/









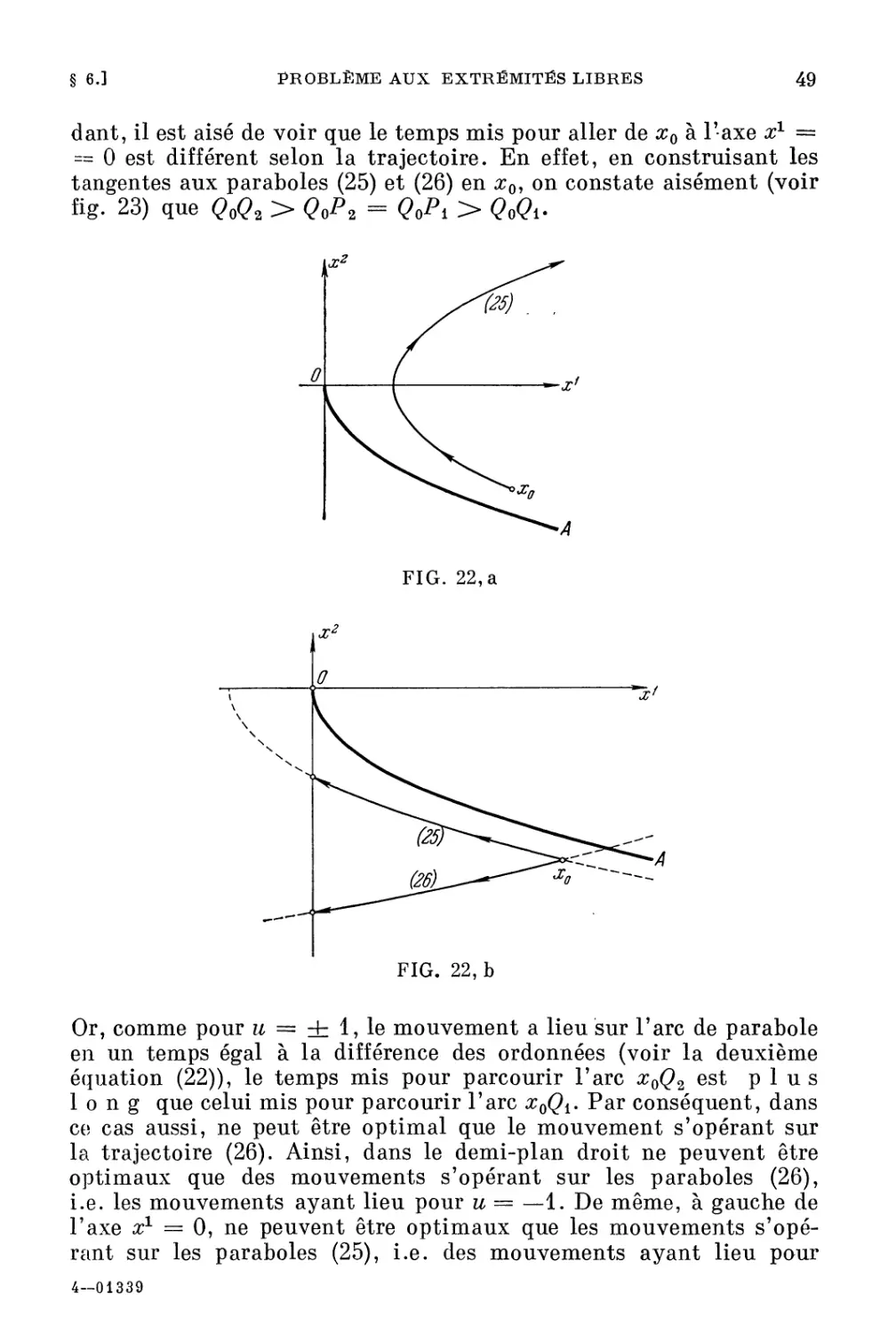
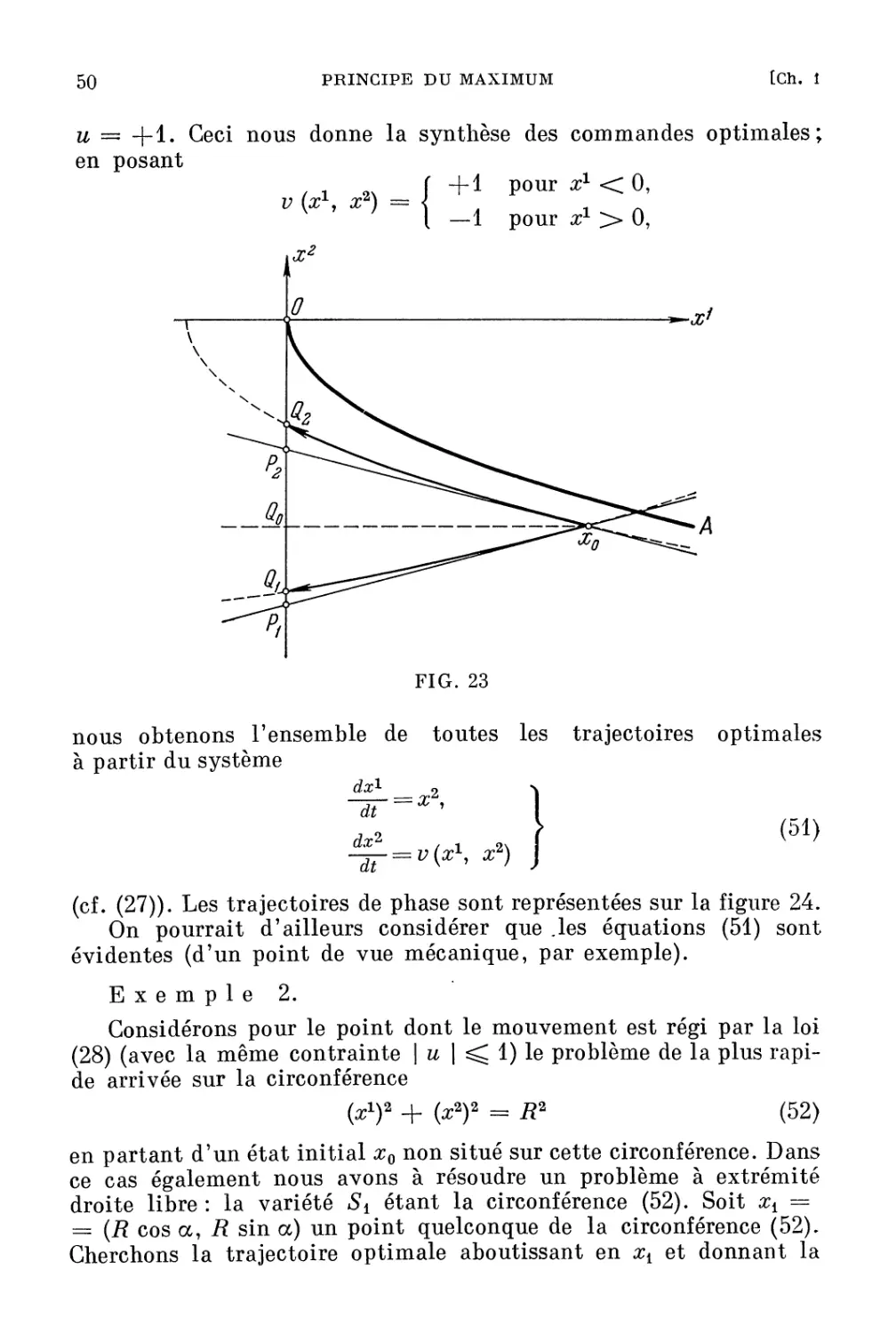
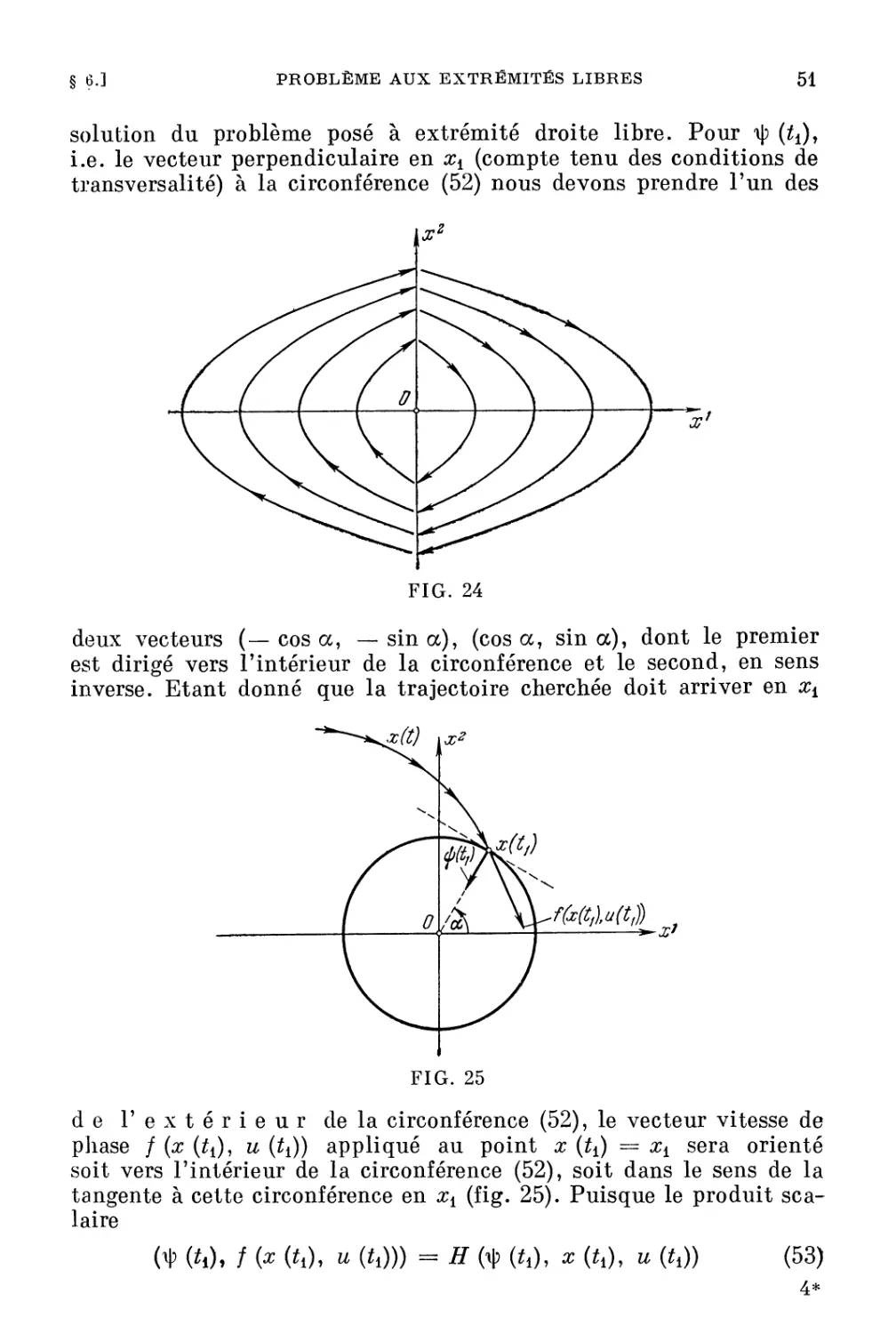







































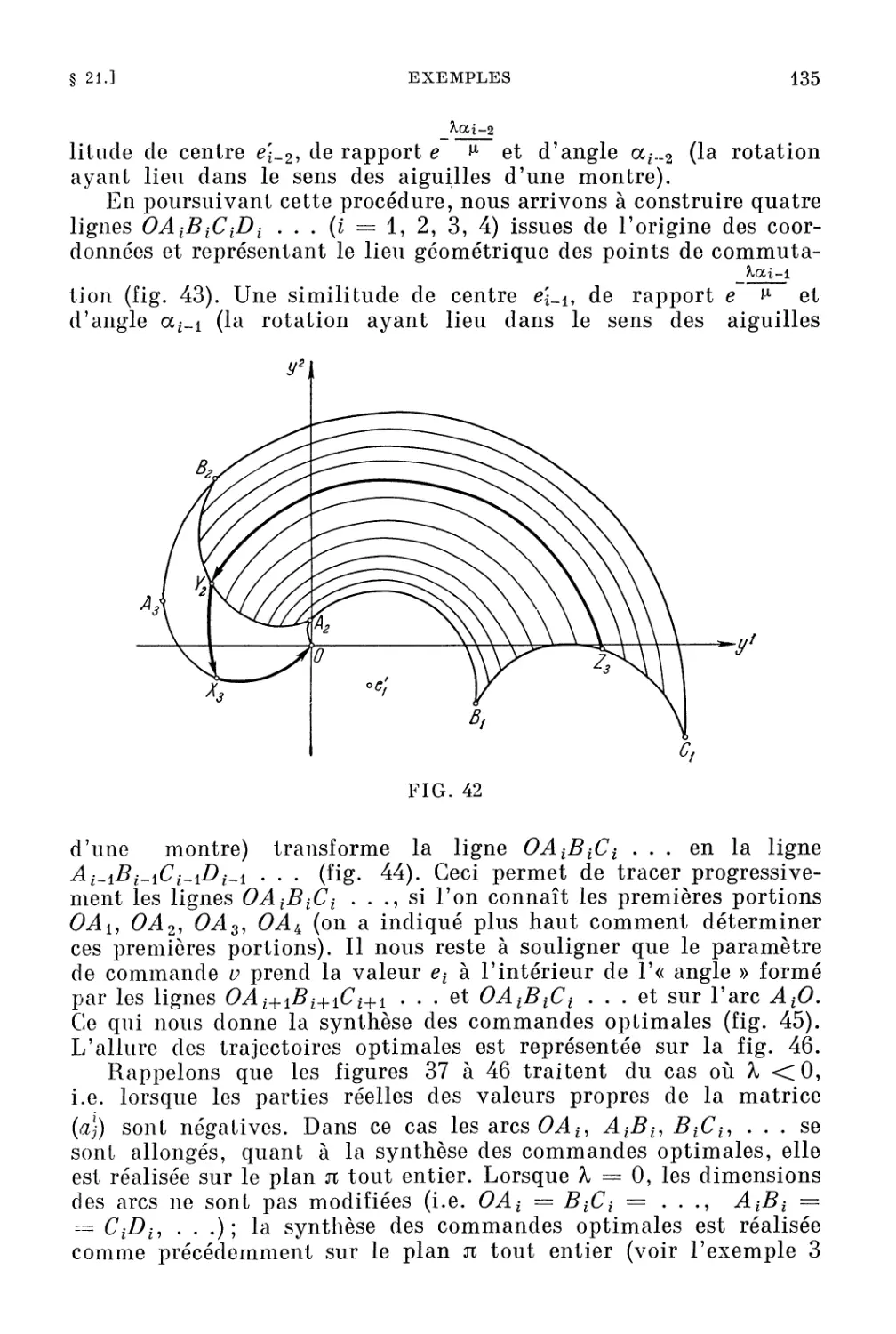
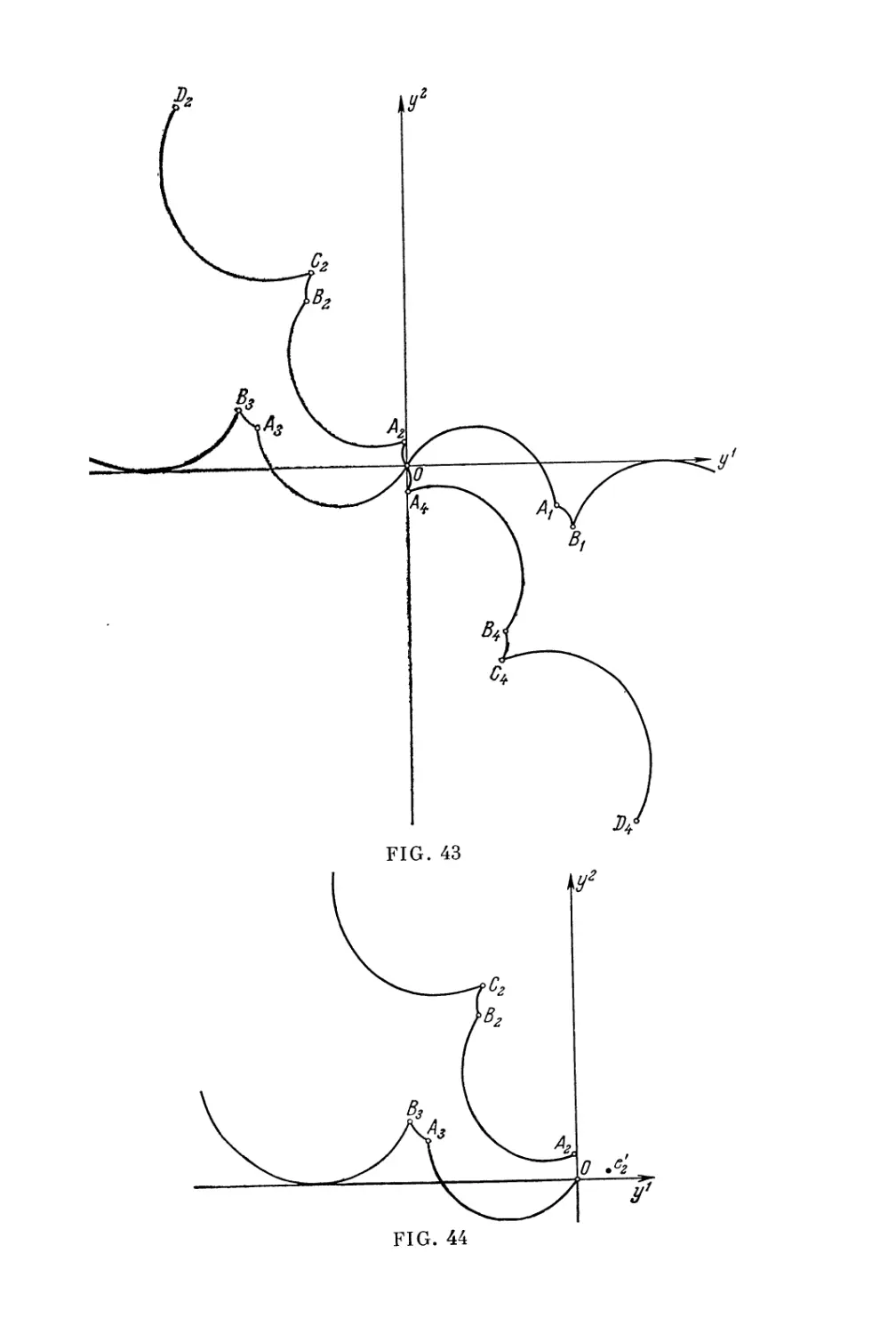
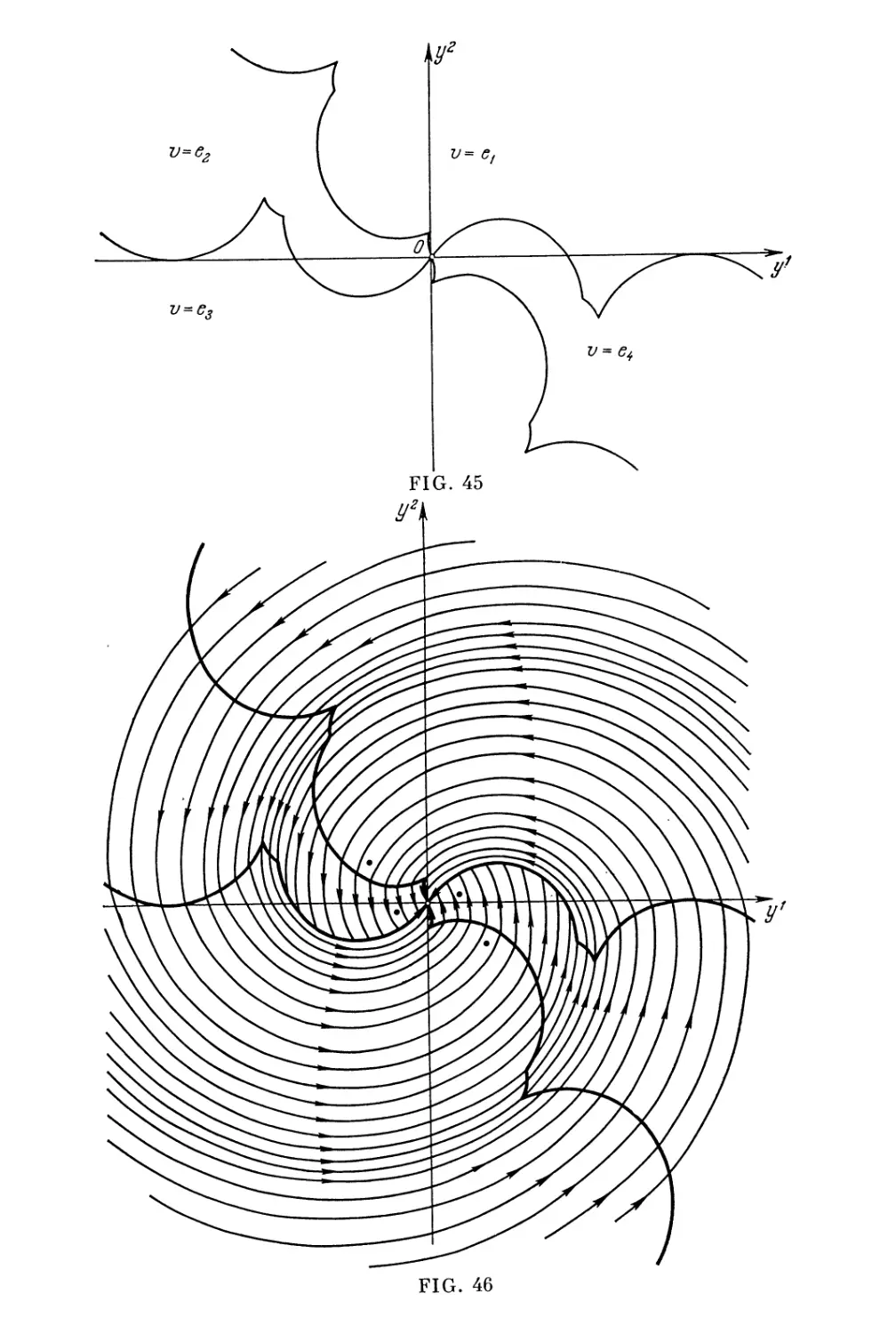
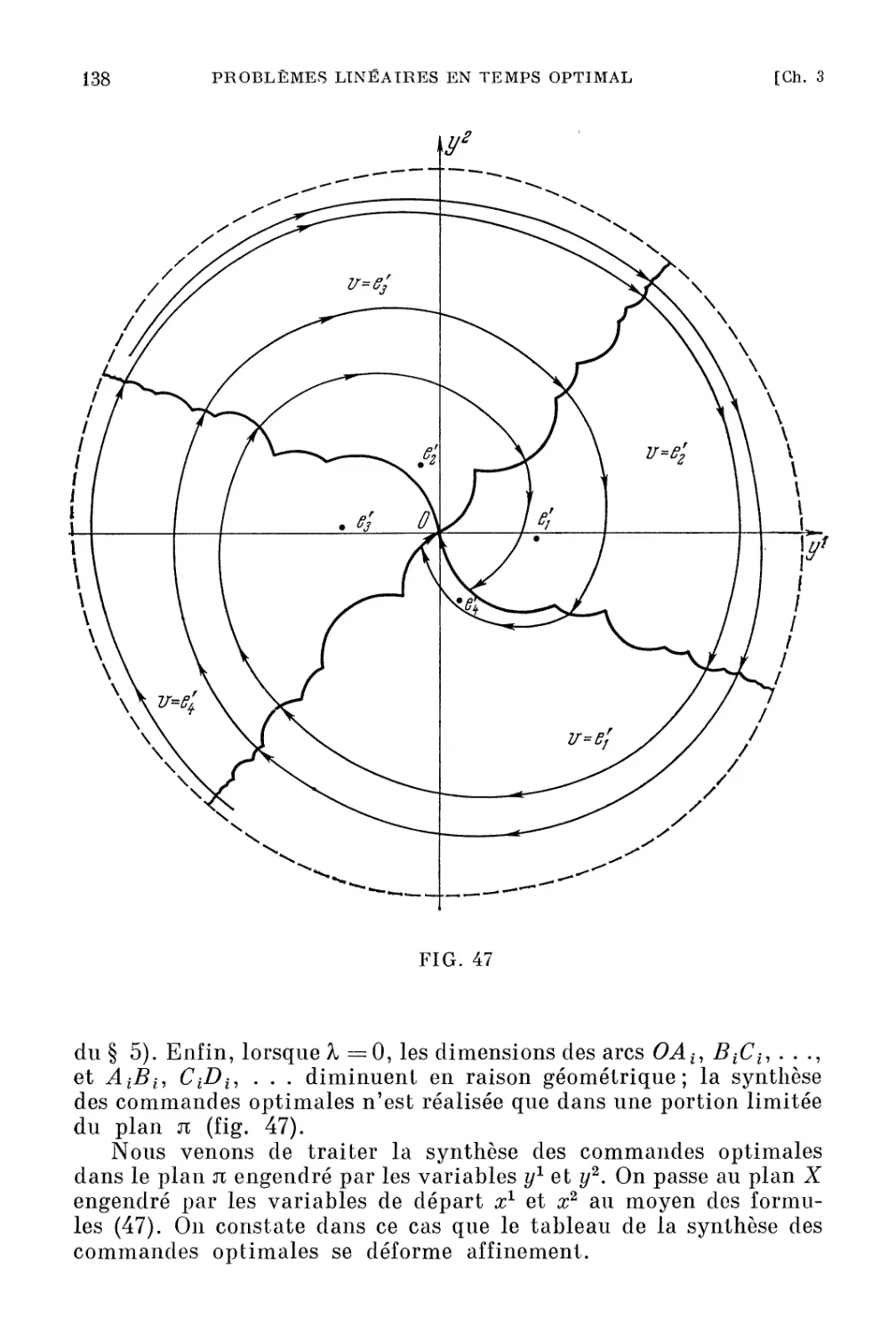

































































































Text
L. PONTRIAGUINE, V. BOL TIANSKI,
R. GAMKRÉLIDZÉ, E. MICHTCHENI(ü
Théorie
mathématique
des processus
optimaux
EDITIONS MIR . MOSCOU
Traduit du russe
par D jilali Embarek
Ha çppaHlfyacnoM JlablJ e
@ Traduction française Editions j\1ir 1974
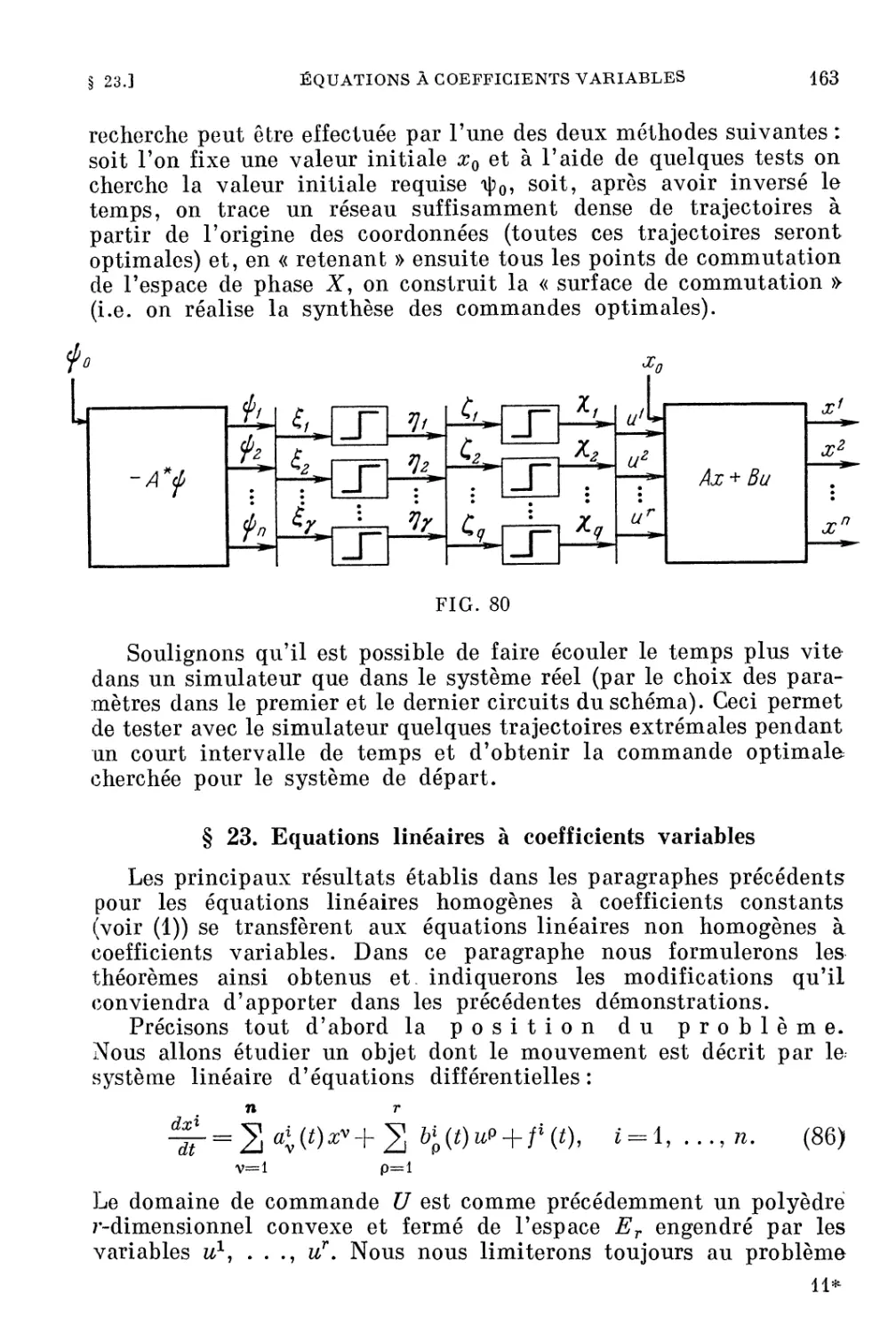
Introduction
Les processus physiques qui trouvent leurs applications en techni-
que sont en règle générale c 0 m man dés, i. e. peuvent être
réalisés de multiples façons au gré de l'homme. Dès lors il s'agira
donc de chercher la meilleure commande selon tel ou tel critère,
en d'autres termes la commande optimale du processus. Ce peut être
par exemple une commande en temps optimal, i.e. réaliser l'objectif
du processus dans le temps le plus court, ou avec la moindre dépense
d'énergie, etc. Mathématiquement formulés, les problèmes mention-
nés relèvent du cal cul des var i a t ion s à qui d'ailleurs
ils ont donné naissance. Les méthodes variationnelles traditionnelles
s'avèrent néanmoins inaptes à résoudre d'innombrables problèmes
importants pour les techniques actuelles. Les auteurs de cet ouvrage
apportent à nombre de ces problèmes variationnels d'un type non
classique des solutions qu'ils ont groupées sous un procédé mathé-
matique commun appelé p r i n c i p e d u m a x i m u m. Il
importe de souligner que toutes les conditions nécessaires et fonda-
mentales du calcul variationnel classique à dérivées ordinaires
découlent du principe du maximum (voir chapitre 5).
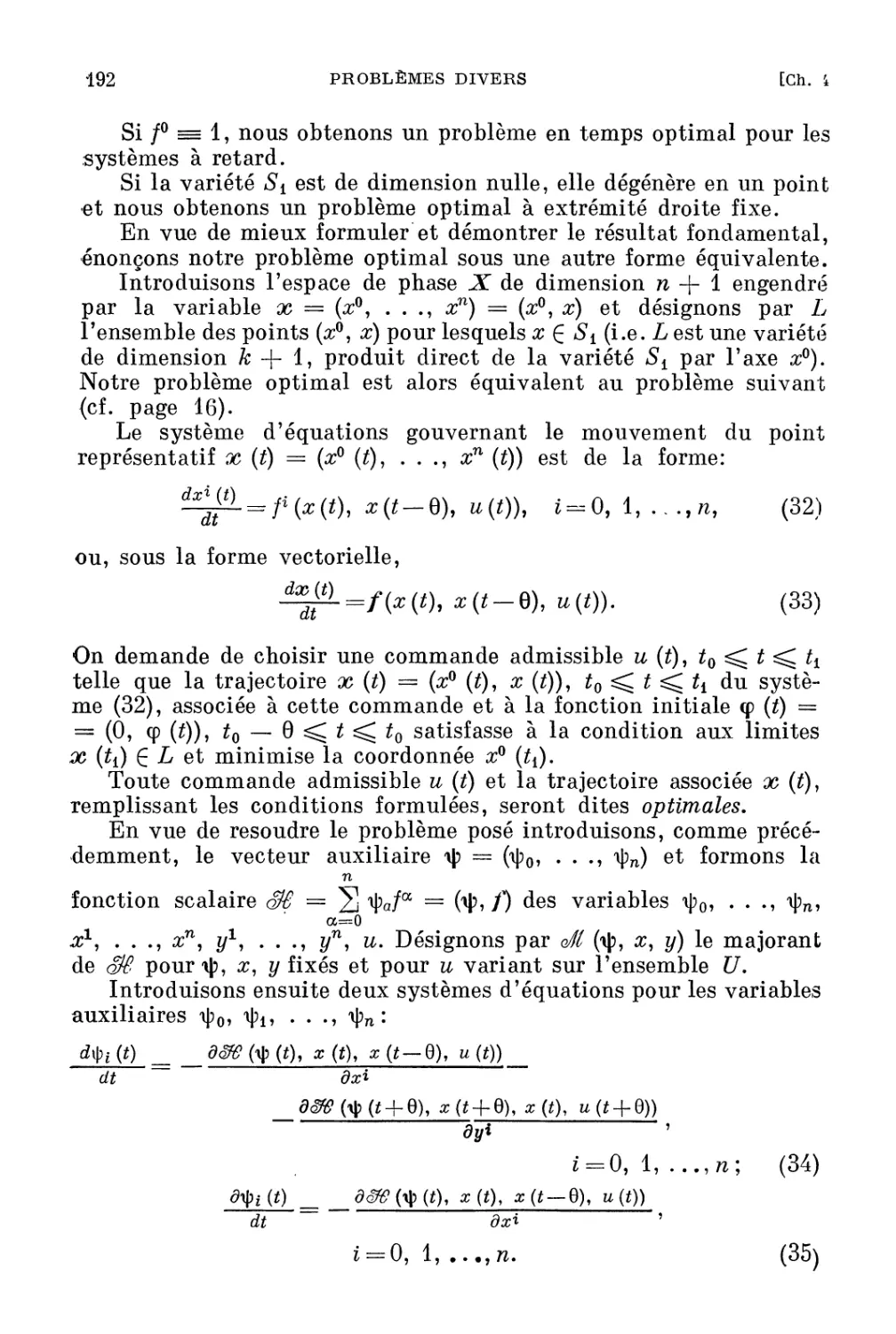
Nous allons examiner ici des processus commandés sUEceptibles
chacun d'être régis par un système d'équations différentielles
dx i f i ( ln 1 r )
---a;:-= X, e.., X, U, ..., U ,
i===1,2, .., n;
(1)
où Xl, . . ., x n sont des grandeurs caractérisant le processus,. i.e.
les coordonnées de phase déterminant l'état de l'objet commandé à
chaque instant t; u l , ..., ur - les paramètres de commande
déterminant la marche du processus et t - le temps. Pour que la
marche du processus commandé soit définie sur un certain intervalle
de temps t o t t i il suffit que sur ce même intervalle soient don
nés (en fonction du temps) les paramètres de commande Ul, ., ur:
u j = u j (t), j = 1, . . ., r.
(2)
6
INTRODUCTION
Alors pour des conditions initiales données
xi (t o ) == x , i 1, ..., n,
(3)
la solution du système (1) est univoque. Le problème variationnel,
lié au processus commandé (1), que nous avons à résoudre est le sui-
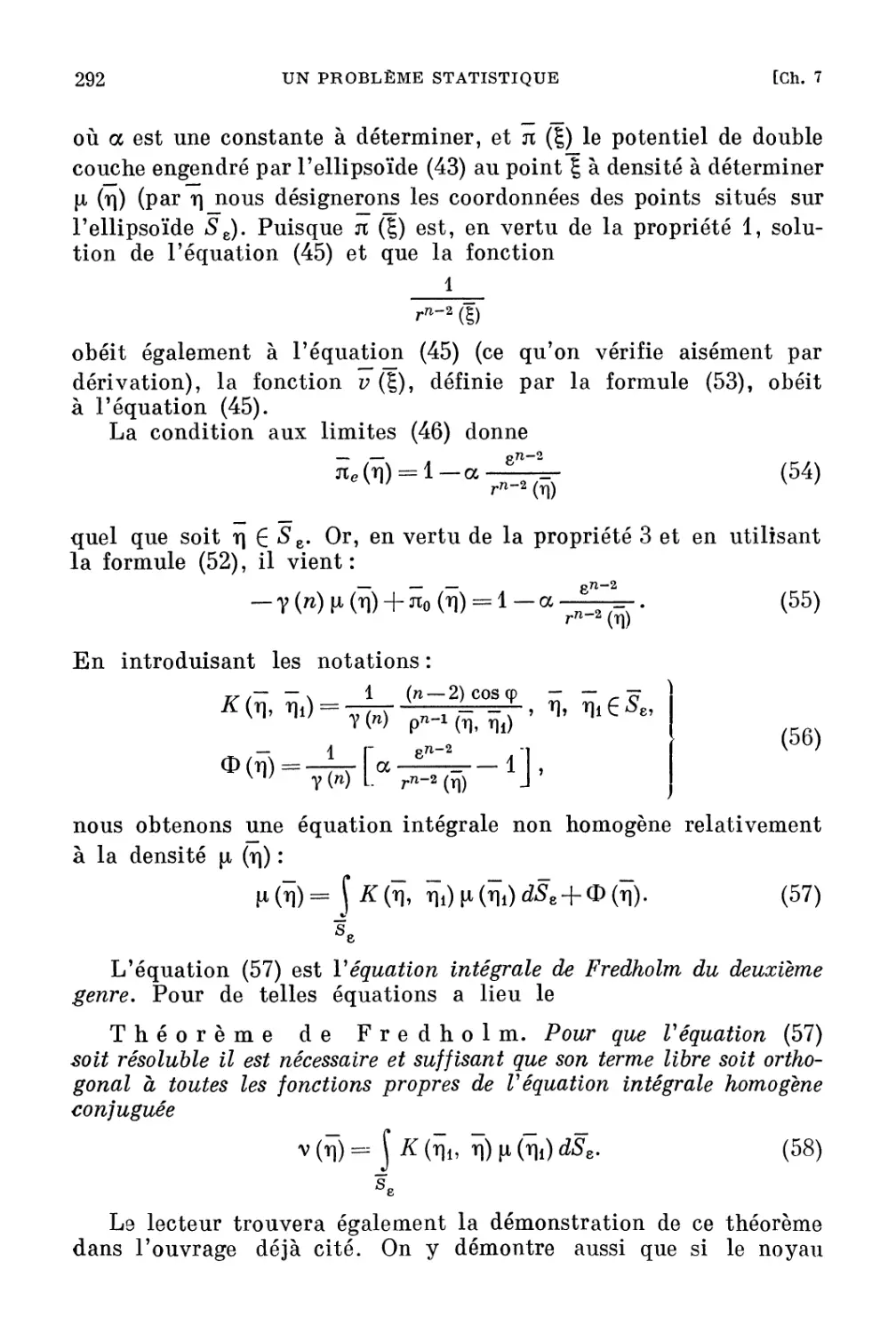
vant. Soit la fonctionnelle intégrale
ft
J = J 1° (xl,
to
n
..., X ,
u l , ..., ur) dt
(4)
où f'J (Xl, . . ., X n , U l , . . ., Ur) est une fonction donnée. Pour cha-
que commande (2) donnée sur un certain intervalle t o t t i
est définie d'une manière uni voque la marche du processus commandé,
et l'intégrale (4) prend une valeur déterminée. Supposons qu'il existe
des commandes (2) transférant l'objet commandé de l'état initial
donné (3) à l'état final imposé
Xi (t i ) == xL i ==: 1, ..., n.
On demande de trouver la commande
ai (t), j = 1, . . ., r (6)
qui transfère l'objet commandé de l'état (3) à l'état (5) de manière
à Ininimiser la fonctionnelle (4). Les instants t o et t i ne sont pas fixés,
on demande seulement qu'à l'instant initial t o l'objet se tro.uve dans
l'état (3) et à l'instant final t i dans l'état (5), et que la fonctionnelle
(4) soit minimale. (Le cas où t o et t i sont fixes est également inté-
ressant à voir; il se ramène sans peine aux problèmes mentionnés
dans cette introduction, voir 9 8.) Dans le cas particulier où la fonc-
t . f o ( 1 X n 111 U 'r ) . d ' t . 1 f t . Il
Ion x , . . ., , w, . . ., qUI e ermine a one lonne e
(4) est identiquement égale à l'unité, la fonctionnelle (4) est égale
à t i - t o et notre problème variationnel se transforme en problème
en temps optimal.
Dans les problèmes techniques où ils définissent, par exemple,
la position des gouvernails d'un engin, les paramètres de commande
u 1 , . . .., ur ne peuvent prendre des valeurs arbitraires: ils sont assu-
jettis à certaines contraintes. De par la construction même du méca-
nIsme décrit par le systèrrte (1) le paramètre u l ne peut, disons, pren-
dre que les valeurs satisfaisant à la condition
(5)
1 u 1 1 1.
(7)
Si, par exemple, les paralnètres Ul, u 2 représentent, dans un plan,
le3 CO np)3an.tes d'une grandeur vectorielle de module non supérieur
à l'un.ité et de sens arbitraire, ils sont alors assujettis à la condition
(U l )2 + (U 2 )2 1. (8)
INTRODUCTION
7
En règle générale, il faut considérer que le point (u l , . . ., ur)
doit appartenir à un ensemble U d'un espace muni des coordonnées
u l , ..., ur, le choix de l'ensemble U reflétant le caractère
de l'objet (1). L'ensemble U (ou « domaine de commande »)
théoriquement est considéré comme étant arbitraire, mais dans les
problèmes techniques un cas particulièrement important et re-
marquable est celui où U est fer m é (cf. inégalités (7), (8)). Cette
condition signifie que le gouvernail peut occuper ses positions extrê-
mes (les valeurs u l = + 1 dans l'inégalité (7) ou les points limites
du cercle (8)), qui peuvent en particulier réaliser la commande opti-
male. C'est précisément cette circonstance qui fait que le problème
variationnel considéré n'est pas classique puisque dans le calcul
variationnel classique les paramètres variables ne peuvent satisfaire
aux expressions (7) et (8).
Le caractère non classique de problème variationnel est le plus
évident dans le problème en temps optimal pour le système (1),
système dont les seconds membres sont des fonctions à coeffici'ents
t 1 . , . 1 n 1 r l '
constan s,ln e aIr e s en x , . . ., x , u , . . ., u et ensem-
ble U est un pol y è d r e con v e x e fer m é, un cube par exem-
pie, défini par les inégalités:
1 u j / 1, j = 1, . . ., r.
Il s'avère dans ce cas que la commande optimale (6) est réalisée
par le point (u l (t), . . ., ur (t)) qui se trouve à tour de rôle dans les
divers sommets du polyèdre U. Les règles qui régissent les sauts du
point commandé d'un sommet à un autre définissent précisément
la loi de commande optimale. Ce problème variationnellinéaire aux
multiples applications techniques se résout par les méthodes généra-
les exposées au chapitre 3. Les méthodes classiques sont totalement
impropres à sa résolution.
De ce qui précède sur les sauts du point commandé d'un sommet
à un autre du polyèdre U, il résulte que la classe des commandes
adnlissibles (2) ne peut être composée de fonctions continues. Nous
supposerons en général qu'elle est composée de fonctions continues par
morceaux. Les coordonnées de phase Xl, . . ., x n sont considérées
comme étant des fonctions du temps continues et dérivables par mor-
ceaux. Sous ces hypothèses, les conditions nécessaires d'optimalité
se formulent par le principe du maximum (voir chapitre 1) qui est
dénlontré dans le chapitre 2.
Si l'objet considéré. est un système mécanique, la partie
Xl, . . ., Xh des coordonnées de phase en décrit l'état géométrique,
tandis que l'autre partie Xk+l, . . ., X2k (2k = n) - la vitesse.
Dans certains problèlnes, le but du processus peut ne pas consister
à faire arriver l'objet en un point déterminé (x , . . ., x7) de l'espace
de p h a s e, mais à faire occuper au système mécanique une position
spa t i ale définie (x , . . ., x ) avec des vi tesses arbi traires en
8
INTRODUCTION
fin de processus. Par conséquent ici est posé le problème variationnel
du transfert optimal de l'objet d'un point initial donné x , . . ., x
de l'espace de phase à un point arbitraire d'un plan de dimension k
défini par les équations
1 1 k h
X = Xi' ..., X = Xl .
Nous constatons que le problème optimal formulé au début évite tou-
te une série d'importantes questions. Aussi le 9 6 du chapitre 1 traite-
t-il du transfert optimal de l'objet d'une variété initiale quelconque
M 0 d l'espace de phase à une variété finale quelconque Mt, les di-
mensions des variétés Mo et Mi étant arbitraires (si, en particulier,
elles sont toutes deux nulles on est ramené au problème initial).
Il est clair que les paramètres de commande de l'objet de même
d'ailleurs que ses coordonnées de phase, de par la nature même du
problème posé, sont assujettis à certaines conditions. Si, par exemple,
on étudie le vol d'un avion dont Xl représente l'altitude au-dessus du
sol, alors doit être vérifiée l'inégalité Xl h > 0 où h désigne l'al-
titude minimale admissible de vol. L'inégalité Xl h ne découle ni
des propriétés du système d'équations (1), ni des inégalités auxquelles
sont soumis les paramètres de commande, elle est entièrement indé-
pendante. Le chapitre 6 traite" de la commande optimale d'un objet
dont le point représentatif de l'espace de phase est astreint à rester
constamment dans un domaine fermé G de cet espace de phase. On
suppose en outre que la frontière du domaine G est dérivable par mor-
ceaux. Sous ces conditions, ùne partie d'u mouvement de l'objet
se réalise à l'intérieur du domaine G conformément au principe ordi-
naire du maximum, l'autre partie sur la frontière du domaine G,
conformément au principe complexe du maximum. Le passage des
morceaux de trajectoires contenus à l'intérieur de G aux morceaux
de trajectoires portés par la frontière de G est régi par des règles origi-
,nales rappelant, et généralisant dans un certain sens, les lois de dif-
fraction de la lumière.
Jusqu'ici il n'a été question que de la commande optimale
transférant un objet dans un point donné ou dans une sous-variété
donnée de l'espace de phase. Le problème de commande optimale
peut néanmoins se transformer en un problème d' optimali té de l' ar-
rivée dans un point m 0 b i 1 e de l'espace de phase. Soit dans
l'espace de phase "un point mobile
Xi = Si (t), i = 1, . . ., n. (9)
On demande de faire coïncider dans un temps optimal l'objet (1)
avec le point mobile (9). Ce problème se ramène facilement au pro-
blème étudié. Il suffit pour cela d'introduire les nouvelles variables
_ Y i = X i - S i (t) , 7 - 1 n
- ,..., .
INTRODUCTION
9
Le système commandé (1) se transforme en un nouveau système,.
qui, cependant, n'est plus autonome; quant au but du processus
commandé, il consiste désormais à faire arriver le nouvel objet
(yI, . . ., yn) dans le point fixe (0, . . ., 0) de l'espace de phase.
Les résultats fondamentaux se transférant aisément aux processu
commandés non a u ton 0 mes (voir 9 7), le problème est résolu.
Nous avons supposé que le mouvement du point poursuivi (9)
était connu sur l'intervalle de temps considéré tout entier. Un
problème nouveau et d'une grande importance pratique se pose lors-
que le mouvement de l'objet poursuivi n'est pas connu d'avance,.
mais sur lequel on reçoit des informations au fur et à mesure que le
temps passe. Pour résoudre de tels problèmes, on doit posséder des-
données sur le comportement de cet objet. Un cas particulièrement
important est celui où l'objet poursuivi est commandé, i.e. son mou-
vement est régi p al" le système d'équations
dz i i ( ln 1 S ) . 1
= g z, ..., z , v, ..., v, == , ..., n.
(10)
Connaissant les perforlnances techniques de l'objet poursuivi, i.e.
le système d'équations (10), et sa position à chaque instant donné,.
il s'agit de déterminer au même instant une commande qui réalise
la poursuite en un temps optimal. Tel qu'il est posé, ce problème
est traité dans la théorie des jeux différentiels, théorie que nous
n'aborderons pas ici. Dans le chapitre 7 est résolu un autre problème
de poursuite. On y suppose qu'à l'instant initial, la position de l'ob-
jet poursuivi est connue, et que son comportement futur est décrit
probabilistiquement, à savoir son mouvement est considéré comme
étant un processus markovien. Sous ces hypothèses on cherche une-
commande, telle que la rencontre d'un petit voisinage de l'objet
(1) avec l'objet poursuivi soit la plus probable.
* * *
Le principe du maximum s'est pleinement justifié et a trouvé.
d'innombrables applications au cours des 7 années écoulées depuis la
première édition russe de cet ouvrage. Aussi convient-il d'ouvrir
dès maintenant une parenthèse sur sa nature, son origine et sa dé-
monstration. Prenons, pour fixer les idées, le problème de commande.
en temps optimal. Car c'est précisément pour ce problèn1e que-
Lev Pontriaguine formula l'hypothèse du principe du maximum.
Pour l'essentiel le problème est le suivant. Toute commande
admissible u l (t), . . ., ur (t), définie sur l'intervalle t o t t 1 t,
et tout vècteur constant 'i' de l'espace de phase sont associés d'une:-
manière déterminée à la fonction
H (t, U 1 , . . ., Ur)
10
INTRODUCTION
de la variable t, t o t t 1 , et des. paramètres de comn1ande admis-
:sibles. Il s'avère que si la commande étudiée est optimale, il existe
alors une valeur du vecteur "p =1= 0 telle que pour chaque valeur fixe
de t, t o t t i , la grandeur H qui est considérée comme une fonc-
tion des valeurs admissibles des paramètres de commande, atteigne
.son maximum pour u j == u j (t), j == 1, . . ., r. On constate donc que
lorsqu' on'utilise le principe du maximum, on ne doit pas comparer seu-
Jement des commandes proches l'une de l'autre. D'où sa distinction
des théorèmes classiques du calcul variationnel, d'où sa force, mais
aussi une certaine complexité de la démonstration.
La première démonstration du principe du maximum appliqué
aux systèmes commandés linéaires a été donnée par R. Gamkrélidzé
-qui a par ailleurs entièrement élaboré la théorie de ces systèmes.
L'idée est la suivante: supposons que ,la commande optimale étudiée
transfère le point Xo en Xi. Si, au lieu de la commande optimale, on
prend une commande admissible quelconque définie sur le précé-
.dent intervalle, cette dernière transférera le point Xo en un point
X (t l ). Compte tenu de la linéarité, l'ensemble de tous les points x (t f )
ainsi obtenus forme un corps convexe P. De l'optimalité de la com-
mande initiale, il résulte que le point Xi est situé sur la frontière de
,ce corps. Par conséquent, le corps P admet un plan d'appui en Xi'
le vecteur "p perpendiculaire à ce plan et dirigé vers l'extérieur du
-corps P n'étant autre que le vecteur utilisé dans la construction de
la fonction H.
Lorsque le système commandé est non linéaire, l'ensemble des
points X (t l ) obtenus à l'aide de toutes les commandes admissibles
possibles est non convexe et infini. Il n'est pas dans la nature du
principe du maximum d'utiliser, pour linéariser les problèmes, des
commandes différant légèrement de la commande optimale. Dans le
cas général non linéaire, le principe du maximum fut démontré
par V. Boltianski qui ensuite élabora les fondements de la théorie
non linéaire de la commande optimale. C'est précisément lui qui
a judicieusement choisi une classe de commandes dans le but de les
-comparer à la commande optimale en se servant des variations de
McShane, i.e. en étudiant les commandes admissibles distinctes de
l' op timale sur un nombre fini seulement de peti ts intervalles de temps,
mais distinctes arbitrairement sur chaque intervalle. Le problème
fut de la sorte linéarisé: l'ensemble des points X (t 1 ) correspondant
aux commandes indiquées, quoique non convexe, est proche d'un
.ensemble convexe de sorte qu'il fut possible de construire un plan
id' appui et un vecteur "p perpendiculaire à ce plan.
Leu Pontriaguine
CHAPITRE 1
Principe du
.
maXImum
9 1. Commandes admissibles
Nous étudierons le comportement d'un objet dont l'état est à
chaque instant caractérisé par n nombres réels Xl, x 2 , . . ., x n (par
exeulple les coordonnées et les vitesses). L'espace vectoriel X de la
variable vec torielle x == (xl, . . ., x n ) est l'espace de phase de l'objet
-considéré. Le comportement (mouvement) de l'objet consiste (du
point de vue mathématique) en une variation de Xl, . . ., x n en
fonction du temps. On suppose que le mouvement de l'objet est sus-
ceptible d'être c 0 m ID and é, i.e. l'objet est doté de «gouver-
nails }) dont la position conditionne le mouvement. Les positions des
-« gouvernails » sont données par les points u d'un domaine de comman-
de U qui peut bien être un ensemble quelconque d'un espace eucli-
,dien Er de dimension r; la donnée du point u == (u l , u 2 , . . ., ut) E
E U équivaut à la donnée du système de paramètres numériques Ul,
u 2 , . . ., ur. Dans les applications un cas est important, celui où
U est un domaine fer m é de l'espace Er. Le domaine de commande
U peut, en particulier, être un cube de l'espace de dimension r
1 ' 1 . bl 1 2 r
:engenc re par es varia es u , u , . . ., u :
1 u j 1 1, j == 1, 2, . . ., r,
(1)
ou un autre ensemble quelconque fermé et limité de cet espace de
dinlension r. D'un point de vue physique, il est clair pourquoi étu-
die-t-on (dans l'espace engendré par les variables Ul, u 2 , . . ., ur)
un dOluaine de commande fermé et limité U: les paramètres de com-
luande Ul, u 2 , . . ., ur peuvent représenter la quantité de combusti-
ble fourni à un moteur, la température, l'intensité du courant, la
tension, etc., qui ne peuvent prendre des valeurs arbitrairement
grandes. Par ailleurs, de par la construction technique du gouver-
nail de l'objet, les paramètres de commande u l , u 2 , . . ., u} peuvent
être liés entre eux par une ou plusieurs liaisons de la forme
<p (u l , u/', . . ., ur) == O. Dans ce cas, le domaine de commande U
-peut ôtra d'une forme géométrique plus ou moins complexe. Si, par
eXBJuple, les paramètres de comlllande Ul, u 2 sont par con'struction
de la forlu3 u l == cos <p, u 2 == sin <p, où <p est un angle arbitrairement
choisi, le domaine de commande sera ,la circonférence
(U 1 )2 + (u 2 ) 2 == 1.
(2)
12
PRINCIPE DU MAXIMUM
[Ch. 1
Dans la suite nous considérerons simplement le domaine de commande
U et ses points u E U et nous nous donnerons U sous la forme
d'un ensemble de l' esp ace engendré par les v ari ables u 1 , u 2 , . . ., ur
en prenant pour « point » u 'un système arbitraire de paramètres de
commande u == (u 1 , u 2 , . . ., ur) (voir (1) ou (2) par exemple) conte-
nu dans U.
Nous désignerons par commande toute fonction u == u (t) définie
sur un certain intervalle t o t t i et à valeurs dans le domaine de
commande U. U étant un ensemble de l'espace engendré par les para-
mètres de commande u 1 , u 2 , . . ., ur, chaque commande
u (t) == (u 1 (t), u 2 (t), . . ., ur(t))
est un. v e c t e u r f 0 n c t ion (défini sur l'intervalle t o :::;; t
t i ) à valeurs dans le domaine de commande U. Dans la suite, selon
la nature du problème à résoudre, nous imposerons diverses conditions
(continuité par morceaux, différentiabilité par morceaux, etc.) sur
la commande u (t). Nous désignerons par co m man des a d ID i s-
s i b 1 e s .les commandes satisfaisant à ces conditions. Dans ce cha-
pitre, nous appellerons admissibles des c 0 m man des que l-
con que s con t i nue spa r m 0 r c eau x (à valeurs dans
U), i.e. des commandes u == u (t) telles que chacune d'elles soi t con-
tinue pour toutes les valeurs de t considérées, à l'exception d'un nom-
bre fini où la fonction u (t) peut subir des discontinuités de première
espèce. Afin d'éviter toute confusion, observons que par définition
des discontinuités de première espèce, on suppose qu'au point 'r
de discontinuité existent les limites fin i e s
u ('t - 0) === lim u (t), u Cr + 0) === lim u (t).
t-+'T: t-+'T:
t< 'T: t>'T:
D'où il vient, en particulier, que toute commande u (t) est limitée
(même si le domaine U n'est pas limité).
La valeur de la commande continue par morceaux u (t) au point
de discontinuité ne joue aucun rôle dans la suite. Pour fixer les idées
il est néanmoins commode de supposer qu'en chaque point 't de dis-
continuité la valeur de la commande u (t) est égale à la 1 i ID i t e
à g a II che :
u ('t) == U ('t - 0)
(3)
et que chaque commande étudiée u (t) est continue aux extrémités
de l'intervalle t o t t i sur lequel elle est définie.
Ainsi donc" dans ce chapitre, nous conviendrons de désigner par
commande admissible toute fonction continue par morceaux u (t),
t o t t i , à valeurs dans le domaine de commande U, satisfaisant
à la condition (3) dans les points de discontinuité et continue aux
extrémités de l'intervalle t o t t i sur lequel elle est définie. Les
commandes continues par morceaux correspondent à l'hypothèse
2.]
ÉNONCÉ DU PROBLÈME FONDAMENTAL
13
de gouvernails « sans inertie» puisque les valeurs de la' fonction
u (t) peuvent (à l'instant de discontinuité) sauter instantanément
d'un point à un autre du domaine de commande. Cette classe de com-
mandes admissibles est apparemment la plus importante pour les
applications techniques de la théorie développée ici.
9 2. Enoncé du problème fondamental
Nous supposerons que la loi régissant le mouvement de l'objet
(ou l'action des « gouvernails » sur ce mouvement) s'écrit sous la
forme d'un système d'équations différentielles
dx i f i ( 1 2 n 1 r ) f i ( )
([t == x, x , · · ., x , u , ..., u == x, u ,
i == 1, 2, ..., n, (4)
ou sous la forme vectorielle
dx
(ft==f(x, u),
(5)
où f (x, u) est un vecteur de composantes
f1 (x, u), f2 (x, u), . . ., f n (x, u) .
Les fonctions fi sont définies quelles que soient les valeurs de la varia-
ble vectorielle x E X et les valeurs de u E U. Elles sont supposées
continues en Xl, x 2 , . . ., X n , U et continûment dérivables en Xl,
X 2 , . . ., x n . En d'autres termes les fonctions
f i ( 1 2 n ) t âfi (xl, x 2 , ..., xn, u).
X , X , ..., x , u e . ,
âx J
i, j == 1, 2, ..., n
sont définies et continues sur le produit direct X X U.
Observons que le système (4) est autonome, i.e. ses seconds
membres ne dépendent pas explicitement du temps t. Nous verrons
plus loin ( 7) le cas où les seconds membres sont fonctions du
temps.
Si est donnée une loi de commande, i.e. est fait choix d'une com-
mande admissible u = u (t), alors l'équation (5) s'écrit sous la forme
dx
lit == f (x, u (t», (6)
d'où (quelles que soient les conditions initiales x (t o ) = xo) est défi-
nie d'une manière univoque la loi du mouvement de l'objet x = x (t),
i.e. une sol ution de l'équation (6) définie sur un certain intervalle de
temps. Si, précisément, la commande u (t) est donnée sur un inter-
valle t o t t 1 et 8 1 , 8 2 , . . ., 8h. sont ses points de discontinuité
(de première espèce) tels que t o < 8 1 < 8 2 < . . . < 8h < t 1 , nous
étudierons l'équation (6) d'abord sur l'intervalle t o t 8 1 où
14
PRINCIPE DU J\IAXIIVIUM
[Ch. 1
son second membre est continu. Désignons par x (t) une solution
de cette équation avec la condition initiale x (t o ) == Xo. Si cette solu-
tion est définie sur l'intervalle t o t 8 i tout entier et prend en 8 1
la valeur x (8 i ), nous. pouvons alors étudier l'équation (6) sur l'in-
tervalle 8 i t 8 2 , 'en prenant pour valeur initiale x (8 i ). Dési-
gnons également cette solution par x (t). La solution x (t) ainsi cons-
truite est donc continue partout sur son intervalle de définition et,
en particulier, en le « point de conjugaison » 8 i . Si, maintenant, la
solution x (t) est définie sur l'intervalle t o t 8 2 tout entier et
prend en 8 2 la valeur x (8 2 ), nous pouvons alors étudier l'équation
(6) sur l'intervalle 8 2 t 8 3 , en prenant pour condition initiale
x (8 2 ), etc. La solution x (t) obtonue par cette procédure est par
conséquent continue et dérivable par morceaux; plus précisément,
la solution x (t) (là où elle est définie) est continûment dérivable en
tous les points sauf en 8 i , 8 2 , . . ., 8k. Nous dirons que x (t) est la
solution du système (4) (ou de l'équation (5)) associée à la conlnlande
u (t) avec la condition initiale x (t o ) == Xo. Cette solution peut ne pas
être définie sur l'intervalle t o t t i tout entier de définition de
la commande u (t) (elle peut s'éloigner à l'infini).
Nous dirons que la commande admissible. u (t), t o t ti't
transfère le point représentatif de la position. Xo à la position Xi si
la solution x (t) de l'équation (5) (ou ce qui revient au même (6)) lui
correspondant et vérifiant la condition initiale x (t o ) == Xo est définie
sur l'intervalle t o t t i tout entier et passe à l'instant t i par ]e
point Xi' i.e. satisfait également à la condition finale x (t 1 ) == .Ti'
Supposons maintenant qu'est donnée une autre fonction
fO (Xl, x 2 , . . ., x n , u) == 1 0 (x, u) définie et continue avec ses déri-
vées partiEÙles : , i = 1, 2, . . ., n, sur l'espace X X U tout
entier. Alors le problème fondamental (i.e. la recheJ;che des COlnman-
des optimales) peut se formuler de la manière suivante.
Etant donnés dans l'espace de phase X deux points Xo et Xi ; parmi
les commandes a!dmissibles, U == u (t) transférant le point représentatif
de Xo en Xi (si elles existent) trouver celle qui minimise la fonctionnelle
tl
J = \ 1° (x (t), u (t)) dt ;
-.-
to
(7)
x (t) désigne ici la solution de l'équation (5) avec la, condition ini-
tiale x (t o ) == Xo associée à la commande u (t) et t i l'instant où cette
solution passe par le point Xi.
Remarquons que (pour Xo et Xi fixés) les bornes t o et t 1 de l'i té-
grale (7) ne sont pas des nombres fixes, elles dépendent du choix de la
commande u (t) qui transfère le point représentatif de Xo en Xi (ces
bornes sont tirées des relations x (t o ) == Xo et x (t 1 ) == Xi). Nous ver-
2.]
ÉNONCÉ DU PROBLÈME FONDAMENTAL
15
rons plus loin ( 8) comment se résout ce problème lorsque les extré-
mités de l'intervalle d'intégration sont fixées.
La . commande u (t) qui donne la solution du problème énoncé
ci-dessus est appelée commande optimale correspondant au transfert,
de la position Xo à la position Xi' et la trajectoire correspondante
X (t) - trajectoire optimale. Ainsi donc' le problème fondamental
consiste à chercher les commandes optimales (et les trajectoires opti-
males correspondantes).
Un cas particulier important du problème optilIlal posé est celui
où
1 0 (x, u) == 1.
La fonctionnelle (7) s' écri t alors sous la forme:
J == t 1 - t o (8}
et l' optilIlali té de la cOInmande u (t) revient à minimiser le transfert
de Xo en Xl. Dans ce cas le problème s'énonce pro b 1 è m e d e
c 0 m man d e e n t e m p s 0 P t i mal.
Pour la formulation et la démonstration de la condition néces-
saire d'optimalité, il nous sera plus commode d'énoncer le problème
posé sous une autre forme. Plus exactement, ajoutons aux coordon-
nées de phase Xl, x 2 , . . ., x n régies par la loi (4) la coordonnée X Oj
dont les variations obéissent à la loi
dx O 1 0 ( 1 2 11, )
-cr;:-==- x, X, ..., x, u,
où 1° est la fonction qui a servi à définir la fonctionnelle J (voir
(7)). Autrement dit, nous considérerons le systèn1e d'équations diffé-
ron tielles
dx i _ f i ( 1.2 H 1
dt- X, x, ..., x, u, ...,
ur) = I i (X, U),
i == 0, 1, 2, . . ., n (9)
dont les deuxièlIles menlbres ne dépendent pas de xo. En introduisant
le vecteur
X - (X O X l 2 11 ) - ( ° )
- , , x, . . ., X - x, X
de l'espace vectoriel X de dimension n + 1, le système (9) s'écrit sous
la forme vectorielle:
dx
([t=f(x, u), (10)
où j' (x, u) est un vecteur de l'espace X de coordonnées fO (x, u), . . .
· · ., ln (X, u). Remarquons que le vecteur 1 (x, u) ne dépend pas
de la coordonnée XO du vecteur x.
Supposons maintenant que u (t) soit une commande admissible
transférant Xo en Xi' et X == x Ct) - la solution correspondante de
'16
PRINCIPE DU MAXIMUM
[Ch. 1
J'équation (5) avec la condition initiale x (t o ) = Xo. Désignons par
Xo le point (0, xo), i. e. le point de l'espace X de coordonnées 0,
x , . . ., xa où x , . . ., xa sont les coordonnées du point Xo dans
l'espace X. Il est alors évident que la solution de l'équation (10)
associée à la commande u (t) et vérifiant la condition initiale x (t o ) =
= Xo est définie sur l'intervalle t o t t 1 tout entier et s'écrit sous
la forme
t
X O = ) 1 0 (x (t), u (t» dt,
to
x=x(t).
En particulier, lorsque t = t i , nous avons
t1
X o = ) fO (x (t), u(t»)dt=J, X=Xh
to
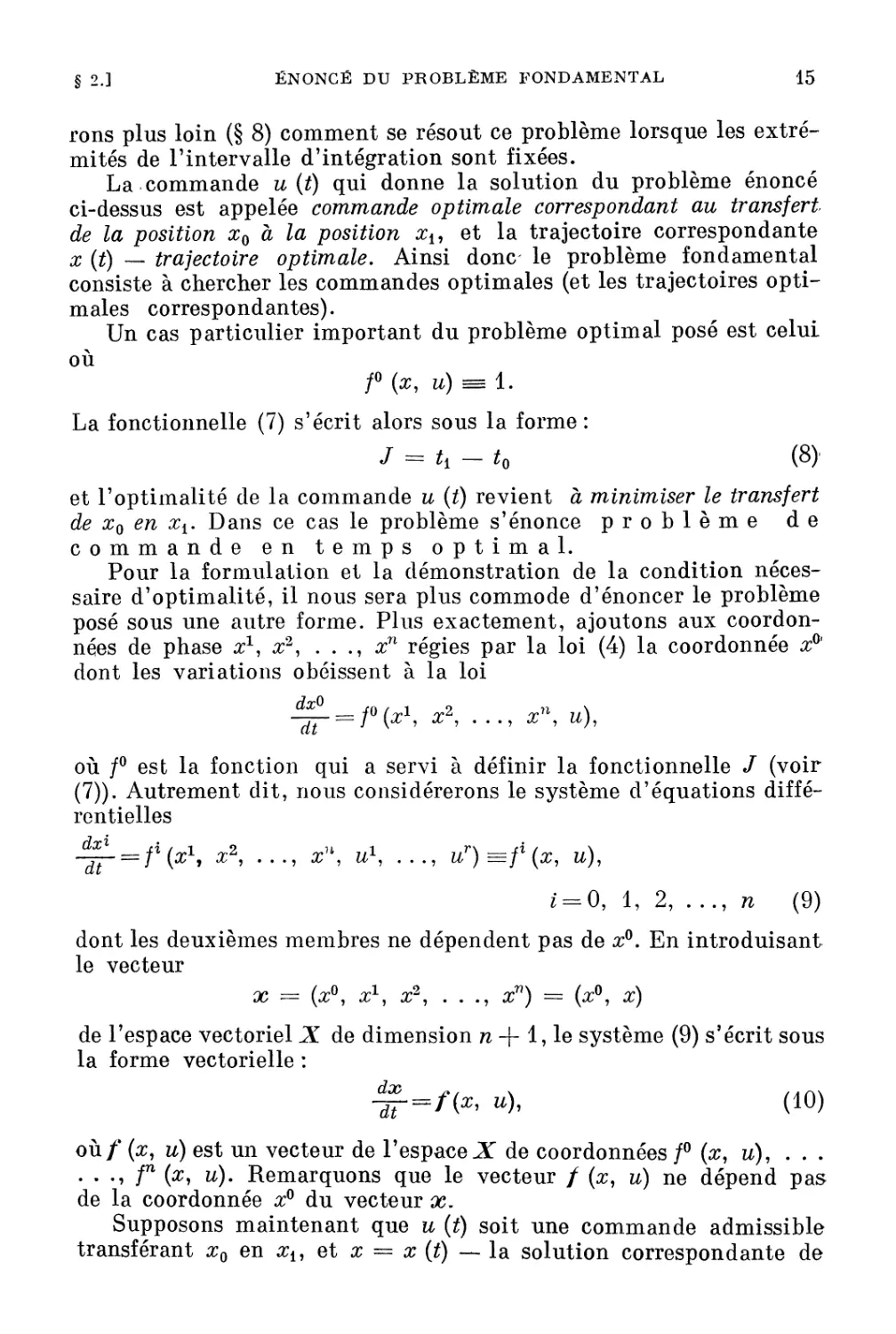
i.e. la solution x (t) de l'équation (10) vérifiant la condition initiale
x (t o ) = X o passe] à l'instant t = t i par le point x = (J, Xi). En
d'autres termes, si l'on dé-
signe par II la droite qui,
dans le plan X, passe par
le point x == (0, Xi) et est
par allèle à l'axe Xo (cet te
droite II est constituée de
tous les points ( , Xi) où
est un nombre arbitraire;
fige 1), nous pouvons dire
que la solution x (t) passe
à l'instant t = t 1 par le
point de coordonnée xO==J
situé sur la droite II. In-
versement, si u (t) est une
commande admissible telle
que la solution x (t) de l'équation (10) avec la condition initiale
x (t o ) == Xo = (0, xo) qui lui correspond passe à un certain instant t i
par le point Xi E II de coordonnée X O == J, alors la commande u (t)
transfère (dans l'espace X) le point représentatif de la position Xo
à la position Xi' la fonctionnelle (7) prenant la valeur J.
Nous pouvons par conséquent énoncer le problème optimal posé
plus haut sous la forme équivalente suivante.
Etant donnés dans un espace de phase X de dimension n + 1 le
point xo = (0, xo) et une droite II parallèle à l'axe X O et passant par
le point (0, Xi) ; parmi les commandes admissibles u == u (t) telles que
la solution x (t) de l'équation (10) avec la condition initiale x (t o ) ==
= xo associée à chacune d'elles coupe la droite fI, trouver celle qui
n
J
X{t)
FIG.1
2,]
ÉNONCÉ DU PROBLÈME FONDAMENTAL
17
nLllumise la coordonnée X O du point d'intersection avec la droite II.
C'est ce problème que nous allons résoudre. Nous conserverons
les mêmes termes de « commande optimale » et de « trajectoire opti-
nlale ».
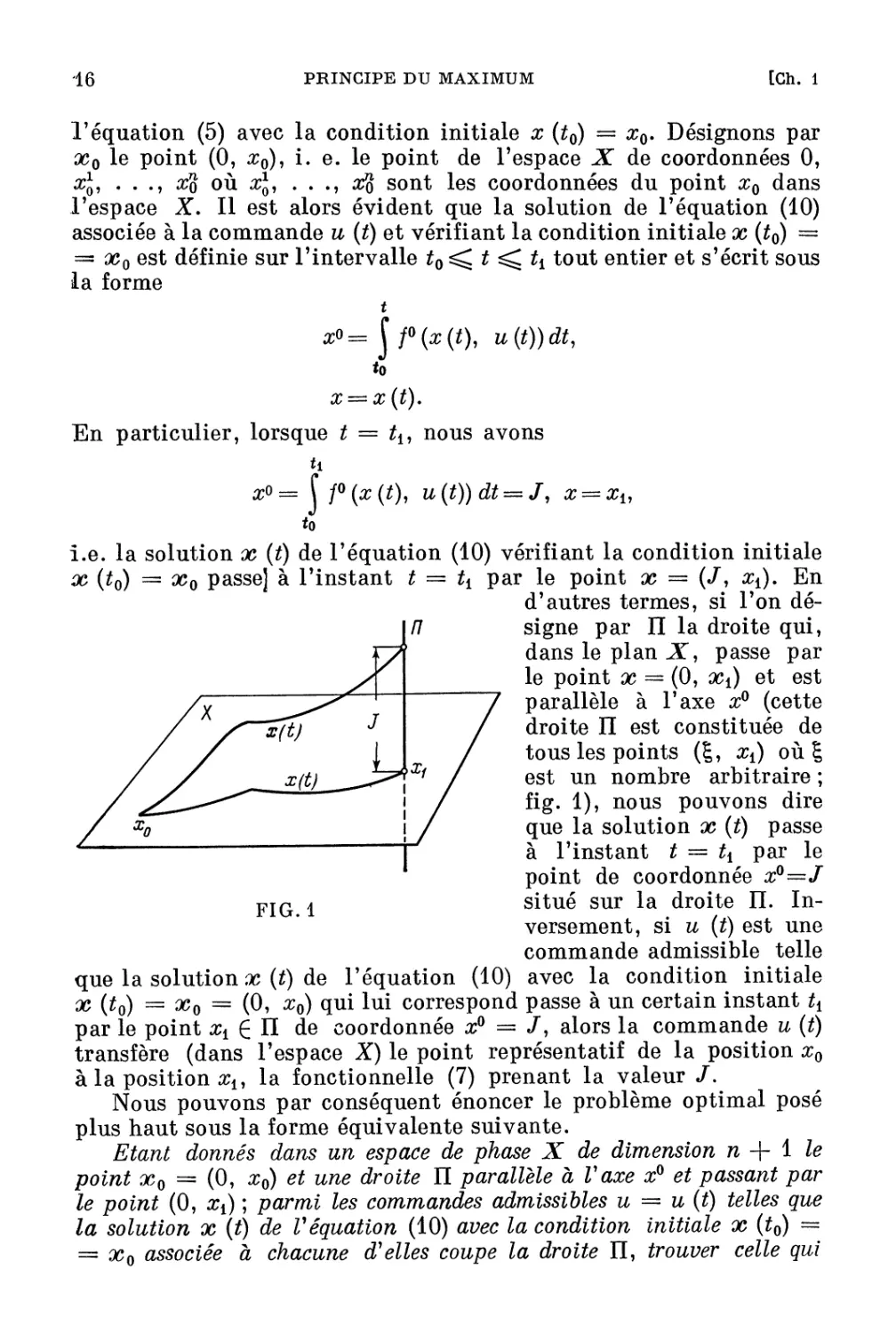
Soulignons quelques propriétés simples des commandes et trajec-
toires optimales qui découlent immédiatement de l'énoncé du pro-
blème fondamental. Tout d'abord de l'autonomie du système (9)
il vient qu'une translation le long de l'axe t (fig. 2) ne modifie
r
----,
( ) --
u 1 t+I7".-- 1
..--' 1
," 1
( l ,
1 l ,
1 :' 1
1 l " 1
1 l " 1
t -h
o
t o
t
FIG.2
pas los propriétés des commandes. Autrement dit, si la commande
U (t), t o t t 1 , transfère le point représentatif de Xo en Xi et fait
prendre à la fonctionnelle (7) la valeur J, alors pour tout h réel la
conllnande u (t + h), t o - h t t i - h, transfère également le
point représentatif de la position Xo à la position Xi et fait prendre
à la fonctionnelle (7) la même valeur J. Ceci nous permet de déplacer
l'origine t o de l'intervalle t o t t 1 sur lequel est définie la com-
mande u (t) en un point quelconque de l'axe des temps.
Si de plus xo, Xi' . . ., Xk est un système fini de points de l'espace
de phase X et s'il existe une commande Ui (t) transférant le point
représentatif de Xi-l en Xi et faisant prendre à la fonctionnelle (7)
la valeur J, i = 1, . . ., k, il existe alors une commande u (t) trans-
férant le point représentatif de Xo en Xk et faisant prendre à la fonc-
tionnelle (7) la valour J 1 + J 2 + . . . + J k- En effet puisqu'il
est possible de déplacer les commandes le long de l'axe des temps,
nous pouvons considérer que les intervalles sur lesquels sont définies
les commandes Ui (t) sont contigus (fig. 3), i.e. la commande Ui (t)
est définie sur l'intervalle t i -i t t i où t o < t i < · .. < th.
Désignons par U (t) la commande définie sur l'intervalle t o t th
et coïncidant sur l'intervalle semi-ouvert t i -1 < t ti avec la com J
rnancle Ui (t), i.e. 1'« union » de toutes les commandes Ui (t). On vé
rifie imnlédiatement que la commande u (t) transfère le point repré-
sentatif de Xo en Xi et fait prendre à la fonctionnelle (7) la valeur J 1 +
+ J 2 + . . . + J k. Remarquons que cette opération d'« union »
de quelques commandes aurait été impossible dans la classe des com-
2--0133D
18
PRINCIPE DU MAXIMUl\I
[Ch. 1
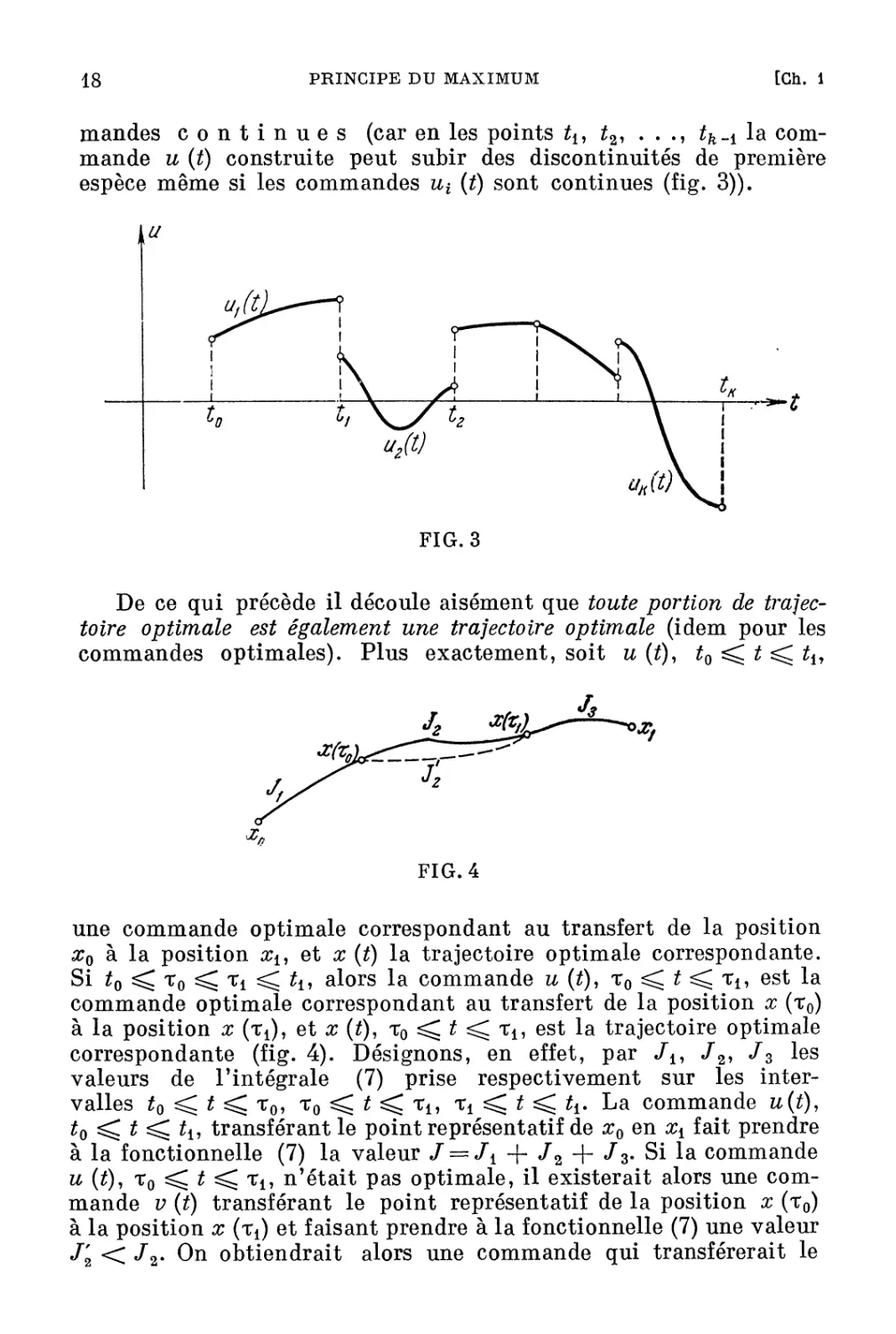
mandes con t i nue s (car en les points t i , t 2 , . . ., tk-t la com-
mande u (t) construite peut subir des discontinuités de prenlière
espèce même si les commandes Ui (t) sont continues (fig. 3)).
lJ
1
1
ta
. t
FIG.3
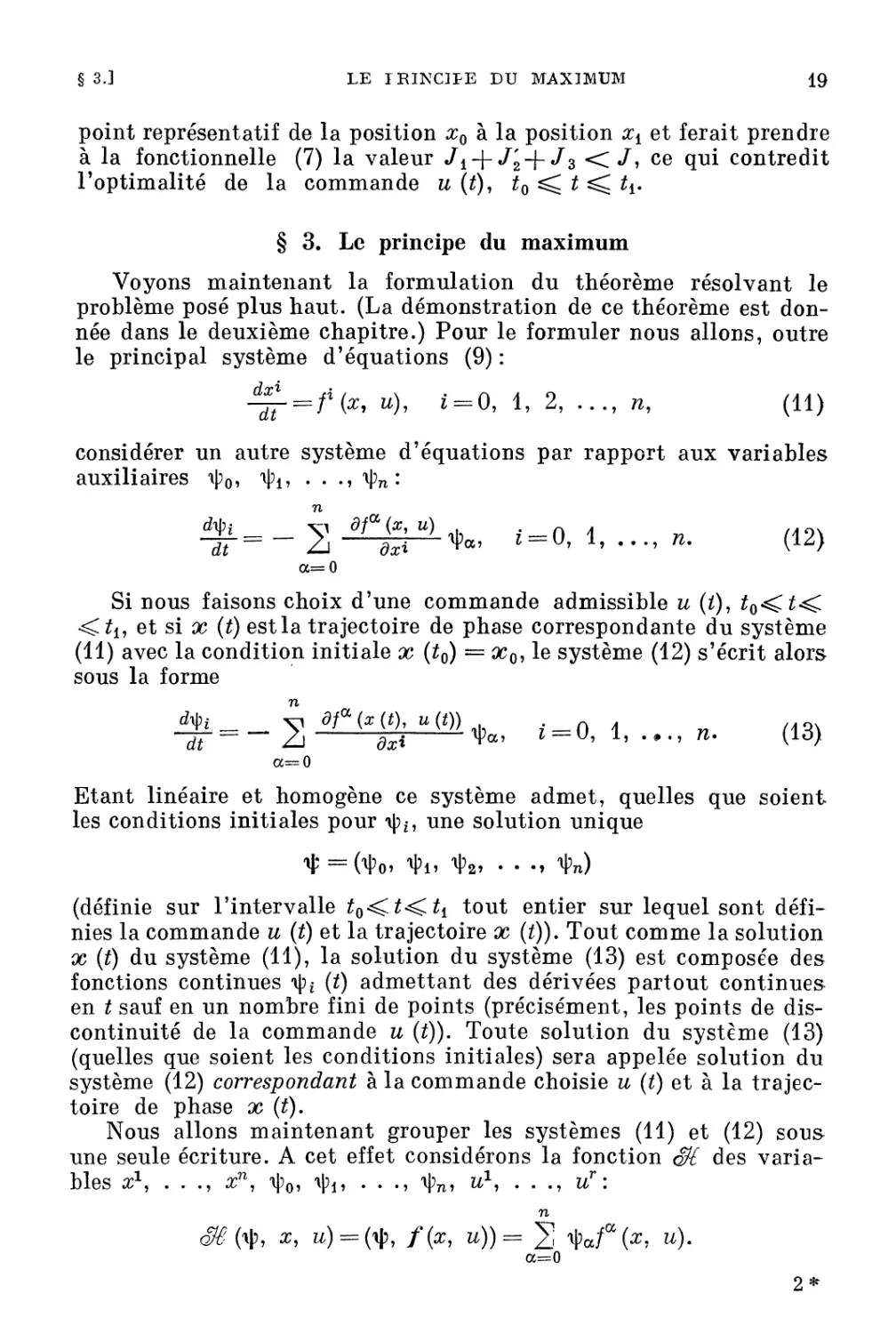
De ce qui précède il découle aisément que toute portion de trajec-
toire optimale est également une trajectoire optimale (idem pour les
commandes optimales). Plus exactement, soit u (t), t o t tf,
.fa
.zj
--......
- - ..-----/ ---
J 2
.z/)
FIG.4
une commande optimale correspondant au transfert de la position
Xo à la position Xi' et x (t) la trajectoire optimale correspondante.
Si t o '"Co '"Ct t i , alors la commande u (t), '"Co t '"Ci' est la
commande optimale correspondant au transfert de la position X ('"Co)
à la position x ('"Ci), et x (t), '"Co t '"Ct, est la trajectoire optimale
correspondante (fig. 4). Désignons, en effet, par J t , J 2' J 3 les
valeurs de l'intégrale (7) prise respectivement sur les inter-
valles t o t '"Co, '"Co t '"Ct, '"C1 t tt. La commande u(t),
t o t t i , transférant le point représentatif de Xo en Xt fait prendre
à la fonctionnelle (7) la valeur J === Ji + J 2 + J 3. Si la commande
u (t), '"Co t '"Ct, n'était pas optimale, il existerait alors une com-
mande v (t) transférant le point représentatif de la position x ('"Co)
à la position x ('"Ct) et faisant prendre à la fonctionnelle (7) une valeur
J; < J 2 . On obtiendrait alors une commande qui transférerait le
3.]
LE IRINCJI-E DU MAXIMUl\1
19
point représentatif de la position Xo à la position X1 et ferait prendre
à la fonctionnelle (7) la valeur J 1 + J; + J 3 < J, ce qui contredit
l'optimalité de la commande u (t), t o t t 1 .
9 3. Le principe du maximum
Voyons maintenant la formulation du théorème résolvant le
problème posé plus haut. (La démonstration de ce théorème est don-
née dans le deuxième chapitre.) Pour le formuler nous allons, outre
le principal système d'équations (9):
dx i i
([t==1 (x, u), i ==0, 1, 2, ..., n, (11)
considérer un autre système d'équations par rapport aux variables
auxiliaires 'Po, 1P1, · · ., 1Pn :
n
d'Pi == _ l afa (x u) ,,1-\ 0 1
dt L.J ax'L 't'a, i == , ,. · ., n.
a=O
(12)
Si nous faisons choix d'une commande admissible u (t), t o <' t
< th et si x (t) est la trajectoire de phase correspondante du systèn1e
(11) avec la condition initiale x (t o ) = Xo, le système (12) s'écrit alors
sous la forme '
n
d'Pi == _ afa (x (t), u (t)) '11-\ 0 1
dt L.J ax i 't'a, i==, , .-., n.
a=O
(13)
Etant linéaire et homogène ce système admet, quelles que soient
les conditions initiales pour 'Pb une solution unique
'\j; = ('Po, 'P1' 'P2' · · ., 'Pn)
(définie sur l'intervalle t o <' t< t 1 tout entier sur lequel sont défi-
nies la commande u (t) et la trajectoire x (t». Tout comme la solution
x (t) du système (11), la solution du système (13) est composee des
fonctions continues 'Pi (t) admettant des dérivées partout continues-
en t sauf en un nombre fini de points (précisément, les points de dis-
continuité de la commande u (t». Toute solution du systÈme (13)
(quelles que soient les conditions initiales) sera appelée solution dll
système (12) correspondant à la commande choisie u (t) et à la trajec-
toire de phase x (t).
Nous allons maintenant grouper les systèmes (11) et (12) sous
une seule écriture. A cet effet considérons la fonction QJ{ des varia-
bles Xl, . . ., x n , 'tJJo, 'Pi' . . ., 1Pn, U l , . . ., Ur:
n
Q7t? ('\ , X, U) == ('\l', f (X, u» == 'Pal a (X, u).
cx=O
2*
20
PRINCIPE DU MAXIMUM
[Ch. 1
On vérifie immédiatement que les systèmes (11) et (12) peuvent,
à l'aide de la fonction QJ£, prendre la forme du système hamiltonien
suivant:
dx i 8Q/O
-:ru == 81jJi '
d )i ()Q/O
dt - - ox i '
i==O, 1, ..., n.
(14)
(15)
i==O, 1, ..., n,
Ainsi, si l'on prend arbitrairement une commande admissible
(i.e. continue par morceaux) u (t), t o t t 1 , et la condition
initiale x (t o ) == xo, nous pouvons trouver la trajectoire x; (t) ==
= (X O (t), Xl (t), . .., x n (t)) correspondante (i.e. satisfaisant au
système (14)). Nous pouvons ensuite trouver les solutions
'i' (t) == (11' 0 (t), 'Pi (t), · · ., lPn (t))
du système (15) correspondant aux fonctions u (t) et x (t). Soulignons
une fois de plus que les vecteurs fonctions x (t) et 'i' (t) sont continus
et admettent des dérivées continues en t partout sauf en un nombre
fini de points.
Pour des valeurs fixes (constantes) de 'i' et x, la fonction QJt est
une fonction du paramètre u EU; soit
C?Jft ('i', x) == sup QJ£ ('i', x, u).
u6.U
Si la fonction continue OJ8 a t t e i n t son supremum en un point
du domaine U," alors C?J!t ('i', x) représente le maximum de la fonction
QJ8 pour'i' et x fixes. Aussi appellerons-nous p r i n c i p e d u m a-
x i m u m le théorème 1 qui va suivre (condition nécessaire d'opti-
malité) et qui s'exprime essentiellement par l'égalité (16).
Thé 0 r è fi e 1. Soit u (t), t o t t 1 , une commande admissi-
ble telle que la trajectoire correspondante x (t) (voir (14)), issue du point
Xo à l' in tant t o pa se à l' in tant t 1 par un point de la droite II. Pour
que la commande u (t) et la trajectoire x (t) soient optimales il est néces-
saire qu'existe un vecteur fonction 'i' (t) == (tpo (t), 11'1 (t), · · ., 'Pn (t))
continu et non nul, correspondant aux fonctions u (t) et x (t), (voir
(15)) tel que:
1° quel que soit t, t o t t 1 , la fonction Olt ('i' (t), x (t), u) de la
variable u E U atteigne au point u = u (t) son maximum
Q!t? ('i' (t), x (t), u (t)) === (}Ji ('i' (t), x (t)) ; ( 16)
2° à l'instant final t 1 soient vérifiées les relations
11'0 (t l ) 0, 0ft ('i' (t 1 ), x (t 1 )) == O. (17)
Si par ailleurs les grandeurs 'i' (t), x (t) et u (t) satisfont aux systè-
mes (14), (15) et à la condition 1°, les fonctions 'Po (t) et D/fl ('\ (t), x (t))
de la variable t sont constantes, de sorte qu'on peut vérifier la relation
3.]
