/


































































































































































































Similar




Text
। надежность
и эффективность
В ТЕХНИКЕ
Справочник в десяти томах
Редакционный совет:
В. С. АВДУЕВСКИЙ, акад. АН СССР
(председатель)',
В.И. КУЗНЕЦОВ, акад. АН СССР;
Н.Д. КУЗНЕЦОВ, акад. АН СССР;
В.А. МЕЛЬНИКОВ, акад. АН СССР;
В.П. МИШИН, акад. АН СССР;
В.Ф. УТКИН, акад. АН СССР;
КВ. ФРОЛОВ, акад. АН СССР;
Б.В. ГНЕДЕНКО, акад. АН УССР;
И.Н. КОВАЛЕНКО, акад. АН УССР;
В.Ф. ЛОМОВ, чл.-корр. АН СССР;
Н.А. СЕВЕРЦЕВ, д-р техн, наук
Том Проектный
5 анализ
надежности
Под редакцией д-ра техн, наук
В.И. ПАТРУШЕВА
и д-ра техн, наук
А.И. РЕМ БЕЗЫ
Москва
«МАШИНОСТРОЕНИЕ»
1988
ББК 30.14
Н17
УДК 621-192 (035)
Авторы тома: Б. И. Бельчич, В. Ф. Грибанов,
Э. В. Дворецкий, В. А. Комягин, Г. Н. Кравченко,
Б. П. Креденцер, Ф И. Кузьмин, В. И. Манойло,
В. П. Мишин, Г. К- Москатов, В. И. Патрушев,
А. С. Прон и ков, А. И. Рембеза, И. А. Рябинин,
Н. А. Северцев, Ю. С. Слотин, Ю. А. Соколов,
Г. Н. Черкесов, Г. А. Ярыгин
Рецензент д-р техн, наук П. С. Батурин
Надежность и эффективность в технике: Справочник.
Н17 В 10 т./Ред. совет: В. С. Авдуевский (пред.) и др. —М.:
Машиностроение, 1988. (В пер.)
Т. 5.: Проектный анализ надежности/Под ред. В. И. Па-
трушева и А. И. Рембезы. — 316 с.: ил. — 1 р. 70 к.
Рассмотрены вопросы проектного анализа и синтеза надежности изде-
лий машиностроения и приборостроения, приведены методы расчетами опти-
мизации систем с различными видами резервирования. Изложены общие
рекомендации по обеспечению надежности при проектировании механиче-
ских систем, конструкций и радиоэлектронной аппаратуры.
Предназначен для инженерно-технических работников, занятых проек-
тированием, изготовлением, испытаниями и эксплуатацией техники.
Будет полезен студентам и преподавателям высших технических учебный
заведений.
2702000000—609
Н р38 (Q1)—88— Подписное ББК 30.14
СПРАВОЧНИК СПЕЦИАЛИСТА
Борис Иванович Бельчич, Виталий Федорович Грибанов,
Эргард Васильевич Дворецкий и др.
НАДЕЖНОСТЬ И ЭФФЕКТИВНОСТЬ В ТЕХНИКЕ
ТОМ 5
ПРОЕКТНЫЙ АНАЛИЗ НАДЕЖНОСТИ
Редактор Т. С. Грачева. Художественный редактор С. С. Водчиц
Переплет художника А. Я- Михайлова. Технический редактор Н. Н. Скотникова
Корректоры Л. Л. Георгиевская, О. Е. Мишина
ЙБ № 4876
Сдано в набор 16.12.87. Подписано в печать 11.05.88. Т-06999. Формат
бОХЭО1/^. Бумага офсетная №• 2. Гарнитура литературная. Печать офсетная.
Усл. печ. л. 20,0. Усл. кр.-отт. 20,0. Уч.-изд. л. 25,20. Тираж 12 712 экз.
Заказ 337. Цена 1 р. 70 к.
Ордена Трудового Красного Знамени издательство «Машиностроение»
107076, Москва, Стромынский пер., 4
.Ленинградская типография № 6 ордена Трудового Красного Знамени Ленин-
градского объединения «Техническая книга» им. Евгении Соколовой Союзполи-
графпрома при Государственном комитете СССР по делам издательств, по-
лиграфии и книжной торговли. 193144, г. Ленинград, ул. Моисеенко, 10.
© Издательство «Машиностроение», 1988
Оглавление
Введение
Глава 1. ПРОЕКТИРОВА-
НИЕ СИСТЕМ И ЗА-
ДАЧИ ИССЛЕДО-'
ВАНИЯ НАДЕЖ-
НОСТИ
1. Выбор проектных решений
с учетом надежности (Ю. А.
Соколов, В. И. Патру-
шев, А. И. Рембеза)
2. Задачи, модели и методы
проектного исследования
надежности (Ю. А. Соколов,
В. И. Патрушев, А. И. Рем-
беза) ..................
3. Проектные нормы надежно-
сти (Ю. А. Соколов, А. И. Рем-
беза) ....................
4. Анализ возможных отказов
(Г. Н. Кравченко) ....
5. Показатели надежности си-
стем и изделий (Б. И. Бель-
чин, В. А. Комягин) . . .
6. Виды отказов и математиче-
ские законы надежности
(А. И. Рембеза, В. И. Па-
трушев) ..............
7. Задание и распределение
требований по надежности
(А. И. Рембеза, В. И. Па-
трушев)
Глава 2. РАСЧЕТ НАДЕЖ-
НОСТИ ЭЛЕМЕН-
ТОВ И ПОСЛЕДО-
ВАТЕЛЬНЫХ СИ-
СТЕМ (А. И. Рембе-
за, В. И. Патрушев)
1. Невосстанавливаемый эле-
мент
7
10
10
13
19
22
25
32
38
43
44
2. Восстанавливаемый элемент 47
3. Последовательные системы 50
Глава 3. РАСЧЕТ НАДЕЖ-
НОСТИ СИСТЕМ СО
СТРУКТУРНОЙ
ИЗБЫТОЧНОСТЬЮ 58
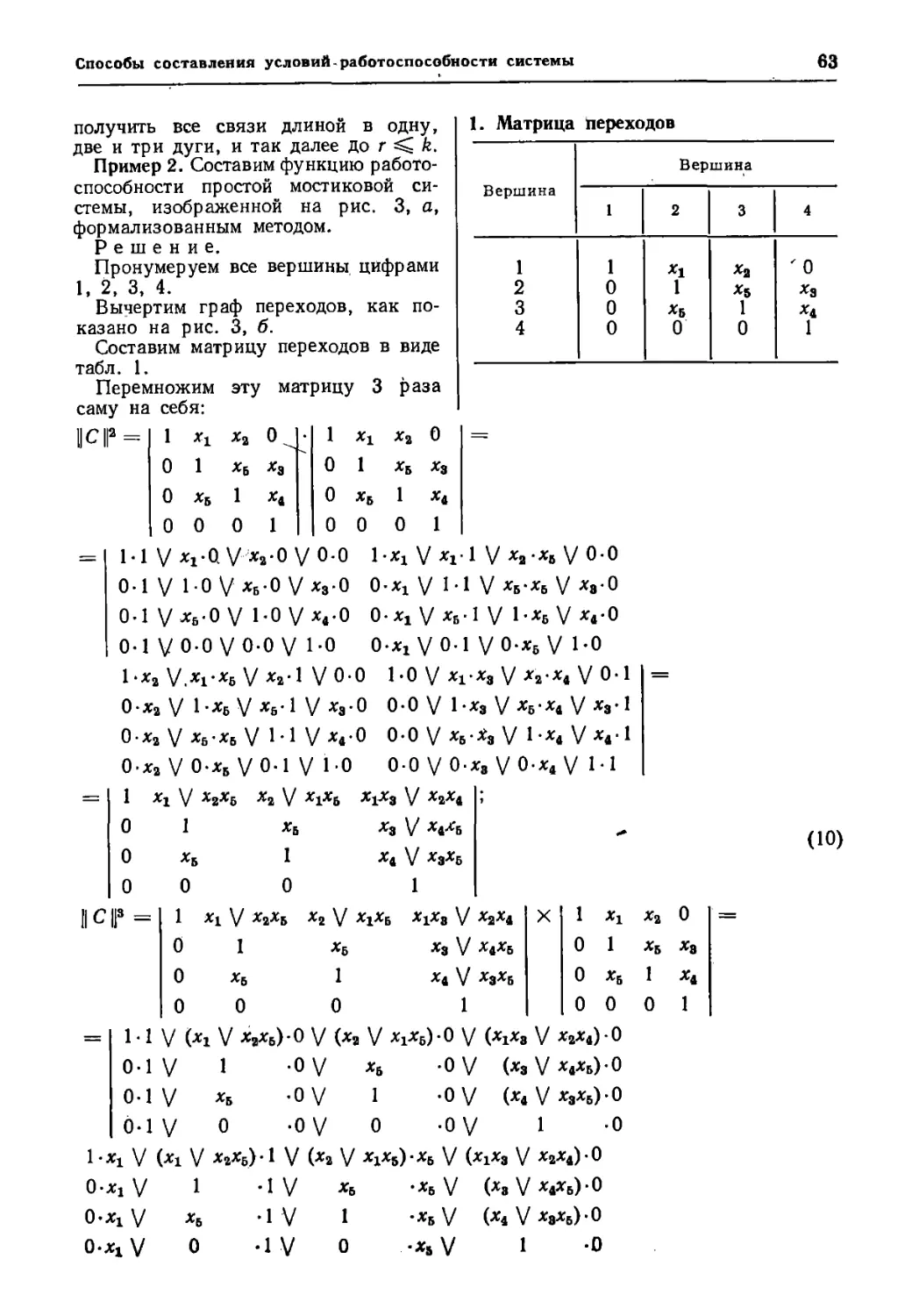
1. Способы составления усло-
вий работоспособности си-
стемы (И. А. Рябинин) . . 58
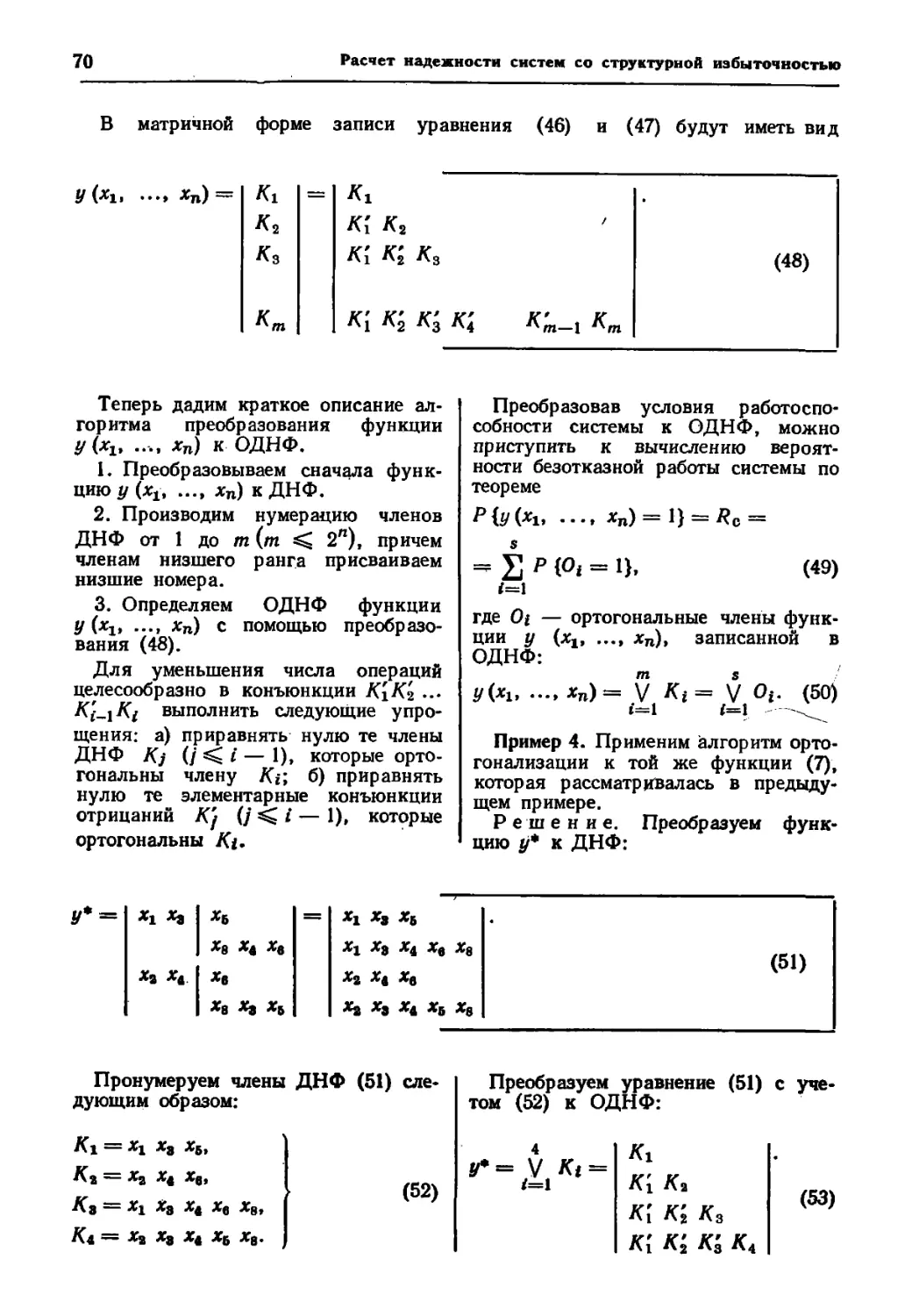
2. Логико-вероятностные ме-
тоды расчета структурной
надежности сложных систем
без учета восстановления
(И. А. Рябинин) .... 64
3. Методы оценки важности
отдельных элементов при
синтезе систем с заданной
надежностью (И. А. Ряби-
нин) ....................... 78
4. Логико-вероятностный ме-
тод расчета структурной на-
дежности сложных систем
с учетом восстановления
(Я. А. Рябинин) .... 92
5. Расчет надежности двухпо-
люсных систем с помощью
модифицированного логико-
вероятностного метода
(Г. Я. Черкесов)........ 101
6. Расчет надежности систем
с ветвящейся структурой и
меридианными связями
(Г. Н. Черкесов)........ 113
7. Расчет надежности иерархи-
ческих адаптивных систем
управления (Г. К. Москатов) 124
Глава 4. РАСЧЕТ НАДЕЖ-
НОСТИ СИСТЕМ С
ВРЕМЕННОЙ ИЗ-
БЫТОЧНОСТЬЮ 135
1. Системы с временной избы-
точностью (Г. И. Черкесов) 135
6
Оглавление
2. Одноканальные системы с
пополняемым резервом вре-
мени при непрерывной за-
грузке и идеальном контро-
ле работоспособности
(Б. П. Креденцер) ...
3. Одноканальные системы с
пополняемым резервом вре-
мени при различных спосо-
бах контроля и случайной
загрузке Б. П. Креденцер)
4. Одноканальные системы с
непополняемым резервом
времени (Б. П. Креденцер,
Г. Н. Черкесов) ....
5. Многоканальные системы
(Г. Н. Черкесов) ....
6. Многофазные системы
(Г. Я. Черкесов)
Глава Б. ОБЕСПЕЧЕНИЕ
НАДЕЖНОСТИ ПО
СТАДИЯМ ЖИЗ-
НЕННОГО ЦИКЛА
1. Модель изменения надежно-
сти по стадиям жизненного
цикла (А. И. Рембеза,
В. Ф. Грибанов, Э. В. Дво-
рецкий) ..................
2. Сетевое планирование и уп-
равление (Э. В. Дворецкий)
3. Метод ориентированных гра-
фов с поглощением ресурсов
в вершинах (А. И. Рембеза)
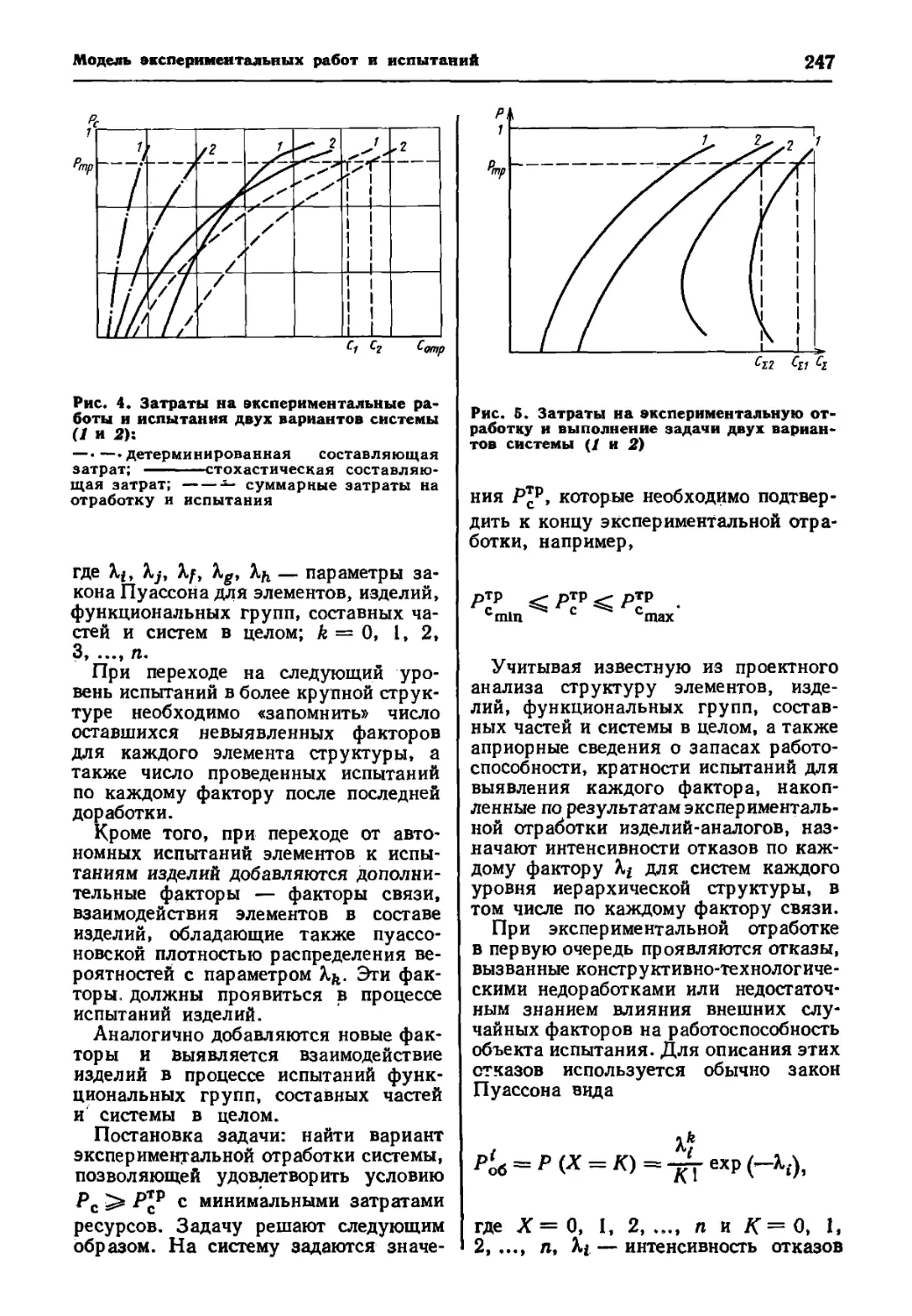
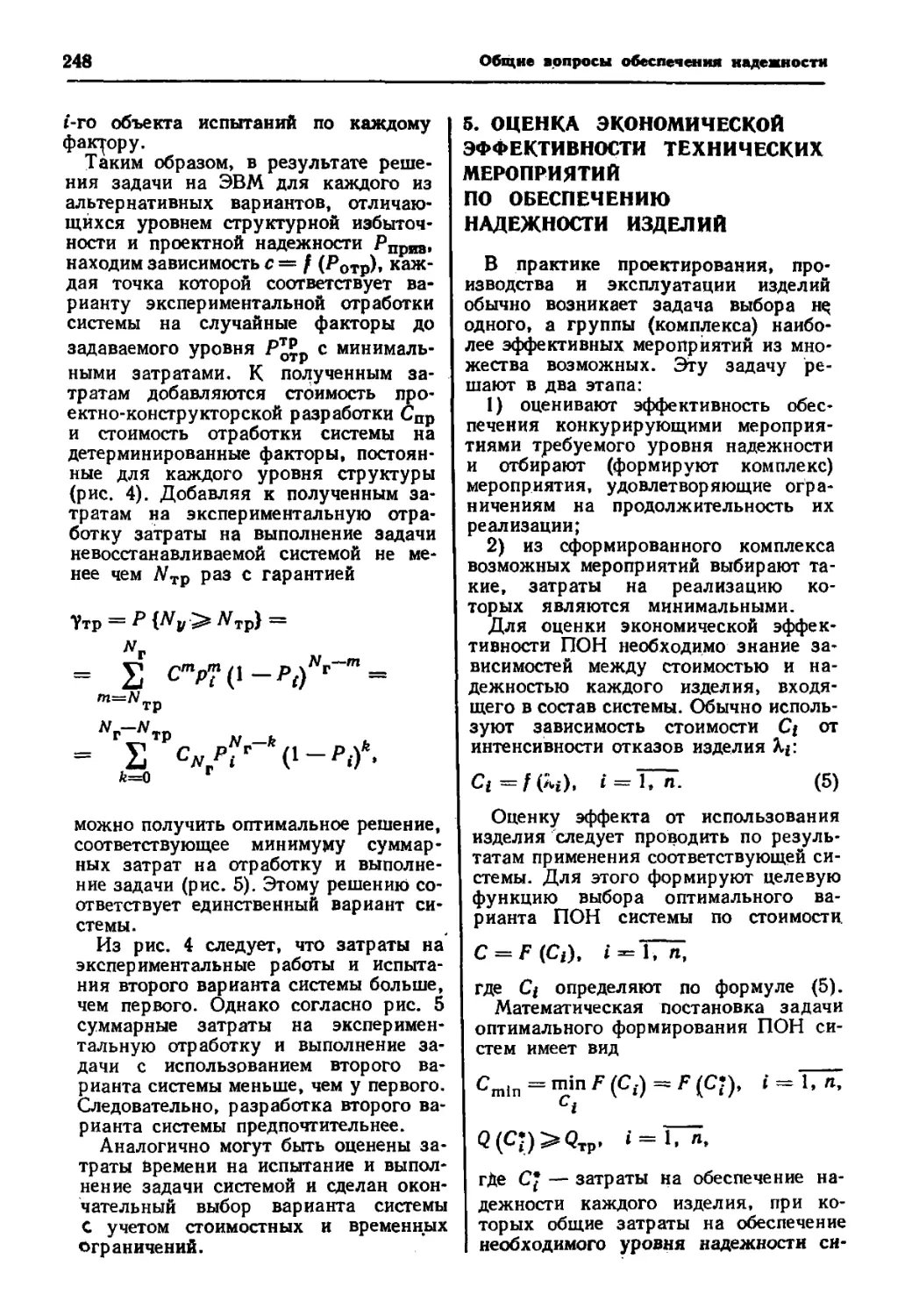
4. Модель экспериментальных
работ и испытаний (А. Я. Рем-
беза, В. Ф. Грибанов) . .
5. Оценка экономической эф-
фективности технических
мероприятий по обеспече-
нию надежности изделий
(Э. В. Дворецкий, Ю. С. Сло-
тин)
Глава в. ОБЕСПЕЧЕНИЕ
НАДЕЖНОСТИ
МАШИН И МЕХА-
НИЧЕСКИХ СИ-
СТЕМ (А. С. Прони-
кав)
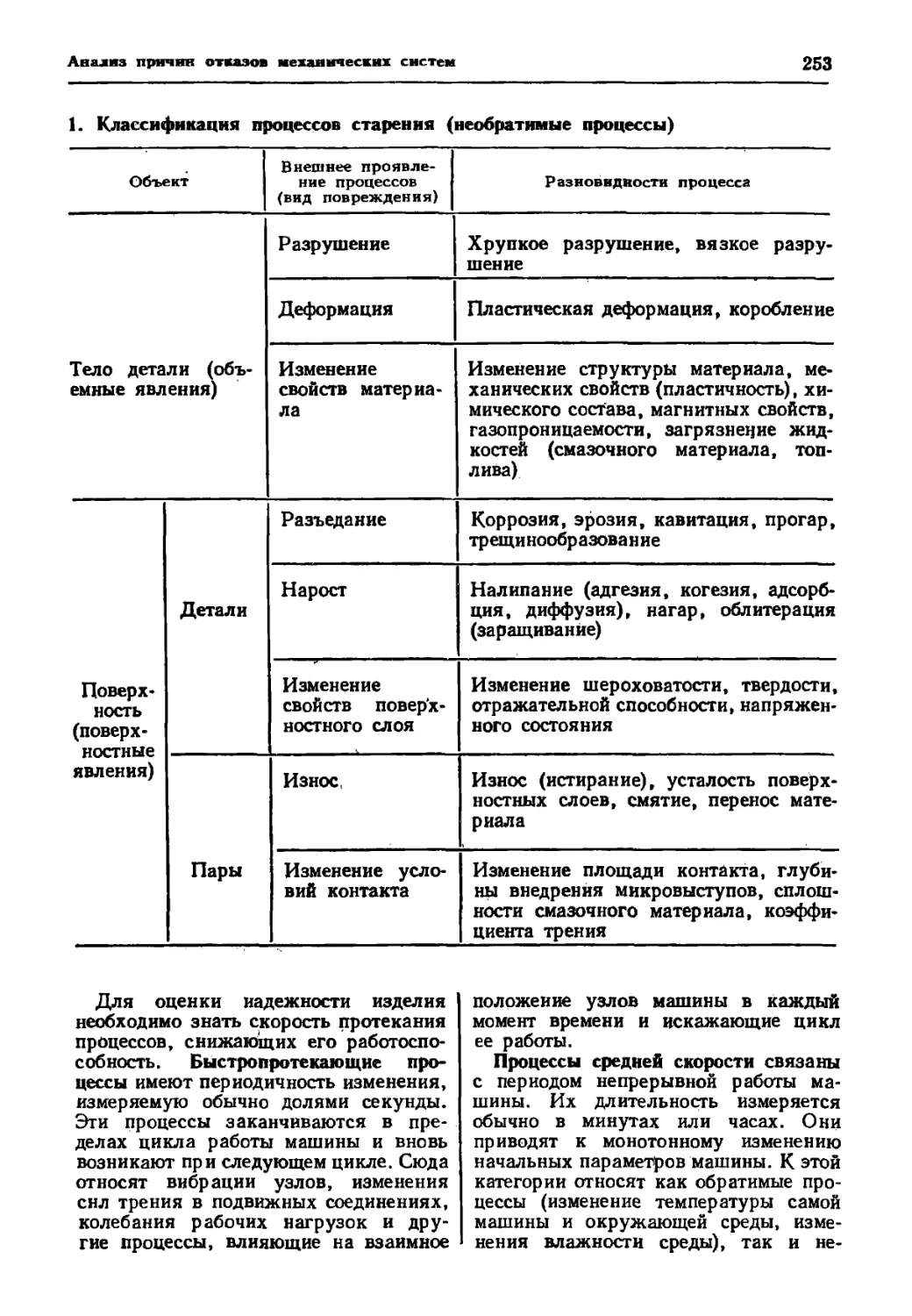
1. Анализ причин отказов ме-
ханических систем
2. Модели отказов машин
3. Расчет надежности механи-
ческих систем на стадии
141 проектирования . . .
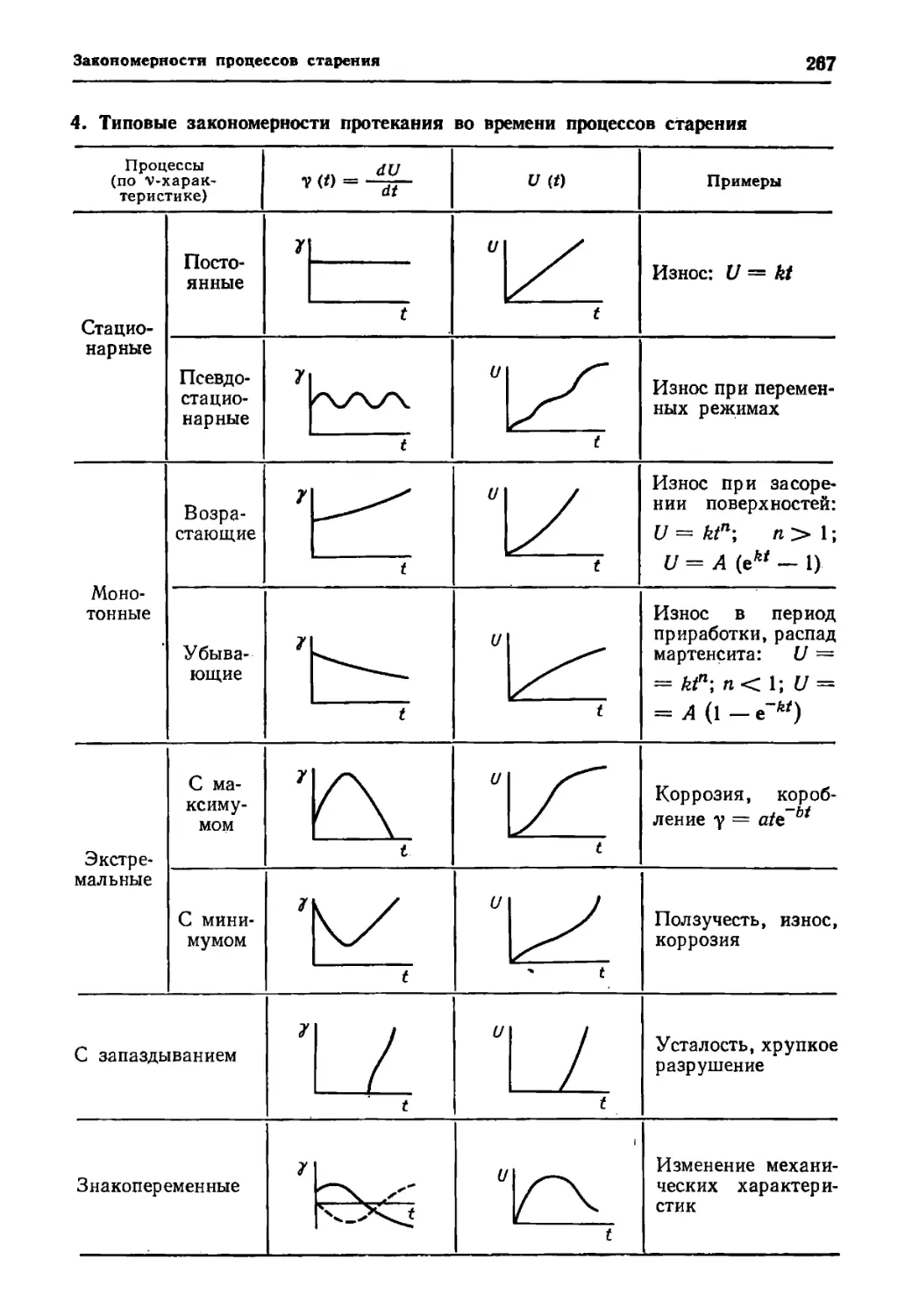
4. Закономерности процессов
старения ....
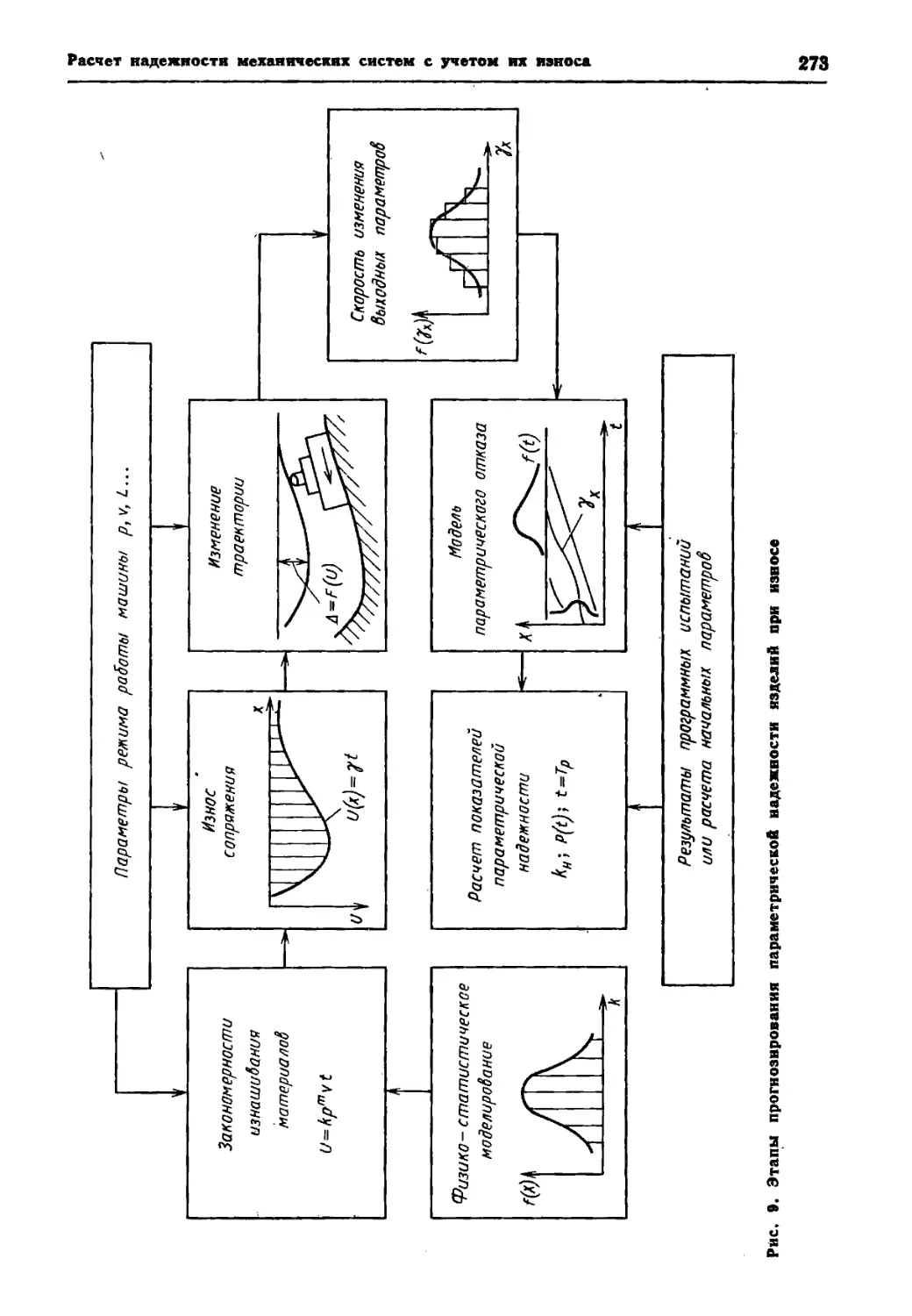
5. Расчет надежности механи-
ческих систем с учетом их
156 износа
252
255
263
266
268
170
196
217
240
240
242
244
245
248
252
Глава 7. ОБЕСПЕЧЕНИЕ
НАДЕЖНОСТИ
РАДИОЭЛЕКТРОН-
НЫХ СИСТЕМ
(В. И. Манойло,
А. И. Рембеза,
Н. А. Северцев,
Г. А. Дрыгин)
1. Общие принципы обеспече-
ния надежности радиоэлек-
тронных систем (РЭС) при
проектировании . ...
2. Особенности обеспечения на-
дежности цифровой аппара-
туры .................. . .
3. Надежность программного
обеспечения ..............
4. Выбор методов обеспечения
надежности радиоэлектрон-
ных систем
Приложения
1. Оптимизация затрат по обе-
спечению надежности нере-
зервированных технических
систем (Ю. С. Слотин,
А. Я. Рембезй)..........
2. Учет эксплуатационных тре-
бований при проектирова-
нии (Ф. Я. Кузьмин) . . .
3. Задача определения опти-
мальной избыточности слож-
ного изделия (А. Я. Рембе-
за, В. Ф. Грибанов) . . . .
4. Ранжирование факторов
(Ю. С. Слотин)
Предметный указатель .
275
275
276
279
281
291
291
300
307
310
316
Введение
Большое разнообразие методов и
средств исследования и обеспечения
надежности при проектировании поз-
воляет успешно решать проблему на-
дежности, используя наилучшим об-
разом имеющиеся материально-техни-
ческие ресурсы.
Исследование и выработка мер по
обеспечению надежности системы про-
водятся на всех стадиях ее жизненного
цикла. Наиболее важные технические
решения закладываются в процессе
проектно-конструкторской разработки.
Основу исследования надежности при
проектировании составляют задачи,
перечисленные ниже.
1. Задачи обоснования требований
по надежности к системе и ее состав-
ным частям и выбора основных путей
(концепций) их достижения. Эти за-
дачи приходится решать с учетом
взаимодействия разрабатываемой си-
стемы с другими техническими систе-
мами и (или) окружающей средой,
а также с учетом ограничений, связан-
ных с достигнутым научно-техниче-
ским уровнем и ресурсами, выделяе-
мыми на создание системы.
2. Задачи синтеза требуемой надеж-
ности системы в рамках принятых кон-
цепций построения системы с учетом
упомянутых выше ограничений.
3. Задачи анализа надежности, ре-
шаемые с целью получения оценки
надежности системы и ее элементов
при выбранных в процессе проектиро-
вания технических решениях. Полу-
чаемые оценки надежности используют
для сравнения различных вариантов
изделий и выбора варианта, в наиболь-
шей степени удовлетворяющего задан-
ным требованиям по надежности, а
также для обоснования последующих
решений.
На ранних стадиях проектирования
задачи синтеза и анализа надежности
решают в рамках единого итератив-
ного процесса выбора наилучших тех-
нических решений по обеспечению
надежности.
4. Задачи распределения располагае-
мых ресурсов на обеспечение надеж-
ности, реализуемых на последующих
стадиях создания, эксплуатации и при-
менения изделий и систем. К их числу
относят задачи обоснования программ
обеспечения надежности, программ ис-
пытаний, выбора эффективных средств
контроля качества продукции, под-
держания надежности системы в про-
цессе эксплуатации и др.
Некоторые из перечисленных задач
выходят за рамки проектно-конструк-
торской разработки конкретной си-
стемы, однако результаты их решения
учитываются при создании новых си-
стем.
Все перечисленные задачи успешно
решаются благодаря использованию
разнообразных количественных мето-
дов исследования надежности, кото-
рыми располагает теория надежности.
Однако не следует забывать, что теория
надежности — наука эксперименталь-
ная. Ее рабочие гипотезы и выводы
базируются на конкретных экспери-
ментальных данных (результатах ис-
пытаний или эксплуатации ранее соз-
данной техники). Экспериментальные
данные и выводы всегда отражают не-
которую предысторию, а решения»
которые принимаются на их основе
при проектировании, касаются вновь
создаваемых образцов техники и в оп-
ределенной степени учитывают отри-
цательный опыт прошлого.
Теория надежности в качестве рабо-
чих гипотез использует несколько раз-
8
Введение
личных механизмов возникновения от-
казов и соответствующих им моделей
надежности, учитывающих влияние на
надежность факторов окружающей сре-
ды, конструкторских и технологиче-
ских решений, конструкторской и тех-
нологической отработки, автоматиза-
ции операций изготовления и контро-
ля, способов обслуживания и восста-
новления. Потенциальных причин из-
менения надежности всегда больше,
чем можно установить на основе име-
ющихся экспериментальных данных,
и поэтому одним и тем же данным мо-
гут соответствовать несколько раз-
личных моделей надежности.
Следствием этого является недо-
статочная полнота конкретных част-
ных моделей и наличие неформализуе-
мых факторов. Поэтому количествен-
ный анализ надежности не обеспечи-
вает полную гарантию от возможных
ошибок. Однако нельзя пренебрегать
и количественной оценкой надежности
при обосновании проектных реше-
ний.
При проведении количественного
анализа надежности необходимо оце-
нивать полноту и достоверность исход-
ных данных, адекватность и точность
используемых моделей, обоснованность
принимаемых допущений и зависимость
от них получаемых рекомендаций и вы-
водов.. При выборе окончательных ре-
шений необходимо проводить оценку
гарантий, обеспечиваемых количествен-
ным вероятностным анализом', а также
рассматривать возможное повышение
этих гарантий благодаря применению
апробированных технических крите-
риев, норм и правил, позволяющих
в совокупности обеспечить требуемую
высокую надежность техники.
Материал пятого тома справочника
наряду с изложением необходимых све-
дений по методам расчета надежности
изделий при проектировании содер-
жит полезные сведения и рекоменда-
ции по практическим методам обеспе-
чения надежности^ В справочнике рас-
смотрены особенности проектирования
и задачи исследования надежности на
различных этапах разработки изделий
и иа разных уровнях структуры тех-
нических систем. Определенный инте-
рес представляет логическая схема
исследований и предварительная клас-
сификация задач и соответствующих
им методов исследования надежности
при проектировании. При задании
требований и последующих исследова-
ниях надежности необходимо исполь-
зовать такие показатели надежности,
которые наилучшим образом характе-
ризуют потребительские свойства си-
стем и особенности их функционирова-
ния, учитывать различные виды отка-
зов и соответствующим им математи-
ческие законы надежности, уметь рас-
пределять требования по надежности
между элементами системы.
В технике часто используются нере-
зервированные системы с последова-
тельным в смысле надежности соедине-
нием элементов. К этой категории си-
стем относят механические системы и
конструкции, машины и механизмы.
В процессе работы эти системы под-
вержены как внезапным, так и по-
степенным отказам, связанным с изно-
сом и старением. Исследование и обес-
печение надежности таких систем имеет
ряд особенностей, которые потребо-
вали специального рассмотрения.
Использование структурного пред-
ставления сложной резервированной
технической системы позволяет выявить
общие закономерности функциониро-
вания ее в различных режимах, не
рассматривая особенности физической
природы отдельных элементов системы.
Подобный подход дает возможность
изучать общие закономерности пове-
дения технических систем разного на-
значения. Это могут быть электриче-
ские, радиотехнические, информацион-
ные и другие системы. Выбор рацио-
нальной структуры и оценка пара-
метров позволяют повысить их надеж-
ность. Одним из перспективных на-
правлений исследования надежности
при проектировании сложных техни-
ческих систем являются логико-ве-
роятностные методы аналитической за-
писи условий работоспособности си-
стем и способов перехода к вероят-
ностным функциям, определяющим по-
казатели надежности системы.
Логико-вероятностные методы иссле-
дования надежности позволяют про-
водить анализ и синтез надежности
систем, обладающих большой струк-
турной сложностью, выявлять кри-
тические элементы и разрабатывать
Введение
9
к|х}м‘кт явные меры по повышению на-
дежности систем.
Особый класс задач возникает при
исследовании надежности адаптивных
систем.
Повышение надежности технической
системы может быть достигнуто выбо-
ром рациональных временных харак-
теристик функционирования системы.
Этот прием используется в системах
с временной избыточностью. В этом
случае создаются условия для полу-
чения в системе или отдельных частях
1ч> избыточного времени, которое ис-
пользуется для восстановления работо-
способности, обнаружения и локали-
зации отказов, реконфигурации струк-
туры системы или подключения струк-
турного резерва и пр.
Методы создания временной избы-
точности построены на различных ис-
точниках резервного времени. К ним
относят: запас производительности си-
стемы, создающий разницу между опе-
ративным временем выполнения зада-
ния и фактическим временем; комплек-
тирование устройств одинакового на-
значения; создание внутренних за-
пасов продукции в накопителях; функ-
циональную инерционность, вызывае-
мую физико-техническими процессами
в системе; способ загрузки системы.
Технические системы могут иметь не-
пополняемый резерв времени или по-
полняемый по определенному закону.
Временная избыточность должна рас-
сматриваться с учетом структуры тех-
нической системы.
Анализ общих закономерностей из-
менения надежности по стадиям жиз-
ненного цикла позволяет примени-
тельно к разрабатываемой системе ра-
ционально распределить располагае-
мые ресурсы на обеспечение надеж-
ности при проектировании, испыта-
ниях, серийном изготовлении и эксплу-
атации системы, выбрать этапность
работ, установить контрольные точки
для оценки достигнутого уровня на-
дежности и выработки управляющих
решений. Эти задачи решаются с ис-
пользованием методов сетевого пла-
нирования и управления, методов тео-
рии графов, методов динамического про-
граммирования.
Широкое использование вычисли-
тельной техники выдвинуло в число
важнейших проблему обеспечения на-
дежности ЭВМ и программного обеспе-
чения, сравнения и выбора наиболее
эффективных методов обеспечения
надежности электронных систем.
По нашему мнению, сочетание в од-
ной книге материалов по методам
расчета и методам обеспечения надеж-
ности современной техники, исполь-
зуемых при проектировании, придает
справочнику большую практическую
направленность.
В. П. Мишин,
акад. АН СССР
Глава 1. Проектирование систем
и задачи исследования надежности
1. ВЫБОР ПРОЕКТНЫХ РЕШЕНИЙ
С УЧЕТОМ НАДЕЖНОСТИ
Для ряда изделий и сооружений
проблема обеспечения надежности ре-
шается без непосредственного исполь-
зования методов теории надежности.
Промышленные и жилые здания, мо-
сты, плотины и другие сооружения
проектируют с учетом эксплуатацион-
ных нагрузок и изменений во времени
свойств конструкционных материалов.
Установленные для различных видов
техники нормы прочности и другие
строительные и проектные нормы, реа-
лизуемые совместно с правилами при-
емки готовых сооружений, правилами
эксплуатации, включающими необ-
ходимый надзор, обслуживание и вос-
становление, обеспечивают практиче-
ское отсутствие отказов в течение
всего срока службы. Методы матема-
тической статистики и теории вероят-
ностей исползьуются при определении
реальных диапазонов эксплуатацион-
ных нагрузок, характеристик прочно-
сти материалов, обосновании коэффи-
циентов запаса прочности и коэффи-
циентов безопасности. В процессе же
разработки конкретного проекта ис-
пользуются преимущественно детерми-
нированные (нормативные) показатели
и коэффициенты, согласованные мето-
дики выбора материала и профиля,
периодичности осмотра или замены,
ремонтов или контрольных нагруже-
ний. При таком нормативном детерми-
нистском подходе к выбору проектных
решений все возможные разбросы воз-
действующих факторов, характеристик
материалов, технологии изготовления
перекрываются вводимыми запасами.
При этом отсутствие отказов гаранти-
руется для всех образцов, выполнен-
ных по данному проекту и эксплуати-
руемых в оговоренных условиях.
Усложнение техники, ужесточение
эксплуатационных нагрузок, использо-
вание новых материалов, комплекту-
ющих изделий, конструктивных реше-
ний, технологических процессов, огра-
ничения по массе, габаритам, энерго-
потреблению и другие аналогичные
факторы затрудняют распространение
детерминистского подхода на многие
виды изделий. Тем не менее, если это
уникальные изделия единичного изго-
товления, то проектное исследование
их надежности направлено на обеспе-
чение максимальной гарантии успеш-
ной работы каждого образца в усло-
виях имеющихся ограничений. Эконо-
мичность (себестоимость) при этом не
является главным критерием оптими-
зации надежности, так как послед-
ствия отказов превосходят затраты
на создание самих изделий. Для таких
видов техники к обоснованию проект-
ных решений, связанных с надеж-
ностью, применяют программно-целевой
подход, основой которого является
комплексный анализ всех мер и средств
обеспечения и контроля надежности,
включая все виды резервирования и
запасов, контроля, обслуживания, спе-
циальных мер предупреждения, выяв-
ления и защиты от последствий отка-'
зов. Выбирают решения, обеспечива-
ющие (в совокупности) заданный или
максимальный уровень гарантий, с
учетом ограничений по срокам созда-
ния, массе, габаритам и т. п. При
этом затраты времени и средств на
проектно-конструкторскую разработ-
ку и испытания опытных изделий могут,
составлять большую часть суммарных
затрат на реализацию всей про-
граммы.
Выбор проектных решений с учетом надежности
11
3iuриги времени и средств на про-
ектно-конструкторскую разработку и
исhi/танин изделий массового произ-
подстпа составляют малую долю за-
ipitt на изготовление и эксплуатацию
и ок лий. Возникают условия для суще-
ciкокания оптимального уровня надеж-
ности проектируемого изделия, так
как нысо ненадежные изделия дороже
обходятся в изготовлении, но эконо-
мичнее в эксплуатации.
Другими словами, становится оправ-
данным нормативный вероятностный
подход, при котором нормируется тре-
буемый (экономически обоснованный)
уровень вероятностного показателя на-
дежности, а затем он контролируется
перед запуском изделия в производ-
ство с помощью специальных испыта-
ний на надежность. Объем испытаний
на надежность и соответствующие это-
му объему риск изготовителя и
риск потребителя нормируются за-
ранее.
Большому диапазону значений объ-
ема производства [от единиц (единич-
ное) и до тысяч (массовое)] соответ-
ствует область программно-целевого ве-
роятностного подхода, когда вероят-
ностные показатели используются при
проектном исследовании, но не могут
быть использованы в качестве основы
обеспечения гарантий успешной реали-
зации программы. При задании тре-
бований следует учитывать и целесооб-
разность затрат на подтверждение тре-
бований, так как эти затраты могут
составлять существенную долю общей
стоимости программы.
При любом из подходов возникает
ряд задач исследования эффективно-
сти расходования ресурсов на основ-
ных стадиях жизненного цикла изде-
лия, Эти задачи обычно формулируют
как задачи оптимального планирова-
ния программ обеспечения надежно-
сти, программ экспериментальных ра-
бот и испытаний, программ эксплуата-
ции и ремонта.
Анализ типовых задач исследования
надежности и особенностей постановки
задач обоснования решений на основ-
ных стадиях жизненного цикла созда-
ния техники позволяет уточнить ло-
гическую схему постановки задачи
исследования надежности, из которой
в виде частных случаев вытекали бы
постановки задач для различных клас-
сов объектов исследования [3].
Логическая схема постановки задачи
представлена на рис. 1.
Ниже приведены модели исследова-
ния надежности.
Модель изготовления и
контроля качества опыт-
ных образцов устанавливает
соответствие между уровнем безотказ-
ности образцов и техники, предназна-
ченных для экспериментальных работ
и испытаний, и уровнем затрат на
контроль качества. Неопределенными'
факторами модели являются уровень
отработанности опытной технологии,
определяющей начальный уровень без-
дефектности опытных образцов JRa опо,
и уровень эффективности применения
средств производственного контроля
«и on ~ яг” где Си оп — затраты
«‘-'И оп
на изготовление опытных образцов.
Таким образом, формализованная за-
• пись модели может быть представлена
в виде
9иоп:{^иопо> аи оп, Си оп} “►
->{^иоп}, (D
причем параметры модели зависят от
сложности изделия (сборочных еди-
ниц), объема производства, других
факторов классификации изделий.
Модель эксперимен-
тальной отработки устанав-
- ливает соответствие между уровнем
отработанности конструкторской доку-
ментации и уровнем затрат на экспе-
риментальную отработку. Неопреде-
ленными факторами модели являются
уровень отработанности процесса про-
ектирования, определяющий началь-
ный уровень отработанности (качества)
конструкторской документации /?эо, и
уровень эффективности методов и
средств экспериментальной отработки
На результативность процесса отра-
ботки также влияет уровень бездефект-
ности опытных образцов /?и оп- Таким
образом, формализованная запись мо-
дели экспериментальной отработки мо-
жет быть представлена в виде
89’ {^эо> оп» оЬэ» Сэ} —►
12
Проектирование систем и задачи исследования надежности
причем параметры модели зависят от
степени новизны отрабатываемых ре-
шений, оснащенности эксперименталь-
ной базы и других характеристик
изделий.
Модель изготовления и
контроля качества серий-
ных образцов аналогична со-
отношению (1) и может быть представ-
лена в виде
£ис: {^исо» “ис» Сис} -**• {^ис}'
Модель эксплуатации
и обслуживания устанавливает соот-
ветствие между уровнем надежности
серийных изделий, находящихся в
эксплуатации, и уровнем затрат на
эксплуатацию, обслуживание, ремонт.
Неопределенными факторами модели
являются зависимость надежности из-
делия от эксплуатационных воздей-
ствующих факторов R (/э) и уровень
эффективности способов и средств кон-
троля, обслуживания и ремонтно-вос-
л dR(t9) u
становительных работ ав ~ .Л . На-
аСв
чальный уровень надежности изделий
на стадии эксплуатации определяется
отработанностью и бездефектностью
/?ис серийных образцов. Таким обра-
зом, формализованная запись модели
эксплуатации имеет вид
£экспл: ^?ис> (^э)» Св}->
{Я (*э)Ь
где /?э — текущее, а /?0 — начальное
значения параметра.
Модель функциониро-
вания изделия устанавливает соот-
ветствие между уровнем надежности
изделия в процессе применения и
уровнем затрат ресурсов на проектные
меры и средства повышения надеж-
ности. Неопределенными факторами
модели являются зависимость надеж-
ности изделий от условий применения
Рис. 1. Логическая схема постановки задачи исследования надежности
Задачи, модели и методы проектного исследования надежности
13
Яо (hip) и уровень эффективности про-
ектных мер обеспечения надежности
(запасов, резервирования, средств опе-
ративного контроля и управления функ-
. dR (/пр) тт
ционированием) аф— tft — . На ре-
йс п
зультаты функционирования также
влияет текущий уровень надежности
изделий, применение которых начи-
нается по истечении определенного
срока эксплуатации R (/э). Таким об-
разом, формализованная запись мо-
дели функционирования может быть
представлена в виде
Яф- (*э)» Яо (/пр), аф, Сп) —►
ЧЖЬхр)}- (2)
Для сложных, многофункциональ-
ных изделий, множество состояний ко-
торых не может быть достаточно точно
охарактеризовано двумя классами со-
стояний (работоспособностью и нера-
ботоспособностью) и, следовательно,
неудовлетворительным является одно-
значное определение понятия «отказ»,
модель функционирования устанавли-
вает соответствие «выходной эффект —
затраты». Этому соответствует форма-
лизованная запись:
Яф: {R (^э), Ro (hip)» ап» £п) ~
(hip)},
где W (/пр) — дифференциальный или
интегральный выходной эффект, полу-
чаемый от одного изделия.
Модель применения систе-
мы устанавливает соответствие между
уровнем эффективности функциониро-
вания системы и затратами в процессе
применения. Неопределенным факто-
ром модели является уровень потреб-
ности Утр (/Пр)» если исследование
проводится на стадии проектирования.
Характеристики изделий оказывают
влияние на эффективность применения
системы через показатели надежности
изделий в процессе применения R (/пр)
[в случае модели (2)] или через вы-
ходной эффект W (/пр). Формализован-
ная запись модели применения может
быть представлена в виде
Япр: (/пр)> Утр (hip), ^hip} ~*
+ У (<пр)
или
Япр: (/пр)» Утр Опр)» ^пр} —*•
У Опр)-
В том случае, когда условие дости-
жения требуемого уровня потребно-
сти V (tap) Утр (/пр) используется
в качестве критерия для принятия
решения, выходом модели является
прогнозируемый уровень гарантий вы-
полнения требований:
Япр: Опр)» Утр Опр), -^hip}-*?;
ёпр- Опр), Утр Опр), -^пр}-
Формализованная запись обобщен-
ной модели создания и применения
как композиции частных моделей (g —
= (ёи oii, Яэ, £ис» Яэкспл» Яф» Япр))
приобретает вид
ё‘ {^и опо» аи on, Rqo> Од, ^исо» аис»
*о(У> “в’ *о('пр)> аф‘ ^тр’
-*7»
где С2 — Си оп + Сэ + (Спс + Св+
+ Сп) А/пр — суммарные затраты на
программу создания и применения
изделий.
В зависимости от потребности в изде-
лиях, подхода к выбору проектных
параметров и особенностей конструк-
тивного и технологического решений
изделий определяется состав и сте-
пень детализации моделей, рассмотрен-
ных в общей постановке.
2. ЗАДАЧИ, МОДЕЛИ
И МЕТОДЫ ПРОЕКТНОГО
ИССЛЕДОВАНИЯ НАДЕЖНОСТИ
Стандартная последовательность за-
дач проектного исследования надеж-
ности включает:
задание требований;
принятие решений, обеспечивающих
надежность;
контроль выполнения требований.
Содержание каждого из этапов иссле-
дования может уточняться для раз-
личных классов изделий в зависимости
от их сложности, массовости изготов-
ления, сложившейся организации ра-
14
Проектирование систем и задачи исследования надежности
бот и т. д. Тем не менее для любого
из них подходит методика исследова-
ния, изложенная в первом томе. Всегда
условия задачи исследования описы-
вают множество решений (условия
выбора) и правило обоснования (вы-
бора) решений;
Для задачи «задание требований»
множество возможных решений (в виде
интервала значений показателя на-
дежности) допускает в качестве пра-
вила выбора поиск минимального зна-
чения показателя надежности, при
котором выполняются требования по
эффективности (и тогда в качестве
модели используется отображение на-
дежность эффективность), либо по-
иск максимально достижимого значе-
ния показателя надежности при вы-
полнении ограничений на затраты (тог-
да нужна модель затраты -+ надеж-
ность).
Если же в условиях задачи не опре-
делен показатель, то, естественно, ус-
ловия выбора расширяются, что вле-
чет дополнительные требования к пра-
вилам выбора и используемым моде-
лям.
Для задачи «принятие решений,
обеспечивающих надежность» множе-
ство возможных (допустимых) решений
может описываться в терминах проект-
ных параметров, структуры (избыточ-
ности) изделия, конструкции, техно-
логии изготовления и контроля, экс-
плуатации, обслуживания и т. д.
Возможные формулировки правила
выбора;
найти хотя бы один набор проектных
параметров (решений), при котором
выполняются требования по надеж-
ности;
найти набор проектных решений,
обеспечивающих выполнение требова-
ний по надежности при минимуме
затрат.
Соответствующие модели должны
устанавливать зависимость уровня за-
трат и уровня надежности от иссле-
дуемых параметров. В частном случае
в качестве возможных решений могут
выступать значения показателей на-
дежности подсистем, и тогда модель
должна устанавливать зависимость на-
дежности изделия от надежности под-
систем. Такую задачу обычно называют
задачей нормирования надежности.
Для задачи «контроль выполнения тре-
бований» множество возможных реше-
ний состоит из нескольких альтер-
натив, например, «требования выпол-
нены», «требования не выполнены».
Обоснование решения проводят по
следующим критериям: минимум ри-
ска «заказчика» при ограничении
средств на контроль; минимум затрат
на контроль при условии ограничения
риска «заказчика»; минимум суммар-
ных потерь на реализацию программы
с учетом потерь, вызванных ошибка-
ми I и II рода.
Рассмотрим особенности этих задач
применительно к отрасли, реализую-
щей нормативный вероятностный под-
ход.
На стадии научно-исследовательских
работ, при определении потребности
в новом виде техники надежность буду-
щего класса техники исследуется на
уровне проблем. Определяя целесооб-
разность разработки нового изделия,
исследуя его потребительские свой-
ства и его потребительскую ценность,
уже на этой стадии можно предста-
вить способ, систему применения бу-
дущего изделия; возможные послед-
ствия его ненадежности; сочетание
свойств (безотказности, долговечно-
сти, ремонтопригодности и сохраняе-
мости), существенных для возможных
вариантов назначения изделия и усло-
вий его применения. Уже на этой ста-
дии могут быть определены наиболее
существенные технические проблемы
обеспечения надежности будущего из-
делия. Хотя, не имея облика изделия,
не зная диапазона его возможных кон-
структивных, технологических, экс-
плуатационных характеристик, труд-
но говорить даже о выборе показателей
надежности, тем более об обосновании
требуемого уровня надежности, тем
не менее анализ «от потребности», как
правило, позволяет установить содер-
жание и показатели эффективности
применения будущего изделия.
При разработке технического пред-
ложения анализ «от потребности» до-
полняется анализом «от возможностей»
с учетом прогноза затрат ресурсов на
создание и применение различных ва-
риантов изделия; проводится сравне-
ние вариантов облика создаваемого
Задачи, модели и методы проектного исследования надежности
16
наделия, выбор рационального соче*
танин проектных параметров. На этой
стадии становится возможным от по-
казателя эффективности перейти к вы-
бору «эффективной меры надежности»,
т. е. к показателю, наиболее полно и
адекватно отражающему влияние ха-
рактеристик надежности изделия на
эффективность его применения. Учет
способа применения и особенностей
системы эксплуатации позволяет обос-
новать показатель надежности изде-
лия. После этого появляется возмож-
ность качественные соображения о це-
лесообразности разработки нового из-
делия, рациональности того или иного
сочетания проектных параметров под-
креплять количественными характе-
ристиками. Количественные оценки по-
казателя надежности изделия на ста-
дии разработки технического предло-
жения обычно называют предвари-
тельными, расчетными, прогнозными.
В строгом смысле это даже не оценки,
так как будущее изделие представлено
пока комбинациями параметров, об-
щими конструкторскими, технологи-
ческими решениями. Однако опыт соз-
дания и применения близких по об-
лику и проектным параметрам изделий
позволяет прогнозировать зависимо-
сти уровня надежности изделия от
определяющих потребительских
свойств и предполагаемых затрат вре-
мени, средств и других ресурсов на
обеспечение и контроль надежности.
Таким образом, предварительным рас-
четом устанавливается некоторое соот-
ветствие между вариантами изделия,
затратами на обеспечение и контроль
надежности и ожидаемыми уровнями
показателя надежности.
Построение подобных моделей яв-
ляется необходимым условием для реа-
лизации задачи «задание требований»,
которая обычно решается на стадии
«разработки технического задания».
Согласование и утверждение техниче-
ского задания, включающего указания
требуемого уровня надежности, завер-
шает и документирует выбор, обосно-
ванный на предыдущих стадиях; при
этом неопределенность задачи может
приводить к ошибкам I и II рода,
т. е. к занижению либо завышению
требований по сравнению с объективно
целесообразным уровнем. Вероятности
ошибок, или уровни рисков, могут
быть оценены лишь в том случае,
когда используемые модели, кроме за-
висимостей для средних ожидаемых
или наиболее вероятных значений па-
метров, содержат диапазоны возмож-
ных разбросов параметров. Именно
диапазоны разбросов параметров мо-
дели являются количественным описа-
нием уровня неопределенности усло-
вий задачи исследования надежности
и позволяют применить методики и
принципы обоснования решений в ус-
ловиях неопределенности.
На следующих стадиях эскизного
и технического проектирования прини-
мается основная доля конструктор-
ских и технологических решений. По
мере «углубления» процесса проекти-
рования к нижним уровням иерархиче-
ской структуры изделия уточняются,
конкретизируются предварительные
модели. При этом каждая «веточка»
процесса заканчивается на уровне
элементов, агрегатов, механизмов, уже
выпускаемых промышленностью, либо
новых деталей и сборочных единиц,
для которых достаточно точно может
быть назван ранее созданный аналог
и конкретные изменения относительно
аналога по материалу, конструкции,
технологии изготовления и кон-
троля .
После завершения процесса обосно-
вания проектных решений появляется
возможность построения модели «на-
дежность — затраты» для типа изде-
лий.
В случае необходимости разработки
новых деталей и сборочных единиц
их надежность прогнозируется на ос-
нове данных по испытаниям и эксплуа-
тации аналогов, а также эксперимен-
тальным или теоретическим данным
о свойствах предлагаемого материала,
технологического процесса.
Начиная со стадий разработки рабо-
чей документации, проводится экспе-
риментальная пррверка соответствия
заложенных в конструкторскую доку-
ментацию свойств создаваемого изде-
лия требованиям ТЗ. Одновременно
выявляются и устраняются причины
несоответствия.
Задачи оценивания надежности. Рас-
смотрим возможную классификацию
задач оценивания надежности изделий
16
Проектирование систем и задачи исследования надежности
по эспериментальным данным по сле-
дующим признакам:
1) оцениваемый показатель надеж-
ности;
2) форма представления результатов
(вид) оценивания;
3) форма исходной информации;
4) сложность модели оценивания.
Номенклатура оцениваемых пока-
зателей надежности изделий и их
элементов содержит шесть показа-
телей:
— Р (f3) — вероятность безотказ-
ной работы за время /3, R2 — То —
среднюю наработку до отказа, R3 =
= Ту — у-процентную наработку до
отказа, /?4 — Тв— среднее время
восстановления, = Тву — у-про-
центное время восстановления, =
= Кг (0 — коэффициент готовности и
не может быть существенно дополнена
показателями, которые бы не выра-
жались однозначно через приведен-
ные в перечне. Можно указать четыре
различные формы представления ре-
зультатов (видов) оценивания:
= R — точечное оценивание; О2—
— Rfi — 0-доверительное оценивание;
Оэ Ку, р — уР-толерантное оцени-
вание; 04 = Вер {/?' £ /?} — про-
верка статистической гипотезы.
Формы регистрации эксперимен-
тальной информации рассмотрены
ниже.
Если время испытания (работы) всех
образцов изделия задано и одинаково
(t — ^зад)» то вся информация о ре-
зультатах испытаний 1±— {(о) содер-
жится в векторе значений «индика-
тора» отказов со = {<•>!, а>2. соп),
где п — число образцов, (О/ = (0, 1).
В более общем случае мы имеем
выборку /2 — {/, со) в форме вектора
наработок t= {^, t2, t3, ..., tit ...,
(где i — номер образца, п — общее
число образцов) и соответствующего
ему вектора значений «индикатора»
отказов (о — {(Op <о2, ..., (о£, .... соп),
где со, = {0, 1). Выборка I2 = {t, со)
является естественным обобщением ча-
стично группированных выборок или
частично регистрируемой выборки.
Классическая выборка испытаний до
отказа всех экземпляров является ча-
стным случаем /2 при условии
(<>» = 1).
Кроме информации по наработкам,
в процессе испытаний может фикси-
роваться информация по определя-
ющим параметрам, используемым при
оценке состояния изделия. При этом
информация может регистрироваться
как в альтернативной форме (допу-
сковый контроль), так и в количе-
ственной (величина запаса работо-
способности или величина выброса
параметра состояния за допуск).
Запасом работоспособности по /-му
фактору Zj называют невоэрастающую
положительно определенную величи-
ну (возможно функцию времени или
наработки), которая определяет мо-
мент отказа условием Zj = 0. Исход-
ная информация для оценивания на-
дежности в форме реализаций запаса
работоспособности по /-му фактору
регистрируется как вектор значений
наработки tj == {(/lt tj2, ..., tji, ....
tji}, где tji—точка t-го замера, I —
общее число замеров запаса работо-
способности в /-й реализации) и соот-
ветствующий ему вектор значений за-
паса работоспособности Zj = {2д,
Zj2, .... Zjt, Zji}. В случае’, когда
в данной реализации по j-му фактору
в момент tji наблюдается отказ изде-
лия или системы, значения Zjm (m
/) тождественно равны нулю. Вы-
борка в форме запасов работоспособ-
ности /3 = {t, Z} — набор 2п векторов
по каждому фактору, где п — общее
число наблюдаемых образцов.
Параметром состояния у называют
действительную величину (возможно
функцию времени или наработки),
первый выход которой за допуск оп-
ределяет момент отказа изделия (си-
стемы). Возможны многочисленные ва-
рианты моделей изменения параметров
состояния и допусков. Большинство
из них сводится к модели, описыва-
ющей изменение расстояния до допу-
стимой границы Yj по /-му параметру.
В таком случае момент отказа опре-
деляется условием | Yj (tOTK) | = 0.
Существенно, что на функцию у (t) не
накладывается условие монотонности.
Исходная информация в форме пара-
метров состояния регистрируется как
вектор значений времени (наработки)
tj ~ tji> tj2, tji, ..., tji} где (tji
точка t-ro замера /-го параметра, I —
общее число замеров) и соответству-
Задачи, модели и методы проектного исследования надежности
17
ющий ему вектор значений Y j —
= {yji> yj2> > yji>—,yjl} расстоя-
ния до границы допуска по /-му пара-
метру.
Выборка в форме параметров со-
стояния = {/, У) — набор 2п век-
торов по каждому параметру, где п —
общее число наблюдаемых образцов.
Формы представления информации /3
и /4 допускают обобщение, аналогич-
ное обобщению /2. В этом случае
в состав данных включается матрица
значений «индикатора» измерения (о —
= где e>ijr={O,l}. Значение
и/j ~ 1 соответствует точному изме-
рению значения Zij или Уг-у. При
(Hij — 0 удостоверяется факт, что
истинное значение запаса работоспо-
собности или параметра превышает
уровень Zij или Y[j соответственно.
Такое обобщение включает как частные
случаи различные варианты допуско-
вого контроля параметров и запасов
р аботоспособности.
Итак, имеем:
/г — {со} — альтернативная инфор-
мация;
/2 = {со, t} — наработки;
/3 = {to, t, Z} — запасы работо-
способности;
/4 = {0> у} — параметры состоя-
ния.
Сложность моделей оценивания на-
дежности, кроме оцениваемого пока-
зателя и формы исходной информации,
определяется уровнем регистрации ре-
зультатов экспериментов. При реги-
страции наработок = {<в, на
уровне изделия в целом по выборке
{(о, 2} оцениваются параметры распре-
деления Fq (0 времени до отказа
(наработки);
т: {со, /}->{0), (3)
а затем вычисляется оценка показа-
теля надежности
+ (4)
где т — используемая статистика (ста-
тистическая оценка параметров);
{0} — вектор параметров распределе-
ния Fq (0; г •*- зависимость (модель
«наработка—надежность»), выражаю-
щая показатель надежности изделия
через параметры распределения вре-
мени до отказа (распределения на-
работки) .
Задачу построения подходящей ста-
тистики (3) называют стандартной за-
дачей статистического оценивания. За-
дачу нахождения оценки показателя
надежности по выборке {со, /}, т. е.
преобразования тг в соответствии с (3)
и (4), — задачей статистического оце-
нивания надежности. В простейшем
случае оцениваемый показатель (сред-
няя наработка до отказа) может сов-
падать с параметром распределения
Fq (0 [например, математическим ожи-
данием у нормального закона распре-
деления W (т, о2)]. В этом случае
г — тождественное преобразование, и
задача статистического оценивания на-
дежности сводится к стандартной за-
даче статистического оценивания с од-
ноуровневой однопараметрической мо-
делью. Случай, когда показатель на-
дежности R зависит от двух и более
неизвестных координат вектора {0},
соответствует одноуровневой многопа-
раметрической модели.
В случае регистрации наработок на
уровне составных частей изделия в рас-
смотренной последовательности (3) и
(4) может быть проведена оценка по-
казателей надежности Rt для каждой
из составных частей i, где i = 1...., т;
т — число составных частей, входя-
щих в изделие. Затем с помощью мо-
дели надежности рд проводят оценку
показателя надежности изделия:
(5)
где {Ri} — вектор показателей на-
дежности составных частей. Переход
с уровня составных частей на уровень
изделия может осуществляться с по-
мощью модели наработок и сверткой
распределений наработок
Не: - {©}. (6)
где i — 1, .... т; т— число состав-
ных частей; {0^} — вектор параметров
распределения наработки t-й состав-
ной части; {0} — вектор параметров
распределения времени работы изде-
лия.
Модели оценивания надежности, ис-
пользующие свертки типа (5) [в схеме
(3)—(4)—(5)] или типа (6) [в схеме
(3)—(6)—(4)], называют многоуров-
невыми (со сверткой показателей на-
дежности и сверткой наработок).
18
Проектирование систем и задачи исследования надежности
Для каждой из форм исходной ин-
формации /3 и /4 в результате решения
стандартной задачи статистического
оценивания (3) определяют параметры
соответствующего распределения Fq (t,
Z) или Fq (t, Y), а по ним параметры
распределения времени до отказа каж-
дой из систем.
Однако не исключается возможность
реализации многоуровневых моделей
со сверткой запасов работоспособности
{Zi} - {Z} (7)
или сверткой параметров состояния
(8)
где i = 1, ..., m; т — число систем;
{Zi} — вектор запасов работоспособ-
ности i-й системы; {У^}— вектор пара-
метров состояния i-й системы; Z —
запас работоспособности изделия; Y —
параметры состояния изделия.
Таким образом, по степени слож-
ности различают следующие модели
оценивания:
Gj — одноуровневую однопараметри-
ческую; G2 — одноуровневую многопа-
раметрическую; G3 — многоуровневую
со сверткой показателей надежности;
G4 — многоуровневую со сверткой рас-
пределения наработок; GB — много-
уровневую со сверткой распределения
запасов работоспособности; Ge — мно-
гоуровневую со сверткой распределе-
ний параметров.
Рассмотренные значения признаков
классификации задач оценивания не
исчерпывают реальных жизненных си-
туаций. Так, в рассмотренных формах
исходных данных не учтены различные
варианты фиксации результатов вос-
становления работоспособности (ре-
монтов). При измерении на уровне
составных частей разнородных пара-
метров могут возникнуть всевозмож-
ные комбинации форм /2, /3, /4
и соответственно моделей G3, G4, GB, Ge.
Но даже рассмотренные значения поз-
воляют выделить около 600 вариантов
задач оценивания надежности изделий.
Общая постановка задачи оценива-
ния надежности изделия включает и
выбор наилучшей (в некотором смысле)
статистики типа (3), и построение пре-
образований типа (4)—(5) или (6)—
(4), и разработку алгоритма, реали-
зующего всю схему оценивания. При
простейшей модели задача сводится
к стандартной статистической, а при
использовании в качестве исходных
данных готовых оценок показателей
надежности составных частей изделия
задача оценивания сводится к чисто
вероятностной постановке.
Методом оценивания надежности на-
зывают совокупность правил построе-
ния (выбора) статистик, алгоритмов
и моделей оценивания и способов про-
верки их качества. Критерии качества
оценивания (точности статистики, адек-
ватности модели, правильности алго-
ритма) формулируют на основе анали-
за общих требований к специальному
математическому обеспечению управ-
ления процессом создания и примене-
ния изделий, таких, как обоснован-
ность, рациональность, интерсубъек-
тивность, реализуемость и оператив-
ность. Критерии научной обоснован-
ности, используемые в математической
статистике, в первую очередь отно-
сятся к задаче выбора той или иной
статистики (оценки). Так, для задач
точечного оценивания эти критерии
связаны как с качественными свойст-
вами несмещенности, состоятельности,
инвариантности, линейности, нормаль-
ной распределенности оценок, так и
с количественными характеристиками
эффективности (асимптотической эф-
фективности) оценок. Критерии каче-
ства решения задач интервального
оценивания и различения гипотез бази-
руются на характеристиках равно-
мерно наибольшей точности, ошибок
1-го и 2-го рода, потерь, связанных
с неправильными решениями.
Качество статистики (3) примени-
тельно к конкретной задаче оценива-
ния надежности может быть исследо-
вано айриори только при условии,
что остальные используемые отображе-
ния (4)—(8) или их сочетания адек-
ватно отражают особенности реаль-
ного объекта оценивания. Только в этом
случае при увеличении объема вы-
борки обеспечивается сходимость оцен-
ки к истинному значению показателя
надежности. В противном случае мо-
жет иметь место погрешность, кото-
рую нельзя уменьшить никакими до-
полнительными измерениями на ниж-
них уровнях структуры изделия без
Проектные нормы надежности
19
использования апробированных ранее
моделей.
Эти особенности тем более суще-
ственны в связи с тем, что при проект-
ном исследовании надежности всегда
приходится применять интерполяцию
или экстраполяцию ранее полученных
данных, ранее проверенных моделей
на новую область: новое изделие или
его часть, новые условия работы и т. п.
Актуальными становятся задачи про-
верки гипотез, принципов и механиз-
мов, использованных при построении
моделей. Так, для многоуровневых
многопараметрических моделей типа
(5), (6), (7) существенным становится
допущение независимости характери-
стик надежности отдельных элементов,
запасов работоспособности, параметров
состояния изделия, внешних воздей-
ствующих факторов.
По мере уточнения и конкретизации
задачи проектирования изделия на
более поздних стадиях создания и на
более низких уровнях структуры изде-
лия появляется возможность исполь-
зования более содержательных и точ-
ных моделей, а также возможность
более обстоятельной проверки их адек-
ватности в связи с наличием все более
полной экспериментальной информа-
ции.
3. ПРОЕКТНЫЕ НОРМЫ
НАДЕЖНОСТИ
Содержание проектной нормы надеж-
ности (ПНН) является основной частью
и конкретизацией такого понятия, как
«объект нормирования». Конкретные
формы задания требований и номен-
клатура показателей надежности уста-
навливаются стандартами по видам
техники. Объектом нормирования мо-
гут быть сами нормативные значения
показателя надежности; контрольные
уровни показателя надежности, нор-
мативные значения доверительной ве-
роятности, с которой должен быть
подтвержден контрольный уровень по-
казателя надежности к моменту при-
емки изделия в серийное производство
или к моменту поставки; требования
к точности оценивания нормативного
значения к моменту приемки.
Для контроля надежности в процес-
се экспериментальных работ и испыта-
ний головной разработчик может уста-
навливать промежуточные значения
контрольных уровней или доверитель-
ных вероятностей, с которыми кон-
трольные уровни показателей надеж-
ности составных частей изделий долж-
ны быть подтверждены к моменту на-
чала комплексных или государствен-
ных испытаний.
Организационные и технические тре-
бования по обеспечению надежности
изделия системы устанавливают в фор-
ме требований к проведению преду-
предительных, контрольных и защит-
ных мероприятий в целях: предупреж-
дения конструкционных, производствен-
ных и эксплуатационных отказов; вы-
явления потенциальных источников от-
казов и борьбы с ними; защиты изде-
лий в процессе эксплуатации (приме-
нения) от последствий всех видов отка-
зов в составных частях, агрегатах.
Таким образом, объектом нормиро-
вания в ПНН изделий могут быть и
нормативные значения (диапазоны,
ряды значений) показателей надеж-
ности, и контрольные уровни, и норма-
тивные значения доверительных вероят-
ностей, и виды, объемы испытаний,
и, наконец, конкретные организацион-
ные и технические требования по обе-
спечению и контролю надежности.
Так как при проектировании в кон-
структорскую документацию заклады-
ваются все Основные решения для
обеспечения требований по надежно-
сти, то, кроме требований по надеж-
ности, к объекту нормирования отно-
сят перечень, последовательность и
методы обоснования проектных реше-
ний, связанных с надежностью. Имен-
но поэтому ПНН для класса изделий —
совокупность требований к процессу
обоснования и (или) к самим проект-
ным решениям, связанным с надеж-
ностью. В первом случае объектами
нормирования являются перечень, по-
следовательность, правила, критерии,
методы и алгоритмы принятия (обос-
нования) проектных решений, свя-
занных с надежностью изделий, во
втором случае — параметры назначе-
ния, включая все формы задания тре-
бований по надежности, конструктив-
ные, технологические и эксплуата-
ционные параметры, а также условия
эксплуатации (применения), связанные
20
Проектирование систем и задачи исследования надежности
с обеспечением и контролем выполне-
ния требований по надежности изделий.
По степени категоричности и обяза-
тельности нормы делят на три кате-
гории: собственно нормы, рекомен-
дации и вспомогательные сведения.
Обязательная норма может устанав-
ливать некоторое требование, разре-
шать, обязывать или запрещать неко-
торые действия, решения, мероприя-
тия. \
Стимулирующая норма создает уело-'
вия для повышения заинтересован-
ности конкретных исполнителей в ко-
нечных результатах работ по надеж-
ности, в обоснованности соответству-
ющих проектных решений.
Нормы трактующего характера пред-
назначены для конкретизации требова-
ний (других норм) применительно к от-
дельным видам и классам изделий,
уточняют общий порядок использова-
ния проектных норм надежности. Так,
общее требование устойчивости аппа-
ратуры изделия к любому одному
отказу составных частей может уточ-
няться для различных классов изде-
лий с указанием допустимых послед-
ствий отказов нерезервированных бло-
ков.
Кроме классификации по объектам
применения норм, возможна класси-
фикация проектных норм надежности
по характеристикам результативности.
Разные требования и мероприятия
по обеспечению и контролю надеж-
ности отличаются по реализуемости,
наблюдаемости результата выполнения
нормы на одном образце или всей со-
вокупности экземпляров объекта при-
менения нормы. В первую очередь
следует различать групповые и инди-
видуальные показатели и требования.
Далее различают вероятностные и
детерминированные показатели и тре-
бования. Первые измеримы лишь в ста-
тистическом смысле, т. е. на некоторой
статистической совокупности, вторые
измеримы на каждом образце.
Одновременное использование этих
признаков классификации позволяет
выделить следующие классы норм:
групповые вероятностные показате-
ли и требования, контролируемые на
основных стадиях создания совокуп-
ностью операций, включающих оценку
показателей надежности, статистиче-
ский контроль на всей генеральной
совокупности по результатам, отрабо-
точных и производственных испытаний
и эксплуатации;
индивидуальные вероятностные по-
казатели и требования, контролируе-
мые (оцениваемые) на условной ста-
тистической совокупности с учетом
измерений параметров состояния и за-
пасов работоспособности на конкрет-
ном образце;
групповые детерминированные пока-
затели и требования, контролируемые
на каждом образце совокупности по-
ставляемых издеДий, обеспечивающие
заданный уровень гарантий для всей
совокупности изделий;
индивидуальные детерминированные
показатели и требования, контроли-
руемые (оцениваемые) на каждом об-
разце, обеспечивающие заданный уро-
вень гарантий на этом конкретном
образце.
Типовая структура проектных норм
надежности. Для обеспечения едино-
образного подхода к формированию
ПНН используют типовую структуру
нормативно-технических документов
(НТД),'излагающих проектные нормы
надежности. Обычно НТД по конкрет-
ному классу изделий состоят из четы-
рех разделов:
проектные решения;
количественные требования;
качественные требования;
источники отказов.
Основным назначением раздела «Про-
ектные решения» является увязка про-
цесса обоснования проектных решений
с процессом задания требований и
проектного анализа надежности. В этом
разделе уточняют состав, последова-
тельность и взаимосвязь основных про-
ектных решений, связанных с надеж-
ностью. Для каждого из решений нор-
мируются методы и (или) алгоритмы
обоснования, либо единые требования
по выходным параметрам проектных
решений.
Выходные параметры проектных ре-
шений — параметры, вносимые в кон-
структорскую документацию, включая
технические условия и инструкции по
эксплуатации изделия, а также тех-
нические задания на разработку со-
ставных частей проектируемого изде-
лия. Их минимальный состав; проект-
Проектные нормы надежности
21
ные параметры изделия, параметры
назначения и условия эксплуатации
составных частей проектируемого из-
делия. Для каждого из решений раз-
рабатывают алгоритм обоснования ре-
шений во всем диапазоне входных
параметров.
Назначением раздела «Количествен-
ные требования» является комплексное
изложение количественных требований
по надежности изделия, увязка их
с требованиями по надежности состав-
ных частей.
Выходными параметрами раздела яв-
ляются количественные требования по
надежности составных частей изде-
лия.
Последовательность решений по нор-
мированию и контролю надежности про-
веряют на совместимость с последова-
тельностью проектных решений (уста-
новленной первым разделом): значения
параметров, являющихся входами ре-
шений по нормированию надежности,
должны быть определены к моменту
их использования в результате приня-
тия предыдущих проектных реше-
ний.
Назначением раздела «Качественные
требования» является комплексное из-
ложение организационно-технических
требований по обеспечению и контро-
лю надежности изделия, увязка со-
става и содержания программных до-
кументов по обеспечению надежности
с заданными требованиями.
Выходными параметрами раздела яв-
ляются типовая структура и содержа-
ние программных документов по обеспе-
чению надежности. Основу содержания
третьего раздела составляет методика
обоснования программы обеспечения
надежности рассматриваемого класса
изделий на основе анализа типовых
отказов и прогнозирования эффектив-
ности мер и средств обеспечения на-
дежности. Методика должна удовлетво-
рять следующим требованиям:
давать количественную оценку (про-
гноз) полноты и достаточности преду-
смотренных мер и средств обеспечения
и контроля надежности для выполне-
ния требований второго раздела ПНН;
предусматривать обоснование ра-
циональности (оптимальности) ПНН
по критерию минимума расходования
ресурсов;
обеспечивать учет критичных эле-
ментов, особо ответственных операций
изготовления, контроля.
Назначением раздела «Источники от-
казов» является комплексное изложе-
ние требований пр устойчивости изде-
лия к отказам составных частей (эле-
ментов), а также обеспечение исходной
информацией методик обоснования ре-
шений, принимаемых в соответствии
с требованиями первых трех разделов
ПНН.
Информационная часть раздела со-
держит типовые перечни потенциаль-
ных источников отказов изделия (со-
ставных частей), составленные на ос-
нове данных эксплуатации изделий-
аналогов и экспертного анализа новых
конструкторских, технологических и
эксплуатационных решений, по кото-
рым отсутствует достаточная инфор-
мация.
Выходные параметры раздела — до-
пустимые уровни вероятностей (ин-
тенсивностей) или другие характери-
стики возможности возникновения и
последствий отказов каждого из за-
данных типов.
Задача практического формирова-
ния ПНН. Научный аспект задачи со-
здания ПНН заключается в необхо-
димости проведения фундаментальных
и прикладных теоретических исследо-
ваний в фазе «постановки задачи»,
собственно «формирования ПНН», со-
провождения и совершенствования ।
ПНН.
В фазе «постановки задачи» необхо-
димо провести исследование отрасле-
вой системы обеспечения надежности
(или комплексной системы управления ’
качеством продукции) для изыскания
путей повышения ее эффективности.
Актуальность задачи создания ПНН,
как задачи повышения обоснованности
проектных решений, может быть пока-
зана на основе прогноза возможного
экономического эффекта от ее решения.
Для этого априори необходимо промо-
делировать весь процесс формирова-
ния ПНН и оценить его последствия.
Отправной точкой такого исследова-
ния является определение перечня
проектных решений, связанных с на-
дежностью, т. е. решений, на которые
будут распространяться вновь созда-
ваемые нормы.
22
Проектирование систем и задачи исследования надежности
Обычно к таким проектным ре-
шениям относят:
1) введение всех видов избыточности,
включая резервирование, запасы ра-
ботоспособности, ресурса;
3) определение системы эксплуа-
тации изделия, включая порядок хра-
нения, контроля, обслуживания, ре-
монта и т. п.;
3) определение системы производ-
ственного контроля, включая выход-
ной, пооперационный, приемосдаточ-
ные испытания;
4) выбор планов экспериментальных
работ и испытаний опытных образ-
цов.
Каждое из этих решений может су-
щественно повлиять на конструкцию
изделия, массу, объем, энерговыделе-
ние, энергопотребление и т. д. Выбор
схемно-конструкторских решений ча-
сто определяет напряженность кон-
струкций, защищенность от внешних
воздействующих факторов, от ошибок
при изготовлении, эксплуатации, кри-
тичность к отказам комплектующих
изделий.
Задача состоит в прогнозировании
возможного положительного эффекта
от упорядочения и рационализации
процесса обоснования проектных ре-
шений.
В фазе «формирование ПНН» иссле-
дования заключаются в разработке
конкретных методик, алгоритмов и
моделей обобщения опыта разработки
и эксплуатации изделий, оценивания
и прогнозирования надежности, обос-
нования конкретных проектных реше-
ний. Существенным при этом является
использование в качестве общей мето-
дологии исследования общей схемы
и принципов обоснования решений
в условиях неопределенности.
В фазе сопровождения и совершен-
ствования ПНН необходимые иссле-
дования связаны с накоплением опыта
применения норм, уточнением исход-
ных данных, используемых при проек-
тировании техники, пополнением арсе-
нала методов и алгоритмов обоснова-
ния проектных решений.
Технический аспект задачи создания
ПНН заключается в необходимости
переработки больших массивов инфор-
мации, автоматизации процесса про-
ектирования и моделирования про-
цессов создания и применения проекти-
руемых изделий
Организационный аспект задачи соз-
дания ПНН заключается в необходи-
мости привлечения к задаче формиро-
йания норм коллективов ученых, про-
ектантов, конструкторов, технологов,
испытателей.
4. АНАЛИЗ
ВОЗМОЖНЫХ ОТКАЗОВ
Анализом возможных отказов изде-
лия или его элементов называют
оценку влияния возможных отказов
элементов следующего уровня струк-
туры на выходные характеристики
исследуемого изделия и определение
перечня его возможных отказов. Воз-
можным отказом изделия называют
состояние, в которое может перейти
изделие за время эксплуатации при
возникновении отказов входящих в
него элементов следующего уровня
структуры. Совокупность возможных
отказов называют перечнем возможных
отказов.
Анализ возможных отказов прово-
дят с целью определения последствий
отдельных видов отказов, времени их
возникновения, выбора методов обна-
ружения, оценки вероятности возник-
новения, выявления возможных при-
чин их возникновения и разработки
предупредительных, контрольных и за-
щитных мероприятий по обеспечению
надежности [2 ].
В зависимости от стадии создания
изделия и глубины его конструкторской
проработки анализ возможных отка-
зов проводят с использованием раз-
личных источников информации. На
ранних этапах проектирования для
проектного анализа возможных отка-
зов используют данные ТЗ на разра-
ботку изделия, проектные проработки
структуры, конструкции и схемы экс-
плуатации изделия, опыт создания
и эксплуатации изделий-аналогов. На
завершающих этапах создания изде-
лия при проведении поверочного ана-
лиза возможных отказов используют
дополнительно принципиальные схе-
мы, циклограммы функционирования,
конструкторскую документацию, ре-
зультаты статистической обработки из-
Анализ возможных отказов
23
мерениЙ выходных параметров при
испытаниях.
Анализ возможных отказов преду-
сматривает следующие этапы:
анализ процесса эксплуатации изде-
лия и составление перечня периодов
эксплуатации;
составление перечня возможных от-
казов для каждого периода эксплуата-
ции;
определение возможных причин и
последствий отказов, возможности их
обнаружения и устранения (или умень-
шения степени опасности), а также
оценка вероятностных и временных
характеристик каждого вида отказов
из перечня возможных отказов;
анализ критичности отказов и ран-
жирование отказов по важности.
Анализ возможных отказов должен
удовлетворять следующим требовани-
ям, выполнение которых в значитель-
ной мере повышает качество проводи-
мых исследований:
проводиться с достаточной степенью
полноты и детализации;
учитывать физическую природу про-
цессов, протекающих в изделии;
учитывать взаимовлияние отказов,
различные режимы работы элементов
изделия, возможные отказы межсистем-
ных связей (соединений);
обеспечивать согласованность пара-
метров элементов изделий.
Анализ процесса эксплуатации из-
делия позволяет получить необходимые
сведения для выявления возможных
отказов. Его проводят в следующем
порядке:
определяют назначение изделия, осо-
бенности его эксплуатации и перечень
выполняемых задач;
выделяют основные, обеспечивающие
и вспомогательные функции изделия.
К основным относят функции, опре-
деляющие целевое назначение изде-
лия, указанное в ТЗ. Обеспечива-
ющими являются функции, выполне-
ние которых необходимо для выполне-
ния основных функций. К вспомога-
тельным относят функции, которые
не оказывают непосредственного^ влия-
ния на выполнение целевых задач, но
отсутствие которых может осложнить
их решение;
для каждой выделенной функции
определяют взаимно однозначные груп-
пы статистически независимых выход-
ных параметров, номинальные и пре-
дельно допустимые значения каждого
параметра;
определяют виды элементов изделия,
их функциональные особенности и ха-
рактер взаимодействия при эксплуата-
ции, наличие резервных элементов,
выявляют элементы, не имеющие ана-
логов;
определяют особенности эксплуата-
ции изделия (основные и резервные
режимы эксплуатации, возможности
работы с измененными выхрдными па-
раметрами и т. д.);
определяют продолжительность каж-
дого периода эксплуатации.
Составление перечня возможных от-
казов. Перечень возможных отказов
должен обладать достаточной полнотой,
определяемой наличием наиболее ве-
роятных и критичных (приводящих
к наиболее тяжелым последствиям)
отказов, но не может быть избыточным
из-за включения в него зависимых
отказов. Отказы, возникающие по од-
ной и той же причине, могут быть объ-
единены.
Общее число возможных отказов
в перечне складывается из общего
числа всех выделенных условных не-
зависимых параметров по каждой функ-
ции изделия с учетом возможного
числа нарушений предельно допусти-
мых значений по каждому параметру.
При составлении перечня анализируют
также ограничения на условия приме-
нения изделия, нарушения которых
рассматривают как возможные отказы.
Далее уточняют перечень при про-
ведении анализа причин, оценке ве-
роятностей возникновения, возмож-
ностей обнаружения отказов и их
последствий. Перечни возможных от-
казов и их причин оформляют в виде
таблиц.
Определение причин возникновения
отказов. Причины каждого из возмож-
ных отказов определяют двумя допол-
няющими друг друга методами ана-
лиза: методом структурных схем на-
дежности (метод «снизу вверх») и
методом «дерева отказов» (метод «свер-
ху вниз»).
Методструктурныхсхем
надежности заключается в по-
следовательном преобразовании па-
24
Проектирование систем и задачи исследования надежности
раллельных и последовательных уча-
стков структурной схемы надежности
эквивалентными блоками до сведения
ее к одному блоку. Основной принцип
метода заключается в последователь-
ной постановке вопроса: к какому со-
бытию в процессе работы изделия (его
элементов) приводит отказ элемента
следующего уровня структуры, т. е.
в осуществлении анализа «снизу вверх».
Анализ проводят следующим обра-
зом. Составляют перечни возможных
состояний элементов (начиная с элек-
трорадиоэлементов, механических эле-
ментов, приборов, агрегатов и т.д.,
число возможных состояний которых
невелико). Далее для элементов более
высокого уровня структуры или для
изделия в целом определяют вектор
основных технических параметров и
значения этого вектора для каждого
из возможных (рассматриваемых) со-
стояний элементов более низкого уров-
ня структуры.
Метод «дерева отказов»
заключается в построении и анализе
модели надежности, представляющей
собой логико-вероятностную модель
причинно-следственных связей отказов
изделия с отказами его элементов и
другими событиями (воздействиями).
Основной принцип построения «дерева
отказов» заключается в последователь-
ной постановке вопроса: по каким при-
чинам может произойти отказ изделия,
т. е. в осуществлении анализа «сверху
вниз».
Структурными элементами «дерева
отказов» являются события, связанные
между собой логическими операторами
(«и», «или», «не» и др.).
При использовании «дерева отказов»
применяют следующие основные по-
нятия:
результирующее событие — неже-
лательное событие (конкретный вид
отказа изделия из перечня возможных
отказов), анализ которого проводится;
промежуточное событие — сложное
событие с логическим оператором, яв-
ляющееся одной из возможных при-
чин результирующего события. Его
выявляют в ходе анализа причин ре-
зультирующего события и подвергают
дальнейшему анализу;
базовое событие — простое событие,
означающее первичный отказ, которое
дальше не анализируется в связи с на-
личием достаточного числа данных;
неполное событие — недостаточно
детально разработанное событие, кото-
рое дальше не анализируется из-за
невозможности или отсутствия не-»
обходимости проведения его ана-
лиза;
логический оператор «и» (схема сов-
падения), означающий наличие собы-
тия на выходе только при наличии
событий на всех входах;
логический оператор «или» (схема
объединения), означающий наличие со-
бытия на выходе при наличии хотя
бы одного события на его входе.
Соответственно каждому виду собы-
тия и оператора присваиваются сим-
волы, которые используются для гра-
фического построения «дерева отка-
зов».
Исходными данными при построении
«дерева отказов» являются перечни
возможных видов отказов и их при-
чин, нерасчетные значения внешних
воздействующих факторов и др.
Методом «дерева отказов» проводит-
ся качественный и количественный
анализ отказов. В результате качест-
венного анализа определяют виды и
причины отказов, степень защищенно-
сти изделия от конкретных видов отка-
зов, причины возникновения двух и
более видов отказов, проводят ран-
жирование причин отказов по важно-
сти (по влиянию на возникновение
отказа изделия). ''
Количественный анализ отказов изде-
лий и их причин методом «дерева-
отказов» заключается в определении
вероятностных характеристик отказов
изделия (результирующего события)
по вероятностным характеристикам ба-
зовых и неполных событий.
По результатам количественного ана-
лиза могут быть проведены корректи-
рование перечня возможных отказов и
ранжирование причин отказов изде-
лий. В перечень вводятся критические
виды отказов, которые имеют наиболь-
шую вероятность появления, а также
отказы, анализ которых затруднен.
Анализ возможностей обнаружения
отказов проводят в следующем по-
рядке:
определяют характерные признаки
отказа или его симптомы;
Показатели надежности систем и изделий
25
оценивают минимальное время изме-
нения выходного параметра от номи-
нального значения до предельно допу-
стимого;
определяют контролируемые пара-
метры для системы контроля и прогно-
зирования технического состояния;
подразделяют отказы на внезапные
и постепенные в зависимости от воз-
можности их прогнозирования.
В заключение проводят общий ана-
лиз уровня критичности отказов. Он
представляет собой окончательное ран-
жирование отказов по уровню критич-
ности. Отказ считают по сравнению
с другими более критичным, если его
предпочтительнее рассматривать в пер-
вую очередь при разработке мер по
обеспечению надежности. При сравни-
тельной оценке критичности отказов
учитывают последствия отказа, ве-
роятность возникновения, время раз-
вития, возможность обнаружения и
локализации и др.
Результаты анализа возможных от-
казов целесообразно оформлять в виде
таблиц.
! Анализ возможных отказов является
весьма эффективным инструментом для
разработки мероприятий по обеспече-
нию надежности сложных систем,осо-
бенно в тех случаях, когда в их со-
ставе имеется много новых элементов.
5. ПОКАЗАТЕЛИ НАДЕЖНОСТИ
СИСТЕМ И ИЗДЕЛИЙ
Невосстанавливаемые системы. Для
невосстанавливаемых систем и эле-
ментов (изделий), работающих до пер-
вого отказа, на этапе проектирования
обычно используются (прогнозируют-
ся) показатели безотказности и прежде
всего «вероятность безотказной рабо-
ты». Конкретное численное значение это-
го показателя в большинстве случаев
имеет определенный смысл лишь тогда,
когда оно поставлено в соответствие
заданной наработке, в течение которой
возможно возникновение отказа. При
этом вероятность безотказной работы
определяется в предположении, что
в начальный момент времени исчисле-
ния заданной наработки изделие было
работоспособным.
Далее для краткости системы и их
элементы будем называть изделиями.
Ниже приведены две формы показа-
телей надежности — вероятностная и
статистическая [5]. Вероятностную
форму удобнее использовать при за-
дании требований и исследованиях на-
дежности системы и изделий на ранних
стадиях проектирования. Статистиче-
ская форма удобнее для оценки резуль^
татов испытаний изделий, проводимых
в процессе проектно-конструкторской
разработки на стадиях эскизного про-
екта, технических предложений, авто-
номных и комплексных испытаний.
При увеличении числа испытаний ста-
тистические показатели надежности
сходятся по вероятности к соответ-
ствующим вероятностным показателям;
В некоторых случаях разработки слож-
ных и весьма ответственных систем и
изделий заказчик имеет право задавать
в ТЗ не только конечные уровни ве-
роятностных показателей надежности,
но и промежуточные уровни надежно-
сти в виде статистических показателей,
которые следует подтвердить на опре-
деленных промежуточных стадиях раз-
работки изделий, например, перед на-
чалом комплексных испытаний или
государственных испытаний.
Вероятность безотказной работы
изделия в интервале времени от 0 до t0:
при вероятностной оценке
Р (/о) = Р (0; /о) = Р {& > /0} =
где Р (/0)—вероятность того, что изде-
лие, начав работать в момент времени
t = 0, не откажет в течение заданного
времени работы tQ, или вероятность
того, что наработка изделия до отка-
за будет больше заданного времени
работы t0; Fx (tQ) — распределение вре-
мени до первого отказа; — случай-
ная наработка изделия до первого
отказа;
при статистической оценке
Р (4>) = N (0) = 1 -п (t0)/N (0),
где P(t0)— отношение числа изделий,
безотказно проработавших к моменту
t0, к числу изделий, работоспособных
в начальный момент времени t — 0,
или частость события, заключающегося
в том, что время работы изделия до
отказа окажется больше заданного
26
Проектирование систем и задачи исследования надежности
1 —
времени работы i0; ДО (t0) — число изде-
лий, работоспособных к моменту вре-
мени t0; п (t0) — число изделий, отка-
завших к моменту времени t0.
В случаях, когда изделие выполняет
задачу, имеющую случайную длитель-
ность, характеризующуюся своей функ-
цией распределения W (0 = Р {£
t), выражение полной вероятности
безотказной работы изделия за время
выполнения задачи имеет вид
со
р0 = J P(f)dW (0.
о
Вероятность отказа изделия в ин-
тервале времени от 0 до t0: Q (f0) —
= 1 - Р (t0) и Q (4) = 1 - Р (М-
Вероятность безотказной работы
изделия в интервале времени от t до
t+t0:
при вероятностной оценке
Р V, t + ^о)=Р {£i > t + to I Si > 0=
= P (0, t, + t0)/P (0, t) =
= p {t4-tQ)tp <t)t
где P (t, <4- t0) — вероятность того,
что изделие будет безотказно работать
в течение заданного времени работы t0,
начинающегося с момента времени t,
или условная вероятность того, что
случайная наработка изделия до от-
каза будет больше величины t + t0
при условии, что изделие уже прорабо-
тало безотказно до момента времени t0;
при статистической оценке
P(t, *+*о)= ДО(^+/о)/ДО(О,
где Р (t, 14- t0) — отношение числа
изделий, проработавших безотказно до
момента времени t -J- t0, к числу изде-
лий, проработавших к моменту вре-
мени t, или частость события, состоя-
щего в том, что реализация наработки
изделия до отказа будет больше t -f-to
при условии, что эта реализация боль-
ше величины t.
Вероятность отказа изделия в ин-
тервале времени от t до t 4“ to опре-
деляется через вероятность безотказ-
ной работы
<?((. t+w- 1-Р(6 «+« =
= [Р (0-P(t + Wl/P (0.
Плотность распределения отказов:
при вероятностной оценке
/(0 = -a-f(0=4-QW =
= ~37-PW.
где f (0 — плотность вероятности того,
что время работы изделия до отказа
окажется меньше t, или плотность
вероятности отказа к моменту вре-
мени t;
при статистической оценке
_ п(/ + Д0-Д(0 _
' ' ' “ ДО (0) At ~
ДО(< + Д0 —ДО(0
ДО (0) At
ДлО, Г4- АО
ДО (0) ы
где f (0 — отношение числа отказов
в интервале времени [t, t 4- At] к про-
изведению числа работоспособных из-
делий в начальный момент времени
t — 0 на длительность интервала вре-
мени At; An (t, t 4- At) — число из-
делий, отказавших в интервале вре-
мени [t, t 4-At].
Интенсивность отказов изделия в мо-
мент времени i:
при вероятностной оценке
=T=bj"S-F(') =
— f(t)/p(t),
где X (0 — условная плотность ве-
роятности отказа изделия к моменту
времени t при условии, что до этого
момента отказ изделия не произошел;
при статистической оценке
а /а _ n(*4-At)-n(t)
Af(t)At
_ ДО (t 4-At) —ДО ft) __
“ ДО (t) At
_ An(t, t + A0
Af(t)At
где л (0 — отношение числа отказов
в интервале времени ft, t 4- At] к про-
Показатели надежности систем и изделий
27
изведению числа исправных изделий
в момент времени t на длительность
интервала времени Д/.
Средняя наработка изделия до от-
каза:
при вероятностной оценке
СО
= = j xf(x)dx =
о
со со
= j xdQ (х) = j Р (х) dx,
о о
где Ti — математическое ожидание
(среднее значение) времени работы
изделия до отказа;
при статистической оценке
1
^(0)
N (0)
или
?>=^1)+2wrL^2>-^,]+
+ +^KW<O)]-^<O,-11L
где — реализация случайной нара-
ботки для i-го изделия.
Дисперсия времени безотказной ра-
боты изделия
*>а1}=м(&1-л)=и2=
со
= J (х —T)adF(x) =
о
со
= j xadF(x) —Та.
о _____
Величина о= VеD {£х} — среднее
квадратическое отклонение времени
работы изделия до отказа от своего
среднего 7\.
Знание одной любой функции Р (f0),
Q (^о). f (0 или X (0 Дает возможность
определить три остальные. Необходи-
мые для этого функциональные связи
представлены в табл. 1.
1. Функциональные связи между показателями надежности
Показа- тели на- дежности Вероятность отказа <2 (f) Вероятность без- отказной работы P (t) Плотность распределе- ния f (0 Интенсивность отказов 1 (f)
<2(0 Q(0 i-Q(t) t J f (x) dx 0 1 — exp t — j X (x) dx _ 0
1 — Q (0 P(i) 00 j f(*)dx t exp t — j X (x) dx _ 0
7(0 atpw X (/) exp t — J X (x) dx - о
МО --^-[ln/>(0] MO
1 — Q (0 oo J f(x) dx
28
Проектирование систем и задачи исследования надежности
Восстанавливаемые системы. Все по*
казатели надежности, приведенные для
невосстанавливаемых изделий, могут
использоваться и для восстанавливае-
мых изделий при исследовании надеж-
ности изделия до первого отказа.
Однако восстанавливаемые изделия ха-
рактеризуются еще рядом дополни-
тельных показателей надежности (5]..
Введемх обозначения, необходимые
для восстанавливаемых систем: g (0 —
плотность распределения G (0; G (0 =
= Р {1] t} — распределение време-
ни * восстановления; п (t, Г) — число
изделий, неработоспособных в момент t
или отказавших хотя бы один раз
в интервале [/, V ]; пв (0—число
изделий, восстановление которых дли-
лось меньше /; N (t, Г) — число из-
делий, работоспособных в момент t
и отказавших до Г; 7VB (0 — число
изделий, восстановление которых дли-
лось больше t; tm — произвольный,
достаточно удаленный момент време-
ни, соответствующий стационарному
режиму случайного процесса;
t') — число изделий, восстановление
которых длилось больше /, но меньше
— случайное время работы (слу-
чайная наработка) изделия перед fe-м
отказом после (k—1)-го восстановле-
ния; Е1^ — реализация для t-ro
изделия; т|^ — случайное время вос-
становления (простоя) изделия после
fe-ro отказа; — r-я реализация
времени восстановления.
Средняя наработка между отказами:
при вероятностной оценке
Т = Тт == lira М (7\) =
ft—>00
k
= lim-L V Tj,
где T математическое ожидание пре-
дельного значения наработки между
отказами для стационарного процесса;
T’ft — средняя наработка изделия от
момента окончания (k—1)-го восста-
новления до fe-ro отказа,
тк = м {Eft}
со
= J //ft (/) dt =
О
CD CD
= J tdQ(t) — j Ph(t)dt,
о о
t. e. 7’ft — математическое ожидание
(среднее значение) наработки изделия
от момента окончания (k —1)-го от-
каза;
при статистической оценке
N (0)
Tk= N (0) У
i=l
где 7ft — среднее арифметическое реа-
лизаций времени работы до fe-ro отказа
при достаточно большом k.
Для 7’ft при произвольном фиксиро-
ванном k справедливо следующее ста-
тистическое определение:
N (0)
I___(0)]\ _ 1 У но
"t" 5а / N(0) Д|
/=1
ИЛИ
7\ _ t( 1) _J_ — * rt(2) e(D1 .
1 k — 6ft I ДГ (Q) 1,6ft J г
I______I 1 (0)]_
7V(0)
_ (0)—1]] =
N (0)
S# (0) — / + 1 r£(f) _ g(/-i)-|
7V(0)
f=l
где принято, что ЕГ> ’C 6ft2^
... < &kN (0)], причем Eft0) = 0.
В этом выражении N (0) — общее
число изделий, начавших работать
после (k — 1)-го восстановления; Ед/>—
реализация времени работы после (fe —
— 1)-го восстановления до k-rp отказа
для /-го изделия (в порядке поступле-
ния отказов); Тк — среднее арифме-
тическое реализаций наработки изде-
лий от момента окончания (k — 1)-го
восстановления до Д-го отказа.
Показатели надежности систем и изделий
Параметр потока отказов:
при вероятностной оценке (для
стационарного ординарного потока
отказов) X = Y/T, где X — матема-
тическое ожидание числа отказов вос-
станавливаемого изделия в единицу
времени для установившегося про-
цесса эксплуатации;
при статистической оценке X ~ \/Т,
где X—среднее число отказов восстана-
вливаемого изделия в единицу времени.
Средняя наработка на отказ:
при вероятностной оценке
Т М ~ М {п (/„)} ’
где Т (Q — отношение суммарной
наработки /0 за заданный период вре-
мени к математическому ожиданию
числа отказов за это время;
статистическое определение
где Т (f0) — отношение суммарной
наработки f0 за время наблюдения за
изделием к наблюдаемому числу отка-
зов за это же время, где £ — наработка
изделия от момента устранения пос-
леднего отказа до окончания наблю-
дения за изделием.
Среднее время восстановления из-
делия:
при вероятностной оценке
СО
т = М {т|} = j tg (0 dt =
о
СО со
= j tdG (t) = j — О (t)]dt,
о о
где т — математическое ожидание
(среднее значение) времени восстанов-
ления изделия;
при статистической оценке
♦- Wr(’i,,, + 4<2,+
N (0)
/=1
или
t = TiU) -I- ~~ 1 Г-п(2) _ «(ПТ 1
Т П + W (0) I11 n J +
W (0) L 1
_ (0)-1 ]] _
N (0)
= Y ЛГ(О> —Z-Fl v
Zj n (0) х
t=l
где принято, что г/1) ...
... (0^, причем т|(0)= 0; т —
среднеарифметическое реализаций
времени восстановления.
