/







































































































































































































































































Author: Стерлингов В.Л.
Tags: электротехника учебник радионавигация авиатехника пособие для пилотов
Year: 1982



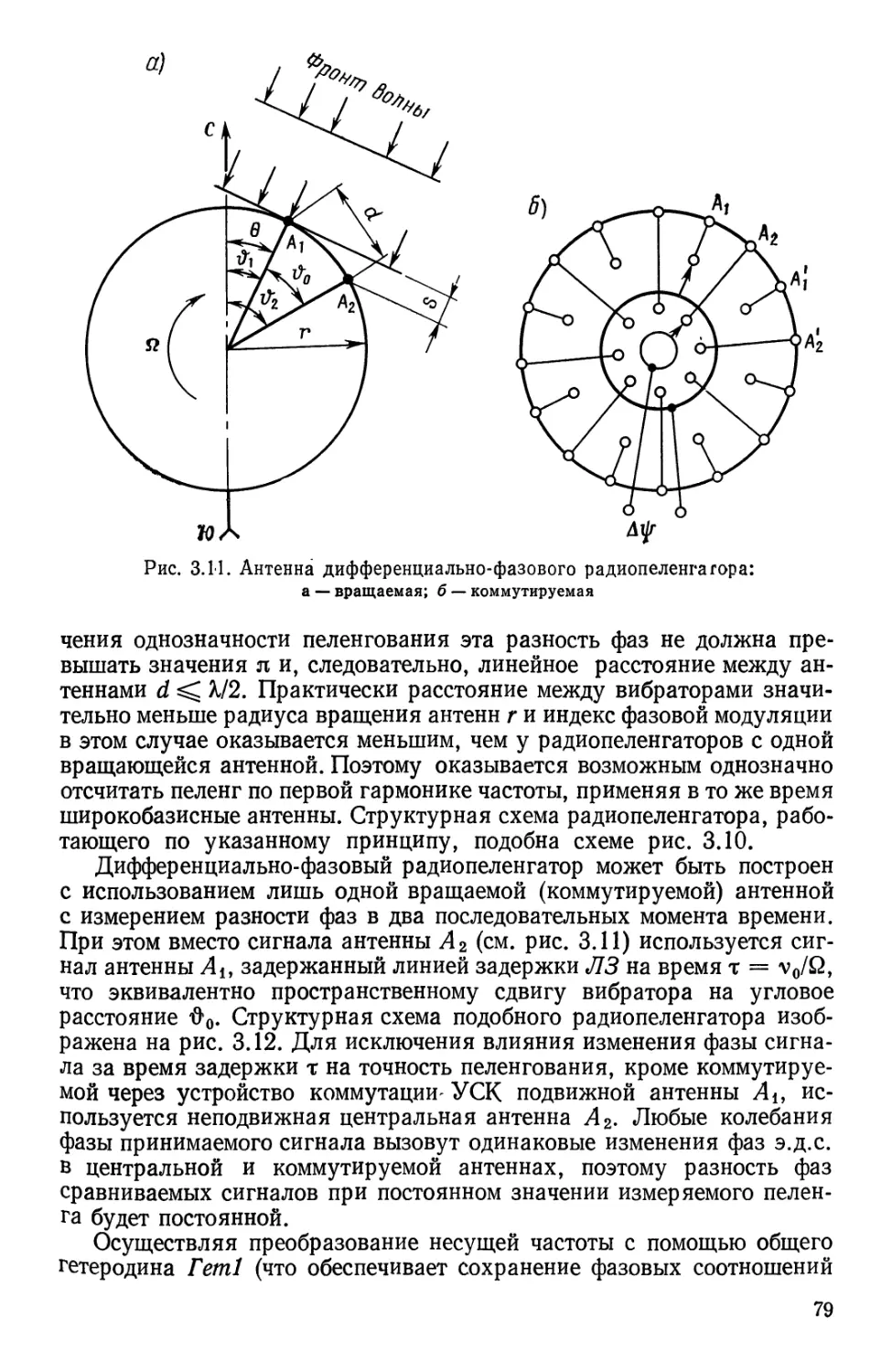
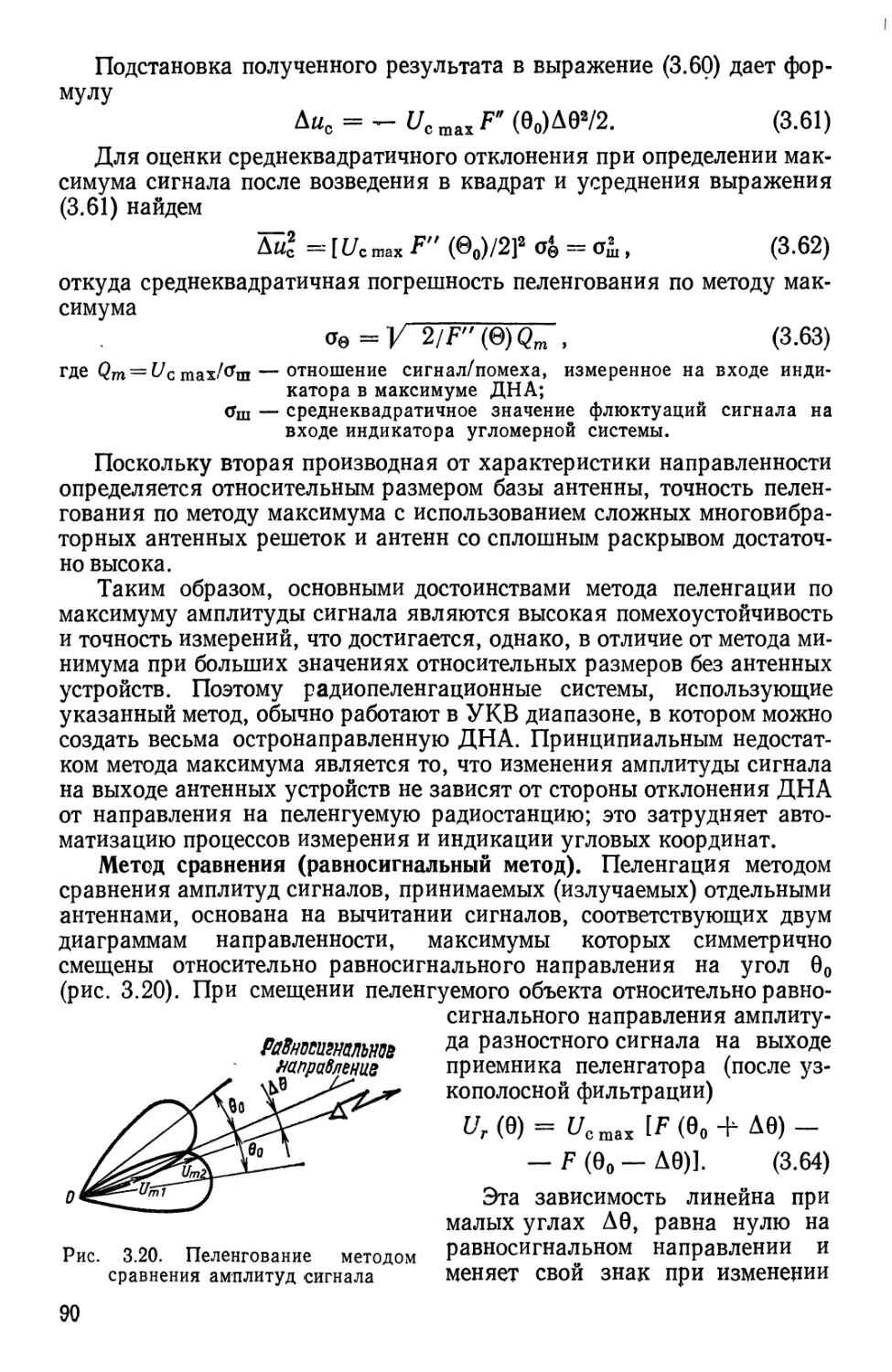
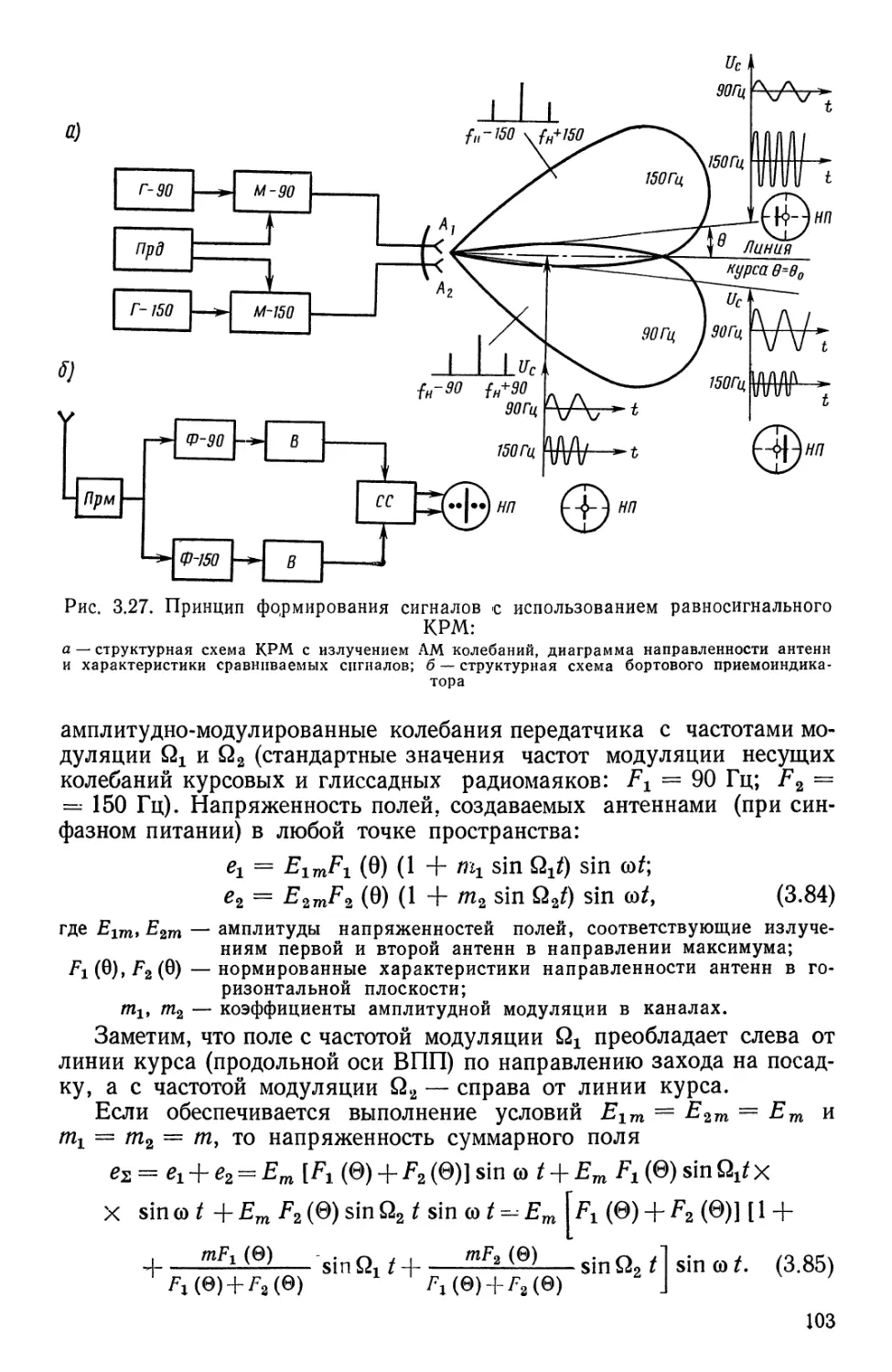
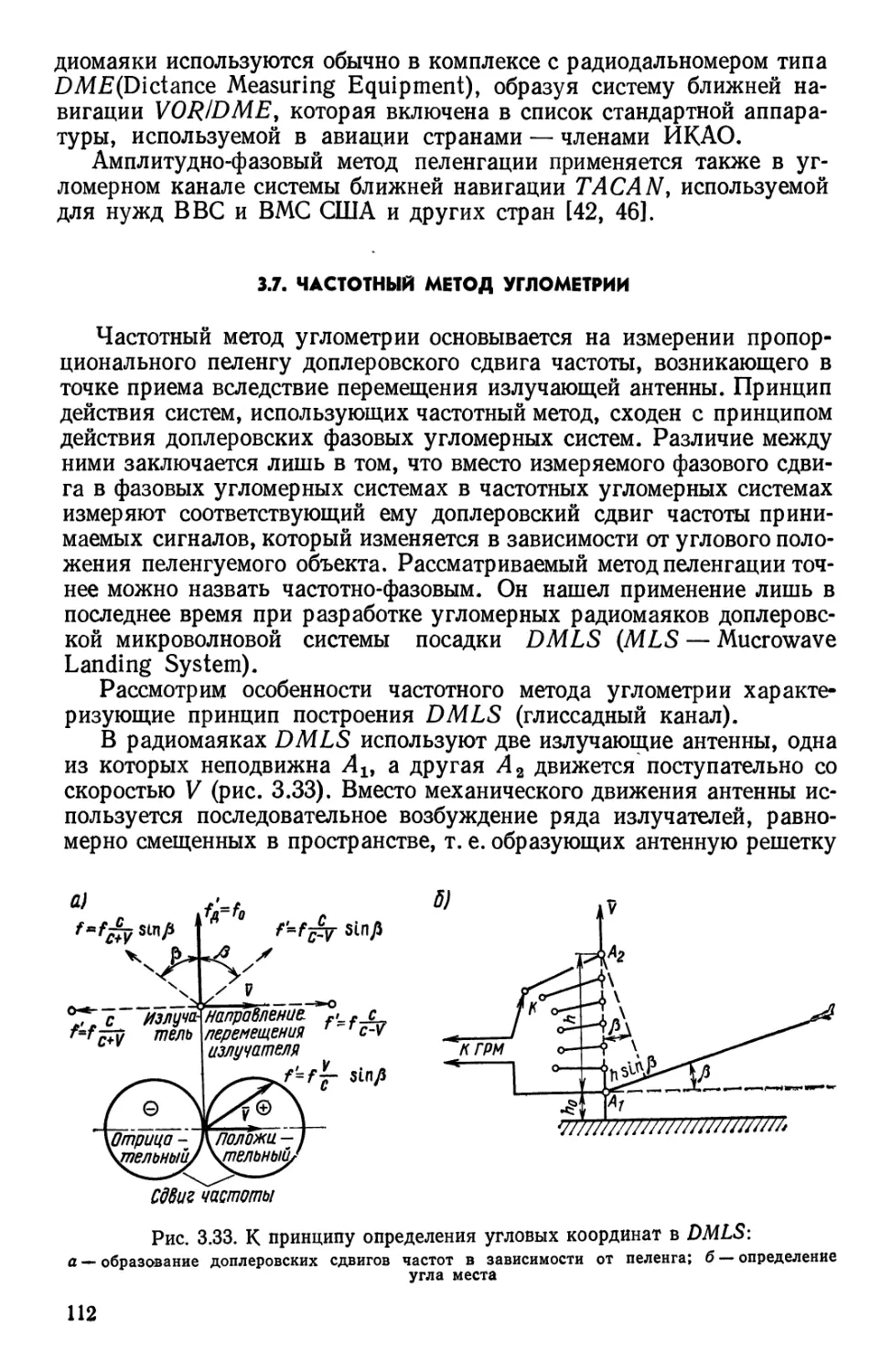
Text
Л. С. БЕЛЯЕВСКИЙ, В. С. НОВИКОВ, П. В. ОЛЯНЮК
ОСНОВЫ РАДИОНАВИГАЦИИ
Утверждено УУЗ МГА
в качестве учебника
для вузов гражданской авиации
ф
МОСКВА «ТРАНСПОРТ» 1982
УДК 621.396.932.1(071.1)
Беляевский Л. С, Новиков В. С, Олянюк П. В. Основы
радионавигации: Учебник для вузов гражд. авиации. —М.: Транспорт,
1982. —с. 288.
Излагаются элементы общей теории навигации летательных
аппаратов (ЛА). Рассматриваются радиотехнические методы
определения основных навигационных параметров, характеризующих
положение и движение ЛА (линейных, угловых координат и их
производных). Описываются принципы построения фазовых,
амплитудных, частотных и временных средств радионавигационных
измерений. Рассматриваются основные вопросы применения
радиотехнических методов и средств для решения задач навигации ЛА и
обеспечения воздушного движения.
Учебник предназначен для студентов вузов гражданской
авиации. Может быть полезен студентам радиотехнических
специальностей других вузов, а также инженерно-техническому и летному
составу предприятий гражданской авиации.
Ил. 143, табл. 4, библиогр. 63 назв.
Введение и гл. 2, 3, 4, 5 и 9 написаны Л. С. Беляевским; гл. 6 —
В. С. Новиковым; гл. 8 и 10 — П. В. Олянюком; гл. 1 —В. С.
Новиковым и Л. С. Беляевским; гл. 7—П. В. Олянюком и Л. С.
Беляевским; раздел 2.4 —И. П. Чутким.
Рецензенты В. С. Шебшаевич, кафедра АРО и ТЭ
МИИГА
ЛЕОНИД СТЕПАНОВИЧ БЕЛЯЕВСКИЙ
ВЛАДИМИР СТЕФАНОВИЧ НОВИКОВ
ПЕТР ВАСИЛЬЕВИЧ ОЛЯНЮК
ОСНОВЫ РАДИОНАВИГАЦИИ
Редактор В. Л. Стерлигов
Переплет художника Ю. Н. Егорова
Технический редактор Т. Л. Захарова
Корректоры В. Я. Кинареевская, Н. В. Каткова
ИБ № 2306
Сдано в набор 17.08.81. Подписано в печать 17.02.82. Т-00794
Формат 60X90Vi6. Бум. тип. № 1. Гарнитура литературная. Высокая печать.
Усл. печ. л. 18 Усл. кр.-отт. 18 Уч.-изд. л. 20,78 Тираж 6000 экз. Заказ 444 Цена 95 коп.'
Изд. № 1-1-1/17 № 1252
Издательство «ТРАНСПОРТ», 107174, Москва, Басманный туп., 6а
Московская типография № 4 Союзполиграфпрома
при Государственном комитете СССР
по делам издательств, полиграфии и книжной торговли
129041, Москва, Б. Переяславская ул., д. 46
3606040000-095
049(01)-82 © Издательство «Транспорт», 1982.
ВВЕДЕНИЕ
Одной из важнейших составных частей транспортной системы народного
хозяйства СССР являегся гражданская авиация (ГА), услугами которой ежегодно
пользуются более 100 млн. пассажиров, а объем выполненных ею перевозок за
последнее десятилетие возрос более чем в 2 раза. Постоянное увеличение числа
и протяженности авиалиний ГА, повышение интенсивности воздушного движения
и тактико-технических характеристик современных летательных аппаратов (ЛА)
требуют дальнейшего совершенствования методов и средств навигации и
управления воздушным движением. Это нашло свое отражение и в «Основных
направлениях экономического и социального развития СССР на 1981—1985 годы и на
период до 1990 года», согласно которым в числе основных задач, поставленных
перед ГА в одиннадцатой пятилетке, предусматривается «...широкое внедрение
бортовых и наземных систем навигационного и радиотехнического оборудования,
обеспечивающих автоматизацию управления воздушным движением, взлетом
и посадкой самолетов и повышающих безопасность и регулярность полетов».
Первоначально под термином «навигация» (от латинского navigatio —
мореплавание) подразумевались лишь способы вождения морских кораблей. В
настоящее время термин распространен и на способы вождения таких подвижных
объектов, как самолеты, вертолеты, космические корабли. Применение этого термина
не относят к вождению объектов, траектории движения которых заранее жестко
определены и положение которых известно в любой момент времени, например
железнодорожных составов, автомобилей. Таким образом, навигация — это наука
о методах и средствах вождения подвижных объектов при наличии
неопределенности текущих координат объектов и траекторий их движения в пространстве.
В связи со специфическими особенностями вождения морских, воздушных
и космических объектов в навигации как науке выделились соответствующие
направления: морская навигация, воздушная (аэронавигация) и космическая
навигация.
Основной задачей навигации является вывод подвижного объекта по
оптимальной (наивыгоднейшей для данных условий) траектории в заданную точку
или область пространства в заданный момент времени. Решение этой общей
задачи подразделяется на ряд частных задач, разнообразных по характеру и
методам решения. К частным задачам навигации относят:
выбор и расчет оптимальной траектории движения объекта и временных
характеристик движения (при подготовке к полету и в процессе полета с учетом
изменения условий полета);
измерение основных навигационных параметров движения объекта, т. е.
величин, характеризующих текущие координаты объекта, направление и скорость
его перемещения;
сравнение результатов определения навигационных параметров с заданными
или расчетными значениями и выработка корректирующих команд (сигналов),
обеспечивающих движение объекта, необходимое для решения основной
навигационной задачи.
Кроме того, из определения основной навигационной задачи следует, что
к указанным частным задачам необходимо добавить операции непосредственного
3
воздействия на органы управления объекта с целью изменения его углового
положения (либо стабилизации) относительно центра масс. Процессы навигации
применительно к конкретным типам подвижных объектов получили названия
самолетовождения, вертолетовождения, кораблевождения (для морских судов).
При этом единый процесс обеспечения движения ЛА при самолето- и вертолето-
вождении разбивают на две взаимосвязанные задачи: собственно навигационную
задачу перемещения центра масс ЛА по заданной пространственно-временной
траектории и пилотирование — управление угловым положением ЛА относительно
центра его масс (изменение или стабилизация углов крена, тангажа и др.).
В полете на воздушных трассах и в районах аэропортов может одновременно
находиться большое количество ЛА, что приводит к необходимости постоянного
диспетчерского контроля и регулирования процесса выполнения полетов,
поддержания установленного порядка движения ЛА в воздушном пространстве с целью
обеспечения регулярности и безопасности полетов. Этот круг задач решается
методами и средствами управления воздушного движения (УВД) путем
непосредственной передачи команд (управляющей информации) на борт ЛА
руководителем полета либо автоматической передачи данных, а также путем суточного
и перспективного планирования воздушного движения.
Для определения навигационных параметров в процессе полетов ЛА
применяют различные технические средства навигации, которые в соответствии с
используемыми в них физическими принципами работы можно разделить на пять
основных групп.
1. Навигационно-пилотажные средства общего назначения, основанные на
использовании различных физических свойств Земли и ее атмосферы (земной
магнетизм, изменение атмосферного давления с высотой, зависимость давления
воздуха от скорости и т. д.). К этой группе относят магнитные и гироскопические
компасы, указатели скорости, барометрические высотомеры и т. д. Они просты
и надежны в работе, но имеют низкую точность и решают ограниченный круг
навигационных задач.
2. Светотехнические и другие визуальные средства земного обеспечения
воздушного движения, к которым относят световые маяки, посадочные огни,
прожекторы, цветовые сигнальные знаки (полотнища), сигнальные ракеты и т. д.
Эти средства могут быть использованы лишь в условиях хорошей видимости
и также решают ограниченный круг навигационных задач.
3. Астрономические средства навигации, основанные на использовании
закономерного изменения взаимного положения Земли и различных небесных светил.
К этой группе относят астрономический компас, авиационный секстант,
автоматический астроориентатор. Применение астрономических средств возможно лишь
при хорошей видимости небесных светил.
4. Инерциальные навигационные средства, основанные на измерении
ускорений ЛА, вызванных силами негравитационного происхождения (тяга двигателей,
силы сопротивления атмосферы, подъемная сила). Интегрирование ускорений,
измеренных на борту ЛА, позволяет определить его скорость, а последующее
интегрирование скоростей — пройденный путь. Инерциальные средства полностью
автономны, достаточно просты и надежны в работе; однако погрешность
счисления скорости и пройденного пути при использовании инерциальных средств
накапливается с течением времени. Поэтому они обычно используются в комплексе
с другими, позволяющими периодически корректировать накапливающиеся
погрешности.
5. Радиотехнические средства навигации, основанные на использовании
закономерностей и свойств распространения в пространстве электромагнитных
колебаний радиотехнического диапазона (радиоволн). Основными из этих
закономерностей и свойств являются:
прямолинейноеib распространения и постоянство скорости распространения
радиоволн в однородной среде;
отражение радиоволн от земной поверхности и других объектов (в том
числе подвижных);
эффект сдвига частоты принимаемых сигналов относительно частоты
излучаемых сигналов, возникающий при взаимном перемещении источника и
приемника радиоволн (эффект Доплера).
4
Радиотехнические средства навигации позволяют осуществлять вождение
летательных аппаратов и управление воздушным движением в условиях
отсутствия видимости Земли и небесной сферы. Радиотехнические средства навигации
обладают высокой точностью измерения навигационных параметров и большой
дальностью действия, решают комплекс разнообразных навигационных задач.
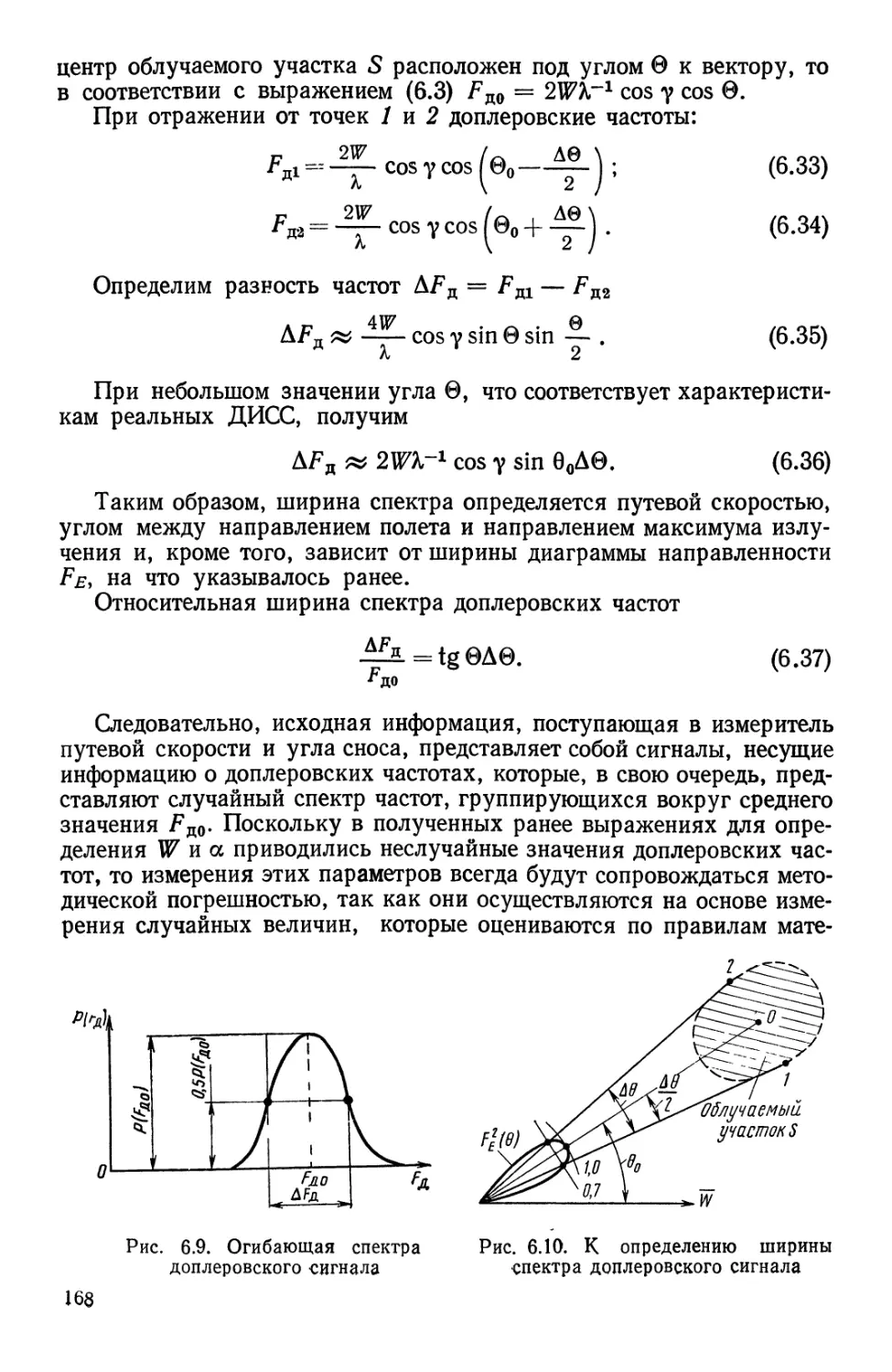
Наука, изучающая методы создания и применения навигационных средств,
использующих эффект и закономерности распространения радиоволн для
обеспечения подвижных объектов навигационной информацией, называется
радионавигацией.
Впервые на возможность применения радиотехнических методов и средств
для навигации кораблей указал в 1897 г. выдающийся русский ученый
изобретатель радио А. С. Попов, который на основе опытов радиосвязи на Балтийском
море дал впервые в мире рекомендации по определению направления на источник
радиоизлучения и дальности до него. Идеи и опыты А. С. Попова послужили
основой для создания первых радиотехнических средств навигации —
радиопеленгаторов. В 1910—1912 гг. русскими учеными и инженерами были созданы
первые наземные и корабельные радиопеленгаторы с зонтичными и рамочными
антеннами.
Большую роль в развитии радионавигации как науки сыграли работы
советских ученых В. М. Шулейкина, М. А. Бонч-Бруевича, А. И. Берга, посвященные
разработке теории направленного излучения и приема радиоволн, исследованию
особенностей распространения радиоволн и погрешностей радиопеленгования. Эти
работы (1921—27 гг.) послужили основой для создания радиопеленгаторов и
радиомаяков, использующих направленные антенны.
В последующий период вместе с интенсивным развитием авиации,
увеличением скорости, высоты и дальности полета самолетов возросли требования к
самолетному навигационному оборудованию. В связи с этим в 1932—1933 гг. был
разработан первый самолетный радиопеленгатор АРП-1, а в 1933 г. инженером
Н. А. Корбанским был предложен первый самолетный радиополукомпас, позднее
модернизированный в серийную модель «Чайка». В этот же период под
руководством В. В. Ширкова, В. Б. Пестрякова и других ученых были выполнены
разработки по созданию коротковолновых аэродромных радиопеленгаторов и
радиомаяков.
Появляются и новые направления радионавигационной техники, связанные
с использованием импульсных сигналов. В 1932 г. М. А. Бонч-Бруевичем был
создан импульсный радиодальномер с электронно-лучевой трубкой, а в 1937 г.
группа советских ученых и инженеров под руководством Ю. Б. Кобзарева
завершила разработку и испытания первых импульсных радиолокаторов, получивших
позднее широкое использование в радионавигации ЛА. В 1938 г. советским
инженером Э. М. Рубчинским была предложена идея создания импульсной разностно-
дальномерной системы. Многочисленные варианты подобных систем были созданы
позднее в нашей стране и за рубежом («Лоран», «Джи»).
В 1930—1934 гг. Л. И. Мандельштамом, Н. Д. Папалекси, Е. Я. Щеголевым
были выполнены очень важные работы по теории и проектированию фазовых
дальномерных и разностно-дальномерных радиосистем, обладающих высокой
точностью. Разработанные ими принципы явились основополагающими для создания
современных фазовых методов и средств дальней навигации (например, систем
«Декка», «Омега» и др.).
С началом Великой Отечественной войны возросли темпы развития
радиотехнических средств навигации, совершенствовались методы их применения. Этот
период характеризуется созданием радионавигационных средств высокой
точности и большой дальности действия. В послевоенные годы большое внимание
в нашей стране уделялось развитию гражданской авиации, обеспечению
регулярности и безопасности полетов Л А в любых метеорологических условиях (в
особенности на этапе посадки самолетов). Поэтому в 50-х годах появляются в
эксплуатации радиотехнические системы посадки самолетов (например, система
СП-50, разработанная в СССР), а также автономные доплеровские измерители
путевой скорости и угла сноса самолетов (ДИСС), новые радиотехнические
системы ближней (РСБН) и дальней навигации (РСДН). В настоящее время теория
и техника радионавигации развивается в направлении автоматизации процессов
5
лолета (по маршруту), взлета и посадки ЛА, разрабатываются комплексные
навигационные системы, улучшаются их тактико-технические характеристики.
Запуск первого советского искусственного спутника Земли (ИСЗ) 4 октября
1957 г., открывший эру завоевания человеком космоса, явился началом
следующего этапа развития радионавигационных методов и средств, т. е. возникновения
космической радионавигации. Увеличение скорости ЛА в космосе выдвинуло на
первый план задачу повышения точности и быстродействия радионавигационных
средств. Эти задачи могут быть решены только на основе полной автоматизации
обработки данных радионавигационных измерений с использованием ЭВМ. Уже
в ближайшее десятилетие самолеты ГА будут оснащены радионавигационной
аппаратурой, взаимодействующей с навигационными ИСЗ. Это позволит
осуществлять воздушное движение с высокой точностью в любом районе планеты
независимо от метеоусловий, времени года. Возрастут безопасность и регулярность
полетов ЛА.
Предметом данного учебника является рассмотрение основных материалов
курса «Теоретические основы радионавигации» для подготовки радиоинженеров
по специальности «Техническая эксплуатация авиационного радиоэлектронного
оборудования». Задачей настоящего курса является не только изучение
физических основ и методов радионавигационных измерений, положенных в основу
построения радионавигационных средств различного типа, но также и
рассмотрение наиболее важных тактических задач применения этих средств для
обеспечения навигации и воздушного движения на трассах и в районе аэропортов.
Особенности изложения материала книги при рассмотрении основных
радионавигационных методов и средств следующие. В книге не рассматриваются
детально отдельные тракты или схемы радионавигационных средств
(предполагается, что эти вопросы либо предварительно изучены в курсах «Радиопередающие
устройства», «Радиоприемные устройства», «Антенные устройства»,
«Радиоавтоматика», либо будут служить предметом изучения в последующем курсе
«Радионавигационные системы аэропортов и ЛА»); изложение носит системотехнический
характер. При этом учтены особенности специализации радиоинженеров по
эксплуатации, для которых вопросы анализа радионавигационных методов и средств
более важны, нежели вопросы синтеза и проектирования. Рассмотрение основных
принципов построения современных радионавигационных средств (РНС)
используется для иллюстрации того или иного метода радионавигационных измерений.
Описание принципов построения радиолокационных систем (РЛС), также
используемых в ГА для решения задач навигации ЛА и УВД, в книге не дается, чему,
как известно, посвящены специальные курсы («Основы радиолокации» и
«Радиолокационные системы»). Поэтому радионавигационные измерительные средства,
использующие в основе типично радиолокационные методы (например,
импульсные дальномеры), описаны кратко. В то же время достаточно полно дается
описание: радиотехнических методов измерения угловых координат (методов
радиоуглометрии), широко применяемых в радиотехнических системах ближней
навигации и посадки самолетов; методов измерения разности расстояний,
радиальных и угловых скоростей ЛА, а также рассматриваются основы комплекси-
рования радионавигационных методов и средств.
Глава 1
ЭЛЕМЕНТЫ ОБЩЕЙ ТЕОРИИ НАВИГАЦИИ
1.1. НАВИГАЦИОННОЕ ПРОСТРАНСТВО
И СИСТЕМЫ КООРДИНАТ В ТРЕХМЕРНОМ ПРОСТРАНСТВЕ
Для определения параметров, характеризующих положение и
движение ЛА в околоземном и космическом пространстве, используются
навигационные сигналы радио-, оптического и звукового диапазонов.
Создаваемые сигналами (в общем случае перемещающимися)
физические поля определенным образом распределены в рабочем окружающем
ЛА пространстве, свойства которого зависят от распределения и
движения элементарных частиц и материальных тел. К таким свойствам
относят, в частности, и так называемые метрические свойства
пространства, характеризуемые той или иной метрикой, т. е. критерием,
позволяющим установить определенные количественные оценки
навигационной информации.
Таким образом, в качестве навигационного пространства целесооб-
разнр полагать пространство, содержащее перемещающийся
навигационный сигнал. От метрических свойств такого пространства будут
зависеть траектории сигналов и, в частности, геометрические свойства
радиоволновых полей, используемых РНС.
Следует иметь в виду, что в общем случае метрическим
пространством называется множество элементов (точек или векторов) е= {#, у, г,
i m}, в котором для любых двух его элементов (например х и у)
определено понятие расстояния d (х> у) как вещественной
неотрицательной величины, удовлетворяющей следующим аксиомам:
1) d (xt у) = 0 -ф==>- хг = #2 (аксиома тождества);
2) d (х, у) = d (уу х) v(aKCHOMa симметрии);
3) для любых трех элементов х> у, z, d (х, у) < d (x, z)+d (z, у)
(аксиома треугольника).
Расстояние d (x, у) может быть введено различным образом по
определенному правилу, которое называется метрикой данного
пространства. JB частности, если элементами пространства являются два
вектора х = {хъ х2, х3>^..хп}_иу = {у1у уъ уа,.шш уп} и для каждого
из них введены нормы ||*||э \\у\\у представляющие собой
неотрицательные вещественные числа
imi=i/ S** • (1Л)
то в рассматриваемом пространстве расстояние между векторами
d(xyY"\\x-y\\=> l/j (*,-?,)•. {L2>
* (=1
7
Пространство с метрикой, описываемой формулой (1.2),
называется линейным эвклидовым пространством. Очевидно, что подобное
пространство является метрическим, поскольку расстояние (1.2)
удовлетворяет всем аксиомам метрик. Расстояние между элементами
пространства может быть введено различными способами, от которых
зависят особенности соответствующих пространств. Заметим, что группа
величин, дающая n-мерную характеристику каждому элементу
используемого пространства, носит название координат. Вид координат и
начала их отсчета могут выбираться по-разному, что зависит от
геометрических свойств пространства, метода навигационных измерений,
обеспечения достаточно простых алгоритмов преобразования и обработки
навигационной информации.
При использовании современных радионавигационных методов и
средств навигационное пространство характеризуют обычно
евклидовой метрикой, полагая траектории сигналов в виде прямых линий.
Поэтому в последующем изложении расстояние между элементами
навигационного пространства при оценке параметров положения и
движения ЛА и их погрешностей будем полагать соответствующим
формуле (1.2). Однако в некоторых случаях метрика рассматриваемого
пространства отклоняется от евклидовой. Действительно, траектории
сигналов РНС, работающих в коротковолновом и ультракоротковолновом
диапазонах, будут искривленными вследствие рефракции волн в
атмосфере; соответственно искривленным будет и навигационное
пространство. Также могут искривляться и траектории сигналов в космическом
пространстве под влиянием полей тяготения. При использовании РНС,
работающих на длинных волнах, которые дифрагируют вокруг Земли,
навигационное пространство будет иметь вид той или иной области
поверхности земного шара, а геодезические линии этой поверхности
будут соответствовать траекториям сигналов.
Обычно задачи воздушной навигации стремятся аналитически
решать в неискривленном пространстве, вводя соответствующие
поправки на возможное отклонение метрики от евклидовой (поправки на
рефракцию радиоволн в атмосфере и ионосфере, на сферичность земного
шара и др.). Хотя воздушная навигация по своему существу
трехмерна и строгое решение навигационных задач также трехмерно, однако
в практике штурманских расчетов часто используется более простая
двумерная модель навигационного пространства (плоскость), а третья
координата — высота — вводится обособленно от двух
поверхностных координат. Плоской модели навигационного пространства
соответствуют и основы построения навигационных карт. Если подобное
упрощение оправдано в воздушной навигации, решение задач
навигации Л А в космическом пространстве требует большей точности и,
следовательно, более строгого учета фактической метрики
навигационного пространства соответствующего числа измерений.
Поэтому в общем случае навигационное пространство следует
полагать искривленным, метрика которого отклоняется от евклидовой
(риманово пространство). При этом стремятся алгоритмы решения
навигационных задач для неевклидовых пространств представлять как
обобщение алгоритмов обычной евклидовой навигации [60].
8
Рассмотрим способы задания координат в трехмерных
навигационных пространствах с линейной метрикой. Координатные системы,
используемые для решения навигационных задач, классифицируются по
следующим признакам:
по положению начала координатной системы;
по ориентации первой плоскости отсчета;
по связанности с телом, в центре которого размещено начало
координат;
по геометрическим свойствам координат.
Первый признак классификации предполагает возможность
размещения начала координатной системы в центре естественного космичес-
ского тела (планеты, звезды, их совокупности), на его поверхности либо
вне этого тела (например, совмещаться с ЛА). Поэтому в зависимости от
указанного положения начала координат относительно естественного
космического тела их можно подразделить соответственно на астроцент-
рические, топоцентрические (от греческого то яо£— место) и экзоцент-
рические (от греческого е£со — вне). К первой группе из названных
систем координат относят геоцентрическую, гелиоцентрическую,
селеноцентрическую и другие системы. Ко второй группе — геотопоцентри-
ческую, селенотопоцентрическую, к третьей группе — геоэкзоцентри-
ческую, селеноэкзоцентрическую и др.
Второе подразделение основывается на ориентации первой
плоскости отсчета координат, наиболее характерными положениями которой
бывают совмещение с экваториальной плоскостью космического тела,
с плоскостью орбиты его спутника либо с плоскостью горизонта
некоторой точки на поверхности космического тела. В соответствии с этим
по второму признаку координатные системы можно подразделить на
экваториальные, орбитальные и горизонтальные.
Следующий (третий) признак разделения предполагает возможность
изменения во времени положения второй плоскости отсчета координат.
Если, например, в экваториальной системе вторую плоскость отсчета
направить по меридиану, то такая система будет жестко связана с
планетой, но окажется вращающейся в инерциальном пространстве.
В случае же ориентировки соответствующей оси координатной системы
на удаленную звезду можно получить систему, не участвующую
в суточном вращении планеты. Таким образом, третье подразделение,
производимое по признаку связанности координатной системы с телом
(в центре которого размещено ее начало), позволяет выделить
связанные и несвязанные (например, инерциальные) системы координат.
Четвертое подразделение должно учитывать геометрические
свойства координатных систем, их ортогональность, линейность или кри-
волинейность и т. п. Согласно этому признаку системы координат
подразделяют на системы с прямоугольными, сферическими,
эллиптическими, гиперболическими и подобными им координатами.
Любая из перечисленных координатных систем может оказаться
более удобной в зависимости от условий навигации. Для задания или
отсчета координат объектов на поверхности Земли и в околоземной
зоне целесообразно использовать геоцентрическую систему координат,
одна координатная плоскость которой проходит через плоскость зем-
9
N *
Рис. 1.1. Географическая система ко- Рис. 1.2. Геосферическая система
координат ординат
ного экватора, а две другие перпендикулярны к первой, т. е.
геоцентрическую экваториальную прямоугольную несвязанную систему. Для
межпланетной навигации удобно использовать гелиоцентрическую
орбитальную сферическую несвязанную систему координат.
Для математического описания траекторий перемещения ЛА
относительно наземных РНС и поверхности земного шара при решении
задач радионавигации обычно используется геоцентрическая
координатная система в виде трех ее вариантов: географической,
геосферической и ортодромической систем. Эти системы координат обеспечивают
определение положений ЛА и траекторий их движения при полете на
любые расстояния вблизи земной поверхности и в околоземном
пространстве.
Если в качестве модели, характеризующей форму Земли, принят
эллипсоид вращения (референц-эллипсоид *), для навигационных
определений используется географическая система координат (рис. 1.1).
Координаты местоположения самолета или вертолета (далее — МС)
либо наземной РНС в этой системе определяются географической
долготой X и географической широтой ф. Долгота X есть угол, заключенный
между плоскостями начального (гринвичского) меридиана и
меридиана точки МС, а широта ф — угол между нормалью к поверхности
эллипсоида в рассматриваемой точке (линией отвеса) и экваториальной
плоскостью.
Геосферическая система координат основывается на сферической
модели формы Земли. При этом геосферическая долгота Хс совпадает с
географической, а геосферическая широта фс отличается от географи-
хГеографическая система координат, используемая в СССР для
навигационных расчетов и в картографии, основывается на введенном в 1946 г. референц-
эллипсоиде Ф. Н. Красовского, значение элементов которого: большая полуось
а = 6 378 245 м, малая полуось 6=6 356 863 м, полярное сжатие с = (а —
— Ь)1а = 0,00335.
10
ческой на угол Дф между направлением к центру Земли и нормалью к
ее поверхности (рис. 1.1 и 1.2). Переход от сферических координат
фс, %с, г к прямоугольным геоцентрическим координатам х, у, г, что
нередко требуется при навигационных расчетах, осуществляется с
использованием выражений:
X = Г СОБф Q,OsX\y = Г С05ф SinV,2 = ГБШф. (1.3)
Ортодромическая система координат — это обобщенная
сферическая система координат, которая определенным образом связана с
земным шаром. При ее использовании в качестве начальной плоскости
отсчета выбирается условная экваториальная плоскость, а направление
ее экватора, называемого главной ортодромией, принимается за ось
У (рис. 1.3). За ось X ортодромической системы координат
принимается направление меридиана, проведенного через любую искомую точку
МС объекта с географическими координатами ф, %. Тогда МС объекта
может быть указано двумя ортодромическими координатами х и у,
которые являются линейными величинами, а все направления
перемещения объекта (в том числе курс самолета) принято измерять
относительно оси У. Полюс ортодромической системы координат находится
в точке Р0, из которой выбранное за положительное направление оси
У будет видно совпадающим с движением часовой стрелки. Основными
параметрами при навигационных расчетах с использованием
ортодромической системы координат являются геосферические (либо
географические) координаты ф0Я0 точки начала отсчета 0, точки вертекса
V (фр, Xv) (т. е. точки пересечения главной ортодромией меридиана под
углом 90°) или полюса Р0 (фр, Яр).
Координаты МС могут быть выражены также через ортодромиче-
скую долготу Хорт и ортодромическую широту форт- Взаимосвязь
ортодромических и геосферических координат с учетом введенных
параметров ортодромической
координатной системы [3, 60] может быть
выражена соотношениями:
фс = arcsin (sin Яорт sin фv) +
+ arctg (tg форт cos cpv); (1.4)
Яс = Xv + arctg (tgXopT cos ф^ —
— arcsin (sin форт sin фv),
в которых Яорт и форт, в свою
очередь, выражаются через линейные
величины х и у с помощью
известных формул:
*ч>Рт = 180° у/п (г + Я); Форт =
- 180 х/п(г + Н). (1.5)
В формулах (1.5), кроме
радиуса Земли г, введена высота ЛА над Рис L3. Ортодромическая
земной поверхностью Я, что позво- координат
система
11
ляет определить МС в пространстве. Ортодромическую и
геосферическую системы координат наиболее широко применяют в навигации
ЛА, поскольку они обеспечивают необходимую полноту решения
навигационных задач на основе простых математических зависимостей.
Для описания траекторий полетов ЛА на сравнительно небольшие
расстояния, когда кривизна Земли мала и ею можно пренебречь в
расчетах, используются горизонтальные системы координат —
прямоугольная декартова система либо полярная сферическая. В
прямоугольной системе координат положение центра масс ЛА относительно
местоположения РНС определяется линейными координатами s
(пройденным расстоянием), z (боковым уклонением), Я (высотой полета).
Пространственное положение ЛА в полярной сферической системе
координат определяется следующими параметрами: расстоянием R от
начала координат до ЛА, углом (5 между плоскостью горизонта и
радиусом-вектором, проведенным из начала координат к точке
расположения ЛА, а также углом 0 в горизонтальной плоскости между
северным направлением меридиана, проходящего через начало координат,
и проекцией радиуса-вектора на эту плоскость (азимутом). В
практике навигационных определений эту координатную систему нередко
заменяют полярной плоскостной (R, 0).
1.2. ТРАЕКТОРИЯ И ЭТАПЫ ПОЛЕТА САМОЛЕТА
Движение центра масс ЛА в пространстве характеризуется
траекторией полета, под которой в общем случае понимают зависимость
положения центра масс объекта от времени в принятой системе
координат. Траектория полета считается известной, если в любой момент
времени t на заданном временном интервале известен вектор
действительного движения объекта, т. е.
~Xi=~x(t), (1.6)
где xt — значения текущих координат объекта; i = 1, 2, 3.
Поскольку траектория полета представляет собой непрерывную
пространственно-временную функцию, она может быть представлена в
виде совокупности конечного числа независимых параметров, с
достаточной степенью точности характеризующих положение и движение
объекта на заданном временном интервале. Под воздействием
различных возмущающих факторов действительное (истинное) движение
объекта будет отличаться от заданного (расчетного), характеризуемого
вектором
xt =xt(t). (1.7)
Для решения основной задачи навигации необходимо измерять
параметры действительного движения объекта, а затем сопоставлять
полученные данные с параметрами заданного движения, что в
принципе составляет основное содержание процесса получения и
использования навигационной информации. Предположим, что до момента
12
времени т включительно ЛА следует заданному закону движения,
т. е. действительное движение совпадает на интервале от нуля до т
с заданным:
*f(*) = Xi(0, 0<*<т. (1.8)
Требуется показать, какие характеристики движения нужно знать
в момент т, чтобы обеспечить тождество движений в смысле
*,(т + Ат) = Х, (т + Ат) (1.9)
и через любой малый интервал времени Ат.
Для ответа на этот вопрос разложим xt (t) и Xt (f) в ряд Тейлора в
окрестности т:
Л»!
xt (x + Ar)= 2 — *Г} СО Ат";
Х,(г + Дт) = J-T^WAt».
о nl
(1.10)
Очевидно, что ЛА будет по-прежнему находиться на траектории в
момент t = т + Ат, если выполнено условие равенства производных
в выражениях (1.10).
*<я>(тНХ|я>(т); (1.11)
где я = 0, 1, 2, 3 ...
Практически речь может идти о выполнении равенства (1.11)
только лишь с известной степенью точности. В этом случае достаточно
измерить ограниченное число производных. Однако ясно, что чем более
высокого порядка производные измеряются, тем точнее можно
воспроизвести движение. В большинстве практических случаев достаточно
использовать первые три члена ряда xt (т), х\ (т) и х\ (т).
Таким образом, как следует из соотношений (1.9)—(1.11), на борту
ЛА, движущегося по заданной траектории, необходимо измерение его
координат, скорости и ускорения. Если действительные значения этих
величин в процессе управления ЛА равны заданным, то ЛА движется
точно по заданной траектории.
Совокупность параметров, характеризующих координаты ЛА и их
производные по времени, называют параметрами движения. Эти
параметры и измеряют в процессе навигации подвижных объектов.
Проекцию траектории полета ЛА на земную поверхность называют
линией пути. Различают линию заданного пути (ЛЗП),
соответствующую заданной траектории движения ЛА, и линию фактического пути
(ЛФП), соответствующую траектории действительного движения.
Основная часть линии пути, называемая маршрутом полета,
расположена между исходным пунктом маршрута (ИПМ) и конечным пунктом
маршрута (KJ1M).
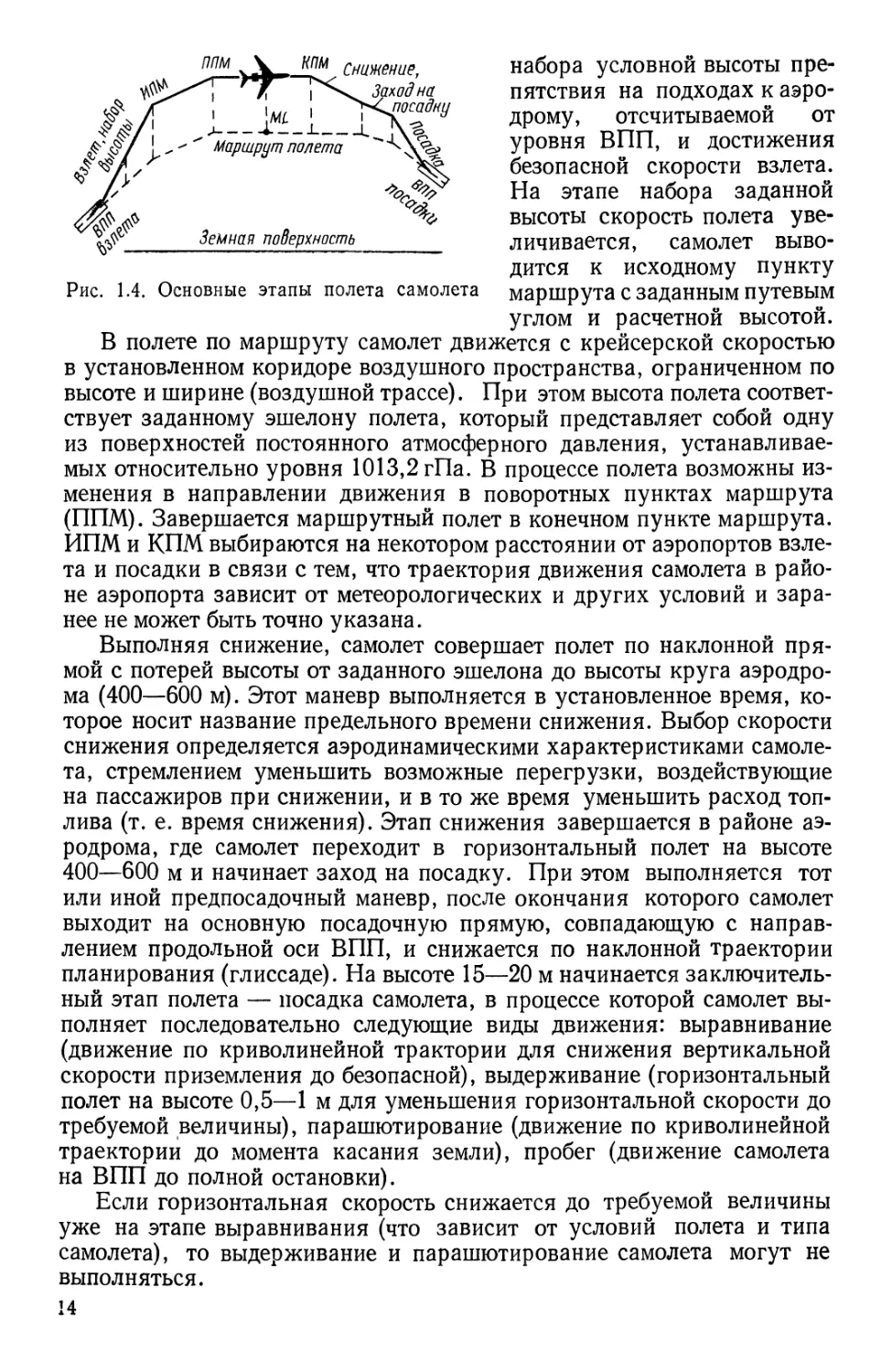
Вся траектория полета применительно к движению самолета
разделяется на следующие этапы (рис. 1.4): взлет, набор высоты, полет по
маршруту, снижение, заход на посадку, посадка. При взлете самолет
движется от момента старта на взлетно-посадочной полосе (ВПП) до
13
набора условной высоты
препятствия на подходах к
аэродрому, отсчитываемой от
уровня ВПП, и достижения
безопасной скорости взлета.
На этапе набора заданной
высоты скорость полета уве-
^i>v исмнин nuuc/jAHuuuo личивается, самолет
выводится к исходному пункту
Рис. 1.4. Основные этапы полета самолета маршрута с заданным путевым
углом и расчетной высотой.
В полете по маршруту самолет движется с крейсерской скоростью
в установленном коридоре воздушного пространства, ограниченном по
высоте и ширине (воздушной трассе). При этом высота полета
соответствует заданному эшелону полета, который представляет собой одну
из поверхностей постоянного атмосферного давления,
устанавливаемых относительно уровня 1013,2 гПа. В процессе полета возможны
изменения в направлении движения в поворотных пунктах маршрута
(ППМ). Завершается маршрутный полет в конечном пункте маршрута.
ИПМ и КПМ выбираются на некотором расстоянии от аэропортов
взлета и посадки в связи с тем, что траектория движения самолета в
районе аэропорта зависит от метеорологических и других условий и
заранее не может быть точно указана.
Выполняя снижение, самолет совершает полет по наклонной
прямой с потерей высоты от заданного эшелона до высоты круга
аэродрома (400—600 м). Этот маневр выполняется в установленное время,
которое носит название предельного времени снижения. Выбор скорости
снижения определяется аэродинамическими характеристиками
самолета, стремлением уменьшить возможные перегрузки, воздействующие
на пассажиров при снижении, и в то же время уменьшить расход
топлива (т. е. время снижения). Этап снижения завершается в районе
аэродрома, где самолет переходит в горизонтальный полет на высоте
400—600 м и начинает заход на посадку. При этом выполняется тот
или иной предпосадочный маневр, после окончания которого самолет
выходит на основную посадочную прямую, совпадающую с
направлением продольной оси ВПП, и снижается по наклонной траектории
планирования (глиссаде). На высоте 15—20 м начинается
заключительный этап полета — посадка самолета, в процессе которой самолет
выполняет последовательно следующие виды движения: выравнивание
(движение по криволинейной трактории для снижения вертикальной
скорости приземления до безопасной), выдерживание (горизонтальный
полет на высоте 0,5—1 м для уменьшения горизонтальной скорости до
требуемой величины), парашютирование (движение по криволинейной
траектории до момента касания земли), пробег (движение самолета
на ВПП до полной остановки).
Если горизонтальная скорость снижается до требуемой величины
уже на этапе выравнивания (что зависит от условий полета и типа
самолета), то выдерживание и парашютирование самолета могут не
выполняться.
ППМ
Маршрут полета
Снижение,
Заход на
посадну
Qл) Л I I г-4 П ПлНлп1/| «плт t
14
1.3. ОСНОВНЫЕ НАВИГАЦИОННЫЕ ЭЛЕМЕНТЫ ПОЛЕТА
Параметры, определяющие положение ЛА в пространстве
(координаты) и его движение (направление перемещения, скорость),
называются навигационными элементами полета, или навигационными
параметрами — НП. К основным навигационным элементам относятся: место
ЛА, высота полета, курс ЛА, курсовой угол ориентира, пеленг,
воздушная скорость, путевая скорость, угол сноса, путевой угол,
время полета.
Место ЛА — это проекция центра тяжести ЛА на земную
поверхность. Местоположение Л А определяется координатами,
отсчитываемыми в той или иной системе геоцентрических координат
(геосферических, ортодромических, декартовых, полярных), например,
широтой, долготой, высотой, линейными координатами, или полярными
координатами — дальностью, азимутом, углом места.
Высотой полета Я называется расстояние между ЛА и
земной поверхностью, измеренное по вертикали. Высота полета
является одним из важнейших навигационных параметров, связанных
с обеспечением безопасности воздушного движения. В зависимости от
решаемых навигационных задач и этапа полета используются
различные понятия (определения) высоты полета ЛА, а именно:
абсолютная, истинная, относительная и условная барометрическая высота
(рис. 1.5).
Абсолютная высота Яа — это высота, отсчитываемая от среднего
уровня Балтийского моря. Расчет абсолютной высоты необходим при
выполнении исходных штурманских расчетов и прокладке маршрута с
использованием карты, на которой значения высот рельефа местности
обозначены в величинах Яа, что позволяет проложить маршрут на
безопасной высоте полета.
Истинная высота Яи — это действительное расстояние от нижней
точки Л А до ближайшей точки на земной поверхности. Постоянный
контроль этой высоты особенно важен при полете на малых высотах, над
местностью с неоднородным рельефом, а также при взлете и посадке.
Измеряется Яи с помощью радиовысотомеров.
Относительная высота Яотн отсчитывается барометрическим
высотомером по отношению к уровню аэродромов взлета или посадки.
Информация об этой высоте используется при взлете ЛА либо заходе на
посадку, когда индикатором
высоты является
барометрический высотомер, начальное
барометрическое давление на
котором должно быть
установлено в соответствии с
барометрическим давлением на
уровне ВПП.
Условная барометрическая
высота Я усл отсчитывается „ UVUIIU, ^ ^ ~_.
по показаниям барометриче- -/— .-.,«.. ^
ского высотомера от условно- Рдс. 1.5. К определению высоты полета
1
.
ШЁШб
: i
а:
\
*^х^ АэР0
UnnRpub P
^
1 ^л
fyOM /
чя»—
2
3=
«VI
g4 as
ХЛ
'
Аэродром 1
[ ^
15
го уровня, соответствующего давлению 1013,2 гПа, на который
устанавливается нуль шкалы высотомера. Данная высота принята в
качестве основной для выдерживания экипажами заданных уровней
полета по маршруту, называемых эшелонами. При рассредоточении
ЛА в воздушном пространстве на различных высотах полета
используют значения Яусл, что обеспечивает безопасное расстояние по
вертикали между Л А, летящими на встречных, одинаковых и
пересекающихся курсах (вертикальное эшелонирование). Нормы
вертикального эшелонирования определены наставлением по производству
полетов в гражданской авиации СССР (НПП ГА — 78).
При величине магнитных курсов полета от 0 до 179°разрешены
следующие высоты вертикальных эшелонов Яусл: 0,9; 1,5; 2,1; 2,7;
3,3; 3,9; 4,5; 5,1; 5,7; 6,6; 7,8; 9,0; 10,2 км. При полете на магнитных
курсах от 180 до 359° разрешены эшелоны #усл: 1,2; 1,8; 2,4; 3,0;
3,6; 4,2; 4,8; 5,4; 6,0; 7,2; 8,4; 9,6 и 10,8 км.
Следует заметить,что нижний безопасный эшелон определяется
округлением так называемой истинной безопасной высоты полета Яиб до
ближайшего верхнего эшелона. В общем случае безопасная высота
рассчитывается и устанавливается для различных условий полета в
зависимости от рельефа местности, допустимых отклонений при
пилотировании, скорости полета. С учетом показаний высотомеров значения
безопасных высот #б полета по маршруту рассчитываются по формуле
Яб = Яиб + Яар - AHt + 11 (1013,2 ). (1.12)
где #ар—абсолютная высота наивысшей точки рельефа местности (включая
искусственные препятствия) в пределах ширины воздушной трассы
полета;
AHt — методическая температурная поправка показаний высотомера; %
^np.min — наименьшее атмосферное давление по маршруту полета,
приведенное к уровню моря, гПа.
Выполнение правил
выдерживания безопасных высот полета
обеспечивает предотвращение
столкновений ЛА с земной
поверхностью или наземными
препятствиями.
Курсом ЛА (рис. 1.6)
называется угол в горизонтальной
плоскости между северным
направлением меридиана, проходящего через
центр масс ЛА, и проекцией
продольной оси ЛА. Курс отсчиты-
вается по часовой стрелке от
северного направления в пределах от
0 до 360°.
В зависимости от направления,
выбранного для начала отсчета,
Рис. 1.6. К определению курса поле- Различают следующие разновидно-
та сти определения курса:
16
истинный курс (ИК),
отсчитываемый от северного направления
географического меридиана Си,
проходящего через центр масс
ЛА;
магнитный курс [(МК),
отсчитываемый от северного
направления магнитного меридиана См,
проходящего через центр масс
ЛА;
компасный курс (КК),
отсчитываемый от северного направления, рис. 1.7. К определению ортодроми-
указываемого самолетным магнит- ческого курса самолета
ным компасом Ск.
Разность между истинным и магнитным курсом, вызванная
несовпадением географического и магнитного полюсов Земли, называется
магнитным склонением ДМ, т. е. ИК = МК ± AM.
Величина магнитного склонения на территории СССР
варьируется в пределах от —13 до +30° (для Москвы около + 7°). При столь
существенном изменении учет поправки ДМ в навигационных
расчетах обязателен.
Разность между магнитным и компасным курсом, называемая
девиацией компаса Д/(, представляет собой погрешность в показаниях
магнитного компаса, вызванную искажением магнитного поля Земли за
счет влияния ферромагнитных материалов, а также инструментальную
погрешность компаса.
Таким образом
МК = КК± А/С; ИК = КК ± ДМ ± А/С. (1.13)
Следовательно, магнитный и истинный курсы могут быть
определены с помощью магнитного компаса с учетом указанных поправок.
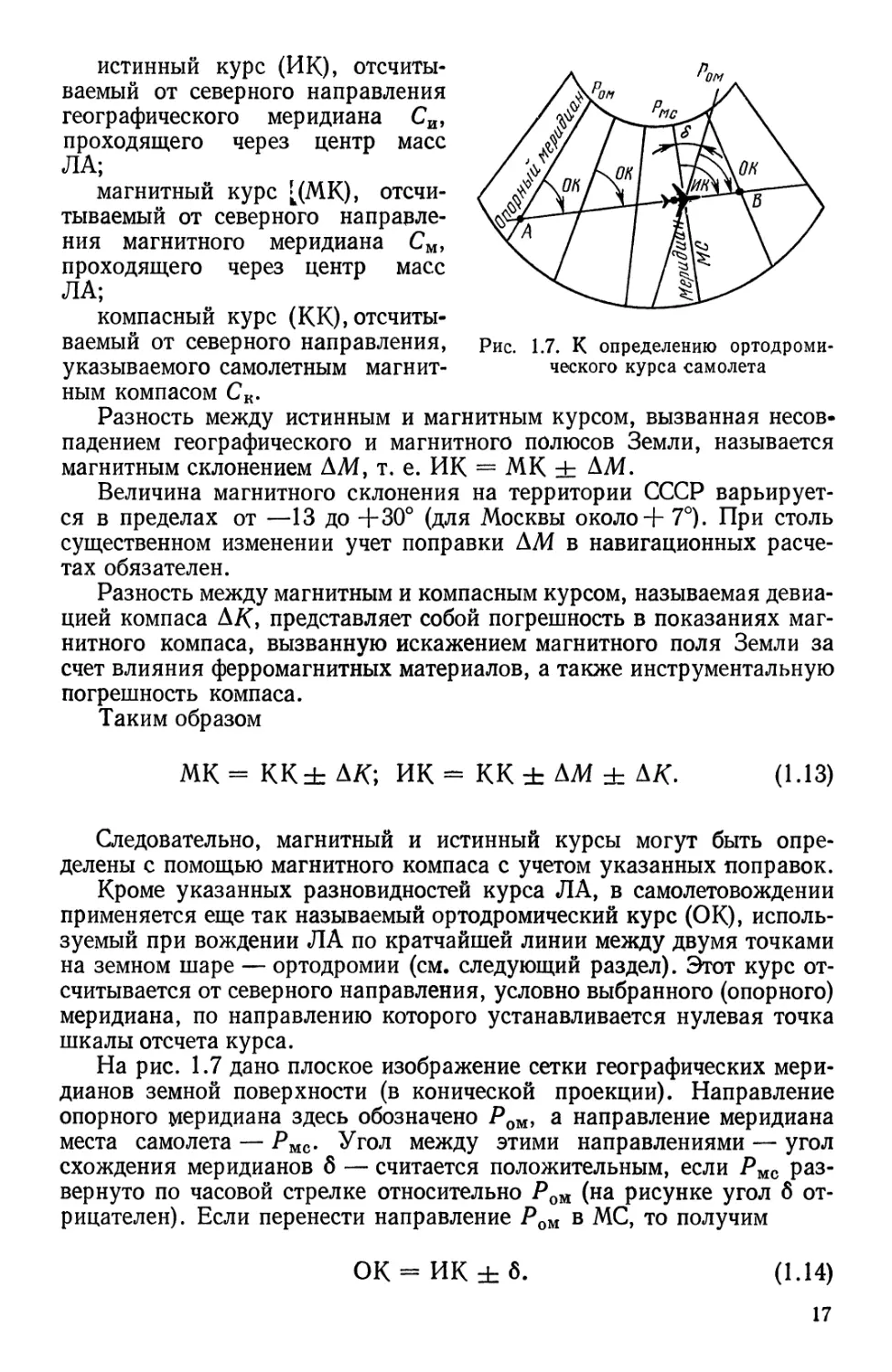
Кроме указанных разновидностей курса ЛА, в самолетовождении
применяется еще так называемый ортодромический курс (ОК),
используемый при вождении ЛА по кратчайшей линии между двумя точками
на земном шаре — ортодромии (см. следующий раздел). Этот курс от-
считывается от северного направления, условно выбранного (опорного)
меридиана, по направлению которого устанавливается нулевая точка
шкалы отсчета курса.
На рис. 1.7 дано плоское изображение сетки географических
меридианов земной поверхности (в конической проекции). Направление
опорного меридиана здесь обозначено РоМ, а направление меридиана
места самолета — Рмс. Угол между этими направлениями — угол
схождения меридианов б — считается положительным, если Рмс
развернуто по часовой стрелке относительно РоМ (на рисунке угол б
отрицателен). Если перенести направление РоШ в МС, то получим
ОК = ИК±б. (1.14)
17
Угол схождейий меридианов на небольших участках пути (до 500—
600 км) приближенно оценивается по формуле
6=-(Я0М —Ямо) sin Ф, (1.15)
где А,0м> ^мс — соответственно долгота (географическая или геосферическая)
опорного меридиана и долгота места ЛА. На маршрутах большой
длины 6 определяется по более сложным формулам сферической
тригонометрии.
Курсовым углом ориентира (КУО) называется
угол между проекцией продольной оси Л А на горизонтальную
плоскость и направлением на неподвижный ориентир, расположенный на
земной поверхности, либо перемещающийся в космическом
пространстве по заданной траектории (с детерминированными параметрами).
Поскольку в радионавигации обычно определяют направление на
радиоориентир (радиостанцию, радиомаяк, радионавигационную точку
— РНТ*), то используют понятие курсового угла
радиоориентира — КУР, который измеряют с помощью бортовых
радиопеленгаторов (радиокомпасов) и отсчитывают от продольной оси
ЛА по часовой стрелке в пределах от 0 до 360° (рис. 1.8).
Пеленгом, или азимутом радиоориентира (ПР)
относительно ЛА называют угол в горизонтальной плоскости между
северным направлением меридиана центра массы ЛА и направлением на
радиоориентир. В зависимости от того, отсчитывается пеленг от
истинного (географического) или от магнитного меридиана, различают
истинный пеленг радиоориентира ИПР (рис. 1.8) и магнитный пеленг
радиоориентира МПР, которые связаны зависимостью
ИПР = МПР ±АМ = МК±Ш + КУР = ИК + КУР. (1.16)
Пеленгом самолета (ПС) относительно радиоориентира
называют угол в горизонтальной плоскости между северным направлением
меридиана, проходящего через наземную РНТ, и направлением на
самолет. Различают истинный пеленг самолета (ИПС) и магнитный
(МПС). Как видно из рис. 1.8,
ИПС = ИПР ± 180° ± б, (1.17)
где знак «+» при 180° соответствует
расположению ЛА западнее РНТ,
а знак «—» — восточнее.
Скорость полета ЛА
характеризуется истинной
воздушной, путевой и вертикальной
скоростью.
Истинной воздушной
скоростью V (рис. 1.9)
называют скорость полета ЛА
относительно воздушной среды. Воздуш-
Рис. 1.8. К определению пеленгов и
,КУР *См. предметный указатель
18
Рис. 1.9. Навигационный треугольник
скоростей
ная скорость измеряется с помощью
приборов, определяющих величину
скоростного напора набегающего
на ЛА воздушного потока. При
решении большинства
навигационных задач учитывается только
горизонтальная составляющая
скорости ЛА, поэтому воздушная
скорость рассматривается как вектор,
расположенный в горизонтальной
плоскости. Ориентировочно
считают, что воздушная скорость ЛА
направлена вдоль его продольной
оси, однако из-за неравенства тяги
двигателей, размещенных слева и справа от продольной оси ЛА,
несимметрии конструкции и его нагрузки угол между направлением
продольной оси ЛА и направлением вектора воздушной скорости
может иногда достигать 1—2°. Это необходимо учитывать при
выполнении точных навигационных расчетов. Отношение истинной
воздушной скорости к скорости звука при данной температуре — число
М — используют при решении некоторых задач пилотирования.
Горизонтальная составляющая скорости перемещения ЛА
относительно поверхности Земли называется путевой скоростью
W. Эта скорость равна векторной сумме воздушной скорости V и
горизонтальной составляющей скорости ветра U.
Проекция путевой скорости на земную поверхность определяет
направление линии фактического пути ЛА в любой точке маршрута, т.е.
является касательной к линии пути. Угол в горизонтальной плоскости
между вектором воздушной скорости и вектором путевой скорости
называется углом сноса (УС), который может быть
положительным или отрицательным. Положительным он считается тогда, когда
вектор путевой скорости расположен справа от оси ЛА. Угол между
северным направлением меридиана центра масс ЛА и направлением
вектора путевой скорости называется путевым углом (ПУ).
Различают истинный путевой угол (ИПУ) и магнитный путевой угол
(МПУ), которые отсчитываются в горизонтальной плоскости по
часовой стрелке соответственно от географического и магнитного меридиа-
ноь:
ИПУ = ИК ± УС; МПУ = МК ± УС.
(1.18)
Кроме того, различают заданный путевой угол (ЗПУ), который
задают перед началом полета, и фактический путевой угол (ФПУ). В
навигационных расчетах используют ортодромическии путевой угол
(ОПУ), отсчитываемый от некоторого опорного меридиана.
Ортодромическии путевой угол с учетом формул (1.18) выражается суммой ор-
тодромического курса и угла сноса
ОПУ = ОК ± УС
(1.19)
19
Скорость и направление ветра, воздействующего на Л А,
характеризуется вектором ветра U. Угол, заключенный между вектором
путевой скорости и вектором ветра, называется углом ветра (УВ). Угол,
заключенный между вектором воздушной скорости и вектором ветра,
называется курсовым углом ветра (КУВ),а угол между направлением
меридиана центра тяжести ЛА и направлением ветра называют
навигационным направлением ветра (НВ).
Треугольник, образованный векторами V, W> и Uy называют
навигационным треугольником скоростей и широко используют в
навигационных расчетах. Навигационный треугольник скоростей служит для
определения путевой скорости, угла сноса,ФПУ и других
навигационных параметров. Путевая скорость и угол сноса (а также
соответствующий им вектор ветра) в полете могут определяться так же с помощью
специальных РНС — доплеровских и инерциальных систем.
Рассмотрим некоторые зависимости между навигационными
параметрами, определяемыми из навигационного треугольника скоростей
(см рис. 1.9). Спроектировав вектор ветра и вектор воздушной
скорости на направление вектора путевой скорости, получим
W = V cos УС + U cos УВ. (1.20)
Из соотношения (1.17) согласно теореме синусов имеем
sin УС= UIV sin УВ. (1.21)
Как видно из формулы (1.21), угол сноса в основном зависит от
изменения угла ветра и его скорости с учетом соотношения (1.16). Зная
направление ветра и ИПУ, угол ветра и курсовой угол ветра можно
рассчитать по формулам:
УВ = НВ — ИПУ; КУВ = НВ — ИК= УВ + УС. (1.22)
Зависимости (1.16)—(1.22) играют важную роль в расчетах
навигационного режима полета ЛА.
Кроме того, в ряде навигационных расчетов учитывают также
вертикальную скорость самолета относительно земли, т. е. скорость
изменения высоты полета (WB = dHldt).
Время также является навигационным параметром, так как
перед началом полета всегда производится штурманский расчет времени
на каждый этап полета и на выполнение всех маневров (набора высоты,
разворотов, снижения и т. п.) в процессе полета. Различают путевое и
часовое (контрольное) время. Путевое время — это отрезок времени,
затрачиваемый на полет по определенному участку маршрута или на
выполнение какого-либо маневра. Часовое время — это время,
соответствующее определенному фиксированному моменту выполнения
какого-либо этапа полета, например, время вылета, время пролета
отдельных пунктов маршрута и т. п. Для отсчета времени на борту ЛА
используют специальные часы, имеющие большую точность:
механические и электронные (последние могут использоваться и как эталоны
времени при радионавигационных измерениях [7, 24, 25]).
20
1.4. ПОВЕРХНОСТИ И ЛИНИИ ПОЛОЖЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
При выборе траектории полета ЛА, расчете и определении их
текущих координат осуществляют геометрические построения,
основанные на использовании так называемых поверхностей и линий
положения летательных аппаратов.
Поверхностью положения называется геометрическое место точек
положения ЛА в пространстве, определяемого постоянным значением
одного из измеряемых навигационных параметров. Так, например, при
полете с фиксированным расстоянием R от ЛА до наземной РНТ
поверхностью положения будет сфера (рис. 1.10). Если зафиксировать
еще, например, высоту полета Я, то получим линию положения (ЛП),
представляющую собой пересечение поверхности равных расстояний с
поверхностью равных высот. Спроектировав эту кривую на земную
поверхность, получим линию равных расстояний (ЛРР), радиус которой
r = ]^R2 — Я2 (без учета кривизны Земли). Полет с сохранением-
разности расстояний (гА—rB = const) до неподвижных наземных РНТ
будет совершаться по поверхности гиперболоида, пересечение которого
с земной поверхностью даст гиперболу. Если ЛА летит с постоянным
значением измеряемого пеленга (а = const), то местоположением
ЛА будет являться плоскость большого круга земного шара (рис. 1.11),
пересечение которой с земной поверхностью даст линию положения,
называемую ортодромией.
Таким образом, пересечение в пространстве двух каких-либо
поверхностей положения дает линию положения ЛА, характеризуемую
неизменным значением измеряемого навигационного параметра
(изолинию). Поверхности и линии положения широко используют при
решении навигационных задач. В частности, ЛП наносятся на полетные
карты, выполненные в различных картографических проекциях [28], и слу-
Рис. 1.10. Поверхность и линия рав- Рис. 1.11. Плоскость большого круга
ных расстояний Земли и ортодромия
21
L Локсодромия Рис# 1Л2. Ортодромия и локсодро-
Ортодримип мия на земной сфере
ЪинВичскии
меридиан
Рис. 1.13. Ортодромия, локсодромия
и линия равных пеленгов на картах:
а — равноугольной цилиндрической
проекции; б — равноугольной конической
проекции
жат в качестве своеобразной координатной сетки, создаваемой
радиотехническими методами. По этим линиям можно непосредственно
прокладывать маршрут полета, либо преобразовывать координатную сетку
ЛП (с помощью счетно-решающих устройств) в любую другую н
получать новые ЛП, геометрические свойства которых более удобны для
навигации.
В настоящее время в теории и практике навигации используются
следующие основные линии положения ЛА: ортодромия, локсодромия,
линия равных пеленгов (ЛРП), линия равных углов (ЛРУ), линия
равных расстояний, линия равных разностей расстояний (ЛРРР).
Ортодромией называется линия кратчайшего расстояния
между двумя точками на поверхности земного шара. Из рис. 1.12 видно,
что ортодромия является дугой большого круга земного шара,
проходящего через две точки (А и В) заданного маршрута. Ортодромия на
карте равноугольной цилиндрической проекции (проекция Меркатора)
выглядит кривой, выпуклость которой всегда направлена к полюсу
(рис. 1.13, а).
На картах конической проекции (рис. 1.13, б) и картах некоторых
других видов проекций для сравнительно небольших расстояний (до
1000— 1500 км) ортодромия может быть проложена в виде прямой.
22
Ортодромию ё географической системе координат можйо представить ё
виде уравнения
tgq> = sin (Х-К) ctgaa, (1.23)
гдефиЯ—географические координаты текущей точки ортодромии;
аэ—угол между ортодромией и меридианом в точке А пересечения с
экватором (см. рис. 1.12);
Кэ—долгота точки Л пересечения ортодромии с экватором.
С помощью уравнения (1.23) можно построить ортодромию, если
известны угол аэ и долгота Яэ точки А. В этом случае при построении
ортодромии задаются долготой % текущей точки В и определяют ее
широту ф. Повторяя такие вычисления для различных значений Я,
по точкам строят ортодромию. Ортодромическое расстояние S между
двумя точками с координатами <plf кг и ф2, Я2 можно определить по
формуле
cos S = sin фх sin ф2 + cos q^cos ф2 cos (Х2 — Лх). (1.24)
Формула (1.24) дает значение ортодромического расстояния S в
угловых единицах. Ортодромическое расстояние в километрах
определяют умножением значения S в минутах дуги на 1,852.
Локсодромией называется линия, пересекающая
меридианы земной поверхности под одинаковыми углами. На поверхности
земного шара локсодромия имеет вид пространственной спирали, с
каждым витком вокруг земного шара асимптотически приближающейся к
полюсу (см. рис. 1.12). Уравнение локсодромии на поверхности земного
шара
X = tganlntg(45° + q>/2) + Xi ]
или 1 (1.25)
tg (45° + ф/2) = e(A>-*o)ctg ал 9 J
где ф и X—текущие координаты точки локсодромии;
ал—угол пересечения локсодромии и меридианов (локсодромический
путевой угол);
%0—долгота точки пересечения локсодромии и экватора.
Локсодромический путевой угол рассчитывается по формуле
tg ал = (К2 - Я,)/ (D2 - DJ, (1.26)
гдеА,!—Я2—разность долгот точек локсодромии в минутах;
Da—Di—разность меридиональных частей (меридиональная разность широт) в
морских милях, которая берется из таблиц или вычисляется по
формуле
D=7915,705 lntg (45°+ф/2).
Кроме частных случаев, когда локсодромия и ортодромия совпадают
(полет по меридиану или экватору), локсодромия длиннее ортодромии
и обращена выпуклостью всегда к экаватору. Вид локсодромии в
картографических проекциях Меркатора и равноугольной конической
изображен на рис. 1.13.
При малых расстояниях (500—600 км) локсодромия незначительно
отличается от ортодромии. Если расстояние между пунктом вылета и
23
пунктом назначения велико, то маршрут полета прокладывается по
ортодромии, а затем для удобства самолетовождения на маршруте
выбирают характерные ориентиры (через 300—500 км), между которыми
прокладывают путь по локсодромии.
При путевых углах ал, близких к 90° и 270°, расстояние по
локсодромии
S = 1,8521(%2 — AJ'/sin ал] cos (<p2 — ф1)/2, (1.27)
а при путевых углах, близких к 0 или 180°,
S = 1,852 (ф2 — ф1)' /cos а л. (1.28)
Линией равных пеленгов называется такая линия,
в каждой точке которой направление на определенную точку В,
например радиостанцию, составляет постоянный угол а0 с меридианом
(рис. 1.14). Эта кривая является линией положения ЛА, совершающего
полет при постоянном пеленге на радиостанцию (ИПР = а0 = const).
Основное уравнение ЛРП на сфере выражается так:
ctg ИПР = cos ф tg фр cosec (А,р — К) — sin cp ctg (Яр — Я), (1.29)
где фр, Хр — геосферические координаты РНТ.
При прокладке маршрута по ЛРП на карте важно определить, под
какими углами (ИПУ) эта линия пересекает меридианы. Поскольку
известен ИПР, то для определения ИПУ в данном случае необходимо
знать угол i, так как ИПУ=ИПР + i.
k Угол i между ортодромией и ЛРП определяют как
igi = tg AJcsin ф. (1.30)
Г В этом выражении ДЯ — разность долгот РНТ и данной точки
пересечения меридиана и ЛРП; ф — широта точки пересечения.
Длина ЛРП еще больше, чем длина локсодромии, причем эта
разница особенно велика вдали от экватора; поэтому даже в средних
широтах полет по ЛРП не экономичен. ЛРП используется в основном для
определения положения Л А по удаленным наземным РНТ. Определив
пеленги одновременно по двум РНТ и построив соответствующие ЛРП,
находят текущие координаты ЛА.
Линией равных углов называется линия, в каждой
точке которой угол между направлениями на две неподвижные РНТ
является постоянной величиной (рис. 1.15). На плоскости ЛРУ является
дугой окружности, проведенной через выбранные РНТ так, чтобы угол
Р был равен заданному значению.
ЛРУ широко используется при самолетовождении в полярных
областях, где магнитный компас не дает достаточно устойчивых и точных
показаний и оценка направления меридиана для построения,
например, ЛРП, ортодромии, локсодромии затруднена. Величина угла |3
легко отсчитывается с помощью двустрелочных указателей курсовых
углов, применяемых на современных ЛА, оборудованных двумя
радиокомпасами. Уравнение ЛРУ в этом случае выражается так:
Р = КУРХ — КУР2 = const. (1.31)
24
Необходимые ЛРУ обычно
строятся на карте заранее, что
облегчает определение маршрута и
места Л А в полете.
Линия равных
расстояний (ЛРР) — линия на
земной поверхности, все точки
которой равно удалены от
фиксированной точки. Как видно из
рис. 1.10, на земной поверхности
ЛРР представляет окружность и
является линией положения ЛА
при навигационных определениях
с помощью дальномерных РНС.
При этом непосредственно
измеряют радиус окружности малого
круга г, а координаты центра
окружности Х0 и ф0 обычно
известны, что позволяет представить
уравнение ЛРР в виде:
cos г = sin ф0 sin ф +
+ cos ф0соз ф cos (Я0 — Я), (1.32)
где X и ф — текущие координаты
точки М местоположения ЛА.
0
Рис. 1.15. Линии равных углов
Рис. 1.16. Линия равных разностей
расстояний
25
ЛРР используется также при
определении местонахождения ЛА
с помощью авиационного сестанта
путем измерения высоты светила.
Линией равных
разностей расстояний
(ЛРРР) называется такая линия
положения, в каждой точке
которой разность расстояний до двух
точек на земной поверхности
является постоянной величиной
(рис. 1.16). На поверхности земной
сферы эта линия представляет
собой сферическую гиперболу,
поэтому разностно-дальномерные РНС
называют еще гиперболическими.
При использовании навигационных
карт ограничиваются построением
гипербол как плоских кривых.
Уравнение гиперболы на плоскости
в прямоугольных координатах
имеет вид:
*2/a2-*/2/(0,25d2 — а2) = 1, (1.33)
где х и у — текущие координаты;
а== (гх—г2)/2 — действительная полуось гиперболы;
d — длина базы, т. е. расстояние между наземными пунктами
Л и В.
Построение ЛРРР на картах требует сложных вычислений.
Поэтому на практике ЛРРР (гиперболы) рассчитываются заранее и
наносятся на карты типографским способом. Определив в полете величину
Аг = гг — тъ можно найти на карте линию положения, на которой
находится ЛА, а поддерживая величину Аг постоянной, можно
использовать гиперболу в качестве линии пути. ЛРРР широко применяются
при решении задач дальней навигации, осуществляемой на основе
информации разностно-дальномерных РНС.
Таким образом, проведенный анализ показывает, что измерение
(контроль) одной из геометрических навигационных величин дает лишь
одну линию положения на плоскости или поверхность положения в
пространстве, хотя подобной информации достаточно для прокладки
определенного маршрута движения ЛА и следования в его направлении;
при определении местоположения ЛА на плоскости и в пространстве
необходимо, очевидно, использовать две пересекающиеся линии и
поверхности положения. В зависимости от используемых ЛП и
соответствующих им радионавигационных средств для определения
местоположения ЛА наибольшее практическое применение получили
следующие методы: дальномерный, угломерный (пеленгационный), разност-
но-дальномерный, угломерно-дальномерный. wy -
При использовании дальномерного метода местоположение объекта
определяется пересечением в точке М'двух окружностей ЛРР (рис.
1.17, а), которые строятся шГрасстояниям Rx и R2 до двух наземных
РНТ (в точках Л и Б).
Угломерный (пеленгационный) метод оценки местоположения
предполагает использование двух ЛРП, которые строятся на основе
информации, получаемой"от^двух угломерных систем (рис. 1.17, б),
расположенных в точках Л и В, Поскольку на сравнительно малых
расстояниях (300—40(Гкм)~ЛРП может быть с достаточной степенью точности
заменена прямой^линией, определение местоположения (точки М) этим
методом в значительной"мере упрощается, чем и объясняется широкое
практическое использование пеленгационного метода.
Разностно-дальномерным методом местоположение объекта
оценивается в результате^пересечения двух~гипербол]—"ЛРРР.При этом
Рис. 1.17. Определение местоположения ЛА по двум пересекающимся линиям
положения:
а — по двум ЛРР; б — п0 двум ЛРП; в — по двум ЛРРР; г — по ЛРР ц ЛРП
26
необходимо использовать не менее двух пар наземных РНТ, одна из
которых В является общей (рис. 1.17, в).
