























































































































































































































































Author: Горьков В.Л. Авдеев Ю.Ф. Беляков А.И. Брыков А.В. Григорьев М.М. Журин Б.Л.
Tags: авиация и космонавтика летательные аппараты ракетная техника космическая техника междупланетные соединения (междупланетные полеты) космонавтика (аэронавтика)
ISBN: 5-217-01065-7
Year: 1990



ПОЛЕТ
КОСМИЧЕСКИХ
АППАРАТОВ
примеры и задачи
2-е издание
переработанное
и дополненное
Москва
• Машиностроение •
1990
ББК 39.62я2
П49
УДК 629.78.076.6.001.12 (035)
Авторы: Ю. Ф. Авдеев, А. И. Беляков, А. В. Брыков,
В. Л. Горьков, М. М. Григорьев, Б. Л. Журин,
В. А. Иванов, Г. С. Титов, В. М. Ягудин
Рецензент д-р техн, наук В, Н. Почукаев
Полет космических аппаратов: Примеры и задачи: Спра-
П49 вочник/Ю. Ф. Авдеев, А. И. Беляков, А. В. Брыков и др.;
Под общ. ред. Г. С. Титова. —2-е изд., перераб. и доп. —
М.: Машиностроение, 1990. —272 с.: ил.
ISBN 5-217-01065-7
Содержит систематизированное изложение основных проблем теории
космического полета в форме справочника-задачника. Сформулированы
конкретные практические задачи и дано подробное аналитическое либо
графоаналитическое решение каждой из них.
Во втором издании (1-е изд. 1980 г.) расширены главы «Выведение
космического аппарата на орбиту», «Орбитальный полет», «Маневрирова-
ние на орбите». Введен новый раздел, посвященный полету системы двух
гибко связанных космических аппаратов.
Для специалистов, занятых разработкой и применением космической
техники.
2705140400—114 п4_90 ББК 39 в2я2
038(01}—90
СПРАВОЧНОЕ ИЗДАНИЕ
Авдеев Юрий Федорович, Беляков Аркадий Иванович,
Брыков Анатолий Викторович и др.
ПОЛЕТ КОСМИЧЕСКИХ АППАРАТОВ:
ПРИМЕРЫ И ЗАДАЧИ
Редактор Н. А. Педченец. Переплет художника В. А. Галкина
Художественный редактор В. В. Лебедев. Технический редактор Л. А. Макарова
Корректоры: Т. В. Багдасарян, И. М. Борейша
ИБ № 6542
Сдано в набор 08.12.89. Подписано в печать 05.06.90. Т-01837. Формат 60X90/16.
Бумага офсетная № 2. Гарнитура литературная. Печать офсетная. Усл. печ. л. 17,0.
Усл. кр.-отт. 17,0. Уч.-изд. л. 17,93. Тираж 2700 экз. Заказ 30. Цена 1 р. 20 к.
Ордена Трудового Красного Знамени издательство «Машиностроение»,
107076, Москва, Стромынский пер., 4
’Жшография Ns 6 ордена Трудового Красного Знамени издательства «Машиностроение»
при Государственном комитете СССР по печати. 193144, Ленинград, ул. Моисеенко, 10.
ISBN 5-217-01065-7 © Издательство «Машиностроение», 1980
© Ю. Ф. Авдеев, А. И. Беляков,
А. В. Брыков и др., 1990, с измене-
ниями
Введение
Быстрое развитие ракетно-космической техники и осуществле-
ние полетов автоматических и пилотируемых космических аппа-
ратов (КА) привели к формированию нового раздела небесной
механики — механики космического полета, или космической
баллистики.
Космическая баллистика занимается изучением движения
только искусственных небесных тел и в сравнении с небесной
механикой имеет некоторые особенности.
Во-первых, в классической небесной механике учитываются
исключительно силы взаимного притяжения небесных тел. В кос-
мической баллистике не всегда можно ограничиться только этими
силами. В ряде задач обязательно приходится учитывать атмо-
сферу планет, оказывающую сопротивление при движении КА
на относительно низких орбитах спутников планет.
Во-вторых, космическая баллистика предполагает возможность
преднамеренного изменения траектории движения КА с помощью
реактивных двигателей, т. е. она связана не с пассивным, а с уп-
равляемым движением небесных тел. В связи с этим возникают
задачи анализа и синтеза траекторий движения КА, которые
не рассматривает классическая небесная механика.
В-третьих, космическая баллистика связана с новыми для
небесной механики вопросами выбора и проектирования орбит.
Орбита запускаемого КА должна наилучшим образом удовлетво-
рять цели полета, а ее реализация требует минимальных затрат
топлива.
В-четвертых, нужды обеспечения космических полетов, на-
сыщенность и динамичность программы полета поставили перед
космической баллистикой задачу быстрого получения результата.
Если в небесной механике построение теорий движения могло
продолжаться многие годы, так как вопрос об ограничении вре-
мени, необходимого для решения тех или иных задач, как правило,
не возникал, то в космической баллистике этот вопрос является
одним из главных. Это обстоятельство привело к необходимости
разработки быстродействующих алгоритмов и привлечения для
решения указанной задачи ЭВМ.
Изучению различных аспектов космической баллистики по-
священо множество публикаций советских и зарубежных авторов.
Несмотря на это, сложилась, однако, парадоксальная ситуация,
когда при наличии значительного числа публикаций, посвящен-
1* 3
ных космическому полету, начинающему специалисту, вступаю-
щему в мир космонавтики, приходится сталкиваться с серьезными
трудностями на пути усвоения и практического использования
ее результатов в своей повседневной работе. Не меньшие труд-
ности возникают и у широкой группы специалистов, соприкасаю-
щихся со смежными с космической баллистикой областями тех-
ники, когда возникает необходимость в быстрой и достаточно
надежной оценке решения той или иной задачи теории полета.
В связи с этим возникла потребность последовательного изложе-
ния теоретических и прикладных задач космической баллистики,
отражающих накопленный опыт. В основу большинства аналити-
ческих методов положены следующие соображения:
1) предполагается, что гравитационное поле Земли является
центральным и возникающая при этом сила притяжения КА
является основной, определяющей. Тогда движение КА описы-
вается конечными формулами кеплеровой теории;
2) при движении КА на него кроме основной действуют дру-
гие силы, обусловленные отличием действительного поля сил от
центрального, сопротивлением атмосферы, которые во много раз
меньше силы притяжения КА к Земле. Эти малые дополнительные
силы в небесной механике называются возмущениями, а порож-
даемое ими отклонение от кеплерового движения — возмущен-
ным. Образно говоря, в аналитических методах результирующее
движение КА рассматривается как сумма невозмущенного (кепле-
рового) и возмущенного движений. В этом случае математическое
описание движения КА удается представить в виде конечных ана-
литических соотношений (формул) с той или иной степенью точ-
ности. Естественно, что такие соотношения являются прибли-
женными. Однако они находят самое широкое применение на прак-
тике, по крайней мере, при оценках движения.
Приближенное решение занимает особое место при рассмотре-
нии задач управляемого движения КА и обычно называется
нулевым приближением. Имея нулевое приближение, можно на-
глядно представить качественные характеристики управления,
дать количественные оценки оптимальных условий его осуществле-
ния и использовать это приближение для проверки решения задач
численными (точными) методами.
В книге рассматриваются главным образом аналитические ме-
тоды решения задач космической баллистики. Численные методы
используются лишь в отдельных случаях для подтверждения точ-
ности решения задач аналитическими методами. Чтобы аналити-
ческие методы и вытекающие из них решения задач могли быть
использованы в практических целях, они, очевидно, должны
удовлетворять ряду специфических требований, среди которых
отметим следующие:
приближённое решение должно сохранять все основные ка-
чественные закономерности точного решения на рассматриваемом
временном интервале движения КА;
4
погрешности приближенного решения должны находиться
в ограниченной области по отношению к точному решению;
алгоритмы приближенного решения должны представляться
в удобной для счета аналитической форме, позволяющей значи-
тельно уменьшить затраты машинного времени при расчетах.
Материал книги изложен в форме справочника-задачника
с акцентом на практическую сторону решаемых задач.
Построение книги соответствует некоторой обобщенной схеме
полета КА: выведение на орбиту, пассивный полет по орбите,
маневрирование и спуск с орбиты на Землю.
Большое внимание в книге уделяется решению различных
задач, связанных с динамическими операциями КА. К ним отно-
сятся выведение на орбиту, одноимпульсные и двухимпульсные
переходы с малыми и большими импульсами, встреча на орбите,
формирование предспусковых орбит, сход с орбиты и т. д.
Книга состоит из пяти глав, каждая из которых дает ответы
на ряд вопросов баллистического обеспечения космического по-
лета. В начале каждой главы и каждого раздела приводятся не-
обходимые теоретические сведения, используемые при решении
задач. После формулировки задачи приводится ее подробное ре-
шение в аналитической либо в графоаналитической форме и необ-
ходимый справочный материал. В наиболее сложных задачах
проводится подробный анализ решения. Из всего многообразия
задач космической баллистики представлены, в основном, наи-
более типичные.
При написании книги использованы отечественные и зарубеж-
ные источники, однако большинство задач составлено авторами.
Цель книги — помочь изучающим теорию полета КА приобре-
сти навыки практического решения различных прикладных за-
дач.
Авторы выражают искреннюю признательность рецензенту
книги В. Н. Почукаеву за сделанные им предложения и заме-
чания.
ОСНОВНЫЕ ОБОЗНАЧЕНИЯ
а — большая полуось;
е — эксцентриситет;
р — фокальный параметр;
Т — период обращения;
I — наклонение плоскости орбиты;
со — аргумент широты перигея;
Q — долгота восходящего узла;
г — модуль радиуса-вектора;
v — скорость полета;
v8 — характеристическая скорость;
и — аргумент широты;
О — истинная аномалия;
Л, Н — высота полета;
t — время;
R = 6371 км — средний радиус Земли;
Rd = 6378 км — экваториальный радиус Земли;
аз = 1 : 298,3 — сжатие Земли;
0)3 = 7,292-10"6 рад/с — угловая скорость вращения Земли;
g — ускорение силы тяжести;
|А = 3,986 • 10® км8/с2— гравитационный параметр Земли;
е2 = —1,756-1010 кмб/с2— второй коэффициент в разложении гравитационного
потенциала Земли в ряд по сферическим функциям;
83= 2,634-1010 кмб/с2;
S — баллистический коэффициент;
Fm — площадь миделевого сечения;
m — масса;
Сх — коэффициент лобового сопротивления;
Су — коэффициент подъемной силы;
А — азимут стрельбы;
5Сф — сферическая дальность;
Ек — кинетическая энергия;
£п — потенциальная энергия;
Q — возмущающее ускорение;
ve — скорость истечения рабочего тела;
Р — тяга двигателя;
Руп — удельная тяга двигателя;
F — сила;
М — момент сил;
0 — угол наклона вектора скорости к местному гори-
зонту;
go = 9,81 м/с2 — ускорение силы тяжести на поверхности Земли.
ГЛАВА 1
Выведение КА на орбиту
1.1. Основные положения
Полет КА начинается с выведения его на орбиту с помощью
ракеты-носителя. Орбита КА определяется параметрами движе-
ния ракеты-носителя в конце активного участка.
Подготовка к пуску ракеты-носителя осуществляется ракетно-
космическим комплексом, который обеспечивает проведение цикла
предстартовых операций и пуск. Современные ракеты-носители
отличаются многообразием конструктивных форм, схемами рас-
положения ступеней («тандем», «пакет»), видом используемого
топлива и т. д.
Старт ракеты-носителя производится, как правило, верти-
кально. Это условие является одним из типичных требований,
предъявляемых к современным носителям. Движение ракеты-
носителя по заданной траектории обеспечивается системой управ-
ления. При достижении расчетной скорости, соответствующей
разделению ступеней, система управления выдает команду на
выключение двигателей отработавшей ступени, отделение ступени
и запуск двигателя следующей ступени.
Одна из основных проблем выведения на орбиту КА состоит
в выборе таких параметров управления полетом на активном
участке, при которых обеспечивается наибольшая эффективность
решения определенных задач.
Основными задачами баллистики ракет-носителей, исполь-
зуемых для запуска КА на заданные орбиты, являются следую-
щие:
исследование зависимости летных характеристик ракеты-носи-
теля от конструктивных параметров с целью выбора наиболее
рационального сочетания этих параметров (баллистическое про-
ектирование);
определение траектории и других характеристик движения
ракеты-носителя с известными конструктивными параметрами и
системой управления, обеспечивающих заданные конечные усло-
вия выведения (поверочные баллистические расчеты);
выбор номинальной траектории движения, обеспечивающей
наилучшее использование возможностей носителя (выбор про-
граммы управления и составление полетного задания).
Самостоятельными задачами являются вопросы выбора точки
старта ракет-носителей, трасс полета, районов падения отделяю-
щихся частей носителя, времени старта и др.
7
Разработка и исследование вопросов оптимальных режимов
движения ракет-носителей связано, как правило, со значитель-
ными математическими трудностями, обусловленными сложностью
задач теории оптимального управления. Поэтому решение этого
класса задач не всегда удается представить в аналитической форме.
Их обычно решают при тех или иных упрощающих допущениях.
1.2. Граничные условия. Уравнения движения
Одним из главных условий космического полета является
сообщение КА необходимой скорости. Не достигнув требуемого
уровня скорости, невозможно выйти на орбиту спутника Земли
или отправиться в межпланетный полет. Если движение КА рас-
сматривается в центральном поле сил, то круговая скорость
на расстоянии г от центра Земли вычисляется по формуле
01 =(1.1)
и она называется местной круговой скоростью (при г = R =
= 6371 км — первой космической скоростью). При достижении
этой скорости на расстоянии г от центра Земли при условии, что
скорость перпендикулярна радиусу г, КА выходит на круговую
орбиту спутника Земли.
Скорость полета, определяемая зависимостью
t,a = j/'aL, х (1.2)
называется скоростью отрыва или параболической скоростью
(при г = R — второй космической скоростью). Получив такую
скорость, КА уходит от Земли по параболической траектории.
Если скорость полета удовлетворяет неравенству t>i < о < оа,
то орбита КА будет эллиптической, а при t> £> — гиперболи-
ческой.
Поскольку поле Земли не является центральным, то формулы
(1.1), (1.2) дают лишь приближенное значение скорости для ре-
ализации той или иной орбиты. Величины скорости уточняются
с учетом реального поля сил при проектировании конкретного
полета.
Другим условием осуществления орбитального космического
полета является обеспечение определенного времени существо-
вания КА. Как известно, движение КА по орбите в основном оп-
ределяется силами гравитационного поля планеты, силами притя-
жения других планет Солнечной системы и сопротивлением атмо-
сферы (для планет, окруженных атмосферой). За счет совмест-
ного влияния этих сил время существования КА может оказаться
ограниченным, КА в конце концов упадет на планету. Значит,
это условие осуществления космического полета формально сво-
дится к выбору минимально допустимой высоты полета КА.
8
Совокупность указанных условий в конкретной схеме выве-
дения на орбиту является основой для формулировки так назы-
ваемых граничных условий.
Решение любой задачи выведения на орбиту начинается
с разработки математической модели полета ракеты-носителя,
которая описывается достаточно сложивши уравнениями движе-
ния. При исследовании проблем выведения в зависимости от со-
става действующих сил уравнения движения упрощаются. При
этом траекторию полета ракеты-носителя условно разделяют на
следующие основные участки:
активный, т. е. участок подъема ракеты-носителя над Землей
и разгона ее до необходимой скорости с работающими двигатель-
ными установками;
пассивный, на котором ракета-носитель движется как свобод-
ное тело (этот участок может существовать в промежутках между
включениями двигательных установок очередных ступеней).
Кроме того, следует учитывать и такие участки:
атмовферный, лежащий в плотных слоях атмосферы (на этом
участке учитывается влияние аэродинамических сил);
внеатмосферный (здесь пренебрегают влиянием аэродинами-
ческих сил).
При разработке математической модели полета ракеты-носи-
теля используются известные классические теоремы об изменении
количества движения:
rndv = Fdt (1.3)
и об изменении момента количества движения:
-^-(r х ту) = М, (1.4)
которые позволяют получить уравнения поступательного движе-
ния центра масс и вращательного движения относительно центра
масс.
В том случае, если возможно поступательное движение рас-
сматривать независимо от вращательного, то для описания тра-
ектории может быть использовано уравнение Мещерского:
= ? + <L5>
При движении вне поля притяжения (F = 0) и при постоянной
скорости истечения (ve = const) уравнение (1.5) приводится к из-
вестной формуле Циолковского:
о = ив1п-^-. (1.6)
Величину о, получаемую по формуле Циолковского, называют
характеристической (идеальной) скоростью. Величина этой ско-
рости является одной из важнейших характеристик ракеты-
носителя.
9
Для составления дифференциальных уравнений движения
ракеты-носителя в ряде случаев удобно использовать уравнения
Лагранжа второго рода:
-4- = Рь » = 1,2......п, (1.7)
at \ oqt / dqt 1 ' '
где qt — обобщенные координаты; — обобщенные силы; Вк —
кинетическая энергия.
Задача 1.1. Определить суммарную характеристическую ско-
рость, обеспечивающую возможность выведения КА на круговую
орбиту спутника Земли высотой й.
Решение. Искомая характеристическая скорость выведения
на орбиту включает три слагаемых. Первое — характеризует
работу, которую нужно совершить, чтобы поднять КА на высоту h
и сообщить ему круговую скорость, соответствующую заданной
высоте; второе — обусловлено затратами энергии на преодоле-
ние сопротивления атмосферы и третье — затратами на перемеще-
ние топлива и элементов конструкции ракеты-носителя.
Итак, первое слагаемое определяется работой, состоящей
из двух частей.
1. Работа, необходимая для поднятия КА с расстояния R
от центра Земли (например, с поверхности Земли) до расстояния
г = R + h (потенциальная энергия). Так как сила притяжения,
действующая на единичную массу со стороны Земли, равна р/га,
то для перемещения этой массы из положения R в положение г
потребуется работа
Еа = J ~^~dr = и (т"— т)
R
2. Работа, которую нужно совершить, чтобы сообщить КА
круговую скорость (кинетическая энергия). Для единичной массы
она равна
Е — —
— 2
или, воглаено завивимовти (1.1),
Е —
2г ‘
Полная энергия
Е = £п + = Р (-£- — -%г) ,
и, вледовательно, первое влагаемое характеривтичевкой вкорости
определяется из воотношения
откуда вледует
10
Таблица 1.1
Круговая фк и характеристическая скорости (в м/с)
выведения КА без учета потерь энергии на участке
выведения для различных высот полета
Высота, км Земля Марс Луна
ик V1 °к V1 VK V1
0 7912 7912 3562 3562 1679 1679
100 7851 7973 3510 3612 1633 1724
200 7791 8031 3461 3660 1590 1764
300 7732 8088 3414 3704 1551 1798
400 7675 8142 3369 3745 1514 1829
500 7619 8194 3325 3784 1480 1857
35 809 ♦ 3076 10758
* — стационарная орбита.
В табл. 1.1 приведены значения круговых скоростей для раз-
личных высот полета над поверхностью планет и величины со-
ответствующих значений характеристической скорости, рассчи-
танных по формуле (1). Приведенные результаты показывают, что
с увеличением высоты орбиты величина характеристической ско-
рости Рх также возрастает. Так, для орбиты с высотой 200 км
характеристическая скорость составляет 8031 м/с, а для высоты
300 км она увеличивается до 8088 м/с, т. е. возрастает на 57 м/с
(при падении круговой скорости на 59 м/с).
Второе слагаемое суммарной характеристической скорости
обусловлено потерями на преодоление сопротивления атмосферы.
Величина ее в значительной мере зависит от аэродинамических
характеристик ракеты-носителя и скорости движения на активном
участке. Она составляет примерно 0,1 ... 0,5 км/с [291.
Наконец, третье слагаемое суммарной характеристической
скорости связано с так называемыми гравитационными потерями.
Они обусловлены тем, что приходится тратить энергию не только
на подъем и сообщение скорости полезной нагрузке, но и на
перемещение элементов конструкции ракеты-носителя и топлива.
Величина этих потерь в существенной степени зависит от пара-
метров ракеты-носителя и времени движения на активном участке.
При увеличении времени подъема на заданную высоту при про-
чих равных условиях указанные потери возрастают. Для около-
круговых орбит с высотой 200 км гравитационные потери состав-
ляют 1000 ... 1200 м/с. Значит, для запуска КА на высоту 200 км
величина характеристической скорости составит 9,0 ... 9,5 км/с.
Задача 1.2. Определить граничные условия на правом конце
траектории выведения КА на стационарную орбиту в центральном
•и нормальном гравитационном полях Земли.
11
Решение. Известно, чфо круговая стационарная орбита лежит
в плоскости экватора Земли, а период обращения Т равен звезд-
ному периоду вращения Земли вокруг своей оси. Граничными ус-
ловиями выведения для такой орбиты являются радиус круговой
орбиты, величина и направление скорости и долгота выведения.
Предположим вначале, что гравитационное поле Земли яв-
ляется центральным. Так как по условию орбита является круго-
вой, то величина радиуса ее может быть определена из уравнения
[28]
„3/2
т = 2л W'
где Т = 23 ч 56 мин 04 с. Определив радиус г из соотношения (1),
величину круговой скорости находим по формуле (1.1):
(1)
дт =
(3)
<2>
Эта скорость должна быть направлена в сторону вращения Земли
по нормали к радиусу-вектору в плоскости экватора. Долгота
выведения характеризует положение КА на стационарной орбите
и выбирается в соответствии с назначением КА.
В рассматриваемом случае граничные условия примут следую-
щие значения: о = 3076 м/с, Л = 35 809 км, г = 42187 км, 0=0.
Нормальное гравитационное поле в отличие от центрального
учитывает вжатие Земли.
Как известно, сжатие Земли приводит к вековому изменению
периода обращения за один виток по отношению к движению
в центральном гравитационном поле на величину [28]
4л е8
Ум? и '
Для вычисленного значения г величина ДТ за виток составит
—6,4 с. Это означает, что если КА будет выведен на стационарную
орбиту с граничными условиями, соответствующими центральному
гравитационному полю сил, то фактический период обращения
его окажется на 6,4 с меньше требуемого. В результате КА нач-
нет смещаться вдоль экватора со скоростью около 20 км за один
виток (т. е. за сутки). Чтобы этого не произошло, необходимо уве-
личить период обращения на величину ДТ и сохранить движение
КА на круговой орбите. Это можно достигнуть путем увеличения
радиуса круговой орбиты и соответствующего изменения скорости.
Из выражения (1) найдем связь вариаций ДТ и Дг.
Используя соотношения (1), (3), найдем величину Дг, на ко-
торую необходимо увеличить радиус орбиты КА:
Дг =
Згц
(4)
12
Для приведенных параметров стационарной орбиты Дг = 2,1 км.
Для определения поправки к скорости полета найдем связь
вариации скорости кругового движения с вариацией радиуса ор-
биты. Из равенства (2) следует
а о Дг
Д°=-----2—' <5)
В рассматриваемом случае До = —0,08 м/с.
Из проведенного анализа следует, что для определения при-
ближенных значений граничных условий выведения КА на ста-
ционарную орбиту необходимо найти их значения в центральном
гравитационном поле сил, а затем радиус увеличить на 2,1 км
и скорость полета уменьшить на 0,08 м/с.
Задача 1.3. Используя уравнения Лагранжа второго рода,
составить дифференциальные уравнения поступательного движе-
ния центра масс ракеты-носителя в нормальном гравитационном
поле Земли в цилиндрической системе координат при отсутствии
влияния атмосферы.
Решение. Пусть г, и, Ъ —обобщенные координаты и г, й, b —
обобщенные скорости ракеты-носителя в цилиндрической системе
координат, (г — радиус, и — аргумент широты, b — расстояние
по нормали к плоскости орбиты). Поскольку кинетическая энер-
гия
Ея =-^-(га + гай’ + б»), (1)
то, используя уравнения Лагранжа (1.7), получаем
/пйг = -^ + Гг,
---^~ + Fu, (2)
mvb = Fb.
Так как гравитационное поле вил притяжения Земли является
консервативным, то
₽ atz« р р ди°
Рг ~ дг ’ Ра~ ди ’ ?ь~ дЬ ’
где Fu — производная по направлению; £/0 — гравитационный
потенциал Земли, который для случая нормального поля может
быть записан в форме
= + <3>
Здесь Во — геоцентрическая широта,
sin Во = (г sin a sin i + b cos Q,
d = ra + ft2.
13
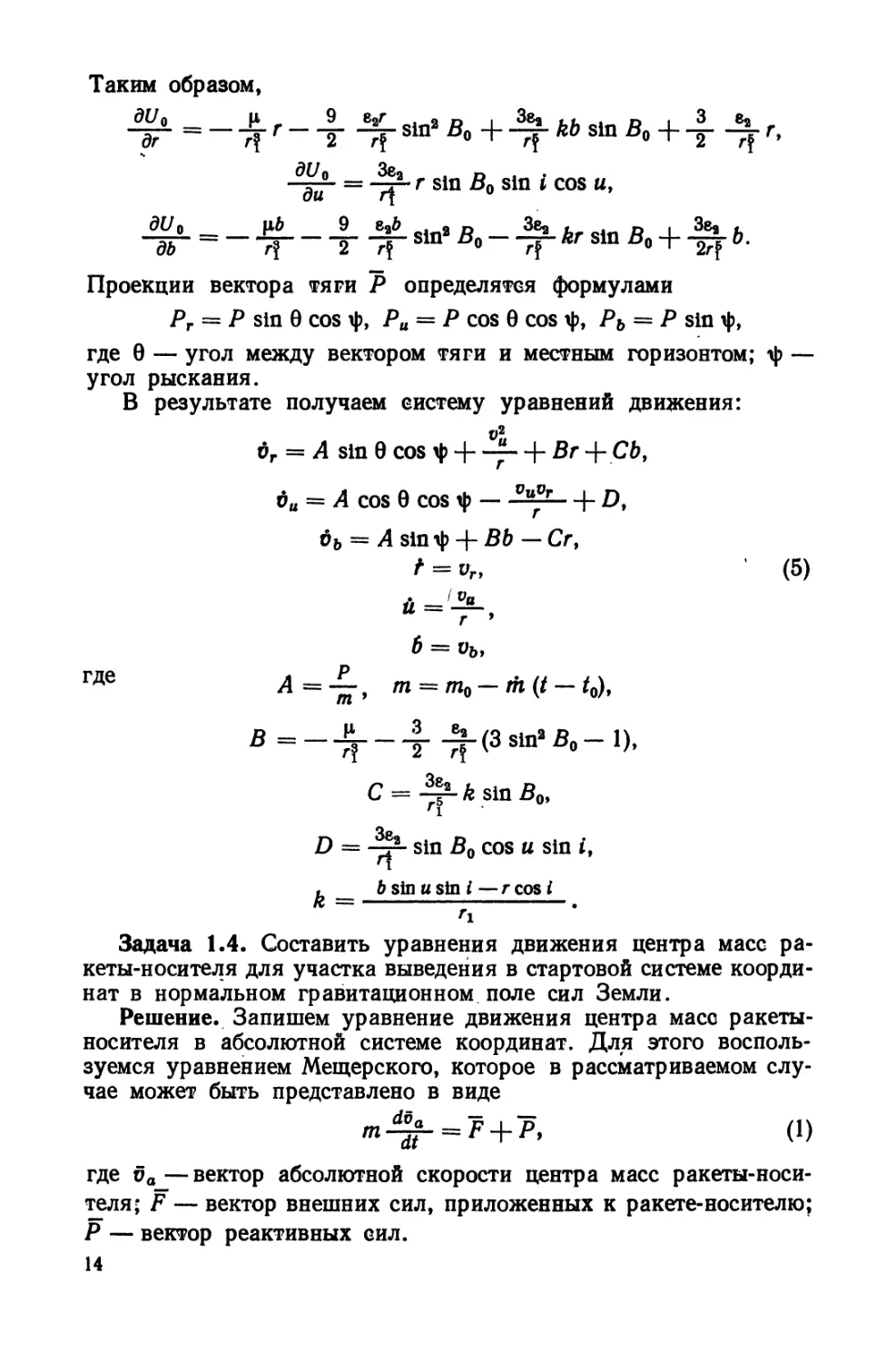
Таким образом,
____________tL г ?- Cjn2 D I Ьк С|П О I JL f
dr ~ rf Г___________________________2 г? sln "° + rf Й° Sin «о + 2 rf г>
= 4г*г sln ВО sin i cos «,
OU r\
0 9 ®2^ D ^®2 Ao nin D I *^®2 A
~дГ = - 7?-----Г 7Г sin B° —7Г kr sin B° + “24 b •
Проекции вектора тяги P определятся формулами
Рг = Р sln 0 cos ф, Pa = P cos 0 cos ф, Pb = P sin ф,
где 0 — угол между вектором тяги и местным горизонтом; ф —
угол рыскания.
В результате получаем систему уравнений движения:
и2
6r = A sln 0 cos ф + -у- + Вг + СЬ,
6и = A cos 0 cos ф —+ D,
оъ — A sin ф 4- ВЪ — Сг,
f = vr, ‘ (5)
й = —,
Г 9
6 = оь,
где А = —, т = тй — th (t — t0),
в=--^-4тг<3 sin2Bo-1)>
С = ^-k sin Bo,
rl
Зе
D = —A sin Bo cos и sin i,
« b sin и sin i — r cos i
Задача 1.4. Составить уравнения движения центра масс ра-
кеты-носителя для участка выведения в стартовой системе коорди-
нат в нормальном гравитационном поле сил Земли.
Решение. Запишем уравнение движения центра масс ракеты-
носителя в абсолютной системе координат. Для этого восполь-
зуемся уравнением Мещерского, которое в рассматриваемом слу-
чае может быть представлено в виде
т-^- = ? + Л (1)
где va — вектор абсолютной скорости центра масс ракеты-носи-
теля; F — вектор внешних сил, приложенных к ракете-носителю;
Р — вектор реактивных сил.
14
Величина Р, как известно, определяется соотношением
Р = P^mgv + (ра - р) Fb, (2)
где РУд — удельная тяга двигателя; th — массовый секундный
расход рабочего тела; gQ — ускорение силы тяжести на поверх-
ности Земли; ра — давление газов на срезе сопла; р — атмосфер-
ное давление; Fb — площадь выходного сечения сопла.
Абсолютное ускорение va можно представить в форме
va = u + ?e + FK, (3)
где v — относительное ускорение; ve — переносное ускорение;
vK — кориолисово ускорение.
При описании движения ракеты-носителя в стартовой системе
координат ускорение силы притяжения Земли удобно разложить
на две составляющие: £тг, направленную к центру Земли, и gT(ii9
направленную параллельно оси вращения Земли. В рассматри-
ваемом случае эти составляющие определяются формулами
gw = -%- + 4 > <5 sln2 - 1), (4)
Ятш ’ —3 sin Во. (5)
Аэродинамические силы, возникающие при движении ракеты-
носителя в атмосфере, можно привести к одной результирующей
силе, проходящей через центр масс ракеты-носителя и называе-
мой полной аэродинамической силой. Проекции вектора полной
аэродинамической силы на оси системы координат, связанной
с КА, определяются по формулам
= Cxi<]Fт, Yi = CyigFт, Zi = CzlqFm, (6)
где Ск1, Cvi, CZ1 — безразмерные аэродинамические коэффициенты;
----------скоростной напор набегающего потока воздуха; р —
плотность воздуха.
Ограничимся введенными вилами и не будем рассматривать
демпфирование, управляющие воздействия, влияние колебания
жидкости в баках, возмущения от разделения ступеней и т. п.
Уравнения движения центра масс ракеты-носителя в проек-
циях на оси стартовой системы координат получим следующим
образом.
Очевидно, что центробежное ускорение = —®в. Суммируя
его с ускорением земного притяжения gT, получим
g = + йц- (7)
Разложим центробежное ускорение на две вовтавляющие:
по радиуву-вектору г и по ови вращения Земли
Оцг = ©3G Оц<» = <»ЗГ SIH Bq.
15
Тогда составляющие суммарного ускорения будут равны
gr = gir — ЮзЛ ga> = + Из/- Sin Во. (8)
Проектируя полученные значения ускорений на оси стартовой
системы координат, находим
ga = — -у- (х — х0) — ga cos В cos А,
gy = —-у-(у-Уо)~ ga sin В, (9)
gz = — -у- (z — z0) + g» cos В sin A,
где x0, уо, z0 — координаты центра земного эллипсоида в стартовой
системе координат, определяемые по формулам
jb0 = г о sin До cos А;
Уо = —Гу eos До — hyi
z0 = —г о sin До sin А,
До = В — By — угол между осью Од/ стартовой системы коорди-
нат и направлением r0; Во = arctg [(1 — е2) tg В ] — геоцентри-
ческая широта точки стояния пусковой установки; В — геодези-
ческая широта точки стояния пусковой установки; А — азимут
стрельбы; h0 — высота точки стояния пусковой установки; г0 =
= —7' -----радиус, соединяющий центр земного эллип-
у1 — е*соб2В0
соида с точкой стояния пусковой установки; а, е — соответственно
большая полуось и эксцентриситет земного эллипсоида.
Проекции кориолисова ускорения на оси стартовой системы
координат определяются по формулам
«кв = —2ш3 (vy cos В sin А + dz sin В),
vKy = 2о>3 (vz cos В cos А + vx cos В sin 4), (10)
vKZ = 2<o3 (»„ sin В — vv cos В cos 4),
где oB, Vy, vz — проекции вектора относительной скорости центра
масс ракеты-носителя на оси стартовой системы координат.
Проекции вектора кажущегося ускорения на оси связанной
системы координат имеют вид
Р + Хх . Ух /11Ч
Текущую массу определим из выражения
i
т = т0 — f ihdt,
где ту — начальная масса ракеты-носителя.
Используя полученные значения проекций кажущегося уско-
рения на оси связанной системы координат, определим величины
16
проекций кажущегося ускорения на оси стартовой системы ко-
ординат:
fi»=l
<вв MX1X &V1
(12)
где — матрица перехода от связанной системы координат
к стартовой. В итоге систему дифференциальных уравнений
движения центра масс ракеты-носителя в стартовой системе
координат можно записать в виде
va = <ЬЮ + 0кш + ga,
vy = d>y vHy -|- gy9
vz = 62 + dKZ + gz, (13)
* =
У = ®y,
z = 0Z.
1.3. Элементы массового проектирования
ракеты-носителя
Основная формула, определяющая характеристическую ско-
рость одноступенчатой ракеты, имеет вид
v3 = v0lnz, (1.8)
где z = mjm — отношение начальной массы ракеты к конечной
(число Циолковского).
Характеристическая скорость ракеты-носителя
с п ступенями определяется по формуле
V, = S Vet lnz(. (1.9)
i=l
Ступени ракеты-носителя нумеруются начиная Z
от основания к ее вершине (рис. 1.1).
Введем следующие обозначения:
тп р — масса полезного груза, выводимого на ор-
биту; тг1 — расходуемая масса топлива i-й сту- -
пени; mci — отделяющаяся масса конструкции /
t-й ступени; — начальная масса i-й ступени. ~
Основными характеристиками ракеты-носителя
являются:
Массовое число (число Циолков-
ского) г для i-й ступени — это отношение началь-
ной массы ступени к массе ступени в момент ее __
выключения:
----, (1.10) Рис- 1J* Схем?
1 mi—mri v ' отсчета ступеней
17
Коэффициент полезной нагрузки для 1-Ъ.
ступени представляет собой отношение начальной массы (I + 1)-й
ступени к начальной массе i-б ступени:
= О-11)
Коэффициент конструкции для i-й ступени —
это отношение отделяющейся массы конструкции к начальной
массе ступени:
(1.12)
Приведенные характеристики связаны между собой зависимо-
стью
Л' + 8'=-^-’ а-13)
а отношение стартовой массы ракеты-носителя к массе полезного
груза равно
= <114>
Величину р назовем коэффициентом массовых затрат.
Основная задача массового проектирования заключается в вы-
боре оптимальных характеристик ракеты-носителя для выведе-
ния на орбиту полезного груза.
.Задача 1.5. Определить оптимальные массовые характери-
стики многоступенчатой ракеты-носителя при заданном значении
характеристической скорости, а также числа ступеней, скорости
истечения газов и коэффициентов конструкции.
Решение. В качестве критерия оптимальности используем
коэффициент массовых затрат р. В массовом отношении ракета-
носитель будет оптимальной, если коэффициент р принимает мини-
мальное значение, что эквивалентно максимуму функции
п
т-ГК. (•>.
i=l
следующей из выражения (1.14).
Введем следующие обозначения:
п
(2)
£=1
(3)
0
Тогда из формулы (1.9) после несложных преобразований полу-
чим
о, = »: In (2^2“4... г“п). (4)
18
Воспользовавшись соотношением (1.13) и используя равенство
(4), находим
= (5)
*=1
где
(6)
е*р —
\ е /
Теперь задача сводится к определению таких значений
чтобы величина 0”1 стала максимальной при постоянном значе-
нии /?1. Для решения этой задачи на условный экстремум со-
ставим функцию Лагранжа L = Р-1 + pi/?i (где — неопреде-
ленный множитель).
Напишем уравнения Эйлера—Лагранжа
= « «-1.2......
откуда получаем п уравнений относительно неизвестных
-ИГ + = 0 (» = 1. 2.л).
РА| Bi + kt
Из этого выражения следует, что
= const (i = 1, 2,..., л),
т. е. для получения минимальной суммарной массы ракеты-носи-
теля должно выполняться равенство
oetz(X{ = const (i = 1, 2,..., л). (7)
Равенство (7), очевидно, должно выполняться и для последней
ступени ракеты-носителя
_ °етАп
Xj + 8i A.n + ®n ’
откуда
et Х( =
_________
°еп
Vet ®п +
(8)
(9)
Далее из выражений (5) и (9) находим
(Ю)
Теперь из уравнения (10) при известных vet, e.t можно найти 1п
а из уравнения (8) — значения для I — 1, 2, ..., л — 1.
19
Если предположить, что скорость истечения рабочего тела
каждой из ступеней одинакова: vei = vef то условие оптималь-
ности сводится к равенствам
= const (/ = 1,2, ..., п)
или
= 0 = 1.2.....п-1). (11)
Лп ьп
Пример 1. Пусть характеристическая скорость двухступенчатой ракеты-
носителя в конце активного участка траектории выведения и8 = 9,5 км/с.
Известно, что для первой ступени vel = 3 км/с, 8Х = 1/10, а для второй =
— 4 км/с, 8а = 1/20. Определить параметры X/, и величины приращения ско-
ростей на каждой ступени.
По формуле (2) находим среднюю скорость истечения рабочего тела о' =
= 3,5 км/с. По формуле (6) определяем — 1/15,05 и поэтому из уравнения (10)
следует: Х2 = 0,0847. После этого из соотношения (8) находим Хх = 0,5155.
Таким образом, согласно (1.13) и (1.8), имеем
Zj = 1,623, и81 = 1,46 км/с,
г2 = 7,430, и82 = 8,04 км/с,о
Р = 22,9.
Пример 2. Пусть в предыдущём примере 8Х= 1/20, е2 = 1/10. В этом
случае получим
%! = 0,2119, = 3,82, и81 = 4,025 км/с,
Ха = 0,1545, 02 = 3,93, и82 = 5,475 км/с,
Р = 30.6.
Из этих примеров видно, что первый вариант ракеты-носителя имеет лучшие
характеристики, чем второй.
Задача 1.6. Количество расходуемого топлива I ступени
ракеты-носителя изменено на k %. Как это повлияет на характе-
ристическую скорость носителя?
Решение. Характеристическая скорость I ступени определится
по формуле
„ = + Ац_), (1)
где т„ — масса ракеты-носителя в момент выключения I сту-
пени; mTi — расходуемая масса топлива I ступени.
Если заправка топливом I ступени ракеты-носителя отличается
на k % от заданной, то характеристическая скорость I ступени
ракеты-носителя станет равной
V.-V.lnfl + Л+.°«”ц],
откуда после элементарных преобразований находим
Учитывая выражение (1), перепишем последнее соотношение
в виде
1 / 1 1 0,01^Шт| \
1п(1 + ,ml^)
20
или относительное изменение скорости ракеты-носителя
Pl —Р _ in / j । 0.01toTi \
P« o« \ «1 / ’
(2)
где о, — заданная характеристическая скорость ракеты-носи-
теля. Поскольку z = — массовое число, то из выражения
(2) следует
^=A|n[| + W-n (3)
и8 и8 L £ J
Так как в равенстве (3) второе слагаемое, стоящее в квадратных
скобках, значительно меньше единицы, то разлагая логарифми-
ческую функцию в ряд по степеням этого малого числа и ограничи-
ваясь линейными членами разложения, окончательно получим
Af1 = -^- = 0,01 (4)
Полученное выражение определяет относительное изменение ха-
рактеристической скорости в зависимости от изменения началь-
ной заправки топливом первой ступени.
Пример 1. Стартовая масса ракеты-носителя «Титан-II» составляет
150 т, расходуемая масса топлива 1 ступени равна 112 т, удельная тяга дви-
гателя 1 ступени 298 с. Определить приращение характеристической скорости
ракеты-носителя при увеличении массы топлива 1 ступени на 1%. В номиналь-
ных условиях характеристическая скорость носителя равна v8 = 9,5 км/с.
Определим массовое число носителя
, _ т1 _ 150 . = з 047
тк ~ 150—112 13,947
и скорость истечения рабочего тела
ve — go? уд = 0,00981 -298 = 2,923 км/с.
Затем по формуле (4) получаем относительное изменение характеристической
скорости
Р1~~Р = 0,0023 = 0,23 %.
V»
Характеристическая скорость при этом изменится на 21,8 м/с.
Пример 2. Ракета-носитель «Сатурн-5» имеет следующие технические
данные: стартовая масса 2710 т, расходуемая масса топлива 1 ступени ракеты-
носителя 2010 т, удельная тяга 282 с, характеристическая скорость при номи-
нальной заправке va = 9,5 км/с. Определить изменение характеристической
скорости ракеты-носителя при увеличении топлива 1 ступени на 1%(т. е.
на 20 т).
Как и в примере I, находим массовое число 0 = 3,907, скорость истечения
рабочего тела ve = 2,766 км/с, и тогда относительное изменение характери-
стической скорости составит 0,22 %. Следовательно, Ди8 = 20,6 м/с.
Задача 1.7. Перед пуском одноступенчатой ракеты-носителя
масса ее изменена на k % . Определить, как это повлияет на харак-
теристическую скорость, и сравнить с влиянием изменения
правки топлива.
21
Решение. Характеристическая скорость ракеты-носителя опре-
деляется выражением
V = Vein (1
\ тк /
Определим величину этой скорости после изменения сухой массы
ракеты-носителя на k %:
Vi Vein [1 + (1 +o,Olfe)mB ] •
Преобразуем это выражение:
(1 + 0,01.)/пк + тт
(1 + 0,01.)т.
ИЛИ
/ 1 _|------------------------------------м*------
= 01 = ”е InI о + 0,016)я»в
1 ° ° \ ! «т
\ тк
Вводя массовое число г, найдем
/ j j 0,016 \
= +o,oi.
откуда в линейном приближении получим
ил °е 0,01. / 1 ,\
Зависимость (1) определяет относительное изменение характе-
ристической скорости от увеличения или уменьшения сухой
массы конструкции. Она показывает, что с ростом массового числа
влияние изменения сухой массы на характеристическую скорость
увеличивается. Из формулы (4) задачи 1.6 и соотношения (1)
при одинаковых численных значениях коэффициента k получим
"“-7ТПЙГ- <2>
Данное выражение показывает, что при одинаковом процентном
изменении массы топлива или сухой массы конструкции характе-
ристическая скорость также изменяется примерно на одинаковую
величину, но имеет противоположный знак. Однако одно и то же
процентное изменение массы топлива и сухой массы ракеты-носи-
теля соответствует несоизмеримым изменениям самой массы топ-
лива и сухой массы ракеты-носителя. Так, например, для ракеты-
носителя «Атлас» масса одного процента топлива в 10 раз превы-
шает массу одного процента конструкции.
Пр и м е р. Даны следующие характеристики ракеты-носителя: в = 7,43,
= 9,5 км/с, ие= 4 км/с, масса полезного груза составляет 20% от сухой
массы ракеты-носителя. Определить изменение характеристической скорости
при увеличении топлива на 1% и массы полезного груза на 5%.
22
Используя формулу (4) предыдущей задачи, находим изменение характе
ристической скорости за счет увеличения массы топлива: Мг = 0,364%, чт
соответствует увеличению характеристической скорости на 34,6 м/с. Так ка]
масса полезного груза составляет 20% от общей сухой массы ракеты-носителя
то увеличение полезного груза на 5% равносильно увеличению общей cyxoi
массы на 1%. Тогда из формулы (2) следует: /И2 = —0,361%, что соответствуй
изменению скорости на —34,3 м/с.
В рассматриваемой задаче 1% сухой массы ракеты-носителя меньпк
в 7,43 раза 1% топлива.
Задача 1.8. Перед стартом многоступенчатой ракеты-носители
изменены сухая масса и расходуемая масса топлива в каждой
из ступеней соответственно на k^i и k'Ti процентов, а также массг
полезного груза на kn, г процентов. Как это повлияет на величину
хар актер истической скорости р акеты-носителя ?
Решение. Введем обозначения:
kGi = 0,01&сь kTi = 0,01&ть
fen.r = 0,01£n.r (1)
и вначале решим задачу для трехступенчатой ракеты-носителя.
Характеристическую скорость трехступенчатой ракеты-носи-
теля можно определить из соотношения
V = Vel In + Ve2 In + Ves In ,
0 mKX r mK2 r 68 mK8
где mKi, /ика, mK8 — массы ракеты-носителя соответственно в мо-
менты выключения двигателей I, II и III ступеней.
После изменения сухих масс и расходуемых масс топлива каж-
дой из ступеней, а также полезного груза получаем следующее
выражение для характеристической скорости ракеты-носителя:
Г1 _Г| mi + &т1тт1 + Л1 | 1 т2 + &Т2/ИТ2 + А-
01 — 001 1П ----—-7-т------1- in-------—-г-д-----
г Al ^К2 I **2
I р jn т8 4~ ^Т8тТ8 ~Н Ад
08 тК8 Н” Ад ’
А8 — йп, р/пПо р -|~ &с8/пс8,
Ла = А8 -|- &т8/пт8 4~ ^с2^с2,
Л1 = А а 4" ^т2^т2 4“ ^ci^ci-
Найдем разность характеристических скоростей
/ т1 + ^Tl^Tl ~Н АХ \
01 — 0 = vel In
(2)
где
.(3)
mi________I .
mKi 4~ Ai J
mKl '
/ ^2 ~b ^T2^T2 ~4~ A8 \ ( tn8 -|- ^T8^T8 Ад
+ In I---------— -------I + In
/Па | | f48 I
^K2 ~Ь A8 I 08 I ^K8 H~ Ад I
mK2 ' ' mK8 '
В полученном соотношении логарифмируемые выражения
больше нуля и меньше двух. Поэтому раскладывая логарифми-
23
ческую функцию в степенной ряд и ограничиваясь линейными чле-
нами разложения, получаем
где обозначено
vei тт1 (&Г1 — &1) I иез
v mr (1 + ' v
I иез ттз №гз &з)
V m8(l+B8) ’
/Пта (^T2 - B2)
m2 (1 + Ba)
(4)
, Ba = _d2_ B, = jk
/ЛК1 ^K2 ’ ^K8
(5)
Л18 = -^
Аналогично можно получить общие формулы для многоступен-
чатой ракеты-носителя, содержащей п ступеней:
Л4 = — V о . mri ^Tt /к\
м8 р 2i °ei mt (1 + Bt) ’ 'b'
/=1
л.
где обозначено Bt = —— (i = 1, 2, ... , n), An = k^etna.p +
mKi
4" ^cn^cn,
An—P = Лл—p-j-1 4~ (n—(П—p+1) 4“ (n—p)^G (n—P)>
p = 1, 2, n — 1.
Анализ зависимостей (5) и (6) показывает, что для случая
kri = kci = kUt p(i = 1,2, ..., n) можно записать Bt = fen. P, так
как
АЛ = Лп. p/7lKn, Ап—p — kn. (n—p) (p = 1» 2,. . ., П 1).
Следовательно, в этом случае получим
AzJL = 0.
V
Таким образом, если сухие массы и расходуемые массы топлива
ступеней, а также масса полезного груза изменены на одно и то же
количество процентов (в сторону увеличения или уменьшения),
то при сделанных допущениях характеристическая скорость оста-
нется неизменной.
Пример 1. Ракета-носитель «Сатурн-5» имеет следующие основные ха-
рактеристики [25]:
число ступеней 3, начальные массы тг = 2710 т; = 2010 т, тта =
= 422 т, тт8 = 13 т; т0± = 13,6 т, /пса = 33 т, тс8 = 9 т; /Пц. г = 91 т, ско-
рости v8 = 9,5 км/с; = 2,766 км/с; = 3,865 км/с; Vg3 = 4,139 км/с. Опре-
делить отклонение характеристической скорости в конце участка выведения
при следующих возмущениях масс:
= = ^2 = ^2= Ь5°/о> ^3 = ^3= 1О/о» *п.г = 0,5%.
По формулам (1) и (3) наводим
Л8 = 0,54 т, Аа = 1,16 т, Ai = 10,21 т.
Далее находим = 700 т, тм = 145 т, = 100 т, после чего вычисляем
коэффициенты (5):
Вх = 0,014527, В8 = 0,008021, В8 = 0,0054545.
24
По формуле (4) определяем относительное ивмененне характеристической
скорости Мя = 0.02675, что соответствует увеличению иарактеристической ско-
рости на 254,1 м/с.
Задача 1.9. Масса полезного груза многоступенчатой ракеты-
носителя увеличена на г %. На сколько процентов нужно уве-
личить количество расходуемого топлива для дозаправки I сту-
пени, чтобы характеристическая скорость ракеты-носителя оста-
лась неизменной?
Решение. Рассмотрим вначале трехступенчатую ракету-носи-
тель. Воспользовавшись формулой (4) задачи 1.8, положим
Л4, '‘- 0, ^сВ === ^О2 == ^01 == ^Т8 ==
получим
Ugl/nTi
/Л1
Реэ^тэ^ __ Л
(®К8 *4" Л) ’
тК1 Ч" (тм + Л)
ГДв А = fen. г^п. р> fen. v == 0,01 fen. р»
Решив уравнение (1) относительно feTi,. получим
* _ fen. г^п. г Г 1 । mi (/nKi "Ь fen.r^n. г) чх
Т1 ~ 1 ~
/
PeimTi
_____________________ __________ттэРе8_____
\ ma (tf*K2 + fen. Г®П. г) т9 (тК8 4" fen. Г^П. г)
Зависимость (2) можно распространить на ракету-носитель
ступенями:
1, __ fen. г^п. г
^Т1-----------
G П
mi (пЦд Н~ fen. г^п. г) х.
»в1/ПТ1
mKl
п
4 mi (mKi + fen. г^п. г)
/=2
(1)
(2)
(3)
В частности, если скорости истечения рабочего тела одинаковы для
всех ступеней, то из выражения (3) получим
1, fen. г^п, г тК1 | | wl (mKl ~F fen. Г^П. г) х /ЯТ1
п ~~
X У т1т ”т‘ т . . (4)
jhJ mt (fnKi + kn. г^п. г)
i=2 _
Пример 1. Пусть трехступенчатая ракета-носитель имеет следующие
основные характеристики: т1 = 300 т, пц = 100 т, гщ = 30 т, тТ1 = 190 т,
/пт2 = 50 т, тт8 = 20 т, тп. г = 5 т, а скорости истечения рабочего тела оди-
наковы. Определим количество топлива, которое необходимо дозаправить в 1 сту-
пень, чтобы характеристическая скорость не изменилась, если масса полезного
груза увеличена на 50 кг. Очевидно, что 50 кг груза составляет 1% от массы
полезной нагрузки и, следовательно, &п. г == 0,01. В этом случае по формуле (4)
получаем &Т1 = 0,00666 = 0,67%. Следовательно, в рассматриваемом случае
в I ступень необходимо дозаправить 1266 кг топлива. Иначе говоря, изменению
массы полезного груза на 1 кг соответствует 25 кг топлива I ступени.
25
Пример 2. Двухступенчатая ракета-носитель «Титан-II» имеет следу-
ющие характеристики: = 150 т, тт1 = 112 т, = 33 т, тта = 27 т, тп. г =
= 3,7 т, ие1 = 2923 м/с, ие2 =3100 м/с. Какое количество топлива необходимо
дозаправить в I ступень ракеты-носителя, если масса полезного груза увели-
чена на 1%?
Воспользовавшись зависимостью (3), получим kT1 = 0,00788 = 0,79%. Это
соответствует 880 кг топлива I ступени.
Задача 1.10. Космическому аппарату массой тп, р в конце
активного участка траектории выведения необходимо сообщить
скорость, соответствующую характеристической скорости я8. Для
запуска аппарата используются одно- и двухступенчатая ра-
кеты-носители, имеющие одинаковые скорости истечения про-
дуктов сгорания ve и конструктивные характеристики ех = еа = в.
Определить стартовые массы ракет-носителей и отношение на-
чальных масс.
Решение. Для оптимальной многоступенчатой ракеты-носителя
при одинаковой скорости истечения продуктов сгорания всех
ступеней имеем (см. задачу 1.5)
-ф5- = — для всех k и п.
Лп еп
Для двухступенчатой ракеты-носителя при в! = е, = е по-
лучим X, == X, == X,,.
Так как =-57-» (1)
ТО 21 = Za 212-
Величину массового числа z12 определим из зависимости =
= ve In zf2, откуда следует
Z12 = е 2ve . (2)
Теперь с учетом зависимости (1) получим
Х12 = —----е. (3)
Z12
Коэффициент массовых затрат равен
^11 = (4)
М2
Стартовую массу двухступенчатой ракеты-носителя определяем
по формуле
Шц =Хцтп.1>. (5)
Для одноступенчатой ракеты-носителя имеем
%
v, = ve In zn; zu = e ; (6) Xu = — e; (7)
Xx = -7!—; (8) = Xi/n„. r. (9)
Mi
26
Отношение стартовых масс ракет-носителей
/ °8 \2
I 2о0 I
mi _ Xi _ Х|2 _ \1 —ъе /
/пц Хц Хц °а (Ю)
1 — ее °в
Пример 1. Космическому аппарату массой 5 т в конце активного участка
необходимо иметь характеристическую скорость 9,5 км/с. Принимая ve = 3 км/с
и е = 1/20, определить начальные массы одно- и двухступенчатой ракет-носи-
телей и отношение их стартовых масс.
Используя формулы (2), (3), (4), (5), получим
s^2 = 4,87; Х1а = 0,155; Хц = 41,7; тц = 208,6 т.
Для одноступенчатой ракеты-носителя воспользуемся формулами (6) и (7)
и определим
ги= 23,81; Хц = —0,008.
Очевидно, что при Хи< 0 эта величина не имеет физического смысла, т. е.
не существует одноступенчатой ракеты-носителя с характеристиками ve = 3 км/с
и е — 1/20, с помощью которой можно вывести КА массой 5 т на орбиту.
Пример 2. Решить предыдущий пример при ие = 4 км/с.
В результате решения получим:
1) для двухступенчатой ракеты-носителя:
г1а ~ 3,27; Х12 = 0,257; Хц = 15,15; тц = 76 т;
2) для одноступенчатой ракеты-носителя:
zu = 10,70; А.Ц = 0,044; Xj = 23,00; пц = 116 т; = 1,52.
Примерз. В примере 1 положить е — 1/30 и вычислить отношение стар-
товых масс одно- и двухступенчатой ракет-носителей.
Воспользуемся формулой (10), откуда получим -^2- — 3,4.
/Иц
Полученные результаты показывают, какое влияние оказывают скорость
истечения продуктов сгорания и коэффициент конструкции на массовые харак-
теристики ракеты-носителя.
1.4. Схемы выведения на орбиты
В настоящее время в космической баллистике используются
три основные схемы выведения на орбиты: прямое, с промежуточ-
ным баллистическим участком и с промежуточными орбитами.
Прямое выведение. В этой схеме выведение на ор-
биту осуществляется при непрерывной работе двигательных уста-
новок. В случае многоступенчатых ракет-носителей величина тяги
и масса ракеты-носителя изменяются скачком при переходе с од-
ной ступени на другую. После выключения двигателя последней
ступени достигается требуемая орбитальная скорость полета.
Выведение с промежуточным баллисти-
ческим участком. В этой схеме траектория полета ра-
кеты-носителя состоит из трех участков. На первом участке КА
получает скорость, которая меньше требуемой орбитальной ско-
рости, вследствие чего его пассивный полет на втором участке
27
совершается по переходному эллипсу, пересекающему Землю.
На третьем участке (участке доразгона) двигатели ракеты-носи-
теля доводят скорость полета КА до требуемой орбитальной.
Выведение с промежуточной орбиты. По
этой схеме КА вначале выводится на промежуточную орбиту.
После этого серией импульсов КА переводится на заданную ор-
биту.
Выбор схемы выведения на орбиту в основном определяется
из условия минимизации расхода топлива с учетом ряда ограниче-
ний на характеристики движения, например, по величине пере-
грузки, по требуемой точности реализации кинематических пара-
метров движения, по простоте системы управления, по возможности
слежения с наземных пунктов управления, по допустимым райо-
нам падения ступеней и др.
Задача 1.11. С помощью ракеты-носителя с заданными харак-
теристиками на круговую рабочую орбиту высотой Н прямым
выведением доставлена полезная нагрузка тп. г. Определить,
какую полезную нагрузку можно вывести на ту же орбиту с ис-
пользованием промежуточной круговой орбиты высотой h < Н,
если на промежуточную орбиту прямым выведением доставлена
полезная нагрузка т1 = тп г + Дт.
Решение. Переход КА с полезной нагрузкой mi с промежу-
точной орбиты на рабочую должен осуществляться двумя импуль-
сами, приложенными в перигее и апогее гомановского перехода.
Величину первого импульса при этом можно определить из
выражения ___________________
Дих = ип — икр (Л) = + £ я + д) К+Л • W
Аналогично находим второй импульс:
Др2 = fKp (Н) — va = я + # — ]/ (R _|_ щ (2Я + Н + h) • (2)
Определим количество топлива, которое необходимо израсходо-
вать для перевода КА массой тх с промежуточной орбиты на ра-
бочую.
Используя формулу Циолковского для каждого из импульсов,
находим расходы топлива
Дтх = mip — ехр (— , (3)
Дта = (znx — Дтх) [1 — ехр ( — . (4)
Таким образом, при использовании промежуточной орбиты
на рабочую орбиту будет выведена полезная нагрузка
/Пп. г = гпп. г + Д/п — (Д/П1 + Дт2). (5)
В выражении (5) при оптимальном выведении
Дт > Дтх 4- Дт,. (6)
28
Поэтому выведение КА на рабочую ор-
биту с использованием промежуточной
является более выгодным по сравнению
с прямым выведением.
Пример. Ракета-носитель «Восток» с
ve = 3200 м/с при прямом выведении доставляет
на круговую орбиту высотой Н = 200 км полез-
ный груз тп. г = 7000 кг. На круговую орбиту
высотой h = 100 км выводится масса т1 =
= 7000+ 290 (кг). Определить полезный груз,
который можно вывести на круговую орбиту с
Н = 200 км, если промежуточная орбита задана
высотой h = 100 км.
По формулам (1) и (2) находим
Дс^ = 31 м/с, Ди2 = 29 м/с.
Далее по формулам (3), (4) определяем
Д/Hj = 68 КГ, Д/Т12 = 63 кг.
Следовательно, на круговую орбиту с Н = 200 км
в данном случае будет выведен полезный груз
т'п г = 7000 + 290 — (68 + 63) = 7159 кг,
т. е. на 159 кг больше, чем при прямом выве-
дении.
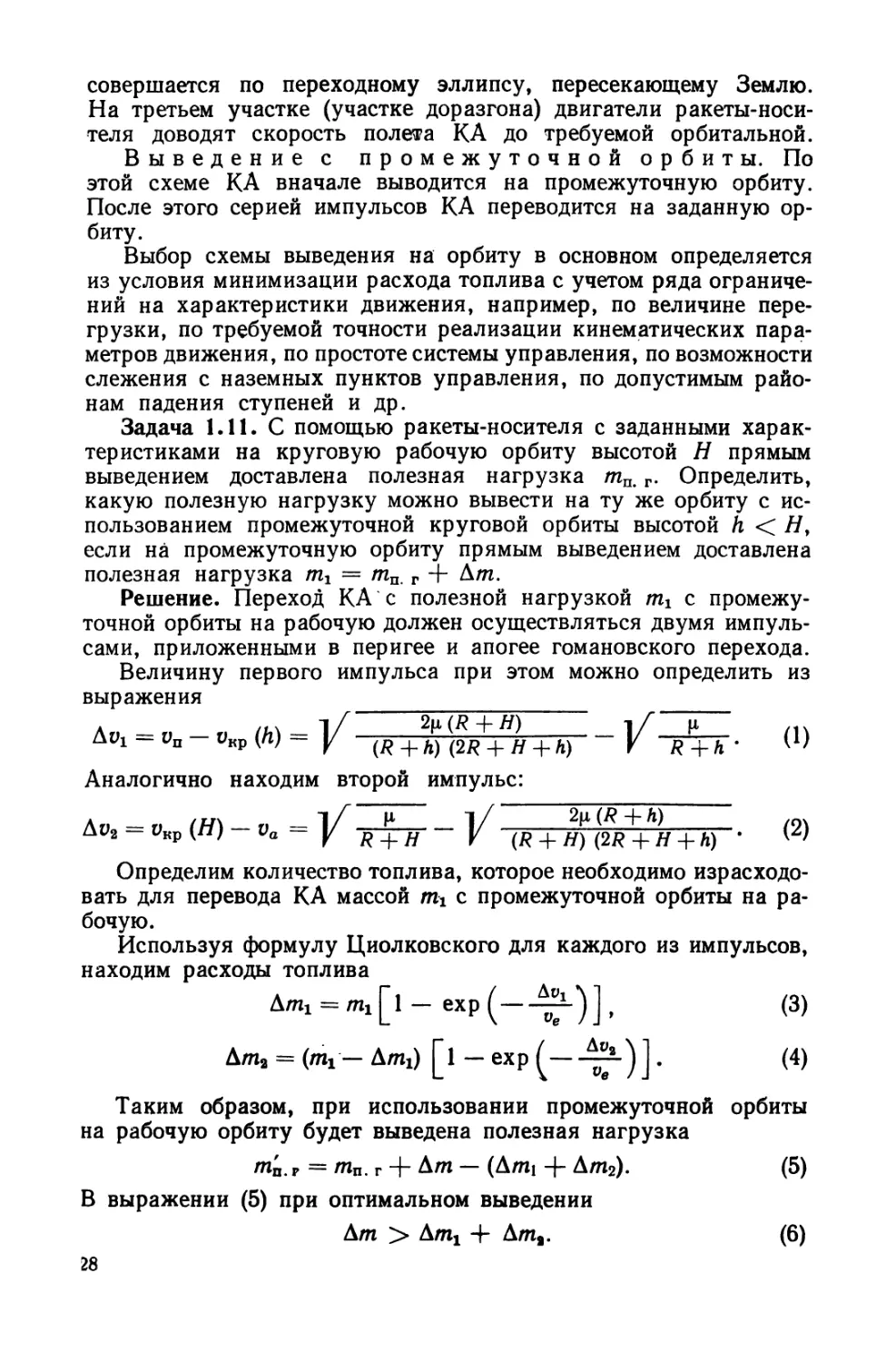
Рис. 1.2. Схема отсчета угло-
вых расстояний точки паде-
ния ракеты-носителя вдоль
поверхности Земли
Задача 1.12. На активном участке траектории выведения
произошло аварийное выключение двигательной установки. На
момент аварии известны составляющие вектора скорости в на-
чальной стартовой системе координат vx, vv и координаты х, у.
Геодезические координаты точки старта Lr и азимут стрельбы А
заданы. Определить расстояние от точки старта до точки падения
ракеты-носителя и геодезические координаты точки падения.
Сопротивлением атмосферы пренебречь.
Решение. Вначале определим угловую дальность Фа (рис. 1.2)
от точки старта до точки а, в которой произошло аварийное вы-
ключение двигательной установки:
Ф. = arctg-^-
(1)
После выключения двигательной установки ракета-носитель
совершает полет по инерции в центральном гравитационном
поле Земли. В этом случае угловую дальность полета Ф (см.
рис. 1.2) можно определить по формуле [23]
0 = 2arctg[+(6 + /^+X], (2)
где а = 2R (1 + tg* 0) — (2R + h)v, b =vRtg 6, с = vh, h =
= r — R, (3)
X v*r
r = ------ v = -----
sin Фв ’ ц ’
U = + &₽> 0 = Фа + arctg .
29
Рис. 1.3. Схема отсчета угло-
вых расстояний при опреде-
лении геодезических коорди-
нат точки падения ракеты-
ноСителя
ского треугольника 1Р2
Llt Фх, А известны, то
Тогда дальность точки падения, отсчи-
тываемая вдоль поверхности Земли (сфе-
рическая дальность), будет равна
5Сф = ЯФ1, Ф1 = Ф + Фв. (4)
Если предположить, что h г, то
зависимости (2) и (4) можно упростить:
Ф = 2 arctg 62 57(1 +®8а0)_ря , (5)
5сф = 111.2Ф! км (6)
(в формуле (5) скорость v измеряется
в километрах в секунду, а угол Фх в
формуле (6) — в градусах).
Геодезические координаты точки па-
дения определим с помощью сфериче-
(рис. 1.3). Поскольку величины Blf
ctg (AL) =
cos Bi ctg Фх — sin Bj cos A
sin A
(7)
sin = sin Bx cos Фх + cos Bx sin Фх cos A, (8)
o sin Ф1 sin A ltY.
c°sB»~ sin (AL) • <9>
После этого находим
La = Lr + AL. (10)
Пример. На момент аварии ракета-носитель имела следующие характе-
ристики движения:
у — 57,5 км, х = 62,5 км, vx = 1565,14 м/с, vy = 929,20 м/с.
Координаты точки старта: Bj = 40°, = 60°, азимут стрельбы А = 90°.
Определить дальность до точки падения ракеты-носителя и геодезические коор-
динаты этой точки.
Воспользовавшись зависимостью (1), находим угловую дальность точки
выключения двигательной установки Фо = 0,0097. По формулам (2) и (3) опре-
делим вспомогательные величины 0 = 0,5454, v = 1,8204 км/с, г = 6428,45 км,
h = 57,45 км, v = 0,05344, с = 3,07 км, b = 206,61 км, а = 16 749 км и угло-
вую дальность Oj = 0,0710.
По формуле (4) находим сферическую дальность £Сф = 452,34 км.
Заметим, что приближенные соотношения (5) и (6) приводят к следующему
результату: Фх = 0,0586, 5Сф = 373,34 км.
Для определения геодезических координат точки падения воспользуемся
формулами (7), (8), (10):
AL = 4° 35'; £а = 64° 35'; Ва = 40°.
Задача 1.13. В момент аварийного выключения двигательной
установки величина скорости, ее направление и высота полета
определены с погрешностями соответственно би, 60, 6h. Опреде-
30
лить ожидаемое отклонение сферической дальности точки паде-
ния ракеты-носителя от расчетной.
Решение. Сферическая дальность полета, соответствующая
участку полета от момента аварии до момента падения ракеты-
носителя на Землю, связана с угловой дальностью полета Ф за-
висимостью
Ясф = /?Ф, (1)
где Ф определяется соотношением (2) задачи 1.12. Очевидно, что
ф = Ф (и, 0, h). Характеристики движения о, О, Л в момент ава-
рийного выключения по условию задачи известны.
