на
Q—до 2% их предельных значений. Влияние ошибок в задании
хп больше: так, добавочные потери активной мощности достигают
18%, нарушения ограничений на контролируемые U и Q составляют
соответственно до 1,5 и 15%.
Ошибки в определении уровней напряжения из-за неточности
задания хт не превысили 2%, a Q—10%. Погрешности в определении
267
АР при этом для рассмотренных схем составили до 3%, при возмож-
ных избыточных потерях—13—18%. В схеме 5 табл. 12.2, имеющей
виачительное количество автотрансформаторных связей, перерасход
потерь из-за систематических ошибок в задании хт составлял до 25%
полученной экономии потерь. Контролируемые U могут отклоняться
на 2%, a Q — на 8—12% их предельных значений. Совместное воз-
действие систематических погрешностей задания гл, хт приводит
Таблица 12.2
Номер схемы ^иом Число узлов— связей, генера- торов Примечание
1 ПО 5—6, 2 Замкнутая сеть с линиями примерно одинаковой длины и загрузки
2 35, ПО, 220 12—13, 4 Часть ОДУ Сибири с сильно загру- женными связями, неоднородными кон- турами, наличие п', п"
3 ПО 9—11, 3 Часть ОДУ Средней Азин; парамет- ры линий примерно равны; замкнутая сеть
4 ПО, 220 17—19, 2 Схема Читаэнерго; наличие коротких и длинных слабо загруженных линий
5 35, НО, 220, 500 39—43, 7 Схема Красноярскэнерго; наличие не- однородности н сильно загруженных связей, комплексных коэффициентов трансформации
к большему искажению результатов (средний перерасход 18—25%),
чем каждая из них в отдельности. В случае преобладания в схеме
автотрансформаторных связей, наличия большого количества парал-
лельных цепей, параметры которых задаются со значительными по-
грешностями, эффект от оптимизации режима может обесцениваться
на 30—40%.
Влияние рассмотренных ошибок в задании параметров схем за-
мещения уменьшается вводом усредненных систематических поправок
при подготовке D или устраняется прн разработке математических
моделей, в которых предусмотрена корректировка этих параметров
в зависимости от конструктивных, метеорологических и режимных
факторов.
В табл. 12.3 приведены результаты, учитывающие раздельное и
совместное влияние случайных ошибок в задании параметров схем
замещения и нагрузок потребителей на расчеты оптимальных режи-
мов электрических систем. Моделирование случайных ошибок зада-
ния Р„ в диапазоне 9—10% и Q„ в диапазоне 14—15% показало, что
предельные ошибки, вероятность появления которых»—около 0,01%,
268
в определении Ur для рассмотренных схем не превысили 0,4—0,5%
их оптимальных значений при детерминированном расчете.
Предельные погрешности определения активных мощностей гене-
рации составили до ±9% их оптимальных значений при приближении
Рп и Qa из детерминированного расчета.
При моделировании случайных ошибок в QH (с учетом ошибок
в задании Рн) погрешности результата на 16—20% больше.
Таблица 12.3
Интервалы задания погрешности D Предельные ошибки, %, в определении Перерасход целевой функции по отноше- нию к экономии потерь
1 и Q ДР п предель- ный средний
Гл±16 % 1,5—2 2—3 1,8-2 1,2-3,1 16—18 7—11
у Ц- Q О/ Ал /о 1,7—2 2,1-4 1,6—2,2 1,9—3,5 14—16 3—5
п, *т±2; 10 % * 1,8-2,5 1,7—3,8 1,2—2,9 1.2-2,4 12—17 6—9
Р , О +10: 15% 1,6—2,5 1,4—19 2—2,8 1—3,1 19—22 11—14
При совместном дей- ствии 1,7-2,9 16-20 2,1-3,3 4,5-3,5 31—46 15—20
Математические ожидания для большинства компонент вектора
Y((7, п', п") в этом интервале изменения Ря и QH близки к их опти-
мальным значениям при детерминированном расчете. Иными словами,
нелинейность уравнений установившегося режима в указанном диа-
пазоне изменения нагрузок и учет технических ограничений в боль-
шинстве случаев не приводят к заметному отклонению M(Y) от
вектора Y, полученному при нагрузках, соответствующих детермини-
рованному расчету. Максимальное значение избыточных потерь,
вызываемых ошибками в задании нагрузок потребителей с вероят-
ностью около 1%, не превышает 0,7—1% оптимального значения по-
терь или 19—22% получаемой экономии ДР.
(Влияние случайных погрешностей в нагрузках, проявляющееся
в М (Др), равном 11—14% экономии потерь в расчете с детерми-
нированными параметрами, становится заметным для схем и режимов,
Для которых ограничения на функции от Y нарушаются раньше, чем
ограничения на U, п' и п", либо в случае, когда большиство ком-
понент Y и контролируемые параметры находятся в допустимой зоне.
В общем случае перерасход обусловлен двумя факторами: измене-
нием самой целевой функции ДР при учете случайного характера D
и отличием вектора Y от их значений при детерминированных D.
Математическое ожидание экономии ДР при учете случайных
ошибок в задании исходных данных обычно оказывается больше их
значения при детерминированном расчете. Расчетами установлена
существенная роль точности учета технических ограничений и количе-
ства параметров, находящихся на границе допустимой области, при
оценке влияния случайных ошибок в задании D на погрешность
оптимизации режима электрических систем.
В ходе статистических испытаний контролировалась точность со-
блюдения задаваемых числовых характеристик законов распределения
всех компонент D, имеющих случайные погрешности, т. е. математи-
Та блица 12.4
Наличие ошибок (причины появления ошибок) Перерасход %
Систематические в гп 15
Систематические в хл (из-за иеучета параллель- 18
ных цепей)
Систематические в хт (из-за неучета работы РПИ 25
в случае большого количества автотрансформатор- ных связей) 18—25/30—40
Совместные в гя, хя, хт
Совместная случайная в гл, хл, хт 10
Случайная в Рн+10 %, QH±15 % 11—14
Совместные случайные и систематические в пара- 28—35/40—50
метрах схем замещения
Совместные случайные и систематические исход- 29—39/41—54
ных данных
Предельные 37—49 50—62
Устранимые систематические и случайные в гл. 15—23
Х.ч, Хт, Р„, Q
Примечание. В наиболее характерных случаях / в редко встречаю-
щихся случаях.
ческого ожидания Af(D) и дисперсии o(D). По мере достижения за-
данных Af(D) и o(D) для всех компонент D варьирование искомых
Y, X, AD и Дф уменьшается. Установлено, например, что скорость
уменьшения варьирования вектора Y и Др зависит от числа ком-
понент D, точности датчика случайных чисел, его программной реа-
лизации, а также от погрешности итерационного метода. Испытания
прекращались после того, как длины доверительных интервалов,
вычисленные с наперед заданной доверительной вероятностью, стано-
вились несоизмеримо малыми по сравнению с самими числовыми ха-
рактеристиками.