Интенсивность восстановления из-
делия в момент времени tt отсчитыва-
емого с момента начала восстановления:
при вероятностной оценке
„ (П - g<0
1—G(0’
где р, (/) — условная плотность вероят-
ности восстановления изделия в мо-
мент времени t, отсчитываемого с мо-
мента начала восстановления, при
условии, что до момента времени t
восстановления изделия не произо-
шло;
при статистической оценке
«в (t + ДО — пв (0
N* (О
(t + ДО - 2VB (0
(0 Л/
Дпв (/, t + ДО
N* (0 Ы ’
где |1 (0 — отношение числа восста-
новлений в интервале времени [/, 14-
4- ДИ к произведению числа изделий,
еще не восстановленных к моменту t,
на длительность интервала времени Af.
Нестационарный коэффициент опе-
ративной готовности:
при вероятностной оценке
RU, / + «,)= S pjs (Ь+ш_<
л=1 v=o
< * < t + ^0 £fc+i +
30 Проектирование систем и задачи исследования надежности
k )
+ S (Si + ni) =
1=0 J
оо
= S р < + «„]€ во,
где R (t, t 4- f0) — вероятность того,
что изделие окажется работоспособным
в момент t и проработает безотказно
в течение заданного времени t0, начиная
с этого момента, или вероятность того,
что интервал времени jf, цели-
ком попадает внутрь одного из интер-
валов 0£, k = 1,2,
при статистической оценке
Г-Мо)-----------дцо)
N (t, t + *о)
~ N (0)
где R (f, t + f0) — отношение числа
изделий, работоспособных в момент
времени t и проработавших безотказно
до момента времени 14- t0, к общему
числу изделий, работоспособных в мо-
мент t.
Стационарный коэффициент опе-
ративной готовности (или коэффи-
циент оперативной готовности):
при вероятностной оценке
R (tQ) = lira R(t, t + /0),
где R (f0) — вероятность того, что
изделие проработает безотказно в! те-
чение заданного времени /0, начиная
с произвольного достаточно удаленного
времени t.
Для любых распределений наработ-
ки между отказами Т и времени вос-
становления т
СО
Л (М = (О л.
* *1 •
^0
где Рсо (0=1 — Fm (0, Fa, (0 —
функция распределения наработки
между отказами;
при статистической оценке
р z/ \ _ N (*°°» О
N (0)
где R (/о) — отношение числа изделий,
исправных в произвольный достаточно
удаленный момент времени и про-
работавших затем в течение заданного
времени t0, к общему числу изделий.
Нестационарный коэффициент го-
товности изделия:
при вероятностной оценке
к(о= S(u+«i*x«
t=i 1Л=о
f л
< S ге» + л») + Ux}
k=Q J
или к (0 = R (/, tQ = 0),
где К (0 — вероятность того, что
в момент времени t изделие находится
в работоспособном состоянии (при из-
вестных начальных ' условиях в мо-
мент t = 0);
при статистической оценке
К(О = л(О/лцо) = 1-£Ф-,
где К (0 — отношение числа изделий,
находящихся в работоспособном со-
стоянии в момент к общему числу
объектов.
Нестационарный коэффициент го-
товности изделия:
при вероятностной оценке
t
§ К (х) dx,
О
где К* (0 — математическое ожидание
отношения времени, в течение кото-
рого изделие находится в работоспо-
собном состоянии в интервале [0, /],
ко всей длительности этого интервала;
при статистической оценке
N (0)
**w=Йо? S S €
i=I k
tf(0)
,')=wEs,w'
/=1
где (0 — суммарная наработка /-го
изделия за время /, т. е. К* \t) —
среднее арифметическое суммарных
наработок изделий за время t.
Стационарный коэффициент го-
товности (или коэффициент готов-
ности):
Показатели надежности систем и изделий
31
при вероятностной оценке
К = lim К (0 = lim К* (0 или X =
/-*00 /—►СО /
= R (4 = 0),
где К — вероятность нахождения из-
делия в работоспособном состоянии
для стационарного случайного про-
цесса или математическое ожидание
отношения времени (для стационар-
ного случайного процесса), в течение
которого изделие находится в работо-
способном состоянии в некотором ин-
тервале, ко всей длительности этого
интервала.
Для любых распределений наработки
между отказами и времени восстанов-
ления, имеющих конечные средние
значения соответственно и т, спра-
ведливо выражение
Л = 7со/(Тсо- -J- т);
при статистической оценке
K = N (0) = 1 — п (M/W (0)»
где К — отношение числа изделий,
находящихся в работоспособном со-
стоянии в произвольный достаточно
удаленный момент времени, к общему
числу изделий.
Нестационарный коэффициент про-
(тоя изделия
((0 = 1 — К(0 и Л(0 = 1 —Л(0.
Коэффициент простоя изделия k
еляется дополнительным для коэф-
фициента готовности
। = 1 — К и ? = п (0).
Наряду с перечисленными показате-
лями надежности для восстанавлива-
емых сложных систем используют спе-
циальные показатели надежности,
отражающие особенности их функци-
онирования или особенности вы-
полнения задачи [5].
Общие рекомендации по выбору по-
казателей надежности при задании тре-
бований. Номенклатуру показателей
надежности изделий выбирают в зави-
симости от класса изделий, режимов его
жсплуатации, характера отказов
и их последствий, а также принципа
ограничения длительности исполь-
зования.
Все изделия подразделяются на сле-
дующие:
1 — неремонтируемые и невосста-
навливаемые изделия общего назначе-
ния, составные части изделий, не-
восстанавливаемые на месте эксплу-
атации и не подлежащие ремонту
(подшипники качения, крепежные
детали, конденсаторы, электродвига-
тели малой мощности и др.), а также
невосстанавливаемые изделия само-
стоятельного функционального назна-
чения, например, электрические
лампы, контрольные приборы и др.;
2 — восстанавливаемые изделия, не
подвергающиеся капитальному ре-
монту (изделия, которые подвергаются
плановым операциям технического
обслуживания, текущего или среднего
ремонта). К этому классу относят
также изделия, подлежащие обезли-
ченному капитальному ремонту, и из-
делия, ресурс которых полностью вос-
станавливается после капитального ре-
монта;
3 — восстанавливаемые изделия, ре-
сурс которых частично восстанавли-
вается при капитальном ремонте;
4 — изделия, предназначенные для
выполнения кратковременных (разо-
вых или периодических) . заданий.
К этой группе относят изделия, вы-
полнение задания которыми обеспе-
чивается готовностью изделия в мо-
мент начала использования.
При выборе того или иного показа-
теля надежности для изделия должен
быть выбран характерный временной
режим эксплуатации, определяю-
щийся чередованием периодов ожи-
дания, при которых по условиям
эксплуатации изделие не функциони-
рует, но оно готово к немедленному
приведению в действие, и периодов
действия (периодов функционирова-
ния). Режимы эксплуатации:
1 — непрерывный, при котором
период действия длится непрерывно;
2 — циклический, при котором пе-
риоды действия и простоя чередуются
с постоянной цикличностью;
3 — оперативный, когда неопре-
деленный период простоя сменяется
периодом действия заданной продол-
жительности;
4 — общий, при котором периоды
действия и простоя чередуются слу-
32
Проектирования систем и задачи исследования надежности
чайным образом, причем закономер-
ность чередования не может быть уста-
новлена по условиям эксплуатации,
либо условия эксплуатации разли-
чаются для разных экземпляров изде-
лия одного вида.
В зависимости от последствий отказа
изделие должно быть отнесено к одной
из трех групп надежности. К первой
группе надежности относят изделия,
отказ которых влечет за собой угрозу
безопасности людей или значительный
материальный или моральный ущерб.
Ко второй группе относят изделия,
для которых материальный ущерб от
невыполнения задания или от про-
стоя — одного порядка со стоимостью
самого изделия. Изделия, для которых
в случае отказа материальный ущерб
определяется утратой самого изделия
или затратами на его восстановление,
относят к третьей группе надежности.
Группу надежности изделия уста-
навливают на стадии технического
задания. Для конкретного изделия
следует выбирать минимально необ-
ходимое число показателей, достаточно
полно определяющих его надежность.
При этом показатели надежности
должны обеспечивать возможность
их количественной оценки на этапе
разработки; возможность подтвержде-
ния их методами испытаний или под-
контрольной эксплуатации.
При выборе номенклатуры показа-
телей надежности и их определении
необходимо руководствоваться госу-
дарственными стандартами и отрас-
левыми нормативно-техническими
документами.
6. ВИДЫ ОТКАЗОВ
И МАТЕМАТИЧЕСКИЕ ЗАКОНЫ
НАДЕЖНОСТИ
По причине возникновения отказы
делят на конструкционные, производ-
ственные и эксплуатационные. Кон-
струкционные отказы связаны либо
с ошибками при конструировании,
либо с использованием несовершенных
методов конструирования. Производ-
ственные отказы вызываются ошиб-
ками при изготовлении или обуслов-
лены несовершенством технологии. От-
казы при эксплуатации происходят
или вследствие нарушений правил экс-
плуатации, или из-за внешних воз-
действий, не свойственных нормальной
эксплуатации изделий.
По природе происхождения отказы
делят на естественные и искусственные.
По месту проявления различают
отказы при испытаниях (при экспе-
риментальной обработке), при при-
работке (в производстве), при нор-
мальной эксплуатации, а также отказы
последнего периода эксплуатации.
По характеру проявления отказы
делят на случайные и детерминиро-
ванные (т. е. отказы, вероятность про-
явления которых сколь угодно близка
к единице).
К числу детерминированных отказов
относят отказы, связанные с незна-
нием разработчиком реальных условий
эксплуатации или грубыми ошибками,
допущенными в конструкторской, тех-
нологической или эксплуатационной
документации. Эти отказы прояв-
ляются на всех изделиях, изготовлен-
ных в соответствии с дефектной до-
кументацией .
Нормальная эксплуатация системы
возможна лишь после устранения при-
чин детерминированных отказов
изделий и доработка документации.
По характеру изменения параметра,
определяющего надежность изделия
до момента отказа, различают внезап-
ные и постепенные отказы.
По связи с другими отказами раз-
личают независимые и зависимые от-
казы.
По возможности последующего ис-
пользования изделия после возник-
новения отказов последние подраз-
деляют на полные и частичные.
По характеру устранения отказы
делят на устойчивые, самоустраня-
ющиеся, сбои, перемежающиеся. Сбои
не нарушают работоспособности изде-
лий, они приводят лишь к кратковре-
менной потере или искажению полез-
ной информации в системе. Переме-
жающиеся отказы — многократно
возникающие самоустраняющиеся от-
казы одного и того же характера.
По наличию внешних проявлений
отказы делят на очевидные и скрытые.
По числу причин отказов элементов
изделий различают одну или несколько
независимых или зависимых причин.
Виды отказов и математические законы надежности
33
Для оценки вероятности безотказ-
ной работы статистическими мето-
дами необходимо большое число испы-
таний. Однако если известен вид функ-
ции надежности с точностью до одного
или нескольких неизвестных пара-
метров Р (0 = Р (t, а, р, ...), то для
оценки этих параметров требуется зна-
чительно меньший объем испытаний.
Тип функции (или плотности) рас-
пределения отказов можно найти двумя
путями — статистически, проверив
гипотезу о принадлежности распреде-
ления данному параметрическому
классу, или физически, построив и
проверив экспериментально физиче-
скую модель отказа.
Наиболее изученными* являются
следующие схемы отказов.
1. Схема мгновенных повреждений
(внезапные отказы). Например, во
время движения любого транспорт-
ного средства каждый его элемент
испытывает нагрузки. Нагрузка имеет
характер знакопеременного случай-
ного процесса. Неровности дороги при
движении транспортного средства
вызывают отдельные пиковые на-
грузки.
Предположим, что отказ элемента
(Наступает в том случае, когда нагрузка
превышает некоторый допустимый
(уровень. Вследствие случайного
(характера изменения нагрузки момент
(отказа также является случайным и не
«зависит от состояния элемента, от
того, сколько времени до отказа он
находился в эксплуатации. Различают
схемы внезапных отказов с постоянной,
возрастающей и убывающей интен-
сивностью.
। 2. Схема накапливающихся изме-
рений (постепенные отказы). Эта
(схема реализуется, когда в процессе
(функционирования изделия; в его эле-
ментах накапливаются изменения (по-
вреждения). Постепенное старение
и (или) износ элементов приводят
к тому, что их рабочие параметры
выходят за установленные допустимые
.пределы. Постепенно ухудшается
(качество функционирования всего
Ризделия. Выход за нижний допусти-
мый предел качества функционирова-
ния (например, точности, быстродей-
'ствия, мощности ит. п.) влечет за собой
отказ изделия в целом.
3. Схема релаксации. Эта схема
наблюдается в тех случаях, когда
износ и (или) старение могут явиться
косвенной причиной отказа. Если,
например, допустимые пределы на па-
раметры элементов не установлены, то
постепенное изменение параметров
может привести к скачкообразному
изменению состояния изделия.
Примеров релаксации достаточно
в практике машиностроения, когда
вследствие постепенного увеличения
зазора в трущихся парах, на который
не установлен допустимый предел,
наблюдается заклинивание. Отказ
резервных элементов электронных
систем также приводит иногда к пере-
грузке основных элементов и к отказу
изделия.
4. Схема действия нескольких не-
зависимых причин. Перечисленные
выше три схемы отказа на практике
часто реализуются в сочетании друг
с другом. Например, шина автомобиля
может отказать как вследствие про-
кола или дефекта, допущенного при
изготовлении, так и вследствие по-
степенного износа. Многие электро-
радиоизделия отказывают и из-за по-
вышенной нагрузки и по причине
постепенного старения.
В практике конструирования обычно
учитываются доминирующие при-
чины. В тех случаях, когда одновре-
менно действует несколько причин
одинакового влияния, их условно за-
меняют одной эквивалентной или
решают задачу защиты от последствий
отказов последовательно, с учетом сни-
жения опасности их возникновения.
5. Схема действия нескольких за-
висимых (взаимосвязанных) причин,
Сколько-нибудь полное описание свя-
зей между разнообразными зависи-
мыми причинами отказов в литературе
отсутствует. Часто случаи действия
взаимосвязанных причин удается
привести к случаю действия одной
эквивалентной и таким образом упро-
стить задачу исследования.
В общем случае поведение мате-
риалов и изделий в процессе работы
характеризуется кривой интенсив-
ности отказов или U-образной функ-
цией, имеющей три резко различа-
ющиеся между собой участка (рис. 2).
На отрезке времени от t9 до tv про-
34
Проектирование систем и задачи исследования надежности
Рис. 2. Типичные формы кривых для основ-
ных характеристик надежности элементов
и систем:
Р (/) — вероятность безотказной работы;
f (t) — плотность распределения отказов;
X (О — интенсивность отказов
являются ранние отказы из-за кон-
структорских или производственных
дефектов. Элементы, содержащие
дефекты, отказывают в течение этого
периода, называемого периодом при-
работки.
Тщательный контроль качества
исходных материалов и элементов,
экспериментальная обработка изде-
лий, специальные контрольные испы-
тания первых образцов и прирабо-
точные испытания последующих поз-
воляют значительно уменьшить
интенсивность отказов системы в этот
период.
Обычно в расчетах надежности из-
делий этот участок кривой не учиты-
вается, так как он должен быть «прой-
ден» до начала периода нормальной
работы, который характеризуется
небольшими значениями интенсив-
ности отказов. В период нормальной
работы интенсивность отказов близка
к постоянной, в некоторых случаях
она может убывать (проявляется эф-
фект упрочнения конструкций) или
несколько возрастать. На отрезке вре-
мени от до t2 проявляются отказы,
вызванные случайным увеличением
внутренних нагрузок в системе или
предельно тяжелыми условиями работы
системы. Этих отказов можно избежать,
проектируя элементы и изделия в рас-
чете на предельно тяжелые условия
работы, однако для большинства слу-
чаев такой подход неоправдан и прак-
тически нереализуем. Последний
участок 4) — это период старения
или износа. К этому времени в эле-
ментах происходят необратимые фи-
зико-химические изменения, они
стареют, изнашиваются, их надеж-
ность снижается, т. е. интенсивность
отказа монотонно возрастает.
В процессе разработки, испытаний
и эксплуатации изделий широко при-
меняют их математические модели (за-
коны) надежности, описывающие
поведение изделия на различных уча-
стках U-образной функции [1, 4].
Для описания надежности непрерывно
работающих изделий используются
непрерывные законы надежности
(табл. 2). Для изделий, работающих
в циклическом режиме, используются
дискретные законы надежности (см.
табл. 3).
Период старения многих элементов
(например, электрорадиоизделий) на-
ступает через большой промежуток
времени, и весь реальный срок службы
элемента укладывается на нормальном
периоде, где интенсивность отказа по-
стоянна. В этом случае можно поль-
зоваться экспоненциальным распре-
делением. Часто отказ элемента можно
интерпретировать как выход эргоди-
ческого случайного процесса за до-
пустимый высокий уровень. В теории
случайных процессов доказывается,
что при некоторых общих условиях
момент первого пересечения высокого
уровня будет иметь асимптотически
экспоненциальное распределение.
Экспоненциальное распределение (см.
табл. 2) используют для расчета на-
дежности радиоэлектронной аппара-
туры, подверженной вибрациям.
В случаях длительно функциониру-
ющей сложной системы, состоящей из
большого числа нестареющих элемен-
тов, мгновенно заменяемых при отказе,
время от данного произвольно взятого
момента функционирования до отказа
системы с хорошим приближением опи-
сывается экспоненциальным законом
распределения. Поэтому экспонен-
циальный закон широко исполь-
2. Основные непрерывные распределения
Распределение Область значений Плотность распределения
Равномерное (а, Ь) I Ь — а
Экспоненци- альное (0, оо) X ехр (—Хх)
Нормальное (Гаусса) (—оо, оо) 1 —ехр о ]Л2л (х— а)2 2а2 J
Логарифмиче- ски нормальное (0» оо) 1 7=-ехр ха V 2л (1пх — д)2 ' 2о2 J
Вейбулла— Гнеденко (0» оо) асха 1 — ехр (—сха)
Матем этическое ожидание Дисперсия Мода
a-j-b 2 (6 —а)3 12 —
1 X 1 X2
а а2 а
(0 ехр (2а + <*-) [ехр (а2) — 1] ехр (а) — аЗ
—1—Г (1 4~—) с» । 1 ь , 10 ‘ 1 X X ° “ t ч П | № i 1 s 1 а У а — 1/са (при а> 1)
00
Виды отказов и математические законы надежности
СИ
Распределение Область значений Плотность распределения
Гамма-распре- деление (0, сю) -tV*0 ' ехр( ₽*>
%2-распределе- ние (0, сю) I М ЬЭ to|w to “ ф X X) 'Т to| >
Бета-распреде- ление (0, 1) ха"! (1 — х)*-1
Стьюдента (—оо, оо) 1 • 1 to X w 1 1 '"7?' Tf + 4 а 3 1 ьо + , 1 X
со
о»
Продолжение табл. 2
Математическое ожидание Дисперсия Мода
а 0 а а — 1 Р (при а> 1)
k 2k Л* 1
•ха о + <3 ab (а + Ь)‘(а + Ь + 1) а — 1 а b — 2
0 1 --2 2 2 0
Проектирование систем и задачи исследования надёжности
Ътды отказов и математические законы надежности 37
дуется в проектных расчетах надеж-
ности сложных систем.
Для однородных материалов времен-
ное сопротивление, предел текучести
и предел выносливости ийеют нормаль-
ное распределение. Некоторые виды
нагрузок также имеют почти нормаль-
ное распределение (например, давление
газа на головки цилиндров поршневого
двигателя, тяга реактивного двига-
теля и др.). Поэтому нормальное рас-
пределение используется для вероят-
ностных расчетов прочности конструк-
ций.
Распределение экстремальных зна-
чений используется при изучении от-
казов вследствие коррозии или
усталостных разрушений.
Закон Вейбулла—Гнеденко исполь-
зуется для описания прочности сплавов
на основе железа и некоторых свойств
цветных металлов.
Сопротивление усталости сплавов
цветных металлов в зависимости от
способов термической обработки, ше-
роховатости обработанной поверх-
ности и температуры описывается
несколькими распределениями (Вей-
булла — Гнеденко, экстремальных
значений, нормальным, логарифми-
чески нормальным, гамма-распре-
делением).
Гамма-распределение используется
на практике, когда отказ изделия
нызывается появлением точно k «уда-
ров», каждый из которых возникает
согласно экспоненциальному закону
< параметром X. Тогда вероятность
безотказной работы изделия равна
। умме вероятностей возникновения
«очно 0, 1, 2,... или k—1 «уда-
ров».
Г амма-распределением пользуются
для описания одновершинных не-
< имметричных распределений, для
которых нормальное распределение
является плохим приближением.
Частными случаями закона Вейбул-
ла -Гнеденко, когда параметр a pa-
nt1 в 1 или 2, являются соответственно
экспоненциальное распределение и рас-
пределение Рэлея.
Распределения Вейбулла — Гне-
Л'-нко, гамма-распределение и рас-
пределение Рэлея пригодны для описа-
ния поведения изнашивающихся или
। ареющих изделий.
Для расчета надежности восстанав-
ливаемых систем, у которых параметры
потока отказов и потока восстановле-
ний суть параметры экспоненциального
распределения, используется распре-
деление Эрланга, являющееся ча-
стным случаем гамма-распределения,
когда параметр а — целое положитель-
ное число.
Для логарифмически нормального
распределения логарифмы случайных
величин — время безотказной ра-
боты— имеют нормальное распределе-
ние. Интенсивность отказов для лога-
рифмически нормального распределе-
ния возрастает во времени после уча-
стка убывания, а при малых и больших
t стремится к нулю.
Логарифмически нормальное рас-
пределение используют для описания
процесса возникновения отказов
из-за усталостных изломов. Прочно-
стные свойства сплавов часто имеют
логарифмически нормальное распре-
деление.
Дискретные распределения (табл. 3)
используют в расчетах надежности
резервированных изделий или для
описания дискретных случайных
величин (ударных или цикличе-
ских нагрузок, кратности испыта-
ний невосстанавливаемых изделий
и т. п.).
При исследовании надежности реаль-
ных изделий могут встречаться раз-
личные комбинации распределений
нагрузки и свойств изделий, обусло-
вливающих их надежность. Поэтому
при выборе распределения следует
учитывать ожидаемую погрешность
расчетов.
Смесь распределений. Пусть W =
= + N2 + ... 4- Nh .+ ... + Nn—
множество однотипных элементов,
состоящее из k групп элементов (k =
= 1, п), и ajt = Nk/N — доля k-н
группы элементов в 2V. Элементы
каждой группы имеют время безотказ-
ной работы, описываемое экспонен-
циальным распределением с параме-
тром Xfc. Все элементы, изготовленные
на разных заводах, поступают на
общий склад, где хаотически пере-
мешиваются. Какую функцию на-
дежности имеет взятый наугад эле-
мент?
38
Проектирование систем и задачи исследования надежности
3. Основные дискретные распределения
Распре- деление Возможное значение Вероятность Матема- тическое ожида- ние Дисперсия
Биноми- альное 0, 1,2 п d /^тпт„п-т Рт (т) = Спр 9 пр npq
Отрица- тельное биноми- альное Г, г+ 1,... Рт = Г ~р~ ЯГ Р2
Геоме- трическое 0, 1, 2, ... Pm=pqm~l 1 р д р2
Гипер- геометри- ческое 0, 1, ...» min (2И, п) ^т^п~т п М n~N~ М (N — M) п (N — п)
~ гп N2 (N — 1)
Пуассона 0, I, 2, ... Pm — ехр (X) X X
По формуле полных вероятностей
п
P(t) = S ahexp (— Xht).
Такое распределение называют
смесью экспоненциальных распре-
делений.
7. ЗАДАНИЕ И РАСПРЕДЕЛЕНИЕ
ТРЕБОВАНИЙ ПО НАДЕЖНОСТИ
Задание требований по надежности
на систему. В случаях создания совер-
шенно новых типов систем, эффект
от функционирования которых еще
недостаточно известен, задание требо-
ваний может осуществляться на основе
экспертного анализа. При этом обосно-
ванность принимаемых решений зави-
сит от квалификации, научной и ин-
женерной интуиции экспертов.
Нередко требования по надежности
на системы, особенно модернизиру-
емые, задаются «от достигнутого» на
аналогах и прототипах с учетом ожида-
емого роста надежности материалов,
комплектующих изделий, повышения
качества изготовления и надежности
изделий общего применения. В этом
случае в дополнение к экспертным i
оценкам используются статистические /
данные о достигнутых и ожидаемых на
период разработки системы характе-
ристиках надежности элементов
систем, созданных и использованных
в других системах ранее.
Если применение системы' может
дать экономический эффект, то его мож-
но сравнить с затратами на создание
и эксплуатацию системы. В этом слу-
чае имеется возможность решить за-
дачу задания оптимального уровня
надежности. Эта задача может быть
решена, если известны структура, об-
лик и характеристики системы, харак-
теристики надежности элементов,
процесс функционирования и способы
повышения надежности изделий,
' входящих в систему.
В общем случае требуется получить
максимум целевой функции
Gt (R) = Wi(R)—Ci (R),
Задание и распределение требований по надежности
30
где 7? — показатель надежности си-
стемы, зависящий от выбранного х-го
варианта системы (х = 1, n); Wi (R) —
выходной экономический эффект от
применения х-го варианта системы при
уровне надежности R; Ct (R) — за-
траты на обеспечение уровня надеж-
ности, равного R для х-го варианта
системы.
Для каждого х-го варианта системы
оптимальное решение находят из усло-
вия
dWt (R)ldR = dCi (R)/dR.
Далее, сравнивая между собой опти-
мальные решения ITj (R), выбирают
вариант, для которого достигается
наибольшее абсолютное значение
из оптимальных решений Wj (R).
Изложенная схема получения оп-
тимальных требований по надежности
на систему применима на ранних
стадиях разработки системы. При более
детальной проектной проработке и
особенно при применении САПР воз-
можна более тонкая оптимизация.
Однако для этого нужно знать сле-
дующее; может ли ухудшение (улуч-
шение) некоторых выходных харак-
теристик изделий системы (например,
производительности, быстродействия,
точности и т. п.) привести к повыше-
нию (снижению) их надежности; на-
сколько ухудшение (улучшение) вы-
ходных характеристик ухудшает
(улучшает) выходной эффект от при-
менения системы.
Зная ответы на перечисленные во-
просы и используя модели функциони-
рования и применения системы, можно
получить оптимальное решение.
Распределение требований по надеж-
ности между элементами системы. За-
дача распределения заданной на-
дежности R* по элементам системы
имеет вид
I (*1, *2...Яп) > Я*» (9)
где Rt — вероятность безотказной
работы х'-го элемента.
Если вероятность безотказной ра-
боты задана как функция времени, то
н< равенство (9) можно обобщить, рас-
<мптривая R* и Ri, i= 1, 2........п,
я лк функции времени i.
Большинство основных моделей
распрёделения требований по на-
дежности основано на допущениях, что
элементы системы выходят из строя
независимо друг от друга, что отказ
любого элемента приводит к отказу
системы (т. е. система состоит из
последовательно соединенных эле-
ментов) и что интенсивность отказов
постоянна [5]. При этих допущениях
получаем следующее неравенство
как частный случай неравенства (9):
К. (0. Л. (0 ... Rn (0 > R* (t). (10)
Пусть Xf — интенсивность отказов
х-го элемента, а Л — интенсивность
отказов системы. Тогда неравенство
(10) принимает вид
е 1 4- е 1
>е
—At
И
4- ... 4~ Л.
Метод равномерного распределения.
Предполагается, что система состоит
из п последовательно соединенных
элементов, имеющих одинаковую
надежность.
Пусть R* — требуемая вероятность
безотказной работы системы, a Ri —
вероятность безотказной работы х*-го
элемента системы. Тогда
п
R* = П Rt
или
Ri = (R*)r/n, 1 = 1, 2......n.
Таким образом могут быть распре-
делены такие показатели надежности,
как вероятность безотказной работы,
средняя наработка на отказ, коэффи-
циент оперативной, готовности, коэф-
фициент готовности.
Задаваемая средняя наработка для
х-го элемента системы будет равна
Ti — пТ, i = ТПй, где Т — задан-
ная средняя наработка системы.
Недостатком . этого метода является
то, что уровень надежности элементов
системы устанавливается без учета
их важности, последствий их отказов
и степени трудности достижения
надежности.
40
Проектирование систем и задачи исследования надежности
Метод пропорционального распре’
деления. Если kf — число элементов
в i-й подсистеме (i = 1, и), то Rj =
a,=kt ( 2 ЛЛ”1.
Здесь kf — число «приведенных» эле-
ментов. Если известны интенсивности
отказов элементов (или прототипов
элементов) /-го типа Ху, то метод про-
порционального распределения можно
модифицировать, положив
ai = / 2 X
X J]
Метод распределения требований
no надежности с учетом относительной
уязвимости элементов [2]. Предпола-
гается, что элементы системы соеди-
нены последовательно и имеют по-
стоянную интенсивность отказов, что
отказ любого элемента системы вызы-
вает отказ всей системы и что заданная
наработка элементов равна заданной
наработке системы.
Требуется выбрать такие X?, чтобы
п
1=1
ио
где X* — заданная интенсивность от-
казов Z-го элемента, а Л — требуемая
интенсивность отказов системы.
Задачу решают в два этапа: 1) опре-
деляют интенсивность отказов Хг- основ-
ных элементов системы на основе опы-
та; 2) задают весовые множители
и>1 для каждого элемента системы
в соответствии с интенсивностями от-
казов, определенными на первом
этапе,
/П \
П.
f=l
(12)
Таким образом, coj показывает отно-
сительную уязвимость x-го элемента.
Тогда
п
2 «4 = 1-
i=l
Далее вычисляют требуемые интен-
сивности отказов элемента с помощью
соотношения
X; = ®,Л» i = 1, 2, . ., п.
Тогда формула (11) рассматривается
как равенство
2 ©гА = Л.
/=1
Пример 1. Система состоит из трех
последовательно соединенных элемен-
тов, для которых получены оценки
А-! = 0,1)05, Х2 — 0,003 И Хд = 0,001.
Требуемая вероятность безотказной
работы системы за 20 ч составляет 0,95.
Определить требуемые значения ве-
роятности безотказной работы эле-
ментов.
Решение. С помощью (12) опре-
деляем:
0,005
01 0,005 + 0,003 + 0,001
= 0,555; <о2 == 0,333; <о„ =
Известно, что R* (/ = 20) =
= ехр [— Л (20) ] — 0,95 или Л —
= 0,00256.
Следовательно,
X* = Ш1Л = 0,555-0,00256 = 0,00142;
X* = ®2Л = 0,333-0,00256 = 0,000852;
X* = <й3Л = 0,111-0,00256 = 0,000284.
Соответствующие заданные значе-
ния вероятности безотказной работы
элементов:
R; (20) = ехр (—0,00142-20) = 0,97;
(20) = ехр (— 0,000852-20) = 0,98;
R* (20) = ехр (— 0,000284-20) = 0,99.
Метод распределения требований
по надежности с учетом важности
элемента [5]. Предполагают последо-
вательное соединение взаимно не-
зависимых элементов (подсистем),
имеющих экспоненциальное распре-
деление времени работы. Показатель
важности элемента (подсистемы) опре-
Задание и распределение требований по надежности
41
деляется через вероятность отказа си-
стемы, если этот элемент выйдет из
строя. Показатель важности, равный
единице, означает, что для безотказной
работы системы этот элемент (под-
система) должен безотказно работать,
а показатель важности, равный нулю,
означает, что отказ этого элемента
(подсистемы) не влияет на работу
системы.
Сложные элементы определяют как
модули, имеющие соответствующие
схемные соединения.
При распределении требований
к надежности предполагают, что каж-
дый модуль вносит одинаковый вклад
в безотказную работу системы. Экви-
валентность требований состоит в том,
что интенсивность отказов одинакова
для каждого модуля. Поскольку для
очень малых х ехр (—х) та 1 — х,
заданная интенсивность отказов
для каждого i-го элемента имеет вид
Х( = [— In Я* (t)V(Nuiti), i =
« 1. 2.....я, (13)
где Ni — число модулей в t-м эле-
менте (подсистеме); R* (£) — требуемая
вероятность безотказной работы си-
стемы при заданной наработке t\ N —
общее число модулей в системе; (Of —
показатель важности для t-го элемента
(подсистемы) [вероятность отказа
системы при выходе из строя г-го
элемента (подсистемы)]; /г- — требу-
емая продолжительность работы t-ro
элемента (подсистемы) за время работы
системы (0 ti ().
Требуемая вероятность безотказной
работы t-ro элемента (подсистемы) при
требуемой наработке имеет вид
((,.) == 1 -
г * . N IN1
1-U? (/) 11 1 14
(14)
формула дает хорошее приближе-
если для каждого элемента (под-
емы) значение коэффициента
пости близко к единице.
Пример 2. Для системы, состоящей
1стырех подсистем, требуется обес-
ить вероятность безотказной ра-
4, равную 0,95 при непрерывной
,?те в течение 10 ч. Для подсистем 1
к J показатель важности равен еди-
4. Исходные данные к примеру 2
№ под- систе- ы Число модулей Ni Коэффи- циент важности Продол- житель- ность ра- боты, ч
1 15 1,0 10
2 25 0,95 9
3 100 1,00 10
4 70 0,90 8
нице. Подсистема 2 должна работать
только 9 ч за время работы системы,
а подсистема 4 имеет показатель важ-
ности 0,9, и для безотказной работы
системы она должна работать 8 ч.
Остальные данные приведены в табл. 4.
Решение. Общее число модулей
4
в системе N = J Nj — 210.
Максимально допустимые интенсив-
ности отказов для подсистем соглас-
но (13):
X»! —
15 (— In 0,95)
210-1,0-10
Х<2 —
25 (— In 0,95)
210-0,95-9
Х<з
100 (—In 0,95)
210-1,0-10
= 0,000366;
= 0,000714;
= 0,002442;
70 (—In 0,95)
210-0,90-8
= 0,002377.
По формуле (14) находим требуемые
значения вероятности безотказной
работы подсистем:
1 _ (0,95)15/21°
R* (/ = Ю) = 1----------------------- =
= 0,996;
„ z АЧ f 1 — (0,95)25/21°
Я* 0 — 9) ~ 1 о,95
= 0,993;
1
1 _ (0,95)100/210
R* (/ = 10) = 1----------- —---------~
= 0,976;
R’(t = 8) = —
0,90
= 0,981.
42
Проектирование систем и задачи исследования надежности
4
Проверка: R* = R* ж
i=l
fv 0,95, что близко к заданному.
Метод оптимального распределе-
ния. Если при задании требований по
надежности на систему в целом (R*)
известны структура системы (S) и ме-
тоды повышения надежности подси-
стем, т. е. функции Ri (С), где С —
ресурс, затрачиваемый на обеспече-
ние надежности подсистемы, то можно
найти оптимальное решение для двух
случаев:
максимум показателя надежности
системы при ограничениях на суммар-
ный ресурс С*
max|R(S, Rt(Ci))
с I
С — (Съ С2, Сп)\
минимум затрат на систему при
достижении заданного показателя
надежности R*
min (С (S, Ri (Ct)) | R*}.
С
Обе задачи решают способами мате-
матического программирования, как
задачи на условную оптимизацию.
СПИСОК ЛИТЕРАТУРЫ
1. Вопросы математической теории
надежности/Под ред. Б. В. Гнеденко.
М,: Радио и связь, 1983. 376 с.
2. К- Капур, Л. Ламберсон. Надеж-
ность и проектирование систем. М.:
Мир, 1980. 450 с.
3. Надежность и эффективность в
технике: Справочник. Т. 1. Методоло-
гия, организация, терминология/Под
ред. А. Н. Рембезы. М.: Машинострое-
ние, 1986. 224 с.
4. Надежность и эффективность в
технике: Справочник. Т. 2. Математи-
ческие методы в теории надежности и
эффективности/Под. ред. Б. В. Гнеден-
ко. М.: Машиностроение, 1987.
280 с.
5. Надежность технических систем:
Справочник/Под ред. И. А. Ушакова.
М.: Радио и связь, 1983. 606 с.
Глава 2
Расчет надежности элементов
и последовательных систем
Показатели надежности элемента
можно рассчитать, если известен закон
распределения наработки элемента
до отказа F (0 или его основные
параметры [3].
Для любого (произвольного) закона
распределения дискретная функциярас-
пределения времени нар аботки до отказа
О, 0 t
Vi, ti t ^2»
Р /А + V2’ *3,
•* V) —' . .
fe(f)
S VP (О *k (П“Р*
где ti — момент i-го скачка функции
F (0; k (t) — число скачков функции
F (0 к моменту 0 vt- — скачок функции
F (0 в точке ti-
На ранних стадиях проектирования
новых элементов и систем используют
экспериментальные данные в виде F (0,
полученные по изделиям-аналогам , и
в процессе разработки элементов.
В табл. 1 приведены основные показа-
тели надежности элементов для произ-
вольного закона распределения
.наработки до отказа [3], которые
можно вычислить, если извест-
на F (0.
1. Показатели надежности для произвольного распределения
Показатель Непрерывная функция Дискретная функция
P(t0) 1-^(4) k «о) 1- S V, (=1
Q(4) F(t0) k (to) i=l
Р V, t + to) +ад ]/[!-/ (01 fk (t+t0) \ / / It (t) \ \ S Vi\ \l~ S \ i=I // \ 1=1 /
ta) И (/ + 4) “F (Ol/п - F (0] f k (t+t0) \ 1 / k (t) \ P- S М/ 1- S Vi| \ i=k (t) / / \ i—1 /
т J [1 - Г (01 й 0 N i=-l
44
Расчет надежности элементов и последовательных систем
1. НЕВОССТАНАВЛИВАЕМЫЙ
ЭЛЕМЕНТ
Внезапные отказы. Экспоненциаль-
ное распределение. При экспоненци-
альном законе распределения на-
работки до отказа интенсивность отка-
зов является величиной постоянной
X (t) ~ X — const. Зависимости между
основными показателями надежности
элемента (вероятностью безотказной
работы Р (t), вероятностью отказа
Q (0 и средней наработкой отказа Г)
выражаются через параметр экспонен-
циального распределения — его А,-ха-
рактеристику:
Р («о) = Р (Ы И- *о) = exp (-Xf0) «
« 1 - U9;
Qtto) = Q (t, /+ t0) = 1 -
— exp (—H)
T= l/A.
Приближенными значениями для
P (t) и Q (t) можно пользоваться, если
Дисперсия времени наработки до
отказа
СО
D (/0) = XT2 J [exp (— Х01 di = T2.
О
Среднее квадратическое отклонение
а(Оо- КЩМ = Т.
Таким образом, при экспоненциаль-
ном распределении надежности сред-
нее квадратическое отклонение на-
работки до отказа равно средней на-
работке до отказа. Это свойство на
практике используют для проверки
истинности гипотезы о существовании
экспоненциального закона надежности.
Постепенные отказы. «Стареющие»
распределения. Многие элементы в пе-
риод хранения и работы подвержены
старению и износу. Интенсивность от-
казов этих элементов X (t) со временем
монотонно возрастает. В некоторых
случаях в результате упрочнения ма-
териалов в процессе работы элементов
наблюдается уменьшение интенсив-
ности их отказов, т. е. X, (О со временем
монотонно убывает.
2. Верхняя и нижняя границы вероятности безотказной работы Р (0
и квантили для ВФИ-распределения
Пока- затель Граница Интервал, для которого справедлива оценка Примечание
НИЖНЯЯ верхняя
Р(0 ехр (—t/T) 0 1 ехр (—со/0 0 с t с т t > т G>t определяется из уравнения I _ atT = == ехр (—©/О; . определяется из уравнения F (ip) = Р-. ltl<l—/>) ъ
ехр (—«0 ехр (—Ы) а. о. V A -к*
£р -In (1 - р) Т Т , ,—।— In (1 — р) Р 1п(1—р)^ Р Р < 1 — ехр (—1) р > 1 — ехр (—1)
Невосстанавливаемый элемент
45
Изменение характеристик надеж-
ности таких элементов во времени
принято описывать с помощью «старе-
ющих» и «молодеющих» распределений
времени наработки до отказа. Если
известен один из моментов распределе-
ния наработки до отказа (например,
среднее значение наработки до отказа)
или квантиль этого распределения sp,
а также известно, что элемент подвер-
жен упрочнению, износу или старению,
то его поведение можно охарактеризо-
вать с помощью распределений, име-
ющих соответственно убывающую или
возрастающую функцию интенсив-
ности отказа. Явление старения (моло-
дения) формулируется в виде интен-
сивности отказа
= /(<)/[1 -Р (9]
или в виде ведущей функции
t
Л (0 == J X (х) dx = — log [1 — F (/)].
о
Обозначим р (t) через F (t) = 1 —
— F (/) и дадим определения различ-
ных классов «стареющих» и «молоде-
ющих» распределений [1, 3].
ВФИ (УФИ). Распределение F на-
зывают ВФИ (УФИ), если оно харак-
теризуется монотонно возрастающей
(убывающей), по i интенсивностью от-
каза Л (/).
ВСФИ (УСФИ). распределение F
имеет возрастающую в среднем функ-
цию интенсивности (ВСФИ-распре-
деление) или убывающую в среднем
функцию интенсивности (УСФИ-рас-
пределение), если соответственно
функция -Ь- log F (f) возрастает по t
или----j- log F (t) убывает по t.
Если на конструкцию (например, на
шасси самолета при посадке) воздей-
ствует по пуассоновскому закону во
времени некоторая ударная нагрузка,
причиняя с каждым ударом независи-
мый случайный ущерб, и изделие
отказывает, когда накопленный ущерб
достигает некоторого критического
уровня, то ее надежность можно опи-
сать ВСФИ-распределением.
3. Верхние границы вероятности
безотказной работы для ВФИ-
распределения с фиксированным Т
t/T
0,00 0,02 0,04 0,06 0,08
1,0 1,000 0,961 0,924 0,889 0,856
1,1 0,824 0,794 0,765 0,738 0,711
1,2 0,686 0,662 0,640 0,618 0,597
1,3 0,577 0,558 0,540 0,522 0,505
1,4 0,489 0,474 0,459 0,444 0,430
1,5 0,417 0,417 0,369 0,380 0,369
1,6 0,358 0,348 0,337 0,328 0,318
1,7 0,309 0,300 0,292 0,283 0,275
1,8 0,268 0,260 0,253 0,246 0,239
1,9 0,233 0,226 0,220 0,214 0,209
2,0 0,203 0,198 0,193 0,188 0,183
В табл. 2—5 приведены граничные
оценки надежности элемента для ВФИ-
и ВСФИ-распределений [3].
Верхняя граница вероятности без-
отказной работы, которая может быть
найдена решением уравнения 1 —
— ©t? = ехр (—<ot0. Для t > Т дана
в табл. 3.
Нижняя граница вероятности без-
отказной работы для ВФИ-распределе-
ния на интервале времени 0 t Т
равна ехр (—ttT)\ при tz> Т P(t) = 0.
Если время выполнения элементом
задачи есть случайная величина, име-
ющая функцию распределения W( t)
или плотность распределения ©(/),
то вероятность безотказной работы
можно вычислить по формуле
СО
Р = J Р (0 dW (0 -
о
j P(t)aj(t)dt.
о
В табл. 6 даны выражения для Р
при различных законах распределения
времени выполнения задачи. Погреш-
ности приведенных формул имеют по-
46
Расчет надежности элементов и последовательных систем
4. Границы вероятности безотказной работы для ВФИ-распределения
с фиксированными Т и аа
ЦТ очт* ЦТ 0*/Тя
0.10 0,20 0,30 0,40 0,50 0,60 0,70 0,80 0,90 1,00
Верхние границы вероятности безотказной работы
0,30 1,000 1,000 1,000 1,000 0,993 0,05 1,000 1,000 1,000 1,000 0,951
0,36 1,000 1,000 1,000 1,000 0,936 0,15 1,000 1,000 0,957 0,906 0,861
0,42 1,000 1,000 1,000 0,951 0,883 0,25 0,976 0,917 0,866 0,820 0,779
0,48 1,000 1,000 0,974 0,897 0,833 0,35 0,884 0,831 0,784 0,742 0,705
0,54 1,000 1,000 0,921 0,847 0,785 0,45 0,801 0,752 0,709 0,671 0,638
0,60 1,000 0,959 0,871 0,800 0,741 0,55 0,726 0,681 0,642 0,608 0,577
0,66 1,000 0,909 0,824 0,755 0,699 0,65 0,658 0,616 0,581 0,550 0,522
0,72 0,972 0,862 0,779 0,713 0,659 0,75 0,596 0,558 0,526 0,497 0,472
0,78 0,927 0,819 0,737 0,674 0,622 0,85 0,540 0,506 0,476 0,450 0,427
0,84 0,887 0,778 0,698 0,636 0,587 0,95 0,490 0,458 0,431 0,407 0,387
0,90 0,850 0,740 0,661 0,601 0,554 1,00 0,467 0,436 0,410 0,388 0,368
1,00 0,796 0,682 0,608 0,548 0,503 1,05 0,444 0,415 0,390 0,369 0,350
1,05 0,774 0,656 0,579 0,523 0,479 1,10 0,423 0,395 0,371 0,351 0,333
1,10 0,756 0,632 0,554 0,499 0,457 1,15 0,402 0,376 0,353 0,334 0,317
1,15 0,742 0,609 0,531 0,476 0,435 1,20 0,383 0,358 0,336 0,317 0,301
1,20 0,633 0,588 0,509 0,455 0,415 1,25 0,365 0,340 0,320 0,302 0,286
1,25 0,514 0,570 0,488 0,435 0,396 1,30 0,348 0,324 0,304 0,287 0,272
1,30 0,411 0,554 0,469 0,416 0,374 1,35 0,331 0,308 0,289 0,273 0,269
1,35 0,326 0,519 0,451 0,397 0,360 1,40 0,316 0,293 0,275 0,260 0,247
1,40 0,258 0,444 0,434 0,380 0,343 1,45 0,300 0,279 0,262 0,247 0,235
1,50 0,163 0,321 0,405 0,348 0,313 1,50 0,286 0,266 0,249 0,235 0,223
Нижние границы вероятности безотказной работы
0,05 0,987 0,978 0,970 0,965 0,961 0,05 0,957 0,955 0,953 0,952 0,951
0,15 0,962 0,934 0,913 0,893 0,886 0,15 0,878 0,871 0,866 0,863 0,861
0,25 0,937 0,892 0,860 0,836 0,818 0,25 0,804 0,794 0,787 0,782 0,779
0,35 0,913 0,853 0,810 0,778 0,755 0,35 0,737 0,724 0,715 0,708 0,705
0,45 0,886 0,813 0,762 0,724 0,695 0,50 0,647 0,631 0,619 0,611 0,606
0,55 0,847 0,763 0,709 0,671 0,642 0,60 0,592 0,575 0,563 0,554 0,549
0,65 0,787 0,695 0,643 0,608 0,583 0,70 0,534 0,521 0,511 0,505 0,497
0,75 0,699 0,609 0,567 0,538 0,518 0,80 0,475 0,466 0,460 0,454 0,449
0,85 0,569 0,510 0,482 0,466 0,454 0,90 0,419 0,415 0,411 0,409 0,407
0,95 0,452 0,412 0,403 0,399 0,395 0,95 0,392 0,390 0,389 0,388 0,387
1,00 0,368 0,368 0,368 0,368 0,368 1,00 0,368 0,368 0,368 0,368 0,368
1,05 0,315 0,329 0,336 0,340 0,342 1,05 0,345 0,347 0,348 0,349 0,350
1,10 0,270 0,292 0,305 0,312 0,318 1,10 0,324 0,326 0,329 0,331 0,333
1,15 0,230 0,264 0,280 0,290 0,298 1,15 0,303 0,308 0,311 0,314 0,317
1,20 0 0,236 0,256 0,268 0,277 1,20 0,284 0,290 0,294 0,298 0,301
1,25 0 0,211 0,233 0,248 0,258 1,25 0,266 0,273 0,278 0,283 0,286
1,30 0 0,188 0,213 0,229 0,241 1,30 0,250 0,257 0,263 0,268 0,272
1,35 0 0 0,194 0,212 0,224 1,35 0,234 0,242 0,249 0,254 0,259
1,40 0 0 0,174 0,196 0,209 1,40 0,220 0,228 0,235 0,241 0,247
1,45 0 0 0,162 0,181 0,195 1,45 0,206 0,215 0,222 0,229 0,235
1,50 0 0 0,146 0,167 0,182 1,50 0,193 0,202 0,210 0.217, 0,223
Восстанавливаемый элемент
47
5. Нижняя оценка вероятности безотказной работы
для ВСФИ-распределения при фиксированном Т
ЦТ Нижняя граница ЦТ Нижняя граница ЦТ Нижняя граница ЦТ Нижняя граница
0,00 1,000 0,14 0,868 0,28 0,8155 0,45 0,615
0,02 0,980 0,16 0,8504 0,30 0,731 0,50 0,567
0,04 0,961 0,18 0,833 0,32 0,714 0,55 0,526
0,06 0,942 0,20 0,8155 0,34 0,698 0,60 0,484
0,08 0,923 0,22 0,798 0,36 0,681 0,70 0,396
0,10 0,904 0,24 0,781 0,38 0,665 0,80 0,296
0,12 0,896 0,26 0,764 0,40 0^649 0,90 0,186
0,99 0,034
Оценка дана в интервале 0С//Т<С 1.
в. Вероятность безотказной работы Р невосстанавливаемого элемента
при случайной длительности выполнения задачи
Распределение Точное выражение Приближенное выражение
Экспоненциальное /А 1 ( М СО (0 =-7-ехр — \ 10 \ / 1 1— Ч I - Ч +
Нормальное <о (0 = —X 2паа ХехоГ—~<)Д 1 Х е Р-[ 2са J ехр (-Ч + —J Л2 (in + °2) 1-4 + —
* Произвольное W(t) Я (in + о2) 1—4 + ’ &
|<*к (Af0)3. Через /Лд обозначен fe-й
явный момент распределения
КОССТАНАВЛИВАЕМЫЙ
Н МЕНТ
процессе функционирования вос-
наиливаемого элемента наблюдает-
ся последовательность чередующихся
интервалов его работы £ и простоя Т|:
£1» Ях» £г> Лг» ••• [1» 3].
Введем обозначения:.
£д — случайная наработка элемента
до k-ro отказа после (k — 1)-го восста-
новления; т]д — случайное время,
восстановления (простоя) элемента
после k-го отказа; G (0 = Р {т} t} —
48
Расчет надежности элементов и последовательных систем
7. Основные показатели надежности для восстанавливаемого элемента
Пока-
затель
Точное выражение
Приближенное выражение
(Мо <S 1, Х/ц с 1)
Р(/о)
Qtfo)
т
т
К
k
к0 (о
но
*°(0
R (Л /о)
ехр (—Xf0)
1 — ехр (—Х/о)
1/Х
1/р.
ц Т _ 1
Л -j— р> Т -j— т 1 -j-
К _ Т _ X/JLL
X р. Т -|— т 1 *4~ Х/р
К + k ехр [—(Л + Н) d
К (1 - ехр [-(X + Ц) d)
k (1 — ехр [—(Х+ р) /])
k + К ехр [—(X + р) d
К ехр (—Х/о)
(К + k ехр [— (X + р) d ехр (—Х/о)
1 — Х/о
X/q
1 — Х/р
Х/р
1 — Х/р [ 1 — ехр (—р0 ]
(1 — Х/р.) [1 — ехр (—р/) ]
t1 — ехР<—НО]
г
X
ехр (—рО + — [1 — ехр (—Р0]
г
1-----Х/о
I4
1 — (1 — ехр (—р0 ] О —ЗД
\ Р / J
распределение времени восстановле-
ния; F (t) ~ Р {£>^.1} — распределе-
ние наработки до отказа; f (0 и g (i) —
плотности распределений F (0 и G (0;
too — произвольный «достаточно уда-
ленный» момент времени, соответству-
ющий стационарному режиму слу-
чайного процесса. Определения и фор-
мулы основных показателей надеж-
ности восстанавливаемых элементов
даны в гл. 1.
В табл. 7 приведены показатели на-
дежности для восстанавливаемого эле-
мента, когда F (0 и G (0— экспонен-
циальные распределения.
Характеристики надежности мгно-
венно восстанавливаемого элемента.
0 0 tyy "-Tf "
Рис. 1. Схема работы мгновенно восстанав-
ливаемого элемента
Допустим, что время восстановления
элементов мало по сравнению с вре-
менем безотказной работы, тогда им
можно пренебречь и считать, что вос-
становление мгновенное. Такое до-
пущение во многих реальных случаях
оправданно и позволяет получить важ-
ные теоретические и практические
результаты.
Предположим, что времена безотказ-
ной работы |2« •••> Вп независимы
и имеют одинаковое распределение
(рис. 1). Тогда
P{^<0 = F(O; Mlk = T- D£k =
= f (t) = Fr (0, Fk(t) =
= P{th<t},
где функции Fk (0 определяются pe-
куррентно:
t
^h(i) = j Ffe_!(f-x)dF(x), A>1,
0
(0 = ^(0.
Восстанавливаемый элемент
49
Пусть v (0 — число отказов до мо-
мента t\ тогда
= = (0,
откуда
P{y(t) = k} = Fk (t)-Fh^ (0.
Зная распределение v (0, можно рас-
считать, например, число запасных
элементов, если восстановление со-
стоит в замене, или число ремонтов,
если восстановление осуществляется
путем ремонта.
Обозначив Н (0 — Му (0 — среднее
число отказов до момента t, можно
получить выражение для функции вос-
становления
н (о = 2 я Р7» ю - «оз =
п— 1
= 2 Fn(o-
П=1
Тогда среднее число отказов на ин-
тервале (t, t 4~ х) равно Н (^+ х) —
- И (0.
Плотность восстановления h (0 =
= Я'(О = 2 WO; = (0-
П=1
Из выражения для Н (t) следует,
что среднее число восстановлений на
бесконечно малом интервале (t, t -f-
4- Д0 равно h (0 Д/4- 0 (Д0. Такой
же вид имеет и вероятность появления
отказа на бесконечно малом интервале.
Плотность восстановления h (0 есть
безусловная вероятность отказа за
единицу времени, X (0 — условная
вероятность отказа элемента за едини-
цу времени, следующую за моментом
времени /, при условии, что до мо-
мента t элемент ни разу не отказал.
Остаточное время жизни элемен-
та — время от момента t до первого
справа отказа.
Распределение остаточного времени
жизни получаем из выражения
t
P&l>x)=~F (< + *) +J 7 (/ +
а
4-х — и) h (и) du.
Пусть время жизни имеет экспонен -
циальное распределение
F (0 = ехр (—Х0.
Тогда процесс восстановления на-
зывают пуассоновским потоком, име-
ющим плотность / (0 = X ехр (—Х0.
Характеристиками пуассоновского
потока восстановления являются сле-
дующие:
вероятность наступления k отказов’
(восстановлений) до момента времени t
P{v(/) = *} = ^-exp(-M);
к> •
плотность восстановления
А=1
функция восстановления
t
Н (t) = J h (х) dx = Х0
о
распределение остаточного времени
жизни
PKf>x} = exp[-X(/4-x)]4-
t
4- j X ехр [— X (t 4~ х — u)]du =
0
= exp (—Xx).
Таким образом, для пуассоновского
потока остаточное время жизни имеет
такое же распределение, что и полное
время жизни.
Асимптотические характеристики
процесса восстановления. При боль-
ших t справедливо приближенное ра-
венство Н (0 « t/T. При этом случай-
ное число отказов до момента t имеет
асимптотически нормальное распре-
деление с математическим ожиданием
Му (0 « ИТ и дисперсией Dv (0 «
ж сИТ9. Этот результат можно ис-
пользовать для расчета запасных эле-
ментов на заданный период времени,
если восстановление осуществляется
путем замены. Число таких замен за
время t равно v (0. Поэтому число
запасных элементов п0 должно выби-
50
Расчет надежности элементов и последовательных систем
раться таким, чтобы Р {v (0 п0) =
= 1 — £, где £ — малое число, сте-
пень риска. Пусть время t велико, т. е.
t » Т. Тогда v (0 имеет приближенно
нормальное распределение. Выбирая
число Xi таким, чтобы соблюдалось
равенство Ф (х|) = 1 — £, можно вы-
числить число запасных элементов
п0 ~ tlT + с вероятностью
1 — £. Этого числа элементов доста-
точно на время работы, равное t.
3. ПОСЛЕДОВАТЕЛЬНЫЕ
СИСТЕМЫ
Последовательным, в смысле надеж-
ности, называют такое соединение эле-
ментов в системе, при котором отказ
хотя бы одного элемента приводит
к отказу всей системы.
Большинство типов механических
систем и конструкций, многие радио-
технические, электромеханические,
оптико-механические, электронные
средства представляют собой системы,
не имеющие структурной или времен-
ной избыточности. Высокий уровень
надежности таких систем достигается
за счет использования надежных эле-
ментов, правильного учета и создания
необходимых условий эксплуатации,
контроля технического состояния и,
при необходимости, их восстановления
путем ремонта или замены отказавших
элементов.
Последовательное соединение эле-
ментов в смысле надежности не обяза-
тельно означает, что реальное соеди-
нение этих элементов будет последо-
вательным. Например, если элементы
электрической схемы соединены парал-
лельно, но отказ их имеет характер
короткого замыкания, то в смысле
надежности эти элементы соединены,
последовательно. Аналогичные ситу-
ации встречаются в пневматических
и гидравлических схемах, когда отказ
какого-нибудь трубопровода или
клапана приводит к отказу системы.
Элементы последовательной си-
стемы могут иметь внутри себя раз-
личное резервирование (нагрузочное,
структурное), однако, когда они рас-
сматриваются в составе системы, иссле-
дователя интересуют только их внеш-
ние, потребительские свойства (масса,
габариты, производительность и т. п.),
а также надежность. Одной из важных
задач проектирования является соз-
дание такой системы, в которой отказы
любого элемента или группы элемен-
тов не влияли бы на надежность (не
приводили к отказу) других элементов
системы. Поэтому наиболее часто ис-
пользуемый расчетный случай являет-
ся такой, когда отказы элементов
считаются независимыми.
Последовательные системы могут
быть невосстанавливаемыми и восста-
навливаемыми, контролируемыми по-
стоянно или периодически.
НЕВОССТАНАВЛ ИВАЕМЫЕ
ПОСЛЕДОВАТЕЛЬНЫЕ СИСТЕМЫ
Случайная наработка до отказа си-
стемы, состоящей из m последовательно
соединенных невосстанавливаемых
элементов, равна минимальному зна-
чению случайных наработок ее
элементов. Если известны распределе-
ния до отказа i независимых элементов
(I = 1, /п), то надежность системы для
любого заданного времени t0 будет
m
р (*о)=П Pi (м.
i=l
Численными методами можно опре-
делить точное значение наработки до
отказа системы по формуле
оо
Т = J Р (0 dt.
о
Экспоненциальное распределение. Из
предположения о стационарности по-
тока отказов элементов следует, что
Pi (0 = ехр (—Az0; тогда
m
Р Go) = П ехр (—Kit0) —
i=l
/ m \
= ехр I —0) J Xj = ехр (—Af0),
X /
где If и А — интенсивность отказов
соответственно элементов и системы.
В табл. 8 приведены точные и при-
ближенные выражения для основных
показателей надежности последова-
Последовательные системы
51
тельной системы при экспоненциаль-
ном распределении наработок до отказа
ее элементов |3], Приближенные вы-
ражения получены при условии, что
Л/о < 1.
Все характеристики надежности
системы можно получить, если изве-
стны А/ всех элементов. В реальных
условиях эксплуатации kt зависят от
условий и режимов функционирования.
На стадиях проектирования бывает
затруднительно получить зависимости
интенсивности отказов от условий ра-
боты всех элементов: во-первых, в но-
вых системах часто используют новые
элементы, о которых еще нет достовер-
ных данных об их надежности по
результатам эксплуатации; во-вторых,
на ранних стадиях проектирования
недостаточно известны условия работы
каждого элемента.
Поэтому оценки надежности, полу-
чаемые описываемым методом, наи-
более пригодны для сравнительного
анализа надежности различных ва-
риантов системы, а не для,, точной
оценки надежности конкретного ва-
рианта системы. На завершающих ста-
диях разработки, когда известны усло-
вия работы и характеристики на-
дежности всех элементов, этот метод
может быть применен для окончатель-
ного расчета надежности системы.
В приближенных расчетах прини-
мают, что все однотипные элементы
равнонадежны, т. е. независимо от
режимов работы имеют одинаковую
интенсивность отказов, равную сред-
нестатистическому ее значению.
Тогда
Р (^о) — ехр I /о fiikt j ?
\ 1=1 /
Т = 1/Л= 1/( £пДг),
/ \i=l /
(1)
где щ и kt — число и среднестатисти-
ческая интенсивность отказов элемен-
тов t-ro типа; г — число типов эле-
ментов.
Как правило, не все элементы рабо-
тают непрерывно от момента начала
работы системы и до окончания. Счи-
тая отказы составных частей системы
8. Показатели надежности
последовательной системы
Показа- тель Точное выражение Прибли- женное выражение
Q(t0)
P(t+ t0)
Q (/ +10)
exp (—A/o)
1 — exp (—A/o)
exp (—A/o)
1 — exp (—A/o)
1/A
1 — Л/о
Af0
1 — A/o
A/q
независимыми, надежность системы
можно вычислить по формуле
Р (/0) = Pj (Д/х) Р2 (Д/2) ... Рт (Д/т) =
t=i
(2)
где Pi (Mt) — надежность i-ro эле-
мента в течение промежутка времени
д^ (д^ =
где и — время начала и конца
работы i-ro элемента. Используя экс-
поненциальный закон надежности,
можно записать
Р, (Д<() = ехр [-ХД«?-«?)].
Тогда
т
Р (0 .= ехр
-«?) • (3)
На рис. 2 приведена зависимость
вероятности безотказной работы P(t)
системы, состоящей из четырех эле-
ментов. Зависимости Pi(t) для от-
дельных элементов показаны штрихо-
выми линиями.
Кривая P(t) имеет изломы в мо-
менты времени, соответствующие мо-
ментам начала и окончания работы
отдельных элементов. Поэтому форму-
лами (1) нужно пользоваться для
расчета не всей системы, а только
отдельных частей, у которых элементы
работают одновременно. Надежность
52
Расчет надежности элементов и последовательных систем
Рис. 2. Зависимость Р (t) в случае неодно-
временной работы элементов
образом, можно установить критиче-
ские элементы, от которых в первую
очередь зависит надежность системы.
При значениях надежности системы,
близких к единице, используют при-
ближенные формулы:
N N
Пр<(0 = 1-£<?1 (0:
1=1 1=1
PN (0 = 1- NQ (t);
системы в целом в течение времени /0
на основании (2) и (3)
Р (6) = Pl (t,) Рг (<1) ₽з (<з - <1) X
X Р4 (^э — ехр { А]Уо -[- -|-
+ ^8 (G — ^i) 4" ^4 (/в — ^а)}-
При неодновременной работе эле-
ментов в общем случае справедлива
оценка
С0
Т = j Р (0 dt.
о
Так как сведения о надежности эле-
ментов не всегда точны, то целесо-
образно вести расчет проектируемой
системы для двух крайних значений
интенсивности отказов, устанавливая
тем самым границы, внутри которых
будут находиться количественные
характеристики надежности. Таким
Vp(0 =1-<?(0/Л1.
На практике часто наблюдается за-
висимость элементов в последователь-
ной системе, когда ухудшение харак-
теристик одного элемента приводит
к отказу другого элемента или си-
стемы в целом. Корреляционная зави-
симость между элементами положи-
тельна. В этом случае
р(*о)<Пл (0;
i=i
со N
Л < f П Pl (0 dt.
О f=l
ВФИ-распределение. В табл. 9 даны
нижняя и верхняя оценки для Р (t)
и Т последовательной системы, все
элементы имеют ВФИ-распределение
наработки до отказа Т[.
9. Показатели надежности последовательной системы
из «стареющих» элементов
Показа- тель Нижняя граница Верхняя граница Интервал, для которого справедлива граница
Р(П ехр(-/)(27г) 4=1 / 1 ‘< Л1)
0 / k . \ ехр — S | \ f=l / Л^+1)
т / m \-1 4=1 / min Tt Для любых Tt
Последовательные системы
63
Через T(k) обозначена k-я из
величин Ti, упорядоченных по воз-
растанию, т. е.
Т(1)= min Ть
(2) — m’n (Т i I i > T’d))»
Численные значения границ для Т
могут быть получены численным ин-
тегрированием соответствующих гра-
ниц вероятности безотказной работы.
ВОССТАНАВЛИВАЕМЫЕ
ПОСЛЕДОВАТЕЛЬНЫЕ СИСТЕМЫ
Приведенные ниже аналитические
выражения для различных показателей
надежности восстанавливаемых си-
стем получены в предположении, что
все распределения наработки до отказа
и времени, восстановления отдельных
элементов являются экспоненциаль-
ными, т. е. процесс функционирования
системы описывается однородным
марковским процессом. Это условие
справедливо, если средняя наработка
до отказа элементов системы значи-
тельно больше времени их восстановле-
ния. На практике это условие обычно
выполняется.
В табл. 10, 11 приведены показатели
надежности последовательных систем
из различных и одинаковых элементов.
10. Показатели надежности для последовательной системы
из N различных восстанавливаемых элементов
Показа- тель Точное значение Приближенное значение Условия приближения
При отказе система выключается
г ‘/л —
т (i/Д) s г, i=l —' —
P(to) ехр (—At0) 1 — Af0 At0< 1
К / N \-I (1+2 Vi) N 1 - s Vi i=l max vt -y-
К + (1 — К) X X exp t (л+ -i-) 1 — At 1 — exp Лт< 1
Я (/0) К exp (—At0) 1-Л(т+« A^o < 1, Лт< 1
При отказе система не выключается. Восстановление неограниченное
Т | 1/А | — | —
T 1 Л - w П(1+т0-1 L J i N +e?< " 1 maxyf « —
54
Расчет надежности элементов и последовательных систем
Продолжение табл. 10
Показа- тель Точное значение Приближенное значение Условия приближения
Р(4) ехр (—А/о) 1 — м Л/о« 1
К N П с1+ъгя 1-S 1=1 max Yf С 1/N i
Не приводится 1 — Лт X X 1 — ехр Лт< L
К ехр (—Л/о) 1 - Л (т+ (,) At0 « 1, Ат « 1
Принятые обозначения: Л-г/Р-ь где М — интенсивность
отказа i-ro элемента; Ui — интенсивность восстановления i-ro элемента; Л =
N
= — средняя наработка системы между отказами; т — среднее время
/=1
восстановления системы; Р (t0) — вероятность безотказной работы системы; К —
стационарный коэффициент готовности системы; К (/) — нестационарный коэф-
фициент готовности системы; R (t0) — стационарный коэффициент оперативной
готовности системы.
11. Показатели надежности для последовательной системы
из N одинаковых восстанавливаемых элементов
Показа- тель Точное значение Приближенное значение Условия приближения
При отказе система выключается
т \/(NK) — —
т 1/р —
P(fo) ехр (—NM0) 1 — NM0 < 1
К (1 + Ny)~l 1 — Ny
К4-(1-Юх X ехр £ —? ) 1 —*пкт X Г, / * XI X 1 — ехр Мт < 1
Последовательные системы
55
Продолжение табл. 11
Показа- тель Точное значение Приближенное значение Условия приближения
К ехр (—дед 1-М(т+/„) NM0 « 1 Мт « 1
При отказе система не выключается. Восстановление неограниченное
Т l/(Nx) —
X* ТТЛ 1/p 1
Р(/о) ехр (—Nht0) i — М/о < 1
к (1 + y)-N 1 — Ny
К (О Не приводится 1 — NKx X r. ( t \ 1 • X 1 — exp ( — ) Мт < 1
к ехр (—лад 1 _ NK (T* + t0) «1 1
При т отказе система не выключ 1/NK ается. Восстановление огр аниченное
X N Л 1)! i=l 1/p, (^-1)Т j И-
PW ехр (—NKt0) 1 — MZ0 М/о « 1
к N WI2 (N- 1)1 L t=0 J -I f 1 — Ny Ny < 1
R (to) К ехр (—Nht0) 1 - N + t) АЧЧ+т)«1’
Принятые обозначения см. примечание к табл. 10.
56
Расчет надежности элементов и последовательных систем
КОЭФФИЦИЕНТНЫЙ МЕТОД
РАСЧЕТА НАДЕЖНОСТИ
Коэффициентный метод расчета
применяется, когда в системе имеется
много новых элементов, по которым
отсутствуют справочные данные об их
надежности [2].
Основу метода составляют следу-
ющие допущения:1
1) время возникновения отказов
является простейшим потоком случай-
ных событий, удовлетворяющих усло-
виям стационарности, отсутствия
последействия, ординарности;
2) интенсивность отказов всех эле-
ментов системы изменяется в зависи-
мости от условий эксплуатации в оди-
наковой степени.
Первое допущение означает, что от-
казы являются событиями случайными
и независимыми, отказ любого эле-
мента приводит к отказу всей системы
и интенсивность отказов является вели-
чиной постоянной. Допущение утвер-
ждает справедливость экспоненциаль-
ного закона надежности для сложных
систем. Второе допущение означает, что
при различных условиях эксплуата-
ции справедливо соотношение
= Kj -- const, (4)
где Хо — интенсивность отказов эле-
мента системы, количественные ха-
рактеристики которого известны
достоверно. Элемент, имеющий интен-
сивность отказов Хо, в дальнейшем
будем называть основным элементом
системы, а коэффициент Ki — коэффи-
циентом надежности i-го элемента.
Полагая, что все однотипные эле-
менты равнонадежны, и учитывая со-
отношение (4), запишем выражения
для вероятности безотказной работы,
интенсивности отказов и нароботки
до отказа системы:
Р (0 = ехр I —&0 2
\ 4=1
== ехр (—At);
Л = 1, f NiKf,
4=1
= Т0 /(SWil (5)
I w=l /
где To — среднее время безотказной
работы основных элементов.
Из (5) следует, что для вычисления
количественных характеристик до-
статочно знать коэффициенты надеж-
ности Ki, число элементов и ин-
тенсивность отказов основного эле-
мента Xq. Из анализа справочных
данных по интенсивности отказов эле-
ментов можно установить максималь-
ные и минимальные значения Ki основ-
ных элементов, используемых в изде-
лии, т. е. определить диапазон изме-
нения Ki (Ki max, Ki min)- Уточнения
коэффициентов производят с учетом
ожидаемого повышения надежности
элементов вследствие их усовершен-
ствования и повышения качества из-
готовления или мер по облегчению,
условий и режимов их работы.
При расчете надежности системы
коэффициентным методом целесооб-
разно вести расчет по блокам и строить
кривые Р (Хо/) для всех блоков системы
на одном графике. Это позволяет
наглядно сравнить блоки, выяснить
«слабые места», наметить пути по-
вышения надежности проектируемой
системы.
Для двух систем или блоков одной
и той же системы согласно (5) можно
записать:
Р, (4) = ехр
-Л, J KtNi.,
4=1
/ Га
Р2 (t) = ехр I — Ло 2 KiNit 2
\ i=i
Л,-*, J KiNi.t,
4=1
Гг
Л2 = Хо 2 KiNi, al
4=1
/ V 4=1 J
Последовательные системы
57
или
= 2мм /(2^./) =
4=1 I \ 1=1 /
= 1пР2(0
In Pi (0 ’
Таким обр азом, для сравнения вари-
антов достаточно знать их элементный
состав и коэффициенты надежности.
Коэффициентный метод обладает
приемлемой для практики точностью
и позволяет значительно упростить
расчеты, если требования по надеж-
ности отдельных элементов (частей)
системы заданы не в виде их количе-
ственных характеристик, а в виде
г
J] NtKt- Тогда
i=l
Р (/) = ехр
S KiNit! +
г* rj 1
1=1 i=i j.
(6)
где гх, г2, гj — число типов эле-
ментов в блоках 1, 2, ...,/, Nilt ...,
Nij — число элементов! f-го типа в бло-
ках 1, 2, ..., /.
Зная требования по надежности на
систему P(t) в течение времени t
и интенсивность отказов основного
элемента Хо, из (6) получим
£ KtNtl + £ KiNi2 + +
1=1 4 = 1
ri
+ S = Р (О/(Ло)-
i=l
Если не предпринимаются специаль-
ные меры по обеспечению надежности,
то для проектируемой системы обычно
2ВД1+2М|>+'" +
1=1 4=1
г}
4=1
или
ai 2 11 °2 Zj «#+’•• +
i=l 1=1
rJ
~~l~ g7 Zj KiNij — Р
Л=1
Весовые коэффициенты alt az, aj
распределяются по элементам системы
пропорционально их сложности так,
чтобы равносложные элементы были
равнонадежными. Тогда можно пред-
ставить задаваемые требования к на-
rk
дежности системы в виде \\ KiNik-
4=1
Имея таблицу значений Kt, конструк-
тор может выбрать тип элементов
и их число в данной системе. Если
на практике невозможно удовлетворить
заданному значению суммы вида
rh
KiNik, то необходимо предприни-
i=i
мать специальные меры по повышению
надежности элемента.
Коэффициентный метод расчета поз-
воляет:
с приемлемой точностью сравнить
надежность вариантов систем или их
частей при ограниченных данных по
надежности элементов и выбрать наи-
лучшйй вариант;
достаточно точно пересчитать коли-
чественные характеристики надеж-
ности при изменении режимов работы
системы;
упростить расчеты на раннем этапе
проектирования.
Границы применения коэффици-
ентного метода такие же, как и в ме-
тодах, основанных на экспоненциаль-
ном законе.
СПИСОК ЛИТЕРАТУРЫ
1. Вопросы математической теории
надежности/Под ред. Б. В. Гнеденко.
М.: Радио и связь, 1983. 367 с.
2. Половко А. М. Основы теории на-
дежности. М.: Наука, 1964. 446 с.
3. Надежность технических систем:
Справочник/Под ред. И. А. Ушакова.
М.: Радио и связь, 1983. 606 с.
Глава 3.
Расчет надежности систем
со структурной избыточностью
*
1. СПОСОБЫ СОСТАВЛЕНИЯ
УСЛОВИЙ РАБОТОСПОСОБНОСТИ
СИСТЕМЫ
Способы описания условий работо-
способности системы. Чтобы рассчи-
тать надежность системы, нужно пре-
жде всего описать условия ее работо-
способности, т. е. условия, при кото-
рых она может выполнить стоящую
перед ней задачу. Это можно сделать
разными способами:
а) словесным описанием;
б) графически (с помощью струк-
турной схемы системы);
в) аналитическй (например, с по-
мощью функций алгебры логики —
ФАЛ).
Словесное описание условий рабо-
тоспособности системы является наи-
более распространенным и простым,
но, как правило, очень громоздким
и недостаточно четким.
Графическое описание с помощью
структурной схемы системы является
очень наглядным, но, как правило,
неполным и неоднозначным.
При построении моделей надежности
простых структур и формализации
процессов их функционирования соз-
даются структурные схемы в виде
ориентированного, полуориентиро-
ванного и неориентированного гра-
фов. Во многих случаях структурная
схема содержит полную .информацию
о логике возникновения отказов в си-
стеме. Тогда ее можно рассматривать
как форму представления логических
связей между событием «отказ си-
стемы» и событиями «отказы элемен-
тов», причем как форму, адекватную
логической функции работоспособ-
ности. Такое соотношение между
структурной схемой и ФАЛ харак-
терно для многосвязных информацион-
ных систем с одним источником ин-
формации, одним получателем при
полном оповещении о состоянии сети,
для электроэнергетических систем с од-
ной группой потребителей без огра-
ничения мощности генераторов и про-
пускной способности коммутационной
аппаратуры и ряда других систем.
Во всех этих случаях система счи-
тается работоспособной при наличии
хотя бы одного работоспособного пути
в структуре между ее полюсами.
В дальнейшем такие системы будут
называться системами первого типа.
В системах второго типа структурная
схема не может отразить полностью
логику возникновения отказа в систе-
ме. Для этого есть несколько причин.
Первая состоит в том, что работо-
способность любого пути между по-
люсами может зависеть от работо-
способности элементов, входящих
в другой путь. Отразить эту зависи-
мость в структурной схеме с (?ес-.
повторным вхождением элементов не
удается. Поэтому структурная схема
оказывается неадекватной логической
функции работоспособности и является
лишь вспомогательным средством
при описании математической модели
надежности системы.
Второй причиной, усложняющей
логику работы системы, ярляются пра-
вила управления структурой. Учет
этих правил может приводить к тому,
что не все работоспособные пути можно
использовать для связи входного и
выходного полюсов (из-за различного
рода ограничений, правил доступа
к передаваемой информации, катего-
ричности сообщений, неполноты
информации о наличии работоспособ-
ного пути и др.).
Способы составления условий работоспособности системы
59
Таким образом, условия работо-
способности сложных технических
систем не всегда сводятся к двух-
полюсной схеме функционирования.
Структуры многих систем лишь ча-
стично выражают способ организации
целого из состава частей, и в общем
случае требуется дополнительное ана-
литическое описание условий работо-
способности.
Формализованное (аналитическое)
описание условий работоспособности
системы (УРС) является наиболее чет-
ким, полным, однозначным, но пока
еще малораспространенным и непро-
стым.
При исследовании надежности
сложных систем целесообразно ис-
пользовать все способы описания усло-
вий работоспособности, компенсируя
их взаимные недостатки и дополняя
одно описание другим.
Недостатком многих существу-
ющих методов исследования надежно-
сти технических систем является имен-
но невысокая степень формализации
объекта исследования. Условия
р аботоспособности системы часто
выглядят весьма расплывчато, не-
конкретно.
В связи с многофункциональным
характером сложных технических
систем следует дробить задачи, а не
стремиться к описанию единой сверх-
задачи.
Основные понятия, используемые
при формализации условий работоспо-
собности структурно-сложных систем
на языке алгебры логики. Основным и
общим во всех работах, связанных
со структурными исследованиями, яв-
ляется стремление очистить объект
исследования от всего вторичного, рас-
смотреть лишь его наиболее характер-
ные признаки. При иггпедсг.г.;и,а си-
стем на ранних этапах их проектиро-
вания объект исследования оказывает-
ся «очищенным» естественным способом
из-за недостатка информации о его
свойствах.
Таким образом, в качестве модели
системы выбирают структурную
схему, изображающую некоторую
совокупность отношений.
Структурная схема системы —
графическое изображение совокуп-
ности ее структурных элементов и
функционально-логических связей ме-
жду ними, предназначенное для фор-
мализации УРС. На структурной схеме
все элементы системы равноценны,
и это подчеркивается их одинаковым
графическим изображением (в виде
кружка или квадрата) и одинаковым
обозначением одной и той же буквой
с различными номерами. Способ со-
единения элементов в функциональной
схеме раскрывает структуру системы.
Структурный элемент системы —
условный эквивалентный элемент,
обладающий количественными ха-
рактеристиками надежности некото-
рой совокупности последовательно
соединенных (в функциональном смыс-
ле) реальных элементов системы.
В литературе по надежности доста-
точно подробно описана модель функ-
ционирования системы, используемая
для исследования надежности систем
с разветвленной структурой, которая
может находиться только в двух ха-
рактерных состояниях: в состоянии
полной работоспособности {у = 1) и
в состоянии полного отказа (у — 0).
При этом предполагается, что дей-
ствие системы детерминированно зави-
сит от действия ее элементов, т. е. у
является функцией xlf х2, .... Х[, хп,
которые в свою очередь могут нахо-
диться также только в двух несовме-
стных состояниях: либо в состоянии
полной работоспособности (х{ = 1),
либо в состоянии полного отказа (х; =
= 0). В целом это предположение
является до некоторой степени услов-
ным. Однако оно обладает тем бес-
спорным достоинством, что приводит
к модели, которая имеет строгое ана-
литическое решение и является доста-
точно реальной.
Функцию алгебры логики, связыва-
ющую состояние элементов с состо-
янием системы
У (*i...хп) = у (х), (1)
будем называть функцией работо-
способности системы (ФРС) или усло-
виями работоспособности системы
(УРС).
Функцию у (хъ ..., хп) называют
монотонной, если для любых наборов
(«!, ..., ап) и (pj..рп), таких, что
ai Pi, имеет место соотношение
^(«i, ..., OtnXHPi.......Рп)- (2)
во
Расчет надежности систем со структурной избыточностью
Системы, удовлетворяющие этим
условиям, называют системами с моно-
тонной структурой, или связанной
структурой, или когерентной струк-
турой.
Всякая ФАЛ, записанная через
конъюнкцию и дизъюнкцию (без отри-
цания), задает некоторую монотон-,
ную функцию. Для монотонных струк-
тур функцию работоспособности
системы можно записать с помощью
так называемых кратчайших путей
успешного функционирования и ми-
нимальных сечений отказов системы.
Кратчайший путь успеш-
ного функционирования
системы (КПУФ) представляет собой
такую конъюнкцию ее-элементов, когда
ни одну из компонент ее нельзя изъять,
не нарушив функционирования си-
стемы. Такую конъюнкцию можно
записать в виде следующей ФАЛ:
= A xi> (3)
где Кй0/
означает множество номеров,
соответствующих данному пути.
Иначе говоря, кратчайший путь
успешного функционирования си-
стемы описывает один из возможных
самостоятельных вариантов выполне-
ния задачи, стоящей перед системой,
с помощью минимального набора ра-
ботоспособных элементов, абсолютно
необходимых для осуществления дан-
ного варианта работы системы.
Минимальное сечение
отказов системы (МСО) пред-
ставляет собой такую конъюнкцию из
отрицаний ее элементов, когда ни одну
из компонент нельзя изъять, не нару-
шив условий неработоспособности
системы. Такую конъюнкцию можно
записать в виде следующей ФАЛ:
S/ =
А
itKSj
х1>
(4)
где Ksf означает множество номеров,
соответствующих данному сечению.
Другими словами, минимальное
сечение отказов системы описывает
один из возможных способов наруше-
ний работоспособности Системы с по-
мощью минимального набора отказав-
ших элементов.
Каждая избыточная система имеет
конечное число кратчайших путей (/ ~
~ 1,2, ..., d) и минимальных сече-
ний (/ — 1,2,..., т). Используя эти
понятия, можно по-разному записать
условия работоспособности системы:
а) либо в виде дизъюнкции всех име-
ющихся кратчайших путей успешного
функционирования
d
.....хп) = V =
1=1
A Х1 »
»с
б) либо через конъюнкцию отрица-
ний всех минимальных сечений от-
казов
т
y(xi.....хп) = Д s'i =
tn
(6)
Таким образом, условия работоспо-
собности реальной системы можно
представить в виде условий работо-
способности некоторой эквивалентной
(в смысле надежности) системы, струк-
тура которой представляет параллель-
ное соединение кратчайших путей
успешного функционирования, или
другой эквивалентной системы, струк-
тура которой представляет последова-
тельное соединение отрицаний мини-
мальных сечений.
Пример 1. Составим условия работо-
способности автономной электро-
энергетической системы, принци-
пиальная схема которой изображена
на рис. 1,а. Пусть для этой системы
необходимо оценить надежность
обеспечения питанием ответственных
потребителей, подключенных к распре-
делительному щиту РЩ1.
Решений. Поставленную за-
дачу можно выполнить с помощью
различных комбинаций элементов
системы. В самом деле, указанные
потребители получают питание, если
будут исправлены генератор Г7, глав-
ный распределительный щит ГРЩГ,
кабель К1 и распределительный щит
РЩ1, или если будут исправны гене-
Способы составления условий работоспособности системы
61
ратор Г/, ГРЩ1, перемычка П, ГРЩ2,
кабель К2 и РЩ1, или если будут
исправны генератор Г2, ГРЩ2, ка-
бель /С2 и РЩ1, или если будут исправ-
ны генератор Г2, ГРЩ2, перемычка 77,
ГРЩ1, кабель К1 и РЩ1.
Если это громоздкое словесное описа-
ние перевести на язык алгебры логики,
то ФРС данной системы с помощью
КПУФ в матричной форме запишется
следующим образом:
y(xlf
Рис. 1. Схемы автономной электроэнергети-
ческой системы
XjX3X5X7
XiX3X6XAX6X7
х2х4хвх7
х2хЛх8х3х5х7
(7)
где конъюнкции обозначены располо-
жением логических символов в строке,
а дизъюнкции — их расположением
в столбце.
К логическим матрицам применимы
все известные преобразования ал-
гебры логики. Так, переместительный
закон конъюнкции допускает пере-
становку логических символов в стро-
ке, а переместительный закон дизъ-
юнкции — перестановку строк логи-
ческой матрицы.
Работоспособность этой же си-
стемы через минимальные сечения от-
казов можно записать в следующем
виде:
(8)
Условия работоспособности (7) и
(8) графически можно представить
в виде двух схем (рис. 2), эквивалент-
ных в смысле логики реальной си-
стеме, структурная мостиковая схема
которой приведена на рис. 1, б.
Действительно, из рис. 2 следует,
что поставленная перед системой за-
дача (питание потребителей от щита х7)
будет выполнена, если сохранится
хотя бы один из четырех путей успеш-
ного функционирования или при ус-
ловии исправности всех десяти сече-
ний данной системы.
Формализованный способ составле-
ния функции работоспособности си-
стемы с помощью ЭВМ. В соответствии
с этим способом сначала необходимо
пронумеровать на структурной схеме
системы все вершины. Затем следует
вычертить так называемый граф пе-
реходов (или логических связей), ко-
торый представляет собой структуру,
состоящую из вершин и ориентиро-
ванных дуг, изображаемых в виде
линий между парами вершин и снаб-
женных стрелками, указывающими на-
правление от одной вершины к дру-
гой. Обозначение дуг (Ь) записыва-
ется в виде конъюнкций тех элементов,
работа которых обеспечивает связь
соответствующих вершин. Граф пере-
ходов дает возможность исследователю
отчетливо представить различные
свойства системы, в том числе со-
ставить ФРС формальными метода-
ми (в отличие от эвристических).
В тех случаях, когда указанная
формализация не может быть выпол-
нена визуально или когда граф пере-
ходов настолько сложен, что исполь-
зование визуальной методики бес-
полезно, необходимо составить матри-
цу переходов. Матрица переходов (со-
единений, смежности или непосред-
ственных связей) является математи.
ческой копией графа переходов.
62
Расчет надежности систем со структурной избыточностью
Рис. 2. Логические схемы работоспособности системы
Пусть матрица переходов состоит
из k строк и k столбцов (где k — число
всех вершин). Обозначим булеву мат-
рицу переходов через || С ||. Элемент
(i, j), т. е. содержимое клетки, распо-
ложенной на пересечении i-й строки
уй /-го столбца матрицы ||С||, обозна-
чают через Ctj и определяют следую-
щим образом: '
если вершина i логически
связана с вершиной /,
U,
если эта связь
отсутствует,
если i = /.
(9)
Затем с помощью ЭВМ формируется
логическая функция работоспособно-
сти системы у (xj, хп) путем умно-
жения булевой матрицы переходов
саму на себя г раз (г k) и соответ-
ствующих преобразований логических
переменных, входящих в элементы
матрицы |]С||. Указанные преобразо-
вания должны выполняться по пра-
вилам и законам алгебры логики.
Каждый элемент матрицы [|С[| в соу
ответствии с условием (9) означает
только непосредственные связи вер-
шин. Опосредованные связи, состоя-
щие из нескольких последовательных
дуг, будем связывать путями, а число
дуг, входящих в путь, — длиной
пути. Возводя матрицу непосредст-
венных связей, например, в квадрат,
можно установить все связи длиной
в одну и две дуги; возводя в куб, —
Рис. 3. Мостиковая система (а) и граф переходов (б)
Способы составления условий-работоспособности системы
63
получить все связи длиной в одну,
две и три дуги, и так далее до г /г.
Пример 2. Составим функцию работо-
способности простой мостиковой си-
стемы, изображенной на рис. 3, а,
формализованным методом.
Решение.
Пронумеруем все вершины цифрами
1, 2, 3, 4.
Вычертим граф переходов, как по-
казано на рис. 3, б.
Составим матрицу переходов в виде
табл. 1.
Перемножим эту матрицу 3 раза
саму на себя:
1. Матрица переходов
Вершина Вершина
1 2 3 4
1 1 *1 *2 '0
2 0 1 *5 *3
3 0 *6 1 *4
4 0 0 0 1
х2
1 хБ
хБ 1
О О
О
*з
*4
1
1
0
0
0
*1
1
о
ха 0
Хъ х3
1 хл
0 1
Ы V *i’Q V *2’0 V 0-0
0-1 V Ь0 V *6’0 V *3-0
о-1 v *6-0 V 1’0 V хго
о-i v о-о v о-о v i-о
1 -*i V *1-1 V *2 -*б V 0-0
0-Xi V 1 -1 V *Б’*Б V *3’0
0- Xi V *Б’ 1 V 1*6 V *4’0
0-Х1 V 0-1 v 0-х6 V 1-0
1 ’*а V.*i’*6 V *2’ 1 V 0-0 1 • о v Xi-х3 v *2-*4 V 0-1
0-Ха V 1’*Б V *б'1 V *3’0 0-0 V 1-*3 V *Б’*4 V *3’1
0-Ха V Х6’Хб V 1 ’ 1 V *4'0 0-0 V *5 ’ *3 V 1 *4 V *4’ 1
0 ха V 0-хБ V 0-1 v 1’0 0-0 V 0-х8 V 0-х4 V 1’1
1 хг V *2*6 *2 V *1*6 *1*3 V *2*4 ;
0 1 ХБ Х3 V *4*6
0 хБ 1 х4 V *3*6
0 0 0 1
11С II3 = 1 *1 V *2*Б *2 V *1*6 *1*3 V *2*4 х 1 Xi ха 0
0 1 ХБ Х3 V *4*5 0 1 хБ х3
0 *Б 1 х4 V *3*6 0 хБ 1 х4
0 0 0 1 0 0 0 1
= bl V (*1 V *2*б)’О V (*2 V *1*б)’0 V (*1*3 V *2*4)’О
0.1 V I -0V *6 -0V (*з V *4*б)’о
0-1 V *6 -0V 1 -0V (*4 V *з*б)’о
о-i v о -оу о -оу 1 -о
l'*l V (*1 V *2*Б>’1 V (*2 V *1*б)’*Б V (*1*3 V *2*4)-°
0-Xi V 1 -IV *Б -*Б V (*з\/*4*б)’О
0’*1 V ХБ .I V 1 -*Б V (*4 V х8хБ).О
0-хх v о -IV о '*5 V 1 -о
64
Расчет надежности систем со структурной избыточностью
1-ха v (*i V х2хБ)-х6 V (х2 V ад») -1 V (*1*3 V ад)-о
о-х2V 1 -*bV -IV (х8\/ад)-0
о-х2 v хБ - хБ V 1 -IV (-*4 V ад»)-о
o-x2v о -*bV о -1V 1 -о
ьо v (*i V ад)-х8 V (*а V ад)--«4 У (адз V ад) -1
0-0 v 1 -*з V *6 -*4 V (^зУад)*1
0-0 у хл -ха v 1 *х4 V (*4Уадз)-1
0-0 V 0 -х8у 0 -х4 V 1 -1
= 1 Xi V ХВХ5 Х2 V Х1Х6 Х1Х8 V х2х8х6 V х2хл V Х1Х4Х5
0 1 хй ха V х4хБ
О хБ 1 х4 у х8хБ
ООО 1
На основании условий поставленной задачи (связь вершины 1 с вершиной 4)
запишем следующую ФРС:
У (Х1 Х8) = XjXg V Х2Х8ХЬ V *2*4 V *1ад = *1 Хз •
Х4Х5 (12)
Х2 *4
х8х6
В примере 2 формализованный ме-
тод составления ФРС оказался более
громоздким по сравнению с визуаль-
ным способом составления этой про-
стой ФАЛ. Но в случае сложной струк-
туры, когда визуальный способ ста-
новится малопригодным, с помощью
ЭВМ можно получить ФРС и сложной
системы.
Пример получения ФРС указанным
способом для случая, когда ФРС со-
держала 92 КПУФ, а также способ
составления ФРС (с помощью системы
логических уравнений), позволяющий
избежать многих ошибок на этапе
записи ФРС, приведены в работе [7].
2. ЛОГИ КО-ВЕРОЯТНОСТНЫЕ
МЕТОДЫ РАСЧЕТА СТРУКТУРНОЙ
НАДЕЖНОСТИ СЛОЖНЫХ СИСТЕМ
БЕЗ УЧЕТА ВОССТАНОВЛЕНИЯ
АЛГОРИТМ РАЗРЕЗАНИЯ
Покажем, как можно практически
осуществить переход от некоторой
ФРС к ее вероятностной функции
Вероятностной функ-
цией будем называть вероятность
истинности ФАЛ
Р{У(ХХ.....xn) = 1). (13)
Алгорим разрезания основан на (те-
ореме разложения ФАЛ, согласно ко-
торой ФАЛ путем вынесения какой-
либо переменной и ее отрицания можно
представить в виде
у(Хр ... Xa) = Xty[i) (Хц ..., 1, Xn)V
V (Хр хп). (14)
Таким образом, если аргумент xi
функции у является совместной двоич-
ной переменной, то путем преобразо-
вания (14) переходим к дизъюнкции
двух несовместных высказываний, при-
чем в первое высказывание аргумент х<
входит своим утверждением, а во
второе — отрицанием Хр Функции у у
и уй отличаются от функции у тем,
что в них везде вместо аргумента х/
поставлены соответственно единица и
нуль (в соответствии с этим выбраны
и индексы у функции уг и у0).
Логико-вероятностные методы без учета восстановления
65
Теорема разложения позволяет све-
сти мостиковую схему к последова-
тельно-параллельным структурам.
Действительно, если условие работо-
способности системы описывается урав-
нением (12), то, вынося аргумент хб
по формуле (14), получим
(15)
Упростим теперь функции /Д6' и
у'о°} с помощью правил алгебры логики
Вынося за скобки (х3 V х4) в выра-
жении для /А5’ и упрощая z/os’» окон-
чательно получим
*1 х3
х2 х4
*1*3
х2 х4
(17)
Из выражения (17) следует, что
мостиковая схема эквивалентна дизъ-
юнкции двух последовательно-парал-
лельных схем, в которых в первом слу-
чае точки 2 и 3 (см. рис. 3, а) замк-
нуты накоротко, а во втором — разомк-
нуты.
Чтобы не ошибиться при таких пре-
образованиях и выполнять их фор-
мально (не задумываясь над физиче-
ской стороной вопроса), применяем
алгоритм разрезания, который заклю-
чается в следующем.
1. Подсчитываем число вхождений
каждой буквы Х[ в уравнение функ-
ции у (xt, Хп):
т2, .... тп) = (тД. (18)
2. Среди чисел тг находим макси-
мальное и соответствующую букву
(не ограничивая общности, можно счи-
тать, что это будет хх) полагаем рав-
ной сначала нулю, затем единице,
и для каждого случая отдельно вы-
писываем результат подстановки соот-
ветствующей константы в у (хг,
*п):
*1 — 0; уо~у(О, х2, хп)—
= Ув(*а, *п): (19)
*1 “ I» У1 -~^(1| *2, *п) =
= У1 (*2, *п)- (20)
Эту операцию назовем разрезанием
до переменной хг.
3. Преобразовываем у9 и у±.
4. После применения указанных пре-
образований и упрощения функций у0
и у! может оказаться, что любая из
них либо превращается в константу,
либо принимает такой вид, что каждая
из оставшихся букв будет входить
в выражение функции не более одного
раза, либо принимает вид, когда хотя
бы одна из букв входит в выражение
функции более одного раза.
Проверяем/ какой из трех случаев
имеет место для и для уг.
5. Если имеет место третий слу-
чай, то для соответствующей функции
опять вычисляем величины (mt) для
всех оставшихся в явном виде букв
и опять производим разрезание функ-
ции по переменной, соответствующей
максимуму mt. Не ограничивая об-
щности, полагаем, что такой перемен-
ной окажется х2- Вновь полученные
функции обозначим
!/оо У о (9» *з» *п)
•••» *п); (21)
f/oi — !/о(1» *8»' *п) ™
Уш (*э> */&)♦ (22)
если разрезанию подвергалась функ-
ция у$, или
У in -~Уг (9, *э, -"» *п) =
Ую (*з» •••» *п)» (23)
Ум. — У! О» *з> *п) ~
=Уп (*з» ,-*n)» (24)
66
Расчет надежности систем со структурной избыточностью
если разрезанию подвергалась функ-
ция уг (может случиться, конечно,
что разрезаются обе функции: у0
и */i).
К полученной таким образом си-
стеме функции применяем упрощаю-
щие преобразования, а затем выпол-
няем действия, указанные в пп. 4
и 5. Эти действия выполняем до тех
пор, пока на очередном шаге не ока-
жется, что ни для одной из функций
не имеет места третий случай, ука-
занный в п. 4.
Рассмотренный процесс не бесконе-
чен, ибо если произвести разрезание
сразу по всем переменным, то полу-
чим только константы.
Пример 3. Применим алгоритм раз-
резания к ФРС (7), предварительно вы-
неся общий аргумент Xi за скобки:
х8) — х7
хг х3
х2 х4
х5
х8 х4 хв
х8 Х3 х5
= ХчУ*.
(25)
Решение. В уравнение для у*
буквы хх и х2 входят по одному разу,
а остальные — по два раза.
Среди чисел mi максимальным яв-
ляется число два, но букв, входя-
щих в (25) по два раза, пять. Поэтому
для первого разрезания можно взять
любую из них. Возьмем для примера
букву х8 и разобьем сложное собы-
тие у* на два несовместных события:
у* = Xi х3
х2 х4
хъ
х8 х4 Хе
Х8 х3 х8
Преобразуем у8 и yt\
У о — *1 х3
х2 Хд
У1 = X! Х3
х2 х4
хъ 0 хв 0 х4 Хд х3 х8 хг х8 1 х2 х4
х5 — Х1 Х3
1 Хд Хд
*6 х2 х4
1 Хз хъ
В уравнение (27) все буквы входят
только по одному разу, поэтому функ-
ция у0 будет бесповторной. Беспов-
торной формой ФАЛ называют та-
кую форму, в которой все буквы име-
ют разные номера. В уравнение (28)
буквы х3, х4, хБ и х6 все еще входят
по два раза, поэтому нужно продол-
Логико-вероятностные методы без учета восстановления
67
жить преобразование
разрезание,
например,
У1, произведя
по Лэ.
I Разрезаем функцию у^ по аргументу
л,,:
Функция г/10 будет бесповторной
функцией, а функцию у^ требуется
подвергнуть дополнительному разре-
занию по какой-нибудь из следующих
букв: х4, х5, лв.
Произведем разрезание по л4:
Преобразуем у110 и
Рио —
лх л6
О хв
Лэ 0 Лэ
х6
Рш =
х&
О
О
О
хл
Хъ
Хц
Хв
Х9
Х6
*1
О
68
Расчет надежности систем со структурной избыточностью
Теперь все функции стали беспов-
торными, не подлежащими дальней-
шему преобразованию.
Подставим все найденные функции
в уравнение (25), последовательно рас-
крывая значения аргументов:
х£ Уо
х8 х3 у10
х3 Уи
Хе
Х8
Уо
хз
хз
— х8
Ум
Х4 1/110 *8
Х4 Уш
Х1 Х3 х5
(35)
Уравнение (35) полезно представить в виде
(36)
| Хх I хв
I Ха I Хе
где буквами Н обозначены несовмест-
ные (ортогональные) гипотезы, т. е.
Н\ — х8, Я2 = XgX3, Я3 = х8х3х4,
Н8 — х8хах4. (37)
Расчеты надежности системы. с по-
мощью алгоритма разрезания целе-
сообразно сопровождать одновремен-
ным построением графа состояний
системы (рис. 4). Это особенно по-
лезно делать при большом числе раз-
резаний, что обеспечивает наглядность
и упорядоченность последующих ве-
Рис. 4. Граф состояния системы
роятностных вычислений по формуле
полной вероятности
Hf/(xi, ...» хп) = 1) = Яс =
т
= S Р (Я/) Р (У I Я/). (38)
i=l
где события Hi образуют полную груп-
пу несовместных гипотез, а Р {у | Hi)—
условные вероятности исправного со-
стояния системы при каждой гипотезе
Hi.
Для данных примера 3 формулу
(38) можно записать в виде
Р{у=1} = Р{х7=1}Р{^ = 1} =
= Р{х,= 1}[Р (Я1)Р(у*1Я1) +
+ Р (Нъ) Р (у* | Яа) + Р (Я8) X
X Р (у* | Н8) + Р (Я4) Р (у* I Я4)] =
= Р{Х7 = 1}[Р (x' = l}P{f/0=l) +
Ч- Р {х8х3 = 1} Р {l/io = 0 +
+ Р {х8ХзХ^ = 1} Р {f/110 = 1} +
+ р {ХвХЛ = 1) Р {уш = 1}]. (39)
Логико-вероятностные методы без учета восстановления
69
Если отказы элементов можно счи- I отдельные вероятности в (39)
тать независимыми событиями, то | равны
р {х, = t) = р-,-, /,« = 1) = С8; Р (if,, = 1} =
= 1 — (1 ^3*5) (1 ^2^4^e)» Р (х8хз = 1} = RbQs*
Р 0/10 == 1} = ^?2-^4^в» Р {*8^3X4 = 1} = R^R^O^'t
Р 0/uo = 1} = RiRtH Р {^8^3X4 = 1} = RsR^R^x Р {j/ш = 1} =
= (l-QiQa) (1 — QBQe)-
(40)
Приняв допущение о равной надеж-
ности всех элементов (Я* = /?а =
= ... = Rs = R), определим вероят-
ность безотказной работы системы
виде полинома
Р {у= 1} = Rc = R {(I — R) X
в
+ *3 [1 — (1 — /?)а]а} =
= 2R* + 2R* — ЫР + 2R*. (41)
МЕТОД расчета с помощью
АЛГОРИТМА ОРТОГОНАЛИЗАЦИИ
В некоторых случаях переход от
повторной ФАЛ к ВФ удобнее реали-
зовать (например, с помощью ЭВМ)
не по формуле полной вероятности,
а с помощью теоремы сложения вероят-
ностей несовместных событий. С этой
целью разработан специальный ал-
горитм, основанный на преобразова-
нии произвольной ФАЛ в ортогональ-
ную дизъюнктивную нормальную фо-
рму (ОДНФ).
ДНФ называют ортогональной ДНФ,
если все ее члены попарно ортого-
нальны. Две элементарные конъюнк-
ции называют ортогональными, если
их произведение равно нулю. Напри-
мер, произведение элементарных
конъюнкций хгх2 и XiX2x3 равно нулю,
так как одна из них содержит х2,
а другая х% и, следовательно, они
ортогональны.
Для описания алгоритма ортогонали-
зации сформулируем два утверждения.
Утверждение 1. Отрицание элемен-
тарной конъюнкции ранга г
^ = Ж1* Х2 х/ (42)
эквивалентно дизъюнкции
г a* tz af а. ос
а _
ХГ-1 */, 03)
члены которой попарно ортогональны.
Здесь «степень» аргумента х, означает
а. ( хь если at = 1;
х<‘== ' а (44)
v ( х{, если а{ = 0,
аг — двоичная переменная величина.
Преобразование (43) в частном слу-
чае (когда в элементарной конъюнк-
ции отсутствуют отрицания) имеет вид
(*1 ... *,)' =
Утверждение 2. Булева функция
y(xt, ...» хп), представленная в ДНФ
в виде
y(xlt
т
эквивалентна функции
#(хр .... *„)=к1 vk;k2v
V К{К'гКа V V WK ...
- <47)
70
Расчет надежности систем со структурной избыточностью
В матричной форме записи уравнения (46)
У{х1г
• ••> хп) —
и (47) будут иметь вид
Ki
*2
Кз
Теперь дадим краткое описание ал-
горитма преобразования функции
У (xlt .... хп) к ОДНФ.
1. Преобразовываем сначала функ-
цию у (xlt ...» хп) к ДНФ.
2. Производим нумерацию членов
ДНФ от 1 до т (т С 2п), причем
членам низшего ранга присваиваем
низшие номера.
3. Определяем ОДНФ функции
у (хг хп) с помощью преобразо-
вания (43).
Для уменьшения числа операций
целесообразно в конъюнкции K^K'z ...
K'i-iKi выполнить следующие упро-
щения: а) приравнять нулю те члены
ДНФ К; (/ < Z — 1), которые орто-
гональны члену Kt; б) приравнять
нулю те элементарные конъюнкции
отрицаний K'j (j i — 1)» которые
ортогональны Ki.
Преобразовав условия работоспо-
собности системы к ОДНФ, можно
приступить к вычислению вероят-
ности безотказной работы системы по
теореме
Р \.У (Xi, • • •» хп) = О = =
s
= S р {°«= о. («>
где Ot — ортогональные члены функ-
ции у (х1г ...» хп), записанной в
ОДНФ:
т s
y(xlt ...» Хп) — \/ Ki = V (50)
1=1 f=l
Пример 4. Применим алгоритм орто-
гонализации к той же функции (7),
которая рассматривалась в предыду-
щем примере.
Решение. Преобразуем функ-
цию у* к ДНФ:
У* =
Х1 Хз х6 = Хх Хз хБ
х8 хл хв хг х8 х4
ха хЛ хв х2 х4 хв
х8 Хз хБ Ха Хз х4
«в
Пронумеруем члены ДНФ (51) сле-
дующим образом:
Ki = Xi х$ хБ>
к. = Ъ
Кз — Х1 Х8 х4 хв х8,
Ке = Ха Хз Хд ХБ Х8.
Преобразуем уравнение (51) с уче-
том (52) к ОДНФ:
К{ К^ К’3 К4
Логико-вероятностные методы без учета восстановления
71
Отрицания элементарных конъюнк-
ций K'i выразим с помощью преобра-
зования (45):
х3
Хз
Х1
Хг х3
*1 *3 х'5
(56)
(55)
=
Определим теперь следующие конъ-
юнкции:
х'1 xi х3 4 х2 Х4 Х6.| = х2 х4 х6 Х1 Х2 х3 Х4 Xg (57)
X т К х1 х1 х2 х3 х4 х'5 х6
• I Ху х3 х4 х6 х8 I =
К*2 К3 =
Х1
Xi Х'3
Х1 Х3 х'5
= | Xi х£ х3 х4 х'5 х6
*2
х2 Х4
Х2 Х4
Хв
(58)
Х8
х4 х'6
Х4 Х6 х'9
• I х2 хэ х4 х5 х8| =
(59)
Подставляя (57)—(59)
чательно получаем
!/* — Xi Х3 х6
Х1 Х2 Х4 х6
* *1 Х2 Хз х4 х6
Xi £ 4^ л
Х1 х2 х3 Х4 Xg
х'1 х2 Х3 Х4 Xg
хб
Хв
Хб
Как следует из уравнения (60),
все члены этой дизъюнкции действи-
тельно попарно ортогональны. Урав-
нение (60) по внешнему виду очень
отличается от уравнения (35); тем
не менее оно приводит к тем же ко-
личественным результатам. Действи-
тельно, согласно формуле (49) имеем
Р {у = 1}=Р {*, = !)/> {»• = !} =
— R1 (^1^3^5 + Q1^2^4^6 4“
4“ -^1^2Сз^4^в 4\ 4~
4- RiQzRaRiQbReRe 4~
4- (61)
При одинаковой надежности всех
элементов вероятность безотказной ра-
боты системы
Р (г/ = 1}=Яс = Я[Яз + (1_я)Яз +
4- 7?2 (1 _ Р) R2 #4 (1 _ R
4-/?(1 — R) Я2 *(1 — R) R2 +
4-(1—/?)/?4 *(1~-Ю« =
= 2R* + 2/?6 — 5Я7 4- 2Я8, (62)
72
Расчет надежности систем со структурной избыточностью
что полностью совпадает с решением
(41).
ТАБЛИЧНЫЙ МЕТОД РАСЧЕТА
Практика расчетов надежности си-
стемы, насчитывающих не более 20
элементов, описанными выше мето-
дами показала, что в ряде случаев
эти логические преобразования бы-
вают весьма громоздкими, а число
слагаемых в формулах (38) и (49) не-
редко превышает 100'. При неболь-
шом числе (d < 10) членов ДНФ функ-
ции у указанные затруднения уда-
ется преодолеть с помощью табличного
метода расчета надежности си-
стем.
Он основан на использовании тео-
ремы сложения вероятностей совмест-
ных событий, в качестве которых
Здесь непосредственно выступают эле-
ментарные конъюнкции условий ра-
ботоспособности (или неработоспособ-
ности) системы, записанных в ДНФ
с помощью кратчайших путей успеш-
ного функционирования (3)
Р(ХХ, хп)== V 01 (63)
/=1
или минимальных сечений отказов (4)
tn
.... xn)- V Sj. (64)
Согласно этой теореме и выраже-
ниям (63) и (64) вероятность безот-
казной работы системы (или вероят-
ность ее отказа) можно вычислить
по формулам:
Р {$/(*!, ...» Xrt) -- I] = ==
( d 1
- р v 0i - S р {0i} -
I Г-1 ) у
- ЕЕ p<0i/\0j)-±
I i
4- Е Е £ р a 0j A 0h) -
k j i
• + (-1/-'₽(;?, Д A• • A^i);
(65)
P(y(*i» -•-» xn)~0} —Qc ~
= V sj= S F[$l)-
(P=I ) i
-2 2 p (Si л s>)
/ i
+ S S 2 P <S‘ A 5; Л S„) - +
A / i
+ (-i)m-‘ p (3, Л S, Л A sm),
(66)
где знаки суммы распространяются на
различные значения индексов i, /, k.
Несмотря на кажущуюся громозд-
кость формул (65) И (66), расчеты
надежности с их помощью оказывают-
ся достаточно простыми и легко конт-
ролируемыми. Для этого предлагается
проводить расчеты в табличной форме,
чем и объясняется название данного
метода расчета.
Согласно этому методу необходимо
составить специальную таблицу, в ко-
торой нужно разместить п строк (по
числу элементов в Системе) и =’
— 2d — I или с2 -- 2ni\ 1 столбцов,
причем 1
^1 “ Crf + ’ * 4“ Cd +
4- • •• 4~ Cj,
(67)
С2 = с1т + с*. + + с;„ +
। । /-.т
4~ • • • 4~ Ця»
> / w
где Cd — число сочетании из а по i.
В названиях строк указываются ве-
роятности безотказной работы эле - I
ментов Ri (или вероятности их отка-
зов Qi), а в названиях столбцов за*
писываются все возможные сочета-
ния конъюнкций (или Sj), взятых
по одной, по две, по три и т. Д, Кроме
того, указываются знаки вероятно-
стей этих конъюнкций (4~> или к -»),
чередующиеся в соответствии с фор-
мулами (65) или (66). Указанную
таблицу следует заполнить крестиками
и черточками, причем крестиками от-
мечаются вероятности тех событий
которые входят в данную конъюнк-
цию, а черточками вероятности
событий, отсутствующих в .пей.