Полагая погрешности би, 60, 6Л достаточно малыми (по сравне-
нию с величинами и, 0, Л), разложим выражение для Ф в ряд Тей-
лора по степеням величин би, 60, 6Л и ограничимся линейными
членами разложения. В результате получим
бф=^6р+^60+*16/1. (2)
Для вычисления производных, входящих в выражения (2), вос-
пользуемся уравнением (см. формулу (2) задачи 1.12)
a tg® -у- — 2b tg-^- — с = 0.
Поделим это уравнение на величину v = иаг/р и обозначим
а . Ь с
ai-—, b!- — , Ct-—.
Тогда
= “ТЭТ - 2Л - Л, = /? tg 0, С1 = h,
Oi tga 4' — 26i tg -у- — ci = 0- (3)
Пусть q = q (v, О, Л). Дифференцируя уравнение (3) по q, получим
a‘tg 2 61 дФ t а Ф да1 о4. Ф dbt дсг
cos« Ф. 59 g 2 дЧ g 2 dq dq •
Кроме того, имеем
даг ___ 4R 1 е дЬг __________________ дсг __ ~
dv ~~ cos3 0 vv ’ dv dv ~~ ’
__ 4R tg 0 ' дъ dbx R
00 — v cos3 0 ’ 00 ~ ’ 00 - cos3 0 ’
_ /1 , %R \ . dci _ i
dh ~ V rv cos2 0 )’ dh ’ dh ~ b
31
В результате получим выражения для частных производных
дФ
ди
ф
4 sin»
w cos» 0 ’
(v - 2tg0tg -®-),
0Ф ______ гур sin Ф
дФ
dh
Ф
2sin«-r
rv cos» 0
(5)
= W
w ________!_____
* Л . a , ф
tge + ^ctg-g-
Теперь по формуле (2) можно найти 6Ф. После этого отклонение
сферической дальности определяется из выражения
65сф = Я6Ф. (6)
Пример 1. Для исходных данных, приведенных в примере к задаче 1.12,
определить частные производные, входящие в выражение (2).
Используя формулы (5), получим
дФ 1 дФ дФ 1
= 0,0587, -~- = 0,0282, = 1,83-10~< — .
dv км/с d0 dh км
П р и м е р 2. Пусть в момент выключения двигателя известны погрешности
6v — 1 м/с, 60 = 1°, 6Л = 1 км. Используя производные примера 1, определить
отклонения угловой и сферической дальности точки падения ракеты-носителя
на Землю.
По формулам (2) и (6) определим
6Ф = 0°,042; 6$сф = 4,67 км.
Задача 1.14. Определить положение точки старта ракеты-
носителя с поверхности Земли исходя из условия минимума ха-
рактеристической скорости выведения на орбиты с различным на-
клонением.
Решение. При старте ракеты-носителя за счет вращения Земли
она получает дополнительную скорость о3. Величина этой ско-
рости зависит только от широты точки старта и определяется
выражением
оэ = ц, cos В, (1)
где ц, = ta3R.
Эта скорость, очевидно, достигает наибольшей величины на
экваторе (В = 0) и равна нулю при старте с полюсов Земли (В =
= 90°). На экваторе она равна 465 м/с, а на широте космодрома
Байконур — примерно 316 м/с. Отсюда следует, что при старте
с экватора одной и той же ракетой-носителем может быть выве-
ден более тяжелый КА, чем при старте с любой другой широты.
Однако при этом направление пуска ракеты-носителя должно
выбираться таким образом, чтобы характеристическая скорость
складывалась с величиной скорости и3.
В частности, расчеты показывают, что ракета-носитель типа
«Титан-П» при запуске КА с космодрома имени Д. Кеннеди, рас-
положенного на широте 25°, способна вывести на орбиту дополни-
32
Рис. 1.4. Треугольник
скоростей
Рис. 1.5. Сферический тре-
угольник для определе-
ния наклонения плоско-
сти орбиты
тельную нагрузку около 200 кг по сравнению с запуском ее с кос-
модрома Байконур. Если же старт ракеты-носителя осуществлять
с экватора, то полезная нагрузка может быть увеличена до 285 кг.
Приведенные данные свидетельствуют о том, что с точки зре-
ния получения максимальной характеристической скорости кос-
модром целесообразно размещать возможно ближе к экватору
и стартовать в направлении вращения Земли. Естественно, что
при этом наклонение орбиты не может быть произвольным.
Если же изменять направление старта ракеты-носителя, то
изменится доля скорости и3 в величине характеристической ско-
рости выведения КА на орбиту.
Как видно из рис. 1.4, величина характеристической скорости
выведения КА на орбиту v определяется выражением
& = vj + V3 — 2v8v3 cos ф, (2)
где ф — угол между параллельно, проходящей через точку старта
и касательной к трассе КА; vB — величина характеристической
скорости выведения на орбиту, отложенная вдоль касательной
к трассе.
Из рис. 1.5 следует, что
c°s<p = -^4-. (3)
т COS D ' 7
Из равенств (2) и (3) находим
о2 = о* у9 (оэ cos2 В — 2v8 cos 0. (4)
Полученное выражение показывает, что при заданном значе-
нии наклонения плоскости орбиты минимальному значению ха-
рактеристической скорости v соответствует максимальное значе-
ние широты В. Так как широта точки старта В не может быть
больше наклонения плоскости орбиты, то Вшах = I. Следова-
тельно, минимум характеристической скорости выведения и обес-
печивается в том случае, если широта точки старта численно равна
наклонению плоскости орбиты.
Пример. Определить разность характеристических скоростей выведения
на орбиту заданного наклонения i при старте с экватора (В = 0) и на широте
В = I.
2 П/р Г. С. Титова 33
Воспользуемся зависимостью (4) и для случаев В = I и В = 0 соответ-
ственно находим
о2 = + и2 cos2 i — 2clcl cos i, (5)
о? = о2 + vl — 2v.vn cos I. (6)
Тогда
До = Ui — v =
vl (1 — cos2 i) d2 sin2 i
— 2wsU8 cos 1 + ]/ + ub cos212us°8 cos 1 2u«
Из выражения (7) следует, что наибольшая разность До соответствует на-
клонению i = 90°. Для орбит с высотой полета 200 ... 300 км при v8 = 9,5км/с
в этом случае имеем До « 11,3 м/с. Для других наклонений эта величина умень-
шается. Отсюда следует, что размещение точки старта на широте В = i дает
незначительные преимущества в характеристической скорости при выведении
КА на заданные орбиты. Необходимо также учитывать то обстоятельство, что
выбранное оптимальное положение точки старта В = i исключает возможность
прямого выведения КА на орбиты с наклонением В, поскольку проведение
маневра для изменения плоскости орбиты потребует дополнительного расхода
топлива, который превысит полученный выигрыш.
Следовательно, для обеспечения запуска КА в широком диапазоне накло-
нений космодром целесообразно размещать ближе к экватору.
Задача 1.15. Ракета-носитель стартует вертикально в цен-
тральном гравитационном поле сил, сопротивление атмосферы
отсутствует. В момент старта при hr = 0 ракете-носителю мгно-
венно сообщается скорость, равная Дох (первый импульс), а на
высоте Ла — скорость Диа (второй импульс). Определить скорость
полета ракеты-носителя на высоте А. Показать, что ракета-носи-
тель приобретает большую скорость, если эти два импульса сум-
мируются и прикладываются в момент старта.
Решение. Пусть — радиус точки старта; га = гг + Аа —
радиус точки приложения второго импульса; г = i\ + h — ра-
диус точки, в которой определяется скорость ракеты-носителя.
Определим скорость ракеты-носителя оа на высоте Аа до приложе-
ния второго импульса. Для этого воспользуемся интегралом энер-
гии
о2 ц .
------у- = const.
Так как = 0, то из равенства энергии ракеты-носителя в точке
старта (после приложения первого импульса) и в точке, соответ-
ствующей высоте Аа, следует
Д^______р =v%_______
2 гх 2 г2 ’
откуда
V2= V + (1)
' ri
После приложения второго импульса энергия составит
(До, +о,)1_____
2 г, •
34
и она не изменится при достижении высоты h. Следовательно,
(Др, + о2)’ Ц _ О» Ц
2 г, “ 2 г ’
Из последнего выражения находим кинетическую энергию на
высоте Л:
* = (Д°8 + о»)* _|_ JL _ JL (2)
или, учитывая равенство (1),
4 = 4-(До? + Д°2) + Д°2 1/До‘+-Г---Г- + -7---7-- <3>
Эта формула фактически и определяет значение искомой скорости
на высоте Л.
Если оба импульса прикладываются одновременно в момент
старта, то rt = гх, и из равенства (3) следует, что в момент дости-
жения высоты h кинетическая энергия будет равна
v|_ _ (Дух + At»a)a , р _ р ,
2 “ 2 + г гх • ' '
Пользуясь равенствами (3) и (4), определим разность кинети-
ческих энергий:
- 4-4=дЧД01-^м+тг-М <5>
Правая часть выражения (5) является положительной. Эго
означает, что кинетическая энергия в произвольной точке траек-
тории в случае одновременного приложения импульсов в точке
старта всегда больше, чем при последовательном приложении им-
пульсов. Значит, в первом случае ракета-носитель приобретает
большую скорость полета.
Пр им е р. Определить скорость полета ракеты-носителя на высоте Л =
= 200 км, при следующих данных: Дих = 8 км/с, Ди2 ~ 2 км/с, h2 = 50 км, гх =
= 6370 км. Если импульсы разнесены, то по формуле (3) находим и = 9,846 км/с.
При суммировании импульсов в точке старта по формуле (4) получаем и8 =
= 9,859 км/с. Иначе говоря, совмещение импульсов приводит к увеличению
скорости полета на ~13 м/с.
Задача 1.16. Дана широта точки старта ракеты-носителя
на сфере Во и азимут стрельбы А. Определить наклонение орбиты.
Решение. Рассмотрим прямоугольный сферический треуголь-
ник abc, откуда по формулам сферической тригонометрии непо-
средственно следует (см. рис. 1.5)
cos i = cos Во sin А,
т. е.
i = arccos (cos Во sin Л), (1)
В выражении (1) cos Во имеет всегда положительный знак, так
как Во может изменяться от 90° до —90°. Минимальное значение
2е 35
р
Lc .——
Рис. 1.6. Сферический треугольник для определения
долготы восходящего узла орбиты
наклонения получаем при А = 90°, которое
будет равно Во, а максимальное — при 4=270°
и тогда I = 180° — Во.
Пример 1. Дано: Во = 60°, А = 30°. Определить
наклонение орбиты I.
По формуле (1) находим /= 75° 30'.
Пример 2. Дано: Во = 60°, А = 330°. Опреде-
лить I.
Поскольку А £> 180°, то по формуле (1) находим
£ = 180° — 75* 30' = 104° 30'.
Задача 1.17. КА выводится на орбиту с пускового устройства,
расположенного на широте Во и долготе Lo. Азимут стрельбы
равен А. Предполагая, что Земля является сферой, определить
гринвичскую долготу восходящего узла первого витка орбиты
Решение. Рассмотрим прямоугольные сферические треуголь-
ники dPc и abc (рис. 1.6). При этом точка Р совпадает с полюсом,
a b — с точкой старта ракеты-носителя. Из рис. 1.6 следует, что
долгота восходящего узла первого витка орбиты относительно
гринвичского меридиана будет равна
= Lq — х. (1)
Величину дуги х определим из прямоугольного сферического
треугольника abc.
tg х = sin Bq tg A .
или
x = arctg (sin Bq tg 4). (2)
Если же значение наклонения орбиты i дано (см. задачу 1.6),
то величину этой дуги можно определить также из зависимости
sin х = или х = arcsin (^7-) • (3)
Знак дуги х однозначно определяется с помощью формул (2) и (3).
Пример 1. Дано: Во = 30°, А = 45°, Lo = 60° Определить Ох. Вос-
пользуемся формулами (1) и (2):
х= 26° 30', Ох = 33° 30'.
Пример 2. Дано Bq = 30°, А = 330°, Lo = 60°. Определить Ох* Как
и в примере 1, находим
х = —16° Об', 76° 06'.
Задача 1.18. Двухступенчатая ракета-носитель, расположен-
ная на пусковом устройстве с широтой В, способна вывести КА
массой тп, Р на орбиту с наклонением 1г. Определить массу КА,
который можно запустить этой же ракетой-носителем с данного
пускового устройства, если наклонение плоскости орбиты выве-
дения изменено на величину А/.
36
Решение. Известно (см. задачу 1.16), что наклонение орбиты
определяется широтой места запуска КА и азимутом стрельбы.
Если широта места запуска КА определена, то величину наклоне-
ния орбиты наименьшими энергетическими затратами возможно
изменить только изменением азимута стрельбы А.
Характеристическую скорость, обеспечивающую выведение
КА на заданную орбиту с наклонением i19 можно определить по
зависимости (см. задачу 1.14)
01 = vl + и9 (v9 cos2 В — 2vs cos 0. (1)
При запуске КА на орбиту с наклонением i2 характеристиче-
ская скорость ракеты-носителя изменяется на величину
1
Д01 = [0? + 2v8v9 (cos i\ — cos f2)]2 -—01- (2)
Для удобства вычислений приращения величины характеристи-
ческой скорости ракеты-носителя подкоренное выражение разло-
жим в ряд. Тогда с учетом иэ получим следующую прибли-
женную зависимость
Диа = v3 (cos 0 — cos i2). (3)
Если же дополнительно разложить в ряд функцию косинуса,
то выражение (3) можно упростить до следующего вида
До8 = о8 At (й + ~-). (4)
Теперь определим величину изменения массы полезного груза
ракеты-носителя при изменении ее характеристической скорости
на величину До, определяемую соотношением (2), (3) или (4).
Для этой цели воспользуемся формулой (4) задачи 1.8 и для
двухступенчатой ракеты-носителя получаем
Ду __^ei^Ti^n. г-Кп. г г^п. г /е\
^1 (™К1 + ^П. гКц. г) т2 (тК2 + Г^П. г)
Решив уравнение (5) относительно Ап. г, находим
1
_ _й + (йа_4ас)2
Л п. г ~ 2а ’ W
где
а = ml. r (J±vm\m2 + 0е1/Пт1/п2 + o^^wni),
b = Ди^тзТИп. г (тка + т^) + /ип. г (Пе^т^/Пкз +
+ (7)
с =
Для приближенных оценок зависимость (6) можно упростить
и воспользоваться выражением
Ап. г « -с/Ь. (8)
В этом случае нет необходимости в определении коэффициента а.
37
Пример. Транспортный космический корабль многоразового использо-
вания «Спейс шаттл» имеет следующие основные характеристики: число сту-
пеней 2, mt = 2018,5 т, = 1008,3 т, mTi = 1010,2 т, vel = 2500 м/с, =
= 843,8 т, тга = 134,0 т, /пта = 709,8 т, = 4100 м/с.
На орбиту с наклонением 28° ракета-носитель может вывести полезный
груз 98 т. Определить возможные изменения полезного груза космического
корабля «Спейс шаттл» при его выведении на орбиты с наклонением 38, 48 и 58°.
Сначала найдем изменения характеристической скорости при изменении
величины наклонений соответственно на 10, 20 и 30°. По формуле (2) соответ-
ственно находим значения скоростей 46, 103 и 170 м/с.
Формула (3) дает следующие результаты: 44, 99, 164 м/с, а формула (4) —
соответственно 47, 108, 183 м/с.
Анализ полученных результатов показывает, что формулы (3) и (4) дают
вполне удовлетворительные значения искомой величины Ли.
Теперь по зависимостям (6) и (7) находим значения коэффициента /Сп# г:
1,74, 3,82, 6,18%, что соответствует уменьшению массы полезного груза на 1704,
3742, 6052 кг. Применение формулы (8) дает следующие результаты: 1721, 3700,
5985 кг. Результаты расчетов показывают, что величина потери массы полезного
груза нелинейно зависит от значения наклонения плоскости орбиты. Но по
приближенным оценкам для многоразового космического корабля «Спейс шаттл»
можно считать, что изменение плоскости орбиты на 1° приводит к изменению
массы полезного груза примерно на 200... 220 кг.
1.5. Оптимизация и выбор программы двииения
ракеты-носителя
Постановка задачи. Пусть движение ракеты-носи-
теля описывается обыкновенными дифференциальными уравне-
ниями, представленными в нормальной форме Коши:
х = f(x, и. 0, (1.15)
где х ха, ..., хп}—фазовый вектор, определяющий состоя-
ние системы в момент и {и19 и2, ..., ит} — вектор управляющей
функции.
Требуемое управление выбирается с учетом фазовых ограни-
чений
(1.16)
и ограничений на управляющую функцию
и (0 € Wu. (1.17)
Здесь 1ГЯ, — некоторые заданные множества.
Движение ракеты-носителя, кроме того, может быть ограни-
чено некоторыми начальными и конечными условиями
(х, /о)СФо, (1-18)
(х, и€Фк. (1.19)
Условие (1.19) обычно называется целью управления.
Задача оптимального управления движением ракеты-носителя
может быть сформулирована следующим образом: определить
управления (1.17) при [4» М» доставляющие экстремум функ-
ционалу J = J (х, и) при дифференциальных связях (1.15),
38
ограничениях вдоль траектории (1.16), (1.17) и граничных усло-
виях (1.18), (1.19).
Вектор-функцию и (/), которая удовлетворяет указанным ус-
ловиям, называют оптимальной программой уп-
равления.
Основные уравнения. Если на функции, обеспечивающие
минимум функционала, ограничения не наложены, то поиск ре-
шения сводится к вариационным задачам на безусловный экстре-
мум. При каких-либо ограничениях или особых условиях, на-
ложенных на эти функции, возникает вариационная задача на
условный экстремум.
Задача о нахождении безусловного экстремума при фиксиро-
ванных граничных условиях сводится к решению п уравнений
Эйлера—Лагранжа:
4--я-(4г)=0’ о-20»
где ф (х, и, t) — дифференцируемая функция своих переменных,
являющаяся подынтегральной функцией функционала.
Задача о нахождении условного экстремума функционала при
наличии т связей сводится к решению п уравнений Эйлера—
Лагранжа для вспомогательного функционала
JB=(Od/ (1.21)
с подынтегральной функцией
б = ф+2М0Ь» (1-22)
/=1
где
b (0. xt (0, Л = о,
i = 1, 2,..., п, j = 1, 2,..., m;
kj — неопределенные множители Лагранжа при выполнении не-
равенства т < п.
В задаче с подвижными концами 2п произвольных постоянных
определяются из условия трансверсальности при зависимых
вариациях 6х(, 6/0, 6/к:
при t = t0
при t = tK
(1-23)
(1.24)
39
Если вариации бхг, в/0, б/к независимы, то равенства (1.23J! ж
(1.24) распадаются:
(п \
г I =0; w 6х,1= 0> i = l> <L25)
1J tLt9 tLt9
/ п \
Н=0; <s"l=°’ i=l’2..............л' (L26)
\ <=1 / l=fK
Задача 1.19. Пусть КА совершает плоское движение в одно-
родном гравитационном поле под действием реактивной силы Р,
направленной под углом ср к плоскости горизонта. Предполагается,
что атмосфера отсутствует, а тяга двигателя Р и масса КА являются
известными функциями времени. Начальные условия движения КА
определены полностью, в то время как для конца траектории
даны только значения составляющих вектора скорости. Требуется
определить закон изменения угла ср из условия достижения макси-
мальной высоты в конечной точке при фиксированном значении
времени работы двигателя.
Решение. Запишем уравнения движения КА в следующей
форме:
6» = -^-COST, Sin ф - g, X=Vx, у ~ vy (1)
с начальными условиями движения
V® (to) = Vy (to) = VyQ,
x(tQ) = *о, ff(to) = Уо (2)
и граничными условиями на правом конце
^00 (^к) = Vy (^к) = Уун* (3)
В рассматриваемой задаче функционал
J = Уо + \ Vydt (4)
^0
будет характеризовать высоту подъема КА. Введем вспомогатель-
ный функционал типа (1.22):
G = vIZ4-l1(da,--^-cos<p) +
+ -£-slnq> + g) +Хз(х-ох), (5)
где Хъ Ха, Xj — неопределенные множители Лагранжа.
Очевидно, что функция G равна основному функционалу на
всех траекториях, удовлетворяющих дифференциальным связям (1),
и поэтому позволяет перейти от задачи на условный экстремум
к задаче на безусловный экстремум функционала.
40
Для искомых функций vXi vy, х, ср получаем следующую систему
уравнений Эйлера—Лагранжа (1.20):
= —%3, i2 = 1, ^8 = 0; %i sin ср — Х2 cos ф = 0, (6)
которая имеет решение
+ С3 (/ - /0),
= с2 + (t - t0), %3 = -С8> tg ф = > №
G1 "г и3 V - 1о)
где Ci, С2, С8 — неизвестные постоянные.
Смысл уравнений Эйлера—Лагранжа заключается в том, что
они, заменяя систему оптимизируемых функций, превращают
функционал в функцию постоянных величин С19 С2, С8. Таким
образом, решение задачи сводится к нахождению постоянных С19
С2, С3, которые определяют максимальное значение функционала
(4).
Поскольку на правом конце заданы только два граничных ус-
ловия (3), то их недостаточно для определения трех констант Сх,
С2, С3. Поэтому воспользуемся условиями трансверсальности
(1.26) для координаты х, поскольку в момент tK на нее ограниче-
ния не наложены:
-^6х = к36х I = 0.
ОХ
t==tK
Отсюда следует, что = 0 и С0 = 0. Тогда
tg Ф =-^ +
Так как при t = t0 имеем
tg ф = tg Фо = -§4
то
tg ф = tg Фо + . (8)
В выражении (8) неизвестными являются tg ф0 и С19 для оп-
ределения которых воспользуемся двумя граничными условиями.
Очевидно, что в начальный момент
Jxo
Интегрируя первые два уравнения системы (1), получаем
= f«o+ j -^-cos <pdt,
f,
= Vyo + J sin Ф — g) di.
41
Отсюда можно выразить vxQ, vvq в функции угла ср, исключив
их из выражения для tg ф0:
J -^-sin<pd/
tg фо --------------1----------------, (9)
*к
$4-cos'pd<
*0
где
Sln ф = -g- [tg ф0 Н---g-2-] ,
1
COS ф = —,
c-{i + [t6T. + -^-]2f.
При известных значениях Р, /и, tQ, tK, ф0 уравнение (9) со-
держит только одну неизвестную величину Сг, Следовательно,
решив уравнение (9) относительно Сь полностью определим оп-
тимальную программу угла ср.
Определив оптимальную программу движения в однородном
гравитационном поле сил, можно оценить возможность ее распро-
странения на реальное поле сил с учетом существующих средств
управления полетом ракеты-носителя. На практике, как правило,
имея в виду удобство и надежность технической реализации, при-
меняются программы, достаточно близкие к оптимальным. Та-
кие программы обычно называют квазиоптимальными.
Например, полученную выше программу угла тангажа типа
tg ср = а + b (t — t0) реализуют в виде линейной функции ф =
= Фо + ф (t — /0)» которая содержит в качестве свободных пара-
метров начальное значение угла тангажа ф0 и скорость его изме-
нения ф.
Задача 1.20. Пусть ракета-носитель совершает полет под дей-
ствием реактивной силы в центральном гравитационном поле
сил притяжения Земли. Предполагается, что атмосфера отсут-
ствует, величина тяги и масса ракеты-носителя являются извест-
ными функциями времени. Управления выбираются из открытой
области. Определить законы изменения местного угла тангажа 0,
угла рыскания ф и тяги двигателя Р из условия достижения на
момент tK максимума полной механической энергии ракеты-но-
сителя [311.
Решение. В представленной формулировке задача определения
оптимальной программы управления относится к классу вариа-
ционных задач на условный экстремум. Для описания движения
центра масс ракеты-носителя воспользуемся дифференциальными
42
уравнениями в цилиндрической системе координат
4 = sin 9 cos Ч> - -Jr + ~Г ’
• Р л vuvr
Vu =--COS 0 cos to--
т т г
4=~з1пф, (1)
Л = ог,
й = -^2-,
г ’
6 = оь.
Здесь vr, vu, vb — составляющие вектора скорости в проекциях
на радиус, трансверсаль и бинормаль соответственно; и — аргу-
мент широты ракеты-носителя, отсчитываемый в плоскости ор-
биты (основной плоскости) без учета бокового смещения.
Функционал имеет вид
Пусть 6JR — вариация функционала в окрестности t = <R
при известных кинематических характеристиках движения
64 = т (ЦГкбПгк + Пив 6«ик + »Ьк 6l>bB + -ft- 6rR).
\ к /
Если характеристики движения и программа управления выбраны
оптимальными, то 64 = 0, и тогда
(Пгв 6и,в + Р«в 6our + «Ьв 6») ft-. (3)
°гк
При неоптимальности управления, очевидно, 64 < 0.
Предположим теперь, что известно некоторое текущее значе-
ние функционала. Очевидно, что вариация функционала 64
является функцией кинематических характеристик движения в мо-
мент tK, которые в свою очередь зависят от принятой программы
управления. Определим такие вариации управлений и соответ-
ствующие им вариации кинематических параметров движения,
которые в каждый момент движения обеспечивают максимальное
изменение вариации 64-
Найдем вариации элементов траектории выведения в конечной
точке при варьировании управляющих функций на текущий мо-
мент t. Для этой цели воспользуемся линейнвши уравнениями
в вариациях системы (1)
6д, = -^-бг + -2^-боо-4бг,
64 = - -> 6or - ± 6va + бг, (4)
64 = 0, 6Л = 6ог.
43
Анализ системы уравнений (4) показывает, что на участке
непрерывного выведения вариации Sur, 6vUi 6Г в зависимости от
времени изменяются незначительно. В связи g этим указанные
вариации при интегрировании системы уравнений (4) вынесем
за знаки интегралов и приравняем их вариациям на текущий мо-
мент времени t. Теперь проинтегрируем систему уравнений (4):
6огк = биг + 26vu J dt - J - J dt + 2ц 6r J 4- ’
/ t г
'к ‘к ‘к
6иин = 6ои + 6г J -^-dt - bvT^-^-dt- 6vu f -y-dt, (4')
i t г
dvbK = 6vb,
6rK = fir 4- fiWr (tK — t).
После этого найдем связь вариаций кинематических характери-
стик движения с вариациями управлений 0, if, Р в некоторой те-
кущей точке:
6ог = (cos 0 cos if S0 — sln 0 sln if 6if) + sin e^os 6Pj 6/,
6va = (sln 0 cos if 60 + cos 0 sln if 6if) + cos e^os 6P j 6/,
(5)
6ub = COS if 61f + 6P j 6/,
6r = 0.
Используя последнее из равенств (5), упростим выражения (4'):
6игк = биг + 26п„ У -у- dt,
t
‘к ‘к
6vaR = 6vu - Svr f dt - 6ов J dt, (6)
t t
6vbK = 6ob,
6rB = 6vr (t„ — t).
Исключим из левой части равенства (3) вариации 6огк, 6duk, 6vbK
с помощью соотношений (6). В результате получим
(Д’ 6»г + L 6о„ + оЬк 6vb) = —X, (7)
где обозначено
Х=-^-(/в-0, (8)
= ^гк (9)
44
L = 2vrKU! + oUK( 1 — In , (10)
(П)
i
Затем исключим вариации 6or, 6nu, 6оь, 6г в равенстве (7) с по-
мощью соотношений (5). В результате получим линейное соотно-
шение относительно вариаций 60, бгр, 6Р:
1 (cos 0 cos гр 60 — sin 0 sin гр бгр + sm e^QS 6Р) =
= —К (cos 0 cos гр 60 — sin 0 sin гр бгр 4- sin 9^os 6р) +
+ L (sin 0 cos гр 60 + cos 0 sin гр бгр-CQS 9^os^. gp) _
— t»bK (cos ф 6ф 4~ 4Й- •
Так как вариации 69, 6ф, 6P независимы, то полученное равенство
должно обращаться в тождество при их любых значениях. Это
означает, что коэффициенты, стоящие у каждой вариации, должны
быть равны нулю. Из этого условия находим
X cos 0 cos ф = —К cos 9 cos ф L sin 9 cos ф, (12)
—X sin 9 sin ф = К sin 9 sin ф 4~
4- L cos 9 sin ф — obR cos ф, (13)
— X sin 9 cos ф = К sin 9 cos ф 4*
4- L cos 9 cos ф 4- t»bR sin ф. (14)
Из выражений (12) и (13) следует
= (is)
“♦° vl-Xk,. <'6>
Проанализируем равенство (14). Так как законы изменения
углов 0 и гр выражаются зависимостями (15) и (16), то с использо-
ванием этих соотношений равенство (14) перепишем в таком виде:
L2 4- vh + [К + р (/« - О]2 = 0.
Это равенство выполняется только при t = /к, игк = vUH = иЬн =
= 0, что невозможно по условию задачи. Тогда для выполнения
необходимого условия оптимальности следует принять 6Р = 0,
т. е. вариация от величины тяги на участке выведения равна нулю.
Оптимальные законы изменения управляющих функций 0 и гр
зависят от элементов траектории выведения на правом конце (ги,
игк, 0ик, уьк) и их текущих значений (г, их).
45
Значения rR, orR, uUK, иЬк, обеспечивающие максимум функцио-
нала J, определяются последовательным интегрированием си-
стемы (1), причем при каждом новом интегрировании в выраже-
ния (15) и (16) подставляются те величины скоростей и радиуса-
вектора, которые получаются на правом конце траектории. Пер-
вые приближения этих величин определяются исходя из условия
выведения КА на приближенно заданную орбиту, например,
vUR = 8 км/с, огн = оЬн =0, гк = 6570 км.
Если же граничные условия на правом конце определены, т. е.
поставлена задача о выведении КА на заданную орбиту, то вели-
чины rR, vrR, оик, оЬв определяются непосредственно через эле-
менты орбиты:
orR = j/" -^-е sin OR cos (А0,
Оик = (1 + е cos Фк) cos (At),
__ Рци (At) _ Р____________
bR cosuR ’ в 1 -|-е cos ’
„ &а —Ап _ D । 4~ Ад
е~ 2R 4- ha 4- Лп ’ а~к~^ 2
р = (1 — е8) а,
где ha, h^ — соответственно высоты апогея и перигея; 0в — истин-
ная аномалия точки выведения; At = tR — i0 — разность уг-
лов между плоскостью орбиты и основной плоскостью цилиндри-
ческой системы координат, дпределяемой азимутом стрельбы.
Задача 1*21. Определить скорость изменения углов тангажа
и рыскания при движении ракеты-носителя по оптимальной тра-
ектории.
Решение. В задаче 1.20 были получены программы угла рыска-
ния и местного угла тангажа из условия обеспечения максималь-
ной механической энергии аппарата в точке выведения на орбиту.
Эти программы имеют вид
tg0 О)
tg Ф = ------, (2)
6 v Vl» + (%+K)» ’
где
'к
К = vrK — OBKU1,
L = ZVraUi 4- OBR (1 - In ,
46
Угол тангажа <р связан с местным углом тангажа 0 следую-
щей зависимостью:
Ф = 0 — (и — и0), (3)
где ис — аргумент широты точки старта. Из выражения (3) сле-
дует
ф = 0 — й. (4)
Используя далее соотношение (1), получаем
где
kY = — (b + сиг — b In -у-) (Ьй + d),
^ — (a — bUi — dt) -у- + ей) >
ks = (b 4- CU! — b In—«-у,
kt = (а — buj. — dt)*,
о = огк ”Ь dtK,
& = ®ик»
с = 2огк, d = .
'к
Для оценки величины скорости 0 упростим выражение (5).
Так как величина In-у- является малой, то положим
In (-у-) = 0- Поскольку оптимальной программе соответствует
выведение в перигей орбиты, то в этом случае огк = 0 и поэтому
выражение (5) упрощается:
-« ——-------S^{t t) +Sl.u
A __t>u« Ouk^ Г 1
, , [gKfa-O-VuK»!]2
(6)
у2
где £к=у~.
Так как знаменатель выражения (6) больше единицы и, учи-
тывая, что слагаемое vru/r по своей величине мало по сравнению
с остальными слагаемыми* то окончательно получим
0т«-й--^Г1 + ^(tK - О'], (7)
ипк L r J
а из соотношений (4) и (7) следует
ф"~-(-йЯ1+^<‘--()]+2“)- <8>
47
Из выражения (8) видно, что при движении на внеатмосфер-
ном участке угловая скорость ф достигает наибольшего значения
в окрестности конечной точки.
Пример 1. Дано г = 6570 км, vr = 1 нм/с, gK = 9,5 м/с2, /к — /0 =
= 400 с, vUK = 7,9 км/с. Определить фт.
По формуле (8) получим фт = —0,0036 с"1 = —0,21 град/с, т. е. угловая
скорость оказывается небольшой.
Дифференцируя выражение (2), получаем
ф = - РЬя(^7с,) > (9)
где
Ci = ^2огкй1 -|- оик ) L,
С» = (К + А) (оикй1 + gK),
С3 = £2 + р^ + (Л + %)2,
C4 = [L2 + (K + W2.
Полагая, как и выше,
ргк = 1п^- = 0
и пренебрегая малыми влагаемыми, окончательно получаем
(Ю)
где oi = v2aa + v$„.
Пример 2. Дано: gK = 9,5 м/с®, tK — ta = 400 с, пьк = 3 км/с, oUH =
= 8 км/с. Определить фт-
По формуле (10) находим фт * 0»0И град/с.
Задача 1.22. Летательный аппарат (ЛА) совершает полет
в атмосфере Земли под действием аэродинамических сил и силы
притяжения. Управление движением осуществляется изменением
углов крена у и атаки а, области определения которых являются
открытыми. Начальные условия движения известны полностью,
а правый конец траектории определен заданной величиной ско-
рости или высоты полета. Требуется определить оптимальные за-
коны изменения углов крена у и атаки а ЛА из условия достиже-
ния максимального приближения к заданной точке прилета [32].
Решение. Пусть в текущий момент t ЛА находится в точке
с географическими координатами В и L, где В — широта, a L —
долгота. Выберем систему координат таким образом, чтобы точка
повадки ЛА вовпадала в кородинатами В = L = 0. В этом слу-
чае угловое расстояние А от точки с географическими координа-
тами В, L до заданной точки прилета можно выразить уравнением
cos А = cos В cos L. (1)
48
Движение ЛА будем рассматривать в сферическо-скоростной
системе координат, в которой уравнения связи имеют следующий
вид:
v = я? + gt + а?,
0 = — (ап + gn + а* + о?) + — cos 0,
П = — о~-0- (aS + gK + a“ 4- aS) - -7- tg В cos т] cos 9,
r = 0 sin 0, (2)
В = -7- cos 0 sin 1),
J __ OCOS 0 COST]
r cos В 9
где
a* — —CxqS ; =- cv<ls., cos ая _ sln
T tn n tn K tn
gx = gr sin 0 4- Яц cos 0 sin t|;
gn = gr COS 0 4- g„ sin 0 sin T];
pt>*
gR = gnCOST], <7 = -^-;
gr = £ 2" 7г (sln2 5 — -3-) ;
gn = sin В cos B;
a“ = 2o©, cos В cos n;
a* = 2i»©3 (cos В sin 0 sin t] — sin В cos 0);
a’ = r©| cos В (cos В sin 0 — sin В sin t] cos 0);
an = г®з cos В (cos & cos® H- sin & sin Я sln ®)»
a’ = —r©| sln В cos В cos ц;
p — плотность атмосферы; 0 — наклон вектора скорости к мест-
ному горизонту; т] — угол между параллелью и проекцией век-
тора скорости на плоскость местного горизонта.
Функционал имеет вид
J = cos В cos L. (3)
Из необходимого условия оптимальности на момент /к следует, что
a6LK 4- Ь8ВК = 0, (4)
где
а = cos Вк sln LK, b = cos LK sln BK.
Определим такие вариации управлений у и а и соответствую-
щие вариации кинематических элементов движения, которые в каж-
49
дый момент движения обеспечивают максимальное изменение ва-
риации функционала.
Сначала определим вариации элементов траектории движения
ЛА на момент при варьировании управляющих функций на те-
кущий момент t. Пользуясь линейными уравнениями в вариациях
системы (2), получаем
6L = L (-$L_±_-tg060-tg т]6т] + tg В6В).
6В = В —-у-— tg 060 + ctg г|6т]) . (5)
Теперь найдем связь вариации кинематических элементов
движения ЛА с вариациями управлений ? и а в некоторой теку-
щей точке. Для этого воспользуемся теоремой о среднем и полу-
чаем
6о _ _ баб/,
2 т да ’
4cos^6ah (6)
бт) = 4- cosT6T + ба) б/,
1 \ v 2 /и cos 0 f г 1 2/ncosO да / ’
6В = 6L = 6г = 0.
С учетом 6В = 6L = 6г = 0 выражения (5) примут следующий
вид:
6L = L (4- - tg 060 - tg Т|6Т|), (7)
6В = Ё - tg 060 - ctg т)6т)) .
Предположим, что величины би, 60, 6т) вдоль траектории дви-
жения изменяются на малые величины по сравнению с их значе-
ниями, определенными по зависимостям (6). В связи с этим ука-
занные вариации при интегрировании системы уравнений (7)
вынесем за знак интегралов и приравняем их вариациям на теку-
щий момент /.
Проинтегрировав уравнения (7) от t до /к, находим:
6LK = 6vf — <*/ — 60 С Ltgddt- 6т] С Ltgddt,
Г ° t Г (8)
6ВК = 6» у -^-d/ — 60 J В tg 0 dt + 6т] J В ctg т] dt.
t t t
Затем подставим соотношения (8) в уравнение (4), после чего по-
лучим следующую зависимость:
Лбп — В60 — Сбт) = 0, (9)
50
где
к
А =“( J
у t t
(*к *к \
J LtgOd/ + &i J BtgOdf 1
/ *к 'к \
С = а I у L tg T|d< — bj У В ctg i\dt I
у t t I
&i = tg BK ctg LK.
Исключив из равенства (9) вариации 6v, 60, 6tj с помощью
соотношений (6), получим линейные уравнения относительно
вариаций бу и 6а:
[Ло'^'ба + В (cos? ^L6a“ cv sm ?бу) +
+ (C* cos Ts? + sln Sa)] 6/ = °’
Так как вариации 6a и бу независимы, то полученное равенство
должно обращаться в тождество при их любых значениях. Эго
означает, что коэффициенты, стоящие у каждой вариации, должны
быть равны нулю. Из этого условия следует
ЛпС$ + ВС“со8у + -^*81пу = 0, (10)
cos у -BCV sin у = 0. (11)
Здесь
> pa _ дСх pa ______ дСу
~ “ЛГ’ ~ да ‘
Из уравнения (11) получаем
•«т-тал-- <12>
Далее из соотношения (10) с учетом зависимости (12) находим
Су Ли cos 0 /1Q4
"с®” ~~ Т" ’
х (В1 cos’0 + С2) 2
Для разрешения зависимости (13) относительно угла а предполо-
жим, что значение угла атаки не принимает на всей траектории
51
большие значения (| а | <; 10°). Тогда справедливы соотношения
С9 = Wa3, Са = Wa3,
= 3IFaa, = 2И7а,
да ’да
где W = W (о).
В этом случае выражение (13) можно представить в такой
форме:
2 (Д« cos «е + с»)2
3 Лисов О
(И)
Соотношения (12) и (14) зависят только от текущих и конечных
элементов траектории движения. Элементы, входящие в законы
изменения углов крена у и атаки а, возможно определить методом
последовательного интегрирования системы уравнений (2), ис-
пользуя при каждом новом интегрировании элементы траектории
на правом конце, полученные на предыдущем шаге. Первые при-
ближения этих величин определяются с использованием теоремы
о среднем.
ГЛАВА 2
Орбитальный полет КА
2.1. Основные положения
Движение КА по орбите происходит в сложном силовом поле.
Это поле характеризуется не только относительно большим чис-
лом воздействующих на полет КА сил, но и совершенно различ-
ной их физической природой. Различные силы по-разному влияют
и на характер движения КА по орбите. Учет всех сил, действую-
щих на КА в орбитальном полете, при расчете траектории его
движения чрезвычайно сложен. Физическую картину движения
хорошо иллюстрирует расчет, учитывающий лишь главную силу,
действующую на КА в полете, — ньютоновскую силу гравита-
ционного притяжения Земли. При таком расчете форма Земли
принимается сферической, распределение масс внутри ее — равно-
мерным по радиусу. Принимается также, что отсутствует атмо-
сфера. Рассчитанные с учетом таких допущений параметры дви-
жения КА называются невозмущенными параме-
трами, орбита, по которой осуществляется в этом случае полет
КА, — невозмущенной орбитой, а движение КА
по этой орбите — невозмущенным движением.
Иногда в теории полета КА невозмущенное движение называют
кеплеровым движением. Все остальные силы, действующие на
КА в полете по орбите, меняют в той или иной степени параметры
его движения, форму орбиты, положение плоскости орбиты в аб-
солютном провтранетве. Эти силы, как принято говорить в тео-
рии полета КА, возмущают движение КА. Именно поэтому сами
силы часто называют просто возмущениями, орбиту КА,
рассчитанную с учетом этих возмущений, — возмущенной
орбитой, а движение КА по такой орбите — возмущен-
ным движением.
Положение КА при невозмущенном движении на любой мо-
мент времени определяется шестью независимыми величинами,
называемыми элементами или параметрами ор-
биты. Два из них — наклонение плоскости орбиты и долгота
восходящего узла — определяют положение плоскости орбиты
в пространстве, другие два — большая полуось и эксцентриситет —
размер и форму орбиты, пятый — аргумент перигея — ориента-
цию эллипса в плоскости орбиты. Шестой параметр, временнбй,
позволяет фиксировать положение КА на его орбите в некоторый
момент времени.
53
При невозмущенном движении все элементы или параметры
орбиты (кроме временного) всегда остаются постоянными. Если
имеет место возмущенное движение КА (а на практике оно таким
всегда и будет), то элементы орбиты с течением времени под влия-
нием возмущений будут меняться. Тогда для каждого момента
времени можно вычислить вполне определенную систему элемен-
тов орбиты, соответствующую данному моменту. Если предполо-
жить, что с определенного момента возмущающая сила прекра-
тила свое действие, то указанная система определит движение
КА на последующее время. Эта система называется системой
оскулирующих элементов. Вследствие малости воз-
мущений, действующих на КА, элементы орбиты будут изменяться
медленно. Но они изменяются и поэтому учет их в некоторых за-
дачах теории полета КА необходим.
Каковы же основные силы, возмущающие движение КА?
Основным источником возмущений в движении большинства
спутников является несферичность фигуры
Земли — ее сжатие (вторая гармоника в разложении гравита-
ционного потенциала Земли в ряд по сферическим функциям).
Сжатие Земли вызывает постоянное вращение плоскости орбиты
вокруг земной оси, иными словами, перемещение по экватору
линии узлов. Это перемещение носит название прецессии
линии узлов. Одновременно происходит вращение точки
перигея в плоскости орбиты (изменение аргумента перигея), т. е.
вращение линии апсид. Эти возмущения носят постоянно действу-
ющий характер, поэтому называются монотонными, или вековыми.
Помимо вековых на движущийся по орбите КА действуют
различные периодические возмущения элементов орбиты,
например, колебания перигейного расстояния, вызываемые асим-
метрией Земли относительно экватора, так называемой «груше-
видностью» фигуры Земли (третья гармоника) и т. д. Кроме того,
имеют место короткопериодические возмущения^ элементов ор-
биты, происходящие в течение одного витка. Однако они очень
малы, имеют малый период колебаний, а учет их представляет
значительные трудности.
Второй не менее важной причиной, вызывающей возмущения
элементов орбиты, является атмосфера Земли. Для
того чтобы проводить оценки влияния атмосферы на полет КА,
необходимо выбрать ее модель: стационарную или динамическую.
Стационарная модель предполагает, что атмосфера Земли непод-
вижна относительно вращающейся Земли и при увеличении вы-
соты плотность ее убывает по экспоненциальному закону. Реаль-
ная атмосфера отличается от описанной выше так называемыми
флюктуациями. Так, замечено, что в унисон с периодами солнеч-
ной активности наблюдается несколько видов колебаний плот-
ности атмосферы, разнесенных во времени. Во-первых, это суточ-
ные колебания плотности атмосферы, связанные со сменой дня
и ночи. Во-вторых, колебания плотности атмосферы с периодом
54
около 27 дней, равные периоду вращения Солнца вокруг своей
оси по отношению к Земле. В-третьих, сезонные колебания.
Так, плотность атмосферы стремится к минимуму в июле и к мак-
симуму в октябре, причем в январе наблюдается вторичный ми-
нимум, а в апреле — вторичный максимум. В-четвертых, атмосфера
реагирует на колебания солнечной активности в течение 10-
или 11-летнего цикла появления солнечных пятен. Наконец,
плотность атмосферы зависит от географической широты. С уче-
том всех этих факторов строится динамическая модель атмосферы.
Такая модель предполагает, что атмосфера вращается вместе
с Землей и имеет сжатие, т. е. поверхности постоянной плоскости
имеют эллипсоидальную форму.
С точки зрения физики и математики можно считать удачным
обстоятельством то, что возмущения атмосферой Земли элементов
орбиты КА носят иной характер, чем гравитационные. Так, плот-
ность атмосферы быстро уменьшается с увеличением высоты,
и КА, находящийся на эллиптической орбите, испытывает эф-
фект торможения (главным образом в районе перигея). Это, в свою
очередь, приводит к изменению формы орбиты КА. Эллиптическая
орбита все более приближается к круговой, монотонно изменяются
эксцентриситет и большая полуось. Если бы атмосфера была
стационарной, то а и е оказались бы единственными элементами,
изменяющимися под действием атмосферы. Однако вследствие ее
вращения появляются небольшие поперечные силы, под действием
которых появляются малые монотонно растущие возмущения на-
клонения i и малые периодические возмущения долготы восходя-
щего узла Q. Наконец, сжатие атмосферы тоже приводит к малым
периодическим изменениям Q.
Из сказанного выше уже можно сделать вывод, что элементы
орбиты в процессе полета претерпевают изменения. Поэтому,
для того чтобы КА выполнил запланированные задачи в полном
объеме, помимо надежной работы бортовой аппаратуры, требуется
постоянно отслеживать его положение в космическом простран-
стве, а при необходимости проводить коррекцию орбиты. Отсле-
живание полета КА и измерение элементов его движения являются
сложной технической проблемой, решение которой поручено на-
земному командно-измерительному комплексу. Траектор-
ные измерения могут производиться оптическими и ра-
диотехническими средствами наблюдения. В качестве измеряемых
параметров могут быть, например, радиальная дальность до КА,
азимут, угол места расположения, высота полета КА, а также
скорость изменения радиальной дальности, азимута и т. д. Для
повышения точности определения орбиты обычно используют
избыточные измерения траекторных параметров с различных из-
мерительных пунктов, а также увеличивают временной интервал
проведения измерений.
После осуществления маневра параметры новой орбиты опреде-
ляются аналогично тому, как это делается после выведения КА
55
на орбиту, а величина и направление уже исполненного коррек-
тирующего импульса оцениваются по измененным параметрам ор-
биты.
Следует отметить, что задача определения орбиты
КА является одной из сложнейших задач теории полета КА.
Достаточно строгое ее решение требует проведения громоздких
и трудоемких расчетов, как правило, на электронно-вычислитель-
ных машинах. На практике получение приближенных данных
часто позволяет избежать трудоемких расчетов на ЭВМ и, что
еще более важно, позволяет хорошо прочувствовать физику дви-
жения КА.
2.2. Невозмущенное движение КА
Расчет невозмущенного движения КА относится к так назы-
ваемой ограниченной задаче двух тел, которая в небесной меха-
нике формулируется следующим образом: найти движение мате-
риальной точки, на которую действует центральная сила. Задача
называется ограниченной потому, что в ходе ее решения пренебре-
гают гравитационным воздействием материальной точки на цен-
тральное тело (в нашем случае — КА на Землю). В связи с этим
траектория КА при любых начальных условиях будет плоской
кривой, причем ее плоскость определяется вектором начальной
скорости о0 КА и центром силы притяжения. Если эта плоскость
совпадает в плоскостью OXY декартовой системы координат
с началом в центре Земли, то имеет место равенство, называемое
интегралом площадей:
XY — YX = г’ф = го sin (г, о) = С,
где г, <р — полярные координаты КА.
Величина центральной силы зависит от расстояния КА до
центра Земли.
Напомним теперь законы Кеплера, которые нам потребуются
в дальнейшем.
Первый закон: все планеты движутся по эллиптическим орби-
там, в общем фокусе которых находится Солнце; второй закон:
площадь (секториальная скорость), описываемая радиусом-векто-
ром в единицу времени, есть величина постоянная; третий закон:
для всех планет квадраты периодов обращения планеты вокруг
Солнца соотносятся как кубы больших полуосей эллипсов, т. е.
Т8 j а8 = const.
Из законов Кеплера Ньютон сделал выводы: на планету дей-
ствует центральная сила притяжения, проходящая через Солнце
и равная
Гг- •
Величина ц = —— есть величина повтоянная для каждой
из планет.
56
Законы Кеплера и Ньютона явля-
ются основными на первом этапе реше-
ния задач теории полета КА. Необходи-
мость оценочных расчетов параметров
движения КА с использованием теории
Кеплера возникает настолько часто, а
исходные данные бывают настолько раз-
нообразны, что авторы сочли необходи-
мым поместить не отдельные частные
задачи, а полную сводку формул невоз-
мущенного движения КА (см. приложе-
ние 1), которая поможет читателю не
прибегая к дополнительной литературе,
решить большинство возникающих на
практике задач. Для удобства пользова-
Рис. 2.1. Схема кругового
движения КА
ния и быстроты ориентации в этом довольно обширном мате-
риале составлены таблицы Ш и П2, позволяющие в зависимости
от исходных данных (первая графа) и искомого параметра (го-
ризонтальная строка) найти номер необходимой формулы.
Задача 2.1. Два КА выведены на компланарные круговые
орбиты соответственно с высотами ht и /ц (/i2 <h1). В начальный
момент КА находятся на одной прямой, проходящей через при-
тягивающий центр (рис. 2.1). С какой угловой скоростью один
КА будет смещаться относительно другого? На какое угловое
расстояние разойдутся КА за один полный оборот первого КА?
Решение. Угловые скорости КА определяются из соотношений
М = (1)
где rj. = R + hlt rt — R + h2.
Тогда разность угловых скоростей составит
(2)
Если период обращения первого КА равен 7\, то угловое рас-
стояние между КА через один оборот первого КА составит
Дл = 7,Д>. = 2„[1/(4±^)1-1].
(3)
Предположим, что разность ДА = hx — /ц является малой вели-
чиной по сравнению с величиной R. Тогда уравнения (2) и (3)
можно упростить. После линеаризации получаем
ДХ- 2 R+h’ <4>
Д" = -3"ТТГ- (S)
57
Параметры круговых орбит КА
Таблица 2.1
Высота орбиты fa, км Круговая скорость v, м/с Угловая скорость Х-10-», с"1 Период обращения Т
ч мин с
0 7912 1,242 1 24 25
150 7818 1,199 1 27 20
200 7791 1,185 1 28 25
250 7759 1,172 1 29 26
300 7732 1,159 1 30 27
350 7702 1,146 1 31 28
400 7675 1,133 1 32 29
500 7619 1,109 1 34 32
1 000 7356 0,998 1 45 02
6 378 5595 0,439 3 58 47
12 756 4568 0,239 7 18 40
19 134 3956 0,155 11 15 22
35 809 3076 0,073 23 56 04
189 011 1429 0,007 9 сут. 22 ч 33 мин
378 022 1019 0,000 27 сут. 10 ч 17 мин
Пример 1. Дано: hr = 6378 км; h2 = 200 км. Определить АХ и Ап.
Решение: а) на основании соотношения (2) имеем (табл. 2.1)
АЛ = (1,185 —0,439). 10"» 1/с » 0,746-10“» 1/с,
т. е. второй аппарат будет обгонять первый с относительной угловой скоростью
0,746-10“3 рад/с или —2,6 7мин; (
б) на основании соотношения (3) находим Ап « 2л-1,75, т. е. к моменту,
когда первый КА сделает один полный оборот, второй сделает 1,75 оборота.
Пример 2. Дано: hr = 300 км, h2 = 250 км. Определить АЛ и Ап.
Так как АЛ < то воспользуемся формулами (4) и (5) и получим АЛ =
= 0,013-10—3 1/с « 0,27 угловых минут в минуту и Ап « 2л-0,01, т. е. вто-
рой КА обгонит первый всего лишь на сотую часть оборота.
Задача 2.2. Пусть КА движется по круговой орбите на вы-
соте h вокруг Земли. Определить
должительности пребывания КА в
что тень Земли цилиндрическая.
Рис. 2.2. Схема прохождения КА через
тень Земли
величину максимальной про-
тени Земли в предположении,
Найти минимальное значение
максимальной продолжитель-
ности пребывания КА в тени
Земли в зависимости от вы-
соты орбиты.
Решение. Очевидно, что
максимальная продолжитель-
ность пребывания КА в тени
Земли будет соответствовать
случаю, когда в момент входа
КА в тень прямая, соединя-
ющая центры Земли и Солнца,
лежит в плоскости орбиты
КА. Если пренебречь отно-
58
сительным перемещением Земли и Солнца за время прохождения
КА через тень, то, как следует из рис. 2.2, время нахождения
в тени определяется временем движения КА по дуге аЬ. Очевидно,
что соответствующее этой дуге угловое перемещение КА составит
2а = 2 arcsin• (1)
К т л
Так как угловая скорость перемещения КА по орбите высотой h
определяется соотношением
Х = (R+h)» ’
то искомое время может быть вычислено по формуле
*п>ах = -у- = 2 1/ ^- + Л)8 arcsin у^у. (3)
Величина непосредственно зависит от высоты круговой
орбиты. Определим, при каком значении h величина прини-
мает минимальное значение. Эго решение найдем из условия
На основании (3) и (4) получаем
3(R + &)’arcsin (ууу) 2^[-"-А)* ]Т
dh ~ ± ± ’
[H(R+h)»]2 (7?+Л)(Л»4-2Л/?)2
откуда после преобразований имеем
1
(Л2 + 2hR)2 arcsin (ууг) = 4 R- (5)
Решение этого нелинейного уравнения дает минимальное
значение максимальной продолжительности пребывания КА
в тени Земли в зависимости от высоты круговой орбиты. Эта вы-
сота примерно равна 1450 км, и при этом величина /тах« 35 мин.
Ниже приведены зависимости величин /шах от высоты круговой
орбиты Л:
Л, км............................ 200 1450 10 000 20 000 30 000 36 000
/шах, мин......................... 37 35 44 55 64 70
Задача 2.3. Определить возможные даты и время наступления
затмения стационарного спутника Земли при условии, что тень
Земли представляет собой цилиндр с радиусом, равным радиусу
Земли.
Решение. Особенность стационарного КА состоит в том, что
он всегда находится в плоскости земного экватора и долгота его
постоянна. Максимальное склонение Солнца, при котором КА
59
будет находиться на границе тени и света, определится выражением
.с R
sin 6 ~ Я+Л ’
где 6 — склонение Солнца; h — высота полета стационарного КА-
Подставив R = 6371 км и h = 36 000 км, найдем, что пре-
дельная величина склонения Солнца составляет около 8,6°. Таким
образом, если склонение Солнца больше — 8,6° и меньше +8,6°,
то стационарный КА ежедневно будет входить в тень Земли. Эти
условия выполняются ежегодно с 26 февраля по 12 апреля и
с 1 сентября по 15 октября.
Остается определить время суток в эти интервалы дат, когда
наступает затмение стационарного КА. Поскольку стационарный
КА постоянно находится на одной долготе, то и середина затме-
ния его приходится на истинную солнечную полночь для данной
долготы. Например, для КА, находящегося в точке стояния 30°
в. д., затмение будет наступать около 23 часов по московскому
времени. Для более точного предсказания времени затмения необ-
ходимо учесть уравнение времени, которое дает на 16 мин более
раннее время затмения в конце октября и начале ноября и позже
на 14 мин в феврале.
Таким образом, затмение стационарного КА имеет место
в течение полутора месяцев весной и осенью, а время его наступ-
ления совпадает с истинной местной полночью.
Задача 2.4. КА выведен на круговую полярную орбиту высо-
той h для проведения телевизионной съемки поверхности Земли.
Какой наименьший угол обзора е должна иметь телевизионная
камера, чтобы получить изображение всей земной поверхности
за минимальное время?
Решение. Земля вращается относительно своей оси равномерно
с угловой скоростью (03. Тогда при заданной высоте h за каждый
оборот КА, продолжающийся Т (h) единиц времени, Земля будет
проворачиваться на угол
<p = <о3Т. (1)
Наибольшее линейное смещение земной поверхности, соответ-
ствующее этому углу, будет на экваторе. Оно составит
/ = Ф₽ = <о3Т₽. (2)
Чтобы время съемки было наименьшим, минимальное значение
угла обзора телевизионной камеры определится из условия: на
экваторе межвитковое расстояние I — ab (рис. 2.3) должно пол-
ностью захватиться камерой. На всех остальных участках трассы
будет иметь место перекрытие зон наблюдения. Тогда, как сле-
дует из рис. 2.3,
emln - 2 arctg
(ОоТ
sm-^-
, , h <*>зт
1 +T-C0S~2—
(3)
60
Рис. 2.3. Схема обзора Земли
с КА
Рис. 2.4. Пределы видимости двух КА
Чтобы получить изображение всей земной поверхности, Земля
должна сделать один оборот относительно плоскости орбиты КА.
При этом КА должен завершить съемку на той широте, на которой
начал, т. е. он должен совершить целое число витков
Л* = £Г_?11 1. (4)
L ф J I I
При этом наименьшее время, затраченное рассматриваемым КА
на съемку всей земной поверхности, определяется соотношением
= = (5)
где Е—— наибольшее целое число дроби.
Пример. h= 1000 км, Т = l*45m02s (см. табл. 2.1). По формуле (3)
получаем ет1и = 111°. При этом = 88 228 с = 24 ч 30 мин 28 с.
Задача 2.5. Два КА функционируют на компланарных круго-
вых орбитах соответственно на высотах и /ц и движутся в одном
направлении. В начальный момент КА находятся в зоне види-
мости друг друга на угловом расстоянии п0 (рис. 2.4, а). Через
сколько времени прямая видимость между КА нарушится? Влия-
нием атмосферы пренебречь.
Решение. Как следует из рис. 2.4, б, граница исчезновения
прямой видимости соответствует угловому расстоянию между КА,
равному
D П
п = П1 4- п8 = arccos в , .—I- arccos п , . . (1)
л ~г а “г Ла
Если бы в начальный момент КА находился на одной прямой,
проходящей через притягивающий центр (см. рис. 2.1), то си-
туация, изображенная схематически на рис. 2.4, б, возникла бы,
61
Рис. 2.5. Условия наблюдения стационарного КА
когда КА разошлись на угловое расстояние п. А так как началь-
ное угловое расстояние уже составляло п0, то потребуется лишь
преодолеть угловое расстояние (в случае движения в одном на-
правлении)
п — п0 = пг + и2 — и0. (2)
Обозначим искомое время через /и. Тогда, учитывая фор-
мулу (2) задачи 2.1, можно записать
/и ДА, = пг + п* — п0- (3)
Откуда окончательно имеем
R , R
arccos D + arccos 6- .--г-п0
ta =-----r . (4)
1/________Е____1/______Е____
Г (/?+*.)’ V (Я4-Л1)’
Задача 2.6. Стационарный КА характеризуется географической
долготой Lc. Определить угол места и азимут направления на КА
с наземного пункта, расположенного на широте Вп и географи-
ческой долготе Ln.
Решение. Примем, что Земля представляет собой сферу ра-
диуса R (рис. 2.5). Тогда центральный угол между направле-
ниями на пункт и КА определится из выражения
0 = arccos (cos В cos (Lc — Ln)). (1)
Из условия наблюдения следует, что угол 0 всегда находится
в интервале от 0 до 90°, и поэтому определение его по приведенной
формуле является однозначным.
Азимут линии визирования можно определить из зависимости
А = arcsin sin (£5-Г .£п) . (2)
Определению четвертей азимутального угла поможет следу-
ющее простое правило, вытекающее непосредственно из рис. 2.5.
62
Для пункта, находящегося в север-
ном полушарии 90° < А < 270°, а в
южном — 270° < А < 90°.
Чтобы определить угол места на-
блюдения v, необходимо предвари-
тельно найти дальность пункт — КА:
d =
=/Яа + (Я + й)а - 2 (Я + ft) Я cos 0,
(3)
где h = 35 800 км — высота полета
стационарного КА.
Воспользовавшись теоремой сину-
сов, запишем выражение для угла
места наблюдения:
/ R+I
у = arccos ( —
по эллиптической орбите
sinp). (4)
Возможность наблюдения КА имеет место, если 0° у 90°.
Таким образом, для определения азимута и угла места наблю-
дения стационарного КА достаточно знать широту наземного
пункта и разность долгот стояния стационарного КА и пункта.
Пр и м е р. Наблюдателю, находящемуся в Москве (Лп = 38° в. д., Вп =
= 56° с. ш.), необходимо с помощью оптических средств найти стационарный
КА, расположенный в точке Ло = 38° в. д. Какой азимут и угол места должен
он установить на приборе, чтобы увидеть стационарный КА?
Пользуясь выражениями (1) и (2), легко установить А = 0, л, 2л. Угол
места находится из выражений (3) и (4) и равен 27°.
Необходимо заметить, что максимальная широта, с которой еще виден ста-
ционарный КА, равна 82°. Это и есть максимальный радиус зоны обзора стацио-
нарного КА. С пункта, находящегося на широте 82°, можно наблюдать на гори-
зонте стационарный КА, если он находится на долготе пункта. Если наблюда-
тель находится в северном полушарии, то азимут составляет 180°, а если в юж-
ном, то — 0°.
Задача 2.7. Эллиптическая орбита КА задана большой полу-
осью а и фокальным параметром р (рис. 2.6). Определить время
полета КА между двумя точками эллиптической орбиты, задан-
ными истинными аномалиями и д2.
Решение. Воспользуемся формулой
, . Е — е sin Е
—i—
(1)
которая определяет время полета КА от момента прохождения
перигея орбиты до некоторой точки орбиты, заданной истинной
аномалией О. В формуле (1) Е — эксцентрическая аномалия,
определяемая из выражения
1 —е
(2)
63
X — угловая скорость КА, которую можно вычислить по формуле
уп^?
1 — е cos Е ’
(3)
и е — эксцентриситет, рассчитываемый на основе соотношения
(4)
При вычислении величины Е по этой схеме следует иметь в виду,
что углы £72 и 072 всегда находятся в одной четверти.
В зависимости от положения начальной 0х и конечной О,
точек на орбите возможны четыре случая применения формулы (1).
Случай 1. Первая точка совпадает с перигеем орбиты, на
положение второй точки ограничений не наложено. В этом слу-
чае время полета между точками определится формулой
Д/ = ^2 — ^1»
j 1 I Е2 sin Еп
причем fi = т и 12 = т Н--5—т----- .
Тогда Д/ = 4- (Ei — е sin Е2).
Случай 2. Точки на орбите расположены так, что их истинные
аномалии удовлетворяют неравенству 9,1 < Ф2. Тогда
ti = т + 4- (£г — е sin £х),
ti = т + 4- (Et — е sin Е2),
К
и поэтому Д/ = 4" [Е2 — Е, — е (sin Е2 — sin Е\)].
Случай 3. Положение начальной точки произвольно, конечная
точка совпадает с перигеем орбиты. В этом случае 02 = Ео = 2л,
и тогда
. __ . Ег — esinf1!
G-T+---------£-----,
/а = -г+#- = т + 7’,
где Т — период обращения КА. Поэтому
А / _ m ^1 е S*n ^1
Случай 4, Начальная точка расположена впереди конечной
(О*! > 02). В рассматриваемом случае общее время полета между
точками будет слагаться из времени полета от точки Ох до перигея
орбиты
Д<! = т — £1 —*sin£i
64
Рис. 2.7. Схема прохождения КА черёз тень Земли
и из времени полета от перигея до точки
д Е^ — в sin Е2
.
Таким образом,
А/ = Д4 + Д/а = Т —г- [£\ — Е2 — е (sln Ег — sin Еа)].
Л
Задача 2.8. По эллиптической орбите, заданной высотами
перигея Лп, апогея ЛА и аргументом перигея со (рис. 2.7), дви-
жется КА. Определить продолжительность полета КА в тени
Земли, если известно, что в момент входа КА в тень склонение
Солнца равно 6, прямая, соединяющая центры Солнца и Земли,
лежит в плоскости орбиты и за время прохождения тени относи-
тельное перемещение Солнца и Земли отсутствует. Тень Земли
принять цилиндрической с радиусом R.
Решение. Определим вначале фокальный параметр орбиты р
и эксцентриситет е.
Так как rA = R + ЛА, гп = R + Лп» то находим
Угловая дальность полета КА в тени равна
а = ах + аа,
D р
где = arcsin —, = arcsin —, (1)
Г1 Г2
a rx и rt — радиусы-векторы точек 1 и 2:
Г1 — 1 + е cos <>! ’ Г2 — 1 _|_ е Cos
Истинные аномалии и связаны с углами <о, 6, а соотноше-
ниями
Ох = л — (<о — 6) — ах, #а = л — (со — б) + аа. (3)
3 П/р Г. С. Титова 65
Исключая из выражений (1)... (3) последовательно а^, ц и
а2, га, получим независимые уравнения относительно 01( 0а. Зная
истинные аномалии 0а, продолжительность затмения КА
определим следующим образом.
Воспользуемся формулой, которая определяет время полета
КА от момента прохождения перигея орбиты до некоторой ее
точки, заданной истинной аномалией О:
I - В~"'°В , (4)
Л
а Е — так называемая эксцентрическая аномалия, определяемая
выражением
Входящие в это соотношение углы Е/2 и 0/2 всегда находятся
в одной четверти. Если окажется, что перигей орбиты лежит вне
угла, образованного радиусами-векторами 1\ и г2» то продолжи-
тельность затмения вычисляется по формуле
t = к - 4, (5)
где
. Es — е sin . Е± — е sin Ej
-------£ , h------------i . w
В противном случае необходимо пользоваться выражением t =
= t\ + ti, причем в равенствах (6) следует положить = 2л — Фа.
Задача 2.9. КА функционирует на эллиптической орбите,
характеризуемой высотами перигея Лп и апогея Яд. Определить
наибольшую и наименьшую скорость перемещения подспутни-
ковой точки (точки пересечения радиуса-вектор а КА с земной
поверхностью) по земной поверхности. Вращением Земли пре-
небречь.
Решение. Для КА, движущегося по эллиптической орбите,
максимальная скорость достигается в перигее, а минимальная —
в апогее. Следовательно, и подспутниковые точки, соответству-
ющие положению КА в перигее и апогее, будут иметь экстре-
мальные скорости. Если обозначить угловую скорость движения
КА в перицентре Хп> а в апоцентре — ХА, то искомые значения
скоростей могут быть определены из соотношений
®шах ~ В ®min = (О
Для угловых скоростей Хп и ХА справедливы формулы
(2)
где 1>п — скорость КА в перигее.
66
Для решения задачи осталось ип выразить через hn и ЛА.
На основании известной формулы имеем
Или окончательно после соответствующих преобразований по-
лучим
R \ 1 \
<°ш“ = R+hn у 2ц (к+Лп 2Я + Лп+Ла )’ (4)
<Ош1“= “ 2*+Ап+лл)‘ (5)
Задача 2.10. Требуется построить космическую систему, состо-
ящую из двух КА. Первый КА должен функционировать на эллип-
тической орбите и решать задачи сбора информации, второй КА
должен находиться на круговой орбите и осуществлять периоди-
ческую инспекцию первого КА с целью обмена информацией.
Система строится путем вывода одновременно двух КА на круго-
вую орбиту высотой h0 с последующим переводом другого КА на
эллиптическую орбиту за счет увеличения его скорости на ве-
личину До. Определить величину импульса До, обеспечивающую
при наибольшем значении апогейного расстояния встречу КА
через каждые N оборотов второго КА.