LE PRINCIPE DU MAXIMUM
21
(17) pas forcément à l'instant t i , mais à un instant quelconque t, t o
t t i . (La démonstration du théorème 1 fait l'objet du chapitre 2.)
Tirons maintenant du théorème 1 une condition nécessaire
8.nalogue pour la commande en temps optimal. A cet effet, posons
fO (x, u) == 1 dans le théorème 1. La fonction OJl s'écrit alors sous la
forme
n
cfÏ{? === 'lJo + L.: '\}'"f" (x, u).
'\'=1
En introduisant le vecteur 'IJ == ('lJi, 1P2' . . ., '\}'n) de dimension n et
la fonction
n
JI ('IJ, x, u) == h '\}'vi" (x, u),
'\'=1
nous pouvons écrire les équations (4) et (12) (à l'exception de l'équa-
tion (12) pour i == 0 qui, désormais, est inutile) sous la forme du
système hamiltonien
dx i aIl
-cft - a'lf'i ' i === 1, 2, ..., n,
d'Pi _ aIl 1
-cft - - âx i ' i == , 2, ..., n.
(18)
(19)
Pour des valeurs fixes de "-p et x, la fonction H est une fonction du
paramètre u; soit
M ( 'IJ, x) === su p H ('\)', x, u)
uEU
le supremum de la fonction H. De la rel tion II ('IJ, x, u) ===
== QJt (1J', x, u) - 1P0 il vient:
M (1P, x) === dl ('t, x) - 'IJ 0 ,
et les conditions (16), (17) s'écrivent sous la forme
If (1p (t), x (t), u (t)) == ]Ji (1p (t), x (t)) == - "-Po o.
Nous obtenons par conséquent le théorème suivant.
Thé 0 r è m e 2. Soient u (t), t o t t i , une commande admis-
sible transférant le point représentatif de Xo à la position Xi et x (t)
la trajectoire correspondante (voir (18)), telle que x (t o ) == Xo et x (t 1 ) ==
== Xi. Pour que la commande u (t) et la trajectoire x (t) soient optimales
(au sens du temps optimal) il est nécessaire qu'existe un vecteur fonction
1P (t) == ( 'i (t), 1P2 (t), . . ., 1Pn (t)) continu et non nul correspondant
aux fonctions u (t) et x (t) (voir (19)) et tel que:
1 0 pour tous les t, t o t t 1 , la fonction H (1IJ (t), x (t), u)
de la variable u E U atteigne au point u == u (t) son maximum
H (1P (t), x (t), u (t) == M ("-p (t), x (t)) ; (20)
22
PRINCIPE DU MAXIMUM
[Ch. 1
2 0 à l'instant final t 1 soit satisfaite la relation
M (11' (t 1 ), x (t 1 )) ? o.
(21)
Si par ailleurs les grandeurs 11' (t), x (t), u (t) satisfont au système (18),
(19) et à la condition 1 0 , alors la fonction M (11' (t), x (t)) de la variable
t est constante, de sorte qu'on peut vérifier la relation (21) pas forcément
à l'instant t 1 mais à un instant quelconque t, t o t t 1 .
S 4. Discussion du principe du maximum *)
Le théorème 1 permet entre toutes les trajectoires issues du point
Xo et aboutissant en un point quelconque de la droite 11 et entre les
commandes qui leur correspondent de choisir des commandes et
trajectoires, en général isolées, satisfaisant à toutes les conditions
formulées. Nous avons en effet 2n + 3 relations (14), (15), (16)
entre 2n + 3 variables**) x'X, lPa, u, i.e. « un système complet de rela-
tions » pour déterminer toutes ces variables. Puisque la relation (16)
est finie (non différentielle), et que les équations différentielles sont
au nombre de 2n + 2 (en l'occurrence, les relations (14) et (15)),
le système d'équations (14), (15), (16) admet des solutions dépendant
en général de 2n + 2 paramètres (conditions initiales). Cependant,
l'un de ces paramètres n'est pas essentiel, car les fonctions 'l'a (t)
ne sont définies qu'à un facteur multiplicatif commun près (puisque
*) Ce paragraphe a pour but de prouver la «suffisance» du système de
relations, indiqué dans le théorème 1, pour résoudre le problème optimal posé.
Les raisonnements de ce paragraphe ne prétendent à aucune rigueur et ne sont
nulle part utilisés dans la suite.
**) Rappelons qu'« une» variable u peut se décomposer en plusieurs variables,
par exemple peut être un point d'un espace vectoriel de dimension r; dans ce
cas, on peut considérer aussi que la condition de maximum (16) comporte r
relations distinctes. Si, par exemple, le maximum est atteint en un point inté-
rieur au domaine de commande U (situé dans l'espace de dimension r engendré
par les variables ut, . . ., UT), pour que soit satisfaite la condition de maxi-
mum (16) il est nécessaire que s'annulent les r dérivées partielles:
i}<2l& (11' (t), x (t), u)
8uj
===0, j===1, ..., r;
u=u( t)
si le maximum est atteint sur une face de dimension r - 1 du domaine de com-
mande U, alors doit être satisfaite la condition d'appartenance du point u (t)
à cette face (ce qui nous donne une relation) et doivent s'annuler les dérivées
partielles de la fonction Qfe ('tJ' (t), x (t), u) dans toutes les directions de cette
face (ce qui nous donne encore r - 1 relations). Nous obtenons une situation
analogue sur les faces de moindre dimension (ou sur les parties courbées de la
frontière du domaine de commande U). Dans tous les cas, donc, si le domaine de
commande U est de dimension r, on pourra considérer que la condition de maxi-
mum (16) comporte r relations.
5.]
EXEMPLES. PROBLÈME DE SYNTHÈSE
23
la fonction QJt est homogène en 11'). Par ailleurs, un autre paramètre
annule la quantité
maxQ78 (11' (t o ), x (t o ), u)
uEU
à 1 ' instant t o .
Ainsi, l'ensemble des solutions du système (14), (15), (16) dépend
de 2n paramètres qu'il faut répartir de manière à faire passer la trajec-
toire x (t) par le point Xo pour une valeur don née. t == t o et
par un point de la droite fI pour une valeur que 1 con que
t 1 > io. Le nombre t 1 - t o est aussi un paramètre, de sorte que nous
disposons en tout de 2n + 1 paramètres essentiels. La condition de
passage de la trajectoire par le point Xo et un point de la droite fI
nous donne 2n + 1 relations. Par conséquent, il faut s'attendre
à l'existence de quelques trajectoires isolées joignant le point x 0
à la droite fI et vérifiant les conditions du théorème 1. Seules ces
trajectoires isolées peuvent être optimales (car les conditions du théo-
rème 1 sont n é ces s air e s à l'optimalité ).
Si, en particulier, les conditions du théorème 1 sont satisfaites
par une s e u 1 e trajectoire joignant le point Xo à un point de la
droite II, et si pour les raisons techniques qui ont conduit à poser le
problèlne optimal, il est «clair » que la trajectoire optimale doit exis-
ter, on peut à priori espérer que la trajectoire trouvée est précisément
optimale. Il ilnporte toutefois de souligner que mathématiquement
le problème de l'existence de la trajectoire optimale est à la fois très
important et très complexe. Dans le cas particulier de la commande
en temps optimal pour les systèmes linéaires (4), il est résolu dans le
chapitre 3.
9 5. Exemples. Problème de synthèse
Dans ce paragraphe nous allons voir comment appliquer le prin-
cipe du maximum à la résolution de quelques problèmes simples de
comlnande en temps optimal. L'examen de ces exemples nous per-
mettra d'aborder le problème de synthèse des commandes optimales
qui est une nouvelle et importante manière de poser le problème des
processus optimaux.
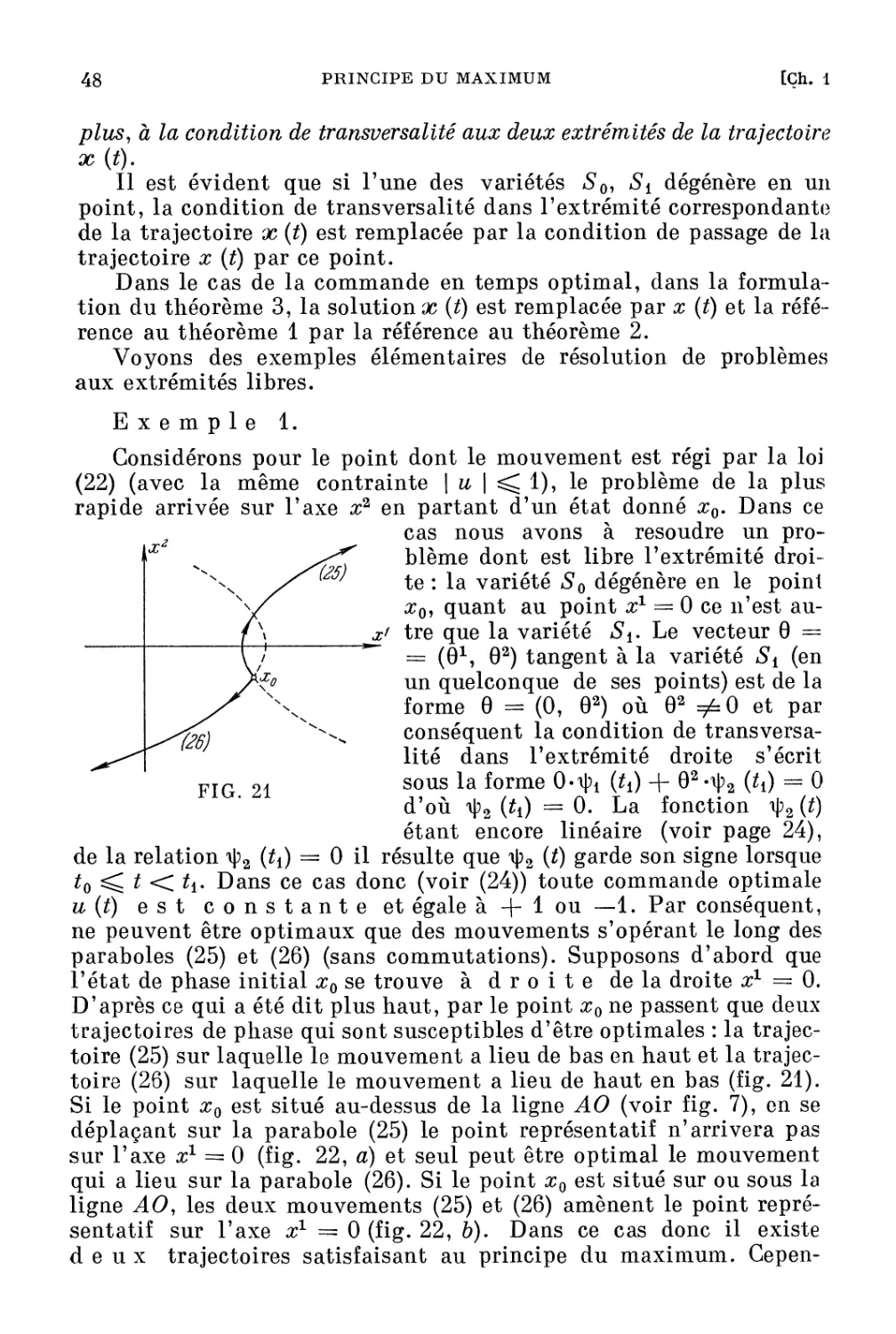
E x e m pIe 1.
S . t l " t . d 2 x" " d d , 1
01 equa Ion dt 2 = u, ou u est un parametre e comman e ree
assujetti à la condition 1 u 1 1. En coordonnées de phase Xl = X,
x 2 = : cette équation prend la forme du système suivant:
dx 1 _ 2
dl-x,
dx 2
dt = u.
(22)
24
PRINCIPE DU MAXIMUM
[Ch. 1
Considérons (pour le point représentatif dont le nlouvement est régi
par la loi (22)) le problème consistant à le faire arriver le plus rapide-
ment à l'origine des coordonnées (0, 0), le départ ayant lieu d'un
poin t ini ti al x o. En d' autres termes, no us allons étudier le pro blèlTIe
de commande en temps optimal lorsque la position finale est l' origi-
ne des coordonnées: Xi = (0, 0).
Dans notre cas la fonction H s'écrit
H == 'l't X2 + 'l'2U.
(23)
Pour les variables auxiliaires 'i't, 11'2 nous obtenons le système d' équa-
tions (voir (19), (23))
d1Pt _ 0 d'\P2 - _ '1101
dt -, ([t - 'Yb
d'où il vient 'i't = Ct, 11'2 = C 2 - Ci t (Ct et c 2 étant des constantes).
La relation (20) donne (compte tenu de (23) et de la condition
-1 u 1)
u (t) = sign 11'2 (t) = sign (c 2 - Ci t ).
(24)
De (24) il vient que chaque commande optimale u (t), t o t t i ,
est une fonction constante par morceaux, prenant les valeurs + 1 et
admettant au plus deux intervalles de constance (car la fonction
linéaire C 2 - Ctt change au plus une fois de signe sur l'intervalle
t o t t i ). Inversement, une telle fonction u (t) peut être tirée
de la relation (24) pour certaines valeurs de constantes Ci' c 2 .
Pour l'intervalle de temps sur lequel u == 1 nous avons (en vertu
du système (22))
t 2 1 ( (s2)2 )
x 2 = t + S2, Xl == 2 + s 2 t + SI == 2 (t + S2)2 + Sl_ 2
(SI, S2 étant les constantes d'intégration), d'où il vient
1
Xl =="2 (X2)2 + s,
(25)
où s = Sl - ;' (S2)2 est une constante. Par conséquent, la portion
de trajectoire de phase pour laquelle u == 1 est un arc de parabole
(25). La famille de paraboles (25) est représentée sur la fige 5, a.
De la même manière, pour l'intervalle de temps sur lequel
u == - 1, nous avons
x 2 == - t + S'2,
Xl = - t; + s'2t + S'l = - -} ( - t + s'2)2 + ( S'l + ; (S'2)2) ,
d'où
1
Xl == -2 (X2)2 + s'.
(26 )
5.]
EXEMPLES. PROBLÈME DE SYNTHÈSE
25
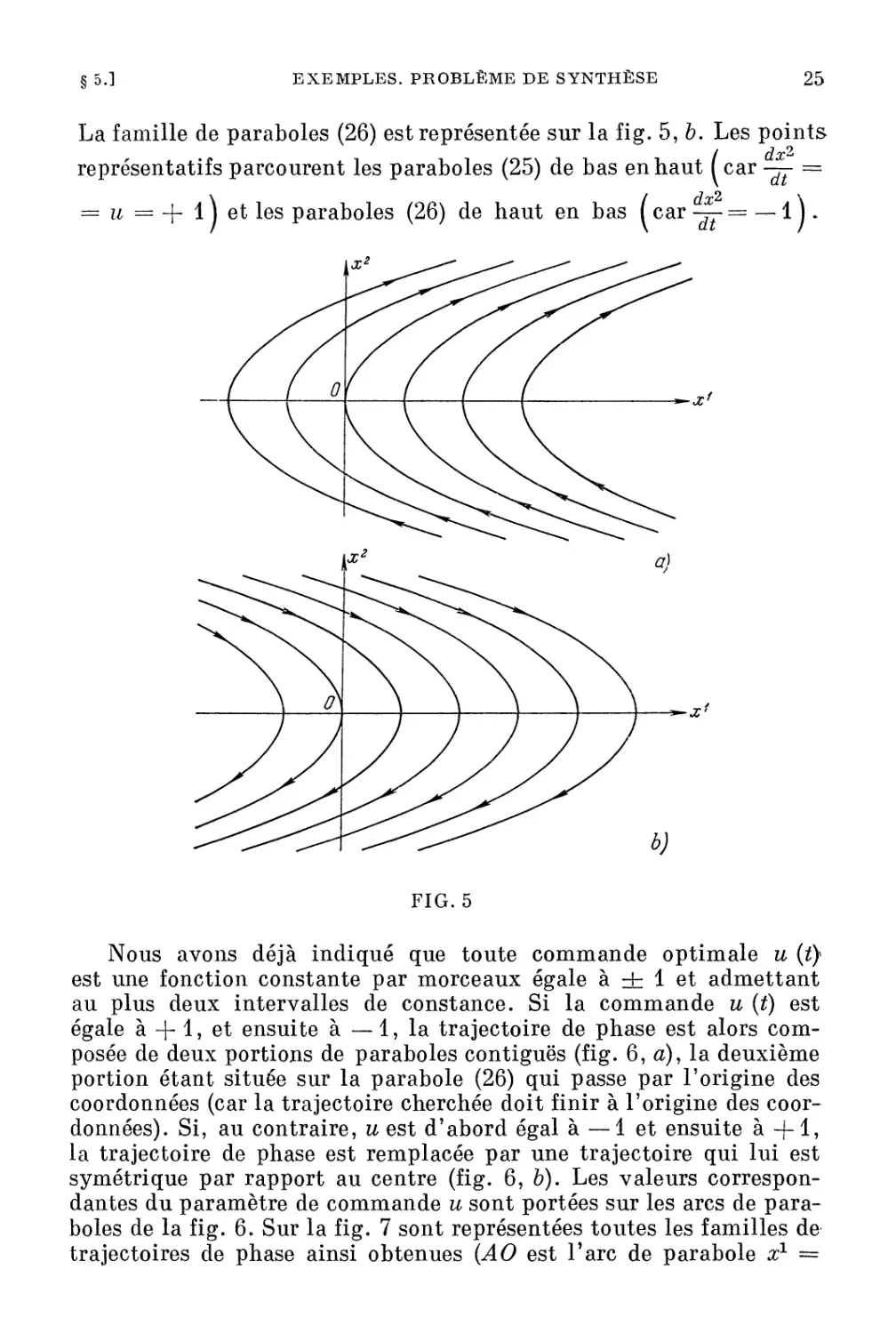
La fan1ille de paraboles (26) est représentée sur la fige 5, b. Les points
représentatifs parcourent les paraboles (25) de bas en haut ( car d 2 =
= u = + 1) et les paraboles (26) de haut en bas (car dd 2 = - 1 ) .
FIG.5
.x'
a)
1
"
.x'
b)
Nous avons déjà indiqué que toute commande optimale u (t)
est une fonction constante par morceaux égale à + 1 et admettant
au plus deux intervalles de constance. Si la commande u (t) est
égale à + 1, et ensui te à - 1, la trajectoire de phase est alors com-
posée de deux portions de paraboles contiguës (fig. 6, a), la deuxième
portion étant située sur la parabole (26) qui passe par l'origine des
coordonnées (car la trajectoire cherchée doi t finir à l'origine des coor-
données). Si, au contraire, u est d'abord égal à -1 et ensuite à + 1,
la trajectoire de phase est remplacée par une trajectoire qui lui est
symétrique par rapport au centre (fig. 6, b). Les valeurs correspon-
dantes du paramètre de commande u sont portées sur les arcs de para-
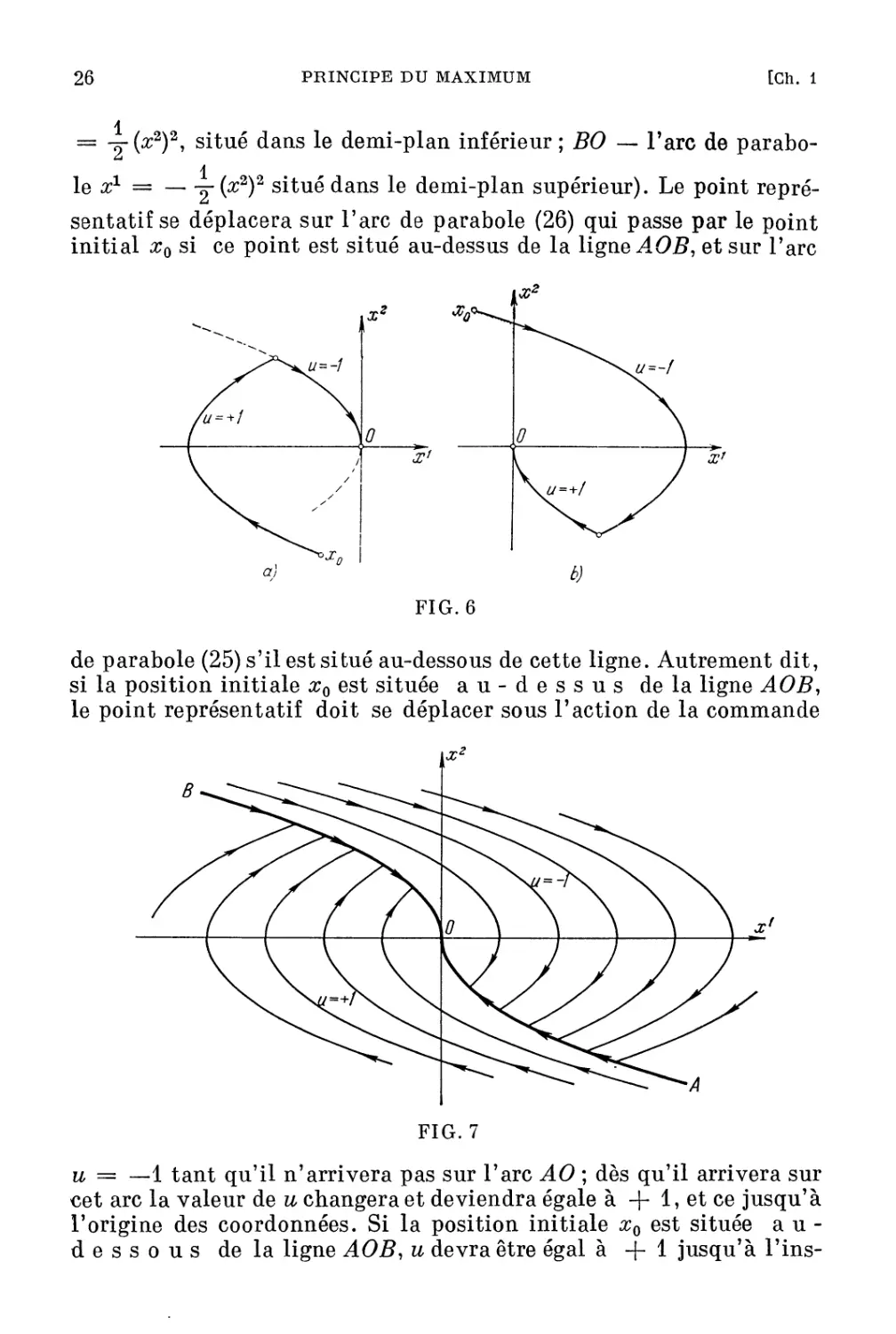
boles de la fige 6. Sur la fige 7 sont représentées toutes les familles de,
trajectoires de phase ainsi obtenues (AO est l'arc de parabole Xl =
26
PRINCIPE DU MAXIMUM
[Ch. 1
= ; (X 2 )2, situé dans le demi-plan inférieur; BO - l'arc de parabo-
le Xl = - (X 2 )2 situé dans le demi-plan supérieur). Le point repré-
sentatif se déplacera sur l'arc de parabole (26) qui passe par le point
initial Xo si ce point est situé au-dessus de la ligne AOB, et sur l'arc
.z2
XZ .k()
:.
:cI
.x'
.........
...............
....,
.......
......
/
/
/
'"
'"
a)
b)
FIG.6
de parabole (25) s'il est situé au-dessous de cette ligne. Autrement dit,
si la position initiale Xo est située a u - des sus de la ligne AOB,
le point représentatif doit se déplacer sous l'action de la commande
.x 2
FI G. 7
u = -1 tant qu'il n'arrivera pas sur l'arc AO; dès qu'il arrivera sur
cet arc la valeur de u changera et deviendra égale à + 1, et ce jusqu'à
l'origine des coordonnées. Si la position initiale Xo est si tuée a u -
des sou s de la ligne AOB, u devra être égal à + 1 jusqu'à l'ins-
5.]
EXEMPLES. PROBLÈME DE SYNTHÈSE
27
tant où le point représentatif arrivera sur l'arc BO; u changera
alors de valeur et deviendra égal à -1.
.A..insi, en vertu du théorème 2, seules les trajectoires décrites plus
haut peuvent être optimales, en outre, de la précédente étude il est
clair que chaque point de l'espace est le point de départ d'une s e u-
1 e trajectoire menant à l'origine des coordonnées et susceptible
d'être optimale (i.e.la donnée du point initial Xo définit d'une maniè-
re uni voque la trajectoire correspondante). Si nous étions sûrs que la
trajectoire optimale e x i s t ait toujours (i.e quel que soit le point
initial xo), nous dirions que toutes les trajectoires trouvées sont
optinlales. Dans le chapitre 3 nous formulerons le thé 0 r è m e
d' e x i s t e n c e pour les systèmes linéaires de commande en temps
optiulal, d'où il vient en particulier que dans l'exemple considéré,
quel que soit le point initial Xo, il existe une trajectoire optimale
(voir page 116). Par conséquent, les trajectoires trouvées (fig. 7)
sont optirnales;et il n'existe pas d'autres trajectoires optimales menant
à l'origine des coordonnées.
La solution du problème optimal de l'exemple précédent peut être
interprétée de la manière suivante. Désignons par v (Xl, x 2 ) =
== V (x) la fonction définie comme suit dans le plan Xl, x 2 :
( { + 1 au-dessous de la ligne AOB et sur l'arc AO,
v x) =
- 1 au-dessus de la ligne AOB et sur l'arc BO.
Alors, sur chaque trajectoire optimale, la valeur u (t) du paramètre
de commande (à un instant arbitraire t) est égale à v (x (t)), i.e. à
la valeur de la fonction v au point où à l'instant t se trouve le point
représentatif parcourant la trajectoire optimale:
u (t) == v (x (t)).
Ce qui signifie qu'en remplaçant dans le système (22) la quantité
u par la fonction v (x), nous obtenons le système
dx 1 2 }
--at == x ,
dx 2 1 2
at==v(x, x),
(27)
dont la solution (avec un état initial arbitraire xo) nous donne la tra-
jectoire de phase optimale qui mène à l'origine des coordonnées.
Autrelnent dit, le système (27) est un système d'équations différen-
tielles (avec un deuxième membre discon tinu) dont la résolution
donne les trajectoires optimales menant à l'origine des coordonnées.
28
PRINCIPE DU MAXIMUM
[Ch. 1
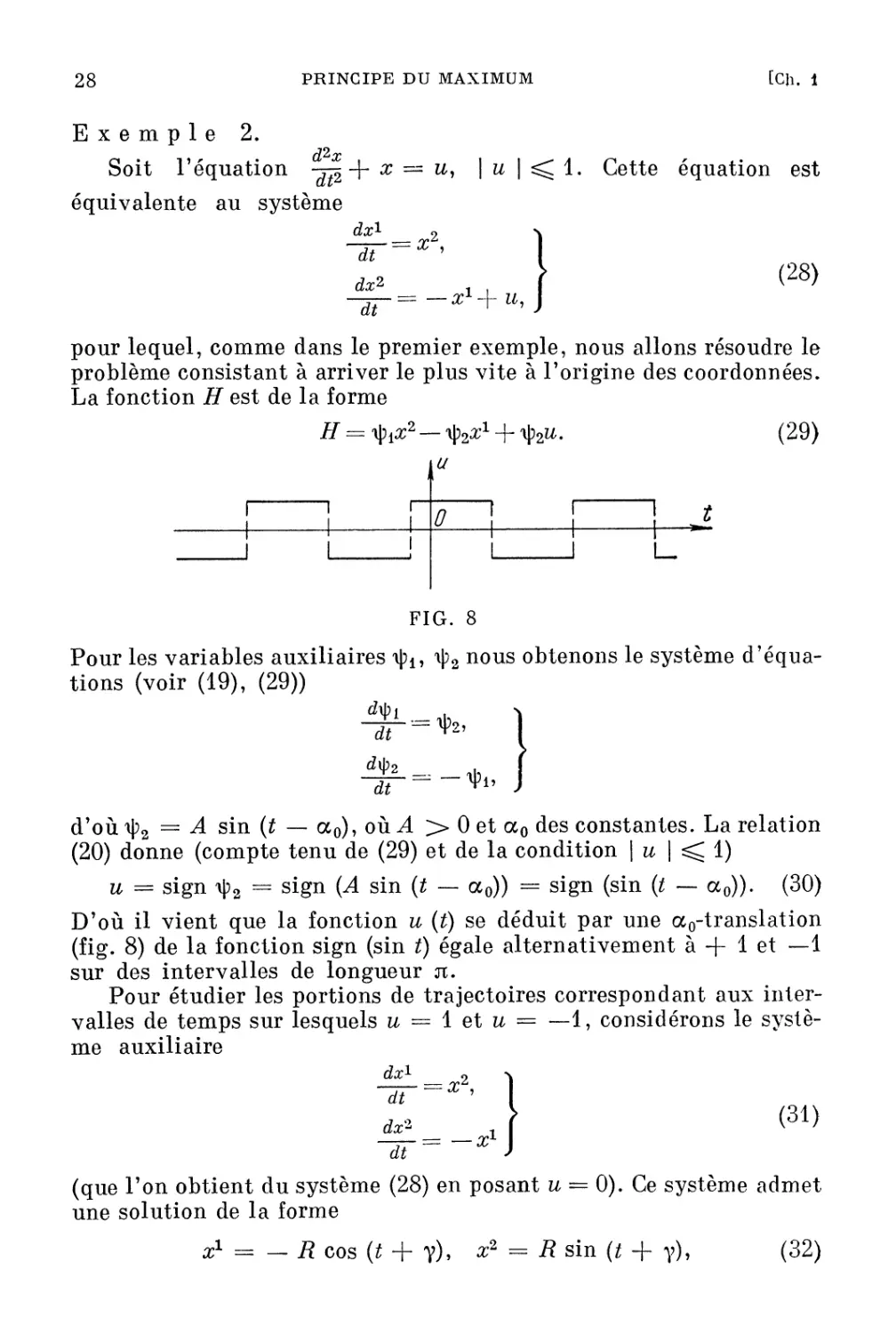
E X e m p 1 e 2.
Soit l'équation t + x = u, 1 u 1 :::;; 1. Cette équation est
équivalente au système
d l = x 2 , }
dx 2 (28)
- == - Xl - t- u
dt '
pour lequel, comme dans le premier exemple, nous allons résoudre le
problème consistant à arriver le plus vite à l'origine des coordonnées.
La fonction H est de la forme
H == 'l'1X 2 - 'l'2Xl + 'l'2U. (29)
1I
1
1
t
L
FIG. 8
Pour les variables auxiliaires '1'1' 'lP2 nous obtenons le système d' équa-
tions (voir (19), (29)
d: 1 = '\J2, }
dtp2
---a:t === - '1' 17
d'où '1'2 == A sin (t - elo), où A > 0 et elo des constantes. La relation
(20) donne (compte tenu de (29) et de la condition lu 1 1)
u == sign '1'2 == sign (A sin (t - elo)) == sign (sin (t - a o )). (30)
D'où il vient que la fonction u (t) se déduit par une elü-translation
(fig. 8) de la fonction sign (sin t) égale alternativement à + 1 et -1
sur des intervalles de longueur n.
Pour étudier les portions de trajectoires correspondant aux inter-
valles de temps sur lesquels u == 1 et u == -1, considérons le systè-
me auxiliaire
1 =X2, }
dx 2
- == - Xl
dt
(que l'on obtient du système (28) en posant u == 0). Ce système admet
une solution de la forme
(31)
Xl == - R cos (t + y), x 2 == R sin (t + 1'), (32)
5.]
EXEMPLES. PROBLÈME DE SYNTHÈSE
29
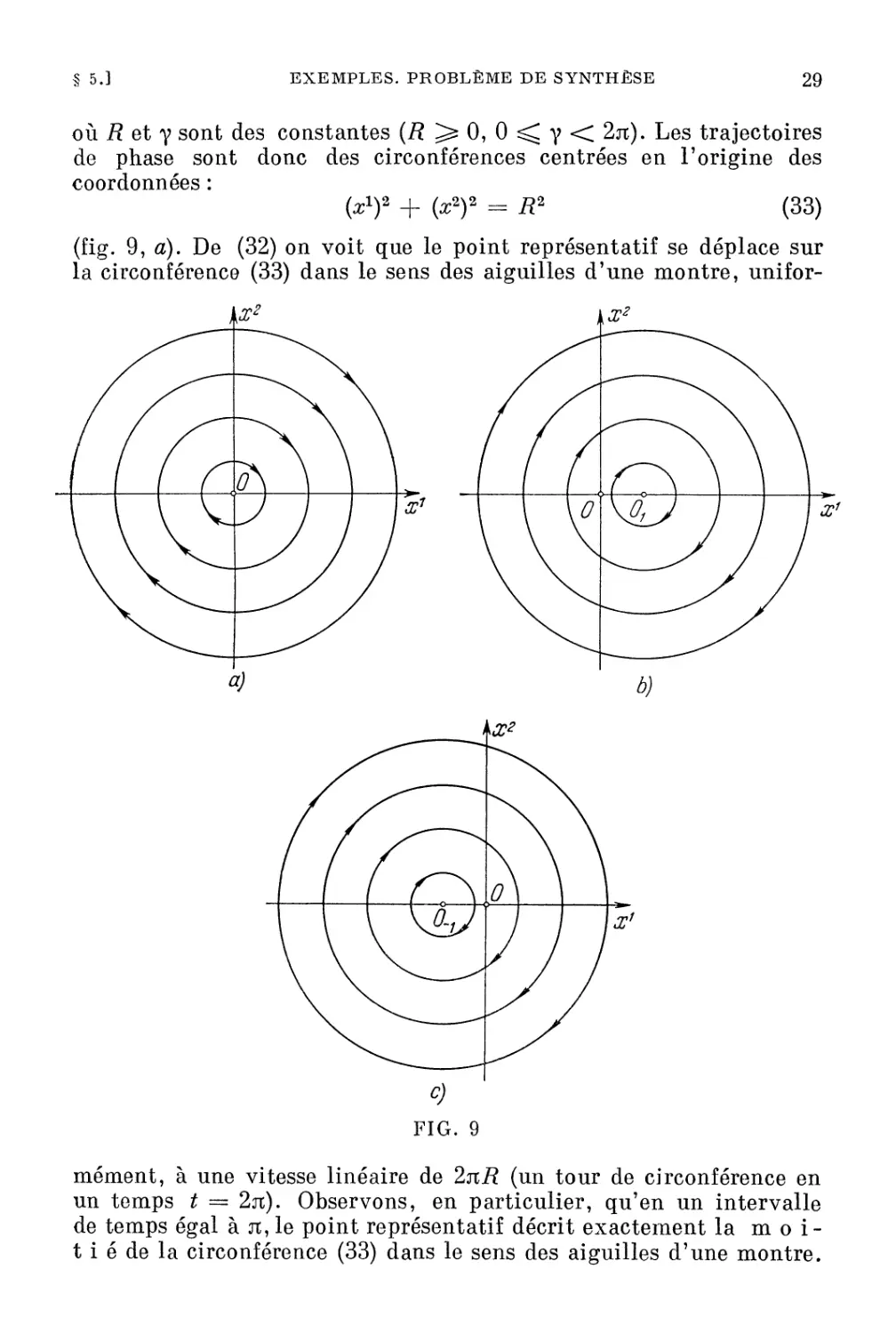
où R et y sont des constantes (R 0, 0 y < 2n). Les trajectoires
de phase sont donc des circonférences centrées en l'origine des
coordonnées:
(X 1 )2 + (X2)2 == R2 (33)
(fig. 9, a). De (32) on voit que le point représentatif se déplace sur
la circonférence (33) dans le sens des aiguilles d'une montre, unifor-
(£2
a)
x 2
x'
b)
x'
c)
FI G. 9
mément, à une vitesse linéaire de 2nR (un tour de circonférence en
un temps t == 2n). Observons, en particulier, qu'en un intervalle
de temps égal à n, le point représentatif décrit exactement la moi-
t i é de la circonférence (33) dans le sens des aiguilles d'une montre.
30
PRINCIPE DU MAXIIVIUM
[Ch. l
Pour u = lIe système (28) s'écrit
dx l _ 2 }
([t-x,
dx 2
-= -x l -L 1
dt 1 ,
(34)
ou encore
d(x l -1) _ 2 }
dt - x ,
dx 2 (35)
dt == - (xl-1).
Compte tenu des relations (31) et (33), nous constatons que les trajec-
toires de phase du système. (35) (ou, ce qui revient au même,
du système (34)) sont des circonférences
(Xl - 1)2 + (X2)2 = R2, (36)
i.e. des circonférences centrées au point 0 1 de coordonnées (1, 0).
En vertu de la loi (34) (i.e. de la loi (28) pour u = 1), le point repré-
sentatif parcourt ces circonférences dans le sens des aiguilles d'une
montre et décrit très exactement la moitié d'une circonférence
(fig. 9, b) en une période de temps égale à n.
D'une façon analogue, pour u = -1 le système (28) prend la
forme
d: t 1 = x 2 , }
dx 2
-= -xl-1
dt
et ses trajectoires de phase sont des circonférences
(Xl + 1)2 + (X 2 )2 = R2
(37)
centrées au point 0_ 1 de: coordonnées (-1, 0). Le point représen-
tatif se déplace Sllr ces circonférences dans le sens des aiguilles d'une
montre et parcourt très exactement la moitié de chacune d'elles en
un tem ps n (fig. 9, c).
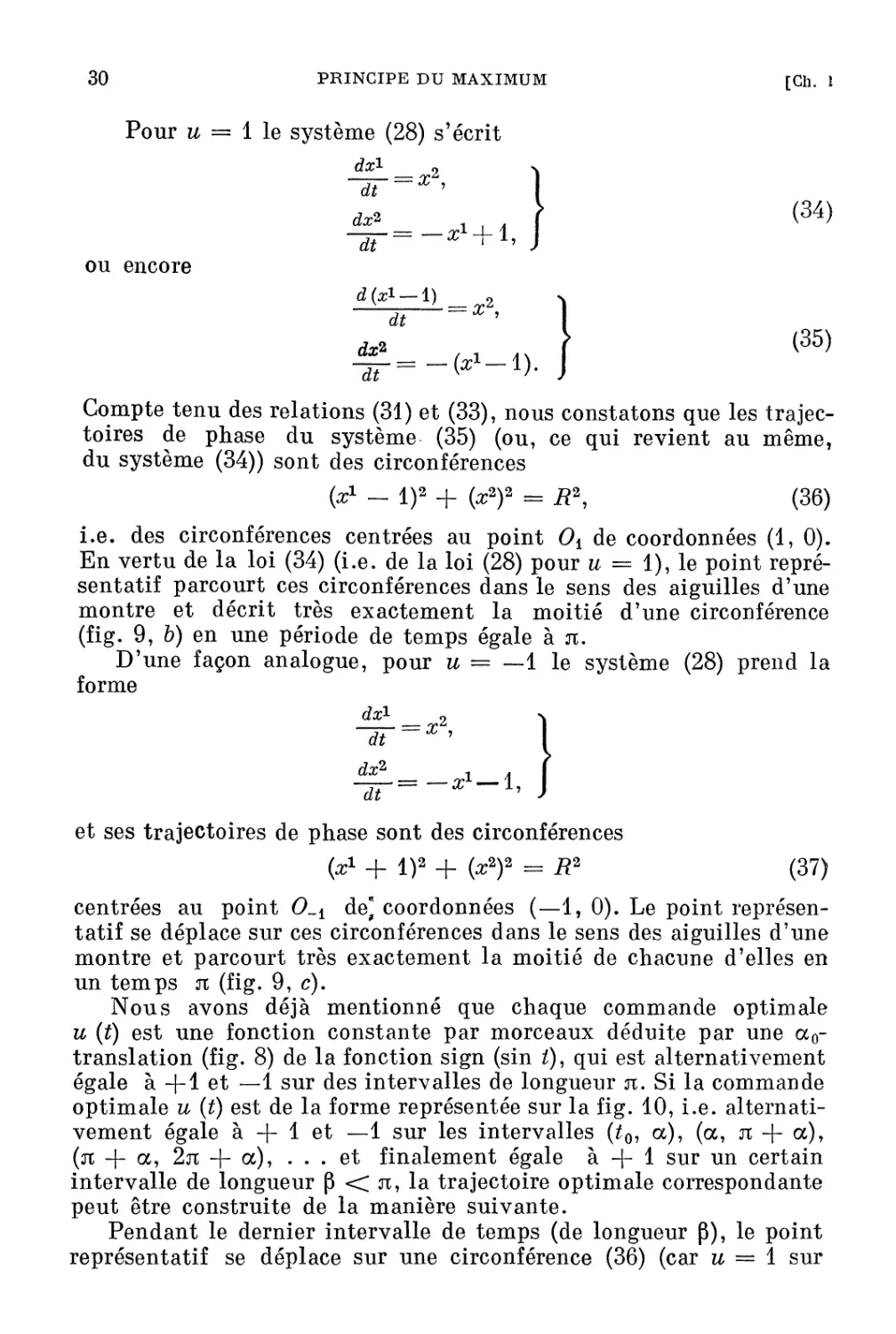
Nous avons déjà mentionné que chaque commande optimale
u (t) est une fonction constante par morceaux déduite par une exo-
translation (fig. 8) de la fonction sign (sin t), qui est alternativen1ent
égale à +1 et -1 sur des intervalles de longueur n. Si la commande
optimale u (t) est de la forme représentée sur la fige 10, i.e. alternati-
vement égale à + 1 et -1 sur les intervalles (t o , ex), (ex, n + ex),
(n + ex, 2n + ex), . . . et finalement égale à + 1 sur un certain
intervalle de longueur < n, la trajectoire optimale correspondante
peut être construite de la manière suivante.
Pendant le dernier intervalle de temps (de longueur ), le point
représentatif se déplace sur une circonférence (36) (car u = 1 sur
5.]
EXEMPLES. PROBLÈME DE SYNTHÈSE
31
cet intervalle de temps), plus précisément, sur la circonférence qui
aasse par l'origine des coordonnées (car la trajectoire cherchée doit
pboutir à l'origine des coordonnées). Cette circonférence n'est autre
u
a)
FIG. 10
b)
.z2
oZl
x 2
: t
! t l
Zn+c
XZ
x'
.x'
FIG. 11
que la circonférence de rayon 1 centrée au point 0 1 (fig. 11, a).
En se déplaçant sur cette circonférence, le point représentatif arrive
à l'origine des coordonnées après avoir parcouru un arc intérieur à une
32
PRINCIPE DU MAXIMUM
[Ch. 1
demi-circonférence (car < n). Si donc nous désignons par MiO la
demi-circonférence inférieure, nous constatons que la dernière por-
tion de trajectoire de phase est un arc AO de la demi-circonférence
M 1 0.
Par ailleurs, le point représentatif est arrivé en A après s'être
déplacé pendant un intervalle de temps n sous l'action de la comman-
de u === -1 (voir fige 10), i.e. la portion précédente de trajectoire
de pllase est la demi-circonférence BA centrée en 0 -1, et ayant pour
extrémité le point A (fig. 11, b). Puisque l'arc BA est égal à une demi-
circonférence, le point B est symétrique du point A par rapport au
centre 0 -1, et, par conséquent, est si tué s ur la demi -circonférence
NiN 2 symétrique de la demi-circonférence 0 illJ 1 par rapport au cen-
tre 0_ 1 . D'une façon analogue, l'arc CB précédant l'arc BA et corres-
pondant à l'intervalle de temps de longueur n sur lequel u === 1,
est égal à une demi-circonférence centrée en 0 1 et par conséquent, le
point C est situé sur la demi-circonférence j\12M 3 , symétrique de la
demi-circonférence N 1 N 2 par rapport au centre 0 1 (fig. 11, c), etc.
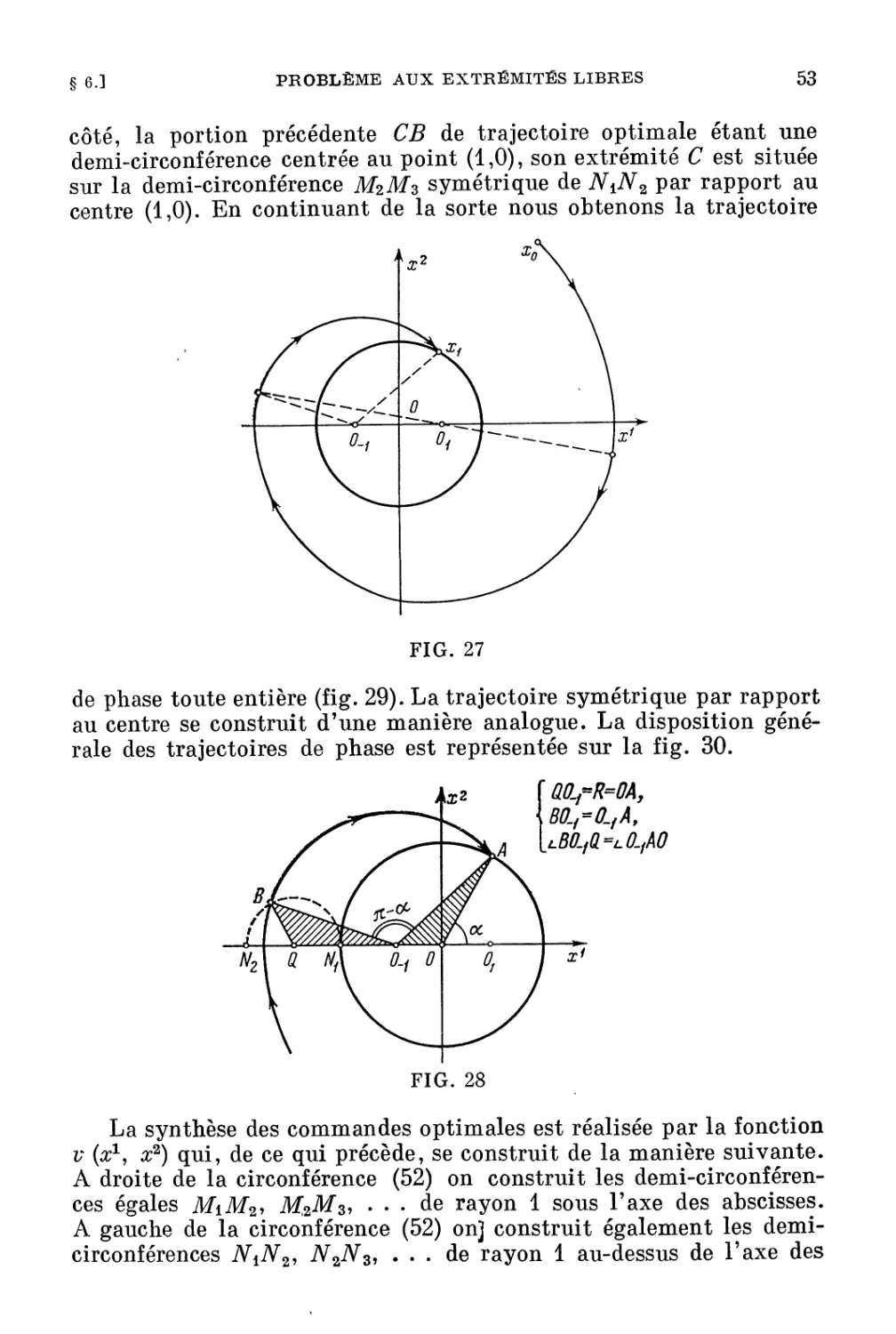
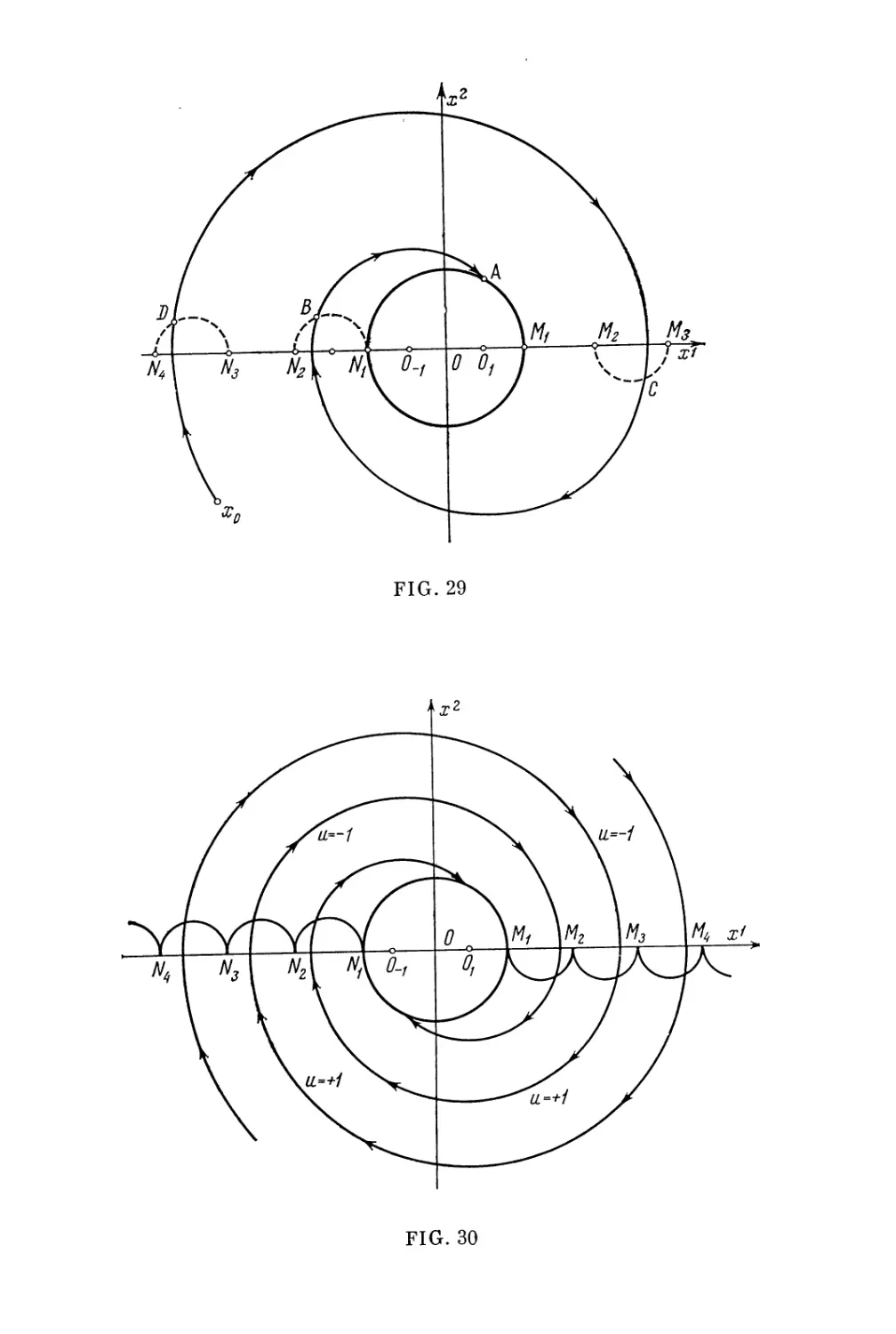
Ainsi donc la trajectoire de phase correspondante est de la forme
représentée sur la fig. 11, c (la première portion de trajec toire de pha-
se sera plus petite qu'une demi-circonférence, pourvu que 0 < a -
- t o < n; voir fige 10).
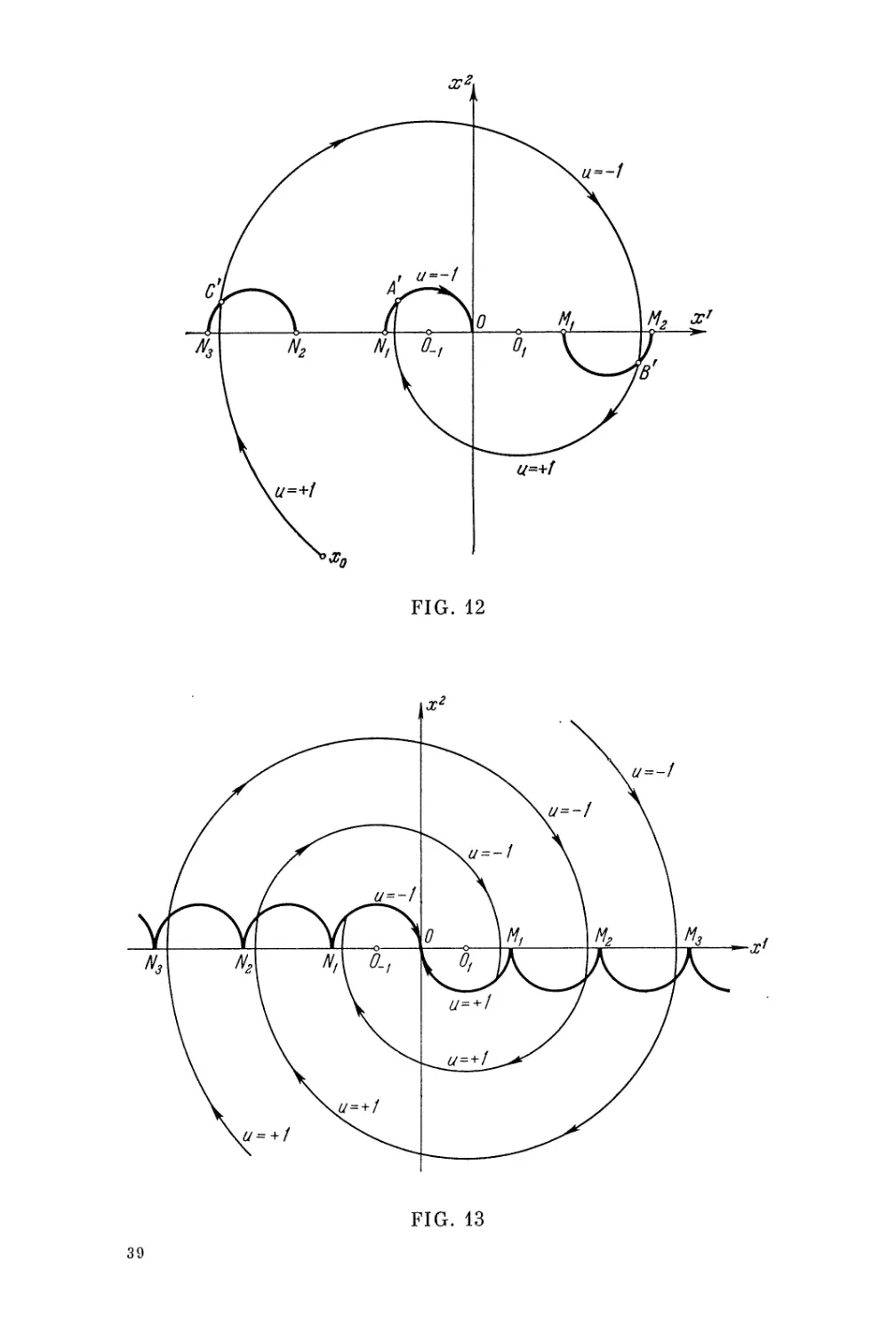
La trajectoire de phase correspondant à la commande optimale
u (t) qui est égal à -1 (mais non à + 1) sur le dernier intervalle de
longueur , se déduit de la trajectoire représentée sur la fige 11, c par
une symétrie centrale (fig. 12). Pour une telle trajectoire' les points
de « jonction » des arcs de cercles seront si tués sur les demi-circonfé-
rences ON 1 , 1 iM2' N 2 N 3 , · . ., symétriques (par rapport à l'origine
des coordonnées) des demi-ci conférences OMi, N 1 N 2' J.1I 21V[p' . · ·
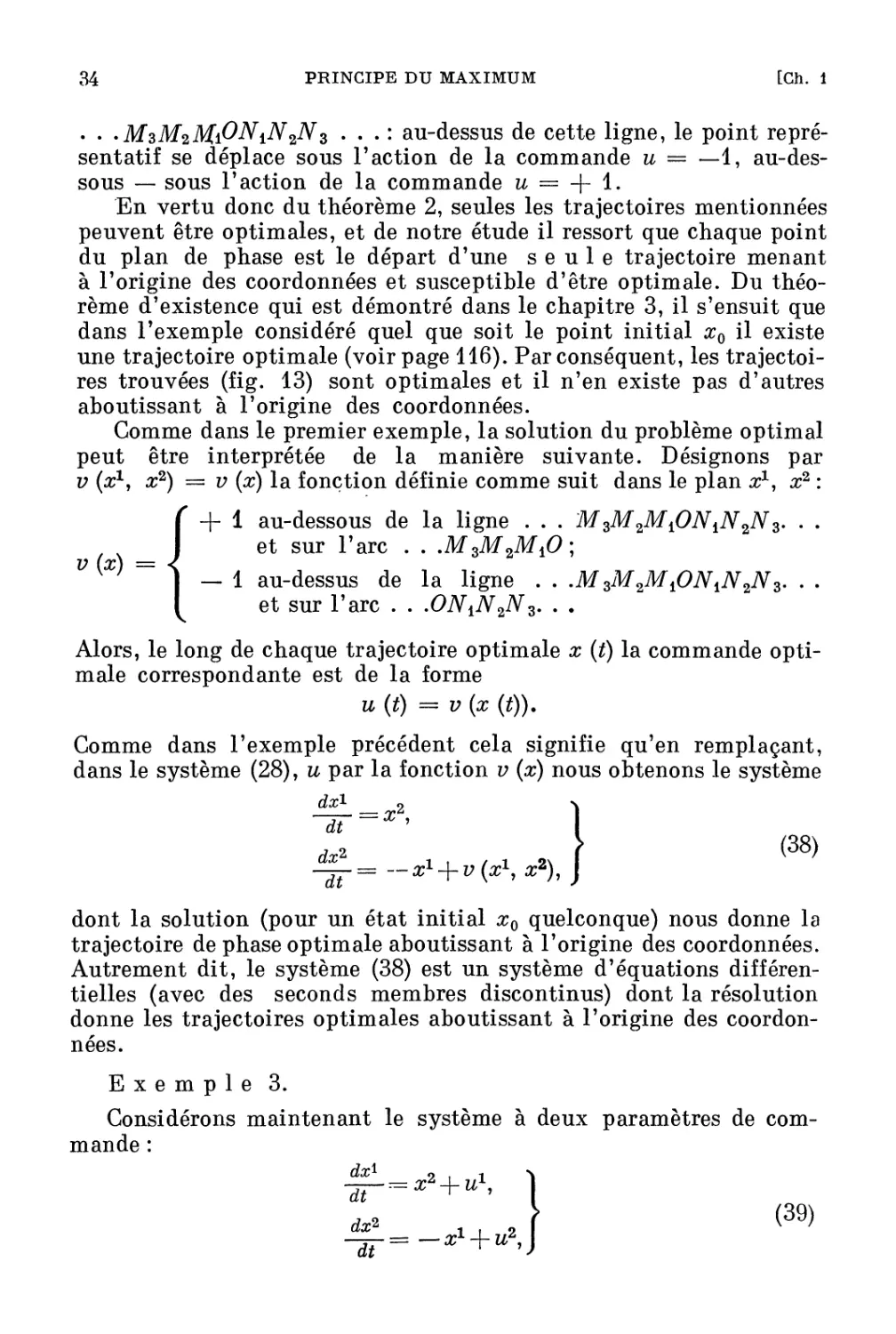
En groupant ces deux cas (flg. 11, c et 12) nous obtenons un tableau
général de l'allure des trajectoires de phase (fig. 13). Les valeurs cor-
respondantes du paramètre de commande u sont portées sur les arcs
des trajectoires de phase de la fige 13. Une inspection de la fige 13
nous montre que si le point initial Xo est situé a u - des sus de la
ligne. . . 1\13M21vfl0N1N2N3 . .., qui est constituée d'une infi-
nité de demi-circonférences de rayon 1, le point représentatif doit se
déplacer sous l'action de la commande u === -1. tant qu'il n'arrive
pas sur l'arc. . .jV[3M2MiO; à l'instant où il arrive sur cet arc u
change de valeur et reste égale à + 1 (le point représentatif se dépla-
çant alors sous la ligne . . .jV[3]J12J.Vf10N1N2N3 . . .) jusqu'au moment
où il arri ve sur l'arc () N iN 2 N 3. . . ; puis il se déplace de nouveau
au-dessus de la ligne... M3M2M10N1N2N3... sous l'ac-
tion de la commande u === -1 et ainsi 'de suite. La dernière portion
de trajectoire de phase (qui abouti t à l'origine des coordonnées) est
un arc de la demi-circonférence Mi O ou de la demi-circonférence N i O .
Le point représentatif se déplace exactement de la même manière
lorsque le point initial Xo est situé a u - des sou s de la ligne
ll=+/
FIG. 12
FIG. 13
39
.If
34
PRINCIPE DU MAXIMUM
[Ch. 1
. . . M 3M 2 M1 0N 1 N 2 N 3 · . · : au-dessus de cette ligne, le point repré-
sentatif se déplace sous l'action de la commande u = -1, au-des-
sous - sous l'action de la commande u = + 1.
"En vertu donc du théorème 2, seules les trajectoires mentionnées
peuvent être optimales, et de notre étude il ressort que chaque point
du plan de phase est le départ d'une s e u 1 e trajectoire menant
à l'origine des coordonnées et susceptible d'être optimale. Du théo-
rème d'existence qui est démontré dans le chapitre 3, il s'ensuit que
dans l'exemple considéré quel que soit le point initial Xo il existe
une trajectoire optimale (voir page 116). Par conséquent, les trajectoi-
res trouvées (fig. 13) sont optimales et il n'en existe pas d'autres
aboutissant à l'origine des coordonnées.
Comme dans le premier exemple, la solution du problème optimal
peut être interprétée de la manière suivante. Désignons par
v (Xl, x 2 ) = V (x) la fonGti<?n définie comme suit dans le plan Xl, x 2 :
+ 1 au-dessous de la ligne . . . M 3 M 2 M 1 0N 1 N 2 N 3.
et sur l'arc. . .M 3 M 2M10;
- 1 au-dessus de la ligne ...M 31112M10NtN2N3.
et sur l'arc. · .ON 1 N 2 N 3. . .
v (x) -
Alors, le long de chaque trajectoire optimale x (t) la commande opti-
male correspondante est de la forme
u (t) = v (x (t)).
Comme dans l'exemple précédent cela signifie qu'en remplaçant,
dans le système (28), u par la fonction v (x) nous obtenons le système
d:; =X2, }
dx 2 (38)
(ft= --xl+v (Xl, x 2 ),
dont la solution (pour un état initial Xo quelconque) nous donne la
trajectoire de phase optimale aboutissant à l'origine des coordonnées.
Autrement dit, le système (38) est un système d'équations différen-
tielles (avec des seconds membres discontinus) dont la résolution
donne les trajectoires optimales aboutissant à l'origine des coordon-
,
nees.
E x e m pIe 3.
Considérons maintenant le système à deux paramètres de com-
mande:
dx 1 }
_:=:: x 2 + u l ,
dt
dx 2
_= _Xl + U 2
dt '
(39)
5.1
EXEMPLES. PROBLÈME DE SYNTH:mSE
35
les grandeurs U l , u 2 étant assujetties aux condi tions 1 u l 1 1,
1 u 2 1 1. Comme dans les deux exemples précédents, étudions pour
ee système le problème consistant à arriver le plus vite à l'origine
des coordonnées. Ecrivons la fonction H
H == 'P1 (x 2 + Ul) + 'P2 ( - Xl + u 2 )
et le système auxiliaire
(40)
d"'1 }
dt == 'P2,
d"'2
([t= -'P1.
D'où il vient
'P1 == A sin (t + CG),
'P2 == A cos (t + CG),
où A et CG sont des constantes; A > 0, 0 CG < 21(. La relation
(20) nous donne maintenant (compte tenu de (40) et des conditions
\ u l \ 1, 1 u 2 \ 1)
u l = sign 'P1 = sign (A sin (t + CG)) == sign (sin (t + CG)),
u 2 = sign 'P2 = sign (A cos (t + CG)) == sign (cos (t + CG)).
Par conséquent, lorsque la commande est optimale chacun des
paramètres de commande u l , u 2 est une fonction constante par mor-
ceaux prenant les valeurs + 1 et -1. De l'étude du système (39)
nous concluons sans peine que les portions de trajectoires de phase
correspondant aux intervalles de temps sur lesquels u l == 1, u 2 == 1
sont des arcs de circonférences centrées au point 01.1 de coordonnées
(1, -1). Pour les autres valeurs de u l et u 2 on obtient le tableau sui-
vant:
(41)
Valeurs constantes des
paramètres de commande
sur un certain intervaIJe
de temps
Centre des circonférences qui sont Jes trajectoires
de phase correspondantes du système (39)
u 1 ==1, u 2 =1
u 1 = -1, u 2 =1
u 1 := -1, u 2 =-1
u 1 :=1, u 2 :=-1
Le point 01,1 de coordonné s (1, -1)
Le point 0-1,1 de coordonnee (1, 1)
Le point 0_1, -1 de coordonl!ees (-1, 1)
Le point 01, -1 de coordonnees (-1, -1)
Dans tous les cas, le mouvement a lieu sur les trajectoires de pha-
se (circonférences) correspondantes dans le sens des aiguilles d'une
Jnontre, uniformément, à la vitesse d'un tour en un. intervalle de
"
temps égal à 211:. En particulier, en un temps égal à ' le point repré-
sentatif parcourt un qua 1:' t d e c i r con f é r e n c e.
3*
36
PRINCIPE DU MAXIl\'IU M
[Ch. 1
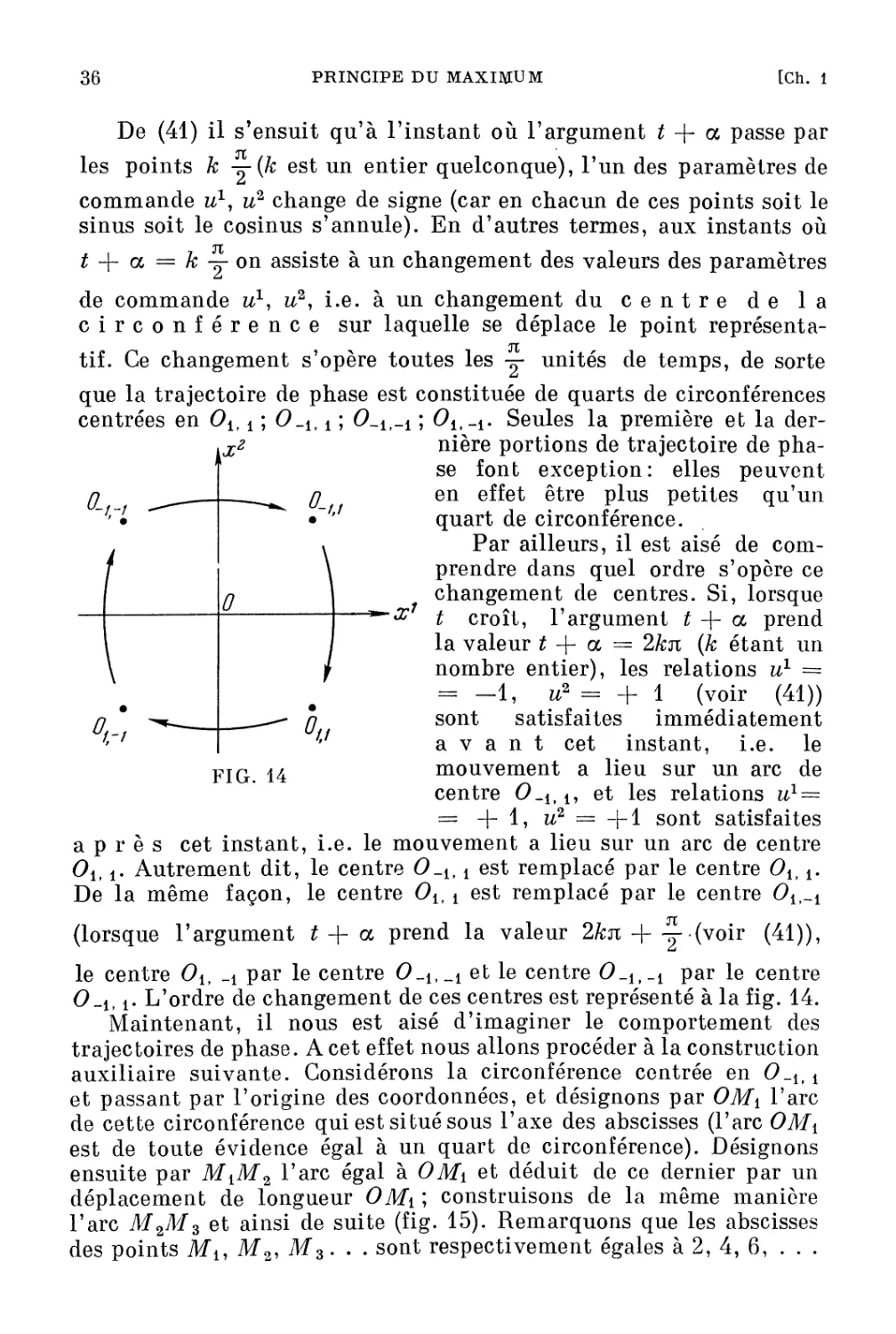
De (41) il s'ensuit qu'à l'instant où l'argument t + a passe par
les points k (k est un entier quelconqu ), l'un des paramètres de
commande u 1 , u 2 change de signe (car en chacun de ces points soit le
sinus soit le cosinus s'annule). En d'autres termes, aux instants où
t + a == k on assiste à un changement des valeurs des paramètres
de commande u 1 , u 2 , i.e. à un changement du c e n t r e d e 1 a
c i r con f é r e n c e sur laquelle se déplace le point représenta-
tif. Ce changement s'opère toutes les unités de temps, de sorte
que la trajectoire de phase est constituée de quarts de circonférences
centrées en 01. 1 ; 0 -1. 1 ; 0-1.-1 ; 01. -1. Seules la première et la der-
.z2 nière portions de trajectoire de pha-
se font exception: elles peuvent
en effet être pl us petites qu'un
quart de circonférence. ,
Par ailleurs, il est aisé de com-
prendre dans quel ordre s'opère ce
changement de centres. Si, lorsque
Z1 t croît, l'argument t + a prend
la valeur t + a == 2kJt (k étant un
nombre entier), les relations u 1 ==
== -1, u 2 == + 1 (voir (41))
sont satisfai tes imlnédiatement
a van t cet instant, i.e. le
mouvement a lieu sur un arc de
cen tre 0 -1. 1, et les relations u 1 ==
=== + 1, u 2 === -r-1 sont satisfaites
a p r è s cet instant, i.e. le mouvement a lieu sur un arc de centre
01. 1- Autrement dit, le centre 0-1. 1 est remplacé par le centre 01. 1.
De la même façon, le centre 01. 1 est remplacé par le centre 01,-1
(lorsque l'argument t + a prend la valeur 2kJt + .(voir (41)),
le centre 01. -1 par le centre 0 -1. -1 et le centre 0 -1. -1 par le centre
0_1. 1. L'ordre de changement de ces centres est représenté à la fige 14.
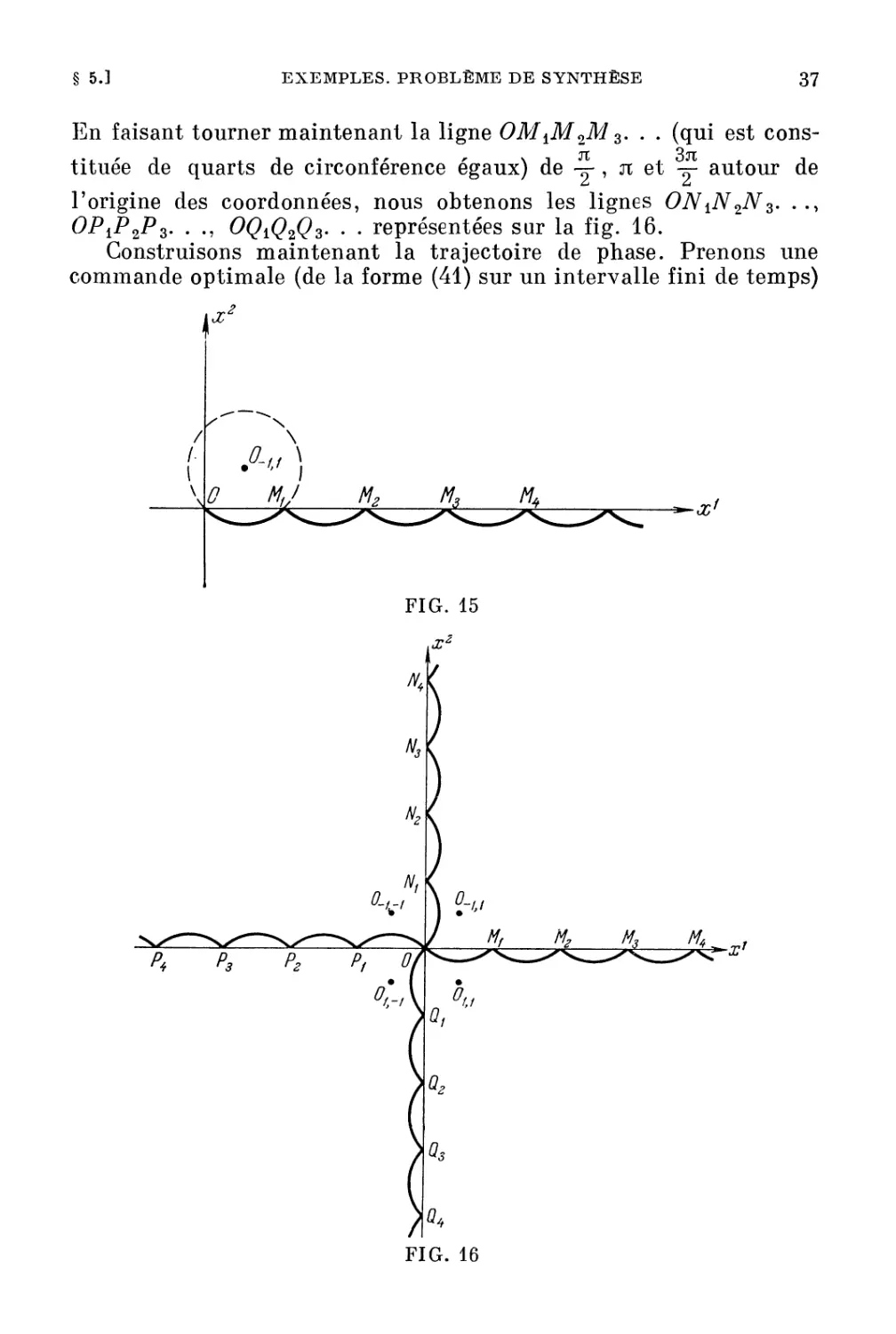
1Vlain tenan t, il nous est aisé d'imaginer le cOlnportemen t des
trajec toires de phase. A cet effet nous allons procéder à la construction
auxiliaire sui vante. Considérons la circonférence centrée en 0 -1. 1
et passant par l'origine des coordonnées, et désignons par OM 1 l'arc
de cette circonférence qui est si tué sous l'axe des abscisses (l'arc 0 f1
est de toute évidence égal à un quart de circonférence). Désignons
ensuite par M lM 2 l'arc égal à 0 M 1 et déduit de ce dernier par un
déplacement de longueur 0 Ml; construisons de la nlême nlanière
l'arc JVI 2 A1 3 et ainsi de suite (fig. 15). Remarquons que les abscisses
des points Ml' M 2' 1113. . . sont respectivement égales à 2,4,6, . . .
fl! -1
, .
0_ 11
. '
o
.
-I
1
.
Dl!
1
FIG. 14
5.]
EXEMPLES. PROBL'ÈIVIE DE SYNTHÈSE
37
J n faisant tourner maintenant la ligne OlJ;f 1 M 2M 3. . . (qui est cons-
tituée de quarts de circonférence égaux) de ' n et 3; autour de
l'origine des coordonnées, nous obtenons les lignes ON i N 2 N 3. . .,
OP i P 2 P 3. . ., OQ1Q2Q3. . . représentées sur la fige 16.
Construisons maintenant la trajectoire de phase. Prenons une
cOilllnande optimale (de la forme (41) sur un intervalle fini de temps)
xz
Xl
FIG. 15
z
,x
0_/1
. )
FIG. 16
38
PRINCIPE DU MAXIMUM
[Ch. 1
.1;2
.x 2
0_1./
.
o
.xl
.x'
A
.
Ou
1
A
0,
0)
b)
A
x 2
O-t-t
.
;cf
d)
FIG. 17
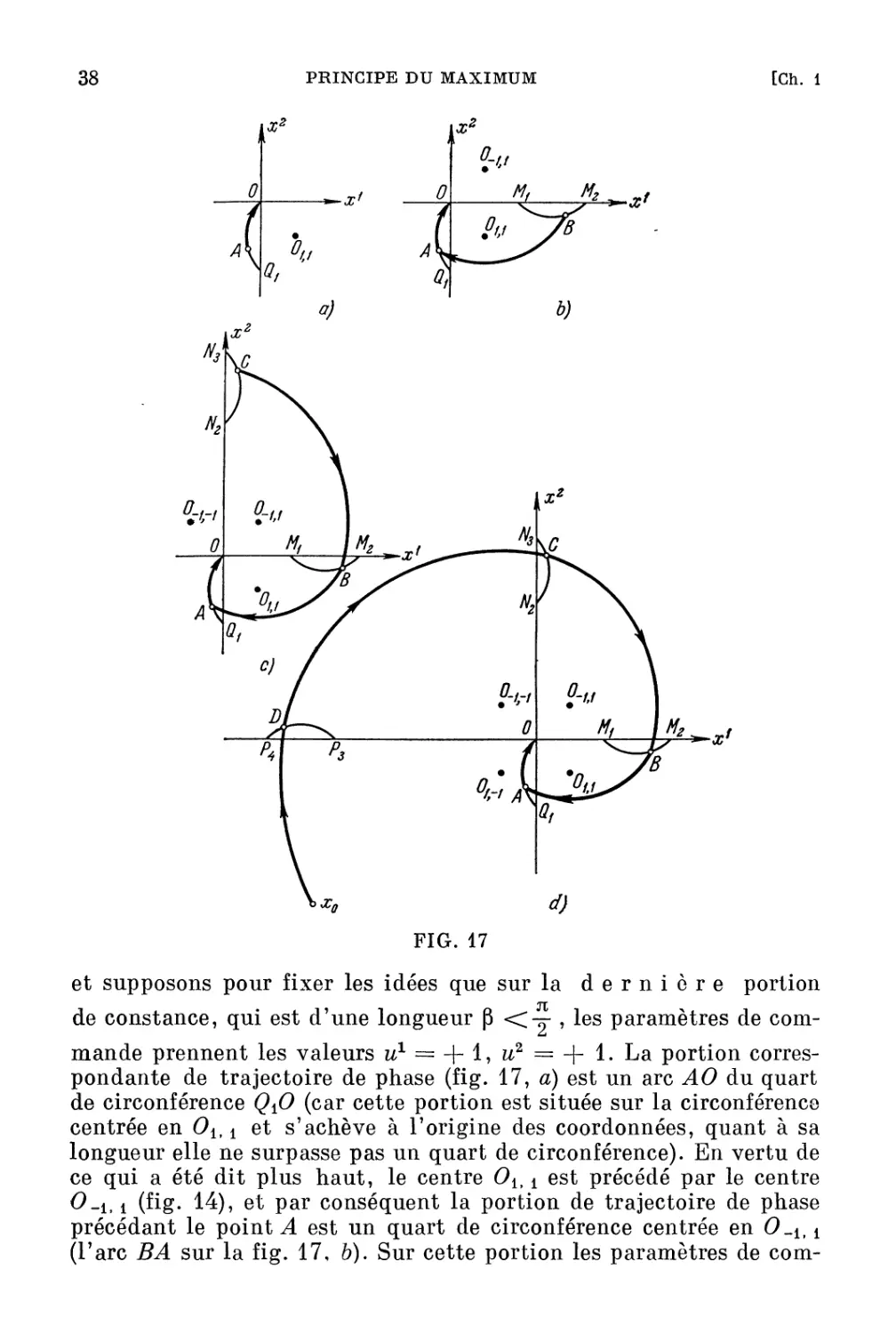
et supposons pour fixer les idées que sur la der n i ère portion
de constance, qui est d'une longueur < ' les paramètres de com-
mande prennent les valeurs u l == + 1, u 2 == + 1. La portion corres-
pondante de trajectoire de phase (fig. 17, a) est un arc AO du quart
de circonférence Q10 (car cette portion est située sur la circonférence
centrée en 0 1 . 1 et s'achève à l'origine des coordonnées, quant à sa
longueur elle ne surpasse pas un quart de circonférence). En vertu de
ce qui a été dit plus haut, le centre 01. 1 est précédé par le centre
0-1. 1 (fig. 14), et par conséquent la portion de trajectoire de phase
précédant le point A est un quart de circonférence centrée en 0 -1. 1
(l'arc BA sur la fig. 17. b). Sur cette portion les paramètres de com-
5.]
EXEMPLES. PROBL ME DE SYNTHÈSE
39
mande prennent les valeurs u l =-1, u 2 =+1. Etant donné que
le point A se trouvait sur l'arc Q10, le point B sera situé sur l'arc
déduit de Q10 par une rotation de :; autour du point 0 -1. 1, i.e.
sur l'arc fl;I lM 2.
L'antécédant du centre 0- 1 ,1 est le centre 0_ 1 , -1, par conséquent.
la portion de trajectoire de phase précédant le point B est un quart
de circonférence centrée en 0_1, -1 (i.e. l'arc CB sur la fige 17, c).
] es paramètres de commande prennent les valeurs u 1 = -1, u 2 =
::= -1. Puisque le point B se trouvait sur l'arc M 1 M 2 , le point C
sera situé sur l'arc déduit de M 1 M 2 par une rotation de :; autour du
point 0-1. -1' i.e. sur l'arc N 2 N 3 . En continuant de la sorte, on peut
entièrement tracer la trajectoire de phase. Sur la fige 17, d est repré-
sentée une trajectoire de phase constituée de trois arcs, qui sont des
quarts de circonférence et de deux arcs (le premier et le dernier)
inférieurs chacun à un quart de circonférence.
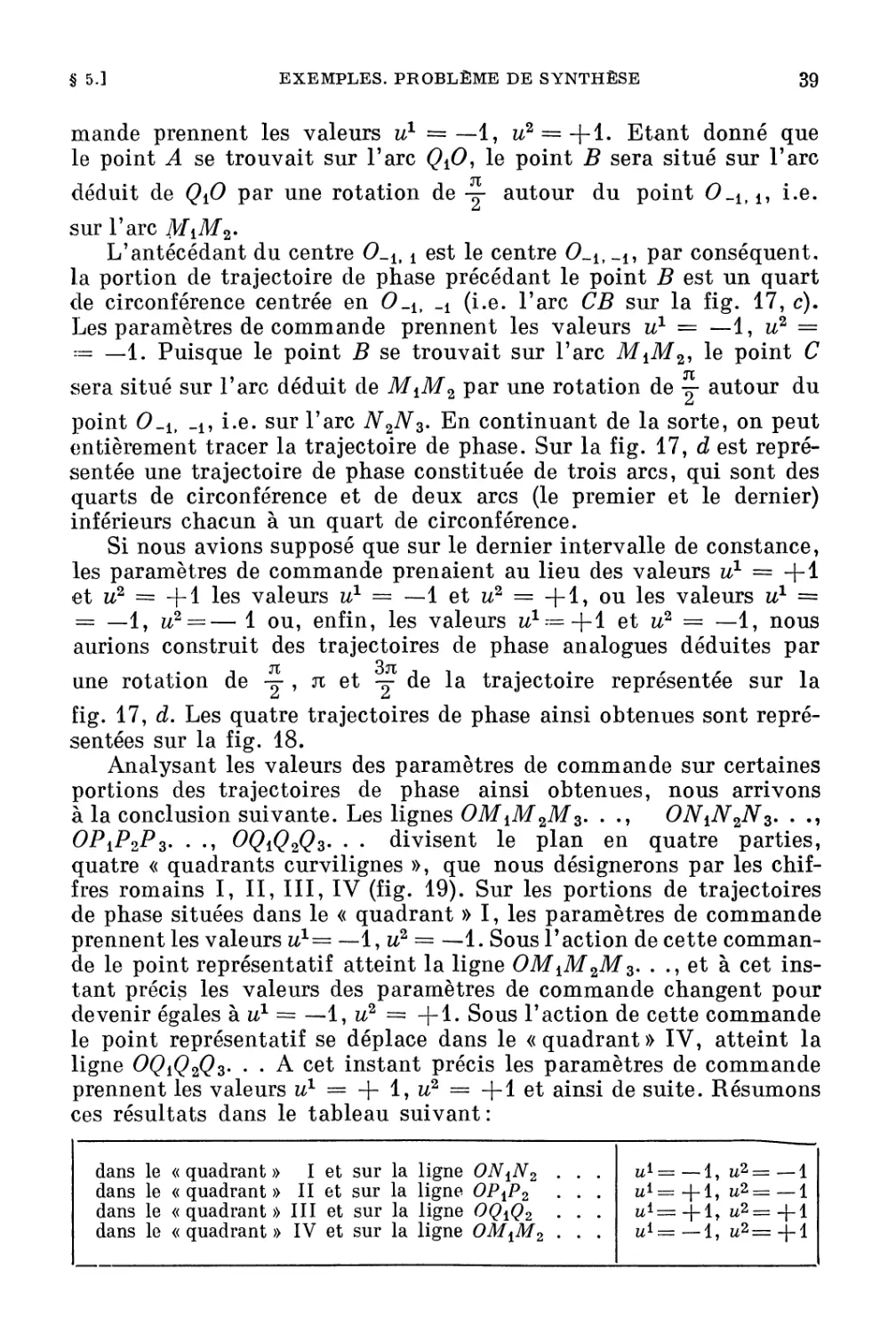
Si nous avions supposé que sur le dernier intervalle de constance,
les paramètres de commande prenaient au lieu des valeurs u 1 = +1
et u 2 = +1 les valeurs u 1 == -1 et u 2 == +1, ou les valeurs u 1 =
== -1, u 2 == - 1 ou, enfin, les valeurs u l === +1 et u 2 == -1, nous
aurions construit des trajectoires de phase analogues déduites par
. d Jt t 3Jt d 1 t .. , t ' 1
une rotation e"2' Jt e 2" e a raJectoire represen ee sur a
fige 17, d. Les quatre trajectoires de phase ainsi obtenues sont repré-
sentées sur la fige 18.
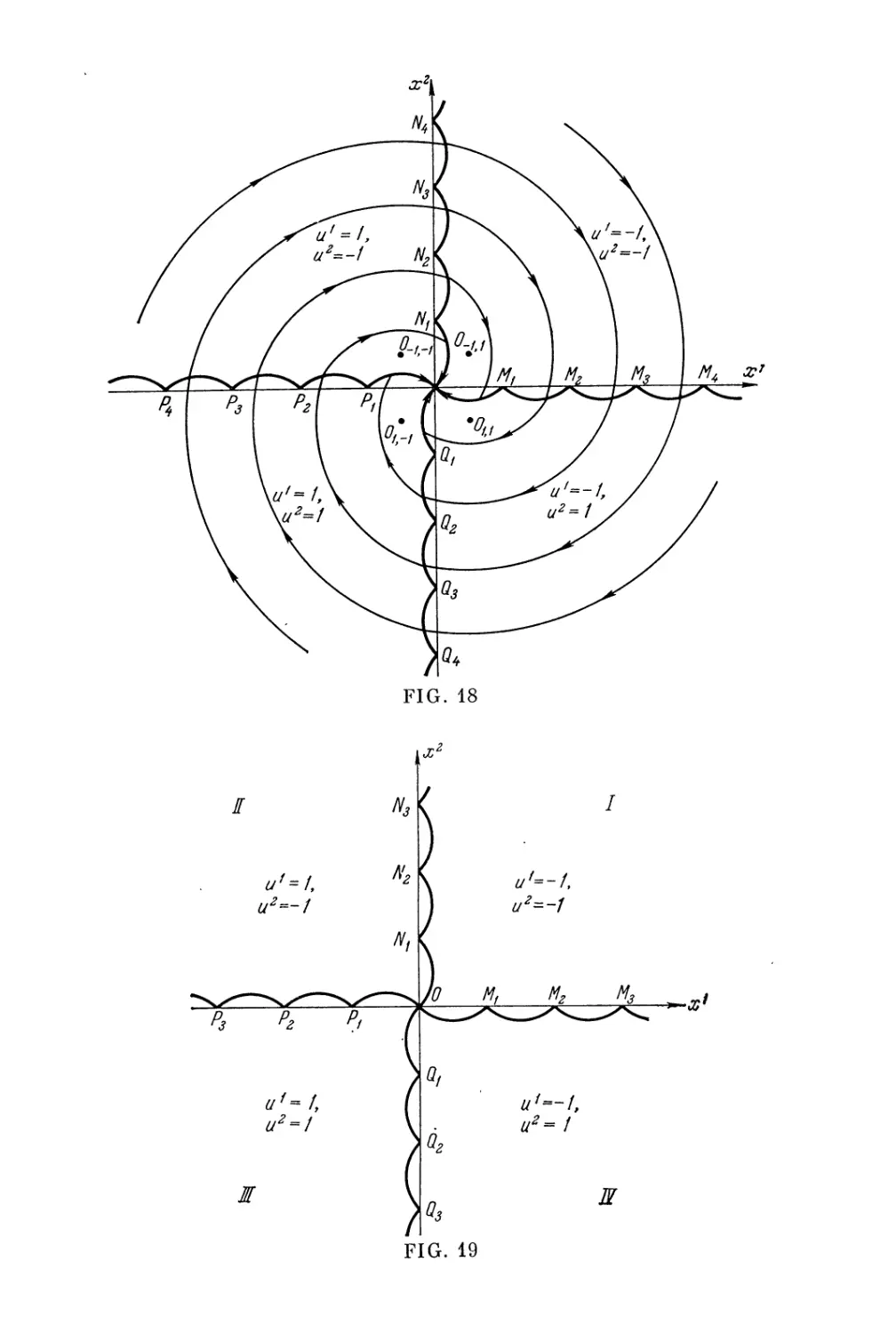
Analysant les valeurs des paramètres de commande sur certaines
portions des trajectoires de phase ainsi obtenues, nous arrivons
à la conclusion suivante. Les lignes OM 1 M 2 M 3 . .., ON 1 N 2 N 3 ...,
OP 1 P 2 P 3 . . ., OQ1Q2Q3. .. divisent le plan en quatre parties,
quatre « quadrants curvilignes », que nous désignerons par les chif-
fres romains l, II, III, IV (fig. 19). Sur les portions de trajectoires
de phase situées dans le « quadrant » 1, les paramètres de commande
prennent les valeurs u l == -1, u 2 == -1. Sous l'action de cette comman-
de le point représentatif atteint la ligne OM 1M 2M 3. . ., et à cet ins-
tant préci les valeurs des paramètres de commande changent pour
devenir égales à u 1 == -1, u 2 = +1. Sous l'action de cette commande
le point représentatif se déplace dans le « quadrant» IV, atteint la
ligne OQtQ2Q3. . . A cet instant précis les paramètres de commande
prennent les valeurs u 1 == + 1, u 2 == +1 et ainsi de suite. Résumons
ces résultats dans le tableau suivant:
dans le «quadrant» l et sur la ligne ON lN 2
dans le «quadrant» II et sur la ligne OP lP2
dans le «quadrant» III et sur la ligne OQ1Q2
dans le «quadrant» IV et sur la ligne OM 1 M 2 .
u 1 = -1, u 2 =-1
u 1 =+1, u 2 =-1
u 1 == +1, u 2 = +1
u 1 = -1, u 2 = +1
.x 2
.2:'
FIG. 18
x 2
JI
1
lI t =!
,
u 2 =-!
(j 1 = _ l,
(j2=-f
:c'
{ff=/,
{j2 = /
,,'=-1
1
,,2 = 1
JI[
11
FIG. 19
5.]
EXEMPLES. PROBLÈME DE SYNTHÈSE
41
En vertu donc du théorème 2, seules les trajectoires trouvées
peuvent être optimales; en outre, de cette étude il est évident que
chaque point de l'espace de phase est le départ d'une s e u 1 e trajec-
toire 'aboutissant à l'origine des coordonnées et susceptible d'être
optimale. Du théorème d'existence (qui est démontré dans le chapi-
tre 3) il s'ensuit que dans l'exemple considéré tout point Xo est le
départ d'une trajectoire optimale (voir page 116). Les trajectoires
trouvées sont par conséquent optimales et il n'en existe pas d'autres
aboutissant à l'origine des coordonnées.