Табличный способ вычисления имеет
два преимущества:
1) автоматически осуществляется ум-
ножение логических переменных са
Логико-вероятностные методы без учета восстановления
73
2. Таблица расчета структурной надежности системы
мих на себя согласно тождеству
A *t Л A (68)
2) взаимно уничтожаются многие оди-.
каковые конъюнкции, вероятности ко*
торых имеют различные знаки.
Пример 5. Решим ту же задачу,
которая уже рассматривалась в пре-
дыдущих примерах 3 и 4, причем за
исходное условие работоспособности
примем функцию (7)* записанную в пов-
торной дизъюнктивной нормальной
форме. Будем считать для простоты
надежность всех элементов одинаковой
и равной R.
Решение. Составляем табл. 2,
как описано выше, и заполняем ее
в такой последовательности. Сначала
проставляем крестики в столбцах, со-
ответствующих путям успешного функ-
ционирования системы но уравнению
(7). Затем последовательно заполняем
следующие столбцы, например, пятый
согласно функции
Омз*б) А (*1Хях4ХвХв) =
- хгт3.г4х5хвхй.
Заполнив всю таблицу крестиками и
черточками, вычеркиваем те одина-
ковые конъюнкции, которые вошли
в нее с разными знаками (в табл. 2
это, например, столбцы 9, И, 14
и 15).
Приступаем к вычислению вероят-
ности безотказной работы системы,
перемножая в каждом столбце те
вероятности Rf, которые оказались
отмеченными крестиками.
При одинаковой надежности эле-
ментов (что имеет место в рассматри-
ваемом случае) расчет существенно
упрощается, так как сводится к непо-
средственному подсчету степеней R
в полиноме
Rc = 2Я* + 2R* — 5R1 + 2₽\ (69)
который тождествен (41)х и (62).
СХЕМНО-ЛОГИЧЕСКИЙ МЕТОД
РАСЧЕТА
Этот метод расчета надежности си-
стемы основан на обобщенной тео-
реме разложения произвольной ФАЛ
по любым ( аргументам и использова-
нии специальной релейно-контактной
схемы (РКС), являющейся наглядной
графической моделью условий рабо-
тоспособности исследуемой системы.
74
Расчет надежности систем со структурной избыточностью
б) — /—2-т-3-г=— /—2- хг(х3Чх'3)=хг хг
Ljd
-1----1—|-------- хтух,хг=л,
LZ_ZJ
} L/—2—4-J
=XjX2(Xj^)
д) — 1—1— •••—1—=—1— x,x/...xz = xr
Рис. 5. Графическая иллюстрация некото-
рых соотношений алгебры логики
Любую ФАЛ, зависящую от п ар-
гументов (п 1), согласно теореме
разложения можно представить/в виде
f(*i....xit хп) = V х?*х$*
••• *?V(aP «2’ •••’ аР х1+1> хп).
(70)
Использование схемно-логического
метода преобразования ФАЛ для рас-
чета надежности сложных систем поз-
воляет найти вероятность безотказ-
ной работы системы значительно бы-
стрее, чем применение предыдущих
методов. Это объясняется тем, что
в данном методе используется разло-
жение повторной ФАЛ не по одной
букве, а сразу по целой комбинации
повторяющихся аргументов и, кроме
того, все преобразования проводятся
по РКС, что дает возможность из-
бежать многих промежуточных пре-
образований, неизбежных при других
методах ортогонализации.
На РКС каждый элемент изобража-
ется электрическим контактом, а про-
вода, связывающие элементы, заме-
няют логические операции И (Д)
и ИЛИ (V)- При таком изображении
РКС она всегда получается в виде
последовательно-параллельных кон-
тактных цепей (а не мостиковых струк-
тур!) с многими повторяющимися кон-
тактами.
РКС дает наглядное представление
о комбинации «выгодных» переменных,
по которым следует делать разложе-
ние ФАЛ, и о наиболее целесообраз-
ной последовательности преобразова-
ний, которая приводит схему к про-
стейшему виду.
Для упрощения графической части
работы условимся^ контакты на схе-
мах не изображать и обозначать не
буквами xt- (замыкатрщий) и х'- (раз-
мыкающий), а просто их номерами:
i (замыкающий) и Г (размыкающий),
как показано на рис. 5, а.
На рис. 5, б дана графическая1
иллюстрация некоторых соотношений
алгебры логики с помощью релейно-
контактных схем. Например, пока-
зано преобразование РКС, соответ-
ствующее операции склеивания, ко-
торая записана справа от схемы.
Преобразования РКС, показанные
на pih:. 5, в и г, соответствуют опера-
циям поглощения и вынесения зц
скобки. Преобразования РКС, пока1
занные на рис. 5, д и е, позволяют
заменить группу последовательно или
параллельно соединенных контактов,
имеющих один и тот же номер, одним
контактом. Постоянно разомкнутая
цепь обозначена на рис. 5, ж нулем,
а постоянно замкнутые цепи на
рис. 5, з, и — римской цифрой I,
чтобы отличать такую цепь от контакта
с номером 1.
После этих замечаний сформулируем
алгоритм схемно-логического метода
преобразования ФАЛ для расчета на-
дежности системы.
.1. По условиям работоспособности
системы, записанным в ДНФ, изобра-
жаем релей но-контактную схему. При
Логико-вероятностные методы без учета восстановления
75
этом контакты, входящие одновре-
менно в несколько параллельных це-
пей, выносим в общую для них по-
следовательную цепь.
2. Выбираем для вынесения в по-
следовательную цепь такую комби-
нацию контактов, которая обеспечи-
вает размыкание всех или большей
части параллельных цепей РКС. Опыт
расчета надежности технических си-
стем показывает, что при числе па-
раллельных цепей не более 20 для
их одновременного размыкания обы-
чно достаточно комбинации, состоящей
из двух—пяти контактов. После вы-
несения группы' из г контактов РКС
распадается на 2Г параллельных схем.
3. В каждой из 2Г полученных па-
раллельных схем производим преоб-
разования, вытекающие из теоремы
разложения, а именно: контакты, оди-
наковые с вынесенными, замыкаем,
а отрицания вынесенных контактов
размыкаем.
4. В схемах, полученных в резуль-
тате преобразований, удаляем все
разомкнутые цепи и заменяем все
группы контактов, оказавшиеся ко-
роткозамкнутыми, проводом (линией).
Кроме того, контакты, имеющиеся во
всех параллельных цепях, выносим
в общую последовательную цепь, а
цепи, поглощаемые другими, парал-
лельными им цепями, удаляем.
5. Изучаем каждую из 2Г преобра-
зованных, как указано в п. 4, схем
(последовательная цепь, состоящая из
г контактов и контактов, вынесенных
в эту цепь дополнительно, не рассма-
тривается).
Вели схема оказалась постоянно
разомкнутой, то она из дальнейшего
рассмотрения исключается.
Если схема оказалась постоянно
замкнутой, то она дальнейшим пре-
образованиям не подвергается.
Если схема оказалась бесповторной,
то на этом процессе ее преобразования
также заканчиваются. Бесповторную
функцию, соответствующую данной
схеме, записываем в конъюнктивной
форме.
Если схема не является бесповтор-
ной, то переходим к п. 2 и произво-
дим дальнейшие преобразования в со-
ответствии с пп. 2, 3, 4 и 5.
Рис. 6. Релейно-контактная схема
6. По полученным в результате пре-
образований схемам записываем ФАЛ.
7. От ФАЛ переходим к вероятност-
ной функции и по ней вычисляем ве-
роятность безотказной работы системы,
как вероятность равенства ФАЛ
единице.
Пример 6. Решим задачу, рассмо-
тренную в примерах 3—5, схемно-ло-
гическим методом.
Решение. По ФАЛ (7) на рис. 6
построена РКС, в которой контакты 7,
1—4 вынесены в последовательную
цепь.
В соответствии с алгоритмом пре-
образования применим разложение,
схемы по контактам (переменным) 5
и 6, которые входят во все параллель-
ные цепи. Так как число г выноси-
мых контактов равно двум, то можно
составить четыре ортогональные
конъюнкции
х'5х'в; х'5хв; х5х'в\ х5хв.
Результат разложения схемы
(рис. 6) приведен на рис. 7. При вы-
несении контактов 5 и 6 и размыка-
нии в схеме на рис. 7 контактов 5'
IS)—5----6—т— 1----5—т—4------8—
Рис. 7. Преобразование РКС
76
Расчет надежности систем со структурной избыточностью
и 6' схема превращается в постоянно
разомкнутую цепь (схема /). Схемы II
и III после вынесения контактов 4
и 3 в общую последовательную цепь
с контактами 5', 6 и 5, 6' соответ-
ственно становятся бесповторными.
В схеме IV контакты 4, 8 и 3, 8 ока-
зались короткозамкнутыми, и остав-
шаяся часть схемы после удаления
этих контактов будет также бес пов-
торной.
По схемам II, Щ и IV (рис. 7) за-
пишем ФАЛ (7) в виде суммы трех
ортогональных слагаемых, заменив
цифры соответствующими перемен-
ными:
y(xlt
..., xs) = x7<
(71)
Теперь бесповторные ДНФ в каж- I правила де Моргана [8] в конъюнктив-
дом слагаемом запишем с помощью I ной форме
У (*1> -» *8)=*7
*5*6*4 [(*1*3*8)' *2
*5*6*3 [*1 (*2*4*8)'
*6*6 С(*х*а)' (*2*а)'
(72)
Г
Отрицание функции заменяем раз-
ностью между единицей и вероят-
ностью истинности этой функции
р {у = 1} = rc = я7 {(I -яБ) X
x[i - (1 - ад»я8) (1 - ад +
+ ад - -Re) ад-а-Я1)х
х (1-ад4ад + адв[1-
-(1-ад3)(1-ад4)]}.
(73)
при 2?! = Т?2 = ... = 7?в = Я по-
лучим
Rc = 2R* + 2Я® — 57?7 + 27?8, (74)
что полностью совпадает с (41), (62)
и (69).
МЕТОД РАСЧЕТА С ПОМОЩЬЮ
НЕСОВМЕСТНЫХ ГИПОТЕЗ
По мере увеличения числа элемен-
тов системы и усложнения ее струк-
туры формализация условий работо-
способности системы с помощью ФАЛ
становится все более трудной. Поэ-
тому на практике при расчете струк-
турной надежности системы наиболее
сложным оказывается иногда нё столь-
ко преобразование ФАЛ в\ВФ, сколь-
ко составление исходной ФРС.
В этих случаях, когда не удается
получить «сквозной» записи условий
работоспособности системы, т. е. за-
писи ФРС в явной форме от всех ар-
гументов (от «входа» до «выхода»),
но можно сравнительно просто сфор-
мулировать все несовместные гипотезы
успешного функционирования си-
стемы непосредственно по смыслу за-
дачи, оказывается возможным рас-
считать ее надежность многократным
поэтапным использованием формулы
полной вероятности. Назовем условно
этот мётод расчета надежности методом
несовместных гипотез.
Расчетный алгоритм метода не-
совместных гипотез, как и во всех
предыдущих логико-вероятностных
методах расчета надежности, состоит
из двух частей, а именно из логиче-
ской части и вероятностной.
На рис. 8 дана графическая иллю-
страция логической части метода не-
совместных гипотез. На этом рисунке
приняты следующие обозначения:
у (%!, .... хп) — условия работо-
способности системы, которые не со-
Логико-вероятностные методы без учета восстановления
77
ставляются в форме ФАЛ, а лишь
имеют словесное и графическое опи-
сания; Я(1), Н(2\ Я(3), ...— несов-
местные гипотезы, которые форми-
руются на языке алгебры логики по
смыслу задач на первом, втором,
третьем и т. д. этапах «разрезания»
незаписанной ФРС; у |Я(1), Н]
н*2) \ Н<3\ ...— условия ра-
ботоспособности исследуемой системы
при высказанных гипотезах.
Для вычисления вероятности безот-
казной работы системы необходимо
многократно пользоваться следующими
формулами:
Р (У<^) = 1}=Ло =
= S р 1^!”); (75)
f=l
Р{яр = 1 | =
= S р(я!7))р(я1п1я1/)); <76>
/=1
Р(яр = 1) =
S
= 2₽(я!/г)рИ((/)1я«’1; (77)
Г=1
где суммы берутся по всем несовмест-
ным гипотезам (d, I, s, ...), образую-
щим полную группу событий.
Из этого алгоритма следует, что
метод несовместных гипотез является
своеобразной модификацией метода раз-
резания, в котором несовместные гипо-
тезы формируются сразу по некото-
рому набору аргументов, а не по
одной букве, в результате чего су-
щественно уменьшается как число ги-
потез, так и число разрезаний, необ-
ходимых для решения задач. Кроме то-
го, данный метод может рассматри-
ваться и как модификация схемно-
логического метода, в котором фор-
мируются несовместные гипотезы по не-
которому набору аргументов функции
у (х) и в несколько этапов производится
ее разложение (в сложных задачах).
Различие между указанными мето-
дами состоит в том, что при исполь-
зовании метода разрезания и схемно-
логического метода несовместные ги-
Рис. 8. Графическая иллюстрация метода
несовместных гипотез
потезы формируются в определенном
смысле механически («автоматически»),
а при использовании рассматривае-
мого метода их нужно каждый раз
формировать по содержанию задачи,
т. е. осмысленно.
В первом случае формализация за-
дачи может быть легко отделена от ее
решения и может выполняться раз-
ными людьми, причем для тех, кто
занимается ее решением, необязательно
даже знать саму систему. Во втором
случае всю работу от начала до конца
должны выполнять специалисты, хо-
рошо знающие исследуемую систему,
ее структуру и особенности функциони-
рования.
Пример 7. Решим задачу, рассмо-
тренную в примерах 1, 3—б, методом
несовместных гипотез.
Решение. Изучая систему, пред-
ставленную на рис. 1, и зная задачу,
поставленную перед ней (обеспече-
ние питанием ответственных потреби-
телей, подключенных к распредели-
тельному щиту РЩ1), нетрудно за-
метить, что для этого необходимо по-
лучить питание от любой комбинации
работающих генераторов (хх, х2):
Щ1’=хгх2, Я^ = ххх;,
Н™ - х[х2. (78)
Гипотезы (78) несовместны и обра-
зуют полную группу.
78
Расчет надежности систем со структурной избыточностью
Составим условия работоспособ-
ности системы при высказанных ги-
потезах, что всегда проще сделать,
чем получить «сквозную» ФРС:
у[Я^’= х4
*5
Х8 Х4 Хв
Хв
х8 х8 х5
(80)
(81)
Функции (79)—(81) являются бес-
повторными и в конъюнктивной форме
имеют вид
^|Я(1>=[(х3х5)'(х4х6)'Г, (82)
у | = х3 [Xs (х8х4х6)']', (83)
у)Щ1)=х4[хИ*«ЗД)']'. (84)
Определим условные вероятности со-
бытий (82)—(84):
Р{у|Я11> = 1} = 1-
-(1-ад6)(1-адв). (85)
Р {0|Я^> = 1)=Яз [1 - (1 - Р5) х
х (1 - ад4Яв)]. (86)
Р {у | Я^1’= 1} = Р4 [1 — (1 — Р6) х
X (1-ад8ЯБ)]. (87)
По формуле полной вероятности
(75) определим теперь вероятность без-
отказной работы всей системы:
Яс = Р {у («) = 1) = ( Р (Я<г>) Р ( у I Я»1’ ) + Р (Я<‘>) Р ( у I Я<г>} +
+ Р(Я^')Р (У|Я!,») ]₽(*, = 1) = {Я (хЛ = I) Р [(хЛ)'(зд)-]' +
4-Р М = 1} Р +Я {*'Л = 1) P{*4[*s[*e*3*s)']'H х
X Р {х, = 1} = {Я,Я, [1 - (1 - Я,Я5) (1 - Я.Я,)] + ЯЛ, {Я, ["1V
-(1 -яБ)(1-P,PaRe)]) + охя, {я,[i-(i-я.)(1 -ад,адп(88)
Проверим правильность расчетов че-
рез полином, т. е. примем условие
равной надежности всех элементов
системы. Заменяя Рг на Р в (88),
получим
рс = 2Р4 4- 2Рв — 5Р7 + 2Р8, (89)
т. е. то же самое, что и в (41), (62),
(69) и (74).
Более сложные примеры использо-
вания метода несовместных гипотез
приведены в работах [8, 9]. /
3. МЕТОДЫ ОЦЕНКИ ВАЖНОСТИ
ОТДЕЛЬНЫХ ЭЛЕМЕНТОВ
ПРИ СИНТЕЗЕ СИСТЕМ
С ЗАДАННОЙ НАДЕЖНОСТЬЮ
ВЕС, ЗНАЧИМОСТЬ И ВКЛАД
ЭЛЕМЕНТА В НАДЕЖНОСТЬ
СИСТЕМЫ
Одним из важнейших этапов проек-
тирования технической системы яв-
ляется рациональное построение ее
структуры. Для этого необходимо
иметь аппарат, позволяющий получать
количественные характеристики струк-
туры системы. Это дает возможность
определять ее «слабые места», выби-
рать оптимальное резервирование и
рационально воздействовать на надеж-
ность сложной системы. ’
Логико-вероятностные методы (ЛВМ)
позволяют не только количественно
оценивать надежность структурно-
сложных систем, но и выяснить роль
конкретных элементов (и их различных
комбинаций) в обеспечении надежности
всей системы. С этой целью были пред-
ложены специальные характеристики,
названные весом, значимостью и вкла-
дом элемента в надежность си-
стемы.
При отсутствии количественной ин-
формации о надежности элементов
структурно-сложной системы их влия-
ние на надежность всей системы можно
определить с помощью понятия «вес»
элемента в структуре. j
Методы оценки важности отдельных элементов
79
Определение 1. Вес функции п пе-
ременных есть число наборов (вер-
шин л-мерного куба, клеток карты
Карно), на которых данная ФАЛ
принимает значение, равное единице.
Если функция представлена в
ОДНФ, то вес исходной функции мож-
но представить в следующем виде [8]:
G {У (*!» *n)} ~ 2 +
i
+ S 2n-rf + 2 2п~\ (90)
f ч
где / — 1, .... /; f = 1, k\ q~
= 1, р; I + k + p = m\ rj, rf,
rq — ранги элементарных конъюнк-
ций; I, k, p — число конъюнкций, со-
держащих xt-, х\ и не содержащих
i-й аргумент; т — общее число конъюн-
кций в исходной ФАЛ, представлен-
ной в ОДНФ; п — число независи-
мых переменных исходной функции.
Пример 8. Имеем ФРС в ДНФ для
системы мостиковой структуры из пя-
ти элементов, изображенной на рис. 3,
в виде ФАЛ
х5 х3
Решение.
С помощью алгоритма ортогонали-
зации определим ОДНФ ФАЛ (91)1
У (-«I» х5) = Х1 х3 •
х2 х3 х4
х[ х2 х3 х4 (92)
х; х2 х3 х4 х5
/ xi х'2 Хз х4 хб
«Взвешивание» функции (92) пяти
переменных можно выполнять по лю-
бому i-му аргументу. Не теряя общ-
ности, рассмотрим эту операцию по
первому аргументу, т. е. хг Число
конъюнкций, содержащих х1, равно
двум (I = 2); содержащих х\ равно
двум (k = 2) и не содержащих хг
равно единице (р = 1). Общее число
конъюнкций равно пяти (т=2-|-2+1 =
= 5). Ранги соответствующих элемен-
тарных конъюнкций
П —2, Г: =5; rf = 4, rt =5;
/1 J2 71 12
r<h = 3-
По формуле (90) имеем
G{y(xlt ..., x5)J = (25-2 + 2б“8)+
+ (25-4 + 25“5) + 26-3 = 16.
Таким образом, на 16 наборах из
2” = 32 ФАЛ (91) принимает зна-
чение, равное единице.
Определение 2. Булевой разностью
(или логической разностью) функции
/ (хх, ..., хп) по аргументу Xi назы-
вают результат логического сложения
по модулю 2 исходной функции и
функции, полученной из исходной
путем замены аргумента х* на его
отрицание:
&Xjf (•*!» • • •» xn)=f (Хх, • • •, Xi, ..., Xn) Ф
Ф f(xi> x'i......xn). (93)
Определение 3. «Вес» элемента Xi
в системе, состоящей из п элементов,
есть отношение «веса» булевой раз-
ности по аргументу Xi к числу всех
наборов л-мерного логического про-
странства, т. е.
6{Аж/у(х1, ..., хп)}
&xi 2п ~
1 . ' А , IV
= 2 2 ) — S 2 \ (94)
7=1 /=1
где I, k — число элементарных конъ-
юнкций исходной ФРС, представлен-
ной в ОДНФ, содержащих соответ-
ственно х,- и х'-; rj rf — ранги этих
конъюнкций.
Булева разность по аргументу Xj
дх^(х,....хп)=У{П(хУ ’ М ®
Ф Уо* (*Р х„), (95)
где ^(хр ..., х„);= y(xlt ..., 1,...
..., хп) — единичная, функция по
аргументу х- y(ol) (xj, хп) =
= у (хх...... 0, ..., хп) — нулевая
функция по аргументу Xj.
Вес элемента характеризует отно-
сительное число таких критических
работоспособных состояний системы,
в которых отказ данного элемента при-
80
Расчет надежности систем со структурной избыточностью
водит к отказу системы (и, наоборот,
его восстановление приводит к вос-
становлению системы), среди всех со-
стояний системы с х< — 1.
Пример 9. Определим вес элементов
хг и хь для ФРС (91).
Решение. Определим числа I,
k, rj и rf для хг. Из (92) и примера 8
имеем: I — 2, г,- ~ 2, ~ 5; k = 2,
9. = *; о,”’5-
По формуле (94)
[2~ О"*» 4- 2" (ь-D] — [2- <4-J> +
2“ («-!>] ~ 2~1 + 2~* — 2-3 — 2“4 --
= 0,375-
Для имеем I = 2, г? ~ 5, ~
= 5; k = 0.
gXt = 2- <6"r> + 2" <Б-П =
— 2“4 + 2”4 --=0,125.
Из примера видно, что вес элемента
хх в 3 раза превышает вес элемента хБ,
а значит, и его важность для надеж-
ности системы (91).
Определение 4. «Значимость» эле-
мента xt в системе у (хь хп) есть
частная производная от вероятности
безотказной работы системы 7?с по
вероятности безотказной работы эле-
мента Ri, т. е.
Р dP{y(xlt ...; хп) 1} dRc
" dP{xt^1} ' dRt '
(96)
Для всех монотонных ФАЛ множе-
ство наборов, на которых нулевая
функция по аргументу х, принимает
значение, равное единице, есть под-
множество множества наборов, на ко-
торых единичная функция по тому
же аргументу xi равна единице, т^ е.
{ (Х1...хп)‘- У™ (Х1....хп) = 1 ) сг
CZ {(Хр .... хлу. (Хр ..., xrt) = 1}.
' (97)
Из (97) вытекают пять следствий:
1) ((х,; х„): х„)==1)с
С{(х,.....х„): y(xi, хп) = 1)с
С |(хр .... хл): у[ 1 (х(, .... х„) 11,
(98)
2> И°(хг — • хп) У4'’(хр
= S1" (*!...................(99)
3) S'!*)(x...*„) А 4°(*1......х„) s
М'’(а.......*п). <100>
Ч »!°(х1’ ••• хп) ЛЙ“’(Х|....*п) =
sMt'i.......х„), (101)
5> S'/0 (xi.хп) Л
л4'’(х1.....xn) s 0. (102)
Частная производная от вероят-
ности истинности монотонной ФАЛ
у (хр ...» хп) по вероятности истин-
ности аргумента х/ численно равна
вероятности истинности булевой раз-
ности этой функции по аргументу Xi,
т. е.
ЯР (у(*ь *п) О _
dP {xt = 1}
Р {AXiy (xt, ..., х„) = i}\ (103)
На основании этого «значимость»
элемента xt численно равна (вероят-
ности равенства единице булевой раз-
ности ФРС по аргументу х/:
= Р {Ах;у (X,...Х„) = I}. (104)
Для монотонных структур
Ц = -^7=Л<р - . (105)
= Р {»}'»(х....х„) = 1|, (106)
= р 14° (х1- хп) —1|- (197)
где и R^ — вероятность безот-
казной работы системы при абсолют-
ной надежности и абсолютном отказе
элемента х^ соответственно [см. обо-
значение функций в выражении (95)].
На основании (103)-—(107) сформи-
руем пять следствий:
’> = ’ (108)
2)ж
Методы оценки важности отдельных элементов
61
3) + +
dRc
ldQi '
(НО)
dRc Rc—Rcq _ ЯсР-Кс
} dRi Ri " Qt
(Ш)
,, Щс *с ~ ~ *с
} Ж’~ Qi ~ Ri '
(112)
Вес. элемента (94) есть частный слу-
чай его значимости (105) при одина-
ковой надежности всех элементов и ве-
роятности безотказной работы, рав-
ной 0,5.
Выражение (105) является основной
для ручных и машинных способов вы-
числения значимости элементов слож-
ных структур.
Пример 10. Определим значимость
элементов xt и хБ системы из при-
мера 9.
Решение. Из выражения (92)
определим единичную и нулевую функ-
ции по аргументу xt:
(х) = *3 1
* со М см И (113)
Х2 Х3 *5
y{Q() (х) = к и1 (114)
Х2 ха хл
а* «я*
По формуле (49) определим
и R^.
= 1) =
“ ^2^3 ^4 "Ь ^2^3^4^5»
(115)
— ^2^3^2^4 "Ь ^2^3^4^5-
(И6)
По формуле (105) найдем £ :
“ ^3 "b ^4^5 ^2^3^4
^2^4^5 ^3^4^5 R2R3R5 +
+ 2Л2^3^4^5-
При Ri — R = const имеем
(П7)
(118)
Для R — 0,5 определим =
= 0,375 ^gXt.
Аналогичные действия для элемента
У? (х) -
!/q5) (*) =
|Х( — Qj^2^3^4 + ^1^2^3^4>
Г =2Я2 — 4Z?3 + 27?4
при Ri ~ R = const,
(П9)
(120)
(121)
(122)
g = 0,125 = g при R = 0,5.
**в
Определение 5. «Вклад», элемента
Xi в надежность системы у (jq, ...,
хп) есть произведение вероятности
безотказной работы элемента Ri на
его «значимость», т. е.
в*( = *<$;• <123>
Подставляя выражение (111) в фор-
мулу (123), получаем
В., = R~ = «с - ^о’-
(124)
Критерий «вклад» Вх. характери-
зует приращение надежности системы
после восстановления элемента из
82
Расчет надежности систем со структурной избыточностью
неработоспособного состояния в ра-
ботоспособное с фактической вероят-
ностью его безотказной работы, рав-
ной fy.
Как следует из (123),
вжг<ц. (125)
Определение 6. «Удельный вклад»
элемента Xi в надежность системы
^(хп хп) есть нормированный
«вклад» этого элемента, т. е.
Вх.
<126>
S Bxt
1=1 1
Все приведенные в этом параграфе
критерии оценки важности элемента
для надежности системы имеют раз-
личную «чувствительность» и инфор-
мационную сущность. Так, например,
критерий «вес» элемента g характе-
i
ризует только местоположение дан-
ного элемента хг- в структуре системы
У (хг...хп).
Критерий «значимость» элемента %
i
характеризует не только местополо-
/ жение данного элемента Xj в структуре
системы у (xlt хп), но и зависи-
мость от вероятностей безотказной ра-
боты всех других элементов системы
(кроме самого i-ro элемента).
Критерий «вклад» элемента В ха-
i
р актер изует местоположение элемента
Xi в структуре системы у (хп ..., хп),
условия ее функционирования и связь
с вероятностью безотказной работы
всех п элементов этой системы, вклю-
чая i-й элемент.
КАЧЕСТВЕННОЕ И ,
КОЛИЧЕСТВЕННОЕ ПРИРАЩЕНИЯ
НАДЕЖНОСТИ СИСТЕМЫ
ЛВМ расчета надежности системы
позволяют вырабатывать новые под-
ходы к синтезу структур сложных
систем с заданной надежностью.
Вследствие линейности функции на-
дежности Rc от аргумента Ri для
монотонных структур «значимость»
элемента х$ оказывается численно
равной приращению надежности си-
стемы (105) при изменении Ri от нуля
до единицы. В общем случае прира-
щение надежности системы
др
(127)
Самая простая структура есть по-
следовательная цепочка минимально
необходимых элементов^ т. е. один
КПУФ. В идеале (при абсолютной
надежности всех элементов) можно
было бы обойтись без всякой избы-
точности. Однако при реальных ха-
рактеристиках надежности элементов
надежность всей системы может быть
существенно меньше заданной RCt зд.
Существуют два пути повышения
требуемой вероятности безотказной ра-
боты системы (без учета восстановле-
ния):
качественное повышение надеж-
ности элементов (лучшие материалы,
современная технология, новые кон-
струкции и т. д.), в результате чего
получим некоторое приращение на-
дежности системы, которое условно
назовем качественным и обозначим
АЯс. кач^
введение структурной избыточности
(например, путем резервирования
элементов), в результате чего также
получим приращение надежности си-
стемы, которое условно назовем ко-
личественным и обозначим Д#с, кол-
За нулевой уровень и начало обс-
чета ДЯС. кач примем-структуру од-
ного КПУФ при р^вно надежных эле-
ментах с - Ri = Qi — 0,5. Для реаль-
ных элементов, как правило, Ri > 0,5,
а
ДЯс.кач = S 2-п+'Д«г +
+ 2 2-'’+2ДЯгД^ + (128)
+ 2 2”"+z
i, j,..,, k NRi^Rj--
• • Д/?А 4“ • • И- Д^1Д/?2 ’ *
где для сокращения записи опущен
аргумент времени i, а запись i £
€ Мь i, j € Л12,...; i, j, ..., k £ Mi
следует понимать так, что суммиро-
вание проводится по всем наборам
указанных индексов из множества
Методы оценки важности отдельных элементов
83
числа сочетаний из п по одному, по два
и по L
При одинаковой надежности всех
элементов выражение (128) примет
вид ,
п
Wc кач = S С^-"+1 (ДК()'. (129)
/=1
Если за нулевой уровень качест-
венного приращения надежности си-
стемы взять произвольный уровень,
то выражения (128), (129) примут вид
ARc. кач = dR" А#! ”1”-
VI dl%c
h 2j dRtdRh..dRh X
i, Mt
X hRt&Rj... &Rh H---+
4- A/?iAR2 ... &Rn, (130)
ARc. кач —
n .
= <I31)
/=1
При дублировании i-го элемента-
однотипным элементом xf надежность
такого звена возрастает на
(132)
а надежность всей системы возрастает
на
AR(-. КОЛ = "ЗеГ AR3B = RiQb
ut\i Oi\t
(133)
Из (133) следует, что количественное
приращение надежности системы за-
висит не только от «значимости», но
и от надежности дублирующего эле-
мента. Причем наибольший эффект
резервирования при одинаковых «зна-
чимостях» будет именно при Ri =
= Qi = 0,5. Принятие Ri = 0,5 за
нулевой уровень удобно обеспечивает
однозначность кривой (132), так как
используется только правая ветвь па-
раболы на участке Ri от 0,5 до 1.
В общем случае при дублировании
нескольких элементов вплоть до мак-
симально возможного их числа п
получим
ARc. коя = У RiQt +
Ди oRi
+ RiRj ... RkQtQj ...
i, j..fefTAfj
о
•" 4hdRidRi...dRh 'l
• • ’ + R1R2* • ‘RnQiQz • • • Qn- (134)
Пример 11. Определим качественное
и количественное приращения на-
дежности для простейшей последо-
вательной структуры, ФРС которой
имеет вид
1/1 (*1. *2. х3) = одх». (135)
Пусть Rx = 0,7, Rz = 0,8 и Ra =
= 0,9.
Решение. Определим сначала
нулевой уровень надежности этой си-
стемы, т. е. 7?сшач при Rt = R2 =
= Ra = 0,5:
Rci нач = 0,53 = 2~s = 0,125.
Найдем теперь качественное при-
ращение надежности системы по фор-
муле (128), учитывая, что ARt = 0,2,
Д/?3 = 0,3, Д/?3 = 0,4:
\ 3
ARcma4 = 2 У, AR/
/=1
_ 2-3+2 Ji bR^R^
/ Е сз
+ ARj AR2 ARs =
= 2”2 (0,2 J- 0,3 4 0,4) +
+ 2"1 (0,2 *0,3 + 0,2-04 + 0,3 -0,4) +
+ 0,2 0,3 0,4 =0,379.
84
I Расчет надежности систем со структурной избыточностью
Определим общую надежность си-
стемы для этого простейшего случая
в виде суммы
*ci = *ci нач Ч- A^ci кач =
= 0,125 + 0,379 = 0,504,
что совершенно точно соответствует
произведению
Яс1 = К1ЯЛ = 0,7-0,8 0,9 = 0,504.
«Веса» и «значимости» элементов
данной структуры будут равны соот-
ветственно
gY =5* = 8* — 2“л“*"1 =
6Ха “X,
= 2“3+1 = 0,25;
L, = *2*3 = 0,72, =*1*з = 0»63,
Ех8 = *1*2 ~
Определим количественные прира-
щения надежности системы при дуб-
лировании элементов по одному:
А*с. кол = Бх!*1^1 =
= 0,72-0,7-0,3 = 0,1512,
А*с. кол = ^х,*,^2 =
= 0,63-0,8-0,2 = 0,1008»
Д*с. кол = £х3 *3<?3 =
= 0,56-0,9-0,1 = 0,0504.
Отсюда следует, что если есть воз-
можность резервировать только один
элемент, то им должен быть именно
первый, обеспечивающий максималь-
ное приращение надежности.
В итоге система с дублированным
элементом хх (пусть номер дублирую-
щего элемента будет 4) имеет ФРС
(Xi.......х4) = хх х2 х9
хл
*С2 = *ci нач + АД ci кач +
-J- А/?с. кол ~ 0,125 “4" 0,379 +
+ 0,1512 = 0,6552.
Легко убедиться, что
«с2 = (1-<2?)/г2«3 =
= (| — 0.32) 0,8-0,9 = 0,6552.
(136)
При возможности дублирования сра-
зу двух элементов такими элементами
должны быть 1-й и 2-й, что обеспечи-
вает максимальное приращение на-
дежности системы
Д«о. «ол = R,Q1 + R А +
RiRaQiQi -
= 0,1512 + 0,1008 + 0,03024 = 0,28224.
Система с дублированными элемен-
тами хх и Xj будет описываться ФРС,
содержащей уже пять элементов,
*с> — *ci нач Ч- А4?сх кач Ч-
+ кол == 0,125 + 0,379 +
+ 0,28224 = 0,78624.
Действительно,
RC3= (1 - 0?) О - <?1)«3 =
= (1 — 0Да) (1 — 0,2») 0,9 = 0,78624.
Таким образом, надежность системы
можно представить в виде суммы
начальной надежности и составляющих
ее качественного и количественного
приращений, что весьма наглядно пока-
зывает роль каждой компоненты.
Таким образом, можно отметить:
1) критерий «значимость» элемента
в монотонных структурах позволяет
определить элементы, обеспечивающие
максимальное приращение надежности
всей системы;
2) качественное и количественное
приращения надежности системы при
одновременном изменении надежности
любого числа элементов необходимо
определять по формулам (130) и (134);
3) при введении дублирования эле-
ментов следует руководствоваться зна-
чением количественного приращения
надежности системы;
4) критерий «вклад» элемента поз-
воляет рационально определять оче-
редность восстановления элементов в
системе.
Методы оценки важности отдельных элементов
85
ПРИМЕРЫ ПРИМЕНЕНИЯ ОЦЕНОК
ВАЖНОСТИ ЭЛЕМЕНТОВ ДЛЯ
АНАЛИЗА ’ НАДЕЖНОСТИ СИСТЕМ
Для всестороннего исследования на-
дежности системы необходимо сфор-
мулировать какое-то множество вари-
антов задач, поставленных перед ней,
а также выдвинуть другие возможные
альтернативы ее использования, чтобы
затем можно было количественно оце-
нить их эффективность. Решив по-
ставленные задачи, можно вполне
объективно судить о важности той
или иной связи в системе, о рацио-
нальной пропускной способности пере-
мычек, о роли резервных средств
ит. д.
Введенные дифференциальные ха-
рактеристики элементов gx*, и Ъх,
позволяют наглядно увидеть распре-
деление роли всех элементов на за-
данной структуре при решении кон-
кретных задач.
Приведенные далее примеры убеди-
тельно свидетельствуют о том, как
полезно знать количественные харак-
теристики структурной надежности,
которые можно использовать как при
проектировании, так и при эксплуата-
ции технических систем.
Пример 12. Оценим количественные
эффекты изменения надежности си-
стемы простой мостиковой структуры,
изображенной на рис. 3.
Решение. Кроме ФРС (12),
сформулируем еще одно условие ра-
ботоспособности этой системы, а
именно:
(138)
которое означает требование одно-
временного обеспечения, например,
электроэнергией щитов ха и х4 при
наличии двух генераторов хг и х%
и перемычки хъ.
ОДНФ первой ФРС приведена в
примере 8 (92), а ОДНФ ФАЛ (138)
имеет вид
Хъ (Хх Хб) = Х1 Хъ *3 ХЛ
9 Х2 хз Х4 Х5
Х1 4 хз Х4 Х5
(139)
Определим RCi и Rc2:
₽С1 — *1*3 4” *2 (1 — *.) *4 4“
4- (1 — *i) R2R3R4 4-
4- (1 - *1) *2*3 (1-*0*5 4-
4“ *1 (1 -R2) (!“" *з)*4*Б>
(140)
*сг — R3R4С*1*з 4~ (1 — *1) 4~
4-Я1(1—д2) ад
(141)
Определим все введенные выше ха-
рактеристики для двух вариантов ис-
ходных данных (табл. 3).
Элемент хБ для ФРС уй (х) стано-
вится равным по «весу» элементам хх
и х%. По «значимости» и «вкладу»
элемент хБ в этих условиях равно-
ценен элементу хх и даже лучше эле-
мента х2 при первом варианте исходных
данных. Для второго варианта исход-
ных данных эффект сравнения по
«значимости» и «вкладу» элемента хБ
с элементами хг и х2 для ФРС у2 (х)
еще больший, но дублировать эле-
мент хБ тем не менее нерационально,
так как он высоконадежен и вносит
очень малое количественное прира-
щение надежности всей системы
(0,0017).
Изменение надежностных характе-
ристик элементов во втором варианте
исходных данных повысило надежность
системы для первой ФРС и уменьши-
ло — для второй.
Указанный эффект приближенно
можно оценить по формуле (130),
опуская в первом приближении для
простоты расчетов члены со смешан-
ными частными производными. Дейст-
вительно, качественное приращение
надежности первой системы у^ (х) с из-
менением исходных данных от первого
86
Расчет надежности систем со структурной избыточностью
3. Оценки важности элементов системы
Условия работоспособности системы
Вариант исходных Номер У1 Сч. х»)
данных элемента j
/ Вх- хг кол *С1
1 0,9 0,375 0,1988 0,1789 0,0179
2 0,8 0,375 0,1134 0,0907 0,0181
1 3 0,8 0,375 0,1134 0,0907 0,0181 0,9565
4 0,9 0,375 0,1988 0,1789 0,0179
5 0,9 0,125 0,0388 0,0349 0,0035
1 0,9 0,375 0,1967 0,1770 0,0177
2 0,8 0,375 0,1010 0,0808 0,0162
2 3 0,7 0,375 0,0507 0,0355 0,0106 0,9648
4 0,95 0,375 0,2940 0,2793 0,0140
5 0,99 0,125 0,0541 0,0536 0,0005
Условия работоспособности системы i
Вариант исходных Номер У г (Xi, .... х»)
данных элемента 1 !
/ % Л^С2 КОЛ ^С2
1 0,9 0,125 0,1872 0,1685 0,0168
2 0,8 0,125 0,1296 0,1037 0,0207
1 3 0,8 0,250 0,8586 0,6869 0,1374 0,6869
4 0,9 0,250 0,7632 0,6869 0,0687
5 0,9 0,125 0,1872 0,1685, 0JD168
1 0,9 0,125 0,1370 0,1233 0,0123
2 0,8 0,125 0,0718 0,0575 0,0115
2 3 0,7 0,250 0,9285 0,6500 0,1950 0,6500
4 0,95 0,250 0,6842 0,6500 0,0374
5 0,99 0,125 0,1729 0,1712 0,0017
ко второму варианту будет в целом
положительным:
<?₽<]>
ARci кач "др— Д«1 Н зп 4"
□ /<1 uf\2
ДЯ4 +
+ 0,1134 (— 0,1) + 0,1988-0,0^+
+ 0,0388-0,09 «0,0021, \
а качественное приращение надежности
по условиям второй задачи при тех
же изменениях исходных данных будет
уже отрицательным:
ДЯ С2 кач — 0,1872-0 + 0,1296 X
дКь
Д/?6 — 0,1988-Ю + 0,1134-0 +
X 0 + 0,8586 (—0,1) + 0,7632 X
X 0,05 + 0,1872-0,09 = —0,0309.
Методы оценки важности отдельных элементов
87
Степень приближенности
оценки можно определить,
величины
такой
сравнив
2'с1 ~ /'е1 г а/<с1 кач =
= 0,9565 + 0,0021 = 0,9586,
г>(2)
КС2,
и
'с2 г'с2 • ^с2 кач
= 0,6869 — 0,0309 = 0,6560
с точными значениями R^
указанными в табл. 3 (индексы в скоб- I
ках обозначают номер / варианта ис-
ходных данных). Ценность такой при-
ближенной оценки будет возрастать
с ростом сложности системы и умень-
шением числа элементов, надежность
которых мы собираемся варьировать.
Пример 13. Рассмотрим систему,
структурная схема которой представ-
лена на рис. 1, б. Определим различ-
ные характеристики важности эле-
ментов(gx_, этой же системы.
Решение.
Для последующего определения |
«вкладов» элементов в соответ-
xi
ствии с формулой (124) сначала нужно
вычислить Rc для выбранных значе-
ний Ri. По формуле (61) для исходных
данных
Ri — R% = 0,7; Rq — R^ = Ri =
= 0,9; R5 = Re = Re = 0,99
имеем
Rc = 0,775559.
Значения R<q> легко вычислить,
пользуясь ортогональной формой
ФРС. Подставляя ноль вместо Xi
элемента (и единицу при х'), опреде-
лим с помощью выражения (60) ну -
левую функцию у д' ’ по аргументу Xi
х.
#0 (*!>••• > *8) =
== X у
^2 ^4 ^6
х2 Х3 Х4 х5 Х6 Х8
^сС? ~ ^7 (^2^4^6~Ь —
= 0,566331.
По формуле (124) имеем
BXi = RC — R^ = 0,209228.
По формуле (123) имеем
t = dRc Вхх
aRj Ri
= °^8 = 0,298897.
При условии равной надежности
Используя результат (62), имеем
Rc - = Я4 + Я6 - + 2R8.
Полиномиальное выражение для
„ dRc
производной -до— при одинаковой
надежности элементов будет
a R
= R3 _|_ R5 _ 4fl6 + 2R7.
dRi
Определим теперь «вес» gXi при
R = 0,5:
gXi = 0,53 + 0,5б — 4-0,56 +
2.0,57 = 0,109375.
В табл. 4 приведены результаты рас-
четов указанных характеристик для
всех элементов системы.
Значение каждого элемента в обе-
। спечении надежности поставленной за-
дачи при выбранных исходных дан-
ных показано на рис. 9. Выходной
элемент х- обладает приоритетом по
1 всем показателям (аналогично и эле-
I мент Хе устойчиво занимает последнее
I место).
Элементы хь х2 и хб, хв по своему
месту в структуре обладают одина-
I ковым весом, однако элементы х1г
х2 оказываются более значительными,
чем элементы хъ, х6 и даже х3, х4,
которым они уступают по «весу».
Следовательно, максимальное прира-
щение надежности системы может быть
обеспечено благодаря качественному
I повышению надежности элементов
именно, в такой последовательности:
1) х7, 2) xlt х2, 3) х3, х4, 4) х6, хв, что
не всегда «очевидно» даже для сравни-
I те ль но простых систем.
88
Расчет надежности систем со структурной избыточностью
4. Характеристики важности отдельных элементов системы,
представленной на рис. 9
i Ri U, Вх- b«i
1 0,70 0,109375 0,298897 0,209228 0,119297
2 0,70 0,109375 0,298897 0,209228 0,119297
3 0,90 0,125000 0,238032 0,214229 0,122148
4 0,90 0,125000 0,238032 0,214229 0,122148
5 0,99 0,109375 0,064834 0,064186 0,036597
6 0,99 0,109375 0,064834 0,064186 0,036597
7 0,90 0,250000 0,861737 0,775559 0,442205
8 0,99 0,015625 0,003031 0,003001 0,001711
f
Пример 14. Исследуем структурную
надежность судовой электроэнергети-
ческой системы, изображенной на
рис. 10. На схеме приняты следующие
обозначения: хх, х2 — основные гене-
раторы системы, каждый из которых
способен обеспечить питанием всю су-
довую нагрузку; х3, х4> х7, х,ч глав-
Рис. 9, Распределение важности элементов
системы
ные распределительные щиты; х5, хв,
х9—х14, х16, х17 — элементы продоль-
ных и поперечных перемычек системы;
х4й — резервный генератор ограничен- /
ной мощности. Стрелками показаны
возможные направления передачи
электрической энергии.
Выполним это исследование на фоне
одной задачи, но при разных ограни-
чениях. Пусть задача заключается
в обеспечении электрической энер-
гией потребителей от щитов (х3 и х4)
или (х7 и х8). Рассмотрим два варианта
резервного генератора х1Б: 1) мощность
достаточна для питания потребителей
двух щитов (х7 и хн), 2) мощность до-
статочна только для питания потре-
бителей одного из щитов (х7 либо х8),
и три варианта структуры: 1) с двумя
перемычками х]в и х17, 2) без перемы-
чки х17, 3) без перемычки х1в. \
Решение. Запишем ФРС для
шести указанных выше вариантов
(табл. 5). Определим любым из мето-
Рнс. 10. Структурная схема судовой элек-
троэнергетической системы
5. Функции работоспособности системы, предназначенной для обеспечения питанием потребителей от щитов
Х>;Х4 ИЛИ X-jX*
Вариант структуры Вариант ограничений
- _ ] — достаточная мощность xis 2 — ограниченная мощность xie.
С Л1с И *17 I У и (*) *3*4 *7*8 ХХХ *1 *2 *1 х2 *я *10- ххх *2* *9* 2 *17 *3 *5 *4 *6 *11*13*15 *12*14*15 3 *5 *10*1 4 *6 *9 *1 10*11*12*1 *10 2*14 1*13 3*14 *15 </12 (*) *3*4 *7*8 *!* *1 *2 *1* *2* *1* *2* 2 *17 3*5 4*0 3*5* 4*6* *10 '10*12*14 9 *11*13 *15
Без х17 2 </21 (*) *з*4^ *7*8 ^1*2 *1 *3 *5 *2 *4 *6 *9 *11*13*15 *10*12*14*15 *1*3 *5 *10*1 *2*4 *6 *9 *1 *9*10*11*12*1 *10 L2*14 1*13 L3*14 *15 !/22 (*) *3*4Л *7*8 1*2 *1*3*5 *2*4*0 *1*3*5^ *2*4*6* *16 '10*12*14 -9 *11*13 *15
Без XjQ 3 !/31 (*) = *3*4 *7*8 *1 *2 Х^Х х2х *9* -2 *17 3 *Б *10*12*14 4 Хв Х9 *Ц*1з 10*11*12*13*14 *15 </32 (^) = *3*4 *7*8 *1 *2 ' *!* *2* 2 *17 3*5*10*12*14' 4*6*9 *11*13 *15
Методы оценки важности отдельных элементов
00
CD
90
Расчет надежности систем со структурной избыточностью
6. Веса gXi элементов системы при питании потребителей
от щитов х3х4 или х7хв
i При достаточной мощности х1Б При ограниченной мощности х1В
с Х14 и х17 без х17 без Xie с х1в и х17 без х17 без х1В
1 0,137695 0,137695 0,126465 0,141602 0,141602 0,126953
2 0,137695 0,137695 0,126465 0,141602 0,141602 0,126953
3 0,253418 0,137695 0,250366 0,258301 0,141602 0,250979
4 0,253418 0,137695 0,250366 0,258301 0,141602 0,250979
5 0,018311 0,021973 0,002136 0,020752 0,024902 0,002441
6 0,018311 0,021973 0,002136 0,020752 0,024902 0,002441
7 0,063965 0,073242 0,007690 0,041504 0,049805 0,004883
8 0,063965 0,073242 0,007690 0,041504 0,049805 0,004883
9 0,012451 0,013184 0,005249 0,001221 0,001465 0,002441
10 0,012451 0,013184 0,005249 0,001221 0,001465 0,002441
15 0,024902 0,026367 0,007690 0,002441 0,002930 0,004883
16 0,056274 0,064453 0,000000 0,036621 0,043945 0,000000
17 0,115723 0,000000 0,123901 0,116699 0,000000 0,124093
дов вероятности безотказной работы
системы в виде полиномов
ЯСи = 3R* — 2ЯБ + 2Я6 + 2Я7 —
_ 4#в 5Я® _ 8flio — ЮЯ11 +
+ 16Я12 —5Я13 +
12Я14 — 14Я15 + 4Я16, (142)
яс12 = ЗЯ4 — 2ЯБ + 2Я6 - 4Я8 +
4- 4Я® — 2Я10 - 4Я11 + 6Я12 — 2Я13,
(143)
Яс21 = ₽* + 2Я6 + 2Я7 - 2Я8 +
+ ЗЯ® — 8Я10 — 4Я11 + 4Я12 -|- ЗЯ13+
+ 4Я1* —4Я16, (144)
ЯС22 = Я4 + 2Я6 - 2Я8 + 2Я® -
— 2Я10 — 2Я11 + 2Я12, (145)
Ясз1 = ЗЯ4 — 2Я5 + ЗЯ® - 4Я11 —
_ з#1з + 6Я14 — 2Я1Б, (146)
Яс32 = ЗЯ4 - 2ЯБ +
4-2Я® — 4Я11 + 2Я12. (147)
Вычислим их значения при Я = 0,9:
Яси = 0,946383,
ЯС12 = 0,911620,
ЯС21 = 0,916018,
Яс22 = 0,872771,
Ясз1 ~ 0,892605,
Ясзг = 0,871778.
Результаты вычисления весов при-
ведены в табл. 6, где под номерами 9
и 10 значатся конъюнктивно связан-
ные элементы х9, хп, х13 и %10, х12,
х14, имеющие всегда одинаковые веса.
Результаты вычисления «удельных
вкладов» при выбранных значениях
исходных данных приведены в табл. 7.
На основании табл. 6 и 7 построим
распределения важности отдельных
элементов и оценим влияние различ-
ных факторов на надежность выполне-
ния. одной и той же задачи.
На рис. 11 представлены
ления «весов» и «удельных
для первого варианта х15
туры (с перемычками х16 и
Из рис. И следует, что
^Х17 ^^Хц*,
Ьх <Ьх .
*17 *1в *15
«Пересечение» этих характеристик
свидетельствует о различной инфор-
мационной их ценности и не является
недостатком. Действительно, при от-
сутствии информации о фактической
расйредё-
вкладЪв»
и струях
Методы оценки важности отдельных элементов
91
7. Удельные вклады bXi элементов системы при питании потребителей
от щитов х3х4 или х7х8
i При достаточной мощности Хц При ограниченной мощности х18
С X» и х17 без х1Т без х1в с х1в и х17 без х1Т без х1в
1 0,79 0,074236 0,117596 0,075185 0,204733 0,102734 0,104683
2 0,79 0,074236 0,117596 0,075185 0,204733 0,102734 0,104683
3 0,98 0,144047 0,117596 0,287566 0,254674 0,102734 0,308700
4 0,98 0,144047 0,117596 0,287566 0,254674 0,102734 0,308700
5 0,99 0,005325 0,042680 0,002634 0,020660 0,085036 0,006253
6 0,99 0 „005325 0,042680 0,002634 0,020660 0,085036 0,006253
7 0,98 0,127984 0,070762 0,024323 0,041320 0,170073 0,012506
8 0,98 0,127984 0,070762 0,024323 0,041320 0,170073 0,012506
9 0,99 0,021591 0,026822 0,017701 0,000241 0,000992 0,006253
10 0,99 0,021591 0,026822 0,017701 0,000241 0,000992 0,006253
11 0,79 0,021591 0,026822 0,017701 0,000241 0,000992 0,006253
12 0,79 0,021591 0,026822 0,017701 0,000241 0,000992 0,006253
13 0,77 0,021591 0,026822 0,017701 0,000241 0,000992 0,006253
14 0,77 0,021591 0,026822 0,017701 0,000241 0,000992 0,006253
15 0,96 0,073796 0,086962 . 0,024322 0,000482 0,001983 0,012506
16 0,98 0,064139 0,054844 0,000000 0,017228 0,070912 0,000000
17 0,98 0,029319 0,000000 0,090056 0,020975 0,000000 0,085687
надежности элементов системы (что
эквивалентно случаю принятия /?£ —
= const = 0,5) веса в целом дают
правильное и объективное представ-
ление о роли элементов в исследуемой
структуре. Смена приоритетов по эле-
ментам х1Б, х1в и х17 (при учете ве-
роятностных характеристик надежно-
сти всех элементов системы) свиде-
тельствует о более точном учете на-
дежностных факторов системы (не
только ее структуры, но и количествен-
ных характеристик). Поэтому резерв-
ный генератор х1Б и оказался важнее
перемычек х1в и х17 и практически
вносит тот же удельный вклад, что
и основные генераторы Xj и х2. Еще
ббльший вклад элементов Хз, х4, х7
и х8 объясняется самой формулировкой
задачи.
На рис. 12, а представлены распре-
деления «удельных вкладов» для двух
вариантов х1Б при первой структуре
(с перемычками х1в и х17). t
Из рис. 12, а следует: в одном слу-
чае (xfP) — резервный генератор —
равноценный «партнер» основных гене-
раторов xt и х2; в другом (х£р) его
роль сводится к нулю =
= 0,000482), говоря точнее, bxJbx =
= 426. Существенно снижается при
Рис. И. Распределения «весов» и «удель-
ных вкладов» для ФРС уи (х)
92
Расчет надежности систем со структурной избыточностью
6)
Рис. 12. Распределения «удельных вкла-
дов» :
а — для ФРС (х) и Угя (х); б — для ФРС
Ун (*). Уп (*) и (*)
этом и вклад Ъг и Ьх . Всю задачу
*7 **е
обеспечивает в основном носовая элек-
тростанция, т. е. —х4.
На рис. 12, б представлены распре-
деления «удельных вкладов» для пер-
вого варианта х1Б и трех сравнивае-
мых структур. Здесь также весьма
наглядно прослеживается роль струк-
туры: отсутствие перемычки х10 су-
щественно снижает вклад резервного
генератора х1б (более чем в 3 раза)
в решение общей задачи, переклады-
вая ответственность «на плечи» носо-
вой электростанции.
Отсутствие перемычки х17 повышает
«удельный вклад» резервного гене-
ратора х16 и всех продольных связей
fa. х9—х14).
Логико-вероятностные методы ис-
следования структурно-сложных си-
стем позволяют:
1) объективно и количественно су-
дить о роли отдельных элементов в обес-
печении надежности всей системы;
2) рационально воздействовать на
повышение надежности системы;
3) оптимально вводить избыточность
в систему;
' 4) определять приоритеты в системе
с целью ее восстановления или управ-
ления ею.
Однако для практического исполь-
зования этих методов необходимы
ЭВМ. х
Если предложенные выше харак\
теристики будут получаться на ЭВМ
в диалоговом режиме с машиной, то
графики, подобные тем, которые пред-
ставлены на рис. 11, 12, а также таб-
лицы будут оперативно высвечиваться
на экранах дисплеев. Тогда специа-
листы, даже плохо подготовленные
в области теории надежности, будут
иметь возможность объективно судить
о результатах своего вмешательства
при конструировании системы. -
4. ЛОГИКО-ВЕРОЯТНОСТНЫЙ
МЕТОД РАСЧЕТА СТРУКТУРНОЙ
НАДЕЖНОСТИ СЛОЖНЫХ СИСТЕМ
С УЧЕТОМ ВОССТАНОВЛЕНИЯ
Основы логико-вероятностного ме-
тода расчета надежности восстанавли-
ваемых систем. Восстановление, как и
резервирование, является одним из
средств повышения надежности систем
длительного использования.
Логико-вероятностный метод с учетом восстановления
93
Количественный учет восстановле-
ния отказавших элементов при рас-
четах надежности систем существенно
усложняет как саму задачу исследо-
вания, так и модель функциониро-
вания.
Рассмотрим возможность учета вос-
становления в структурно-сложных си-
стемах, базирующуюся на использо-
вании аппарата алгебры логики и
теории случайных импульсных пото-
ков. Логическая часть указанного ме-
тода позволяет не только рассчитать
надежность восстанавливаемых си-
стем, но и оценить надежность невос-
станавливаемых монотонных структур,
а также их живучесть и безопас-
ность.
Прежде всего необходимо составить
условия работоспособности системы,
выраженные через конъюнкцию отри-
цаний всех минимальных сечений от-
казов:
т ,
У(хх, ... ,xn) = ДЗ, =
т
V
XI
(148)
Затем следует упростить ФАЛ (148)
с помощью операции вынесения за
скобки одинаковых членов в некото-
рых конъюнкциях. При вынесении
за скобки общих аргументов необ-
ходимо сохранить конъюнктивную фор-
му записи функции у, т. е. следует
от конъюнкции элементарных дизъ-
юнкций (Sy) перейти к конъюнкции
некоторых ДНФ (Sj), которые будем
называть звеньями схемы ненадеж-
ности системы:
У (*1....хп) = Д5/ = Д5и (149)"
где г — число таких звеньев (r^ т).
Последовательно-параллельную
структурную схему, соответствующую
i
функции Д 3t, назовем схемой нена-
•<=1
дежности системы.
Отличительной особенностью схемы
ненадежности системы является по-
следовательное соединение звеньев, со-
ставленных из всевозможных мини-
мальных наборов элементов, одновре-
менный отказ которых приводит к от-
казу всей системы в целом. При этом
структура самого звена представляет
параллельное соединение цепей, со-
стоящих из строго последовательно
соединенных элементов.
Функция у (хг....хп) в форме (149)
является, как правило, повторной
ФАЛ.
Пренебрегая зависимостью отказов
звеньев схемы ненадежности (из-за
повторности ФАЛ), можно определить
вероятность ее безотказной работы
/?с. н по формуле
Яс. н = Р {У (*!• • • • » хп) == 1} =
= П р (3, = 1} = П RBj> (150)
<=1 <=1
где Яа — вероятность безотказной ра-
боты звена 3i.
Расчет надежности системы по фор-
муле (150) несколько занижает вероят-
ность исправной работы систем по
сравнению с точным значением этой
вероятности, и ошибка расчета, та-
ким образом, «идет» в запас надеж-
ности.
Переход от ФАЛ (148) к ФРС (149)
приводит, как правило, к существен-
ному уменьшению числа конъюнктив-
ных членов, совершенно не искажая
логического смысла условий работоспо-
собности системы. Этим по существу
и объясняется бдлыпая точность оцен-
ки надежности системы по формуле
(150) по сравнению с известной нижней
оценкой через минимальные сечения
отказов
*cmln= п Г1- П Qi .
/=i L it*aj
(151)
Пример 15. Составим условия рабо-
тоспособности системы, представлен-
ной на рис. 1, в форме, необходимой
для построения схемы ненадежности.
94
Расчет надежности систем со структурной избыточностью'
Решение. Преобразуем ФРС (8)
у(хъ ... , Х8) = X? *1 Хз
Х2 Х4 Хъ х^ х8 хл
к виду
Х1 ха — | 3j3i ... Зе
Хе Хе х6
Хе Х8
(152)
Из (152) следует, что число звеньев
г = 6, а число всех МСО т — 10.
При = Ri — ... = RB = 0,9 по
формулам (150) и (152) находим
6
«е.н = П«э =
1=1
= 0,9 [1 — (1 — 0,9) (1 — 0,92)]2 X
Х[1-(1— 0,9) (1 — 0,93)] X
X [1 — (1 — 0,9)3]2«0,841,
а оценка по формуле (151)
ю
Rc mln П 1 =
/=1 [ * € *3j
= (1 - Q7) (1 - Q1Q2) (1 - РЛ) х
х (1 — QaQ3)(l — Q3Q4) х
х (1 - Q3Qe) (1 - адБ) (1 - QBQe) x
x (1 — QiQeQe) (1 — QzQbQe)=
= (1—0,l)(l—0,01)7 x
= (1—0,001 )2« 0,837.
Рис. 18. Графическая иллюстрация процес-
са функционирования восстанавливаемой
системы
Подставляя R = 0,9 в точное реше-
ние (41), получим
Rc = 2-0,9* + 2-0,9® — 5-0,97 +
4- 2-0,9® = 0,84453.
Метод расчета надежности восстанав-
ливаемых систем с помощью теории
совпадения импульсов независимых по-*
токов. Функции 3i, записанные в ДНФ,
представляют собой простые парал-
лельные структуры, соответствующие
нагруженному резервированию, а в по-
следовательных цепях (членах дизъ-
юнкции 3}) находятся, как правило,
разнотипные элементы.
Необходимо решить следующие за-
дачи:
1) по известным характеристикам
безотказности и восстанавливаемости
элементов, находящихся в последова-
тельной цепи звена, оценить соответ-
ствующие характеристики этой цепи;
2) по найденным характеристикам
последовательных цепей оценить на-
дежность всего звена.
Эти задачи при некоторых обще-
принятых допущениях можно решить
с помощью теории совпадения им-
пульсов независимых потоков [10].
На рис. 13 процесс функциониро-
вания каждого элемента х$ (1=1,
2, ..., л) представлен в виде потока
прямоугольных импульсов, причем
продолжительность исправной работы
элемента поставлена в соответствие
с длительностью паузы а время
восстановления — с длительностью им-
пульса Zf.
Поток взаимно неперекрывающихся
во времени импульсов, когда
= jf(A) _ f(fe-l) >2^-1)^ (153)
где и z^l — момент появления
и длительность k-ro импульса для
i-го элемента (см. рис. 13), называют
стационарным в широком смысле [10],
если математическое ожидание и ко-
нечная дисперсия случайной вели-
Логико-вероятностный метод с учетом восстановления
95
чины Ti не зависят от t, а коэффициент
корреляции случайных величин
7\ (* Ч" G) и Л (* + h) является функ-
цией t2 —
Примем следующие допущения.
1. Процесс восстановления элемен-
тов является стационарным в широком
смысле.
2. Отказ и восстановление элемен-
тов независимы.
3. Все исправные элементы нахо-
дятся в режиме нагруженного резер-
вирования, а все неисправные неогра-
ниченно восстанавливаются.
Совпадение двух и более импульсов
будем считать состоявшимся, если их
длительности перекрываются- хотя бы
частично. Импульс, образованный в ре-
зультате перекрытия во времени за-
данного числа s импульсов, будем
называть импульсом совпадения.
Длительность такого импульса бу-
дем обозначать тП(5. На рис. 13 за-
штрихованы импульсы совпадения, об-
разованные в результате перекрытия
четырех (тп, 4) и двух (тП12) импуль-
сов из л, а также импульс длитель-
ностью тП11, который условно тоже
будем считать импульсом совпадения.
Через тп, о обозначена длительность
совпадающих пауз.
Процесс совпадения импульсов ха-
рактеризуется только временными па-
раметрами. Это позволяет форму им-
пульсов каждого потока считать пря-
моугольной, а их амплитуду — рав-
ной единице. Длительность Tn,s им-
пульса совпадений, образованного в ре-
зультате перекрытия во времени за-
данного числа s импульсов независи-
мых потоков, является величиной слу-
чайной.
Если в процессе совпадения уча-
ствуют импульсы п стационарных и
независимых потоков, то распределе-
ние длительности импульсов потока
совпадений, образованных в резуль-
тате перекрытия во времени s из п им-
пульсов, определяется плотностью
вероятностей
fns (т) = =— jZa Рns (т)> (154)
где jlns — средняя частота следова-
ния импульсов совпадения^ Pns (т) —
вероятность нахождения случайной ве-
личины Tns в пределах импульса
' потока совпадений, образованного в ре-
зультате перекрытия во времени s из
п импульсов.
Математическое ожидание длитель-
ности импульса потока совпадений, об-
разованного в результате перекрытия
во времени s из п импульсов, согласно
определению
ОО
Тдз ~ (т) dx
‘о
(155)
Подставив в данное уравнение зна-
чение (154) и выполнив интегрирова-
ние по частям, получим
Тп, = _ (156)
Pns
Таким образом, имеется принци-
пиальная возможность вычисления ма-
тематических ожиданий Tns для лю-
бых п и 0 s л.
Располагая формулами для вычисле-
ния Tns, уточним указанные ранее
задачи: _ _
1) зная средние времена Yt и Z,
элементов, входящих в цепь звена
схемы ненадежности системы, требует-
ся определить эти параметры для од-
ного элемента хэ, являющегося эк-
вивалентным (в смысле равенства ма-
тематических ожиданий) последова-
тельной цепочке из п различных эле-
ментов (рис. 14, а);
2) зная средние времена Уэ и Za
для т параллельных ветвей звена
схемы ненадежности системы, требует-
ся определить эти параметры для всего
звена Y3 и Z3, являющегося экви-
валентным (в смысле равенства ма-
тематических ожиданий) параллель-
ному соединению из т различных
элементов (рис. 14, б), и оценить
вероятность его безотказной ра-
боты,
На основании анализа модели сбвпа-
дения импульсов можно утверждать,
что решениями этих задач по экви-
валентированию последовательных це
96
Расчет надежности систем со структурной избыточностью
7-} \ 2п-1 7-}
Рис. 14. Эквивалентирование последова-
тельной цепочки (а) и параллельного соеди-
нения (tf)
почек и параллельных ветвей схемы
ненадежности будут
П = тп, (157)
Zs — Tn, i' (158)
i=l
2з ~Tmi m, (159)
F3=Tm.o-Z3, (160)
где 7М. о — среднее время между от-
казами эвена.
Действительно, математическое ожи-
дание времени исправной работы л эле-
ментов последовательной цепочки зве-
на Уэ равно средней продолжительно-
сти совпадения пауз Тп, 0, а мате-
матическое ожидание времени вос-
становления этой же цепочки Z3 в за-
висимости от принятой модели об-
служивания определяется суммой раз-
личного числа продолжительностей им-
пульсов совпадений Тп^. Если в пе-
риод ремонта одного из элементов
возможны отказы других, т. е. воз-
можны совпадения ремонтов двух, трех
элементов и т. д., то среднее время
восстановления цепочки (обозначим
в этом случае Z^) будет определяться
суммой всех Tn, t.
Функция s (т) при Л —оо И
соблюдении некоторых нежестких ус-
ловий приближается к экспоненциаль-
ному распределению (10):
. , ч I / т \
/п, в ОО = -=----ехр — .
Tn. s \ ГП1Л /
(161)
Даже прр конечных п, если стацио-
нарные потоки восстановлений элемен-
тов независимы и выполняется условие
(162)
суммарный поток восстановлений яв-
ляется практически экспоненциальным
независимо от вида функций qi (у),
vt (z). В условии (162) Vi -- ----
Zi
интенсивность восстановления х-го
элемента, qi (у), (z) — плотности ве-
роятностей соответственно отказа и
восстановления z-ro элемента.
Если же плотности распределения
случайных величин 1 £ и Zj подчиняют-
ся экспоненциальному закону, то сум-
марный поток восстановлений будет
простейшим даже при нарушении усло-
вия (162), т. е. при любом числе п.
С учетом сказанного получим расчет-
ную формулу для определения Уд.-
= “5Г2—- (14
y=L
У, t=i
i=i
Соответствующая интенсивность от-
казов элемента хэ
S Х<- (164)
,=1
Расчетное выражение для определе-
ния Z3 при произвольном п является
весьма громоздким, поэтому запишем
формулы только для п -- 2 и 3:
^э2 — У а, 1 + s ~
_ Z^+Z^ _
Zx -ь Z2 + У1 + у2
Логико-вероятЯостныЙ метод с учетом восстановления
97
2в8 = Тзл + T3t3 + т 3,8 =
= _^Г2Р8 + Z^^ + 5ЛУа
Z1 {Уа + Га) + Za + Уа) +
+ Z8(K1 + ra)_+fare +
+ + Г1У 2 +
^V12aZa + y8ZjZa + Y^Z3
Yi (Za + Z3) + Га (Zi + ZB)+
+ Г3 (Zi + Z2) -J- ZaZ8 +
4- ZiZ8 4- ZxZa 4"
(166)
Если при ремонте одного из элемен-
тов цепочки отказы других элементов
невозможны (случай, весьма распро-
страненный на практике), то все рас-
четы существенно упрощаются, так
как среднее время восстановления та-
кой цепочки будет {5авно математиче-
скому ожиданию продолжительности
только одного импульса совпадений
Т'п, 1'
(167)
Соответствующая интенсивность вос-
становления элемента
ского ожидания длительности восста-
новления цепочки):
1
v
Исходя из понятия коэффициента
готовности (или простоя) последова-
тельной цепочки из п элементов и
допуская совпадения ремонтов, можно
получить следующее простое выраже-
ние для определения Z9 (математиче-
Можно доказать, что
z<I)>z<3>>z<2>.
(169)
(170)
Математическое ожидание времени
восстановления звена Z3, состоящего
из пг элементов, равно средней про-
должительности импульсов совпаде-
ния Tm, т, т. е. средней длительности
совпадения ремонтов во всех т вет-
вях одновременно (ибо в противном
случае нашлись бы ветви «без ремон-
тов», а это означало бы, что звено
исправно).
98
Расчет надежности систем со структурной избыточностью
Расчетная формула для определения
а соответствующая интенсивность вос-
становления элемента х3
т
V, = S va}. (172)
/=н
Математическое ожидание времени
исправной работы звена в формуле
(171) вычисляют с помощью среднего
времени между отказами звена Тм. 0»
обратно пропорционального средней
частоте следования импульсов совпа-
дения Ртп,т-
т
П(^+г»7>
/=1
ГТ 1 +Рэ/
L рэ'
=2Л---------. <173>
/=1
где Рэ/ = •=- .
Интенсивность отказа звена
т
1 5Ча>
*«=-=-=-^-г!----------> <174>
'8 п1+рэ/ — 1
/-! ₽8'
а коэффициент неисправности звена
определяется выражением
Х>з _ 1
Va т < 1
П-Ц^-1
/-1 PW
(175)
Если плотности распределения слу-
чайных величин и Zfc подчиняются
экспоненциальному закону (обычно
принимаемое допущение в теории мас-
сового обслуживания), то вероятность
безотказной работы t-го звена схемы
ненадежности
Яз/0 = ехр(-Х3/). (176)
Для всей схемы ненадежности в со-
ответствий с формулой (150) получим
Г -Хз.'
Rc. к (0 = П е ‘ (177)
Последнюю вероятность удобнее вы-
числять из соотношения
г
In Rc. К (0 = -1 £ Ц. (178)
«=1
Коэффициент готовности можно оп-
ределить по формуле
1
П (1 + ₽.,)
1=1
1
1 + S Ра,
f=l
которую при малой
можно упростить:
величине
(180)
Кг » 1 — Рзр
«=1
Пример 16. Оценим надежность рас-
смотренной выше системы (пример 15)
с учетом восстановления, приняв сле-
дующие параметры для элементов:
Yi = 10 000 ч; Zi = 100 ч;
Pi =0,01; i = 1, 2, ... ,8.
Для того чтобы в дальнейшем можно
было сравнить надежность восстанав-
ливаемой системы с надежностью си-
Логико-вероятностный метод с учетом восстановления
99
Рис. 15. Схема ненадежности системы
стемы без учета восстановления (для
элементов которой ранее принималась
вероятность 7? = 0,9), расчет прове-
дем для времени t — 1050 ч, так как
«1 (1050) = ехр (7^°0500) = 0,9003.
Решение. В соответствии
с рис. 15 и формулой (164) находим
= 2А, = 0,0002~;
*4*4 *4*4 • ч 9
Yx х = Y х = 5000 ч;
*1*4 *4*4
х х =з\. = о.оооз —;
*1*4*4 » Ч *
Y х х х == 3333,3 ч;
*1*4*4 ’
По формуле (165) определяем
7(1) = 7(1) — 2ZiYi । Z{ =
*’*4 *<*• 2Zf + 2Yi + 2Zt
- ZiYi I 057 = 100-10 000
Zi + Yi + '° 1 100+ 10 000
+ 0,5-100 =
1 000 000
10 100
+ 50 =
= 99 + 50 = 149 ч.
4.
Для цепочки из трех элементов по
формуле (166) имеем (
^(1) З-ИЙ-ЮООО-ЮООО ,
*•*<*• 3-100 (10 000 + 10 000) + +
+ 3-10 000-10 000
, 3-10 000-100-100 ,
+ 3-10000 (100+ 100)+ +
+ 3-100-100
100-100-100
+ 3-100-100 ~
= 98,1 +49,7 + 33,3 = 181,1 ч.
Зная параметры всех эквивалентных
цепей, можно рассчитать звенья. По
формуле (171) находим
Z* \ Z„ „
1 , = 59,9 ч;
100 + 149
Z* „
*4 *4*4*4
-j---!—j— = 64,5 ч;
100 + 181,1
_ 2 —___________!_______
1 э’ 1 _i_ 1 . _L
zr + zv + zx
Хе
-j-----?-----j- = зз,з ч.
Too + 100 + Too
По формуле (173) определяем
T =Т ~
м. о. эа * м. о. 34
(YX +ZX MYX X +ZX X )
Zx -VZxx
(10 000 + 100) (5000 + 149)
100 + 149
10 000-5149
249
= 208 855 ч;
100
Расчет надежности систем со структурной избыточностью
м. о. з,
*з 1 ~xtx4xe
(10 000+ 100) (3333,3+ 181,1)
100+181,1
10100.35М.4=126300ч;
Zoiti
М. о. 3,
м. о. з,
=-ж=34 300 000 ч-
Интенсивности отказов звеньев ис*
следуемой схемы ненадежности:
1
К 208 855 — 59,9 ~
= 0,0470 -10"4 1/ч;
Хз» = 126 300 — 64,5 =
= 0.0798-10"4 1/ч;
1 _ 1 —__________i___________
э« Л3. 34 300 000 — 33,3
= 0,00029-10"4 1/ч;
По формуле (178)
In Яс. н (Ю50) = —1050 (1 +
+ 2-0,0470 + 0,0798 + 2-0,00029) X
0,1336,
Ь
208795ч
ХЮ'4 = -
10000 ч I
И
128235 ч
*1-
Yx^ = 5000ч
4..
100 ч
59,9ч
откуда
Яс. н (Ю50) = 0,875.
На рис. 16 изображена схема нена-
дежности системы (152) с указанием
значений вычисленных математических
ожиданий для последовательных це-
пей и звеньев (Уз., Za*.). Эти харак-
теристики дают представление о тех
звеньях схемы ненадежности, которые
в первую очередь и определяют ве-
роятность ее отказа. Такими звеньями
являются, во-первых, во-вторых,
З3 и, в-третьих, 32 и 34. Звенья 3Б
и 36 практически не снижают надеж-
ности системы, и их можно было бы
не учитывать. Надежность данной си-
стемы в основном определяет элемент
х7 (звено Зх), который не имеет резер-
вирования.
Схема ненадежности дает наглядное
представление о «слабых местах» си-
стемы, которые в основном и опреде-
ляют ее надежность.
В самом деле, вероятности отказов
в различных звеньях схемы ненадеж-
ности будут существенно отличаться
друг от друга, причем, очевидно, от-
казы в звеньях, состоящих из боль-
шого числа параллельных цепей, будут
весьма маловероятны (особенно с уче-
том восстановления отказавших эле-
ментов). На этом, по существу ,\ и
строится приближенная методика рас-
чета надежности восстанавливаемых
систем, а схема ненадежности помо-
гает обнаружить именно те комбинации
элементов, которые определяют
дежность системы.
69,5 ч
йена*
208795 ч
59,9 ч
Xf
*6
39,3-106 ч
39,3‘10в
^^х6~5000ч
Хб
33,3 ч
33,3 ч
Рис. 16. Схема ненадежности системы с эквивалентными элементами
Расчет надежности двухполюсных систем
101
Вероятность безотказной работы-ре-
зервированной части системы доста-
точно высока
(1°5°) = =0.972.
Без учета восстановления она равна
0,939.
Ввиду того, что на практике Z3
С Уэ, формулу (174) можно еще не-
сколько упростить, приняв Уъ х
«Тм. 0, и, следовательно,
(181)
Для вычисления коэффициента го-
товности системы определим сначала
по формуле (175) коэффициенты не-
исправности всех звеньев:
Р31 =
100
10 000
= 0,01;
рэ, Рз4 206 795 °«000287,
Рз? = 126 235 = °’000516:
33 3
₽з.=₽з.=34^ = 0'961<Г‘-
По формуле (179)
к =__________1__________
Аг 1 + (10 000 + 2-287 +
+ 516 4-2-0,96) 10“®
5. РАСЧЕТ НАДЕЖНОСТИ
ДВУХПОЛЮСНЫХ СИСТЕМ С
ПОМОЩЬЮ МОДИФИЦИРОВАННОГО
ЛОГИКО-ВЕРОЯТНОСТНОГО/
МЕТОДА (МЛВМ)
МАТЕМАТИЧЕСКИЕ ОСНОВЫ МЕТОДА
Сущность модификации й основная
особенность метода заключаются в том,
что в нем используются смешанные
формы функции вероятностей (СФФВ).
Смешанной называют такую форму
функции, которая получаемся в ре-
зультате частичного замещения в ФАЛ
логических переменных вероятностями
и содержит одновременно два типа пе-
ременных — логические переменные и
вероятности и две системы операций —
арифметические и логические. Осо-
бенность СФФВ состоит в том, что
в ней все зависимости от аргументов
определены в явной форме через ис-
пользуемые логические и арифметиче-
ские элементарные операции. Она не
может содержать операторы типа
Р (f = 1), где f — некоторая ФАЛ,
если неизвестно явное выражение та-
ких функций в виде суперпозиции
элементарных операций. Смешанная
форма имеет простой вероятностный
смысл. Если в функции f после заме-
щения части логических переменных
остались незамещенные переменные,
образующие вектор X, то можно пред-
ставить СФФВ как функцию Р (f =
= 1) = Р (X), которая является услов-
ной вероятностью того, что / = 1,
причем условия записаны с помощью
незамещенных переменных. Эти усло-
вия переменны или случайны. После
задания значений истинности вектора
X — Х° вероятность Р (X) превра-
щается в условную вероятность, за-
писанную в обычной для теории ве-
роятностей форме. Применение сме-
шанной формы при проектном ана-
лизе надежности дает в ряде случаев
определенное преимущество. Во-пер-
вых, СФФВ позволяет не доводить
до конца преобразование исходной
формы ФАЛ к форме перехода к пол-
ному замещению, а начать замещение
раньше, упростив работу на стадии
преобразования ФАЛ и уменьшая вре-
мя анализа. Во-вторых, СФФВ можно
вычислять на любой стадии замеще-
ния и оценивать порядок всех входя-
щих в нее слагаемых. В процессе про-
ектирования требования к точности
анализа могут меняться, и метод позво-
ляет приспособиться к этому измене-
нию, облегчая анализ при снижении
требований к точности путем отбра-
сывания малых членов еще до того,
как в них закончено замещение.
Запись в смешанной форме очень
удобна при программировании задач
102
Расчет надежности систем со структурной избыточностью
надежности на известных алгоритми-
ческих языках для расчетов на ЭВМ.
Высокий уровень формализации ме-
тода позволяет создать машинные
средства автоматизации проектирова-
ния (САПР), постепенно повышая уро-
вень автоматизации вплоть до реали-
зации диалоговых и интерактивных
режимов взаимодействия проектиров-
щика с ЭВМ. Наконец, МЛВМ яв-
ляется единственной разновидностью
ЛВМ, приспособленной к формали-
зованному решению задач надежности
ветвящихся структур.
Техническим объектом, исследуемым
с помощью МЛВМ, является система
с сетевой структурой. Это могут быть
сети связи, сети ЭВМ, сети массового
обслуживания, коммутационные сети
в электроэнергетике, транспортные се-
ти и др. Любая сеть состоит из узлов
и соединяющих их линий связи — од-
нонаправленных или двунаправлен-
ных. Входные и выходные узлы назы-
вают полюсами, прочие узлы — про-
межуточными или просто узлами.
Последовательность узлов и линий
связи, соединяющих входной и вы-
ходной полюсы, образует путь. Если
в системе есть только один входной и
один выходной полюс/ то систему
называют двухполюсной. Если двух-
полюсная система выполняет только
одну функцию (передачи информации,
электроэнергии, энергоносителя от
входного полюса к выходному), то
ее называют однофункциональной.
Если же она должна выполнять не-
сколько функций (обслуживание не-
скольких потоков различной приори-
тетности в сетях массового обслужи-
вания, обеспечение электроэнергией
нескольких групп потребителей и пр.),
то систему называют многофункцио-
нальной. Кроме того, в каждом из
классов различают системы первого
и второго типов (см. с. 58). В системах
второго типа необходимо учитывать
при анализе надежности правила уп-
равления на сети, реализованные в не-
котором алгоритме &. К характеристи-
кам учитываемым при решении
задач надежности систем с сетевой
структурой, относят содержание и
объем информации оповещения узлов
о состоянии сети, способ выбора на-
правления передачи информации —
маршрута, допустимое число обход-
ных путей, условия переадресации
потоков при отказах элементов сети
И др.
Математическая модель сети пред-
ставляется в виде ориентированного
или неориентированного графа. В пер-
вом случае используются термины:
вершина, дуга, путь; во втором —
вершина, ребро, цепь вместо техниче-
ских терминов: узел, линия связи,
путь, маршрут. При этом ребро и
дуга соответствуют двунаправленной
и однонаправленной линиям связи.
Анализ надежности двухполюсных
структур с помощью МЛВМ преду-
сматривает несколько этапов.
Составление условий работоспособ-
ности (УРС). На этом этапе все двух-
полюсные структуры должны быть
классифицированы и установлена их
принадлежность к одному из четырех
классов: однофункциональные первого
и второго типов (соответственно клас-
сы 1 и 2), многофункциональные пер-
вого и второго типов (соответственно
классы 3 и 4). Для систем класса 1
условия работоспособности выра-
жаются с помощью логической функ-
ции работоспособности ФРС вида
/ = /(Х) = хп/ V хпуМ;
^2)
где хп — переменная, соответствую-
щая узлу, расположенному во вход-
ном полюсе; хпу — переменные, со-
ответствующие линиям связи между
входным полюсом и другими узлами
системы; /у — функция работоспособ-
ности подсистемы, в которой узел еу
является входным полюсом; А4у —
множество узлов, имеющих непосред-
ственные связи с бу.
Функция f имеет следующий смысл:
для существования хотя бы одного
пути между полюсами необходимо,
чтобы были работоспособны входной
полюс, линия связи входного полюса,
по крайней мере с одним из узлов еу
структурной схемы и чтобы был хо-
тя бы один работоспособный путь
между узлом ej и выходным полюсом
системы. Если какой-либо элемент
системы идеально надежен (например,
Расчет надежности двухполюсных систем
103
входной полюс), то соответствующая
логическая переменная принимает зна-
чения единицы (здесь хп = 1). Если
какой-либо элемент отсутствует, то
соответствующая логическая перемен-
ная х=0. Выражение (182) пред-
ставляет собой систему логических
уравнений, способы решения которой
представлены далее.
Метод определителей.
Запишем систему (182) в матричной
форме
f = At V Af.
Здесь Аг — вектор-столбец свободных
членов; А = || а^|| — матрица коэф-
фициентов уравнений; ац = 1. Со-
ставим определитель системы
1 а12 013 ат
О 21 1 6^23 • • • а2П
А = Д31 а92 1 &зп
•
аП1 аП2 апз 1
Неизвестные функции получаются
подстановкой в определитель векто-
ра свободных членов на место i-ro
столбца и последующим раскрытием
определителя по правилам, аналогич-
ным существующим в алгебре действи-
тельных чисел:
1
°21
°12
1
ат ам
• • * а1, ir-1 а1 а1, i+l а1п
• • • а2, i-1 °2 а2. i+l • • • Ояп
• • • * • •
• •« °n, i-1 ап °п, i+l • • • 1
Метод подстановки. Метод
состоит в последовательном исключе-
нии из системы одного из уравнений,
а в оставшихся уравнениях — одного
из неизвестных. В результате после-
довательного исключения неизвестных
и уравнений приходят к равенству,
являющемуся решением системы урав-
нений относительно одного неизвест-
ного. Многократно повторяя операции
исключения уравнения и неизвестных,
можно получить выражения для всех
неизвестных, которые и будут служить
решением системы уравнений.
Кроме указанных двух способов,
можно решить систему логических
уравнений матричным способом, путем
приведения к одному уравнению с п
неизвестными и другими способами.
Для однофункциональиых систем
второго типа общая форма записи
УРС имеет вид
/ = f (X, S). (183)
В общем случае функция (183) мо-
жет быть монотонной или немоно-
тонной ФАЛ. Модифицированный
ЛВМ позволяет проводить анализ на-
дежности и в том и в другом случае.
В многофункциональных системах
сначала составляют условия работо-
способности системы при выполнении
t-й функции, а затем устанавливают
логическую связь между условиями
работоспособности при выполнении от-
дельных функций и условиями ра-
ботоспособности системы в целом с по-
мощью следующей ФАЛ:
t = S), I е Af), (184)
где каждая (X, S) имеет вид
(182) илй (183). В частности, если
надо обеспечить выполнение всех или
хотя бы одной функции, то (184)
принимает вид
f = /(1) & /(2) & ... & /(т); (185)
f = V /(2) V • • • V /(т)- (186)
Пример 17. Составить условия рабо-
тоспособности электроэнергетической
системы (рис. 17), состоящей из трех
электрогенераторов одинаковой мощ-
ности (7, 2, 3), трех главных распре-
делительных щитов (4, 6, 8), пере-
мычек между ними (5, 7, 9), шести
вторичных распределительных щитов
(10—15). Система должна обеспечить
бесперебойное питание трех групп по-
требителей (7, 77, 777).
Решение. Система является мно-
гофункциональной класса 3 с логиче-
104
Расчет надежности систем со структурной избыточностью
Рис. 17. Структура электроэнергетической
системы
ской зависимостью между У PC си-
стемы и УРС функций типа (185):
/ = fm. (187)
где
fl == xiofa V fll — xiifa V xufa»
fill = xisfa V xlbf 8-
Остается найти функции fa, fa и fa.
Они определяются из системы логи-
ческих уравнений:
/в = хл (xi V We V W8);
fa = хв (х2 V x6fa V xifa); (188)
fa = x8 (x9 V xofa V Xifa).
Функция (187) зависит от 15 пере-
менных, Из которых шесть беспо-
вторных.
Преобразование ФАЛ к форме пере-
хода к частичному замещению (ФПЧЗ)
и запись СФФВ. Составленную на пер-
вом этапе ФАЛ необходимо преоб-
разовать к виду, допускающему пере-
ход от логической функции к СФФВ
на основе замены некоторых х$ на
вероятности pt = P(xz = 1), а x'i на
qt = 1 —pt и использования стан-
дартной формы представления СФФВ,
в которой незамещенные логические
переменные переводятся в показатели,
степени вероятностей. Такую форму
ФАЛ называют формой перехода к
частичному ч замещению (ФПЧЗ). Из-
вестно всего четыре стандартных
ФПЧЗ и соответствующих им СФФВ.
Они указаны в следующих четырех
теоремах.
Теорема 1. Пусть задана ФАЛ вида
y = /(X)=fv ( Ь
& WT°M*o), (189)
V G )
где X, Xi — векторные аргументы
функции f и fa-, tty — постоянные ко-
эффициенты, равные 0 или 1 (ха = х
при а = 1; ха = х' при а = 0).
Если Xj — бесповторные логические
переменные для всех j £ М =
= (jMp fa—ФАЛ произвольного
вида, а события Xj = а; независимы
в совокупности, то форма функции
(189) является ФПЧЗ (форма
соответствует СФФВ:
Pf = Р (fa, fa.fn) =
1), и ей
где
<4 = (1 — af) JJ pj 4- az x
(190)
(191)
x p- П ₽/)
В (190) операция возведения в сте-
пень определена как обычно: of =^а
при f = 1 и а! = 1 при f = 0.
Пример 18. Составить СФФВ для
ФАЛ из примера 1:
f = х7 (х1х3 (хБ V ^хвхв) V
V х2х4 (xe V *з*бХ8)). (192)
Решение. Форма функции (192)
является ФПЧЗ. Поэтому согласно
(190)
Р (f = 1) = Р1 (1 - х
(193)
Теорема 2. Дизъюнкция и конъюнк-
ция ФАЛ:
f (Х) = V faW; (194)
(S)
/(*)=& fam. (195)
(S)
где fa (X) — функция вида (189)'; X =
= {хх, ..., xnj, Xj —бесповторные пе-
Расчет надежности двухполюсных систем
105
ременные для всех j £ М ~ (J Msi,
(S, l)
являются ФПЧЗ (форма 2), и им соот-
ветствуют СФФВ:
Qf = P(V fs = O\ =
Us) )
(S)
Pf=p(& f8 = l\ =
Vs) )
= Пр(/8 = 1).
(s)
(196)
(197)
где вероятности P (fs = 1) определяют-
ся по формуле (190). Если в (194)
функции ортогональны, то достаточна
бесповторность переменных только в
каждой функции fs. Тогда замещение
переменных в различных слагаемых
проводится независимо друг от друга.
Пример 19. Составить СФФВ для
функции (187) из примера 17.
Решение. Сравнивая (187) с
(194) и (189), устанавливаем, что (187)
является ФПЧЗ (форма 2). Используя
(195) и (190), запишем СФФВ:
pt = 0 - <?!б<?{5) О - «fi?») х
х (1 - «Ы0-
Теорема 3. Пусть заданы две логи-
ческие функции,-
Gi (xlf х2,..., хп, Х2,..., Хп) —
п
= V Xifi (Xf); (198)
i=l
(*i> x2,..., xn, .Vj, ..., Yn) —
n
= V Xigi(Yi),
i=l
где X} — бесповтррные логические пе-
ременные; Xi и,lzf — векторные аргу-
менты функций 'fa и gi произвольного
вида. Составим третью функцию
= GiG2.
(199)
Если fi и gf ортогональны, т. е.
figi =0 для i = 1, п, то (199) яв-
ляется ФПЧЗ (форма 3), и ей соответ-
ствует СФФВ:
Если fi и gi неортогональны, то
ФПЧЗ (форма 3) имеет вид
(и \' / п \
У*Л У*№1 (201)
4=1 / \4=1 /
и ей соответствует СФФВ:
(202)
Если fi и gi ортогональны, то
f'igi = gi и (202) совпадает с (200).
Пример 20. Составить СФФВ для
функции
f (X) = (xtx4 V х2х3х;)' (ххх3 V х2х4),
(203)
Решение. Сводим (203) к виду
(199), полагая Л = х4, /2 = х3х[, g^=
— х3, g2 = х4. Видим, что f2 и g2
ортогональны, а/х и^ неортогональны.
Поэтому составляем ФПЧЗ по фор-
муле (201):
/ = (ххх4 V Х2Х3Х4)' (хгх3х; V *2*4)-
(204)
Смешанная форма согласно (202)
имеет вид
Р1 = (1 - • (205)
Теорема 4. Логическая функция
А—1
/(Х) = & /;(Х)/Л(Х), (206)
/=1 7 я
где (X) = V Xifij, fo— ФАЛ про-
1=1
извольного вида, является ФПЧЗ
(форма 4), и ей соответствует СФФВ:
п А—1 л
pf = И П #/_I х
J J-Л. -LX
4=1 /=1
x ( !—
\ ;==1 /
gt, = V fli- (207)
7=1
106
Расчет надежности систем со структурной избыточностью
При k = 2 формула (207) совпа-
дает с (202).
Пример 21. Составить СФФВ для
функции
f = (xifuY (XtftiY ((xi/ia V *2/22) V
V (xifnY (XifnY (*i/ia V *2/24))-
Решение. Если раскрыть внеш-
ние скобки и выполнить ортогонали-
зацию двух слагаемых, то каждое из
них приобретает вид (206):
f = (*1/11 V W21)Л (*1/12 V *2/22) V
V (*i/n V xifiiY (*1/12 V xifziY х
X (*1/13 V *2/23) ' (*1/14 V *2/24)-
Теперь используем (207) и составим
СФФВ:
pf = f1 ~ <#lfl2$1'22 x
^11^12^13^21^22^23 x
^11^12^13^ 14^21^22^23^24
(208)
Получение вероятностной функ-
ции (ВФ). Искомая вероятность полу-
чается из СФФВ на основе соотношения
Р = М{Р(Х)}, (209)
где М — знак математического ожи-
дания; X — векторная случайная ве-
личина с двоичными компонентами.
Математическое ожидание Р (X) вы-
числяется путем многошагового заме-
щения логических переменных с по-
мощью теоремы разложения. В самом
неблагоприятном случае число шагов
замещения совпадает с числом неза-
мещенных переменных. В каждом кон-
кретном случае число шагов обычно
существенно меньше, так как за один
шаг удается заместить несколько пе-
ременных и упростить СФФВ, от-
брасывая малые члены.
РАСЧЕТ НАДЕЖНОСТИ И ВЫБОР
СТРУКТУРНЫХ ПАРАМЕТРОВ
МНОГОСВЯЗНЫХ СИСТЕМ
С ОРИЕНТИРОВАННОЙ СТРУКТУРОЙ
ПРИ ПОЛНОМ ОПОВЕЩЕНИИ
О СОСТОЯНИИ СЕТИ
Двухполюсная система имеет струк-
туру в виде ориентированного графа,
в котором все элементы (узлы и линии
связи) Могут отказывать с ненулевыми
и, вообще говоря, различными веро-
ятностями. Ориентированный граф
ациклический, т. е. в нем отсутствуют
контуры, а все пути простые. Отсут-
ствуют также нестрого параллельные
дуги, но могут быть строго параллель-
ные дуги. Все вершины графа упоря-
дочены так, что выходной полюс имеет
минимальный номер, а входной по-
люс — максимальный и ни одна вер-
шина с большим номером., не достигает-
ся ни из одной вершины с меньшим
номером. Рангом связности сети на-
зывают максимум разности номеров
вершин, имеющих прямую связь. Лю-
бой частный граф, имеющий ранг
связности г, можно достроить до s-
связного графа, дополняя его дугами
с вероятностями работоспособного со-
стояния pi = 0. При s = п — 1 граф
с п вершинами называют полносвяз-
ным. В s-связных системах выделим
два класса.
В классе 1 система работоспособна,
если есть хотя бы один работоспособ-
ный путь из узла п в узел 1 (рис. 18).
Путь считается работоспособным, если
работоспособны все его элементы: узлы
и линии связи. В классе 2 структур-
ная схема системы не содержит полной
информации о взаимодействии эле-
ментов и их логических связях. По-
этому появляется зависимость рабо-
тоспособности одного пути от состоя-
ния элементов других путей. Инфор-
мация о состоянии элементов сети
полная в каждый момент времени.
Рис. 18. Структурная схема многосвязной системы
Расчет надежности двухполюсных систем
107
Это позволяет воспользоваться для
поддержания работоспособности систе-
мы любым работоспособным путем из
числа разрешенных, который в данный
момент есть в системе.
Многосвязная система первого типа.
Составление У PC. Система содержит
п вершин и имеет связность структуры
ранга s. Обозначим через fn логиче-
скую функцию работоспособности си-
стемы, а через fi —функцию работо-
способности подсистемы, получаемой
путем переноса входного полюса в
узел i. Тогда формула (182) приоб-
ретает вид
fn ~ хп (,хп, n-ifn-1 V хп, n-afn-aV • • •
• • ♦ V хп, n-sfn-s)» (2Ю)
fi = xi-(xi, i-lfi-1 V V xi, i-sfi-s)>
i = S + 1, П — 1,
fi=xi (xi. i-1 f i~l V • • • V xilfl)> t S.
Общее число переменных в fn равно
N — п + s (n — s — 1) + s (s +
+ l)/2.
Преобразование к ФПЧЗ. Сравнение
(210) с (189) показывает, что (210)
является ФПЧЗ (форма 1). В ней
бесповторные переменные: хп и xni
для функции fn; xt и Xij для функции fi.
Запись СФФВ. Используя (190), за-
пишем СФФВ:
Pn=P(fn = 1)=Pn *
(211)
т — max (1, i ^ s).
За один шаг замещается Nr —
= п (п — 1 )/2 переменных, если п
s, и Ni = s (п — (s + 1)/2), если
п > s. При п = 8, _s = 4 = 22
(73 %), а при л=10, s= 5 Nt =
= 35 (78 %).
Получение ВФ. В многошаговой про-
цедуре замещению подлежат функ-
ции fi в такой последовательности:
сначала fn_u затем /п_а, /п-з и т. д.
Первые два шага выполняют по фор-
мулам:
Р (fn = *) = Р^~2У (fn-2< • fn-.)=>
= Рп (Р (/п-1 = 1) X
(212)
Р*,"-3’ (f„_3...fn_,) ~
= P(fn-2=P)*
хР(„"-2)(1. /п_з...../„_,) +
+ Р(/п_2 = 0)Х
X Р<п"~2> (0, fn-....fn-.)- (213)
Функции Р (fn-L = 1) И Р (fn._2 = 1)
находят из (211). Следующие шаги
выполняют аналогично.
Пример 22. Определить достаточную
степень структурной избыточности в
двухполюсной сети с ориентированны-
ми связями, имеющей пять узлов,
если известно, что узлы сети идеально
надежны, а линии связи имеют дове-
рительные интервалы для вероятности
отказа qt С (0,05 ; 0,1). Система долж-
на обеспечить вероятность безотказ-
ной работы не менее 0,99.
Решение. Функция работоспо-
собности системы
У — fb — *1*5 (хы V x&zfz V x6sfs V
V xufi) I
fi~X4 (X41 V *42/2 V *4з/з)>
/з ~ (*31 V *32/2) *3, /2 — *2*21 •
После первого замещения в соот-
ветствии с (211)
(/2* /з» /4) = Р1Рб X
X (1 951^52^53^54) > ^43) (^2» /з) =
=р4 0 - ,ч&&); рз21 (fs) =
= Рз (1 —^з^зз)* Р^ = Р2Р21.
108
Расчет надежности систем со структурной избыточн остью
После второго шага замещения по-
лучаем
Р^ (fz, f9) = X-
Х (Р4 0 ^41^42^4з) Х
Х 0 +
+ (<?4 + Р4^41^42^4з) 0 ^Б^й^бз)).
После третьего шага имеем
р52) (^) = Р1Р5 (1 “ <751^1 +
+ ^51^52^54^4 0 ^41^42) Н"
+ ^3^51^52 0 ^31^32) (^53 ~Ь Р54Р4 Х
X (<?41?42 0 ^53^4з) Рбз))Ь
Теперь замещаем /а и получаем
искомое выражение
₽с = ^1,=Р2Р21^2,(1) +
+ (1 - р2р21) П2) (0).
В частности, при pt = Plt рц —
— Р2 найдем
Яс = р?р2 {Pi (1 - Qi) (1 + P^PzQl х
X (2 + PjQHi ~ Qi) - P1P2)) +
+ (1 - PjP2) (1 + Q2P1P2 (2 - РЛ*
x(P2 + QD))}. Q2 = i-p2.
Вычисления проводим при P± = 1
и P* = 0,94-0,95 (табл. 8). Из таб-
лицы 8 следует, что при расчете с «за-
пасом надежности» для Р2 = 0,9 сле-
дует выбрать s = 3. Однако при уточ-
нении исходных данных о надежности
элементов это значение может быть
скорректировано и избыточность умень-
шена, так как уже при Р2 = 0,93
система-достигает требуемого уровня
Рс ~ 0,99 при s = 2.
Многосвязная система второго типа.
Особенности этих систем отражаются
8. Вероятность Рс безотказной работы
S Р2 - 0.9 Pt = 0,92 Pt = 0,95
1 0,710 0,780 0,810
2 0,970 0,985 0,994
3 0,993 0,995 0,997
в УРС q помощью дополнительных
сомножителей в дизъюнктивных чле-
нах ФАЛ. Поэтому вместо (210) по-
лучаем функцию вида
fn — хп V XnjfjWj j» ft =
= Xi (V/iZ/Pj)- (214)
Здесь <fy — логические функции, вы-
ражающие условия использования на-
правления ij и зависящие от перемен-
ных, вообще говоря, не входящих
в список переменных функции fj.
В системе, содержащей несколько по-
следовательно соединенных участков,
удается свести функцию работоспо-
собности (214) к виду
У = fn (X) ФП (X), (215)
где fn и фп — УРС основной и управ-
ляющей подсистем. Составление fn
и фп, а также все действия по их пре-
образованию проводятся аналогично
тому, как это делают для систем пер-
вого типа.
Многрсвязная система со структурой
в виде неориентированного графа. Осо-
бенность этих систем состоит в том,
что в них обычно УРС более сложные,
чем УРС в системах со структурой
в виде ориентированного графа. По-
этому для таких систем применяют об-
щие правила записи ФПЧЗ И форме 1
или 2. После записи ФПЧЗ прово\
дится запись СФФВ с помощью тео-
рем 1 или 2 и последовательное заме-
щение переменных с помощью теоремы
разрезания.
Пример 23. Найти,вероятность рабо-
тоспособного состояния электроэнер-
гетической системы из примера (18)
и установить требуемый уровень по-
казателей надежности распределитель-
ных щитов, при котором обеспечи-
вается заданное значение вероятности
Яс-
Решение. Смешанная форма
представлена в формуле (193). Прове-
дем замещение в три шага. На первом
шаге замещаем х3 и х4:
Rc (*,. *« *s) = Pi X
X {₽3₽4 0 - +
+ ?3₽4 С1 - Чг') + Рз?4 0 - ??))•
Расчет надежности двухполюсных систем
109
Поскольку слагаемые во внешних
скобках ортогональны, на втором шаге
проводим в них замещение независимо
друг от друга:
Rc Ы = Pi {psPi {рьРь (1 — (71<7а) +
+ ?5Рб(1 “ Фъ) +
+ р^б 0 ^1^2*)}
4" ЯзР&РвРъ + PaQtPbPi} •
Замещая теперь х8, находим окон-
чательно
Rc = Л? {РзРл {РьРв (1 — qiQz) 4-
4- ЧьРе (Рв (1 — Я1<ь) 4- <7вРа) 4*
4“ РьЧь (Рв (1 4~ ЯвР1)} 4-
4- ЯзРлРвРз 4- Рз<7«РбР1) • (216)
Зафиксировав значения р1? р2> Рб»
рв, р8 и полагая р3 = р4, варьируем
значения р3 и р7 так, чтобы добиться
выполнения неравенства 7?с R®.
В результате получим область значе-
ний вероятностей работоспособного со-
стояния главного и вторичного рас-
пределительных щитов, при которых
обеспечивается требуемая надежность
системы.
РАСЧЕТ НАДЕЖНОСТИ
МНОГОСВЯЗНЫХ СИСТЕМ С
ОРИЕНТИРОВАННОЙ СТРУКТУРОЙ
ПРИ НЕПОЛНОМ ОПОВЕЩЕНИИ
О СОСТОЯНИИ СЕТИ
Условия функционирования системы
такие же, что и в системе, рассмотрен-
ной выше. Однако есть одно дополни-
тельное условие: оповещение о состоя-
нии сети неполное. Поэтому при ак-
тивном резервировании не всегда
удается эффективно использовать име-
ющуюся структурную избыточность,
'taj< как не удается, собрать работоспо-
собный путь между полюсами при
рекойфигурации системы, хотя при
полноМ\ оповещении такой путь и
удалось\)Ы найти. В условиях непол-
ного оповещения не удается гаранти-
ровать с вероятностью единица, что
выбранный маршрут (путь) будет ра-
ботоспособным. Неопределенность воз-
никает в процессе эксплуатации и
является причиной возможных оши-
I бок. Однако алгоритм реконфигурации
и выбора маршрута закладывается
при проектировании. Поэтому необ-
ходимо уметь решать две задачи:
задачу анализа надежности с учетом
алгоритма выбора маршрута и непол-
ноты информации оповещения и за-
дачу выбора (синтеза) маршрута по
критерию надежности. Алгоритм вы-
бора маршрута составляется так, чтобы
в условиях неопределенности вероят-
ность работоспособного, состояния си-
стемы была наибольшей среди зна-
чений, достигаемых в заданном классе
алгоритмов.
Системы с оповещением о состоянии
выходящих линий связи. Структура
сети представлена на рис. 18. Алгоритм
выбора маршрута представляет собой
набор рядов приоритетности выходя-
щих линий связи на каждом из узлов
системы. На узле с номером k этот ряд
имеет вид: ki^, ..., kiks при k > s
и kik2l ..., feh, h_i при k s.
В маршрут на каждом узле включается
работоспособная дуга с наивысшим
приоритетом. Обозначим через ал-
горитм выбора маршрута в подсистеме
с входным полюсом в узле k и рассмо-
трим основные этапы анализа.
Составление УРС. Логическая функ-
ция работоспособности имеет вид
J fh №k) = xh tki?ik\ V • • V
fm~l \ \
V & x'ki ]xk{ f, ,
v \/==1 *lhjJ
I m = min (s, k — 1). (217)
Аналогичные ФАЛ составляют для
всех промежуточных узлов. В част-
ности, если наиболее приоритетной
считается линия связи, которая обес-
печивает соединение с узлом, имеющим
наименьший номер, то
(т f т \
V, . * , xl. k-t X
J=1 \l=»/+l /
x Xk, rn = min (s, k — 1),
(218)
Запись СФФВ. Поскольку все сла-
гаемые в (218) ортогональны, а каж-
110
Расчет надежности систем со структурной избыточностью
дое слагаемое является ФПЧЗ (фор-
ма 1), используем формулу (190):
Д = р (f = П = n j 1 — Л-®
с V„n / “п I п—S 1
П—I f-f-S—И . \
4~ II ^П, I—j U
i—n—s-f-l /=1 1 /
п > s,
₽(/»=o='’*(l-4^-.+
s -j- 1 k n — 1;
2 < k < s.
(219)
Получение ВФ. Многошаговую про-
цедуру замещения проводят в каж-
дом слагаемом отдельно, так как все
слагаемые в (219) ортогональны. При
этом используют общие правила, сле-
дующие из теоремы разрезания.
Пример 24. В полносвязной системе,
рассмотренной в примере 22, установ-
лены следующие ряды приоритетности
выходящих линий связи: 51, 52, 53,
54 на узле 5; 41, 42, 43 на узле 4\
31, 32 на узле 3. Необходимо найти
вероятность работоспособного состоя-
ния системы и оценить влияние струк-
турного параметра S на надежность
системы.
Решение. Поскольку здесь s =
= 4, используем третью формулу (219)
при k ^5. Последовательным заме-
щением получаем
#с = Р1Рь (Pbi 4~ ?51 (РъйРъРя! 4"
4" <7б2 (РбзРз (Psi 4” 731Р32Р2Р21) +
4“ ЯьзРмВJPi)))»
В4 = Р1Р4 (р41 4" <?41 (Р42Р2Р21 4"
4~ ?42Р4зРз (Рз1 4“ ^31Рз2р2р21)))« (220)
Чтобы получить выражение для
s = 3, надо в (220) положить рЪ1 = 0.
Варьируя алгоритмы и проводя рас-
четы при pi — 1, найдем, что при
одинаковых вероятностях Pij пред-
ложенный алгоритм Оказывается луч-
шим, если s — 2 или 4. При s = 3
лучшим является алгоритм с рядами
приоритетности: 51, 54, 53, 52; 41,
43, 42; 31, 32.
Системы с оповещением о состоянии
прямой линии связи. В узлах алго-
ритм выбора маршрута состоит из
двух частей: ряда приоритетности пу-
тей, состояния которых известны, и
ряда приоритетности линий связи,
используемых тогда, когда все пути
в первом ряду неработоспособны. При
k > 2s + 1 на узлах нет ни одного
пути, состояние которого было бы
известно. Для этих значений k n s
рассматриваемый случай ничем не от-
личается от предыдущего. Поэтому
далее рассматриваются лишь значе-
ния п 2s + 1. В этой области вы-
деляют две подобласти: п s + 1 и
s ~|- 2 п 2s + 1.
Составление У PC. При п s + 1
логическая функция работоспособно-
сти
У ~ xJn> fh~xk [Bh V х
X
//—I
// I &
'hi
(Xklkl^hl) )’
2 k n,
v xki x. x> J (221)
b'luh-i ‘ft, ft-i ‘ft. ft-i1, ' '
При 2 + s^n^2s+l и k s +
4~ 1 УРС определяется также форму-
лой (221), а при n^sfe^s-|-2 воз-
никает особенность, состоящая в том,
что первый ряд приоритетности со-
держит ровно 2s 4- 2 — k, а второй
ровно s направлений связи. Поэтому
для указанных значений k имеем
V xki xi xt г
Й‘Ь, 8+1 ‘ft, 8+1 ‘ft, 8+11
(222)
Расчет надежности двухполюсных систем
111
Запись СФФВ. Смешанная форма
имеет вид
/ k—I
X 1 “ П О — PkiPiPil) +
\ /=2
- (%vlX'*v)' f'kv' k<n' (223)
Получение ВФ. Дальнейшее заме-
щение происходит, как при полном
оповещении, путем последовательного
разрезания по незамещенным пере-
менным.
Пример 25. В полносвязной системе
из пяти узлов каждый узел опове-
щается смежными узлами о наличии
у них работоспособной линии связи
с узлом 1. Сигнал оповещения одно-
временно служит признаком работо-
способности самого узла, а отсут-
ствие сигнала означает, что узел не-
работоспособен. Необходимо найти ве-
роятность работоспособного состояния
системы при двух вариантах исходя-
щих линий связи на узле 5: 1) 53, 54;
2) 54, 53. Вероятности работоспособ-
ного состояния узлов ръ линий свя-
зи р2.