Решение. Очевидно, что для обеспечения встречи КА на орбите
необходимо, чтобы периоды обращения КА были бы кратны.
Встреча может быть осуществлена только в перигее орбиты.
Чтобы встреча осуществилась при наибольшем значении апогей-
ного расстояния, первый КА должен сделать лишь один оборот,
в то время как второй — N оборотов. Следовательно,
Л = (1)
гле Т —2л <*+М3/2
где 12 — —---в
Период обращения первого КА
„3/2
где а — большая полуось эллипса.
На основании соотношений (1) и (2) получаем
а = (₽+Ло)№/3. (3)
Зная а и Лп = Ло, можно определить скорость первого КА
в перигее
пщ = V-М (4)
г a L К -f- Ло J
3*
67
Очевидно, что искомый импульс
Ао = и1П — va. (5)
Так как оа= у окончательно после несложных преоб-
разований получим
А- - (6)
Задача 2.11. На наземном пункте, предназначенном для наблю-
дения за КА, установлена радиолокационная станция, обеспечи-
вающая связь с КА при угле места у > ymln и при дальности до
КА D £)шах. Определить область космического пространства,
где обеспечивается надежная связь между КА и наземной радио-
локационной станцией. Найти также время пребывания КА
в этой области, если КА движется по круговой орбите с высотой hQ,
а трасса проходит на расстоянии d < £>„.v от места расположения
станции.
Решение. Так как дальность действия станции ограничена
дальностью Р„.у, то все КА, которые будут проходить вне сферы
радиуса Dmay с центром в точке расположения станции, не смогут
войти в связь с радиолокационной станцией. Вторым ограниче-
нием является минимальное значение угла места ymln, которое
приводит к тому, что все КА, не попадающие в конус с вершиной
в точке расположения станции и углом в вершине, равным (180°—
2ymin), также не в состоянии будут связаться со станцией. Таким
образом, область космического пространства, где обеспечивается
связь КА со станцией, представляет собой часть космического
пространства, ограниченного сверху сферой радиуса Dmav и
снизу конической поверхностью с углом при вершине, равным
(180° — 2упип) (рис. 2.8, а).
Рис. 2.8. Схема построения зоны видимости пункта
68
Время пребывания КА в указанной зоне определим прибли-
женно, полагая, что Земля не вращается и в районе рассматри-
ваемой зоны можно пренебречь сферичностью Земли. Тогда, как
следует из схемы, представленной на рис. 2.8, б,
D = |<Ртах-Ло, (1)
L = 2 y~D2max-^-d2. (2)
Так как скорость КА определяется соотношением
то время пребывания КА в зоне видимости радиолокационной
станции при рассматриваемых условиях полета КА будет
If------------ = .
1/
V /?+Ло
2.3. Возмущенное движение КА
Реальное гравитационное поле Земли не является централь-
ным. Это объясняется прежде всего тем, что истинная фигура
Земли — эллипсоид вращения, а не сфера. Кроме того, гравита-
ционное поле Земли характеризуется неравномерностью распре-
деления масс внутри Земли, так называемыми гравитационными
аномалиями. Хотя возмущения орбит КА от действия гравита-
ционных аномалий по величине примерно на два порядка меньше,
чем возмущения, порождаемые сжатой формой Земли, тем не
менее в некоторых случаях практических расчетов учет этих воз-
мущений необходим, так как их действие может приводить к очень
существенным изменениям параметров движения КА.
Влияние аномалий гравитационного поля Земли, как впрочем
и напряженность самого гравитационного поля, с удалением от
поверхности Земли уменьшается, однако начиная с некоторых
высот появляется существенное влияние на параметры движе-
ния КА новых сил, ранее не учитываемых в расчетах из-за не-
значительного их влияния на движение КА. Это — притяжение
Солнца, Луны и других небесных тел, световое давление, магнит-
ные поля и т. д.
' Разнообразие сил, действующих на КА в полете, требует ис-
пользования различных схем расчетов параметров и элементов
орбит. В зависимости от задач, решаемых КА, как правило,
изменяются и требования к точности расчета его фактического дви-
жения. Последнее также определяет число учитываемых в расчете
возмущающих сил, или, как говорят баллистики, структуру пра-
вых частей системы дифференциальных уравнений движения КА.
При рассмотрении задач по расчету возмущенных параметров
движения КА ограничимся учетом возмущений, наиболее сильно
69
влияющих на параметры и элементы околоземных орбит (силы,
порожденные нецентральностью гравитационного поля Земли,
возмущения в движении КА, порожденные атмосферой Земли и
возмущения, обусловленные погрешностями вывода КА на орбиту).
Задача 2.12. Выведенный на орбиту КА из-за влияния сжатия
Земли движется по орбите, изменяющей свое положение в про-
странстве. Как будет изменяться положение узла орбиты в за-
висимости от наклонения орбиты? Определить смещение долготы
восходящего узла орбиты за один виток полета относительно
вращающейся Земли для КА, который в восходящем узле имеет
радиус оскулирующей круговой орбиты, равный г, и наклонение
плоскости орбиты, равное х.
Решение. Под влиянием сжатия Земли узел орбиты испытывает
вековое возмущение. Для прямых орбит (I < 90°) узел орбиты
перемещается в сторону, противоположную вращению Земли
(к Западу); для обратных орбит (х > 90°) узел перемещается по
направлению движения Земли (к Востоку). У полярных орбит
(I = 90°) прецессия плоскости орбиты отсутствует (Д£2 = 0).
Величина прецессии плоскости орбиты за один виток выра-
жается следующей формульной зависимостью:
2Л8о 1
AQB =------^4-cosi. (1)
г '
Формула (1) определяет смещение узла относительно звезд.
Чтобы определить смещение долготы восходящего узла в грин-
вичской системе координат (относительно вращающейся Земли),
необходимо найти период обращения Т, и тогда
AQ = ©зТ AQB. (2)
Как известно, в теории полета используются различные опре-
деления периода обращения. Существуют оскулирующий, сиде-
рический, драконический и другие периоды обращения. Для
определения гринвичской долготы узла воспользуемся дракони-
ческим периодом обращения.
Драконический период обращения — это время между двумя
последовательными прохождениями КА через плоскость экватора
при движении с юга на север, т. е. время между двумя прохожде-
ниями КА через восходящие узлы двух последовательных витков
орбиты.
Драконический период обращения отличается от оскулиру-
ющего То (т. е. периода обращения, определенного в центральном
поле сил) на величину АТ, которая в линейном приближении для
кругового движения определяется по формуле
АТ =-----^=- (3 - 4 sin2 i). (3)
цугр \ * /
Для низких орбит величина АТ достигает 0,42 мин.
Таким образом, драконический период найдем по формуле
Т = То + АТ, (4)
70
где
Г‘=2ятг
(5)
Окончательно для смещения долготы восходящего узла отно-
сительно вращающейся Земли на основании формул (2), (3),
(4) и (5) имеем
<б>
Пример 1. Определить радиус круговой оскулирующей орбиты, обеспе-
чивающей стабильное положение трассы КА относительно поверхности Земли
при заданном числе витков КА по орбите в сутки.
Чтобы трасса полета КА от суток к суткам не смещалась относительно по-
верхности Земли (стабильность трассы), необходимо совпадение гринвичских
долгот 1 и д-р 1-го витков. Иначе говоря, вдоль экватора Земли должно быть
размещено л восходящих узлов, отстоящих друг от друга на равном угловом
расстоянии. В этом случае радиус искомой орбиты должен удовлетворять урав-
нению
2л = л AQ,
или в развернутом виде
п
ез
cos i = ф3
' гЗ/2
Уц
ез
иУй»
(7)
Это уравнение относительно г может быть решено только численно. В ка-
честве первого приближения радиус орбиты может быть найден из уравнения
^/2 _ Ун
дш3 ’
которое следует из уравнения (7) при пренебрежении влиянием сжатия Земли
(ез = 0).
Если принять л = 16 витков в сутки, i = 50°, то из уравнения (7) следует
г = 6575 км (высота орбиты над Землей равна 205 км) и Т = 88,41 мин. При
л = 14 и i = 50° имеем: г = 7351 км (высота полета 820 км), т. е. относительно
небольшое изменение числа витков приводит к резкому возрастанию высоты
полета.
П р и м е р 2. При каком наклонении плоскость орбиты КА будет постоянно
ориентирована относительно Солнца?
Для обеспечения постоянной (неизменной) ориентации плоскости орбиты
относительно Солнца необходимо приравнять угловую скорость движения Солнца
по эклиптике угловой скорости прецессии плоскости орбиты dQjdt. Из выра-
жения (1) следует, что
dQB 2л '
Угловая скорость движения Солнца
2л
365,25-86400
Для определения наклонения плоскости орбиты получаем уравнение
— cos I.
И
1/с.
2Л с3
“с-----7’T’~' _jTC0S
Например, для орбиты с высотой полета 350 км получаем I ** 96,8е.
71
Орбита, плоскость которой имеет постоянную ориентацию относительно
Солнца, называется солнечно-синхронной. Солнечно-синхронные орбиты инте-
ресны тем, что соответствующим выбором долготы восходящего узла (т. е. вы-
бором времени старта) и ее радиуса можно обеспечить постоянные условия осве-
щенности орбиты КА Солнцем.
Пример 3. При каких условиях плоскость орбиты КА будет постоянно
ориентирована относительно звезд?
В этом случае в равенстве (1) следует положить AQB = 0 и оно будет удов-
летворяться при наклонении 90°. Орбита с наклонением 90°, как известно, назы-
вается полярной. В процессе полета по такой орбите КА будет последовательно
проходить над полюсами Земли.
Интересен случай, когда i = 0, т. е. плоскость орбиты совпадает с пло-
скостью экватора и орбита становится экваториальной. Для такой орбиты дол-
гота узла неопределенна, и прецессия вырождается в смещение КА вдоль орбиты.
В рассматриваемом случае плоскость орбиты будет также неизменно ориентиро-
вана относительно звезд и нормаль к ней будет направлена к Полярной звезде.
Пример 4. Рассчитать величину прецессии плоскости орбиты за виток
и за сутки для круговой орбиты высотой Н = 3200 км при наклонении плоскости
орбиты i = 80°.
Следует особо заметить, что расчет величины прецессии плоскости орбиты
в практической космонавтике необходим очень часто для решения самых разно-
образных задач. В соответствии с этим приведена номограмма (рис. 2.9), позво-
ляющая определять величину и направление прецессии плоскости орбиты за
виток полета КА.
Номограмма выполнена по принципу выравненных точек. Прикладывая
линейку к заданным значениям наклонения и высоты полета КА на соответ-
ствующих шкалах, в точке пересечения линейки со шкалой AQ, считываем вели-
чину прецессии плоскости орбиты за виток полета КА. Номограмма снабжена
схемой определения направления прецессии плоскости орбиты.
Соединив линейкой заданные значения Н и г, на пересечении линейки со
шкалой прецессии считываем величину последней на экваторе: AQB = 5 км =
= 2,7'; так как за сутки КА, обращаясь по круговой орбите с высотой 3200 км,
совершает 9,25 оборота, то величина суточной прецессии орбиты составит
AQC = AQBn = 5-9,25 = 46 км,
или
AQ0 = 2,7'-9,25 « 25'.
Задача 2.13. КА движется по эллиптической орбите вокруг
Земли. Как перемещается перигей в плоскости орбиты в зависи-
мости от наклонения плоскости орбиты? Определить вековое сме-
щение перигея в плоскости орбиты.
Решение. Смещение перигея можно характеризовать аргумен-
том перигея со, который под влиянием несферичности Земли
испытывает вековое возмущение. При i < 63° 26' и i > 116° 34'
перигей орбиты смещается в направлении движения КА. При
63° 26' < i < 116° 34' перигей смещается в направлении, про-
тивоположном движению КА. При i = 63° 26' и i = 116° 34'
смещение перигея отсутствует (А со = 0).
Величина смещения перигея за один виток может быть опре-
делена по следующей формуле!
Лфв = —jj^-~j-(5cosa i — 1). (1)
Смещение перигея орбиты КА за п витков
Дсос = Дсовл = (5 cos* i — 1). (2)
72
Рис. 2.9. Номограмма для расчета прецессии плоскости орбита
На рис. 2.10 представлена номограмма для расчета величины
А(ов в зависимости от наклонения плоскости орбиты и величины
фокального параметра. Для расчета искомой величины смещения
перигея необходимо соединить линейкой заданные значения р и I.
Пересечение линейкой шкалы Див покажет величину смещения
перигея за виток. Номограмма снабжена схемой определения
направления смещения перигея орбитв) за виток.
Пример. Определить величину смещения перигея в плоскости орбита
ва один виток и аа одни сутки. Наклонение плоскости орбита I = 67s 20', вели-
73
р,
Z- 11400
F 11000
Формула
^-J^£t(5cos>i-l)
с,
63
Направление смешения перигея орбиты
10500
для i>63
-10000
— 9500
—2
9000
Схема пользования
- 8500
Р
£
<ъ
£
При 1^63° 26'
i2=116°34'>
Ди>в
для 1<63
—3'
- 8000
Ответ
для L
i<63°
Ди) в
Дан0 l>63°
Отбет
3'~
5j
сз
Дано
— 7500
В-
— 7000
^ 6500
62-
----65
61
60-__
-.— 66
159
Дано
----ЪДано
4' —
сх
<ъ
3
^5в
8*
В56
^55
10'%
*
^50
67
68
69
70
Пример расчета
А: Дано- р-9400км
i - 57°20‘
Ответ: Au)S=4>
В: Дано, р = 9400км
L = 67°
Ответ : Дыв^2‘
10
15
с
Q)
— 20
1-30
50‘
1°
45
40
35
30
75
-^г-80
Ю^&5
20
5
$
5»
$
— 5
Рис. 2.10. Номограмма для расчета смещения перигея орбита
чина фокального параметра р = 9400 им (h = 3020 км). Из номограммы полу-
чаем Лсов =4'. За сутки КА совершает п = 9,5 оборотов. Следовательно, сме-
щение перигея в плоскости орбиты за сутки составит
А(ос = 4' «9,5 « 38'.
Задача 2.14. По околокруговой орбите, характеризуемой высо-
той h и наклонением орбиты 4, КА движется в нормальном гра-
витационном поле. Разработать зависимости, по которым можно
74
м
Boj,
Схема
построения трас-
Рис. 2.11.
сы КА
&
построить трассу полета КА, если
известно, что начальный виток пе-
ресекает экватор на долготе Ц.
Решение. Трассу полета КА
наиболее удобно представлять гео-
графическими координатами (ши-
ротой и долготой) подспутниковых
точек. Если их выразить в функции
времени, то легко построить трассу
полета на карте.
На рис. 2.11 представлена схема
построения трассы и подспутнико-
вой точки Mlt соответствующей
/-му моменту движения КА на ор-
бите. Здесь M0L0] и Во} соответст-
вуют случаю движения КА в цен-
тральном поле без учета вращения
и сжатия Земли, 6L0 — смещение
долготы точки Мо за счет вращения Земли и смещения узла орбиты
(из-за сжатия Земли) за время движения КА t}. Так как вращение
Земли и смещение узла орбиты на широту точки Мо не влияют,
то = Во}.
Из рис. 2.11 следует, что для координат точки М с учетом
влияния сжатия Земли справедливы следующие соотношения:
В} = arcsin (sin i sin u), (1)
Ly = L1 + AL + SL = L1 + AL + (-^-+a>3)6. (2)
AL = arctg (cos i tg u), (3)
где tj — время, отсчитываемое от момента первого пересечения
КА экватора. ________
Так как и = М} = ]/” то окончательно получим
Bj = arcsin £sln i sln ’ (5)
L^LH-arctgfeo. i (м~у- T/icos i) t,.
(6)
Задача 2.15. KA выведен на околокруговую орбиту высо-
той h0 с отклонением от расчетной величины на А А- При этом
справедливо неравенство АА, Ло. Как будет отличаться реаль-
ная орбита от расчетной?
Решение. Данная ситуация будет соответствовать случаю,
когда движущийся по круговой орбите КА получает возмущение
в радиусе-векторе. Физически это означает, что КА оказался
на высоте А 4- А/г0, имея скорость, превосходящую круговую
75
для этой высоты. Следовательно, в момент вывода он будет на-
ходиться на расстоянии гп = R + Ао + ДА0 и далее двигаться
по эллиптической орбите. При этом расстояние между реализо-
ванной и расчетной орбитой будет изменяться в соответствии
с соотношением
ДА = (2 — cos <р) ДА0, (1)
где ф — угловое перемещение КА по невозмущенной орбите.
Из соотношения (1) следует, что максимальное удаление КА
в апогее (ф = 180°) составит
ДЛтах = ЗДА0. (2)
В своем движении вдоль орбиты КА будет отставать. Харак-
тер этого отставания можно определить из формулы
ДА — —(Зф — 2 sin ф) ДАо. (3)
За один виток (ф = 2а) оно составит
ДАВ = —6а ДАо. (4)
Задача 2.16. В результате выведения на орбиту КА оказался
на радиальном расстоянии г от центра Земли и приобрел ско-
рость v, которая соответствует круговой скорости для принятого
значения р гравитационного параметра Земли. В действитель-
ности гравитационный параметр Земли отличается от расчетного
на величину Др, причем | Др | <^ р. Как изменится орбита по-
следующего полета КА?
Решение. Как известно, круговая скорость КА в центральном
поле сил определяется по формуле
° = V4- 0)
В этом случае вариация круговой скорости До будет связана
с вариацией гравитационного параметра Др соотношением
До = -^- = 0-^-. (2)
2vr 2р ' '
Следовательно, в рассматриваемой задаче КА окажется на
орбите, скорость полета по которой будет отличаться на До от
действительной круговой скорости. Если при этом Др >0,
то До > 0, т. е. фактическая скорость полета КА окажется меньше
круговой. В этом случае точке выведения будет соответствовать
апогей орбиты. Если же До < 0, то скорость полета будет больше
круговой и точке выведения будет соответствовать перигей ор-
биты.
Исходя из условия | Др | <^ р, получим | До | о. В этом
случае для определения деформации начальной круговой орбиты
воспользуемся результатами теории возмущенного кругового дви-
жения.
76
Так как возмущение скорости До, определяемое соотноше-
нием (2), направлено вдоль трансверсали, то имеем
Дг= 2(1-cosy) Др> (3)
Л
ДП = _.3Ф-^ФДО> (4)
где <р — угловая дальность полета КА, отсчитываемая от момента
выведения на орбиту.
Первое из приведенных выражений определяет возмущение
радиуса орбиты по отношению к первоначальному круговому
движению; второе — смещение КА вдоль орбиты по отношению
к круговому движению.
Так как угловая скорость 1 = v/r, то из выражений (2), (3),
(4) следует
Дг = 2(1 -созф)-^-Др = (1 -совф)-^-, (5)
Дп = — (Зф — 4 sin ф) Д р = — (Зф — 4 sin ф) . (6)
Из формулы (5) получаем, что наибольшее возмущение ра-
диуса произойдет в точке, отстоящей на половину периода обра-
щения от точки выведения на орбиту (ф = я):
ДгШах = 2-^-. (7)
При этом будет происходить вековое смещение КА вдоль орбиты
относительно кругового движения, составляющее за один виток
(ф = 2я)
= (8)
Пример. КА выведен на круговую орбиту с высотой полета 300 км (ра-
диус орбиты равен 6671 км) и имеет скорость 7,732 км/с, соответствующую кру-
говой орбите с принятым гравитационным параметром р = 3,986-10б км®/с2.
Определить наибольшее возмущение радиуса орбиты и вековое смещение вдоль
орбиты на виток при Др = 10 км8/^. На основании (7) и (8) находим Дгшах =
= 0,33 км, Дпв = —1,6 км.
Задача 2.17. КА функционирует на околокруговой орбите
высотой h^. Определить ускорение торможения КА, вызванное
сопротивлением атмосферы.
Решение. Ускорение торможения КА на высоте Ло можно
вычислить по формуле
'р_CXF т PH zix
1 ~ 2т Я+ho *
Чтобы воспользоваться этой формулой, требуется решить
вопрос о выборе коэффициента сопротивления Сх и площади
миделевого сечения Fm.
На больших высотах полета длина свободного пробега моле-
кул воздуха соизмерима или даже превосходит размеры КА.
77
Поэтому величина Ся практически не зависит от формы КА, но
зависит от характера отражения частиц от корпуса КА. Для
большинства современных КА значение Ся лежит в пределах
2 ... 2,5. Наиболее часто используется значение Ся = 2,2; Fm —
площадь максимального сечения КА, перпендикулярна вектору
скорости полета (площадь миделевого сечения). Для ориентиро-
ванного КА определение величины Fm не представляет труда.
Для неориентированного КА: в форме сферы — Fm = яга (г —
радиус сферы); в форме цилиндра, при его беспорядочном вра-
щении, —
Fm = Ld (0,818 + 0,25L/d),
где L — длина цилиндра; d — диаметр цилиндра.
Во многих случаях неплохие результаты дает использование
для определения Fm КА с выпуклой поверхностью (лежащей
по одну сторону от любой плоскости, касательной к ней) при
равновероятных положениях осей следующей приближенной фор-
мулы:
Г^поли
т — 4 •
Задача 2.18. Определить вековые и периодические возмущения
параметров КА, обращающегося по круговой орбите, под воздей-
ствием атмосферы Земли (изменение периода обращения, смеще-
ние вдоль орбиты, изменение высоты, изменение продольной и
радиальной составляющих скорости полета).
1. Период обращения КА под воздействием атмосферы испы-
тывает вековое возмущение, которое (за один виток) можно рас-
считать, используя формулу
6Т= - 12-^LSpr6/2. (1)
Ун
Для расчета векового изменения периода обращения на n-м витке
воспользуемся зависимостью
ДТ = 2n~1 6Т. (2)
2. Вековое смещение КА вдоль орбиты за один виток рассчи-
тывается по формуле
6Z = 12oaSpr«. (3)
Вековое смещение КА за п витков можно определить, исполь-
зуя формулу
А/= 4-6/. (4)
Под воздействием атмосферы КА испытывает также периодическое
возмущение своего положения вдоль орбиты. Максимальную
величину этого смещения можно оценить, используя формулу
I ®^пер [max = ВЗрГ2. (5)
78
3. Вековое изменение высоты полета КА за один виток под
воздействием атмосферы Земли можно рассчитывать по формуле
6Л = —4nSpr*. (6)
Для расчета векового изменения высота полета КА за п витков
в пределах до двух суток можно воспользоваться зависи-
мостью ДЛ = nSh. Максимальное периодическое изменение вы-
соты полета будет
|Sftnep|max = 2SPA (7)
4. Вековое изменение продольной составляющей скорости
полета КА за виток равно
6пв = 2л5рУ~рг. (8)
Вековое изменение продольной составляющей скорости полета
КА за п витков в пределах до двух суток полета можно найти,
используя формулу
ДФИ = п 6ОИ. (9)
Максимальное периодическое возмущение продольной составля-
ющей скорости
| А»и пер |шах = 2SP ЦГ' (Ю)
5. Вековое изменение радиальной составляющей скорости
полета КА за один виток под воздействием атмосферы Земли
можно рассчитать, используя формулу
бог = —23Р/ц7. (11)
Величина максимального периодического возмущения ра-
диальной составляющей скорости будет
|б»гпер|Ш« = 43Р/^. (12)
Пример. Определить величину векового смещения КА вдоль орбиты
за один виток, десять витков и величину максимального периодического смеще-
ния вдоль орбиты под воздействием сопротивления атмосферы. КА движется
по круговой орбите высотой 370 км. Баллистический коэффициент КА s =
= 0,0065 м8/(кгс-с2).
Используя табл. 2.2, находим для h = 370 км: р = 10~w (кгс-с^/м4. Рас-
считывая, получаем вековое смещение для одного витка:
6/век = 12ла$рг2 « 360 м;
для 10 витков:
А/век e “J- б/Век = 6/Век = км»
I 5/пер |шах = 8«Spr2 t= 25 М.
Задача 2.19. Движущийся по околокруговой орбите вокруг
Земли КА из-за торможения атмосферы теряет высоту. Опреде-
лить время снижения КА с высоты h± на высоту < ht.
Решение. Расчет времени перехода КА с высоты полета hx
на высоту /ц под воздействием сопротивления атмосферы прове-
79
Таблица 2.2
Модель атмосферы
Высо- та Ь, км Высота однородной атмосферы, км Плотность воздуха р, (кгс-с^/м4, при максимальной активности Солнца Высо- та h, км Высота однородной атмосферы, км Плотность воздуха р, (кгс-с*)/м4, при максимальной активности Солнца
150 19 1,83-10-ао 510 76 6,15-10-“
160 28 9,58-10-11 520 77 5,16-10-“
170 31 5,38- 10-м 530 79 4,30-10-“
180 33 3,20- 10-м 540 80 3,62-10-“
190 35 2,02- 10-м 550 82 3,07-10-“
200 37 1,32-IO-1’
560 84 2,57-10-“
210 38 8,90- 10-и 570 86 2,17-10-“
220 38 6,14-10-“ 580 87 1,84-10-“
230 40 4,34-10-“ 590 89 1,56-10-“
240 41 3,11- IO-» 600 90 1,34-10-“
250 42 2,26- 10-и
610 91 1,15-10-“
260 43 1,66-ю-“ 620 92 1,00-10-“
270 44 1,23-10-12 630 93 8,86-10-“
280 45 9,29- 10-“ 640 93 7,85-10-“
290 46 7,06-10-“ 650 94 6,98- Ю-“
300 47 5,40-10-“
660 94 6,28-10-“
310 48 4,17-10-“ 670 95 5,67-10-“
320 49 3,24-10-“ 680 96 5,14-10-“
330 51 2,55-10-“ 690 96 4,67-10-“
340 52 2,01-10-“ 700 97 4,26-10-“
350 53 1,59-10-“
710 98 3,91-10-“
360 54 1,26-10-“ 720 98 3,59-10-“
370 56 1,01-10-“ 730 101 3,32-10-“
380 57 8,11-10-“ 740 103 3,06 - ю-“
390 58 6,53-10-“ 750 105 2,84-10-“
400 60 5,28-10-“
760 107 2,64-10-“
410 61 4,28-10-“ 770 109 2,46-10-“
420 62 3,48-10-“ 780 111 2,26-10-“
430 64 2,84-10-“ 790 113 2,14-10-“
440 66 2,32-10-“ 800 115 2,00-10-“
450 67 1,91-10-“
460 69 1,56-10-“
470 71 1,28-10-“
480 72 1,06- ю-“
490 73 8,83-10-“
500 75 7,36-10-“
р — плотность вовдуха на высоте полета КА.
80
Таблица 2,3
Значения функции F (Л) (в средних солнечных сутках)
Высота h, км Вспомога- тельная функция F(h), м* Высота h, км Вспомога- тельная функция F (Ю, ма Высота h, км Вспомога- тельная функция F (Ю, ма
кгс • с1 кгс - с4 кгс • с4
100 1,3-10-* 340 3,44 580 190
но 8,4-10-» 350 4,26 590 217
120 3,30- ю-4 360 5,23 600 246
130 1,36-1О”8 370 6,41 610 279
140 3,83-10-» 380 7,81 620 316
150 8,94-10-8 390 9,48 630 357
160 0,0171 400 11,5 640 403
170 0,0289 410 13,8 650 454
180 0,0441 420 16,8 660 511
190 0,0642 430 19,7 670 574
200 0,0912 440 23,5 680 643
210 0,127 450 27,8 690 721
220 0,172 460 32,9 700 806
230 0,231 470 38,7 710 901
240 0,306 480 45,3 720 1006
250 0,402 490 52,9 730 1122
260 0,523 500 61,7 740 1250
270 0,676 510 71,6 750 1390
280 0,868 520 83,0 760 1545
290 1,11 530 95,9 770 1714
300 1,40 540 111 780 1900
310 1,77 550 127 790 2102
320 2,22 560 146 800 2323
330 2,77 570 167
дем с использованием изотермической модели атмосферы. При
этом поставленную задачу решают по следующей формульной
зависимости (см. приложение 3):
Д( = ^-/а = (1)
где
F(h) = ~=-\—
2Уй I р(Л) Vr
Величину F (Л) находят из табл. 2.3.
Пример. Определить время перехода КА, вращающегося по круговой
орбите, с высоты полета = 150 км на высоту h2 — 140 км. Баллистический
коэффициент КА S = 0,01 м8/(кгс-с2).
Из табл. 2.3 находим
F (М = F (150) = 0,00894 -^^-сут.,
м8
F (Л,) = F (140) = 0,00383 —"j сут.
81
Су tn.
На-200км
Рис. 2.12. График времени существования КА на эллиптической орбите
82
Расчетом определяется
&F = F (Лх) — F (М = 0,00511—g-5-сут.,
А< , . 0,00511
М = /1 — = —Q-gj— « 0,5 сут.
Задача 2.20. Определить время
баллистического существования КА,
вращающегося по круговой орбите
высотой h.
Решение. Определим время бал-
листического существования КА на
круговой орбите, используя изотер-
мическую модель атмосферы, по фор-
муле
t — Г /в
*сущ — S ’
Значение величины F (Ло) для заданной высоты полета КА бе-
рется из табл. 2.3.
Пример. Определить время баллистического существования КА, име-
ющего баллистический коэффициент S = 0,005 м3/(кгс-с2) и высоту полета
160 км.
Из табл. 2.3 F (160) = 0,0171 м^кгс-с2) сут.,
, 0,0171 0,0171 о с
'сущ 0,005 - 0,005 ~3»5 сут.
Задача 2.21. Функционирующий вблизи Земли КА движется
по эллиптической орбите с высотами апогея ЛА и перигея hn,
наклонением плоскости орбиты f, аргументом перигея со. Опре-
делить время баллистического существования КА.
Решение. Поставленная задача на практике встречается очень
часто. Однако точное ее решение затруднительно. Существуют
приближенные способы ее решения. В рассматриваемом случае
предлагается использовать графическую методику. На рис. 2.12
даны результаты расчета на ЭВМ времени баллистического суще-
ствования КА на эллиптической орбите в функции высот перигея
и апогея, наклонения плоскости орбиты и начального положения
перигея. Диапазон изменения переменных:
высот перигея, км................... 150 ... 200, с шагом 10 км
высот апогея, км.................... 200... 400, с шагом 100 км
наклонений плоскости орбиты ... 45 ... 90°
начального положения перигея ... 0 ... 90°
Приведенные на рис. 2.12, 2.13 кривые позволяют прибли-
женно определить время баллистического существования КА для
класса эллиптических орбит, довольно часто используемых в прак-
тике космических полетов.
83
Пр имер. Определить время баллистического существования КА, вра-
щающегося по эллиптической орбите с высотами перигея 160 км, апогея 300 км,
при наклонении плоскости орбиты 85° и аргументе перигея 52°.
Используя графическую методику, по заданным условиям задачи из рис. 2.12
находим время баллистического существования КА — 8,5 сут.
2.4. Определение орбит
Движение КА описывается системой дифференциальных урав-
нений шестого порядка. Поэтому для однозначного определения
орбиты необходимо знать шесть независимых параметров, кото-
рые называются начальными условиями движения. Однако изме-
рить непосредственно параметры орбиты обычно не представ-
ляется возможным. Поэтому на практике измеряют дальность,
радиальную скорость КА — ИП (измерительный пункт), угловое
положение КА относительно некоторых направлений отсчета, его
угловые скорости и другие параметры, а затем, зная зависимости
между результатами измерений и элементами орбиты, определяют
начальные условия движения.
Если измеряемые параметры и времена наблюдений выбраны
правильно, то достаточно шести измерений для составления шести
уравнений, из которых определятся все элементы орбиты (началь-
ные условия). На практике для уменьшения влияния возможных
ошибок производят большее число измерений. В результате
в обработку поступает избыточное число измерений и задача опре-
деления орбиты решается с использованием метода наименьших
квадратов.
Введем следующие обозначения:
rt (i = 1, ..., n) — вектор измеряемых параметров;
qt (j = 1, ..., N) — вектор определяемых параметров;
Is (S = 1, ..., К) — вектор прогнозируемых параметров;
Р — диагональная матрица весов измеряемых параметров
с элементами 1/6*, где Sr — среднее квадратичное отклонение,
характеризующее ошибку соответствующего измеряемого пара-
метра; А — матрица частных производных измеряемых пара-
метров по определяемым параметрам
дг\ дг2 дгп
dQi ’ ’ ’ d<7i
frj dra дгп
dq„ dqN
В — матрица частных производных прогнозируемых параметров
по определяемым параметрам
II во <41 dqt ’ ' ‘ dqN <4g dqi dqt " ' dq^
84
Для решения задач определения орбит можно пользоваться
следующими основными положениями теории обработки наблю-
дений.
1. Если X — n-мерный случайный вектор с математическим
ожиданием X, то вектор
U = DX (2.1)
есть n-мерный случайный вектор с вектором средних значений
М [DX1 и корреляционной матрицей
Ку = DKXDT. (2.2)
Здесь К — корреляционная матрица вектора X; индекс «т» обо-
значает транспонирование матрицы, a D — заданная матрица.
2. Пусть дан вектор отклонений измеряемых параметров от их
расчетных значений Дгп. Тогда вектор поправок S.qN к опреде-
ляемым параметрам в соответствии с методом наименьших ква-
дратов определится по формуле
Д? = (АФА)-1 АФ Дг. (2.3)
Обозначим
АФА = С. (2.4)
3. Если результаты измерений коррелированы, то соотноше-
ние (2.3) принимает вид
ДЯ = (АТК-1А)-1 АТК~‘ Дг. (2.5)
4. Пусть Д| — вектор поправок к прогнозируемым пара-
метрам.
Тогда
Д| = В bq. (2.6)
5. Корреляционная матрица вектора Д|:
К5 = ВС-‘ВТ. (2.7)
Задача 2.22. По результатам траекторных измерений опре-
делены кинематические параметры движения КА X, Y, Z, vx,
vT, vz в абсолютной системе координат. Необходимо определить
оскулирующие элементы этой орбиты: большую полуось, эксцен-
триситет, наклонение, долготу восходящего узла, аргумент пе-
ригея, истинную аномалию.
Решение. Расчет оскулирующих элементов практически всегда
сопровождает процесс определения орбиты. Эго связано с тем,
что они дают более ясное представление о размерах и форме
орбиты (а, е), об ориентации плоскости орбиты в пространстве
(i, Q) и, наконец, о положении КА на орбите (®, 6).
Зависимость для расчета большой полуоси орбиты нетрудно
получить из закона сохранения энергии:
8Ь
где г = yx« + r*4-Z«;
v = V + vy + wb
(2)
Эксцентриситет орбиты определяется из формулы конического
сечения
(3)
где р — фокальный параметр орбиты, определяемый из интеграла
площадей
с. (Х»у -/.,)• + (r»2-z»r)> + (X»2-z^)>
Р -—------------------------л----------------- <4>
Наклонение плоскости орбиты к экватору может принимать
значения 0 < i < л и определяется из выражения
v — YvT Xv^ — Yv^
= arccos ——— = arccos —* . (5)
c VW
Величины Q, со и ft изменяются в пределах от 0 до 2л, поэтому
для раскрытия четвертей их вычисление производится с исполь-
зованием формул тригонометрических функций.
Для определения восходящего узла орбиты эти формулы
имеют вид
Л . Yv.-Zvz
Q = arcsin —Д , . , ,
С sin I
_ Хо- — Zv_
Q = arccos —i .
С sin i
(6)
где
Угловое расстояние от восходящего узла орбиты до перигея
со = и — О,
~ . FcosQ —XsinQ
и = arcsin-------------------------,
г cos i ’
~ X cos Q — Y sin Q
“ = arccos------7^i------’
« , C Xvz + YvT + Zv
0 = arcsin--------------------
Г
(7)
ег
й = arcsin
er
Пр и м e p. Кинематические параметры движения КА в абсолютной системе
координат имеют значения
X = —7452 км,
Y = 6800 км,
Z = 0,
vx = —5044 м/с;
v? = 309 м/с;
v7 = 6205 м/с.
86
По приведенным выше формулам определяем
а = 26 590 км, Q= 137,5°;
е = 0,73» (в = 288°;
I = 63°, О = 72°.
Анализ полученных результатов показывает, что этот КА находится на
высокой эллиптической орбите с наклонением 63°. Перигей орбиты лежит в Юж-
ном полушарии. Оскулирующие элементы даны на момент пересечения КА вос-
одящего узла орбиты, поскольку
в = © + О = 288° + 72° = 360°.
Этот вывод может быть сделан и по кинематическим параметрам, так как
2 = 0 и > 0, а это соответствует положению КА в плоскости экватора и
движению его из Южного полушария в Северное.
Задача 2.23. С измерительного пункта, расположенного на
поверхности Земли, в некоторый момент времени t производятся
одновременно измерения шести независимых характеристик дви-
жения КА rt (i = 1, ..., 6). Погрешности измерений некоррели-
рованы с нулевым математическим ожиданием и имеют средне-
квадратичные отклонения at._ Определить отклонения вектора
прогнозируемых параметров и точность полученного решения.
Решение. Пусть qQ — шестимерный вектор начальных усло-
вий движения КА и to — вектор прогнозируемых параметров,
соответствующих начальным условиям q0. Определим расчетные
значения измеряемых параметров г01 по начальным условиям q0
и найдем разность
Дп = г0< - п. (1)
Для определения поправок к начальным условиям движения
воспользуемся соотношением (2.3). Поскольку в рассматриваемом
случае матрицы А и Р являются квадратными 6x6, то из выра-
жения (2.3) следует
Д<7 = А"1 Дг. (2)
Тогда
q = q0 + bq. (3)
Далее по формуле (2.6) находится отклонение прогнозируемых
параметров
Д| = В Д$. (4)
Оценка точности полученного результата дается матрицей (2.7)
К6 = ВС-!ВТ, (5)
причем
С = АФА, (6)
где Р — диагональная матрица с элементами 1 /ст,.
Сформулированная задача может быть решена и другим спо-
собом. Пусть имеется шестимерный вектор результатов измере-
ний г, после чего найдены начальные условия движения в форме
<7. = (И, i = I, 2, .... 6. (7)
87
В линейном приближении между начальными условиями и
измеряемыми параметрами, как следует из соотношения (7),
существует связь
A$ = NAf, N=^-. (8)
Далее в соответствии с соотношением (2.2) определяется корре-
ляционная матрица начальных условий
К, = NKrtf’, (9)
а затем корреляционная матрица прогнозируемых параметров
Ks = BKgBT, (10)
где Кг — диагональная матрица с элементами а*-
Задача 2.24. С измерительного пункта, расположенного на
поверхности Земли в точке с координатами X, Y, Z, в некоторый
момент времени t производятся одновременно измерения шести
независимых характеристик движения КА (i = 1, ..., 6). По-
грешности измерений некоррелированы с нулевым математиче-
ским ожиданием и имеют среднеквадратичные отклонения, ха-
рактеризуемые значениями ог. Константы, определяющие воздей-
ствие внешних сил на движение КА, составляют вектор R и изве-
стны со среднеквадратичными отклонениями оя. Ошибки коорди-
нат измерительного пункта заданы величинами оп. Определить
требования к точности измерения параметров гг из условия,
чтобы предельная ошибка времени прохождения экватора не пре-
высила заданного значения Дт8.
Решение. Поскольку измеряемые характеристики движения
КА являются независимБШП, вентор начальных условий движения
КА в функции измеряемых параметров определяется зависи-
мостью
Я = 4(f), (1)
причем очевидно, что
f = г (X, У, Z), (2)
т. е. результаты измерений зависят от координат пункта.
Время прохождения экватора может быть определено зависи-
мостью вида
« = -» (<7, R). (3)
Линеаризуя это соотношение, получаем
Дт = А Д<? + В AR, (4)
где А = В = — матрицы частных производных.
В свою очередь в соответствии с выражениями (1) и (2) имеем
Д? = Е Дг + D ДК, (5)
где ДК=|АХ, ДУ, Д2|», Е=-^-, D = -^-
и Дч = АЕ Дг + АОДК + В AR. (6)
88
На основании соотношений (2.1), (2.2) получим следующее
выражение для оценки времени прохождения экватора:
о? = AEQr (АЕ)’ + ADQ* (AD)’ + BQRBT, (7)
где Qr, Q*, Qr — диагональные матрицы с элементами aj, о*
и or соответственно.
По условиям задачи неравенство означает, что
точностные характеристики измерений, как следует из выраже-
ния (7), должны удовлетворять условию
-^i--a2>AEQr(AE)’, (8)
где
а2 = ADQK (AD)’ + BQHBT, (9)
причем всегда а2 > 0.
Чтобы неравенство (8) удовлетворялось, необходимо прежде
всего выполнить условие
Дтз>9а2. (10)
Иначе говоря, ошибки поля и привязки измерительного пункта
должны быть таковы, чтобы обусловленная ими погрешность вре-
мени прохождения экватора не превышала заданного значения Дт3.
Если неравенство (10) выполняется, то задача определения ог
становится неопределенной, имеет бесчисленное множество реше-
ний. Действительно, правую часть выражения (7) можно пред-
ставить в следующем виде:
в
AEQr (АЕ)” = 2 ЪУп, (11)
i=\
где bi — заданные коэффициенты; ori — искомые среднеквадра-
тичные отклонения.
Для отыскания значений ori, удовлетворяющих поставленным
требованиям, можно наложить условие «равновесомости», полагая
= btfjfl = • • • = Ьб^гб-
Используя это условие, находим максимально допустимые
среднеквадратичные отклонения для каждого измерения:
<,2>
Задача 2.25. Движущаяся по орбите космическая станция
импульсом vK, приложенным в точке К орбиты, переведена на
траекторию спуска. Расчетное движение после коррекции опре-
деляется начальными условиями q0. На участке полета в промежу-
ток времени между подачей импульса и точкой входа в атмосферу
проводятся орбитальные измерения параметра г с шагом h. Даль-
ность спуска в атмосфере может быть представлена зависимостью
89
/ = ф(9вх, Р, S), где <7ВХ — параметры движения станции при
входе в атмосферу; р — плотность атмосферы; S — баллистиче-
ский коэффициент. Полагая движение плоским, спрогнозировать
по данным измерений точку посадки станции и определить воз-
можную предельную погрешность прогнозирования места посадки.
Ошибки измерений считать несмещенными некоррелированными
случайными величинами со среднеквадратичными отклонениями ог.
Ошибками знания поля и погрешностями привязки измеритель-
ного пункта пренебречь.
Решение. Пусть временной интервал измерений составляет т.
Тогда на этом интервале уложится п измерений, представляющих
собой целое число дроби —у—•
По данным измерений определим фактически реализованную
орбиту и соответствующую ей точку посадки станции. Затем оце-
ним для этой орбиты возможный разброс параметров движения
при входе в атмосферу. Далее с учетом погрешностей прогнозиро-
вания движения станции в атмосфере определим граничные точки
посадки. Итак, начнем с определения траектории спуска по дан-
ным измерений. Введем в рассмотрение прямоугольную систему ко-
ординат OXY с началом в центре Земли. Ось ОХ проходит через
точку /С, ось OY лежит в плоскости орбиты и направлена в сто-
рону движения станции. Начальные условия движения, соответ-
ствующие точке К в этой системе координат, обозначим через qK
с составляющими Х%, Yт. е. q^
vTK). Очевидно, что связь измеряемых параметров с начальными
условиями движения можно выразить зависимостью
ri = fi VXK> vyk)> i = 1, 2, ..., п. (1)
Эти соотношения представляют собой систему п уравнений (п > 4),
которую необходимо решить относительно четырех параметров,
характеризующих начальные условия движения. Задача эта
может быть решена, если известно достаточно хорошее начальное
приближение. Таким приближением в данной задаче может слу-
жит расчетное движение, заданное параметрами qP. Тогда,
полагая
Як ~ Яр + (2)
после линеаризации соотношений (1) получаем
Дг, = ЬХК + ДУ + &vXK +
1 дХк д 1 дУ к 1 dvXK 1
+ -^-Дрглс (1 = 1,2.......п). (3)
OVYK
Теперь задача сведена к решению системы п линейных уравне-
ний относительно четырех неизвестных. Основываясь на методе
наименьших квадратов, в соответствии с (2.3) имеем
А? = (АФА)-1 АТР Аг. (4)
90
Если окажется, что вычисленная на основании соотношения
(4) поправка Ад дает значение qK, при котором полученная траек-
тория не согласуется с измерениями ги г2, ..., гп, то необходимо
провести последующие сближения, принимая каждый раз в ка-
честве нового приближения только что полученную уточненную
траекторию спуска на неатмосферном участке. Тогда, повторив
этот процесс v раз, получим искомые начальные условия:
Як = Яр + 2 Ад^. (5)
/«1
Зная начальные условия движения, определим параметры
движения станции на входе в атмосферу. Пусть параметрами,
характеризующими вход в атмосферу, будут ZBX — отклонение
вдоль трассы на высоте Латм от расчетной точки входа в атмосферу,
ивх— модуль скорости входа в атмосферу и 0ВХ— угол входа
в атмосферу. Тогда связь параметров, характеризующих вход
станции в атмосферу двх (ZBX, ивх, 0ВХ), с начальными условиями
движения можно выразить зависимостью
<7вх = F (<7к), (6)
и, следовательно, дальность спуска определится выражением
I = ф (<7вх, Р. S). (7)
Теперь перейдем к оценке точности прогнозирования точки
посадки. Считая погрешности расчета величин /вх, ивх, 9ВХ ма-
лыми, связь вариаций параметров входа и вариаций начальных
условий движения представим в виде
Адвх = В Ад, (8)
где
AgBx = IIAZBI, Аовх, А0ВХ||Т.
Корреляционная матрица параметров входа определится со-
отношением
К,В1 = ВК,ВТ = В (АтРА)-‘ Вт. (9)
Таким образом, параметры входа в атмосферу определяются
как система случайных величин с корреляционной матрицей (9).
Теперь можно определить возможную предельную погреш-
ность прогнозирования (места посадки на Земле). Рассмотрим два
случая решения этой задачи.
1. Пусть заданная зависимость
1 ~ Ф 0?вх» Р» S) = ф (/вх, ОВх» 6вх> Р» 5) (Ю)
допускает линеаризацию. Тогда
« = в/„ + + % бе„ + + -g- 8S
91
и, так как 6р и 6S не коррелировали между собой и с параметрами
входа, то
°? - (£ -„у+а°-„у+(% °.„у+’«у+
+ (тЬУ + 2 +2 # к,„.„ +
। 9 дф дф
dv 50 *^°вхевх’
где aj ст| К, «, , К/ 0 » Kv о - элементы матрицы
X>Jk ОА DA 0Jk DA DJk OJk 0Jk DA
K</BX, определяемой соотношением (9).
В этом случае точность прогнозирования точки посадки для
нормального закона распределения будет характеризоваться пре-
дельным отклонением, равным Зо^.
Если же зависимость (10) не допускает линеаризацию, то
можно принять наихудшую корреляцию между параметрами
входа: I = /шах при
<7вхах (/Вх + Зо/ , увх + Зо0 , 0ВХ + Зсге )
I ~ ^min ПрИ ^вх (/вх ЗО/ , Увх ЗОл , 0ВХ 3cFq )
\ BJk BJu Da/
где о/вх, а„вх, сгевх — среднеквадратичные отклонения, определя-
емые корреляционной матрицей (9).
Если теперь еще учесть, что параметры р и S также имеют
погрешности, представляющие собой случайные функции, то при
оценке ожидаемого разброса точек посадки следует учесть и их
влияние. Выберем из всей совокупности возможных реализаций
этих случайных функций те, которые обеспечивают наибольшую
и наименьшую дальность спуска. Тогда
/max = ф (*вх + ЗСТ( , Овх + ЗСТ„ , 6ВХ + Зсг0 р - 6р, S — 6S),
^mln = ф (^вх Зог , ^BX ^bi’ ®BX 3G0bx’ P +
а возможный предельный разброс точек посадки составит:
при недолете
б^нед = 3^1вх G ^min)>
при перелете
б^пер = + (^шах + 0-
В заключение заметим, что если оба принятых допущения
некорректны, то задачу оценки возможного предельного разброса
точек посадки КА можно решить методом статистических испыта-
ний, используя исходные зависимости, варьируя погрешности
измерений, плотность атмосферы и баллистический коэффициент.
Задача 2.26. В точке О заданной орбиты КА в фиксированном
направлении проводится коррекция движения. В точках 1 и 2
для контроля величины корректирующего импульса с измери-
тельного пункта проведены измерения радиальной скорости КА г.
92
Погрешности измерений представляют собой систему случайных
величин с математическим ожиданием М [г ] — 0 и корреляционной
матрицей Кг. Определить величину корректирующего импульса
и проанализировать влияние степени корреляции между измере-
ниями на точность полученных результатов.
Решение. Связь измеряемых параметров с искомым можно
выразить зависимостью
г = f (Ок) = f (?). (1)
Учитывая малость возможного отклонения импульса коррек-
ции от его расчетного значения с£, соотношение (1) можно ли-
неаризовать:
* У А
Дг = &а,
дд 7
(2)
где
Дг = ||Дг1( Дг4Ь
К,
а?, К
К <£.
Г» = /а (Ок)-
&r = f (»к) — f (t£), Д<? = Дик = vK — nJ.
Далее воспользуемся зависимостью (2.5)
Д? = (А’КГ’А)-1 АТК7* Дг,
где применительно к рассматриваемой задаче
Д<7 = Дпк,
а = дК
1 dvK
п
at
Г1 = /1(ОК),
На основании этих зависимостей, полагая для простоты
= стг, = ст, получаем
А _ (giO* — сцК) + (a2qa 4- <hK)
“ ~ (a1o1 - а,К) в1 + (а,а2 + в1К) аа '
Используя это выражение, находим искомое значение
чины импульса коррекции
С»к = «к + Д«к-
(3)
(4)
(5)
вели-
(6)
А =
Теперь перейдем к анализу точности определения импульса
коррекции. Известно, что корреляционная матрица, характери-
зующая погрешности определения вектора Д</, выражается соот-
ношением
Кд, = (А’К-‘А)-‘. (7)
В рассматриваемой задаче, когда оценивается одна величина,
отношение (7) принимает вид
„2 =______________________________________ ,я.
° (а,а* — atK) aj + (а,а8 — ajK) а, ' ' '
93
Преобразуем это выражение так, чтобы среднеквадратичное
отклонение о0 выражалось через а = ajai и коэффициент кор-
реляции k — KJ&.
Тогда
где = *), (9)
При фиксированных значениях ах и о погрешности определе-
ния импульса коррекции с точностью до постоянной величины
можно характеризовать, как это следует из соотношения (9),
функцией ф (a, k). На рис. 2.13 представлен характер такой
зависимости.
Из приведенных на рисунке графиков явно видно, что харак-
тер зависимости ф (k) существенно зависит от значений а. При
а < I, т. е. когда производная в точке 2 меньше, чем в точке I,
возрастание степени корреляции приводит вначале к уменьшению
точности, затем точность возрастает и при k = I имеет место
абсолютно точное определение импульса. Причем максимум по-
грешности соответствует, как следует из (9), условию k = а и
всегда равен
Ф (a, k) = фтах = I. (Ю)
Аналогичное изменение зависимости ф (k) имеет место и при
а > I. Однако в этом случае с увеличением а уменьшается зна-
чение максимальной величины ошибки и максимум сдвигается
в сторону меньших значений коэффициента корреляции. Как
следует из соотношения (9), в этом случае максимум погрешности
соответствует условию k = l/a и значение максимума опреде-
ляется соотношением
Ф (a, k) = фшах = l/a.
(И)
2. Особое место занимает случай, когда a = I. Как следует
из графика, с ростом корреляции между измерениями погрешность
монотонно возрастает и при k = I достигает наибольшего значе-
ния.
Из сравнения кривых ф (Л), соответствующих различным зна-
чениям а, следует, что при а < I и малой степени корреляции
измерений точность решения задачи очень низкая. При a > I,
т. е. в случае, когда производная
возрастает вдоль траекто-
dq
рии, точность определения импульса коррекции существенно
повышается во всем диапазоне изменения степени коррекции,
кроме значения Л, равного единице. При k = I при всех значе-
ниях a I обеспечивается точное определение импульса коррек-
ции.
94
Пример. На борту КА, движущегося по круговой орбите, изменена
скорость на величину цк. Требуется выбрать оптимальную программу из двух
измерений скорости, проводимых с борта КА по местной вертикали в точках,
отстоящих от точки приложения импульса на угловом расстоянии фх и ф2. При
этом программа измерений должна обеспечивать наивысшую точность опреде-
ления импульса ик.
В этом случае фактически измеряется радиальная скорость КА. Поэтому
t>rj = 2 sin ф|О„, (12)
откуда
at =-^- = 2 sin ф< (13)
и
а = _а1,= 4пФ2.> (14)
ar sin фх
Тогда на основании (9) при k = 0 получим .
СТЛ
21/8^2Ф1 + 8Ш2фа )
Отсюда следует, что наивысшая точность достигается при Фх = л/2 и фа =
= Зл/2, т. е. измерения нужно производить в точках, отстоящих от точки про-
ведения коррекции на четверть витка и на три четверти витка. При этом точ-
ность определения импульса коррекции будет характеризоваться среднеквадра-
тичным отклонением
at
В случае k — 1 измерения в любых точках при sin фт sin фа =#* О дают
определение импульса без ошибок.
При фиксированном значении k< 1 на основании (9) получим, что наи-
меньшая ошибка в оценке импульса реализуется в случае, если выражение
J =а\+а^ — Ч.а^к (17)
принимает наибольшее значение. Как легко видеть, величина J имеет минимум,
реализуемый при а2/а± = k. Следовательно, J будет увеличиваться по мере
того, как отношение aa/ai будет все больше отличаться от значения k, соответ-
ствующего этому минимуму. Очевидно, что в рассматриваемом случае J будет
наибольшим, если первое измерение провести в районе Фх = 0° или фх = 2л,
а второе — при фа = л/2 или фа = Зл/2.
Тогда
0/1 ,_____
08)
В рассматриваемом случае задача решается с использованием одного измерения.
Задача 2.27. На космическом корабле, возвращающемся
с Луны, при подлете к Земле проведена коррекция движения на
плоскости орбиты. Импульс коррекции характеризуется модулем
скорости рк и его направлением G. Космонавты имеют возможность
проконтролировать точность исполнения импульса по данным п
измерений г, проводимым на участке полета между точками 1
и 2. Погрешности измерений коррелированы, однако характер
корреляции неизвестен. Задача космонавтов состоит в выборе
такой программы, при которой, обрабатывая измерения методом
95
наименьших квадратов, наиболее точно определяется высота услов-
ного перигея Лп орбиты возвращения.
Предельные значения ошибок измерений заданы вектором
®^пред*
Решение. Связь измеряемых параметров с параметрами, харак-
теризующими коррекцию, будет определяться зависимостью
П 0), * = 1, 2, ..., п. (1)
В линейной постановке
Аг' =т^4»« + тг48- ...." <2>
Введем в рассмотрение некоторые безразмерные параметры г?
и f*i, полученные делением соотношения (1) на предельные зна-
чения погрешности 6гпрвд. Тогда из (2) получим
Дг* = ац Док + а.ц ДО, i = 1, 2, ..., п,
где Дг? = ,
огпред i
а 1 а 1 dfl
** ^пред ^пред дб
(3)
I) определить
э, очевидно,
JA)-1 Ат Дг*.
Аг* =
(4)
импульс коррекции,
Дг’
Дг?
Дг£
(5)
условного перигея связана
Очевидно, что Дг* при принятых допущениях будет представлять
собой безразмерные измерения со значениями
ь
Если теперь из системы
обозначить его Д<? (Дпк, ДО),
Д<7 = (
Здесь
0ц 021
012 022
А —
01 п Cl2n
Пусть погрешность в опр<
с погрешностями в исполнении импульса коррекции условием
ДЛЯ = <р Д</, (6)
где <р = Цфх, <ра||.
Тогда поставленную задачу можно свести к минимаксной.
Выберем из располагаемого состава возможных измерений некото-
рую группу Дгв и соответствующую ей матрицу Ав с числом из-
мерений v = п. Далее в пределах этой группы рассмотрим все
возможные реализации ошибок измерений с различной степенью
корреляции и выберем такую, которая обеспечивает максимум
ошибок определения условного перигея, т. е. найдем
max Дт)®. (7)
96
путем варьирования погрешности. Теперь будем варьировать
состав измерений и число v, т. е. будем вводить в рассмотрение
различные комбинации матрицы А. Сопоставив все возможные
комбинации, в каждой из которых выполняется условие (7), найдем
такую комбинацию, которая обеспечивает минимум ошибок опре-
деления условного перигея.
Таким образом, приходим к минимаксной задаче, которую
можно записать так:
min min ДЛп- (8)
а Аг
Известно, что число оптимальных измерений равно числу
искомых параметров. Следовательно, применительно к поставлен-
ной задаче требуется определить лишь два измерения. Выберем
из всей совокупности располагаемых измерений произвольно два
измерения г* и г*. Им будут соответствовать элементы матрицы
Аа1Ь и а^. Тогда на основании соотношений (5) и (6)
получим
ДЛп = ф1 [^11 Дг* + alj + ^12 (fl2i Дг? + 02/ Дг?)] 4~
+ ф2 [&21 Дг* + 4“ ^22 Дг* + 02/ ДГ/)], (9)
где b^v — элементы матрицы
Ь\\ &12
^21 ^22
2 2
a\i + а1 la2i + ia2f
I 2,2
02/01/ + 02/01/ + 02/
Из (9) следует, что max Д/in достигается при | Дг, | = | Дг/1 =
= 1. Следовательно,
max ДЛп = Ф1 [^и (| | + | 01/ |) 4~ ^12 (| 02/1 4~ | |)] +
+ ф2 [^21 (I аи | 4- I ац |) 4“ ^22 (I 02/ | 4- I ^2/ |)]« (10)
Чтобы теперь найти min max Дйп, нужно в (10) проварьиро-
вать индексы «/» и «/» от 1 до п при i=£j и из всех полученных
значений выбрать Дйп наименьшее. Два измерения, соответству-
ющие этому наименьшему значению ДЛП, и будут оптимальными.
Задача 2.28. Для космического корабля, движущегося по
орбите вокруг Земли, необходимо обеспечить наилучший прогноз
плоскости орбиты. Для этого воспользуемся значениями восхо-
дящих узлов орбиты полученных по результатам траекторных
измерений.
Решение. Изменение положения плоскости орбиты КА в абсо-
лютном пространстве в основном определяется сжатием Земли.
Вековое возмущение плоскости орбиты за один виток определяется
выражением
6Q = —— cos i. (1)
р2 ц v 1
4 П/р Г. С. Титова
97
Приведенная формула достаточно точно описывает движение
плоскости орбиты, хотя и не учитывает влияния аномалий поля
сил тяжести Земли, воздействие которых на два порядка меньше.
Прогнозированное положение плоскости обиты на некоторый мо-
мент может быть определено из зависимости
Одр = Qo п 6Q,
где £2пр — прогнозируемое значение восходящего узла орбиты;
Qo — начальное значение долготы восходящего узла на момент
начала прогнозирования; п — количество витков прогнозирования.
Для повышения точности прогноза целесообразно уточнить
по результатам наблюдений коэффициент ез, характеризующий
сжатие Земли, выбрав его в качестве параметра согласования.
Согласующее значение может быть определено следующим
образом. Допустим, имеется несколько независимых определений
долгот восходящих узлов
Qi (Zi), Qg (^2), • • •» (/m),
где t± < t2 < ... < tm — времена наблюдений.
Наиболее подходящее значение коэффициента 83 будем опре-
делят по методу наименьших квадратов. Для этого запишем
уравнение невязок
(8q + ДВо \
Qo — п-------6Q j. (2)
Здесь дополнительно использованы обозначения: Офакт—
фактическое Q, полученное по результатам определения парамет-
ров орбит на момент прогнозирования; Де3 — искомая поправка
к величине е3, обеспечивающая наилучший в смысле метода
наименьших квадратов прогноз величины по формуле (1).
Из последнего выражения нетрудно получить уравнение,
которое примем в качестве условного:
Используя известное правило формирования нормальных урав-
нений по методу наименьших квадратов, получим
т т
1=0 1=0
где т — общее количество условных уравнений, которое в нашем
случае совпадает с количеством использованных пар значений Q,
найденных при определении параметров орбит по результатам
наблюдений за полетом КА.
98
Поскольку уточняемый параметр у нас один, то окончательно
выражение для определения величины е8 будет иметь вид
5 п(^пр — ^фант) 6Q
Лее - е3 -!=£—%------------ (3)
2 (п бй)’
<=0
где опущены индексы «т» и «/».
Уточняемое значение в8 теперь определится из зависимости
8,, = »з + Дев- (4)
Поскольку используемое в расчетах уравнение (2) справед-
ливо только в первом приближении, то вычисление по формулам
(3) и (4) носит итерационный характер и для получения удовлетво-
рительной точности прогноза плоскости орбиты бывает достаточно
нескольких приближений.
ГЛАВА 3
Маневрирование КА
3.1. Основные положения
Маневром называется управляемое движение КА, в результате
которого происходит заданное изменение орбиты или траектории
его полета. Управляемое движение КА происходит под действием
управляющей силы, в качестве которой будем рассматривать силу
тяги реактивного двигателя, а на участке спуска на Землю —
аэродинамическую силу.
При исследовании методов маневрирования КА в настоящее
время в механике космического полета сложились два основных
направления: 1) полет КА с двигателями большой тяги, 2) полет
КА с двигателями малой тяги.
Основной особенностью первого направления является малая
продолжительность активных участков (участков полета с ра-
ботающим двигателем) по сравнению с общей продолжительностью
полета. В этом случае активные участки полета аппроксимируются
точками приложения мгновенных импульсов скорости, т. е. дей-
ствие тяги двигателя сводится к скачкообразному изменению
скорости полета без изменения координат КА за время работы
двигателя. Тогда допустимо употребление терминов коррек-
тирующий импульс или импульс скорости.
Характерная особенность второго направления — малая ве-
личина ускорения, сообщаемая КА при движении его в окрест-
ности планеты, по сравнению с местным гравитационным ускоре-
нием. В результате оказывается, что полет КА с двигателем ма-
лой тяги на значительной части траектории (или на всей) про-
исходит с работающим двигателем.
Орбита, по которой совершает полет КА до проведения ма-
невра, называется начальной орбитой. В результате
проведения одного или следующих друг за другом нескольких
маневров могут преднамеренно изменяться либо отдельные эле-
менты орбиты (например, период обращения), либо КА пере-
водится на конечную (требуемую) орбиту. В про-
межутках между маневрами полет происходит по переходным
орбитам.
В зависимости от поставленной задачи различают следующие
основные виды выполнения маневров: переход с одной орбиты на
другую (орбитальный переход); корректирующие маневры; сбли-
жение на орбите; снижение и посадка на Землю.
Под маневром орбитального перехода понимается такое управ-
ляемой движение, которое обеспечивает переход КА с одной орбиты
100
на другую. Если маневры производятся в плоскости начальной
орбиты, то их называют компланарными, в случае
изменения положения плоскости орбиты в пространстве — н е -
компланарными.
Корректирующие маневры также изменяют орбиту КА. Однако
это изменение предназначено для коррекции ошибок действи-
тельной траектории полета, как правило, отдельных элементов
траектории. Основной особенностью корректирующих маневров
является их вероятностный характер, поскольку отклонения
действительной траектории от расчетной могут быть предсказаны
лишь статистически.
Маневры также разделяют по числу импульсов: одно-, двух-
и трехимпульсные и т. д.
Как известно, в общем случае расчет маневров КА сводится
к решению краевой задачи для систем обыкновенных дифферен-
циальных уравнений, описывающих движение КА в принятой
модели действующих сил. На практике широкое распространение
получили итерационные линейные методы решения краевых за-
дач. Эти методы позволяют установить приближенную линейную
зависимость (для нелинейных связей) между вариациями вектора
промаха и вектора управлений, в результате чего решение крае-
вой задачи сводится к последовательному устранению невязок
в краевых условиях целенаправленным изменением компонент
вектора искомых управлений.
Главная проблема линейных методов — это поиск достаточно
надежного нулевого приближения искомых управлений, обеспе-
чивающего устойчивую сходимость итерационного процесса. Ну-
левое приближение, как правило, определяется в рамках теории
эллиптического движения с использованием различных искус-
ственных приемов. В настоящей главе в основном рассматриваются
задачи применения линейных методов расчета одноимпульсных
и многоимпульсных переходов. Вследствие этого решения задач
будут приближенными и могут служить для ориентировочных
оценок маневров.
3.2. Одноимпульсные переходы
При решении задач одноимпульсных переходов будем пола-
гать, что величины импульсов по абсолютной величине значи-
тельно меньше орбитальной скорости полета КА, а следовательно,
допустимо линейное представление зависимости между коррек-
тируемым промахом и величиной импульса.
Если начальная орбита является круговой или близка к ней,
то для расчета одноимпульсных переходов воспользуемся резуль-
татами теории возмущенного кругового движения.
Пусть Дц., Дпп, Дпь — компоненты корректирующего импульса
в орбитальной системе координат и Дг, Дп, ДЬ — возмущения
координат КА соответственно вдоль радиуса, трансверсали и по
101
нормали к плоскости орбиты. Между этими величинами суще-
ствует следующая связь [281:
Дг-^Д»,+ 2(1 Ди„, (3.1)
Л Л
Дп - - д„г _ д„„ (3.2)
Л Л
Д6 = 21ЕФ- дОь. (3.3)
Здесь <р = М — угловая дальность полета КА, отсчитываемая от
точки приложения импульса; X — средняя угловая скорость
движения КА по орбите, равная
х =4-1/ -4->
где г — средний радиус орбиты.
Если орбита КА является эллиптической, то для расчета
одноимпульсных переходов во многих случаях удобно пользо-
ваться системой дифференциальных уравнений для оскулирующих
элементов [281:
dp 2pkQn
dt 1 + е cos О ’
ь/л «.-а 1 в cos’О + 2 cos О + е л \
ЗГ = k (A sin О +----i +7c-o3»---’
d<D k Г n sin 0 (2 + e cos 0) n 'ectg/sinw n 1
ST = - [—Qr COS 0 +------1 + ecos0—Qn —r+T^QbJ ’
dQ _ k sin и n
dt ~ (1 +esin «) sin/ Уь’
di fecosu
dt 1 + e cos О
k = 1/^ —, О = И — <o,
Г I* ’
где Qr, Qn, Qb — проекции возмущающего ускорения на оси орби-
тальной системы координат.
Так как Q = -^-, то> переходя к конечным приращениям,
систему уравнений в оскулирующих элементах представим в сле-
дующей форме (удобной для практического использования):
<3-4>
Де = * (sin О Д»г + + ’ Д-.), (3.5)
а Г ла । slnd(2 + ecosO) >
Д<о = _ [-cosi> Дог +----До» ~
_ eet^stan д 1 (3б)
1 + е cos 0 ° J 4 1
102
Ла = 7Г+7^)ЛГГд“- <3'7>
4' = Т^Ьг4“ь- (3-8)
В выражениях (3.4) ... (3.8) величины р, е, ю, Q, i являются эле-
ментами орбиты КА в момент приложения импульса с компонен-
тами Аог, Аоп, Аоь. Аргумент широты и и истинная аномалия &
относятся к точке орбиты, в которой прикладывается импульс.
Задача 3.1. Орбита КА является круговой радиуса г0. В не-
которой точке орбиты с аргументом широты ит прикладывается
радиальный импульс Аиг0. Определить радиусы апогея гА, пе-
ригея гп и аргумент широты перигея со орбиты после приложения
импульса.
Решение. Полагая величину корректирующего импульса до-
статочно малой по сравнению с орбитальной скоростью полета,
для решения задачи воспользуемся результатами теории возму-
щенного кругового движения. В этом случае в линейном приб-
лижении радиальное расстояние КА от центра Земли определится
формулой
Г = r0 + Ar, (1)
где Аг — линейная поправка к невозмущенному значению ра-
диуса орбиты, которая находится из выражения (3.1):
Ar=-^Avr0, (2)
причем <р = и — ит,
Очевидно, что величина Аг достигает наибольшего значения
при <р = л/2 и становится минимальной при <р = —л/2.