Comme dans les deux exemples précédents, nous pouvons inter-
préter la solution du problème optimal de la manière suivante.
Construisons dans le plan Xl, X2 deux fonc tions VI (Xl, x 2 ) et v 2 (Xl, x 2 ):
f +1 à gauche de la ligne. · · Q3Q2Q1 0N 1 N 2 N 3 · · .
et sur l'arc . . . Q3Q2Q10,
1 -1 à droite de la ligne. . . Q3Q2Q10N1N2N3 . . .
l et sur l'arc . . · N 3 JV 2 N 1 0 ;
-t-1 au-dessous de la ligne. . . P3P2P10M1M2M3. . .
et sur l'arc . . .M 31V1 M 10,
-1 au-dessus de la ligne · · .P 3 P 2P 10M1JVI 2.113. . .
et sur l'arc · . · P 3 P 2 P 10.
Alors, le long de chaque trajectoire optimale x (t) == (Xl (t), x 2 (t)
la commande optimale correspondante u (t) == (u l (t), u 2 (t)) est de la
forme:
u l (t) == VI (Xl (t), x 2 (t)), u 2 (t) == v 2 (Xl (t), X2 (t)).
Ce qui veut dire qu'en remplaçant dans le système (39) les grandeurs
u 1 et u 2 par les fonctions VI (Xl, x 2 ) et v 2 (Xl, x 2 ) nous obtenons le
système
v L (Xl, x 2 )
v (Xl, x 2 )_
dx l == x 2 - VI ( Xl X2 ) }
dt l , ,
dx 2 ( 42)
_ === _ Xl _L v 2 ( Xl X2 )
dt l"
dont la solution (pour un état initial quelconque xo) nous donne la
trajectoire de phase optimale aboutissant à l'origine des coordonnées.
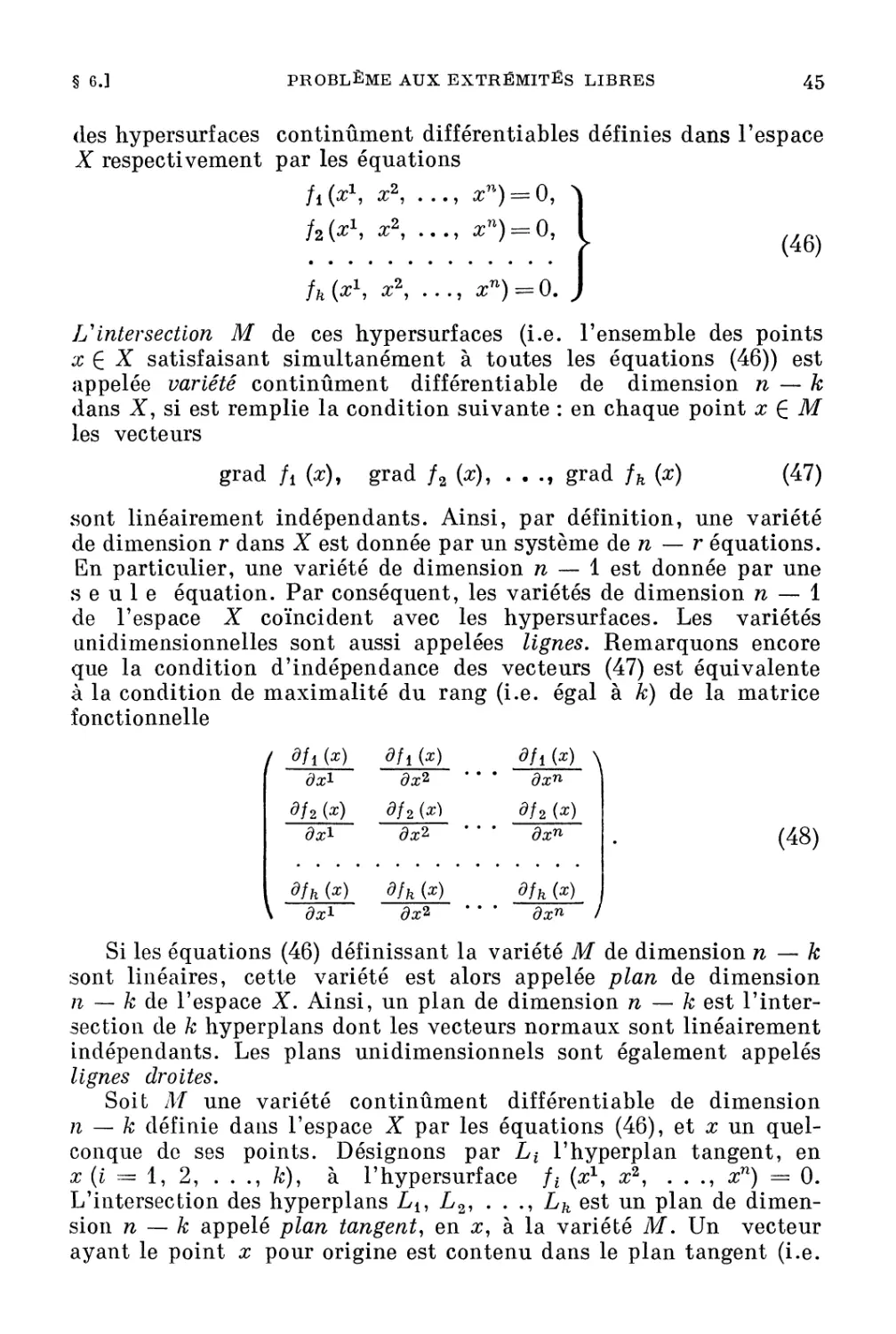
A utrelnent dit, le système (42) est un système d'équations différen-
tielles (à seconds membres discontinus) dont la résolution nous
donne les trajectoires optilnales aboutissant à l'origine des coordonées.
Problème de synthèse des commandes
optimales
Les exemples examinés plus haut montrent qu'il est naturel de
chercher la solution du problème des commandes optimales sous la
forme suivante. Nous résoudrons le problème optimal dans le cas
42
PRINCIPE DU MAXIMUM
[Ch. 1
général (voir (9)), en considérant tous les états initiaux Xo possibles
et en prenant à chaque fois pour état final l'origine des coordonnées
o de l'espace X. Alors (autant qu'on puisse en juger d'après les exem-
ples traités plus haut) il existe une fonction v (x) définie dans l'espace
de phase X et à valeurs dans le domaine des commandes U, telle que
l'équation
dx
dt == f (x, v (x»
(43)
(cf. (5» définit toutes les trajectoires optimales aboutissant à l'origine
des coordonnées. Autrement dit, il est naturel de chercher la comman-
de optimale non pas sous la forme u == u (t), mais sous la forme u =
== v (x), i.e. la commande optimale cherchée ne dépend à chaque
instant t que de la position occupée à ce même instant t par le point
représentatif. Ce qui est évident: si en effet nous nous trouvons déjà
au point x, le mouvement ultérieur (du point x en 0) doit être opti-
mal (car toute portion de trajectoire optimale est elle-même une tra-
jectoire optimale, voir page 18). La valeur de la commande optimale
u (t) à l'instant où le point représentatif occupe la position x dépend
donc uniquement de ce point x et non pas du point de départ du mou-
vement ni du temps qu'il a mis avant d'arriver en x. Les formules
(27), (38), (42) nous donnent précisément la solution des problèmes
optimaux examinés sous la forme d'une équation différentielle (43)
à second membre discontinu. (Si le domaine de commande U
est un espace de dimension r engendré par les variables u l , u 2 , . . ., ur,
la donnée de la seule fonction vectorielle v (x) équivaut à la donnée
de r fonctions scalaires u l == VI (x), . . ., Ur == V r (X); cf. formules
( 42) . )
La fonction v (x) qui donne l'équation des trajectoires optimales
sous la forme (43) sera désignée par fonction de synthèse et le problème
qui consiste à déterminer cette fonction (si elle existe ne fût-ce que
dans un voisinage suffisamment petit de l'origine des coordonnées)
par problème de synthèse des commandes optimales. Dans les exem-
ples traités plus haut les fonctions de synthèse étaient continues par
morceaux.
La connaissance de la fonction de synthèse permet de considérer
que le problème de l'arrivée optimale à l'origine des coordonnées,
est entièrement résolu mathématiquement. En effet, si l'objet techni-
que considéré sera équipé d'un instrument mesurant les états de
phase, et d'un mécanisme exécutif plaçant les gouvernails dans la
position u == v (x) où v (x) est la fonction de synthèse (supposée con-
nue), l'objet en question se déplacera optimalement. Si la fonction
v (x) est d'une forme compliquée, de toute évidence il serait plus
rationnel de faire appel à des calculateurs (universels ou spéciaux)
pour déterminer la position convenable des gouvernails u == v (x).
Le lecteur s'intéressant à ces problèmes pourra se référer à l'ample
6.]
PROBLÈME AUX EXTRÉMITÉS LIBRES
43
monographie de A. Feldbaum « Les calculateurs dans les systèmes
automatiques», Fizmatgiz, Moscou, 1959 (voir chapitre XIII) (en
russe) .
Dans le cas général, le problème de synthèse (i.e. l'existence de
la fonction de synthèse et sa détermination) n'est pas résolu. Dans
le cas particulier des systèmes linéaires et de la commande en temps
optimal, ce problème sera traité plus bas dans le chapitre trois.
6. Problème aux extrémités libres et conditions
de transversalité
Certaines notions géométriques nous seront indispensables en
vue de formuler et résoudre de futurs problèmes sur les commandes
optimales. Rappelons ici ces notions pour la commodité du lecteur.
Soi t f (x) == f (Xl, x 2 , . . ., x n ) une fonction scalaire réelle,
définie sur un domaine quelconque G d'un espace euclidien *) X
muni des coordonnées orthogonales Xl, x 2 , . . ., x n . Si la fonction f
admet dans le domaine G des dérivées partielles premières par rap-
port aux variables .x l , . . ., x n , alors en chaque point x du domaine
G est défini le vecteur
( ::1 ' ::2 '...' a n )'
appelé gradient de la fonction f (x) et désigné par le symbole
grad f (x).
Nous désignerons par hypersurface de l'espace Xl' ensemble S
des points x == (Xl, . . ., x n ) satisfaisant à la relation
f (Xl, x 2 , . . ., X n ) == 0 ( 44)
et par équation de cette hypersurface "- la relation (44) . Nous suppo-
serons maintenant que le premier membre de l'équation (44) admet
des dérivées partielles continues. en Xl, x 2 , . . ., x n . Le point x E S
satisfaisant aux relations
al (x) _ al (x) _ _ al (x) _ 0
1X 1 - ax 2 -... - ax n -
(i.e. le point en lequel le vecteur grad f (x) est nul) est appelé point
singulier de l'hypersurface S. Les points de 1 'hypersurface S en les-
quels grad f (x) =1= 0 sont appelés points non singuliers. Une hyper-
surface définie par l'équation (44) à premier membre continûment
dérivable et ne renfermant pas de points sin gu-
*) L'espace X peut ne pas être euclidien, auquel cas le vecteur grad 1 (:1:)
introduit plus bas doit être considéré comme covariant.
44
PRINCIPE DU MAXIMUM
[Ch. 1
1 i ers, est appelée hypersurface continûment différentiable. Dans
la suite toutes les hypersurfaces seront supposées continûment diffé-
ren tiables.
Pour n = 2, l'équation (44) prend la forme
f (Xl, x 2 ) = 0
et la notion d 'hypersurface continûment différentiable se ramène
dans ce cas à la notion de ligne continûment différentiable (dans le
plan engendré par les variables Xl, X2). Pour n == 3, l'équation (44)
s'écrit sous la forme
f (Xl, x 2 , x 3 ) == 0
et la notion d 'hypersurface continûment différentiable se ramène
alors à la notion de surface continûment différentiable (dans l'espace
engendré par les variables Xl, x 2 , x 3 ).
Si l'équation (44) est 1 i n é air e, i.e. est de la fornle
a1xl + a2x2+ . . . + anx n +b == 0,
(45)
l'absence de points singuliers sign ifie que l'un an nloins des coeffi-
cients ai est non nul.
Dans ce cas, l'hypersurface définie par l'équation (45) est appelée
hyperplan.
Pour n = 2, l'hyperplan est une droite (dans le plan) et pour n == 3,
un plan (dans un espace tridimensionnel).
Soit Xo un point quelconque d'une hypersurface différentiable S..
définie par l'équation (44). Le vecteur grad f (xo) (ou tout vecteur
qui lui est colinéaire) est appelé vecteur normal (ou tout sinlplenlent
normale) à l'hypersurface S en Xo. Dans le cas d'un Il y p e r p 1 a n
(voir (45» les vecteurs normaux sont équivalents en tous les points..
i.e. il existe uns e u 1 vecteur normal
(ai' a 2 , . . ., an) ·
Tout hyperplan est univoquement défini par la donnée du vecteur
normal et par un point appartenant à cet hyperplan. Si S est une
hypersurfaco continûment différentiable définie par l'équation (44)
et Xo un de ses points, alors l'hyperplan passant par Xo et admettant
pour norrnale le vecteur grad f (xo) est appelé hyperplan tangent,
en Xo, à l'hypersurface S. Tout vecteur d'origine Xo contenu dans
1 'hyperplan tangent est appelé vecteur tangent à 1 'hypersurface S
en Xo. Autrement dit, un vecteur d'origine Xo est tangent à l'hyper-
surface S si, et seulement si, il est orthogonal au vecteur grad f (xo).
Soient maintenant
" i, S 2 , · · ., S k
6.]
PROBLÈME AUX EXTRÉMITÉS LIBRES
45
des hypersurfaces
X respectivement
continûment différentiables définies dans l'espace
par les équations
1 1 (Xl, X2, ..., X n) == 0,
12 (xl, X 2 , ..., X n) == 0,
(46)
.............
Ih (Xl, X 2 , ..., X n ) == o.
L'intersection M de ces hypersurfaces (i.e. l'ensemble des points
x E X satisfaisant simultanément à toutes les équations (46)) est
appelée variété continûment différentiable de dimension n - k
dans X, si est remplie la condition suivante: en chaque point X E M
les vecteurs
gr a d Il (x), gr a d 1 2 (x), . . ., gr ad 1 k (x) ( 4 7)
sont linéairement indépendants. Ainsi, par définition, une variété
de dinlension r dans X est donnée par un système de n - r équations.
En particlliier, une variété de dimension n - 1 est donnée par une
s e u 1 e équation. Par conséquent, les variétés de dimension n - 1
de l'espace X coïncident avec les hypersurfaces. Les variétés
unidimensionnelles sont aussi appelées lignes. Remarquons encore
que la condition d'indépendance des vecteurs (47) est équivalente
à la condition de maximalité du rang (i.e. égal à k) de la matrice
fonctionnelle
âf 1 (x) af 1 (x) a/ 1 (x)
ox I âx 2 âx n
af2 (x) af 2 (x) âf2 (x)
âx I ax 2 ax n (48)
. . . . . . . . . . . .
âl h (x) al h (x) Dlh (x)
âx 1 ax 2 âx n
Si les équations (46) définissant la variété M de dimension n - k
sont linéaires, cette variété est alors appelée plan de dimension
n - k de l'espace X. Ainsi, un plan de dimension n - k est l'inter-
section de k hyperplans dont les vecteurs normaux sont linéairement
indépendants. Les plans uni dimensionnels sont également appelés
lignes droites.
Soit l f une variété continûment différentiable de dimension
n - k définie dans l'espace X par les équations (46), et x un quel-
conque do ses points. Désignons par Li l'hyperplan tangent, en
X (i == 1, 2, . . ., k), à l'hypersurface Ii (Xl, x 2 , ..., x n ) == o.
L'intersection des hyperplans L1' L 2 , . . ., Ln est un plan de dimen-
sion n - k appelé plan tangent, en x, à la variété M. Un vecteur
ayant le point X pour origine est contenu dans le plan tangent (i.e.
46
PRINCIPE DU MAXIl\iUM
[Ch. 1
est un vecteur tangent en x à la variété M) si, et seulement si, il
est orthogonal à tous les vecteurs (47).
Soulignons enfin une circonstance simple dont nous aurons à
nous servir dans la sui te. Soit
Xi === cr i ( ), i === 1, . . ., n, ( 4 g)
l'équation paramétrique d'une ligne dans l'espace X ou, sous la for-
me vectorielle, x === cr ( ). Le vecteur tangent à cette ligne au point
=== o est de la forme:
( dcp! ( o) dcp2 ( o) d(pn ( o) ) === dcp ( o) (50)
d ' d ,. · · , d d .
Si la ligne (49) est entièrement contenue dans la variété continûment
différentiable M (d'une certaine dimension), le vecteur tangent (50)
à cette courbe est également tangent à la variété M au point cr ( o).
Inversement, si est donné un vecteur tangent à la variété M au point
Xo E M, il existe dans la variété M une ligne passant par le point
Xo et admettant ce vecteur pour vecteur tangent. Autrement dit,
un vecteur ayant pour origine un point quelconque Xo E M est tan-
gent à la variété M si, et seulement si, il est tangent à une ligne con-
tenue dans M.
Formulons maintenant le problème de la commande optimale
aux extrémités libres. Soient S 0 et S 1 des variétés continûment diffé-
rentiables de dimensions ro et rl arbitraires (mais inférieures à n)
So
FIG. 20
de l'espace X. Soit à résoudre le problème: trouver la commande admis-
sible u (t) qui transfère le point représentatif d'une position Xo E S 0
(non donnée à l'avance) à une position Xl E S 1 et qui minimise la fonc-
tionnelle (7) (fig. 20). Nous appellerons ce problème le problème
optimal aux extrémités libres. Si les variétés S 0 et S 1 dégénèrent en des
points, le problème aux extrémités libres se transforme en le problème
aux extrémités fixes que nous avons traité précédemment.
Il est clair que si les points xo, Xi étaient connus, nous aurions
à résoudre le problème aux extrémités fixes. La commande u (t),
6.]
PROBL ME AUX EXTRÉMITÉS LIBRES
47
optimale au sens du problème aux extrémités libres, est donc opti-
Inale au sens précédent, i.e. le principe du maximum (théorèmes 1,2)
reste en vigueur pour le problème aux extrémités libres.
Dans ce cas toutefois, il faut encore des relations qui permettraient
de déterminer la position des points Xo et Xi sur les variétés So et S1.
Ces relations sont formulées dans ce paragraphe sous le nom de con-
ditions de transversalité. Ces conditions nous donnent ro + ri rela-
tions dans lesquelles figurent les coordonnées des points extrémaux
Xo et Xi. Etant donné par ailleurs que le nombre des paramètres incon-
nus (en comparaison avec le problème aux extrémités fixes) a égale-
rnent augmenté de ro + ri (car la position du point Xo sur la variété
1..') 0 de dimension ro est caractérisée par ro paramètres, et la position
du point Xi E Si par ri paramètres), les conditions de transversalité
forment avec le principe du maximum un système «suffisant» de
relations pour la résolution du problème optimal aux extrémités
Ii bres .
Formulons maintenant les conditions de transversalité. Soient
Xo E 8 0 , Xi E 8 1 deux points quelconques, et To, T 1 des plans tan-
gents aux variétés So et S1 en ces points. Les plans T 0 et T 1 de dimen-
sions respectivement ro et r1 sont contenus dans l'espace X. Soit,
ensuite, u (t), x (t), t o t t i , une solution du problème optimal
aux extrémités fixes Xo et Xi. Soit, enfin"l' (t) le vecteur dont l' exis-
tence est affirmée dans le théorème 1. Nous dirons que le vecteur
'i' (t) satisfait à la condition de transversalité à l'extrémité droite
de la trajectoire x (t) (i.e. au point x (t i )), si le vecteur 1fJ (t i ) =
== (lfJi (t i ), 1fJ2 (t i ), · · ., lfJn (t i )) est orthogonal au plan T 1 . Autre-
filent dit, la condition de transversalité signifie que pour tout vecteur
e === (8 1 , 8 2 , .. ., 8 n ) contenu dans le (ou parallèle au) plan Ti est
vérifiée la relation (1fJ (t i ), 8) = O. On a la même condition de
transversalité dans l'extrémité g a u che de la trajectoire x (t) (il
suffit simplement d'y remplacer t i et Ti respectivement par t o et To).
IL est clair que la condition de transversali té à 1 ' extrémité droite de
la trajectoire x (t) contient ri relations indépendantes, puisque dans
la relation (1fJ (t 1 ), 8) = 0 il suffit de porter les ri vecteurs linéaire-
nIent indépendants 8 1 , 8 2 , . . ., 8r! contenus dans le plan T 1. La
condition de transversalité à l'extrémité gauche contient ro rela-
t ions indépendantes.
Les conditions de transversalité nous permettent désormais de
formuler la solution du problème aux extrémités libres.
Thé 0 r è ID e 3. Soientu (t), to t<ti' une commande admissible
transférant le point représentatif d'une certaine position Xo E S 0 dans
la position Xi E S 1, et x (t) la trajectoire correspondante (issue du point
Xo = (0, x o )). Pour que u (t) et x (t) soient solutions du problème optimal
aux extrémités libres, il est nécessaire qu'existe un vecteur fonction", (t)
continu et non nul, satisfaisant aux conditions du théorème 1 et, de
48
PRINCIPE DU MAXIMUM
[Çh. 1
plus, à la condition de transversalité aux deux extrémités de la trajectoire
x (t).
Il est évident que si l'une des variétés S 0' SI dégénère en un
point, la condition de transversali té dans l' extrémi té correspondan t(
de la trajectoire x (t) est remplacée par la condition de passage de la
trajectoire x (t) par ce point.
Dans le cas de la commande en temps optimal, dans la formula-
tion du théorème 3, la solution x (t) est remplacée par x (t) et la réfé-
rence au théorème 1 par la référence au théorème 2.
Voyons des exemples élémentaires de résolution de problèmes
aux extrémités libres.
E x e m pIe 1.
Considérons pour le point dont le mouvement est régi par la loi
(22) (avec la même contrainte 1 u 1 ::::;; 1), le problème de la plus
rapide arrivée sur l'axe x 2 en partant d'un état donné Xo. Dans ce
cas nous avons à resoudre un pro-
blème dont est libre l' extrémi té droi-
te : la variété S 0 dégénère en le poin 1
xo, quant au point Xl == 0 ce Il' est au-
.xl tre que la variété S 1. Le vecteur 8 ==
== (8 1 , 8 2 ) tangent à la variété SI (en
un quelconque de ses points) est de la
forme 8 == (0, 8 2 ) où 8 2 * 0 et par
conséquent la condition de transversa-
Ii té dans l'extrémité droite s'écrit
sous la forme 0.11'1 (t 1 ) + 8 2 .11'2 (t 1 ) == 0
d'où 11'2 (t 1 ) == O. La fonction '4'2 (t)
étant encore linéaire (voir page 24),
de la relation 11'2 (t 1 ) == 0 il résulte que 11'2 (t) garde son signe lorsque
t o ::::;; t < tt. Dans ce cas donc (voir (24)) toute commande optimale
u (t) est con s tan t e et égale à + 1 ou -1. Par conséquent,
ne peuvent être optimaux que des mouvements s'opérant le long des
paraboles (25) et (26) (sans commutations). Supposons d'abord que
l'état de phase initial Xo se trouve à d roi t e de la droite Xl == O.
D'après ce qui a été dit plus haut, par le point Xo ne passent que deux
trajectoires de phase qui sont susceptibles d'être optimales: la trajec-
toire (25) sur laquelle le mouvement a lieu de bas en haut et la trajec-
toire (26) sur laquelle le mouvement a lieu de haut en bas (fig. 21).
Si le point Xo est situé au-dessus de la ligne AO (voir fige 7), en se
déplaçant sur la parabole (25) le point représentatif n'arrivera pas
sur l'axe Xl == 0 (fig. 22, a) et seul peut être optimal le mouvement
qui a lieu sur la parabole (26). Si le point Xo est situé sur ou sous la
ligne AO, les deux mouvements (25) et (26) amènent le point repré-
sentatif sur l'axe Xl == 0 (fig. 22, b). Dans ce cas donc il existe
d eux trajectoires satisfaisant au principe du maxinlUln. Cepen-
.xZ
1
1
.zo
,
"
"
"
"
"-
.....
,
"
FIG. 21
6.]
PROBLÈME AUX EXTRÉMITÉS LIBRES
49
dant, il est aisé de voir que le temps mis pour aller de Xo à 1 '.axe Xl =
== 0 est différent selon la trajectoire. En effet, en construisant les
tangentes aux paraboles (25) et (26) en Xo, on constate aisément (voir
fige 23) que QOQ2> QOP2 == Q o P 1 > QoQl.
FIG. 22, a
.x 2
o
\
\
,
,
,
,
"
"
"
.......
.xl
A
---
FIG. 22, b
Or, comme pour u = + 1, le mouvement a lieu 'sur l'arc de parabole
en un temps égal à la différence des ordonnées (voir la deuxième
équation (22)), le temps mis pour parcourir l'arc X O Q2 est plu s
Ion g que celui mis pour parcourir l'arc xoQt. Par conséquent, dans
ce cas aussi, ne peut être optimal que le mouvement s'opérant sur
la trajectoire (26). Ainsi, dans le demi-plan droit ne peuvent être
optimaux que des mouvements s'opérant sur les paraboles (26),
i.e. les mouvements ayant lieu pour u == -1. De même, à gauche de
l'axe Xl == 0, ne peuvent être optimaux que les mouvements s'opé-
rant sur les paraboles (25), i.e. des mouvements ayant lieu pour
4 --0 1339
50
PRINCIPE DU MAXIMUl\'I
(Ch. 1
u = +1. Ceci nous donne la synthèse des commandes optilnales;
en posant
V (Xl, x 2 ) == { +1
-1
pour Xl < 0,
pour Xl > 0,
(£2
_ _ Ou
xl
\
\
,
"-
"-
"
A
FIG. 23
nous obtenons l'ensemble de toutes les trajectoires optimales
à partir du système
d: t 1 = x 2 , }
dx 2
-Jt == V (Xl, x 2 )
(cf. (27)). Les trajectoires de phase sont représentées sur la figure 24.
On pourrait d'ailleurs considérer que .les équations (51) sont
évidentes (d'un point de vue mécanique, par exen1ple).
E x e m p 1 e 2.
Considérons pour le point dont le mouvement est régi par la loi
(28) (avec la même contrainte 1 u 1 ::::;; 1) le problème de la plus rapi-
de arri vée sur la circonférence
(51)
(X 1 )2 + (X 2 )2 == R2
(52)
en partant d'un état initial Xo non situé sur cette circonférence. Dans
ce cas également nous avons à résoudre un problème à extrémité
droi te libre: la variété S 1 étant la circonférence (52) . Soit Xi ===
== (R cos ex, R sin ex) un point quelconque de la circonférence (52).
Cherchons la trajectoire optimale aboutissant en Xi et donnant la
.]
PROBLÈME AUX EXTRÉMITÉS LIBRES
51
solution du problème posé à extrémité droite libre. Pour 'i' (t f ),
i.e. le vecteur perpendiculaire en Xi (compte tenu des conditions de
transversali té) à la circonférence (52) nous devons prendre l'un des
.:c Z
X'
FI G. 24
deux vecteurs (- cos ex, - sin ex), (cos ex, sin et), dont le premier
est dirigé vers l'intérieur de la circonférence et le second, en sens
inverse. Etant donné que la trajectoire cherchée doit arriver en Xi
f(.x{t/),IJ{tJ)
.x'
FIG. 25
deI' e x t é rie u r de la circonférence (52), le vecteur vi tesse de
phase f (x (t f ), U (t f )) appliqué au point x (t i ) == Xi sera orienté
soit vers l'intérieur de la circonférence (52), soit dans le sens de la
tangente à cette circonférence en Xi (fig. 25). Puisque le produit sca-
laire
('1' (t l ), t (x (t f ), U (t f ))) == H (1p (t f ), X (t i ), U (t f )) (53)
4*
52
PRINCIPE DU MAXIMUM
[Ch. 1
doit être non négatif (voir théorème 2 et notamment la relation (21))
il importe donc de prendre pour '\}J (t 1 ) le vecteur (-cos a, - sin ex)
orienté radialement vers l'intérieur de la circonférence. (Si le vecteur
vitesse de phase f (x (tt), U (t 1 )) se trouve orienté suivant une tangen-
te à la circonférence, alors le produit scalaire (53) s'annulera et pour
'\}J (t 1 ) on pourra prendre un vecteur orienté aussi bien vers l'intérieur
que vers l'extérieur de la circonférence; convenons que dans
ce cas aussi le vecteur- '\}J (t 1 ) est orienté vers l'intérieur de la
circonférence.) Nous avons donc
'\}J (tt) = (- cos a, - sin a).
Si l'on revient maintenant au système d'équations (voir page 28)
d1Pi d1P2
dt = '1'2' d:t -== - 'li'1
on obtient en définitive
'P1 (t) = - cos (t - t 1 - a), 'P2 (t) = sin (t - t 1 - a), t o t :;;;;/1.
Compte tenu de (29) et de la condition 1 u 1 1, la relation (20)
nous donne:
u = sign 'P2 = sign (sin (t - t 1 - a)).
(5q)
Si l'angle a satisfait aux inégalités 0 a < n, alors sur l'inter-
valle t 1 - (n - a) t t1 la commande u (t) sera, compte tenu
de (54), égale à -1, et avant cela, alternativement égale à +1 et -1
u
t
FI G. 26
sur des intervalles de longueur n (fig. 26). Par conséquent, la derniè-
re portion de trajectoire de phase (qui se termine en Xi) est un arc
de circonférence centrée au point (-1, 0), cet arc étant intercepté
par l'angle au centre n - ai et les portions précédentes de trajectoi-
re sont des demi-circonférences alternativement centrées en (1, 0)
et (-1, 0). La trajectoire est représentée sur la fig. 27. Si l'angle ex
satisfait aux inégalités Je a < 2n, on obtient alors une trajectoire
symétrique par rapport au centre de celle représentée sur la fig. 27.
On voit aisément (voir fige 28) que pour 0 a < Je l'extrémité B
du dernier arc" BA de la trajectoire optimale considérée est située
sur la circonférence de rayon -1 centrée au point (-R, -1, 0).
Lorsque a varie entre 0 et Je, le point B décrit la demi-circonférence
N 2 N t , qui est située au-dessus de l'axe des abscisses., D'un autre
6.]
PROBL:ÈME AUX EXTR:ÉMIT:ÉS LIBRES
53
côté, la portion précédente CB de trajectoire optimale étant une
demi-circonférence centrée au point (1,0), son extrémité C est située
sur la demi-circonférence M2M3 symétrique de NiN 2 par rapport au
centre (1,0). En continuant de la sorte nous obtenons la trajectoire
Xf
FIG. 27
de phase toute entière (fig. 29). La trajectoire symétrique par rapport
au centre se construit d'une manière analogue. La disposition géné-
rale des trajectoires de phase est représentée sur la fige 30.
{ o.fLi R=OA,
80.., = 11., A ,
L8fl.,Q =L O-fAO
Xf
FIG. 28
La synthèse des commandes optimales est réalisée par la fonction
v (Xl, X 2 ) qui, de ce qui précède, se construit de la manière suivante.
A droite de la circonférence (52) on construit les demi-circonféren-
ces égales MtM2' M.2M3, . . . de rayon 1 sous l'axe des abscisses.
A gallche de la circonférence (52) on] construit également les demi-
circonférences N i N 2 , N 2 N 3 , . . . de rayon 1 au-dessus de l'axe des
N J
/1 2 M3
\ 1 Xl
, /
....-- C
FIG.29
FIG. 30
7,] LE PRINCIPE DU MAXIMUM POUR LES SYSTÈMES NON AUTONOMES 55
,
abscisses. La fonction v (Xl, x 2 ) se définit maintenant en dehors de
la circonférence (52): elle est égale à + 1 au-dessous de la ligne
... N 2 N 1 M i lVI 2 ... et à -1 au-dessus de la ligne .. .M 2 M i N 1 N 2 ...
Ainsi donc nous avons la synthèse des commandes optimales:
dx i 2
---;Il == X ,
dx 2
-= -X 1 + V ( X l
dt '
x 2 ). }
7. Le principe du maximum pour les systèmes
non autonomes
A. Considérons le même problème optimal que ( l) et (7), mais
dans le cas où les fonctions fa dépendent explicitement du temps (le
domaine de commande U est supposé indépendant du temps). La
loi régissant le n10uvement de l'objet et la fonctionnelle dont on cher-
che le minimum s'écrivent alors
dx i .
dt==f (x, u, t), i== 1,2, ..., n; (55)
tf
J = \ /0 (x (t), u (t), t) dl, (56)
'"
to
t o est supposé connu, t i est le temps de passage par Xi que nous nous
proposons de trouver. Comme précédemment, introduisons la nouvel-
t
le coordonnée Xo = ) /0 (x (t), u (t), t) dt et énonçons le problème
to
sous la forme suiv nte (cf. 2).
Etant donnés dans l'espace de phase X de dimension n + 1 un point,
Xo === (0, xo) et une droite II parallèle à l'axe X O et passant par le point
(0, Xi), parmi les commandes admissibles u == u (t) telles que la solu-
tion correspondante x (t) du système
dx i .
(ft==f1(X, u, t), i==O, 1, ..., n (57)
avec la condition initiale x (t o ) == Xo coupe la droite II, trouver celle qui
rninimise la coordonnée XO du point d'intersection avec la droite II.
En vue de résoudre ce problème nous allons introduire une incon-
Il ue auxili aire x n + l t lle que
dxn+1
dt == 1, xn+1 (t o ) == t o .
] l est évident que x n +1 == t. Désignons par X* l'espace engendré
par les variables Xl, X2, . . ., x n , x n + 1 . Le système (57) peut alors
56
PRINCIPE DU MAXIMUM
[Ch. 1
être écrit sous la forme autonome (i.e. ne
te ment du temps) suivante:
dx i .
- - I (x U xn+1 )
dt - " ,
dxn+l
dt === 1.
dépendant pas explici-
i = 0, 1, ..., n, }
Le problème est Inaintenant de chercher une trajectoire optimale
· . d 1 , X * 1 . ( 1 2 n ) " .
JOIgnant ans espace e pOInt xO' xO' . . ., xO' t o a un pOInt
de la droite Si qui passe par le point (x , xî, . . ., x , 0) et est paral-
lèle à l'axe x n +1 (puisque la valeur finale de la v ari able x n +1, i.e
l'instant où le point en mouvement arrive en Xi n'est pas préalable-
ment donnée). Nous sommes par conséquent amenés à résoudre un
problème optimal ordinaire à extrémité gauche fixe et extrémité
droite libre.
Ecrivons le principe du maximum et la condition de transversali-
té. Le système auxiliaire d'équations (12) est de la forme
n
d'l{?i _ _ a/a
dt - L.J ôxi 'Pa,
a=O
; -- 0 1
f/- , ,
. . ., n,
(58)
n
d'Pn+t _ _ ô/a 1101
dt - L.J ôt 'fa.
a=O
(59)
En vertu des théorèmes 1 et 3, il faut former la fonction
'Polo (X, u, Xn+1) + 'P1f 1 (X, u, Xn+1) + . . . + 'Pnl n (x, u, Xn+1) + 'P11+1 .1.
Désignons cette fonction par QJi* (et non par QJ£ comme dans le théo-
rème 1) et conservons la notation QJt pour la fonction
&e ('\l', X, t, u) == 'Polo (x, u, t) + 'P1f 1 (x, U, t) + .. . + 'Pnf n (x, u, t),
à l'aide de laquelle les équations (57), (58) s'écrivent sous la forme
du système hamiltonien
dx i ôQJ& d'Pi ôQJ&
dt == Ô'l{?i ' ---at===- ôx i ' i==O,1, ...,n.
De la même façon désignons !par Q/ft* ('\l', x, xn+1) (et non par dIt
comme dans le théorème 1) le maximum par rapport à u de la fonction
QJt* pour Xi et 'Pi fixes, et conservons la notation Glft ('\l', x, t) pour le
maximum (en u) de la fonction QJt ('\l', x, t, u) pour '\l', x, t fixes. En
vertu de la relation x n + 1 == t nous pouvons écrire que Q1f* === QJ£ +
+ 'Pn+i, dlt* == dt + 'Pn+i, et par conséquent la relation JJt* ==
== rYft* == 0 qui est satisfaite le long de la trajectoire optimale (voir
théorème 1) prend la forme
QJ8 (11' (t), x (t), t, u (t» == dIt ('i' (t), x (t), t) == - 'Pn+1 (t). (60)
7.] LE PRINCIPE DU MAXIMUM POUR LES SYSTÈMES NON AUTONOMES 57
] a condition de transversalité à l'extrémité droite de la trajectoire
indi que, enfin, que 1 a droite S 1 (qui est parallèle à l'axe x n +1) est
orthogonale au vecteur (1P1 (t 1 ), 1P2 (t 1 ), · · ., 'l'n+1 (t 1 )). Autrement
dit, 1Pn+1 (t i ) == o. En tenant compte des relations (60) et (59), nous
avons
t n
clt( '\jJ (t), x (t), t) = apx (x (t 't u (t), t) 1PCG (t) dt.
t1 a=O
Nous obtenons donc le théorème suivant (principe du maximum
pour les systèmes non autonomes).
Thé 0 r è m e 4. Soit u (t), t o t t 1 , une commande admissible
telle que la trajectoire x (t) du système (57) qui lui correspond, en partant
du point Xo à l'instant t o , passe à l'instant t 1 par un point de la droite
II. Pour que la commande u (t) et la trajectoire x (t) soient optimales il
est nécessaire qu'existe un vecteur fonction"" (t) == (1Po (t), 1P1 (t), . . .
. . ., "'n (t)) continu et non nul, correspondant aux fonctions u (t) et
x (t) (voir (58)) et tel que:
1 0 quel que soit t, t o t t 1 , la fonction QJt ('i' (t), x (t), t, u)
de la variable u E U atteigne en le point u == u (t) son maximum
QJt ("1' (t), x (t), t, u (t)) == cY/t ('i' (t), x (t), t);
2° soient vérifiées les relations
"'0 (t) == const 0,
t n
cIt ('\jJ (t), x (t), t) = . a/CG (x (t t u (t), t) 1PCG (t) dt.
t1 a=O
(61)
(62)
Si, par ailleurs, les grandeurs "1' (t), x (t) et u (t) vérifient le système
(57), (58) et la condition 1 0 , alors la fonction "'0 (t) de la variable test
constante, et la fonction &ft ('i' (t), x (t), t) ne peut différer que d'une
constante de l'intégrale mentionnée dans la relation (62) si bien qu'il
suffit de vérifier la relation (62) à un instant quelconque t, t o t ii ;
au lieu de (62), par exemple, il suffit de vérifier les relations
'" 0 (t 1) 0, olt ("i' (t 1), X (t 1), t 1) == 0 . ( 6 3)
B. Si nous supposons ll1aintenant que le point Xi en lequel le
point Xo est transféré par la commande u (t) est en mouvement, i.e.
X1 == Xi (t), le théorème 4 se modifie légèrement. Plus exactement,
soit u (t), t o t i 1 , une commande admissible transférant le point
1 . ( ) " l ,. t t . dX1 1 ( 1 2 n )
.1;0 en e pOInt X1 t 1 a Instan t i e SOIt -;- == q , q, . . ., q
dt t=t1
l.ln vecteur tangent à la courbe Xi (t) à l'instant t i . Après l'introduction
de la variable auxiliaire x n + 1 == t il résulte que la variété S 1 ne sera
plus une droite parallèle àl'axe x n + 1 ,mais une courbe (x (8), x; (8),. . .
. . ., x (8), 8) où 8 est un paramètre. La tangente à cette courbe en
58
PRINCIPE DU MAXIMUM
[Ch. 1
le point 8 === t 1 est définie par le vecteur (ql, q2, . . ., qn, 1) et, par
conséquent, la condition de transversalité s'écrit sous la forme
n
1JJv (t 1 ) qV + 'Pn+1 (t 1 ).1 == o.
\'=1
D'où il vient en vertu de la relation (60)
n
al! ('1' (t 1 ) , X (t 1) , t 1) === - 'i' n + 1 (t 1) == 1p v (t 1) q \' .
\'=1
Enfin, la fonction dl! ('i' (t), x (t), t) étant, en vertu de (60) et (59),
une primitive pour
n
rJ/ a (X (t ; U (t), t) '\Ja (t),
<x=o
nous avons:
n t n
,di! ('Ij1 (t), x (t), t) = '\Jv (tl) qV + \ L; iJ/ a (x (t u (t), t) '\Ja (t) dt. (64)
v=1 ii <x=o
Ceci n'est autre que la relation qui doit remplacer la deuxième
égalité (62) dans le théorème 4; les relations (63) prennent: donc la
forine
n
1p 0 (t 1) 0, &fI ('i' (t 1) , X (t 1) , t 1) === 'i' v (t 1) qV . ( 65 )
\'=1
Le reste du théorèlne 4 demeure en vigueur.
C. Considérons, enfin, le problèn1e optin1al non autonome aux
extrémités libres. Limitons-nous au cas d'une extrémité droite
libre. Soit S1 (t) une variété de dimension r, mobile et dépendant
différentiablement de t. Le problème consiste à chercher une comman-
de admissible u (t), t o t t 17 telle que le point dont le Inouvement
est régi par la loi (55) avec la condition initiale x (t o ) == Xo arrive à
un instant t 1 sur la variété S 1 (t 1 ) et telle que la fonctionnelle (56)
prenne sa valeur minimale.
. Précisons tout d'abord la notion de « variété mobile ». Soit dans
un espace de dimension n + 1 engendré par les variables Xl, x 2 , . . .
. . ., x n , t, une variété .S de dimension r + 1 définie par le systèIne
d'équations
f d Xl, x 2 , ..., x:' t) = 0, }
f 2 (Xl, x 2 , ..., X , t) == 0,
.... .......
fn-r (Xl, x 2 , ..., Xn, t) == O.
On suppose plus loin que les premiers membres de ces équations
admettent des dérivées premières continues en Xl, X 2 ,. . ., X n , t
(66)
ii 7.] LE PHINCIPE DU MAXIMUM POUR LES SYSTÈMES NON AUTONOMES 59
et que le rang de la matrice fonctionnelle ( ; ) soit égal à n - r
en chaque point de la variété S:. Considérons maintenant dans l'es-
pace X engendré par les variables Xl, x 2 , . . ., x n le système d' équa-
tions
f 1 (Xl, x 2 , ..., x n , t *) == 0,
f 2 (,Tl, x 2 , ..., X n, t *) === 0,
(67)
f n - r (Xl, X 2 , ..., X n, t *) == 0,
obtenu à partir du système (66) en particularisant t == t*. En vertu
des hypothèses faites, le système (67) définit dans l'espace X une
variété continûnlent différentiable de dimension r que nous désigne-
rons par S1 (t*). En modifiant t* nous obtenons toute une famille
de yariétés SI (t) dont la position et la forme varient (d'une manière
générale) en fonction de t. D'où la notion de « variété mobile S 1 (t) ».
Supposons que u (t) et x (t) sont les solutions cherchées, et dési-
gnons par T 1 le plan tangent, en x (t 1 ), à la variété S1 (t 1 ). L'ensemble
des vecteurs (ql, q2, . . ., qn, 0) tangents en le point (x (t 1 ), t 1 )
à la variété S étant de dimension r, et la variété S:: de dimension
supérieure à r, il existe des nOlnbres ql, . . ., qn tels que le vecteur
(ql, . . ., qn, 1) soit tangent à la variété S (en le point (x (t 1 ), t 1 )).
] es nombres ql, q2, . . ., qn nous permettront justement d'écrire
]es relations (64) et (65) auxquelles doit satisfaire le vecteur'i' (t).
] nfin, comme au 6, nous dirons que le vecteur 'i' (t) ==
:== (tpo (t), "'1 (t), . . ., "'n (t)) vérifie la condition de transve salité
il l'extrémité droite t f , si le vecteur", (t 1 ) == ('iJ1 (t 1 ), 1.P2 (t 1 ), . . .
. . ., 1.Pn (t f )) est orthogonal au plan T 1 (i.e. au plan tangent en x (t 1 )
il la variété S 1 (t 1 )). Sous ces conditions formulons 1 'hypothèse sui-
vante (qui est une généralisation du' théorème 3 au cas non auto-
nome).
Thé 0 r è m e 3*. Pour que u (t) et x (t) soient solutions du pro-
blème optimal non autonome à extrémité droite libre, il est nécessaire
qu'existe un vecteur fonction 'i' (t) continu et non nul, satisfaisant aux
conditions du théorème 4 où les relations (62), (63) sont remplacées par
les relations (64), (65), et de plus à la condition de transversalité au
[>oint t 1 .
Cette assertion découle aisément du théorème 3 après introduc-
tion de la nouvelle variable xn+l == t (cf. démonstration du théorè-
rne 4). 0 bservons que si la variété S 1 est immobile, les relations (64),
(65) coïncident avec les relations (62), (63) car dans ce cas le vecteur
(0, 0, . . ., 0, 1) est tangent à la variété Si.
D. Déduisons lnaintenant du théorème 4 une condition nécessaire
analogue pour le problème en temps optimal. Autrement dit, consi-
60
PRINCIPE DU MAXIMUM
[Ch. t
dérons pour un point dont le mouvement est régi par la loi (55) le
problème consistant à le faire passer en un temps optimal d'un état
initial donné xo à un état donné Xi. En vue de résoudre ce problème
posons dans le théorème 4 fO (x, u, t) == 1. La fonction QJ£ s'écrit.
alors sous la forme
n
c27t ('i', x, t, u) = 'lIJ0 + 'lIJvf" (x, u, t).
)'=1
Introduisant le vecteur 'lIJ == ('lIJ1, 'lIJ2' . . ., 'lIJn) et la fonction
n
H ('lIJ, x, t, u) = 'lIJv!" (x, u, t),
'\'=1
nous pouvons écrire les équations (55) et (58) (à l'exception de l' équa-
tion (58) pour i == 0 qui est désormais inutile) sous la forme du systè-
me hamiltonien
dx i a}]
([t - a1. i '
d'Pi aIl
dt == - ax i '
i == 1, 2, ..., n.
(68)
(59)
i == 1, 2, ..., n,
Pour des valeurs fixes de 'lIJ, x, t la fonction JI est une fonction
du paramètre u; soit
lW ('lIJ, x, t) == sup H ('lIJ, x, u, t).
uEU
En vertu de la relation H ('lIJ, x, t, u) == Q/{ ('i', x, t, u) - 'lIJo
il vient
M (11', x, t) == dIt ('i', x, t) - 'lIJ0,
et les conditions (61), (62) prennent maintenant la forme
H ('lIJ (t), x (t), t, u (t)) == M ('lIJ (t), x (t), t) == G//t ('i' (t), x (t), t) - '" 0 ==
t n
= J iW (x (t1 u (t), t) '\Jv (t) dt - '\Jo >
ti ,,= 1
f n
:;;> ) a/v (x (t ; u (t), t) '\Jv (t) dt.
ti ,,=1
Nous avons par conséquent le théorème suivant.
Thé 0 r è m e 5. Soit u (t), t o t t i , une commande admis-
sible transférant le point représentatif de la position Xo à la position
X1, et x (t) la trajectoire correspondante (voir (55) ou (68)), telle que
x (t o ) == Xo, X (i 1 ) == X1. Pour que la commande' u (t) et la trajectoire
x (t) soient optimales (au sens du temps optimal) il est nécessaire qu'exis-
8.]
PROBLÈMES À TEMPS FIXE
61
te un vecteur fonction'" (t) == ("'i (t), "'2 (t), . . ., "'n (t» non nul et
continu, correspondant aux fonctions u (t) et x (t) (voir (69) tel que:
1 0 quel que soit t, t o t t i la fonction H (", (t), x (t), t, u)
de la variable u E U atteigne au point u == u (t) son maximum
H ('1' (t), x (t), t, u (t» == M (", (t), x (t), t); (70)
2 0 soit vérifiée la relation
t n
M (1\1 (t), x (t), t) > J a/v (x (t 't u (t), t) 1\1v (t) dt. (71)
t 1 \'= 1
Si par ailleurs les grandeurs", (t), x (t) et u (t) vérifient le système (68)
(69) et la condition 1 0 , la différence entre le premier et le second membres
de la relation (71) est constante, si bien qu'il suffit de vérifier la relation
(71) seulement à un" instant qùelconque' t, t o t t f ; au lieu de
(71) il suffit par exemple de vérifier la relation
M ('1' (t f ), x (t f ), t i ) > O.
(72)
E. Si le point Xf en lequel le point Xo est transféré par la comman-
de u (t) au lieu d'être immobile est libre, i.e. si Xi == Xf (t), le théorè-
me 5 se modifie légèrement. Plus exactement soit u (t), t o t t i ,
une commande admissible transférant le point représentatif de la
position Xo à la position Xi (t f ) à l'instant t f . Posons
dXi 1 ( 1 2 n )
- dt == q , q , ..., q ·
t=t1
Alors (cf. (64), (65» les relations (71), (72) s'écrivent
n t n
M (1\1 (t), x (t), t) > 1\1v (ti) qV + J a/v (x (t u (t), t) 1\1v (t) dt, (73)
\'=1 Li \'=1
n
M ('" (t 1 ), X (t f ), t i ) > 'l'v (t f ) qv. (74)
\'=1
Le reste du théorème 5 demeure en vigueur.
Le problème à extrémité droite libre se traite d'une manière ana-
logue (cf. pages 58-59).
9 8. Problèmes à temps fixe
A. Supposons nlaintenant que nous avons à résoudre le même
problème optimal que dans le 2 (ou dans le 7, i .e. les fonctions fa
dépendent du temps), sauf que le temps de départ (de la position xo)
t 0 et le temps d' arri vée t f en Xi son t pré a 1 a b 1 e men t
don nés, i.e. le temps t i - t o est fixe. La solution de ce problème
se déd ui t aisélnen t des précédentes.
62
PRINCIPE DU MAXIMUM
[Ch. 1
Comme dans le paragraphe précédent ajoutons au système d'équa-
tions
dx i i
dt==f (x,u,t), i==1, ...,n
(7,5)
l'équation
dxn+l == 1
dt
avec la condition initiale xn+l (t o ) == t o . Alors xn+l == t et nous som-
mes amenés à résoudre le problème optimal suivant.
Etant donnés deux points (xo, t o ) et (X1, t 1 ) dans l'espace de phase
de dimension n + 1 engendré par les variables Xl, . . ., x n , Xn+l
et le système d'équations
dx i _ f i ( n+1 ) 1
- x,u,X , i==, ...,n,
dxn+1 == 1
dt
régissant le mouvement du point représentatif; on demande de trouver
une commande u (t) transférant ce point de la position (xo, t o ) à l'instant
t o à la position (X1, t 1 ) et minimisant la fonctionnelle
if
J = J fO (x, u, x n +1) dt. (76)
to
Dans ce cas, l'instant t 1 d'arrivée en le point (x 1 , t 1 ) peut ne pas être
considéré comme fixe (car en vertu de la relation xn+l == t le point
représentatif ne peut arriver en (X1, t 1 ) qu'à l'instant t 1 ) de sorte qu'on
peut appliquer le théorème 1.
En vertu du théorème 1, pour résoudre ce problème nous deyons
introduire la variable x O , former la fonction
n
Q7t* ==' Q7C + 'Pn+1 === 'Pa/a (x, u, xn+1) + lPn+1
a=O
et étudier le système d'équations suivantes par rapport aux variables
auxiliaires:
d'Pi
dt
d1Pn+1
dt
f)Qf(} . 0 1 }
- f)x i ' l == , ,..., n,
8Qf(}
-fit · )
(77)
Les relations (16), (17) du théorème (1) s'écrivent ll1aintenant
QJt (11' (t), x (t), t, u (t)) + 'Pn+1 (t) == &1t ('i' (t), x (t), t) + 'Vn+1 (t),
'Po (t o ) 0, 0ft ('i' (t), x (t), t) + 'P n +1 (t) = 0,
8.1
PROBLÈMES À TEMPS FIXE
63
ou encore
QJt ('i' (t), x (t), t, u (t)) == QI!! ('i' (t), x (t), t), 'Po (t O ) 0, (78)
dit ('i' (t), x (t), t) + 'lPn+1 (t) == O. (79)
Si toutes les grandeurs 'Po (t), 'Pi (t), . . ., 'Pn (t) s'annulaient à un
instant t, on aurait QJ{; ('i' (t), x (t), t, u (t)) == 0, d'où 'Pn+1 (t) == 0
(voir (78), (79)), ce qui est impossible. Par conséquent "-P 0 (t), . . .
. . ., 1pn (t) est une solution non n u Il e dll système (77). Ce qui
permet de négliger la fonction 'Pn+i (t) et la relation (79). Nous obte-
nons de ce fait le théorème suivant.
Thé 0 r è m e 6. Soient u (t), t o t t 17 une commande admis-
sible transférant le point représentatif de la position Xo à la position
Xi et x (t) la trajectoire correspondante (voir (75)) telle que x (t o ) == Xo,.
X (t i ) == Xi (les instants t o et ti-sont fixes). Pour que u (t) soit solution
du problème optimal à temps fixe posé, il est nécessaire qu'existe un
vecteur fonction 'i' (t) == ('Po (t), 'Pi (t), . . ., 1Pn (t)) non nul et
continu correspondant aux fonctions u (t) et x (t) (voir (77)) tel que:
1° quel que soit t, t o t t i la fonction QJB ('i' (t), x (t), t, u)
de la variable u E U atteigne au point u == u (t) son ma.ximum
&t ('i' (t), x (t), t, u (t)) == Q;/t ('i' (t), x (t), t);
2° la fonction "-p 0 (t) soit non positive (ce qu'il suffit de vérifier à un
instant quelconque t de l'intervalle t o t t i puisque, d'après (77),.
"-Po == const).
Soulignons que ce théorème résout le problème à temps fixe dans
la même mesure què le théorème 1 résout le problème à temps non
fixe. La réduction du nombre de conditions (plus exactement, l'ab-
sence par rapport au théorème 1 de la condition &If ('i' (t i ), x (t i )) ==
=== 0) est compensée ici par le fait que le nombre de paramètres incon-
nus diminue d'un, car le temps t i de passage de la trajectoire par le
point Xi est désormais don n é.
B. Considérons maintenant le problème à temps fixe et à extré-
Irrités Xo et Xi libres. Désignons par S 0 et Si les variétés (dans l' espa-
ee engendré par Xl, . . ., x n ) dans lesquelles doivent être choisis.
les points extrêmes Xo et Xi. Nous sommes alors amenés à résoudre le
problème aux extrémités libres dans l'espace engendré par les va-
riables Xl, x 2 , . . ., X n , x n + l . Les extrémités (xo, t o ) et (Xi' t i ) de
la trajectoire cherchée doivent précisément se trouver respectivement
sur les variétés S 0 et S1, où Si est constituée des points de la forme
(x, ti), x E Sb i == 0, 1. Considérant les conditions de transver-
salité (théorème 3) pour les variétés S 0 ' Si et négligeant comme
précédemment la coordonnée xn+l, nous constatons que le théorème 3
reste valable (dans la même formulation) et donne la solution du
problème à extrémités libres lorsque le temps est fixé. Les théorènles
64
PRINCIPE DU MAXIMUM
[Ch. 1
1 et 3 s'appliquent par conséquent au problème à temps fixe, si dans
le théorèm9 1 on néglige la deuxième des relations (17).
Voyons en particulier le cas où (dans le problème à temps fixe)
l'extrémité droite est entièrement libre.
Autrement dit, considérons le problème: trouver une commande
admissible u (t), t o t t 1 , telle que la trajec toire correspondante
(voir (75)) partant de la position initiale Xo à l'instant t o minimise
la fonctionnelle (76); l'instant t 1 e'St fixé, le point x (t 1 ) peut être
quelconque. C'est un problème à extrémité droite libre où la variété
S t coïncide avec l'espace X tout entier, engendré par les variables
Xl, x 2 , . . ., x n . Par conséquent t 0 u t vecteur de cet espace est
tangent à la variété Sl et la condition de transversalité nous donne
"'1 (t 1 ) = '4'2 (t 1 ) = · · · = '-Pn (t 1 ) = O. D'où il résulte que '4'0 =1= 0,
et nous pouvons donc poser '4'0 == -1. Ainsi '4' (t 1 ) == (-1, . . ., 0)
et nous obtenons le théorème suivant.
Thé 0 r è fi e 7. Pour qu'une commande admissible u (t), t o
t t 1 , et la trajectoire correspondante x (t) (voir (75)) soient solutions
du problème optimal (75), (76) à extrémité gauche fixe Xo et extrémité
droite libre (t o et t 1 étant donnés), il est nécessaire qu'existe un vecteur
fonction", (t) == (11'0 (t), 11'1 (t), . . ., '4'n (t)) non nul et continu, cor-
respondant aux fonctions u (t) et x (t) (voir (77)) tel que:
1 0 quel que soit t, t o t t 1 , la fonction aJ8 ('" (t), x (t), t, u)
de la variable u E U atteigne au point u == u (t) son maximum
0Jt (", (t), x (t), t, u (t)) == &It (", (t), x (t), t);
2° '1' (t 1 ) = (-1,0, . . ., 0).
9 9. Lien entre le principe du maximum et la méthode
de programmation dynamique . '.
Dans ce paragraphe nous allons brièvement nous pencher sur le
lien existant entre le principe du maximum et la méthode de pro-
grammation dynamique de R. Bellman.
La méthode de programmation dynamique fut élaborée pour
les besoins de la commande optimale de processus d'un caractère
plus général que les processus décrits par les systèmes d'équations
différentielles. Aussi la méthode de programmation dynamique
revêt-elle un caractère plus universel que le principe du maximum.
Néanmoins, à la différence de ce dernier, cette méthode n'a pas été
démontrée avec la rigueur voulue dans les cas où l'on pourrait en
user comme un précieux instrument euristique.
Il est naturellement intéressant de savoir si la méthode de pro-
gralnmation dynamique s'applique au problème optimal formulé
dans le 2. La démonstration de la méthode de programmation dyna-
mique donnée par Bellman suppose qu'aux candi tions naturelles
du problème (voir notre théorème 1) s'ajoute une condition fonda-
9.]
MÉTHODE DE PROGRAMMATION DYNAMIQUE
65
rnentale: la dérivabilité de la fonction û) (x) définie plus loin. Cette
supposition ne découle pas de la position du problème, elle revêt
plutôt un caractère de restriction, restriction qui comme nous le
verrons plus bas n'est pas remplie même dans les cas les plus simples.
Cette supposition faite, la méthode de programmation dynamique
ramène à une équation aux dérivées partielles que nous appellerons
équation de Hellman. Cette équation (sous certaines conditions sup-
plémentaires) est. équivalente au système hamiltonien (14), (15)
et à la condition du maximum (16), (17).
Nous allons exposer ici la méthode de programmation dynamique
et montrer son lien avec le principe du maximum. Pour simplifier
les choses, considérons uniquement le problème en temps optimal.
Fixons un point Xi de l'espace X et soient u (t), t o t t 17 une
commande optimale transférant (d'après la loi (5)) le point repré-
sentatif d'une position Xo E X à la position Xi' et X (t) la trajectoire
optimale correspondante. Désignons par T (xo) le temps de passage
optimal t i - t o du point Xo au point Xi. (Le point Xi étant fixe, il ne
figure pas dans la désignation du temps de passage.) Par consé-
quent, la fonction T (xo) est définie sur l'ensemble Q de tous les
points de l'espace X d'où est possible un passage optimal en Xi.
La condition auxiliaire utilisée habituellement pour démontrer le prin-
cipe de programmation dynamique (condition que nous allons aussi
adopter) est que l'ensemble Q soit ouvert dans l'espace X et que la fonc-
tion T (x) admette des dérivées partielles continues par rapport aux coor-
données du point x.
Au lieu de la fonction T (x) on introduit généralement la fonction
ù) (x) = - T (x).
Puisque x (t), t o t th est une trajectoire optimale et toute
portion de trajectoire est elle-même une trajectoire optimale quel
que soit t, t o t t i , on a
ù) (x (t» = - T (xo) + t - t o .
Donc,
n
n
"" 8ro(x(t)) ta (x (t), u (t)) = "" 8ro (x (t)) dxa (t) _ dro (x (t)) -1 (80)
L.J ôx a L.J axa dt - dt -.
a=1 a=t
Soit maintenant un point quelconque v. du domaine de commande
U. Considérons un point représentatif' se déplaçant de la position
x (t) sous l'action d'une commande constante égale à v. Au bout
d'un intervalle de temps infiniment petit dt > 0, ce point occupera
la position x (t) + dx où le vecteur' dx = (dx 1 , . . ., dx n ) est tiré
des relations
dx i = fi (x (t), v) dt; i = 1, . . ., n.
(81)
5-01339
66
PRINCIPE DU MAXIMUM
[Ch. 1
Si maintenant du point x (t) + dx nous nous rendons d'une façon
optimale en Xi' il nous faudra un temps égal à T (x (t) + dx). Donc t
le temps global mis pour' aller optimalement du point x (t) au point
Xi est égal à T (x (t) + dx) + dt. Ce temps ne peut être infé-
rieur au temps de passage optimal T (x (t)), i.e. a lieu la relation
T (x (t) + dx) + dt T (x (t)), ou ce qui est équivalent
û) (x (t) + dx) - ù) (x (t)) dt.
En vertu de (81) on peut encore écrire
n
ôm (x (t)) f a ( X ( t ) V ) dt dt
.L.J ôxa , . ,
a=l
ou bien
n
oro (x dt)) j'J' (x (t), v) 1, v EU.
(}x
a=l
Les relations (80) et (82) montrent que
(82)
n
sup ôm(x(t)) ja(x(t), v)==1,
vEU axa
a=1
de plus, la borne supérieure est atteinte pour v == u (t). Puisque par
chaque point x E Q passe une trajectoire optimale aboutissant au
point Xi' nous arrivons à la conclusion que la fonction ù) (x) vérifie
dans le domaine Q l'équation suivante, non classique, aux dérivées par-
tielles que nous appellerons équation de Bellman:
n
sup oro (x) fa (x, u) = 1; (83)
uEU dx a
a=l
de plus la borne supérieure est atteinte pour un certain u E U (précisé-
ment pour la valeur de la commande optimale au point x) et la fonction
û) (x) est non positive et ne s'annule qu'au point Xi.
Ceci n'est autre que le principe de la programmation dynamique
appliqué au problème considéré.
Nous allons maintenant montrer comment du principe de la
programmation dynamique se déduit le principe du maximum;
nous supposerons à cet effet que la fonction û) (x) est deux fois con-
tinûment dérivable. Par suite, la fonction
n
g (x, u) = o:x ) fa (x, u)
cx=l
(84)
(voir (83)) admet des dérivées premières continues par rapport
à Xl, . . ., x n . Du principe de programmation dynamique il vient
9.]
MÉTHODE DE PROGRAMMATION DYNAMIQUE
67
aussitôt (voir (80) et (83)) que si u (t) est une commande optimale
transférant le point représentatif de Xo en Xi' et que X (t) soit la trajec-
toire correspondante, alors pour t, t o t t 1 , fixe, la fonction
g (x, u (t» de la variable X E X atteint son maximum (qui est égal
à 1) au point x = x (t): Il s'ensuit que
âg (x u (t» = 0, i = 1, ..., n, to k;;;,tl'
En dérivant (84), il vient
n
)l a 2 m (x ( )) fa (x (t), u (t)) +
LJ ôxaôx1.
a=l
n
+ â(fJâ Jt)) . â/a (x ; u (t)) = 0, i = 1, ..., n; (85)
a=1
ces relationrs sont vérifiées le long de toute trajectoire optimale.
Nous avons plus loin
n
a 2 m (x ( )) fa (x (t), u (t)) ==
LJ ôx a ax 1
(.(=1
n
== ( am (x .(t)) ) dxa (t) == ( am (x .(t») )
LJ axa ax 1 dt dt ax 1
a=1
et les relations (85) prennent la forme
n
( am (x (t)) ) = _ aja (x (t), u (t») . am (x (t))
dt axi LJ axi axa ' i == 1, ..., n.
a=1
Ainsi, le long de chaque trajectoire optimale les grandeurs
1101. ( t ) = am (x5 t » . 1
'fl ax 1 ' l == , ..., n
( 6)
vérifient le système linéaire d'équations différentielles
n
d'i'i (t) == _ aja (x (t)., u (t» 1101 (t) 1
dt L.J ax 1 'fa, i = , ..., n.
a=1
(87)
Par ailleurs, l'équation de Bellman (83) s'écrit, en vertu de (80),
sous la forme
n n
Li 1pa(t)ja(x(t), u(t))=sup Li 1Pa(t)ja(x(t), u)==1. (88)
a=1 U(U a=1
5*
68
PRINCIPE DU MAXIMUM
[Ch. 1
Les relations (87) et (88) coïncident avec le principe du maximum,
quant à la relation (86), elle lie explicitement les grandeurs '\Pi (t)
à la fonction ro(x). Soulignons encore, ainsi qu'il résulte de (88),
que les mouvements optimaux peuvent toujours être réalisés de
telle sorte que le long des trajectoires optimales ait lieu l'égalité
H ('1' (t), x (t), u (t)) = 1. (89)
Rappelons que toutes ces conclusions n'ont de valeur que si la fonc-
tion ffi (x) est deux fois continûment dérivable. Sans cette condition
supplémentaire, la démonstration de la relation (89) n'a pas de sens.
Remarquons que dans tous les exemples traités dans le 5, la
fonction (ù (x) n'a d met pas d e d é r i v é e s pre m i ère s
aux points situés sur les lignes de commutation (ce que l'on établit
directement par des calculs). Etant donné que c h a que trajectoire
optimale passe pendant un certain intervalle de temps le long de la
ligne de commutation, la condition de dérivabilité de la fonction
(ù (x) n'est remplie sur aucune trajectoire. Et par conséquent même
dans les cas les plus simples, les conditions nécessaires à l'établis-
.sement de l'équation de Bellman ne sont pas remplies.
CHAPITRE 2
Démonstration du principe
du maximum
S 10. Commandes admissibles
Nous allons donner ici une définition exacte de la classe des com-
lnandes admissibles (cf. 9 1) et décrire les plus importantes de ces
classes. Le domaine de commande U sera représenté par un ensemble
arbitraire d'un espace vectoriel Er *) de dimension r.
Nous allons étudier ici non seulement des commandes continues
par morceaux, mais des commandes bien plus générales. Une com-
]nande u (t), t o t t 1 (i.e. une fonction u (t) à valeurs dans le
domaine de commande U) est mesurable si pour tout ensemble ou-
vert 0 c Er' l'ensemble des valeurs de t telles que u (t) E 0 est
mesurable (au sens de la mesure de Lebesgue) sur l'intervalle t o
t t 1 . La borne est comprise dans le sens habituel, i.e. une com-
mande u (t), t o t t b est bornée si l'ensemble des points u (t),
t o t t b admet dans l'espace Er une a d h é r e n c e c 0 m -
p a c t e.
Dans la suite nous supposerons qu'a été fait choix d'une classe
de commandes D; on appellera admissibles les commandes apparte-
nant à cette classe. Tout ce qu'on demande à la classe D, c'est qu' el-
le satisfasse aux trois conditions suivantes:
1) Les commandes u (t), t o t t 1 , de la classe D (i.e. les com-
mandes admissibles) sont mesurables et bornées.
2) Si u (t), t o < t t 1 , est une commande admissible, v up. point
arbitraire de l'ensemble U et. t'et t" deux nombres tels que t
t' t" t 1 , alors la commande U1 (t), t o t t 1 , définie par
la formule
( ) _ { V pour t' < t t",
Ut t - , "
u (t) pour t o t t et t < t t 1 ,
\
est aussi admissible.
3) Si l'intervalle t o t t 1 est partagé en un nombre fini
d'eintervalles partiels sur lesquels la commande u (t) est admissible,
*) Les raisonnements cités plus bas valent intégralement pour le cas où U
est un sous-ensemble quelconque d'un certain espace topologique de Hausdorff
à base dénombrable. Une légère modification de la démonstration permet de
lever la condition d'existence d'une base dénombrable. Dans le texte nous nous
limiterons toutefois au cas, le plus simpe et suffisant parfaitement aux applica-
tions, d'un sous-ensemble d'un espace vectoriel de dimension r.
70.
DÉMONSTRATION DU PRINCIPE DU MAXIMUM
(Ch. 2
alors cette commande est admissible sur l'intervalle t o t t 1 tout
entier. Une commande adqIissible sur un intervalle partiel est,admis-
sible aussi. Une commande déduite d'une commande adm.issible
U (t), t o t t 1 , par une translation du temps (i.e. la commande
Ut (t) = u (t - ex), t o + ex t t 1 + ex) est aussi admissible.
Comme classe de commandes admissibles 0 n peu t par exemple
prendre l'ensemble de toutes les commandes mes u rab 1 e s et
b 0 r née s. Cette classe de commandes admissibles contient, de
toute évidence, une autre classe quelconque de conlmandes admis-
sibles, aussi la désignerons-nous par le symbole Dmax.
On pourrait encore prendre l'ensemble de toutes les commandes
con t i nue spa r m 0 r c eau x dont il a été question dans
le chapitre 1. '
Enfin comme classe de commandes admissibles nous avons l'en-
semble des commandes con s tan tes par m 0 r c eau x (i.e.
des cQmmandes u (t), t o t t 1 , telles que l'intervalle to', t t 1
puisse être divisé en un nombre fini d'intervalles partiels sur chacun
desquels)a commande u (t) est constante). Cette classe de commandes
admissibles étant contenue dans une classe quelconque de commandes
admiss'ibles par suite des conditions 2) et 3), nous la désignerons
par le symbole D min .
Dans toute la suite de ce chapitre nous supposerons, sans le
spécifier, qu'a été fixée une fois pour toute une classe de commandes
admissibles que nous désignerons par le symbole D.
L'étude des commandes mesurables (et pas seulement des com-
mandes continues par morceaux) n'est pas dictée par le souci d'une
plus grande généralisation mathématique. En fait, dans le ,chapi-
tre 3, pour démontrer le très important thé 0 r è nl e d'e x i s-
t e n c e, nous serons forcés de faire appel aux commandes nlesu-
rables (bien que dans l'énoncé définitif du théorème ne figurent que
des commandes constantes par morceaux).
Soulignons quelques propriétés, importantes pour la suite, des
fonctions mesurables. Soit u (t) une fonction mesurable quelconque
définie sur l'intervalle a < t < b et à valeurs dans le domaine de
commande U: Nous dirons que le point e de l'intervalle a < t < b
est un point régulier pour la fonction u (t), si, quel que soit le voi-
sinage 0 c U du point u (8), est vérifiée la relation
1 - mes (u- 1 (0) nI) 1
lm = ,
mes 1..0 mes 1
OÙ u- 1 (0) désigne l'ensemble des points t de l'intervalle a < t < b
tels que u (t) E 0, l un intervalle quelconque contenant le point 8,
et mes la mesure lebesguienne d'un ensemble. Il est, éyident que
tou t P 0 i n t d e con t i nui t é de la fonction' il (t) est un
point .régulier de cette fonction (car si 1 'inter ,alle l renfermant le
point e est suffisamment petit, alors le u- 1 (0)). Si donc la fonc-
10.]
COMMANDES ADMISSIBLES
71
t ion u (t) est continue par morceaux, alors tous les points de l'inter-
valle a < t < b, sauf un nombre fini d'entre eux, sont des points
réguliers pour la fonction u (t). Il s'avère *) que si u (t) est une fonc-
tion lnesurable quelconque, l'ensemble de tous les points réguliers
admet une mesure complète sur l'intervalle a < t < b, Ï.e. tous les
points presque de l'intervalle a < t < b sont des points réguliers pour
la fonction u (t).
Soit ensuite g (t, u) une fonction réelle continue du couple de
variables t E (a, b), u E U et u (t), a < t < b, une fonction mesu-
rable b 0 r née à valeurs dans U. Si 8 est un point régulier pour la
fonction u (t), on a alors
8+q8
I g ( t, u ( t)) dt = f, (q - p) g (e, u (e» + 0 (f,), ( 1 )
9+p£
où p et q sont des nombres réels arbitraires, B un infiniment petit
positif et 0 (8) un infiniment petit d'ordre supérieur par rapport
à 8, Ï.e. lim 0 (ë) ==.0; l'intégrale est prise au sens de Lebesgue.
£-0 ë
La relation (1) se déduit aisément de la définition du point régu-
lier. Soulignons que si la fonction g est de plus continue en le para-
mètre v appartenant à un ensemble c 0 m p a c t N (par exemple
à un ensemble borné fermé d'un espace vectoriel de dimension finie),
alors la formule (1) reste valable:
9+q8
J g (t, u (t), 'V) dt = f, (q - p) g (e, u (e), v) + 0 (f" v), v EN, (2)
8+p£
la quantité 0 (8, v) étant uni for m é m e'n't en v d'un ordre de
petitesse supérieur par rapport à B, Le. 0 (ë, v) tend uniformément en
ë
'V E lV vers 0 lorsque B -+ o. .
Faisons encore quelques remarques sùr les équations différen-
tielles à seconds membres mesurables **). Soit le système
dz i _ h i ( lm ) 1 2
dt - Z , ..., z , t, u, i == , ,..., m.
(3)
Les seconds membres des équations (3) sont continus en l' ensem-
ble des variables Zl, Z2, . . ., zm, t, u 'et- continûment dérivables par
*) Cette assertion découle aisément de ce que-presque tous les points d'un
ensemble mesurable arbitraire sont des points de densité (voir, par exemple,
F. Ris s et B. S e k e 1 f a 1 v i d i - Nad « Conférences sur l'analyse fonc-
tionnelle» (en russe), Moscou 1954, p. 21; 1. Nat ans 0 n « La théorie des
fonctions d'une variable réelle )} (en russe), Moscou 1957, p. 285.
**) Voir C. Car a the 0 d 0 l' Y « Vorlesungen über reelle Funktionen »,
Leipzig 1927, p. 665'; D. S'a n son e t «Equatiç>:Q. différentielles ordinaires )}
(en russe), Moscou 1954, p. 120.
72
DÉIV[ONSTRATION DU PRINCIPE DU MAXIMUM
[Ch. 2
rapport à Zl, Z2, . . ., zm. Soit u (t) une fonction mesurable bornée
quelconque, définie sur l'intervalle t o :::;; t :::;; t 1 et à valeurs dans
U. Nous allons considérer des fonctions a b sol ume n t con -
t i nue s Zl (t), . . ., zm (t) vérifiant presque partout sur une cer-
taine partie de l'intervalle t o t t 1 les relations
dz;/t) = hi (Zl (t), ..., zm (t), t, u (t)), i = 1, 2, ..., m.
Nous appellerons sol u t ion du système (3), cor r e s p 0 n -
dan t à la commande u (t), chacun des systèmes de fonctions
Zl (t), . . ., zm (t). Cette définition des solutions du système (3)
ne modifie pas (pour une commande u (t) donnée arbitrairement) les
princi paux théorèmes de la théorie des équations différentielles et
notamment le théorème d'existence et d'unicité des solutions. D'une
façon générale, la solution du système (3) n' est pas d é f i -
nie sur l'i n ter v a Il e t 0 u t e n t i e r t o t t 1 sur
lequel est donnée la commande u (t) (et, par conséquent, où sont
donnés les seconds membres du système (3)). Cependant, si le
système (3) est 1 i n é air e en Zl, . . ., zm, toute solution de ce
système est définie sur l'intervalle t o :::;; t t 1 t 0 u t e n t i e r
de définition de la commande u (t).
Lorsque les seconds membres du système (3) dépendent de
plus continûment d'un certain paramètre 11, alors ont lieu les
théorèmes ordinaires de dépendance continue des solutions par
rapport aux paramètres. En particulier, les solutions du système
(3) sont continues par rapport aux yaleurs initiales. Par ailleurs,
les « accroissements» des fonctions z pour une petite variation des
valeurs initiales satisfont à un s y s t è m e ordinaire d'é qua -
t ion s a u x var i a t ion s (cf. 12).
S 11. Formulation du principe du maximum
pour une classe quelconque de commandes admissibles
Comme dans ,le chapitre précédent nous allons considérer le
système d' équa tions différentielles
dx i f i ( l 2 n l r ) - f i ( ) 1 2 (4)
dt = x , x , ..., x , u , ..., u = x, u, i = , ,..., n,
ou, sous une forme vectorielle,
d:e
dt =1 (x, u).
(5)
Les fonctions
fi (Xl, x 2 , ..., x n , u) et
ôfi (xl, :e 2 , . . ., :en, u)
ôx;
11.]
FORMULATION DU PRINCIPE DU MAXIMUM
73
(i, j == 1, 2, ., n) sont supposées données et continues sur le pro-
duit direct X X U où U est l'adhérence de l'ensemble U dans l'es-
pace Er.
Comme dans le chapitre précédent introduisons la fonctionnelle-
in tégrale
i1
J = 1 JO (x (t), u (t» dt
to
(6)
où /0 satisfait aux mêmes conditions que les fonctions fi, i
== 1, 2, . . ., n. Posons le problème suivant: parmi toutes les com-
-ntandes admissibles u == u (t) transférant le point représentatif de la.
position Xo à la position Xi trouver celle qui minimise la fonctionnelle (6)
(t o et t i ne sont pas donnés à l'avance). Nous conserverons dans ce.
chapitre aussi les termes de « commande optimale» et de « trajec-
toire optimale ».
Textuellement, comme dans le chapitre 1, le problème optimal à
résoudre se formule de la manière équivalente suivante.
Etant donnés dans l'espace de phase de dimension n + 1, engendré
par les variables x O , Xl, . . ., x n , un point xo === (0, xo) et une droite
n parallèle à l'axe XO et passant par le point (0, xo). Parmi toutes les'
commandes admissibles u == u (t) telles que la solution correspondante
x (t) du systeme
dx i f i ( ln )
dt == x , ..., x , u ,
i === 0, 1, ..., n
(7}
avec la condition initiale x (t o ) === xo coupe la droite Il, trouver celle-
qui minimise la coordonnée X O du point d'intersection avec la droite n.
En vue de fprmuler le principe du maximum, introduisons comme-
dans le chapitre 1le système d'équations
n
d'Pi == _ a/a (x, u) I)hl'Y , i == 0 , l ' ... , n
dt Lj axi
a=O
(8)
pour les inconnues auxiliaires 'Po, 'Pi' . . ., 'Pn et la fonction
n
o7t ('1', x, u) == ('1', f (x, u)) = 'Pa fa (x, U),
a=O
qui permet d'écrire les équations (7) et (8) sous la forme du système-
hamiltonien
dx i aQfe
dt - a'Pi '
d'Pi aQfe
dt - - ax i '
i=O, 1, ..., n,
i = 0, 1, ..., n.
(9}
(10}
74
DÉMONSTRATION DU PRINCIPE DU MAXIMUM
[Ch. 2
En se donnant une commande arbitraire u (t), t o t t 17 de la
classe D (Le. admissible) et une condition initiale x (t o ) == Xo, on
peut trouver la trajectoire x (t) == (X O (t), Xl (t), . . ., x n (t)) cor-
respondante (i. e . satisfaisant au système (9)). Supposons qu'elle
soit définie sur l'intervalle t o t t 1 tout entier. En portant alors
les fonctions u (t) et x (t) dans les seconds membres du système
(10), nous obtenons un système linéaire en 1po, 1p1, . · ., 1pn dont les
-coefficients sont définis et continus sur l'intervalle t o t t i tout
entier . Nous dirons que toute solution
\)' (t) == (1po (t), 1pi (t), ... ., 1Pn (t))
de ce système (celle-ci est aussi définie sur l'intervalle t o t t1
tout entier) est une solution du système (10) correspondant aux fonc-
tions u (t) et x (t). Soulignons que les vecteurs fonctions x (t) et
11' (t) sont absolument continus (comme étant les solutions des systè-
mes d' équa ti ons différentielles).
Pour des valeurs fixes (constantes) de 'i' et x, la fonction QJt de-
vient une fonction du paramètre u EU; posons
ait (\)', x) = sup o7t (\)', x, u).
uEU
Une égalité vraie pre s que par t 0 u t sera représentée par
le signe (==). Autrement dit, si CPi (t) et CP2 (t) sont deux fonctions
de la variable t définies sur l'intervalle t o -< t -< t 1 , l'écriture
CPl (t) (==) CP2 (t)
signifiera que les fonctions coïncident presque partout.
Le but du présent chapitre est la démonstration du principe du
maximum (théorème 8) et des conditions de transversalité.
Thé 0 r è m e 8. Soit u (t), t o < t t 1 , une commande admis-
sible telle que la trajectoire correspondante x (t) (voir (9)) issue à l'ins-
tant t o du point xo, soit définie sur l'intervalle t o t t 1 tout en-
tier et passe à l'instant t 1 par un point de la droite II. Pour que soient
optimales la commande u (t) et la trajectoire x (t) il est nécessaire qu'e-
xiste un vecteur fonction non nul et absolument continu \)' (t) ==
== (11'0 (t), 11'1 (t), . · ., 1Pn (t)) correspondant aux fonctions u (t) et
x (t) (voir (10)) tel que
1 0 la fonction QJ8 (\)' (t), x (t), u) de la variable u E U atteigne son
maximum
QJ8 (\)' (t), x (t), u (t)) (==) oJIt (\)' (t), x (t)) (11)
au point u == u (t) presque partout sur l'intervalle t o t t 1 ;
2 0 à l'instant final t 1 aient lieu les relations
, ,
1po (t 1 ) -< 0, olt (\)' (t 1 ), x (tl)) == o. (12)
11.]
FORMULATION DU PRINCIPE DU MAXIMUM
75
k')i par ailleurs les grandeurs'i' (t), x (t) et u (t) satisfont au système
(9), (10) et à la condition 1°, alors les fonctions'lp.o (t) et cYlt ('i' (t), x (t))
de la variable t sont constantes de sorte qu'on peut vérifier les relations
.(12) pas forcément à l'instant t 1 , mais à un instant quelconque t de
l'intervalle t o t t 1 .
Le théorème 8 reprend presque textuellement le théorème 1 for-
Inulé au chapitre 1. La seule différence c'est que le théorème 8 est
valable pour t 0 u t e classe D de commandes admissibles tandis que
le théorème 1 n'est valable que pour la classe des commandes con-
tinues par morceaux. Par ailleurs, la condition de maxinium (11)
Il'est satisfaite que pre s que par t 0 u t, alors que dans le
théorème 1 elle est partout remplie (voir égalité (16), chapitre 1).
Il est aisé de comprendre que le théorème 1 découle du théorème 8.
i\.ppliquons en effet le théorème 8 au cas où la classe D coïncide avec
la classe des commandes continues par morceaux. Désignons par N
l'ensemble des points de l'intervalle t o t t 1 en lesquels est
-satisfaite la condition de maximum (11). Autrement dit, si t E N,
on a
6Je ('i' (t), x (t), u (t)) QJe ('1' (t), x (t), v) (13)
quel que soit v E U. L'ensemble N admettant sur l'intervalle t o
t t 1 une mesure complète, et la commande u (t) appartenant à D,
i.e. est continue aux extrémités de l'intervalle t o t t 1 et à
g a u che de tout point de discontinuité (voir en page 12 la con-
vention sur les valeurs aux points de discontinuité), il existe pour
"tout point 't' de l'intervalle t o t t1 une suite de points Ti, T2,
.. · ., 't'Tu · .. appartenant à N, convergeant vers T, telle que
lim u (Th) = u (T). En vertu de (13) nous avons
h-+ 00
QJt ('i' (Th), x (Th), u (Th)) QJ8 ('i' (Th), x (Th)' v), V E U.
.QJe étant une fonction continue en ses arguments 'i', x et u et les fonc-
iions 'i' (t) et x (t) étant continues, on a
lim cl7e ('1' ('th), x (Th), v) = QJ8 ('i' ('t), x ('t), v).
h oo
])'une façon analogue, on a
lim $t ('i' ('th), x ('th), u ('th)) = 6Je ('1' ('t), x (T), U (T)
h oo
(puisque lim u (Th) = u (T)). Comparant les trois dernières rela-
h-.. 00
tions, on a
QJ8 ('i' (T), x (T), U (1')) QI8 ('i' (1'), x ('t), v)
(quel que soit v EU), i.e4
QJ8 ('i' (1'), X (1'), U (T)) = al/t ('1' ('t), X (1')).
76
DÉMONSTRATION DU PRINCIPE DU MAXIMUM
[Ch. 2'
Donc, la condition de maximum est remplie en t 0 u t point 't de
l'intervalle t o t t 1 . Ce qui démontre le théorème 1 (à condition
que soit vrai le théorème 8).
Le théorème 8 sera démontré dans les quatre paragraphes suivants.
9 12. Système d'équations aux variations
et son système adjoint
Dans les démonstrations qui vont suivre nous rencontrerons sou-
vent un paramètre positif 8, que nous considérerons comme étant
un infiniment petit du premier ordre. Les grandeurs aussi bien vec-
torielles que scalaires, d'un ordre de petitesse su périeur (en 8) se-
ront désignées par le symbole 0 (8) (Le. lim 0(8) = 0). Pour dési-
B O 8
gner les grandeurs d'un ordre de petitesse supérieur par rapport à 8,
nous utiliserons 1 e m ê m e symbole 0 (8) (de sorte que par exem-
ple 0 (8) + 0 (8) = 0 (8)).
Soit u (t) une commande admissible quelconque définie sur l'in-
tervalle t o t t 1 et x (t) = (XO (t), Xl (t), . . ., x n (t)) = (X O (t)?
X (t)) - la solution correspondante du système (7) avec la condition
initiale x (t o ) = xo. Désignons par y (t) la solution correspondant à
la même commande u (t) et issue (au même instant t o ) d'un point.
voisin de Xo
Yo = xo + 8 0 + 0 (8)
(14)
où o est un vecteur constant (Le. ne dépendant pas du paramètre
8) de l'espace X. La solution y (t) est de la forme
y (t) = x (t) + 8ÔX (t) + 0 (8),
(15)
où ôx (t) = (ÔX O (t), Ôx 1 (t), . . ., ôx n (t)) est un vecteur ne dépen-
dant pas de 8, défini par le système suivant d'é qua t ion s a u x
variations:
n
d (1 Xi ) = aji (x (t), u (t» ôxa., i = 0, 1, ..., n, (16)
t axa
a=O
a vec la condition initiale
ôx (t o ) = o.
(Dans le deuxième membre de la relation (16) la sommation pourrait
s'opérer de 1 à n, car les fonctions fi (x, u) ne dépendent pas de xo.)
Rem a r que 1. Dans la formule (15) la grandeur 0 (8) dépend
certes aussi de t, i.e. est de la forme 0 (8, t). Elle possède cependant
uni for m é men t en t un ordre de petitesse supérieur par rap-
12.]
SYSTÈME D"ÉQUATIONS AUX VARIATIONS
77
port à 8, i.e. le rapport 0 (8, t) tend vers 0 uniformément en t E [t o , t 1 ]
8
lorsque 8 -+ O.
Rem a r que 2. Supposons que dans la formule (14) les gran-
.deurs So et 0 (8) dépen'dent continûment d'un paramètre v variant
dans un ensemble c 0 m p a c t N (i.e. sont de la forme So (v),
.() (e, v)) et, de plus, que la grandeur 0 (8, v) soit, uni for ID é -
nl e n t en v E N, d'un ordre de petitesse supérieur par rapport à 8
(Le. que le rapport 0 <:' 'V) tend uniformément en 'V ENvers 0 lorsque
-+ 0). La formule (15) reste alors vraie et de plus ôx (t) dépend dé-
sormais de v E N, quant à 0 (e) qui dépend aussi de v, i.e. est de la
forme 0 (8, t, v), elle possède uni for ID é men t en v E N et
t E [t o , t l ] un ordre de petitesse supérieur par rapport à 8 (Le.
() (e, t, 'V), -+ 0 uniformément en t et v lorsque 8 -+ 0).
8
Les équations (16) permettent d'associer à chaque vecteur So =
== ôx (t o ) une famille de vecteurs St = ôx (t) (pour t > t o ). Nous
conviendrons de dire que St = ÔX (t) est un vecteur 1 i é issu du
point x (t). Donc, chaque vecteur So, donné au point Xo définit un
champ de vecteurs {St} le long de la trajectoire x (t). Nous dirons
que les vecteurs de ce champ se déduisent du vecteur initial So par
une translation le long de la trajectoire x (t).
Désignons par X t l'espace vectoriel déduit de X par une transla-
tion de l'origine des coordonnées en le point x (t), Le. l'espace des
vecteurs liés issus du point x (t). Le vecteur St = ôx (t) est un élé-
nlent de l'espace Xt. Désignons ensuite par At, to la transformation
de l'espace X to dans l'espace Xt transportant tout vecteur So de
l'espace X t 0 en le vecteur St de l'espace X t, déd ui t de So par une
translation le long de la trajectoire x (t). Le système (16) étant li-
néaire et homogène, la transformation At. to est linéaire et non dé-
générée. Par ailleurs, il est évident qu'elle est homogène, i.e. qu'elle
envoie l'origine des coordonnées de l'espace X to dans l'origine des
coordonnées de l'espace X t.
Si au lieu de t o et t on considère des instants quelconques t'et
t" (pris dans l'intervalle sur lequel sont définies la commande u (t)
et la solution x (t)), nous définissons d'une façon analogue une trans-
formation non dégénérée, linéaire et homogène, A tIf, t' de l'espace
X t' dans l'espace X tIf. II est évident que ces transformations linéaires
jouissent de la propriété suivante (E étant la transformation iden-
tique) :
At" t' = E; Atm, t".A t ", t' = At,", t'.
(17)
Par définition des transformations At, to' les vecteurs At. to (So)
constituent une famille de vecteurs déduits de So par une translation
78
DÉMONSTRATION DU PRINCIPE DU MAXIMUl\'I
[Ch. 2-
le long de la trajectoire x (t), et vérifient donc le système (16) :
n
..:£ [ A ( )] i = " afi ex (t), u (t)) [ A ( )] a
dt t, to '00 L.J axa t, to '00 ,
a=O
i=O, 1, ..., n. (18)
Il est évident que la solution (15) peut s'écrire sous la forme:
y (t) - x (t) = gAt, to (60) + 0 (8) = At, to [y (t o ) - x (t o )] + 0 (g). (19)
Comparons maintenant les systèmes (16) et (8). Ces systèmes sont
linéaires et homogènes et les matrices qui leur sont associées sont
respectivement de la forme:
( afi (x (t), u (t)) )
axa '
' ( _ a/a (x (t) u (t)) ) .
ax'L
Autrement dit, ces matrices se déduisent l'une de l'autre par une
transposition négative, Le. les systèmes (16) et (8) sont adj 0 i n t s.
Remarquons que nous pouvons étudier les systèmes (8) et (16)
seulement dans le cas où a été fait choix d'une commande u (t)"
t o t t 1 , et de la trajectoire correspondante x (t) (Le. la solution
du système (7)), car les fonctions u (t) et x (t) figurent dans les
seconds membres des systèmes (8) et (16). Par suite de la linéarité.
des systèmes (8) et (16) les solutions de ces systèmes peuvent être
étudiées sur l'intervalle t o t t 1 tout entier, si la solution x (t)
est définie sur cet intervalle.
Les systèmes (8) et (16) étant adjoints, il en résulte que si'" (t) ===
== (11'0 (t), 11'1 (t), . · ., 'Pn (t)) est une solution quelconque du système-
(8) et ôx (t) == (ÔX O (t), ôx 1 (t), . . ., ôx n (t)) une solution quelcon-
que du système (16), alors le produit scalaire
n
('i'(t), ôx(t))= 'l'a(t)ôxa(t)
a=O
est constant sur l'intervalle t o t t 1 tout entier. En effet, nous
avons (presque partout sur l'intervalle t o t t 1 )
n n
'l'cd t ) ôx IX (t) = dW:e (t) ôx IX (t) +
a=O a=O
n n
+ 'l'a (t) dÔ : (t) = _ iJl (x ; u (t» '1'(3 (t) ô,xa; (t)-+
a=O a, (3=0
n
+ " '\l'a (t) a/a ex et), u (t» ôx (t) = O.
L.J ax
a, 6=0
12.]
SYSTÈME Dl ÉQUATIONS AUX VARIATIONS
79
Soit, en particulier, un vecteur quelconque 60. Par définition,
le vecteur fonction 6t == At. to (60) est alors solution du systèn1e (16)
(voir (18)). Donc est vrai le lemme suivant.