Решение. Для первого варианта
приоритетности линий связи УРС
/ Б = *1*5 (^Б V ^Б (*Бз/з V
V (*БЗхз)/ *54/4))»
ВБ = ХБ1 V Х52Х2Х21 V *63*3*31 V
\у *64*4*41»
f4 ХЛ (*41 V *42*2*21 V xtsfз) >
fs =\*3 (*31 V *32*2*21)-
Побле упрощения получим
fs = *1*5 (^5 V *51 (*31*52 X
X (*54*4*11Г *53*3*32*2*21 V *41 X
X (*53*3)^ (*52*2*21) *54*4 X
X (*42*2*21 V *4з/з)))’
Здесь три слагаемых ортогональные.
Поэтому замещение в них проводим
независимо, используя теорему 1:
0 Cj + X
х (i-^f<&));
/ 4
Ci = foi I (1 — PsiPiPii) —
' i=2
— ЯмЯзгРвзРзРзгРзРп X
x (1 — РБ4Р4Р41) ;
C2 = 9Б1Р4РБ4?41-
Замещая остальные переменные, по-
лучим искомую формулу:
= Р1Рб (1 С1 4“ С2 (р2Р21<7б2 X
X (Рз?бз (О Я31Я32) (1 ЯюЯ&з) Н"
4" <7з1?з2Р4г) + Q3P42) 4“
“F (1 Р2Р21) РзРз1Р4з<7бз))-
Для второго варианта алгоритма
fs — *1*5 (^5 V (*54^4 V
V (*54*4) *5з/з))‘
После преобразования и замещения
бесповторных переменных имеем
«с = (1 - сз + •• X
х(1
I 4
Сз ~ <7б1 I XT PsiPiPii — ЯзгЯъз X
\ 1=2
X (1. — РБ4Р4) РзРьзРззРгРз!^ •
После замещения остальных пере-
менных окончательно имеем
Пс ~ Р1Рб (1 Сд 4~ С2 X
X С752Р2Р21 (РзРз17бз (1 —ЯлъЯлз) 4~
4“ РзЯз1 (Р32 (1 — ЯлзЯлз) 4- ЯззРю) 4-
4“ ЯзРю) 4~ О ---Р2Р21) РзРз19бзР4з))’
Расчет показывает, что при <?i = О
алгоритм 2 дает более высокую веро-
ятность Рс, чем алгоритм 1, во всем
диапазоне значений q2 (q2 0,5).
112
Расчет надежности систем со структурной избыточностью
ОЦЕНКА РАСПРЕДЕЛЕНИЯ
ИНФОРМАЦИОННОЙ НАГРУЗКИ
ЭЛЕМЕНТОВ НЕНАДЕЖНОЙ СЕТИ
При передаче сообщений в много-
связных информационных сетях для
каждой пары узлов назначается основ-
ной маршрут передачи, по которому
происходит передача, если он рабо-
тоспособен и не перегружен. Если
нагрузка в сети в среднем невелика,
то перераспределение информационных
потоков является следствием нена-
дежности элементов сети. Нахождение
распределения информационных по-
токов и управление ими при отказах,
элементов являются одной из важней-
ших задач проектирования сетей.
Если в системе есть всего т путей
между полюсами, то можно ввести т
состояний и случайных значений,
времени пребывания в этих со-
стояниях. Обозначим через Pi среднюю
долю времени пребывания в на
стационарном участке эксплуатации.
При пуассоновских потоках сообщений
вероятности Р{ характеризуют сред-
нюю долю числа сообщений, исполь-
зующих t-й путь. Кроме того, Pi
есть вероятность того, что «меченое»
сообщение застанет систему в состояв
нии и использует r-й путь. В даль-
нейшем распределение вероятностей
{Pf} будем называть информационной
(п \
2 Pt = 1 ), где Ро—
f=0 /
вероятность отсутствия работоспособ-
ных путей между полюсами. Аналогич-
но вводятся показатели информацион-
ной нагрузки узлов, линий связи и
любых подсистем. Информационная на-
грузка элементов сети зависит как от
надежности сети, так и от алгоритмов
выбора маршрутов и условий опове-
щения о состоянии сети. Разнообра-
зие сведений, которое надо учитывать
при прогнозировании нагрузки в про-
цессе проектирования, усложняет за-
дачу расчета надежности. Однако
именно в таких задачах в наибольшей
степени проявляются преимущества
ЛВМ перед другими методами, ис-
пользующими неформализованные про-
цедуры.
Нагрузка путей при полном оповеще-
нии о состоянии сети. Рассмотрим
двухполюсную ориентированную сеть
произвольной структуры. В условиях
полного оповещения о состоянии сети
алгоритм выбора маршрута базируется
на ряде приоритетности путей в узлах
сети. Ряды приоритетности фиксиро-
ваны и должны быть выбраны при
проектировании. При адаптивных ал-
горитмах ряды приоритетности могут
перестраиваться, адаптируясь к со-
стоянию сети.
Исходными данными для решения
задачи являются варианты структуры
сети между выбранными полюсами,
класс алгоритмов, в котором проис-
ходит выбор алгоритма, критерии ге-
нерации вариантов структуры и алго-
ритмов, показатели надежности эле-
ментов сети.
Для построения расчетных формул
все пути нумеруют в порядке их рас-
положения в ряду приоритетности.
Для i-го пути составляют элементар-
ную конъюнкцию
Ki = & (XjXjh); k£Mi, i^Mi,
где Mi — множество узлов, входящих
в путь. Логическая функция инфор-
мационной нагрузки пути
fl = ( V Kj) Ki- (224)
\/=1 /
Эта форма является ФПЧЗ (фор-
ма 3), поэтому СФФВ составляется
с помощью формулы (202). Для группы
путей Л, расположенных рядом в ряду
приоритетности, логическая функция
нагрузки
— & (xnrfrY ( V xnrSr} . (225)
r=l V=l 7
Согласно (202) СФФВ
ра=П’М'-П4'Л • (226)
/=1 \ /=1 /
Если пути образуют две группы
в ряду приоритетности Ла и Л4, раз-
деленные группой Л3, то
/а = Bl (в2 V ^В^
Bi = V Kf, 1 = 1, 4, (227)
l£Al
Системы с ветвящейся структурой
113
а соответствующую ей СФФВ нахо-
дят с помощью (207):
где gf2логическая
функция связности по направлениям
ni через группы путей Лх; А2; Аг (J
U ^2 U Лэ; А4. Далее осуществляют
разрезание по общим правилам.
Нагрузка узлов и линий связи при
полном оповещении о состоянии сети.
Задача поиска средней нагрузки узла,
линии или групп узлов и линий сво-
дится к поиску средней нагрузки
группы путей, содержащих интере-
сующие проектировщика элементы се-
ти. Если эти пути образуют в ряду
приоритетности одну или две компакт-
ные группы, то расчет проводят с по-
мощью (226) и (228). В общем случае,
когда группу А разбивают на т под-
групп,
/а = С®2 V В3 X
X (В4 V • • • V 1^2/п)* • •)»
Для приведения к ФПЧЗ (форма 4)
преобразуют этух функцию к виду
/а = Bi (в2 V (fi4 V в4ву X
х (Bg V • • • V &2m—2B2m—lB2m)' • )>
где
п—1
В/ = V xnxnifij. (229)
t—1
Смешанная форма, полученная с по-
мощью (207),
Р
Pn<lni X
i=I
2fe—I
Sih = ftp
(230)
Далее проводят многошаговое заме-
щение остальных переменных.
Пример 26. В системе, рассмотрен-
ной в примере 7, ряд приоритетности
путей при s= 3 имеет вид: 521, 531,
541, 5321, 5421, 5431, 54321. Найти
вероятности использования транзит-
ного узла 3 при передаче информации
из узла 5 в узел 1 (см. рис. 18).
Решение. В формуле (229) функ-
ции В^ имеют вид
Bi = ХБ2^2^а1» В'2 = Х5 3X3X31;
В3 = xMx4x4i', Вл = ХБ3Х3Х32Х2Х21;
В Б = Х54Х4Х42Х2Х21;
Ва = Х54Х4Х43Х3 (х31 V Х32Х2Х21).
Подставляя их в (229) и проводя
некоторые упрощения, запишем
СФФВ:
Вбз=С1(С2+^41Рб«Р«Р43 (1 --(1 -<7ьэХ
х (дл2яЬ2)ХгХя1)х*1УХзгХгХг1)У
= РхРзРб! С2 = Рбз (Psi (1 ~
— Р&2Р2Р21) + дзгЯьъРзъРъРп X
X (1 —РБ4Р4Р41))»
здесь замещаем сначала х91, затем
Хзз и х2х21. Окончательно имеем
Вбз = Ci (^2 + ЯиРълРлРлз (Рз1<7бз X
X (1 752?5з)) +
+ Яь2Яз1Ял2ЯьзР32Р2Р21)’
Далее можно проводить анализ влия-
ния каждой линии и других узлов
на нагрузку узла 3. При qi = Qij = q
Рбз = Р6 ((1 — Р3) (1+<72Р2) +
+ <72Р2(1 — 72) + Р94)-
Варьируя ряд приоритетности пу-
тей, можно регулировать нагрузку
рассматриваемого узла.
6. РАСЧЕТ НАДЕЖНОСТИ
СИСТЕМ С ВЕТВЯЩЕЙСЯ
СТРУКТУРОЙ И МЕРИДИАННЫМИ
СВЯЗЯМИ
МАТЕМАТИЧЕСКИЕ ОСНОВЫ МЕТОДА
Системами с ветвящейся структурой
(ветвящимися системами) называют си-
стемы, состоящие из одного или не-
114
Расчет надежности систем со стружтурной избыточностью
Рис. 19.
Системы с ветвящейся структурой
скольких центральных и группы пе-
риферийных устройств (звеньев, уз-
лов), предназначенных для выполне-
ния общего задания и объединенных
общей целью функционирования. Осо-
бенность функционирования состоит
в том, что звенья ветвящейся системы
имеют определенное функциональное
подчинение. Поэтому выделяются груп-
пы звеньев первого, второго, т-го
уровней (рангов), назначаемых в по-
рядке подчиненности. Периферийные
звенья являются звеньями младшего
ранга. При наличии нескольких ран-
гов отказ звена промежуточного ранга
может сделать невозможной нормаль-
ную работу подчиненных звеньев.
Число звеньев одного ранга увеличи-
вается по мере перехода от централь-
ной части системы к периферии. Имен-
но за это свойство системы получили
название ветвящихся. Они могут иметь
структуру типа «дерево» (рис. 19, а),
где каждый узел имеет связь с узлами
соседних рангов. В общем случае воз-
можны связи между узлами различных
рангов (меридианные связи) и с узлами
одного ранга (широтные, или рокад-
ные связи). В системе с меридианны-
ми связями - вводится понятие ветви.
Ветвь — это фрагмент структуры, со-
держащий центральный узел, один
периферийный узел и все линии связи
и промежуточные узлы, которые могут
принять участие во взаимодействии
центрального и периферийного узлов.
Ветвь называют простой, если в нее
входит не более одного узла каждого
ранга. Простые ветви могут быть од-
носвязными, многосвязными, полно-
связными. Если все ветви простые,
то это система с однозначным подчи-
нением (рис. 19, б). Если все ветви
одинаковы, то структура является изо-
тропной. В системах с неоднозначным
подчинением есть ветви, содержащие
по нескольку узлов одного ранга
(рис. 19, в). Число /С (f) работоспособ-
ных ветвей в момент времени t в вет-
вящейся структуре является случай-
ной величиной, изменяющейся в пре-
делах от 0 до N и имеющей распреде-
ление
Ph (О = р (К (0 = *);
k = 0, 1,2, .... N. (231)
Если качество функционирования
системы при наличии k работоспособ-
ных ветвей задается числом Е^, то
можно рассчитать показатель техниче-
ской эффективности
_ N
£(О = 2ЕЛ(<). (232)
k=Q
В некоторых случаях зависимость
от числа работоспособных ветвей мож-
но представить в виде полинома
т
(=0
Тогда
т
Е = J] ам at = (233)
1=0
где MKl — i-& начальный момент слу-
чайной величины К. При Oj = 1,
Системы е ветвящейся структурой
116
at = 0 для i =/= 1 из (233) получается
£=2^Pft = X, (234)
Л=1
т. е. техническая эффективность опре-
деляется средним числом работоспо-
собных ветвей. Из (234) можно найти
коэффициент сохранения эффектив-
ности
К* = E/EN = K/N.
В изотропной системе
_ / N \ N
к = м £&(0 (0 =
\i=i /
= NMl (0 = NP{f^= 1), (235)
где — индикатор работоспособности
i-й ветви; М — знак математического
ожидания; Р (f — 1) — вероятность
работоспособного состояния одной
ветви.
Основная задача состоит в том,
чтобы найти распределение числа ра-
ботоспособных ветвей {Ph (0}» с по-
мощью которого можно найти и Дру-
гие характеристики. Распределение
{Рь (/)} получается как множество
коэффициентов в производящем поли-
ла
номе Ф (z) = Ph (0 zk, определяе-
мо
мом в такой последовательности.
1. Запись логической функции ра-
ботоспособности ветви (или ветвей).
2. Составление СФФВ для одной
ветви по правилам, изложенным в пре-
дыдущем параграфе.
3. Составление производящего по-
/ линома для одной ветви типа
Ф (г, X) = 1 + Р (X) (z — 1). (236)
4. Многошаговая процедура возве-
дения полинома Ф (г, X) в степень,
равную коэффициенту разветвления
на ярусе, или перемножения полино-
мов с последующим замещением части
логических переменных, относящихся
к одному рангу (ярусу).
При выполнении п. 4 используют
три теоремы разложения.
Теорема 1 {первая теорема разло-
жения). Пусть задана функция
Ф (Z, ^1» • • •» Яд) =
= £ Pl (*1» Яа, • • - » хп) (237)
1=о
с коэффициентами, записанными в сме-
шанной форме и зависящими от ло-
гических переменных xlt х2, ..., хп.
Тогда
Ф (г, х9+1.....хп) =
= £ P(xt =аь i = 1~)Ф(2,
(ar • •-.%)
oti, ..., otsxs+i, ..., хп). (238)
Теорема 2 {вторая теорема разложе-
ния). Пусть
<p(z, Xi, ..., хп) =
= £ Pi (*i, хп) z';
t=0
ф {Zf • ♦ •» ^s+1» • । Xji ) =—
m
= £ Pi(alt..., as, xs+ll..., хп)г1;
Ф (z, xlt ..., xn) = фг (z, xlt..., xn) =
mr
= % Pi (Xi.......*n) zl. (239)
Тогда
Ф (г, (Xi, ..., a8, x8+i...xn) =
= (Ф (z. ......a8, xs+l......xn))r-
(240)
Теорема 3 {третья теорема разло-
жения) . Пусть
Ф (г, хь ..., хп) =
= £ Ф/(г» хг........хп),
(/)
Ф/ (z, Х$+1....Яд) =
= £ Р (xi = ab i “ iTsj Ф; X
(а1....ав)
X (z, o&i, •.., оь8, x8+i, • • •, Яд),
ф (z, Xs+l. хп) =
116
Расчет надежности систем со структурной избыточностью
= J] Р (xt =ait х=1,5)Ф X
(ai.....%)
X (z, Ott, • • •, &8» ^3+1» • ♦» ^7i)‘
Тогда
Ф(2. *8+1» •••» хп) =
= S фН2’ *s+i« •••» *п). (241)
(/)
Эта теорема устанавливает способ
перехода от производящего полинома,
записанного в смешанной форме, к по-
линому, не содержащему логических
переменных, если исходный полином
является суммой нескольких слагае-
мых полиномов. Согласно теореме до-
пускается раздельное замещение пе-
ременных в каждом из слагаемых поли-
номов.
РАСЧЕТ НАДЕЖНОСТИ И ВЫБОР
СТРУКТУРНЫХ ПАРАМЕТРОВ
С ОДНОЗНАЧНЫМ ПОДЧИНЕНИЕМ
ПРИ ПОЛНОМ ОПОВЕЩЕНИИ
О СОСТОЯНИИ СЕТИ
Система состоит из одного централь-
ного узла, г\ узлов второго ранга
(первого яруса), каждому из которых
подчинено г2 узлов третьего ранга
(второго яруса). Всего в системе п — 1
ярус и узлы до л-го ранга включи-
тельно, причем каждому узлу х-го
ранга подчинено г\ узлов i -f- 1-го
ранга. Связи в системе только мериди-
анные, а каждая ветвь представляет
собой многосвязную двухполюсную
ориентированную систему, которая
рассмотрена в предыдущем параграфе.
Это значит, что при передаче снизу
вверх путь может содержать последо-
вательность узлов только с убываю-
щими номерами, а при передаче сверху
вниз — только с возрастающими но-
мерами. Все элементы сети функцио-
нируют независимо, т. е. отказы —
независимые события, а восстановле-
ния — автономные. Это позволяет в
невосстанавливаемой системе опреде-
лять вероятность безотказной работы
ветви или группы ветвей по схеме
независимых событий, а в восстанав-
ливаемой системе определять коэф-
фициент готовности. В качестве исход-
ных данных, кроме структуры, за-
даны вероятности работоспособного со-
стояния узлов pi и линий связи pij.
В условиях полного оповещения алго-
ритм выбора маршрута не влияет на
вероятностные характеристики Р^ (/),
поэтому он не используется в качестве
исходных данных.
При записи производящего полинома
работоспособности ветви используем
формулу (211):
= I+Pn(fi......(242)
Следующий этап — возведение по-
линома'в степень гп-1 и замещение
xn-i и
(?. f.....fn-г) =
X (Ф'п) (г, f\...Х„_2. +
(п—2 f \
Яп—I “Ь Рп—1 П Яп—1, t ) х
i=l /
X (г, /„_2, 0))'"-*.
(243)
Здесь оказались замещенными логи-
ческие переменные n-го и (п — 1)-го
рангов, соответствующие независимым
участкам^ путей, а логические пере-
менные общих участков записаны в по-
казателях степени. Поэтому полином
(243) можно возводить в степень гп_2,
чтобы получить полином распределе-
ния суммы независимых случайных
величин. Затем надо заменить логи-
ческие переменные х„_2 и хп_2, i.
Такая процедура повторяется до тех
пор, пока не будут замещены все пере-
менные. Для перехода от х-го ранга
к (х' — 1)-му рангу надо использовать
формулу
w (*. f,.....ft-l) =
I t \
=Pt 1 _П’4) x
\ /=i /
X (г. ft..... ft_t. !))'< +
Системы с ветвящейся структурой
117
X (Чг+1) (г. f....0))г*,
t = 1, n— 1. (244)
Для структуры типа «дерево» мно*
гократное использование формулы
(244) приводит к результату
fi — Xi^i, i—ifi—i> I == 2, П, fl =-
Ф<"> (2, fn_J = 1 +
+ (z—о pn (i —
®n(2) = ?l + Pl( • (((1 +
4" (z 1) Pn Pn, n-1) n-1 Pn-iPn-i, n-s4"
4“ 1 Pn-lPn-1, ,n-a) п”гРп-гРп-2,п-з4_
4-1 Рп-гРп-2, n-з) П~3 4-
+ — 4* 1 — PaPai)51* (245)
Отсюда получаем формулы для мо-
ментов распределения:
_ п—1
^=ф;(о=П'-л+л; (246)
^2=ф;(1)+ф;(1)=ф;(1)х
/ п—I п—[ п—I \
X ( S‘ (!—flj) П riai + П riOi I;
\/=1 i=i+i f=i J
ai = Pz+lPi+l, <•
Для полносвязной трехъярусной
структуры согласно (242)
ф^4) (Z, fl. fz, /з) - 1 +
/4" (z 1) Р4 (1 ^41^42^43)»
I fl = *1» fz ~ Xzx21f 1»
f s = X3 (*3ifi V x32fz)> (247)
Трижды применяя формулу (244),
получим
\Ф4 (z) = <71 + Pi (Р2Р21 (Рз (1 — Яз1Чзг) X
X (14" (Z 1)Рв(1 — ^41^42^4з))Г* 4"
4- (<7з 4" P3Q31Q32) (1 4- (z — 1) Р4 х
х (1 — <741<742)Л>)Г’ 4- (1 — P2P21) X
х (РзРз1(1 4- (z— 1) р4 (1 —
— <741<742)р 4- (1 — РзРзг) (1 +
4" (Z - 1) Р4Р4!)г’)Гг)Г1- (248)
Формулы (245) и (248) позволяют
проводить выбор структурных пара-
метров системы, так как можно варь-
ировать не только коэффициенты раз-
ветвления г/, сохраняя1 неизменным
общее число ветвей, но и число ярусов
системы. Для этого следует положить
некоторые ri = I и соответствующие
узлы и линии связи считать идеально
надежными (pi = рц = 1). Напри-
мер, чтобы перейти от трехъярусной
к двухъярусной структуре, надо взять
Гз = Pi — Ра = Р42 = Р43= L Можно
варьировать и число линий связи,
изменять уровень структурной избы-
точности. Чтобы учесть в формулах
.удаление тех или иных связей, надо
положить соответствующие Pij — 0.
Применяя раздельное резервирова-
ние, можно изменять значение пока-
зателей Pi и Pij.
РАСЧЕТ НАДЕЖНОСТИ И ВЫБОР
СТРУКТУРНЫХ ПАРАМЕТРОВ
ИЗОТРОПНЫХ СИСТЕМ
С ОДНОЗНАЧНЫМ ПОДЧИНЕНИЕМ
ПРИ НЕПОЛНОМ ОПОВЕЩЕНИИ
О СОСТОЯНИИ СЕТИ
Условия функционирования данной
системы такие же, как у системы,
рассмотренной выше (см. рис. 3, б).
Однако они отличаются объемом и со-
держанием информации оповещения.
В каждой ветви оповещение организо-
вано так, как в системе, рассмотрен-
ной выше. Логическая функция работо-
способности одной ветви определяется
формулами (217) и (218)' при отсутствии
оповещения и формулами (221) и (222)
при оповещении о состоянии прямой
линии связи с выходным полюсом.
В системе без оповещения о состою
янии сети полином для одной ветви
имеет вид
(’. h...fn-i) =
= h + (z-i)pn (1 -x
118
Расчет надежности систем со структурной избыточностью
где 1; ilt i2t ...; in_2— ряд приоритет-
ности направлений связи на узле п.
Далее выполняются многошаговая
процедура возведения в степень и
замещения логических переменных
в соответствии с формулами; •
(Z> fl..f i—2) =
= Pi—\ (Л» - • •• fi—z) х
X (Ф^ (2. fl...f£^ +
+ Qi—i(fv^ ft—2) x
X (фп^ (z« /p • ’» f i—2, 0)) * X’
i = 3, л — Г, Фп (z) = <71 + Pl x
х(Р2(1)Ф£2)(г, 1,1) +
+ Q2(1)®<i2)(z, 1, 0))\
I (250)
где Р£ (Д, ff_i)= 1 — Qt (fi, ....
fi-i)= P (fi = l) определяется по фор-
мулам (219).
Для полносвязной системы с опове-
щением о прямой линии связи произ-
водящий полином для одной ветви
имеет вид
Ф},"’ Ml.....fn-1. вз> • • • • «п-l) =
/ п—1
= !+(,-!) Рп 1-ПЛГ +
\ 1=1
g, =*,*„*!;
/я — 62 i 3. (251)
Далее разрезание проводится с по-
мощью формулы
Фд* l) (z’ fi> • • •» fk—р &з> • •, Sk—i) —
= (Р (/Л = 1)+Р (^ = 1)Ф^) X
X (z, f...fft_pO, ff3,..,.,£A_pl)+
+ Р (skfh = 1) Ф(нЙ) (zJp...Jfe_b
1, gk-y О))'*-1; 6 = 3,n — 1.
(252)
Во втором слагаемом принимаем
fk = 0, так как при gk = 1 слагаемые,
содержащие fk, обращаются в нуль,
независимо от значения fk. Функции
р (g'kfk = >)• p(gk = >) и = !)
определяют по формулам, полученным
для двухполюсных структур.
Полносвязная четырехъярусная си-
стема без оповещения о состоянии сети.
В системе есть узлы пяти рангов:
один узел первого ранга, fj узлов вто-
рого, гхг2 третьего, ггг2г3 четвертого
и ггг2г3г^ пятого рангов. Ряд приори-
тетности направлений связи на узле k
имеет вид: 1; 2; k—1. Тогда
согласно (250)
®s(z) =?! +Р1 (Р, (1> 1)Х
X {Р4(1, 1. 1)Ф^4'(г. 1. 1. 1. 1) +
+ Q4(1. 1, 1)Ф5‘>(г, 1, 1, 1. 0)}г,+
+ <2з(1. О (Р4 (1. 1. 0)Ф5“(г.
1, 1, 0, 1) + Q4(1. l.OW (z.
1, 1, 0, 0))r«}r' + Q2 (1) X
X {P3(l, 0)(Р4(1, 0, 1)Ф3”(г.
1, 0, 1, 1) +<?4 (1, 0, 1)Ф5(г,
1, 0, 1, 0)}r4-Q3(l, 0)'x
X (P4(l, 0, 0)Ф6”(г. 1. 0, 0, 1) +
+Q4(1, 0, 0)Ф54’ (г, 1, 0, 0, 0))'«}Г!}Г‘,
(253)
где
Ф^’(Л 1. /2. г3. ft) =
= (1 + (z О (1 ?51?s5 “Ь ?51^52 X
Системы с ветвящейся структурой
119
Х С1 ?5з) + ^53^52^51 С1 “~<754)))f4»
^4(1» /г» ^з) = р4^ ?41^42 4~
+ ^41^42 С1 ?4з)) » ^>з(1’^г) =
= Р3 (Рз1 4- 7з1 (1 ?зг))»
(1) = 1 - Q2 (1) = р2р81.
Из (253) можно получить полиномы
и для других п < 5. Так, Ф4 (г) полу-
чается при рБ1 = ри = рБ8 = 0; фз (z)
при р41 = рм =0; р4 = Рм = Гз = 1-
Отсюда же можно получить формулы
для двухсвязной и трехсвязной сети.
Полносвязная четырехъярусная си-
стема с оповещением о состоянии пря-
мой линии связи с центром. На узлах
k = 2, 3, 4 информации оповещения
достаточно, чтобы принять уверенное
решение о передаче по работоспособ-
ному пути. Поэтому на этих узлах
алгоритмы выбора маршрута не
отличаются от алгоритма в системе
с полным оповещением. На узле 5
возникает неопределенность при
отказе путей 51, 521 и линий 31 и 41,
так как неизвестно состояние путей
5321, 5421 и 54 321. В этом случае
при работоспособных узлах 3 и 4
и работоспособных связях 54 и 53
сообщения направляются на узел 4.
Логические функции работоспособ-
ности:
А) — ХЪ V V *Б4 (/4 V 8 а) V
V (ХнХ«)'*вз/з)» (254)
/4 = ХА (*41/1 V *4я/я V ХАЗ?з)> fs —
= х3 (*31/1 V x3if2) I
/2 *2*21/1> /1 = *1» 8i = xixilxi’
/ Составим производящий полином
/для одной ветви:
I- Х 0 X
'х (1-<7Й'3))-
Проводим замещение переменных,
соответствующих элементам четвер-
того ранга, рассматривая три ситу-
ации: Х4/4 = 1; *^=1; ха= 0.
После возведения в степень и замеще-
ния имеем
®б4) (*• fl- Si) = р4 (1 - ?41<?Ы0 X
х(1+(г-1)р5х
X (1 ^51(?52<?5з9&1))Г4 +
+ Р4 (I + (Z - О Р, X
х (1 ?sf?s2^6 + х
X (1 -?f/3)))r‘ +?4 (l + (z-l)p6x
х (1 951‘?52£?5з))Г4-
Здесь использовано равенство ga V
V £з/з ~ /з- На следующем шаге воз-
водим в степень г3 и рассматриваем
несовместные события: g3 = 1; fag's —
= И 1з8з= 1- Вероятности этих
событий равны
(при Xj = 1)
Р (8з = 1) = РзРзп Р (8'з1з = О =
— Рз^з1 0 — ^зг); Р (&'з?з = 0 =
= <7з + Рз^з^зг-
Далее возводим в степень га, заме-
щаем x21Xi, возводим в степень гх
и замещаем /х. Окончательно имеем
Фб (z) = qi + Pi {Р2Р21 {РзРз1 {Рл (1 —
— Яа1Яа2Яаз) Ф1 (2> 1> 0 4"
4“ (РаЯа1ЯазЯаз 4~ Яа) Фг (z» 1» 1)}Г> 4“
4*<7з1РзРз2 {Рб(1 Яа1ЯазЯаз)Ф1 (г> 1» 1)4"
4-^4ф2(2, 1, 1)4-
4- РаЯа1Яа2ЯазЧ>з (2, 1, 1)}г> 4-
4" (Яз 4- Р3Я31ЯЗ2) {₽4 (1 Яа1Яаз) Ф4 (2»
I, 1) 4- (ЯА 4- РаЯахЯаз) Ф4 (г>
1. 1)}г,)гЧ-(1-Р,р21) X
X {р8Рз1 {(1 — ЯахЯая) Ф1(г. 1» 0) 4-
4- (Яа 4- РаЯа1Яаз) Фя (2, 1, 0)}Гв +
4" (1 —Р3Р31) {(1 ‘ PaPai) Фь (г» 1» 0)4-
+ Р.Р.1Ф. (г. 1. 0)f (255)
120
Расчет надежности систем со структурной избыточностью
где
Ф1(г, /Р +(2—1)Р5 X
X С1 ~ ^51^52^53^5i))r*>
<Р2 (Z’ Л’ /2) = С1 + (г ” О Р5 х
х 0 ~ ^б^бг^бз)/4»
Фз(2’ Л> /2) = (1+(г—ОРб Х
X (i ^брУбЮ ^54^бз)))Г*»
Ф4 (2- Л» /2) = 0 + (г “ О Рб х
X (1 -якч&ы))г*\
<Рб(2’ Л’ Z2) = (1 + (2 —1)р5х
X (1 -^52))г4‘
Как и в предыдущей системе, здесь
также можно вести поиск желаемой
структуры, варьируя структурными
параметрами и отбирая структуры по
критерию надежности.
РАСЧЕТ НАДЕЖНОСТИ
ИЗОТРОПНЫХ СТРУКТУР
С НЕОДНОЗНАЧНЫМ ПОДЧИНЕНИЕМ
И НЕИЗОТРОПНЫХ СТРУКТУР
Системы с неоднозначным подчине-
нием имеют ветви, в которых могут
быть по два и более узла одного ранга
на одном или нескольких ярусах.
При наличии широких связей все
узлы, соединенные друг с другом,
входят также в одну ветвь. Неизо-
тропность создается различиями
в структуре ветвей, показателях на-
дежности одноименных элементов
в различных связях, а также в коэффи-
циентах разветвления разных кустов
ветвящейся структуры.
Неизотропная структура типа «де-*
рево». Система имеет п-ранговую
структуру и содержит /V ветвей, отли-
чающихся друг от друга хотя бы
одним структурным признаком или
значениями показателей надежности
элементов. Каждая ветвь входит в опре-
деленный куст (п — 1)-го, (п — 2)-го,
..., 1-го рангов. Пусть порядковый
номер линии связи, принадлежащий
данной ветви, в кусте (fe + 1)-го ранга
равен /ft. Тогда для обозначения но-
мера ветви и узла л-го ранга исполь-
зуют вектор 1П-1 = {«1, •••»
in-i}> Для любого узла fe-ro ранга
вводят вектор = (t\, t2........
Коэффициент разветвления в узле Ik-i
равен а вероятности работо-
способного состояния узла и ли-
нии связи, соединяющей его с узлом
(k — 1)-го ранга, равны соответственно
и P^V-I* Если обозначить век-
торы меньшей размерности, вложенные
В /п-1» чеРез ~ *2> 0th ТО
можно установить области изменения
: 1 < k - 2, n-1;
1 < *1 fi*
Логическая функция работоспо-
собности ветви /п-1
fUn-l) n-l)А1 п-1) fVп-ь).
• п лп. лп, n—v п—1 ’
Ik —
—. A?h-1)k-1)h-b)• b 9 n 1*
— xk xk, k—Vk—l , R — 4, « — 1,
fi = xt. (256)
Производящий полином для одной
ветви:
4n)(*. ЛЧ-2)) = 1 + (г-ох
Далее осуществляют многошаговую
процедуру перемножения полиномов
для всех ветвей одного куста и за-
мещения функции k = 2, tv
> Окончательно получаем
(г) = ?! + Р1 п {1 — +
1'1=1
4<*> /
G=1 \
I ... । AJn-ъ) пСп-2) у
Т ТР п-1 Рп—1, п—2 х
Системы с ветвящейся структурой
121
г(^п-й)
п—1
х П (1 + (г-1)Х
'п-1-1
(257)
у п(*П-2' *71-1)„(*п-а* *п-1)\ I
л "п ип, П—1 ) • • • I*
-Если в каком-либо кусте все ветви
одинаковы, то умножение заменяется
на возведение в степень.
Пример 27. В двухъярусной системе
со структурой типа «дерево» все линии
связи и узлы третьего ранга, при-
надлежащие одному кусту, равно-
надежны и имеют вероятности работо-
способного состояния соответственно
и Рз°> * ri- Коэффициент
разветвления в i-м кусте второго ранга
равен t=l, Гр а вероятности
работоспособного состояния узлов
и линий первого и второго рангов
равны рр р^\ p£j\ Найти распределе-
ние и среднее значение числа работо-
способных ветвей.
Решение. Логические функции
р аботоспособности
но _ иолоно. НО _ ЛОЛО*,
/з —*3 *32 «2 » »2 —*2 *21*1»
i = 1, rt.
Производящий полином для ветви
фз3) (2» /г0) = 1 + (Z ~ О х
/ t(O \
А 1(1)•
/ После возведения в степень
и разрезания по f^ получим
X2’(».4°. *0 = 1+^’ X
х (1—(4J ’Г’) (1 + (z—1) х
.«о \
хдУЧР) 2 -1/
На последнем шаге перемножаем
полиномы и замещаем хх:
фз (2) = 91 + Pi П (1 — Р^)₽21) +
/=1
Г(О\
+«о+(*-»«)2 )•
Среднее число работоспособных вет-
вей
# = фз (O=Pi £
1=1
Приведенные формулы позволяют
решить задачу о рациональном числе
узлов второго ранга и размерах’ ку-
стов, а также о влиянии неизотроп-
ности на показатели надежности си-
стемы при прочих равных условиях.
Система со структурным дублирова-
нием узлов. Структура системы пока-
зана на рис. 19, в. Система относится
к классу систем с неоднозначным под-
чинением, так как есть узлы, связан-
ные с двумя узлами более высокого
ранга. В полносвязной системе узлы
t-го ранга дублируются, и каждый
узел имеет полный комплект связей
с узлами других рангов.
Логическая функция работоспособ-
ности
/л—1 \
fn ~ хп I V xni?i ]» ft =
\t=l /
Производящий полином для ветви
<”(*. f........^-1) = 1+ДпХ
/ Л-1 f *(D f(2)
X (z— 1) 1 - П д„Хл1 X
\ /=1
rt-i ч
X П <?'()
1=/г-Н /
122
Расчет надежности систем со структурной избыточностью
При i > k полином преобразуют,
как в изотропной структуре, а при
i ~ k разрезание проводят последова-
тельно по /V» И /'2>. В результате по-
лучим
®п * (* /|.../*—1) =
= PU’ (р<2> (ф<ж>(2,
....fk—1> 01 "И
+<г^(Ф^+1)(г,
Л.....fk—v о)) *) +
ft....fk-t- 0. >)/* +
+<гр(Ф^+»(2.
ft....fk-i' 0, О))'»), (259)
Далее разрезание проводят, как
в изотропной структуре.
Пример 28. В трехъярусной системе
с полносвязными ветвями и полным
оповещением дублируются узлы вто-
рого и третьего рангов (рис. 19, в).
Известны коэффициенты разветвле-
ния на ярусах ц и вероятности pi и pij
работоспособного состояния узлов
и линий связи. Найти распределение
числа работоспособных ветвей.
Решен и е. Логическая функция
работоспособности
h = *4 (*41*1 V V *42^22> V
v v ФП
4° = 4° (414 v v
v W)= Г = («*1): ' =
= 1, 2.
Производящий полином для ,ветви.
Ф<4) (z, хр = 1 + р4 X
/ .(!•) Л2) f(l) f(2)\
х (2—1) (1 “ ^41?42,1^42,2^43,1^43,2/ •
Этот полином возводим в степень г8,
затем проводим разрезание по
возведение в степень г2, разрезание
по возведение в степень q. Окон-
чательно имеем
®4 <*) = «1 + Р1 (Рг'Ш’ 1₽22,Р21’ X
хФ{!|(г, 1, 1) + (1— р£2Ц2))х
X Ф$2’ (г, 1, 0)] + (1 — pjnpjn) X
X (Р22)Р21>Ф42) (* °> О +
+ (1-р£2>р<?>)ф<2>(г, 0. 0)))г‘,
где Ф<2> (z, /(21) = (р<2) х
х(Ф<4’(г. 1. /Р*. /Р’. 1. !))'• +
+ Qj2,(®V>(2.1.fP>. f?\ 1. «))'•)+
+QJ» {рГ>(фГ’(*-
!,/<», fP>, 1, 0)У)Р;
p£l> = !_(#)= Ррх
/ f(l> z<2) X
х \ 1 — ?31, 1Рз2, <1?32, 12/> =
В частности, при pt — р^— 1, р41 =
= 0» Яц = Р; Pi = « = 1 — а»
Pij = р имеем
Ф1(г) = {а»₽»{«!(1-₽’)’(1 +
+ (г- 1) (1 -₽4)Х* + 2а (1 -р3) х
X (а + ар3) (1 + (г - 1) (1 -Р3))'1 +
+ (а + ар3)2(1 + (г— 1) X
X (1 — Р2)/,}г* + 2а₽ (1 — ар) X
х{а2(1—₽2)2(l + (z—1)х\
х(1 — ₽3)Уч-2а(1— р^Х '
X (а +а?2)(1 + (z—1) (1 — р2)/" +
+ (а + ар2)2 (1 + (г -1) ₽)ГЧ,’,},‘-
Сравнивая эти формулы с форму-
лами (247) и (248), можно оценить
эффективность структурного резер-
вирования узлов и линий связи в си-
стеме.
Системы с ветвящейся структурой
123
ОЦЕНКА РАСПРЕДЕЛЕНИЯ
ИНФОРМАЦИОННОЙ НАГРУЗКИ
ЭЛЕМЕНТОВ НЕНАДЕЖНОЙ СЕТИ
ПРИ ЦЕНТРАЛИЗОВАННОМ СБОРЕ
ИНФОРМАЦИИ
Ветвящаяся система работает в ре-
жиме, когда по инициативе централь-
ного звена или по регламенту проис-
ходит централизованный сбор ин-
формации от периферийных звеньев.
Если в основной маршрут передачи
включен промежуточный узел, то через
него проходит информация от несколь-
ких периферийных звеньев. Количе-
ство этой информации зависит от
состояния сети. Элементы сети, не
включенные в основные маршруты
передачи, имеют информационную на-
грузку при отказе основных маршру-
тов, если алгоритм перераспределения
потоков информации предусматривает
использование этих элементов. На-
ходя распределение числа периферий-
ных звеньев, использующих данный
элемент сети в передаче информации,
и зная объем передаваемой информации
каждым звеном (или функцию распре-
деления), определяют суммарный
объем информации, длину очереди,
время передачи (завершения сбора
информации).
Нагрузка путей при полном опове-
щении о состоянии сети. Логическая
функция нагрузки пути и группы путей
определяется по формулам (224) и
(225), а СФФВ — по формуле (226).
Производящий полином для ветви
ФУ’(г’ fl.....fn-l’gl......Sn-1)=
После возведения (260) в степень
гп_1 проводят замещение xn_i и xn_lt j,
входящих в fn_r и gn_i, путем разложе-
ния полинома на три слагаемых: /п_1=
I; 1; fn-ig'n-i = 1. Эти
операции продолжаются до полного
замещения всех логических перемен-
ных. Если для некоторого I функции gj
и fi в записи (260) отсутствуют, то
после возведения в степень этап
замещения пропускают и выполняют
возведение в степень г^.
Пример 29. В четырехъярусной изо-
тропной ветвящейся системе с полно-
связными ветвями при полном опове-
щении о состоянии сети ряд приоритет-
ности путей имеет вид: 51, 541, 531,
521, 5431, 5421, 5321, 54321. Коэффи-
циенты разветвления на ярусах rlt г2,
г3, г4. Найти распределение числа
периферийных звеньев, доставляющих
информацию центральному звену по
прямым линиям связи и по путям с од-
ним транзитным звеном.
Решение. Логические функции
нагрузки при / транзитных звеньях
(/= 0,1)
/йО ~ ХЬХЪ1Х1г /б1 — *51*Б*1 (*54*4*41 V
V *53*3*31 V *52*2*21) *
Производящий полином распре-
деления числа звеньев, использующих
прямые линии связи,
Возводим в степень и за-
мещаем
Фбо (z) = <7i + Pi (1 +
+ (z— 1)Р6Р61)Г1Г,Г,Г<-
Для путей с одним транзитным
звеном
ф5? (z« S* Я4) = 1 + <z —!) х
х Рб^51 С1 —
gi — *si*i*ii, i = 2, 3, 4.
Далее следуют четыре шага воз-
ведения в степень и замещения. Окон-
чательно имеем
Фв1 (2) == Я1 “Ь Pi {Р2Р21 {РзРзДРлРи X
X (1 +(z — 1)рб^Б1(1 —
— Яъ2ЯъзЯы))Г* + (1 -PdPdl) (1 +
+ Рв<?Б1 (Z — 1) (1 — ЯбзЯъз))Г*}Гл “Ь
+ (1 —РзРзг) |р«Р« (1 + (z — 1) X
X РъЯы (1 — ЯмЯьл))Г* + О — Р4Р41) X
X (1 + (z — 1) РБ^51РБв)Г<}Г’}Г‘ +
124
Расчет надежности систем со структурной избыточностью
+ (1 — Р2Р21) {PaPai {РлРи (1 +
+ (г--- 0 Рб?Б1 (1 -<753<7б4))Г* +
(1 - РлР«) (1 + (Z- 1) X
X <7Б1Р5р5з)Г*}Г* Ч- (1 -PsPsi) X
X {ptPn (1 + (Z — 1) Pi.q6iPu)r‘ +
+ 1 -P<P«)r,}r’}r'-
Определяя потоки информации,
можно установить требования к про-
пускной способности направлений
связи, объемам памяти и времени
доставки.
Нагрузка линий связи и транзитных
узлов при полном оповещении о состоя-
нии сети. Логическая функция на-
грузки линии связи fai2 определяется
формулой (229). Используя стандарт-
ную форму (230), составляют произ-
водящий полином
/<)=• + (*-о
(261)
Далее преобразование проводят по
общим правилам. Возведение в сте-
пень заканчивается при достижении
яруса, которому принадлежит исхо-
дящий для линии узел. Далее замеще-
ние проводят, как в двухполюсной
системе. Для упрощения следует ис-
пользовать формулу
1 — qfl + 1 — qh = 1 — 1 —
— 0f=fa (262)
При расчете распределения нагрузки
узла полином (z, f{) имеет струк-
туру (261). Различия касаются лишь
конкретного вида функций fa.
7. РАСЧЕТ НАДЕЖНОСТИ
ИЕРАРХИЧЕСКИХ АДАПТИВНЫХ
СИСТЕМ УПРАВЛЕНИЯ
Постановка задачи. Систему управ-
ления S нестационарным объектом,
состояние которой зависит от пара-
метров |j, 1=1, т (причем каждый
из них принимает конечное множество
значений) называют адаптивной,
если для критерия I и класса сред S
значения {£} изменяются таким обра-
зом, что поведение S оптимизируется
по отношению к S при экстремальном
в некотором смысле выборе I.
Адаптивная система S обладает, кро-
ме отмеченных, следующими структур-
ными и функциональными свойствами.
1. Она имеет п > 1 различных под-
систем Sj с S и соответственно п
режимов функционирования
/ = 1, л, в каждом из которых цель
управления, возложенная на S, может
быть достигнута частично или пол-
ностью.
Между подсистемами Sj устанавли-
вается иерархическое соответствие.
В основу S положен уровень низшего
ранга Sx (основной контур), реализу-
ющий алгоритм координатного управ-
ления, который учитывает «нормаль-
ный» режим координатных и пара-
метрических возмущений и обеспечи-
вает требуемую реакцию. Структура
в общем случае содержит объект, изме-
ритель, наблюдатель, регулятор
(рис. 20).
Уровни старших рангов Sit j Z> 1,
называют контурами адаптации;
последние воздействуют на параме-
трические входы непосредственно под-
чиненного уровня и осуществляют ко-
Рис. 20. Структурная схема двухуровневой адаптивной системы управления с обучаемым
наблюдателем
Иерархические адаптивные системы управления
125
орд и натно- пар аметр ическое у правле-
ние. Алгоритмы подсистем Sj, j > 1,
называют алгоритмами адаптации.
Подсистемы Sj характеризуются
функционалами качества Ij; между
последними также устанавливается
иерархическое соответствие. Крите-
рий 1п верхнего уровня Sn служит
общим (глобальным) функционалом ка-
чества S. Наличие режимов Ri, 1 =
= 1, п, делает естественным выбор в ка-
честве функционала
п
г = м [£• (I)j = £ Pi (0 El (0 -»extr,
1=1
впервые использованного А. Н. Кол-
могоровым. Здесь Pi (t) — вероятность
функционирования S в R{ в момент i;
Ei (0 — условный выходной эффект
системы S при условии функциониро-
вания в режиме Ri в момент t, t £
€ (О, TJ.
2. В каждый из моментов времени
f С 10» Т} система S работает в одном
и только в одном из режимов.
Двухуровневая система S с адап-
тивной настройкой параметров наб-
людателя, регулятора и объекта за-
дается пятью соотношениями
*(0 = /(*. u,w, Г); (263)
х (М = *о; х (0 € Gx;
У (t) = <р (х, п, t)- (264)
* (0 = Му, 0; (265)
= О.; «(0 С Gu; (266)
i (0 = Ф (£, и, у, *, в, 0; £ Go) =*
= (267)
и функционалом качества I = М [ Е (х,
и, 0], где (263) — уравнение неста-
ционарного объекта; (264) — уравне-
ние измерителя; (265) — уравнение
наблюдателя, (266) — закон управле-
ния; (267) — алгоритм адаптации;
™ (О. Д (0 — шумы; £ (0 = {£н (0,
ьр (0 Со — (01 — вектор настраива-
емых параметров; £я, £р, — на-
страиваемые параметры наблюдателя,
регулятора, объекта; Я (0 — оценка
х (t); е (0 = х (0 - £ (0; Gx, Gu -
ограничения, наложенные на траек-
тории х (0 и управление и (0.
Из обобщенной структуры, пред-
ставленной .на рис. 20, получаются
важные частные случаи.
Если в объекте допускается выделе-
ние настраиваемых параметров, с по-
мощью которых компенсируются
параметрические возмущения, то
наблюдатель играет роль эталонной
модели объекта, и нет нужды настра-
ивать регулятор и модель.
Если в объекте не допускаются
выделения настраиваемых параметров
для компенсации его параметрических
возмущений, то обеспечение I -+ extr
достигается настройкой параметров
регулятора и подстройкой параметров
наблюдателя к объекту (система с об-
учаемой эталонной моделью).
Надежностью адаптивной системы S
будем называть ее свойство, состоящее
в способности достигать цель управле-
ния в случайных средах, не выходящих
из класса S.
Из анализа экспериментальных дан-
ных формулируются существенные
свойства системы S и класса сред 3,
которые используются в математиче-
ской модели надежности адаптивной
системы.
Относительно проектируемой адап-
тивной системы известны: внутренняя
структура уровней; алгоритм их вза-
имодействия; элементная база, вклю-
чая 1-характеристики компонентов
в номинальном режиме эксплуатации;
коэффициенты экстремальных элек-
трических, тепловых и механических
нагрузок и, следовательно, поправоч-
ные коэффициенты для 1-характери-
стик; время выполнения оператив-
ного задания.
На заключительном этапе проекти-
рования предполагается известным
протокол неоднородных испытаний
с доработками аппаратуры. Предпо-
лагается следующее:
1) область катастрофических зна-
чений случайного процесса развития
состояний системы принадлежит
классу нечетких множеств;
2) время адаптации — непрерывная
случайная величина с произвольным
законом распределения;
3) установившиеся режимы (и, сле-
довательно, финальные вероятности),
за редким исключением, отсутст-
вуют;
128
Расчет надежности систем со структурной избыточностью
4) математическое ожидание вре-
мени существования переходного
режима соизмеримо с математическим
ожиданием времени адаптации.
В математической модели надеж-
ности адаптивной системы представ-
лены: статистические свойства вну-
тренней и внешней среды; способность
к частичной компенсации параметри-
ческих и структурных нарушений;
числовые характеристики случайного
времени адаптации; многоконтурность.
Исследование модели приводит к эф-
фективному прогнозированию (вы-
числению) вероятности достижения
цели управления, а также экстремаль-
ных функционалов, чувствительных
к наступлению «редких или жела-
тельно редких событий» [2], в ча-
стности: вероятности отказа за
время выполнения оперативного за-
дания; математического ожидания
времени до первого нескомпенсирован-
ного параметрического отказа.
Приведенные характеристики яв-
ляются средними по ансамблю реали-
заций случайного процесса, относя-
щегося к некоторому множеству изде-
лий. Их необходимо дополнить доста-
точно точными текущими оценками
фазового вектора индивидуального
образца изделия в процессе его дви-
жения. Это достигается использова-
нием в составе системы адаптивного
наблюдателя (см., например, [5]).
Анализ возможностей компенсатор-
но-приспособительных механизмов. Та-
кой анализ необходим при сопоставле-
нии конкурентоспособных вариантов
проектируемой системы. Он проводится
с использованием известных методов
теории автоматического регулирова-
ния (например, методов корневого го-
дографа, частотных характеристик
и др.), дополненных экспериментом
с искусственной имитацией отказов.
Необходимое и достаточное условие
полной компенсации (параметриче-
ской инвариантности) получено для
линейных систем, описываемых пере-
даточной функцией вида
К
®0K = аН (s) + JG (s) + Q (sj'
(268)
где а — параметр, изменяющийся при
движении объекта; £ — автоматически
настраиваемый параметр основного
контура с целью компенсации вари-
ации параметра а; Л — коэффициент
усиления.
Изменения одного параметра пари-
руются путем адаптивной настройки
другого, если направления векторов
а = const и £ == const совпадают
на плоскости s. На плоскости (а, 5)
эти векторы являются ортогональны-
ми. Необходимое и достаточное условие
полной компенсации согласно иссле-
дованиям Е. Д. Добрынина и
Г. Д. Курзенкова имеет вид
Im G (s) Re Н (s) — Im H (s) Re G (s) =
= 0. (269)
Выражения для корневых годогра-
фов замкнутой системы имеют вид:
1. avar:Im[Q(s) +
+ EG(s)]Retf(s)-
— 1m Я (s) Re [Q (s) -f-
+ (s)] = 0; {270)
2. g var: Im [Q (s)-|-
+ аЯ (s)] ReG(s) —
— ImG(s) Re[Q (s)+
+ aH (s)] = 0.
Совместное решение уравнений (269)
и (270) дает координаты точек, в кото-
рых выполняется условие полной ком-
пенсации.
Необходимое и достаточное условие
полной компенсации для систем с пе-
редаточной функцией произвольного
вида пока не получено.
Физические адаптивные системы
всегда нелинейные и нестационарные.
Поэтому теоретический анализ при-
способляемости, проведенный на
раннем этапе проектирования по отно-
шению к линейной модели системы,
дает весьма ограниченное представле-
ние о действительных возможностях
компенсаторно-приспособительных ме-
ханизмов.
Различают следующие изменения
параметров в непрерывных адаптивных
системах:
a-вариации, не приводящие к изме-
нению начальных условий и порядка
уравнения движения системы;
Р-вариации, приводящие к измене-
нию начальных условий;
Иерархические адаптивные системы управления
127
Х-вариации, приводящие к измене-
нию порядка дифференциального
уравнения движения системы. На-
копленный к настоящему времени об-
ширный экспериментальный материал
свидетельствует о способности блока
адаптации в двухуровневых адаптив-
ных системах к компенсации а-, В- и,
в ограниченной степени, также л-ва-
риаций вектора внутренних параметров
основного контура (подсистемы Зх).
При этом следует иметь в виду; 1) ком-
пенсируются неисправности преиму-
щественно тех элементов, которые уча-
ствуют в формировании настраива-
емого параметра; 2) для адаптации
используется информация об отка-
зах, содержащихся в вызванных ими
возмущениях.
Полу марковская модель надежности.
Структура входящего
потока. Процесс функционирова-
ния двухуровневой адаптивной си-
стемы 3 представляют как развитие
ее состояний на интервале [0, 7],
где Т — время выполнения задания.
Состояние системы в каждый момент
t С [О, 7] характеризуется вектором
х (0, который является л-мерным
случайным процессом. Наблюдению
доступен вектор у (0, связанный с х (0
соотношением (264).
Средн совокупности компонент
{*! (0....хп (0) имеется I < п опре-
деляющих параметров, пределы изме-
нения которых ограничены по усло-
виям безопасности. Выход выборочных
функций соответствующего наблюда-
емого процесса yi (0 за пределы об-
ласти Q допустимых по условиям
безопасности значений может быть
отождествлен с аварийной ситуацией.
Пересечения границ области Q с тра-
екториями процесса (0 определяют
моменты времени, когда корректиру-
ющее воздействие контура адаптации
на параметрические входы основного
контур а становится необходимым. Если
выборочные функции процесса — моно-
тонные неубывающие функции вре-
мени, то корректирующие воздействия
необходимы для сохранения устойчи-
вости и безопасности системы.
Необходимость в самонастройке воз-
никает в связи с изменениями как
внешней, так и внутренней среды.
Поэтому поток компенсируемых
параметрических отказов — заявок
на адаптацию — образуется в резуль-
тате наложения потоков из нескольких
источников, внутренних и внешних.
Принимаются допущения о гауссов-
ском свойстве процесса yi (0 и не-
однородном по времени пуассоновском
потоке компенсируемых параметри-
ческих отказов [1, 3, 4].
Если процесс одномерный и уровень
I (0 — дифференцируемая функция
времени, то применяют формулу
М. Р. Лидбеттера:
Г(0: °’ Г] =
Т
= - ff/ДДЛх
2/р(0) J \Гр(0)/
х (2К-р*(0)+
+ г (п [201 v — ill dt,
L p"(o)/ JJ
(271)
где p (t) — дважды дифференцируемая
нормированная корреляционная функ-
ция процесса yi (0; f (?) — плотность
нормального распределения; Ф (г) =
1 Г / ta \
= -g-— J ехр (-j dt—функция
—со
Лапласа. При постоянном уровне зна-
чения М (0] определяют по фор-
муле Е. В. Булинской, представля-
ющей частный случай (271) при Г (0 =
= const:
*>[*„<«; Г(0; О, Т] =
=4/-WM₽(-r‘/2p(0,)-
(272)
Полумарковская мо-
дель надежности. В си-
стеме S имеются в виду следующие
потоки случайных событий: а) не-
однородный по времени пуассоновский
поток параметрических отказов
128
Расчет надежности систем со структурной избыточностью
Рис. 21. Граф переходов двухуровневой адаптивной системы автоматического управле-
ния 1
Рис. 22. Зависимость математического ожидания времени до первого нескомпенсированно-
го постепенного (параметрического) отказа от скорости процесса адаптации
с мгновенной интенсивностью v (0;
б) однородный пуассоновский поток
внезапных отказов в основном кон-
туре с интенсивностью т); в) однород-
ный пуассоновский поток внезапных
отказов в блоке адаптации с интенсив-
ностью Л.
Случайность разрывных по величине
или производным возмущающих воз-
действий и начальных условий по-
рождает случайность переходных
процессов в адаптивных системах.
Предполагается:
время адаптации — непрерывная
случайная величина с произвольным
законом распределения F (и) =
= Р {^ад <
адаптация начинается в момент до-
стижения траекторией случайного
процесса yi (0 границы области Q;
процесс адаптации квазистаци-
онарный, т. е. очередь параметрических
отказов (заявок на обслуживание) не
образуется.
Случайный процесс развития со-
стояний изучается с помощью фазо-
вого пространства, состоящего из мно-
жества изолированных точек и полу-
прямой (0 и < оо). При .сделан-
ных допущениях эволюция состояний
системы S образует полумарковский
случайный процесс.
Для снижения размерности задачи
выделяют обобщенные состояния,
образующие фактор-множество исход-
ного множества состояний по экви-
валентности функционала I: со$ —
~ (ОуФФ- / (°i) = (wj)- В результате
рассматривают следующие обобщен-
ные состояния:
. й)0 (О; S исправна в момент 0
ci)x (t, и): внезапных отказов нет,
блок адаптации занят компенсацией
параметрического отказа в течение
времени и;
со2 (0: в момент t возник внезапный
отказ блока адаптации, параметриче-
ских и внезапных отказов в ОК нет
(в этом состоянии возможна ложная,
не оправданная состоянием системы
адаптация);
со3 (0; параметрический отказ в ОК
и внезапный отказ в блоке адаптации;
со4 (0: попадание системы S в мо-
мент / в поглощающий экран.
Состояниям ©у (0, / = 0, 2, 4 в фа-
зовом пространстве соответствуют изо-
лированные. ТОЧКИ, СОСТОЯНИЮ й)ц (f,
и) — полупрямая. Граф переходов
системы $ представлен на рис. 21.
Развитие состояний системы S управ-
ляется следующей системой интегро-
дифференциальных уравнений с пере-
менным параметром v (0:
А)(0 = -М0 + Ы-пИо(0 +
t
+ j Pl (Л и) р> (и) du;
О
dpi(0 и) , dpi(t, и)
dt “Г ди
= — (р.(ц) + ^ + л>Р1(^ “);
Ра (0 = ХР0 (0 - (v (0 + rj) Ря (0;
t
Р9 (0 = X j Pi.(/, и) du -j- v (0 X
о
х р2 (0 - № (0;
К (0 = л (1-РЛ0).
(273)
Иерархические адаптивные системы управления
129
Граничное условие ft (f, 0) =
= V (0 Ро (0.
Начальные условия: Ро (0) = 1,
Р2 (0) = Ря (0) = Р4 (0) = 0.
Условие нормировки
t 4
JP1(/, B)<ta+ 2 ^(0 = 1-
0 (i=0, foM)
Решение системы (273) в изображе-
ниях при v (0 = const:
Ро (s) = {« + X + Т] +
+ v[l — g (s-J-X-j-
Px (s) = Po (s) X
V [! — g (s + X 4- Д)].
X s + X-|-n
P2 (s) = Po (s) X
X—, Л-Г-;
* i 4
y П —g(s + x + n) ,
( s 4” X -f- ij
I 1
' S + v + ^J ’
(274)
где g (•) — лапласово преобразование
дифференциального закона распре*
деления времени адаптации.
Для системы S, способной функци*
онировать по крайней мере на отдель-
ных участках траектории движения
с неисправным, но отключенным (во
избежание ложной самонастройки)
блоком адаптации, множество благо-
приятных состояний — {<М. i —
= 0, 1, 2, 3. Вероятность безотказной
работы в изображениях Ps (s) =
з _
- S Pi («)-
Математическое ожидание времени
до первого внезапного отказа
T’o = PS (s) L=o = {^ + Я +
= v(l - g (X + tj)))-i x
( V
х^-^п-гй+п)]-!-
. X vX Г 1 — g (X 4- Tj)
'^ + т] Л L X 4-11 ‘
+ v4-t) ] }•
Если функционирование блока
адаптации необходимо на всей траек-
тории движения объекта, то Ps (s) =
2 _
= 2 р‘ »•
<=0
Математическое ожидание времени
до первого нескомпенсированного па-
раметрического отказа
2
= ]jPi(s)ls-o = (x + ’l +
/=0
+ V[1 - g (X 4- П)]}"1 х
х 11 i — г(^ + л)1 j
X 1
"г v 4- Л Г
При известном законе распределения
случайного времени адаптации полу-
чаются показатели безотказности
системы S в оригиналах. Важные для
приложений частные случаи приве-
дены ниже.
При экспоненциальном законе рас-
пределения случайного времени само-
настройки
PS(0 = exp(-(X-M))/ +
, Х(Х4-р— v) . . .
4~ <7л- ;— г у—-—— ехр (— (v 4-
X(X4-|i —V) —vjx
+ ^<+(v_XHv + iTeXPX
х (— (Х4-П)) < —/ .Л. \--Х
(р 4- X) (р 4- v)
X ехр (— (v 4- р 4- X 4- п))
Этот показатель может быть ото-
ждествлен с вероятностью достижения
цели управления, если v учитывает
130
Расчет надежности систем со структурной избыточностью
также определяющие факторы внеш-
ней среды
____________X (X 4~ Н — у) .
+ {% (X + р, — v) — vp,} (v-И т]) +
______________Хр____________
+ (v — X) (v 4- р) (X + т|) ~
vX
“ (р + X) (р + v) (v 4- р + X + т]) *
График зависимости Тп от скорости
процесса адаптации р приведен на
рис. 22.
Если деятельность блока адаптации
необходима на всей траектории дви-
жения объекта, то среднее время до
попадания адаптивной системы в по-
глощающий экран при равномерном
законе распределения времени само-
настройки
ехр (— а (X 4- л)) П ~
— ехр (— (Ь — а) (X 4- П))]
(X + т)) (Ь — а)
ехр(— а(Х4-т])[1 —
— ехр(— (Ь — а) (Х4-П))]
(Х + 1]) (Ь-а)
Учет частичной приспособляемости
двухуровневой адаптивной системы S
к внезапным отказам элементов основ-
ного контура (подсистемы SJ при-
водит к изменению некоторых коэффи-
циентов системы интегродифферен-
циальных уравнений (273). Пусть £ —
суммарная интенсивность таких от-
казов. Тогда система (273) примет вид
Ро (0 = ~(v + Рь (0 +
t
+ j р* (*, и) g («)
о
др* (/, и) др* (t, и) =
dt ди
= — (X 4- (П — 0) рГ (*«);
р2 (о = хр0 (0 - (V (0 + n) Р* (О;
t
Рг (t) = Ь j Pi (t,
О
x du 4- v (0 P2 (/) — т)Рэ (0;
л
О
x (t «) [1 — F (u)}du 4-
+ *1(M)4M)).
(275)
. . Pi (tt u)
W p; (t, «) = .
Изменится также граничное условие
Pi (t, 0) = (v (0 4- t) PQ (f).
Алгебраическое суммирование ин-
тенсивностей отказов вытекает из
того, что пуассоновский поток является
самопроизводящим по отношению
к операции суперпозиции.
Условием повышения вероятности
достижения системой S цели управле-
ния при работе в режиме /?2 по сравне-
нию с режимом Pj является выполне-
ние неравенства
V (/) 4- I, t е [0, Г]. (276)
Выполнение неравенства (276) сле-
дует рассматривать как проектное тре-
бование, которое целесообразно
включать в ТЗ на проектирование,
если одним из конкурентоспособных
вариантов может стать адаптивная
система.
Пример 30. Проектируется двухуров-
невый адаптивный автомат угловой
стабилизации летательного аппарата
по каналу крена. Структурная схема
автомата с эталонной моделью и кон-
Иерархические адаптивные системы управления
131
Рис. 23. Структурная схема беспоискового двухконтурного адаптивного автомата стаби-
лизации с эталонной моделью, контролем амплитудной частотной характеристики и пара-
метрической обратной связью
тролем амплитудной частотной харак-
теристики изображена на рис. 23.
На вход основного контура от генера-
тора пробных сигналов подаются гар-
монические колебания a sin of. На
выходе основного контура (рассма-
тривается его линейная модель) воз-
буждаются вынужденные колебания
sin (at 4- <р), которые подаются на
вход блока адаптации (подсистемы Sa).
Последний состоит из резонансного
фильтра Ф (s), выпрямителя В, сравни-
вающего устройства, усилителя Ка
и интегрирующего звена с передаточ-
ной функцией . Передаточная функ-
s
ция эталонной модели основного кон-
тура в разомкнутом состоянии W* (s).
Частоты пробных сигналов выби-
рают таким образом, чтобы основные
спектры управляющих сигналов и воз-
мущений, а также тоны иэгибных
колебаний летательного аппарата ле-
жали вне полосы пропускания резо-
нансного фильтра Ф (s). С выхода
Ф ($) вынужденные колебания по-
даются на вход выпрямителя В, выход
которого а2 (0 сравнивается с жела-
емым выходным сигналом (/), фор-
мируемым эталонной моделью. При
достижении рассогласованием (/)=
= Оо (0 — ая (/) порога чувствитель-
ности блока адаптации интегрирующее,
устройство подсистемы Sa осуществляет
автоматическое изменение настраива-
емого параметра К с До тех пор, пока
произведение КСКО не станет равным
постоянной величине (с точностью до
помех и допустимых приборных по-
грешностей).
Таким образом, стабилизация ам-
плитуды вынужденных колебаний а2 (1)
с помощью автоматического изменения
Кс означает Стабилизацию коэффици-
ента усиления основного контура в ра-
зомкнутом состоянии. Тем самым обес-
печивается поддержание на приемле-
мом уровне эффективности аэродина-
мических рулей Оу, в (0 при широком
диапазоне вариаций внешней среды.
(Автоматическая настройка Кс поз-
воляет также компенсировать не-
которые вариации постоянной времени
объекта.)
Для уточнения пределов приспособ-
ляемости адаптивного автомата к па-
раметрическим и структурным нару-
шениям и выявления опасных отказов
используют: -
а) необходимое и достаточное усло-
вие параметрической компенсации
(269);
б) метод корневого годографа;
в) специально поставленный экспе-
римент.
Опасные отказы выявляют путем
моделирования неисправностей на
физическом макете автомата, его ана-
логовой или цифровой модели, сопря-
женными с уравнениями объекта ста-
билизации. Внезапные отказы, вос-
производимые в ходе «электронных
полетов», рассматриваются как де-
терминированные воздействия, ими-
тируемые в конкретный момёнт вы-
полнения задания. Для сокращения
132
Расчет надежности систем со структурной избыточностью
9. Кусочно-линейная аппроксима-
ция V (/)
№ участка Время движе- ния, с Время корреля- ции, с vf(f) = ± с"1
1 18 18 0,0087—0,0002
2 5,4 5,4 0,0055+0,0045
3 3,1 2,7 0,3907—0,1265
4 1,6 10 0,0621+0,0382
5 2,1 10 0,1232—0,0390
6 1,2 10 0,0412+0,2683
7 6,2 10 0,0261
8 3 10 0,0439
9 19,4 20 0,0194
объема испытаний до приемлемого ми-
нимума отказы воспроизводятся
в наиболее характерные моменты вре-
мени.
Основные допущения:
Время выполнения задания разби-
вается на девять неперекрывающихся
интервалов, в пределах каждого из
которых законы допущения о стаци-
онарности и нормальности процесса
av, б (О и известно его нормированное
корреляционное ядро р (т) =
= ехр (—(ат)2).
Время адаптации — непрерывная
случайная величина с экспоненциаль-
ным законом распределения.
Адаптация начинается в момент до-
стижения выборочной функцией про-
цесса ат, е(0 границ трубки качества.
(В действительности адаптация начи-
нается несколько раньше, в латентный
период, при достижении рассогласова-
нием 8^а (/) порога чувствительности
блока адаптации.) Обслуживание за-
явки на адаптацию завершается в мо-
мент входа траектории этого процесса
в допустимые пределы.
Исходные данные:
время работы системы в полете
^пол ~ 60 с;
вероятность достижения цели
управления Ртз 0,999;
суммарная интенсивность внезап-
ных отказов подсистемы <Sj с учетом
электрических, тепловых и механи-
ческих нагрузок в полете
т| = 43- IO"? с"1;
суммарная интенсивность внезап-
ных отказов подсистемы S2 с учетом
отмеченных нагрузок
15-10-7 с-1.
Ку сочно-л инейная аппроксимация
мгновенной интенсивности компенси-
руемых параметрических отказов
основного контура для каждого из
девяти участков траектории полета
сведена в табл. 9.
Плотность распределения случайно-
го времени адаптации р. = 0,2 с-1.
Выяснилось, что 20 % возможных
отказов (преимущественно типа «об-
рыв») регулятора подсистемы ком-
пенсируется за счет деятельности бло-
ка адаптации S2.
Требуется:
а) выделить движения адаптивного
автомата стабилизации, которые
осуществляются с наибольшей вероят-
ностью;
б) определить (вычислить) вероят-
ность достижения адаптивным ав-
томатом цели управления с учетом
действия компенсатор но-приспособи-
тельных механизмов за время выпол-
нения задания;
в) проверить выполнение неравен-
ства (276);
г) оценить эффективность работы
блока адаптации.
Решение.
В результате моделирования и об-
работки осциллограмм приспособле-
ния к компенсируемым внезапным и
параметрическим отказам было уста-
новлено, что математическое ожидание
времени адаптации весьма близко
к среднему квадратическому отклоне-
нию. Была принята гипотеза об экс-
поненциальном законе распределе-
ния случайного времени самона-
стройки.
При сделанных предположениях
относитель’но потоков случайных со-
бытий и закона распределения случай-
Иерархические адаптивные системы управления
133
ного времени адаптации система ин- 1 (273) превращается в матричное диффе-
тегродифференциальных уравнений | ренциальное уравнение
(0~
d
dt
Pi (0
(0
Рз (О
_ Рл (0 _
-СМО+М-Т])
Vi (0
X
о
п
(p+X-Ml) О 0 0
-(Vi (0+л)
Vi (0
л
о
X
п
О О X
о
о
_Р< (0_
где i — номер участка траектории.
Из анализа решения этого уравне-
ния на ЭВМ (рис. 24) можно заключить
следующее.
1. При данном портрете внутренней
и внешней среды (сочетании электри-
ческих, тепловых и механических воз-
действий на схему и конструкцию)
изображающая точка с вероятностью,
близкой к единице (0,999480), мигри-
рует из состояния й)0 (0 в состояние
©t (0'и обратно, способствуя достиже-
нию цели управления.
Вероятности состояний при т — 60 с:
Ро (60) = 0,909238;
Pi (60) = 0,090231;
Р3 (60) = 0,000034;
Р3 (60) = 0,000055;
Р4 (60) = 0,000470.
Если деятельность блока адаптации
необходима на всей траектории движе-
ния аппарата, то вероятность дости-
жения цели управления равна
0,999614 > Ртз.
Парирование отмеченной выше доли
внезапных отказов подсистемы Sj при-
водит к заметному снижению вероят-
ности попадания автомата в поглоща-
ющий экран (см. кривую Р4 (0 на
рис. 24). Вероятность гибели автомата
S, несмотря на деятельность блока
адаптации, монотонно возрастает,
хотя и остается допустимо малой
(Р (t = тпол) < 3-10~4) в пределах
времени выполнения полетного за-
дания.
134
Расчет надежности систем со структурной избыточностью
2. Функционирование адаптивного
автомата представляет собой причуд-
ливое чередование переходных
цессов.
3. Выполнение
проверяем для конца третьего
стка, где vf (t) |,=18с
2. Достигнутый уровень надежно-
сти соответствует требованию тех-
про- | нического задания
РS СЧгол) 3> РsT3 С^пол) > 0,999.
неравенства (276)
уча-
минимальна: I СПИСОК ЛИТЕРАТУРЫ
I. Бортовые терминальные системы
15-10"7с 1 < 51-10~4Ч- 0,2-43-10" с” . управления. Проблемы построения и
элементы теории/Б. Н. Петров,
Выполнение неравенства для дру- I А. Я. Андриенко, В. П. Иванов,
гих участков траектории гарантиро- I К)* “• Портнов-Соколов. М.: Машино-
вано. Следовательно, гарантировано строение, 1983. 200 с.
улучшение показателей безотказно- 2. Коваленко И. И. Анализ редких
сти S за счет S2. событий при оценке эффективности и
Оценим эффективность деятель- I надежности сложных систем. М.: Сов.
ности блока адаптации (работу в ре- РаДИ0» 1980. 208 с.
жиме R2)- При отключенном блоке I 3. Коваленко И. Н., Москатов Г. К.»
адаптации суммарная интенсивность I Барзилович Е. Ю. Полумарковские мо-
потока внезапных и параметрических I дели в задачах проектирования систем
отказов I управления летательными аппаратами.
М.: Машиностроение, 1973. 176 с.
» /А — и I v /А 4. Москатов Г. К- Надежность адап-
U Л т I) тивных систем. М.: Сов. радио, 1973.
101 с.
5. Москатов Г. К- Применение адап-
тивной нелинейной фильтрации в за-
дачах навигации автономного глубоко-
водного аппарата//Изв. АН СССР. Тех-
ническая кибернетика. 1978. № 3.
С. 70—78.
6. Нечипоренко В. И. Структурный
анализ систем. М.: Сов. радио, 1977.
214 с.
7. Рябинин И. А., Черкесов Г. Н.
Логико-вероятностные методы исследо-
вания надежности структурно-сложных
систем. М.: Радио и связь, 1981. 264 с.
8. Рябинин И. А. Основы теории и
расчета надежности судовых электро-
Таким образом, можно сделать еле- энергетических систем. 2-е изд. Л.:
дующие выводы. Судостроение, 1971. 456 с.
1. За счет компенсаторно-приспосо- 9. Рябинин И. А.,)Киреев Ю. Н. На-
бительных механизмов обеспечи- I дежность судовых электроэнергетиче-
вается почти 8-кратное увеличение ве- ских систем и судового электрообору-
роятности достижения системой S дования. Л.: Судостроение, 1974. 264 с.
цели управления по сравнению с соот- 10. Седякин Н. М. Элементы теории
ветствующим обыкновенным (не- случайных импульсных потоков. М.:
адаптивным) вариантом. | Сов. радио, 1965/ 261 с.
И
9 *1
Pat (Тдол) = ехр — I
-0,12.
Отсюда
Ps С*пол)/^В1 (^пол) —
= 0,999614/0,12—8.
т
Глава 4. Расчет надежности систем
с временной избыточностью
1. СИСТЕМЫ С ВРЕМЕННОЙ
ИЗБЫТОЧНОСТЬЮ
ОСНОВНЫЕ ПОНЯТИЯ
И ОПРЕДЕЛЕНИЯ. СПЕЦИАЛЬНАЯ
ТЕРМИНОЛОГИЯ
Временное резервирование — сово-
купность правил применения изделия
и способов повышения его надежности,
основанных на увеличении номиналь-
ной производительности (пропускной
способности), создании внутренних
запасов производимой продукции,
введении дополнительных устройств
для увеличения суммарной производи-
тельности, совершенствовании алго-
ритмов функционирования и условий
взаимодействия изделия со смежными
объектами (изделиями), использо-
вании функциональной инерционности
систем, а также других способов, при-
водящих к возникновению у изделия
или отдельных его устройств избыточ-
ного времени, которое может быть
использовано для восстановления ра-
ботоспособности, обнаружения и лока-
лизации отказов, реконфигурации тех-
нической структуры, повторения ра-
бот, информационного восстановления,
подключения структурного резерва
и пр. [2].
Надежность систем с временным ре-
зервированием (СВР) оценивается по
результатам выполнения установлен-
ных временных ограничений ко всей
траектории функционирования или
по результатам выполнения некоторого
задания. Задание содержит последо-
вательность и объем работ, моменты
начала и завершения этапов работ,
ограничения на использование различ-
ных ресурсов, которыми располагает
система, ограничения на взаимопо-
мощь и взаимодействие различных
устройств. Поэтому задания могут быть
одноэтапными, многоэтапными, бри-
гадными, индивидуальными (авто-
номными), групповыми, поступа-
ющими в начальный момент времени,
по расписанию или по заявкам в слу-
чайные моменты времени. Выполнение
задания — это событие, заключа-
ющееся в завершении заданного объема
работ с установленными ограничени-
ями на времена выполнения всех работ
и отдельных этапов, и установленными
требованиями к качеству и ритмич-
ности работы СВР. Нарушение уста-
новленных требований и ограничений
приводит к срыву выполнения задания
и рассматривается как срыв функци-
онирования.
Для СВР нарушение работоспособ-
ности не обязательно сопровождается
отказом системы даже при последова-
тельном соединении элементов, так
как есть возможность восстановить
работоспособность за резервное
время. Отказ СВР — событие, заклю-
чающееся в нарушении работоспособ-
ности, имеющем недопустимые по-
следствия или неустраненном за до-
пустимое время. Иначе говоря, отказ
СВР — событие, приводящее немед-
ленно или с некоторой задержкой
к срыву функционирования, срыву
выполнения задания. Для установле-
ния признаков отказа СВР необходимо
вести статистику потерь времени или
проводить специальные измерения,
например, запасов продукции в нако-
пителе.
СВР может рассматриваться как
совокупность исходного объекта и ре-
зервного времени (рис. 1). Схема ис-
пользования резерва, показанная на
рис. 1, аналогична схеме ненагружен-
ного дублирования аппаратуры, так
136
Расчет надежности систем с временной избыточностью
Рис. 1. Схема резервирования времени
как после отказа объекта начинает
действовать резерв времени. Отказы
объекта могут отличаться по послед-
ствиям. Если отказ вызывает лишь
задержку выполнения задания, но не
приводит к повторению работ, то его
называют необесценивающим или
неразрушающим. В противном случае
его называют обесценивающим или
разрушающим. Обесценивание может
быть полное или частичное. В связи
с наличием обесценивающих отказов
всю наработку СВР можно разделить
на полезную и обесцененную. Полез-
ной является наработка, не обесце-
неннаяг отказами объекта. Обесценен-
ная наработка — наработка, не вклю-
ченная в полезную.
Обобщение данных о практических
методах создания временной избыточ-
ности позволяет выделить пять основ-
ных источников резервов времени.
Первым является запас производи-
тельности, который можно образовать
увеличением быстродействия элемен-
тов, пропускной способности, мощно-
сти и т. д. Наличие запаса производи-
тельности позволяет при безотказной
работе всех элементов выполнить уста-
новленный объем работ за время,
меньшее выделенного оперативного
времени системы. Разность между опе-
ративным временем и минимальным
временем выполнения задания, за-
трачиваемым при безотказной работе,
есть резерв времени.
Вторым источником создания резерва
времени является комплексирование
устройств одинакового назначения,
что также создает запас производи-
тельности и уменьшает минимальное
время выполнения задания.
Резерв времени можно создать также
за счет внутренних запасов производи-
мой продукции, хранимых в специаль-
ных накопителях. Пока запас не исчер-
пан, продукция продолжает поступать
на выход системы в заданном объеме,
несмотря на отказы отдельных элемен-
тов системы.
Четвертым источником является
функциональная инерционность смеж-
ных систем. Физической основой функ-
циональной инерционности является
инерционность физико-химических
процессов в системах, например, про-
цессов нагрева, охлаждения, полиме-
ризации, механических перемещений,
химических преобразований и пр.
Наконец, резерв времени и возмож-
ности его использования зависят от
способа загрузки системы заданиями.
При непрерывной загрузке все заявки
на выполнение работ и все необходи-
мые условия для их выполнения имеют-
ся в системе к началу оперативного
интервала времени. В таких случаях
приостановка работы системы может
происходить лишь из-за отказов эле-
ментов. В системах с переменной (по
расписанию) или случайной загрузкой
резерв времени образуется естествен-
ным образом благодаря паузам между
периодами занятости, которые можно
полезно использовать для повышения
надежности.
КЛАССИФИКАЦИЯ МЕТОДОВ
ВРЕМЕННОГО РЕЗЕРВИРОВАНИЯ
И СИСТЕМ С РЕЗЕРВОМ ВРЕМЕНИ
На методы временного резервирова-
ния частично может быть распростра-
нена классификация методов структур-
ного резервирования. Среди методов
временного резервирования (ВР)
можно выделить резервирование об-
щее, раздельное, групповое, с целой
и дробной кратностью. При общем ВР
созданный резерв времени может быть
использован любым элементом си-
стемы. При раздельном ВР каждое
устройство или элемент обеспечивают-
ся собственным резервом времени, ко-
торый не может быть использован
другими элементами. При групповом
ВР резерв времени предназначается
для любого элемента, входящего в дан-
ную группу, и не может быть исполь-
зован элементами вне группы. Крат-
ность ВР — это отношение величины
резерва времени к минимальному вре-
мени выполнения задания. Она может
быть целым или дробным числом.
Системы с временной избыточностью
137
Рис. 2. Варианты структур СВР:
а — основное соединение; б — многофазное;
последователь но-параллельное
в — резервное; г — многоканальное; д—s —
По возможности увеличения резерва
времени во время функционирования
СВР различают непополняемый и по-
полняемый резервы времени. Непопол-
няемый резерв времени устанавливает-
ся заранее, до начала работы, и не
возрастает при выполнении задания.
При работоспособном состоянии всех
элементов системы текущее значение
резерва не меняется, а при отказах
может уменьшаться либо скачко-
образно (при обесценивающих отка-
зах), либо в линейной зависимости от
времени при восстановлении работо-
способности. Пополняемый резерв
времени возрастает по некоторому за-
кону при работоспособном состоянии
системы, а также при восстановлении
работоспособности некоторых отка-
завших элементов. Мгновенно попол-
няемый резерв восстанавливается до
исходного уровня скачком сразу же
после окончания ремонта. В одной и
той же системе могут быть оба вида
резерва времени. Тогда резерв времени
называют комбинированным или сме-
шанным. При раздельном или группо-
вом ВР возможны дополнительные
ограничения на способ пополнения
и использования резерва времени. Тог-
да его Называют резервом времени со
сложными ограничениями.
По типу структуры различают си-
стемы с. последовательным, параллель-
ным и последовательно-параллельным
соединением. Все соединения, не сво-
дящиеся к одному из названных,
приводят к системе с сетевой струк-
турой. При последовательном соеди-
нении отказ системы поступает в мо-
мент времени
Т0= min {Л + т,}, (1)
1=1, п
где Tt — время до отказа элемента
с длительным восстановлением (TBj >
>- Tf); Tf — групповой или индиви-
дуальный резерв времени, которым
располагает t-й элемент к моменту
отказа; п — число элементов системы.
Резерв времени создается благодаря
запасам в промежуточных накопите-
лях. Время X} определяется суммар-
ными запасами во всех накопителях
между входом системы и отказавшим
элементом. В* дальнейшем будем раз-
личать две разновидности последо-
вательного соединения: основное
и многофазное.
В основном соединении отсутствуют
накопители и Т/ — 0 (рис. 2, а). По-
этому То = min 7\. При многофазном
(О . .
соединении в системе есть по крайней
мере один накопитель (рис. 2,6).
Число фаз на единицу превышает число
накопителей.
При параллельном соединении отказ
СВР наступает либо при уменьшении
числа работоспособных элементов N
ниже установленного порога п, либо
при превышении установленного зна-
чения резерва времени /р фактическим
138
Расчет надежности систем с временной избыточностью
суммарным расходом резерва времени:
То = inf
t: (N (t) < n) V
(m \ 1
E’VlOX» (2)
J J
Параллельное соединение имеет
две разновидности: резервное и много-
канальное. При резервном соединении
/р = О, 1 л < т, где m — об-
щее число параллельно соединенных
элементов, а п — минимально до-
пустимое число работоспособных
элементов. Избыточные элементы не
включаются в работу, пока работо-
способны основные элементы, и не
создают запаса производительности
(рис. 2, в). При многоканальном соеди-
нении все параллельно включенные
элементы включены в полезную работу
и создают запас производительности
и резерв времени. При этом мини-
мально допустимое число работоспо-
собных элементов п может быть как
равным нулю, так и больше нуля
(рис. 2, г). Примеры системы с после-
довательно-параллельным соедине-
нием приведены на рис. 2, д—з. В си-
стемах с сетевой структурой о много-
фазном соединении можно говорить
при рассмотрении любого пути между
входом и выходом системы, а о много-
канальном соединении — при рассмо-
трении любого сечения сети.
Для обозначения классов СВР ис-
пользуют мнемонику, аналогичную
мнемонике Кендалла для систем массо-
вого обслуживания. Для обозначения
предусмотрены четыре разряда ХХтп,
из них первые два — для указания
типа распределения наработки и вре-
мени восстановления (М — экспонен-
циальное, Е — эрланговское, W —
Вейбулла — Гнеденко, £ М — гииер-
экспоненциальное, D — вырожденное,
G — произвольное), а два других —
для указания числа каналов в много-
канальном соединении и числа фаз
в многофазном соединении. С помощью
принятых обозначений можно выде-
лить четыре основных класса СВР*.
GG11 ~ одцокапальные однофазные,
GGml — многоканальные однофазные,
GG\n — одноканальные многофазные,
GGmn — многоканальные многофазные
системы.
Показатели надежности свр
Основными случайными величи-
нами, изучаемыми теорией надежности
СВР, являются время до отказа То (/р)
при непополняемом резерве времени fp;
полезная наработка Тп (/р) до окон-
чания резерва времени fp; время вы-
полнения задания /вз заданной /3 или
случайной длительности с распределе-
нием Т (f3); суммарное непроизводи-
тельное время Тип (f3) до выполнения
задания; суммарная полезная на-
работка в заданном интервале времени
Т2 (7). Время , Тнц состоит из суммар-
ного времени восстановления работо-
способности Тв и обесцененной на-
работки. Для характеристики этих
случайных величин используют сле-
дующие показатели.
Вероятность выполнения задания
(вероятность безотказного функциони-
рования)
р (С щ) = Р (Твз W < 0 =
= Р (То (щ) > Г), (3)
где w — векторный аргумент, харак-
теризующий временную избыточность
и выполняемое задание; t — оператив-
ное время системы.
Если задание имеет постоянную дли-
тельность t3, то непополняемый резерв
времени fp = t — ta, и тогда вместо (3)
можно записать
Р (k, /р, №) = р (Гц (#р) > /з) =
- Р (Тип ('з) < М- (4)
Поскольку аргументы /э, /р и /
связаны соотношением t = t3 -f- tp, то
кроме функции (4)- можно рассматри-
вать еще две:
Pm (*а, t, w) ~ Р ((„ t - /р, ш);
Р12‘ (f, tp, «,) = ₽(<- /р, <р, ®).
От основного показателя образуется
несколько производных»
Системы с временной избыточностью
139
Вероятность отказа СВР (вероятность
невыполнения задания, вероятность
срыва функционирования)
Q (t3, /р, w) =
= Q(,) (/з. *з + *Р, №)-
= <?(Z) (*э+ fp, tp, О') =
= 1-р(/3, /р, да). (6)
Интенсивность отказов
Л (t3, /р, да) ---In Р (fa, tp, w).
(7)
Средняя наработка до отказа СВР
(до окончания резерва времени)
Т’ср^р. да) = j xdQ(x, ip, да). (8)
о
Среднее время выполнения задания
Твз (^з» да) =
= J(l-P(1) (t„ I, u>))dt =
о
= «3 + j Q (ta, X) dx. (9)
0
Старшие начальные моменты нара-
ботки и времени выполнения задания:
MTW (t„ и>) =
= ( xndQ(x, tp, о>),
О
(t3,.») = (10)
= j xndP(1) (f3, х, да),
о
Для характеристики надежности
СВР на стационарном участке экс-
плуатации используют комплексные
показатели.
Коэффициент готовности за задан-
ное время
Кг (/р, да) = Кг НН J р (Гв (е) <'-
е £ Ei
<r:(fp’w’ e))dp^ (и>
где Кг — коэффициент готовности
в отсутствие резерва времени; Ег —
множество неработоспособных со-
стояний; Т’в(е) — время восстановле-
ния работоспособности при началь-
ном состоянии системы е; Т* — до-
пустимое время восстановления;
dP (е) — вероятность состояния е.
В частности, для одного элемента
Кг(*р, да) = Кг +(1 ~КГ) X
X Р (Г, < т; (tp, ш)). (12)
Коэффициент оперативной готовно-
сти за заданное время
Ког(^з» ^р» да) =
= J Pe(t3 tp, w)dP(e), (13)
е£Е
где Е — множество всех состояний;
Ре (^pw) — условная вероятность
выполнения задания при начальном
состоянии е. В отсутствие резерва
времени = 0, да = да0, G =
Т* (е) “ 0 Для е € И тогда
Кг (0, да0) = Кг, Ког (t, 0, да0) =
- КГР (/, да0).
Вероятности (3)—(5) допускают и
другую трактовку. Для этого вводим
два новых случайных процесса:
. dV (х)
Сц (х) »= —— мгновенная фак-
тическая производительность в мо-
мент xt, равная объему работ, выпол-
ненных в единицу времени;
t
C (t) — ~ J См (х) dx — интервальная
о
фактическая производительность (да-
лее — фактическая производитель-
ность).
Если номинальная производитель-
ность постоянна и равна с0, то См (П =
— с0 в интервале безотказной работы
и С (/) ~ Тя (0 cjt при наличии отка
зов, где Гн (0 —. суммарная наработка
системы в интервале (0, 0, имеюшая
распределение (5):
Q'1’ (i3. I. te) = I — P(t> (t,. t, о» =
-?(T.W«i)- О4)
140
Расчет надежности систем с временной избыточностью
Используя (4) и эквивалентность
неравенств {Тн (0 >= /3) оо {С (0 >
> с), где с = Cotg/t = Co/Ct, Kt —
плановый коэффициент использования
оперативного времени, составим ве-
роятность поддержания фактической
производительности в интервале
(0, 0 на уровне не ниже заданного
/><'>(<:, <) = />“> t) =
\ со /
= Р(С (Г)>с)
(15)
и вероятность поддержания фактиче-
ской производительности при выпол-
нении задания длительности /3 на
уровне не ниже заданного
Pc (t3, с) = Р (С (Твз) > с) =
= P(t3, t3(c0 — c)/c). (16)
При постоянной номинальной про-
изводительности заданный объем работ
V ~ а кратность временного ре-
зервирования mt = (с© — с)/с. По-
этому можно ввести модификации по-
казателей (4), (5) и (15):
Ру (У, Гр) = Р(У/с0, Гр),
4” О'- t) = Pw(V/c0, /); ((7)
Рус (У, с) = Рс(У/с0> с),
РШ/ (^3» Mf) — Р (^3»
Если номинальная производитель-
ность не постоянна, а переменна или
случайна, то показатели (Ру (V, Гр),
Р$> (V, 0 и PC(V, с) имеют самосто-
ятельное значение.
На основе показателей (4)—(17) мо-
гут быть также вычислены:
средняя фактическая производи-
тельность в интервале (0, 0
ССр (0 = Л (Г)/Г =
Со
= JcdQ(I) (с, Г), (18)
о
коэффициент использования си-
стемы в оперативном интервале вре-
мени
кй (0 = Тн (i)/t == Сср (0/со; (19)
средняя фактическая производи-
тельность в интервале времени до вы-
полнения задания объема V
Сер (V) = У/Твз (V); (20)
средняя наработка системы до пер-
вого снижения фактической производи-
тельности до уровня ниже с
ОО
ТСр (0 = J Рс (^» с) dX ~
0
оо
= | Pmt (х, mt) dx; (21)
о
коэффициент использования произ-
водительности (средняя относительная
производительность).
Кип (Ю = Сер (У)=Сср (V)/c0.
, (22)
Последний показатель является раз-
новидностью коэффициента сохране-
ния э!ффективности.
В системах, в которых непополня-
емый резерв времени создается с по-
мощью запасов продукции объема v,
при расчете показателей надо заменить
Гр на о/с0. В частности, из (8) находят
Тер (»)•
Для этих систем определяют также:
коэффициент ритмичности
К р (v) = (Тдр (о) + v/c0)/(Tср (о) +
+ р/с04-Тв); (23)
коэффициент использования за-
пасов
кга(у>)=-2-/(tcp(v) + 4l');
с0 / \ с0 /
(24)
коэффициент устойчивости факти-
ческой производительности
Яс(с) = тср(С)/(тср (с) + Тв);
коэффициент полезного использова-
ния системы до окончания запасов
к т<? (М
Т ср (^р) Ч-^р+^п+Тц
(25)
Одноканальные системы при непрерывной загрузке
141
где Тер (fp)— средняя полезная на-
работка до окончания запасов;
7ср (^р) — средняя наработка до окон-
чания запасов; Тп — средние суммар-
ные потери рабочего времени в не-
загруженном состоянии; Тв—среднее
время восстановления работоспособ-
ности.
2. ОДНОКАНАЛЬНЫЕ СИСТЕМЫ
С ПОПОЛНЯЕМЫМ РЕЗЕРВОМ
ВРЕМЕНИ ПРИ НЕПРЕРЫВНОЙ
ЗАГРУЗКЕ И ИДЕАЛЬНОМ
КОНТРОЛЕ РАБОТОСПОСОБНОСТИ
СИСТЕМА КАК ОДИН
ВОССТАНАВЛИВАЕМЫЙ ЭЛЕМЕНТ
Представим систему в виде одного
восстанавливаемого элемента, в кото-
ром предусмотрено использование
пополняемого резерва времени. Пусть
наработка системы между соседними
отказами /н имеет такое же распределе-
ние F (0, что и наработка t0 до первого
отказа. Время восстановления работо-
способности tB является случайной
величиной с функцией распределения
FB (0, не зависящей от места возник-
новения отказа и предшествующей
наработки. В процессе ремонта си-
стема полностью восстанавливает
свои исходные свойства. Используемый
в системе резерв времени представляет
собой случайную величину тд с произ-
вольной функцией распределения
D (0 = Р {тдС t}. Будем предпола-
гать, что функции распределения F (0,
FB (О и D (0 имеют непрерывные плот-
ности распределений и конечные мате-
матические ожидания (МОЖ) соот-
ветственно ?н, ?в, тд. Система функци-
онирует следующим образом: про-
работав случайное время /н , она
отказывает и затем восстанавливается
за случайное время /в ; после оконча-
ния восстановления работоспособ-
ности она опять работает случайное
время /Hj, затем снова восстанавли-
вается в течение времени (Bj и т. д.
Согласно принятым предположениям
величины 0.,. и tni независимы, причем
Р {tni < 0 = F (0 и Р {tbj <t} =
= FB (0, i, j = 1,2, ... В момент каж-
дого отказа «включается» резерв вре-
мени. Если восстановление работо-
способности заканчивается до момента
израсходования резерва времени, то
считается, что данный отказ не нару-
шает нормального функционирования
системы. В противном случае (т. е.
при /в Z> Тд) в момент израсходования
резерва времени возникает отказ (срыв
функционирования) системы. Осо-
бенностью рассматриваемой системы
является то, что короткие интервалы
времени восстановления работоспо-
собности /в < Тд относятся к полезному
времени. Обозначим через 7Hf и TBj
соответственно наработку между от-
казами и время восстановления работо-
способности системы с пополняемым
резервом времени и будем предпола-
гать, что все отрезки времени Тш-
распределены одинаково по закону
Q (t, тд) = Р {Тн<И) со средним
Тн (Тд) и все периоды пребывания
системы в неработоспособном состо-
янии тоже распределены одинаково
по закону FB (0 Тд) = Р {Тв < t}
со средним Тв (тд).
Для проведения расчетов показате-
лей надежности системы необходимо
знать (или задать) вид законов распре-
деления F (0, FB (0 и jD (0.
Формулы для средней наработки
на отказ 7Н (тд), среднего времени
восстановления Т в (тд) и коэффициента
готовности Кг (Тд) системы при произ-
вольных законах распределения F (0,
FB (0 и D (0 имеют вид:
Тн (тд) = -у [?н + М min (tB, тд)],
(26)
Тв (Тд) = -i-[?B — Af min (tB, тд)],
(27)
Аг(Тд) = *г+(1-*г)(1-<7). (28)
где
СО
q = р {/в > тд} = j [1 - FB m dD (О,
о
М min (tB, тд) =
СО
= j[l-FB ШД-DWdt,
О
kr ~ ?н/(?н ?в)» А4 — символ МОЖ.
1. Расчетные формулы для q и М min (1в, Тд)
Закон распределения Рв (i) q цля случая
1 2
Экспонен' циальный (параметр р) Y т + м- e-“'«
Нормальный (параметры ?в» °в) 1 — exp X X (—yiB + 0.5/aJ) X X 0,5 + / ?B — \ ] . + Ф — \ °® /J V / 0,5 4-Ф(?в/(М 1
Вырожденный, (?в = const) 1 ~T*B 1 — e B У 0 при ZB ta ( 1 при 7B > /д
to
M min Тд) для случая
1 2
1 _L( 1
1 С
— 1— ехр X
X (—Т?в + 0,5у2о2) X
X | 0,5 +
Zg ПрИ 7g ^Д,
/д при /д ?Q
Расчет надежности систем с временной избыточностью
Закон распределения (/) <7 для случая
1 2
Рэлея (параметр ов) У2пуове0,:> X X [0,5 — Ф (Т<тв) ] -'д/2ав V
Эрланга 2-го порядка (параметр 2/’») У (Y 4- 2ц) (V + И)2 0 + Н*д) е“Ц/д
Эрланга k-ro порядка (параметры = k/lB, k) k-\ v2j(r-i-M'+i р=0 /г-1 (Р'^д)^ е~ц/д »=о z
Продолжение табл. 1
М min Гд) для случая
1 2
V2лове°>5 X X [0,5 — Ф Срств)] ^2лавФ (*д/(Тв)
Одноканальные системы при непрерывной загрузке
144
Расчет надежности систем с временной избыточностью
Точные выражения для вероятности
безотказного функционирования Р (/,
Тд)и коэффициента оперативной готов-
ности Рог (/, тд) для этих общих усло-
вий излишне громоздки и не при-
водятся. Расчетные формулы для
величин q и Afmin (Л тд), входящих
в общие выражения (26)—(28), при-
ведены в табл. 1. Эти формулы полу-
чены для некоторых конкретных зако-
нов распределения времени восста-
новления FB (0 и двух частных случаев
закона распределения пополняемого
резерва времени D (0: 1) экспонен-
циального с параметром у и 2) выро-
жденного (тд = fд = const). В фор-
мулах через Ф (х) обозначена табули-
рованная функция Лапласа
х .
е 2 du.
о
Вероятность безотказного функци-
онирования Р (t, Тд) системы может
быть рассчитана с помощью простой
приближенной формулы:
Р (Л ^д) « ехр (— , t > Тд,
\ *н /
(29)
которая справедлива для распростра-
ненного на практике случая ?в ?и
и произвольных распределений исход-
ных случайных величин /н> *в и тд.
Относительная погрешность этой
формулы не превышает 10 % при
10; ?в/?н 0,1 и q = Р {^в -^>
>тд) <0,1 в широком диапазоне
изменения интервала оперативного
времени t.
При вырожденном распределении
D (0 (тд — (ц = const) вместо (29)
следует использовать выражение
Р (Г, /д) «
~ ехр -
где <? — 1 — Рв (^д).
Приведем расчетные соотношения
для вероятности безотказного функ-
ционирования системы при некоторых
сочетаниях законов распределения
F (0, FB (0 и D (ty.
все законы экспоненциальные с па-
раметрами соответственно X, р и у
Р (Г, т„) = -L. [В<ГЛ‘ - Ле-В'1,
_______________________ (31)
где С = (X. 4'- И + Т)2 ~
В = 0,5 (Л + р + у + С)’, А= 0,5 (К +
+ И + т — С); F (0, FB (0 — экспо-
ненциальные (параметры к и р); D (0 —
вырожденный (тд- /д = const)
Р V, *д) =
V Aj(l-Ar)i+I
2j (и>* х
1—0
Хе-<™>*д(-А, +
I 1 + 1
i
+ / , Q (<+«I [° - (i+1) ч,чх
/=0
x[(_l/+/(! + 4rer±+2L£)_
t > tn (32)
где fer = p./(X + p); a = (b + 10 0
b — (Л- г|- p) ^д-
Формулы (31), (32) являются точ-
ными.
Выражение для коэффициента опе-
ративной готовности при произвольных
распределениях F (0 и Рв (0 и вы-
рожденном распределении D (0 имеет
ВИД
Рог (0 ^д) —
ехр
Г—у-(7 —<д)1х
L *н
:{Аг + (1 — *r)F.i] +
"4~ (1 — Ар) F в2» 1д t 21д,
Х(Ар (1 — Аг) Рвз].
t > 27д, (33)
Одноканальные системы при непрерывной загрузке
145
где q — 1 F-в (^д); — ^н/(^н + ^в)>
[1 - FB (0)3 <ffi;
F вэ = j- f ^'гч [1 - FB (0)] d6.
0
В частном случае при экспоненциаль-
ных распределениях F (0 и FB (О
(параметры X и р.) из (33) получаем
For (*» ^д) —
И (X + Р — М)
(X + и) (Н ~ М)
ехр [—X (t —
-t)gi *2ехР(-НО
(Х + н)(н-М)
*д < t 2/д,
Ь ц;— ехр [—X (t — 1д) д] X
X (1 — ехр (— (р— Xg) /д))] ,
t > 2/д, (34)
где q = ехр (—|НД).
Формулы (33) и (34) являются при-
ближенными. Их относительная по-
грешность не превышает 10 % при
q 0,1,/в/^н 0,01 и /д<2 t tfdq,
что вполне приемлемо для практиче-
ских расчетов.
Пример 1. Автоматизированная си-
стема управления, включающая в себя
устройства первичной и вторичной
обработки информации и аппаратуру
передачи данных, осуществляет об-
работку информации, поступающей
от ряда источников, и ее передачу
потребителям в реальном масштабе
времени. Интенсивности отказов X и
ремонта ft аппаратуры АСУ равны
соответственно 0,04 1/ч и 5 1/ч. По
условиям функционирования перерыв
в передаче информации на время более
0,1 ч рассматривается как срыв функ-
ционирования системы. При про-
стоях АСУ в течение времени, не пре-
вышающего допустимое, поступающая
от источников информация теряется,
а после восстановления система начи-
нает передавать новую информацию.
Требуется определить показатели
надежности системы.
Решение. В соответствии
с исходными данными АСУ выполнит
задание, если в течение 8 ч не будет
ни одного перерыва в работе, пре-
вышающего 0,1 ч. Поскольку ?в/?н=
= Х/р. = 0,04/5 = 0,008, то для рас-
чета вероятности безотказного функ-
ционирования можно воспользоваться
приближенной формулой (30):
Р (*, tp) =
= ехр [—0,04-7,9 ехр (—5-0,1)] =
= 0,8255.
Для сравнения определим вероят-
ность безотказной работы аппаратуры
АСУ без учета пополняемого резерва
времени: Р (0 = ехр (-0,04-8) =
= 0,7261. Выигрыш в надежности по
вероятности срыва функционирова-
ния от введения резерва времени со-
ставляет 0,2739/0,1745 = 1,57. Ис-
пользуя формулы (26), (28), (34), на-
ходим значения остальных показателей
надежности:
Тп (/д) = ехр (5-0,1) [25 +
+ 0,2(1 —ехр (—5-0,1))] = 41,3 ч;
Лг (/д) = 25/(25 + 0,2) +
+ [0,2/(25 + 0,2)] X
Х(1 — ехр (-5-0,1)) =0,9951;
Рог(*, /д) = 0,8179-1,0032 = 0,8205.
СИСТЕМА С. НАГРУЖЕННЫМ,
ОБЛЕГЧЕННЫМ ИЛИ
НЕНАГРУЖЕННЫМ СТРУКТУРНЫМ
РЕЗЕРВОМ
Рассмотрим систему, состоящую из л
основных (n 1) и /п резервных
(т 1) идентичных восстанавлива-
146
Расчет надежности систем с временной избыточностью
емых элементов (резервирование
скользящее). Функционирование си-
стемы происходит следующим обра-
зом. Через некоторое случайное время
после включения системы возникает
отказ одного из основных или резерв-
ных (при а >> 0) элементов. При отказе
резервного элемента сразу же начи-
нается его ремонт, после окончания
которого он возвращается в резерв.
Если первым отказал один из основных
элементов, то в момент отказа начи-
нается подключение одного из резерв-
ных элементов. Считаем, что во время
подключения система не изменяет сво-
его состояния. В момент окончания
подключения ремонтная бригада при-
ступает к восстановлению отказавшего
элемента. Если во время ремонта
возникает новый отказ, то в момент
отказа начинается второе подключение
(при отказе одного из основных эле-
ментов) или второе восстановление
(если отказал резервный элемент и
имеется свободная ремонтная бригада;
при отсутствии бригад отказавший
элемент не восстанавливается, а ожи-
дает в очереди освобождения одной
из бригад), и т. д. После окончания
восстановления элемент возвращается
в резерв.
Сформулируем исходные пред-
посылки и допущения:
наработка между отказами одного
основного элемента распределена
по экспоненциальному закону с пара-
метром % и не зависит от номера
элемента;
фактическая интенсивность отказов
отдельного резервного элемента Хф
зависит от степени нагрузки, т. е.
Лф = аХ, где а — коэффициент на-
грузки (0 ct 1). При полной
нагрузке сс= 1, при неполной на-
грузке (облегченный режим) 0 <
< а < 1, при отсутствии нагрузки
(ненагруженный режим) а = 0;
время восстановления одного эле-
мента /в распределено по экспонен-
циальному закону с параметром р;
ремонтный орган состоит из I (I 1)
бригад, работающих независимо, ре-
монт отдельного элемента произво-
дится одной бригадой, при этом исход-
ные свойства элемента восстанавли-
ваются полностью;
время подключения резервного
элемента — случайная величина fn
с произвольной функцией распределе-
ния Fn (0 и конечным МОЖ ?п, причем
переключатель считается абсолютно
надежным;
резерв времени — неслучайная по-
стоянная величина /д;
при отказе (т + 1)-го элемента объ-
ект выключается и новые отказы не
возникают, система возобновляет свою
работу при окончании ремонта одного
из т + 1 неработоспособных эле-
ментов;
предполагается, что
fn < Л1 min t3i;
min t3i‘,
1 I < fn + 1;
система отказывает в двух случаях:
в момент, когда время подключения
превышает допустимое значение /д,
и в момент отказа (т -|- 1)-го элемента.
Для проведения расчетов показате-
лей надежности системы необходимо
задать количество основных (п 1)
и резервных (т 1) элементов, сте-
пень нагруженности структурного
резерва (0 ос 1); интенсивности
отказа (%) и восстановления (р) одного
элемента; число ремонтных бригад
(1 I ^т-\- 1);величину резерва вре-
мени (/д) и вид закона распределения
времени подключения Fn (0.
В табл. 2 приведены общие расчетные
соотношения для показателей надеж-
ности системы Тн (^д), Тв (/д) и Кг (/д),
учитывающие различные режимы
нагрузки резервных элементов (0
ос <1 1) и произвольное число ре-
монтных бригад (1 I т -\- 1).
Расчетные формулы для частных слу-
чаев одного (т = 1) и двух (т = 2)
резервных элементов представлены
в табл. 3. В формулах табл. 2, 3 при-
няты следующие обозначения: р =
= Х/р.; То (tjj) — средняя наработка
системы до отказа; q — вероятность
того, что при подключении резервного
элемента взамен отказавщегб основ-
ного произойдет срыв функционирова-
ния системы, т. е. q ~ Р ffo > ^д} “
Одноканальные системы при непрерывной загрузке
147
= I — (*д); Ь — математическое
ожидание превышения времени под-
ключения tn над резервом времени /д
при условии /п > ^д> т. е.
?п — М min (tn, 1Д)
?п~ J [1 “Fn Wdt
= ° - f п (<д) : (35)
6+ — абсолютная погрешность прибли-
женной формулы, дающей заниженное
по сравнению с истинным значение.
При проведении расчетов значения q
,и L целесообразно определять с по-
мощью формул табл. 1 (случай 2),
только в них следует заменить FB (0
на Fn (0, a fB и овна ?п и оп- Операции
суммирования и произведения, пред-
усмотренные в формулах табл. 2, не-
обходимо выполнять с учетом соотно-
шений
/ /
П Xi — 1, У, Xi — 0 при / < k.
i=k i=k
Для случая, когда подключение ре-
зервных элементов происходит прак-
тически мгновенно (?п 0 и /д->- 0),
все указанные расчетные соотношения
приводятся к формулам, известным
в теории структурного резервирования.
В общем случае точные выражения
для вероятности безотказного функ-
ционирования Р (t, tj$ крайне гро-
моздки. Вместо них целесообразно
использовать приближенные (асимп-
тотические) формулы, которые при-
ведены в следующем параграфе. В ча-
стном случае одного резервного эле-
мента (m = 1) точная формула для
Р (t, /д) имеет вид
р <* *д> = S11S, X
X l(SL 4- nfy) es** — (Sa 4- nkq) eSl/]>
где Si, з = (1 4- (2n 4- <x) P) ±
d= КГЦ- 2p (2n (1 — g) 4- a) 4- сся’р*]»
P = M*-
Пример 2. Рассмотрим систему пере-
дачи данных (СПД), с помощью кото-
рой осуществляется обмен информа-
цией между территориально рассредо-
точенными объектами (ЦВМ). Одной
из ее важных подсистем являются
переключаемые каналы передачи дан-
ных. Пусть эта подсистема включает
в себя два основных (л = 2) и два
резервных (т — 2) идентичных канала
(резерв нагруженный) с интенсивно-
стями отказов и восстановления каж-
дого из них X — 0,02 1/ч и р = 2 1/ч,
причем обслуживание производится
одной ремонтной бригадой (/ = 1).
В подсистеме предусмотрено два спо-
соба подключения резервных каналов:
автоматический (основной) и полуавто-
матический (запасной). Время под-
ключения — нормально распределен-
ная случайная величина с параме-
трами ?ni = 1 с; ani = 0,25 с; ?п2~
= 5с; оп2 = 3 с соответственно при
первом и втором способах подключе-
ния. Будем считать, что переключатель
обладает идеальной надежностью. По
условиям функционирования перерыв
в передаче информации при подключе-
нии резервного канала на время, превы-
шающее допустимое /д = 2 с, приводит
к срыву функционирования системы.
Требуется оценить Показатели надеж-
ности подсистемы при указанных выше
способах подключения резерва.
Решение. По формуле табл. 1
(случай 2) для нормального закона
распределения Fn (0 определяем при
автоматическом подключении
ft = {0,5 — Ф [(2 — 1)/0,25 ]}/ [0,5 4-
+ Ф (1/0,25)] = 3,2.10-»,
а при полуавтоматическом
ft = {0,5 — Ф [(2 — 5)/3 ]}/[0,5 +
4- Ф (5/3) ] = 0,885.