Тогда из соотношений (1) ... (3) находим радиусы апогея и
перигея:
= + (5)
Гп = Го-^, (6)
а также аргумент широты перигея
(0 = um-^-. (7)
Таким образом, в результате приложения радиального им-
пульса круговая орбита превращается в эллиптическую, ось
апсид которой перпендикулярна направлению импульса. При этом
апогей орбиты находится в точке орбиты, отстоящей на угол л/2
от точки приложения импульса в направлении движения по орбите
(рис. 3.1).
103
Рис. 3.1. Схема изменения формы орбиты после приложения радиального им-
пульса Дог:
1 — начальная круговая орбита; 2 — орбита КА после приложения радиального им-
пульса; 3 — ось апсид; А, П — апогей и перигей конечной орбиты
Рис. 3.2. Схема отсчета угловых расстояний
Полученные соотношения позволяют решать обратную за-
дачу: пусть почти круговая орбита задана параметрами гА, гп, о.
Определить радиальное расстояние КА от центра Земли в точке
орбиты с аргументом широты и.
Рассматривая равенства (5) и (6) как уравнения с неизвест-
ными г0, Аиг0/Х и решая эту систему, находим
Avr0 = Га 2---п-
(9)
Используя далее выражения (1), (2), (8), (9), определяем текущее
значение радиального расстояния:
Теперь выразим угловую дальность полета <р в функции аргу-
мента широты и. Пользуясь рис. 3.2, находим
ф = и— (-^-+ ®)-
В результате получаем
г = ---Гд д cos («—©). (Ю)
Таким образом, если орбита КА характеризуется параметрами
г*, гп> w> т0 согласно теории возмущенного кругового движения
радиальное расстояние КА от центра Земли для данного значения
аргумента широты и может быть вычислено по формуле (10).
Из формул (1) и (10) также следует, что по отношению к среднему
круговому движению по орбите радиуса г0 возмущение радиаль-
ного расстояния определится формулой
Дг = — 2 Гп cos (и — ®). (11)
104
Перейдем в соотношениях (10), (11) от радиальных расстояний
к высотам полета. Так как
г = /?+Л, C/i = Я + '’п==^+Лп,
где h — высота полета, то выражения (10), (11) можно представить
в следующей форме:
h = А 0 п--------А а- п cos (и — со), (12)
Z а
ДЛ -------а~2~~п cos (и — со), (13)
причем
А. ~Н h>rt
А7П = Ло (14)
есть средняя высота полета.
Пример 1. КА совершает, полет по круговой орбите на высоте 300 км.
В точке орбиты с аргументом широты 30° прикладывается радиальный импульс
10 м/с. Определить радиусы апогея и перигея.
Так как радиус круговой орбиты г0 = 300 + 6371 = 6671 км, то по фор-
муле (4) находим угловую скорость полета % = 1,16* 10“8 с-1. Далее по фор-
мулам (5) и (6) определяем гА = 6680 км, гп = 6662 км. Иначе говоря, наи-
большее возмущение радиального расстояния, как следует из формулы (2),
составляет ±9 км.
П р и м е р 2. Орбита КА задана высотами в перигее Лп = 200 км и в апогее
ЛА = 300 км. Аргумент широты перигея со = 0°. Определить высоту полета КА
в точке орбиты с аргументом широты и = 60°.
По формуле (13) находим изменение высоты полета по отношению к средней
круговой орбите, равное АЛ = —25 км. Затем по формуле (12) определяем иско-
мую высоту полета: h = 225 км.
Задача 3.2. Орбита КА является почти круговой и задана
параметрами rA, гп, со. С целью проверки корректирующего
двигателя в зоне видимости измерительного пункта (т. е. в точке
орбиты с аргументом широты ит) производится его включение
и отрабатывается заданный радиальный импульс Дог. Определить
минимальную и максимальную высоты полета КА после отра-
ботки импульса.
Решение. Поскольку орбита КА близка к круговой, то для
решения задачи воспользуемся результатами теории возмущенного
кругового движения.
Пусть г0 — радиус средней круговой орбиты, определяемый
по формуле (см. задачу 3.1)
и X — средняя угловая скорость полета по орбите. Тогда радиаль-
ное расстояние КА от центра Земли в линейном приближении
можно определить выражением
г = г0 + Дт» 4* Дга.
105
Здесь Afi — возмущение радиального расстояния, обусловленное
отличием орбиты КА от круговой, причем
г. — гп
Ari =------- 2 cos (и — со)
(см. задачу 3.1).
Величина Ага учитывает возмущение радиального расотояния,
вызванное воздействием радиального импульса, и находится из
выражения (3.1)
А sin ф *
Дга=
причем в рассматриваемом случае <р = и — ит.
Таким образом, получаем следующее выражение для определе-
ния радиального расстояния КА от центра Земли:
г = Го — — 2'П cos (« — ©)+ sin Дог- (1)
Так как г = R + h, rK = R + /гА, гп = R + hn, то выражение (1)
можно переписать в следующей форме:
Л - Л. - cos (и - <>) 4- V “”•> (2)
л Л
\ l
где А 2 = Ло
есть средняя высота полета.
Теперь задача состоит в определении аргументов широты и,
при которых высота полета становится минимальной или макси-
мальной. Для этого воспользуемся необходимым условием экстре-
мума функции (2) и получим следующее уравнение относительно
неизвестной и:
sin(U - о)+C0S(H-F“ro) = 0.
Это уравнение можно переписать в такой форме:
A sin и + В cos и => 0, (3)
л Г к Лиг
где А = А -2 cos со + sin ит,
В = — 2Ги sin (В + cos uTO.
Из уравнения (3) следует
tgu = —W
т. е. аргументы широты минимальной и максимальной высот
th = arctg , th = Ui + л. (5)
106
После этого, полагая в выражении (2) последовательно и =
= и = и2, находим минимальную и максимальную высоты
полета.
Пример. Дано: гА = 6800 км, гп = 6600 км, ш = 0°, Дог = 10 м/с,
um = 30°. Определить минимальную и максимальную высоты полета после
приложения импульса.
Вначале находим коэффициенты: А = 104,5 км, В = 8 км. По формулам (5)
определяем аргументы широты минимальной и максимальной высот полета:
Ui = —4,5°, Ug = 175,5°. По формуле (2) накодим искомые высоты полета:
^шах = 434 им, &тгнп = 221 км.
Задача 3.3. Орбита КА является эллиптической и задана
радиусами апогея гА и перигея гп- Требуется определить вели-
чину и направление корректирующего импульса для изменения
периода обращения на АТ, причем ДТ < Т. В какой точке орбиты
целесообразно прикладывать корректирующий импульс, чтобы
величина его оказалась минимальной?
Решение. Как известно, период обращения КА может быть
определен по формуле
fl3/2
г = 2я7Г <>>
причем большая полуось
а = -у (га + гп)- (2)
Из равенства (1) находим связь вариации периода обращения
с вариацией большой полуоси
Из теории эллиптического движения известно, что
Варьируя это выражение, находим
= (4)
Используя далее равенства (3.4), (3.5), (3), (4), получаем следу-
ющую зависимость вариации периода обращения от компонент
импульса Ди„ Доп и точки его приложения (истинной аномалии •&):
ДТ = 1/4 [е sln # Дпг + (1 + е cos О) Дпп], (5)
1 с?" г |Л
причем
п = 2ГаГП е = ГА~ГП
И га+гП ’ ГА + ГП ’
Обозначим далее через Р угол между трансверсалью и направ-
лением корректирующего импульса (рис. 3.3). Тогда
Диг = Ди sln р, Доп = Ду cos р
107
и поэтому
AT = ]/f [е sin ft sin 0 +
+ (1 + е cos ft) cos pi До. (6)
Рис. 3.3. Схема отсчета Пользуясь выражением (6), определим
направления импульса направление корректирующего импульса
(угол Р), когда при заданной точке прило-
жения корректирующего импульса (истинной аномалии О) для кор-
рекции периода обращения потребуется минимальный импульс.
Так как необходимое условие максимума ДТ (или минимума
До) отвечает равенству
d (ДТ)Дф = О
или е sin ft cos р — (1 + е cos ft) sin Р = 0, (7)
находим
□ esinft__
1 + ecosft •
Для определения точки приложения импульса из условия
минимума его величины воспользуемся условием: d (&T)ld$ = О,
или согласно (6) находим
cos ft sin р — sin ft cos р = 0. (8)
Решая уравнение (8), с учетом (7) находим р = ft = 0.
Таким образом, для энергетически оптимального изменения
периода обращения корректирующий импульс должен быть ка-
сательным и прикладываться в перигее орбиты. При этих усло-
виях (ft = 0, Р = 0) из выражения (6) следует
дГ=ЗТ_ !/-£-д0.
1 — е V р.
(9)
В частности, для почти круговых орбит с высотой полета 200 ...
400 км имеем е < 1, У ц/р = п, и поэтому
ДТ = ЗТ^£_. (Ю)
В этом случае
АТ = 2,1Аяс, (11)
где импульс До должен выражаться в м/с.
Пример 1. КА связи «Молния-3» выведен на орбиту с апогеем 40 825 км
в Северном полушарии и перигеем 467 км в Южном полушарии. Период обра-
щения КА составляет 12 ч 16 мин.
Необходимо определить корректирующий импульс для увеличения периода
обращения КА «Молния-3» на 1 мин. При этом рассмотрим два случая коррек-
ции периода обращения. В первом случае будем полагать, что корректирующий
импульс прикладывается в перигее орбиты и во втором — в ее апогее.
108
Примем, что Земля имеет сферическую форму радиусом 6371 км. В этом
случае имеем
гА = 40 825 + 6371 = 47 196 км,
гп = 467 + 6371 = 6838 км,
а = 27 017 км.
По формулам (5) находим: р = 11 900 км, е = 0,75. Далее воспользуемся вы-
ражением (6). В случае приложения импульса в перигее (0 = 0, О = 0) получим
Ау = 0,66 м/с. Если же импульс прикладывается в апогее (0=0, 0= 180°),
то Ау = 4,6 м/с.
Полученные результаты наглядно иллюстрируют целесообразность коррек-
ции периода обращения путем приложения трансверсального импульса в перигее
орбиты. В рассматриваемом случае получается почти семикратный выигрыш
в величине импульса.
П р и м е р 2. Орбита КА является круговой с высотой полета 300 км. Опре-
делить корректирующий импульс для увеличения периода обращения на 1 мин.
В этом случае по формуле (11) получаем Аи = 28,5 м/с.
Задача 3.4. КА осуществляет полет по круговой солнечно-
синхронной орбите на высоте h. Задано наклонение орбиты I.
Вследствие влияния возмущений угол между направлениями на
Солнце и на восходящий узел орбиты изменился на AQ относи-
тельно его заданного значения. Определить величину и точку
приложения бокового импульса (т. е. импульса, направленного
вдоль нормали к плоскости орбиты) для ликвидации возникшего
отклонения Ай.
Решение. Воспользуемся выражением (3.7): при е = 0 (орбита
КА является круговой) р/р = V,
Дс,в = 1/JL-^LLaq. (1)
в V р smu ' '
Решив уравнение д bvjdu = 0, получим, что величина коррек-
тирующего импульса будет минимальной, если аргумент широты
точки приложения импульса н=±л)/2. Иначе говоря, для энер-
гетически оптимального корректирования долготы восходящего
узла импульс должен прикладываться в вершинах трассы.
Полагая в выражении (1) и = и/2, получаем
Дяв = о sin i ДО. (2)
При использовании формулы (2) следует иметь в виду, что радиус
солнечно-синхронной орбиты и наклонение ее связаны зави-
симостью [6]
±^з.^£ = 0,98567сут. (3)
Величина наклонения i для заданной высоты h орбиты, удов-
летворяющая равенству (3), может быть найдена е помощью
рис. 3.4. На этом же рисунке приведена завиеимоеть круговой
скорости v от высоты полета. С целью прикидочных расчетов
величин импульсов при полетах КА на орбитах в высотой 500 ...
109
Рис. 3.4. Графики зависимости
скорости полета о и наклоне-
ния i солнечно-синхронной ор-
биты от высоты полета h
1000 км можно воспользоваться при-
ближенной зависимостью
Дсв = 125AQ м/с, (4)
где AQ выражена в градусах.
Пример. Определить корректирую-
щий импульс для смещения восходящего
узла солнечно-синхронной орбиты на 1°. Вы-
сота орбиты составляет 1000 км.
Используя рис. 3.4, при h — 1000 км
находим: v = 7360 м/с, i = 99,5°.. По фор-
муле (2) находим Див = 120 м/с.
Задача 3.5. По наблюдению с Зем-
ли установлено, что КА, находя-
щийся на стационарной орбите, со-
вершает периодические суточные ко-
лебания по долготе с амплитудой Д<р.
Выяснить причину этих колебаний.
Что необходимо предпринять для устранения обнаруженных ко-
лебаний?
Решение. Периодические колебания КА по долготе могут
возникнуть только в том случае, когда период обращения его
равен звездному периоду вращения Земли вокруг своей оси, но
орбита по форме отличается от круговой. Установим связь между
амплитудой колебаний и геометрическими характеристиками
орбиты.
Из теории возмущенного кругового движения известно, что
радиальный импульс Дрг приводит к периодическому смещению
спутника вдоль орбиты (по отношению к чисто круговому движе-
нию), определяемому по формуле (3.2),
&п = ~2{'-со^ До,
Л
2
с амплитудой Дпо = -г- До,.
/V
Пусть г — радиус стационарной орбиты КА. Тогда, очевидно,
ДФ=-^ = ^-ДрР. (1)
Соотношение (1) устанавливает линейную связь между величиной
импульса и амплитудой колебаний Д<р.
Выразим радиальный импульс в функции высот апогея и пе-
ригея стационарной орбиты. Поскольку радиальный импульс До,
приводит к периодическому изменению радиуса орбиты (3.1):
дг=_^дОг
Л
с амплитудой Дго = , (2)
110
то высоты перигея и апогея
hn = h — Дга, ЛА = h + Дга,
откуда
ЛГа= А2 П- (3)
Таким образом, найдена искомая связь между радиальным
импульсом и высотами апсидальных точек
Д«г = 4(Л*-Лп). (4)
Далее из выражений (1) и (4) определяем зависимость амплитуды
периодических колебаний вдоль орбиты от высот апогея и пери-
гея
дф=Аг±1. (5)
Теперь рассмотрим возможные способы ликвидации обнаружен-
ных колебаний путем коррекции орбиты.
Первый способ заключается в приложении одного радиального
импульса в точке орбиты, отстоящей на угол л/2 от линии апсид.
Величина импульса находится из формулы (1):
Дог = -у* Дф (6)
или по формуле (4).
Второй способ коррекции состоит в последовательном при-
ложении первого импульса в перигее орбиты и второго — в ее
апогее (с целью совмещения точек перигея и апогея с круговой
орбитой). Для расчета величин импульсов воспользуемся зави-
симостью (3.1):
Дг = ДОп,
Л
выражающей связь между трансверсальной составляющей им-
пульса Дип и радиусом Дг при угловой дальности полета <р. По-
скольку в рассматриваемом случае <р = л (высоты корректи-
руются в точках, диаметрально противоположных точкам при-
ложения импульсов), то
Д'- = Y Аип-
В случае приложения импульса в перигее для коррекции высоты
апогея Дг = ЛА — h. Тогда
* . ла~а
Afni = k —у— •
При коррекции высоты перигея получим
« Л — Ап
Дг = Л — йп, Д»п8 = л —,
111
после чего определяем суммарный импульс перехода на круговую
орбиту:
Дип = Дипх + Дun2 = 1 &А 4 hn . (7)
Из выражений (4) и (7) следует, что в целях экономии топлива
целесообразно использовать двухимпульсный трансверсальный
переход, поскольку для него потребуется в два раза меньше
топлива, чем для одноимпульсного перехода с радиальным им-
пульсом.
С помощью формул (5) и (7) также получаем
Дпп = 4-Дф. (8)
Поскольку кг — г>, где р — скорость полета по стационарной
орбите, то, выражая Дф в градусах, получаем
Дог = 27Д<р м/с, (9)
Доп = 13,5Дф м/с. (10)
Пример. Пусть амплитуда колебаний КА по долготе составляет 0,1°.
Тогда для устранения этих колебаний, как следует из формул (9) и (10), потре-
буется одноимпульсный маневр радиальным импульсом 2,7 м/с, либо двухим-
пульсный трансверсальный переход с суммарным импульсом 1,35 м/с.
Задача 3.6. По наблюдению с Земли установлено, что КА,
находящийся на околостационарной орбите, постоянно смещается
по долготе на угол Дф за сутки. В чем состоит причина такого
смещения? Что необходимо сделать для устранения смещения КА?
Решение. Постоянное (или вековое) смещение КА вдоль ор-
биты обусловлено отличием периода обращения его от звездного
периода вращения Земли вокруг своей оси. Для устранения ве-
кового смещения необходимо изменить период обращения КА
трансверсальным импульсом. Определим величину импульса.
Угловому смещению КА соответствует следующее смещение
вдоль орбиты:
Дп = г Дф, (1)
где г — радиус орбиты.
В соответствии с соотношением (3.2) трансверсальный им-
пульс Дп„ связан с изменением отклонения вдоль орбиты выра-
жением
Дп = — Л».. (2)
Л
Поскольку период обращения КА равен суткам, то из выражений
(1) и (2) следует
До» = "ST Д<Р
или
До" = —£-дч>- (3)
112
Для стационарного КА v =3076 м/с, и поэтому,
выражая Дф в градусах, получаем
Дрп = 2,8 Дф м/с. (4)
Пример 1. Найти значение характеристической
скорости, необходимой для ликвидации смещения Аф = Г.
Согласно формуле (4) находим Аип = 2,8 м/с.
Пример 2. Определить импульс для смещения
спутника вдоль орбиты на угол Аф. Для решения задачи
потребуется два трансверсальных импульса, первый из
которых производит смещение спутника вдоль орбиты,
и величина его равна
Др» = —ЙГД,Р’
Рис. 3.5. Схема ор-
бит КА (/) и кап-
сулы (2)
а второй производит возвращение КА на начальную орбиту после завершения
перехода. Величина его также определяется формулой (3), но по направлению
второй импульс противоположен первому.
Задача 3.7. Чтобы взять пробу воздуха на низкой высоте,
в точке А круговой орбиты (рис. 3.5) от КД отделяется капсула.
Требуется определить импульс отделения капсулы при следу-
ющих условиях: минимальная высота полета капсулы (в точке В)
задана; после завершения одного, витка капсула должна встре-
титься с КА в точке А.
Решение. Предположим, что поле сил является центральным,
а орбиты КА и капсулы компланарны. Пусть г — радиус круговой
орбиты КА, а — большая полуось орбиты капсулы, h — мини-
мальная высота орбиты капсулы (в точке В, см. рис. 3.5). Из
условия обеспечения встречи КА и капсулы спустя виток после
их разделения следует, что периоды обращения их должны быть
равны, т. е. г = а. Это означает, что радиусы апогея и перигея
капсулы гА = г + Л, гп = г — h, т. е. эксцентриситет орбиты
капсулы
и фокальный параметр
р = а(1-е*) = г(1 - (2)
Далее находим трансверсальные составляющие скорости капсулы
и КА соответственно: опк = *£• у-» — ]/" у-, откуда опре-
деляем трансверсальную составляющую импульса отделения кап-
сулы: ___ _____
А»п = «пк — On = 1Л у- (]Л у- — 1)
или на основании соотношения (2)
(3)
из
Для вычисления радиальной составляющей скорости капсулы
в точке А воспользуемся интегралом энергии
и» = — JL.
г а
Поскольку Г = а, ТО 1>?к + Рпк = -у-, И поэтому vh = -у- .
Так как для КА имеем vr = 0 (орбита КА является круговой),
то получаем следующее выражение для определения радиальной
составляющей импульса:
Для нахождения истинной аномалии точки А воспользуемся
соотношением р = г (1 + е cos &), откуда следует
cos 0 = — А. (5)
Если предположить, что hl г 1, то выражение (3) можно
упростить:
(6)
Тогда
Доп = —-Ад»г-
Пример. Пусть КА совершает полет по орбите с высотой 350 км. Опре-
делить импульс отделения капсулы при минимальной высоте ее полета 150 км.
По формулам (4) и (6) находим Аип =7,2 м/с, Аиг = 240 м/с, а истинная ано-
малия О = 91° 43'. Заметим, что для мягкого соединения капсулы с КА после
завершения витка потребуется точно такой же импульс, но направленный в про-
тивоположную сторону.
Задача 3.8. При выведении КА на орбиту из-за влияния ошибок
системы управления наклонение плоскости орбиты реализовано
с погрешностью AZ. Определить аргумент широты точки приложе-
ния и и величину бокового импульса Диь для изменения наклоне-
ния на величину Д/. Орбита КА характеризуется параметрами гА,
гп, <0.
Решение. В линейном приближении вариация наклонения
плоскости орбиты А/ связана с боковым импульсом выраже-
нием (3.8)
.. kCOS и Ш — 1+вСО8« Д»Ь, (1)
л — - *а'п . = ~ ГН (2)
р ГА + T П га + гп ’
# = » — & = ’К р/р.
(3)
где
114
Задача состоит в определении аргумента широты и точки при-
ложения импульса из условия, что величина импульса, которая
находится из выражения (1)
д = 1 +ecos0 д
" k cos и ' '
минимальная.
Необходимое условие минимума импульса запишем в виде
d (&vb)/du = О,
откуда получаем следующее уравнение относительно искомого
аргумента широты:
-е sin Ф + 0+gcos»)sta“ = о
1 cos и
или sin и + е sin со = 0. (5)
Уравнение (5) имеет следующее решение:
и = arcsin (—е sin со) + /пл, т = 0, 1, ... .
Исходя из геометрического смысла решаемой задачи, коэффициент
т может принять два значения: 0 или 1, т. е.
= arcsin (—е sin со), (6)
ua = arcsin (—е sin со) + я. (7)
При значениях т = 2, 3 ... аргументы широты и19 и2 будут просто
изменяться на угол 2л, т. е. других точек приложения импульсов
не получается.
Из формулы (4) следует, что величина импульса будет мини-
мальной, если произведение е cos О, стоящее в числителе фор-
мулы (4), является отрицательным. Это обстоятельство позволяет
сформулировать правило выбора аргумента широты точки при-
ложения импульса: из двух значений и2 следует принять то,
при котором величина е cos О становится отрицательной.
Пример 1. Орбита КА задана элементами р, е, со = 0. Определить аргу-
мент широты точки приложения бокового импульса.
По формулам (6), (7) находим = 0, щ = л. Теперь определим произве-
дения
в cos Of = е cos (»] — <d) = a,
e cos Oa = e cos (u^ — co) = —e.
Поскольку второе из произведений является отрицательным, то в соответствии
с сформулированным выше правилом следует и = л.
Полученный результат имеет следующий геометрический смысл. Так как
ось апсид орбиты лежит в плоскости экватора со = 0, то коррекцию наклонения
целесообразно проводить в момент прохождения КА апогея орбиты и = л, где,
как известно, скорость полета по орбите является минимальной.
Пример 2. Дано: = 10 000 кмэ гп = 8000 км, со = 30°. Определить
аргумент широты точки приложения бокового импульса и величину импульса
для изменения наклонения орбиты на угол А/ = 0,1°.
По формулам (2), (3) получаем: р= 8900 км, е= 0,11, = 0,149 с/км.
115
По формулам (6), (7) находим аргументы широты и± = —3,16°, щ = 176,84°
и затем вычисляем
е cos = е cos (ux — <о) = 0,093,
е cos Ф2 = е cos (и^ — со) = —0,081,
т. е. аргумент широты точки приложения импульса и = 176,84°. Далее по фор-
муле (4) определяется боковой импульс: = 11 м/с.
3.3. Двухимпульсные переходы
между почти круговыми орбитами
Решение задач двухимпульсных переходов, как правило,
связано со значительными математическими трудностями. Главная
трудность обусловлена необходимостью обеспечения перехода
с минимальным расходом топлива (минимальным суммарным
импульсом) при наличии тех или иных ограничений.
В настоящее время известно большое число работ отечествен-
ных и зарубежных авторов, посвященных исследованию различ-
ных частных задач двухимпульсных переходов. При решении
таких задач используются различные искусственные приемы,
позволяющие в конечном счете представить решение в аналитиче-
ской форме или привести его к разрешимой системе уравнений.
Однако в последнее время появились обобщающие исследова-
ния двухимпульсных и многоимпульсных переходов, которые
охватывают широкий класс важных практических задач, связан-
ных с маневрированием КА. В связи с этим решение задач двух-
импульсных переходов (приводимых ниже) в основном будет
проводиться на методических основах, разработанных в [14].
Предположим, что движение КА рассматривается в централь-
ном гравитационном поле сил, а воздействие тяги бортового дви-
гателя КА носит импульсный характер.
Двухимпульсные переходы можно разделить на два больших
класса: переходы с малыми импульсами (когда допускается
линеаризация уравнений движения) и с большими импульсами.
В первом классе переходы, очевидно, осуществляются между
почти круговыми орбитами, и поэтому будем пользоваться урав-
нениями возмущенного кругового движения (3.1) ... (3.2). Во
втором классе переходов ограничения на начальную и конечную
орбиты не накладываются (т. е. они могут быть произвольными,
а не обязательно почти круговыми). Естественно, что в этом
случае линеаризованные уравнения движения становятся не-
приемлемыми (при переходах могут потребоваться большие кор-
ректирующие импульсы) и для решения задач двухимпульсных
переходов необходимы иные методические основы, чем предло-
женные в [14]. Этот класс переходов вынесен в отдельный раздел.
При решении задач будем полагать, что начальная и конечная
орбиты заданы элементами
Pi» ©I, 119 йх, (3.9)
Pg, ^2» OJg, Zg, ^2 (3.10)
116
(индекс «1» относится к начальной орбите, индекс «2» — к ко-
нечной).
Допустим, что < 1, еа < 1 (т. е. орбиты близки к круговым).
Поэтому правые части уравнений орбит в полярной системе
координат
Г1 = 1 + Й10)S •&! ’ Га = 1 +^08^ *
могут быть разложены в ряд по степеням эксцентриситета и тогда
с точностью до линейных членов разложения
i\ = Pi — prei cos fl*!, (3.12)
Га = p2 Pa^2 COS Ф2* (3.13)
В общем случае задача двухимпульсного перехода состоит в опре-
делении корректирующих импульсов
Avi|Aurl, Дуп1, Доы|; Диа{ЛаГ2, Д^п2, Д^ьаЬ
а также точек их приложения (аргументов широты иг, обеспе-
чивающих переход с начальной орбиты на конечную при заданных
дополнительных условиях или ограничениях.
Решение приводимых ниже задач двухимпульсных переходов
производится из условия минимального расхода топлива (сум>
марного импульса). При этом задачи (3.9), (3.10), несмотря на
самостоятельный интерес, носят вспомогательный характер. Они
используются для получения общего решения задачи двухим-
пульсного компланарного перехода (задача 3.11). Последующий
задачи иллюстрируют применение общего решения для различ-
ных частных случаев.
Пусть Дг = |г2 — /-J, г = (г2 + ^1). В работе [14] пока-
зано, что при 0 Дг/г 0,5 линеаризованная теория по сравне-
нию с точным решением задач импульсных переходов (в рамках
эллиптической теории) приводит к практически совпадающим
результатам. Следовательно, линеаризованная теория, применя-
емая для решения задач орбитальных переходов, может быть
использована в тех случаях, когда средние радиусы орбит отли-
чаются не более чем на 3000 км.
Задача 3.9. Начальная и конечная орбиты КА заданы элемен-
тами ръ er, ©i, р2, е2, со2 соответственно. Орбиты являются ком-
планарными. Определить радиальное расстояние между орби-
тами для заданного значения аргумента широты и. При каком
значении аргумента широты uQ расстояние между орбитами в ра-
диальном направлении будет минимальным или максимальным?
Решение. Воспользуемся соотношениями (3.12) и (3.13) и опре-
делим радиусы орбит в функции аргумента широты:
Г1 = pi — PiCi cos ,ft1,
(1)
Г2 = p2 — Pa^a COS 'O’a,
где = U — ©i, Фа = U — (0а-
117
Рис. 3.6. Схема взаимного распо-
ложения двух орбит КА
Для данного значения аргу-
мента широты и расстояние между
орбитами в радиальном направле-
нии будет равно
Дг = г, —
или Дг = Ах + A, cos и + Д8 sin и,
(2)
где Al = р, — pi,
Аа — pxe! cos а>х — раеа cos
(3)
А, = ргег sin ©! — pjfij sin <в8.
Теперь определим минимальное и максимальное расстояния
между орбитами. Аргумент широты и, при котором расстояние
между орбитами принимает экстремальное значение, удовлетво-
ряет уравнению
d \rldu = О,
т. е. —A, sin и + Ав cos и —0, (4)
откуда tgu = -^-. (5)
Обозначим в0 = arctg . (6)
Ла
В этом случае аргументы широты экстремальных расстояний
между орбитами будут
«1 = «о. (7)
иа = Ио + а. (8)
На рис. 3.6 показаны две орбиты КА и линия BD, положение
которой определяется аргументом широты и0, точки А, С пере-
сечения этой прямой с орбитой 1 и точки В, D — с орбитой 2.
Экстремальные расстояния между орбитами будут равны длинам
отрезков AD и ВС. Обозначим длину отрезка AD через ДгЛ и от-
резка СВ — через Дгс. В этом случае из соотношений (2), (7), (8)
получим следующие выражения для определения искомых экстре-
мальных расстояний:
ДгА = Aj 4- Аа cos «о + Ав sin Во, (9)
Дгс = Ах, — А8 cos Во — А8 sin Bq. (10)
Затем определим радиальную скорость между точками А и D,
С и В. Дифференцируя равенство (2) по времени, получаем
Дог = % (—Аа sin в 4“ А8 cos и). (11)
Из выражений (4) и (11) следует, что Дог = 0, т. е. в точках экс-
тремальных расстояний относительная радиальная скорость равна
нулю.
118
Таким образом, если даны две произвольные компланарные
орбиты, то минимальное и максимальное расстояния между ними,
отсчитываемые вдоль радиуса, лежат на одной и той же прямой,
проходящей через притягивающий центр. Аргумент широты
указанной прямой определяется соотношением (6), а расстояния
могут быть найдены из выражений (9) и (10).
Пример. Начальная и конечная орбиты заданы высотами перигея, апогея
и аргументами перигея:
ДП1 = 200 км, = 400 км, = 30°;
ДП2 = 250 км, &А2 = 300 км, ©2 = 60°.
Определить минимальное и максимальное расстояния между орбитами.
Для начальной орбиты определяются:
rA1 = R + = 6371 + 400 = 6771 км;
ГП1 = ^ + = 6371 + 200 = 6571 км;
г 1 = Pi = 6671 км; = 100 км.
Аналогично для конечной орбиты находим
гАа = 6671 км, гП2 = 6621 км;
га = ра = 6653 км, рае, = 25 км.
Далее по формулам (3) находим коэффициенты Ai = —25 км, Аа = 74,5 км,
А3 = 28 км. Затем по формуле (6) определяем аргумент широты прямой, вдоль
которой отсчитываем минимальное и максимальное расстояния ио == 21°, а по
формулам (9) и (10) — искомые расстояния: ДгА = 54,3 км, Агс = —104,3 км.
Таким образом, минимальное расстояние между орбитами находится между
точками А и D (см. рис. 3.6) и равно 54,3 км. Максимальное расстояние, состав-
ляющее 104,3 км, соответствует отрезку ВС, причем конечная орбита лежит
внутри начальной (знак минус у величины Дгс).
Задача 3.10. Орбита КА является круговой радиусом г. В точ-
ках его орбиты, заданных аргументами широты и19 u2i приклады-
ваются трансверсальные корректирующие импульсы A^i
и Avn2- Определить возмущение радиуса орбиты, обусловленное
воздействием корректирующих импульсов.
Решение. Воспользуемся выражением (3.1), положив в нем
Дог = 0, а также
<рг = и — и19 ф2 = и — и2.
2 ( )
Тогда Аг' = -г- j [1 — cos (и — их)] Д»п1 + [1 — cos (и — ua)] Д»паЬ
Л t z
откуда получаем
Дг' = [ДОщ + Допа — COS и (Д0п1 COS иг + Допа COS U2) —
— Sin « (Д Vnl Sin «1 + Д Vn2 Sin «а)1 • (1)
Выражение (1) определяет искомое возмущение радиуса орбиты
в функции аргумента широты.
119
Задача 3.11. Начальная и конечная орбиты являются компла-
нарными и заданы элементами plt elt ра, еа, <оа соответственно.
Определить аргументы широты ult иа точек приложения и вели-
чины трансверсальных импульсов Avnl, Aun2> обеспечивающих
переход КА с начальной орбиты на конечную.
Решение. В задаче 3.9 было показано, что величина радиаль-
ного расстояния между двумя произвольными орбитами для
заданного значения аргумента широты определяется выражением
Аг = + Аа cos и + Ае sin и. (1)
С другой стороны, если на начальной орбите приложены два
трансверсальных импульса Аип1, Дупа в точках орбиты с аргумен-
тами широты ult иа, то возникающее при этом возмущение радиуса
в функции аргумента широты находится по формуле (см. за-
дачу 3.10)
Аг' = Доп1 Aona — cos и (Avni cos Auna cos иа) —
— sin и (At»ni sln Ui + Auna sln иа)]. (2)
Чтобы переход с начальной орбиты на конечную оказался
возможным, необходимо выполнение тождества Аг = Аг' для
любого произвольного значения аргумента широты и. Исходя
из этого условия, используем выражения (1) и (2) и приравняем
коэффициенты, стоящие у sin и и cos и, а также у свободных чле-
нов. В результате получаем три уравнения
2 (A^ni Н" A^na) =
2 (Avni cos «1 + Awna cos «а) = — KAa, (3)
2 (Avni sln «1 + Auna sln ua) = —X A8.
В полученной системе уравнений (3) неизвестными являются
две компоненты импульсов Дпп1, Awna и два аргумента широты «!,
иа, т. е. всего четыре неизвестных величины. Чтобы дополнить
систему (3) до четырех уравнений относительно четырех неизве-
стных, воспользуемся условием задачи: переход между орбитами
осуществляется только трансверсальными составляющими им-
пульсов. Это означает, что радиальные составляющие импульсов
Aurl = AiVa = — X (— Аа sln о + Ав cos в) = 0
(см. задачу 3.9). Обозначим
«о = arctg А. (4)
В результате получим следующие выражения для определения
аргументов широты точек приложения импульсов:
«1 =* «о, (5)
иа = и0 + л. (6)
Для решения системы уравнений (3) относительно искомых
импульсов Aonl, А°па исключим в ней аргументы широты ult ua
120
с помощью равенств (5) и (6). Тогда
2 (Avni + Anna) = Mi,
2 (Аип1 — Auna) cos По = — Ма, (7)
2 (АиП1 — Avna) sln «о = — М8.
Теперь умножим второе уравнение системы (7) на cos u0, третье —
на sin «о и полученные уравнения сложим:
2 (АуП1 + Аипа) = 1Лх,
2 (Аип1 — Аипа) = — А, (Ла cos Uq + Л8 sin Uo). ' '
Решая эту систему относительно искомых импульсов, получаем
Auni = Т (Л — Аа COS «о — А8 Sln «о).
% (9)
Avna = (Лх 4- Аа cos «о + л8 sln Ио).
Таким образом, определены все характеристики двухимпульс-
ного компланарного перехода с начальной орбиты на конечную:
аргументы широты точек приложения импульсов (5), (6) и вели-
чины трансверсальных импульсов (9). Ввиду важности получен-
ного решения отметим некоторые его особенности.
1. Точки приложения импульсов разнесены вдоль орбиты на
угол 180° и лежат на прямой, проходящей через притягивающий
центр. Эта прямая в последующем для краткости называется
линией переключения. Аргумент широты линии переключения
определяется выражением (4).
2. Трансверсальный переход с начальной орбиты на конечную
(т. е. при отсутствии радиальных составляющих импульсов), как
показано в работе [14], является необходимым и достаточным
условием энергетически оптимального перехода между почти
круговыми орбитами (т. е. для систем, описываемых уравнениями
типа (3)). Иначе говоря, полученное решение определяет точки
приложения и величины импульсов из условия, что суммарный
импульс перехода будет минимальным из всех возможных схем
перехода. При этом величина суммарного импульса, как следует
из выражения (9), в случае непересекающихся орбит составит
Ап = | Апв11 +1 Дппа | » 4 Лх. (10)
Поскольку (см. задачу 3.9) = р2 — то
Pi = ri = ’2‘(гА1 + rm)» (П)
Ра == г2 = + гпз) (12)
или
At» = 4lr«-H|. (13)
121
a) s)
Рис. 3.7. Схема двухимпульсного перехода (а) и аналог перехода между соос«
ными эллипсами (б):
1,2 — начальная и конечная орбиты; 3,4 — орбиты перехода
Выражение (13) показывает, что суммарный импульс перехода
между произвольными почти круговыми орбитами энергетически
эквивалентен двухимпульсному переходу между двумя средними
круговыми орбитами, образованными из начальной и конечной
орбит.
3. Если в соотношении (9) угол щ увеличить на л, т. е. при
сохранении положения линии переключения импульсы поменять
местами, то
At»ni = -5- И1 + А2 cos «о + Л sin ы0).
% <14>
Аип2 = 4- (А — A cos «о — sin Ио),
а величина суммарного импульса (13) не изменится.
Выражения (9) и (14) показывают, что существуют две траек-
тории двухимпульсного перехода (рис. 3.7, а) с начальной орбиты
на конечную, эквивалентные по энергетическим затратам (АВ
и CD).
4. Поскольку корректирующие импульсы являются транс-
версальными и точки приложения их разнесены на угол 180°,
то переход между произвольными орбитами формально сводится
к апсидальному переходу между соосными эллипсами, оси апсид
которых совпадают с линией переключения. Такие эллипсы будем
называть аналогами начальной и конечной орбит (рис. 3.7, б).
5. Выражения (9) могут быть представлены в следующей
форме:
Avnl = ^-(rB-rc), Avni = ^(rD-rA), (15)
где rA, rB, rc, rD — радиусы точек А, В, С, D(cm. рис. 3.7, а),
122
в которых прикладываются импульсы. Величины радиусов могут
быть определены по формулам вида (1) задачи 3.9:
гА = Pi — Pi«i cos («о — ®i).
г в = Pt + cos («о — и,),
Г С = Pl + Plel cos («о - «О, (16)
rD = Pt — ptft COS («о — CO,).
Обозначим
Дга = гЪ— Гд, Дгс==гв— rc (17)
и тогда, как следует из выражения (15),
Дот = т Дгс, Доп. = 4 Дга- (18)
причем величины Дгс, ДгА находим по формулам (9), (10) за-
дачи 3.9:
Д^а = + Л cos ио + Д8 sin и0,
Дгс = Ai — At cos «о — Ав sin «о. ' '
Пример. Начальная и конечная орбиты КА являются компланарными
и заданы высотами перигея, апогея и аргументами перигея:
ДП1 = 200 км, йд1 = 400 км, ©1 — 30°;
ДПа = 250 км, Ддя = 300 км, (О2 = 60°.
Определить аргументы широты точек приложения и величины импульсов, обес-
печивающих переход КА с начальной орбиты на конечную.
Для начальной орбиты определяются:
г fa = 6771 км, ГП1 = 6571 км и
гг = рх = 6671 км, = 100 км.
Аналогично для конечной орбиты находим:
гА1 = 6671 км, гпа = 6621 км,
г9 = р2 = 6653 км, Рава = 25 км.
Далее определяются:
по формулам (3) задачи 3.9 коэффициенты
Ai = —25 км, Л8 = 74,5 км, А8 = 28 км;
по формуле (4) — аргумент широты и0 — 21°, определяющий положение
линии переключения;
по формулам (19) — корректируемые расстояния
Дг . = 54,3 км, Д/> = — 104,3 км;
А V
по формулам (18) — корректирующие импульсы
Дцп1 = 15,8 м/g, - Дип1 = — 30,2 м/в;
по формулам (5) и (6) — аргументы широты точек приложения импульсов
tii = 21°, и2 = 20г.
Задача 3.12. КА был выведен на круговую орбиту радиуеа г.
В результате воздействия возмущений первоначальная орбита КА
123
изменилась и стала эллиптической с радиусом апогея гА и ра-
диусом перигея гп, причем аргумент перигея со также известен.
Определить аргументы широты точек приложения корректиру-
ющих импульсов и их величины для перевода КА на первоначаль-
ную круговую орбиту.
Решение. Особенностью задачи является то, что конечная
орбита является круговой, в силу чего формульная схема расчета
двухимпульсного перехода, изложенная в задаче 3.11, упро-
щается .
В принятых в задаче 3.11 обозначениях для начальной орбиты
имеем
ri = Pi = “Ь гп), (1)
Pi^i = 4-(га-гП), <O! = cd.
Для конечной круговой орбиты
Га = ра = г, Раеа = 0. (2)
В этом случае коэффициенты Alt Аа, А3 (см. задачу 3.9) найдем
по формулам
Л2 = 2 fn cos to, (3)
г. — гп
As = 2 sln
Тогда
«о = arctg = со. (4)
Это означает, что линия переключения совпадает с линией апсид
начальной (эллиптической) орбиты, т. е. точки приложения
импульсов лежат на линии апсид и аргументы широты их будут
равны
ux = со, и, = <о + л. (5)
Теперь найдем корректируемые расстояния ДгА, Дгс по форму-
лам (19) задачи 3.11:
ДгА = 4Х + At cos u0 + Аа sin и0,
&с = .41 — At cos «о — Аа sin и0.
Используя соотношения (3), (4), отсюда после элементарных
преобразований получаем
ДгА = г — гп,
Дгс = г — Га-
(6)
124
По формулам (18) задачи 3.11 опреде-
ляем корректирующие импульсы
Лот = (г — гд), Доп» = А- (г — гп)>
(7)
. 1 1/ и
причем Х = —]/
Таким образом, решение задачи пе-
рехода с эллиптической орбиты на кру-
говую сводится к определению аргумен-
тов широты точек приложения импуль-
сов по формулам (5) и корректирующих
импульсов по формулам (7).
Рис. 3.8. Схема перехода
с начальной 1 на конечную
круговую орбиту 2 по пере-
ходной орбите 3 (импульсы
прикладываются в точках А
и В)
Пример. Конечная круговая орбита за-
дана радиусом г = 6800 км. Начальная орбита
характеризуется параметрами: гА = 6700 км,
гп = 6600 км, со = 40°. Определить аргументы
широты точек приложения импульсов ult u2 и величины импульсов Дуп1, Аип2
для перехода на круговую орбиту.
Используя соотношения (5), находим аргументы широты точек приложения
импульсов Ui = 40°, и2 = 22(г, а по формулам (7) — величины импульсов Дип1 =
= 29 м/с, Дип2 = 58 м/с.
Схема такого перехода показана на рис. 3.8. Полученный результат реше-
ния задачи показывает, что первый корректирующий импульс прикладывается
в перигее начальной орбиты и КА переводится на переходную орбиту, апогей
которой касается конечной круговой орбиты. По достижении апогея переходной
орбиты прикладывается второй касательный импульс, который переводит КА
на круговую орбиту. Таким образом, в данном случае переход является апси-
дальным (оба импульса прикладываются на линии апсид по касательной к орбите)
и этот переход, как известно, является энергетически оптимальным.
Следует заметить, что соотношения (5) и (7) позволяют решить и обратную
задачу перехода с круговой орбиты на эллиптическую. В этом случае необходимо
лишь поменять знаки импульсов на обратные.
Для орбит с высотами 300 ... 500 км можно также использовать приближен-
ное выражение для расчета импульсов, следующее из соотношений (7) при X =
= 1,16* 10”8 с"1. В этом случае, выражая радиусы в километрах, по-
лучаем
АпП1 = 0,29 (г — гА) м/с,
At>n2 = 0,29(r —гп) м/с.
Задача 3.13. КА дистанционного зондирования Земли совер-
шает полет по заданной эллиптической орбите и в момент про-
хождения минимального расстояния от поверхности Земли (в пе-
ригее) производит фотографирование. В процессе выполнения
полета потребовалось провести фотографирование других уча-
стков Земли, т. е. сместить перигей орбиты без изменения формы
орбиты (повернуть орбиту в ее плоскости на угол а). Требуется
определить двухимпульсный переход, обеспечивающий выполне-
ние поставленной задачи.
125
Рис. 3.9. Схема отсчета взаимного
Решение. В рассматриваемой
задаче начальная и конечная ор-
биты по форме и размерам явля-
ются одинаковыми, т. е.
гА1 = гла=:ГА, Пп = гги = ^п>
Г1 = г, = г.
Pi — Pt — Pt ei ~et ~е> Piei —
= =у('А —гп)-
положения начальной 1 и конеч- Орбиты отличаются лишь поло-
жением перигеев (при совпадении
плоскостей орбит). По условиям задачи начальная орбита 1
(рис. 3.9) в результате приложения двух импульсов должна быть
повернута в своей плоскости на угол а. Проведем биссектрису Ов
угла аОЬ и относительно ее будем отсчитывать аргументы пери-
геев орбит. Значит, для начальной орбиты ©! = —<о, для конеч-
ной (О, = со.
Вначале по формулам (3) задачи 3.9 находим коэффициенты
Лх = Ая = О, Ая = —2ре sin со.
Далее из формулы (4) задачи 3.11 следует, что и0 =—я/2,
т. е. линия переключения Od (см. рис. 3.9), на которой приклады-
ваются импульсы, перпендикулярна биссектрисе Ос и аргументы
широты точек приложения импульсов, отсчитываемые от бис-
сектрисы Ос, будут равны
«х = —л/2, и, = л/2. (1)
Теперь по формулам (19) задачи 3.11 находим корректиру-
емые расстояния
ДгА = 2ре sin со = (rA — гп) sin со,
Дгс = — 2ре sin со = — (гА — гп) sin со,
а по формулам (18) — корректирующие импульсы
ДоП1 = — 4- (гА - гп) sin а»,
к ®
Дов1 = т (гА - гп) sin со.
Таким образом, получено полное решение поставленной задачи:
найдены аргументы широты точек приложения импульсов и вели-
чины импульсов.
Пр и м е р. Начальная орбита КА задана параметрами:
Лд! = 400 км, Лп1 = 200 км, (i>i = 50°.
Требуется определить аргументы широты точек приложения импульсов
и их величины для поворота орбиты в ее плоскости на угол 60° без изменения
ее формы и размеров.
126
В этом случае, согласно рис. 3.9, имеем со = 60 : 2 = 30°. Учитывая соот-
ношения (1) и отсчитывая аргументы широты от восходящего узла, получаем
U1 = —90 + 50 = —40°, и2 = +90 + 50 = 140°.
Так как гА —гп = ЛА1 —ЛП1 = 200 км, то по формулам (2) определяем
искомые импульсы: Аип1 = —29 м/с, Дип2 = 29 м/с, т. е. суммарный импульс
составит 58 м/с.
3.4. Двухимпульсные переходы
между произвольными орбитами
В этом классе переходов ограничения на величины импульсов
не накладывается. Естественно, что в этом случае линеаризован-
ные уравнения движения, которыми часто пользуются для поиска
нулевого приближения, можно применять лишь с большими
оговорками либо они вообще становятся неприемлемыми. По этой
причине для поиска нулевого приближения применяется общая
теория кеплеровского движения без линеаризации уравнений
движения.
Существо метода расчета переходов с большими импульсами
состоит в следующем.
Пусть начальная и конечная орбиты заданы элементами
(рис. 3.10)
^1» ®i>
^2» ^2> ^2» ^2>
Требуется определить орбиту перехода а, е, f, Q, со из точки А
в точку В, если угловое расстояние ? между точками А и В
задано, а импульсы тяги прикладываются в этих точках.
Решая эту задачу, получим следующие выражения для опре-
деления компонент импульсов в точках А и В в орбитальной
системе координат [30]:
At4 = (/i cos V - fa) + (3.14)
A»ni = cos at — t>nl, (3.15)
Д Vm = qfi sin Oi, (3.16)
Avrt = + +<4, (3.17)
A»na = — qh + V na COS aa, (3.18)
AVba = »na Sin a2. (3.19)
Рис. 3.10. Схема перехода с на-
чальной 1 на конечную 2 орбиту
по промежуточной орбите 3.
Импульсы прикладываются в
точках А и В
127
Здесь введены следующие обозначения: = р/гх; /а = р/га; г19
г2 — радиусы начальной и конечной точек перехода; иг1, ап1,
ura, vn2 — соответственно радиальная и трансверсальная состав-
ляющие скорости на начальной и конечной орбитах в точках
приложения импульсов; ах — угол между плоскостями начальной
и переходной орбит; аа — угол между плоскостями переходной
и конечной орбит; q — свободный параметр, который связан
с кинетическим моментом переходной орбиты следующим соотно-
шением:
? = £> (3.20)
г*
причем С = rvn.
Выражения (3.14) ... (3.19) показывают, что каждому значе-
нию свободного параметра q соответствуют свои значения им-
пульсов, прикладываемых в точках Л и В, и определенная орбита,
проходящая через эти точки. Следовательно, задаваясь рядом
значений q9 получим множество переходных орбит и соответству-
ющих им корректирующих импульсов Д^, Диа. Поскольку пара-
метр q является свободным, то задача расчета одноимпульсного
(или двухимпульсного) перехода сводится к поиску такого зна-
чения q (т. е. соответствующей ему орбиты), при котором удовлет-
воряются некоторые дополнительные условия (например, мини-
мум суммарного импульса, время перехода и др.). В противном
случае задача становится неопределенной. Такого рода дополни-
тельные условия в дальнейшем будем называть функцией цели
и обозначать F (q).
В общем случае функция цели
F (?) = 0 (3.21)
может определять либо дискретное множество значений q19 q29 ...,
qn9 либо интервал {q19 q2\9 либо только одно значение q. Возможны,
наконец, ситуации, когда уравнение (3.21) не будет иметь решения
(в области q > 0), что будет свидетельствовать о невозможности
осуществления перехода.
Таким образом, в общем случае решение задачи маневрирова-
ния КА с использованием функции цели будет производиться
по следующей схеме:
формирование функции цели (3.21) по заданным дополнитель-
ным условиям;
определение условий, при которых уравнение (3.21) имеет
решение в области q > 0;
нахождение корней уравнений (3.21);
определение импульсов Дс\, Диа по формулам (3.14) ... (3.20)
и множества переходных орбит, соответствующих корням q19
q29 ... уравнения (3.21);
выбор из полученного множества орбит одной, удовлетворя-
ющей заданному критерию.
128
В частном случае, если уравнение (3.21) имеет единственное
решение, то переход также будет единственным и дополнительного
анализа не потребуется.
Подчеркнем также, что применение кеплеровской теории для
расчета нулевого приближения маневров позволяет проводить
оригинальные исследования. Не случайно, что этому направле-
нию посвящены многочисленные публикации отечественных и за-
рубежных авторов. Однако интерес к решению такого рода задач
не уменьшается в связи с растущими практическими запросами.
Задача 3.14. Начальная и конечная орбиты КА являются
компланарными и заданы элементами р19 е19 р2, е2, со2. Тре-
буется определить величины импульсов и точки их приложения
для обеспечения двухимпульсного перехода с начальной орбиты
на конечную, если известно, что каждый из импульсов является
трансверсальным (т. е. на направление импульсов наложено
ограничение).
Решение. Если оба импульса являются трансверсальными,
то радиальные компоненты их равны нулю, и в этом случае функ-
цию цели (3.21) можно записать в виде
Ft (д) = Диг1 = 0, (д) = Дог2 = 0.
Тогда согласно выражениям (3.14), (3.17) получаем систему
уравнений
И7 [«c°s v - W + 1 ~gCOST J + = 0.
которая связывает между собой три величины: свободный пара-
метр q, угловую дальность перехода у и аргумент широты иг
точки приложения первого импульса. Проведем анализ этой
системы уравнений.
Вычтем из первого уравнения второе, в результате чего по-
лучим
Умножим первое уравнение системы (1) на /2, второе — на f±
и вычтем из первого уравнения второе. Тогда
(fl + Л) - (3)
Исключим д из выражений (2) и (3):
(fi + /г) (Ц-i + Угз)2 =
= [(/1 — f?Y + (OrX + Vr2) (fiVrl + flVr2)] (1 + cos у). (4)
Очевидно, что уравнение (4) превращается в тождество при вы-
полнении условий
On + vr2 = 0, 1 + cos у = 0. (5)
Проведем анализ этих условий.
5 П/р г. С. Титова 129
Из второго условия (5) следует, что ? = и. Это означает, что
трансверсальный переход возможен, если только корректиру-
ющие импульсы разнесены друг от друга на угловое расстояние,
равное 180°. Следовательно, существует некоторая прямая, про-
ходящая через притягивающий центр, и точки приложения им-
пульсов совпадают с точками пересечения этой прямой с началь-
ной и конечной орбитами по разные стороны от притягивающего
центра. Прямую, на которой прикладываются корректирующие
импульсы трансверсального перехода, в последующем также бу-
дем называть линией переключения (см. задачу 3.11).
Для определения аргумента широты линии переключения
воспользуемся первым из условий (5). Из теории эллиптического
движения известно, что радиальные составляющие скорости КА
связаны с элементами орбит следующими соотношениями:
Он = 1/ бх sin Оь Vra = у -^-еа sin Оа,
* Pl * Ръ
где &!, Фа — истинные аномалии точек приложения импульсов
соответственно на начальной и конечной орбитах. Пусть ult иа —
аргументы широты точек приложения импульсов,
«х = Ох. + <ох, иа = Фа + юа,
причем согласно второму из условий (5) иа — их = я. В этом
случае
Ох = их — ©х, Оа = иа — а»а = я + их — соа>
и тогда он + »гя = 6i sin («i — сох) — еа sin (th — со2) =
= 0.
Решая это уравнение относительно аргумента широты их,
получаем ___
1 Г ц - Г ц
I/ в! sin ©i — I/ е2 sin ©а
tg wi = F pl------------. /6)
т f и 1 /* Ц
I/ 01 COS ©1 — I/ 02 COS ©2
V Pl V P2
Физический смысл перехода по линии переключения, положе-
ние которой определяется аргументом широты и19 состоит в том,
что радиальные скорости в точках А и В равны и одинаково
направлены, вследствие чего оказывается возможным чисто транс-
версальный переход.
Формула (6) показывает, что если
то их -> со2, и линия переключения стремится совпасть с линией
апсид конечной орбиты.
В частности, если = 0 (начальная орбита является круго-
вой), то иг = со2 и переход начинается и завершается на линии
апсид конечной орбиты.
130
Если
то «1 -» ©! и линия переключения стремится совпасть с линией
апсид начальной орбиты. При ея = 0 (конечная орбита является
круговой) имеем их = <oi и переход будет апсидальным с при-
ложением импульсов на линии апсид начальной орбиты. Таким
образом, подтверждается известное правило притяжения экс-
центриситетов, сформулированное Д. Ф. Лоуденом 119 J: главная
ось оптимального эллипса перехода стремится совпасть с главной
осью концевого эллипса, имеющего больший эксцентриситет.
Следовательно, для осуществления перехода с начальной
орбиты на конечную потребуются два трансверсальных импульса:
один — в момент схода с начальной орбиты, а другой — в момент
достижения конечной орбиты. Такой переход может быть осуще-
ствлен как из точки А в точку В, так и из точки С в точку D (см.
рис. 3.7), причем в обоих случаях будут иметь место чисто транс-
версальные переходы.
Описанный переход можно показать геометрически. Построим
на отрезках АС и BD соосные эллиптические орбиты и назовем их
аналогами начальной и конечной орбит (см. рис. 3.7). Тогда
переход между произвольными орбитами формально сводится
к переходу между аналогами начальной и конечной орбит, которые
являются соосными эллипсами. Анализируя свойства оптималь-
ного импульсного перехода между соосными орбитами,
В. В. Ивашкин 1131 доказал следующую теорему: внутренние
точки оптимальной траектории, в которой сообщаются импульсы,
будут апсидальными, т. е. в них радиальная компонента скорости
равна нулю до и после сообщения импульса. Эта теорема показы-
вает, что весь переход между аналоговыми эллипсами будет
происходить по соосным эллиптическим орбитам с приложением
импульсов в точках апсид, лежащих на линии переключения.
Для определения значения свободного параметра q умножим
обе части первого уравнения системы (1) на sin у и после этого
положим у = л, в результате чего получим следующее уравнение
относительно qt
-<7(fi + f>) + | = 0, (7)
откуда находим
’“/тпг- (8>
или в развернутом виде
ОТ
Если для определения величины q использовать второе урав-
нение системы (1), то получим выражение, аналогичное выра-
жению (7).
5» 131
Теперь найдем трансверсальные составляющие импульсов
(3.15), (3.18), имея в виду, что у = л, at = аа = О (переход
компланарный). В этом случае
Лот = 4fi — fm.
Д»па = — qfa + Опа»
(Ю)
причем
Vnl =
»п2 =
Ра
Г2
(Н)
Н Pi
Ръ Г1
Таким образом, стратегия энергетически оптимального двух-
импульсного перехода между заданными компланарными эллип-
тическими орбитами состоит в том, что каждый из импульсов
является трансверсальным; точки приложения импульсов раз-
несены друг от друга на угол 180°, т. е. лежат на одной прямой,
проходящей через притягивающий центр. При этом аргумент
широты положения линии переключения определяется соотно-
шением (6), а трансверсальные составляющие импульсов вы-
числяются по формулам (10).
Задача 3.15. Начальная и конечная орбиты КА являются
круговыми соответственно радиусами и га. Требуется опре-
делить величины трансверсальных импульсов Дип1, Дуп2 и точки
их приложения для компланарного перехода КА с начальной
орбиты на конечную.
Решение. Поскольку обе орбиты являются круговыми, то
ег = е2 = 0 и поэтому положение линии переключения, как сле-
дует из соотношения (6) задачи 3.14, не определяется. Значит,
точка приложения первого импульса может выбираться произ-
вольно, а точка приложения второго импульса, как показано
в задаче 3.14, должна отстоять от первой точки на угловом рас-
стоянии 180°.
Для определения величин импульсов воспользуемся выраже-
нием (10) задачи 3.14:
Д«»1 = qh - fm.
д«па = — <7/a + «ns-
Поскольку в рассматриваемом переходе ег = ея = 0, то рг = rlt
ря = гя и из выражений (11) задачи 3.14 следует
1 Г и . 1 f ц
Ут-; »п» = У т-.
Г '1 Г Г2
причем свободный параметр
q = ]Z 2flfa .
4 V (‘('•1+'»)
132
Так как ft = p/rlt ft = ц/га, то из выражений (1) получаем
(2)
(3)
Пример 1. Дано: г, = 6600 км, г2 = 7000 км. Определить импульсы
перехода с начальной орбиты на конечную.
По формулам (2), (3) получим: Аип1 = НО м/с, Аила = 118 м/с. Таким
образом, первый касательный импульс переводит КА на переходную орбиту,
апогей которой касается конечной орбиты. По достижении апогея приклады-
вается второй касательный импульс, который переводит КА на конечную орбиту.
Пример 2. Дано: гг = 6600 км, г2 = 42 180 км (стационарная орбита).
Определить импульсы перехода с начальной орбиты на конечную.
По формулам (2) и (3) получим: Аол1 = 2,42 км/с, Аила = 1,48 км/с, т. е.
суммарный импульс компланарного перехода составляет 3,9 км/с.
Задача 3.16. КА выведен на круговую орбиту радиуса гг
при наклонении плоскости орбиты 1г. Определить двухимпульс-
ный переход КА на стационарную орбиту, имеющую радиус г2
и наклонение i2.
Решение. В рассматриваемой задаче линия переключения будет
совпадать с линией пересечения плоскостей орбит и возможны две
схемы двухимпульсных переходов с начальной орбиты на ко-
нечную.
Схема 1. Первый импульс является трансверсальным и лежит
в плоскости начальной орбиты. Величина импульса выбирается
так, чтобы апогей переходной орбиты касался стационарной
орбиты. Второй импульс прикладывается в момент достижения
апогея и будет иметь боковую и трансверсальную составляющие.
Он переводит КА с переходной орбиты на конечную. Следова-
тельно, компоненты обоих импульсов можно найти по формулам
(3.14)—(3.19):
Диг< = 0,
Д»п1 = <7/1 — »П1.
Д»м = 0,
= 0, (1)
Допа = — (if 2 + »na cos аа,
ДиЬа = Опа Sin аа.
В задаче 3.15 было показано, что
Vni = -^, Опа=]/у-,
Г1 Г Г2
? = (2)
Кроме того, имеем
аа = — /2. (3)
133
Тогда из выражений (1) следует
(4)
Схема 2. Первый импульс производит поворот плоскости
начальной орбиты до совпадения с плоскостью конечной орбиты
и одновременно переводит КА на эллиптическую орбиту, апогей
которой касается конечной орбиты. Следовательно, второй им-
пульс будет лежать в плоскости переходной орбиты и являться
трансверсальным. Очевидно, что эта схема по суммарному им-
пульсу будет уступать схеме 1, поскольку здесь поворот плоско-
сти орбиты производится при большей скорости полета, чем
в схеме /, а это потребует увеличения импульса.
Для этой схемы компоненты импульсов находят по формулам
Дог1 = О,
Аощ = ^icosaj - vni,
Аом = sin <Xi,
AOra = 0, (5)
AynS =- — qft + Vni,
0,
причем ax = —aa. Используя соотношения (2), из выражений (5)
находим _ ________
До»! =]/#(]/-7Г?ТГСО5^ - 0 ’
^Г2
ri 4-
(6)
sin аь
Пример. Дано: = 6600 км, = 51°, га = 42 180 км, Za = 0. Опреде-
лить корректирующие импульсы для обеих схем переходов с начальной орбиты
на стационарную.
Используя формулы (1) ... (6), получаем
для схемы /:
Дпг1 = 0, Доп1 =2,42 км/с, ДиЬ1 = 0;
Д»гЯ 0, Доп1 = 0,34 км/с, Дям = 2,42 км/с;
134
для схемы 2:
Д»г1 = 0, Доп1 = — 1,36 км/с, Дом = — 8 км/с;
Дога = О, Доп2 = 1,48 км/с, Доьа = О.
Таким образом, суммарный импульс перехода с начальной
орбиты на стационарную g изменением наклонения плоскости
орбиты для схемы 1 составляет 4,86 км/с, а для схемы 2 он увели-
чивается до 9,6 км/с. Отсюда очевидно преимущество использо-
вания схемы 1.
Задача 3.17. Элементами р, е, © задана эллиптическая ор-
бита КА. Требуется определить аргументы широты точек при-
ложения ult иа импульсов и величины импульсов Аоп1, Дппа для
поворота орбиты в ее плоскости (без изменения ее формы) на угол а
(смещение перигея орбиты на угол а, без изменения формы орбиты).
Решение. Аналогичная задача смещения перигея (поворота
линии апсид) уже рассматривалась в двухимпульсных переходах
между почти круговыми орбитами. Однако при больших эксцен-
триситетах орбиты разработанная в задаче 3.13 методика расчета
двухимпульсного перехода уже становится неприемлемой. По-
этому рассмотрим решение указанной задачи в общем случае,
т. е. без ограничений на эксцентриситет эллиптической орбиты.
Введем новую систему отсчета угловой дальности полета,
в которой аргумент широты перигея начальной орбиты равен
©1 = —а/2. Тогда для конечной орбиты ©а = а/2. В этой системе
отсчета начальная и конечная орбиты будут симметричны относи-
тельно биссектрисы Ос угла аОЬ, образованного линиями апсид
начальной и конечной орбит (см. рис. 3.9).
Для определения положения линии переключения восполь-
зуемся соотношением (6) задачи 3.14, имея в виду, что в рассма-
триваемом переходе = ра = р, ег = еа — е. В данном случае
из указанного соотношения следует, что их — —л/2. Это означает,
что линия переключения Od, перпендикулярна биссектрисе Ос
(см. рис. 3.9).
Следует заметить, что аналогичный вывод был получен в за-
даче 3.13, т. е. взаимная ортогональность линии переключения
и биссектрисы свойственна не только почти круговому движению,
но распространяется и на произвольные эллиптические орбиты.
Как было показано в задаче 3.14, при оптимальном переходе
аргумент широты точки приложения второго импульса отстоит
от точки приложения первого на угловом расстоянии л. Поэтому
«х = —л/2, иа = л/2. (1)
Далее определяем истинные аномалии точек приложения импуль-
сов на начальной и конечной орбитах:
„ л , а
&! — Ui — ©1 —--2" Н" ~2~ >
„ ла
V2 — ^2 - — ~2---’
135
после чего находим радиуса орбит в точках приложения импуль-
сов
Г = Р1
1 1 + cos di , , . а ’
l+estay (2)
г = Ра = р
2 1 + е, cos 0а , . . а ’
1+ в sin у
откуда следует гх = га = г.
Теперь перейдем к определению величин импульсов.
В соответствии с условиями оптимальности перехода, сформу-
лированными в задаче 3.14, имеем Дип = Дога = 0. Поскольку
далее переход является компланарным, то в соотношениях (3.14)...
(3.19) следует принять = аа = 0. Поэтому — ДоЬа = 0
и переход осуществляется только трансверсальными импульсами:
Ao»i = <7/1 - оп1,
Д°пя = — <?/а 4~ Ппа-
При этом трансверсальные составляющие скорости oni» ont в точ-
ках приложения импульсов определяются формулами:
»ш = ^-(1 + ex cos О1)= -£(l+esin-y),
о»а = = -у (1 H-esiny-),
т. e. onl = una = on. Так как A = р/гъ /а = р/га, то Л = /а = /,
и поэтому / = р/г.
Свободный параметр q, как показано в задаче 3.14, при опти-
мальном переходе определяется выражением (8):
„ _ i/~2~ 1/7
q~ У /1 + /а“ У/ - У р-
Тогда компоненты импульсов (3) определятся по формулам:
Дс»п1= у (1 H-eslny-), (4)
Дом = -]/ Т +]/?• (I + е81пт) •
Так как р = г (1 + е sin -у-), то выражения (4) можно при-
вести к следующему виду:
До»1= l + esin-2-),
г---------- (5)
Л»па = -]/-?-(1 -]/ 1+esiny-).
Таким образом, получено полное решение поставленной за-
дачи: аргументы широты точек приложения импульсов (отсчиты-
ваемые от биссектрисы угла, образованного линиями апсид на-
136
чальной и конечной орбит) определяются выражениями (1),
а компоненты импульсов — выражениями (5), в которых
г=------(6)
1 + в sin у
Равенства (5) упрощаются, еели е sin у С 1. В этом случае
разложим подкоренное выражение в ряд по степеням произведе-
ния е sin -у и удержим только линейные члены разложения.
Тогда
Если, далее, начальная орбита КА является почти круговой, то
величина УV^r будет равна средней круговой скорости полета о.
Проведем тождественные преобразования:
ve = — ре ж Кре = 1 'А 'п .
р *
Таким образом, для почти кругового движения
Д»П1 =----Г- (ГА - ГП) Sin у ,
1 а (8)
Afna = -4- (Га - гп) sin 3- •
Полученные выражения полностью совпадают с выражениями (2)
задачи 3.13, в которых положено о = а/2.
Пример. Дана орбита КА «Молния» с параметрами гА = 47 196 км,
гп == 6838 км. Определить величины импульсов для поворота линии апсид
орбиты на угол а = 1°.
Для этой орбиты имеем
2гагп га “ т п
о = . р — .
ГА~ГП ГА + ГП
Далее по формуле (6) находим радиус точек, в которых прикладываются им-
пульсы г= 11 820 км. Тан как е sin = 6,5-10“8 <С 1, то для определения
импульсов воспользуемся соотношениями (7). В результате получаем: Дод1 =
= —19,5 м/с, Аипа = 19,5 м/с. При этом первый импульс должен приклады-
ваться в точке орбиты с истинной аномалией 270,5°, а второй — спустя 180°.
3.5. Трехимпульсные переходы
между круговыми орбитами
Пусть начальная и конечная орбиты близки к круговым и за-
даны элементами р19 сод ра, еа, соа, причем обе орбиты лежат
в одной пловковти.