Lem m e 1. Si 'i' (t) est solution du système (8) et 60 un vecteur
quelconque, donné au point x (t o ), alors sur l'intervalle t O -<.t.::(.t 1
tout entier est vraie la relation
('i' (t), At. to (60)) = const.
Le lemme 1 permet de donner l'interprétation géométrique sui--
vante au système (8). Soit Lo un hyperplan quelconque de l'espace X
passant par le point xo (i.e. par l'origine des coordonnées de l'es-
pace ...cY to). La transformation linéaire At. to transporte 1 'hyperplan
Lo dans un certain hyp plan Lt (passant par le P9int x (t)). De cette
façon donc est engendrée une famille d 'hyperplans {Lt}, dont nous
dirons qu'ils ont été obtenus par translation de l'hyperplan Lo le
long de la trajectoire x (t). L'équation de 1 'hyperplan Lt peut s' écri-
rü sous la forme: .
n
'Pa (t) x a = 0
a=O
(20)
OÙ x a , a = 0, 1, . . ., n sont des coordonnées courantes de l' es-
pace X t et '\{Ja (t) les coefficients de l'équation de cet hyperplan (le
terme libre a disparu car 1 'hyperplan Lt passe par l'origine des coor-
données de l'espace Xt). Nous voulons savoir quelles doivent être
les fonctions 'Pa (t) pour que l'équation (20) définisse pour diffé-
rentes valeurs du paramètre t une famille d 'hyperplans translatés
le long de la trajectoire x (t). Il s'avère que les fonctions 1Pa (t)
peu ven t être tirées du système (8), i. e. si 'i' (t) == ($0 (t), 'Pl (t), . . .
. . ., 'i'n (t)) est une solution quelconque du système (8), alors les hyper--
plans (20) se déduisent l'un de l'autre par une translation le long de la,
trajectoire X (t).
En effet, si les fonctions 'l'a (t), a == 0, 1, . . ., n, vérifient le.
système (8) et si le vecteur 60 est contenu dans 1 'hyperplan
n
,pa (t o ) x a == 0 (Le. le produit scalaire ('i' (t o ), 60) s'annule), alors.
a=O
quel que soit t, le produit scalaire ('1' (t), At, to (60)) s'annule, i.e.
tout vecteur 6t == At, to (60) déduit,de 60 par _une translati n le long
de la trajectoire x (t) est contenu darrs l'hyperplan correspondant
(20). Ceci étant vrai pour tout vecteur 60 contenu dans 1 'hyperplan
Tt
2j 'Pa (t o ) x a 0" on en conclut que les hyperplans (20) se dédui-
a=O
sent l'un, de l'autre par une translation l long de la trajectoire x (t)..
80
DÉMONSTRATION DU PRINCIPE DU MAXIMUl\I
[Ch. 2
9 13. Variations des commandes et des trajectoires
Soit u (t) une commande admissible définie sur l'intervalle
t o < t ti- Faisons choix d'instants Lt, L2, . . ., LS' L tels qu'ils
satisfassent aux inégalités t o < Li L2 . . . LS 't < t 1 et
qu'ils soient des points réguliers pour la commande u (t). Faisons
choix ensuite de nombres non négatifs arbitraires ôt i , _ . ., ôt s '
d'un nombre réel arbitraire (pas forcément non négatif) ôt et de
points Vi, V2, . . ., V s arbitraires (pas forcément distincts) du domai-
ne de commande U. Définissons maintenant comme suit les inter-
valles I l , 1 2 , . . ., Is dépendant de 8. Posons
{ ôt-(ôti +... +ôt s ), si 'ti= L;
Li = - (ôti + . . . + ôt s ), s Ti = Ts < T;
- (ôt i + . . . + ôt}), SI Li = 'ti+1 = . . . = 'tj < 't'j+1 (j < s)
et désignons par Ii l'intervalle
Li + 8li < t 'fi + 8 (li + ôti).
Si donc 'ti = Li+i = · · · = Lj, les intervalles Ii' I i + i , . . ., Ij
sont contigus et se succèdent de gauche à droite; si par contre
l'intervalle Ih n'est pas contigu à droite à l'intervalle suivant
(i.e. si 'th <'fh+i ou k = s), l'intervalle l h admet alors pour extrémité
droite le point Lh lorsque Lh <'f et le point L + 8ôt lorsque 'fh = L.
La longueur de Ii est égale à 8ôt i . Si ôt i = 0, l'intervalle Ii
correspondant est «vide», i.e. n'existe pas.
Pour 8 suffisamment petit, les intervalles It, . . ., 1 s sont
disjoints deux à deux et se situent tous sur l'intervalle principal t o
t < t i , à gauche du point 'f + 8ôt. En supposant que 8 remplit ces
conditions, nous définissons une commande u* (t) sur l'intervalle
t o t < 'f + 8Ôt comme suit:
{ u (t), si t n'appartient à aucun des ensembles
u* (t) = I t ,1 2 , ..., Is,
Vi' si t E Ii.
Nous dirons que la co m nde u* (t) se (léduit par perturbation de la
commande u (t). Par suite de la convention sur les classes de com-
mandes admissibles ( 10), la commande u* (t) est admissible (pour
8 suffisamment petit).
Soit x = S (8), 0 8 80 l'équation paramétrique d'une ligne
continûment différentiable passant par le point Xo pour 8 = 0 et
admettant en ce point un vecteur tangent So ( = d O» ) .
Désignons par x (t), t o < t -<. tit la trajectoire correspondant
(voir. (7)) à la commande il (t) et issue du point xo; 'et par x* (t) la
13.]
VARIATIONS DES COMMANDES ET DES TRAJECTOIRES
81
trajectoire correspondant à la commande perturbée u* (t) et issue
du point S (e). (Le paramètre e est le même dans la commande
perturbée u* (t) et dans l'équation paramétrique de la ligne S (e).)
Puisque la commande u* (t) est bornée et diffère de u (t) seule-
Dlont d'un ensemble de mesure e (ôt 1 +. . . + ôt s ), il découle
aisément du théorème de la dépendance continue des solutions des
équations différentielles par rapport aux valeurs initiales que pour
c suffisamment petit la solution x* (t) est définie sur l'intervalle
to<t-<.'t + eôt tout entier sur lequel est considérée la commande
u * (t). Notre objectif immédiat est de déterminer la position du
point x* ('t + eôt). Nous allons notamment prouver qu'est vraie la
formule
x* ('t + e8t) == x ('t) + eA,;, to (So) + e x + 0 (E), (21)
oÙ x est un vecteur ne dépendant pas de E, défini par l'égalité
x == f(x ('t), U ('t)) ôt +
s
+ 2j A,;,,;. (f(x ('ti), Vi) -f(x ('ti), U ('ti))] ôt i . (22)
i=1 z
Prouvons les formules (21) et (22) par récurrence sur s. En appli-
quant, pour commencer, la relation (1) à la fonction vectorielle
g (t,u) == f (x (t), u) (qui de toute évidence est continue en ses
arguments) et en posant e == 't, P = 0, q = ôt, il vient:
1:+ëÔt
J f (x (t), u (t» dt = f,ôt.f (x (1:), u (1:» + 0 (f,),
1:
ou, puisque x (t) est une solution (absolument continue!) du systè-
nle (7),
x ('t + ëôt) = x ('t) + e[ (x ('t), u ('t)) ôt + 0 (ë). (23)
Si, ensuite, 'ts < 't, alors pour e suffisamment petit, l'intervalle
(t, 't + e8t) est situé à d roi t e du point 'ts, de sorte que sur cet
intervalle la commande u* (t) coïncide avec u (t) et donc
,;+ëÔ t
;x:* ('r + f,ôt) - x* ('r) = J f(x* (t), u* (t» dt =
1:
1:+ëÔt
= , f(x*(t), u(t»dt. (24}
...
1:
I)ar. ailleurs, on voit aisément ( n vertu du théorème de la dépen-
d an ce continue par rapport aux valeurs initiales), que la solution
x* (t) tend uniformément (sÜr l'intervalle t o t 't + eôt tout
6-01339
82
DÉMONSTRATION DU PRINCIPE DU MAXIMUM
[Ch. 2
entier) vers x (t) lorsque 8 O. Donc f (x* (t), u (t)) == j- (x (t),
u (t)) + Si (t) où Si (t) tend uniformémen t (en t) vers 0 lorsque
8 0. D'où il vient:
-r+eôl ,;+eôt
i f(x* (t), u (t)) dt = i f(x (t), u (t)) dt + 0 (e) =
,; ,;
=== X ('t + eôt) - x ('t) + 0 (e) === ef(x ('t), u ('t)) ôt + 0 (ë)
(voir (23)). D'où, en comparant cette relation avec (24), (pour 'ts <
< 't)
x* (1' + e8t) === x* ('t) + ëf (x (1'), U ('t)) 8t + 0 (8). (25)
Trouvons enfin l'accroissement de la fonction x* (t) sur Ii.
Puisque sur cet intervalle
f(x* (t), u* (t)) ===f(x(t), Vi) + S2(t),
où S2 (t) tend uniformément vers 0 lorsque 8 O, alors sur Ii'
l'accroissement
x* ('t i + 8 ( l i + 8t i)) - x * ('t i + 8l i) === x* II.
l
de la fonction x* (t) prend la valeur suiva,nte
X*II.= \f(x*(t), u(t))dt===
l .J
I.
l
= J f(x (t), Vi) dt + 0 (e) = ef(x (1:i), Vi) ôti + 0 (e) (26)
I.
l
(rappelons que la longueur de 1 i est égale à ëôt i et que cet intervalle
se réduit au point 'ti lorsque e -+ 0).
Vérifions maintenant par récurrence les relations (21) et (22).
Pour s === 0 nous avons u* (t) === u (t). D'où (voir (14), (15), (19)):
x* (t) == x (t) + 8At, t o (so) + 0 (8).
En particulier,
x* ('t) - X ('t) === 8A,;, to (So) + 0 (8).
En vertu de (23) et (25) il vient:
x* ('t + 8ôt) - x ('t + 8ôt) === x* ('t) - X ('t) + 0 (ë) === 8A,;, to (£0) + 0 (8),
d'où (voir (23))
x* ('t + e8t) === x ('t + 8ôt) + eA,;, to (So) + 0 (e) ===
=== x ('t) + ef(x ('t), u ('t)) ôt + ëA,;, to (SO) + 0 (8),
et les formules (21) et (22) sont établies pour s == O.
13.]
VARIATIONS DES COMMANDES ET DES TRAJECTOIRES
83
Supposons maintenant que les formules (21), (22) sont démon-
trées pour le cas où le nombre des intervalles If, 1 2 , . . . est
i n f é rie u r à s et prouvons que ces formules sont vraies lorsque
les intervalles I l , 1 2 , . . ., l s sont au nombre de s. Désignons par
le un entier tel que
'tk+1 === 'tk+2 == · · · == 'tg et 't i < 'tg pour i k
(le cas k == 0 n'est pas exclu). Remplaçant le point 't par le point
1's, le nombre ôt par le nombre lk+1 et, enfin, le nombre s par le
nombre i n f é rie u r k, il vient de (21) et (22), en vertu de notre
hypothèse récurrente,
x* ('tg + ëlk+1) == x ('t s ) + ëf(x ('t s ), U ('t s )) lk+1 +
k
.tEA't t (Sa)+B Li A't 'te [f(X('ti)' vi)-f(x('ti)' U('ti))] ôt i + 0(8). (27)
s' 0 i=1 s' l
Ce qui n'est autre que la valeur prise par la fonction x* (t) à l' ex-
trémité gauche de l'intervalle 1 k+1. Etant donné ensuite que les
intervalles I h + 1 , . . ., l s sont contigus, en sommant la relation
(26) po1ir i == k + 1, . . ., s, nous obtenons l'accroissement de la
fonction x* (t) de l'extrémité gauche de Ik+1 à l'extrémité droite
de Is, Le. jusqu'au point 'ts + B (ls + ôt s ) :
s
x* ('t s + B (ls + ôt s )) - x* ('t s + Elk+1) == B Li f(x ('ti), Vi) ôt i -t- 0 (B).
i=k+1
En additionnant cette relation à la relation (27) il vient:
x* ('t s + B (ls + ôt s )) == x ('t s ) + BJ"(X ('t s ), U ('t s )) lk+1 +
s
+ BA,; , t o (Sa) + B f (x (1'i), Vi) ôt i +
s i=k+1
k
+ B Li A't , 't. [J"(x ('ti)' Vi) - f(x ('ti), U (1'i))] ôt i + 0 (B) ==
i=1 s l
== X ('t s ) -t- Ef (x (1's), U (1's)) (lk+1 + Ôt k + 1 + . . . + ôt s ) +
s
+ BA't , t (Sa) + B Li [J" (x ( 't i)' Vi) - f (x ('t s), U ('t s) )] ôt i +
s a i=k+l
k
+ B lj A,; , 't. [J" (x ( 't i ), Vi) - f (x ( 't i ), U ( 't i) )] ôt i + 0 (ë).
i= 1 s z
Puisque A';s.';t == E pour i == k + 1, . . ., s (voir (17)) la der-
nière expression peut s'écrire sous la forme:
x* ('t s + B (ls + ôt s )) ==
6*
:S4
DÉMONSTRATION DU PRINCIPE DU MAXIMUM
[Ch. 3
==X(LS) +8f(x (LS)' U(LS)) (lk+1+Ôt k + 1 + ... + ot s ) + 8.4"S' tO( O)+
S
+ 8 A" , ". [f (x (L i), Vi) - f (.'e (L i ), U (L i ) )] 8t i + 0 (8). ( 28)
i= 1 S l '
Si Lk+1 == LS == L, en vertu de la définition des nombres li nous
avons ls + ôt s == 8t, lk+1 + 8t h + 1 + .,., + 8t s == 8t, et dans ce
cas donc la relation (28) coïncide avec (21) et (22). Si LS < 't, alors
ls + ôt s == 0, lk+1 + 8t k + 1 + . . . + 8t s == 0, et la relation (28)
prend la forme:
x* ('t s ) == X (LS) + 8A,;s', t o (So) +
s
+ ë A" , ". [f(x (Li), Vi) -f"(x (Li), U ('ti))] 8t i + 0 (8). (29)
i= 1 s l
Puisque dans ce cas sur la portion d'intervalle LS < t L la com-
mande u* (t) se confond avec u (t), alors avec une précision d'une
grandeur, d'un ordre de petitesse supérieur par rapport à 8 (voir
12), les vecteurs x* (t) - x (t) pour 't s -< t 't se déduisent l'un
de l'autre par une translation le long de la trajectoire x ( t) (voir (19)) :
. x* (t) -. x (t) == .A t, "s (x * (L s) - x (L s)) + 0 (8) ( t 't s ) .
En appliquant donc à la formule (29) la transformation A", "s'
nous obtenons (voir la deuxieme relation (17)):
x* ('t) - X Cr) == 8A", to (So) +
s
+ ë A",.,;. lf(x (Li), Vi) - f(x (Li), U (Li))] 8t t + 0 (8).
i=l w l
En additionnant enfin la dernière expression et la relation (25)
nous obtenons dans ce cas aussi (i.e. pour LS < 't) les relations (21)
et (22), ce qui achève notre démonstration.
Rem a r que. En analysant la démonstratioÎ1 faite, nous cons-
tatons qu'elle repose sur la formule (1) et les équations aux varia-
tions (formules (14),. (15) et (l6)). Aus i, en tenant compte de la
formule (2) et de la remarque 2 de la page 77, nous aboutissons à la
conclusion suivante., Si toutes les grandeurs 8t 17 8t 2 , . . ., 8t s , 8t
dépendent continûment d'un èertain paramètre v variant dans l'en-
semble compact N, les formules (21) et (22) restent vraies, et, de
plus, la grandeur 0 (8) 'de la formule (21) (qui dépend évidemment de
v) est uni for m é men t e n v d'un ordre de petitesse supé-
rieur par rappo,rt à 8.
, 9 14. Lemmes fondamentaux
Si l'un quelconque des nombres 8t i est nul, on peut le négliger
avec les points correspondants Li et Vi dans la définition de la com-
mande perturbée u* (t) sans que cette dernière soit Inodifiée. Inverse-
14.]
LEMMES FONDAMENTAUX
85
Jnent, l'adjonction de nouveaux points 'ti' Vi pour lesquels 8t i
== 0 ne modifie pas la commande u* (t). S'il est question d'un nom-
bre fin i de commandes ur (t), . . ., u (t) obtenues par perturbation
d 'nne seule et même commande. u (t) pour le même 't, de ce qui pré-
cède nous pouvons considérer que dans la définition des commandes
a (t), . . ., u (t), tous les points 't i1 Vi son t ide n t i que s
et sont pris en quantité ide n t i que, mais que la seule distinc-
tion existant entre ces commandes est qu'elles ne possèdent pas
les mêmes 8t i et 8t. Dans la suite nous nous servirons, mais sans le
spécifier cbaque fois, de cette possibilité de 'considérer que tous les
points 'ti et Vi sont identiques (lorsqu'il sera question d'un nombre
fin i de différentes perturbations d'une même cOlnmande).
Le vecteur x (voir (22)) ne dépend pas de 8, mais dépend. essen-
tiellement du choix des points Li' Vi' L et des nombres 8t et 8t i
(i == 1, 2, . . ., s). Désignons l'ensemble des grandeurs Li' Vi' 't,
8t i, 8t par a :
a == {Tb Vi' T, 8t i1 8t},
et le vecteur (22) par Xa pour en indiquer la dépendance par rap..l
port à ces grandeurs.
Nous supposerons dans ce paragraphe que le point régulier 'L de
la commande u (t) est fi x é et que toutes les perturbations de cette
commande satisfont à la condition t o < 't1 't 2 'Ls
't < t 1 .
Soit le nombre fin i de grandeurs
a' == {'ti, Vi' 't, 8ti, 8t'},
a" == { 't i, Vi' 't, ôti, 8t"},
. . . . . . . . . . . . .
Nous pouvons considérer (voir plus haut) que tous les points 'Li et
Vi sont ide n t i que s pour toutes les grandeurs a', a", . . . (ce
qui est prévu par les notations). Définissons la combinaison linéai-
"1' , + "1" " f- d d ,,, " ff .. t
re l'v a l'v a - ... es gran eurs a, a , . .. a coe lClen s
non négatifs Â', Â", . . . au moyen de la formule *) -
'A 1 a 1 + Â" a" + . . . == {'Li' Vi' 't, Â/8ti + 'A" 8ti + . . ., Iv' 8t' + Â" 8t" + . . . }.
(La non-négati vi té des coefficients Â', Â", . . . est essentielle, sinon
les grandeurs ')../8ti + Îv "8t'[ + . . . pourraient être négatives, ce
qui est inadmissible.)
*) Notons que, d'une façon générale, l'adjonction de nouveaux points 't'i
et Vi pour lesquels ôti == 0 (grâce à quoi tous les points 't'i, Vi de la suite finie des
grandeurs a', a" ... deviennent les mêmes) peut se réaliser de plusieurs maniè-
res. Par suite, la combinaison linéaire Â' a' + Â"a" + . . . aussi est déter-
n1inée d'une manière non univoque. Cependant, on voit aisément que cette non-
unicité n'influe nullement sur les calculs ultérieurs.
86
DÉMONSTRATION DU PRINCIPE DU MAXIMUM
[Ch. 1
A près a voir fai t choix d'une certaine commande u (t), t o t
tt, et de la trajectoire x (t) correspondante, nous allons maintenant
considérer les vecteurs x == xa pour les divers symboles a ('t étant
fixé). Le lemme suivant est évident.
L e ID ID e 2. Si a == Îv' a' + };' a" + . . . (0 ù Îv' ? 0, Îv" ? 0, ...) ,
les vecteurs correspondants x sont liés par la même combinaison li-
néaire
Xa == Â' xa' -t Îv" xa" +. . . .
Ceci découle immédiatement de la 1 i n é a rit é des nombres
8t 1 , . . ., 8t s , 8t dans la formule (22).
Nous considérerons que x est un vecteur lié issu du point x('t),
i.e. est un élément de l'espace X'"C (voir 12). Si nous prenons tous
les symboles a ('t étant fixé), les vecteurs x == xa rempliront un
ensemble [(T: dans l'espace X '"C.
Prouvons maintenant que l'ensemble KT: est un cône convexe *) de
l'espace vectoriel X '"Ce
*) Un ensemble M d'un espace vectoriel X est appelé cône convexe de som-
met au point 0 si 1) il est un cône, Ï.e. avec tout point a distinct de 0, il con-
--+
tient le rayon oa tout entier, 2) il est convexe, Le. il contient le segment qui joint
deux quelconques de ses points. Remarquons que si le cône convexe M ne reffi-
plit pas l'espace vectoriel X tout entier qui le contient, il existe alors dans l'espace
X un hyperplan passant par le somffiet du cône 0 et tel que le cône M est entière-
ment contenu dans l'un des demi-espaces (fermé) défini par cet hyperplan. Un
point x E X est un point intérieur du cône convexe Mc X si l'un de ses voisina-
ges est entièrement contenu dans le cône M. L'ensemble de tous les points
intérieurs constitue l'intérieur du cône M eX.
Soient ensuite Mi et M 2 deux cônes convexes de l'espace X de sommet com-
mun o. Nous dirons que les cônes Mi et M 2 sont séparables dans X s'il existe un
hyperplan qui les sépare, i .e. un hyperplan tel que le cône Mt soit entièrement
situé dans l'un des demi-espaces (fermé) défini par cet hyperplan et le cône M 2
dans l'autre demi-espace. Pour que les cônes Mt et M 2 soient séparables, il est
nécessaire et suffisant que soit reffiplie l'une des deux conditions suivantes:
1) qu'il existe un hyperplan contenant les deux cônes Mt et M 2 ; 2) qu'il n'existe
pas de-point intérieur à la fois à Mt et à M 2 relativeffient à leurs plans portants.
Si donc les cônes Mt et M 2 (de sommet commun 0) ne sont pas séparables dans
X, l'enveloppe linéaire de leurs plans portants se confond avec l'espace X
tout entier et de plus, il existe un point a intérieur à chaque cône Mi et M 2 relati-
vement à leurs plans portants. Dans ce cas, on peut faire passer par le point
a un plan C orthogonal à la droite oa, coupant en a seuleffient le plan portant
du cône M 2 et tel que tous ses points suffisamment proches de a appartiennent
également au cône M17 et de plus l'enveloppe linéaire du plan C et du plan
portant du cône M 2 est confondue avec X. Autreffient dit, une boule de rayon
petit centrée en a coupe le plan C suivant une « aire complémentaire » au plan
portant le cône M 2 . Cette « aire complémentaire » est orthogonale à la droite oa,
est entièrement contenue dans le cône Mt et sa dimension est égale à la diffien-
sion de l'espace X diminuée de celle du cône M 2 .
14.]
LEMMES FONDAMENTAUX
87
En effet, si a' et a" sont deux points de l'espace X 'C' appartenant
à l'ensemble K 'C' i.e. s'il existe des symboles a', a" tels que
, A "A
a == LlX a " a == LlX a "
alors quels que soient Â' , Â" non négatifs nous avons, en vertu du
lemn1e 2:
'l' ' + 'l"" 'l'A -L'l"A A
IV a IV a ==IV LlX a ' 1 IV LlXa"==LlXO,,'a'+Â."a"),
i.e. le point Â' a' +. Â "a" appartient également à l'ensemble K 'C. Ce
qui signifie que Il. 'C est un cône convexe de l'espace X'C (ou, ce qui
est équivalent, un cône convexe de l'espace X admettant le point
x Ct) pour sommet).
Nous appellerons l'ensemble l{ 'C cône d'atteignabilité.
DéITIontrons maintenant deux lemmes qui nous permettront
d'appliquer les constructions exposées précédemment à l'étude des
processus optimaux.
I.J e m m e 3. Soient T (t o < T < tt) un point régulier de la com-
mande u (t), x (t) la trajectoire associée à la commande u (t) et issue
du })oint Xo, et A - une ligne issue du point x (T) et admettant en ce
point un rayon tangent L. Si le rayon L appartient à l'intérieur du
cône [('C (i.e. si tous les points du rayon L, à l'exception de son extré-
mité, sont des points intérieurs à l'ensemble K 'C)' il existe alors une
commande u* (t) telle que la trajectoire correspondante x* (t) issue du
mênLe point Xo passe par un point (distinct de x (L)) de la ligne A.
D é mon s t rat ion. Choisissons sur le rayon L un point
quelconque A distinct de x (L). Traçons à partir de A n vecteurs
et, e 2 , · · ., en de même longueur r, orthogonaux au rayon L et or-
thogonaux deux à deux. Posons ensuite fi == -eh i == 1,2, . . ., n;
nous supposerons que les vecteurs fi sont également issus du point A.
Nous considérons que la longueur commune r des vecteurs et, . . .
. . ., en, fi, . . ., j.n est tellement petite que les extrémités de tous
ces vecteurs appartiennent au cône K'C (ce qui est possible puisque A
est un point i n t é rie u r à ce cône). Désignons enfin par c le
vecteur admettant pour origine le point x (L) et pour extrémité le
point A. Comme les vecteurs
c, c + et, C + e 2 , . · ., c + en, C + ft, C + 1 2 , . . ., C + fn
(issus du poin t x (T)) a pp artiennen tau cône [( 'C' il existe des symbo-
les ao, at, ..., an, a;, ..., a tels que
i1x ao == c, i1x ai == c + eh ..., i1xan == C + en,
i1xa ==C+fb ..., xa ==c+f n.
88
DÉMONSTRATION DU PRINCIPE DU MAXIMUM
[Ch. 2
Définissons maintenant deux fonctions (de toute évidence continues
et non négatives) h + (p) et h- (p) de la variable réelle comme suit:
{ p pour p? 0, { 0 pour p ? 0,
h+ (p) === h- (p) ===
o pour p < 0; -p pour p < O.
Pour (pl)2 + (p2)2 + + (pn)2 1, la formule
a ::.:::: a (pl, ..., pn) ===
n n n
= ( 1 - 1 pi 1) ao + h+ (pi) ai + h- (pi) ai
i=l i=l i=l
défini t le symbole a (pl, . . ., pn) dépendant de n nOlnbres réels
pl, . . ., pn. (En effet, nous avons un nombre fin i de sym-
boles ao, ai,ai et de plus tous les coefficients h+ (pi), h- (pi) et
n
1 - .!. 1 pi 1 sont non négatifs, comme il 'est aisé de le voir.)
n i=l
Le vecteur x correspondant au symbole a === Π(pl, . . ., pn) est,
en vertu du lemme 2 et des relations fi === - eb h+ (p) + h- (p) ===
=== 1 p 1, h+ (p) - h- (p) === p, de la forme suivante:
n
AXa = ( 1- ] 1 pi 1 ) c +
i=1
n n
+ h+(pi)(c+ei)+ h-(pi)(C+fi) =
i=1 i=1
n
=[1+ (-lpil+h+(pi)+h-(pi))JC+
i=l
TI n
+.! 'Y, [h+ (pi) - h- (pi)] ei === C +.!. I piei.
n... nk..J
i=1 i=1
Si donc le point (pl, . . ., pn) parcourt la boule unitaire
(pl)2 + . . . + (pn)2 1 (30)
dans l'espace numérique de dimension n, alors le vecteur xa (plus
exactement, son extrémité) parcourra une boule de din1ension n
dans l'es p ace X't, en l'occurrence la boule de ra y on ..!.- r centrée en A
11
et orthogonale au rayon L. Sous les mêmes conditions, l'extrémité
du vecteur B Xa (tous les vecteurs sont issus du point x ('t), i.e. de
l'origine des coordonnées de l'espace X 't) parcourt une boule E£ de
S 14.]
LEMMES FONDAMENTAUX
89
dimension n, de rayon 8..!- , orthogonale au rayon L ; la boule Ee est
n
centrée au point Ae du rayon L, distant de 8d du point x ('t'), où d
est le module du vecteur c (fig. 31).
Puisque notre raisonnement ne porte que sur des symboles a
qui sont des combinaisons linéaires (à coefficients non négatifs) d'un
nombre fin i de sym oles a o , ah .ai, i== .x(Z}
==1, 2, . . ., n, les pOInts 't'j, Vj, ] == 1,
2, . . ., s figurant dans la défini tion du
symbole a == a (pl, . . ., pn) sont identi-
ques pour tous ces symboles, i.e. ne
dépendent pas de pl, . . ., pn; le point
't est également fixé. Les nombres
8t h . . ., 8t s et 8t (qui ont servi à définir
la commande perturbée u* (t)) dépendent
continûment de pl, . . ., pn. Aussi écri-
rons-nous u (t) et 8t a pour souligner que
les grandeurs u* (t) et 8t dépendent de
pl,. . ., pn. Désignons par x (t) la tra-
jectoire ,x;* (t) issue du point Xo et asso-
ci ée à la commande u* (t), de sorte que
la relation (21) (dans laquelle So == 0,
car le point initial se confond avec Xo FIG.31
pour tous les 8) nous donne:
xci ('t -t- 88t a ) == X ('t) + 8 Xa + 0 (8).
(31)
Notons quo la trajectoire x (t) dépend con t i n û men t des
paramètres pl,..., pn; d'une façon analogue, le non1bre 8t a
dépend con t i n û men t de pl, . . ., pn. Donc, le point
x ('t' + 88t a ) dépend con t i n û men t de pl, . . ., pn, et la
grandeur 0 (8) est uniformément en pl, . . ., pn d'un ordre de peti-
tesse supérieur par rapport à B (voir la remarque de la page 84).
Par conséq uen t, lorsque le point (pl, . . ., pn) décri t la boule (30),
le point (31) décrit (pour tout 8 fixe) un « disque » Fe (i.e. une ilnage
continue de la boule (30) ; le disque peut posséder des points cruno-
daux, etc.). Le disque Fe «coïncide » avec la boule Ee (voir (31)
avec une précision d'une grandeur d'un ordre supérieur de petitesse
par rapport à 8; plus exactement, les points du disque Fe sont dis-
tants des points correspondants de la boule Ee d'une longueur d'un
ordre supérieur de petitesse par rapport à 8 (uniformément pour tous
les points de la boule Ee). Le point d'intersection de cette boule
avec la ligne A (point qui existe pour des 8 suffisamment petits) est
séparé du point x ('t) et de la frontière de la boule Ee d'une grandeur
de l'ordre de 8. Donc, pour 8 suffisamment petit, le disque Fe cou-
90
DÉMONSTRATION DU PRINCIPE DU MAXIMUM
[Ch. 2
pela ligne A en un point *). (fig. 32). Choisissons un tel B. Comme
le disque FE tout entier est composé de points de la forme (31), éta-
blir l'intersection de F e avec la ligne A revient à dire qu'il existe
des pt, . . ., pn (contenus dans la boule (30)) tels que x (T + ë8t a ) E
E A. Autrement dit, en désignant par u* (t) et x* (t) les grandeurs
u (t) et x (t) correspondant aux valeurs choisies de pl, . . ., pn et
.:etc:) en supposant 't -t- e8t a == 't f , on a x*( t o ) ==
1 f
== Xo, x* ('t ) E A, et le lemme 3 est dé-
montré.
\
\
Fe
\
\
\
\
\
\
\L
FIG. 32
Lem m e 4. Si la commande u (t) et
la trajectoire correspondante x (t), t o
< t < t 1 , sont optimales, alors pour tout
point régulier 't (t o < 't < t 1 ) le rayon
L'C, issu du point x ('t) et orienté dans
le sens du demi-axe négatif x O , n' appar-
tient pas à l'intérieur du cône K'C (i.e. pas-
se soit à l'extérieur du cône soit par sa
frontière) .
D é mon s t rat ion. Supposons
que pour un certain 't le rayon L" appartient à l'intérieur du
cône 11.'C. Appliquons le lemme 3 en prenant pour ligne A (et pour
rayon L) le rayon L'C. Il existe alors une commande u*(t) telle que
la trajectoire correspondante x* (t) (issue du même point xo) passe
à un instant 't f > t o par un point situé sur le rayon L'(. Autrement
dit,
X ('tf)==Xi('t), i==1,2, ..., n;
x ('t f ) < X O ('t).
Définissons sur l'intervalle t o t t 1 + ('t f - 't) la commande
u** (t) en posant
{ u* (t)
u** (t) ==
u (t - ('t f - 't)) pour 't f < t t 1 + ('t f - 't).
La trajectoire x** (t) associée à la commande u** (t) et issue du point
xo coïncide de toute évidence sur l'intervalle t o t 't f avec la
trajectoire x* (t) de sorte que, en particulier,
x * ('t f ) -== xi ('t), i == 1, 2, ..., n;
x ('t f ) < X O ('t).
*) L'existence d'un tel point d'intersection paraît « évidente »; la délnons-
tration rigoureuse se fait facilement par les méthodes élémentaires de la top 0 -
log i e (au moyen de la notion d'indice d'intersection; voir par exenlple
V. Bol t i ans k i «La théorie homotopique des applications continues et des
champs de vecteurs », Travaux de l'Institut Steklov, t. XLVII, 1955.
pour t o t 't f ,
(32)
9 15.]
DÉMONSTRATION DU PRINCIPE DU MAXIMUM
91
D'autre part sur l'intervalle L' t t 1 + (L' - T) la trajectoire
x** (t) prend la forme:
x** (t) == x (t - (T' - T)) + p,
(33)
où p est un vecteur constant
p == (x * (T') - XO (L), 0, 0, ..., 0).
( e qu'on obtient immédiatement en portant la solution (33) dans
l'équation (7) et en tenant compte du fait que les seconds membres
du système (7) ne dépendent pas de t et de XO ; le vecteur p est défini
à partir de la con di tion en vertu de laquelle la trajectoire x** (t) doi t
être continue au point de « jonction » T' de ses deux portions.) Pour
t == t 1 + (L' - L) nous obtenons:
x** (t 1 + (T' - T)) == X (t 1 ) + p.
Autrement dit, le point x** (t 1 + (-t' - T)) est situé sur la droite II,
définie dans le 11 (car le vecteur p est parallèle à l'axe XO) et,
de plus,
x * (t 1 + (T' - T)) == XO (t 1 ) + x * (L') - XO (T) < XO (t 1 )
(voir (32)). Or cela contredit l' optimalité de la trajectoire x (t) et de
la commande u (t). Donc l'hypothèse faite en début de démonstra-
tion conduit à une contradiction et le lemme 4 est entièrement dé-
D10ntré.
9 15. Démonstration du principe du maximum
Dans ce paragraphe nous supposerons que x (t), t o t t 1 , est
une trajectoire optimale (joignant le point Xo à un point de la droite
II, voir 11) et u (t) la commande optimale correspondante. Soit T
un point régulier quelconque de la commande u (t). D'après le lem-
n1e 4, le rayon L" n'appartient pas à l'intérieur du cône 1(" de sorte
que celui-ci ne remplit pas entièrement l'espace X. Aussi existe-t-il
un hyperplan d'appui au cône [(" en son sommet, i.e. un hyperplan
l' tel que le cône [(" tout entier est situé sur l'un des deux demi-
espaces fermés définis par l'hyperplan r. (L'hyperplan r jouissant
de cette propriété peut ne pas être unique; les raisonnements ulté-
rieurs sont valables pour un tel hyperplan quelconque.) L'équation
de l'hyperplan r (dans l'espace X ,,) peut s'écrire sous la forme
n
a(Xx a == 0 où xo, Xl, . . ., x n sont des coordonnées courantes.
a=ü
( olnn1e le produit de tous les coefficients aa par un même nombre
non nul ne n10difie pas l 'hyperplan r, nous pouvons considérer (en
ehangeant au besoin les signes de tous les nombres aa) que le cône
n
J( 'C est situé dans le demi-espace n é g a tif ( L aaxa ::(; 0 ). Autre-
a=O
92
DÉMONSTRATION DU PRINCIPE DU MAXIMUM
[Ch. 2
ment dit, pour tout vecteur L\x, défini par la formule (22), on a
(a, x) 0 ( x E l( -c), (34)
où a désigne le vecteur (a o , ai, . . ., an) (car l'ensemble des vec-
teurs (22) n'est autre que le cône ]{-c). En posant dans la fornlule (22)
8t i == 8t 2 == . . . == t$ == 0, on a x == j" (x (L), u (rr))8t, et
d'après (34),
( a, j" (x (L), U (L)) 8 t) o.
Comme cette inégalité est valable quel que soit 8t (négatif ou posi-
tif), il vient
(a, f (x (L), U (L))) == 0,
i.e.
QJt (a, x (L), u (L)) == 0 (35)
(cette relation a lieu si le vecteur a satisfait à la condition (34)).
Désignons par
"" (t, a) == (1Po (t, a), 1P1 (t, a), . . ., 1Pn (t, a))
la solution du système d'équations (8) (correspondant à la commande
u (t) et à la trajectoire x (t) optilnales étudiées) vérifiant la condi-
tion ini tiale
"1' ('t, Ct) == a.
(36)
La solution"" (t, a) est définie sur l'intervalle t o t t i tout entier
puisque le système (8) est linéaire.
Lem m e 5. Si le vecteur a satisfait à la condition (34) alors en
tout point régulier de la commande u (t), contenu dans l'inter-
valle t o < t 't est vérifiée la relation
QJ8 ("" (t, a), x (t), u (t)) == &ft ("1' (t, a), x (t)).
Soit 'ti un point régulier de la commande u (t) contenu dans le SOl1S-
intervalle t o < t 't et Vi un point quelconque de l'espace U. Soit
le symbole a (voir 14) avec un seul point Li (i.e. s == 1) et où 8t h
8t sont respectivement égaux à 1 et 0 :
a == {Li' Vb 't, 1, O}"
Le vecteur x (voir (22)) correspondant à ce symbole a sera alors
égal à
x == A 't, L 1 [," (x ('t 1), V 1) - j" (x (L 1)' U (L 1) ) ] .
D'où il résulte en vertu des relations (34) et (36)
("1' ('t, a), AL, L 1 [j" (x ('t 1)' V 1) - f (x (L 1), u ( L 1 ) ) ] 0
15.]
DÉMONSTRATION DU PRINCIPE DU MAXIMUM
93
et, par conséquent, d'après le lemme 1 et la relation At'l,tl == E
(voir (17))
('i' ('"Ci' a), j" (x ('"Ci), Vi) - j" (x ('"Ci), U ('"Ci))) o.
( ette expression (de par la défini tion de la fonction QJC) peut s'écrire
sous la forme:
QJt ('i' ('"Ci' a), x ('"Ci), Vi) - QJg ('i' ('"Ci' a), x ('"Ci), U ('"Ci)) 0,
et cOll1me cette inégalité est valable pour tout point Vi EU, il vient:
cf)[ ( ('th a), x ('Li), u ('"Ci)) ==
== max QJt ('i' ('"Ci' a), x ('ti), Vi) == ait ('i' ('"Ch a), x ('"Ci)),
VtEU
et le lemme 5 est démontré.
La relation indiquée dans le lemme 5 est également valable pour
t === L (car '"C est un point régulier) :
QJ8 ('i' ('t, a), x ('t), U ('"C)) == aIIt ('i' ('"C, a), x ('"C)).
En vertu donc de (35) et (36) il vient l'assertion suivante.
Lem m e 6. Si le vecteur a satisfait à la condition (34), alors
dit ('i' ('"C, a) , x ('t)) === o.
Lem m e 7. Si une fonction absolument continue 'i' (t) vérifie
presque partout sur un intervalle 1 l'équation (8) et la relation
QJ8 ('i' (t), x (t), u (t)) == C?J!t ('i' (t), x (t)), (37)
alors la fonction alt ('i' (t), x (t)) est constante sur l'intervalle 1 tout
entier.
Ren1arquons tout d'abord que la fonction ait ('i' (t), x (t)) est
'semi-continue inférieurement sur l'intervalle J. Soit en effet t'un
point quelconque de cet intervalle et 8 un nombre positif. Par défi-
nition de la borne supérieure, il existe un point u' E U tel que
QJ8 ('i' (t'), x (t'), u ') c>./It ('i' (t'), x (t')) - .
Par ailleurs, la fonction QJ8 ('i' (t), x (t), u) étant continue en t pour
n === u' fixe, il existe un Ô > 0 tel que pour 1 t - t' 1 < Ô on ait
1 $t ('i' (t), x (t), u') - cW ('i' (t'), x (t / ), u ' ) 1 < .
-Donc, pour 1 t - t' 1 < ô, est vraie l'inégalité
-?lIt ('1' (t), x (t)) == su p cW ('i' (t), x (t), u)
uEU
, > QJ8 ('i' (t), x (t), u') > dit ('i' (t'), x (t')) - ë,
qui lllontre que la fonction a/lt ('i' ( ), x (t)) est semi-continue infé-
rieurement.
94
DÉMONSTRATION DU PRINCIPE DU MAXIMUM
[Ch. 2
Par ailleurs, la commande u (t) étant admissible, l'image de l'in-
tervalle 1 par l'application u admet dans l'espace Er une adhérence
compacte (voir 10), i.e. il existe dans Er un ensemble compact P
tel que u (t) E P lorsque tEl. Posons
m ( 'l', x) == max Q7{ ("', x, u).
uEP
Il est alors évident que
oJ!t ("" x) > m ("" x),
(38)
quels que soient x et 'i'. L'expression (37) signifie que presque par-
tout sur l'intervalle 1 a lieu l'égalité
m (", (t), x (t)) == Q/jt (", (t), x (t))
(car u (t) E P).
Ainsi donc &Il ('" (t), x (t)) est une fonction semi-continue infé-
rieurement, coïncidant presque partout sur l'intervalle 1 avec la
fonction m (", (t), x (t)) et liée avec elle par la relation (38). Il en
résulte que si la fonction m ('i' (t), x (t)) est continue, alors la fonction
C?l!t ('" (t), x (t)) cOl'ncide avec elle par t 0 u t sur l'intervalle 1 (et pour
cette raison est continue). Nous allons maintenant prouver que la
fonction m ('" (t), x (t)) et, par conséquent, la fonction Q/!{ ('" (t), x (t))
es t a b sol ume n t con t i il U e sur l' in ter v aIle 1.
L'intervalle 1 étant compact, il existe dans l'espace engendré
par les variables 1Po, 1P1, . . ., 1Pn, X O , Xl, . . ., x n un ensemble borné
et convexe Q tel que le point ('" (t), x (t)) appartienne à l'ensemble Q
lorsque tEl. Par conséquent, le triplet ('" (t), x (t), u (t)) appartient
à l'ensemble Q X P lorsque t E J. D'autre part, les dérivées partielles
de la fonction QJ8 (",. x.. u) par rapport à 1Pa, x a étant continues en les
variables "', x, u (voir les conditions imposées aux fonctions fi dans
le 11), elles sont bornées sur l'ensemble compact Q X P. Il s'en-
suit qu'il existe une constante K > 0 (ne dépendant pas de u) telle
que quels que soient ("', x) E Q, (",', x') E Q et u E P est vérifiée la
relation
1 QJt ("" x, u) - QJt (",', x', u) 1 Kd,
(39)
où d est le plus grand des nombres l1Pi -1Pi 1, 1 Xi - X'i 1, i ==
== 0, 1, . . ., n. Soient ("" x) et (",', x') deux points de l'ensemble Q
et u et ut des points de l'ensemble P tels que
m ("" x) == QJB ("', x, u), m ('i", x') == QJ£ (",', x', u ' ).
Les inégalités sont immédiates
0Jt ('i', x, u') 0Jt ("', x, u), JJl (",', x', u) QJt (",', x', u ' ),
et en vertu de (39)
-Kd OJ8 ("" x, u ' ) - OJ£ (",', x', u')
15.]
DÉMONSTRATION DU PRINCIPE DU MAXIMU1\I
95
0Je ('i', x, u) - Q}[ ('i", X', U') Kd.
.A.utrement dit,
1 m ('i', x) - m ('i", x') 1 Kd,
où d est le plus grand des nombres l'lI'i -'lI'i 1, 1 Xi - x'i 1, i =
== 0, 1, . . ., n. Il s'ensuit notamment:
1 m ('i' (t), x (t)) - m ('i' (t'), x (t')) 1 Kd, t, t' E l,
où d est le plus grand des nonlbres l'lI'i (t) -'lI'i (t') 1, 1 xi(t) - Xi (t') 1.
De cette inégalité, en vertu de la continuité absolue des fonctions
'\ (t) et x (t), nous concluons aisément que la fonction m ('i' (t), x (t))
est absolument continue.
Prouvons enfin que la fonction m ('i' (t), x (t)) admet presque
partout une dérivée nulle. Par suite de la continuité absolue de la
fonction m ('i' (t), x (t)) et par définition des fonctions x (t) et 'i' (t)
nous avons presque partout sur l'intervalle 1 : la fonction
m ('i' (t), x (t)) est dérivable et les fonctions x (t) et 'i' (t) vérifient
les relations (7) et (8), ou, ce qui revient au même, (9) et (10), et
de plus
m ('i' (t), x (t)) === Q)[ ('i' (t), x (t), u (t)).
Soit t == 't un point quelconque où a lieu ce qui vient d'être dit sur
]es fonctions m ('i'. (t), x (t)), x (t) et'i' (t), et soit t'un point quelcon-
que de l'intervalle 1 distinct du point 't. Alors
m ('i' (t'), x (t')) QJt ('i' (t'), x (t'), U ('t)),
et donc
ln ('l' (t'), x (t ' )) - m ('i' ('t), X ('t)) QJ£ ('i' (t'), x (t'), u ('t)) -
- QJt ('i' ('t), x ('t), U ('t)).
Nous allons maintenant supposer que t' tend vers 't à droite, i .e.
t' - 't e t positif. On ne change donc pas le signe de la dernière
expression en la divisant par t' - 't:
m ('i' (t'), x (t')) -m ('i' Cr), x (1")) Q16' ('i' (t ' ), x (t ' ), U (1")) - Q16' ('i' (1"), x (1"), U (1"))
t' -'t -::? t' - 1" .
En passant aux limites pour t' - 't (t' > 't), il vient
d d
lIt m ('\1' (t), x (t)) It=-r>dT $8 ('i' (t), x (t), u ('t)) It=-r ==
n n
= aQ/& . dlpa (t) 1 + aQJe .
alpa at t=-r axa
a=O a=O
axat
al
j -0
t=T:
96
DÉMONSTRATION DU PRINCIPE DU MAXIMUM
[Ch. 2
(les dérivées sont calculées au point ,;,où ,; et, par conséquent u (,;),
sont fixes). D'une façon analogue, lorsque t' -+,;, t' <,;, nous
obtenons l'inégalité inverse
d
dt m ('i' (t), x (t» It=-r o.
Donc la fonction m ('i' (t), x (t)), tout comme la fonction
(lIt ('i' (t), x (t)) qui co ïnci de avec elle, est une fonction absol umen t
continue admettant presque partout une dérivée nulle. Il s'ensuit
donc que cette fonction est constante sur l'intervalle 1.
Démontrons la propriété suivante importante des cônes K'C-
Lem m e 8. Si ,; et ,;' sont des points réguliers de la commande
u (t) tels que t o < ,;' < ,; < t i , alors A'C'L' (l{L') C K'C où AL, 'C'
est une application de l'espace X L' sur X 1: définie au g 12.
En effet, le cône K 'C' est constitué par des vecteurs dont chacun
peut être représenté, en vertu de (22), sous forme d'une somme de
deux vecteurs:
1X = f(x (,;'), u (,;')) ôt,
s
2X= A'C',-r. [f{X(';i), vi)-f(x{';i), U(';i»)]ôt i .
i=1 z
Il suffit donc de montrer qu'ont lieu les inclusions
A-r, -r' ( iX) E K1:, A-r, -r' ( 2X) E K".
D'après (17) nous avons:
(40)
s
AL, 'C' ( 2X) == A-r, Li [f-(X{';i), Vi)-j'(X{';i), U (';i)] ôth
i=1
et donc a lieu la deuxième des inclusions (40) (puisque ';1
. . . ,; s ,;' < ,;). Prouvons la première de ces inclusions.
Supposons que (pour un certain ôt) le vecteur A L,L' ( 1X) n' appar-
tienne pas au cône K 'C. Il existe alors un hyperplari les séparant,
i.e. il existe des nombres ao, ai, . . ., an tels que le cône K 1: soi t
n
situé dans le demi-espace négatif G:axa ,0, et le vecteur
a=O
A'C'1:' ( 1X) dans le demi-espace positif 0 u ver t, i.e.
(a, A'C,"')( 1X))>0, (41)
où a est le vecteur de composantes (a o , ab . . ., an). Désignons par
'i' (t, a) la solution du système (8) vérifiant la condition initiale
'i' (';, a) = a. Etudions cette solution sur l'intervalle t o t ,;.
Puisque le cône K'C est situé dans le de i-espace négatif, i.e. est
remplie 'la condition (34), il résu}te alors des lemmes 5,7, et 6 que
&ft (", (t, a), x (t» = 0 pour t o t ,;. Puisque par ailleurs ,;'
15,]
DÉMONSTRATION DU PRINCIPE DU MAXIMUM
97
est un point régulier (qui est situé dans l'intervalle t o < t T),
il vient alors d'après le lemme 5
QJ£ ('i' (Tf, a), x (Tf), U (Tf)) == GIIt ('i' (Tf, a), x (-r f )) == 0,
l.e.
('i' (Tf, a), j" (x (T f ), u (-r f ) )) == O.
])' où il s'ensuit d'après le lemme 1 :
('i' (T, a), A-r, -r', ({(x (Tf), u (-r f ))) == 0,
or cette relation contredit l'inégalité (41); le lemme 8 est donc dé-
rnontré.
Soit maintenant T un point régulier quelconque de la commande
u (t), situé dans l'intervalle t o < t < t 1 . Posons K :) ==
==: A ii ,,; (1('L). L'application A t1 .'L étant linéaire, I( :) est un
cône convexe contenu dans l'espace X ii. Les cônes K ) forment une
sui tee roi s san te: si -r f < T sont des points réguliers, alors
d'après le lemme 8 il vient (voir (17))
1( ') == Att, ,;' (K,;') == Att, -r (A-r, 'L' (I{ -r')) c Ail, -r (l( ,,) == K ) ·
(:'est pourquoi l'union (par tous les points réguliers T de l'intervalle
t o < t < t 1 ) de tous les cônes I{ ) est de nouveau un cône convexe
(pas forcément fermé) contenu dans l'espace X tt (admettant l'ori-
gine des coordonnées pour sommet). Nous désignerons ce cône par
]( il et l'appellerons cône limite.
Lem m e 9. Si la commande u (t) et la trajectoire associée x (t),
t o t t 1 , sont optimales, alors le rayon Ltt issu du point x (t 1 ) et
orienté dans le sens du demi-axe négatif X O n'appartient pas à l'in-
térieur du cône K ti.
Supposons, en effet, que le rayon L ti appartienne à l'intérieur
du cône l{ ii. Choisissons un polyèdre convexe M, contenu entièrement
dans l( il et renfermant un point quelconque l E L tl à son intérieur.
1 out sommet du po]yèdre M appartient au cône Ktp i.e. appartient
à un cône I(} ), or comme les cônes K ) forment une suite croissan-
te, il existe un point régulier -r tel que t 0 u s les sommets du poly-
èdre M appartiennent au cône l{ ). Le cône K :) contient donc le
polyèdre M tout entier et le point l est un point intérieur au cône
1( ), ou, ce qui est équivalent, le rayon Ltt appartient à l'intérieur
du cône K ). Le rayon A ,1 ,; (L tt ) appartient alors à l'intérieur du
c.ône A , (K ») = K" (car At";,\ est une application linéaire et
non dégénérée, donc, une application homéomorphe). Le rayon
.fl ,1 " (Lit) se confond avec le rayon L" issu du point x (T) et orienté
dans le même sens que le demi-axe négatif x o . Ceci découle de ce que
les seconds membres du système d'équations aux variations (16)
7-01339
98
DÉMONSTRATION DU PRINCIPE DU MAXIMUM
[Ch. 2:
ne dépendent pas de xo, et, par conséquent, les vecteurs (-1, 0, . . ..
. . ., 0) issus des points de la courbe x (t) et égaux entre eux se dé':'
duisent l'un de l'autre par une translation le long de la trajectoi-
re x (t).
Ainsi le rayon L" appartient à l'intérieur du cône K", ce qui
contredit l'optimalité de la commande u (t) (voir le lemme 4).
Achevons maintenant la démonstration du théorème 8. Soient
II (t), t o t t b une commande optimale et x (t) la trajectoire
optimale associée. Le rayon Lt1 n'appartient pas alors à l'intérieur-
du cône limite If ti (lemme 9), et, par conséquent, il existe un hyper-
plan les séparant, i.e. des nombres Co, Ci' . . ., C n tels que le cône.
n
Kt! soit contenu entièrement dans le demi-espace L: crxXX Ot
(1=0
?1
et le rayon L ti dans le demi-espace L; cax a O. Autrement dit, le
a=O
vecteur (-1, 0, 0, . . ., 0) qui est orienté dans le même sens que
n
le rayon L ti est contenu dans le demi-espace fermé L; cax a O
a,=o
i.e. Co O.
Désignons par'i' (t) = (11'0 (t), 'lJJ1 (t), · . ., lPn (t» la solution dlt
système (8) vérifiant la condition initiale 'i' (t f ) = C où C est le.
vecteur de composantes (co, Ci, . . ., c n ). Le système (8) étant li-
néaire, la solution 'i' (t) est définie sur l'intervalle t o t if tout
entier. Montrons que le vecteur'i' (t) n'est autre que le vecteur dont
l'existence est affirmée par le théorème 8.
Remarquons tout d'abord que x (t) et'i' (t) vérifient les équations.
(7) et (8) ou, ce qui revient au même, (9) et (10). Montrons que la
relation (11) a lieu en tout point régulier de l'intervalle t o < t < t i .
Soit '( un point régulier de cet intervalle. Puisque le cône Il. in et par
conséquent le cône A tn: (If.;), est situé tout entier dans le demi-
n
espace négatif 'lJJa (t f ) x a 0, il vient (par une translation du
rx=O
point x (t l ) au point x Cr) le long ne la trajectoire x (t» que le cône
Ait1,-.;(Att," (11.-.;») = K" tout entier est situé dans le demi-espace
n
'l'a (,;) x a 0 (voir 12). Autrement dit, le vecteur a = 'i' (,;)
a=O '
satisfait à la condition (34). Il s'ensuit que l'assertion du lemme 5,
est valable pour la solution 'i' (t, a) de l'équation (8) vérifiant la
condi tion initiale", ('t, a) = a, or cette solution coïncide manifeste-
ment avec 'i' (t). En particulier (puisque '( est un point régulier),
QJt (", ('(), x ('(), u (-r) = &ft (l!' (1"), X ('t» = 0
(voir le lemme 6).
Ainsi donc est remplie la condition 1° du théorème 8. Il existe en
outre des points en lesquels 1a fonction cIIt ('i' (t), x (t» s'annule (i.e.
16.1
CONDITIONS DE TRANSVERSALITÉ
9S1
en chaque point régulier ,;) et par ailleurs 'Po (t 1 ) = Co O. Pour
vérifier donc la condition 2° du théorème 8 il suffit de démontrer la
dernière assertion de ce théorème sur la constance des fonctions
aIIt ("i' (t), x (t)) et 'Po (t) lorsque "i' (t), x (t), u (t) vérifient le systè-
me (9), (10) et lorsque est remplie la condition 1°. Ceci découle immé-
diatement du lemme 7 et du fait que les fonctions fa ne dépendent
pas de x O , de sorte que la première des équations (8) est de la forme
o = O. Le théorème 8 est donc entièrement démontré. Par la même
occasion, nous avons démontré le théorème 1 du chapitre 1.
S 16. Conditions de transversalité
Nous allons prouver ici le théorème 3 (valable pour une classe
quelconque D de commandes admissibles) que nous avons formulé
au chapitre 1.
Soient u (t), t o t tf, une commande admissible et x (t) la
trajectoire associée issue du point Xo = (0, xo). Soit par ailleurs S 0
une variété continûment différentiable (dans l'espace X) de dimen-
sion ro < n, passant par le point Xo, et T 0 le plan tangent en ce
point à la variété S o. Désignons par .!!7 0 le plan de dimension ro
contenu dans l'espace X et constitué de tous les points (0, x) où x E
E T o. Il est évident que le plan !T 0 passe par le point Xo. En faisant
subir au plan 3' 0 une translation le long de la trajectoire x (t) pour
l'amener au point x (,;), t o < ,; < t 1 , nous obtenons le plan
A 'C. to (Y 0) passant par le point x (,;). Si ,; est un point régulier de
la commande u (t), alors est également défini un cône 1{'C de sommet
au point x (,;). Désignons par QJC 'C l'enveloppe convexe de l'ensemble
A'C. to (Y 0) U K'C. Il est évident que l'ensemble 'C est un cône
convexe ayant son sommet au point x (,;). Ceci posé, démontrons un
lemme généralisant le lemme 3.
Lem ID e 10. Soient ,; (t o < ,; < t 1 ) un point régulier de la
commande u (t), t o t t b et x (t) la trajectoire associée issue du
point xo. Soit par ailleurs A une variété à bord de dimension n9n supé-
rieure à n et contenue dans X de telle sorte que le point x (,;) soit situé
sur ce bord. Désignons par M le demi-plan tangent en x (,;) à la variété
A. Si les cônes 6'JC 'C et M de sommet commun x (,;) ne sont pas séparables.,
il existe une commande u* (t) et un point x E S 0 tels que la trajectoire
x* (t) associée à u* (t) et issue du .point x = (0, x ) passe par un poin
de la variété A non situé sur son bord. .
D é mon s t rat ion. Désignons par n la projection orthogo
nale de la variété Bo'sur le plan To. L'application n considérée non
pas sur la variété So tout entière" mais dans un certain voisinage du
point Xo est un homéomorphisme; donc est définie une application
réciproque n- 1 d'un certain voisinage du point Xo du plan To sur
7*
1.00
DÉMONSTRATION DU PRINCIPE DU MAXIMUM
[Ch. 2
un certain voisinage du point Xo de la variété S o. Si donc S est un
vecteur quelconque situé dans le plan T 0 et issu du point Xo, alors
pour un E > 0 suffisamment petit, est défini le point n- 1 (ES) E
E 8 0 , i.e. le vecteur S définit une 1 i g n e
x == n- 1 (e ), O e < eo,
située sur la variété S 0 et issue du point Xo. Le vecteur est tangent
à cette ligne en Xo, i.e.
n- l (e ) == Xo + e + 0 (e).
D'où il s'ensuit que la ligne (0, n- 1 (e )) E X est issue du point
Xo == (0, xo) et admet en ce point un vecteur tangent S == (0, ):
(0, 1[-1 (eS)) == Xo + eS + 0 (e). (42)
Soit a === {'ti1 Vi' 't, ôt i , ôt} l'ensemble des grandeurs définis-
sant la perturbation de la commande u (t) (voir page 85). Désignons
par x , a (t) la trajectoire issue du point (0, 1[-1 (g )) (à l'instant t o )
associée à la commande perturbée u* (t) (le paramètre e est le même
dans (42) et dans la définition de la commande u* (t)). De (42) et
(21) il vient
x , a ('t + eôt) == X ('t) + e [A-r, to (S) + xa] + 0 (e), (43)
üù le vecteur Xa est défini par la formule (22).
Désignons par s + 1 la dimension de la variété A (et du demi-
plan M). Puisque les cônes 6Jî -r et M ne sont pas séparables, il existe
(voir la note de la page 86) un point a appartenant au demi-plan
M, mais non à son bord, et un plan C de dimension n - s > 0
passant par le point a, tels qu'une boule de rayon petit centrée en
a engendre, en coupant le plan C, une « aire complémentaire » au
demi-plan M. Cette « aire » est orthogonale à la droite passant par les
points x et) et a, et est entièrement contenue dans le cône % '(. Nous
désignerons par E cette « aire complémentaire » qui n'est autre
qu'une boule de dimension n - s. Soient e17 . . ., en -s des rayons
mutuellement orthogonaux de la boule E; posons I.i == -eh i ==
== 1, . . ., n - s. Nous supposerons que les vecteurs et, . . .
. . ., en-s' fl, . · ., fn-s ont pour origine le point a. Les extrémités
de ces vecteurs sont situées sur le cône 6% '( (car E c: r/C '(). Désignons
enfin par c le vecteur d'origine x ('t) et d'extrémité a. Puisque les
vecteurs c, c + ei, c + fi (i == 1, . . ., n - s) d'origine x ('t) appar-
tiennent au cône 6JC 1: et que celui-ci est formé de tous les vecteurs
A '(. t o (S) + a possibles où E T 0' L\x l1 E I{ 1:' il existe dans le
plan To des vecteurs o' i' · · ., n-s' , · · ., -s d'origine Xo
et des symboles ao, ai' · .., an-s,a , · · ., a -s tels qu'on ait
A-r, to (So) + xao = C, A't, to ( i) + xai == c + ei,
A -r, to ( si) + x a == c + rh i == 1, ..., n - s.
1.
16.]
CONDITIONS DE TRANSVERSALITÉ
101
Sous la condition que
(pl)2 + (p2)2 + . . . + (pn-S)2< 1,
(44)
définissons le symbole a(pl, . . ., pn-s) de la même façon qu'à la
page 88, mais en sommant en i non pas de 1 à n, mais de 1 à n - s;
posons par ailleurs
n-s n-s
S (pt, ..., pn-.) = (1- 1 pi 1 ) So + h+ (pin; +
i=1 i=1
n-s
+ h-(pi)sj.
i=1
II vient alors (voir les calculs de la page 88):
n-s
A 1:, to (6 (pl, ..., pn-.» + LlXa(pl, . . ., pn-s) = c + pie;. (45)
i=1
Si donc le point (pl, . . ., pn-s) décrit la boule (44) dans l' esp ace
numérique de dimension n - s, alors l'extrémité du vecteur (45)
décrit dans l'espace X" une boule Et, déduite de la boule E par une
homothétie de centre a et de rapport 1 ln. Sous les mêmes condi tions,
l'extrémité du vecteur
ë [A", to (6 (pl, .. ., pn)) + Xa (pl, . . ., pn-s)]
décrit une boule E e de dimension n - s déduite de la boule Et par
une homothétie de centre x (,;) et de rapport ë.
Pour S == S (pl, . . ., pn-s) et a == a (pl, . . ., pn-s) la trajec-
toire xt, a (t) dépend continûment des paramètres pl, . . ., pn-s de
même d'ailleurs que ôta. C'est pourquoi le point x;, a (,; + ëôt a )
dépend continûment de pl, . . ., pn.-s. Donc, lorsque le point
(pl, . . ., pn--s) décrit la boule (44), le point x!, a (,; + ëôt a ) décrit,
lui, (pour ë quelconque fixe) un certain « disque » F e (image conti-
nue de la boule (44)), « coïncidant » avec la boule E e avec une pré-
cision d'un ordre de petitesse supérieur par rapport à ë. La boule
E e et le demi-plan M (ou, plus exactement, la dernière portion voi-
sine du point x (,;)) sont des chaînes (voir la note de la page 90)
respectivement de dimensions n - s et s + 1, l'indice d'intersec-
tion de ces chaînes étant égal à + 1 et la distance de toute chaîne
à l'extrémité de la suivante étant de l'ordre de ë. C'est pourquoi le
« disque» Fe (distant de Ee d'une grandeur d'un ordre de petitesse
supérieur par rapport à ë) et la variété A (tangente au demi-plan M)
possèdent pour ë suffisamment petit un indice d'intersection égal
à + 1, i.e. pour ë suffisamment petit le disque Fe coupe la variété A
en un point non situé sur le bord de cette variété. Autrement dit,
102
DÉMONSTRATION DU PRINCIPE DU MAXIMUM
[Ch. 2
il existe un B > 0 et des pl, . . ., pn-s tels que le point xt a ('t + eôt a )
appartienne à la variété A, mais n'est pas situé sur son bord. En dé-
signant donc par u* (t) et x* (t) les grandeurs u (t) et xt a (t) cor-
respondant aux valeurs choisies de ê, pl, . . ., pn-s, on constate
que la trajectoire x* (t) commence au point x* (t o ) = (0, rc- l (8£») =
= (0, x:) où x: === n- l (B;) E 8 ° et passe (à l'instant 'L" 'L +
+ eôt a ) par un point de la variété A, non situé Sllr le bord de celle-ci.
Le lemme 10 est donc démontré.
Soient maintenant 'u (t), t o t t 1 , une commande optimale
et x (t) la trajectoire optimale, donnant la solution du problème aux
extrémités libres posé dans le 6. Posons x (t o ) === xo, x (t i ) = X1 ;
définissons les points Xo et Xi de l'espace X en « rejetant », comme
précédemment, la coordonnée « nulle » des points xo, Xi' i.e. Xo =
= (0, XO), Xi === (X O (t 1 ), Xl). Désignons par Ti le plan tangent en Xi
à la variété 8 1 et par Ylle plan (de dimension ri) contenu dans l'es-
pace X constitué de tous les points de la forme (XO (t i ), x) où x E Tl.
Traçons en chaque point du plan !7 1 un rayon parallèle au demi-axe
pégatif xo, et désignons par Q l'ensemble des points de ces rayons.
'ensemble Q est un demi-plan de dimension ri + 1, dont les points
'frontières appartiennent au plan Y 1. Introduisons d'une façon ana-
logue les notations T ° et Y 0' et désignons par t1 1 ' enveloppe con-
vexe de l'ensemble A t1. to (.7"' 0) U If. t1. Donc, le cône 6% t de sommet
.x (t) est défini pour tout point régulier t === 't de la commande u (t)
ainsi que pour t === t 1 . Si t" > t', alors At" ,t' (6% t') C 67î tIf (voir
lemme 8).
Lem m e 11. Les cônes 6% ti et Q de sommet commun au point
x (t 1 ) sont séparables.
En effet, supposons que les cônes QJî tt et Q ne sont pas séparables.
Puisque 6%t1 est l'union des cônes Att. '( (&f''(), il existe un point
régulier 't de la commande u (t) tel que les cônes A t10 '( (6% ,,) et Q
ne soient pas séparables. Considérons ce point 'ta
Désignons par A ti la variété dont le bord est constitué de tous
les points (XO, x) EX, pour lesquels Xo Xo (t 1 ), x E 8 1 . Alors le
demi-plan tangent en X (t 1 ) à la variété Att. se confond avec Q. Etant
donné un point quelconque 11 E Att. désignons par y (t, 1]) la solu-
tion du système (7) vérifiant la condition initiale 1/ (t 1 , 11) === 11.
Nous allons considérer cette solution sur l'intervalle 'L t tt,
où 'L est le point régulier choisi plus haut de la commande u (t).
Lorsque le point 11 décrit la variété Ait, le point 11 ('t,11) décrit lui
aussi une variété A'( avec bord. On voit aisément que le demi-plan
tangent en X ('t) à la variété A" se confond avec A t t '( (Q).
Les cônes Ah." (6% ,,) et Q n'étant pas séparables, les cônes
At1 'C (A t1, " ( ,,» === 6%" et A 't (Q) ne le sont pas non plus. Or
puisque A -r (Q) est un demi-plan tangent à la variété A'(, il existe
16.1
CONDITIONS DE TRANSVERSALIT
103
donc, en vertu du lemme 10, une commande u* (t) telle que la tra-
jectoire x* (t) issue du point x: = (0, x ), où xci E S 0 qui lui est
associée passe par un point !le la variété A,; non situé sur son bord.
Autrement dit, il existe un t' > t o et un point 1] E A ti non situé sur
le bord de la variété A ti tels que
x* (t ' ) = 1/ ('r, 1]). (46)
Définissons maintenant la commande u** (t) sur l'intervalle
iD t t 1 + (t ' - T) comme suit:
{ u* (t) pour t o t t ' ,
u** (t) = u (t _ (t' _ 't)) pour t' < t t 1 + (t' - 1:),
La trajectoire x** (t) associée à la commande u** (t) et issue du
point x; est de la forme (cf. (46)) :
( ) { x* (t) pour t o t t '
x** t = ,
1/ (t - (t ' - T), 1]) pour t ' t t f + (t ' - T).
En particulier, x** (t f + (t ' - T)) = 1/ (t f , 1]) = 1'). Or le point
1) appartient à la variété A ti , i.e. est de la forme 1] = (11 0 , 11) où
11 E 8 1 . Puisque, par ailleurs, le point 1] n'est pas situé sur le bord
de la variété Atp il s'ensuit que 11° < X O (t 1 ). La commande u** (t)
transfère donc le point représentatif de la position x à la position
11 E 8 1 , et en outre la fonctionnelle (6) prend une valeur 110 plu s
pet i t e que pour la commande u (t). Ce qui contredit l'optimalité
de la commande et de la trajectoire x (t). Le lemme 11 est donc dé-
montré. ' '
Il est maintenant aisé d'achever la démonstration du théorème 3.
Les cônes c?7C ti et Q étant séparables, il existe des nombres Co, Cf, . . .
· · ., C n tels que le cône.c?7C ti (et par conséquent K t1 c t1) soit situé
n
dans le demi-espace C(1.x a 0 (où xo, Xl, . . ., x n sont des coor-
a=O
données dans l'espace X ti)' et le cône Q dans le demi-espace
n
c(1.x a o.
'a=O
En particulier, le rayon Lt! (contenu dans le demi-plan Q) est
n
situé dans le demi-espace c(1.x a O. Les nombres Co, Cf' . . ., C n
a=O
jouissent donc de toutes les propriétés mentionnées dans le 9 15 et,
par conséquent, la solution"" (t) du système (8) vérifiant la condi-
tion initiale"" (t 1 ) = C (où c est le vecteur de composantes (co, Ci1 . . .
. . ., cn)) satisfait aux conditions du théorème 8 (ou du théorème 1).
lVIontrons que le vecteur"" (t) satisfait à la condition de transver-
salité aux deux extrémités de la trajectoire x (t). Le plan S 1 (con-
104
DÉMONSTRATION DU PRINCIPE DU MAXIMUM
[Ch. 2
n
tenu dans Q) est entièrement situé dans le demi-espace 2j cax a 0
a=O
.n
et, par conséquent, dans 1 'hyperplan cax a = 0, ou ce qui est
a=O
n
équivalent, dans l'hyperplan lPa (t l ) x a = O. Si maintenant
a=1
11 = (11 1 , · · ., l1 n ) est un vecteur quelconque tangent en x (t l )
à la variété St, i.e. un vecteur situé dans le plan Tt, alors le vecteur
1] = (0, 11) E X est situé dans le plan .!Y t, et par conséquent, dans
n
1 'hyperplan h lPa (tt) x a = O. En d'autres termes, ('\1' (tt), 1]) = o.
a=O
Or comme la coordonnée « nulle » du vecteur 1] est égale à zéro, la
n
dernière relation prend la forme 1P\' (tt) 'Y}" = O. Le vecteur fonc-
,,=1
tion'\l' (t) satisfait donc à la condition de transversalité à l' extré-
mité droite de la trajectoire x (t).
Par ailleurs, le plan Ah ,to ( r 0) c 6%t1 est entièrement contenu
n
dans le demi-espace caXX 0 et, par conséquent, dans l'hyperplan
a=O
n
cax a = 0, ou, ce qui est équivalent, dans l'hyperplan
a=O
n
lPa (tt) x a = O. En d'autres termes, quel que soit le vecteur
a=O
sE 3 0 , le vecteur Atuto (s) est contenu d ns l'hyperplan
n
lPa (tt) x a = 0, l.e.
a=O
('\1' (tt), At, to (£)) =0.
Il s'ensuit, en vertu du lemme 1, que ('\1' (t o ), S) = O. Or tout vecteur
S E y 0 est de la forme S = (0, £), où £ = (£1, . . ., £n) est un
vecteur contenu dans le plan T o. Donc la relation ('\1' (t o ), s) = 0
n
prend la forme 1P\' (t o ) £" = O. Le vecteur fonction '\1' (t) satisfait
'\'=0
donc à la condition de transversalité à l'extrémité gauche de la
trajectoire x (t).
Le théorème 3 est entièrement démontré et par la même occasion
tous les autres théorèmes du chapitre 1.
CHAPITRE 3
Problèmes linéaires en temps
optimal
9 17. Théorème du nombre de commutations
Les problèmes linéaires en temps optimal (i.e. des problèmes où
sont linéaires les équations régissant le mouvement de l'objet étu-
dié) sont importants pour les applications et illustrent bien les ré-
sultats généraux. Le présent chapitre est consacré à l'étude de telS'
problèmes. Nous ne nous contenterons pas seulement d'exposer des
faits découlant immédiatement des théorèmes démontrés plus haut,
nous déduirons de nouveaux résultats et nous démontrerons notam-
ment le théorème d'existence pour les problèmes linéaires en temps
optimal.
Précisons tout d'abord la p 0 s i t ion d u pro b 1 è me. N OTIS
allons étudier un objet dont le mouvement est gouverné par un
système linéaire d'équations différentielles
n r
d.Ii "" i ,, + b i
([t = LJ a"x LJ p uP ,
,,=1 p=1
Nous supposerons que le domaine de commande U est un polyèdre *)
borné, fermé et convexe, situé dans un espace vectoriel Er de di-
mension r, muni des coordonnées u l , . . ., ur. Le paramètre de com-
mande u == (u l , . . ., ur) est donc un point du polyèdre U.
Nous étudierons enfin uniquement le problème en temps opti-
mal, i.e. le problème consistant à minimiser le temps de transfert
ti
t l - t o = j' dt. Nous appellerons le problème optimal ainsi for-
to
mulé problème linéaire en temps optimal.
Le système (1) peut se représenter sous la forme vectorielle sui-
vante:
i == 1, 2, ..., n.
(1)
dx
([t== Ax+Bu,
(2)
*) Un polyèdre fermé convexe dans Er est l'intersection d'un nombre fini de-
semi-espaces fermés, Le. un ensemble de points dans Er vérifiant un système-
n
fini d'inégalités linéaires a uh< i, i == 1,2, . . ., s. S'il est borné (et donc-
h=1
COffipact), ce polyèdre est une enveloppe convexe de ses sommets; il est évident
que le nombre de sommets est fini.
106
PROBLÈl\ŒES LINÉAIRES EN TEMPS OPTIMAL
[Ch. 3
où A : X -+ X et B: Er -+ X sont' des opérateurs linéaires représen-
tés (en coordonnées Xl, . . ., x n , et u l , . . ., ur) respecti vement par
les matrices (a}) et (bk).
Dans tous les théorèmes démontrés dans ce chapitre, nous sup-
poserons (sans le spécifier chaque fois) qu'est remplie la condition
de position commune suivante imposée aux coefficients de l'équa-
tion (2) et à la disposition du polyèdre U:
si west un vecteur orienté dans le sens de l'une des arêtes du polyè-
dre U, le vecteur Bw n'appartient à aucun véritable sous-espace de
l'espace X, invariant re,lativement à l'opérateur A, i.e. les vecteurs
Bw, ABw, ..., An-1Bw (3)
sont linéairement indépendants dans l'espace X.
Dans notre cas la fonction H (11', X, u) (voir théorème 2) est
de la forme
H = (1P, Ax) + (1P, Bu) == 2J 'l J1a xv + 2J '\ J1b uP (1.)
J.t, v J.t, P
et le système auxiliaire (voir formule (19) du chapitre 1):
n
d1l' . v
d/ == - L.I aj 'i'v,
v=1
j = 1, ..., n,
()u, sous la forme vectorielle,
= -A*1jJ,
(5)
où A * est l'opérateur adjoint de A, i.e. un opérateur représenté (dans
le même système de coordonnées) par la transposée de la matrice
(a}) du système (1).
Il est évident que la fonction H qui est considérée comme une
fonction de la variable u E U atteint son maximum en même temps
que la fonction (11', Bu). Désignons par P (11') le maximum de la fonc-
tion ('\f', Bu) qui est considérée comme une fonction de la variable
u E U. Du théorème 2 il vient (voir la formule (20) du chapitre 1)
que si u (t) est une commande optimale transférant le point repré-
sentatif de la position Xo à la position Xi' il existe une solution '\p(t)
,de l'équation (5) telle que
(11' (t), Bu (t» = P (11' (t»). (6)
Or, comme l'équation (5) ne contient pas les fonctions inconnues
x (t) et u (t), toutes les solutions de cette équation peuvent être
facilement déterminées, après quoi il est aisé de trouver toutes les
commandes u (t), solutions de l'équation (6) ; parmi ces commandes
figurent de toute évidence toutes les commandes optimales de l' équa-
tion (2). Voyons comment la condition (6) définit univoquement la
bommande u (t) en fonction de 11' (t).
. 17]
THÉOR ME DU NOMBRE DE COMMUTATIONS
107
Thé 0 r è m e 9. Pour toute solution non triviale'i' (t) de l'équa-
tion (5), la relation (6) définit d'une manière univoque *) une com-
n ande u (t) constante par morceaux et dont les valeurs ne sont autres
que les sommets du polyèdre U.
D é mon s t rat ion. Puisque la fonction
('1' (t), Bu), (7)
q:ui est considérée comme une fonction du vecteur u est linéaire,
elle est soit constante, soit atteint son maximum uniquement sur
la frontière du polyèdre U. Ceci est également valable pour toute
face du polyèdre U. Don"c, la fonétion (7) atteint son maximum soit
.en un sommet seulement du polyèdre U, soit sur toute une face de
ce polyèdre **). Montrons qu'en vertu de la condition de position
commune, la dernière éventualité n'est possible que pour un nombre
fini de valeurs de t.
En effet, supposons qu'il existe sur l'intervalle t o t t f une
infinité de valeurs t en lesquelles la fonction (7) de la variable u E
E U atteint son maximum sur une face (de dimension positive) du
polyèdre U. Puisque U posséde un nombre fini de faces, nous pouvons
choisir un ensemble infini M de t pour lesquels la fonction (7) atteint
son maximum sur une face r (la même pour tous les t E ]VI) du polyè-
dre U. Par conséquent, quel que soit t E M, la fonction (7) de la
variable U est constante sur la face r. Soient Uo et Ui des vecteurs
ayant pour origine l'origine des coordonnées (de l'espace Er) et
pour extrémité une arête de la face r, de sorte que le vecteur w =
= Ut - Uo est orienté dans le même sens que cette arête. Pour t E M
nous avons (puisque la fonction (7) est constante sur la face r)
( , (t), Bw) = ('lf' (t), B (Ut - uo)) =
= ('i' (t), BUt) - ('1' (t), Bu 2 ) = O. (8)
Soient maintenant b l , b 2 , . . ., b n les coordonnées du vecteur
Bw (b l , b 2 , . . ., b n sont constantes puisque west une arête e n -
t i ère men t d é fin i e du polyèdre U). Alors,
( 1p (t), Bw) = b l 1Pt (t) + b 2 1P2 (t) + . . . + bn1Pn (t). (9)
Pllisque les fonctions 'tPi (t), 'i'2 (t), . . ., 'lf'n (t) constituent une solu-
tion'lJ' (t) de l'équation (5) à coefficients constants, elles sont a n a -
.1 Y t i que s, et par conséquent la fonction (9) est aussi analytique.
*) Comme dans le chapitre 1, nous supposons que les commandes considérées
sont semi-continues à gauche et continues aux extrémités de l'intervalle t o
t t1 (voir page 12). Sans cette condition le théorème 9 serait faux, Le. les
valeurs de la fonction U ,(t) "ne seraient pas univoquement définies aux points
.de discontinuité. Il est d:ailleurs clair que les valeurs de la fonction u (t) aux
points de discontinuité 1)e jouent aucun' rôle dans les problèmes étudiés.
**) Nous considérons' que le polyèdre est une face (impropre) de lui-même.
108
PROBLÈMES LINÉAIRES EN TEMPS OPTIMAL
[Ch. 3
Pour tout t E M (i.e. pour un ensemble infini de t) la fonction ana-
lytique ('1' (t), Bw) de la variable t s'annule (voir (8» et on a donc
sur l'intervalle t o t tt
('1' (t), Bw) = O. (10)
Une dérivation successive de cette relation par rapport à t donne
(puisque '1' (t) est solution de l'équation (5»
(A *'1' (t), Bw) == 0,
(A *2lJJ (t), Bw) == 0,
(A *n- 1 1lJ (t), Bw) == 0,
ou (puisque (x, Ay) == (A *x, y) est valable quels que soient les
vecteurs x, y)
('1' (t), ABw) == 0,
(1IJ (t), A 2 Bw) === 0,
(11 )
. . . . . . . . . .
(1IJ (t), An-lBw) == O.
Les vecteurs (3) constituant une base dans l'espace X en vertu de la
condition de position commune, les relations (10) et (11) signifient
que quel que soit t, t o t t l , le vecteur 1IJ (t) est orthogonal à
tous les vecteurs d'une certaine base et par conséquent est nul, ce
qui, toutefois, contredit la non-trivialité de la solution '1' (t).
Donc, pour tous les t à l'exception d'un nombre fini de valeurs,
t o t tt, la fonction (7) atteint (sur U) son maximum seulement
en un point, sommet du polyèdre U. Il s'ensuit en vertu de (6) que.
la fonction u (t) est définie d'une manière univoque (voir la note:
de la page 107).
En écartant les points où l'équation
('i' (t), Bu) == P ('i' (t» (12)
n'admet pas de solution univoque, nous divisons l'intervalle t o
t t l en un nombre fini de portions. Il est aisé de voir que la
fonction u (t) est constante sur chacune de ces portions. Soit en effet.
J une de ces portions (celle-ci peut être un intervalle ouvert, un
intervalle semi-ouvert ou un intervalle fermé). Soient et, e 2 , . . ., e q
les sommets du polyèdre U. Désignons par M i1 i == 1, 2, . . ., q,
l'ensemble de tous les points t E J tels que le point ei soit solution
de l'équation (12). Les ensembles Mt, M 2 , . . ., Mq sont donc dis-
joints deux à deux et leur somme est égale à J (certains de ces ensem-
bles peuvent être vides). Nous allons maintenant prouver que cha-
que ensemble Mi est ouvert sur J, d'où (compte tenu de la connexité
de J) il résultera que tous les ensembles Mi' à l'exceptiond'unseul
17.]
THÉORÈME DU NOMBRE DE COMMUTATIONS
109
:sont vides et la solution de l'équation (12) sera constante sur J.
( e qui achèvera la démonstration du théorème 9.
Soit donc t E J un point quelconque de l'ensemble ]VIi. On a
{1}J (t), Bei) = P ('1' (t)) et ('1' (t), Bej) < P ('1' (t)) pour i =1= j. Chaque
fonction ('1' (t), Bej), j = 1, 2, . . ., q, étant continue sur J, on a
en tout point de l'ensemble J suffisamment proche de t l'inégalité
{1}J (t), Bei) > ('1' (t), Bej) pour j =1= i. Autrement dit, tous les points
.de l'ensemble J suffisamment proches de t appartiennent à l' ensem-
])le J!;1 b i.e. l'ensemble Mi est ouvert sur J.
Le théorème 9 est démontré.
En vertu donc du théorème 9 toute commande optimale est une
-fonction constante par morceaux à valeurs en les sommets du polyè-
ire u. Nous appellerons également p 0 i n t d e c 0 m mut a -
t ion tout point de discontinuité d'une commande optimale. D'une
façon complète, si t'est un point de discontinuité d'une commande
üptimale u (t) et si u (t' - 0) = ei et u (t' + 0) = ej (où ei et ej
sont des sommets distincts du polyèdre U), nous dirons que pour
t = t' a lieu une c 0 m mut a t ion de la commande optimale
:a(t) du sommet ei au sommet ej.
Nous pouvons maintenant caractériser le théorème 9 de théo-
rème de la finitude du nombre de commutations. Il est bien entendu
que dans chaque cas concret le nombre de commutations dépend de
la valeur des coefficients du système (1), de la forme du polyèdre U
Bt du choix des points Xo, Xi. De ce point de vue, il est intéressant
.de comparer les e x e m pIe s 1 et 2 du 5. Dans l'exemple 1,
'quelle que soit la position initiale Xo, la commande optimale u (t)
possédait a u plu sun e commutation (i.e. admettait au plus
.deux intervalles de constante), tandis que dans l'exemple 2 le nom-
bre de commutations augmente infiniment lorsque le point xo s'éloi-
gne de l'origine des coordonnées (bien que le nombre de commuta-
tions soit fini pour chaque valeur f i x e de xo). A quoi tient cette
,différence entre les commandes optimales dans les deux exemples
'cités'? Le théorème 10 énoncé plus bas, dû dans sa forme initiale à
A. Feldbaum, montre que cette différence provient de ce que dans
l'exemple 1 la matrice du système possède des valeurs propres
ré e Il e s, tandis que dans l'exemple 2 ces valeurs sont co m ple-
x e s.
Dans le théorème 10 nous n'étudierons pas le cas général d'un
polyèdre convexe quelconque U, nous nous limiterons au cas suivant
très important dans les applications. Plus exactement, nous considé-
rerons que le polyèdre U est un parallélépipède défini dans l'espace
Er' engendré par les variables u l , u 2 , . . ., ur, par les inégalités
ap uP Bp, p= 1, 2, ..., r. (13)
Autrement dit, nous allons étudier le cas où chaque grandeur u P
figurant dans les équations (1) est un paramètre de commande dont
110
PROBL MES LIN AIRES EN TEMPS OPTIMAL
[Ch. 3'
le domaine de variation ne dépend pas de la valeur des autres para-
mètres de commande, et est défini par l'inégalité (13). Nous suppo-
serons que la condition de position commune (page 106) est satis-
faite comme précédemment.
Thé 0 r è m e 10. Supposons que le domaine de commande U
est le parallélépipède (13) et que sont réelles les valeurs propres de la
matrice (aJ) constituée des coefficients de l'équation (1). Alors, pour-
toute solution non triviale '4' (t) de l'équation (5), la relation (6) définit
univoquement une commande u (t) = (u 1 (t), u 2 (t), . . ., ur (t»; il
s'avère de plus que chaque fonction u P (t), P = 1, . . ., r est constante
par morceaux, ne prend que les valeurs cx'p et p (voir (13» et admet au
plus n - 1 commutations (i.e. au plus n intervalles de constance) où
n est l'ordre du système (1).
D é mon s t rat ion. En coordonnées, la fonction (7) s'écrit.
sous la forme suivante (cf. (4» :
r n
('4' (t), Bu) = ( 2J '4'11 (t) bgu p ).
p=1 fJ,=1
Pour que cette fonction prenne sa valeur maximale, il est nécessaire
que chaque fonction
n
'4'11 (t) b uP, P == 1, 2, ..., T, (t4)
J.L=1
prenne sa valeur maximale (car le domaine de variation de chaque-
grandeur Ul, . . ., ur ne dépend pas de la valeur des autres). D'où,
comme nous allons le montrer, il découle que u P ne prend que les
valeurs cx'p et p et admet au plus n - 1 commutations.
Il est évident que les relations
u 1 = ai pour i * p, cx,p u P p
définissent une arête du parallélépipède U. Le sens de cette arête
est défini par le vecteur
w = (0, 0, . . ., 1, . . ., 0),
où l'unité est en p-ème place. Le vecteur Bl/) s'écrit donc
Bw = (b , b , ..., b ),
d'où
n
( (t), Bw)= "'11.(t)b .
- J.L=1
(15)
Si cette fonction était identiquement nulle, alors, comme dans la
démonstration du théorème 9 (cf. (10), (11», '" (t) = 0, ce qui con-
17.]
THÉORBME DU NOMBRE DE COMMUTATIONS
11t
tredi t les conditions du théorème. Donc quel que soit p = 1, 2, . . .
. . ., r la fonction (15) n'est pas identiquement nulle et par consé-
quent comme toute fonction analytique ne s'annule qu'en un nombre
fini de points; quant à la fonction (14), elle est égale au produit d&
la fonction (15) par u p . Or, comme la fonction (14) doit atteindre-
son maximum, u P doit prendre la, valeur cx'p si la fonction (15) est
négative et la valeur p si la fonction (15) est positive. Autrement
dit, les points de commutation du paramètre de commande u P ne'
peuvent être que les zéros de la fonction (15). Le théorème 10 sera
donc entièrement démontré si nous prouvons que la fonction (15),
i.e. la combinaison linéaire non identiquement nulle des fonctions-
'Pl (t), '1'2 (t), . . ., 1Pn (t), admet au plus n - 1 racines réelles.
En vertu des théorèmes sur les équations linéaires à coefficients
constants, les fonctions 1Pl (t), 1P2 (t), . . ., 1Pn (t) qui constituent la
solution de l'équation (5) sont chacune de la forme:
f 1 (t) eÂ.l t + f 2 (t) e Â2t + . . . + lm (t) e'A.m t , ( 16}
où Â 1 , Â 2 , . . ., Âm sont des valeurs propres distinctes deux à deux
de la matrice A*, et fl (t), f2 (t), . . ., fm (t), des polynômes de
degré inférieur à la multiplicité de la valeur propre  i . La combi-
naison linéaire (15) des fonctions '1'1 (t), 'P2 (t), . . ., 1Pn (t) est donc
de la même forme (16). Tous les  1 ,  2 , . . ., Âm sont réels (car par
hypothèse toutes les valeurs propres de la matrice A et par consé-
quent de la matrice A * sont réelles). Si nous désignons par ri la
multiplicité de la valeur propre  i (de sorte que rl + r 2 + . . . +
-+ r m == n), alors le degré du polynôme fi (t) n'est pas supérieur-
à ri - 1 et d'après le lemme qui sera démontré plus bas le nombre-
de racines réelles de la fonction (16) n'est pas supérieur au nombre-
(ri - 1) + (r 2 - 1) + . . . + (rm - 1) + m - 1 ==
== ri + r 2 + . . . + r m - 1 = n - 1.
Ce qui achève la démonstration du théorème 10.
Lem m e. Soient  1 ,  2 , . . ., Âm des nombres réels non égaux
deux à deux, et Il (t), 12 (t), . . ., fm (t) des polynômes à coefficients:
réels de degrés respectivement k 1 , k 2 , . . ., km. A lors la fonction
fl (t) eÂ.l t + 12 (t) e'A.2 t + . . . + lm (t) e'A.mt (17}
admet au plus k 1 + k 2 + . . . + km + m - 1 racines réelles.
D é mon s t rat ion. Pour m = 1 le lemme est évident PUIS-
que la fonction f 1 (t) eÂ.l t admet les mêmes raçines que la fonction
fl (t) et possède donc au plus k 1 racin s réelles.
Supposons que le lemme a été démontré pour le cas où la formu-
le (17) renferme un nombre de termes inférieur à m et démontrons-le-
pour le cas où la formule (17) renferme m termes. Supposons que le-
1.12
PROBLÈMES LINÉAIRES EN TEMPS OPTIMAL
[Ch. 3
lemme soit faux et que la fonction (17) admette au moins k 1 + k 2 + . . .
. . . + km + m racines réelles. En multipliant la fonction (17) par
e- Â ,n t (ce qui ne modifie pas ses racines), nous obtenons la fonction
Il (t) e(Ât-Âm)t + . . . + Im-1 (t) e(Â m -1-Â m )t + lm (t), (18)
qui admet également au moins k 1 + k 2 + . . . + km + m racines
réelles. Or l'intervalle compris entre deux racines réelles d'une fonc-
tion contient au moins une racine de la dérivée de cette fonction,
donc la (km + 1)-ème dérivée de la fonction (18) admet au moins
(k1 + · · . + k Tn + m) - (km + 1) == k1-/- . . . + k m - 1 + (m -1)
racines réelles. Il est par ailleurs aisé de voir que la (km + 1)-ème
dérivée de la fonction (18) est de la forme:
g 1 (t) e(Â1-Â m )t + g2 (t) e(Â2-Â m )t + . . . + gm-1 (t) e(Âm-1-Âm)t, (19)
les nombres  1 - Âm,  2 - .Âm, . . ., Âm -1 - Âm étant non égaux
deux à deux et le degré du polynôme gi (t) égal à k i comme précédeln-
ment. Par hypothèse la fonction (19) admet au plus kt + k 2 + . . .
. . . + k m - 1 + (m - 1) -1 racines réelles contrairement à ce qui a
été dit antérieurement. Cette contradiction achève le raisonnement
par récurrence.
Le lemme est donc démontré.
9 18. Théorèmes d'unicité
Résolvons l'équation (2) comme une équation non homogène
par la méthode de variation des constantes. A cet effet désignons par
CP1 (t), CP2 (t), · . ., CPn (t) (20)
le système fondamental de solutions de l'équation homogène
dx
dt == Ax,
satisfaisant aux conditions initiales cpj (t o ) == ô;, et par
'1'1 (t), '1'2 (t), . . ., 1P n (t)
le système fondamental de solutions .de l'équa ion homogène (5)
satisfaisant aux conditions initiales 1P (t o ) == ô . Il est clair que
quel que soit t
('Pi (t), cr i (t)) == ô{, i, j == 1, 2, . . ., n.