Для заданных значений X и р. опре-
деляем р = Х/|х = 0,01. Используя да-
лее формулы табл. 3 при п = 2 и
а = 1, находим: (?д) = 21 475 ч;
(U = 21092 ?<'> (<д) =
= 0,486ч; №>(<д) = 1-К<”('а)=
=2,3-10~5 при первом способе и
т‘2) (<д) = 28,1 ч; Т<,2> (<д) = 27,8 ч;
00
2. Расчетные формулы (общие случаи) для показателей надежности системы
Показа- тель Точная формула Приближенная формула Погрешность
Мд) п 1 основных и т 1 резервных элеменл 1 А + ртВ qA + ртВ 'ов; 0<а^: 1; ограниченное вс 1 пк (п 4- am) (qA 4~ ртВ) ^становление (/ = 1) в 1 р + пк qA 4- ртв
Т* (*д) LqA 4- ртД/р. qA + ртВ — —
Хг (/д) Прим А+ртВ А (1 4- nkLq) 4- ртВ (1 4- пр) । т—1 /—1 [ е ч а н и е. А = ; У р} ТТ [п 4- 1 — п (п 4" ат) X X (kLqA 4- рт+1В) т—I а (т — /)]; В = [п 4~ а (' i=l 6+ п (п 4- am)2 X X р (M-qA + рт+1В) п — 0]
п 1 Тн(У основных и т 1 резервных элементов, 0 1 А 4- ртВ < а 1; произвольное восстав 1 /1 1т~1 овление (1</<т4- 1) Л 1т-‘ р
пк qA 4- ртВ пк (п 4- am) (qA 4- ртВ) + ” пк qA+pmB
Ъ (*д) -Q * §. i + з _ -о Со •₽ 3 Со —
Кг (Q А 4-РтВ А (1 4" nkLq) 4" РтВ (1 4~ прИ) п(п-^ат) п 1т-1 X (\LqA + pm+lB/l) А /г(/г + ат)2р 11 1т-‘ X (ЩА + pm+1 S/I)
Расчет надежности систем с временной избыточностью
min (/, m-1) /—1 m-1 f—1
Примечание. A = 4 fl [n + “(m ~ 01 + TTSS" У, 7=7 ГЪ” + “X
/=0 i—0 /—min (I, m-l)+l /=0
m-1
X(m — t)]; В = ]~| [n 4- a (m — 0]
i=!
n 1 основных и m 1 резервных элементов; 0<a^ 1; неограниченное восстановление (I ~ m-j- 1)
Тн (*д) 1 А + рщВ qA 4- ртВ 1 ml (п -4- am) (qA 4- ртВ) 1' + nh qA ртВ
ТВ(/д) LqA 4~ pmBi(m 4~ 1) р- qA -г ртВ
*г(*д) т . /—1 У'-Т'П [л + а(т-0] п 4-ат \ /! 1 1 /=о /=о А (1 4- nkLq) 4- ртВ [1 4- пр/(т 4- 1) л (п 4т ат) ml Х / пт в \ х(^л + т+1) л п(п4-ат)2р °* ml Х / л/п+1 /?\ X А/луД 4-2—4 \ т 4~ 1/
Примечание.
Однокаяальные системы при непрерывной загрузке
m-1 /—1 rn-l
A П^ + а<т-‘»: в=П1п + “<т~од
/=о /=0 1=1
CD
Продолжение табл. 2
Показа- тель Точная формула Приближенная формула Погрешность
п 1 основных и m > 1 резервных элементов; а = 0; ограниченное восстановление (/ = 1)
1 1 — (пр)7”*1 1 1 6+~ix
7н Пд) q [1 - (np)7”] + (пр)т (1 — пр) q [1 + np 4- (np)2] + (np)m X q [1 4- np + (np)2] 4- (np)m
Л, (<д) [1 — (пр)ст] + (пр)т (1 — пр)/р f и-ОФ)"]+ («₽)" (1-лр) — —
Кг (^д) 1—(пр)7”*1 1 — nXLq (1 — (np)771] - (np)m+1 6+ — n2pkLq [1 — (np)7”] —
1 — (пр)7”*2 + nkLq II — (np)m] - (np)"’-2
л а > 1 основных и m 1 резервных элементов; a == 0; произвольное восстановление (1 I tn + 1)
"Th (U 1 A + (np)m 1 /I lm~l g+ /! lm~l np
пЬ qA + (np)m qA + (np)m Ж qA 4- (np)m
Тв(/д) LqA + (np)m/lp. qA + (np)7” —
Расчет надежности систем с временной избыточностью
Кг Од)
__________А + (пр)т___________
А (1 4- nkLq) 4- (np)w (1 + np/Z)
Примечание.
min (Z, т-1)
/=0
Т’н Од)
Тв (;д)
Кг (^д)
1 ” i\ П^-С (LgA +
т-1
/=min (/, m-l)+l
ЯаЛр
Л tm-l
X
X (LqA + (np)?/Zp)
rt 1 основных и m 1 резервных элементов; a = 0; неограниченное восстановление (I = т + 1)
т
ml J (пр)у//1
1 А _________________
qA 4- (яр)7”
_1______ml
qA +’(лр)т
~jnl_______пр
+ qA + (лр)т
LqA+1^
ml 2 («РУ//1
/=0
А (1 + nkLq) + (пр)т i 1 4-
m-i
Примечание. А ~ ml 2 (пр)7//!
/=о
Одноканальные системы при непрерывной загрузке
3. Расчетные формулы для частных случаев одного и двух резервных элементов
Показа- тель Точная формула Приближенная формула Погрешность
п То (^д) 1 основных и один резервный элемент; 0^ 1 1 4~ (2п 4~ а) Р — прд tik q + р (п 4- а) a^ 1; одна (/= 1) или две (/ 1 1 лХ q 4- Р (л 4- а) = 2) ремонтные бригады б Г р[а +л (2 —у)] + лХ q 4- р (п 4- а)
Тн (/д) 1 1 4- р (п 4- а) 1 1 g = 1 р(л4-а)
лХ q 4- Р (п 4- а) лХ q 4- Р (п 4~ а) * пк q 4- р (л 4- а)
Тв (^д) L‘' + y<n + a> q 4- р (п + а) —
Кг (/д) 1 4- р (п 4- а) 1 4- nkLq + р (л 4- а) (1 4- лр//) ! _ яХХд—-2±L±_21£1 6+ — л (л 4- а)2 х X Р ( lLq 1 рД) \ л -f- а 1 ;
То (*д) п > 1 основных и два резервных элемента 1 а 4- [а 4- л (1 — ?)] [2a 4- л (1 — ?)] р2 лХ q [1 4- 2р (л 4- а)] 4- (л 4- а) (л 4- 2а) р9 1 О^а^ 1; ограниченное воссз 1 1 гановлекие (/ == 1) fi ~ 1 2Р <п + а)
лХ д[14’2р(л4-а)]4- 4- (л 4" а) (я 4- 2а) р2 * лХ ?[14~2р(л4-а)]4- 4- (л + а) (л + 2а) р8
Тн(/д) 1 1 4- р(л 4- 2а) 4- (л 4- а) (л 4- 2а) ра лХ q [1 4- Р (Д 4- 2а)] 4- (л 4- а) (« 4- 2а) р2 1 1 л . 1 р(л4-2а)
лХ q [ 1 4- Р (п 4" 2а)] 4- 4- (л 4- а) (л 4- 2а) р2 + лХ q [1 4- Р (л 4- 2а)] 4- 4- (л 4- а) (л 4- 2а) р8
Расчет надёжности систем с временной избыточностью
Т* Кд) Lq [1 + р (я + 2а)] + ~ (п 4- а) (л 4- 2а) ра г — —
q [1 + р (п + 2а)] 4- (п'+ а) (п + 2а) р2
*г Кд) Прим 1 + Р (я 4~ 2а) 4- (л -f- а) (п 4- 2а) р2 [1 4-р(п4-2а)(1 4-яХ£(?)4- 4- (1 4- лр) (п 4- а) (п 4- 2а) р2 [ечание. л = (1 — лр) [1 4“ Р (п + 2а)] 1 — л (л 4- 2а) ^р 4~ + тдк:) +Р“(" + «)1 л 4~ 2а/ j 4- лр2 [а 4- я (1 — 0] 6+ — (л 4- 2а)2 р kLq ^р 4" + п + 2а ) + р’(П + а)]
л Го Кд) s 1 основных и два резервных элемента; 0^ 1 а + [а + л (1 — д)] [2а 4-л (1 — д)] р3 а^ 1; две (/ == 2) или три (/ = 1 2 = 3) ремонтные бригады _ 1 р (Зл 4- 4а)
пк q[2 + р (Зл 4- 4а)] 4- 4- (л 4- а) (л + 2а) р3 пк q [2 4- Р(3п 4- 4а)] 4- 4- (л 4- а) (л 4- 2а) р3 °+'~ пк д[24-р(3л4-4а)] + 4- (л 4- а) (л + 2а) р2
Гн КД) 1 2[1 4-р(п4-2а)]4-(л4-а) (л 4-2а)р2 1 2 I 2р (л 4- 2а)
пк 2^[14-р(л4-2а)]4- 4- (л 4- а) (л 4- 2а) р2 пк 2д[14-р(л4-2а)]4- 4- (л 4- а) (л 4- 2а) р3 + лХ2^[1+р(л4-2а)] + 4- (л 4- а) (л 4" 2а) р2
ТвКд) 2L<? [1 4- Р (я + 2а)] 4-(л 4-а) (л 4- 2а) р2 —
2? [I 4- Р (я 4- 2а)] 4- (л -|- а) (л 4- 2а) р2
Кг Кд) 2 [I 4- р (л 4- 2а)] + (я 4~ а) (я 4~ 2а) р2 2 [1 4- р (л 4- 2а)] (1 4- nkLq) 4- 4" (1 4- (п + а) (я 4- 2а) р3 1 — л (л 4- 2а) X Г, г / , 1 \ . X kLq ( р 4- . о ) 4- L \ п 4- 2а/ о3 "1 + 7i" <п + «>] 6+ — л (л 4- 2а)2 р X X kLq (р 4- I п 4~ [ 7 \ л 4- 2а/ о3 1 + 7,-(« + “)_
Примечание. а = (2 4- лр) [1 + р (л 4~ 2а) J + пр2 [а + п (1 — <?)].
Одноканальные системы при непрерывной загрузке
154
Расчет надежности систем с временной избыточностью
Т<2> (,д) = ИГ® ч; К*,2’ (/д) = 1 -
— (#д) = 3,6-КГ5 при втором спо-
собе подключения резервных каналов.
Сравнивая эти результаты, получаем
Сд)^2’ ('д) = 764=
TP (tJ/T™ (<д) = 758;
FJ1' (<д)/т<2> (<д) = «6;
W ('д)/42) (<д) = О-638-
СИСТЕМА СО СМЕШАННЫМ
ПО НАГРУЗКЕ СТРУКТУРНЫМ
РЕЗЕРВОМ
Пусть имеется система, состоящая
из п основных (п 1) и т резервных
(/n 1) идентичных элементов, кото-
рые могут отказывать, причем суммар-
ная интенсивность отказа зависит от
числа неработоспособных элементов.
Обозначим через Xft суммарную интен-
сивность отказа элементов при условии,
что в данный момент неработоспособны
k элементов. Значение Х^ определяется
числом основных и резервных элемен-
тов, а также интенсивностью отказа
отдельного основного и резервного
элементов.
В частности, для ненагруженного
структурного резерва '
Xft = nX, k = 0, 1, 2, ..., т\
для нагруженного резерва
Xfc = (л 4- т —> k) X, k = 0, 1,
2, ..., тп\
для облегченного резерва
Хй = [п + (т — k) а ] X,
О < а < 1, k = 0, 1,2, т.
В случае смешанного по нагрузке
резерва будем считать, что первона-
чально в системе тл элементов нахо-
дятся в нагруженном резерве, т0 —
в облегченном, а остальные (т —
— то) — в ненагруженном. При
отказе одного из основных элементов
он заменяется элементом из нагру-
женного резерва, отказавший элемент
нагруженного резерва заменяется эле-
ментом из облегченного резерва, а эле-
менты облегченного резерва попол-
няются из ненагруженного резерва, т. е.
(п + тв 4- amo) X
при — тн — то;
[п 4- тн 4- (т — тн — k) а] X
при
т~ тн — m0^k^m — тн;
(л 4- tn — k)X
при т —
Ремонтный орган включает в себя I
ремонтных бригад с одинаковым рас-
пределением длительности восстанов-
ления работоспособности (0. Каж-
дая бригада может одновременно ре-
монтировать только один отказавший
элемент, и каждый элемент восстанав-
ливается лишь одной из I бригад.
Если все бригады заняты и отказывает
еще один элемент, то он становится
в очередь на ремонт. Бригада, закон-
чившая восстановление работоспособ-
ности одного из элементов, берет на
ремонт первый из стоящих в очереди
элементов. Как и прежде, будем счи-
тать, что ремонт полностью восстанав-
ливает исходные свойства элемента.
Время подключения нагруженного ре-
зервного элемента вместо отказавшего
основного — случайная величина 1Л
с произвольной функцией распреде-
ления Fn (0, а допустимое время под-
ключения (используемый в системе
резерв времени) -- случайная вели-
чина Тд с функцией распределения D (0.
Примем следующие допущения: в си-
стеме реализуется «быстрое» восста-
новление, т. е. продолжительность ре-
монта гораздо меньше наработки эле-
мента между отказами (?в «С 1/Х); дли-
тельность подключения и величина
резерва времени значительно меньше
наработки системы между отказами
(?п < 1/Х*, тд < и продолжи-
тельности ремонта ?в (?п < ?в, тд<
<?в).
Отказ системы (срыв функциониро-
вания) может возникнуть в двух слу-
чаях: при длительном подключении
структурного резерва в работу (tn >
> Тд) или при отказе (т 4" 1)-го эле-
мента.
Одноканальные системы при непрерывной загрузке
155
Для проведения расчетов необхо-
димы следующие исходные данные:
число основных (п> 1), нагруженных
(шн 0)» облегченных (то 0) и
ненагруженных (т — ти — то) 0
резервных элементов; интенсивность
отказа (1) одного основного элемента;
вид законов распределения времени
восстановления одного элемента FB (f),
времени подключения структурного
резерва Гп (/) и величины пополняв*
мого резерва времени D (/); число
ремонтных бригад (1 I т), а так-
же степень нагруженности элементов,
находящихся в облегченном резерве
(0 < а < 1).
Формулы для вероятности безотказ-
ного функционирования Р (/, тд) и
среднего времени до первого отказа
системы То (Тд) имеют вид
Р (t, Тд) « ехр (—t/T0 (Тд)); (36)
_ 1 хот
» + -£j-X
X (П + mH + х
(37)
где р = 1?в, х = 1 при неограничен-
ном восстановлении (I = т), х =
= Рт/Р^ при ограниченном восста-
новлении (/ = 1), а
о
в общем случае,
1 - Fn (*д)
при Тд = tn = const.
Через рто, т 1, обозначен m-й на-
чальный момент времени восстановле-
<х>
имя tB, т. е. pm = J х"1 dFB (х).
0
При экспоненциальном законе рас-
пределения (х) времени восста-
новления с параметром р
При усеченном нормальном законе
распределения с параметрами ?в и ав
т
/=о
т ) xi-m-iy
I I гв°в vm-i>
где Уо — К2л [0,5 + Ф (?в/сгв)];
Vi = e в/ ;
V* = v, + (k - 1) п_г;
k>2;
Ф (?в/ав) — табулированная функция
Лапласа.
При распределении Рэлея с пара-
метром ав
₽, = ?, = Кл/2ав, р2 = 2а*.
Pm = ma»₽m-2. “>2;
при распределении Эрланга fe-го по-
рядка с параметрами р и k
Pm
(*+m-_l)l=_Ln(t+0
(k~ l)!pm pm
Из выражения (37) можно получить
более простые расчетные формулы для
различных частных случаев нагружен-
ности элементов структурного резерва.
В частности, для случая только на-
груженного (а = 1), ненагруженного
(а = 0) или облегченного (0 < а < 1)
резерва
7*0 (хд)
. Г т т
ЛЛ /711 f-~—1
(ЗЭ)
где 0 С а < 1;
156
Расчет надежности систем с временной избыточностью
для случая нагруженного (тн) и не-
нагр уженного (т — тп) резерва
То(т”)~-к
X (n +
mH
П<п+о
i=l
для случая нагруженного (mH) и облег-
ченного (mo) резерва
хрт
ml
X Ц(« +
i=0
где 0 < а < 1;
для случая облегченного (т0) и нена-
гр уженного (т — т0) резерва
хрт
ml
X (n + ато)т~то
то
(п -f- fa)
i=l
(42)
где 0 < а < 1.
Формулы (36), (37), (39)—(42) яв-
ляются приближенными. Их относи-
тельная погрешность не превышает
10 % при р = к?в <1 0,01 в широком
диапазоне изменения оперативного вре-
мени t. С увеличением числа резерв-
ных элементов т погрешность умень-
шается при прочих одинаковых усло-
виях.
При расчетах показателей надеж-
ности системы Р (t, Тц) и То (тд) зна-
чения вероятности q (выражение (38)]
целесообразно вычислять с помощью
формул табл. 1, только в них следует
заменить FB (t) на Fn (/), а ?в и ов на
И
3. ОДНОКАНАЛЬНЫЕ СИСТЕМЫ
С ПОПОЛНЯЕМЫМ РЕЗЕРВОМ
ВРЕМЕНИ ПРИ РАЗЛИЧНЫХ
СПОСОБАХ КОНТРОЛЯ
И СЛУЧАЙНОЙ ЗАГРУЗКЕ
СИСТЕМА С ДИСКРЕТНЫМ ПОЛНЫМ
ДОСТОВЕРНЫМ КОНТРОЛЕМ
Пусть имеется некоторая система,
представленная одним структурным
элементом, в которой рассмотрен по-
полняемый резерв времени — случай-
ная величина Тд с функцией распре-
деления D (/). Будем полагать, что
в начальный момент времени система
работоспособна. Ее функционирование
происходит следующим образом (рис. 3)
Проработав случайное время fH1, она
отказывает и ожидает случайное вре-
мя ipj обнаружения отказа. Контроль
работоспособности системы осуществ-
ляется через случайные промежутки
времени 0<1'> (Г > Будем считать,
что продолжительность контроля на-
столько мала по сравнению с време-
нем ожидания обнаружения отказа, что
ею можно практически пренебречь.
Отказ системы будет обнаружен в мо-
мент очередного контроля, период ко-
торого перекрывает момент отказа (на
рис. 3 это соответствует периоду кон-
троля б£|3)). После обнаружения отка-
за осуществляется восстановление си-
стемы в течение случайного време-
ни fB1'. Как и прежде, считаем, что
ремонт полностью восстанавливает ис-
ходные свойства системы. После окон-
чания восстановления система про-
должает использоваться и работает
безотказно в течение времени /щ,
Рис. 3. Схема функционирования системы с дискретным контролем
/
Одноканальные системы при случайной загрузке
157
затем время ф2 ожидает обнаружения
отказа, после чего восстанавливается
в течение времени /в2 и т. д.
Отказ аппаратуры приводит к срыву
функционирования системы лишь в том
случае, если суммарное время <р$
ожидания и восстановления (<р$ =
= ф(-4~ t3 , i = 1, 2, ...) превышает
допустимое значение 1Д = const, кото-
рое определяет используемый в си-
стеме пополняемый резерв времени.
Если ф! < /д, то система продолжает
нормально функционировать, не реа-
гируя на отказ.
Относительно случайных величин
/н>, 6кГ)» *в. (* ^ О пРимем следу-
ющие допущения:
величины tn , екИ’
взаимно
независимы;
наработки системы между отказа-
ми t распределены одинаково по
закону F (0 = Р |/н < t j с МОЖ ?н
и плотностью распределения f (I) =
= г' (О;
периоды контроля 6<.ir> распреде-
лены одинаково по закону Fv (0 ==
= Р (0</г) < /} с МОЖ ёк и плот-
ностью распределения /к (0 = Г' (0;
длительности восстановления t рас-
Bi
пределены одинаково по закону Гв(0 =
= Р с МОЖ ?в И плот-
ностью распределения f3 (0 = F' (0.
В соответствии с принятыми пред-
положениями в дальнейшем будем опу-
скать индексы i у величин fH, 0К,
и ф.
Для проведения расчетов необхо-
димо задать вид законов распределе-
ния F (0, Гв (0, FK (0 и значения их
параметров.
В общем случае формулы для сред-
ней наработки на отказ Тн (£д), сред-
него времени восстановления Тв (0Л
и коэффициента готовности /Сг (Q
системы имеют вид
Тв (/д) =
= -у [Ф + ?в — м min (/д, ф + /в)],
(44)
Кг (У = *г + О - М (1 - <7). (45)
где
<7 = Р{ф + /в>^д) = 1-С(/д) =
= 1-] L(ta-x)dFB(x), (46)
о
£(0 = Р{ф<0,
М min (/д, ф + /в) = j [1 — G (0] dt,
о
(47)
J5
(48)
Для расчета вероятности безотказ-
ного функционирования Р (0 /д) мо-
жет быть использована формула (30),
в которой вероятность q определяется
выр ажен нем (46).
Для облегчения расчетов в табл. 4
приведены формулы для q и М min X
X (/д, ф -|- fB), полученные с помощью
общих выражений (46), (47) для раз-
личных сочетаний исходных законов
распределения F (0, Гв (0 и FK (0.
Формула для МОЖ ф случайной
величины ф при экспоненциальном за-
коне распределения F (0 с параме-
тром X и произвольных законах рас-
пределения FK (0 и Гв (0 имеет вид
*=—---------------------4-- <49>
1 - j е-« dFK (0
о
Подставляя (49) в (48), находим
оо
1 - j е~м dFK (t)
о
Гн (/д) =
- у [?н + Л4 mih (/д, ф + /в)], (43)
X0K Х?в
dF* (0
(50)
4. Расчетные формулы для q и М min (1д, ф + ^в)
Законы распределения Гк (х), F (х), FB (х) я
FH (х) — экспоненциальный (параметр v) F (х) — произвольный F3 (х) — экспоненциальный (параметр р) 1 / -v/_\ v_ u(ve я —ре Д)
Гк (*) — экспоненциальный (параметр v) F (х) — произвольный FB (х) — нормальный (пара- метры fB, сгв) ^1? «Т*1 и а । > ма 1 у t> I а %® > „ 1 е> 5 '« I я к? ° Ь о I а 6 н® I " в ю % е + о + ’—1 X X
FK (*) — экспоненциальный (параметр v) F (х) — произвольный FB (х) — Рэлея (параметр ов) е д + K2nvorBe ' в' ДХ X [Ф (vaB) + Ф (/д/ав — voB)J
00
M mln (/д, ф + fB)
— exp [— v (/д — ?в — 0,5v<Jb)] X
/2л(ТвФ (^Д/<7В) + [1 - е“У/Д -
— V2nvaBe0,6^v°B^2”"v^ х
X (Ф (vaB) + Ф (*д/ав — vaB))J
Расчет надежности систем с временной избыточностью
FH (х) — Эрланга 2-го поряд-
ка (параметр v =
= 2/ёк)
F (х) — экспоненциальный
(параметр X)
FB (*) — экспоненциальный
(параметр р)
е д 4~
ра (X + 2v) — ру (2Х + Зу)
(Х4-2у) (р — у)2
( ~vtn I
X (е Д — е д) 4-
pv (X + у) ?де
(X 4- 2v) (р — v)
X
4 (1 - е’*"'1) О - Л) +
Г
1 / —V/ \ —V/
+ v(l-e ?д)(Л + В)-^де Д,
где
р2 (X + 2у) — pv (2Х + Зу) ,
А= (X + 2v)(p —у)2
р (X + у)
В = (X + 2v) (ц - V) •
exp (—ХГК) 1
Д 1 — exp (— XTr) X 4- p
Одноканальные системы при случайной загрузке
FK (х) — вырожденный
(Тк — const)
F (х) — экспоненциальный
(параметр X)
Гв (*) — экспоненциальный
(параметр р)
Хр/(Х 4- р) Г )
1 “ехр (XTr — 1) L X
—i-O-e"*'»)], /Д<Г,
exp (— рГд) X
exp (XTK) — 1 X 4- p x
х^н.-О, (я>гк
X £ (eX'« - 1) - /д(Л + n) +
< Т’к» _
exp (pTK) — exp (— ХГН)
1 — exp (—XTK)
P (Л T Р/
^д > Тк
160
Расчет надежности систем с временной избыточностью
Используя выражения (49) и (50),
можно получить расчетные соотно-
шения для ф и £Р, входящие в (44)
и (45), при различных видах законов
распределения FK (/). В частности, при
экспоненциальном распределении FK (t)
с параметром v
при распределении Эрланга 2-го
порядка с параметром v = 2/0к
при вырожденном распределении с па-
раметром Тк = const
Гн______L-
(53)
Пример 3. Сохраним исходные усло-
вия примера 1, но будем считать, что
контроль работоспособности в АСУ
проводится периодически сГ^ = 0,5 ч,
безошибочно, практически мгновенно,
причем контролируется вся аппара-
тура. Оценим показатели надежности
системы и сравним их с результатами
примера, полученными для случая
идеального контроля.
Решен и е. Подставляя в соот-
ветствующие формулы для q и М minX
X (/д, /в) (см. табл. 4, случай
вырожденного распределения FK (х)]
заданные значения X, р, /д и Тк (в дан-
ном случае Тц), определяем q —
= 0,9778 и Almin (/д,ф + /в) = 0,099 ч,
а затем по формуле (30) при ?н — 1/Х
находим Р (/, ^д) = ехр (—0,04 X
X 0,9778-7,9) = 0,74. Сравнивая это
значение с Р (t, = 0,8255 для
случая идеального контроля, видим,
что реализованный в системе периоди-
ческий контроль привел к уменьшению
вероятности безотказного функциони-
рования примерно на 10 %. Используя
выражения (43)—(45) и (53), опреде-
ляем 7’н (/д) = 33,92 ч; Тв (/д) =
= 0,4743 ч; /Сг (/д) = 0,98. Сравнение
этих результатов с результатами при-
мера 1 (см. с. 145) показывает, что
благодаря периодичности контроля
средняя наработка системы на отказ
(срыв функционирования) уменьшилась
на 18%, а коэффициент готовности
снизился примерно на 1,5 %.
СИСТЕМА С НЕДОСТОВЕРНЫМ
НЕПРЕРЫВНЫМ ПОЛНЫМ
КОНТРОЛЕМ ОСНОВНЫХ И
РЕЗЕРВНЫХ ЭЛЕМЕНТОВ
Рассмотрим систему, состоящую из п
основных (n 1) и одного резервного
идентичных элементов, в которой пре-
дусмотрен пополняемый резерв вре-
мени /д — const.
Наработка между отказами одного
основного элемента распределена по
экспоненциальному закону с пара-
метром ^2 и не зависит от номера отка-
за. Фактическая интенсивность отка-
зов резервного элемента определяется
степенью нагрузки, т. е. Хф = 0X2,
где а == 1 при полной нагрузке, 0 <
< а < 1 при неполной нагрузке (об-
легченный режим), а = 0 при отсут-
ствии нагрузки (ненагруженный ре-
жим). Время восстановления работо-
способности одного элемента также
распределено по экспоненциальному
закону с параметром р2.
Все элементы (основные и резерв-
ный) подвергаются непрерывному пол-
ному, но недостоверному контролю
работоспособности. Недостоверность
контроля проявляется в появлении
сигнала типа «ложная тревога» с ин-
тенсивностью Хх от каждого основного
элемента и интенсивностью aXj от
резервного (O^asg^l), который пе-
реводит элементы в режим проверки?
Продолжительность проверки — слу-
чайная величина, распределенная по
экспоненциальному закону с пара-
метром рг. Предположим, что во время
проверки элемент не отказывает и при
восстановлении работоспособности эле-
мента ложные сигналы не поступают.
Будем считать, что в нашей задаче
справедливы все допущения, принятые
ранее (см. с 146) (кроме того, что
Одноканальные системы при случайной загрузке
161
в данном случае m = 1, ?п <С 1/pi,
1/p-i)-
Система функционирует в соответ-
ствии со схемой, описанной ранее
(см. с. 146). Отличие нашей системы
состоит лишь в появлении сигналов
типа «ложная тревога», источниками
которых могут быть основные и резерв-
ные элементы. Если этот сигнал по-
ступает от резервного элемента, то
последний переводится в режим про-
верки. Если же источником ложного
сигнала является один из основных
элементов, то вместо него подключается
резервный элемент (при условии его
работоспособности), и после окончания
подключения начинается проверка ос-
новного. По окончании проверки этот
элемент становится резервным. В том
случае, когда ремонтный орган вклю-
чает в себя только одну ремонтную
бригаду (/ = 1) и в него поступают
два элемента — один для проверки,
другой для восстановления работо-
способности, — будем считать, что вна-
чале проводится проверка одного, а за-
тем ремонт другого элемента.
Срыв функционирования системы на-
ступает в момент времени, когда дли-
тельность подключения превышает
допустимое значение /д (резерв вре-
мени) или когда отказ (или сигнал
типа «ложная трёвога») одного из
основных элементов совпадает с вос-
становлением работоспособности или
проверкой резервного элемента.
Для проведения расчетов необходи-
мо задать число основных элементов
(л), коэффициент нагруженности ре-
зервного элемента (а), значения интен-
сивностей Xj, Хг. Hi» Р^> величину
резерва времени (/д), вид функции
распределения времени подключения
Fn (t) и значения ее параметров,
а также число ремонтных бригад (/).
Расчетные формулы для показате-
лей надежности системы имеют сле-
дующий вид
То (^д) ~
1 + [а + * (1 — <7)] X
X Г ____________।_____^2 1
_ [ (яХ 4~ Р-i) (п^> 4~ Иг) J . /гдч
(п + а) X — [а + л(1 — д)]Х ’ ' 7
. Х2ц2 1
_ (tik 4~ P'l) (яХ "1“ Р^) J
Xi [(я 4~ ос) X 4- Pi] А 4~
у + [(” 4- а) Эь 4- 141 Я . /сеч
bi [(« 4- а) * 4- <7Н11 Л 4- ’ * '
+ Х2 [(л 4~ а) X + ^р-и] В
Т* (*д) =
Xi £(л 4- а) С 4~ ^/9Р,11 А 4-
__4~ Х2 [(я 4- а) D 4~ ^gp^l В.
[(я + а) X 4- <7P-i] А 4- ’ *
4- Хг [(л 4- а) X 4- ?Р-2] В
Кг (*д) =
Х1 [(л 4- а) X 4- р-1] А 4-
= + ** + <*) ^ 4~ Н2] В
ДХ^ [X (и 4~ О яС) 4~ P'l] 4т *
4- ВХ2 [X (л 4- а) (1 4- я£>) 4- Р-г]
(57)
где L и q определяются выражениями
(35) и (38),
л = ящ________________, Нг .
Hi + (I - О Р2 Ь ’
Я = (* —, Pi .
Р1 + (/ — 1) ^2 ' к '
__ _______^2________|_ ^1 .
~ 1Н 4- U — О Иг "г *Н1 ’
d = ___А______________l •
р-1 4- (/—1)^2 /р<2 ’
X^Xj + Хг, 1</<2, 0<а<1.
При проведении расчетов значения q
и L целесообразно вычислять с по-
мощью соотношений табл. 1 (случай 2),
только в них следует заменить FB (f)
на Fn (f), а ?в и ов на £п и оп.
При отсутствии сигналов типа «лож-
ная тревога» (Хх = 0) формулы (54)—
(57) совпадают с соответствующими
формулами в случае идеального кон-
троля (табл. 3).
СИСТЕМА С ИДЕАЛЬНЫМ
КОНТРОЛЕМ ОСНОВНЫХ
И ДИСКРЕТНЫМ ПОЛНЫМ
Достоверным контролем
РЕЗЕРВНОГО ЭЛЕМЕНТОВ
Рассмотрим систему, состоящую из л
основных (л 1) и одного резервного
идентичного элементов, в которой пре-
162
Расчет надежности систем с временной избыточностью
дусмотрен пополняемый резерв вре-
мени /д = const.
Наработка между отказами одного
основного элемента — случайная вели-
чина /н, распределенная по экспонен-
циальному закону с параметром X
и не зависящая от номера отказа.
Фактическая интенсивность отказов
резервного элемента Хф = аХ, где ос =
= 1 при полной и 0<СС< 1 при
неполной нагрузке. Время восстанов-
ления работоспособности одного эле-
мента tB распределено по экспоненци-
альному закону с параметром р.
Основные элементы охвачены идеаль-
ным контролем работоспособности. Кон-
троль резервного элемента дискрет-
ный полный достоверный. Время меж-
ду периодами контроля в общем слу-
чае — случайная величина 0К с функ-
цией распределения FK (/) = Р {0К <
< 0 и МОЖ 0К < оо или в частном
случае — неслучайная величина 0к =
— Тк — const. Пусть время контроля
очень мало, так что им можно прак-
тически пренебречь. Будем считать^
что система функционирует в соответ-
ствии со схемой, описанной ранее
(см. с. 146), и для нее справедливы все
принятые там допущения, за исключе-
нием того, что в данном случае m = 1.
Срыв функционирования системы
возникает в трех случаях: в момент
времени, когда длительнос'гь подклю-
чения превышает допустимую вели-
чину tjj-, в момент окончания подклю-
чения (при ta <_ /д), когда обнаружи-
вается неработоспособность резерв-
ного элемента; в момент, когда отказ
одного из основных элементов совпа-
дает с неработоспособным состоянием
резервного элемента.
Для проведения расчетов должны
быть заданы значения п; а; X; р; <д;
/; вид законов распределения Fn (t),
FK (t) и значения их параметров.
В табл. 5 приведены формулы для
.показателей надежности при экспо-
ненциальном и вырожденном распре-
делениях FK (0, где приняты следу-
ющие обозначения:
Ад = гаХДгаХ + v); В9 = аХ/(аХ 4- v);
D3 — С(лХ 4- V). аХ 4- raXv] X
X (nX 4- v)"1 (аХ + v)“l;
Дв = 1 — ехр (—гаХТк);
Вв — 1 — ехр (—аХГк);
DB = 1 — ехр [— (п 4- а) ХТК];
0<а<1; 1 С I < 2.
При Тк 0 (v оо) формулы
табл. 5 приводятся к соответствующим
выражениям табл. 3 (случай идеально-
го контроля). При Тк оо (v 0)
приходим к расчетным соотношениям
для случая отсутствия контроля ре-
зервного элемента:
То ад) =
1 -|- np [1 га (1 — д)/(п 4~ °Q]
гаХ [пр 4- (а 4~ д<?)/(д + а) ’
(58)
Тн (U
_ I ______________1 пр___________
пХ пр + (nq + сс)/(п + а) ’
(59)
Тв (/ц) ---
Lq 4- (1/fp) (а/(га -|- а) 4~ Др)
пр + (nq 4- а)/(п 4- а)
•Кг (^д) =
_ ,_______1 4- др_____________
~~ 1 + nkLq +
4- др [1 4- (1/0 (а/(д 4- а) 4- Др)]
(61)
Как и прежде, при расчете по фор-
мулам табл. 5, а также (58)—(61) зна-
чения q и L целесообразно определять
с помощью формул табл. 1 (случай 2),
только в них следует заменить FB (/)
на F-a (t), а ?в и ав на ?п и °п-
Пример 4. Рассмотрим входящую
в СПД подсистему переключаемых
каналов передачи данных, которая
состоит из двух основных (га = 2)
и одного резервного (m = 1) идентич-
ных каналов. Резерв нагруженный
(а = 1). Пусть интенсивности отказов
и восстановления каждого канала рав-
ны соответственно X = 0,02 1/ч и
р = 2 1/ч, причем ремонт произво-
дится одной бригадой (/ = 1). Пусть
в подсистеме предусмотрено автомати-
ческое подключение резервного ка-
нала. Допустим, что переключатель
обладает абсолютной безотказностью,
5. Идеальный контроль основных и дискретный, полный, достоверный контроль резервного элементов
Показатель Распределение
Экспоненциальное FR (t) (параметр v) Вырожденное FR (/) (Тн = const)
Tq (tjj) Г / аВэ(1— о)\1 J Аэ (1 + пр) + пр — Аэ + - -п а ’) J Ав (1 + пр) + лр [п£>в( 1 — д)/(п + а) + 1 +Вв(1- Л,)]
пК л L । аВэ(1 — ?) ~| , п п Л[? + - „ + а -]+£>э«Р пк Г ( I — Q \ 1 Db 1+4р-я + ; -Вв(1-Дв)
Гн(/д) 1 Аэ + D^np 1 Ав + DBnp
пк Аэ [q 4- аВэ (1 — q)/(n + а)] 4- Dgnp пк Ав 4- nDB [р — (I — <?)/(п 4- а) ]
Тв (Q LqAg -f- (1/Zp,) [аАэВэ/(п + а) + £>эпр] К<?АВ 4- [Ав 4- nDB (р — 1/(п 4- а))]
Аэ [q + аВэ (1 — q)/(n + а) ] + Dgnp Ав + nDB [р — (1 — q)!(n 4- а)]
Кг (1д) Аэ 4- Dgnp - А в + DBnp
Аэ (1 4- nkLq 4- ; 4- Dgnp (1 4- пр/1) Ав (1 4“ nkLq 4- пр/1) 4- 4-DBnp [1 4- (nil) (р — 1/(п 4- а))] •
Одноканальные системы при случайной загрузке
164
Расчет надежности систем с временной избыточностью
а время переключения — случайная
величина /п, распределенная по нор-
мальному закону с параметрами =
= 1 с и оп = 0,25 с. По условиям
функционирования перерыв в передаче
информации (за счет подключения ре-
зерва) на время, превышающее допу-
стимое значение /д = 2 с, приводит
к отказу рассматриваемой подсистемы.
Требуется оценить показатели надеж-
ности подсистемы при трех значениях
периодичности контроля работоспо-
собности резервного элемента: Тк = 0
(контроль непрерывный), Тк — 1/Л и
Тн оо (контроль отсутствует).
Решение. Используя результаты
расчетов в примере 1, запишем зна-
чение q = Р {6т > Лц) = 3,2-10"'6.
Для заданных интенсивностей X и р
находим р — Х/р, — 0,01. Используя
далее формулы табл. 3, при 7к = 0
вычисляем значения показателей на-
дежности: То (<д) — 875 ч; Тн (^д) =
= 858 ч; Тн (/д) = 0,5 ч; Кпр (*д) =
= 1—/<г (/д) = 5,8‘10~4. По форму-
лам табл. 5 при Тн — 1А определяем
значения показателей: То (/д) = 89 ч;
ТН(М = 88,4 ч; Тв (/д) = 0,5 ч;
Кпр (60 = 5,6* 10-3. С помощью вы-
ражений (58)—(61) (случай отсутствия
контроля резервного элемента) на-
ходим: Tojffl) = 73,7 ч; Тн (tji) =
= 72,8 ч; Тв (/д) = 0,5 ч; Кпр (М =
= 6,8-10~3.
СИСТЕМА СО СЛУЧАЙНОЙ
ЗАГРУЗКОЙ
Рассмотрим систему, представлен-
ную/ одним структурным элементом.
В системе предусмотрено использова-
ние пополняемого резерва времени,
который включает в себя две составля-
ющие. Первая составляющая обуслов-
лена случайной загрузкой системы и
представляет собой случайную вели-
чину, определяемую от момента от-
каза до момента поступления задания.
Вторая составляющая характеризует
предусмотренное в системе допустимое
запаздывание в выполнении поступив-
шего задания иа некоторое время тд —
случайную величину с произвольной
функцией распределения D (/). Дли-
тельность выполнения задания будем
считать настолько малой по сравне-
нию с наработкой на отказ, что ею
можно практически пренебречь (си-
стема кратковременного действия).
Предположим, что в системе преду-
смотрен идеальный контроль и что
в результате ремонта система пол-
ностью восстанавливает исходные свой-
ства.
Функционирование системы осуще-
ствляется в соответствии со схемой,
описанной ранее (см. с. 141). Отличие
заключается в формулировке крите-
рия отказа: срыв функционирования
системы возникает в момент исчерпа-
ния допустимого запаздывания в вы-
полнении задания, заставшего систе-
му в неработоспособном состоянии.
Пусть наработка системы между
отказами /н и время восстановления fB
имеют произвольные функции распре-
деления соответственно F (/) и FB (f)
с непрерывными плотностями / (/) =
F' (0, fB (0 = F'B (0 и конечными
МОЖ ?н и Относительно распреде-
ления времени z между моментами
наступления задания примем два пред-
положения:
1) случайная величина z распреде-
лена по экспоненциальному закону
с параметром у3, при этом в системе
предусмотрено «быстрое» восстанов-
ление, т.е. ?в<С?н> ^«Cl/ya (модель 1);
2) случайная величина г имеет про-
извольное распределение А (/) с не-
прерывной плотностью a (t) = А' (0 и
конечным МОЖ z, при этом наработка
на отказ значительно больше средней
длительности промежутков времени
между моментами поступления зада-
ния, т.е. 1н!^ > 15-=-20 (модель 2).
Для проведения расчетов необхо-
димо задать вид законов распределе-
ния D (0, F (/), FB (t), А (0 и значе-
ния их параметров.
Вероятность безотказного функцио-
нирования Р (t, z + тд) и среднее время
до первого отказа системы То (z -f- тд)
определяют по приближенным фор-
мулам:
Р (6 z-1-Тд) « ехр (—qt/tH) * » z-j-Тд;
(62)
Л, (г 4- тд)«
« 4 + Minin (fB, z + Тд)]. (63)
ч
Одноканальные системы при случайной загрузке
165
Погрешность формул (62) и (63) не
превышает 10 % при tlz + тд :> Ю,
?в/?н С 0,1 и <7 < 0,1. Для вычисления
значения q и Мmin (0,, z-j- Тд) могут
быть использованы выражения:
9 = =
ОО(
= (64)
о
A4min (tB, z 4- тд) =
оо
= j [1 - S (t)JЕ l - Г>„ (/)] dt. (65)
0
В формулах (64) и (65) S (t) — сверт-
ка двух функций распределений: А (0
и Ь (0, которая имеет вид:
для модели 1
S (0 = [ [1 — e~v® dD (х) =
6
t
= Тз J e“Va* D (t — x) dx, (66)
о
для модели 2
t
S(t) = j D(t — x)dA* (x) =
о
t
= j Л* (i — x) dD (x), (67)
о
где Л* (x) = P {z# <x} =
x
=-M и - л «л <«.
dbt _ I
0
В том случае, когда тд = /д = const,
выражение (67) принимает вид
8(0 = Р(г,<«-у = Л‘(/-ГД);
(68)
q — Р {/в > Н- —
= J П-^в(*4-<д)]<М’(0; (69)
о
Almin (/в, z# + /д) =
*д
-J [1 - FB (0] dt +
о
ОО
+ J [1 - Fв (/)] [! — Л* (/ — )„)] dt.
‘а (70)
Формулы для q и Afmin (/в, z*+
4~ Тд), полученные с помощью соот-
ношений (64)—(66), приведены в
табл. 6, а с помощью соотношений
(68)—(70) — в табл. 7.
В частном случае, когда тд = 0 и
резерв времени содержит только пер-
вую составляющую, обусловленную
случайной загрузкой системы, форму-
лы для q и A4min (fB, z*) упрощаются
и принимают вид:
для модели 1
СО
<7 = Р {*в > z} = Тз J X
о
X[l-FB(0]d0
Almin (tB, z) —
CO
= je“Vs'[l-fB (()]<«---if
0
для модели 2
q = P {^B>z4 =
= J[l-FB(<)]<M*(f);
0
Almin (fB» z*) —
(71)
(72)
(73)
oo
= '|[1-Л«(0][1-Рв(О]Л. (74)
0
Для вычислений q и Almin (tB, z)
в случае модели 1 [выражения (71),
(72)] можно воспользоваться форму-,
лами табл. 1 (случай 1), только в них
вместо у следует подставлять у3.
В табл. 8 приведены формулы для q
и Afmin (tB, z*), полученные с помощью
(73) и (74) (модель 2) при некоторых
конкретных распределениях (?) и
А (0. В этих формулах при гиперэкспо-
6. Резерв времени — случайная величина (модель 1)
Закон распределения FB (П. D (t) Формула для <7
FB (t) — экспоненциальный (параметр р) D (/) — экспоненциальный (параметр у) FB (0 — Эрланга 2-го поряд- ка (параметр р = = 2/?в) D (/) — экспоненциальный (параметр у) Уз? (Р- + У) (Р 4- Уз) УзУ [Зр2 + УзУ + 2р (Уз + У)] (1* + Уз)2 (Р + У)2
FB (0 — экспоненциальный D (t) — Эрланга 2-го поряд- ка (параметр у = = 2/Тд) УзУ2 (р + у)2 (р + Уз)
FB (f) — гиперэкспоненциаль- ный (параметры Р/, vit i = 1, п) D (0 — экспоненциальный п УзУ S (Pi 4- Уз) (Hi 4- у) 1=1
Формула для Afmin (/в, z#
+ тд)
1 ( Уз __ У \
Уз— У\Р< + У Ц + Уз/
1 Г Уз (2ц + у) _ у (2н + у3) '
Уз — У L (н + У)2 (И + Уз)2 .
(Р- + У)2 + Уз (И + 2у)
(|Л + у)2 (JJ. 4- Уз)
* У /_Уз____________У \
Уз — У 4J Vi \Hi + У t4 + Уз/
i=l
Расчет надежности систем с временной избыточностью
7. Резерв времени #д = const (модель 2)
Закон распределения FB (t), A (t) Формула для <7 Формула для Aimin (fB. z* + <д)
FB (/) — экспоненциальный (параметр р) А (/) — экспоненциальный (параметр у3) Узе д Уз , / -|Xf_ \ J_ (1 Узе • д । P \ n + Va /
Гв (0 — экспоненциальный A (t) — гиперэкспоненци- альный (параметры Yai» vit п} IM3 -S О g5 Is + ’, « J- **• я n —ui,r V Qje ц Д . Zj Узг(р + Уз/) 1 /, -uta , i==i H (1 e ) + n V La Ysi i=l
FB ($ — экспоненциальный (параметр р) А (0 — Эрланга 2-го поряд- ка (параметр у3 = = 2/г) Ya (2?з + И) 2 (Ya + Ю2 (Зу3 + 2p) е~Ц^Д 1 t \ 2(Уз + Н)2 + H '
FB (0 — Эрланга 2-го поряд- ка (параметр р = - 2/?в) А (/) — экспоненциальный (параметр у3) (Уз + p)2 [?3 (?3 + 2jX) + 7зИ/д (?3 + е“^д I Ya + 2p + (Уз + P<) ]/(у3 + p)3 + 2 —iif_ /2 \ —1— * e Д 1 - —1— tn 1 + H k 1» +
Гв (/) — гиперэкспоненци- альный (параметры И/, v'i, 1= 1, п) А (0 — экспоненциальный (параметр ?3) V YaPie^ft Zj Уз + Pi i=l У [2. (1 _ + Ч2— e-'*''*] Zj Lpz '^Тз + Pi J i=i
Одноканальные системы при случайной загрузке
8. Случай Тд = 0 (модель 2)
Законы распределения FB (/), А (Г) Q
FB (/) — экспоненциальный (параметр |х) А (/) — экспоненциальный (параметр у3) Уз Уз + И
FB (0 — нормальный (пара- метры ?в, ав) А (/) — экспоненциальный (параметр у3) Л 1 — ехр { — уз?в -j- 0,5узОв} X Г /г 2 \1 X 0,5+ Ф "В Ъ )
FB (/) — Рэлея (параметр ов) А (/) — экспоненциальный (параметр у3) К2яТ8<гве0,6 [0,5 - Ф (№„)]
Гв (0 — экспоненциальный (параметр р.) А (/) — гиперэкспоненци- альный (параметры Узь i = М) 1 _ JL V ai <0 Zj (Уз/ + и) Уз/
Mmin (tB, zj
1
?з4-Н
) 1 — exp [— y3?B + 0,5?Ы]I X
ГЗ
X 0,5+®rB Тза*)
L \ °в /J
К2лаве°’5 <^в)а [0,5 — Ф (?3ав)]
1 V «г
to Z-J ?3i (H + ?3f)
Расчет надежности систем с временной избыточностью
FB (/) — нормальный (пара- метры ?в, ов) А (/) — гиперэкспоненци- альный (параметры Ъь &1, 1 = ГГп) п 1 ~ S ехр Тз/?в + °’5^ав 1 X Г /2 2\Т X 0,5 + ФI B-~nfe,°1’ \ ав /J п f 1 X? (X-i г _ о о, —ехр [— WB + 0,5уз;ов] X i=i 43i X [о,5 + ф(гв~0^)Т-
FB (/) — Рэлея (параметр ов) А (/) — гиперэкспоненци- альный (параметры Узь «ь i = Г~п) S х W Z=1 X (0,5 — Ф (уэгав) ] У at_ 0.5(v3iaB)3 ® jLi тэ/ x i=i X [0,5 — Ф (Тэ^в)]
Fв (7) — экспоненциальный (параметр р) Л (/) — Эрланга 2-го поряд- ка (параметр у3 = ® 21 z) Тз (Н + 2у3) 2(Н+Тз)? 2Ц + 3?з 2 (Н + ЪУ
Одноканальные системы при случайной загрузке
170
Расчет надежности систем с временной избыточностью
ненциальном распределении А (0 при-
нято обозначение
п
“ = S ai/ТзГ
i=i
Пример 5. В процессе функциониро-
вания АСУ, рассмотренной в приме-
ре 1, внесем одно изменение: сообще-
ния от источников информации по-
ступают в случайные моменты времени
и допускают задержку в их обработке
на время tд = 0,1 ч. Промежутки вре-
мени между моментами поступления
сообщений z распределены по экспо-
ненциальному закону с параметром
Уз = 20 1/ч. Время обработки и пере-
дачи каждого сообщения настолько
мало по сравнению с z, что им можно
практически пренебречь. Если в мо-
мент поступления сообщения аппара-
тура АСУ неработоспособна и ремон-
тируется, то срыв функционирования
системы возникает в момент израсходо-
вания резерва времени /д. Определим
показатели безотказности системы при
заданном оперативном времени t = 8 ч.
Решение. По формуле табл. 7
для принятых исходных данных вы-
числяем вероятность q = (ехр (—5 X
X 0,1)/(20 + 5)) 20 = 0,485. Далее
по формуле (62) находим Р (t, г -}- /д)=
= ехр (—0,04-0,485-8) = 0,86. Для
сравнения напомним, что вероятность
безотказной работы аппаратуры Р (0=
= ехр (—0,04-8) = 0,7261. Выигрыш
по вероятности срыва функционирова-
ния за счет использования в системе
суммарного резерва времени (z-f- /д)
составляет 0,2739/0,14 — 1,96. Среднее
время до первого отказа системы опре-
деляем по формуле (63), в которой
значения q и Almin (fB, z+ /д) вычис-
ляем с помощью соответствующих вы-
ражений табл. 7, полученных при
экспоненциальных р аспределениях
FB(0 и А (0 : То (2 +/д) — 51,7 ч.
Полученное значение в 51,7/25 ~ 2,06
раза превышает среднюю наработку
аппаратуры АСУ на отказ.
4. ОДНОКАНАЛЬНЫЕ СИСТЕМЫ
С НЕПОПОЛНЯЕМЫМ РЕЗЕРВОМ
ВРЕМЕНИ
Система с необесценивающими отка-
зами и непрерывным контролем рабо-
тоспособности (общий случай). В си-
стеме есть два множества состояний:
£о и ip В множестве Ео резерв вре-
мени не расходуется, а вся наработка
является полезной. В Ei полезная
наработка не увеличивается, а резерв
времени уменьшается на величину,
равную времени пребывания системы
в этом множестве состояний. Кон-;
троль работоспособности непрерывный,
обеспечивающий мгновенное обнару-
жение отказов. Моменты изменения
состояний являются марковскими мо-
ментами времени, когда предыстория
процесса функционирования перестает
влиять на характеристики процесса
в будущем. Интервалы времени между
соседними изменениями состояний мо-
гут иметь произвольные распределе-
ния.
Заданы функции вероятностей Ptj (0
перехода из состояния е/ в состояние е,
за время /; вероятности а/ того, что
процесс в начальный момент времени
находится в состоянии е/; время /3
выполнения задания при безотказной
работе (длительность задания) ; не-
пополняемый резерв времени fp.
Вероятность выполнения задания
длительностью /3 при непополняемом
резерве времени /р находят из системы
интегральных уравнений:
Fi (/3, /р) — 1 — Fi (tp) +
+ У J /р) (л),
/ £ Ео 0
/ёЕ»; (75)
Pl (*в. 1р) = £ J Pi (<з. tp - У) X
/£ Eq
X dPij (y)t i^Elt Ё = FoU^iI
f; (0 = S Pit (t).
(/)
Среднюю наработку до отказа опре-
деляют из системы интегроалгебраи-
ческих уравнений:
Т’ср i (^р) = 71/ + ptjTpp j (/р),
i£E
со
«6Е». Tt = JxdFiW;
о
Непополкяемый и комбинированный резерв времени
171
7’ср 1 (tp) = J Гер j (tp х) X
О
XdPij(x), pij = limPfHO-
/-►co
(76)
Средний расход резерва времени
до выполнения задания
(в
Гц (<г) =2 j Tlt (t, - х) dPtj (х),
о
t €
Tu (t9) = Tt +
+ S РгАН'з). < ё£1- (77)
В уравнениях (75)—(76) индекс i
указывает на начальное состояние.
Вероятность выполнения задания по
заявке, поступающей в систему в про-
извольный момент времени на стацио-
нарном участке эксплуатации, опре-
деляют с помощью интегрального со-
отношения:
/’(<3. <р)= У Pi( 1-Гг(<з) +
\
+ У j Ру (*,-*.
/££ о
f
'р
+ S Pi S
i £i j £ Е о
t
ftiW = TTj'
О
Pij (t) = Pij (t)/Pij, Pi (0 =
— Pi (*)) dx,
(78)
Pij (0 — PijPij (0» Pij — PijTijfTit
CO co
Tij = [ xdFij (x). Ti = J xdFi (x),
б о
Pt — stiTi / ztjTj, Л/ —
/ W
— S пиры.
k£E
Среднюю наработку до окончания
резерва времени при стационарном
распределении вероятностей началь-
ного состояния определяют по формуле
7’ср (ip) = У] Pi/Pt~^
i€£0 \
+ J] PijPcpj (ip)\
/
/р
+ S S J
i^E О
(79)
Изменение состояний в системе про-
исходит при отказах, восстановлениях,
изменениях режимов работы, измене-
ниях условий применения. Поэтому
в каждой конкретной модели надеж-
ности функции должны быть найдены
по исходным данным о безотказности
и ремонтопригодности элементов, о ха-
рактеристиках контроля, вероятност-
ных законах переключения режимов
работы и изменения условий приме-
нения.
Последовательная система с необесце-
нивающими отказами и идеальным
контролем. Система из N последова-
тельно соединенных элементов функ-
ционирует так, что после отказа /-го
элемента через время Toi с распределе-
нием Fi (t) происходит восстановление
работоспособности отказавшего эле-
мента в течение времени Tai с распре-
делением FbI (0 благодаря непополняе-
мому резерву времени fp. Одновре-
менно происходит техническое обслу-
живание всех работоспособных элемен-
тов, так что в следующем интервале
наработки системы функции Fi (t)
сохраняют свой вид и параметры.
Во время ремонта новых отказов не
возникает. Обнаружение отказов мгно-
венное, полное, достоверное.
Заданы параметры распределений
Fi (0 и (0, первый и второй на-
172
Расчет надежности систем с временной избыточностью
чальные моменты распределений Toi,
аоь длительность задания t3,
непополняемый резерв времени /р или
объем запасов v и номинальная произ-
водительность cq. Для системы ММ11
распределение задается одним пара-
метром Хг- или jif, для системы EEW
двумя параметрами (kt, Xj) и (г, рД,
для системы WW11 параметрами (т,
М и (г, рг).
Для системы типа Д4А111, состоящей
из одного элемента (N = 1), расчетные
формулы приведены в табл. 9. В ней
для вероятности выполнения ^адания,
кроме точных формул, даны прибли-
женные формулы, основанные на свой-
ствах асимптотической нормальности
распределения, а также формулы, обе-
спечивающие гарантированную точ-
ность (ошибка не превышает 10-4 *).
Если фиксируется кратность резервиро-
вания mt =?= X/nj/p, то расчет проводят
по формуле для Рс (t3, с) при с =
— с0/(1 + mt). Для систем ЕЕ 11 и
TJ7TJ711 при N — 1 расчетные формулы
приведены в табл. 10. Таблицы коэф-
фициентов atj и ci можно найти в
работе [2]. Для последовательной
системы типа 7И7И11, WEI 1, 1F1F11
формулы приведены в табл. 11.
Свертка функций FB (Zp) выполняется
численно. Для системы 7И/И11 воз-
можна двусторонняя оценка точного
значения вероятности выполнения за-
дания с помощью следующих нера-
венств:
Л (Р> 7)^/>(/з» zp)^
^e-P(l-fe)po(Ap; Vi)> (80)
где р — Л/3; А, = J Аг-; у = —In X
Х(1 -FB(/p)), 1-1 k =
N
р3 (0) = s Vi A; Vb (0)/FB x
X (rfp), Yi — решение уравнения x —
— a (1 — exp (—x))t функцию Po (p,
у) находят по формулам табл. 9.
Для других систем, имеющих рас-
пределение типа УСФИ (убывающая
в среднем функция интенсивности
* Оценки с гарантированной точностью по-
лучены Ю. М. Макаровым.
[2]), можно использовать следующие
оценки более общего вида [4])-.
Р(*зЛ) = 1 - V-*71
—Ро (Рь 71)) — Ri,
Р (/з. М = е-92 (1-М X
X Р0(Р3, 7г) + Я2;
(81)
qx = — In F (f3), q2 = —In FB (tp),
Pi = а^з, Рг = k2q2, 7i = Vi»
72 = Й2^р»
fli = (1 — e-*7162),
R2 = + F (t3) X
X (1 — e-^61)),
6i = Fa3)-^(l-e-p1)*
6a = FB GP)— fe2(l-e“H
fli = 6i (t3 — i/i), a2 = 62/(fp — y2),
k^~F (y^1 t/al> ^2 =
= (y2) ^7^
»( = Cl (l-e-b0> F(t) = l-F(t),
Q = f' (Vi) Оз ~ - F Ы),
C2 = Р'в(У2) ^p— У2)/(Рв^р)~Рв(У2))‘
Значения y± и у2 подбирают в диапа-
зонах (0, t3) и (0, /р). Если одно из
распределений экспоненциальное, то
для соответствующего I коэффициенты
ki = 1, 6/ = Ri = 0, Of = X или ц.
В частности, если Ёв (0) == F' (0) —
= оо, то из (81) имеем
l-F(ts)
< Р (<з. <р) < (1 - F (<₽>-
(82)
Эти оценки можно уточнить, если
взять yt > 0. При этом, однако, уве-
личивается объем вычислений. В си-
стемах ££11 и WW 11 оценки (81)
и (82) можно применять при т < 1
и г < 1.
Непополняемый и комбинированный резерв времени
173
9. Расчетные формулы для системы 7И7И11
Показатель
Формула
Ро (^3» ^р)
।
р — М3, у — р7р
Ф ((Т - р)/К2р), Ф ((? + 1 - р)/К2т),
Ф(х) =
1
]/~ 2я
х
j z~y2f2dy
—оо
т2т I
_|_ у2т “г 4т
1
S 4- р — y)/ck +
fc=0
4-е hfi 4- Р — Т)/^)«
РТ 4, т ~ 2
2
S e“Cft (ch + p — y)/ch 4-
л=о
+ е (й2 4- Р — y)/hz,
4 р? =С 16, т = 3
з _
S е Cft (Cfe 4- Р — Y)/Ch.
й=0
16^рт:С49, т = 4;
РТ ^49, т — mpv
'Яру— 1 + I2 з УртЪ
Ch = Р + У — bk> hh = р 4- Т + Ьн
= 2 Р^рт cos —-г~— л
я г‘ 4т
174
Расчет надежности систем с временной избыточностью
Продолжение табл. 9
Показатель Формула
Рс С) 2». d. \ п=1 / —P(l+mf) VI р" Y _ X -1— » т‘=т-’ ₽ = Т Л=1
[(п—1)/2] а„ = (1+«,)»-6П= 2 (")»', i=0 с = с0 (1 +
Л- (^з» ^р) Ле—»’^-v/o (2 Ую)/Р0 (<3, /р). /о(х) =2 (^-)26 1(k,)S fe=0
7’ср (tp) (1 + ?)/А
Т'вз (^з) М1+*Л,) = «3(1+ВД
яг (/р) (1 + 2у)/№
ТЭТ’вз (/з) ОО 2М3/р2 = АоспГ3, ав = j х2 dFB (х) 0
7’ср (с) ( (1 4- mf)-1 + 2 bn (1 + mt)~l~n ) К, mt<l \ n=\ / /
(tp) 1 — Xexp (— v)/(Z,+
ТСог (tat tp) Po (t3> tp) - A exp (— p — у) /0 (2 Крт)/(Л + P-)
Т^р (^р) (1 + T (1+₽))/(!+₽) (1 + V)
Cep (t)tca Лг + (1 - Kr) (1 - exp (- (Л + p) t))/& + p) t, Kp = p>/(^> + p)
Непополняемый и комбинированный резерв времени
175
10. Расчетные формулы для систем ЕЕ11 и IVIFll
Показатель Формула
Ро (^з> ^р) Система ЕЕ11 1 — I (kt, р) + 1 (k*n> V) U <kxn, р) — / (М + klt р)) = П=1 = 1 — S (1 — / (М. т)) (; (М» р) — / (kvtt + kt, р)), П=1 п— 1 xi _х р = м3. т = р*Р; 1 (п, *) = !—£ ti е 4=0
Р» (^з> ^р) Ф ((У — k^lkt)IV(1 + &2/£i) k2p/kt) Ф ((kt + kxylk2 — р)/И(1 H- ktlk2) kty/k^
Т'ср (^р) -Mi + S нм. ?) 'U A (1 + тй A \ } h \ k2)
DT (/р) -^-*1 (*i + 1) У I VW. V) + У nl (k2n, T) - T’p (tp) n=0 n=l
(*з, ^р) n^t (n+B—1 Z , X Г /Ь >„-!!» <7 - 1 + *»- T))/P» ('a. (p) 1 t«l (n -f- 1)) n=l
^вз (^з) /з+ ix 2/(M> ₽)~(з(1+ p. fej n=i
^Т'вз (^з) pZ?2 / । . k2 \ р.2^! \ "Г kt J
КГ (*р) h i 1 , ^1 \ . - 4 / - it s Z(n + 1, У), k2 — целое P-^l 4“ ^2 "b ^2 n=0
К(ЗГ (^3> ^р) Kr (lp) - Kp (0) 4- £ 1 (" P) (l - FВ (<p) (1 - F (4))) - «1 n=0 *2-I ~~kF (is) (1 -Kp (0)) s 1 (n- W; F (M = 1 (Ap, A/3). FB (ip) = / (42, |ilp)
176
Расчет надежности систем с временной избыточностью
Продолжение табл. 10
Показатель Формула
о° I / оо \ (V + С(А 2 7 ^2Л* \ + с° "V 2 z ^гП> ) п=0 / ' п=0 / Y = рр/с0
Кнз (0 ' / / °° \ Ар / 1 Av -f- с0^! У] 1 (k2n, iw/c0) ) / \ п=о /
Система IFliPll
Ро (Аз» ^р)
г> 1
т > 1
е (“J" + g рл (У Fвп (/р) = е <UJ" + F (« FB (ip) -
П=1
оо
У] a7n+i (t3) рвп (/р)
Л=1
Р = №т. 7 = (Р*р)Г
П—I
Fп (^з) = F (^з) Pi (U?
i=I
п~1
вп (^р) ~ в Ор) У Рвг (^р)
#=1
Ро (^з» ^р)
г = 1
Непополняемый и комбинированный резерв времени
177
Продолжение табл. 10
Показатель Формула
Р. (<з. <р) т ~ 1 + 242Oi' ix) -1 -e-V<1 -e-P)- \ j=l f=i s=0 / co _ i—I co -—2422»^ f=I /=1 s=/
Ра0 9 1 e + 1 Э - tf 1 1 H- + || ^ ^ —г ' S J* b- z""“s 1 - T «Г t + i Э - 7^ £ •x' 1 M T — XN r— о t £ + + + э - 4. ,|_ - - 1 I V “ 1 4- t о + _д “ 4- + ± T±
А (/3, tfp) «=1 I X a„I (j. y)/PQ (t3, Jp). r = 1 /=1 iu-p-v + 2 -i 2 тг) M(<- fp): m =1
Гер (^р) -гг(1+4-)(1+^(1+4-))
Гвз (^а) °° , + Pb c^”Tf e ₽ ^a + pTb> Z=I » r. = -J-r(n-L), 'i-Zkav
178
Расчет надежности систем с временной избыточностью
Показатель
Формула
Продолжение табл. 10
Яр (у)
11. Расчетные формулы для последовательной системы
Показа-
тель
Тип
системы
Формула
P0(t3, /р) ЛШ11
тон
mi
N
(*р) = £ (W)m 1 (kit р^р)
N
FB (М = S (W1 (1 - ехр ( -
f=I
Непополняемый и комбинированный резерв времени
179
Продолжение табл. 11
Показа- тель Тип системы Формула
^ср (tp) ММ11 GG11 №£11 / N \ I . N ₽<р+Емч ₽’. ₽<=-£-, ₽=£₽< \ к=1 /1 f=i Л«р + в, А = то/Тв. В = Т^/2Т1, N То = Г (1 + Тв = J (Я.,/Х)т г/щ. (=1 N i=l N “в = S (Xi/X)'n aBl, “b< ='('+•)/(*? l—l
ТВз Оз) ALM11 GG11 №£11 , 0 + P) is (l + A^i^ + Bt, Al = TB/T0, В^а^/Й^-б,/^ aat = a,t = (Г (1 + 2/m))/Z.a, 6в = Г (1 + 1/m) Ts/1
DT (fp) 7И7И11 / N / N \ 2 2'p S ₽i/l*i + <S/P) 2 ₽г/[Ч I — \ f=l \i=l / N \ 1 ~4E ₽«/>*?) ip3 i-1 / |
GG11 (“»Ta2 + r02 (a, - 27=3) <p/^ - “Bfo/TB2 + + (“6“в^ + T? (2.5a’ - 4PBTB/3))/27=‘;
№£11 N P„ = ' (Г + 1) (r + 2) 2 1=1
DTB3 (?з) ММП N У Pi/14» i=l
180
Расчет надежности систем с временной избыточностью
Продолжение табл. 11
Показа- тель Особые условия Формула
£>7вз (t3) GG11 WG11 <3 («В + - 26BfJT0)/rQ + В2 вг = (" тв + Vb/^o + + (ао/2го) (“в — 4₽07»/3“о7’о + 4ГвВ1)) + В1 N _ N __ Тв = S — тв t=l «=1 poi = (Xf/X)m, Tpi=^P0if0, ₽o = г (1 4-3/m)/X3
Кг (tp) ММ11 ЕЕ 11. WEW N 1 — 2 pf eXP (— Mp)/(1 + P) i=i (r„ + J_ 2 I (j; fifp)) /(7„ + 7B) \ H /=1 /1 / N r \ _ _ H + s MmV-T S 1 (Mp) (To + TJ \ £=1 7=1 /
Пример 6. Для решения задачи
на ЭВМ-1 производительностью с1 =
= 100 тыс. операций в секунду необ-
ходимо 6 ч машинного времени. Пола-
гая, что интенсивность отказов Хг —
= 0,05_ч-1, среднее время восстанов-
ления 7В1 = 1/Щ = 1- ч> сравнить два
метода повышения надежности: струк-
турное резервирование и создание за-
паса производительности.
Решение. При общем нагружен-
ном дублировании без резерва вре-
мени вероятность выполнения задания
совпадает с вероятностью безотказной
работы Р (/) = ехр (—3^/(3^ +
+ Hi)) = 0,975. При использовании
ЭВМ-2 производительностью с2 =
= 200 тыс. операций время t3 = tc-Jc^
= 3 ч, резерв времени /р = 3 ч.
Если, пр и этом Х2 = то вероятность
выполнения задания без структурного
резервирования согласно формуле из
табл. 9 (7з, tp) = 0,991. Для сравни-
ваемых вариантов коэффициентов го-
товности /Сг= 0,9955 и 0,9976, коэф-
фициент оперативной готовности Лог =
= 0,9? и 0,988, т. е. и по этим пока-
зателям преимущество имеет резерви-
рование времени, создаваемое благо-
даря запасу производительности. При
Х2 = Ро Уз, tp) = 0,981, Лг (/р) =
— 0,9966, Лог (*з, tp) = 0,974. Преи-
мущество сохраняется,* но оно уже не
столь существенно. Полагая затем
с2 = b&i и Х2 —= aXj, находим, что
вероятн°сти выполнения- задания вы-
равниваются при а = 2,53; b = 2
или а 2; b = 1,6.
Призер 7. Технологическая система
имеет распределение наработки Вей-
булла-^Гнеденко с параметрами т =
= о,7 и X = 0,0104 ч-1 и экспонен-
циальное распределение времени вос-
становления с параметром р, = 1 чГ1.
для выполнения задания длитель-
ностью t3 = 4 сут. создается резерв
времени tp = 4 ч (кратность резерви-
рования 4Д %). Необходимо найти
Ро (t3, tp), Твз (7з) и 7Ср(*р).
Решение. Согласно исходным
данным Р ~ (МГ = 1, у = |17р = 4.
Непополняемый и комбинированный резерв времени
181
Рассчитывая по точным формулам из
табл. 10 при г = 1 путем вычисления
первых четырех слагаемых, найдем
Ро = 0,9334; Ро = 0,9358. Двусто-:
ронние оценки получены из-за отбра-
сывания, в одной формуле положи-
тельных, а в другой — отрицательных
слагаемых. Среднее арифметическое
Po = (fo + Ро)/2 - 0,9347. По при-
ближенным формулам (81) при % 1/1 =
= 0,1 и уг = 0 имеем: f0 — 0,927;
Ро = 0,952; (Ро + Ро)/2 = 0,940.
Здесь расчет проще, но погрешность
возрастает.
Пример 8. Система из трех элемен-
тов с параметрами 2^ = 0,02 г1, Х2 =
= 0,001 ч”1, Хз = 0,0001 ч-1, Pi =
= 6 ч-1, р2 = 0,6 ч^1, Рз = 0,09 ч~х
выполняет задание длительностью 16 ч.
При этом допускается задержка в окон-
чании выполнения задания на время
/р =_20 мин. Необходимо найти Р (t3,
^р), Т’вз(^з), ПТвз (/3), Тср (^р), DT (/р).
Решение. Расчет Р (t3, tp) про-
ведем по приближенной формуле (80)
при п = 3, t3 = 16 ч; /р = 0,333 ч.
Согласно исходным данным р = 0,3376;
= 0,8283; F; (0) = 5,716;
у =1,762; а =2,3; у* = 1,985; k =
— 0,96. Используя теперь формулы
из табл. 9, находим Р = Р3 (р, у)_—
= 0,9356; fo(fcp, Ti) = 0,9491; Р =
= 0,9363. Другие характеристики:
Твз (^з) = 16,1 ч; ПТвз (М = 0,5017ч2;
Тср (/р)= 474,4 ч; DT (/р) =
= 593 000 ч2. Выигрыш в надежности
по средней наработке Gp = 7’ср X
X Gp)/T0 = 10, где То = 1/Х = 47,4 ч.
Системы с обесценивающими отка-
зами и непрерывным контролем (об-
щий случай). Одноканальная система
с непрерывным контролем имеет два
множества состояний: Fo — работо-
способные и Ei — неработоспособные.
В состояниях ei £ Ро система за вре-
мя х приобретает полезную наработ-
ку х и не расходует резерв времени.
При переходе из состояния ei С Ео
в состояние е/ £ вся накопленная
к этому времени наработка х обесце-
нивается, а резерв времени мгновенно
уменьшается на величину х. Если х
больше резерва времени, то переход
в Ег приводит сразу же к срыву зада-
ния. При пребывании в состоянии
е С Ег наработка не накапливается,
а резерв времени за время у умень-
шается на величину у. После возвра-
щения в выполнение задания на-
чинается заново. Основное допущение
математической модели состоит в том,
что моменты перехода являются марков-
скими моментами времени и распре-
деление времени пребывания в новом
состоянии зависит лишь от номера со-
стояния и не зависит от траектории,
по которой процесс пришел в это
состояние.
На основе первичных исходных дан-
ных о безотказности и ремонтопри-
годности элементов системы, о харак-
теристиках задания, системы контроля
и системы технического обслуживания
определяются следующие исходные
данные для модели: Pij (t) — функции
вероятностей переходов из е/ в ej
за время t при условии, что начальный
момент времени также является мо-
ментом перехода. Кроме того, заданы
длительность задания t3 и непополняе-
мый резерв времени tp.
Вероятность выполнения задания
при начальном состоянии определяется
из системы интегральных уравнений:
Fi (t3, /р) = 1 Fi (t3) -J-
*з
У^ J Pj (^з x> ^p) dPtj (x) 4-
/€£<» 0
/CM
* € Eq,
Pi (^з> ^p) = J Pj (^з» ^p *)X
itE о
XdPij(x); i^Ei, E = Eq\JEi,
a = min (f3, tp),
S P‘lW>-
i^E
(83)
После операционного преобразова-
ния Лапласа—Стилтьеса при Pij (0 =
= 0,' i £ Eq, j £ £о система (83) сво-
182
Расчет надежности систем с временной избыточностью
дится к системе алгебраических урав-
нений:
+ S “)р/“)•
*3
i &ij = J ® dPij (*)>
о
р; ('з- «•) = Е р"ч <°»pi “).
КЕй
СО
О
(84)
Обратное преобразование может быть
выполнено численно [6].
Средний расход резерва времени до
выполнения задания определяется из
системы алгебраических уравнений:
Т11 (<з) = (Z3) + Pi j (t3) X
/ € Ei
X7\y(Z3); i£E0‘, Тi (t3) =
^з
= j xdFi (*);
0
Tii (M = 'Ei +
4~ 2j (^з)> i£Ei;
itE
CO
Tt = j xdFt (x).
о
1 (85)
Последовательная система с обесце-
нивающими отказами. Дополнительно
к условиям, изложенным для систем
с необесценивающими отказами, по-
является новое условие: после отказа
любого из элементов вся накопленная
наработка обесценивается. Отказы об-
наруживаются с помощью средств
встроенного аппаратурного контроля
с вероятностью аг- — («оЛог (0 4~
4- aKf (Z) XKl- (0)/^ (0, где aOf и aKf —
вероятности обнаружения отказов в
основной и контрольной аппаратуре;
ХОг- (Z) и Хкг- (0 — интенсивности отка-
зов в основной и контрольной аппара-
ту ре; (0 = Xof (Z) 4- (Л, I =
= 1, Л\
Для каждого элемента задаются
Fi (0> Fbi (0» Xqi (Z), XKg (0, otoi’&Kf*
Кроме того, заданы Z3 и Zp. При идеаль-
ном контроле aOl- = aKl- = 1. В случае
сбоев Ту, = 0.
Для системы типа МЛП1 с одним
элементом (TV = 1) и идеальным кон-
тролем расчетные формулы приведе-
ны в табл. 12, Среднее значение и
дисперсию времени выполнения зада-
ния можно рассчитать и в случае
произвольных распределений для си-
стемы типа GG11. Там же приведены
формулы для системы с неполным кон-
тролем (a^< 1) при N = 1 и Zp Z3.
Значение И (Zp) является решением
интегрального уравнения, записан-
ного в табл. 12 в операционной форме.
Решение получается методом итераций.
Пример 9. На ЭВМ с потоком сбоев
интенсивностью Хс = 1 ч-1 решается
задача длительностью Z3 = 2 ч. Си-
стема аппаратурного контроля обна-
руживает и исправляет a = 90 % всех
сбоев. Прочие сбои обнаруживаются
с задержкой средствами функциональ-
ного контроля и приводят к обесце-
ниванию наработки. Необходимо рас-
считать, при каком значении резерва
времени вероятность решения задачи
будет не ниже 0,95, и найти среднее
значение и дисперсию времени реше-
ния задачи.
Решение. Интенсивность раз-
реженного потока сбоев X = (1 —г-
— ос) Хс = 0,1 Ч-1. Полагая Zp = Z3,
находим Р (Z3, Z3) = 0,98, следователь-
но, требуемый резерв времени Zp <С Z3.
По формуле из табл. 12 находим, что
(1 4~ XZp) ехр (—AZ3) = 0,95 при Zp =
= 1,6 ч. Другие показатели; Тъз (Z3) =
= 2,21 ч; ПТвз (/%) = 0,326 ч2; ст =
= 0,57 ч; г = о/Твя = 0,26.
Системы с отказами двух типов,
непрерывным контролем и непопол-
няемым резервом времени (общий слу-
чай). .Система содержит три множе-
ства состояний: Ео — работоспособные
£1 —•' неработоспособные после необе-
Непополняемый и комбинированный резерв времени
183
12. Последовательные системы с обесценивающими отказами
Показа- тель Особые условия Формула
Система с идеальным контролем
Ро (^з> ^р) Тв>0 [mtl 2 (At (tp - il3) - 4i+, (tp - it3)) e ('+I) *'• Al (t) = (2i 7 1) (w)' + + y<‘+/.-1,)lpV(xot-1-/ x t l/1 (i — 1 — /)! * ’ j=0 X »-(/ + /) ?e- <*+(•» <\ \ 1 1 / i>l; Ao= 1; p = 1 — q = p/(X + p)
тв = о 2 (- 1)' (1 + *=£) e- ('+» ₽; i=0 At (о=Цр-м'. p = A/3, Y = Л/р
A (t3, tp) mt< 1 % (1 — Лж (tp)) e-o/Pp (tp. tp)
1 < mt < 2 \ + е~2₽ (X (Л, (/p - /3) - A2 (tp - f3)) + + 4 (<P - M - a, (<p - <3))/p0 (G. tp)-, 41'(0 = -Xp(l-e-1); A'2 (t) = (* — 2 4- (2 + x) e~*) Kptq-, x = (X + pi) t
Тв= 0 [mtl X ((1 + T) e-₽ +2 (~ 1)' <Т(7-Р1)Г e- <‘+" ₽ X X ( (2 + Ц-) (V - Ф) + t + -7- (V - ip)’ ) j P° (»s. <p). P — ^tg, Y
184
Расчет надежности систем с временной избыточностью
Продолжение табл. 12
Показа- тель Особые условия Формула
г?р('р) Тв = 0 _L L _i_« _ у . (е-т (1+1/п । у у X Zj (/+1)‘Ч-2 + и х *Н0+4))‘-2^-Ч'+4)Х)) /=о /
7’ср (^р) Тв> 0 X (1+ (Х + ц)2 ((Х + р,)/р 1 + + ехр (— (X + ц) /р)))
1 GG11 (М (W + 2ГВ7„ (/3) + щ (у)/(1 - F («) + + (T,F (ls) + Тс (t3))“/(l - F ₽s = ( x2 dF3 (x), Oj (fa) = ( x‘ dF (x) 0 0
ММ11 5г('з) + р-(ер->)(!+-£-) + + -Д' (ep — 1 — pep) — 2f3ep/P- Л
Т’вз (^з) GG11 tz + (rBF (t3) + f0 (/3))/(i - F (*3)); то (M = | xdF (x) 0
7ИЛП1 + (exP(^3)~ P=WB
Кг (*р) GG11 Л:р (^p)/(7’ср (*p) + 7’B)
Непополняемый и комбинированный резерв времени
185
Продолжение табл. 12
Показа- тель Особые условия Формул а
/’о Us> ^р) С и с т GP11 Тв= 0 ^р ^3 ема с неполным контролем (1 - Fo (<з)) (1 + н (/„)). Н- (s) = В* (з)/(1 - В* (S)) N B(t) = 2 а‘р"‘ <*>• р“ (/> = i=l i = j(l-F0 (х)) (x)dx; 0 AZ F0 (0 = 1 - П (1 - Ft (0), X( (0 = i=l = F\ - Ft (0)
WD11 Тв^= 0 ^р *3 / N \ N exp - 2 (№)”> (i +я(<)). = 2 \ r=i / <=i N В(<) = 2“'(т)Ю(1-в~<М’"'): i=l “o№ + Щ CZj = : * I лт A0i “Г Ак/
GD11 Тв= 0 /р оо (1 ~ F0 (^))/(I-^o (<з) + N 4~ oi (^)). Pi = 1 ai i=l
(У GG11 Тв> 0 t» + 2 “«<p«< c« T»< + T°i wove1 - B <‘>n- i=l *3 oi (^з) = J xdPof (x) 0
GZ211 Тв= 0 N t, + 2 “<г»| <«/(> - в (У) 1=1
186
Расчет надежности систем с временной избыточностью
Продолжение табл. 12
Показа- тель Особые условия Формула
ГОП N + (£)" (1-е“ ^)М)4- /=1 // N , \ + (1.)) / 1 - 2 “< (т)" <* - : 1 \ /=1 / т ' m / *i V" V (- 1)1 “ ЬШ 2d /!(лг/ + /и+1) /=о
1 ООП N ai (®2i (^а) *f* 2Тbi*Poi (^з) “F «=! + (£з))/(1 - В (/3)) + (rv3 (Q - /3)2; а2< (G) = j *2 02/ = j Я2 В£ (х) 0 0
гоп _ т 1)Z (Мз)т1+т+2 v X ) /1 (m/ + m+2) /«=0
оценивающих отказов, Е2 — неработо-
способные после обесценивающих отка-
зов. Моменты изменения состояний
являются марковскими моментами вре-
мени. Времена пребывания в заданном
состоянии имеют произвольные рас-
пределения. Поэтому процесс функ-
ционирования системы является полу-
марковским случайным процессом.
Заданы функции вероятностей пере-
ходов Ptj (f), i, j £ E = Eq и El U E2;
вектор вероятностей начальных состоя-
ний {aj, i £ E; длительность зада-
ния /в, непополняемый резерв вре-
мени /р.
Вводятся вероятности Pi (ts, t, х)
того, что задание t3 будет выполнено
не позднее времени / при условии, что
к начальному моменту система нахо-
дилась в состоянии i и уже наработала
в счет задания время х. Кроме того,
рассматриваются вероятности Pf X
Х(/3,/)=Pf (t3, t, 0). Изображение
этих функций по Лапласу—Карсону
СО
Р* (t3, s, х) = s j e“sfP, (t3, tt x) dt
0
удовлетворяет системе уравнений:
dP? (L, s, x)
i£E0: —’—(«+M*))X
XPj (/в’ s' X)
XPj (/g, S, X) + ^ij(X) X
X p; (/,, s) = 0;
Непополняемый и комбинированный резерв времени
187
Р( (^з> s»
= 2 p<i(s) р? е.’s- *)+
+ 2 p‘i(s) pi s):
Fft (х) .
Xi(X) “ 1— Ft (x) ’
P?p3. *) =
= s p-ц (s) p; (*3>s);
i€e
P'a (*)
(X) ~ 1 - Fi (x) ’ p*i(s) =
= J e~« dPu (x).
0
(86)
Систему уравнений решают следующим
образом. Сначала с помощью системы
алгебраических уравнений [второе и
третье соотношения в (86)] из (86)
исключают Pj (i3,s, х), i £ Ер Р?(/3,
s), i £ Е2. Затем решается система
дифференциальных уравнений отно-
сительно Р? (/3, s, х), i £ Ей, Полагая
затем х = 0, получают систему алгеб-
раических уравнений относительно
Р* (/8, s), I £ Ео, и после ее решения
выполняем обратное преобразование
по s аналитически или с помощью
численной процедуры [6].
Последовательная система с отказа-
ми двух типов. Система из N элемен-
тов имеет отказы двух типов: необесце-
нивающие интенсивностью Х^ = p^t
и обесценивающие интенсивностью
X2j ~ (1 — Pi) ^i- После отказа в си-
стеме проводится восстановление рабо-
тоспособности в течение времени, име-
ющего распределение FB1I- (0 и FB2£ (0
для отказов соответственно первого и
второго типов. Контроль работоспо-
собности идеальный. Отказ системы
наступает, когда суммарные потери
времени на восстановление и повторе-
ние обесцененных работ превысят не-
пополняемый резерв времени /р.
Заданы интенсивности отказов кц,
X2f, * — 1» N, функции распределения
FbU (О и FB2i (О» длительность зада-
ния ta и непополняемый резерв вре-
мени ip.
В табл. 13 приведены формулы для
вероятности и среднего времени вы-
полнения задания. Вероятность Ро X
X (/3, tp) может быть рассчитана для
системы Л4ЛП1 в случаях: a) FB ij(t) =
= 1 — ехр (—рО; б) FB1J (0 = 1 —
• ехр ( PiO> Tb2i в) FBn (0
= 1 ехр ( Pijt); Т’В2 — 0, /р /3;
г) FBli (0 = 1 — ехр (—PifO; FB2i (i) =
= 1 — ехр (—p.20, tp t3). В по-
следнем случае свертку функций
FB1 (0 выполняют численно. Для Т^Х
X (/3) в табл. 13 приведены формулы
не только для экспоненциальных рас-
пределений, но и для распределения
наработки Вейбулла между отказами
обоих типов (система WG 11), и для
произвольного распределения нара-
ботки между отказами второго типа
' [система (MG) G11 ].
Пример 10. На ЭВМ, имеющей в своем
составе арифметико-логическое (АДУ),
управляющее (УУ) и запоминающее
(ЗУ) устройства, решают задачу дли-
тельностью 8 ч. Интенсивности отка-
зов устройств равны Хуу = Хдлу —
= 0,02 ч-1; Хзу = 0,01 ч-1. При от-
казе ЗУ могут возникнуть неконтро-
лируемые и неустранимые искажения
хранимой информации. Поэтому после
восстановления работоспособности ЗУ
задача решается заново. После отказа
АЛУ или У У счет возобновляется
с той операции, на которой он был
приостановлен. Необходимо найти ве-
роятность решения задачи в течение
10 и 12 ч, полагая, что среднее время
восстановления TBi = 1 ч.
Решение. По условиям задачи
находим = 0,04 ч -1, Ха = 0,01 ч”1,
X = 0,05 ч-1, у = pf’g = 2 при t = 10 ч
и у — 4 при t — 12 ч. По формуле
табл. 13 при Hi = Иг = 1 вычисляем
Ра (*з» tp) = 0,886. При Хх = 0 ве-
роятность Ро (t3, ip) = 0,931, а при
Хг = 0 Ро (tB, tp) = 0,949. При расчете
по схеме независимых событий Ро (f3,
tp) = 0,931-0,949 = 0,883. Эго до-
статочно близкая к точному значению
188
Расчет надежности систем с временной избыточностью
13. Последовательная система с отказами двух типов
Показа-
тель
Условия
Формула
Р0 (^э> ^р)
ЛШ11
PiJ ~ Р
((> - л (PXV) + В (й. V) +
+ (Гга-х 2 Мт^-1V - «Л
i=0 /
Л7
Pi = V = Р^р» — У А (Р1> ?) =
/=1
= е“P1 f 1 + 2 ТГ 7 ('• В ^Рь =
\ i=1 /
-т- S /0+1, ₽1)/0 + 1, т)
1=0
ММ\\
= 1 -
Л4Л411
Pi; = Pi
Твз ~ 0
N
* = + н.) <р. Fn (/р) = 2 ТГ ~ е“’11?₽)'
i=l 1
Рг£ — Ра
Непополняемый и комбинированный резерв времени
189
Продолжение табл. 13
Показа- тель Условия Формула !
Ро ^р) ММ11 Рв1г (0 = . —н? = 1—е е (1 + Мр) [ 1 + 2 7Т ' (i’ А \ 1=1 / ^р ^3’ Т^В2 ~ ® N 1=1
Рвз (^з) MGI1 (1 + Хх7В1 в2) (ехр pg — ОДв». 71 в tj = Тш
1FG11 <з + Р1ТВ1 + Тв2 (е₽- - 1) + е₽- (а, (£3) + + (У) Ты = 2 (Лг,Аг)т Гв ih £ = 1,2; /=1 p( = (v3)m. /=1 *3 = J тЦУ”—ехр (— (Л2т)т) di 0
(A4G) G11 £3 G 4" bi) "1" (ТB2F2 (£3) -f- + (1 + МЛп) Т02 (£3))/(1 - F, (М) *9 N То1 (У = J xdFi (х), 1 - F, (0 = П (1 - F2i (0) 0 1‘ =1
оценка снизу. При t — 12 ч точное
значение вероятности Ро (f3, tp) =
=?= 0,938, приближенное значение Рс X
X(f3, *р) = 0,951-0,99 = 0,942 дает
оценку сверху. Среднее время выпол-
нения задания 7в3 = 100-1,05 X
X (ехр 0,08 — 1) = 8,75 ч.
Системы с многоэтапным заданием.
Разбиение задания на этапы с запоми-
нанием промежуточных результатов
является одним из способов уменьше-
ния потерь от обесценивания наработ-
ки. Однако на организацию промежу-
точных «контрольных точек» требуется
дополнительное время. Это уменьшает
общий резерв времени, который можно
использовать для восстановления ра-
ботоспособности и повторения работ.
Поэтому существует оптимальная дли-
тельность одного этапа. При доста-
точно общих условиях наиболее вы-
годно по критерию максимума про-
190
Расчет надежности систем с временной избыточностью
изводительности разбивать задание на
этапы одинаковой длительности. Далее
всюду она считается равной т = /3/л,
где п — число этапов. После выпол-
нения очередного этапа в отсутствие
отказов создается контрольная точка,
и на ее создание затрачивается время
tK, включаемое в расход резерва вре-
мени. Таким образом, даже при без-
отказной работе резерв времени умень-
шается на величину niK и становится
равным /р1 — tp — ntK. При появле-
нии отказа на j-м этапе он сразу об-
наруживается, и часть наработки в пре-
делах текущего этапа обесценивается.
Задание оказывается выполненным,
если в течение i = /а + /р выполнены
все его этапы. Поэтому время выпол-
нения задания можно представить
как сумму случайных величин Твэ f(x),
имеющих смысл времени выполнения
t-го этапа. Другие условия функцио-
нирования варьируются, и в соответ-
ствии с этим формируются пять моде-
лей надежности. В модели 1 все от-
казы частично обесценивающие, они
приводят к повторению только одного
этапа задания. В модели 2 в каждом
из М элементов могут возникать от-
казы двух типов: необесценивающие и
обесценивающие текущий этап соот-
ветственно с интенсивностями Xlt- и k2i.
В модели 3 у элементов также отказы
двух типов: с вероятностью р^ отказ
обесценивает наработку одного этапа»
а с вероятностью 1 — р{ — всю на-
копленную наработку. В модели 4
условия функционирования такие же,
как в модели 1, но контроль работо-
способности неполный: вероятность об-
наружения отказов aOj < 1. Контроль-
ная аппаратура самоконтролируется
полностью (aKf = 1) и имеет интенсив-
ность отказов лК£. В модели 5 длитель-
ность этапа является случайной вели-
чиной с распределением F3 (0, время
образования контрольной точки тк
также является случайной величиной
с распределением FK (0. Интенсив-
ность отказов i-ro элемента в интер-
вале тк равна X*, а время восстановле-
ния после такого отказа имеет распре-
деление F*( (0. Прочие условия функ-
ционирования такие же, как в модели 1.
Заданы интенсивности отказов Х$,
вероятности возникновения отказов
первого типа pt, распределения вре-
мени восстановления FBl- (0, длитель-
ность задания t3, время образования
контрольной точки непополняемый
резерв- времени /р. Число этапов за-
дают заранее или вычисляют опти-
мальное значение по заданному крите-
рию: минимуму среднего времени вы-
полнения задания (п01) или максимуму
вероятности выполнения задания (п02).
В модели 2, кроме того, задается
доля необесценивающих а.ц, обесце-
нивающих a2j и необнаруженных от-
казов рг- =1 —а1г —a2f, где =
= 1, 2. В мо-
дели 4 задаются ХОг-, ХК£ и aOi- В мо-
дели 5 задаются также X*, F*f (0,
а вместо /3 и /к распределения F3 (0
и FK (0.
Для моделей 1, 2, 4 и 5 расчетные
формулы приведены в табл. 14. Мо-
дель 3 представлена формулой для
расчета Твз.
Пример 11. В системе передачи дан-
ных при отсутствии отказов для пере-
дачи сообщений требуется 15 мин
непрерывной работы. Для уменьшения
последствий отказов сообщение разби-
вают на три равные части, передавае-
мые как самостоятельные сообщения.
При этом длина каждого сообщения
увеличивается на 10%. Необходимо
определить вероятность передачи сооб-
щения за 30 мин, полагая, что в сред-
нем каждые 5 ч работоспособность
тракта нарушается в среднем на 6 мин.
Распределения наработки и времени'
восстановления экспоненциальные.
Решение. По исходным, данным
определяем X (t3 + ntv) = 0,2-1,1 X
X 0,25 = 0,055, Xfpl = 0,2 (0,5 —
— 0,275) = 0,045, (X + p) H = 2,295,
(X -(* fi) (fpi Z3/3 — 1,346, n =
= 3, XxtfpO = 0,0269, A2 (/pl) =
= 0,0002, Ai (£pl ^3/3 0<) =
= 0,0117. Вероятность передачи сооб-
щения: P (t3, tn) = exp (—0,055) (1 —
— 3 (—0,0269) 4- 3-0,0002 + 3 X
X HO,0117) exp (—0,055/3)) =0,991.
При n — 1 и tK = 0 P (t3,
tp) = 0,983. При разбиении сооб-
щения на три части вероятность
передачи сообщения за отведенное
время увеличилась, хотя объем пе-
Непополняемый и комбинированный резерв времени
191
14. Системы с многоэтапным заданием
Показатель Формула
₽о (^э« ^р» Модель 1 рппД п е-₽ ~ ' + 9 е~'Р'" 2 Аиз (Wpl ~ t=0 /=о — ip/n) (— D/ . Р = ь (4 + ntK) mt = (*р - ЧЖ + Ч) • *Р1 = <р - ч> А[ (х) — см. табл. 12, Тв = 0 : Z (л, — X (/pi /3)) 1 pt — /д] 4' n . i— 1 +2(П^2(П7>- 1=1 /=0 р (1 t/л)п 1 f (j 2 /) । ехр < р'+- + ip/n + Х/р1) 1 [7р1 — f3 (1 — i/fiy]
Л (/g, tfp, fl) п ^-р 2 (n_(1 + ‘)2(/)X £=о /=0 X (А[+1 (^pi — Ф/п) 4~ ( 1У ^i+i — ip/n)}!Ро (^з» ^р» я) “F А; (х) — см. табл. 12
п01 М3/И 2 (1 — ехр (— 7)), у = Х/к
П02 (VПН 4~ 1 — 1)/^к» ^p/ta
Пз (Аз< п) MGI1 : п (1 • + ХТВ) (ехр (Х0) — 1)Д, _ N _ Т'В = У 0 = ^g/Л -р 1=1 GG11 : ta + ntK 4- п (T^F (0) 4- f0 (0))/(1 - F (0)), е Гв(0) = Jx dF (x) 0
192
Расчет надежности систем с временной избыточностью
Продолжение табл. 14
Показатель Формула
^ВЗ (^3» «01) *з (1 + %7*в) (ехр (И2 (1 — ехр (— у)) + у) — - 1)/И 2 (1 -ехр (- -у))
£>ГВз (^з> п) V f J. ('» п> + п <еМ> ~ 0 (₽2 + 27вА ~ 28Д) + + 2 (п (ехв — 1) — — nU^/У,2 — 2ТВ (/, + п/„) ехв, ₽„ = Т х» dF, (х) 0 Модели 2 и 3
Р (^з» ^р» е—р (ф + X — аг (ф))" ехр (пйаг (ф))/(ф + X — аг (ф) — — Ojj (ф) (1 — ехр (— 9 (ф + X — ах (©)))))"> N <.,«=£>./• w, /=1 р = X (fa + п^к)> = Pjhjt — (1 — Pj) hjt P = 0, F;0-(a>) = 0 [nmf] rB( = 0: e-O" 2 <- o' — J + *) e-,₽>,n X 1=0 \ X 2 (/) (A« <'p‘ - iPa/n))'+//(‘' + /)1 /=0 N Рз ~ ^2 (^з + Л^к)» ^-я = О "Pi) i=l т1 = ('р-п'кЖ + л'к)
Т01 i _ /2 (cc2 + p exp ((ot-j -p p) ?)) (Л (1 — exp (— (eta + 4-1/ + P) Y)) + By r («2 + P) (Ясса + 2Baa — рЛ) Л = ct2 (1 4~ PiM0^ 4~ P) ~Ь Ря« В = p (1 4- pi);
Непополняемый н комбинированный резерв времени
193
Продолжение табл. 14
Показатель Формула
N N
Т01 У = ^к» ~ U Pj) = У! Ali + ^2i)» /=1 1=1 N Р — 1 — ai — аз» А8 — У Pf (Xlt- 4- Х2/] * i=i
К (»,. ") А + Л ((е°в 0 ( t (1 + р1) + р0 + х /кд “7" 4 ' z . N _ Х(1+Р1)0), Pi = 2 ij, J /=1 fl Л2 -|- Л8, 0 = ^з/я 4”
Пз (Z3’ П01) (A (e(a,+S) (т+^и) _ 1) 4. в (Хти + + T) e<“.+₽> <V+^.,))/(aa + ₽ exp ((<xa + ₽)(? + 1TO1))) n—1 _
Т’вз (Аэ« я) Модель 3 V (1 — p) 10 exp (— tX0) — 1Д — TB 8 *" p 4- (1 — p) exp (— iXO) “J" i=0 +2 (v+7" ~ ° -p) 0 exp ixfl) - i=l — p0 exp (— X0)/ (p exp (— X0) 4~ (1 — pj exp (— iXO))
Модель 4
Ро (^з» ^р» я)
X (*pl l®)’ mt —
Рр1/Гв]
ЛЮП : Л„(/р1) = 2 а"+‘(П-‘+9z<n +
i=t>
+ i. Я. (<pi - (n + О Тв))
194
Расчет надежности систем с временной избыточностью
Продолжение табл. 14
Показатель Формула
^0 (^э» ^р> л) Т„ = 0 : А„ (*р1) = (-2-)" / (л, ₽Upl), а = 1 - ₽ = Л' = + ^kz)A i=l
Р0 (^3» ®о, /1) exp (—/Л0) (P + a exp (—X6))~n, 0 — t3/n -j- tK
То! \ 1 . Л(2 (a + ₽ev) (1 - e-v + ₽v/<x (1 + M\)))/(l - X V -Wb/(1+W»)) _ N _ i=l
ЛУ3 О) n ^pe + (1 - e-xe)^a 4- 2 )/<₽ + ae'X6)
Пз(^. По) „ / / \ "o8 + “T- a + S а.АЛг <e“ - 0 - Л \ \ i=l / । — aX8^|(peKe + a)
Dr^3 (t3, n) / N 1 al (3, X6) + 2 «АЛ? (2- *»> + \ i=l + "T 2 aiA,^2< ~ e’xe)^/to 4- ae‘xe)’ Psi = J dFi W 0
^ср (*з» По) ^з/Т'вз^з» Ло)
Непополняемый и комбинированный резерв времени
195
Продолжение табл. 14
Показатель Формула
Ро (^з» ^р» Ц) Модель 5 Ppi/6] i 2 <-»' (”_ +') 2 (;) w (хх f=Q /=0 и~Ь/ X ехр (м3 — (Л + /)^к) 2 (П j" 9 х г=0 X Мп (1р 11а/п (л + /) /ц) о .(л = V ^~V(-1)V(--1-V)I . п( (r-v)lv1(>-l)l(V)‘+'’ f—1 \1 zf~v-f (г + у)!(—1)г+1ех*г +-jfcJ (i — v— l)!v!r!(h*)r+v+1 z = tp — it3/n — (л + /) iK
FВЗ (^3» п) » г*'к(емз/" -0(1 + 2 X,7=J + Л \ l-l / + -А- (еХ**к — 1) (1 + £ Y f3 = const \ i=l / F*3 (X) F* (X*) ( X W (! + Д ) + + h+S^xff) F* (X) = 1 - F; (X) = j dF3 (x), 0 u*)=J w 0
Пр ujVb, b=A- («**'« - o (1 + Л \
196
Расчет надежности систем с временной избыточностью
редаваемой информации возрос на
10 %.
Пример 12. На ЭВМ с потоком сбоев
интенсивностью X ~ 1 ч-1 и полнотой
аппаратурного контроля а = 0,9 ре-
шается задача длительностью 2 ч.
Полагая, что сбои, обнаруженные ап-
паратурным контролем, немедленно ис-
правляются, а прочие сбои обнаружи-
ваются с некоторой задержкой сред-
ствами функционального контроля,
найти резервное время, обеспечива-
ющее вероятность выполнения задания
не менее 0,95 при разбиении задания
на п этапов (п =100) с временем
образования контрольной точки tK =
= 1 с. Найти оптимальные длитель-
ности этапов и значения показателей
надежности при оптимальном разбие-
нии, полагая, что резерв времени не
меняется.
Решение. При 100 этапах т =
= t3!n — 120/100 = 1,2 мин. Если
/р1 = т, то Х/р1 = 0,002, и в формуле
из табл. 14 для модели 1 надо взять
/=0, Л; (/) = (-1/(М)///!. Тогда
Р 0э> *р) = ехр (—0,2) (1 4- 100 X
X 0,002 4-
( 1°° )о,ОО22/24- (I°°) X
\ & / \ О /
X 0,0023/6) = 0,991 > 0,95. Поэтому
/р1 < т- Вычисляя по той же формуле
вероятность выполнения задания как
функцию /р, находим, что Р (t3, /р) =
= 0,95 при /р1 = 0,0155 ч = 56 с <Z т,
а /р = 56 4~ 101 = 157 с, т. е. к ми-
нимальному времени t3 = 2 ч надо
добавить /р = 2,62 мин (кратность
резервирования = 2,2 %). При
этом вероятность выполнения задания
увеличится от 0,82 до 0,95. Оптималь-
ная длительность этапа по критерию
максимума вероятности т02 = 92 с.
Оптимальное число этапов Ио2 =
= 7200/92 = 78 с. При этом /р1 =
= /р — = 157 — 78 = 79 с и ве-
роятность Ро (*з- *р. «оз) = 0,963.
Среднее время выполнения зада-
ния при 100 этапах 7^= 100-10 X
X (ехр (0,00203) — 1) = 2,03 ч. Дис-
персия ОТвз == 2-0,0022/100 — 100 X
X (ехр (0,002) — 1) 20-0,024-200-100 X
X (ехр (0,002) — 1,002) = 4-10~» ча;
О = 2-10~4 ч; г = 0/7^ = 10"4. Оп-
тимальное число этапов =
= 720/^2-10-3600 = 27, а 7ва (/а,
rtoi) = 2,015 ч.
5. МНОГОКАНАЛЬНЫЕ СИСТЕМЫ
Многоканальное соединение элемен-
тов является одним из способов соз-
дания запаса производительности, ко-
торый является источником непопол-
няемого резерва времени. Отсюда сле-
дует, что в многоканальных системах
(МС) резерв времени создается только
в том случае, когда для системы мо-
жет быть введено понятие производи-
тельности, а целью ее функционирова-
ния является производство некоторого
объема продукции при определенных
ограничениях на процесс производ-
ства. Так, например, многоканальное
соединение может применяться в ий-
формационных, энергетических, тран-
спортных, измерительных, технологи-
ческих системах и других, в которых
соответственно информация, энергия
или энергоноситель, изделия машино-
строения, нефтехимии и другие яв-
ляются производимой продукцией. На-
оборот, если понятие производитель-
ности для системы не имеет смысла
(например, для радио- или телевизион-
ных приемников, электронных систем
аварийной защиты, выполняющих
включение или отключение аппаратуры'
по особым событиям), то многоканаль-
ное соединение не создает резерва вре-
мени и равносильно нагруженному
структурному резервированию.
В многоканальных системах процесс
функционирования существенно зави-
сит от правил технического обслужива-
ния и действий после первого отказа.
Если при отказе любого из парал-
лельных каналов вся система приоста-
навливает работу до окончания вос-
становления, то МС называют систе-
мой с жесткой структурой. Ее можно
свести к одноканальной системе с экви-
валентной производительностью, рав-
ной суммарной производительности
всех каналов. Надежность такой си-
стемы рассчитывают с помощью фор-
мул предыдущего параграфа. Если
же во время ремонта одного из
каналов работоспособные каналы про-
должают полезную работу, то при
Многоканальные системы
197
।
отказах производительность системы
уменьшается лишь на величину одного
канала. Именно такие системы назы-
вают системами с гибкой структурой.
СИСТЕМЫ С НЕПОПОЛНЯЕМЫМ
РЕЗЕРВОМ ВРЕМЕНИ
Система состоит из нескольких па-
раллельно работающих каналов. В каж-
дом канале может быть несколько
видов отказов, приводящих либо к
снижению производительности, либо
к полному прекращению работы. В
множестве состояний системы Е вы-
деляются подмножества Eh, k — 0, т,
в каждом из которых производитель-
ность системы постоянна и равна
Сд (с0 > Ci-> ... > ст = 0). Процесс
переходов из состояния в состояние
задается функциональной матрицей
{Pfj (/)}. Моменты переходов являются
марковскими моментами времени. Для
выполнения задания объемом V =
= cot3 системе предоставляется время
t = t3 + /р. В состояниях ei £ Ео
резерв времени /р не расходуется.
В остальных состояниях происходит
накопление наработки со скоростью
ск = Cfc/co и одновременно расход ре-
зерва времени со скоростью Ьд = 1 — Сд.
Задание считают выполненным, если
суммарная наработка во всех состоя-
ниях в течение времени t, приведенная
к производительности системы в пол-
ностью работоспособном состоянии, бу-
дет не менее t3. Вся наработка является
полезной, так как обесценивающих
отказов нет. При tn = 1 данная си-
стема превращается в одноканальную
систем/. Заданы функции вероятно-
стей переходов Pij (/), х, / £ Е\ про-
изводительности ci в состояниях Et,л =
= 0, т; длительность задания /3,
не пополняемый резерв времени
Вводятся условные вероятности вы-
полнения задания Pi при усло-
вии, что начальным было состояние
ei € ^Д. Эти вероятности удовлетво-
ряют системе интегральных уравне-
ний:
Р|«а. <р) = 1 - Ft (М +
+ S J Р>(1а ~ ЛР>1 (Х)’
!^Е о
(87)
Pi (*з, м = (I - Fi (W*a)) х
6д
3 Сд .
У Р j (^з “ скх, ^р &кх) X
XdPjj(x); i£Eh, k—1, т',
V bk ’ ch )
fm^tp, 1И=1,
1 [x] = 0, x<0.
Двойное операционное преобразова-
ние Лапласа—Карсона сводит (87)
к системе алгебраических уравнений:
PJ* (s, cd) = scft(l —
— F (sch + abK))/(sch + (о&д) +
+ S (^+pr <s-
i £EK, k = 0T~m; P^ (s) =
= J e~sx dPij (x).
0
Вычисление вероятности можно про-
вести с помощью процедуры числен-
ного обращения двумерного преобра-
зования Лапласа.
Среднюю наработку до отказа на-
ходят из системы алгебраических урав-
нений с последующим обращением
с помощью той же процедуры:
< («о=+ Е p.a’p/W’
/Се
/ С Е» Ti — j xdFi (x),
о
(/)
(89)
198
Расчет надежности систем с временной избыточностью
т’ср I (®) = ck 0 ~ F* (^hjy^k +
+ S Pil W Ге-р i (<“) €£).,
/С E
k =: 1. m; pjj -- lim Pf7- (/).
/—►co
Среднее время простоя до выполне-
ния задания определяют из системы
уравнений:
7’и (s) = bh (1 F{ (scfc))/sck 4-
+ S pu (s). •££»,
itE
k — Q, m—К (90)
/ €e
Tli (^я) = Т'вз (^з) — ^3’
Если заявка на выполнение задания
поступает в произвольный момент вре-
мени на стационарном участке работы,
то вероятность выполнения задания
и среднюю наработку до отказа опре-
деляют из уравнений:
р“(». <»)=2 2Р/Х
х (-зс-ДЪг (1 - Ъ («к+ча)+
+ 2 р»+“М <s' “0 •
i^E
(91)
л*Р <<>>= 2 pi (?<+
i С Е, '
+ 2 ^О’^ср/ +
*=1 i£Eh
+ 2 р'н (“М гср / <®>
/Се
(92)
Значения Рг> (/), (0. Tt
определяют из (78), а Р** (s, со) и
Т*р г (со) из (88) и (89).
Если известно, что заявка посту-
пила в работоспособную систему, то
вместо (91) и (92) надо использовать
уравнения:
P"(s, е>)= S k-‘ /1 -F' (s) +
i$E0 \
н s «»у
7 —
*r = 2 Pi. (93)
Тс*р (<>)== 2 ^'Р,х
i € Ео
х (fi+ S PiPcpi^Y (М)
\ j с Е
Если задание имеет случайную дли-
тельность с распределением Ф (/), то
вероятность выполнения задания
CD
М^ф(^з). (95)
о
При Ф (/) — 1 — ехр (—v/) вероят-
ность (95) имеет изображение
Р* (®) =х ру (у, со). (96)
При автономных заданиях равной
длительности для каналов вероятность
выполнения задания
Р(1з, ip, т) =-- Рт 1), (97)
где Р (т, tp, 1) определяют как вероят-
ность выполнения задания одноканаль-
ной системой задания длительностью т
при непополняемом резерве tp.
СИСТЕМА С ВЗАИМОЗАМЕНЯЕМЫМИ
КАНАЛАМИ И
НЕОБЕСЦЕНИВАЮЩИМИ ОТКАЗАМИ
Система MGml состоит из т иден-
тичных каналов с постоянными интен-
сивностями отказов и выполняет бри-
гадной задание. Число ремонтных бри-
гад равно г. При k неработоспособных
каналах суммарная интенсивность от-
казов каналов равна Л^, а произво-
дительность системы равна с^. Время
Многоканальные системы
199
восстановления одного канала при k
неработоспособных имеет распределе-
ние (t). Отказ системы наступает
тогда, когда суммарное время простоя
всех каналов в ремонте превысит зна-
чение mtp. Ограничений на минималь-
ное число работоспособных каналов
нет. Контроль работоспособности ка-
налов и системы идеальный.