Угломерно-дальномерный метод позволяет определить
местоположение путем пересечения двух различных ЛП: ЛРП и ЛРР, т. е. точка
М определяется на плоскости с помощью двух координат: дальности и
азимута (или угла места) (рис. 1.17, г). Характерной чертой этого
метода является возможность однозначного определения местоположения
объекта из одной точки, что является большим преимуществом по
сравнению с другими методами. Действительно, указанные выше методы
оценки местоположения требуют нескольких неподвижных (или
закономерно перемещающихся) РНТ, которые должны быть разнесены на
расстояния, соизмеримые с расстоянием от каждой из них до объекта;
это необходимо (как будет показано в гл. 9) для исключения больших
погрешностей оценки местоположения.
Кроме рассмотренных методов в радионавигации для оценки
местоположения объектов иногда используют ЛРУ. Определив ЛРУ по
двум парам РНТ, можно определить их пересечение, т. е. координаты
ЛА. При этом одна из РНТ является общей при построении обеих
ЛРУ (рис. 1.15).
1.5. ОСНОВНЫЕ АЛГОРИТМЫ ПРОЦЕССА НАВИГАЦИИ ЛА
Из предыдущего следует, что в процессе навигации обеспечивается
движение ЛА по заданной пространственно-временной траектории,
для чего параметры заданного движения непрерывно или
периодически сопоставляются с параметрами действительного движения,
измеряемыми во время полета. Информация о величинах отклонения
параметров действительного движения от заданных значений используется
для управления полетом ЛА, т. е. для коррекции его
пространственного положения, направления и скорости движения. Таким образом,
заданный навигационный режим, определяемый программой полета,
должен быть выдержан в каждый момент времени для выполнения
основной навигационной задачи.
Управление навигационным режимом полетов современных ЛА
практически полностью автоматизировано на основе использования
бортовых и наземных средств автоматизации и вычислительной техники.
При этом для обработки измерительной навигационной информации
используются как специализированные вычислители (аналоговые и
цифровые), входящие в состав РНС, так и универсальные бортовые и
наземные ЭВМ. ЭВМ, обеспечивая автоматизированное управление
движением в соответствии с заданным навигационным режимом, решает
вычислительные и логические задачи навигационного процесса, а
также вырабатывает команды, воздействующие на органы управления ЛА.
Основным условием автоматизации управления полетом ЛА
является алгоритмизация навигационного процесса, т. е. представление его
в виде последовательности этапов преобразования и использования
навигационной информации: от математического описания операций,
определяющих измеряемые навигационные параметры, и решения нави-
27
гацйонных задач с использованием ЭВМ, до определения принципов
работы комплексных навигационных систем управления полетом.
В качестве основных алгоритмов процесса навигации можно назвать
определение пространственного местоположения ЛА, определение
параметров фактического навигационного режима полета (скорости,
направления полета и др.) и выполнение полета по заданному
маршруту (по координатам точек, заданных относительно ЛА).
В конечном итоге решение навигационных задач основывается по
существу на определении (счислении) параметров движения ЛА
(координат, скоростей/направлений). Указанные параметры следует от-
отнести к категории вторичных навигационных параметров, поскольку
их получают путем выполнения тех или иных математических
операций над так называемыми первичными навигационными параметрами,
которые могут быть непосредственно получены из результатов
измерений (в частности, с использованием радионавигационных средств).
К первичным геометрическим навигационным параметрам относят
измеряемые расстояния, разности расстояний и их производные
различных степеней либо соответствующие им, например при
радиотехнических измерениях, временные интервалы, фазовые и частотные
сдвиги и т. п. (т. е. радионавигационные параметры — РНП).
Таким образом, алгоритмы процесса навигации ЛА выражаются
уравнениями, которые описывают взаимосвязь первичных
геометрических параметров (определяемых с помощью технических средств
навигации) с вторичными, полученными в результате счисления первичной
навигационной информации на ЭВМ либо в результате упрощенных
способов вычислений вручную. Указанные навигационные уравнения
в основном отображают две важнейшие взаимосвязанные
математические процедуры: преобразование пространственных координат и
счисление координат и параметров движения. Рассмотрим некоторые
алгоритмы решения этих задач.
Необходимость преобразования координат, т. е. перехода от одной
координатной системы к другой возникает на различных этапах
процесса навигации ЛА, например от прямоугольной экваториальной
системы геоцентрических координат к прямоугольной горизонтальной,
от полярной сферической к прямоугольной декартовой, от
гиперболических координат к прямоугольным и т. д. Переход от одной
координатной системы к другой требует сохранения прямых линий (или
отрезков прямых) и их параллельности. Эти условия взаимооднозначного
отображения координатных систем называются аффинным
преобразованием пространств. В общем виде данное преобразование при
разложении любого вектора V, характеризующего положение точки в
пространстве в координатных системах у и z на составляющие уь и zt
(i = 1,2, 3), описывается векторным уравнением [60]
\V\z = \C\\v\y + A, (1.34)
где от координатной системы у осуществлен переход к новой координатной
системе г, начало которой в прежней системе выражается радиус-вектором А с
составляющими а1\
у
2-в
С|
\c\ =
оператор преобразования
определяемый девятичлен
ной матрицей
=
| Сц С12 С1з
^21 ^22 ^23
1 ^31 ^32 ^33 |
•
cV
(1.35)
^/
о
Iй
z ZtS&X
/m\ \
\ Ц \ \
/
/
\ ^^
r \
J —
h
1.18. Схема преобразования
навигационных координатных систем
Коэффициенты Ctj
матрицы характеризуются
обобщенными направляющими
косинусами, учитывающими относи- #
тельное направление
координатных осей преобразуемых рис>
систем координат. В
частности, для геоцентрических
систем координат обобщенные направляющие косинусы могут быть
выражены, например, через географические (или сферические)
координаты, ф, X и угол а, являющийся углом между направлением
на север и касательной к земной поверхности в точке М,
соответствующей началу произвольно выбранной горизонтальной системы
координат zly 22, г3 (рис. 1.18). Любой вектор V может быть выражен
составляющими при переходе от экваториальной геоцентрической
системы прямоугольных координат уъ у2, у3 к горизонтальной системе
прямоугольных координату, z2, z3 с помощью соотношения (1.34), в
котором А = г. В этом случае обобщенные направляющие косинусы,
соответствующие коэффициентам матрицы (1.35), выражаются
соотношениями:
Сп = — cos a sin X — sin a sin cp cos X;
С12 = cos a cos Я — sin а sin cp sin Я;
С13 = cos ф sin а;
С21 = sin а sin X — sin ф cos a cos X;
С22 = — sin а cos X — cos а sin ф sin X; \ (1.36)
С23 = cos Ф cos а;
С31 == cos ф cos X;
С32 = cos ф sin X\
С33 = sin ф.
В частности, например, с помощью приведенных соотношений
осуществлен переход от сферических координат (ф, X, р) к
геоцентрическим прямоугольным координатам х, у, z согласно преобразования
(1.34), для которого
tg X = С32/С31\ sin ф = С.а
(1.37)
Таким образом, координатные системы при решении
навигационных задач преобразуются с использованием алгоритмов (1.34)—
(1.37), реализуемых на ЭВМ.
29
Методы счисления координат ЛА и параметров его дйижейия могут
осуществляться прямыми методами независимых навигационных
определений либо косвенными методами путем непрерывной обработки
первичной навигационной информации с учетом ее значений в
предшествующие моменты времени.
Методы независимых определений основаны на непосредственном в
определенные моменты времени отсчете параметров положения и
движения ЛА относительно навигационных ориентиров и создаваемых ими
физических полей (источников радиоизлучения, светового излучения
т. п.), положение которых точно определено в системе координат,
связанной с Землей. Для применения этих методов не требуется знание
местоположения ЛА и навигационного режима полета в
предшествующие моменты времени. В частности, например, определяют
направление на источник радиоизлучения, расстояние до него, разности
расстояний до различных излучателей. На основе этой информации находят
координаты местоположения ЛА путем решения сферических и
плоских треугольников либо используя другие приемы сферической и
плоской тригонометрии. Фиксируя местоположение объекта в
различные моменты времени, определяют его скорость и пройденный за это
время путь. При выполнении расчетов рассматриваемым методом
широко используют уравнения, описывающие различные линии и
поверхности положения ЛА, а также уравнения преобразования координатных
систем. Примеры счисления координат ЛА методом независимых
определений с использованием радионавигационных средств и решения на
этой основе конкретных навигационных задач даны в гл. 9.
Непрерывное счисление координат косвенными методами
осуществляется путем обработки информации о параметрах движения ЛА
(радиальных и угловых скоростей и ускорений, направлений движения)
в текущий момент времени с учетом известной информации о
координатах ЛА в предшествующие моменты времени. В качестве примера
реализации этих методов рассмотрим
алгоритмы счисления пройденного
пути и оценки местоположения ЛА
в горизонтальной плоскости путем
обработки информации о векторе
путевой скорости W. Алгоритмы
решения этой задачи в
значительной мере определяются выбором
координатной системы, в которой
задаются навигационные
параметры. Наиболее простой вид имеют
алгоритмы счисления пути в
геосферической и ортодромической
координатных системах [1].
При использовании
геосферической системы координат алгоритм
счисления пути может быть найден
Рис. 1.19. К счислению пути в гео- из рассмотрения рис. 1.19, накото-
сферической системе координат ром координаты текущего места са-
30
молета (точка М0) на линии пути
обозначены сферической долготой
%0 и широтой ф0. Параметрами
движения ЛА являются параметры W
и ИПУ, характеризующие
навигационный режим полета.
Как следует из рис. 1.19,
небольшие линейные смещения ЛА в
направлении меридиана d/M и
параллели dlu относительно
некоторого фиксированного положения
М (^о> Фо) выражаются
зависимостями:
dlM = г3Жр = W cos (ИПУ) dt\ 1
dtn = r3 cos qdl = W sin (ИПУ) dtj
(1.38)
где г3 — радиус земного шара.
Из последних зависимостей получаем:
dcp = W cos (ИПУ) dt/rs; dX=W sin (ИПУ) dt/(r3 coscp). (L39)
Интегрируя выражение (1.39) в заданном промежутке времени (0, /),
найдем:
t
Ф = ФЬ+1/гв f ИГ cos (ИПУ) #;
t " (1.40)
X = Я0 + 1 /rB j Г sin (ИПУ) cos <рЯ,
о
т. е. формулы, выражающие алгоритмы счисления координат ЛА по
заданным параметрам движения W и ИПУ. Практически маршрут
полета прокладывается по локсодромии путем выдерживания заданного
магнитного путевого угла (ЗМПУ), измеренного относительно среднего
меридиана маршрута. Однако при полетах в высоких широтах и на
участках большой протяженности отклонение локсодромии от
ортодромии становится значительным и от счисления координат в
геосферической системе целесообразно перейти к ортодромической системе
координат (см. рис. 1.3.)
Ортодромия, соединяющая исходный и конечный пункт маршрута,
носит название главной ортодромии, а система координат, связанная
с ней, называется главноортодромической системой координат.
Практически полеты ЛА выполняются в гражданской авиации не по
главной ортодромии, а по участкам маршрута, поскольку воздушные
трассы/ проходящие через заданные пункты, имеют вид ломаных линий.
Ортодромии/соответствующие каждому отдельному участку, называют
частными ортодромиями, а системы координат, связанные с ними, част-
но-ортодромическими.
Рассмотрим алгоритмы счисления пути в плоской частно-ортодро-
мической системе координат (рис, 1,20), выбирая частную ортодромию
Рис. .1.20. К счислению пути в
плоской частно-ортодромической системе
координат
31
такой длины, на которой сферичность земной поверхности можно не
учитывать. Поскольку пройденный путь и в этом случае будет найден
интегрированием составляющих путевой скорости в ортодромической
системе координат (Sy Sx), то уравнения счисления пути для первой
частно-ортодромической системы координат (соответствующей первой
частной ортодромии — от ИПМ до КПМ) будут иметь вид:
t t
Syi = Sy0- J Wsydt, Sxl= - jj Wszdt, (1.41)
о о
где Sy0 — длина первой частной ортодромии;
WSy — составляющая вектора путевой скорости ЛА в направлении частной
ортодромии;
WSx — составляющая вектора путевой скорости самолета,
перпендикулярная к направлению частной ортодромии.
Аналогичные уравнения могут быть записаны и для других
частных ортодромий, направление которых задается с помощью ортодроми-
ческого путевого угла или угла карты (УК), отсчитанного от
северного направления меридиана, проходящего через ИПМ, до направления
ортодромии.
Составляющие вектора путевой скорости в формулах (1.41) могут
быть представлены согласно рис. 1.20 выражениями:
WSy = W cos (ИК + УС — УК); WSyL= W sin (ИК + У С — УК).
(1.42)
Из выражений (1.42) видно, что непрерывно измеряя путевую
скорость ЛА и вводя ее в вычислительное устройство вместе с данными об
истинном (магнитном) курсе, угле сноса и ортодромическом путевом
угле по формулам (1.41), )можно вести счисление пройденного пути в
частно-ортодромической системе координат, а следовательно,
определять местоположение объекта по двум координатам Svl, Sy^ На
следующем участке маршрута путь в очередной частно-ортодромической
системе координат счисляется аналогично.
Заметим, что как следует из рис. 1.20, составляющие вектора
путевой скорости могут быть выражены через составляющие векторов
воздушной скорости V и скорости ветра U в той же
частно-ортодромической системе координат:
WSy = VSy cos (ИК - УК) + USy cos (HB - УК); \ п А^
WSx = VSx sin (ИК - УК) + USx sin (HB - УК) У (L43)
Поэтому путь может счисляться на основе информации о величине
и направлении векторов воздушной скорости и скорости ветра, т. е.
прямое измерение путевой скорости и угла сноса не требуется.
Глава 2
ОБЩИЕ СВЕДЕНИЯ О РАДИОТЕХНИЧЕСКИХ МЕТОДАХ
И СРЕДСТВАХ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
2.1. ФИЗИЧЕСКИЕ ОСНОВЫ РАДИОТЕХНИЧЕСКИХ МЕТОДОВ
НАВИГАЦИИ И ИХ КЛАССИФИКАЦИЯ
Решение навигационных задач радиотехническими методами и
средствами основывается на использовании электромагнитных полей
и волн радиотехнического диапазона.
Для анализа общих закономерностей и физических процессов
получения (извлечения) навигационной информации рассмотрим ее
взаимосвязь с параметрами радиосигнала РНС (электромагнитного поля),
представляющего собой в исходной точке излучения обычную
периодическую функцию времени.
В общем случае взаимное положение подвижного объекта и
заданного пункта на земной поверхности, относительно которого измеряются
координаты объекта (либо взаимное положение в пространстве двух и
более подвижных объектов), определяется
пространственно-временным интервалом, для нахождения которого необходимо сопоставить
события (информацию) в рассматриваемых точках. В качестве
материального носителя для сопоставления сведений о навигационных
параметрах подвижных объектов в разнесенных точках пространства с
помощью радионавигационных средств используется радиосигнал,
перемещающийся в пространстве — времени. Таким образом приращение
пространственных координат объектов неразрывно связано с
приращением времени прохождения радиосиганалом расстояния между
сравниваемыми точками пространства. Поэтому общее понятие
радионавигационной информации вводят как информацию об относительных
координатах подвижных объектов в четырехмерном
пространственно-временном многообразии, а единый процесс определения информации
связывают как с навигационно-пространственными, так и с навигационно-
временными определениями [60].
При навигационно-пространственных определениях с
использованием радиотехнических средств можно непосредственно измерять лишь
геодезические расстояния, разности расстояний и их производные
различных степеней.
Именно эти навигационные параметры, называемые первичными,
используются путем соответствующих преобразований для получения
всей совокупности навигационных параметров, относящихся к
категории вторичных.
Хотя первичные навигационные параметры определяются самыми
различными радиотехническими методами, общность их состоит в моде:
лировании и измерении временных интервалов в определенных
масштабах.
2 Зак. 444
33
Если масштабный коэффициент моделирования времени k
представить в виде производной от времени по измеряемому параметру
радиосигнала v, то
k=dtldvy (2.1)
т. е. при использовании, например, фазовых и частотных методов
измерений фаза и частота радиосигнала оказываются функциями
времени. Соответствующее значение масштабного коэффициента при
фазовых измерениях (v = -ф) равно k = 1/4 nfy а при частотных
измерениях (v = F) равно к = 1/8A/FM, где через / обозначена рабочая частота
радиосигнала, FM — частота модуляции, А/ — девиация частоты при
осуществлении частотной модуляции радиосигнала.
Поскольку в общем случае каждый из п навигационных параметров,
характеризующих координаты и динамику подвижного объекта,
функционально связан с любым из т параметров радиосигнала (РНП), то
переход от /г-мерного пространства навигационных сообщений А =
= {аъ а2, ..., ап} (формирующихся в радиолинии связи) к /п-мерному
пространству радиосигналов N = {vb v2, ..., vm} можно представить
в виде:
а± = ЯхК, v2,..., vm); \
«2 = «2 fa, v2,..., vTO); I ,g 2
an =ап (vi, v2, ..., vm). I
Следовательно, изменение навигационных параметров вызовет
изменение совокупности соответствующих радиосигналов—переносчиков
измерительной информации. Указанная функциональная взаимосвязь
представляет собой, как правило, линейное преобразование, что
обеспечивает достаточно простое решение задач преобразования и
отображения навигационной информации, достижения необходимой точности
градуировки и калибровки измерительных приборов, осуществляющих
индикацию навигационных параметров. Поэтому для любой £, /-й
пары сигнал-навигационный параметр справедлива зависимость
fli=Af<;v/f (2.3)
в которой масштабный коэффициент Ми (коэффициент линейного
преобразования) зависит не только от метода измерения, т. е. от выбора
коэффициента моделирования времени согласно формуле (2.1), но также
и от особенностей построения РНС различного типа, алгоритмов
преобразования и обработки измерительной информации, геометрических
характеристик РНС.
Рассмотрим процесс преобразования навигационной информации
в изменение того или иного параметра электромагнитного поля:
его фазы, амплитуды, частоты, времени прихода сигнала. Представим
электрическую составляющую напряженности е (t) поля, создаваемого
точечным излучателем РНС, в следующем виде:
е (t) = ReEm (t) exp (_ / [ю0* + q> (*)]), (2.4)
34
где Ет (0-—амплитуда в^зависи-
мости от времени
определяется амлитуд-
ной (AM) модуляцией;
со0—несущая ^частота;
Ф W — фаза сигнала в
зависимости от времени,
определяемая
фазовой (ФМ) или
частотной (ЧМ) модуляцией.
Рис. 2.1. Радиолиния связи РНС
В результате изменения взаимного положения элементов РНС в
пространстве (рис. 2.1) радиолиния связи, соединяющая передатчик
и приемник, изменяет свою длину R и направление, заданное
угловыми координатами р и #. Поэтому принимаемая в месте расположения М
подвижного объекта радиоволна представляет собой пространственно-
временную функцию вида х
е^ (t — т, Р, #) = Re £mnp (t — т, р, О) X ехр {— j [со0 (/ — т) +
+ <р(*-т, Р, Ф)]}, (2.5)
где запаздывание сигнала т = R (t)/c несет информацию об
измеряемом расстоянии между передатчиком и приемником РНС, а амплитуда
сигнала, принятого антенной с нормированными диаграммами
направленности (ДНА) в горизонтальной G (О) и вертикальной G (Р)
плоскостях, может быть описана зависимостью
i/mnp (* ~ Т, Р, Ф) « (/пр.мах (t ~ Т) G (Р) G (*), (2.6)
в которой f/np.max — максимальное значение амплитуды сигнала.
Оценивая значения р, Ф и т, соответствующие максимуму (или
минимуму) амплитуды принимаемого сигнала, можно получить
информацию об угловом положении излучателя (путем определения
направления перемещения фронта волны принимаемого радиосигнала).
Если приемник РНС перемещается относительно передатчика,
например, в радиальном направлении, то, как известно, длина
радиолинии связи будет изменяться по закону
R(t) = R0+Vrt + Vr №, (2.7)
где коэффициенты Vr = dR/dt и Vr = d2R/dt2 — соответственно радиальные
скорость и ускорение взаимного перемещения излучателя и приемника
сигналов (т. е. коэффициенты, усеченного степенного ряда).
Тогда из выражения (2.5) следует, что несущая частота ю0 получит
доплеровское приращение
йд = а)0 Vr/c + «>0Vr/2c. (2.8)
Переносчиками навигационной информации могут быть как
смодулированные (монохроматические), так и модулированные сигналы,
параметры огибающих которых являются функциями навигационных
величин. Если, например, принимается сигнал, модулированный по
выражения (2.4) и (2.5) не учитывают векторного характера
электромагнитного поля, так как поляризация радиоволн не используется для получения
навигационной информации, а антенны РНС обычно согласованы с заданной
поляризацией.
2*
35
амплитуде низкочастотной огибающей fiM, то при учете запаздывания
сигнала т при его распространении на расстояние R (t) имеем
^пР (0 = Umnp [1 + т cos QM (/ — т)] х
X cos [со0 (* — т) + Ф (/ — т)], (2.9)
где т — коэффициент глубины амплитудной модуляции принимаемого сигнала
Тогда с учетом соотношений (2.7) и (2.9) при Vr = 0 изменение
амплитуды принимаемого сигнала
f/mnp (* — *)= ^mnp Ч + m COS (QM/ - QM/?0/c - Од/)]. (2.10)
Поскольку на низких частотах (при QM^co0) влиянием доплеровско-
го эффекта можно пренебречь, то согласно формуле (2.10) в огибающей
амплитудно-модулированного колебания содержится информация о
дальности до излучателя, а при использовании приемной антенны,
состоящей из совокупности элементарных вибраторов, — об угловых
координатах излучателя (формула 2.6). Так как фазовые сдвиги
наиболее просто и с высокой точностью измеряются на низких частотах, для
определения угловых и линейных координат подвижных объектов
используют обычно огибающие модулированных колебаний. В свою
очередь, для измерения скорости обьекта излучения целесообразно
использовать высокочастотные несущие колебания, обеспечивающие
более значительный доплеровский сдвиг частоты. РНС, использующие
немодулированные колебания, относят к типу //, я использующие
модулированные — к типу М.
Таким образом, как следует из выражений (2.4) — (2.10),
изменения параметров радиосигнала РНС (его фазы, амплитуды, частоты,
временного интервала) информируют о навигационных параметрах:
дальности до объекта излучения, его угловом положении, скорости и
ускорении перемещения. В окончательном виде навигационная
информация формируется на выходе РНС в результате оценки изменений
сигнала в заданной системе отсчета.
Используя приведенные данные, можно указать основные способы
классификации радиотехнических методов и средств навигации.
Кстати, последние обычно подразделяют на радионавигационные
устройства РНУ, предназначенные для решения навигационных задач
небольшой степени сложности, и радионавигационные системы РНС,
представляющие собой совокупность пространственно-разнесенных
радионавигационных устройств и предназначенных для решения достаточно
сложных задач навигации.
Однако такое деление в значительной мере условно, так как
современные РНУ состоят из принципиально различных
радиоэлектронных устройств, а также устройств автоматики и вычислительной
техники, т. е. представляют собой, в свою очередь, достаточно сложные
системы. В связи с этим последующее изложение вопросов анализа
характеристик и принципов построения радионавигационных средств,
а также необходимые теоретические обобщения выполняются
применительно к сложным системам.
36
Современные методы и средства радионавигации классифицируются
по следующим основным признакам:
по типу измеряемого навигационного параметра (типу
геометрической величины или ее производной по времени);
по типу радиотехнических измерений, т. е. в зависимости от типа
измеряемого параметра радиосигнала, используемого для
определения навигационного параметра;
по назначению;
по дальности действия.
По первому признаку радионавигационные методы и средства
подразделяют на угломерные (или пеленгационные), дальномерные, раз-
ностно-дальномерные, измерители линейных (радиальных) и угловых
скоростей и комбинированные (позволяющие определять совместно
различные навигационные параметры, например угол и дальность).
Подразделяя радиоанавигационные методы и средства по типу
радиотехнических измерений, рассматривают параметры
электромагнитных колебаний, доставляющих навигационную информацию. В этом
смысле различают фазовые, амплитудные, частотные, а также и
временные РНС.
Существуют также радионавигационные методы и средства,
основанные на определении и сравнении статистических характеристик
(например, корреляционных функций) радионавигационных сигналов,
представляющих собой в общем случае случайные процессы. РНС,
использующие подобную методику определения навигационных
параметров, называют корреляционными.
По назначению радионавигационные средства подразделяют на
системы:
посадки, навигации (трассовой и в приаэродромной зоне),
используемые в комплексах УВД;
предупреждения столкновения, измерения путевой скорости ЛА,
опознавания и др.
По дальности действия различают радионавигационные средства:
глобальные, т. е. неограниченной дальности действия,
позволяющие определять место Л А в любой точке земного шара или в
околоземном пространстве;
дальней навигации — для полетов на расстояние до 2500—3000 км
от радионавигационных точек (РНТ), относительно которых
определяются пространственно-временные координаты ЛА;
ближней навигации — для полетов на расстояние до 350—400 км
от РНТ.
Кроме того, радионавигационные методы и средства можно
подразделять по некоторым другим признакам:
по характеру излучения — с непрерывным и импульсным
излучением;
по степени автономности — автономные и неавтономные;
по степени автоматизации — автоматические, полуавтоматические
и неавтоматические;
по способу индикации — с визуальной индикацией (стрелочный
прибор, цифровое табло, электронно-лучевая трубка) и слуховой.
37
2.2. ОБОБЩЕННАЯ СТРУКТУРНАЯ СХЕМА РНС
Как системы информационные, радионавигационные (так же как
и радиолокационные) средства относят к классу систем извлечения
информации, поскольку основной функцией таких систем является
извлечение (получение) количественных данных о координатах подвижных
объектов, параметрах их движения, пространственно-временной
ориентации, относительно заданных траекторий.
С точки зрения оценки основных этапов передачи, переработки и
извлечения информации в РНС (РНУ) целесообразно представить ее в
виде обобщенной структурной схемы. Такая схема, описывающая РНС
в соответствии с положениями теории информации независимо от
конкретного назначения и степени сложности системы, изображена на
рис. 2.2 *.
Составляющими элементами схемы являются передающее (Прд),
приемное (Прм) и антенное устройства, радиолиния связи,
измерительное (сравнивающее) устройство, с выхода которого навигационная
информация поступает к потребителю, а также устройство формирования
опорного параметра (опорный генератор), необходимого для
выделения навигационной информации в окончательном виде. Под
передающим устройством в схеме рис. 2.2 будем понимать всю аппаратуру
формирования структуры высокочастотного сигнала (включая его
модуляцию и кодирование с целью повышения помехоустойчивости передачи
* Уточнение особенностей структурных схем спутниковых РНС с учетом на-
вигационно-пространственных и навигационно-временных определений дано в
работах [24, 60] и гл. 10.
а)
пРд
. -L--n
| Опорный |
I параметр \
Радиолиния связи
Прм
ZJ3^ET
Измерительное
устройство
Навигационная
информация
I I
| Источники |
помех |
Опорный,
параметр
Потребитель
информации
6)
Прм2
Радиолиния запроса
А2.
Радиолиния ответа
Прд1
I Навигационная \
| информация |
. Lf~
з—1
Источники J
помех i
Т '
Прм J
Опорный
параметр
Измерительное
устройство
Потребитель
информации
AAA
Рис. '2.2. Обобщенная структурная схема РНС:
- беззапросная (однонаправленная) схема; б — схема с ретрансляцией сигнала (с актив*
ным ответом)
38
и переработки данных), а под приемным устройством — аппаратуру,
обеспечивающую выделение информационных сигналов и
преобразование (демодуляцию и декодирование) их к виду, пригодному для
подачи в измерительное устройство системы.
На схеме рис. 2.2, а изображена беззапросная система, передающая
сигналы в одном направлении по одному радиоканалу («земля—ЛА» или
«ЛА — земля»). При этом опорный параметр (сигнал) может быть
сформирован как на приемной, так и на передающей стороне системы. При
использовании высокостабильных синхронизированных эталонов
времени и частоты для формирования опорных параметров в обоих
пунктах возможно измерение любых навигационных параметров.
Схема рис. 2.2, б отображает РНС с ретрансляцией сигналов, в
которой сигналы передаются в двух направлениях («земля — ЛА —
земля» или «ЛА — земля — ЛА»). Для РНС, использующих принцип
отражения сигналов, в схеме рис. 2.2, б вместо приемопередатчика
(Прд2 + Прм2) ответчика следует рассматривать объект, отражающий
сигнал. При этом схема РНС может содержать несколько передающих,
приемных и антенных устройств, т. е. являться многоканальной
(многопозиционной).
В общем случае радиосигналы, излучаемые передатчиком РНС, не
содержат навигационной информации и предназначены для
сопоставления событий в различных точках пространственно-временного
многообразия. Местом возникновения информации является радиолиния
связи, параметры электромагнитного поля которой изменяются
(подвергаются модуляции ) в результате изменения протяженности, ориентации
радиолиний в пространстве, скорости взаимного перемещения
передатчика и приемника сигналов, изменения структуры сигналов,
обусловленного физическими свойствами исследуемых объектов. Поэтому РНС
в отличие от радиосвязных систем, формирующих информацию в
готовом виде в передатчике путем внутренней модуляции сигналов,
называют системами с внешней модуляцией сигналов.
Таким образом, в отличие от информации радиосвязных систем
навигационная информация и ее носитель — радиосигнал — представ-
ляют~собой пространственно-временные процессы, в значительной
степени характеризующиеся принципами построения РНС,
пространственным размещением ее элементов и геометрическими свойствами
системы в целом и измеряемых ею параметров.
Местом формирования навигационной информации в виде,
пригодном использования потребителем, является'измерительное
(сравнивающее) устройство, в"котором параметры выходных "информационных
сигналов приемника сопоставляются: с опорным параметром, задающим
начало отсчета измеряемых данных.
Навигационный радиосигналов общем случае является функцией
ряда параметров, каждый из которых несет информацию о подвижном
объекте. Кроме того, реальные РНС по принципу построения являются
многоканальными системами. Таким образом навигационный
радиосигнал является многопараметрическим носителем информации, для
получения которой в общем случае должна осуществляться многомерная
обработка принимаемых сигналов.
39
Основной трудностью, возникающей при разработке и
использовании РНС, в отличие от радиосвязных систем, является не столько
увеличение количества передаваемой по радиоканалу информации,
сколько повышение помехоустойчивости и точности переработки
навигационной информации.
Для извлечения навигационной информации необходимо оценить
параметры сигнала РНС в условиях присутствия различных помех,
разрушающих информацию. В связи с этим можно подразделить весь
процесс извлечения навигационной информации на ряд задач,
соответствующих характеру оценки параметров. Если выносится решение о
присутствии или отсутствии полезного сигнала, имеет место задача
обнаружения информации. Если оценивается принадлежность значения
параметра данному сообщению (из всей совокупности дискретных
сообщений), имеет место задача распознавания, различения информации.
Если задача обнаружения полезных сообщений, изменяющихся
непрерывно, уже решена, то точно оценивается информационный параметр,
т. е. реализуется задача получения измерительной информации.
Однако независимо от всех промежуточных задач и этапов
переработки информации конечной целью работы РНС является получение
результата измерения навигационной информации, что достигается
выбором определенного интервала, содержащего искомое значение
измеряемой величины, из множества ее возможных значений, в пределах
всего диапазона (шкалы) измерений. Другими словами, процесс
извлечения измерительной информации с помощью РНС трактуется как
сужение области неопределенности результата измерения до ее
минимального значения, поскольку этот результат не может представлять
собой идеально точного значения, а доставляется всегда с
определенной погрешностью. Такое описание процесса радионавигационных
измерений вполне согласуется с определениями современной
метрологии (науки об измерениях, методах и средствах обеспечения их
единства и способах достижения требуемой точности [59]).
С учетом указанных особенностей РНС, как систем
информационных, для их анализа используют современный аппарат
информационно-статического анализа, разработанный первоначально для систем
передачи информации. Что касается проектирования собственно
радиоканалов радионавигационных и радиосвязных систем, то эта задача в
случае, например, оценки ассимптотических свойств радиоканалов,
помехоустойчивости и эффективности обоих типов систем решается
аналогично на основе методов теории информации.
В частности, для оценки количества навигационной информации,
которое может быть получено в процессе измерений на выходе РНС,
вводят меру неопределенности значений измеряемого параметра — его
энтропию. Если обозначить исходную (априорную) неопределенность—
энтропию оценки навигационного параметра а через Н (а), а
неопределенность оценки параметра после получения результата измерения
с использованием РНС (апостериорную энтропию) через Н (а/аи), то
полученное в результате измерения количество информации
I = Н (а) — Н (а\аи). (2.11)
40
Следует иметь в виду, что апостериорная энтропия в соотношении
(2.11) должна учитывать наличие аддитивных и мультипликативных
мешающих воздействий, сопровождающих полезную информацию на
всех этапах ее переработки, и в том числе аддитивную составляющую
погрешности измерений, являющуюся следствием неточного значения
опорного параметра, т. е. начала отсчета измеряемой информации.
Если измеряемые параметры являются дискретными, то энтропия
РНС как источника дискретных сообщений описывается соотношением
H(a)=-2Pt(a)lo&Pt(a), (2.12)
в котором Pt (а) — вероятность выбора /-го значения измеряемого
параметра из всего диапазона (шкалы) его значений.
Поскольку в общем случае измеряемые навигационные параметры
(и соответствующие сигналы) представляют собой непрерывные
многомерные процессы, характеризуемые совместной плотностью
вероятности m-мерного распределения w (аъ а2,..., ат), то энтропия РНС как
источника непрерывных сообщений представлет собой энтропию
относительно выбранной меры точности Aait т. е. интервала дискретизации
непрерывных сообщений (с точностью до которого может быть измерен
параметр а)
оо оо
Н(а)=— j . . . j w(a1,a2,...,am)x
—оо —оо
X log[Aa!...,Aam^(ab ...,tfm)] X da^^dd^ (2.13)
где Aai — интервал дискретности по i-y параметру, размерность [w (au ..., aw)]=
т
= [1/По/]], размерности [at] и [Aat] одинаковы.
Так как носителями навигационной информации яляются сигналы,
то используют понятие энтропии источника сигнала и оценивают
количество информации, содержащейся в сигнале; для этих оценок также
применяют соотношения (2.11) — (2.13).
Для нормальной работы системы необходимо, чтобы энтропия
источника сигнала Н (а)с была не меньше энтропии источника
навигационных сообщений Н (а)п (количество информации, вырабатываемое
источником сигнала, должно быть не менее количества информации,
содержащегося в сообщении). При Н (а)с > Н (а)п сигнал приобретает
избыточность, обеспечивающую возможность повышения
помехоустойчивости РНС. Избыточность сигнала достигается за счет
использования помехоустойчивых видов модуляции и кодирования. Следует
помнить, что, кроме того, модуляция параметров сигналов РНС (в
отличие от радиосвязных систем) осуществляется пространственным
положением и движением исследуемого объекта, а не готовыми
сообщениями, что создает особый вид пространственно-временной модуляции.
Поэтому, преобразуя сигнал (модуляция и кодирование) по обычным
временным закономерностям в интересах улучшения точностных ха-
41
рактеристик РНС, необходимо в первую очередь обеспечить
формирование и сохранение информационной огибающей модулируемого
сигнала, отображающей пространственное положение и движение объекта
навигации.
Приведенное информационное описание процесса
радионавигационных измерений является достаточно общим и формализованным и
используется для анализа асимптотических свойств радиоканалов
навигационной системы.
2.3. ОСНОВНЫЕ ТАКТИКО-ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ РНС
Возможности практического использования радиотехнических
средств навигации и их назначение определяются совокупностью
тактических характеристик. К числу основных тактических
характеристик радиотехнических средств навигации относятся: точность, рабочая
зона (область) и дальность действия, разрешающая способность,
пропускная способность, помехозащищенность, оперативность, надежность
и эффективность, габариты, масса.
1. Точность РНС как средства измерения (а также метода
радионавигационных измерений) есть степень близости к нулю его
погрешности, которую вводят как разность между истинным значением
измеряемого навигационного параметра и его реальным значением по
показаниям индикаторного устройства. РНС должна обеспечить
необходимую точность процесса измерения, под которой, в свою очередь,
понимают близость результатов измерения РНП к истинному значению
измеряемой величины. Поскольку точность измерительных средств
представляет собой понятие, обратное понятию их погрешностей, а наиболее
широкое применение и описание в метрологии находят критерии
погрешностей измерений, в последующем изложении количественная
оценка точности РНС будет отождествляться с количественными
показателями их погрешностей.
Если перерабатывается и извлекается дискретная (или дискрети-
зованная) навигационная информация, то точностные возможности
РНС характеризуют ее достоверностью, т. е. вероятностью Рпр
правильного извлечения информации:
/==1
где Рt(a | ап) — условная вероятность извлечения j-ro элемента сообщения при
фактическом его значении ап; Pi(a) — априорная вероятность
извлечения г'-го элемента сообщения об измеряемой величине.
Аналогично можно определить полную вероятность ошибки Рош
при извлечении информации. Поскольку правильные и ошибочные
решения об измеряемых параметрах представляют собой несовместные
события, образующие полную группу, то Рпр = 1 — Р0ш-
Учитывая, что точностные показатели являются важнейшими так
тическими показателями, характеризующими количественную меру
42
степени выполнения навигационной задачи с использованием РНС,
вопросам их оценки посвящен специальный последующий раздел.
2. Рабочей зоной (областью) РНС называется часть пространства,
в пределах которого погрешность определения навигационных
параметров с использованием системы (и соответствующая погрешность
определения линий, поверхностей положения или местоположения
объекта) не превышает с выбранной вероятностью заданного значения.
Таким образом этот важный тактический показатель связывает точность
радиотехнической информации РНС с геометрией системы и
пространственным положением подвижного объекта. Анализ методики
построения рабочих зон РНС приведен в гл. 9.
3. Под дальностью действия РНС понимают максимальное
расстояние в пределах ее рабочей зоны, т. е. то максимальное расстояние
между наземной РНТ и подвижным объектом, на котором обеспечивается
получение навигационной информации с требуемой точностью.
Дальность действия зависит от используемого диапазона радиоволн и
условий их распространения (характера земной поверхности, рельефа
местности, состояния атмосферы и ионосферы, времени суток, высоты
Полета и др.), а также от технических характеристик передающих и
антенных устройств РНС. В частности, основными факторами, учитываемыми
при оценке дальности действия РНС, работающих в диапазонах
сверхдлинных (СДВ) и длинных (ДВ) волн, являются мощности наземных
станций, электрические свойства земной (подстилающей) поверхности
и время суток; для средних (СВ) и коротких (KB) волн — состояние
ионизированных слоев ионосферы и время суток; для
ультракоротковолнового диапазона (УКВ) — учет высоты полета ЛА, а также
высоты антенн и препятствий на пути распространения радиоволн.
Радиоизлучения средних и длинных волн способны
распространяться, огибая поверхность земного шара; при этом дальность
распространения волн этого диапазона составляет 2,5—3 тыс. км. Для
излучений СДВ диапазона земля и ионосфера образуют своеобразный
сферический волновод, что обеспечивает поглощение лишь небольшой
части энергии волны, и, следовательно, более медленное ее затухание.
В связи с этим дальность действия РНС СДВ-диапазона достигает 8—10
тыс. км. Максимальная дальность действия РНС, использующих СВ,
ДВ и СДВ диапазоны, не зависит от высоты расположения
передающей, приемной антенн и высоты полета ЛА. Ее рассчитывают исходя
из общей методики определения дальности радиосвязи с учетом
стационарного размещения наземных РНТ.
Дальность действия УКВ радионавигационных систем вследствие
прямолинейности распространения радиоволн этого диапазона
определяется пределами прямой видимости; за этими пределами земная
поверхность экранирует приемник системы от передатчика. В связи с
указанным обстоятельством дальность действия УКВ
радионавигационных систем существенно зависит от высоты полета ЛА, высоты
антенных устройств РНС и рельефа местности. Поэтому при подготовке к
полетам и в процессе полетов летньшГсоставом оцениваются расстояния,
в пределах которых возможен прием, излучений РНС метрового,
дециметрового и сантиметрового диапазонов.
43
В частности, оценка расстояния прямой видимости может быть
найдена из рис. 2.3, на котором высоты Лпрд (hx) передающей антенны и
приемной Лпрм (h2) показаны относительно среднего уровня
равнинной местности, т. е.
(2.14)
Rn^-V (Rz+htf-RI +V (R3 + h2)*-R! ,
где R3 — радиус Земли.
Так как обычно hx < R3 и h2 < R3, то приближенно расстояние
прямой видимости
Ru = VWB {VK + VK) = 3,57 {VK + VKY (2.15)
Во второй части формулы высоты hl9 h2 выражаются в метрах, Rn —
в километрах.
Опыт показывает, что в атмосфере происходит рефракционное
искривление траектории распространения радиоволн, благодаря
которому дальность прямой видимости возрастает. С учетом рефракции
дальность прямой видимости определяется по формуле
Ru=(3J + 4il)(Vh1 + Vh2).
(2.16)
Из формулы видно, что дальность прямой видимости зависит от
высоты полета и от высоты подъема антенны наземного
радионавигационного устройства над земной поверхностью. Так как обычно высота
полета значительно превышает высоту подъема антенны, то, в первом
приближении справедлива более простая формула
Яп= (3,7-7-4,1) VK (2.17)
где h2 — высота полета.
Формулы (2.14—2.17) характеризуют расстояние прямой
видимости над сферической земной поверхностью. Неровности рельефа
местности могут приводить к уменьшению или увеличению расстояния
прямой видимости в зависимости от взаимного расположения точки приема
и точки излучения относительно «линии горизонта». Практически
расчеты дальности радиосвязи в УКВ-диапазоне при известных значениях
высоты полета самолета, высоты антенных устройств и неровностей
рельефа местности выполняются с
использованием специальных
номограмм [33, 35].
Основные уравнения для
расчета дальности действия РНС,
соответствующих схемам рис. 2.2, при
заданных энергетических
ограничениях на мощность излучаемого
сигнала Ризл и чувствительности
приемника Рпрм mm приведены
Рис. 2.3. К определению дальности
действия РНС при прямой
видимости
в табл. 2.1.
4. Разрешающая способность
характеризует способность РНС раз-
44
Структура РНС
Уравнение дальности для свободного
пространства
Без ретрансляции сигнала
(однонаправленная)
С ретрансляцией сигнала
(«запрос» — «ответ»)
С пассивным отражанием в
свободном пространстве
С пассивным отражением и с
учетом переотражений от
поверхности земли (зеркальное
отражение)
-| / ^излЧдлЧА.г*' Лпрм^р
V
(4 я)2
Ч / ^изл1^А1^
V
1 / ^И31
V
(4я)2
Лпрм min
А4^2/Ппрм2^р
"прм т!п2
i GдЛ2 50тр Лпрм -^р
(4я)3
*прм min
= Ятах<?(*. W Ф №)
Таблица 2.1
Обозначения
Gau — ^А4 — коэффициенты
направленного действия антенн;
т]прм — коэффициент полезного
действия приемного тракта;
Лр—коэффициент, учитывающий
влияние условий распространения
радиоволн;
Sotp—эффективная отражающая
площадь объекта;
б(#, Р)—диаграмма
направленности антенны в функции азимута и
угла места;
Ф №)- Kl + Р2о6 + 2Роб cos (Ф+Дф)-
интерференционный множитель;
Ро б = ~ — обобщенный коэф-
^отр
фициент отражения,
характеризующий отношение амплитуд прямой
волны £Пр и отраженной от земной
поверхности £0тр;
Ф — аргумент коэффициента
отражения;
Дф — сдвиг по фазе между прямым
и отраженным лучом за счет
разности хода волны
личать малые приращения измеряемых навигационных параметров.
Количественно разрешающая способность оценивается минимальной
разностью Aamln двух сообщений об измеряемых параметрах, при
которой возможно различение этих сообщений. Выполняя
радионавигационные измерения, рассматривают разрешающую способность по
дальности, угловым координатам, составляющим скорости и
ускорения подвижного объекта.
5. Пропускная способность РНС определяет ее способность к
одновременному обслуживанию определенного числа абонентов
(подвижных объектов, Л А) либо способность обслуживать определенное число
абонентов в единицу времени. Пропускную способность характеризуют
максимальным количеством информации, которое может быть
переработано, извлечено и передано радионавигационной системой в единицу
времени.
Таким образом, пропускная способность С определяется как
максимальная скорость переработки и извлечения навигационной
информации (на множестве сообщений в области / (Л), т. е.
С-max #(a), (2.18)
где R (а) = 1/Т—скорость переработки и получения информации с помощью РНС;
Т — время, необходимое для выбора элемента сообщения о
параметрах исследуемого объекта.
Соотношение (2.18) для РНС, использующих дискретные
сообщения и каналы, может быть представлено так:
С = 2 Fclogg, (2.19)
где g = a/Aa — число градаций измеряемой величины, определяемое диапазоном
(шкалой) и погрешностью измерений Да (при равномерном
квантовании шкалы и малом уровне помех в канале);
Лз — граничная частота спектра сигнала.
Для РНС непрерывного действия теоретический предел
пропускной способности
С = Fc log (l + SC/NK), (2.20)
в котором Sc — мощность нормально распределенного сигнала в
радиоканале системы; NK — мощность аддитивного «белого шума»,
действующего в радиоканале.
Как следует из соотношений (2.18) —(2.20), уменьшение
погрешности измерений, улучшение соотношения сигнал/шум увеличивает
количество информации об измеряемых навигационных параметрах и,
следовательно, требует увеличения пропускной способности РНС.
6. Помехозащищенность РНС характеризует возможность ее
надежной работы в условиях естественных и искусственных помех.
Помехозащищенность определяется помехоустойчивостью системы и
скрытностью ее работы. Помехоустойчивость количественно
оценивают отношением сигнал/помеха на входе [и выходе приемника
системы, при котором погрешность определения параметра не превышает
допустимого значения с заданной вероятностью.
46
Под скрытностью понимают способность системы затруднять
обнаружение ее работы и определение параметров ее сигналов со стороны
абонентов (получателей информации), не имеющих предварительной
информации об основных характеристиках системы. Скрытность
обеспечивается путем увеличения направленности излучения и
уменьшения его мощности, сокращением длительности функционирования
радиосистемы, усложнением структуры радиосигналов и изменением их
параметров.
7. Оперативность РНС определяется длительностью процесса
получения навигационной информации, т. е. суммарным временем
переработки информации на всех этапах: от формирования сигнала-носителя
информации, до этапа отображения информации в готовом виде и
использования ее потребителем. Оперативность РНС в значительной мере
повышается с использованием автоматизации процессов переработки,
отображения информации, применения современной
быстродействующей вычислительной техники для обработки результатов измерений в
реальном масштабе времени и автоматического ввода сигналов-команд
в систему управления воздушным движением (либо для
пилотирования ЛА).
8. Надежностью называется способность РНС выполнять
заданные функции и сохранять эксплуатационные показатели в течение
требуемого интервала времени.
В качестве основной количественной меры надежности,
характеризующей закономерности появления отказов системы (т. е. изменения ее
характеристик сверх допустимых пределов) во времени, используется
вероятность безотказной работы, т. е. вероятность превышения
времени безотказной работы системы заданного промежутка времени:
Р (0 = р (t> t),
где t — заданное время работы системы;
? — случайный временной интервал наработки до наступления отказа.
В практических расчетах надежности используется зависимость
вероятности безотказной работы системы от интенсивности ее отказов
I (среднего числа отказов в единицу времени). Если известна
интенсивность отказов элементов системы, то можно вычислить интенсивность
отказов системы в целом и соответствующую экспоненциальную
зависимость для вероятности безотказной работы:
Р (t) = ехр [— М]. (2.21)
Увеличения надежности РНС можно достичь путем уменьшения
количества ненадежных элементов, т. е. упрощением схемы и
конструкции системы, а также резервированием элементов, узлов или системы
в целом (введением аппаратурной избыточности), периодическим
контролем и профилактическим ремонтом аппаратуры в процессе ее
хранения и эксплуатации.
9. Эффективность показывает, насколько полно (с каким качеством)
радионавигационная система решает поставленные перед ней задачи с
учетом целевого назначения системы и условий ее работы. Поскольку
47
задачи, решаемые радионавигационными системами и комплексами,
сложны и многообразны, для оценки эффективности РНС используют
совокупность тактико-технических характеристик систем.
Если понятие эффективности РНС связано с получением полезного
эффекта путем экономических затрат для оценки эффективности
используют соотношение Э = Сэ/С0, в котором Сэ — стоимостное
выражение выполненной тактической задачи при использовании РНС;
С0 — общие затраты на изготовление, установку и использование РНС.
10. Масса и габариты. Ограничения по массе и габаритам имеют
особую важность для бортовой радионавигационной аппаратуры. С
увеличением сложности РНС и разнообразия решаемых ими задач, а
также включением в их состав встроенных контрольно-измерительных
средств для контроля технического состояния и отыскания
неисправностей возрастают общая масса и габариты РНС. Поэтому большое
значение имеет перевод бортовой радионавигационной аппаратуры на
новую микроэлементную базу, комплексное использование бортовой
радиоаппаратуры с целью устранения функциональной и
аппаратурной избыточности.
С описанными тактическими характеристиками РНС неразрывно
связаны ее технические параметры, основными из которых являются:
диапазон рабочих частот;
мощность излучаемых сигналов;
чувствительность приемного устройства;
характеристики антенны (размеры раскрыва или ширины
диаграммы направленности, уровень боковых лепестков);
метод обзора пространства;
тип оконечного устройства отображения информации;
потребляемая мощность и др.
Совокупность технических параметров РНС обеспечивает
установленные тактические требования, предъявляемые к системе. Поскольку
взаимосвязь между техническими параметрами и тактическими
требованиями РНС неоднозначна, в процессе конструирования и
разработки РНС отыскивается наиболее рациональное и экономичное решение
задачи определения этой взаимосвязи.
Так как указанные технические параметры характеризуют
свойства любых радиотехнических систем, описание этих параметров для
РНС различного типа и назначения одинаково.
2.4. ТОЧНОСТЬ РАДИОНАВИГАЦИОННЫХ ИЗМЕРЕНИЙ И СПОСОБЫ ЕЕ ОЦЕНКИ
Точность радионавигационных измерений в значительной мере
зависит как от физики метода, положенного в основу построения РНС,
так и от особенностей технической реализации и условий
эксплуатации РНС. Это означает, что на показатели точности
радионавигационных измерений влияют не только погрешности и отказы в работе
отдельных узлов РНС, но также и внешние помехи в радиоканале,
изменение условий распространения радиоволн, а в ряде случаев и
геометрия взаимного расположения наземных и бортовых устройств РНС.
48
В зависимости от объективных причин и физической природы
возникновения погрешности радионавигационных измерений можно
подразделить на три основные группы: методические, аппаратурные
(инструментальные) и субъективные.
1. Методические погрешности являются следствием неточности
исходных математических моделей, описывающих исследуемый объект
(измеряемый процесс), а также отличия алгоритмов и методики
измерений, положенных в основу построения РНС, от оптимальных
вариантов проектируемых систем. Действительно, при самом строгом
подходе к выбору модели приходится вводить определенные ограничения
и использовать приближенные соотношения (не учитывающие,
например, динамику объекта в процессе измерения, изменение условий
распространения радиоволн и др.), что приводит к появлению так
называемой теоретической погрешности. Выбор оптимальных алгоритмов
построения того или иного типа РНС также в известной мере является
условным, поскольку зависит от исходного критерия оптимальности
и методов преобразования и обработки измерительной информации,
также являющихся приближенными (алгоритмическая
погрешность).
2. Аппаратурные (инструментальные) погрешности появляются
в результате того, что принятые для построения РНС алгоритмы
измерения, как правило, не могут быть точно реализованы практически.
Это связано с несовершенством технологии производства
радиоизмерительной аппаратуры ее неисправностями, погрешностями регулировок
и калибровок, а также может быть вызвано изменением параметров
окружающей среды (изменением температуры, влажности, давления и
др.) и старением аппаратуры в процессе эксплуатации.
3. Субъективные погрешности (погрешности оператора) являются
следствием индивидуальных особенностей оператора, свойств его
организма (остроты органов зрения, слуха, реакции при изменении
информации), степени профессиональной подготовки для выполнения
измерений и др.
По характеру проявления и влияния на последующие этапы
переработки и использования измерительной информации погрешности
РНС подразделяют на систематические (постоянные или меняющиеся
по определенному закону) и случайные. Однако это деление также
условно, поскольку в общем случае систематические погрешности
вызываются тоже случайными медленно меняющимися факторами и к их
оценке применяют статистические критерии.
Кроме того, погрешности радионавигационных измерений можно
рассматривать как статические (характеризуемые одномерным
распределением) и динамические, рассматриваемые как случайный
процесс изменения параметров систем во времени.
Проведем анализ способов оценки погрешностей
радионавигационных измерений, для чего примем исходную математическую модель
процесса измерений в следующем достаточно простом виде;
a(t) = M (t) [S (/, v) + 8 (/)], (2.22)
49
где a(t) — величина измеряемого навигационного параметра на выходе РНС;
S(t, v) — радиосигнал, несущий информацию об измеряемом параметре;
Je (t) — внешние и внутренние аддитивные мешающие воздействия (помехи,
шумы);
M(t) — масштабный коэффициент (крутизна преобразования), зависящий
от метода и схемы построения РНС.
В случае когда составляющая г (t) связана мультипликативно с
измеряемым параметром, соотношение (2.22) записывается как:
а (0 = М (t) S(t, v) [1 + 8 (*)]. (2.23)
Полученное в результате измерения значение параметра a (t) будет
отличаться от своего истинного значения а° (t) вследствие наличия
погрешности измерений. Полная погрешность измерительных
преобразований является функцией вида
а° (t) — а (/) = q [М (t), S (t, v), 8 (t)) (2.24)
и в общем случае представляет собой многомерный нестационарный
случайный процесс. Однако во многих практических случаях погрешность
радионавигационных измерений (2.24) может рассматриваться как
стационарный, эргодический случайный процесс или случайная
величина. Среднее значение (математическое ожидание) этого процесса или
величины составляет систематическую погрешность, а отклонение от
среднего значения характеризует случайную погрешность.
Наиболее полными характеристиками погрешностей измерений
являются распределение совместных Р (а, а0) и условных вероятностей
Р (а|а°), либо совместная w (а, а°) и условная плотности вероятностей
w (а | а0). Вместо w (a \ а°) часто используют условную плотность
вероятностей распределения значений самой погрешности w (e | а°) либо
при отсутствии статистической связи погрешности с измеряемой
величиной безусловную плотность вероятностей w (e). Однако указанные
характеристики не всегда известны и удобны для использования.
Поэтому на практике используют более компактные оценки точности
измерений, представляющие собой функционалы от указанных
распределений. К наиболее широко применяемым оценкам погрешностей РНС
относят экстремальные и статистические оценки.
В качестве экстремальных оценок погрешности обычно указывают
наибольшие их значения, полученные в произвольно ограниченном
ряду измерений. В этом случае используют понятия модуля
максимальной абсолютной погрешности
(Aa)maxHa°-a|max (2.25)
и модуля максимальной относительной погрешности
(g0)ma^|a°-a'ma*. (2-26)
а
Методы статистической оценки погрешностей основаны на
использовании понятий среднего значения, среднеквадратичного отклонения
и дисперсии, доверительных интервалов и доверительных
вероятностей, а также понятия среднего риска (средней стоимости). В частности,
для одномерных законов условных распределений погрешностей, рас-
50
сматриваемых как непрерывные случайные величины, среднее
значение равно их математическому ожиданию
00
««= f \a°—a\w(a\a°)da, (2.27)
—оо
а среднеквадратичное отклонение
°а = (] {a-maYw{a\a*)dc^l\ (2.28)
Понятие доверительных интервалов и вероятностей вводят для
указания допустимых пределов (допусков) ± в0, за которые не
выходит (в которых находится) с заданной доверительной вероятностью
рд погрешность системы | ед |, описываемая с помощью статистических
оценок (2.27), (2.28) и других моментов более высокого порядка, т. е.
/>{|ед1^е0}=,рд, (2.29)
Например, доверительный интервал для оценки математического
ожидания
h = (ma—e0; та + е0), (2.30)
где та — оценка математического ожидания (состоятельная и несмещенная).
Для определения доверительной вероятности по заданному
доверительному интервалу необходимо знание плотности вероятностей
распределения погрешности w (е), т. е.
Рд= Г w(e)ds. (2.31)
—80
В частности, при нормальном законе распределения погрешностей
доверительная вероятность согласно (2.29) для интервалов а, 2 а, 3 а
составит соответственно значения
Р {I 8д К °] = 0>68; Р {| ед |< 2а} = 0,95;
Р {| ед |< За} = 0,9973.
Некоторой обобщенной функцией указанных выше оценок
погрешностей является критерий среднего риска (полного или условного),
широко используемый для сравнения точностных характеристик РНС
и их оптимизации. Для уяснения этих понятий рассмотрим
совокупность ситуаций совмещения случайного значения измеряемого
параметра а и его истинного (или действительного значения) а°. Каждой из
ситуаций совмещения поставим в соответствие некоторую функцию
стоимости г (а, а°), т. е. размер штрафа, налагаемого в зависимости от
разности между истинным значением измеряемой величины и
результатом измерения (в ряде работ вместо понятия «функция стоимости»
используется аналогичное понятие «функция штрафов»). Поскольку
разность (а° — а) является случайной величиной, функция стоимости
г (а, а°) также случайна.
51
')
r(a-a°)
e
a-a°
a-ac
a-ac
Рис. 2.4. Возможные виды функций стоимости:
а — линейная; б — квадратичная; в — ступенчатая
Тогда оценка качества (точности) измерения может быть
представлена в виде числа, соответствующего условному среднему риску 7а9
если функция риска усреднена при фиксированном значении а°, т.е.
f r(a, a0) w (a \ a0) da,
(2.32)
и соответствующего полному среднему риску г, если усреднение
произведено при всех возможных значениях а и а°, т. е.
:== Г Г ф, а°) w (а, а°) dada0.
(2.33)
Выбор функции стоимости при решении задачи измерения
(оценки) навигационных параметров зависит от требуемой точности
измерений и условий применения РНС различного типа.
На рис. 2.4 представлены примеры возможного вида функций
стоимости, соответствующих определенным критериям оценки
погрешностей измерения. При г (а, а°), равном модулю максимального
отклонения \а° — а\ (рис. 2.4, а), среднему риску согласно формуле (2.31)
соответствует среднее значение (математическое ожидание)
погрешности., При г (а, а°)_ = | а0 —а [2 (рис. 2.4, б) средний риск равен
среднеквадратичному значению погрешности. Если выбирается ступенчатая
функция стоимости (рис. 2.4, в) и
г(а, а0) -
0 при \а° — а |<е;
1 при | а°—а\ >е,
(2.34)
то средний риск равен доверительной вероятности превышения по
абсолютной величине установленного допуска.
Следует иметь в виду, что функции плотности вероятностей
распределения погрешностей w (е), w (е \а°), w (a | а°) практически
ограничиваются пределами шкалы (О, L) в отличие от бесконечных пределов
интегрирования этих функций. При этом поправками на усеченность
закона распределения можно пренебречь лишь в том случае, если
среднеквадратичное значение а (либо самой погрешности е ) много меньше L,
а измеряемые величины находятся достаточно далеко от края шкалы.
В заключении раздела рассмотрим вопрос оценки результирующей
погрешности РНС, которая определяется путем суммирования
частных погрешностей составляющих узлов всей цепи измерительных пре-
52
образователей системы. Эта задача решается по правилам
алгебраического либо геометрического суммирования частных погрешностей.
Если, например, суммируются случайные погрешности двух
величин (характеризующих точность того или иного узла системы),
связанных взаимной корреляционной связью, то при использовании
критерия среднеквадратичного отклонения результирующая погрешность
равна алгебраической сумме составляющих погрешностей, т. е.
а2-Vo2\+2pGla2 + a22 , (2.35)
где р — коэффициент взаимной коррелляции двух величин.
При слабой корреляционной связи либо ее отсутствии
(Р = 0)
Oz = Voi + o*2, (2.36)
т. е. результирующая погрешность находится по правилу
геометрического суммирования составляющих.
Оценивая результирующую погрешность РНС практически
приходится суммировать множество составляющих погрешностей, что
усложняет учет всех взаимных корреляционных связей между ними.
Поэтому используют следующий упрощенный подход к решению этой
задачи.
Вначале для суммирования выделяют группу погрешностей,
достаточной «сильно» коррелированных между собой, и коэффициент их
взаимной корреляции принимается равным р = ± 1. В этом случае
по формуле (2.36) а2 = а4 ± сг2. Вторую группу суммируемых
погрешностей составляют погрешности, вызываемые причинами, не
имеющими между собой связи, т. е. для них р = 0. При этом
промежуточные значения коэффициента корреляции в расчет не принимаются.
Результирующие погрешности аь полученные после суммирования
в каждой из групп
a^V S°« ' (2-37)
уже не имеют между собой заметных корреляционных связей и
могут рассматриваться как статистически независимые.
2.5. ПОТЕНЦИАЛЬНАЯ ТОЧНОСТЬ РАДИОНАВИГАЦИОННЫХ ИЗМЕРЕНИЙ
Оптимальное измерение параметров навигационных радиосигналов.
Задачи радиообнаружения и измерения параметров
радионавигационных сигналов, смешанных в реальных условиях с флюктуационными
помехами, являются статистическими задачами и имеют общую
статистическую модель. Действительно, характеристики смеси сигналов с
помехами на входе устройств измерения те же, что и на входе устройств
обнаружения. В частности, при использовании наиболее общих
критериев оптимального обнаружения сигналов и измерения их
параметров — критериев минимума среднего риска (байесовых критериев)
53
различие обеих задач в статистическом смысле заключается лишь в
выборе функции стоимости, которая в задачах измерения может быть
непрерывной и дискретной, а в задачах обнаружения — только
дискретной. Кроме того, для решения задачи оптимального измерения
(оценки) параметров РНС необходимо, чтобы информационный (полезный)
сигнал присутствовал в смеси достоверно, а отношение сигнал/шум
на входе измерительного устройства было много больше единицы.
Учитывая аналогию указанных задач обработки принимаемого
радионавигационного сигнала, а также значительное число работ по
радиолокации, в которых подробно анализируются задачи и методы
оптимального радиообнаружения [19, 51, 58], рассмотрим только
основные вопросы оптимального измерения параметров
радионавигационных сигналов с точки зрения теории статистических решений.
Такой подход, в свою очередь, позволит рассмотреть одну из
важнейших задач анализа и синтеза РНС — оценку их потенциальной
точности, т. е. той минимальной погрешности измерений, которую
можно достичь, используя оптимальную обработку радионавигационных
сигналов.
Если на входе приемника РНС действует напряжение и (/),
представляющее смесь сигнала S (t, v) и помехи п (t) (где v — измеряемый
параметр радиосигнала, сохраняющий постоянное значение на
временном интервале от 0 до Т его анализа и оценки), то в результате
измерения может быть получена лишь статистическая оценка v искомого
параметра на основе оптимального правила (алгоритма) решения задачи.
С точки зрения обеспечения наиболее высокой точности (качества)
измерений согласно критериям (2.32 и 2.33) оптимальный измеритель
должен минимизировать средний риск.
Для вычисления среднего риска по формуле (2.32) необходимо
задаться определенной функцией стоимости г (а, а0) и найти
апостериорное распределение измеряемого параметра. При определении и
анализе апостериорного распределения параметра будем считать, что
статистика смеси и (t) на входе приемника измерителя полностью
известна.
В качестве функции стоимости будем использовать квадратичную
функцию г (v, v) = (v — v)2. Тогда с учетом формулы (2.33) средний
риск
7= J j (v—v)2 w (v, и) dvdu, (2.38)
гдедо^,и)— совместная плотность вероятности параметра v и совокупности
отсчетов вектора и (t) на интервале измерения от 0 до Т, а интегрирова-
вание осуществляется в пределах области изменения совместных
значений измеряемых парметров v и и.
Если плотность вероятности w (v, и) представить в виде
произведения w (v, и) = w (и) w (v \ и), в котором w (и) — безусловная
плотность вероятности отсчетов и (/), a w (v, и) — условная
(апостериорная) плотность вероятности параметра v, то формула (2.38)
преобразуется к виду:
Г= \ w (и) du [ (v — v)2 w[(v | и) dv. (2.39)
54
Минимум среднего риска определяется из уравнений
dz/dv = 0, (2.40)
корень которого является оптимальной оценкой измеряемого
параметра.
Однако, поскольку величина w (и), входящая в формулу (2.39),
не зависит от метода получения оценки v, оптимальную оценку v (и)
следует искать из условия обеспечения минимума внутреннего
интеграла в соотношении (2.39), т. е.— 2J(v— v) w (v | и) dv = 0, откуда
получим
v = \vw (v | u) dv = M [v | u]9 (2.41)
где M [v/u] — математическое ожидание v при условии и. Как следует из
выражения (2.41) оптимальной оценкой параметра v является среднее
значение (математическое ожидание) апостериорной плотности
вероятности измеряемого параметра (соответствущее ее центру
тяжести.).
При выборе функции стоимости другого вида в общем случае будут
получены иные результаты. Однако известно [51], что при
симметричности апостериорного распределения всякая симметричная функция
стоимости приводит к одной и той же оптимальной оценке.
Рассмотрим важный частный случай отыскания оптимальных
оценок с использованием функции правдоподобия. Представим формулу
(2.41) в другом виде, выражая ее через функцию правдоподобия, т. е.
v = k$vw (v) L (и | v) dv. (2.42)
Здесь w (v) — априорная плотность вероятности параметра v, L (и | v)
— w (u\v) — функция правдоподобия, которая при фиксированной
входной реализации и (t) является функцией параметра v, а
коэффициент k = \lw (и) может быть определен из условия нормирования:
k = l/$w (v) L (u\v) dv.
Если априорное распределение w (v) равномерно и достаточно
широко в области значений v, а функция L (и | v) имеет единственный
максимум и симметрична относительно него, то максимум апостериорного
распределения w (v | и) совпадает с максимумом функции
правдоподобия. Следовательно, оптимальный метод оценки в этом случае сводится
к решению уравнения
aL("|v):=0*, (2.43)
корень которого v соответствует значению максимума функции L (и | v)*.
Поэтому такой метод оптимального измерения называют методом
максимума правдоподобия, а соответствующую оценку измеряемого
параметра, полученную указанным методом,— максимально
правдоподобной.
*К аналогичной по форме зависимости можно прийти, выражая
оптимальные оценки через отношение правдоподобия , т. е. отношение функций
правдоподобия при наличии и отсутствии сигнала на входе приемника-
55
Практически часто используют для получения оптимальных
(квазиоптимальных) оценок измеряемых параметров навигационных
радиосигналов метод и критерий максимума функции правдоподобия или
монотонно связанной с ней функцией корреляции выходного сигнала.
В частности, для нормального белого шума и детерминированного
сигнала, действующих на входе измерителя, функция правдоподобия
L (и | v) - k ехр — — С u(t) S(t9 v) dt\ ; (2.44)
( N» о j
2 T.
г^з — —- \ и (t)S (t, v)dt — z (u | v) — корреляционный интеграл, а
N0 6
N0 = o£/FK — спектральная плотность мощности
шумов, действующих в полосе частот FK
на входе измерителя.
Из теории оптимального приема сигналов известно, что
корреляционный интеграл может быть вычислен коррелятором либо
оптимальным согласованным фильтром СФ, выполняемых на основе
многоканальных схем либо использующих весьма простые одноканальные
перестраиваемые схемы, которые последовательно анализируют
измеряемый параметр, вычисляя для каждого его значения максимум z (u\v).
Для определения максимума функции z (и | v) необходимо
продифференцировать ее по измеряемому параметру и приравнять нулю, т. е.
}u(f)JS<h*Ldt = 0, (2.45)
J dv
о
dS (/, v)
где LJ—' — весовой множитель.
dv
Уравнение (2.45) выражает оптимальное правило оценки
измеряемого параметра. Переходя от производной к конечным приращениям,
уравнение (2.45) представим в приближенном виде:
т т
\и (/) S (t, v — Av) dt — \u (t) S (t, v + Av) dt = 0, (2.46)
о о
где S (t, v — AV) и S (t, v + Av) — весовые функции.
Для решения уравнения (2.46) используются схемы
дифференциального типа, состоящие из дискриминатора, который вычисляет
корреляционные интегралы для двух близких значений измеряемого
параметра, и схемы сравнения. При этом максимально правдоподобная
оценка v соответствует равенству корреляционных интегралов, т. е.
нулевому сигналу на выходе дискриминатора. Такой алгоритм используют,
например, импульсные дальномеры и пеленгаторы, доплеровские
измерители скорости с оценкой ее по центру тяжести спектра отраженного
сигнала и другие устройства.
В общем случае выбор конкретной схемы оптимального
(квазиоптимального) измерителя определяется принципом построения РНС и
тактическими задачами, решаемыми системой, ее взаимосвязью с
другими средствами, используемыми в радиокомплексе, особенностью уст-
56
ройств отображения информации и другими требованиями. В связи с
этим существует большое разнообразие измерительных схем,
использующих оптимальные (квазиоптимальные) критерии оценки
параметров, и отличающихся между собой функциональными схемами,
степенью сложности технической реализации и точностью измерения.
Потенциальные точности измерений. Одной из важнейших задач,
возникающих перед проектировщиками РНС, является оценка
предельных точностных возможностей того или иного метода
радиотехнических измерений, положенного в основу построения проектируемой
системы. Определение потенциальной точности РНС (т. е.
наименьших предельных погрешностей) позволяет указать конкретный
результат, к которому нужно стремиться в процессе проектирования
системы и ее технической реализации, доставляет проектировщику
объективный критерий для оценки степени достижения цели. Кроме того,
знание предельных погрешностей системы позволяет обоснованно
задать допустимые значения погрешностей устройств, используемых на
последующих этапах обработки информации потребителем (без
излишнего ужесточения допусков).
Современная теория и техника радиотехнических методов и
средств измерения указывает, что принципиально неустранимые
погрешности систем обусловлены шумами (помехами), сопровождающими
полезный сигнал на всех этапах его передачи и переработки. Если даже
выбранный метод радиоизмерения и соответствующая РНС позволяют
снизить до нуля погрешности других видов, то устранить полностью
влияние шумов не представляется возможным, и поэтому вызываемые
ими погрешности характеризуют предельные точностные возможности
данного метода и средства радиоизмерения.
Для оценки точности РНС, которую можно достичь, используя
различные оптимальные алгоритмы выделения и обработки сигналов,
осуществляют обычно формирование и анализ апостериорной плотности
вероятности измеряемых параметров с учетом априорных сведений о
сигналах и шумах в радиоканале. В связи с этим, учитывая
предыдущий материал, будем анализировать потенциальную точность
радионавигационных измерений, используя максимально правдоподобные
оценки измеряемых параметров (полученные с помощью оптимального
измерителя) в предположении, что функция правдоподобия определена
для случая воздействия на вход измерителя нормального белого шума
и детерминированного сигнала, т. е.
L(u |v) = iexp[^-2(a|v)]f (2.47)
где корреляционный интеграл z (и | v) может быть представлен в виде
суммы двух составляющих: автокорреляционной функции сигнала
zc (v,v) и флюктуации на выходе коррелятора zn (и, v).
Тогда с учетом соотношения (2.44) запишем
z(«|v) = zc(v,v) + zn(a,v) =
т т
- ^s(t,v)s(t,v)dt+^n(t)s(t,v)dt. (2.48)
о о
57
Если учесть, что оптимальные измерения производятся при
соотношениях сигнал/шум на входе измерителя много больших единицы,
флюктуациями можно пренебречь. Тогда функцию правдоподобия
(2.57) представим в виде:
L (ufv) = к ехр
|"^Js(/fv)s(/f;)£tfl. (2.49)
Для анализа предельных погрешностей используем тейлорово
разложение zc (v, v) в окрестности оптимального значения измеряемого
параметра v0 = v с сохранением трех первых членов ряда:
zc (v, v) = zc (v, v0) + z\(v, v0)(v —v) f
+ Y^(v,v0) (v-v)2.
(2.50)
Второй член ряда (2,50) равен нулю, так как первая производная
в точке v = v равна нулю. Учитывая также, что первый член ряда не
содержит погрешности измерения функции правдоподобия, для
оптимальной оценки измеряемого параметра согласно (2.49), получаем
I (и | v) = к ехр [(v- vfzl (v, v)/N0].
Найдем дисперсию случайной величины v:
<*5 = JVo/2*S(v,vHl /?^*(vfv),
/ N0
(2.51)
(2.52)
где *ф" (v, v) — нормированная корреляционная функция, а а* является
предельной (по максимуму правдоподобия) погрешностью измеряемого
параметра при наличии шума.
Таким образом, из-за наличия шумов оптимальная оценка
параметра (абсцисса максимума) смещается относительно истинного значения
измеряемого параметра на величину v° — v, что приводит к появлению
погрешности измерения (см.
изображение отклика СФ на входную
смесь сигнала с шумом на рис. 2.5).
Формула (2.52) позволяет
количественно оценить потенциальную
погрешность измерения любого
параметра сигнала (временной
задержки, частоты, фазового сдвига),
а следовательно, оценить и
потенциальную точность измерения
соответствующих навигационных
параметров.
|Измерение
дальности. Если сигнал, несущий
информацию о дальности R и запаз-
Рис. 2.5. Изображение отклика СФ
при оценке потенциальной точности
РНС
58
дывающий на временной интервал т относительно опорного времени,
имеет комплексный спектр g (со), то отклик СФ на подобный сигнал
определяется его корреляционной функцией:
z (т, т) = — ? \g (w) |2 exp /со (т — т) da. (2.53)
—00
Используя разложение экспоненты в ряд и ограничиваясь тремя
первыми членами, запишем ехр /со (т, т) = 1 + /со (т — т) —
-1(02(Т-Т)2.
Подставив полученное выражение в формулу (2.53) и учитывая,
1 °°
что энергия сигнала Е =— | | g (со) |2dco, найдем
2я —оо
z (т, т) = Е
I+/(T~^"dr S e^e>,2><
\2 1 Г „2 I Z /„\ 12
X Лв — (t-т)2 —L- f (о21 i (ю) |2 Л» |. (2.54)
—00
1 °°
В полученном соотношении j* со | g (со) |2 dco = Мг
2кЕ —оо
представляет собой первый момент энергетического спектра сигнала,
равный нулю при совпадении центра тяжести спектра с несущей часто-
1 °?
той, а J со2 | g (со) | 2 dco =4 я2/7! = Л12
2я£ —оо
есть второй момент энергетического спектра, являющийся
эффективной шириной спектра сигнала.
Тогда из соотношения (2.54) найдем вторую производную
корреляционной функции г" (т, т) = ЕМ 2 = 4 nF9 E,
подстановка которой в формулу (2.52) позволяет определить
дисперсию временного запаздывания
а? = 1/ (q4n2F2), (2.55)
где <у2 = 2E/N0 — отношение сигнал/шум при согласованной фильтрации.
Соответствующая потенциальная погрешность (т. е. минимальная
погрешность) измерения дальности рассчитывается по формуле (2.55)
с учетом введения масштабного коэффициента с/2:
о% = c/((f 8я2 FJ). (2.56)
Таким образом потенциальная погрешность измерения дальности
обратно пропорциональна отношению сигнал/шум на выходе
оптимального измерителя и эффективной ширине спектра сигнала.
Измерение радиальной скорости.
Информацию о радиальной скорости подвижного объекта несут доплеровские
59
частоты сигнала. Поскольку в данном случае корреляционная функция
вдоль оси частотных сдвигов
оо
z(Q.U)= J s2(t)expj(Q-tl)tdt, (2.57)
—оо
то, используя методику преобразований, аналогичную предыдущей,
как и при оценке погрешностей измерения дальности, получим
выражение, подобное (2.54):
г (Q, Q) = E[l + j(Q — Q) щ——. (Q- ti)2 m2], (2.58)
1 °°
где т1~— Г ts2(t)dt = 0, а т2 для симметричного спектра
—оо
—оо
представляет собой эффективную длительность сигнала.
Вторая производная г (й, й) по Q равна z" (Q, Q) = Е 7|, что
при подстановке в соотношение (2.52) дает дисперсию оценки частоты
ai-l/(^Ti). (2.59)
Поскольку радиальная скорость перемещения подвижного объекта
связана с измеряемой, частотой Йд соотношением Vr = CFn/(2 /0),
то из выражения (2.59) получим
а* = С/(2 /о^Г|). (2.60)
Формула (2.60) выражает предельные возможности минимизации
погрешности измерения радиальной скорости.
Измерение угловых координат. Пусть задача
измерения углового положения подвижного объекта сводится к
определению момента времени, при котором напряжение на выходе
оптимального измерителя достигает максимального значения. При этом
измеряемый угол а0 будет соответствовать оси симметрии вращающейся
диаграммы направленности антенны F (а) (метод максимума). Если
диаграмма направленности антенны имеет гауссову форму, т. е,
F(a) = F (QA t) = exp [- 0,7 (О*/Ф0.5)], (2.61)
то огибающая импульса, несущего информацию об угловых
координатах, также будет иметь гауссову форму. В соотношении (2.61): Qa —
угловая скорость вращения антенны, а #0,5 — ширина диаграммы
направленности антенны, отсчитанная на уровне половинной мощности.
Эффективная ширина спектра сигнала подобного типа [19] HF9 =
= 1,66 Qa/'O'o.b» и> следовательно, согласно формуле (2.59)
потенциальная погрешность оценки временного интервала, пропорционального
измеряемому углу,
Ох = 0,6 $0>b/(QAV2E/N0)\ (2.62)
60
Преодразоба-
тпель
—^
Фильтр низких
частот{инер-
циоиноезбено)
v(t/
Индикатор
Рис. 2.G. Упрощенная А
структурная схема про- Ук ^
цесса измерительных u(t)
преобразований в РНС
Переходя к характеристике потенциальной точности угловых
измерений из формулы (2.62), окончательно находим:
аа = QAoT = 0,6 bjVq. (2.63)
В общем случае при различных формах диаграммы направленности
и используемых методах радиопеленгации формулы для определения
потенциальных погрешностей измерения угловых координат
различны. Поэтому в качестве исходного соотношения для проведения
подобных расчетов необходимо использовать формулу (2.52).
Оценка помехоустойчивости РНС. В практике инженерного
анализа точностных характеристик РНС большое значение имеет также
оценка помехоустойчивости измерения параметров при различных видах
модуляции и кодирования сигналов. При этом обычно интересуются
взаимосвязью отношений сигнал/шум на выходе и на входе
оптимального измерителя. Представим упрощенную структурную схему
процесса радионавигационных измерений в виде цепи (рис. 2.6),
состоящей из безынерционного преобразователя навигационной информации
в параметры радиосигнала, последетекторного фильтра
(инерционного звена) и устройства отображения информации (индикатора).
Если на входе подобного измерителя действует сигнал, имеющий
длительность Тс и энергию Е, то средняя мощность сигнала
Sc = Е/Тс. (2.64)
Спектральную плотность помех (шумов), равномерно
распределенных в полосе частот FK на входе измерителя (FK ограничена полосой
пропускания входных цепей приемника РНС) запишем в виде:
N0 = g2JFk = Nn/FK. (2.65)
С учетом формул (2.55), (2.64) и (2.65) отношение сигнал/помеха
на выходе оптимального измерителя
<72 = (Sc/Nn) (FJFC) = Q2FJFC, (2.66)
где Fc « 1/Те.
Из формулы (2.66) следует, что отношение сигнал/помеха на выходе
оптимального измерителя зависит от отношения сигнал/помеха Q на
входе измерителя и величины базы сигнала (т. е. произведения FKTC).
В непрерывных системах с дискретизацией сигналов и в
дискретных системах используется кодирование сигналов (сообщений) в
процессе их передачи и переработки. При этом каждое значение q =
= У2 E/N0 уровней сигнала, различимых на фоне шумов и
доставляющих навигационную информацию, представляется в процессе
переработки группой кодовых символов (системы с кодово-импульсной и
дельта-модуляцией и др.). Для представления каждого из q разрешенных
уровней сигнала кодовой комбинацией (образованной последователь-
61
ностью импульсов либо путем фазовой или частотной манипуляции)
требуется группа импульсов, минимальное число которых k — logm<7,
где т — основание кода.
Так как согласно (2Л8) скорость передачи информации по
радиоканалу может быть представлена в рассматриваемом случае как R =
= ^с Iogm<72> то с учетом формулы (2.20) запишем
Fc logm q* < logm FK (1 + Sc/Nn),
откуда
q<V(i+f}^ ■ (2-67)
Таким образом, согласно формуле (2.67) в системах с оптимальным
кодированием сообщений (в отличие от систем без кодирования)
отношение сигнал/шум на выходе системы возрастает по
показательному закону с увеличением полосы частот радиоканала.
Для приближенной оценки помехоустойчивости радиосистем с
различными видами модуляции используют коэффициент |х, называемый
обобщенным выигрышем системы и определяемый из соотношения
Ц = g2Fc/Q2FK. (2.68)
Это соотношение конкретизируется для различных видов
модуляции и кодирования сигналов, используемых в РНС различного типа
[56].
Глава 3
МЕТОДЫ РАДИОУГЛОМЕТРИИ
3.1. ОБЩАЯ ХАРАКТЕРИСТИКА МЕТОДОВ РАДИОУГЛОМЕТРИИ
Для измерения угловых координат подвижных объектов в
радионавигации используют методы радиопеленгования, под которым
понимается процесс определения направления на источник радиоизлучения
с помощью радиотехнических средств. Сравнение полученного таким
образом направления с некоторым исходным, принятым за начало
отсчета, позволяет определить угловое положение объекта.
Совокупность вопросов, связанных с радиопеленгованием и задачами
определения угловых координат, объединяется в рамках теории и техники
радиоуглометрии, использующей, в частности, методы
радиопеленгации. Рассмотрим основные из этих вопросов.
Как известно, направление движения радиоволны,
распространяющейся прямолинейно в однородной среде, характеризуется вектором
р (вектором Пойтинга), расположенным перпендикулярно к векторам
напряженности электрического Е и магнитного поля Н (рис. 3.1).
Точки пространства, имеющие одинаковую фазу электрического поля
радиоволны, образуют поверхность, называемую фронтом волны;
причем вектор р расположен перпендикулярно к фронту волны в каждой
точке (рис. 3.1, б). При распространении радиоволны в свободном
пространстве ее фронт сферический; на больших удалениях от передающей
антенны участок фронта волны можно считать плоским.
Ориентацию вектора электрического поля волны относительно
плоскости распространения (т. е. плоскости, перпендикулярной к
поверхности земли и содержащей направление распространения волны)
характеризуют поляризацией.
Различают линейную и эллиптическую поляризацию радиоволн.
Линейная поляризация наблюдается в виде нормальной и аномальной
поляризаций. Нормальная, или вертикальная, поляризация
соответствует вертикальному расположению вектора электрического поля в
плоскости^ распространения.
В случае аномальной поляризации вектор электрического поля
составляет определенный'угол с вертикальной плоскостью, содержащей
направление распространения. Частным случаем аномальной
поляризации является горизонтальная поляризация, когда вектор Е
горизонтален, а вектор Н вертикален.
Характерной особенностью любой линейной поляризации является
то, что электрическое поле можно разложить на две составляющие
поля — вертикальную и горизонтальную, совпадающие по фазе. Если
63
Рис. 3.1. Принцип радиопеленгования:
а — нормально поляризованное электромагнитное поле; б — фронт волны; в — определение
направления на излучатель
же между вертикальной и горизонтальной составляющими
электрического поля имеется фазовый сдвиг, создается эллиптически
поляризованное поле. Конец вектора напряженности электрического поля, за
период высокой частоты описывает эллипс. Частным случаем
эллиптической поляризации является круговая, когда вертикальная и
горизонтальная составляющие равны друг другу, а фазовый сдвиг равен
,90°. Эллипически поляризованную волну можно представить как
сумму двух линейно-поляризованных волн: в плоскости распространения
и перпендикулярной к ней.
Реальные радиопеленгационные системы рассчитывают на прием
только одной из составляющих, обычно вертикальной составляющей
электрического поля, что значительно упрощает техническую
реализацию системы и снижает число измеряемых параметров. В связи с этим
в последующем анализе будет учитываться действие только
вертикальной составляющей электрического поля; влияние горизонтальной
составляющей электрического поля будет учитываться лишь при оценке
так называемых поляризационных погрешностей.
Определение направления фронта волны и измерение угловых
координат состоит в сравнении времени прихода излучаемых сигналов
в разнесенных точках пространства, в которых размещаются антенны
радиопеленгационной системы. Если осуществлять пеленгацию с по-
мбщью, например, антенной системы, состоящей из двух
ненаправленных вибраторов, разнесенных на расстояние d (называемое базой),
а направление на пеленгуемый объект 9 отсчитывать от перпендикуляра
к центру базы (рис. 3.1 б), то при отклонении объекта от равносигналь-
ного направления (например, на угол 8), в точке приема возникает
разность хода сигналов AR = Rx — R2 и пропорциональное ему
временное запаздывание сигналов
r=AR/cf (3.1)
где с — скорость распространения радиоволн.
64
Подобные системы, строго говоря, являются разностно-дально-
мерными (гиперболическими), однако при больших удалениях от
центра базы, когда R > d, гиперболы практически совпадают с их асимпто-
мами, исходящими из центра базы, и лучи Rx и R2 можно считать
параллельными, т. е. А/? = d sin 0, и тогда формула (ЗЛ) примет вид:
T = dsin Q/c. (3.2)
Таким образом, т при фиксированных размерах базы зависит лишь
от направления на пеленгуемый объект. Очевидно, что угломерные
(радиопеленгационные) системы являются фактически разностно-
дальномерными системами с малыми базами по сравнению с
расстоянием до пеленгуемых объектов.
Временной интервал т можно измерить любым из следующих
методов: фазовым, амплитудным, частотным или импульсным. Однако
практически наиболее широко используется фазовый метод угловых
измерений (и производный от него амплитудный), поскольку он дает наиболее
высокую точность, так как запаздывание измеряется по разности фаз
самой несущей частоты /0, т. е.
Аф = 2я/0т = 2я d sin 8/Я. (3.3)
Из формулы (3.3) может быть найдено соответствующее значение
пеленга
0 = arcsin (Aq>X/2nd). (3.4)
Если направление на пеленгуемый объект отсчитывать от
направления базы ft, то
Аф = 2ndX-1 cos ft, (3.5)
ft = arccos(AqA/2otd). (3.6)
Заметим, что согласно соотношениям (3.4) и (3.6) однозначный
отсчет пеленга возможен лишь в пределах изменения фазового сдвига до
2 л. Отсюда минимальный размер базы антенны (минимальное
расстояние между разнесенными точками приема или излучения сигналов,
полученное из соотношения 3.5)
(cos ft)max—(cos G)mln '
Таким образом, при использовании ненаправленных или
слабонаправленных антенн, когда однозначный отсчет пеленга
обеспечивается при условии —1 < cos ф < +1, согласно (3.7) минимальный
размер базы антенны
dmin - т. (3.8)
Для анализа принципа построения радиопеленгационных систем
важно выяснить минимально необходимое число разнесенных антенн
или элементов антенн (точек апробирования сигнала в пространстве),
необходимых для определения угловых координат.
Характеризуя напряженность электромагнитного поля плоской
волны в фиксированной точке пространства (с учетом действия только
3 Зак. 444
65
вертикальной составляющей электрического поля), из соотношений
(2.4) и (3.3) найдем
Е = Ет ехр /ф exp l—finftr1 R sin 0 sin p], (3.9)
где 0, Р — углы, характеризующие соответственно направление
распространения волны и наклон фронта волны, (т. е. угловые координаты
излучателя в горизонтальной и вертикальной плоскостях);
R — расстояние от излучателя до точки апробирования сигнала;
г|) — фаза сигнала в начале координат отсчета.
В реальных условиях распространение радиоволны от излучателя
носит многолучевой характер, поскольку, помимо прямой волны в
точку приема прибывают отраженные от различных слоев ионосферы и
тропосферы многопутевые волны, а также волны, отраженные от
местных предметов, от неровностей рельефа земной поверхности и т. д.