(21)
En effet, cette relation est vérifiée, pour t = t o de par le choix
même des conditions initiales; par ailleurs
d ,. . .
dt ('lf' (t), CPi (t)) == ( - A *'lf'3 (t), CPi (t)) + ('lf'3 (t), ACPi (t)) == O.
18.]
THÉORÈMES D'UNICITE
113
Cherchons la solution générale de l'équation (2) sous la forme
n
x(t)== 2j <Pv(t)CV(t).
\'=1
En portant cette solution dans l'équation (2) nous obtenons
n
( t ) dev (t) == B ( t ) .
LJ <Pv dt U,
\'=1
en multipliant scalairement la dernière expression par 'l'j (t) et
compte tenu de (21), il vient
dC t(t) = (tl/ (t). Bu (t)).
Donc, pour une commande arbitraire u (t) et la condition initiale
x (t o ) === Xo === (x , x , . .., x ), l'équation (2) admet une solution
de la forme:
n t
X (t) = fl!" (i) (x;i + J ('1''' ('t), Bu (1:)) d1:). (22)
\'= 1 to
Thé 0 r è m e 11. Soient Ui (t) et u 2 (t) deux commandes opti-
Inales définies respectivement sur les intervalles t o t t i et t o
t t 2 et transférant le point Xo en le même point Xi. A lors ces deux
commandes sont confondues (voir la note de la page 107), i.e. t i === t 2
et Ui (t) == U 2 (t) sur l'intervalle t o t t i .
Défi 0 n s t rat ion. Tout d'abord il est clair que t i === t 2
sinon, pour par exemple t i < t 2 , la commande u === U 2 (t) ne serait
pas optimale.
Puisque les deux trajectoires issues du point Xo et associées aux
commandes Ui (t) et U 2 (t) passent par le même point Xi à l'instant
t === t i , il vien t (en vertu de (22»
n tl
Xt = fl!" (tt) ( x;i + J ('l''' (t), Bud t )) dt ) =
v= 1 to
n ti
= fl!" (t) ( X;i + J ('l''' (t), BU2 (t)) dt ) 1
v= 1 to
d'où
n ti t1
fl!" (it) [J ('l''' (t), BUt (t)) dt- J ('l''' (t), BU2 (t)) dtJ = O.
v=1 to to
8-01339
114
PROBLÈMES LINÉAIRES EN TEMPS OPTIMAL
[Ch. 3
Les vecteurs CPi (t i ), . . ., CPn (t i ) étant linéairement indépendants,
il résulte de la dernière égalité
tl tl
5 (1jJi (t), BUt (t» dt = 5 (1jJi (t), BU2 (t» dt, i = 1, ..., n. (23)
to to .
La commande optimale U1 (t) est associée à un vecteur fonction
'1' (t) vérifiant la condition (6) et l'équation (5). Désignons par
'4'0 == ('4'10' · · ., '\j)no)
la valeur initiale de cette fonction (à l'instant t == t o ); la solution
'4' (t) peut alors s'écrire sous la forme
n
'll' (t) == '4'vo'll'v (t).
'\7=1
En multipliant l'expression (23) par '4'iO et en sommant en i, il vient
tl tl
5 (1jJ (t), BUt (t» dt = 5 (1jJ (t), BL0, (t» dt.
to to
(24)
Or, en vertu de la relation (6) et par définition de la grandeur P ('ll'),
nous avons (sur l'intervalle t o t t i )
('i' (t), BUt (t)) = P ('i' (t)) ('4' (t), BU 2 (t)),
donc de (24) il résulte ('ll' (t), BU1 (t)) == ('1' (t), BU 2 (t)). Les comman-
des U1 (t) et U 2 (t) vérifient la relation (6) avec la même fonction
'4' (t), donc (en vertu du théorème 9) Ui (t) == U 2 (t).
. Ce qui achève la démonstration du théorème 11.
Nous dirons qu'une commande U (t), t o t t 1 , est extrémale
si elle yérifie la cond tion (6) où '1' (t) est ne solution non triviale
de l' équa ion (5).
Pour trouver la commande 0 p t i mal e qui transfère le point
représentatif de Xo en Xi on peut d'abord chercher toutes les conlnlan-
des e x t r é mal e s transférant le point représentatif de Xo en ,1:>i
et ensuite choisir parmi elles celle (unique, en vertu du théorème 11)
qui réalise ce transfert en temps optimal. Une question se pose:
peut-il exister plusieurs commandes extrémales transférant le point
représentatif de Xo en Xi? En général, elles sont plusieurs à réaliser
ce transfert. Le théorème suivant mentionne un cas important d'uni-
cité des commandes extrémales.
Thé 0 r è m e 12. Supposons que l'origine des coordonnées de
l'espace Er est un point intérieur au polyèdre U, et soient Ui (t) et
u 2 (t) deux commandes extrémales définies respectiv ment sur les inter-
valles t o t t i et t o t t 2 et recalant le point Xo à l'origine
18.1
TI-IÉORÈMES D'UNICITE
, ,
115
des coordonnées' Xi = 0 de l'espace X. A lors ces commandes coïnci
dent, i.e. t i === t 2 et Ut (t) == U 2 (t) sur l'intervalle t o t t i .
D é mon s t rat ion. Désignons par Xi (t) et X 2 (t) les tra-
jectoires associées aux commandes Ui (t) t U 2 (t) et issues du point
a;o à l'instant t . En vertu des hypothèses du théorème nons avons
Xi (t i ) === X 2 (t 2 ) === 0 ou (en vertu de (22»
n tl
qJv (tt) ( X -+- ). (1jJv (t), BUt (t)) dt) = 0,
'\7=1 to
n t2
qJv (t 2 ) ( X + J (1jJv (t), BU2 (t)) dt) = O.
'\7= 1 to
D'où (en vertu de l'indépendance linéaire des vecteurs (20) quel qu
soit t) il résulte (i === 1, 2, . . ., n):
tl t2
- x = J (1jJi (t), Bud t )) dt = 1 (1jJi (t), BU2 (t)) dt. (25)
to to
Supposons pour fixer les idées que t i > t 2 et soit '1' (t) la solution de
l'équation (5) qui vérifie" sur l'intervalle t o t t i , la relation
('1' (t), BU1 (t» === P ('1' (t», ,
déterminant la fonction Ut (t). Comme dans la démonstration du
théorème 11 mettons la fonction '4' (t) sous la forme 'i' (t) =
n
:== 'l'vo'l''' (t). En multipli nt l'e pressio (25) par '4'io et en som-
,\,=1 ' '
Inant en i, il vient:
tl t2
J (1jJ (t), BUt (t)) dt = J (1jJ (t), B (t)) dt.
to to
(26)
Remarquons que toute solution '1' (t) de l'équation (5) vérifie
] , inégali té
'p ('1' (t» o.
(27)
] n effet, l'origine des coordonnées de l'espace Er étant un point
intérieur au corps convexe U, la fonction ('1' (t), Bu) en tant que
fonction de U est soit identiquement nulle soit peut prendre de
valeurs tant négatives que positives. .
En vertu de (27) et (26) nous avons les inégalités
t2 12
J (1jJ (t), BUt (t)) dt J (1jJ (t), BU2 (t)) dt.
to to
8*
116
PROBLÈMES LINÉAIRES EN TEMPS OPTIMAL
[Ch. 3
D'où, comme dans la démonstration du théorème 11, il vient:
Ui (t) == u 2 (t) sur l'intervalle t o t t 2 .
Et, compte tenu de (26),
t2
) ('IjJ (l), BUi (l)) dl = O.
fi
(28)
Par ailleurs, l'égalité P ('i' (t)) == 0 n'ayant lieu que si la fonction
('i' (t), Bu) est nulle sur le polyèdre U tout entier, i.e. ne pouvant
avoir lieu que pour un nombre fini de valeurs de t, il résulte néces-
sairement des expressions (27) et (28) que t f == t 2 .
Le théorème 12 est donc démontré.
Rem a r que. Jusqu'à maintenant nous n'avons utilisé que
la condition 1° du théorème:2 (i.e. la formule (20) du chapitre 1),
mais jamais la condition 2° (i.e. la relation (21) du chapitre 1). Il
est toutefois aisé de voir que lorsque les conditions du théorème 12
sont remplies, l'égalité (21) du chapitre 1 est immédiatement véri-
fiée. En effet, en vertu des relations (4), (6), (27) et de la relation
(20) du chapitre 1, nous avons
M ('i' (t f ), x (t i )) == H ('1' (t f ), x (t f ), u (tt)) =
== ('1' (t f ), Ax (t f )) + ('1' (t f ), Bu (t i )) =
= ('i' (t i ), AXt) + P ('i' (t f )) = P, ('1' (t f )) 0
(car Xi = 0).
9 19. Théorèmes d'existence
Thé 0 r è m e 13. Si pour le processus décrit par l'équation (2)
il existe au moins une commande transférant le point représentatif de
Xo en Xi' il existe alors une commande optimale transférant le point
représentatif de Xo en Xi. (Nous supposons comme toujours qu'est
remplie la condition de position commune.)
D é ID 0 n s t rat ion. Nous devons supposer qu'est donnée
une certaine classe D de com.mandes admissibles et que dans cette
classe il existe des commandes transférant le point représentatif de
Xo en Xi. Désignons par Dmax la plus grande classe de commandes,
i.e. l'ensemble de toutes les commandes mesurables (à valeurs dans
U), et par D min la plus petite classe de commandes, i.e. l'ensemble
de toutes les commandes constantes par morceaux (à valeurs dans
U). Nous avons donc Dmax-::::J D -::::J D m1n .
Prouvons tout d'abord que dans la classe Dmax il existe une
commande optimale transférant le point représentatif de Xo en Xi.
Désignons par l'ensemble des commandes de la classe Dmax
19.]
THÉORÈMES D'EXISTENCE
117
transférant le point représentatif de Xo en Xi. L'ensemble n'est pas
vide, car par hypothèse la classe D (et par conséquent Dmax) con-
tient des commandes transférant le point représentatif de Xo en Xi.
Chaque commande u (t) E est associée à un temps de transfert
(de Xo en Xi). Désignons par t* le minorant de tous les temps de trans-
fert et montrons qu'il existe une commande u* (t) transférant le
point Xo en Xi pendant le temps t*. Puisqu'il est possible de procéder
à une translation dans le temps (voir la condition 3 dans le 9 10),
nous pouvons nous limiter aux seules commandes définies sur les
intervalles de la forme 0 t t i .
Extrayons de l'ensemble' d une suite infinie de commandes
{Uh (t)} définies respectivement sur les intervalles 0 t tk
(k == 1, 2, . . .) telle que soit vérifiée l'égalité
lim th == t* .
h oo
Désignons par Xh (t) la trajectoire associée à la commande Uh (t)
et partant à l'instant t == 0 du point Xo; alors xh (th) == Xi- Nous
avons
n th
lim (q\, (t*) - cp" (th» (x + J (1jJ" (t), Budt» dt) = 0
h oo \'=1 0
(car le deuxième facteur figurant sous le signe de la somme est bor-
né, tandis que le premier tend vers 0); de la même façon
n th
cp" (t*) ( J (1jJ" (t), BUh (t» dt) = O.
\'=1 t*
D'où il résulte que
n t*
lim cp" (t*) ( xX + J (1jJ" (t), BUh (t» dt ) =
h oo \'=1 0
n th
= ! cp" (th) ( x + .\ (1jJ" (t), BUh (t» dt) = Xh (th) = Xi (29)
\'=-=1 0
(voir (22».
Considérons maintenant l'espace hilbertien L 2 de toutes les
fonctions mesurables de carré intégrable, définies sur l'intervalle
o t t*. La commande Uh (t) est un vecteur fonction, dont nous
désignerons la i-ème composante par ul (t). La fonction Uih (t) dé-
finie sur l'intervalle 0 t t* appartient à l'espace £2 (elle est
mesurable et bornée). L'ensemble de toutes les fonctions u1 (t),
k == 1, 2, . _ ., pour chaque i (== 1, 2, . _ ., r) fixe appartient de
118
PROBLÈMES LINÉAIRES EN TEMPS OPTIMAL
LCh. 3
toute évidence à une boule de l'espace £2; nous pouvons donc en
extraire une suite *) faiblement convergente. Nous considérerons
tout simplement que la suite
.. i
u (t), u (t), ..., Uh (t), ... (30)
converge elle-même faiblement vers une fonction u i (t), i = 1, 2, . . .
., r.
Prouvons maintenant que le vecteur fonction
u* (t) = (u l (t), u 2 (t), . . ., ur (t))
vérifie la condition u* (t) E U pour presque toutes les valeurs de t.
Prenons une face quelconque r de dimension r - 1 du polyèdre U
r
et soit £ (u) == LbfJu P une forme linéaire des variables u l , u 2 , . . .
p=o
. . ., ur telle que l'équation du plan contenant la face r soit de la
forme £ (u) == b, et que le polyèdre U soit situé dans le demi-espa-
ce L (u) b. Soit par ailleurs m l'ensemble de tous les points t de
l'intervalle [0, t*] pour lesquels £ (u* (t)) > b et v (t) la fonction
caractéristique de l'ensemble m. Cette fonction est mesurable et
bornée (i.e. appartient à l'ensemble £2) et nous avons donc en vertu
de la faible convergence de la suite (30)
t*
lim r v (t) [£ (u* (t)) - L (Uh (t))] dt == o.
h 00
Par ailleurs mes m == 0 puisque L (u* (t)) - L (Uh (t)) > 0 sur
l'ensemble m (car L (Uh (t) b). Donc, pour presque tous les t de
l'intervalle 0 t t*, le point u* (t) est situé dans le même demi-
espace L (u) b que le polyèdre U. Ce raisonnement étant valable
pour tout point de la face r du polyèdre U, on a u* (t) E U pour
presque tous les t.
Une variation de la fonction u* (t) sur un ensemble de mesure
zéro n'ayant pas d'effet sur la faible convergence de la suite (30)
vers les fonctions u i (t), i == 1, 2, . . ., r, nous pouvons, sans perdre
en généralité, considérer que u* (t) E U pour t 0 u s les t, 0 t
t*.
De la faible convergence de la suite (30) et en vertu de
(29) il vient:
n t*
qJv (t*) ( x + J ("'v (t), Bu* (t)) dt ) = Xi'
\'=1 0
*) Voir par exemple L. Lusternik et V. Sobolev «Eléments
d'analyse fonctionnelle )} (en russe), Moscou 1951, pp. 194-196.
19.1
THÉORÈMES D'EXISTENCE
119
Donc, u,* (t) est une commande optimale mesurable transférant
le point représentatif de Xo en Xi' i.e. la classe Dmax contient une
commande optimale. En vertu du théorème 2 (voir également le théo-
rème 8) l'équation (5) admet une solution non triviale (voir (6))
telle que presque partout sur l'intervalle 0 t ::::;; t* on ait
(11' (t), Bu* (t)) == P (11' (t)).
I)'après le théorème 9 on peut considérer (en la faisant varier
sur un ensemble de mesure zéro, ce qui ne nuit pas à son optimalité)
que la commande u* (t) est constante par morceaux. Elle appartient
donc à la classe D min et par conséquent à la classe D. La commande
u* (t) transfère le point représentatif de Xo en Xi plus rapidement
que toute autre commande de la classe Dmax et par conséquent de
la classe D.
La classe D renferme donc la commande optimale et le tlléorème
est démontré.
Rem a r que. Si la classe D des commandes admissibles coÏn-
eide avec la classe Dm ax de toutes les commandes mesurables, d'après
]a démonstration on peut formuler le théorème 13 sans la condi-
tion de position commune (cette condition n'est en effet exigée
qu'en raison de la référence au théorème 9).
Thé 0 r è m e 14. Supposons que l'opérateur A de l'équation (2)
est stable, i.e. les parties réelles de ses valeurs propres sont négatives,
et que l'origine des coordonnées de l'espace Er est un point intérieur au
polyèdre U. (La condition de position commune est supposée remplie
comme précédemment.) A lors pour tout point Xo E X il existe une com-
mande optimale recalant Xo à l'origine des coordonnées 0 EX.
D é mon s t rat ion. Montrons tout d'abord que l'origine des
coordonnées 0 E X admet un voisinage V tel que chaque point Xo E
E V peut être recalé en 0 par une commande. (Pour démontrer cette
assertion nous n'utiliserons pas la stabilité de l'opérateur A.)
Désignons par cD (t) la matrice ayant pour colonnes les compo-
santes des vecteurs CPi (t), . . ., CPn (t) (voir (20)), i.e. cD (t) ==
== (cp} (t)). Les vecteurs (20) formant un système fondamental de
sol utions de l' équa tion
dx
-==Ax
dt
et satisfaisant aux conditions cpj (0) == ôj (nous faisons t o == 0), on a
dcD (t)
rtt == AcD (t), cD (0) == E,
d'où
(D'(t) == e tA .
120
PROBLÈMES LINÉAIRES EN TEMPS OPTIMAL
[Ch. 3
Désignons par ailleurs par 'l'(t) la matrice dont les lignes sont les
composantes des vecteurs 'Pl (t), . . ., 'l'n (t), i.e. 1f (t) = ('l') (t»).
La relation (21) s'écrit maintenant 1f (t) <D (t) = E d'où
'l' (t) = e- tA .
En portant les expressions des matrices cD (t) et 1f (t) dans (22),
nous avons
t
x (t) = e tA ( Xo + ) e--rABu (,;) d,;) ,
o
où x (t) est la trajectoire associée à la commande u (t) et partant du
point Xo à l'instant t = O.
Choisissons maintenant dans U un vecteur v tel que le vecteur
-- v appartienne aussi à U et que le vecteur
b = Bv
(31)
n'appartienne à aucun sous-espace propre de l'espace
X invariant par rapport à l'opérateur A. Le vecteur v existe puisque
l'origine des coordonnées de l'espace Er est un point intérieur au
polyèdre Tf et puisque est remplie la condition de position comnlune.
Pour B positif suffisamment petit les opérateurs A et e-eA possèdent
des sous-es paces invariants qui se confondent *) et les vecteurs
*) En calcul matriciel cette assertion se démontre de la manière suivante.
Soit la matrice M == e -eA - E; celle-ci peut être représentée sous la forme
d'une série matricielle convergente
E E2 2 E3
M=-IT A +2T A -3T A3 +... (*)
D'où il résulte que toute matrice C représentée sous la forme d'unesériematri-
cielle entière convergente
C == aoE + atM + a2M 2 + a3M3 + . . ., . (**)
est transposable avec la matrice A. Les valeurs propres de la matrice M sont
de la forme e -et... - 1 où Â est une valeur propre de la matrice A. Il existe donc
un Eo > 0 tel que pour 0 < E < Eo les valeurs propres de la matrice AI sont
contenues dans le cercle unitaire. Il existe donc (voir L. P 0 n tri a gui n e
« Equations différentielles ordinaires », Editions Mir, Moscou, 1969
p. 338) une Inatrice C représentée par une série entière (* *) telle que
e C == M + E, Le. e C == e -eA, les valeurs propres de la matrice C étant supposées
arbitrairement proches de 0 (pour Eo suffisamment petit). Les matrices A et C
étant transposables, de la relation e C == e -eA il résulte eC+eA == E et toute"
les valeurs propres de la matrice C + EA sont donc de la forme 2kni. Puisque
par ailleurs elles sont proches de 0 (pour Eo petit), elles sont toutes nulles. Soit 8
une matrice telle que la matrice G == 8 (C + EA) 8- 1 soit de la forffie de Jor-
dan. En multipliant l'expression eC+eA == Epar 8 à gauche et par S-l à droite,
. 1 . t G E .
1 VIen e == , I.e.
E = E + G + G2 + G3 + . . .
(***)
19.1
THÉORÈMES D'EXISTENCE
121
e-eAb, e- 2eA b, ..., e-neAb
(32)
sont donc linéairement indépendants.
Soit par ailleurs la fonction cr (t, 't, s) de la variable t où 't et
sont des paramètres réels, égale par définition à sign S sur l'inter-
valle ('t, 't + s) et nulle en dehors de cet intervalle. Définissons
enfin la commande u == u (t, SI, . . ., Sn) des n paramètres réels
£1, . . ., n en posant
n
Sn) === v. cr (t, kë, Sk);
h=1
nous allons étudier cette commande pour des valeurs suffisamment
petites de ë > 0 et SI, . . ., Sn sur l'intervalle 0 t t 1 où i 1
est un nombre positif fixé. La trajectoire associée à la commande
u (t, SI, . . ., çn) et partant du point Xo à l'instant t == 0 aboutit
(à l'instant t == [1) au point
ti n
Xi = Xi (Xo, \ ..., n) = e t1A (xo + I e-tAb cr (t, k8, 1;k) dt ) (33)
o h=1
(voir (31)).
La somme fignrant dans l'intégrale (33) étant nulle pour SI -
== Sn == 0, il vient:
u (t, 1,
. . . ,
Xl (Xo, SI, ..., Sn) Ix=o; £l=...=£n=O ===0. (34)
Puisque, par ailleurs, (pour des valeurs suffisamment petites de
k et ë) le terlne de (33) qui dépend de £h est de la forme
he+ h
eltA ( Xo + J e - tAb dt ) ,
he
Les valeurs propres de la matrice G étant nulles, tous ses éléments diagonaux et
les éléments qui sont situés au-dessus de la diagonale principale sont nuls.
Donc tous les éléments situés directenlent sous la diagonale principale des
matrices G2, G3, G4, . . . sont également nuls. Il s'ensuit alors de (***) que les
éléments situés sous la diagonale principale de la matrice G sont nuls, i .e. G
est nulle (rappelons que G est de la forme de Jordan). C + EA étant aussi une
matrice nulle, on en déduit que C == - EA.
De (* *) il découle que la matrice A est représentée par une série convergente
A === -_..!. (aoE + atM + a2M2 + a 3 M3 + . . .). (****)
E
Tout sous-espace invariant de la matrice A est, en vertu de (*), un sous-
espace invariant de la matrice M. Inversement, tout sous-espace invariant de
la matrice M est, en vertu de (* * * *), un sous-espace invariant de la filatrice A.
Les matrices A et M (et par conséquent les matrices A et e -eA == M + E)
admettent donc les mêmes sous-espaces invariants (à condition que E soit suffi-
samment petit pour que la démonstration proposée soit valable).
122
PROBLÈMES LINÉAIRES EN TEMPS OPTIMAL
[Ch. 3
une dérivation de l'expression (33) nous donne:
: 1 == e t1A (e-heAb), k == 1, 2, ..., n.
u':, k=O
D'où il résulte que le j acobien
iJ (xl, xi, ..., xf) 1 (35)
d (G 1 , 2, ..., n) Sl= 2=.. .= n=o
est égal à 1 e t1A 1 · où est le déterminant de la matrice composée
des coordonnées des vecteurs (32). Le déterminant de la matricE'
e t1A étant non nul de même d'ailleurs que pour des valeurs suffi-
samment petites de ë (car les vecteurs (32) sont linéairement indé--
pendants), le jacobien (35) est non nul.
Nous pouvons donc dans les schémas précédents choisir le para-
mètre E arbitrairement petit de n1anière que le jacobien (35) soit
non nul. Par ailleurs nous avons la relation (34) cl? où en. vertu dl!
théorème de la fonction in1plicite il résulte que l'équation
x 1 (x 0, 1, 2, ..., n) == 0
est résoluble en 1, 2, . . ., n pour toutes les valeurs de Xo appar-
tenant à un certain voisinage V de l'origine des coordonnées 0 E X.
En d'autres termes, pour tout point Xo E V il existe une commande u
constante par morceaux (en l'occurrence, la commando
u (t, 1, . . ., n), 0 t t 1 , les paramètres 1, . . ., n étant
dûment choisis) recalant le point Xo à l'origine des coordonnées
(dans le temps t1).
Soit à présent Xo un point quelconque de l'espace X. Faisons
déplacer le point représentatif d'abord de la position Xo sous l'effet
de la commande u (t) == O. Les parties réelles des valeurs propres de
l'opérateur A étant 'négatives, au bout d'un certain temps le point
représentatif arrivera au voisinage V, d'où, d'après ce que nous
.avons démontré, il pourra être recalé à l'origine des coordonnées.
En vertu donc du théorème 13 nous concluons à l'existence d'une
commande 0 p t i m 'a 1 e recalant le point Xo à l'origine des coordon-
nées.
I e théorème est dOllC démontré.
e 0 roll air e. Supposons que l'origine des coordonnées de l'es-
pace Er est un point intérieur du polyèdre U. Désignons par T l'en-
semble de tous les points Xo E X susceptibles (sous l'effet d'une comman-
de dûment choisie) d'être recalés à l'origine des coordonnées 0 E X en
un temps n'excédant pas T (T étant un nombre positif quelconque).
A lors T est un ensemble convexe fermé possédant des points intérieurs
(i.e. est un corps convexe).
D é mon s t rat ion. Voyons la démonstration du théorème 14
où l'on posera t 1 == T. Nous obtenons alors un voisinage V de l'ori-
20.]
s YN'rHÈSE DE LA COMMANDE OPTIMALE
123
gine des coordonnées 0 E X tel que pour tout point Xo E V il existe
nne cOilllnande constante par morceaux recalant le point Xo à l'ori-
gine des coordonnées (pendant le temps T). Autrement dit, V c T
i.e. l'origine des coordonnées est un point i n t é rie u r à l'en-
semble T. Cet ensemble est fermé en vertu du théorème d'existence.
Il ne nous reste plus qu'à démontrer que l'ensemble T est con-
r S . t ( 1 2 71, ) t f 1 2 71 ) d
vexe. olen Xi == Xl' Xi' · · ., Xi e X2 == ,X 2 ' X 2 ' . . ., X 2 eux
points de l'ensemble T et Ut (t), U2 (t) des commandes recalant les
points .Ti et X2 à l'origine des coordonnées en un temps n'excédant
pas T. Nous supposerons que les deux commandes Ut (t) et U2 (t)
sont défin ies sur l'intervalle 0 t T tout entier et égales à zéro
(le l'instant où le point représentatif arrive à l'origine des coordon-
nées jusqu'à l'instant T. Les commandes Ut (t) et U2 (t) sont donc
des con1mandes définies sur l'intervalle 0 t T et recalant dans
]e ten1 ps T les points Xi et X2 à l'origine cles coordonnées, i. e. en
vertn de (22)
n T
\Pv (T) ( xr + ) ('\Jv (t), BUt (t)) dt ) = 0,
v=1 0
n T
\Pv(T) (Xi + J ('\JV(t), BU2 (t)) dt) = O.
v=1 0
Soient maintenant ai et a2 deux nombres posi tifs arbitraires tels
que ai + a2 == 1; posons Xo == aixi + a2x2, Uo (t) = aiui (t) +
+ a2112 (t). Le point Xo est alors situé sur le segment reliant Xt et X2
et le point Uo (t) sur le segment reliant Ui (t) et U2 (t) (quel que soit t,
o t T) de sorte que Uo (t) E U quel que soit t (puisque U est
un polyèdre con v e x e); la commande Uo (t) est donc une com-
Jnande admissible définie sur l'intervalle 0 t T. En multi-
pliant les expressions (36) et (37) respectivement par ai et a2 et en
<l.dditionnant nous obtenons:
(36)
(37)
n T
\Pv (T) (x + J ('\Jv (t), Buo (t) ) dt = O.
v= 1 0
La commande Uo (t) recale donc le point Xo à l'origine des coor-
données en un temps T, Le. Xo E T. Tout point du segment reliant
les points Xi et X2 appartient à l' ensemble T' cet ensemble est donc
convexe.
9 20. Synthèse de la commande optimale
Dans le chapitre 1 nous avons étudié sur des exemples concrets le
problème de synthèse des commandes optimales. Ce problème peut
être posé pour un processus commandé quelconque (voir formule (4),
124
PROBLÈMES LINÉAIRES EN TEMPS OPTIMAL
[Ch. :
2). Cependant, nous n'examinerons ici que les systèmes linéaires
de la forme (1) satisfaisant aux conditions du théorème 14 (quant à
la condition de stabilité de l'opérateur A, voir la remarque faito
en fin de ce paragraphe). Les théorèmes d'existence et d'unicitê
(théorèmes 14 et 12) étant valables pour ces systèmes, le problème dH
synthèse est en principe résolu. Nous allons exposer une méthodE
constructive de résolution de ce problème, une méthode nécessitant
toutefois de nombreux schémas dans chaque cas concret.
La synthèse d'une commande optimale du système linéaire (1) a
été réalisée antérieurement (par des méthodes foncièrement diffé-
rentes, i.e. sans l'utilisation du principe du maximum), mais dans
le cas d'un seul paramètre de commande (Le. pour r===1) par A. Feld-
baum pour des valeurs propres réelles de l'opérateur A et pa].
D. Buschaw dans le cas où n === 2 et où les valeurs propres de l' opéra-
teur A sont complexes. Le principe du maximum permet d'accéder
aux mêmes résultats avec de plus grandes facilités (voir les exemples
du 5). Plus loin nous montrerons comment à l'aide du principe du
maximum il est possible pour n === 2 de construire la synthèse des
systèmes linéaires à commande optimale dotée de d eux paramètres
de commande.
Dans ce paragraphe nous nous livrerons à des réflexions générales
sur le problème de synthèse des commandes optimales. Nous sup-
poserons remp]ies les conditions du théorème 14. Alors, pour tont.
point Xo E X il existe une et une seule comn1ande optimale u xo (t)
(constante par morceaux) recalant le point Xo à l'origine des coor-
données 0 E X. L'unicité est réalisée à une translation du temps
près et aux valeurs de la commande u xo (t) près en ses points de dis-
continuité. Comme à chaque instant nous somnles naturellement
intéressés par le comportement p 0 sté rie u r de la commande
optimale, il serait plus rationnel (contrairement aux conventions
admises dans la page 12 et la note de la page 107) de considérer qu'en
chacun de ses points t' de discontinuité la commande U xo (t) est
égale à U X () (t' + 0). Ceci étant, à tous les instants (sauf pour un
nombre fini où la valeur de la commande ne joue aucun rôle) est.
vérifiée la relation
u xo (t) === u xo (t + 0),
ce qui permet de lever la non-unicité de la commande u xo (t) à l'ins-
tant initial et aux points de discontinuité. La grandeur U xo (t o ) n'est
fonction donc que ou point Xo et non de l'origine arbitraire des tem ps
t o , et par conséquent:
v (xo) = u xo (t o ).
Soit x (t) la solution de l'équation (2) aSSOClee à la comm andp
U xo (t) et t o t t 1 l'intervalle de temps pendant lequel le point
représentatif est recalé de Xo à l'origine des cooroonnées. Or, quel
20.1
SYNTHÈSE DE LA COMMANDE OPTIMALE
12;)
que soit le point l' pris dans cet intervalle de temps, la commande
u xo (t) définie sur l'intervalle l' t t 1 recale 0 p t i mal e -
fi e n t le point représentatif de x (1') à l'origine des coordonnées
(sinon la commande ne serait pas optimale), donc
u Xo ('t) == v (x ('t)).
Par conséquent,
d
dt x (t) == Ax (t) + Bv (x (t)),
let nous voyons que la solution de l'équation
dx
dt==Ax+Bv(x)
vérifiant la condition initiale arbitraire x (t o ) == Xo est précisément la
loi qui régit le recalage optimal du point Xo à l'origine des coordonnées.
On dit que la fonction v (x) s y n thé t i s e la commande optimale
recalant le point Xo à l'origine des coordonnées (cf. 5). Le problè-
me de synthèse de la commande optimale (pour le système linéaire (2))
consiste précisément à chercher la fonction v (x).
Donnons une méthode de construction de la fonction v (i). Soit
1p (t) la solution (non triviale) de l'équation (5) qui en vertu du
théorème 2 est associée à la commande U xo (t). On a
d ;t) = _ A *1\1 (t), (38)
et la fonction u xo (t) est tirée de l'équation
('P ( t ), B u xo (t)) === P ('1' (t)).
(39)
Soit par ailleurs x (t) la solution de l'équatio:o (2) associée à la com-
mande u == U xo (t), vérifiant la condition initiale
x (t o ) == Xo (40)
et la condition finale
x (t 1 ) == 0,
(41)
de sorte que
dx (t)
dt = Ax (t) + Bu xo (t).
La fonction v (x) satisfait alors à la condition
('1' (t o ), Bv (x (t o ))) == P (11' (t o )).
(42)
(43)
En vertu du théorème d'existence et d'unicité, il existe un et un seul
(à une translation du temps près) couple de fo'nctions u xo (t) et x (t)
définies snr l'intervalle t o t t i et vérifiant les conditions (38)
à (42). Ces conditions ne définissent pas d'une manière univoque les
nombres t o et t 1 en raison de la translation du temps, par contre
elles définissent leur différence t 1 t o . .
126
PROBLÈMES LINÉAIRES EN TEMPS OPTIMAL
[Ch. 3
On ne sait absolument pas comment chercher les fonctions u xo (t)
et x (t) vérifiant toutes les conditions (38) à (42), mais en revanche,
il est aisé de déterminer toutes les fonctions U xo (t) et x (t) vérifiant
seulement les conditions (38), (39), (41) et (42). Pour cela nous allons
procéder comme suit. Puisqu'une translation arbitraire du temps est
possible, fixons le nombre t 1 en posant t 1 == O. Soit à présent
X == (Xi, X2, . . ., "ln) vecteur quelconqu e non nul, et 'lJ? (t, X) la
solution de l'équation (38) vérifiant la condition initiale
1P (0, X) == X
et définie pour t O. Définissons par ailleurs la fonction u (t, X)
à partir des conditions
(1P (t, X), Bu (t, X)) == p (1P (t, X) ), t 0,
et la fonction x (t, X) vérifiant la condition initiale x (0, X) === 0 à
partir de l'équation
dx t' x) = Ax (t, X) + Bu (t, X).
De ce qui précède, la fonction v (x) sera définie de la relation
(1P (t, X), B v (x (t, X) )) == p (11' (t, X) ) . ( 44)
En vertu du théorème d'existence (théorème 14), le point x (t, X)
parcourt l'espace X t 0 u t e n t i e r lorsque t est négatif, le vecteur
X variant arbitrairement. La relation (44) définit donc la fonction
v (x) en un point arbitraire x de l'espace X.
Remarquons que la condition de stabilité de l'opérateur A n'a
été utilisée dans les raisonnements précédents qu'une seule fois,
précisément à la fin du paragraphe préc'édent, lorsqu'on a prouvé
qu'à partir d'un point quelconque de l'espace X il était possible de
s'approcher aussi près que l'on veut de l'origine des coordonnées.
Toutes les conclusions donc du présent paragraphe restent en vigueur
dans le cas où l'opérateur A n'est pas stable; cependant en choisis-
sant dûment la commande u (t), on peut à partir d'un point quelcon-
que Xo E X s'approcher aussi près que l'on veut de l'origine des coor-
données (voir exemple 1, 5). Si cette condition n'est pas relnpliü
non plus, la synthèse est encore possible, non pas pour l'espace X
tout entier, mais pour ùn' de ses domaines. Plus exactement dési-
gnons par YI' ensemble des points de l'espace X d'où on peut (sous
l'effet d'une commande dûment choisie) s'approcher aussi près que
l'on veut de l'origine des coordonnées. Il est alors possible de cons-
truire la fonction v (x) sur l'ensemble Y (en supposant que l'ori-
gine des coordonnées de " l'espace Er est un point i n t é rie Ù r au
polyèdre" U et qn' est rem plie la condition de position comm une),
i.e. la solution du problème de synthèse. Il n'est guère indispen-
sable de vérifier par avance si l'on peut aboutir à l'origine 'des coor-
21.]
EXEMPLES
127
données en partant d'un point arbitraire ou non: si on résout le
problème de synthèse comme indiqué plus haut (Le. en nous dépla-
çant de l'origine des coordonnées par des « mouvements à reculons »),
alors l'ensemble des points de 'espace X en lesquels nous pouvons
a bOll tir (en vertu des formules (38), (39), (41) et (42)) en partant de
l'origine des coordonnées ne sera autre que le domaine Y pour lequel
le problème de synthèse admet une solution.
L'ensemble ¥ est 0 u ver t, i.e. il contient tout point avec l'un
quelconque de ses voisinages. Soient en effet Xo E y et u (t), t o
t t 1 une commande optimale recalant le point Xo à l'origine
(les coordonnées. Soit par ailleurs un voisinage V de l'origine des
coordonnées tel qu'en partant d'un quelconque de ses points on puis-
se (sous l'effet d'une commande dûment choisie) aboutir à l'origine
des coordonnées. En vertu du théorème de la dépendance continue
des solutions des équations différentielles par rapport aux condi-
tions initiales il existe dans X un voisinage W du point Xo tel que
la trajectoire de phase associée à la commande u (t), t o t t 1 ,
en partant à l'instant t o d'un point quelconque Yo E W aboutisse
à l'instant t 1 à un point quelconque de l'ensemble V. Tout point
Uo E W peut donc par une commande dûment choisie être recalé à
l'origine des coordonnées, i.e. W E Y. L'ensemble Yest donc ouvert.
'Puisque par ailleurs en partant d'un point quelconque Xo E y on
peut au bout d'un temps fin i aboutir à l'origine des coordonnées,
alors (voi;r le corollaire du théorème 14) :
00
y = U LT,
T=1
i.e. }T est égal à l'union d'une suite croissante d'ensembles convexes
et donc est lui-même un ensemble con v e x e.
Ainsi, l'ensemble Y de tous les points de l'espace X d'où l'on peut
aboutir à l'origine des coordonnées est un ensemble convexe ouvert con-
tenu dans l'espace X. Le problème de la synthèse des commandes opti-
males admet une solution à l'intérieur de cet ensemble ¥.
S 21. Exemples
E x e m pie 1.
(Système du deuxième ordre avec deux paramètres de commande
et des valeurs propres complexes.)
Soit le système d'équations
dx 1 }
- == a 1 x 1 + alx2 + blUl -f- b 1 u 2
dt 1 2 1 2'
dx 2
- == a 2 x 1 -t- a 2 x 2 + b2Ul + b 2 u 2
dt 1 2 1 2
(45)
128
PROBLÈMES LINÉAIRES EN TEMPS OPTIMAL
[Ch. 3
où l'on suppose que les valeurs
i.e. (a - a;)2 + 4a a < 0, et
est définie par les inégalités
lu 1 1<':1,
de la matrice (a)) sont complexes.
que le domaine de commande U
1 u 2 1 1.
(46)
Si le rang de la matrice (b]) est inférieur à 2, alors les colonnes de
cette matrice sont proportionnelles, i.e. b === kb (i === 1, 2) et le
système (45) prend la forme
dx 1 1
Cil === a x1 + a x2 + b (U1-i- ku 2 ),
dx 2 J
_ - a 2 x 1 + a2x2 + b2 ( u 1 + kU2 )
dt - 1 2 1 ·
u l + ku 2 est une grandeur pouvant prendre des valeurs quelconques
assujetties à la condition
1 u 1 + ku 2 1 1 + 1 k 1.
Le système (45) est donc dans ce cas un système à uns e u l
paramètre de commande u === u 1 + ku 2 . Nous allons exclurre ce cas,
Î.e. nous supposerons que le déterminant de la atrice (bj) est
non nul.
Désignons par  + if-t où f-t =1= 0 les valeurs propres de la matri-
ces (aJ); on peut prendre f-t > O. Les raisonnements qui vont suivre
sont indépendants du signe de Â, toutefois pour fixer les idées nous
examinerons le cas où Â < O.
Par le changement linéaire des variables
y1 === S X1 + S X2 , }
y2 === S X1 + s; x 2
(47)
le système (45) se ramène à la forme
dy1 }
dt == Ây1-l--ty2 + C U1 + C U2,
dy2
dt === y1 + Â y 2 + c u 1 + c;u 2 ,
où les coefficients cj s'expriment de toute évidence en fonction des
éléments des matr;ices (b)) et (s)). La variable indépendante t (le
temps) n'étant pas affectée par le changement linéaire opéré et les
formules (47) étant homogènes, les trajectoires optimales du systè-
me (45) aboutissant à l'origine des coordonnées se transforment sous
l'effet de (47) en trajec toires optimales du systè,me ( 48) aboutissant
à l'origine des coordonnées. Par suite nous pou vons étudier uniquement
la synthèse des trajectoires optimales du système (48) en portant les
variables y1 et y2 sur les axes des coordonnées. Cette synthèse une
(48)
21.]
EXEMPLES
129
fois obtenue, nous pouvons au moyen de la transformation affine
(47) trouver la synthèse des commandes optimales du système (45).
Désignons par rt le plan engendré par les variables yI et y2.
Posons
C UI + C U2 == VI, }
c;u l + c;u 2 == v 2 .
Le système (48) s'écrit alors:
dyl }
dT == Âyl - fly2 + VI,
dt = lA-yl + 'A y 2 +v 2 .
(49)
(50)
De (49) il s'ensuit que pour toutes les valeurs u l et u 2 satisfaisant
aux inégalités (46) le point (VI, v 2 ) décrit dans le plan rt un p a -
r a Il é log r a m ID e, que nous désignerons par V (fig. 33), ayant
pour son1mets les points
( 1 + 1 2 + 2 )
Ci c 2 ' Ci c 2 '
( - c + c , -- c; + c; ),
( 1 1 2 2 )
C i -C 2 , C i -C 2 ,
( 1 1 2 2 )
-c! -c 2 , -C i -C 2 ·
Nous somn1es ainsi amenés à étudier le problème de synthèse des
comn1andes optimales du système (50) à condition que le point v ==
=== (VI, v 2 ) décrive dans le plan rt engendré par les variables yI, y2
un parallélogramme V centré en l'origine des coordonnées. Voyons
CH problème.
Le système (5)
s' écri t d ans le cas du processus
d 1 }
dT == - Â'\jJ1 - fl'\jJ2,
d 2 Il
dT == fl '\jJ 1 - I\i '\jJ2,
commandé (50)
d'où l'on tire immédiatement la solution générale
'\jJ1 == ce-'J..t cos (flt + ex),
'\jJ2 == ce-'J..t sin (flt + ex),
où c > 0 et ex sont les constantes d'intégration. Puisque nous n'étu-
d ions los coordonnées du vecteur 11' == (\Pb 'P2) qu'à un facteur positif
de proportionnalité près (car la fonction H est homogène en 'Pi),
nous pouvons négliger le facteur positif de proportionnalité ce- Àt et
considérer que le vecteur '\jJ est défini par les relations
'lPi == cos (flt + ex), 11'2 == sin (flt + ex).
I n d'autres termes, le vecteur 'lp == (11'1' 11'2) est animé d'un mouve-
Inent de rotation uniforme (autour de l'origine des coordonnées) en
£1- 0 i 3 3 9
130
PROBLÈMES LINÉAIRES EN TEMPS OPTIMAL
[Ch. 3
sens inverse des aiguilles d'une montre à une vitesse angulaire Il
(rappelons que Il > 0).
Désignons maintenant les sommets du parallélogramme V par
et, e 2 , e3, e 4 ; la numération va en sens inverse des aiguilles d'une
!J2
!J'
Ca
FI G. 33
FI G. 34
montre. Traçons ensuite à partir de l'origine des coordonnées des
droites perpendiculaires aux côtés du parallélogramme V et dési-
gnons par ai, CX2, a3, CX4 les angles forInés par ces droites (fig. 34).
D ans le cas présen t la fonc-
tion If étant de la forn1e
H === . . . + 'PtVI + 'lP2V2 ===
== ... + (1}J, v)
(les points £le suspensjon dé-
signen t les term es ne renfer-
mant ni VI ni v 2 ), il s'ensllit
donc de la fige 3,) que si le
vecteur 'lp est sitl1é dans]' an-
gle ai (i === 1,2,3,4), la fOllC-
t ion JI a t t e i nt son Tn ax i nl n fil
au sommet v === el' v E V. Or,
le vecteur 'lp etant animé el 'un
mouvement de rotation uni-
forme de vjtesse angulaire l,
nous sommes donc conduit
à la conclusion suivante sur les commandes optimales. Pen-
dant un temps égal à ai le paramètre de comm ande v est égal à e i'
Il
ensuite v « saute» dans le sommet ei+i où il restera pendan l 111l
tem ps ai+1 (si i == 4, alors i + 1 == 1), de là il « saute » el ans le
f.t
sommet ei+2 et ainsi de suite. Le premier et le dernier intervallr
.
t'/ I .
1 f
FI G. 35
21.]
EXEMPLES
131
de temps peuvent fort bien être inférieurs aux grandeurs respectives
ai , car le mouvement peut ne pas avoir commencé à un instant de
t
« cOlnmutation » et peut finir (Le. le point représentatif aboutit à
l'origine des coordonnées) avant que ne se produise une autre com-
ml1tation.
Désignons par ei le point (at, aÏ) E :Tt dont les coordonnées véri-
fient les relations
'i 1 2 1 }
I\ a i -Ilai == - Vi ,
1 +Â 2 2
flai ai == - Vi
1/2
(51 )
e'
3
!J'
où vt et vÏ sont les coordonnées
du sommet ei du parallélogram-
me V. Nous obtenons ainsi qua-
tre points e;, e , e , e , sommets
d'un parallélogramme V' (car les
relations (51) sont linéaires).
Les formnles (51) montrent que le
parallélogramme V' se déduit de
V par nne similitude (centrée à
l'origine des coordonnées) et
d'angle quelconque (fig. 36). D'après les formules (50) et (51) on
voit que lorsque le paramètre de commande V prend la valeur
ei, les variations des coordonnées yI et y2 sont régies par les
équations
,
el
FIG. 36
d 1
1t == Â (yI - al ) - Il (y2 - at ),
dy2 ( 1 1 ) ' 'i ( 2 )
dl == Il Y -- ai -}- 1\, y 2 - ai
En comparant le système (52) au système
d 1
1t == Âyl-lly2, }
d 2
1t == Ilyl + Ây 2 ,
nous constatons qne, graphiquement, ils se déduisent l'un de l'autre
par nne translation; pIns exactement, la position d'équilibre du
système (52)i n'est pas à l'origine des coordonnées (comme pour le
système (53), fige 37), mais au point ei.
Nous sommes donc amenés à l'affirmation suivante sur la struc-
ture des commandes optimales. Le point représentatif décrit pen-
dant un temps ai un arc de la trajectoire de phase du système (52) i,
Il
puis, pendant un temps ai+1 , une portion de trajectoire de phase
Il
du système (52)i+17 ensuite, intervient le système (52)i+2 et ainsi
pourv=ei. }
( 52)i
(53)
9*
132
PROBLÈMES LINÉAIRES EN TEMPS OPTIMAL
[Ch. 3
de suite (le premier et le dernier intervalles de temps pouvant être
inférieurs aux grandeurs correspondantes i ).
11 2
!II
FIG. 37
!l 2
e'
3
Cf............ A.,
\ ...... jJ
\
!Jf
AI
FIG. 38
A présent, il est aisé de construire dans le plan Jt les « lignes de
commutation » qui définissent la synthèse des commandes optimales.
Désignons par A iO (i == 1, 2, 3, 4) l'arc de la trajectoire de phase
du système (52)i aboutissant au point 0 et correspondant à l'inter-
valle de temps ai (fig. 38). Il est clair que le point représentatif
}.t
21.]
EXEMPLES
133
a c h è v e son mouvement optimal sur l'un des arcs AiO qu'il
peut ne pas parcourir entièrement mais seulement une portion X iO
(puisque le dernier intervalle de temps peqt être inférieur à :i ) .
( omme, par ailleurs, le point X i est un point, e « commutation »
{ t qu'après cette commutation le mouvement du point représentatif
obéit au système (52)i, on en déduit qu'a van t l'instant de com-
]nutation le mouvement du point représentatif est gouverné par
AJ
z
!J
!JI
AI
FIG. 39
la loi (51)i-1. La portion précédente YiX i de trajectoire optimale
est un arc de la trajectoire du système (52)i-i qui aboutit au point
X i et correspond à l'intervalle de temps CX i - 1 . Lorsque le point Xi
11
décrit entièrement l'arc AiO, les arcs YiX i de la forme indiquée
remplissent le «quadrilatère curviligne» (fige 39) dont l'un des
« côtés» coïncide avec l'arc Ai-iO (car lorsque Xi === 0, l'arc YiX i
coïncide avec A i-10). Trois des sommets du quadrilatère curviligne
mentionné se trouvent donc en Ai, 0, A i - i ; désignons le quatrième
sommet par B i - l . L'arc Bi-iA i - i est alors le lieu géométrique des
points Yi' Le. des points de commutation {du système (52)i-2 au
système (52)i-l) situés sur les trajectoires optimales.
On conçoit aisément que l'arc Bi-iA i - i se déduit de l'arc AiO
Âa. 1
l-
par une similitude de centre ei -b de rapport e J.A. et d'angle CXi-1
(dans le sens des aiguilles d'une montre). En effet, en coordonnées
polaires (yI === P cos Cf), y2 === P sin Cf)) les solutions du système (53)
s'écrivent sous la forme:
p = ce"At, cp =!lt + cx,
où c > 0 et cx sont les constantes d'intégration. Si le mouvement
du point représentatif est régi par cette loi, alors au bout d'un
134
PROBLÈMES LINÉAIRES EN TEMPS OPTIMAL
[Ch. 3
temps 't, le rayon vecteur du point représentatif subira une simili-
tude de rapport eÎv't et d'angle Il't. Pour 't == ai-1 nous démontrons
I-t
notre assertion, à savÛ'ir: le vecteur ei-1X i se déduit du vecteur
ei-1Yi (fig. 40) par une similitu-
Â.a. 1
l-
de de rapport e J.t et d'angle
CXi-1 (la rotation ayant lieu en
sens inverse des aiguilles d'une
Inontre).
Donc la similitude de centre
'Aa- 1
l-
ei-l, de rapport e - et d'angle
!II CXi-1 (la rotation ayant lieu en
sens inverse des aiguilles d'une
montre) transforme l'arc OA i en
l'arc A i-1B i-1 sur lequel se
produit la «commutation» du
système (52)i-2 au système
(52)i-1 (fig. 41).
Avant la comw.utation au point Yi' le mouvement du point
représentatif était' régi par le système (52)i-2 pendant un temps
8z
/iP
/7
/1
/ 1
/ 1
/ \
1
1 \ r
1 3
AJ "
\ ........
!J2
e;
FI G. 40
/12
!JI
BI,
FIG. 41
Cti-2 (l'arc ZiYi sur la fige 42). Lorsque le point Yi décrit entièrement
I-t
l'arc A i - 1 B i - l , les arcs ZiYi de la forme mentionnée remplissent le
« quadrilatère curviligne » dont deux des côtés sont les arcs A i-1 B i-l
et A i-1B i-2. Désignons le quatrième sommet par C i-2. Comme
précédenlment, il s'avère que l'arc B i - 2 C i - 2 (i.e. le lieu géolnétrique
des points de commutation) se déduit de l'arc A i - 1 B i - l par une simi-
21.]
EXEIVIPLES
135
Âai-2
litude de centre ei-2, ùe rapport e - Il et d'angle Cli--2 (la rotation
ayant lien dans le sens des aigu lles d'une montre).
] n poursuivant cette procédure, nous arrivons à construire quatre
lignes OAiBiCiD i . . . (i == 1,2,3,4) issues de l'origine des coor-
données et représentant le lien géométrique des points de commuta-
Îvai-1
tion (fig. 43). Une similitude de centre ei-b de rapport e-J! et
el' angle Cli-i (la rotation ayant lieu dans le sens des aiguilles
y2
!J'
C,
FI G w 42
d'une montre) transforme la ligne OAiBiC i . .. en la ligne
Ai-1Bi-1Ci-1Di-1 . .. (fig. 44). Ceci permet de tracer progressive-
nlent les lignes OA iB iC i . . ., si l'on connaît les premières portions
OAt, OA 2 , OA 3 , OA 4 (on a indiqué plus haut comlnent déterminer
ces prelnières portions). Il nous reste à souligner que le paramètre
de con11nanrle u prend la valeur ei à l'intérieur de 1'« angle » formé
par les lignes OAi+1Bi+iCi+1 . . . et OAiBiC i . . . et sur l'arc AiO.
C:e qui nous donne la synthèse des commandes optimales (fig. 45).
1/ allure des trajectoires optimales est représentée sur la fige 46.
Rappelons que les figures 37 à 46 traitent du cas où Â < 0,
Le. lorsque les parties réelles des valeurs propres de la matrice
(a;) sont négatives. Dans ce cas les arcs OA i, A i B i, B i C i, . . . se
sont allongés, quant à la synthèse des commandes optimales, elle
est réalisée sur le plan n tout entier. Lorsque  == 0, les dimensions
d es arcs ne sont pas modifiées (Le. OA i == B i C i == . . ., A i B i ==
== CiD i, . . .); la synthèse des commandes optimales est réalisée
con101e précérlernn1ent sur le plan n tout entier (voir l'exemple 3
FI G. 43
,
.e z
1/1
FIG. 44
!J'
!/2
v=e 2
v= el
!II
v=e a
v= et
y'
FIG. 46
138
PROBLÈMES LINÉA IRES EN TEMPS OPTIl\IAL
[Ch. 3
.Y
1
1
1
1
1
1
1
1
1
1
\
\
\
\
\
\
\
\
\
\
\
"
"
"
"
--
,.,---
,.,
/'
./
,/
,/
/
/
/
/
/
/
/
/
......-------
--
- "'"-
"'................
.........
.......
.......
"-
'"
,
'-
"
\
\
\
\
\
\
\
\
\
\
\
\
,
tg l
1
1
1
1
1
1
1
'"
"'-
"
...............
.......'--
'-...
---..-
/
/
/
/
/
/
/
/
./
./
./
..;
.,...
...-""""
---...-"'-
FIG. 47
du 5). Enfin, lorsque À == 0, les dimensions des arcs OA b B i C i, . . .,
et A iB i, CiD b . . . diminuent en raison géométrique; la synthèse
des commandes optimales n'est réalisée que dans une portion limitée
du plan Jt (fig. 47).
Nous venons de trai ter la synthèse des commandes optimales
dans le plan Jt engendré par les variables yI et y2. On passe au plan X
engendré par les variables de départ Xl et x 2 au moyen dos formu-
les (47). On constate dans ce cas que le tableau de la synthèse des
cOlnlnandes optimales se déforme affinen1ent.
f-21.]
EXEIVIPLES
139
E x e m pIe 2.
(Système du deuxième ordre à deux paramètres de commande
et des valeurs propres négatives.)
Soit le système (45) où l'on suppose que les valeurs propres de
la matrice (aj) sont réelles, négatives et distinctes. Nous admettrons
( omme précédemment que le domaine de commande U est défini
par les inégalités (46) et que le déterminant de la matrice (bj)
est non nul. Désignons les valeurs propres de la matrice (a;) par  i et
Î\,2, À 2 < À i < O. Un changement linéaire des variables (voir (47))
ramène le système (45) à la forme:
dlt i = Â,jyl + C UI + c u 2 , }
dy2
- == Â Y 2 + C2Ul + C"U2
dt 2 1 2'
ou
dlt I = Â,jyl + VI, }
dy2 _ À 2 + 2
di-- 2Y v
(voir (49)). Comme dans le premier exemple, le point v == (VI, v 2 )
décrit le parallélogramme V (voir fige 33) dans le plan Jt engendré
par les variables yI, y2.
Dans le cas d'un processus commandé (54), le système (5) prend
la forme:
(54)
d'Pt '1 }
di == - f\.,t1Pt,
d 'p 2 '1
Cft == - f\.,2'tP2,
et sa solution générale est:
'tPi == Ct e - Îv1t , 'tP2 == C2 e - J - 2t .
()n voit d'après l'allure des formules que si l'une des constantes
d'intégration Ci ou C2 est nulle, le vecteur 1P == (1Pl, 1P2) conserve
une orientation constante (qui est parallèle à l'un des axes de
coordonnées). Si les deux nombres Ci et C2 sont non nuls, alors le
vecteur 'tp est animé d'un n10uvement de rotation uniforme (lorsque
t croît ) entre l'axe des abscisses et cel ni des ordonnées, tout en res-
tant dans le même quadrant (car I : I = 1 : 1 e(Â!-Â2)t -+ 00,
lorsque t croît).
Supposons que la condition de position commune est. satisfaite
pour le syst.ème (45); elle esl donc satisfaite aussi pour le système
(54) qui se déduit du système (45) par une lransforn1ation linéaire.
140
PROBLÈMES LINÉAIRES EN TEMPS OPTIMAL
[Ch. 3
En d'autres termes, aucun des côtés du parallélogralnme n'est
parallèle à aucun des axes de coordonnées. Abaissons de l'origine
des coordonnées des droites l1 et l2 perpendiculaires aux côtés du
parallélogramme V (voir fige 34; ces droites ne sont pas confondues.
avec les axes de coordonnées en vertu de ce qui précède). Nous
constatons comme précédemment que si le vecteur 1P est contenu dans
l'angle ai (i == 1, 2, 3, 4), la fonction JI atteint son maximum
au point v == ei, v E V (voir fige 35).
Désignons maintenant par ei le point (al, a ) E JI: de coordonnées:
1 1 1 2 1 2 55)
ai == - Â 1 Vi, ai == - Â 2 Vi, (
où vl et V sont les coordonnées du sommet ei du parallélogramlne V.
Nous obtenons alors quatre points e , e;, e;, e , qui sont les SOInlnets
d'un certain parallélogramme V'. Des formules (54) et (55) il résultp
que lorsque le paramètre de commande v prend la valeur eb les
variations des coordonnées yl et y2 obéissent aux équations
dyl  ( l 1 )
(ft== 1 Y -ai,
dy2 2 2
(ft == Â 2 (y - ai )
(pour v = ej). }
(56) i
Le graphique du système (56)i se déduit de celui du systèn1c
d:!t 1 = Â,tyl, } (57)
dy2 Â 2
(ft == 2Y
par une translation; la position d'équilibre du système (5G)i n'étant
plus à l'origine des coordonnées (comme pour le systènle (57),
fig. 48), mais au point ej.
En poursuivant notre étude, nous aboutissons à des résultats
totalement différents selon la disposition des droites l1 et l2 perpen-
diculaires aux côtés du parallélogramme V. Considérons les deux
cas suivants.
Premier cas. Les droites l1 et l2 sont situées dans des quadrants
différents (Le. l'une dans le premier et le troisième, l'autre dans
le second et le quatrième, fige 49). Numérotons les angles ai (défi-
nis par les droites l1 et l2) comme l'indique la fige 50, Le. e2 et el,
désignent respectivement les sommets supérieur et inférieur du
parallélogramme V, et e1 et e 3 les sommets droit et gauche (fig. 49).
Le caractère de variation des grandeurs 1P1 et 1P2 nous amène à faire
la conclusion suivante sur les commandes optimales. Toute comn1an-
de optimale soit ne renferme pas de points de commutation (Le. tout
au long du déplacement le paramètre v conserve sa valeur constante
qui coïncide avec l'un des sommets du parallélogramme V), soit
21.]
EXEMPLES
141
y2
!l'
FI G. 48
ne renferme qu'un seul point de commutation et alors avant la com-
mutation le paramètre v se confond avec l'un des sommets et ou e 3
et, après la commutation, avec l'un des sommets e2 ou e4.
1 l est désormais facile de construire dans le plan Jt les «lignes de
conlmutation» qui déterminent la synthèse des commandes opti-
!f3
Ct
/1\
/ \
/ JI \
cJ \
\
o
!Il
z,
JI'
z,
Y,
Z2
Z2
FIG. 49
FI G. 50
142
PROBLÈMES LINÉAIRES EN TEMPS OPTIMAL
[Ch. :
males. Désignons respectivement par AO et BO les trajectoires
des systèmes (56) 2 et (56)4 qui aboutissent à l'origine des coor-
données (fig. 51). Les lignes AO et BO sont symétriques par
rapport à O. Si le mouvement optirnaL
renferme une commutation (et une seulo
d'après ce qui précède), sa fin est gou"'
vernée par le système (56)2 ou (56)4'
Le. le point représentatif se déplacera
sur la ligne AO ou la ligne BO. Aupa-
ravant (Le. avant el' arriver sur la ligne
BOA), le point représentatif se sera dé-
!JI placé soit sous l'action du système (56) 1
soit sous l'action du sysLème (56)3. La
ligne BOA est donc une ligne de corn-
mutation, quant aux deux don1aines
qu'elle délimite sur le plan, ils sont rem-
plis par les trajectoires des systèmes
(56)1 et (56)3: le domaine de droite par
les trajectoires du système (56) 3' le do-
maine de gauche par les trajectoires du
système (56)1. Ceci nous donne la synthè-
se des commandes optimales (fig. 52).
Le passage des variables yI et y2 aux variables initiales Xl, x 2
a pour effet de d former affinement le graphique des trajectoires
optimales.
Deuxième cas. Les droites l1 et l2 sont situées dans les mêmes
quadrants, par exemple dans le premier et le troisième. Numérotons
les angles ai (définis par les droites l1 et l2) comme l'indique la
fige 53; les sommets du parallélogramme V sont numérotés sur la
fige 54. Le caractère de variation des grandeurs 1Pl et 1P2 nous amène
à faire la conclusion suivante sur les commandes optimales. Si la
valeur initiale 1Po du vecteur 1P == (1P1, 1P2) est située à l'intérieur
du quatrième quadrant (ou sur ses côtés), le vecteur cr variera sans
quitter ce quadrant, i.e. il restera constammen,t dans l'angle a1.
Nous aurons don v == el (sans commut8.tion). Cette commande esL
associée à la trajèctoire du système (56)1 qui aboutit à l'origine
des coordonnées (fig. 55). D'une manière analogue, si la valeur
initiale 1Po du vecteur 11' est située à l'intérieur ou sur les côtés du
deuxième quadrant, nous aurons v == e 3 tout au long du déplace-
ment, Le. nous obtenons la trajectoire du système (56)3 qui aboutit
à l'origine des coordonnées (fig. 56). Toutes les autres trajectoires
optimales correspondent aux cas où le vecteur 11'0 est situé à l'inté-
rieur du premier ou du troisième quadrant. Discutons le cas où 'Po
est situé dans le premier quadrant (le cas du troisième quadrant
se déduit par une symétrie par rapport à l'origine des coordonnées).
Soit donc le vecteur 1Po situé à l'intérieur du premier quadrant,
B
g2
.,
(}j
-e'
1
-e'
A
FI G. 51
21.]
EXEIV[PLES
143
!l 2
!l'
FIG. 52
mais dans l'angle (Xl. Le vecteur", est animé d'un mouvement de
rotation uniforme en sens inverse des aiguilles d'une montre qui le
rapproche de l'axe des ordonnées. La commande optimale admet
donc deux commutations: d'abord v == el, ensuite v == e2 après la
première commutation et, enfin, iJ == e 3 après la seconde commuta-
l,
FI G. f)
144
PROBLÈMES LINÉAIRES EN TEMPS OPTIMAL
[Ch. 3
tion. Nous allons montrer que dans le cas des deux commutations
mentionnées, l'intervalle, de t mps pendant lequel le paramètre de
commande v prend la valeur e2 est d'une dur é e b i end é -
fin i e (indépendamment du choix des conditions initiales).
e3
.......
\ V.......-
\
l,
!l'
FIG. 54
En effet, désignons respectivement par k 1 et k 2 (k 1 < k 2 ) (voir
fige 53) les coefficients angulaires des droites II et l2. Le vecteur 1P
variant suivant la loi
'\Pi == cie- lt; '\P2 == C2 e - Â2t
(où C1 > 0 et C2 > 0 puisque 1P est situé dans le premier quadrant),
y2 y2
e' e'
.3 .2
0 !JI
C' . ,
.'2 e 1
0 !If
. , .,
e" CI
FIG. 55
FIG. 56
l'instant de commutation Ti du sommet el au sommet e2 (i.e. l'instant.
où le vecteur 'lp coupe la droite l1) se déduit de la relation
c2e- 2'tl
=1£1.
C1e- 1't1
S 21.]
EXEMPLES
145
D'une manière analogue, l'instant de commutation T2 du sommet e2
au sommet e 3 (Le. l'instant où le vecteur", coupe la droite l2) se
déduit de la relation
C 2 e - Â.2't2
== k 2 .
C1 e -Â. 1 't 2
Donc,
1 1 k1C1 1 1 k2C1
ti == '1 '1 n-, T2 == '1 1 -'1 2 n - C2 '
""1 -""2 C2 "" ""
et l'intervalle de temps [T1,T2] durant lequel le paramètre de com-
lllande v prend la valeur e2 est d'une longueur:
1 ( l k2c 1 1 ki Ci ) 1 l k2
'(2-'(1== 'A 'A n-- ll- == 'A 'A n - k ·
1 - 2 C2 C2 i - 2 1
Le nombre figurant dans le deuxième membre de l'expression (58.)
ne dépend ni de Ci ni de C2 (i.e. de la valeur initiale 1PO du vec-
teur '\p), désignons-le par T.
Ainsi lorsque le vecteur 1P varie dans le premier quadrant, les
trajectoires optimales sont de la forme suivante. Le paramètre de
comnlande v prend la valeur v == e1 durant un certain temps, puis
la valeur v == e2 durant le temps T et, enfin, la valeur v == e 3 jus-
qu'à la fin du mouvement.
Il est bien entendu que le nombre de commutations peut être
inférieur à deux. Si, par exemple, nous avions commencé à étudier
le mouvement du point représentatif à un moment où le paramètre
de commande v était égal à e2, alors pendant un intervalle de temps
non s u p é rie u r à T le paramètre v se serait trouvé au sommet
e2 et après commutation, au sommet e 3 . Le mouvement aurait pu
aboutir aussi à l'origine des coordonnées avant l'instant de commuta-
tion du sommet e2 au sommet e 3 . Autrement dit, si le paramètre
de commande v réalise moins de deux commutations, le temps qu'il
passera dans le sommet e2 n'est pas s u p é rie u r à T (la commuta-
t.ion peut s'opérer soit de e1 en e2 soit de e2 en e3).
A présent il est aisé de construire sur le plan nIes «lignes de
commutations» qui définissent la synthèse des commandes opti-
nlales. Traçons d'abord les trajectoires correspondant à d eux
commutations. Sur ces trajectoires, la phase finale du mouvement
correspond à la valeur du paramètre v == e 3 , i.e. le mouvement
a lieu sur l'arc AO de la trajectoire définie par le système (56)3
qui abou Li t à l'origine des coordonnées (fig. 56). A van t d' arri ver
sur la ligne AO le point représentatif s'est déplacé sous l'action du
système (56)2. La ligne AO est donc une ligne de commutation du
sommet e2 au sommet e 3 . Soit X un point quelconque de la ligne AO.
IJa portion de trajectoire optimale Y X antérieure au point X est
un arc de la trajectoire du système (56)2 qui correspond au temps T
(fig. 57). Les solutions du système (57) étant de la forme yI == C1eÎv1t.
(58)
10-01339
146
PROBLÈMES LINÉAIRES EN TEMPS OPTIMAL
[Ch. 3
y2 == C2eÂ2t, lorsque le point représentatif se déplacera sur la trajec-
toire de ce système durant le temps T, son abscisse sera multipliée
par e'A1T et son ordonnée par e'A2T. Le système (56)2 se déduisant
du système (57) par un déplacement de la position d'équilibre, les
points X se déduisent des points correspondants Y (fig. 57) par une
transformation affine L consistant à multiplier les abscisses par
2
Il
yZ
1 e'
e J e' e'
. .3 .3 .2
!l' 0 !JI
.,
e
8
A
A
FIG. 57
e'A1T et les ordonnées e'A2T dans un système de coordonnées admet.tant
pour origine le point e (voir 55)) et pour axes des droites parallèles
aux yI et y2. D'où l'on déduit que le lieu géométrique des points Y
est une ligne CB transformée affine de AO par L (fig. 58). En
traçant par ailleurs la ligne BO qui est un arc de la trajectoire
du système (56)2 aboutissant à l'origine des coordonnées et corres-
pondant à l'intervalle de temps T, nous constatons que la «bande»
AOBC est entièrement remplie par des portions de trajectoires du
système (56)2 partant de la ligne CB, aboutissant à la ligne AO
et correspondant à l'intervalle de temps T.
Le lieu géométrique des points Y en lesquels s'opère la comn1uta-
tion du sommet et au sommet e2 est donc la ligne CB . Avant d' arri-
ver en Y, le point représenta tif s'est déplacé sur la trajectoire el u
système (56)1. En définitive, nous obtenons des trajectoires corres-
pondant à d eux commutations (fig. 59). La trajectoire « extrê-
me » DEO de la figure 59 correspond à une commutation: le
21.]
EXEMPLES
147
point représentatif arrive à l'origine des coordonnées juste à l'instant
oÙ devrait avoir lieu la deuxième commutation (du sommet e2
au sommet e 3 ).
!l 2
e'
..3
,
e z
.
o
!JI
lJ
FIG. 59
Voyons à présent les trajectoires correspondant à une commuta-
tion de el en e2. La phase finale du mouvement se déroule alors
durant un intervalle de temps n'excédant pas T sur la trajectoire
!J2
,
1:3 e'
. .2
0 !Jf
. 1
el
FIG.60
el u système (56) 2 qui aboutit à l'origine des coord onnées, i. e. sur
une certaine portion ZO de la ligne BO (fig. 60). .LL\vant d'arriver en Z,
le mouvement du point représentatif est régi par le système (56)1.
10*
148
PROBLÈMES LINÉAIRES EN TEMPS OPTIMAL
[Ch. ;)
Lorsque le point Z parcourt l'arc BO tout entier, les trajectoires de
la forme mentionnée remplissent la « bande » DBOA / (fig. 61) où
A'O est la trajectoire du système (56)1 qui aboutit à l'origine des
coordonnées.
!l 2
!J
!J'
v= e 3
v- e
- 1
o
!l'
FI G. 61
FIG. 62
En groupant toutes les trajectoires optimales obtenues nous
constatons qu'elles remplissent le domaine situé à gauche de la
ligne AOA / (fig. 59, 61). Il est évident que la ligne A'O et la ligne
AO sont symétriques par rapport à l'origine des coordonnées.
A droite de la ligne AOA' les trajectoires se comportent d'une
manière symétrique et les commutations ont lieu de e 3 en e4, ensuite
de e4 en et. En définitive, la synthèse des commandes optimales
se réalise sur le plan tout entier (fig. 62). Les trajectoires optimales
sont représentées sur la fige 63.
21.]
EXEMPLES
149
Le passage des variables yI et y2 aux variables initiales Xl et x 2
a pour effet de déformer affinement les trajectoires optimales.
!J2
!JI
FIG. 63
E x e ID pIe 3.
(Cas où le polyèdre U est unidimensionnel et les valeurs propres
de la matrice (aj) sont réelles.)
Su pposons que r == 1 dans le système (1), i. e. le paramètre de
cornmande u est un nombre réel; supposons en outre que ce nombre
est assujetti à varier dans l'intervalle -1 u 1. Le polyèdre U
est donc l'intervalle [-1, 1] de l'axe numérique et le système (1)
s' écri t sous la forme
n
dx i . ·
(ft == LJ a xv+ b'u, 1 u 1 1,
,,=1
i == 1, 2, ..., n.
(59)
Supposons, enfin, que les valeurs propres de la matrice (aj) sont
réelles. Alors, en vertu du théorème (10), la trajectoire optimale
150
PROBLÈMES LINÉAIRES EN TEl\IPS OPTIMAL
[Ch. 3
contient au plus n intervalles de constance sur lesquels on a alter-
nativement u == +1, u == -1.
En d'autres termes, sur chaque intervalle de constance le mouve-
ment du point représentatif est régi par l'un des deux systèmes
suivants:
n
dx i . i
- == a'Lx V -L b
dt Vi'
v=1
i == 1, 2, ..., n,
(60)+
n
dx i 2} . .
-== a'LxV-b
dt v '
v=1
i == 1, 2, ..., n.
(60)_
Désignons respectivement par lVI et M;, les trajectoires des
systèmes (60)+ et (60) _ qui aboutissent à l'origine des coordonnées.
/1+
n
-
/1-
n
FI G. 64
Ces trajectoires forment une ligne passant par l'origine des coordon-
nées et que nous désignerons par Mn (fig. 64). D'après le caractère
des commandes optimales il est clair que la phase finale du mouve-
11;
/1-
n
FIG. 65
ment optimal (qui s' àchève à l'origine des coordonnées) aura lien
sur la ligne lVI; ou sur j1f .
Considérons maintenant toutes les trajectoires du système (60)+
aboutissant sur la ligne lVI;. (fig. 65). Ces trajectoires remplissent
une certaine surface M -1 admettant pour bord la ligne 111n. D'une
façon analogue, les trajectoires du système (60) _ aboutissant sur
la ligne A1 remplissent une certaine surface lVI;;'_1 admettant pour
bord la ligne Mn. En groupant les surfaces AI -1 et M;;'-1 nous obte-
nons une surface que nous désignerons par AIn -1 (fig. 66). Il est clair
21.]
EXEMPLES
151
que les deux dernières phases de tout mouvement optimal se dérou-
leron t sur la surface Mn -1, car seules les trajectoires de cette surface
permettent d'aboutir à la ligne Mn sur laquelle a lieu la phase fina-
le du mouvement.
Par ailleurs, les trajectoires du système (60)+ qui aboutissent
sur la surface M-;;'-1 forment une variété tridimensionnelle M -2
admettant pour bord la surface M n-1. Les trajectoires du système
(60) _ qui aboutissent sur la surface M -1 engendrent une variété
FI G. 66
tridimensionnelle M-;;'-2 de bord M n-1. Les variétés M -2 et M-;;'-2
forment une variété tridimensionnelle M n - 2 où s'achèvent les trois
dernières phases de tout mouvement optimal.
En poursuivant cette procédure nous construisons les variétés
111n, J11 n-17 . . ., M 1 où Mi est de dimension n - i + 1. La variété
Mi+l est entièrement contenue dans la variété Mi qu'elle divise
en deux domaines Mt et Mi, le premier étant constitué de toutes
les trajectoires du système (60)+ aboutissant sur Mi+1 et le second
de toutes les trajectoires du système (60) _ aboutissant sur Mt+1.
La dernière variété 1\1 1 soit est confondue avec l'espace de phase X
tout entier, soit est un domaine de cet espace renfermant l'origine
des coordonnées. C'est à l'intérieur du domaine M 1 que se réalise
la synthèse des commandes optimales.
Cet te synthèse se réalise de la façon suivante: le paramètre de
COll1ll1ande u est égal à +1 dans tous les domaines Mi et à -1 dans
tous les domaines 111i. Le point représentatif est en mouvement dans
le domaine Mi: U == +1 s'il se trouve en Mt et u == -1 s'il se
trouve en 1\1 1 . Lorsqu'il arrive sur la variété M 2, il se produit une
comn1utation ot le reste du mouvement se déroule sur la variété M 2 .
La commutation suivante se produit lorsque le point représentatif
en se déplaçant sur M 2 arrive sur M3. Il continue de se déplace!"
sur J1I1 3 et ainsi de suite. La phase finale du mouvement qui s'achève
à l'origine des coordonnées se déroule sur la ligne Mn. Il se produit
152
PROBLÈl\iES LINÉAIRES EN TEMPS OPTIMAL
[Ch. 3
donc n - 1 commutations en tout. Il est bien entendu que pour
certaines positions de départ du point représentatif le nombre de
commutations peut être inférieur à n - 1 (il peut arriver par
exemple que le point Xo soit situé sur la variété M 2, ou sur AI 3 ,
etc. ).
L' exem pIe 1 du 5 est un cas particulier de la construction géné-
rale exposée ci-dessus.
E x e m pIe 4.
Soit à résoudre le problème suivant. Dans un espace euclidien
de dimension n est en mouvement un point commandé sous l'action
d'un « moteur» susceptible de lui communiquer une accélération
n'excédant pas l'unité en module et orientée arbitrairen1ent. Com-
ment faut-il commander le mouvement de ce point si l'on veut qu'en
partant d'une position initiale donnée avec une vitesse initiale
donnée il mette le moins de temps pour arriver à l'origine des coor-
données (avec une vitesse finale arbitraire)?
Pour résoudre ce problème désignons les coordonnées du point
en mouvement par Xl, x 2 , . . ., x n , les composantes de sa vitesse
par xn+l, . . ., x 2n et les composantes de son accélération par
u 1 , . . ., un. Prenons l'unité pour masse de ce point. Les équations
du mouvement du point s'écrivent alors sous la forme:
dx 1 - xn+l )
dt - ,
dx 2 - xn+2
dt - ,
. . . .
dx n -x 2n
dt ,
l (61)
dxn+1
-u l
dt - ,
dxn+2 -u 2
dt - ,
. . . . . .
dx2n n
dt == u . J
L'accélération u == (u l , . . ., un) n'excédant pas l'unité en module,
le domaine de commande U est défini par l'inégalité
(U 1 )2 + (U 2 )2 +. . . + (U n )2 1.
(62)
Puisque la position initiale et la vitesse initiale du point en mouve-
ment sont données, la position initiale Xo === (x , ..., x n) se trouve
ainsi définie dans l'espace de phase X engendré par les variables
21.]
EXEMPLES
153
l 2 n 2n L d . t . d ' ., l ,.. d
X , X , . . ., X , _ . ., x. a con lIon arrl vee en orIgIne es
coordonnées (avec une vitesse finale arbitraire) signifie qu'en fin
de mouvement doivent être vérifiées les relations
X l - X 2 - - X n - 0
- -...- -,
(63)
les grandeurs Xn+l, . . ., x 2n pouvant être arbitraires. Autrement
dit, le problème consiste à transférer en temps optimal un objet
commandé par les équations (61) et (62) du point initial Xo E X
en un point quelconque de la variété S 1 définie dans X par les équa-
tions (63). La variété S 1 est de toute évidence un plan de dimension n.
Dans ce cas, la fonction H s'écrit:
H == 1p1Xn+I-t- '\f2Xn+2 -1- . . . + 1pn x2n + 1pn+1 ul + . . . + 1p211. Un . (64)
Le système d'équations pour les variables auxiliaires 'tf'i s'écrit:
d'P1
dt == 0,
d'l'2
dt == 0,
d'l'11. == 0
dt '
dWn+1 _ _ 1h
dt - 't'b
d'l'n+2 == -1 h
dt Y2,
d'l'2n _ _ 1h
dt - 't'n-
Il s'ensuit que pendant toute la durée du mouvement optimal les
grandeurs 11'1' 11'2' · · ., 11'n restent constantes et donc les grandeurs
'lp11.+ 17 11'11.+ 2, . · ., 11'2n sont des fonctions linéaires en t.
Ecrivons maintenant la condition de transversalité à l'extrémité
droite de la trajectoire optimale. Pour que le vecteur 1P ==
== (11'1, · . ., 11'11.' 11'11.+1' · . ., 11'2n) soit orthogonal à la variété S 1 qui
est définie par les équations (63), il est nécessaire et suffisant que
soient vérifiées les conditions
11'n+1 = 11'n+2 = · · · == 1J'211. == O.
] a condition de transversalité à l'extrémité droite de la trajectoire
s'écrit donc:
11 J n+1 (t 1 ) == 'Pn+2 (t 1 ) == · - · == 1P211. (t 1 ) == 0,
(65)
OÙ t 1 est l'instant où le point représentatif arrive sur la variété S 1-
( om pte tenu de la linéarité des fonctions 11'n+ 1, 1Pn + 2, · . ., 11' 2n'
154
PROBLÈMES LINÉAIRES EN rrEMPS OPTIMAL
[Ch. 3
il vient de (65):
lPn+1 === a1 (t 1 - t), lPn+2 == a2 (t 1 - t), ...,
1JJ2 n == an (t t - t), ( (6)
où ab a2, . . ., an sont des constantes. Les grandeurs lPi étant défi-
nies à un facteur positif commun de proportionnalité près, nous pou-
vons supposer que le vecteur a == (ab a2, . . ., an) est égal au vec-
teur unitaire, Le.
(a1)2 + (a2)2 + . . . + (a n )2 == 1.
En portant (66) dans (64) il vient:
H ==... +(tt-t) (atul+a2u2+ ... + an un),
où les points de suspension désignent les termes ne dépendant pas
de u 1 , . . ., un. Puisque t 1 - t > 0 (car t 1 représente l'instant
fin a 1 du mouvement), la condition de maximUln de la fonction
H signifie que pendant toute la durée du mouvement la grandeur
alul + a2u2 + . . . -+ an un === (a, u)
doit être maximale, ce qui signifie, en vertu de (62), que u (t) == a,
i.e. les grandeurs u l , u 2 , . . ., un gardent des valeurs constantes
u i == ai, i == 1, . . ., n, pendant toute la durée du mouvement.
Ainsi, dans le cas considéré, l' optimalité du mouvement signifie
que l'accélération u est con s tan t e et égale à l'unité en
module. Ceci nous permet de définir d'une manière univoque l'accé-
lération cherchée (Le. de trouver le sens du vecteur accélération u).
En effet, dans l'espace euclidien considéré la trajectoire du mou ve-
ment du point représentatif est la parabole
.. . . t 2
X == X 'l. + X n+l t + U - l 1 n
o 0 2'. === , ..., ,
où u == (u l , ., un) est le vecteur constant de l'accélération de
module égal à l'unité, i.e. vérifiant la condition
(U 1 )2 + (U 2 )2 +. . . + (U n )2 == 1. (67)
Pour que cette trajectoire passe par l'origine des coordonnées, il
faut que soient vérifiées les conditions
. . . t 2
x +x +1.t+ut 2 ==0, i== 1, ..., n. (68)
Les relations (67) et (68) forment un système de n + 1 équations
en u 1 , u 2 , . . ., un, t où t ne prend que des valeurs positives. S'il
existe plusieurs solutions, nous devons prendre celle où t a 1 a
plu s pet i t e valeur positive (puisqu'il s'agit d'arriver en
temps optinlal à l'origine des coordonnées). De (68) il vient:
. 2 (xi + xn+it)
11 === _ 0 0 1 1 7 '1
Ut t 2 ' : == , · · ., " ·
(69)
22.]
SIMULATION
155
En portant cette valeur dans la relation (67), nous obtenons l' équa-
tion
n
4 (x + x l+it)2 - t 4 == 0
i=1
(70)
n
en t. Lorsque t == 0, on a 4 2j (X )2 > 0 (il est bien entendu que le
i=1
poin t (x , x , . . ., xB) n'est pas confondu avec l'origine des coor-
données, sinon la solution du problème optimal aurait été évidente:
f == 0). Lorsque t cx>, le premier membre de l'équation (70) est
négatif. Cette équation (70) admet donc au moins une racine positive.
Désignons par 't (xo) == 't (x , x , . . ., xa, xa+ 1 , . . ., xÔ n ) 1 a plu s
pet i t e racine positive de cette équation. Alors nous tirons de
(69) les valeurs cherchées des corn posan tes de 1 ' accélération
. 2 (xi -+ xn+i't (xo))
U === _ 0 0 .
('t (xO))2
Nous obtenons ainsi la synthèse des commandes optimales du problè-
lue posé. (La fonction 't (xo) et par conséquent les fonctions u i sont
eontinues par morceaux.)
22. Simulation des commandes linéaires en temps optimal
par des circuits à relais
Revenons au problème des commandes linéaires en temps opti-
Inal étudié au 17. En vertu du théorème (9), toute trajectoire extré-
Inale (voir page 114) qui part du point xo à l'instant t o est définie
par les valeurs initiales '\}J (t o ) de la solution '\}J (t) de l'équation (5).
Si précisément est donné un vecteur '\}Jo arbitraire et non nul, la solu-
tion 'p (t) de l'équation (5) vérifiant la condition initiale '\}J (t o ) == 11'0
est univoque. Par ailleurs, en vertu du théorème (9), la relation (6)
définit d'une manière univoque la commande extrémale u (t). Une
fois connue la commande extrémale u (t), nous déduisons de l' équa-
tion (2) la trajectoire x (t) qui lui est associée et qui part du point xo.
I n définitive, la trajectoire extrémale x (t) est définie donc d'une
rnanière univoque par le choix de la valeur initiale 'Po. Si l'on arrive
à trouver une valeur initiale '\}Jo telle que la trajectoire x (t) pas s e
par l' 0 r i gin e des c 0 0 l'do n née s 0, alors la commande
u (t) et la trajectoire x (t) obtenues par la procédure indiquée pré-
cédeUlment seront optimales. En effet, la trajectoire x (t) ainsi
obtenue partira dans ce cas du point xo au point 0 imposé, d'où l'on
conclut à l'existence d'une commande optimale (théorème 13). Cette
commande optimale est unique (théorème 11) et obéit au principe
du n1aximum, Le. est extrémale (page 114). Or il n'existe qu'une
156
PROBLÈMES LINÉAIRES EN TEMPS OPTIMAL
[Ch. 3
commande extrémale recalant le point Xo à l'origine des coordonnées
(théorème 12). Donc, cette commande extrémale est précisément
la commande optimale.
Il importe de souligner que la d é ter min a t ion de la
trajectoire x (t) correspondant à la valeur initiale 'Po donne lieu à des
calculs assez laborieux. Il faut en effet résoudre l'équation (5),
trouver la fonction u (t) à l'aide de la formule (6), et, enfin, résoudre
l'équation (2), ce qui revient donc à résoudre plu sie u r s
systèmes d'équations différentielles en prenant chaque fois le résul-
tat obtenu pour conditions initiales (car la fonction u (t) en général
n'est pas constante, mais seulement constante par morceaux).
fo
.xo
!
Il' X'
-
u 2 :£2
-
- Ax+ Bu
. .
. .
. .
ur x n
-
-A*r
FI G. 67
FIG. 68
Si l'on suppose que la recherche de la trajectoire x (t) d'a près
la valeur initiale 'Po peut être effectuée par un a p par e i Il quel-
conque, il reste le pro b l è m e deI are che r che de la
valeur initiale 'Po pour laquelle la trajectoire x (t) passe par l' ori-
gine o.
Sans nous soucier du deuxième problème (le problème de la
recherche des conditions ini tiales 'Po) nous allons indiquer dans ce
paragraphe comment construire un simulateur permettant par la
connaissance de la valeur initiale 11'0 de déterminer la trajectoire
extrémale correspondante x (t). Ce simulateur est composé de deux
systèmes linéaires à équations (2) et (5) et d'un certain nombre
d'é 1 é men t spa r t 0 u t 0 uri e n don t le schéma et le
nombre de connexions sont déterminés par le polyèdre U et l' opéra-
teur B.
Voyons maintenant la description mathématique de ce simula-
teur. Soit un système linéaire dont les états de phase sont décrits
par les variables 'PI, . . ., lPn en vertu de la loi (5). Représentons
conventionnellement ce système comme l'indique la figure 67.
La donnée des valeurs initiales des grandeurs 11'1' . . ., 'Pn (i.e. la
donnée du vecteur '\}Jo) définit univoquement les variations ultérieu-
res des grandeurs 11'1' . . ., 'Pn dans le temps . Représentons le système
initial (qui est régi par l'équation (2)) comme l'indique la figure 68.
Pour que la variation (dans le temps) des grandeurs de sortie (i.e. des
22.]
SIMULATION
157
coordonnées de phase) Xl, . . ., x n , soit définie uni voquelnent il
faut que soient donnés l'état de phase initial Xo du système et la
variation (dans le temps) des grandeurs d'entrée u l , . . ., ur (i.e. des
paralnètres de cOlnmande). Le simulateur cherché est de la forme
représentée sur la fige 69; la «caisse» médiane située entre les
systètnes représentés sur les fige 67 et 68 contient un certain nombre
d'éléments par tout ou rien. Le reste du paragraphe est consacré
précisément à la description de la «caisse» médiane.
1'0
.zo
'--_________-.J
J ut. x,
J x 2
J u 2
1 Ax + Bu -
1 -
1 . .
. .
J . .
1 ur x n
1 -
- A *'1
I r-.--------,
1
2 1
J
1
1
n 1
FIG. 69
Distinguons tout d'abord les cas particuliers où le dispositif
de la « caisse » médiane est d'une conception très simple . Voyons,
pour COlnmencer, le cas où dans l'équation (2) ne figure qu'un seul
paramètre de commande u, variant dans les limites -1 u 1
(i.e. le cas où le polyèdre U est l'intervalle [-1, 1]). La matrice (bj)
se transforme en la colon n e (b l , b 2 , . . ., b n ) et la fonction (7)
s'écrit sous la forme
n
'Pa (t) bau.
a=l
:L'équation (6) admet donc la solution suivante:
n
U == sign ( ba\j)a (t)).
a=l
(71)
...i\.utrement dit, SI nous introduisons la grandeur auxiliaire
n
== i.' ba\fa, (72)
a=l
la solution de l'équation (6) sera définie par la formule
u == sign . (73)
Le passage des grandeurs 11'1' . . ., lPn à la grandeur définie par
la formule (72) est réalisé par un som mat e u r représenté
eonventionnellement sur la fige 70. La fige 71 représente un é 1 é -
158
PROBLÈMES LINÉAIRES EN TEMPS OPTIMAL
[Ch. 3
men t par t 0 U t 0 uri e n, i.e. un système dont la grandeur
de sortie et la grandeur d'entrée sont liées par la relation 11 == sign .
Groupons les systèmes représentés sur les fige 67, 68, 70 et 71
dans un schéma uni que (fig. 72). Il est clair que quel que soit le
vecteur initial '\}Jo, à la sortie du premier circuit (du schéma représenté
1
1
2
.
.
.
6: -lsl1J .
rn
FI G. 70
FIG. 71
sur la fig. 72) nous obtiendrons les grandeurs 'Pi (t), . . ., 1Pn (t)
qui sont solution de l'équation (5). Dans le circuit suivant (repré-
senté en pointillé) ces grandeurs se transforn1ent d'après les forn1u-
ro
.Io
-A*
1 r----------l
1
1
é; S : u
1 1
n 1 1
1
L_________.J
X'
x 2
Ax + Bu
x n
FI G. 72
les (72) et (73) de sorte qu'à la sortie nous obtenons la grandeur (71)
qui n'est autre que la solutic:l de l'équation (6). En d'autres termes,
à la sortie du deuxième circuit, nous obtenons la c 0 m man d e
e x t r é mal e u (t), et par conséquent les grandeurs de sortie
Xl (t), . . ., x n (t) du dernier circuit donneront la trajectoire opti-
male correspondante. Autrement dit, le schéma de la fige 72 réalise
le mouvement du système (2) de coordonnées de phase Xl, . . ., xrl sur
la trajectoire extrémale correspondante quelles que soient les valeurs
initiales 'Po et Xo. Si le schéma de la fig. 72 est adopté pour principe
d'un appareil (un simulateur, par exemple), il ne restera plus pour
l'utiliser qu'à déterminer la valeur initiale 'Po pour laquelle (la
valeur initiale Xo étant donnée) la trajectoire obtenue aboutit à l'ori-
gine des coordonnées.
Les raisonnements précédents se généralisent sans difficulté au
cas où le domaine de commande U est un cube r-dimensionnel, i.e.
S 22.]
SIMULATION
159
il est défini par les inégali tés
1 u i 1 1, i == 1, . . ., r.
Dans ce cas la fonction (7) s'écrit
(74)
r n
2.; L 1Pa(t)bBut3. (75)
(3=1 a= 1
Puisque, en vertu de (74), le domaine de variation de chaque para-
mètre de commande u 1 , . . ., ur ne dépend pas des valeurs prises
ro
r
f , Xf
rf2 2 U 2 x 2
-A *1' Ax + Bu
.
n r . ur
.
,zn
1 I
-
cfz t. 2
- -
. .
. .
. t,.r
n
-
FI G. 73
FIG. 74
par les autres paramètres de commande, pour que la fonction (75)
prenne sa valeur maximale, il est nécessaire que c h a c u n des
termes
n
'Pa (t) b u(3
a=l .
( == 1, . . ., r) qui la composent prenne sa valeur maximale. D'où
n
u(3 == sign ( 1}Ja (t) b B ).
a=1 '
Si nous introduisons les grandeurs auxiliaires
n
= bBtPa, == 1, ..., r,
a=1
(76)
la solution de l'équation (6) sera définie par les formules:
u B == sign B, == 1, . . ., . r.
Le passage des grandeurs 'Pi' · · ., 'Pn aux grandeurs £1, · · ., r
s'effectue au moyen du sommateur représenté conventionnellement
sur la fige 73. Il est clair de ce qui précède que dans le schén1a de la
fige 74 on obtiendra à la sortie des éléments par tout ou rien la
c 0 ID man d e e x t r é mal e u l (t), . . ., ur (t) et à la sortie
du dernier circuit la trajectoire extrémale correspondante x (t).