В табл. 12.4 приведены значения средних и предельных перерас-
ходов в целевой функции оптимизации из-за случайных и системати-
ческих ошибок в задании исходных данных.
270
*** «-'‘J • • *
4 - r • i ' ; 4
Если сравнить погрешности в результатах расчетов оптимальных
режимов, вносимые систематическими ошибками задания параметров
схем замещения и случайными ошибками в нагрузках, то можно
утверждать, что их влияние соизмеримо.
Совместные случайные и систематические ошибки в задании Рн,
Qu и параметров схем замещения в рассчитываемых сетях вызвали
предельные погрешности в уровнях С/, достигающие в сетях 500 кВ
3%, а в сетях 110—220 кВ — 4% (7ПОм. Предельный погрешности в
определении ДР составили 4—6% значения потерь в оптимальном
режиме, т. е. около 50—62% их экономии.
Следует отметить существенное влияние систематических погреш-
ностей в параметрах схем замещения на перерасход целевой функции
а нарушение технических ограничений в сравнении со случайными
ошибками в задании этих величин. Ликвидация систематических
ошибок в задании Рн и QH, а также уменьшение ошибок в задании
параметров схем замещения за счет уточнения математического
описания позволят примерно наполовину снизить погрешность реше-
ния задачи оптимизации из-за ошибок в задании D. Устранение
систематических ошибок в задании параметров схем замещения и
нагрузок эквивалентно снижению результирующего перерасхода по-
терь активной мощности при управлении оптимальными режимами
электрических систем по U ,Q и п примерно на 30%.
Проведенные расчетные исследования позволяют сделать следую-
щие выводы.
1. При расчетах оптимальных режимов совместные случайные
ошибки в задании параметров схем замещения и нагрузок потреби-
телей приводят к средним перерасходам потерь на 15*—20%. С малой
вероятностью (около 0,01) предельные значения перерасхода потерь
могут достигать 46%. Совместные систематические ошибки в задании
параметров схем замещения могут в ряде случаев вызвать
30—40%-ный перерасход целевой функции по отношению к экономии
потерь активной мощности; средний перерасход—18 й-25%.
2, Совместные систематические и случайные ошибки в задании
исходных данных могут вызвать 50—62%-ный перерасход потерь
активной мощности по отношению к их экономии. Уменьшение си-
стематических ошибок в задании параметров схем замещения и на-
грузок потребителей позволяет в среднем наполовину снизить влия-
ние погрешностей в задании исходных данных при расчетах опти-
мальных режимов электрических систем.
12.5. Погрешности режимов электрических систем,
оптимальных по 77, Q и п
', «В процессе развития и реализации -методов оптимизации режи-
мов по мере усложнения и усовершенствования вычислительных и
информационных систем используемые математические модели и ме-
271
тоды учитывают все большее количество факторов и становятся
все Солее сложными. В связи с этим большое значение приобретает
задача выбора оптимальных математических моделей и методов. Эта
задача не может быть решена без исследования погрешностей мате-
матического моделирования при расчетах оптимальных режимов элек-
трических систем. Определение погрешностей необходимо прн разра-
ботке автоматизированных систем управления в энергетике для со-
поставления математических моделей и методов, выбора используе-
мой ЭВМ и целесообразной точности исходной информации.
Эффективное использование программ, применяемых в матема-
тическом обеспечении АСДУ для управления оптимальными допу-
стимыми режимами электрических систем, невозможно без оценки
точности • расчетов, выполняемых по этим программам. Точность рас-
четов оптимальных допустимых режимов и повышение обоснованно-
сти применяемых диспетчерских решений приобретают возрастающую
актуальность. Немаловажно это и для задачи минимизации суммар-
ных потерь активной мощности в системе ДР. В общем случае ДР
состоят из нагрузочных потерь в поперечных и продольных прово-
димостях, активных потерь на корону, потерь, связанных с выработ-
кой реактивной мощности, и т. д. Задача минимизации ДР перерас-
пределением реактивных мощностей генерации Q, изменением уров-
ней напряжения U и коэффициентов трансформации л широко рас-
пространена, хотя и является частным случаем более общей задачи —
комплексной оптимизации режима.
Из-за погрешностей расчетов возникают ошибки в определения
ДР, векторов X и Y (совокупность которых образует вектор Z),
а также нарушается выполнение технических ограничений, наложен-
ных на контролируемые параметры.
Как и в предыдущем параграфе, будем анализировать ошибки
в определении целевой функции и вектора регулируемых парамет-
ров Y. Под перерасходом целевой функции Д;У будем понимать раз-
ность в значениях ДР при неточных Y и в действительно оптималь-
ном режиме (12.22). Установка рассчитанного оптимального вектора
Y (управляющих воздействий) сопровождается погрешностью реали-
зации, которая тоже приводит к перерасходу целевой функции и на-
рушению технических ограничений.
Точность решения задачи оптимизации режимов на ЭВМ, а сле-
довательно, и эффективность используемых программ зависят от ряда
недостаточно изученных факторов: выбранного и реализованного ва-
рианта математического описания режима сети (модели), точности
исходных данных, округлений в разрядной сетке ЭВМ н, наконец,
степени завершения вычислительного процесса нахождения миниму-
ма целевой функции. Исследование этих факторов, проведенное в ря-
де работ, указанных в [79], ие закончено по следующим причинам:
для анализа погрешностей расчета и реализации использовались прон
272
граммы, в которых реализовано неодинаковое по точности математи-
ческое описание. При проведении расчетов анализировались режимы»
различных схем с использованием неадекватных методических под-
ходов, погрешности- решения, технические ограничения, способы их
учета, критерии окончания поиска минимума целевой функции, сами:-
целевые функции, а также форма записи уравнений установившегося-
режима. Классы ЭВМ при этом были различными.
Перечисленные обстоятельства, а также противоречивость полу-
ченных разными авторами результатов по анализу погрешностей рас-1
четов и точности реализации параметров режимов в условиях диспет-
черского управления указывают на необходимость продолжения;
расчетных и аналитических исследований погрешностей при управле-
нии режимами электрических систем [79]. Ниже описываются ре-
зультаты, приведенные в . [79].