В связи с этим в точке приема действует результирующее
интерференционное поле, являющееся суммой N когерентных радиоволн
£s= %Emiexp Wiexpl—j^nl-1 RsmQiS'mfiil (3.10)
Поскольку, как было показано выше, для угловых измерений
имеют значение четыре независимых параметра, характеризующих
каждую i-ю волну (EmU г|)ь г|;ь Qu рг), то в целом результирующее поле
описывается \N параметрами. Если принять фазу и амплитуду одной
из волн в качестве опорных для сравнения с ними параметров других
волн, то число неизвестных параметров, которые требуется определить,
равно 4N — 2. Сведения о параметрах получают с помощью
разнесенных антенн, в которых наводится сигнал, фаза и амплитуда которого
измеряется относительно опорных фаз и амплитуд одной из антенн.
В связи с этим, используя п антенн, получим 2 (п — 1) результатов
измерения. Располагая антенны определенным образом, можно
составить 2 (п — 1) уравнений, связывающих параметры радиоволн с
фазами и амплитудами сигналов в антеннах. Приравнивая число
неизвестных параметров числу уравнений, имеем
4N — 2 = 2(п— 1) (3.11)
либо п = 2N, (3.12)
т. е. для независимого определения параметров всех приходящих волн
число антенн должно быть вдвое больше числа волн, что обеспечит
безошибочное определение направления каждой из волн. Однако
подобный радиопеленгатор, помимо большого числа антенн, требует весьма
сложных приемных, а также вычислительных устройств для решения
указанных уравнений. Поэтому все радиопеленгационные системы
принципиально рассчитаны на пеленгование одной волны; при этом,
однако, учитывают так называемые интерференционные погрешности
(рассматриваемые в гл. 7), возникающие под влиянием сложного поля
нескольких волн.
Для одноволнового радиопеленгатора число антенн больше
указываемого формулой (3.12). Это связано с тем, что амплитуда
напряженности поля одной волны и, следовательно, амплитуды сигналов в ан-
66
теннах во всех точках измерения будут одинаковы и не несут полезной
информации. Поэтому может быть составлено лишь (п— 1) уравнений
по результатам относительных измерений фазы. Так как число
неизвестных (углы 0 и р) равно двум, то из соотношения (3.12) следует, что
при одноволновом методе радиопеленгации (N = 1) требуется не менее
трех (п = 3) разнесенных неподвижных антенн. Если считать угол
места р известным (приняв для него некоторое среднее значение) и
интересоваться лишь азимутальным углом 0, то пеленгование может быть
осуществлено двумя неподвижными антеннами (п = 2). Однако при
этом необходимо учитывать возможное изменение угла Р для того, чтобы
избежать так называемых высотных ошибок. В реальных радиопелен-
гационных системах число антенн часто превышает указанный
теоретический ^минимум, что необходимо с целью улучшения точности,
помехоустойчивости, чувствительности систем и ликвидации
многозначности отсчета пеленга.
Следует обратить внимание на тот факт, что совокупности фазовых
проб {%, г|>2, ...,<фп}
сигналов, принимаемых (излучаемых) с помощью
разнесенных антенн, при осуществлении радиопеленгации могут
рассматриваться как кодовые буквы. В общем случае число таких кодовых
букв
l=SJSh (3.13)
где Su — площадь поверхности излучения (приема), в пределах которой
расположены отдельные излучатели (точки приема) радиопеленгационной
системы;
Si — элемент поверхности излучения (содержащий отдельный излучатель
или точку приема), размеры которого учитывают минимально
допустимое разнесение излучателей.
Из полученных указанным способом наборов кодовых букв могут
составляться кодовые комбинации, содержащие любые количества
букв с любым желаемым «весом» амплитуды результирующего сигнала.
Каждая комбинация букв образует кодовое слово (например,
диаграмму направленного излучения антенны либо вполне определенную
последовательность сигналов от ряда антенн, размещенных определенным
образом в пространстве и др.), которое при сравнении с другим
кодовым словом (или кодовой буквой) будет давать искомое значение
пеленга. Как уже было показано выше, «минимальная» система пеленгации
(т. е. наиболее простая) должна содержать одно кодовое слово (или две
буквы, соответствующие паре разнесенных антенн). Однако в
последующем будет показано, что для однозначного отсчета пеленга в пределах
полного азимутального угла (2я) необходимо второе кодовое слово
(вторая пара антенн с базой, ортогональной первой паре) либо
достаточно одной вращаемой пары антенн.
Вводя кодовое расстояние между двумя кодовыми комбинациями в
пространстве сигналов (отображающих значения пеленга), например,
в соответствии с формулой (1.2) как сумму (по модулю) поэлементных
разностей фаз (проб) сигналов отдельных антенн, можно проводить
сравнительный анализ помехоустойчивости и точности радиопеленга-
ционных систем по величине кодового расстояния их сигналов [10].
В этом случае могут использоваться известные методы помехоустой-
з*
67
чивого кодирования и модуляций радиопеленгационных сигналов с
учетом изложенных выше особенностей их анализа [47, 56].
На основании общей классификации РНС все радиоугломерные
(радиопеленгационные) методы и системы можно подразделить на
фазовые, амплитудные и комбинированные. Имея в виду особенности
преобразования и измерения угловых координат с помощью
комбинированных методов радиопеленгации, последние разделяют на
амплитудно-фазовые (т. е. сочетающие свойства амплитудных и фазовых
методов), частотные (использующие эффект Доплера) и импульсные
(временные). Кроме того, с точки зрения особенностей применения и
комплектации угломерные радиосистемы образуют две группы: радио-
пеленгаторные и радиомаячные.
Радиопеленгаторная система состоит из источника радиоволн-пере-
датчика с ненаправленным или слабонаправленным излучением и
радиопеленгатора — приемного устройства, служащего для
определения направления на источник радиоизлучения с помощью пеленгаци-
онных антенн. Радиопеленгаторы могут устанавливаться на земле
(рис. 3.2, а)'для определения направления на бортовой
радиопередатчик или на подвижном объекте (рис. 3.2, б) для определения
направления на радиостанцию, установленную на земле в точке с известными
координатами. В последнем случае в качестве излучателей используют
передатчики специальных навигационных радиостанций, называемых
приводными радиостанциями.^Оба типа радиопеленгаторных систем
широко используются в гражданской авиации. Пеленгование ЛА с
помощью наземных радиопеленгаторов позволяет осуществлять
диспетчерский контроль за воздушным движением в районе аэропорта.
Пеленгование наземных радиостанций с помощью бортовых
радиопеленгаторов (радиокомпасов) обеспечивает управление полетом на
радиостанцию и от нее в любом заданном направлении, а также оценку
местонахождения ЛА.
<L)
Боргподой
радиопередатчик
Бортовой
А
-радиопеленгатор I
ю
1 Наземный
м радиопеленгатор
Наземная
радиостанция
Рис. 3.2. Радиопеленгаторная система:
- с наземным пеленгатором; б — с бортовым пеленгатором
68
Радиомаячная угломерная си-
стема состоит из наземного радио- НвадмТ^мнм
маяка и бортового приемоиндика- ч Рабочий, сектор ^ А ра аопРаемн^
тора (рис. 3.3). \ радиомаяка ф
W
$
Угломерный радиомаяк — это sx \ У$
передающее радионавигационное
устройство, задающее в
пространстве определенные линии положе- wJ^w радиомаяк
ния (обычно линии равных
пеленгов) С ПОМОЩЬЮ пеленгационных Рис. 3.3. Радиомаячная система
антенн. С использованием
бортового приемоиндикатора определяется линия положения, на которой
находится подвижный объект. Угломерные радиомаяки могут
создавать линии положения во всех направлениях (всенаправленные
радиомаяки) либо в определенном секторе (секторные радиомаяки).
Иногда радиомаяк служит для задания лишь одного (основного)
направления, и на выходе приемоиндикатора в этом случае
вырабатывается сигнал, указывающий величину отклонения от основного
направления.
Всенаправленные и секторные радиомаяки используются для
обеспечения воздушного движения в зонах аэропортов и на трассах;
однонаправленные радиомаяки нашли широкое применение в
радиотехнических системах посадки самолетов для указания траектории, по
которой должен двигаться самолет при заходе на посадку.
3.2. ФАЗОВЫЙ МЕТОД УГЛОМЕТРИИ
Рассмотрим радиопеленгование объекта фазовым методом в одной
плоскости при использоании двух идентичных ненаправленных антенн
А1 и А2 (рис. 3.4), разнесенных на расстояние d. Если принять за
начало отсчета фаз сигналов центр базы антенной системы, то э. д. с,
индуктируемые в антеннах электромагнитным полем излучателя,
описываются с учетом выражения (3.9) в следующем виде:
еА\ = Ет hx exp [/ (co01 + ndk~l sin в)]; 1 „щ
еА2 = Ет hx exp [/ (ю01— ndk~x sin 0)], J '
где Ет — амплитуда напряженности электромагнитного поля в центре
антенной системы;
hi — действующая высота каждой из ненаправленных антенн;
8 — пеленг излучателя относительно перпендикуляра к середине базы
антенны.
Разность фаз этих сигналов при неподвижных антеннах Дер =
= 2nd sin Q/X. При вращении одной из них вокруг неподвижной
второй с угловой скоростью Q разность фаз
Аф = 2nd/X cos (Q* — 9). (3.15)
69
/НащВле-/излучения/
Если подать сравниваемые Сигналы с ЁыХоДа приемника на фазо*
метр, чувствительным элементом которого является фазовый детектор,
то с учетом (3.14) напряжение на его выходе
i/фд = кфМ cos (2nd/l sin 0), (3.16)
где Um — амплитуда сигнала на входе детектора;
&фд — масштабный коэффициент преобразования сигналов фазовым
детектором.
Поскольку изменение амплитуды принимаемых сигналов
неизвестно, то для получения достоверной информации об угле прихода сигнала
его амплитуду ограничивают либо применяют эффективную АРУ.
Кроме того, cos Аф — функция четная, а поэтому знак напряжения на
выходе фазового детектора не зависит от стороны отклонения
антенной системы от направления на объект. Для ликвидации этого
недостатка в один из приемных каналов вводят фазосдвигающую цепь на 90°.
В связи с указанными
дополнительными преобразованиями
сигналов соотношение (3.16) примет
вид:
i/фд = U0sin (2nd/Xsin 0), (3.17)
где U0 — нормированная амплитуда.
В случае малых значений углов
0 зависимость (Л&д (0) имеет
приближенно линейный характер
£/фд« U02ndQ/X (3.18)
и при изменении стороны
отклонения меняет знак (полярность).
Зависимость относительного значения
напряжения рассогласования
ифд/и0 от угла 0 (угла
рассогласования относительно равносиг-
нального направления) носит
название пеленгационной
характеристики угломерной системы (рис.
3.5):
Fn (0) = £/фд/£/0 = 2nd№. (3.19)
Производная от Fn (0) при
0 -> 0 называется крутизной
пеленгационной характеристики, или
чувствительностью пеленгования:
Se-=|-^eEL|e.o = 2^-1 <3-20>
Чем больше крутизна
пеленгационной характеристики, тем
меньше угол нечувствительности ае
(среднеквадратичная погрешность)
А1\
Прм 1
d
*
Фазомегр
lis
од (6
7AZ
Прм 2 |
i
'
л/г |
>}
Рис. 3.4. К анализу фазового метода
углометрии
Рис. 3.5.
Пеленгационная
стика
характери-
70
fl)
итп
О ПШальныи 2ж &фг
отсчет
i i I i i
0 ^^JN^fin/Sit A(/>r
Ложные отсчеты
Рис. 3.6. Многошкальное пеленгование:
а — многобазовая антенная система; б —устранение многозначности отсчета пеленга
при заданном уровне шума аш (нормированного относительно сигнала
U0)f тем выше пеленгационная чувствительность системы.
Переходя от соотношения (3.18) к оценке взаимосвязи линейного
приращения сигнала и измеряемого пеленга и усредняя полученные
результаты, найдем среднеквадратичную погрешность пеленгования
(см. рис. 3.5):
<Ув = l/SeQ, (3.21)
где Q = UQ/Um — отношение сигнал/шум по напряжению на входе фазометра.
Полученное соотношение приближенное, так как справедливо при
условии, что фазовый детектор не ухудщает соотношения
сигнал-помеха в полосе выходного фильтра нижних частот, а коэффициент
передачи &фд одинаков как для сигнала, так и для помехи.
Таким образом из формул (3.18) — (3.21) можно сделать вывод,
что чувствительность и точность пеленгования растут с увеличением
отношения d/k.
Однако с ростом размера d базы, как было показано (формула 3.8),
возникает многозначность отсчета пеленга. Для ее ликвидации и
обеспечения высокой точности пеленгования используется многошкальный
метод построения систем, т. е. антенная система с несколькими
базами (рис. 3.6, а). При этом малая база dr образует грубую шкалу с
однозначным отсчетом угла, а большая база drt точную шкалу, но с
неоднозначным отсчетом (рис. 3.6, б). Если точность отсчета по второй шкале
недостаточна, добавляют еще одну антенну с еще большей базой dr2
и т. д. Очевидно, что подобная многошкальная система (в принципе не
отличающаяся от многошкального измерения дальности) дает
правильный отсчет лишь при условии, что удвоенная максимальная
погрешность измерения фазы по грубой шкале 26 фтах не превышает
интервала однозначности 2я точной шкалы.
Хотя рассмотренный многошкальный фазовый метод пеленгации и
обладает весьма высокой точностью, однако он не обеспечивает угловое
разрешение, так как несколько объектов, расположенных на
различных направлениях, создадут в антеннах результирующий сигнал,
соответствующий некоторому усредненному (ложному) направлению.
Для раздельного измерения пеленгов объектов следует использовать
антенны с достаточно узкими амплитудными характеристиками
направленности,
71
В фазовых пеленгационных системах, использующих импульсные
сигналы, их сравнение и обработка выполнимы за время приема
каждого импульса, ввиду чего подобные пеленгаторы (также и
амплитудные) получили название моноимпульсных. Особенностью
моноимпульсных (многоканальных) пеленгаторов, использующих параллельное
сравнение фаз (амплитуд) сигналов (полученных с помощью
независимых каналов), является высокая помехозащищенность и,
следовательно, перспективность использования для радиопеленгации.
3.3. ПРИНЦИПЫ ПОСТРОЕНИЯ ФАЗОВЫХ УГЛОМЕРНЫХ СИСТЕМ
Фазовые угломерные (радиопеленгационные) системы
подразделяют на две основные группы: системы с непосредственным измерением
разности фаз сигналов от неподвижных антенн (на несущей частоте
или частоте модуляции) и системы, основанные на эффекте Доплера,
т. е. использующие пространственно-временную модуляцию разности
фаз сигналов двух антенн, одна из которых вращается относительно
неподвижной другой. Можно подразделять фазовые угломерные
системы (как и другие типы угломерных РНС) по числу независимых
каналов преобразования и обработки сигналов (одноканальные, двух-
канальные, многоканальные — моноимпульсные), по степени
автоматизации измерений (автоматические, полуавтоматические), по способу
индикации и т. д. Рассмотрим несколько примеров, характеризующих
принципы построения фазовых угломерных систем.
Фазовые радиопеленгаторы с непосредственным измерением
разности фаз. Примером подобных систем может служить
радиоинтерферометр (рис. 3.7), антенная система которого работает в режиме
непрерывного излучения и состоит из четырех идентичных разнесенных
антенн, ориентированных в направлениях «север — юг» и «запад —
восток». Пеленгационные пары антенн «С — Ю» и «3 — В» подключены к
отдельным двухканальным приемникам, с выхода которых
сравниваемые по фазе сигналы подаются непосредственно на фазометры ФМ1
и ФМП радиопеленгатора.
Ы Рис. 3.7. Структурная
J| схема фазового радиопе-
§ ленгатора с
непосредствен венным измерением раз-
JNc ности фаз
Ъ
[ Прм„3~В"\
П
Согласно формулам (3.14) индуктируемые в каждой из антенн э. д. с:
ес = Emh1F (6, Р) ехр [/ (ю01+ <рс')]; I
*в -EmhxF (9, р) ехр [/ (со01 + Фв)]; (3 22
*ю = EmhF (6, Р) ехр [/ (©о /—фю)]; |
^э = -БщЛ1^(в,Р)ехр[/(ю0<—фа)], |
где77(0,р)—нормированная характеристика направленности антенн;
/*! — действующая высота одиночной антенны.
Поскольку измеряются разности фаз сигналов на выходе приемных
каналов «С — Ю» и «3 — В», то из выражения (3.22):
Фс-ю = Фс ~ Фю = 2Ж&-1 cos в cos P; ^
Фв-з^Фв—Ф3 = 2л;с(Я"-1 sin6sinp. ^' '
Решая систему уравнения (3.23), можно определить искомые
значения пеленга в горизонтальной 9 и вертикальной р плоскости:
0=arctg "^: р = arccos Ь£г У*--*-) • <3-24>
Для автоматического определения пеленгов 0 и р по формулам
(3.24) используется вычислительное устройство (ВУ), с выхода
которого угломерная информация поступает на индикатор (стрелочный
или цифровой).
В схеме рассмотренного радиопеленгатора несущие частоты в
параллельных каналах преобразуются с помощью общего гетеродина в
более низкую, достаточно стабильную частоту Q. Такое
преобразование не изменяет фазовых соотношений между сравниваемыми
сигналами, но обеспечивает большую точность измерений, так как
современные фазометры обеспечивают лучшее подавление шумов с помощью
узкополосных фильтров и более высокую стабильность при работе на
низких частотах.
Так как непосредственная фильтрация принимаемого сигнала
затруднена из-за непостоянства его частоты, вызванного эффектом
Доплера и другими факторами, применяются специальные способы и
устройства получения стабильной частоты Q и подавления шумов.
Один из таких способов и реализующая его схема представлены на
рис. 3.8, где показан один из измерительных каналов оценки фазовых
сдвигов любой из пеленгационных пар («С — Ю» или «3 — В») схемы
радиопеленгатора, изображенной на рис. 3. 7. Сигналы
промежуточной частоты (оп с выхода 1-го и 2-го приемных каналов поступают на
смесители См1 и См2 (см. рис. 3.8), к которым подводятся также два
напряжения гетеродина, частоты которых сог и ог + Q разнесены на
постоянную величину.
Пусть текущие значения фазы сигналов промежуточной частоты
составляют at + фх и о/ + Ф2> а фазы напряжений гетеродина
соответственно равны (urt + фг1 и (сог + Й) / + фг2. В этом случае фазы сиг-
73
налов на выходе первого Смесителя См1 и второго См2 станут равными
(ог — со) t + Фп — Ф1 и (юР*+ Q — со) t + фг2 — ф2.
Тогда на выходе смесителя биений сигналов получится колебание
частоты биений с текущей фазой фс = Qt + (фг2 — фг1) + (ф2 —<Pi).
В свою очередь, напряжения гетеродина подаются на смеситель
опорных биений, с выхода которого снимается напряжение той же
частоты Q с текущей фазой ф0 = Ш + (фг2 — фг1).
Таким образом, измеряемый выходным фазометром фазовый сдвиг
равен искомой разности фаз двух сигналов, в которой содержится
угломерная информация, т. е. Аф = фс — ф0 = ф2 — фх.
Поскольку смеситель биений сигналов содержит узкополосный
фильтр, настроенный на постоянную частоту Q, это обеспечивает
эффективное подавление шумов. Аналогичный фильтр ставится в
смесителе опорных биений, благодаря чему запаздывание процессов в
сигнальном и опорном каналах одинаково. Рассмотренный
радиопеленгатор называют фазометрическим.
Другой способ поддержания стабильности частоты Q состоит в
применении системы автоматической подстройки частоты (АПЧ)
гетеродина. В отличие от приведенной выше схемы при использовании АПЧ
обеспечивается максимальное подавление шумов при сильных и слабых
сигналах, однако снижается быстродействие измерений из-за затрат
времени на поиск и захват сигнала по частоте.
Достоинствами рассмотренных радиопеленгаторов является
возможность одновременного определения двух угловых координат объекта,
а также высокая точность и угловая чувствительность пеленгования.
Высокие точностные показатели достигаются за счет использования
антенных систем с большими базами и остронаправленными
характеристиками излучения (многоантенные интерферометры,
использующие когерентную обработку сигналов). Следует отметить, что
многоэлементные антенны с пространственно-временной обработкой сигнала
нашли широкое применение в радиоинтерферометрах (например,
многоэлементные антенны с ортогональными базами типа «крест Миллса»,
комбинированные антенны компаунд-интерферометра и
интерферометра Христиансена [23, 25]).
*|р)-п
Прм„ С-Ю"
7-й канал
cot+ y>f
k
Ъ
2-й канал
С м1
cut + y>2
См2
<*>Г*+9п
Гетеродин
wr + Q
(шг-(рН + УгГ?г
±
Смеситель
биений
каналоб
X
((0{ + Я-ш)Ь + у>Г2~¥2
Фазометр
Смеситель
опорных,
биений
Т
м
nt+(yr2-yn)
Рис. 3.8. Структурная схема фазометрического радиопеленгатора
74
а) д)
Рис. 3.9. К принципу 'радиопеленгования с использованием эффекта Доплера:
а — при круговом вращении антенны; б — при коммутации неподвижных антенн
Современные радиоинтерферометры, работающие обычно в УКВ
диапазоне, позволяют измерять угловые координаты с точностью до
угловых минут и получать разрешение до угловых секунд.
В 1963 г. в СССР был предложен метод радиоинтерферометрии со
сверхдлинными базами (глобальная интерферометрия [21,23]). В
отличие от рассмотренных интерферометров в данном случае антенны
непосредственно не связаны между собой и могут быть удалены на сколько
угодно большое расстояние. С помощью таких антенн ведется
синхронно независимый прием сигналов в различных точках земного шара
(и вне его) и запись их на магнитную ленту. Полученные подобным
методом результаты обрабатываются на ЭВМ с весьма тщательной
привязкой по времени.
В настоящее время крупные радиотелескопы СССР, Австралии,
Голландии, Англии, Канады, ФРГ и США объединены в глобальную
сеть радиоинтерферометров, т. е. своего рода глобальный
радиотелескоп. Его угловое разрешение достигает 0,0001 секунды, т. е. в 10 000
раз больше, чем у лучших оптических телескопов. Таким образом,
метод сверхдальней интерферометрии открыл перед радиоастрономией
широкие возможности для исследований радиоисточников,
находящихся в безграничных глубинах Вселенной.
Фазовые радиопеленгаторы с использованием эффекта Доплера.
Принцип работы радиопеленгаторов этого типа основывается на
использовании фазовой модуляции сигналов, принимаемых
вращающейся антенной; при этом фаза огибающей модуляции сигналов зависит
от направления на излучатель. В простейшем случае приемная
антенна подобного радиопеленгатора представляет собой ненаправленный
в горизонтальной плоскости вибратор Alf который движется с угловой
скоростью Q по окружности радиуса г (рис. 3.9, а). Так как антенна
при этом то приближается к источнику излучения, то удаляется от
него, возникает эффект Доплера, вызывающий пространственно-фазовую
модуляцию принимаемого сигнала.
75
Если в точке О размещена неподвижная ненаправленная антенна
А2, то наводимая в ней электродвижущая сила ел2 = Ета sin co01.
Фаза сигнала в подвижной антенне будет отличаться от <р± = со0 / на
величину
Аф-2я5Д, (3.25)
где S — разность хода радиоволны до местоположения антенн At и А2.
Из рисунка имеем S = г cos (Ш — 8), где Ш —текущее значение
пеленга подвижной антенны; 0 — пеленг объекта.
Следовательно,
Аф = 2nr/K cos (Ш — 6). (3.26)
Тогда во вращающейся антенне с учетом формул (3.14) мгновенное
значение э. д. с.
еА\ = Ет sin [со0 t + тф cos (Ш — 9)1, (3.27)
где т — 2я/7Я — индекс фазовой (угловой) модуляции сигнала.
Из этого выражения следует, что э. д. с. в антенне At промодули-
рована по фазе с частотой вращения антенны Q; причем информация
о пеленге заключается в фазе модулирующего колебания, которое
может быть выделено после сравнения сигналов подвижной и
центральной антенн.
Упрощенная структурная схема радиопеленгатора, реализующая
описанный принцип пеленгования, приведена на рис. 3.10. Сигнал от
антенны Л4, вращаемой электродвигателем Дв, через коллектор
поступает в приемник Прм1 и после преобразования подается на вход
фазового детектора ФД. На второй вход ФД подается сигнал от приемника
Прм2 центральной антенны Л2. На выходе фазового детектора
выделяется низкочастотная огибающая фазовой модуляции Q, фаза
которой зависит от направления на пеленгуемую радиостанцию
(информационный сигнал Q^). Этот сигнал с выхода ФД подается на фазометр
ФМ, где сравнивается по фазе с опорным напряжением той же частоты
Qon, вырабатываемым генератором опорного напряжения ГОН, ротор
которого вращается синхронно с подвижной антенной с помощью
электродвигателя. Отсчет фазометра дает непосредственно значение пеленга
радиостанции относительно
северного направления
меридиана , проведенного
через точку О. При
расположении пеленгуемого
объекта точно в северном
направлении от пеленгатора
фазы низкочастотных
сигналов опорного £/оп и
информационного U„
совпадают.
Фазовые
радиопеленгаторы доплеровского типа
обладают повышенной уг-
Рис. 3.10. Структурная схема фазового
радиопеленгатора с использованием
эффекта Доплера
76
ловой чувствительностью и помехоустойчивостью по отношению к
мешающим отражениям от местных предметов. Действительно, при
увеличении индекса фазовой модуляции тф за счет увеличения
относительного размера базы г/Я согласно формуле (3.26) будет создаваться
больший угол сдвига фаз Дер при тех же значениях измеряемого
пеленга. Кроме того, при этом происходит расширение спектра радиосигнала,
что согласно формуле (2.66) обеспечивает повышение
помехоустойчивости пеленгования.
Однако при больших размерах радиуса г механическое вращение
антенны At с угловой скоростью Q становится затруднительным.
Поэтому вместо вращаемой антенны можно использовать систему
неподвижных антенн, расположенных по окружности того же радиуса г
и подключаемых поочередно ко входу приемника с помощью
механического или электронного коммутатора (см. рис. 3.9, б). Важно
оговорить при этом условия допустимости такой замены с точки зрения
обеспечения необходимой точности пеленгования, т. е. определить
максимально допустимое расстояние между соседними
ненаправленными антеннами. Для решения этой задачи проанализируем
соотношение (3.27).
В соответствии с положениями теории модуляции сигналов
известно, что спектр модулированного по фазе или частоте сигнала
(подобного описанному выражением 3.27) состоит из бесконечного ряда
боковых частот, которые отличаются по частоте от несущей на величину
± k Q (к — номер гармоники). При этом существенные для
воспроизведения боковые частоты лежат в пределах от Q до тфй.
Использование коммутируемых антенн позволяет заменить непрерывную
модуляционную функцию рядом ее дискретных значений в определенных
точках пространства, соответствующих расположению неподвижных
антенн. Согласно теореме Котельникова воспроизведение функции с
ограниченным спектром рядом ее дискретных значений возможно, если
интервал временной дискретизации удовлетворяет условию
Д*<1/2/те, (3.28)
где fm — максимальная (верхняя граничная) частота спектра функции.
Поскольку в нашем случае fm = тфШ2я, то величину углового
разнесения соседних антенн с учетом выражения (3.28) найдем как
^о^ QM <; Q/2 fm = Я/2 г, а соответствующее ему линейное
расстояние между антеннами
d ~ г v0 < Я/2. (3.29)
Таким образом расстояние между соседними антеннами,
расположенными по окружности, должно быть не больше половины длины
несущих колебаний.
Следует иметь в виду также, что увеличение отношения г/Я и
увеличение измеряемого фазового сдвига сигнала ф допустимо лишь в
ограниченных пределах из-за нелинейности характеристики фазового
детектора, на выходе которого при больших значениях г (Я) появляются
77
высшие гармоники. При аппроксимации характеристики фазового
детектора синусоидой его выходное напряжение
£/фдвых=£/о sin [тф cos (Qt— 0)]. (3.30)
Представляя уравнение (3.30) в виде ряда, содержащего функции
Бесселя первого рода различных порядков, можно получить
оо
1/фдвых = 2£/0 2 J2k+i(m9)sinx
х [(2A+i) (f-Q/ + e)] = 2(/0/lW x
X cos (Qt—в) —2UQ J3 (щ) cos (3Q/—
— 3e)+2[/0/5(/i^)cos(5Qf—50)—... (3.31)
Как видно из уравнения (3.31), амплитуды основной спектральной
составляющей частоты Q и высших гармоник 3Q, 5 Q и т. д. зависят
от индекса модуляции. Объясняется это тем/ что при измерениях на
частоте nQ, как следует из уравнения, фаза выходного напряжения
уже не однозначно соответствует измеряемому пеленгу, а будет
больше его в п раз (где п — номер гармоники). Измерение сдвига фаз по
гармоникам усложняет пеленгатор, потому что при этом необходимо
иметь и опорные напряжения для всех гармоник. Усложняется также
и работа с пеленгатором вследствие появляющейся при таком методе
измерения многозначности в отсчете пеленга.
Для устранения многозначности отсчета пеленга при увеличении
размера базы антенны (2 г) в радиопеленгаторах доплеровского типа
применяется так называемый дифференциально-фазовый способ
пеленгования. В этом случае разность фаз измеряется не между э. д. с. в
неподвижном (центральном) и вращающемся вибраторах, а между
э. д. с, наведенных в двух синхронно вращающихся вибраторах
(рис. 3.11, а), либо между двумя соседними коммутируемыми
вибраторами (рис. 3.11, б). В антеннах Ai и Л2. расположенных под углами
fy и 02 C&i — $2 = ®о)> разность фаз сигналов
<ф =^sin(^2-0)-2-^sin(01-e) =
^ifL'cos fMii_e)sin^=±x. (з.32)
Так как линейное расстояние между соседними антеннами
d = 2rsin^ = 2rsin^=±\
2 2
то соотношение (3.32) запишем в виде
t=^cos(*±*-e). (з.зз)
Как видно из формулы (3.33), разность фаз сигналов в антеннах
At и Л 2 изменяется от нуля до максимального значения, равного
i|) = 2 nd /Я. Поскольку функция (3.33) периодическая, то для обеспе*
78
юл
Рис. 3.11. Антенна дифференциально-фазового радиопеленгатора:
а — вращаемая; б — коммутируемая
чения однозначности пеленгования эта разность фаз не должна
превышать значения п и, следовательно, линейное расстояние между
антеннами d <; V2. Практически расстояние между вибраторами
значительно меньше радиуса вращения антенн г и индекс фазовой модуляции
в этом случае оказывается меньшим, чем у радиопеленгаторов с одной
вращающейся антенной. Поэтому оказывается возможным однозначно
отсчитать пеленг по первой гармонике частоты, применяя в то же время
широкобазисные антенны. Структурная схема радиопеленгатора,
работающего по указанному принципу, подобна схеме рис. 3.10.
Дифференциально-фазовый радиопеленгатор может быть построен
с использованием лишь одной вращаемой (коммутируемой) антенной
с измерением разности фаз в два последовательных момента времени.
При этом вместо сигнала антенны А2 (см. рис. 3.11) используется
сигнал антенны Аи задержанный линией задержки ЛЗ на время т = v0/Q,
что эквивалентно пространственному сдвигу вибратора на угловое
расстояние О0- Структурная схема подобного радиопеленгатора
изображена на рис. 3.12. Для исключения влияния изменения фазы
сигнала за время задержки т на точность пеленгования, кроме
коммутируемой через устройство коммутации УСК подвижной антенны Аи
используется неподвижная центральная антенна Л2. Любые колебания
фазы принимаемого сигнала вызовут одинаковые изменения фаз э.д.с.
в центральной и коммутируемой антеннах, поэтому разность фаз
сравниваемых сигналов при постоянном значении измеряемого
пеленга будет постоянной.
Осуществляя преобразование несущей частоты с помощью общего
гетеродина Гет1 (что обеспечивает сохранение фазовых соотношений
79
сравниваемых сигналов), полученную промежуточную частоту /цр
вновь преобразовывают с помощью второго гетеродина Гет2 и
смесителя См1. В результате на выходе фильтра Ф выделяется сигнал
частоты /пр — /г, а после смесителя См2 — сигнал частоты /г фаза
которого модулирована согласно выражению (3.26); соответствующая
величина индекса фазовой модуляции /пф = 2 яг/Я. Этот сигнал
подается на фазовый детектор непосредственно и через элемент задержки ЛЗ с
т = Vq/Q, что приводит к уменьшению индекса фазовой модуляции до
величины /Пф = 2 я d/X. На фазометре ФМ сравниваются фазы
опорного напряжения частоты Fou, подаваемого от генератора опорного
напряжения ГОН, и выходного напряжения F„ той же частоты,
несущие информацию о пеленге на радиостанцию.
Таким образом, рассмотренные широкобазисные фазовые
радиопеленгаторы с использованием эффекта Доплера являются весьма
перспективными в диапазонах коротких и ультракоротких радиоволн,
так как обладают повышенной угловой чувствительностью,
помехоустойчивостью и точностью при обеспечении однозначности
определения пеленга.
Доплеровская радиомаячная угломерная система. Применение до-
плеровского принципа пеленгования возможно и в радиомаячных
угломерных системах. Поскольку в силу принципа взаимности с точки
зрения создания и выделения информации о направлении на объект между
радиомаяками и радиопеленгаторами нет различия (как нет
принципиального различия между их антеннами), проведенный анализ до-
плеровских пеленгаторов может быть адекватно отнесен и к доплеров-
ским радиомаякам [48]. Поэтому сигнал, создаваемый в каждой точке
пространства за счет вращения излучателя Л4 (рис. 3.13, а)
относительно неподвижного излучателя Л2, описывается соотношением
ем = Emi sin [d)0t + m<pCos (Qt — 9)1, (3.34)
где со0 — несущая частота излучаемых сигналов, т. е. вследствие до-
плеровского изменения частоты (фазы) сигнала огибающая модуляции
t\ . .
л'Т>;-а: Н "р"'
k—•! ^АчУТ5-"? 1 remt
\У It \\ I
^^"*- -LrV^"' \—^J ПпкЛ О
""H-^ -^1 HUM L
1
1
1 UP 11 \^ „„,.,,._ ГПИ
I yui\ ^ 1 ' uu
•fnpi I
I ЬМ с
fnp~ ii T
1 ф
f
/npZ,| flit/
i
1 f
For
2 ^ rfjn 1
> ФД
i
1—H m 1 1
2 1 1
-J / Uffi с 1
f 1 \f~
Рис. ЗЛ2. Структурная схема дифференциально-фазового радиопеленгатора
80
й) кс 5) f|
Рис. 3.13. Принцип формирования радиопеленгационного сигнала в доплеровском
фазовом радиомаяке:
а — антенна с вращаемым вибратором; б — временные диаграммы, характеризующие
изменение пеленга; в — коммутируемая антенна, излучающая две боковые частоты модуляции
содержит информацию об угловом положении объекта относительно
радиомаяка. Для выделения этой информации служит сигнал опорной
фазы, излучаемый центральной антенной Л2. При этом девиация
частоты сигнала
Дсо = J± = _ ** Q Sin (Ш— 0). (3.35)
Изменение частоты, вызываемое вращением антенны Л4, и сигналы
переменной (Ua\) и опорной (/Удг) фаз для точки приема с пеленгом
0 = 90° показаны на рис. 3.13, б (цифры на графике соответствуют
положению антенны At).
Для создания в доплеровских радиомаяках частотного спектра
сигналов, соответствующего спектру стандартных угломерных
радиомаяков VOR* (принцип работы которых рассмотрен ниже), антенны
At и А2 излучают колебания более сложного вида. Центральная
антенна излучает амплитудно-модулированное колебание, используемое
для формирования сигнала опорной фазы
£А2 = Ет2 (1 + т sin Q*) sin co0*, (3.36)
где т — коэффициент амплитудной модуляции несущей сигналом частоты Q.
На ряд коммутируемых вибраторов, имитирующих движение
антенны At (рис. 3.13, в), подаются сигналы амплитудной модуляции
несущей вспомогательной поднесущей частотой Qn, т. е. со0 + &п (в
стандартном VOR поднесущая частота /п = 9960 Гц).
В свою очередь, поднесущая частота промодулирована по частоте
в результате перемещения (коммутации) антенны Л2. Таким образом
подвижной антенной создается комбинированный AM — ЧМ сигнал,
*VOR — «Very high freguency omnidirectional range beacon» (англ.) —
высокочастотный всенаправленный радиомаяк.
81
который, будучи принят на расстоянии от радиомаяка Д > 2 г, имеет
частоту
со = (со0 + Qn) \l + -^ sin (Qt—6)1 (3,37)
(в стандартном VOR частота F = Q/2n = 30 Гц).
В результате суммирования полей центральной и коммутируемой
антенн в точке приема ТП создается двухполосный по отношению к
со0 сигнал. Для создания двухполосного сигнала противоположные
вибраторы коммутируемой антенны (например, Аз и А[\) питают
токами разных частот /0 ± Fn, что создает имитацию вращения двух
вибраторов, расположенных на противоположных концах диаметра
круга (рис. 3.13, в). При этом обеспечивается требуемое условие
частотной модуляции несущей частоты, а именно: когда частота в верхней
боковой полосе возрастает из-за приближения вибратора к объекту,
то частота в нижней боковой полосе уменьшается ввиду удаления
этого вибратора от объекта.
Для обработки сигналов рассмотренного доплеровского
угломерного радиомаяка (называемого DVO^-доплеровским VOR) применим
бортовой приемоиндикатор стандартной VOR (см. рис. 3.32). Только
в данном случае каналы опорной и переменной фазы меняются ролями,
поскольку информация о пеленге заключена в изменении фазы ЧМ
колебания. В аппаратуре VOR частотная модуляция используется для
передачи сигнала опорной фазы, а сигнал переменной фазы
передается путем амплитудной модуляции.
Размеры круга (2 г) в радиомаяках DVOR принимаются
значительно большими длины волны с целью уменьшения погрешностей
пеленгования, вызываемых отражениями от местных предметов и неровностей
рельефа местности. Поскольку при увеличении базы антенны
увеличивается девиация частоты сигнала (что и обеспечивает высокую
помехоустойчивость системы), можно определить размер радиуса круга
коммутируемых вибраторов по заданной величине девиации частоты. Из
формулы (3.35) найдем абсолютное значение девиации частоты
Асотах = 2 я/Ш = 2 nrQf0/c. (3.38)
Разделив обе части выражения (3.38) на 2зх, определим радиус
антенны
г = cAfmJ2 nFf0 (3.39)
Большие размеры антенной системы радиомаяков DVOR приводят
к уменьшению влияния отражений от местных предметов на точность
пеленгования примерно в 10 раз по сравнению со стандартными
маяками VOR [62]. Для практически полного исключения этого влияния
разработаны прецизионные доплеровские радиомаяки PDVOR, в которых
информация о пеленге передается так же, как и в DVOR. Сигнал для
опорной фазы в отличие or DVOR в прецизионном доплеровском
радиомаяке передается поднесущей частотой /п = 6500 Гц, модулируемой
по частоте колебанием опорной фазы с частотой коммутации антенн
(как и в стандартной VOR — с частотой вращения диаграммы
направленности антенны).
82
3.4. АМПЛИТУДНЫЙ МЕТОД УГЛОМЕТРИИ
При амплитудном методе углометрии напряжения отдельных
антенн разнесенной антенной системы комбинируются таким образом
(до подачи на вход приемника), чтобы амплитуда несущей частоты
либо глубина амплитудной модуляции результирующего напряжения
являлась функцией пеленга. При этом измеряют фазовые
соотношения между сигналами, принимаемыми разнесенными антеннами,
преобразуя фазовые сдвиги сигналов антенн в амплитудную зависимость
от угла прихода радиоволны. Фазовые сдвиги при использовании
фазового метода пеленгации, как уже было показано, сохраняются
неизменными до подачи на выходное измерительное устройство
(фазометр).
Углы в амплитудных системах пеленгации находят путем
измерения с помощью приемоиндикатора амплитуды или параметров
амплитудной модуляции сигналов антенных устройств. При этом различают
три варианта амплитудного метода углометрии: по минимуму, по
максимуму амплитуды принимаемых (излучаемых) сигналов, а также
путем сравнения амплитуд сигналов, принимаемых (излучаемых)
различными антеннами с пересекающимися диаграммами направленности.
Метод минимума. Рассмотрим амплитудную пеленгацию по
минимуму принимаемых (излучаемых) сигналов на примере разнесенной
антенной системы (рис. 3.14, а, б), состоящей из двух ненаправленных
вертикальных вибраторов Ai и Л2, включенных противофазно. Если
антенная система располагается в электрическом поле излучателя с
нормально поляризованной волной, то э.д.с, наводимые в каждом из
вибраторов, также описываются соотношением (3.14). Разностный сигнал на
выходе антенны (см. векторную диаграмму рис. 3.14, в)
Ёт = Ё1—Ё2 = 2Emh1 sin -J- exp [/©*], (3.40)
где Em — амплитуда напряженности поля в центре антенной системы.
Из выражения (3.40) видно, что величина фазы разностной э. д. с.
не зависит от пеленга 0, а ее амплитуда
Emr = 2Emhi sin (тийг1 sin 0) (3.41)
является периодической функцией пеленга.
Часто отсчет пеленга выполняют относительно плоскости антенны—
ее базы и тогда формула (3.41) примет вид:
Emr = 2 Emhi sin (яДг1 cos 0). (3.42)
При малом разносе антенн по сравнению с длиной волны (d/X < 1)
Emr=Em Ад cos 0, (3.43)
где hjl = 2ndh1lX — действующая высота антенной системы, состоящей из двух
вибраторов.
Выражения (3.41) — (3.43) определяют характер диаграммы
направленности антенной системы в горизонтальной плоскости, т. е.
зависимость амплитуды разностного сигнала от пеленга 0. Анализируя,
в частности, соотношение (3,43), можно сделать следующие выводы:
83
диаграмма направленности антенной системы из двух разнесенных
вертикальных вибраторов (включенных противофазно) при приеме
нормально поляризованной волны имеет вид косинусоиды, которая в
полярных координатах изображается в виде «восьмерки»,
ориентированной в горизонтальной плоскости (рис. 3.14, г). В направлениях
0 = 90° и 9 == 270° приема (или излучения) нет; максимумы
диаграммы направленности (ДНА) находятся в направлениях 0° и 180°;
фаза э. д. с, наводимой в антенной системе пеленгуемой
радиостанцией, изменяется на 180° при переходе через минимальное значение
теоретически равное нулю).
Указанные свойства ДНА рассмотренной системы используются
для определения пеленга на излучатель по минимуму амплитуды
разностного сигнала, фиксируемого при повороте антенной системы. Для
определения стороны отклонения излучателя от направления нулевого
приема (т. е. ликвидации двузначности оценки радиопеленга)
используется противофазность измеряемых сигналов при переходе их
амплитуды через минимальное значение.
По мере увеличения относительного размера базы антенной
системы ее ДНА постепенно теряет форму «восьмерки» (рис. 3.14, г), а при
значениях dl% = 1 становится многолепестковой, что приводит к
многозначности отсчета пеленга, хотя при этом и повышается крутизна
a) V/\
8)
Л
прм
(прд)
гр.
эо°
У #
М
Ai«
I)
^Л!л
180°\ | Г^/Г\ I
f-O-
270°\ Л
Рис. 3.14. Пеленгование по
минимуму разностного сигнала:
а — схема включения разнесенных
вибраторов; б — схема отсчета пеленга;
в — векторная диаграмма сигналов;
г — диаграмма направленности в
горизонтальной плоскости при
различных значениях dlh
84
Рис. 3.15. Пеленгование с
использованием рамочной антенны:
а — прямоугольная рамка; б —диаграмма
направленности в горизонтальной плоскости
ДНА в направлении минимума
приема. Из рассмотрения формы
косинусоидальной ДНА
очевидно, что пеленгование по
максимуму амплитуды разностного
сигнала является значительно
менее точным (чем по
минимуму), так как крутизна
характеристики направленного
излучения в районе ее максимума мала.
Как будет показано ниже, при
больших размерах антенны
можно получить остронаправленные
многолепестковые диаграммы,
но при этом пеленгование по
максимуму разностного сигнала
дает многозначный пеленг. Поэтому метод пеленгации по минимуму
амплитуды сигналов предполагает обычно использование минимума
разностного сигнала.
Следует заметить, что ДНА широко используемых в амплитудных
радиопеленгаторах рамочных антенн (рис. 3.15) описывается
выражением, аналогичным (3.43), в котором действующая высота антенны
Ад = 2 яЯр, [хс N/X,
где 5Р — площадь витка рамочной антенны (для прямоугольной рамки рис. 3.15
«Sp = dl)\ N — число витков рамки;
цс — эффективная магнитная проницаемость определяется формой
сердечника, на который наматываются витки рамки, и магнитными
свойствами материала.
Анализ особенностей метода минимума может быть использован и
для описания процесса пеленгации с применением более сложных
типов антенн. В частности, соотношение (3.40) справедливо и для
случая, когда определяется разностный сигнал двух разнесенных антенн,
каждая из которых обладает направленностью.
Оценим точность и угловую чувствительность радиопеленгования
по методу минимума, используя в общем случае антенную систему с
нормированной функцией направленности F (0), обладающей острым
минимумом. Согласно выражениям (3.41) — (3.43) амплитуду сигнала
на выходе приемника радиопеленгатора (на входе индикаторного
устройства) представим так
Uc (0) = Um F (0). (3.44)
Тогда вызванное отклонением направления приема относительно
минимума ДНА (положение которого соответствует углу 0О, рис. 3.16)
при отсутствии помех и флюктуации сигнала, изменение сигнала на
выходе радиопеленгатора
А1/с= UcmaxF (0о + А9), (3.45)
где Uc max—напряжение сигнала в направлении максимума ДНА.
85
Рис. 3.16. К оценке
точности метода минимума.
Диаграмма направленности
антенны
Используя маклореновское разложение
функции F (90 + АЭ) в ряд по степеням
Д9, получим
F (80 + ДО) = F (90) + Г (0О) АЭ +
+ 1г'(е0)А92 + ... (3.46)
Если положить, что угол А9 достаточно
мал, т. е. большая величина погрешности
пеленгования маловероятна, и поскольку в
направлении 90 функция F(90) = 0, то
F (92 ■+• А9) « F ' (90) А9. Тогда с учетом
формулы (3.45) абсолютное значение
изменения сигнала
Af/c-f/cmaxF^o)^- (3.47)
В реальной системе пеленгации изменение сигнала А[/с носит
случайный характер вследствие воздействия помех и флюктуации сигнала
в процессе его переработки. Поэтому возводя в квадрат и усредняя
выражение (3.47), получим
Ш = [£/с max F' (в0)]2 02в = 02ш, (3.48)
откуда среднеквадратичная погрешность оценки пеленга
ere = VF' (90) Q, (3.49)
где аш — среднеквадратичное значение флюктуации сигнала на входе
индикатора (выходе детектора); Q= UcmSLX/om.
Если радиопеленгование производится не по минимуму амплитуды
сигнала, а по минимуму коэффициента его амплитудной модуляции
т (9), то вместо выражения (3.44) можно записать
т (9) = Мп F (в0), (3.50)
где Мп — максимальное значение глубины амплитудной модуляции (в направ
лении максимума ДНА).
Тогда выражения (3.48) и (3.49) с учетом (3.50) примут вид:
(Д^)2 = [MnFf (60)]2 о2е = о2т; (3.51)
ae^oill/Ff(e0)Mnt (3.52)
где ат — среднеквадратичное значение погрешности оценки глубины
модуляции сигнала.
Следовательно, как видно из формул (3.48) и (3.52), для повышения
точности и угловой чувствительности пеленгации с использованием
метода минимума необходимо повышать крутизну ДНА в
направлении минимума приема (излучения) сигналов. Крутизна ДНА зависит
от относительного размера базы антенны d/%, увеличение которого
ограничивается появлением неоднозначности отсчета пеленга из-за
многолепесткового характера ДНА. В частности, применительно к
рассмотренному выше примеру пеленгации с использованием ДНА
86
типа косинусоиды формула (3.49) с учетом выражения (3.43) дает еле*
дующий результат:
сг8 — Ш ndh! Q sin 9, (3.53)
который подтверждает необходимость увеличения базы антенной
системы для повышения точности пеленгации.
Таким образом, оценивая метод радиопеленгации по минимуму
излучаемых (принимаемых) сигналов с точки зрения его достоинств,
можно указать его высокую точность и угловую чувствительность при
относительно небольших размерах базы (по сравнению с методом
максимума) радиопеленгационных антенн, а также возможность
определения стороны отклонения пеленга от минимума ДНА для некоторых
типов антенн (за счет противофазности сигналов при переходе через
минимум приема), что очень важно для осуществления автоматизации
процесса радиопеленгования. Недостатком метода является отсутствие
сигнала на входе приемника угломерной системы в момент отсчета
пеленга, что снижает достоверность измерений и исключает возможность
передачи по радиоканалу системы дополнительной информации.
Поэтому, кроме пеленгационной направленной антенны подобные
угломерные системы всегда используют дополнительную ненаправленную
антенну, доставляющую сигнал постоянной интенсивности.
Метод максимума. Реализуя метод, следует отыскивать
максимальное значение амплитуды результирующего сигнала на выходе
антенной системы. Поэтому, например, сигналы разнесенной пары
вертикальных вибраторов следует просуммировать, т. е. включить их син-
фазно (рис. 3. 17, а). При пеленговании нормально поляризованной
волны на выходе подобной антенной системы получим суммарный
сигнал, амплитуда которого с учетом формул (3.14) определяется так
(см. рис. 3.17, б):
Етъ = Ет {ехр[/ф/2] —ехр [—/<р/2]} = 2Ет cos (ndk-1 sin в), (3.54)
2nd . .
где ф = -«г- sin 0 — разность фаз между эде разнесенных антенн.
а) V
В)
Рис. 3.17. Пеленгование по максимуму суммарного сигнала:
■ схема включения антенны; б — векторная диаграмма сигналов; в — диаграмма
направленности в горизонтальной плоскости
87
Полученная зависимость амплитуды выходного сигнала антенны
от угла 0 изображена в полярных координатах на рис. 3.17, ву из
которого видно, что в принципе эта зависимость может быть использована
для пеленгации объектов по максимуму сигнала, соответствующего
значению 0 = 0°. При этом методика оценки пеленга заключается в
повороте ДНА и анализе огибающей принимаемого сигнала, в результате
чего фиксируются максимум его амплитуды и соответствующее ему
направление на объект (пеленгация методом анализа огибающей).
Однако угловая чувствительность и точность пеленгации при
использовании зависимости (3.54) будут низкими, так как при малых 0 эта
зависимость имеет квадратичный характер, а крутизна ДНА в районе
максимума мала и не зависит от соотношения d/X (хотя и здесь
многозначность отсчета сигнала при увеличении d/k будет наблюдаться).Поэтому
рассмотренная простейшая двухвибраторная система для пеленгации
по методу максимума не используется.
Указанные недостатки устраняются при использовании для
пеленгации более сложных многовибраторных антенн и антенн со
сплошным раскрывом, которые позволяют сформировать остронаправленную
ДНА за счет больших размеров базы и обеспечить при этом
однозначность пеленгования, высокую точность и разрешающую способность
измерения угловых координат.
В качестве примера радиопеленгации с использованием подобной
антенной системы рассмотрим синфазную многовибраторную
антенну (рис. 3.18), состоящую из п ненаправленных вибраторов,
разделенных интервалом d = Da/п (Da — размер базы антенны). Будем
полагать, что амплитуды сигналов Ет во всех вибраторах одинаковые, а
относительный сдвиг фазы равномерно нарастает в каждом вибраторе
по отношению к соседнему на величину ср = 2 я (d/X) sin 0. Если
отсчет фазы вести от середины антенны, то фаза сигнала по раскрыву
антенны будет изменяться от — (п — 1) ср/2 до + (п — 1) ср/2.
Амплитуда суммарного сигнала на выходе такой антенны будет найдена как
сумма п членов геометрической
прогрессии с начальным членом
at = е-^"-1^/2 и знаменателем
q = е/ф, т. е.
Я2»=£т(е-/<»-ПФ/2 +
_[_е —/ (п —2) ф/2 _|_ ^ ^ _|_
Объект
излучения
= Еп
4-е'<п-1>ч>/2) =
е/шр/2__ е— /шр/2
е/Ф/2_е-/ф/2 *
(3.55)
или, переходя к
тригонометрической форме записи,
Рис. 3.18. Принцип пеленгования с
использованием синфазной
многовибраторной антенны
-2m:
sin (fl(p/2)
sin (ф/2)
(3.56)
88
Как следует из формулы (3.56),
максимальное значение амплитуды
£2 max при малых значениях
Ф (ф ->• 0) равно пЕт. Поэтому
нормированная характеристика
направленности антенны из п
вибраторов
sin sin в
ШП
РХ(В)-
\ х
[п sin (ndk-l sin ©)]
(3.57)
Рис. 3.19. Диаграмма
направленности синфазной антенны со сплошным
,раскрывом
т. е. является остронаправленнои
и имеет один главный максимум.
Так как синфазную антенну со сплошным раскрывом D& и
равномерным распределением (по раскрыву) поля можно представить как
многовибраторную антенну при п -> со (т. е. интервал между
соседними вибраторами d = (Ьд/п) -> 0), то знаменатель соотношения
(3.57) можно записать в виде nDx sin Q/X. Тогда характеристика
направленности антенны со сплошным раскрывом
Fz (в) = sin (nDA X"l sin @)/(nDA Х~l sin 0)
(3.58)
имеет вид функции sin */* (рис. 3.19). Первое нулевое значение
характеристики направленности наступит согласно выражению (3.58) при
sin 0 = XIDp,- Так как относительный раскрыв сплошной антенны
достаточно велик (Da/A, > 1), то раствор характеристики
направленности по нулевому уровню 9 = 2 XIDa. Если отсчет угла производить
на уровне половинной мощности сигнала, то ширина диаграммы
направленности (в радианах)
9 = XIDA.
(3.59)
Таким образом, увеличив размеры базы антенн со сплошным
раскрывом и многовибраторных антенн, можно получить более
остронаправленные диаграммы (в направлении главного лепестка), и,
следовательно, высокие разрешающую способность по направлению и
точность измерений при обеспечении однозначности.
Оценим количественно погрешности пеленгации по методу
максимума, используя общую методику, аналогичную анализу метода
минимума. Пусть приращение выходного сигнала радиопеленгационной
системы (при отсутствии помех и флюктуации сигнала), вызванное
изменением направления приема на угол А9 относительно максимума
ДНА (соответствующего углу 90), определяется как
£\UC Uс тах
[1 - F (0О + АО)].
(3.60)
Разлагая функцию F (0), описывающую нормированную ДНА, в сте-
степенной ряд (3.46) и учитывая, что в данном случае F (0О) = 1, а
F' (0О) = 0, получим F (0О + А0) ъ 1 + F" (0„) А02/2.
89
Подстановка полученного результата в выражение (3.60) дает
формулу
Д«с = ~(/СтахГ(90)Де72. (3.61)
Для оценки среднеквадратичного отклонения при определении
максимума сигнала после возведения в квадрат и усреднения выражения
(3.61) найдем
Ы - [Uc max F" (60)/2]2 оЬ = о2ш, (3.62)
откуда среднеквадратичная погрешность пеленгования по методу
максимума
а0=У 2/F'(e)Qm , (3.63)
где Qm = £/Cmax/tftn — отношение сигнал/помеха, измеренное на входе
индикатора в максимуме ДНА;
<*ш — среднеквадратичное значение флюктуации сигнала на
входе индикатора угломерной системы.
Поскольку вторая производная от характеристики направленности
определяется относительным размером базы антенны, точность
пеленгования по методу максимума с использованием сложных
многовибраторных антенных решеток и антенн со сплошным раскрывом
достаточно высока.
Таким образом, основными достоинствами метода пеленгации по
максимуму амплитуды сигнала являются высокая помехоустойчивость
и точность измерений, что достигается, однако, в отличие от метода
минимума при больших значениях относительных размеров без антенных
устройств. Поэтому радиопеленгационные системы, использующие
указанный метод, обычно работают в УКВ диапазоне, в котором можно
создать весьма остронаправленную ДНА. Принципиальным
недостатком метода максимума является то, что изменения амплитуды сигнала
на выходе антенных устройств не зависят от стороны отклонения ДНА
от направления на пеленгуемую радиостанцию; это затрудняет
автоматизацию процессов измерения и индикации угловых координат.
Метод сравнения (равносигнальный метод). Пеленгация методом
сравнения амплитуд сигналов, принимаемых (излучаемых) отдельными
антеннами, основана на вычитании сигналов, соответствующих двум
диаграммам направленности, максимумы которых симметрично
смещены относительно равносигнального направления на угол 0О
(рис. 3.20). При смещении пеленгуемого объекта относительно равно-
сигнального направления амплиту-
РйВндттпътв да Разностного сигнала на выходе
шраблвщ приемника пеленгатора (после
узкополосной фильтрации)
^г(в)= 1/0т.х^(во + Ав)-
_ F (е0 _ Д0)]. (3.64)
Эта зависимость линейна при
малых углах А0, равна нулю на
Рис. 3.20. Пеленгование методом равносигнальном направлении и
сравнения амплитуд сигнала меняет свой знак при изменении
90
стороны отклонения (± Д6) пеленга от равносигнального
направления. Выбирая угол смещения диаграмм 0О из условий обеспечения
высокой крутизны диаграмм направленности в зоне их пересечения,
можно получить высокую точность пеленгования.
Хотя по разностному сигналу Ur (0) достаточно точно
фиксируется равносигнальное направление, однако определить величину
отклонения от этого направления еще нельзя, так как (/стах — неизвестная
величина. Поэтому в системах пеленгации, реализующих
рассматриваемый метод, используют обычно нормирование сигналов путем
образования отношения разностного сигнала Ur (0) к суммарному £/2 (0):
иг(в) _ /че0+Ае)-/че0-Ае)
"г(в) " ^(0о+дв)+,Р(0о-де) ~Гп[и)' {6-00)
которое может быть принято в качестве пеленгационной
характеристики Fn (0) при выполнении условий фазирования. Операция деления
разностного сигнала на суммарный выполняется в приемном
устройстве в результате изменения с помощью АРУ коэффициента усиления
(обратно пропорционально амплитуде суммарного сигнала).
Оценим точность пеленгования при использовании метода
сравнения, полагая, что вблизи равносигнального направления (т. е. при
А0 -> 0) Fa (0) -^ 1. Тогда дифференцируя выражение (3.65) и
переходя к конечным приращениям, получим AFn (0) = 2 р ^} А0,
откуда среднеквадратичное значение погрешностей пеленгования
aQ = f(e) oFn, (3.66)
2F' (в)
где Op — среднеквадратичная погрешность, возникающая из-за флюктуации
п пеленгационной характеристики.
Из соотношения (3.66) следует, что точность пеленгования
возрастает с увеличением крутизны пересекающихся ДНА в равносигналь-
ном направлении. Как было показано при анализе метода максимума,
остронаправленные антенны с большим относительным размером базы
обладают большой крутизной ДНА. Радиопеленгационные системы,
реализующие рассмотренный принцип, называют
суммарно-разностными или аддитивными.
Вместо вычитания амплитуд сигналов их можно сравнивать путем
образования отношения (деления) амплитуд сигналов. В этом случае
(см. рис. 3.20) пеленгационная характеристика
р (в) =,^21=, f(0o~Ae) = tg в. (3.67)
пК } Umi m+дв) б v '
Можно показать, что точность метода сравнения путем определения
отношения амплитуд сигналов также характеризуется выражением
типа (3.66). Радиопеленгационные системы, использующие отношение
сравниваемых сигналов, называют мультипликативными.
Радиопеленгационные системы, основанные на методе сравнения
амплитуд сигналов, могут быть одноканальными (последовательными)
или многоканальными (параллельными). В одноканальном пеленгато-
91
ре сигналы принимаются поочередно при дЁуХ различных положениях
(коммутации) диаграммы направленности, благодаря чему
используется один приемный канал. Поэтому достоинством одноканального
радиопеленгатора является простота аппаратуры. Недостатком
одноканального пеленгатора являются модуляционные погрешности,
вызываемые изменением интенсивности сигнала в различные полупериоды
его коммутации. Особенно существенны эти погрешности в импульсных
радиопеленгаторах.
В многоканальных радиопеленгаторах одновременно сравниваются
сигналы, получаемые на выходах независимых приемных каналов.
Поэтому любое изменение интенсивности принимаемого сигнала в
одинаковой степени проявляется во всех каналах. Благодаря высокой
помехоустойчивости многоканальные системы пеленгации весьма
перспективны, в особенности при построении моноимпульсных
радиопеленгаторов. В то же время создание прецизионных многоканальных
систем сравнения встречает определенные технические трудности из-за
сложности аппаратуры, высоких требований к идентичности каналов
и стабильности их характеристик. В непрерывных системах
многоканального типа возможны аппаратурные упрощения путем
амплитудной модуляции сигналов на выходах отдельных антенн близкими по
величине частотами. Это создает возможность использования общего
приемного канала для переработки сигналов, а сравнение выходной
угломерной информации осуществляется с использованием
низкочастотных огибающих модуляции.
Таким образом, на основе приведенных характеристик метода
сравнения очевидны его достоинства, позволяющие получить высокую
точность, помехоустойчивость и угловую чувствительность пеленгации
при обеспечении ее однозначности. Поэтому метод амплитудной
пеленгации, несмотря на то, что он более сложен, нашел широкое
использование в современных угломерных радиосистемах.
Систематические погрешности амплитудной радиопеленгации,
обусловленные свойствами антенн. Характеризуя точностные возможности
амплитудных методов и средств радиопеленгации, необходимо также
указать на систематические погрешности оценки направлений,
вызванные особенностями пеленгационных антенн и условий их применения.
К таким погрешностям относят погрешности, вызванные антенным
эффектом, разносом антенн и эффектами поляризации. Кроме того, на
точность радиопеленгования оказывают влияние местные отражения
сигналов (погрешности радиодевиации), которые для РНС различного
типа и с учетом свойств радиоволн рассмотрены в гл. 7.
1. Погрешности антенного эффекта,
вызываемые дополнительным ненаправленным приемом направленных антенн,
являются следствием геометрической и электрической несимметрии
направленной антенны. Причиной антенного эффекта (АЭ) может быть
также прием сигналов на соединительные провода при условии
несимметричности схемы подключения антенны ко входу приемника либо
непосредственное воздействие электромагнитного поля на вход
высокочастотной схемы приемника. При действии АЭ результирующая
диаграмма отличается от расчетной, так как на вход приемника подаются
92
два напряжения: Напряжение f/a,
зависящее от направления
приходящей волны, и напряжение АЭ
0аэ. В общем случае напряжение
Ua3 сдвинуто по фазе на
некоторый угол фаэ относительно
основного напряжения £/а. Поэтому
напряжение АЭ целесообразно
представить в виде двух составляющих:
фазной £/аЭф, совпадающей по фазе
с основным напряжением £/а и
нефазной £/анэф, сдвинутой
относительно £/а по фазе на 90° (рис.
3.21, а).
При наличии только фазной составляющей АЭ результирующее
напряжение равно сумме напряжений направленного приема UA
и не зависящего от угла поворота антенны напряжения фазного
антенного эффекта £/аэф. Полагая диаграмму направленности
используемой антенны в виде косинусоиды («восьмерки») — F (0) = cos 0, для
амплитуды результирующего напряжения можно записать
*>№$
Рис. 3.21. К оценке влияния
антенного эффекта на точность
пеленгования:
a — векторная диаграмма напряжений
Uа и £/аэ; б —диаграмма направленности
антенны с учетом антенного эффекта
Um= UmaCOS 6+ t/,
таэф»
(3.68)
Результирующая диаграмма направленности, полученная в
результате сложения радиусов-векторов £/та и £/таЭф> изображена на
рис. 3.21, б. По форме она также близка «восьмерке», так как
^таэ С ^та> но нулевые направления смещены по сравнению с
идеальным (случаем отсутствия АЭ) на некоторый угол Д0, т. е.
наблюдается излом оси минимумов. Нулевое направление найдем,
приравнивая уравнение (3.68) к нулю: (/ma cos 0 + £/таэф = 0.
В этом случае
0 = arCCOS (— [/тавф/t/ma) И А0 = 0°
= arcsin ((/таэф/[/та).
90° =
(3.69)
При малых значениях фазной составляющей АЭ можно считать,что
Вызываемая ею ПОГреШНОСТЬ А0 « £/таэф/^та-
Соотношение (3.69) позволяет рассчитать погрешность
пеленгования в присутствии фазной составляющей АЭ. При наличии только
нефазной составляющей АЭ диаграмма направленности принимает вид
«восьмерки» с расплывчатыми минимумами, которые сохраняют свое
исходное направление. Однако расплывание минимумов приводит к
Уменьшению крутизны диаграммы направленности, а следовательно,
к уменьшению точности пеленгования и уменьшению угловой
чувствительности.
Антенному эффекту подвержены не только разнесенные двухвиб-
Раторные и рамочные антенны, но и более сложные типы антенн* Для
Уменьшения влияния АЭ используют специальные схемы,
обеспечивающие симметричность включения направленной антенны на вход
93
приемника, а остаточное напряжение АЭ компенсируется
электрическим путем.
2. Погрешности разноса являются следствием
изменения формы и размеров диаграмм направленности антенн при
увеличении относительного размера их базы (d/X) путем разнесения
вибраторов. Эти погрешности в особенности характерны для амплитудных
радиопеленгаторов, использующих ортогональные пары разнесенных
вертикальных вибраторов (Я-образные антенны). Для повышения
угловой чувствительности радиопеленгации приходится увеличивать
разнос вибраторов, что, как уже было сказано ранее, приводит к
изменению формы ДНА (рис. 3,14, г). Идельная «восьмерка» (выражение
3.43) деформируется (выражение 3.42)),
Определим зависимость погрешностей разноса от направления на
пеленгуемую радиостанцию А9 = 0И —0 как разность между
измеренным 8И и действительным 0 углом на пеленгуемую радиостанцию.
Пеленг радиостанции найдем, определяя отношение амплитуд
сигналов Uml и Um2 (используя метод сравнения), наведенных в антеннах
с ортогональными базами. С учетом формул (3 23), (3.41) и (3.67)
получим
. / nd п . А
sin 1—7— cos р sin 61
f nd \
i —— cos p cos 0 I
// Sln
tg 9U - Sim -= L±. L . (3.70)
Представим А0 в следующем виде (используя известные
тригонометрические соотношения): tg A0 = (tg 0И — tg 0)/l + tg 0и tg 0.
Подставив в это выражение значение tg 0И из формулы (3.70)
после преобразований имеем
to Ав — cos вsin (я-^""1 cos ftsin ®)—sin ®sin (ndk"1 cos p cos в)
cos0 sin(ndh~~l cosp cos 0)-{-sin0sin (ndk^1 cos Р sin 0)
(3.71)
Формулу (3.71) можно привести к более простому виду,
воспользовавшись соотношениями теории бесселевых функций:
tg A0 = — (rcft,-l cos P)2 sin 46. (3.72)
Из формулы (3.72) следует, что погрешности разноса зависят от
значений 0, |5 и dlh. Пример расчета зависимости погрешности А0 от
пеленга 0 (в горизонтальной плоскости) при различных соотношениях
d/X и (J = const иллюстируется на рис. 3.22. Из рисунка и формулы
(3.72) видно, что значение погрешности разноса обращается в нуль
через каждые 45° значений пеленга в пределах полного азимутального
угла 360°, а максимального значения погрешности достигают в
направлениях с интервалом ±22,5°. Таким образом, погрешность имеет ок-
тантальный (восьмикратный) характер. В связи с тем, что внесение
поправок на разнос антенны на практике затруднительно, размеры
базы антенн ограничивают некоторой допустимой величиной, при
которой погрешность разноса не превышает установленного значения.
94
■Плоскость
фронта Волны
Рис. 3:22. Зависимость погрешности
разноса от пеленга радиостанции
Рис. 3.23. К определению
поляризационных погрешностей
радиопеленгования при использовании рамочной
антенны
3. Поляризационные погрешности. При
использовании амплитудных радиопеленгационных систем приходится
определять также направления распространения радиоволн, имеющих
аномальную поляризацию (а не только нормальную) и наклон фронта
волны. Пространственные волны, отраженные от ионосферы, а также
волны, распространяющиеся между движущимся на значительной
высоте объектом и земной поверхностью, в общем случае оказываются
эллиптически поляризованными.
Изменение угла поляризации принимаемого радиосигнала может
вызвать погрешности в определении направления на источник
излучения. Эти погрешности, называемые поляризационными, могут быть
существенными при использовании амплитудных методов и средств
пеленгации. Наибольшее влияние поляризационные эффекты
оказывают на точность радиопеленгаторов с рамочными антеннами,
которые способны принимать горизонтальную составляющую
электромагнитного поля.
Пусть пространственная радиоволна приходит в точку О (рис. 3.23),
совпадающую с центром рамочной антенны и являющуюся началом
прямоугольной системы координат X, У, Z. Будем полагать, что
фронт волны наклонен относительно вертикали на угол |3, а большая
ось эллипса поляризации наклонена к плоскости распространения на
угол а. Эллиптически поляризованное поле можно представить (в
точке О) в виде двух ортогональных полей с мгновенными значениями
напряженностей:
ех = Ет1 sin со/; е2 = Еш2 cos со/, (3.73)
где Ет1Ет2— амплитуды, соответственно равные большой и малой полуосям
эллипса поляризации электромагнитного поля.
Рассмотрим вначале действие на рамочную антенну поля ег. Для
этого разложим векторы поля ег на его составляющие по
координатным осям ЕхЪ ЕуЪ Ezl. Как следует из рис. 3.23, составляющие:
Ех1 = Ьм cos a sin Р sin cof; Eyl = Ет1 sin a sin со/; Ezl =
= Emi cos a cos P sm <*>'• (3.74)
i
95
Определим э. д. с, наведенные каждой составляющей
электрического поля (3.74) в рамочной антенне, полагая, что плоскость рамки
составляет с плоскостью распространения (осью ОХ) угол 0 (см.
рис. 3.23). Очевидно, что составляющая поля Ezl воздействует только
на вертикальные стороны рамки, а составляющие полей Ех1 и Еу1 —
на горизонтальные. Вычисление результирующей э. д. с. на выходе
рамочной антенны с использованием формулы (3.43) (при условии
d < Я и / « ^) приводит к выражению
£pi = EmlhK (cos a cos 0 + sin а sin р sin 0) cos со/, (3.75)
где Лд = 2ndt/X — действующая высота рамочной антенны.
Найдем погрешность пеленгования из условия, что при отсчете
пеленга результирующая э. д. с. на выходе рамки равна нулю
(пеленгация по минимуму сигнала), т. е. согласно формуле (3.75) это
равносильно уравнению
cos a cos 0 + sin a sin Р sin 0 = 0. (3.76)
Так как в момент отсчета пеленга плоскость рамки составит с
направлением распространения волны угол 0 = 90° + А0 (где
А0—погрешность пеленгования), то, подставляя значение 0 в уравнение (3.76)
и решая это уравнение относительно А0, получим
tg A0 = tg a sin (3. (3.77)
Таким образом, погрешности поляризации появляются лишь в том
случае, когда наряду с наклоном фронта волны имеет место поворот
плоскости поляризации.
Воздействие второй составляющей эллиптически поляризованного
поля е2 на рамочную антенну рассматривается аналогично с учетом
того, что угол поляризации равен 90° — а. Тогда результирующее
напряжение на выходе рамки с учетом выражений (3.73) и (3.75) имеет
вид:
EV2 = Em2hn ( sin a sin 0 + cos a sin р sin 0) sin со/. (3.78)
Сопоставляя выражения (3.75 и (3.78), приходим к выводу, что
условия минимума для э. д. с. £р1 и £р2 не совпадают и
результирующая э. д. с. £2 = £pi + £p2 не обращается в нуль при любых
значениях 0, т. е. вообще не будут наблюдаться явно выраженные
минимумы приема сигналов.
В радиопеленгационных системах, использующих в качестве
антенн разнесенные вертикальные вибраторы, приема горизонтальной
составляющей поля не происходит и поляризационные погрешности
в подобных системах отсутствуют. Таким образом, ослабление влияния
поляризационных эффектов на точность пеленгования может быть
достигнуто использованием специальных антенн, не вносящих
поляризационных погрешностей. Кроме того, выбор диапазона волн, в
котором отсутствуют отражения от ионосферы (УКВ дипазон),
позволяет уменьшить поляризационные погрешности.
96
3.5. ПРИНЦИПЫ ПОСТРОЕНИЯ АМПЛИТУДНЫХ УГЛОМЕРНЫХ СИСТЕМ
В настоящее время для решения задач ближней навигации и
посадки ЛА применяется большое количество разнообразных типов
амплитудных радиопеленгаторов и радиомаяков. Основной признак
их классификации — метод радиопеленгования, положенный в основу
их построения. В связи с этим различают радиопеленгаторы и
радиомаяки с определением и заданием направлений по минимуму,
максимуму и сравнению амплитуд сигналов (либо глубин их модуляции
низкочастотными огибающими).
Существуют и другие признаки классификации амплитудных
радиопеленгаторов и радиомаяков. Радиопеленгаторы, например,
подразделяют также по числу приемных каналов, используемых для
переработки и выделения угломерной информации (одноканальные,
двухканальные, многоканальные), по типу используемой антенной
системы (рамочные, с разнесенными вертикальными вибраторами и
др.), по диапазону радиоволн (средневолновые, коротковолновые,
ультракоротковолновые), по месту установки (наземные —
стационарные и подвижные, бортовые) , по степени автоматизации измерения
и отсчета пеленга (автоматические, полаувтоматические,
неавтоматические) и др. Могут также быть учтены признаки (в том числе размеры
обслуживаемого пространства), приведенные в разделе 3.1. Иногда,
подрадразделяя радиомаяки (в частности, используемые в системах
посадки), указывают тип формируемых и излучаемых сигналов
(радиомаяк с излучением амплитудно-модулированных, балансно-модули-
рованных колебаний, радиомаяки с «опорным напряжением»,
«опорным нулем» и др.).
Поскольку не представляется возможным рассмотреть принципы
построения всех вариантов реализации амплитудных угломерных
РНС, основное внимание в настоящем разделе уделим характеристике
принципов построения радиопеленгаторов и радиомаяков,
использующих в качестве метода пеленгации метод сравнения амплитуд
сигналов. Этот выбор объясняется не только тем, что принципы
построения подобных радиопеленгационных систем носят достаточно общий
характер (с точки зрения включения элементов использования
других методов и средств пеленгации), то также и тем, что эти системы
являются наиболее сложными, высокоточными и перспективными.
Амплитудные радиопеленгаторы с пеленгованием по методу
сравнения. У радиопеленгаторов этого типа антенная система состоит из
двух идентичных пар ортогональных неподвижных разнесенных
вибраторов (или рамочных антенн), сигналы с выхода которых подаются
в приемо-индикаторное устройство, позволяющее путем определения
отношения сравниваемых сигналов определить пеленг на излучающий
объект. При этом база одной пары антенн обычно ориентируется в
направлении «север—юг» («С—Ю»), а база второй пары — в
направлении «запад-восток» («3—В»).
Наиболее простым вариантом амплитудных радиопеленгаторов
рассматриваемого типа является двухканальный радиопеленгатор,
состоящий из двух независимых приемных каналов, которые обеспе-
4 Зак. 4 44
97
I и^
в
c? /
3 Aug/
о -у
_
/ l—^"
Б
~-С
i"
i
1 Ю
■
j
Г
БШ
1
ДУ
i
"
*
■*4г~
—^
ГНЧ1
9i
Прм
Ш2
ГНЧ2
«2
ФД1
f
Ф-я,
i
'
1
ф-я2
1
1
ФД2
ЗИ1
А
ГК/У
-*-
1—.
у
W2
1
\
ос
/ \
1 П~~\
Рис. 3.24. Структурная схема одноканального амплитудного радиопеленгатора
чивают выделение сигналов каждой пары антенн и последующее их
сравнение с помощью ЭЛТ или стрелочного индикатора.
Существенными недостатками двухканального радиопеленгатора являются
необходимость обеспечения полной идентичности обоих приемных
каналов (как по коэффициентам усиления, так и по фазовым сдвигам),
а также неоднозначность определения пеленга 15, 17].
Указанные недостатки двухканальных радиопеленгаторов
отсутствуют в так называемых одноканальных пеленгаторах (рис. 3.24), в
которых основное усиление сигналов обеих антенн производится в
общем приемном канале. Для того чтобы сигналы с выхода обеих пар
антенн «С—Ю» и «3—В», имеющие одинаковую частоту со, могли быть
после усиления в общем приемнике разделены, их модулируют по
амплитуде низкочастотными напряжениями частот Qt и Q2> достаточно
близкими по величине. При этом для обеспечения возможности
пеленгации коэффициенты амплитудной модуляции частотами йх и £22
должны быть пропорциональны амплитудам сигналов на выходе
антенных пар «С—Ю» и «3—В». Таким образом, в одноканальном
пеленгаторе осуществляется преобразование зависимости амплитуды
сигналов от величины пеленга в зависимость коэффициента амплитудной
модуляции от пеленга. Направление на радиостанцию определяется
путем сравнения коэффициентов местной модуляции сигналов,
принятых двумя независимыми антеннами.
Метод реализуется согласно структурной схеме одноканального
радиопеленгатора (см. рис. 3.24). Если напряженность поля,
создаваемого излучателем, изменяется по синусоидальному закону то
мгновенные значения э. д. с, наведенных в ортогональных парах
разнесенных антенн (обычно Я-образных), с учетом выражений (3.40—
3.43) могут быть представлены в виде
ес. io = EmhR cos в sin ©7: 1 (~ 7дч
е3-в = Ет йД sin G sin ®t ? J
98
Поскольку э. д. с в центральной ненаправленной антенне Лц
совпадает по фазе с напряженностью поля, т. е.
ец = t тцЛд sin at, (3.80)
то для возможности эффективного сложения на входе приемника
напряжений направленных и ненаправленной антенн эти напряжения
должны быть сфазированы. Это достигается обычно фазировкой
напряжений на выходах балансных модуляторов БМ1 и БМ2, которые
обеспечивают получение модулированных по амплитуде
высокочастотных колебаний (баланской модуляции), описываемых
выражениями:
^БМ1 = Кбж\ Ет Ад cos в sin Q± t sin со t:
и>ъж2 = Кът Ет Ад sin в sin Q2 t sin co^,
где/СБШ,КБМ2~ коэффициенты передачи балансных модуляторов, которые для
упрощения анализа будем считать равными;
Qx и Q2 — низкочастотные модулирующие напряжения, достаточно
близкие по частоте для обеспечения одинаковых условий
прохождения боковых частот модуляции через тракт приемника.
В результате сложения высокочастотных сигналов выражений
(3.80) и (3.81) на входе антенного усилителя А У получим
Hs = иц + мБм1 + ивт = итц 11 + БМ т Д cos в sin Qtt +
/гБМ Emhjr \
А sin в sin Q2 / sin со/= Um(l +m1s'mQ11 +
^тц J
+ m2 sin Q21) sin со /, (3.82)
в котором т1 = КьмЕтЬр, cos 0/£/тц; m2 = КвшЕтНп sin 6/(/тц —
коэффициенты амплитудной модуляции, зависящие от угла 0; Um ц —
амплитуда напряжения, снимаемого от центральной антенны.
Таким образом, как видно из выражения (3.82), информация о
величине пеленга и его знаке заключена в коэффициентах амплитудной
модуляции несущих колебаний двумя низкими частотами йх и й2.
После усиления и детектирования суммарного сигнала в приемнике
его выходное напряжение воспроизводит огибающие модулированных
колебаний , т. е. состоит из двух переменных напряжений с частотами
Qx и й2 (после фазировки).
"вых = Um вых c°s в sin Qx * -}- Um вых sin 6 sin Q21.
Эти напряжения после фильтрации с помощью фильтров Ф — Q1
я Ф — й2 поступают на соответствующие фазовые детекторы ФД1 и
ФД2 (синхронные балансные детекторы). Кроме того, к детектору
ФД1 подводится опорное напряжение частоты йх от первого
генератора низкой частоты ГНЧ1, к к ФД2 — опорное напряжение частоты
(3.81)
4*
Q2 от ГНЧ2. На выходах фазовых детекторов будут выделены постоя-
ные напряжения:
£/фД1 = &Фд/Утвых COS 0; (/фд2 = ^ФД^/твых sin 0> (3.83)
где £фд — коэффициент передачи ФД: £ФД = £ФД1 = £ФД2-
Величина напряжений, как видно из сравнения выражений (3.83)
и (3.79), пропорциональна амплитудам соответствующих
высокочастотных напряжений антенных пар, так как все преобразователи
сигналов (включая балансные детекторы) работают в линейном режиме.
Полярность выходных напряжений (3.83) будет определяться фазами
огибающих модуляции по отношению к опорным напряжениям, т. е.
в конечном счете фазами высокочастотных напряжений антенн «С—Ю»
и «3—В».
Если подвести выходные напряжения фазовых детекторов,
например, к отклоняющим пластинам электронно-лучевых трубок (ЭЛТ),
то при одинаковых коэффициентах передачи каналов и
чувствительности пластин ЭЛТ световое пятно на ее экране сместится от центра
в направлении, расположенном под углом а относительно
вертикальной оси. Тогда согласно формуле (3.83) tg а = £/фд2/£/фд1 = tg Э,
т. е. а — 9 и направление смещения светового пятна укажет
непосредственно пеленг радиостанции.
Поскольку удобнее пользоваться отметкой пеленга в виде
световой линии, на выходах фазовых детекторов используются
электронные коммутаторы (ЭК1 и Ж2), преобразующие постоянные
напряжения в пилообразные, что обеспечивает радиальную линейную
развертку. Электронные коммутаторы управляются прямоугольными
импульсами от генератора коммутирующего напряжения ГКН.
Временные диаграммы, отображающие процесс преобразования
сигналов в рассмотренной схеме радиопеленгатора, изображены на
рис. 3.25. Как следует из анализа графиков, именно использование
направленной и ненаправленной антенн позволило сформировать амп-
литудно-модулированный сигнал, огибающая которого £/вых#црм
меняет свою амплитуду и фазу в зависимости от изменения амплитуды
и фазы высокочастотного входного сигнала £/с_ю направленной
антенны «С—Ю». Поэтому при противоположных пеленгах на выходе
фазового детектора выделяются одинаковые по величине, но
противоположной полярности постоянные напряжения. Очевидно также, что
соотношение фаз амплитуд сигналов в обоих каналах таково, что
всегда обеспечивается однозначный отсчет (индикация) пеленга в каждом
из квадратов.
Таким образом, хотя в конструкции радиопеленгатора,
использующего метод сравнения, имеются два канала преобразования и
обработки угломерной информации, однако благодаря частотному способу
разделения сигналов для их усиления и преобразования используется
общий приемник. Это в значительной мере упрощает конструкцию
радиопеленгатора и снижает влияние аппаратурных погрешностей
из-за неидентичности каналов. Помехоустойчивость у подобных
радиопеленгаторов хуже, чем у двухканальных, так как любая помеха
100
a) V*nk
5) ис.т\
Ubm t JFi
rn^—t
uw k
?f»
ШЩЩ.
Рис. 3.25. Временные диаграммы напряжений канала «С —- Ю» амплитудного
радиопеленгатора:
а_е, = о°; б — 02= 180°
в полосе пропускания входных цепей приемо-индикатора будет
подвергнута балансной модуляции и выделена на выходе приемника.
Воздействуя на фазовые детекторы, помехи в конечном счете создадут
погрешности пеленгования. В связи с этим одноканальные
радиопеленгаторы обычно используются в УКВ диапазоне для целей ближней
навигации, т. е. в условиях обеспечения высокого отношения сигнал/
помеха на входе радиопеленгатора (например, радиопеленгатор
АРП-6).
Следует обратить внимание на тот факт, что использование лишь
одной направленной антенны (например, рамочной) в комбинации с
ненаправленной также реализовано в амплитудных радиопеленгаторах.
В этом случае все преобразования сигналов аналогичны
рассмотренным выше для одного из каналов, например, для канала «С—Ю» (см.
рис. 3.25). Однако пеленг на радиостанцию будет определяться по
минимуму глубины местной модуляции принимаемых сигналов, так как
вторая направленная антенна отсутствует. На таком принципе
построены бортовые радиопеленгаторы — автоматические радиокомпасы
АРК.
Угломерные радиомаяки систем посадки. В современных
радиотехнических системах посадки самолетов по приборам широкое
применение нашли угломерные радиомаяки амплитудного типа. Именно
радиомаячные системы посадки (РМС) являются основным средством
101
обеспечения посадки самолетов, поскольку обладают высокой
точностью и оперативностью определения углового положения самолета
относительно ВПП при его заходе на посадку и посадке (о
вспомогательных посадочных радиосредствах см. в гл. 9).
Угломерные радиомаячные системы посадки обеспечивают выдачу
экипажам снижающихся самолетов непрерывной информации о
положении самолета относительно заданного курсового направления
(канал курса) и траектории снижения (канал глиссады). При этом
курсовой угломерный радиомаяк служит для задания в пространстве
плоскости курса, совпадающей с продольной осью ВПП, а глиссадный
угломерный радиомаяк служит для задания плоскости планирования,
пересечение которой с плоскостью курса дает линию планирования
(глиссаду), составляющую с горизонтальной плоскостью (содержащей
ВПП) угол планирования, т. е. угол глиссады |30. Положение
плоскостей курса ПК и глиссады ПГ в пространстве и размещение курсовых
и глиссадных радиомаяков относительно ВПП изображено на рис. 3.26.
В качестве основного метода задания направления с
использованием глиссадных и курсовых радиомаяков применяют равносигналь-
ный метод (метод сравнения амплитуд сигналов). Современные
радиомаяки этого типа построены на основе дальнейшего
усовершенствования равносигнального метода (глиссадные и курсовые маяки с
«опорным нулем»). В отечественных курсовых радиомаяках
используется также метод задания направлений по минимуму глубины
модуляции излучаемых сигналов (радиомаяк с «опорным напряжением»).
Рассмотрим несколько примеров принципа построения глиссадных и
курсовых радиомаяков и их взаимодействие с бортовыми приемоин-
дикаторами.
1. Равносигнальные радиомаяки с
излучением амплитудн о-м одулированных
колебаний. Антенная система равносигнального радиомаяка состоит
из двух независимых антенн с пересекающимися в заданном
направлении диаграммами направленности. Сигналы, излучаемые в
направлении первой и второй диаграмм направленности, должны отличаться
либо несущими частотами, либо частотами модуляции, либо видом
манипуляции сигналов, если несущие частоты одинаковы. Структурные
схемы равносигнальных
курсовых и глиссадных
радиомаяков одинаковы (рис. 3.27,
а); также аналогичны и
схемы бортовых приемоиндика-
торов каналов курса и
глиссады (рис. 3.27, б).
Антенная система
курсового радиомаяка КРМ состоит
из двух симметрично
разнесенных относительно задан-
flJ26. Плоскость курса (ПК), плоскость направления антенн Ах
глиссады (ПГ) и линия планирования л t q 07 \
(глиссада), формируемые с использовани- и л2 1см- рис. о.II, а), к
коем РМС торым подведены синфазные
102
а)
Г-90
прд
Г-150
м
-an
,
—н
{
Y
M-isn
' / Л,
/ /
\Л
Ао
S)
ЧПрм
Ф-90 h
Ф-150
\в
в
\
\
ее ,
1
1
90Гц fVv » *
шк Щ/
-*-t
©
нп
Щ)" ©
///7
Рис. 3.27. Принцип формирования сигналов с использованием равносигнального
КРМ:
а — структурная схема КРМ с излучением AM колебаний, диаграмма направленности антенн
и характеристики сравниваемых сигналов; б — структурная схема бортового приемоиндика-
тора
амплитудно-модулированные колебания передатчика с частотами
модуляции Q2 и Q2 (стандартные значения частот модуляции несущих
колебаний курсовых и глиссадных радиомаяков: Ёг = 90 Гц; F2 =
= 150 Гц). Напряженность полей, создаваемых антеннами (при
синфазном питании) в любой точке пространства:
£i = ElmFx (9) (1 + тх sin йх/) sin со/;
£2 = E2TnF2 (9) (1 + т2 sin Q2t) sin со/, (3.84)
где Е1т, Е2т — амплитуды напряженностей полей, соответствующие
излучениям первой и второй антенн в направлении максимума;
^i (Q) > ^2 (Q)—нормированные характеристики направленности антенн в
горизонтальной плоскости;
Щ* Щ — коэффициенты амплитудной модуляции в каналах.