160
PROBLÈMES LINÉAIRES EN TEMPS OPTIMAL
[Ch. 3
Soulignons que dans ce schéma le nombre des éléments par tout ou
rien est égal au nombre des paramètres de commande.
Examinons enfin le cas général où le polyèdre U est arbitraire.
Soient
1, 2' · · ., v
(77)
des vecteurs non colinéaires, deux à deux, orientés dans le sens des
arêtes du polyèdre U (i.e. chacun des vecteurs (77) est parallèle
à au moins une arête du polyèdre U et chaque arête possède dans
m- l" ..I I I 1J!
(It t.: :.
: "I I I '12
....
.
. . .
. . !. : .
. 1J r.
n r I j- 1
FIG. 75 FIG. 76
le système (77) un vecteur qui lui est parallèle). Désignons par
w}, j, . . ., j les coordonnées du vecteur j. Posons
n r
j === ('\p, Bw j) === L: 1Pabawf?, j == 1, ..., y. (78)
a=lp=l p J
Les variables 1' . . ., £1' sont donc des formes linéaires (en général,
linéairement dépendantes) en 11'1' . . ., 1Pn. Le passage des variables
1Pi aux variables j est représenté sur la fige 75. Les variables j
sont déterminées par lPi sur lesquelles toutefois elles n'exercent pas
d'action en retour (ce qui est représenté sur la fige 75 par le séns des
flèches) .
Appliquons chaque grandeur j à son élément par tout ou rien,
et désignons par 111, . . ., l1v (fig. 76) les sorties de ces éléments:
11 j == si gn j, j == 1, . . ., y. (79)
Soient maintenant e1, . . ., e q les sommets du polyèdre U.
Considérons un sommet quelconque ei et soit j l'un des nombrei
1, 2, . . ., y. Si un vecteur admettant pour origine le sommet eS
est porté par une arête du polyèdre U partant de ce sommet, nouS
posons 8ij == +1 si ce vecteur est ég!ll à j et 8ij == -1 s'il est égal
à - j. Le symbole 8ij n'est pas déterminé si aucun des deux cas
ne se présen te.
Figeons un indice i (i == 1, 2, . . ., q) et examinons seulement
les indices j pour lesquels le symbole 8ij est déterminé. Les vecteurs
8ij j sont alors orientés dans le sens des arêtes de U partant du
sommet ei. Soit d'autre part 11' == ('tPi' 11'2' · . ., lPn) un vecteur
ar.bitraire non nul. Désignons par B*1P le vecteur de l'espace Er
{, 22.]
SIMULATION
161
n
dont la i-ème coordonnée est égale à b 11'a' i = 1, . . ., r. Alors,
a=1
pour tout vecteur u de l'espace Er est vérifiée la relation
(B*11', u) = ('\}', Bu). . (80)
rrraçons dans l'espace Er l'hyperplan A passant par le point ei et
orthogonal au vecteur B*'\}J, que nous supposerons issu du sommet ei.
Pour que la grandeur ('\}J, Bu), prise comme fonction du point u E U,
atteigne son supremum seulement en un sommet ei il est nécessaire
( t suffisant (en vertu de (80) que le polyèdre U soit entièrement
eontenu dans le demi-espace défini par l'hyperplan A qui ne contient
pas le vecteur B*'\}J ; or pour ,cela il est nécessaire et suffisant que tout
vecteur issu du point ei et orienté dans le sens d'une arête du polyèdre
U forme un angle obtus avec le vecteùr B*11'. Autrement dit, pour
que l'équation
('l', Bu) = P (11')
(81)
adnlette une solution unique u = ei, il est nécessaire et suffisant
que tous les prod ui ts scalaires
(B*11', 8ijWj)
(correspondant aux indices j pour lesquels le symbole 8ij est défini)
soient négatifs ou, ce qui est équivalent, que soient vérifiées les
inégali tes
Bij ('lP, BWj) < O.
En vertu de (78), la dernière inégalité prend la forme
Bi/Ç,j < o. (82)
Donc pour que l'équation (81) admette une solution unique
a = eh il est nécessaire et suffisant que pour tous les j (pour lesquels
est défini le symbole Bij) soit vérifiée l'inégalité (82), ou, ce qui
revient au même, l'égalité
Bij1]j = -1
(83)
(voir (79).
Posons maintenant
i = li -1 + Bi/'lj, i = 1, 2, ..., q,
j
(84)
OÙ li désigne le nombre d'arêtes du polyèdre U partant du sommet ei,
la sommation s'opérant par rapport à toutes les valeurs de j pour
lesquels le symbole Bij est défini (de sorte que cette somme renferme
li termes). Le passage des grandeurs 'Y}j aux grandeurs i est repré-
senté sur la fige 77. La grandeur i prend la valeur -1 si tous les j
vérifient l'égalité (83), et une valeur p 0 s i t ive si pour l'un
au moins des indices j est vérifiée l' égali té Bij"1j = + 1. [L' égali té
11-01339
162
PROBLÈMES LINÉAIRES EN TEMPS OP'rIMAL
[Ch. 3:
Ei/Y)j === 0, OU, ce qui est équivalent, (11', BWj) === 0 (voir (78)) ne
peut être vérifiée en vertu du théorème 9 que pour un nombre fin i
de valeurs de t que nous négligerons.] Donc l'équation (81) adn1et
une solution unique u === ei si, et seulement si, Si < O. En appli-
quant les grandeurs 1' . · ., Sq aux éléments par tout ou rien et
en désignant les grandeurs de sortie par Xi' . . ., Xq (fig. 78), nous
constatons que l'équation (81) admet une solution unique u === ei
si, et seulement si, est vérifiée l'égalité Xi === -1. De ce qui précède
il est clair qu'à tout instant t (à l'exception d'un nOlnbre fini d'ins-
tants où l'une au moins des grandeurs j est nulle) l'une des gran-
deurs Xi prend la valeur -1, et les autres la valeur +1.
c
tt_lsl X t _
2 III 2.
. . .
'q IS' X r
X f
A. 2
u l
-
1], f
7j2 '2_
...
. .
. .
. .
1Jr C q
u 2
FIG. 77
FIG. 78
.. .
q.1 ;:
FIG. 79
Soient main tenant et, . . ., eI les coordonnées du somn1et e i
du polyèdre U. Posons
q
uP= (1-Xa.)e , p=1, ...,1'
cx=1
(85)
(fig. 79). De (85) il est clair que le point (u l , . . ., ur) est confondu
avec le sommet ei si Xi === -1 et les grandeurs restantes Xa sont
égales à +1. Autrement dit, si l'équation (81) admet une solution
unique, cette solution n'est autre que le point (u l , . . ., ur) obtenu
au moyen des formules (85).
Groupons maintenant les systèlnes représentés sur les fige 67,
68, 75-79. Nous obtenons ainsi le schéma de la fige 80. De ce qui
précède il est clair que quel que soit le vecteur initial 11'0' les fonctions
u l (t), . . ., ur (t) obtenues en sortie de l'avant-dernier circuit
forment la c 0 m man d e e x t l' é fi ale (puisqu'elles satisfont
à l'équation (6); à la sortie du circuit nous obtenons les grandeurs
Xl (t), . . ., x n (t) qui décrivent la trajectoire extrémale correspon-
dante.
Le schéma de la fige 80 réalise donc le mouvement du système (2)
sur la trajectoire extrémale (quelles que soient les valeurs initiales
11'0' x o ).
Il reste comme nous l'avons indiqué plus haut à trouver une
valeur initiale de 11' pour laquelle (la valeur initiale Xo étant donnée)
la trajectoire obtenue passe par l'origine des coordonnées. Cette
23.]
ÉQUATIONS À COEFFICIENTS VARIABLES
163
recherche peut être effectuée par l'une des deux méthodes suivantes:
soit l'on fixe une valeur initiale X o et à l'aide de quelques tests on
cherche la valeur initiale requise "'0' soit, après avoir inversé le
telnps, on trace un réseau suffisamment dense de trajectoires à
partir de l'origine des coordonnées (toutes ces trajectoires seront
optimales) et, en « retenant » ensuite tous les points de commutation
de l'espace de phase X, on construit la « surface de commutation >)
(i.e. on réalise la synthèse des commandes optimales).
10 Xo
cfl C, 'JI " x, u l Xl
2 c'z 1Jz C z Xz u 2 x 2
-A*f Ax + Bu
. . . . . .
. . . . . .
. . . . .
r . .
cfn . 7jJ' C q . ur
. . X q .zn
FI G. 80
Soulignons qu'il est possible de faire écouler le temps plus vite-
dans un simulateur que dans le système réel (par le choix des para-
:mètres dans le premier et le dernier circuits du schéma). Ceci permet
de tester avec le simulateur quelques trajectoires extrémales pendant
un court intervalle de temps et d'obtenir la commande optimal(}
cherchée pour le système de départ.
9 23. E(luations linéaires à coefficients variables
Les principaux résultats établis dans les paragraphes précédents
pour les équations linéaires homogènes à coefficients constants
(voir (1)) se transfèrent aux équations linéaires non homogènes à
coefficients variables. Dans ce paragraphe nous formulerons les-
théorèmes ainsi obtenus et _ indiquerons les modifications qu'il
eonviendra d'apporter dans les précédentes démonstrations.
Précisons tout d'abord la position du problème.
Nous allons étudier un objet dont le mouvement est décrit par le;
système linéaire d'équations différentielles:
n r
d i = a (t)xv+ b (t)uP+fi (t), i=1,..., n. (86)
v=1 #)=1
] e domaine de commande U est comme précédemment un polyèdre
r-dimensionnel convexe et fermé de l'espace Er engendré par les
variables Ul, . . ., ur. Nous nous limiterons toujours au problème
11*
164
PROBLÈMES LINÉAIRES EN TEMPS OprrIMAL
[Ch. 3
€n temps optimal. Les fonctions a} (t), b (t) et fi(t) qui figurent
dans le système (86) seront supposées définies sur un certain inter-
valle a < t < b (pouvant être confondu avec la droite numérique)
et admettant sur cet intervalle un nombre suffisant de dérivées
continues. Nous supposerons, plus exactement, que les fonctions
a} (t) admettent n - 2 dérivées continues (mais pas moins d'une),
les fonctions bl (t) - n - 1 dérivées continues et les fonctions
fi (t) - une dérivée continue. (La remarque de la fin du présent
paragraphe montre que ces contraintes peuvent être moins strictes.)
Toutes les valeurs de la variable t seront supposées appartenant
à l'intervalle a < t < b ; en particulier, toute commande admissible
sera supposée donnée sur un intervalle con t e n u dans l'inter-
valle a < t < b.
Le système (86) p'ellt s'écrire sous la forme vectorielle suivante:
dx
CU=A(t)x+B(t)u+f(t); (87)
où A (t): X -+- X et B (t): Er-+- X sont des opérateurs linéaires
associés dans" les coordonnées Xl, . . ., x n et U l , . . ., Ur respective-
ment aux matrices (a}(t)) et (bl (t)), et f(t) un vecteur de composan-
tes fi (t).
Introduisons les opérateurs Bi (t), B 2 (t), . . ., Bn (t) en posant
Bdt) = B (t), B j (t) = - A (t) Bj-dt) + dBjitdt) , (88)
j = 2, ..., n.
Pour la détermination de ces opérateurs il est nécessaire que les
fonctions b (t) admettent n - 1 dérivées et les fonctions a} (t)
n - 2 dérivées.) Nous dirons qu'à l'instant t est remplie la condi-
lion de position commune si pour toute arête w du polyèdre U les
vecteurs
Bi (t) w, B 2 (t) w, . . ., Bn (t) w
(89)
sont linéairement indépendants dans l'espace X. Dans ce paragraphe
nous supposerons partout, qu'à tout instant t, a < t < b, est remplie
.la condition de position commune.
Observons que si les matrices (a}(t)) et (bl (t)) sont constantes,
i.e. si a) et b ne sont pas fonctions du temps, alors de (88) il résulte
que Bj = (_1)j-lA:1-1B et donc les vecteurs (89) coïncident, au
signe près, avec les vecteurs (3). La condition de position commune
formulée dans ce cas se confond donc avec celle introduite dans le
17.
23.]
ÉQUATIONS À CORFFICIENTS VARIABLES
165
La fonction H ('\p, X, t, u) (voir page 60 et théorème 5) est ici
de la forme:
H = ( " A (t) x) -t- ('\p, B (t) u) + ('lJ, f (t)) == ' a (t)xV +
f.l,V
+ '\p b (t) u P + L: '\p ff.l (t), (90)
f.l , P I-L
et le système auxiliaire (voir formule (69) du chapitre 1) s'écrit
sous la forme:
d'i'.i == _ '" a y ( t ) 1101 . 1 2
dt L.J J 't'v, ] == , ,..., n,
v
ou sous la forme vectorielle (cf. 5):
=-A*(t)1p. (91)
Il est évident que la fonction H, qui est considérée comme une
fonction de la variable u E U, atteint son maximum en même ten1ps
que la fonction (1\', B (t) u). Désignons par P (1\', t) le maximuln de
la fonction (1\', B (t) u) que nous considérons comme une fonction
de la variable u E U. Du théorème (5) il résulte (voir la formule (70)
du chapitre 1) que si u (t), t o t tf, est une commande optimale
transférant le point représentatif de Xo en Xi' alors l'équation (91)
admet une solution 1\' (t) non triviale telle que
('\jJ (t), B (t) u (t)) = P (1\' (t), t) (92)
quel que soit t pris dans l'intervalle t o t t 1 .
Nous dirons qu'une fonction donnée sur l'intervalle a < t < b
ou sur une partie de cet intervalle est constante par morceaux si
l'ensemble de tous les points de discontinuité de cette fonction ne
possède pas de points limites à l'intérieur de l'intervalle a < t < b
et si la fonction considérée est constante sur chacun des intervalles
déterminés par les points de discontinuité sur l'intervalle a < t < b.
(Observons que les points de discontinuité peuvent s'accumuler
à proximité des extrémités de l'intervalle a < t < b.)
r h é 0 r è m e 15. A toute solution non triviale", (t) de l'équation
(91) la relation (92) associe d'une façon univoque *) une fonction de
commande u (t); la fonction u (t) est constante par morceaux et n'admet
pour valeurs que les sommets du polyèdre U.
Ce théorème est celui de la « finitude du nombre de commuta-
tions» pour les équations linéaires à coefficients variables (car
toute commande u (t) est définie sur un certain i n ter y a Il e
t o t t 1 contenu tout entier dans l'intervalle a < t < b, et il
résulte du théorème 15 que le nombre de points de discontinuité
de la fonction u (t) est fini). Si les coefficients sont constants, le
théorème 15 est remplacé par le théorème 9.
*) Voir note de la page 107.
166
PROBLÈMES LINÉAIRES EN rrEl\iPS OP1.'IMAL
[Ch. :3
D é ID 0 n s t rat ion. Elle est analogue à celle du théorème
9. Indiquons seulenlent les modifications insignifiantes qu'il con-
vient d'apporter à la démonstration du théorème 9.
Supposons que l'ensemble des points où la commande u (t) n'est
pas univoquement définie par la relation (92) admette au moins
un point lilnite à l'i n t é rie u r de l'intervalle a < t < b.
Alors (voir formule (8) et le texte s'y rapportant) nous pouvons
trouver une arête w du polyèdre U et un ensenlble M, admettant
à l'intérieur de l'intervalle a<t<b un point linlite T, tels que
(11' (t), B (t) w) == 0
(93)
quel que soit t E M.
La formule (9) peut être remplacée par l'expression
( (t), B (t) lU) == 1pv (t) b (t) u;p. (94)
'V, P
Les fonctions a} (t) admettant n - 2 dérivées continues, les fonctions
'P1 (t), . . ., 'Pn (t) qui sont solution de l'équation (91) en admettent
n - 1 ; par ailleurs, les fonctions b (t) admettent également n - 1
dérivées continues par hypothèse. Donc, la fonction (94) est n - 1
fois continûment dérivable.
Puisque T est un point limite de l'ensemble il!, nloyennant la
continuité de la fonction (94), il résulte de la relation (93) que
(11' (T), B ('t) w) == O.
Par ailleurs, étant donné que l'intervalle compris entre deux racines
d'une fonction dérivable renferme au moins une racine de sa dérivée,
il s'ensuit que la dérivée de la fonction (94) s'annule en une infinité
de points admettant 't pour point limite. Or, cette dérivée est de la
fornle :
d
dl ('p (t), B (t) w) == ( - A * (t) 11' (t), B (t) w) -1-
+ ( 1\1 (t), d it) w) = (1\1 (t), - A (t) B (t) w) +
--1- ( ) (t), d Y) w) = (1p (t), B 2 (t) w)
(voir (88)). Sur l'ensemble infini de points admettant 't pour point
limi te on a donc
(11' (t), B 2 (t) w) == 0,
et, en vertu de la continuité,
(11' ('t), B 2 ('t) w) == O.
D'une façon analogue, l'intervalle compris entre deux racines quel-
conques de la fonction ( , (t), B 2 (t) w) renferme au moins une racine
, 23.]
ÉQUATIONS À COEFFICIENTS VARIABLES
167
de sa dérivée; en reprenant les mêmes raisonnements on a
(1\J (-r). B3 (-r) lV) == 0 et ainsi de suite. Finalement, nous obtenons
les re lations
(1lJ ('t), Bi ('t) w) == 0, i == 1, 2, . . ., n
(95)
(cf. (10), (11)). 1\Ioyennant l'indépendance linéaire des vecteurs (89),
il s'ensuit de la relation (95) que 1lJ ('t) === 0 et donc la solution 11' (t)
de l'équation (91) est triviale. Cette contradiction montre que l'en-
semble des points en lesquels la commande u (t) n'est pas définie
d'une façon univoque par la relation (92), ne possède pas de points
limites à l'intérieur de l'intervalle a < t < b.
La suite de la démonstration ne diffère pas de celle du théorème 9.
1.18 théorème 15 est donc démontré.
\ ovons nlaintenant les thé 0 r è mes d'e x i s t e n cee t
d'u nie i t é pour le système (86). Comme précédelllment (voir (20)),
considérons le système fondamental de solutions
CPt (t), · · ., CPn (t)
de l'équation homogène = A (t) x satisfaisant aux conditions
initiales cp) (t o ) == ôj, et le système fondamental de solutions
'\ 1 (t), . . ., '" n (t)
de l'équation (91) satisfaisant aux conditions initiales 1lJ{ (t o ) = ô{,
la relation (21) restant valable. Par ailleurs, la solution de l'équa-
tion (87) associée à une commande u (t), t o t t i , arbitrairement
choisie peut être cherchée sous la forme
n
x(t)=== 2' CPv(.t)c"(t)
'V=1
(voir page 113). En définitive, nous obtenons la forlnule suivante
(voir (22)) :
11 t
x (t) = 2: cp" (t) ( x + J ('p" (t), [B (t) u (t) + t (t)) dt) . (96)
\'= 1 to
Dorénavant, les théorèmes 11 et 12 se transposent textuellement
au cas étudié. Restent également valables les démonstrations de
ces théorèmes où les relations (22) sont remplacées par les relations
(96) HyeC toutes les modifications évidentes qui en découlent. Reste
enfin valable le théorème d'existence (voir théorème 13).
1" h é 0 r è nl e 16. Si, pour un processus gouverné par l'équa-
tion (87), il existe pour un t o donné au moins une commande u (t),
t o t t 1 , transférant le point représentatif de Xo en Xi' il existe alor
168
PROBL:ÈMES LINÉAIRES EN TEMPS OPTIMAL
[Ch. 3
une commande optimale (avec le même instant initial t o ) transférant
le point représentatif de Xo en Xi.
D é mon s t rat ion. Elle reprend textuellement celle du
théorème 13 (la référence à la formule (22) étant remplacée par celle
à la formule (96)). Soulignons néanmoins que la translation dans
le temps mentionnée à la page 117, ne peut plus être introduite ici
car l'équation (87) n'est pas autonome; de toute façon, cette transla-
tion dans le temps est inutile maintenant puisque ne sont considérées
que des commandes avec un instant initial to.
Rem a r que. Dans le présent paragraphe nous avons adnlis
que les fonctions a) (t), b1 (t) et fi (t) figurant dans le systèn18 (86)
étaient définies sur un certain intervalle a < t < b (peut-être lnêlne
sur la droite numérique toute entière) et admettaient respectiYelnent
(n - 2), (n - 1) et les premières dérivées continues. (De plus. nous
avons admis comme toujours qu'était satisfaite la condition de posi-
tion commune.) Il est aisé de comprendre alors que tous les résultats
obtenus restent valables si les fonctions aj (t), b1 (t) et fi (t) sont
continues et leurs dérivées (respectivement n - 2, n - 1 et les
premières) ne sont que con t i nue spa r ID 0 r c eau x. En
effet, repérons sur l'intervalle a < t < b tous les points en lesquels
l'une au moins des dérivées Inentionnées subit une disconti-
nuité. Ces points divisent l'intervalle a < t < b en parties sur
lesquelles les fonctions a} (t), bl (t), fi (t) admettent le nombre requis
de dérivées continues. Le théorème 15 s'appliquant à chacune de
ces parties prises séparément, il s'applique donc à l'intervalle
a < t < b tout entier. La formule (96) restant valable (ce qui est
évident), les théorèmes d'existence et d'unicité le restent égalolnent.
CHAPITRE 4
Problèmes divers
24. Cas d'une fonctionnelle définie par une intégrale impropre
Considérons le problème optimal suivant qui se ramène à l'étude
d'un intervalle infini d'intégration de la fonctionnelle J.
Etant donné un point Xo de l'espace de phase X, parmi les comman-
des admissibles u (t), t o t < + 00, pour lesquelles la trajectoire
x (t) correspondante du système
dx i f i ( ln ) 1 E U
dt === x,. · ., x , u, i == , ..., n, U
(1)
issue du point Xo est définie pour tous les t> t o et satisfait, lorsque
t -+ 00, aux conditions aux limites (données à l'avance), trouver celle
qui minimise et fasse converger l'intégrale
00
if = ) fO (x (t), u (t)) dt.
to
(2)
Les fonctions fi (x, u) sont assujetties à des conditions analogues
à celles indiquées dans les chapitres 1 et 2, i. e. elles sont supposées
continues en x et en u et continûment dérivables par rapport à
Xl, . . ., x n sur le produit direct X X U. Précisons n1aintenant ce
que nous entendrons par commandes « admissibles ». Nous dirons
qu'une fonction u (t), t o t < 00, à valeurs dans le domaine de
comrnande U est b 0 r née, si l'ensemble de tous les points u (t)
où t parcourt un intervalle fermé et fin i quelconque contenu dans
l'intervalle t o t < 00, admet une adhérence compacte dans l'espace
Er (qui contient le domaine de commande U). En adoptant cette
définition d'une comlnande bornée (et en n'étudiant que les con1man-
des définies sur des intervalles de la forme t o t < 00), nous con-
serverons la défini tion de la classe de commandes admissibles donnée
dans le S 10. En particulier, pour classes de commandes admissibles
on peut prendre la classe de toutes les commandes mesurables bor-
nées (au sens indiqué) définies sur des intervalles de la forn1e t o
t < 00, ou encore la classe de toutes les commandes bornées
continues par morceaux (une con1mande u (t) est continue par mor-
ceaux si elle admet un nombre fini de discontinuités de première
espèce sur tout intervalle fermé et fin i contenu dans l'intervalle
170
PROBLÈMES DIVERS
[Ch. 4
t o t < 00.) Une dernière remarque, enfin, au sujet des «condi-
tions limites à l'infini » mentionnées dans l'énoncé du problèlne.
Nous supposerons que ces conditions sont de la forine
lin1 xi (t) == x , (3)
t-oo
OÙ Xi === (x , x ., x 7 i) est un point donné de l'espace de phase X.
Si la trajectoire de phase x (t) associée à la con1mande admissible
u (t) et partant du point Xo vérifie les conditions (3), nous écrirons
.x (00) == Xi et nous dirons que la commande u (t), t o t < 00,
transfère le point représentatif de Xo en Xi.
La solution du problème optimal posé est fournie par le théorème 1
(ou le théorème 8) où l'on prendra évidemment soin de remplacer
l'intervalle t o t ti par l'intervalle infini t o t < 00 et la
'condition de passage de la trajectoire par un point de la droite II
par les conditions limites à l'infini. En effet, tous les raisonnements
des 13 et 14 étaient tributaires du choix d'un point régulier T
tel que T < t i ; ces raisonnelnents se transposent intégralement au
-cas où t i == 00. Il en est de même pour la formulation et la démonstra-
tion des lemmes 5-8 du S 15. Toutefois, il n'est plus possible de cons-
truire le cône lilnite puisque le point t i (i.e. l' extrén1ité droite de
l'intervalle de temps) n'existe plus. On peut néann10ins modifier
légèrelnent la construction du cône limite de manière à pouvoir
l'appliquer dans le cas étudié. Désignons en effet par I( ) le cône
con vexe A :C,lto (I( 1;) . Ces cônes forment une sui te croiss an te :
1( ') c K ) pour T' < T (pour le prouver il suffit d'appliquer
à l'inclusion du lemme 8 la transformation A:c,\o et d'utiliser les
formules (17) du chapitre 2). C'est pourquoi l'union (par rapport
à tous les points réguliers T) de tous les cônes l(" ) est de nouveau
un cône convexe (il se peut, non fermé) de l'espace X t . Appelons-le
-cône ini ti al et désignons-le par l( to. Il est aisé de voir qu'on a 1 a
relation (pour le problème optimal des SS 2, 11)
A tj, to (l( 10) == Il: fi-
Le cône initial est donc absolument équivalent au cône lin1ite et l'on
peut achever la délnonstration du principe du maximun1 (S 15,
après le lemme 8) avec le côn e i nit i a 1 [{to, le len1n1e 9 et
'Sa démonstration restant en vigueur (on prendra certes soin de rem-
placer le rayon Ltt, les cônes Ktu l(i ), et les transformations Att 1 ,'t
respectivement par Lto, [(t , K ) et A't,to). Ensuite, on applique
sans peine les raisonnements du S 15, ce qui achève la démonstration
du théorème 8 (et du théorème 1) dans laquelle on a remplacé le
'cône limite par le cône i nit i a 1. Or, cette dénlonstration se
transpose intégralen1ent (sauf qu'il faut rOTIlplacer l'intervalle
25.]
PROCESSUS OPTIMAUX À PARAMÈTRES
171
t 0 t t i par l'intervalle t o t < 00) au problème optimal consi-
déré ('1) et (2). Notre assertion est donc démontrée.
Renlarquons que l'on aurait pu «transporter » les cônes 1(1:
non seulement au point x (t i ) ou au point x (t o ), lnais en un point
quelconque x (t) de la trajectoire considérée. La démonstration
exposée est de ce fait valable au cas également où l'intervalle d'inté-
gration est fornlé par toute la droite -00 < t < 00.
25. Processus optimaux à paramètres
Nous allons étudier dans ce paragraphe le problènle optimal
suivant. Etant donnés les fonctions /0, /1, . . ., /n des trois variables
x E X. u E U, w E W où X et U gardent leur sens précédent et W
est un espace vectoriel de dinlension m. Les fonctions 1 0 , /1, . . ., ln
et leurs dérivées partielles par rapport aux variables Xl, X 2 , . . ., x n
sont supposées définies et continues sur l'espace X X U X W tout
entier. Le mouvement d'un objet est gouverné par les équations
dx i .
dl == / (x, u, w), i = 1, 2, ..., n . ( 4 )
Deux points Xo et Xi sont donnés dans l'espace X. On demande de
choisir un point con s tan t W o E W (i.e. choisir avant le début
du lllouvement une valeur du paramètre w qui reste constante pen-
dant toute la durée de ce mouvement) et une conlmande admissible
u (t) tels que la trajectoire associée x (t) qui part à l'instant t o du
point Xo passe à l'instant t i par le point Xi et que l'intégrale
fi
J = J /0 (x (t), u (t), wo) dt
to
soit nlinimale. Si les fonctions u (t), x (t) et le point W o sont solution
du problème posé, nous dirons que les grandeurs u (t), x (t) et Wo
sont optimales (pour les points Xo et Xi donnés).
Nons supposerons que toutes les fonctions admissibles sont
e 0 n t i fi U e spa r ID 0 r c eau x, i.e. la classe D de commandes
adtnissibles soit est confondue avec l'ensemble de toutes les fonctions
continues par morceaux (à valeurs dans U), soit en est un sous-ensem-
ble vérifiant les conditions du 10.
Le problème que nous avons à étudier est un peu spécifique en
ce sens que nous nous limitons seulement aux commandes continues
par morceaux (et non pas à des commandes mesurables arbitraires).
J n effet, alors que dans le problèlne optimal formulé au 11 toute
portion de trajectoire optimale était de nouveau une trajectoire
optirnale (car en « améliorant » une portion de trajectoire c'est
tout.e la trajectoire qu'on « améliore », cf. g 2), ici, dans le pro-
blèrne à paranlètres, la situation est tout autre. En effet, les valeurs
172
PROBLÈMES DIVERS
[Ch. 4:
optimales du paramètre w peuvent fort bien ne pas se confondre sur
la trajectoire toute entière et sur une portion de cette trajectoire,
i.e. si u (t) et Wo sont solution du problème optimal posé dans ce-
paragraphe, la commande u (t) étant en outre définie sur l'intervalle"
t o t t i , il se peut qu'il soit possible d' « améliorer » cette corn--
mande sur un intervalle moindre ID 0 yen n a n t une var i a --
t ion d u par a m è t r e Wo. De ce qui précède il résulte que
les raisonnements de la démonstration du lemme 4 sont i Il a p -.
pli cab 1 e s au problème optimal considéré. La démonstration
du théorème 8 (ou du théorème 1) peut cependant être appliquée
ici, à condition de considérer dans le lemme 9 que le point T coïncide
avec le point fin alti (ce qui rend superflu le lemme 4). Or, pour
ce faire, il faudra considérer que le point t 1 est un point r é g 11 1 i e r
de la commande u (t), i.e. en guise de commandes adnlissibles
il nous faudra prendre des commandes qui soient régulières à l'ex-
trémité droite de l'intervalle. Sous ces conditions la classe de com-
mandes admissibles qui s'impose le plus naturellement est la classe-
de commandes continues par morceaux (ou l'une quelconque de S€E,
sous-classes) .
On obtient la solution du problènle optimal posé en appliquant
le théorème suivant, analogue au théorème 1 (la fonction est définie-
n
comme précédemment QJl == 1Paf a ).
a=O
Thé 0 r è ID e 17. Etant données une commande adlnissi ble
u (t), t o t t 1 , et une valeur ZVo ,== (w 1 , . . ., w m ) du paramètre lO
telles que la trajectoire associée
x (t) == (X O (t), Xl (t), . . ., x n (t)) == (XO (t), x (t))
(i.e. la trajectoire du système (4) complémenté par l'équation correspon..
dant à i == 0) vérifie les conditions x (t o ) == Xo, XO (t o ) == 0, x (t 1 ) === Xi-
Pour que lès grandeurs u (t), x (t) et Wo soient solution du ]Jroblèlne
optimal posé, il est nécessaire qu'existe un vecteur fonction 'l' (t) ==:
== ('$0 (t), '$1 (t), . . ., 1\'71, (t)) continu et non nul tel que:
1 ° l(Js fonctions x (t), 'i' (t), u (t) et la valeur Wo vérifient le système
hamiltonien
dx i _ âQfO ('1' (t), x (t), u (t), wc) }
dt- â'Pi ' .
d'Pi _ aoc ('\1' (t), x (t), u (t), wo) l === 0, 1, ..., n ;
dt - âx i '
2° la fonction QJ£ ('i' (t), x (t), u, wo) de la variable u E U atteigne
au point u == u (t) son maximum
QI[ ('i' (t), x (t), u (t), w 0 ) === (}J!! ('i' (t), x (t), lV 0) *);
*) Voir page 20.
25.]
PROCESSUS OPTIMAUX À PARAMÈTRES
173
3° au point initial t o soient vérifiées les relations
'l' 0 (t 0 ) 0, Qlt ('1' (t 0), x (t 0), w 0 ) === 0;
4° aient lieu les égalités
n ti
J 'I\1a (t) a/a (x ( :(t), wo) dt = 0, p = 1, ..., m. (5)
a=O to
Si par ailleurs les grandeurs"P (t), x (t), lVo et u (t) satisfont aux condi-
lions 1 ° et 2°, alors les fonctions "Po (t) et oit ("P (t), x (t), wo) de la
.variable t sont constantes, de sorte qu'on peut vérifier la condition 3°
pas forcément à l'instant t o , mais à un instant quelconque t, t o
t t 1 .
Ce théorème diffère du théorème 1 (ou du théorème 8) par la
condition 4° qui donne m relations complémentaires et permet de
résoudre le problème puisque ont été introduites m inconnues supplé-
mentaires lV I , w 2 , .. . ., w m (les coordonnées du point Wo dans l'espa-
,ce W) .
Indiquons maintenant les modifications qu'il convient d'apporter
à la démonstration du théorème 8 pour obtenir celle du théorème 17.
lvlodifions légèrement les constructions du 12.
Plus exactement, soit u (t) une commande admissible quelconque
,définie pour t o t, t 1 ; w une valeur arbitraire du paramètre et
x (t) === (XO (t), Xl (t), . . ., x n (t)) === (XO (t), x (t)) la solution du sys-
tème (4) correspondant à la commande u (t) et au paramètre w et
vérifiant la condition initiale x (t o ) === Xo. Désignons par y (t) la
.solution correspondant à la même commande u (t) et à la valeur
.IV + ëÔW du param tre et partant (au même instant t o ) du point
llo === Xo + ëSo + 0 (ë)' où So E X est un vecteur constant (i.e. ne dépen-
.dant pas de ë) proche du point Xo. La solution y (t) est de la forme:
y (t) == x (t) + ëÔX (t) + 0 (ë),
.où ôx (t) == (ÔXO (t), ôx I (t), . . ., ôx n (t)) est un vecteur ne dé pen-
.dant pas de ë, déterminé à partir du système suivant d'équations
.aux variations:
n m
Ô i == ôfi (x (t), u (t), w) ex + ôfi (x (t), u (t), w) (3
d t x L..J ex uX LJ (3 u w ,
8x 8w
ex=O (3=1
i == 0, 1, . . ., n,
.avec la condition initiale ôx (t o ) == So. Contrairement au système (16)
du 12, ce système d' équ ations aux variations n' est pas h 0 m 0-
:g è ne.
Affectons maintenanL la transformation At to de l'indice supé-
lrieur ôw. Plus exactement, nous supposerons q e
A? to (So) == ÔX (t),
(6)
174
PROBLÈMES DIYERS
[Ch. 4
où ÔX (t) est une solution du systèn1e (6) satisfaisant à la condition
initiale ôx (t o ) === So. Comme dans le 12, nous supposerons que le
vecteur est contenu dans l'espace X t (dont l'origine de coordollnées
est le point x (t»). Comme le système d'équations aux variations est
désormais non homogène, la transformation linéaire A , o ( o) est
également non homogène.
Enfin le lemme 1 qui clôture le 12 prend la forn1e suivante:
si '\1' (t) est une solution du système (8) du 11 et So un vecteur arbi-
traire défini au point x (t o ), alors sur l'intervalle t o t t 1 tout
entier on a:
('\1' (t), A1 to (So)) == ('\1' (t o ), ;0) +
t n 1n
+ ) 'l\Ji (t) afi (x (t ; (t), w) ôwt3 dt. (7)
10 i=O (3=1
Référons-nous ensuite an 9 13. Tous les points de continuité
de la commande u (t), Le. tous les points de l'intervalle t o t t 17
à l'exception d'un nombre fini de points de discontinuité, sont
des points réguliers pour cette commande. Prolongeons la cOlnmande
u (t) à droite de l'intervalle t o t t 1 en posant u (t) === U (t 1 - 0)
pour t > t 1 . La commande u (t) ainsi prolongée est continue all
point t 17 donc ce point est régulier. Ensuite, nous supposerons que
le point 'L qui figure dans la définition de la commande perturbée
(page 80) est confondu avec le point tf, Le. nous poserons
t o < 'L1 'L2 <. . . ::( 'Ls ::( 'L === t 1 "
Faisons, enfin, choix d'un vecteur ôw E W et désignons par
x* (t) (pour 8 suffisamment petit) la solution du système
dx i .
([t == 1 1 (x, u* (t), Wo + 8ÔW), i == 0, 1, ... n,
i.e. la trajectoire associée à la commande perturbée u* (t) et à la valeur-
W == Wo + 8ÔW du paramètre w. Nous supposerons enfin que la
ligne S (8) dégénère en xo, i.e. la solution x* (t) satisfait à la même
condi tion initiale
x* (t o ) === Xo,
que la solution x (t). Les formules (21) et (22) du chapitre 2 peuvent
maintenan t s'écrire
x* (t 1 + 8Ôt) === x (t 1 ) + 8dx + 0 (8),
où
d x == j" (x (t 1), u (t 1 ), ZOo) ôt + A to (0) +
+ A '(. [f (x ('Li), Vi, wo) - t" (x ('Li), II ('Li), iDo)] Ôti (8)
i=1 l
(car 60 == 0).
25.]
PROCESSUS OPTIMAUX À PARAMÈTRES
175
Voyons maintenant le 14. Introduisons le vecteur ôw dans le
synlbole a, i.e. supposons
a == {'tb Vi, ôt i , ôt, ôw}
(nous avons omis de désigner le point 't puisque le point 't == t 1
est à présent un point fixe). La combinaison linéaire des symboles a
se définit COlnme précédemment, sauf qu'il faut tenir compte du
dernier argument:
Â' {. . ., Ô lV'} + Â" {. . ., <S lV "} + . . . ==
== {. . ., Â' ô w' + Î\/' Ô w" + .. .} .
Ceci posé, les dénl0nstrations des lemmes 2 et 3 (pour 't == t 1 )
passent sans modification, tandis que le lemme 4 est tout simplen1ent
inutile (puisque 't == t 1 ). Nous obtenons ainsi le cône d' atteignabilité
((t1 pour lequel est valable le lemme 3.
Les raisonnements du 15 restent également en vigueur (on
prendra soin do rem placer 't par t 1 ), quant au cône limite il est inu-
tile puisque nous n'avons plus qu'un seul cône K tf construit précisé-
ment à l'extrémité x (t 1 ) de la trajectoire x (t) (par suite le lemme g,
n'est plus nécessaire car il se ramène tout simplement au lemme 3)..
Enfin, les raisonnements de la fin du 15 prouvent (pour ôw == 0)
les conditions 1 0, 2°, 3° et la fin du théorème 17.
Il nous reste à prouver qne le vecteur"i' (t) ainsi choisi vérifie la
condition 4°. Posons dans la formule (8) <St == ôt 1 == ôt 2 == . . ..
== ôt s == O. Il vient alors
x == A to (0).
De ce qui précède (voir formules (34), (36) du chap. 2) il résulte
('i' (t 1 ), x) O pour tout vecteur x de la forme (8) et donc (voir (7)
t1 n m
(1jJ (ti), A to (0)) = J 1Pi (t) dfi (x (t) u (t), wo)) ôw f3 dt O. (7*)
to i=O {3=1 w
Ces relations étant vraies quelles que soient les valeurs réelles des
paramètres ôw 13 , il vient
n t1
r '1h (t) a/a (x (t), u (t), wo) dt R 1 2
LJ J a awf) , p ==, . . ., m,
a=O to
et le théorème (17) est entièrement démontré.
Soulignons en conclusion que si le paramètre w peut varier non
pas sur l'espace W tout entier, mais seulement sur un domaine fermé
W 1 c W dont le bord est différentiable par morceaux, alors les
conditions (5) du théorème 17 sont remplacées par les relations
n l1
'" r 'Ih ( t ) a/a (x (t), u (t), wo) dt O
J a aw ,
a=O to
176
PROBLÈMES DIVERS
[Ch. 4.
où la dérivée figurant sous le signe somme est prise dans une direc-
tion quelconque du vecteur w d'origine Wo et contenu dans W t -
Autrement dit, toute courbe dérivable w (8) issue du point Wo pour
8 == 0 et contenue dans le domaine W 1 vérifie la relation
n t{
) 1Pa (t) a/a (x (t).ô (t), w (8» L=o dt O.
a=O ta
Cette assertion découle imlnédiatement de la relation (7*).
9 26. Application de la théorie des processus optimaux
à l'approximation des fonctions
Soit F (x, y) une fonction définie. et continue pour toutes les
valeurs réelles de ses arguments. Alors, quelles que soient les fonc-
tions x (t) et y (t) définies sur l'intervalle a t b, la grandeur
b
J = ) F (x (t), y (t)) dt (9)
a
peut servir de critère de comparaison des fonctions x (t) et y (t).
Si, par exemple, F (x, y) == (x - y)2 l'intégrale (9) prend la forme:
b
J=) (x(t)-y(t))2dt (9*)
a
let n'est autre que le carré de la distance de deux éléments x (t)
et y (t) de l'espace L 2 . (Ici et dans la suite de ce paragraphe toutes
les fonctions de la variable t seront définies sur un seul et même
intervalle a t b.)
Le présent paragraphe aura pour objet la résolution du problème
suivant. Etant donnés les fonctions F (x, y) et y (t), un nombre
entier n 0 et un nombre réel ex O. Parmi les fonctions x (t) n fois
.continûment dérivables, définies sur l'intervalle a t b, telles que
.les fonctions x(n) (t) soient lipchitziennes (dans le rapport ex), trouver
.celle qui minimise l'intégrale (9). C'est ce problème que nous appel-
lerons dans la suite pro b 1 è m e f 0 n dam e n t a 1.
Dans le cas particulier où F (x, y) == (x - y)2 (Le. la fonction-
nelle (9) est remplacée par (9*)) et ex est nul, le problème consiste
alors à chercher un polynôme x (t) de degré n défini sur l'intervalle
a t b et dont est minimale l'erreur quadratique par rapport
à une fonction donnée y (t), Ï.e. nous sommes raJnenés au problème
classique de la détermination des coefficients de Fourier lorsque la
fonction y (t) est développée en polynômes de Legendre. Le problème
fondamental généralise donc le problème classique.
Tout el' abord nous allons montrer que moyennant quelques
conditions naturelles imposées à la fonction F (x, y), le problème
S 26.]
APPLICATION À L'APPROXIMATION DES FONCTIONS
177
fondamental admet toujours (Le. quelle que soit la fonction y (t))
une solution et une seule si l'on considère la fonctionnelle (9*)
(quelle que soit y (t)).
On cherchera ensuite la fonction x (t), qui est solution du pro-
blèlne fondamental, en appliquant le principe du maximum. A titre
d'exemple sera résolu le «problème du profil d'une route ».
L'e x i s t e n cede la solution du problème fondamental (et
l'unicité de cette solution dans le cas particulier (9*)) fait l'objet
du théorème suivant.
Thé 0 r è m e 18. Supposons que la fonction F (x, y) est définie
et continue pour toutes les valeurs réelles des arguments x et y et que
lorsque y varie sur un intervalle fini quelconque, elle tend vers + 00
uniformément (en y) pour x + 00. Sous ces hypothèses, le problème
fondamental possède au moins une solution pour toute fonction con-
tinue y (t). Si, en particulier F (x, y) == (x - y)2, le problème fonda-
mental admet une solution et une seule pour toute fonction y (t).
Désignons par Q ) l'ensemble de toutes les fonctions x (t) défi-
nies sur l'intervalle a t b, n fois continûment dérivables et
telles que la n-ième dérivée x<n) (t) satisfasse à la condition de
Lipchitz dans le rapport a. L'inclusion x E Q signifie alors que
la fonction x (t) est définie sur l'intervalle [a, b], possède sur cet
intervalle n dérivées continues et vérifie l'inégalité
1 x<n> (t f ) - x<n> (t") 1 a 1 t f - t" 1
quels que soient les points t f et tilde l'inte valle [a, bl. L'ensemble
Q ) est de toute évidence contenu dan=, l'espace de Banach C[a,b]
de toutes les fonctions continues définies sur l'intervalle [a, b].
Lem m e f 0 n dam e n t a 1. L' ensemble Q ) est un sous-
ensemble fermé, convexe, localement compact de l'espace C[a,b].
Tout ensemble borné, fermé, contenu dans Q ) est compact.
Ce lemme est connu *). En effet, désignons par R l'ensemble
de toutes les fonctions x E Q n) vérifiant la condition "x lie R, et
par ) l'ensemble de toutes les fonctions de la forme xCi) (t) où x E R.
En vertu du théorème cité précédemment, les ensembles
R, H->' · · ., W) sont «compacts dans l'espace C[a,b]», i.e. les
adhérences de ces ensembles sont compactes. Si x est un point limite
arbitraire de l'ensemble R' il existe alors une suite Xi, X2, . . .
d'éléments de l'ensemble R convergeant en x. En passant, au besoin,
à une soussuite, nous pouvons considérer (en vertu de la compacité
de l'adhérence de l'ensemble ») que la sui te X i), X i) , . . . est
*) Voir théorème 3.5.1, page 127, de l'ouvrage de A. T i man n «La
théorie d'approximation des fonctions de la variable réelle » (en russe) Moscou,
Physmathguiz, 1960. '
12-01339
178
PROBLÈMES DIVERS
[Ch .
convergente (i == 1, 2, . . ., n). D'où il résulte, en vertu du théorème
sur l'intégration d'une suite uniformément convergente, que la
fonction x (t) admet des dérivées continues d'ordre i === 1, 2, . . ., n et
que x(i) est la limite de la suite x i), X i), . . . En particulier, x(n) (t)
étant la limite de la suite xi n >, x n>, . . ., vérifie la condition de
Lipchitz dans le rapport a, et donc x E Q n). L'ensemble R est
donc fermé et par conséquent compact. La convexité de l'ensemble:
Q n) est évidente. Ce qui prouve le lemme fondamental.
D é mon s t rat ion dut h é 0 r è m e 18. Désignons par l
l'intervalle des valeurs de la fonction y (t) lorsque t E [a, bL La
fonction F (x, y) est bornée inférieurement quels que soient y E l
et x puisqu'elle tend uniformément en y vers +00 lorsque x + 00.
Il existe donc un nombre N non négatif tel que
F (x, y) - N quels que soient y E 1 et x. (10)
Choisissons dans [a, b] des points quelconques ao, ab . . ., an
distincts deux à deux et désignons par CPi (t) un polynôme de degré n.
égal à l'unité au point ai et nul en aj. Désignons ensuite par p un
nombre positif arbitrairement petit tel que le polynôme CPi (t) prenne
sur un intervalle Ii de longueur p et de centre ai (i == 0, 1, . . ., n)
des valeurs supérieures à 2/3 et les autres polynômes CPi (t), des valeurs
inférieures en module à 1/3n. Désignons, enfin, par A un nombre
positif tel que 1 CPi (t) 1 A pour t E [a, b], i == 0, 1, . . ., n.
Soit à présent x (t) une fonction quelconque appartenant à l'en-
semble Q ) et Il x Il == max 1 x (t) 1 sa norme sur l'espace C[a,b]o
a t b
Désignons par cP (t) le polynôme de degré n satisfaisant aux condi-
tions x(i) (a) == cp(i) (a), i == 0,1, . . ., n. Alors, la fonction Xi (t) ===
== x (t) - cP (t) satisfait aux conditions xii) (a) == 0, i === 0, 1, . . .
. . ., n. Nous avons par ailleurs
xi n > (t) == x n> (t) - x n) (a) ==
= [x(n> (t) - x<n> (a)] - [(pen> (t) - cp<n> (a)] = x<n> (t) - x<n> (a)
(car cp<n> (t) est une constante). La fonction x<n> (t) vérifiant, sur
l'intervalle [a, b], la condition de Lipchitz dans le rapport a, quel
que soit t E [a, b], on a:
1 x n) (t) 1 == 1 x<n) (t) - x<n> (a) I a (t- a) a (b - a).
Développant la fonction Xi (t) en séries de Taylor, on a:
t-a , ( ) (t-a)2" ( ) +
Xi(t)==Xt(a)+ 1! Xi a + 21 Xi a...
+ (t-a)n-l <n-l) ( ) + (t-a)n x 1 <n> (8),
· · · ( _ 1) ' Xi a ,
n. n.
26.]
APPLICATION À L'APPROXIMATION DES FONCTIONS
179
où e est compris entre a et t. Puisque Xi (a) == x (a) == . . .
. . . == Xl(n-l) (a) == 0, on a, quel que soit t E [a, b],
l x ( l )I == 1 (t-a)n x(n) ( e )l (t-a)n a ( b-a ) a (b-a)n+l . ( 11 )
1 n! 1 n! n!
(b - a)n+l
D'où, Il Xi Il a , et, donc
n.
Il (p Il = II X- xiII >- /1 x II-II Xi/l >- /1 x 11- a (b-,;r+1 (12)
Faisons choix maintenant d'un indice i == 0, 1, . . ., n tel que
le nombro 1 <P (ai) 1 soit le plus grand des nombres 1 <P (ao) 1,
1 <P (al) 1, . . ., 1 cp (an) 1. En interpolant d'après la formule de
Lagrange, nous obtenons:
<P (t ) == <P (a 0 ) cp 0 (t ) + <P (a i) cp i ( t) + · · . + cp (an) cp n ( t) ,
el ' 0 ù 1 (P (t) 1 (n + 1) 1 <P (a i) 1 A pou r t E [a, b], i . e.
Il <P Il (n + 1) 1 <P (ai) 1 A. (13)
En composant les inégalités (12) et (13), nous avons:
Il cp I! 1 [ 1 Il (b-a)n+l J
1<p(ai)l> (n+1)A > (n+1)A _' x -a nI .
Sur l'intervalle Ii sont vérifiées les inégalités
2 1
(P i (t) > 3; (-P j (t) < 3n ' j =i= i,
donc sur cet intervalle nous avons
1 cp (t) 1 == 1 cp (ao) <Po (t) + <P (ai) <Pi (t) + · . . + c:p (an) <pn (t) 1 >
>- 1 cp (ai) <Pi (t) 1-1 (P (ao) (Po (t) + · . · + <P (ai-l) <Pi-1 (t) +
+ <P (ai+i) <Pi+1 (t) + · · · + (P (an) <Pn (t) 1> 1 <P (ai) 1 { 1 <Pi (t) 1-
- [ 1 (Po (t) 1 + · · · + 1 <Pi-1 (t) 1 + 1 (Pi+1 (t) 1 + · . · + 1 (Pn (t) 1 ]} >
> (n+\) A [II x II-a (b- n a(+1 J ( - n. 3 ) =
= 3(n 1)A [II xII-a (b- n a t+1 J.
D'où il résulte que sur l' in terv alle Ii
1 X (t) 1 == 1 <P (t) + Xi (t) , >- 1 <P (t) )-1 Xi (t) 1 >-
1 [II 11 - (b-a)n+l ] _ (b-a)n+l
> 3(n+1)A . x a n! a n! (14)
(voir (11)). Donc, quelle que soit la fonction x E Q ), il existe un
indice i == 0, 1, . . ., n tel que sur l'intervalle Ii soient vérifiées.
les inégalités (14).
12*
180
PROBLÈMES DIVERS
[Ch. 4
Soit à présent Jo la valeur prise par la fonctionnelle (9) lorsque
x (t) == O. Soit par ailleurs P un nombre positif tel que pour 1 xl>
> P, y E 1 l'on ait
F ( ) Jo+N (b-a)
x, y >
p
(ce nombre P existe en vertu des propriétés de la fonction F (x, y)
indiquées dans la formulation du théorème). Soit, enfin, R un
nombre positif tel que pour Il x Il > R le deuxième membre de la
relation (14) soit plus grand que P. Alors, quelle que soit la fonction
x E Q n) satisfaisant à la condition Il x Il > R, il existe un indice
i == 0, 1, . . ., n tel que sur l'intervalle Ii soit vérifiée l'inégalité
(14) et, par conséquent, soit satisfaite l'inégalité 1 x (t) 1 > P.
D'où il résulte que
F (x (t), y (t)) > J o+N (b-a) , tE Ii. (15)
p
Par ailleurs, en vertu de (10)
F (x (t), y (t)) - N pour t E [a, b]. (16)
L'intervalle Ii étant de longueur p, il vient des inégalités (15) et
(16)
b
5 JO+1V (b-a)
F(x(t),y(t))dt> p p+(-N)[(b-a)-p]>J o .
a
(17)
Donc, l'inégalité (17) est vérifiée quelle que soit la fonction x E Q n)
.satisfaisant à la condition Il x Il > R.
Désignons par R l'ensemble de toutes les fonctions x E Q )
vérifiant la condition /1 x Il R et soit J* le minorant de la fonc-
tionnelle (9) pour les fonctions x E R. Il est évident que J 0 J*
b
et par conséquent ) F (x (t), y (t» dt J* quelle que soit la fonc-
a
tion x E Q n): pour Il x Il > R cela découle de l'inégalité (17) et
pour Il x Il R de la définition du minorant. Pour achever la
démonstration de la première partie du théorème il ne nous reste
plus qu'à établir qu'il existe une fonction x E Q l) telle que la fonc-
tionnelle (9) prenne la valeur J*. Ceci découle aisément de la compa-
.cité de l'ensemble R (voir le lemme fondamental) et de la conti-
nuité de l'intégrale (9) considérée comme une fonction de x E Q ).
La première partie du théorème (i.e. l'existence d'une solution)
est donc démontrée. Puisqu'en particulier la fonction F (x, y) ==
== (x - y)2 satisfait aux conditions énoncées dans le théorème (18),
le problème posé admet toujours une solution pour la fonctionnelle
(9*). Montrons que dans ce cas cette solution est unique. La fonction-
26.]
APPLICATION À L'APPROXIMATION DES FONCTIONS
181
nelle (9*) étant égale à d 2 où d = d (x, y) représente la distance
entre les fonctions x et y au sens de la métrique de l'espace L 2 , et
puisque les grandeurs d et d 2 atteignent leur minimum simultané-
ment, le problème se ramène à la recherche d'un élément x E Q )
tel que d (x, y) = min, i.e. du point x E Q ) 1 e plu s pro che
de y. L'espace C[a,b] est de toute évidence contenu dans L 2 et en
outre les droites de l'espace C[a,b] sont également droites dans L 2 .
Donc, l'ensemble Q ) qui est convexe (voir le lemme fondamental)
dans C[a,b] est un sous-ensemble convexe de l'espace L 2 . Or, dans
l'espace £2 (en raison de la stricte convexité de la boule unitaire)
un ensemble convexe ne peut contenir plus d'un point proche de y.
C'est pourquoi le problème fondamental n'admet qu'une seule solu-
tion.
Le théorème (18) est démontré.
Voyons maintenant comlnent che r che r la solution à
l'aide du principe du maximum. Soit x (t) une fonction arbitraire
de la classe Q ). La fonction x(n) (t) existe alors sur l'intervalle
[a, b] et satisfait à la condition de Lipchitz dans le rapport ex et,
par conséquent est une fonction absolument continue. Il existe donc
presque partout une fonction mesurable u = x(n+l) (t) telle que
1 u (t) J ex en tous les points où la fonction u (t) est définie. En
désignant les fonctions x (t), x' (t), . . ., x(n) (t) respectivement par
1 2 n+l
X , X , . . ., x , nous avons
dx 1 )
dt == x 2 , 1
dx 2
-x 3
dt - ,
(18)
dx n _ 11,+1
dt - x , j
dxn+l
dt = u (t),
où 1 u (t) 1 ex. Ces relations sont vérifiées presque partout sur
l'intervalle [a, b] (les n premières relations sont même partout véri-
fiées). Il est aisé de voir qu'inversement, si les fonctions Xl, x 2 , . . .
. . ., xn+l vérifient presque partout sur l'intervalle [a, b] les rela-
tions (18), où u (t) est une fonction mesurable satisfaisant à la condi-
tion 1 u (t) 1 ex, alors la fonction x (t) = Xl (t) appartient à la
classe Q n). En effet, puisque la fonction xi+l (i = 1, 2, . . ., n)
est absolument continue et, par conséquent, continue, il résulte
de la relation d;; = Xi +1 , qui est vérifiée presque partout sur l'inter-
valle [a, b], que la fonction absolument continue xi est une intégrale
de la fonction con t i nue xi+l. La fonction xi admet donc
par t 0 u t sur l'intervalle [a, b] une dérivée continue égale à
182
PROBLÈMES DIVERS
[Ch. .
Xi+l (i == 1, 2, . . ., n). La fonction Xl (t) admet donc partout sur
l'intervalle [a, b] une n-ème dérivée absolument continue, égalB
à xi+l (t) et cette dérivée, en vertu des relations dXd +1 = u (t),
1 u (t) 1 <ex qui ont lieu presque partout, satisfait à la condition
.de Lipchitz dans le rapport ex, i.e. Xl E Q n).
Nous pouvons donc remplacer les fonctions de la classe Q l)
par les solutions (absolument continues) du système (18) à condition
.que 1 u (t) 1 ex. Le problème fondamental est donc équivalent
.au problème 0 p t i mal suivant: dans la classe des commandes
mesurables u (t) satisfaisant à la contrainte 1 u (t) 1 ex trouver celle
pour laquelle la solution du système (18) minimise l'intégrale
b
J = J F(xt, y(t))dt;
a
les valeurs extrémales xi (a) et xi (b), i == 1, 2, . . ., n + 1 sont
arbitraires. ,
L'intégrande étant une fonction dépendant explicitement de t
(en raison de la fonction don Il é e y (t)), introduisons la variable
auxiliaire xn+2 == t qui est une solution évidente de l'équation
différen tielle
dxn+2
== 1,
dt
avec la condition initiale xn+2 (a) == a. Le problème optimal posé
se formule alors comme suit.
Soient dans l'espace X engendré par les variables Xl, x 2 , . . .
. . ., Xn+l, Xn+2 une variété initiale S 0 d'équation xn+2 == a et une
variété finale S1 d'équation xn+2 == b (ces deux variétés étant cha-
cune de dimension n + 1). Dans la classe des commandes mesurables
u (t) vérifiant la contrainte 1 u (t) 1 ex trouver celle pour laquelle
la solution du système
dx 1 _ 2 '\
-x , 1
dx 2
- == x 3 ,
dt
dx n _ n+l
dt -X ,
(19)
dxn+l
dt
== u,
dxn+2
dt == 1 , J
26.J
APPLICATION A. L'APPROXIMATION DES FONCTIONS
183
issue à l'instant t o == a d'un point de la variété 8 0 et aboutissant (en
vertu de la dernière équation (19) à l'instant t 1 == b) sur la variété 8 1
minimise l'intégrale
tf
\ F (.1:1, Y (x n + 2 )) dl.
t
C'est ce problème (qui est équivalent à notre problème fonda-
mental) que nous allons résoudre, en lui appliquant les théorèmes
8 et 3. Les fonctions F (x, y) et y (t) seront supposées continûment
déri vables. La fonction QJt est ici de la forme:
QJe == 'l'oF (Xl, Y (x n + 2 )) + 1P1X2 + '\P2 X3 + . . .
. . · + 'lfnXn+1 + lPn+1U + lPn+2. (20)
Formons avec la fonction QJC un système d'équations différentielles
pour les variables auxiliaires lPi:
d'Po == 0 '\
dt ' 1
d'Pt == _ 8Qfe == _1101 8F (Xi, y (xn+2))
dt 8xl 'fO 8xl '
d'lp2 8Qfe
Cft == - 8x2 == -11'1' } (21)
d'P 3 8Qfe
([t== - 8x3 -== -11'2'
d'lf'n+l 8Qfe
- - ,\101
dt - - 8xn+1 - - rn
J
(l'ex pression a''P;t 2 n ' étant d ' aucune u tili té, nous ne l'écrirons pas).
Soit x (t) la solution du problème fondamental. En vertu de ce
qui précède, les fonctions
Xl (t) == x (t), x 2 (t) == x' (t), . . ., Xn+l (t) === X(n) (t), Xn+2 == t
sont solution du problème optimal énoncé plus haut (voir (19)).
Le système (21) (auquel on a ajouté une équation pour lPn+2) admet
donc une solution non nulle 11'0' 11'1, ..., lPn+1, lPn+2 satisfaisant aux
conditions des théorèmes 8 et 3. La condition de maximum de la
fonction QJ[ donne (presque partout sur l'intervalle [a, b]):
max '\IJ n +1 t(u) == lPn+1 (t) u (t),
-a u a
i.e.
u (t) { == a sign lPn+1 (t), si
non définie, si
lPn+t (t) =1= 0,
lPn+1 (t) ==- O.
(22)
184
PROBLÈMES DIVERS
[Ch. 4
Ecrivons maintenant les conditions de transversalité (théorèn1e 3).
Les vecteurs orientés dans le sens des axes Xl, x 2 , . . ., xn+l étant
parallèles aux hyperplans S 0 et Si' les conditions de transversalité
s' écri vent:
'\p i ( a) == 0,
lPi (b) == 0,
i == 1, 2,
i == 1, 2,
. . .,
n + 1,
n + 1.
(23)
(24)
. . .,
De la première des équations (21) il résulte que 11'0 == const, et de
plus, 11'0 0 en vertu du théorème 8. Il est aisé de constater que
l'hypothèse 11'0 == 0 aboutit à une contradiction. En effet, si 11'0 == 0,
alors d1: = 0 (voir (21)) et, en vertu de (23), 1P1 = O. D'où il vient
que d1: = 0 (voir (21)) et, en vertu de (23), 1P2 = 0 et ainsi de suite.
Nous obtenons en définitive 11'0 == 11'1 == 11'2 == · · · == lPn+1 == o.
Comme la fonction QI{! est identiquement nulle sur une trajectoire
optimale (théorème 8), il s'ensuit en vertu de (20) que lPn+2 == o.
Or, ceci est en'contradiction avec le fait que la solution 11'0' 1P1, . . .
. . ., lPn+2 est une solution non n u Il e. Donc 11'0 < 0, et nous
pouvons considérer que 11'0 == -1 (puisque toutes les grandeurs lPt
sont définies à un facteur de proportionnalité positif et constant
près). Le système (21) prend à présent la forme (après la substitu-
tion xn+2 == t) :
d'Pi _ aF ,xl, y (t))
dt - a xl ,
d'lf'2
dt== -11'1'
d'lf'3
-cit == -11'2'
d1Pn+1 == _ '1h
dt 't'n,
d'où il vient, compte tenu de la condition de transversalité (23):
t
'Ih ( t ) == r aF (xl (t), y (t)) dt
't'1 J ax l '
a
t t
1P2 (t) = - J (J aF (Xla ' y (t)) dt) dt,
a a
t t t
1P3 (t) = J [1 (J aF (Xla ;' y (t)) dt) dtJ dt,
a a a
26.]
APPLICATION À L'APPROXIMATION DES FONCTIONS
185
et en général
t t
'l\Jk (t) = ( - WH J ... J aF (xl a ' y (t» dt . . . dt (k quadratures),
a a
k = 1, 2, . . ., n + 1.
Du cours d'analyse on sait que
t t t
J ... J j(t)dt... dt= (k 1)! J (t-S)k-Ij(£)d£,
a a a
'-y--'
k
donc 'Pk (t) peut s'écrire sous la forme:
t
'l\Jdt)= (k 1)1 J (£_t)k-I aF(xl ; Y(£» d£, (25)
a
k = 1, 2, . . ., n + 1.
Les conditions de transversalité (24) prennent maintenant la forn1e :
b
'P k ( b)= 1 r ( _b)h-1 8F(xl( ), Y( )) d =O
(k-1)! J 8x 1 '
a
k = 1, 2, . . ., n + 1.
En multipliant cette expression par (k -1)! Ck-i et en sommant.
en k = 1, 2, . . ., n + 1, nous obtenons:
b
J [co + ct(£-b) + C2 (£ - b)2 + . .. + C n (£- b)n] aF (xl ; y (£» d£ = 0
a
quelles que soient les valeurs des constantes Co, Ci' . . ., C n . Le
polynôme Co + Ci ( - b) + . . . + C n ( - b)n étant un polynôme-
que 1 con que de degré non supérieur à n, nous pouvons grouper
les conditions de transversalité (24) sous une seule condition:
b
J p ( ) aF (xl y <£» d£ = 0
a
pour tout polynôme P ( ) de degré non supérieur à n.
186
PROBLÈMES DIVERS
[Ch. 4
Par ailleurs, en vertu de (25), la formule (22) peut encore s'écrire
( · ( r ( t t) n ôF (xl ( ), y ( )) d t ) .
1 === ex slgn J - ôx l SI
U (t) a
1 l'expression figurant sous le symbole sign
est non nulle;
l non définie, si cette expression est nulle.
Autrement dit, presque partout sur l'intervalle [a, b] est vérifiée
l'une des relations
t
J (£ - tt 8F (xl ; Il (£)) d£ = 0,
a
t
u (t) = ex sign ( J (£ - tt 8F (xl ; Il (£)) d£ ) .
o
Enfin, des relations (19) il vient
d n + l
u (t) === dt n + l Xl (t)
(presque partout sur l'intervalle [a, b]). En conclusion donc si l'on
désigne de nouveau Xl (t) par X (t) on obtient la proposition suivante.
Thé 0 r è m e 19. Supposons que les fonctions F (x, y) et y (t)
possèdent des dérivées premières continues. Pour que la fonction x (t)
.soit solution du problème fondamental, il est nécessaire que presque
partout sur l'intervalle [a, b] soit vérifiée l'une des relations
t
J (£ _t)n 8F (x ( Il (£)) d£= 0,
a
t
x ntl (t) = ex sign ( J (£ - tt 8F (x ( Il (£)) d£)
a
Bt que de plus pour tout polynôme P (t) de degré non supérieur à n,
.soit vérifiée la condition
b
r P (t) ô F (x (t), y (t)) dt == O.
J âx
a
E X e m pIe (problème du profil d'une route). En considérant
la fonctionnelle (9*), pour n == 0, nous sommes conduits au problèn1e
:suivant. Etant donnés une fonction y (t) dérivable sur l'intervalle
[a, b] et un nombre ex ? 0, trouver une fonction x (t) vérifiant la con-
.dition de Lipchitz dans le rapport ex et minimisant l'intégrale (9*).
-s 20.]
APPLICATION À L'APPROXIMATION DES FONCTIONS
187
Ce problème peut être interprété de la manière suivante. On se pro-
pose de relier deux localités A et B par une route, le relief du terrain
étant donné (par la fonction y (t)), et d'après les conditions d'ex-
ploitation la pente ne doit pas être supérieure à a, i.e la coupe longi-
tudinale (ou profil) de la route est décrite par une fonction satisfaisant
à la condition de Lipchitz dans le rapport a. On pourra soit faire
épouser à la route le relief du terrain, soit exécuter des remblais,
soit, enfin, creuser une tranchée. Le profil de la route étant x (t),
supposons que l'intégrale (9*) désigne le coût des travaux de terras-
sement (exécution des remblais si x (t) > y (t) et creusement des
tranchées si x (t) < Y (t)). On demande de trouver ]e profil le plus
économique.
Ce problème admet une solution qui est unique (théorème 18).
Pour que la fonction x (t) soit la solution cherchée, il est nécessaire
(en vertu du théorème 19) que presque partout sur l'intervalle [a, b]
soit vérifiée l'une des relations
t
,"
j [x (G) - y (G)] dG == 0,
a
(26)
t
x' (t) =--' ex sign ( i [x (s) - y (s)] ds) ,
a
(27)
et de plus que soit remplie la condition
b
J [x (t) - Y (t)] dt = O.
a
(28)
Si sur un intervalle quelconque contenu à l'intérieur de [a, b]
est vérifiée la relation (26), alors x (t) == Y (t) sur cet intervalle,
i.e. la route doit suivre le relief du terrain. Si sur un in terv aIle
quelconque est vérifiée la relation (27), alors en tous les points de
cet intervalle x' (t) === + a, de sorte que la route est constituée d'un
ou de plusieurs tronçons de pente égale à a ou -a. Ainsi, la route
est constituée de tronçons épousant le relief du terrain et de tronçons
de pente lnaximale admise empruntant des remblais ou des tranchées.
Supposons, par exemple, que les localités A et B sont situées sur
un terrain plat traversé entre A et B par un ravin (que la route doit
enjanlber). Le profil du terrain suivant la ligne AB est représenté
sur la fige 81. Assimilons ce profil au graphique de la fonction y (t),
l'axe des abscisses à la droite AB et les abscisses des points A et B
respectivement à a et b. Nous supposerons que les parois du ravin
sont abruptes (de pente supérieur à a). Désignons, comme plus haut,
par x (t) la fonction dont le graphique représente le profil de la route.
Il est aisé de voir que x (t) 0 quel que soit t. En effet, si x (t ' ) > 0
188
PROBLÈMES DIVERS
[Ch. 4
alors, par suite de la continuité de la fonction x (t), on aura x (t) > 0
dans un certain voisinage du point t ' . Aussi, en déplaçant au besoin
t'
le point t f nous pouvons faire en sorte que x (t f ) > 0, J (x (t) -
a
A
B
FIG. 81
t'
- y (t)) dt =1= O. Si J (x (t) - Y (t)) dt > 0, alors, en vertu de (27),
a
x' (t) = +ex pour t t ' (fig. 82) et donc
b t' b
J (x(t) - y(t))dt= J (x(t)-y(t)) dt+ J (x(t)-y(t))dt>O,
a a t'
a
b
t
I/(t)
FIG. 82
t'
ce qui contredit la relation (28). Si au contraire J (x (t) - Y (t)) dt <
a
< 0, alors, en vertu de (27), x' (t) = -ex pour t t ' (fig. 83), or
cela signifie que x (t) > Y (t) pour a t t ' contrairenlent
t f
à l'inégalité ) (x (t) - y (t)) dt < O. Cette contradiction montre
a
que x (t) 0 quel que soit t.
Supposons maintenant qu'en un point t ' on a x (t ' ) < Y (t ' ).
i'
Si, en outre, J (x (t) - Y (t)) dt < 0, alors pour t > t f la route
a
accuse une pente de ex (i.e. x' (t) = -ex) tant qu'est satisfaite l'iné-
26.]
APPLICATION À L'APPROXIMATION DES FONCTIONS
189
t
galité J (x (t) - Y (t)) dt < O. Les graphiques des fonctions x (t)
a
et y (t) doivent nécessairement se couper pour t > t f , sinon x (t) <
< y (t) pour tous les t > t f (fig. 84), et donc
b t' b
J (x(t)-y(t))dt= J (x(t)-y(t))dt+ J (x(t)-y(t))dt<O,
a a t'
lJ
t
a
FIG. 83
tl .lJ: t
a
1 1
1 1
1 J
1 1
1 1
1
1
1
1
r
[
1
5
1
FI G. 84
contrairement à la relation (28). D'une façon analogue, si x (t f ) <
t'
< Y (t') et (x (t) - y (t)) dt > 0, alors pour t < t' la route
a
monte vers le point t f avec un angle a (i.e. Xf (t) = +a) et de plus,
les graphiques des fonctions x (t) et y (t) se coupent nécessairement
pour t < t f .
Cet exposé nous permet donc de chercher la fonction x (t) pour
les différents graphiques y (t). Des exemples sont traités sur les
fige 85 et 86. Le point t l et les valeurs x (t l ) de la fige 85 sont déter-
minés à partir des relations
ti b
J (x (t) - y (t)) dt = 0, J (x (t) - Y (t)) dt = 0,
a ti
190
PROBLÊl\iES DIVERS
[Ch. 4
tandis que les points t 1 et t 2 de la fig. 86 sont tirés des relations
tf b
J (x (t) - y (t)) dt = 0, J (x (t) - y ( t)) dt = O.
a t2
Il est bien en tend u que les exemples trai tés sont très sinl pIes.
Leur étude détaillée ne poursuivait qu'un seul objectif, celui de
a
o
t/
!J(t)
b
.:.-
FI G. 85
o
r
t l
j
!f(t )
FIG. 86
t 2
I
lJ
'J
montrer que les relations (26), (27) et (28) (et, dans le cas général,
les relations mentionnées dans le théorème (19)) étaient en général
« suffisantes » pour déterminer la fonction x (t).
27. Processus optimaux à retard *)
Le problème de commande en temps optimal se trouve conlpliqué
dans de nombreux cas par l'effet de retardement. Celui-ci peut incom-
ber à une perte de temps dans la transmission des signaux, ou ce qui
est plus fréquent, à des simplifications faites sur le déroulelnent du
processus lorsqu'on considère que le rôle des éléments intermédiaires
et amplificateurs du système commandé consiste à transmettre des
signaux avec retard.
Le mouvement de l'objet est décrit dans l'espace de phase X
engendré par les variables Xl, x 2 , . . ., x n , par le système d'équations
dx i (t) 1
dt == fi (Xl (t), . . ., x n (t), x (t - 8), . . .
. . . , X n (t --- e), u (t)), i == 1, . . . , n, 8 == co ns t > 0, ( 29)
ou, sous la fornle vectorielle,
d ?) = f(x (t), x (t - S), u (t)).
(30)
*) Les résultats de ce paragraphe sont dus à G. Kharatichvili.
27.]
PROCESSUS OPTIMAUX. À RETARD
191
L'argUJ11ont retardé ne figure donc que dans les coordonnées de phase
et manque dans les comman des. Les fonctions fi (Xl, . . ., x n ,
yI, . . ., yn, u) sont supposées continues en l'ensemble de leurs
argulnents et continûment dérivables par rapport à Xl, . . ., x n ,
1 n A d . 1 f . f i a fi a fi d ' f .
Y , · . ., y. utren1ent It, es onctIons , fJ J . , sont e 1-
X' dyJ
nies et continues sur le produit direct X X X X U . Pour la classe
D de commandes admissibles nous prendrons la classe de toutes les
commandes con t i nue spa r m 0 r c eau x à valeurs dans U
(ou l'une de ses sous-classes) ; voir g 10. Comme précédemment, pour
fixer les idées, nous supposerons que les équations étudiées sont
continues à gauche dans les points de discontinuité
u (t) == u (t - 0).
Pour que la trajectoire x (t) de l'équation (30) soit définie d'une
manière univoque sur l'intervalle t o t t 1 , il est nécessaire de
donner non seulement la commande admissible u (t), t o t t 1 ,
mais aussi une fonction initiale cr (t) à valeurs dans X définie sur
l'intervalle t o - e <- t <- t o . La fonction initiale cp(t) sera supposée
continue sur l'intervalle t o - 8 t t o tout entier.
Nous dirons que la fonction x (t) définie et c 0 Il t i nue sur
l' i n ter val 1 e t o - 8 t t i t 0 u t e n t i e r est la tra-
jectoire de l'équation (30) associée à la commande admissible u (t) t
t o t th et à la fonction initiale cr (t), t o - 8 t t o , si cette
fonction x (t) est solution de l'équation (30) sur l'intervalle t o ::;;
t t 1 , et se confond avec la fonction cr (t) sur l'intervalle t o -
- 8 t t o .
For m u l 0 n s lnaintenant le problème optimal que nous nouS'
proposons de résoudre dans ce paragraphe. Ce faisant, nous énonce-
rons le problème à extrémité droite mobile (qui englobe, comme cas.
particulier, le problème à extrémité droite fixe).
S . t f . f o ( ln l n ) ' . f . 1
01 une onctIon x , . . ., x , y , . . ., y , u verl Iant es:
mêmes conditions que les fonctions fi, i == 1, . . ., n. Soient en outre.
une variété de dimension k continûment différentiable 8 1 EX,
o k n -1, et une fonction initiale cr (t). On demande de choisir
dans la classe des commandes admissibles une commande u (t),
t o t t 1 telle que la trajectoire x (t), t o - 8 t t i du systè-
me (29) associée à la commande choisie u (t) et à la fonction initiale
cr (t) satisfasse à la condition aux limites x (t 1 ) E 8 1 et minimise
l'intégrale
t1
\ jO(x(t), x(t-8), u(t))dt.
'"
to
Remarquons que les limites d'intégration ne sont pas fixes; ne sont
fixes que les conditions « aux }imites » cr (t) et 8 1 .
(31)
192
PROBLÈMES DIVERS
[Ch. i
Si 1° == 1, nous obtenons un problème en temps optimal pour les
.systèmes à retard.
Si la variété 8 1 est de dimension nulle, elle dégénère en un point
.et nous obtenons un problème optimal à extrémité droite fixe.
En vue de mieux formuler" et démontrer le résultat fondamental,
.énonçons notre problème optimal sous une autre forme équivalente.
Introduisons l'espace de phase X de dimension n + 1 engendré
par la variable x = (XO, . . ., x n ) = (XO, x) et désignons par 1
l'ensemble des points (XO, x) pour lesquels x E 8 1 (i.e. L est une variété
de dimension k + 1, produit direct de la variété S1 par l'axe XO).
Notre problème optimal est alors équivalent au problème suivant
(cf. page 16).
Le système d'équations gouvernant le mouvement du point
représentatif x (t) = (XO (t), . . ., x n (t)) est de la forme:
dx i (t) .
dt == / (x (t), x (t - e), u (t)), i === 0, 1, . _ ., n, (32)
ou, sous la forme vectorielle,
dœ (t)
dt === f (x (t), x (t - e), u (t)).
(33)
On demande de choisir une commande admissible u (t), t o t t 1
telle que la trajectoire x (t) = (XO (t), x (t)), t o t t 1 du systè-
me (32), associée à cette commande et à la fonction initiale <Ç (t) =
= (0, cr (t)), t o - 8 t t o satisfasse à la condition aux limites
x (t 1 ) E L et minilnise la coordonnée XO (t 1 ).
Toute commande admissible u (t) et la trajectoire associée x (t),
remplissant les conditions formulées, seront dites optimales.
En vue de resoudre le problème posé introduisons, comme précé-
.demment, le vecteur auxiliaire 'i' = ('1'0' . . ., 'l'n) et formons la
n
fonction scalaire QJÇ = Li 'l'a/a = ('i', Jj des variables '1'0' · · ., 'l'n,
(1,=0
1 n 1 n D ' . . JI ( ) 1 ·
.x , . . ., X , Y , . . ., y , u. eSlgnons par (}JJ{; 'i', x, y e maJorant
de QJt pour 'i', x, y fixés et pour u variant sur l'ensemble U.
Introduisons ensuite deux systèmes d'équations pour les variables
auxiliaires '1'0' '1'1' · · ., 'l'n:
dtPi (t)
dt
8Qff ('1' (t), x (t), x (t- 8), u (t))
8xi
a ('i' (t + 8), x (t + 8), x (t), u (t + 8))
agi
aWi (t)
dt
i === 0, 1, . . . , n ; ( 34 )
8Qfe ('1' (t), x (t), x (t-8), u (t»
ox i
i=O, 1, ...,n.
(35)
7.]
PROCESSUS OPTIMAUX A RETARD
193
Nous dirons que le système de fonctions 11'0 (t), lPi (t), · . ., lPn (t)
continues et dérivables par morceaux sur l'intervalle t o t t 1
correspond aux fonctions u (t), t o t 1 t, et x (t), t o - 8 t t 1 ,
s'il vérifie (34) sur l'intervalle t o t t i - 8 et (35) sur l'inter-
valle t i - 8 t t i .
Nous pouvons désormais formuler la condition Il é ces s air e
d'optimalité pour le problème posé (sous forme de principe du maxi-
mum).
Thé 0 r è m e 20. Soit u (t), t o t t i , une commande admis-
sible telle que la trajectoire correspondante x (t), t o - 8 t t i
du système (32) avec la fonction initiale <p (t), t o - 8 t t o , passe
à un instant t i > t o par un point de la variété L. Pour que la commande
u (t) et la trajectoire correspondante x (t) soient optimales, il est néces-
saire qu'existe un vecteur fonction'i' (t) == (11'0 (t), lPi (t), · · ., lPn (t»
non nul correspondant aux fonctions u (t) et x (t) et tel que:
1° pour tous les t, t o t t i , soit remplie la condition de maximum
éJ[ ('i' (t), x (t), x (t - 8), u (t» == Q/ft ('i' (t), x (t), x (t - 8»; (36)
2° à l'instant final t 1 soient satisfaites les relations
11'0 (t i ) 0, Q/lt ('i' (t i ), x (t i ), X (t i - 8» == 0 (37)
(observons qu'en vertu des équations (34) et (35) nous avons 11'0 ==
== const) ;
3° le vecteur (lPi (t i ), . . ., lPn (t i » soit orthogonal au plan tangent
au point x (t i ) === (Xl (t 1 ), . . ., x n (t i » à la variété S1.
Remarquons que l'application de ce théorème soulève des diffi-
cultés dues au fait que les fonctions inconnues Xl (t), . . ., x n (t),
'tp1 (t), . . ., 'tpn (t) interviennent dans le système (32) et (34) avec
un argument aussi bien retardé qu'avancé. Il est évident que pour
les systèmes linéaires cette difficulté n'existe pas.
Dans le cas d'un problème en temps optimal (fO == 1) au lieu de la
n
fonction cfJt on considère la fonction H == 2j lPa/ a des variables
a=l
'tpi' . . ., lPn, Xl, . . ., x n , yi, . . ., yn, u; désignons par M (11', x, y)
le majorant de cette fonction par rapport à u E U (11', x, y étant fi-
xés). En substituant la fonction H à la fonction OJ{; dans les équations
(34), (35) nous pouvons dans ce cas expliciter les fonctions lPi (t), . . .
. . ., 'tpn (t), t o t t 1 , correspondant aux fonctions u (t), t o t
t 1 , et à x (t), t o - 8 t t i . Ensuite, dans le cas de commandes
en temps op timal, on conserve la formulation du théorèn1e 20 sauf que
les fonctions QJt et ail sont remplacées par les fonctions JI et AI et la
condition 2° par la condition
Cl.,ft ('tp (t 1 ), x (t 1 ), x (t 1 - 8» > O.
1 3 -- 0 l 3 3 9
194
PROBLÈMES DIVERS
[Ch. 4-
Autrelnent dit, la condition d'optimalité découle du théorèn10 20,
tout comme le théorème 2 se déduit du théorème 1.
Lad é mon s t rat ion du théorème 20 se fait dans ses
traits généraux suivant le même schéma que celle du théorèn1e 1
(ou du théorème 8). Nous la ferons en prenant soin de noter en détail
les passages qu'il est nécessaire de modifier et en omettant los cons-
tructions qui ne diffèrent en rien de celles exposées dans le chapitre 2.
Soit x (t) la solution de l'équation (33) correspondant à la COln-
mande admissible u (t), t o t t 1 , et à la fonction initiale <p (t),
t o - 8 t t o . Appelons système d'équations aux variations pour
le système (32) le système linéaire suivant:
d (ôx i (t»
dt
n
( Ofi (x (t), x (t - 8), u (t)) ôx CL (t) +
L.J â x a
a=O
+ ofi (x (t), - 8), u (t» ÔxCL (t _ 8) ), i = 0, 1, ..., n. (38)
Nous allons considérer sur l'intervalle t o - 8 t t 1 ou sur une
partie de cet intervalle les solutions du système (38) qui correspon-.
dent à des fonctions initiales con t i nue spa r m 0 r c eau x ;
comme nous n'excluons pas l'éventualité d'une discontinuité de la
solution à l'instant initial t o , pour que le système (38) adn1ette une
solution univoque, il est nécessaire que soit donnée (outre la fonction
initiale) la valeur initiale de cette solution. Si donc 'f} (t) est une
fonction arbitraire continue par morceaux, définie sur l'intervalle
't - 8 t 't, où 't E [to, t 1 ] et S un vecteur quelconque de l'espace
X, nous appellerons solution du système (38) avec la fonction initiale
'f} (t) et la valeur initiale S une fonction ôx (t) == (ÔX O (t), . . .
. . ., ôx n (t)), 't - 8 t t 1 telle qu'elle coïncide avec 11 (t) sur
l' in terv aIle 't - 8 t 't, qu'elle soit con tin ue et vérifie le systè-
me (38) sur l'intervalle 't t t 1 et, en outre qu'elle vérifie la
relation ôx ('t) == s. Nous désignerons cette solution par le sYlnbole
At. 'L ('f), s), 't - 8 t t 1 .
Nous conviendrons (pour 't - 8 t t i ) de considérer que
At. 'L (1), s) est un vecteur 1 i é admettant pour origine le point
x (t). Ainsi, pour les éléments initiaux donnés S et 'f} (t), 't - 8
t 't, est défini le champ de vecteurs At. 't (11, S), 't - 8
t t 1 ; nous dirons que les vecteurs At. 't ('f), s) de ce champ se
déduisent l'un de l'autre par une translation le long de la trajectoire
x (t).
Indiquons les propriétés facilement démontrables de la transla-
tion dont nous aurons à nous servir dans la suite (cf. formules (17)..
chapitre 2).
1. Ato, to ('f), ) == s.
27.J
PROCESSUS OPTIMAUX À RETARD
195
II. Posons 1]1(t)==A t .'t(f), 6), 't1-8 t 'tb où to 't 't1 t1;
alors
A t ,'t1(1]1, A't 1 ,'t(1], S))===A t ,'t(1], S), 171 t t1.
III. At. 't (1'11]1 + 1'1"12, 1'1S1 + 1'262) ==
= 1'1 A t, 't (1]17 S1) + 1'2 A t, 't (1]2' S2)' 17- 8 t t1'
où '\'1 et 1'2 sont des nombres réels arbitraires.
IV. Soit 1]1 (t) une fonction continue par morceaux définie sur
l'intervalle 't - 8 t 't (où 17 E [to, t 1 ]), M une constante et 6 un
vec teur al' bi tr aire . Supposons ensui te que les in terv aIle s 1 i sont
définis comme dans le 13 et soit 11 (t) une fonction définie sur l'in-
tervalle 17 - 8 t 17 comme suit:
{ 'f}(t)==e1)1 (t)+o(e) en tous les points de l'intervalle
17- 8 t 17 n'appartenant pas aux
intervalles Ii;
l 'f} (t) 1 êl I sur les intervalles Ii.
Alors,
At.'t(f), eS+o(e))==A t ,'t(e'f}1' e6)+0(8), 't t t1.
Les propriétés 1 et II découlent directement de la définition du
symbole At. 't (1], S). La validité de la propriété III sur l'intervalle
t o t t o + 8 résulte du fait que sur cet intervalle le système (38)
est un système linéaire (non homogène) d'équations différentielles
o l'di n air e s. Sur les intervalles consécutifs de longueur 9
(jusqu'à t 1 ) la propriété III se démontre d'une façon analogue en uti-
lisant la propriété II. De la même manière s'établit la validité de la
propriété IV. .
Etudions maintenant les peI' tu r bat ion s des co ID man des
et des t l'a j e c toi l'es. Soit u (t), to t t 17 une commande
admissible et x (t) la trajectoire correspondante de l'équation (33)
avec la fonction initiale cr (t), t o - 8 t t o . Les points réguliers
de la commande u (t) seront tous les points où elle est con tin ue, i.e 0-
tous les points sauf un nombre fini d'entre eux appartenant à l'inter-
valle t o t t 1 . Nous conviendrons de prolonger toute commande
u (t), t o t < t 17 au-delà du point t 1 , en supposant u (t) = u (t f )
pour t > t 1 . Il est important de souligner que le point t 1 sera un'
point régulier de la commande u (t). Si 17 est un point arbitraire de
continuité de la commande u (t), quels que soient les nombres réels p
et q, on a:
't'+që
l [(x (t), x (t - 8), n (t)) dt =
T+pë
== e (q- p)f(x (1;), X (17- 8), U (T)) + 0 (8) (39)
(cf. formule (1), chap. 2).
13*
196
PROBLÈMES DIVERS
[Ch. 4
Soit maintenant u (t), t o t t b une commande adrnissible,
x (t) la trajectoire correspondante de l'équation (33) avec la fonction
initiale cr (t), t o - 8 t t o , et a le symbole définissant la pertur-
bation de la commande. Désignons par u* (t) la comlnande perturbée
et par x* (t) la trajectoire correspondante a v e c 1 a m ê m e fonc-
tioninitiale cr (t). (Notons que quel que soit B O, la trajectoire
x* (t) est une fonction con t i nue de t par définition des solu-
tions de l'équation (33).) Pour B suffisamment petit, la trajectoire
x* (t) est définie sur l'intervalle t o t t i tout entier (théorème
de la dépendance continue d'une solution par rapport aux paramè-
tres). Montrons que pour tout point 't de continuité de la commande
u (t) on a la formule suivante (cf. formules (21) et (22) du chap. 2) :
x* ('t + BÔt) == x ('t) + B X + 0 (B), (40)
où x est un vecteur ne dépendant pas de B, défini par la forillule :
x == 1 (x ('t), X ('t - 8), U (17)) ôt-t--
s
1
+ LI A'C, 'C. (0, f (x ('ti), X (Ti - 8), Vi)-
i=l l
- j. (x (17 i ) , X (17 i - 8), U (17 i ) )) ôt i . ( 41 )
On démontre les formules (40) et (41) de la même façon que les
formules (21) et (22) du chap. 2. Remarquons tout d'abord qlH
x ('t + BÔt) == x (17) + Bi (x ('t), x (17 -- 8), U ('t)) ôt -t- 0 (e), (42)
x* ('t + BÔt) == x* ('t) + BI (x ('t), x ('t - 8), U (17)) ôt + 0 (B)
(43)
(pour 't 8 < 17).
Ces formules s'établissent comme les formules (23) et (25) du chap. 2
(à la seule différence qu'il faudra se référer non plus à la formule t
du chapitre 2, mais à la formule (39)). Ensuite, la rnême démarche
qu'au chapitre 2 nous donne l'accroissement de la fonction x* (t)
sur l'intervalle [i:
x * 1 l i = ej. (x (17 i ) , X (17 i - 8), Vi) ôt i -t 0 (B) ( 44 )
(cf. formule (26), chapitre 2).
Vérifions par récurrence les relations (40) et (41). Ces formules
sont vraies (voir (42)) pour s == O. Supposons qu'elles sont démontrées
pour le cas où le nombre d'intervalles Ii' [2' . . . est inférieur à s
et montrons qu'elles sont vraies pour un nombre s d'intervalles Ii,
1 2 , . . ., [8. Désignons par k un entier tel que
Tk+i == 'tk+2 == . . . == 17 8 et 'ti < 't s pour i k
(le cas k == 0 n'est pas exclu). En remplaçant le point 't par le point
L's, le nombre ôt par le nOlnbre lk+i et, enfin, le nombre s par le
nombre inférieur k, il vient de (40) et (41):
x* (178 + Blk+i) = x (17 8 ) + ej.(x (Ts), X (178 - 8), U (17 8 )) l/{+l -1-
27.J
PROCESSUS OPTIMAUX À RETARD
197
k
+ 8 A -r , -r. (0, f' (x (T i ) , x (1' i - 8), Vi)-
i= 1 s l
- f (X (Li), X (17 i - 8), U (Li))) ôt i -f-- 0 (8). ( 45)
Ceci n'est autre que la valeur de la fonction x*(t) à l'extrémité gauche
de l'intervalle I k + 1 . Les intervalles I k + 1 , . . ., Is étant contigus, en
sommant (44) pour i == k + 1, . . ., s et en ajoutant l'expression
obtenue à l'expression (45), il vient:
x* (Ls + 8 (ls + ôt s )) == x (1's) + 8j'(X (Ls), X (LS- 8), U (Ls)) X
s
X (lh+1+ôt k + 1 +... -f-ôt s ) +8 AL ,L.(O, f'(x(Li), x(1'i-8), Vi))-
i= 1 s l
-f.(X(Li), X(1'i-8), U(1'i)))ôt i +o(e) (46)
(cf. la démonstration de la formule (28) au chap. 2, en prenant soin
de se référer non plus à la formule (17) du chap. 2, mais à la proprié-
té 1 de la translation, voir page 194). Si 1'k+l === 1's === 1', la relation_
(46) se confond avec (40), (41). Si, par contre, LS < L, alors
19 + ôt g == 0, Ih+1 + Ôtk+l + . . . + ôt s == 0,
et l'expression (46) prend la forme
s
x* (Ls) == X (Ls) -t-- 8 AL , L. (0, jO(x (Li), X (Li - 8), Vi)-
i=l S l
-fO ( X (Li), X (1' i - 8), u (Li))) Ô t i + 0 (8) ( l' S < 1'). ( 47)-
Désignons par 1) (t) la fonction x* (t) - x (t) étudiée sur l'intervalle
Ls - 8 t LS. Alors (puisque sur l'intervalle 1's t l' la
commande u* (t) se confond avec u (t)), la fonction x* (t) - x (t),
avec une précision de 0 (8), est sur l'intervalle LS - 8 t l' solu-
tion du système el' équations aux variations (38) avec la fonction
initiale 1] (t) et la condition initiale x* (1's)-x (1')s (rappelons que
les fonctions x (t) et x* (t) sont toutes deux continues). Autrement
dit, les vecteurs x* (t) - x (t) se déduisent l'un de l'autre avec une
précision de 0 (8) (sur l'intervalle LS - 8 t L) par la translation:
x* (t) - x (t) == At, LS (1], x* (1's) - X (Ts)) + 0 (e),
Ls-8 t L. (48)
Partout, sauf sur un nombre fini d'intervalles Ii' la fonction 1] (t),
17 8 - 8 t Ls, est de la forme (en vertu de la récurrence) :
Il,
1] (t):=:; x* (t) - x (t) == 8 . At, Li (0, f(x (Li), X (1'i - 8), Vi) -
1=1
- f (x (17 i ) , x (1' i - 8), u ('t i ) )) Ôl i + 0 (ë).