137
Рассмотрим два класса импульсных переходов: 1) с начальной
орбиты на конечную с обеспечением заданного положения КА
на конечной орбите; 2) с начальной орбиты на конечную с обес-
печением заданного значения гринвичской долготы восходящего
узла конечной орбиты.
Каждой из этих переходов может быть обеспечен последова-
тельным приложением трех импульсов. Первые два импульса
переводят КА с начальной орбиты на промежуточную (фазиру-
ющую), касающуюся конечной орбиты. Период обращения и время
полета по промежуточной орбите выбираются из условия, чтобы
КА в момент приложения третьего импульса в точке касания
орбит либо занял необходимое положение на конечной орбите,
либо гринвичская долгота восходящего узла ее стала заданной.
Переходы первого класса связаны с решением задач встречи
на орбите, размещением КА вдоль орбиты при построении спутни-
ковой системы или коррекции их положения, т. е. так или иначе
обеспечивают фазовое положение КА на орбите.
Поэтому указанный класс переходов можно отнести к задачам
фазирования с одновременным получением заданных характери-
стик орбиты. Переходы второго класса, по существу, связаны
с решением задач коррекции прохождения. Действительно, пусть
поставлена задача: путем проведения соответствующих маневров
обеспечить прохождение КА над некоторым пунктом, расположен-
ным на поверхности Земли, с целью его наблюдения, причем
орбита КА должна иметь заданные параметры. Через этот пункт
можно провести след орбиты с наклонением, равным наклонению
плоскости орбиты находящегося в полете КА. Этот след орбиты
пересечется с экватором в некоторой точке А, которая будет
являться восходящим узлом орбиты. Значит, если в результате
коррекции долготу восходящего узла определенного витка КА
совместить с точкой А, то в последующем полете КА пройдет над
заданным пунктом. Именно по этой причине указанный класс
переходов отнесен к задачам коррекции прохождения.
Алгоритм решения задач трехимпульсных переходов строится
по следующей схеме.
Вначале решается задача двухимпульсных переходов (см.
разд. 3.3), в результате чего определяются компоненты импульсов
АоП1 = -j- (Al — Аа cos Uo — Аа sin «о).
Допа = -4 (Al + Аа cos Uo + А8 sin u0)
и аргументы широты точек их приложения
«я = «о + п»
где u0 = arctg-^-,
138
(3.22)
(3.23)
(3.24)
Л1 = р, — ри
Л, p^i cos Шх — р8е8 gos со», (3.25)
Л8 = Pi6i sin сох — ptet sin <о8.
Далее один из корректирующих импульсов представляется в виде
суммы
Дощ = Дох + (3.26)
затем каждое из слагаемых определяется из условия обеспечения
фазирования или прохождения над заданной точкой.
Задача 3.18. Начальная орбита КА задана оскулирующими
элементами plt elt ©х в восходящем узле. Определить компоненты
импульсов At>x, До8, Ди3 и аргументы широты ux, u8, u8 точек их
приложения для перехода на конечную орбиту с элементами р8,
е2, соя при условиях, если поле сил является центральным; кор-
ректирующие импульсы прикладываются на n.it п8, па витках
соответственно; после осуществления перехода фазовое положение
КА (по отношению к движению по начальной орбите) должно быть
изменено на величину Ди; начальная и конечная орбиты являются
компланарными.
Решение. Трехимпульсный переход с начальной орбиты на
конечную с фазированием положения может быть осуществлен
по одной из возможных четырех схем (рис. 3.11). На рисунке
показаны аналоги начальной и конечной орбит (см. задачу 3.3,
гл. 3 и рис. 3.7) и линии переключения BD, на которой распо-
лагаются точки приложения импульсов (отмечены числами 1, 2, 3).
Схемы перехода «а», «б» отличаются от схем перехода <а», <а> тем,
что первые начинаются в точке А, тогда как вторые — в точке С.
Таким образом, если не задана схема перехода, то для поиска
энергетически оптимального перехода необходимо рассчитать пере-
ходы для каждой из указанных четырех схем, а затем выбрать
из них переход с минимальным суммарным импульсом. А это
означает, что необходимо написать алгоритм расчета трехимпульс-
ного перехода для каждой из этих схем.
Рие. 3.11. Схемы трвхимпульсныя переходов в начальной (н) на конечную (н)
орбиту. Импульвы прикладываются в точная 1, 2, S
139
Однако из рис. 3.11 следует, что схемы перехода «в», «а» могут
быть получены из схем перехода «а», «б» путем смещения точек
приложения импульсов на угол 180°. Следовательно, если изве-
стен алгоритм расчета перехода для схем «а», «б», то для получения
переходов по схемам «в», «а» достаточно аргумент широты и0 линии
переключения увеличить на 180°. Тогда задача расчета много-
образия переходов сведется только к рассмотрению схем «а», «б».
Чтобы и дальше уменьшить объем выкладок для получения
алгоритмов перехода по схемам «а», «б», воспользуемся следу-
ющим искусственным приемом.
Введем числа ех, е2, каждое из которых может принимать
значение 0 или 1. Назовем заданный набор чисел ех, еа кодом
схемы коррекции и обозначим его КСК =
Будем полагать, что в двухимпульсном переходе КСК = 00;
в трехимпульсном переходе по схеме «а» КСК = 10; в трехим-
пульсном переходе по схеме «б» КСК = 01.
Схемы переходов «а», «б» могут быть объединены и представ-
лены в виде обобщенной четырехимпульсной схемы переходов
с приложением импульсов в точках /, 2, 3, 4 на линии переключе-
ния (рис. 3.12). На рисунке показаны только первые полувитки
переходных орбит, хотя после каждого из маневров КА может
совершать произвольное число витков. Задаваясь значениями ех,
еа, из обобщенной схемы можно выделить необходимый трех-
импульсный переход, соответствующий схемам «а» или «б». В этом
случае один из четырех импульсов окажется нулевым, т. е. он
отсутствует.
Четырехимпульсная обобщенная схема переходов по существу
отражает возможность разделения каждого из импульсов в двух-
импульсном переходе на два слагаемых в соответствии с соотно-
шением (3.26).
Введем обозначения:
ДАХ, ДЛа — изменение высоты полета в точке, диаметрально
противоположной точке приложения импульса, после приложения
импульса при переходе на промежуточную орбиту (см. рис. 3.11
и 3.12); Дгх, Дга — расстояния между точками С и В, А и D соот-
ветственно, определяемые по формулам
Дгх = Ах — Аа cos u0 — А3 sin и0, .
Дга = Ах + А2 cos u0 + А3 sin u0,
где u0 — аргумент широты линии переключения, определяемый
по формулам (3.24), (3.25).
Для определения величин импульсов и точек их приложения
воспользуемся свойством оптимального перехода: каждый из
импульсов является трансверсальным, а точки приложения их
принадлежат линии переключения. Величины импульсов опре-
делим по формулам типа (3.22):
Avm=^-A/i„, т = 1,2,3. (2)
140
Рис. 3.12. Обобщенная схема перехода с началь-
ной (н) на конечную (к) орбиту. Импульсы
прикладываются в точках /, 2, 3, 4
Рис. 3.13. Схема отсчета угловых расстояний:
1,2, 3- точки приложения импульсов
В выражении (2) величины Ыгт являются корректируемыми
высотами, которые находятся с помощью соотношений
ДА! = ci ДАГ + (1 — ej) Ди,
ДАг = е2 ДАг + (1 —- е2) Дгг, (3)
ДАз = — ej (ДА1 — Ди) — е2 (ДАг — Дгг).
Далее определим количество витков между точками приложения
импульсов
Л\ = п2 — пъ
(4)
JVa = Па — пг.
Теперь введем систему отсчета угловых расстояний, показан-
ную на рис. 3.13. Имеем:
Фог = ы0»
Ф1а = 2л Nr + я,
(5)
фаз = 2л N2 +
Фа = Фаз = 2л#а + 8^,
Фи, = Фша + Фа = 2® (N% + Na) + я (1 + в^), (6)
Ф = и0 + ф, = и0 + 2о (Nt + Na) + л (1 + в,).
Пользуясь рис. 3.13 и выражениями (5), определим аргументы
широты точек приложения импульсов:
«в = «о.
“а = «о + «» (7)
«з = «о + « (1 — М-
Чтобы определить величины импульсов по формулам (2),
необходимо знать значения корректируемых высот АЛа,
входящих в выражения (3). Для этого воспользуемся условием
фазирования: в момент приложения последнего импульса фазовое
положение КА по отношению к его движению по начальной орбите
141
должно измениться на Ди. Иначе говоря, корректируемое рас-
стояние вдоль орбиты составит
Д£ = Ди, (8)
где гх — средний радиус начальной орбиты.
Далее воспользуемся соотношением (3.2), в котором положим
Дог = 0 (переход осуществляется только трансверсальными им-
пульсами), тогда
Дп = ^481п<р дОп
Л
Применим это выражение для решения задачи фазирования.
Поскольку на фазирование оказывают влияние только первый
и второй импульсы (третий импульс переводит КА на конечную
орбиту), то суммарное смещение вдоль орбиты составит
Дп =-----д01 _ ..Зфу-^Ф» д01
Л Л
и должно быть равно корректируемому расстоянию, т. е.
Д£ 4- Дп = 0.
Так как углы <рх, <р4 кратны а [см. соотношения (6)], то
Д£ (<Р1 Д»1 + фа До«).
Используя выражения (2)
ДС1 = Т ~ [81 ДЛх + (1 - 8х) ДГх],
Д^а = [ва ДЛа + (1 — Bj) ДГа],
получаем уравнение относительно искомых корректируемых высот
D = Dj ДЛХ + D, ДЛ9, (9)
4
где D = -у Д£ — [фх (1 — вх) Дгх + Фа (1 — ва) Дга[,
D» = в^фх,
(Ю)
Dt — 8афа.
Для определения величин ДЛц, из уравнения (9) восполь-
зуемся тем обстоятельством, что в рассматриваемых схемах пере-
хода (КСК — 10 или КСК = 01) один из коэффициентов еь е,
обязательно равен нулю, т. е. один из коэффициентов Dt, D,
также обращается в нуль. Это означает, что сумма
D4 + D, = B (11)
будет равна одному из коэффициентов DB или Dt, и тогда может
быть определена корректируемая высота
ДЛ = 4’ (12>
142
хотя пока неизвестно, к какой из высот (AAj или ДЛ2) ее следует
отнести. Чтобы определить ее, воспользуемся формулами
ДЛ1=-^-ДЛ, ДЛ2 = ^ДА, (13)
которые автоматически определят величины корректируемых вы-
сот, причем одна из них обязательно окажется равной нулю.
Затем по формулам (2) и (3) находим корректирующие импульсы.
Пример 1. Начальная и конечная орбиты заданы элементами
&П1 = 200 км, &А1 = 400 км, = 30°;
АП2 = 250 км, &А2 = 300 км, ®2 = 60°.
Первый и второй импульсы прикладываются на первом витке п± = п2 = 1,
а третий — n8 = 11. Переход осуществляется по схеме, показанной на рис. 3.11, а,
т. е. КСК = 10 (Bi = 1, е2 = 0)- Определить величины импульсов и аргументы
широты точек их приложения для обеспечения трех импульсного перехода с на-
чальной орбиты на конечную с изменением фазы КА на угол Au = 36°.
Для начальной орбиты определяются:
радиусы апогея и перигея
rA1 = R + кд! = 6771 км;
гп1 = R + ЛП1 = 6571 км;
средний радиус и фокальный параметр
= рг = 6671 км;
произведение фокального параметра на эксцентриситет
pier = 100 км;
средняя угловая скорость полета по орбите X = 1,16-10“8 с"1. Аналогично
для конечной орбиты находим:
гА2 = 6671 км, гП2 = 6621 км;
г2 = р2 = 6653 км, р2е2 = 25 км.
Далее определим:
коэффициенты (3.25) Aj = —25 км, А2 = 74,5 км, А8 = 28 км;
аргумент широты линии переключения (3.23) и0 = 21°;
расстояния между орбитами вдоль линии переключения (1)
Дгх = —104,3, км, Дг2 = 54,3 км;
числа витков между точками приложения импульсов (4)
Nt = 0, N2= 10;
угловые расстояния (5) <р12 = л, фа8 = 56, <рх = 69,14, <ра = 66;
аргументы широты точек приложения импульсов (7)
U1 = 21°, и2 = 201°, «в = 21°;
корректируемое расстояние вдоль орбиты (8) Д£ = 4200 км;
коэффициенты (10) D = 1980 км, Di = 69,14, D2 = 0;
коэффициент (11) В = 69,14;
корректируемая высота (12) ДЛ = 28,6 км;
корректируемые высоты (13) = 28,6 км, ДАа = 0;
высоты (3) MJ == 28,6 км, ДД2 = 54,3 км, ДАд = —132,9 км;
искомые импульсы трекимпульсного перевода (2) Дс^ = 8,4 м/с, Доа =
= 15,7 м/с, Ди8 = —38,6 м/с.
143
Заметим, что в случае двухимпульсного перехода (без фазирования), как
следует из формул (3.22), потребуются импульсы Дс^ = —30,2 м/с и Ди2 =
= 15,7 м/с. Иначе говоря, первый из корректирующих импульсов в двухимпульс-
ном переходе, равный — 30,2 м/с, в случае трехимпульсного перехода пред-
ставляется в виде двух импульсов
—30,2 = 8,4 — 38,6 м/с.
Пример 2. Дана система КА, находящихся на одной и той же орбите,
и указано место размещения очередного КА в этой системе (точка Л4). КА вы-
веден на орбиту с последующим переходом в точку М системы КА. Определить
маневры перехода КА в точку М.
Рассмотрим особенности решения этой задачи.
Будем полагать, что орбита КА (начальная) и орбита системы КА (конеч-
ная) заданы. В этом случае может быть решена задача двухимпульсного пере-
хода КА с начальной орбиты на конечную, однако при этом переходе КА не ока-
жется в точке М. Следовательно, возникает задача трехимпульсного перехода
с начальной орбиты на конечную с фазированием положения КА на конечной
орбите.
Если схема перехода задана, то для решения задачи необходимо прежде
всего определить фазовое рассогласование Ди. Величина Ди может быть опре-
делена следующим образом:
по формуле (3.24) определяется аргумент широты линии переключения и0;
рассчитывается прогноз движения точки Л4, и на заданном витке (на кото-
ром КА должен занять место в системе) определяется время достижения точ-
кой М линии переключения (аргумента широты Uo);
рассчитывается прогноз движения КА на момент времени t и на этот момент
времени определяется угловое расстояние Ди между точкой М и КА.
В дальнейшем решается задача трехимпульсного перехода (как указано
в примере 1).
Задача 3.19. Пользуясь результатами решения задачи 3.18,
определить начальное угловое расстояние Ди (т. е. начальную
фазу) между ТК и ОС, обеспечивающее дальнее наведение с ми-
нимальным суммарным импульсом.
Решение. В задаче 3.18 было показано, что суммарный им-
пульс дальнего наведения
До = | Дс>11 +1Д| +1До81 (1)
зависит от величины фазового рассогласования Ди (т. е. от угло-
вого расстояния между ТК и ОС на расчетный момент встречи).
Рассмотрим схему сближения, соответствующую рис. 3.11, а,
для которой КСК = 10. В этом случае из выражения (13) задачи
3.18 следует
АЛ1 = = 17 (4 AL ~ фа Аг») »АЛ« = °«
и поэтому суммарный импульс (см. задачу 3.18)
Ао =т[-^-|тА£-ч’аАга| + 1АГа1 + |Аг1--$г(тА£-
— Фа Д/а) |] • (2)
144
Рис. 3.14. График зависимости функ
ции М от расстояния вдоль орбиты Д£
Так как по физическому смыслу
Ф]. > 0, то перепишем равенство
(2) в форме
Ао = ^г[|А1-тфаАг2|+
+ |Д^»1+|-|-(Ф1Лг1+
+ Фа Дг,) - AL |]. (3)
Выражение (3) в явной фор-
ме отражает зависимость сум-
марного импульса от начальной
фазы AL. Теперь задача состоит
в исследовании зависимости (3),
т. е. в определении величины AL, дающей минимум суммарному
импульсу До. Для упрощения выкладок введем обозначения
Bi = Фз А'з. В, = -|- <Ф1 АГ1 + фа А^’ (4)
М = | AL - Вг | + |В, - AL |, (5)
и тогда выражение (3) можно записать в форме
Av== Зй (тф11 Ar*l + M)- (6)
Из равенства (6) следует, что величина суммарного импульса
зависит только от значения функции М (AL), причем суммарный
импульс Ао будет минимальным при минимальном значении .М.
Следовательно, задача сводится к отысканию минимума функ-
ции (5).
Обозначим
x = |AL-B1|, 0 = |В, —AL|, (7)
т. е.
М = х + у. (8)
Рассмотрим два случая решения поставленной задачи.
В первом случае будем полагать, что начальные условия
таковы, что выполняется неравенство В2 > Bt. Построим на
плоскости с координатами М, AL функцию М (AL) (рис. 3.14).
На этом рисунке можно выделить три характерных участка.
Участок 1, AL Bv В этом случае
М = х + у = В, + В, — 2 AL,
причем минимального значения функция М достигает в точке
AL = Въ
min М = х (В^ + у (Bi) == В), + В, — 2Bj, = В, — Bt.
Участок II, Вх < AL < В,. В этом случае функция
М = х + у = В, — AL + AL — Вх = В, — Вх
остается постоянной и не зависит от AL.
145
Участок III, AL B2. В этом случае
М = х + у = 2 AL - (Bt - В2),
причем минимального значения функция М достигает в точке
AL = В2,
min М = х (В2) + у (В2) = 2В2 — (В^ — В) = В2 — Bv
Проведенный анализ показывает, что на интервале
Bi < AL < В2 (9)
функция М является постоянной. Это означает, что если фазовое
рассогласование AL удовлетворяет неравенству (9), то на этом
интервале изменения AL для осуществления дальнего наведения
потребуется один и тот же суммарный импульс, причем величина
его (6) будет минимальной. Если же фазовое рассогласование не
удовлетворяет неравенству (9), то суммарный импульс будет
возрастать по сравнению с его минимальным значением.
Заметим также, что если начальное фазовое рассогласование
удовлетворяет равенствам AL = Blt AL = В2, или в развернутой
форме
Д£=4<р8Дга, (10)
Д£ =ДГ1 + фа Дга), (11)
то трехимпульсный переход вырождается в двухимпульсный.
В случае (10) исчезает первый импульс (At\ = 0) и переход осу-
ществляется по траектории типа CD (см. рис. 3.7). При выпол-
нении равенства (11) исчезает третий импульс (Доа = 0), и тогда
переход происходит по траектории типа АВ.
При выполнении неравенства (9) суммарный импульс трех-
импульсного перехода определится по формуле
Д« = з^(4ф1|Дг21 + 1^-В11)
ИЛИ До = 4(|Дг1| + |Дга|) (12)
и будет равен суммарному импульсу двухимпульсного перехода.
Во втором случае будем полагать, что Ва < В%. Не повторяя
аналогичных выкладок, приходим к следующему неравенству:
Вх>Д£>Ва, (13)
которое определяет фазовое рассогласование Д£, удовлетворя-
ющее энергетически оптимальному переходу.
Измеряя фазовое рассогласование в угловых величинах, также
получаем
при Ва>Вх -^<Ди<-^, (14)
при Ва<Вх (15)
г0 го
146
Таблица 3 J.
Основные характеристики переходов
Схема перехода AL Знаки импульсов
Avi At>a А и»
I ДД Ва + +
II Д£ == Ва + + 0
III Bt< Д£< Ва + + +
IV Д£ = Вх 0 + +
V AL< Bi — + +
Пример 1. Рассмотрим геометрическую картину переходов, соответству-
ющую различным участкам изменения Д£, если исходные данные соответствуют
первому из рассмотренных случаев. В рассматриваемом примере компоненты
импульсов согласно выражениям (4) и (3) определяются формулами
Л»,=.А.(Д£„В1),
К
Диа Дга, (16)
До8 == (Ва — Д£).
Основные характеристики переходов при различных значениях фазового
рассогласования приведены в табл. 3.1, а схемы переходов — на рис. 3.15. На
рисунке показан частный случай непересекающихся орбит ТК и ОС, причем
орбита ТК лежит внутри орбиты ОС. В схемах II, IV трехимпульсный переход
вырождается в двухимпульсный, и эти схемы являются граничными по отно-
шению к схеме III, соответствующей оптимальному переходу при удовлетворе-
нии начальной фазы неравенству (9). В оптимальном переходе (схема III) сум-
Рис. 3.15. Схемы перехо-
дов при различных значе-
ниях начальной фазы (см.
табл. 3.1):
1,2— начальная н конеч-
ная орбита ТК; 3, 4 — пере-
ходные орбита; BD — ли-
ния переключения
147
марный импульс остается постоянным до тех пор, пока переходная траектория 3
и точка приложения второго импульса будут лежать между начальной и конеч-
ной орбитами (схема III). В схеме I, соответствующей большим начальным
фазовым рассогласованиям, переходная орбита пересекает конечную, большая
полуось переходной орбиты возрастает, период обращения увеличивается и тем
самым достигается фазирование.
При малых фазовых рассогласованиях (схема V) первый импульс понижает
орбиту, и эта схема перехода становится недопустимой, если существуют огра-
ничения на минимальную высоту полета.
П р и м е р 2. Пусть начальная (орбита ТК) и конечная (орбита ОС) орбиты
являются круговыми с высотами Aj = 200 км, А2 = 300 км соответственно. Пло-
скости орбит совпадают. Переход осуществляется при КСК = 10 (см. задачу 3.18)
и заданных витках проведения коррекций пх = ла = 1, п3 = 11. Фазовое рас-
согласование на момент встречи составляет Да = 78°. Определить аргументы
широты точек приложения импульсов иъ аа, и3, величины импульсов Д^, Да2,
Дц8, а также требования к начальной фазе ОС из условия энергетически опти-
мального перехода.
В рассматриваемом примере рг = rlt ег = 0, р2 = г2, е2 = 0, а аргументы
широты ©J, со2 не определены (орбиты являются круговыми).
Используя формулы задачи 3.18, определяются:
радиус средней круговой орбиты и средняя угловая скорость полета: г0 =
= 6621 км, 1 = 1,16-IO"3 1/с;
коэффициенты: Аг = 100 км, Л2 == А3 = 0.
Аргумент широты и0 линии переключения в данном примере не опреде-
ляется, поскольку
. 0
«о = arctg ,
и поэтому может назначаться произвольно. Геометрически это означает, что
суммарный импульс не будет зависеть от положения линии переключения, по-
скольку при переходе между круговыми орбитами все точки начала перехода
являются равносильными. В этом случае аргументы широты точек приложения
импульсов Hi = Uq, ка = Uq + л, u8 = uQ + л, где и0 — произвольно.
Далее определяются:
относительное расстояние между орбитами вдоль линии переключения
Дг = Дгх = Дг2 = г2 — = 100 км;
угловые расстояния между точками приложения импульсов
Ф12 = я, фзз = 21л;
угловые расстояния от точек приложения и первого, и второго импульсов
до точки приложения третьего импульса
Ф1 = 22л, фа = 21л;
корректируемое смещение вдоль орбиты ДА = 9000 км; коэффициенты
D = 5400 км, Di = 22л, Da = 0; корректируемые высоты Д/ц = 77 км, ДА2 = 0,
ДА{ = 77 км, ДА2 = 100 км, ЛАд = 23 км;
трансверсальные составляющие корректирующих импульсов Дс^ = 22,4 м/с,
Доа = 29 м/с, Ди3 = 6,6 м/с.
Чтобы определить схему перехода, найдем коэффициенты (4) Bi = 4960 км,
В2 = 10 200 км. В рассматриваемом случае < ДА < В2 и переход соответ-
ствует схеме III (см. рис. 3.15). Приведенное в исходных данных фазовое рас-
согласование, равное 78°, соответствует начальному расстоянию между ОС и ТК
(9000 км). Поэтому в соответствии с неравенством (9) переход будет оптимальным.
Оптимальность перехода сохранится при изменении величины ДА от 4960 до
10 200 км.
В частности, если ДА = Bi == 4960 км, то корректирующие импульсы рас-
пределятся следующим образом: Дс^ = 0, Ди2 = 29 м/с, Ди3 = 29 м/с, и трех-
импульсный переход вырождается в двухимпульсный переход по схеме II (см.
рис. 3.15) с тем же суммарным импульсом.
148
Если же AL = В2 = 10 200 км, то At^ = 29 м/с, Аи2 = 29 м/с, Аи8 = 0
и переход также будет двухимпульсным по схеме IV (см. рис. 3.15).
Задача 3.20. Заданы начальная и конечная орбиты КА. Опре-
делить величины импульсов и аргументы широты точек их при-
ложения для трехимпульсного компланарного перехода с началь-
ной орбиты на конечную при условии, чтобы на n-м витке грин-
вичская долгота восходящего узла орбиты КА после осуществле-
ния перехода приняла заданное значение (задача коррекции
прохождения).
Решение. Покажем, что эту задачу можно свести к задаче
трехимпульсного фазирования.
Введем следующие обозначения:
Qo — гринвичская долгота восходящего узла орбиты КА на
начало n-го витка, определяемая в результате прогнозирования
движения КА без учета корректирующих импульсов; Q — требу-
емое значение гринвичской долготы восходящего узла в восходя-
щем узле n-го витка; AQ = Q — Qo — корректируемый промах
по долготе узла, который должен быть ликвидирован в результате
приложения импульсов при переходе на конечную орбиту.
Пусть А/ есть изменение времени прохождения восходящего
узла на момент начала n-го витка, вызванное влиянием коррек-
тирующих импульсов. Тогда времени А/ будет соответствовать
следующее смещение долготы восходящего узла:
AQ = —®э А/, (1)
где соэ — угловая скорость вращения Земли. В свою очередь,
А/ = S Afm, т = 1, 2, 3, (2)
т
где Д/т — соответствующее изменение времени полета, обуслов-
ленное влиянием каждого из трех импульсов.
Известно, что трансверсальный импульс Дит приводит к изме-
нению времени выхода на экватор за /па витков на
А/т = З^Дрто, (3)
где Тъ о, — соответственно период обращения и средняя скорость
полета КА по начальной орбите.
Пусть, далее, ат — угловая дальность полета КА от момента
приложения т-го импульса до начала п-го витка. Тогда
а» = + 0.
“я = Фа + 0. (4)
а8 = 0»
где 0 — угловая дальность полета КА от точки приложения
третьего импульса до начала n-го витка. Так как аргумент широты
точки приложения третьего импульса (см. задачу 3.18)
ия = и0 + л (1 — 81) (5)
149
и n, — номер витка, на котором прикладывается третий им-
пульс, то
Р = 2л — и, + 2я (n — ng) = 2л (1 + п — п3) — (6)
Поскольку = ат/2л, то из выражений (2) ... (4) следует
д*=1Р (Др1++Дц,)+
+ ф1 Дс»1 4~ фа Доа]. (7)
В равенстве (7) сумма импульсов До4 + До, 4- До8 трехимпульс-
ного перехода в соответствии с соотношениями (3.22) и (3.26)
должна быть равна сумме импульсов в двухимпульсном переходе,
т. е.
ДоП1 + Допа = Дох + Доа + До,.
В свою очередь, как следует из выражений (3.22),
A°ni + A°na = Ai.
Тогда из равенств (1) и (7) получаем
-^-ДО-Ьд1р = Ф1До1 + ФаДОа. (8)
1 3
Воспользуемся теперь соотношением
% ДЬ = Ф1 Дох + фа Доа, (9)
О
полученным в задаче 3.18. Так как X], = 2л/7’1, то из выраже-
ний (7) ... (9) находим
д£ = _^.да з Л1Р> (10)
®з
а также Ди = -^-, (И)
где Г| — средний радиус начальной орбита.
Танин образом, если в задаче фазирования 3.18 величину
рассогласования фаза Ди определять по формуле (11), то фор-
мально задача коррекции прохождения сводится к задаче фази-
рования.
Пример. Дано: Dj == 7,79 км/с, = —25 км, n = n8t «о = 2Г, 8Х == 1
(см. пример 1 задачи 3.18). Определить необходимую величину фазового рас-
согласования для изменения долготы восходящего узла на величину ДО = 10°.
По формулам (5), (6), (10), (11), находим: и3 = 2Г, 0 = 5,91, AL =
= —18 400 км, Дм = —2,8.
Таким образом, если начальное рассогласование по фазе принять равным
—2,8 радиана, то в результате решения задачи перехода с начальной орбиты
на конечную гринвичская долгота восходящего узла конечной орбиты изменится
на 10°.
150
3.6. Орбитальные маневры КА с двигателями
малой тяги
Принимая за единицы измерения линейного расстояния, вре-
мени, скорости и ускорения соответственно значения радиуса
некоторой круговой орбиты гф, времени круговой
1 Г и ц
скорости Ц. = у у-, гравитационного ускорения g* = урав-
нения движения маневрирующего КА в прямоугольной инер-
циальной системе координат Oxyz (рис. 3.16) с началом в гравита-
ционном центре можно записать в безразмерных величинах:
х = ая--^, у = ау-±-,
2 = az--^,
(3.27)
где ах, а„, аг — составляющие вектора безразмерного управля-
ющего ускорения по осям инерциальной системы координат.
Для решения многих практических задач оказывается целесо-
образным перейти к сферическим координатам г, <р, 0 (см.
рис. 3.16). Связь между ними и декартовыми координатами опре-
деляется следующими зависимостями:
X = Г COS 0 COS ф, у — т cos 0 sin ф,
z = г sin 0. (3.28)
Используя зависимости (3.28), систему уравнений маневриру-
ющего КА (3.27) можно представить в сферических координатах
f — Гф2 cos20 — г02 + ут = аг.
г cos 0ф + 2гф cos 0 — 2гф0 sin 0 = ач, (3.29)
г0 + 2г0 + гф2 sin 0 cos 0 = ае,
где аг, аф, ае — составляющие вектора безразмерного управля
ющего ускорения соответственно по
осям г, ф, 0.
Задача 3.21. Движение маневри-
рующего КА рассматривается в цен-
тральном гравитационном поле под
действием постоянного по величине
радиального управляющего ускоре-
ния. Определить зависимость ради-
альной скорости от радиуса г. Для
старта КА с круговой орбиты уста-
новить связь между величиной ради-
ального управляющего ускорения а?
и возможным диапазоном изменения г.
Рнс. 3.16. Схема отсчета коорди-
нат и ускорения КА при исполь-
зовании двигателей малой тяги
151
Решение. Воспользуемся уравнениями движения маневриру-
ющего КА в сферических координатах (3.29), которые в рассма-
триваемом случае при 0 = 0 и аф = а0 = 0 могут быть пред-
ставлены в виде системы двух уравнений второго порядка
f = аг + гфя — гф = — 2гф. (1)
Преобразуем второе уравнение системы (1):
Ф ____ 2г 1 ___2 dr
ф г ’ ф dt г dt * '
Уравнение (2) можно записать в виде
-^= — 2—. (3)
Ф г v ’
Проинтегрируем уравнение (3):
Ф = Фо (-у-)* • (4)
Подставим выражение (4) в первое уравнение системы (1):
? = уг(ф<»)2-4+а- (5)
Обозначим радиальную скорость г = vr. Тогда
а dvr . dvr dvr____________________d / °r \
r ~ dt ~ r ~dF ~ Vr ~dF “ 17 \“2") • w
Рассмотрим числитель первого члена правой части уравнения
(5). Обозначим трансверсальную скорость гф = оф. Имеем
гоФо = ОфО, (фо/о)2 = (Уфо^о)2- (7)
Подставляем зависимости (6) и (7) в уравнение (5):
"37 ("у °2) = yr (°<pofo)2 + ог. (8)
При аР = const уравнение (8) интегрируется:
— ой») = — (^фо^о)2[та- ~ + у------+ «г (г — Го).
Отсюда следует:
(9)
Для случая старта КА с круговой орбиты, параметры которой
(радиус гф, круговую скорость оф, гравитационное ускорение ge)
принимаем за масштабные величина для безразмерных значе-
152
ний г, vr, v<f, аг, в зависимости (9) необходимо принять r9 = 1,
Ц-о = 0, о<ро = 1. т. е.
Ог = ±[_-‘г + 2- + 2ар(Г_1)_1],/2. (Ю)
Преобразуем подкоренное выражение зависимости (10):
-2. + A + 2<Ir(r-i)-i =
=2Ог(Г_1)[(-4.+4-1)^д1-15.+ 1]. ни
Рассмотрим выражение, стоящее в квадратных скобках правой
части равенства (11):
г» —£-----------------------------------------------!_
( 1 , 2 । \ 1 । 1 _ 2аг 2аг
к-+ Ч 2аг(г—1) 1 ~ г*
2__ _______!___
г Ч 2аг(г-1)
1 _ ('— 'ХМ'’ — Г»)
1 ~ Г2
где
4аг
1 — ~|/1 —8a,
4аг
(13)
(Н)
Перепишем выражение (10) с учетом зависимостей (11) и (12)
«г = ± 4- 12аг (г - W - Гг) (Г - г2)],/2. (15)
Используя выражение (15), перейдем к определению зависимости
возможного диапазона изменения г от величины аг.
Случай 1. аг < 0. Из зависимостей (13), (14) следует, что <
< 0, г2 > 0. Поэтому 2Ор (г — г\) < 0.
Для того чтобы иг была действительной величиной, необхо-
димо, чтобы подкоренное выражение зависимости (15) было поло-
жительным или равным нулю. Это выполняется только при усло-
вии
(Г - 1) (г - rt) < 0. (16)
Условие (16) выполняется либо при 1 г г2, либо при 1
•< г < г2. Но из выражения (14) следует, что величина г2 может
быть меньше единицы. Поэтому выполнимо только первое из
указанных условий. Учитывая, что г2 > 0, запишем окончатель-
ное выражение для возможного диапазона изменений г:
1>г>га>0. (17)
Таким образом, в случае старта КА с круговой орбиты при
а, < 0 траектория маневрирующего КА заключена между двумя
концентрическими окружностями, внешняя из которых соответ-
153
ствует начальной круговой орбите, а радиус внутренней, окруж-
ности определяется величиной аг и значением радиуса начальной
орбиты.
Случай 2. От = 0. В соответствии с выражением (15) в этом
случае vT = 0, т. е. КА продолжает свободное движение по началь-
ной круговой орбите (г = 1 = const).
Случай 3. 0 < ат < 1/8. Рассмотрим возможный диапазон
изменения и г2. Запишем производные от гх и г2 по аг:
4'1 _ _ । — 4аг + У1 — 8аг ,]ft,
dar~ 4а2гУГ-8аг- ’
drt 1 — 4аг — ~|/1 — 8аг ,)Q.
dar~ 4a2ry~&,’ ‘ ( ’
Из выражения (18) видно, что на интервале 0 < аг < 1/8 произ-
водная < 0, т. е. с увеличением аг значение г\ уменьшается.
Для
аг = 0 Г1 = оо, а для аг = 1/8 гх - 2.
Таким образом, при 0
ния (19) следует,
-fo > 0, т. е. с
Раскрывая предел
аг < 1/8 имеем гх 2. Из выраже-
что на интервале 0 < аг < 1/8 производная
увеличением аг значение г2 также возрастает.
,. .. 1 —"1/1 — 8а,
11 m г 2 - 11 m------------!
0 ia?
получаем, что при о, = 0 г, = 1. Для = 1/8г2 = 2. Следова-
тельно, при 0 < аг < 1/8 имеем 1 < г2 < 2. Учитывая возможные
значения гх и г2, можно установить, что гх г2.
Запишем выражение (5) для случая старта КА с круговой
орбиты, когда
Ф</о = »ф0 = К го = 1,
f = тг - + аг. (20)
В начальный момент времени
г = г0 = 1, г = аг > 0.
Поэтому после старта КА с круговой орбиты радиальная ско-
рость аг и радиус г начнут возрастать. Увеличение г может проис-
ходить только до значения г2. При г = r2, vr = 0. Найдем выра-
жение для г при г = г2. Подставляя в зависимость (20) значение г2
из выражения (14), получаем
Г = 1 + -72 [(6аг - 1) - Юаг + 1 ]. (21)
1оаг
При 0 < Oj. < 1/8 выражение (21) отрицательно, а при а^. = 1/8
равно нулю. Следовательно, максимальное удаление-KA от центра
154
притяжения ra < 2. Таким образом, при 0 < а,. < 1/8 имеем
1<г<га<2. (22)
Случай 4. От> 1/8. В этом случае гх и га являются комплексно-
сопряженными числами. Поэтому значения (г — гх) и (г — га)
также будут комплексно-сопряженными числами, а их произ-
ведение
(Г _ Г1) (Г _ Га) > о. (23)
Выражение (15) с учетом зависимости (23) показывает, что вели-
чина ог будет действительной при условии (г — 1) 0. Следова-
тельно,
г > 1. (24)
Таким образом, в случае старта КА с круговой орбиты при
а,. > 1/8 радиус г неограниченно возрастает.
Пример, Старт маневрирующего КА производится с круговой орбиты
радиуса г* — 7370 км при величине радиального ускорения аг — —0,1 м/с2.
Определить диапазон изменения радиуса г'.
Находим величину гравитационного ускорения для высоты начальной кру-
говой орбиты КА £* = 7,343 м/с2 и безразмерное управляющее ускорение ат —
= o£/ge = —0,01362. По зависимости (14) определяем г2 = 0,9741. Затем нахо-
дим г[ = г2гф = 7180 км.
Таким образом, радиус маневрирующего КА изменяется от 7370 до 7180 км
(7370 > г' > 7180 км).
Задача 3.22. Маневрирующий КА стартует с круговой орбиты
и движется под действием постоянного по величине трансверсаль-
ного управляющего ускорения а^,. Принимая управляющее уско-
рение а, = a'tf/g* малой величиной и пренебрегая вследствие этого
значением ? по сравнению с гравитационным ускорением, опре-
делить зависимости значений радиуса г и угловой скорости ф
от времени и уравнение траектории КА в полярных координа-
тах г, ф.
Решение. Запишем систему уравнений (3.29) в безразмерных
величинах применительно к рассматриваемому случаю управля-
емого движения КА, когда 6=0,аг = ае = 0:
/ = гфа-2-. гф = а, — 2/ф. (1)
Пренебрегая по условию задачи величиной f, из первого урав-
нения системы (1) найдем
= (2)
Дифференцируя уравнение (2), получаем
П _ 3 —6/2 « ул.
ф — 2 W
Подставим выражение (3) во второе уравнение системы (1):
г-8'2/ = 2а,, r~s,2dr = 2а, dt. (4)
155
После интегрирования уравнения (4) получим выражение,
определяющее зависимость г от времени:
г = (1-М-а. (5)
Подставляя найденное выражение для г в уравнение (2), получаем
зависимость для угловой скорости ф:
ф = (1 - аф/)8. (6)
Для определения уравнения траектории маневрирующего КА
рассмотрим совместно зависимости (5) и (6). Проинтегрируем
уравнение (6):
Ф = 4^U — (1 — (7)
Из уравнения (5) получим
(1 - аФ04 = Г2. (8)
Из выражений (7) и (8) следует, что
Определяя из выражения (9) значение г, получаем окончательное
уравнение траектории маневрирующего КА в полярных коор-
динатах:
г = (1 — 4афф)"1/а. (10)
Пример. Определить увеличение высоты полета КА, стартующего с кру-
говой геоцентрической орбиты радиуса г* = 6600 км при постоянном значении
трансверсального управляющего ускорения = 0,05 м/с2, после одного оборота
вокруг Земли (<р = 2л).
Находим величину гравитационного ускорения g* для радиуса
ё» = -у- = 9,159 м/с3.
Определяем безразмерное управляющее ускорение:
а_ = ^2- = 0,005459.
Подставляя в выражение (10) значения аф и <р = 2л, получаем г = 1,0766. Далее
находим увеличение высоты КА за один оборот вокруг Земли:
ДЛ = (г — 1) = 506 км.
Задача 3.23. Движение КА происходит по круговой орбите.
В некоторый момент времени за счет сообщения импульса по
касательной к орбите угловая орбитальная скорость КА изме-
няется до значения ф. В дальнейшем включается двигательная
установка, сообщающая КА переменное трансверсальное управ-
ляющее ускорение, обеспечивающее постоянство угловой скорости
КА (ф = const). Определить зависимость радиальной скорости
от текущего радиуса г и установить характер изменения радиуса
в зависимости от величины ф.
156
Решение. Учитывая условия задачи, уравнения движения
маневрирующего КА в безразмерных величинах (3.29) запишем
при 0 = 0, аг = ае = 0, ф = 0:
? = аф = 2?ф. (1)
Отсюда находим
'£ = "Ра-^г- (2)
После интегрирования уравнения (2) получаем
+ (3)
Из уравнения (3) определяем значение безразмерной радиальной
скорости КА:
п, = ±|>(га-1) + 2(4-- 1)]‘/2. -(4)
Для определения характера изменения радиуса г в зависимо-
сти от величины ф запишем первое уравнение системы (1) для
начального момента времени, когда г = г0 = 1-
г0 = фа— 1. (5)
Рассмотрим зависимость (5) для следующих трех случаев.
Случай /. ф > 1. В этом случае г0 > 0. Поэтому радиальная
скорость сразу после начала маневра станет положительной
(иг > 0) и радиус г будет возрастать. Из первого уравнения си-
стемы (1) видно, что с увеличением г значение г будет все время
расти. Следовательно, при ф > 1 движение КА характеризуется
непрерывным увеличением радиуса г со все возрастающей ра-
диальной скоростью vr.
Случай 2. ф = 1. Движение КА происходит при г = const.
Этот случай соответствует нулевому значению начального им-
пульса скорости. КА продолжает движение по начальной круговой
орбите.
Случай 3. ф < 1. Согласно выражению (5) в начальный момент
времени г < 0. Это вызовет появление отрицательной радиальной
скорости (vr < 0) и радиус г начнет уменьшаться. В соответствии
с первым уравнением системы (1) с уменьшением г вторая произ-
водная г, оставаясь отрицательной, будет по модулю возрастать.
Таким образом, при ф < 1 движение КА характеризуется не-
прерывным уменьшением радиуса г при увеличении модуля
радиальной скорости иг.
Задача 3.24. КА совершает движение по круговой орбите
радиуса г*. В некоторый момент времени ему сообщается импульс
скорости До по касательной к орбите, изменяющий скорость
157
движения до заданного значения о = г,ф' (ф' — требуемое зна-
чение угловой скорости движения КА по орбите). В дальнейшем
за счет создания постоянного по величине радиального управля-
ющего ускорения аг поддерживается постоянное значение ра-
диуса орбиты. Определить суммарное потребное значение харак-
теристической скорости на выполнение маневра, соответствующего
перемещению КА по орбите на угловую дальность <р.
Решение. Суммарное значение характеристической скоро-
сти о2 слагается из начального импульса До и характеристической
скорости Ох для поддержания постоянного радиуса орбиты:
о2 — До + 01. (1)
Величина импульса До определяется разностью заданного
значения орбитальной скорости о и круговой орбитальной ско-
рости, соответствующей радиусу
(2)
Принимая во внимание, что размерная угловая скорость ф'
определяется через безразмерную ф зависимостью ф' = фЛ* (%, —
орбитальная угловая скорость свободного движения КА по кру-
говой орбите радиуса г*), выражение (2) может быть представ-
лено в следующем виде:
ДП= |/^_|ф-1|. (3)
Для определения характеристической скорости Ui рассмотрим
уравнения движения маневрирующего КА в безразмерных вели-
чинах при 0 — 0, аф = а9 = О, а также с учетом того, что за счет
действия радиального ускорения а'г имеем г = 0, и, следовательно,
г = 0. Тогда
аг = тг — ГФ’. ГФ = °- (4)
Из второго уравнения системы (4) следует,' что ф = const, т. е.
движение маневрирующего КА происходит по прежней круговой
орбите, но с новой постоянной угловой орбитальной скоростью.
Характеристическая скорость будет равна
t t
Di = J|a,|d/ = g, (|аг|Л. (5)
Исключим в зависимости (5) значение а, с помощью первого урав-
нения системы (4):
t
= ГФ*|Л-
О
(6)
158
Принимая во внимание, что
(р Лфф
перейдем в выражении (6) от переменной t к переменной <р:
ф
о
(7)
Учитывая, что
Г Гг Г-----------
g* _ И 1/ = 1/ _м_
X» т Р ’ г* ’
*
получаем следующее выражение для характеристической ско-
рости Оь ___
о1 = 1/тН?ф-гФ|<р- (8)
Поскольку управляемое движение КА происходит по круговой
орбите радиуса г*, то в выражении (8) безразмерный радиус
г = 1 и тогда
01=}/ 14- - Ф | Ф. (9)
Из выражений (3), (9) и (1) получим
»2 = 1/^-(|ф-1| + |4--ф|ф). (10)
Пример. Космический аппарат движется по круговой орбите радиусом
г* = 6620 км. Определить характеристическую скорость для перемещения КА
по указанной орбите на угловую дальность ср = л/4 при увеличении орбиталь-
ной скорости на 10%.
Увеличение угловой орбитальной скорости на 10% соответствует значению
ф = 1,1. Подставляя в выражение (3) числовые величины г+, ф, получаем До =
= 776 м/с. После подстановки числовых значений в зависимость (9) и выпол-
нения расчетов находим = 1163 м/с. Суммарная характеристическая скорость
и = 1939 м/с.
Задача 3.25. КА выведен на стационарную орбиту с ошибкой
по долготе Ду = у — утр, где утр — требуемое значение долготы
стационарного КА; у — действительное значение долготы точки
вывода. Предполагается, что маневр коррекции КА по долготе
слагается из начального импульса скорости Диъ. изменяющего
величину орбитальной скорости КА, участка управляемого дви-
жения КА с постоянной скоростью вдоль стационарной орбиты
под действием постоянного по величине радиального управля-
ющего ускорения аг и конечного импульса скорости Ди2, обеспе-
чивающего стационарное положение КА на орбите. Для заданной
159
продолжительности маневра коррекции КАф определить величину
потребного управляющего ускорения аг, значения начального
и конечного импульсов скорости, а также потребную величину
характеристической скорости для реализации управляемого дви-
жения КА на среднем участке коррекции.
Решение. Для определения величины управляющего ускоре-
ния аг и значений импульсов Ась, Аи2 сначала найдем безразмер-
ную угловую скорость орбитального движения КА на среднем
управляемом участке полета:
где к* — угловая скорость свободного движения КА по стаци-
онарной орбите; ф' — размерная угловая скорость управляемого
движения КА по стационарной орбите.
Принимая во внимание, что на среднем участке движение КА
происходит при ф' = const, запишем зависимость, связывающую
величины Ау, ф', к* и т:
Л* ф
(1)
Переходя в зависимости (1) от ф' к безразмерной величине ф,
получаем
ф=1-£г. (2)
Из уравнений движения (3.29) при = ад — 0, г = 1 следует
ат = 1 - фа, (3)
и тогда из (2) и (3) получим
^-(2
—
(4)
Так как dr = g*ar, то
а’г =
«г_Ду /9
X. т V
Ду
ХфТ
(5)
Учитывая выражения для g* и окончательно получаем
a; = ^vi/jL(2-^i/ а).
ТГГф\ т г р /
(6)
Характеристическая скорость vu необходимая для реализации
управляемого движения КА на среднем участке маневра, опре-
деляется произведением а,ч. Поэтому
(7)
160
В предыдущей задаче было получено следующее выражение
для импульса скорости потребного для перевода КА на дви-
жение по круговой орбите с угловой скоростью ф:
Дох
(8)
Подставляя в зависимость (8) значение ф из выражения (2), нахо-
дим Avi = ]/-^JA£L = ^4AY|. (9)
Конечный импульс скорости Диа по величине равен импульсу Дих,
но направлен по касательной к орбите в противоположную сто-
рону.
Пример. Определим a', t>p Дур Ду2 для Ду = ±2° и т = 5 ч. Подстав-
ляем в выражения (6), (7), (9) числовые значения Ду, т, г* = 4,217-107 м. Значе-
ния импульсов Диь Af2 не зависят от знака Ду и равны по величине Дс^ = Ди2 =
= 81,8 м/с. Для Ду = —2° а'г = —0,0121 м/с2, Uj = 217,3 м/с, а для Ду = 2°
а' = 0,0118 м/с2, Uj = 211,5 м/с.
6 П/р Г. С. Титова
ГЛАВА 4
Встреча на орбите
4.1. Основные положения
Осуществление сближения и встречи КА на орбите представ-
ляет одну из наиболее сложных научно-технических проблем
космонавтики, решение которой непосредственно связано с реали-
зацией многих проектов по освоению космического пространства.
Задачи встречи КА могут отличаться друг от друга по своему
целевому назначению. Это влечет за собой различие как в методах
сближения КА, так и в аппаратурном составе систем управления.
Однако задачи сближения и встречи КА различного целевого
назначения имеют вместе с тем очень много общего. Эта общность
заключается прежде всего в том, что решается задача встречи
двух движущихся объектов. Кроме того, во всех случаях процесс
сближения КА слагается из совокупности таких частных задач,
как поиск и обнаружение КА, слежение за ним и измерение пара-
метров движения, формирование и реализация управлений, обе-
спечивающих встречу. В результате выполнения маневра встречи
вектор относительного состояния двух КА в момент окончания
маневра th должен принять требуемое значение q = || ||.
Первая из составляющих этого вектора р (th) определяет относи-
тельное положение объектов, а вторая v (th) — относительную
скорость в момент времени tk.
Обычно в зависимости от требуемых конечных условий сбли-
жения различают три разновидности маневра встречи [7].
1. Мягкая встреча, при реализации которой все компоненты
вектора относительного состояния должны в момент окончания
маневра обратиться в нуль, т. е. q (th) = 0 [р (tk) = v (th) = 0].
2. Жесткая встреча, при осуществлении которой в момент
th должны обратиться в нуль только компоненты вектора относи-
тельного положения, а компоненты вектора относительной ско-
рости могут быть произвольными, т. е. р (tk) = 0, v (4) = vh.
3. Совместный (групповой) полет, при реализации которого
должны обратиться в нуль компоненты вектора относительной
скорости, а компоненты вектора относительного положения
должны принять требуемые (как правило, достаточно малые)
значения, т. е. v (tk) = 0, р (tk) = рА. В результате выполнения
этой разновидности маневра встречи и при дальнейшем специаль-
ном управлении групповым полетом один КА как бы зависает
относительно другого на некотором заданном расстоянии рА.
162
Впервые групповой полет двух космических объектов был осу-
ществлен в Советском Союзе при запусках космических кораблей
«Восток-3» и «Восток-4», а трех — при запусках «Союз-6»,
«Союз-7» и «Союз-8». Минимальное расстояние между кораблями
«Восток-3» и «Восток-4» за время совместного полета составляло
около 6,5 км [16]. Проведенный эксперимент подтвердил возмож-
ность осуществления совместного полета КА. В будущем, без-
условно, потребуется осуществлять групповой полет с самыми
различными орбитальными объектами.
В осуществлении операции встречи принимают участие по
меньшей мере два КА. При этом обычно один из них не маневри-
рует, а совершает свободный орбитальный полет. Этот пассив-
ный КА в дальнейшем для определенности будем называть орби-
тальной станцией (ОС), а маневрирующий КА — транспортным
кораблем (ТК).
Осуществление встречи может производиться либо по схеме
сближения непосредственно с участка выведения ТК на орбиту
(прямое выведение), либо по схеме сближения с промежуточной
орбиты (или орбиты ожидания). В случае сближения с участка
выведения на орбиту время запуска ракеты-носителя и траекто-
рия выведения выбираются такими, чтобы в конце этого участка
параметры движения выводимого ТК соответствовали требуемым
условиям сближения.
Траектория выведения может или лежать в плоскости орбиты
ОС (компланарное выведение), или в общем случае не совпадать
с этой плоскостью (некомпланарное выведение).
Очень часто сближение с участка выведения на орбиту ока-
зывается нецелесообразным или невозможным, так как при допу-
стимых значениях углов некомпланарности (углов между пло-
скостью орбиты ОС и плоскостью траектории выведения ТК) потре-
буется значительная задержка его запуска до прохождения ОС
над районом старта ТК.
От этого недостатка свободен способ сближения с промежуточ-
ной орбиты, который в настоящее время и применяется при встрече
космических объектов. Применение этого способа предполагает
предварительное выведение ТК на орбиту ожидания. Далее сбли-
жение осуществляется переходом ТК с орбиты ожидания на ор-
биту ОС. Разница в периодах обращения ТК и ОС позволяет
выбрать момент начала сближения при наиболее выгодном взаим-
ном положении. Время, необходимое для достижения этого поло-
жения, называют временем фазирования. Оно определяется взаим-
ным начальным положением объектов, параметрами орбит ТК
и ОС, а также критериями оптимальности по энергетическим затра-
там, времени сближения, точности решения задачи встречи
и др.
Наиболее выгодным по простоте управления и по энергетиче-
ским затратам является случай, когда орбита ожидания лежит
в плоскости орбиты ОС [24].
6* 163
При решении задачи встречи предъявляются весьма высокие
требования к точности измерения параметров движения сближаю-
щихся объектов. Поэтому рассматриваемые в настоящее время
схемы управления сближением, особенно сближением с непосре-
ственным контактом, предусматривают использование бортовых
систем, выдающих информацию о параметрах относительного
движения. Дальность действия таких систем, учитывая допусти-
мые их массы, ограничена. Поэтому при больших относительных
дальностях между сближающимися объектами основная информа-
ция для управления сближением поступает с наземных измери-
тельных пунктов. Указанный характер получения первичной
информации для управления сближением диктует необходимость
разделения всей траектории сближения ТК с ОС на этапы даль-
него и ближнего наведения.
На этапе дальнего наведения для управления сближением
используются данные наземных измерительных средств. В про-
цессе сближения на этом этапе ТК должен быть выведен в неко-
торую окрестность ОС, величина которой определяется даль-
ностью действия бортовых измерительных средств. С переходом
на автономное управление сближением начинается этап ближнего
наведения ТК. Для обеспечения мягкой встречи ТК с ОС после
этапа ближнего наведения (точнее, в конце его) следует участок
причаливания, завершающийся встречей при близких к нулю
значениях относительных скоростей и механической стыковкой
ТК с ОС.
Таким образом, операция встречи ТК с ОС с использованием
орбиты ожидания слагается из следующих этапов: 1) выведе-
ния ОС на орбиту сборки; 2) выведения ТК на орбиту ожидания;
3) дальнего наведения ТК; 4) ближнего наведения ТК; 5) при-
чаливания и стыковки ТК с ОС.
При выполнении встречи ТК и ОС большое значение имеет
выбор параметров орбиты сборки или монтажной орбиты. Решение
задачи дальнего и ближнего наведения значительно упрощается,
если в качестве монтажной орбиты выбирается круговая орбита.
Высота монтажной орбиты выбирается с учетом условий безопас-
ности полета космонавтов (ниже радиационного пояса Земли)
и времени функционирования ОС на орбите. Наклонение монтаж-
ной орбиты зависит от географической широты космодрома и допу-
стимого диапазона азимутов запуска ракеты-носителя.
Обычно методы дальнего наведения классифицируют по коли-
честву активных участков полета, по виду рассогласования,
применяемого при формировании обратной связи, по способу
ориентации вектора тяги и по характеру математических моделей
движения, используемых при разработке алгоритма наведения.
Для решения задачи вывода ТК в район ОС в принципе доста-
точно одного активного участка полета. Поэтому значительная
часть методов дальнего наведения разработана для одного актив-
ного участка. Возникающие в процессе полета ошибки устра-
164
няются небольшими корректирующими импульсами. В случае
большой продолжительности этапа дальнего наведения для умень-
шения расхода топлива оказывается более целесообразным исполь-
зовать несколько активных участков (два и более).
Различие в методах дальнего наведения по характеру математи-
ческой модели движения ТК зависит от предполагаемого диапазона
линейных и угловых дальностей полета и точности наведения.
В том случае, когда дальнее наведение ТК осуществляется на боль-
шом удалении от ОС и при значительной продолжительности
выведения, при разработке алгоритмов наведения ТК исполь-
зуют уравнения движения в абсолютной системе координат.
Если же расстояние между ТК и ОС на этапе дальнего наведения
невелико и продолжительность выведения небольшая, можно
использовать уравнения относительного движения ТК с линеари-
зацией относительного гравитационного ускорения или с разло-
жением уравнений с точностью до членов второго порядка ма-
лости [3].
Методы ближнего наведения обычно подразделяют на две
основные группы [3]: методы, разрабатываемые без учета зако-
нов орбитального движения, и методы, основанные на использо-
вании законов орбитального движения.
Методы первой группы часто называют методами сближения
по линии визирования. Управление движением центра масс ТК
при использовании этих методов производится по результатам
измерений относительной дальности (расстояния между ТК и
ОС), скорости изменения относительной дальности (скорости
сближения или удаления) и угловой скорости линии визирова-
ния (линии, соединяющей центры масс ТК и ОС). Наиболее про-
стым и удобным в реализации из методов первой группы является
метод параллельного наведения (сближения), практическое при-
менение которого для мягкой встречи предполагает стабили-
зацию угловой скорости линии визирования около нулевого
значения и регулирование скорости сближения объектов. Этот
метод наведения использовался при автоматическом и ручном
управлении сближением во время экспериментов по стыковке
спутников «Космос» и космических кораблей «Союз», а также при
доставке экипажей и грузов на орбитальные станции «Салют».
Из методов ближнего наведения второй группы основным
является метод свободных траекторий, в соответствии с которым
каждый из корректирующих импульсов скорости рассчитывается
из условия встречи ТК с ОС через некоторое время свободного
полета. В случае отсутствия возмущений метод свободных траек-
торий представляет собой двухимпульсный маневр встречи, при
котором первый импульс обеспечивает прохождение траектории
через расчетную точку встречи в заданное время, а второй им-
пульс прикладывается в конце сближения для выравнивания
скоростей. Метод свободных траекторий применялся при выполне-
нии маневров встречи кораблями «Джемини» и «Аполлон».
165
К методам наведения второй группы также относятся различ-
ные оптимальные методы, предусматривающие использование
двигателей непрерывной или дискретной малой тяги [16, 241.
4.2. Начальные условия для обеспечения встречи
Параметры траектории ТК после выведения его на орбиту
определяются широтой и долготой точки старта, временем и ази-
мутом запуска. При постоянных характеристиках участка выве-
дения на орбиту от этих параметров будет в значительной мере
зависеть ориентация начальной орбиты ТК по отношению к ор-
бите ОС.
Азимут старта А при данных географических координатах
точки старта (широте В и долготе L) определяет наклонение ор-
биты i ТК и гринвичскую долготу восходящего узла. Между
наклонением, азимутом старта и широтой точки старта существует
соотношение (см. задачу 1.16)
cos i = sin A cos В. (4.1)
Время старта /ст определяет долготу восходящего узла орбиты
ТК в абсолютной системе координат.
Таким образом, при неизменной точке старта независимыми
начальными условиями ТК для обеспечения встречи являются
азимут и время старта.
Очевидно, что независимо от схемы сближения (прямое выве-
дение в точку встречи либо с использованием промежуточной
орбиты) азимут и время старта должны выбираться таким обра-
зом, чтобы после окончания участка выведения орбиты ТК и ОС
оказались компланарными. Этим самым исключаются боковые
импульсы для совмещения плоскостей орбит и достигается эко-
номия топлива. Для обеспечения компланарности орбит время
старта должно выбираться из условий прохождения трассы ОС
через точку старта.
Если на азимут старта наложено ограничение, то при неизмен-
ной точке старта наклонение плоскости орбиты ТК в соответствии
с соотношением (4.1) может изменяться только в определенных
пределах. Из-за наложенных ограничений наклонение плоскости
орбиты ТК может отличаться от наклонения плоскости орбиты ОС.
В этом случае становится неизбежным пространственный маневр
(т?е. боковой импульс) для совмещения плоскостей орбит. Задача
будет заключаться в выборе такого момента старта, когда расход
топлива на совмещение плоскостей окажется минимальным.
Существует еще одно начальное условие для обеспечения
встречи: начальная фаза ОС, т. е. угловое расстояние между ОС
и ТК в момент выхода ТК на орбиту (или на какой-нибудь иной
заданный момент времени). В схеме с прямым выведением в точку
встречи начальная фаза равна нулю. В схеме с использованием
промежуточной орбиты для определения начальной фазы должна
166
(1)
быть указана программа сближения: время (аргумент широты)
встречи, номера витков, на которых разрешается проведение
маневров дальнего наведения, схема маневров и др. В результате
выбора необходимого значения начальной фазы обеспечивается
дальнее и ближнее наведение с минимальным расходом топлива.
Задача 4.1. Дано: наклонение i плоскости орбиты ОС и ши-
рота В точки старта ТК. Определить азимут старта для выве-
дения ТК на орбиту с заданным наклонением i плоскости орбиты.
Решение. Воспользуемся соотношением (4.1), откуда находим
значение азимута старта:
- . cos i
А = arcsin--5.
cos В
Пример. Дано: i = 51,5°, В — 45°. Определить азимут старта ТК. По
формуле (1) получаем А = 61,7°.
Задача 4.2. При подготовке к пуску ТК азимут старта его
выбран из условия получения ожидаемого наклонения i0 пло-
скости орбиты ОС. Однако фактическое наклонение плоскости
орбиты ОС оказалось равным i, причем разность Ai = i — i0
является малой величиной. Определить необходимое изменение
азимута старта ТК для обеспечения компланарности орбит ТК
и ОС.
Решение. Воспользуемся соотношением (4.1), варьируя кото-
рое по переменным i и Л, получим
—sin i Ai = cos A cos BAA,
откуда находим искомое изменение азимута старта ТК:
дл =------5^4-(1)
cos Л cos В ' 7
Учитывая соотношение (4.1), также получаем
АЛ =-(*бЛ tgi) Ai. (2)
Пример 1. Дано: А = 61,7°, i = 51,5°, М = 0,1°. Определить необхо-
димое изменение азимута старта.
По формуле (2) получим АЛ = —2,46 А/ = —0,245°. Иначе говоря, для
приведенных данных существует линейная зависимость
АЛ = —2,46 А/°.
П р и м е р 2. При выведении ТК на орбиту азимут старта его был отклонен
на угол АЛ = 0,1° относительно его номинального значения. Определить изме-
нение наклонения плоскости орбиты при исходных данных, указанных в при-
мере 1. По формуле (2) получим: At = —0,041°.
Задача 4.3. При выведении КА на орбиту азимут старта был
отклонен на угол АЛ относительно его номинального значения,
обеспечивающего компланарность орбит ТК и ОС при наклонении
плоскости орбиты ОС, равном i. Вследствие отклонения азимута
старта орбиты ТК и ОС окажутся некомпланарными. Определить
величину бокового импульса для совмещения плоскостей орбит.
167
Решение. Как показано в задаче 4.2, существует следующая
связь вариации азимута старта АЛ с вариацией наклонения пло-
скости орбиты А/:
Ai = _(tg i tg Л)"1 АЛ.
Если и —. скорость полета ТК в точке приложения бокового
импульса, то величина этого импульса определится формулой
Аз = о sin А/ ж и Ai
или
А© = —v (tg i tg Л)-*1 АЛ. (1)
Для орбит ТК с высотой полета 200 ... 500 км можно приближенно
принять v = 7700 м/с. Если АЛ выражать в градусах, то
А® = —135 (tg i tg Л)’1 АЛ. (2)
Пример. Дано: i = 51,5°, А = 61,7°, а отклонение азимута старта АД =
= 0,1°. Определить корректирующий импульс для совмещения плоскостей орбит.
По формуле (2) находим Ди = —54,9 АД = —5,49 м/с.
Задача 4.4. Оскулирующая орбита ОС является круговой,
с высотой полета в восходящем узле (на экваторе) h9 и имеет
наклонение i. Определить величину импульса Аоп, прикладывае-
мого в восходящем узле орбиты, исходя из условия, чтобы высоты
полета в восходящем и нисходящем узлах орбиты с учетом сжатия
Земли стали одинаковыми.
Решение. Эта задача связана с решением некоторых вопросов
формирования так называемых монтажных орбит, в частности,
с выбором скорости полета в восходящем узле.
Монтажная орбита — это орбита, на которой производится
стыковка КА. На монтажную орбиту обычно выводятся орбиталь-
ные станции, с которыми в последующем сближаются и стыкуются
стартующие с Земли пилотируемые (и беспилотные) транспортные
корабли.
Из теории полета КА известно, что чисто круговая орбита
может быть образована только при движении в центральном поле
сил. Как же тогда следует понимать термин «круговая орбита»
в реальном поле Земли, которое существенно отличается от цен-
трального главным образом за счет сжатия Земли?
Процитируем отрывок из книги «Союз и Аполлон» (М., Полит-
издат, 1976, стр. 89): «Несколько слов хочется сказать об одном
из понятий, описанных в документе «Баллистическая вычисли-
тельная модель», — понятии «круговая орбита». Во-первых, ее
нельзя назвать круговой в прямом смысле этого слова. Расстоя-
ние корабля от центра Земли при полете по круговой орбите изме-
няется в пределах до 2 километров — это результат влияния гра-
витационного поля сплюснутой Земли. Во-вторых, высота над
различными точками поверхности Земли при полете по такой
орбите может отличаться на 11 километров из-за отличия поверх-
ности Земли от сферической поверхности ... Поэтому мы догово-
168
рились, что будем считать круговой такую орбиту, высота которой
одинакова в радиально противоположных точках; при этом за
высотную характеристику орбиты принимать высоту над земной
поверхностью на экваторе».
Таким образом, чтобы сохранить общепринятый термин «кру-
говая орбита», баллистики условились понимать под ней орбиту,
отвечающую следующим требованиям:
а) параметры орбиты определяются на заданном витке (по-
скольку за счет влияния атмосферы и других возмущений орбита
с течением времени будет деформироваться и параметры ее, в част-
ности, высота, будут меняться);
б) высоты полета в восходящем и нисходящем узлах орбиты
(т. е. на экваторе) равны между собой (для «Союза-19» в ЭПАС
такая высота была принята равной 225 км);
в) радиусы орбит в других диаметрально противоположных
точках отличаются не более 1,5 км.
Орбиту, отвечающую указанным требованиям, в последу-
ющем будем для краткости называть квазикруговой.
Поскольку в восходящем узле орбиты радиус
Г = 4- Лэ, (1)
то оскулирующая круговая скорость
Vn = 1/-Т- (2)
Как известно, при движении КА с круговой скоростью (2)
сжатие Земли приводит к периодическому изменению радиуса
круговой орбиты, определяемому выражением
Аг0 = у- {(2 — 3 slna t) (1 — cos и) +
+ [12 cos 2и0 — 3 cos (2u0 + и) —
— 2 cos 2 («о + и) — 7 cos (2и0 — «)]}• (3)
Найдем величину возмущения радиуса орбиты в нисходящем
узле ее, вызванного влиянием сжатия Земли. В этом случае
в равенстве (3) следует положить и0 = 0 (возмущения радиуса
отсчитываются от начала движения с восходящего узла), и — п
(возмущение радиуса определяется в нисходящем узле, т. е. через
половину витка). В результате получаем
^=-vv(1-4sin,0- <4>
Например, при = 225 км и i = 51,8° из формулы (4) следует,
что Агс = —12 км. Этот результат показывает, что в нисходящем
узле орбита будет проходить на 12 км ниже заданной высоты,
которая по условию должна быть равна 225 км.
169
(5)
(6)
Чтобы поднять высоту полета в нисходящем узле, необходимо
увеличить скорость полета vn. Величину трансверсальной соста-
вляющей импульса Доп определим с помощью соотношения (3.1),
в котором положим Дц. = 0, ф = л, Дг = —Дгс:
Дрп = Дг0,
откуда в учетом равенства (4) получим
Выражение (6) определяет искомый импульс. Если его приложить
в восходящем узле в направлении скорости полета, то оскули-
рующая круговая орбита превратится в эллиптическую. Но сжа-
тие Земли как бы сожмет орбиту вдоль ее оси апсид, в результате
чего высоты над экватором станут одинаковыми. Например, для
приведенной орбиты потребуется импульс Дс/П = 3,6 м/с, т. е.
величину круговой скорости (2) следует увеличить на 3,6 м/с.
При этих начальных условиях высота полета в узлах окажется
одинаковой.