Методика анализа полной погрешности расчетов и ее составляю-
щих. Полная погрешность расчета на ЭВМ вектора управляющих
воздействий Y в общем случае определяется соотношением (12.13):
A=Y(D, щ a, x)-Y(D). (12.55)
Полный перерасход целевой функции определяется выражением,
аналогичным (12.22):
A^=AP(Y(D, р, а,-с), D) — АР (Y (D), D), (12.56>
где AP(Y(D, р, а, т), D) и AP(Y(D), D) —соответственно значения-•
ДР в приближенно найденном и действительно оптимальном ре-
жимах. - ' ....
— * г 4 .
Анализ полных погрешностей расчетов А и Д^ и их состав-
ляющих при совместном действии по выражениям (12.55), (12.56)-
реализуется поэтапно. Например, вначале имеем пр: ближенное ре-
шение AP(Y(D, ц, а, т), D) и Y(D, р, а, т). Последовательно уточ-
нив математическое описание, устранив ошибки итерационных мето-
дов и округления, исключаем и одновременно оцениваем значения-
погрешностей А„, А^, Аа, Д^, Ах, А, по выражениям (12.30) —
(12.37), после чего, исключая систематические ошибки в D и оценивая*
влияние случайных погрешностей входных данных, рассчитываем дей-
ствительно оптимальные режимы, т. е. AP(Y(D), D) и Y(D). Иссле-
дование полной погрешности расчетов и ее составляющих возможно-
и в обратной последовательности.
Выражения (12.30) — (12.37) можно использовать для прибли-
женной оценки отдельных составляющих А и А^ , анализа соотно-
шения этих составляющих при совместном действии. По мере внед-
рения оптимизационных расчетов в практику диспетчерского управ-
ления полная погрешность расчетов А и Д^ должна дополняться
погрешностью реализации управляющих воздействий в электрической*
273«
18—6189
системе Лреал и д£*ал, определяемой по (12.29). Погрешность реа-
лизации получаемого из расчета вектора Y возникает из-за ошибок
прогноза параметров режима н схем замещения на момент реализа-
ции Y, а также из-за погрешности в передаче и установке управляю-
щих воздействий в системе.
Для расчетного исследования составляющих полной погрешности
необходимо использовать условно-эталонные математическую модель
и метод, позволяющие рассчитывать оптимальные режимы без оши-
бок А р, и Дв. Анализ погрешностей математической модели режима
сети Ди и необходим также для обоснованного учета тех или
иных факторов в математическом описании режима сети. Погрешно-
сти Д^ и А" отсутствуют только прн определенной совокупности
факторов, учитывающих реальные зависимости и связи в объекте
управления, т. е. при расчетах по программам с условно-эталонным
математическим описанием режима. Наличие такого описания — не-
обходимое условие при исследовании влияния всех составляющих
полной погрешности расчетов.
Эталонная модель установившегося режима необходима и при
оценке погрешности реализации рассчитанного вектора Y в электри-
ческих системах. Реализация приближенного Y в системе моделирует-
ся расчетом установившегося режима при векторе Y(D, р, а, т) с
использованием точной модели и данных.
.В качестве условно-эталонного математического описания опти-
мального режима сети программно реализована модель, точно учи-
тывающая нелинейные уравнения установившегося режима, ограниче-
ния в виде неравенств, накладываемые на основные контролируемые
параметры. Кроме того, в модели предусмотрен учет статических
характеристик нагрузок потребителей (СХН), потерь активной мощ-
ности на корону прн хороших и неблагоприятных метеорологических
условиях на трассе линий электропередачи, изменений пределов по
напряжению в узлах с трансформаторами в зависимости от изме-
нения п, реактивной мощности источников, потерь активной мощно-
сти на выработку Q, коррекции сопротивлений обмоток трансформа-
торов по мере изменения п. Математическое описание сети, вклю-
чающее учет этих факторов, принималось за точное, а приближенные
модели образовывались исключением тех или иных факторов из точ-
ного описания.
В качестве условно-эталонного математического метода, позволяю-
щего рассчитывать оптимальные режимы практически без ошибок от
прерывания процесса оптимизации, использовался метод второго по-
рядка. Итерационные процедуры метода второго порядка, реализо-
ванные на алгоритмических языках АЛГОЛ н ФОРТРАН, и его
ускоряющие модификации использовались для исследования состав-
ляющих полной погрешности расчетов, в частности для оценки по-
.274
грешности итерационных методов при определении Да и
Влияние случайных и систематических ошибок в задании пара-
метров схем замещения и нагрузок потребителей на результаты рас-
четов оптимальных режимов по U Q и п подробно рассмотрено
в § 12.4.
Для оценки погрешности из-за ошибок округления Дт и их влия-
ния на ход итерационного процесса один и тот же алгоритм расчета
оптимальных режимов методом второго порядка был реализован на*
ЭВМ с разной точностью выполнения арифметических операций. Раз-
работанные математические модели и методы использовались при*
исследовании составляющих полной погрешности расчетов и реали-
зации оптимальных режимов на примере схем пяти реальных элек-
трических систем, различающихся по конфигурации и параметрам.
Составляющие полной погрешности расчетов и реализации опти-
мальных режимов в ЭС. Погрешность оптимизационных расчетов
из-за неучета в модели режима сети статических характеристик на-
грузок зависит от числа узлов, напряжение в которых не может
поддерживаться" постоянным существующими средствами регулировав
ния, состава и свойств нагрузок потребителей в таких узлах.
При расчетах оптимальных режимов с учетом СХН и без такого-
учета интервал допустимого изменения U принимался численно рав-
ным ошибкам измерения напряжения на стороне 6—10 кВ при его
регулировании, т. е. в диапазоне менее ± (2-4-2,5) % ^Ном. В настоя-
щее время постоянство напряжения в нагрузочных узлах практически
невозможно поддерживать с большей точностью. Предполагалось, что
ущерб у потребителей при изменении U в таком диапазоне ввиду
его неощутимости можно не учитывать. Состав потребителей в узлах
нагрузки принимался типовым.
Отличие состава потребителей от типового незначительно влияет
на характер СХН в указанном диапазоне изменения U. В силу этого
погрешность расчетов от учета СХН типовыми характеристиками
вместо точных, но не всегда известных расчетчику, как правило, на
порядок меньше ошибок из-за неучета действительных свойств на-
грузок в узлах с изменяющимся U. Расчеты указывают на важность
учета этого фактора, в противном случае реализация рассчитанных
оптимальных режимов всегда будет сопровождаться перерасходом
ДР, соизмеримым с получаемой экономией потерь. Необходимость уче-
та СХН будет уменьшаться по мере ввода в эксплуатацию средств,,
обеспечивающих постоянство U в нагрузочных узлах с большей точ-
ностью. •_
Важным фактором математического описания оптимальных ре-
жимов по U, Q и п является учет зависимости потерь на корону ДРК
от напряжения и метеоусловий вдоль трасс ВЛ 220—1150 кВ. Услов-
но-эталонный учет изменения ДРК от U реализован по зависимостям,
существенно отличным от квадратичных. Оптимизационные расчеты
18* 275-
для плохой погоды следует выполнять при повышенных (до 25%)
значениях удельных емкостных проводимостей ВЛ.