Заметим, что поле с частотой модуляции Qx преобладает слева от
линии курса (продольной оси ВПП) по направлению захода на
посадку, а с частотой модуляции й2 — справа от линии курса.
Если обеспечивается выполнение условий Е1т — Е2ш = Ет и
тг — т2 — т> то напряженность суммарного поля
ez=e1 + e2 = Em [Fx (6) + ^2(e)]sin со t + Em F1(e)sinQ1tx
X sin со t +Em F2(S) sinQ2 * sin со t^Em \fx (@) + F2 (0)] [1 +
HiElM "sinQx/H- ^-^ sinQ21] sin со/. (3.85)
Fi (*) + ?*(*)
103
Таким образом, как видно из выражения (3.85), результирующее
поле, создаваемое в пространстве антеннами КРМ, представляет собой
сумму напряженностеи поля несущей частоты и напряженностеи двух
полей, соответствующих боковым частотам модуляции.
Коэффициенты при функциях sin Qxt и sin Q2t, определяющие зависимости
амплитуд колебаний боковых частот модуляции от угла 8, назовем
коэффициентами глубины пространственной модуляции, обозначая
их через
Ml (в) = mFl(e) и М2 (в) = mF*(e) . (3.86)
Бортовой приемоиндикатор (см. рис. 3.27, б), состоящий из
собственно приемника, устройств сравнения и индикации, принимает
сигналы КРМ. После детектирования сигнала вида (3.85) выделенные
напряжения частот £1г (Т^ = 90 Гц) и Q2 (^2 = 150 Гц) разделяются
фильтрами и выпрямляются. В цепь разностного тока
выпрямителей включена курсовая отклоняющая система стрелочного индикатора
положения — прибора с нейтральным (средним) положением
вертикальной стрелки-скобы (нуль-прибор НП). Величина отклонения
стрелки индикатора положения самолета относительно линии курса
Дк пропорциональна величине разности коэффициентов глубины
пространственной модуляции (РГМ)
Дк = k [Мг (®)—М2 (в)] = km
F1(e)-F2(B)
F1(e) + F2(8)
(3.87)
Приравнивая выражение (3.87) нулю, получим уравнение равно-
сигнального направления, т. е. Дк = 0 при Мх (0) = М2 (0) и Fx (6) =
= F* (6).
Именно в этом направлении пересечения двух ДНА располагается
линия курса, соответствующая направлению продольной оси ВПП.
Изменения соотношений амплитуд сигналов частот £1г и Q2 при
различных положениях самолета относительно линии курса показаны на
рис. 3.27, а. Из рисунка видно, что стрелка-скоба индикатора
положения НП отклоняется в направлении линии курса, указывая ее
положение, к которому должен быть приведен изменившийся по каким-
либо причинам курс самолета.
Равносигнальный глиссадный радиомаяк (ГРМ) создает с помощью
разнесенных верхней Лв и нижней Лн антенн также два поля,
напряженность которых описывается выражениями (3.84). Принцип
формирования направленного излучения равносигнального ГРМ и
диаграммы выходных сигналов бортового приемника при различных
положениях самолета отображены на рис. 3.28, из которого очевидна
идентичность построения КРМ и ГРМ равносигнального типа. Поэтому
отметим лишь некоторые особенности формирования линии глиссады.
Диаграммы направленности антенн ГРМ являются
многолепестковыми, так как формируются путем сложения радиоволн прямой и
отраженной от земной поверхности. Нижние лепестки ДНА при
пересечении образуют глиссаду, т. е. линию, угол наклона которой
определяется геометрическим местом точек, в которых удовлетворяется
104
kvc
90Гщ
150Гц
т «
/„-/50 fr+150
Рис. 3.28. Диаграмма направленности антенн !равносигнального ГРМ
условие РГМ = 0, т. е. Аг = k Шг ф) — М2 (Р)]. Выше линии
глиссады преобладает коэффициент глубины модуляции М2 (Р), так как
при Р > Ро имеет место неравенство тг FR (p) > m2FB ф) и РГМ
имеет отрицательное значение. Ниже глиссады РГМ положительна.
Изменение знака РГМ приводит к изменению направления разностного
тока через индикатор положения, и отклонение его стрелки укажет
положение линии глиссады. При возрастании глубины модуляции с
частотой 150 Гц стрелка НП отклоняется вверх, при возрастании
глубины модуляции с частотой 90 Гц — вниз.
| Поскольку ГРМ в целях обеспечения безопасности посадки
самолетов вынесен за пределы ВПП на расстояние 120—180 м от ее оси (см.
рис. 3.26), то линия планирования имеет вид не прямой линии, а
гиперболы. Действительно, если пренебречь направленными
свойствами верхней и нижней антенн ГРМ в горизонтальной плоскости,
то равносигнальная поверхность, создаваемая пересечением нижних
лепестков их ДНА в вертикальной плоскости, можно изобразить в
виде конуса, ось которого оу вертикальна, а вершина о находится в
месте установки ГРМ (рис. 3.29). При этом плоскость курса, секущая
конус и параллельная его оси, оставит след на поверхности конуса в
виде гиперболы.
Снижение самолета в плоскости курса по линии планирования
(соответствующей гиперболе) возможно лишь до некоторой высоты #min>
а не до точки приземления. Поэтому для уменьшения высоты #min
стремятся спрямить гиперболу на ее последнем участке, что достигает-
105
ся путем специальной ориентации
ДНА нижней антенны ГРМ
относительно верхней антенны. В
результате напряженность поля,
создаваемого нижней антенной,
оказывается несколько больше
напряженности поля верхней антенны,
что обеспечивает спрямление
линии планирования на конечном
участке и уменьшение #mIn до
нескольких метров.
Равносигнальный принцип
построения ГРМ и КРМ
используется в некоторых типах
международной системы посадки ILS* и в
отечественной системе посадки СП-50.
б) Радиомаяки с
«опорным нулем». Этот тип
угломерных радиомаяков систем посадки реализует усовершенствованный
равносигнальный метод, обеспечивающий улучшение точности и
стабильности выходных параметров радиомаяков.
Рассмотрим принцип действия радиомаяков с «опорным нулем» на
примере глиссадного радиомаяка, структурная схема которого
изображена на рис. 3.30, а. Высокочастотные сигналы передатчика
радиомаяка через делители мощности ДМ подаются на амплитудные
модуляторы (с частотами модуляции йх и Q2), каждый из которых
связан через фазирующий мост ФМ с обеими антеннами — верхней Лв
и нижней Лн. При этом фазирующий мост обеспечивает синфазное
питание обеих антенн AM колебаниями с частотой Q± (F1 = 90 Гц) и
противофазное питание антенн AM колебаниями с частотой Q2 (^2 —
= 150 Гц). В результате нижняя антенна питается суммарным AM
колебанием, спектр которого содержит несущую и две пары боковых
0- место
установки ГРМ
Рис. 3.29. Образование линии
планирования с использованием равносиг-
нального ГРМ
*ILS — Instrumental Ladingn System (англ.)
посадки»
система инструментальной
о)
М
90Гц
Разностный сигнал
rWSOY.fH^O /le_
^f^—
сигнал fH;frt ±30, fH±i50
Рис. 3.30. Глиссадный радиомаяк с
«опорным нулем»:
а — структурная схема; б —диаграмма
направленности антенн и спектры
сигналов
450
106
частот (fH; /н ± /Y, fv ± F2). Верхняя антенна питается балансно-
модулированным колебанием, боковые составляющие которого /н ±FX
сдвинуты по фазе на 180° относительно составляющих /н ± F2\ причем
одна пара боковых частот совпадает по фазе с аналогичными боковым
частотами AM колебания, питающего нижнюю антенну, а вторая
пара боковых частот противофазна соответствующей паре частот
колебаний антенны Лн (рис. 3.30, б).
Учитывая указанные особенности формирования излучений
радиомаяком с «опорным нулем», поле, излучаемое нижней антенной,
можно описать выражением
еи = EmiiFn ф) (1 + т1 sin QJ + т2 sin Q2 t) sin <of, (3.88)
а поле верхней антенны —
ев = Ьтвръ Ф) 0 + т1 sin QlO sin ®t —
— EnlBFB (P) (1 4- m2 sin Q2fj sin at. (3.89)
При одинаковой глубине модуляции сигналов в каналах ГРМ
(тх = т2 = т) сложение в пространстве полей (3.88) и (3.89) дает
результирующее поле:
^=2£тен^(Р)
тЕтъ FB (P)
1 + /^+ в
V * ^тн ^н (Р) ,
х sin Q, t + (JL- "f"»^) sin Q2 Л sin со /. (3.90)
Из выражения (3.90) видно, что коэффициенты при sin Q^t и
sin Q2t определяют зависимость амплитуд частот модуляции от угла.
Обозначим эти коэффициенты через Мг и М2:
2 \ Ятен FH (Р) ) 2 \ £шн ^н (Р) У
а затем запишем величину отклонения стрелки нуль-индикатора на
борту самолета пропорционально РГМ, т. е.
^=k(M.-M,) = km ЕртвР*{® , (3.91)
£тн ^н (Р)
где k — масштабный коэффициент преобразования сигнал — угловое
отклонение самолета.
При расположении самолета на глиссаде Аг = 0 и Ет BFB (P) =
= 0. Диаграммы направленности глиссадного радиомаяка с
«опорным нулем» представлены на рис. 3.30, б. Из приведенного анализа
следует, что бортовая аппаратура глиссадной радиомаячной
системы посадки с «опорным нулем» не отличается от соответствующей
аппаратуры, работающей в комплекте с равносигнальным радиомаяком.
Рассмотренный принцип построения радиомаяка с «опорным нулем»
реализован, например, в глиссадном радиомаяке ГРМ-2М2К системы
посадки СП-68. Аналогичный принцип построения используют и
курсовые радиомаяки с «опорным нулем», удовлетворяющие требованиям
II и III категории стандартов ИКАО.
107
В заключении анализа принципов построения угломерных РМС
посадки дадим общую характеристик} их выходных параметров,
подлежащих стандартизации при проведении наземных и летных
испытаний в соответствии с требованиями отечественных ГОСТов и
стандартов ИКАО. Как известно, принципы построения РМС (как и
других радиопеленгационных систем) и используемые алгоритмы
преобразования и переработки измерительной информации выбираются
таким образом, чтобы обеспечить линейную (или близкую к ней)
зависимость между измеряемыми угловыми величинами и выходными
токами бортовых приемников РМС в пределах заданной рабочей зоны
системы. В реальных условиях работы системы различные помехи
(внешние и внутренние), отражения от местных предметов, искажения
характеристик радиоканалов и другие факторы создают малые
случайные отклонения выходных параметров РМС. Поэтому в качестве
пеленгационной характеристики РМС принимают усредненную
линейную зависимость сигнал — угловая координата, т. е.:
/к(в, 0 = /ок + 5„в;/гф, t) = 70r + Sr$t (3.92)
где 6, Р—угловые отклонения самолета относительно номинальных
(установленных) линий курса и глиссады;
^к(в, О» МР>0~— значения токов на выходе курсовых и глиссадных приемников
РМС (либо соответствующие им значения РГМ) под углами 6 и
Р;
Лж» ^ог—усредненные значения смещений линий курса и глиссады;
5К» ~Sr—усредненные значения крутизны преобразования ток—угол в
пределах рабочих зон курсовых и глиссадных радиомаяков.
Измеряя, например, в процессе летных испытаний РМС выходные
токи приемников и одновременно с помощью специальной образцовой
системы угловых измерений (использующей теодолиты) траекторию
посадки самолета ^определяют затем соответствие допускам
параметров /ок, hv и SK, Sr. [36]. Так как зависимость (3.92) на интервале
измерения, соответствующем длине основной посадочной прямой (от
дальнего приводного радиомаяка до поверхности ВПП), представляет собой
случайный процесс, интересуются также величиной
среднеквадратичного отклонения выходных токов РМС, т. е. величиной
искривлений линий курса и глиссады.
Описанные принципы построения амплитудных угломерных РНС
не охватывают всего многообразия этого класса. Известны секторные
(пеленговые) радиомаяки типа «Консол» и «ВРМ-5» с вращающейся
ДНА, секторные амплитудные радиопеленгаторы с коммутируемой
антенной и другие угломерные РНС [5, 6, 171.
3.6. АМПЛИТУДНО-ФАЗОВЫЙ МЕТОД УГЛОМЕТРИИ
Помимо рассмотренных методов углометрии—амплитудного и
фазового, возможно использование комбинированных методов
углометрии и, в частности, амплитудно-фазового. Этот метод характеризуется
тем, что, как и при амплитудцых методах пеленгования, здесь исполь-
108
зуются направленные антенны.
Однако благодаря использованию
антенн с быстрым вращением ДНА
угломерная информация
содержится в этом случае в фазе
огибающей амплитудной модуляции.
Поэтому приемоусилительные
устройства подобных угломерных систем
такие же, как и амплитудных, но
для измерения и индикации
пеленга используются фазометры.
Рассмотрим особенности
амплитудно-фазового метода
радиопеленгования на примере одной из его
технических реализаций —
фазовой угломерной системы с быстрым
вращением ДНА. Если
напряженность поля пеленгуемого сигнала
ес = Ет sin (о^, ДНА определена
F2(BH0SQ
F3(8)=Sine
Рис.
3.31. Диаграмма излучения
антенны радиомаяка VOR
функцией F (0) и частота
вращения ДНА равна Q, то напряжение сигнала на входе приемоиндикато-
ра радиопеленгационной системы в общем виде может быть
представлено как
(3.93)
'^с = Um (Q, 6) Sin CO/.
Если ДНА имеет форму «восьмерки» (косинусоиды), т. е.
F (t, 0) = sin (Qt — 0), то согласно выражению (3.93) сигнал на
входе приемоиндикатора угломерной системы
(3.94)
*с = Um sin (Qt — 0) sin со/,
т. е. получим амплитудно-модулированный сигнал с подавленной
несущей.
При вращении ДНА, имеющей форму кардиоиды, уравнение
которой FL(0) = 1 — cos 0, сигнал на входе приемоиндикатора
= Um [1 + т cos (Qt — 0)] sin со/.
(3.95)
Это амплитудно-модулированное колебание с коэффициентом
модуляции т и огибающей частоты Q, сдвиг фазы которой относительно
начала отсчета (/ = 0) равен углу прихода волны 0.
К угломерным радиомаякам с быстро вращающейся диаграммой
направленности относят азимутальный радиомаяк VOR, который
обеспечивает определение азимута на борту самолета путем сравнения
фаз двух сигналов: опорного (сигнала постоянной фазы) и
переменного, фаза которого жестко связана с направлением приема. Это
достигается путем вращения ДНА, осуществляемого электрическим
способом. Антенная система радиомаяка VOR состоит из трех антенн с
совмешенным электрическим центром (рис. 3.31). Центральная
антенна Аг не имеет направленности, т. е. Fx (0) = 1. Антенны А% (2-2)
109
\ф-ЯпН^НУМН
Рис. 3.32. Структурная схема
бортового приемоиндикатора (канал VOR
аппаратуры КУРС-МП-2)
и Л з (3-3) с ортогональными
базами, состоящие каждая из двух
разнесенных вибраторов, имеют
ДНА в форме «восьмерок», т. е.
^з (6) = cos 0, a F2 (9) = sin 9.
Центральная антенна питается
токами несущей частоты, т. е.
создаваемое ею поле е± = £mlcos (о/.
Антенна Л2 питается амплитуд-
но-модулированным сигналом с
подавлением несущей и огибающей модуляции частотой Q\ создаваемое
ею поле е2 = Emi cos 9 cos Ш cos со/.
Антенна А 3 питается также амплитудно-модулированным
колебанием с подавлением несущей, но со сдвигом по огибающей на 90°.
Поэтому создаваемое ею поле е3 = Ems sin 9 sin Qt cos со/.
В пространстве происходит сложение полей всех трех антенн, и их
суммарное поле радиомаяка имеет вид:
еъ = Ет1 (1 + т cos 9 cos Qt + т sin 9 sin Qt) cos со/ =
= Eml [1 + m cos (Qt — 9)] X cos со/, (3.96)
коэффициент амплитудной модуляции (£„
где т = Em2/Eml = EmjEn
Сравнивая соотношения (3.95) и (3.96), видим, что в пространстве
антеннами радиомаяка создается электрически вращающаяся с
угловой скоростью ДНА типа кардиоиды (см. рис. 3.31).
На борту самолета на выходе приемоиндикатора системы
(рис. 3.32) можно выделить после детектирования такого сигнала
напряжение «переменной фазы»
Uc = Um cos (Qt - 9),
(3.97)
фаза которого зависит от направления из точки приема на радиомаяк.
Для измерения сдвига фазы информационной огибающей (3.97) на
борту самолета необходимо опорное напряжение той же частоты Q и
неизменной фазы, с которой сравнивается фаза огибающей. Поэтому
радиомаяк, помимо излучения поля «переменной фазы» создает поле
«опорной фазы» («постоянной фазы»), не зависящее от угла 9.
Напряжение «опорной фазы» в целях упрощения устройств передается на той
же несущей частоте путем ее частотной модуляции. Поскольку
непосредственная частотная модуляция несущей опорным напряжением
не представляется возможным (из-за паразитной амплитудной
модуляции несущей сопровождающей ее частотную модуляцию,что может
привести к искажению информационной огибающей), опорным
напряжением частоты Q модулируется по частоте вспомогательная поднесу-
щая частота Яш которая затем накладывается с помощью
амплитудной модуляции на несущую частоту. Высокочастотные колебания,
промодулированные указанным способом, излучаются центральной
ПО
антенной, и поэтому в действительности создаваемое ею поле имеет
вид:
<?2 = £ml
1 + mn cos (йп t + -^ cos Q t\
cos со t, (3.98)
где mn — коэффициент амплитудной модуляции напряжения поднесущей
частоты;
ЛЙП — девиация частоты при модуляции поднесущей Qn.
Поэтому согласно выражению (3.98) результирующее
электромагнитное поле радиомаяка VOR может быть описано формулой
е2 = £
тгы.
1 +тл cos [ QR t +-^-ncosQ t) +mcos(Qt — @)
COS CO t.
(3.99)
В бортовой аппаратуре, работающей с маяком VOR (канал VOR
аппаратуры КУРС-МП-И), после приема сигналов, усиления и
детектирования на выходе фильтра Ф — £1П выделяется низкочастотное
частотно-модулированное напряжение
*/4M=-t/mCos(Qn*+-^H cosQn*j, (3.100)
а на выходе фильтра Ф— Q напряжение «переменной фазы» (3.97).
Далее после ограничения и частотного детектирования выделяется
напряжение «опорной фазы», которое через фазовращатель ср подается на
фазовый детектор ФД для сравнения с напряжением переменной фазы.
Постоянное напряжение на выходе ФД, пропорциональное искомому
пеленгу, преобразуется в переменное, которое используется для
отработки с помощью следящей системы (электродвигатель-сельсин—
датчик М—СД) измеряемого пеленга 0 и его индикации.
Сравним угломерную систему типа VOR с рассмотренной ранее
фазовой системой типа DVOR (см. п. 3.5) с точки зрения влияния
местных переизлучений на точность пеленгования. Для этого используем
описанную в п. 3.1 методику помехоустойчивого кодирования радио-
пеленгационных сигналов. Действительно, угломерная система VOR
обеспечивает радиопеленгование в пределах полного азимутального
угла с использованием двух кодовых слов (двух пар разнесенных
вибраторов) угломерной информации. Система D VOR дает число кодовых
слов, равное числу вибраторов, расположенных на окружности
радиуса R на расстоянии не более Я/2, т. е. п = 4яг/Я. Это в 2пг/к раз
больше числа кодовых слов системы VOR и, как показывает анализ
спектров сигналов обеих систем [10, 47], во столько же раз спектр
радиосигнала, излучаемого радиомаяком DVOR, больше аналогичного
спектра амплитудно-фазового радиомаяка. Таким образом, увеличением
длины кодового слова (и в конечном итоге кодового расстояния между
сигналами — носителями информации) объясняется повышенная
помехоустойчивость доплеровских угломерных систем по сравнению с
системами амплитудно-фазового типа.
Радиомаяки VOR работают в диапазоне 108—118 МГц, обеспечивая
среднеквадратичную погрешность оценки пеленга не хуже 3—4°. Ра-
Ш
диомаяки используются обычно в комплексе с радиодальномером типа
DM£(Dictance Measuring Equipment), образуя систему ближней
навигации VOR/DME, которая включена в список стандартной
аппаратуры, используемой в авиации странами — членами ИКАО,
Амплитудно-фазовый метод пеленгации применяется также в
угломерном канале системы ближней навигации TACAN, используемой
для нужд ВВС и ВМС США и других стран [42, 46].
3.7. ЧАСТОТНЫЙ МЕТОД УГЛОМЕТРИИ
Частотный метод углометрии основывается на измерении
пропорционального пеленгу доплеровского сдвига частоты, возникающего в
точке приема вследствие перемещения излучающей антенны. Принцип
действия систем, использующих частотный метод, сходен с принципом
действия доплеровских фазовых угломерных систем. Различие между
ними заключается лишь в том, что вместо измеряемого фазового
сдвига в фазовых угломерных системах в частотных угломерных системах
измеряют соответствующий ему доплеровский сдвиг частоты
принимаемых сигналов, который изменяется в зависимости от углового
положения пеленгуемого объекта. Рассматриваемый метод пеленгации
точнее можно назвать частотно-фазовым. Он нашел применение лишь в
последнее время при разработке угломерных радиомаяков доплеровс-
кой микроволновой системы посадки DMLS (MLS — Mucrowave
Landing System).
Рассмотрим особенности частотного метода углометрии
характеризующие принцип построения DMLS (глиссадный канал).
В радиомаяках DMLS используют две излучающие антенны, одна
из которых неподвижна Аъ а другая А2 движется поступательно со
скоростью V (рис. 3.33). Вместо механического движения антенны
используется последовательное возбуждение ряда излучателей,
равномерно смещенных в пространстве, т. е. образующих антенную решетку
а)
/Wi
Ж
с Излучау
rc+V
S V
у
Г=ф ЬЩ
О
{направление. f> f_c
{перемещения T^Tc-V
излучателя
f'=fj- sinfi
Шприца - к Положи — >
\пельныи/ \тельныи/
Шиг частоты
Рис. 3.33. К принципу определения угловых координат в DMLS:
а — образование доплеровских сдвигов частот в зависимости от пеленга; б — определение
угла места
112
и подключаемых через электронный коммутатор К к передатчику глис-
садного радиомаяка ГРМ. Сигналы, принимаемые на самолете, в
результате перемещения антенны Л2 и самолета сдвинуты по частоте.
Рис. 3.33 иллюстрирует принцип образования доплеровской частоты в
зависимости от направления движения антенны Л2 и изменения
пеленга р. В трехмерном пространстве поверхность постоянных доплеров-
ских частот представляет собой конус коаксиальный с направлением
движения подвижного излучателя. Доплеровский сдвиг на плоскости,
перпендикулярной к базе h подвижной антенны и проведенной через
ее середину, равен нулю.
Так как сигнал, излучаемый неподвижной антенной Аъ
используется на борту самолета в качестве опорного, составляющие допле-
ровского спектра, возникающие из-за перемещения самолета,
компенсируются. Для исключения многозначности измерений доплеров-
ских сдвигов частота неподвижного излучателя смещается
относительно подвижного на величину F0. Неподвижная антенна излучает
смодулированные непрерывные колебания ем = Ет1 sin co0/, где со0 =
= со — Q0 — частота колебаний, излучаемых антенной Аъ а со —
частота колебаний, излучаемых антенной Л2.
Колебания, излучаемые подвижной антенной, в точке приема
относительно опорных колебаний имеют фазовый сдвиг:
ФА2 = ю/ + 2nh (t) Х~г sin р, (3.101)
где функция h (t) отображает динамику изменения расстояния
(высоты) между подвижной и неподвижной антенной, Поэтому колебания,
излучаемые антенной Л2, в точке приема имеют вид:
еА2 = Ет2 sin [<oQt + 2яЛ (t) Х~г sin p]. (3.102)
С учетом доплеровского сдвига из выражения (3.102) частота этих
колебаний
, п ^Фа2 , 2я . а dh(t)
откуда
Од = 2jtVsinp/X, (3.103)
где V — dh(t)ldt — скорость движения антенны.
Таким образом на выходе бортового приемника DMLS выделяется
частота биений F6 = F0 + 2nV sin р/Я. Заметим, что антенная
решетка излучателей (А2) коммутируется таким образом, что моделируется
движение излучателя в обоих направлениях (вверх и вниз). Для того
чтобы знак доплеровского сдвига частоты йд при этом не изменялся,
одновременно с переключением направления движения частота
неподвижного излучателя Аг сдвигается в отрицательную сторону
относительно частоты подвижного излучателя.
Как видно из соотношения (3.103), измеряя величину
доплеровского сдвига частоты на выходе приемника, можно определить текущее
значение искомого пеленга (в данном случае угла места Р), т. е.
Р = arcsin ЛОд/2я1/. (3.104)
113
Преимуществом рассматриваемого угломерного радиомаяка
является возможность эффективного подавления сигналов, отраженных от
земли и местных предметов. Действительно, как видно из рис. 3.33, б,
отраженные сигналы дадут на выходе бортового приемника различные
доплеровские сдвиги частоты по сравнению с прямым сигналом (так
как угол р для них различен). Это позволяет отделить на самолете
прямой сигнал от отраженных, а следовательно, повысить
помехоустойчивость и точность измерения по каналу глиссады.
DMLS (как nMLS с отсчетом времени, рассматриваемая ниже)
работает на частотах, около 5 ГГц (С-диапазон) и 15 ГГц (Q-диапазон).
Благодаря достаточно простой конструкции антенной системы и
высокой надежности DMLS успешно конкурирует с MLS с отсчетом
времени. И хотя MLS рекомендована ИКАО в качестве основной системы
посадки, перспективность DMLS (которая разработана позже, и
поэтому опыт применения подобных систем еще недостаточен) не
вызывает сомнения.
3.8. ВРЕМЕННОЙ МЕТОД УГЛОМЕТРИИ
Временной (импульсный) метод углометрии основывается на
измерении разности времени индуктирования импульсных сигналов в
разнесенных антеннах радиопеленгатора. Измерение временного
запаздывания несущих колебаний на выходе радиопеленгационных
антенн, обладающих малыми базами, технически трудно реализуемо.
Хотя известно применение такого метода для пеленгования
атмосферных разрядов на частотах порядка 10 кГц [26], в «чистом» виде
временной метод измерения угловых координат широкого применения не
нашел. Поэтому временные (импульсные) угломерные системы, широко
применяемые в настоящее время, являются, строго говоря,
комбинированными амплитудно-временными системами, поскольку в подобных
системах создается зависимость между пеленгом объекта относительно
радиомаяка и временным интервалом между двумя импульсами, один
из которых является опорным (т. е. задающим начальное время
отсчета), а второй — несет информацию об измеряемых угловых
координатах. При этом направление на радиомаяк (либо на объект)
фиксируется с использованием амплитудных методов пеленгации. Примерами
подобных систем являются угломерные каналы радиотехнических
систем ближней навигации (РСБН) и РЛС различного применения.
Принцип действия угломерного канала РСБН иллюстрируется
рис. 3.34. Исходные данные для изменения азимута задают наземные
радиосредства: передатчик азимутальных сигналов АзС и передатчик
опорных сигналов ОпС. Передатчик АзС работает в режиме
непрерывного излучения и нагружен на направленную антенну, которая имеет
в горизонтальной плоскости двухлепестковую диаграмму
направленности. Направленная антенна, управляемая от блока управления
поворотом антенны БУПА, вращается с угловой скоростью £2, облучая
поочередно самолеты, расположенные под различными азимутами в
зоне действия системы. Каждый из самолетов облучается в различный
114
и
Опорный („северный")
импульс
Азимутальный
^ч^ч радиосигнал
t
i Азимутальный
1 импульс
Г[
В)
<н
Г"
6УПА
прд
АЗС
прд
ОпС
Наземный радиомаяк
прм
в°Т •
БИА
КЗ
бортовой приемоиндинатор
j Рис. 3.34. К принципу работы
угломерного канала РСБН:
а — пеленгация с использованием
опорного и азимутального сигналов; б —
эпюры напряжений; в — структурная
схема угломерного канала
момент времени т^, измеряемый относительно начального (опорного)
времени, соответствующего северному направлению оси двухлепест-
ковой ДНА. Опорное время задается с помощью импульсов,
излучаемых передатчиком ОпС, который синхронизируется от БУПА таким
образом, чтобы за один полный оборот антенны на борту самолета был
сформирован один «северный» (опорный) импульс, соответствующий
расположению оси ДНА вращаемой антенны точно в северном
направлении меридиана, проходящего через радиомаяк (рис. 3.34, а, б).
На вход бортового приемника каждого из самолетов поступает
радиосигнал, огибающая которого имеет двойную кол околообразную
форму, определяемую конфигурацией ДНА, вращаемой антенны, а
также «северные» опорные радиоимпульсы. Направление на самолет
(или на радиомаяк) определяется по минимуму амплитуды
направленного излучения, и поэтому на выходе приемника формируется
азимутальный импульс, передний фронт которого соответствует оси
симметрии двойного колоколообразного импульса (оси симметрии ДНА).
В блоке измерения азимута БИА (рис. 3.34, в) измеряется временной
интервал xt между опорным и азимутальным импульсом. Эта задача
решается с помощью стандартных схем измерения временного
интервала аналоговым либо дискретным методом.
115
С учетом рис. 3.34, я, б текущий азимут самолета Эт
0Т = 2я (т, + QIT, (3.105)
где Т — 2я/й — период вращения антенны передатчика АзС;
t3 — постоянная задержка азимутального сигнала в тракте
бортовой аппаратуры.
Следовательно, при обеспечении стабильности угловой скорости
вращения антенны измеряемый азимут пропорционален временному
интервалу rt.
Используя методику п. 2.4, можно получить абсолютную
погрешность измерения азимута
де=Щ- (дТ|+щ—|р- дг. (злоб)
Из выражения (3.106) можно установить следующие общие
требования к рассмотренной угломерной системе, обеспечивающие заданную
точность:
1) высокая стабильность угловой скорости вращения антенны
передатчика АзС;
2) высокая точность схемы измерения азимута;
3) высокая стабильность постоянной задержки азимутального
сигнала в тракте бортовой аппаратуры.
Для обеспечения последнего требования в системе
предусматривается регулировка tQ к ее постоянному значению (регулировка «нуля
азимута»).
В РЛС различного назначения для измерения угловых координат
используется вращающаяся ДНА с достаточно узким лепестком и
острым максимумом. В этом случае пеленг на объект определяется путем
отсчета временного интервала т = 0T/Q (относительно исходного
времени, принятого за начало отсчета) в момент, когда амплитуда
огибающей принимаемого сигнала максимальна (пеленгация методом
анализа огибающей). Особенности способов и схем временного измерения
угловых координат в РЛС (в том числе, принципы работы следящих
измерителей направления) глубоко проанализированы, например, в
работах [25, 51].
Большой интерес представляет решение задачи измерения
углового положения самолета с использованием временного метода в
современных микроволновых системах посадки MLS со сканирующим
лучом и отсчетом времени (рис. 3.35, а). Передатчики курсовых и глис-
садных радиомаяков MLS излучают смодулированные колебания
СВЧ диапазона. Для обзора пространства (в горизонтальной плоскости,
например, в пределах ±60°) используют электронное ступенчатое
сканирование остронаправленного излучения, формируемого с
помощью фазированной антенной решетки (ФАР). Информация об угловом
положении самолета в пределах рабочего сектора радиомаяков MLS
кодируется величиной временного интервала между импульсами
прямого и обратного хода луча, величина которого является линейной
функцией измеряемого пеленга.
На рис. 3.35, б представлена стандартизованная последовательность
импульсов, формируемых на входе бортового приемника MLS во время
116
/ 'Обратный код
луча
ъ g | Прямое гй 2 ' §
§§ сканирование (Ж) §§hg
g ^ Г"""ггт--ттп"~тт1—1 5-§!s
Обратное сканирование^")
г - tit ~ -m- - ттт—I
TIT*
и
Рис. 3.35. К принципу определения угловых координат в MLS с отсчетом
времени:
а — сканирование луча в горизонтальной плоскости; б — формат сигнала угловых
координат; в — определение временных интервалов в бортовом приемоиндикаторе
прямого и обратного сканирования луча при различных угловых
положениях самолета (так называемый стандартизованный формат
сигналов при измерении угловых координат). Временной интервал tt
между импульсами прямого и обратного хода луча («Я»—«О»),
соответствующий угловому положению 9Х самолета У, больше временного
интервала t2, соответствующего угловому положению 02 самолета 2,
так как 9Х > 02. Как следует из рис. 3.35, б, в информация об
измеряемом пеленге самолета может быть найдена как линейная функция
разности временных интервалов, один из которых соответствует
изменяющемуся временному сдвигу между прямым и обратным ходом луча, а
другой — t0 — соответствует нулевому азимуту самолета 9 = 0, (т. е.
расположению самолета точно на продольной оси ВПП). Тогда с
учетом выражения (3.105) получим формулу, связывающую текущее
значение азимута и измеряемые на борту самолета временные интервалы
сравниваемых сигналов, т. е. 6Т = (tt — t0)/K, где k = 2/Q —
масштабный коэффициент преобразования временных измерений в
угловые, определяемый величиной угловой скорости сканирования
луча Q; tt — временной интервал между импульсами прямого и
обратного хода луча.
Формат сигналов при угловых измерениях синхронизируется
относительно начального времени, задаваемого от высокостабильного
генератора. При этом большое внимание уделяется симметричности
углового формата сигналов, т. е. установке среднего времени tc =
= 8,4 мс, относительно которого симметрично располагаются
временные интервалы, соответствующие прямому и обратному перемещению
луча в пределах рабочей зоны излучения радиомаяка (+60°).
При облучении антенны бортового приемоиндикатора MLS
сканирующим лучом на его входе появляются импульсы, длительность
которых согласно формуле (3.105) т = 9д/й, где 9д — угол раствора
ДНА направленного излучения.
В бортовом приемоиндикаторе дискретным методом автоматически
измеряется временной интервал между центроидами двух импульсов
«Я»—«О», т. е. между точками, находящимися на оси симметрии
импульсов (рис. 3,35, в), путем счета импульсов, следующих с
частотой
Последует заметить, что последовательность сигналов, излучаемых
наземными курсовыми и глиссадными радиомаяками MLS (т. е.
полный формат сигнала), в действительности значительно сложнее
представленной на рис. 3.42, б. Это связано с тем, что помимо
радиосигналов для определения угловых координат, наземные радиомаяки
передают дополнительную информацию, в которой закодированы,
например, сведения о размерах ВПП, направлении курса посадки,
наклоне глиссады планирования, комплектации наземными
радиомаяками и их размещении относительно оси ВПП, стандартном коде
опознавания радиомаяков, метеоусловиях и др. Передаются также сигналы,
обеспечивающие подавление боковых лепестков излучения ФАР и
калибровку бортовой аппаратуры по эталонному временному интервалу.
Угломерные радиомаяки NILS (обычно совместно с
радиодальномером DME) работают на одном из 200 независимых частотных кана-
118
лов в С-диапазоне и одном из 200 каналов в Q-диапазоне (глиссадный
радиомаяк). Система обладает высокой точностью углового наведецря,
поскольку на нее практически не влияют установочные погрешности
ДНА, погрешности «дрейфа» сигнала в бортовой аппаратуре, а также
переизлучения сигнала от местных предметов (ширина луча менее 2°).
Поскольку MLS выдает угловую информацию с высокой точностью
в большом объеме пространства (±60° по курсу и до 30° по глиссаде),
траектория полета самолета при заходе на посадку может быть
выбрана оптимальной, что позволяет уменьшить опасность сближения
самолетов при посадке и повысить пропускную способность аэропорта.
Вследствие указанных преимуществ MLS со сканирующим лучом и
отсчетом времени была рекомендована ИКАО в качестве единой
системы посадки для аэропортов III категории. Ожидается, что к 1995 г.
MLS с отсчетом времени займут доминирующее положение при
оборудовании аэропортов радиотехническими средствами посадки [7, 63].
Глава 4
МЕТОДЫ РАДИОДАЛЬНОМЕТРИИ
4.1. ОБЩАЯ ХАРАКТЕРИСТИКА МЕТОДОВ
Как уже отмечалось, при измерении дальности требуется измерить
временную задержку т между излучаемым и принимаемым сигналом,
которая пропорциональна текущей дальности RT. При этом в дально-
мерных РНС используется непосредственное измерение временного
интервала либо фазы и частоты, являющихся функциями времени и
позволяющими моделировать время в соответствующем масштабе. В
зависимости от этого различают временные фазовые и частотные методы
дальнометрии. Использование информации об изменении амплитуды
сигнала для оценки дальности хотя принципиально возможно (по
величине затухания сигнала), но применения не нашло ввиду того, что
амплитуда радиосигнала зависит от изменения условий
распространения радиоволн, изменения мощности излучения и других параметров
радиодальномера. Излучаемые сигналы, используемые для измерения
дальности, могут быть модулированы и смодулированы, т. е.
измерения могут выполняться на несущей частоте, частоте модуляции и
частоте биений излучаемых и принимаемых сигналов.
По способам формирования принимаемого сигнала различают
методы и средства радиодальнометрии с отраженным (автономные) и
ретранслированным сигналом (неавтономные). Кроме того, процесс
и схема измерения дальности могут быть однонаправленными (т. е.
системы используют один радиоканал), если опорный параметр (для
измерения времени, фазы или частоты) вырабатывается в точке
приема местным эталонным (опорным) генератором, сигналы которого тем
или иным способом жестко синхронизированы с излучаемыми
сигналами.
В зависимости от способа построения схем оптимального
(квазиоптимального) измерения дальности последние подразделяют на
измерители неследящего и следящего типа. Наиболее широкое применение
в современной радионавигации находят следящие измерители
дальности (СИД). Структурная схема СИД в общем случае состоит из
кольца отслеживания дальности (временной дискриминатор—экстраполя-
тор—синтезатор задержки), а также схемы поиска и захвата. Задачей
СИД является формирование следящих импульсов, временное
положение которых отображает лишь плавное, закономерное изменение
дальности и практически не изменяется под воздействием хаотических
шумовых возмущений. В этом смысле СИД подобен сглаживающему
фильтру для функции т (t) = 2R (t)/c. При отсчете дальности по
положению следящих импульсов с использованием СИД обеспечивается
120
высокая точность измерения. Анализ работы СИД и особенностей их
построения приведен в специальной литературе [25, 58]. Рассмотрим
последовательно особенности методов измерения дальности при
использовании сигналов с различными видами модуляции.
4.2. ФАЗОВЫЙ МЕТОД
Измерение дальности фазовым методом основывается на
определении фазового сдвига между двумя гармоническими колебаниями, одно
из которых является опорным, а другое несет информацию об
измеряемом расстоянии. Разность фаз сравниваемых сигналов может
измеряться на высокой (несущей) частоте, частоте модуляции несущих
колебаний и частоте биений двух колебаний, разностная частота
которых служит для измерения расстояния. Фазовые дальномерные
системы могут быть реализованы в двух вариантах: системы с
ретрансляцией сигнала («запрос—ответ») и системы с однонаправленным
радиоканалом (с хранением начальной фазы сигналов эталонным
генератором).
Рассмотрим вначале наиболее простой вариант фазового дальномер-
ного метода, использующего для измерения фазовых сдвигов несущей
частоты однонаправленный радиоканал (рис. 4.1). Дальномерная
система состоит из задающего генератора ЗГ частоты со0, передающего
устройства Прду располагаемого в пункте с известными
координатами, и излучающего сигнал
и (0 = Um cos (co0t + ф0) (4.1)
с начальной фазой ф0. В результате прохождения измеряемого
расстояния R сигнал приобретает запаздывание по фазе (времени) и
может быть описан на входе приемника Прм как
U„ (0 = gUn cos (ю01 + Фо-^- ± J5l7L^) ■ <4-2)
где Wr — радиальная составляющая путевой скорости сближения
передатчика и приемника сигналов;
g — коэффициент, учитывающий затухание амплитуды сигнала.
Если не учитывать величину ^ R
доплеровского сдвига частоты
(фазы) измеряемого сигнала (выбирая
сравнительно малые значения
частот со0), то на входе фазометра
согласно выражению (4.2) фаза
сигнала, несущего дальномерную
информацию,
Ф2 = <Pi — ®oRlc = со0/ +
+ Фо — ©о#/*. (4-3)
тг « Рис. 4.1. Структурная схема фазово-
Крометого на фазометр также го даЛьномера с измерениями на
неподается сигнал опорной фазы от сущей частоте
d
Прд
j
9i
(л)0
1 ЗГ
^
•
h
Прм
г~
гон
(О0
Фазометр
г
Индикатор 1
(R) j
121
высокостабильного генератора опорного напряжения ГОН. Фаза
опорного сигнала должна быть равна исходной фазе сигнала,
формируемого также высокостабильным задающим генератором, что
практически достигается с точностью до погрешности синхронизации частот
(фаз) обоих генераторов, т. е. согласно выражению (4Л)
Фз == Ф1 + Фсх = ©о* + Фо + Фсх, (4.4)
где фсх — &<ut погрешность синхронизации, обусловленная отклонением
частоты ГОН от номинального значения со0.
Текущее расстояние R определяют, измеряя разность фаз срг
принятого и опорного сигналов. Поэтому из выражений (4.3 и 4.4),
пренебрегая фсх, имеем
со0 R 2nR /л сч
Фг-Фз— Фз^-1— ^-5— > (4-5)
С А0
откуда
« — Фг^Фг. (4.6)
Фазометром измеряется разность фаз лишь в пределах одного
фазового цикла, а величина фг может включать в себя неизвестное число
полных фазовых циклов. Как следует из формулы (4.6), изменение
фазы на полный цикл произойдет при изменении расстояния Rmax = Я0.
При дальнейшем увеличении расстояния показания фазометра будут
повторяться. Таким образом, максимальное расстояние, которое может
быть измерено однозначно рассматриваемым методом, равно длине
волны излучаемых колебаний Х0.
Зона в пространстве, в пределах которой фаза сигнала изменяется
на 2п при изменении расстояния, является зоной однозначного
отсчета, или фазовой дорожкой. Для рассматриваемой дальномерной
системы фазовые дорожки имеют вид концентрических колец шириной
Х0 (для дальномеров с ретранслятором — шириной А,0/2). В зависимости
от измеряемого расстояния число фазовых дорожек пх = /?/Я0. В
пределах каждой фазовой дорожки можно различить лишь конечное
число пг линий положения — ЛРР, определяемое величиной погрешности
фазовых измерений Дфг: п2 = 3607Афг.
С учетом соотношений (4.4) и (4.6) погрешность измерения
дальности
Afl = -^A<pr + -^Lrf, (4.7)
где Афг — аппаратурная погрешность измерения фазового сдвига;
ДА,0 — отклонение длины волны колебаний опорного генератора от
номинального значения за время полета, отсчитанное от момента начала
синхронизации работы задающего и опорного генераторов.
Из соотношения (4.7) видно, что погрешности измерения дальности
могут быть уменьшены путем уменьшения длины волны (увеличением
частоты) рабочих колебаний дальномера, а также увеличением
стабильности частоты опорного и задающих генераторов и точности
синхронизации их работы. Поскольку в современных высокостабильных
122
генераторах достигнута величина
относительной нестабильности
частоты 10_1° —Ю-11 (за длительный
период работы), то вызываемая ею
погрешность измерения дальности
невелика. Труднее обеспечить
синхронность (синфазность) работы
задающего и опорного
генераторов, что выполняется обычно в
начале измерений.
Увеличение рабочей частоты
дальномера в интересах
повышения точности измерений снижает,
как это видно из формулы (4.6),
максимальное значение
измеряемого расстояния и вызывает трудности
отсчета расстояния "
Рис. 4.2. Структурная схема
фазового дальномера с измерениями на
частоте модуляции
в ликвидации многозначности
Поэтому подобные системы (в частности,
американская система типа «Наваро» [5]) работают на длинных волнах.
Устранение многозначности отсчета в фазовых дальномерах
осуществляется обычно следующими способами:
1. Использованием в индикаторах дальности счетчиков полных
фазовых циклов. При этом необходимо предварительно «привязать»
показания индикатора к ориентиру на местности, производя от него
последующий отсчет дальности.
2. Использованием предварительной информации о расстоянии,
полученной путем счисления пути другим способом. В этом случае
погрешность оценки местоположения (дальности) должна быть
меньше ширины фазовой дорожки.
3. Излучением двух или более рабочих частот, т. е. изменением
масштаба измерения дальности. В данном случае для правильного
определения дальности необходимо чтобы: период наиболее низкой
масштабной частоты Tqk был больше величины 2/?тах/с, а период
каждой последующей более высокой частоты был (как будет показано
далее) больше возможной погрешности запаздывания ответного
сигнала, возникающей при измерении на предшествующей, более низкой
масштабной частоте. Этот способ ликвидации многозначности отсчетов
требует расширения диапазона рабочих частот дальномера, что не
всегда возможно.
Таким образом, несмотря на сравнительную простоту реализации
рассмотренной схемы дальномера с измерениями на несущей частоте
и его практически неограниченную пропускную способность,
присущий дальномеру недостаток многозначности измерения дальности
снижает его достоинства и создает известные трудности при
использовании.
Значительное уменьшение и даже полное устранение
многозначности измерения дальности может быть достигнуто применением системы
(рис. 4.2) с измерением фазовых сдвигов на частотах модуляции
несущих колебаний (по амплитуде). Дальномер с ретранслятором сигнала
и разносом несущих частот прямого (оа и ретранслированного ю2 сиг"
123
налов обеспечивает исключение взаимного влияния сигналов обеих
радиоканалов. Высокочастотные сигналы передатчика запросчика
модулируются по амплитуде от генератора низкой частоты ГНЧ
низкочастотным напряжением йм, которое также подается на фазометр в
качестве опорного напряжения QM.on- Воспринимаемые приемником
ретранслятором Прмр на частоте сох модулированные сигналы
детектируются, усиливаются усилителем У и модулируют сигналы
передатчика Прдр ретранслятора, излучаемые на частоте со2. На выходе
приемника запросчика Прм выделяется напряжение частоты QM, фаза
которого содержит информацию о текущей дальности. Это напряжение
сравнивается с опорным в фазометре (аналоговом или цифровом) и
индикатор на выходе фазометра выдает информацию об измеряемой
дальности R.
Если на выходе ГНЧ модулирующее напряжение
Ux = Unl sin (QJ + Фо), (4.8)
то соответствующее ему напряжение на выходе приемника Прм
приобретает запаздывание по фазе в результате прохождения сигналом
расстояния 2R, т. е.
U2 = Um% sin (QM/ + Фо - 2QMR/c) (4.9)
(при измерениях на низких частотах доплеровским сдвигом частоты
можно пренебречь).
С помощью фазометра в результате вычитания фаз напряжений —
см. выражения (4.8) и (4.9)—измеряется разностный фазовый сдвиг
Фг = 2QmR = -i^-, (4.10)
с Хш
где Хм — длина волны модулирующих колебаний.
По измеренной разности фаз фг найдем согласно формуле (4.10)
расстояние
# = ЯмФг/4я. (4.11)
Так как показания фазометра циклически (через каждые фг = 2я)
повторяются, то в этом случае максимальное однозначно измеряемое
расстояние Rm8LX = A,M/2.
Поскольку модулирующая частота может быть выбрана достаточно
малой (по сравнению с несущей частотой), достоинством
рассматриваемого дальномера является возможность однозначного определения
больших расстояний. Однако точность измерения в данном случае
снижается, так как погрешность (например, среднеквадратичная gr)
оценки дальности с учетом формулы (4.11) запишется в виде
<fo = ЯмаФг,/4я, (4.12)
где аф — среднеквадратичная погрешность измерения фазовых сдвигов.
Из выражения (4.12) следует, что при необходимости все большее
увеличение масштаба измеряемого расстояния (и соотвествующей
длины волны %м) достигается за счет проигрыша в точности измерений.
Для разрешения указанных противоречий, свойственных всем фазо-
124
о
о—
Отсчет дальности
2Я
4Я
Гочная
шкала
Ложные
показания
V/
вым дальномерам, используют
несколько масштабных
модулирующих частот (сетку частот),
что легче обеспечить, чем
создать масштабную сетку
несущих колебаний.
При введении сетки
модулирующих (масштабных) частот
дальность отсчитывается
многошкальным методом. В этом
случае для однозначного измерения
дальности вводят грубую
шкалу с низкой масштабной
частотой £2МГ, при которой разность
фаз на максимальной дальности не превышает 2я, т. е. согласно
формуле (4.11), масштабная, частота грубой шкалы выбирается из условия
А^/л
m
/руВая
шкала.
Рис. 4.3. К исключению ложных
показаний при многошкальной фазовой даль-
нометрии
QMr < nc/R
max»
(4.13)
а соответствующая ей длина волны Ямг ^ 2/?тах.
Для обеспечения высокой точности измерения дальности вводят
точную шкалу с высокой масштабной частотой Ймт или несколько
частот. При этом QMT > QMr, что приводит к трудностям при стыковке
различных шкал. Условие правильной стыковки двух шкал
заключается в том, что максимальная погрешность измерения фазы Афтах по
грубой шкале в пересчете на точную шкалу не превосходила
интервала однозначности последней, т. е. если отношение точной и грубой
масштабных частот m = QMT/QMr, то должно выполняться условие
Афтах m < 2я. При невыполнении этого условия возникают
дополнительные грубые погрешности (рис. 4.3). Исходя из указанных
требований, при стыковке шкал устанавливается максимально допустимое
отношение двух смежных масштабных частот
тдоп = 2л/Афтах = 3607Д<ртах. (4.14)
Отношение грубой и точной масштабных частот в реальных
условиях обычно не соответствует условию правильной стыковки шкал (4.14),
что приводит к необходимости использования не двух, а нескольких
п шкал. Поскольку погрешности фазометров на всех п шкалах, как
правило, одинаковы, отношения масштабных частот любых двух
смежных шкал целесообразно брать также одинаковыми. В этом случае
масштабные частоты многоканальной дальномерной системы
образуют геометрическую прогрессию со знаменателем
тп^УЩЖ^ (4Л5)
(с учетом того, что число отношений частот на единицу меньше числа
шкал).
Очевидно, соотношение (4.15) должно удовлетворять условию
стыковки (4.14), т. е.
/nn ^ m
доп»
(4.16)
125
Логарифмируя неравенство (4.16) с учетом выполнения условия
стыковки шкал, получим необходимое число шкал:
*- _ 1 _|_ & (^мт/^мг) (л \п\
Таким образом, используя формулы (4.13)—(4.17), можно
определить характеристики многошкальной дальномерной системы и
число шкал из условий обеспечения однозначности и заданной точности
измерений. Некоторое усложнение устройств измерения и индикации
дальности в многошкальных радиодальномерах, использующих для
измерения фазовых сдвигов модулирующие частоты, окупается
несомненными достоинствами этих систем, обладающих высокой точностью
и однозначностью отсчета дальности.
Фазовым дальномером с модуляцией сигналов является дальномер-
ный канал одного из вариантов спутниковой радионавигационной
системы» «Timation» (США), работающей в диапазоне несущих частот
150—400 МГц, амплитудно-модулированных низкими частотами 0,1;
0,3; 1,3; 10; 30 и 100 кГц [61].
Не менее совершенным вариантом фазового дальномера является
дальномерная система с измерением разности фаз на частоте биений,
разработанная советскими учеными И. И. Мандельштамом и Н. Д. Па-
палекси еще в 1930 г. В настоящее время модернизированный вариант
такой системы «Рэйдист» [5] используется за рубежом.
В заключение приведенного анализа необходимо указать на
отсутствие у фазового метода измерения дальности разрешающей
способности по дальности. При одновременном поступлении на вход
приемника фазового дальномера нескольких сигналов они будут
интерферировать и дадут результирующий сигнал, фазовый сдвиг которого
не несет информации о дальности до объектов. Поэтому фазовый метод
дальнометрии дает наилучшие результаты ь тех случаях, когда
заведомо известно, что источником дальномерной информации является лишь
один объект. В силу указанных причин фазовые дальномеры нашли
широкое применение в космической радионавигации, а также при
измерении параметров орбит искусственных спутников Земли.
4.3. ЧАСТОТНЫЙ МЕТОД
Дальность до цели частотным методом в основном определяется с
использованием непрерывных частотно-модулированных сигналов.
При этом измеряют приращение частоты сигналов передатчика за
время их прямого (до цели) и обратного распространения, т. е. измерение
частоты биений прямого и отраженного сигналов, соответствующее
текущей дальности.
В случае изменения частоты передатчика /п (0 по линейному
(пилообразному) закону изменение частоты отраженного сигнала f0T (t)
будет запаздывать на время t3 = 2R/c, пропорциональное
измеряемому расстоянию R (рис. 4.4, а). При смешивании этих сигналов
образуются биения, огибающая которых является гармоническим колеба-
26
Частотомер
Рис. 4.4. Виды периодической
модуляции частоты, используемые в
частотных дальномерах
Рис. 4.5. Упрощенная структурная
схема частотного радиодальномера
(радиовысотомера)
нием. Величина изменения частоты передатчика (см. рис. 4.4, а) за
время /3» т- е- частота биений,
F, = U tg « - d/п/Л = -^* Л. (4.18)
В частотных радиодальномерах (ЧД) используются различные
виды периодической модуляции несущей частоты /п (О- ПРИ этом оги"
бающая модуляции FM (t) имеет следующий вид:
для симметричного пилообразного закона (см. рис. 4.4, а)
F*(t)=l-
2t
при
7м
2
<t<
для несимметричного пилообразного (рис. 4.4, б)
FM (t) = 2t/TM при -TJ2 < / < 7M/2;
для гармонического (рис. 4.4, в) FM (t) = sin QMt,
где QM = 2jt/7M = 2jx/TM —частота модуляции.
Дадим характеристику частотному методу дальнометрии по
упрощенной структурной схеме частотного дальномера (рис. 4.5), которая,
в частности, применяется в частотных радиовысотомерах (РВ),
предназначенных для определения истинной высоты полета.
Модулированные по частоте колебания /п (/) высокочастотного генератора
ЧМГ излучаются передающей антенной Аъ а также подаются на вход
смесителя См— схему перемножения прямого и отраженного /От(0
(принимаемого антенной А2) сигналов. На выходе смесителя
выделяются лишь низкочастотные колебания (сигнал биений),
пропорциональные абсолютному значению разности мгновенных значений частот
прямого и отраженного сигналов, т. е.
(4.19)
127
1М01= 1М0-/«(01.
Частота биений введена в формулу по модулю, поскольку
физически частота всегда положительна (хотя формально можно учитывать
и знак частоты). Как видно из временных диаграмм (рис. 4.6, а, б),
частота биений, которая остается постоянной в течение большей
части периода модуляции Тм, может быть выражена с учетом
соотношения (4.18) так:
Fgo = t5dfn/dt - 8AfuFuR/c,
или i? =
Л>о
(4.20)
(4.21)
"tmin
О
feftfli
fn(*L
8Л/М FM
где А/м — девиация несущей частоты.
Отрезки времени ts, в течение которых частота F6o не остается
постоянной, называют зонами обращения, поскольку в средней точке их
изменения функция F6 (t) проходит через нуль (см. рис. 4.6, б).
Очевидно, что влияние зон обращения тем меньше, чем лучше
выполняется условие Тм > t3. Таким образом, зависимость (4.21) носит
линейный характер лишь на малых дальностях (высотах).
Рассмотрим процесс формирования огибающей биений при
различных фазовых сдвигах отраженных сигналов относительно излучаемых
с помощью диаграммы (рис. 4.7). Будем полагать неподвижным
опорный вектор £/ш характеризующий зондирующий сигнал. При этом
ось проекций вращается с переменной круговой частотой соп (/) =
= 2nfn (t) по часовой стрелке, а соответствующий принимаемому
сигналу вектор Um вращается
относительно Un с частотой биений
jr*r^\ ^ -ч ^ ^ ,Л Рб W ^ fu ^ ~ f™ (/) B НаПРаВ"
*y£i J.sH-S^l Jr-i- лении, определяемом знаком F6 (t).
"&!/ 2JJi |» 1 ^ ПРИ /от < fn вектор U0T вращается
по часовой стрелке, а при f0T>
>/п— против нее.
Для оценки формы изменения
амплитуды огибающей биений
сравним изменение частот сигналов на
рис. 4.6, а и рис. 4.7 в точках /,
2, 3, 4. В интервале времени 1—2
вектор U0T вращается по часовой
стрелке с постоянной скоростью, а
в интервале 2—3 вращение
вектора £/от замедляется. В точке Звек-
....... ... | | | | Т0Р ^от останавливается (так как
Я\ I I I I I III I I I I в этой точке /п = /от), после чего
начинает вращаться в
противоположном направлении с
возрастающей скоростью, пока не достигнет
~t ее постоянства и т. д. При этом
Рис. 4.6. Временные диаграммы про- результирующий вектор 7/р совер-
цессов в частотном дальномере шает угловые колебания, величина
0)
шЧ^-лгл/
^ОГР ,
0
Щш
и ^ J
t ППППППП ПППГ"
IUUII UUUullUU *
MM Ml ММ
t
_ Jt
128
Рис. 4.7. К принципу образования сигнала биений
которых определяется положением вектора U0T. Длина вектора Ь\
характеризует величину амплитуды биений UBX на входе приемника.
Таким образом, огибающая биений на выходе смесителя
(называемая обычно преобразованным сигналом Uuvc (t)) имеет форму
гармонического колебания, за исключением участков длительностью t3
(отстоящих друг от друга на расстоянии Тм/2), внутри которых фаза
этого колебания изменяется на 180°. Для определения дальности
(высоты) необходимо измерить F6o, для чего используют частотомеры
различного типа, выполненные в виде анализаторов спектра, либо
аналоговых или дискретных счетных измерительных схем следящего и
неследящего типа.
В приведенной схеме частотного дальномера обработка сигналов
называется корреляционно-фильтровой, поскольку вначале
выполняется операция умножения отраженного сигнала на опорный
(излучаемый) сигнал, а затем энергия сигнала биений накапливается в
фильтрах. В зависимости от выбранных параметров измерителя частоты
возможна реализация почти оптимальных алгоритмов.
Наиболее широко в частотных радиодальномерах
(радиовысотомерах) используют неследящие измерители частоты биений благодаря
технической простоте и надежности работы. Принцип его работы
заключается в подсчете числа импульсов (счет нулей процесса Unvc (/),
сформированных из напряжения биений, за период модуляции Тм.
Для этого биения F6 (t) усиливаются и после двустороннего
ограничения £/огр и дифференцирования С/дц одноподярные импульсы (выде-
б Зак. 444
129
ляемые с помощью диода)
поступают на вход счетчика
импульсов — основного элемента
частотомера (рис. 4.6, в, г, д). При
аналоговом способе счета постоянная
составляющая напряжения на
выходе интегратора £/вых,
усредняющего импульсную
последовательность, будет пропорциональна
числу импульсов пт за период
модуляции, т. е. частоте биений (рис.
4.6, е).
От линейной (пилообразной)
модуляции частоты сигналов можно
перейти к оценке влияния
нелинейности модуляции на работу
частотного радиодальномера,
например при использовании синусоидального типа модуляции. Формы
диаграмм изменения частоты излучаемых /п (/) и отраженных
сигналов /от (0 приведены на рис. 4.8, а, а частоты биений F6 на рис. 4.8, б.
Запишем зависимости для частот излучаемых и принимаемых
сигналов с учетом синусоидального закона ЧМ в виде:
/п (0 = /о + АЛ. sin 2kFJ;
Рис. 4.8. К определению средней
частоты биений при синусоидальной
ЧМ
/от (0 = /о + A/Msin2nFM(/
Из соотношений (4.22) частота биений
Q.
(4.22)
F*(t) = fn(t)4 <*(*)-
А/м
[sin2nfM t—sm2nFtl (t — t3)] =
= Д/м cos 2я Fu(t—1\ sin ( 2"^M R \. (4.23)
Интегрируя выражение (4.23), найдем среднюю частоту биений за
период модуляции Т"м:
'з+'м/4 'з+'м/4
^б.ср = ^- f F6(t)dt = -t- f ^ cos2n FM(t-R/c)X
X sin (2nFM Я/с) Л - -^- sin (2я FM R/c) x
-, 'з+'м/4
X |sin2nFM(*—Я/с)
2nFM
i^_ sin (2jxFm #/c). (4.24)
При выполнении условия t3 = R/c <C Тм заменим sin (2nFMR/c)
выражением 2я#/ (сТм). С учетом замены выражение (4.24)
преобразуется к виду
^.cP = 8Af^/(cTM), (4.25)
130
откуда
Из соотношений (4.21 и 4.26) следует, что при выполнении условия
t3 С Тм формулы для оценки дальности при линейной и
синусоидальной модуляции аналогичны при замене F6o на F6.cv. Реальный
частотомер измеряет именно среднюю частоту биений, а поэтому
приведенные выше характеристики принципа действия частотных дальномеров
с линейной частотной модуляции справедливы и для синусоидальной
модуляции.
Следует иметь в виду, что сам метод измерения дальности путем
оценки частоты биений принципиально содержит методические
погрешности. В частности, так называемая методическая погрешность
дискретности отсчета дальности вызвана нарушением кратности
периодов Тм и 7б0 при изменении высоты, а также наличием зон обращения.
Кроме того, вывод формул (4.21 и 4.26) справедлив при условии, что
доплеровским приращением частоты биений /^д, вызванным
перемещением отражающего объекта, можно пренебречь по сравнению с
^бо С^бо 3> ^бд). Последнее условие в практике измерения дальности
(высоты) подвижного объекта частотным методом обеспечивается
далеко не всегда. Рассмотрим основные виды погрешностей частотного
метода дальнометрии и их влияние на характеристики дальномера
более подробно.
Погрешность дискретности отсчета дальности. Проанализируем
эту погрешность при измерении дальности спектральным методом и
методом счета числа импульсов.
При использовании спектроанализатора непосредственно
измеряется частота преобразованного сигнала (см. рис. 4.6, в). Если
измерение производится в течение интервала времени 7И > Тм (это всегда
выполняется в реальных условиях), можно полагать, что
преобразованный сигнал состоит из последовательности импульсов, следующих
с периодом Тм. Как известно, частотный спектр такого сигнала можно
принять дискретным с интервалом между отдельными спектральными
линиями FM = \1Ти. Огибающая амплитудного спектра
рассматриваемого сигнала имеет форму функции sin xlx с шириной основного
лепестка огибающей 2/ти = AFM (рис. 4.9). При этом наличие зон
обращения приводит к расширению спектра сигнала. В результате,
помимо основной спектальной линии jp6o (около которой
группируется спектр одиночного импульса), появляется ряд боковых линий.
Заметим, что максимум огибающей спектра не всегда совпадает с nFM,
так как частота F60 может быть не
кратна частоте /V W)\
Частота FCo (а, следовательно,
и дальность) измеряется спектро-
анализатором по положению
линии, имеющей максимальную ам- ° ?пг?п
плитуду. А поэтому минимальное
изменение дальности (высоты) AR Рис. 4.9. Спектр сигнала биений
/
' I
I
5*
131
можно зафиксировать лишь по изменению амплитуды спектральной
линии, смещенной относительно предыдущей на величину FM.
Поскольку минимально фиксируемое изменение частоты биений AF00 =
= FM, то в данном случае имеет место методическая погрешность
измерения дальности, которая при подстановке в формулу (4.21)
минимального значения AF60 выражена формулой
AR = cAFQ0/8AfMFM = c/8AfM. (4.27)
Полученное значение методической погрешности дискретности
отсчета дальности AR определяет по существу также интервал
разрешения по дальности и минимально измеряемую дальность.
Действительно, так как минимальная частота биений F6 min ограничена величиной
^м, то согласно (4.21)
«mm = с/ (8А/М). (4.28)
Для установления максимальной дальности необходимо, как еле*
дует из рис. 4.6, а и формул (4.21)—(4.26), обеспечить выполнение
условия F60 < Д/м, а поэтому
Ятах = cF6mj8AfMFM = с/ (8FM). (4.29)
Практически для уменьшения влияния зон обращения значение
i?max выбирают значительно меньшим указанного формулой (4.29).
В частности, подобные дальномеры предназначены для измерения
малых высот полета.
В случае использования для определения дальности метода счета
импульсов, формируемых из сигнала биений за период модуляции
например, при пилообразном законе модуляции), их число
пт = F,0 Тм = 8AfMR/c. (4.30)
Соответственно число импульсов в секунду, т. е. средняя частота
повторения импульсов, определяемая счетчиком,
пг = Щ1ТШ = 8AURFJC (4.31)
С учетом этих соотношений также может быть найдена методическая
погрешность дискретности отсчета, возникающая в данном случае из-
за того, что для изменения показаний счетчика число импульсов пт за
период модуляции должно измениться по меньшей мере на один. В свою
очередь, соответствующее изменение дальности AR = с/ (8А/М), что
совпадает с формулой (4.27).
Чтобы уменьшить методическую погрешность дискретности
отсчета, надо увеличивать девиацию частоты А/м, что требует расширения
спектра излучаемого сигнала. Вместе с тем существуют способы
уменьшения погрешности дискретности отсчета А/? при сохранении
величины девиации частоты постоянной.
Одним из таких способов является использование специального
фазовращателя для сдвига по частоте (и фазе) прямого сигнала на
величину Fn перед сложением его с отраженным. В результате средняя
частота сигнала становится равной /0 + Fu (вместо /0)> а абсолютное
значение девиации частоты остается неизменным. Таким образом, час-
132
fofа излучаемого сигнала /0 — А/ < /изл < /0 + Д/> а частота
прямого сигнала, подаваемого на вход смесителя, /0 — А/ + Fn < /пр ^
<fo + Fn + A/.
Если теперь для данного типа дальномера повторить аналитическое
описание его работы, используя, например, синусоидальную частотную
модуляцию, то в результате выполнения преобразования типа (4.21)—
(4.26) методическая погрешность оценки дальности
Д#п = А/?/*, (4.32)
где к = FJ(4Fn).
Из формулы (4.32) видно, что подобный способ преобразования
прямого сигнала (его сдвиг по частоте) позволяет уменьшить
погрешность дискретности отсчета дальности в k раз, т. е. в зависимости от
выбора соотношения частоты FM и Fu.
Другой способ уменьшения рассматриваемой погрешности
состоит в том, что прямой сигнал передатчика перед его сложением с
отраженным сигналом преобразуется путем понижения несущей частоты
при сохранении неизменной девиации частоты. При этом разность
несущей частоты /0 и частоты гетеродина /г представляет собой
промежуточную частоту /1П = /о — /г, которая является (по принципу
построения дальномера) частотно-модулированной с коэффициентом
модуляции, зависящим от высоты. Измерение глубины модуляций в этом
случае позволяет определить дальность при отсутствии погрешности
дискретности отсчета, обеспечивая более простую конструкцию
передатчика, модулятора и приемника [5, 6, 43].
Кроме указанных способов, уменьшения погрешности
дискретности можно достигнуть, используя двойную частотную модуляцию
излучаемых сигналов. Частоты модуляции отличаются по величине в
несколько десятков раз. Хотя подобная схема радиодальномера
обладает высокой точностью, она конструктивно очень сложна.
Влияние доплеровских сдвигов частот на точность измерения
дальности. В случае измерения дальности до подвижного объекта (цели),
помимо частоты биений FG0, пропорциональной текущей дальности,
возникают доплеровские сдвиги частоты принимаемого сигнала
относительно излучаемого, т. е. Fn = 2/п (t)Wr/c, где Wr — радиальная
составляющая относительной скорости. Поэтому результирующая
частота биений
Заметим, что, строго говоря, вследствие изменения частоты пере
датчика доплеровскии сдвиг отраженного сигнала изменяется от
^дтт = 2Wrfmln/c до Z^max = 2Wrfm8iJc. Но так как Д/м =
= /max — /mm С (/max + /min)/2, то изменением доплеровской
частоты за период модуляции можно пренебречь, считая FRmin =
= ^дтах = Гц>
Таким образом, изменение результирующей частоты биений за счет
доплеровских сдвигов при измерении дальности до подвижного объекта
может дать значительную погрешность в оценке дальности. Поэтому
133
ч
\
ч
ч
ч
ч
\
/
ч
Рис. 4.10. К оценке влияния
эволюции самолета на точность измерения
высоты
возникает необходимость
разделения в приемном устройстве
постоянной и переменной
составляющих функции F6 (t) и их
отдельного измерения. Таким способом
можно обеспечить высокую
точность оценки дальности и, кроме
того, измерить еще один важный
навигационный параметр —
радиальную скорость движения
объекта. Детальный анализ влияния
доплеровских сдвигов частот на
результаты измерений дальности
частотным методом приведен в
работах [43, 58].
Влияние динамики объекта на
точность измерения дальности
(высоты). Эволюции относительно
центра масс подвижного объекта, в
частности, самолета, высота
которого над земной поверхностью измеряется, могут вызвать
значительные погрешности измерений. Это связано с использованием
направленных антенн, вследствие чего при появлении углов тангажа и крег
на, частотный радиовысотомер измеряет наклонную дальность до
точки пересечения ДНА с земной поверхностью (рис. 4.10). В этом
случае истинная высота Яи « Ниш cos у, где у — угол тангажа.
Возникающая погрешность оценки высоты пропорциональна углу
тангажа (или крена) и может быть уменьшена путем расширения ДНА,
что допустимо лишь в ограниченных пределах из-за снижения
помехоустойчивости системы.
При использовании аналоговых схем измерения частоты биений
в радиовысотомерах возникают погрешности, вызванные
инерционностью отдельных схем радиовысотомера. Эти погрешности проявляются
при больших значениях вертикальной скорости самолета во время
снижения и набора высоты, когда показания индикатора высотомера
отстают от истинных значений измеряемой высоты.
В этом случае погрешность показаний высоты
д#. = ±Ц7вТи,
где WB — вертикальная составляющая скорости самолета;
ти — постоянная времени радиовысотомера, определяемая в основном
постоянной времени интегратора — счетного каскада. Величина
погрешности значительно уменьшается при использовании цифровых
счетчиков импульсов сигнала биений.
Помимо названных методических погрешностей, в дальномерах
необходимо учитывать аппаратурные погрешности, которые приводят
к изменению таких важных параметров (определяющих точность
показаний), как девиация частоты Д/м, частота модуляции FM9 а также
к постоянной задержке сигналов в трактах антенно-фидерной
системы («остаточная высота»), и другие факторы.
134
Рассмотренный частотный метод дальнометрии наиболее широко
используется для определения дальности или высоты до одиночного
объекта. В частности, гладкую земную поверхность в первом
приближении можно также считать за одиночный отражающий объект.
Описанный выше принцип действия частотных дальномеров положен в
основу построения широкого класса частотных радиовысотомеров малых
высот (например, отечественных РВ-2, РВ-УМ, РВ-3, РВ-5 и др.).
Современные радиовысотомеры малых высот (с диапазоном измерения,
непревышающим 1500м) используют не только для непосредственной
индикации истинной высоты полета, но также включают в
автоматизированный комплекс управления заходом на посадку и посадкой
самолетов. Основные требования к радиовысотомерам, предназначенным
для использования в системах посадки III категории, следующие [48]:
диапазон измерения высоты от 0,5—1,5 и до 750 м;
погрешность определения высоты на заключительном этапе
посадки, начиная с высоты 15—18 м не хуже 0,3 м (максимальная
погрешность). Указанная погрешность должна обеспечиваться при
вертикальной скорости не менее 4—5 м/с, при углах крена ±20° и тангажа
±15°.
Определение дальности частотным методом до многих объектов
требует сложных многоканальных схем спектрального или
временного анализа, поэтому подобный метод в радионавигации ЛА
применения не нашел.
4.4. ВРЕМЕННОЙ МЕТОД
Временной (импульсный) метод измерения дальности является
методом непосредственного измерения дальности R по времени
запаздывания ответного (отраженного) импульса по отношению к прямому
(зондирующему). Рассмотрим особенности измерения дальности в
импульсных дальномерах с отраженным (автономных РД) и с
ретранслированным (неавтономных РД) сигналами.
В радиодальномерах с отраженным сигналом (рис. 4.11, а)
передатчик Прд и блок измерения и индикации дальности БИД
синхронизируются последовательностью видеоимпульсов, вырабатываемых
синхронизатором (диаграмма / на рис. 4.11, б). Передатчиком
формируются импульсные высокочатотные колебания, которые могут быть
модулированы или манипулированы по фазе или частоте по
определенному закону в пределах каждого импульса (диаграмма 2 на рис. 4.11, б).
5)
Рис. 4Л1. Структурная
схема автономного
импульсного дальномера
(а) и процессы в нем (б)
а)
Прд
i
1
\CuHXpo-
\низатор
ц
7'
L
АП
'
6ИД
rfc®
Антенна
J_
-Ц
Прм
-*»ь
1И111Ч11
^ -J
—-*
H11W
135
С выхода передатчика радиоимпульсы через антенный переключатель
АП поступают в антенну и излучаются в пространство.
На вход приемника Прм дальномера поступают сигналы,
отраженные от каких-либо объектов Ц или от земной поверхности. С выхода
приемника видеоимпульсы подаются в ВИД, где измеряется время т
запаздывания этих импульсов относительно зондирующих сигналов
передатчика (диаграмма 3 на рис. 4.11, б). Антенный переключатель
служит для запирания приемника во время излучения передатчиком
зондирующих импульсов и для блокировки выходных цепей Прд во время
приема сигналов. Таким образом, временное запаздывание т при
прохождении сигналов до отражающего объекта и обратно и измеряемое
расстояние до объекта R связаны соотношением
R = сх/2. (4.33)
При одновременном измерении расстояния до нескольких
объектов с помощью импульсного дальномера необходимо, чтобы принятые
сигналы не перекрывались во времени на входе приемника. Если,
например, /?! и R2 — расстояния до двух объектов, то отраженные от
объектов сигналы не перекрываются при условии
\2R2/c-2R1/c\^xJi, (4.34)
где ти — длительность импульса на выходе приемника.
Из соотношений (4.33) и (4.34) следует, что минимальное
разрешаемое расстояние ARmin (при котором возможно раздельное измерение
дальности до двух объектов)
ЛЯтш > cxJ2. (4.35)
Это же расстояние определяет величину минимальной измеряемой
дальности с помощью импульсного дальномера.
При заданной максимальной дальности действия дальномера i?max
период следования излучаемых импульсов Тп выбирается из условия
обеспечения однозначности измерения расстояния, согласно которому
максимальное время запаздывания ттах не должно превышать период
следования 7П, т. е.
Tmax = 2tfmax/C<7n. (4.36)
При нарушении условия (4.35) и R > сТп/2 возникает погрешность
измерения, кратная величине сТп/2.
В качестве индикаторных устройств импульсного дальномера
применяют визуальные индикаторы на ЭЛТ либо автоматические
измерители компенсационноного типа, обычно преобразующие измеряемый
временной интервал в цифровой код. В последнем варианте
осуществляется подсчет в ВИД числа измерительных импульсов (меток) от
специального генератора, который "запускается зондирующим
импульсом дальномера и останавливается отраженным импульсом. Число
счетных импульсов, поступивших на счетчик дальности в момент
прихода ответного импульса (диаграмма 4 на рис. 4.12, б),
и* = 2T,4R/c, (4.37)
Ш
„Ответ
-в&Н
№
Прм
вид
Прд
Запросчин
Ретранслятор
Прдр V* 1 *А Прм
и \ \ | 1 г
" УЦ nPav [*-
Lb
Л.
^„Запрос
ЛЛ.
W
60
_TL
^ I I
Рис.
4.12. Структурная схема импульсного
дальномера с ретранслятором
где Тсч — период следований
счетных импульсов, а число
tiR отображает измеряемую
дальность в двоичном
(двоично-десятичном и т. п.) коде.
Достоинством рассмотренной
схемы дальномера является
возможность измерения
дальности до многих объектов при
использовании сравнительно
простой аппаратуры. К
недостаткам дальномера относится
невозможность измерения
очень малых расстояний (во
время излучения
зондирующего сигнала приемник заперт), а также необходимость
использования для измерения больших расстояний мощных передатчиков.
Радиодальномеры с ретрансляцией сигналов состоят из запросчи-
ка и ответчика (ретранслятора) сигналов. Возможны два варианта
установки ответчика: на борту ЛА либо в наземном пункте, координаты
которого известны. В первом случае определяется дальность до ЛА от
наземного пункта, где установлен запросчик. Во втором случае
дальность до наземного радиоориентира определяется непосредственно на
борту ЛА. Структурная схема радиодальномера с ретрансляцией
сигнала представлена на рис. 4.12. Передатчик запросчика Прд
синхронизируется импульсами с выхода блока измерения дальности Б ИД.
Антенна Ах излучает высокочастотный сигнал на частоте /lf который
через антенну А2 поступает на приемник Прмр ретранслятора. Далее
сигнал усиливается, передатчик Прдр генерирует колебания и
антенна А з на частоте/2 передает ответные радиоимпульсы, воспринимаемые
приемником запросчика Прм через антенну Л4. В результате сравнения
в БИД временного положения запросного (опорного) и ответного
импульсов определяется текущее расстояние, которое зависит от
временной задержки сигналов по дальности т и от задержки сигналов в
трактах радиоаппаратуры /3» т. е.
R = с (т — д/2. (4.38)
С учетом соотношений (4.36) и (4.38) условие однозначности
измерения для дальномера с ретранслятором примет вид:
^п > 2i?max/c + t3. (4.39)
Заметим, что минимальная измеряемая дальность в таком
радиодальномере может быть как угодно малой, так как всегда можно
выбрать задержку сигнала tQ необходимой величины для исключения
совмещения ответного и запросного импульсов.
Как правило, в радиодальномерах с ретрансляцией излучаемые
сигналы кодируются группами импульсов (двух- и трехимпульсные
посылки), в соответствии с принципами кодово-импульсной модуляции
(КИМ). Это позволяет повысить помехоустойчивость передачи и извле-
137
чения дальномерной информации, поскольку%в процессе ретрайслй-
ции смесь полезного сигнала и шумов «очищается» от последних с
помощью регенерации импульсов. Кроме того, использование КИМ
обеспечивает комбинированное частотно-временное уплотнение рабочих
каналов, что очень важно при увеличении количества независимых
рабочих каналов РНС. Кодирование и декодирование сигналов
радиодальномера выполняют (рис. 4.12) шифратор Ш и дешифратор
ДШ ретранслятора. Аналогично сигналы преобразуются и в запрос-
чике (на схеме не показано).
К указанным преимуществам радиодальномера с
ретрансляцией сигналов следует добавить возможность измерения больших
расстояний при сравнительно небольших мощностях передающих устройств
(за счет регенерации и усиления сигнала ретранслятором).
Однако в подобных радиодальномерах необходимо учитывать
величину пропускной способности, которая в данном случае
ограничивается энергетическими ресурсами передатчика ответчика [5, 41, 51].
Точность импульсной дальнометрии. В разделе 2.5 рассматривались
оценки потенциальной точности измерения дальности. Поэтому здесь
рассмотрим погрешности, относящиеся к реальным методам и
средствам импульсной дальнометрии.
Оценивая абсолютную погрешность измерения дальности AR для
наиболее сложного варианта импульсного дальномера,
характеризуемого соотношением (4.38), вычислим полный дифференциал этого
соотношения.
Переходя к конечным приращениям, получим
AR = — Дс + — Ат — — Дгз, (4.40)
где Ас, Ат, At3 — абсолютные погрешности измерения временных
интервалов т и t3 и измерения скорости распространения радиоволн с.
Поскольку эти погрешности носят случайный характер и независимы,
то с учетом формулы (4.40) среднеквадратичная погрешность
определения дальности
^j/?*1 HH+t0& • (4-41)
В формуле Gc, Oxy Gt3 — дисперсии погрешностей оценки скорости
распространения радиоволн и измеряемых временных интервалов.
Таким образом, для обеспечения высокой точности измерения
дальности импульсным методом необходимо использовать диапазоны
радиоволн с высокой стабильностью скорости их распространения, а
также применять схемы измерения временных интервалов с малыми
методическими и аппаратурными погрешностями.
Наибольшую точность при определении дальности импульсным
методом обеспечивают радиодальномеры дискретного типа. В частности,
подобные дальномеры лишены субъективной погрешности (погрешности
оператора), поскольку дальность отсчитывается по показаниям
цифрового табло. Основной инструментальной погрешностью дальноме-
138
ров дискретного типа является (с учетом формулы 4.33) погрешность
дискретности отсчета
Д#д = сДт = с (т° — т) = ±сТсч/2.
Строго говоря, погрешность считывания в общем случае является
случайной величиной, среднеквадратичное значение которой
зависит от того, согласовано или не согласовано временное положение
счетных импульсов с моментом излучения запросного сигнала. Как
показывает анализ этой погрешности [51], в случае согласованного
положения указанных импульсов ^среднеквадратичная погрешность
преобразования время — код в V 2 раз меньше, чем при случайном
положении счетных импульсов относительно запросных.
Применение современных быстродействующих счетчиков
импульсов позволяет уменьшить погрешность дискретности отсчета дальности
до нескольких метров и даже долей метра. Существуют также
специальные способы уменьшения ошибки дискретности без увеличения
частоты повторения счетных импульсов, как, например, использование
несинхронных шкал счетных и зондирующих импульсов, усреднение
погрешности дискретности за полное время измерения дальности и
др. [51]. Кроме того, следует заметить, что повышения точности и
разрешающей способности по дальности можно достичь, уменьшая
длительность импульсов; однако при этом снижается дальность действия
радиодальномера за счет уменьшения энергии импульсов. Основным
способом разрешения указанного противоречия является переход к
использованию в радиодальномерах сложных сигналов, у которых
произведение ширины спектра сигнала на его длительность
удовлетворяет условию Fxa > 1. Такие сигналы формируются путем
модуляции сигнала в пределах его длительности. При этом в качестве
сложных сигналов могут рассматриваться преобразованные указанным
способом одиночные импульсы и пачки (группы) импульсов (например,
когерентная пачка импульсов). Чаще всего используют частотную и
фазовую модуляцию (манипуляцию) сигналов длительности 7\ в
результате расширяется спектр сигнала Fc и выполняется условие FCT =
= N > 1. Поскольку в современных дальномерных РНС сложные
сигналы находят все более широкое прменение (они используются для
передачи сигналов синхронизации угломерных РНС временного типа,
например в MLS), дадим краткую характеристику процессов
формирования сложных сигналов с точки зрения обеспечения необходимой
точности и разрешающей способности.
При осуществлении оптимального приема сложных сигналов на
выходе согласованного фильтра или коррелятора получают
напряжение пропорциональное автокорреляционной функции z (т).
Эффективная длительность основного пика автокорреляционной функции тс
(интервал корреляции) определяется шириной спектра сигнала, т. е.
тс = 1/А/0. (4.42)
Поэтому длительность основного пика выходного сигнала
оптимального приемника оказывается в N раз меньше длительности исходного
сигнала Т = N/AfC9 т. е. происходит сжатие сигнала. При сжатии им-
139
а)
"\ АЛА
V
Рис. 4.13. Фазоманипулированная кодовая последовательность Баркера:
а — пятизначная кодовая последовательность; б — корреляционная функция
пульсов пиковая мощность возрастает в N раз по сравнению с
мощностью немодулированного сигнала.
Таким образом, преимуществом сложных сигналов перед простыми
(у которых произведение FCT = 1) является обеспечение заданной
точности и разрешающей способности измерения дальности при
отсутствии ограничения на дальность действия радиодальномера. При
этом форма сложного сигнала выбирается в соответствии с
требованиями по точности и разрешающей способности. В радионавигации
наиболее часто применяют импульсные сигналы, фаза
высокочастотного заполнения которых манипулируется в дискретные моменты
времени (фазоманипулированные сигналы), а также импульсные сигналы,
частота которых изменяется в пределах импульса по закону линейно-
частотной модуляции (ЛЧМ).
Синтезируя сложные сигналы того или иного типа, стремятся
свести к минимуму уровень некомпенсированных остаков авткорреля-
ционной функции, подобных боковым лепесткам диаграммы
направленности антенны. Это позволяет повысить помехоустойчивость и
точность измерения дальности, поскольку интенсивность
автокорреляционной функции z (т) вне пределов интервала тс (за пределами
главного пика) сводится к минимуму. В качестве примера сложных
сигналов, обладающих описанными свойствами, рассмотрим
фазоманипулированные сигналы, образованные путем статистического
(псевдослучайного) кодирования.
Подобные сигналы представляют собой выосокочастотные
колебания, фаза которых через определенное число тактовых интервалов тс
изменяется на 180°. Комплексную огибающую такого сигнала можно
представить в виде:
S (0 = N±X е/яа* q (t-kxc) = N% (- \)а* q (t-kxc)t
k=0 k=Q
где q(t)
140
_ f 1, при 0<*<тс;
I 0, при*<0, *>тв
а числа ak образуют псевдослучайный код в виде последовательности
нулей и единиц, которая определяет порядок чередования фаз.
Например, при ак = О имеем (—1)*K = 1, а при ah = 1 получим (—l)a« =
= —1, т. е. знаки плюс и минус определяют фазы сигнала,
соответствующие нулю и я.
Фазоманипулированные кодовые последовательности образуются
согласно определенным закономерностям, характеризующим тот или
иной класс сигналов, обладающих одинаковыми свойствами.
В частности, кодовая последовательность Баркера состоит из
символов ak = ±1, причем число символов в кодовой
последовательности может быть 3, 4, 5, 11 и 13. Кодовых последовательностей Баркера
с другим числом символов не существует. Пример пятизначного кода
Баркера дан на рис. 4.13, а, а нормированная автокорреляционная
функция'комплексной огибающей такого сигнала — на рис. 4.13, б.
Уровень боковых лепестков автокорреляционной функции |г(т)б| по
сравнению с главным не превосходит величины VN9 т. е. \z (т)б| <;
< UN < 1/FC.
Для рассматриваемого конкретного примера (N = 5) кода Баркера
уровень боковых лепестков (пиков) равен UN = 1/5.
Для получения других классов фазоманипулированных (ФМ)
сигналов используют различные кодовые последовательности с другими
корреляционными свойствами, в том числе М-последовательности,
последовательности Холла, последовательности символов Лежандра
(либо L-последовательности Лежандра), последовательности с
периодом, равным произведению двух простых чисел, нелинейные
последовательности и другие [25,51]. Все указанные кодовые
последовательности сигналов дальномерных систем формируют исходя из условия
минимума боковых пиков автокорреляционных функций и
обеспечения требуемой точности и разрешающей способности измерения
дальности. В дальномерных (и разностно-дальномерных) РНС, кроме
кодов Баркера широкое применение нашли также
М-последовательности, которые применяют при больших значениях N.
Глава 5
МЕТОДЫ РАЗНОСТНО-ДАЛЬНОМЕРНЫХ РАДИОИЗМЕРЕНИЙ
5.1. ОБЩАЯ ХАРАКТЕРИСТИКА МЕТОДОВ
Измерение разности расстояний от объекта (ЛА) до двух (или
нескольких) радионавигационных точек, координаты которых известны,
основано на сравнении времени прихода сигналов, излучаемых РНТ,
в точку приема. При этом временной интервал т между временем
прихода сигналов оказывается пропорционален измеряемой разности
расстояний AR до двух РНТ.
Радионавигационные методы и средства разностно-дальномерного
типа (гиперболические) применяются в основном в системах дальней
навигации (СДН), используя в качестве линий положения (ЛП)
летательных аппаратов гиперболы, семейство которых в определенном
масштабе наносится на специальную навигационную карту.
Информация разностно-дальномерных РНС позволяет непрерывно
определять параметры положения и движения ЛА, а также осуществлять
вывод ЛА в заданную точку (или область) пространства. Кроме того,
подобные системы могут комплексироваться с навигационными
системами других типов (например, доплеровскими измерителями скорости,
инерциальными системами, системами ближней навигации). В этом
случае информация разностно-дальномерных систем может
использоваться и в зонах ближней навигации в качестве вспомогательной.