Таким образом, скорость полета в восходящем узле орбиты
определится по формуле
ез
бцг3
Определим теперь высоту полета в некоторой произвольной точке
орбиты, заданной аргументом широты и. Эта высота определится
по формуле
v = vn + Дип = 14
(7)
h = h9 + Дп + Дга + Да. (8)
Здесь Дгх = /?эаз sin2 В (9)
— изменение высоты полета, вызванное геометрическим сжатием
Земли, В — широта -точки орбиты, причем
В = arc sin (sin i sin и).
Слагаемое Дга учитывает изменение радиуса орбиты за счет
отличия поля Земли от центрального, и при и0 = 0 из выраже-
ния (3) следует
Дга = -у-[ 1 — cos и + (4 cos и — 3 — cos 2и) J. (10)
Слагаемое Дгэ учитывает изменение скорости полета на вели-
чину импульса Дол и согласно соотношению (3.1)
А 2(1—cos и) А
Д'з = ——%—- Д^п-
Исключая отсюда импульс Доп с помощью выражения (6), полу-
чаем
Дгэ =
1_ JjL (1 _ cos u) (1 __2_sin8i).
(И)
170
Из равенств (10) и (11) следует
в, sin* i
hr = &г9 + Дг3 -----36 (1 — cos 2и) (12)
ИЛИ
Со sin8 i
Ьг=— -3 - sln8 u. (13)
Из выражений (8), (9), (13) следует, что при изменении аргу-
мента широты и на 180° величина h не изменится. Это означает,
что в любых диаметрально противоположных точках орбиты вы-
соты полета над Землей оказываются равными.
Таким образом, в результате увеличения оскулирующей кру-
говой скорости vn на величину Дяп удовлетворяются все требова-
ния по высотам полета и полученная орбита является квазикру-
говой. Эта орбита по форме будет похожа на эллипс, центр кото-
рого совпадает с центром Земли, а большая полуось лежит в пло-
скости экватора Земли (напомним, что при движении в централь-
ном поле сил орбита тоже получается эллиптической, но в этом
случае с центром Землй совпадает фокус эллипса, а не его центр).
В заключение определим оскулирующие элементы квазикру-
говой орбиты. Известно, что эксцентриситет орбиты выражается
через радиус перигея и радиус апогея следующим соотношением:
е = Га~'п
ГА + ГП ’
В рассматриваемом случае гп ~ г> гк — г — е-
е =____________________________А'с
2г + Дг0 ’
Так как Дгс 2г, то приближенно
или, учитывая выражение (4),
е=% 0 - -rsin8 0 • <14>
Далее находим фокальный параметр
р = а (1 — е8).
Так как большая полуось орбиты
а=-^М-гп) = г-^- (15)
и е8 1, то
+ л <16>
171
Задача 4.5. Орбитальная пилотируемая станция выведена
на круговую орбиту с высотой h. Вследствие влияния сопротивле-
ния атмосферы высота полета постепенно снижается и, наконец,
достигает минимально допустимой величины hm. Определить число
коррекций для повышения орбиты станции, времена их прове-
дения и суммарный импульс для обеспечения существования стан-
ции в течение заданного времени t.
Решение. Как известно, время перехода станции с высоты
полета h на высоту hm под воздействием атмосферы для изотерми-
ческой модели ее определяется следующей формулой [61:
.. F(h)— F(ftm) /1Ч
Д/ —---' ' $ ' т> сут, (1)
где S — баллистический коэффициент станции, а значения функ-
ций F (й) находятся из табл. 2.3.
Если время снижения станции, вызванное сопротивлением
атмосферы, меньше заданного, то для увеличения времени суще-
ствования должно быть предусмотрено повышение орбиты путем
приложения корректирующих импульсов. Предположим для опре-
деленности, что орбита станции после снижения также является
круговой с высотой hm. В этом случае повышение орбиты сводится
к решению задачи двухимпульсного компланарного перехода
между круговыми орбитами. Исходя из условия минимума сум-
марного импульса на осуществление перехода, каждый из коррек-
тирующих импульсов должен быть направлен по касательной
к орбите, а точки приложения импульсов разнесены друг от друга
на угол 180°. Для расчета величин импульсов воспользуемся выра-
жением (3.1), в котором положим ф = 180°, Дог =0, Дг = h —
Йт-
Тогда
Д(*п1 = Д^п2 = (Л hm)-
Для орбит КА с высотой полета 200 ... 400 км можно приближенно
принять Л. = 1,16-10”8 1/с и поэтому
Доп1 = Дцпа = 0,29 (ft — Лго) м/с,
где высоты ft и hm должны быть выражены в километрах.
Таким образом, для однократного повышения высоты стан-
ции потребуется суммарный импульс
Дцх = ДоП1 -|- Дип2 = 0,58 (Л — hm) м/с. (2)
Если Af есть время снижения станции с высоты ft до высоты ftm,
причем Д/ < t, то для удержания станции в заданном диапазоне
высот полета потребуется
(3)
пар коррекций (символ Е обозначает выделение целого числа из
отношения //Д/). Тогда суммарный импульс удержания станции
172
составит
До = п Дв1.
(4)
Пример 1. Определить начальную высоту круговой орбиты, на которую
должна быть выведена орбитальная станция, для обеспечения ее существования
60 суток. Допустимая нижняя граница высоты полета станции составляет hm =
= 200 км, баллистический коэффициент S = 0,01 м8/(кгс«с2).
По формуле 1 и табл. 2.3 определяем:
F (h) = S Д/+ F (hm) = 0,6912 м8/(кгс-с2) сут.
Из табл. 2.3 при F (h) = 0,6912 находим h = 272 км, т. е. начальная высота
круговой орбиты станции должна быть не менее 272 км.
Пример 2. Орбитальная станция выведена на круговую орбиту с высотой
h = 250 км, минимально допустимая высота полета hm = 200 км, баллистиче-
ский коэффициент S — 0,01 м8/(кгс-с2). Определить число коррекций, времена
их проведения и суммарный импульс для обеспечения существования станции
в течение года.
По формуле (1) определяем время перехода станции с высоты 250 км на
высоту 200 км, которое составит Д/ = 31 сут. Значит, через каждые 31 сутки
полета орбитальная станция снижается до нижней границы высоты полета, и
в это время необходимо проведение двухимпульсного перехода для увеличения
высоты полета до 250 км. В этом случае каждый из корректирующих импульсов
составит 14,5 м/с и тогда для одного двухимпульсного перехода, как следует
из формулы (2), потребуется суммарный импульс Дс^ = 29 м/с.
Из формулы (3) следует, что для обеспечения существования орбитальной
станции в течение года потребуется проведение 11 двухимпульсных коррекций
с суммарным импульсом Ду = 11 Д^ = 319 м/с.
Необходимо отметить, что способ увеличения времени существования стан-
ции путем последовательного корректирования высоты полета не является эко-
номичным. Действительно, для обеспечения времени существования станции
в течение года ее потребуется поднять на высоту 345 км. Для подъема ее на эту
высоту с высоты 250 км потребуются два импульса, каждый из которых равен
27,5 м/с, т. е. суммарный импульс подъема орбиты (55 м/с) будет значительно
меньше суммарного импульса (319 м/с) поддержания высоты.
Таким образом, если не существует ограничений на верхнюю границу вы-
соты полета, то с точки зрения экономии топлива орбитальную станцию целе-
сообразно сразу поднять на необходимую высоту с заданным временем существо-
вания, чем поддерживать высоту полета периодическими коррекциями.
Задача 4.6. Предположим, что определено номинальное время
старта /ст ТК с Земли из условия, чтобы плоскости орбит ТК и ОС
оказались компланарными и тем самым обеспечивалось компла-
нарное дальнее наведение. Пусть теперь А/ есть отклонение вре-
мени старта ТК от его номинального значения, причем А/ Т,
где Т — период обращения ТК после его выведения на орбиту.
Вследствие отклонения времени старта на величину А/ плоскости
орбит ТК и ОС окажутся некомпланарными. Определить величину
бокового импульса До для совмещения плоскостей орбит ТК и ОС.
Решение. Расчет времени старта ТК может быть произведен
исходя из следующих соображений. Вначале определяется дол-
гота восходящего узла орбиты станции в абсолютной системе
координат на начало витка старта ТК. Затем выбирается такое
время старта, чтобы долгота восходящего узла орбиты ТК сов-
пала с долготой узла орбиты станции. Это требование может быть
удовлетворено всегда по крайней мере один раз в сутки.
173
Действительно, траектория стартующего с Земли ТК и после-
дующего его свободного полета вплоть до пересечения экватора
(в восходящем узле первого витка) для данного пуска (т. е. при
неизменных характеристиках ракеты-носителя) остается неизмен-
ной относительно поверхности Земли. Можно, следовательно,
подобрать такое время старта, чтобы эта точка (восходящий узел
орбиты ТК) лежала в плоскости орбиты ОС, и тогда при равных
наклонениях плоскости орбит обоих аппаратов совпадут.
Пусть Яа — долгота восходящего узла орбиты станции, Ях —
долгота восходящего узла орбиты корабля при старте его в неко-
торый момент времени t. Тогда время старта, при котором обеспе-
чивается совмещение узлов орбит аппаратов, определится оче-
видной формулой
4 _ /| ^2 —
ГСТ *
Теперь предположим, что ТК стартовал с Земли с отклоне-
нием Д/ от номинального времени старта. Очевидно, что в этом
случае долготы восходящих узлов орбит не совпадут, вследствие
чего даже при одинаковых наклонениях плоскости орбит пересе-
кутся под некоторым углом. Определим величину этого угла,
который в последующем должен быть ликвидирован соответствую-
щим боковым импульсом.
Итак, для определенности положим, что в восходящих узлах
даны элементы орбит iu Ях корабля и /а, Яа станции. Направляю-
щие косинусы нормалей к плоскостям орбит в абсолютной системе
координат запишем в форме [281
mi = { sin Ях sin ii, —cos Ях, sin cos ix} ,
ma = {sin Яа sin ia, —cos Яа sin ia, cos fa} .
Тогда угол между плоскостями орбит определится из выражения
cosa==m1fn2 (1)
или
cos а = sin it sin /а cos (Яа — Ях) + cos it cos fa.
Разность долгот узлов Яа — Ях = ДЯ возникла вследствие за-
держки старта на время Д/, поскольку
ДЯ = (03Д/. (2)
Таким образом, выражения (1), (2) позволяют определить
угол а между плоскостями орбит. Упростим формулу (1) для
приближенных оценок.
Прежде всего предположим, что величина Д/ является доста-
точно малой по сравнению с периодом обращения ТК, вследствие
чего допустимо разложение косинуса в ряд. В этом случае с точ-
ностью до квадратичных членов разложения можно запивать
cos ДЯ = 1
Дйа
2 *
174
Предположим также, что наклонения орбит ТК и ОС отличаются
на малую величину At = i2 — ii. Тогда угол между плоскостями
орбит окажется также малым (а = Да) и поэтому
А • 1 Ш
COS Al = 1---2”.
В этом случае выражение (1) упрощается и принимает вид
Аа = У ДР + AQa sin2 й (3)
или, используя выражение (2), запишем
Аа = У № + (<°з sin ii А/)2. (4)
Если, в частности, наклонения плоскостей орбит одинаковы (А/ =
= 0), то из равенства (4) следует
Аа = юз sin i А/. (5)
Пусть станция совершает полет по орбите со скоростью о.
Для совмещения плоскостей орбит потребуется боковой импульс
Дв = 0 sin а = в Аа
или
Ав = вш3 sin ii А/. (6)
Полученное соотношение (6) дает искомую связь между задерж-
кой времени старта Ai и величиной бокового корректирующего
импульса Ав для совмещения плоскостей орбит. Для орбит с высо-
тами полета 200 ... 400 км можно приближенно принять в =
= 7700 м/с. Так как угловая скорость вращения Земли ю3 =
= 7,292-10~6 с-1, то Ав = 0,56 sin ii Ы м/с (где Af выражается
в секундах).
Если при этом наклонение орбиты принять равным 51,5°, то
Ав = 0,44 А< м/с. Иначе говоря, для компенсации задержки вре-
мени старта на 1 с потребуется боковой импульс 0,44 м/с.
Заметим, что если, например, располагаемый запас импульса
для коррекции совмещения плоскостей орбит, вызванный за-
держкой времени старта, равен 10 м/с, то допустимая задержка
времени старта составит Д< = 10 : 0,44 = 24 с.
4.3. Дальнее наведение
Задача этапа дальнего наведения заключается в выведении ТК
в некоторую окрестность ОС, где начинается этап ближнего наве-
дения с использованием бортовых измерительных средств. На
этапе дальнего наведения управление ТК осуществляется с по-
мощью наземных измерительных средств.
Основные проблемы, которые возникают при рассмотрении
траекторий дальнего наведения, ввязаны в тем, что запуск ТК
175
в общем случае не может быть произведен в любой момент вре-
мени. Движение точки старта ТК вместе с вращающейся Землей
не зависит от движения ОС по орбите. Это приводит к несовпаде-
нию плоскостей орбит ТК и ОС. Компланарность орбит может
быть обеспечена при запуске в любое время суток только в двух
случаях: с экватора на экваториальную орбиту и с полюса на
полярную орбиту. Таким образом, несовпадение плоскостей орбит
ТК и ОС вызывает необходимость проведения маневра для их
совмещения. Такие маневры требуют иногда значительных энер-
гетических затрат. Поэтому более предпочтительными являются
траектории дальнего наведения, лежащие в плоскости орбиты ОС.
Дальнее наведение может осуществляться либо непосредственно
с участка выведения ТК на орбиту, либо с промежуточной орбиты.
Оптимальным по энергетике траекториям дальнего наведения
отвечают вполне определенные положения начала и конца маневра
межорбитального перехода. Поэтому дальнее наведение ТК целе-
сообразно начинать после некоторого ожидания на орбите, в ре-
зультате которого ТК и ОС займут необходимое взаимное поло-
жение.
Орбита, на которой находится ТК и ожидает благоприятного
момента для начала сближения, называется орбитой ожидания
или фазирующей орбитой. Требуемое взаимное расположение ТК
и ОС определяется центральным углом итр между их радиусами-
векторами. При известных орбитах ОС и ТК для каждого маневра
перехода на этапе дальнего наведения существует свое значение
угла итр, при котором данный маневр выполним. Обеспечение
требуемого угла между ТК и ОС представляет собой фазирование
их движения.
Таким образом, на этапе дальнего наведения для обеспечения
встречи ТК с ОС необходимо решать задачи совмещения плоско-
стей орбит и фазирования движения рассматриваемых объектов.
Если дальнее наведение осуществляется непосредственно
с участка выведения ТК на орбиту, то траекторию выведения
выбирают так, чтобы в конце участка выведения параметры дви-
жения соответствовали условиям начала этапа ближнего наведе-
ния. При этом участок выведения может быть полностью активным
или может содержать пассивные участки полета ТК.
В случае дальнего наведения с промежуточной орбиты ТК
первоначально выводится на орбиту ожидания, обычно мёныпую
по высоте, чем орбита ОС, и находится на ней до обеспечения
требуемого углового рассогласования итр. После осуществления
фазирования выполняется межорбитальный переход для встречи
с ОС.
Наиболее известной схемой дальнего наведения для компла-
нарных круговых орбит является переход по эллиптической
траектории, касающейся орбит ТК и ОС (хомановский переход),
с ожиданием на начальной круговой орбите (рис. 4.1). Переход
ТК на орбиту ОС осуществляется благодаря приложению двух
176
Vпз В
&Vni 7К
а 5
Рис. 4.1. Дальнее наведение ТК с использованием перехода по эллипсу Хомана:
а — орбита ожидания внутри орбиты ОС; б — орбита ОС внутри орбиты ожидания
трансверсальных импульсов скорости. Первый импульс ДопХ обе-
спечивает переход ТК с орбиты ожидания радиуса гх на переход-
ную эллиптическую траекторию. Второй импульс Аопа сообщается
в момент встречи ТК с ОС для выравнивания их скоростей, т. е.
для перехода ТК на круговую орбиту радиуса га. В том случае,
когда орбита ожидания располагается внутри орбиты ОС (гх < га),
оба импульса скорости являются разгонными (см. рис. 4.1, а).
Если же радиус орбиты ожидания больше радиуса орбиты ОС
(гх > га), то оба импульса являются тормозными.
Для реализации этапа дальнего наведения ТК могут исполь-
зоваться трехимпульсные переходы. Одним из возможных вариан-
тов трехимпульсного дальнего наведения является биэллиптиче-
ский переход между компланарными круговыми орбитами [3].
При его осуществлении первый трансверсальный импульс ско-
рости прикладывается так, чтобы ТК перешел на эллиптическую
орбиту — внутреннюю или внешнюю по отношению к орбите ОС.
В апогее этой орбиты прикладывается второй трансверсальный
импульс для перехода на новую эллиптическую орбиту с радиусом
перигея (для внешней орбиты) или радиусом апогея (для внутрен-
ней орбиты), равным радиусу орбиты ОС. В точке касания эллип-
тической и круговой орбит ОС в момент встречи ТК и ОС прикла-
дывается третий трансверсальный импульс скорости, и ТК пере-
ходит на орбиту ОС.
Рассмотренные в разд. 3.5 схемы трехимпульсных переходов
также могут быть использованы для осуществления дальнего наве-
дения ТК при встрече с ОС.
Задача 4.7. ТК выведен на круговую орбиту ожидания ра-
диуса гх. Определить требуемое угловое рассогласование между
ТК и ОС, движущейся по круговой орбите радиусом га, для осу-
ществления хомановского перехода в точку встречи ТК с ОС и ве-
личины трансверсальных импульсов скорости AvnX, А^па-
177
Решение. Исходным для определения требуемого углового
рассогласования итр между ТК и ОС является равенство времени
перехода tn ТК в точку встречи и времени tc движения ОС до
той же точки:
tn = /о- (I)
Время перехода /п равно половине периода обращения по пере*
ходному эллипсу. Учитывая, что большая полуось переходного
эллипса л = -к- 01 + г2), а период обращения
а3/2
Т = 2л^=,
получаем
(2)
Время движения ОС до точки встречи определяется выраже-
нием
я —итр
(3)
Подставляя в зависимость (3) значение орбитальной угловой ско-
рости ОС
_ Ун
^2 гЗ/2 >
Г2
имеем
гЗ/2
/с =у=-(л-итр). (4)
После подстановки зависимостей (2) и (4) в равенство (1) и разре-
шения полученного уравнения относительно нтр определяем тре-
буемое угловое рассогласование между ТК и ОС:
(6)
Видно, что при гх < га величина итр > 0, а при т\ > rt значение
итр < 0- Действительно, если орбита ожидания ТК распола-
гается внутри орбиты ОС, то угловая орбитальная скорость дви-
жения ТК по орбите ожидания больше угловой скорости орби-
тального движения ОС > А.а) и, следовательно, в начальный
момент перехода ТК должен находиться сзади ОС (см. рис.
4.1, а). Если орбита ОС располагается внутри орбиты ожидания,
то %а > и сзади должна находиться ОС (см. рис: 4.1, б).
Для случая /*1 < rt величины трансверсальных импульсов
скорости были определены в задаче 3.15
178
Оба импульса Доп1, Доп2 направлены по направлению орбиталь-
ной скорости ТК, т. е. являются разгонными (см. рис. 4.1, а).
В случае Гд > г2 импульсы Доп1, Д«па представляют собой
соответственно разности между круговой скоростью для орбиты
ожидания и скоростью в апогее переходного эллипса, а также
в перигее переходного эллипса и круговой скоростью орбиты ОС
Д«п1 = «1вр — va,
Д«ла ~ «акр-
(8)
Скоровть в апогее переходного эллипса в данном случае опреде-
ляется выражением
(9)
а скорость в перигее — выражением
, = 1/ 2Н'1
Я ’ га (Н + f а)
(10)
Подставляя в зависимости (8) выражения (9), (10) и значения кру-
говых скоростей
^1кр = , «акр = ,
определяем величины трансверсальных импульсов скорости
(П)
(12)
Пример. Движение ОС происходит по круговой орбите радиуса гг =
= 13 400 км, а ТК выведен на круговую орбиту ожидания радиуса гг = 6700 км.
Определить требуемое угловое рассогласование между ТК и ОС для осуществле-
ния хомановского перехода ТК в точку встречи и трансверсальные импульсы
скорости АоП1. Аоп2.
По формуле (5) определяем иТр = 1,101 рад, а по выражениям (6), (7) нахо-
дим Доп1 = 1,194 км/с, Доп2 = 1,001 км/с.
Задача 4.8. Определить суммарную продолжительность этапа
дальнего наведения /2 для заданных значений радиуса гг круговой
орбиты ожидания, радиуса г2 круговой орбиты ОС и начального
углового рассогласования и0 между ТК и ОС.
Решение. Полное время дальнего наведения ТК представляет
собой сумму времени ожидания /ож и полетного времени 1П по
переходному эллипсу
ts = tow + tv (1)
Зная начальное угловое рассогласование и0 между ТК и ОС
и требуемое их взаимное положение итр, найденное в предыдущей
179
задаче, можно определить время ожидания ТК на промежуточной
орбите
Знак «плюс» в правой части выражения (2) соответствует условию:
гх < га, а знак «минус» — условию гх > га. Величина Ди опре-
деляется отклонением начального рассогласования и0 от его тре-
буемого значения итр.
Для Гх < га в случае и0 ^тр
Ди = Uq UTp, (3)
а в случае и0 < итр
Ди = 2л + (Uq — итр).
Для Гх > га в случае и0 < итр + 2л
Дм = 2л — (м0 + мтр),
а в случае и0 > итр + 2л
Дм = 4л — (м0 — мтр).
(4)
(5)
(6)
После подстановки в выражение (2) значений угловых скоро-
стей орбитального движения ТК и ОС
’•1 = ^. (7)
Г1 г2
получаем окончательную зависимость для времени ожидания ТК
на промежуточной орбите
Ди (Г1Г»)3/2
(8)
Время полета ТК по переходному эллипсу было установлено
в предыдущей задаче. Подставляя значение /п, а также зависи-
мость (8) в выражение (1), определяем суммарную продолжитель-
ность этапа дальнего наведения ТК
тв
±
Ди (Г1Га)3/2
гЗ/2_гЗ/2
(9)
Пример. Используя условия предыдущей задачи при = 6700 км, г2 =
л
= 13 400 км и начальном угловом рассогласовании между ТК и ОС uq = —,
получаем tQW = 630,9 с, /п = 5011,1 с, = 5642 с = 94,03 мин.
Задача 4.9. При осуществлении дальнего наведения ТК из-за
неточности работы системы управления корректирующие импульсы
отработаны с ошибками 6^, 6и2- Определить положение ТК отно-
сительно ОС в момент приложения третьего импульса (в момент
окончания сближения).
180
Решение. Воспользуемся выражениями (3.1) и (3.2), в которых
положим Дц. = 0:
Дг=2(1-СО8ф) Дрп>
Л
An = _.3?-.4sin? дРп.
Л
Применим их для определения величин Дг, Дп, вызванных
ошибками трансверсальных составляющих импульсов дии 6о2.
Для определения угловых дальностей полета после прило-
жения импульсов используем равенства (6) задачи 3.18. Для
первого импульса имеем
Доп = <р = <рх = л [2 (n, — nJ + 1 + ej,
^ni = —
Л
Аналогичным образом для второго импульса находим
Доп = бо2, ф = ф2 = п [2 (пв — п2) + 8J,
дГа = 2(1^03^)^
Дп2 = — 6о2.
Таким образом, в момент окончания перехода ТК отклонится
от ОС в радиальном направлении на
2
Дг = ДГх + Дг2 = -7- [(1 — COS Ф1) 6О1 + (1 — COS ф2) 6о2] (1)
и вдоль орбиты — на
з
Дп = Д/li 4~ Дя8 =---(ф1^1 4” фа®^а)« (2)
л
Для схемы перехода, показанной на рис. 4,1 а, имеем 81 = 1,
е2 = 0 и поэтому
Дг = 4- бп2, (3)
Л
Дп =----г- [2 (п8 — Hi -|- 1) Soi 4~ (я8 — ^а 1) боа]. (4)
л
Аналогично для перехода по схеме рис. 4.1, б имеем ех = О,
в2 = 1 и поэтому
Дг = 4- (5)
Л
Дп = — 4- ([2 (n, — nJ + 1] бох + 2 (п8 — п2) 6о2(. (6)
Л
18Р
Пример. Пусть ТК совершает полет по орбите со средней угловой ско-
ростью X = 1,16 -10”* 1/с (что соответствует высоте полета 200 ... 300 км), ошибки
импульсов = &>2 = 0,1 м/с, п8 = 11, пх = п2 = 1. Определить отклонение
ТК от ОС на момент приложения третьего импульса для обеих схем перехода.
По формулам (3) ... (6) находим:
для перехода по схеме <а>: Дг = 0,35 км, Дп = —27 км;
для перехода по схеме «б»: Дг = 0,35 км, Дп = —33 км.
Задача 4.10. Даны фокальные параметры орбит ТК и ОС
и наклонение плоскости орбиты ТК. Известны также виток старта
п0 ТК и витки проведения коррекций дальнего наведения nx, па,
«э с импульсами At>b Доа, До8. Пусть, далее, определено номиналь-
ное время старта ТК из условия совпадения долгот узлов орбит
ТК и ОС на витке старта. Требуется определить поправку Д/
ко времени старта, обусловленную разностью прецессий узлов
орбит ТК и ОС за счет влияния сжатия Земли.
Решение. Как известно, при движении КА по орбите за счет
влияния сжатия Земли возникает вековой уход долготы восходя-
щего узла. Иначе говоря, от витка к витку долгота узла непре-
рывно изменяется. Величина векового ухода (прецессии) долготы
узла за один виток в первом приближении определяется фор-
мулой
AQo = —^r-ycosi. (1)
Очевидно, что скорость прецессии узла будет зависеть от зна-
чения фокального параметра р. Если фокальные параметры рг,
р2 орбит ТК и ОС не равны, то прецессия узлов будет неодина-
ковой.
Предположим теперь, что время старта ТК выбрано из условия
совпадения долгот узлов орбит ТК и ОС на витке старта. Так как
в последующем полете узлы будут прецессировать с различной
скоростью, то к моменту встречи плоскости орбит (даже при рав-
ных наклонениях) окажутся некомпланарными, вследствие чего
потребуется некоторый боковой импульс для совмещения плоско-
стей орбит.
Понятно, что соответствующим сдвигом времени старта на
величину Д/ можно компенсировать разность прецессий узлов
орбит из условия, чтобы на витке встречи плоскости орбит оказа-
лись компланарными.
Предположим, что разность фокальных параметров Др —
— Pi — Pi мала по сравнению с рх. В этом случае в линейном при-
ближении из равенства (1) находим разность прецессий узлов
орбит за виток:
ДОХ = ^5- —cosi^- или ДОХ = — 2^-ДО0.
pf И Pi Pi
Тогда за п витков узлы орбит разойдутся на угол
ДО = пДОх = — 2л ДО0. (2)
182
Отношение Ap/Pi изменяется в процессе полета ТК в связи
с деформацией начальной орбиты, вызванной влиянием корректи-
рующих импульсов. Пусть — nQ есть число витков ТК от
старта до момента проведения первой коррекции, п2 — пх —
число витков между второй и первой коррекциями, Пэ — па—
число витков между третьей и второй коррекциями. Тогда сум-
марное изменение угла между узлами орбит составит
AQ = — 2 ^2 [(«! — Но) Др0 + («а — П1) ДР1 + (Де — Па) Дра],
где Др0, Дрц Дра — разности фокальных параметров орбит ТК
и ОС на рассматриваемых участках полета. Очевидно, что
Др# = Ра — Pi.
Арх = Р» — (Pi + 6pi),
ДРа = Ра ~ (Pi + Spi + бРа).
где 8рх, бра — изменения фокального параметра орбиты ТК,
обусловленные воздействием корректирующих импульсов.
Из теории эллиптического движения известно, что вариация
фокального параметра 6р связана с вариацией трансверсальной
составляющей скорости полета КА (импульса) зависимостью [28]
. 2 .
ор = -у- До.
В этом случае
2 2
Spi -- -у Д»1, Spa = Да»>
тогда Др0 = ра — Pi,
а 2 .
ДР1 = Ра — Pi — — ДРь
2
Дра - Pi — Pi — — (Д»1 + Д«а).
В результате получим выражение для определения суммарного
угла между узлами орбит на витке встречи:
ДО = — 2 ((н, — По) (ра — Pi) — -г [(На — «1) ДР1 +
Pl t Л
Н- (на — На) (Дох -|- Доа)]|. (3)
Заметим, что для орбит КА с высотами полета 200 ... 400 км и
I = 51,5° имеем
2^2« 1,7-КГ* 1/км.
Для определения угла между плоскостями орбит, отличаю-
щимися долготами узлов на угол ДО, воспользуемся равенством
Ла = ДО sin i.
183
Тогда величина бокового импульса, совмещающего плоскости
орбит, определится формулой Ди — t/Да или
Ди = v sin /АЙ. (4)
Значит, если время старта ТК выбрано из условия совпадения
узлов орбит ТК и ОС на витке старта, то за счет разности скоро-
стей прецессии узлов орбит возникнет угол Ай между узлами,
определяемый выражением (3), и для совмещения плоскостей
орбит потребуется боковой импульс (4).
Поправка к номинальному времени старта ТК, которая ком-
пенсирует разность прецессий узлов орбит, определится по фор-
муле
Пример. Пусть фокальные параметры орбит ТК и ОС рг = 6600 км,
р2 = 6700 км, наклонения орбит одинаковы и равны i = 51,5°. Даны также
номера витков: п0 = 0 (виток старта ТК), пг = 5, п2 = 6, п8 = 16. Дальнее
наведение осуществляется импульсами Auj = 30 м/с, Аи2 = 5 м/с. Определить
поправку ко времени старта с целью компенсации влияния сжатия Земли. Какой
потребуется боковой импульс, если время старта оставить номинальным (т. е.
не учитывать прецессию узлов орбит)?
В рассматриваемом примере скорость прецессии узла орбиты ТК (1) соста-
вит AQ = —5,7*10-8 рад за виток. В процессе полета узлы орбит, как следует
из соотношения (3), разойдутся на угол AQ = 1,64-10“8 = 0,1°. В этом случае
поправка ко времени старта, определяемая выражением (5), будет равна 22,6 с.
Если не производить сдвиг времени старта, то для совмещения плоскостей орбит
потребуется боковой импульс 10 м/с.
4.4. Блиииее наведение без учета действия
относительного гравитационного ускорения
При решении различных задач ближнего наведения существен-
ное значение имеет выбор соответствующей модели процесса отно-
сительного движения рассматриваемых объектов. Наиболее про-
стой моделью является модель движения без учета действия отно-
сительного (разностного) гравитационного ускорения. Эта модель
используется при изучении маневров ближнего наведения на доста-
точно малых расстояниях между кораблем и станцией и при огра-
ниченной продолжительности маневров [3, 16]. При использова-
нии указанной модели относительное движение объектов можно
рассматривать происходящим в перемещающейся поступательно
плоскости относительного движения, положение которой опре-
деляется линией визирования и вектором относительной скорости.
Модель ближнего наведения без учета действия относительного
гравитационного ускорения в основном применяется для решения
задач сближения по линии визирования (первая группа методов
ближнего наведения). Однако в некоторых случаях можно исполь-
зовать ее и для методов ближнего наведения второй группы,
в частности для импульсных методов сближения. При решении
соответствующих задач целесообразно применять геометрические
184
и кинематические построения в плоскости относительного дви-
жения, принимая во внимание, что относительное движение манев-
рирующего корабля на участках траектории между точками при-
ложения импульсов скорости является прямолинейным и проис-
ходит с постоянной относительной скоростью.
Для методов ближнего наведения первой группы относительное
движение объектов чаще всего рассматривают в визирной системе
координат, начало которой совпадает с центром масс станции,
а одна из осей ориентирована по линии визирования, т. е. по линии,
соединяющей центры масс станции и корабля. У равнения движения
корабля относительно станции в визирной системе координат без
учета действия относительного гравитационного ускорения могут
быть записаны в следующем виде [3, 161:
р — рю» = Рр, <Ьр 4- 2шр = (4.2)
где р — относительная дальность «корабль—станция»; со — угло-
вая скорость линии визирования; Рр, — составляющие упра-
вляющего ускорения вдоль линии визирования и по нормали к ней
в плоскости относительного движения.
Как уже отмечалось, одним из наиболее известных методов
ближнего наведения по линии визирования является метод парал-
лельного наведения. В идеализированной схеме относительное
движение корабля, наводимого по этому методу, происходит при
нулевой угловой скорости (со =0). Основные задачи в этом слу-
чае (в рамках модели движения без учета действия относительного
гравитационного ускорения) сводятся к определению условий
выхода корабля на траекторию метода параллельного наведения
и регулированию скорости сближения.
Рассмотрение принципов практической реализации метода
параллельного наведения [7, 16, 17] показывает, что в реальных
условиях наведение корабля происходит не при нулевой угловой
скорости со, а при изменении ее в достаточно узком диапазоне.
Поэтому для более точного отображения характера реального
относительного движения объектов целесообразно представить
наведение корабля на станцию не при со = 0, а при некотором
среднем значении со = const для рассматриваемого диапазона
регулирования угловой скорости линии визирования [9]. Упра-
вление угловой скоростью осуществляется при ориентации упра-
вляющего ускорения по нормали к линии визирования.
Приведенные в работах [9, 26] результаты показывают, что за
счет выбора определенного постоянного значения со можно обе-
спечить реализацию широкого класса маневров корабля относи-
тельно станции. Учитывая указанные особенности движения ко-
рабля, можно в более общей постановке рассматривать движение
при со = const не только как более реальную модель процесса
параллельного наведения корабля на станцию, но и как самостоя-
тельный метод наведения при постоянной угловой скорости линии
визирования.
185
Для метода наведения при постоянной угловой скорости линии
визирования система (4.2) разделяется на уравнение
р - рша = О, (4.3)
определяющее относительное движение корабля вдоль линии
визирования, и уравнение
Р = 2сор, (4.4)
связывающее значение управляющего ускорения с характери-
стиками относительного движения для рассматриваемого метода
наведения.
Уравнение (4.3) имеет следующий первый интеграл:
р2 _ р2ю2 = с> (4 5)
где С = ро — рою2.
В безразмерных величинах относительное движение при по-
стоянной угловой скорости линии визирования может быть пред-
ставлено в виде системы двух уравнений [12]:
IF = V^=TsignP” = V &а — 1 Sign р0, (4.6)
где k — параметр, определяющий отношение начальной даль-
ности р0 к начальному пролету корабля относительно станции
Do (k = ро/D,), р = р/ро, р = р/ро-
Задача 4.11. Определить минимальную величину импульса
скорости Ди, обеспечивающего пролет корабля мимо станции на
расстоянии DK и продолжительность движения корабля до
пролета, предполагая, что в момент приложения импульса из-
вестны расстояние между объектами р0, скорость сближения р0
и начальный пролет Do-
Решение. Предварительно выполним геометрические и кинема-
тические построения, которые позволят рассмотреть возможные
траектории движения корабля с пролетом ОС на минимальном
удалении DK и определить необходимые для их реализации им-
пульсы.
Рис. 4.2. Схема относительного дви-
жения корабля при заданном зна-
чении пролета мимо станции на рас-
стоянии DK
Рассмотрим треугольник КОВ
с гипотенузой р0 и катетом Do
(рис. 4.2). Начальная относитель-
ная скорость о0 будет направлена
по катету КВ. По линии КО (ли-
ния визирования) отложим задан-
ное значение скорости р0. Вос-
становив из конца этого вектора
перпендикуляр до пересечения
с катетом КВ, определим век-
тор и0. Затем опишем вокруг точки
О окружность радиуса Ьк и про-
ведем к этой окружности касатель-
186
ные из точки К. Соединяя точки касания Кх и с центром О, полу-
чим два прямоугольных треугольника КК10 и KKtO. Катеты КХО и
Кг0 определяют требуемые значения конечного пролета корабля от-
носительно станции. Таким образом, требуемыми траекториями ма-
неврирующего ТК относительно станции должны быть прямые ККХ
и ККг. Отрезки перпендикуляров, опущенных из конца вектора vQ
на линии KKi и ККа, определяют минимальные величины импульсов
скорости Дих и Доа, обеспечивающие пролет корабля около ОС
на расстоянии DK соответственно по траекториям ККХ и
Из двух прямоугольных треугольников с общей гипотенузой
о0 и катетами Дох, Доа получаем выражения для искомых импуль-
сов:
Дох = р0 sin (а0 — а),
Доа = t»o sin (а0 + а). (1)
Используя подобие прямоугольного треугольника КВО и
треугольника с гипотенузой о0 и катетом р0, принимая во внимание,
что ро < 0, можно записать
___Ра _ Ро
Уро-°о’
откуда ро = ~ '-,>Т° 2‘ (2)
УРо~°о
Поскольку sln (а0 ± а) = sin а0 cos а ± sln а cos а0, (3)
slna0 = -^, slna = 7?> (4)
coscto = -^-Уро — Do ,
cosa = J-l/’pJ —
Po f
TO ________ ______________
sln (a0 ± a) = (Do У po — D2K ± DK У po — Do). (5)
Таким образом,
Дох =
у/ Ро-О2к
V P^-D§
Доа =
з/ Ро-р2к
V pg-I>02
(6)
Отсюда следует, что Дох < Диа, т. е. минимальная величина
импульса определяется первым из выражений (6).
187
Voi О
Рис. 4.3. Схема двухим-
пульсного сближения с
приложением первого им-
пульса в момент пролета
корабля на минимальном
расстоянии от станции
Теперь определим время полета на уча-
стках KKi и КК.2. Очевидно, что для траек-
тории КК1
(7)
и01 г
а для траектории /СК2
та = —— 1/”ро — Ок • (8)
и02 г
Величины с/01, о02 представляют собой ре-
зультирующие значения относительной
скорости корабля после приложения соответственно импульсов Д^
и Ду2. Выражения для uOi и и02 получаем, рассматривая прямо-
угольные треугольники с катетами у01, о02 и общей гипотенузой и0
(см. рис. 4.2):
Ц)1 = Щ cos (а0 — а), и02 = ц, cos (а0 + а), (9)
причем cos (а0 ± а) = cos а0 cos а sin а0 sin а. (10)
Далее из выражений (4) и (10) следует
COS (а0 ± а) = 4 (К(ро ~ ^о) (ро - D2K) =F D0DK). (11)
Ро
Учитывая зависимости (7) ... (11), окончательно получим
Рр ]Л(рр - ро) (Ро - Дк)
Ро [р^Ро - Do) (Ро - °к) ± °0°к]
Пример. Дано: р0 = 25 км, Dq = 8 км, р0 = —400 м/с, DK = 0,5 км.
В результате расчетов получим: А^ = 123 м/с, Ау2 = 139,5 м/с, = 62,1 с,
т2 = 62,9 с.
Задача 4.12. Определить двухимпульсный переход, обеспечи-
вающий мягкую встречу корабля со станцией в заданное время,
предполагая, что первый импульс прикладывается в момент про-
лета корабля на минимальном расстоянии от станции.
Решение. Пусть в начальный момент корабль находится на
расстоянии ро от станции, имея относительную скорость v0, на-
правленную (по условию) по нормали к линии визирования КО
(рис. 4.3). Очевидно, величина и направление первого импульса
Дих должны быть такими, чтобы после его приложения вектор
относительной скорости корабля был ориентирован по линии
визирования в сторону станции и обеспечивал встречу корабля
со станцией за время т, т. е.
«01=-^. (1)
Тогда Дс»1 = J/”do + »ot . (2)
188
и поэтому
(3)
Определим направление импульса Дг^ углом у (см. рис. 4.3).
Поскольку л/2 < у < л, то
81п? = йг <4>
Из выражений (3), (4) получим
1 /Е\
у = л — arcsin —. (5)
После приложения импульса Avx относительное движение корабля
будет происходить по линии визирования в сторону станции
с постоянной скоростью о01- Для обеспечения мягкой встречи
аппаратов необходимо в момент встречи их приложить второй
импульс Ava = —о01- Следовательно, второй импульс Ava должен
быть ориентирован по линии визирования в направлении от ко-
рабля, а величина его определяется выражением (1).
Пример. Дано: р0 = 10 км, у0 = 100 м/с, т = 300 с. По формулам (1),
(3), (5) получаем = 105 м/с, Ау2 = 33,3 м/с, у = 161,6°.
Задача 4.13. Определить суммарный импульс Av, необходи-
мый для реализации мягкой встречи корабля со станцией по двух-
импульсной схеме за время т, если известны начальные значения
относительной дальности р0, скорости v0 и пролета Do.
Решение. Для двухимпульсной схемы сближения
Av = Avx + Ava. (1)
Определим величины импульсов. Первый импульс скорости дол-
жен быть таким, чтобы после его приложения вектор относитель-
ной скорости v01 совпал с линией визирования, а величина его
обеспечила встречу корабля со станцией за время т (рис. 4.4).
Следовательно,
(2)
В соответствии с теоремой косинусов
Av? = Vo + Voi — 2vovoi cos a. (3)
Рис. 4.4. Схема двухимпульсного
сближения при заданной продол-
жительности полета корабля до
встречи со станцией
Из выражений (2) и (3) следует
Av. = Р +(-£-)’
(4)
Рассмотрим треугольник, образованный векторами ц0, Дс^,
с01. Используя теорему синусов, найдем угол у, который опреде-
ляет направление первого корректирующего импульса:
sin у =
и01 sin а
Дрх
(5)
Поскольку sin а = О0/р0,
, £>о
то sin у = -V-2-.
1 Дрхт
Далее по теореме косинусов находим
у01 — vo — М
cosy =
(6)
(7)
(8)
2и0Ди1
Исключая величины п01 и Дс^, окончательно получаем
COS у = —-------
' voi;
~ иот
Выражения (6) и (8) определяют направление первого корректи-
рующего импульса.
Второй корректирующий импульс Ди2 ориентирован вдоль
линии визирования (см. рис. 4.4), и величина его Лоа = о01.
Суммарный корректирующий импульс в соответствии с формулой
(1) равен
+ (9)
Пример. Дано: р0 = 20 км, и0 = 250 м/с, Do = 5 км, т = 300 с. По фор-
муле (9) получим До = 252,9 м/с.
Задача 4.14. Корабль выведен в зону сближения с орбитальной
станцией при относительной дальности р0, скорости сближения
р0 и начальном пролете Do. Наведение корабля осуществляется
последовательными корректирующими импульсами вдоль линии
визирования и по нормали к ней. Определить минимально необ-
ходимое число корректирующих импульсов, их величины и на-
правления для реализации мягкой встречи объектов за время т.
Решение. В общем случае при Do =/= 0 число импульсов опре-
деляется необходимостью последовательного устранения началь-
ного промаха, изменения скорости сближения для обеспечения
заданного времени сближения и выравнивания скоростей в момент
встречи объектов. Отсюда следует, что в общем случае необходимое
число импульсов будет равно трем.
Первый импульс Дг\ (рис. 4.5) должен быть ориентирован
в плоскости относительного движения по нормали к линии визи-
190
рования и направлен в сторону,
противоположную вращению
линии визирования. Его вели-
чина определяется из подобия
треугольника КВО и треуголь-
ника, образованного векторами
Vo, Д^ъ Ро-
Рйс. 4.5. Схема двухимпульсного сбли-
жения при ориентации импульсов ско-
рости вдоль линии визирования и по
нормали к ней
Второй импульс Ду2 прикла-
дывается вдоль линии визирова-
ния. Он должен иметь такую величину и направление, чтобы ско-
рость сближения гарантировала встречу объектов спустя время т,
т. е.
+ р0
откуда
= --. ( Ро + •
(2)
Если Ди2 < 0, то этот импульс должен быть разгонным, т. е.
направлен к станции.
Из формулы (2) следует, что при р0 = —р0/<г имеем Ди2 = О
и схема сближения оказывается двухимпульсной.
Третий импульс прикладывается в момент встречи объектов.
Этот импульс должен быть тормозным, т. е. направлен вдоль линии
визирования от станции:
= -Т
(3)
Задача 4.15. Определить характеристическую скорость v' для
выполнения маневра выхода корабля на траекторию методом
параллельного сближения со станцией при постоянной величине
управляющего ускорения Р, ориентированного по нормали к ли-
нии визирования. В начальный момент даны относительная даль-
ность р0, скорость сближения р0 и угловая скорость линии визи-
рования (оо. Изменение относительной дальности в процессе ма-
невра происходит по линейному закону р = р0 + р0/.
Решение. Задача заключается в том, чтобы с помощью постоян-
ного управляющего воздействия устранить угловую скорость ли-
нии визирования корабль — станция и тем самым создать усло-
вия для параллельного сближения.
Для постоянного управляющего ускорения Р величина харак-
теристической скорости определяется произведением этого уско-
рения на продолжительность управляемого движения t:
°' =\P\t. (1)
191
Для определения времени t воспользуемся уравнениями отно-
сительного движения корабля в визирной системе координат (4.2).
Запишем второе уравнение этой системы с учетом линейного
закона изменения относительной дальности:
(ро + РоО«> + 2ро® = Р,
2d Р
OTKW * + <2>
Таким образом, решение задачи сводится к интегрированию
линейного дифференциального уравнения первого порядка. Общий
интеграл этого уравнения находится по формуле
(о = ехр
__?£»___dt
Ро+Ро<
О
(т \
J Ро Т Ро* /
О 7
(3)
Интегрируя уравнение (3), получим следующее выражение
для текущего значения угловой скорости линии визирования
в функции времени:
<в
(4)
В момент т = t завершения выхода корабля на траекторию парал-
лельного сближения должно выполняться условие <о = 0 и по-
этому
[#(» + £) + (5)
Так как р0 0, то отсюда следует
и относительно искомого времени t получим квадратное уравнение
Z2 + 2Poz=0. (6)
Ро Рро
Решение уравнения (6) имеет вид
Ро (j । 1 । ___2р0<о0 \
Ро \ ~ ' Р I
Исходя из физических условий задачи t > 0, получим
I ____ Ро ft __ I /~ । _ 2ро<Ор \
_ Ро \ " Р Г
(7)
(8)
192
Далее из выражений (1) и (8) определим значение характеристи-
ческой скорости
0» = _bP|P»(l -j/fZ
Для того чтобы задача имела решение, необходимо, очевидно,
выполнение условия Р > 21 р01 соо-
В случае импульсного перехода корабля на траекторию по
методу параллельного наведения характеристическая скорость
определяется величиной импульса скорости, прикладываемого
по нормали к линии визирования для устранения ее угловой ско-
рости:
До = р0<о0. (10)
Пример. Дано: р0 = 30 км, р0 = —500 м/с, <оо = 0,008 c_J, Р = —16 м/с3.
По формулам (9) и (10) получим: о' = 281 м/с, Д»1 = 240 м/с, т. е. импульсный
характер воздействия тяги оказывается более экономичным.
Задача 4.16. Корабль выведен на траекторию по методу парал-
лельного сближения со станцией. Определить время полета /2
корабля до встречи со станцией, момент 4 включения тормозного
двигателя, сообщающего кораблю постоянное управляющее уско-
рение Р вдоль линии визирования, и характеристическую скорость
для обеспечения мягкой встречи объектов.
Решение. Воспользуемся первым уравнением системы (4.2),
которое запишем в виде двух дифференциальных уравнений пер-
вого порядка:
(»
По условию задачи рассмотрим два участка полета корабля.
Первый участок от t = 0 до t — h характеризуется свободным
относительным движением корабля вдоль линии визирования
с неработающим двигателем и с постоянной скоростью р0. Второй
участок от t = 4 до t = t2 соответствует движению корабля вдоль
линии визирования с включенным тормозным двигателем. Про-
интегрируем систему (1) для первого и второго участков. В ре-
зультате получим:
для первого участка
Р = Ро> Р = Ро + Ро*; (2)
для второго участка
Р = Р! + (Pl - Ph) (t - h) + 4 № - (3)
p = Pi + P(/-*i)>
где plt pt — соответственно значения дальности и относительной
скорости в момент окончания первого участка, т. е.
Pi = Ро + Ро4> Pi = Ро- (4)
7 П/р F. О. Титова 193
Из равенств (3) и (4) следует
Р = Ра + Ро* I + (Ра — Pti) (t — fi) + (f2 — й)’
2 (5)
|i = Po + P(f-fi).
Учитывая, что в конце второго участка полета при t = ia должно
выполняться условие р = р = 0, получаем систему уравнений
Ро И- Ро4 Н- (ро — Ph) (*2 — fi) + “С- (fi — fi) = О»
(6)
Po + P(fa-fi) = O,
решение которой имеет вид
<8)
Характеристическая скорость для обеспечения мягкой встречи
корабля со станцией определяется произведением управляющего
ускорения на продолжительность участка сближения с работаю-
щим двигателем:
о' « Р (fa — 4),
т. е. = — р0. (9)
Из выражения (8), полагая 4 = 0, находим минимально необхо-
димое значение управляющего ускорения:
• 2
(10)
Пример. Дано: р0 = 25 км, = —300 м/с, Р = 8 м/с1. По формулам
(7)... (10) получим: 4 = 64,6 с, 4 = 102 с, о' = 300 м/с, Рт = 1,8 м/с1.
Задача 4.17. Сближение корабля со станцией начинается
с расстояния р0 при относительной скорости о0. Определить зна-
чение угловой скорости линии визирования (о и максимальное
управляющее ускорение для обеспечения сближения при постоян-
ной угловой скорости линии визирования на расстояние р о отно-
сительной скоростью о.
Решение. Воспользуемся первым интегралом уравнения отно-
сительного движения при постоянной угловой скорости линии
визирования (4. 5):
р — р (о = ра — ро© . (1)
Поскольку и2 == ра + Ра®а»
то
р =сг — р (о , Ра = Vq — Ра со » (2)
и тогда из выражений (1) и (2) следует
о2 — 2pV = vq — 2ро«а2.
194
Таким образом, искомая угловая скорость линии визирования
I
Теперь определим управляющее ускорение. Для этого восполь-
зуемся выражением (4.4), и тогда
Р = 2ю|р0|. (4)
Входящие сюда значения со, р0 исключаются с помощью выраже-
ний (3) и (2).
Пример. Дано: р0 = 10 км, о0 = 80 м/с, р = 0,5 км, о = 5 м/с. Опре-
делить значение угловой скорости линии визирования ш и Р. По формулам (3),
(4) получаем ш = 1,788-10“? 1/с, Р = 0,202 м/с2.
Задача 4.18. Регулирование управляющего ускорения Р при
ориентации его по линии визирования осуществляется таким обра-
зом, чтобы поддерживать постоянное значение относительной
радиальной скорости р = р0 = const между кораблем и станцией.
Даны также начальное расстояние между объектами р0, угловая
скорость линии визирования ю0 и располагаемая характеристиче-
ская скорость v'. Определить конечную дальность рк.
Решение. Запишем систему (4.2) с учетом условий задачи;
— рю* = Р, юр + 2юр = 0. (1)
Из второго уравнения системы (1) находим
ю = ю0(-^)2, (2)
после чего из первого уравнения системы (1) следует
Р = (3)
Определим характеристическую скорость
t
t>’ = J|P|dt (4)
о
(5)
Учитывая, что р = dp]dt, dt — dp/p = dp/p0, после интегрирова-
ния (4) в пределах р0 ... рк получим
2Ро \
Из выражения (5) находим искомую конечную дальность
р"-₽"Г1 <б>
7*
195
в Пример. Дано: р0 = 30 км, соо = 0,009 с-1,
р0 = —90 м/с, v' = 400 м/с. Определить конеч-
\ иую дальность рк.
\ Do По формуле (6) находим; рк = 21,6 км.
X
шъ \ Задача 4.19. Определить траекторию
к X \ 0 движения корабля относительно стан-
?о PosOK ции при наведении по методу постоянной
Рис. 4.6. Начальные условия угловой скорости линии визирования,
сближения корабля со стан- Решение. Траекторию относитель-
ного движения корабля представим в по-
лярной системе координат р, <р, причем в начальный момент <р =
= Фо. Используя очевидное равенство
dp _ dp dtp _ dp
dt ~ dtp dt ~ dtp 1
перепишем уравнение (4.5) в форме
(1)
Из подобия треугольника КОВ (рис. 4.5) и треугольника скоро-
стей, образованного катетами р0 и ®0, следует, что
(£)’ = (2)
Используя выражение (4.6) для константы интегрирования и соот-
ношение (2), уравнение движения (1) в полярной системе коорди-
нат приведем к виду
2)- (3)
Перейдем к безразмерной величине г = р/р0 и окончательно полу-
чим
<4>
Отсюда находим безразмерную радиальную скорость
^• = ±/^ + ^-2. (5)
Интегрируя уравнение (5), получим зависимость угловой даль-
ности полета от радиальной дальности:
Ф — Фо = ± 1п
1 +Vfea— 1
г +Vra+^—2
(6)
откуда находим формулу для определения безразмерной дальности
«корабль —• станция»:
1 г i+Vfe3—1
2 ехр[±(<р —ф0)]
г =
(А?—2)ехр [± (Ф —фр)]
1 +Уад — 1
(7)
196
Знак «плюс» в правой части выражения (7) соответствует траек-
ториям сближения КА, а знак «минус» — траекториям удаления.
Для анализа возможностей маневрирования корабля при наве-
дении по методу постоянной угловой скорости линии визирова-
ния воспользуемся уравнением (5), принимая во внимание, что
для рассматриваемого метода наведения полярный угол есть вели-
чина, монотонно возрастающая с постоянной скоростью.
Определим экстремальное значение дальности г. Приравнивая
нулю подкоренное выражение в соотношении (5), получим
rm = ]/2=K (8)
Для того чтобы правая часть уравнения (5) была действительной
величиной, необходимо выполнение условия гт. Следова-
тельно, выражение (8) определяет минимальное значение относи-
тельной дальности. Для траекторий сближений точка, соответ-
ствующая гт, может быть только конечной точкой сближения,
а для траекторий удаления — только начальной точкой удаления.
При этом экстремальное значение гт существует при выполнении
неравенства 1 •< k •< ]/2, так как при k > 1/2 подкоренное выра-
жение зависимости (8) становится отрицательным, а минималь-
ное значение т = 1.
Если k = 1, то гт — 1, т. е. экстремальное значение относи-
тельной дальности соответствует начальной точке. В этом случае
возможно только удаление корабля от станции по раскручиваю-
щейся спирали. Уравнение траектории (7) можно записать в виде
г = -±- [ехр (<р - ф0) + ехр (ф0 - ф)]. (9)
В случае k > 1 в зависимости от начальных условий возможно
как удаление корабля от станции, так и сближение с ней. Сбли-
жение при условии 1 < k < J/2 характеризуется тем, что про-
изводная (5) до момента достижения гт отрицательна. При г = гт
следует, что dr/dq = 0, и в дальнейшем уже происходит удаление
корабля от станции, так как экстремальная дальность г = гт
может соответствовать только конечной точке траектории сближе-
ния и начальной точке траектории удаления. Таким образом,
в правых частях уравнений (5) и (7) в момент пролета корабля
мимо станции на минимальном расстоянии должна производиться
.смена знака.
Особенностью сближения при k = f/2 является то, что в этом
случае гт = 0. Поэтому в момент встречи корабля со станцией
как нормальная, так и радиальная составляющие относительной
скорости оказываются равными нулю. Следовательно, при k = У~2
сближение объектов должно закончиться мягкой встречей, причем
г = ехр [±(ф — ф0)Ь (10)
т. е. относительное движение корабля происходит по логарифми-
ческой спирали (закручивающейся в случае сближения и раскру-
197
чивающейся при удалении корабля от станции). Из выражения (10)
видно, что при сближении мягкая встреча объектов может про-
изойти при ф -> оо, т. е. конечное состояние достигается при
£->оо. Такое движение иногда называют лимитационным.
Перейдем к рассмотрению особенностей сближения при k >
>]Л2. Как уже отмечалось, изменение относительной дальности
в этом случае происходит без экстремума. Производная (5) в про-
цессе сближения остается все время отрицательной. Все траекто-
рии сближения заканчиваются встречей корабля со станцией,
но относительная скорость в момент встречи не равна нулю.
Для всех траекторий удаления подкоренное выражение пра-
вой части уравнения (5) возрастает. Это означает, что при постоян-
ной угловой скорости линии визирования удаление корабля от
станции происходит по раскручивающейся спирали со все возра-
стающей скоростью.
Задача 4.20. Определить относительную скорость корабля
в момент встречи со станцией или в момент пролета на минималь-
ном расстоянии от нее при наведении корабля с постоянной угло-
вой скоростью линии визирования.
Решение. Относительная скорость корабля может быть опре-
делена по текущим значениям р, р, ш:
оа = р’ + (р(о)а. (1)
Используя выражение (4.5), получим
v2 = Ро + <о2 (2р2 - р§). (2)
Из рис. 4.6 следует, что
откуда Ро = (ро®)2 (k2 — 1)- (4)
Таким образом, из выражений (2) и (4) получим
^ацр^-гэ + грг2. (5)
Введем безразмерную относительную скорость б в v[v0, причем
из выражения (5) при р = р0 находим
оо m COPo/k.
Из равенства (5) и (6) следует
б = Г1- 2 (1 _ г8)]173 ,
L К 'J
(6)
Отсюда видно, что при сближении корабля со станцией величина б
непрерывно уменьшается, достигая минимального значения в мо-
мент встречи (k J/2) или в момент пролета мимо станции (й <
198
Подставляя в правую часть зависимости (7) г = 0, получаем
выражение для относительной скорости в момент встречи корабля
со станцией
- /” 2
= (8)
С уменьшением параметра k скорость (8) также уменьшается, и при
k я= ]/2 она становится равной нулю. _____
Наконец, если в зависимости (7) положить г s= гт >= У 2 —
[см. задачу (4.19)], то получим выражение для определения отно-
сительной скорости в момент пролета корабля мимо станции
т/ 2 ,
(9)
откуда видно, что с увеличением параметра k относительная ско-
рость уменьшается и при k = 1^2 достигает нуля.
Задача 4.21. Сближение корабля со станцией происходит при
постоянной угловой скорости линии визирования. Определить
необходимое значение параметра k = p0/D0 из условия обеспече-
ния заданной угловой дальности облета станции до момента окон-
чания участка сближения.
Решение. Воспользуемся соотношением (6) задачи 4.19:
, 1 + W — 1
Т-Ф.-1П f + v,.+t._2 <‘>
которое связывает угловую дальность полета <р — <р0 со значением
искомого параметра k. Полагая г = 0, находим угловую дальность
полета корабля до момента встречи:
1 + у& — 1
АФ1"’П yt.-2 ' (2)
а при г s=\/^2 — ka — до момента пролета на минимальном рас-
стоянии /
ДФ. = 1п . (3)
Из выражений (2) и (3) находим значения параметра для обоих
случаев: __________'
. V2 (ехр 4 Дф1 + 1)
1 ехр 2Дфх — 1 ’
. _ 1/2 (ехр 4Дфа + 1) ...
~ ехр 2Дф, +1 * W
Если в качестве примера положить Афх = Л<р» = л, то по фор-
мулам (4) находим ki = 1,417, k* = 1,412.
Соотношения (2) и (3) показывают, что с увеличением значения
параметра k угловая дальность полета возрастает и при прибли-
199
женин его к величине J/2 угол облета станции неограниченно
возрастает.
Задача 4.22. Корабль наводится на станцию при постоянной
угловой скорости линии визирования. Определить значение харак-
теристической скорости v' для обеспечения наведения в заданном
диапазоне изменения относительной дальности.
Решение. Величина характеристической скорости, как следует
из соотношения (4.4),
т
t>” = f 2|©p|d/ = ±2<B(p —р0). (1)
о
В выражении (1) знак «минус» следует брать при сближении объек-
тов, а знак «плюс» — при их удалении.
В случае сближения корабля с пролетом мимо станции на неко-
тором минимальном расстоянии рт с последующим удалением до
дальности р характеристическая скорость может быть определена
в виде суммы
V = v't + V2, (2)
где of — характеристическая скорость сближения от р0 до рт;
02 — характеристическая скорость при удалении от рт до р;
причем
с>1 = — 2со (рт — ро), (3)
V2 = 2ю (р — рт). (4)
Таким образом, vr — 2<в (р0 + р — 2рт). (5)
Введем безразмерную характеристическую скорость:
Qt = . 2а(р—Ро) .
VPo + (Po<*>)2
Поскольку = ^-Кро —= V — 1 ,
2
то получим б{ = ± -^-(г — 1). (6)
Отсюда можно найти значение о' при заданных начальных и конеч-
ных характеристиках сближения k, г.
Задача 4.23. Наведение корабля на станцию осуществляется
при использовании комбинированного (импульсного и непрерыв-
ного) управления, включающего в себя приложение начального
импульса скорости До по нормали к линии визирования, обеспе-
чивающего требуемое значение угловой скорости линии визирова-
ния © = —Ро/Ро. поддержание постоянной величины которой при
последующем непрерывном управлении позволяет реализовать
мягкую встречу объектов. Определить значение суммарной харак-
теристической скорости для осуществления наведения.
Решение. В зависимости от величины нормальной составля-
ющей относительной скорости оп0 = ро<о по сравнению с модулем
200
Рис. 4.7. Схема начальных условий сближения при использовании комбини-
рованного (импульсного и непрерывного) управления с приложением импульса
скорости по нормали к линии визирования:
а начальные условия при unQ < | 0q; б начальные условия при unQ > pg
начальной скорости сближения | р01 следует различать два слу-
чая, соответствующие различной ориентации импульса скорости
До (рис. 4.7).
Если оп0 | Ро |, то k "1/^2 и величина начального импульса
представляет собой разность между требуемой нормальной соста-
вляющей относительной скорости после сообщения импульса
oD := рш и начальным значением этой составляющей оп0, т. е.
До = —(ро + р0со), (1)
а характеристическая скорость для наведения корабля при по-
стоянной угловой скорости линии визирования
о? = 2®ра = — 2ра. (2)
Суммарная характеристическая скорость
о' = —(Зр0 + Ро®). (3)
Отсюда находим безразмерную характеристическую скорость:
& = — 3 — — • (4)
t>0 '
Из подобия треугольника К.ВО и треугольника, образованного
векторами о0, «по» Ро (см. рис. 4.7, а), следует, что
_ Ро _ УрГЩ _ i/i
“ Ро ~ И Л8 ’
Ро® Do 1
— = —= V <5>
После подстановки (5) в (4) получим
0'=з]/1-4-(6)
Анализ выражения (6) показывает, что величина v' возрастает
с увеличением k от 5' = при k = J/2 до о' = 3 при k со.
Если оП0 > I Ро I» то й ]/2 (см. рис. 4.7, б). В этом случае
величина начального импульса скорости До представляет собой
201
разность между значениями оп0 и оп м р0© = —р0:
До = р0<в + р0. (7)
Складывая (7) и (2), получим суммарную характеристическую
скорость
v’ » р0© — ро, (8)
или в безразмерной форме
+ (’)
Из анализа выражения (9) следует, что о уменьшением пара-
метра k значение б' также уменьшается от б' =1^2 при k — у2до
8' = 1 при k -> 1. Таким образом, для всех возможных начальных
условий сближения корабля, соответствующих диапазону 1 <
< k < оо, минимальное значение характеристической скорости (б' =
= 1) имеет место при k -> Г, а максимальное значение (б' s= 3) —
при k —> оо.
4.5. Ближнее наведение с учетом действия
относительного гравитационного ускорения
Разработка алгоритмов управления движением центра масс
корабля для методов наведения с использованием законов орби-
тального движения, а также решение многих других задач ближ-
него наведения предполагает использование модели движения
с учетом относительного гравитационного ускорения. В качестве
такой модели наиболее часто применяют уравнения управляемого
относительного движения корабля в орбитальной системе коор-
динат х, у, z, начало которой совмещено с центром масс станции.
Ось у этой системы координат направлена по текущему радиусу-
вектору центра масс станции г, а ось z — по вектору ее угловой
скорости движения по орбите Л. Ось х дополняет систему коор-
динат до правой, т. е. расположена в плоскости орбиты станции и
направлена в сторону, противоположную ее орбитальному дви-
жению.
Как уже отмечалось, круговая или близкая к круговой мон-
тажная орбита станции обладает определенными преимуществами
по сравнению с эллиптической. Учитывая это обстоятельство,
а также то, что выполнение маневров на этапе ближнего наведения
осуществляется на сравнительно небольших (по сравнению с ра-
диусом орбиты г) расстояниях между кораблем и станцией, для
решения многих задач оказывается возможным использование
линеаризованных уравнений относительного движения объектов
в орбитальной системе координат [3]:
X — 2Ку = Рк,
£ + 2U - ЗХ2^ = (4.7)
2 + 1»г = Рг,
202
где Рх, Ру, Рх — составляющие вектора управляющего уско-
рения (обусловленного тягой двигателя) в проекциях на оси
орбитальной системы координат.
Предполагая значения составляющих Рх, Ру, Pz постоянными,
решение системы (4.7) может быть записано в следующем виде:
* - (т5- -6®» - т»s,nU - Ст- + т»' + * +
+ + ТГ - (3*. - Ыц. - тг) < - -г PJ’.
» = (т+т» "+(~ msU -2-т +
+ 4й + -^-^(.
z = -^sinM+(z0--^-)cosM + -£f-, (4.8)
где х0, у0, z0, х0, t/g, Zg — начальные значения координат и соста-
вляющих относительной скорости корабля в орбитальной системе
координат.
Решения (4.8) и система уравнений (4.7) находят широкое при-
менение при рассмотрении импульсных и дискретных методов
ближнего наведения, выборе оптимальных программ сближения,
а также при определении характеристик неуправляемого движе-
ния корабля относительно станции. Использование линеаризо-
ванной модели дает удовлетворительные результаты при решении
задач ближнего наведения при расстояниях между кораблем и
станцией не более 100 ... 150 км и для времени движения, не пре-
вышающем половины периода обращения станции по орбите.
При больших значениях продолжительности движения и рас-
стояния между объектами, а также в случае движения станции по
эллиптической орбите, необходимо использовать нелинейную
модель относительного движения [3, 24].
При наличии тех или иных ограничений на маневры ближнего
наведения особый интерес представляет вопрос о возможности
выполнения конечной цели наведения. В этом случае при решении
ряда задач целесообразно использовать понятие управляемости
системы. В теории управления движением термин «управляемость»
системы означает, что в течение конечного отрезка времени t
систему можно перевести из любого начального состояния в задан-
ное конечное. Если конечное состояние Хк достижимо из началь-
ного Хо при tg, то говорят, что состояние Хо управляемо при t0.
При этом должна существовать кусочно-непрерывная функция
управления U, переводящая Хо в Хк. Если каждое состояние Хо
управляемо при t0, то система управляема при t0; если любое
состояние Хо управляемо в каждый момент времени /0 на интер-
вале определения системы, то система полностью управляема.
. С математической точки зрения управляемость линейной
системы в нашем случае определяется следующим образом. Пред-
203
ставим систему управляемого движения корабля в виде матрич-
ного уравнения
* = Ах + С/, (4.9)
где А — матрица постоянных коэффициентов; U — вектор упра-
вления;
U = || 6i«i в3и2... впип ||т. (4.10)
Здесь индекс «т» обозначает операцию транспонирования, п —
порядок системы (4.9), ех, е3, ..., еп — числа, принимающие зна-
чения 0 или 1, с помощью которых выделяется частная реализация
управления кораблем посредством вектора
е = ||е182...вп||’. (4.11)
Сформируем матрицу
К = ||Ма.....М> (4.12)
где klt k2, ..., kn— столбцы матрицы К, определяемые по фор-
мулам
k1 = в, k2 = Ае, ke = Аав, ....kn = №~l8. (4.13)
Необходимым и достаточным условием полной управляемости
линейной системы (4.9) на отрезке [/0, 4J является равенство
ранга матрицы К порядку рассматриваемой системы.
Задача 4.24. Для двухимпульсной схемы ближнего наведения
определить величины начального и конечного Ап3 импульсов
скорости, с помощью которых реализуется мягкая встреча корабля
со станцией спустя время t после приложения первого импульса.
Предполагается, что движение станции происходит по известной
круговой орбите и заданы значения координат и составляющих
относительной скорости в момент приложения первого импульса.