Расчетами установлено, что минимизация нагрузочных потерь
в продольных сопротивлениях схем замещения ДРГ, сопровождаю-
щаяся, как правило, повышением U, может вызвать рост ДРК (н как
•следствие — рост результирующих потерь ДР), соизмеримый со сни-
жением ДРИ. Неучет точных зависимостей ДРК(С/), особенно для
плохой погоды, как л неучет СХН в отдельных узлах при оптими-
зационных расчетах, может привести к получению такого вектора
¥(D, р), установка которого в системе вызовет не снижение,
а рост ДР.
Изменения ДРК определяются располагаемым регулировочным
диапазоном ДРК и ограничениями на уровни напряжения в сети. Ре-
гулировочный диапазон U для сетей 220 кВ, а следовательно, и от-
носительное изменение ДРК выше, чем в сетях 500 кВ. Относительное
уменьшение ДРН по мере снижения номинального напряжения воз-
растает. Минимизация нагрузочных потерь при хорошей погоде без
учета наличия и изменения ДРК в сетях 220—500 кВ может сопро-
вождаться погрешностью Д^, равной 10—20% экономии ДРИ.
Происходит это за счет увеличения потерь на корону, которые в слу-
чае хорошей погоды обычно не превосходят 4—6% ДРИ.
Анализировались соотношения ДРи и ДРК для двух характерных
режимов проектируемой линии 1150 кВ при соблюдении ограничений
на перетоки активной мощности и уровни напряжения *. Минимиза-
ция ДРК в линиях 1150 кВ при плохой и хорошей погоде приводит
к численно большему снижению активной мощности генерации, чем
снижение этой мощности за счет минимизации ДРН. Расчеты под-
твердили необходимость учета зависимости ДРК от U по соотноше-
ниям, отличным от квадратичных. По мере ухудшения погоды ДРК
могут быть снижены понижением U внутри допустимой зоны.
При неучете СХН в отдельных узлах, равно как и из-за неучета
_ДРК от U при плохой погоде на отдельных участках ВЛ 220—500 кВ,
перерасход целевой функции после реализации приближенного
Y(D, и) составляет не менее 20—40% возможного снижения сум-
марных ДР.
Немаловажное значение при расчетах оптимальных допустимых
режимов ЭС и анализе ошибок решения имеют погрешности учета
технических ограничений, а также способы алгоритмического учета
их изменений в зависимости от параметров режима. В работе ана-
лизировались ошибки расчетов, обусловленные неучетом изменений
•ограничений на реактивные мощности источников, а также пределов
1 Исследование режимов выполнялось совместно с Энергетическим
институтом им. Г. М. Кржижановского.
276
напряжения на высокой стороне трансформаторов в зависимости от
изменений их п.
Для оценки влияния ошибок в задании пределов реактивных
мощностей источников Qnp на ход итерационного процесса и погреш-
ность в определении Y и Дя для генерирующих узлов зависимость
Qnp(l7, Рг), отн. ед., представлялась нелинейным уравнением вида
Qnp=0,2(—-0,34 +0,92 — . (12.57)
Как показали расчеты оптимальных режимов, в которых Q ис-
точников без учета (12.57) находились на пределе, учет изменения
Qnp приводит к расчету такого вектора Y(D, р), реализация которого
в системе, как правило, не вызывает изменения Qnp. Реализация
Y D, р,), однако, сопровождается увеличением нагрузочных потерь на
12—16% по отношению к экономии, так как приближенные U и Qnp
меньше действительно оптимальных. При расчетах оптимальных ре-
жимов, .в которых Q находятся в допустимой области, учет измене^
ния Qnp зависимостью (12.57) практически не повышает точности
проводимых расчетов.
Неучет изменения допустимых напряжений обмоток трансфор-
маторов Unp в зависимости от изменения п при расчетах оптималь-
ных режимов также приводит к различиям в определении искомых
величин. При анализе погрешностей в решении из-за неучета этого
фактора учитывалась как зависимость от п пределов по U на высо-
кой стороне трансформаторов, так и зависимость от п сопротивлений
обмоток этих трансформаторов (хт и гт). Учет этих зависимостей
в математическом описании обеспечивает расширение допустимой
области по уровням U и Q и дополнительное снижение ДР на
15—27%.
Погрешность определения ДР возникает и от неучета потерь
активной мощности на выработку Q—ДР<?. Потери ДР$ составляют
в среднем от 2,5 до 3,5% нагрузочных потерь. При расчетах опти-
мальных режимов ДР<?, как правило, уменьшаются, обеспечивая тем
самым дополнительное уменьшение ДР. Таковы погрешности в реше-
нии задачи, обусловленные упрощениями математического описания
при оптимизации режима по U, Q и п.
Был выполнен анализ предельно возможных случайных и систе-
матических погрешностей в реализации вектора управляющих воздей-
ствий и было проведено расчетное исследование влияния Дреал на точ-
ность управления оптимальными режимами. В результате расчетов
установившихся режимов при моделировании случайных погрешностей
в реализации регулируемых параметров Y в сочетании со случайными
ошибками прогноза Рн и QH получены статистические характеристики
погрешностей реализации. Средние погрешности реализации в целевой
функции составили 8—16% экономии потерь.
277
Случайные ошибки в задании нагрузок потребителей и парамет-
ров схем замещения в среднем могут вызывать 15—20%-ные пере-
расходы целевой функции. С малой вероятностью Ар могут дости-
гать 46%. Совместные систематические ошибки в задании параметрон
схем замещения приводят к 30—40%-ному обесцениванию проводимых
расчетов. Влияние случайных ошибок в D, проявляющееся в отличии
математического ожидания Af(Y) от значений детерминированного
расчета, характерно для схем и режимов, для которых большинство
ограничений на функции от Y нарушается раньше, чем ограничения
на Y, либо при нахождении компонент вектора Y в допустимой зоне.
Проведенные расчеты указывают также на существенную роль
ошибок от прерывания итерационного процесса поиска минимума
АР. Для схем большой размерности, загрузки и связности перерасход
потерь из-за используемых градиентных методов может составить до
18—20% их действительной экономии. Приблизительно такая же
была погрешность Аа при расчетах режимов методом второго по-
рядка, прн которых направление спуска контролировалось с исполь-
зованием градиента, а шаг подбирался методом экстраполяции. По-
грешность расчетов от прерывания процесса поиска минимума ДР
с преобразованием матрицы Гессе к положительно определенной при
расчетах методом второго порядка при одинаковых затратах машин-
ного времени для этих схем была меньше.