198
PROBLÈMES DIVERS
[Ch. 4:
Aussi, en vertu de la propriété IV (page 195) pouvons-nous remplacer
la formule (48) par la formule:
x*(t)-x(t)==A t ,L s (1]b 1)+O(8), Ls t L, (49)
où
k
"If (t) == 8 At, L. (0, J' (x (L i), X (L i - 8), Vi)-
i=l l
-- j' (x (L i ) , X (rr 1 - 8), u ( rr i ) )) ôt i ,
s
S 1 == 8. AL, 't'. (0, J (x ( Li), X (Li - 8), Vi)-
i=l S l
-j' ( X (Li), X (Ti - 8), U (L d )) ôt i
(voir (47)). Compte tenu de la propriété III de la translation (voir
page 195), la formule (49) peut s'écrire:
k
x* (t) - x (t) == B LAt, L (1] l i), li») ôti +
i=1 S
s
+8 At, l' (0, Sii»)ôt i +O(8), Ts t rr, (50)
i=k-I-l s
où
ll i) (t) == At, 1'i (0, f(x (Ti), X (Li - 8), Vi)-
- j' (x (Ti)' X (Li - e), u ( Li) ) ), T s - 8 < t
Ts, i==1,...,k,
s i) == A t s' 1'i (0, j (x (L i ) , X ( Li - 8), Vi).-
-f'(x (Ti), X (Ti - 8), u (rri)))' i == 1, .. ., s.
Enfin, en vertu de la propriété II de la translation (page 195) il
vient:
At, 'ts (llii)S i») == At, 1'i (0, J'(x (Ti), X (Li - 8), Vi)--
- j' (x ( Li), X ( Li - 8), U (L i ) ) ) ,
i == 1, . . . , k,
et, cOlnpte tenu de la propriété l,
ii) == J' (x (Li)' X (Li - 8), Vi)-
-J'(x (Li)' X (Ti - 8), U (Ti)),
i == k + 1, . . ., s.
La formule (50) s'écrit donc sous la forme:
27.]
PROCESSUS OPTIMAUX À RETARD
199
s
X*(t)-X(t)=-=ë L At,Ti(O, t.(X(Li),(X(Li- 8 ), Vi)-
i= 1
-j. (X (Li), X (Li - 8), U (Ti))) 6ti + 0 (B), Ts t 't.
En particulier, pour t == 't,
s
X * (1') -- X (1') = B A T, Ti (0, j. (x ( l' i ) , X ( 17 i - 8), Vi)-
i=1
- j' (x (Li), X ( Li - 8), U (L i))) ôt i + 0 (B).
En ajoutant cette expression à l'expression (43), nous obtenons dans
ce cas aussi (i.e. pour LS < 't) les relations (40) et (41), ce qui achève
notre raisonnement par récurrence. Les formules (40) et (41) sont
donc entièrement prouvées.
Puisque t 1 est 'un point régulier de la commande u (t), les formu-
les (40) et (41) sont valables, en particulier, pour 17 == t i :
x* (fi + tôt) ==- x (t 1 ) + Bi1X + 0 (B), (51)
OÙ
x=J.(X(tl)' x(t 1 -8), u(t 1 ))ôt+
s
+ Att, 'te (0, j'(X (Li), X (Li - 8), Vi)-'
l=1 l
-j. ( X (Li), X (Li - 8), u (L i) )) ôt i . ( 52)
Désignons maintenant par I( l'ensemble de tous les vecteurs (52)
adnlettant pOlIr origine le point x (t 1 ). Comme au chapitre 2 (pages
8G à 90) on établit textuellement que fi. est un côn e con v e x e
'contenu dans l'espace X et que le lemme 3 est valable (pour 17 == t 1 ).
Est également valable le lemme 4 pour 't == t i , ce qui résulte directe-
nlen t el u lemme 3. Si donc la trajectoire x (t) est optimale, alors le
rayon Lt! n'est pas contenu à l'intérieur du cône l{. C'est pourquoi,
par le son1met x (t i ) du cône I( on peut faire passer un hyperplan r
tel que le cône I( soit situé dans l'un des deux demi-espaces fermés,
définis par r, et le rayon Ltt dans l'autre. (Le cône 1( remplace ici
le cône limite de la page 97.) Ceci permet comme au chapitre 2 de
détern1iner une solution non triviale "" (t) == ('i'o (t), lPi (t), . . .
. . ., '4 J n (t)) pour le système d'équations (34) et (35) telle que
1po == const 0, (53)
("" (t i ), i1x) 0 pour i1x E [{. (54)
Prouvons que 'i' (t) est la fonction cherchée (son existence est
el' ailleurs affirmée par le théorème 20). Soit 'ti un point régulier
quelconque, i.e. lIn point de continuité de la commande u (t), t o <
< Tl < t i . Exalninons le symbole a (voir 14) avec le seul point Li
200
PROBLÈMES DIVERS
[Ch. fi
(i.e. s == 1) et les nombres ôt 1 , ôt respectivement égaux à l'unité
et à zéro. Alors, le vecteur x (voir (52)) correspondant à ce SYll1bo-
1 ". t
e a, s ecrl :
x === A tl , 'rl (0, f (x (L 1), x (L1 - 8), Vt)-
- ja (X ( L t), X ( L t - 8), U ( L t) ) ) . ( 55 )
Posons
g (t) === At, 'r 1 (0, f (x ( L 1), X ('t 1 - e), v 1) - f (x ( L 1), X ('t 1 - e), U (T 1) ) ) ,
't1-e t t1.
Alors, par définition, g (t) === (gO (t), gl (t), . . ., gn (t)) est la solu-
tion du système (38) correspondant à la fonction initiale identique-
ment nulle (sur l'intervalle 't1 - e t Ll) et à la valeur initiale
g (L 1) == f (x ('t 1), X (L 1 - e), V 1) - j" (x ('t 1), X (L 1 - 8), U (L 1) ) ·
(56)
De plus, en vertu de (55) et (54), il vient:
(1P (t 1 ), g (t 1 )) o.
(57)
Nous allons ll1aintenant prouver qu'est vraie l'égalité
('l' (Li), {J (Li)) === ('l' (t 1 ), {J (t 1 )).
En effet, il vient (compte tenu de (34), (35) et (38)):
(58)
11
(,\, (t l ), U(t l » - ('\' (TI), U (TI» = ) :e ('\' (t), U (t)) dt =
'rl
tl
= ) [( d ?) , g (t) ) + ('\' (t), d ?). )] dt =
'rI
n 11-8
= _ ) ( aQ16' ('" (t), x (t : (t - 8), u (t» ga (t) +
a=O 'rl
+ aç;e ('" (t+O), x (t+O), x (t), u (t+O)) ga (t) ) dt-
aya
n 11
_ r a Qte ('" (t), x (t), x (t - 0), u (t)) ga (t) dt -'ï
LJ J axa
a=O 11-8
n 11 n
+ ) ('l'a (t) a/a (x (t), :;;-8), u (t» gi (t) +
(X=O 'rI j=O
27.]
PROCESSUS OPTIMAUX A RETARD
201
n
+ '\jJa (t) a/a (x (t), x (t:--a), u (t» gi (t _ e) ) dt ==-
âyJ
j=O
n tl- e
= _ \ aQ16'(,\, (t+a), X(t a), x (t), u(t+a» ga(t)dt+
" ây
cx=O 'tl
n tl
-t- r OQfe ('1' (t), x (t), x (t-8), u (t)) gCX (t _ 8) dt ==
.LJ J âya
a=O 'tl
n tl- e
= _ \ aQ16' ('\' (t +a), x (; :a), x (t), u (t + a» ga (t) dt +
y
a=O 't1
n 11- e
+:S J aQ16'(,\,(t+a), X(; a), x (t), u(t+a» ga(t)dt=O
a=O 't't- e
(dans les calculs nous avons utilisé la définition de la fonction QJt
et le fait que fJ (t) == 0 sur l'intervalle LI - 8 < t < LI). L'égalité.
(58) est donc démontrée.
De (57) et (58) il vient:
('1' (L1)' g (L1)) 0,
d'où, compte tenu de (56) et de la définition de la fonction QJ{,
,{j8 ('" ('t 1), x (L 1 ), x ( 't 1 - 8), V 1) QJt ('" ('t 1) , x ('t 1), x ('t i - 8), U (L 1) ) ·
Cette inégalité étant vérifiée pour tous les points Vi E U, l'égalité (36)
( st valable pour t ==- L. Ainsi l'égalité (36) est démontrée pour tous.
les points de continuité de la commande u (t). Comme la fonction
u (t) est continue à gauche en ses points de discontinuité et que les fonc-
tions QJt et 011 sont continues par rapport à leurs arguments, la rela-
tion (36) est vérifiée en les points de discontinuité de la commande
II (t). La relation (36) est donc entièrement prouvée.
Par ailleurs, nous avons déjà démontré la première des relations
(37) (voir (53)). En faisant ôt 1 == e . . === ôt s == 0 dans la formule
(52), il vient:
x === je (x (t 1), X (t 1 - 8), u (t 1)) Ô t,
et donc, en vertu de (54),
QJt ('1' (t 1 ), x (t 1 ), X (t 1 - 8), U (t 1 )) ôt o.
( ette inégalité etant vérifiée quel que soit ôt (positif ou négatif),.
il vient:
0Jt ('1' (t 1 ), x (t 1 ), X (t 1 - 8), u (t 1 )) === 0,
et la deuxième relation (37) est établie (voir (36)).
202
PROBLÈMES DIVERS
[Ch. q
Nous avons donc établi le théorème 20 dans le cas où l'extrémité
droi te est f i xe. La condition de transversali té (condi tion 3°
du théorème 20) pour le problème à extrémité droite mobile s'établit
comme au chapitre 2 (avec les modifications qui s'imposent).
Ceci achève la démonstration du théorème 20.
28. DIl problème de poursuite *)
,
Supposons que dans un espace de phase X de dimension n sont
en mouvement deux points commandés, l'un étant appelé « point
poursuivant », l'autre « point poursuivi ». Le mouvement de chacun
de ces points est régi par son propre systè'me d'équations différentiel-
les avec son propre paramètre de commande. Le paramètre de com-
mande, le domaine de commande et la trajectoire du point poursui-
vant seront désignés respectivement par.; u, U et x (t), et ceux du
point poursuivi par v, V et y (t).
Soient u (t) et v (t) des commandes admissibles et x (t) et y (t)
les trajectoires correspondantes satisfaisant aux conditions initiales
x (0) == xo, y (0) == yo.
(59)
Si pour t 1 > 0 on a x (t 1 ) == y (t 1 ), nous dirons que le nombre t 1
représente l'instant de rencontre et l'égalité x (t 1 ) == Y (t 1 ) réalise la
rencontre. D'une manière générale, si les comlnandes u (t) et v (i)
sont arbitrairement choisies, la rencontre peut ne pas se produire
quel que soit t > O. Si toutefois la rencontre est réalisée, nous
dirons que u (t) est la commande poursuivante (pour la comman-
de v (t) donnée et les conditions initiales données Xo et Yo). Ceci
étant, pour xo, Yo et v (t) donnés et pour une commande u (t) choisie
il peut y avoir plusieurs rencontres. Le plus petit instant de rencontre
t 1 sera appelé temps de poursuite correspondant aux commandes u (t)
et v (t). Nous désignerons le temps de poursuite par T u,v. Dans la
suite, les conditions initiales (59) seront supposées fixées (de sorte
qu'elles n'interviennent pas dans la désignation du temps de pour-
suite).
NOLls supposerons encore que le point poursuivant jouit de la
propriété suivante: pour toute commande v (t) il existe (pour les
conditions initiales (59)) une comlnande poursuivante u (t).
Si est choisie la cOlnmande v (t) du point poursuivi, on peut poser
le problème de la recherche d'une commande poursuivante u (t)
telle que le temps de poursuite correspondant T u,v soit lninimal.
Nous supposerons que pour toute commande admissible v (t) i 1
e x i s t e une commande admissible u (t) réalisant le fi i n i fi U ln
*) Les résultats obtenus dans ce paragraphe sont dus à D. Kelendgéridzé.
28.]
UN PROBLÈME DE POURSUITE
203
du temps de poursuite. Désignons ce lllinimum par Tv:
Tv === min Tu, v.
u
Nons supposerons par ailleurs qu'il existe une comnlande admissible
v (t) réalisant le m a x i m II III de la grandeur T v, maximum
que nous désignerons par T:
T == max Tv === max (nlin Tu, v). (60)
v v u
Le problèllle consiste à trouver un couple de conlmandes adlllissi-
hIes Il (t) et v (t) tel que pour le temps de poursuite correspondant soit
vérifié3 l'égalité Tu, v == T. Ce coupl de commandes u (t) et v (t)
sera désigné par couple optilfLal de commandes et le couple correspon-
dant de trajectoires x (t) et y (t) (avec les conditions initiales (59))
par couple optimal de trajectoires.
Ainsi donc, la commande u (quel que soit la commande v (t))
,est choisie de manière à r a p pro che r au possible la rencontre
du point poursuivant avec le point poursuivi; quant à la commande v,
elle est choisie de manière à éloigner au maximum (dans le temps)
l'instant de rencontre. Ajoutons encore qu'en choisissant la comman-
de u (t) qui gouverne le mouvement du point poursuivant, nous sup-
poserons chaque fois que la commande v (t) du point poursuivi est
con nue à l'avance; en conséquence, pour définir la grandeur T
on prend d'a b 0 r d le minimum de toutes les commandes u (t)
pour uno commande fixe v (t), et e n sui t e le maximum de toutes
les conlmandes v (t).
Nous supposerons encore que le lllouvement du point poursuivant
est régi dans l'espace X par l'équation linéaire (sous forme vectoriel-
le) .
; =j(x, u) = Ax+Bu+c,
(61)
pour laquelle est satisfaite la condition de position commune et
dont le domaine de commande U est un polyèdre convexe borné et
fermé, contenu dans l'espace Er' engendré par la variable u ===
=== (Ul . . ., ur). Supposons que le mouvement du point poursuivi
est décrit par l'équation *) (sous forme vectorielle)
dy
di == g (y, v, t) (62)
*) On aurait pu sc lhniter, certes, au cas où le second membre de l'équation
(62) est autonome, i. e. il ne dépend pas explicitement du temps. Toutefois les
transfornlations opérées plus bas conduisent (même dans le cas autonome) à intro-
duire explicitement la variable t dans le deuxième membre de l'équation régis-
sant le 1110UVement du point poursuivi. Aussi le problème n'est pas plus simple
Jans le cas d'une équation (62) autonome.
204
PROBLÈMES DIVERS
[Ch.
et que son domaine de commande V est un ensemble contenu dans
l'espace de dimension s engendré par la variable v == (VI, . . ., VS).
Comme classe de commandes admissibles (tant pour u que pour v)
nous allons prendre l'ensemble de toutes les commandes continues
par morceaux. Les coordonnées de la fonction vectorielle g (y, v, t)
sont assujetties aux conditions habituelles (i.e. elles doivent être
continues en y, v et t et continûment dérivables par rapport aux
coordonnées yI, . . ., yn du point y).
En vue de résoudre le problème posé, introduisons deux vecteurs
a uxili aires
'P === ('Pt, . · ., 'Pn), X == (Xt, · . ., Xn)
et deux fonctions hamiltoniennes:
n
H 1 ('I', x, u)== 2 'Pafa(x, u)=== ('P, j(x, u),
a=1
n
H 2 (X, y, v) == Xa g a (y, v, t) == (X, g (y, v, t) ) ,
a=l
correspondant à l'objet poursuivant et à l'objet poursuivi. Utilisons
1es fonctions Hi et H 2 pour composer les deux systèmes suivants
d'équations différentielles en les variables auxiliaires 'Pi et Xi:
d'Pi DHt 2
---rIt == - Dxi ' i == 1, ,..., n,
dXi _ D JI 2 . 1 "
d ., l == , , ..., n.
t- - (.Iy
(63)
(G4)
Si les fonctions u (t), x (t), v (t) et y (t) sont données, en les portant
dans les deuxièmes membres du système (63), (64) nous obtenons des
systèlnes linéaires en 'Pi et Xi. Nous dirons que toute solution 1P (t)
et X (t) de ces systèmes correspond aux fonctions u (t), x (t), v (t)
et y (t) choisies.
Le théorème qui va suivre donne une condition n é ces s air e
d' optimali té el u problème étudié.
Thé 0 r è ID e 21. Soient u (t) et v (t) un couple optinlal de
commandes, x (t) et y (t) le couple optimal correspondant de trajectoires
(voir les équations (61) et (62» et T le temps de poursuite. Les systèmes
(63) et (64) admettent alors des solutions non triviales '\p (t) et X (t)
correspondant aux fonctions u (t), x (t), v (t) et y (t) telles que:
1 0 pour tous les t, 0 t T, soient satisfaites les conditions de
maximum
max Hi (11' (t), x (t), u) = Hi ('P (t), x (t), u (t», (G5)
u u
maxH 2 (x(t), y(t), v)==H 2 (X(t), y(t), v(t)); (of»)
vEV
28.]
UN PROBLÈME DE POURSUITE
205
2° à l'instant t == T soient satisfaites les conditions
Hi ('1' (T), x (T), u (T») H 2 (X (T), Y (T), v (T)), (67)
'1' (T) == X (T). (68)
D é ID 0 n s t rat ion. Soit Uo un point intérieur quelconque
du polyèdre U. Posons
fi == u - uo.
L'équation (61) s'écrit alors sous la forme
dx -
"dt == Ax + Bu + (Buo + c).
l n transportant donc l'origine des coordonnées de l'espace Er en uO,
nous ne faisons que modifier le terme libre c de l'équation (61);
toutefois, l'origine des coordonnées de l'espace Er sera maintenant
un point intérieur au polyèdre U. Nous supposerons que ce déplace-
ment (s'il était nécessaire) a été déjà fait dans l'équation (61) et donc
l'origine des coordonnées est un point intérieur au polyèdre U.
Désignons ensuite par XO (t) la solution de l'équation (61) corres-
pondant à la commande u == 0 (cette commande est admissible
puisque l'origine des coordonnées appartient au polyèdre U) et à la
condition initiale XO (0) == Xo (voir (59»). La solution XO (t) obéit
à l'équation
d.1:0(t) == Axo (t) -1- c,
dt
(69)
elle est donc une fonction analytique en t.
Soient Ui (t), Vi (t), 0 t t 17 un couple quelconque de comman-
des et Xi (t), Yi (t) les trajectoires correspondantes des équations (61)
et (62) satisfaisant aux condi tions ini tiales (59), i.e.
dXlt(t) = AXl (t) + Bu! (t) + c, (70)
dY1 (t)
dt == g (Yt (t), Vi (t), t), (71)
Xt(O)==xo, Yt(ü)==yo. (72)
Posons
- -
x (t) == X t (t) - X O (t), y (t) == Yi (t) - XO ( t) .
Alors, en vertu de (69), (70) et (71) il vient:
d Y) = A x (t) + Budt),
dy (t) . - -
dt =-==g(y(t)+.rO(t), Vt(t), t)-AxO(t)-c== gi(y(t), Vt(t), t),
(73)
206
PROBLÈJ\IES DIYERS
[Ch. 4
OÙ g1 désigne la fonction
gi (y, V, t) == g (y + XO (t), v, t) - Axo (t) - c
(cf. note de la page 203). Les fonctions x (t), y (t) obéissent donc aux
équations différentielles
dx
at===Ax-1-Bu, (74)
dy
dt === g1 (y, V, t) (75)
(pour U === Uj (t), v == Vi (t)) et aux conditions initiales (voir (72))
x (0) === 0, y (0) === Yo - xo. (76)
Si, inversement, les fonctions x (t) et y (t) obéissent aux équations.
(74) et (75) et satisfont aux conditions initiales (76), les fonctions
Xi (t) et Yi (t) tirées des formules (73) vérifieront les équations (61)
et (62) et les conditions initiales (59). De (73) il est clair que chaque
instant de rencontre des trajectoires Xi et Yi est également un instant
de rencontre des trajectoires x et il et inversement (i.e. si Xi (t ' ) ==
== Yi (t f ), alors X (t ' ) == Y (t') et inversement). Dans le problèlne
initial de poursuite on peut donc remplacer les équations (61) et
(62) et les conditions initiales (59) par les équations (74) eL (75) et
les conditions initiales (76). Enfin, il est clair que si nous prouyons.
le théorème 21 pour le problème (74), (75) et (76) et si ensuite nous.
faisons le changement (73), nous obtenons ce mênle théorènle 21
pour le problème (61), (62) et (59). Nous pouvons donc procéder
à la démonstration du théorème 21 sur le problème (74), (75), (76)"
Autrement dit, il nous suffira de prouver le théorèn1e 21 (dans sa
première formulation, voir (61), (62), (59)) pour le cas où
c == 0, xo === 0
(77)
et, de plus, où l'origine des coordonnées de l'espace Er engendré par
les variables u 1 , . . ., ur est un point intérieur au polyèdre U"
Ceci posé, voyons maintenant la démonstration du théorènle 21.
Quel que soit t 1 > 0, désignons par tl l'ensemble de tous les
points de l'espace de phase X qu'on peut atteindre en un temps t1
en se déplaçant à partir de l'origine des coordonnées en vertu du
système (74) (sous l'effet d'une commande convenablement choisie)"
L'ensemble t1 est un ensemble convexe borné contenu dans l'espace
X et admettant des points intérieurs (voir page 122). Quel que soit
le point de l'ensemble t1 considéré on peut y accéder en un ten1pS
e x a c t e men t é gaI à t 1 (car avant le début du mouvement
on peut rester pendant un temps quelconque à l'origine des coordon-
nées, en faisant u == 0). Désignons p r Stl le bord du corps conve-
xe tl.
8.]
UN PROBLÈME DE POURSUITE
207
/Iontrons qu'on peut accéder en tout point i n t é rie u r
à l'ensemble tl (en partant de l'origine des coordonnées en vertu
du système (74)) en un temps i n f é rie u r à t 1 ; et inversement
si on accède à un point en un temps inférieur à t 1 , ce point est i n -
t é rie u r au corps tl. Soit, en effet, a un point quelconque inté-
rieur à l'ensemble ti. Soit par ailleurs '\fJ* (t) une solution de l'équa-
tion (5), chap. 3, telle que la commande u* (t) définie par l'équation
(6), chap. 3, transfère le point représentatif de l'origine des coor-
données en a. Désignons par t f l'instant où le point représentatif
arrive au point a sous l'effet de cette commande. Considérons la
Et!
FIG. 87
fonction '\fJ* (t), la commande u* (t) définie par cette fonction et la
trajectoire de phase correspondante x* (t) sur l'intervalle 0 t C
t", où t" > t f . Puisque x* (t f ) === a, le point x* (t") est contenu
à 1 ' intérieur du corps ti pour t " suffisamment proche de t'. Or la
trajectoire x* (t), 0 t t", est une trajectoire 0 p t i mal e
du système (74) (unique en vertu du théorème 12) menant de l'origine
des coordonnées au point x* (t") et comme x* (t") E ti donc t" t 1
et t f < ti. Supposons inversement qu'on peut accéder au point a en
un temps t f < t 1 sous l'effet d'une commande u* (t). Considérons
l'ensemble tt-t' des points auxquels on peut accéder (sous l'effet
d'une commande quelconque) en un temps inférieur ou égal à t 1 -
- t f ; l'origine des coordonnées se trouve à l' i n t é rie u r
de cet ensemble. Quel que soit le point de l' ensemble ti-t' d'où
l'on part, en se déplaçant sous l'effet de la commande u* (t) pendant
un temps t'on obtient un ensemble W contenant le point a (fig. 87)
Partant de l'origine des coordonnées, on peut accéder en tout point
de l'ensemble W en un temps t1 (en se déplaçant d'abord à l'inté-
rieur de l'ensemble tl-t' pendant un temps t 1 - t'et ensuite en
parcourant en t' la distance séparant l'ensemble tl-t' de l'ensem-
ble W), i.e. Wc tl. Le point a est donc un point i n t é rie u r
à l' ensemble ii.
208
PROBLÈMES DIVERS
[Ch. '*
Revenons rnaintenant aux commandes optimales u (t) et v (t) et aux
trajectoires optimales x (t) et y (t) mentionnées dans le théorème 21.
(on tiendra compte des simplifications (77) introduites) et prouvons
que le point x (T) est situé sur 1 e b 0 r d du corps T. Suppo-
sons en effet, que le point x (T) est un point intérieur à ce corps.
On peut donc accéder à ce point (en partant de l'origine des coor-
données sous l'effet du système (74)) en un tenlps t f < T. En pre-
nant donc un point t 1 tel que t f < t 1 < T, il vient que l'ensemble
tl (constitué des points auxquels on accède en un temps t 1 ) contient
le point x (T) et, par conséquent, une boule de rayon r centrée sur
le point x (T). l)our t 1 < t < T l'ensemble t contient égaleJnent
une boule de rayon r centrée sur le point x (T). Faisons choix mainte-
nant d'un nombre t (pris dans l'intervalle t 1 < t < T) arbitraire-
ment proche de T de manière que la distance qui sépare le point
y (T) === x (T) du point y (t) soi t inférieure à r. Alors, l' ensemble t
contient le point y (t) et de plus t < T. Ce qui veut dire que le point
poursui van t peu t accéder en y (t) à 1 ' instant t < T, i. e. (pour une
commande convenablelnent choisie v (t)) la rencontre peut se réaliser
il l'instant t < T. Or, cela contredi t la définition d LI non1bre T.
Donc, le point x (T) est situé sur le bord S T de l'ensemble T.
De ce qu'il précède il s'ensuit que u (t), 0 t T, est une COln-
mande en temps optimal transférant le point représentatif de l'ori-
gine des coordonnées en x (T) (en vertu du système (74)). En effet.
si cette commande n'était pas optimale, le point représentatif serait
transféré en x (T) en un temps inférieur à T et alors x (T) serait situé
à l' i n t é l' i e u r de l'ensenlble T' ce qui est faux. De ce qui
précède il résulte que la comn1ande u (t), 0 t t 1 (où t 1 < T)
est aussi une commande en temps optimal transférant le point repré-
sentatif (en vertu du système (74)) de l'origine des coordonnées eIl
x (t 1 ). Autrement dit, il est in1possible d'aboutir au point x (td
(0 < t 1 T) en un temps inférieur à t 1 , et donc le point x (t 1 ) est
situé sur le bord de l'ensemble tl.
Soit l'union de tous les ensembles t, t > O. Il est clair que
est un ouvert de l'espace X, contenant l'enseu1ble T et par suite
le point x (T) === Y (T). Il existe donc nn nOJnbre t* < T tel que
y (t) E pour t* < t T. Désignons par L (t) un nombre tel que
y (t) E S'tu> quel que soit t, t* t T. Il est aisé do voir que T(t)
est une fonction continue de t, définie sur l'intervalle t* t T.
u (t) et v (t) étant un couple 0 p t i mal de commandes et T le
temps de poursuite, il vient:
L (T) == T,
L (t) > t pour t < T.
(78)
(79)
Si en effet, l'inégalité L (t) t était vérifiée pour un certain t < T,
le point poursuivant accéderait au point y (t) ESt (t) C t en nn
28.]
UN PROBLÈME DE POURSU ITE
209
temps t, i.e. (sous l'effet de la commande v (t) choisie) la rencontre
aurait pu se réaliser en un temps t < T, ce qui contredit la défini-
tion du nombre T.
Le point y (t) étant situé sur le bord S 'tet) du corps convexe 'tet),
il est possible de faire passer par ce point un hyperplan d'appui au
corps 'tco. Cet hyperplan (ou l'un quelconque d'entre eux s'ils
sont plusieurs) sera désigné par d't(t). Soit e't<t) le vecteur unitaire
d'origine y (t), orthogonal à l'hyperplan d't<t) et orienté vers le
den1i-espace ne contenant pas l'ensemble 't<t). Le vecteur x - y (t)
admettant pour origine un point quelconque x E 't(t) étant orienté
vers le demi-espace contenant l' ensen1ble 't(t), le produit scalaire
(x - y (t), e'{;(t») O. En particulier de (79) il résulte que t c:
,= '{;(o et .
(x - y (t), e-r(t») 0, x E t.
(80)
Faisons choix maintenant d'un procédé de perturbation de la com-
mande v (t) (voir page 80). La trajectoire perturbée corr spondante
(avec la précédente condition initiale, voir (59)) est de la forme:
y* (t) == y (t) + 8Ôy (t) + 0 (€), a t T; (81)
le vecteur dy == ôy (T) se tirant de la formule (22), chapitre 2 où il
convient de poser L == T, ôt == a et de négliger la coordonnée XO
(puisque c'est l'espace de phase X qui est considéré et non pas X).
Soit maintenant 81, 8 2 , . . ., 8i, . .. une suite quelconque de
nombres positifs convergeant vers zéro. Désignons par yi (t) la
trajectoire (81) associée à 8 == 8i, et par vT (t) la commande corres-
pondante. Le temps d'e poursuite correspondant à la commande
vi (t) sera noté t i == T v . On a:
yt= (ti) E t., i = 1, 2, · · .
l
(82)
De l'optimalité du couple de commandes u (t), v (t) il vient:
i T, i == 1, 2, .
Par ailleurs, il est aisé de constater que
li ti = T.
i-+oo
(83)
(84)
Supposons en effet que la relation (84) n'est pas sa tisfai te. En passant,
au besoin, à une sous-suite nous pouvons supposer que lim t i existe
i-+oo
et est inférieure à T. Posons lim t i == t. Puisque lim 8i == 0, de (81)
i-+oo i-+oo
il s'ensuit:
lim yr (t i ) == Y (t).
i-+oo
14-01339
210
PROBLÈl\IES DIVERS
[Ch.
Par ailleurs, en passant à la limite dans (82) il vient:
lim yi (ti) E t.
i-oo
Donc, y (t) E t' où t < T, ce qui contredit la définition de T. La
relation (84) est donc satisfaite.
De (83) et (84) il résulte que les nombres L (t i ) sont définis pour i
suffisamment grand; nous supposerons (en négligeant au besoin les
premiers termes de la suite) que les nombres L (t i ) sont définis pour
tous les i == 1, 2, . .. De (78) et (84) on a, en vertu de la conti-
nuité de la fonction L (t),
lim't (ti) == T.
i-+ 00
(85)
Considérons maintenant les vecteurs
e't(t i ), i = 1, 2, ...
(86)
La sphère unitaire de l'espace X de dimension n étant compacte,
nous pouvons considérer (en passant au besoin à une sous-suite) que
les vecteurs (86) convergent pour i -+ ex:> vers un vecteur unitaire de
l'espace X. Soit maintenant x un point arbitraire i n t é rie u r
au corps T. Alors, x E t. pour i suffisamment grand et donc
l
(X-y(ti)' e't(t.») O
l
(voir (80)). En passant à la limite pour i -+ ex:> (et compte tenu de la
relation y (T) == x (T) et de la relation (85)), on a
(x - x (T), e) O. (87)
Puisque la relation (87) est vérifiée pour tous les points x intérieurs
au corps T' elle l'est par conséquent pour tous les points x de ce
corps.
De (82) et en vertu de (80), il découle:
(yt (ti) - Y (ti), e't(t.») O, i == 1, 2, . . ·
l
ou , compte tenu de (81),
(Eiôy(ti)+o(e)le=e., e't(t.») O, i==1, 2, ...
z. z.
En divisant cette expression par Ei et en passant à la limite pour
i -+ ex:>, il vient ( en vertu de la relation lim o( ) == 0 )
e-+ 00 e
(ôy (T), e) 0,
ou encore,
(l1y, e) O.
(88)
9 28.J
UN PROBLÈME DE POURSUITE
211
Considérons enfin la fonction
cr i (t) == (X (t) - y (t), e 't( t i») .
Puisque x (t) E t, quel que soit t, de (80) il s'ensuit cri (t i ) O.
Par ailleurs, cri (T) == 0 puisque x (T) == Y (T). De plus, la fonction
cri (t) admet pour i suffisamment grand une dérivée continue sur
l'intervalle ti t T (les commandes u (t) et v (t) étant continues
par lnorceaux et la relation (84) étant vérifiée). Il existe donc un
i' t i < £i < T tel que cri (£i) 0, i.e.
(f(X(£i)' U(£i)-g(Y(£i), V(£i), £i), e't(t.)) O.
z
En passant à la limite pour i -+ ex> il vient:
(w, e) 0,
(89)
où
w == g (y (T), v (T), T) - f (x (T), u (T». (90)
Désignons maintenant par d l'hyperplan de l'espace X passant
par le point x (T) et orthogonal au vecteur e. Nous considérerons
en outre que les vecteurs l1y et w sont issus du point x (T). Les rela-
tions (87), (88) et (89) montrent alors que le corps T tout entier et
les vecteurs l1y et w sont situés d'un même coté de l'hyperplan 11. Autre-
ment dit, si nous désignons par * l'enveloppe convexe du corps T
et du vecteur w, nous constatons que le corps * et le vecteur l1y
sont situés d'un même côté de l'hyperplan 11. Le corps * et le
vecteur - l1y sont donc situés dans deux demi-espaces fermés
dis t i net s définis par l'hyperplan 11. D'où nous concluons enfin
que le vecteur -l1y issu du point x (T) ne__passe pas par des points
intérieurs au corps * .
Considérons maintenant toutes les méthodes possibles de perturba-
tion de la commande v (t) en portant les vecteurs obtenus dy == ôy (T)
(voir (81) à partir du point x (T). Les extrémités de ces vecteurs
remplissent un certain ensemble K dans l'espace X, qui, on le cons-
tate aisément (voir pages 86-87), n'est autre qu'un cône convexe
de sommet au point x (T). Les extrémités des vecteurs -l1y remplis-
sent un cône convexe symétrique du cône K par rapport au point
.r (T), que nous désignerons par -K. De ce qui précède, il résulte
que le cône -K ne rencontre pas l'intérieur du corps convexe *.
Puisque en outre le corps * contient des points intérieurs (car le
corps T en renferme aussi), les corps * et -K sont séparables.
Autrement dit, il existe dans X un hyperplan 11 * tel que le corps
La* soit contenu dans l'un des demi-espaces fermés définis par l'hy-
perplan 11* et le cône -I( dans l'autre. Les ensembles convexes *
et K sont donc situés dans un même demi-espace fermé défini par
l'hyperplan d *. Désignons par e* le vecteur unitaire issu du point
.x (T), orthogonal à 1 'hyperplan * et orienté vers le demi-espace
14*
212
PROBLÈMES DIVERS
[Ch. '*
ne contenant pas les corps * et K. Le vecteur e* satisfait donc aux
relations (cf. (87), (88), (89)):
(x - x (T), e*) 0 pour x E T' (91)
( y, e*) 0 pour y E K, (92)
(w, e*) O. (93)
Désignons par 1P (t) la solution du système (63) vérifiant la condi-
tion initiale 1P (T) == e* et par X (t) la solution du système (64)
vérifiant la condition initiale X (T) == e*. Nous allons prouver
maintenant-que les fonctions 1P (t) et X (t) sont les fonctions cherchées
(i.e. elles vérifient les conditions du théorème 21). Remarquons tout
d'abord que la relation (68) est satisfaite en vertu du choix des con-
ditions initiales pour les fonctions 1P (t) et X (t). Quant à la relation
(67), elle découle immédiatement des expressions (90) et (93). Enfin
les relations (65) et (66) se démontrent, en utilisant les inégalités (91)
et (92) tout comme, dans le chapitre 2, la relation (11) a été délnontrée
à l'aide de l'inégalité (34) (bien entendu on prendra soin de procéder
aux modifications évidentes imposées par le fait que c'est l'espace X
et non plus l'espace X qui est considéré).
Ce qui achève la démonstration du théorème 21.
Le principe du
calcul des
CHAPITRE 5
maximum et le
variations
Dans ce chapitre, nous allons voir le lien qui existe entre la théo-
rie des processus optimaux et le calcul variationnel classique. Nous
démontrerons que le problème optimal résolu dans les chapitres 1
et 2 est une généralisation du problème de Lagrange dans le calcul
variationnel et qu'il lui est équivalent lorsque le domaine de com-
n1ande U est lln ensemble ouvert de l'espace vectoriel Er.
Nous montrerons ensuite que lorsque U est 0 u ver t, toutes
les conditions nécessaires dll calcul des variations (notamment le
critère de Weierstrass) découlent du principe du maximum. Cepen-
dant lorsque U est un ensemble fer m é de l'espace Er (qu'il ne
couvre pas entièrement), la condition de Weierstrass cesse d'être
valable, i.e. est f a u x le théorème selon lequel pour qu'une fonc-
tionnelle atteigne son minimum, il est nécessaire que soit remplie
la condition de Weierstrass. L'avantage du principe du maximum sur
les théorèmes classiques du calcul variationnel réside donc dans le
fait qu'il s'applique à un ensemble quelconque (qui peut être fermé)
U c Er- L'élargissement de la classe de domaines de commande
possibles U par rapport au cas classique des ensembles ouverts est
très important pour les applications techniques de la théorie. C'est
précisément le cas où l'ensemble U c: Er est fer m é qui présente
le plus d'intérêt dans les problèmes de commandes optimales et
notamment dans les problèmes d'applications. Ainsi, mêmes les
problèmes simples cités dans le 5 n'auraient pu être traités avec
les méthodes du calcul variationnel classique, étant donné que le
domaine de commande U est un ensemble fermé et les valeurs des
commandes optimales sont situées dans tous ces exemples sur 1 e
b 0 r d de U. Si, dans l'un quelconque de ces exemples, nous nous
limitons à l'étude d'un ensemble ouvert, en négligeant les points
frontières du domaine de commande U, alors les théorèmes classiques
nous donnent la réponse suivante: les commandes optimales n'exis-
tent pas. Ceci implique notamment que le paramètre de commande
doit prendre des valeurs situées sur 1 e b 0 r d de l'ensemble U,
mais cette condition ne suffit absolument pas pour résoudre le pro-
blèn1e puisqu'il faut savoir c 0 m men t doit varier ce paramètre
de commande sur le bord de U. Par exemple, dans le cas des problè-
mes linéaires, il importe de connaître le nombre de commutations,
214
CALCUL DES VARIATIONS
[Ch. 5
de quels sommets à quels somlnets du polyèdre U se réalisent ces
commutations, etc. La théorie classique est impuissante face à toutes
ces questions; par contre, nous avons vu sur des exemples que le
principe du maximum contenait suffisamment d'informations pour
résoudre les problèmes mentionnés.
Dans le g 29, nous déduirons du principe du maximum des con-
ditions nécessaires pour le problème fondamental du calcul des
variations.
Dans le 30, nous prouverons l'équivalence du problème de
Lagrange et du problème optimal du chapitre 2, et déduirons aussi
du principe du maximum le critère de Weierstrass lorsque le donlaine
de commande U est un ensemble ouvert de l'espace Er de dimension r.
Par souci de simplification, nous nous limiterons à l'étude des extre-
mums forts des problèmes variationnels.
9 29. Problème fondamental du calcul variationnel
Quoique le problème fondamental du calcul variationnel ne soit
qu'un cas particulier du problème de Lagrange étudié dans le para-
graphe suivant, il n'empêche qu'il fera l'objet d'un paragraphe
isolé puisque le lien existant entre le principe du maximum et les
conditions nécessaires dll calcul variationnel ressort le plus nette-
ment dans cet exemple simple.
Définitions
Soit dans l'espace Rn+l de dimension n -t- 1 engendré par les
variables réelles (t, Xl, . . ., x n ) === (t, x) une courbe x (t) définie
par les équations
xi == xi (t), i == 1, ..., n, t o <. t t 1. ( 1 )
Si les fonctions Xi (t), i === 1, . . ., n, sont absolument continues et
admettent des dérivées bornées, i.e. en tout point où la dérivée est
définie on a
1 dX;t(t) I M =const, i = 1, ..., n,
nous dirons que la courbe (1) est absolument continue. Désignons, par
ailleurs les points x (t o ) et x (t 1 ) respectivement par xo et X1; nous
dirons que la courbe (1) relie les points (t o , xo) et (t 1 , X1) ou encore
qu'elle satisfait aux conditions aux limites
x (t o ) === XOt x (t 1 ) === Xi. (2)
Appelons ô-voisinage de la courbe absolument continue (1) l'ensemble
de toutes les courbes absolument continues
X' (t) == ( 't (t), ..., ;n (t)), t o t t i
29.]
PROBLÈME FONDAMENTAL
215
telles que
Ixi(t)_'.;;i(t)l<ô pour to t t1' i===1, 2, ..., n.
Soit maintenant G un ensemble ouvert de l'espace R n +l et soit
la fonc tion réelle
f (t, Xl, . . .,
n 1
X , U , . . .,
un) == f (t, X, U)
définie, quel que soit le point (t, x) E G et quelles que soient les
valeurs réelles u l , . . ., Un. Nous supposerons en outre, que la fonc-
tion f est continue et continûment dérivable par rapport à tous ses
arguments.
Supposons que la courbe (1) est entièrenlent située dans le do-
maine G. Alors est définie l'intégrale
ti
J = J (x) = J f (t, x (t), dXd t) ) dt,
to
(3)
que nous considérerons COllIne une fonctionnelle du vecteur fonction
,-.J
x (t), t o t t i . Il est évident, que pour toute courbe x (t), t o
t t i appartenant au ô-voisinage de la courbe (1), est également
définie la fonctionnelle J (.Î) pourvu que Ô > 0 soit suffisamment
peti t.
Nous dirons que la courbe absolument continue (1) est une extré-
male (forte) de la fonctionnelle (3) s'il existe un ô > 0 tel que la
fonctionnelle (3) prenne son minimum (ou son maximum) pour x == x
sur l'ensemble de toutes les courbes x (t), t o t t i , si tuées dans
le ô-voisinage de la courbe (1) et satisfaisant aux mêmes conditions
aux limites (2). Nous n'étudierons dans la suite que le cas du m i -
n i m u m. On dira donc de la courbe (1) qu'elle est une extrémale
de la fonctionnelle (3) s'il existe un ô > 0 tel que J (x) J (x)
pour toute courbe absolument continue x (t), t o t t f , apparte-
nant au ô-voisinage de la courbe (1) et vérifiant les conditions aux
lilnites X (t o ) == Xo, x (t i ) == Xi.
Le problème fondamental du calcul des variations consiste à trouver
toutes les extrémales de la fonctionnelle donnée (3) pour les condi-
tions aux limites (fixes) données (2).
E qua t ion s d'E u 1 e r etc 0 n dit ion d e L e g end r e
Nous allons montrer que toute extrémale est une trajectoire
optimale pour un certain problème optimal. Soit le système
dx i i
(ft==u, i=-== 1, ..., n,
(4)
216
CALCUL DES VARIATIONS
[Ch. !)
et la fonctionnelle intégrale
f1
J=J(x, u)= J f(t,
to
1
X, ...,
11 1
X, u, ...,
Uli) dt ==
ti
= J f (t, x, u) dt, ( 5)
tu
où u == (u 1 , . . ., un) représente le paramètre de commande qui est
choisi dans la classe des vecteurs fonctions mesurables bornés. Lü
domaine de commande U se confond donc dans le cas considéré avee
l'espace En de dimension n engendré par les variables u 1 , . . ., un.
Vu qu'elles seront appliquées au calcul des variations, nous
allons définir les trajectoires optimales des problèmes (4) et (5) d'unü
façon différente que dans les chapitres 1 et 2. Plus exactement,
supposons que les limites d'intégration sont fixes dans (5). UnE
commande mesurable bornée u (t), t o t t 1 , et la trajectoire
x (t) absolument continue correspondante du système (4) avec les
conditions aux limites (2) seront dites optimales s'il existe un Ô > 0
tel que J (:;, T;) J (x, u), quelle que soit la commande ç; (t) pour
laquelle la trajectoire correspondante x (t) du système (4) satisfait
aux conditions aux limites (2) et se trouve dans le ô-voisinage de la:
courbe x (t). Autrement dit, dans la définition des commandes et des
trajectoires optimales nous allons comparer la trajectoire x (t) non
pas à t 0 u tes les autres trajectoires ;; (t), mais seulement aux
trajectoires qui sont situées dans le ô-voisinage de la courbe x (t).
Toute trajectoire, optimale au sens des chapitres 1 et 2, est optilllale
au sens adopté ici, mais d'une manière générale, la réciproque n'est
pas vraie. Par conséquent, les commandes et les trajectoires optinlales
son t plu s nom b r eus e s au sens défini ici qu'au sens défini
dans les chapitres 1 et 2.
Il est aisé de comprendre que le principe du maximum, en tant
que condition n é ces s air e d'optimalité, reste valable dans la
même forme pour les commandes et les trajectoires optimales au sens
défini ici. En effet, pour démontrer le principe du maximUlll nous
avons, au chapitre 2, comparé la trajectoire x (t) seulement aux tra-
jectoires de la forme
x* (t) = x (t) + 8ÔX (t) + 0 (8),
où 8 est un infiniment petit. Pour 8 suffisamment petit, la trajectoi-
re x* (t) est contenue dans le ô-voisinage de la courbe x (t) (quel que
soit ô) et tous les raisonnements du chapitre 2 passent donc san s
c han g e m e fi t pour les commandes et les trajectoires optinlales
au sens défini ici. -:
29.]
PROBLÈME FONDAMENTAL
217
Le problème optimal (4), (5) est un problème à extrémités et à
temps fixes (voir g 8). Il est évident que toute trajectoire optimale
du problème (4), (5) est une extrémale de l'intégrale (3) et inverse-
ment (il suffit, en vertu de (4), de remplacer dans (5) les grandeurs
u i (t) par les dérivées dX:?) ). Aussi, le principe du maximum qui
est une condition nécessaire d' optimalité est-il également une condi-
tion nécessaire pour que la courbe x (t) soit une extrémale de l'inté-
grale (3). Cette simple constatation nous permet d'appliquer le
principe du maximum à la résolution du problème variationnel (3).
Pour résoudre le problème optimal posé, nous devons, en vertu
du théorème 6, composer les équations pour les variables auxiliaires
inconnues '4'0' '4'1' · · ., '4'n et la fonction 0Jt qui, el' après (4), pren-
nent ici la forme suivante
0Je == 1Vof (t, x,
d'Po == 0
dt '
d; i = -1\Jo
u) + 1VfU l + . . . -!-1V n u n ,
i = 1, ..., n. }
(6)
af (t, x, u)
ax i
(7)
La condition de maximum du théorème 6 donne
n
c2It (1J' (t), x (t), t, u (t)) == lna ('Pof (t, x (t), u) -1- 1V ex (t) ua) ( 8 )
uEEn a=l
(presque partout sur l'intervalle t o t t f , cf. théorènle 8). Le
dOlnaine de cOlnmande U se confondant avec l'espace En tout entier
(pour la suite il est suffisant d'exiger que U soit un ensemble 0 u
ver t dans En), le point u == u (t) où la fonction QJt ('i' (t), x (t),
t, u) qui est considérée comme une fonction de la variable u E U
atteint son maximum, est un point s t a t ion n air e de cette
fonction. Il s'ensuit donc de (8) (pour presque tous les t, t o t t f ) :
a
au i Q1e (1J' (t), x (t), t, u (t)) ==
== 'Ih o af (t, x (t . ), u (t)) + 'Ih l . (t) == 0, 1 2
au?, i == , ,..., n.
D'où l'on déduit que 1Vo =1= 0, puisque dans le cas contraire '\}Ji (t) ==
== 0, i == 0, 1, . . ., n. Nous pouvons donc poser 11'0 == -1 puisque
'4'0 == const 0 (voir théorème 6) et que les grandeurs '4'0' 1V1, . . .
. . ., '4'n sont définies à un facteur commun positif de proportionna-
lité près. En faisant 'Po == -1 dans les égalités précédentes, nous
obtenons (presque partout sur l'intervalle t o t t f )
'Ih. (t) == al (t, x (t , u (t)) . 1
l au'/,' l == , ..., n.
(9)
218
CALCUL DES VARIATIONS
[Ch. 5
Par ailleurs, en faisant 'Po == -1 dans l'équation (7), et en intégrant,
nous obtenons
t
'l\Ji (t) = 'l\Ji (to) + J Of ('r, à ' u ('r)) d'T:
io
i === 1, ..., n, t o t t 1. ( 10)
De (9) et (10) nous déduisons les équations d'Euler sous forme
intégrale (en remplaçant u i (t) par les dérivées d:it(t) , voir (4)):
( dx (t) ) t ( dx ('t) )
81 t,x(t), dt al 't, x ('t), dt .
àui (=) J àxi d'T:+ Ji (to), L= 1, ..", n,
to
où le symbole (===) signifie, comme dans le chapitre 2, que les égalités
sont vérifiées pour presque tous les t, t o t t i . En dérivant par
rapport à t (à condition que la fonction f et l' extrénlale x (t) soient
deux fois continûment dérivables), nous obtenons les équations
d'Euler sous forme ordinaire
( dx (t) ) ( ( dx (t) ) )
al t, x(t), dt _ al t, x(t), dt _
dx i dt alti (-)0, (10a)
i:==:1,..., n.
Supposons maintenant que la fonction f (t, x, u) admet des
dérivées secondes partielles continues en u 1 , . . ., un. Alors 1
si la fonction
n
age ('i' (t), x (t), t, u) === f (t, x (t), u) + 'Pa (t) ua,
a=l
prise comme une fonction de la variable u atteint son maximum
au point u == uo, la forme quadratique
n
a 2 B
LJ '); B QI{ ('" (t), x (t), t, uo) £a£ ===
au a au
<x, f)=1
n
82 ta
f (t, x (t), Uo)
au a au f3
a, 13=1
est non positive (quels que soient £1, . . ., n). De la condition de
maximum (8) il vient, pour presque tous les t, t o t t 1 ,
2 ( dx (t) )
a f t, x (t), dt
2j a {3 O.
aua auf)
a, /3=1
29.]
PROBLÈME FONDAMENTAL
2'19
Cette condition, nécessaire pour que la courbe x (t) soit une extrémale
de l' in tégrale (3), est appelée condition de Legendre.
Variables canoniques
Soient, comine précédemment, u (t), x (t), t o t t i , une com-
lnande optilnale et la trajectoire optimale correspondante du problè-
nle (4), (5), et soit par ailleurs", (t) == (-1, '\}Ji (t), . . ., 'Pn (t)) ==
== (-1, 'lIJ (t)) la solution absolument continue non HuIle du systè-
lne (7) qui correspond à u (t) et x (t).
Posons
(? /1 ( J, X , t) =--= su p QJ£ ("" x, t, u) == su p ( - j (t,
uEEn uEEn
n
:1', u) + 'Paua),
a=l
'" == (-1, 'lIJ), x et t étant fixés.
Supposons que l'équation
Q)[ ('i', x, t, u) == dit (tp, x, t)
(11)
adnlet une solution unique
u == u ( " x, t), (12)
définie, continue et continûment dérivable par rapport à ses argu-
1110nts pour
to<t<tt, \Xi_Xi(t)\<<5,
\1Pi--'lIJi(t) 1<<5, i==1, ..., n,
(13)
où <5 un nombre positif suffisamment petit. Sous ces conditions, nous
dirons que les variables (Xl, . . ., x l1 ) == X, ('lIJt, . · ., 'Pn) == 'lIJ sont
les variables canoniques du problème optimal considéré et la fonction
n
If ( " x, t) == - j (t, x, u ('P, x, t)) + 'Pa ua ('P, x, t),
a=1
jonction de Hamilton.
Puisque la commande optilnale u (t) satisfait presque partout
sur l'intervalle t o t tt à la condition de maximum (8) (rappe-
lons que 'Po == -1) et que u ('lIJ, x, t) est l'u n i que solution de
l'équation (11) (pour les conditions (13)), alors (presque partout sur
l'intervalle t o t tt) on a
dx (t)
u(t)=u('I'(t), x(t), t)= dt . (14)
On peut même affirmer que l'égalité (14) est vérifiée par t 0 u t
.sur l'intervalle t o t t i . En effet, puisque l'égalité (14) est
presque partout vérifiée, on a
t
x (t) =x (t o ) + J u (1\1 Cr), x ('r), 't) d't.
to
220
CALCUL DES VARIATIONS
[Ch. 5
Or l'intégrande est une fonction con t i nue en L (car la solu-
tion (12) est continue en ses arguments), la dérivée de cette intégrale
est donc par t 0 u t sur l'intervalle t o t t 1 égale à l'inté-
grande.
Il résulte de l'égalité (11) que les dérivées partielles de la fonction
QJt ('i', x, t, u) par rapport à u i , i = 1, . . ., n s'annulent pour
u === u ('l', x, t) (pourvu que soient satisfaites les conditions (13)):
_ af (t, x, u (11', x, t)) -+- '1101. == A . 1 (15)
oui 1 l , l === , ..., n.
Par sui te
aH (11', x, t) _.
a'Pi
n
.-!!.L. oua (\jJ, x, t) + u i (1\', x, t) +
au a ihp l
a=1
n
+ '11-1 alla ('P, x, t) == ai ( "101 x , t ) + _
1 LJ a a'IJi ,
a= 1
n
( ai ) aua i
+ 1\'a- oua OIPi =u (\)1, X, t);
a=1
n
a Il (11', x, t)
ax i
al
- ----
- ax i
. au a (11". x, t) +
LJ au a ax
a=1
n
+ '1101 au<X(tp,.x, t) == _ +
LJ a ()x ax
<x=1
n
-!_ ( ,101 _ 3!..L ) au == _ ai {t, x, u 1P, x, t)) .
I.L.J ya iJua ax ax1,
a=1
Et, en vertu des (14) et (7), nous obtenons les équations canoniques
d'Euler-Hamilton:
dx i a Il
--rit - a\f-'i '
d'Pi _ aIl
dt - - ax i '
i == 1, ..., n,
i === 1, ..., n,
qui sur l'intervalle t o t t i sont vérifiées par les composantes
des vecteurs foI1ctions x (t) == (Xl (t), . . ., x n (t)) et '\}J (t) ==
= ('Pi (t), · · ., 'Pn (t)).
Supposons, enfin, que la fonction f (t, x, u) est d eux foi s
continûment dérivable par rapport aux variables u l , . . ., un et
que le déterminant
a 2
. . f (t, x (t), u ('p (t), x (t), t) )
au au J
(16)
30.]
PROBLÈME DE LAGRANGE
221
est non nul sur l'intervalle ta t tf- Ceci étant, le système
d'équations
rah _ af (t, x, u) - 0 . 1
'-Yi au i -, L === , ..., n,
(17)
Bst ullivoquement résoluble en u l , . . ., un, si xi et 1Pi diffèrent peu
do Xi (t) et 1Pi (t) et, en vertu de (15), cette solution se confond avec
la fonction (12). Donc, la définition que nous avons donnée des
coordonnées canoniques concorde avec la définition ordinaire de ces
coordonnées à l'aide du système (17) à condition que le détermi-
nant (16) soit non nul.
Rem a r q u c. Si l'on suppose que la fonction f (t, x, u) est
définie non pas pour toutes. les valeurs réelles des variables u l , . . .
. . ., un, lnais seulement pour u EUe En' où U est un ouvert de En'
alors (après des modificati9J!s évidentes dans la définition des extré-
males de l'intégrale (3)), tout ce que nous venons de dire reste vrai.
Il conviendra seulement dans le problème optimal (4), (5) de prendre
pour domaine de comnlande non plus l'espace En tout entier mais
son sous-ensemble ouvert U. Cette remarque vaut aussi pour le
paragraphe suivant.
9 30. Problème de Lagrange
Enoncé du problème
Soient k fonctions
jl(t, Xl, ..., xn, vI, ..., V l1 - h )===fi(t, x, v), i===1,..., k,
continues et continûment dérivables par rapport à tous leurs argu-
lnents pour (t, x) E G et pour des valeurs quelconques du vecteur
v === (VI, . . ., v r ), où r === n - k. Considérons le système sui vant
de k équations différentielles avec les fonctions inconnues Xl (t),
. . ., x n (t) :
dx i _ f i ( t .
dt '
= cpi (t, xl,
l 1\ . 0 dxk+l dx n ) ==
x , ..., X, dt ,. · ., dt -
11, dx l dx n ) 0 . 1
..., x, di' ..., di === , l== ,
. . ., k < n. (18)
Une courbe absolument continue x (t), ta t t l , contenue
entière nlen t dans le domaine G sera appelée admissib le si elle vérifie
les conditions aux limites (2) et si ses coordonnées vérifient le systè-
me (18). Par ailleurs, une courbe absolument continue x (t), ta
t t l , sera appelée extrémale de la fonctionnelle (3) pour les
conditions aux limites données (2) et le système donné (18) si x (t)
est une courbe admissible et s'il existe un B > 0 tel que J (x)
222
CALCUL DES VARIATIONS
[Ch. 5
J (X) pour toute courbe a d mis s i b 1 e x (t), t o t t f
contenue dans le ë-voisinage de la courbe x (t).
Le problème de Lagrange (à extrémités fixes) pour les conditions
aux limites (2) et le système (18) donnés consiste à chercher toutes
les extrémales d'une fonctionnelle de la forme (3).
1\'Iontrons que ce problème se ramène à un problème optimal.
Pour des besoins de symétrie posons
1° (t, x, v) == 1 (t, x, fI (t, x, v), . . ., fh (t, x, v), VI, . . ., vr), (19)
où la fonction 1 (t, x, u l , . . ., un) est celle définie dans le précédent
paragraphe.
Considérons le système d'ordre n
d;: =/i(t, x, v), i=1, ...,
dxh+j _ j
dt - v ,
j = 1,
k, }
n-k=r,
(20)
. . .,
où v == (VI, . . ., vr) désigne un vecteur de commande. Toute com-
mande mesurable bornée sera considérée comme admissible, i.e.
le domaine de commande sera l'espace Er de dimension r engendré
par les variables VI, . . ., v r .
On demande de trouver une commande admissible v (t) corres-
pondant à la trajectoire x (t) du système (20), satisfaisant aux condi-
tions aux limites (2) et minimisant l'intégrale
t1
J (x) = 1° (t, x (t), v (t)) dt.
to
Il est évident, que toute solution de ce problème optimal (à extré-
mités fixes) est une extrémale pour le problème de Lagrange considéré
et, inversement, une extrémale quelconque x (t) == (Xl (t), . . .
. . ., x n (t)), t o t t b du problème de Lagrange est une trajectoire
optimale correspondant à la commande optimale
1 r ( dxh+l (t) dx n (t) )
(V (t), ..., v (t)) == dt ,. · ., dt . (21)
Il est aisé de voir qu'inversement tout problème optimal à temps
fixe est un problème de Lagrange (à extrémités fixes) si la classe de
commandes admissibles est composée de commandes mesurables
bornées arbitraires et si le domaine de commande se confond avec
l'espace Er tout entier.
Règle des multiplicateurs de Lagrange
Soient v (t), t o t t f , une commande optimale et x (t) la
trajectoire correspondante du système (20) satisfaisant aux condi-
tions aux limites (2). Soit par ailleurs, 'i' (t) = ('Po (t), . . ., 'Pn (t))
30.1
PROBLÈME DE LAGRANGE
223
un vecteur fonction absolument continu et non nul correspondant
aux fonctions x (t) et v (t). La fonction Q7E ("l', x, t, v) est de la forme
k n-k
Q1C ('\l', x, t, v) == 'P% (t, x, v) + L 'Pai a + 'Pk -t- a va .
a=1 a=1
Par ailleurs nous avons en vertu de (19)
k
ajO al al afa
ax i == ax i + L.J au a ax i '
a=1
k
afo _ al + -.!L at "
avj - au h + j dua av j ,
a=1
i=1, ..., n,
(22)
j==1, ..., n-k.
(23)
"Le système d'équations pour les inconnues auxiliaires est donc de la
forme (voir théorème 6) :
d'i'o - 0
dt - ,
k
k
(24)
d: i = - ( : i + : a : ) o - : a.
a=1 a=1
De la condition de maximum (théorème 6) on a presque partout sur
l'intervalle t o t t f (voir (23)):
k
. QJt ('\1' (t), x (t), t, v (t))( == ) ( a f . + !.L af ) 'Po +
âvJ 8u h +3 L.J au a av
a=1
h
aja
+ ----:- 'Pa + 'Pk+ j == 0, j == 1, ..., n - k. ( 25 )
avJ
a=1
Introduisons les notations
dx i e.
. 1
dt == x , l == , ..., n,
( "' dx · )
c.-a-d. dt ==x ,
aj af af af
au i == a;i ' au h + j == a h+j ,
aji
i == 1, ..., k,
ôji
av j
(26)
a h+j
j==1, ..., n-k.
])e plus, pour i == 1, . . ., k, on a (voir (18))
acpi _ 1 k
. -UJ' j ,
fJx j
Ô(pi
a.;.h+j
afi
a;k+j
1 j n-k.
1
(
t'
.:
k'
/'
(27)
224
CALCUL DES VARIATIONS
[Ch. 5
Mettons maintenant l'expression (24) sous la forme:
t k
'i'd t ) = 'i'dto) - f [ ::i 'i'o + :: ( : '\Jo + 'i'a ) ] d'L, i = 1, ..., n.
to cx=l ax
(28)
Les égalités (25) donnent (voir (26)) :
h
( al "al cx ( al ) ) .
'" k + j (t) ( == ) - . . "'0 + LJ . . 1Po -1- )a , ] ==: 1, . · ., n - k ·
ax k t J cx= 1 ax R + J axcx
Comparant les égalités obtenues aux dernières n - k égalités (28),
nous obtenons:
h
, f . 'i'o + fa. (4- 'Po + 'i'a ) ( = )
ax h + J cx=l axR+J axCX
t h
( ==) r [ a f . 'i'o + a fa . ( 'Po + 1Pcx ) ] dL-
J âxh+J axR+J axcx
to cx=l
-1Ph+j(t O )' j==1, ..., n-k. (29)
Introduisons enfin k fonctions  i (t), i == 1, . . ., k, mesurables,
bornées sur l'intervalle t o t t f :
.
 i (t) == al (t, x (!), x (t)) 1Po + '" i (t), i == 1, ..., k, ( 30)
ax i
et mettons les expressions (28) et (29) sous la forIne:
t R
'i'd l ) = - J ( ::i 'Po + Âa : ) d'L+'i'i (to), i= 1, .. " n, (31)
to cx= 1
k t R
al 1" a/ cx J ( al "ala )
· . 1POT LJ Âa, · . (==) a k+. 1Po+ LJ Âcx a k+j X
axk+J axR+J x J x
cx=l to a=l
X dL-"'k+j(t o ), j== 1, ..., n-k. (32)
, Nous allons rnaintenant formuler et démontrer la règle des multi-
plicateurs de Lagrange.
Supposons que la courbe absolument continue (1) est une extrémale
de l'intégrale (3) pour les conditions aux limites (2) et le système (18).
Il existe alors k fonctions  i (t), t o t t f , mesurables bornées, appe-
lées multiplicateurs de Lagrange et une constante '\po 0 telles que
la fonction
h
F (t, x (t), (t)) == -1Pof (t, x (t), (t)) + Âa, (t) <pa (t, x (t), (t))
cx=l
30.J
PROBLÈME DE LAGRANGE
225
satisfasse presque partout sur l'intervalle t o t t 1
. t .
aF (t, x (t), x (t)) _ J aF (L, x (L), X (L)) d + .
. - . L C l , i == 1,
ax i 8x 1
to
aux égalités:
. . ., n,
oÙ Ci sont des constantes.
D é mon s t rat ion. Définissons les multiplicateurs  i (t),
i == 1, ..., k, à l'aide des égalités (30), et prenons pour constante '\}Jo
1a coordonnée d'indice zéro du vecteur fonction 'i' (t). Alors pour
1. i k, les égalités (27), (30) et (31) donnent
h
u = -1/'0 f. + Âa a = -'Po a!. +Âi =
f)x ax cx=1 ax ax 1
t k
= 1/'i (t) = - ( :;i 'Po + Âa ;x ) dl: + 1/'i (to) =
to cx=1
t h t
== r ( - 'Po + Âa arp ) dL + 'Pi (t o ) == r a d,; + 'Pi (t o ).
J ax 1 ax J ax
ta cx=1 ta
])e (32), il vient pour j == 1, . . ., n - k
h
.uF = -'Po .a f _ Âa rpa (=)
âxh+j axh+j ax k + j
cx=1
t k
r ( ai )' acpCX )
( == ) - J ax k + j '\po + LJ Âa axh+j d,; + 1Pk+j (t o ) ==
ta a=1
t h
= ) ( - û:';+j 1/'0 + Âa a: :j ) dl: + 1/'k+j (t o ) =
ta a= 1
t
) aF
== . d,; + 1Pk+j (t o ).
axh+J
ta
La règle des multiplicateurs de Lagrange est donc démontrée.
Inégalité de Weierstrass
Soit l == (lo, l1, . . ., lh) un vecteur quelconque de dimension
.
k + 1. Donnons-nous une fonction de Weierstrass notée (t, x, x, , l)
dépendant des arguments t, x === (Xl, . . ., x n ), ; == ( l, . . ., ;n),
15-01339
226
CALCUL DES VARIATIONS
[Ch. ).
= ( 1, . . ., n) et l = (lo, ll, . . ., lh) par la fornlule
. .
é(t, x, x, £, l)==F(l, x, , l)-F(t, x, x, l)-
n ·
_ (£a _ ;a) al? (t, :'C, x, l) ,
a=1 axa
où
k
F (t, x, ;, l) == -10/ (t, x, ) -1- lacpa (t, x, ;),
a=1
les fonctions f (t, x, ;), Cpi == i - fi (t, X, h+l, ..., n), i ==
= 1, . . ., k é tant les lnêmes que précédemnlen t.
Désignons, pour plus de commodité, les dernières n - k coordon-
nées du vecteur par yI, . . ., yn-k, les k premières coordonnées
étant toujours désignées par I, . . ., k:
== ( l, ..., k, YI, ..., yn-k), V == (VI, ..., v n - k ).
Calculons lnaintenant la fonction de Weierstrass dans le cas où
x == x (t) est une extrémale du problème de Lagrange pour les équa-
tions (18), ;; = d ?) , l = Â (t) = (1\10' Â 1 (t), " . ", Âh (t» (voir (30)
et les k premières coordonnées du vecteur == ( l, . . ., ' , yl,
. . ., yn-k) obéissent aux équations
i-fi(t, x(t), VI, ..., yn-k) = i-fi(t, x(t), V)===o, i===1, ...,If.
(33)
Des conventions précédentes il résulte que le yecteur fonction
de dimension n - k
. .
v (t) === (VI (t), ..., V n- k (t)) === (X Il + l (t), ..., X n (t) )
est une comnlande optimale correspondant à une trajectoire x (t)
du système (20). On a (voir (18), (19), (33)):
F (t, x (t), ; (t), Â (t)) == - "'of (t, x (t), ; (t)) == -'Polo (t, x (t), v (t)),
F (t, x (t), , Â (t)) === -'Pof (t, x (t), ) +
k
+ Âa(t)( a-fa(t,x(t), Y)) === -'tpot(t,x(t), )== -'PofO(t,x(t), V).
a=1
Si i == 1, . . ., k, alors (voir (30))
a. ai
-;- F (t, x (t), x (t), Â (t)) === - 'Po --;- + Â i === '-Pi (t) ;
Dxi ox i
30.]
PROBL ME DE LAGRANGE
227
si i == k -t- j, j = 1, . . ., n - k, alors (cf. (19), (23), (25)):
â ·
-;- F (t, x (t), x (t), Î (t)) =
âx i
h
= - '\jJo .a f . - ( '\jJa (t) + '\jJo) fa. =
âxk+J axa axh+J
0:.=1
h
= - '\Jo af - '\Ja af = - d% ("Ii' (t), x (t), t, v (t)) + '\jJk+j (t).
auJ auJ auJ
cx=l
Par suite:
.
o (t, x (t), x (t), £, Â (t)) == -- 'i'olo (t, x (t), V) + 'Polo (t, x (t), v (t))-
k
- (fa (t, X (t), V) - fo:. (t, x (t), v (t))) 'lPa-
cx=l
n-k
- (Va - va (t)) ( '\jJk+a (t) - a:a d% ("Ii' (t), X (t), t, V (t)) ) =
a=l
== @6 ('i' (t), x (t), t, V (t)) - &6' ('\)' (t), x (t), t, V) +
n-k
+ (Va - va (t)) a a &£ ("Ii' (t), X (t), t, V (t)). (34)
cx=l
Puisque x (t) est une extrémale, l'égalité (25) est satisfaito presque
partout sur l'intervalle t o t t 1 et il s'ensuit de la condition de
]naximum pour presque tous les t
.
G (t, x (t), x (t), , Â (t)) ? 0,
(35)
ee qui exprinlo la con dit ion n é ces s air e d e Wei e r-
s t ras s: si x (t) est une extrémale dans le problème de Lagrange con-
sidéré, il existe des fonctions  i (t), i = 1, . . ., k, mesurables bornées'
et une constante positive 'l}Jo telles que soit vérifiée l'inégalité (35) pour
presque tous les t quel que soit le vecteur £ satisfaisant aux conditions
(33) .
Si donc 10 domaine U de variations des variables Vi, . . ., v r
couvre l.espace Er tout entier (ou en est un sous-ensemble ollvert),
] a règle des multiplicateurs de Lagrange et le critère de Weierstrass
découlent du principe du maximum.
Nous avons examiné ici en détail le problème variationnel
à extrémités fixes. Pour le problème à extrémités ID 0 b i les
toutes les conclusions qui sont connues en calcul des variations se
(léduisent facilement en utilisant les conditions de transversalité-
15*
228
CALCUL DES VARIATIONS
[Ch. 5
(voir 6). Discutons maintenant le lien existant entre le principE
du maximum et le critère de Weierstrass lorsque l'ensemble [J
n ' est pas 0 u ver t. P os an t
V v (t) + v
et considérant que v est un infiniment petit, nous pouvons, en
appliquant la formule de Taylor, mettre l'expression (34) (en négli-
geant les infiniment petits d'ordre supérieur) sous la forme:
n
== _ â 2 QJ6> ("" (t), x (t), t, v (t)) vel v13. (3G)
2 âvelâvB
el, 13= 1
Ce qui rend tout à fait naturelle la condition de \i\Teierstrass Ù 0
dans les points intérieurs du domaine de valeurs possibles U (car
la fonction QJt doit, en vertu du théorème 8, atteindre son maximuITL
en v v (t) et, par suite, v (t) est un point stationnaire pour cette
fonction). Toutefois, dans les points frontières, où d'une façon géné-
rale les dérivées cessent d'être nulles (i.e. au voisinage de ces
uV
points le développement de la fonction &[('i' (t), x (t), t, v (t) + v)
renferme des membres de pre mie r ordre de petitesse par rap-
port à v), la non-négativité de la fonction ù (qui est du d eux i à--
m e ordre de petitesse) cesse d'être une condition nécessaire de maxi-
malité de la fonction QJ8. En d'autres termes, d'une façon générale,
la condition de Weierstrass ù 0 n'est plus valable dans les points
lrontières de l'ensemble U.
CI-IAPITRE 6
Processus optimaux avec
contraintes sur les coordonnées
de phase
Dans le problèlne optimal traité dans les chapitres 1-3, seul le
domaine U de variation du paralnètre de commande u était limité,
tandis que le point représentatif x n'était assujetti à aucune contrain-
te et, par conséquent, son domaine de variation coïncidait avee
l'espace de phase X tout entier.
Aussi n'est-il pas exclu que lorsque le point représentatif est
transféré optimalement (au sens du chapitre 1) du point initial Xo
à un point final Xi voisin, la trajectoire x (t) s'écarte d'abord forte-
ment des points Xo et Xi et aboutisse ensuite au point Xi. Or, souvent
en pratique, non seulement ce comportement du systèlne est indé-
sirable, mais il est intolérable.
En effet, dans nombre de cas la puissance des signaux permis de
commande est amplement suffisante pour transférer le système à un
état inadmissible du point de vue de la sécurité ou de la fiabilité
du fonctionnement (par exemple, échauffement excessif du moteur,
surcharge, etc.).
Force est donc de limiter, dans certains cas, aussi bien le donlaine
U de variation du paramètre de commande que le domaine de varia-
tion du point représentatif. En d'autres termes, il est pernlis de
choisir nniqnelnent des cOlnmandes optimales pour lesquelles les
trajectoires de phase correspondantes sont situées dans un don1aine
B donné et fixé par avance dans l'espace de phase X de dimension n.
Dans ce cas, le problème optimal consiste à choisir une conl1nande
optimale telle que la trajectoire correspondante soit entièrenlent
contenue dans le domaine B et satisfasse aux conditions aux limites
données tout en minimisant une fonctionnelle donnée.
Le systènle complet de conditions nécessaires que doivent vérifier
les commandes optimales et les trajectoires correspondantes de ce
problème optimal généralisé est donné par le théorème 25 (voir
page 275) qui est le résultat essentiel du présent chapitre.
Si le domaine B est un 0 u ver t de l'espace de phase X, alors
le problème optimal ici formulé est équivalent au problème optimal
des chapitres 1 et 2 et sa solution est donnée par le principe du maxi-
111um (puisque dans la démonstration du principe du maximum nous
n'avons utilisé qu'un voisinage arbitrairement petit de la trajectoire
optimale).
230 PROCESSUS AVEC CONTRAINTES SUR LES COORDONNÉES [Ch. 6
De nouvelles difficultés se présentent dans le cas, intéressant pour
les applications, o le domaine B est un fer m é (i.e. l'adhérence
d'un ouvert dans X) et où la trajectoire optimale étudiée est partielle-
ment ou entièrenlent située sur le bord du domaine B.
Dans la suite nous supposerons que B est un fermé de X et que
son bord est une hypersurface continûment différentiable ou conti-
nûment différentiable par morceaux dans X. Nous n'allons étudier
,que les trajectoires optimales susceptibles d'être di visées en un nonl-
bre fini de portions, dont chacune soit est entièrement située sur une
portion continûment différentiable du bord du domaine B, soit
appartient (à l'exception peut-être de ses extrémités) à un noyau
ouvert du domaine B.
Les portions de trajectoire optimale situées entièrement sur une
portion continûment différentiable du bord de B satisfont aux con-
ditions nécessaires luentionnées dans le théorème 22 qui est équiva-
lent au principe du maximum. L'énoncé et la délllonstration de ce
théorème, ainsi que certaines de ses généralisations font l'objet des
g 32-35 du présent chapitre.
Les portions de trajectoire optimale qui appartiennent (à l'excep-
tion peut-être de leurs extrémités) à un noyau ouvert de B, satisfont
au principe du lnaximum dans sa forme ordinaire (chapitre 1, 2).
Enfin, toute paire de portions contiguës d'une trajectoire opti-
male, si l'une est située dans un noyau ouvert de B et l'autre sur son
bord, ou si elles sont situées toutes les deux sur des portions conti-
nûment différontiables et distinctes du bord de B, satisfait à une
certaine condition de conjugaison que nous appellerons condition
de saut (théorème 24). La démonstration de cette condition et cer-
taines de ses applications font l'objet du g 36.
31. Position du problème
Définitions fondanlentales
COlnm9 cornmandes optimales il aurait été naturel de prendre
des vecteurs fonctions u (t) continus par morceaux et définis sur un
intervalle de temps t o ::s;;; t ::s;;; t i . Cependant, les délnonstrations des
théorèlnes énoncés dans ce chapitre sont valables si l'on admet de
plus que les c 0 fi man des u (t) son t con t i n Û ln e n t
d i f f é r e n t i a b les par fi 0 r c eau x.
D'autre part, le domaine U de variation de la cOlumande adlnis-
sible ne sera plus un sous-espace arbitraire de l'espace Er' mais un
ensenlble qui admettra la structure « régulière » définie plus bas au
voisinage de chacun de ses points frontières.
Aussi dans le présent chapitre allons-nous adopter la définition
sui vante de la classe de commandes adnlissibles (ce qui est large-
.: 3 1. ]
POSITION DU PROBLÈME
231
L11ent snffisant pour toutes les applications techniques des résultats
obtenu ).
C01l11ne dOJnaiue de commandes U nous prendrons un ensemble
arbitraire de l'espace Er engendré par la variable U === (u l , . . ., u/)
pt ln uni au voisinage de chaclln de ses points frontières d'une structu-
re « régulière» au sens suivant.
Si Ut E U est un point frontière arbitraire de l'ensemble U, il
existe des fonctions scalaires continûment dérivables
qi (u), i = 1, . . ., s (s 1) (1)
telles que l'enselnble U soit donné au voisinage Uj par le système
d 'inéga]i tés
qt (u) 0, '. · ., qs (u) 0,
et au point Ut par les égalités
q 1 (Ut) === · · · === q s (Ut) === 0,
les vecteurs
aqt (u 1) := O' r (} d q ( u )
au b et t t,... ,
aqs (Ut) === grad qs (Ut)
Du
(2)
étant linéairelnent indépendants.
Ainsi donc, les faces de dimension (r - 1) du donlaine U, con-
tiguës au point Ut, sont définies par les équations:
qt (u) === 0, . . ., qs (u) === 0 (3)
et sont des hypersurfaces continûment différentiables de l'espace Er'
situées, en vertu de l'indépendance des vecteurs (2), au point Ut
dans le cas général. Le point Ut, lui, est situé sur 1'« arête » de dimen-
sion (r s) continûment différentiable du bord, définie comme
l'ensenlble des solutions du système (3) proches du point Ut.
Bien que les fonctions (1) ne soient pas définies univoquement par
les conditions énumérées, il est aisé de voir que les faces de l'ensemble
TJ quelle que soit leur dimension sont univoquement définies au
voisinage du point Ut (en particulier, l' « arête » de dimension (r - s)
(3) et par conséquent le nombre s).
Les principaux théorèmes de ce chapitre restent naturellement
invariants par rapport au choix des fonctions (1) pour le point
frontière Ut considéré. Cependant, ce choix influe considérablement
snI' certaines constructions dans la démonstration des théorèmes, d'où
une grande complication de l'exposé. Aussi, pour éviter cet arbi-
traire, allons-nous fixer pour chaque point frontière Ut E U un des
systènles possibles de fonctions (1) et dans la suite nous parlerons des
fonctions (1) pour le point Ut étant entendu que ces fonctions repré-
sentent le système en question.
On appellera classe de commandes admissibles l'ensemble de tous
les vecteurs fonctions u (t) === (u l (t), . . ., 11/ (t)) continus par
232 PROCESSUS AVEC CONTRAINTES SUR LES COORDONNÉES [Ch. 6
morceaux et continûment différentiables par morceaux (à discontinuité
du premier ordre) et définis sur un intervalle arbitraire t o t t f
(un pour chaque fonction) et à valeurs dans le domaine U. Si à
l'instant t' la commande subit une discontinuité alors l'enscJnble
U doit contenir les deux points u (t' - 0) et u (t' + 0).
Comme dans le chapitre 1, à l'instant de discontinuité, nous
prendrons la limite à g a u che pour la commande optinlale et
sa dérivée.
Soit dans l'espace de phase X de dinlension n engendré par la
variable x == (Xl, . . ., x n ) un fermé B de bord continûment diffé-
rentiable, défini au voisinage de son bord par l'inégalité
g (x) == g (Xl, . . ., x n ) 0,
où g (x) est une fonction scalaire définie et admettant des dérivées
partielles du deuxième ordre continues au voisinage de la froutière
g (x) == 0, le vecteur
Qg (x) ( âg âg )
QX === grad g (x) == âxl '...' QX n
étant non nul en tout point du bord.
Donc le bord du domaine B est une hypersurface de l'espace X
de courbure continue. Le cas, important pour les applications, où
le domaine B admet un bord continûment différentiable par lllorceaux't
est examiné plus bas (voir page 275).
Enoncé du problème
Soient les fonctions scalaires réelles fO (x, u), fi (x, u), i == 1,
., n, continues et continûment différentiables par rapport à
l'ensemble des coordonnées des vecteurs x et u, sur le produit
direct B* X U*::) B X U, où B* et U* sont des ouverts de X et
Er' contenant respectivement B et U.
Comme au chapitre 1, l'équation du lnouvement du point repré-
sentatif est de la forme
dx
dl == f (x, u),
(4)
où
f (x, u) == (f1 (x, u), . . ., fn (x, u)).
Soit le problème suivant. Etant donnés dans l'espace X deux
points Xo et Xi appartenant au fermé B, parmi toutes les cOlnmandes
admissibles transférant le point représentatif de Xo en Xi de telle
sorte que la trajectoire de phase correspondante x (t) soit entière-
ment contenue dans le fermé B, on demande de trouver celle notée
u (t), t o t t i , qui minilnise la fonctionnelle
il
) fO (x (t), u (t)) dt.
to
31.]
POSITION DU PROBLÈME
233
En vue d'énoncer notre problème optimal (cf. page 16) sous une-
autre forme (équivalente), introduisons l'espace X de dinlension
n + 1 engendré par la variable
X - ( ° 1 n ) _ ( ° )
- x, x , . . ., x - x, x ,
où
x == (Xl, . . ., X n ) EX.
'route fonction F (x) vectorielle Oll scalaire de la variable x E X
peut, de toute évidence, être considérée comme une fonction de l'ar-
gument x == (XO, x) EX, si l'on pose
F (x) == F (XO, x) == F (x) ;
nous utiliserons constamment cette circonstance dans la suite.
Comme dans le chapitre 1, introduisons le vecteur
j" (x, u) == f (x, u) == (1° (x, u), Il (x, u), . . ., III (x, u)) =
== (1° (x, u), f (x, u))
Reillarquons que la fonction j (x, u) ne dépend pas de la coordon-
née xo.
Désignons par G le produit direct du fermé B par l'axe xo. Le-
dOlllaine G tout comille le domaine B est défini au voisinage de son
bord par l'inégalité
g (x) == g (XO, x) == g (x) o.
Elle adillet un bord de dimension n continûment différentiable'
g (x) == 0
à courbure continue, le vecteur
âg (x) ( 8g âg âg )
âx == grad g (x) == iJxO ' âxl '...' âx n ==
= (0, :;1 ' ..., a n ) = (0, grad g (x))
ne s'annulant en aucun point du bord du domaine G.
Soit dans l'espace X l'équation
dx
dt=!(x, u),
(5)
qUI résulte de l'équation (4) et la relation
dxO 0
([t==1 (x, u).
Ces notations introduites, énonçons notre problènle optinlal sous.
une forme équivalente. On demande de choisir une commande ad-
missible u (t), t o t t 1 , de telle sorte que l'extrémité x (t 1 ) de la
trajectoire correspondante x (t) de l'équation (5) qui satisfait à la
234
PROCESSUS AYEC CONTRAINTES SUR LES COORDONNÉES
lCh. ()
condition initiale
x (t O ) == (0, xo)
soit située sur une droite IIe X passant par le point (0, Xi) et parallè-
le à l'axe xo, et aussi que la trajectoire x (t), t o t t 1 , soit entière-
lnent contenue dans le ferlné G, la coordonnée XO (t 1 ) prenant sa
valeur nlinimale.
Dans la suite nous utiliserons de préférence la seconde fornlula-
tion du problènle.
Les cOlnmandes et les trajectoires satisfaisant à toutes ces condi-
tions seront appelées optimales.
Reillarques
Dans le chapitre 1, nous avons qualifié les cOllllllandes continues
par morceaux de « commandes sans inertie » puisque en cas de besoin
lIne telle commande peut instantanément sauter d'une valeur à une
autre. Cependant, dans de nombreux cas les « gouvernails » possè-
dent une certaine inertie et par conséquent parmi les fonctions
u l (t), . . ., ur (t) il Y en aura (peut-être même toutes) qui seront
continues avec leurs dérivées jusqu'à un certain ordre.
Les problèmes optimaux à commandes inertielles se ramènent
aisénlent au problème optimal énoncé plus haut. Soient, par exemple,
des cOllllnandes admissibles continues et continûment dérivables dont
les dérivées sont limitées en module par lIne même constante, disons
l'unité, et supposons que le domaine de comlnande U est un fermé
de bord continûment différentiable. Pour plus de simplicité, suppo-
sons que le domaine de variation du point représentatif x coïncide
avec l'espace X tout entier.
Prenons le paramètre u pour variable de phase et la dérivée
de u pour paramètre de comillande. L'équation du mouvelllent (4)
est alors remplacée dans l'espace de phase X de dimension Il par
le système:
dx
([t==t(x, u)
du
([t== v
,dans l'espace de phase X X Er de dimension n -1- r, où v == (VI,
. . ., ur) est une commande continue par morceaux (sans inertie) dont
le domaine de définition est un cube unitaire r-dimensionnel
1 Vi 1 1, i == 1, . . ., r,
le point représentatif (x, u) parcourant le produit direct X X U.
Soulignons encore que le principe du nlaximum est valable pour
les trajectoires optÎ111ales qui sont situées à l'i TI t é rie 11 r
. 32.J
TRAJECTOIRES OPTIMALES SITUÉES SUR LE BORD
235
d'u n n 0 y a u 0 u ver t de G à l'exception des extrémités qui
son t si tuées sur le bord de ce dOlllaine.
Supposons que les extrémités x (t o ) et x (t 1 ) de la trajectoire opti-
Inale (t), t o t t 1 , sont situées sur le bord g (x) == O. Alors, la
portion de trajectoire définie pour t o + 't t t 1 - 't, 'L > O
est entièrement contenue dans un noyau ouvert du domaine G et par
suite il existe une fonction 'PL (t), t o + 't t t 1 - 'ta satisfaisant
aux conditions du principe du maxilllum (théorème 1) sur la portion
; (t) correspondant à t o + 'L t t 1 - 'L. On peut considérer que
le vecteur 'PL (t o + 't) admet l'unité pour longueur.
Une boule unitaire de tout espace vectoriel de dilnension fini
étant co 111 pacte, on peut choisir une suite de nombres positifs 'Ll,
T 2' . . ., 'tb . . ., convergeant vers 0 telle que la suite des vecteurs
'1''(. (t o + 'Li), i == 1, 2, . . ., admette 'Po pour limite. Il est évident
l
que la fonction 'P (t), t o t t 1 , correspondant à la trajectoire
x (t) et satisfaisant à la condition initiale 'P (t o ) == 'Po entre t o et t 1 ,
est la liulite des fonctions,!,,,. (t), i==1, 2, ...; c'est donc la fonc-
l
tion cherchée.
32. Trajectoires optimales situées sur le bord
du domaine
Le théorèllle 22 qui est formulé dans ce paragraphe fournit un
systènle complet de conditions nécessaires que doit satisfaire toute
trajectoire optimale régulière située entièrement sur le bord continÜ-
lllent différentiable g (x) == 0 du domaine G.
La nécessité de se limiter aux trajectoires régulières qui seront
définies plus bas résulte non pas de l'insuffisance de la méthode de
démonstration du théorème 22, mais du fond du problèllle. En effet,
lorsqu'on déduit les conditions nécessaires auxquelles doit satisfaire
une trajectoire optimale, il faut comparer cette dernière aux autres
trajectoires optimales satisfaisant aux mêmes conditions aux limites,
i.e. inclure (au llloyen d'une méthode de variations dÜment choisie)
cotte trajectoire optimale dans une famille « suffisamment riche »
de trajectoires voisines contenues dans G. Il n'est guère difficile de
citer un exemple de trajectoire optimale située sur le bord de G
dont t 0 u t e variation déborde le domaine G et pour laquelle le
théorènle 22 ne soit pas vrai.
Ce t te circonstance exceptionnelle n'a pas lieu si la trajec toire
étudiée est régulière. Plus exacte;ment, on démontrera ici que par
des variations adéquates de la commande, toute trajectoire optimale
peut être incluse dans une famille suffisamment riche de trajectoires
si tuées clans le ferlué G.
236 PROCESSUS AVEC CONTRAINTES SUR LES COORDONNÉES [Ch. 6
Définitions fondamentales
Posons
n
1
p(x, u)== ag(x) ja(x, u)=
L.J axa
a=O
n
== ag (x) fa ( X, U ) === ( ag (x) ,j"(x, u) ) ,
L.J axa ax } ( G )
a=l
a p u) = ( ::0 ' : ' ..., ::n ) = ( 0, : ' ..., ::'1 ) ,
ap (x, u) _ ( .!L )
au -- au I '...' au r ·
Pour que la trajectoire x (t), t o t t 17 de l'équation (5) corres-
pondant à la commande u (t) soit entièrement située sur le bord
g (x) = 0, il est de toute évidence nécessaire et suffisant que soient
vérifiées les égali tés
g (x (t o )) = 0, P (x (t), u (t)) == 0, t o t t 1 ,
dont la première affirme que le point de départ de la trajeetoire
appartient au bord du domaine G, la seconde, que la vitesse de phase
du point représentatif qui se déplace sur la trajectoire est à tout
instant tangente au bord.
Un point x E X sera appelé régulier relativement au point Ut E [J
SI sont renlplies les conditions suivantes:
1) p (x, Ut) === 0;
2 ) ap (x, u1) =f= O.
au '
3) si Ut est un point frontière de l'ensemble U et qi (u), i ==
= 1, . . ., s, sont les fonctions (1) pour le poin t Ut, alors les vec t enrs
ap (x, Ut) aq! (Ut) aqs (Ut)
au au' . · ., Du,
(7)
sont linéairement indépendants.
Examinons le sens géométrique de la condition 3).
Tout d'abord, il est clair que la con di tion 2) peut être considérée
comme un cas particulier de la condition 3) en faisant dans cettE
dernière s === 0, lorsque U1 est un point intérieur à l'ensen1ble u.
Ce que d'ailleurs nous admettrons dans la sui te.
Les vecteurs (7) étant indépendants, il s'ensuit que 1'« arête » (3)
continûmeHt différentiable de dilnension r--s du bord de U est situéü
dans le cas général au point U1 avec une hypersurface de dilnension
r-1 définie au voisinage de ce point par l'équation p (x, u):=-= O. Doue
32.]
TRAJECTOIRES OPTIMALES SITUÉES SUR LE BORD
237
s r - 1; en d'autres termes, Ut ne peut être un sommet du bord
de U en lequel concourent r faces distinctes de dimension r - 1.
Soulignons encore le fait évident que la notion de régularité
du point x relativement à Ut ne dépend pas du choix des fonctions (1)
définies pour le point Ut.
Désignons par û) (x) l'ensemble des points U E U relativement
auxquels le point x est régulier. L'ensemble û) (x) c U peut bien
entendu être vide.
Nous dirons que la trajectoire x (t), to t tb de l'équation (5)
correspondant à la cOlnmande U (t) et entièrement située sur le bord
de G est régulière si U (t) E û) (x (t)) en chaque point t de continuité
de la cornmande u (t) et si
u (t - O).E û) (x (t)), U (t + 0) E û) (x (t)),
lorsque t est un point de discontinuité de la commande u (t).
Définissons pour les points x situés sur le bord de G et tels que
û) (x) =1= <p, la grandeur m ('l', x) au moyen de l'égalité
m ('l', x) == sup Jïli( 'l', x, u),
ltE(ù (x)
"
ou, COJllme auparavant,
n
OJC ('l', x, u) == 2i 'l'a fa (x, u) == ('1', f(x, u)).
a=O
Si le point x est lIn point régulier du bord g (x) == 0 relativement
.au point u E U, et si pour un certain vecteur", on a
QJ8 ('1', x, u) == m ("i', x),
alors, d'après la règle des multiplicateurs de Lagrange, il existe des
nombres réels À, "t, . . ., v s tels que
s
8QfO ('\l', x, u) == Â 8p (x, u) + v 8qa (u)
8u au..w ex ôu '
ex=1
(8)
où qi (u), i == 1, . . ., s, sont les fonctions (1) définies pour le point u,
et le vecteur a;: est défini par la formule
8Q1t ( 8Qfe 80J0 )
-au == 8u I '... , 8u T ·
Introduisons les notations suivantes:
8QJe ('\l', x, u) _ ( 8Q1t 80J0 8QJe ) _ ( 0 aQJO
8x - 8x O ' 8xI'...' ax n - , 8x I ' ...,
aQJe ('\(?, x, u) _ ( 80J0 8QJO 8QJO ) - f( )
8'\(? - a,po' a,p 1 ' ..., iJtpn - x, u ·
8QJO )
8x n ,
238
PROCESSUS A VEC CO 'TRAINTES SUR LES COORDONNÉES
[Ch. ().