Решение. Подставляя в решения линеаризованных уравнений
относительного движения (4.8) для конечного времени t значения
координат х = у = г = 0 и Рх = Pv = Pz = 0, получим систему
уравнений для определения требуемых величин составляющих
относительной скорости х', y',i' после приложения импульса Аих:
cos М — (-*£- - 6r/0) sin U - х0 - 4- (Зх* - 6%t/o) t = 0,
Xsin^+(-^--3&0)cosX/-^ + 4&0 = 0, 0)
-4— sin М + z0 cos kt — 0.
Решая систему (1), находим значения х', у*, i':
_ lx0 sin 1/ + sin 1? — 14(1 — cos IQ] ly0
Х ~~ 31/sin 1/ — 8(1 — cos 1/) ’
. t ___ 2 (1 — cos 10 lx0 + (4 sin If — 31/ cos 1/) l#0
У ~~ 31/ sin 1/ —8(1 — cos 1/)
HJ = — lz0 ctg It
204
i = z0 cos*/ — (z0
Зная £’, 0’, и начальные значения *0, #о, *о> определяем
величину импульса
Д»1 = V (х' - *0)а + (у( - Уо)3 + (z' - i0)2.
Для определения импульса Доа продифференцируем выра-
жения (4.8) по времени
* = (2#о + sin kt + (4*0 — 60О* — cos kt — 3*о +
+ 6*0О+^--ЗРК/,
i) = (& + cos*/ - (2*о - Зуо* - -^) sin*/ - (2)
*--£-) sin*/.
Подставляя в систему (2) *0 = *', 0О = У'* Лс = Ру =
— Pz =0, получим значения составляющих относительной ско-
рости в момент встречи,
*ь = 2у' sin kt + (4*' — 60О*) cos kt — 3*' + 6*0О,
0Ь = у' cos kt — (2*' — 30о*) sin kt,
ib = z' cos kt — z0* sin kt.
По известным значениям *ь, уъ, zb определяем величину им-
пульса Ли2> предназначенного для выравнивания скоростей ко-
рабля и станции,
Дс>2 = ^6 4" ^6 4“
Задача 4.25. В момент начала этапа ближнего наведения
корабль находится на одной из осей орбитальной системы коор-
динат, связанной со станцией, движущейся по круговой орбите.
Определить управляющее ускорение Р для обеспечения сближе-
ния корабля со станцией вдоль соответствующей оси с постоянной
относительной скоростью.
Решение. Воспользуемся дифференциальными уравнениями
(4.7) и рассмотрим отдельно случаи движения корабля вдоль
каждой из трех осей орбитальной системы координат.
Случай 1. Сближение по оси х. В этом случае в уравне-
ниях (4.7) следует положить у — г = у =i = х = у = z =0,
* = *0. Тогда Рх = Pz =0, Ру = 2Х*0, т. е. сближение проис-
ходит при постоянном значении управляющего ускорения, ориен-
тированного вдоль оси 0 орбитальной системы координат. Если,
например, высота полета станции составляет 200 км (* = 1,16 х
X 10-3 с-1) и *0 = 10 м/с, то потребное управляющее ускорение
Ру = 0,0232 м/с8. При массе корабля 6000 кг для создания такого
управляющего ускорения потребуется двигатель с тягой 145 Н.
Случай 2. Сближение по оси у, т. е.подход корабля к стан-
ции сверху или снизу. Полагая в уравнениях (4.7) х = z = * =
205
— z = x = у = z == 0 и у — y0, получаем Ря = —2Ху0, Рд =
= —ЗХ2г/, Pz — 0, причем по условию у = у0 + yot. Иначе говоря,
для обеспечения сближения корабля со станцией в радиальном
направлении управляющее ускорение не остается постоянным
и должно изменяться по определенному закону.
Случай 3. Сближение по оси г, т. е. по нормали к плоскости
орбиты станции. Тогда в уравнениях (4.7) х=у=х=у=>
= х = у = z = Q, z = z0, поэтому Ря = Рд = О, Pz = X2z, при-
чем z = z0 + z0Z, т. е. управляющее ускорение должно изме-
няться по линейному закону.
Задача 4.26. Сближение корабля со станцией осуществляется
при постоянном значении управляющего ускорения. Определить
величину и ориентацию управляющего ускорения в орбитальной
системе координат, а также характеристическую скорость для обе-
спечения выхода корабля в некоторую фиксированную точку
окрестности станции с координатами хк, ук, z„ за время t при
заданных значениях координат и составляющих относительной
скорости в начальной точке ближнего наведения.
Решение. Для определения трех компонент управляющего
ускорения Рх, Ру, Pz воспользуемся уравнениями (4.8), в кото-
рых следует принять х = хк, у = ук, г — гк. В результате реше-
ния этой системы получим
р _ а22^1 — а12^3 р _ а11&2 — а21^1
® а11а22-а12а21 ’ ® а11а22-а12а21 ’
р __X [X (2^ Zq cos Xi) 2$ sin Xi]
** 1—cos Xi ’
где axl = -p- (1 — cosX^ — ?;
2 (2 sin Kt \
012 = ~y -------; (hi = — 012»
_____ I — cos Kt
022__--------»
61 = (*k - Xo) - -^2- (1 - COS Xi) - _ 60O) Sin X( +
-p (3x0 — бХуо) t\
ьг = ук-уо(4-3 COS M) + -#2- (1 - COS kt) - SlnM.
Л Л
Зная составляющие Ря, Pu, Pz, найдем модуль полного управляю-
щего ускорения
P = VP2» + P2B + Pl
и направляющие косинусы, определяющие ориентацию вектора Р
относительно орбитальной системы координат:
cos (.О’) =-уЧ соз(уГр)=-&-, (cos Ср) = •
206
Определение потребной характеристической скорости произ-
водится интегрированием выражения для полного управляющего
ускорения:
vf « Pi.
Задача 4.27. Управление кораблем на этапе ближнего компла-
нарного наведения осуществляется при ориентации управляющего
ускорения либо по оси х, либо по оси у орбитальной системы коор-
динат, связанной со станцией, движущейся по круговой орбите.
Показать, что в первом случае система является полностью уп-
равляемой, а во втором случае условия полной управляемости
не выполняются.
Решение. Компланарное управляемое относительное движение
корабля определяется двумя первыми уравнениями системы (4.7).
Введем новые независимые переменные = х, х2 = х, х3 — у,
ха = у вектора х = || xrx2x3Xi а также вектор управлений (4.10)
и = II0 еа и2 0 е4 u4 II1,
где ua = Рх, Ui = Pv, е2, е4 — коэффициенты, которые могут
принимать значения 0 или 1 для выделения частных реализаций
управления кораблем по оси х или у.
Тогда система уравнений компланарного относительного дви-
жения корабля может быть представлена в матричной форме (4.9):
jt = Ax + t/, (1)
где
0 1 0 0
0 0 0 21
А = 0 0 0 1
0 — 21 31а 0
Если реализуется только управление Рх, направленное вдоль
оси х, то 8 = || 01001» и тогда в соответствии с равенствами (4.12)
и (4.13) определим матрицу
0 1 0 — 41а
1 0 — 41а 0
К = 0 0 — 21 0 • (2)
0 — 21 0 21’
Отсюда видно, что все строки и столбцы матрицы (2) ЯВЛЯЮТСЯ
линейно независимыми. Поэтому ранг матрицы К равен четырем,
т. е. соответствует порядку системы. Следовательно, система,
описываемая уравнениями (1), в рассматриваемом случае яв-
ляется полностью управляемой. Это означает, что задача компла-
нарного наведения корабля может быть решена при ориентации
управляющего ускорения по оси х орбитальной системы коор-
динат.
207
Если реализуется управление только вдоль оси у, то е =
= || 0 0 0 1 и матрица
0 0 22, 0
0 22, 0 — 22s
к = 0 1 0 — Ха • (3)
0 0 — 2? 0
В данном случае ввиду линейной зависимости второй и третьей
строк матрицы (3) ранг ее равен трем. Следовательно, при ориен-
тации управляющего ускорения по оси у система компланарного
относительного движения корабля не является полностью управ-
ляемой.
Задача 4.28. Движение маневрирующего корабля на этапе
ближнего наведения происходит при ориентации управляющего
ускорения по оси г орбитальной системы координат, связанной
со станцией, движущейся по круговой орбите. Установить, яв-
ляется ли в этом случае система относительного движения ко-
рабля по оси z полностью управляемой.
Решение. Относительное движение корабля вдоль оси г ор-
битальной системы координат определяется третьим уравнением
системы (4.7). Перейдем в этом уравнении к новым переменным
X! = z, ха = z и запишем его в матричной форме
x = Ax + Z7, (1)
I 0 i| t/ = ||0 e2 М’,
-Xs о|’8 = ||0 И)’; иа = Рг.
Далее определяем матрицу К (4.12)
q: ;i-
Отсюда видно, что ранг матрицы К равен двум, т. е. соответствует
порядку рассматриваемой системы (1). Следовательно, система
относительного движения корабля вдоль оси z является полностью
управляемой.
Задача 4.29. Компланарное наведение корабля на станцию,
совершающую полет по круговой орбите, происходит при по-
стоянном значении управляющего ускорения, ориентированного
по оси х орбитальной системы координат, связанной со станцией.
Определить в орбитальной системе координат границы области
начальных положений корабля (х0, t/0), наведение из которой
гарантирует осуществление встречи корабля со станцией (без
ограничения на условия встречи) при заданной продолжитель-
ности полета t и нулевом значении начальной относительной
скорости (х = у = 0).
Решение. Текущие значения относительных координат корабля
при компланарном наведении на станцию определяются первыми
двумя уравнениями системы (4.8). Решим каждое из этих уравне-
208
ний относительно управляющего уекорения Ра при х0 = у0 — О,
Ру = 0 и учитывая, что в момент встречи t значения координат
х = у = 0:
, _ Л2уо (4 — 3 cos kt)
" “ 2 (kt — sin kt)
р к* [х0 + 6у0 (X/ — sin X/)]
-|-(А0а—4(1 — cosAO
Приравнивая правые части выражений (1), получим зависимость
х0 + бУо (М — sin ^0 _go (4 — 3 cos AZ) _„
3 /1А2 л /1 ла 2 (AZ — sin Xs) ~ ’
-%- (м> — 4 (I — cos Л/) ' '
(1)
(2)
устанавливающую связь между начальными координатами х0 и у0
при обеспечении встречи за время i при некотором постоянном
значении управляющего ускорения Ра. Из уравнения (2) находим
отношение
!/оДо = f <№, (3)
где
__________________________2 (Л/ — sin kt)______________________________
(4 — 3 cos AZ) £-|- (X/)3 — 4 (I — cos A/)]— 12 (kt — sin kt)
Уравнение (3) определяет границу области начальных поло-
жений корабля, из которой может быть осуществлена встреча
корабля со станцией, в зависимости от величины орбитальной
угловой скорости станции к и времени полета корабля до встречи.
Пример. Пусть полетное время корабля t и соответствующее угловое
перемещение станции заданы на интервале 60° kt 120°. Численный анализ
функции (3) на указанном интервале изменения угла kt показывает, что эта функ-
ция является отрицательной и монотонно убывающей с ростом kt. Следовательно,
граница области начальных значений х0, у0 для продолжительности полета,
соответствующей рассматриваемому диапазону значений kt, определяется зави-
симостью (3), записываемой для граничных значений диапазона kt. В результате
расчетов получаем, что при kt = 60° значение f (kt) = —0,1167, а при kt =
= 120° значение f (kt) = —0,2088. Поэтому граница искомой области началь-
ных координат определяется прямыми у0 = —О,1167хо и у0 = —0,2088 х0, про-
ходящими через начало координат, а сама область начальных положений ко-
рабля располагается между этими прямыми.
Задача 4.30. От орбитальной станции, совершающей полет
по круговой орбите, отделяется ТК, и ему сообщается импульс
скорости Ла. Предполагая, что импульс Ла ориентирован по одной
из осей орбитальной системы координат, определить характер
неуправляемого относительного движения корабля.
Решение. Если кораблю сообщается импульс скорости в ра-
диальном направлении (по оси у), то характер относительного
движения определяется первыми двумя уравнениями системы
(4.8), в которых необходимо принять
*о = ffo = х = 0, уо = Да, Ра = Ру = 0,
X = у—• (1 •—COS X/), у = - Sin kt.
Л A#
8 П/р Г. С. Титова
209
Исключая из уравнений (1) sin kt и cos kt, получаем уравнение
траектории движения центра масс корабля
/ 2 Ди \2
V I -^--1 (2)
4(ДоД)а (ДоД)3 К W
Выражение (2) представляет еобой уравнение эллипса, центр
которого располагается на оси х и смещен от начала координат
на величину 2 Большая полуось эллипса равна 2 -у-, малая —
4^-. Период обращения корабля по эллипсу равен периоду обра-
Л
щения станции по орбите. Максимальное удаление корабля от
станции происходит через половину периода обращения станции
по орбите и составляет хшах = 4 Через каждый период обра-
щения корабль снова возвращается к станции.
Если кораблю сообщается импульс скорости в трансверсаль-
ном направлении (по оси х), то в первых двух уравнениях си-
стемы (4.16) необходимо принять х0 = Уо = Уо = О, х0 =
Р« = РУ = 0:
х = 4 4^- sln kt — ЗДо/,
Л
jf = 2 -у- cosM — 2
(3)
Используя зависимости (3), можно записать уравнение траектории
относительного движения центра масс корабля:
(, , Др \2
к \ ж
„Др ~ w
2 —т— I
к /
Выражение (4) представляет собой уравнение эллипса, кото-
рый перемещается параллельно оси х со скоростью — ЗДо. Малая
_ До
полуось эллипса располагается параллельно оси у и равна 2 -у-.
Большая полуось в два раза больше малой. В момент запуска
корабля геометрический центр эллипса имеет координаты 0,
9 До
2 к '
При ориентации импульса скорости по оси г, т. е. по нормали
к плоскости орбиты станции, с учетом значений г0 = 0, 20 = До,
Pz = 0 третье уравнение системы (4.8) приобретает следующий
вид:
z = sln kt. (5)
Л
Следовательно, движение центра масс корабля будет соответ-
ствовать простым гармоническим колебаниям вдоль оси г с пе-
риодом, равным периоду обращения станции по орбите, с амплиту-
210
дой, равной До/i. После сообщения кораблю импульса скорости
по оси z происходит его удаление от станции. Максимальное зна-
чение удаления имеет место через четверть периода обращения
станции по орбите, после чего корабль начинает приближаться
к станции. Через половину периода обращения он снова встре-
тится со станцией и в дальнейшем будет удаляться уже в противо-
положном направлении. Через период опять произойдет сближе-
ние. Таким образом, встреча корабля со станцией будет проис-
ходить дважды за каждый период обращения станции по орбите.
Задача 4.31. Отделение корабля от станции, движущейся
по круговой орбите, происходит за счет приложения импульса
скорости Ап в плоскости орбиты станции под углом а к оси х
орбитальной системы координат. Определить траекторию отно-
сительного движения корабля.
Решение. Запишем первые два уравнения системы (4.8), опре-
деляющие компланарное относительное движение корабля,
с учетом условий задачи
х0 = у„ =? 0, хп = До cos а, у0 = Ao sln а, Р„ = Pv = 0;
х =
2 Ad / 4
-т- (1 — cos kt) sln а + До (-г- sln kt — 3t) cos а,
A \ Л
(1)
у = — (1 — cos X/) cos а + “Г sln^ sln а.
Л Л
Определяя из зависимости (1) значения sin kt, cos kt и принимая
во внимание выражение sin2 kt cos2 kt = 1, получаем уравне-
ние траектории относительного движения центра масс корабля
в орбитальной системе координат:
Отсюда видно, что относительное движение корабля про-
исходит по перемещающемуся вдоль оси х со скоростью — ЗДо cos a
эллипсу. Большая полуось эллипса в два раза больше малой.
Геометрический центр эллипса в начальный момент времени опре-
деляется координатами 2 sln а и — 2 ~ cos а. Следователь-
но, траектория движения центра масс корабля в орбиталь-
ной системе координат будет представлять собой циклоиду, ле-
жащую в плоскости орбиты станции.
Задача 4.32. Пусть плоскости орбит корабля и станции совпа-
дают. В начальный момент положение корабля и скорость его
движения относительно станции заданы. Определить общие ха-
рактеристики траектории движения корабля относительно станции.
Решение. Напомним, что в результате анализа движения КА
вокруг Земли удалось установить наглядные геометрические
характеристики этого движения. Ими являются, например, на-
8* 211
клонение плоскости орбита к плоскости экватора, период обра-
щения по орбите, высоты апогея и перигея, эксцентриситет и др.
Теперь попытаемся и в относительном движении выделить общие
геометрические характеристики, которые позволили бы удобно
и наглядно представить в пространстве характер этого движения.
Обратимся к дифференциальным уравнениям (4.7) относи-
тельного движения в орбитальной системе координат и положим,
что тяга двигателей отсутствует (Р = 0). Решение уравнений
(4/8) запишем в виде, удобном для последующего исследования,
х = С4 + ЗСхФ + 2СВ sin ф — 2Са cos ф,
у == 2Ci + Са sin ф + С8 cos ф, (1)
z = Сб sin ф 4- Ce cos ф,
где ф = U — угловая дальность полета станции, отсчитываемая
от некоторого начального положения в момент t = 0. Постоянные
интегрирования уравнений движения выражаются через началь-
ные условия движения корабля следующим образом:
Vx vV
Cr = 2z/0~ =
2и«
Cs = -3y0 + -^~, C4 = Xo + -Jh (2)
Vz
Ce = z0.
Первые два уравнения системы (1) описывают движение ко-
рабля в его плоскости, а третье — по нормали к ней. Это обстоя-
тельство позволяет раздельно изучать движение корабля в его
плоскости и по нормали к ней.
Для исследования движения корабля в его плоскости опреде-
лим из первых двух уравнений системы (1) sin ф, cos ф и, прини-
мая во внимание выражение sin2 ф + cos2 ф = 1, получим сле-
дующее уравнение траектории движения центра масс корабля
относительно станции:
[х-(С4 + ЗС1Ф)Г (у-2С3)* _ 1
4(С1 + С23) С1 + С1 W
Уравнение (3) можно трактовать следующим образом: в общем
случае (при Са =/= 0, С8 =/= 0) в относительном движении корабль
описывает эллиптическую траекторию с полуосями:
большая полуось а = 2 ]/Т?2 + С23, (4)
малая полуось b = ]/ + С|, (5)
причем большая полуось в два раза превышает малую, т. е. экс-
центриситет этого эллипса является постоянной величиной,
равной
212
Эллипс ориентирован таким образом, что малая полуось его
всегда параллельна оси у (т. е. параллельна радиусу-вектору
станции), а большая — оси х (лежит в плоскости местного го-
ризонта).
Центр эллипса расположен В точке е координатами
%н — С< + ЗС1Ф,
Ун = 2CV (6)
При этом в процессе полета радиальная компонента центра эл-
липса уь (т. е. положение центра эллипса над станцией) остается
неизменной и равной 2СХ. Одновременно центр эллипса смещается
параллельно оси х. Так как <р = X/, то скорость смещения центра
эллипса будет равна
vk = ЗСХ1. (7)
Если при этом центр эллипса расположен выше орбиты станции
(Сх > 0), то сам эллипс отстает от станции. Если же он находится
ниже станции (Сх < 0), то эллипс удаляется от станции в направ-
лений ее полета. Наконец, когда центр эллипса лежит на орбите
станции (С1 = 0), то эллипс оказывается неподвижным относи-
тельно станции.
Таким образом, можно сформулировать следующие основные
особенности движения корабля относительно станции:
траектория относительного движения корабля является эл-
липсом;
независимо от размеров орбиты станции эллипс имеет постоян-
ный эксцентриситет, равный КЗ/2, а большая полуось его всегда
в два раза превышает малую;
малая полуось эллипса всегда параллельна радиусу-вектору
станции, а большая — лежит в плоскости местного горизонта;
если центр эллипса лежит выше орбиты станции, то этот эллипс
дрейфует (отстает) от станции;
если центр эллипса лежит ниже орбиты станции, то эллипс
обгоняет станцию;
если центр эллипса лежит на орбите станции, то эллипс ока-
зывается неподвижным относительно станции;
период обращения корабля по эллипсу равен периоду обраще-
ния станции.
Теперь рассмотрим некоторые частные случаи.
Случай 1. Предположим, что начальные условия движе-
ния корабля таковы, что одновременно выполняются условия
С2 = 0, С8 == 0, т. е.
Vyjk = 2оао ЗХг/о ~ 0.
В этом случае уравнения движения (1) примут вид:
х = С4 + ЗС1Ф, у = 2СХ.
Отсюда следует, что эллипс стягивается в точку к своему
центру. Значит, при этих начальных условиях корабль будет
213
двигаться выше или ниже станции параллельно ее орбите. Дру-
гими словами, в рассматриваемом случае корабль оказывается
на круговой орбите, охватывающей орбиту станции (при Сх >
> 0), либо лежащей внутри нее (при Сх < 0).
Если же, наконец, Сх = 0, то из выражений (2) следует, что
х = х0, у = 0, т. е. корабль будет находиться впереди или позади
станции на ее орбите, а орбиты корабля и станции совпадают.
Приведенные выкладки позволяют сделать вывод, что зави-
сание корабля относительно станции (т. е. его неизменное поло-
жение) может быть обеспечено только в том случае, если корабль
будет находиться на орбите станции впереди или позади нее.
Во всех других случаях зависание не обеспечивается.
Пример 1. Какую скорость должен иметь корабль относительно станции,
чтобы двигаться параллельно ее орбите на высоте 100 м? В начальный момент
корабль находился над станцией.
Согласно рассматриваемому случаю имеем: х0 = 0, у0 = 100 м, vVo = 0;
определению подлежит горизонтальная составляющая скорости корабля оЮ(> =
= 3/2кд9. Для орбиты станции с высотой полета 250 км угловая скорость ее дви-
жения X = 1,16‘10”3 с-1. Тогда требуемая скорость корабля будет равна =
= 1,75 см/с. Она направлена навстречу движения станции, и корабль будет
отставать от нее. За один виток корабль отстанет от станции на 95 м.
Случай 2. Начальные условия движения станции таковы,
что соблюдаются условия: =й= 0, = 0.
В рассматриваемом случае, как следует из соотношений (6),
центр эллипса, по которому движется корабль, окажется непо-
движным относительно станции и будет находиться в точке с коор-
динатами хк = С4у, ук = 0, т. е. будет располагаться на орбите
станции впереди нее (при С4у <3 0) или позади (при С4у > 0).
Следовательно, при этих начальных условиях корабль будет
описывать по отношению к станции неподвижную эллиптическую
траекторию. Такие траектории корабля иногда называют кри-
тическими.
Любопытен случай, когда центр критической траектории совпа-
дет с центром масс станции, т. е. выполняется условие хк = 0,
yk = 0. Тогда согласно соотношениям (6) начальные условия дви-
жения корабля должны отвечать требованиям Сх = 0, С4 = 0,
или, как следует из выражений (2),
2^о - v„, = 0,
Хх0 + 2vv, = 0. 1 ’
Положим для простоты, что в начальный момент корабль нахо-
дился впереди станции на расстоянии х0 = —а на ее орбите,
т. е. уо — 0. Тогда из равенств (8) следует
- Ка + 2vVt = 0. (9)
Значит, чтобы вывести корабль на критическую траекторию,
в центре которой находится станция, его вначале необходимо
поместить впереди станции на расстоянии а, а затем приложить
214
радиальный положительный импульс (в направлении от Земли),
величина которого определится формулой
V». = 4- (10)
(корабль можно поместить и позади станции, но при этом отра-
ботать отрицательный — к Земле — импульс).
Так как в этом случае х0 = —а, у0 == 0, ои, = 0, оу, = -у-,
то постоянные интегрирования (2) будут иметь значения Сг = 0,
Ct = —а/2, Св = 0, С4 = 0, и уравнение критической траекто-
рии запишется в виде
а ,
х = a cos ф, у --------------------------»- sin ф.
А
Критические траектории могут оказаться удобными для реали-
зации экономичного периодического облета станции.
Пример 2. Станция находится на орбите с высотой полета 300 км. Для
проведения осмотра станции корабль требуется перевести на критическую траек-
торию с таким расчетом, чтобы наибольшее удаление корабля от станции не
превышало а = 100 м.
В этом случае корабль вначале помещается впереди (позади) станции на
расстоянии 100 м, а затем ему сообщается положительный (отрицательный) им-
пульс, определяемый по формуле (10). Для рассматриваемых данных этот импульс
составит 5,8 см/с.
При движении по такой траектории спустя четверть периода обращения
станции корабль окажется над станцией на расстоянии b = а/2 = 50 м, через
половину периода — позади станции на расстоянии 100 м, через 3/4 периода —
ниже станции на расстоянии 50 м и спустя виток — вернется в исходное со-
стояние.
Пример 3. Космонавт отделился от станции после сообщения ему ра-
диального импульса Vyo == 1 м/с. Определить траекторию его движения относи-
тельно станции.
Так как в этом случае х0 = Уо = 0, = 0, vy* = 1 м/с, то Ci = 0, Са =
= VyJ'k, С9 = 0, = 2vyJ'kt и траектория космонавта будет критической.
Центр критической траектории будет лежать позади станции на расстоянии
Xfe = 2vy /к = 1,72 км. Уравнения движения (1) примут вид
sin <р 2(1—cos <р)
17 = —*= Х о»,-
Через четверть периода обращения станции космонавт окажется выше станции
на 0,86 км, удалившись от нее на 1,72 км. Спустя половину периода высота его
полета станет равной высоте полета станции, но расстояние между ними соста-
вит уже 3,44 км. В последующую половину периода космонавт по дуге критиче-
ской траектории возвратится к станции.
Пример 4. Космонавт отделился от станции после сообщения ему гори-
зонтального импульса Рхо = 1 м/с. Определить траекторию его движения отно-
сительно станции.
Так как в этом случае х0 = Уо = 0, Vy* = 0, пЖо = 1 м/с, то уравйения
движения космонавта можно записать в форме
4$тф —Зф
Ж:------------------------------i—ч,
2(1—cos ф) ....
8 =-----1J——°*.- О1)
215
Иначе говоря, космонавт будет двигаться по эллиптической траектории, центр
которой расположен на расстоянии 2иЖо/А. от оси х, и дрейфовать со скоростью
. Если ово < 0, то вначале космонавт обгонит станцию и начнет
подниматься вверх. Через половину витка он поднимется над станцией на макси-
мальную высоту 4oWo/i = 3,44 км, отстав от нее на = 8,2 км. Спустя
виток он окажется на равной высоте со станцией позади нее на расстоянии
6лои /X = 16,4 км. В последующем полете от витка к витку это отставание будет
нарастать.
Приведенные примеры свидетельствуют о высокой чувствительности харак-
теристик траектории движения космонавта относительно станции даже при
небольших импульсах его отделения. Отсюда становится понятной необходи-
мость привязки космонавта к станции с помощью файла.
Пример 5. Космонавт находится выше станции на расстоянии 10 м.
Определить характеристики его относительного движения.
В этом случае х0 = 0, у0 = 10 м, = vy^ = 0. Постоянные интегриро-
вания Ci = 2у0, Са =0, Са = —Зу0, = 0. Уравнения для движения космо-
навта запишутся в виде:
х = 6 (ф — sin ф) уо» у = (4 — 3 cos ф) у0.
Большая полуось эллипса а = буо = 60 м, малая — b = Зу0 = 30 м. Коор-
динаты центра эллипса: х^ = 6уоф, уь = 4у0 = 40 м. Иначе говоря, космонавт
будет двигаться по эллиптической траектории, смещающейся вдоль орбиты
станции со скоростью бХу0 в сторону, противоположную ее орбитальному дви-
жению. В процессе движения космонавт через половину витка окажется на
максимальной высоте 70 м, а спустя виток отстанет от станции на 380 м, снова
возвратившись на высоту 10 м. И это отставание будет нарастать от витка
к витку.
Пример 6. Корабль находится на высоте 200 м и на удалении 300 м
относительно станции позади нее. Какой импульс нужно приложить к кораблю,
чтобы он оказался на критической траектории, центр которой совпадает с цен-
тром масс станции?
В рассматриваемом примере имеем х0 = 300 м, у0 = 200 м, а определению
подлежат компоненты импульса иЖо,
Чтобы траектория корабля оказалась критической, в равенстве (6) необхо-
димо положить = 0, т. е. 2у0 — = 0, откуда находим одну из компонент
импульса vXo = 2%у0. Так как центр критической траектории должен совпадать
с центром масс станции, то из равенства (6) при х^ = 0 и = 0 находим С4 = 0
2и^о
или х0 + —г— = 0, откуда определяем вторую составляющую импульса
п
vv0==----.
Если орбита станции имеет высоту 250 км, то компоненты импульса vx =
= 0,46 м/с, vy9 = —0,17 м/с.
ГЛАВА б
Спуск КА на Землю
5.1. Основные полоиения
Спуск КА на Землю является заключительным этапом выпол-
нения программы полета, основной задачей которого является
безопасное приземление спускаемого аппарата (СА) в заданном
районе. Как известно, КА, находящийся на орбите ИСЗ, обладает
значительной энергией и поэтому для осуществления схода с ор-
биты необходимо погасить часть этой энергии, что достигается
путем включения тормозной двигательной установки (ТДУ).
Оставшаяся часть энергии (основная) гасится за счет сопротивле-
ния, возникающего при движении КА в плотных слоях атмосферы.
Точка на орбите, в которой производится включение ТДУ,
называется точкой схода, а траектория КА от точки схода до
точки посадки СА — траекторией снижения.
Траекторию снижения КА с орбиты часто условно разделяют
на следующие основные участки [1].
Участок Г. сход с орбиты путем гашения части орбитальной
скорости с помощью ТДУ.
Участок 2 (начальный): снижение до входа в плотные слои
атмосферы. Так как атмосфера Земли не имеет строго очерченной
границы, то в качестве ее условной границы выбирают некоторую
высоту над поверхностью Земли, например, по результирующему
действию аэродинамических сил, величине перегрузки и др.
Эта граница обычно соответствует высоте 80 ... 100 км [1 ]. На на-
чальном участке полета в оценочных расчетах влиянием атмо-
сферы обычно пренебрегают.
Участок 3: управляемое или неуправляемое (баллистическое)
снижение в плотных слоях атмосферы. На этом участке проис-
ходит интенсивное торможение СА и гашение скорости его до
звуковой.
Участок 4 (конечный): ввод парашютной системы и спуск
на парашюте, заканчивающийся приземлением. Для смягчения
удара о Землю могут использоваться тормозные пороховые дви-
гатели. Если СА имеет высокие несущие свойства (типа планера),
то конечный участок спуска может осуществляться по-самолет-
ному: планирующее снижение и посадка на аэродром.
С баллистической точки зрения обеспечение спуска КА свя-
зано с решением различных задач по определению величины,
направления и точки приложения тормозного импульса. Особое
место занимают вопросы обеспечения схода с орбиты путем после-
довательного приложения двух импульсов.
217
Рис. 5.1. Схема отсчета
угла а, определяющего
направление тормозного
импульса
При рассмотрении вопросов схода КА
с орбиты с целью обеспечения посадки СА
на Землю приняты следующие основные
допущения:
гравитационное поле Земли является
центральным;
тяга двигателя носит импульсный ха-
рактер;
поверхность Земли является сферой
радиуса ₽;
атмосфера Земли имеет некоторую ус-
ловную границу радиуса гвх (или высоту
Лвх), начиная с которой происходит интен-
сивное торможение СА;
полет КА до пересечения условной границы атмосферы рас-
сматривается без учета сопротивления воздуха.
В дальнейшем будем пользоваться следующей системой обо-
значений.
Назовем предспусковой ту орбиту КА, на которой начинаются
маневры КА при снижении на внеатмосферном участке и обеспе-
чении последующего спуска в атмосфере.
Предспусковая орбита может быть задана элементами р, е, ш,
либо радиусами апогея гА и перигея гп> либо высотами ЛА, Лп
при известном аргументе широты перигея ш. В этом случае радиус
средней круговой орбиты
'o = P = -g-(rA + rn) = ^ + _§_(/iA + Лп)
(5.1)
и средняя угловая скорость
<5-2>
По отношению к среднему круговому движению отклонение ра-
диуса, вызванное эллиптичностью орбите!,
Дгх = —ре cos (и — о) (5.3)
или
Ari = — Г-п cos (и — со), (5.4)
а также
— Лгт
ДГ1 ------—— cos (и — со), (5.5)
где а — аргумент широты.
Тормозной импульс, непосредственно обеспечивающий сход
с орбиты перед входом в плотные слои атмосферы, обозначим
через Дс^. При этом направление импульса по отношению к орби-
тальной скорости определится углом а (рис. 5.1), отсчитываемым
в плоскости орбиты КА. Очевидно, что угол а положителен,
218
если тормозной импульс наклонен к Земле. Тогда компоненты
тормозного импульса
Ди-i = —Дел sin ct,
Л Л (5.6)
Доп1 = —Дих cos а. . v '
Аргумент широты тормозного импульса обозначим через иг.
Тормозной импульс вызывает возмущение радиуса орбиты,
который в почти круговом движении определяется выражением
Дга = Sin(“-“1) дUrl + gn-S2^“—..“X.)]Д0л1 =
= _ д01 sln а _ 2 [1-cos («-«,)] ДУ1 cos а (5 7)
Л Л
При рассмотрении двухимпульсного схода с орбиты импульс,
предшествующий тормозному, обозначим Ди2 и назовем его кор-
ректирующим, прикладываемым в точке орбиты с аргументом
широты и2, Таким образом, в задачах обеспечения спуска вводится
обратный счет импульсов: первым прикладывается корректирую-
щий импульс Ди2, а вторым — тормозной Д^.
Будем также полагать, что корректирующий импульс яв-
ляется трансверсальным и приводит к возмущению радиального
расстояния, определяемому формулой
Дг8 = 2[1~cos(“-««И д„2. (5.8)
Теперь сформулируем граничное условие обеспечения спуска.
Определим суммарное возмущение радиуса средней круговой
(предспусковой) орбиты
Дг = Дгх + Дг2 + Дг8. (5.9)
Очевидно, что для обеспечения входа в атмосферу должно быть
выполнено граничное условие
Дг = Дг0, (5.10)
где Дг0 — радиальное расстояние между границей плотной ат-
мосферы и средней круговой орбитой:
Л'® =• Gx — ''о- (5.11)
Величина Дг0 всегда отрицательна.
Пусть и — ипх есть аргумент широты точки входа в плотные
слои атмосферы, когда выполняется граничное условие (5.10).
В этом случае обозначим
ф = UBI — (5.12)
угловую дальность участка снижения, заключенную между точкой
приложения тормозного импульса и точкой входа в атмосферу
219
Рис. 5.2. Схема отсчета характеристик
снижения КА:
1 — граница плотной атмосферы; 2 — пред-
спусковая орбита КА
и корректирующего До, импульсов,
(рис. 5.2). В рассматриваемом
случае граничное условие
(5.10) можно записать в виде
Дг4 = — ре cos (мВх — со) —
sin q> .
----7х- Д»1 sin а
Л
2(1 — cos <р) А .
-------; Д®! сов а +
Л
+ 2[l-cosj&x-«,)J Дра
(5.13)
В общем случае задача
расчета снижения на внеат-
мосферном участке заключа-
ется в определении целого
ряда неизвестных величин:
угловой дальности участка
спуска <р, тормозного Ас^
аргументов широты точек их
приложения ulf м2, а также направления тормозного импульса —
угла а при заданном аргументе широты ивх точки входа в плотные
слои атмосферы (для обеспечения посадки СА в заданный район
поверхности Земли), удовлетворяющих граничному условию (5.13).
Граничное условие (5.13) можно рассматривать как уравнение
со многими неизвестными. Для определения неизвестных необ-
ходимо наложить некоторые дополнительные условия, которые бы
позволили дополнить уравнение (5.13) до замкнутой системы
относительно искомых неизвестных. В качестве такого дополни-
тельного условия может быть наложено требование минимизации
расхода топлива (минимум импульса), которое, очевидно, экви-
валентно минимизации угловой дальности спуска при заданном
тормозном импульсе.
5.2. Одноимпульсный сход с орбиты
Пусть предспусковая орбита задана элементами р, е, о, а для
осуществления схода с орбиты прикладывается тормозной им-
пульс Дс\, который должен обеспечить вход в плотную атмосферу
в точке с аргументом широты цвх. В этом случае граничное усло-
вие (5.13) упростится:
а ✓ \ sin® А 2(1 —cos а) А _
Аг0 = — Р^ cos (авх — со) г-* sin а —« Ath cos а.
Л Л
(5.14)
Перепишеи равенство (5.14) в виде
—sin ф sin а — 2 (1 — cos ф) cos а = Сг, (5.15)
220
где Ci = [Дг0 + ре cos (uBI — ®)] -Д- . (5.16)
В граничной условии (5.14) или (5.15) искомыми величинами
могут быть Ut, Дох, а. В связи с этим возможны пять задач обеспе-
чения одноимпульсного схода с орбиты (табл. 5.1).
Задача 5.1. Найти точку приложения тормозного импульса Ui
и его направление св при заданной величине импульса Дох из усло-
вия, чтобы угловая дальность спуска <р стала минимальной.
Решение. Воспользуемся граничным условием (5.15) и запи-
шем функцию Лагранжа:
L = ф + pt [Сх + sin ф sin а + 2 (1 — cos ф) cos а],
где рх — неопределенный множитель Лагранжа. Искомые ф, а,
рх удовлетворяют системе уравнений
dL dL _n dL р
дф 0’ да ’ дрх
После дифференцирования получим систему уравнений
1 + рх (cos ф sin а 4- 2 sin ф cos а) = О,
sin ф cos а — 2 (1 — cos ф) sin а = 0, (1)
Ci + sin ф sin а + 2 (1 — cos ф) cos а = 0.
Из двух последних уравнений системы (1) находим минимальную
угловую дальность спуска
Ф = arccos Di, (2)
где D. = 4- (4 - ГТ + ЗС|), (3)
и направление импульса
^а=2-(1-Хф)> И)
Таблица 5.1
Варианты задач одноимпульсного схода с орбиты
Ns задачи Дано т.1 - Определить Мини- мизи- руется
Mt а Mt а
1 — + — + — — Ф •
2 — + + + — — —
3 + — + — + — —
4 + — — — + +
5 + + — — — + —
221
Далее с помощью равенства (5.12) определяется аргумент
широты точки приложения тормозного импульса
«1 = «вх — Ф- (5)
Таким образом, поставленная задача полностью решена. Про-
ведем анализ полученного решения.
Очевидно, что задача имеет решение, если выполняется не-
равенство | Di | •< 1.
Если Dj = 1, то из выражения (3) следует, что С* = О, тогда
из равенства (5.16) получим
Дг0 + ре cos (uBX — ш) = 0.
Геометрический смысл полученного решения состоит в том, что
предспусковая орбита пересекает (или касается) границу плот-
ной атмосферы (см. рис. 5.2). При этом угловая дальность спуска
Ф = 0. Формальное решение задачи показывает, что в этом случае
тормозной импульс прикладывается в момент достижения КА
границы плотной атмосферы.
Если Dx = —1, то из выражения (2) получим ф = 180°, т. е.
двигатель включается в точке, диаметрально противоположной
точке входа в атмосферу. При этом а = 0, т. е. импульс направ-
лен навстречу скорости полета. Эта ситуация может возникнуть
только в том случае, когда тормозной импульс оказывается по
величине минимально возможным.
При Dx = —1 из равенства (3) получаем С* — 16 и с помощью
выражения (5.16) находим минимально возможный импульс,
который еще обеспечивает спуск с орбиты:
Aoi = [Дг0 + ре (ип — ®)]. (6)
Наконец, если | Dx | > 1, то после приложения импульса КА
не достигает границы плотной атмосферы и поэтому спуск ока-
зывается невозможным.
Полученное решение позволяет также сформулировать тре-
бования к положению перигея предспусковой орбиты, обеспечи-
вающего минимальную угловую дальность спуска.
Из выражений (2) и (3) следует, что угловая дальность спуска
будет тем меньше, чем меньше величина (%. Однако в выражении
для С$ (5.16) слагаемое Дг0 (5.11), как указывалось ранее, всегда
отрицательно. Значит, чтобы уменьшить величину С[, необходимо
аргумент широты <в предспусковой орбиты выбрать так, чтобы
слагаемое ре cos (wBX — ш) было положительным и максимальным
по величине. Этим требованиям удовлетворяет равенство
® = ивх. (7)
Геометрический смысл равенства (7) состоит в том, что в целях
сокращения угловой дальности спуска перигей предспусковой
орбиты целесообразно размещать над точкой входа в плотные
слои атмосферы.
222
Пример 1. Пусть предспусковая орбита является круговой с высотой
полета Ло = 200 км, высота верхней границы атмосферы hBX = 50 км. Опреде-
лить минимальную угловую дальность спуска ф и направление тормозного им-
пульса (угол а), если величина тормозного импульса Ао, = 100 м/с. В этом
случае по формулам (2) ... (4) получим ф = 75,3°, а = 33°.
Пример 2. Дано: hQ = 400 км, Лвх = 50 км, А^ = 120 м/с, ивх = 40°.
В этом случае по формулам (2) ... (5) находим: Ст = —3,3, DT = —0,57, ф = 125°,
а = 14,5°, ит = —85°.
Задача 5.2. Определить точку приложения тормозного им-
пульса иг при заданных его величине Дпг и направлении а.
Решение. Воспользуемся граничным условием (5.15), в котором
Ф = ивх — ^1, и будем рассматривать его как уравнение относи-
тельно неизвестного иг.
Введем новые переменные по формулам
2 cos а А sin а /1Ч
sln о =-----, cos о -------, (1)
а = У sin2 а + 4 cos2 а .
Тогда уравнение (5.15) перепишем в виде
cos ф sin 6 — sin ф eos 6 =з С,
где
С — Ci + 2 cos а
Vsina «4-4 cosa а
откуда находим С = sin (6 — ф) и поэтому
(arcsin С
б — ф = „ ’ (2)
т | и — arcsin С ' 7
После этого находим аргумент широты точки приложения
импульса
Ui = ивх — ф. (3)
Из двух решений (2) для угловой дальности спуска ф следует
выбирать положительное с минимальным значением ф.
Очевидно, что задача будет иметь решение, если удовлетво-
ряется неравенство | С | 1.
Пример. Дапо: п0 = 400 км, Лвх = 50 км, Aof = 120 м/с, а = 0, ивх =
= 40°. Определить аргумент широты точки приложения тормозного импульса.
По формулам (1) ... (3) находим: 6 = 90°, С = —0,65, ф2 = —50°, ф2 =
= 50°. Ив двух значений ф выбираем ф = 50°. Тогда аргумент широты точки
приложения импульса = 10°.
Задача 5.3. Определить величину тормозного импульаа Дох
при заданных точке его приложения их и направлении св.
Решение. В рассматриваемой задаче значение тормозного
импульса находим из уравнения (5.14)
д = _1 Ar0 + pecos(uBI —Ш) „V
1 sin ф sin а + 2 (1—cos ф) cos а* ' '
223
Пример. Пусть предспусковая орбита КА является круговой с высотой
Ла = 350 км, высота плотной атмосферы ЛВ1 = 50 км. Угловая дальность спуска
ф = 90° и тормозной импульс направлен вдоль трансверсали навстречу ско-
рости полета (а = 0). Определить Да,. По формуле получим До, = 87 м/с.
Задача 5.4. Определить величину тормозного импульса Дог
и его направление а при заданных точках приложения импульса и,
и входа в атмосферу uBZ из условия, чтобы величина импульса
оказалась минимальной.
Решение. Воспользуемся выражением (1) задачи 5.3:
До 1 Ar0+pecos(KBX—ю)
1 $1пф sin а+2 (1—cos ф) cos а* ' '
Тогда необходимое условие минимума импульса (1)
дДРг _ л
да ~
сводится к решению уравнения
sin ф cos а — 2 (1 — cos ф) sin а = 0,
откуда находим угол а, определяющий оптимальное направление
тормозного импульса:
. sin го
tg« = 2-(--cosy)’ Ф = “»х-«ь
а затем из выражения (1) определим величину тормозного им-
пульса.
Задача 5.5. Определить направление импульса а при задан-
ной точке его приложения и величине Дих.
Решение. Задача сводится к решению уравнения (5.15) отно-
сительно угла а. Введем новую переменную по формулам
₽2 (1 — cos го) о sin го
= — Е COS В г*- ,
О г о
Ъ — У sin2 ф 4~ 4 (1 — cos ф)2.
Тогда уравнение (5.15) запишем в виде
sin се cos 0 + gos a sin 0 = С,
где С = ’ —у- или sin (а + 0) = С,
откуда находим искомое значение угла со:
( — 04- arcsin С,
а~ (я 4- 0 — arcsin С.
Из двух значений угла со выбирается то, которое удовлетворяет
неравенству 0 а п/2.
Очевидно, что задача имеет решение, если выполняется не-,
равенство |С |1.
224 4
Пример. Пусть корректирующий импульс прикладывается в точке,
диаметрально противоположной точке входа в плотные слои атмосферы, т. е.
в этом случае <р == 180°. Тогда b = 4, sin 0 = 1, cos 0 = 0 и 0 = 90°.
Значит, sin (90° + а) = cos а = С, а = arccos С, т. е. в общем случае
импульс уже не будет касательным и сход с орбиты окажется энергетически
неоптимальным.
Задача 5.6. КА совершает полет в центральном поле сил по
эллиптической орбите, для которой заданы: г0 — средний радиус,
гА — радиус апогея, гп — радиус перигея. На положение линии
апсид и наклонение плоскости орбиты ограничений не наклады-
вается. Дан также радиус гвх некоторой условной границы плот-
ной атмосферы, при достижении которой происходит интенсивное
торможение и спуск КА на Землю. Определить точку приложения
тормозного импульса из условия минимума затрат характеристи-
ческой скорости для схода с орбиты и достижения границы плот-
ной атмосферы (энергетически оптимальный переход на траек-
торию спуска).
Решение. Задача сводится к определению точки приложения
тормозного импульса на начальной орбите из условия, чтобы
радиус перигея переходной орбиты стал равен радиусу гвх кру-
говой орбиты, а величина импульса оказалась минимальной.
Как известно, из всех возможных переходов между двумя
компланарными орбитами, на взаимное положение которых огра-
ничения не наложены (а именно этот случай рассматривается
в данной задаче), энергетически оптимальным будет апсидальный
переход [13]. Это означает, что тормозной импульс должен при-
кладываться в апогее или перигее начальной орбиты. Тогда
ось апсид переходной орбиты совместится с осью апсид началь-
ной орбиты, перигей переходной орбиты совпадет с границей
плотной атмосферы радиуса гвх, а сама переходная орбита будет
целиком лежать внутри начальной орбиты. Остается лишь выяс-
нить, какая из двух возможных точек приложения импульса
(апогей или перигей) приведет к меньшим затратам энергии
на торможение.
Эту задачу можно решить путем сравнения расчетных величин
импульсов, прикладываемых в перигее или апогее начальной
орбиты. Однако анализ значительно упростится, если воспользо-
ваться выражением для частной производной радиуса по транс-
версальной составляющей импульса [28]:
В обоих случаях здесь необходимо положить щ = 0 (поскольку
переход заканчивается в апсидальной точке) и <р = л.
В случае приложения импульса в апогее орбиты имеем
_ • - ^вх = ^П» =
225
и тогда
(1)
Если импульс прикладывается в перигее орбиты, то г = гА,
поэтому
Теперь найдем величины тормозных импульсов
(3)
(4)
(5)
Поскольку гА > гп> т0 отсюда следует, что Дод/Доп < 1» т. е.
ДоА < Доп. Значит, для энергетически оптимального схода с ор-
биты тормозной импульс целесообразно прикладывать в апогее
начальной орбиты.
Оценим отношения величин импульсов. Положим, что
причем
Тогда
гп = г0 + ДГП, гк — Г0 + ДГА>
Дгп «С г0> ДгА с Го-
Г0 j ______ Г° 1 Аг к ,
ГП Го ’ гк Г°
Поэтому из соотношения (5) следует
Аоа _ Агп
Аоп Ага ’
(6)
Пример 1. Пусть начальная орбита характеризуется высотами в апогее
Л А = 300 км и перигее &п = 200 км, а высота плотных слоев атмосферы состав-
ляет 50 км. Тогда Дгп = 200 — 50 = 150 км, Дгд = 300 — 50 = 250 км. По-
этому для снижения с апогея потребуется импульс, который в 150 : 250 =
= 0,6 раза меньше, чем при снижении с перигея.
226
Пример 2. Пусть начальная орбита задана радиусами перигея гп =
— 6600 км и апогея = 6800 км, а радиус плотных слоев атмосферы состав-
ляет 6420 км. Определить величины импульсов при сходе с орбиты в апогее
и перигее.
Используя формулы (3) и (4), находим
До = 52,7 м/с, Дор. = 107,5 м/с.
л ’ ’ п
Задача 5.7. Орбита КА является почти круговой с периодом
обращения Т. Прогноз движения КА показал, что трасса расчет-
ного n-го спускового витка проходит вне заданного района по1
садки. Определить корректирующий импульс для обеспечения
прохождения трассы через район посадки. / ;
Решение. Пусть п и п + 1 есть два соседних витка, между
трассами которых оказался район посадки. Известно, что один
из возможных способов смещения трассы относительно поверх-
ности Земли заключается в коррекции периода обращения КА.
При этом минимум расхода топлива достигается при условии, что
корректирующий импульс прикладывается по касательной к ор-
бите. В этом случае между величиной импульса Дол и изменением
периода ДТ в линейном приближении имеет место следующая
связь [28]:
ДТ = 3-^-Доп. (1)
В свою очередь вариация периода ДТ связана с вариацией
долготы восходящего узла ДО и числом витков п следующим
очевидным соотношением:
ДО = пшд ДТ. (2)
Из выражений (1) и (2) находим величину импульса
^ = 37^ДЙ- С3)
Если в выражении (3) величину Доп выражать в м/с, ДО — в гра-
дусах, то для орбит с высотой полета 200 ... 400 км величину им-
пульса можно определять по приближенной зависимости
Доп = 115-^-м/с, (4)
т. е. для изменения долготы узла орбиты на Г за виток потре-
буется импульс 115 м/с.
Понятно, что в наиболее тяжелом случае для совмещения
трассы с районом посадки потребуется сдвиг ее по долготе на
половину межвиткового расстояния, определяемого по формуле
Д£ = 4-<Д°1-шзП>
где ДОХ — смещение долготы узла, вызванное влиянием сжатия
Земли:
л г» 2я ®з
ДО. =-----.----— cost.
1 г* р
227
Тогда для смещения трассы на половину межвиткового расстоя-
ния
потребуется
импульс
Дип =
6Т (ОдЛ
(5)
Для орбит КА с высотами полета 200 ... 400 км и наклонением
51,5° имеем ДО, = 20', аэТ = 22,4°, т. е. а>3Т > ДО,. В этом
случае можно приближенно записать
Доп
V
6л
1285
п
м/с.
(6)
Значит, для смещения трассы на половину межвиткового рас-
стояния в случае приложения импульса за виток до спуска по-
требуется импульс 1285 м/с.
Из теории почти кругового движения известно, что транс-
версальный импульс Дип приводит к изменению высоты полета h
в точке орбиты с угловой дальностью полета <р, отсчитываемой
от момента приложения импульса, на величину
ДЛ = 2(1~с??Ф) дОп (7)
Таким образом, если на высоту полета наложены некоторые
ограничения, то после определения корректирующего импульса,
обеспечивающего прохождение КА через район посадки, необ-
ходимо проверить возникающее при этом изменение высоты полета.
Пример 1. Определить величину импульса, необходимого для смещения
трассы на половину межвиткового расстояния спустя 17 витков после прило-
жения импульса. Орбита КА является круговой с высотой 300 км.
По формуле (6) при л = 17 находим: Аип = 76 м/с.
Пример 2. Пусть КА совершает полет по орбите с высотами в перигее
Лп = 250 км и апогее Ла — 350 км. Определить величину импульса, прикла-
дываемого за 10 витков до спуска КА, если долготу восходящего узла витка
посадки требуется сместить к западу на 3°.
Найдем средний радиус орбиты, орбитальную и угловую скорости полета
КА и период обращения
г = R + -1- (Лп + М = 6671 км.
о =]/-£- = 7732 м/с,
Х = —= 1,16.10-» с"1, 7’ = -^-= 5427 с.
Г X
Далее по формуле (3) при л = 10 в AQ = —3° определим величину импульса:
Аип = —34,2 м/с. Затем по формуле (7) находим наибольшее изменение высоты
полета, которое при найденном значении импульса составит АЛ =—118 км.
Полученный результат показывает, что корректирующий импульс необхо-
димо прикладывать в окрестности перигея орбиты. В этом случае апогей орбиты
понизится на 118 км, его высота составит 232 км и станет минимальной.
Задача 5.8. Центр района посадки отстоит от трассы посадоч-
ного витка на расстоянии ЛЬ. Определить точку приложения и
228
величину бокового импульса Доь для смещения трасса посадоч-
ного витка на величину ЛЬ в районе посадки. Орбита КА близка
к круговой.
Решение. Предположим, что величина бокового отклонения
достаточно мала по сравнению со средним радиусом орбиты,
т. е. | ДЬ | г. В этом случае связь между отклонением ДЬ и
импульсом До6 выражается соотношением
ДЬ = Аиь- 0)
где ф — угловая дальность полета КА от точки приложения им-
пульса до точки, в которой корректируется величина ЛЬ. Если
величина Д& задана, то из выражения (1) находим импульс
Диь = (2)
° Sin ф ' '
Из полученной формулы следует, что величина импульса будет
минимальной, когда | sin ф | = 1. Это означает, что для энерге-
тически оптимальной коррекции бокового отклонения точка
приложения импульса должна отстоять на угол л/2 от точки,
в которой производится коррекция бокового отклонения.
Пример 1. КА совершает полет по круговой орбите с угловой скоростью
% = 1,16-10“3 1/с (что соответствует высоте ~300 км). В результате прогнози-
рования движения КА установлено, что центр района посадки отклонен от трассы
на 100 км. Определить оптимальный боковой импульс и точки его приложения
для устранения обнаруженного бокового отклонения.
В рассматриваемом случае угловое расстояние точки приложения импульса
от района посадки составит ±90°, т. е. существуют две энергетически эквива-
лентные точки приложения импульсов. Как следует из формулы (2), для сме-
щения трассы потребуется импульс Ди& = 116 м/с.
Пример 2. Определить величину бокового импульса при Д6 = 100 км
и угловой дальности ф = 70°. По формуле (2) находим Диь = 124 м/с.
5.3. Двухимпульсный сход с орбиты
Предположим, что на борту КА имеется некоторый запас топ-
лива и ему соответствует суммарный импульс До0- В целях обес-
печения схода КА с орбиты этим запасом топлива можно распо-
рядиться по-разному.
Можно, например, сразу израсходовать все топлива, отра-
ботав тормозной импульс Дс^ = Дп0, а направление импульса
и точку его приложения при этом выбрать оптимальным образом
из условия получения минимальной угловой дальности спуска,
т. е. решить задачу 5.1.
Можно поступить иначе, разделив топливо на две части, и
отработать два импульса. Первый из импульсов Дйа как-то изме-
нит предспусковую орбиту, а второй Дих, тормозной, осуществит
сход КА с полученной орбиты. Разумеется, что величины импулй-*
сов и точки их приложения должны быть подобраны так, чтобы
в конечном счете были наилучшим образом удовлетворен^ не-
229
которые критерии качества, например, угловая дальность участка
спуска.
Таким образом, задача двухимпульсного схода с орбиты может
бвсть сформулирована так: дана предспусковая орбита, точка
входа СА в плотные слои атмосферы и импульс До0. Требуется
определить точки приложения импульсов и их величины при
условии, что | Дих | + | Ди21 = До0, а угловая дальность спуска
после приложения тормозного импульса оказалась минимальной.
При этом предполагается, что первый корректирующий импульс
Ди2 является трансверсальным и после приложения его КА может
совершить некоторое число витков с целью определения орбиты
и исключения тем самым влияния ошибок исполнения коррекции
и прогнозирования движения.
В двухимпульсном сходе с орбиты граничное условие (5.13)
перепишем в виде
—sin ф sin а — 2 (1 — cos ф) cos а = С2, (5.17)
где
С2 = [ Дг0 + ре cos («В1 — <о) — 2I1-C0S2“.bi-^)1 дОа ] ,
(5.18)
причем | Дог | +1 Ди21 = До0,
ДгQ ~~ hjlZ Лф,
= R — p.
Решение задач двухимпульсного схода с орбиты базируется
на использовании соотношения (5.17).
Задача 5.9. Орбита КА характеризуется элементами р, е, ю.
Определить трансверсальный импульс Ди2, который приклады-
вается в точке орбиты с аргументом широты и2, при условии,
чтобы высота перигея орбиты стала равной Лт.
Решение. Воспользуемся граничным условием (5.13), которое
в рассматриваемом случае примет вид
Дг = —ре cos (и — ©) 4- 2t* ~со?(“~ д у2> (1)
А
причем Дг = hm — h9.
Очевидно, что отклонение радиального расстояния Дг дости-
гает экстремального значения в перигее или апогее орбиты и
поэтому
После дифференцирования выражения (1) получим
ре sin (и — со) _|_ 2sin дОа _ о. (2)
А
Уравнения (1) и (2) определяют искомое значение импульса
До2 и аргумент широты и линии апсид. Для решения этой системы
230
умножим уравнение (1) на sin (и — со), а уравнение (2) — на
cos (и— со) и сложим эти уравнения. В результате получим
( Дг---До21 sln (и — со) = -jj- sln (со — и2) До2. (3)
Далее уравнение (1) умножим на cos (ы — со), а уравнение (2) —
на sin (и — со) и вычтем почленно из первого уравнения второе.
Тогда
/ 2 \ 2
( Дг--Ди2) cos (и — со) — — ре----cos (со — и2) До2. (4)
Затем возведем обе части уравнений (3) и (4) в квадрат и сло-
жим эти уравнения
(Дг----Доа)2 = [-у- sln (со — и2) Доа]2 +
[2 12
ре + — cos (со — и2) До21 ,
откуда находим искомое значение корректирующего импульса
До = — (Ре)а (51
а 4 hm — До + ре cos (® — и2) ’ ' '
в результате приложения которого высота перигея орбиты станет
равной Лто.
Задача б. 10. Даны пред спусковая орбита КА с элементами
р, е, со, а также минимально допустимая высота полета hm, вы-
сота границы плотной атмосферы ЛВ1, аргумент широты ывх точки
входа в плотную атмосферу. Требуется определить трансверсаль-
ную составляющую корректирующего импульса Ди2, аргумент
широты и2 точки его приложения, а также величину тормозного
импульса Дох, его направление (угол а) и аргумент широты ых
точки его приложения при следующих условиях:
суммарная величина импульса До0 задана;
после приложения корректирующего импульса перигей ор-
биты должен оказаться на высоте Лт;
угловая дальность спуска после приложения тормозного им-
пульса должна быть минимальной.
Решение. Воспользуемся граничным условием (5.17)
—sin <р sin а — 2 (1 — cos ф) cos а = С2, (1)
где
С2 = [Дг0 + pl cos (uBI - ш) - 2 -“?)]_ дОа]
(2)
причем
Дг» = Лвх — Ло. Ло = R — Р>
| Дох | +1 До21 = Доо.
231
Поскольку во всех случаях Дс^ > 0 (величина тормозного им-
пульса положительна) и Ди, < 0 (корректирующий импульс
отрицателен, поскольку он предназначен для понижения пред-
спусковой орбиты), то
Дих = До0 + До,. (3)
В задаче 5.9 было показано, что трансверсальная составляю-
щая корректирующего импульса До„ обеспечивающего понижение
перигея до высоты hm, связана с аргументом широты и, точки его
приложения зависимостью
(4)
* 4 hm — fa — ре cos (со — us) ' '
Если известна величина С, (2), то оптимальное значение угловой
дальности спуска, как было показано в задаче 5.1, определится
выражением
Ф — arccos D„ (5)
где d2 = _|_(4-]/1 -ЗС^),
причем направление импульса
“ = arc*2(d^
и аргумент широты точки его приложения
и1 = и„ — ф. (7)
Чтобы угловая дальность спуска (5) оказалась минимальной,
необходимо минимизировать величину С\ (2), которая с учетом
выражений (3) и (4) будет являться функцией только аргумента
широты и, точки приложения корректирующего импульса. Необ-
ходимое условие экстремума функции С, (и,) запишем в виде
= 0.
аа,
После выполнения дифференцирования функции (2) получим
следующее уравнение относительно и,:
ах sin (со — и,) + а, sin (и„ — а,) = а,, (8)
где
01 = — 1ре£Дг0 + ресо8(ивх —®) + 2-пр],
а, = 2 (А 1(Лт - V - (ре)’] + (Лт - Ло) До»), (9);
а, = 2ре sin (ИвХ — о») До0-
Для решения уравнения (8) относительно и, приведем его
к форме
Af, cos и, — Af, sin а, = а,,
232
где Ма = ai sln w -|- aa sin uBX, (10)
Ma = Oi cos ® 4- Oi cos u8S. (11)
Теперь введем новую независимую переменную 0 по форму-
лам
sin₽ = 4k cos0 = -^, (12)
М = У М? + 4- + 2°!°» cos (“»» — “)•
Тогда уравнение (10) перепишем в виде
sin (0 - и,) = ,
откуда находим
| 0 4- arcsin (—-Jjj-)»
[ л - 4- arcsin (—. (13)
Решение (13) дает два экстремальных значения иа. Выбор необ-
ходимого из них производится по величине Са (2): надо брать то
из иа, при котором Са по абсолютной величине минимальна (что
соответствует наименьшей угловой дальности спуска).
Трансверсальная составляющая корректирующего импульса
затем определится по формуле (4), величина тормозного им-
пульса — по формуле (3), угловая дальность спуска, направление
и точка приложения тормозного импульса — по формулам (5) ...
(7).
Пример 1. Пусть предспусковая орбита является круговой (е=0).
В этом случае из выражений (9) следует, что = 0, тогда из равенств (12)
получим р = uBZ. Поэтому
( п — UBZ,
= 5
I «вх-
Значит, точна приложения корректирующего импульса диаметрально противо-
положна точке входа в атмосферу = я — uBZ). Второе решение = uBZ)
соответствует также экстремуму, однако при этом угловая дальность спуска
оказывается максимальной.
Трансверсальная составляющая корректирующего импульса (4)
Д»1 = 4"(Лт~4<,)’
т. е. перигей орбиты понизится до высоты hm и будет расположен над точкой
входа в атмосферу.
Величину С, найдем из выражения
с,= (лг0
где Дс^ = Ац> + До*.
Далее находятся характеристики ф, <z, по формулам (5)... (7).
233
Пример 2. Пусть цвх = (о, т. е. перигей предспусковой орбиты рас-
положен над точкой входа в атмосферу. Тогда а9 = 0, а из выражений (12), (13)
следует
( ивт
и2 = 1
( Л — Мвх,
т. е. корректирующий импульс прикладывается на линии апсид предспусковой
орбиты, причем величина импульса
До» = -4- К*т — М + ре],
а коэффициент
С»=[Д'о-ре--------
. Примерз. Пусть предспусковая орбита задана следующими характери-
стиками: Лд = 400 км, hn = 250 км, ш = 0. Даны также: минимально допу-
стимая высота полета hm = 180 км, высота границы плотных слоев атмосферы
ZiBX = 50 км, аргумент широты точки входа в плотную атмосферу цвх = 90°,
суммарный импульс Аи0 = 120 м/с.
Определить корректирующий и тормозной импульсы, точки их приложе-
ния, а также характеристики схода с орбиты.
В рассматриваемом примере имеем
Ре = (ЛА — Лп) = 75 км>
Р = (ГА + гп) = 6696 км,
Дг0 = —275 км, ho = 325 км, X = 1,16-10“8 с"1.
По формулам (9) ... (13) находим
аг = 5,9 км2/с, а2= —21,8 км2/с, а3 = 18 км2/с,
Mi = —21,8 км2/с, М2 = 5,9 км2/с, М = 22,6 км2/с,
Р = _80°,
Г —(80 — 53)°= — 133°,
“2 = [ 180° + (80 + 53)° = 313°.
Далее определяем два значения корректирующих импульсов, соответствующих
двум значениям
Ди' = —48 м/с, Ди£ = — 18,8 м/с,
а также величины тормозного импульса
Ду{ = 72 м/с, Д^1 = 101,2 м/с.
Затем находим величины коэффициента Са
с;= —2,12, с;= —2,50.
Поскольку' | С'2 К | CJ |, то принимаем
Дуа = —48 м/с, = —133°, дУ1 = 72 м/с.
Далее по формулам (5) находим Da = 0,067 и угловую дальность спуска
Ф = 86°. Затем по формулам (6) и (7) определим направление тормозного им-
пульса (а = 28°) и аргумент широты точки приложения тормозного импульса
U1 =4°. '
Заметим, что в одноимпульсном оптимальном сходе с предспусковой орбиты
(см. задачу 5.1) при полном израсходовании импульса Дох = Др0 = 120 м/с
угловая дальность спуска получается равной 166°, т. е. она значительно пре-
вышает дальность спуска при двухимпульсном сходе с орбиты.
234
5.4. Снижение КА на внеатмосферном участке
Участок снижения начинается с момента приложения тор-
мозного импульса и заканчивается входом в плотные слои ат-
мосферы.
На этом участке выполняются подготовительные динамиче-
ские операции: отделение СА от приборного и двигательного отсе-
ков, разворот его по тангажу, рысканию и крену (при необходи-
мости), подготовка приборов и агрегатов системы управления
к работе и др. К моменту входа в плотные слои атмосферы должны
быть обеспечены необходимые условия для дальнейшего расчет-
ного движения СА. С баллистической точки зрения такими усло-
виями являются скорость и угол входа, высота полета спускае-
мого аппарата, время достижения СА заданной перегрузки или
какого-либо иного измеряемого параметра.
Задача 5.11. Предспусковая орбита задана элементами р, е, со.
В точке орбиты с аргументом широты их прикладывается тормоз-
ной импульс с компонентами Дог1, ДиЛ1> Определить радиальную
составляющую скорости СА ог и угол входа 0 в плотные слои
атмосферы на высоте ЛВ1. Сопротивлением атмосферы на участке
снижения пренебречь.
Решение. Предположим, что предспусковая орбита близка
к круговой и поэтому воспользуемся соотношениями почти круго-
вого движения.
Пусть v — скорость движения. по средней круговой орбите:
» = (1)
и ог — радиальная составляющая скорости полета СА на момент
входа в плотные слои атмосферы. В этом случае угол входа опре-
делится формулой
= (2)
причем при малых углах 0 можно приближенно положить
tg 0 = 0.
Для определения величины vr воспользуемся граничным усло-
вием (5.13), которое для текущего значения угловой дальности
спуска <р с учетом равенств (5.6) при До2 = 0 перепишем в виде
Дг = — ре cos (и—<о) 4- Apri + Аощ. (3)
где и = «j 4 ф.
Так как в среднем круговом движении ф = Kt, то, дифферен-
цируя равенство (3) по времени, находим радиальную скорость
для данного значения ф:
vr = Кре sin (и — и) + cos ф Дог14- 2 sin ф Доп1. (4)
Чтобы рассчитать радиальную скорость по формуле (4), необ-
ходимо знать угловую дальность спуска ф. Для определения
235
ее воспользуемся граничным условием (3), в котором положим
А/* = Дг q = ^вх
и тогда равенство (3) можно представить в следующем виде:
аг = а2 sin ф + а3 cos ф, (5)
где
Л - Лг О
“1 — ^лГ о — Z ,
аг = ~г11- + Ре sln (ut — (о),
Л
а9 = 2 — ре cos (их — и).
Для решения уравнения (5) относительно ф введем новую
независимую переменную 0 по формулам
Sin0=-^-, COS0 = -^-,
А = У + а23. (6)
Тогда выражение (5) упрощается
J- = sin (ф + 0) (7)
и отсюда находим угловую дальность спуска ф Очевидно, что
уравнение (7) будет йметь решение при выполнении условия
|aiM | < 1.