Методы разностно-дальномерных радиоизмерений могут
основываться на определении запаздываний по фазе сигналов либо на
измерении соответствующих временных интервалов. В первом случае
измеряемая разность расстояний оказывается функцией фазового
сдвига фг сравниваемых сигналов (излучаемых, например, наземными
РНТ), проходящих различные расстояния, т. е. AR = / (фг); во
втором случае разность расстояний рассматривается как функция
измеряемого интервала между временем прихода сигналов различных
станций. Поэтому в зависимости от типа разностно-дальномерных
измерений различают фазовый, импульсный и комбинированный импульсно-
фазовый методы. Рассмотрим особенности указанных методов
разностно-дальномерных радиоизмерений и принципы построения
современных гиперболических СДН, реализующих эти методы.
5.2. ФАЗОВЫЙ РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ МЕТОД
Определение разности расстояний фазовым методом
осуществляется в результате измерения разности фаз двух когерентных колебаний,
создаваемых в точке приема двумя РНТ. В этом случае измерение фа-
142
зовых сдвигов
осуществляется на несущих (высоких)
частотах. Возможны измерения
фазовых сдвигов
некогерентных колебаний,
осуществляемые на частоте биений
сигналов, излучаемых РНТ. При
этом, как будет показано
ниже, масштаб, в котором
задаются сетки линий
положения (ЛРРР), может
определяться частотой,
отличающейся от частоты, на которой
производится измерения.
Соответственно различают
фазовые р азностно-дал ьномер-
ные методы и системы с
заданием сеток линий положения
частоте сравнения
Рис. 5.1. Семейство линий положения при
использовании фазовых .разностно-дально-
мерных систем
IWWIllv на несущей частоте, на приведенной
,Ш1С ^„«^ппуж, на частоте биений и на комбинационных частотах.
Наибольшее применение в гражданской авиации нашли СДН
фазового типа, использующие для измерения разности фаз (и
соответствующих разностей расстояний) несущие частоты. Поэтому в
последующем изложении основное внимание уделено характеристике именно
такого типа методов и средств.
Рассмотрим упрощенный вариант разностно-дальномерного
фазового метода с измерениями на несущей частоте. Предположим, что
две наземные радиопередающие станции располагаются в точках А и
В (рис. 5.1), разнесенных на расстояние Rab (называемое базой
системы), и создают в пространстве электромагнитные поля с напряжен-
ностями:
еА = ЕАщ cos (®a t + Фол); ев = Евт cos (сов / + (ров), (5.1)
где
^Ат' ^Вт
амплитуды напряженностей полей;
• несущие частоты излучаемых колебаний;
• начальные фазы колебаний.
сол, сод
Фол» Фоб
Будем считать, что обе станции излучают колебания одной и той же
частоты, а начальные фазы их согласованы и могут быть приняты
одинаковыми, т. е. ©д = ©в = ©о и фол = Фоб = Фо-
Колебания, излучаемые наземными станциями, воспринимаются
бортовым приемоиндикатором ЛА, расположенным в точке М. В
результате запаздывания по фазе колебаний, излучаемых станциями А
и В, при прохождении расстояний RA и RB эти колебания имеют в
точке М следующие значения текущих фаз:
Флл1 — со01 + ф0—со0 RA /с;
Фбл! = <о01 + Фо -—со0 Rb /с
Здесь RA и Rb —расстояния от точки М до станций А и В.
(5.2)
143
Если сигналы обеих станций могут быть раздельно приняты и
поданы на фазометр согласно выражениям (5.2), то измеряемая разность
фаз на борту ЛА
фг = Чам — Чвм = <о0 (RA — RB)/c. (5.3)
Соответствующая фазовому сдвигу фг измеряемая разность
расстояний
А/? = RA — Rb = С(рг/щ = Я0фг/2я. (5.4)
Множеству возможных значений разностей расстояний {ARl9 Ai?2,
..., ARn} соответствует семейство софокусных гипербол (см. рис. 5.1),
являющихся линиями равных разностей расстояний. Наносят ЛРРР
на полетные карты и, оцифровывая их через равные интервалы
разности фаз в пределах 0—360°, получают возможность определения
линий положения ЛА. При необходимости ЛРРР выбирается путем
интерполяции. Местоположение подвижного объекта при
использовании разностно-дальномерных систем определяют по пересечению двух
ЛРРР, т. е. после выполнения измерения по другой паре наземных
станций.
Рассматриваемый разностно-дальномерный фазовый метод
отличается достаточно высокой точностью измерений. Например, из
формулы (5.4) среднеквадратичная оценка погрешности в измерении раз*
ности расстояния
#дя = ^оаФ /2я, (5.5)
Где о — среднеквадратичная погрешность измерения разности фаз.'
Из этого соотношения видно, что при высокой точности
современных методов измерения фазовых сдвигов (использовании цифровых
фазометров, высокостабильных фазосдвигающих элементов) погрешность
определения расстояний в значительной мере зависит от выбора
рабочей частоты системы. Однако увеличение частоты ограничивается
возникновением многозначности отсчета разности расстояний*
Таким образом, фазовому разностно-дальномерному методу также
Присуща многозначность отсчета, возникающая при циклических
изменениях разности фаз в пределах 0—2л. Принимая в формуле (5.4)
(рг = 2зт, получим максимальное значение разности расстояния,
измеряемого однозначно, т. е. A/?max = V При больших значениях
расстояния показания фазометра будут повторяться, что потребует
специального счетчика циклов. Линии положения, для которых разность
фаз между сигналами двух наземных станций кратна 2я,
разграничивают рабочую область системы на зоны однозначного отсчета или так
называемые фазовые дорожки (см. рис. 5.1). Минимальной ширины
дорожки достигают на базе системы, возрастая по мере удаления от
нее. Фазовые измерения (и, следовательно, измерения AR) в пределах
одной дорожки оказываются однозначными.
Для определения степени многозначности отсчета фазы, т. е. числа
дорожек, найдем ширину дорожки d, т. е. кратчайшее расстояние ММ'
между двумя ЛРРР (см. рис. 5.1). Как будет показано в разделе 9.2,
144
Sto расстояние (по существу
определяющее точность задания и
определения линии положения)
d = ДЯтах/2 Sin X = А0/2 Sin -J- ,
(5.6)
где 7-угол между направлениями Рис 52 к определению работы фа-
на наземные РНТ (из ТОЧКИ М). зовых СДН с частотной селекцией
На базе угол у = 180° и ширина сигналов
дорожки d0 = Я0/2, т. е. половине
длины волны несущих колебаний (либо половине длины волны,
соответствующей частоте сравнения, на которой может осуществляться
измерение фазы). Поэтому число дорожек N равно числу полуволн
Я0/2, укладывающихся на базе системы Rab, т. е.
N = 2RAB/K. (5.7)
Формулы (5.5)*— (5.7) используют для расчета масштабной сетки
линий положения разностно-дальномерных систем для нанесения их
на специальную навигационную карту. Неоднозначность отсчета в
фазовых разностно-дальномерных системах рассматриваемого типа
устраняется либо путем счета полных циклов приращения разности фаз
принимаемых колебаний, либо за счет создания дополнительных сеток
ЛП при использовании вспомогательных частот сравнения. ^
Рассмотренный упрощенный вариант фазового разностно-дально-
мерного метода с измерением разности фаз на несущей частоте не
может быть реализован практически. Действительно, при работе
наземных радиопередающих станций на общей несущей частоте излучаемые
ими сигналы будут интерферировать в пространстве и приемное
устройство примет суммарный сигнал, который не содержит объективной
информации о разности расстояний. Поэтому в реальных разностно-
дальномерных РНС с измерениями на несущей частоте осуществляют
разделение рабочих каналов наземных станций благодаря частотной
и временной селекции сигналов. Рассмотрим принципы построения
современных СДН, использующие указанные виды разделения
рабочих каналов.
Фазовая разностно-далькомерная РНС с частотным разделением
каналов. Принцип действия подобной системы был разработан в 30-х
годах советскими учеными Л. И. Мандельштамом и Н. Д. Папалекси,
которые назвали ее «фазовым зондом». В настоящее время за рубежом
широко используется фазовая система дальней навигации «Декка»,
построенная на этом принципе. В состав наземного оборудования
системы входит несколько станций (обычно четыре), образующих так
называемую цепочку (три пары станций). На рис. 5.2 изображена дву-
базовая разностно-дальномерная система, состоящая из двух пар
станций, одна из которых А — ведущая (общая для обеих пар), а
станции В и С — ведомые. Местоположение объекта (точка М)
определяется пересечением двух ЛРРР (ЛРРРг и ЛРРР2), создаваемых двумя
145
йарами станций (базы Rab и Rac)- Разделение каналов в системе
осуществляется в результате частотной селекции, которая
обеспечивается установлением целого числа соотношений частот сигналов,
излучаемых наземными станциями:
Ыа1®в = mln\ сол/сос = 1/т, (5.8)
где т и п — простые целые числа (2, 3, 4 и т. д.).
Радиопередатчик ведущей станции А излучает высокостабильные
незатухающие колебания частоты со^, которыми синхронизируются
колебания ведомых станций. При этом на ведомых станциях ведется
слежение за фазой колебаний ведущей станции с помощью систем
фазовой автоматической подстройки (ФАП), что обеспечивает
необходимую когерентность колебаний всех станций системы. Упрощенная
структурная схема одной из ведомых станций показана на рис.5.3.
Колебания о>л ведущей станции воспринимаются приемником
ведомой станции Прмву затем частота (оА последовательно делится на
т и умножается на п. В результате формируются колебания частоты
соя = гнйд/т, которые возбуждают мощный передатчик Прдв
станции В, излучающий сигналы на частоте юд. В состав ФАП, следящей
за фазой сигналов ведущей станции, входят умножитель частоты со^
на я, умножитель частоты со5 на т и управляющая схема, состоящая
из фазового детектора (ФД) и схемы подстройки фазы. С помощью
умножителей сигналы частот соА и (о# приводятся к общей частоте
сравнения сох = пахА = тыв и подаются на ФД управляющей
схемы. Если в тракте передачи и преобразования сигнала частоты сол в
сигнал частоты сов возникают нежелательные фазовые сдвиги, то
фазы сравниваемых сигналов частотой па>А и тсов также будут
отличаться. В результате на выходе ФД управляющей схемы появляется
напряжение рассогласования. Это напряжение, воздействуя на
умножитель частоты через схему подстройки фазы, устраняет
рассогласование фаз сигналов ведущей и ведомой станций.
Аналогично ведется слежение за фазой сигналов ведущей станции
на ведомой станции С, где формируются сигналы а>с = тсол//.
Приведем анализ основных фазовых соотношений,
характеризующих работу рассматриваемой разностно-дальномерной системы. Пусть
передатчик ведущей станции А излучает сигналы с фазой ер л =
= ©л* + ф0.
Принятые в точке М (на подвижном объекте) сигналы в результате
прохождения расстояния Ra приобретают запаздывание по фазе
Щм = ©л* + Фо — <*aRaIc. (5.9)
лПрМв гп
ЩрШразобатепо частотыЛ
Делитель]
нот
Ь>АГ
Умножитель на п\
Умножитель
нап
пшА
гНпрд* К'
Упрабляющщ
схема
тшъ
Умножитель
нот
канал ФАП
Рис. 5.3. Упрощенная
структурная схема ведо
мой станции с частотным
разделением каналов
146
Прм
\\Входные
Я] цели
Н У-щ НН
Умн1
(хт)
У-си*
Умн2
(*п)
И1
\Фазометр
Ф1
7
Ч У-ыс гН
УмнЗ
(хт)
(JJr,
Умни
(П)
\&RK=f(<Prz)
Кроме того, эти же
сигналы принимаются ведомыми
станциями В и С,
приобретая фазы:
Флв = сол t + %—о)Л RabIc\ \
флс = сод t + % —сол RacIcA
(5.10)
где #ЛБ и #лс — размеры баз
системы.
В процессе
преобразования частот сигналов,
принятых на ведомых станциях, их
фазы также преобразуются.
Если не учитывать
постоянных фазовых сдвигов в соотношении (5.10), равных &aRab/c и
maRacIc (которые учитываются при начальной градуировке
аппаратуры), то излучаемые станциями В и С сигналы имеют фазы:
Фазометр]
Ф2
РЭ
QJE
Рис. 5.4. Упрощенная структурная схема
бортового приемоиндикатора
фв = Флб п/т = о)В / + Ф0 п/т\
Фс = флс tnll = сое t + % mil.
(5.11)
Получив дополнительные фазовые сдвиги, пропорциональные
расстояниям Rb и Rc, сигналы станций В и С прибывают в точку М с
фазами:
Фвм=юя* + Ф0я/т—(ubRb/c, )
фсл* = toe t + Ф0 т//—сое #с /с. )
(5.12)
Сигналы, излучаемые станциями А9 В, С, поступают на вход
бортового приемоиндикатора (в точку М), упрощенная структурная
схема которого показана на рис. 5.4. Приемное устройство состоит из
входных разделительных цепей и трехканального усилителя частот ©л,
о)в и (ос. После усиления сигналы приводятся с помощью
умножителей частоты к частотам сравнения, на которых производится
измерение разности фаз: щ — для базы АВ и ©и — для базы АС. На
выходах умножителей (Умн1 и Умн2) будут получены сигналы частоты
сравнения щ = со^/г = со^т, на выходах умножителей Умн 3 и
Умн 4 — сигналы частоты сравнения (оп = (оАт = сос/. Фазы
сигналов, полученных на выходах умножителей Умн1 и Умн2 (для базы
АВ), определяются с учетом выражений (5.9) и (5.12):
(5.14)
Измеряемая с помощью фазометра Ф1 разность фаз этих сигналов
Фп = Флм"4>вл* = ®i (Ra — Rb )lc. (5.15)
147
Аналогично выражениям (5.14) фазы сигналов, полученных на
выходах умножителей УмнЗ и Умн4 (для базы Л С), будут иметь вид:
у'ам= ^Амт=-~ ©и t + Фо /я—юн Ял /с;
Фсм -" Фсм/ = (0" t + %m—(uuRc/c.
Описываемая выражениями (5.16) и измеряемая фазометром Ф2
разность фаз сигналов
Фг2 = Ч'ам — <Рсм = ©и (#л — Re)/с. (5.17)
Из формул (5.15) и (5.17) соответствующие разности расстояний по
базам Rab и Rac-
ARab = cyrl/(Oi\ ARac = с<рг2/(Оц. (5.18)
Таким образом, индикаторы Ш и И2 совместно дают информацию
о двух линиях положения, соответствующих измеренным сдвигам фаз
(разностей расстояний). Точка пересечения этих линий, найденных на
карте, даст местоположение объекта. Для ликвидации
многозначности определения разностей расстояний в системе используется также
грубая масштабная сетка частот, образованная на разностных частотах
биений сигналов наземных станций.
В настоящее время система «Декка» широко используется для
радионавигации морских и (в меньшей мере) воздушных судов на
Европейском континенте, а также в Австралии, Японии, Индии и других
странах. По данным на 1980 г. всего на земной поверхности
установлено около 50 цепочек наземных станций системы «Декка»,
работающих в диапазоне частот 70—130 кГц и обеспечивающих дальность
действия до 1500 км [8].
Фазовые разностно-дальномерные системы с временным
разделением каналов. К таким системам относится спроектированная и
изготовленная в Англии в 1954 г. система «Делрак», а также
усовершенствованный вариант этой системы — система «Омега» (производство
США), рекомендованная ИКАО в качестве основной системы дальней
навигации для гражданской авиации.
Наземная часть системы «Омега» состоит из восьми передающих
станций, излучающих синфазные колебания на частотах 10—14 кГц,
т. е. в диапазоне сверхдлинных волн (СДВ). Для точных
навигационных определений предназначены колебания одной частоты /0 =
= 10,2 кГц (излучаемой всеми станциями), на которой измеряются
разности фаз. Кроме того, наземные станции излучают
дополнительные частоты 13,6 и 11,33 кГц, используемые для устранения
многозначности определения разности расстояний.
Излучение каждой станции системы «Омега» строго
регламентировано во времени и по частоте, что, помимо решения основной задачи
временного разделения каналов, позволяет исключить также
взаимные помехи по соседним частотным каналам. Стандартизованная
временная последовательность излучениясигналов всеми станциями
(формат сигналов) системы «Омега» приведена на рис. 5.5. Полный период
(цикл) излучения сигналов станциями Тц = 10 с. Длительность излу-
(5.16)
143
чения (посылки) сигналов
каждой станцией (около 1 с)
определена форматом
сигнала, а интервал между
соседними посылками равен 0,2 с.
Работа каждой станции
синхронизирована с
международным стандартом времени
UT-2 (точность
синхронизации контролируется
специальными пунктами службы
единого времени). Все
наземные станции работают
практически независимо (т. е.
делить их на ведущие и
ведомые нет необходимости),
обеспечивая в то же время
получение когерентных колебаний
в пункте приема. География
размещения наземных
станций системы (имеющих
буквенные обозначения А, В, С, Д, Е, F, G, Н)у поясняется с
помощью таблицы 5.1.
В бортовом приемоиндикаторе системы сигналы наземных
станций принимаются в заданной временной последовательности и
запоминаются в отдельных каналах схемы «памяти» на время периода
излучения. Выбирая любую пару каналов «памяти» индикатора, можно
измерить разность фаз между двумя колебаниями (фл-в) и таким
образом определить разность расстояний до двух наземных станций.
Для определения местоположения ЛА необходимы измерения разности
А
^ о
^г
а:
сз
Б С
cj
си
I П
р
G
н\
0,9
Щ2
ч=
Wc
■ '.'и '.2 и/./цд0ц /,2 |,/,0,
П7711 " '| и и i
I"» «Mi М И и и 1
i к о м м и м i
| го|| п || /?|i и и и ,
1 1
1 1
1 1
1 II II II II II 1
ГЛГЛГ711 " " i
1 to\\fi \\f2\\ ii и i
1 1
1 1
1 1
i п ii и п i
1 1
1 1
1 1
i 11 11 11 i
1 fo J J fi 1J fz 11 |
II 1 II 1
1 ! ЦШЛ
И 1
а1! !
11 i
7Ш
1 1
Г7П
—i—i i i i i,
i i
га
\Л9
1 i l
i *
[ *t
i *
i -h
Ш
i i
ll ll
i
к.
t
t
012345678 9 Ю t
Рис. 5.5. Временная последовательность
излучения сигналов наземными станциями
•системы «Омега»
Условное обозначение
станции
А
В
С
D
Е
F
G
И
Координаты
широта
66°25'15"N
6°18'19,32"W
2i°24'20,6"w
46°21'57,2"#
20°58'26,47"S
43о03'12,53"5
31°22'17,8"5
34°36'53,26"W
долгота
13°09'10" Ost
10°39'44,21// 1Г
157°49'52,7"№
98,°20'08,77" W
55°17'24,25"Os<
65°11'27,69"W
139°12'15,7" 0»'
129°27'12,49"Os'
Таблица 5.1
Место расположения
Норвегия
Либерия
Гавайские
острова
Штат Сев.
Дакота (США)
о. Реюньон
(Индийский океан)
Аргентина
Австралия
о. Цусима
149
расстояний по двум парам станций. При этом ЛА будет находиться в
точке пересечения двух изолиний (двух ЛРРР), каждая из которых
создается одной парой станций.
Для измерения фазовых сдвигов и соответствующих разностей
расстояний в системе «Омега» используются соотношения (5.3—5.7).
Устранение многозначности отсчетов в системе достигается за счет
использования более низких частот сравнения. С этой целью излучаются
дополнительные сигналы частот fx = 13,6 кГц и f2 — 11,33 кГц. В
бортовых приемоиндикаторах создаются колебания разностных частот
Fx = ft — /УЗ и F2 = f2— /о = f0/9. На этих разностных частотах
производятся «грубые» измерения разности фаз (например, по базе АВ)У
т. е.
Vn = ^(RA-RB)\<P*=-^(RA-RB). (5.19)
Поэтому согласно формуле (5.7) первая ступень уменьшения
многозначности отсчетов будет содержать N± = 2i?W3X0 дорожек, а
вторая ступень — N2 = 2Rab/9X0 дорожек. Поскольку Х0 = c/f0 =
= 15 км, то фактически в системе «Омега» создается семейство ЛРРР
в трех масштабах: для точных измерений с шириной дорожек на базе
d0 = 15 км и для «грубых» измерений (уменьшения многозначности) —
с шириной дорожек на базе dx = 45 км и d2 = 135 км. При устранении
многозначности отсчетов счислимое место ЛА должно быть известно
с погрешностью Дсср, не превышающей половины дорожки, т. е. для
рассматриваемых масштабов (в км):
Acq)! < dJ2 = 22,5; Дяра < d2l2 = 67,5.
Для измерения навигационного параметра в каждом из трех
семейств изолиний бортовой приемоиндикатор должен иметь три
отдельных приемных канала (для частот /0, /i и /2) и три фазометра для
определения разности фаз на различных частотах сравнения. В процессе
индикации разности расстояний по измерениям грубого фазометра
(второй ступени) устраняется неоднозначность показаний фазометра
первой ступени, которые, в свою очередь, служат для устранения
многозначности точного фазометра.
Рассмотрим упрощенную структурную схему (рис. 5.6) одного из
трех каналов приемоиндикатора системы «Омега», использующего
для измерения навигационных параметров, управления работой
системы и контроля ее параметров цифровое вычислительное устройство
ЦВУ. Сигналы наземных станций принимаются с помощью рамочной
антенны с управляемой ДНА и через антенный усилитель АУ
поступают на антенную матрицу AM. Антенная матрица, с помощью которой
ДНА поворачивается в положение, соответствующее максимуму
отношения сигнал/шум при приеме сигналов каждой станции,
нагружена на три параллельных приемных канала, соответствующих числу
несущих частот (/0, fl9 f2) в системе. Сигнал любой из несущих частот
/н попадает в усилитель высокой частоты УВЧ и после усиления
поступает на первый смеситель См1. В результате гетеродинирования
несущей частоты /н с сигналами, полученными от когерентного гетеро-
150
♦ At
1 АУ 1
\
1 AM h^
\fH
1 /1-. 1 1
Уич г->
1
Ifrr
Cm1 \~*
/7/7 Lrf.—
MU )r*i"—
, ' ,
1 АЦ1Г 1
1
I лг h
l
* i
J nit L—
i ^ i
?npi
*| УПЧ1 f-
\
ifr2
*\ cmz I | <ОД
. IV | *~
-| УПЧ2 \-*\ Orp
^ HH .--._
> //*"
,0°"
/nn" ' ^
£0#
1 H2 '
| ФЛ
1B111«W /114
1 1
-| ЦВ
\ 1
л '
г
|< '
^Формация
Управление
j—^—
f
- |
Рис. 5.6. Упрощенная структурная схема приемоиндикатора системы «Омега*
дина КГ и делителя частоты ДЧ на выходе См1 выделяются сигналы
первой промежуточной частоты /npi и после усиления в первом
усилителе промежуточной частоты УПЧ1 подаются на второй смеситель
См2. .Поскольку на См2 подан от ДЧ также второй гетеродинирующий
сигнал /г2, на его выходе выделяется сигнал с частотой /пр2 = 20 Гц,
одинаковой для всех каналов приемника.
Гетеродинирующие сигналы всех частот получают с помощью
высокостабильного когерентного генератора КГ, охваченного цепью
автоматической подстройки частоты (АПЧ) через ЦВУ, и делителя
частоты ДЧ. На выходе приемника имеется амплитудный ограничитель
Огру обеспечивающий нормирование сигнала и ограничение его
динамического диапазона, поэтому применение АРУ в приемнике не
требуется.
Фазометр по структуре представляет собой оптимальный
измеритель с квадратурными каналами, в которые входят фазовые
детекторы ФД и цифровые интеграторы ЦИ. Оба канала идентичны и
отличаются лишь фазовым сдвигом на 90° между опорными сигналами,
подаваемыми на ФД. Для формирования опорных сигналов служит блок
опорной фазы БОФ, сигналы управления которым подаются от ЦВУ,
замыкая систему слежения за измеряемым фазовым сдвигом.
На выходе фазовых детекторов ФД выделяется сигнал,
пропорциональный рассогласованию подаваемых на их вход сигналов
(опорной и переменной фаз). Указанный выходной сигнал рассогласования
накапливается в цифровых интеграторах ЦИ и в виде
последовательности импульсов подается в ЦВУ, где и осуществляется слежение за
фазой. Фазы сигналов сравниваются и разность фаз измеряется на
частоте 200 Гц. Цепи слежения за фазой позволяют также определить
значение и знак корректирующих сигналов, управляющих местным
когерентным гетеродином.
Детектор огибающей ДО выделяет сигнал, повторяющий по форме
огибающую импульсных посылок на входе приемника. Этот сигнал
151
преобразуется из аналоговой ё цифровую форму с помощью
аналого-цифрового преобразователя А ЦП и поступает в ЦВУ, где
используется для поиска и обнаружения принимаемых полезных
сигналов, т. е. для повышения достоверности работы системы.
Входящее в состав приемоиндикатора ЦВУ общего назначения
выполняет следующие функции: определяет по огибающей взаимнокор-
реляционную функцию принятого сигнала и его аналога,
вырабатываемого в приемоиндикаторе в целях обнаружения сигнала и
установления общей временной базы измерений; измеряет разность фаз сигналов,
излучаемых на одной частоте для определения линии положения, а
также на вспомогательных частотах для устранения многозначности
измерений; решает ряд дополнительных задач коррекции результатов
измерения с учетом условий распространения радиоволн, динамики
движения Л А и другие задачи. Кроме того, на ЦВУ возложены также
функции синхронизации работы и управления бортовой системы
приема и индикации, контроль важнейших параметров приемоиндикатора
и ряд дополнительных функций. Бортовой приемоиндикатор системы
«Омега» выполнен на основе интегральной схемотехники и обладает
высокой надежностью, малыми габаритами и массой [41].
При использовании в бортовых приемоиндикаторах системы «Оме-
Га» высокостабильных эталонов времени (частоты), корректируемых
по атомным стандартам, разностно-дальномерная система
применяется также в дальномерном режиме [63].
В заключение необходимо отметить, что использование СДВ
диапазона в системе «Омега», обладающего высокой стабильностью
распространения волн на большие расстояния (до 10 000 тыс. км),
обеспечивает высокую точность оценки местоположения ЛА,
способствует улучшению геометрии расположения изолиний, формируемых с
помощью системы. В настоящее время все восемь станций системы
«Омега» (расположенные на расстояниях 8—10 тыс. км друг от друга)
Таблица 5.2
Параметр
Дальность действия, км
дневное время суток
ночное » »
Диапазон частот, кГц
Точность измерения временных
интервалов (2а), мкс
Допустимое отношение сигнал/шум*2,
дБ
Точность определения линии
положения*3, км
База системы, км
Характеристики системы
«Омега» 1 «Лоран-А»**
Более 9000
То же
10—14
0,6
—20
■1,85/3,9*4
I 9000—15 000
1300—1500
1100—1300
1850—1950
1,5
+3
300—400
«Лоран-О**
2600
1850
100
0,8
—20
0,6
960—1300
*! Параметры Даны при работе системы поверхностной волной над морем.
*2 При котором реализуется заданная точность измерения временных интервалов.
*3 Точность рассчитана при углах V» близких к 90°.
*4 В числителе — в дневное, в знаменателе — в ночное время суток.
152
вступили и в эксплуатацию и обеспечивают информацией подвижные
объекты практически в любой точке земной поверхности.
Кроме того, как показали испытания, комплексирование системы
«Омега» со спутниковой РНС «Транзит» способствует улучшению
точности местоопределения и счисления пути ЛА на основе информации
глобальной сети систем с неподвижными (наземными) и орбитальными
РНТ, что в значительной мере расширяет тактические возможности
систем дальней навигации.
Основные параметры системы «Омега» (в сравнении с
рассмотренными ниже СДН) приведены в табл. 5.2, из которой очевидны
преимущества системы «Омега», выдвинувшие ее в качестве основной СДН по
рекомендациям ИКАО.
5.3. ИМПУЛЬСНЫЙ РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ МЕТОД
Определение разности расстояний импульсным методом
основывается на измерении в точке приема временного интервала т между
моментами поступления радиоимпульсов, излучаемых наземными ради
опередатчиками, расположенными в пунктах с известными координа
тами.
Пусть в точках Л и Б, отстоящих друг от друга на расстоянии Rab,
установлены радиопередающие станции, одновременно излучающие
импульсные сигналы (рис. 5.7) ^с одинаковой частотой следования
Fn. Если в точке М расположить приемоиндикатор, то время /д и7я
появления на его входе импульсов станций А к В будет отличаться,
поскольку оно соответственно пропорционально расстояниям Ra и
Rb, т. е. tA = Ra/c; tB = Rb/c.
Приемоиндикатор измеряет разностный временной интервал т,
пропорциональный разности расстояний до передающих станций, т. е.
т = tB — tA = (Rb — Ra)Ic = AR/c. (5.20)
Соответствующая величина измеряемой разности расстояний
ДЯ = ст. (5.21)
Однако при одновременном излучении станциями радиоимпульсов
возникает неоднозначность определения интервала времени т, так как
в точках М и ЛГ,*симметрично
расположенных относительно
перпендикуляра к середине базы,
временные интервалы тх = т2, а на
изменение их знака индикатор не
реагирует. Очевидно, что т = ттах
при расположении ЛА за
пределами базы на линии, совпадающей с
направлением базы (например, в
точках Мл или М2). Если ЛА на- .. е_ v
хптштгя «чя гтянтшей А то т - Рис* 57« К 0ПРеДелению Действия пм-
ходтся 3d iidHuueu/i, ш imax — Пульсной разностно-дальномерной си-
== МАв = RabIQ > 0 (так как стемц
153
Ra < Rb)> а если ЛА расположен за станцией В, то ттах = Ыав =
= Rab/c < 0, так как RA > RB.
Для устранения неоднозначности определения т необходимо,
чтобы условие т > 0 выполнялось независимо от места расположения ЛА
относительно наземных станций. С этой целью, а также для
устранения взаимного наложения импульсов при Аг = 0 и возможности
распознавания на экране индикатора (при использовании ЭЛТ) работы
станции В (называемой ведомой) синхронизируется сигналами
станции Л. При этом станция В излучает радиоимпульсы с постоянным
запаздыванием относительно момента излучения радиоимпульсов
станцией Л (ведущей) на время tAB = RabIc (рис. 5.8). Кроме
указанной задержки сигналов ведомой станции, зависящей от размера базы
Rab, предусматривается дополнительная кодовая задержка /к этих
сигналов. Значение кодовой задержки можно изменять, затрудняя
использование информации системы абонентами, не заключившими
договор с владельцами системы на право ее использования. Учитывая,
что импульс ведомой станции (для удобства индикации) обычно
смещают во второй полупериод следования импульсов Ти/2 = 1/2FH,
результирующая постоянная задержка излучения сигналов станцией В
*8 = tAB + tK + TJ2. (5.22)
Тогда с учетом соотношений (5.20) и (5.22) и временных диаграмм
рис. 5.8 измеряемый разностный временной интервал
x=h + tB—tA=t9 + ДД/с. (5.23)
Из соотношения (5.23) видно, что условие т > 0 всегда
выполняется, т. е. пределы изменения временного интервала ттах ^ т ^тт1п:
Ттах = 2/лв + tK\ Tmin = tK. (5.24)
Заметим, что величина TJ2 вводится для получения двухстрочной
развертки на экране индикатора (с длиной строки Ти 12) разностно-
дальномерной системы. Это в значительной мере улучшает процесс
распознавания импульсов станций на экране индикатора (рис. 5.9),
так как импульсы ведомой станции В всегда будут находиться на
нижней строке развертки. Значение
Ги/2 в соотношениях (5.23) и (5.24)
опущено поскольку при
выполнении отсчета оно автоматически
исключается.
Постоянному значению
измеренного интервала хг соответствует
определенная разность
расстояний A/?t = Rbi — Rai, а каждому
значению ARt соответствует своя
линия положения (ЛРРР).
Максимальное количество линий положе-
Рис. 5.8. Временные диаграммы излу- ния *л.т задаваемых системой,
чения и приема импульсных сигналов МОЖНО определить, зная ПОГрещ-
Utth
А
В
О
М
-^
t
т
А
1
/
tAB
•^ 9
>
н
1
1
Г г*
А
1
В А
П п
к
к.
—»«
В А
п п
<•
А
п >
в
п ,
t
в
п:
*
154
ность измерения временного интервала,
например среднеквадратичную at> т. е.
У**лв
п
. — (ттах — Tmin)/at —
со,.
(5.25)
ь ^'
г
г 1
А \
п N
%
-* »-
в
п у
Рис. 5.9. Положение импульсов
на развертке индикатора
В практике навигации ЛА при
использовании импульсных разностно-
дальномерных РНС применяют
специальные карты с нанесенными на них
линиями положения через 50—100 мкс.
Примером технической реализации
рассмотренного импульсного разностно-
дальномерного метода является система
дальней навигации «Лоран-А». Цепочка
системы «Лоран-А» включает, как
правило, одну ведущую и две ведомые
станции, размещаемые обычно вдоль
береговой линии океанов для возможности использования информации
системы морскими и воздушными судами. Ведомые станции обычно
располагают в 320 км от ведущей. Для распознавания цепочек
станций и уменьшения влияния взаимных помех используются пять
несущих частот — 1750, 1800, 1850, 1900 и 1950 кГц.
Для разделения сигналов двух пар станций одной цепочки (а
также соседних цепочек) сигналы каждой пары следуют со своей частотой
повторения. Всего используются три группы частот повторения
обозначаемых //, L, S. Каждая группа состоит из восьми рекуррентных
частот, из которых одна является основной частотой повторения (/н=
= 33,3 ... Гц, fL = 25 Гц, fs = 20 Гц), а другие /р образуются
согласно формулам, имеющим для каждой из групп следующий вид:
Uh = 1/ (300 - N)№\ /pL = 1/ (400 - N)№\ fvs =
= 1/(500 —Л0100,
где N — порядковый номер частоты в группе (N = 0, 1, 2, ..., 7)
Дальность действия системы «Лоран-А» достигает 1500 км. Другие
характеристики системы приведены в табл. 5.2. Значительным
преимуществом системы является возможность отделить импульсные
сигналы, соответствующие пространственной и поверхностной волнам,
используя их различное временное запаздывание. Однако недостаточная
дальность действия системы, использующей диапазон около 2 МГц,
снизило перспективность ее применения. В настоящее время система
заменяется более современной СДН «Лоран-С».
5.4. ИМПУЛЬСНО-ФАЗОВЫЙ РАЗНОСТНО-ДАЛЬНОМЕРНЫИ МЕТОД
Метод основывается на измерении интервала времени между
моментами прихода радиоимпульсов от наземных станций и на
измерении разности фаз высокочастотных колебаний, заполняющих импуль-
155
бы. Таким образом, используются по существу два метода изменений
разности расстояния: импульсный — для грубого определения
линий положения ЛА и устранения многозначности отсчетов; фазовый —
для определения линий положения с высокой точностью.
Рассмотрим особенности импульсно-фазового метода измерения
разности расстояний на примере СДН «Лоран-С», реализующей этот
метод. Тракт грубого определения А/? "основан на тех*же принципах
что и система «Лоран-А», т. е. на измерении временного интервала т
между моментами приема импульсов ведущей и ведомой станциями,
который определяется из выражения (5.23).Тракт точного измерения
использует фазовый метод оценки разности расстояний. В этом
случае в точке приема (как и в РНС «Декка») измеряется фазовый сдвиг
сигналов двух высокочастотных когерентных колебаний
(заполняющих импульсы), излучаемых ведущей и ведомой станциями:
2я
*г = — Ув - tA) --= 2лт/Гн,
(5.26)
где TK = \/fK — период несущих колебаний частоты /н заполняющих импульсы.
Согласно формуле (5.4) разность расстояний до наземных станций
Д# = Я,ня|)г/2я (5.27)
является однозначной величиной лишь в пределах длины волны
несущих колебаний Ян.
С учетом многозначности измерения фазы выражение (5.26) для
временного интервала между запаздываниями сигналов в точке приема
можно записать в виде:
т = kT + тф + атф,
(5.28)
где
а)
к — целое число периодов несущих колебаний, неизвестное при
выполнении фазовых измерений;
Тф — дробная часть периода Тн, которая может быть измерена (та < Гн)
атф — среднеквадратичная погрешность измерения Тф.
и1иш*\?ф=80укс
Ati
At 2
Atz
Tn=0,l-Qfl4c
->-п-4
Ти = 1мс
\ t
Рис. 5.10. Формат сигналов в системе «Лоран-С»:
а —пачки импульсов, излучаемых ведущей (А) и ведомыми (В и С) станциями; б —
параметры импульсов в пачке
156
С другой стороны, измеренный
импульсным методом временной
интервал
* = *и + огт.и, (5.29)
гдети — отсчет интервала времени;
<тти — среднеквадратичная погреш.
ность измерения времени.
Из совместного решения
уравнений (5.28) и (5.29) находим
*=(*«-*ф)|/Гн +
+ (охл - охф)/Тн. (5.30)
Из выражения (5.30) следует,
что число k определяется
однозначно, если погрешность измерения
(второе слагаемое) будет меньше
±1/2, т. е.
Охи — сттф < TJ2. (5.31)
Поскольку обычно погрешность
фазовых измерений аТф < ати
погрешности импульсных измерений,
то условие (5.31) однозначности
измерений в рассматриваемых
системах можно переписать в виде:
а™ < 772.
(5.32)
Таким образом, для устранения
многозначности фазовых измерений
в импульсно-фазовых разностно-
дальномерных системах
погрешность измерения параметра AR
импульсным методом (по огибающей
радиоимпульсов) не должна
превышать половину периода несущих
колебаний.
Каждая из станций системы
«Лоран-С» излучает пачки
радиоимпульсов (рис. 5.10, а), что
способствует увеличению средней мощности
принимаемого сигнала при данной
импульсной мощности передатчика.
Кроме обеспечения когерентности
несущих колебаний, необходимой
для фазовых измерений, соблюдается когерентность частоты
следования импульсов и частоты несущих колебаний в пределах каждого
импульса. Расстояния между пачками импульсов и между импульса-
Рис. 5.11. К определению
формирования измерительных импульсов
157
ми пачки определяются требованиями отсутствий совпадений (в зоне
действия цепочки станций) сигналов, распространяющихся с помощью
поверхностной (основной) и пространственной (мешающей) волн. С
этой целью на ведущих станциях вводится кодовая задержка
сигналов, значение которой зависит от размера базы станций.
Дополнительная защита от пространственной волны при многократном
отражении от ионосферы достигается фазовым кодированием импульсов
пачки (манипуляцией по фазе несущих колебаний). Такой фазовый
код используется и для опознавания сигналов ведущей и ведомой
станций цепочки. Опознавание цепочек станций производится по
частоте следования пачек импульсов, лежащей в пределах от 10 до 25 Гц.
Для разделения сигналов пространственной и поверхностной волн
желательно излучать импульсы длительностью не более 40—50 мкс [48].
Однако при использовании длинных волн и по энергетическим
соображениям приходится излучать импульсы большей длительности
(свыше 200 мкс). Поэтому для повышения точности измерений
(разделения сигналов поверхностной и пространственной волн в точке
приема) используют только часть импульса (обычно первые три периода
несущих колебаний). В этой части импульса амплитуда сигнала
составляет 0,5 от максимального значения: именно по этой точке отсчета ТО,
отстоящей от начала импульса примерно на 30 мкс, отсчитывается
измеряемый временной интервал (рис. 5.10, б).
Измерительные импульсы в приемоиндикаторе системы должны
быть «привязаны» по времени к ТО, а их длительность не должна
превышать длительность переднего фронта импульсов информационного
сигнала. При формировании измерительных импульсов (рис. 5.11)
выделенная огибающая Uv (t) радиоимпульса дважды
дифференцируется. Точка перехода напряжения Up (t) через нуль соответствует ТО
и, в частности, определяет временное положение измерительного
импульса ИИ. По положению ИИ грубо измеряется интервал
времени, пропорциональный разности расстояния. С помощью ИИ
выделяется также пакет высокочастотных колебаний (напряжение ис),
который служит для точных фазовых измерений.
Таким образом, система «Лоран-С» не только обеспечивает
методически более высокую точность измерения временных интервалов (по
сравнению с «Лоран-А»), но и позволяет избавиться от мешающего
влияния пространственной волны.
Цепочки СДН «Лоран-С» состоят из одной ведущей и трех-четырех
ведомых станций. В настоящее время в эксплуатацию введено семь
цепочек СДН «Лоран-С». Благодаря использованию баз большой
длины (800—1200 км) система обслуживает одксй цепочкой большей
район. Основные характеристики системы «Лоран-С» приведены в
табл. 5.2.
Глава 6
РАДИОТЕХНИЧЕСКИЕ МЕТОДЫ ИЗМЕРЕНИЯ
РАДИАЛЬНЫХ И УГЛОВЫХ СКОРОСТЕЙ
6.1. ДОПЛЁРОВСКИЙ МЕТОД ИЗМЕРЕНИЯ
ПУТЕВОЙ СКОРОСТИ И УГЛА СНОСА
Для выяснения основных количественных соотношений при
навигационных измерениях с использованием эффекта Доплера
рассмотрим следующую схему.
На борту ЛА, находящегося в некоторый момент времени в
заданной точке и движущегося с путевой скоростью W, установлены
радиопередающее и приемное устройства. На земле установлен точечный
радиолокационный отражатель, способный переотражать сигнал
самолетного передатчика, в том числе и в сторону приемника ЛА. Если
передатчик Л А излучает сигнал, а расстояние между Л А и
отражателем в некоторый момент времени равно Ry то с учетом запаздывания
R 1с принятый в точке отражения сигнал euV = Епт cos со (t — R/c).
Отраженный от переизлучателя сигнал будет принят на борту ЛА
с временем запаздывания 2Rlc, т. е. е0^= £OTpmXcos со (t — 2Rlc).
Учитывая известное соотношение между частотой и фазой сигнала —
со = dy/dt, определим частоты излученного • и принятого сигналов:
изл dt 0TP dt с dt
Разность частот излученного и принятого сигналов
л 2со dR
Дсо ==-- соизл—(оотр = . —
с at
называют доплеровским смещением частоты, или частотой Доплера.
Следовательно, суть эффекта Доплера состоит в изменении частоты
принимаемого сигнала в соответствии со скоростью W перемещения
источника излучения. Таким образом, значение частоты Доплера
или F« = "T"' (6-2)
где X = elf — длина волны излучаемых колебаний.
Более строгое рассмотрение [22] позволяет уточнить частоту при-
нятого сигнала сопр = (оизл (1 + —г + •••)•
Однако на практике (выполняется условие W < с) достаточно
воспользоваться первыми членами ряда, что и приведет к выражениям
(6.1) и (6.2) для доплеровской частоты.
159
Рассмотренный эффект смещения частоты при перемещении
источника радиоизлучений положен в основу радионавигационных
методов измерения путевой скорости и угла сноса ЛА.
Основные соотношения при определении путевой скорости на
основе измерения доплеровскои частоты показаны на рис. 6.1.
Поскольку значение доплеровскои частоты пропорционально радиальной
составляющей Wr путевой скорости W, при облучении участка земной
поверхности S под углом у и при наличии угла 0 между проекцей
вектора путевой скорости и плоскостью излучения радиоволн, то
согласно выражению (6.2)
FA = 2WЯ"1 cos у cos 0. (6.3)
Очевидно, что если обеспечить неизменным угол наклона у, то
максимальному значению доплеровскои частоты /^max будет
соответствовать угол 0 = 0, что реализуется при совмещении плоскости
распространения радиоволн с вертикальной плоскостью, в которой
перемещается Л А. Значение путевой скорости, как следует из формулы
(6.3), для этого случая
W= FnmSLXX/(2cosy). (6.4)
На основе полученного выражения может быть реализован
принцип действия при определении путевой скорости с помощью доплеров-
ского измерителя.
Определение угла сноса а между вектором путевой скорости W и
вектором воздушной скорости V при излучении радиоволн в
направлении отражателя поясняет рис. 6.2. Поскольку 0 = а —яр, значение
доплеровскои частоты
Fn = 2WK-1 cos у cos ya — f). (6.5)
Как и ранее, при неизменном наклоне луча к земной поверхности
максимальному значению доплеровскои частоты соответствует угол
0 = 0, т. е. .Рдгаах = 2WK"1 cos у при a = t|). Приведенные соотноше-
ния^показывают, что если поворачивать антенну в горизонтальной
плоскости до'положения, которое соответствует максимальному
значению доплеровскои частоты, то на основе выражения (6.5) можно
определить значение путевой скорости, а отсчитанное значение угла пс-
ворота^антенны будет равно углу сноса. Следовательно, путевая ско-
Рис. 6.1. К определению путевой ско- Рис. 6.2. К определению уг\тц
рости chocq
т
ДУ
\стабилизиробанная
\ платформа
Горизонтащ
иг
w
\У-йГ /
Направление'
луча
Рис. 6.3. К определению влияния
неточности стабилизации антенны на
погрешность измерения путевой
скорости
Направление-
пича ^т
Рис. 6.4. К определению влияния
вертикальной скорости на
погрешность измерения путевой скорости
рость и угол сноса могут быть измерены аппаратурой, которая имеет
в своем составе приемо-передающее устройство и устройство для
излучения узконаправленного луча. Такие измерители называют однолу-
чевыми доплеровскими измерителями путевой скорости и угла сноса
(ДИСС). Вследствие ограниченной точности и незначительных
функциональных возможностей однолучевые ДИСС не нашли широкого
распространения на современных ЛА.
Чтобы выяснить причину больших погрешностей при измерениях
навигационных параметров с помощью однолучевых ДИСС,
рассмотрим поочередно влияние крена и тангажа ЛА на точность определения
путевой скорости и угла сноса (рис. 6.3). р-[
Если платформа, на которой устанавливается антенна однолуче-
вого ДИСС, отклоняется от горизонтальной плоскости на угол Ay,
то это в соответствии с выражением (6.4) приведет к погрешности в
определении путевой скорости. Продифференцируем выражение (6.4):
XFjtmax sln v - dy = W tg ydy. (6.6)
dW-
дтах
Отсюда
AW
W
cos2 у
tgyAy.
(6.7)
Полученное выражение показывает, что погрешность в
определении путевой скорости пропорциональна нестабильности положения
антенны Ay. Основным способом уменьшения погрешностей такого
вида является применение стабилизированных платформ, на которых
размещается антенная система.
Другим источником погрешностей в однолучевых ДИСС является
влияние эволюции ЛА при изменении высоты. Если ЛА совершает
набор высоты под углом (рис. 6.4), то при условии, что излучение
совпадает с направлением путевой скорости, в соответствии с выражением
(6.4) имеем Рдтах = 2WX~X cos (y + л), или
дтах
=■= 2WX"1 cos y cos г) — 2WX~X sin y sin r).
(6.8)
О Зак. 444
161
Таким образом, FnmA1L = 2Wrlr1CQsy —2WBX~* sin7, (6.9)
где WT — Wcosr\ и WB = №sin r)— горизонтальная и вертикальная составляющие
путевой скорости.
Из формулы (6.9) следует, что причиной погрешности AFn =
= (2Wji) sin у является наличие вертикальной составляющей
путевой скорости. Выражение
Ш AFR __ WB
W Fx Wr
tgY (6.10)
показывает, что относительная погрешность возрастает при
увеличении вертикальной составляющей скорости.
Рассмотрим погрешности однолучевых ДИСС в определении угла
сноса. Процедурой измерения в этом случае предусматривается
поворот антенны в горизонтальной плоскости до получения максимума
значения доплеровской частоты в соответствии с выражением (6.4).
Однако если при этом не выполнено условие (6.4), т. е. а — ф Ф 0, то
значение доплеровской частоты Fn = /^max cos б, или (после
разложения в ряд Тейлора при ограничении ряда первыми двумя членами)
/^ = /w(l-S2/2), (6.11)
а также F^ = FnmtLT — Д^д, (6.12)
где Д^д = FnmRXS2/2.
Выражение, связывающее значение погрешности в определении
угла сноса с доплеровской частотой, имеет вид:
(6.13)
Таким образом, однолучевые ДИСС обладают существенными
погрешностями при определении путевой скорости и угла сноса.
Некоторые виды погрешностей можно уменьшить, перейдя к
использованию двухлучевых ДИСС.
Геометрические соотношения между углами в двухлучевом ДИСС
при направлении лучей вперед и назад относительно продольной оси
ЛА при полете с углом тангажа т)ис погрешностью выдерживания
вертикали на угол А^ показаны на рис. 6.5. В этом случае доплеровские
частоты по лучам 1 и 2:
FK1 = 2WX-1 cos [у + ft - AV)1; (6.14)
F^ = 2WI-1 cos [у — ft - Ду)]. (6.15)
Поскольку луч / направлен вперед по маршруту ЛА, а луч 2 —
назад, частоты отраженных сигналов /i = /0 + ^"дг и f2 = /0 — F^
(при излучаемой частоте /0)-
Определим на входе приемного устройства разность частот
&F = fi-f2- Fm - Fn2 = 2Ш-1 { cos [у + ft - Ну)] +
+ cos [у — ft — Ay)]} = WK-1 cos y cos ft — Ay)> (6.16)
16?
При полете с углом тайгажа ti
существует вертикальная
составляющая вектора путевой скорости,
вызывающая сдвиг доплеровской
частоты по первому и второму лучу.
Однако, поскольку это изменение
частоты по обоим лучам одного
знака, то при вычитании доплеровских
частот разность этого сдвига равна
нулю. Действительно, поскольку
W cos ц = Wr, то из выражения
(6.16) при Ду = 0 имеем
- cos у
Горизонталь
Платформа
/Ну-А у)
*«=■
или
гг=
4 cos Y
(6.17)
Рис. 6.5. Погрешности определения
скорости в двухлучевых ДИСС
Следовательно, в двухлучевых ДИСС отсутствуют погрешности,
вызванные вертикальной составляющей путевой скорости.
Рассмотрим влияние нестабильности выдерживания положения
платформы при горизонтальном полете, т. е. при г| = 0.
В этом случае
ш
cos у cos Ду:
4W
cos у
(,-jn
(6.18)
Неточность выдерживания вертикали (&у Ф 0) приводит к
изменению доплеровской частоты на величину
AFn
4W
cos у
А?2 _/7
2 д
ay2
(6.19)
X ' 2 rt 2
Поскольку относительная погрешность в определении путевой
скорости пропорциональна изменению доплеровской частоты, то
А^
W
_ Д^д
Ду2
(6.20)
Из выражения (6.20) видно, что в двухлучевых ДИСС погрешности
в измерении путевой скорости, вызванные нестабильностью
выдерживания платформы, существенно меньше, чем в однолучевых.
Следовательно, применение двухлучевых ДИСС допускает использование
нестабилизированных платформ.
Для повышения точности измерений угла сноса в двухлучевых
ДИСС применяют ориентацию лучей влево и вправо относительно
продольной оси ЛА (рис. 6.6). При этом процедура определения угла
сноса на основе полученной информации о доплеровских частотах fnl и
FK2 по лучам 1 и 2 будет различной в зависимости от типа
применяемых антенн (повторная или неподвижная). При использовании
поворотной в горизонтальной плоскости антенны можно изменять
положение угла между лучами 1 и 2, совмещая биссектрису угла с
направлением путевой скорости.
6*
163
При радиальных составляющих скоростей лучей 1 и 2 доплеровс-
кие частоты:
Следовательно, с учетом рис. 6.6:
F# = 21^X-1cosy cos [6 — (а—г|))];
Д2
2^-! cosy cos [9 f (а—Ш
(6.21)
Разностная частота на входе приемного устройства
h-h
Д1
Д2
4Ш,-1 cos у sin 6 sin (a — if). >
(6.22)
Процедура определения угла сноса при вращающейся антенне в
соответствии с полученным выражением состоит в повороте антенны до
положения а = гр. О равенстве этих углов свидетельствует нулевое
значение доплеровскои частоты, так как при а = яр выдерживаются
равенства sin (а — я|э) = 0 и ^д = 0. В этом положении антенны
лучи направлены симметрично относительно вектора путевой скорости,
следовательно, разностная доплеровская частота
^Д0 — *Д1
Fn2 = 2WX~l cos у cos 0.
(6.23)
дисс
Определение угла сноса путем поворота антенны может
осуществляться вручную или с помощью следящей автоматической системы,
сигналом рассогласования для которой должна служить разностная
доплеровская частота (или пропорциональный ей сигнал).
Дифференцируя выражение (6.22) и перейдя к конечным
приращениям, получим значение погрешности в определении угла сноса:
Да = ^Д . (6.24)
41FA,-1 cos у sin 0 cos (а—--ф)
Так как в момент отсчета угла сноса i|) « a, cos (а —гр) ж 1, a
также с учетом того, что из выражения (6.23) 2W%r1 cosy = ^% ,
формулу (6.24) преобразуем к виду
Да = Д/У2^д0 tg 0.
Полученное выражение
показывает, что точность определения
угла сноса в двухлучевых ДИСС
существенно выше, чем в однолуче-
вых.
Ц^При использовании
неподвижных антенн для определения угла
сноса лучи 1 и 2 размещают
симметрично относительно продольной
оси ЛА. В этом случае из равенства
(6.21) получим систему уравнений:
Fm = 2WX~l cos у cos (0 — а);
^Д2 = 2WX-1 cos у cos (0 + а).
flyul
Продольная
7 ось
W
\Луч2
Рис. 6.6. К определению
погрешностей двухлучевых ДИСС при
измерении угла сноса
164
Горизонталь
2,3
**г
У
>
W
«да^
Рис. 6.7. К определению путевой
скорости и угла сноса в трехлучевом
дисс
В нахождении неизвестных W
и а в вычислительном устройстве
и состоит процедура определения
вектора путевой скорости и угла
сноса.
Для измерения с высокой
точностью путевой скорости и угла
сноса в доплеровских измерителях
целесообразно использовать пары
лучей с излучением вперед-назад и
влево-вправо. На практике данный
принцип реализуется в
многолучевых ДИСС с различной
конфигурацией лучей. Практическое
использование нашли трехлучевые и
четырехлучевые ДИСС с жестко
закрепленными или
стабилизированными антеннами. Вследствие большего влияния тангажа на
погрешность измерения, а также в целях упрощения системы
стабилизации антенны часто ограничиваются стабилизацией антенны только по
тангажу, а при полетах с большим углом крена применяют
автоматическое отключение ДИСС. Рассмотрим принцип формирования
доплеровских частот в трехлучевом измерителе с расположением лучей
вперед-вправо, назад-влево, назад-вправо (рис. 6.7). Определяя
значения радиальных составляющих вектора путевой скорости по
трем лучам и подставляя их в выражение (6.2), получим значения
доплеровских частот:
F& = 2Ш,-1 cos у cos (в — a); Fn2 = 2ШГ1 cos у cos (9 + а);
Fm = 2WK-1 cos у cos (9 — а). (6.25)
Отраженные от лучей сигналы будут приняты на борту ЛА с
частотами: h = f0 + Fja, /2 = /о — F*2> /з = /о — ^дз- При этом Fm =
= FA3, поскольку лучи 1 к 3 расположены в одной плоскости.
В целях определения навигационных параметров W и а в допле-
ровском измерителе осуществляется обработка полученных сигналов
по различным алгоритмам. Например, полусумма доплеровских
частот по лучам 1 и 2 дает
*да+*
Д2
W
= —— cos у [cos (9—а) + cos (9 + а)] ■-=
W
а полуразность по лучам 3 и 2-
гдз"
^Д2
2W
cos у sin 9 sin а.
cos у cos 9 cos а,
(6.26)
(6.27)
Полученные уравнения (6.26) и (6.27) содержат определяемые в
вычислительном устройстве навигационные параметры W и а.
Если сформировать поочередное излучение сигналов по парам
лучей 1— Зи 2— 4, расположенных симметрично относительно
продольной оси ЛА, то получим четырехлучевой ДИСС (рис. 6.8), который так-
165
же находит широкое применение на
практике. Частоты принятых
сигналов в этом случае: /х = /0 + Fn\
/з — /о + ^дз> А =
Рис. 6.8. К определению путевой
скорости и угла сноса в четырехлучевом
ДИСС
U = U + F*
Если найти проекции вектора
путевой скорости в плоскостях
лучей 1—3 и 2—4 (Wli3= Wcos (6—а);
№2,4 = W cos (0 + а)), а затем
перейти к радиальным
составляющим (WVi,3 = Wlt3 cos у; Wr2A =
= №2,4 cos 7), to получим
значения доплеровских частот:
•jM=2WX-1casycas(B—a); (6.28)
^2,4=2^-1cosTcos(9+a). (6.29)
Если пары лучей работают поочередно, то при равенстве амплитуд
отраженных сигналов от лучей 1 и 3 на вход приемного устройства в
некоторый момент времени поступят сигналы е± = emcos (co0 + Йдх,3) t
и ез = ет cos (со0 —ЙД1,3) t9 что при сложении с сигналом гетеродина
^г = erm cos co^
даст суммарный сигнал
ec = e2 + e1 + ea = e9mcosG>0t + 2e1l
2em
cosQffl>3fcoscof =
= e2m( 1 + -^- cos QAli31) cos co0 Л
\ 827П /
Таким образом, суммарный сигнал представляет собой амплитуд-
но-модулированный сигнал с частотой модуляции ЙД1,3 = 2я F^ и
коэффициентом глубины модуляции т — 2em/e2m. По аналогии при
приеме отраженных сигналов от лучей 2 и 4 йд2,4 = 2я^д2>4) получим
амплитудно-модулированный сигнал ес = е2т (1 + tn cosQa2,40 cos со/.
Детектируя полученные сигналы, выделим напряжения с допле-
ровскими частотами Яд1>3 и йд2>4, которые используются для
определения навигационных'параметров в соответствии с выражениями:
^1,3 + ^2,4 __ 2W
Fflx!3—F]
Д2.4 _
2W
-cos у cos в cos a;
cos y sin 0 sin a.
(6.30)
(6.31)
Совместным решением уравнений с двумя неизвестными
определяют алгоритм вычисления путевой скорости W и угла сноса а.
Изложенные ранее принципы определения путевой скорости и угла
сноса базировались на предположении, что при облучении земной
поверхности узким лучом частота отраженного сигнала сдвигается на
величину, равную доплеровской частоте в соответвии с выражением (6.4).
Данное положение имеет место при облучении точечного отражателя,
однако в действительности вследствие конечной ширины луча всегда
облучается некоторый участок поверхности. Так как наличие допле-
ровского смещения характерно для всех участков облучаемой поверх-
166
ности, а облучение каждого из них происходит под разными углами у,
то отраженный сигнал содержит спектр доплеровских частот.
Следовательно, на устройство обработки всегда поступает сигнал,
сформированный в результате отражения от множества элементарных
отражателей, который содержит в своем спектре многие составляющие
доплеровских частот. Очевидно, что элементарные отражатели,
облучаемые под одинаковым углом, при прочих равных условиях дадут
одинаковое значение доплеровской частоты. Следовательно, линией
положения облучателей, дающих одно и то же значение доплеровской
частоты, является линия пересечения горизонтальной поверхности
с конусом, ось которого совпадает с направлением вектора путевой
скорости. Такой линией является гипербола, ось симметрии которой
совпадает с линией пути ЛА, а семейство линий положения, дающих
одинаковое значение доплеровской частоты, называемых изочастот-
ными линиями, является семейством гипербол. Каждый элементарный
отражатель, расположенный на изочастотной линии, при облучении
дает сигнал с одинаковой доплеровской частотой. Частоты сигналов,
принятых от всех отражателей, расположенных на изочастотной
линии, равны /0 + F^t и имеют случайные фазы и амплитуды.
Поскольку на вход приемного устройства поступают сигналы, отраженные от
отражателей, расположенных на множестве различных гипербол,
суммарный отраженный сигнал формируется как результат наложения
множества элементарных сигналов со случайными амплитудами А%
и случайными фазами ф0г-, т. е.
"отр (0 = 2 Аг (О C0S IK + Од«) t + «Awl. (6.32)
Следовательно, отраженный сигнал содержит спектр частот с
множеством доплеровских сдвигов Fni относительно излучаемой частоты
/о, расположенных вокруг некоторого среднего доплеровского сдвига
'до-
При выделении доплеровских частот в измерителе также
получаем спектр доплеровских частот /^, расположенных вокруг Fn0. Таким
образом, исходной информацией, поступающей на обработку в
процессе определения 'навигационных параметров, является спектр
доплеровских частот.
При формировании амплитуд отраженного и принятого на борту
ЛА сигнала следует также учитывать, что облучение участков
поверхности и прием сигналов в доплеровских измерителях осуществляется
антеннами с узкими диаграммами направленности. Вследствие этого
разные участки поверхности облучаются сигналами разной мощности,
определяемыми формой диаграммы направленности, и, кроме того,
направленные свойства приемной антенны обусловливают различный
уровень принятых сигналов от разных точек отражающей
поверхности. Изложенные соображения приводят к тому, что кривая мощности
Р (Fn) принятого сигнала в зависимости от частот принятого спектра
^д имеет вид, показанный на рис. 6.9. Определим ширину спектра
доплеровских частот на уровне половинной мощности (рис, 0,10). Если
167
центр облучаемого участка S расположен под углом @ к вектору, то
в соответствии с выражением (6.3) FK0 = 2Wk~1 cos у cos 0.
При отражении от точек 1 и 2 доплеровские частоты:
2W
cos y cos
Гда= -у- COS YCOS (в0 + — J .
Определим разность частот Д/^ = Ffll — /^
W ^Л.^ О
Л/%
cos v sin 6 sin —
Я r 2
(6.33)
(6.34)
(6.35)
При небольшом значении угла 0, что соответствует
характеристикам реальных ДИСС, получим
Д/?д да 2WX-1 cos y sin 6ОД0.
(6.36)
Таким образом, ширина спектра определяется путевой скоростью,
углом между направлением полета и направлением максимума
излучения и, кроме того, зависит от ширины диаграммы направленности
Fe, на что указывалось ранее.
Относительная ширина спектра доплеровских частот
(6.37)
Следовательно, исходная информация, поступающая в измеритель
путевой скорости и угла сноса, представляет собой сигналы, несущие
информацию о доплеровских частотах, которые, в свою очередь,
представляют случайный спектр частот, группирующихся вокруг среднего
значения Fn0. Поскольку в полученных ранее выражениях для
определения W и а приводились неслучайные значения доплеровских
частот, то измерения этих параметров всегда будут сопровождаться
методической погрешностью, так как они осуществляются на основе
измерения случайных величин, которые оцениваются по правилам мате-
*Мк
i
i ^
4
1 "^
У
! \
.
:)
ГА
[ !
Облучаемый
участокS
Рис. 6.9. Огибающая спектра
доплеровского сигнала
Рис. 6.10. К определению ширины
спектра доплеровского сигнала
166
магической ста1*исТики. Можно
показать [9], что величина
относительной погрешности, обусловленной
случайным характером доплеров-
ского сигнала при определении
путевой скорости,
aW _ Т/Я sin у0 Ау
W ~
К0п((р)
(6.38)
ю
10
30
4/7
50
L\ Al
V\ ' UfJL,
j
~\
Cytua
N
I
A
,3 —
'1
0
10 10 30 (ргград'
4cosYoyWT
где h — длина волны;
T — время наблюдения сигнала.
Приведенное выражение
позволяет выбрать время измерения с
учетом допустимого уровня
погрешности, а также исходя из
динамических ошибок, вызванных
эволюциями ЛА.
На спектр доплеровского
сигнала оказывает влияние также угол
наклона луча в вертикальной
плоскости. Проведя рассуждения,
аналогичные рассуждениям при выводе формулы (6.37), получим
выражение для относительной ширины спектра
Рис. 6.11. Зависимость
коэффициента обратного рассеивания от угла
падения:
1 — спокойное море; 2 — слабое волнение;
3 — среднее волнение; 4 — сильное
волнение
r4^tgVoAY.
(6.39)
Существенное значение на спектр доплеровского сигнала
оказывают отражающие свойства облучаемой поверхности (суша, водная
поверхность и т. д.) . Как известно [6], удельная эффективная площадь
рассеивания а0 и коэффициент обратного рассеивания /С0.р связаны
с углом облучения яр = 90 — у соотношением
То = 2tfo.p (♦) cosip = 2K0.V (у) sin у.
(6.40)
Коэффициент обратного рассеивания зависит от угла падения и
характеристик отражающей поверхности (рис. 6.11). Из приведенных
графиков следует, что амплитуда отраженного сигнала при полете
над морем может оказаться существенно меньше, чем при полете над
сушей; при этом огибающая доплеровского спектра смещается в
сторону низких частот. Указанное смещение является причиной
появления дополнительной погрешности, которая зависит от состояния
волнения водной поверхности. С целью компенсации погрешностей в ДИСС
предусматриваются два режима измерения: «суша—море».
Рассмотренные ранее погрешности измерения путевой скорости и
угла сноса относятся к методическим погрешностям ДИСС. В
реальных радиоэлектронных системах возникают инструментальные
погрешности вследствие проникновения излучаемого сигнала на вход
приемных антенн, переотражения сигналов от элементов
конструкции ЛА и т. д. Поэтому существенное различие в технических реали-
169
зацияХ современных ДИСС объяснйетея также й йыбранным методом
уменьшения инструментальных погрешностей.
В целях уменьшения паразитного проникновения сигнала
передатчика на вход приемного устройства вместо ДИСС с непрерывным
излучением, как правило, используют ДИСС с импульсным режимом
работы. Кроме того, соответствующим выбором режима (частоты
следования и длительности импульсов) добиваются того, что на время
работы передатчика приемное устройство запирается. Однако недо-
статаком импульсных ДИСС является невозможность измерения W
и а при малых высотах гт1п, соответствующих времени
распространения сигнала в течение длительности импульса передатчика, а также
неработоспособность ДИСС на высотах, кратных rmla. Для
уменьшения инструментальных погрешностей применяются также когерентные
ДИСС, непрерывно-импульсные ДИСС с когерентным приемом, ДИСС
с частотной модуляцией излучаемых колебаний и др.
6.2. КОРРЕЛЯЦИОННЫЙ МЕТОД ИЗМЕРЕНИЯ
ПУТЕВОЙ СКОРОСТИ И УГЛА СНОСА
Этот метод основан на измерении корреляционных характеристик
сигналов, переотраженных при облучении отражающей поверхности
и принятых разнесенными антеннами, установленными на борту ЛА.
Сигнал, переотраженный от протяженных отражателей, какими
являются поверхности суши, моря, атмосферные осадки, слои
ионосферы и т. д., и принятый антенной ЛА, является результатом наложения
множества сигналов. Вследствие этого, а также из-за влияния ряда
других факторов (нестабильность частоты передатчика, эволюции ЛА
и т. д.), сигнал, принятый антенной ЛА, флюктуирует, а его
характеристики могут быть описаны методами теории случайных процессов.
Для радионавигационных измерений достаточно воспользоваться
взаимной корреляционной функцией сигналов, принятых на разнесенные
антенны на борту ЛА. Если сигналы, принятые двумя антеннами,
обозначить щ (t) и и2 (0, то их взаимная корреляционная функция
(корреляционная функция связи)
К ft, к) = М [и, {U)u2 (t2)l (6.41)
Как показывают результаты исследования статистических свойств
отраженных сигналов щ (t) и и2 (t)> они на определенном участке
полета являются стационарными случайными функциями,
поэтому могут описываться нормированной корреляционной функцией
Р (т = t2 — U) = К (t)ID (т), где D (т) = р (т = 0) — дисперсия
случайного сигнала. Функция р (т) есть не что иное, как коэффициент
взаимной корреляции между сечениями сигналов щ (t) и и2 (t),
разделенных интервалом т. Максимальное значение этот коэффициент
приобретает при т = 0, т. е. р (т = 0) = 1.
Если ЛА летит с углом сноса а (рис. 6.12), то при симметричных
диаграммах направленности антенн и при выполнении некоторых дру-
170
гих условий [2] коэффициент
взаимной корреляции сигналов щ (/)
и щ (О
р(т) = ехр[ -i^-^Jx
X expj l-L(d2-y)^
(6.42)
где % — длина волны;
Ав и Аг — эффективная ширина
диаграммы направленности
разнесенных антенн 1 и 2
соответственно в
вертикальной и в
горизонтальной плоскости;
d — расстояние между
передающей и приемной
антеннами.
Поскольку сигналы /, 2, 3,
принятые антеннами на борту ЛА,
идентичны, но смещены на время т0 =
= d/2 (рис. 6.13), то принцип
корреляционного метода измерения
путевой скорости состоит в
определении времени задержки между
сигналами, принятыми разнесенными
антеннами. Значение этой временной
задержки пропорционально
значению путевой скорости ЛА в момент
наибольшего значения
коэффициента взаимной корреляции
То = d/W. (6.43)
Если в канал приема одного из
принятых сигналов ввести
устройство регулируемой задержки, то
при изменении времени задержки на
величину т0 функция взаимной
корреляции примет максимальное
значение. Следовательно, шкала
регулируемой задержки может быть
отградуирована в соответствии с
выражением (6.43) в единицах
измеряемой путевой скорости. Один из
возможных способов реализации
рассмотренного принципа
изображен на рис. 6.14. В этом случае
сигнал щ (t) подается для определения
значения функции взаимной
корреляции на умножитель через уст-
Рис. 6.12. К принципу действия
корреляционных измерителей (полет с
углом сноса)
Положение
\ЛЛ 6
момент t
Рис. 6.13. К принципу действия
корреляционных измерителей:
а — положение ЛА в момент t; б —
положение ЛА в момент t + %
u2(t+t)
И
Смеситель*
Гетеродин l-^f
УПЧШ
Каскад
умножения
п
\Ujlt
Смеситель \*\ УЛЧ(М)
It)
ФНЧ
u(tH3)
Устройство
регулируемой^
задержки
р
Ручка ■
регулировки
if*
Указатель (tp)
Рис. 6.14. Структурная схема
корреляционного измерителя
171
Рис. 6.15. К принципу измерения
путевой скорости и угла сноса в
корреляционных измерениях
ройство регулируемой задержки.
Процесс измерения в такой системе
заключается в том, что путем
изменения задержки сигнала щ (t)
добиваются максимального его
значения на выходе коррелометра (при
этом регулируемое устройство
задержки градуируется в единицах
скорости). Процесс измерения
можно автоматизировать, если
использовать следящую систему для
управления приводом регулируемой
задержки. Сигналом
рассогласования в этом будет служить
напряжение на выходе коррелометра.
В общем случае направление полета ЛА может не совпадать с осью
антенны, поэтому функция взаимной корреляции сигналов щ (t) и
и2 (t) примет максимальное значение при задержке сигнала щ (t) на
время т0 = d cos a/W, однако и в этом случае время задержки будет
определяться значением путевой скорости. Корреляционный метод
позволяет осуществлять измерение не только продольной, но и
поперечной составляющей путевой скорости, а также угла сноса.
Естественно*, что для этого необходимо увеличить количество приемных
антенн. Схема, иллюстрирующая одновременное измерение путевой
скорости и угла сноса, приведена на рис. 6.15. Здесь используются
приемные антенны А, Б, В, причем расстояние на продольной оси между
антеннами А и Б равно 2du а расстояние между антеннами Б и В
равно 2d2. Если полет летательного аппарата происходит без сноса,
коэффициенты взаимной корреляции сигналов с выходов антенн А и Б,
а также антенн А и В равны между собой. По аналогии с выражением
(6.42) можно записать
Раб (х) = 9ав (х) = ртах ехр [ -2яД2 Я~2 (d1—x)\ (6.44)
где
Ртах = ехр
Г"^"d2J
При равенстве коэффициентов взаимной корреляции время
задержки между сигналами ыаб и uab, соответствующее максимальному
значению коэффициентов взаимной корреляции, равно времени,
необходимому для перемещения на расстояние, равное половине отрезка
по оси Л А между антеннами А и Б или А и В.
Если ЛА летит со сносом, т. е. а^О, то коэффициенты взаимной
корреляции сигналов от антенн не будут равны между собой, так как
в соответствии с выражением (6.44):
РАБ (X) = рАБ щах ехР — У°АБ тах"
рАв(х)^-РАвтахехр\
2яД2
(хав
max
(6.45)
(6.46)
172
При этом максимальные значения коэффициентов:
Г 2яД2 d\ sin2(8 — a) 1 ,а лп\
Рл5шах = ехр | ^ J ; (6.47)
Рл* max - ехр [ ;8cos2;P+ J • (6-48)
В соответствии с рис. 6.15 значения координат *лвтах и *лвтах»
определяющих время запаздывания сигналов между антеннами,
выражены формулами:
ХАБтах = ^1 C0S (Р — аУ C0S Pi (6.49)
*ЛВтах = di COS (p + a)/ COS p. (6.50)
Времена задержки сигналов uab и млв, соответствующие
максимальным значениям коэффициентов взаимной корреляции:
тАвтах = (к cos (p — a)fW cos P; (6.51)
ЪШплх = dt cos (P + a)IW cos p. (5.52)
Как следует из приведенных соотношений, максимальные
значения коэффициентов взаимной корреляции при наличии сноса не
равны между собой. Процедура определения путевой скорости и угла
сноса основана на определении задержек тл5тах и тдвгаах,
(соответствующих максимальным значениям рлятах и РАвтах) ПРИ решении
уравнений (6.51, 6.52), содержащих определяемые навигационные
параметры Уиа.
Рассмотрим основные погрешности корреляционных измерений и
методы их уменьшения. Существуют две группы погрешностей —
методические и инструментальные. Методические погрешности
обусловлены применяемым способом измерения и теми допущениями, которые
приняты при обосновании метода и расчетных формул определения
навигационных параметров. Значения этих погрешностей зависят от
степени соответствия реальных процессов, протекающих в
измерителях и теми допущениями, кототрые приняты при описании этих
процессов.
Инструментальные погрешности возникают при реализации
метода и зависят от характеристик трактов прохождения сигналов в
корреляционных измерителях.
Рассмотрим влияние эволюции летательных аппаратов на
погрешности корреляционных измерителей. Можно показать [2], что при
полете с углом тангажа г) коэффициент корреляции
/ ч / A4d2<n2 \ Г 2яА2 ,<9 ч21 2я
р (х) = ехр ^ ^±-] ехр ^ — (d2 cos rj—x)2J cos — x
X [2rj (d cos T] — x) — 2dsinT|]. * (6.53)
Графики зависимостей р (x) при различных значениях углов
тангажа т] приведены на рис. 6.16. Из них видно, что полет с тангажом
приводит к искажению графика функции взаимной корреляции и к
уменьшению максимального значения коэффициента корреляции.
Соответствующее максимуму функции взаимной корреляции значение ар-
173
гумента лгтах = dcost), что указывает на смещение этого максимума
на относительную
величину
d—d cost)
1—COST).
(6.54)
При подстановке хтак = d cos т) в выражение (6.53)
максимальное значение коэа
£шциента взаимной корреляции
Да d* yj2
РшаХ = ехр |^ ^4C0S —(2dsm л).
(6.55)
Следовательно, относительная погрешность в определении путевой
скорости будет соответствовать относительному смещению
максимального значения коэффициента взаимной корреляции и в соответствии
с выражением (6.54) будет определяться так:
8W = 1 — cos т|. (6.56)
Данная погрешность при наличии измерителя угла тангажа может
быть вычислена и соответствующим образом скомпенсирована.
Погрешности измерения угла сноса в измерениях с подвижной
антенной вызваны тем, что угол сноса а в плоскости антенны не
совпадает с его проекцией аг на горизонтальную плоскость.
Функциональную связь между этими углами и углом тангажа к\ можно определить
из выражения
tg аг = tg a/ cos г), (6.57)
поэтому абсолютная погрешность в определении угла сноса
1—COS Г)
| Да | = arctg а -
COST]
(1— cost)) arctg а.
(6.58)
При малых значениях угла сноса выражение для абсолютной
погрешности можно упростить:
|Да| «а(1 -cosri). (6.59)
Следовательно, при существующих режимах полетов (обычно со
сравнительно малыми углами сноса а и тангажа г]), как показывает
полученное выражение,
погрешности в определении угла сноса
незначительны.
При определении погрешностей
корреляционных измерителей с
неподвижными антеннами необходимо
учитывать способ, который
используется для слежения за
максимальным значением функции
корреляции. Одним из часто применяемых
является способ, основанный на
непрерывном сравнении двух
значений взаимной функции
корреляции, которые соответствуют
симметричным задержкам сигнала на
время ti = т0 + Дт3 и т2 =
Мх,см
Рис. 6Л6. Графики зависимостей ко
эффициента корреляции от угла
тангажа
174
s=t0 — Ат3 (способ вилочного отсчета). Можно показать [12], что при
небольших углах сноса а измерители с неподвижной антенной
вследствие изменения углов тангажа имеют абсолютную погрешность
определения угла сноса:
| Аа| «а(1 —У~1—sin2ос sin2rj/cos r|)# (6.60)
Анализ этого выражения показывает, что погрешность
определения угла сноса является малой, одноко ее наличие приводит к
дополнительной погрешности в определении путевой скорости. Можно
показать, что в рассматриваемом измерителе с неподвижной антенной
относительная погрешность в определении путевой скорости
8W = 1 —cos ч\ ^.5 # (6.61)
cos а + sin2 a (1 — cost])
Рассматривая влияние других эволюции ЛА (наличие крена,
развороты и т. д.), можно показать, что погрешности в определении
путевой скорости и угла сноса также малы. Исключение составляет
случай, когда ЛА совершает повороты с малым радиусом разворота, что
характерно для некоторых режимов полета вертолетов. Суть
возникающих при этом погрешностей заключается в том, что ЛА (а,
следовательно, и приемные антенны) совершают переход из одной точки в
другую по дуге, т. е. проходят расстояние, равное дуге окружности
с соответствующим радиусом поворота. Относительная погрешность
в измерении путевой скорости fi^ = sin <p/<p — 1 может оказаться
неприемлемо большой.
Рассмотрение погрешностей, вызванных эволюциями ЛА,
позволяет сделать следующее сравнение. Погрешность измерителей с
подвижными антеннами в определении путевой скорости возникает при
полете с тангажом и с углом сноса, однако погрешность в определении
угла сноса при этом отсутствует. Измерители с неподвижной антенной
обладают погрешностями и в определении угла сноса и, кроме того,
обладают большими погрешностями при определении путевой скорости,
так как последние возрастают с увеличением угла сноса. Однако
следует отметить, что погрешности корреляционных измерителей,
вызванные эволюциями ЛА, при прочих равных условиях меньше
аналогичных погрешностей доплеровских измерителей.
Из числа методических погрешностей наибольший интерес в
корреляционных измерителях представляют флюктуационные погрешности
в определении путевой скорости и угла сноса, вызванные принципом
действия, заложенным в основу работы этих имзмерителей.
Действительно, суждение о значениях измеряемых навигационных параметров
в корреляционных измерителях по своей сути представляет решение
статистической задачи об оценке корреляционной функции на основе
экспериментальных данных. Поэтому, как и по результатам всякого
статистического эксперимента, получается не истинное значение
наблюдаемой величины, а ее статистическая оценка. В нашем случае
оценка путевой скорости и угла сноса определяется измерением
задержки сигнала, соответствующего максимальному значению
функции взаимной корреляции. Поскольку время, за которое определяет-
175
ся функция взаимной корреляции, ограничено, это приводит к флюк-
туациям определяемых значений функции ^взаимной корреляции и
в конечном итоге к флюктуационным погрешностям в определении
путевой скорости и угла сноса. Как показано в литературе [12],
среднеквадратичное значение относительной флюктуационной
погрешности измерения путевой скорости в корреляционных измерителях
gw = K аъЛ/1ъ , (6.62)
d ~]/WT
где величины д и аэ: К = —-— ; аэ = — 1 -1 .
3,6о£ А \ 2д /
В приведенных формулах ан и ас — дисперсия помехи на входе
системы слежения и дисперсия сигнала соответственно, а коэфффи-
циент b определяется экспериментально и характеризует отражение
сигналов от различных поверхностей. Например, при отражении от
водной поверхности с волнением 0,5 балла /С» И, с волнением
2 балла К ж 6.
Абсолютная среднеквадратичная погрешность при определении угла
сноса в этом случае
Аа = * 2Ло1^ , (6.63)
KaVWT
где Ка — крутизна дискриминационной характеристики в рабочей точке
слежения канала угла сноса.
В заключение приведем качественное сравнение характеристик
корреляционных с доплеровскими измерителями путевой скорости и
угла сноса и возможные области применения корреляционных
измерителей.
Основные характеристики корреляционных и доплеровских
измерителей (точность определения навигационных параметров, масса
и габариты) совпадают. Однако в определенных условиях применения
корреляционные измерители обладают рядом преимуществ перед
доплеровскими. Прежде всего у корреляционных измерителей более
простые и менее габаритные антенны,что позволяет использовать их на
ЛА малых размеров. Это связано с тем, что в корреляционных
измерителях используются антенны со значительно более широкими
диаграммами направленности (20—25° при 5—8° у доплеровских измерителей).
Существенным преимуществом корреляционных измерителей
является большая точность определения навигационных параметров
при работе над водной поверхностью. Если доплеровские измерители
сохраняют устойчивую работоспособность при волнении свыше 1
балла, переключаясь в режим запоминания при меньшем волнении, то
корреляционные устойчиво работают практически при любом
состоянии водной поверхности. Это связано с тем, что при вертикальном
излучении сигнала в корреляционных измерителях возрастает
интенсивность отраженных сигналов, причем отражающие свойства при
спокойной поверхности даже возрастают. Преимуществом корреля-
176
циоййых измерителей является также стабильность йх показаний при
изменении свойств отражающей поверхности. Поэтому применение
корреляционных измерителей наиболее целесообразно на
гидросамолетах, самолетах морской аваиции, легких и малогабаритных
самолетах. Возможно построение корреляционных измерителей для
комплексного определения координат, высоты и скорости ЛА. Такие
измерители могут быть использованы также при стыковке и мягкой посадке
космических кораблей.
6.3. ДОПЛЕРОВСКИЙ МЕТОД ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ
При осуществлении пеленгации подвижного объекта одновременно
можно измерить и его угловую скорость. В частности, используя
фазовый метод пеленгации, разность фаз сигналов, принимаемых двумя
разнесенными в пространстве антеннами, находят согласно (3.3)
Ф = 2ПХ-1 AR = 2ПК-1 (RA—RB) = 2nd%r1 sin a,
(6.64)
где AR=RA~-RB — разность расстояний до пеленгуемого объекта от антенн А
и В\
d — база системы.
Дифференцируя соотношение (6.64) по времени получим
— = 2п(— -—J^—.acosa,
откуда угловая скорость перемещения объекта может быть найдена
следующим образом:
О . (VA VB\I d F^a-F^b
Мв1т — ]/ТС08а--^^- (6.65)
где VA и VB — линейные скорости перемещения объекта относительно антенн
Л и В.
Значит, измерение разности частот доплеровских приращений
Fma = Va А и FдB = Vb/Ь позволяет непосредственно определить
угловую скорость пеленгуемого объекта, т. е. согласно равенству (6.65)
Qa^AF*k
rfcosa
(6.66)
где
AF^FnA-F
НА'
-дВ.
Ж.
См1
Т
Гетеродин
fr+F
В
СмЕ
/(частотомеру*
Узкополосный
фильтр
\AFA+F
Hi
Смеситель
биений
Рис. 6.17. Упрощенная
структурная схема доп-
леровского измерителя
угловой скорости
177
Разйостйую доплеровскую qacfofy, гфопорцйойальНук) угловой
скорости, измеряют двумя способами: непбсредственным измерением
частоты биений двух принимаемых сигналов либо путем измерения
частоты каждого сигнала с последующим вычитанием полученных
результатов. При одинаковой относительной погрешности первый
способ дает меньшую абсолютную погрешность, так как AFn <^ Рда С
« Рдв.
Упрощенная структурная схема доплеровского измерителя
угловой скорости в одной плоскости показана на рис. 6.17. Приемное
устройство измерителя должно не только выделить узкополосный спектр
доплеровских частот AFд, но и сохранить его знак для определения
направления углововй скорости вращения объекта. С этой целью в
приемнике формируется так называемая частота подставки F > | AFH | max,
а перестройка узкополосного фильтра, подавляющего шумы перед
поступлением сигнала на частотомер, осуществляется автоматической
подстройкой частоты гетеродина. В результате на входе частотомера
образуется измеряемый сигнал Fc = F + AFfl.
В устройствах с раздельным измерением сраниваемых
доплеровских частот системы автоподстройки устанавливают в каждом из
каналов.
Из приведенных соотношений (6.65, 6.66) очевидно, что измеритель
угловой скорости дает однозначный отсчет при сколь угодно большой
базе. Это тем более важно, что погрешность оценки угловой скорости
уменьшается с увеличением размера базы:
оьа^- оРл. (6.67)
d cos a A
Измерение угловых скоростей в двух плоскостях производится с
помощью двух систем разнесенных антенн, базы которых
ориентированы в пространстве в направлениях север—юг и запад—восток. При
этом измеряются доплеровские сдвиги сигнала, соответствующие
угловым скоростям по азимуту 0 и углу места (5. Поэтому
дифференцируя соотношения (3.24), найдем:
йе = ; щ = — , (6.68)
cos р si n p
где Фс-ю» Фв-з — разности фаз сигналов на выходе приемных каналов «С—Ю»
и «В—3», определяемые по формулам (3.23).
Рассмотренный метод измерения угловых скоростей реализован
в современных системах космических траекторных измерений и, в
частности, при определении параметров орбит ИСЗ [25].
Глава 7
ВЛИЯНИЕ СВОЙСТВ РАДИОВОЛН И УСЛОВИИ
ИХ РАСПРОСТРАНЕНИЯ НА ТОЧНОСТЬ
РАДИОНАВИГАЦИОННЫХ ИЗМЕРЕНИЙ
7. ОБЩИЕ ПОЛОЖЕНИЯ
В процессе передачи и переработки информации в каналах РНС
радиосигналы — носители информации претерпевают изменения,
в значительной мере определяемые свойствами радиоволн различных
диапазонов и условиями их распространения. В частности,
точностные характеристики РНС находятся в прямой зависимости, например,
от стабильности скорости и прямолинейности распространения
радиоволн, их отражающей способности от ионосферы, от неоднородностей
рельефа местности, местных предметов и т. д.
Определенной общностью свойств, как известно, обладают
некоторые группы частот, которые объединяют в частотные диапазоны.
Принятое в настоящее время деление всей частотной области, занимаемой
радиоволнами, на диапазоны с указанием соответствующих им (по
использованию) РНС, приведено в табл. 7.1. По закономерностям
распространения в околоземном пространстве радиоизлучения можно
разделить на четыре основные группы: прямолинейно
распространяющиеся излучения, поверхностные волны, пространственные волны и
излучения волноводного типа. Рассмотрим наиболее существенные
особенности и свойства радиоволновых полей указанных групп с точки
зрения их влияния на точностные характеристики навигационных
средств, а также дадим аналогичную оценку влияния неоднородностей
рельефа местности и местных предметов.
7.2. ПРЯМОЛИНЕЙНО РАСПРОСТРАНЯЮЩИЕСЯ ИЗЛУЧЕНИЯ
Радиоизлучения распространяются по прямолинейным
траекториям в однородных средах. В атмосфере и за ее пределами по
траекториям, близким к прямолинейным, распространяются метровые,
дециметровые и сантиметровые волны, которые не отражаются от ионосферы,
а проходят через нее.
Основными особенностями прямолинейно распространяющихся
волн, используемыми при радионавигационных измерениях, являются
высокая степень постоянства скорости и направления их
распространения (которые в общем случае зависят от влияния параметров
атмосферы).
Для излучений метрового, дециметрового и сантиметрового
диапазонов земная атмосфера является недиспергирующей средой, а
поэтому групповая скорость распространения радиоволн (скорость
распространения огибающей радиосигнала vTV) в ней равна фазовой скорости
т
Диапазоны радиочастот
Название
Границы
Очень низкие частоты
(ОНЧ)
Низкие частоты (НЧ)
3—30 кГц
30—300 кГц
Средние частоты (СЧ)
Высокие частоты (ВЧ)
Очень высокие частоты
(ОВЧ)
Ультравысокие частоты
(УВЧ)
Сверхвысокие частоты
(СВЧ)
0,3—3 МГц
30—300 МГц
30—300 МГц
0,3—3 ГГц
3—30 ГГц
Примечание. Диапазоны радиочастот
меньшую длину и исключают наибольшую.