Заданы интенсивности отказов Ль,
k = 0, т — 1; функции распределения
времени восстановления FBh (/)> число
каналов /п, производительность систе-
мы при т — k работоспособных кана-
лах Ch, требуемый объем работ V
или длительность задания /3 = V/c0,
непополняемый резерв времени /р.
При заданных условиях функциони-
рования уравнения (88)—(92) имеют
вид
PJ* (S. ф) = 1 — FJ (s) + (s) X
X Pf*(s, <о); Р^* (s, (о) =
= ?1т (®> Pm-l (s- ®);
+ (Ф* + А») Pit 1 (s. <0) +
+ ’фД\ (’ - + Л*)) X
X Pk+i (s. ©)» k ~ 1. m—Г,
(m)=4г+>(т):
ГЪт№) = Fin (®) ^ёр. т-1 (®):
Т1Г. к «“) = (1 - Fi„ (Q)) +
+ FIt (О*) (о» +
+ W 0 - pt Л» Ге₽. *+1 <“>’
k 1 1 f /П 1 D
^'о <s) = s + Л, <s):
=^вт + Л’.т-1<5):
т» -^(’»)) +
+ (\> t:. *-! (?)+X
X 0 ~ F»k (sft)) Tl, k-t-1 (s)’
k — 1, m — i;
P»(S, ш| = р»(л^х
X (1 - Bk (4>k)) + Bh (Ф„) X
X Pil, (S, Ш) + ---X
" 1 Лц + ф),
X(1 - вк (<p)) РЦ.1 (s. И)):
rtP («»=S p* (4rX
X^ + A^p.^t^X
X (1 - B„ (<o6ft)) + j
+ Bk(<*bt,)TlP, *_,(«»>. )
(98)
где ерь = scji -j- <)/>&; Qfc — abh + Л&;
S* == ak + А»: P-1 <s- ®) “
- pm+i (s“) = °:
P, = 1/(ЛЛо); Pk = (АЛ*)-» X
i-r;,(A,)
;=I ’
4=1. m-П; Pn,^^-^-X
XU ’
Bh (®) = Vb (A„) -
- Fib (Ш + Aft))/(1 - Fh, (A*)):
200
Расчет надежности систем с временной избыточностью
'Ъ (л1)
1 — ^Sl(Ar)
1-л;2(Аг)/ 1
f;2 (л2) л,
Двухканальная система с произволь-
ным распределением времени восста-
новления. Заданы относительные зна-
чения производительностей с0 — 1,
Cj = 0,5; интенсивности отказов Л& =
= (2 — k) X, функции распределения
времени восстановления FB1 (t) и
Fb2 (0» длительность задания f3, резерв
времени tp.
Расчетные формулы приведены в
табл. 15. Вычисление вероятности Ро X
X (^з, ^р) следует проводить численно
с помощью процедуры [6J.
Многоканальная система MMml.
Заданы относительные значения про-
изводительности k — (\ т — 1;
интенсивности отказов ЛА, интенсив-
ности восстановления канала при k
неработоспособных каналах Mfe, k =?=
= 1, т; длительности задания ta, ре-
зерв времени fp.
Расчетные формулы приведены в
табл. 16. При > 0 обращение функ-
ции Pg* (s, со) выполняется численно
с помощью процедуры [6]. Она может
использоваться также и для обраще-
ния Pg jya, со) при Мь = 0 в случаях,
не отраженных в табл. 16. При Mh =
= 0 Твз (ta) следует рассматривать
как условное среднее при условии, что
задание выполнено.
Для определения вида функции
f (k) — зависимости производительно-
сти системы от числа работоспособных
каналов — можно использовать следу-
ющие две модели затрат ресурсов на
комплексирование.
Модель слабой связно-
сти. Каждый канал в процессе взаи-
модействия связан только с одним из
соседних каналов. На обеспечение этих
связей затрачиваются ресурсы в объ-
еме 100а % от основного объема работ.
Тогда сь = 1 — k/m.
Модель сильной связ-
ности. Каждый канал связан со
всеми остальными й затрачивает на
обеспечение каждой связи 100а % ос-
новного объема работ. Тогда =
= (т — k) (1 + а (т — l))/m (1 ~Н
+ а (т — 1 — k)).
Если в МС, кроме ограничения на
суммарное время простоя всех ка-
налов, есть также ограничение на до-
пустимое число работоспособных кана-
лов (Л1 т*) либо на минимально,
допустимое значение мгновенной про-
изводительности (см > с*), то в вы-
ражении для Pg* (s, со) из табл. 16
при М^ = 0 следует положить Р^ (s,
со) = 0 для всех k > т — т*, а при
Mji > 0 положить в уравнениях для
k > т — т* Значения — 0. Вы-
ражения для вероятности выполнения
задания при т* = 1 и т* >• 1 при-
ведены также в табл. 16.
Многоканальная система со слабой
связанностью каналов и независимым
восстановлением. В течение заданного
времени t каналы функционируют не-
зависимо друг от друга, получая не-
обходимые порции общего бригадного
задания, обеспечивающие им непре-
рывную загрузку, пока они работо-
способны. Общим результатом работы
системы является суммарная полезная
наработка всех каналов, равная сумме
наработок отдельных каналов в общем
интервале времени (0, 0 без учета
затрат времени на организацию работ
в комплексе.
Заданы функции распределения на-
работки F (0 и времени восстановле-
ния FB (0 одного канала; производи-
тельность канала с, длительность за-
дания /3, приведенная к масштабу
времени m-канальной системы (t3 =
= V /(/нс)), интервал времени функ-
ционирования t.
Расчетные формулы для вероятно-
сти ° (/3, t, т) невыполнения зада-
ния /в в течение времени t приведены
в табл. 17. Функции Q(1) (х, 0 =
= 1— Р^(х, 0=1— Р(х, t — x)
определяют с помощью формул табл. 17
после замены t3 на х и tp на t — х.
Функцию готовности определяют для
одного канала.
Многоканальные системы
201
15. Двухканальная система с произвольными распределениями
Показа- тель Условия Формула
р;* (s, со) MG21 s (s + <a + !» + 2Z.(l — F;2(<o)) (1 — F*j (x-f- + -L(s+m)))/|(S+ 2X) (s + a> + + 2X(l-F^(®))(l-F;I (x + ±(s-f-®))))- -afe-KoJF;, (x + -^-)|
Твз (^а) MG21 U1 + Л1)“М1 =(1 “ M) (1 + 2W',2); Bt = a, /a - -Lgl (X) (1 + атм); gi (*)•= j xfe-X*dFB1 (x) 0
TBi = т г= 1 <з + (Ц-р)(<з (1 - e-2»)) , <3<-^-T; p=XT, <3 + (1 + P) ((*3 ^-) <1 - e-p) + + -1- Ге-»), <з>Т/2
73 » Т, г = 1 <3 (1 + P + P2)
(0 ~ = 1 - е’^; г = 2 (1+P)<3 2(X + |i) <^=3<<1+P) ;з. p = x/p-
ТВЗ ф (<з) = —vt = 1 — е 3 T- + V V) 0 + 2KT^) (1 - F3-1 (x + 1) )
DTB3 (t3) г = 2 <s (2Xa2 (1 - f;, (X)) + 4~ л/;, (X) - -(i-A)gi(M(i +2XfM)
а) = = l-e-iu/ pWh» p = M*
202
Расчет надежности систем с временной избыточностью
/ Продолжение табл. 15 1 -—
Показа- тель Условия Формула
Гер, п (^р) h > 2ТВ1 А/p 4~ В <Z.TСр, о (^р) <- г1== |/£Гв1/Гв1<1» ^р 4—2Х~ < ^СР- ° (*р) < А*Р 4“ ri > I; А~ 1/Аг; в“А(^г + ?в2(’-^| W) + + Х«2/(1 + 2Х7в2) - g, (>.)/2 (1 - F’l (М))
Тер. о (^р) Т «г 1 1 / otj 2/р \ г 21 ( ОТ2 Т I ’ ai ~~ J Х ^в’ 1 ZA \ 2ГВ1 ГВ1 / 0J
Т'ср (^р) Гср. 0 (9 - (V^ll W) (А (2^2 + ^2 + + (1 + ыт„2) (‘ - F 51 (М - tet R) + + 2^.2 (" - F;f R)
DTq (tp) «р [ А (1 - A) gl (1)/(1 - f;, (1)) + +-г A2f li w + 2XA’“2 (’ - R}
16.хМногоканальная система с экспоненциальными распределениями
Показа- - тель Условия Формула
PJ* (s, <o) ^ft>0 T T co e. * !! s' 5 al a 9 ~ < + z + 3 4- « — Э Г 3 + °- Э A”1 « де ДГ Z. 1. ; = • | . 1 » _ < -f- ft »t: < t AJ . ’Г g - =; II 5 + "b •« l| < -a 4- II
Многоканальные системы
203
Продолжение табл- 16
Показа- тель 1 Условия Формула
Ро (*з*>) Mft = 0 rn—1 2 exp(—(to6fc +Aft)/3/ch)X A=0 m—I i X S ot₽M П (• + “«)'> i—fe /=M) i—I Оо — 1, Oj = j~| ; Ppp — 1; Р/= /=o Ci i = П(4-~ J-); i^k; /-» V c> Ck } «Ik = (A|sk — Акг|)/(гк — El). i^k
f*o Ga> ?р) Mh^Q tn—I m—I 2exp( Jk<3)Sai,(‘- k--0 i=k a. (t — t } \ 1 P;bCtfc я \ P C)i Л) / / Г*Я
\ Mh - 0 aik aJh i j x i|. X T .* ~ ecu ?•« *3 *et- a“ 8 Ik Ipql -сП ' _ л О IQ 1—* । L-^ 1 Л Л Л & 8* 1 i 8 о, a o, S bZ_> 2 -Et ICXl'a x “РЯЦ "г" X
204
Расчет надежности систем с временной избыточностью
Продолжение табл. 16
Показа- тель Условия Формула
?0 (^3» fp) ° « II II •* е е-Л(/э (j . -^1 Л _ ехп (_ / А __ е l'+л^АогД1 ехр (. (Л1 -г,А.)-^-)) —-4А . (1- by J ) Aj — AoCj — ехр (— (Лх — A0Ci) (ГрЛх — *э/г1))} X X ехр (—Л^з/cJ 1 [<р — Мз/Ci]
Mft=0 Aj = (m — 0 А г = tn II II х ~ х = гм» » х 4 L х м iMc г-s и 2 г z—Л а 1-1 3 Т 'в 3 с: л г । । ?. | S_ | Т i - £ Л» Л и гч. С 5 ~ t | 1 i 'Г' । з .д w а "1 I 1Д1^ В 4 ' S' S' t** 9 o' ,5: 1 3 3 5 1 в ~ 3 '* и M ”* S 1 1 1 ° 1 Т з sS I "t II 71 -L - 5 X X II X X
JWft = O /р = оо / / co tn [ 2exp ( 4 *») 2 a‘₽«x Jfe=0 i=k i x П a/ft » / /=0
Тср о (^р) /р>2МГ1 1 (i । *P \ 1 (i । Mi . \ . Aq \ A / Ao \ by ) ’ A = {Aj—Am_i + Aj. • •Am_2^m-i^m + + • • • + biMa.. .Afm}/{A0...Am_2cm_iAlpi 4~ ,4- A®...Am_3Cm_aAlm_>iAlm 4~ • • - 4" Afj.. ,Mm)
Многоканальные системы
205
Продолжение табл. 16
Показа- тель Условия Формула
Тср, 0 (^р) Mft = .O X Л* *tf <j -*ъ 1 «о 1 -сх ^5 J. -С It 4— л •Q IHii g г л -*й U + х о — <
о-|Е О о 1 и - 5 ". т / т—1 i 4- '+S<-»-'("7')2O \ £=1 Л=1 х mk_k ( *>«₽)}
Гвз (4») мй>0 (1 + А) ^з»’ А см. ТСр, о (fp)
ajh aih х X х -ъ TZ1- тао‘ * j £ SI "Ml 1 Л .г Я * -• SJ- А + + । l: >» > 4L 1Г « тч. ?г Х X
Л** (*. “) 2 , * ?? V II о 2 $Л0... M-tCi Д (SCJ + собу 4- Лу) 1 £=0 /=0
Р0 (^3» ^р) 0 т = 3 т* = 2 (I -Ь бу) ехр (—Зр), у < р/2; р = Ма, у = (1 + Зр) ехр (—Зр), у > р/2
Р0 (^з» ^р) Э з * д йг II !| II - w О (1 + бу + 4,5у2) ехр (—Зр), у < р/2 (1 + Зр + 4,5у2 - 1,5 (2у - р)2 ехр (-Зр);. р/2 < у < 2р; (1 + Зр) ехр (—Зр), у > 2р
206
Расчет надежности систем с временной избыточностью
17. Многоканальная система с независимым восстановлением
Показатель Условия Расчетная формула
<2^’ая. #р.л») GGtnl ci — 1 — Um r—m QC1) (mt3 — (m — 1) t, t) 4- (1 — F (0) X X QU)(mf3~ t, t, m — 1) 4- ь 4- j Q(1) (mt3 — x, t, m — 1) at (xU) dx; a a = max (0, mt3 — (m — 1) t) b = min (mt3, t); at (x, t) =(x, t) ил
Р (*3. *р» т) m — 2 (1 4- у) e~P, T < p, T = 2Mp, p = 2M3 (1 + p) e—p; T > P
m = 3 (1 4- 2? 4- t2/2) e-p; 7 < р/2; p = ЗМ3; у = 3Mp (1 + P + — (2y — p)2/3!) ©“P; p/2 < y < 2p (1 4- p 4- p2/2) e—₽; -y = 2p
Л (f3, tp, m) II II о « 2Л, р<т 2Xp/(l 4-P). P>T
Mfe-0 m = 3 Q. + V/ CL* °- V/ 5 ?-|<N - ” 1 - с? II P- x—X Ъ. f % A + -I? 1 | °- О- м -ф" ₽- s/ + II 1 5 °* од ₽t 1 £ + 1 IQ и . ~ $2 <N «яг|сч 4~
Th (0 GGml ct — 1 — Um t j Kr (x) dx Krt = tTo/tTv 4~ Тв) 0
MMml Ci~l — i/m л 4- p Ф 4- Pr
DTU (/) MMml ci — I — i/m 1 / 2Лр/ % o/oi m ((Jl + |x)i (X + (1)*(4<‘ X 2>1(2 + 4- (Л 4- p) t) e* (Z'+|X) 14- Xe“"
Многоканальные системы
207
Продолжение табл. 17
Показатель Условия Расчетная формула ।
Тм (if э IB- IS |! 1 о «а(1 +М,е~а'»)
5 я- 11 II “□ <з (1+<2+е~3“э)
Пример 13. Технологическая система
с номинальной производительностью
с0 = 40 изделий/ч состоит из техноло-
гических линий, имеющих интенсив-
ность отказов X — 0,01 г1 и среднее
время восстановления Тв ~ 5 ч. При
технологической подготовке производ-
ства к выпуску партии изделий объе-
мом V ™ 3200 шт. в течение / = 100 ч
для компенсации простоев создан запас
готовой продукции v ~ 800 изделий.
Необходимо найти вероятность выпол-
нения задания, среднее время выпол-
нения задания, средний объем выпу-
ска за время 100 ч, среднее время до
исчерпания запасов, среднюю произ-
водительность в интервале (0, t) и до
выполнения задания, коэффициент ис-
пользования запасов.
Решение. Для расчета вероят-
ности выполнения задания используем
вычислительную процедуру 15] при
к = 0,01 ч-1, 0 = р/Х =20, X/ — 1,
m = 3, /3 = У/с0 “80 ч. Среднюю
производительность в интервале (0, t)
определяем по формуле Сср (i) =
Г с°Сср (0 = 3_1 (120Сср(0), где
ССр (0 определяем по формуле табл. 9г
Средний объем выпуска V = Сср (t) t =
= 38,2-100 = 3820 изделий. Значения
^вз (^з)’ ^ср находим по формулам
табл. 16; средняя производительность
с (У) = V/TM (V), коэффициент ис-
пользования запасов &иэ ~ v^v 4"
4- 7ВЗ (и)). Другие результаты расче-
тов: Р (V, t, m) = 0,9984; ГВз = 84;
Гср (f) “ 451.6; гср (t) = 38,2; сср X
X (V) = 38,1; kw3 (о) = 0,042.
Средняя производительность в ин-
тервале (0,100 ч) составила 95,5 %
от номинального значения.
СИСТЕМА СО СТРУКТУРНЫМ
И ВРЕМЕННЫМ РЕЗЕРВИРОВАНИЕМ
И НЕОБЕСЦЕНИВАЮЩИМИ
ОТКАЗАМИ
При организации структуры много-
канальной системы, состоящей из А/
идентичных устройств, могут встре-
чаться следующие варианты:
все N устройств используются как
параллельные каналы, т. е. все они
имеют многоканальное соединение;
N устройств группируются в /г, во-
обще говоря, не равных групп по Nt
устройств в группе (А^ 4~ ... + ~
= N)', из устройств mi имеют мно-
гоканальное соединение, а л/ = Ni~~
— mt — резервное соединение;
часть устройств (иг из N) выделяется
для организации параллельных кана-
лов, а остальные Af — m переводятся
в структурный резерв.
Система с бригадным заданием и об-
щим структурным резервом с дробной
кратностью.. Система состоит из m
параллельных каналов и п резервных
устройств, каждое из которых может
заменить любой отказавший канал.
Отказы обнаруживаются мгновенно и
устраняются за время, имеющее экспо-
ненциальное распределение. Все уст-
ройства имеют постоянные интенсив-
ности отказов. Система может нахо-
диться в одном из состояний I =
= 0, m 4- и. Причем в еь — еп она
имеет максимальную производитель-
ность с0 — 1, в состоянии en+i про-
изводительность ct — 1 — ilm. Интен-
сивность переходов из в рав-
на Аь а из в ei-t равна Мj.
Заданы число каналов m и число
резервных устройств л, интенсивности
переходов Af к A4j, i =0, m 4"
208
Расчет надежности систем с временной избыточностью
18. Система с общим структурным резервом
Показа- тель Особые условия Расчетная формула
0 tp) 1 т — 2, п = 1 HP, а = 0 Mft = 0 (3 — 2е-0) е"2» + 6е-2₽ (р — 1 + €“₽), ^3 ^р» Р = ^3 (3 — 2е—р) е“^2р 4- 6е~2р (у + е~р — е~₽+v), tp, у = Мр
X 9 £ 5 11 »* У to II Я » ° II II о ►- (1 4- 2р 4- гр2) е-2р, t3 < tp, р — М3 (1 4- 2р 4- 4р? — 2у2) е“2р, t3 ^tp, у = Мр
т = 3, п = 1 HP, а = 0 Л4Л = 0 (28 — 27е-р — 24р 4- 18р2) е“зр, tg tp/2; р = &t3, у = Х£р (24 (р — у) 4- 18у2 — 20 — 27е“р 4- 48е“р+?/2 — -24 (у — р/2)2) е““3р; (24у 4- 18у2 4- 4 — 27е“р — 24е~р+2? 4- 4-48e~p+v/2) е“3Р, f3>2fp
т = 3, п = 1 ННР, а = 0 СО -1- — Ч~ СО 1 X № со “ -о ? I /Л 4- 7 4 | с ч- 1 — ?? « to 1 со V 1 « W "° ~ — Г *О II м к 1 + « to СО _L Т = s 4-< 1’ 1. х A j. < 4“ г ч~' Л + -| to « о*. та п ' 1 to та «*
сч о II II е 8 II а? 6 Я (16е-₽ + 12р - 12 - Зе-2₽) е"2», /, < <р; (6 — 8е_₽ + 3e-2p + 12у — 24e~₽ (е1’ — 1) + + 6е-2р(е2?_1))е-2₽: /3>(р
т = п = 2 ННР, а = 0 (1 + 2р + 4- (2Р)2 + 4- (2р)3) е-2₽, 13 < «р (1 + 2р 4- -±- (2р)2 4- 4? (р2 — РУ 4- Т2/3)) е“2р, \ " / ^3 tp
Многоканальные системы
209
Продолжение табл. 18
Показа- тель Особые условия Расчетная формула
Гер (^р) т — 2, п. = 1 -1-+-L/1+.4М + Ло 1 Лх \ Ло м 1 (1 Ч~ Mi/Ao)/Ai / д . । + л2+м*а ( а*р + , Л2 ( —(Л»+^Ма)\\ + Ла + М4„ '1-в ‘ ')
т = п = 2 1 , 1 , All . ? , fr + M.Ta „ Ло 1 Ах 1 Л0Лх 1 и 1 Л. + М*« х(*.+таяг<'-"''<лл+"‘1>) г _ 1 Л , , MtM2 \ ,г Ла v+ л, 1 ДоЛ, /
т — 3, п = 1 1 I 1 4 O-3V/2 2 _6V, 1 Ло 9Х 9Х ’ Ло = 4%, ЯР; Ло = 31, ННР
Г„з(У т = 2 t (\ | Лп+ifМ п+2 \ \ Сх 4- МП+1Т п / / п п \ гп=4- 1+у п-^- л- \ s z=t ai /
т — 3 <*+(в*+))/(**+ + Л!„+а + (Лп+1 + Л1п+1)) )
Принятые обозначения: HP — нагруженный режим резервных
устройств; ННР — ненагруженный режим; Лд = (т + п) % при HP, Ло = тк
при ННР.
210
Расчет надежности систем с временной избыточностью
19. Результаты расчетов к примеру 14
Вероятности i
0 1 2 з
Pi 0,3563 0,4196 0,1851 0,03638
Р (ta, ip, т, п) 0,99898 0,9971 0,9754 0,7866
Ро (t3, tpt 2, 2) = 0,9834
производительность с$, длительность
задания t3, непополняемый резерв вре-
мени tp или время функционирования
t = t3 + £р. Расчетные формулы при-
ведены в табл. 18.
Пример 14. Невосстанавливаемая вы-
числительная система (ВС) состоит из
четырех идентичных устройств, два из
которых образуют двухканальную си-
стему, а два находятся в нагруженном
резерве. ВС поручено выполнение двух
сеансов расчета и выделено время 12 ч.
Интервал времени между сеансами
т= 18 ч. Для выполнения одного
расчета одному устройству необхо-
димо 12 ч. Интенсивность отказов
устройства в рабочем режиме или на-
груженном резерве равнаXj = 0,02 ч-1,
в ожидании сеанса = 0,001 ч-1.
Необходимо найти вероятность выпол-
нения задания,.
Решение. Согласно исходным
данным для каждого сеанса 13 = ip =
= 6 ч, структурные параметры си-
стемы т — п = 2 к началу первого
сеанса. К началу второго сеанса с ве-
роятностью pi, i = 0, 1 и 2; tn = 2,
п— 2 — I, ис вероятностью р3: т =
/ 4 \
= 1, п = 0, где pi ~ I j X
X ехр (-(4 - t) (2Мз + V)) (1 -•
— ехр (—(21^3 + %2Т))1» * = 0, 1, 2,
3. Искомая вероятность
Ро (^з> ^р> 2, 2) — р3Р (i3, ip, 2, 2) -}-
+ PiP (*з, tp, 2, 1) + р2Р (t3, tp, 2, 0)+
-Р Рзе 2Х1/з
где Р (t3, tp, 2,2) и Р (t3, tp, 2,1)
находят из табл. 18, Р (i3, ip, 2,0) —
из табл. 17 при т ~ 2, Mh — 0,
t3 = tp. Результаты расчетов сведены
в табл. 19.
Система с раздельным резервирова-
нием каналов и бригадным заданием.
Система состоит из т независимых
каналов, и каждый канал имеет п — 1
идентичное ему устройство в резерве.
Резерв, приданный одному из кана-
лов, нельзя использовать для резерви-
рования других каналов. Каждая груп-
па, состоящая из одного канала и ре-
зервных устройств, является однока-
нальной системой. Между т подси-
стемами распределяется бригадное за-
дание длительностью t3. Каждая под-
система имеет собственный ремонтный
орган, состоящий из одной или не-
скольких ремонтных бригад. Каналы,
взаимодействующие между собой при
выполнении общего задания, слабо
связаны, и поэтому cft == 1 — k/tn.
Обнаружение отказов обеспечивается
идеальной системой контроля мгновен-
но и достоверно.
Заданы число каналов т, число
устройств в подсистеме л, интенсив-
ности переходов в графе состояний
подсистемы, включающей п устройств
(одно основное и п — 1 резервное):
Л<-п — интенсивность перехода из е{
в i = 0, п — 1;, -г- интен-
сивность перехода из в I =
— 1, п; длительность задания
непополняемый резерв времени. Ве-
личина равна сумме интенсивно-
стей отказов всех работоспособных
Многоканальные системы
211
20. Невосстанавливаемые системы с раздельным структурным резервом
Показа- тель Особые условия Расчетная формула
Z5о (^3» /р) ННР лр> = X X а т . Н<: S 1 4Mt =" 1 IWI =1- £ л 1 -к | < € а /Л и ~ £ Q । 1 Л| i £ t s Ч -'Л 1 « ”» I «ч. 1 1 V Ю з л < 1
HP, п = 2 Л^п = 2Х лр = X т—I (-2Г 2 ( ^т- Г1 ) < 1 — / <* 4-1. i=0 2mp)) — (—1)! (1 — I (i + 1, тр))) = Р°; ^р/(/и — 1); р = Т = ^р> ро — ДР; tp/(m — 1) < t3 < 2tp/(m — 2); f m—I mlvi / 2m — 3 — i \ 1 ЛР = т(~2Г 2Д m-2 ) 7ГX I 1=0 X ((m - 1) P - v)' e“”₽ f (-1 )'+t + 4 e-“₽) + \ J m—2 VI /2m — 3 — i \ 1 f + 2j ( m-1 j-n^-’JP-v/x 1=0 X f e—2,”P+p+V _p _1_ e— (2m-H) P-V^ 1 \ z I
212
Расчет надежности систем с временной избыточностью
Продолжение табл. 20
Показа- тель Особые условия Расчетная формула
7’ср (tp) ННР т — п — 2 2 1 Л А + Т = Ч
HP т = п — 2 4- 1 е"-47 2Х ЗА, 1 I2X
Из (У ННР т = п = 2 <а(1+-^-(2+рР)е~2»}/ Ра(13, оо)
HP т = п — 2 /3 (1 + 2е—2р (2р — 4 + (2 + р) + + (4 - 6е~р + 2е“2р))/рР0 (/3, оо))
Pq (^3> tp) ННР т = п = 2 (1 + 2р +-±-(2р)2 +-g-(2р)3} е~2р, p<v
HP т = п = 2 4 (2р — 1) е~2Р 4 (5 + 4р) е“4Р, Р< Y. Р = ^э> У = t
тя(/) ННР т = п = 2 -L (2 _ (2 + Kt)
HP т = п = 2 з 2 —Kt I 1 e—2Kt 2k к 1 2k
Примечание. См. принятые обозначения в табл. 18.
устройств группы в состоянии et, n-i т.е. Л<»= J к^, где - /=1 интенсивность отказов /-го устройства в состоянии ех.. Величину опре- деляют по формуле J == р min (i, г), где р — интенсивность восстановления одной ремонтной бригадой; г — число ремонтных бригад в подсистеме. Расчет показателей надежности дан- ной системы можно вести по формулам табл. 15—17, если принять, что к = = l/T’cp (л), FBi (0 = 1 — ехр X X (—М( /), где М(п1} —- интенсивность восстановления подси- стемы в состоянии еп\ Тср (п) — сред- няя наработка подсистемы до отказа, определяемая по формуле Рср (п) = ~ 2d ^4 Ло|)--4) ' f=i s=o Ad1) ... AfW 1 4
Многоканальные системы
213
21. Результаты расчетов к примеру 15
m Т’в Режим p = 0,9 p — 0,99
Cp( Тыс. о пераций/с
2 2 HP, kK = 1 39,12 36,96
2 1 HP, kK = 1 39,72 38,72
2 2 HHP, kK = 0 39,60 37,52
4 2 HP, kK = 1 69,36 60,0
Некоторые частные случаи для невос-
станавливаемых систем приведены в
табл. 20.
Пример 15. В двухканальном вычи-
слительном устройстве с быстродей-
ствием каждого канала 20 тыс. опе-
раций в секунду и бригадной органи-
зацией работы для повышения надеж-
ности применено раздельное нагружен-
ное дублирование каналов. Интенсив-
ность отказов одного канала X =
= 0,05 ч-1, среднее время восстанов-
ления Тв = 2 ч. Оценить гарантируе-
мую с вероятностью р реадьную про-
изводительность системы в интервале
времени t — 20 ч, считая отказы ка-
налов независимыми событиями, а р =
~ 0,9 и 0,99. Для тех же р оценить
реальную производительность также
в следующих случаях: а) Тъ = 1 ч;
б) m = 2, п = 2, НИР; в) m = 4,
п = 0.
Решение. Искомую производи-
тельность определяем по формуле ср =
= е/э (p)!t, где с — 40 тыс. операций
в секунду; t — 20 ч, a t3 (р) опреде?-
ляется из уравнения Q(1) (fa, t, tn) —
— 1 — p. Вычисление функции Q(1) X
X (Z3, /, tn) при t — 20 4, tn 4,
1 = 0,05 Ч-1, 0 = l/lfB = 10, kt = 1
проводим с помощью вычислительной
процедуры [5J. С помощью той же
процедуры вычисляем вероятность и
при пг — 2, но к заменяем на Хд =
= (1 + ад W(2i_-f- + ц), а р =
Mg/Ag 2/Аэ7'в — р, =
= 1/Тв. Результаты расчетов сведены
в табл. 21. Из таблицы следует, что
в четьгрехканальной системе фактиче-
ская производительность, гарантируе-
мая с вероятностью р, больше не
вдвое, чем в двухканальной системе,
а лицц> на 77,3 и 62 % соответственно
для р = 0,9 и р — 0,99 при HP.
СИСТЕМЫ С ПЕРИОДИЧЕСКИМ
КОНТРОЛЕМ И НЕПОПОЛНЯЕМЫМ
РЕЗЕРВОМ ВРЕМЕНИ
Система состоит из m взаимозаме-
няемых каналов, выполняющих бри-
гадное задание длительностью ta. Вы-
полнение задания нарушается потоком
отказов интенсивностью Ло в каждом
канале. Для уменьшения обесцененной
наработки задание разбивают на п
этапов. Для организации контрольной
точки, подготовки к выполнению ново-
го этапа и действий по проверке ре-
зультатов-выполнения этапа затрачи-
вается 'Время fK. Время восстановле-
ния Тв = 0 (случай сбоев) или мало
по сравнению с tK, и тогда его вклю-
чают в состав tK.. Предельное время
завершения работ равно t. По способу
контроля выделяют две модели надеж-
ности.
Модель 1. Каждому каналу при-
дается устройство аппаратного кон-
троля, включаемое периодически с пе-
риодом т = ttyt3/n и имеющее собствен-
ный поток отказов интенсивностью Хк.
Контроль полный и достоверный. После
обнаружения отказа (сбоя) и восста-
новления работоспособности канала он
возвращается вновь к выполнению
того же этапа сначала. Ни один из
этапов не передается для выполнения
более чем одному каналу.
Модель 2. Контроль сбоев обе-
спечивается методом повторного счета
по совпадению результатов. После
каждого просчета затрачивается вре-
мя tK на сравнение результатов. При
214 Расчет надежности систем с временной избыточностью
22. Системы с периодическим контролем
Показатель Условия Формула
1 Модель 1 У) ( 7 ) Чт~1Р*ро} — t — п^т, 6 — т 4- £и P(I) (kt, t, m) pk 4- ( г ) X г i X i, rn)t kcm P(1) (0, t, m) — I; p — 1 — <7 — exp ( —X0); Л — Xo 4 - '^h
Модель I т — 2 442''’"Г.лзь X (\ -L- gJL±ffZ.2. '*) 1 n - 21 r rlsL' X k • q 2j J Г ‘ ’ L 8 J r i [=:) j^Q v fl 1 a n + 2j~l \ 2/4-1 n ~ 21 4- 1. fpi “ t th i
Р^п(пт, t,m) Модель 2 и Д, т e H " - V e C El-* I i ? •• E * 1 « E — 7- | I! 34 •«J O' '7 z~4 li H 1 ’ Ci. S' 5- T '7 1 c a. 1 1 Д V «И? 6" й Д II X
Многоканальные системы
215
Продолжение табл. 22
Показатель Условия Формула
Модель 2.1 0, т = 2 1 — {'/’Qu1 ’ (t, / - е, 2) + 2р<да> (т, < - е, 2) + + Р2<№ (т, Г —в, 2)}, Qi1’ (т. t, 2) = ?2Q{1>(t, i-e, 2) + + Р</ОД1‘(Т. t — 9, 2); QP’(T, t, 2)— = W(T, t — 6, 2)
Модель 2.2 k - 0, т — 2 l-VW’ft, <-e. 2) + 2wQ;i'(T, If - 0, 2)}; t, 2)=?2Qp>(T, «-0, 2)
Модель 2.3 k = 0, т = 2 pQi»(T. t — 0, 2) + tfitf > (t, t — Q, 2); QP>(T, I, 2) = 9Qj»(T, t — Q, 2)
Ро (пт, tp, 2) Модель 2.1 P2n((l ng)2 — ng2 ((1 —- (—l)n)/2), *pi = 0 p2" |(1 + nq)2 + n (n + 1) q2 + 2л (n + 1) (2л + + 1) дЗ/3 + n (2л3 + 2n2 — n — 3) q4/6 + + ч' 1~<Г~(8п3 + 17"2 + 11п - 2) J ’ /р1 = 20
Твз (^э» Модель 1 т = 2 гр (' р) + 4^<1+^ + , 0 Л \ ( р У"1 + 4 I1 14-^7 к 1+9/
Модель 2 т ~ 2 nfl 1 8 n"f Р Vp 1 1 Р 1 ₽ V l) U+J ₽ 4 2 q / p \2n+l t0 f / p \л—I 4 1l+q) ' 2 [1 l+q) + 1 -f“ Я fi । f P \2n 1 \ . + 2 к 1 к 1 +<7 / / J+ Tt f , 2q / p n f p к2,1—1 \ + 2 к P к 1+9/ к 1+9 / / Модель 2.1: Tq = 20 (I + 2q + 2^)/p (1 + 9)3J 0(1+2g) 1 P (1 + 9)a
216
Расчет надежности систем с временной избыточностью
х
Продолжение табл. 22
Показатель Условия Формула
Твз (^з> т) Модель 2 т = 2 Модель 2.2: т0 — 0 (1 + 3g)/р (1 -f- g)2; Ti = 0/p(l +7) Модель 2.3: т0 = 20/р; тх = 0/р
ТН (0 т) Модель 1 т = 2 0(2рР/0] — (?) + ^'/в]+')
Модель 2 0 (р [«/01 g- + 4- (2? -
несовпадении результатов любых двух
просчетов выполняется третий просчет.
При совпадении этап считается выпол-
ненным, и канал приступает к выпол-
нению следующего этапа. Если число
невыполненных этапов стало меньше
числа работоспособных каналов, то
загрузка освобождающихся каналов
происходит согласно одному из сле-
дующих „правил.
1. Каждый этап, если есть свобод-
ные каналы, поступает в два канала
и каждый канал выполняет его дваж-
ды и сравнивает результаты. Обмена
информацией между каналами нет.
2. Каждый этап при наличии сво-
бодных каналов передается для испол-
нения двум каналам, которые обмени-
ваются результатами и сравнивают их.
3. Каждый этап выполняется только
одним каналом, освободивщиеся ка-
налы простаивают в ожидании оконча-
ния работы во всей системе.
Заданы число каналов т, длитель-
ность задания t3, число этапов п =
= tnt3li, интенсивность отказов кана-
ла Хо и устройства контроля Хк, время
подготовки нового этапа fK, макси-
мальное время выполнения задания t.
Расчетные формулы для вероятно-
стей выполнения задания Р'о1) (пт,
t, т) и Р<£) (nr, t, т) = 1 — Q(Kn (пт,
I, т) среднего времени выполнения
задания Тва (t3, т) и средней полезной
наработки Тп (t, т) в интервале (0, 0
приведены в табл. 22.
Пример 16. Сравнить по вероятности
и среднему времени выполнения зада-
ния, содержащего п этапов, при ве-
роятности сбоя на этапе q = 0,1 сле-
дующие варианты организации работы
двух устройств.
1. Одноканальная система с син-
хронным счетом на двух устройствах
по одинаковым алгоритмам и перио-
дическим сравнением результатов.
2. Двухканальная система с ап-
паратурным контролем и = Хо.
3. Двухканальная система с кон-
тролем по совпадению результатов
при повторном счете и тремя вариан-
тами загрузки каналов при одном
невыполненном этапе.
Решение. Расчет показателей на-
дежности одноканальной системы про-
водим по формулам:
Ро (nr, /р1) = р2п ((1 + ng)2 —
— л (n + 1) д2), /р1 = 0;
Ро (пх, /Р1) = р2п ((1 + ng)2 —
-п(п + 1) (1------L(1+p)«<7>),
/pi = 20;
Рвз (пт>) = П0/ра.
Для двухканальной системы исполь-
зуем формулы табл. 22. Результаты
расчетов сведены в табл. 23 и 24.
Из таблиц следует, что по среднему
времени выполнения задания лучшей
Многофазные системы
217
23. Среднее время выполнения задания
п Одноканальная система Двухканальная система
Модель 1 Модель 2.1 Модель 2.2 Модель 2.3
1 1,235 1,238 2,038 1,193 2,222
2 2,469 1,421 2,403 2,334 2,404
3 3,704 2,288 4,136 3,506 4,261
4 4,938 2,689 4,747 4,643 4,751
5 6,172 3,407 6,267 5,772 6,366
10 12,35 6,296 11,57 11,36 11,61
50 61,72 29,89 56,08 55,80 56,13
100 123,5 59,38 111,6 111,4 111,7
24. Вероятность выполнения задания Ро (пт, £р1)
Одноканальная система Двухканальная система
Модель 1 Модель 2.1
л Vе
1 2 1 2 1 2
6 0,992 0,999 0,757 0,880 0,996 0;999
10 0,981 0,997 0,550 0,804 0,990 0,998
50 0,724 0,908 0,001 0,015 0,817 0,943
100 0,384 0,658 — —* 0,527 0,881
является двухканальная система с ап-
паратурным контролем. Но она имеет
практически вдвое больше оборудова-
ния, чем остальные системы. Именно
поэтому при одинаковом резерве вре-
мени /р1 она имеет наименьшую ве-
роятность выполнения задания. Да-
лее по величине Т^з следует двух-
канальная система с взаимопомощью
каналов при выполнении последнего
этапа, но она близка к двухканальной
системе без взаимопомощи каналов.
Последняя превосходит одноканаль-
ную систему и по вероятности, и по
среднему времени выполнения зада-
ния.
6. МНОГОФАЗНЫЕ СИСТЕМЫ
Работа многофазной системы органи-
зована так, что на вход ее первого
устройства производительностью Cj в
каждый отрезок времени Д£ поступает
столько единиц продукции N, сколько
оно сможет обработать за это время
при безотказной работе, т. е. 2V (Д/) =
= Cj&t. После обработки в первом
устройстве продукция поступает во
второе устройство, затем в третье и
т. д. Если все устройства имеют оди-
наковую производительность, работают
безотказно и синхронно, то никаких
простоев устройств или неполного
использования их производительности
из-за отсутствия продукта на входе
устройств или невозможности принять
обработанную продукцию на выходе
нет. Иначе говоря, отсутствуют «тех-
нологически связанные» простои (ТСП).
При неравной производительности
и отказах устройств возникают тех-
нологически связанные простои, обус-
ловленные либо недоиспользованием
производительности, либо приостанов-
218
Расчет надежности систем с временной избыточностью
кой функционирования устройств в
работоспособном состоянии. Для
уменьшения ТСП устанавливают про-
межуточные накопители («бункеры»,
«хранилища», «парки», «запоминаю-
щие устройства» и пр.) для хранения
внутренних запасов продукции. Си-
стему считают работоспособной до
тех пор, пока она может выдавать
готовую продукцию.
Наличие запасов в накопителях
позволяет при определенных условиях
не прерывать выдачу продукции в уста-
новленном темпе даже тогда, когда
в системе есть отказавшие устройства,
что при отсутствии запасов привело бы
к прекращению выдачи продукции,
а следовательно, к отзыву системы.
Именно поэтому наличие запасов соз-
дает для отказавших устройств неко-
торый резерв времени и увеличивает
показатели надежности системы. Оп-
ределенный уровень запасов можно
поддерживать благодаря внешним ис-
точникам или внутренними средствами
в процессе естественного функциони-
рования. Одним из таких средств
является запас производительности,
позволяющий увеличить заполнение
накопителей, расположенных после бо-
лее производительного устройства.
Вместе с тем повышение производи-
тельности может сопровождаться сни-
жением безотказности, поэтому оно
не всегда целесообразно, так как одно-
временно с увеличением запасов уве-
личивается и суммарный поток отка-
зов устройств.
По структуре многофазные системы
относят к последовательным системам,
в которых фазой называют участок
системы от входа до первого накопи-
теля, между накопителями и от по-
следнего накопителя до выхода си-
стемы. Многофазное соединение может
использоваться наряду с другими ви-
дами соединений в последовательно-
параллельной структуре. Повышение
показателей надежности наблюдается
при установке накопителей для хра-
нения внутренних запасов и в сетевой
структуре. В этом случае понятие
многофазного соединения следует от-
носить к любому пути между одним
из входов и одним из выходов системы.
В многофазной системе исследуются
те же случайные величины, что и в дру-
гих классах систем. При, отсутствии
общего не пополняемого резерва ис-
следуются время до первого отказа Го
(первого прекращения выдачи готовой
продукции на выходе системы), на-
работка между соседними отказами Тн.
Кроме того, рассматриваются суммар-
ное время собственных Тпс / и техноло-
гически связанных простоев Тпт i /-го
устройства и системы, уровень запол-
нения накопителей Vj. При наличии
общего не пополняемого резерва вре-
мени рассматриваются также такие
величины, которые уже были рассмо-
трены для одноканальных и много-
канальных систем. Вероятностные ха-
рактеристики перечисленных случай-
ных величин являются показателями
надежности.
ДВУХФАЗНЫЕ ОДНОКАНАЛЬНЫЕ
СИСТЕМЫ
Показатели надежности системы при
выполнении задания известной дли-
тельности. Система состоит из двух
последовательно соединенных элемен-
тов, имеющих производительность со-
ответственно q и с2, и промежуточного
накопителя транзитного (Н1) или тупи-
кового (Н2) типов емкостью Уо =
= 20 min (clt с-2). В начальный момент
времени накопитель заполнен до уровня
Vi == Zi min (q, q). Интенсивность от-
казов элементов У1 и У2 и накопи-
теля Н равна соответственно
и %н. Времена восстановления имеют
распределения FB1 (/), Fb2 (О и ^вн (О-
Восстановление неограниченное, т. е.
каждый элемент ремонтирует собст-
венная ремонтная бригада. Если. сг >•
> с2 и элемент У1 работает с произ-
водительностью сг из-за переполне-
ния Н, то его интенсивность отказов
равна X, — Если q < q и нако-
питель пуст, то У2 работает с произ-
водительностью q. Тогда его интен-
сивность отказов равна Ц — у2Х2. При
выполнении задания длительностью
и q — q уровень заполнения нако-
пителя не возрастает, так как У2
должен работать непрерывно в тече-
ние времени /3. При q > q допу-
скаются отказы У1, но такие, что за
время восстановления текущий уро-
вень запасов в накопителе не падает
до нуля. При q < q допускаются
Многофазные системы
219
отказы У2, при этом У! работает на
заполнение накопителя. Но к момен-
ту /3 накопитель должен быть пуст,
чтобы задание было выполнено свое-
временно. Отказы У1, У2 и Н — собы-
тия независимые.
, Заданы интенсивности отказов Хх,
A.j и Хн, и функции распределе-
ния Fnl (/), Fn2”(/) и FBH (/); производи-
тельности Cj и с2- тип накопителя HI
или Н2, емкость z0 = V0/min (съ с.^
и начальное заполнение накопителя
гг V/min U j, с2). непополняемый ре-
зерв времени
Расчетные формулы приведены в
табл. 25, где знаком * обозначена опе-
рация свертки. Значение Р2 (^з’ °)
при Cj С с2 следует находить численно,
применяя для решения интегрального
уравнения с разностным ядром k (t)
метод последовательных приближений.
В той же таблице через р (zx) обозначена
плотность распределения уровня за-
полнения накопителя в начальный мо-
мент времени.
Пример 17. В вычислительном комп-
лексе из двух ЭВМ решается задача
статистического моделирования. ЭВМ-1
с быстродействием Cj - 90 тыс. опе-
раций/с подготавливает предваритель-
ные данные для модели и передает
их через устройство обмена (УО)
в буферное запоминающее устройство
(БЗУ), состоящее из двух блоков опе-
ративного запоминающего устройства
(ОЗУ) и одного накопителя на маг-
нитной ленте (НМЛ), откуда эти дан-
ные поступают по требованию в основ-
ную память ЭВМ-2 с быстродействием
с2 — 80 тыс. операций/с. Найти ве-
роятность безотказного функциониро-
вания комплекса в течение I = 18 ч
и среднюю наработку до первого от-
каза, полагая, что обе ЭВМ выполняют
в одной реализации моделирующего
алгоритма одинаковое число операций.
Наработка на отказ ЭВМ-1, ЭВМ-2,
НМЛ и УО с ОЗУ равна соответст-
венно 100 , 250, 1250 и 5000 ч. Среднее
время восстановления Тъ = 0,5 ч.
Сравнить полученные характеристики
с характеристиками надежности того же
комплекса без БЗУ. Как изменятся
показатели надежности, если предва-
рительную обработку поручить ЭВМ-2,
а основную — ЭВМ-1?
Решение. Согласно исходным
данным ЭВМ-1 имеет запас производи-
тельности в 10 тыс. операций/с, т. е.
а = 1,125. По исходным данным на-
ходим pi = Хх/3/а =0,16, а = ц,Х
Х(а — l)/^! = 25, сх > с2, = 0,
Vo — оо, Zj = 0. Расчет проводим по
формулам табл. 25. Вероятность (t3,
а) ж Ру (оо, а) = 1 — 1/сс = 0,96.
Согласно точной формуле Рг (t3, а) =
— 0,961. Вероятность Р (t3, а) =
= ехр ( (Х2 "Ь ^-нмл-!- ^уо) ^з) FxX
Х(/3, а) = ехр (-0,005-18) 0,961 =
= 0,878. При гг = 0 находим сред-
нюю наработку
+ а 4-1 —
-/(°v+“ + 1)2-4“)) =
= 196 ч.
Без БЗУ средняя наработка ТсрХ
Х(а — 1) = (М + Аг)-1 = 0,01'4-! =
= 71 ч. Вероятность Р (t3) = ехрХ
Х(—f3/Tcp) = ехр (—18/71) = 0,777.
Если ЭВМ поменять местами, то сог-
ласно формулам табл. 25 имеем: Р (t3,
а) -- ехр (— (Х2 Н- Хнмл Ч- ^уо) /з)^
ХР2 (t3, а) = ехр (—0,05X18) 24/25Х
X (1 + 0,01/2) __= ехр (—0,09) X
X 0,952 = 0,87; Тср =172 ч. В этом
случае БЗУ работает лишь при отказе
ЭВМ-1. Поэтому требуемый объем па-
мяти уменьшается. Если емкости БЗУ
достаточно для хранения передавае-
мых данных, то можно не использовать
НМЛ. При этом Р (t3, а) = 0,952 ехрХ
(—0,0042X18) = 0,883, Тср = 210 ч,
т. е. больше, чем в 1-м варианте.
Коэффициент готовности двухфаз-
ной системы. Система состоит из эле-
ментов У1 и У2 и тупикового накопи-
теля Н2. Интенсивности отказов в ра-
бочем состоянии равны Xf, и лн.
Во время простоя в работоспособном
состоянии интенсивности отказов эле-
ментов равны и к'2, а X' = 0. При
работе с неполной производительно-
стью интенсивности отказов элемен-
тов равны соответственно и Х2-
Восстановление работоспособности осу-
ществляется различными ремонтными
бригадами с интенсивностями щ, jAa
220
Расчет надежности систем с временной избыточностью
25. Показатели безотказности двухфазной системы
Показа- тель Условия 1 Формула
1 Система при с^^с2 и tp — 0
Р (*з» а) - II А Л *4 о (1 - Fa (W) (1 - F, (/,)) Р, (<з, а) для Я1; (I Fz (t3)) ехр ( Аг]Лн^з/(А1 + Рн)) X X Pi (t5, а) для /72
Pl ('а. о) С1 > tp = о, Vo = оо, Vi>0 Fbi (0=1 — — ехр (—М II с. х [S -8 . Д . ^а н " О <у е j + + । t и в +.. -S ®_ <£ а а=—>о Х> f 7? 1 е ? о "-5 - «О < - в Is ~ = + г 1 5 < •s * •HllV £ X £ " J - a 8 "<£ 8 f । » + T -° •* II X
Сд > Сл, /р = 0 Vo = оо, Vt = 0 FBl (0 = = 1 - е“И1 2 (2n") (1 + а)-2"~‘ I (2n + 1, (1 + л=0 n ’I + a) Pi) = 1 - e“(1+a) p* (/,<Pi) + co n—[ + /a/i(<Pi) + (a—1>2 a 2 x X/n(<Pi)); <Pi = 2Kapi; /пМ = У-^Х_/см.табл. 10 ” ' ' v! (n + v)! <v=0
Многофазные системы
221
Продолжение табл. 25
Показа- тель Условия Формула
Pi Уз, а) > Cs, /р = 0 Уо = оо, Vx= 0 Тв = const 1- Е е- <"-» •> (I (л. хп) + П=1 \ + S (/ + 1) Тп-2-// (/ + 2, хп)^| /=о / Хп = min (у, шах (0, р, — (п — 1) ?)); Т = Х1Тв/(о- 1)
^Э=ОО шах (0,1 — 1/а), р > 3/а, а 2> 3
Л(/3, а>г1) с%, ti ~ 0 z0 = оо ^2 4~ + Ai (i3, a, Zi); Ai = ai (t3, а, г^/р! (ta, a, zi) СО Oi«a. а. zl) = ^-e-^‘ п=0 X е“ <1+“> р‘ (In (ЧР1) - '»«<Ч>1» \К а/
Гер (ai г1) о 11 я ,0.0 0 А II Л * * W J-(i —р; (Х2и. ajexp^pj г, (I - (^2н ’ а)))) » ^2н ~ ^2 “Ь Ч > Q1 (Чи ’ а) = (а “ + + 1 — у/" (вр + а-|-1) —4а 2а
^*2Н — 0 а < 1 (1 + Hizi) 1 Рт а))* а — 1 < Xt/цх
а.2о) N N Г* о и м V II V О О «Р P,=e-<>‘(1+Pi-
222
Расчет надежности систем с временной избыточностью
Продолжение табл. 25
Показа- тель Условия Формула
Л(*э. ^о) Сх> Са /Zi = 0 / ?о 0 / *> / Л = 1 — -j-J— (1 — е“ (I+“> Р1), 1 + а ' Pi Xi20/(g — 1) р = е^1 (*a-zo) _|_ е“р1 (у L (1 _ 1 V а — «(pj —т))(1—e~W1Z®)), Pi>v pl = l -J—(l-e-<I+a>v) + 1 -f- Ct + e-a?(e-vр1>т=-^г
Тср (a, Zq, 21) ) Г Д* ® 11 11 11 о * 1 eM2o 1 ( aa . 1 v x(eMz. 1} ^0+«!-.)) 6 = (ot 1 )/(a 1); Yj = Xj/Xp а = pi (a — 1)/Xj#= 1;
И о в. II 1? п II *< Xi \ Ti 10l1+7i(a—l)/ + g / X12O у \ 2 U-17 /
Zf < Zq Хдц = 0 ( 1 gXifiZo I 1 / 1 I А у Xi 1 7i г" а — l\7i а — 1/ X | •+^.(_1 + e«»-S + Ct — 1 4-XiZi (1+jii/Xi)/(l—ot)j> «^1
а = Vi = 1 (1 + zi (1 ~b Hl/М). Хгн = 0
Многофазные системы
223
Продолжение табл. 25
Показа- тель Условия Формула
Тср (а» %о» Z1) 21 ~ 20» Yi ~ 1 Х2Н = 0 -Г 1^те6к,г- + - » + Al 1 Ct — 1 (Ot — 1 4“ 1 ^izol 9 Р — СЛ> • 1 1
Z1 = 20 Л2Н > 0 г—. 1 71 (с 1)(©2 cojexpf J_° х Лгн [ [ \ ° 1 4- (а — 1) (Т1 4- ©2)) — (а — 1) Ti©i ) X X е-®Л- - (W1 + ^ + <° ~ 1) X \ Aj \ Л1 X (71 + ©i)) — (а — 1) 7i©a)e~Wa*'1Zo j 2(а —1) (Д (0 2) + а 1Т =F ]/~(^(а-2) + а-1)» + 4(а_1)^я('1 + Р + ’^.')) **1 \ **1 / /
г“(! 1 — ~г1-(<*— ОMi) х Лгн ( л2н / х е-Х1<»12о-Х1<»121 _ Ц __ 71 _ Yl (а — 1) (0а Х X е—Х1<ив2о—1^(1 +у + 4-(а— 1) (т14-©2 —х х (1 + м + (а _ ц (Т1 + + ©1 — Л- Т1©2 ) ) U Л>зн / / | j
224
Расчет надежности систем с временной избыточностью
Продолжение табл. 25
Показа- тель Условия Формула
ср (а> г0» 21) Zo — ОО Х-2Н > 0 Г“ (1 — Л ехр (— (%2Н + Hl (1 — Л)) zx)); лгн л 1 / ^*2Н 1 1 л=ггЧа-хг+“ + + 1-((^(а-2) + а- 1)* + + 4(а- 1)^ (1 +₽ +^))*/2) =“~ '
Zq оо, ^2Н = 0 4- (а/(1 - а) 4- (₽ + 1) 2^/(1 - а)), <х<1
DT (а) / / Zi — Zq ^2Н = 0 т (т . 2а (а 4- 0 _ n а —2 \ , 1 °F V ср + ь^а — 1)2 а— 1 ) + + (^2 ^2)А1 J ^2 — & + j — 2а (а + 1) (а — 2) Мо/(« — О2 (а — I); b — (а — 1) (1 — аа) (2а 4~ оа. — \)Ца — I)2; В2 = 2а/т! (а — I)2 4- 2 (1 — атх/(а — 1)) (аа — — а 4- 1) Vo/Ъ (g — 1) (а — I)2 + + (Mo (ga - а + 1 )/(а — 1) (а - I))2 4- + евХ‘г° ( {2Оа ns + b + cXi*o) ; \ Ух (а— О2 / с = 2а (а — 1 4- (а 4- а — 1 )/Т1 (а — О8 (а “ О
Система при ; и = О
р в) 8 ° II II (1 — Fi (/,)) (1 - FB (<3)) Рг (ta, а) для Я1, (1-Л(М)»р(-ХДД/<*.+ + ^и)) Рг (^’а) «ля Я2 ,
Р1 Л. в) II К 8 о S 1 II II «я о Я* П «—« N Йч II ^3 е”Мв 4- A*g К a J k (t3 — у) Рл (у, a) dy; 0 t(«-y)= J -^-^(гКаХае/^Х 0 X ехр (— ^=^(На — Мв~М* — »))<® а = ца(й— 1)Дя
Многофазные системы
225
Продолжение табл. 25
Показа- тель Условия Формула
(оо, а) 8 ° II II шах (0, (а — 1)/а (1 4~
Тер (я) Vo — оо 2/{]Л(^н +Х2 («+ О)2 —4аХ|4- + (2 а) Х1н (ос 1) Х2} » ^1н = ^<1 •+
^1Н = 0 1/Ха(1—а), а<1
Р (*з, a, zj) Cj= Са 21= 20 e-W. (, _ e-v J 4 Z 0- + 1, х. «з-Zo» j ; у = P1ZO; ^гн = 4"
С1= с, РоР (*з. в. 20) + Pie~M* + । /1 D о\ е“Х2н*э / ] Мз . + (1 р„ Pl)« (1 (Х+(11)2с + + Ж VX (А + Н1) 20 V У X Л(2КА.1 (*3 — 2о) у)), у = |А120; Л = А<1 ^ан Pl = Р (21 = 0), Ро = Р (2Х = Z0), Р(«1) = (1 “ Ро — Р1)/2о
Тср (af zi) Р (Z1) = (1 - — Ро — Pl)/Zo Ci = Ct “F РоТ ср (в» 21 = 20) 4“ 1(1 — Ро — Р1) X У /| ^>1 (1 ехР (—A*2hzo (1 4~ Н1А)))\ \ (Л» + Hi) ^ан2о /
С1= Са 21 = 2о 1 / j ^*1 — ^2HZ0 (1“*“**1/Л')'\ ЬиД * )
<г >? ° II II II J (1 + (^>1 4“ Н-1) 2о)
226
Расчет надежности систем с временной избыточностью
Продолжение табл. 25
Показа- тель Условия Формула
Р (*8, а) Ср Н1,20=^0 Zj — 0 Fit W = = 1- е”1-' гстема при q 2> сл и /р > 0 2^е-Р’ (/ (П’ * Pl(*a’ ** а))’ п=0 ра = (Ха -f- Хн) ta Pi а,. '₽• °)=1 - 2 4ге-Ул-(₽1)" л=0 = e-v 2 У"~‘а‘ <* + п=0<=0 + а)-"-'-7(л + 0 1) I (п + 1 + 1. Р1); (n + 01 (п + 1 -01 Л“' = («4-1)141 ’ ,<п Л„ (Р1> = = V /2Л + п\ а* (я + 1) х k ) (п + 4+1)(14-а)2‘+'*+1 Х/(24 + л+ 1. Pt (!+«)) Y = Pi^p» Pi = Х1^3/а; pa = (Ха + Хн)
Hl,Zo= ОО zt = 0 Hi = Нг т k / 1-24г«-т /<*+••₽.)+ к! \ А=0 ' +24л*-,(р1)е“'”) /=0 '
7*ср (а» 2о) Н2, zx ;= z0 1з= 0 хг(л»+ А> + л‘ (1+ Т1 + ₽н ) ) ’ „ _ — 21_- R —lis. V1“V’ Рн” Хх (I +Bi) Пх + (а— 1)(1 +Яа)02 — — (а — 1) В2Л<о ° ~ (а - 1) ((<a,Bi - ?1Ш1) - » — (©1^! — ?1©2) e-^*x‘z° 4- ТнДш)
Многофазные системы
227
Продолжение табл. 25
Показа-
тель
Условия
Формула
Тср (а» 2о)
Н2, = Zo
=0
и Рн- Во время ремонта одного из эле-
ментов другие также могут отказы-
вать. Емкость накопителя Уо =
= Zo min (clt Са).
Заданы производительности элемен-
тов q и с2; емкость накопителя Zj>;
интенсивности отказов Хр Ха, Хц,
XJ, Х2; интенсивности восстановле-
ния |хр р2 и рв. При Cj> с2 задана Х^
а при Ci <С с2 интенсивность Х2.
Расчетные формулы для случая
Ci == са приведены в табл. 26, а при
Ci > с2 в табл. 27. При сг < с2 расчет-
ные формулы получают также из
табл. 27 путем круговой замены ин-
дексов 1 и 2 во всех входящих в фор-
мулы переменных Xf, Хр XJ. Кроме
коэффициентов готовности, вычис-
ляют коэффициент наложения потерь
б (Zo, а) — условное значение коэф-
фициента простоя системы при усло-
вии, что элемент У2 работоспособен,
а элемент У1 — нет.
Пример 18. Автоматическая станоч-
ная линия разделяется на два участка
с равной производительностью и имеет
промежуточный бункер емкостью, до-
статочной, чтобы принять всю про-
дукцию первого участка, изготовлен-
ную в течение 1 ч. Интенсивности от-
казов и восстановления: Х^ = 0,2 ч-1,
Ха = 0,02 ч"1, gi = 1 ч"1, ра = 0,2 ч”1.
Найти коэффициент готовности и ве-
роятности состояний в установившемся
режиме для трех режимов работы:
1) Ч = Хг; 2) х; = 0, X' = Х2; 3) X; =
= Х2 = 0. Как изменится коэффициент
готовности, если увеличить на 10 %
производительность первого участка?
Решение. Согласно исходным
данным Zq = l,X=Xi + Xa = 0,22 ч-1,
р=Ц14-ра=1/2 ч-1, V— 0,5. Ре-
228
Расчет надежности систем с временной избыточностью
26. Стационарные показатели надежности двухфазной системы при сг =г ся
Показа- тель Особые условия Расчетная формула
Kr(zo) Хн=о -у- (1 + £- (р + Тз*) (еАг*/(р + Хъ) + 4-(eAz° —1)/(V—(1 + -y~+-jf- + + 1 (н+х?.) ( 1 еЛ” + л = -у^- (V — 1) (1 + Р); V = XaPiAtm; Ус ~ Р~ Pi 4~ Иг* Л, = К| + Х2
•и О II II > "W G^)2+vft(*+^<*+^)1
* =? г II II II - о о (v + ^’(l+T)t‘,z")/(2 + Т + + -Цг-(1+т)2») г* \ Л / /
о о — II II t (v2eAz° — l)/(v — 1) (1 + + (1 + veAz° Ц- + v (X + р) («*”• - 1)/Х (v -1))
Хн — 0, Vf = 1 v=#= 1 TT^O-VTiT6^)1 Ла г Ра \ Л1 “Г Pi / б (*о) = (1 + * (еА* — l)/(v — 1))~1
о” —• i «< Л II II II «Г £ (ц’+ 4-!“• (X +10 (X + и (1+С») / (1+ + -j- (Х'+ и) г, (1 4- с)) (X + ji)’, с = Кн (рн 4- 2Х) (pg -|- 2р) + (рн -|- 2р) (2Х + Р + Рн)
II г < II II О (1 +ЬАз(* + р)2<Л"Тх
о о — II 111k «4s (v — l)/(veA** — I)
Многофазные системы
229
Продолжение табл . 26
Показа* тель Особые условия Расчетная формула
«(Zo) kg = 0 z(I+v)/(x+tli+x^ +
^4 II * £ > У (Х + Н>. (еЛг« - I))
А и II II << ££<< (1 - (X + Н) М2 + (X +|0 (1 + 0 г»)
27. Коэффициент готовности двухфазной системы при Хн = О, С\> С2
Условия Формула
Ха = 0 1 -Xi/ (х> + Hie-111'2" + ь (^_ 1) 0 -е-‘,1л)) , Ь Д-Н 1 = -1=-^ Pt (а—1) а
Хд 0 / 8 (Ло + Л> + Лв) / 2 А$; / <=1 Ло = (((М 4~ и) (а 1) сз + Нс4) ((М 4“ н) (а 1) В3 4" 4- ^s)/(M (М + р) 4* Л1 = р ((^«2сз (а 1)4- 4" с4 (^*1 4" ^г)) — (^<2 (° — 0 4" 4“ ^4 (М 4" ^г)) ^s)/(P2 (^i (М 4- р) 4- ^Аг))« Аз = Х^Л^р; Л> = csD2 4~ Ав = ((а — 1) сз 4~ с«) ^si 4“ 4- ((о — 1) &з 4“ ^i) Лв = --- (c^Dz + Z>4Dx); 0 Лд =Л5 (Х2 (а — 1)4-Ml Л7 = 1; Лд = Xj/p; Di = е~в‘г° — e-s,z‘; D, = — (1 — e"S|*°) — Si (1 . g-н + щ; В, = <а_^»^-.5-, bt ~ db — (а — 1) (ар! — pa + (а^рх — MpaVp); ьа = ^14- (Мч—М1! — Pi (а — 1) (^2 4- и*)); «1. 2 = (*! ЯР V bf — 4ab2 (а — 1))/2а (а - I)
230
Расчет надежности систем с временной избыточностью
Продолжение табл. 27
Условия Формула
сз = Hi (Hi (Ц — + “ (Н 4* ^1 4" ^г))/(н(а — 1) («а — $1));
и г’ II II II = Pl (Hl (Ха Х2) 4" (ХаР 4* ^2)/(fl l))/(p<a (S2 Si)) (a _ j) (5j _ sj { X <“ SA s.e"'‘2’) +
Hi = Hi = н 4- (X + p)2 (— (1 — e—S1Z°) — (I — e~s,z°)) 4- 4- (h (a 4-1) 4- g2^1 (2H2 + Xp 4- aX2) (e“s*z° — .-’•’•4/11-1- X (^ + н)41 + M° + 1)/2ац) e 4/11+2p+ X X (— (1 - «-’’•) (1 - «-'•’•) ) + (52.-’л - \ $1 Sa / _ + - J— 4+ 2X|i (s, s,) s, — s, \ (h + H) (X + 2ц) X’ (a + 1) X ‘ 2Xa 4pa 2a ' (X 4- H8) 4- gH2 \ + (.(3-1) 1 v
28. Результаты расчетов к примеру 18
Условия Режим P Ф 6 Kr
1 0,7652 0,1279 0,1069 0,2283 0,7717
Cl = c. 2 0,7565 0,1380 0,1055 0,2269 0,7731
3 0,7855 0,1214 0,0931 0,2197 0,7803
Cl> Cj 1 0,0872 0,3180 0,5948 0,1768 0,8231
зультаты расчетов для коэффициента
готовности и вероятностей застать бун-
кер пустым Р, полным Фис проме-
жуточным заполнением G приведены
в табл. 28.
Без бункера коэффициент готов-
ности Кг = 0,7576 в режиме 1 и
Кг = 0,7692 в режиме 3. Коэффициент
простоя кп уменьшился на 5,8 %
в режиме 1 и на 4,8 % в режиме 3.
При запасе производительности Кп
уменьшился на 27 %.
МНОГОФАЗНЫЕ ОДНОКАНАЛЬНЫЕ
СИСТЕМЫ С ОДИНАКОВОЙ
ПРОИЗВОДИТЕЛЬНОСТЬЮ ФАЗ
Система состоит из т последова-
тельно соединенных устройств оди-
наковой производительности с проме-
жуточными накопителями емкостью
Vo* = «ofc. k= 1, m — I (рис. 4, a).
При отказе одного из устройств осталь-
ные продолжают работать до тех пор,
пока не заполнятся все накопители
Многофазные системы
231
между входом системы и отказавшим
устройством и не опустошатся все
накопители между ним и выходом си*
стемы. Устройства приостанавливают
свою работу не одновременно, а по
мере переполнения своего выходного
или опустошения входного накопителя.
Во время работы k-e устройство отка-
зывает с интенсивностью Х&, а после
приостановки работы в работоспособ-
ном состоянии не отказывает вовсе.
Поскольку во время ремонта отка-
завшего устройства другие еще ра-
ботают в течение некоторого времени,
в системе возможно появление более
одного неработоспособного устрой-
ства. Время восстановления имеет
экспоненциальное распределение с па-
раметром р.
Заданы интенсивности отказов Хь
i — 1, т\ емкости накопителей
= 1, т — 1; интенсивность восста-
новления р, производительность уст-
ройств с.
Коэффициент готовности
Кг (z0/, i == 1, m — 1) = 1 —
— Х/(Х + Н). X = Ц + Ц* — Ч, (99)
а значения Х£ и kJ’ находят из си-
стемы уравнений:
kfe+i = Х*+1 + Ц х
X (1 — Y (Vfc + 1) g (X, Vfc, Zoh)) ,
Аз
г)
Рис. 4. Структурные схемы многофазных
систем и сетей
л
л7 *3
\ — kfe+iAfe» л.—i, m—i;
xr = xh + x^(i-(vfc + i)x
X g (X, z0ft)/2vfc),
k = 1, m-1; X = Ц + ХЦ1;
X* = Xp X£* = Xm, g (X, v, zQ) =
= {2pv (еЛг° — l)}/{(v — 1) (X + p)X
X (1 4- ve42°) + v(2p + Х)(еЛг° — 1)}»
(100)
Решение системы (100) следует .про-
водить методом последовательных при-
ближений, полагая в качестве началь-
ных условий значения Х£ = Х£* =
= Х&. Вычисления прекращают, когда
разность между значениями X = Х£ -|-
+ Х£* — ХЛ для различных k не ста-
нет меньше заданного значения:
max | Afc — Xj | < 8.
Пример 19. Автоматическая станоч-
ная линия разделена на четыре уча-
стка с тремя промежуточными бун-
керами. Интенсивности отказов уча-
стков Xj = Х4 — 0,01 ч"}, Xj = 0,02 ч-1,
Xj = 0,1 ч-1. Интенсивность восста-
новления р = 1 ч"1. Емкости бунке-
ров z01 = 10 ч, Zq2 — 2 ч, Зад = 5 ч.
Найти коэффициент готовности и коэф-
фициент наложения потерь.
232
Расчет надежности систем с временной избыточностью
29. Результаты расчетов к примеру 19
Номер итерации К2 ч* Ч ч* к
1 0,02087 0,1056 0,1056 0,10095 0,10647 0,10655 0,9038
2 0,02096 0,10685 0,1067 0,10125 0,10781 0,10722 0,9027
Xf = 0,10781, X: = 0,10792.
Решение. Из уравнений (99),
(100) составляем шесть уравнений от-
носительно Xj, k ~ 2, 3, 4, и Xj*t
k = 1,2, 3:
М = Х2 4* Xt fl jr- (1 -f" Vj) g (Xi X
x (i + vi), vlt 701)); (i)
M ~ ^>3 + M (1------n~ (1 + vz) S (^2 X
X (1 4~ V2)» V2» *02)^» V2 — Xj*/Xjj (2)
X* = x4 + X* fl — (1 + v3) g (h* X
\ *
X (1 4- V3), v3, z03)),
v3 — Х4/Х3» v, — X** /X}i (3)
ХГ=Х1+Х?*(1 — (l+v0gx
X(X**(l+v1)/v1, l/vlf z01)/2Vi); (4)
M*==^ + M*(i-d + v2)gx
X (X£e (1 4-‘v2)/v2, 1/v2, z02)/2v2); (5)
Xj • = X3 4- X4 (1 — (1 4- v3) g (X4 x
X (1 4- ve)/va, l/v#, zM)/2v8). (6)
Сначала задаем X* — Хз, X£* = X3
из уравнений (2) и (5) находим X*
и XV, затем из уравнений (1) и (6)
X? и Х3*. Это первое приближение под-
ставляем вновь в (2) и (6) и т. д. Когда
найдены установившиеся значения Х$,
Х2* и Х§, Xj*> из уравнений (3) и (4)
находим X** и X;. Результаты расчетов
сведены в табл. 29.
Коэффициент наложения потерь 6 =
= (X — Х4)/Х* КГ4 = (0,10781 —0,01)Х
X/(0,10667-0,991) = 0,917. В отсут-
ствие бункеров Кг = 1/1,14 — 0,8772;
8 (X» v) = 0; Х2 — X] 4" Х2; Х3 = )Х4"
+ ^4-Хэ! X; — X; Х3 •= Х3 4* Х4; Х2* =
4-Хз 4- + х4; кг = р/(Х + Р); 6 =
=(Х Хд)/Х* = 1.
Выигрыш по Кп = 1 — Кг будет
GKn = 0,1229/0,0973 = 1,26.
СИСТЕМЫ С СЕТЕВОЙ СТРУКТУРОЙ
И СОСРЕДОТОЧЕННЫМИ ЗАПАСАМИ
Ниже дано обобщение результатов
для двухфазной системы на случай
сети с произвольной структурой и
одним встроенным в нее накопителем.
Частным случаем такой сети является
многоканальная двухфазная система
с одним входом и одним выходом.
Скорость заполнения или опустоше-
ния накопителя в общем случае ме-
няется при каждом отказе в одном из
устройств сети. Однако могут быть си-
туации, когда при отказе скорость
изменения запасов не меняется. Это
зависит от расположения накопителя
и алгоритма управления материаль-
ными и информационными потоками
в сети. Заполнение накопителя мо-
жет происходить как вследствие из-
быточного продукта в сети, так и
вследствие временного падения про-
изводительности участка сети. Сеть
может иметь несколько входов мате-
риальных или информационных пото-
ков и несколько выходов. Поставка
продукции по заданному выходу про-
должается с интенсивностью, которая
Многофазные системы
233
позволяет обеспечить потребность в
продукции по этому выходу и которая
определяется пропускной способно-
стью и запасами в данный момент вре-
мени. Если позволяет пропускная спо-
собность, то заданная интенсивность
поддерживается до тех пор, пока есть
запасы. Полное прекращение .подачи
продукта или снижение интенсивности
подачи (снижение производительности)
вследствие исчерпания запасов рас-
сматривается как отказ системы. Коэф-
фициент готовности показывает сред-
нюю долю времени, в течение которого
производительность системы не мень-
ше заданного значения. Однако, кроме
этого показателя, с помощью стацио-
нарных вероятностей можно найти
коэффициент сохранения эффектив-
ности Ка где Ci — произ-
(/)
водительность в i-м состоянии; с0—
заданная производительность (по дан-
ному выходу системы).
Сеть со сбалансированным потребле-
нием. Структура сети и расположе-
ние накопителя показаны на рис. 4, б.
Особенность сети состоит в том, что
при всех работоспособных элементах
уровень заполнения накопителя не
меняется и относительная интенсив-
ность изменения запасов а0 =
— | Д Уо |/с0Д/ = 0, где Д Vo — изме-
нение запасов за время Д/; с0 — произ-
водительность системы в работоспособ-
ном состоянии. Состояния системы
разбивают на восемь групп (см.
рис. 5, а). В состояниях Do, Dr и D2
все элементы работоспособны, но в Do
накопитель полон, в Dz пуст, а в DT
заполнен до промежуточного уровня
г < г0. В состояниях i— 1, fe,
в сети есть отказавший элемент, уро-
вень запасов z > 0, происходит по-
требление запасов с интенсивностью flj.
В состояниях Bi в сети также есть
отказавший элемент, накопитель пуст,
производительность меньше требуемой.
В состояниях Fi и Ф, уровень запасов
не меняется, хотя есть отказавший
элемент. В состояниях накопитель
полон, в Fi заполнение промежуточ-
ное. В состояниях Pi накопитель по-
лон и восстанавливается работоспособ-
ность одного из элементов. В состоя-
ниях Mt накопитель пуст, а в состоя-
ниях Gi имеет промежуточное запол-
нение и пополняется с интенсивно-
стью Ь{. В состояниях Pi пропускная
способность элементов сети между на-
копителем и выходом системы такова,
что при наличии запасов всегда мо-
жет быть компенсировано уменьшение
потока продукции от входов системы.
Аналогично в состояниях Gi пропуск-
ная способность элементов сети между
входами систёмы и накопителем та-
кова, что накопитель всегда может
принять весь избыточный поток без из-
менения суммарного входного потока.
Отказы являются редкими события-
ми. Поэтому возможность повторного
отказа во время ремонта считают мало-
вероятной и в модели надежности пов-
торные отказы не учитывают. Все
элементы по последствиям отказов
разделяют на три группы: приводящие
к снижению уровня запасов (интен-
сивности отказов Ijf, при отказе про-
исходит переход Di~+Rj или
-► bi), не приводящие к изменению
уровня запасов (интенсивности отка-
зов 1ц, переходы и йг->-
-> Fi, Dz-+- и приводящие к воз-
растанию запасов (интенсивности от-
казов Лэь переходы Do -►
Gi, D2->- Gt), интенсивности вос-
становления этих групп элементов
равны соответственно p2j, Pai-
Как н в предыдущей модели, стацио-
нарные вероятности состояний обо-
значены теми же буквами, что и сами
состояния, а через Г/ (z), gi (г), fi (г),
(г) обозначены плотности распре;
деления уровня запасов z в накопи-
теле (0 z z0).
Заданы число элементов в каждой
из трех групп: k, п, т\ интенсивности
отказов элементов: Alft i = 1, k;
j = 1, n; Ag/, I = 1, m; интенсивности
восстановления pn-, p2j, Рз/i скорости
уменьшения запасов i~ 1,
увеличения запасов bj, j= 1, m;
емкость накопителя и0 — ZqC0, произ-
водительность системы при нормальном
функционировании с0.
Коэффициент готовности и коэф-
фициент сохранения эффективности:
k т
ъы = 1 - S - S +с<);
<=1
234
Расчет надежности систем с временной избыточностью
k
К, Uo) = 1 - 2 а,в, -
4=1
m
- 2 »4 (Pl + G|).
i=l
Вероятности В/, Pf и Gj определяют
ив системы уравнений:
m п
(1) U>, = 2 P4pl + S H«4®4.
<=1 /=1
k
Л1 = кц,
1=1
' п m
Aj = Mi, Aj = J] Mi,
1=1 1=1
к — Aj 4“ Aj 4" AaJ
(2) — k^iDf), i — lt n, (103)
(3) р.81-Рi — k^iDf} 4~ b^gi (z0),
i — 1, m;
k n
(4) XDa = У p>i|B{ -j- У1
i=l i=L
(5) p>2tMi — k^, i — 1, я>
(6) HiiBf = MA 4- atrt (0),
/ = 171;
(7) bf^(z)4-|i3^(z) —
— Mi^i (z) = 0, i = 1, m;
(8) —(z) 4- (z) —
—MAi (z) — o, i = i. k;
k
(9) kdvfz) = £ jiii<i (z) 4-
! Z=1
“1“ (z) H- jS M'S iSi (z),
1=1 i=l
(io) ?2ifi (z) = МЛ (z). * = ТГй;
(11) i (Z(j) —— 1»
(12) bigi (0) = XsiD2.
Систему дифференциальных уравне-
ний порядка т 4“ к решают в такой
последовательности.
1. Составляют определитель
/ /. ^11 \ Хц Mi Мт Mi
Л1з Н13- • А М1Л Л13 Л Иа1’ Л13 • - А м»т Л1з
(1 Мз \ Мй Мг Мй
4— ни Лц SOj р.12 \ Лдз/ Л1з л 1X81 Л1з •• а Нэт Л1з
Мл (1 Мл \ Мл Мл
л Ли д—Н12‘ Л18 «Ъ—Н1Л 1- -А — ) \ л13 / л И81 •' Л13 л ^8т Л1з
^31 Mi Mi Mi \ "Mi..
Л I111 Л13 А1з Н12-- а Н1Л Л18 sbi + Hsi 1 ~
А М-И Л13 ^37П л18 .. Мт .. Нм- • • а— М1Л Л13 Мт 1 А Л13 \ л13 /
23Б
Многофазные системы
I
Находят корни уравнения Д (s) = О
и представляют Д (s) в виде Д (s) =
= ai ... ... ьт (s+sj)... (s +
"г sk+m)> гДе Л18 — Лг Лд.
2. В определителе Д (s) заменяют 1-й
столбец вектор-столбцом || |ХцВ1 —
~ ^11^2» ...» ^31^2. •••>
А-зт^М* u представляют новый опреде-
литель Д^ ($) в виде
k
(5) = S «М (s) В/ + ai0 (s) Dit
/=1
i = l, k + т-
3. Вычисляют коэффициенты
k-f-m
Л<? (го) = al S “М (-»») х
V=1
Xe"Mo/Av, 1=М;
/=177; Лу= П>ПЛХ
i=i /=1
Л-|-т
х («I — sv);
t=i
i¥=V
k+m
(zo) = S ai0 Sv) X
v=l
X e s^°/AVt t = l, fe;
a|2) =
1
д(2)
л(1) 1 л(П
А(1> X Д*1)
л12 • • • л12 ... я2А
л<;> ... <
с
(2) _
i ~
л(1) _ лП) Д<’>
Л12 — ^2 ’ * ’ ^2k
4V • • • - ... 4V
1 ft ft ftft
A'2J=Det|^<}»||.
k
= s (-\) «!?’ =
/=i
t = 1, m; p8f = ^sf/p-sb
k m
1=1 i=l
Л-13 = At -f- A#.
4. Вычисляют коэффициент готов-
ности и коэффициент сохранения эф-
фективности:
(k
i=l
m
+2 (^+л₽‘) p. <im>
i=l '
f x i !
M^)=’-TT Se<W’ +
(i=l
m
+ <Г,ЛХ>2) + 2 Ь‘ (E»+< + ЛР«) '
t=l
(Ю5)
236
Расчет надежности систем с временной избыточностью
а)
Рис. 5. Граф состояний сети со сбалансированным (а) и иесбалянсирпиянии— (tf) потреб-
лением
Л — (1 + ре) (1 + 4* ^Da) 4*
k
k-{m m
+ E Et + S APi>
i=l t=l
(Ю6)
Сеть с несбалансированным потреб-
лением. Структура сети и расположе-
ние накопителя представлены на
рис. 4, б. Условия функционирования
такие же, как в системе со сбалансиро-
ванным потреблением. Отличие со-
стоит лишь в том, что при работоспо-
собном состоянии сети суммарный вход-
ной поток превышает суммарный вы-
ходной поток, а их разность поступает
в накопитель, пока он не заполнен.
При заполнении накопителя суммар-
ный входной поток уменьшается до
величины выходного потока. Граф
состояний (рис. 5, б) получается из
графа состояний сети со сбалансиро-
/Ванным потреблением (рис. 5, а), если
удалить в нем состояния £>2 и М/,
i = 1, п. В состояниях G} послед-
ствия отказа элемента могут быть не-
одинаковы. При отказе некоторых
элементов производительность сети L
(рис, 4, в) снижается на величину,
меньшую а0. Поэтому Ь{ < а^, и выход-
ной поток не меняется. Такие состоя-
ния являются работоспособными для
системы. При отказах других элемен-
тов снижается производительность
сети 2 до такого уровня, что она не
может обеспечить требуемую произ-
водительность с0. Поэтому скорость
пополнения запасов при неизменном
входном потоке возрастает до вели-
чины bi >• а0. Тогда возникает не-
доотпуск выходной продукции на ве-
личину bi — Oq. Такие состояния яв-
ляются частично работоспособными,
а их вероятность входит в коэффициент
простоя системы.
Заданы число элементов в трех груп-
пах: k, п, т, интенсивности отказов д,^,
i= 1, k; Kzj, j = 1, n; 1=1, m;
интенсивности восстановления p.^,
p3l-; скорость увеличения запасов при
работоспособном состоянии dj и при
отказе одного из элементов третьей
группы bt, i = 1, т; скорость умень-
шения запасов при отказе элемента
первой группы di, i = 1, k; производи-
тельность системы при нормальном
функционировании системы с0; ем-
кость накопителя Vo — CqZq.
Коэффициент готовности и коэф-
фициент сохранения эффективности:
k
Kr(*o) = l- S В,-
/=1
т
- 2 (G< + Pi) 1 [01 - о.]; (107)
i=l
Многофазные системы
237
„ , , , Л „ (5) (2) + |i3ie( U) - ЧЛ W = °.
Кэ (z0) = 1 — 2j <4Bi —
1=1 i = 1, m;
- S (.Gi + P|)max(0, h-a,). (108) 1=1 Стационарные вероятности состоя- ний находят из системы уравнений: (1) XD0 = У1, р-г/Ф< 4“ 2 Pef+ i=i »=1 + a<4i (zo)» X = Ai + Ла + Л8; (2) р>2{Ф{ = i — 1, п\ k п Ах = 2 ^it» ^г= i=l i=l A# = 2 Х^; i=l (3) — XgjZ^o-|-bigt (zo)> 1 = 1» Ш, (4) HitBt = °1П (0)» i = й"Л; (6) —atr; (z) + Hj/f (z) — Xj^j (z) = 0, i = 1, k; k (7) (г) + Id, (г) - £ Hi/, (*) - i=l — S iWi (г) — S Ptigi (г) = o, i=l t=l (8) |Wt (z) = Xjjjdi (z), i = 1, n; k (9) Oq^i (0) = 2 P-it^i» i=l (10) airi (z0) = XlfD0. (109) Систему дифференциальных уравне- ний порядка т + k + 1 решают в та- кой последовательности. 1. Составляют определитель:
Xifcfle ... —M-ifc —^ih^i
Xsi^i —Хз1а2 —^3k<h —••• “ где df = aja^, &i= bi/a^ находят корни уравнения Д (s) = 0 и пред- ставляют Д (s) в виде: Д (s) = аг ... Cftbi ... bm (s + Sj) ... (sH“Sh+m). 2. Составляют определители Д$ (s) путем замены Z-го столбца в Д (s) на вектор-столбец || рцВ1, .... 0, ..., 0[|* и представляют их в виде k Ai (s) = 2 aM(s)Bt- /=1 3. Вычисляют коэффициенты: = ®ij ( SvV^v» k пг k-1-т Ду = a bj (sj Sv)> i=l /~1 tgfcV ^Xjjdft sbi + p.31 + Хз]/»! ... Хз(бт —Xaftdfc Хзт51 ...'5^тН“Нвт+Хзто5т Ац Ы = 2 Alhf-sS°, V=1 i = 1, k + m; j = 1, k; Ли ... Xn Xjfc Д21 ... X12 Ла& л _ Дщ Xih ... Аы Bi ~ k An a12 / 1 [ AiX Л22 Л2й / 1 Ь / f==I Ahl Aki ... Акк j = 1» k;
238
Расчет надежности систем с временной избыточностью
30. Исходные данные к примеру 20
1 X/ И/ Pf = =
1 0,002 0,02 0,1
2 0,001 0,04 0,025
3 0,001 0,02 0,05
4 0,0005 0,04 0,0125
v=«l
4. Вычисляют искомые характери-
стики:
/ k
Кг(20) = 1 -Do 2 4-
\/=l
m \
+ £ (Aei + APi) 1 [», - a.] ; (110)
/-I /
(k
£ <hAbi +
i—l
m \
4- 2 + Лр*) maX (°* bi ~ I >
i=l J
= Jj bh+iv О • °)/Sv;
V=1
k _________
^iv = 2 Ai/vArJI I — 1, k 4“ CTJ
/=1
v = 1, k + m;
(HI)
где
k
D^ = (1 + ₽2) (1 + XDI) + £ XR/+
1=1
k m
4" 2 Лв< + 2 (л°* + Лр*)-
i=l i=l
k-f-m
Api = Pzi 4- bt j ^д+fve ву2®
v=l
i = l, m; p8f =X8l/p,3i;
k m
Adi = 2 ^iAri — 2 biAGi.
/=1 1=1
Отсюда можно получить как част-
ный случай модель системы, в которой
сеть 2 (см. рис. 4, б) пуста и накопи-
тель оказывается на выходе системы
(рис. 4, г). Тогда надо положить =
= Paf = 0, из (109) удалить третье
и пятое уравнения, а из остальных
уравнений удалить слагаемые, содер-
жавшие Pt и Gi, gi (г).
Пример 20. В транспортной сети
(рис. 4, в) с требуемой пропускной
способностью с0 и пр о изводите ль но-
31. Результаты расчетов к примеру 20
Zo, Ч Кг для вариантов /С_ для вариантов э ।
Z 1 2 3 1 2 3
/ 0 0,8421 0,8421 0,8632 0,9116 0,9074 0,9558
20 0,8689 0,9007 0,9447 0,9227 0,9345 0,9833
40 0,8731 0,9208 0,9668 0,9284 0,9463 0,9916
60 0,8794 0,9316 0,9752 0,9320 0,9527 0,9954
80 0,8837 0,9352 0,9793 0,9344 0,9565 0,9974
100 0,8866 0,9400 0,9815 0,9361 0,9577 0,9985
Многофазные системы
239
стью участков cj = ср0, Ci =сэ, са =
= с4 установлен накопитель емкостью
Уо = Со*о» Доступный участкам 1 и 2
для заполнения, а участкам 3 и 4 для
потребления. Интенсивности отказов
и восстановлений участков приведены
в табл. 30. Необходимо найти коэф-
фициент готовности и коэффициент
сохранения эффективности для сле-
дующих вариантов исходных данных:
1) Cj. *” 0,6, са —
= с4 = 0,4;
2) ci = с3 — 0,8, с2 = с4 = 0,4;
3) Ci = с3 = 0,8, с2 — с4 — 0,4.
Накопитель перемещен на выход си-
стемы, и между выходами участков 1
и 2 установлена безотказная перемычка,
к которой подключен запасной источ-
ник продукта U2 производительно-
стью 0,4 с0 (рис. 4, г). Пополнение нако-
пителя может происходить только за
счет основного источника Ux произво-
дительностью 1,2 с0.
Решение. Для варианта 1 по
исходным данным устанавливаем: k =
— т= 2, п = 0, Xu = Хь Х12 = Х2,
Х31 = Xj, Xg2 — Х4, Ао = 0, ctj — 0,6,
а2 — 0,4, Ьг = 0,6, Ь2 = 0,4. Для ва-
рианта 2 а0 = 0.2, ai = 0,6, а2 =
= 0,2, = 0,8, b2 = 0,4, другие дан-
ные, как в варианте 1. Для варианта 3
k — 3, п = 1, т = 0, а0 = 0,2, =
= 0,6, 02 = 0,2, а3 = 0,2, Хп = Х3,
— Х4, Xjj = Xj, Xjj! = Xj.
Результаты расчетов сведены в
табл. 31.
СПИСОК ЛИТЕРАТУРЫ
1. Бронштейн И. Н., Семендяев К. А.
Справочник по математике. М.: Наука,
1981. 720 с.
2. Черкесов Г. Н. Надежность тех-
нических систем с временной избыточ-
ностью. М.: Сов. радио, 1974, 296 с.
3. Креденцер Б. П. Прогнозирова-
ние надежности систем с временной из-
быточностью. Киев: Наукова думка,
1978. 240 с.
4. Черкесов Г. И., Бабуш-
кин А. И., Макаров Ю. М. Анализ
надежности двухуровневой иерархи-
ческой системы управления ГПС//Тр.
Л ПИ. 1987. Вып. 394. С. 18—25.
5. Черкесов Г. Н., Езимов С. Ф.
Расчет вероятности выполнения зада-
ния многоканальной системой с взаимо-
заменяемыми каналами. Алгоритм
ГФАП, per. № ПОО3604//Алгоритмы
и программы, 1979, № 3 (29). С. 45.
6. Черкесов Г. Н., Митрофа-
нов С. Ф. Расчет надежности однока-
нальных систем с временной избыточ-
ностью на основе численного обраще-
ния преобразования Лапласа. Алго-
ритм ГФАП, per. № ПОО4529//Ал-
горитмы и программы, 1980, № 6 (38).
С. 36.
Глава 5.
Обеспечение надежности
по стадиям жизненного цикла
1. МОДЕЛЬ ИЗМЕНЕНИЯ
НАДЕЖНОСТИ ПО СТАДИЯМ
ЖИЗНЕННОГО ЦИКЛА
Жизненный цикл системы охваты-
вает ряд стадий и этапов проектиро-
вания, испытаний, изготовления и
эксплуатации.
Уровень надежности системы в об-
щем случае зависит от уровней на-
дежности, достигаемых на каждой
стадии жизненного цикла системы
следующим образом:
/? = /? (РПр, Р ИСП, Р изг» Р эк)»
где Рпр = [^>оН_(1 Р0) Оцр] ЬПр5 (1)
здесь Ро — надежность номиналь-
ного (исходного) варианта системы
без какого-либо резерва или других
форм избыточности; апр — коэффи-
циент, выражающий эффективность
введения избыточности и других до-
полнительных проектные решений, на-
правленных на обеспечение надеж-
ности; Ьпр — коэффициент, выражаю-
щий качество (бездефектность) про-'
ектно-конструкторской документации;
Рисп — надежность системы, достигну-
тая в процессе экспериментальных ра-
бот и испытаний,
Расп — Е^пр 4~ (1 Рпр) аисп] ^исп»
(2)
где Рпр — надежность системы, до-
стигнутая в результате проектирова-
ния; a„cn — коэффициент, выражаю-
щий эффективность выявления и устра-
нения дефектов в конструкторской
документации (конструкторских оши-
бок); 6ИСП — коэффициент, выражаю-
щий качество (бездефектность) испы-
таний и корректировки рабочей доку-
ментации на изготовление изделий;
Ризг — надежность системы, обеспе-
ченная при изготовлении,
Ризг — исп 4“ О Рйен) °изг) ^изг»
(3)
здесь Риси — надежность системы
после завершения экспериментальных
исследований и испытаний; аиэг —
коэффициент, выражающий эффектив-
ность мероприятий, направленных на
обеспечение качества и надежности
изделий системы в процессе произ-
водства, в том числе эффективность
мер по выявлению и устранению де-
фектов в технической н нормативной
документации на серийное изготовле-
ние; Ьизг — коэффициент, выражаю-
щий качество (бездефектность) изготов-
ления изделий; Рэк — надежность си-
стемы, введенной в эксплуатацию,
Р эк = изг 4"-(I Ризг) °эк] ^эк* (4)
В этой формуле Ризг — надежность
системы, обеспеченная при изготов-
лении; ОзК — коэффициент, выражаю-
щий эффективность выявления и устра-
нения дефектов эксплуатационно-тех-
нической документации и локализа-
ции последствий отказа системы в на-
чале эксплуатации; Ьэк — коэффи-
циент, выражающий качество (без-
дефектность) работы персонала.
Используя формулы (1)—(4), полу-
чим рекуррентные выражения для
достигнутого уровня надежности си-
стемы после каждой стадии работ:
Р пр —o4~G —Р о)впр]^пр — [•] *пР;
Рисп = {[*] ^пр 4“ (1 ~ [ ] ^пр) °исп)Х
X &исп — о 4“ (1 — Ро) апр] ^пр 4“
4- (1 о 4- (1 Ро) °пр}^пр) °исп) X
X Ьисл = {•} 6ИСП;
Модель изменения надежности по стадиям жизненного цикла
241
^изг ~ [{•} ^ИСП 4“ (1 -{’} ^исп) X
X «иэг] ^изг — [{[^*о + (1 — Р о) «пр! X
X &пр 4" (1 [^о Ч- (1 Ро) «пр] X
X ^пр) «исп) ^отр + (I - {[Л> +
4* (1 Ро) «пр! ^пр 4“ (1 [Р о 4"
4“ (1 Ро) «Пр].«ИСп) ^исп) «изг] X
X £>ИЗГ ~ [ ♦ 1 ^изг»
РЭК ~ ([ ♦ ] ^ИЭг4~ (1 '— [ ♦ ] ^изг) «ЭК> X
X бэк = ([{[Ро 4“ О Ро) «пр! ^пр 4“
4“ (1 [Ро4-(1 Ро) «пр] ^пр)«исп) X
X ^исп 4- (1 {[Ро 4~ (1 Ро) «пр] X
X ЬПр 4~ (1 [Ро 4~ О Ро) «пр] X
X &пр) «исп) ^исп) «ИЗг] ^изг 4*
4- (1 - ([{Ро 4~ (1 - Ро) «пр] *пр 4-
4* (1 [Ро4“(1 Ро) «пр] ^пр) «отр) X
X &отр 4* {[Ро 4" (1 — Ро) «пр] X
X ЬПр 4- (1 [Ро 4- (I Р0) апр] X
X &пр) «исп) ^исп) «изг! ^йзг) «эк) ^эк-
Как следует из этйх выражений,
надежность, достигнутая на й ста-
дии работ, зависит от номинального
(исходного) уровня надежности Ро
и коэффициентов at, bt.
Коэффициенты Of характеризуют эф-
фективность мероприятий, оценивае-
мых математическим аппаратом тео-
рии вероятностей и математической
статистики. Коэффициенты характе-
ризуют потери надежности системы
вследствие разных ошибок, допущен-
ных при проектировании, испытаниях,
оформлении документов, в производ-
стве и эксплуатации, т. е. отражают
слабо формализуемую, неточно про-
гнозируемую и неоперативно контро-
лируемую статистически неустойчи-
вую часть надежности изделия (2, 6].
На рис. 1 показано влияние различ-
ных уровней Ро, й[ и Ь} на надежность
системы по стадиям работ. Из рисунка 1
следует:
наибольший рост надежности мо-
жет быть достигнут на ранних стадиях
разработки системы, а именно при
проектировании, однако достигнутую
надежность можно утратить на любой
последующей стадии жизненного цикла
системы;
Рис. 1. Динамика изменения надежности R
системы по стадиям жизненного цикла
(ЖЦ>:
1 — проектирование; 2 — испытания; 3 —
изготовление; 4 — эксплуатация; Р® » 0,5
важнейшую роль играет выбор ис-
ходного варианта системы, обеспечи-
вающего уровень Ро (в частности,
использование новых, неапробирован-
ных решений может снизить или по-
высить Ро);
реализация эффективных мероприя-
тий по обеспечению надежности (по-
вышение а/) позволяет снизить по-
тери и достичь требуемой высокой
надежности системы;
совершенно недопустимо пренебре-
гать «бездефектной» составляющей на-
дежности, особенно применительно
к уникальным системам, так как ошибки
и дефекты могут испортить самую
лучшую разработку;
необходимо учитывать затраты ре-
сурсов на повышение надежности,
реализуемые на различных стадиях
созданий изделий, уметь рационально
распределять располагаемые ресурсы
по стадиям работ;
увеличение числа контролируемых
стадий и этапов в разумных пределах
позволяет уменьшить потери из-за
недостаточной надежности.
На рис. 2 показаны относительные
потери надежности в зависимости от
числа контролируемых стадий при
фиксированных значениях Ро = 0,5,
= 0,5 и bf = 0,9. Ломаная линия 1
соответствует четырем контролируе-
мым стадиям, ломаная линия 2 —
двенадцати. Ломаная линия 3 показы-
вает разницу AQf = Q({1}— Q)2), по-
лучаемую при переходе от четырех-
к двенадцатнстадийному процессу соз-
дания и эксплуатации системы.
242
Общие вопросы обеспечения надежности
Рис. 2. Относительные потери надежности
в зависимости от числа контролируемых
стадий
На рис. 3 показана разница в за-
тратах на устранение причин и по-
следствий ненадежности при четырех
и двенадцати стадиях жизненного
цикла системы, полученная в предпо-
ложении, что стоимость доработок
документации и изделий от стадии
к стадии возрастает примерно на по-
рядок. Несмотря на уменьшение раз-
ницы AQf при переходе от стадии
к стадии, потери от ненадежности при
реализации двенадцатистадийной про-
граммы работ меньше примерно в
1,5 раза, чем при четырехстадийной
программе.
Рассмотренный пример характери-
зует качественную картину распреде-
ления потерь по стадиям жизненного
цикла системы. Для более детального
исследования конкретных многоста-
дийных программ целесообразно раз-
\рабатывать статистические модели.
• При создании дорогостоящих уни-
кальных сложных систем наиболь-
ший эффект в экономии материаль-
ных, стоимостных и временных ресур-
сов при прочих равных условиях дает
расчленение сложного процесса соз-
дания и эксплуатации системы на
большее число контролируемых ста-
дий.
Однако при введении каждой кон-
тролируемой стадии^ в процесс тре-
буются дополнительное время на сбор
информации, на /анализ полученных
результатов и выработку управляю-
щих воздействий, а также дополни-
Рис. 3. Зависимость экономического эффек-
та от числа контролируемых стадий
тельные затраты материально-техни-
ческих и стоимостных ресурсов. Поэ-
тому разделение процесса на число
стадий больше двенадцати может быть
оправданно только для сверхсложных
уникальных систем, отказы которых
совершенно недопустимы. При созда-
нии простых систем, по которым име-
ется большой опыт аналогичных раз-
работок, целесообразно сокращать
число контролируемых стадий не в
ущерб надежности.
2. СЕТЕВОЕ ПЛАНИРОВАНИЕ
И УПРАВЛЕНИЕ
Сетевые методы планирования поз-
воляют осуществить комплексный под-
ход при создании программы работ
и выборе оптимальной последователь-
ности ее выполнения.
Различные методы сетевого планиро-
вания и управления дают возможность
оценивать и оптимизировать затраты
различных видов располагаемых ре-
сурсов (временных, стоимостных, ма-
териальных и трудовых), а также вы-
бирать рациональные пути достиже-
ния требуемых значений основных
проектных параметров и надежности
системы.
Все мероприятия планируемой про-
граммы в их взаимосвязи представ-
ляются в виде наглядной схемы —
сетевого графика. Сетевой график со-
стоит из элементов двух видов: работ
и событий [4].
Сетевое планирование и управление
243
Основные свойства сетевого графика:
ни одно событие не может произойти
до тех пор, пока не будут закончены
все входящие в него работы;
ни одна работа, выходящая из дан-
ного события, не может начинаться
до тех пор, пока не произойдет дан-
ное событие;
ни одна последующая работа не мо-
жет начаться раньше, чем будут за-
кончены все предшествующие ей ра-
боты.
Работа кодируется индексом, со-
держащим номера событий, между
которыми она заключена. Свершение
события зависит от окончания самой
длительной из всех входящих в него
работ. Последовательные работы и
события формируют пути (цепочки),
которые ведут от исходного к завер-
шающему событию. Максимальное
число отдельных работ, входящих в ка-
кой-либо из путей, ведущих из исход-
ного события в данное, и дает ранг
события.
Сетевой график дает возможность
оценить количество и качество меро-
приятий планируемой операции. Он
позволяет установить, от каких из
них и в какой степени зависит дости-
жение конечной цели операции.
Основные параметры сетевого гра-
фика приведены ниже.
1. Наиболее раннее возможное на-
ступление времени /-го события Тр (/),
вычисляемое по формуле
Т'р (/> = max {Тр (0 -h itj),
где символами i и / обозначены но-
мера соответственно предшествую-
щего и последующего событий; tij —
продолжительность (i, /)-й работы.
Обозначение i CZ / показывает, что
событие i предшествует событию /.
2. Самое позднее допустимое время
наступления i-ro события
Тп (0 = гшп [Тп (/) — fij],
где обозначение j г~ i показывает, что
событие j предшествует событию i.
3. Резерв времени данного события
^ = 7'п(0-Тр (0.
4. Полный резерв времени работы
г лО» /) — Т'п (/) Т'р (0 —
Смысл полного резерва времени ра-
боты заключается в том, что задержка
в выполнении работы (/, /) на вели-
чину А///> гп приводит к задержке
в наступлении завершающего события
на величину A^j — гп (fj>).
5. Свободный резерв времени ра-
боты
rc (i» 7) = Т'р (7) Т'п (0 tij-
Смысл свободного резерва времени
работы заключается в том, что за-
держка в выполнении работы на ве-
личину Д/fj rc (i, /) не влияет ни
на один другой срок, определенный
данным сетевым графиком.
Основные показатели сетевого гра-
фика, по которым выполняется его
анализ, перечислены ниже.
1. Критический путь — полный путь,
на котором суммарная продолжитель-
ность работ является максимальной.
Это самый длинный по времени путь
в сетевом графике .от исходного до
завершающего события. Критический
путь лимитирует выполнение операций,
поэтому любая задержка критического
пути увеличивает время всего про-
цесса. События, через которые про-
ходит критический путь, и работы,
лежащие на критических путях, на-
зывают напряженными. Полные и сво-
бодные резервы времени критических
работ равны нулю (признак критиче-
ской работы). Критический путь рас-
считывают путем определения работ,
полные резервы времени которых равны
нулю.
2. Полный резерв времени нена-
пряженного пути — это резерв вре-
мени ненапряженных событий и ра-
бот, т. е. тех, которые лежат не на
критическом пути. Если ненапряжен-
ный и критический пути не пересе-
каются, то полный резерв времени
ненапряженного пути равен разности
между его длиной и длиной критиче-
ского пути (во временной мере). Если
ненапряженный и критический пути
пересекаются, полный резерв времени
равен самому длительному участку
ненапряженного пути, заключенному
между соответствующими парами со-
бытий критического пути. Полный
резерв времени ненапряженного пути
показывает, насколько может быть
244
Общие вопросы обеспечения надежности
увеличена продолжительность всех ра-
бот этого пути без изменения срока
выполнения операции в целом.
Сущность анализа сетевого графика
заключается в том, что выявляются
резервы времени работ, лежащие на
ненапряженных путях, и направляются
на работы, лежащие на критическом
пути. Этим достигается сокращение
времени выполнения критических ра-
бот, а значит, и всей операции.
3. Время выполнения работ (вре-
менная оценка работ) может опреде-
ляться либо по нормативам (статисти-
ческим показателям), либо (при от-
сутствии их) по следующим эмпириче-
ским формулам:
х ^mln + 4^нв 4“ ^тах .
=----------а--------•
_ ^тах —
=------6------’
где tij — математическое ожидание
продолжительности выполнения ра-
боты; fmln — продолжительность ра-
боты в наиболее благоприятных ус-
ловиях (оптимистическая оценка);
fHB — продолжительность работы при
условии, что не возникает никаких
неожиданных трудностей (наиболее ве-
роятная оценка); tmax — продолжи-
тельность работы при самом неблаго-
приятном стечении обстоятельств (пес-
симистическая оценка); 07у — средняя
квадратическая ошибка в определе-
нии продолжительности работы.
Математическое ожидание любого
параметра сетевого графика равно ЗДу.
Средняя квадратическая ошибка в оп-
ределении этого параметра равна
Вероятность свершения /-го собы-
тия в расчетный срок
где Ф — функция Лапласа; Т3 — за-
данный срок свершения событий;
Тр (/) — время заданного свершения
/-го события; (Jij — средняя квадрати-
ческая ошибка в определении про-
должительности работы, которая ис-
пользуется при вычислении раннего
срока наступления /-го события.
Методы сетевого планирования ши-
роко применяют для обоснования тре-
буемых ресурсов на различных ста-
диях жизненного цикла системы, вклю-
чая разработку, производство и экс-
плуатацию техники.
3. МЕТОД ОРИЕНТИРОВАННЫХ
ГРАФОВ С ПОГЛОЩЕНИЕМ
РЕСУРСОВ В ВЕРШИНАХ
Любой поэтапно рассматриваемый
процесс со случайными исходами на
отдельных этапах может быть представ-
лен некоторым ориентированным гра-
фом, т. е. перечислением вершин графа
операций, подлежащих выполнению,
и указанием последовательности пере-
хода от одной операции к другой, что
означает задание ребер графа и вы-
бор направлений на них. Одна из вер-
шин графа соответствует началу работ,
другая их окончанию. Тогда реа-
лизация процесса соответствует блуж-
даниям по графу, ведущим из начала
в конец.
При этом некоторые заранее задан-
ные вершины графа могут обладать
задерживающим (поглощающим) свой-
ством: траектория может проходить
через поглощающую вершину не бо-
лее заданного числа раз, своего для
каждой вершины. Это число называют
индексом поглощения. Постепенное по-
глощение траекторий в вершинах со-
ответствует исчерпанию некоторого за-
паса ресурсов (средств, времени, из-
делий и т. д.).
Некоторые вершины графа — про-
стые, элементарные вершины, дру-
гие вершины графа сами представляют
собой граф и являются сложными.
Условия поглощения в элементар-
ных поглощающих вершинах задаются
индексом поглощения в сложной вер-
шине.
В каждой вершине графа с I выхо-
дами из нее задаются вероятности
Ръ •••» Pl выходов по соответствую-
щим направлениям, так что Рг 4-
4~ Р2 Н---Н Pi = I. Предполагается,
что величины Р/ остаются постоянными
в течение всего времени процесса
блуждания, если только не изменится
Модель экспериментальных работ я испытаний
245
сам граф в случае поглощения или
условного изменения ребер.
«Путем» называют любую линию,
которая может быть проведена на
графе от начальной вершины по на-
правлению, определенному ориента-
цией ребер графа и в соответствии с ус-
ловным заданием ребер. «Траекторией»
называют любой путь, проходящий
через поглощающую вершину с ин-
дексом п не более чем л раз.
Таким образом, если траектория
блуждания проходит через поглощаю-
щую вершину, индекс этой вершины
уменьшается на единицу. Если ин-
декс вершины 0, то траектория обры-
вается. Путь на графе может быть бес-
конечным; траектория всегда конечна,
так как она всегда проходит через
поглощающие вершины, а индексы
поглощения — конечные числа.
Траектории, ведущие из начальной
точки в конечную, называют успеш-
ными. Задача состоит в том, чтобы
при заданном графе, заданных ин-
дексах поглощения и вероятностях
выхода из элементарных вершин вы-
числить вероятность успеха, состоя-
щего в том, что блуждание будет
проходить по одной из успешных тра-
екторий. Необходимо вычислить ве-
роятности каждой отдельной траек-
тории и сложить их.
Метод ориентированных графов с
поглощением пригоден для описания
и вычисления вероятности успеха лю-
бой целенаправленной операции с ог-
раниченными ресурсами (времени или
средств), поглощаемыми (расходуе-
мыми) в ходе ее выполнения. Если,
например, считать, что xt — средства,
отпущенные на осуществление х-й опе-
рации, то можно решить задачу об
оптимальном распределении общей
суммы средств X для достижения
(наибольшей вероятности успеха.
Если в двух разных вариантах для
одного и того же графа наборы пог-
лощающих вершин есть J — (1п, ...,
1т) И G = (/!, .... jn), причем J = G,
то нужно решить обе задачи и путем
сравнения вариантов по определенному
показателю выбрать более рациональ-
ное решение. Данный метод можно
использовать для вычисления мате-
матического ожидания времени окон-
чания работ и вообще для вычисле-
ния функции распределения этой слу-
чайной величины. Действительно, F —
= [У1, ..., есть вероятность того,
что успешная траектория Ki раз
пройдет через первую поглощающую
вершину, /2 — через вторую и т. д.
Допустим, что каждое прохождение
через первую поглощающую вершину
требует tt времени, через вторую t2
и т.д. Тогда Т = Y2t2 4---------h
+ есть время выполнения работ
по траектории, соответствующее на-
бору Y = (П, Y2....Yn).'
Пусть Ux= (Flt .... Yn) есть сово-
купность решений неравенства
п
£ Yhtk<X.
£=1
Тогда вероятность
Р(Т<Х)= 2 .... Гп]
есть функция распределения времени
окончания работ.
Изложенный метод можно использо-
вать для решения задач оптимального
резервирования (средств, времени, из-
делий, элементов и т. д.).
Введение зависимости Р/ от прош-
лого траектории (например, от вре-
мени и т. д.) позволяет учесть дина-
мику процесса.
Оценки затрат ресурсов на строи-
тельство линий электропередачи, газо-
провода, железных дорог, многосек-
ционных мостов, на проведение испы-
таний изделий и другие задачи можно
решать этим методом.
4. МОДЕЛЬ
ЭКСПЕРИМЕНТАЛЬНЫХ РАБОТ
И ИСПЫТАНИЙ
Для сложных систем и их элементов
характерна связь между выбранной
структурой системы, проектными пара-
метрами ее элементов, требуемым уров-
нем надежности и затратами распола-
гаемых ресурсов, времени и средств
на ее экспериментальную отработку.