Пример 1. Пусть предспусковая орбита является круговой (е = 0 с вы-
сотой h0 и сход с нее совершается трансверсальным импульсом, т. е. Диг1 = 0).
В рассматриваемом случае получим
а1 = ЛВ1-Л0-2^-,
аа = 0, а, = 2^-,
Л
Из выражения (5) следует
и поэтому радиальная скорость на момент входа в атмосферу
vr = 2 sin <р Дип1 = 2 ~|/1 — cos2 Ф Аоп1.
Далее по формуле (2) находим угол входа
0 = 2 1/ (8)
V V 2 Avnl / V
Рассмотрим числовой пример. Пусть высота орбиты = 200 км, высота
плотных слоев атмосферы Лвх = 80 км, трансверсальная составляющая тормоз-
ного импульса Дип1 = —100 м/с. В этом случае по формуле (8) находим 0 =
= —1,4°. Если предположить, что величина тормозного импульса увеличена
в два раза, то угол входа станет равным —2, 2°.
236
Зависимость массовой плотности атмосферы
от геометрической высоты (ГОСТ 4401—73)
Таблица 5.2
ь, км р. (кгс»с*) м4 h, км Р, (кгс-с*) м4 Л, км р. (кгос*)
0 1,2492-10-1 100,0 5,5058-10-» 200,0 3,6821-10-“
5,0 7,5106-10~* 105,0 2,3352-10-’ 205,0 3,2226-10-“
10,0 4,2172-10—’ 110,0 1,0792-10-’ 210,0 2,8255-10-“
15,0 1,9851-10-’ 115,0 5,1673-10-» 215,0 2,4816-10-“
20,0 9,0623-10-’ 120,0 2,7110-10-» 220,0 2,1834-10-“
25,0 4,1422-10-’ 125,0 1,3282-10-’ 225,0 1,9242-10-“
30,0 1,8254-10-’ 130,0 7,6525- 10-м 230,0 1,6985-10-“
35,0 8,4475-10-4 135,0 4,8817-10-“ 235,0 1,5016-10-“
40,0 4,0792-10-4 140,0 3,3412- 1О-10 240,0 1,3296-10-“
45,0 2,0482-10-1 145,0 2,4070-10-10 245,0 1,1791-10-“
50,0 1,0966-10-’ 150,0 1,8031-10-“ 250,0 1,0472-10-“
55,0 6,0090-10-’ 155,0 1,4128-10-10 255,0 9,2989 10-“
60,0 3,3816-10-’ 160,0 1,1300-ю-10 260,0 8,2711-10-“
65,0 1,8291-10-’ 165,0 9,7569-10-“ 265,0 7,3681 • 10-“
70,0 9,4576-10-’ 170,0 8,4419-10-“ 270,0 6,5736-10-“
75,0 4,6387-10-’ 175,0 7,3182-10-“ 275,0 5,8741-10-“
80,0 2,1393-10-’ 180,0 6,3561-10-“ 280,0 5,2564-10-“
85,0 8,6985-10-’ 185,0 5,5305-10-“ 285,0 4,7106-10-“
90,0 3,5418-10-’ 190,0 3,8209-10-“ 290,0 4,2281-10-“
95,0 1,4450-10-’ 195,0 4,2096-10-“ 295,0 3,7987-10-“
П р и м е р 2. Предспусковая орбита КА является круговой с высотой h$ —
= 300 км, тормозной импульс At/j = 120 м/с, высота границы плотных суюев
атмосферы hBX == 50 км. Определить минимальную угловую дальность спуска
направление тормозного импульса, радиальную составляющую скорости и угол
входа в плотные слои атмосферы.
Для решения этого примера вначале воспользуемся задачей 5.1 и находим
угловую дальность спуска <р = 95,9° и направление тормозного импульса (а =
= 24,27°). Далее по формулам (5.6) и (4) находится радиальная составляющая
скорости полета: = —216 м/с. Полагая, что средняя круговая скорость помета
1Л й
v~ У Я + V
по формуле (2) определяется угол входа 0= —1,46°.
Задача 5.12. Определить высоту полета СА на момент дости-
жения заданной перегрузки п. Баллистический коэффициент S
СА задан.
Решение. Так как сила аэродинамического сопротивления СА
Q = C„Fm-^~,
то при его массе т величину перегрузки можно определить по
формуле
237
или
« = (1)
р
где S = Сх ~2^— баллистический коэффициент.
Полагая скорость полета v СА известной, из выражения (1)
находим плотность атмосферы, соответствующую заданной пере-
грузке
(2)
Далее с помощью табл. 5.2 определяется высота полета.
Пример. Дано: п = 0,1» S = 0,01 м’Дкгс-с2), v = 7500 м/с. По фор-
муле (2) находим р= 1,74-10-в (кгс-с^/м4. С помощью табл. 5.2 определяем
искомую высоту полета: h = 82 км.
Задача 5.13. Предспусковая орбита задана элементами р9 е, со.
Даны также величина тормозного импульса высота границу
плотной атмосферы Лвх и аргумент широты ивх точки входа в плот-
ные слои атмосферы. Предположим, что в результате неточной
работы автономной системы управления КА и прогнозирования
движения его допущены следующие погрешности:
бу — по величине тормозного импульса;
ба — по ориентации направления тяги в плоскости орбиты;
6Л0 — по высоте полета;
6ЛВХ — по высоте границы плотной атмосферы;
6Лп — по высоте перигея предспусковой орбиты;
6hA — по высоте апогея предспусковой орбиты;
6(0 — по аргументу перигея предспусковой орбиты.
Определить изменение угловой дальности спуска, обусловлен-
ное влиянием указанных погрешностей. При этом предпола-
гается, что направление тормозного импульса и точка его прило-
жения находятся из условия обеспечения минимальной угловой
дальности спуска (см. задачу 5.1).
Решение. В задаче 5.1 было показано, что минимальная угло-
вая дальность спуска <р и соответствующее ей направление им-
пульса (угол а, см. рис. 5.1) определяются выражениями
<р = arccos D, (1)
tga = —-staE... (2)
& 2 (1 — cos ф) v '
где
D = 4- (4 - V 1 + ЗС2), (3)
С = [ Дг0 4- ре cos (ип — (О)] -Д-, (4)
Дг о — Лвх Л©*
238
Теперь предположим, что перечисленные в условии задачи
погрешности являются достаточно малыми (по сравнению с соот-
ветствующими параметрами), вследствие чего допустима линеа-
ризация угловой дальности спуска (1). В этом случае в линейной
постановке задачи
= "гаг + -й- s“ + -ж? +
Теперь найдем частные производные, входящие в выражение (5).
Из равенств (1) и (3) находим
—sln <рД<р = ДР,
д£>_ _
Vi + зс3
откуда
л С6С ,е.
Аф = mT/ftr^~ • (6)
sin ф у 1 -j-
Выражение (4), определяющее величину С в соответствии с ра-
венствами (5.1), (5.5), перепишем в следующей форме:
+ &Г7 А. —h„ 11
Лвх----Ц-11 + а2 п COS (ывх - ш)] -Д-. (7)
Далее найдем связь вариации функции С (7) с вариациями пере-
численных выше параметров:
SC(6o) = --^T6w> (8)
6С(бЛ0)= (9)
i 1
6С(6ЛВХ) = -А-6АВХ, (10)
6С (6ЛП) = - [1 + cos (uBX - ш)1 6Лп( (11)
6С (6ЛА) = - [1 - cos (uBI - со)] -2^- 6ЛА, (12)
6С (6ш) = ~sln (“вх — “) 6ш. (13)
Из выражения (2) находим
Дф = - 2 1 ~caOS<P ба- (14)
v cos2 а v 1
Далее из равенств (6) ...(14) определяем частные производные
дф дС
d Av Av! ’
(15)
239
— 2<71~с”ф , (16)
да cos8 a v '
^ qk П7.
dhg ~~ Аох ’ ЗЬВХ ~ А»! ’ *1Z'
^-=-(l+cos(U„-<o)]A, (,8)
^. = _|1_COS(U„_<U)IJL, (1Ц
где обозначено
4 ~ sincp ут+3^ ’ (21)
Пример 1. Пусть орбита KA является круговой с высотой h$ = 400 км,
тормозной импульс Ас?! = 120 м/с, высота границы плотных слоев атмосферы
Лвх = 50 км. На сколько изменится угловая дальность спуска, если высоту гра-
ницы плотных слоев атмосферы уменьшить на 1 км (6/iBX = 1 км)?
По формулам (1) ... (4) находим С = —3,3, <р = 125°. Далее по формуле (21)
определяем q = —0,61 и угловая дальность спуска изменится на
Дф = 6ЛВ1 = 0,34°.
ОЛВХ
Пример 2. По исходным данным, приведенным в примере 1, определить
изменение угловой дальности спуска, если тормозной импульс отработан с по-
грешностью 1%.
В этом случае = ±1,2 м/с. По формуле (15) находим частную произ-
водную
*L = 16,7 _Р^ = да
д Ао км/с м/с
Следовательно, Дф = —= ± 9°, 6.
Пример 3. Оценить влияние нецентральности гравитационного поля и
несферичности Земли на угловую дальность спуска.
В соответствии с принятыми допущениями основные характеристики участка
снижения с орбиты после приложения тормозного импульса выше определялись
в предположении, что гравитационное поле сил Земли является центральным,
а поверхность Земли есть сфера радиуса /?. Однако в действительности грави-
тационное поле сил Земли является нецентральным. Главное отличие его от цен-
трального поля обусловлено сжатием Земли. Сжатие Земли вызывает периоди-
ческое возмущение радиального расстояния КА от центра Земли, которое для
почти круговых орбит в линейном приближении определится из выражения [28]
Агс =---— -1- ((2 - 3sin8 0(1— cos и) +
sin® i
+ (12 cos 2ц, — 3cos (2u0 + u) — 2cos2(u0 + «) —
— 7cos(2u0 —a)]j , (22)
где Uo — аргумент широты, начиная с которого производится учет влияния
сжатия Земли. Условимся, что учет влияния сжатия Земли производится с мо-
240
О 30 60 90 120 150 и°
Рис. 5.3. Изменение радиального рас-
стояния КА — центр Земли, вызван-
ное влиянием сжатия Земли
Рис. 5.4. Отклонение радиуса поверх-
ности Земли от сферы, вызванное не-
сферичностью Земли
мента прохождения КА восходящего узла. В этом случае и0 = 0 и тогда из вы-
ражения (22) получим
Дг0 =----£ 1 — cos и 4- ~• (4 cos и — 3 — cos 2и) j . (23)
Чтобы оценить порядок величины Дгс на рис. 5.3 в качестве примера при-
ведена зависимость (23) при наклонении плоскости орбиты i — 51,5° и высоте
круговой невозмущенной орбиты h0 = 300 км.
Теперь оценим влияние сжатия Земли на угловую дальность спуска. Вос-
пользуемся соотношениями (5) и (17)
Аф = 4?- бЛо.
ОП0
причем в рассматриваемом случае 6hQ = Дгс, поскольку сжатие Земли при-
водит к понижению орбиты. Для оценок примем, что орбита КА является кру-
говой с высотой hQ = 400 км, тормозной импульс Дих = 120 м/с, высота границы
плотных слоев атмосферы Лвх = 50 км, аргумент широты точки входа в плотные
слои атмосферы ивх == 90°. По формулам (1) ... (4) находим С——3,3, ф =
= 125°. Так как в соответствии с выражением (21) q — 0,61, то по формуле (17)
определяем
дф
-чг- 0,34 градус/км.
оЛо
Теперь найдем величину Дг0. При и = uBX = 90Q согласно равенству (23)
имеем Дг0 = —8 км. Тогда
Дф = -%- Дгс = -2,7е,
оЛд
т. е. за счет влияния сжатия Земли угловая дальность спуска уменьшится на 2,7°
(иа 230 км).
Теперь рассмотрим влияние несферичности Земли на угловую дальность
спуска. Если — экваториальный радиус Земли, то на широте В отклонение
радиуса Земли от сферы определится по формуле
ДгСф = —sin8 В» (24)
где sin В = sin a sin I.
Чтобы оценить порядок величины Дгсф, на рис. 6.4 приведен график функ-
ции (24) при i = 51,56.
Оценим далее влияние несферичности Земли на угловую дальность спуска.
Дано: h0 — 400 км, Д^ == 120 м/с, цвх = 90°; hBX = 50 км. В этом случае со-
гласно (17)
= —0,34 градус/км.
д«вх
9 П/р Г. С. Титова
241
Для приведенных исходных данных по формуле (24) находим ДгСф = —13 км
и тогда возмущение угловой дальности
д<р = а£ДГсф==4’4°’
т. е. дальность спуска изменится на 520 км.
Таким образом, в общем случае влияния сжатия и несферичности Земли
могут привести к заметному изменению угловой дальности спуска. Чтобы учесть
влияние этих возмущений, при расчете коэффициента С (4) необходимо рас-
стояние между средней круговой орбитой и границей плотных слоев атмосферы,
обозначаемое Дг0, вычислить по формуле
Д'о = Дг0 — Дг0 + ДгСф. (25)
где величины Дгс, ДгСф определяются выражениями (23) и (24) соответственно.
В рассмотренном примере за счет совместного влияния указанных возмущений
угловая дальность спуска увеличится на угол 1,7° (т. е. на 200 км).
Задача 5.14. Показать, что после приложения тормозного им-
пульса при движении КА в разреженной атмосфере за счет влия-
ния торможения ее скорость КА возрастает («парадокс спутника»
141).
Решение. Введем следующие обозначения: Р — сила притя-
жения КА к центру Земли, Р — т — масса КА; Q — сила
сопротивления атмосферы; 0 — угол между трансверсалью и
вектором скорости КА; <р — угловая дальность полета КА.
Запишем уравнения движения КА в проекциях на вектор
скорости
Р sin 0 — Q — то (1)'
и на нормаль к нему
Р cos 0 = то (ф + 0). (2)
В уравнении (1) выразим произведение то через Р и 0. Очевидно,
что о cos 0 = гф, и поэтому
• v cos 0 /Ч\
ф = ——. (3)
Кроме того, воспользуемся равенством
0=-^Ф- (4)
Далее из соотношений (2), (3), (4) получаем
Pcos0 = -^^^(l+-ey (5)
Г \ аф /
Пока сопротивление атмосферы достаточно мало, можно пола-
гать, что угол 0 меняется относительно медленно по сравнению
с изменением угловой дальности полета <р. Поэтому примем, что
1 • Тогда из равенства (5) находим
о> = ±. (6)
Используя затем очевидное соотношение
—v sin 0 = г (7)
242
и выражение (6J, получаем
. do . do . .«у m , Л do*
mo = mr = msta 0) = — —sln 0 =
m . a I P \ n sin e
= Tsln0 •
p
Таким образом, mb = -g-sln0. (8)
Теперь из равенства (1) находим
-j-sin0 = Q, (9)
откуда sin 0 = 2
или при малых углах снижения
0 = 2-^-. (10)
Формула (10)' показывает, что измеренный в радианах угол сни-
жения КА, движущегося по почти круговой орбите, примерно
вдвое больше отношения силы аэродинамического сопротивления
к силе притяжения [4].
Из выражений (8) и (9) также следует
mb = Q. (11)
Формула (11) выражает известный «парадокс спутника»: ско-
рость полета КА, движущегося по орбите, близкой к круговой при
движении в атмосфере возрастает; ускорение в направлении
движения оказывается таким же, каким бы оно было, если бы
сила лобового сопротивления изменила свое направление на
противоположное и толкала бы КА вперед.
Отсюда, в частности, следует, что из двух КА, находящихся
на одной и той же орбите, быстрее будет двигаться тот, который
испытывает большее сопротивление.
Пример!. Выразить угол снижении КА через баллистический коэффи-
циент.
Поскольку Q = CxFm -ns—,
п та м 9
То Р----^- = —о*,
в поэтому из соотношения (10) следует
0 = 2Spr,
причем г = R + h.
Пример 2. Дано: S = 0,01 м8/(кгс-са), h = 200 км. Определить угол 0.
По формуле (12), пользуясь табл. 5.2, находим 0 = 2,8°-1О“4.
Пример 3. Определить радиальную составляющую скорости КА, вы-
званную влиянием сопротивления атмосферы»
Очевидно, что vr = и0.
Для приведенных в примере 1 данных получаем: при высоте полета 200 км
радиальная составляющая скорости составит 2,2 м/с»
9* 243
5.5. Сход с орбиты с использованием связки
Применение связанных тросом космических объектов (связки)'
позволяет осуществить безымпульсный сход СА с орбиты. Это
обусловлено особенностями орбитального движения связки. Дей-
ствительно, суммарные силы, действующие на связанные косми-
ческие объекты при натянутом тросе, отличаются от сил, которые
действуют на них при свободном орбитальном полете. Это опреде-
ляет отличие связанного движения космических объектов от сво-
бодного орбитального движения и позволяет использовать до-
полнительные силы реакции связи в качестве управляющих сил
для осуществления маневров объектами связки, в том числе и
маневра схода с орбиты для спуска ПО, 11, 12].
Соответствующим выбором характеристик связки и начальных
условий движения можно ’ обеспечить различные режимы абсо-
лютного и относительного движений объектов связки. Для осу-
ществления спуска с орбиты обычно рассматривают равновесный
стационарный режим, при котором связка в процессе полета
все время ориентируется по местной вертикали (при высоте полета
нижнего объекта более 120 км) и оба ее объекта совершают полет
по круговым орбитам с одинаковой орбитальной угловой ско-
ростью [10, 11]. При этом линейная скорость верхнего (пер-
вого) объекта, совершающего полет по круговой орбите радиуса
г1г будет больше круговой скорости для данной высоты нр,
а скорость нижнего (второго) объекта va будет меньше круговой
скорости v2 кр, соответствующей радиусу га. Если в некоторый
момент времени произвести разъединение связки, то оба объекта
перейдут на эллиптические орбиты. Положение верхнего объекта
в момент разъединения будет соответствовать перигею его новой
орбиты, а нижнего объекта — апогею. Траектория свободного
движения второго объекта при соответствующих характеристиках
связки и условий отделения может пересечь плотные слои атмо-
сферы, т. е. рассматриваемый объект перейдет на траекторию
спуска (рис. 5.5).
Принимая во внимание, что длина соединительного троса D
значительно меньше расстояний каждого из связанных объектов
до центра притяжения, можно получить ряд аналитических
выражений, характеризующих зависимость параметров движе-
ния связанных объектов от их масс и длины троса. С учетом
членов первого порядка малости по отношению к величинам
Dlrt и D/ra движение центра масс связки можно считать кепле-
ровским [11 ]. В данном случае его угловая скорость определяется
выражением
где т19 т2 — соответственно массы первого и второго объектов
связки.
244
Рис. 5.5. Использование
связки для спуска с ор-
бита
В условиях равновесного стационарного режима полета связки
угловые скорости орбитального движения верхнего и нижнего
объектов одинаковы и равны угловой скорости центра масс (Хх =
= Ха = Xs). Следовательно, значения и Ха также определяются
выражением (5.19). Тогда для линейных скоростей верхнего и
нижнего объектов связки могут быть записаны следующие за-
висимости:
<5-2»
Для стационарного режима полета связки
rt — G + r2 = ri~ D. (5.22)
Тогда с учетом членов первого порядка по отношению к величинам
D/rt и D/ra имеем
”• = ”»(’ +т^Н). <Б-23>
С-*„(1-4 J_£). (5.24)
Если связка состоит из орбитальной станции и спускаемого
аппарата и масса станции тг значительно превосходит массу СА
лц, то из выражений (5.20), (5.21) непосредственно следует, что
ох = ]/-£- = <4 „Р> (5.25)
Oj — "з75 — (^i D) Xi Rp, (5.26)
ri
где X}Rp — круговая угловая орбитальная скорость для орбиты
радиусом Гщ.
245
Рассматриваемый для схода о орбиты равновесный стационар-
ный режим движения связки соответствует модели невозмущен-
ного кругового движения без учета действия сопротивления
атмосферы при расстоянии между связанными объектами значи-
тельно меньшем их удаления от центра Земли. Однако этот режим
отвечает устойчивому относительному движению связки. Наличие
небольших по величине возмущений приводит к появлению малых
колебаний связки относительно вертикального равновесного поло-
жения. Так, для рассматриваемых высот полета связки при тре-
буемых для схода с орбиты длинах соединительного троса, а также
при эллиптичности орбиты первого объекта до значений эксцен-
триситета е 0,02 амплитуда колебаний связки, как правило,
не будет превышать одного градуса. Такое возмущение начальных
условий будет незначительно сказываться на параметрах траек-
тории спуска.
Задача 5.15. Определить условия, гарантирующие вход СА
в плотные слои атмосферы при спуске с использованием связки,
осуществляющей полет в равновесном стационарном режиме.
Решение. Для обеспечения входа СА в плотные слои атмосферы
необходимо, чтобы в момент отделения СА его начальная скорость
v0 была бы меньше некоторой предельной величины
< %>• (11
Величина опр определяется из условий перехода СА на эллип-
тическую орбиту, касающуюся в перигее сферы радиуса гвх,
которая представляет собой границу плотных слоев атмосферы.
Точка отделения СА от связки является апогеем траектории
спуска. Поэтому ________________
v = 1/"________2НГВХ______ /О)
пр V (Гх_о)(Г1_о+Гв1)’ W
где — радиус круговой орбиты первого (верхнего) объекта
связки; D — длина соединительного троса связки.
Для определения начальной скорости СА воспользуемся вы-
ражением (5.24), в которое подставим значения
^2 кр —
га = fi — D.
Тогда
о0 =
rx-D
3 ________D \
2 + /na rx — DJ
(3)
С учетом выражений (2) и (3) условие (1) может быть записано
в следующем виде:
тг 3 D /_________"]/гi — D -|- гвх \ 1
2 'x-^T/r1-D + rBX-VS^/ ’
Пример 1. Верхний объект связки массой mf = 10 т совершает полет
по круговой орбите высотой hi = 300 км. Определить максимально допустимую
246
массу нижнего объекта при которой еще возможен спуск с орбиты для длин
соединительного троса Di == 32 км и Da = 50 км. Граница плотных слоев атмо-
сферы определяется высотой Лвх = 100 км.
Значениям hi = 300 км и Лвх = 100 км соответствуют радиусы = 6671 км
и гвх = 6471 км. Подставляя в формулу (4) эти значения, а также величины D%
и Da, получаем
для Di = 32 км: ma/mf< 0,1248;
для D2 = 50 км: 0,9717.
Поэтому в первом случае т2шах = 1,248 т, а во втором — mamax — 9,717 т.
Задача 5.16. Связка состоит из ОС, движущейся по круговой
орбите радиуса г19 и СА, располагающегося радиально под стан-
цией. Считая, что масса ОС значительно превосходит массу СА,
определить минимальную длину соединительного троса Dmln,
при которой возможен спуск СА с орбиты.
Решение. После разделения связки СА переходит на эллипти-
ческую траекторию спуска с радиусом апогея
2 == -О mln* (1)
Скорость СА в этой точке определяется величиной
Учитывая, что движение связки осуществляется в равновесном
стационарном режиме, запишем
О)
ч
Приравнивая правые части выражений (2) и (3), получаем урав-
нение четвертой степени относительно искомого радиуса г,
4 + гвх4-2г?г«»0. (4)
Для нахождения действительного корня уравнения (4) можно
воспользоваться методом последовательных приближений. В ка-
честве первого приближения возьмем
Им = УгКг (5)
Последующие приближения выполняются о использованием вы-
ражения _______________
гп = V>BX(2r!-rh<-i))- (6)
После нахождения г2 определяется минимальная длина соедини-
тельного троса
jDmln == Г 1 Г 2* (7)
Пример. Для условий спуска, определяемых значениями г± = 6871 км
и гвх = 6471 км, по зависимости (5) находим = 6769 км. В результате после-
дующих приближений определяем га = 6812 км. Тогда по зависимости (7) нахо-
дим D щщ = 59 км.
Задача 5.17. Сход с орбиты СА осуществляется с использова-
нием связки, состоящей из ОС, движущейся по круговой орбите
247
радиуса rt, и самого СА, подвешенного к ОС на тросе длиной D.
Определить эксцентриситет и фокальный параметр траектории
спуска.
Решение. В качестве исходных зависимостей для определения
эксцентриситета и фокального параметра траектории спуска вос-
пользуемся известными соотношениями
е = /1 -jfea(2-fia)cosa0a, (1)
p = 4-(ra°2cosea)2- (2)
Г*
Величины га, оа, 0а определяют значения радиуса, скорости и угла
наклона вектора скорости СА в момент отделения от связки. Пара-
метр fea зависит от га и оа:
= (3)
Принимая во внимание, что масса ОС значительно превосходит
массу СА, для определения скорости v2 можно воспользоваться
выражением (5.26). После подстановки этого выражения в зави-
симость (3) получаем
<4>
Для условий спуска, соответствующих равновесному стацио-
нарному режиму полета связки, 0а = 0. Поэтому с учетом зави-
симости (4) выражение (1) может быть записано в следующем виде:
' ~ 1 (#)’• <5)
В случае равновесного стационарного режима полета связки
r^^rt — D. (6)
Подставляя это соотношение в зависимость (5)’, получаем оконча-
тельное выражение для эксцентриситета траектории спуска
' =1 - о - Z-)3- (7>
Аналогичным образом, используя выражение (5.26)', зависи-
мость (2) преобразуется к виду
Р = (8)
С учетом зависимости (6) выражение (8) для фокального параметра
траектории спуска записывается следующим образом:
Р = (9)
Пример. Для значения радиуса круговой орбиты ОС rj = 6671 км уве-
личение длины соединительного троса связки D с 25 до 100 км приводит в соот-
ветствии с зависимостями (7) и (9) к росту эксцентриситета траектории спуска
с 0,0112 до 0,0443 и уменьшению фокального параметра этой траектории с 6572
до 6280 км. Уменьшение радиуса гх с 6871 до 6571 км для D = 100 км вызывает
увеличение эксцентриситета траектории спуска с 0,043 до 0,045 и уменьшение
фокального параметра от 6480 до 6276 км.
248
Задача 5.18. Движение связки, состоящей из ОС и СА, проис-
ходит в равновесном стационарном режиме. Для заданных зна-
чений радиуса гх круговой орбиты ОС, длины соединительного
троса D и радиуса гвх, определяющего границу плотных слоев
атмосферы, определить угловую дальность <р траектории спуска
до входа СА в плотные слои атмосферы, величину скорости пвх
и угол наклона 0ВХ вектора скорости СА в момент входа в плотные
слои атмосферы (см. рис. 5.5).
Решение. Для определения <р, пвх и 0ВХ воспользуемся за-
висимостями теории кеплеровых движений летательных аппа-
ратов [231.
tg-f = 4- fa + (1)
Z 2ъ2
^x = V2 + 2pb, (2)
• 2
tg0BX = —I^(tg0a + fiactg4), (3)
где йа = ^^-,
гвх
KS ~ vUr COS2 0 2
Vgf 2 СО5 "2
Принимая во внимание, что масса ОС значительно превосходит
массу СА и спуск осуществляется из равновесного стационарного
режима движения связки, начальный угол наклона вектора
скорости СА 0а = О, а величина скорости оа определяется зави-
симостью (5.26). Тогда после подстановки в выражения (1) ...
(3) значений fta и ха они приобретают следующий вид:
Ф __ Г rtl (Г2 гвх) П1/2 /Д\
ё 2 “ L 2r?rBI-rg(ra+rBX) J ’ W
0„={4^+2(j__A)r, ©
tg 0вх = {(га гвх) £ 2гвх Оа Н- гвх) J} • (6)
Учитывая, что для равновесного стационарного режима полета
связки га = гх — D, зависимости (4) ... (6) можно переписать
в окончательном виде:
tff _Ф - Г (^i—Р)3(Г1-Гвх-Р) 1 (7}
2 ~L2rirBI-(r1-Dy(rl+rBI-D) 1 ' V/
<8>
tg 0BX -
= - {("1 - - D) [2гвх (т^б)3 - (Г1 + Гвх - £»)]}Г/2. (9)
Пример. Провести сравнительную оценку условий спуска с использова-
нием связки длиной D = 100 км для высот полета ОС 300 и 500 км для hBX =
= 100 км. Значениям высот полета ОС 300 и 500 км соответствуют значения
249
Таблица 5.3
Значения параметров траектории спуска
hlf км ф °вх. “/о 0ВХ
300 48,149е 7740 —1,949е
500 91,779е 7864 —2,459е
ri = 6671 км и rf = 6871 км, величина Лвх = 100 км отвечает гвх = 6471 км.
Результаты расчетов ф, увх и 0ВХ по формулам (7) ... (9) для двух рассматри-
ваемых вариантов приведены в табл. 5.3. Видно, что для связки длиной D =
= 100 км с увеличением высоты круговой орбиты ОС с 300 до 500 км угловая
дальность траектории спуска возрастает почти в два раза, увеличение скорости
входа СА в плотные слои атмосферы происходит на 1,6%, а модуля угла входа —
на 26%.
Задача 5.19. Для условий спуска из равновесного стационар-
ного режима движения связки определить величины длин соеди-
нительного троса, при которых обеспечиваются максимальные
значения модуля угла входа СА в атмосферу, величины скорости
входа и угловой дальности траектории спуска от момента рас-
цепления связки до входа СА в плотные слои атмосферы.
Решение. Для определения длины троса D*, при которой мо-
дуль угла входа СА в плотные слои атмосферы | 0ВХ | имеет макси-
мальное значение, воспользуемся полученным при решении преды-
дущей задачи выражением (6). Это выражение может быть пре-
образовано к виду
fcrA ( I А | гвх i\ /1\
Дифференцируя зависимость (1) по гя и приравнивая производную
от 0ВХ по г2 нулю, получаем кубическое уравнение для искомого
значения радиуса гя:
гт (гг)а + Иг? — 5гвхг| = 0. (2)
Определим дискриминант кубического уравнения (2):
Так как d > 0, то уравнение (2)' имеет одно решение (одно дей-
ствительное и два мнимых), которое можно найти по формуле
Кардана
Учитывая радиальное расположение связки в равновесном со-
стоянии, на основании выражения (4) можно записать формулу
250
для искомой оптимальной длины троса
с—{-[(!+
<*>
Для определения длины троса, при которой имеет место макси-
мальное значение скорости входа СА в плотные слои атмосферы,
используя полученную при решении предыдущей задачи зависи-
мость (5), находим производную
_ 2^(4+^) /сч
дг2 ~ rfrlvBX ' ™
Видно, что -^>0. Поэтому максимальное значение ив1 имеет
место при минимальной длине троса. Минимальная длина троса,
при которой возможен спуск СА с орбиты, была определена в за-
даче 5.16. Следовательно, найденное там значение Dmm обеспечи-
вает максимальную величину скорости входа СА в плотные слои
атмосферы.
Максимальная угловая дальность полета СА до входа в плот-
ные слои атмосферы определяется величиной <pmax = 180°, так
как эта угловая дальность соответствует предельному случаю
(рассмотренному в задаче 5.16), когда траектория спуска касается
сферы радиуса гвх. Поэтому найденное там значение Ртш соответ-
ствует максимальной угловой дальности траектории спуска. Сле-
довательно, при минимальной длине троса Dmln имеют место
максимальная угловая дальность траектории спуска и максималь-
ная скорость входа СА в плотные слои атмосферы.
Пример. Для Лвх = 100 км при изменении высоты полета ОС от 200
до 500 км оптимальная длина троса D*, соответствующая максимальным вели-
чинам углов входа СА в атмосферу, возрастает от 57,8 до 237,8 км, а сами зна-
чения углов входа изменяются от —1° до —3,93°. Максимальные значения угло-
вой дальности траектории спуска <р = 180° и максимальные значения скорости
входа СА в плотные слои атмосферы для hi — 200... 500 км имеют место при
изменении длины троса от 14,43 до 59,28 км. Величина скорости входа СА в плот-
ные слои атмосферы при этом возрастает от 7878 до 7952 м/с,
5.6. Снижение в плотных слоях атмосферы. Посадка
За начало участка снижения СА в плотных слоях атмосферы
принимают либо некоторую заданную высоту полета, либо одну
из характеристик движения, измеряемых на борту СА: перегрузку,
ускорение, кажущуюся скорость и др. Участок снижения закан-
чивается раскрытием парашюта (на высоте 6 ... 9 км). Для обес-
печения мягкого контакта с поверхностью Земли непосредственно
перед приземлением могут включаться тормозные пороховые
двигатели.
Снижение в плотных слоях атмосферы может быть управляемым
и неуправляемым (баллистическим}.
25]
В случае управляемого снижения СА придают специальную
геометрическую форму с определенными аэродинамическими ха-
рактеристиками. В общем случае система управления разворотом
СА по углам тангажа и крена обеспечивает управляемый спуск
в заданную точку.
При баллистическом спуске управление процессом снижения
не производится.
Участок снижения СА характеризуется интенсивным возра-
станием аэродинамической силы, перегрузки и теплового нагрева.
Определение основных характеристик движения СА на участке
спуска обычно производится численными методами, так как урав-
нения, описывающие движение СА в плотных слоях атмосферы,
строго говоря, не имеют аналитического решения. Однако для
качественного анализа характеристик движения СА могут быть
использованы некоторые приближенные приемы. В этом случае
уравнения движения СА удобно записывать в проекциях на на-
правление вектора скорости и нормаль к нему при следующих
допущениях:
поле Земли является центральным;
вращение Земли и захват ею атмосферы не учитываются;
ускорение СА, обусловленное притяжением Земли, не зависит
от высоты полега, т. е. остается постоянным}
из всех поверхностных сил, воздействующих на СА, учиты-
ваются только сила лобового сопротивления и подъемная сила}
весовые и аэродинамические характеристики СА принимаются
постоянными;
массовая плотность атмосферы определяется для ее изотерми-
ческой модели в функции высоты h по формуле:
р = РоеЗ\ (5.27J
где р0 = 0,1249 (кгс-с2)7м4, р ~т^б6 м**• ® этои слУчае Урав-
нения движения имеют вид
т = mg sin 0 - CxFm (5.28)
—mu = CyFm + mu2 -У? - — mg cos 0, (5.29)
где 0 — угол между плоскостью местного горизонта и вектором
скорости.
Задача 5.20. Определить максимальную продольную пере-
грузку при баллистическом спуске СА с круговой орбиты.
Решение. Для решения задачи воспользуемся приемом, изло-
женным в работе 127].
Перепишем уравнение (5.28) в следующей форме:
-^- = gsin0 — Spo% (1)
С F
где S = — баллистический коэффициент.
252
Численные расчеты показывают, что наибольшее торможение
СА при относительно небольших углах входа (1° ... 4°) наступает
на высотах 30 ... 40 км, и тогда в уравнении (1) g sin 0 Spv2, т. е.
(2)
Отсюда находим перегрузку
1 dv S а
Л“ = Т dF = ~Tp0 - (3)
Воспользуемся далее очевидным равенством
dv dv dp ...
-ц- = ^~гг’ <4>
где р = р/ро-
Используя соотношение (5.27J, а также выражение
dh , п
~ЗГ==—° sin 0,
получаем = 0р» sin 0. (5)
Из уравнения (2) о учетом соотношений (4) и (5) следует
dv _ Sv
dp ~ ₽ sin 0 е W
Интегрируя это уравнение от момента входа в атмосферу
(р = 0, v = ивх) до некоторого момента, соответствующего ско-
рости и, получаем
v = uBIexp(-^). (7)
Теперь выражение (3) для определения перегрузки с учетом равен-
ства (7) запишем в виде
п» =~ ро2 = - РоР^вх ехр (- . (8)
Используя уравнение dhldp = 0, находим значение плотности,
при котором перегрузка достигнет максимального значения
p = ^sln0, (9)
из выражения (7)’ — величину скорости
0 = -^-, (10)
у в
а из выражения (8) — максимальную перегрузку
_ pt^sta 9 (Ц)
"• 2ga *
253
Далее из выражений (5.27) и (9) можно найти высоту, когда
действующая перегрузка максимальна:
. да
При определении величин р, пя, h по формулам (9), (11), (12)
в точке максимального торможения необходимо знать величину
угла 0. В работе [1 ] показано, что максимум перегрузки насту-
(13)
в точке
угла 0. В работе [1 ] показано, что максимум перегрузки
пает при условии, когда
0 = (2,5-~3) 0В1.
Пример. Определить скорость полета, высоту и перегрузку
максимального торможения при следующих данных:
бвх = Г,5, овх = 7600 м/с, S = 0,01 м»/кгс.с».
По формулам (9)... (13) находим
0 —.<$>, р = 4,54 «Ю-4 (кгс-с^/м*,
о = 4600 м/с, Пх = 9,9, Л = 40 км.
Задача 5.21. Определить силу лобового сопротивления СА
в точке максимального торможения при баллистическом спуске.
Решение. Воспользуемся результатами, полученными в за-
даче 5.20. Очевидно, что масса спускаемого аппарата и сила
лобового сопротивления Q связаны с продольной перегрузкой па
следующим соотношением
" = W- (1>
Определим перегрузку в точке максимального торможения по
формуле (11) задачи 5.20
sin 6
n“ = —2gB *
Затем из формулы (1)' находим искомое значение силы лобового
сопротивления
Q = nxmg. (2)
Пример. Пользуясь данными, приведенными в примере задачи 5.20,
определить силу лобового сопротивления при массе СА 3000 кг.
Поскольку в этом случае пх = 9,9, то по формуле (2) находим Q =
= 29! 357 Н. Если при этом предположить, что площадь поперечного сечения
СА составляет 3 ма, то удельная нагрузка будет равна 97 119 Н/ма.
Задача 5.22. Определить максимальную перегрузку при пла-
нирующем спуске в атмосфере.
Решение. Предположим, что снижение СА происходит с нуле-
вым углом крена, т. е. вектор подъемной силы лежит в плоскости
орбиты. В этом случае полная перегрузка может быть вычислена
по формуле
VFF+Q3 ^Fm
а----щ-------2Й5Г^С' + С'
или
(1)
(2)
254
где К = СУ!СЯ — аэродинамическое качество СА. Предположим,
что при снижении с круговой орбиты малой высоты уменьшение
скорости входа овх относительно мало до момента наступления
максимальной перегрузки. Вследствие этого разность между силой
тяжести и центробежной силой будет мала по сравнению с подъ-
емной силой [27]. Тогда уравнение (5.29) можно представить
в виде:
-mv^.=CvPm^-. (3)
Разделив уравнение (3) на уравнение (3) задачи 5.20, получим
I do _______________________ 1 d0 ...
о dt — К dt * W
Поскольку аэродинамическое качество предполагается постоян-
ным, то интегрирование уравнения (4) дает
0 — 0BX /СЧ
о = овх ехр —. (5)
Далее поделим уравнение (3) на (5) задачи 5.20. В результате по-
лучим
Интегрируя это уравнение, найдем
Р = -р^тСу <C0S 9 — C0S 0BI^
Для малых углов входа воспользуемся разложением
cos 0 « 1 — -у-
и тогда р = -тДг- (0в1 — О2)- (7)
г т^у
Если теперь в выражении (2) исключить величины р и v с помощью
равенств (7) и (5), то перегрузка определится по формуле
п=(& - е2) К1+*2 ех₽2(6 7м- *
*gA г А
Используя далее выражение (9) задачи 5.20 и равенство (7),
получаем следующее уравнение для определения угла наклона
траектории, соответствующего максимальной перегрузке:
slnO = i(0BX-O2)- (9)
Если угол наклона траектории мал, то можно приближенно при-
нять sin 0 tn 0. В этом случае из уравнения (9) следует
o-i/oL ад
После подстановки значения 0 в соотношение (8)' получим явную
зависимость максимальной перегрузки в функции овх, 0ВХ, К-
255
Рис. 5.6. Опорная зависи-
мость угла крена при
управляемом спуске
Задача 5.23. При управляемом спуске
опорная зависимость угла крена (рис. 5.6)
моделируется функцией
V = То U + ₽Ф (QI, (1J
где
? = ?о U — Ф (О’в]. (2J
Входящая в формулу (1) функция ср (/) оп-
ределяет вид деформации опорной зависи-
мости, а параметр 0 — величину деформа-
ции. Модулирующая функция (2) опреде-
ляет деформацию опорной зависимости по
фазе, а параметр в — глубину модуляции. Приближенные значения
параметров 0О и е0 даны. Известны также отклонения ДД и ДО
от заданной точки посадки по дальности и по боку. Определить
поправки Де, Д0 к параметрам е0, 0О для ликвидации промаха.
Решение. Введем следующие индексы: индекс «О» относится
к опорному прогнозу при 0 = 0о, в = е0; индексы «1» и «2» —
к двум дополнительным прогнозам при значениях параметров
81 = во, Pi = 0о + Д0',
еа = е0 + Де', 02 = 0О,
где Де', Д0' — произвольные малые вариации параметров во, 0О.
Рассчитывая прогноз движения спускаемого аппарата для каждой
пары параметров е, 0, находим три пары отклонений по дальности
и боку: ДО0, A.Dlt &L2, &D3. В линейном приближении
с учетом этих отклонений получим два уравнения для определе-
ния искомых приращений Д0 и Де:
Д0 -4
Р1~ Ро
ДОг~АД°де = _дд
еа — е0 °’
(3)
и тогда компенсация промаха произойдет при значениях пара-
метров
в = е0 + Де, 0 = 0о + Д0.
Заметим, что множители, стоящие у искомых величин Д0, Де
в уравнениях (3), по существу, являются частными производными.
Поэтому уравнения (3) можно переписать так:
“ё[Г ДР + ~дё Дв---д^°»
6D *о । dD * аг»
д0 Д0 + де Д® — Д^°*
они также дают решение поставленной задачи.
Задача 5.24. Спускаемый аппарат после торможения в атмо-
сфере снижает скорость полета до дозвуковой и на высоте b пере-
256
ходит в планирующий полет. Определить дальность планирования
спускаемого аппарата при заданном аэродинамическом каче-
стве /<.
Решение. При установившемся планировании dv!dt ~
— d$!dt = 0, тогда из уравнений (5.28), (5.29) следует:
mg sin 0- СЛ-у-^0, (1)
CuFm + (4 - g) т cos 9 = 0. (2)
Поделив первое уравнение на второе и учитывая, что v2/r < gt
получим
tge = 4~- (3)
Эта формула показывает, что угол планирования полностью опре-
деляется аэродинамическим качеством спускаемого аппарата.
Если I — дальность планирования, то
tge = 4=4,
откуда / = hK, (4)
т. е. дальность планирования равна произведению качества на
высоту полета. Формулы (3) и (4), в частности, находят широкое
применение в аэродинамике полета самолета.
Пример I. Определить дальность планирования спускаемого аппарата
с высоты 5 км при аэродинамическом качестве 0,3.
По формуле (4) получим I — 1,5 км, т. е. дальность планирования оказы-
вается относительно небольшой и маневренные возможности спускаемого аппа-
рата крайне ограничены.
Пример 2. Спускаемый аппарат после выхода на режим установивше-
гося планирования оказался на высоте 6 км и на удалении 30 км от места по-
садки. Определить необходимое аэродинамическое качество спускаемого аппа-
рата для обеспечения планирования на дальность 30 км.
По формуле (4) получаем /С = 5, т. е. спускаемый аппарат должен иметь
относительно небольшое качество (заметим, что современные планеры имеют
качество 30 ... 40).
Задача 5.25. Определить установившуюся скорость снижения
спускаемого аппарата.
Решение. К моменту раскрытия тормозного парашюта началь-
ная энергия СА почти полностью погашена и СА, возвращаемые
по баллистической (К ~ 0) или управляемой (/< < 0,2 ... 0,3)
схемам спуска, переходят к крутому снижению с квазиустановив-
шейся скоростью, а СА, возвращаемые по управляемой или пла-
нирующей схемам спуска с высокими несущими свойствами
(К £> 1 ... 2) — к режиму стационарного планирования [1 ].
При крутом квазиустановившемся снижении справедливо со-
отношение
fng = Ca-^Fmi (1)
257
откуда находим вертикальную скорость снижения
"=/<• (2)
где S — баллистический коэффициент.
Пример. Определить скорость снижения СА на высоте 10 км при S =
= 0,01 м3/(кгс-с2). Используя табл. 5.2, по формуле (2) находим и = 152 м/с.
Задача 5.26. Определить площадь парашюта, обеспечивающего
снижение СА у поверхности Земли со скоростью V.
Решение. Так как для снижения на парашюте справедливо
равенство
_____ /* Р^2 п
fHg* — 2 * п>
получаем следующее выражение для определения площади па-
рашюта:
р - - 2те
Рп~ схр«а •
Пример. Определить площадь парашюта для обеспечения снижения
спускаемого аппарата у Земли со скоростью 8 м/с при т = 200 кг и Сх = 1,2.
По формуле (1) получаем Гп = 420 м2.
Задача 5.27. Перед приземлением спускаемого аппарата вклю-
чается тормозной пороховой двигатель, который отрабатывает
импульс /. Определить скорость приземления спускаемого аппа-
рата при массе т и начальной скорости v0.
Решение. В соответствии с законом сохранения количества
движения имеем: т (v0 — v) = /, откуда находим искомую ско-
рость приземления
v = v0—
т
Пример. Дано: и0 = Ю м/с, I = 1000 кг-с, т = 200 кг. Определить
скорость приземления СА. По формуле (1) получим и = 5,0 м/с.
ПРИЛОЖЕНИЕ I
Таблица П.1
Элементы движения а ъ в р 'Л гп °л vn
а, Ь 41 60 79 98 117 137
af е 20 61 80 99 118 138
р 21 42 81 100 119 139
а’ гк 22 43 62 101 120 140
а, Гп 23 44 63 82 121 141
a, v 24 45 64 83 102 142
а, оА 25 46 65 84 103 122
Ъ, е 1 66 85 104 123 143
Ь, р 2 47 86 105 124 144
Ь, гк 3 48 67 106 125 145
Ь, гп 4 49 68 87 126 146
е, р 5 26 88 107 127 147
е’ ГА 6 27 69 108 128 148
е> гп 7 28 70 89 129 149
е, vA 8 29 71 90 109 150
е, »п 9 30 72 91 ПО 130
Р, гА 10 31 50 111 131
Р, гп 11 32 51 92 132 151
Р, оА 12 33 52 93 112 152
Р, vn 13 34 53 94 113 133
ГА’ ГП 14 35 54 73 134 153
ГА’°А 15 36 55 74 114 154
ГА’ РП 16 37 56 75 115 135
ГП> °А 17 38 57 76 95 155
ГП’ °п 18 39 58 77 96 136
Q а 19 40 59 78 97 116
259
Таблиц а П.2
Параметры 1 А ДА а в
i, А 179 189 201
i, SL 169 186 199
i, и 166 176 196
i, В 171 181 191
Д, AL 160 188 200
Д, и 157 178 197
А, В 161 180 190
&L, и 158 168 198
AL, В 159 170 187
и, В 156 167 177
i, Д, AL 194 202
i, Д, и 184 203
i, Д, В 182 192
Д, AL, и 165 205
Д, AL, В 162 195
AL, ut В 164 175
i, &L, и 174 204
it ЬЬ, В 172 193
А, и, В 163 185
it и, В 173 183
Большая полуось орбиты
ь /1Ч ь2 /оч
а-у—О); а = — (2);
П + ь2
2г А
(3);
а
а =
(6);
“--Йгст. ““4г (-^тМ
= ^(ю); м?иЬ^Г,12):
= —7—/^=---^-(13); а
ип (2 Vu/р— Оц)
0=^_+^ + 8Н% (16
4vn '
4ч1» “=2ггВл<15);
Л _ Гп°а + КГпоа + 8Ргп ,, 74.
а~ 4v. U'>’
а =
260
___ р I ^а ~t~ Лд___&______rarn _га —гп_____га°а___
и—а8-Г 2 ц(1—е?) р ~ 2е ~ |х(1— е2) “
_ rnvn _ Ц _ М»п _ Г / Т \2 -11/3
“ 2р/г — и* (t>ft)*(l—е2) ’
При известных начальных условиях движения КА (r0> Оо, v0):
а = где Jfe=-^L
2 — k ’ |Л
Малая полуось орбиты
b = а ]/1 -еа (20); b = Уар (21); 6 = V гл(2а-г&) (22);
» = /г„ (20-^123); 6»^g>(24); Ь = (25);
г* । р к п
4 = ут=?(26); г’ = г"/т^<27>’ > =
ь~ '‘нЛ 1” (29); 6~ (30); 4 ~ г‘ 1/ а^=7<31);
v 1 +е vn V1 “е У zr л р
ь = га V(32); b = 1/ W3/2-_(33);
к 2гп — Р У »а(2(* —»а Урн)
6=]/—6 = /7^(35);
у оп(2р — vnypli)
b = V 2iT=7^<36>; Ь = ]/-Й-(У«+8^Г-^п)(37);
6 = V+ Гп»а) (38);
6 = 1/ о h (39); Ь =---------&-7— (40).
Г 2Р гпип (иа + °п) Ууаип
При известных начальных условиях движения КА (г0» Ц»> vo):
Ь = го»о cos v0 Л/ о,, Г°.„2- •
Г zp---------------Г qL/q
Эксцентриситет орбиты
е = /1 - (Ь/а/ (41); е = У1 - pla (42); е = - 1 (43);
й = 1-гп/а(44); е = ^т(45); ^ = ^(46);
е== V 1 — (Р/Ь)а(47); e = I|Z^.(48); е = ^^-(49);
е=1-р/Ра(50); а = р/гп-1(51); е« 1-»а/ЙЙ(52);
261
e = onVp/£-l(53); e=^S-(54); e=l-^-(55);
„ °п /Фп + ^а - 2p - rav’
e -----------2ji-------- (56),
2a + rnvl — оя l/r^ —8ur_ r_t£
е = п а---^2-2----5-2(57); е = - 1 (58);
При известных начальных условиях движения КА (г0> Ц» v0)i
е = "И1 — k (2 — k) cos2 v0, где k = .
Фокальный параметр орбиты
p=-£-(60); p = 0(1-^) (61); p =-у-(2a — ra) (62);
p=-J-(2a-rn)(63); p = -----fe—_<64);
a T aoa /
P = ~,--*Вй-^Н6б>; р = Ь/Г^(66); Р = ^г(67);
P= 1^(68); p = r.(l-e)(69); p = rn (1 + ') (70);
₽ = »(1^),<71>= "-^Tt<73>’
P = (74); P = 2k (4y — on + 8pra + rafn) (75);
P = (4p + — Уа V ГдОа — 8grn) (76);
P-^-rd+ecosO).
При известных начальных условиях движения спутника (г0» ио>
vo):
р = —(roO„COSVo)a.
F*
Радиус-вектор апоцентра орбиты
га = а + (79); га = а(1 + е)(80); га = а (1 +/Г=р^) (81);
г.^2а-гМ (83); ,„ = 35L (84);
= » /Тй(85); г.- ,_У1Р_-— (86); Г. =^.(87);
262
£Ц^(90);
а
Га=П~(88); Га = Гп
_ pd+e)» „
Г*~ v 2П(1— е) (У1)’ Г“
г = Vw
“ 21/р/р — 1)п
Г* = 2Н° . (96); Г& = Mva+fn)
Г
' пип
При известных начальных условиях движения КА (r0, По, v0):
Га = 0-4-11 + /l-fe(2-6)cos2v0], где k =
ГпР
2>n + Р
(94); г,
(93);
1/А+^
V 4 Т «I
---(97); га = — =
гп уа
-£-(95);
Радиус-вектор перицентра орбиты
гп = а - (98); гп = а (1 - е) (99); гп = - р- (100);
1 + V 1 —P/CL
г, = 2а-г. (101); гп = тт^-,(102); ,п = j-J^IOS);
= Ь l/jfi(104); г,- 1+у1Р_т, (Ю5); г. = ^-(106);
^--Г^(Ю7); r.-r.-£|(l(>S); ^ = 5го^(юэ);
'.-•t^y^dlO); г- = ',У-7 ("2>;
vn ^л — р 2y^/p — v&
r. = lS.(113); =
гп = /г^4 + 2мга/й - Га/2 (115); (116);
г _ ар _ rat>a
Гп--г~ — “7, •
'а Рп
При известных условиях движения спутника (r0, v0, v0):
гп = -2=k Г1 — V 1 — ^(2 —fe)cos2v0], где k = .
Скорость полета КА в апоцентре орбиты
°-=<*17* ’• - <’,8>;
fa = W (1/F7 - /1/р - 1/а) (119); Па = (120);
’• - /НЁО<12|); °- --^,|22);
263
= у (4^) (123); оа = У t [1_/1-(р/&)2] (124);
= 1Л Га (62%Г2)(125); °а = Ь2 (Ь2 .£ f2) (126);
fa = ]/-£- (1 - е) (127); оа = К!Ц=^ (128);
Ua = /-MTW(129); уа = ЧтТ7)<130): ^« = -^-(131);
уа = Кт(2-’т)(132); fa = 2}/^--pn(133);
Va ' V ra(ra
„ 2H-Vn ,1Qfiv
°a =----ZZZ—(I36)’
rnvn
/“ 2
^(134); + ^(135);
= V -Sr=1/2 - V--"тт-=(^a у .
При известных начальных условиях движения КА (rOt v0, v0)t
„_ = оф_М1^рде* = ^.
Скорость полета в перицентре орбиты
]А [ ] <137* °”=^(4^)
°”=’/?(w+l/4—4-) <139>7» - /-S- (s£d <14°>;
»» = (тЙ) (>«);
V* = Кт[1 + “ ^2] <144>;
Vn = ]/ 62 (r| +^j(145)’ = }/ гпК+^^46^
Уп-К^О + ^О47)’ °п = ]/ ^iE^(148);
рп = К-т(1 +е) (149); °п = °а (150); °п в (151);
nD = 2 Kf - :<(152); оп = КмТ^<153);
264
vn = 2>>г' (154); va = Vvlli + 2ц/гп - va/2 (155);
• a^a
°n = 1^-^- = = <u«)“ V~1T = (Р*Ь¥2-гп/а.
При известных начальных условиях движения спутника (г0,
?о):
_ voll + V1 — *(2— tycos’Yo] fc_r0oo
t'“--------’ ГДе Л - —.
Наклонение орбиты
i = arcs‘”-S£<1B6>: i = (157);
i-arccos ^(158); i = arctg(169); I = arcsin^- (160);
l — arccos.(cos В sin A) (161); i — arcsin (162);
i = arccos*”^ (164);
Азимут KA, отсчитываемый от направления на Север
А = arctg(166); А = arccos (167); А = arcsin sin (168);
° COS и 47 tg U 4 7 SlDtt V 7
A = arccos (sin i cos AL) (169); A = arctg (170);
Л, cos i /1 \ л i sin i sin Л ^rw
= arcSinCT A = sin В (172);
A = arccos (173); A = arccos (174);
A ^arcsin-^-^-(175).
Центральный угол между направлением на восходящий узел
и проекцией текущей точки полета КА
AL = arctg (cos i tg и) (176); AL = arccos (177);
AL = arcsin (sin A sin и) (178); AL = arccos (179);
AL = arctg (sin В tg A) (180); AL = arcsin -J|y- (181);
AL = arcsin 51П^?Л (182); AL = arctg --sin D.(183);
sin/ v 7 ° tgicosu 4 7>
аг sin A cos и „ ол Ar cos A sin и Z1 o-4
AL = arccos —— (184); AL = arccos--------r-5— (185).
cos I ' 7 sin В 4 7
265
Аргумент широты
и = arctg (186); и = arccos (cos В cos AL) (187);
и = arcsin ss1”^' (188); и = arccos (ctg i ctg A) (189);
“ = arcte S<19()>: “ = ar<:slnTS7-(i91);
°=агс51п-Жл-<194>- “=aresi°--S--£ fl95>-
Географическая широта KA
В = arcsin (sin i sin и) (196); В = arctg (cos A tg u) (197);
В = arccos (198); В = arctg (tg i sin AL) (199);
В = arcsin ^(200); В = arccos (201);
В = arcsin 51П ^п^А£ (202); В = arctg (tgi sin A sin u) (203);
В = arctg (sin i cos AL tg u) (204); В = arcsin С°^д2“’ (205).
ПРИЛОЖЕНИЕ 2
ПАРАМЕТРЫ ДВИЖЕНИЯ
В ЗАВИСИМОСТИ ОТ ВРЕМЕНИ
Радиус-вектор КА
г - 1+.е.,0 ' - + + Г " °<1 - eCOs£);
_ 2ца г = д [1 ± ]<1 -|- (1 — е2) sec2 у]; г = а у
аи2 + р- L v 7 f е sin v
r = ца(1-О . r = a(l—e2) . f = гд(1-е) .
Ц ±j/>2e2 — ца(1— e2)»2’ 1+ecosd’ 1+ecosO’
_____t„ '•all—e) . _ rnDn
T — d ~~ (Cl ’ Гтт) COS -kt f Г ~~~ f . q . Г — 11 \ _qa “ •
4 n/ ’ l+ecosfl ’ p.(l H-ecosO)
Истинная аномалия
о = 2 arctg ( ]/"-j-ij tg -f-) 5 * = arccosr=7^:
266
О = arcsin ^£^1 ; Ь = arccos-7-(cosЕ — ё);
1—ecosE ’ г ' ''
„ , а VI —е2 sin£ А в(1—e’Jtgy .
О = arcsin —-------; v = arcsin —1;
г er
• -«сш °((|Z£)2/ • * =arccos ;
»- arcsla-J-1/3^2; « - arccos
0 r pi ^pi0
О = arccos-^— 1/"gS(*— 1; 0 = arccosr°^;
e r p, r(rt — ra)
0 = arccos -j- (cos’ 7 — 1 ± cos 7 ]/cos2y — (1 — e2));
0 = arccos^-=^; О = arccos™----; О = arccosra-cos'y~ft;
re pie pis
O = arcsin ?tg -; 0 = arcsin ”*!|L ;
re це
0 = arcsin-^-; 0 = arcsin^7^-; 0 = arctg ^tgv .
vaer pie p — r
Эксцентрическая аномалия
г? . 1/1 — е3 sin О г? е + cos О
Е = 3108111 Т+есозО.; Е = arcC0S "-Hoose 5
£ = 2arctg[jZ4^-tg41;
E = arccos
“pis2 zfc у pi2e2 — pia (1 — s2)
. pie ± ]Лpi2*2 — 0 — e2) i/2 . ’
e 1/au2 — Ц\ г? Д — r
E = arccosE-arccos-^-;
E = arccos — (1-; E = arcsin ;
e \ ayb / ayi— e3
E = arcsin sln 0); E = arccos£-y ± У1 — (1 — ^Jsec’yj;
e, a — r
E = arccos--------.
Скорость полета KA
v
и
а Уца (1 — e3)
267
V =
У — с(1— б2)уп].
а(1—е)а ;
У г(Ц
= Уца (1—е2)
г cos Y
и
Радиальная скорость КА
рг = v sln v; vr = е 1/"sin О; vr = — —e s?n Е ;
г ’ т г а (1—ё2) ’ r V а 1—gcosE’
_ 1 Г ц [2аг — г2 — а2 (1 — е2)] _ if4|ыаи2 — (av2 + ц)2 (1 — g2)
°r ~ V ; Vt ~ V 4ра ’’
ог=1/ 4,2и/Г ---^--xy^U-g2);
У уца(1 — е2) а
„ _ т/"^ На0 — е2) . _ _ Уца(1—^tgY . _ vaesinO .
Or- у V 7i , Vr- - , Or-pLecosd"’
0r = 2a^jn g. Or = E£sJn#; Vr=|/A.esln^;
Трансверсальная скорость KA
vu = v cos v; o0 = 1^.; vu = у JL (i _|_ e Cos 0);
vu =
•\/~ |LL (1 + gCOS E)
V a(l—gcosE)
COS V.
Угловая скорость KA
1 _ 1 /JL Vl—g3 . « _ Уца(1 — ea) .
V a> (1— ecosE)” ~ r2 ’
. __ (00* + p)2 Уца (1 — e2) . . _ -.Z p(l+ecosO) .
Л ~ & — У 7» ’
2ь = 1/ (! + ecosO)2; —-------V^G-e2)
k a’(l- ?)’' 1 a2 (1 ± V(1 — e^sec2 v)2
268
ПРИЛОЖЕНИЕ 3
ПАРАМЕТРЫ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
Разность между драконическим и оскулирующим периодами
обращения
ДТа>-—^=(з---------f~sin2i).
Изменение элементов орбиты относительно абсолютного про-
странства за один виток из-за сжатия Земли
АО (2лез cost )
В JI Р2 ’
Асо ~ Яез 5cos2i— 1
®В ~ —ц р~1 •
Изменение элементов орбиты из-за начальных возмущений
Дг = (2 — cos <р) Дг0,
Ди = —(3<р — 2 sin ф) Дг0,
Дг^О-СОЗф)
л
л
Изменение элементов орбиты из-за торможения в атмосфере
6ТВ«- 12-z^-Spr5/2,
|/ц
S/B а> 12n2Spra, 6ftB а* — 4jrSpr2,
боив aj 2nSp Кpr, 6orB a? — 2Sp Vp,r,
где 5 = -^-.
zm
Ускорение торможения на высоте h
Т mt РЦ
~ 2т R 4- h ’
Время снижения КА с высоты на высоту h
ы = пм-п/»).,
где
F(h) = —ly= f-----.
v 2VjTJ P(h)-[/R + h
269
СПИСОК ЛИТЕРАТУРЫ
1. Андреевский В. В. Динамика спуска космических аппаратов на Землю.
МЛ Машиностроение, 1970. 232 с.
2. Атанс М., Фабл П. Оптимальное управление. Мл Наука, 1968. 764 с.
3. Балахонцев В. Г., Иванов В. А., Шабанов В. И. Сближение в космосе.
Мл Воениздат, 1973. 367 с.
4. Балк М. Б. Элементы динамики космического полета. Мл Наука, 1965.
340 с.
5. Бебенин Г. Г., Скребушевский Б. С., Соколов Г. А. Системы управле-
ния полетом космических аппаратов. Мл Машиностроение, 1978. 272 с.
6. Беляков А. И. Графоаналитический метод исследования движения
космических аппаратов. Мл Машиностроение, 1973. 148 с.
7. Гончаревский В. С. Радиоуправление сближением космических аппа-
ратов. Мл Советское радио, 1976. 240 с.
8. Дмитриевский А. А., Лысенко Л. Н. Прикладные задачи теории опти-
мального управления движением беспилотных летательных аппаратов. Мл
Машиностроение, 1978. 328 с.
9. Иванов В. А. Исследование управляемого компланарного относитель-
ного движения космических аппаратов при постоянной угловой скорости линии
визирования//Космические исследования, т. XII. Вып. 5. 1974. С. 691—700.
10. Иванов В. А., Даниленко А. В. Маневры тросовых систем/1Авиация
и космонавтика. 1988. № 7. С. 42—43.
11. Иванов В. А., Ситарский Ю. С. Динамика полета системы гибко свя-
занных космических объектов. Мл Машиностроение, 1986. 248 с.
12. Иванов В. А., Лаптырев Д. А. Исследование относительного движения
связки двух тел при регулируемой длине троса//Кисмические исследования.
Т. XXIV. Btin. 4. 1986. С. 544—552.
13. Ивашкнн В. В. Оптимальные траектории импульсного перехода между
орбитами при наличии ограничений по радиусу//Космические исследования.
Т. IV. Вып. 4. 1966. С. 93—102.
14. Ильин В. А., Кузмак Г. Е. Оптимальные перелеты космических аппа-
ратов. Мл Наука, 1976. 744 с.
15. Космонавтика: энциклопедия. Главный редактор В. П. Глушко. Мл
Советская энциклопедия, 1985. 528 с.
16. Лебедев А. А., Соколов В. Б. Встреча на орбите. Мл Машиностроение,
1969. 366 с.
17. Легостаев В. П. Раушенбах Б. В. Автоматическая сборка в космосе//
Космические исследования. Т. VII, вып. 6. 1969.
18. Линник Ю. В. Метод наименьших квадратов и основы теории обра-
ботки измерений. Мл Физматгиз, 1962. 349 с.
19. Лоуден Д. Ф. Межпланетные траектории ракет. — В кн.: Космические
траектории. Мл ИЛ, 1963. С. 177—242.
20. Лох У. Динамика и термодинамика спуска в атмосфере планет. Мл
Мнр, 1966. 276 с.
21. Назаренко А. И., Скребушевский Б. С. Эволюция и устойчивость спут-
никовых систем. Мл Машиностроение, 1981. 288 с.
22. Понтрягин Л. С., Болтянский В. Г., Гамкрелидзе Р. В., Мищенко Е. Ф.
Математическая теория оптимальных процессов. Мл Наука, 1969. 423 с.
270
23. Погорелов Д. А. Теория кеплеровых движений летательная аппаратов
М.: Физматгиз, 1961. 106 с.
24. Пономарев В. М. Теория управления движением космических аппа-
ратов. М.: Наука, 1965. 456 с.
25. Попович П. Р., Скребушевский Б. С. Баллистическое проектирование
космических систем. М.: Машиностроение, 1987. 240 с.
26. Титов Г. С., Иванов В. А., Горьков В. Л. Межорбитальные и локаль-
ные маневры космических аппаратов. М.: Машиностроение, 1982. 245 с.
27. Управление космическими летательными аппаратами: Сборник статей;
Под ред. К. Леондеса. М.: Машиностроение, 1967. 324 с.
28. Эльясберг П. Е. Введение в теорию полета искусственных спутников
Земли. М.: Наука, 1965. 540 с.
29. Эрике К. Космический полет. Т. 11, ч. I, II. М.: Наука, 1969. 571 с.
и 743 с.
30. Эскобал П. Методы астродинамики. М.: Мир, 1971. 371 с.
31. Ягудин В. М., Авдеев Ю. Ф. Об одной вариационной задаче простран-
ственного программного движения ракеты-носителя: Труды тринадцатых Чтений,
посвященных разработке научного наследия и развитию идей К. Э. Циолков-
ского//Секция Проблемы ракетной и космической техники. М., 1979, С. 110—116.
32. Ягудин В. М. Синтез оптимальной программы управления движением
летательного аппарата, совершающего «пассивный» полет в плотных слоях атмо-
сферы: Труды шестнадцатых Чтений, посвященных разработке научного насле-
дия и развитию идей К. Э. Циолковского//Секция «Механика космического
полета». М.э 1982. С. 19—25.
ОГЛАВЛЕНИЕ
Введение.............................................................. 3
Глава 1. Выведение КА на орбиту ..................................... 7
1.1. Основные положения........................................ 7
1.2. Граничные условия. Уравнения движения..................... 8
1.3. Элементы массового проектирования ракеты-носителя. ... 17
1.4. Схемы выведения на орбиты................................ 27
1.5. Оптимизация и выбор программы движения ракеты-носителя 38
Глава 2. Орбитальный полет КА..................................... 53
2.1. Основные положения..................................... 53
2.2. Невозмущенное движение КА.............................. 56
2.3. Возмущенное движение КА................................ 69
2.4. Определение орбит................................. . 84
Глава 3. Маневрирование КА....................................... 100
3.1. Основные положения.................................... 100
3.2. Одноимпульсные переходы............................... 101
3.3. Двух импульсные переходы между почти круговыми орбитами 116
3.4. Двухимпульсные переходы между произвольными орбитами 127
3.5. Трехимпульсные переходы между круговыми орбитами. . . 137
3.6. Орбитальные мдневры КА с двигателями малой тяги .... 151
Глава 4. Встреча на орбите ...................................... 162
4.1. Основные положения.................................... 162
4.2. Начальные условия для обеспечения встречи............ 166
4.3. Дальнее наведение..................................... 175
4.4. Ближнее наведение без учета действия относительного гра-
витационного ускорения.................................... 184
4,5. Ближнее наведение с учетом действия относительного гра-
витационного ускорения..................................... 202
Глава 5. Спуск КА на Землю........................................ 217
5.1. Основные положения..................................... 217
5.2. Одно импульсный сход с орбиты.......................... 220
5.3. Двух импульсный сход с орбиты. ....................... 229
5.4. Снижение КА на внеатмосферном участке.................. 235
5.5. Сход с орбиты с использованием связки.................. 244
5.6. Снижение в плотных слоях атмосферы. Посадка............ 251
Приложение 1.................................................. 259
Приложение 2.................................................. 266
Приложение 3.................................................. 269
Список литературы............................................. 270