Таблица 7.1
Диапазоны радиоволн
Название
Границы „
Радиотехнические средства навигации
и посадки ЛА
Сверхдлинные (мириамет-
ровые) волны (СДВ)
Длинные (километровые)
волны (ДВ)
Средние (гектаметровые)
волны (СВ)
Короткие (декаметровые)
волны (KB)
Метровые волны (MB)
Дециметровые волны
(ДЦВ)
Сантиметровые волны
(СМВ)
10—30 км
1—10 »
0,1—1 »
10—100 м
1—10 м
1—10 дм
1—10 см
Радиотехническая система дальней
навигации «Омега»
Радиокомпасы, секторные
радиомаяки, РНС дальней навигации «Ло-
ран-С»
Радиокомпасы
Секторные радиопеленгаторы
Радиотехнические системы посадки
(СП-50, СП-70, СП-75), наземные
автоматические радиопелегаторы
Радиотехнические системы ближней
навигации (РСБН), самолетные
радиодальномеры, спутниковые системы
навигации
Доплеровские измерители путевой
скорости и сноса, бортовые
радиолокационные станции, микроволновые
системы посадки, спутниковые
системы навигации
наибольшую частоту и исключают наименьшую. Диапазоны радиоволн включают наи-
(скорости распространения
фазового фронта радиоволн Vф); причем
обе скорости зависят от показателя
п преломления атмосферы, т. е.
<>гр Г Ч
clп.
Земля
Траектория
радиолуча
Впрм
Зона тени
Рис. 7.1. Рефракция радиолуча в
атмосфере
Так как для атмосферы п > 1,
то vTV = Vф<.c. В частности, для
стандартной атмосферы на уровне
моря п = 1,000326 и vrV = Vф =
= 299 694 км/с. Однако по мере
подъема над землей параметры
атмосферы быстро изменяются, в
результате коэффициент преломления
приближается к единице, а
скорость радиоволн с — к скорости
света в вакууме. Поэтому в
соответствии с опытными данными для
реальной атмосферы скорость
радиоволн принимается равной в
среднем 299 710—299 723 км/с. Скорость прямолинейно
распространяющихся волн в атмосфере отличается высокой степенью
постоянства, так как характеризуется высокой стабильностью коэффициента
преломления атмосферы.
Вариации скорости распространения, обусловленные вариациями
давления, температуры и влажности воздуха, имеют порядок 10~4.
Опыт показывает, что среднеквадратичное значение отклонений
действительных значений скорости из-за вариаций параметров атмосферы
от средних значений своих параметров составляет 2,7 • 10~4. Такая
точность определения скорости распространения обычно достаточна
для решения задач воздушной навигации на удалениях порядка сотен
километров от источника радиоизлучения.
Однако при особо точных (например, геодезических) измерениях
необходимо учитывать зависимость скорости радиоволн от давления,
влажности и температуры воздуха.
При необходимости оценки, например, систематической
погрешности измерения расстояния R, обусловленной изменением скорости
распространения радиоволн в атмосфере v& по сравнению с вакуумом,
используется соотношение AR = с f dllv^ — R, где L — длина всей
трассы прохождения радиоволн. L
Рассматриваемые волны распространяются прямолинейно. В
частности, с высокой степенью точности прямолинейными являются
траектории в диапазонах MB, ДЦВ, СМВ в горизонтальной плоскости.
Траектория же распространения волн этих диапазонов в вертикальной
плоскости не совсем прямолинейна. Это является следствием
изменения коэффициента преломления по высоте (в связи с изменением
параметров атмосферы), что приводит к искривлению радиолуча (рефрак-
ции)~в~вертикальной плоскости (рис. 7.1); причем выпуклость его
траектории направлена вверх (рефракция положительна). Из-за
рефракции фактическая дальность распространения больше расстояния пря-
181
мой видимости. В результате возникают погрешности измерения угла
места г) в вертикальной плоскости. Для оценки этих погрешностей
вводят понятие угла рефракции Лт) между прямой АВ (соединяющей
точки приема и передачи сигнала) и касательной к траектории
радиолуча. При значениях угла т] ^ 10° угол рефракции оценивают в угловых
секундах (с точностью 1") приближенной зависимостью [9]
Дт] = 206 265 (п — 1) ctg г]. (7.1)
Рефракционное искривление траектории радиолуча может
достигать нескольких десятков угловых минут.
7.3. ПОВЕРХНОСТНЫЕ ВОЛНЫ
Радиоизлучения средних и длинных волн способны
распространяться, огибая поверхность Земли. Такие волны получили названия
поверхностных.
В отличие от прямолинейно распространяющихся волн, дальность
распространения которых на поверхности земли ограничена
пределами прямой видимости, поверхностные волны проникают в область тени.
По мере перехода в область все более длинных волн дальность
распространения волн возрастает. При этом она не зависит от высоты
расположения передающей и приемной антенн. Поэтому поверхностные
волны могут приниматься как на больших, так и на малых высотах
полета ЛА. В частности, дальность радиосистем длинноволнового дипаза-
зона может достигать 2,5—3 тыс. км. Особенностью поверхностных
волн является также высокая степень постоянства направления их
распространения вдоль поверхности Земли. Сравнительно невысокой
стабильностью отличается значение скорости распространения.
Поэтому ДВ и СВ излучения используются для угломерных и разностно-
дальномерных измерений.
Рассмотрим особенности распространения поверхностных волн
в связи с влиянием их на показатели точности РНС.
Степень постоянства скорости распространения поверхностных
волн заметно меньше, чем прямолинейно распространяющихся волн.
На формирование поверхностной волны оказывают влияние
электрические свойства среды вдоль трассы распространения, причем
поперечные размеры пространства, вовлекаемого в волновой процесс, тем
больше, чем длиннее волна. Поэтому скорость распространения
зависит от электрических свойств подстилающей поверхности, т. е. грунта
и водной поверхности, над которыми проходит трасса.
Неоднородность свойств подстилающей поверхности приводит
к непостоянству величины и направления скорости поверхностных волн
и ее зависимости от координат точки наблюдения. Относительная
нестабильность скорости распространения поверхностных волн
составляет 10~3. Однако при учете электрических свойств подстилающей
поверхности удается уменьшить отклонения скорости
распространения радиоволн от скорости света до значения 10~4.
182
Так как ctfof)ocfb гтоверхйостйых волк йзмеййетСя бдоль всей
трассы распространения, на практике оперируют усредненным
значением скорости, которая определяется измерением фактического
фазового сдвига фф волны в конечном пункте трассы. Разность
полученного опытным путем фазового сдвига ф0 и фазового сдвига, который
существовал бы, если бы радиоволна распространялась в стандартной
атмосфере со скоростью va, называется дополнительной фазой
радиоволны фд. По определению
Фд = Фо— ©го.1, (7-2)
где г — длина трассы распространения электромагнитных колебаний частоты со.
Используя формулу (7.2), нетрудно установить, что средняя по
трассе фазовая скорость радиоволны УффСР = о)Гф~J выражается через
дополнительную фазу соотношением
%.сР=»а(1 + ^)~\ (7-3)
которое ввиду незначительности второго слагаемого в знаменателе
можно выразить формулой
Оф.ср = v8i—vl фд со-1 г-1. (7.4)
Из выражения (7.4) следует, что относительная величина
отклонения среднего по трассе значения фазовой скорости выражается через
дополнительную фазу соотношением
А^ф.ср = Рф.ср— ^ __ _ Рафд __ Уд А/д Х_ А/д ,j ^.
va vA cor r г Т
где Д£д — временная задержка, соответствующая дополнительной фазе;
А*д. = фд.» ю-1.
Здесь Т = /-1 — период несущих колебаний.
Заметим, что фазовая скорость распространения поверхностной
радиоволны меньше скорости света в вакууме. При разностно-даль-
номерных измерениях оперируют разностью дополнительных фаз,
появляющихся на трассах распространения до обеих наземных станций.
Таким образом, соотношения (7.2)—(7.5) позволяют дать оценку
изменений фазовых сдвигов радиоволны и фазовой скорости ее
распространения при определении точностных характеристик РНС.
Значения фазовых сдвигов волны в реальных условиях для оценки срд
находят непосредственным измерением диэлектрических свойств
подстилающей поверхности и составлением карт поправок.
Зависимость скорости распространения поверхностных волн от
электрических свойств подстилающей поверхности, а также
неоднородность подстилающей поверхности обусловливают локальные
деформации их фазового фронта. Особенно ощутимы эти явления в
горных районах и вблизи береговой черты («горный эффект» и
«береговая рефракция»). Следует отметить, что влияние горных образований
и береговой черты носит локальный характер и проявляется на
расстояниях, меньших одной—трех длин волн от них.
183
Кроме того, необходимо ответить, что ё диапазонах среднйх^й
длинных волн высок уровень атмосферных помех, поэтому для передачи
сигналов этого диапазона на большие расстояния необходимо строить
передатчики большой мощности. Потребность в использовании
передатчиков большой мощности обусловлена также низкой
эффективностью антенных систем в этом диапазоне. Однако, несмотря на
отмеченные трудности, средние и длинные волны до последнего времени
используются в РНС, так как обеспечивают большую дальность
действия вне зависимости от высоты полета ЛА.
7.4. ПРОСТРАНСТВЕННЫЕ ВОЛНЫ
Радиоизлучения коротких, средних и длинных волн, попадая на
ионосферу, отражаются ею и возвращаются в приземные слои
атмосферы. Затем они могут отражаться Землей и повторно отражаться
ионосферой. Эти излучения, траектории распространения которых сильно
искривлены и имеют форму ломаной линии, называются
пространственными волнами. i ^j
feb При радионавигационных измерениях используется факт
постоянства направления распространения пространственных волн
относительно меридиана и их способность проникать далеко за линию горизонта.
Пространственные волны используются для угломерных и разностно-
дальномерных измерений. В ряде случаев пространственные волны
оказывают мешающее действие и нарушают нормальные условия
приема поверхностных волн.
Скорость распространения пространственных волн различна на
отдельных участках траектории. В околоземном пространстве она
определяется электрическими свойствами воздуха и достаточно
стабильна, в то время как в зоне ионосферы она зависит от состояния
ионосферных слоев, электрические свойства которых изменяются в
зависимости от времени суток, времени года и солнечной активности. От
этих же факторов зависит также и глубина проникновения
пространственной волны в ионосферу при отражении, а значит, и время
задержки пространственной волны относительно поверхностной.
Излучения, падающие на ионосферу по нормали к ней или под
углами, близкими к нормали, пронизывают ионосферу, не создавая
отражений. Отражения проявляются только при падении волн под
наклоном к ионосфере, поэтому пространственные волны
обнаруживаются лишь на определенном удалении от передатчика. Значение этого
удаления и мощность отраженного сигнала зависят от^частоты
излучения и состояния ионосферных слоев. Таким образом, в районе
расположения передатчика существует только поверхностна?! волна; по
мере удаления от передатчика возрастает напряженность поля
пространственной волны и на некотором расстоянии интенсивности обеих
полей сравниваются. На больших удалениях преобладает поле
пространственной волны. При взаимодействии в точке приема сигналов
поверхностной и пространственной волны (от общего излучателя)
могут возникать так называемые интерференционные погрешности ра-
184
дионавигационных измерений (и в том
числе явления" типа замираний),
являющиеся следствием фазового*сдвига
результирующего сигнала в точке приема. Если
амплитуда поля Ех поверхностной волны
больше амплитуды поля Е2
пространственной волны и разность фаз между этими
волнами равна я|э, то результирующее поле
Ех, будет сдвинуто по фазе относительно
поля Ei поверхностной волны на
величину Аф (рис. 7.2).
Для рассматриваемого случая
погрешность Аф может быть найдена из
соотношения
tg Аф = k sin -ф/ (1 + k cos г|)), (7.6)
где k = Em2/Eml.
Из приведенной зависимости ясно, что
в этом случае высокая точность измерений
с помощью РНС (фазового и временного
типа) может быть достигнута 'лишь при
k С 1, т. е. Аф = k sin i|>. **
Поскольку в реальных условиях сдвиг
фаз между поверхностной и
пространственной волнами является случайной
величиной, значения которой равновероятны в
пределах угла от 0 до 2я, то на
основании формулы (7.6) можно вычислить среднеквадратичное значение
фазовой погрешности:
/1 °° k2n
т.5, — • (7J>
где п — натуральный ряд чисел.
В области, где напряженности полей пространственной и
поверхностной волн соизмеримы друг с другом (k = 1), условия
радионавигационных измерений оказываются особенно неблагоприятными, так
как одна из волн мешает приему другой и погрешности измерений
будут недопустимо велики. В частности, в указанной области
происходят более или менее быстрые изменения интенсивности
результирующего поля, называемые замираниями. Замирания обусловлены
случайными изменениями длины пути, проходимого пространственной
волной, и непостоянством на этом пути разности фаз интерферирующих
колебаний.
При k > 1 измерения выполняются с использованием
пространственной волны. Однако из-за нестабильности электрических свойств
отражающих слоев ионосферы и изменения высоты этих слоев
измерения на пространственной волне всегда будут менее точными, нежели
Рис. 7.2. Векторная
диаграмма напряженностей полей
пространственной и
поверхностной радиоволн
185
на поверхностной. Определенная компенсация возникающих
фазовых сдвигов возможна лишь в системах разностно-дальномерного
типа, у которых сигналы приходят в точку приема по двум (и более)
трассам от наземных станций. Эта компенсация оказывается тем
больше, чем ближе к нормали, проведенной через середину базы системы,
находится точка приема, чем ближе расположены друг к другу точки
отражения пространственных лучей от ионосферы и чем меньше
отличаются условия распространения радиоволн по обеим трассам.
Для излучений длинноволнового диапазона (К > 3000 м)
характерно сильное затухание поля пространственной волны в дневное
время. Ослабление пространственных волн ночью сравнительно невелико;
оно меньше, чем ослабление поверхностных волн.
Приведенные сведения позволяют рассчитать интерференционные
погрешности, используя соотношения (7.6) и (7.7), и ввести на них
поправки при радионавигационных измерениях, для чего обычно
используют специальные номограммы [9].
В процессе отражения от ионосферы может изменяться также
характер поляризации сигналов и происходить поворот плоскости
поляризации. При этом поляризационные характеристики пространственной
волны оказываются, как правило, также нестабильными. Из-за
поперечного наклона поверхности отражающего слоя может происходить
изменение направления распространения пространственных волн.
Указанные явления приводят к поляризационным погрешностям
(влияние которых уже рассматривалось в разделе 3.3), оказывающим
наибольшее влияние на точность угломерных РНС.
7.5. РАДИОИЗЛУЧЕНИЯ ВОЛНОВОДНОГО ТИПА
Для излучений очень низких частот (/0 = 3—30 кГц) Земля по
своим свойствам становится близкой к проводнику. Так как длины волн
этих излучений'велики (Я> 10 км), неровности рельефа оказываются
малыми по сравнению с длиной волны и поверхность Земли для
таких излучений является гладкой. Сравнительно хорошо отражаются
колебания СДВ диапазона и ионосферой. Поэтому для этих излучений
Земля и ионосфера образуют своеобразный сферический волновод.
В процессе распространения рассматриваемых радиоволн
происходит их многократное отражение от Земли и ионосферы и как
следствие интерференция колебаний (рис. 7.3). В приземном сферическом
волноводе распространяются волны поперечно-магнитного типа ТМ,
т. е. волны, магнитное поле которых имеет только поперечную, а
электрическое — только продольную составляющие. При этом поле в
направлении вертикали имеет характер стоячих волн, а в направлении
распространения оно представляет собой" бегущие волны. Так как
в поперечном направлении в приземном волноводе укладывается более
одной волны, то в результате электромагнитное поле содержит волны
нескольких типов, называемых модами. Различные моды отличаются
числом полуволн, укладывающихся между Землей и ионосферой.
Электрическое поле первого мода ТМ имеет один максимум и в волноводе
186
^нд сфера
Рис.
7.3. Распространение излучения
волноводного типа
ТМ2
укладывается четверть длины
волны (рис. 7.4, а); поле второго мода
ТМ имеет два максимума и по
высоте укладывается 3/4Я (рис. 7.4, б
и т. д.
Характерной особенностью СДВ
является высокая степень
постоянства зависимости фазового сдвига
в данной точке пространства от
положения этой точки на поверхности
Земли и от времени суток и года,
т. е. довольно высокая степень
детерминированности фазовой
скорости от времени и от координат
точки наблюдения. Другой важной
особенностью СДВ излучений
является независимость
интенсивности этих излучений от высоты точки
наблюдения над земной
поверхностью, т. е. СДВ могут
приниматься при полете как на больших
так и на малых высотах. Третья
особенность сверхдлинных волн
связана с тем обстоятельством, что
они затухают в процессе
распространения гораздо медленнее, чем
волны других диапазонов. Поэтому
дальность действия СДВ систем
достигает 8—10 тыс. км.
Сверхдлинные волны используются в
радионавигации для измерения
разностей расстояний и дальностей.
Фазовая скорость сверхдлинных
волн в атмосферном волноводе
превышает скорость света в вакууме.
Причина этого связана с
особенностями волноводного распространения, о которых упоминалось
ранее. Действительно, как показано на рис. 7.5, волна последовательно
отражается от стенок волновода, двигаясь в направлении, составляющем
угол а со стенками. Если скорость волны в направлении а равна с, то
скорость движения фазового фронта в направлении оси волновода
будет с sec а и превысит скорость света с, а скорость перемещения
энергии волны в волноводе, представляющая собой групповую скорость,
будет равна с cos а, т. е. будет меньше скорости света в вакууме. Из
теории волноводов известно, что в зависимости от соотношения между
длиной волны и высотой волновода фазовая скорость в волноводах
Рис. 7.4. Типы волн
электромагнитного поля волноводного излучения:
а — электрическое поле первого мода ТМ;
б — электрическое поле второго мода ТМ
'//////////////////£////////<
У7777777777777777777Т7777777,
Рис. 7.5. Фазовая и групповая
скорости сверхдлинных .волн
*>ф
~v-w\
тЯЛ* 1-1/2
2Л
(7.8)
187
где m — номер мода;
h — высота ионосферы;
К — длина волны излучения в вакууме.
Высота ионосферы непостоянна: днем она равна около 70, а ночью' —
90 км. На освещенной стороне Земли она меньше, на теневой больше.
В процессе суточного вращения Земли линия раздела между
освещенной и неосвещенной частями ионосферы перемещается относительно
наземных пунктов. Так как фазовая скорость СДВ согласно равенству
(7.8) зависит от высоты ионосферы, то на освещенной части трассы она
имеет одно значение, а на неосвещенной — другое и плавно
изменяется вдоль трассы от одного из упомянутых значений к другому. В
результате этого дополнительная фаза в точке приема оказывается
зависящей от высоты Солнца над горизонтом и от времени года.
На значение фазовой скорости влияет также проводимость Земли
вдоль трассы распространения, угол между направлением
распространения и направлением магнитного поля, широта точки наблюдения,
сезон года и другие факторы.
Фазовая скорость результирующего поля зависит от числа
возбуждаемых мод, их относительной интенсивности и от скорости
распространения различных мод. Несмотря на сложный характер указанных
зависимостей, благодаря повторяемости явлений величины
дополнительных фаз и их разностей удается довольно точно прогнозировать.
Опыт показывает, что среднеквадратичное отклонение действительной
разности задержек СДВ от прогнозируемого значения не превышает
0,05—0,1 периода несущих колебаний днем и 0,05—0,15 периода
в вечерние и в утренние часы.
Интересно отметить, что от погрешностей прогнозирования
разности дополнительных фаз и разности временных задержек на трассах
можно перейти к погрешности прогнозирования разности средних
вдоль трассы значений фазовой скорости радиоволн. Обращаясь
к формуле (7.5), получаем, что на удалении 5—10 км при К = 30 км
относительная погрешность прогнозирования разности средних по
трассам значений фазовых скоростей
-^fcSL =1^.(3^-6) Ю-4. (7.9)
Таким образом, точность прогнозирования разности средних
значений фазовых скоростей в СДВ диапазоне оказывается близкой к
точности данных о скорости радиоволн в диапазонах MB, ДЦВ, СМВ.
Нетрудно установить, что зависимость погрешности определения
разности расстояния А (бг) от погрешности определения разности времен
распространения сигналов от обеих наземных станций A (8t)
выражается формулой A (8r)/K = A (8t)/T, где Т — период несущих
колебаний, с помощью которых ведутся измерения.
Подобный же характер имеют и зависимости между
среднеквадратичными значениями отклонений. Так как согласно опытным данным
ot/T = 0,05—0,15, то погрешности определения разностей расстояний,
выраженные в долях длины волны на СДВ, составляют оЬг/к = 0,05—
188
0,1 днем и 0,05—0,15 в утренние и в вечерние часы. Так для длины
волны 30 км абсолютные значения среднеквадратичных погрешностей
определения разностей расстояний лежат в пределах от 1,5 до 4,5 км.
Поскольку в пределах рабочих областей разностно-дальномерных
систем погрешности определения линий положения близки к
погрешностям определения разностей расстояний, то приводимые значения
погрешностей характеризуют также точность определения линий
положения с помощью фазовых разностно-дальномерных РНС СДВ
диапазона.
Погрешности, обусловленные неточностью прогнозирования
разности фазовых сдвигов при распространении радиоволн по обеим
трассам, определяют результирующую точность СДВ радионавигационных
систем. Значение фазовой скорости распространения, используемое
при определении наносимых на карту гиперболических линий
положения, принимается равным 1,0026 с = 300 574 км/с.
7.6. ВЛИЯНИЕ НЕОДНОРОДНОСТЕЙ РЕЛЬЕФА
МЕСТНОСТИ И МЕСТНЫХ ПРЕДМЕТОВ
Неоднородности рельефа местности (горы, возвышенности,
овраги, водные поверхности и т. д.) в районе расположения РНС, а также
наличие местных предметов либо гидрометеоров (облачности, дождя,
снега) в зоне радиоизлучения могут оказывать значительное
воздействие на направление распространения радиоволн. Даже если местные
предметы, лежащие на пути распространения радиоволн, прозрачны
для них, но изменяют свои электрические параметры, происходит
искривление радиолуча (рефракция). В случае непрозрачности
препятствия радиоволны дифрагируют около него и тем сильнее, чем
больше длина волн. Наибольшие воздействия создаются при
отражении метровых и более коротких радиоволн от наклонных участков
рельефа местности и местных предметов.
Большое практическое значение имеет изучение влияния
отражений (пассивных помех), создающих вторичные электромагнитные
поля, на основное поле полезных сигналов, излучаемых наземными
угломерными радиомаяками РМ либо воспринимаемых радиопеленгаторами
РП. При этом возникают корреляционные погрешности определения
радиопеленга, поскольку взаимосвязь прямого и отраженного
сигналов в общем случае носит случайный характер.
Для определения методики расчета погрешностей, возникающих
вследствие взаимодействия основного сигнала и коррелированного
с ним отраженного, будем рассматривать систему, состоящую из
угломерного радиоустройства (с РМ или РП), объекта, угловое положение
которого требуется определить, и отражающего предмета (рис. 7.6).
Изучение взаимного влияния полезного и мешающего сигналов
целесообразно проводить, представляя эти процессы в виде медленноме-
няющихся составляющих (огибающих амплитуды) и быстроменяющихся
периодических составляющих (изменения фазы) процессов. При этом
под медленноменяющейся функцией a (f) по сравнению с Ъ (t) будем
189
йбйимать функцию, удовлеТЁоряю-
щую условиям daldt < dbldt и
d la (t) b (t)]/dt ~ a (t) db (t)/dt.
Для прямого и отраженного
сигналов на входе приемника
угломерной системы можно в общем
случае записать:
Un = z(t, #п)созФп(/); (7.10)
U0T = pz(t — x, #OT)cos0oT(* — т),
(7.11)
где Un, Uot — прямой и отраженный
сигналы;
Фп» Фот — азимутальные углы
объекта и отражателя;
2 (t, дп),—медленноменяющиеся со-
z(t—т, Ост) ставляющие процессов
(огибающие их
амплитуды);
Фп (0» — аргументы
быстроменяющихся периодических
составляющих
процессов;
р — отношение амплитуды поля прямого сигнала в точке приема к амплитуде
поля отраженного сигнала;
т — запаздывание отраженного сигнала по отношению к прямому.
Из выражений (7.10) и (7.11) получим суммарный сигнал
Uz = z (ty ftp) cos Фп (0 + pz(t — т, Фот) cos Фот (t — т) = zs cos Ф2.
(7.12)
Вводя комплексно сопряженный процесс для выражения (7.12)
U% = z2 sin Ф2, согласно общему правилу для огибающей и фазы
суммарного процесса соответственно найдем
Отражающий
предмет
Рис. 7.6. Взаимное расположение
РНС, самолета и местного отражаю- фот (/—т/
щего предмета
xVzi(t,$u) + z*(t-T,vm) + 2z(t,$n)z(t-T,$OT)cosA<P =
*z=*<M*) + arctg
z(t,$a)V 1+g2 + 2g cos АФ
pz (ti—x, ■dpi) sin АФ
z(t> *п)+/к(<—г, '&ot)cos АФ
(7.13)
(7.14)
где g = pz (t —. т, $0i:)/z(t> Фи) —относительная величина, характеризующая
влияние отраженного (мешающего) сигнала;
cos A0=cos [ФП (0—Фот (*—т)1 —взаимная корреляционная функция
высокочастотных составляющих прямого и
отраженного сигналов (sin АФ — аналогичная
функция для сопряженных процессов).
190
Как следует из соотношений (7,13) и (7.14) именно параметрами g
и cos АФ определяется степень искажения угломерной информации
в радиопеленгационных системах под влиянием отражений от
местных предметов.
Определим, например, погрешность радиопеленгования, вызыван-
ную местными отражениями для амплитудных радиопеленгаторов,
использующих рамочную антенну или разнесенную пару (антенну
Эдкока) с малой базой. Для подобных антенн огибающая прямого
сигнала (как следует из анализа раздела 3.4) имеет вид z (t, dj =
= sin {&п — Ф0), а огибающая отраженного сигнала описывается
равенством pz (t — т, #от) = sin (ft0T — Ф0). Здесь ft0 — направление
минимального (нулевого) приема ДНА.
Огибающая суммарного сигнала для данного случая с учетом
выражения (7.13)
z\ = sin2 (Фп - Ф0) + р2 sin2 (*от — #0) + 2р sin (Фп — ф0) X
X sin (#от — ^о) cos АФ. (7.15)
Определим значение vn, при котором обеспечивается минимальный
прием сигнала с учетом действия отражений от местных предметов.
Поскольку это значение будет отличаться от^о, то погрешность
пеленгования Д# = Фи — Ф0« Для определения А# необходимо решить
уравнение дгЦ/дФ, что после преобразований дает следующий результат:
где р' = /?2sin2 АФ + р cos АФ.
Достаточную для практических расчетов точность при р < 1
дает приближенная формула
tgA,= - ,7n\C°sA^-- (7Л7)
1 + cos d cos АФ
Формулы (7.16) и (7.17) используются для расчета погрешности
радиопеленгования (радиодевиации), вызванной влиянием
отражений от местных предметов в амплитудных радиопеленгаторах.
Поскольку при установке антенн угломерных систем стремятся
по возможности удалить из зоны их излучения местные предметы
либо путем специальных мер ослабить их действие, то обычно
обеспечивается выполнение условия р> 1. С учетом этого на основе
выражений (7.10—7.17) в работе [47] найдены приближенные формулы для
оценки абсолютных погрешностей пеленгования, вызванных
местными отражениями. Для широко используемых типов угломерных
РНС эти формулы приведены в табл. 7.2.
При наличии большого количества отражающих местных
предметов суммарную погрешность угломерной системы рассматривают как
случайную величину, оценивая ее среднеквадратичным значением
погрешности.
Если отражатели расположены таким образом, что их влияние вза-
имонезависимо и нц один из них не создает погрешности, существенно
191
Тип угломерной РНС
Амплитудный
радиопеленгатор с подвижными антеннами и
определением отношения
сигналов
Функция, характеризующая
огибающую сигнала
Амплитудная угломерная
РНС с неподвижными
антеннами, работающая по принципу
равносигнальной зоны
Амплитудная угломерная
РНС с вращающейся
остронаправленной антенной
Амплитудно-фазовая
угломерная РНС с вращающейся
ДНА (типа «Кардиоиды» или
многолепестковой)
Доплеровская фазовая
угломерная РНС
z(t, On)=F(ft)
z (t, ®n) = 1 +m [Сг cos (cosfitf-
I ~ #)+Cncosrt(Qf—#)]
Нормирована
Таблица 7.2
Формула погрешности
Примечание
/7' sing
1 +р cos a
А^=/?/А0(а)
-р' sin а
А^ =р cos АО sin а ==
где а=Фп—#от
^i (О), ^2 (Ф) —
характеристики направленности антенн;
Л1 (0» Л 2 (0 — огибающие
низкочастотной модуляции
несущей (для разделения
сигналов антенн на выходе общего
приемного тракта);
т — глубина модуляции
Ао (а) — функция,
определяемая пространственной
избирательностью антенны
При условии, что
sin
Ло(а)= я/2 В ■
где В —ширина ДНА на
уровне половинной мощности
Угловое положение
определяется по фазе 1-й гармоники;
Сь Сп — относительные
амплитуды 1-й и я-й гармоник; Q —
угловая частота вращения ДНА
А (Фт)—функция Бесселя 1-го
порядка;
4яг
Фт =
г-
ны
■sin
а
2
•радиус вращения антен-
превышающей совокупности погрешностей, вызванных всеми
местными предметами, то можно описать распределение результирующих
погрешностей угломерных систем нормальным законом:
Г п
а<ю=1/ <4о+2>|., (7.18)
* /=i
где а^0 — среднеквадратичная аппаратурная погрешность радиопеленгования;
°fti — погрешность радиопеленгования, вносимая каждым i'-м отражателем
в отдельности;
п — число отражателей.
Поскольку угломерные системы различного типа имеют и
различную восприимчивость к влиянию местных предметов, удобной мерой
для ее оценки является отношение среднеквадратичной погрешности
радиопеленга (при наличии отражателей) для данного вида
радиопеленгатора crv/ к среднеквадратичной погрешности влияния того же
отражателя в малобазовом радиопеленгаторе сгм, у которого размер
базы антенны много меньше длины рабочей волны d <C К т- е-
Yi = <V*m. (7Л9)
Тогда при наличии п изотропных отражателей с учетом выражения
(7.18) среднеквадратичная погрешность пеленгования
CTflS
-/
T/ai
(7.20)
о** + Ц
Из графиков рис. 7.7 видно, что достаточно получить ослабление
среднеквадратичной погрешности в 3—5 раз, чтобы местные предметы
не оказывали существенного влияния на точность пеленгования
малобазовым радиопеленгатором, и она определялась бы в основном
инструментальной погрешностью последнего.
Рассмотренные примеры оценки влияния местных отражений
(пассивных помех) относятся чаще всего к системам радиопеленгации
с непрерывным режимом излучения. Анализ погрешностей
радиопеленгования, вызванных
пассивными помехами, в системах с
импульсным режимом излучения
приведен в литературе [51, 58] по
радиолокации и радиолокационным
системам. Основными методами
борьбы с влиянием местных
отражений на точность угломерных
радиосистем являются повышение
пространственной избирательности
антенных систем РНС, расширение
спектра радиосигнала (фазовые и
фазочастотные системы, временные
системы, использующие сложные
сигналы с большой базой и др.),
применение *методов селекции, ос-
I
k°
J°
1
к
№
V4
Г^
£=>
ч
<-—1
<%■'"
г
г
к
Рис. 7.7. Зависимость погрешностей
радиопеленгования, вызванных
местными отражениями, от
коэффициента k=\/y
7 Зак. 444
193
нованных на использовании дополнительной априорной информации
о целях и источниках помех в процессе первичной обработки сигналов,
а также введение специальных схем регулировок в приемном тракте,
позволяющих повысить его динамический диапазон и уменьшить
вероятность перегрузок (быстродействующие АРУ, логарифмические
усилители и др.).
7.7. ЕСТЕСТВЕННЫЕ И НЕПРЕДНАМЕРЕННЫЕ РАДИОПОМЕХИ
С появлением малошумящих входных усилителей приемников РНС
т. е. с снижением собственных шумов приемных устройств, возникла
необходимость учета внешних шумов в радиоканалах РНС,
вызванных радиоизлучением галактики, тепловым радиоизлучением и
грозовыми разрядами в атмосфере земли, т. е. естественными
радиопомехами, а также непреднамеренными радиопомехами, создаваемыми
радиотехническими и электротехническими средствами различного
назначения.
Источник теплового радиоизлучения характеризуют мощностью
излучения, принимаемого антенной с коэффициентом усиления G (0, Р)
в полосе частот df
/>и--^],Гя(9)Р)0(9,Р)^) (7.21)
где Тя (9,$) — яркостная температура источника
радиоизлучения, К;
dip — элементарный телесный угол источника
радиоизлучения;
& = 1,38-10-23 Вт-град.-1 Гц — постоянная Больцмана.
Мощность космических радиопомех, создаваемых радиоизлучением
галактики, определяется соотношением (7.21).
Из литературы [54] известно, что радиоизлучение галактики
характеризуются яркостными температурами (в К): 2,6; 17; 107; 450;
1370; 3860; 14 000, значения которых соответствуют длине волны (в м)
источника радиоизлучения: 0,1; 0,25; 0,6; 1,5; 2,3; 16,7.
Из этих данных и формулы (7.21) следует, что излучение
Галактики является наиболее значительным в метровом диапазоне, хотя
при использовании малошумящих усилителей СВЧ оно может быть
достаточно заметным и в дециметровом диапазоне. Излучение носит
постоянный характер, и его максимум наблюдается в области Млечного
пути. Температура радиоизлучения, приходящего с различных
областей небосвода, не одинакова. Например, на частоте 400 мГц яркост-
ную температуру, превышающую 300 К, имеет 0,01% области
небосвода, Тя > 100 К имеет 27% области, а Тя > 25 К имеет 70%
области небосвода.
Кроме космического, необходимо учитывать и тепловое
радиоизлучение ряда дискретных источников, к которым относятся Солнце,
Луна, планеты, а также отдельные интенсивные источники
Галактики. Наиболее интенсивным среди них является Солнце,
194
Область Шумы
Т,к галактических ихцмоб атмосферы
1000 г * —-
Я?0
700
50
/0
V
\
у/Т71П
г \ 4
max
— Л
[3
*°ч
10}
дО\
90°
0,1
0,5 1
5 10 ЬГГц
Рис. 7.8. Зависимость шумовой
температуры атмосферы Земли от
частоты излучения и угла места
приемной антенны
Плотность потока мощности
излучения Солнца (в Вт-м-2-Гц"1):
1,6- Ю-19; 3,3- Ю-20; 1,2-10"20;
4,8-Ю-21; 3,6-Ю-21; 9-10"аа; 3,2-
• 10"22; 4-10"23 соответствует
длине волны радиоизлучения: 8,5 мм;
3 см; 10 см; 25 см; 50 см; 1,5 м;
3 м; 10 м.
Используя приведенные данные,
можно определить мощность шума
на входе приемника, если известны
эффективная площадь антенны и
полоса его пропускания.
Тепловые шумы атмосферы на
высоких частотах возникают в
результате переизлучения энергии
Солнца, поглощаемой кислородом
и парами воды. Интенсивность
этого вида шумов в значительной мере
зависит от угла места р
направления ДНА приемной антенны и
достигает максимума при р = 0. Это
объясняется тем, что при р = 0 излучающий объем атмосферы
заключает в себе наибольшую массу излучающих компонентов (паров воды,
кислорода). Как видно из графиков (рис. 7.8), шумы атмосферы
Земли существенны на частотах, больших 0,5 ГГц. В этом диапазоне
шумы атмосферы преобладают над шумами Галактики и являются
практически единственными, влияющими на энергетические
характеристики РНС. Возрастающая зависимость интенсивности атмосферных
шумов от угла места наблюдается в области малых его значений.
Например, при увеличении угла места ог р = 0 до р =• 5° яркостная
шумовая температура уменьшается в 2—3 раза в диапазоне частот
0,5—10 ГГц. При дальнейшем увеличении угла места эта зависимость
ослабевает. Поэтому с энергетической точки зрения целесообразно
выбирать угол места приемной антенны РНС, больший 5°.
Атмосферные радиопомехи, вызываемые грозовыми разрядами,
появляются в виде импульсов тока длительностью 20—80 мс, спектр
которых простирается в область радиочастот. Международным
консультативным комитетом по радиосвязи (МККР) опубликованы
специальные карты прогнозов атмосферных радиопомех для различных районов
земного шара в зависимости от времени года и суток. На этих картах
нанесены линии равных уровней радиопомех, что позволяет учесть
влияние атмосферных радиопомех на точность радионавигационных
измерений при размещении наземных РНС и при прокладке маршрутов
ЛА. Максимум интенсивности атмосферных радиопомех лежит около
частоты 10 кГц, т. е. подобные помехи оказывают существенное
влияние на работу РНС СДВ диапазона.
В настоящее время с увеличением числа используемых
радиотехнических и электротехнических устройств значительно возрастает
7*
195
также опасность возникновения непреднамеренных
(неорганизованных) активных помех. Радиопомехи промышленных
электротехнических установок, а также радиопомехи на борту ЛА, создаваемые
электродвигателями, преобразователями и другими устройствами,
тщательно исследуются и могут быть уменьшены в источниках.
Особенно остро стоит проблема уменьшения межсистемных
(взаимных) радиопомех между различными РНС, РЛС, средствами радиосвязи,
радиоуправления и другими радиосредствами в условиях постоянного
возрастания их числа и типов, т.е обеспечения их электромагнитной
совмес тимости (ЭМС).
Под ЭМС радиоэлектронных средств (РЭС) понимается их
способность одновременно функционировать в условиях эксплуатации с
требуемым качеством (при воздействии на них непреднамеренных
радиопомех) и не создавать недопустимых радиопомех другим
радиоэлектронным средствам. Для обеспечения нормальной работы РЭС
определена номенклатура их технических характеристик, оказывающих
наиболее существенное влияние на ЭМС. К основным из этих
характеристик относятся (ГОСТ 23872—79):
для радиопередатчиков: основное радиоизлучение (в
необходимой полосе радиочастот), внеполосное радиоизлучение,
радиоизлучение на гармониках и субгармониках, комбинационное
радиоизлучение (побочное излучение на комбинированных частотах,
образованных при взаимодействии несущей и формирующих ее частот),
интермодуляционное радиоизлучение (возникающее при взаимодействии
на нелинейные элементы передатчика генерируемых
высокочастотных колебаний и внешнего электромагнитного поля), паразитное
радиоизлучение (побочное излучение вследствие самовозбуждения
каскадов передатчика);
для радиоприемников: частотная избирательность по основному
и побочным (на промежуточных, зеркальных, комбинационных и
субгармонических частотах настройки) каналам, частотная
избирательность по перекрестным искажениям (определяемая при заданном
коэффициенте перекрестных искажений), частотная избирательность
по интермодуляции (т. е. по помехам, образованным в результате
действия на входе ПРМ двух и более сигналов, отличающихся по
частоте от частот основного и побочных каналов приема),
восприимчивость к радиопомехам (т. е. реакция на радиопомехи, воздействующие
через антенну, экран или цепи питания, управления, коммутации);
для антенных устройств: направленность и усиление, поляризация,
связь между антеннами (коэффициент связи).
Значения указанных параметров для РНС устанавливаются
государственными и ведомственными стандартами (например: ГОСТ
18832—73 «Радиотехнические системы ближней навигации»; ГОСТ
23288—78 «Радиопеленгаторы»), что обеспечивает необходимые
условия ЭМС РНС. Эффект влияния непреднамеренных помех сводится
к минимуму не только конструктивным выполнением РНС и введением
норм на их параметры, но также и разделением их рабочих каналов во
времени, частоте, пространственным разнесением рабочих зон,
фильтрацией сигналов, экранированием блоков систем и другими мерами.
196
Глава 8
ОСНОВЫ КОМПЛЕКСИРОВАНИЯ
РАДИОНАВИГАЦИОННЫХ МЕТОДОВ И СРЕДСТВ
8.1. ПРИНЦИПЫ ПОСТРОЕНИЯ БОРТОВЫХ
НАВИГАЦИОННЫХ КОМПЛЕКСОВ
Назначение и структура. Бортовым навигационным комплексом
1БНК) называется автоматизированный комплекс взаимосвязанных
технических средств, обеспечивающих выполнение всей совокупности
навигационных функций с представлением экипажу данных,
требуемых для управления центром масс ЛА, или с вводом этих данных в
систему автоматического управления полетом.
Основными навигационными функциями, выполняемыми с помощью
БНК, являются:
запоминающие информации о требуемом законе движения ЛА;
измерение текущих значений действительных параметров
движения ЛА;
определение рассогласования между действительным и требуемыми
законами движения ЛА и формирование управляющих воздействий,
обеспечивающих реализацию требуемого закона движения;
отображение навигационной информации.
Таким образом, все функции навигационных средств можно
разделить на информационные, метрические, вычислительные и
иконографические. Поэтому в состав БНК должны входить средства запоминания
информации и измерения навигационных параметров (последние также
называют датчиками навигационной информации), вычислительные
средства и средства отображения навигационной информации. Типовая
структура БНК и связи между элементами БНК, летательным
аппаратом и экипажем показаны на рис. 8.1. Помимо упомянутых
элементов, на схеме приведено также устройство управления. Обычно это
устройство является составной частью навигационного
вычислительного устройства (НВУ), с помощью которого обеспечивается
управление БНК и задание требуемого закона движения ЛА.
Ввиду того, что ни один из известных датчиков навигационной
информации не является достаточно универсальным, на борту ЛА
приходится использовать большой арсенал разнообразных
навигационных измерителей. В большинстве случаев на борту самолетов 1-го
и 2-го классов устанавливаются:
1. Точные курсовые системы (ТКС), состоящие из гироскопических,
магнитных и астрономических датчиков направлений. Они позволяют
получать информацию о направлении меридиана и об ориентации
продольной оси ЛА относительно него.
2. Центральная гировертикаль (ЦГВ), представляющая собой
датчик информации о направлении вертикали и о кренах ЛА.
197
Устройство управления U
\
Датчики
информации.
i
i
-
иву у
\
Устройство
отображения
Автопилот
I
3пи по ж U
Рис. 8.1. Структурная схема БЫК
3. Система воздушных
сигналов (СВС), называемая также
централью скорости и высоты (ЦВС),
включающая аэродинамический
измеритель скорости и
барометрический высотомер и позволяющая
судить о воздушной скорости,
числе М, высоте полета и скорости ее
изменения.
4. Инерциальная система,
состоящая из трех ориентированных
по взаимно перпендикулярным направлениям измерителей ускорений.
Система обеспечивает получение информации о значении и
направлении ускорения, скорости и координатах ЛА.
5. Радиотехнические средства навигации и посадки, позволяющие
получать информацию о координатах ЛА, его путевой скорости и
направлении полета.
Следует отметить, что процесс создания новых и совершенствования
существующих навигационных измерителей продолжается и в
настоящее время. Примерами тому могут служить созданные в последние
годы инерциальные измерители и создаваемые в ряде стран
спутниковые системы радионавигации и радиотехнические системы
предупреждения столкновений ЛА.
Различные датчики навигационной информации используют
разнообразные физические принципы и поэтому обладают различными
свойствами и возможностями, достоинствами и недостатками.
Важное место в БНК занимают вычислительные средства. Помимо
ранее упомянутых функций по определению различия между
действительными и заданным законами движения и по формированию
управляющих сигналов, с их помощью решается и ряд других
навигационных задач. Например, задача обработки результатов навигационных
измерений в интересах определения действительного закона движения
и задача рационального использования различных датчиков
навигационной информации (т. е. задача комплексирования навигационных
измерителей).
Принципы комплексирования. В процессе разработки и
эксплуатации БНК сформировались основные принципы комплексирования,
которые можно сформулировать в виде следующих положений.
1. В БНК производится объединение навигационных данных
различной физической природы. Навигационные датчики, включаемые
в состав БНК, используют различные физические принципы и
обладают различными свойствами. Датчики различаются составом
непосредственно измеряемых геометрических и кинематических величин,
пространственно-временными свойствами систематических и случайных
погрешностей, формой и размером рабочих областей, а значит, и
сферами применения. Таким образом, в процессе функционирования БНК
открывается возможность использования тех измерителей, которые
в данных конкретных условиях отличаются наибольшей
эффективностью.
198
3. В БНК обеспечивается полнота использования навигационной
информации. Суждение о текущих значениях параметров движения
формируется на основе анализа всей доступной навигационной
информации, включая данные, известные до начала измерений.
3. Важнейшей функцией БНК является статистическая обработка
всех имеющихся навигационных данных. Статистический анализ
обеспечивает сглаживание случайных погрешностей измерений с учетом
их достоверности, корреляционных и других свойств, выявление и
определение систематических погрешностей и оценку точности
результирующих значений определяемых величин. Сглаживание погрешностей
достигается за счет их осреднения по ансамблю датчиков и по времени.
4. В процессе статистической обработки в БНК осуществляется
оптимизация процессов навигационных измерений и процесса
обработки данных. Целью оптимизации является достижение максимально
возможных в данных условиях точности и надежности определения
конечных величин. Достижение высокой точности обеспечивается
использованием избыточных данных от различных, независимо
функционирующих измерителей, данных, известных до начала измерений, и
данных, получаемых в процессе повторных измерений отдельными
измерителями.
Благодаря свойству БНК обеспечивать точность определения
параметров движения, превышающую точность отдельных измерителей,
в его составе могут использоваться датчики, точность которых ниже
требуемой точности навигационных определений. Использование
таких датчиков позволяет упростить бортовое навигационное
оборудование и снизить его стоимость.
5. В БНК ведется непрерывный автоматический контроль
качества функционирования всего навигационного комплекса и отдельных
его датчиков. Одним из важнейших показателей качества
функционирования БНК является точность определения выдаваемых
комплексом навигационных величин. Эта точность оценивается в процессе
статистической обработки измерений. Контроль качества
функционирования датчиков и других элементов БНК предусматривает
автоматическое подключение резерва и отображение данных о текущем
состоянии тех или иных элементов.
6. В БНК осуществляется резервирование большинства
элементов и применяются все доступные методы обеспечения высокой
надежности. Эти меры исключают возможность отказа в работе БНК при
отказе отдельных его элементов.
7. Непременным условием эффективного комплексирования
навигационных средств является полная автоматизация всех процессов.
В БНК предусматривается автоматизация управления работой
датчиков навигационной информации: их включение, выключение,
настройка, калибровка, переход с одного диапазона или режима на другой
и т. д. Кроме того, в БНК осуществляется автоматизация всех
вычислительных и логических операций, выполняемых в процессе счисления
пути, анализа и обработки данных, при переходе из одних
координатных систем в другие и т. д. Все операции выполняются в реальном
масштабе времени.
199
Комбинирование радионавигационных датчиков. Рассмотрим
принципы выбора и объединения радионавигационных датчиков,
включаемых в состав навигационного комплекса. Каждый отдельно взятый
радиотехнический датчик навигационной информации позволяет
получать сведения об одной единственной геометрической или
кинематической величине (т. е. об одной линии положения или об одной
составляющей скорости). Для решения задачи навигации знания одной
навигационной величины, как правило, недостаточно. Поэтому в состав
навигационных комплексов включают несколько радионавигационных
датчиков, совокупность которых образует комбинированную РНС.
Комбинированной РНС называется система, обеспечивающая
одновременное определение нескольких несовпадающих между собой
однородных или разнородных геометрических и кинематических
навигационных величин. К таким системам относятся РНС,
предназначаемые для одновременного измерения дальности и угловой величины или
двух дальностей до различных РНТ, дальностей и радиальных
составляющих скорости и др.
Основная цель одновременного использования нескольких
радионавигационных датчиков заключается в стремлении обеспечить
возможность определения всей совокупности параметров движения
(компонент вектора состояния), позволяющей получить требуемое качество
управления летательным аппаратом. В зависимости от назначения
РНС требуемая совокупность параметров движения может включать
две или три координаты, две или три составляющих скорости или
представлять собой полный набор (или некоторую комбинацию) упомянутых
величин. Чаще всего на комбинированные РНС возлагается задача
определения места ЛА на поверхности Земли (например, его
географических или ортодромических координат) или места ЛА в
пространстве, что достигается, к примеру, одновременным определением
азимута, угла места и дальности относительно определенной системы
координат. В проектах наиболее совершенных спутниковых'РНС
предусматривается одновременное определение трех пространственных
координат ЛА и трех составляющих вектора скорости.
Очевидно, что определение различных навигационных величин с
помощью комбинированной РНС связано с необходимостью включения
в их состав соответствующих функциональных элементов и
предполагает одновременное функционирование этих элементов. Составная
часть комбинированной РНС, ответственная за измерение определенной
навигационной величины, называется подсистемой или каналом. В
зависимости от типа измеряемой величины подсистемы (каналы) могут
быть однородными или разнородными. В однородных подсистемах
производится измерение одной и той же геометрической величины, в
разнородных—измеряются неодинаковые геометрические величины.
Примером комбинированных РНС однородного состава могут служить даль-
номерные или разностно-дальномерные РНС сверхдлинных волн,
включающие несколько одинаковых пространственно разнесенных
наземных подсистем, позволяющих определять географические координаты
ЛА в пределах определенного региона или в глобальном масштабе.
Примерами комбинированных РНС неоднородного состава являются
200
угломерно-д&льномерные системы ближней навигации (РСБН, VOR—
DME), включающие азимутальную и дальномерную подсистемы, или
микроволновые системы посадки, в состав которых входят две
угломерные подсистемы и радиодальномер.
При выборе принципа действия подсистем обычно стремятся к
использованию одного и того же метода измерений или методов,
близких друг к другу, однако если эксплуатационно-технические требова-
вания к каналам различаются, то в подсистемах одной
комбинированной РНС могут использоваться различные методы измерений.
Например: в курсовых и глиссадных радиомаяках систем посадки
метрового диапазона используются различные амплитудные методы
угломерных измерений; в азимутальной и угломестной подсистемах
микроволновой системы посадки намечается использовать один и тот же
временной метод измерения угловых координат.
С точки зрения конструктивного исполнения и функционального
разделения подсистемы комбинированных РНС чаще всего строят
независимыми, хотя в некоторых случаях оказывается возможным их
конструктивное или функциональное объединение. Например,
наземные маяки радиотехнической системы посадки метрового диапазона
и бортовые приемники выполняются в виде различных конструктивных
элементов. Общими являются только низкочастотный блок и корпус
указателя курса и глиссады. Примером конструктивного и
функционального объединения, относящегося к элементам подсистем, может
служить радиотехническая система ближней навигации, в состав
бортового оборудования которой включается один приемник, общий для
дальномерного и азимутального каналов.
Методы коррекции счислимых координат. Так как погрешности
счисления в полете со временем возрастают, возникает необходимость
коррекции, т. е. исправления счислимых координат по данным,
получаемым от измерителей позиционного типа, позволяющих
непосредственно получить достаточно точную информацию о координатах ЛА.
Такими измерителями являются радионавигационные системы.
В общем случае наряду с коррекцией счислимых координат может
также осуществляться коррекция скорости ЛА.
Известны два метода коррекции счислимых координат и скорости,
получившие названия коррекции замещением и статистической
коррекции.
При коррекции замещением производится простая замена данных
о счислимых координатах данными о координатах ЛА, получаемыми
от источника информации, который считается более точным. При
коррекции замещением оценка точности скорректированных данных
о координатах не производится. Предполагается, что точность
координат ЛА после коррекции равна точности корректирующей РНС,
которая характеризуется значениями систематической и случайной
погрешности одиночного измерения.
Достоинство метода коррекции замещением — простота. Его
недостаток заключается в том, что в процессе коррекции совершенно не
используются данные о счислимых координатах и о точности счисления.
В ряде случаев это оправдано, однако полное пренебрежение этими
201
данными допустимо лишь в условиях, когда точность корректирующих
средств намного выше точности счисления. Между тем на практике
часто встречаются ситуации, когда это условие выполняется не в полной
мере или не выполняется вообще. Например, может оказаться, что
радионавигационная система, давая возможность точно определять одну
линию положения, не позволяет столь же точно определять вторую
линию положения. Иногда встречаются ситуации, когда в одной части
рабочей области РНС точность измерений достаточно высока, а в
другой ее части она заметно ниже и соизмерима с точностью счисления.
Соизмеримые значения могут иметь погрешности счисления и
погрешности корректирующих средств при малом значении интервалов
коррекции.
В упомянутых случаях метод коррекции замещением данных не
обеспечивает высокой точности коррекции и не позволяет использовать
всю имеющуюся навигационную информацию.
Статистическая коррекция лишена всех упомянутых недостатков
коррекции замещением и обеспечивает полное и эффективное
использование всей навигационной информации. Методы статистической
коррекции пригодны для использования при любых соотношениях между
точностными свойствами РНС и средств счисления и в общем случае
позволяют получать точность более высокую, чем точность РНС и
средств счисления, рассматриваемых изолированно друг от друга.
Поэтому коррекция замещением представляет собой частный случай
статистической коррекции в условиях, когда погрешности счисления
значительно превышают погрешности РНС.
Важным достоинством методов статистической коррекции
является оценка точности результата коррекции, что позволяет получить
представление об эффективности коррекции и выработать правильную
стратегию действий экипажу.
Недостатком статистических методов коррекции является их
относительная сложность и трудность практической реализации.
Рассмотрим сущность методов статистической коррекции. При
формулировке задачи статистической коррекции предполагается, что к
моменту t счислимые координаты ЛА равны хсиус и данные о счислимых
координатах искажены случайными погрешностями. Математическое
ожидание этих погрешностей будем считать равным нулю, а
дисперсии — равными alx и oly.
В момент t производится измерение координат ЛА
радионавигационной системой. Измеренные значения координат равны х и у.
Известны дисперсии однократного измерения координат с помощью РНС
fflp и ajp.
Ставится задача использовать все имеющиеся данные наиболее
рациональным способом для того, чтобы оценить значения координат
Л А и точность их определения.
В теории погрешностей подобная задача называется задачей
обработки результатов двух неравноточных измерений, погрешности
которых случайны и независимы.
В общем виде с помощью РНС может осуществляться не одно
измерение, а ряд последовательных измерений, и эта задача может быть
202
сформулирована как определение
координат самолета, наиболее
близких к истинным, по результатам п
неравноточных измерений при
независимых случайных погрешностях.
Необходимо отметить, что
постановка задач статистической
коррекции на практике несколько
отличается от вышеприведенной.
Описывая задачу коррекции,
принималось допущение, что с помощью
корректирующих радиотехниче- Н)^
СКИХ Средств непосредственно Изме- рис. 8.2. Геометрические соотношения
РЯЮТСЯ те координаты ЛА, которые при азимутально-дальномерной кор-
используются на борту для управ- рекции счислимых координат
ления. Как известно, управление
ЛА осуществляется по данным о продольном и боковом его
уклонении относительно той точки траектории полета, на которой он должен
находиться. Таким образом, в приводимой постановке предполагается,
что радиотехнические средства обеспечивают прямое измерение
продольного и бокового отклонений ЛА. Задачи статистической
коррекции и статической обработки данных в такой постановке называются
задачами статистической обработки прямых измерений.
На практике приходится иметь дело с задачей обработки
результатов косвенных измерений, в процессе которых определяются не сами
по себе продольное и боковое отклонения, а такие геометрические
величины, как дальность до РНТ и разность дальностей до двух РНТ.
Измеряемые величины не равны продольному и боковому
отклонениям, но они связаны с продольным и боковым отклонениями
определенными функциональными зависимостями, имеющими
детерминированный характер. Поэтому результаты измерений без особого труда пересчи-
тываются в отклонения ЛА.
Однако оказывается, что процедуры статистической обработки
прямых и косвенных измерений различаются между собой алгоритмически,
причем задача обработки косвенных измерений в вычислительном
отношении сложнее задачи обработки прямых измерений.
Ниже описываются методы статистической обработки результатов
косвенных навигационных измерений в целях наиболее эффективного
использования всей навигационной информации для коррекции
счислимых данных о координатах и скорости ЛА. Совокупность процедур
по обработке всей навигационной информации называется
комплексной обработкой информации.
Линеаризация задачи коррекции счислимых координат. Рассмотрим
вначале задачу коррекции счислимых координат ЛА по результатам
измерения дальности и азимута с помощью радиотехнической системы
ближней навигации. Предположим, что наземный радиомаяк системы
располагается в точке Р (рис. 8.2) и в момент, когда ЛА оказывается
в точке М, на его борту измерены наклонная дальность до маяка гн
и азимут А, Предполагаются известными счислимые значения част-
203
но-ортодромических координат JIAsc и гс, частно-ортодромические
координаты маяка sp и~гр и заданный путевой угол траектории полета
Риз Задача состоит в] том, чтобы по измеренным дальности и азимуту
определить частно-ортодромические координаты ЛА s и г.
Искомая зависимость выражается соотношениями
s = sp — г cos П; (8.1)
z = zp + r sin П; (8.2)
где г = |/7*—Я2 — горизонтальная дальность до маяка;
Я — высота Л А;
П = А—риз — ортодромический пеленг Л А относительно радиомаяка.
Зависимости (8.1) и (8.2) являются нелинейными функциями
измеряемых величин, однако в них не представлена явным образом
информация о счислимых координатах ЛА. Между тем вычислительные
процедуры при статистической коррекции упрощаются, если данные
измерений обрабатываются на основе линейных зависимостей между
измеряемыми и определяемыми величинами. Такие зависимости можно
получить следующим образом путем линеаризации приведенных
соотношений.
Определим по результатам радионавигационных измерений не
сами координаты ЛА, а поправки к счислимым координатам:
As = s — sc; (8.3)
Az = z — zc. (8.4)
Так как непосредственно измеряемыми величинами являются
дальность и пеленг Л А относительно радиомаяка, то необходимо установить
связь между измеренными значениями дальности и пеленга и
упомянутыми поправками к счислимым координатам. Эта связь
выражается следующим образом. Аналитические выражения щя дальности
и ортодромического пеленга имеют вид:
r=,]/-(z-Zp)2 + (s-Sp)2; (8.5)
sinII = -£=3L. (8.6)
При известных счислимых координатах гс и sc можно рассчитать
счислимые значения дальности и пеленга:
rQ = V{zQ-zv? + {sQ-sv)*\ sinn^-^iL.
Учитывая равенства (8.3) и (8.4), формулы (8.5) и (8.6) можно
переписать так:
г - V(zc + Аг -zp)2 + (sc -+*As -sp)2;
8ШП= , *c + Az-zp
V(zc+As--zp)» + (s0+As-^Sp)«
2C4
Разложим эти функции в ряд Тейлора по переменным As и Аг
в точке sc, гс. Сохраняя в разложении лишь линейные члены, можно
воспользоваться формулами:
dsc dzG
dsc dzG
Очевидно, что имеет место соотношения:
i^. = Jo=£iL==sinn
dnG
dzG
ozG rG
dsG rc
_ cosnc # дПс _ sinnc
rG dsG rG
В итоге:
Ar = r — rc = As cos Пс + Az sin Пс; (8.7)
АПгс = (П — Пс) гс = — As sin Пс + Аг cos Пс. (8.8)
В этих соотношениях гс, Пс — известные величины; Аг = г — гс
АП = П — Пс — разности между измеренными и счислимыми
значениями расстояний и пеленгов (также известные величины).
Неизвестными являются искомые поправки к счислимым координатам
As и Аг. Разрешая систему линейных уравнений (8.7) и (8.8)
относительно этих поправок, получаем:
As = Ar cos Пс + АПгс sin Пс;
Аг = Ar sin Пс + АПгс cos Пс.
Поправки к счислимым значениям ортодромических координат
выражаются линейными функциями определяемых^ в процессе
измерений величин Аг и АП. Соотношения (8.7) и (8.8), выражающие эти
поправки, пригодны для обработки данных измерений дальности и
азимута по методу наименьших квадратов, в то время как более простые
по виду соотношения (8.1) и (8.2) ввиду их нелинейности для этой
цели непригодны.
Рассмотрим линеаризацию формульных соотношений при
коррекции с помощью разностно-дальномерных систем.
Геометрические соотношения при коррекции счислимых координат
с помощью разностно-дальномерных систем показаны на рис. 8.3,
на котором буквами А и Б обозначены радионавигационные точки
системы; М — место ЛА; Щ и Щ—ортодромические пеленги, обратные
пеленгам радионавигационных точек системы (опорных станций);
г4 и г2—расстояния до наземных станций, отсчитываемые вдоль
сферической или эллипсоидальной поверхности Земли. Особенностью
рассматриваемых соотношений является то, что дальности до наземных
205
Рис. 8.3. Геометрические соотношения
при коррекции с помощью разност-
но-дальномерной системы
станций и расстояния между ними
очень велики и необходимо
учитывать сферичность или даже эллип-
соидальность Земли. Однако,
несмотря на это, линеаризованные
уравнения коррекции,
связывающие между собой сравнительно
малые разности между измеренными
и счислимыми значениями
разностей расстояний и ортодромических
координат, не требуют учета
сферичности Земли и могут быть
получены из линеаризованных
уравнений дальномерной коррекции.
Используя уравнение (8.7), для
приращений дальностей до обеих
РНТ можно написать:
Дгх = As cos Щ + Az sin ГЦ;
Дг2 = As cos П'2 + Az sin П2.
Отсюда для разности измеренных и счислимых значений разности
расстояний запишем
А (бг) = Агх—Аг2 — As (cos ГЦ —cos Щ) + Az (sin Щ—sin Щ).
Учитывая, что обратные ортодромические пеленги РНТ из счисли-
мой точки связаны с самими пеленгами РНТ соотношениями
П4 = П4-180°; Щ = Па-180°,
для искомой разности между измеренными и счислимыми
величинами получаем формулу
А (бг) = As (cos П2 — cos П4) + Az (sin П2 — sin П4).
Таким образом, линеаризованные уравнения, связывающие между
собой разности между измеренными и счислимыми значениями
разностей расстояний и ортодромических координат, подобны
линеаризованным уравнениям, получаемым при дальномерных измерениях, и
отличаются от них тем, что постоянными коэффициентами в этих
уравнениях выступают не синусы и косинусы ортодромических пеленгов,
а разности синусов и косинусов пеленгов обеих РНТ, образующих
р азностно-дальномер ную систему.
8.2. КОМПЛЕКСНАЯ ОБРАБОТКА НАВИГАЦИОННОЙ ИНФОРМАЦИИ
Линейная динамическая модель навигационного комплекса.
Комплексные навигационные системы ЛА в первом приближении можно
отобразить линейными динамическими моделями, процессы в которых
описываются системами линейных стохастических дифференциальных
уравнений, В частном случае такие системы могут описывать процесс
206
движения центра масс ЛА, а значит, и процесс изменения параметров
движения, подлежащих определению с помощью навигационных
измерителей.
При использовании матричной символики, которая существенно
упрощает запись, анализ и решение этих уравнений, системы
дифференциальных уравнений любого порядка сводятся к векторным
дифференциальным уравнениям первого порядка. Переменными
величинами в этих уравнениях выступают компоненты некоторого вектора,
получившего в задачах навигации и управления название вектора состояния.
Его элементами выступают координаты ЛА, их производные (скорости
и ускорения), различные геометрические, кинематические и
динамические величины, связанные с ними, а также систематические погрешности
оценивания элементов вектора состояния. В связи с использованием
цифровой вычислительной техники и целесообразностью
дискретизации процесса измерений от обычных дифференциальных уравнений
переходят к их дискретным аналогам — разностным уравнениям, в
которых вместо производных фигурируют конечные
приращения'определяемых переменных величин за время, равное интервалу
дискретности.
Таким образом, основу количественного описания процесса
навигационных определений составляет векторное разностное
стохастическое уравнение первого порядка. Обозначая вектор состояния буквой
х, такое уравнение можно записать в виде
ХпЛЛ = ФХп + QWn. (8.9)
Здесь п — номер момента времени, к которому относится данная
величина; W — случайное возмущение, действующее на систему; ф —
переходная матрица состояния системы; Q — переходная матрица
возмущения.
Не уменьшая общности рассмотрения, можно считать
некоррелированными значения случайной величины Wn, соответствующие
различным моментам времени. Известна дисперсия величины W и ее
математическое ожидание. В упомянутых условиях по заданному
начальному состоянию системы можно определить ее состояние в любой
последующий момент времени.
Стохастические разностные уравнения позволяют дать
количественное описание процессов в динамической системе, подвергаемой
управляющему или возмущающему внешнему воздействию случайного
характера. В частном случае воздействие может носить и регулярный
характер. Будем предполагать, что векторное воздействие Wn в каждый
момент п времени представляет собой реализацию случайного вектора,
выбираемого из множества независимых векторов, подчиняющихся
гауссову распределению. Векторные воздействия в различные моменты
времени принимаются независимыми друг от друга.
Обозначим математическое ожидание внешнего воздействия
символом М [Wn] = Wn9 а его корреляционную матрицу —
M[(Wj-W^{WK-WK)T}--=QK 8,K,
207
где б-к — символ Кронекера, определяемый соотношением
1 11 i=k.
Примем, что начальное состояние системы Х0 также случайно,
причем вектор Х0, как и вектор 1/к, имеет гауссово распределение,
и его отдельные реализации некоррелированы с внешними
воздействиями. Корреляционная матрица разброса начальных состояний
системы обозначается символом /(0.
Выясним, что собой представляют векторы состояния системы Хп
в моменты времени, отличные от начального.
Прежде чем приводить количественные соотношения,
характеризующие поведение системы, необходимо отметить главную
отличительную особенность процессов в динамической системе. Она состоит в том,
что если рассматривать воздействие на систему некоррелированных
случайных воздействий типа «белого шума», то, несмотря на отсутствие
статистических связей между значениями внешних воздействий в
различные моменты времени, состояние системы в любой данный момент
времени оказывается зависящим от состояния системы в
предшествующий момент. Причина появления этой зависимости связана со
свойствами самой динамической системы, которая обладает определенной
инерционностью, предопределяющей реакцию системы на то или иное
воздействие. Это свойство системы отображается разностным уравнением,
которое представляет собой уравнение динамики системы и фиксирует
тот факт, что если состояние системы в определенный момент времени
известно и известно действующее на нее в этот момент усилие, то этим
предопределяется состояние системы в последующий момент времени.
Отличие рассматриваемой задачи от задач классической механики
состоит в том, что исходное состояние системы и действующая сила
случайны. Однако благодаря тому, что реакция системы носит неслучайный
характер, случайное состояние системы в следующий момент времени
будет зависеть от случайного состояния ее в предыдущий момент.
Таким образом, зная вероятность того или иного состояния системы
и вероятность появления того или иного возмущения в данный момент
времени и располагая уравнениями динамики, можем определить
вероятность перехода системы в то или иное состояние в последующий
момент времени.
Таким образом, появляется взаимосвязь между состояниями
системы в примыкающие друг к другу моменты времени. Следует, однако,
заметить, что связь между состояниями динамической системы
первого порядка распространяется лишь на два соседних момента времени
и не выходит за пределы этих двух моментов, т. е. она не касается
третьего и последующих моментов. Объясняется это тем, что после
перехода системы из предшествующего состояния в текущее на нее
действует случайная сила, значение которой не зависит ни от состояния
системы, ни от значения силы, действующей в предыдущем цикле работы
системы. Поэтому, несмотря на то, что состояние системы в данный
момент зависит от ее состояния в предшествующий момент времени,
ее поведение в будущем определяется новым случайным воздействием,
208
независимым от предыдущего воздействия, и ее реакция в последующий
момент времени будет зависеть от] случайного воздействия в данный
момент времени и не будет зависеть от воздействия в момент,
предшествующий данному.
Таковы главные особенности поведения динамической системы при
случайных воздействиях на нее. Случайный процесс, значения
которого в различные смежные моменты времени статистически
взаимосвязаны и для которого заданы вероятности смены значений при переходе
от одного момента времени к другому, называется марковским.
Следовательно, состояния динамической системы представляют собой
марковский случайный процесс.
Рассмотрим количественные соотношения, характеризующие
поведение системы при случайных воздействиях. Для этого рассчитаем
основные статистические характеристики вектора состояния
динамической системы в условиях случайных воздействий. Математическое
ожидание вектора состояния получается из разностного уравнения
системы (8.9) и выражается соотношением
МХп+1 = Xn+i =<bXn + QWK . (8.10)
При известных Wk и Х0 с помощью полученного реккурентного
соотношения можно вычислить Хп+1 для любого момента времени.
Вычислим ковариационную матрицу вектора состояния. По
определению Kn+i = М (Хв+1 — Хп+1) X (Хп+1 — Хп+1)т.
Подставляя в эту формулу значения Хп+1 из разностного
уравнения (8.9) и Хп+1 из выражения (8.10) и учитывая статистическую
независимость векторов Хк и Wk, получаем соотношение
Кп+х =ФКп <PT + QKwnQT. (8.11)
Формула (8.11) представляет собой реккурентное соотношение,
позволяющее при известных Kw0 и Ко определить ковариационные
матрицы вектора состояний для любого последующего момента времени.
Характерной особенностью реккурентных (т. е. повторяющихся)
алгоритмов является то, что для определения результата
функционирования на данном цикле в них используются данные вычислений,
полученные на предыдущем цикле работы, и повторяется одна и та же
вычислительная процедура на каждом цикле. Реккурентные
алгоритмы удобны для реализации на ЦВМ.
Векторные разностные стохастические уравнения первого
порядка, эквивалентные системам разностных уравнений первого или
более высокого порядка, представляют собой эффективный аппарат
количественного описания процессов в динамических системах.
Представляется, что ограничивая множество случайных воздействий
воздействиями некоррелированного типа, существенно сужается сфера их
практического применения. В действительности этого не происходит. С
помощью векторных разностных уравнений удается описать реакцию
динамической системы не только на некоррелированные, но и на
коррелированные воздействия. Это достигается увеличением размерности
209
вектора состояния. Специально вводимые дополнительные компоненты
этого вектора играют роль дополнительных разностных уравнений,
позволяющих из некоррелированного входного воздействия
сформировать коррелированные процессы, используемые в дальнейшем в
качестве входных воздействий в разностных уравнениях, описывающих
навигационную систему. Дополнительно вводимые уравнения
называются уравнениями формирующего фильтра.
Рассмотрим свойства простейших формирующих фильтров.
Предположим, что в качестве такого фильтра используется система,
описываемая разностным уравнением первого порядка. Для упрощения
задачи рассмотрим процессы, описываемые аналогом этого
уравнения — дифференциальным уравнением первого порядка. Покажем, что
с помощью стохастического дифференциального уравнения первого
порядка из некоррелированного случайного процесса формируется
случайный процесс с экспоненциальной функцией корреляции.
Докажем справедливость следующего положения: если на
динамическую систему, описываемую линейным дифференциальным уравнением
первого порядка X (t) = aX (t) + W, действует белый шум, т. е.
некоррелированное случайное возмущение, спектральная плотность
которого не зависит от частоты S (со) = 1, то поведение системы будет
характеризоваться случайным процессом, спектральная плотность
которого в установившемся режиме
S(w) = 1/(а2 + (о2), (8.12)
а корреляционная функция
#(т) = о2е-аК (8.13)
Доказательство ведется следующим образом.
Известно, что спектральная плотность процесса на выходе
динамической системы выражается через спектральную плотность входного
воздействия F (со) и квадрат модуля частотной характеристики
системы А (<©) соотношением FBbIX (о) = А (со) F (со).
В рассматриваемом случае на входе действует белый шум, для
которого F (ш) = 1, а квадрат модуля частотной характеристики
2 1
Ф +0)2
Таким образом, спектральная плотность процесса на выходе
системы
Рвш (со) = .
вых } а*+(о2
Первая часть сформулированного положения установлена.
Теперь необходимо определить корреляционную функцию случайного
процесса (8.12).
Л(со) =
1
а-Н'со
210
Корреляционная функция и спектральная плотность случайного
процесса связаны между собой прямым и обратным
преобразованиями Фурье:
оо оо
F(со) = — Г /С (т) е-'«" dx; К {%) = Г F (ю) е*"* rfco,
— оо —оо
поэтому, располагая данными о спектральной плотности процесса на
выходе динамической системы FBblx (со), можно определить
корреляционную функцию этого процесса.
Однако в данном случае проще решается задача по вычислению
спектральной плотности по корреляционной функции. Поэтому
предположим, что корреляционная функция случайного процесса
представляется экспонентой (8.13), и рассчитаем спектральную плотность
такого процесса. В результате
оо
2я J
— оо
Расчленяя этот интеграл на два, один из которых охватывает
область положительных значений т, а другой — отрицательные
значения, и учитывая, что при т > 0 | т | = т, а при т < 0 | т | = — т,
находим
F (со) = 1 — . .
2я \а+ш a—i(o) n а2+со2
Таким образом, корреляционной функции экспоненциального типа
соответствует спектральная плотность, выражаемая формулой (8.12).
Очевидно, что справедливо и обратное утверждение. Поэтому
можно заключить, что корреляционная функция случайного
процесса на выходе динамической системы первого порядка, возбуждаемой
«белым шумом», оказывается экспоненциальной. Таким образом,
доказана справедливость обоих высказанных суждений.
Подобным образом доказывается, что системы диференциальных
уравнений позволяют формировать и случайные воздействия с
корреляционными функциями более сложных типов.
Количественное описание процесса радионавигационных
измерений. Как отмечалось ранее, в состав комплексной навигационной
системы, помимо автономных навигационных измерительных средств,
использующих естественные геофизические поля, включаются
неавтономные и автономные радиотехнические средства, с помощью
которых осуществляется коррекция бортовых измерителей.
Уравнения коррекции — это сложные нелинейные соотношения,
которые за счет использования данных, получаемых от автономных
нерадиотехнических средств, приводятся к линейным зависимостям,
связывающим отклонения измеренных значений радионавигационных
величин с компонентами вектора состояния, а точнее, с отклонениями
значений этих компонентов от значений, известных на борту ЛА и
выполняющих роль априорных данных.
211
Линеаризованные уравнения измерений обладают двумя
особенностями. Первая состоит в том, что они отражают косвенный характер
измерений. Радионавигационные средства не обеспечивают прямые
измерения компонент вектора состояния X, позволяя
непосредственно фиксировать лишь значения вектора Un, связанного с вектором
состояния определенной зависимостью.
Вектор Un называется вектором измеряемых навигационных
величин. Оператор связи Р между измеряемым и определяемым
векторами известен.
Вторая особенность уравнений обусловлена тем, что процесс
навигационных измерений, как правило, протекает в условиях
воздействия помех. Предполагается, что помехи носят случайный характер,
являются аддитивными и некоррелированными. Таким образом,
зависимость между значениями измеряемых навигационных величин
и значениями параметров состояния имеет вид:
Un = PXn + Nn. (8.14)
Здесь матрица Nn представляет собой помеху. Уравнение (8.14)
называется уравнением наблюдения. Система векторных уравнений
(8.9) и (8.14) описывает процесс движения ЛА и процесс
навигационных измерений как единый процесс, протекающий в условиях
воздействия случайного и регулярного характера и случайных помех. Эта
система уравнений отображает процессы в системе, включающей ЛА
и систему навигационных измерителей, под действием двух случайных
воздействий, одно из которых действует на ЛА, другое — на
измерительную систему.
Воздействие помех обусловливает статистический характер связи
между векторами наблюдаемых и определяемых величин. В свою
очередь, случайные возмущения процесса движения ЛА также
обусловливают случайный характер связи между значениями вектора состояния
в различные моменты измерений. Таким образом, модель процесса
навигационных определений оказывается довольно сложной. Однако она
пригодна для решения задачи оптимизации навигационного процесса
на основе представления об оптимальном оценивании значений
случайной величины по результатам наблюдения другой величины,
связанной с первой некоторой статистической зависимостью (эту задачу
будем называть задачей'косвенного оценивания случайной величины).
Принципы косвенного оценивания случайной величины. Задача
косвенного оценивания в общем виде формулируется следующим
образом. Необходимо определить значение случайной величины X по
данным измерений другой случайной величины S, которая связана с
искомой величиной статистической зависимостью.
Рассмотрим методологию решения этой задачи и ее использование
в навигационной практике, для чего вначале приведем определение
некоторых понятий математической статистики, которыми придется
оперировать.
Прежде всего необходимо дать понятия статистических
характеристик случайных величин. Как известно, наиболее полная информация
о случайных величинах содержится в их законах^распределения, ко-
212
торые отображают связь между случайными событиями (в случае
навигационных измерений—измеренными случайными значениями
параметров движения) и вероятностями их появления. Однако законы
распределения сложны и оперировать ими на практике, как правило,
неудобно. Опыт показывает, что на практике достаточно'располагать
некоторыми числовыми характеристиками случайных величин.
Такими характеристиками являются параметры законов распределения,
в частности моменты случайных величин. Числовые характеристики
случайных величин в совокупности с законом распределения
называются статистическими характеристиками.
Определим понятия статистики и оценки. Статистикой принято
называть любую функцию результатов измерений случайной величины,
не зависящую от статистических характеристик этой величины,
которые при решении конкретных задач обработки данных, как
правило, не известны. Оценкой статистической характеристики
называется статистика, которая принимается за неизвестное истинное
значение рассматриваемой статистической характеристики.
Для получения оценки той или иной статистической
характеристики случайной величины необходимо располагать рядом измеренных
значений этой величины, т. е. выборкой этой случайной величины. Для
получения самих статистических характеристик требуется все
бесконечное множество значений случайной величины.
Итак, располагая результатами измерения конечного числа
значений случайной величины, можно дать лишь оценку той или иной
статистической характеристики рассматриваемой случайной величины.
Возвращаясь к решаемой задаче, можем отметить, что она состоит
в том, чтобы по измеренному значению s случайной величины S
определить связанное с нею значение х случайной величины X (условимся
обозначать случайные величины прописными буквами, а их
значения—строчными). Так как зависимость между S и X в общем случае
носит статистический характер, то по известному значению s
случайной величины S можно определить лишь оценку значения х
случайной величины X.
Таким образом, в общем случае находим оценку значения
случайной величины X как функцию значений s величины S. Обозначим
искомую оценку как х (s). Очевидно, что она должна по возможности
меньше отличаться от оцениваемой величины х.
Так как значение s случайно, то случайна и оценка х (s). Поэтому
отличие х (s) от х целесообразно характеризовать математическим
ожиданием квадрата их разности при данном s: e (s) = М {[X (S) —
— ХЩ.
Осредняя погрешность 8 (s) по всем значениям величины S,
получаем ее среднее значение
8 = M[X(S) — X]\ (8.15)
Очевидно, что функцию X (S) целесообразно выбрать так, чтобы
указанное математическое ожидание было минимальным. В этом
случае 8 = М IX (S) — X]2 = min.
213
Оценка, удовлетворяющая этому условию, называется
оптимальной. Отклоняясь от оптимального значения оценки в любую сторону,
приходим к значению погрешности оценивания, превышающему ее
минимальное значение.
Условия оптимальной оценки. Предположим, что оптимальная
оценка представляет собой линейную функцию S:
k = gS + h, (8.16)
где g — квадратная матрица размером п X и;
S и h — n-мерные векторы-столбцы;
h = [/1^2, ..., hn]T\
В этом случае математическое ожидание квадрата погрешности
оценки е = М IgS + h — X]2 = min.
Используя приведенное условие оптимальности оценки, можно
определить оптимальную матрицу g и вектор h линейного преобразования
случайного вектора S. Воспользуемся для этого известным методом
нахождения минимума функции. Дифференцируя г по g и h и
приравнивая производные нулю, можно найти искомое оптимальное
преобразование. Результаты дифференцирования имеют вид: М [gS + h — Х]Х
X ST = 0; М [gS + h — X] = 0,
где верхний индекс Т означает операцию транспонирования.
Эти соотношения можно выразить следующим образом:
gMSST + hMST — MXST = 0; gMS + h — MX=--0.
Величины MSST и MXST представляют собой соответственно
момент второго порядка вектора S и взаимный момент второго порядка
величин X и S: MSST = Ts; MXST = Txs.
Обозначая математические ожидания величины X символом тх
a MS — символом ms и учитывая, что вторые моменты выражаются
через ковариационные матрицы Kxs и Ks и математические
ожидания соотношениями:
Txs = Kxs + rnx mTs\ Ys = Ks + ms mTs,
приходим к следующим зависимостям для элементов g и h оператора
оптимального линейного преобразования вектора S, обеспечивающего
формирование оптимальной оценки величины X:
g=KxsKsU, (8Л7)
h^mx—gms. (8.18)
Матрица оптимального линейного преобразования наблюдаемого
случайного вектора S образуется делением ковариационной матрицы
Ks> характеризующей статистическую взаимосвязь определяемого и
наблюдаемого векторов X и S, на ковариационную матрицу
наблюдаемого вектора S, равную дисперсионной матрице этого вектора.
Таким образом, процедура определения оптимальной оценки
значения величины X по результатам наблюдения случайной величины 5
214
состоит в преобразовании наблюдаемых значений s с помощью
линейного оператора:
х =- Kxs Ks l s+mx—Kxs Ks~l ms.
Напомним, что s представляет собой значение функции S,
зависящей от случайной величины X. Так как последнее соотношение
справедливо для любых значений х и s, то его можно переписать в виде:
X = gS(X) + h^-Kxs KFl [S(X)—ms] + mx. (8.19)
При этом на функцию S (X) никаких ограничений не
накладывается, т. е. она может быть как линейной, так и нелинейной.
В частном случае, когда S и X представляют собой скалярные
величины, матрица g и вектор h вырождаются в коэффициенты
линейного преобразования: g = KxsDs1', h = тх = gtris.
Используя понятие коэффициента корреляции в случае
скалярной величины, получаем
°х
g^rxs —.
Gs
Из этого соотношения видно, что размерность коэффициента g
определяется размерностями величин X и S.
Значение коэффициента g оптимального линейного
преобразования определяется степенью корреляционной зависимости между
наблюдаемой и определяемой случайными величинами. Она тем больше,
чем больше значение коэффициента корреляции между ними. В
предельном случае детерминированных величин, для которых rxs = 1,
коэффициент g равен отношению средних квадратических значений
определяемой и наблюдаемой величин. Это означает, что степень
близости оценки и оцениваемой величины тем больше, чем сильнее
корреляционная связь между оцениваемой и наблюдаемой случайными
величинами и чем меньше разброс наблюдаемой случайной величины.
Установленные факты хорошо согласуются с интуитивными
представлениями о процессе косвенного оценивания
Оптимальная динамическая фильтрация навигационных данных.
Используя представление о косвенном оценивании случайных
величин, можно разработать процедуру оптимального оценивания
параметров движения по результатам измерений с помощью комплекса
навигационных датчиков. Эта процедура получила название оптимальной
фильтрации.
Так как процесс оптимальной фильтрации реализуется в
комплексной навигационной системе с учетом динамики ее функционирования,
то его можно назвать процессом оптимальной динамической
фильтрации.
Задача оптимальной динамической фильтрации формулируется
следующим образом. Заданы разностное уравнение (8.9) динамики функ»
ционирования навигационного комплекса, уравнение (8.14) процесса
радионавигационных измерений, начальные условия протекания
процессов и статистические характеристики случайных воздействий и по-
215
мех. Необходимо определить оптимальные оценки значений вектора
состояния и ковариационную матрицу погрешностей оценивания этого
вектора для всех моментов времени, относящихся к интервалу
наблюдения.
Решение задачи в указанной постановке сводится к определению
оптимальной оценки вектора состояния Хп+1, относящегося к п + 1
моменту времени. Искомая оценка обозначается символом Хп+1.
Предполагается, что она выражается через оценку вектора состояния,
относящегося к предшествующему моменту времени Хп, и через вектор
измеренных значений Un с помощью линейного оператора
Xn+i=giXn + g2Un, (8.20)
где gi и g2 — операторы преобразования наблюдаемых значений случайных
величин Хп и Unt обеспечивающие получение оптимальной
оценки искомой величины Хп+1.
По поводу выбора наблюдаемых величин необходимо сделать
некоторые пояснения. Так, момент времени, к которому относятся
результаты радионавигационных измерений, можно выбрать по-разному.
В некоторых случаях считают, что моменты оценки и наблюдения
совпадают. Однако с точки зрения упрощения формульных
соотношений для алгоритмов фильтрации целесообразно момент
радионавигационных измерений выбирать с отставанием на один цикл по
отношению к моменту выдачи оценки вектора состояния, как это делается
в данной работе. Существенно, что используемая методика определения
оптимальной оценки оказывается плодотворной в обоих случаях. При
совпадении моментов наблюдения и оценки уравнения наблюдения
имеют вид: Un+1 = РХп+1 + Wn+l = РФХп + PQVn + Wn+1.
Отметим также, что оценка вектора состояния Хпу относящаяся
к предшествующему времени по отношению к моменту п+1,
рассматривается в качестве известной наблюдаемой величины, потому что
заданы оценка этого вектора, относящаяся к исходному моменту
времени п = 0, и алгоритм его преобразования по мере изменения времени.
Оценка Х0 выступает в роли начального условия, знание которого
необходимо для решения разностного уравнения (8.9). Известно
также случайное воздействие V0 и его дисперсия, что позволяет
моделировать воздействия на систему в любой последующий момент времени и
таким образом получить оценку Хп, относящуюся к произвольному
моменту времени п.
Исследования показывают, что в условиях поставленной задачи
элемент h матрицы оптимального преобразования равен нулю,
поэтому он не рассматривается.
Формула (8.20) обеспечивает учет двух упомянутых случайных
воздействий. Сравнение соотношений (8.20) и (8.19) показывает, что
формула (8.20) приводится к равенству (8.19) введением матрицы
g=\gig2\ (8.21)
и вектора
S = \kn,Un\T. (8.22)
216
Таким образом, искомое линейное преобразование представляется
соотношением
%п+\ = gS(Xrt, Un),
(8.23)
подобным соотношению (8.19), относящемуся к задаче, в которой
учитывается одно случайное воздействие. Учитывая подобие формул (8.23)
и (8.19), применим в данном случае ранее изложенную схему
определения матрицы оптимального преобразования. Примем, что, как и
прежде, матрица оптимального преобразования g = KxsKs1, где
Ks = M [Sn (Xn, Un) - MSn (Xny Un)] STn (Xn, Un)\ (8.24)
Kxs = M[Xn+i-MXn+i] Sl(Xn, Un). (8.25)
Учитывая выражения (8.21) и (8.22), ковариационную матрицу
Ks можно привести к виду
Ks =
%Хп
к
UnXn
К~
^XnUn
Кип
(8.26)
Элементы ковариационной матрицы (8.26) выражаются через
ковариационные матрицы векторов Хп и Хп. Принимая во внимание
формулу (8.14), получаем
Kun-M[(PXn + Nn)-M(P^Xl+Nl)](PTXl+Nl)^
= PKxnPT+KNn.
Так как Хп и Nn некоррелированы, то аналогично
K%nUn = &
ХпХп
РТ.
В свою очередь, взаимная ковариационная матрица оцениваемого
и наблюдаемого векторов
Kxs - М [(ФХп + QWn)-M {ФХп +QWn)] \Xn Un\ =
= \ФКхпФКхпРт\.
При определении элементов последней матрицы учитывается, что
воздействия Vn и Wn некоррелированы, а также принимается во
внимание равенство матриц Къ = Ку р , которое является следствием
лп лплп
равенства (8.17) М [X — X] ST = О, так как из него М [X — X] X
XF = 0.
Таким образом, основное уравнение для определения элементов
матрицы оптимального преобразования принимает вид:
1&й1 =
\КхпРКхпРт + Кмп
\ФКхпФКхпРт\.