Затраты средств на эксперименталь-
ную отработку основных элементов
системы составляют обычно значи-
тельную долю затрат на создание из-
делий. Поэтому в целях экономии
средств на создание системы при про-
ектировании следует выбирать такие
24S
Общие вопросы обеспечения надежности
ее структуру и характеристики, ко-
торые давали бы возможность, чтобы
экспериментальная обработка систем
могла быть выполнена в приемлемые
сроки и с минимальными затратами.
Ввиду большой размерности за-
дачи выбора оптимального варианта
системы и планирования эксперимен-
тальных работ можно успешно ре-
шить только с помощью ЭВМ в диало-
говом режиме, причем при моделиро-
вании статистически устойчивых, де-
терминированных свойств элементов
системы и процессов их отработки сле-
дует использовать детерминированные
модели и методы, а для недетермини-
рованных процессов функционирова-
ния изделий и процессов их экспери-
ментальной отработки — стохастиче-
ские модели и методы.
Экспериментальную отработку сло-
жной системы можно представить в ви-
де многоэтапного ориентированного
графа [1].
На первом этапе испытываются эле-
менты, на втором этапе — изделия или
группы взаимодействующих приборов,
узлов, на третьем — функциональные
группы изделий (ФГ), на четвертом —
составные части системы, на пятом —
система в целом.
Практика экспериментальной отра-
ботки сложных изделий такова, что
не исключает повторения испытаний
на каждом этапе и даже возвращения
на предыдущие этапы испытаний. На-
пример, при комплексном испытании
составной части могут обнаружиться
отказы, из-за которых требуются до-
работка и повторные испытания эле-
ментов, изделий, функциональных
групп изделий и составной части,
прежде чем можно будет перейти
к испытаниям системы.
Всю совокупность отказов изделий,
выявляемых при экспериментальной
отработке, делят на две группы. К пер-
вой группе относят отказы, прояв-
ляющиеся детерминированно в пер-
вом же испытании при имитации од-
ного воздействующего фактора. Пред-
полагается, что после доработки изде-
лия отказ по данному фактору больше
не проявляется. /
Общее число испытаний, требую-
щихся для выявления и устранения
отказов первой группы,
= S (2"ф! + !).
mi
где mi — число изделий, на которых
проявляются отказы первой группы;
Пф£ — число факторов, проверяемых
на /-м изделии (как правило, это при-
боры, узлы).
Ко второй группе относят отказы,
проявляющиеся случайно с некоторой
интенсивностью.
Предположим, что после выявления
отказа по данному элементу и прове-
дения доработки требуется провести
одно дополнительное испытание для
подтверждения эффективности дора-
ботки. Это условие не нарушает общ-
ности модели, так как можно задать
любое число дополнительных испыта-
ний. Общее число испытаний элемен-
тов, составных частей и системы в це-
лом для выявления отказов первой и
второй групп определяется с помощью
теории полного факторного экспери-
мента. При этом матрица факторов раз-
бивается на две самостоятельные ма-
трицы.
Первая матрица соответствует де-
терминированным факторам, а вто-
рая — случайным.
Учитывая возможность проведения
утяжеленных испытаний по отдель-
ным воздействующим факторам, крат-
ность испытаний изделий, а также опыт
отработки и выявления случайных
отказов на изделиях-аналогах, можно
каждый из случайных факторов опи-
сать некоторым законом его проявле-
ния, имеющим математическое ожи-
дание, дисперсию или другие пара-
метры, например:
. К*1
pL.=-57r“P(-4;
₽"=ifrехр (~Ч;
рфг = ехр (-М:
^kg
р‘ =Т7Гехр<-х<!):
^=тУехр(-м.
Модель экспериментальных работ и испытаний
247
Рис. 4. Затраты на экспериментальные ра-
боты и испытания двух вариантов системы
(1 и 2):
— • —«детерминированная составляющая
затрат; стохастическая составляю-
щая затрат; •»- суммарные затраты на
отработку и испытания
где Ki, Kj, Kf, Kg, Kh — параметры за-
кона Пуассона для элементов, изделий,
функциональных групп, составных ча-
стей и систем в целом; k — 0, 1, 2,
3, п.
При переходе на следующий уро-
вень испытаний в более крупной струк-
туре необходимо «запомнить» число
оставшихся невыявленных факторов
для каждого элемента структуры, а
также число проведенных испытаний
по каждому фактору после последней
доработки.
Кроме того, при переходе от авто-
номных испытаний элементов к испы-
таниям изделий добавляются дополни-
тельные факторы — факторы связи,
взаимодействия элементов в составе
изделий, обладающие также пуассо-
новской плотностью распределения ве-
роятностей с параметром Х^. Эти фак-
торы. должны проявиться в процессе
испытаний изделий.
Аналогично добавляются новые фак-
торы и выявляется взаимодействие
изделий в процессе испытаний функ-
циональных групп, составных частей
и системы в целом.
Постановка задачи: найти вариант
экспериментальной отработки системы,
позволяющей удовлетворить условию
Рс Р? с минимальными затратами
ресурсов. Задачу решают следующим
образом. На систему задаются значе-
Рис. Б. Затраты на экспериментальную от-
работку и выполнение задачи двух вариан-
тов системы (/ и 2}
ния Р’р, которые необходимо подтвер-
дить к концу экспериментальной отра-
ботки, например,
Plp <Р*р</*р .
'’mln max
Учитывая известную из проектного
анализа структуру элементов, изде-
лий, функциональных групп, состав-
ных частей и системы в целом, а также
априорные сведения о запасах работо-
способности, кратности испытаний для
выявления каждого фактора, накоп-
ленные по результатам эксперименталь-
ной отработки изделий-аналогов, наз-
начают интенсивности отказов по каж-
дому фактору X/ для систем каждого
уровня иерархической структуры, в
том числе по каждому фактору связи.
При экспериментальной отработке
в первую очередь проявляются отказы,
вызванные конструктивно-технологиче-
скими недоработками или недостаточ-
ным знанием влияния внешних слу-
чайных факторов на работоспособность
объекта испытания. Для описания этих
отказов используется обычно закон
Пуассона вида
Х^
Р‘<Л = Р (X = К) = ехр
где X = О, I, 2, ..., п и К ~ 0, 1.
2,..., п, Х^ — интенсивность отказов
248
Общие вопросы обеспечения надежности
t-го объекта испытаний по каждому
фактору.
Таким образом, в результате реше-
ния задачи на ЭВМ для каждого из
альтернативных вариантов, отличаю-
щихся уровнем структурной избыточ-
ности и проектной надежности РПриз>
находим зависимость с — f (РОтр)> каж-
дая точка которой соответствует ва-
рианту экспериментальной отработки
системы на случайные факторы до
задаваемого уровня Р*?р с минималь-
ными затратами. К полученным за-
тратам добавляются стоимость про-
ектно-конструкторской разработки СПр
и стоимость отработки системы на
детерминированные факторы, постоян-
ные для каждого уровня структуры
(рис. 4). Добавляя к полученным за-
тратам на экспериментальную отра-
ботку затраты на выполнение задачи
не восстанавливаемой системой не ме-
нее чем ЛГТр раз с гарантией
уТр — Р {АГNТр) —
тр
можно получить оптимальное решение,
соответствующее минимуму суммар-
ных затрат на отработку и выполне-
ние задачи (рис. 5). Этому решению со-
ответствует единственный вариант си-
стемы.
Из рис. 4 следует, что затраты на
экспериментальные работы и испыта-
ния второго варианта системы больше,
чем первого. Однако согласно рис. 5
суммарные затраты на эксперимен-
тальную отработку и выполнение за-
дачи с использованием второго ва-
рианта системы меньше, чем у первого.
Следовательно, разработка второго ва-
рианта системы предпочтительнее.
Аналогично могут быть оценены за-
траты Времени на испытание и выпол-
нение задачи системой и сделан окон-
чательный выбор варианта системы
С учетом стоимостных и временных
ограничений.
5. ОЦЕНКА ЭКОНОМИЧЕСКОЙ
ЭФФЕКТИВНОСТИ ТЕХНИЧЕСКИХ
МЕРОПРИЯТИЙ
ПО ОБЕСПЕЧЕНИЮ
НАДЕЖНОСТИ ИЗДЕЛИЙ
В практике проектирования, про-
изводства и эксплуатации изделий
обычно возникает задача выбора н^
одного, а группы (комплекса) наибо-
лее эффективных мероприятий из мно-
жества возможных. Эту задачу ре-
шают в два этапа:
1) оценивают эффективность обес-
печения конкурирующими мероприя-
тиями требуемого уровня надежности
и отбирают (формируют комплекс)
мероприятия, удовлетворяющие огра-
ничениям на продолжительность их
реализации;
2) из сформированного комплекса
возможных мероприятий выбирают та-
кие, затраты на реализацию ко-
торых являются минимальными.
Для оценки экономической эффек-
тивности ПОН необходимо знание за-
висимостей между стоимостью и на-
дежностью каждого изделия, входя-
щего в состав системы. Обычно исполь-
зуют зависимость стоимости С/ от
интенсивности отказов изделия
Cf=/(Xf), /=17л*. (5)
Оценку эффекта от использования
изделия следует проводить по резуль-
татам применения соответствующей си-
стемы. Для этого формируют целевую
функцию выбора оптимального ва-
рианта ПОН системы по стоимости.
C = F(Cf),
где Ct определяют по формуле (5).
Математическая постановка задачи
оптимального формирования ПОН си-
стем имеет вид
Cmln = ™n f (С.) = f
ci
Q(CJ)>QTP, » =
гДе С* — затраты на обеспечение на-
дежности каждого изделия, при ко-
торых общие затраты на обеспечение
необходимого уровня надежности си-
Оцени «канонической эффективности
249
стемы являются минимальными; QTp —
требуемый уровень обеспечения на-
дежности системы.
Поиск оптимального варианта ПОН
каждого изделия и системы в целом
проводят с применением методов ма-
тематического программирования (МП).
Особенностью поиска является наличие
дискретных переменных» характери-
зующих комплекс возможных меро-
приятий по обеспечению надежности
изделий. Эта особенность обусловли-
вает использование методов целочис-
ленного программирования.
Более простым и более удобным для
анализа является выбор оптималь-
ного варианта ПОН с использованием
методов МП, в которых аналогичные
переменные являются непрерывными.
В этом случае необходимо знание по
каждому изделию зависимости стои-
мости ПОН от интенсивности отказов.
Данная зависимость имеет строго моно-
тонный убывающий характер и для
ее аппроксимации по эксперименталь-
ным данным обычно используют функ-
цию
С = (6)
где а > О, Р •< 0 — неизвестные пара-
метры, оценки которых находят мето-
дами нелинейного,регрессионного ана-
лиза [1). Поиск оценок неизвестных
параметров модели (6) включает два
этапа:
1) путем логарифмирования модель
(6) преобразуют в линейную
in С = In а + рХ (7)
и по методу наименьших квадратов
(МИК) находят начальные оценки
неизвестных параметров;
2) уточняют начальные оценки путем
минимизации функционала
® (». ₽) = s (с„ - ое^и)2, (8)
Ы=1
где N — число экспериментальных зна-
чений стоимости ПОН и интенсивности
отказов какого-либо изделия, входя-
щего в систему.
С целью наибольшей простоты поиска
начальных оценок параметров мо-
дель (7) преобразуют к виду
lnC = lna + p J Xu/N +
u=l
/ N \
+ р х- £хи/лИ
\ и=1 /
и находят начальную оценку пара-
метра Р по формуле
N / N \
Рн = I ^*ц j х
\ и=1 /
/Nt N \2
£ (к«-
U=I \ и=1 /
Затем с использованием преобразо-
ванного функционала МНК, позволяю-
щего двухпараметрический поиск ми-
нимума функционала свести к одно-
параметрическому в соответствии с ус-
ловием
ф(₽опт) = max х
находят оптимальное значение пара-
метра Р и по формуле
« - s cu.BXu / Е
и=1 / и—1
вычисляют оптимальное значение дру-
гого параметра.
Для поиска оптимального значения
параметра Р вычисляют различные
значения преобразованного функцио-
нала МНК и аппроксимируют функ-
цией
Z(₽) = b. + 6(x+a(x2-l)), (9
где *=(₽ — Рн)/др, |ж|<1.
Область изменения значений Р вы-
бирают достаточной для накрытия
оптимального значения.
Оценки неизвестных параметров в мо-
дели (9) находят по формулам:
»о = (Z (Ра + Др) + Z (Ра - Др))/2;
Ь = (Z (Рн + ДР) - Z (Ра - ДР))/2;
i = (6.-Z(pa))/6.
250
Общие вопросы обеспечения надежности
Экстремум функции (9) вычисляют
по формуле
хэк — —1/2д,
а соответствующее значение пара*
метра Р — по формуле
Рэк = Рн Др/2и.
Для последующего уточнения оценки
параметра 0 выбирают в окрестности рэк
новую более малую область и прово-
дят аналогичные вычисления.
Реальные зависимости ПОН от ин-
тенсивности отказов изделий могут
быть более сложными, чем экспонен-
циальные, например, иметь характер
логистической кривой. В этом случае
увеличивается число неизвестных пара-
метров в модели (5), и вместо однофак-
торной функции (9) необходимо ис-
пользовать функцию
где р — вектор неизвестных параме-
тров в функции
С = ат) (X, Р),
используемой для аппроксимации ис-
следуемой зависимости. Число таких
комбинаций (точек плана) должно быть
не меньше числа неизвестных пара-
метров модели (10);
2) путем статистической обработки
полученных таким образом данных
находят по МН К оценки неизвестных
параметров модели (10).
Для проведения ВЭ используют
планы второго порядка на кубе типа
Вп [5]. Точки данных планов распо-
лагаются в вершинах гиперкуба и
в центрах его (п — 1)-мерных граней.
Оценки параметров модели (10) вычис-
ляют по формулам [3J:
«=^+1
п
z(₽) = ».+ 2 +
n n
+ 2 ^iiXiXl "b 0®)
/>i=l i=l
где
Xj — (Pi Pin)/APi> — 1» л»
PiH — ДР* C Pi C PiH + ДРь
i == 1, n;
(И)
0IH — начальные оценки параметров Pt;
2> 0 — интервалы, с помощью
которых образуется область, накры-
вающая оптимальные значения пара-
метров р,-.
Для оценки параметров модели (10)
проводят вычислительный экспери-
мент (ВЭ):
1) выбирают в области (11) различ-
ные комбинации значений параметров Р;
для них находят соответствующие
значения преобразованного функцио-
нала МН К, имеющего вид
Z(₽) =
/ n \г I n
=( y^i Р)) / ч(^и» Р)а»
\u=I / I U=l
где ЛГ1 — число точек плана, распола-
гаемых в вершинах гиперкуба; N —
общее число точек плана.
Уточненные оценки параметров р/
находят путем решения системы ли-
нейных уравнений:
п _____
-|-25jjXj = 0, i = 1, п.
/=#1=1
После решения системы Х} вк вы-
числяют значения
Pi эк = Pin Ч- ApjXj вк» 1 — 1» л’ (12)
Оценка экономической эффективности
261
Для последующего уточнения оце-
нок параметров проводят новый
аналогичный ВЭ в более малой об-
ласти с центром в точке с координа-
тами (12).
Для вновь создаваемых и эксплуа-
тируемых изделий целесообразно про-
водить построение достаточно досто-
верных моделей, описывающих зависи-
мости стоимости ПОН от интенсивности
отказов изделий в различных условиях
эксплуатации. Наличие такой инфор-
мации позволяет при проектировании
систем выбрать наилучший вариант
технических мероприятий по обеспе-
чению их надежности.
СПИСОК ЛИТЕРАТУРЫ
1. Бард Й. Нелинейное оценивание:
Пер. с англ. М.: Статистика, 1979.
349 с.
2. Надежность и эффективность в
технике: Справочник. Т. 1. Методоло-
гия, организация, терминология/Под
ред. А. И. Рембезы. М.: Машинострое-
ние, 1986. 223 с.
3. Слотин Ю. С. Композиционное
планирование регрессионного экспери-
мента. М.: Знание, 1983. 51 с.
4. Справочник по исследованию опе-
раций/Под ред. Ф. А. Матвейчука. М.:
Воениздат, 1979. 368 с.
5. Таблицы планов эксперимента:
Справочное издание/Под ред. В. В. На-
лимова. М.: Металлургия, 1982. 750 с.
6. Эффективность и надежность
сложных систем (информация, опти-
мальность, принятие решений)/
И. Л. Плетнев, А. И. Рембеза, Ю. А. Со-
колов, В. А. Чалый-Прилуцкий. М.:
Машиностроение, 1977, 216 с.
Глава 6. Обеспечение надежности
машин и механических систем
1. АНАЛИЗ ПРИЧИН ОТКАЗОВ
МЕХАНИЧЕСКИХ СИСТЕМ
При проектировании машин, меха-
нических систем, механизмов и от-
дельных элементов необходимо не
только обеспечить требуемые пара-
метры и характеристики изделий, но
и гарантировать эти показатели в за-
данны^ пределах в течение всего
периода эксплуатации.
В процессе эксплуатации на машину
действуют внутренние и внешние фак-
торы, которые могут привести к из-
менению параметров отдельных эле-
ментов, механизмов и машины в це-
лом. Известны три основных источника
воздействий:
действие энергии окружающей среды,
включая человека, выполняющего
функции оператора или ремонтника;
внутренние источники энергии, свя-
занные как с рабочими процессами,
протекающими в машине, так и с ра-
ботой отдельных механизмов машины;
потенциальная энергия, которая на-
коплена в материалах и деталях ма-
шины в процессе их изготовления
(внутренние напряжения в отливке,
монтажные напряжения).
Различные виды энергии, действую-
щие на машину, вызывают в ее уз-
лах и деталях процессы, связанные
со сложными физико-химическими яв-
лениями, приводящими к деформации,
износу, поломке, коррозии и другим
видам повреждений. Возникновение
повреждений влечет за собой измене-
ние выходных параметров изделия,
что может привести к отказу.
Процессы, приводящие к изменению
начальных свойств изделия, проте-
кают в материалах, из которых соз-
дано изделие, включая не только де-
тали машины, но и смазочные мате-
риалы, топливо, которые участвуют
в рабочем процессе. Приведем при-
меры этих взаимосвязей. Механиче-
ская энергия, действующая в звеньях
металлорежущего станка, приводит к
изнашиванию его звеньев. Это вызы-
вает искажение начальной формы со-
пряжений (т. е. их повреждение)
и потерю точности станка, которая
является его основным выходным пара-
метром. При достижении определен-
ной погрешности в движении форм**
образующих узлов станка воэнйка
отказ.
Химическая энергия вызывает про-
цессы коррозии в резервуарах й трубо-
проводах агрегатов химической про-
мышленности. Повреждение стенок ре-
зервуаров может привести вначале
к ухудшению выходных параметров
агрегата (загрязнение химических ве-
ществ, изменение пропускных сече-
ний трубопроводов), а затем при раз-
рушении стенок к полному выходу
из строя изделия.
Различают обратимые и необратимые
процессы, происходящие в машине и
влияющие на ее технические харак-
теристики. Обратимые процессы вре-
менно изменяют параметры деталей,
узлов и всей системы в некоторых
пределах, без прогрессивного ухуд-
шения. Наиболее характерный при-
мер таких процессов — упругая де-
формация узлов и деталей.
Необратимые процессы приводят к
прогрессивному ухудшению техниче-
ских характеристик машины с тече-
нием времени. Наиболее характер-
ными необратимыми процессами в ма-
шинах являются изнашивание, кор-
розия, усталость, перераспределе-
ние внутренних напряжений и ко-
робление деталей с течением времени.
Анализ причин отказов механических систем
253
1. Классификация процессов старения (необратимые процессы)
Объект Внешнее проявле- ние процессов (вид повреждения) Разновидности процесса
Тело детали (объ- емные явления) Разрушение Хрупкое разрушение, вязкое разру- шение
Деформация Пластическая деформация, коробление
Изменение свойств материа- ла Изменение структуры материала, ме- ханических свойств (пластичность), хи- мического состава, магнитных свойств, газопроницаемости, загрязнение жид- костей (смазочного материала, топ- лива)
Поверх- ность (поверх- ностные явления) Детали Разъедание Коррозия, эрозия, кавитация, прогар, трещинообразование
Нарост Налипание (адгезия, когезия, адсорб- ция, диффузия), нагар, облитерация (заращиванйе)
Изменение свойств поверх- ностного слоя Изменение шероховатости, твердости, отражательной способности, напряжен- ного состояния
Пары Износ, Износ (истирание), усталость поверх- ностных слоев, смятие, перенос мате- риала
Изменение усло- вий контакта Изменение площади контакта, глуби- ны внедрения микровыступов, сплош- ности смазочного материала, коэффи- циента трения
Для оценки надежности изделия
необходимо знать скорость протекания
процессов, снижающих его работоспо-
собность. Быстропротекающие про-
цессы имеют периодичность изменения,
измеряемую обычно долями секунды.
Эти процессы заканчиваются в пре-
делах цикла работы машины и вновь
возникают при следующем цикле. Сюда
относят вибрации узлов, изменения
сил трения в подвижных соединениях,
колебания рабочих нагрузок и дру-
гие процессы, влияющие на взаимное
положение узлов машины в каждый
момент времени и искажающие цикл
ее работы.
Процессы средней скорости связаны
с периодом непрерывной работы ма-
шины. Их длительность измеряется
обычно в минутах или часах. Они
приводят к монотонному изменению
начальных параметров машины. К этой
категории относят как обратимые про-
цессы (изменение температуры самой
машины и окружающей среды, изме-
нения влажности среды), так и не-
254
Обеспечение надежности машин и механических систем
2. Показатели степени повреждения материала изделия
Поврежде- ние Методы оценки степени повреждения
интегральный днфференци альный по выходным параметрам изделия
Глубинное Ослабление сечения трещинами (факти- ческая площадь се- чения). Суммарная деформация детали. Число дислокаций в опасном сечении Размер трещин и их распределение. Эпю- ра деформаций. Рас- пределение дислока- кий по объему детали Потеря несущей способности дета- ли
Поверхностное Полное Весовой износ. Сред- ний износ. Объем- ный показатель кор- розии Линейный износ по- верхности. Глубин- ный показатель кор- розии. Изменение твердости по поверх- ности Изменение темпе- ратуры, коэффи- циента трения, утечек, плотности, давления, вибра- ций
Локаль- ное Суммарная площадь повреждения. Число дефектов на едини- цу площади. Разме- ры наибольшего по- вреждения Законы распределе- ния параметров, ха- рактеризующих от- дельные поврежде- ния. Плотность по- вреждения на отдель- ных участках поверх- ности
обратимые (износ режущего инстру-
мента, который протекает во много
раз интенсивнее, чем изнашивание де-
талей и узлов машины).
Медленные процессы протекают за
время работы машины между периоди-
ческими осмотрами или ремонтами.
Они длятся дни и месяцы. К таким
процессам относят обратимые про-
цессы, например, сезонные изменения
температуры, но в основном это не-
обратимые процессы старения — из-
нашивание основных механизмов ма-
шины, перераспределение внутренних
напряжений в деталях, ползучесть
металлов, загрязнение поверхностей
трения, коррозия.
Эти процессы также влияют на точ-
ность, мощность, КПД и другие пара-
метры машин, но изменения их про-
исходят очень медленно. Обычные ме-
тоды борьбы с медленными процес-
сами — ремонт и профилактические
мероприятия, которые проводятся че-
рез определенные промежутки вре-
мени.
Протекание в машине процессов
старения является одной из основных
причин потери ею работоспособно-
сти [6].
В табл. 1 дана классификация про-
цессов старения по их внешнему про-
явлению и указаны основные разно-
видности каждого процесса.
Тело детали может подвергаться
разрушению, которое является наи-
более опасным проявлением процес-
сов старения, деформироваться или
изменять свойства материала — его
пластичность, электропроводимость,
магнитные свойства и т. п.
Наиболее часто процессы старения
протекают в поверхностных слоях.
При этом поверхность детали может
Модели отказов машин
255
подвергаться температурным, хими-
ческим, механическим или иным воз-
действиям внешней среды. В резуль-
тате могут происходить явления, свя-
занные с потерей (отделением) мате-
риала поверхности вследствие кор-
розии, эрозии, кавитации и других
процессов, которые можно объеди-
нить одним термином — разъедание
поверхности.
На поверхности могут протекать
и такие процессы, как адгезия, аб-
сорбция, нагар и другие, которые ха-
рактеризуются присоединением к по-
верхности других материалов. Их бу-
дем называть наростом. В результате
внешних воздействий возможно также
изменение свойств поверхностного
слоя — его микрогеометрии, твердо-
сти, отражательной способности и др.
Чтобы оценить запас надежности
детали, необходимо численно опреде-
лить степень ее повреждения.
Существуют два основных метода
оценки степени повреждения.
При первом методе выбирают чис-
ленные критерии для непосредствен-
ного измерения степени повреждения
изделия, например, величины дефор-
мации детали, ее линейного или весо-
вого износа, глубины и размеров ка-
верн при локальном разрушении по-
верхности и т. п. Однако во многих
случаях, особенно при локальных ви-
дах повреждения, бывает трудно не-
посредственно оценить степень по-
вреждения.
В этом случае применяют второй
метод, когда о повреждении судят
по изменению выходного параметра.
Например, при местных повреждениях
детали или при возникновении пла-
стических зон о степени повреждения
судят по потере несущей способности
(прочности); о локальных поврежде-
ниях направляющего гидрораспреде-
лителя судят по падению давления и
т. п.
Показатели, которые используют для
определения степени повреждения ма-
териала изделия, приведены в табл. 2.
Оценка степени повреждения мате-
риала изделия и изучение закономер-
ностей процессов старения, приводя-
щих к данным повреждениям, являются
основой для построения моделей рас-
чета и прогнозирования надежности
механических систем.
2. МОДЕЛИ ОТКАЗОВ МАШИН
Постепенные (износные) отказы воз-
никают в результате протекания того
или иного процесса старения, ухуд-
шающего начальные параметры из-
делия. При этом чем дольше эксплуа-
тируется изделие, тем выше вероят-
ность возникновения отказа. К этому
виду относят большинство отказов
машины. Они связаны с процессами
изнашивания, коррозии, усталости и
ползучести материалов.
Внезапные отказы возникают в ре-
зультате сочетания неблагоприятных
факторов и случайных внешних воз-
действий, превышающих возможности
изделия.
Основным признаком внезапного от-
каза является независимость вероят-
ности его возникновения в течение
заданного периода времени от дли-
тельности предыдущей работы изде-
лия. Примерами таких отказов могут
служить тепловые трещины, возникаю-
щие в детали вследствие прекращения
подачи смазочного материала, поломки
детали из-за неправильной эксплуа-
тации машины или возникновения пере-
грузок, деформация или поломка де-
талей, попавших в такие условия ра-
боты, когда каждый параметр имеет
экстремальное значение. Выход из
строя при этом происходит, как пра-
вило, внезапно, без предшествующих
признаков разрушения.
Отказы разделяют также на отказы
функционирования, когда изделие пе-
рестает выполнять свои функции в ре-
зультате поломок, заклинивания, и
параметрические отказы, когда регла-
ментированные параметры изделия вы-
ходят за допустимые пределы. При
отказе функционирования дальней-
шее использование машины возможно
только после ее ремонта. Продолжение
эксплуатации машины, имеющей пара-
метрический отказ, может привести
к выпуску некачественной продукции
или к снижению эффективности ра-
боты машины. Более того, в сложных
машинах и системах параметрические
отказы элементов могут привести к от-
казу функционирования.
256
Обеспечение надежности машин и механических систем
Основной задачей при оценке на-
дежности изделия на стадии проекти-
рования является отыскание закона
распределения времени работы из-
делия до отказа, выраженного в диф-
ференциальной форме в виде плот-
ности вероятности / (t) или в интеграль-
ной форме в виде функции распреде-
ления F (0. Закон распределения F (0
является полной характеристикой на-
дежности изделия или его элемента
и позволяет определить вероятность
безотказной работы Р (0 = 1 — F (0
и другие показатели надежности.
Теория вероятностей рассматривает
различные законы распределения слу-
чайных величин, которые могут быть
использованы и для решения задач
надежности (см. т. 2). Основанием для
использования того или иного закона
распределения и оценки его параме-
тров обычно служат статистические
данные, полученные при испытании
изделий или образцов, сведения об
аналогах, эксплуатационные наблю-
дения или теоретические предпосылки.
При этом следует применять методы
проверки статистических гипотез о
правомерности применения данного за-
кона распределения.
Для оценки надежности при по-
степенных отказах широко применяют
нормальный и логарифмически нор-
мальный законы распределения, закон
Вейбулла, гамма-распределение и дру-
гие, а для внезапных отказов — экс-
поненциальное и равновероятное рас-
пределения [3].
Однако непосредственное примене-
ние законов распределения сроков
службы не может быть признано ос-
новным методом решения на стадии
проектирования задач надежности по
следующим причинам. Во-первых, за-
кон выбирают формально, по внеш-
ним признакам, он не отражает про-
цесса формирования отказа, и поэтому
всегда имеется опасность весьма гру-
бого приближения. Во-вторых, для
получения статистических данных, поз-
воляющих судить о законе распреде-
ления, требуется, как правило, очень
длительное время, так как фиксируется
конечная стадия процесса поврежде-
ния — отказ.
Статистика дает достоверную инфор-
мацию о надежности изделий, уже на-
ходящихся в эксплуатации, и, как
правило, не может служить единствен-
ной основой для расчетов надежности
при проектировании машин, так как
при разработке новых изделий реали-
зуются многие мероприятия, предот-
вращающие повторение отказов, наб-
людавшихся ранее.
Для более полного анализа надеж-
ности новых машин необходимо по-
строение моделей формирования отка-
зов, которые отражают процессы, из-
меняющие выходные параметры про-
ектируемых изделий.
Рассмотрим общую схему формиро-
вания отказа изделий (рис. 1), когда
протекание различных процессов по-
вреждения приводит к изменению во
времени выходного параметра X. От-
каз возникает при достижении пре-
дельно допустимого значения Хтах
параметра, что произойдет через не-
который случайный промежуток вре-
мени работы изделия.
На схеме показаны основные этапы
формирования закона распределе-
ния f (0. Вначале имеет место рассея-
ние параметров изделия / (а) относи-
тельно своего математического ожи-
дания Oq. Это связано с рассеянием на-
чальных показателей новой машины,
с возможностью ее работы при различ-
ных режимах и протеканием таких
процессов, как вибрация, деформация
и другие, которые проявляются сразу
же при работе машины. Затем в про-
цессе эксплуатации параметры изде-
лия ухудшают медленно протекаю-
щие процессы, например, изнашива-
ние. В общем случае процесс изме-
нения параметра может начаться через
некоторый промежуток времени тв,
который также является случайной
величиной и связан с накоплением
повреждений (например, усталостных)
или действием внешних причин.
Процесс изменения параметра X
со скоростью ух (скорость деграда-
ции) также является случайным и
зависит от изменения повреждений
отдельных элементов изделия (их из-
носа со скоростью Ух, у2, .... Ул).
Надежная работа изделия будет
обеспечена в том случае, если его
выходные параметры Х1( Х2, •••» Хп
находятся внутри области работоспо-
Модели отказов машин
257
Рис. 1. Общая схема формирования параметрического отказа
собности, т. е. в области допустимых
значений, которая определяется зна-
чениями Ximax* Xgtnax» •••» Хптах ДЛЯ
каждого параметра. В общем случае
Хтах также может иметь рассеяние,
если оно оценивает диапазон требова-
ний потребителей к предельным зна-
чениям показателей машины (размытое
множество).
Область, в которой находятся пара-
метры изделий в данный момент вре-
мени, называют областью состояний.
Анализ! явлений, приводящих к вы-
ходу области состояний за пределы
области работоспособности, и должен
дать возможность определить закон
распределения / (X, 0, оценивающий
вероятность этого события и позволя-
ющий определить вероятность отказа.
Рассмотренная схема в общем виде
описывает процесс возникновения от-
каза и при частных значениях входя-
щих параметров может отражать те
или иные случаи, характерные для
определенных условий работы и кон-
структивных особенностей изделия.
Если процесс изменения параметра
начинается сразу (тв = 0), то полу-
чаем типичную схему возникновения
постепенного параметрического отка-
за. Если при достижении Хтах будет
резкое возрастание X (0, то, как пра-
вило, возникает отказ функциониро-
вания. Если в процессе формирования
отказа основную роль играет возник-
новение (зарождение) процесса, т. е.
функция f (тв), а затем процесс про-
текает с большой интенсивностью
X (0 со, то получаем модель вне-
запного отказа.
Рассеяние начальных параметров из-
делия f (а) следует учитывать при рас-
смотрении определенной совокупности
изделий, например, всех машин дан-
ной модели, выпускаемых заводом.
Если рассматривается конкретное из-
делие, то значение а превращается
в неслучайную величину, так как
характеризует начальные параметры
данного образца. Если же учитывать
рассеяние начальных параметров ма-
шины в результате ее работы при раз-
личных режимах, то а будет случайной
величиной и для одного экземпляра
изделия.
Если изменение параметра X во
времени происходит по линейному за-
кону, то
+ (1)
где а — начальный параметр изделия
(например, точность изготовления де-
тали), который также является слу-
чайной величиной и подчиняется не-
которому закону распределения.
Срок службы Т (наработки) до
отказа является функцией двух неза-
258
Обеспечение надежности машин и механических систем
Рис. 2. Модель параметрического отказа при рассеянии параметров по нормальному за-
кону и постоянной скорости изменения параметра
висимых случайных аргументов а и у:
р Хтах д
“ У
При этом а С Хтах, так как изделие
изготовлено в пределах допуска.
Если случайные аргументы а и у
распределены по нормальному закону,
то и параметр’ X для каждого значе-
ния t = Т будет распределен по то-
му же закону с параметрами (рис. 2):
математическое ожидание
Лср = До + Тср^» (3)
среднее квадратическое отклонение
о = , (4)
где а0 — математическое ожидание;
0а — среднее квадратическое откло-
нение случайного параметра а.
Учитывая, что вероятность безотказ-
ной работы изделия равна вероятности
того, что параметр Л не выйдет за
допускаемые пределы Хтах в течение
— т. е. Р (О = Вер (X Лтах),
получим
Р (Г.) = Ф
Лтах До Тср^
(5)
где Ф — функция Лапласа (0,5 ^Ф
<1) (см. [13]).
В общем случае, если известны ма-
тематическое ожидание изменения па-
раметра X во времени Мх (0 и диспер-
сия Dx (0 этого параметра в каждый
момент времени с учетом начального
рассеяния, то вероятность безотказной
работы изделия может быть опреде-
лена как
Р (Т) = Ф
Хетах ‘ ' До — (0 <
KSF(0
(6)
Пусть, например, изменение пара-
метра во времени подчиняется экспо-
ненциальному закону (тепловые про-
цессы, процесс коробления изделия
и др.):
X (0 = А
1 - / /
1 — ехр (-------
\ а
(7)
где А — установившееся значение про-
цесса (при i ->• оо); а — постоянная,
характеризующая параметры узла и
его материала (например, тепловая
постоянная узла).
Модели отказов машин
259
Тогда математическое ожидание
— Г ' / /V
Мх (0 = а0 + А II — ехр ( — —- ) ,
I \ Cv /
(8)
где А — математическое ожидание па-
раметра А, который имеет рассеяние
по нормальному закону.
Если среднее квадратическое откло-
нение этого параметра также из-
меняется во времени по экспоненциаль-
ному закону с параметрами о0 и а0,
т. е.
ох (0 = Со
то вероятность безотказной работы
Р (/) =ф (z), где г =
-^тах—а0—А Г1—ехр А—•—'j
__ L______\ О'О / J
1/ аа+а0 Г1 — ехР (— £-) ]2
(10)
Данные зависимости позволяют, ис-
пользуя закономерности процесса из-
менения (деградации) параметра, про-
гнозировать надежность изделия.
В общем случае функция рассея-
ния параметра f (t) не будет подчи-
няться нормальному закону распреде-
ления при рассеянии исходных пара-
метров (а; по нормальным законам.
Лишь при частном значении пара-
метров, когда основную роль играет
рассеяние начальных параметров, а
дисперсия процесса незначительна
[ох= 0 в формуле (5)], закон рас-
пределения наработки до отказа f (0
будет нормальным.
При малом рассеянии начальных
параметров (оа = 0) по сравнению
с дисперсией скорости процесса
деградации X (0 закон / (0 будет
асимметричным с большим значением
коэффициента асимметрии, чем в об-
щем случае при оа #=0 .
Свою специфику в формировании
закона распределения до отказа имеют
те случаи, когда модель, помимо за-
кона старения, учитывает также флук-
туацию параметра. Это случай, когда
имеются дополнительные возмущения,
приводящие к большему или меньшему
перемешиванию реализаций и к воз-
никновению помех (например, типа
«белый шум»).
Случайный процесс X (0, основан-
ный на функциональной зависимости
того или иного процесса старения,
возникает в связи с тем, что его аргу-
менты являются случайными величи-
нами, не зависящими от времени.
Такие процессы называют детермини-
рованными . случайными (или полу-
случайными) процессами. Эти про-
цессы и были положены в основу рас-
смотренных выше моделей отказов.
В общем виде случайный процесс
изменения параметра X во времени
можно представить как
X (0= а+ X (0+ е (0, (11)
где а — начальное значение параметра;
X (0 — центрированный случайный
детерминированный процесс; е (0 —
флуктуации параметра.
Флуктуации параметра также могут
содержать детерминированную состав-
ляющую (например, периодические
компоненты ' кинематических ошибок
механических передач) и случайные
флуктуации [10]. В результате этого
реализации процесса старения (дегра-
дации) отличаются от линейных, об-
ладают свойством «перемешанного» про-
цесса и могут иметь как монотонный,
так и немонотонный характер. Эти
свойства случайного процесса влияют
на параметры закона распределения
f (0 и на оценку вероятности безот-
казной работы изделия Р (0.
С учетом указанной динамики про-
цесса старения (при а — 0) получены
следующие зависимости для оценки
параметрической надежности при раз-
личной степени влияния флуктуаций
процесса [1, 10] (рис. 3):
а) для веерного случайного про-
цесса (рис. 3, а)
_ _ -^шах Тср^
Р(Т) = Ф -------, (12)
х
т. е. получаем формулу (5) при а = 0
и аа = 0. Данное распределение не
является нормальным;
б) модель деградации в виде «сильно
перемешанного» гауссовского процесса
260
Обеспечение надежности машин и механических систем
X, f (Т)
Рис. 3. Модели отказов при различном характере перемешивания реализаций процесса
деградации
(рис. 3, б) приводит к нормальному
распределению;
в) представление деградационного
процесса в виде непрерывного мар-
ковского процесса с монотонными реа-
лизациями (рис. 3, в) приводит к так
называемому диффузионному распре-
делению, для которого
Р(Г) = Ф
Хтах Тер
(13)
Эта модель может быть использова-
на, например, применительно к на-
коплению усталостных повреждений
в различных деталях механических
систем [4];
г) модель непрерывного марковского
процесса деградации с немонотонными
реализациями, которые в процессе
изменения параметра могли бы выхо-
дить за допустимый уровень' и воз-
вращаться обратно (рис. 3, г), описы-
вается следующим диффузионным рас-
пределением:
/ / 2*у2 \ \
Р (Г) = 1 - ехр X
\ \°Х
Хтах Тер
(14)
Физический смысл такой модели,
когда реализации не могут выйти за
пределы «экрана» — Хтах и возвра-
щаются обратно. К такому распреде-
лению могут привести модели уста-
лостной долговечности материалов при
учете процесса «разупрочнения — уп-
рочнения» металла [4, 11].
В основу любых моделей отказов
положены закономерности изменения
выходных параметров изделия, кото-
рые в свою очередь определяются
закономерностями процессов старения
с учетом их физической природы.
Рассмотренные выше модели посте-
пенного изменения параметров изде-
лия оценивают вероятность их выхода
за пределы Хтах, т. е. Вер (X
Хтах). Однако в ряде случаев воз-
можно наличие для данного параметра
двух пределов — верхнего Хтах и ниж-
него Xmln. Выход за границы Xmin
также будет отказом изделия. Данная
схема будет иметь место, когда выход-
ной параметр должен находиться в
Модели отказов машин
261
Рис. 4. Модели отказов с двумя пределами
определенных границах, например, до-
пуск на размер обрабатываемого на
станке изделия, жесткость пружины
и др. Закон изменения выходного
параметра может быть достаточно слож-
ным и не обязательно монотонно воз-
растающим, так как в общем случае
он является следствием нескольких
процессов повреждения.
На рис..4» а показана модель отказа
при наличии двух пределов. Вероят-
ность безотказной работы изделия в
данный момент времени t=T чис-
ленно равна площади кривой f (X, t),
находящейся в пределах допуска 6 =
= -^шах —
р (Г) = ф ( ^"ю.-о.-ТорГ \
\ )
В частном случае при симметричном
допуске Хтах = —-^пип» По — 0 и
уср = 0 (рис. 4, б), т. е. при увеличе-
нии со временем лишь дисперсии про-
цесса без смещения центра группиро-
вания поля рассеяния параметров,
получим
Р (Т) - 2Ф
В ряде случаев закон изменения
выходных параметров X (t) может быть
достаточно сложным, но общий мето-
дический поход для оценки вероятности
отказа будет тем же. Так, на рис. 4, в
приведен случай со знакопеременным
(по скорости процесса) изменением
выходного параметра (см. типовые кри-
вые, табл. 4). В среднем за пределы
допуска параметр изделий выйдет толь-
ко через промежуток времени t = Тл.
Однако в процессе работы в началь-
ный период эксплуатации в период
времени t от до Та возникает опас-
262
Обеспечение надежности машин и механических систем
Рис. 5. Схема модели «нагрузка—проч-
ность»
ность отказа для изделий, выполнен-
ных по верхней границе допуска.
Затем их безотказность будет возра-
стать. Изделия, выполненные по ниж-
ней границе допуска, не будут иметь
такого периода, но их выход за ниж-
нюю границу допуска возможен с мо-
мента времени t= Т3. Такая картина
наблюдалась, например, при исследо-
вании изменения в процессе эксплуа-
тации точности одностоечного коорди-
натно-расточного станка мод. 2А450.
На рис. 4, г показано изменение от-
клонения от перпендикулярности оси
вращения шпинделя к поверхности
стола станка в поперечной плоскости
за 7 лет эксплуатации. Обработка
опытных данных показала, что мате-
матическое ожидание угла поворота
шпинделя аср и среднее квадратиче-
ское отклонение сга в функции вре-
мени t (лет) могут быть аппроксими-
рованы следующими зависимостями:
аср (f) = 1,04/2 + 6,88/ — 1,22;
(Та (0 = 0,17е0*47* 4- 0,9.
Такой сложный характер изменения
положения оси шпинделя связан с сум-
мированием двух различных процес-
сов — коробления чугунных корпус-
ных деталей станка и изнашивания на-
правляющих шпиндельного блока, ко-
торые действуют в противоположных
направлениях.
Свою специфику имеют модели на-
дежности механических систем, когда
причиной отказа является разрушение
конструкции. К этой категории отно-
сят модели «нагрузка—прочность»,
учитывающие рассеяние прочностных
характеристик материалов и диспер-
сию действующих нагрузок, а также
различные модели, которые базируют-
ся на законах механики разрушения
материалов и учитывают процессы на-
копления повреждений (зарождения
и развития трещин) [2].
Простейшая модель «нагрузка —
прочность» может быть представлена
как статическая (без фактора времени),
когда учитываются законы распреде-
ления нагрузки q [плотность вероят-
ности /(</)] и прочности г [плотность
вероятности f (г)] (рис. 5). Тогда ве-
роятность безотказной работы Р опре-
делится условием, что нагрузки не
превзойдут требуемых показателей
прочности. В- общем виде
Р = jj f(r, q)drdq. (15)
r—q>0
Так, если распределение величин г
и q подчиняется нормальному закону
(что, однако, не всегда соблюдается),
математическое ожидание этих значе-
ний соответственно аг и aq, а диспер-
сии О“ и о|, то разность этих величин
(г — q) также распределена нормально.
Тогда вероятность безотказной ра-
боты конструкции
р = ф ( ,\ .
\ Vсг + /
(16)
Если считать, что расчетные значе-
ния прочности г и нагрузки q равны
их математическим ожиданиям, то не-
обходимо установить коэффициенты за-
паса (см. рис. 5):
по материалу Км = 1 —г\
по нагрузке Кн = 1 + kqWд>
] (17)
где Wг == — и Wq = —--------коэффи-
ar aq
циенты вариации; kr и kq — числовые
коэффициенты, характеризующие тре-
буемый уровень надежности.
Данный подход является простей-
шим, не учитывает фактор времени
и не позволяет проследить эволюцию
системы, связанную с процессами раз-
рушения.
Модели отказов, связанные с по-
степенным накоплением поврежде-
Расчет надежности механических систем при проектировании 263
ний — пластических деформаций,
усталостных разрушений, рассмотре-
ны В. В. Болотиным [2J. При этом
автор отдает предпочтение так назы-
ваемым полуэмпиричёским моделям,
связывающим скорость накопления по-
вреждений с действующими нагрузка-
ми и условиями окружающей среды.
Рассматривая различные методы ана-
лиза надёжности механических систем
и модели отказов, предпочтение сле-
дует отдавать тем, которые, учитывая
физику процесса и его стохастическую
природу, позволяют установить непо-
средственную аналитическую зависи-
мость между показателями надежности
[в первую очередь для Р {t ~ Т)} и
исходными параметрами. Такие зави-
симости служат основой для разра-
ботки программ ЭВМ для прогнози-
рования надежности и оценки различ-
ных вариантов принимаемых решений
по совершенствованию конструкции.
Рассмотренные выше зависимости
позволяют при знании физических за-
конов изнашивания или других зако-
нов старения, с учетом возможных
вариаций исходных показателей рабо-
тоспособности и условий эксплуатации,
прогнозировать потерю работоспособ-
ности изделия и определять основные
показатели надежности, так как в
структуру формул входят исходные
данные, не зависящие от времени.
При использовании моделей отказов
следует иметь в виду, что между вы-
ходным параметром изделия X, и сте-
пенью повреждения (например, изно-
сом) имеется обычно детерминирован-
ная зависимость X — <р [U]. Наиболее
характерна линейная зависимость ме-
жду X и U. Например, износ направ-
ляющих поверхностей механизмов ли-
нейно связан с точностью перемещений
ведомого звена. Для многих динамиче-
ских процессов характерна степенная
зависимость между X и Ut когда
в качестве выходного параметра при-
няты значения динамических нагрузок
в машине. Например, величина износа
зубчатых передач связана степенной
зависимостью с динамическими на-
грузками в приводе [6]. Получение
таких соотношений базируется на ана-
лизе работы данных механизмов с уче-
том их функционального назначения.
3. РАСЧЕТ НАДЕЖНОСТИ
МЕХАНИЧЕСКИХ СИСТЕМ
НА СТАДИИ ПРОЕКТИРОВАНИЯ
Знание законов старения и взаимо-
связей между степенью повреждения
элементов машины и ее выходными
параметрами и разработка моделей
отказов позволяют построить схему
расчета параметрической надежности
машины (рис. 6).
Целью расчета является оценка ос-
новных показателей надежности и
сравнение их с заданными. Поэтому
технические условия на машину долж-
ны устанавливать допустимые откло-
нения выходных параметров Хх, Х2,
..., Хп, т. е. предельные значения
Xi шах для каждого из них и значения
показателей надежности для всего из-
делия. В первую очередь следует уста-
новить допускаемую величину вероят-
ности безотказной работы и запас
надежности для каждого из параме-
тров и для машины в целом и ресурс,
в течение которого целесообразно экс-
плуатировать машину с учетом техни-
ческого обслуживания и ремонта.
При проведении расчета должны
быть известны конструкция всех эле-
ментов и узлов, применяемые материа-
лы, условия эксплуатации и режимы
работы.
Расчет заключается в оценке всех
тех факторов, которые участвуют в
формировании процесса потери маши-
ной работоспособности и в определении
основных показателей надежности, на-
пример, по формуле (5).
Для решения этой задачи необхо-
димо в первую очередь оценить на
основании законов старения степень
или скорость повреждения тех эле-
ментов, которые определяют значение
выходного параметра. При этом мате-
матическое ожидание и дисперсия про-
цесса оцениваются с учетом спектра
нагрузок и режимов работы. Одновре-
менно на основании данных о, конструк-
ции основных элементов машин и об-
щей компоновки ее узлов определяются
начальные параметры изделия — его
геометрическая точность, жесткость,
влияние бысгропротекающих процес-
сов и процессов средней скорости на
параметры изделия. Обычно не все
264
Обеспечение надежности машин и механических систем
Рис. в. Схема расчета машины на параметрическую надежность
эти показатели могут быть получены
расчетным путем. Так, например, ме-
тоды расчета, связанные с виброустой-
чивостью и с тепловыми деформациями
сложных деталей и узлов, еще не-
достаточно разработаны. В этом слу-
чае следует использовать данные ана-
логов, производить моделирование про-
цессов на макетах или задаваться
допустимой их величиной. В послед-
нем случае при окончательной отра-
ботке конструкции изделия всегда
могут быть приняты меры для дове-
дения данного параметра до требуемого
уровня.
Прием, когда устанавливаются огра-
ничения для скоростей протекания
ведущих процессов, снижающих рабо-
тоспособность изделия, можно широко
использовать при оценке надежности
сложных систем, трудно поддающихся
расчету. Устанавливая допустимые
значения для изменения отдельных
показателей и для степени поврежде-
ния (износа) элементов, можно расчет-
ным путем показать, что при этом
будут обеспечены требуемые показа-
тели надежности машины в целом.
Используя конструктивные и техно-
логические методы и зная закономер-
ности процессов повреждения, можно
добиться, чтобы скорость процессов
старения находилась в установленных
пределах.
Изменение выходных параметров
происходит в результате развития
повреждений во времени и подчи-
няется той или иной функциональной
связи X} = F (Ult ..., Uk)- Для
выявления этих взаимосвязей необ-
ходимо построить расчетную схему,
которая, например, для процессов из-
носа машины позволяет установить
функциональную зависимость между
износом отдельных элементов и вы-
ходными параметрами узла.
Расчет вероятности безотказной ра-
боты изделия по данному параметру
и других показателей надежности ве-
дут на основе принятой модели отказа.
Если выходные параметры незави-
симы и необходимо оценить Р (t) для
Расчет надежности механических систем при проектировании
265
3. Характеристика последствий отказа
Последствия отказа Допустимая вероятность безотказной работы Тип машины
Ката- строфи- ческие Авария. Катастро- фа. Невыполнение ответственного зада- ния Р(0- 1; Кн= 1,2-Т-1,5 ). Летательные аппараты. Подъемно-транспортные машины. Машины хими- ческого производства. Ме- дицинское оборудование
Эконо- миче- ский ущерб Повышенные про- стои в ремонте. Ра- бота на пониженных режимах. Работа с ухудшенными па- раметрами Значительный ущерб: Р (/) > 0,99 Незначительный ущерб: Р (0 > 0,9 Технологическое обору- дование. Сельскохозяй- ственные. Бытовые
Без последствий (затраты на ремонт в пределах нормы) Р (0 < 0,9 Отдельные узлы и эле- менты машин
всей машины, то используют теорему
умножений вероятностей. Если надо
учесть также и вероятность внезапных
отказов, то оценивают их уровень и
характер взаимодействия с постепен-
ными отказами.
Для высоконадежных систем основ-
ной характеристикой является запас
надежности по каждому из выходных
параметров.
Запас надежности Кн 1 — это от-
ношение допустимого значения вы-
ходного параметра Хтах к его экстре-
мальному значению Хэк, которое па-
раметр может принять за данный пе-
риод работы изделия (см. рис. 2).
При высоких значениях вероятности
безотказной работы Р (/) (порядка
0,999 и выше), когда этот показатель
теряет свою эффективность, для оценки
степени надежности изделия целесооб-
разнее применять показатель /Сн [6].
Полученные в результате расчета
показатели надежности корректируют
с учетом системы ремонта (это в основ-
ном относится к установлению ре-
сурса Тр) и сравнивают с заданными
техническими требованиями значе-
ниями.
Если полученные результаты не
удовлетворяют этим требованиям, то
исходные данные корректируют. При
этом, поскольку известна структура
формирования показателей надежно-
сти, можно указать оптимальные ва-
рианты корректирования исходных па-
раметров (характеристики материалов,
смазочных материалов, размеры и кон-
струкцию узла и т. п.).
Для сложных систем указанная схе-
ма является основной для разработки
алгоритма расчета надежности с при-
менением ЭВМ.
Выбор допустимых значений пока-
зателей надежности проводят исходя
из оценки тех последствий, к которым
может привести отказ изделия.
Нормированию подлежат в первую
очередь вероятность безотказной ра-
боты Р (t) с оценкой ресурса Тр,
в течение которого она регламенти-
руется, а для высоконадежных си-
стем, в которых Р(0->1, опреде-
ляют запас надежности Кн.
Во многих случаях с экономической
точки зрения выгодно делать более
надежное изделие даже в том случае,
если к нему не предъявляются высо-
кие требования безотказности по ус-
ловиям эксплуатации.
Допустимые значения вероятности
безотказной работы машин приведены
в табл. 3.
Нормирование показателей надеж-
ности всей машины связано, в первую
очередь, с оценкой изменения выход-
266
Обеспечение надежности машин и механически* систем
ных параметров, определяющих ее
работоспособность.
Надежность машины определяется
работой наиболее ответственных узлов
и систем, так как в любой машине есть
узлы, выход из строя которых не при-
водит к указанным недопустимым по-
следствиям.
Расчет машины на надежность позво-
ляет указать наиболее рациональные
пути повышения ее технических ха-
рактеристик.
Методы повышения надежности из-
делий разнообразны и связаны в пер-
вую очередь с повышением стойкости
изделий к внешним воздействиям. Сюда
относят методы создания прочных,
жестких, износостойких узлов за счет*
их рациональной конструкции, при-
менение материалов с высокой проч-
ностью, износостойкостью, антикорро-
зийностью, теплостойкостью, а также
применение различных смазочных ма-
териалов.
Другой путь повышения надежности
работы машин и изделий — это их
изоляция от вредных воздействий; уста-
новка машины на фундамент, защита
поверхностей от запыления и загряз-
нения, создание для машин специаль-
ных условий по температуре и влаж-
ности, применение антикоррозийных
покрытий, виброизолирующих уст-
ройств и т. д.
Активным средством для решения
проблемы надежности является при-
менение автоматики для обеспечения
длительного выполнения машиной
своего служебного назначения в раз-
личных условиях эксплуатации.
4. ЗАКОНОМЕРНОСТИ
ПРОЦЕССОВ СТАРЕНИЯ
Изменение начальных свойств и со-
стояния материалов, из которых вы-
полнено изделие, является первопри-
чиной потери им работоспособности,
так как эти изменения могут привести
к повреждению изделия и к опасности
возникновения отказа.
Для расчета надежности необходимо
знать скорость протекания процесса
повреждения у (0 или степень дан-
ного повреждения U (i) в функции
времени.
Такие зависимости могут быть по-
лучены на основе рассмотрения физики
процесса или экспериментальным пу-
тем.
В табл. 4 представлены типовые за-
кономерности протекания процессов
старения во времени. Они относятся
к одностадийным процессам, когда
в течение рассматриваемого периода
не происходит изменения физико-хими-
ческой картины процесса.
Наиболее просто протекают стацио-
нарные процессы, когда скорость про-
цесса постоянна или колеблется отно-
сительно среднего значения. Это про-
исходит в том случае, если все фак-
торы, влияющие на скорость процесса,
стабилизировались и нет причин, из-
меняющих интенсивность процесса. За-
висимость U (/) имеет обычно линейный
или близкий к нему характер. Такая
закономерность характерна для уста-
новившегося периода изнашивания,
для некоторых видов коррозии и дру-
гих процессов. Если при старении
возникают факторы, которые интен-
сифицируют или, наоборот, замедляют
скорость его протекания, т. е. скорость
процесса у изменяется монотонно,
функция U (/) будет иметь нелинейный
вид и соответственно описывать интен-
сификацию или затухание процессу
повреждения материала изделия. Ход
процесса в этом случае связан с тем,
что его скорость зависит не только от
внешних факторов, но и от степени
повреждения U. Поэтому сам про-
цесс (его результат) влияет на ин-
тенсивность дальнейшего его проте-
кания. Это условие может быть запи-
сано как
4^-=/(to. de)
at
Например, некоторыми исследова-
телями установлено, что скорость роста
усталостной трещины зависит от ее
длины. Есть примеры аналогичного
подхода и к оценке скорости изнаши-
вания сопряжений.
При линейной зависимости у от U,
т. е. при
^- = C±kU. (19)
Закономерности процессов старения
267
4. Типовые закономерности протекания во времени процессов старения
Процессы (по v-харак- теристике) u (t) Примеры
Стацио- нарные Посто- янные 7 и Износ: U = kt
t t
Псевдо- стацио- нарные If и Износ при перемен- ных режимах
t t
Моно- тонные Возра- стающие If и Износ при засоре- нии поверхностей: U = ktn\ п > 1; U = A (ew — 1)
t t
Убыва- ющие 7 и Износ в период приработки, распад мартенсита: U ~ = ktn-,n< 1; U ~- = А (1 — e~kt)
t t
Экстре- мальные С ма- ксиму- мом 7 и Коррозия, короб- ление у = ate~bi
t t
С мини- мумом 7 и Ползучесть, износ, коррозия
t ' t
С запаздыванием 7 и j Усталость, хрупкое разрушение
t t
Знакопеременные 7 и 1 t Изменение механи- ческ их х ар а ктер и- стик
268
Обеспечение надежности машин и механических систем
интегрированием этого уравнения по-
лучим экспоненциальную зависимость
для величины повреждения как функ-
ции времени.
В некоторых случаях, когда на ско-
рость процесса одновременно действует
ряд равноценных факторов, которые,
претерпевают изменение во времени,
зависимость у (/) может иметь экстре-
мум (максимум или минимум), что
характерно, например, для некоторых
видов коррозии, для процессов короб-
ления и др. В этом случае’ функция
U (t) имеет точку перегиба. При до-
стижении максимума и последующем
падении до нуля процесс повреждения
прекращается. Такая зависимость ха-
рактерна, например, для перераспре-
деления внутренних напряжений и
деформаций в отливках в процессе
их эксплуатации. После определенного
периода, который иногда длится не-
сколько лет, коробление отливки пре-
кращается.
Существует определенная категория
процессов, для которой вначале про-
исходит накопление каких-то вну-
тренних повреждений, а затем с не-
которым запаздыванием начинается сам
процесс.
Если в процессе с запаздыванием
время до начала процесса (порог чув-
ствительности) является основным пе-
риодом эксплуатации изделия, а сам
процесс протекает с большой интен-
сивностью, то такое явление воспри-
нимается обычно как спонтанный (са-
мопроизвольно возникающий) процесс.
Так, хрупкое разрушение металлов,
схватывание при трении и ряд других
процессов носят лавинообразный ха-
рактер и возникают после накопления
внутренних повреждений или при не-
благопри’ятном сочетании внешних воз-
действий.
Если скорость процесса меняет знак,
что характерно для сложных физико-
химических процессов, протекающих
в материале, то функция U (/), харак-
теризующая степень повреждения, бу-
дет иметь экстремум.
При протекании различных про-
цессов старения могут быть случаи,
когда изменяется физическая сущность
процессов и соответственно меняется
и закономерность, описывающая дан-
ное явление. Такие процессы называют
многостадийными. Для их описания,
как правило, применяют законы для
каждой стадии процесса у (t) и U (/).
Все рассмотренные функциональные
зависимости, определяющие протека-
ние процесса старения, проявляются
при эксплуатации изделий как слу-
чайные процессы. Это связано с двумя
основными причинами. Во-первых, на-
чальные свойства материала и геоме-
трические параметры изделия имеют
рассеяние, так как являются продук-
том некоторого технологического про-
цесса, который может функциониро-
вать лишь с определенной точностью
и стабильностью. Во-вторых, стоха-
стическая природа процесса старения
связана с широкой вариацией режимов
работы и условий эксплуатации из-
делий. В результате зависимости, опи-
сывающие процессы старения, стано-
вятся функциями случайных аргумен-
тов — нагрузок, скоростей, темпера-
тур и т. п.
Поэтому скорость процесса старе-
ния у является случайной величиной,
и ее полной характеристикой будет
закон распределения f (у). Для полу-
чения f (у) экспериментальным мето-
дом применяется физико-статистиче-
ское моделирование - [8], при котором
испытание, например для оценки ско-
рости изнашивания проводят при раз-
личных значениях внешних факторов
(нагрузок, скоростей, смазочного ма-
териала и т. п.). При этом значения
этих факторов принимают в соответ-
ствии с законом их распределения,
отражающим условия эксплуатации.
Применяя метод статистического моде-
лирования (метод Монте-Карло), опре-
деляют зйкон распределения и его
статистические характеристики для ис-
комой величины — скорости изнаши-
вания (в общем случае — скорости
процесса повреждения) [9].
5. РАСЧЕТ НАДЕЖНОСТИ
МЕХАНИЧЕСКИХ СИСТЕМ
С УЧЕТОМ ИХ ИЗНОСА
Износ, возникающий при трении
сопряженных поверхностей, является
наиболее характерным видом повре-
ждения большинства машин и меха-
низмов.
Расчет надежности механических систем с учетом их износа
268
Изнашивание — это процесс посте-
пенного изменения размеров тела при
трении, проявляющийся в отделении
с поверхности трения материала и
(или) его остаточной деформации. Изна-
шивание может сопровождаться про-
цессами коррозии и является сложным
физико-химическим процессом. Его из-
учению посвящена обширная литера-
тура [5, 12].
Основными показателями износа яв-
ляются ;
линейный износ U (мкм) — измене-
ние размера поверхности при ее изна-
шивании, измеренное в направлении,
перпендикулярном к поверхности тре-
ния;
скорость изнашивания у —
dU . , .
= (мкм/ч) -— отношение величины
износа ко времени, в течение которого
он возник;
интенсивность изнашивания / —
dU
= -----отношение величины износа
ds
к относительному пути трения, на
котором происходило изнашивание.
При изнашивании деталей машин
в первый период приработки износ
возрастает нелинейно во времени, а
в период установившегося износа его
скорость у постоянна. Этот период яв-
ляется основным, и при расчетах
можно принимать у = Ult — const.
Анализ большого числа исследова-
ний износа различных материалов в
условиях граничного трения и трения
без смазочного материала показывает,
что в общем случае скорость изнаши-,
вания может быть выражена зависи-
мостью
U - kpmVt = kpms, (20)
т. е.
у = kpmV и / = kpm, (21)
где k — коэффициент износа, характе-
ризующий материал пары и условия
изнашивания; т = 0,5ч-3, s = Vt —
путь трения.
Для абразивного и ряда других ви-
дов изнашивания т= 1.
На значение коэффициента k влияют
характеристики применяемых материа-
лов пары, условия в зоне контакта и,
в первую очередь, смазочный мате-
риал.
5. Классы износостойкости материалов
по скорости изнашивания
Класс V, мкм/ч Примеры
0 <5-10-6 Калибры, гидро-
1 <с10~4 распределители
2 sc2-10-4 Зубчатые переда-
3 ^4-10-* чи
4 ^8-10-4 Направляющие
5 ^1,6-10’3 станков, ходовые
винты
6 <3,2-IO"3 Фрикционные
7 <6,4-IO"8 муфты
8 ^1,25-1(Г2 Лемехи
9 >1,25-10- 2 АвиатормОза «
При расчетах надежности изделий
необходимо, оценить скорость процесса
повреждения, скорость изнашивания
основных сопряжений.
Особую сложность при расчетах*
представляет определение коэффици-
ента износа материалов k, которые
зависят от большого числа факторов.
Наиболее желательно определение
этих значений из закономерностей,
полученных на основе изучения физики
процесса изнашивания.
При отсутствии значений коэффи-
циентов износа материалов в расче-
тах сопряжений на износ можно ис-
пользовать следующие приемы.
1. Проводить сравнительные расче-
ты, определяя, во сколько раз повы-
сится износостойкость данной пары
по отношению к прототипу или при
сравнении нескольких вариантов кон-
струкций.
2. Оценивать значение коэффициен-
та k на основе опыта эксплуатации
аналогичных пар трения или прогно-
зируя возможное повышение износо-
стойкости при применении новых ма-
териалов, зная изменение их механи-
ческих характеристик и структуры.
3. Нормировать скорости и интенсив-
ности изнашивания, назначая опре-
деленный класс износостойкости и ста-
вя условие перед технологами и экс-
плуатационниками о необходимости
подбора таких пар трения и создания
270
Обеспечение надежности машин и механических систем
Рис. 7. Классификация сопряжений по условиям их изнашивания
таких условий эксплуатации, чтобы
интенсивность их изнашивания нахо-
дилась в установленных пределах.
4. Проводить испытание образцов
сопряженных материалов, используя
эти данные для расчета сопряжений.
Классы износостойкости по скорости
изнашивания и примеры сопряжений
машин приведены в табл. 5.
Знание закономерностей изнашива-
ния является предпосылкой для рас-
чета износа сопряжений и механизмов
на стадии проектирования.
Основной характеристикой износа
детали является линейный износ U,
который измеряется в направлении,
перпендикулярном к поверхности тре-
ния. Вследствие ряда причин (раз-
личные значения удельных давлений
и скоростей относительного скольже-
ния на поверхности трения, неодина-
ковое попадание абразива и т. д.)
износ детали может быть неравномер-
ным.
Для полной характеристики вели-
чины износа детали необходимо знать
его распределение по поверхности тре-
ния U (х, у), т. е. форму изношенной
поверхности.
В результате износа сопряженных
деталей происходит изменение их от-
носительного положения, которое на-
зывают износом сопряжения.
Износ сопряжения является той гео-
метрической характеристикой, кото-
рая непосредственно связана с потерей
машиной или механизмом их началь-
ных служебных свойств. Он является
выходным параметром сопряжения.
При решении задач, связанных с из-
носом деталей, необходимо учитывать,
что конструктивная схема сопряжения
оказывает влияние на распределение
износа по поверхности трения и на
характер взаимодействия изношенных
поверхностей.
Во многих случаях влияние кон-
структивных факторов на форму изно-
шенной поверхности проявляется в
большей степени, чем влияние законо-
мерностей изнашивания материалов.
При проектировании машин конструк-
тор должен располагать методами рас-
чета на износ различных сопряжений,
характерных для данной машины,
чтобы обосновать выбор той или иной
конструкции. На рис. 7 приведена
классификация сопряжений по усло-
виям их изнашивания. В зависимости
от характера возможного сближения
деталей при износе их поверхностей
все сопряжения подразделяют на два
типа. У сопряжений типа I имеются
дополнительные неизнашивающиеся и
малоизнашивающиеся направляющие,
которые обеспечивают сближение де-
талей при износе только в заданном
направлении х — х. В сопряжениях
типа II происходит самоустановка из-
ношенных деталей, а их взаимное
положение зависит от формы изношен-
ной поверхности. В Таких сопряжениях
износ обычно более сильно сказывается
на функциональных свойствах пары.
Расчет надежности механических систем с учетом их износа
271
Кроме того, в классификаций все
сопряжения разделены на пять групп
в зависимости от постоянства условий
трения и износа для расположенных
на одной траектории точек сопряжен-
ных поверхностей.
У сопряжений 1-й группы точки,
расположенные на одной траектории,
имеют одинаковые условия изнашива-
ния для каждого из тел. Поэтому их
износ будет одинаков, и для определе-
ния формы изношенной поверхности
достаточно рассмотреть осевое сече-
ние.
Ко 2-й группе относят сопряжения,
у которых сохраняются постоянными
условия изнашивания для всех точек,
лежащих на данной траектории, для
одного тела. Поэтому только одна по-
верхность имеет условия для равномер-
ного изнашивания в данном сечении.
У сопряжений 3-й и 4-й групп усло-
вия изнашивания не сохраняются по-
стоянными для всех точек обоих тел.
Следовательно, здесь имеются боль-
шие возможности для возникновения
неравномерного износа поверхностей.
К 3-й группе отнесены сопряжения
с низшими парами, к 4-й — с высшими
парами.
К 5-й группе относят сопряжения,
когда поверхность детали контакти-
рует с твердой средой — почвой, по-
родой, обрабатываемой деталью.
В этом случае изучается износ лишь
одной поверхности, которую обтекает
абразивная или иная среда, от харак-
тера взаимодействия с которой (эпюры
нагрузок и скоростей) будет зависеть
форма изношенной поверхности.
Разработанные методы расчета на
износ сопряжений различных типов
позволяют определить форму изношен-
ной поверхности и износ сопряжений
в зависимости от применяемых мате-
риалов, условий изнашивания и режи-
мов работы узла трения [6].
В качестве примера на рис. 8 при-
ведена расчетная схема для определе-
ния износа направляющих скольжения
при условии, что износ материалов под-
чиняется зависимости (20); при т = 1
уравнение эпюры давлений р — f (I) из-
вестно, а ползун (суппорт) совершает
по направляющим перемещения раз-
личной длины, которые характеризуют-
ся законом распределения у — ф (х).
Рис. 8. Расчетная схема для определения
износа направляющих скольжения
На рисунке приняты следующие
обозначения: U (х) — искомая вели-
чина линейного износа направляющих
станины (Uy) по длине х при 0
х (L + /0); U (Z) — искомая ве-
личина линейного износа направляю-
щих стола (суппорта) (С/2) по длине I
при 0 I /0; L — максимальный
ход стола; /0 — длина направляющих
стола; р = f (/) — уравнение эпюры
давлений; у = ф (х) — кривая распре-
деления общего пути трения (кривая
условно отнесена к левой точке стола).
Форма изношенной поверхности на-
правляющих определяется в этом слу-
чае в виде
11
U (х) = ks J Ф (х dlt (22)
/i
где s — путь трения, который прохо-
дит каждая точка направляющих стола
за рассматриваемый промежуток вре-
мени; k — коэффициент износа.
Данная формула является общей
для различных случаев. При этом
пределы интегрирования определяются
в зависимости от того, какой участок
эпюры давлений воздействует на дан-
ную точку станины с координатой х
(табл. 6).
В формуле (22) учтено влияние основ-
ных факторов на форму изношенной
поверхности направляющих; k отра-
жает износостойкость материалов и
условия изнашивания; s — интенсив-
ность работы машины во времени;
р = f (I) отражает конструкцию суп-
272
Обеспечение надежности машин и механических систем
6. Пределы интегрирования
при расчете износа по формуле
L 10 Уча- сток Пределы участка Пределы интегри- рования
I 0 X /0 0 X
II /0 X L 0 ^0
III L X L 4- /0 х — L Iq
I 0^ х^ L 0 X
II х^ 10 х — L X
III /q х Iq 4~ z. х — L
порта (стола), т. е. расположение сил
(характер эпюры давлений), и вели-
чины действующих сил; <р (х) характе-
ризует процесс работы машины, на-
пример, технологические процессы об-
работки, осуществляемые на универ-
сальном станке.
Пользуясь полученной формулой,
можно проанализировать влияние от-
дельных факторов на величину и ха-
рактер U (х) и в каждом конкретном
случае указать наиболее эффективные
пути для уменьшения величины износа
и получения более равномерной формы
изношенной поверхности, которая не-
посредственно связана с точностью
работы, виброустойчивостью конструк-
ции и возможностью компенсации из-
носа.
Для расчета надежности машины не-
обходимо установить значения, до ко-
торых можно допускать износ отдель-
ных деталей и сопряжений, т. е. уста-
новить их предельные износы.
Можно выделить три группы крите-
риев предельного износа:
1) в результате износа машина не
может больше работать (происходит
поломка детали, заклинивание меха-
низма или невыполнение им своих
функций);
2) износ приводит к попаданию ма-
шины и узлов в зону интенсивного
выхода их из строя (возникают удары,
интенсивный износ поверхностей, ви-
брации машины, повышается темпера-
тура узлов);
3) в результате износа характери-
стики машины выходят за допустимые
или рекомендуемые пределы (ухуд-
шается качество продукции, пони-
жается производительность, снижается
КПД, увеличивается шум).
Критерии предельного износа в од-
них случаях связаны только с работой
данного сопряжения или детали, в
других — с работой нескольких де-
талей механизма или узла.
Для машины в целом наиболее ха-
рактерен отказ, связанный с выходом
ее параметров за допустимые пределы.
В этом случае необходимо установить
зависимость между износом отдельных
сопряжений и изменением выходных
параметров машины.
Например, при износе направляю-
щих тяжелых продольно-фрезерных и
продольно-строгальных станков наи-
больший износ Umax связан с возни-
кающей погрешностью обработки по-
верхности А зависимостью [6]
(L \ 2
, (23)
JU /
где Lo — длина направляющих и L —
длина обрабатываемой на станке по-
верхности.
Для расчета и прогнозирования на-
дежности механических систем с учетом
износа отдельных сопряжений и меха-
низмов необходимо осуществить сле-
дующее:
рассчитать износ сопряжения с дан-
ными конструктивными особенностя-
ми, т. е. рассмотреть макрокартину
процесса изнашивания;
оценить влияние износа сопряжений
на выходные параметры машины;
учесть вероятностную природу всех
явлений и действующих факторов;
разработать модель параметрическо-
го отказа для расчета показателей
надежности машины при ее износе.
На рис. 9 схематично показаны этапы
прогнозирования параметрической на-
дежности изделия при износе его эле-
ментов с использованием в качестве
входных данных расчетных или полу-
ченных на основе специально прове-
денных испытаний для оценки началь-
ных параметров изделия |7 ].
В качестве примера показано влия-
ние износа направляющих, который
рассчитывается по формуле (22), на
изменение траектории А, оценивающей
точность функционирования машины.
Рйс, 9. Этапы прогнозирования параметрическое надежности изделий при износе
Расчет надежности механических систем с учетом их износа
274 Обеспечение надежности машин и механических систем
Многократные расчеты данного па-
раметра при различных входных дан-
ных, т. е. моделирование процесса экс-
плуатации машины, например, с ис-
пользованием метода Монте-Карло, по-
зволяют получить закон распределения
скоростей ух изменения выходного
параметра X — А. Применение модели
параметрического отказа (см. рис. 2)
дает возможность рассчитать показа-
тели надежности по каждому выход-
ному параметру изделия.
Большинство изделий машинострое-
ния являются сложными системами,
состоящими из отдельных узлов, де-
талей, агрегатов, систем управления
и т. п. Специфика механических си-
стем заключается в том, что метод
структурного резервирования здесь
сравнительно редко применяется в чи-
стом виде.
Создание запасов прочности, изно-
состойкости (например, за счет уве-
личения площади опорных поверхно-
стей), жесткости, виброустойчивости,
теплостойкости приводит к тому, что
повышается запас надежности, по-
скольку область состояний изделий
удаляется от предельных значений
параметра. Для механических систем
наиболее характерен случай, когда
при расчете надежности нельзя считать
отдельные элементы независимыми и
применять теорему умножения.
Для оценки надежности необходимо
рассматривать весь механизм или узел
в целом и оценивать процесс измене-
ния выходного параметра, как это
было изложено выше. Разбивать слож-
ную систему на независимые элементы
можно для механических систем и ма-
шин в следующих основных случаях:
1) при рассмотрении больших си-
стем, состоящих из отдельных машин,
агрегатов, подсистем, которые могут
функционировать самостоятельно (на-
пример, технологические комплексы);
2) при рассмотрении нескольких неза-
висимых выходных параметров изделия;
3) при анализе надежности систем,
состоящих из отдельных агрегатов,
особенно в тех случаях, когда их
принцип работы и особенность функ-
ционирования представляют самостоя-
тельную конструктивную единицу (уз-
лы гидросистем, двигатели и агрегаты
самолета, целевые узлы станков —
коробка скоростей, механизм загруз-
ки и др.). Все перечисленные случаи
условны, и требуется предварительный
анализ для решения вопроса о возмож-
ности расчленения изделия на неза-
висимые, элементы или подсистемы.
СПИСОК ЛИТЕРАТУРЫ
1. Бароне П. П., Звиедрис А. В.,
Салиниекс Н. К. Надежность и каче-
ство механических систем. Рига: Авото,
1982. 86 с.
2. Болотин В. В. Прогнозирование
ресурса машин и конструкций. М.: Ма-
шиностроение, 1984. 280 с.
3. Гнеденко Б. В., Беляев Ю. К.,
Соловьев А. Д. Математические методы
в теории надежности. М.: Наука, 1965.
524 с.
4. Кордонский X. Б., Фридман Я. Ф.
Некоторые вопросы вероятностного
описания усталостной долговечности//
Заводская лаборатория. 1976. № 7.
С. 825—847.
5. Крагельский И. В., Добы-
чин М. Н., Комбалов В. С. Основы
расчетов на трение и износ. М.: Ма-
шиностроение, 1977. 526 с.
6. Про ни ков А. С. Надежность ма-
шин. М.: Машиностроение, 1978. 592 с.
7. Проников А. С. Программный
метод Испытания металлорежущих стан-
ков. М.: Машиностроение, 1985. 288 с.
8. Проников А. С. Программный
метод испытания технологического обо-
рудования по параметрам качества и
надежности// В ест ник маш и ностр оен ия.
1984. № 3. С. 51—56.
9. Проников А. С., Бугаков А. В.
Вероятностная оценка скоростей изна-
шивания на основе физико-статисти-
ческого моделирования//Трение и из-
нос. 1983. № 1. С. 26—33.
10. Стрельников В. П. Модели отка-
зов механических объектов//Киев: Зна-
ние, 1982. 20 с.
11. Стрельников В. П., Таций В. Г.
Приложение теории процессов Марко-
ва к исследованию механического из-
носа//Прикладная механика. 1977. Т.
XIII, № 3. С. 63—69.
12. Трение, изнашивание, смазка:
Справочник. М.: Машиностроение.
Кн. 1, 1978. 400 с.; кн. 2, 1979. 358 с.
13. Шор Н. Б., Кузьмин Р. И. Таб-
лицы для анализа и контроля надеж-
ности. М.: Сов. радио, 1968. 284 с.
Глава 7.
Обеспечение надежности
радиоэлектронных систем
1. ОБЩИЕ ПРИНЦИПЫ
ОБЕСПЕЧЕНИЯ НАДЕЖНОСТИ
РАДИОЭЛЕКТРОННЫХ СИСТЕМ
(РЭС) ПРИ ПРОЕКТИРОВАНИИ
Количественные методы анализа на-
дежности создаваемых систем на ран-
них этапах проектирования позволяют
выбрать оптимальную структуру по-
строения системы, определить требо-
вания к надежности комплектующих
элементов, сформировать принципы оп-
тимальных режимов их использования,
определить оптимальную стратегию
эксплуатации и обслуживания системы
[1, 3, 4, 5].
Наряду с количественными (веро-
ятностными) требованиями и методами
их оценки и контроля широко исполь-
зуют детерминированные количествен-
ные и (или) качественные требования
инженерного характера, которыми раз-
работчики обычно руководствуются в
своей практической деятельности.
Опыт разработок сложных систем
дает возможность сформулировать ряд
общих конструктивных требований,
норм надежности, выполнение кото-
рых на ранних стадиях проектирова-
ния позволяет гарантировать опре-
деленный, хотя и не всегда измеримый
количественно уровень надежности бу-
дущей системы. Как правило, такие
требования носят детерминированный
характер и базируются на оценке
конкретных физических свойств мате-
риалов и КЭ, из которых строится си-
стема схемных решений, конструк-
ции, общих характеристик и параме-
тров функционирования, в том числе
запасов работоспособности, режимов
использования и других технических
мер и средств, обеспечивающих на-
дежность аппаратуры. Кроме того,
к нормам обеспечения надежности сле-
дует отнести и требования организа-
ционно-технического характера, регла-
ментирующие обязательный порядок
проведения работ по стадиям создания
изделия, контроль и отчетность.
Выбор надежной элементной базы.
Особо важное место в проблеме обес-
печения надежности РЭС занимают
вопросы правильного выбора элемент-
ной базы, обоснования оптимальных
требований к ее надежности.
Выбор комплектующих электрора-
диоизделий (ЭРИ) должен проводиться
с учетом эксплуатационных условий
работы системы. Кроме приемлемости
по своим функциональным характе-
ристикам, КЭ должны иметь и необ-
ходимую механическую, тепловую и
электрическую прочность, обладать вы-
сокой безотказностью и долговеч-
ностью.
Необходимо стремиться использовать
отработанные ЭРИ, высокое качество
и надежность которых с большой до-
стоверностью подтверждены практиче-
ской эксплуатацией их в условиях,
близких к эксплуатационным усло-
виям проектируемой РЭА.
Одним из важнейших факторов обес-
печения надежности РЭА является
проведение систематического анализа
качества и надежности ЭРИ с целью
подготовки ограничительных перечней
элементов для данной разработки,
наиболее полно отвечающих не только
требованиям необходимой функцио-
нальной полноты, обеспечивающей реа-
лизацию всех функций и режимов ра-
боты системы, но и обладающих тре-
буемыми характеристиками качества
и надежности. При этом необходимо
стремиться к максимальному снижению
разнообразия типов и номиналов при-
меняемых элементов, что позволяет
276
Обеспечение надежности радиоэлектронных систем
более эффективно осуществлять кон-
троль качества и оперативно управ-
лять этим процессом. Режимы при-
менения указанных в перечник ком-
плектующих ЭРИ должны строго со-
ответствовать требованиям технических
условий на них.
Надежность ЭРИ зависит не только
от качества их разработки и изготов-
ления, но и от условий (режимов)
использования их в аппаратуре (в ос-
новном электрических и тепловых).
Кроме того, на РЭА могут воздейство-
вать и другие факторы: влажность,
давление, вибрация, удары, вакуум
и др. Номенклатура и уровни воздей-
ствующих факторов зависят от назна-
чения РЭА и ее конструктивного испол-
нения.
Режим электрической нагрузки обыч-
но характеризуется коэффициентом на-
грузки /Ср, определяющим запас по
определенному параметру ЭРИ для
реального режима по сравнению с но-
минальным по ТУ.
Для большинства комплектующих
ЭРИ существует явно выраженная
зависимость их надежности от вели-
чины /Ср [5]. Поэтому требование
использования ЭРИ в облегченных
режимах (с /Ср < 1) является кон-
структивным и широко используется
разработчиками РЭА как одна из
важнейших норм проектного обеспе-
чения надежности РЭС. Однако не
во всех случаях и не для всех элемен-
тов уменьшение /Ср приводит к росту
надежности. Ряд элементов критичен
к снижению /Ср, и его уменьшение ниже
определенного уровня может привести
не к повышению надежности, а к ее
снижению.
Значительное снижение /Ср непо-
средственно- связано с увеличением
числа комплектующих ЭРИ для реа-
лизации заданной функциональной
схемы или устройства, которое, в свою
очередь, приводит к увеличению га-
баритов и массы аппаратуры, потреб-
ляемой мощности.
Одним из важнейших факторов, су-
щественно влияющим на надежность
ЭРИ, является тепловой режим ра-
боты аппаратуры. Повышение тем-
пературы приводит к ускоренному
окислению проводников, ухудшению
изоляционных свойств диэлектриков,
нарушению герметичности, спаев, уско-
рению различного рода коррозионных
процессов, процессов старения мате-
риалов и др.
Основным источником теплоты яв-
ляются сами ЭРИ. Поэтому при кон-
струировании аппаратуры следует при-
нимать такие конструктивные меры,
которые обеспечивают работу ЭРИ
в температурных режимах, близких
к нормальным условиям.
Выбор надежных схемно-конструк-
тивных решений. Постоянное увели-
чение сложности проектируемых РЭС
при сохранении и даже повышении
предельно жестких требований к ее
надежности не позволяет обеспечить
высокую надежность только за счет
правильного выбора надежной эле-
ментной базы. Дальнейшее повышение
надежности обеспечивается на этапе
схемно-технического проектирования и
конструирования. Основными факто-
рами обеспечения надежности на этом
этапе являются: выбор надежных схем-
но-конструктивных решений; введе-
ние различных видов избыточности;
обеспечение определенных запасов ра-
ботоспособности.
Критериями правильности выбора
схемно-конструктивных решений и об-
основания необходимости и достаточ-
ности используемых видов избыточ-
ности и запасов работоспособности на
данном этапе являются количествен-
ные требования в виде вероятностных
показателей надежнрсти на отдельные
блоки,, приборы и систему в целом,
а также количественные и качествен-
ные требования детерминированного
характера, представляющие собой со-
вокупность норм, приемов и правил,
реализация которых способствует пра-
вильному решению вопросов обеспе-
чения надежности на данном ' этапе
проектирования.
2. ОСОБЕННОСТИ
ОБЕСПЕЧЕНИЯ НАДЕЖНОСТИ
ЦИФРОВОЙ АППАРАТУРЫ
При обеспечении надежности цифро-
вой аппаратуры необходимо учитывать
ряд особенностей этого класса РЭА.
К ним прежде всего относят: дискрет-
ный характер работы всех элементов;
наличие двух видов неисправностей;
Особенности обеспечения надежности цифровой аппаратуры
277
использование программного управ-
ления.
Дискретный характер работы цифро-
вой аппаратуры определяется дискрет-
ностью входных, внутренних и выход-
ных сигналов.
Для цифровой аппаратуры и ЭВМ
характерны два вида неисправно-
стей — отказы и сбои. Сбои в цифро-
вой аппаратуре объясняются тем, что
использование микроэлектроники свя-
зано со значительным уменьшением
действующих в схемах сигналов в виде
уровней напряжений и токов, сниже-
нием порогов срабатывания логиче-
ских элементов, а резкое повышение
плотности компоновки цифровой аппа-
ратуры на ИМС увеличило число и
интенсивность взаимных паразитных
связей и наводок.
Кроме того, причинами сбоев могут
быть факторы, связанные с неправиль-
ным выбором рабочей точки устройства
и допусков, старение комплектующих
элементов, изменение электрических
режимов под действием внешних фак-
торов, флюктуации напряжения питаю-
щей сети, нарушения контактов в раз-
личных цепях устройства, и др.
Последствием сбоя является искаже-
ние информации или нарушение вы-
числительного процесса, которые в ко-
нечном счете приводят к нарушению
правильного функционирования циф-
рового устройства или вычислительной
машины в целом, что эквивалентно
отказу.
Поскольку сбой вызывается воздей-
ствием на схему ряда независимых
факторов случайного характера, то
и поток сбоев будет иметь стохасти-
ческий характер.
Для случая, когда рабочая точка
устройства находится далеко от гра-
ницы области работоспособности, по-
ток сбоев близок к простейшему,
а вероятность их появления описы-
вается экспоненциальным законом [2].
В этом, случае вероятность отсутствия
сбоя в логическом элементе за время t
определяется как
рс6(0 = е’Х»б',
где Хсд — интенсивность сбоя логиче-
ского элемента.
Если устройство состоит из N ло-
гических элементов и возникновение
сбоя в каждом логическом элементе
является событием независимым, то
вероятность бессбойной работы устррй-
ства за время t будет
N
~ Zj ^c6i*
Рсб(0 = е '=‘
= е Л°с',
N
где Хсб/ = Лсб — интенсивность
i=l
сбоя устройства.
Если рабочая точка находится вбли-
зи границ области работоспособности
устройства, то поток сбоев такого
устройства уже не является простей-
шим. Вероятность появления сбоя
в этом случае может быть описана
законом Паскаля
Реб (0 =
1/Лсб 1
1/Лсб Ч- 1 + ЛС(5^ ’
где Лсд — среднее значение интенсив-
ности сбоя устройства;
Надежность нерезервированной циф-
ровой аппаратуры с учетом отказов
и сбоев в предположении, что поток
сбоев является простейшим, а само
появление сбоя эквивалентно отказу
аппаратуры, может быть определена
как
р (/) = е 7 (Лотк+Лсб) (1)
Оценка надежности с учетом сбоев
в соответствии с (I) является довольно
приближенной, так как не учитывает
структуру цифровой аппаратуры и
возможные входные наборы. Это объ-
ясняется тем, что воздействие сбоя
продолжается очень короткий про-
межуток времени, который обычно
сравним с длительностью такта ма-
шины, и может оказаться, что при
данных входных наборах и конкретной
структуре построения устройства сбои
в отдельных элементах не окажут
влияния на выходной результат. По-
этому для более точных оценок надеж-
ности необходимо учитывать филь-
трующие в отношении сбоев свойства
конкретной структуры цифрового уст-
ройства и системы или использовать
оценку ЛСб, полученную эксперимен-
278
Обеспечение надежности радиоэлектронных систем
тально для цифрового устройства в це-
лом в процессе реальной эксплуатации.
Конструктивными методами решения
проблемы устранения сбоев являются:
применение серий логических эле-
ментов, обладающих повышенной по-
мехоустойчивостью;
применение тщательной экраниров-
ки устройств, чувствительных к по-
мехам;
специальная компоновка и соблю-
дение правил монтажа слаботочных и
сильноточных цепей устройств;
установка развязывающих и подав-
ляющих фильтров по цепям питания;
использование гальванических раз-
вязанных цепей с симметричными вхо-
дами и выходами;
использование линий связи, нечув-
ствительных к внешним наводкам.
Наряду с техническими методами,
направленными на снижение интен-
сивности сбоев в цифровой аппара-
туре, важное значение имеют методы
проектирования цифровой аппаратуры
и систем, нечувствительных к сбоям,
т. е. такой аппаратуры, которая спо-
собна автоматически парировать по-
следствия возникающих в ней сбоев.
К таким методам относят методы про-
ектирования аппаратуры с введением
специальных видов избыточности и
контроля.
По характеру парирования сбоев
все методы можно разделить на две
группы: 1) методы маскирования сбоев;
2) методы выявления и исключения
последствий сбоев.
Методы маскирования сбоев обеспе-
чивают автоматическое исключение по-
следствий сбоев без прерывания про-
цесса функционирования системы [7].
Таким свойством обладают избыточные
структуры, построенные по принципу
мажоритарного резервирования или
учетверенной логики.
Вторая группа методов парирования
сбоев предполагает разработку струк-
туры и алгоритмов функционирования
избыточной системы таким образом,
чтобы обеспечивался контроль работо-
способности устройств системы, опе-
ративное выявление факта сбоя и по-
следующая нейтрализация его послед-
ствий с помощью дополнительных ап-
паратурных или программных средств
[7].
По принципу используемых средств
контроль бывает аппаратным и про-
граммным [7, 11].
Аппаратный контроль осуществляют
с помощью специальной контрольной
аппаратуры, вводимой в структуру
цифровой аппаратуры или ЭЦВМ.
Аппаратный контроль позволяет в от-
личие от программных видов контроля
определить место отказа или сбоя
именно в момент его возникновения,
что важно с точки зрения возможности
оперативного устранения последствий
отказа или сбоя.
Контроль по модулю при-
меняется наиболее широко. Эффектив-
ность данного метода растет с увеличе-
нием количества модулей в аппара-
туре, однако при этом возрастает
количество дополнительного контроль-
ного оборудования, что существенным
образом сказывается на надежности
аппаратуры контроля, а значит, и на
надежности системы в целом. Так, для
организации контроля трех модулей
процессора требуется '-'15 % допол-
нительного оборудования, пяти моду-
лей — в 2 раза больше, семи моду-
лей — в 3,5 раза больше. Контроль
по модулю обнаруживает как сбои, так
и отказы.
Существенными недостатками метода
являются:
трудность применения метода к уст-
ройствам ЦВМ, не имеющих регистров
(устройство управления и другие по-
следовательные устройства ЦВМ);
усложнение обнаружения неисправ-
ностей как в контролируемом устрой-
стве, так и в самой контролирующей
схеме;
резкое увеличение количества до-
полнительного оборудования с ростом
глубины контроля.
Кодовый контроль. Его
эффективность определяется информа-
ционной избыточностью, т. е. допол-
нительными разрядами двоичной ин-
формации, которые вводятся в исход-
ную с целью обнаружения или (и)
исправления ошибок. Затраты допол-
нительного оборудования примерно со-
ответствуют рассмотренному методу
контроля по модулю.
Однако при использовании кодового
контроля невозможно осуществить
сквозной оперативный контроль всей
Надежность программного обеспечения
279
ЦВМ из-за того, что информационная
избыточность может быть использо-
вана не во всех устройствах ЦВМ.
Кроме того, с ростом глубины кон-
троля усложняется схема контроля
и увеличивается дополнительное обо-
рудование. Наиболее распространен-
ным методом использования указан-
ного вида контроля являются цепи и
устройства передачи информации,
Аппаратный контроль
из двух или трех одно-
типных ЦВМ применяют как при
решении вычислительных задач, так
и при использовании ЦВМ в автомати-
зированных системах управления.
Сравнение информации в таких си-
стемах может осуществляться на раз-
личных уровнях: канал, блок, устрой-
ство ит. д. Выбранный уровень сравне-
ния определяет глубину контроля и,
соответственно, степень локализации
места отказа или сбоя. Ограничением
при выборе уровня сравнения является
наличие регистров в данном устрой-
стве.
Основные недостатки аппаратного
контроля данного вида: большое ко-
личество дополнительного оборудова-
ния (одна или две ЦВМ); ограничен-
ная глубина контроля; недостаточно
эффективное использование избыточ-
ного оборудования.
Программный контроль включает в
себя программно-логический и тесто-
вый контроль.
П рогр аммно-логический
контроль базируется на ис-
пользовании программной и вре-
менной избыточности, позволяющей
путем повторения операций перера-
ботки или пересылки информации и
последующего их сравнения обнаружи-
вать наличие сбря в контролируемом
устройстве.
Тестовый контроль осу-
ществляют с помощью специально под-
готовленных и заложенных в про-
граммное обеспечение тестовых про-
грамм. Для его использования также
требуется временная избыточность.
Введение контроля в цифровую ап-
паратуру сопровождается обязатель-
ной платой. Это может быть увеличе-
ние дополнительного оборудования,
или (и) увеличение непроизводитель-
ных затрат машинного времени.
Не все виды контроля в одинаковой
мере влияют на показатели надеж-
ности цифровой аппаратуры.
Так, программные методы контроля
улучшают готовность и достоверность,
не изменяя при этом, как правило,
безотказность системы. Аппаратный
контроль, как правило, улучшает до-
стоверность, но ухудшает безотказ-
ность системы вследствие введения
дополнительного оборудования. Для
аппаратного контроля с дублирова-
нием и троированием каналов улуч-
шается достоверность, безотказность,
а в отдельных случаях и готовность.
3. НАДЕЖНОСТЬ
ПРОГРАММНОГО ОБЕСПЕЧЕНИЯ
Проблема надежности программного
обеспечения (ПО) приобретает все боль-
шее значение в связи с постоянным
усложнением разрабатываемых си-
стем, расширением круга задач, воз-
лагаемых на них, а следовательно,
и значительным увеличением объемов
и сложности ПО.
Реальная надежность ПО нередко
оказывается ниже, чем надежность
самой аппаратуры.
Под ПО понимают совокупность
программ и документов на них для
реализации целей и задач ЦВМ.
Производство программ регламенти-
руется Единой системой программной
документации — ЕСПД, представляю-
щей собой комплекс государственных
стандартов, устанавливающих общие
положения, виды программ и про-
граммных документов, правила раз-
работки, оформления и обращения
программ и программной документа-
ции.
Ненадежность программного обеспе-
чения обусловливается наличием в
программах разного рода ошибок,
внесенных в нее, как правило, при
разработке или в процессе эксплуа-
тации.
Под ошибкой понимают всякое не-
выполнение программой функций, ко-
торые заданы в ТЗ на разработку ПО
или вытекают непосредственно из ин-
струкции пользователю. Проявление
ошибки является отказом программы.
Программа при фиксированных исход-
ных данных и абсолютно надежной
280
Обеспечение надежности радиоэлектронных систем
аппаратуре должна давать однознач-
ный результат на выходе при много-
кратном его повторении. Однако ком-
бинаторный характер исходных дан-
ных, множество условных переходов,
зависящих от промежуточных резуль-
татов вычислений, создают огромное
число возможных путей исполнения
программы, которое может быть на
несколько порядков больше числа
команд в^ программе. Проверить все
вариантьГисполнения программы прак-
тически невозможно, и практика соз-
дания сложных комплексов программ-
ного обеспечения показывает, что и
после нескольких лет эксплуатации
встречаются непроверенные варианты,
в которых вдруг обнаруживаются
ошибки.
Вследствие изложенного проявление
ошибки в ПО, т. е. отказ ПО, является
случайным событием, хотя сама ошибка
не является случайной.
Факторы, определяющие надеж-
ность ПО. Главную роль в создании
надежного ПО играют правильная
организация и управление процессом
разработки:
подготовка инженерного и руково-
дящего персонала по технологии ис-
пользования вычислительных машин;
контроль вьщачи и изменений про-
грамм;
постоянная связь между разработ-
чиком и заказчиком ПО;
применение эффективных методов
контроля процесса разработки про-
грамм и документации;
внедрение стандартов, регламенти-
рующих работы по проектированию
ПО.
Важную роль в повышении качества
и надежности разрабатываемого ПО
играет постоянный контроль в виде
достаточно формализованных «про-
смотров» проектной и программной
документации специальной группой
экспертов, в которую включаются:
специалисты по проектированию и
программированию; специалисты по
Отладке и испытаниям ПО; специалисты
по компоновке программ; представи-
тели заказчика.
Повышению качества разработки
сложных программ способствуют про-
грессивные приемы структурного про-
граммирования и принцип модуль-
ности ПО.
В основу структурного программи-
рования положены достаточно простые
положения:
программа должна составляться мел-
кими шагами;
сложная задача должна разбиваться
на достаточно простые, легко воспри-\
нимаемые части, каждая из которых1
имеет только один вход и выход;
логика программы должна опираться
на минимальное число достаточно про-
стых базовых управляющих структур.
Принцип модульности заключается
в разбиении сложной программы на
отдельные подпрограммы — модули,
характеризующиеся функциональной
законченностью, автономностью и не-
зависимостью в разработке и оформле-
нии. Рекомендуется объем модулей
в 100— 500 команд. Запрет на приме-
нение потенциально ненадежных про-
граммных конструкций, возможность
оперативного автономного контроля
результатов функционирования моду-
ля обеспечивают высокую вероятность
исключения ошибок на самых ранних
этапах разработки ПО.
Для создания надежного ПО ис-
пользуют также принцип структури-
рования массивов данных, что позволяет
снизить вероятность появления оши-
бок из-за их неправильного использо-
вания.
Отладка и испытания ПО. Исходя из
задач и применяемых методов для
выявления ошибок, процесс отладки
можно разделить на три этапа:
1) структурный контроль соответ-
ствия ПО формализованным требова-
ниям;
2) откладка ПО методами детерми-
нированного тестирования;
3) отладка ПО методами статистиче-
ского тестирования.
Структурный контроль соответ-
ствия ПО формализованным требова-
ниям применяют на нижних уровнях
иерархической структуры ПО — мо-
дулях, подпрограммах, отдельных
блоках программы. Формализованные
требования содержат правила струк-
турного, синтаксического и семанти-
ческого построения программы, вы-
полнение которых обязательно для
всех ее составных частей.
Выбор методов обеспечения надежности
281
Детерминированное тестирование
предусматривает задание конкретных
исходных данных и маршрутов испол-
нения программы. Проверка всех марш-
рутов при всех значениях исходных
данных может быть реализована толь-
ко для очень простых программ и при
малых диапазонах изменения исход-
ных данных. Диапазон варьирования
исходных данных и степень охвата
возможных маршрутов определяют эф-
фективность обнаружения ошибок дан-
ным методом.
Различают тестирование восходящее
и нисходящее.
Восходящее тестирование начинается
с автономного тестирования программ-
ных модулей самого нижнего уровня.
После этого проводится тестирование
модулей более высокого уровня, про-
верка которых требует обращения
к уже оттестированным модулям.
После проверки данного уровня со-
вершается переход к модулям все
более высокого уровня вплоть до
программы в целом.
Недостатком данного метода тести-
рования является то, что для сложного
ПО с многоуровневой иерархией вы-
явление серьезных ошибок в специ-
фикациях, алгоритмах и интерфейсах
осуществляется только на завершаю-
щей стадии отладки ПО — стадии ком-
плексного тестирования программ и
ПО в целом.
При нисходящем тестировании ав-
тономно тестируется только головная
программа, затем подсоединяются про-
граммы модулей и компоненты сле-
дующего уровня, и так до тех пор,
пока не будет собрана и испытана
вся программа.
Преимущество нисходящего тести-
рования заключается в том, что оно
позволяет выявить ошибки и каче-
ственно их устранить.
Сложное ПО целесообразно подвер-
гать статистическому тестированию
для проверки комплекса программ
в расширенных по сравнению с детер-
минированным подходом условиях
функционирования и, соответственно,
получения более достоверных данных
о надежности ПО. Статистические про-
верки проводят комплексно с целью
получения основных характеристик
программ и подтверждения их соот-
ветствия требованиям ТЗ, в том числе
и по надежности.
4. ВЫБОР МЕТОДОВ
ОБЕСПЕЧЕНИЯ НАДЕЖНОСТИ
РАДИОЭЛЕКТРОННЫХ СИСТЕМ
Выбрать эффективный метод обес-
печения надежности можно только
тогда, когда известно, как изменяются
количественные характеристики на-
дежности при применении различных
методов [5].
При экспоненциальном законе на-
дежности все основные количествен-
ные характеристики и показатели на-
дежности нерезервированной системц
выражаются через интенсивность от-
казов X, среднее время восстановле-
ния Тв и суммарное время t работы
системы. Для резервированных систем
надежность зависит также от способа
и кратности т резервирования.
Все методы повышения надежности
принципиально могут быть сведены
к следующим основным:
1) резервированию;
2) уменьшению интенсивности отка-
зов системы;
3) сокращению времени непрерыв-
ной работы;
4) уменьшению среднего времени
восстановления.
Указанные методы реализуются по
стадиям создания и применения си-
стемы.
Уменьшить интенсивность отказов
системы можно многими способами,
основными из которых являются:
выбор более надежного опорного
варианта системы при проектирова-
нии;
упрощение системы;
выбор наиболее надежных элементов
и материалов;
облегчение электрических, механи-
ческих, тепловых и других режимов
работы элементов или введение запа-
сов работоспособности;
тщательная экспериментальная от-
работка и испытания;
тренировка элементов и системы;
создание схем с ограниченными по-
следствиями отказов элементов;
создание контролепригодных и вос-
станавливаемых систем;
282
Обеспечение'* надежности радиоэлектронных систем
Рис. 1. Зависимость Oq (/) для различных
способов резервирования:
------- резервирование с дробной кратно-
стью; -резервирование с целой крат-
ностью
стандартизация и унификация эле-
ментов и узлов;
совершенствование технологии про-
изводства, разработка упрощающих
технологий;
автоматизация проектирования, про-
изводства, испытаний;
статистический контроль качества
продукции;
проведение профилактических ме-
роприятий при эксплуатации аппара-
туры, направленных на предупрежде-
ние отказов;
обучение персонала.
Большая часть этих способов реали-
зуется при проектировании, осталь-
ные — при производстве и эксплуата-
ции.
чЭффективность этих способов со-
стоит в том, что они позволяют полу-
чать варианты системы, обладающие
высокой надежностью, реализовать
наиболее эффективные мероприятия
на всей совокупности будущих изде-
лий с минимальными затратами ре-
сурсов. На последующих стадиях ра-
бот можно повысить надежность по
мере выявления и устранения недо-
статков путем осуществления меро-
приятий, связанных с большими мате-
риальными затратами, что не всегда
оправданно.
Для каждого конкретного изделия
применяют не все из перечисленных
способов, а наиболее эффективные из
Рис. 2. Зависимость О-^ от кратности резер-
вирования т:
1 — общее постоянное резервирование; 2 —
поэлементное постоянное; 3 — общее заме-
щением; 4 — поэлементное замещением;
5 — с дробной кратностью ’
них в данных конкретных условиях.
Резервирование. Методы резервиро-
вания позволяют из элементов и ма-
териалов с ограниченной надежностью
создавать надежные системы [1, 5, 6).
Выигрыш в надежности по вероят-
ности отказов * Gn (0 всегда начи-
нается с нуля (рис. 1) и асимптотически
стремитсй к единице независимо от
надежности резервированной системы
и ее элементов. При этом скорость роста
Gq (0 тем выше, чем менее надежна
основная система и чем ниже крат-
ность резервирования. При несколь-
зящем резервировании с дробной крат-
ностью величина Gq (/) может быть
больше единицы, начиная с определен-
ного значения времени непрерывной
работы системы t.
Выигрыш в надежности резервиро-
ванной аппаратуры тем выше, чем
меньше время непрерывной работы
резервированной системы.
Выигрыш в надежности по интен^
сивности отказов <?Л (0 качественно
не отличается от Gq (0. Поэтому свой-
ства резервированных систем, если их
надежность оценивать интенсивностью
* Выигрыш по вероятности отказов оп-
ределяется как отношение вероятности от-
каза нерезервированной системы к вероят-
ности отказа резервированной.
Выбор методов обеспечения надежности
283
отказов Л, будут теми же, что и при
оценке надежности с помощью ве-
роятности отказов.
Среднее, время безотказной работы
при резервировании с дробной крат-
ностью и нескользящем резерве может
быть меньше, чем среднее время без-
отказной работы нерезервированной
системы в том случае, если число ре-
зервных систем меньше числа основ-
ных. С ростом кратности резервирова-
ния выигрыш надежности Gt по средне-
му времени безотказной работы растет,
причем скорость роста существенно
убывает с повышением кратности ре-
зервирования (рис. 2). Это свойство
также присуще общему и поэлемент-
ному резервированию с постоянно
включенным резервом.
При резервировании замещением и
идеальных переключателях выигрыш
Gt растет с ростом кратности резерви-
рования линейно при общем резерви-
ровании, а при раздельном (поэлемент-
ном) или скользящем — быстрее. Для
схемной реализации резервирования
замещением требуются переключатели,
при этом существенно снижается ско-
рость роста выигрыша Gt (tn).
Резервирование системы приводит
к снижению ее коэффициента готов-
ности. Выигрыш надежности резерви-
рованной системы по /Сг для всех
значений t превышает единицу лишь
при условии Т0/Тс < Тво^вс, где То,
^во — соответственно среднее время
безотказной работы и среднее время
восстановления нерезервированной (ос-
новной) системы; Тс, Тъс — соответ-
ственно среднее время безотказной
работы и среднее время восстановле-
ния резервированной системы.
С ростом кратности резервирования
среднее время безотказной работы Тс
растет медленнее, чем растет слож-
ность системы.
Поэтому Т^с может увеличиться
в большее число раз, чем увеличится
Тс, и неравенство будет нарушено.
Эти соображения справедливы и
для режима длительного хранения
аппаратуры.
Таким образом, резервирование как
средство повышения надежности Дает
наибольший эффект для сложных си-
стем, непрерывно работающих корот-
Рис. 3. Зависимости вероятности безотказ-
ной работы аппаратуры от числа элемен-
тов N и вероятности их безотказной работы
кое время. Повышение надежности
путем резервирования достигается за
счет ухудшения таких ее характери-
стик, как масса, габариты, энерго-
потребление, стоимость, усложнение
условий эксплуатации (увеличение ча-
стоты проверок, ЗИП и т. п.).
Уменьшение интенсивности отказов
системы. Уменьшение числа элемен-
тов в системе (уменьшение сложности
системы) может существенно повысить
ее надежность [5].
На рис. 3 приведены зависимости ве-
роятности безотказной работы аппа^
ратуры от числа элементов и вероят-
ности их безотказной работы для слу-
чая экспоненциального закона надеж-
ности. Эффект от упрощения системы
тем больше, чем ниже надежность эле-
ментов и чем сложнее система.
Однако значительное упрощение си-
стемы в большинстве случаев не позво-
ляет обеспечить выполнение предъяв-
ляемых к ней технических требований
по производительности, точности и
быстродействию. Таким образом, упро-
щение системы является весьма эф-
фективным, но достаточно трудно реа-
лизуемым методом повышения надеж-
ности.
284
Обеспечение надежности радиоэлектронных систем
Выбор наиболее надеж-
ных элемен то в. Эффект уве-
личения надежности системы за счет
повышения надежности элементов тем
выше, чем сложнее система. Однако
стоимость более надежных элементов,
как правило, больше. Может ока-
заться, что предъявляемые требования
таковы, что при данном числе элемен-
тов и при данных условиях работы
системы удовлетворить их можно, вы-
бирая не самые надежные элементы.
Облегчение режимов ра-
боты элементов. Улучшить ус-
ловия работы элементов можно, во-
первых, уменьшая вредное влияние
окружающей среды и внешних воздей-
ствий, и, во-вторых, облегчая режимы
работы. Применительно к аппаратуре
облегчение электрических режимов ра-
боты и температуры дает эффект, если
элементы в аппаратуре работают в пе-
регруженном /Или в близком к номи-
нальному режиме. Зная принципиаль-
ную схему системы и зависимость ин-
тенсивности отказов от нагрузок для
всех элементов системы, можно вы-
брать режим работы (или запасы ра-
ботоспособности) такие, чтобы вероят-
ность безотказной работы системы была
максимальной или не ниже требуемой.
Если однотипные элементы равно-
надежны и подчиняются экспоненци-
альному закону распределения, можно
записать
лс = ЛТД, = - 1п р;(0 . (2)
1=1
Надежность сложной системы, как
правило, определяется ограниченным
числом типов элементов: это либо наи-
менее надежные, либо наиболее мно-
гочисленные элементы. Поэтому "об-
легченные режимы следует применять
в первую очередь для наименее на-
дежных элементов. Пусть элементы
типов l-=-(fe—1) или не оказывают
существенного влияния на надежность,
или обеспечение их режимов работы
не представляется возможным. Тогда
выражение (2) можно записать в виде
Ас = Лео + (3)
i=k
k—1
где Apo = ^Ai«
f=l
Учитывая (2), выражение (3) можно
записать в виде
In Ре (О А z.v
Л' Af =------“ Лео- (4)
При разработке принципиальной
схемы наиболее важным является вы-
бор t° и /Сн элементов. Амплитуды и
частоты вибраций, влажность и давле-
ние влияют не столько на выбор типов
элементов, сколько на конструкцию
узлов и устройств (амортизация, гер-
метизация и т. п,).
Имея зависимость к{ = f t°),
можно выбрать режимы работы эле-
ментов следующим образом. По выра-
жению (4) на плоскости переменных
кг- и kj (где j #= i >= fe) строится семей-
ство прямых kf = f (к7) для различ-
ных значений к остальных элементов.