Расчетами установлено незначительное влияние на ход вычисли-
тельного процесса ошибок округления в разрядной сетке ЭВМ. Это
влияние несколько возрастает для расчетов режимов схем большой
размерности, связности и загрузки (значение составило 2—4%).
Оценка полной погрешности расчетов оптимальных режимов.
Прн приближенных р, D, а и т значение полной погрешности сильно
зависит от соотношения интервала изменения D, факторов, учиты-
ваемых в приближенных моделях ц, погрешности итерационных ме-
тодов. Поэтому интервалы изменения средней величины перерасхода
целевой функции по отношению к действительной ее экономии нахо-
дятся в широких пределах (—30—85%).
Расчетное исследование составляющих полной погрешности управ-
ления оптимальными режимами, результаты которого сведены
в табл. 12.5, выполнялось в следующей последовательности.
1. Вначале с использованием условно-эталонных модели и ме-
тода оценивалось влияние возможных случайных ошибок в задании
параметров схем замещения и нагрузок потребителей на точность
решения задачи оптимизации режима по U, Q и п. Было установлено
не более чем 15—20%-ное отличие средних перерасходов М (Ар)
от потерь в детерминированном расчете, характеризующее влияние
случайных ошибок в D при оптимизационных расчетах.
278
2. Исключение существующих систематических ошибок в задании
Ри, равных 4—7%, эквивалентно увеличению эффекта решения зада-
чи до 5%. Уменьшение случайных ошибок в задании Рн до 7,5%,
a Qu До 8,5% приводит к уменьшению перерасхода Д^ примерно
на 6—7% при решении задачи (по сравнению с п. 1). Отличие М (Др)
от ДР при детерминированном расчете при этом уменьшается с 15—20
до 9-13%.
Таблица 12.5
Условия расчетов
Средний (предельный)
перерасход отне-
сенный к экономии АР,
%
Учет случайного характера D
Уменьшение случайных ошибок в Рн до
7,5 % и Q —до 8,5 %
Наличие устранимых за счет уточнения мо-
дели систематических ошибок в гя, хя, хт
Уточнение математической модели за счет
учета изменения Q и U
Наличие короны на участках ВЛ при пло-
хой погоде или СХН в отдельных узлах
Ошибки итерационных методов
Результирующая погрешность расчетов
Погрешность реализации
Результирующая погрешность управления
Уменьшение: Д^—до 10% и менее; Д^ол—
до 11%; Д0~Д° 13%; Д^—до 15%
До 15—20 (31—46)
До 9—13
До 11—18
10—20/15—27
Не менее 20—40
8—11/11—14
45—69/54—78
8—12/9—14
51—75/60—85
До 32-40
Примечание. В наиболее характерных случаях/в редко встречаю-
щихся случаях.
3. Загрубленнем модели оценивалось влияние устранимых оши-
бок в задании параметров схем замещения линий и трансформаторов,
которое составило в Д^ 11—18% возможной экономии потерь.
4. Неучет .в модели потерь активной мощности на короиу для
ВЛ 220—500 кВ прн хорошей погоде обусловливает перерасход ДР
на 10—20%. Неучет изменений ограничений, накладываемых на Q и
U, вызывает увеличение Д^ иа 15—27% в наименее благоприят-
ных (редко встречающихся) случаях. Как правило, такой перерасход
составляет около 10—20% (см. табл. 12.5).
5. Было установлено, что решение задачи оптимизации исполь-
зуемыми в настоящее время итерационными методами обесценивается
на 8—14% (как правило, имеет место недооптимизация режима).
Проведенные исследования показали, что результирующие по-
грешности расчетов и реализации таковы, что они прн существующих
279
моделях и алгоритмах, точности сбора исходных данных, ошибках
прогноза и точности реализации параметров режима обесценивают
проведение расчетов оптимальных режимов. Это затрудняет выявле-
ние резервов повышения экономичности режима в системах и сни-
жает обоснованность принимаемых решений при управлении опти-
мальными режимами электрических систем по Ut Q и п.
Полная погрешность управления может быть снижена примерно
наполовину за счет устранения систематических ошибок в задании:
параметров схем замещения, измерения мощностей нагрузок, генера-
ции, уровней напряжения н учета изменений ограничений на U и Q
в узлах, а также снижения ошибок итерационных методов оптимиза-
ции. Погрешность управления также снижается при учете изменения
потерь на корону в зависимости от U и статических характеристик
нагрузок.
Приведенные расчетные исследования позволяют сделать следую-
щие выводы.
1. При расчетах оптимальных режимов электрических систем по
напряжению, реактивным мощностям, генерации и коэффициентам
трансформации перерасход целевой функции составляет из-за: воз-
можных случайных ошибок в задании параметров схем замещения
и нагрузок потребителей — в среднем 15—20%, погрешности мате-
матического описания — 10—27%, ошибок итерационных методов —
8—14% и округления—1—3% экономии потерь активной мощности.
2. Результирующая погрешность управления может в среднем из
50—85% обесценить эффект от минимизации потерь активной мощно-
сти в электрических системах.
3. Устранением систематических ошибок в задании параметров
схем замещения элементов сети, в измерении нагрузок потребителей»
напряжений и мощностей генерации, учетом в моделях изменений
пределов по напряжению, реактивной мощности генерации, потерь на
корону, а также снижением ошибок итерационных методов до 10%
и меиее перерасход потерь активной мощности при управлении опти-
мальными режимами может быть снижен до одной трети их эко-
номии.
Список литературы
1. Электрические системы/ В. А. Веников, А. А. Глазунов,
Л. А. Жуков и др.; Под ред. В. А. Веникова. М.: Высшая школа.
1971. Т. II: Электрические сети.
2. Справочник по проектированию электроэнергетических систем/
В. В. Ершевич, А. Н. Зейлннгер, Г. А. Илларионов и др.; Под ред.
С. С. Рокотяна и И. М. Шапиро. М.: Энергоатомиздат, 1985.
3. Максимович Н. Г. Линейные электрические цепи и их преобра-
зование. М.—Л.: Госэнергоиздат, 1961.
4. Теоретические основы электротехники/ П. А. Иоикнн,
Н. А. Мельников, А. И. Даревский и др.; Под ред. П. А. Ионкиуа.
М.: Высшая школа, 1965.
5. Нейман Л. Р., Демирчян К. С. Теоретические основы электро-
техники. Л.: Энергоиздат, Леннигр. отд-ние, 1981. Т. 1.
6. Идельчик В. И. Расчеты установившихся режимов электрических
систем. М.: Энергия, 1977.