217
Оно эквивалентно системе уравнений относительно элементов gx
и gt-
ёгКхп + 82КхпРт = ФКк;
A Kxn P + g2 (PKxn Рт + Кмп) --= Ф Кхп Рт-
Разрешая эту систему, получаем аналитические выражения для
искомых элементов матрицы оптимального преобразования:
& = (Ф Кп Рт){РКп Рт + Ы-1; (8.27)
g1 = 0_g2P. (8.28)
В полученных соотношениях буквой Кп обозначена
ковариационная матрица ошибок оценивания вектора Хп. При этом
Kn=M(ki-xij(kl-xD=Kx-Kft •
Буквой Х°п обозначен центрированный вектор, и учтено, что
м (х°п-х°п) (хтп-хтп)=м (хп -хп) {xl-xly
Подставляя полученные значения элементов матрицы
оптимального преобразования наблюдаемых значений случайных векторов Un
и Хп в формулу (8.20), получаем алгоритм оптимального оценивания
вектора состояния
Хп+1 =Ф Xn + g2{Un-PXn)> (8.29)
где ft = Ф Кп Рт (РКЛ Рт + Кмп)-1.
Первая часть поставленной задачи решена. Получена оптимальная
оценка значений вектора состояния, относящихся к произвольному
моменту времени п + 1. Располагая этой оценкой, можно рассчитать
ковариационную матрицу погрешностей оценивания вектора
состояния, относящуюся к этому же моменту времени. Эта погрешность
представляет собой разность оценки и оцениваемой величины:
Xn+i==Xn+x-Xn+i=-OXn + g2(Un-PXn)-
-OXn-QWn = glXn-QWn + g2Nn.
Так как значения Хп не коррелированы со значениями Wn и Nn,
то для ковариационной матрицы погрешностей оценивания значений
вектора состояния, относящихся к моменту п + 1, по аналогии с
соотношением (8.11) получаем соотношение
Кп+1 -gi Кп £ + QKwn QT + g2 Кмп gT2, (8.30)
с помощью которого по значению ковариационной матрицы
погрешностей оценивания, относящейся к предшествующему моменту
времени, можно определить значение ковариационной матрицы,
относящееся к любому последующему моменту.
Уравнения (8.27—8.30) представляют собой алгоритмы
оптимальной динамической фильтрации, впервые установленные в 1960 г. Кал-
маном и называемые обычно алгоритмами фильтра Калмана. Идеи
218
Калмана были развиты Быосси, поэтому динамический фильтр иногда
называют фильтром Калмана—Быосси.
Уравнение (8.29) является рекуррентным соотношением,
позволяющим получить оптимальную оценку значения вектора состояния
ЛА на п + 1 цикле функционирования навигационного комплекса.
Оптимальная оценка равна сумме двух величин, первая из которых
получается преобразованием оценки хп вектора состояния,
относящейся к /г-му циклу, осуществляющемуся при переходе к п -\- 1 циклу
работы. Второе слагаемое суммы равно взвешенной разности
результата измерений на n-м шаге vn и того значения измеряемой величины,
которое соответствует оценке вектора состояния на этом шаге. Эта
разность была бы равна нулю, если бы оценка вектора состояния
была безошибочной и если бы результат измерений не искажался
помехами.
В уравнение (8.29) оптимальной оценки входит весовой
коэффициент g2i аналитическая форма записи которого представлена
формулой (8.27). Этот коэффициент обычно называют коэффициентом
усиления фильтра. Из формулы (8.27) видно, что значения этого
коэффициента зависят от интенсивности внешних воздействий и помех и
изменяются от цикла к циклу.
Уравнения (8.27), (8.28), (8.30) представляют собой одно разностное
уравнение рекуррентного типа, называемое уравнением Риккати. Это
уравнение дает возможность на каждом цикле измерений одновременно
с определением оптимальной оценки вектора состояния рассчитывать
ковариационную матрицу погрешностей оценивания, что позволяет
судить о достигаемой точности определения вектора состояния. Как
следует из постановки задачи, полученные алгоритмы обеспечивают
минимизацию среднего квадратичного значения погрешностей
оценивания вектора состояния.
Важной отличительной особенностью алгоритмов оптимальной
фильтрации является то, что они позволяют получать оценки вектора
состояния как в установившемся режиме функционирования
навигационного комплекса, так и в нестационарном режиме, охватывающем
начальный период работы системы и периоды изменения управляющих
воздействий. В общем случае внешнее воздействие Wn может
включать не только возмущающие воздействия случайного характера,
но и управляющие воздействия регулярного типа.
Рассмотрение алгоритмов оптимальной фильтрации показывает,
что получение с их помощью численных значений вектора состояния
для конкретного навигационного комплекса предполагает
использование ЦВМ.
Таким образом, рассмотренная методика и алгоритмы
количественного описания процессов применимы к широкому классу
навигационных комплексов, включая системы с переменными параметрами.
Оптимальная динамическая коррекция счислимых координат.
Методы статистической обработки информации открывают возможность
наиболее полного использования данных измерений в интересах
достижения высокой точности и надежности навигационных определений.
219
Однако для реализации они требуют применения производительных
и быстродействующих ЦВМ, причем, чем сложнее ЦВМ, тем больше ее
объем, масса, энергопотребление и стоимость. В то же время
необходимо учитывать жесткие ограничения, предъявляемые к бортовым
системам ЛА по всем перечисленным показателям, поэтому
приходится идти на упрощение алгоритмов обработки, а значит, и на сужение
возможностей навигационного комплекса. В качестве примера
рассмотрим одну из наиболее простых моделей бортового навигационного
комплекса.
Предположим, что в БНК путь счисляется по данным о скорости
ЛА, получаемым от бортовых измерителей скорости, например от
ДИСС, и результаты счисления корректируются с помощью разност-
но-дальномерной РНС. Проведем количественное рассмотрение
процессов в БНК, включающем два указанных датчика.
Вначале необходимо описать процесс счисления пути.
Дифференциальные уравнения счисления пути отображают связь между
линейными координатами и скоростью ЛА. Векторная форма записи
зависимости между ними имеет вид:
X = U + щ,
где X иХ- векторы поправок к счислимым координатам и их производным;
wx — случайные погрешности измерения скорости.
Дополнив эти выражения уравнениями наблюдения, получим
систему уравнений процесса динамической фильтрации. В общем виде
U = РХ + N,
где U — разность между измеренными значениями радионавигационных величин
и соответствующими значениями, рассчитанными для счислимого
местоположения ЛА (измеренными значениями могут быть дальности до
РНТ или разности дальностей до них).
В частном случае измерения разности дальностей, уравнения
наблюдения выражаются соотношениями:
д1 (S/-i2) = pzl2kz + psl2As + пг\ (8.31)
Д2 (S/*23) = р22.3Д2 + Р*23Д* + Пг. (8.32)
Система уравнений, включающая уравнения счисления и
уравнения наблюдений, является полной и дает возможность исследовать
динамику функционирования БНК рассматриваемого типа. Однако
процессы в БНК, отображаемые приведенными уравнениями,
представляют собой довольно грубое приближение к процессам, протекающим
в реальных комплексах. Одно из существенных допущений, которое
принимается в данном случае, заключается в том, что возмущающие
воздействия предполагаются некоррелированными, что не в полной
мере соответствует реальным условиям. Ранее отмечалось, что от этого
ограничения можно освободиться, увеличивая порядок системы
уравнений. Рассмотрим, как учитывается коррелированность погрешностей
данных о скорости движения ЛА.
220
Для этого к уравнениям (8.31, 8.32) необходимо присоединить
уравнение формирующего фильтра. В качестве такого уравнения можно
использовать дифференциальное уравнение первого порядка.
Av = kvAv + w,
(8.33)
в правой части которого слагаемое w отображает некоррелированный
случайный процесс.
Ранее было показано, что если на динамическую систему,
описываемую дифференциальным уравнением первого порядка, воздействует
некоррелированное возмущение, то реакция системы будет
представлять собой случайный процесс с экспоненциальной функцией
корреляции. Следовательно, процесс Av (f), отображаемый
дифференциальным уравнением (8.33), становится коррелированным. Поэтому, вводя
в рассмотренную ранее систему (8.31) и (8.32) уравнение (8.33) и
принимая хюг = О, получаем систему уравнений, более полно
отображающую динамику процессов в БНК рассматриваемого типа.
Для того чтобы представить систему уравнений (8.31)—(8.33) в
канонической форме (8.9), (8.14), необходимо принять:
=
1
Аг 1
As
Afs
II ° 1
0
\\Wz\
\ а
>»\
• Ф = 1
; и = \
10 0 1
0 1
0 0 0 1
0 0 kvz 0 |
0 0 0
А (бг12) 1
А (бггз)
0
0 |
Kvs\
; Q = \
; Р = \
Рх\г
Рг23
0
о
10 0 0 0
0 0 0 0
0 0 10
| 0 0 0 1
Раг 0 0
PS23 0 0
0 0 0
0 0 0
w =
n = \\n12n2300\\T.
Систему уравнений (8.31)—(8.33) необходимо дополнить также
соотношениями, отображающими начальные условия протекания
исследуемых процессов, т. е. сведениями о начальных значениях
элементов вектора состояния и корреляционной матрицы погрешностей.
Подобный же вид имеют уравнения оптимальной коррекции счис-
лимых координат и скорости в случае, когда в состав БНК входит
инерциальная система и разностно-дальномерная РНС. Приведем
в качестве примера уравнения процессов, протекающих в северном
канале такого комплекса. Первое из уравнений отображает операцию
счисления пути, и аналогично уравнению (8.31) As = Avs.
Второе уравнение учитывает ускорение, измеряемое
акселерометром ИНС. Как известно, это ускорение в первом приближении
пропорционально углу |3 наклона гиростабилизированной платформы
относительно вертикали и гравитационному ускорению g0, т. е.
Av = — g0p + b, где b — смещение нуля акселерометра.
Третье уравнение описывает прецессионное движение
гиростабилизированной платформы, к гироскопу которой прикладывается
момент интегральной коррекции, вызывающий вращение платформы
221
с угловой скоростью: (3 = &vs/R3 + е. Здесь е — угловая скорость
собственного ухода гироскопа; vC4/R3 — угловая скорость вращения
платформы; R3 — радиус Земли.
Наконец, четвертое уравнение представляет собой уравнение
формирующего фильтра случайного процесса, отображающего дрейф
гироскопа; 8 = — цЕе + w& (/), где we {t) — некоррелированное случайное
возмущение.
Уравнения процессов в БНК приводятся к каноническому виду
(8.9), (8.14), если используются следующие обозначения:
Х =
As
A/go
8
=
; Ф = |
1 0 0 0 0 1
0 0 00
0 0 00
0 0 0 1 |
1 °
1 0
0 0 ~gl
0 R-* 0
0 0 0
»
w — \
1 ° 1
0
0
1 ®г {t) I
0 |!
) 0
1
Q
Ввиду того, что здесь рассматривается лишь северный канал, для
коррекции ИНС достаточно привлечь результаты одного измерения
разности расстояний, поэтому вектор наблюдений и матрицы частных
производных по сравнению со случаем коррекции двух координат
упрощаются: в состав первого из них входит лишь один отличный от
нуля член А (бг); в составе матрицы Р частная производная р8ф 0.
Отметим основные особенности процесса обработки информации
при оптимальной динамической коррекции.
Аппарат динамической фильтрации обеспечивает оптимизацию
процесса коррекции в условиях непостоянства оцениваемых
компонентов вектора состояния и параметров динамической системы, которая
подвергается коррелированным или некоррелированным случайным
воздействиям. В процессе определения текущих значений компонентов
вектора состояния рассчитывается корреляционная матрица
погрешностей определяемых величин. Таким образом, реализация процесса
оптимальной оценки параметров движения в нестационарных
условиях представляет собой основную отличительную особенность
методов динамической коррекции.
С точки зрения навигационных приложений очень важно то, что
уравнения динамической фильтрации в принципе позволяют
определять не только дисперсии случайных погрешностей, но дают
возможность оценивать также и значения систематических погрешностей,
присущих навигационным датчикам. Систематические погрешности
рассматриваются в качестве дополнительных компонентов вектора
состояния и определяются в процессе динамической фильтрации вместе
с поправками к счислимым значениям координат и скорости, что
создает благоприятные условия для достижения высокой точности
навигационных определений.
222
Глава 9
ПРИМЕНЕНИЕ РАДИОТЕХНИЧЕСКИХ МЕТОДОВ
И СРЕДСТВ ДЛЯ РЕШЕНИЯ НАВИГАЦИОННЫХ ЗАДАЧ
9.1. ОПРЕДЕЛЕНИЕ МЕСТОПОЛОЖЕНИЯ ЛА. РАБОЧИЕ ЗОНЫ РНС
На основе информации, получаемой от РНС, можно решать
следующие навигационные задачи:
определять линии положения и местоположение ЛА;
выводить ЛА в заданную точку пространства (район и аэродром
посадки, ИПМ, КПМ и др.);
контролировать маршрут (трассу) полета;
выполнять заход на посадку, снижение и посадку ЛА;
выходить на заданную (предвычисленную) линию положения;
определять координаты точки на земной поверхности и решать
другие задачи.
Для выдерживания заданного навигационного режима полета
экипаж ЛА должен постоянно знать местоположение в пространстве, что
позволяет ему определять отклонение от заданной траектории полета
и контролировать время выхода на основные навигационные
ориентиры.
Местоположение ЛА может быть определено с помощью
радионавигационных методов и средств следующими путями:
определением двух или нескольких линий положения, полученных
относительно одной или нескольких РНТ;
обзорно-сравнительным методом;
методом координатных преобразований;
счислением пути;
определением момента пролета РНТ.
Первый, наиболее точный способ определения местоположения
ЛА, применяется в маршрутных полетах. При этом для решения
данной задачи, обычно используют две линии (поверхности) положения,
а при наличии бортовой ЭВМ обрабатываются результаты
определения множества линий положения. Именно этому способу определения
местоположения уделено наибольшее внимание в последующем
изложении.
Обзорно-сравнительным способом местоположение ЛА оценивают
с помощью бортовых РЛС, сравнивая радиолокационное изображение
местности с картой. Методика решения этой задачи, а также
определения других навигационных параметров с использованием РЛС
достаточно полно изложена в курсах «Основы радиолокации» и
«Радиолокационные системы» [39, 51, 58].
Логика способа координатных преобразований состоит в
определении с помощью РНС параметров точки, являющейся проекцией мес-
223
тоположения Л А на земную поверхность, с последующим расчетом
координат (обычно в прямоугольных координатах). Основная часть этой
задачи сходна с первым способом оценки местоположения, а
измерительная информация преобразуется и обрабатывается машинными
методами.
Местоположение ЛА непрерывным счислением пути определяется
с использованием вычислителей; особенности решения этой задачи
рассмотрены в гл. 1.
Как отмечалось к основным методам определения местоположения
Л А на плоскости относятся: дальномер ный (местоположение
определяется при пересечении двух окружностей), угломерный
(местоположение определяется при пересечении двух прямых), разностно-даль-
номерный (местоположение определяется при пересечении двух
гипербол), угломерно-дальномерный (местоположение определяется
при пересечении прямой с окружностью).
Важнейшими вопросами, которые возникают при оценке
местоположения Л А любым из указанных методов, являются точность
получения навигационных данных в процессе решения этой задачи, а также
размеры и конфигурация рабочей зоны (области пространства), в
пределах которой погрешность определения местоположения ЛА с
помощью РНС будет меньше заданного (допустимого) значения.
Решение задач оценки точности местоположения ЛА с помощью
РНС основывается на оценках погрешностей линий положения с
использованием в общем случае вероятностных категорий и понятий о
градиентах полей навигационных параметров.
Точность определения поверхностей и линий положения ЛА. Как
отмечалось, измерительная информация, получаемая от РНС,
представляет собой не только временные процессы, но и отображает в
общем случае изменение пространственной протяженности и ориентации
радиоканала РНС в соответствии с изменением параметров подвижных
объектов. Погрешности измерения геометрических навигационных
параметров с помощью РНС вызывают погрешности определения
местоположения и траектории движения ЛА в пространстве. Поскольку
взаимосвязь между указанными погрешностями определяется
характером измеряемого радиотехническими методами навигационного
параметра, то для выявления этой связи целесообразно использовать
элементы теории скалярного поля.
Совокупность точек пространства, в которых скалярная
величина имеет одно и то же значение, образует эквипотенциальную
поверхность уровня скалярного поля. Аналогично применительно к
скалярным полям навигационных параметров, измеряемых с помощью РНС,
поверхность уровня скалярного поля представляет собой поверхность
(а на плоскости — линию) положения равных значений измеряемой
навигационной величины.
Поскольку в пределах рабочих областей навигационных систем
измеряемые параметры at представляют собой непрерывные функции
координат и имеют непрерывные первые производные, изменение поля
навигационного параметра можно описать его градиентом (градиент —
векторная величина, показывающая направление наискорейшего роста
224
скалярной функции, а ее модуль
характеризует степень изменения
этой функции). _
Если обозначить через п
нормаль к поверхности положения,
направленную в сторону
возрастания (рис. 9.1), гто градиент
навигационного параметра
grad a = g=-^-n, (9.1)
on
М/
Рис.
йп
9.1. К оценке градиента поля
навигационного параметра
где численное значение (модуль) градиента выражается производной
да/дп = |grad a\.
Используя градиент, можно определить значение производной
от параметра а по любому направлению. Например, если задан
градиент и известен угол между нормалью к поверхностью положения п
и направление S, производная по которому отыскивается, то эту
производную можно выразить в виде:
da/dS = | grad a | cos (S, Ъ). (9.2)
Понятием градиента удобно пользоваться при анализе
точностных характеристик РНС, поскольку оно позволяет связать
погрешность измеряемого параметра Да с погрешностью определения
поверхностей и линий положения An. Действительно, переходя в
соотношении (9.1) к конечным приращениям, найдем смещение
поверхностей и линии положения
An = Aa/|grad a\.
(9.3)
Соотношение (9.3) показывает, что для уменьшения погрешности
определения поверхностей и линий положения, а также
местоположения необходимо стремиться к увеличению градиента поля
навигационного параметра и точности его измерения.
Градиенты, соответствующие различным измеряемым параметрам,
могут быть найдены, если известны уравнения линий и поверхностей
положения, т. е. функциональная зависимость для навигационного
параметра в выбранной системе координат.
В частности, если функция для at задана аналитически в
прямоугольной m-мерной системе координат а = а (хъ ..., хт), то модуль
градиента
|grada|
Ytm
откуда для плоских поверхностей при а = а (х, у) имеем
(9.4)
(9.5)
8 Зак. 444
225
Используя соотношения (9.1)—(9.5), оценим величину
погрешностей определения линий положения для дальномерных, угломерных
и разностно-дальномерных методов измерения навигационных
параметров. При этом будем полагать, что начало координат при
определении навигационного параметра совпадает с местоположением РНТ.
При дальномерных методах (рис. 9.2, а) измеряемое расстояние
до РНТ г = Ух2 + у2.
Тогда в соответствии с выражением (9.1) модуль градиента
Igrad r\ = 1, а погрешность измерения расстояния Аг вызовет
смещение линии положения (линии равных расстояний) на величину An = Аг
или на соответствующее среднеквадратичное отклонение
ап = аг. (9.6)
В случае угломерных методов (рис. 9.2, б) измеряемая величина
а = arctg х/у, откуда с учетом равенства (9.1) модуль градиента
Igrad а | = 1/r, a погрешность измерения угла Да вызовет смещение
линии положения An = Дал Выраженное в радианах
соответствующее среднеквадратичное отклонение ЛП
сгп = о«г (9.7)
и в градусном измерении
сгп = 0,017саг, (9.8)
где сг — среднеквадратичная погрешность измерения пеленга.
При использовании разностно-дальномерных методов (рис. 9.2, в)
измеряемая разность расстояний
га — гв = У(х + d)2 + у2 — V(x — d)2 + у2, откуда, учитывая
равенство (9.1) Igrad (га—Ы1 = 2 sin ср/2, и линейное смещение линии
положения (линии равных разностей расстояний), вызванное
погрешностью в измерении разности расстояния,
An = Дг/2 sin 0,5 ср. (9.9)
Соответственно для среднеквадратичного отклонения ЛП
ап = сДг/2 sin 0,5 ф. (9.10)
Последнее соотношение показывает, что погрешность
определения ЛРРР'зависит от угла ср. Наименьшая погрешность^ аи = сДг/2
Рис. 9.2. К определению погрешностей линий положения:
« — для дальномерных систем; б —для угломерных систем; в —для разностно-дальномерных
систем
226
Рис.
9.3. К определению
погрешности местоположения
будет при ф = 180°, что
соответствует местонахождению ЛА на линии
базы АВ; при удалении ЛА от базы
ап возрастает. Соотношения (9.6)-—
(9.10) широко используются в
задачах определения (выбора) ЛП.
Оценка точности определения
местоположения ЛА. Рассмотрим
вначале задачу определения
местоположения ЛА на плоскости (в
пространстве) с помощью двух РНС,
относительно которых заданы
(измерены) линии (поверхности)4поло-
жения ЛП! и ЛП2 (рис. 9.3).
Предположим, что в результате
допущенных при измерении навигационных параметров погрешностей Ааг
и Аа2 линии положения определены с погрешностями Апг и Дя2. Тогда
местоположению объекта по результатам измерения будет
соответствовать точка Мъ определяемая с отклонением (погрешностью) Аг
относительно точки М фактического местоположения объекта. Поскольку
в общем случае линии положения могут пересекаться под
произвольным углом у, то из рассмотрения построенного параллелограмма
погрешностей
Дг2 = С2 _|_ b2 + 2bc cos y, (9.11)
где Ъ = Anjsm 7; с = An2/sin у.
Соотношение (9.11) можно представить в виде:
Аг2-—— (Ап^ Ап2\-2Ап1 An2cosy)9 (9.12)
sin2 7
из которого следует, что при детерминированном способе (наиболее
простой случай) задания погрешностей линий (поверхностей)
положения точность местоположения ЛА зависит от точности задания
(определения) ЛП и особенностей «геометрии» системы, т. е. значения угла
7. В понятие «геометрии» системы входят размер базы системы,
расстояние от центра базы до ЛА и направление на него относительно
перпендикуляра к центру базы.
Для обеспечения высокой точности определения места ЛА с
помощью конкретных РНС и получения полной картины распределения
погрешностей в пределах рабочей зоны РНС используют
вероятностные характеристики оценки местоположения и, в частности, понятие
эллипса (эллипсоида) погрешностей (эллипса рассеяния).
Если, например, при оценке вероятности результирующей
погрешности определения места ЛА независимые погрешности линий
положения пъ п2, ns заданы дисперсиями их нормальных распределений
°ль °л2> °пзу можно записать соотношение для трехмерной плотности
вероятности совместного появления этих погрешностей:
w(nun2tns)
1
(2л)3/2 оП1 оП2 опз
ехр
21 <&
ил2
°«3
)]
+ -2i- .(9.13)
227
Приравнивая показатель
степени выражения (9.13)
некоторой постоянной Я,
получим уравнение поверхности,
на которой плотность
распределения погрешностей места
одинакова, т. е.
nfKi + n\lQh + пЦо2пЪ =
= 2АЛ (9.14)
Полученное уравнение есть
эллипсоид погрешностей
(эллипсоид рассеяния) в
косоугольной системе координат
О, tti, n2y п3, оси которой
совпадают с нормалями к поверхности положения. Эллипсоид
погрешностей ограничивает область пространства, в которую с заданной
вероятностью попадают точки местоположения ЛА. В случае оценки
вероятности погрешности местоположения объекта на плоскости
соотношение (9.14) для двумерной плотности распределения зависимых
значений погрешностей примет вид
Рис. 9.4. Эллипс погрешностей определения
местоположения ЛА
2(1
-Р2) Unl
2p/ti n2
Gni °na
■ «2
b2,
(9.15)
где р — коэффициент корреляции, характеризующий степень взаимосвязи
погрешностей параметров.
Очевидно, что кривая, описываемая соотношением (9.15), есть
эллипс погрешностей (рис. 9.4).
Для оценки точности местоположения объекта с использованием
эллипса погрешностей целесообразно перейти к прямоугольной
системе координат, ось Од: которой совпадает с направлением большой оси
эллипса, а центр с точкой М — истинным местом ЛА. В этом случае
параметры пг и п2 оказываются независимыми и согласно выражению
(9.13) совместная плотность вероятности их погрешностей
W(nin2) = 1- ехрГ—— ^ + —Ц. (9.16)
Тогда, используя каноническую форму записи уравнения
эллипса погрешностей
хУс2 + у2/Ь2= 1, (9.17)
преобразуем соотношение (9.15) к виду
кгх* + к2у* =4V<tfi о2п2/(о2т +о2п2). (9.18)
где ^i,2 = l ±
(-
4а,
«1 ип2
^1+°&
sin2 у j
М*
(9.19)
228
Используя формулы фЛ1) и (9.18), запишем сооТноШейий дли
оценки квадратов полуосей эллипса погрешностей:
Ь2= _4in(l-p)a^ ofo/kM + агп2); (9.20)
c*=-4\n(l-p)o2nlo2n2/k2(o2nl+o22). (9.21)
Угол поворота большой оси эллипса относительно биссектрисы
угла между линиями положения (т. е. ориентация эллипса)
определяется соотношением
tgft^tgy til2 - <9'22)
Формулы (9.17)—(9.22) позволяют определить размеры и
ориентацию эллипса погрешностей и осуществить его построение.
Если требуется найти вероятность Рмс попадания расчетного
местоположения ЛА внутрь области Q (X), ограниченной эллипсом
заданных размеров, то используя соотношение
м0 = J f w fa, n2) dnx dn2, (9.23)
Р =
и выполнив интегрирование с учетом формулы (9.16), получим
Л*с= 1-ехр(-^2), (9.24)
где Я = К1-1п(1-Рмс) .
Выражение (9.24) определяет размеры эллипса, вероятность
попадания в который фиксирована. Полагая, например, X = 1; 1,73; 2,15,
найдем согласно равенству (9.23) вероятности местоположения ЛА
в пределах соответствующих эллипсов рассеяния: PMcd) = 0>63
^мс(1,7з) = 0>95; «РМс(2,15) = 0,99.
Хотя эллипс погрешностей полностью характеризует точность
определения местоположения ЛА на плоскости и в пространстве, однако
его нахождение не всегда является необходимым. Обычно в практике
навигационных расчетов используется приближенная методика оценки
местоположения ЛА на основе среднего квадрата отклонения
объекта от его истинного положения в пространстве и на плоскости (а не
относительное распределение погрешностей по координатным осям).
Тогда для оценки точности местоположения ЛА достаточно к
соотношению (9.12) применить теорему о дисперсии случайных величин
о? = —— (oft + ой + 2рад1 оп2 cos у). (9.25)
sinv
Переходя от погрешностей определения линий положения к
погрешностям измерения навигационных параметров, соотношение (9.25)
перепишем в окончательном виде, учитывающем величины модулей
градиентов параметров:
]/(^Г+ f^iy + 2p-2if2LcosT , (9.26)
V \\gi\) Vifti/ ift'fti
где |ft | = | grad ax|; | g2\ = |grada2|.
1
siri7
229
Приведенная методика оценки
точности местоположения ЛА целесообразна
для вполне конкретной расстановки
наземных станций РНС. Для полной
оценки навигационных возможностей РНС,
сравнения их между собой и
рационального размещения наземных станций
производится построение линий (кривых)
равной точности определения
местоположения ЛА (т. е. линий, для которых
в каждой точке соблюдается условие
or = const) и рабочей зоны (области)
системы.
Методика построения рабочих зон
РНС. При построении рабочей зоны РНС
определяют значение области Q
пространства (х, у у г), в пределах которого
погрешность измерения параметров не
превышает (с заданной вероятностью)
выбранного, например
среднеквадратичного, значения. Для этого используют
обычно соотношение (9.26), на основе
которого может быть построено семейство
кривых, соответствующих постоянному
значению оу при заданных значениях аа1 и оа2 (кривых равной
точности). Поскольку размеры рабочей зоны определяются также
дальностью действия системы и диаграммами направленности ее антенн
в горизонтальной и вертикальной плоскостях, эти характеристики
также должны быть учтены при построении рабочих зон конкретных
типов РНС.
Рассмотрим упрощенную методику построения рабочих зон для
дальномерных, угломерных, разностно-дальномерных и угломерно-
дальномерных РНС.
Если местоположение объекта определяется, например, с помощью
информации от двух радиодальномеров, расположенных в точках А
и В (рис. 9.5), то соотношение (9.26) при независимости измеряемых
дальностей D± и D2 (p = 0) с учетом формулы (9.6) примет вид:
Рис. 9.5. Рабочая зона дально-
мерной РНС
1
sin у
Vobl +02D2 •
(9.27)
Если полагать, что точность измерения дальности с помощью обоих
радиодальномеров одинакова и Od± = oD2 = gd, to
ar =
_ UD
VT
sin-у
<C
Г ДОН»
(9.28)
где о>Доп — значение допустимой погрешности оценки местоположения с
помощью дальномерной РНС.
230
Очевидно, что в данном случае постоянной точности сг будут
соответствовать кривые, в каждой точке которых угол между
направлениями на радиодальномеры в точках А и Б есть величина постоянная:
sin у = —^- V~2 = const. (9.29)
®г доп
Такими линиями будет семейство окружностей, опирающихся на
базу d, как на хорду.
Как видно из рис. 9.5, минимальное значение среднеквадратичной
погрешности местоположения аг достигается на окружности /, для
которой база d является диаметром и sin у = 1. При удалении
объекта от базы угол у уменьшается и погрешность оценки местоположения
увеличивается.
На окружности 2 погрешность достигает допустимого значения
°V доп> а ПРИ дальнейшем удалении от базы превосходит это значение.
Напротив, при приближении объекта к базе величина sin у
уменьшается, что приводит к возрастанию погрешностей места. При
достижении окружности 3 условие <гг = оудоп вновь выполняется, а при
дальнейшем уменьшении расстояния до базы погрешность будет
превосходить допустимую. Таким образом, рабочей зоной дальномерной
РНС будет часть плоскости (заштрихованная на рис. 9.5) по обе
стороны от базы, заключенная между окружностями 2 и 3. Заметим, что
область пространства, ограниченная линиями максимальной
дальности действия радиодальномеров, обычно больше рабочей зоны РНС.
Однако требуемая точность оценки местоположения ЛА с помощью
РНС гарантируется лишь в пределах рабочей зоны.
Из соотношения (9.29), в частности, следует, что увеличение
погрешности aD при заданном значении сггдоп приводит к сокращению
размеров рабочей зоны (пунктирная линия внутри рабочей зоны).
Отсюда можно сделать важный вывод о влиянии уменьшения точности
радиодальномерной РНС на размеры ее рабочих зон, что справедливо
для любого типа РНС вследствие обобщенности исходных
предпосылок анализа геометрии их рабочих зон. Уменьшение точности РНС,
вызванное любым внешним и внутренним фактором и, в частности,
недостаточностью контроля параметров в процессе эксплуатации РНС,
может привести к значительному сокращению их рабочей зоны.
При использовании угломерного метода оценка местоположения
ЛА осуществляется по пеленгам двух наземных радионавигационных
точек А и В, разнесенных на величину базы d (рис. 9.6). При
независимости измеряемых радиопеленгов для данного случая из
соотношения (9.26) с учетом равенства (9.8) погрешность местоположения
объекта
= _^Ш_ ут ^ g 30)
sin у
где Dlt D2 — дальности от ЛА до радионавигационных точек Л и В;
о ь вц2 — среднеквадратичные погрешности радиопеленгов^по двум РНТ.
231
В частном случае, когда аа1 = сга2 = ва,
0,017аа
ог = -
sin у
VDI + D
(9.31)
Для определения границ рабочей зоны необходимо построить
кривую равной точности, в любой точке которой о> = сг доп. Для этого
преобразуем соотношение (9.30) с учетом того, что согласно рис. 9.6
у = 180° — (аг + а2) и
__ d sin g2 # n __ dsmax
sin(a!+a2)
*V
D, = -
sin(ax+a2)
Подставив найденные значения Dx и D2 в формулу (9.31),
<rr = kdaay
l/sin2a1+sin2 a2
получим
(9.32)
(9.33)
где £ = 0,017
sin^ai+o^)
Коэффициент k в формуле (9.32) при известных значениях аг и
а2 определяется по специальным вспомогательным таблицам [33],
используемым при построении рабочих зон РНС. Такое построение
производится обычно исходя из заданных значений d, aa и сгг, согласно
которым из формулы (9.32) находят коэффициент k, а затем по
таблицам — соответствующие ему значения аг и а2. Пересечение
вспомогательных линий, проведенных под углами ах и а2, дает точки Мъ М2,
М3, ..., Мп, принадлежащие кривой заданной точности.
На рис. 9.6 приведен вид рабочей зоны угломерной РНС,
построенной с помощью указанной методики. Определим минимальное значение
погрешности оценки местоположения в пределах рассматриваемой
рабочей зоны. Для этого положим
в соотношении (9.31) D1 = D2 = D,
а вместо D запишем его значение
в виде D = d/2 sin 0,67.
Тогда соотношение (9.31) можно
представить как
0,017 <т„
ог = - г-^. (9.34)
sin у sin 7/2
Для получения минимального
значения аг приравняем нулю его
производную по углу у, т.е. 1/sinY
sin (7/2) = — 0,5 cos(7/2) sin 7 — cos 7
sin (7/2) = 0, откуда tg-7 = 2tg (7/2)
и 7 = 109°28\
Найденному значению угла 7
соответствуют две точки в рабочей
области угломерной РНС,
расположенные симметрично на
перпендикуляре, проведенном через сере-
Рис. 9.6. Рабочая зона угломерной ДИНУ баз*? (см. РИС. 9.6) И на рас-
рнс стоянии 0,35^ от яее,
№
Ё практике расчетов
построения рабочих зон угломерных РНС
обычно используют шаблоны
(рис. 9.7) с кривыми постоянных
значений k. Если заданы значения
(Тг, ога и d = 10 см, то
непосредственно по шаблону можно путем
интерполяции построить кривую
равной точности.
Если, например, нужно
построить рабочую область для
системы
с d = 200 км; <га = Г и аг =
Рис. 9.7. Шаблон кривых равной
точности угломерной РНС
= 11 км, то значение &,
вычисленное из соотношения (9.32), равно
0,052. Производя интерполяцию между кривыми, соответствующими
значениям kx = 0,005 и k2 = 0,06, построим искомую кривую. Для
перенесения полученной кривой на карту необходимо учесть масштаб
чертежа, который при заданных значениях параметров для
рассматриваемого примера составляет 1 : 2 000 000. Кроме кривых равной
точности, на шаблоне иногда указывают также расположение и
размеры эллипсов погрешностей для нескольких точек рабочей области,
что позволяет получить общее представление о распределении
погрешностей оценки местоположения по различным направлениям.
При построении рабочей зоны разностно-дальномерной системы
соотношение (9.26) с учетом формулы (9.10) запишем в виде:
аг =
V lsin0,5<pj +\s
;)'+
2ро~х q2
sin 0,5 ф2/ sin 0,5 ф2 sin 0,5 ф2
2 sin у
(9.35)
где o"i и ст2 — среднеквадратичные погрешности определения разности по 1-й и
2-й базам;
фх и ф2 — углы между радиальными направлениями на наземные станции
(по каждой базе) из точки, соответствующей местоположению Л А
(см. рис. 9.2, в)
Если в частном случае погрешности определения разности
расстояний по двум базам системы (состоящей из трех наземных станций)
одинаковы и независимы, т. е.
(9.35) получим
0j = а2 - а и р = 0, то из формулы
2 sin
Ф1+Ф2
У 81П0,5ф!
1
sin 0,5 ф2
(9.36)
Кривые постоянной точности, ограничивающие рабочую зону
разностно-дальномерной системы, построены на рис. 9.8 с использованием
соотношения (9.36) для различных величин допустимых погрешностей
^гдоп оценки местоположения ЛА. Из анализа соотношений (9.10),
(9.35) и (9.36) и рис. 9.8 следует, что наибольшая точность оценки
местоположения ЛА достигается на базах системы. В направлении
233
Рис. 9.8. Рабочая зона разностно- Рис. 9.9. Рабочая зона угломерно-
дальномернои РНС дальномерной РНС
перпендикуляра, восстановленного из середины базы, погрешности
оказываются меньшими, чем в других направлениях; в направлении
базы за ее пределами, когда ф = 0 (или 360°), погрешности становятся
бесконечно большими и использование системы в секторах,
прилегающих к продолжению линии баз, не представляется возможным.
Для угломерно-дальномерного способа оценки местоположения
ЛА выражение (9.25), преобразованное согласно формулам (9.6)
и (9.8) определения погрешностей линий положения, запишется так:
oT = Vob + D*Ga, (9.37)
где odug — среднеквадратичные погрешности определения линий положения
(ЛРР и ЛРП) с помощью угломерно-дальномернои системы.
Из соотношения (9.37) видно, что точность определения
местоположения ЛА с помощью угломерно-дальномерных систем зависит лишь
от точности определения указанных линий положения, так как угол
у их пересечения всегда равен 90°. Для построения кривых заданной
точности, ограничивающих рабочую зону угломерно-дальномернои
системы, преобразуем равенство (9.37) в уравнение
Ядоп = Vo2rAon~o2D/oa = const, (9.38)
представляющее собой окружность радиуса Вдоп, описанную вокруг
места расположения наземного радиомаяка РМ (рис. 9.9). Кроме того,
внешняя граница рабочей зоны определяется максимальной
дальностью действия Z)max, определяемой по общей методике оценки
дальности УКВ радиосредств.
234
Рассмотренная выше методика построения рабочих зон РНС
различного типа обеспечивает решение задач радионавигации ЛА с
заданной точностью. Как следует из приведенных данных, площадь
рабочей зоны РНС (в пределах дальности действия наземных станций)
увеличивается с увеличением размеров базы и уменьшением
погрешностей навигационных параметров, измеряемых с помощью РНС.
Рабочая зона может быть расширена и в результате увеличения
допустимых при решении определенных тактических задач значений
погрешности. Для рассмотренных РНС (кроме угломерно-дальномерной)
характерно наличие определенного (главного) направления в
пределах рабочей зоны, которое обеспечивает наивысшую точность
определения местоположения ЛА. Как правило, это направление проходит
через центры баз и перпендикулярно к ним.
9.2. ВЫВОД ЛА В ЗАДАННУЮ ТОЧКУ
При маршрутном полете намечают обычно несколько точек, через
которые должен пройти ЛА. В качестве таких точек (ориентиров)
служат исходный пункт маршрута (ИПМ), поворотный пункт
маршрута (ППМ), исходный пункт обратного маршрута (ИПОМ), конечный
пункт маршрута (КПМ), точка начала снижения и др.
Используя радионавигационные средства, ЛА в заданную точку
можно вывести в результате полета: на РНТ; по заданной линии
положения; по прямолинейному либо произвольному маршруту.
Полет на РНТ может выполняться пассивным и активным
способами с использованием радиокомпасов, радиосистем ближней
навигации, бортовых РЛС и др.
Пассивным полетом на РНТ называется полет, выполняемый с
постоянной значением КУР (обычно с помощью АРК) без учета действия
ветра; причем продольная ось ЛА совмещается с направлением на РНТ.
В этом случае ЛА описывает криволинейную траекторию полета,
которая носит название радиодромии (рис. 9.10).
При активном способе полета на РНТ учитывается влияние ветра
и значение КУР устанавливается равным углу сноса а, который
рассчитывается или измеряется, т. е. КУР = а. Возможные отклонения
от заданного маршрута ввиду неточного определения ветра (или его
изменения) либо из-за
погрешностей пилотирования
определяются по изменению
значения КУР. Для
корректировки уклонения и внесения
поправки в угол сноса при
полете с помощью АРК дово-
рачивают ЛА в сторону
отклонения стрелки
радиокомпаса; при этом значение дово-
рота определяется разностью
курсовых углов и величиной
поправки на угол сноса [33]. рис. 9.10. Пассивный полет на РНТ
235
Активный способ полета на РНТ
является основным в
радионавигации, так как он повышает точность
выдерживания заданного
маршрута, особенно при полете на большие
расстояния и при сильном ветре.
Пассивный способ, обладающий
простотой и достаточной
надежностью выполнения, применяется для
вывода ЛА на РНТ, находящуюся
Рис. 9.11. К определению поправки от него на небольших расстояниях,
к курсовому углу при выходе на Выход в заданную точку при
лзп полете по линии положения,
проходящей через эту точку, осуществляется с учетом особенностей
используемых ЛП (линии предвычисленного пеленга, орбиты, гиперболы
и др.) и значений координат точки выхода.
Полет по линиии равных пеленгов
начинается с выхода ЛА на линию предвычисленного пеленга (ЛПП). При
использовании радиокомпаса определение момента выхода на ЛПП
производится контролем значения г|)рп = КУР, которое
определяется (рис. 9.11) по карте в точке выхода а|)Р11 = МПР — ум.
При этом следует выдерживать расчетное значение магнитного
курса Тм» которое устанавливается на указателе АРК, и тогда в момент
выхода на ЛПП МПР = МПРП, где МПРП — предвычисленное
значение магнитного радиопеленга.
При выполнении выхода на ЛПП для последующего полета по
этой линии (полет на или от РНТ) необходимо учитывать радиус
разворота ЛА и вводить соответствующую поправку А-фр в величину i|)pn
или МПРП.
Пусть РНТ установлена в точке А и ЛА выходит в предвычислен-
ную точку 5, удаленную от РНТ на расстоянии D (М — точка
разворота с учетом упреждения).
Из треугольника MB А следует, что sin Да|)р = -j-j sin Ay.
Из треугольника BOM: MB = R tg 0,5Ay; MA = D,
где Ay — угол разворота Л А для выхода на ЛПП.
С учетом этого
sin А¥р = — tg (Av/2) sin Ay, или sin Аг|)р = — sin2 (Ay/2),
откуда A% = 120 — sin2(Ay/2.) (9.39)
Соотношение (9.39) позволяет вычислить поправку Aipp с учетом
необходимого упреждения на разворот и, следовательно, обеспечить
выход на ЛПП с заданным курсом.
После вывода ЛА на ЛРП осуществляется полет по маршруту,
соответствующему форме этой линии положения, т, е. обеспечивающему
236-
выполнение условия МПР Ф const при непрерывном изменении курса
полета.
Наиболее просто полет по ЛРП выполняется с использованием
угломерных радиомаяков СБН, непрерывно доставляющих
информацию о текущих значениях ПР. Полет по ЛРП часто выполняют,
используя также совмещенный указатель (типа УГР или подобный ему),
на котором индицируются значения КУР (стрелки радиокомпаса)
и магнитного курса ЛА. В этом случае при полете необходимо с
помощью задатчика пеленгов установить на указателе УГР заданное
значение МПР. Затем изменением курса полета нужно добиться
совмещения стрелки радиокомпаса АРК со стрелкой задатчика пеленга.
Очевидно, что необходимый курс полета будет подобран автоматически и
для дальнейшего полета по ЛРП стрелка АРК должна удерживаться
совмещенной со стрелкой задатчика.
При автоматизированном способе полета ЛА по ЛРП (что
позволяет исключить использование карты) возможен полет в направлении
на угломерный радиомаяк или от него (режимы «азимут на — от»). При
этом необходимо выполнение равенства ИПРТ = ИПР3, левая часть
которого соответствует текущему значению измеряемого с помощью
угломерной системы истинного пеленга, а правая — значению
заданного пеленга.
Возникающее при невыполнении этого условия (рис. 9.12) боковое
отклонение ЛА от ЛЗП х = (ИПРТ — ИПР3) R.
Величина х является параметром, по которому производится
управление боковым движением ЛА. Для определения х в вычислитель
непрерывно вводятся текущие значения ИПРТ и дальность R от
радиомаяка, а также вводимое вручную значение ИПР3. Для указания
положения ЛА относительно ЛЗП в этом случае используют нуль-
прибор (его вертикальную стрелку), на который подается
управляющий сигнал U {t, #), пропорциональный боковому отклонению х.
Полет по линии равных расстояний. Выход в заданную
точку можно осуществлять полетом по ЛРР (орбите) с
использованием дальномер ной радиосистемы (рис. 9.13). При этом определяется
дальность R до заданной точки и рассчитывается линейное упреждение
на разворот AR = R (1 — cos Ду), где Д-у — угол разворота ЛА для
Рис. 9.12, Полет по заданной ЛРП Рис. 9.13. Выход на заданную ор
биту
231
Рис. 9Л4. Полет по -прямолинейному
маршруту с использованием угло-
мерно-дальномерной системы
выхода на орбиту; R —
расстояние от дальномерного радиомаяка
до ЛА.
v^lrj \^\ I ^ля вых°Да на °Рбиту маршрут
^r "x^^^vv I /7г Ли полета подбирается таким образом,
чтобы угол разворота не превышал
50—60° для одиночного ЛА и 30—
40° для группы летательных
аппаратов.
При автоматизации решения
задачи полета по орбите значение
дальности, измеряемой на борту
ЛА, равно заданному значению,
т. е. RT = jR3. При этом
параметром (позиционным сигналом)
управления полетом является значение
бокового отклонения ЛА от ЛЗП (х = RT — R3). Сигнал бокового
отклонения ЛА, пропорциональный х, используется для управления
вертикальной стрелкой нуль-прибора (или подается в автопилот). Это
позволяет контролировать положение ЛА относительно орбитальной
ЛЗП и обеспечивать выход на нее.
Полет по произвольному маршруту. Полет
в заданном направлении (для выхода в намеченную точку) осуществляют
на основе навигационной информации о местоположении ЛА,
полученной от РНС различного типа. Как правило, эта задача решается с
использованием автоматизированных средств управления полетом, а
управляющий сигнал, пропорциональный величине бокового уклонения
ЛА от ЛЗП, вырабатывается бортовой ЭВМ либо малогабаритным
специализированным счетно-решающим устройством, входящим в состав
радиотехнической системы.
При использовании угломерно-дальномерных систем положение ЛА
на ЛЗП постоянно контролируется по текущим значениям дальности
до наземного радиомаяка R и радиопеленгов ПР (при оценке
местоположения непосредственно на борту ЛА) или ПС (при оценке
местоположения Л А на земле).
Предположим, что ЛА, находящийся в точке М (рис. 9.14),
совершает полет в направлении заданной точки 0, координатами которой
являются R0 и ПС0, а положение ЛЗП определяет ЗПУ.
Уравнение прямой, соединяющей точки М и О при заданных
значениях ее координат, имеет вид
d3 = R0 sin (ЗПУ — ПС). (9.40)
Для текущих значений координат уравнение
dT = RT sin (ЗПУ — ПСТ) (9.41)
определяет ЛФП, параллельную заданной прямой.
Условием движения ЛА точно по ЛЗП является выполнение
равенства dT = d3. При отклонении ЛА от заданного маршрута
(см. рис. 9.14) величина бокового отклонения
/ = RQ sin (ЗПУ - nCQ) - RT sin (ЗПУ — ПС). (9.42)
238
В результате решения уравнения (9.42) и сравнения заданных и
текущих коодинат ЛА вычислительное устройство вырабатывает сигнал,
пропорциональный боковому уклонению /, изменяющий свой знак на
противоположный при изменении стороны отклонения и
воздействующий на отклоняющую систему нуль-прибора и на органы управления
ЛА.
Указанный способ обеспечивает полеты по любому маршруту в
пределах зоны действия наземных радиомаяков систем ближней
навигации и находят все более широкое применение при осуществлении
так называемой зональной (или внетрассовой) навигации. Если при
обычной трассовой навигации маршруты полетов ЛА прокладываются
на маяк или от него, то зональная навигация предполагает
использование всего рабочего пространства, обслуживаемого системой. Для
решения задач зональной навигации на борту ЛА необходима
достаточно мощная ЭВМ (обычно ЭЦВМ), которая ведет оптимальную
обработку информации комплекса навигационных систем. Она выдает
сведения о боковом отклонении ЛА от ЛЗП и о расстоянии до следующего
промежуточного пункта маршрута, где предполагается изменить
параметры ЛЗП либо осуществить маневрирование.
9.3. ЗАХОД НА ПОСАДКУ И ОСНОВНЫЕ ПРЕДПОСАДОЧНЫЕ МАНЕВРЫ
Радионавигационное обеспечение этапов захода на посадку и
посадки ЛА. Организация воздушного пространства над территорией
СССР, правила полета ЛА и управление воздушным движением (УВД)
на трассах и в районе аэропортов регламентируются «Наставлением по
производству полетов гражданской авиации» (НПП ГА) [31].
Соответствующие правила организации полетов и УВД на международных
авиалиниях регламентируются документами международной
организации гражданской авиации ИКАО (специализированного учреждения
ООН), основными из которых являются документы 8168-OPS/611/3
(Правила для авианавигационных служб) и 4444—RAС/501 /10
(«Правила полетов и обслуживания воздушного движения»). Согласно
указанным правилам, примерная схема взаимодействия диспетчерских
служб, использующих информацию наземных радиотехнических
средств, и экипажей ЛА на этапе захода на посадку выглядит
следующим образом.
Вся воздушная трасса, проходящая через заданные районы
диспетчерских служб (РДС), на которые разбито все воздушное
пространство, перекрывается рабочими зонами радиотехнических средств
обеспечения полетов (РСБН, трассовые обзорные РЛС, приводные
радиомаяки, радиопеленгаторы, радиодальномеры и др.). Средства
обеспечения полетов выводят ЛА на КПМ (аэропорт назначения) в
заданное время.
При выходе ЛА в район аэродрома посадки (в зону подхода) эки
паж устанавливает связь с диспетчером пункта подхода (ДПП), кото
рый управляет полетом ЛА от границ РДС до высоты снижения 900—
239
1200 м (до высоты полетов по кругу)1, установленной для данного
аэродрома. Для контроля за воздушным движением в зоне подхода
в зависимости от удаления ЛА используется обзорный радиолокатор
(ОРЛ) или обзорно-диспетчерский радиолокатор (ОДРЛ). С учетом
местоположения и количества ЛА в зонах подхода и посадки диспетчер
ДПП дает разрешение на начало захода на посадку и указывает
условия проведения предпосадочного маневра либо направляет ЛА в зону
ожидания. Зона ожидания устанавливается обычно над РНТ в районе
аэродрома или воздушного коридора (над ДПРМ, РСБН и др.) для
ожидания ЛА своей очереди^подхода к аэродрому или захода на
посадку. Диспетчер ДПП передает управление диспетчерскому пункту
круга (ДПК), который управляет движением ЛА от верхней границы
круга до последнего разворота при выходе на основную посадочную
прямую. При этом широко используются приводные радиомаяки,
радиопеленгаторы, ОДРЛ и РСБН.
После выполнения ЛА последнего (четвертого) разворота
диспетчер ДПК передает управление диспетчерскому пункту посадки и
взлета, который контролирует движение ЛА на основной посадочной
прямой и управляет им до посадки на ВПП с помощью радиотехнических
систем посадки.
Рассмотрим детально наиболее ответственный и важный (с точки
зрения безопасности полетов) заключительный этап полета — заход
на посадку и посадку.
Для стандартизации посадочных операций и упорядочения работ
по их обеспечению ИКАО ввела понятия посадочных минимумов и
установила три классификационных категории этих минимумов.
Посадочными минимумами называются минимальные значения параметров,
характеризующих условия посадки, и значения факторов, при которых
обеспечивается заданная вероятность успешной посадки, т. е.
приземление определенной части ЛА, совершающих посадку, и уход на второй
круг неприземлившихся ЛА.
Для того чтобы принять решение о посадке или о необходимости
ухода на второй круг, командир ЛА должен иметь возможность
увидеть необходимые ориентиры на ВПП с минимальной высоты, откуда
еще возможен уход на второй круг (эта высота называется высотой
принятия решения ВПР). Поэтому основным показателем,
характеризующим условия посадки, являются дальность видимости с высоты
принятия решения. Таким образом, первый из упомянутых
метеорологических параметров (дальность видимости с высоты принятия
решения) расчленяется на дальность видимости на ВПП и на высоту
нижней границы облаков.
Вероятность успешной посадки зависит не только от
метеорологических условий посадки, но и от свойств самолета и аэродрома, от
качественных характеристик бортового и наземного оборудования и от
квалификации экипажа. От надежности и точности радиотехнических
1Высота полетов по кругу устанавливается относительно уровня аэродрома
и определяется в зависимости от местных условий, безопасной высоты и типов
ЛА.
240
средств зависит надежность проведения посадки и точность вывода
самолета в точку принятия решения. От свойств летательного
аппарата, оснащенности и качественных показателей средств управления,
а также от квалификации пилота зависит точность выполнения
посадочной программы.
Таким образом, в число факторов, определяющих вероятность
успешного выполнения посадки, входят не только метеорологические
факторы, но и свойства аэродрома, аэродромного оборудования,
летательного аппарата, ботового оборудования и квалификация
командира корабля. Поэтому, помимо понятия посадочных минимумов в
широком смысле, вводятся понятия посадочных минимумов командира
корабля, летательного аппарата, аэродрома в целом и
радиотехнических систем посадки в частности.
Из изложенного видно, что, несмотря на многообразие факторов,
определяющих успешность посадки и возможности ухода на второй
круг, в качестве наиболее общих квалификационных признаков,
объективно определяющих возможности экипажа, бортовых и наземных
средств, являются минимальные значения дальности видимости на
ВПП и высоты нижней границы облачности, при которых
обеспечивается заданный уровень вероятности успешной посадки и
гарантируется возможность ухода на второй круг.
Определение посадочных минимумов, даваемые в приложении 10-й
конвенции ИКАО [1, 7], таковы.
Посадочный минимум категории I: полет со снижением до ВПР
60 м при дальности видимости на ВПП (ДВВПП) не менее 800 м^и
с высокой степенью вероятности успешных заходов на посадку.
Посадочный минимум категории II: полет со снижением до ВПР
30 м при ДВВПП 400 м и с высокой степенью вероятности успешных
заходов на посадку.
Посадочный минимум категории IIIA: полет без ограничения по
ВПР со снижением до поверхности ВПП и движение по ней при
внешней визуальной ориентировке на конечном этапе посадки при ДВВПП
не менее 200 м.
Посадочный минимум категории IIIB: полет без ограничения по
ВПР со снижением до поверхности ВПП и движение по ней без
внешней визуальной ориентировки с последующим рулением при внешней
визуальной ориентировке и при видимости на ВПП не менее 50 м.
Посадочный минимум категории II 1С: полет без ограничения по
ВПР со снижением до поверхности ВПП и движение по ней, а также
руление по рулежным дорожкам без внешней ориентировки.
В соответствии с этим категории систем посадки определяют
следующим образом.
Система посадки категории I обеспечивает наведение от границы
своей зоны действия до точки на высоте 60 м или менее над
горизонтальной плоскостью, проходящей через порог ВПП.
Система посадки категории II обеспечивает наведение от границы
своей зоны действия до точки на высоте 30 м или менее над
горизонтальной плоскостью, находящейся на уровне порога ВПП.
241
Система посадки категории III обеспечивает наведение от границы
своей зоны действия до поверхности ВПП и вдоль нее.
В зависимости от посадочного минимума, установленного для
определенного аэропорта, и интенсивности воздушного движения
используются следующие типы радиотехнических систем:
упрощенные системы посадки;
системы инструментальной посадки (радиомаячные системы
посадки);
системы посадки по командам с земли (радиолокационные
системы посадки);
В упрощенной системе посадки в состав
наземного радиотехнического оборудования входят: две приводные
радиостанции (ближняя и дальняя), два маркерных радиомаяка
(ближний и дальний), коротковолновый радиопеленгатор и
командно-стартовые радиостанции. На борту ЛА при выполнении посадки
используют радиокомпас, маркерный радиоприемник, радиовысотомер и пи-
лотажно-навигационные приборы.
С помощью приводных радиостанций, размещенных на продольной
оси ВПП (ближняя — на расстоянии 1 км, дальняя — на расстоянии
4—7 км от торца ВПП), и радиокомпаса экипаж ЛА контролирует
выдерживание посадочного курса. Моменты прохода ЛА над приводными
радиостанциями определяются с помощью маркерных радиомаяков,
устанавливаемых в месте расположения приводных радиостанций.
В связи с этим ближний (по отношению в ВПП) приводной комплект
радиосредств получил название БПРМ, а дальний — ДПРМ. Полет
по линии планирования (глиссаде) контролируется по показаниям
радиовысотомера малых высот. Радиопеленгатор в данном случае
является резервным средством вывода ЛА на посадочный курс при отказе
основного оборудования.
Упрощенная система посадки обеспечивает надежное снижение
ЛА до высоты 50—60 м и вывод его на посадочный круг. При этом на
заключительном этапе посадка осуществляется визуально, для чего
используются светотехнические средства. Таким образом, по своим
характеристикам упрощенная система посадки не превышает
возможностей систем посадки категории I.
Подобную систему используют обычно в аэропортах с малой
интенсивностью воздушного движения.
Радиомаячные системы
инструментальной посадки предназначены для обеспечения посадки ЛА в
условиях ограниченной видимости земли и в аэропортах с большой
интенсивностью воздушного движения. В их состав входят курсовые,
глиссадные и маркерные радиомаяки, а также указанное выше
оборудование, которым комплектуются РНС при упрощенном варианте
системы посадки. Современные радиомаячные системы посадки
(принципы построения которых рассмотрены в гл. 3) удовлетворяют
требованиям посадочных минимумов всех трех категорий, установленных
ИКАО.
Радиолокационные системы посадки РСП
позволяют управлять посадкой Л А по командам с земли. Основным
242
оборудованием РСП является посадочный радиолокатор ПРЛ, с
помощью которого контролируется положение ЛА в плоскостях курса
и планирования. По результатам наблюдения положения ЛА
операторами с помощью средств связи передаются указания экипажу. По
командам операторов РСП обеспечивается снижение ЛА до высоты
50—70 м на удалении 500—700 м от начала ВПП. Следовательно, си-
стема посадки по командам с земли может удовлетворять требованиям
лишь категории I; кроме того, недостатком РСП является малая
пропускная способность. Системы посадки такого типа используют
обычно в качестве дублирующего средства. РСП в целом (например,
РПС-7) и посадочные радиолокаторы описаны в пособиях по
радиолокационному оборудованию аэропортов.
Основные предпосадочные маневры. В зависимости от условий
полетов, особенностей рассмотренных выше радиотехнических средств
посадки, которыми оснащен данный аэропорт, количеством ЛА в зоне
подхода, общей интенсивностью воздушного движения в зоне
аэродрома посадки а также других факторов используют несколько вариантов
захода и расчета на посадку и соответствующих предпосадочных
маневров.
Рассмотрим основные предпосадочные маневры при комплектации
аэродрома радиосредствами упрощенной системы посадки до выхода
на основную посадочную прямую (курс посадки).
В гражданской авиации при заходе самолетов на посадку
используются следующие типовые маневры, обеспечивающие высокую
точность выхода на курс посадки, в том числе в сложных метеоусловиях
и ночью:
заход на посадку с прямой;
заход на посадку маневром «большая коробочка»;
заход на посадку маневром «малая коробочка»;
'заход на посадку с рубежа начала снижения.
Разрешение на посадку в аэропорту экипаж получает от
руководителя полетов, который сообщает также на борт ЛА сведения об
условиях посадки (метеоусловия, посадочный курс, высоту полета в
районе аэродрома и др.).
Решение задачи захода на посадку любым маневром всегда
начинается с момента выхода ЛА на ДПРМ с последующим выведением ЛА
в точку начала снижения (ТНС), лежащую в створе ВПП и
находящуюся от торца ВПП на заданном расстоянии LCH.
Заход на посадку с прямой обычно осуществляют
в тех случаях, когда ЛА вышел на ДПРМ с курсом, противоположным
посадочному или близким к нему. При этом используются три схемы
маневрирования, являющиеся достаточно экономичными с точки
зрения затраты полетного времени: отворот на расчетный угол; разворот
на 180°; круг над ДПРМ.
Маневр «отворот на расчетный угол» применяется в случае, когда
направление выхода ЛА на ДПРМ противоположно посадочному или
отличается от него не более чем на ± 30°. Этот маневр заключается
в том, что в момент прохода над ДПРМ производится отворот на
расчетный угол Аур (рис. 9Л 5, а) таким образом, чтобы в точке начала раз-
243
ворота на посадочный курс уклониться от направления посадки на
величину 2R. Значение расчетного угла
tg (Аур/2) = R/LCH; AYp = 2 arctg (#/LCH),
а время полета без учета ветра до точки начала разворота (ТНР)
^р ~ Lcn/V, где V — скорость полета.
Но так как LCH = VCJ011, то окончательно
*нр«
(Я-Яр) Vch
VBV
где
Яр — высота полета над ДПРМ;
высота начала снижения;
Vch — средняя скорость на участке снижения;
VB — средняя вертикальная скорость ЛА;
*сн — время снижения.
При заходе на ДПРМ с курсом, близким к посадочному (или
отличающемся от него не более чем на ± 30°), осуществляется
предпосадочный маневр «разворот на 180°» (рис. 9.15, б). В этом случае при
проходе ДПРМ берется курс, противоположный посадочному (с
учетом угла сноса), и выполняется полет до ТНР в течение времени /нр,
которое определяется по методике, аналогичной рассмотренному
выше маневру. В ТНР выполняется второй разворот на 180° и выход на
посадочный курс.
Круг над ДПРМ как маневр для захода на посадку может
применяться при любом направлении выхода ЛА на ДПРМ. Сущность этого
маневра заключается в том, что над ДПРМ начинается разворот в
сторону посадочного курса до получения значения КУР = 90? при
правом или КУР = 270° при левом развороте (рис. 9.15, в). Поскольку VIA
при этом развернется на 180° и центром разворота становится ДПРМ,
радиус разворота увеличится вдвое (R2 = 2Rt) и самолет будет
выведен на курс, противоположный посадочному. Последующее
маневрирование выполняется также, как и при маневре «разворот на 180°».
Рис. 9.15. Схема захода наг посадку с
прямой: -
а — отворот на - расчетный угол; - б — разворот
• - -на 180°i &— круг над, ДНРМ"
244
Заход на посад- /^T\w>=2koo
к у м а н е в р о м « б о л ь- > KJw^^ М/юЛ/шТЧ
ш а я коробочка» ис- \ ^^ w ^L \
пользуют в тех случаях, |кур=ш° \ '\±У
когда особенности рельефа /"Т\ \ ,'' кур=н
местности, значительная ин- (-*k-UL___ \у ^ьйраздорот
тенсивность воздушного дви- VAj^ pa3Sopdnr\LCH. wv^ впп
гчо°
жения и метеоусловия не поз- m'(^^J!0ia^^^/Cp^^^
воляют осуществить заход на -Ц*^_Т / х\
о - * ™ / \ КУР =
№/Z0°
/" /7/Ш0Ш /C/7^2
/#7°
посадку с прямой. В связи с
этим маршрут полета по
«большой коробочке» строится ^ f^i,
с таким расчетом, чтобы осу- у
ществить выход на
посадочную прямую на таком удале- Рис. 9.16. Схема захода на посадку манев-
нии от ВПП, которое позво- Р°м «большая коробочка»
лит исправить возможные
ошибки и подготовиться к выполнению посадки (рис. 9.16). Кроме
того, этот маневр, как правило, используют при уходе самолета на
второй круг.
После пролета ДПРМ самолет следует в направлении посадочного
курса до первого разворота в течение времени, зависящего от летно-
тактических данных самолета. Выполнив первый разворот на 90°
(например, с помощью гирополукомпаса) влево или вправо в
зависимости от того, какой круг полета (левый или правый) принят на
аэродроме, экипаж определяет моменты начала последующих разворотов
по курсовым углам относительно ДПРМ.
Второй и третий развороты на 90° выполняются при достижении
значений курсового угла, равного КУР-2400 для полета левым и
КУР = 120° для полета правым кругом. Наиболее ответственный
элемент маневра — четвертый разворот выполняется при КУР = 290°
для левого и КУР = 70° для правого круга. После четвертого
разворота и выхода на посадочный курс самолет переводится в режим
планирования, проходя на высоте около 200 м над ДПРМ, о чем
сигнализирует (серией тире) выходной сигнал бортового маркерного приемника.
После пролета ДПРМ самолет снижается в направлении курса
посадки с таким расчетом, чтобы пройти над БПРМ на высоте, определя-
мой профилем самолета на посадочной прямой1 (сигнализация о
моменте пролета БПРМ серией чередующихся точек и тире).
Завершающий этап посадки при использовании упрощенной
системы посадки производится визуально, а при наличии радиомаячной
системы инструментальной посадки — по ее сигналам до выхода на
ВПР, соответствующую категорийности системы.
Заход на посадку маневром «малая
коробочка» (рис. 9.17) используют в тех случаях, когда не требует-
1 Конкретные значения высот пролета ДПРМ и БПРМ на посадочной
прямой указываются экипажу в инструкции по эксплуатации данного типа
самолета, •
245
ЛЧ?--{ЬО°
е-
\W
ТНС
ш
ДОМ
Рис. 9.17. Схема захода на посадку
маневром «малая коробочка»
ся построение более сложного
маневра «большая
коробочка». Самолет при этом
заходит с любого направления на
ДПРМ, после пролета
которого выводится с помощью
гирополукомпаса на курс
перпендикулярный к
посадочному. Затем следует этим
курсом в течение времени tn
(устанавливаемого в
зависимости от типа самолета),
далее разворачивается на 90° и
выходит на курс, обратный
посадочному. Последующие
элементы маневрирования
совершаются в соответствии с
методикой, принятой для
выполнения маневра «большая
коробочка».
Заход на
посадку с рубежа
начала снижения. При
комплектации аэродрома уг-
ломерно-дальномерной
системой типа РСБН или
обзорной РЛС (в комплексе с
радиомаячной системой посадки)
заход на посадку можно
выполнять со значительно
меньшей затратой времени (по
сравнению с рассмотренными
выше маневрами) путем непосредственного вывода самолета в ТНС
(без захода на ДПРМ) с рубежа начала снижения (рис. 9.18). В этом
случае для выхода в ТНС самолет должен лететь по касательной к дуге
установленного радиуса R разворота, а в точке касания производится
разворот и выход на посадочный курс. При подходе самолетов к ТНР
на одной высоте (или рассмотрении навигационной задачи в
плоскости карты) геометрическое место точек А, В, С начала снижения
будет располагаться на дуге окружности, которая называется рубежом
начала снижения.
Наиболее просто, непосредственно на борту самолета решается
задача захода на посадку с рубежа начала снижения при установке в
точке, являющейся центром разворота на посадочный курс, угломерно-
дальномерной радиосистемы. Контролируя при этом величину
путевого угла самолета (рис. 9.18) ИПУ = ИПР —Ап + б ± 180°,
определяют поправку на пеленг Ап = arcsin RID, где б — поправка на
схождение меридианов; D — дальность до РСБН. С учетом величины
Ап разворот начинают в момент, когда!) = #, В ТНР величина D
Рис. 9.18. Схема захода на посадку
бежа .начала снижения
с РУ-
246
ДоЛЖйа увеличиваться. Если £>тт^> % самолет собершит разЬороТ
до ТНС; если Dmin < R, то разворот будет закончен после прохода
ТНС. После выхода на посадочный курс полет выполняется так же,
как и при использовании рассмотренных выше предпосадочных
маневров.
Очевидно, что заход на посадку с рубежа снижения несмотря на
простоту и малую длительность маневра не всегда выполним по
условиям неудовлетворительного рельефа местности, интенсивности
воздушного движения и метеоусловиям. С точки зрения безопасности
воздушного движения в сложной обстановке захода на посадку
предпочтение отдается более длительным предпосадочным маневрам.
Глава 10
СПУТНИКОВЫЕ МЕТОДЫ РАДИОНАВИГАЦИИ
10.1. ЗАКОНОМЕРНОСТИ ДВИЖЕНИЯ ИСЗ
Спутниковыми РНС называют системы, радионавигационные точки
которых располагаются на навигационных искусственных спутниках
Земли (НИСЗ). -.1
Навигационные ИСЗ обращаются вокруг Земли на высотах от 600
до 36 тыс. км. Благодаря большой высоте полета увеличивается
расстояние прямой видимости от спутника до наземного или приземного
наблюдателя. Это позволяет на волнах метрового, дециметрового или
сантиметрового диапазонов обеспечить прием электромагнитных
колебаний и осуществить с высокой точностью навигационные измерения
на удалениях в сотни и тысячи километров от точки, над которой
находится спутник.
Отмеченные достоинства спутниковых систем делают их весьма
перспективными для обеспечения полетов на трансокеанских воздушных
трассах при полетах над районами со слабо развитой сетью наземных
радионавигационных средств и при внетрассовых полетах.
Известны две разновидности спутниковых систем навигации:
регионального и глобального типов. Рабочая область региональных
спутниковых систем ограничена определенным регионом; она может
охватывать, например, район Северной Атлантики или территории
отдельных государств. Спутниковые системы глобального типа
обеспечивают навигацию в масштабе земного шара.
Общие сведения. В первом приближении можно считать, что
траектория полета ИСЗ представляет собой неподвижную относительно
удаленных звезд плоскую эллиптическую орбиту, один из фокусов
которой совпадает с центром масс Земли (рис. 10.1). Параметрами такой
орбиты являются величины большой а и малой b полуосей. Вместо этих
параметров размеры и форму эллипса можно характеризовать
равноценной им другой парой величин: длиной большой полуоси и
эксцентриситетом е = ]/а2 — Ь2/а.
Положение спутника на орбите характеризуется длиной радиус-
вектора г и истинной аномалией #. Уравнение эллипса в полярных
координатах имеет вид
г= а(1~е2) . (10.1)
[ l+e cos ft
Точка Я наименьшего удаления ИСЗ от фокуса называется
перигеем, а точка А орбиты, наиболее удаленная от фокуса, называется апо-
248
«41
J
\
А
{
—•
fa
Л
>>^
^
V
/7
Рис. 10.1. Эллиптическая орбита ИСЗ
геем орбиты. Период обращения
ИСЗ определяется длиной большой
полуоси.
Простр анственное положение
орбиты относительно Земли
показано на рис. 10.2. Здесь
изображена неподвижная относительно
удаленных звезд прямоугольная
геоцентрическая экваториальная
система координат Oxyz, плоскость
хОу которой совмещена с
плоскостью экватора, а ось х направлена в точку у весеннего
равноденствия. Плоскость орбиты составляет с плоскостью экватора угол t,
называемый наклонением орбиты. Линия пересечения этих плоскостей
называется линией узлов. Точка пересечения плоскости орбиты с
экватором, в которой спутник переходит из южного полушария в
северное, называется восходящим узлом.
Положение восходящего узла в пространстве, характеризующееся
углом между линий узлов и осью Ох, называется долготой
восходящего узла и обозначается тем же знаком, что и сам узел. Так как ось х
совмещена с точкой весеннего равноденствия, то долгота восходящего
узла равна его прямому восхождению.
Таким образом, пространственная ориентация плоскости орбиты
определяется углами наклонения орбиты и долготы восходящего узла.
Ориентация большой оси эллипса в пространстве определяется углом
со, представляющим собой угол между восходящим узлом и перигеем
и называемым аргументом перигея. Спутник на орбите располагается
в точке И. Положение его относительно большой оси характеризуется
истинной аномалией Ф. На рис. 10.2 показан также угол «, равный
сумме аргумента перигея со и инстинной аномалии Ф.
Система параметров, включающая большую полуось,
эксцентриситет, наклонение орбиты, долготу восходящего узла, аргумент перигея
и время прохождения ИСЗ через перигей, называется системой кепле-
ровых элементов орбиты. Эти элементы определяют закон движения
ИСЗ. Этот закон может задаваться и с помощью других величин, на-
Орбита
г/ /
\ И
г / \
14} А
Л /7
———^~
У
^Экдатор
Рис. 10.2.
Пространственное положение
орбиты и кеплеровы
элементы
Линия узлод
^Земля
249
пример прямоугольными координатами ИСЗ л;ио, #ио, £ио и их
производными хт, Уио, гио, относящимися к некоторому определенному
моменту времени t0. Прямоугольные координаты ИСЗ и соответствующие
составляющие скорости могут рассматриваться в качестве начальных
условий движения ИСЗ. Интегрируя уравнения движения при этих
начальных условиях и известных силах, действующих на ИСЗ, можно
установить закон движения спутника в любой последующий момент
времени, т. е. определить его координаты хи, уи, ги и их
производные л;и, #и, 2и для любого представляющего интерес момента
времени.
Скорость полета ИСЗ является функцией высоты и истинной
аномалии Ф. Она максимальна в перигее и минимальна в апогее. Для
круговой орбиты она постоянна и выражается формулой
к-1/Т-/^' (1°-2)
где R3 — радиус Земли;
Ни — высота ИСЗ;
\i — 3,986 . 105 км3/с2
Из формулы (10.2) следует, что на высоте 300 км скорость ИСЗ
близка к 8 км/с и уменьшается по мере подъема над Землей. Если ИСЗ
движется по круговой орбите на высоте 35 810 км, в направлении
вращения Земли, то его скорость оказывается такой, что при i = 0°
спутник «зависает» над определенной точкой экватора. Угловая
скорость движения такого ИСЗ оказывается равной угловой скорости
вращения Земли. Спутники, обращающиеся по орбитам, период которых
равен звездным суткам, называются суточными или синхронными,
а при / = 0° — стационарными.
Реальный закон движения ИСЗ несколько отличается от
описанного. Причины, обусловливающие это отличие, таковы: несферичность
Земли и неоднородность ее массы, сопротивление атмосферы,
притяжение Луны и Солнца, давление солнечного излучения. Влияние
этих причин прогнозируется и учитывается при запуске и в полете
навигационных ИСЗ.
Зоны видимости ИСЗ и околоземного наблюдателя. Радиосвязь
между наземным и околоземным наблюдателем ИСЗ может
поддерживаться только в пределах прямой видимости, поэтому вводятся
понятия зон видимости наземного пункта, летательного аппарата и ИСЗ.
Определим эти понятия.
Зона видимости наземного пункта — это область местонахождения
ИСЗ, в пределах которой осуществима устойчивая связь между ИСЗ
и наземным пунктом.
В первом приближении кажется, что зона видимости наземного
наблюдателя представляет собой область пространства, расположенную
над горизонтом точки наблюдения. Однако при определении размеров
зоны видимости на практике учитывается то обстоятельство, что
устойчивая радиосвязь между ИСЗ и наземным наблюдателем
поддерживается лишь при углах места ИСЗ, превышающих некоторую минимальную
250
Ша видимости
Рис. 10.3. Зона -видимости наземного
наблюдателя
величину 6 (рис. 10,3). Поэтому
зона видимости наземного
наблюдателя определяется как
область пространства,
заключенного в пределах конуса,
вершина которого располагается в
точке наблюдения, ось совпадает с
вертикалью этой точки, а
образующая расположена под углом
б к горизонту (т. е. под углом
90° — б к вертикали).
Однако обычно это понятие
сужается, так как практический
интерес представляет определение условий видимости ИСЗ,
обращающихся на вполне определенной высоте, и отображение этих условий на
географической карте. При этом под зоной видимости наземного пункта
понимают совокупность спроектированных на Земле точек
расположения обращающихся на высоте Ни спутников, видимых из наземного
пункта под углом, превышающим б. Очевидно, что определяемую
таким образом зону видимости получим, если найдем пересечение
указанной ранее конической поверхности со сферой радиуса Яз + Ни
и построим центральную проекцию вырезаемой конусом части этой
сферы на земную поверхность (см. рис. 10.3).
Зона видимости ЛА определяется таким же образом, как и зона
видимости наземного наблюдателя, однако при этом считается
допустимым предположение о том, что наблюдение ИСЗ возможно при
любых углах места, начиная с нуля (т. е. в данном случае
принимается б = 0°).
Количественные соотношения, определяющие размеры зон
видимости, установим, применяя к треугольнику ЦСИ теорему синусов
sin Я __ sin (6 + 90°)
^з ^з + Ни
При этом центральный угол, определяющий радиус зоны видимости,
R3 cos б
Рз - arccos
*з + #и
(10.3)
Линейное значение радиуса зоны видимости, отсчитываемого вдоль
земной поверхности, ^ Сг = /?зРз.
Очевидно, что размеры зон видимости зависят от высоты полета
ИСЗ и от величины минимального угла места б, при котором можно
поддерживать связь с ИСЗ.
В качестве примеров можно указать, что б = 10° радиусы зон
видимости для высот 1000, 10 000, 20 000, 35 810 км составляют
соответственно 2410, 6383, 7359 и 7937 км ф3 = 21,7; 57,5; 66,2 и 71,5°).
251
Наряду с понятием зоны видимости наземного (приземного)
наблюдателя вводится понятие зоны видимости ИСЗ — совокупность
наземных или приземных точек, из которых ИСЗ, расположенный на
данной высоте над Землей, виден под углами, превышающими б
(рис. 10.4). Размеры зон видимости ИСЗ определяются также по
формуле (10.3).
Зона видимости нескольких ИСЗ. Зоной видимости нескольких
ИСЗ называют область земной поверхности (или околоземного
пространства), в пределах которой обеспечивается одновременное
наблюдение установленного числа ИСЗ под углами возвышения,
превышающими угол б над горизонтом. Для решения задач навигации обычно
требуется одновременное наблюдение нескольких ИСЗ.
Нетрудно установить, что зона видимости нескольких ИСЗ
представляет собой пересечение их зон видимости. Например, зона
видимости трех ИСЗ (рис. 10.5) равна пересечению 3i_3 = Зх f| 32 Л 33
зон видимости первого, второго и третьего ИСЗ. Иначе говоря,
множество точек, образующих зону видимости трех ИСЗ, равно
пересечению множеств точек, составляющих зоны видимости отдельных
ИСЗ. Последние представляют собой малые круги на поверхности
Земли, центрами которых являются проекции спутников, называемых
подспутниковыми точками. Зона видимости трех ИСЗ есть общая часть
малых кругов, ограниченная отрезками дуг малых кругов.
252
40.2. ПРИНЦИПЫ НАВИГАЦИОННЫХ ИЗМЕРЕНИЙ С ПОМОЩЬЮ ИСЗ
Идея измерения параметров движения ЛА по ИСЗ в сущности
идентична идее навигационных измерений по внеземным естественным
источникам излучения, например по звездам. Ее можно сформулировать
следующим образом. Если известно положение и скорость перемещения
нескольких ИСЗ относительно земной поверхности, то, определяя
положение и скорость перемещения ЛА относительно этих спутников,
можно определить его положение и скорость полета относительно
земной поверхности.
Определение параметров движения ИСЗ. Знание координат и
скорости ИСЗ является условием определения параметров движения ЛА
с помощью ИСЗ. Оно достигается наблюдением за ИСЗ со
стационарных наземных пунктов либо прогнозированием движения ИСЗ, т. е.
предвычислением параметров движения ИСЗ по данным о значениях
этих параметров, относящихся к некоторому предшествующему
моменту времени, с учетом информации о силах, действующих на ИСЗ
в полете.
При использовании высокоорбитных, например, суточных ИСЗ
параметры их движения могут определяться наблюдением из наземных
пунктов, проводимых одновременно с наблюдателем ИСЗ с борта ЛА.
Определение координат ИСЗ, обращающихся на низких и средне-
высотных орбитах, осуществляется прогнозированием их движения.
В сущности именно этот метод применяется в астрономической
навигации. Точность прогнозирования зависит от точности данных о
координатах и скорости ИСЗ в исходный момент времени, от степени
регулярности сил, действующих на ИСЗ, и от точности сведений об этих
силах. Изучение поля сил, действующих на спутники, продолжается
много лет и достаточно хорошо изучено. Установлено, что при
движении спутников на высотах, превышающих 1000 км, эти силы
отличаются высокой стабильностью, что позволяет точно прогнозировать
движение ИСЗ на несколько месяцев. Высказываются идеи о поддержании
постоянства элементов орбиты ИСЗ в результате применения
небольших бортовых корректирующих двигателей.
Методы радионавигационных измерений. Определение положения
ЛА относительно ИСЗ может осуществляться дальномерными, раз-
ностно-дальномерными и радиально-скоростными (доплеровскими)
методами. Скорость измеряется доплеровским методом.
В свою очередь, для дальномерных измерений могут
использоваться фазовые и временные (импульсные) методы измерений. Наряду
с дальномерными системами с запросом все более широкое
распространение начинают находить системы беззапросного типа.
Дальномерные радионавигационные методы обеспечивают
наиболее высокую точность навигационных измерений. Несмотря на
значительное удаление самолета от ИСЗ погрешности измерений дальности
удается доводить до 10 м. Один навигационный ИСЗ позволяет
определить одну сферическую поверхность положения. Поэтому для
определения места ЛА требуется одновременное или последовательное
измерение дальности до двух или трех ИСЗ, разнесенных в пространстве
253
таким образом, чтобы поверхности положения, получающиеся при
измерениях дальности, пересекались под углами более или менее
близкими к 90°.
С точки зрения технической реализации с дальномерными системами
во многих отношениях сходны спутниковые разностно-дальномерные
системы. Существенными достоинствами этих систем являются их
неограниченная пропускная способность и простота бортовой
аппаратуры ЛА (обусловленная отсутствием радиопередатчика). Однако по
точностным характеристикам разностно-дальномерные системы
несколько уступают дальномерным. Кроме того, при реализации раз-
ностно-дальномерных методов для получения одной поверхности
положения необходимо использовать одновременно две спутниковые
радионавигационные точки, а поэтому число спутников в зоне видимости
ЛА должно превышать на единицу число спутников при дальномер-
ных измерениях.
Спутниковые разностно-дальномерные системы синхронизируются
по каналу связи или в результате использования независимо
работающих высокостабильных эталонов частоты.
Помимо дальномерных и разностно-дальномерных методов, в
спутниковых системах навигации применяются так называемые псевдо-
дальномерные методы, т. е. дальномерные методы беззапросного типа,
которые реализуются в условиях, когда уход часов на борту ЛА
весьма значителен и игнорировать его нельзя. Из-за расхождения шкал
часов ЛА и ИСЗ временные интервалы между моментами излучения
зондирующих сигналов с борта ИСЗ и моментами их приема на
самолете определяются с погрешностями. Поэтому измеряемые дальности
будут отличаться от истинных на величину игрА/ч, где
A/q—расхождение шкал времени на борту ЛА и ИСЗ.
Процедура измерений и обработки информации при измерении
псевдодальностей строится таким образом, чтобы в процессе измерений
определять не только параметры движения ЛА, но и поправку к
бортовой шкале времени ЛА. Более подробно псевдодальномерный метод
будет рассмотрен ниже.
Измерение времени. Непременным условием точного определения
параметров движения ЛА с помощью ИСЗ является точная привязка
результатов измерения дальности или разности дальностей ко
времени. На Земле, на борту ИСЗ и на борту Л А необходимо иметь
высокоточные часы, обеспечивающие формирование местных шкал времени,
согласованных между собой и хорошо воспроизводящих истинное
время. При этом руководствуются следующими соотношениями,
характеризующими требуемую точность измерения времени. Если погрешность
измерения времени А/ равна 1 с, то это приведет к погрешности
определения места (в км) ИСЗ и ЛА А/- = Vn At = 8.
Отсюда следует, что для достижения высокой точности
определения координат ЛА погрешность измерения времени не должна
превышать 10~2—10~3 с. Это означает, что на борту ЛА и на Земле
необходимо располагать часами, погрешность которых не должна
превосходить указанной величины.
254
Основным элементом всяких часов является генератор колебаний,
стабильность частоты которого определяет точность их хода. Так как
стабильность частоты реально используемых генераторов ограничена,
возникает потребность в периодической сверке и коррекции бортовых
часов по более точным часам, используемым на Земле, а наземных
часов— по часам общегосударственной службы времени. Периодичность
сверки определяется степенью стабильности часов. Такая сверка
производится с помощью сигналов времени, передаваемых по
радиомаякам от более точных часов к менее точным, причем необходимо
учитывать запаздывание сигналов времени в процессе их
распространения. Так, если сигналы времени передаются на борт ЛА через ИСЗ,
а удаление ИСЗ от Земли и от ЛА, к примеру, равно 30-103 км, то
сигналы времени, проходя путь от наземного пункта до ИСЗ и от ИСЗ
до ЛА, задерживаются на 0,2 с.
При этом очевидно, что для точного учета задержки сигналов,
необходимо знать расстояние от ЛА до точки установки источника
сигналов времени. Так как ЛА перемещается, то возникает потребность в
довольно точном измерении расстояния ЛА до ИСЗ и от ИСЗ до
наземного пункта в момент синхронизации часов. Таким образом, задача
синхронизации часов предполагает точное определение координат ЛА.
Наиболее успешно она решается при использовании дальномерных
методов запросного типа.
Если в спутниковых системах навигации определение координат ЛА
производится беззапросным дальномерным методом, то
синхронизацию часов осуществляют в два этапа. Вначале по наземной шкале
времени, отличающейся наиболее высокой точностью, обеспечивается
синхронизация часов, устанавливаемых на навигационных ИСЗ, и
формируется спутниковая шкала времени. Затем, опираясь на нее,
формируют бортовую шкалу времени ЛА. Время, отсчитываемое по
спутниковой шкале, получило название системного времени.
Так как на спутниках устанавливаются атомные часы высокой
стабильности и координаты спутников определяются дальномерными
системами запросного типа, т. е. системами, в которых дальности до
ИСЗ измеряются путем ретрансляции запросных сигналов наземных
дальномеров спутниками, шкала системного времени задается с
высокой точностью.
Часы ЛА синхронизируются по спутниковым часам в процессе
навигационных измерений. По сигналам, излучаемым тремя или
четырьмя ИСЗ, на борту ЛА определяются псевдодальности до спутников.
Как отмечалось, псевдодальности отличаются от дальностей
погрешностью агрД/ч, обусловленной расхождением системной шкалы
времени и шкалы времени ЛА. Благодаря высокой точности задания
системного времени измеряемые псевдодальности отличаются от
дальностей только из-за ухода часов ЛА относительно спутниковых часов,
точность хода которых столь высока, что можно считать показания
часов на всех ИСЗ навигационной системы одинаковыми. Поэтому
измеренные псевдодальиости будут отличаться от дальностей до всех
ИСЗ на одно и то же значение, что позволяет в процессе определения
№
координат ЛА определять расхождение шкал ЛА и ИСЗ. Алгоритмы
решения указанной задачи приводятся ниже.
Распространение эфемеридной информации. Эфемеридами
называются предвычисленные значения координат и скорости ИСЗ. При
навигационных определениях на борту ЛА было бы желательно иметь всю
необходимую эфемеридную информацию в таком виде, чтобы
использовать ее в любой момент времени без привлечения средств связи с
наземными центрами управления. Однако срок действия прогноза пока
ограничен, поэтому оказывается необходимой оперативная доставка
на борт ЛА информации об эфемеридах, относящейся ко времени
измерений. В настоящее время эфемериды передаются с помощью самого
навигационного ИСЗ, который производит запоминание эфемерид,
относящихся к определенным моментам времени, и их выдачу в период
проведения навигационных измерений.
Рассмотренный способ распространения эфемеридной информации
реализуется следующим образом.
Со стационарных наземных пунктов наблюдения, называемых
командно-измерительными пунктами, измеряются текущие координаты
ИСЗ с точной привязкой результатов измерения ко времени.
Результаты измерений собираются и периодически обрабатываются, что
позволяет определять элементы орбиты ИСЗ на заданное время. Эти
данные используются для прогнозирования движения ИСЗ. Результаты
прогнозирования передаются на борт ИСЗ и закладываются в бортовое
запоминающее устройство. Затем производится последовательная
выборка прогнозируемых значений координат и скорости ИСЗ,
относящихся к определенным моментам времени (например, к началу каждой
минуты), и излучение их по радиоканалу. На определяющемся объекте
ведется прием и регистрация принятых эфемерид для дальнейшего
использования при навигационных расчетах.
В некоторых системах с борта ИСЗ передаются сигналы, несущие
эфемеридную информацию двух типов: поисковую (альманах) и
навигационную (рабочую). Поисковые эфемериды отличаются от
навигационных меньшей точностью и отображаются меньшим числом двоичных
знаков. Они используются для определения углового положения ИСЗ
на небосводе и быстрого наведения на него бортовых антенн ЛА.
Навигационные эфемериды предназначаются для точного определения
параметров движения ЛА.
Алгоритмы определения местоположения и скорости Л А по
результатам дальномерных радиотехнических измерений. В большинстве
случаев наиболее высокая точность определения трех пространственных
координат и трех составляющих вектора скорости ЛА достигается при
одновременном определении дальности и скорости полета ЛА
относительно трех или большего числа ИСЗ. Измерения по трем НИСЗ
позволяют получить три поверхности положения и три компоненты вектора
скорости/Таким образом, при благоприятном пространственном
разносе ИСЗ можно определить положение и скорость ЛА.
В тех случаях, когда требования к точности навигационных
определений не очень высоки и не обязательно определение всех трех ко-
256
ординат Л А и всех трех составляющих скорости, можно ограничиться
и меньшим числом спутников.