Имея зависимости интенсивностей
отказов от /Сн и Г, можно определить
значения Р и /Сн для выбранных к.
Если хотя бы по одному значению к,
взятому из семейства прямых, не
удовлетворяет ни одно из значений
функции^к = / (Кн, t°), то это значит,
что невозможно подобрать режимы
работы, удовлетворяющие заданной на-
дежности. В этом случае нужно под-
бирать либо другие элементы, либо
использовать другие способы повыше-
ния надежности, например, резерви-
рование.
Решение получается простым, если
число типов элементов, режим работы
которых выбирают, не превышает трех.
На практике наиболее часто встре-
чается, когда г — k >• 3. В этих слу-
чаях режимы работы удобно выбирать
по средневзвешенным значениям к для
однотипных элементов. Методика вы-
бора заключается в следующем.
1. Строят зависимости средневзве-
шенных значений интенсивностей от-
казов квз для однотипных элементов
от коэффициента нагрузки /Сн и тем-
пературы Г. Построение осущест-
вляют по известной принципиальной
Выбор методов обеспечения надежности
285
схеме и кривым = ft (Лн, t°) с ис-
пользованием формулы
г
KjNj
ЛВЗ — Xi ~jv ’
1=1
где г — число элементов данного типа,
но различных номинальных данных;
Ху, Nj — интенсивность отказов и
число /*-х элементов; N — общее число
элементов данного типа.
2. Определяют If по семейству пря-
мых, построенных по выражению (4).
Определенные таким образом Xlt Х2..
Хг будут средневзвешенными значе-
ниями интенсивности отказов элемен-
тов данного типа.
3. По кривым Хвз — f (Кн, t°) опре-
деляют средние значения коэффици-
ентов нагрузки И температуры эле-
ментов данного типа. Полученные зна-
чения Кн и t° можно выбрать при про-
ектировании, а по кривым определить
действительные значения интенсивно-
стей отказов всех элементов.
Отбраковка малона-
дежных элементов. Интен-
сивность отказов системы на началь-
ном участке ее работы обычно значи-
тельно выше, чем на участке нормаль-
ной работы. Это объясняется тем, что
при изготовлении системы в нее могут
попасть элементы с внутренними про-
изводственными дефектами, которые
трудно выявить при обычных методах
испытаний в течение сравнительно
короткого времени работы системы.
Отбраковать ненадежные элементы
можно путем тщательной проверки
элементов при тяжелых условиях их
работы. Утяжелять условия работы
элементов наиболее удобно, увеличи-
вая либо коэффициент нагрузки Кп,
либо температуру окружающей среды.
Выбрать режим выжигания потенци-
ально ненадежных элементов можно
на основании анализа кривых X =
= /(/). Эти кривые для большинства
элементов, из которых состоит система,
имеют вид такой, как показано на
рис. 4. С увеличением /Сн (или при
увеличении F окружающей среды)
кривая X = f (t) смещается вверх и
влево. При этом участок, где X =
== const, сокращается, а начало этого
участка смещается влево.
Рис. 4. Зависимость интенсивности отказов
от времени при различных коэффициентах
нагрузки
Включать элементы можно при
таком режиме, при котором имеется
участок X = const. При установлении
значений коэффициентов нагрузки и
времени выжигания необходимо про-
вести испытания элементов при раз-
личных коэффициентах нагрузки и
на основании статистических данных
об отказах построить кривые X =
= /(0.
Необходимо дополнительно про-
анализировать, как сохраняются ос-
новные параметры элементов при том
или ином режиме выжигания. Если
интенсивность отказов на основании
статистических данных об отказах со-
храняет постоянную величину, а па-
раметры элемента «уходят» за допу-
стимые пределы, то такой режим вы-
жигания является вредным.
Создание схем с огра-
ниченными последстви-
ями отказов элементов.
Отказы элементов сложной системы
неравноценны. Одни отказы приводят
к потере работоспособности, другие
лишь ухудшают характеристики си-
стемы, третьи нарушают контроль
человека за работой системы и т. п.
Очевидно, что та часть системы, отказ
которой приводит к тяжелым послед-
ствиям, должна быть более надежной,
другие части — менее надежными.
Созданию высоконадежных систем
способствуют методы логического и
инженерного анализа отказов эле-
ментов и частей системы и их влияния
на работоспособность и надежность
системы в целом.
286
Обеспечение надежности радиоэлектронных систем
Стандартизация и уни-
фикация. Использование станда-
ртизированных и унифицированных уз-
лов и элементов упрощает построение
систем высокой надежности, позво-
ляет повышать контролепригодность
систем, облегчает поиски и устранение
неисправностей, удешевляет разра-
ботку, изготовление и эксплуатацию
изделий.
Совершенствование технологии про-
изводства и его автоматизация обе-
спечивают высокую однородность про-
дукции, повышают ее надежность и
уменьшают дисперсию времени воз-
никновения отказов. Большой эффект
дает применение упрочняющих техно-
логий, например, порошковая ме-
таллургия, перспективные методы об-
работки поверхности деталей, при-
менение робототехники.
Однако насколько бы совершенны
ни были технология производства и
его автоматизация, возможны откло-
нения качества продукции вследствие
ряда закономерных или случайных
причин, нарушающих нормальное те-
чение технологического процесса.
Профилактические ме-
роприятия, проводимые при эк-
сплуатации аппаратуры и направ-
ленные на предупреждение отказов,
позволяют выявить слабые элементы
и узлы, устранить их дефекты до по-
явления полного отказа и тем самым
уменьшить интенсивность отказов всей
системы. В процессе эксплуатации
надежность аппаратуры расходуется.
При проведении профилактических
мероприятий она может частично или
полностью восстанавливаться.
Оценим эффективность, которую да-
ют способы, обеспечивающие умень-
шение интенсивности отказов системы.
Как обычно, оценка дается по выиг-
рышу в надежности. Вероятность без-
отказной работы системы, интенсив-
ность отказов которой уменьшена в К
раз при экспоненциальном законе на-
дежности, может быть выражена фор-
мулой
Рс (0 = ехр (- Ло/К) t,
где Л© — интенсивность отказов си-
стемы до ее повышения; К — коэффи-
циент, показывающий, во сколько раз
уменьшена интенсивность отказов си-
стемы.
Тогда выигрыш в надежности по ос-
новным количественным характери-
стикам можно представить следующими
выражениями:
по вероятности отказов
Gq (0 = ; (5)
4 1 — ехр (—Ло/) т ' 7
по среднему времени безотказной
работы Gt = /С;
по частоте отказов
ба W = ехр Л ( ) t;
по интенсивности отказов бл(0 —
= 1/К.
Зависимости Gq (0 = f (Ло0 для
различных значений К, рассчитанные
по (5), приведены на рис. 5. Из (5)
и рис. 5 следует, что при малых A^t вы-
игрыш по вероятности отказов равен
примерно 1/Л, а при больших Aot
стремится к единице (т. е. выигрыш
исчезает).
Выигрыш в надежности по среднему
времени безотказной работы растет
прямо пропорционально К и не за-
висит от величины Aot, выигрыш по
интенсивности отказов обратно про-
порционален К-
Недостатком способа снижения ин-
тенсивности отказов по сравнению со
способом повышения надежности пу-
тем резервирования является незначи-
тельный выигрыш надежности по ин-
тенсивности и вероятности отказов при
малых значениях A^t.
Сокращение времени непрерывной
работы аппаратуры достигается ее мно-
гократным включением и выключением
(в тех случаях, когда это допускается
логикой функционирования системы).
Это позволяет разумно расходовать
надежность изделий.
Однако при частом включении и
выключении переходные процессы мо-
гут оказывать настолько сильное вред-
ное влияние, что дискретная работа
системы станет нецелесообразной.
Вероятности безотказной работы
Pi (0 и Ра (0 двух идентичных систем,
одна из которых работает непрерывно,
а вторая — с перерывами в работе, так
Выбор методов обеспечения надежности
287
Рис. 5. Зависимость Qq от интенсивности
отказов системы
что время ее функционирования в К
раз меньше, будут:
Рх (0 = ехр (—ЛоО;
Р2 (0 = ехр (—Ло0К).
Тогда выигрыш надежности по ве-
роятности отказа
Gq = [1 - ехр (-Ло W]-[l -
— ехр(—Ло0]. (6)
Сравнивая (6) и (5), видим, что со-
кращение времени функционирования
эквивалентно уменьшению интенсив-
ности отказов системы. Наибольший
эффект дает этот метод применительно
к резервированным системам (рис. 6).
Уменьшение времени восстановления
не влияет на основные количественные
характеристики надежности. Оно поз-
воляет повысить коэффициент готов-
ности и другие коэффициенты, свя-
занные с вынужденным простоем,
проведением обслуживания, частотой
обслуживания, и тем самым повысить
эффективность системы. Это достига-
ется путем повышения надежности
системы рассмотренными выше спо-
собами, созданием контролепригод-
ной и восстанавливаемой аппаратуры,
введением встроенного контроля, ис-
пользованием научных методов эксплу-
атации (например, временного резер-
ва).
Эффективность различных методов
повышения надежности. Оценить эф-
фективность того или иного метода
можно на основании сравнения коли-
Рис. 6. Зависимость вероятности безотказ-
ной работы резервированной (Л) и нерезер-
вированной (Б) систем при сокращении
времени непрерывной работы
чественных характеристик надежности
идентичных по своей конструкции и
принципу действия систем, но разных
по методам повышения надежности.
За критерий эффективности удобно
принять выигрыш надежности по всем
или по большинству количественных
характеристик, прежде всего по тем,
что заданы в ТЗ.
Резервирование и
уменьшение интенсив-
ности отказов системы.
Общее резервирование при посто-
янно включенном резерве
Gq (О = [1 - ехр (—ЛоОГ+'Л1 ~
- ехр (-Л^/Л)];
у 1/1 + i .
t=0
0а (0 = К (т + 1) ехр (-Л,/) [1 —
— ехр(—A,0]m/exp(—(7)
Ga (0 = К (т + 1) ехр (—Ло/) [1 -
-ехр(-Л^)Г/1 — [1 —
-exp(-A0/)]"*+‘. (8)
При резервировании „.замещением
gQ (О — С1 — ехР (—ЛоО X
X 2 (AoO'/i!]/[! - ехр (--Л,,/«)!;
288
Обеспечение надежности радиоэлектронных систем
Рис. 7. Предельные зависимости кратности
резервирования:
— ----при постоянно включенном резерве;
• при резервировании замещением
G? = (m + 1)/К;
Ga (/) = К (Л0/)т ехр (—Л0/)/т I X
X ехр [—Ло///С); (8)
Сл(0 = Л(Ло/)ю/т1 2(Л0/)'//1
Рассмотрим выигрыш в надежности
по среднему времени безотказной ра-
боты. Из выражений (7) и (8) следует,
что резервирование по сравнению с
уменьшением интенсивности отказов
системы выгоднее, если выполняются
следующие условия:
т
и т + 1>К. (9)
/=0
На рис. 7 приведены предельные
зависимости (9). Из рисунка следует,
что условие (9) выполняется при
весьма высокой кратности резерви-
рования.
Уменьшение интенсивности отка-
зов системы вдвое достигается при
т — 2 с постоянно включенным ре-
зервом, а уменьшение Лс втрое (К ~
— 3) достигается при т — 10. Та-
кого же результата легче добиться
облегчением режимов работы и от-
браковкой малонадежных элементов.
При поэлементном резервировании
приведённые выше рассуждения спра-
ведливы для отдельных элементов, а
значит, и для системы в целом. При
резервировании с дробной кратностью
среднее время безотказной работы
может быть меньше, чем нерезерви-
рованной системы, а следовательно,
оно будет меньше по сравнению с си-
стемой, у которой уменьшена интенсив-
ность отказов. Исключение составляет
резервирование по плавающему прин-
ципу при идеальном переключателе.
Однако это практически очень трудно
реализовать.
Таким образом, повышения сред-
него времени безотказной работы легче
добиться уменьшением интенсивности
отказов системы, чем резервированием.
Анализ функций Од (t) показывает,
что резервирование является наиболее
эффективным способом повышения на-
дежности системы, у которой A^t
мало. При больших Ло/ предпочти-
тельней уменьшение интенсивности от-
казов системы.
При малых значениях Ло/ Gq (0 «
К а при больших Ло/
lim Gq (0 = I.
При больших К имеем 1 —
— ехр (—Ло//К} т Aot/K; тогда
GqW ~ Д'[1 - ехр (~A„Z)]m+l/
/Ло/, откуда следует, что при сколь
угодно большой кратности резерви-
рования т всегда найдется такое зна-
чение Л, при котором Gq 1. Из
этого следует, что зависимости Go (0
начинаются при малых Ло/ с нуля,
пересекают ось Gq (0 = 1, имеют мак-
симум и в области больших значений
Ло/ стремятся к единице (рис. 8).
При малых Ло/ наиболее эффективным
способом повышения надежности яв-
ляется резервирование, при больших
Ло/ — уменьшение интенсивности отка-
зов системы. Увеличение т расширяет,
а увеличение К уменьшает область
значений Ло/, при которых целесооб-
разно резервирование. Аналогичный
результат получаем при резервирова-
нии замещением; при этом область
целесообразности резервирования сме-
щается вправо, т. е. расширяется.
При других методах резервирования
качественно картина остается такая же,
а изменяется лишь область целесо-
образности резервирования. Так как
выигрыш Gq (0 и Од (0 тем больше,
чём меньше Ло, то наиболее целесо-
образно резервировать простые си-
стемы.
Выбор методов обеспечения надежности
289
Сравнивая указанные методы по
коэффициентам надежности с помо-
щью следующих аналитических за-
висимостей:
для коэффициента готовности
оКр (О = [1 + Лое/К]/[ 1 + шс (0 Гвс];
для коэффициента простоя
~ „у. Х<ас(0Твс[1+(Ло/А)7во].
ATBO[l-Fwc(OTBC] ’
для коэффициента профилактики
0к„ (0 = №>с (О (Гвс/Л0) Гм,
приходим к выводу, что /Сг резерви-
рованной системы будет выше /Сг
системы с уменьшенной в /С раз ин-
тенсивностью отказов при следующих
условиях:
(10)
Если предположить, что ТВо = Твс,
то
Ло>К©с(О. (П)
Средняя частота отказов сос = f (f)
резервированной системы при t = 0
всегда равна нулю, а при увеличении t
растет, асимптотически стремясь к
значению, обратному среднему вре-
мени безотказной работы. Это озна-
чает, что условия (10) и (11) при ма-
лых t выполняются независимо от
кратности т резервирования, вели-
чины К и соотношения между Тв0
и Твс. Таким образом, при малых t
Кг резервированной системы выше,
чем системы с уменьшенной интенсив-
ностью отказов. При t -+- 0
lim СКг (0 = 1+ Г во-
При /->0 условие (11) имеет вид
IZ
До > -=— или Gt > К, т. е. выигрыш
• е
в надежности резервированной систе-
мы по сравнению с нерезервированной
должен быть больше коэффициента К
уменьшения интенсивности отказов си-
стемы.
Условие Gt > К справедливо при
больших значениях т. Для сложных
систем большой кратности резерви-
рования т достичь не удается. Поэ*
Рис. 8. Зависимости Oq (О при различных
кратностях резервирования и коэффициен-
тах уменьшения интенсивности отказов:
-------постоянное резервирование;--------
резервирование замещением
тому при больших К это условие не
выполняется. Отсюда следует, что для
сложных систем больший эффект до-
стигается не резервированием, а
уменьшением интенсивности отказов
элементов системы.
Аналогичные выводы получаем, оце-
нивая надежность системы по коэф-
фициентам простоя, обслуживания и
частоты обслуживания.
Резервирование и умень-
шение времени восстанов-
ления. Время восстановления вхо-
дит как параметр лишь в выражения
для коэффициентов надежности. Поэ-
тому сравнить эти методы можно по
коэффициентам надежности.
Выигрыш надежности G^r резерви-
рованной системы по сравнению с си-
стемой с уменьшением времени восста-
новления будет
GKv = (14- ЛоТво/К)/(1 4~ й>с (0 Гвс),
(12)
где К — коэффициент, показывающий,
во сколько раз уменьшено среднее
время восстановления нерезервиро-
ванной системы.
290
Обеспечение надежности радиоэлектронных систем
Из (12) следует, что резервирование
целесообразно, если
Лр ^ВС iz
©с (0 Уво
Так как средняя частота отказов <ос
при t 0 также стремится к нулю,
то при сколь угодно больших К най-
дется такое значение т, что при t <7 т
условие (13) выполняется.
При большом t средняя частота
отказов сос Тогда в пределе
условие (13) переходит в следующее:
GT > 4s2-к- <14>
Но Твс резервированной системы
всегда больше Тво нерезервированной.
Поэтому при большом коэффициенте К
условие (14) может выполняться лишь
при большой кратности резервирова-
ния и при условии, если с увеличением
кратности среднее время восстановле-
ния резервированной системы растет
медленнее, чем среднее время ее безот-
казной работы. Таким образом, для
систем, предназначенных для корот-
кого времени работы, резервирование
является лучшим способом повышения
Кг- При больших t более эффективным
может оказаться уменьшение среднего
времени восстановления. Тем не менее
уменьшение времени восстановления
всегда целесообразно.
Уменьшение интенсив-
ности отказов системы
и времени восстановле-
ния. '
Из выражений для коэффициентов
надежности Лг, Ап, Кр следует, что
До и Тв0 входят как произведение.
Это означает, что уменьшение в одно
и то же число раз интенсивности отка-
зов До или среднего времени восста-
новления Тв0 приводит к одинаковому
увеличению коэффициентов надежно-
сти. Однако это вовсе не означает, что
данные методы повышения надежности
эквивалентны. Интенсивность отка-
зов системы определяет все количе-
ственные характеристики надежности.
От нее зависит и среднее время вос-
становления. Однако среднее время
восстановления не влияет на основные
количественные характеристики на-
дежности и в том числе на интенсив-
ность отказов.
Разный эффект от этих мероприятий
следует учитывать при проектировании
системы.
Рассмотренные выше методы повы-
шения надежности дают максимальный
эффект, если они применяются не
в отдельности, а в комплексе, с учетом
особенностей системы, условий ее экс-
плуатации, а также ограничений, на-
кладываемых на ее массу, габариты,
энергопитание, стоимость и т. п.
СПИСОК ЛИТЕРАТУРЫ
1. Дружинин Г. В. Надежность ав-
томатизированных систем. М.: Энер-
гия, 1977. 526 с.
2. Журавлев Ю. П., Комелюк А. А.,
Циклинский Н. И. Надежность и кон-
троль ЭВМ. М.: Сов. радио, 1978.
416 с.
3. Левин Б. Р. Теория надежности
радиотехнических систем. М.: Сов. ра-
дио, 1978. 262 с.
4: Надежность технических систем:
Справочник. М.: Радио и связь, 1985.
606 с.
5. Половко А. М. Основы теории на-
дежности. М.: Наука, 1964. 446 с.
6. Райкин А. Л. Элементы теории
надежности технических сцстем. М.:
Сов. радио, 1978. 280 с.
7. Щербаков Н. С. Самокорректи-
рующиеся дискретные устройства. М.:
Машиностроение, 1975. 214 с.
Приложения
Прцложение 1
ОПТИМИЗАЦИЯ ЗАТРАТ
ПО ОБЕСПЕЧЕНИЮ НАДЕЖНОСТИ
НЕРЕЗЕРВИРОВАННЫХ
ТЕХНИЧЕСКИХ СИСТЕМ
Постановка задачи. Рассмотрим не-
резервируемые технические системы
(НТС), состоящие из последовательно
соединенных независимых между собой
подсистем или основных технических
элементов (ОТЭ). Надежность каж-
дого ОТЭ системы зависит от надеж-
ности используемых комплектующих
изделий, условий изготовления и эксп-
луатации ОТЭ. Перечисленные фак-
торы непосредственно определяют за-
траты на создание ОТЭ и системы в це-
лом.
Рассмотрим показатели надежности
ОТЭ системы, которые при условии
независимости отказов ОТЭ позволяют
оценку надёжности НТС проводить
по формуле
п ___
Ri=T\Rij. 1 = 1, k, (1)
(=1
где Rtj — j-н показатель надежности
i-го ОТЭ системы.
При проектировании НТС необхо-
димо выполнение требований по надеж-
ности:
п ___
П Ri) > Rjo. i = 1. k, (2)
1=1
где Rj0 — требуемый уровень /-го
показателя надежности НТС.
Анализ условий (2) показывает, что
выполнение требований по надежности
НТС возможно при различных ком-
бинациях значений показателей на-
дежности ОТЭ, а следовательно, и при
различных затратах на создание ОТЭ
и системы в целом. Поэтому возможны
различные варианты создания ОТЭ
системы (сроки и условия создания,
эксплуатации и т. п.).
Рассмотрим затраты, например, по
стоимости создания НТС, как детер-
минированную функцию показателей
надежности ОТЭ системы:
C = f(Rij)t i = ГГп, / = Г7. (3)
Функцию (3) называют целевой
функцией затрат (ЦФЗ). Будем по-
лагать, что с повышением надежности
каждого ОТЭ системы при постоян-
ном уровне надежности других ОТЭ
скорость роста затрат непрерывно по-
вышается и ЦФЗ имеет строго моно-
тонный выпуклый характер.
Данное свойство изменения затрат
наиболее четко проявляется при соз-
дании высоконадежных НТС. Разг
мерность ЦФЗ равна числу показате-
'лей надежности системы, умноженному
на число последовательно соединен-
ных ОТЭ.
Задачу минимизации затрат можно
записать следующим образом:
CnHB = ”J,nf (*</) = /(*</)»
1=1. п. j=l, k. (4)
ПRn Rjo^^, I =1> п,
i=l
/ = 1, fe, (5)
где R*j — значения показателей на-
дежности ОТЭ системы, при обеспе-
чении которых затраты на создание
НТС являются минимальными.
292
Приложения
Данные значения показателей на-
дежности ОТЭ называют опти-
мальными, и нахождение их
является задачей оптимизации затрат
по стоимости создания НТС.
Сформулированная задача оптими-
зации затрат является задачей поиска
условного минимума и с учетом харак- Y
тера ЦФЗ и ограничений (5) может быть
решена с использованием методов не-
линейного программирования. При ре-
шении этой задачи область поиска
оптимальных значений показателей на-
дежности ОТЭ системы является из-
вестной и
RjO Rij 1, i == 1, ?lt / == 1, kl
(6)
где Rj0 — требуемый уровень /-го
показателя надежности системы.
Уточнение области (6) производится
при анализе различных вариантов
создания ОТЭ системы. Чем более
точно будет определена область поиска,
тем более точно и просто можно найти
оптимальные значения показателей
надежности ОТЭ. В более общем виде
область поиска
Rjo Rij mln Rij Rij max 1»
i — 1, n, / = 1, k, (7)
где Rijm\at Rtjmax есть соответственно
минимально и максимально возможные
значения /-го показателя надежности
f-го ОТЭ системы.
Следует также учитывать наличие
зависимости между значениями пока-
зателей надежности каждого из ОТЭ
системы. При большом числе различ-
ных показателей надежности системы
могут возникнуть трудности при по-
иске оптимальных значений.
Для решения задачи оптимизации
затрат необходимо построение ЦФЗ
или знание методики определения за-
трат в области поиска (7).
В ряде случаев может оказаться»
что найденные оптимальные значения
показателей надежности ОТЭ системы
не могут быть практически реализо-
ваны. В этой ситуации принимают ре-
шение о выборе наилучшего варианта
создания системы.
Решение задачи минимизации стои-
мости создания системы с одним пока-
зателем надежности. Рассмотрим НТС
с одним показателем надежности R,
определяемым по формуле (1). Путем
логарифмирования формула (1) преоб-
разуется к виду
ln/?=2]n£f. (8)
4=1
В этом случае вместо ограничения
П Ri > Ro. I (9)
4=1
где Ro — допускаемое значение пока-
зателя надежности системы, можно
использовать ограничение
J In Ri > In Ro
i=l
или
2 In Ri — In Ro > 0.
i=l
Соотношение (7) преобразуется к
виду
in Ro In Rj mln In Ri
In Ri max 0-
(10)
Геометрически неравенству (9) в
пространстве преобразованных по
формуле (8) показателей надежности
ОТЭ системы соответствует область
в виде правильной пирамиды с верши-
ной в центре координат. Основанием
данной пирамиды является много-
мерный тетраэдр. Координаты любой
точки, лежащей внутри и на поверх-
ности тетраэдра, ^определяются в соот-
ветствии с условием
п
J Intfi —1пЯо = 0. (11)
4=1
При числе ОТЭ системы, равном
двум, условию (11) будет соответство-
вать основание (отрезок прямой) пря-
моугольного равнобедренного тре-
угольника; при числе ОТЭ системы,
равном трем, — равносторонний тре-
угольник и т. д.
Приложения
293
Условие (И) преобразуем к виду
п п
ln«, = £ xt = 1, (12)
1П /<о t-=l 1=1
где переменные
‘=тгп’ <’3)
являются положительными и с учетом
выполнения условия (12) изменяются
в области
i = 1, п. (14)
Величины, определяемые по формуле
(13), называют преобразованными по-
казателями надежности (ППН) ОТЭ
системы. Значению ППН, равному
единице, соответствует значение пока-
зателя надежности ОТЭ системы, рав-
ное а значению ППН, равному
нулю, — значение показателя надеж-
ности ОТЭ, равное единице,
В соответствии с условием (12) при
изменении значения одной из пере-
менных (преобразованного показателя
надежности) изменяются значения
остальных переменных. Геометриче-
скую фигуру, соответствующую усло-
вию (12), называют правильным симп-
лексом. Она представляет собой вы-
пуклый многогранник, величина каж-
дого из ребер которого равна единице.
Число вершин (ребер симплекса) равно
числу ППН ОТЭ системы. В каждой
вершине симплекса значение одной
переменной равно единице, а значения
остальных переменных равны нулю.
Ввиду строго монотонного харак-
тера ЦФЗ оптимальные значения по-
затёлей надежности ОТЭ системы
(₽?, i — 1, п) удовлетворяют усло-
вию (11), а соответственно и условию
(12). Это объясняется .тем, что при вы-
боре любых значений показателей на-
дежности ОТЭ (Ri, i = 1, ri), удовлет-
воряющих условию (11), и при увели-
чении значения показателя надеж-
ности одного из ОТЭ системы значе-
ние ЦФЗ также увеличивается, т. е.
имеет место соотношение
f№>^)>/№), i=17n. (15)
С учетом (15) условие минимизации
затрат (4) при одном показателе на-
дежности системы можно записать
следующим образом:
cmln = min/(«,) =/К).
Ri£0>, i =ТГп, (16)
где R* — оптимальное значение пока-
зателя надежности t-ro ОТЭ системы;
Ф — область значений показателей на-
дежности ОТЭ системы, удовлетворя-
ющих условию (12), и представляющая
в пространстве ППН правильный п-
мерный симплекс.
Сформулированная задача опти ми-
зации затрат при строго монотонном
характере ЦФЗ является задачей по-
иска условного минимума при нали-
чии ограничений в виде равенства
(12). Областью поиска минимума за-
трат является правильный симплекс.
Значения показателей надежности
ОТЭ системы определяют с помощью
формулы
In Rt = Xi In Ro, i = 1, n (17)
и подставляют в целевую функцию
затрат.
В соответствии со строго монотон-
ным выпуклым характером ЦФЗ за-
траты вблизи вершин симплекса будут
возрастать, а по мере удаления от вер-
шин — уменьшаться.
Для ряда случаев ЦФЗ может быть
представлена в виде функции
п п
С = а0 П * = а0 ехр 2
i= I /=1
а0 >0, а$ > 0, (18)
которая учитывает строго монотон-
ный характер зависимости затрат при
изменении значений каждого из пока-
зателей надежности ОТЭ системы, а
также учитывает эффекты взаимодей-
ствия затрат на создание каждого
ОТЭ системы, которые проявляются
в том, что с повышением указанных
затрат повышаются затраты, необхо-
димые для обеспечения согласованного
функционирования ОТЭ в системе.
Данную функцию назовем экспо-
ненциальной функцией затрат (ЭФЗ).
Главной особенностью ЭФЗ является
возможность аналитического нахож-
294
Приложения
дения минимума затрат при условии
выполнения ограничений
П«г=Яо. (19)
где 7?о — допускаемое значение пока*
зателя надежности системы,
Яо<Яг<1. i = 1. «• (20)
Минимальное значение затрат
п / п
Cmin = ехр п у Ro П аь (21)
а для нахождения оптимальных значе-
ний показателей надежности ОТЭ си-
стемы используют формулу
п
П а/.
/*»=1
i = 1, п.
(22)
Оптимальные значения показателей
надежности ОТЭ системы, определя-
емые по формуле (22), удовлетворяют
условию (19). В результате подста-
новки значений (22) в формулу (19)
образуется соотношение
п п
П R, = Ro П х
i =1 1=1
Для системы, состоящей из двух
ОТЭ, формулы (21), (22) соответственно
имеют вид
С min = ^р 2
= у/ ос'2^о/ОС'1 > #2 = 7^ а1^о/а2-
Для системы, состоящей из трех ОТЭ,
Cmin = ехр З^ахОСцОз/го;
R2 = а1а3^о/а2»
0 j .4
Аналогичным образом можно запи'
сать формулы для системы, состоящей
из большого числа ОТЭ. Формулы
(21), (22) получены следующим обра-
зом. Минимум ЭФЗ (18) при условии
выполнения ограничения (19) дости-
гается в соответствии с условием
п
Cmin == min «б ехр J =
Ri *=1
п
= «О ехр min V а^г, а0>0, af>0.
Используя условие (19), значение
показателя надежности одного (по-
следнего по порядку) из ОТЭ системы
можно определить через значения пока-
зателей надежности остальных ОТЭ:
'(23)
С учетом (23) получим
п п—1
2 aiRt = 2 <*tRi 4-
i=i i=i
ОпЯо.. (24)
ru
z=i
Путем дифференцирования (24) по
каждому (л — 1)-му показателю на-
дежности ОТЭ образуется система
уравнений
i = I, п— 1,
(25)
в результате решения которой находят
оптимальные значения показателей на-
дежности ОТЭ, за исключением по-
следнего ОТЭ.
Оптимальное значение показателя
надежности последнего ОТЭ системы
находят с помощью формулы (23)
путем подстановки найденных опти-
мальных значений показателей на-
дежности ОТЭ.
Приложения
295
Для трех ОТЭ система уравнений
(25) состоит из двух уравнений:
азКо _q
«3^0 Л
Ofe----X— = о
^2^1
с неизвестными величинами Rlt R2.
Из первого уравнения определяют
^2 = аз*о/М1
и подставляют во второе уравнение,
из которого
Р* — f а2кз р
\ “1
Затем определяют значение R% и
с помощью формулы (23) значение R$.
Полученные оптимальные значения
показателей надежности ОТЭ под-
ставляют в ЭФЗ (18):
„ / ,3 Г «2«3 D i
Cmin = «о ехр pt! 1 / —-f-
\ V “1
которая преобразуется к виду
3 Г Q q\ 3' Q
+ а9^<х^) = а0ехр1 / —-j X
/ |/ а1а2<хэ
X За^с^ — а0 ехр 3 у/ .
Аналогично находят оптимальные
значения показателей надежности боль-
шего числа ОТЭ и соответствующие
им значения затрат.
Используя ЭФЗ для аппроксима-
ции целевой и других функций за-
трат, достаточно легко можно нахо-
дить оптимальные значения показате-
лей надежности ОТЭ и минимум за-
трат на создание системы.
Процесс аппроксимации зависимо-
стей затрат с использованием ЭФЗ
состоит в вычислении оценок неиз-
вестных параметров а0 и а$ по сово-
купности значений затрат (Си, и —
= 1, N}, соответствующих различным
значениям показателей надежности
ОТЭ, удовлетворяющих условию (19).
Число различных комбинаций (чи-
сло опытов) значений показателей на-
дежности ОТЭ должно быть не меньше
числа неизвестных параметров, рав-
ного (п + 1).
Для выбора числа опытов и условий
их проведения используют равномерно
распределенные в симплексе последо-
вательности точек (планы эксперимен-
та). При числе опытов, равном (п + 1),
точки располагаются в центре и на
высотах симплекса. Высотами симп-
лекса являются расстояния от вер-
шин симплекса до центров противопо-
ложных (п—1)-мерных граней. На
каждой высоте симплекса выбирают
по одной точке на равном расстоянии
между центром и вершиной симплекса.
Оценки параметров находят в ре-
зультате решения системы нелиней-
ных уравнений
п
Си — аоехр J] a,iRiu — 0,
й=1
и = 1, п + 1,
которую путем логарифмирования ЭФЗ
преобразуют в систему линейных урав-
нений
п
In Си — In Оо — 2 aiRiu = 0»
и = 1, п +1. (26)
Найденные (исходные) оценки пара-
метров (а0(П+2)» «г (п+2)) используют
для определения с помощью формул
(21), (22) исходных оценок минимума
затрат (Сп+2) и оптимальных значе-
ний показателей надежности (Rf (п+2))
ОТЭ системы.
Одновременно для исходных оценок
оптимальных значений показателей на-
296
Приложения
дежности ОТЭ системы определяют
затраты (Сп+2) с использованием рас-
четных методов (машинных программ)
и сравнивают с затратами, полученны-
ми по формуле (21).
Затем независимо от точности про-
гнозирования минимума затрат уточ-
няют исходные оценки параметров
ЭФЗ путем аппроксимации исследуе-
мой функции затрат в области не-
правильного симплекса, который яв-
ляется n-й частью исходного (правиль-
ного) симплекса и внутри которого
находятся найденные исходные оценки
оптимальных значений показателей на-
дежности ОТЭ системы. Одна из вер-
шин данного симплекса расположена
в центре исходного симплекса, а ос-
тальные вершины совпадают с вер-
шинами исходного симплекса. В этом
случае из системы линейных уравне-
ний (26) исключают уравнение, соот-
ветствующее точке плана экспери-
мента, лежащей за пределами вновь
образованного симплекса, и вводят
уравнение, соответствующее найден-
ным исходным оценкам оптимальных
значений показателей надежности
ОТЭ системы:
1пСп+2 — 1па0 —
п
— 2 a{Ri (л+2) = 0.
f=l
Решают новую систему линейных
уравнений и с помощью формул (21),
(22) уточняют исходные оценки ми-
нимума затрат и оптимальных значе-
ний показателей надежности ОТЭ си-
стемы.
Если уточненные оценки оптималь-
ных значений показателей надежности
ОТЭ системы незначительно (в преде-
лах точности используемых методов
определения затрат) отличаются от
исходных, то их принимают в качестве
оптимальных значений показателей на-
дежности соответствующих ОТЭ си-
стемы и для них находят соответству-
ющий минимум затрат. В противном
случае уточнение оптимальных зна-
чений показателей надежности ОТЭ
системы следует продолжить. Из пред-
шествующей системы линейных урав-
нений исключают уравнение с наи-
худшим значением затрат и вводят
уравнение с уточненными оценками
оптимальных значений показателей на-
дежности ОТЭ системы:
1пС«+з — 1пао“
п
S (п+З) = °-
В случае плохой сходимости про-
цесса уточнения оптимальных значе-
ний показателей надежности ОТЭ си-
стемы целесообразно по мере накопле-
ния достаточного числа опытов для
аппроксимации ЦФЗ использовать ка-
нонические полиномы Шеффе второго
порядка [1}
п п
с (х) = 2 bixi + 2 buxtxb (27)
1=1 j>i=l
где Xi удовлетворяют условию (12);
ьь bij — неизвестные параметры,
оценки которых находят по формуле
В = (ХТХ)~’ ХТС,
где В — вектор параметров; X —
прямоугольная матрица размерности
NXk, с помощью которой записывают
значения ППН, соответствующие вы-
численным значениям затрат Си (и =
= 1, TV); k— число неизвестных пара-
метров в модели (27); С — вектор
значений затрат, вычисленных при
различных значениях ППН ОТЭ си-
стемы.
Число опытов, минимально необхо-
димое для оценки параметров модели
(27), равно п (п -j- 1)/2 и при большем
числе ОТЭ системы значительно пре.-
вышает число опытов, необходимое
для оценки параметров ЭФЗ.
Модели (27) путем замены одной из
переменных по формуле
п
xt = l — 2 xi> i =
преобразуются в полиномиальные мо-
дели второго порядка
п—1
С (х) = во + 2 aixi +
z=o
n—h л—1
+ 2 aljxixi + S an*t* (28)
/>z=i
Приложения
297
Координаты минимума затрат на-
ходят в результате решения системы
линейных уравнений, образованных
путем дифференцирования функции (28)
по каждому (п — 1)-му преобразо-
ванному показателю надежности и
приравнивания производных нулю.
При большом числе (несколько де-
сятков и более) ОТЭ системы нахожде-
ние оптимальных значений показате-'
лей надежности ОТЭ с помощью ЭФЗ
и полиномов Шеффе является затруд-
нительным ввиду большой размер-
ности системы линейных уравнений.
Если для вычисления затрат не тре-
буются продолжительные расчеты на
ЭВМ, то размерность системы линей-
ных уравнений можно уменьшить пу-
тем разбиения ОТЭ на группы.
Поиск оптимальных значений пока-
зателей надежности ОТЭ системы
проводится последовательно по каж-
дой из групп. В процессе поиска по
какой-либо группе ОТЭ значения пока-
зателей надежности по остальным груп-
пам являются постоянными (равными
найденным в процессе поиска значе-
ниям). Поиск по группам продолжа-
ется циклически до получения устой-
чивых оценок максимальных значений
показателей надежности ОТЭ системы.
Другим методом поиска оптимальных
значений показателей надежности
ОТЭ при большом их числе, позволяю-
щим уменьшить объем вычислений по
сравнению с аппроксимационными ме-
тодами поиска, является поиск по
различным направлениям в симплексе.
Суть данного метода, названного м е-
тодом ножниц, состоит в по-
следовательном выборе в области симп-
лекса различных отрезков прямых и
нахождении на данных отрезках пря-
мых условных минимумов затрат та-
ким образом, чтобы координаты услов-
ных минимумов затрат последова-
вательно приближались к абсолют-
ному минимуму затрат.
Поиск начинается с нахождения
условного минимума затрат (УМЗ)
на одной из высот симплекса аппрокси-
мацией зависимости затрат на отрезке
прямой (высоте симплекса) полино-
миальной моделью второго порядка:
С (А) = &о “I” (А — а) Н-
+ ь2 (A (h — р) - у), (29)
где b0, blt b2, tt, Р, у — неизвестные
параметры; h — длина отрезка пря-
мой, положение которого внутри симп-
лекса фиксируется с помощью двух
точек. Так, для высоты симплекса та-
кими точками являются вершины и
центр противоположной (л — ^-мер-
ной грани симплекса.
Для любого отрезка прямой, не
совпадающего ни с одним из ребер
симплекса, выполняется условие h с 1.
Значения параметров в модели (29)
определяют по методу наименьших
квадратов по формулам:
N
». = S Cu/N;
и=1
N I N
*1 = 2 (Ац tt) Си I Yj (Au а)2,
и=1 / h=l
N
а = 2 hu/N',
И=1
N
*2 = 2 (Ац (Аи —- р) — у X
/N
2 (Ли (Ли — Р) — т)а.
и=1
/ N
₽ = И2 л’-
\ и=1
N N \ I / N
и =1 и =1 / I \ и—1
N J \
2 ) )•>
и=1 / /
где Си — затраты в и-й точке отрезка
прямой; N — число точек. Для этого
необходимо определить затраты не
менее чем в трех точках на отрезке
прямой. Координаты УМЗ (точки УМЗ)
находят в соответствии с условием
dC (А)
dh
= &!-{- 2АгА — р&о = 0;
Лэк = (*i — $Ь^!2Ь2.
298
Приложения
Через найденную точку УМЗ из
различных вершин симплекса, про-
водят два отрезка прямых и на каж-
дом из них с использованием модели
(29) находят точки УМЗ. Направление
прямых (вершины симплекса) выби-
рают из условия наиболее равномер-
ного размещения внутри симплекса
всех трех отрезков прямых, проходя-
щих через найденную точку УМЗ.
Через две вновь найденные точки
УМЗ, лежащие на отрезках прямых,
проходящих через вершины симплекса,
проводят отрезок прямой и на нем
находят соответствующую точку УМЗ.
Данный отрезок прямой и найденную
точку УМЗ называют основными,
а два предыдущих отрезка прямых,
проходящих через вершины симплекса,
и найденные на них точки УМЗ на-
зывают вспомогательными.
Через основную точку УМЗ вновь
проводят два вспомогательных от-
резка прямых, определяют вспомога-
тельные точки УМЗ, через которые
проводят новый основной отрезок пря-
мой, и на нем находят основную
точку УМЗ. Процесс поиска заканчи-
вается при размещении основных и
вспомогательных точек УМЗ вблизи
ДРУГ друга.
С целью более равномерного разме-
щения вспомогательных и основного
отрезков прямых внутри симплекса
вспомогательные отрезки прямых про-
водят из точек, лежащих на высотах
вблизи вершин симплекса.
Следует отметить, что метод нож-
ниц можно использовать при опреде-
лении минимума затрат не только на
симплексе, но и в области многомер-
ного параллелепипеда или в другой
многомерной выпуклой области. Воз-
можны различные модификации мето-
да, например, одновременно с основ-
ным отрезком прямой использовать
часть окружности, вращающуюся во-
круг основного отрезка прямой, и на
ней найти точку УМЗ, через которую
затем провести вспомогательные от-
резки прямых.
Решение задачи оптимизации затрат
с несколькими показателями надежно-
сти системы и ограничениями на дру-
гие виды затрат. В случае нескольких
показателей надежности НТС, опре-
деляемых по формуле (1), по каждому
из показателей с помощью формулы
преобразования (13) образуются со-
ответствующие симплексы, которые ис-
пользуют при минимизации затрат.
При независимых затратах по каж-
дому показателю надежности (симп-
лексу) системы находят минимальные
затраты, которые затем суммируют.
Если целевая функция затрат учи-
тывает взаимное влияние затрат по
каждому из показателей надежности
системы, то поиск минимума затрат
необходимо проводить одновременно
по всем симплексам (преобразованным
показателям надежности ОТЭ систе-
мы).
Полученные оптимальные значения
показателей надежности ОТЭ системы
анализируют и уточняют с учетом воз-
можности практической реализации
(учет корреляции значений показате-
лей надежности ОТЭ системы). Может
оказаться, что одновременно с целевой
функцией одного вида затрат имеются
ограничения по другим видам затрат,
которые необходимо учесть при ми-
нимизации ЦФЗ. Пусть по каждому
виду затрат имеются функции огра-
ничений, аналогичные по характеру
ЦФЗ (строго монотонные выпуклые);
Y, (Hi) = Ф; (Hl), i = FS, i =TS
(30)
и ограничения имеют вид
Уj mln ¥ ] (^i) Y j max,
/ = 1, т, i = 1, л, (31)
где У;т1п> ^jmax — минимально ^мак-
симально допустимые значения /-го
вида затрат.
По каждой функции (30) образуется
две функции:
Ф/ (^i)i — ¥j (Rl) ¥ j mln,
/ = 1, m, i = 1, n\ (32)
Ф/ (^1)2 = Уj max ¥ j (-Ri)»
/ = TTm, I = T?n, (33)
которые при изменении значений пока-
зателей надежности ОТЭ системы мо-
гут быть знакопеременными.
При выполнении ограничений (31)
функции принимают положительные
и равные нулю значения. При не-
Приложения
299
выполнении ограничений (31) значе-
ния функций являются отрицатель-
ными. Данное свойство функций (32),
(33) используют при поиске минимума
затрат с учетом выполнения ограниче-
ний (31).
Первоначально проверяют возмож-
ность^ одновременного выполнения
всех ограничений на симплексе. Обра-
зуется функция
Ф (Rt) = min [фу (R^k/tYj max —
/. *
Yj min)]> / == 1» П*»
k = 1, 2, i = TT“n, (34)
которая является огибающей снизу
значений всех функций (32), (33).
Функцию (34) называют обобщен-
ной функцией ограничений. При вы-
полнении всех ограничений (31) одно-'
временно обобщенная функция огра-
ничений принимает положительные или
равные нулю значения. Условие одно-
временного выполнения всех ограни-
чений (31) на симплексе имеет вид
max ф (Ri) 0, Rt Э i = 1, п,
Ri
(35)
где — область значений показателей
надежности ОТЭ системы, удовлетворя-
ющих условию (11).
При проверке условия (35) необя-
зательно находить максимум, а до-
статочно найти одно положительное
значение обобщенной функции огра-
ничений.
Поиск минимума затрат при нали-
чии ограничений (31) проводят в опре-
деленной последовательности [21,
указанной ниже.
1. Находят минимум затрат без учета
ограничений (31).
2. Оптимальные значения (R*) пока-
зателей надежности ОТЭ системы под-
ставляют в обобщенную функцию огра-
ничений и вычисляют ее значение.
Если
ф(R*)>о, i=i7n, (36)
то найденный минимум затрат явля-
ется искомым. Если условие (36)
не выполняется, то уточняют найден-
ный минимум затрат (С min)-
3. Образуют функцию
C(Ri, С) = —L~^C~f(Rin.
bmln
i = I, n, (37)
где С > Cmin является параметром,
значение которогр изменяется в про-
цессе уточнения минимума затрат.
Данный параметр называют уточняю-
щим.
Функцию (37) объединяют с обоб-
щенной функцией ограничений (34)
Y (Rb С) = min С (Rt, С) V ф (Rt),
i == ТГ7Г. (38)
Функция (38) является огибающей
снизу двух функций (34), (37). Функ-
цию (38) называют обобщенной целе-
вой функцией затрат; при различных
значениях показателей надежности
ОТЭ системы и значениях уточняю-
щего параметра она может быть знако-
переменной. Положительные и рав-
ные нулю значения функции соответ-
ствуют выполнению ограничений (31).
4. С помощью обобщенной ЦФЗ
записывают условие нахождения ми-
нимума затрат с учетом выполнения
ограничений (31)
min max Y (Ri, С) =
C
= max У (Rh С*) = 0,
Rf
Ri q #>, i = T7T (39)
и проводят поиск искомого (оптималь-
ного) значения С*.
Для этого уточняющему параметру
задают различные значения (не менее
трех) /
Сmin "“С Ci <С С2 <С
и для каждого значения на симплексе
определяют соответствующие макси-
мальные значения обобщенной ЦФЗ
(38).
Y (Cu)max — max Y (Ri, Си), Rj £ 5°,
Ri
и = 1TW. (40)
300
Приложения
Если имеются положительные и
отрицательные значения, то оптималь-
ная величина затрат находится между
выбранными значениями уточняющего
параметра. Если положительных зна-
чений не имеется, то оптимальная
величина затрат превышает заданные
значения уточняющего параметра.
В обоих случаях для нахождения оп-
тимального значения затрат зависи-
мость максимального значения обоб-
щенной ЦФЗ от значений уточняю-
щего параметра целесообразно аппрок-
симировать моделью
Y (Опи = Ьо + Ь1С + ЬгС*
и находить оптимальное значение за-
трат из условия
Ьо -1- ЬгС 4- Ь2С2 = 0,
которое соответствует условию (39).
При поиске минимума затрат без
учета и с учетом ограничений на раз-
личные виды затрат используют оди-
наковые методы оптимизации. Это поз-
воляет сосредоточить основное вни-
мание на анализе целевой функции
затрат и функций ограничений, а не
на выборе соответствующего метода
поиска минимума затрат.
СПИСОК ЛЙТЕРАТУРЫ
1. Зедгинидзе И. Г. Планирование
эксперимента для исследования много-
компонентных систем. М.: Наука, 1976.
390 с.
2. Слотин Ю. С. Аппроксимацион-
ный поиск оптимальных проектных
решений//Прочность и долговечность
элементов конструкций. Киев: Пауко-
ва думка, 1983. С. 128—137.
Приложение 2
УЧЕТ ЭКСПЛУАТАЦИОННЫХ
ТРЕБОВАНИЙ ПРИ
ПРОЕКТИРОВАНИИ
1. ОЦЕНКА ЦЕЛЕСООБРАЗНОСТИ
ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ
ИЗДЕЛИЯ И РАЦИОНАЛЬНОЙ
ПЕРИОДИЧНОСТИ ЕГО ПРОВЕДЕНИЯ
Техническое обслуживание (ТО)
представляет собой комплекс меро-
приятий (работ) для поддержания ис-
правности или только работоспособ-
ности изделия (системы) при подго-
товке и использовании по назначению,
а также хранении и транспортирова-
нии. Виды ТО, сроки их проведения,
объемы выполняемых работ и трудо-
затраты при каждом виде обслужива-
ния устанавливают с учетом обеспе-
чения требуемого обобщенного пока-
зателя надежности изделия, эффект-
ного его использования и принятой
системы ТО.
Оценка целесообразности техниче-
ского обслуживания изделия и рацио-
нальной периодичности его проведе-
ния в зависимости от имеющихся огра-
ничений может быть произведена на
основании решения прямой или об-
ратной задачи оптимизации.
Целью решения прямой задачи яв
ляется обеспечение заданного (требуе
мого) обобщенного показателя на-
дежности, в частности, коэффициента
оперативной готовности КОг изделия
при минимальных удельных суммарных
затратах (стоимость, трудоемкость) Суд
на техническое обслуживание:
Ког ^ог> £уд =
min {Т’опт f} T’min» i = 1» AfT0, (0
где К*г — требуемое значение Ког;
Т’опт: — оптимальная (в указанном
выше смысле) периодичность прове-
дения ТО i-го вида или Z-го изнашивае-
мого и стареющего элемента; 7\nin—
минимально допустимая периодич-
ность ТО изделия (системы); /VTO —
число видов ТО или число изнашивае-
мых и стареющих элементов изделия,
подвергаемых профилактическому об-
новлению (замене, регулировке, на-
стройке и т. п.).
Цель решения обратной задачи —
обеспечение максимума обобщенного
показателя надежности (коэффициента
оперативной готовности ЛоГ изделия)
при заданных (допустимых) удельных
суммарных затратах (стоимости, тру-
Приложения
301
доемкости и т. п.) С*д на техническое
обслуживание:
Суд,
Лог = max;
min {Топт Д Тпнп» * — 1» ^то- (2)
Под удельными суммарными затра-
тами (стоимость, трудоемкость и т. п.)
на ТО понимают отношение средних
суммарных совокупных затрат (стои-
мости, трудоемкости) за определенную
наработку или период эксплуатации
к математическому ожиданию этой
наработки или длительности эксплу-
атации
N то
Суд = У £*УД 1» Суд< = Ci/Tt,
1=1
1—1, Л^то» (3)
где Суд, Суд t — удельные суммарные
затраты на ТО изделия в целом и ТО
i-ro вида (i-ro изнашиваемого и старею-
щего элемента); С/ — средние за-
траты на ТО i-ro вида (/-го элемента);
Ti — наработка или длительность
эксплуатации между соседними ТО
/-го вида (/-го элемента).
Для оценки целесообразности ГО
и рациональной периодичности его
проведения выделим два наиболее ха-
рактерных режима эксплуатации: пер-
вый — режим «ожидание—работа»;
второй— режим «непрерывная работа».
Первый режим эксплуатации ха-
рактерен тем, что в режиме ожидания
с устанавливаемой периодичностью
проводится ТО изделия (с проверкой
его работоспособности, проведением
соответствующих профилактических
работ и устранением выявленных не-
исправностей), во время которого ис-
пользование изделия по назначению
не планируется. Заявка на использо-
вание изделия по назначению может
поступить в любой (случайный) мо-
мент между плановыми ТО. При этом
непосредственно перед применением
по назначению ТО изделия не про-
водится.
При втором режиме эксплуатации
изделие используется по назначению
непрерывно, кроме вынужденных пере-
рывов на проведение ТО (осуществле-
ние соответствующих профилактиче-
ских работ) и устранение возникших
в процессе работы нарушений работо-
способности.
Показатель надежности изделия в
целом можно и целесообразно пред-
ставить в виде двух составляющих
Ког
— ^Согсэ^огнэ»
(4)
где /Согсэ, Яогнэ “ коэффициенты
оперативной готовности изнашивае-
мых и стареющих (подвергаемых ТО),
а тадже неизнашиваемых и нестарею-
щих (не подвергаемых ТО) элементов.
Соотношение (4) позволяет устано-
вить требование к надежности изна-
шиваемых и стареющих элементов, ис-
ходя из требований к надежности изде-
лия в целом, а также ожидаемой (про-
гнозируемой) надежности неизнаши-
ваемых и нестареющих элементов:
Когсэ — Лог/-Когнэ* (5)
В общем случае вероятность невоз-
никновения отказа изделия на интер-
вале т = /1э /2 определяется соотно-,
шением
Р (h, *г) = ехр
/1 7
— j Л (/) dt ;
при этом Л (/) = X (/) — интенсивность
отказов (для невосстанавливаемых из-
делий); Л (/) = со (/) — параметр по-
тока отказов (для восстанавливаемых
изделий).
Если фактические распределения
длительности безотказной работы (не-
возникновения отказа) изнашиваемых
и стареющих элементов не установ-
лены, то в качестве наиболее -универ-
сального аппроксимирующего рас-
пределения рекомендуется использо-
вать распределение Вейбулла—Гнеден-
ко, при котором
Л (П = (bld’) (7)
где а,Ь — параметры масштаба и формы
распределения.
Для первого режима эксплуатации
(«ожидание—работа») условия прямой
задачи оптимизации (Г) ТО изделия
с последовательным, соединением эле-
302
Приложения
ментов (не имеющего избыточности)
принимают вид
"уг" — min; min {Тоат i}^Tmin,
i=l 1
________ (8)
= )4
здесь WC9 — число стареющих эле-
ментов в изделии; /р — длительность
непрерывной работы изделия; apt-,
b^i — параметры распределения дли-
тельности безотказной работы i-ro
элемента; 7Qrcg — требование к на-
дежности (Лог) стареющих элементов;
<з0£-, hot — параметры распределения
длительности невозникновения отказа
i-го элемента в режиме ожидания при-
менения.
В результате решения системы (8)
относительно 7\*, i = 1, /VC3 находят
оптимальные периодичности ТО ста-
реющих элементов. Если при этом
выполняется условие min {Топт 0
Tmin» то проведение ТО с получен-
ными периодичностями является це-
лесообразным. В частности, в случае
одного стареющего элемента или пол-
ного обновления изделия в целом
в процессе ТО в результате решения
системы (8) находим оптимальную пе-
риодичность проведения ТО
Топт — Go X
(9)
и минимальные удельные суммарные
затраты на ТО
г _______Сто v
с-уд mln — — л
(Ю)
Проведение ТО с установленной пе-
риодичностью (9) является целесооб-
разным при выполнении условия
^опт Тmln -
В случае отсутствия процессов ста-
рения и изнашивания (bQi ~ bpt =
= 1, i = 1, Уэ), когда ТО проводится
в целях проверки работоспособности
и устранения выявляемых неисправ-
ностей, условия (8) оптимизации ТО
принимают вид
"э с
"2^7 = min, min {Топт Тпип»
1
(Н)
где Tot — средняя длительность экс-
плуатации между отказами (до от-
каза) в режиме ожидания применения;
Тр1- — средняя наработка между отка-
зами (до отказа) в режиме применения.
В результате решения системы (11)
получаем соотношения, определяю-
щие оптимальные периодичности ТО
элементов:
а также минимальные удельные сум-
марные затраты на ТО:
Суд min —
Приложения
303
Если при этом выполняется условие
min {7’otiT i}^ T’mln» i= 1, ^э> то
проведение ТО с установленными пери-
одичностями (12) является целесооб-
разным. В частности, в случае одно-
типных ТО для изделия в целом на
основании зависимостей (12) получаем
выражения, определяющие оптималь-
ную периодичность ТО:
Т’опт Т’оН 1" ~ уД Ь (К)
\ 1 р /
а также минимальные удельные сум-
марные затраты на ТО:
/-| ^ТО
Ьуд mln — -f 7—Г .
то(^1п^г—^-1
\ 1 р/
(15)
При выполнении условия Топт
T’mtn проведение ТО с установленной
периодичностью (14) является целе-
сообразным.
При втором режиме эксплуатации,
когда изделие используется по назна-
чению непрерывно, кроме, вынужден-
ных перерывов на проведение ТО
и устранение возникших в процессе
работы нарушений работоспособно-
сти, оптимизацию ТО необходимо про-
водить на основе минимизации простоя
изделия в неработоспособном состо-
янии:
^прсэ Л -Кпр it
i=l
где Ti — продолжительность и пе-
риодичность ТО (замены) t-ro эле-
мента; Tni — среднее время восста-
новления работоспособности (теку-
щего ремонта) t-ro элемента; Л; (7) —
интенсивность (параметр потока) от-
казов элемента.
Полагая в соответствии с зависи-
мостью (7) At- (0 = X А 1
и исследовав соотношение (17) на
экстремум, получаем выражения,
определяющие:
оптимальную периодичность ТО
(обновления, замены) каждого t-ro ста-
реющего элемента
Т’опт i
(18)
оптимальное значение коэффициен-
та простоя на ТО каждого t-ro элемента
то i опт----------“
। Cti
(19)
оптимальное значение коэффициен-
та простоя каждого t-ro элемента на
восстановлении работоспособности
К - V^-l _ i/T’Bi.
Авр/опт - д. У
(20)
оптимальное соотношение между
простоем на ТО и восстановлении
работоспособности
где Лцр I — ^Сто i Ч- ^<вр it (15)
Кто i опт/Квр i опт — 1- (21)
где Кто, Квр— коэффициенты соответ-
ственно простоя на ТО и простоя на
восстановлении работоспособности
(на текущем ремонте).
Коэффициент простоя (16) в нерабо-
тоспособном состоянии любого t-ro
изнашиваемого и стареющего элемен-
та, полностью обновляемого (заменя-
емого) в процессе ТО, в общем случае
определяется соотношением
tfnpl = 77 + 77 j MWdt. (17)
1 * (
Из приведенных зависимостей (18)—
(21) следует, что проведение планового
обновления (настройки, регулировки,
замены) путем проведения ТО имеет
смысл только применительно к изна-
шиваемым и стареющим элементам,
интенсивность (параметр потока)
отказов Aj(/) которых возрастает со
временем (b^ >> 1). Профилактическая
замена неизнашиваемых и нестареющих
элементов (&j = 1) не имеет смысла
(Т’опт i — °°)-
Оптимальное соотношение между
простоем на ТО и простоем на восста-
304
Приложения
новлении работоспособности (21) зави-
сит только от коэффициента формы
распределения наработки элемента до
отказа (между отказами) Ь^.
2. ОЦЕНКА ГАРАНТИЙНОЙ
НАРАБОТКИ (ГАРАНТИЙНОГО
СРОКА СЛУЖБЫ) ИЗДЕЛИЯ
Для сокращения затрат на гарантий-
ные ремонты (гарантийные замены)
целесообразно выявлять скрытые
дефекты изделия до передачи его по-
требителю. Для выявления скрытых
дефектов целесообразно проводить
доводочные испытания опытных изде-
лий (образцов), а также технологи-
ческий прогон (технологическую
тренировку) серийно выпускаемых из-
делий, что связано с определенными
материальными затратами разработ-
чика и изготовителя изделия.
В этих условиях возникают задачи
(прямая и обратная) оптимизации объ-
ема доводочных испытаний и техноло-
гического прогона с учетом затрат на
их проведение и гарантийные ремонты
(гарантийные замены) на протяжении
гарантийного срока службы (гарантий-
ной наработки) <г. Эти задачи форми-
руются следующим образом.
Прямая задача — установить опти-
мальный объем доводочных испытаний,
обеспечивающий заданную гарантий-
ную наработку изделия многоразового
применения (заданный гарантийный
срок хранения изделия одноразового
применения) t* при соответствии без-
отказности изделия q (со) заданным
требованиям при минимальных сум-
марных затратах (времени, трудоем-
кости, стоимости) разработчика (за-
вода-изготовителя) на проведение
доводочных испытаний и гарантийные
ремонты (замены):
*г > i*; Q (й>) < /(©*); с = min,
(22)
где <?*, со* — допустимая (заданная)
величина вероятности отказа и
параметра потока отказов; С — сум-
марные затраты на проведение дово-
дочных испытаний (технологической
тренировки) и гарантийные ремонты
(замены).
Обратная задача — установить оп-
тимальный объем доводочных испыта-
ний (технологической тренировки),
обеспечивающий максимальную га-
рантийную наработку изделия много-
разового применения (максимальный
гарантийный срок хранения изделия
одноразового применения) при соот-
ветствии безотказности изделия за-
данным требованиям и заданных
суммарных затратах (продолжитель-
ности, трудоемкости, стоимости) раз-
работчика (завода-изготовителя) на
проведение доводочных испытаний
(технологической тренировки) и га-
рантийные ремонты (замены):
tp = max, q (со) q* (о*), С С*,
(23)
где С* — допустимые (заданные) сум-
марные затраты на проведение дово-
дочных испытаний (технологической
тренировки) и гарантийные ремонты
(замены).
Решим указанные задачи оптими-
зации применительно к двум характер-
ным для практики вариантам.
1. Скрытые дефекты изделия одно-
разового применения выявляются
в процессе проводимых разработчи-
ком доводочных испытаний опытных
образцов; при этом технологическая
тренировка серийно выпускаемых
изделий не проводится.
2. Скрытые дефекты изделия много-
разового применения выявляются
в процессе проводимой заводом-
изготовителем технологической тре-
нировки, представляющей собой
специальные испытания.
Доводочные испытания изделий
одноразового применения, как пра-
вило, являются разрушающими
испытаниями. Снижение вероятности
отказа изделия q при использовании
по назначению в зависимости от объема
п0 доводочных испытаний часто опи-
сывается соотношением
q («о) = <?у + &qt~aqTl0 »
= (<7о — <7у). (24)
где q7 — минимально достижимая (пре-
дельная) величина вероятности от-
каза изделия за цикл испытаний, кото-
Приложения
305
рая может быть достигнута при по -*
-*• оо; aq — оценка коэффициента,
характеризующего скорость умень-
шения вероятности отказа (выявления
скрытых дефектов) в процессе испыта-
ний; q0 — оценка вероятности отказа
изделия при использовании по назна-
чению (за цикл испытаний), соответ-
ствующая началу доводочных испы-
таний (по = 0).
Условие возможности достижения
в процессе доводочных испытаний за-
данного уровня безотказности изде-
лия q* имеет вид
<7о > <7* > Яу\ (25)
при этом минимальный объем доводоч-
ных испытаний, обеспечивающий
снижение вероятности отказа изделия
до максимально допустимой (предель-
ной) величины q*, составляет
no mm = — in . (26)
aq Я — Яу
Суммарные затраты на доводочные
испытания и гарантийные замены из-
делия одноразового применения со-
ставляют
С = Со 4~ ^хр ^пр» (27)
где Со, Схр, Спр— затраты на доводоч-
ные испытания, а также гарантийные
замены изделий, отказывающих соот-
ветственно при хранении и использо-
вании по назначению в пределах га-
рантийного срока службы.
При фактических уровнях безотказ-
ности изделий одноразового примене-
ния (q 0,1) относительные затраты
на доводочные испытания и гарантий-
ные замены, приходящиеся на каждое
выпускаемое изделие, характери-
зуются величиной
Сотн = р 4~ Яхр + #пр» (28)
’-'ИЗД
где Сизд — стоимость изделия; N —
общий объем производимых изделий;
<7хр» <7пр— вероятность отказа изделия
соответственно при хранении и исполь-
зовании по назначению в пределах
гарантийного срока службы.
При условии, что в пределах гаран-
тийного срока службы процессы изна-
шивания и старения не имеют суще-
ственного значения, и учитывая, что
q 0,1, будем иметь
<7пр « Я (Ло); Яхр & -у q
(29)
где q (по) — достигнутый к концу
доводочных испытаний уровень вероят-
ности отказа изделия при использо-
вании по назначению (24); тпр — дли-
тельность функционирования изделия
при использовании по назначению;
К = ХПр/ЛХр — отношение интенсив-
ности отказов изделия при применении
по назначению к интенсивности отка-
зов при хранении.
При решении прямой задачи опти-
мизации исследуется на экстремум
относительно по соотношение (28) с уче-
том выражений (24), (29), в результате
чего устанавливается объем доводоч-
ных испытаний, обеспечивающий
заданный гарантийный срок службы
при минимальных суммарных затра-
тах на доводочные испытания и гаран-
тийные замены изделия (28):
по опт =
Naq hq
(30)
Для решения обратной задачи опти-
мизации соотношение (28) с учетом
зависимостей (29) представляем в виде
*г
~WiCo™ .
(31)
В результате исследования выра-
жения (31) на экстремум относительно
п0 с учетом зависимости (24) опреде-
ляем объем доводочных испытаний,
обеспечивающий максимальный гаран-
тийный срок службы (31) при заданных
суммарных затратах на доводочные
испытания и гарантийные замены из-
делия С*тн:
% опт = f (ач’ N, ^<7» ^ОТН’ ^пр*
(32)
В качестве необходимого объема
доводочных испытаний принимаем.
306
Приложения
при решении прямой задачи — наи-
больший из объемов испытаний, опре-
деляемых соотношениями (26) и (30);
при решении обратной задачи —
наибольший из объемов испытаний,
определяемых выражениями (26) и (32).
Соответствующие условиям прямой
задачи минимальные относительные
затраты на доводочные испытания и
гарантийные замены, приходящиеся
на каждое производимое изделие, рас-
считываем по формуле (28) с учетом -
выражения (24). В свою очередь,
соответствующий условиям обратной
задачи максимальный гарантийный
срок службы изделия определяем по
зависимости (31) с учетом соотноше-
ния (24).
Технологическая тренировка (тех-
нологический прогон) изделия много-
разового применения является состав-
ной частью технологического про-
цесса изготовления и охватывает все
выпускаемые изделия. Зависимость
параметра потока отказов изделия со
от объема (длительности) /тр техноло-
гической тренировки обычно описы-
вается выражением вида
св (^тр) — шу + а“2?тр.
До = (соо — соу), (33)
где ©у— оценка минимально, достижи-
мого (предельного) значения пара-
метра потока отказов изделия при
/Троо; аа — оценка коэффициента,
характеризующего скорость измене-
ния параметра потока отказов (выявле-
ния скрытых дефектов) в процессе
испытаний; со0 :— оценка параметра
потока отказов изделия, соответству-
ющая началу тренировки (/тр = 0).
Условием возможности достижения
в процессе технологической тренировки
требуемого уровня безотказности
изделия св* является
со 0 :> со* > (Оу; (34)
при этом минимальный объем техноло-
гической тренировки, обеспечива-
ющий снижение параметра потока от-
казов до максимально допустимого
(предельного) значения со* составляет
д 1 . Дсо
min - — 1п • <35)
Суммарные затраты на технологи-
ческую тренировку и гарантийные ре-
монты восстанавливаемого изделия
многоразового применения составляют
С = СТр-|- СГр, (36)
где <?тр — затраты на технологический
прогон; Сгр — затраты на гарантий-
ные ремонты,
СТр = /ТрСтр 1» ^гр = ^гр^гр 1»
шгр = ipd) (^тр)» (37)
где Стр1 — затраты на единицу времени
технологической тренировки; /пгр —
среднее количество отказов (гарантий-
ных ремонтов) изделия на протяжении
гарантийной наработки; Сгр1 — за-
траты на один гарантийный ремонт;
св (^тр) — достигнутый к концу техно-
логической тренировки уровень
параметра потока отказов изделия (33).
Обычно в пределах гарантийной на:
работки процессы изнашивания
и Старения еще не оказывают замет-
ного влияния, поэтому параметр по-
тока отказов। изделия ца протяжении
гарантийной наработки согр практи-
чески является постоянным и равным
достигнутому к концу технологической
тренировки значению свгр = св (^тр).
С учетом соотношений (36), (37)
относительные затраты на технологи-
ческую тренировку и гарантийные ре-
монты изделия представляются в виде
Сотн ~ С/Сгр 1 =• Р^тр (^тр)>
(38)
г де = Стр i/Crp р
При решении прямой задачи иссле-
дуется на экстремум относительно fTp
выражение (38) с учетом соотношения
(33) и в результате устанавливается
длительность технологической тре-
нировки, обеспечивающая заданную
гарантийную наработку изделия t*
при минимальных суммарных затратах
на технологический прогон и гаран-
тийные ремонты:
t - — In А<йЬсо*г (39)
{тр. ОПТ — _ ш Г • ' '
г
Приложения
307
Для решения обратной задачи соот-
ношение (38) представляется в виде
^отн Н^тр
tv -= '—тт—\—
(40)
В результате исследования выраже-
ния (40) с учетом соотношения (33)
на экстремум относительно /тр опре-
деляется длительность технологиче-
ской тренировки, обеспечивающая
максимальную гарантийную нара-
ботку изделия (40) при заданных
суммарных затратах на технологиче-
ский прогон и гарантийные ремон-
ты сотн:
^тр. ОПТ f (А®» а(0» Н» ^отн)* (41)
В качестве необходимой длитель*
ности технологической тренировки
<Тр принимаем:
при решении прямой задачи — наи-
большую из длительностей, определя-
емых соотношениями (35) и (39);
при решении обратной задачи — наи
большую из длительностей, определя-
емых выражениями (35) и (41).
Соответствующие условиям прямой
задачи минимальные суммарные за-
траты на технологическую тренировку
и гарантийные ремонты рассчитываем
по соотношениям (36) или (38), а соот-
ветствующую условиям обратной
задачи максимальную гарантийную
наработку изделия определяем по
зависимости (40).
СПИСОК ЛИТЕРАТУРЫ.
1. Барзилович Е. Ю. Модели тех-
нического обслуживания сложных си-
стем. М.: Высшая школа, 1982. 232 с.
2. Дедков В. К-, Северцев И. А.
Основные вопросы эксплуатации слож-
ных систем. М.: Высшая школа, 1976.
406 с.
3. Кузьмин Ф. И. Задачи обеспече-
ния надежности технических систем.
М.: Радио и связь, 1982. 176 с.
Приложение 3
ЗАДАЧА ОПРЕДЕЛЕНИЯ
ОПТИМАЛЬНОЙ ИЗБЫТОЧНОСТИ
СЛОЖНОГО ИЗДЕЛИЯ
Пусть сложное изделие включает
в себя Ni основных (целевых) систем,
отказ каждой из которых приводит
к отказу изделия в целом, и N2 вспо-
могательных систем, отказ каждой из
которых приводит к частичной потере
эффективности изделия. Общее число
систем равно i (i — 1, -|- N2). Каж-
дая система включает в себя Nj под-
систем (приборов, агрегатов, узлов,
/ ~ 1, Л^), отказ каждой из которых
приводит в свою очередь к отказу
системы. Числа Nj, Nx, N2 — целые,
натуральные. Подсистемы могут быть
зарезервированы, если это техни-
чески возможно.
о
Введем обозначения: X — вектор,
составляющие которого означают оп-
тимальное число резервных под-
систем для каждой /-й подсистемы
х-й системы; £0 — заданная эффектив-
ность функционирования изделия
Wq — максимально допустимая масса
резервного оборудования; Wijk —
масса fe-й резервной подсистемы */-й
подсистемы х-й системы /= 1, Ni;
i= 1,(Л^ + #2).
При наличии ограничений снизу
на Ео или сверху на Wo задача выбора
оптимальной избыточности сложного
изделия может быть сформулирована
двумя способами.
1. Определить X, при котором до-
fl г .
стигается (X) = min 2] WlJh,
ijk
при условии, что Е (X) Ей.
о
2. Определить X, при котором дости-
о
гается Е (X) = max Е (X), при усло-
о
вии, что W-% (X) Не-
эффективность функционирования
рассматриваемого в данном примере
изделия за время Т измеряется вели-
308,
Приложения
чиной обобщенной функции готов-
ности Е = Е (Т):
£(£) =
R CN
S S G/r х
2=1
N,
х . <ii ПР, (F) 4“
2 2 fe=i
Nt N-i
+• П Pi (T) ПР/СЛ.
z=i /=1
где G, , , — значимость дан-
*1’ 12‘ lz
кого состояния; R — максимально
допустимое число отказавших основ-
ных (целевых) подсистем.
Если ДГ2 = 0, то Е = Р (Т), т. е.
эффективность Е становится численно
равной надежности.
При большид Nx и jVf размерность
задачи может быть очень велика.
С целью снижения размерности ис-
пользуется прием, связанный с по-
строением для систем изделия непре-
рывных функциональных зависимо-
стей надежности каждой t-й системы
(р^) от суммарной массы резервного
оборудования, вводимого в систему
(Е
= wiJk\. (1)
\ /А /
Построение этих зависимостей ве-
дется с использованием алгоритма на-
правленного перебора Кеттеля и его
модификации при добавлении k-й ре-
зервной подсистемы к той ;-й под-
системе, относительное приращение на-
дежности для которой дает наибольшее
приращение надежности всей системы
на единицу массы добавленного эле-
мента:
max {ДР/ДИЛ,}. (2)
/
Затем эти дискретные функции ап-
проксимируются непрерывной кривой
вида (1). Может возникнуть ситуация,
когда с помощью резервирования не
достигается необходимый уровень
надежности из-за ограничений по мас-
се. Тогда наряду с резервированием
для повышения надежности резервных
групп (и систем) может быть исполь-
зована «доработка» основных подси-
стем.
Зависимость надежности от затрат
на доработку может быть описана
выражением
0<а'<1,
(3)
где Со и Ро — начальная стоимость
и надежность основной подсистемы;
ос' — величина, обратная коэффи-
циенту формы зависимости Р = <р (С).
Из (3) получаем зависимость Р =
= Ф (С):
(4)
1 .
где а = —-г,
а
1 < ос < оо;
Со С оо,
а-Л))к'
f
р 0
Тогда надежность Ррг каждой ре-
зервной группы или подсистемы зави-
сит от числа резервных подсистем (л)
и от затрат на доработку основной
подсистемы РГ (Сд):
Ррг = ф^ц» Сд)« (5)
Учитывая, что частные производные
дР рг дРрг
—г— и ----------функции, монотонно
utZ uL д
убывающие (т. е. функция Ррг —
вогнутая в пространстве п, Сд), можем
использовать для построения (5) алго-
ритм (2).
Свойство вогнутости позволяет
использовать данный алгоритм и для
построения зависимости надежности
г-й системы от числа резервных эле-
ментов mjk (j = i, Ni и k — 1, Nj)
и от затрат на доработку Cnif.
Pc = f (Сд. C„) = f (C), .(6)
Приложения
309
где Сд — S Сд$; — S здесь
/ ik
cnjh — стоимость резервной под-
системы /-го типа С — Сд -|- Сп-.
Если величина Сп^ пропорциональ-
на массе Wnjk резервной подсистемы,
т. е.
Cnjh = KWnjk, (7)
то оптимальный вариант системы по
стоимости будет соответствовать оп-
тимальному ее варианту и по массе,
что позволяет контролировать одно-
временно и ограничения на массу
изделия.
В общем случае это условие не
соблюдается. Тогда используют алго-
ритмы Барлоу [1 ], позволяющие полу-
чить оптимальный вариант размещения
резервных элементов при двух огра-
ничениях: на массу и стоимость. Од-
нако эти ограничения должны быть
заданы при условии преобразования
структурной схемы надежности си-
стемы в последовательную. Кроме того,
стоимость резервного элемента счи-
тают неизменной.
Если стоимость резервной подси-
стемы много меньше общей стоимости
системы, т. е.
Cnijk^Coi» (8)
то при соблюдении условий (7) и (8)
минимизация стоимости будет равно-
значна минимизации по массе при
некоторой погрешности в определении
общих затрат. Однако эти затраты
можно уточнить после отыскания оп-
тимального варианта размещения
резервных подсистем и при необходи-
мости произвести пересчет.
Полученные зависимости (6) для всех
систем изделия позволяют решить пер-
вую задачу оптимизации в два этапа:
сначала с использованием непрерыв-
ных зависимостей определить век-
о
тор Р, оптимизирующий систему, затем
с использованием его составляющих
в качестве ограничений для каждой
системы найти оптимальное число ре-
зервных элементов и затраты на до-
работку.
Эта задача может быть сформулиро-
вана следующим образом:
1) определить X, при котором С =
о
— Cmin, при условии, ЧТО Е (X) = Eq
о
и (X) — 1Г0, или
о
2) определить X, при котором
о о
Е (X) = max Е (X), при условии, что
о
С = со и ITZ (X) = tr0.
Рассмотрим соотношение затрат
на доработку и резервирование. Для
каждой резервной группы зависимость
надежности от затрат на доработку
определим, используя (3). Введем обо-
значение (6) — отношение стоимости
резервированной подсистемы (ДСП)
к начальной стоимости основного звена
этой подсистемы:
6 = дсп/с0.
Путем сравнения относительных
приращений надежности (ДР) подси-
стемы при доработке (ДР/ДСд) и ре-
зервировании (ДР/ДСП) можно опре-
делить точки, в которых эти отношения
становятся равными, т. е.
ДР/ДСд = ДР/ДСП ДСд = ДСП. (9)
На практике обычно резервирование
является более экономичным спосо-
бом обеспечения требуемой надежно-
сти. Только при наличии жестких
ограничений на массу системы необ-
ходима доработка основных элементов.
Число резервных элементов
п = In а/ln (6/а),
Если начальная стоимость под-
системы больше или даже равна сто-
имости резервной, то всегда сначала
выгоднее использовать резервирова-
ние, а доработку проводить после
310
Приложения
решения задачи распределения ре-
зерва.
При решении подобных оптими-
зационных задач необходимо учиты-
вать ожидаемые разбросы параметров
надежности, массы, стоимости. В ра-
боте [2] \приведена вычислительная
процедура, позволяющая решать за-
дачу в тех случаях, когда эти пара-
метры заданы не точечными своими
значениями, а возможным диапазоном
этих значений.
Приложение 4
РАНЖИРОВАНИЕ ФАКТОРОВ
Основной трудностью проектного
анализа надежности при поиске опти-
мальных вариантов создания техниче-
ских систем является большая раз-
мерность поиска и как следствие этого
сложность и громоздкость проведения
необходимых расчетов. С целью умень-
шения размерности поиска целесооб-
разно предварительно выявить фак-
торы, в наибольшей степени влияющие
на изменение затрат, показателей на-
дежности и характеристик систем.
Данные факторы называют значимыми,
а процесс количественной оценки вли-
яния факторов — ранжированием фак-
торов. Используемые для выбора
наилучшего проектного решения ме-
тоды математического программирова-
ния не позволяют количественно оце-
нить величину «вклада» каждого фак-
тора или группы факторов.
Обычно задача количественной
оценки влияния факторов в заданной
области их исследования решается
путем последовательного варьирова-
ния значений каждого из факторов
при постоянных значениях остальных
факторов. Однако данный тради-
ционный метод ранжирования факто-
ров не позволяет учесть их взаимодей-
ствие, и может быть принято ошибоч-
ное решение об их влиянии на харак-
теристики системы.
Ранжирование факторов Для слу-
чаев, когда модели проектирования
исследуемых систем заданы не анали-
тически, а в виде машинных программ,
производят с использованием стати-
стических методов теории экспери-
СПИСОК ЛИТЕРАТУРЫ
1. Барлоу Р., Прошан Ф. Математи-
ческая теория надежности: Пер. с
англ./Под ред. Б. В. Гнеденко. М.:
Сов. радио, 1969. 245 с.
2. Эффективность и надежность
сложных систем (информация, опти-
мальность, принятие решений)/
И. Л. Плетнев, А. И. Рембеза, Ю. С. Со-
колов, В. А. Чалый-Прилуцкий. М.:
Машиностроение, 1977. 216 с.
мента, названных планами группо-
вого отсеивания факторов (ГОФ) [1 ].
Наиболее простые из них — двух-
стадийные — предусматривают деле-
ние всех исходных факторов на группы
с равным числом факторов. На первой
стадии проводят ранжирование каждой
группы факторов. При этом пред-
полагают:
все факторы независимо друг от
друга с равной вероятностью могут
оказаться эффективными (оказыва-
ющими влияние);
отсутствуют эффекты взаимодей-
ствия факторов и направления воз-
можных (главных) эффектов известны;
существуют планы, обеспечива-
ющие ранжирование факторов; ошиб-
ки всех опытов, полученных в соот-
ветствии с данными планами, незави-
симы и нормально распределены с изве-
стной постоянной дисперсией.
По каждому фактору определяют
верхний и нижний уровни. В качестве
верхнего уровня принимают значение
фактора, при котором получается наи-
лучший, результат (наивысший от-
клик), а в качестве нижнего уровня —
наихудший результат.
Все верхние уровни факторов в каж-
дой группе образуют верхний уровень
соответствующего группового фак-
тора (ГФ), а нижние уровни — нижний
уровень ГФ. С использованием двух-
уровневых отсеивающих планов
проводят ранжирование групповых
факторов.
На второй стадии проводят ранжи-
рование исходных факторов в каждой
из эффективных (значимых) групп фак-
торов.
С целью большего сокращения числа
опытов используют многостадийное
Приложения
311
1
групповое отсеивание, при котором
на первой стадии формируются группы
факторов достаточно большой размер-
ности. На второй стадии каждую из
значимых групп факторов делят на
группы и среди них выявляют значи-
мые факторы, т. е. на последующей
стадии исследуют группы факторов,
которые оказались значимыми на
предыдущей стадии.
Эффективность процедур двухста-
дийного и многостадийного группо-
вого отсеивания факторов во многом
зависит от удачного формирования
групп. Если даже в каждой из групп
окажется по одному значимому фак-
тору, то на последующей стадий необ-
ходимо рассматривать все исходные
группы факторов. Использование
процедур ГОФ целесообразно для слу-i
чаев, когда действительно есть уве-
ренность в отсутствии эффектов вза-
имодействия факторов и известно на-
правление возможного влияния
каждого фактора.
Количественную оценку влияния
факторов с учетом их взаимодействия
проводят следующим образом. Область
изменения значений факторов (Х1э
Х2, •••» Хп) задается в виде многомер-
ного параллелепипеда (7?п) и имеет вид
Xf min ^-i max» i = 1, Л, (1)
где Xj min* Xf max — минимально
и максимально допускаемые значения
i-ro фактора. Область (1) называют
областью допустимых значений факто-
ров (ДЗФ).
Зависимость исследуемой величины
(отклика) от факторов рассматривается
в виде детерминированной функции
Y(X)=f(X), X£Rn, (2)
где X — вектор факторов.
Функцию (2) называют функцией
отклика. Фактор, подлежащий оценке,
называют ранжируемым, а осталь-
ные — базовыми.
Путем фиксации значений базовых
факторов из многофакторной функции
отклика (2) образуется условно одно-
факторная функция отклика
У (Хг-/Х) — У (X)j =/(Xj/X),
XiGfy, i =17"^ XGZ?n-b (3)
где X — вектор базовых факторов;
%'i — область допустимых значений
Ранжируемого фактора, заданная
*-м условием (1); Rn-i — область
допустимых значений базовых факто-
ров в виде (л — 1)-меркого параллеле-
пипеда, заданная соответствующими
условиями (1).
Находят значения:
У W, max - max f (Xt/X). Xt £ i,.
i = 1» л, X £ Rn-i> (4)
У (X)i min = min f (Xt/X), Xt £
Xi
i = 1, n, X C Rn-i' (5)
Величина
ДУ (X)i - У (X)i max - У fX)i mln,
X £ Rn_1> i = 1, n (6)
характеризует влияние ранжиру-
емого фактора на отклик при фиксиро-
ванных значениях базовых факторов.
Затем находят значения базовых фак-
торов (X*), при которых величина (6).
будет максимальной:
ДУг шах = ДГ (X*)f = max ДУ (Х)ь
X
/ = гт; Х€яп_х. (7)
Полученное значение (7) используют
для оценки влияния факторов с учетом
их взаимодействия. Суть данной оцен-
ки заключается в отыскании таких
значений базовых факторов, при кото-
рых разность между максимальным (4)
и минимальным (5) значениями условно
однофакторной функции отклика (3)
является максимальной. Данный кри-
терий оценки влияния факторов на-
зван критерием максимума
разности значений функции
отклика (МРЗФО).
МРЗФО определяют следующим
образом:
1) выбирают исходные значения
базовых факторов, получают условно
однофакторную функцию отклика (3)
и в области допустимых значений
ранжируемого фактора находят ее ма-
ксимальное и минимальное значения;
312
Приложения
2) вычисляют значение (6), соответ-
ствующее исходному значению век-
тора базовых факторов;
3) с использованием методов по-
иска максимума в соответствии с усло-
вием (7) находят МРЗФО.
Выбор методов поиска МРЗФО зави-
сит от степени сложности функции
отклика в области ДЗФ. Если в об-
ласти ДЗФ функция отклика много-
экстремальная, то для поиска макси-
мального и минимального значений
условно однофакторной функции
отклика необходимо использовать
однофакторные методы глобального
поиска оптимума, а для поиска
МРЗФО — многофакторные методы
глобального поиска оптимума.
При большом числе факторов для
поиска МРЗФО можно использовать
метод поиска оптимума по различным
направлениям в области допустимых
значений базовых факторов. Суть дан-
ного метода состоит в преобразовании
многофакторного поиска в условно
однофакторный. В области допустимых
значений базовых факторов последова-
тельно выбирают различные отрезки
прямых и на них находят значения
факторов, при которых МРЗФО яв-
ляется максимальным. Данные значе-
ния МРЗФО называют условными.
Для их нахождения используют одно-
факторные методы глобального поиска
оптимума. Отрезки прямых (направле-
ние поиска) выбирают таким образом,
чтобы условные значения оптимума
(значения МРЗФО) последовательно
улучшались.
Поиск оптимума в области, заданной
в виде многомерного параллелепипеда,
можно "начинать с поиска условного
оптимума на одной или нескольких
главных диагоналей параллелепипеда,
проходящих через его центр. Найден-
ные точки условного оптимума ис-
пользуют для построения новых отрез-
ков прямых с более лучшими значе-
ниями условного оптимума.
Метод поиска оптимума, называемый
методом ножниц, удобен при исполь-
зовании диалоговых систем оптими-
зации, позволяющих графически
представлять однофакторные зависи-
мости и находить координаты услов-
ного экстремума. Для ранжирования
факторов по МРЗФО характерен боль-
шой объем расчетов на ЭВМ. Однако,
как правило, затраты на использова-
ние ЭВМ для проведения необходимых
расчетов оказываются значительно
меньше затрат на создание опытных
образцов изделий системы и их экс-
периментальную отработку. С целью
сокращения календарных сроков про-
ведения необходимых расчетов по
ранжированию факторов возможно
проведение расчетов одновременно
на нескольких ЭВМ.
Большинство зависимостей харак-
теристик систем от факторов в области
ДЗФ имеют строго монотонный или
унимодальный характер. Данное
свойство зависимостей позволяет
использовать для ранжирования фак-
торов процедуру, основанную на пред-
варительной аппроксимации исследу-
емой зависимости полиномиальными
моделями (ПМ):
+ 2 btjxtxj}
/>/=1
У (X) = Ьо + 2 biXi +
(8)
+ 2 bijXiXi + S bii*i‘
j>i—]. i=l
где
Xi ^(Xt — i = T7~^ (10)
здесь Xi = (Xi max “1” Xi min)/2,
&Xt = (Xi max — Xi mln)/2.
Формулу (10) называют формулой
нормализации значений факторов (пре-
образования натуральных значений
факторов в безразмерные).
В соответствии с (10) области ДЗФ
(1) будет соответствовать дбласть зна-
чений
— 1 <+ 1, i = 1, п. (11)
МРЗФО по каждому фактору при
аппроксимации исследуемой зависим
Приложения
313
мости неполной ПМ второго порядка
(8) вычисляют по формуле [2]
(п \
I 1 “Ь У! I bij I ) ,
1=1 /
i=/=j, i=T7n, (12)
а при аппроксимации моделью (9) —
по формуле
1 / п
ду< "»х = ЗТЬТЛ V6' I+ Ibii| +
)2
, /=#/. f=r^. (13)
если функция отклика по ранжиру-
емому фактору в области (11) имеет
унимодальный характер, и по фор-
муле (12) — в случае строго монотон-
ного характера функции отклика по
ранжируемому фактору.
Неполные ПМ второго порядка мож-
но использовать для аппроксимации
зависимостей, имеющих прямо (об-
ратно) пропорциональный или строго
монотонный характер по ранжиру-
емому фактору в области ДЗФ. Для
аппроксимации унимодальных зави-
симостей используют ПМ второго по-
рядка (9).
Процесс аппроксимации состоит в вы-
числении значений оценок неизвестных
параметров в ПМ (8), (9) по совокуп-
ности наблюдений отклика (Уи) при
различных значениях факторов в об-
ласти ДЗФ:
Ги=/(Хи), « = (И)
Число различных наблюдений (опы-
тов) отклика должно быть не меньше
числа неизвестных параметров, рав-
ного
для неполной ПМ второго порядка и
4----1- (п + 1) (п + 2) (16)
для полной ПМ второго порядка.
Формулы (15), (16) позволяют опре-
делить минимально необходимое
число опытов в зависимости от числа
факторов. В случае равенства^ числа
опытов числу неизвестных параметров
их оценки находят путем решения
системы линейных уравнений, каждое
из которых образуется приравнива-
нием полиномиальной модели с соот-
ветствующими значениями факторов
к полученному по формуле (2) значе^
нию отклика.
При числе опытов больше числа
неизвестных параметров появляется
возможность проводить оценку точ-
ности аппроксимации по величине от-
клонений значений функции отклика
(2) от значений отклика, определяемых
с помощью полиномиальных моделей.
В теории эксперимента модели, в ко-
торых проведена оценка неизвестных
параметров, называют регрессион-
ными. Полиномиальные модели отно-
сят к классу моделей, линейных по
параметрам.
Для построения неполных регрес-
сионных полиномиальных моделей
(РПМ) второго порядка используют
двухуровневые планы первого поряд-
ка, а для построения полных РПМ
второго порядка ,— планы второго
порядка.
При использовании методов теории
эксперимента (ТЭ) для аппроксимации
исследуемых зависимостей в процессе
проектирования сложных техниче-
ских систем появляется возможность
учета случайного характера параме-
тров, значения которых определяют
эмпирическим путем. В этом случае
модель наблюдений отклика при раз-
личных значениях факторов имеет слу-
чайный характер
У и = / (Хи) + ett, и = ТТЛ/, (17)
где е — случайная величина, относи-
тельно которой предполагается, что
математическое ожидание равно нулю,
дисперсия является постоянной в об-
ласти ДЗФ и отсутствует корреляция
между значениями случайной вели-
чины при различных значениях фак-
торов.
В отличие от модели (17) модель
наблюдений отклика (14) является
детерминированной, ее используют
только для вычисления оценок пара-
метров ПМ без анализа статистических
свойств моделей.
314
Приложения
Наиболее простыми методами' ТЭ
для построения РПМ второго порядка
являются композиционные симме-
тричные планы второго порядка типа
Вп. Область планирования экспери-
мента данных планов совпадает с об-
ластью ДЗФ. Планы имеют мини-
мально необходимое число уровней
варьирования факторов, равное трем,
близки к D- и G-оптимальным планам
и позволяют использовать простые
формулы для построения РПМ второго
порядка [2]:
i = 1,
—'о । \r ~ S х1и¥ и» I — 1» Л»
1 N —
= TF" S xiuxju^w (I®)
"я Ы
/>< =I7n;
Sa {60} - (2 + nN„)
Sa {*«} =
= ([n (n — 3) + 3] Мя 4- 2) Sa {K}/m<p,
i — 1. n;
S2{fif)=Sa {KJ/m (2 + ЛГЯ);
i =T7n;
{biД = Sa (У}/тЫя, J> I = Un;
<p = 2ЛГЯ (n - l)a,
где ~YU — среднее значение отклика
в й-й точке плана; NH — число точек
ядра плана, равное 2п~р (р ±= 0, 1,
2, ...); N* — число точек плана, за
исключением центральной точки;
т — число параллельных опытов
в каждой точке плана.
В случае исключения из РПМ не.
которых функций (I — 1, d) ввиду
незначимости соответствующих оце-
люк параметров Ьц (i = 1, d) уточнение
оценок остальных параметров Ьц про-
изводится по формулам:
— [(n —2)2n”I-p — 1] X
Z = 2П~₽ X
X [(л — 1 )я — d (п — 2)] + 2d,
р = 0, 1, 2, ...
Точки плана (значения факторов)
располагаются в вершинах (±1, ...»
±1) гиперкуба (ядро плана), в центрах
(п — 1)-мерных граней куба (звездные
точки с координатами 0, ...» ±1, ...» 0)
Приложения
31 5
и в центре куба (центральная точка).
Число точек плана
N =‘2п~р + 2п + 1, р = 0, 1, 2, ...»
оно должно быть наиболее близким
числу неизвестных параметров мо-
дели.
Точки, образующие ядро плана, мо-
гут быть расположены не во всех
вершинах куба (р = 0), а в некоторых
из них (р = 1,2, ...).
Ядро плана, используют для по-
строения неполных РПМ второго по-
рядка с помощью формул:
a bij определяют по формуле (18).
Композиционность планов Вп поз-
воляет по результатам опытов в точках
ядра плана построить вначале непол-
ные РПМ второго порядка и в случае
недостаточной их точности провести
опыты в звездных точках плана и
построить полную РПМ второго по-
рядка.
Основной трудностью ранжирова-
ния факторов с использованием РПМ
второго порядка является громозд-
кость моделей (большое число степен-
ных функций) при большом числе
факторов. В этом случае по аналогии
с групповым отсеиванием факторов
целесообразно использовать раз-
биение факторов по группам. По-
строение РПМ в каждой группе про-
водят при постоянных (нормализован-
ных нулевых) значениях остальных
факторов.
С помощью построенных РПМ про-
водят ранжирование факторов и по
каждой группе факторов определяют
максимальное
Yg max ~ max Y (Xg)t
xg
Xg € 36g, g — 1, /,
и минимальное
Vg mln ~ min Y (Xg),
xg
Xg^g, g = tt
значения отклика, где Xg— вектор
факторов, образовавших g-ю группу;
xg — область допустимых значений
факторов g-й группы.
Затем находят разность
АУg = Yg щах — Кg min»
£ = (19)
которую принимают в качестве оценки
влияния соответствующей группы
факторов.
С учетом результатов ранжирования
факторов проводят переформирование
факторов по группам. В первую груп-
пу включают факторы с наибольшими
значениями МРЗФО, во вторую груп-
пу — с меньшими значениями МРЗФО
и т. д.
Для вновь образованных групп снова
проводят построение соответствующих
РПМ, ранжирование факторов и опре-
деляют значения (19).
Если по результатам второго этапа
ранжирования факторов в первой груп-
пе оказались факторы с меньшими зна-
чениями МРЗФО, чем в остальных
группах, то снова проводят пере-
группировку факторов и процесс ран-
жирования повторяют до образования
устойчивой группы факторов.
Разность (19), соответствующую
устойчивой группе факторов, сравни-
вают с аналогичной разностью ДУ,
полученной для функции отклика по
всем факторам. По каждой устойчивой
группе факторов определяют
71g = Ayg/AK, g=T7t
называемое относительным групповым
. вкладом факторов.
Если устойчивой группе факторов
соответствует максимальное значение
относительного группового вклада
факторов, то можно полагать, что
данные факторы являются наиболее
значимыми, и их исключают из даль-
нейшего рассмотрения. Значения
данных факторов в функции отклика
316
Приложения
остаются постоянными до окончания
процесса ранжирования факторов.
После этого аналогичным образом на-
ходят следующую устойчивую группу
факторов и исключают ее из дальней-
шего рассмотрения. По мере исключе-
ния факторов размерность функции
отклика уменьшается, и на последнем
этапе она равна числу оставшихся
факторов.
Выбор числа групп и числа факто-
ров в каждой группе проводят с учетом
характера функции отклика. При стро-
го монотонном характере число факто-
ров в группе может быть большим по
сравнению с числом факторов в груп-
пах при унимодальном характере функ-
ции отклика. Например, при уни-
модальном характере функции отклика
наименьшее число факторов в каждой
группе может быть равным пяти.
В этом случае реализуется план
из 27 точек. Ядро плана представляет
ДФЭ типа 25'1. При исследовании,
например, ста факторов на первом
этапе проводится 540 опытов. В случае
существенного отличия значений
МРЗФО некоторых факторов от
МРЗФО остальных факторов на втором
этапе можно рассмотреть не все груп-
пы, а только несколько групп, обра-
зованных из наиболее значимых фак’
торов, и на их основе выделить одну
или две устойчивые группы, которые
исключают из дальнейшего рассмо-
трения.
Эффективность процедуры ранжи-
рования факторов по МРЗФО с ис-
пользованием РПМ зависит от отно-
шения числа значимых факторов к об-
щему числу факторов. Небольшому
числу значимых факторов и существен-
ному отличию их влияния от влияния
остальных факторов соответствует до-
статочно быстрое их выделение. При
относительно равном влиянии фак-
торов процедура ранжирования
факторов потребует большего числа
опытов.
СПИСОК ЛИТЕРАТУРЫ
1. Клейнен Дж. Статистические ме-
тоды в имитационном моделировании.
Вып. 2. М.: Статистика, 1978. 335 с.
2. Слотин Ю. С. Композиционное
планирование регрессионного экспери-
мента. М.: Знание, 1983. 52 с.
3. Таблицы планов эксперимента:
Справочное издание/Под ред. В. В. На-
лимова. М.: Металлургия, 1982. 750 с.
Предметный указатель
А
Алгоритм разрезания 64—71
Анализ отказов возможных 22—25
— качественный 24
— количественный 24
Аппроксимация кусочно-линейная 132
В
Вероятность выполнения задания 138
— отказа систем с временным резер-
вированием 139
Вес функции в обеспечении надежности
системы 79
— элемента в обеспечении надежности
системы 78—80 — Пример распреде-
ления 91
Вклад элемента в надежность системы
81, 82
— удельный 82 — Примеры распре-
деления 91, 92
Выбор методов надежности радио-
электронных систем 281—290
— Выбор наиболее надежных эле-
ментов 284
— Облегчение режимов работы эле-
ментов 284, 285
— Отбраковка малонадежных эле-
ментов 285
— Профилактические мероприятия 286
— Резервирование 282, 283
— Резервирование и уменьшение вре-
мени восстановления 289, 290
— Резервирование и уменьшение ин-
Предметный указатель
317
тенсивности отказов системы 287—289
— Создание схем с ограниченными
последствиями отказов элементов 285
— Сокращение времени непрерывной
работы аппаратуры 286, 287
— Стандартизация и унификация 286
— Уменьшение времени восстановле-
ния 287
— Уменьшение интенсивности отказов
системы 283—286
— Уменьшение интенсивности отказов
системы и времени восстановления 290
Г
Гамма—распределение 37
Граф переходов двухуровневой адап-
тивной системы автоматического уп-
равления 128
— состояния системы 68
/.......~'х д
Дерево отказов — Структурные эле-
менты 24
I " 3
Задачи оценивания надежности 15—19
Значимость элемента в обеспечении
надежности системы 78, 80, 81
И
Избыточность оптимальная сложного
изделия — Задача определения 307—
310
Износ — Основные показатели 269
— предельный — Критерии 272
Интенсивность отказов — Формула
139
Исследование надежности — Задачи,
модели и методы 13—19 — Логиче-
ская схема постановки задачи 12
К
Контроль аппаратный 278, 279
— кодовый 278, 279
— по модулю 278
— постоянный 280
— программно-логический 279
— программный 279
< — структурный 280
— тестовый 279
Коэффициент готовности за заданное
время 139
— оперативный 139
Критерий максимума разности значе-
ний функции отклика 317
М
Материал изделия — Показатели сте-
пени повреждения 254
Матрица переходов 63
Метод временного резервирования
136—138
— дерева отказов 24, 25
— логико-вероятностный расчет струк-
турной надежности сложных систем
с учетом восстановления 92—:101 —
Основы метода 92—94
— модифицированный логико-вероят-
ностный — см. Расчет надежности
двухполюсных систем с помощью моди-
фицированного логико- вероятностного
метода
— ножниц 303
— определителей 103
— ориентированных графов с погло-
щением ресурсов в вершинах 244, 245
— подстановки 103
— сетевого планирования и управле-
ния 242—244
Метод расчета коэффициентный 56, 57
— надежности восстанавливаемых си-
стем с помощью теории совпадения
импульсов независимых потоков
94—101
— с помощью алгоритма ортогонали-
зации 69—72
— с помощью несовместных гипотез
76—78
— структурных схем надежности 23, 24
— схемно-логический 73—76
— табличный 72, 73
Методы оценки важности отдельных
элементов при синтезе систем с задан-
ной надежностью, 78—92
Методы расчета логико-вероятностные
структурной надежности сложных си-
стем без учета восстановления 64—
78 — с учетом восстановления 92—101
Модели исследования надежности —
см. под их названиями
Модели отказов при различном харак-
тере перемешивания реализаций про-
цесса деградации 259, 260
— с двумя пределами 261, 262
Модель изготовления и контроля ка-
чества опытных образцов 11
— изготовления и контроля качества
серийных образцов 12
— изменения надежности по стадиям
жизненного цикла 240—242
— «нагрузка—прочность» 262
— надежности полумарковская 127—
134
— параметрического отказа при рас-
сеянии параметров по нормальному
закону и постоянной скорости изме-
нения параметра 258
318
Предметный указатель
— применения 13
— сильной связности 200
— слабой связности 200
— функционирования изделия 12, 13
— экспериментальной отработки 11, 12
— экспериментальных работ и испыта-
ний 245—248
— эксплуатации и обслуживания 12
И
Надежность — Задание и распределе-
ние требований 38—42
— механических систем — Расчет с
учетом износа 268—274
— параметрическая изделий при из-
носе — Этапы прогнозирования 272—
274
— параметрическая машины 263, 264
Наработка обесцененная 136
— полезная 136
Нормы надежности проектные 19—22
О
Обеспечение программное (ПО) — На-
дежность 279—281
Область работоспособности 256, 257
— состояний 257'
Отказ возможный — Понятие 22
— систем с временным резервирова-
нием 135, 136
Отказы — Виды 32—38
— внезапные 255
— механических систем — Анализ
причин 252—255
— параметрические 255
— постепенные (износные) 255
— функционирования 255
Оценки важности элементов для анали-
за надежности систем — Примеры при-
менения 85—92
П
Перечень возможных отказов — Поня-
тие 22
Планирование сетевое 242—244
Подход к выбору проектных решений
нормативный вероятностный 11
— нормативный детерминистский 10
— программно-целевой 10
— программно-целевой вероятност-
ный 11
Показатели надежности — Типичные
формы кривых 34
— восстанавливаемых систем 28—31
— для произвольного распределения
43
— невосстанавливаемых систем 25—27
— основные для восстанавливаемого
элемента 48
— последовательной системы 51
— последовательной системы из N
одинаковых восстанавливаемых эле-
ментов 54, 55
— последовательной системы из раз-
личных восстанавливаемых элементов
53, 54
— последовательной системы из «ста-
реющих» элементов 52
— при задании требований Общие
рекомендации по выбору 31, 32
— систем и изделий 25—32 — Функ-
циональные связи между показате-
лями 27
Потери надежности относительные в
зависимости от числа контролируемых
стадий 241, 242
Принцип модульности 280
— структурирования массивов дан-
ных 280
Приращения качественное и коли-
чественное надежности системы
82—84
Программирование структурное 280
Проектирование систем — Учет экс-
плуатационных требований 300—307
Процессы быстропротекающие 253
— детерминированные случайные 259
— медленные 254, 255
— необратимые 252, 253
— обратимые 252
— средней скорости 253, 254
— старения — Классификация 253
Р
Ранжирование факторов 310—316
Распределение логарифмически нор-
мальное 37
— нормальное 37
— Рэлея 37
— экспоненциальное 34—37
— экстремальных значений 37
— Эрланга 37
Распределения дискретные 37, 38
— основные дискретные 38
— основные непрерывные 34—36
Расчет надежности двухполюсных си-
стем с помощью модифицированного
логико-вероятностного метода — Ма-
тематические основы метода 101—
106 — Многосвязанные системы с
ориентированной структурой при не-
полном оповещении о состоянии сети
109—111—Многосвязные системы с
ориентированной структурой при не-
Предметный указатель
319
полном оповещении о состоянии сети
106—109 — Оценка распределения ин-
формационной нагрузки элементов не-
надежной сети 112, 1J3
Расчет надежности систем с ветвящейся
структурой и меридианными связя-
ми — Изотропные системы с однознач-
ным подчинением при неполном опове-
щении о состоянии сети 117—120
— Изотропные структуры с неодно-
значным подчинением неизотропных
структур 120—122
— Математические основы метода
113—116
— Оценка распределения информа-
ционной нагрузки элементов нена-
дежной сети при централизованном
сборе информации 123, 124
-^Расчет надежности и выбор струк-
^урных\рараметров с однозначным под-
чинением при полном оповещении о со-
стоянии сети 116, 117
Расчет надежности элемента восстанав-
ливаемого 47 — Асимптотические ха-
рактеристики процесса восстановле-
ния 49, 50 — Характеристики надеж-
ности мгновенно восстанавливаемого
элемента 48, 49
— невосстанавливаемого — Внезап-
ные отказы. Экспоненциальное распре-
деление 44 — ВСФИ (УСФИ) распре-
деление 45, 47 — В ФИ (У ФИ) рас-
пределение 45, 46 — Постепенные от-
казы. «Стареющие» распределения 44,
,45
Резерв времени 136, 137
Резервирование временное 135
С
Сечение отказов минимальное 60
Система автономная электроэнергети-
ческая— Схемы 61, 62
— восстанавливаемая —т Графическая
иллюстрация процесса функциониро-
вания 94
— многосвязная — Расчет надеж-
ности 106—113 — Структурная схема
106
Система одноканальная с нёпопол-
няемым резервом времени последова-
тельная с необесценивающими отка-
зами и идеальным контролем 171—181
— последовательная с обесцениваю-
щими отказами 182—186
— последовательная с отказами двух
типов 187—189
—> с отказами двух типов, непрерыв-
ным контролем и непополняемым резер-
вом времени (общий случай) 182, 186,
187
— с многоэтапным заданием 189—196
— с необесценивающими отказами и
непрерывным контролем работоспо-
собности 170, 171
— с обесценивающими отказами и
непрерывным контролем работоспо-
собности (общий случай) 181, 182
Система одноканальная с пополняемым
резервом времени при непрерывной
загрузке и идеальном контроле работо-
способности как один восстанавливае-
мый элемент 141—145
— с нагруженным, облегченным или
ненагруженным структурным резер-
вом 145—154
— со смешанным по нагрузке струк-
турным резервом 154—156
Система одноканальная с пополняемым
резервом времени при различных спо-
собах контроля и случайной загрузке
с дискретным полным достоверным
контролем 156—160
— с идеальным контролем основных
и дискретным полным достоверным ко-
нтролем резервного элементов 161—164
— с недостоверным непрерывным пол-
ным контролём основных и резервных
элементов 160, 161
— со случайной загрузкой 164—170
Система полносвязная четырёхъярус-
ная без оповещения о состоянии -сети
118, 119
— полносвязная четырехъярусная с
оповещением о состоянии прямой линии
связи с центром 119, 120
— с дискретным контролем 156—160 —
Схема функционирования 156
— со структурным дублированием уз-
лов 121, 122
— управления двухуровневая адап-
тивная с обучаемым наблюдателем —
Структурная схема 124
Системы — двухполюсные — Расчет
надежности — см. Расчет надежности
двухполюсных систем с помощью мо-
дифицированного логико- вероятност-
ного метода — двухфазные однока-
нальные — Коэффициент готовности
219, 227—230 — Показатели надеж-
ности системы при выполнении зада-
ния известной длительности 218—227
Системы механические — Анализ при-
чин отказов 252—255 - Расчет надеж-
ности на стадии проектирования 263—
320
Предметный указатель
266 — Расчет надежности с учетом
износа 268—274
Системы многоканальные 196, 197
— с взаимозаменяемыми каналами и
необесценивающими отказами 198—
207 — Двухканальная система с про-
извольным распределением времени
восстановления 200—202 — Система
ММт 1200, 202—205 — Система со сла-
бой связанностью каналов и независи-
мым восстановлением 200, 206, 207
— с непополняемым резервом време-
ни 197, 198
— со структурным и временным резер-
вированием и нёобесценивающими от-
казами 207—213 — Система с бригад-
ным заданием и общим структурным
резервом р дробной кратностью 207—
210 — Система с раздельным резерви-
рованием каналов и бригадным зада-
нием 210—213
— с периодическим контролем и непо-
полняемым резервом времени 213—217
Системы многофазные одноканальные
с одинаковой производительностью фаз
230, 231
— с сетевой структурой и сосредото-
ченными запасами 232—239 — Сеть со
сбалансированным потреблением 233—
236 — Сеть с несбалансированным по-
треблением 230—239
Системы последовательные восстанав-
ливаемые — Расчет надежности 53—55
— невосстанавливаемые — Расчет на-
дежности 50—53
Системы радиоэлектронные — Выбор
методов обеспечения надежности — см.
Выбор методов обеспечения надеж-
ности радиоэлектронных систем —
Общие принципы обеспечения надеж-
ности при проектировании 275, 276 —
Особенности обеспечения надежности
цифровой аппаратуры 276—279
Системы с ветвящейся структурой и
меридианными связями — Понятие
113, 114 — Расчет надежности — см.
Расчет надежности систем с ветвя-
щейся структурой и меридианными
связями—Структура 114
Системы с временной избыточностью —
Классификация методов временного
резервирования и систем с резервом
времени 136—138 —Основные поня-
тия и определения 135, 136 — Пока-
затели надежности систем с временным
резервированием 138—141
Системы технические нерезервирован-
ные — Оптимизация затрат по обеспе-
чению надежности 291—300
Системы управления иерархические
адаптивные — Расчет надежности
124—134
Смесь распределений 37, 38
Сопряжения — Износ 270, 271
Классификация по условиям изнаши-
вания 270
Старение — Закономерности процессов
266—268
Схема структурная системы 59 ;
— с эквивалентными элементацй 100
I .
ц
Цикл жизненный системы — Модель
изменения надежности по стадиям
цикла 240—242
Э
Элемент восстанавливаемый — Расчет
надежности 47—50
— мгновенно восстанавливаемый —
Характеристики надежности 48, 49 —
Схема работы 48
— невосстанавливаемый — Расчет на-
дежности 44—47
— системы структурный — Понятие 59
Эффект экономический — Зависимость
от числа контролируемых стадий 242
Эффективность экономическая тех-
нических мероприятий по обеспечению
надежности изделий — Оценка 248—
251