7. Демидович Б. П., Марон И. А. Основы вычислительной матема-
тики. М.: Паука, 1970.
8. Электрические системы: Математические задачи электроэнергии/
В. А. Веников, Э. Н. Зуев, И. В. Литкенс и др.; Под ред. В. А. Вени-
кова.—2-е изд., перераб. и доп. М.: Высшая школа, 1981.
9. Электроэнергетические системы в примерах и иллюстрациях:
Учеб, пособие для вузов/ Ю. Н. Астахов, В. А. Веников, В. В. Ежков
.и др. М.. Энергоатомиздат, 1983.
10. Брамеллер А., Аллан Р., Хэмэм Я- Слабозаполнениые матрицы:
Анализ электроэнергетических систем. М : Энергия, 1979.
11. Тьюарсон Р. Разреженные матрицы. М.: Мир, 1977.
12. Применение цифровых вычислительных машин в электроэнерге-
тике/ О. В. Щербачев, А. Н. Зсйлигер, К- П. Кадомская и др.; Под ред.
О. В. Щербачева. Л.: Энергия. Ленингр. отд-ние, 1980.
13. Методы оптимизации режимов энергосистем/ В. М. Горнштенн,
Б. П. Мирошниченко, А. В. Пономарев и др.; Под ред. В. М. Горн-
штейна. М.: Энергия, 1981.
14. Жуков Л. А., Стратан И. П. Установившиеся режимы слож-
ных электрических сетей и систем: Методы расчетов. М.: Энергия, 1979.
15. Веников В. А., Суханов О. А. Кибернетические модели элек-
трических систем. М.: Энергоиздат, 1982.
16. Гамм А. 3. Методы расчета нормальных режимов электроэнер-
гетических систем на ЭВМ. Иркутск: Изд-во ИПИ, 1972.
17. Stott В. Review of load flow calculation methods. Proc. IEEE,
July 1974. Vol. 62, № 7. P. 64—81.
18. Фазылов X. Ф., Насыров T. X. Линейные расчетные модели
сетей электрических систем. Ташкент: Изд-иие Фан УзССР, 1982.
281
19 Фаддеев Д. А., Фаддеева В. И. Вычислительные методы линей-
ной алгебры. М.: Физматгиз, 1963.
20. Крумм Л. А. Методы приведенного градиента прн управлении
электроэнергетическими системами. Новосибирск: Наука, 1977.
21. Homer Е. Brown. Unsatisfactory system voltages near the ope-
rating range. Proceedings of the 7th PSCC, Lausanne, 1981. P. 807—810.
22. Васин В. П. Структура области существования самоустанав-
ливающихся режимов электроэнергетических систем в пространстве
активных мощностей// Изв. АН СССР Энергетика и транспорт. 1981.
№ 1. С. 6—18
23 Васин В. П. Расчеты режимов электрических систем/ Пробле-
ма существования решения Учеб, пособие для вузов. М.: Изд-во МЭИ,
1981.
24 Васин В. П. Гранина области существования режима трехма-
шинной электрической системы// Изв. АН СССР. Энергетика и тран-
спорт. 1982. .V? 2. С. 40—45.
25. Виноградов А. А., Идельчик В. И., Лазебник А. И. Расчетное
исследование области существования решения уравнений установив-
шегося режима и соотношение между пределами по существованию и
статической апериодической устойчивости// Вопросы применения мате-
матических методов прн управлении режимами и развитием электриче-
ских систем. Иркутск: Изд-во ИПИ. 1975. С. 22—50.
26. Идельчик В. И. Пример анализа существования и единствен-
ности решения уравнений установившегося режима// Электричество.
1983. № 6. С. 56—59.
27. Идельчик В. И. Предел по существованию решения уравнений
установившегося режима// Вопросы применения математических мето-
дов при управлении режимами н развитием электрических систем.
Иркутск: Изд-во ИПИ 1975. С. 6—22.
28. Веников В А. Переходные электромеханические процессы в
электрических системах М Высшая школа, 1978.
29 Баринов В. А., Совалов С. А. Сходимость итерационных про-
цессов установления режимов как критерий статической устойчивости//
Электричество. 1977. № 2 С. 1—7.
30. Фихтенгольц Г. М. Курс дифференциального и интегрального
исчисления. М. Наука. 1970. Т. 1.
31. Идельчик В. И. Точность математического моделирования при
управлении эксплуатацией электрических систем. Иркутск: Изд-во
ИПИ, 1971.
32 Автоматизация управления энергообъединениями/ В. В. Гончу-
ков, В. М. Гориштейн, Л. А Крумм и др.; Под ред. С. А. Совалова.
М.: Энергия, 1979
33. Калюжный A. X., Соколов Ю. В., Греб А. А. Выбор алгоритма
расчета послеаварийных режимов при больших небалансах мощности в
энергосистеме и анализ апериодической устойчивости таких режимов//
Изв. СО АН СССР Сер. техн. наук. 1977. № 13 Вып. 3. С. 101—106.
34. Веников В А, Идельчик В. И. Методы оптимизации управле-
ния планирования больших систем энергетики. Оптимизация развития
и функционирования/ Электрические станнин, сети и системы// Итоги
науки и техники. М.: ВИНИТИ. 1974 Т. 7.
35. Маркович И. М. Режимы электрических систем.—4-е изд. пе-
рераб. и доп. М.: Энергия, 1969.
36 Электрические системы// Электрические расчеты, программиро-
вание н оптимизация режимов/ В. А. Веников, В. И. Горушкин,
И. М. Маркович и др.; Под ред. В. А. Веникова. М.: Высшая школа,
1973. Т. 4
282
37. Совалов С. А. Режимы Единой энергосистемы. М.: Энергоатом-
издат, 1983.
38. Proceedings of the Eighth Power Systems Computation Confe-
rence. Helsinki, 1984.
39. Веников В А., Журавлев В. Г.. Филиппова Т. А. Оптимизация
режимов электростанций и энергосистем. М.: Энергонздат, 1981.
40. Веников В. А., Идельчик В. И., Лнсеев М. С. Регулирование
напряжения в электрических системах. М. Энсргоатомиздат, 1985
41 Dy Liacco Т. Е. Real — Time Computer Control in Power Sys-
tems. Proc. IEEE, July 1974, Vol. 62, N 7. P. 23—35.
42. Гамм A. 3. Статистические методы оценивания состояния элек-
троэнергетических систем М.: Наука, 1976
43. Применение ЭВМ для автоматизации технологических процес-
сов в энергетике/ М. А. Беркович, Г. А. Дорошенко, У. К. Курбанга-
лиев н др.; Под ред. В А Семенова М.: Эиергоатомиздат, 1983.