Алгоритмы навигационных определений при одновременном
измерении трех дальностей до ИСЗ имеют вид:
(*И|-*)Ч (toi-y)2 + (**i-*Y = rf. (10.4)
Здесь х> у, z — прямоугольные координаты ЛА; хи., #и., ги. —
координаты /-го спутника; г% — расстояние до /-го спутника,
измеряемое с помощью РНС.
Алгоритмы (10.4) позволяют определить координаты ЛА при-
отсутствии какой-либо другой информации о них. В действительности
на борту ЛА ведется счисление пути и известны данные о счислимых
координатах хС9 уСУ zc. При этом спутниковые системы навигации
целесообразно использовать для коррекции счислимых координат, т. е,
для определения поправок к счислимым координатам Ад:, Ay, Az.
Действительные значения координат связаны со счислимыми коор*
динатами и поправками следующими зависимостями:
х = хс + Ах; у = ус + Ау\ z = zc + Az. (10.5)
Определение поправок по данным измерений с помощью ИСЗ
можно осуществить решением сравнительно простых линейных соотноше*
ний, полученных из уравнений (10.4) разложением формулы
ri = V(xw -xc-Axf + (Ут - Ус-А У?+Ы -Zo-Azf (10.6)
в ряд Тейлора по поправкам в точке, соответствующей счислимым
координатам ЛА. Обозначая буквой гс. расстояние от счислимого места
ЛА до i-го спутника, пренебрегая членами второго и более высоких
порядков малости, получаем
rt-rci^^Ax + ^-Ay+^LAzt (10.7)
дхс дус dzc
Частные производные вычисляются в точке, соответствующей
счислимым координатам ЛА. Из выражения (10.6) следует, чтозти
производные равны направляющим косинусов углов, под которыми
видны ИСЗ из точки, соответствующей счислимым координатам ЛА:
дгг,- ХИ.—хс
urci Xli
drGi __ Ущ "" У^
dyG rct
drci '2_ zwj—zg
dzc rct
Таким образом, для определения поправок к счислимым
координатам ЛА можно пользоваться системой линейных уравнений вида:
mtAx + ntAy + ktAz = А/у, Art = r% — rz.\ (10.9)
i = 1, 2, 3.
■cosai= trii\
= cos Pi =/if,
= cos yt = ki%
(10.8)
9 Зак. 444
257
В процессе дальномерных измерений можно также определить
величину и направление скорости движения ЛА. Для этого необходимо
произвести двукратное измерение трех дальностей. Уравнения для
вычисления трех составляющих скорости можно получить из
выражения (Ю.4) путем его дифференцирования:
{xm — x)mi + {yw—y)ni + {zm —z)ki^ru (10.10)
где rt= HritlM\
Arit — приращения дальностей до ИСЗ за интервал времени А/.
В гражданской авиации в большинстве случаев не требуется
определение трех пространственных координат ЛА, поскольку высота ЛА
достаточно точно определяется бортовыми высотомерами. Дье
координаты ЛА (например, его широту и долготу) при этом можно
определить по результатам одновременного измерения дальностей до двух
ИСЗ. Таким образом, для определения места достаточно использовать
уравнения (10.4) или (10.9), дополнив их уравнением, отображающим
результаты измерения высоты:
x* + y* + z2=-(R3 + H)\ (10.11)
где R3 — радиус Земли;
Н — высота ЛА.
Линеаризованный вариант этого уравнения
хс Ах + ус Ay + zc Az = AHVx*c+y*+z2c . (10.12)
Здесь АН— разность измеренной и счислимой высоты, которая,
как правило, равна нулю.
До сих пор рассматривалась методика определения
местоположения ЛА по данным об одновременно измеряемых дальностях до
нескольких ИСЗ. Параметры движения ЛА могут определяться также
по результатам разновременных измерений дальностей до ИСЗ.
По результатам первого измерения дальности, производимого в
момент tx, можно составить уравнение
(хт-хг)* + (ут -yif + (zm -zxf = r\. (10.13)
Здесь хъ yl9 zx и хи\9 ?иь zm — коодинаты ЛА и ИСЗ в момент
первого измерения.
Результаты второго измерения
(*И2 — х2)2 + (уи2 —y2)2 + (zm — z2f=-r\. (10.14)
Производя в промежутке между первым и вторым измерениями
счисление пути, можно записать уравнение связи между координатами
ЛА в моменты первого и второго измерений:
*2 *2 *г
х2 = хг + J xdt\ уг"-= #i + § ydt; г2 = гг+^ zdt. (10.15)
и и и
Уравнения (10.13)—(10.15) представляют собой систему уравнений,
совместное решение которой позволяет определить координаты ЛА
в момент первого или второго измерений. Очевидно, что эти урав-
258
йения можно Линеаризовать; это позволит упростить решение задачи
определения места.
Представленные здесь алгоритмы определения места
предполагают использование минимального числа измерений и не
предусматривают статистической обработки измерительной информации. В тех
случаях, когда возникает потребность в уменьшении случайных
погрешностей измерений, можно использовать измерения, число
которых превышает число определяемых навигационных величин.
Результаты измерений при избыточном числе измеренных величин подвергают
статистической обработке. Точность получаемых таким образом
поправок к счислимым координатам будет, как правило, выше точности
определения поправок по минимуму данных.
Алгоритмы определения координат ЛА разностно-дальномерными
методами. Как известно, при определенных условиях разностно-
дальномерные методы не уступают дальномерным методам по точности
определения координат и скорости. В самом деле, если базовые углы
разностно-дальномерных систем превышают 30°, то погрешности
определения линий положения не будут превосходить удвоенного значения
погрешностей определения разности расстояний. Если, кроме того,
угол пересечения линий положения выбран от 60 до 120°, то
погрешность определения места будет мало отличаться от погрешности
определения линий положения. Построение систем, удовлетворяющих
приведенным условиям, представляет собой вполне реальную задачу.
Так как разностно-дальномерные методы предполагают
использование на борту ЛА более простой аппаратуры, чем дальномерные,
можно заключить, что эти методы относятся к числу наиболее
перспективных методов спутниковой навигации. Приведем алгоритмы
навигационных измерений с помощью спутниковых
разностно-дальномерных систем.
Предположим, что определение координат ЛА осуществляется по
трем ИСЗ И1э И2 и И3, образующим две независимые базы ИХИ2 и
И2И3, и что, кроме измерения разностей расстояний до спутников
(Иг — И2) и (И2 — И3), определяется также высота Н ЛА.
Тогда уравнения навигационных измерений:
V (*ш — xf + (Уи 1 —у)2 + (*и 1 — г)2 —
— У(ХИ2— Х)2 + (уи2— У)2— (2И2— Z)2 = 6г12;
У(хт—xf + (уи2 —у)2 + (гиг — z)2 —
—V(xm —xf + (ут — У)2 + (*из — zf = 6г23;
x2 + y2+z* = (R3+H)*
(10.16)
Здесь бг12 и 8г23 — измеренные значения разностей расстояний до
ИСЗ.
Решая полученную систему уравнений при известных координатах
ИСЗ, можно определить координаты х, у, z местоположения ЛА,
Уравнение (10.16) является нелинейным, и его использование на
практике затруднительно. Однако, поскольку на борту ЛА всегда
9*
259
имеется некоторая информация о местоположении, уравнения (10.16)
можно подвергнуть линеаризации:
т12 A* + n12 Ay + k12 Az = A (8r12); ]
т2з Ал: + п23 Ау + k23 Az = А (бг23); | (10.17)
тс Ах + пс Ay + kc Az = АН. ]
Здесь использованы обозначения:
т12 = т1—/Иг; пх2-=пх—п2\ kl2 = kx—k2\
tYl26 ~ ^2 ^3» ^23 == ^2 ^3> ^23 == ^2 "'З»
ть=—L; я^—-; kt = —-
дх ду дг
(10.18)
где ri — расстояние от /-го спутника до счислимого места ЛА;
Л (6r^)==6rjj — 6rjj G — разность измеренного и счислимого расстояний;
m-iAiMi — направляющие косинусы отрезков, соединяющих /-й
ИСЗ со счислимым местом самолета;
я*с> пс, kc — направляющие косинусы геоцентрического
радиус-вектора счислимого места.
Если точность счислимых координат низка, процесс определения
поправок необходимо повторить, используя в качестве исходных
данных о координатах данные, полученные в результате первого цикла
определения поправок.
Дифференцируя определяемые координаты ЛА по времени или
определяя доплеровское смещение частот принимаемых сигналов,
можно определить соответствующие составляющие путевой скорости
движения самолета и фактический путевой угол его движения.
Алгоритмы псевдодальномерного метода радионавигационных
измерений. Для определения координат ЛА по результатам псевдодаль-
номерных измерений можно использовать систему нелинейных
уравнений, подобных уравнениям (10.4), или систему линеаризованных
уравнений подобных уравнениям (10.9). Как и ранее, будем
предполагать, что определение высоты осуществляется по данным высотомера,
погрешностью которого можно пренебречь, и результаты измерения
псевдодальностей до ИСЗ используются для определения поправок
Ал: и Ау к счислимым координатам ЛА. Предположим, что измерены
псевдодальности до трех ИСЗ. Результаты измерений отображаются
избыточной системой линейных уравнений
mtAx + ntAy + ktAz = Arnh (10.19)
где i= 1, 2, 3, ..., rni — разности между измеренными значениями
псевдодальностей и значениями дальностей, соответствующих
счислимым координатам ЛА;
А/-Д* = /-| + frPA*, —/с*. (10-2°)
Линии положения, соответствующие трем измеренным значениям
псевдодальностей, не пересекаются в одной точке. Это означает, что
уравнения (10.19) не имеют общего решения и являются несовместными.
Возникает вопрос, можно ли из этих уравнений получить систему
совместных уравнений. Очевидно, что это можно сделать, вводя в
260
правые части ураЁНений поправки Лг. Если, изменяя эти поправки,
подобрать их равными погрешностям измерения дальностей с
обратным знаком Дг = — vrpAt4, то уравнения (10.19) станут совместными,
т. е. будут иметь решение. С другой стороны, очевидно также, что для
обеспечения совместности уравнений поправки Дг должны
удовлетворять системе уравнений
rtiikx + щку — Дг = Arni) (10.21)
где i = 1, 2, 3.
В этой системе трех уравнений три неизвестные величины:
поправки к счислимым координатам и поправка к измеренным
псевдодальностям, учитывающая погрешность измерения дальности,
обусловленную расхождением часов на борту ЛА и ИСЗ. Решая уравнения
относительно Д#, Ау и Дг, можно определить поправки к счислимым
координатам и поправку к измеряемым дальностям, из которой
нетрудно установить поправку к показаниям часов на борту ЛА.
Система навигационных ИСЗ. Для того чтобы условия наблюдения
ИСЗ были по возможности одинаковыми во всех точках земного шара,
целесообразно использовать круговые орбиты.
Если наклонение орбиты равно нулю (такие ИСЗ называют
экваториальными), то зона видимости ИСЗ по мере его движения будет
определяться полосой, ограниченной двумя параллелями, удаленными от
экватора на расстояние, равное радиусу зоны видимости. Если
наклонение орбиты выбрать равным 90° (спутники с таким наклонением
называют полярными), то полоса обзора будет охватывать шар так,
что ее ось будет проходить через полюсы.
Если в состав системы входит несколько полярных ИСЗ, то чаще
всего они будут наблюдаться в околополюсных районах. Сопоставляя
зоны видимости экваториальных и полярных ИСЗ, можно заключить,
что для увеличения частоты появления спутников в зоне видимости
ЛА, совершающих полеты в средних широтах, наклонения орбит ИСЗ
целесообразно выбирать так, чтобы они отличались от 90° на угол
порядка углового радиуса зоны видимости.
Ранее отмечалось, что зона видимости отдельного ИСЗ ограничена
и размеры ее зависят от высоты полета ИСЗ. Чем больше высота
полета ИСЗ, тем меньше число спутников потребуется для создания
глобальной спутниковой системы. Кроме того, чем ближе высота полета
к 35 810 км, тем меньше значение скорости ИСЗ относительно Земли.
Приводимые соображения свидетельствуют о целесообразности
использования для навигационных измерений спутников, обращающихся
на суточных орбитах (т. е. на высотах 35 810 км). Если использовать
три стационарных экваториальных ИСЗ и расположить их на равных
расстояниях друг от друга по экватору, то в поле зрения наблюдателя
в любой точке Земли будет находиться по крайней мере один спутник.
При шести таких ИСЗ в поле зрения наблюдателя всегда будут два
спутника, что позволит определить широту и долготу ЛА. Стационарные
экваториальные ИСЗ не видны только в полярных районах,
следовательно, систему экваториальных ИСЗ необходимо дополнить
спутниками с иным наклонением орбиты.
261
Однако суточные ЙСЗ имеют и определенные недостатки. Вывод
суточных ИСЗ на орбиты требует более мощных ракет-носителей, чем
вывод ИСЗ на более близкие к Земле орбиты. Ввиду большой
удаленности суточных ИСЗ от Земли на них необходимо устанавливать более
мощные передатчики и источники питания. Эти обстоятельства
привели к тому, что в спутниковых навигационных системах первых
поколений использовались вначале низковысотные, а затем средневысотные
ИСЗ.
Первые НИСЗ запускались на высоты 1000—2000 км. Атмосфера
Земли на этих высотах практически не оказывает влияния на
движение спутников и делает возможным прогнозирование их полета на
достаточно большие отрезки времени. Однако продолжительность
пребывания спутника такого типа в зоне видимости наблюдателя
составляет 10—15 мин и в состав системы приходится включать большое число
спутников или считать допустимыми дискретные измерения по ИСЗ
через определенные периоды времени. Так, для того чтобы в зоне
видимости наблюдателя в любой момент времени был виден хотя
бы один спутник при высоте полета 1000 км, общее число
спутников должно составлять 24. При этом место наблюдателя может
определяться только на основе разновременных наблюдений одного и того
же ИСЗ, и, следовательно, для определения места требуется
достаточно большой (порядка нескольких минут) отрезок времени, в течение
которого ИСЗ переместиться так, что получаемая с его помощью
вторая линия положения будет повернута относительно линии положения,
полученной в момент первого измерения, на достаточно большой угол.
Средневысотные спутники, обращающиеся на высотах 10 —
20тыс.км, занимают промежуточное положение между низковысотными
и суточными ИСЗ.
Требуемое количество средневысотных спутников при прочих
равных условиях меньше требуемого количества низковысотных
спутников, но больше, чем требуемое количество стационарных ИСЗ. В свою
очередь, при одном и том же числе ИСЗ при увеличении их высоты
создаются более благоприятные условия
для навигационных определений.
Расположение плоскостей орбит 019
02 и 03 рассматриваемого варианта
средневысотных ИСЗ. показано на рис. 10.6,
а на рис. 10.7 изображено размещение
ИСЗ на орбитах и перекрытие зон их
видимости в направлении орбиты.
Длины линий по горизонтали указывают
размеры зон видимости.
При высоте 20 тыс. км
геоцентрический радиус зоны видимости, в
пределах которой ИСЗ виден под углами
места, превышающими 10°, близок у 65°.
_ 1Л^ гг * Так как геоцентрические углы разноса
РИС. 10.6. ПЛОСКОСТИ Орбит тхпъ лс of\o
ИСЗ спутниковой системы на- ИСЗ составляют 45 и 60 , то зоны види-
вигации мости соседних ИСЗ перекрываются на-
262
ИС31
ИС32
Рис. .10.7. Размещение
спутников на орбитах и перекрытие
зон их видимости
ИСЗЗ
ИС35
130°
Геометрический, ут точки ни поверхности Земли
и« ,
Jfl
,_ 85"
I
л i
0° *£°
(С31 2
\=f^
90°
3
13,
4
рг— j
4
А
I
0°
—j
#5*
i J
7
I
5
столько, что в любой точке земной поверхности (в том числе и на
экваторе, где условия перекрытия зон видимости наименее благоприят
ные) видны по крайней мере два спутника, расположенные на одной
и той же орбите, и третий, — расположенный на соседней орбите.
Система спутников, отличающихся неизменным взаимным
расположением орбит и спутников на орбитах, называется
синхронизованной. Под влиянием внешних воздействий такая система с течением
времени деформируется. Для поддержания неизменности взаимного
расположения орбит и спутников необходимо осуществлять
периодическую коррекцию траекторий ИСЗ.
Величины требуемых корректирующих импульсов невелики, а
поэтому создание подобных корректируемых систем ИСЗ в настоящее
время технически осуществимо.
10.3. ТОЧНОСТЬ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЛА С ПОМОЩЬЮ ИСЗ
Общие положения. Точность определения навигационных
параметров Л А при измерениях по ИСЗ определяется точностью данных о
параметрах движения ИСЗ; точностью радиотехнических измерений и
геометрическими условиями наблюдений. В некоторых случаях на
точность определения координат оказывает влияние и точность счисления
пути автономными бортовыми системами навигации.
В свою очередь, точность данных о параметрах движения ИСЗ
зависит от точности определения орбиты и от точности прогнозирования.
863
Точность измерения дальности от ЛА до ИСЗ в сантиметровом и
дециметровом диапазонах определяется в основном аппаратурными и
методическими погрешностями. Методические погрешности
обусловлены непостоянством скорости распространения радиоволн в ионосфере
и в тропосфере и многопутностью распространения, при которой
сигналы приходят в точку приема по нескольким путям различной длины.
Значение погрешностей, обусловленных помехами, зависит также
от амплитуды полезного сигнала, поэтому мощность передатчиков,
устанавливаемых на борту ЛА и ИСЗ, и направленность антенн
выбирают таким образом, чтобы обеспечить уменьшение флуктуа-
ционных помех до требуемого уровня.
Качественная оценка влияния геометрических факторов. Будем
предполагать, что в состав спутниковой системы входит ряд
спутников, равномерно рассредоточенных по стационарной орбите и что
место ЛА определяется измерением дальности до двух ИСЗ.
Угловое геоцентрическое расстояние между ИСЗ примем равным Хсп
(рис. 10.8). Предположим, что при определении места на борту ЛА
используется также информация о его высоте.
Местоположение ЛА будет определяться по двум линиям
положения, которые представляют собой малые круги на земной
поверхности. Центры кругов располагаются в подспутниковых точках (т. е.
в точках, которые представляют собой геоцентрические проекции
ИСЗ на земную поверхность). Задача местоопределения
иллюстрируется рис. 10.8, на котором точками И\ и #2 показаны спутники,
точками П\ и Я2 — подспутниковые точки и точкой С — место
самолета. Последнее определяется как точка пересечения двух малых кругов,
представляющих собой линии равных дальностей до ИСЗ И\ и Я2.
Точность определения места ЛА зависит от точности
определения линий положения на земной поверхности и от угла между
линиями положения. Рассчитаем погрешность определения линии
положения на земной поверхности. Для этого установим связь между
изменением расстояния г до ИСЗ и смещением точки на земной
поверхности (рис. 10.9). Здесь справедливо соотношение
r2 = /?I f (Яз + #и)2-2/?з(#з + Яи) cos P> (10-22)
где R3 — радиус Земли;
#и —высота ИСЗ;
Р — угловое расстояние ЛА от подспутниковой точки. Так как высота
самолета Н значительно меньше R3 и Яц, то ею можно пренебречь.
Производя дифференцирование полученного соотношения,
находим связь между приращением расстояния до спутника и
приращением углового расстояния до подспутниковой точки.'
Ар = г [Rs (#з + Яи) sin'p]-1 Дг. (10.23)
Отсюда получаем зависимость между изменением расстояния до
ИСЗ и смещением ЛА вдоль нормали к линии положения
Дп = гДр = **L _ (10.24)
Я3(*з+Яц)sin P '
264
Из формулы (10.24) видно, что
вблизи подспутниковой точки
погрешность определения линии
положения стремится к
бесконечности и приближается к погрешности
измерения дальности в районах,
где высота ИСЗ над горизонтом
близка к нулю.
Рассмотрим теперь, как зависит
от местоположения ЛА угол
пересечения линий положения на
земной поверхности. Для упрощения
будем предполагать, что измерения
осуществляются по
экваториальным спутникам, наклонения орбит
которых равны 0° и подспутниковые
точки которых #х и Я2
располагаются на экваторе (рис. 10.10).
Угол пересечения линий
положения зависит от местоположения
ЛА относительно подспутниковых
точек. Из сферического
треугольника СП1П2 видно, что этот угол
равен сумме углов vx и v2,
значение которых определяется широтой
ЛА <р и угловыми расстояниями
Xni и ЯП2 от меридиана ЛА до
подспутниковых точек:
v = vx + v2;
v2 = arcctg (sin ф ctg ЯП2);
v2 = arcctg.(sin ф ctg ЯП1). (10.25)
Из рис. 10.10 видно, что углы
между линиями положения малы
вблизи экватора. Очевидно, что они
будут также малы за пределами
района, ограниченного
меридианами подспутниковых точек.
Представляет интерес
определение значения угла между линиями
положения в околополярных
районах. Широта точек в
околополярных районах близка к 90°, и
поэтому vx = Яп2 и v2 = кщ.
Следовательно, угол между линиями
положения в этих районах близок к
разности долгот подспутниковых
точек: v = Яш + Хт = ^сп-
Рис. 10.8. Схема определения места
самолета по расстояниям до двух
ИСЗ
Рис. 10.9. Геометрические
соотношения при определении линии
положения дальномерным методом
Рис. 10.10. Геометрические
соотношения при определении места самолета
по двум дальностям до ИСЗ
265
Если эта разйость близка к 90°, то близок к этому значению и
угол между линиями положения. Таким образом, выбирая
определенным образом взаимное положение НИСЗ, можно обеспечить
благоприятные условия для определения места с высокой точностью и в
околополярных районах. При этом необходимо учитывать, что зона
видимости стационарных ИСЗ, наклонение орбит которых равно 0°,
ограничена и даже при б = 0° не захватывает широт за пределами
82°.
Приведенные расчеты позволяют определить рабочую область
рассматриваемого варианта спутниковой системы навигации. В
частности, можно условиться, чтобы в пределах рабочей области РНС
погрешность определения места не превышала в заданное число раз
погрешности определения координат в области наиболее высокой
точности (т. е. в области, где An = Дг) и угол пересечения линий
положения был близок к 90°.
Из приведенных данных видно, что рабочая область системы
ограничена меридианами подспутниковых точек и охватывает область
средних широт. Она не включает приэкваториальные и полярные районы.
Поэтому для создания глобальной спутниковой РНС систему
стационарных спутников надо дополнить полярными спутниками или
применять синхронные спутники, наклонение орбит которых
отлично от нуля. Рассмотренные соображения по оценке точности
спутниковых РНС применены как к стационарным, так и к спутникам,
обращающимся на более низких орбитах. В частности, их можно использовать
для анализа точности средневысотных спутниковых систем. Одним из
проектов спутниковой РНС предусматривается создание системы из
24 спутников, запускаемых на высоты до 20 тыс. км. Спутники
равномерно размещаются на трех орбитах, плоскости которых сдвинуты
друг относительно друга на 120°. На каждую приходится по восемь
ИСЗ, угловое расстояние между которыми составляет 45°.
Место Л А может определяться по двум ИСЗ, расположенным на
одной и той же орбите, или по ИСЗ, располагающихся на разных
орбитах. Геометрические условия наблюдения за двумя средневысот-
ными ИСЗ на одной орбите будут такими же, как и условия
наблюдения двух стационарных ИСЗ. Отличие состоит в том, что роль
экваториальной плоскости будет выполнять плоскость орбиты
средневысотных ИСЗ.
Таким образом, рассмотренные вопросы точности навигационных
измерений носили в основном качественно-геометрический характер.
Приведем некоторые соображения по методике количественной оценки
точности определения места ЛА.
Точность определения места дальномерным методом. Основу
количественной оценки точности могут составить ранее приводимые
уравнения для определения координат л:, у, z или поправок к счисли-
мым координатам ЛА Ад:, At/, Дг по результатам измерения дальности
до ИСЗ и высоты ЛА. Полученные линеаризованные уравнения для
определения поправок к счислимым координатам ЛА в случае
измерения трех дальностей и в случае измерения двух дальностей и высоты
ЛА пригодны не только для описания взаимосвязи между результата-
266
ми измерений и поправок к счислимым координатам, но и для
отображения зависимостей между погрешностями измерений и
погрешностями определения координат ЛА, так как и поправки и погрешности
представляют собой малые отклонения соответствующих величин от
своих счислимых (или измеренных) значений. Таким образом,
привлекая для анализа прямоугольную геоцентрическую координатную
систему Oxyz и сохраняя для мгновенных значений погрешностей те
же символы, которые использовались для обозначения поправок, для
погрешностей определения координат ЛА в случае измерения двух
дальностей и высоты ЛА получаем:
т±Ах + пгАу + kxAz = Д/у, т2кх + п2Ау + k2Az = Дг2; (10.26)
т3Ах + п3Ау + k3Az = АН.
Здесь тъ пг и k± — направляющие косинусы линии, соединяющей
ЛА и первый ИСЗ; т2, я2, k2 — направляющие косинусы линии,
соединяющей ЛА и второй ИСЗ; тЗУ n3, k3 — направляющие косинусы
геоцентрического радиус-вектора ЛА, определяемые соотношениями:
*с
Ус
т3 = — = cos ас; п3 = -^ = cos (5С; k3 =
гс гс
гс
■ cosyc;rc
= Vxi +yi +z(
(10.27)
Без уменьшения общности получаемых результатов можно
принять, что ось z используемой системы координат направлена в точку С
расположения ЛА (рис. 10.11). При этом хс и ус равны нулю, а
поэтому система уравнений (10.26) упрощается и прибретает вид:
тгАх + пгАу = Агх — k±AH\ т2Ах + п2Ау = Дг2 — k2AH. (10.28)
При этом погрешность координаты Az = АН.
Система уравнений (10.28) позволяет оценить погрешности
определения координат ЛА вдоль двух взаимно перпендикулярных осей,
расположенных над поверхностью Земли в точке расположения ЛА.
Обозначая правые части этих уравнений символами Аг[, Аг'2
и применяя в знаменателе знак Д в качестве определителя системы,
получаем
Ах
Ду = -
тх Аг'
Щ А'!
(10.29)
где Д — определитель системы, равный
т2 п2
(10.30)
Полученное решение отображает связь между мгновенными
значениями погрешностей и непосредственно применимо для оценки систе-
267
Рис. 10.11. Используемые геоцентри- Рис. 10.12. Угловые координаты ис-
ческая и топоцентрическая прямо- кусственного спутника Земли
угольные координатные системы
матических погрешностей. Из него можно получить выражения и для
средних квадратических значений случайных погрешностей:
аЛ. = А-1аг1/ п21+п22~2п1п2р ; (10.31)
оу = Д-l ar Vm* + ml—2n%i m2 p. (10.32)
При выводе формул предполагается, что средние квадратические
значения погрешностей измерения дальностей при первом и втором
измерениях одинаковы и что коэффициент корреляции между
случайными погрешностями этих измерений равен р.
Анализ соотношений (10.29)—(10.32) также позволяет выявить
наиболее благоприятные условия для измерений и оценить
погрешности определения координат в этих условиях.
Обратимся к определителю системы А. Очевидно, что погрешности
определения координат х и у будут тем меньше, чем больше значение
этого определителя. Оценим, от каких факторов он зависит.
В явном виде определитель системы
А = тгп2 — %m2 = cos аг cos р2 — cos а2 cos p1# (10.33)
Он является функцией направляющих углов линий визирования
первого и второго ИСЗ. От углов аир можно перейти к азимутам А
и углам места h спутников.
Соотношения для этого перехода получаются из рис. 10.12, на
котором показаны точка С расположения самолета, направление на
ИСЗ (он обозначен буквой И), углы ait рь азимут Aif угол места i-ro
ИСЗ hi, ВИР — сферический треугольник, ht — его высота. Поэтому
верны соотношения: cos at = cos ht cos At; cos p* = cos ht sin At.
Учитывая эти зависимости, определитель системы
А = cos кг cos ft2 sin (A2 — Аг). (10.34)
268
Из полученного выражения видно, что точность определения
координат ЛА тем выше, чем меньше высота спутников над горизонтом
и чем ближе к 90° разность их азимутов.
Для того чтобы по результатам дальномерных измерений, кроме
долготы и широты ЛА, определить достаточно точно и его высоту,
помимо двух близгоризонтных спутников, необходимо иметь и третий
ИСЗ, который должен располагаться недалеко от зенита ЛА.
Точность разностно-дальномерных определений. Используя
методику анализа точности определения координат ЛА при
дальномерных измерениях и алгоритмы разностно-дальномерных измерений,
можно получить количественные соотношения, характеризующие
точность определения координат разностно-дальномерными методами.
Мгновенные значения погрешностей определения координат ЛА
при разностно-дальномерных измерениях можно получить, используя
формулы (10.17) для оценки поправок к счислимым координатам. Если
при определении пространственного положения ЛА используется
информация от барометрического высотомера, эти формулы можно
упростить.
Совмещая ось z прямоугольной системы координат с
радиус-вектором счислимого места, получаем: тс = 0; пс = 0; kc = 1.
Нетрудно установить, что при таком выборе координат система
уравнений для оценки погрешностей определения координат ЛА
упрощается:
т12Д* + n12At/ = Дх (бг12); т23Д# + п23Ау = Дх (6г23), (10.35)
где Ах (6г„) = А фг„) —ktJ Д#.
Разрешая эту систему уравнений, получаем формулы для
мгновенных значений погрешностей определения координат ЛА:
Да: = —
А
v д
Ai(S/-12) n,2
Al (б>2з) «23
m12 Ах (бг12)
»Ь Д1 (&2з)
(10.36)
(10,37)
Здесь определитель системы
^23 ^23
(10.38)
Средние квадратические значения случайных погрешностей
определения координат можно представить формулами:
Су = Д.-1 аг У rnU + mfa — 2рт{2 т^ .
(10.39)
(10.40)
269
Анализируя свойства определителя А, можно выявить условия
достижения наиболее высокой точности разностно-дальномерных
измерений. Раскрывая определитель, получаем
А = (cos аг — cos а2) (cos |32 — cos рз) — (cos px — cos p2) X
X (cos a2 — cos а3). (10.41)
Выражая направляющие косинусы углов визирования отрезков
прямых линий, соединяющих счислимое место с точками расположения
ИСЗ, через углы места и азимуты этих отрезков, как это делалось при
анализе точности дальномерных измерений, приводим определитель
к виду
А = — cos hx cos h2 sin (Аг — Л2) + cos h2 cos h3 X
X sin (Л3 — A2) — cos hx cos h3 sin (A3 — At). (10.42)
Условия достижения наиболее высокой точности определения
координат х и у оказываются различными. Однако можно утверждать,
что наиболее высокая точность определения обеих координат ЛА
достигается в условиях, когда определитель системы достигает своего
максимального значения. Установим, каковы эти условия, используя
обычные методы определения экстремума функции. Дифференцируя
определитель по топоцентрическим координатам каждого из трех ИСЗ
и приравнивая к нулю производные, получим систему
трансцендентных уравнений, решение которой выражается соотношениями:
hx = 0; /i2 = 0; h3 = 0; cos (A3 — Лх) = cos (Л2 — Л2);
cos (A3 — A2) = cos (A2 — Аг).
Принимая для простоты Аг = 0 (что не уменьшает общности
получаемых результатов), можно установить, что максимуму определителя
соответствует решение уравнений А3 = — Л2, которое устанавливает
Л 2 в уравнении cos 2Л2 — cos Л2 = 0.
Разрешая это уравнение, получаем искомые условия достижения
определителем максимального значения: Л2 = ± 120°; Л3 = ± 120°.
Таким образом, наиболее благоприятные условия для разностно-
дальномерных измерений достигаются, если высоты всех трех ИСЗ
близки к нулю и спутники разнесены по азимуту друг относительно
друга на 120°.
Точность4 псевдодальномерного метода. Для анализа
точности псевдодальномерного метода можно использовать те же
линеаризованные уравнения, которые получены для определения поправок
к счислимым координатам, и поправки к показаниям часов.
Аналитические выражения для мгновенных значений погрешностей выражаются
теми же соотношениями, которые справедливы для поправок к
счислимым координатам и к показаниям часов. Эти соотношения
получаются в результате решения системы (10.21) и имеют вид:
Ах = Ах/А; Ау = Ау/А; Аг = Аг/Д, (10.43)
270
где
д^
А* =
А,-
\ttli «1—1
' /П2 «2— 1
1 Щ П3 — 1
Ar„i «1 — 1
Агп2 п2 — 1
Агп3 п3 — 1
1 «1 Агге1 —
т2 Агп2 —
1 пи Агпз —
>
»
1
1
1
дг=
/Их «! ДГ„1
т2 п2 Дгп2
Щ п3 Агп3
(10.44)
(10.45)
(10.46)
(10.47)
Из формул видно, что если точность псевдодальномерного метода
определяется лишь расхождением шкал времени на борту ЛА и ИСЗ,
а шкалы времени на всех ИСЗ согласованы друг с другом, то по своим
точностным свойствам псевдодальномерный метод равноценен разно-
стно-дальномерному.
В правильности высказанного суждения можно убедиться,
подвергнув определители (10.44)—(10.46) преобразованиям. Вычитая
вторые строки этих определителей из первых, а третьи из вторых,
получаем соотношения:
А =
т3
«12
И23
^23 ^23
А,-
д,=
(Arnl—Arn2) n12
(Arn2—Arn3) п23
т12 (Arnl —Arn2)
t*ha (А^п2—Д'пз)
Учитывая, что разности погрешностей измерения псевдодальностей
равны погрешностям измерения разностей расстояний Arni — Arnj =
= А (бгц), для погрешностей определения координат ЛА псевдо-
дальномерным методом получаем формулы, совпадающие с формулами
(10.36)—(10.38) для погрешностей определения координат разностно-
дальномерными методами. Это свидетельствует о том, что в условиях,
когда выполняются' принятые допущения, можно констатировать
тождество точностных свойств псевдодальномерного и разностно-дально-
мерного методов.
Нетрудно установить, что сформулированное суждение
справедливо не только в случае определения двух координат ЛА. В равной сте-
271
пени оно сохраняет силу и для случая пространственного местоопре-
деления.
Вывод об адекватности точностных свойств псевдодальномерного
и разностно-дальномерного методов представляется обоснованным,
если иметь в виду следующие соображения. Псевдодальномерные
измерения представляют собой измерения дальности, искаженные
погрешностью, которая считается постоянной и одинаковой для всех
измеряемых псевдодальностей. Естественным путем устранения влияния этой
погрешности является переход от псевдодальностей к разностям
псевдодальностей, которые свободны от постоянных погрешностей
измерения и равны разностям дальностей.
10.4. СПУТНИКОВЫЕ СИСТЕМЫ РАДИОНАВИГАЦИИ
В последние годы в печати появились сообщения о проектах и
разработках спутниковых РНС для летательных аппаратов, приводятся
расчетные характеристики спутниковых систем навигации, связи и
УВД для гражданской авиации («Аэросэт», «Конус»), спутниковой
системы навигации для военной и гражданской авиации («Навстар»),
спутниковой системы поиска и спасения ЛА, терпящих бедствие («Сер-
сэт»). Ниже описываются некоторые системы, введение в строй
которых планируется в ближайшие годы.
Название системы «Навстар» (NAVigation Satellite providing
Time And Range) в переводе обозначает навигационный спутник,
обеспечивающий определение времени и расстояния. С помощью ИСЗ
синхронизируются часы и измеряются пространственные координаты
и скорость ЛА. В системе используется псевдодальномерный метод
навигационных измерений.
Спутниковая система навигации включает сеть навигационных
ИСЗ, наземный комплекс управления спутниками и бортовое
навигационное оборудование ЛА.
Сеть навигационных ИСЗ состоит из 24 спутников, равномерно
расположенных на трех орбитах с наклонением в 63°. Орбиты
круговые, период обращения спутников 12 ч, высота полета на поверхностью
Земли 20 183 км.
При таком выборе орбит обеспечивается возможность
одновременного наблюдения в любой точке земного шара по крайней мере шести
спутников, хотя в среднем будут одновременно видны девять. Таким
образом, в любой точке Земли всегда существует возможность
выбора четырех наиболее благоприятно расположенных для
навигационных измерений спутников.
Спутник имеет массу 430 кг. Все спутники стабилизированы
относительно Земли по трем осям. В качестве источников энергии для
работы бортовых систем ИСЗ используются солнечные батареи и
буферные кадмиево-никелевые аккумуляторные батареи. Солнечные
батареи имеют площадь 5 м2; они непрерывно направлены на Солнце. В
периоды затмений подключаются аккумуляторы. Мощность солнечных
батарей 450 Вт (в конце активного существования ИСЗ она снижается
272
до 400 Вт). Расчетная продолжительность нормального
функционирования бортовых систем ИСЗ — 5 лет.
Бортовое радионавигационное оборудование ИСЗ включает два
радиопередатчика с частотами 1575 и 1227 МГц. Использование
излучений на двух частотах позволяет определять величину
дополнительной задержки, вызываемой различием скоростей распространения
радиоволн в ионосфере и в вакууме, и уменьшать значение
соответствующей методической погрешности измерения псевдодальности.
Излучения бортовых передатчиков подвергаются фазовой
манипуляции, благодаря чему обеспечивается передача эфемеридной
информации и сигналов времени. Колебания несущих и модулирующих частот
формируются из колебаний бортового атомного рубидиевого эталона
стабильностью 10~13.
На борту ИСЗ устанавливаются приемник, запоминающее
устройство и цифровой автомат, обеспечивающие регистрацию эфемерид и их
выдачу в моменты времени, к которым они относятся.
Антенна ИСЗ состоит из 12 спиралевидных элементов и имеет
диаграмму направленности, перекрывающую всю видимую с ИСЗ
земную поверхность. Антенна обеспечивает излучение и прием сигналов
с круговой поляризацией.
Наземный командно-измерительный комплекс спутниковой
системы навигации включает:
четыре станции слежения за ИСЗ (контрольные станции-мониторы
Monitor Station — MS);
корректирующую станцию (Upload Station—ULS);
главную станцию управления (Master Control Station — MCS).
Станции слежения размещены на больших удалениях друг от
друга (Гавайские о-ва, о. Гуам, на Аляске и в Калифорнии), причем
главная и корректирующие станции располагаются на территорий
США.
На станциях слежения осуществляется измерение дальностей до
ИСЗ и регистрация метеорологических условий наблюдения. Эти
данные передаются на главную станцию управления для учета
ионосферной, тропосферной и релятивистской поправок, определения
поправки к показаниям бортовых и наземных часов, статистической
обработки собираемых данных, прогнозирования движения ИСЗ с учетом
влияния солнечного давления и аномалий гравитационного поля Земли.
Рассчитываемые при этом эфемериды с помощью корректирующей
станции передаются на борт ИСЗ и вводятся в бортовое запоминающее
устройство не менее одного раза в сутки.
Бортовое оборудование ЛА обеспечивает прием сигналов,
излучаемых НИСЗ, их демодуляцию, декодирование и определение координат
и скорости ЛА. При навигационных измерениях бортовым
оборудованием управляет ЭВМ, которая осуществляет выбор ИСЗ.
Ожидаемая точность измерений системы «Навстар»
характеризуется погрешностью определения пространственных координат ЛА около
10 м и погрешностью определения скорости, близкой к 0,3 м/с.
Ниже (в скобках) приведены в метрах средние квадратические
значения погрешностей определения дальности до ЛА, обусловленные
273
влиянием наиболее существенных факторов: эфемериды ЙСЗ (1),шумы
приемника ЛА (1), часы и радиоэлектронное оборудование ИСЗ (2),
ионосферная задержка (2), тропосферная задержка (2),
множественность путей распространения (2), результирующее значение (4).
Точность определения места ЛА зависит от геометрических
условий измерений и составляет от 7,6 до 10,8 м по горизонтальной и
вертикальной осям для 90% всего времени измерений и 4,0—4,4 м для
50% времени измерений.
Система «Аэросэт» предназначается для связи, навигации и
управления движением самолетов гражданской авиации при полетах над
Атлантическим и Тихим океанами. В состав системы предполагается
включить шесть стационарных спутников (по три над каждым
океаном).
Производя запрос ЛА через ИСЗ, принимая ответные сигналы,
ретранслируемые двумя ИСЗ, и измеряя время задержки запросных
сигналов, определяют координаты ЛА. Ответные сигналы с борта ЛА
используются также для передачи на Землю данных о высоте его
полета, которые используются для оценки воздушной обстановки.
Предполагается, что место ЛА будет определяться с ошибкой, не
превышающей 1,85 км.
Канал радиосвязи Земля—ИСЗ—самолет и обратный канал
обеспечивают передачу телефонных и цифровых дискретных сообщений,
а также синхронизацию наземной и самолетной аппаратуры.
Телефонные сообщения передаются с помощью цифровой дельта-модуляции со
скоростью выборок 18 кбит/с.
Цифровые дискретные сообщения (в виде двоичных чисел)
передаются с помощью фазовой манипуляции со скоростью 1200 бит/с. Для
поддержания радиосвязи между самолетами и ИСЗ предлагается
использовать волны длиной около 20 см (точнее, для канала ИСЗ-ЛА
выделяется диапазон частот от 1543,5 до 1558 МГц; для канала ЛА—
ИСЗ—частоты от 1645 до 1660МГц). Для связи между наземными
станциями и ИСЗ намечается применять волны в диапазоне частот от 5,0
до 5,25 ГГц. Спутниковые антенны будут иметь усиление около 18 дБ,
самолетные — около 10 дБ. В линии связи планируется использовать
дуплексный режим работы.
В 1978 г. опубликовано сообщение о разработке спутниковой
системы поиска и спасения ЛА, потерпевших аварию.Системе присвоено
наименование «Сэрсэт» (Sarsat). Целесообразность разработки такой
системы обусловливается тем обстоятельством, что процент
пассажиров, выживающих после аварии самолета, тем выше, чем раньше
начинаются операции по спасению и по оказанию медицинской помощи.
По данным США, выживает 10% пассажиров, если самолет обнаружен
через двое суток после аварии, и 50% — если он обнаружен через
8 ч после аварии.
В состав системы предполагается включить три ИСЗ,
обращающихся на низких орбитах. Спутники будут оснащены аппаратурой для
регистрации, обработки и ретрансляции сигналов, излучаемых
аварийными радиопередатчиками самолетов, потерпевших аварию.
Прием этих сигналов осуществляется в течение времени пребывания ИСЗ
274
в зоне видимости самолета. На первой стадии работы системы сигналы
будут ретранслироваться на наземные станции слежения для
определения по доплеровскому сдвигу координат самолета. Точность
определения координат 10—12 км. В дальнейшем предполагается
усовершенствовать аварийные передатчики с тем, чтобы их сигналы несли
закодированную информацию о государственной принадлежности ЛА,
эксплуатанте, виде и времени аварии. Точность определения координат
предполагается повысить до 2—5 км.
В состав системы намечается включить четыре станции слежения,
три из которых предполагается разместить на территории США,
а четвертую в Канаде. На станциях слежения используются антенны
диаметром 3 м. Демонстрационные испытания системы планируются
на 1982 г.
КОНТРОЛЬНЫЕ ЗАДАЧИ
К гл. 1. 1. Самолет совершает полет с компасным курсом КК = 265°.
Девиация компаса А К = + 3 и магнитное склонение AM = + 7°. Определить
истинный курс (ИК) и магнитный курс (МК) следования самолета.
2. Определить магнитное склонение ДМ, если известно, что истинный курс
полета самолета ИК=50°, компасный курс КК = 46° и девиация компаса А/С =
- + 2°.
3. Самолет выполняет полет с магнитным курсом МК = 30°. Измеренный на
этом магнитном курсе курсовой угол радиостанции КУР = 50°, магнитное
склонение AM = + 3° и схождение меридиан б = + 2°. Определить магнитный
и истинный пеленги самолета.
4. Самолет совершает полет с компасным курсом КК = 60°, девиация
компаса А/С = + 2°, магнитное склонение AM =3°, курсовой угол
радиостанции КУР = 70°. Определить истинный пеленг радиостанции и истинный пеленг
самолета, если известно, что схождение меридиан б = + 1,5°.
5. Фактический путевой угол полета самолета ФПУ = 70°. Воздушная
скорость V = 600 км/ч, скорость ветра на высоте полета U = 30 км/ч и
направление ветра НВ = 130°. Определить графическим способом истинный курс
полета самолета, угол сноса и путевую скорость.
6. Истинный курс полета самолета 60°. Воздушная скорость V = 400 км/ч.
Угол ветра на высоте полета УВ = 125°. Угол сноса самолета 8°. Определить
построением навигационного треугольника скоростей фактический путевой угол,
путевую скорость и скорость ветра.
7. Заданный магнитный путевой угол ЗМПУ = 90°. -Через определенное
время полета был снят КУР приводной радиостанции, расположенной в
конечном пункте маршрута, который оказался равным 5°. Определить угол сноса и
магнитный курс полета самолета.
8. Истинная воздушная скорость самолета V = 240 км/ч. Магнитный курс
МК = 80°. Угол сноса 10°. Путевая скорость W — 280 км/ч. Определить
направление ветра НВ и скорость ветра U.
9. Для выполнения рейса по расписанию необходимо обеспечить заданный
навигационный режим полета самолета: ЗПУ = 72°; путевую скорость W =
= 800 км/ч при направлении и скорости ветра НВ =110° и V = 120 км/ч.
Найти параметры фактического навигационного режима полета: курс самолета,
воздушную скорость и угол сноса самолета.
10. Рассчитать безопасную высоту полета самолета, если истинная высота
полета Яи = 4000 м, абсолютная высота наивысшей точки рельефа местности
#ар = 450 м, наименьшее атмосферное давление по маршруту полета
(приведенное к уровню моря) РпРив. mirt ^ Ш-10-гЩ, а, средняя методическая
температурная поправка показаний высотомера равна АЯ?ср = 1,5 м.
275
11. Построить ортодромию между пунктами А и £, если известно, что угол
между ортодромией и меридианом в точке А пересечения с экватором аэ = 35°,
долгота точки А пересечения ортодромии с экватором Хэ = 65° и долгота
пункта В Хв = 140°.
12. Построить локсодромию между пунктами А и В, если известно, что
локсодромия пересекает меридианы под углом ал = 40°, долгота точки
пересечения локсодромии и экватора Х0 = 20° и широта пункта Вф = 50°.
13. Определить радиус круга линии равных расстояний, если координаты
центра окружности соответственно равны Х0 = 105°, <р0 = 52° и известны
текущие координаты самолета X = 125°, ф = 58°.
14. Самолет совершает полет из пункта А в пункт В по линии равных
пеленгов. Координаты пункта АХ — 30°, ф = 50, пункта В Хг = 60° и фх = 65°.
Определить пеленг на радиостанцию в пункте В и построить ЛРП.
15. Построить в прямоугольной системе координат линию равных разностей
расстояний между наземными станциями гиперболической
радионавигационной системы. Определить угол между асимптотой и перпендикуляром к базе
системы, если базовое расстояние между станциями А и В d = 300 км,
действительная полуось гиперболы а = 10 км.
16. При базе d = 300 км разностно-дальномерной системы самолет летит по
линии с равной разностью расстояний AR = 40 км. Разность расстояний
измерена с ошибкой а = 1%, действительная полуось гиперболы а = 20 км.
Вычислить ошибку при оценке угла направления Ав.
И*" К гл. 2. 1. Записать соотношение для минимально необходимой высоты
полета самолета над пересеченной местностью для обеспечения нормальной связи
наземного радиомаяка с самолетом на удалении R при наличии препятствия
высотой hn на пути распространения радиоволн.
2. Уточнить соотношение для максимального и минимального значения
дальности РНС с пассивным отражением сигнала от цели при учете зеркального
переотражения от поверхности земли.
3. Определить доверительные интервалы оценки среднего значения и
дисперсии нормально распределенного параметра, используя функцию Лапласа
[10], для доверительной вероятности Рд = 0,85.
4. Рассчитать суммарную погрешность выходного параметра дальномерной
РНС, вызванную аппаратурной погрешностью аА < 20 м и влиянием условий
распространения радиоволн ар < 8 м.
5. Записать формулу для среднего риска при оценке точности измерений,
если функция стоимости является квадратичной или ступенчатой функцией
(рис. 2.4). Каким статистическим оценкам соответствуют полученные формулы?
6. Определить потенциальную точность измерения дальности, информация
о которой доставляется с помощью импульса, огибающая которого имеет
гауссову форму, если отношение сигнал/шум на выходе измерителя (по мощности)
равно 10, длительность импульса т0>5 = 20 мкс, а эффективная ширина спектра
импульса подобной формы и его длительность связаны соотношением F3 =j
= 1,66/т0,5.
7. Определить потенциальную точность измерения радиальной скорости
подвижного объекта, если среднеквадратичная погрешность оценки доплеров-
ского сдвига сигнала айд = 12 Гц, а рабочая частота измерителя скорости /с —
= 10 ГГц.
8. Определить потенциальную точность измерения угловых координат с
использованием остронаправленного луча, сканирующего с угловой скоростью
Q = 20 000 об/мин, если потенциальная погрешность оценки временного
интервала с помощью бортового измерителя ох = 0,1 мкс.
9. Уточните соотношение (2.73) для различных видов модуляции и
кодирования сигналов РНС (AM, ЧМ, ФМ, КИМ и комбинированных видов модуляции).
К гл. 3. 1. Определить азимут и угол места подвижного объекта с помощью
фазового радиопеленгатора с ортогональными парами разнесенных антенн
(ориентированных в направлении С — Ю и 3 — В), если фазовые сдвиги сигналов
на входе антенных пар составляют соответственно фс. ю — 30°, ф3. в = 120°,
размер базы антенны 2 м, а рабочая частота пеленгатора равна 15 МГц.
276
2. Определить величину интервала пространственного разнесения и
число коммутируемых подвижных антенн доплеровского пеленгатора,
расположенных по окружности радиуса R = 6 м, если радиопеленгатор работает на
частоте 110 МГц.
3. Вычислить размер радиуса вращения разнесенных по кругу антенн
доплеровского угломерного радиомаяка, работающего на частоте 118 МГц, если деви-
ация частоты несущих колебаний (за счет вращения антенны с угловой скоростью
Q = 400 рад/с) составляет 6 МГц.
4. Рассчитать и построить график зависимости максимальной погрешности
пеленгования АЭ, обусловленной разносом вибраторов в четырехмачтовой ан-
тенно-гониометрической системе от длины волны, если радиопеленгатор работает
в диапазоне волн 20-f-80 м, а разнос между вибраторами d = Юм. При
определении максимальной ошибки пеленгования значения к брать через 10 м.
5. Для амплитудного радиопеленгатора с рамочной антенной рассчитать и
построить график зависимости поляризационной погрешности А6 в функции от
угла наклона плоскости фронта волны Р при постоянном угле наклона плоскости
поляризации а = 15°, если Р равно 10, 20, 30, 40°.
6. Определить разнос между вибраторами в четырехмачтовой антенно-го-
ниометрической системе радиопеленгатора, если максимальная погрешность
пеленгования не превышает А0ДОП = 0,4° при длине волны X = Юм.
7. Для двухканального автоматического радиопеленгатора с
электроннолучевым индикатором определить максимальную погрешность в определении
пеленга, обусловленную неравенством коэффициентов усиления кх = 10б и
к2 = 1,5- Ю5 приемных каналов. Угол прихода радиоволны 0 = 45°.
8. Для двухканального автоматического радиопеленгатора определить
погрешность в отсчете пеленга, обусловленную наличием фазового антенного
эффекта, если максимальное значение сигнала на входе обоих каналов Ucm —
= 100 мкВ, а амплитуда напряжения фазового антенного эффекта £/а. эф =
= 10 мкВ. Угол прихода радиоволны 0 = 60°.
9. Определить погрешность пеленгования, обусловленную наличием фазного
антенного эффекта, в одноканальном автоматическом радиопеленгаторе с
двойной модуляцией. Среднее значение амплитуды сигнала Uc = ПО мкВ,
величина, характеризующая неидентичность усиления каналов, AUC = 5 мкВ,
напряжение Ua, фг = 10 мкВ и Ua, ф2 = 20 мкВ. Угол прихода
радиоволны 0 = 40°.
10. Определить ширину зоны курса курсового радиомаяка, если длина
рабочей волны радиомаяка Я = 3 м, соотношение амплитуд токов, питающих
антенную систему маяка, 1т ц//т б = 3, расстояние между боковыми антеннами
d = 4 м.
11. Для курсового радиомаяка определить угол отклонения направления
минимума при изменении фазы питания одной из боковых антенн на угол Аф=
= 6°, если длина рабочей волны радиомаяка X = 3 м, расстояние между
боковыми антеннами d — 3,5 м.
12. Для посадки самолетов в сложных метеорологических условиях
используется курсовой радиомаяк, установленный на расстоянии S = 2500 м от точки
приземления. Определить ширину полосы, в пределах которой будет обеспечено
приземление самолетов с доверительной вероятностью Р = 99,73%, если сред-
няя^квадратичная погрешность в определении с его помощью направления
посадки о = ± 0,25°.
13. Определить требуемую точность определения направления посадки с
помощью курсового радиомаяка, расположенного в 3000 м от точки
приземления, если требуется обеспечить приземление самолетов в пределах полосы
шириной ± 20 м с доверительной вероятностью Р = 99,73%.
14. Определить минимальную высоту глиссады планирования над точкой
приземления взлетно-посадочной^ полосы, если угол планирования Р = 2°40',
а глиссадный радиомаяк удален от оси ВПП на расстояние d = 160 м.
К гл. 4. 1. Определить расстояние между самолетом и маяком фазовой паль-
номерной системы, работающей на частоте /0 = 100 кГц. Найти погрешность
измерения, если разность фаз запросного^и ответного сигнала 6,42 зх, а точность
измерения фазового углаМ°.
2. Определить число 'нулевых фазовых дорожек щ в дальномерной системе
277
с дальностью действия до 300 км при измерении разности фаз на несущей частоте
50 кГц.
3. В фазовой дальномерной системе применена трехдекадная сетка частот
со0, %, со3. Определить ширину зоны однозначного отсчета и получить точный
однозначный отсчет, если на соответствующих частотах зарегистрирована
разность фаз в долях цикла: ф0 = 0,7; срх = 0,3; ф2 = 0,26.
4. Определить необходимое число шкал фазового дальномера,
использующего сетку масштабных частот, если соотношение двух смежных частот (точной и
грубой) сонт/сонг = 10, а максимальная погрешность измерения фазы бф^ 1,5°.
5. Определить пропускную способность импульсного дальномерного
устройства с ретрансляцией запросного сигнала, если коэффициент ответов &отв = 0,8,
время парализации ретранслятора ^пар^ 20 мкс, период повторения импульсов
запроса Т = 10 мс.
6. Определить максимальную погрешность измерения расстояния Аи,
обусловленную нестабильностью частоты следования импульсов 6F
радиодальномера с ретрансляцией запросного сигнала, если дальность действия системы
''max = 500 км; относительная нестабильность частоты следования импульсного
радиодальномера 6F — 2Х Ю-4.
7. Выбрать длительность ти, частоту повторения F и частоту заполнения
/0 радиоимпульсов автономного радиодальномера для измерения высоты полета
до 20 км с разрешающей способностью не менее 100 м.
8. При измерении дальности импульсным радиодальномером известно,
что измеренные величины расстояний до ретранслятора распределены по
нормальному закону с плотностью распределения вероятности Р (г), математическим
ожиданием m (г), равным 500 км, и дисперсией а (г), равной 1 км. Определить
вероятность того, что новая реализация измеренного расстояния будет:
меньше m (г); больше m (r), в пределах 500±1 км при условии, что самолет
совершает полет по линии равных расстояний.
9. Рассчитать значение основной методической погрешности частотного
радиовысотомера, если частота модуляции сигналов передатчика FM = 150 Гц,
а индекс частотной модуляции т/ = 1,33 • 105.
10. Определить минимальную высоту, которая может быть измерена с
помощью частотного радиовысотомера, если девиация частоты ЧМ-колебаний
передатчика А/ = 10 МГц.
11. Определить максимальную высоту, которая может быть измерена с
помощью частотного радиовысотомера, если угловая частота модуляции
высокочастотных колебаний Qm = 945 рад/с.
К гл. 5. 1. Определить и построить линию положения, найти разность фаз
сигналов радиомаяков гиперболической разностно-дальномерной системы, если
расстояние до маяка Л равно RA = 1000 км, до маяка В равно RB = 990 км,
несущая частота /0 = 30 кГц, база системы:^ = 400 км.
2. Подсчитать количество линий положения Afnn, задаваемых фазовой
разностно-дальномерной системой, если длина рабочей волны Х= 2000 м, база
системы d = 100 км, погрешность измерения фазового угла Аф = ±1,8.
3. Определить ширину однозначной фазовой дорожки
разностно-дальномерной системы с измерением разности фаз на частоте биений и с заданием
сетки линий положения движущимися изофазами, если частоты модуляции
(первого и второго передатчиков) Ft = 150 Гц и F2 = 499 Гц.
4. Вычислить диапазон изменения интервала времени At
разностно-дальномерной импульсной системы с ведущей и ведомой станциями в зависимости от
местоположения ЛА, если база системы d = 300 км, время кодовой задержки
/к. з = 1 мс.
5. Зная абсолютную погрешность измерения временного интервала б (А^)
в разностно-дальномерной системе, определить максимальное количество линий
положения Л^лп' задаваемых системой, если база системы d — 150 км,
абсолютная погрешность измерения разности временного интервала б (At) = 3 мкс.
6. На карте нанесено 50 линий положений разностно-дальномерной
радионавигационной системы с базой d = 150 км. Определить разность временных
интервалов At двух соседних линий положений.
7. Определить число фазовых циклов (2 п) для устранения многозначности
измерений в системе «Лоран-С», если грубая оценка временного интервала между
278
импульсами наземных станций /и — 400 мкс, а измеренная дробная часть
периода несущих колебаний частоты /н = 10 кГц равна 0,2 Тн.
К гл. 6. 1. Вычислите величину доплеровского сдвига частоты /0 = 10 ГГц,
излучаемой передатчиком однолучевой^ДИСС, если путевая скорость самолета
W = 1200 км/ч при угле сноса а= 6°, а направление излучения задано в
пространстве углами 6 = 55° и р = 28°30'.
2. Определить путевую скорость самолетаjipn максимальном значении
доплеровского сдвига частоты (Р = а), равном F£ max = 6 кГц, если длина волны
электромагнитных колебаний однолучевого ДИСС X = 2,8 см, а направление
излучения в вертикальной плоскости задано углом 0 = 35°.
3. Определить абсолютную погрешность неточного задания вертикали не-
стабилизированной антенной системы однолучевой ДИСС, если соответствующая
абсолютная погрешность измерения путевой скорости ЛА составила AW =
= 50 км/ч при нормальном значении W = 1100 км/ч, а направление излучения в
вертикальной плоскости задано углом 0 = 45°.
4. Вывести соотношение для относительной погрешности измерения путевой
скорости ЛА с помощью двустороннего двухлучевого ДИСС, использующего не-
стабилизированную антенную систему, установленную с погрешностью в
задании вертикали Ау.
5. Определить значение угла сноса ЛА, если отношение разностного
напряжения на выходе частотомера четырехлучевого ДИСС к суммарному напряжению
равно 0,14, а угол отклонения направленного излучения от продольной оси в
горизонтальной плоскости Р = 43°20'.
6. Определить относительную ширину спектра доплеровского сигнала на
уровне половины его мощности при условии, что ширина диаграммы
направленности на уровне половинной мощности сигнала 0,1 рад, а ориентация диаграммы
направленности в вертикальной плоскости задана углом 0 = 38°.
7. Самолет совершает горизонтальный полет с магнитным курсом v = 42°,
путевой скоростью W = 960 км/ч и углом сноса а = 18° (вычисленными с
помощью ДИСС). Требуется вычислить составляющие пути, пройденного
самолетом за 2,5 ч полета, если полет совершается по ортодромии с ОПУ = 60°.
Используя равномерную масштабную сетку, вычертить маршрут самолета в орто-
дромической системе координат.
8. Определить чувствительность однолучевого ДИСС по измерению путевой
скорости и угла сноса самолета, используя следующие данные: 0 = 60°; Р =
= 32°; а = 10°; Яизл = 3 см.
9. Определить абсолютную погрешность измерения путевой скорости
самолета за счет влияния вертикальной составляющей скорости при использовании
однолучевой ДИСС, пользуясь следующими данными: полная скорость самолета
W = 800 км/ч; 0 = 38°, т) = 24°.
К гл. 7. 1. Рассчитать интерференционную погрешность РНС фазового
типа, если радионавигационные измерения выполняются в ближней зоне при
соотношении амплитуд пространственной и поверхностной радиоволн к = 0,2, а
сдвиг фаз между ними ty = 45°.
2. Определить фазовую скорость распространения волны частотой 3 кГц в
атмосферном волноводе, если высота ионосферы над поверхностью земли 70 км.
3. Определить среднеквадратичное значение фазовой скорости радиоволн,
имеющих длину волны Я = 15 км, на удалении от точки излучения г = 8 км,
если относительное среднеквадратичное отклонение временного запаздывания
волны равно 0,06 ее периода.
4. Определить погрешность пеленгования ЛА курсовым радиомаяком РМС
с «опорным нулем» с учетом переотражений сигнала от местных предметов,
расположенных в секторе ± 35° относительно линии курса.
5. Вычислить погрешность пеленгования угломерного радиомаяка VOR,
если разность угловых положений ЛА и отражающего предмета относительно
радиомаяка а = 35°, а отношение амплитуд прямого и отраженного сигналов
Р « 1.
6. Рассчитать суммарную погрешность раднопеленгования с
использованием угломерной системы, имеющей инструментальную погрешность av0 — 0,5°,
если пеленг определяется в условиях воздействия переотражений сигналов от
279
8 местных предметов с коэффициентом подавления их влияния v = 3, взятом
относительно среднеквадратичной погрешности 6М = 1,5° малобазового
пеленгатора.
7. Вычислить доплеровскин спектр несущих колебаний / = 100 МГц
курсового радиомаяка, если самолет заходит на посадку (по сигналам КРМ) со
скоростью 240 км/ч, а разность угловых положений самолета и отражающего
предмета относительно радиомаяка составляет 24°.
К гл. 8. 1. Известно, что среднее выборочное значение результатов прямых
- 1 1,
равноточных измерений хп — — 2 xi-
п /=1
Доказать, что среднее выборочное значение можно определить, пользуясь
равноценным рекуррентным соотношением хп = *n_i + (хп — xn~i)lny где х%—
результат 1-го измерения; х — среднее выборочное значение.
2. Доказать, что среднее выборочное значение результатов п прямых
неравноточных измерений выражается формулой
*n = *n-i + Рп (хп — *n-i) [ .2 Pi + Pnj ,
где pi — вес i -го измерения, численно равный отношению минимального
значения дисперсии одиночного измерения к дисперсии данного измерения.
3. Доказать, что дисперсия п прямых неравноточных измерений аЗ_=а*11пх
-1
(!■«)" •
X ( 2л Pi) » где р^ — все i-ro измерения.
4. Показать, что дисперсию среднего выборочного значения результатов п
прямых неравноточных измерений можно определять с помощью рекуррентной
формулы следующего вида:
М2|/ГР»]Г
'*(л-1)
п
/ = 1
Oz
°nGn
х(п— 1) / п
2 1>г
/ = 1
5. Самолет движется по прямолинейной траектории, проходящей через
точку установки радиомаяка РСБН. Измерение текущих значений горизонтальной
дальности с интервалом в 1 мин дало следующие результаты: 16,0; 29,0; 44,5;
60,5; 75,2 км. Произвести обработку результатов измерений по методу
наименьших квадратов и определить скорость полета.
6. ЛА движется по прямолинейной траектории, расположенной
параллельно линии заданного пути на удалении 100 км от радиомаяка РСБН. Скорость
полета 900 км/ч. На участке траектории, начиная от траверза маяка,
производятся 10 измерений дальности с интервалом в 1 мин. СКП каждого измерения
составляет 0,1 км. Найти СКП определения бокового уклонения ЛА
относительно линии заданного пути при обработке результатов измерений по методу
наименьших квадратов.
К гл. 9. 1. Рассчитать среднеквадратичное значение погрешности
определения линии равных пеленгов с использованием угломерной системы, если
погрешность измерения пеленга ЛА аа = 1,5°, расстояние от угломерного радиомаяка
до ЛА 160 км.
2. Угол между радиальными направлениями из точки расположения ЛА до
наземных станций гиперболической системы равен 60°, а погрешность
измерения разности расстояний о> = 10 км. Рассчитать среднеквадратичное значение
погрешности определения ЛРРР с учетом исходных данных, а также найти
минимальное значение погрешности.
3. Рассчитать среднеквадратичное значение погрешности определения
местоположения ЛА с помощью дальномерной системы, если значения погрешностей
280
измеряемых дальностей сгх = 110 км; а2 = 180 км; коэффициент их корреляции
р = 0,6, а угол между направлениями из точки расположения ЛА на наземные
станции составляет 60°.
4. Определить размеры полуосей эллипса погрешностей и его ориентацию,
при заданной вероятности местоположения ЛА внутри эллипса рнс = 0,8, если
погрешности определения линий положения с помощью двух радиодальномеров
составляют соответственно ах = 1,5 км; а2 = 0,8 км, а угол пересечения линий
положения равен 30°.
5. Определить вероятность местоположения ЛА в пределах эллипса
погрешностей (эллипса рассеяния), построенного на основе измерительных данных даль-
номерной РНС, если параметр Я, характеризующий размеры эллипса, равен 1,26.
6. Построить рабочую зону угломерной РНС на основе шаблона кривых
равной точности, если размер базы системы, состоящей из двух станций, d =200 км,
погрешности оценки радиопеленга по каждой из станций одинаковы и равны сга =
= 1,8°, а допустимая погрешность оценки местоположения ЛА ог ДОп = 24 км.
7. Построить рабочую зону дальномерной РНС, если наземные станции
системы разнесены на расстояние 150 км, точность измерения дальности с помощью
обоих радиодальномеров одинакова и равна GD = 200 м, а угол между
направлениями из точки расположения на наземные станции у = 30°.
8. Построить рабочую зону разностно-дальномерной РНС, состоящей из трех
наземных станций с совмещенными базами d — 600 км, для одинаковых
независимых погрешностей определения разности расстояний по обеим базам о = 5 км
при условии, что допустимое значение погрешности местоположения о> = 2,4.
9. Построить рабочую область угломерно-дальномерной РНС, если
погрешности измерения азимута и дальности ЛА равны соответственно аа = 0,5°;
aD=0,08 км; а допустимая погрешность оценки местоположения ЛА ог— 2,5 км.
10. Рассчитать значение поправки, которую необходимо ввести в величину
КУР при выходе ЛА на линию предвычисленного пеленга в точку, удаленную от
РНТ на расстояние Д = 60 км, если угол разворота Ау = 45°, а радиус
разворота R = 10 км.
К гл. 10. 1. Используя рис. 10.2, вывести соотношения между
прямоугольными геоцентрическими координатами ИСЗ и кеплеровыми элементами орбиты.
2. Определить, какую часть периода своего обращения ИСЗ находится в
пределах сектора, ограниченного значениями истинной аномалии — 45° и + 45°
при движении по орбите с эксцентриситетом 0,05.
3. Рассчитать угловой и линейный диаметры зоны видимости ИСЗ,
движущегося на высоте 20 тыс. км, если минимальное значение угла места, под которым
возможно его наблюдение, 5°.
4. Рассчитать длину отрезка круговой орбиты, попадающего в зону
видимости ЛА, и продолжительность полета в ней для условий задачи 3, если угловое
расстояние плоскости орбиты от Л А составляет 15°.
5. Определить угловое перекрытие соседних зон видимости восьми ИСЗ,
располагающихся на круговой орбите высотой 20 тыс. км.
6. Рассчитать минимальное угловое перекрытие соседних зон видимости
ИСЗ, обращающихся на разных орбитах, если спутники навигационной системы
расположены на трех равноудаленных полярных орбитах высотой 20 тыс. км.
7. Определить поправки к счислимым координатам ЛА по результатам
измерения дальностей до двух ИСЗ, азимуты и углы места которых равны
соответственно 10°, 120° и 30°, 10°, а разности счислимых и измеренных дальностей
составляют 1 и 5 км.
8. Определить поправку к счислимым координатам ЛА по результатам
измерения разности расстояний до трех ИСЗ, азимуты которых равны 20°, 120°
и 250°, а углы места 30°, 15° и 30°. Разности измеренных и счислимых значений
разностей расстояний составляют 2 и 3 км.
9. Рассчитать средние квадратические значения погрешностей определения
координат ЛА для условий задачи 7, если СКП измерения дальностей равна
0,1 км, а коэффициент корреляции погрешностей измерения дальностей до
разных ИСЗ составляет 0,2.
281
СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ
1. Авиационная электросвязь. Международные стандарты и рекомендации.
Приложение 10 к конвенции по вопросам международной гражданской авиации.
Т. 1.4. 1. ИКАО, 1972. 177 с.
2. Авиационные цифровые системы контроля и управления / Под ред.
В. Л. Мясникова и В. П. Петрова, Л., Машиностроение, 1976, 608 с.
3. Автоматизация самолетовождения и управление воздушным
движением / П. А. Агаджанов, В. Г. Воробьев, А. А. Кузнецов, Е. Д. Маркович. М,
Транспорт, 1980, 357 с.
4. Айзинов Н. Н., Байрашевский А. М. Радиотехника и
радионавигационные приборы. М., Транспорт, 1973. 432 с.
5. Астафьев Г. П., Ш е б ш а е в и ч В. С, Юрков Г. А.
Радиотехнические средства навигации летательных аппаратов. М., Сов. радио, 1962. 963 с.
6. Астафьев Г. П., Грачев В. В., Кульчий А. С. Радиотехнические
средства воздушной навигации. Ч. II. Л., РИО ОЛА ГА, 1972. 161 с.
7. А с т а ф ь е в Г. П., О л я н ю к П. В. Радиотехнические средства
навигации. Принципы функционирования. М., Транспорт, 1981. 324 с.
8. Б а р а н о в Ю. К. Использование радиотехнических средств в морской
навигации. М., Транспорт, 1978. 230 с.
9. Бела вин О. В. Основы радионавигации. М., Сов. радио, 1977. 320 с.
10. Б е л яевский Л. С, Черкашин П. Г. Точность радиоэлектронных
измерительных систем. Киев, Техника, 1981. 136 с.
11. Беляевский Л. С, Чуткий И. П., Семенов А. А. Сборник задач
по радионавигации. Киев, РИО КИИГА, 1974, 46 с.
12. Боркус Н. К., Черный А. Е. Корреляционные измерители путевой
скорости и угла сноса Л А. М., Сов. радио, 1973. 168 с.
13. Быков В. И. Радионавигационная система «Омега», М., Транспорт,
1978. 87 с.
14. Гуткин Л. С, Пестряков В. Б., Типугин В. Н.
Радиоуправление. М., Сов. радио, 1970. 365 с.
15. Документ 8168-OPS/611/3. Правила для аэронавигационных служб.
Производство полетов самолетов гражданской авиации. Третье издание. ИКАО,
1971. 209 с.
16. Долуханов М. П. Распространение радиоволн. М., Связь, 1972.
336 с.
17. Дорожинский Ю. Б. Основные принципы построения
радионавигационных систем. Ч. I. Киев, КИИГА, 1971. 141 с.
18. Дудко Г. К., Резников Г. Б. Доплеровские измерители скорости
и угла сноса самолета. М., Сов. радио, 1964. 310 с.
19. Дымова А. И., Альбац М. Е., Бонч-Бруевич А. М.
Радиотехнические системы, М.. Сов. радио, 1975. 440 с.
20. Игнатов В. А. Теория информации и передачи сигналов. М., Сов.
радио, 1979, 278 с.
21. Кинкулькин И. Е., Рубцов В. Д., Фабрик И. А. Фазовый
метод определения координат. М., Сов. радио, 1979. 280 с.
22. Колчинский В. Е., Мандуровский И. А., Константинов-
с к и й М. И. Авиационные доплеровские измерители скорости и угла сноса
самолета. М., Сов. радио, 1964. 268 с,
282
23. Конторов Д. С, Голубев-Новожилов Ю. С. Введение
в радиолокационную системотехнику. М., Сов. радио, 1971. 368 с.
24. Космические радиотехнические комплексы/С. И. Бычков, Д. П.
Лукьянов, П. В. Олянюк и др. М., Сов. радио, 1968, 584 с.
25. Космические траекторные измерения. Радиотехнические методы
измерений и математической обработки данных/Под ред. П. А. Агаджанова, В. Е. Ду-
левича, А. А. Коростылева, М., Сов. радио, 1969. 497 с.
26. Кукес И. С, С т а р и к М. Е. Основы радиопеленгации. М., Сов.
радио, 1964. 640 с.
27. Л и Р. Оптимальные оценки, определение характеристик и управление.
М., Наука, 1966. 176 с.
28. Л и н н и к Ю. В. Метод наименьших квадратов и основы теории
обработки наблюдений. М., Физматгиз, 1958. 334 с.
29. М а р к о в П. В., О с т р о г с к и й Л. А. Справочник пилота и
штурмана гражданской авиации. М., Транспорт, 1971. 328 с.
30. М е д и ч Дж. Статистически оптимальные линейные оценки и
управление. М., Энергия, 1973. 315 с.
31. Наставление по производству полетов в гражданской авиации СССР.
М., Воздушный транспорт, 1978. 285 с.
32. Новиков В. С. Техническая эксплуатация и надежность
авиационного радиооборудования. М., Транспорт, 1970. 232 с.
33. О д и н ц о в В. А. Радионавигация летательных аппаратов. М.,
Машиностроение, 1968. 226 с.
34. Олянюк П. В. Оптимальный прием сигналов и потенциальная
точность космических измерительных комплексов, М., Сов. радио, 1973. 194 с.
35. О с а д ш и й В. И. Воздушная навигация. М., Транспорт, 1972. 288 с.
36. О с а д ш и й В. И., Ч е р н ы ш е в Г. А. Воздушная навигация. М.,
Транспорт, 1969. 428 с.
37. Панагриев В. Е.,Сосновский А. А., X а й м о в и ч И. А.
Параметры радионавигационных средств обеспечения полетов и их измерение.
М., Транспорт, 1973. 384 с.
39. Поиск, обнаружение и измерение параметров сигналов в
радионавигационных системах/Под ред. Ю. М. Казаринова. М., Сов. радио, 1975. 296 с.
39. Радиолокационные системы летательных аппаратов/Под ред. П. С
Давыдова, М., Транспорт, 1977. 352 с.
40. Радионавигационные системы аэропортов/К. В. Макаров, В. А. Волы-
нец, И. Ф. Шешин, В. В. Червецов, М., Транспорт, 1978. 336 с.
41. Радионавигационные системы летательных аппаратов/Под ред. П. С.
Давыдова, М., Транспорт, 1980. 448 с.
42. Радионавигационное оборудование летательных аппаратов и его
техническая эксплуатация. Ч. Н/Л. С. Беляевский, Ю. Ф. Буйновский, И. М. Браун,
В. В. Червецов.. Киев, КИИГА, 1974, 96 с.
43. Радиотехнические системы/Под ред. Ю. М. Казаринова. М., Сов. радио,
1968. 496 с.
44. Радиотехнические системы обеспечения посадки самолетов/Под ред.
Г. А. Пахолкова. Иваново. РИО Ивановского энергетического института, 1975.
151 с.
45. Ривкин С. С,Ивановский П. И.,Костров А. В.
Статистическая оптимизация навигационных систем. Л., Судостроение. 1976. 280 с.
46. Самолетные навигационные системы/Пер. с англ. Под ред. В. Ю.
Поляка. М., Воениздат, 1973. 462 с.
47. С о л о м о н и к М. Е., Ш а т р а к о в Ю. Н., Расин А. М.
Корреляционные ошибки УКВ угломерных радиотехнических систем. М., Сов.
радио, 1973. 208 с.
48. Сосновский А. А., X а й м о в и ч И. А. Радиоустройства борто*
вых навигационных и посадочных комплексов. М., Транспорт, 1977. 216 с.
49. Сосновский А. А., X а й м о в и ч И. А., Ш о л у п о в Е. И.
Радиомаячные системы посадки самолетов. М., Машиностроение, 1974. 256 с.
50. Судовые комплексы спутниковой навигации П. С. Волосов, Ю. С. Ду-
инко, Б. С. Мордвинов, В. Д. Шинков Л., Судостроение, 1976. 248 с.
283
51. Теоретические основы раДиолокации/Под ред. Ё. Ё. Дулевича. М., Сов.
радио, 1978. 608 с.
52. Теоретические основы радионавигации/Л. С. Беляевский, В. С.
Новиков, В. В. Червецов, И. П. Чуткий. Киев. КНИГА, 1978. 110 с.
53. Тихонов В. И. Статистическая радиотехника. М.,Сов. радио, 1976.
678 с.
54. Точность измерения параметров движения космических аппаратов/
С. Д. Сильвестров, В. М. Лазарев, А. И. Корниенко, Н. И. Паншин. М., Сов.
радио, 1970. 320 с.
55. Ф е д ч и н С. С. Самолетовождение. М., Транспорт, 1966. 362 с.
56. Ф и н к Л. М. Теория передачи дискретных сообщений. М., Сов. радио»
1970. 728 с.
57. Ф а л ь к о в и ч Е. Е. Оценка параметров сигнала. М., Сов. радио.
1970. 334 с.
58. Финкельштейн М. И. Основы радиолокации. М., Сов. радио.
1973. 496 с.
59. Ц а п е н к о М. П. Измерительные информационные системы. М.,
Энергия, 1974. 320 с.
60. Ш е б ш а е в и ч В. С. Введение в теорию космической навигации. М.
Сов. радио, 1971. 296 с.
61. Ч у р о в Е. П. Спутниковые системы радионавигации. М., Сов. радио,
1977. 390 с.
62. Эрп С. Параметры, определяющие общие свойства
радионавигационных средств, — В кн.: Зарубежная радиоэлектроника. М., 1968. № 11. с. 16.
63. Н о з д р и н В. И., П о л я к В. Ю. Развитие систем навигации на
трассах, в аэродромных маневренных зонах и систем посадки. — В кн.: Итоги
науки и техники. Сер. воздушный транспорт. Т. 8. М., 1980, с. 37.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Указатель построен по алфавитному принципу построения рубрик (от буквы
к букве). Он отсылает читателя к тем страницам книги, где дана информация по
существу термина. Если рубрика представляет собой сочетание прилагательного
и существительного, то, как правило, применена инверсия — существительное
поставлено на первое место. Пример: понятие «амплитудная углометрия» следует
искать со слова «углометрия». Внутри сложных рубрик используется также
принцип от общего к частному. Пример: понятие «методы коррекции координат
замещением в РНК» следует искать, начиная с главного понятия «РНК», затем
«методы коррекции координат» и только в последней подрубрике «замещением».
В скобках приводятся номера рисунков и таблиц, относящихся к данным
рубрикам. При работе с предметным указателем следует пользоваться
оглавлением.
Азимут 18 (рис. 1.8)
Бортовой навигационный
комплекс (БНК):
комбинирование
радионавигационных датчиков 200
коррекция счислимых координат
203—206
назначение и структура 197, 198
принципы комплектования 198,
199
Высота полета: абсолютная,
истинная, относительная,
условная 15
ДИСС — см. доплеровский
измеритель путевой скорости и угла
сноса (ДИСС):
Доплеровская радиомаячная
угломерная система (см.
радиомаячные системы) 80—82
Доплеровский измеритель
путевой скорости и угла
сноса (ДИСС):
погрешности инструментальные
169, 170
— методические 161—168
двухлучевого 162—164
однолучевого 161, 162
трехлучевого 165
четырехлучевого 166
путевая скорость, алгоритмы
определения 165, 166
спектр принятых доплеровских
частот на уровне половинной
мощности 167, 168 (рис. 6.9)
угол сноса а, алгоритмы
определения 166, 166
Евклидово линейное пространство 8
Заход на посадку:
маневром «большая коробочка»
245, 246 (рис. 9.16)
— «малая коробочка» 246 (рис.
9.17)
с прямой 243, 244 (рис. 9.15)
с рубежа начала снижения 246,
247 (рис. 9.18)
Искусственные спутники Земли
(ИСЗ):
зоны видимости 250—252
измерение времени 254, 255
определение параметров
движения 253
суточные 261, 262
траектории движения, общие
сведения 248, 249
Координатные системы,
классификация 9, 10
Курс истинный (ИК), компасный
(КК), магнитный (МК), ортодро-
мический (ОК) 17
Линии положения Л А:
локсодромия 23
ортодромия 22
равных пеленгов 24
— разностей расстояний 25
— расстояний 25
— углов 24
Локсодромия 23
285
Местоположение ЛА:
методы определения 223
точность определения 227—229
Методы радионавигационных
измерений:
амплитудные п»о максимуму 87—90
(рис. 3.17)
— по минимуму 83—87 (рис. 3.14)
— сравнением амплитуд 90—92,
97—100 (рис. 3.20)
угломерные 65—69
фазовые с использованием эффекта
Доплера 75—79 (рис. 3.10)
— с непосредственным измерением
разности фаз 72—75 (рис. 3.7)
Навигационные ИСЗ (НИСЗ):
алгоритмы определения места ЛА
256, 257 и 259, 260
зоны видимости 250, 251
измерения времени 254
методы измерений 253
общие сведения 248
параметры движения 253
распространение эфемаридной
информации 256 системы спутников
261, 262
«Навстар» (США) 272—274
Навигационные комплексы (РНК):
линейная динамическая модель
206—210
комбинированные 200
комплектование 198
методы коррекции координат
201—203
замещением 201
линеаризация задачи 203
назначение и структура 197
Навигационные параметры ЛА:
вторичный 28
высота полета 15
курс 16
курсовой угол ориентира 18
радиоориентира 18
место (местоположение) 15
пеленг 18
первичные 28, 33
путевой угол 15
скорость 18
угол сноса 19
Навигация, основная задача 3, 4
— технические средства 4
Ортодромия 22, 23
Пеленг 18 (рис. 1.8)
Полет по ЛРП 236, 237
(рис. 9.12)
ЛРР 237 (рис. 9.13)
произвольному маршруту
238, 239
Посадочные минимумы 241
Преобразование координат 29
Радиоволны:
замирания 185
рефракция 181, 182
скорость распространения 181,
184
частотные диапазоны 180
(табл. 7.1)
Радионавигационные системы,
средства (РНС):
классификация 37
оптимальное измерение
параметров 53—55
оценка помехоустойчивости 61
погрешности измерений 48, 49
— пеленгования абсолютные 192
(табл. 7.2)
среднеквадратичные 192
(формула 7.20)
потенциальная точность 57—59
рабочие зоны, их построение
230—234
решаемые задачи 223
тактические характеристики:
дальность действия 43, 44
надежность 47
оперативность 47
помехозащищенность 46
пропускная способность 46
рабочая зона 43
точность 42
эффективность 47
Радиодальномеры:
временные 134—138
фазовые 12*1—125
частотные (радиовысотомеры)
126—134
Радиомаячные системы:
амплитудно-фазовые 108— 112
амплитудные равносигнальные
102—106
— с опорным нулем 106—108
временные 114—119
фазовые доплеровские 80—82
частотные 112—114
Радионавигационная точка — см.
РНТ
Радионавигационные комплексы
(РНК, см. «навигационные
комплексы»)
Радионавигация, определение 4
Радиопеленгаторные системы:
амплитудные двухканальные 97,
98
— одноканальные 98—101 (рис.
3.24)
фазовые доплеровские 75—80
— с непосредственным
измерением разности фаз 72—74
Разностно-дальномерные системы:
импульсио-фазовые 155—158
импульсные 163—154
286
фазовые с временным
разделением каналов 148—152
— с частотным разделением
каналов 145—147
Референц-эллипсоид 10
РНК — радионавигационные
комплексы (см. «навигационные
комплексы»)
РНС — см. средства радионавигации
РНТ — радионавигационная
точка — пункт с известными
координатами, находящийся в
приземном или космическом пространстве,
в котором размещена
радиоаппаратура и относительно которого
определяется положение ЛА
Системы координат: географическая,
геосферическая, ортодромическая,
10, 11
Системы посадки:
категории 241, 242
радиолокационная 243
радиомаячная 242
упрощенная 242
Способы задания координат 9
Средства радионавигации:
дальность действия 43, 44 (табл.
2.1)
классификация 37
надежность 47
помехозащищенность 46
пропускная способность 46
радионавигационные устройства
и системы 36
обобщенная структурная
схема 38 (рис. 2.2)
Углометрия амплитудная:
методы измерения максимума
87—89
—• — минимума 83—86
сравнением (равносигналь-
ный метод) 90—91
погрешности антенного эффекта
92—93
— разноса антенн 93
— поля!ризационные 95—96
Фазовые радиопеленгаторы с
непосредственным измерением разности
фаз 72 (рис. 3.7)
с использованием эффекта
Доплера 75 (рис. 3.10)
Электромагнитная совместимость
. (ЭМС) 196
Эфемериды 256
ОГЛАВЛЕНИЕ
Введение * 3
Глава 1. Элементы общей теории навигации 7
1.1. Навигационное пространство и системы координат в трехмерном
пространстве 7
1.2. Траектория и этапы полета самолета 12
1.3. Основные навигационные элементы полета 15
1.4. Поверхности и линии положения летательных аппаратов .... 21
1.5. Основные алгоритмы процесса навигации ЛА 27
Глава 2. Общие сведения о радиотехнических методах и средствах навигации
летательных аппаратов 33
2.1. Физические основы радиотехнических методов навигации и
классификации 33
2.2. Обобщенная структурная схема РНС 38
2.3. Основные тактико-технические характеристики РНС 42
2.4. Точность радионавигационных измерений и способы ее оценки 48
2.5. Потенциальная точность радионавигационных измерений .... 53
Тлава 3. Методы радиоуглометрии * 63
30>. Общая характеристика методов радиоуглометрии 63
Ъ% Фазовый метод углометрии 69
3.0> Принципы построения фазовых угломерных систем 72
3.4. Амплитудный метод углометрии 83
3.5. Принципы построения амплитудных угломерных систем .... 97
3.6. Амплитудно-фазовый метод углометрии 108
3.7. Частотный метод углометрии 112
3.8Г Временной метод углометрии 114
Глава 4. Методы радиодальнометрии 120
4.1. Общая характеристика методов 120
4.2. Фазовый метод 121
4.3. Частотный метод 12G
4.4. Временной метод 135
.Глава 5. Методы разностно-дальномерных радиоизмерений 142
5 1. Общая характеристика методов 142
5.2. Фазовый разностно-дальномерный метод 142
5.3. Импульсный разностно-дальномерный метод 153
5.4. Импульсно-фазовый разностно-дальномерный метод 155
Глава 6. Радиотехнические методы измерения радиальных и угловых скоростей . 159
6.1. Доплеровский метод измерения путевой скорости и угла сноса . . 159
6.2. Корреляционный метод измерения путевой скорости и угла сноса . 170
6.3. Доплеровский метод измерения угловой скорости 177
Глава 7. Влияние свойств радиоволн и условий их распространения на точность
радионавигационных измерений . . 179
7.1. Общие положения 179
7.2. Прямолинейно распространяющиеся излучения 179
7.3. Поверхностные водды 182
7.4. Пространственные волны 184
7.5. Радиоизлучения волноводного типа 186
7.6. Влияние неоднородностей рельефа местности и местных предметов . 189
7.7. Естественные и непреднамеренные радиопомехи 194
Глава 8. Основы комплексирования радионавигационных методов и средств . . 197
8.1. Принципы построения бортовых навигационных комплексов . . . 197
8.2. Комплексная обработка навигационной информации 206
Глава 9. Применение радиотехнических методов и средств для решения
навигационных задач 223
9.1. Определение местоположения Л А. Рабочие зоны РНС . . . 223
9.2. Вывод ЛА в заданную точку 235
9J3. Заход на посадку и основные предпосадочные маневры .... 239
Глава 10. Спутниковые методы радионавигации . . ....... 248
10.1. Закономерности движения ИСЗ 248
10.2. Принципы навигационных измерений с помощью ИСЗ .... 253
10.3. Точность определения координат ЛА с помощью ИСЗ .... 263
10.4. Спутниковые системы радионавигации 272
Список использованной литературы 282
Предметный указатель 285