44 Электрические системы // Автоматизированные системы /
В. А. Богданов, В. А. Веников, Я. Л. Лугннский и др.; Под ред.
В. А. Веникова. М.: Высшая школа. 1979. Т. 7.
45. Щербина Ю. В., Банин Д. Б., Скрипник А. Н. Анализ устано-
вившихся режимов электрических сетей на основе метода свободного
выбора заданных и искомых величии/ Киевский политехи, ин-т. Киев,
1982. Деп. в УкрНИИТИ 11.06.82, № 3576—82.
46. Маркушевнч Н. С. Регулирование напряжения н экономия
электроэнергии. М Эиергоатомиздат, 1984
47. Мельников Н. А., Росман Л. В Принципы автоматического ре
гулнрования напряжения и реактивной мощности в питающих сетях//
Электричество. 1971. № 8. С. 14—19.
48 Баравец В. Н., Тимофеев В. А., Элиассон Л. А. Комплекс про-
грамм расчета установившихся и оптимальных режимов электрической
сети// Снижение потерь и повышение качества электроэнергии в элек-
трических сетях энергосистем/ Тез. докл. научи, конф, к Всесоюзному
научно-техническому совещанию. Л.: ВНИИ Г. 1984. С. 11—13.
49. Баркан Я. Д. Регрессионные принципы управления энергетиче-
скими системами: Автореф. дис. ... д-ра техн. наук. М., 1974.
50. Баркан Я. Д. Регулирование напряжения на электростанциях//
Электричество. 1978. № 11 С 4—10
51. Гусейнов Ф. Г., Мамедяров О. С. Экономичность режим в
электрических сетей. М.; Эиергоатомиздат, 1984.
52. Пухов Г. Е., Щербина Ю. В., Качанова Н. А. Статистические
эквиваленты электрических систем для управления в реальном режи-
ме// Электронное моделирование/ Киев. 1983. № 4 С. 75—80.
53. Применение статистических эквивалентов электрических систем
для оперативных расчетов/ Ю. В. Щербина, Н. А. Качанова, Ю. Е. Ло-
ситский и др. Киев: ИЭД АН УССР. Препринт-881, 1984.
54. Маркушевнч Н. С. Регулирование напряжения и реактивной
мощности// Снижение потерь и повышение качества электроэнергии в
электрических сетях энергосистем/ Тез. докл. научн. конф, к Всесоюз-
ному научно-техническому совещанию Л.: ВНИЙГ. 1984. С. 117—140.
55 Мельников Н. А Электрические сети и системы. М.: Энергия,
1975.
56. Глазунов А. А., Глазунов А. А. Электрические сети и системы.
М.—Л.: Госэнергоиздат, 1960.
57. Снижение потерь энергии в неоднородных замкнутых электри-
ческих сетях за счет применения реакторов продольного включения/
Д П Анисимов, Е. О. Ильина, II А. Иваницкая и др.// Снижение по-
терь н повышение качества электроэнергии в электрических сетях энер-
283
госистем/ Тез. докл. научи, конф, к Всесоюзному научно-техническому
совещанию. Л.: ВНИИГ. 1984. С. 11—13.
58. Щербаков И. С., Клюев Ю. Б. Планирование и учет потерь
электроэнергии в электрических сетях: Учеб, пособие для вузов. Сверд-
ловск: Изд-во УПИ, 1983.
59. Временная инструкция по расчету и анализу потерь электро-
энергии в электрических сетях энергосистем/ Главтехуправление Мин-
энерго СССР. М.: СПО ОРГРЭС, 1976.
60. Инструкция о порядке подготовки, передачи и автоматизиро-
ванной обработки отчетных данных по потерям электроэнергии в элек-
трических сетях Минэнерго СССР/ И. С. Щербаков, Н. С. Юсина,
В. П. Андрианов и др. М.: Союзтс энерго, 1983.
61. Потери электроэнергии в электрических сетях энергосистем,
В. Э. Воротницкнй, Ю. С. Железко, В. Н. Казанцев и др.; Под ред,
В. Н. Казанцева. М.: Энергоатомиздат, 1983.
62. Поспелов Г. Е., Сыч Н. М. Потери мощности и энергии в элек-
трических сетях/ Под ред. Г. Е. Поспелова. М. Энергоиздат, 1981.
63. Железко Ю. С. Компенсация реактивной мощности в сложных
электрических системах. М.: Энергоатомиздат, 1981.
64. Комплекс программ для оперативного анализа и планирования
режимов энергосистем на ЭВМ М-222/ С. Г. Бабаев, А. 3. Гамм,
И. Л. Плотников и др.// Статистическая обработка оперативной ин-
формации в электроэнергетических системах. Иркутск: Изд-во СЭИ
АН СССР. 1979. С. 164—177.
65. Щербина Ю. В., Бойко Н. Д.. Бутенко А. Н. Снижение тех-
нологического расхода энергии в электрических сетях. Киев: Техника,
1981.
66. Алберт А. Регрессия, псевдоинверсия и рекуррентное оцени-
вание. М.: Наука, 1977.
67. Афифи А., Эйзен С. Статистический анализ: Подход с исполь-
зованием ЭВМ: Пер. с англ. М.: Мир, 1982.
68. Щербина Ю. В., Гулевич В. А. Методические указания по ана-
лизу и планированию технологического расхода энергии в электриче-
ских сетях. Киев: Изд-во КПИ, 1981.
69. Шапиро И. 3., Бабии Р. М. Математическая модель для рас-
чета потерь энергии в сложнозамкнутых электрических сетях// Энерге-
тика. 1983. № 6. С. 37—40.
70. Таблицы планов эксперимента для факторных и полип миаль-
ных моделей/ В. 3. Бродский и др. М.: Металлургия, 1982.
71. Арзамасцев Д. А., Липес А. В., Ухалов В. А. Алгоритм стати-
стического определения интегральных характеристик установившихся
режимов электроэнергетических систем// Йзв. АН СССР. Энергетика и
транспорт. 1984. № 6. С. 39—48.
72. Основные требования н подходы к построению рациональных
моделей для решения оптимизационных задач/ Л. С. Беляев,
Л. Л. Крумм, А. А. Макаров и др.// Оптимизация и управление в боль-
ших системах энергетики. Иркутск: Изд-во СЭИ АН СССР, 1970. Т. 1.
73. Крумм Л. А. О дополнительной экономии прн переходе от су-
ществующей упрощенной методики к более общей методике определе-
ния экономических режимов объединенных энергосистем ! Изв. АН
СССР. Энергетика и транспорт. 1959. № 2.
74. Моцкус И. Б. Многоэкстремальные задачи в проектировании.
М.: Наука, 1967.
75. Идельчик В. И. Погрешность на ЦВМ при управлении режима-
ми электрических систем. Иркутск: Изд-во ИПИ, 1971
284
76 Паламарчук С. И. Определение погрешностей при расчетах на
ЦВМ установившихся режимов электрических систем Автореф. дне. ..
канд. техн, наук Новосибирск, 1973.
77. Идельчик В. И. Точность математического моделирования пр»
управлении эксплуатацией электрических систем: Учеб, пособие для
вузов. Иркутск: Изд во ИПИ, 1971.
78 Идельчик В. И., Новиков А С, Паламарчук С. И Влияние
погрешностей информации па расчеты оптимальных режимов// Изв.
АН СССР. Энергетика и транспорт. 1982 As 2. С 22—29
79 Идельчик В. И., Новиков А. С., Паламарчук С. И. Погрешности
расчетов оптимальных режимов электросистем// Изв АН СССР. Энер'
гетика и транспорт 1982 № 3. С. 34—41
«Оглавление
Предисловие................................................... 3
Глава первая. Элементы электрической системы, расчет ре-
жимов разомкнутых сетей.................................... 6
1.1. Схемы замещения линий электропередачи и трансфор-
маторов ................................................... 6
1.2. Задание нагрузок при расчетах режимов электрических
сетей и систем............................................. 8
1.3. Представление генераторов прн расчетах установивших-
ся режимов.................................................12
1.4. Расчет режима липин электропередачи прн заданной
мощности нагрузки..........................................15
1.5. Падение и потеря напряжения в линии..................17
1.6. Расчет разомкнутой сети (в два этапа) прн заданных
мощностях нагрузки и напряжении источника питания 20
1.7. Определение токов, потоков и потерь мощности в линии
прн известных напряжениях на ее концах .... 22
Глава вторая. Линейные уравнения узловых напряжений н
методы их решения..........................................25
2.1. Схемы электрических систем, линейные и нелинейные
уравнения установившегося режима........................25
2.2. Уравнения узловых напряжений..........................27
2.3. Метод Гаусса..........................................35
2.4. Расчет с помощью матрицы собственных и взаимных
сопротивлений узлов Z .... 39
2.5. Простая итерация и метод Зейделя......................43
2.6. Примеры решения линейных уравнений узловых напря-
жений .........................’...........................50
Глава третья. Нелинейные уравнения установившегося ре-
жима и методы их решения...................................57
3.1. Нелинейные уравнения установившегося режима . . 57
3.2. Применение метода Гаусса и матрицы Z для решения
нелинейных уравнений узловых напряжений .... 61
3.3 Применение метода Зейделя для решений нелинейных
уравнений узловых напряжений...............................64
3.4 Метод Ньютона .........................................67
3.5. Примеры решения нелинейных уравнений установив-
шегося режима..............................................76
3.6 Методы по параметру....................................85
3.7. Расчет потоков и потерь мощности в сети .... 87
286
Глава четвертая. Расчеты режимов систем большой слож-
ности ...............................................* . 92
4.1. Учет слабой заполненности матриц....................92'
4.2. Эквнвалеитирование прн расчетах установившихся ре-
жимов ....................................................96-
4.3. Разделение на подсистемы и разделение уравнений . . 99
4.4. Разложение на треугольные матрицы, элиминативщщ
форма и другие методы.....................................104-
Глава пятая. Сходимость и ее ускорение........................107
5.1. Сходимость решения уравнении установившегося режима 107
5.2. Сходимость простой итерации н метода Зейделя при
хорошо обусловленной матрице производных . . . 111
5.3. Влияние обусловленности матрицы производных на схо-
димость метода Зейделя.....................................Н6-
5.4. Сходимость методов Ньютона, градиентного н по па-
раметру ...................................................120
Глава шестая. Существование и единственность решения
уравнений установившегося режима.............................123
6.1. Существование решения уравнений установившегося ре-
жима ......................................................123
6.2. Единственность решения нелинейных уравнений устано-
вившегося режима..........................................129*
6.3. Предел по существованию решения и примеры расчет-
ного анализа существования н единственности . . . 132
Глава седьмая. Связь существования, сходимости и чувстви-
тельности решения со статической устойчивостью . . . 138
7.1. Существование решения и апериодическая статическая
устойчивость режима.......................................138-
7.2. Устойчивость и сходимость, определение предельных по
апериодической устойчивости режимов........................143
7.3. Матрица чувствительности, чувствительность решения,
его сходимость и устойчивость режима.......................147
Глава восьмая. Опыт и перспективы расчетов установив-
шихся режимов на ЭВМ.........................................151
8.L Опыт и перспективы применения методов расчета уста-
новившегося режима за рубежом н в СССР .... 151
8.2. Сравнение методов и программ расчета установившихся
режимов................................................158
8.3. Расчет особых режимов, учет изменения частоты . . 164
Глава девятая. Оптимизация режимов в АСДУ .... 170
9.1. Оптимизация режимов электроэнергетических систем 170
9.2. Методы комплексной оптимизации режима .... 175
9.3. Задачи оперативно-диспетчерского управления в АСДУ 182
9.4. Расчеты установившихся, допустимых и оптимальных
режимов в АСДУ . '........................189-
9.5. Информационно-вычислительные и диалоговые системы 192
Глава десятая. Уменьшение потерь мощности — оптимиза-
ция режима по реактивной мощности и напряжению . . . 195
10.1. Оптимизация режима питающей сети по напряжению,
реактивной мощности н коэффициентам трансформации 195»
287
.10.2. Управление^напряжением и реактивной мощностью в
АСДУ в темпе процесса..............................202
10.3. Частные задачи оптимизации режима по U, Q и п . . 208
Глава одиннадцатая. Методы оперативного контроля,
анализа и планирования потерь электроэнергии в сетях . . 216
• ’ ifс
11.1. Задачи и методы расчета потерь электроэнергии . . 216
11.2. Детерминированные методы расчета потерь электро-
энергии при оперативном контроле и анализе . . . 226
11.3. Вероятностно-статистические методы определения по-
терь электроэнергии..................................... 232
Глава двенадцатая. Погрешности при расчетах устано-
вившихся режимов и оптимизации режимов по напряжению
и реактивной мощности....................................238
12.1. Методика определения погрешностей................238
12.2. Применение теории чувствительности для определения
погрешностей.................................... . . 253
12.3. Погрешности при расчетах установившегося режима и-
потерь электроэнергии, оценка состояния электроэнер-
гетической системы......................................256
12.4. Влияние погрешностей исходных данных на расчеты
оптимальных режимов по U, Q и п_........................261
12.5. Погрешности режимов электрических систем, оптималь-
ных по Q и п .......... 271
Список литературы . . ~. ................................281