âQff ( 'th X U ) iJ I ') ( X U ) ,
Observons q ue les vecteurs - 't" , , ne de p endent
âu ' iJu
pas du choix des fonctions qi (u), i == 1, . . ., s. D'autre part, le
s
"1 âqa (u) 1 .. d ()Qff l
vecteur L.J Va âu est a prOjectIon u vecteur iJu sur un p an
a=l
tangen t à l'arête (3) de dimension r - s, sens qui est égalelnen t
invariant par rapport au choix des fonctions qi (u). Le facteur Î
de la formule (8) ne dépend donc pas du choix des fonctions qi (u).
Si u est un point intérieur à l'ensemble U, i.e. s == 0, alors il
résulte de (8) que les vecteurs o, , op x, u) sont colinéaires.
(jU u
Thé 0 r è fi e 22. Soit x (t), t o t t 1 , une trajectoire o]Jtima-
le régulière de l'équation (5) entièrement située sur le bord de G et cor-
respondant à une commande optimale u (t). Il existe alors un vecteur
jonction", (t) == ('Po (t), . . ., 'Pn (t)), to t t 1 , continu et une-
jonction scalaire À (t), t 0 t t 1 , continue par morceaux et conti-
nûment dérivable par morceaux tels que sur l'intervalle t o t i 1
soient vérifiées les égalités (9), (10), (11) et les conditions a), b), c)
suivantes:
dx == â QlfJ ('i', x, u) == J . ( )
dt â'i' - x, u ,
d1J' = _ f)&e ('\l', x, u) + Â ( t) âp (x, u)
dt 8x 8x '
8[('i'(t), x(t), u(t))==m('i' (t), x(t))==O,
(8)
(10)
(1 t)
où À (t) est définie à partir de la condition de nlaximum (11) comlne
un multiplicateur de Lagrange du vecteur op :' u) dans la formule (8) ;
a) la coordonnée 'Po (t) == const 0 ;
b) le vecteur '1' (t o ) est non nul et tangent en x (t o ) au bord g (; ) ==
== 0;
c) en tous les points de dérivabilité de la jonction  (t) le vecteur
d ( t )
dt grad g (x (t))
soit est orienté vers l' intérieur du domaine G, soit est nul ( Le. d ?) 0 ) .
Faisons quelques remarques importantes pour expliquer le sens
des conditions a), b)' et c).
Rem a r que 1. L'égalité 'Po (t) == const résulte de ce que le
second membre de l'équation (10) n'est pas fonction de la coor-
donnée x O .
Les équations (9), (10), (11) et la condition a) sont analogues au
principe du maximum. Les conditions b) et c), propres au cas étudié,
feront l'objet des remarques 4 et 5.
32.1
TRAJECTOIRES OPTIMALES SITUÉES SUR LE BORD
239
Rem a r que 2. De la condition de maximum il découle
immédiatement que l'intervalle t o t t 1 peut être subdivisé par
les points t o == 'to < 'tl < · . . < 'th < 'tk+l == t 1 de telle sorte que
sur l'intervalle Li t 'ti+l, i == 0, 1, .. ., k, soit vérifiée l' éga-
lité
".. S (i)
acïC ('\1' (t), x (t), u (t)) = À ( t ) ap (œ (t), u (t)) l "" v(i) ( t ) aqa (u (t)
au au -r-.LJ a au'
a=l
où q1i) , . . ., q i), S 0, sont les fonctions (1) définies pour le point.
U (Li + 0) et v i) (t), . . ., v i) (t) des fonctions arbitraires.
Cette égalité est équivalente sur l'intervalle considéré à un systè-
me de r équations linéaires en À, vii), . . ., v1 i ) (8 + 1 r) à coeffi-
cients continus par 1110rCeaux, continûment dérivables par morceaux
et à termes libres, dont la nlatrice est de rang 8 + 1. La fonction
À (t) peut donc sur l'intervalle t o t t 1 tout entier être mise
sous la forme
n
 (t) == ); )a (/) a CG (t) == ('i' (t), ft (t)). (12)
CG=o
où a (t) == (aO (t), . . ., an (t)) est un vecteur fonclion continu par
1110rceaux et continûment dérivable par morceaux.
Rem a r que 3. J es équations (9), (10), (11) se transforment
en identité si 'i' (t) == 0, À == 0, t o t t 1 .
Nlontrons que si '" (t o ) =1= 0, alors", (t) =1= 0, t o t t 1 , et in-
versement, de 'i' (t o ) == 0, il résulte que '" (t) == 0, t o t t 1 .
En effet, en portant l'expression (12) dans l'équation (10), nous
obtenons une équation différentielle ordinaire, linéaire et homogène
en '\ (t) qui vérifie le théorème d'unicité, d'où notre assertion.
Rem a r que 4. Pour expliquer le sens de la condition b),
remarquons que le système (9), (10), (11) admet toujours, outre les
solutions u (t), x (t), 'i' (t) == 0 et À (t) == 0, encore une solution
tri viale qui est
u (t), x (t), '\ (t) == v gr ad g (x (t)), À (t) == v,
où v est un nombre arbi traire. Ce qu'on constate aussitôt après
substi tution.
Il est également aisé de vérifier que si
u (t), x (t), '" (t), À (t) (13)
est solution du système (9), (10), (11), alors
u (t), x (t), 'i' (t) + v grad g (x (t)), À (t) + v,
est solution où v est un nombre arbitraire.
En ajoutant donc aux fonctions", (t), À (t) figurant dans la solu-
tion (13) des menlbres de la forme v grad g (x (t)), v, nous pouvons
240
PROCESSUS AVEC CONTRAINTES sun LES COORDONNÉES
[ Ch . 6
toujours faire en sorte que la valeur initiale 'i' (t o ) + v grad g (x (t o ))
soit contenue par un plan tangent en x (t o ) au bord g (x) === o.
Si cette valeur initiale est nulle, alors la solution initiale est
triviale, puisqu'en vertu de la renlarque (3) on peut affirmer que
'i' (t) === -v grad g (x (t)), Â (t) == -v.
La non-trivialité des solutions du systènle (9), (10), (11) découle
donc de la condition b).
De ce qui précède, il s'ensuit que la condition b) est équivalente
à la condition de non-colinéarité des vecteurs '1' (t o ) et grad g (x (t o )).
Rem a r que 5. La condition c) résulte du fait que lorsqu'elle
varie, la trajectoire x (t) est comparée non seulenlenl aux trajectoires
voisines qui sont situées avec elle sur le bord g (; ) === 0, mais aussi
à toutes les trajectoires proches contenues dans le donlaine fer-
mé G.
La démonstration du théorème 22 est donnée dans les deux para-
graphes qui suivent.
33. Démonstration du théorème 22
(constructions fondamentales)
Notations
Introduisons la notation
al _ ( aj'i )
au - auj , i === 0, 1, ..., n, j === 1, ..., r,
et considérons cette nlatrice comme un opérateur de l'espace .E r
engendré par les vecteurs Il === (u l , . . ., ur) dans l'espace .LY engendré
par les vecteurs x === (X O , Xl, . . ., x n ) et simultanément comme un
opérateur de l'espace engendré par les vecteurs '1' === (rtpo, · · ., 'Pn)
dans l'espace Er:
r r
ar al ( afo
u === --ex ua === ---a ua, ...,
vU au au
a=l a=1
r
'Ç1 a )
L.J aU'
au
a=l
n n
al (x, u) ,,1"1 === ( 'Ç1 a fa '1 h 'Ç1 a ta '1 h ) _ a éfO ('1', x, u)
au 't' L.J au l 'fa, .. ., L.J aur 'fa - au ·
a=O a=O
Soit A === (Âo, . . ., Â n ) un vecteur de X. Les matrices
A a p ':' u) = ( p} a p (œ., u) ) , i, j === 0, 1, ..., n,
x ax J
A a p x, u) = ( ÎI} a p (œ: U» ) , i === 0, 1, ..., n, j =-= 1, ..., r,
u au J
33.]
DÉMONSTRATION DU THÉORÈME 22
241
seront également considérées comme des opérateurs agissant sur les
vecteurs 'tJ', X, u comme suit:
n
A a p 1'11'1 = ap ( A 111'1 ) ===!!.l!... Â,a'lh
ax 'Y ôx ' 'Y ôx LJ 't'a,
a=O
)
n
A a p x === A ( a p X ) === A a P xa l
ax ax ' LJ axa ' f
<x=o
(14)
r
A ap u==A ( fJp U ) ===A .!Lua.
âu au ' L..l au<x J
a=l
Dans ce paragraphe x (t), t o t t 1 , est une trajectoire régulière
quelconque de l'équation (5), correspondant à la commande u (t)
et située sur le bord g (x) === 0 du domaine G. Dans le 34 nous
supposerons en outre que u (t) et x (t) sont optimales.
Con s t r u c t ion deI a f 0 net ion R (x, u, f-t)
Construisons maintenant la fonction scalaire R (x, u, p.) qui
jouera un rôle fondamental dans la démonstration du théorème 22.
Fixons 8 points Î1 i === 1, . . ., 8 (8)0), sur la trajectoire x (t)
tels qu'aucun d'entre eux ne soit confondu avec l'extrémité x (t 1 )
de la trajectoire x (t); les égalités i = x (t o ) et i = j étant
possibles pour i =1= j.
Désignons par Ni un vecteur non tangent en i au bord g (x) = 0
et orienté vers l'extérieur du domaine G; pour le reste le vecteur Ni
est arbitraire. Le domaine G étant défini au voisinage de son bord
par l'inégalité g (x) 0, on a
(grad g ( i)' Ni) > O.
Soit O . un voisinage suffisamment petit du point i dans X,
z
tel que son adhérence ne contienne aucun point x (t 1 ); l'unique
condition supplémentaire à laquelle doit satisfaire le voisinage O .
z
est que pour i =1= x (t o ) son adhérence ne renferme pas non plus le
point x (t o ). La «petitesse » de ce voisinage implique que le produit
scalaire
( ag (x) )
ax ' Ni> C > 0
(15)
pour x E O ., i === 1, . . ., s.
l
Désignons par ai (x) une fonction scalaire continue et dérivable,
satisfaisant aux conditions ai (x) === 1 dans un certain voisinage du
point i contenu dans O . ,ai (x) > 0 pour x E O ., et ai (x) === 0
l l
si x E O ..
l
16-01339
242
PROCESSUS AVEC CO TRAINTES SUR LES COORDONNÉES
[Ch. t>
Soit la fonction scalaire
s
h (x, t) == g (x + f-t aa (x) 1a),
a=1
(16)
où f-t est un paramètre scalaire. La fonction h (x, f-t) dépend, de toute
évidence, du choix des éléments ai (x) et Ni qui ont participé à sa
construction.
Si f-t 0 est suffisamment petit et si le point x qui est situé à
proximité du bord du domaine G, vérifie l'équation
h (x, f-t) == 0,
alors x E G; si, en outre, x n'appartient pas à la réunion des voisina-
ges O i ou si f-t = 0, alors x est situé sur le bord g (x) == O. Si x
n'appartient pas à la réunion des voisinages O ., i == 1, . . ., S,
l
ou si f-t = 0, alors h (x, f-t) == g (x) == 0 et l'assertion est vraie.
Supposons que x E O .. Alors
l
s
h (x, /--t) = g ( x + /--t aa (x) Na) =
a=1
s
= g (x) + Il. ( ag ax (x) , (X) ",l ) + ( ) 0
r .L.J aa ..J... T a 0 t = .
a=1
Or pour f-t suffisamment petit, on a, en vertu de (15),
s
( 8g (x)
I-t ax'
aa (x) Na ) + 0 (/--t) > 0,
a=1
et, par conséquent, g (x) < o.
Dans la suite le paramètre f-t prendra des valeurs proches de zéro
de la forme ëÔf1, où ë a le même sens que dans le chapitre 2 et ô!-1
est un nombre non négatif. Dans la définition de la fonction
h (x, eÔf-t) figurent les points i' . . ., s, les fonctions a1 (x), . . .
. . ., as (x), les vecteurs 1'7 1 , . . ., Ts et le nOlnbre ôf1. Désignons
l'ensemble de ces grandeurs par le symbole
o = { i' ai (x), Ni' Ôf-t}.
(17)
Pour indiquer que la fonction h (x, ëÔf-t) dépend de ces grandeurs,
nous la désignerons dorénavant par hfJ (x, ëÔf-t). Soient Di et v 2 deux
symboles de la forme (17); écrivons-les sous la forme:
01 = { b ai (x), Ni, Ôf1}, i = 1, . . ., S1,
b 2 = { h ai (x), Ni' Ôf-t}, i = S1 + 1, · · ., S1 + S2.
33.J
DÉMONSTRATION DU THÉORÈl\IE 22
243
Le symbole v === { h ai (x), T h ô }, i == 1, . . .. Si -t- S2' sera appelé
somme des symboles Vi et V z et noté
v == Vi + v z .
Le produit du symbole V ={ h ai (x), Th ô } par un nombre
arbitraire non n é g a tif  sera défini à l'aide de la formule
Ào =={ h ai (x), N h ÀÔ },
i.e. les points h les fonctions ai (x) et les vecteurs -ri ne changent
pas tandis que le nombre ô est multiplié par Â.
Si donc v' et '6" sont deux symboles de la forme (17) et Â' et Â"
deux nombres arbitraires non négatifs, alors est défini le syn1bole
)}v' + À"v".
Définissons la fonction R (x, u, êÔ ), qui dépend du choix du
symbole (17) , au moyen de l' égali té
n
R ( 5::. ) _ ah (x, ëÔp,) f a ( ) _ ( ah (x, ëÔ l) f( )) (18)
x, Li, êu L - x, u - a ' x, u
axa x
CG=o
(Le. R (x, u, /OÔ!!) est la dérivée dh (x à /l)f1) en vertu de l'équation (5».
De (16) il vient, pour ô = 0,
( 8g (x). )
R (x, u, 0) == 8x ' J (x, u) == p (x, u).
(19)
Pour souligner que la fonction R (x, u, êÔ ) dépend du choix
du symbole (17), nous la désignerons aussi par Rb:
8h b (x, êÔ l) "
RfJ (x, u, /OÔ!!) = ( 8x ' f (x, u) ) · (20)
Supposons que les fonctions v (t) et 1/ (t), t o t t 1 , où v (t)
est une commande admissible et 1/ (t) une fonction continue (pas.
forcément contenue dans le domaine G), satisfassent pour certains B
üt ô au système
dU j " ( )
dt = !l, v , }
R (y, v, êÔ ) === o.
(21)
Dans la suite, lorsqu'il sera question des solutions v (t) et 1/ (t)
de ce système, nous supposerons toujours que v (t) est une commande
admissible et '// (t) une fonction continue. 1
Si '1/ (t) est suffisamment proche de x (t) et si h (1/ (t o ), êÔ ) == 0,.
alors 1/ (t) E G quel que soi t t puisque ,
d
di h (y (t), êÔ ) = R (y (t), v (t), êÔ L) == 0
16*-
244
PROCESSUS AVEC CON'rRAIN'rES SUR LES COORDONNÉES
[Ch. 6
-et par conséquent
h (1/ (t), ëÔ ) == h (!I (t o ), ëÔ ) === o.
La commande u (t) et la trajectoire x (t) vérifient le système (21)
pour ô = o.
Plus bas nous décrirons une méthode qui nous permet, par la
donnée d'un point initial de la forme
y (8) == c (8) + ëÔXa + 0 (ë), t o 8 t i , (22)
Ide construire une solution v (t), y (t), 8 t t i , du système (21)
de la forme
v (t) == u (t) + ëÔU (t) + 0 (ë),
Y (t) == x (t) + ëÔX (t) + 0 (ë),
(23)
(24)
où ôu (t) est une fonction continue par morceaux et continÎlment
dérivable par morceaux et ôx (t) une fonction continue. .
Comme no'us l'avons vu plus haut, si la valeur initiale (22) est
solution de l'équation h (y (8), ëÔl1) === 0, alors la trajectoire 1/ (t),
8 t t 1 , est contenue toute entière dans le fermé G. Les portions
de trajectoire qui n'appartiennent pas à la réunion des voisinages
O i qui ont participé à la définition de la fonction h (11, ëÔl1) sont
situées sur le bord g (x) === 0; si, au contraire, 1/ (t) E O ., alors 11 (t)
l
.appartient à un noyau ouvert du domaine G.
Il importe, en conclusion, de souligner que la formule (21) définit
non pas un, mais toute une famille de systèmes en fonction du choix
,des symboles b (voir (17)).
Rés 0 1 u t ion dus y s t è ID e (21) par 1 a d 0 Il née
d'u n e val e uri nit i ale dei a for n1 e (22)
Subdivisons l'intervalle t o t t i en intervalles partiels Li
t 'T i+ 1, i === 0, 1, . . ., k, de longueur suffisamment petite où
t o === LO < Li < · · · < Lh < Lk+l === tl-
Choisissons les points Li de telle sorte qu'ils con tiennen t tous les
points de discontinuité de la commande et de sa dérivée. La (< peti-
tesse )} des intervalles partiels est caractérisée par la condition de
validité de toutes les constructions décrites plus bas. Il découlera
immédiatement de la régularité de la trajectoire x (t) que le choix
des points de subdivision (qui bien sûr n'est pas unique) est possible.
Supposons que la solution v (t), 1/ (t) du système (21) qui peut se
représenter sous les formes (23), (24) et qui satisfait à la condition
initiale (22), a déjà été construite sur l'intervalle 8 t Li. Pro-
longeons cette solution jusqu'au point Li+1 incl us en conservant la
33.
DÉMONSTRATION DU THÉOREl\IE 22
245
eontinuité de la trajectoire '11 (t) et les propriétés exprimées par les
égali tés (23), (24).
Soient qi (u), i == 1, . . ., s (s 0), les fonctions (1) définies pour
le point u ("Ci + 0). De (19) et de la régularité de la trajectoire x (t),
il résulte que les vecteurs
aR (œ (Li)' u (Li +0), EÔ l)
au
ôq1(U(Li+0))
ôu
. . . ,
aqs (u (Ti + 0))
au
sont linéairement indépendants. Les intervalles Ti t Ti+l étant
petits, les vecteurs
aR (œ (t), u (t), EÔJ.!)
au
aq! (u(t»
au
. . . ,
aqs(u(t))
ôu
sont aussi linéairement indépendants sur l'intervalle Li < t 'Li+l.
Supposons, par exemple,
ôR ôQl ôQs
au l âu l au l
::F O.
(25)
ôR aQ1 ôqs
ôu s + l ôu s + l au s + l
Au VOIsInage des valeurs 'fi' u (Ti + 0), x ('Li), ëÔ = 0, le-
système d'équations
R (y, V, EÔ ) == 0'1 (v, t) = . . . = O's (v, t) = 0, (26)
où O'i (v, t) == qi (v) - qi (u (t», i == 1, . . ., s, admet donc une
solution univoque par rapport aux s+ 1 variables Vi, . . ., v S + 1 :
. . ( S+2 r ,fi.:. ) · 1 1 27 )
v7. === 117. y, v ,..., v , Eull, t, "t === , ..., s +, (
où l1 i , i == 1, . . ., s + 1, sont des fonctions continûment dérivables
par rapport à leurs arguments.
En remplaçant dans (27) V S + 2 , . . ., v r respectivement par
U S + 2 (t), . . ., ur (t), nous obtenons s + 1 fonctions t}i (y, ëÔ t, t),
i = 1, . . ., s + 1. Définissons maintenant le vecteur fonction
v (1/, BÔ , t) au moyen de l'égalité
v (y, ëÔ , t}=== (t}1 (!/, ëôll, t), ..., t}S+l (y, ëa , t), u S + 2 (t), ..., ur (t»).
(28)
Portons, enfin, l'expression (28) de v dans l'équation
dy j " ( )
([t== y,v.
Si désormais on résout cette équation différentielle sur l'intervalle
Li t Li+l, mais avec les conditions initiales 1/ (Li), on obtient
le prolongement de la solution. y (t).
246
PROCESSUS AVEC CONTRAINTES SUR LES COORDONNÉES
[Ch. 6
Le prolongement de la comnlande v (t) sur l'intervalle 'Ti < t
'Ti+l est la fonction
v (t) == v (y (t), ëÔ Il, t), 'T i < t 'T i +b
(29)
.qui s'obtient en relnplaçant dans (28) 'u par le prolongelnent I!/ (t),
Li < t 'Ti+l.
Les propriétés exprimées par les égalités (23) et (24) sont immé-
diates pour les prolongements obtenus. L'admissibilité de la com-
mande (29) découle des égalités (26). En effet, quel que soit i == 1, . . .
. . ., s, on a
cr i (v (t), t) == q i (v (t)) - q i (u (t)) == 0,
1.e.
qi (v (t)) == qi (u (t)) 0, 'Ti < t <- 'Ti+1.
Rem a r que. La construction décrite plus haut définit la
solution du système (21) par la donnée de la condition initiale (22)
d'une manière non univoque puisque le choix des points de subdivi-
sion Li, i == 1, . . ., k de même d'ailleurs que celui des s + 1
variables Vi par rapport auxquelles est résolu le système (26) n'est
pas llnivoque.
Toutefois, il est aisé de voir qu'il est possible de lever cette non-
univocité en fixant pour une commande donnée u (t) et une trajectoire
régulière x (t), t o t t 1 aussi bien les points de subdivision Li
que les s + 1 variables (pour chaque intervalle 'Ti t Li+1) par
rapport auxquelles est résolu le système (26). Ensuite, la solution
v (t), y (t) du système (21) peut être construite par la méthode stan-
dard en se donnant la valeur initiale (22). Cette standardisation sera
supposée réalisée dans toutes les constructions de ce paragraphe qui
feront appel à la méthode exposée.
Equations aux variations pour
1 e s y s t è m e (21)
Supposons que v (t), y (t), e t t 1 , est une solutioll du systè-
me (21) construite d'après la méthode précédemment exposée et
satisfaisant à la condition initiale (22) . Nous allons prouver que ln
terlne principal de l'accroissement 1/ (t) - x (t) ou, ce qui est équiva-
lent, que le vecteur fonction ôx (t), e t t 17 est univoquement
défini par le terme principal du déplacement initial (i.e. par le vec-
teur ôXo) et vérifie une équation différentielle linéaire (voir équa-
tion (35)) avec la condition initiale ôXo.
Pour cela, démontrons tout d'abord qu'il existe un vecteur
fonction
A (t) == (ÂP (t), . . ., Îvn (t))
33.]
DÉMONSTRATION DU THÉORÈ:IYIE 22
247
continu par morceaux et continûment dérivable par morceaux,
défini sur l'intervalle t o t t 1 tout entier et dépendant unique-
ment de u (t) et x (t) (et ne dépendant pas, par conséquent, de la
forme de la fonction R) tel que le terme (en B) ôu (t) de la différence
v (t) - u (t) satisfasse sur l'intervalle e t t 1 à l'équation
[ ÔI (x u (t)) + A (t) ôp (x u (t» ] ôu (t) = O. (30)
Le fai t que j\ (t), t o t t f , ne dépend ni de v (t) ni de R sera im-
portant dans la suite.
En vue de démontrer l'existence de cette fonction, supposons
qu'elle a déjà été construite sur l'intervalle t o t 'th i? 0, et
définissons-la sur les intervalles 'Li < t 'Ti+1, les points 'Lh i =
== 1, . . ., k, étant choisis comme précédemment.
Supposons que le système (26) a été résolu sur l'intervalle Li <
< t Li+l par rapport, par exemple, aux s + 1 premières variables
1 s +1 Al h . 0 1 d ' f . ·
v, . . ., v . ors, pour caque ] == , ,..., n e Inlssons sur
c t intervalle s + 1 fonctions continues et continÎlment dérivables
J../ (t), l (t), == 1, . . ., s, comme solution du système linéaire
non h01110gène:
ôl j (x (t), u (t» _1_ J,./ (t) ôp (x (t), u (t») +
Ou/Y.. 1 8u a 1
s
-1- L l (t) Ôq/3ô a(t» = O. lX = 1, 2, ..., s + 1, (31)
13=1
OÙ q1 (u), . . ., qs (u) sont les fonctions (1) pour le point u (Li + 0).
(L'indice fX affectant les équations (31) parcourt s + 1 valeurs
correspondant aux numéros des variables va par rapport auxquelles
est résolu le système (26) sur l'intervalle 'Li < t 'Ti+1; ici a ==
== 1, . . ., s + 1.)
Le système (31) est résoluble puisque son déterminant coïncide
avec le déterminant (25) pour BÔ == o.
Le yecteur fonction (ÂP (t), . . ., 1-v n (t)), 'Ti < t 'Li+1, n'est
autre que le prolongement cherché.
L'indépendance de la fonction A (t) par rapport à la fonction R
résulte de l'indépendance par rapport à R de la matrice constituée
avec les coefficients et les ternles libres du système (31), j == 0,
'1, . . ., n.
Prouvons maintenant la formule (30) pour l'intervalle 'Li < t
'Ti+1, e 'Ti.
Sur cet intervalle la fonction (23) est de la forme
v (t) == u (t) + ëÔU (t) + 0 (ë),
où
ôu (t) === (ôu 1 (t), ..., ÔU S + 1 (t), 0, ..., 0),
(32)
248
PROCESSUS AVEC CONTRAINTES SUR LES COORDONNÉES
[ Ch. 6
puisque
V S + 2 (t) === U S + 2 (t), ..., V r (t) = u/ (t).
En multipliant donc l'égalité (31) par ôu a et en sommant les
expressions obtenues en a = 1, 2, . . ., s + 1, il vient
s+ 1. S
( +Âj.!.L+ Z ôql3 ) ôua=
Lj au a Oua Lj au a
a=1 (3=1
$
= ( afj -L j ap + Z j ôQI3 ) ôu === O 0 1 (33)
ôu 1 au L.J (3 au ' i === , , ..., n.
(3=1
Définissons le vecteur fonction LB (t) au moyen des égalités
LB (t) === ( Z (t), ..., Z (t)), = 1, ..., s
et Inettons l' égali té (33) sous la forme
S
( ; +A (t) : + Lr3{t) aa q : ) ôu(t)=O. (34)
(3=1
En vertu de (26), la fonction v (t) = u (t) + eôu (t) + 0 (e)
vérifie les égalités (a = 1, . . ., s):
Ua (v (t), t) === Ua (u (t) + eôu (t) + 0 (8), t) ===
= Ga (U (t), t) + 8 ( aO' a , ( v(t), t) , ÔU (t) ) + 0 (8) = O.
Or
Πa (U (t), t) === qa (U (t)) -qa, (U (t)) = 0,
ô(Ja (u (t), t) _ aqa (u (t»
av - au
par sui te
( a q a (u (t» )
au ,ôu(t) = 0, a='l, ..., s,
,et l'expression (34) se ramène à l' égali té
( : +A (t) :: ) ôu(t)=O, 'ti<t 'ti+1'
ce qui démontre l' égali té (30).
En portant les expressions (23) et (24) dans le système (21) et
en comparant les termes en B, il vient:
.!:- ( Ô ) = ôl (œ (t), u (t» ô + al (œ (t), u (t» ô
dt x aœ x au u,
ap (œ (t), u (t» Ô + ap (œ (t), u (t» Ô + ôR (œ (t), u (t), 0) Ô === °
aœ x au u aJ.t .
33.]
DÉMONSTRATION DU THÉORÈME 22
249
En multipliant ensuite la deuxième équation par A (t) et en l'ajou-
tant à la 'première, il vient, compte tenu de (30):
( ) == ( 8f(X(t), u(t)) 1 A , t) 8 P (X(t),U(t» )ô -L
dt uX ax T { 8x x j
+ A (t) aR (x (t u (t), 0) ôt-t. (35 )
Nous appellerons équation aux variations pour le système (21)
l'équation en ôx (t) linéaire et non homogène obtenue. Elle ne dépend
que du système (21) et par conséquent le terme principal de l'accrois-
sement Ô;K{ (t) de la trajectoire y (t) est univoquement défini par la
valeur initiale ôXe et par la valeur du paramètre ôl-1.
Par analogie avec le chapitre 2 (page 77), nous dirons que les
vecteurs ôx (t) se déduisent du vecteur ôx (8) == ôXe, donné au point
x (8), par une translation le long de la trajectoire x (t). Cette transla-
tion qui est dépendante du paramètre ôl1, nous la désignerons par
le synlbole
ôx (t) == Pt, e (ôl-1) ôxo.
Les, forn;lules suivantes sont immédiates:
Pt, e (61-1) ôx == Pt,,; (ôl-1) P,;, e (ôl-1) ôx, t L e, }
P f, e (yôp,) yôx == yP t, e (ôl-1) ôx, (36)
Pt, e (Ôp,i + Ô t2) ( ÔX 1 + ÔX2) === Pt, e (Ô111) ÔXi + Pt, e (Ô112) ÔX2-
Désignons par T (x (t)) le plan tangent en x (t) au bord fJ (x) == o.
Si x (t) n'appartient pas à la réunion des voisinages O i qui ont
servi à définir le symbole (17), alors comme nous l'avons déjà men-
tionné.
g (x (t) + eôx (t) + 0 ( 8)) == 0,
d'où
( ag x(t)) , ôx (t) ) = 0,
l.e. ôx (t) E T (x (t)). Et, en particulier, on a toujours
ôx (t i ) E T (x (t i )).
(37)
Pour ô == 0, l'équation (35) se transforn1e en l'équation homo-
gène
(ôx) = ( ai (x ; u (t)) + A (t) ap (x ' U (t)) ) ôx. (38)
( onsidérons de plus son équation adjointe
. aa = _ ( ai (x ; u (t») + A (t) ap (x ' u (t)) ) 'i'- (39)
250
PROCESSUS AVEC CONTRAINTES SUR LES COORDONNÉES
[Ch. 6
Afin d'éviter toute confusion, écrivons les équations (38) et (39)
sous la forme de deux systèmes d'ordre (n + 1) par rapport aux
coordonnées
n n
. (ôxi) == ( afi + j} ) ôxa == ( ôfi + Âi ) ôxa
dt L..J che a ôxa L..J axa axa
a=O a=1
n
d\Pi '" ( Ôfa r  a ôp )
([t == - LI axi 1 ôx i 'Pa,
cx=o
i = 0, 1, ..., n.
Si ôx (t) et 'i' (t), t o t tj, sont des solutions continues arbi-
traires respecti veInent des équations (38) et (39), alors
('i' (t), ôx (t)) = const
(40)
(cf. page 78).
Désignons par
iP 0 (t),
. . .,
<Pn (t),
t o t th
.un système fondamental de solutions de l'équation (38) et par
,po (t), . . ., n (t), t o t t 1 ,
lIn système fondalnental adjoint de solutions de l'équation (39).
On a
( i(t), <p j(t))=ô}.
La solution ôx (t), 8 1 t 8 2 , t o 8 1 < 8 2 t f , de l'équation
non homogène (35) satisfaisant à la condition initiale
n
ôx (8 1 ) == CG (8 1 ) ôx cx (8 1 )
a=O
.se met alors sous la forme
ôx (t) == Pt, 81 (ô ) ôx (8 1 ) ==
n t
= <ra(t)[ Ôx a (8 j ) + J (1i'a (1:), A (1:) : ) Ô ) d1: ] ·
a=O 81
(41)
Cal cul deI a d é r i y é e ôR (œ (t), II (t), 0)
a t
Cette dérivée nous étant nécessaire sous sa fornle explicite nous
:allons la calculer imnlédiatenlent.
33.]
DÉMONSTRATION DU THÉORJ"tME 22
251
On a
s
h (x, p) == g (x -T- l aa (x) lf et) ==
a=1
s s
== g (XO + aa (x) N&, ..., X n -i- L CG a (x) N ),
a=1 CG=l
DÙ Ni == (N , .... Nf). Posons
s
11i==Xi-t- t aa(x).L\T , i==O,..., n; 1]---=(11°, ..., 'YIn).
a=1
Il yien t
n
fJ ( ) â a
R (x, ll, f.t) = :'l a: B tf" (x, u) =
a, 13=0
n n s
= a: ( ) fa (x, u) + f.t a: ( ) aa;x(:) NffB (x, u) =
a=O a, 6=Oi=1
s
_ ( fJl( (11) f( ) ) + ( fJg (11) .... ) ( âa i (x) j . ( ) )
- 811' X, U t L.J fJ11' 1.1 l fJ X ' X, U ·
i=l
Par suite
n s
iJR (x, u, 0) == ( 8 2 g (11) ta (x, u) ai (x) Nf ) 1 +
ÔJl LJ fJ a â (3 LJ =O
CG, (3=0 i=1
s
+ ( aga ) ,Ni) ( aa ) , f(x, u)) =
i=l
s n
( ) â2g (x) t a ( ) J\ T8 1
== L.J ai x âx a âx t3 X, U i-r
i=1 a, (3=0
s
r ( fJg(X) "?". ) ( fJai(X) j . ( X U )) ==
T L.J (Îx' l fJx' ,
i=1
s
= :t [ad x (t)) ( ag :(t)) , Ni) ] .
i=l
Donc
s
DR (x (t), II (t), 0) == [ a. ( X ( t )) ( âg (x (t)) :\-r ) ] ( 42 )
f) l L L.J dt l âx' .... i ·
1 i=1
252
PROCESSUS AVEC CO:NTRAINTES SUR LES COORDONNEES
[Chio 6
Il vient immédiatement de la définition de la somme des synlbo-
les ( 1 7)
fJ ôR b (œ, u,O) ôB b (œ, u, 0)
( R ( X u 0 )) - 1 + 2
fJ L b1+b " - ôl-L a t
(43)
Var i a t ion s deI a sol u t ion u (t), x (t)
Au chapitre 2, nous avons d'abord défini la classe de cOlllIllandes
perturbées, i.e. les variations de la commande initiale II (t), et
ensuite nous avons construit la trajectoire perturbée (voir 9 13) à partir
de la cOlll111ande donnée, de l' écart initial et du nombre réel ôt.
Désormais nous ne pouvons plus définir, indépendan11nent des
trajectoires perturbées, la classe de commandes perturbées puis à
l'aide de ces dernières construire les trajectoires perturbées, car en
général elles déborderont le fermé G (puisque la trajectoire x (t) est
située sur le bord de G). Dans ce cas, les commandes perturbées et les,
trajectoires perturbées correspondantes devront être construites simul-
tanément, pas à pas, pour qu'à chaque instant on ait la possibilité
d'éviter à la trajectoire perturbée de déborder le fermé G. CecI est.
possible en raison de la régularité de la trajectoire.
Nous parlerons donc dans les formlllations rigoureuses non plus
des variations des commandes ni même des variations des trajectoires
séparément, mais des variations de la solution u (t), x (t), t o t
t 1 , du système (21).
Nous allons ainsi construire une classe <1> de solutions perturbées-
u* (t), x* (t) du système (21), i.e. les variations de la solution
u (t), x (t), t o t t b du système (21) pour ô = O. Stricten1ent
parlant, tout élément (u* (t), x* (t)) de l'ensemble cD ne constituera
pas une seule solution du système (21), mais toute une fa1nille de
solutions, fonctions de l'infiniment petit ë. Néanmoins, pour plus de-
commodité, nous parlerons souvent de la solution perturbée (u* (t)t
x* (t)) E cD ainsi que des variations u* (t) de la commande Zl (J) 011
des variations x*(i) de la trajectoire x (t) qui constituent la solution
u* (t), x* (t) du système (21).
Observons ici que l'ensemble <1> sera constitué non pas des solu-
tions perturbées d'un système concret quelconque (21), mais des solu-
tions perturbées de tous les systèmes de la forme (21) dépendant dll
choix de la fonction R (i.e. du symbole (17)). Cependant, tout élé-
ment donné (u* (t), x* (t)) E cD constituera une famille de solutions
d'un mêm'e système de la forme (21).
Au chapitre 2 nous avons construit une commande perturbée
par la donnée de ses paramètres (voir définition du symhole a en
page 85). De la même façon nous allons construire chaque solutioI1_
perturbée u* (t), x* (t) du système (21) (plus exactement, une falnille
de solutions perturbées) en nous donnant les paramètres de cette solu-
tion. Aussi allons-nous en premier lieu définir les par a 111 è t r e s.
S 33.1
DÉMONSTRATION DU THÉORÈME 22
253
d'une solution perturbée et ensuite décrire une méthode de construc-
tion de cette solution.
Il est naturel de répartir ces paramètres en deux groupes: ceux
de la cOlnmande u* (t) et ceux de la trajectoire x* (t).
Les notations 'ti, . . ., 'tk; ôt i , · . ., ôt k ; Ii, · · ., l k; Vi, . . .
. . ., Uk; 't, ôt garderont le même sens que dans le 13. La commande
u (t) étant continue par morceaux, les points 'ti, . . ., 'tk sont ses
points de continuité. Dans toute la suite nous admettrons que le
point 't. coïncide avec l'extrémité t i de l'intervalle t o t t f (ce
qui est possible puisque la commande u (t) est continue au point ti).
D'autre part, pour Vi' . . ., Vk nous ne pourrons prendre que des
points du domaine de cOlllnlande U tels que pour un i = 1, . . ., k
quelconque, le point x de la trajectoire x (t) soit régulier relative-
Jl1ent au point Vi. L'ensemble des paramètres 'ti1 ôt i , Vi' ôt, qui a servi
à définir la commande perturbée u* (t) sera désigné par a, comme dans
le chapitre 2. Cependant, la commande perturbée u* (t) correspondant
au symbole a ne sera pas définie comme au chapitre 2 (voir page 80),
nlais d'une façon légèrement différente, plus exactement, nous la
construirons en même temps que la trajectoire perturbée correspon-
dante x* (t). Ceci s'explique par le fait que dans la définition de la
commande perturbée telle qu'elle a été faite dans le chapitre 2, la
trajectoire perturbée correspondante est susceptible de déborder le
domaine G sur les intervalles Ii.
Pour paramètres de la trajectoire perturbée x* (t) qu'il nous
faudra construire, nous prendrons les grandeurs figurant dans le
symbole v (17).
Passons maintenant à la construction de la solution u* (t), x* (t)
du système (21) définie par les symboles a, o. Cette solution sera
définie sur l'intervalle t o t t i + ëôt. Pour souligner qu'elle
dépend du choix des symboles a, v, nous désignerons au besoin les
Îonctions u* et x* respectivement par
u*-u* c. ( t )
- a, u ,
x* = x:, b (t).
(44)
(45)
Définissons la valeur initiale x* (t o ) de la trajectoire x* (t) au moyen
de la formule
x* (t o ) = X (t o ) + ëÔX o ,
(46)
où
s
ôXo= -ô"., aa; (x (t o )) Na
cx=l
(47)
De (46) il vient pour B suffisamment petit:
ai (x (t o » == ai (x* (t o », i = 1, . . ., s,
(48)
254
PROC ESSUS AVEC CONTHAI TES SUR LES COORDONNÉES
[ Ch . ()
en outre (pour 8 suffisamment petit)
ai (x* (t o » == ai (x (t o » == 0 pour i =1= x (io),
ai (x* (t o » == ai (x (io» == 1 pour i == X (t o ).
De (47) et (48) il vient:
h (x* (t o ), 8Ô ) == g (x (t o ) + 8ÔXo +
s
+ 8ôll a cx (x* (t o » 3"" cx) == g (x (t o » == O. (49)
cx=1
La méthode de construction de la trajectoire (45) montre aussitôt
que lorsque 8 -+ 0, la trajectoire x* (t) tend uniformément en t
vers x (t) sur l'intervalle t o t t 1 . On déduit donc de (49) que
x* (t) est entièrenlent contenue dans le fermé G (voir page 243).
Comme au chapitre 2 (cf. page 80), on se donne les interyalles Ii'
par les inégalités
'ti + 8li < t 'ti + 8 (li + Ôii).
En partant de la valeur initiale donnée (46), construisons 11laintenant
une solution de la forme (23), (24) du système (21) sur l'intervalle
t o t 171 + 811 (i.e. en partant du point initial t o pour aboutir
à l'extrémité gauche de l'intervalle Ii) à l'aide de la méthode décrite
dans les pages 244-246 et égalons les fonctions (44), (45) à cette solu-
tion sur l'intervalle t o t 'ti + 8l1. On a:
u * (t) == u (t) + 8Ô u (t) + 0 (8),
x* (t) == x (t) + 8ÔX (t) + 0 (8), t o t 171 + 8l1.
Pour t o t 171 + 811 la fonction ôx (t) est donc solution de
l'équation aux variations (35):
ôx (t) == Pt. t o (ô ) ôx (t o ).
Nous allons maintenant prolonger la solution u* (t), x* (t) en
conservant la continuité de la fonction x* (t) sur l'interyalle 1 1
(en supposant qu'il n'est pas vide, i.e. ôt 1 =1= 0) de la manière sui-
vante.
Par hypothèse le point x (171) est régulier relativement à Vi.
Désignons par qi (v), . . ., qs (v), s 0, les fonctions (1) pour le
point Vi. On a alors (en désignant par Rb la fonction R, où I> est le
symbole qui a servi à définir la solution perturbée):
R (x ('L1)' Vi, 0) == q (Vi) == · · . == qs (Vi) == 0,
et le systènle
R (y, v, 8Ôf,t) == qt. (v) == . . . == qs (v) == 0 (50)
33.J
DÉMONSTRATION DU THÉORÈl\lE 22
255
est résoluble par rapport à certaines 8 + 1 coordonnées du vecteur v-
au voisinage des valeurs x ('r1)' Vi' ëÔ!l== 0, par rapport, par exemple,
aux (8 + 1) premières coordonnées:
vi == (}i (11, V S + 2 , ..., v r , ëÔ t), i == 1, ..., 8 + 1, 1 s + 1 -<: r,
où les fonctions {fi, i == 1, . . ., 8 + 1, sont con tinûmen t dérivables
par rapport à leurs arguments. Il est évident que l'argument y des
fonctions {fi peut prendre la valeur x* ('r1) puisque pour ë -+ 0/
l'intervalle Ii dégénère au point 'r1 et
x * ('r 1 + ë ll) == x ('r 1 -j- ë l1) + ëÔ x ('r 1 + ë l1) + 0 (ë) -+ X ('r 1) ·
En portant les fonctions 8 i , i == 1, . . ., 8 + 1 dans la première
des équations du sysLèn1e (21), nous obtenons
=f(y, \'}1 (!l, z;s+2, ..., ur, e,Ôf.t), ..., ur) =
· ( ,,+ 2 }' Ô ) ( 51 )
==/1 y,v , ...,V,ëll.
Renlplaçons lllainLenalll dans le second menlbre les paramètres.
-;+2 l' 1 l , t . s+2 r d . t
V ,..., v par es coor( onnees respec Ives VI , . . ., V l II pOln Vl
et résolvons l'équation différentielle obtenue avec la condition ini-
tiale x* ('rl + ël1) sur l'intervalle Ii. La solution x* (t) n'est autre
que le prolongenlent de x* (t), t o t 'ri + ël1, sur l'intervalle I l .
Donnons-nous le prolongen1ent de la commande u* (t), t o t
'r1 -t- ël1, sur l'intervalle 1 1 par la formule:
u* (t) == ({fI (x* (t), V +2, ..., v , ëÔll), ...
. . ., t}S+l (x* (t), V +2, ..., vr, ëÔl-t), V +2, ..., vr), tE Ii"
L'admissibilité de la cOlnmande u* (t), t E I l et l'égalité
R (x* (t), u* (t), ëÔl-t) == 0, t E I l ,
sont évidentes. Par construction, u* (t) est une fonction continue
sur l'intervalle Ii el tend uniformément vers V1 pour ë -+ 0 sur / 1 -
Si 'ri == 'r 2 == . . . == 'rj < 'rj+1, nous faisons la même construction
sur les intervalles 1 2 , . . ., Ij (en remplaçant Vi respectivement
par V 2 , . . ., Vj) et nous obtenons ainsi la solution u* (t), x* (t) sur-
l'intervalle t o t 'rj.
Ensuite, nous prolongeons les fonctions u* (t), x* (t) sur l'inter-
valle 'rj t 'rj+l + ëlj+l (i.e. jusqu'à l'extrémité gauche de l'in-
tervalle I j + 1 ) en utilisant la construction exposée dans les pages 244-
246 (avec la valeur initiale x* ('rj» et ainsi de suite jusqu'au point t 1 .
Si donc ôt 0, la famille de solutions variées u* (t), x* (t),.
t o t t 1 + ëÔt, du système (21) est définie.
Supposons ôt > o. La solution u* (t), x* (t) a déjà été construite
sur l'intervalle t o t t 1 . Il est aisé de voir que le point x* (t 1 )
256
PROCESSUS AVEC COl'\TRAINTES SUR LES COORDONNÉES
[ Gh. H
est régulier relativement au point u* (t f ) = u* (t f - 0). En effet,
la première condition de régularité vient de ce que pour des valeurs
de t proches de t f on a:
R (x* (t), u* (t), 8Ôl1) = p (x* (t), u* (t)) = 0,
car pour ces valeurs de t le point x* (t) est Sitllé sur le bord
g (x* (t)) = 0
de G.
La deuxième et la troisième conditions de régularité découlent do
la régularité du point x (t l ) relativenlent à u (t f ) = u (t f - 0) et
des relations x* (t l ) -+ x (t l ), u* (t l ) -+ u (t f ) pour 8 -+ O.
La construction au moyen de laquelle nous avons défini la solu-
tion u* (t), x* (t) sur les intervalles Ii nous permet donc de prolonger
les fonctions u* (t), x* (t) continûment au delà de t l jusqu'au point
t l + EÔt.
Par la donnée des paramètres a, 0 nous avons donc construit un€,
famille de solutions perturbées du système (21). L'égalité (51) vaut
évidemment pour t l t t f + EÔt.
Soulignons que la trajectoire (45) n'est pas définie univoquement
par les paramètres a, o. Elle dépend en effet du choix des variables Vi,
par rapport auxquelles est résolu le système d'équations (50) dans la
construction de la solution perturbée sur les intervalles Ii. Le mênlO
arbitraire a lieu lorsque la solution est prolongée sur l'intervalln
t l t t l + EÔt pour ôt > O. On tourne aisélnent cet arbitraire
en fixant pour chaque point u (t) les variables Vi par rapport auxquel-
les est résolu le système (50) au voisinage des valeurs x (t), u (t),
8Ôl1 =0, où Ql, ..., Qs, s O, sont les fonctions (1) définies pour
le point u (t). (Si t est un point de discontinuité de la comnlando
u (t), les variables Vi par rapport auxquelles est résolu le systèm(
(50) peuvent être distinctes pour les points u (t - 0) et u (t + 0).)
Une fois ces conventions adoptées, la donnée des symboles a et v
définit univoquement la famille de trajectoires (48) puisque les tra-
jectoires de cette famille sont construites d'une manière univoque
sur les intervalles fermés contenus entre les intervalles Ii (voir note
page 246).
Con s t rue t ion des côn e s 1(* e t k*
Comme dans le chapitre 2, nous allons nous intéresser maintenant
à l'écart par rapport au point x (t f ) de l'extrémité de la trajectoire
perturbée (45).
Exactement comme au chapitre 2 (pages 81-84) on démontre
la formule
x* (t f + EÔt) == x (t f ) + E X* + 0 (8),
(52)
33]
DÉMONSTRATION DU THÉORÈME 22
257
où le vecteur x* ne dépend pas de E et est défini par la formule
x* == Pti' to (ôl-t) ôXo+f(x (t f ), u (t f )) ôt+
k
+ P ti , 't'a (ôl-t) [f(x(';a), va)-f(x('t a ), u('t a ))] ôta. (53)
a=1
Nous désignerons (au besoin) le vecteur x* par xa V pour montrer
qu'il dépend des symboles a et v.
De l' égali té (37), qui est valable pour des valeurs de t proches
de t f , il vient
x* E T (x (t f )).
(54)
Soient a', 0' et a", 0" deux paires dei symboles définissant la
variation des commandes et des trajectoires et Îv', Îv" deux nombres
non négatifs. Posons
a = Îv' a' + Îv"a", 0 = Îv'o' + Îv "b ".
Des propriétés de la translation (voir formule (36)), de la linéarité
de la fornlule (17) par rapport à ô et de la linéarité de la formule
(53) par rapport à ôXo, ôt, ôta il s'ensuit immédiatement:
A * Il'A * + '\flA *
uX a , f> = IV uX a " f>' l'v uX a ", v".
(55)
Cette formule montre que tous les vecteurs de la forme x , b
portés dans l'espace X à partir du point x (t l ) engendrent un côn e
con v e x e de sommet x (t l ) que nous désignerons par K*. De (54)
il résulte, en outre, que le cône K* est contenu dans le plan T (x (t f ))
tangent au bord g (x) = 0 en x (t f ).
Nous allons utiliser le cône K* pour démontrer la condition de
saut ( 36). Pour prouver le théorème 22 nous prendrons un autre
cône convexe k* contenu dans K*. Plus précisément, nous allons
considérer seulement les symboles 0 pour lesquels aucun point bi
ne coïncide avec le point initial x (t o ) de la trajectoire x (t). Il ré-
sulte alors de la formule (47) que ôXo = 0, i.e. la trajectoire perturbée
x* (t) débute au point x (t o ). Si 0' et 0" sont des symboles de la
forme mentionnée (i.e. ne contiennent pas le point x (t o ) parmi les
points i) et Îv', Îv" deux nombres non négatifs, alors Îv'o' + Îv "b "
est un symbole de la même forme. Aussi, en portant à partir de
x (t l ) des vecteurs de la forme x , f> où v est un symbole ne ren-
fermant pas le point x (t o ) parmi les points h obtenons-nous un cône
convexe noté k* de sommet au point x (t f ).
Puisque 1(;* c K* c T (x (t f )), les cônes k*, K* sont de dimen..
sion non supérieure à n. Aussi par intérieur de ces cônes nous dési-
gnerons l'ensemble des points intérieurs relativement au plan
T (x (t l )), et par rayons intérieurs, les rayons de sommet x (t l )
appartenant à ces cônes et renfermant leurs points intérieurs.
17-01339
258
PROCESSUS AVEC CONTRAINTES SUR LES COORDONNÉES
[CH. 6
9 34. Démonstration du théorème 22 (suite et fin)
Pour que toutes les constructions du précédent paragraphe soient
possibles, il suffit que la trajectoire x (t), t o t i 1 , qui est située
sur le bord du domaine G soit r é guI i ère.
Supposons Inaintenant que u (t) et x (t) sont de surcroît 0 p t i -
mal e s.
Désignons par L le rayon issu d'un point x (t 1 ) et orienlé dans
le sens du demi-axe négatif xo. Il est évident que LeT (x (t 1 )).
Lem m el. Le rayon Ln' est pas intérieur au cône l, *.
D é mon s t rat ion. Désignons par Jt la projection (ortho-
gonale, par exemple) de l'espace X sur le plan T (x (t 1 )). Supposons
que la trajectoire variée x* (t) correspond aux sYlnboles a et 6, où b
est un syn1bole ne contenant pas le point x (t o ) parmi les points i
(de sorte que la trajectoire x* (t) débute au point x (t o )). Puisque
x* (t 1 + 8ot) == x (t 1 ) + 8 X* + 0 (E),
où x (t 1 ) E T (x (t 1 )), x* E T (x (t 1 )), il vient:
Jt (x* (t 1 + Bot)) == x (t 1 ) + B X* + 0 (8).
Donc, les termes principaux (linéaires en 8) des vecteurs
Jt (x* (t 1 + EOt)) - x (t 1 ) et x* (t 1 + Bot) - x (t 1 )
coïncident et remplissent ainsi dans T (x (t 1 )) le n1ên1e cône 1.*.
Supposons maintenant que le rayon L est intérieur au cône l\ *.
Alors en vertu du lemme 3, chap. 2, il existe un 8 > 0 (que l'on peut
supposer arbitrairement petit) et des symboles a et fi tels qu'il
leur corresponde une trajectoire perturbée x* (t) débutant au point
x (t o ) et aboutissant en un point x* (tt + Eot) tel que Jt (x* (t 1 - Bot)
soit un point du rayon L distinct de x (t 1 ).
L'application Jt considérée sur le bord g (x) == 0 esl bijecti ve
au voisinage du point x (t 1 ). Si donc, 1J est un point du bord g (x)=== 0
suffisamment proche de x (t 1 ), alors il résulte de Jt (11)) E L que
Jt (!I) == 11. Puisque pour B suffisamment petit, le point x* (t 1 -t- Bot)
(qui appartient au bord g (x) == 0) est arbitrairement proche
du point x (t 1 ), il vient de la relation :Tt (x* (t 1 + Bot)) E L que
x* (t 1 + Bot) == :Jt (x* (t 1 + Bot)) et donc x* (t 1 + Bot) est un point
du rayon L non confondu avec x (t 1 ). Co qui contredit l'optin1alité
de la solution u (t), x (t).
Le lemme 1 est donc démontré.
Lem m e II. L'équation
d", = _ ( â f (x (t), u (t)) +- A ( t ) â p (x (t), u (t)) ) ,,1"1 ( 56 )
dt âx 1 âx '1'"
34.1
DÉMONSTRATION DU THÉORÈME 22 (SUITE ET FIN)
259
admet une solution continue
'i' (t) == (\Po (t), \}Ji (t), · · ., 'i'n (t)), t o t t i , (57)
telle qu'en chaque point de continuité de la commande optimale u (t)
soit remplie la condition de maximum
de plus
QJt ('1' (t), x (t), u (t)) == m ('1' (t), x (t)),
m ('i' (t i ), x (t i ») == 0
(58)
(59)
et soient satisfaites les conditions suivantes:
a) 1Po (t) == const 0 ;
b) le vecteur '\1' (t o ) n'est pas colinéaire au vecteur
grad g (x (t o ) ;
c) la fonction scalaire continûment dérivable par morceaux
À (t) == - ('\1' (t), A (t») est telle qu'en chacun de ses points de déri-
vabilité le vecteur
dÂ
dt grad g (x (t))
soit est dirigé vers l'intérieur du domaine G, soit s'annule.
D é mon s t rat ion. D'après le lemme 1, par le sommet
x (t 1 ) du cône 1(;* c T (x (t i ) il est possible de faire passer un plan r
de diInension n - 1 contenu dans T (x (t 1 )) et séparant le cône 1 *
du rayon L. Soit X == (Xo, Xi' . . ., Xn) un vecteur situé sur le plan
T (x (t 1 )), orthogonal au plan r et orienté de telle sorte que le rayon
L est situé sur le demi-espace fermé défini par le plan r vers lequel
cst orienté le vecteur X et le cône k* dans l'autre demi-espace fermé.
.lAlors, Xo 0 et, pour tout vecteur x* E k*, on a:
(X, x*) o.
(60)
Le vecteur X étant en outre situé sur le plan T (x (t 1 )), les vecteurs
X et grad g (x (t 1 )) (61)
sont linéairement indépendants.
Définissons la fonction inconnue'i' (t) comme solution de l' équa-
tion (56) avec la valeur finale
'i' (t 1 ) == X.
(62)
On voit aisément que l'égalité (58) est satisfaite. En effet, sup-
posons qu'en un point de continuité 'r1 de la commande u (t) est
vérifiée l'inégalité
QJ£ ('i' (';1)' x ('r1)' u ('r1») < m ('i' ('r1)' x ('rt),
17*
260
PROCESSUS AUEC CONTRAINTES SUR LES COORDONN:Éb:S
CH. 6
i.e. il existe un point Vi E U relativement auquel le point x (Li)
est régulier tel que
QJt ("1' (L 1), x (17 1), V 1) > cfJt ("1' ( 17 1), x (L 1), U (L 1) ) . ( 63 )
Construisons une solution u* (t), x* (t), t o t t i , du systè-
me (21) en prenant pour symbole a le symbole {L1, V1, 8t 1 == 1, 8t==0}
et pour symbole b un symbole dans lequel s == 0 (i.e. où ne figurent
pas h ai (x) et Ni) et 8l-t == O. De (53) il vient alors
x * == Pt 1, 't 1 (0) (f (x (L 1), V 1) - f (x ( T 1) , u ( T 1) ) ) .
Et les formules (40), (63) donnent:
(X, x*) = ('\)' (t 1 ), Pti, 't1 (0) (j.(x (T1)' Vt) -{ (x (Tt), U (T1))) =
== ('\)' (L1)' t (x ( 17 1), Vt) -f(x (L1)' U ('"C1))) > 0,
ce qui contredit l'inégalité (60).
On délnontre l'égalité (59) et la condition a) de la mêlne manière
que les formules correspondantes (12) du chap. 2.
La condition b) découle de l'indépendance des vecteurs (61) et
de l'égalité (62) (cf. remarque 4 du théorème 22).
Prouvons enfin la condition c).
Supposons que u* (t), x* (t), t o t t 1 , est une solution du
système (21) correspondant à un symbole a vide (i.e. un synlbole
pour lequel k == 0 et 8t == 0) et à un symbole b ne contenant pas
le point x (t o ) parmi les points i. Il vient alors des formules (53)
et (41)
n ti
r a 8R
8x* = Pt!. to (ô ) 0 = ô L qJa (t1) J ('I\J (t), A (t)) aï-ï dl.
a=O to
Les formules (62) et (60) donnent
n ii
(X, 8X*) = ô ('I\J (t1), <Pa (t 1 ) J ( a (t), A (t)) : dt) =
a=O to
t1 t1
=ô J ('I\J(t), A (t)) : dtc= -ô J Â(t) : dt<O.
to to
En vertu de la relation Îv (t) == - ('i' (t), A (t)) et de la dualité £ln
système de fonctions ((P1, . . ., (Pn), ( 1, . . ., n) on a:
n
('i' (t 1 ), a (t 1 )) a (t) == 'i' (t).
a=O
34.]
DÉMONSTRATION DU THÉOR ME 22 (SUITE ET FIN)
261
En portant dans la dernière inégalité l'expression (42) de ::
et puisque ôl-t 0, il vient:
11 s
r d [ ( âg(X(t» )]
J Â (t) di LI a et (x (t)) âx ' Net dt O.
to et= 1
Une intégration par parties donne, compte tenu de ai (x 4(t O )) ==
== ai (x (t i )) === 0, i === 1, . . ., s:
ti S
5 aa(x(t» ( ag :tt» ,Na) dt O.
to et= 1
(64)
Puisque les points i peuvent être choisis arbitrairement sur la
trajectoire x (t) (pourvu qu'ils ne coïncident pas avec ses extrémités)
et puisque, par ailleurs, les voisinages Ob. sont arbitrairement
z.
petits, les fonctions ai (x (t)) sont non négatives et Ni des vecteurs
extérieurs (relativement au domaine G), il résulte de (64):
dÂ
dt O.
Cette inégalité exprime justement la condition c) car le domaine G
est défini au voisinage du bord par l'inégalité g (x) O. Donc,
grad g (x (t)) est une normale extérieure au bord g (x) == O.
En vue d'achever la d é mon s t rat ion dut h é 0 r è -
m e 22 il faut montrer premièrement que la fonction scalaire
À (t) == - ('i' (t), A (t)) vérifie l'expression
S
âQfe ('1' (t), œ (t), u (t)) ==  ( t ) âp (x (t), u (t)) + v ( t ) âqet (u (t)) ( 65)
GU âu LJ et au
et=1
et, deuxièmement, que
QJt ('i' (t), x (t), u (t - 0)) === m ('i' (t), x (t))
en les points de discontinuité de la commande u (t) et la constance
de la fonction QJfj (t) == QJf ('i' (t), x (t), u (t)) sur l'intervalle t o
t t i . Aux points de discontinuité de la commande nous pose-
rons par hypothèse
QJ£ (t) === QJt ('i' (t), x (t), u (t - 0)).
Remarquons pour les besoins de la démonstration de (65) que
les coordonnées du vecteur A (t) == (ÂP (t), . . ., Ân (t)) obéissent aux
262
PROCESSUS AVEC CONTRAINTES SUR LES COORDONNÉES
[CH. 6
, .
equatlons
s
al] (x (t), u (t)) _+ Â/ (t) ap (x (t), u (t)) , zj (t) aql3 tu (t)) = 0
âu a oua T L.J f3 âua '
(3=1
j == 0, 1, ..., n, a == 1, ..., s --t- 1.
En multipliant cette expression par '\jJj (t) et en sornmant les
expressions obtenues pour tous les j == 0, 1, . . ., n, nous obtenons
s + 1 égalités (a === 1, . . ., s + 1)
s
âQfe ('i' (t), x (t), u (t)) == Â ( t ) âp (x (t), u (t)) + v ( t ) âq(3 (u (t»
âu a âua LJ [3 âu a '
13=1
à partir desquelles la fonction  (t) est univoquement définie.
D'un autre côté,
QJ8 ('li' (t), x (t), u (t)) == m ('li' (t), x (t))
et d'après la règle des multiplicateurs de Lagrange
s
âQ/& ('i' (t), x (t), u (t)) == Â * ( t ) âp (x (t), u (t)) + " v* ( t ) âqa (u (t)) .
âu âu a âu'
a=1
par conséquent, 'A (t) == 'A* (t).
Démontrons maintenant l'égalité suivante
QJ8 ('i' (t), x (t), u (t)) == m ('i' (t), x (t))
(66)
aux points de discontinuité de la commande u (t).
Supposons qu'au point de discontinuité 17 de la commande u (t)
est vérifiée la relation
Q)[ (17) === QJt ('i' (17), x (17), U (17 - 0)) =1= m ('i' (17), x ('t)).
Il existe alors un point U1 E (ù (x (17)) tel que
QJ[ ('i' (17), x (17), U (17 - 0)) <QJ8 ('i' ('t), x (17), U1). (67)
De la condition U1 E (ù (x (17)) il résulte immédiatement (voir
page 236-237) qu'il existe une fonction continue u* (t) définie pour
les valeurs de t proches de 17 telle que u* (t) E (ù (x (t)), u* (17) == U1.
Etant donné que la fonction QJ8 ('i' (t), x (t), u* (t)) est continue en t
et que la commande u (t) est continue à gauche en 't, nous obtenons
de l'inégalité (67) pour tout point t.< 't suffisamment proche de T
QJi ('i' (t), x (t), u (t)) < QJ8 ('i' (t), x (t), u* (t)).
34.]
DÉMONSTRATION DU THÉORÈME 22 (SUITE ET FIN)
263
Pour les points t considérés nous obtenons donc l'inégalité
Olt ('1' (t), x (t), u (t)) <QJ£ ('1' (t), x (t), u* (t)) m ('i' (t), x (t)),
qui contredit l'égalité (58). L'égalité (66) est démontrée. D'une
façon analogue on démontre que
QJt; ('i' (t), x (t), u (t + 0)) === m ('1' (t), x (t»). (68)
La continuité de la fonction QJt (t) === m ('i' (t), x (t» résulte des
égalItés (66) et (68). Pour démontrer donc que la fonction QJt (t)
est constante sur l'intervalle t o t t 1 il nous reste à démontrer
qu'elle est constante sur tout intervalle où les fonctions'i' (t), x (t)
et u (t) sont simultanément dérivables.
On a (voir formules (9), (10»):
:t cf/C (t) = ( i , aa: ) + ( aa: ' dd ) + ( aa:C ' ) =
s
=== (( _!L ' ) -L ( !L ) (( ap "" a q a ) ) _
ax 'i'+Â 8x "f 1 ax 'i',f + Â au + L.J Va au ' dt -
a=1
s
= ( Â j t )+( Â ap )+( v aqa ) =
ax ' au' dt .L.J a au ' dt
a=1
s
d d
=== Â (t) dI P (x (t), u (t» + L.J Va (t) dI qa (u (t» ===
a=1
s
d
=== LJ Va (t) dI qa (u (t».
a=1
dqa(u (t))
l\1ontrons que dans les points t considérés on a === 0,
dt
a == 1, . . ., s, et, par conséquent,
s
dc2fe (t) === ( t ) dqa (u (t)) === 0
dt .L.J Va dt ·
a=1
Raisonnons par l'absurde; supposons par exemple qu'au
point 't:
dq1 (u ('t)) -1- 0
dt -r-.
(69)
Nous avons
q1 (u ('t)) === . . . === qs (u ('t») === 0,
où ql (u), . . ., qs (u) sont les fonctions (1) définies pour le point
U ('t). La fonction q1 (u (t» change donc de signe au point 't, ce qui
264
PROCESSUS AVEC CONTRAINTES SUR LES COORDONNÉES
[CH. 6
contredit l'admissibilité de la commande u (t) puisque au voisinage
du point u Ct) l'ensemble U est défini par les inégalités
q1 (u) 0, . . ., q s (u) 0 ;
il résulte de l'admissibilité de la commande u (t) que pour toutes
les valeurs de t suffisanlment proches de 't
q1 (u (t)) o.
Le théorème 22 est donc entièrement démontré.
35. Quelques généralisations
Dans ce paragraphe nous donnerons quelques généralisations
évidentes du théorème 22. Nous nous bornerons à la seule formula-
tion des résultats, leur démonstration ne différant que légèrement
de celle du théorème 22.
Dans la démonstration du théorème 22, la dépendance entre
les vecteurs x et u, dépendance exprimée par l'équation
P (x, u) == 0
a été essentielle. La forme de la fonction
p (x, u) = ( iJ ) ,1 (x, u) )
n'a été utilisée que pour démontrer les conditions b) et c) du théorè-
me 22. Le théorème 23 suivant découle immédiatement d'une brève
analyse de la démonstration.
Soient m fonctions Pi (x, u), i == 1, . . ., m, continûment déri-
vables, ne dépendant pas de la coordonnée xo. Le point x régulier
relativement au point Uo E U et satisfaisant au système
Pi (x, uo) == · · · == Pm (X, uo) == 0,
est défini comme précédemment sauf que dans ce cas, au lieu de
l'indépendance des vecteurs (7), il faut exiger l'indépendance des
vecteurs
ap1 (x, uo)
au
, ... ,
aPm (, uo)
au
agi (uo)
au
, ...,
ag.q (uo)
au
Thé 0 r è m e 23. Soient u (t), t o t t 1 , une commande
optimale et x (t) une trajectoire optimale régulière correspondante de
l'équation (5), vérifiant sur l'intervalle t o t t 1 le système d'équa-
tions:
Pi (x (t), U (t)) == · . · == Pm (X (t), u (t)) == O. (70)
Il existe alors un vecteur fonction 'i' (t) == ('\jJo (t), . · ., '\jJn (t)),
t o ::::;; t t 1, continu et non nul tel que sur l'intervalle t o t t 1
35.]
QUELQUES GÉNÉRALISATIONS
265
les fonctions u (t), x (t) et '1' (t) satisfassent au système d'équations
dx _ f ( ) === aQfC ('\l', x, u)
dt - x, u - ô '\1' '
m
d"" === _ aQfC ('\l', x, u) + Â aPa (x, u)
dt ÔX LJ a ôx '
a=1
que soit remplie la condition de maximum
QJ£ ('1' (t), x (t), u (t)) === m ('1' (t), x (t)),
en outre
m ('1' (t), x (t)) == 0;
les fonctions  i (t), i == 1, . . ., m, t o t t i , continûment déri-
vables par morceaux sont définies à partir de la condition de maximum
com" e les multiplicateurs de Lagrange dans la formule
m s
aQfC ("", x, u) == Â ôPa (x, u) + v aqa(u) .
au LJ a au LJ a au '
a=1 a=1
et de plus,
11'0 == const o.
La solution du problème optimal dans laquelle les égalités (70)
sont remplacées par les inégalités
Pi (x, u) 0, . . ., Pm (X, u) 0
(71)
se ramène aisément au théorème formulé.
En effet, en introduisant m paramètres scalaires auxiliaires de
commande Vi' i == 1, . . ., m, tels que Vi 0 et en considérant au
lieu des inégalités (71) les égalités
Pi (x, u) + Vi == · . . == Pm (X, U) + V m == 0,
nous retrouvons les conditions du théorème 23.
So:ulignons enfin que le théorème 22 se généralise immédiatement
lorsque le domaine G est défini au voisinage de son bord par plusieurs,
par exemple par deux inégalités
gi (x) 0, g2 (x) 0,
la trajectoire op timale régulière étant si tuée sur une « arête» de
dimension n - 2 définie par les équations
gt (x) === g2 (x) == o.
Il est en outre naturel d'admettre que les hypersurfaces
g1 (x) == 0, g2 (x) === 0
266
PROCESSUS AVEC CONTRAINTES SUR LES COORDONNÉES
[CH. 6
. 8g j (X)
sont en général situées sur la trajectoire, l.e. les vecteurs 'j ,
(X
8g 2 P (x) sont linéairement indépendants.
8x
9 36. Condition de saut
Une trajectoire optimale contenue dans un fermé G, peut être
située partiellement sur un noyau ouvert de G, et partiellement SUl'
le bord de G. Le principe du maximum et le théorème 22 s'avèrent
insuffisants pour suivre une telle trajectoire d'une manière univoque.
En effet, le principe du maximum donne un systèn1e complet de
conditions nécessaires que vérifie toute portion de trajectoire opti-
male entièrement contenue dans un noyau ouvert de G et le théorèn1e
22 donne des conditions nécessaires que vérifient les portions entière-
ment contenues sur le bord de G. Il ne manque que la con d i -
t ion .d e con j u gai son que vérifie toute paire de portions
de trajectoire optimale contiguës, dont l'une est contenue dans un
noyau ouvert de G et l'autre sur le bord de G. Nous appellerons cette
condition, con dit ion des a u t pour le vecteur fonction
1J' (t), qui est susceptible de subir une discon tinui té lors du passage
d'une portion à l'autre (voir énoncé du théorème 24).
Démontrons tout d'abord un lemme simple dont nous aurons
à nous servir plus loin.
Lem m e. Soient x (t), t o t t 17 une trajectoire de l'équation
(5) située dans un fermé G et correspondant à une certaine comlnande
admissible, et x (t o ) l'unique point de cette trajectoire contenu sur le
bord g (x) == 0 de G. Si le vecteur ôx (t o ) n'est pas tangent à g (x) == 0
au point x (t o ) et s'il est dirigé vers l'intérieur du domaine G, alors
la trajectoire perturbée x* (t), t o t t 17 satisfaisant à la condition
initiale x* (t o ) == X (t o ) + ëÔX (t o ) est entièrement contenue dans un
noyau ouvert de G.
D é mon s t rat ion. Nous avons
x* (t) = x(t) + 8ÔX (t) + 0 (8), ( al! (: to» , ôx (t o ) ) = a,<O.
Pour des ë > 0 suffisamment petits, la grandeur
g (x* (t)) = g(x (t)) + 8 ( ag <:x(t)) , ôx (t) ) + 0 (8), to t <:. t 1
est donc négative. En effet, pour des valeurs de t > t o voisines de t o
cela résulte des inégalités
g (x (t)) <0, a <0.
.16.]
CONDITION DE SAUT
267
Pour des valeurs de t éloignées de t o , la grandeur 1 g (x (t)) 1 est plus
grande que
1 8 ( ô g : (t) ) , ôx (t) ) + 0 (8) 1 '
et de plus g (x (t)) < O.
Soient u (t), t o t t 17 une commande admissible et x (t) une
trajectoire correspondante (pas forcément optimale) de l'équation
(5) entièrement contenue dans le fermé G. Certaines portions de
trajectoire peuvent se situer sur le bord du donlaine G, d'autres
peuvent être contenues à l'intérieur du domaine, i.e. dans un noyau
ouvert du domaine G.
Nous appellerons point de jonction, le point x Ct) de la trajectoire
portée par le bord du domaine G si t o < T < t i et s'il existe un
(J > 0 LeI qu'au moins une portion de trajectoire x (t) soit contenue
dans un noyau ouvert de G pour T - cr < t < T ou pour T < t <
< T + (J. Pour fixer les idées, nous supposerons dans la suite que
la portion de trajectoire qui est contenue à l'intérieur du domaine G
correspond à T - (J < t < T. Nous appellerons T l'instant de jonc-
tion.
Nous allons considérer, sans le spécifier, des trajectoires admet-
tant un nombre fin i de points de jonction.
Nous dirons qu'une trajectoire x (t), t o t t 17 entièrement
contenue dans le fermé G, est régulière si l'une quelconque de ses
portions située sur le bord g (x) == 0 du domaine G est régulière.
Supposons que u (t), t o t t i , est une commande optimale
et x (t )une trajectoire optimale régulière correspondante de l' équa-
tion (5), entièrement contenue dans le domaine G. Soit x (T) un point
de jonction de la trajectoire x (t), t o t t i . Désignons par Ti <
< t < T2 le plus grand intervalle de temps t o t t i contenant
l'unique instant de jonction T. La portion de trajectoire correspon-
dant donc à l'intervalle Ti < t < T est contenue dans un noyau
ouvert de G; quant à la portion correspondant à T < t < T2, soit
elle est entièrement située sur le bord g (x) == 0, soit elle appartient
aussi à un noyau ouvert du domaine G et alors le point x (T) est
l'unique point de la portion x (t), Ti < t < T2, situé sur le bord
du domaine G.
La portion x (t), Ti t T, satisfait donc au principe du maxi-
mum (voir page 234). La fonction non nulle
'i'-(t)==(1Po(t), 1Pi(t), ..., 'Pn(t)), T1 t<'t, (72)
correspondant à cette portion est continue et satisfait au système (15)
du chapitre 1. La portion de x (t), T t T2, satisfait soit aux
conditions du théorème 22 (si elle est située sur le bord g (x) == 0),
soit au principe du maximum (si elle est contenue à l'intérieur du
domaine G). La fonction non nulle correspondante
1J'+ (t) == ('Pt) (t), 'l't (t), ..., 1P (t)), T <: t T2, (73)
268
PROCESSUS AVEC CONTRAINTES SUR LES COORDONNÉES
[CH. 6
est continue et satisfait soit au système (10) et (11) et aux condi-
tions du théorème 22, soit au système (15) du chapitre 1.
Nous dirons que la condition de saut est satisfaite au point de
jonction x (-t) de la trajectoire optimale régulière x (t), t o t th
entièrement contenue dans le fermé G s'il existe une portion de tra-
jectoire x (t), 'tl t 't2, telle que 'tl < t < 't2 soit le plus grand
intervalle ouvert de t o t t 1 renfermant l'unique instant de
jonction 't, et si les fonctions (72) et (73) définies ci-dessus pour les
portions x (t), 'tl t 't, et x (t), 't t 't2, peuvent être choisies
de manière à satisfaire à l'une des deux conditions suivantes (qui,
comme il est aisé de le voir sont incompatibles):
'i'+ ('t) == 'i'- ('t) + l1 grad g (x ('t)), (74)
'i'- ('t) + l1 grad g (x ('t)) == 0, l1 =1= 0, (75)
où l1 est un nombre réel. Si la portion x (t), 't t 't2, est située
sur le bord g (x) == 0, alors la condition (74) est équivalente à la
condi tion
'i'+ ('t) == 'i'- ('t),
puisque la valeur initiale 'i' + ('t) de la fonction 'i' + (t), 't t 't 2,
peut varier d'un vecteur arbitraire de la forme grad g (x ('t)) (voir
remarque 4 du théorème 22).
Thé 0 r è m e 24 (condition de saut). Si une trajectoire optimale
régulière de l'équation (5) contenue dans le fermé G admet un nombre
fini de points de jonction, alors en chacun de ces points est vérifiée la
condition de saut.
D é mon s t rat ion. Soient u (t), t o t t 1 , une commande
optimale, x (t) une trajectoire optimale correspondante, x ('t) un
point de jonction et 'tl < t < 't2 l'intervalle maximal renfermant
l'unique instant de jonction L. Pour fixer les idées nous supposerons
que la portion x (t), 'tt < t < 't appartient à un noyau ouvert de G
et la portion x (t), 't t 't2 est située sur le bord g (x) == o.
Le point.x ('tl) peut se trouver aussi bien à l'intérieur du domaine
G que sur son bord. Nous supposerons pour commencer que ('t 1)
est situé à l'intérieur du domaine G. Dans ce cas il est évident que
'tl == t o -
Introduisons l'équation
ds
(ft== -f(s, v) (7G)
que nous résoudrons sur l'intervalle 0 t 't - 'tl + 868, où 68
est un nombre réel arbitraire. Il est évident que l'équation (76)
admet pour solution les fonctions
v (t) == u ('t - t), S (t) == X ('t - t), 0 t 't - 'tl + 868.
(77)
36.]
CONDITION DE SAUT
269
Désignons par A-r-'tb 0 un opérateur de translation le long de la
trajectoire (77) de l'équation (76) (voir page 78). Supposons par
ailleurs que L\; désigne le vecteur de déplacement (voir formule (22),
chap. 2) pour une trajectoire perturbée quelconque de l'équation (76).
Soi t, enfin, 8;0 un vecteur quelconque issu de x (L) qui, soit est
dirigé vers l'intérieur du domaine G (Le. Îl'est pas tangent au bord
de G), soit est nul. Sous ces conditions est défini un vecteur
ô = A,;_-r1, 0 (8;0) + L\;, (78)
que nous supposerons issu du point x (Li). L'ensemble des vecteurs
(78) engendre un cône convexe J( de sommet au point x (Li) ==
== ; (L - Li) (voir page 86). Désignons par K* le cône défini au
33 et étudions-le pour la trajectoire x (t), L t L2. Le point
x (L2) est le sommet du cône K*. Ce dernier est situé sur le plan
T (x (L2)) tangent au bord g (x) == 0 en x (L2) et est engendré par
les vecteurs de la forme
ô* = P-r2, -r (aIl) (8x ('t)) + L\x , b (79)
(voir formule (53») issus du point x (L2).
Il est important de souligner que la trajectoire perturbée ;* (t)
est entièrement contenue dans le fermé G pour ê suffisamment petit.
En effet, si 6;0 == 0 la portion initiale de trajectoire ;* (t) est
confondue avec la trajectoire; (t) et alors les points de la trajectoire
;* (t), pour t > 0, sont intérieurs au domaine G. Si, au contraire,
6So =1= 0, alors en vertu du choix du vecteur 6;0' notre assertion
découle du lemme (voir page 266).
La trajectoire x* (t) est aussi contenue dans le fermé G (voir
33).
Soit maintenant le produit direct
I( X K* c X X T (x (L2») (80)
des cônes Ii. et Il. *. Ce produit est aussi un cône convexe.
I?ésignons par QJC le cône convexe contenu dans K X K* et en-
gend'ré par toutes les paires possibles de vecteurs (78), (79) telles que
8;0 == 8x (L). (81)
Soit, par ailleurs, k le cône convexe défini au 14 et étudié
pour la trajectoire ; (t), 0 t L - Li et k*, celui défini au 33
pour la trajectoire x (t), L t L2. Il est évident que k c K,
k* c 1(*, d'où
QJC -:::::>k X x (L2)' QJC::Jx (Li) X k*. (82)
Désignons par L le rayon issu de x (L2) et orienté dans le sens du
demi-axe négatif xo. Montrons que le rayon x (Li) X L qui est con-
tenu dans le produit direct K X T (x (L2»' n'est pas un rayon
intérieur au cône QJC.
270
PROCESSUS AVEC CONTRAINTES SUR LES COORDONNÉES
[CH. ()
Supposons l'inverse. Alors, tout comme au 34, pour un B > 0
suffisamment petit, quelconque, on peut démontrer qu'il existe des
trajectoires perturbées
;* (t), 0 t 't - 'tl + eôf), x* (t), 't t 't2 -t- eôt, (83)
dont les déplacements initiaux satisfont à la condition (81) et telles
que le point
;* ('t - 'tl + eôf)), x* ('t2 + eôt) (84)
est situé sur le rayon x ('ti) X L et n'est pas confondu avec son
origine x ('ti) X x ('t2). Autrement dit,
;* ('t - 'tl + eôf)) == x ('ti),
x* ('t2 + eôt) == (x ('t2) + Â (-1, 0, . . ., 0), (85)
où Â > O.
Définissons une commande optimale ii (t), 'ti - eôf) t
't2 + eôt et une trajectoire correspondante x (t), 'ti - eôf)
t 't2 + eôt de l'équation (5) au moyen des formules:
,-
u (t) == v* ('t - t), x (t) == ;* ('t - t) pour 'tl - eôf) t 't,
u (t) == u* (t), x (t) == x* (t) pour 't t 't2 + BÔt
où ; * (t) et x * (t) sont les trajectoires pert ur bées (83), v* (t) et u * (t)
des commandes correspondantes. Il est évident que les fonctions
u (t), x (t), 'tl - BÔf) t 't2 + eôt, obéissent à l'équation (5).
La trajectoire x (t), 'ti - eô8 t 't2 + eôt, étant continue au
point 't en vertu de la condition (81), elle l'est sur l'intervalle
'tl - eôf) t < 't2 + eôt tout entier. De plus, d'après (85) il
vien t :
X ('ti - 8ô8) == x ('ti),
X ('t 2 -1- Bôt) == (X O ('t 2) - Â, Xl ('t 2), . . ., x n (-t 2», Â > O.
Or ces inégalités contredisent le fait que la portion x (t), 'ti t 't2,
de trajectoire optimale x (t), t o t t 17 est également optin1ale.
Ainsi donc le rayon x (t i ) X L n'est pas un rayon intérieur an
cône 6'JC. De l'inclusion (80) il résulte que la dimension du cône f!JC
vérifie l'inégalité dim 6'JC 2n + 1.
Il existe donc un plan d'appui de dimension 2n au cône 6'Jî dans
son somn1et x ('ti) X x ('t2) qui est situé sur le produit direct
X X T (x ('t2» et qui sépare le cône 6'JC du rayon x ('ti) X L. J)ési-
gnons par (X, X*) un vecteur issu du point x ('ti) X x (-t2)' orthogonal
à ce plan, contenu dans X X T (x ('t2») et orienté de telle sorte que
le rayon x ('ti) X L soit contenu dans le demi-espace fermé portant
le vecteur (X, X*) et le cône 6JC dans l'autre.
36.]
CONDITION DE SAUT
271
Nous avons:
X* == (xô, X!, ..., X ) E T (x (L2))' (86)
((X, X*), (ô, ô*))==(x, ô)+(X*, ô*)<O, X <O, (87)
où les vecteurs ô, ô* sont définis par les formules (78) et (79) (avec
la condition (81)). D'un autre côté,
(X, x*) =1= 0
(88)
et les vecteurs "Iv, X* ne s'annulent donc pas simultanément.
Désignons par
(t), 0 t L - Lt,
(89)
la sol u Lion de 1 ' équation
__ al (s (t), v (t)) b
dt -- as '
satisfaisant à la condition aux limites
b (L - Lt) == "Iv,
où la fonction S (t) est définie par la formule (83) et v (t) est une
commande correspondante. Désignons par
'i'+ (t), L t L2, (90)
la solution de l'équation
d'l' == _ a f (œ ( t), u (t)) ta 1,
dt ax 't
avec la condition aux limites
'i' (L 2) == X * .
En vertu des inclusions (82), il vient, tout comme au chap. 2 et
a u 34:
( - (t), t" (s (t), v (t))) == Q1[ ( - (t), S (t), v (t)) == )
== dt(-b (t), s (t)) == 0, 0 t L - Lt, 1
QJe (1\J+ (t), x (t), u (t)) = m (1\J+ (t), x (t)) = 0, 1 (91)
L t L2. )
Outre la deuxième égalité (91), la fonction 'i'+ (t), L t L2, satisfait
à toutes les conditions du théorème 22 à l'exclusion, peut-être,
de la condition b) puisque l'égalité x* == 0 et, par conséquent,
l' égali té 'i' + (t) == 0 sont possibles.
Su pposons que
'i'- (t) == - (L - t), Lt t T.
(92)
272
PROCESSUS A VES CONTRAINTES SUR LES COORDONNÉES
[CH. 6
Il est alors évident que
d",- (t) _ _ â f (x (t), u (t)) ,,1'1_
dt - ✠'Y' "i'-('tt)=-X, 'tl t 't,
Qï8 ('i' -, ( t) , x (t), u (t)) == ait (11' - (t), x (t)) == O.
De l'inégalité (88) il résulte qu'au moins une des deux fonctions
11'- (t), "i'+ (t) est non nulle. Dans la suite nous démontrerons que
précisément "i'- (t) =1= 0 et par conséquent, la fonction "i'- (t) satisfait
à toutes les conditions du principe du maximum.
Prouvons maintenant que soit
"i' + ('t) == "i' - (T) + !-t gr a d g (x (T)), "i' - (t) =1= 0,
soit
"i' - (T) + gr a d g (x (T)) == 0, =1= o.
Les conditions de saut seront démontrées par là même puisque
la fonction "i' - (t), T 1 t T, peut être prise pour fonction (72),
et la fonction "i'+ (t), T t T2, pour fonction (73) pourvu que
11'+ (t) =1= o.
Choisissons les trajectoires perturbées s* (t) et x* (t) de la ma-
nière suivante.
Posons
ôe == ôt == 0, v* (t) == v (t), ÔSo == -N,
où N est un vecteur arbitraire non tangent en x (T) au bord g (x) == 0
et dirigé vers l'extérieur du domaine G. Ces données définissent
d'une manière univoque la trajectoire perturbée s* (t). Pour définir
la trajectoire perturbée x* (t) nous admettrons que le symbole a est
vide et que le symbole b est réduit au seul point l == x (Ti) :
v== { t == X (Ti), al (x), N, ô == 1}.
D'où, en vertu de (47),
ÔX (T) == -N == 6so,
i.e. la condition (81) est satisfaite.
Pour les vecteurs définis par les formules (78) et (79) nous obte-
nons les expressions (voir (53) et la formule (22), chap. 2):
n
Ô == - AL-Li, 0 (N) == - CPCG ('t - Li) Na, (93)
a=O
n L2
ô* = a ('r2) ( - N + J (1I'a (t), A (t)) :: dt, (94)
CG=O L
où
n n
CG '-' CG
L1 CPCG (0) N == LJ CPCG (T) N * == T.
CG=O a=O
S 36.J
CONDITION DE SAUT
273
Ici <Po (t), . . ., <Pn (t), 0 t l' - 1'1, représente un système
fondan1ental de solutions de l'équation aux variations associée à
l'équation (76).
Désignons par "'0 (t), . . ., ",n (t) un système de fonctions conju-
guées de (j)o (t), . . ., <Pn (t). Nous avons
n
-(X, ô)== h (X, <pa (L-L1)N a )==
rJ.=o
n n
== (XB'i'/3 (1' - 1'1), <pa (1' - Li) Na) === L XaNa ( (O), .i\T),
a, B=O a=O
a
où (0) == X a'" a (0) est la valeur ini tiale de la fonction (89).
n=O
De (92) il vient:
( X, ô) == ('" - ( ), 1\"T).
L' égali té (94) donne de même:
(95)
"C2
(x*, ô*)= -(1jJ+('r), iY)+ ) (1jJ+(t), A(t)) dt=
"C
'(2
= - (1jJ+ (-c), .LV) - ) Â, (t) : dt,
"C
où Â (t) == - (",+ (t), A (t». Compte tenu de (42), une intégration
par parties donne:
(x*, ô*) = -- (1jJ+ (-c), N) - [ Â, (t) ai (x (t)) ( f)g : (t)) , N) J 1: 2 +
12
+ ) ; adx (t)) ( f)g : (t)) , N) dt = - (1jJ+ (-c), N) +
"C
"C2
+ Â, (-c) ( f)g <:X(T)) , N) + ) ; ai (x (t)) ( f)g : (t)) , N) dt.
't'
En ajoutant cette expression à (95) et en tenant compte de (87),
nous obtenons
(x' ô) + (x*, ô*) = (1jJ- (-c) -1jJ+ (-c) + Â, (-c) ( f)g X(T)) , X) +
"C2
+ r a ( X ( t )) ( Dg (x (t)) :\r ) dt 0
J dt 1 f)x' ...L .
"C
(96)
18-013:3U
274
PROCESSUS AVEC CONTRAINTES SUR LES COORDONNÉES
[CH. 6
La quantité
1:'2
) ; ai (x (t)) ( Qg :(t)) , N) dt
1:'
peut être rendue arbitrairement petite pour T donné par le choix
du voisinage O 1 qui a contribué à définir la fonction ai (x), tandis
que le premier terme de l'expression (96) ne dépend pas de ce voisi-
nage. Donc, tout vecteur T non tangent en x Ct) au bord g ( ) et
dirigé vers l'extérieur de G obéit à l'inégalité
(",- (17) - "'+ (17) + Â (17) grad g (x (17)), l\T) 0, (97)
ce qui, puisque le vecteur T est arbitraire, est équivalent à l'égalité
"'+ (17) === 'i'- (17) + grad g (x (17). (98)
Le vecteur", - (17) =1= 0, puisque l' égali té '" - (17) === 0 et l' inéga-
lité (88) entraînent l'inégalité "'+ (17) =1= 0; d'autre part, nous obte-
nons de (98) l'expression
'" + (17) === gr a d g (x (17) =1= 0,
qui contredit, en vertu de la relation", ( 17 2) === x*, l'inclusion (86).
Lorsque "'+ (17) === 0, il vient
'i'- (17) + grad g (x (17») === 0, =1= o.
Le théorème (24) est donc démontré dans le cas où x (171) est
un point intérieur au domaine G.
Supposons maintenant que le point x (Li) est situé sur le bord
g (x) === O. Ce cas se ramène aisément à celui que nous venons de
considérer: il suffit pour cela de définir la fonction "'8 (t) sur l'inter-
valle e t L, où Li < e, et ensuite faire tendre le point e vers
Li; nous obtenons une famille de fonctions "'ë (t), e t L, pour
lesquelles existe la fonction limite cherchée "'- (t), Li t L.
Rem a r que 1. Si la portion de x (t), 17 < t < 17 2 , appartient
aussi à un noyau ouvert du domaine G, l'inégalité (97) est relnplacée
par l' inégali té
(",- (17) - ",+ (17), 1\1) 0,
d'oÙ. découle l'égalité
'i' + (17) === '" - (17) -1- gr a d g (x (17», O.
Rem a r que 2. Si la portion de x (t), 17 t 17 2 , est située
sur le bord g (x) == 0, le vecteur grad g (x (17» et le vecteur
je (x (17), U (17 + 0» sont orthogonaux et la condition de saut donne:
("'- (17), f (x (17), U (17 - 0») ==
=== (",- (17) + grad g (x (17», j. (x (17), U (17 -t- 0)) ==
=== ('i' - (17), f (x (17), U (17 + 0») == (?1ft (", - (17), X (17») == o.
37.] FOR:rvIULATION DU RÉSULTAT FONDAMENTAL. EXEMPLES 275
D'où il résulte que si le système d'équations par rapport à u
( '" - ('t), j. (x ('t), u)) == &ft == 0
admet la solution unIque
u ('t - 0) == u ('t + 0),
alors le vecteur
j. (x ('t), U ('t - 0)) == J. (x ('t), U ('t + 0))
est tangent en x ('t) au bord g (x) == 0; en d'autres termes, la tra-
jectoire optimale reste continûment dérivable au point de jonction
x ('t).
R e TI1 a r que 3. Pour une trajectoire optimale située sur un
bord con t i n û men t d i f f é r e n t i a b 1 e par morceaux du
domaine G (jusqu'ici nous avons considéré un domaine G de bord
continûment différentiable), les équations de chacune de ses portions,
entièrement située sur une portion continûment différentiable du
bord, ont été établies au 32. Lorsque cette trajectoire passe d'une
portion continûlnent différentiable du bord à une autre, alors sont
satisfaites des conditions de saut tout à fait identiques aux condi-
tions (74) et (75).
9 37. Formulation du résultat fondamental. Exemples
En composant les théorèmes 22, 24 et le principe du maximum,
nous obtenons le théorème suivant qui fournit un système complet
de conditions nécessaires que doit satisfaire toute trajectoire opti-
Inale régulière qui est solution du problème optimal du 9 31.
rr h é 0 r è ln e 25. Supposons qu'une trajectoire optimale de
l'équation (5) soit entièrement contenue dans un fermé G, qu'elle adlnette
un nombre fini de points de jonction et que chacune de ses portions située
sur le bord de G soit régulière. Sous ces conditions, toute portion de
trajectoire contenue dans un noyau ouvert de G (à l'exception peut-être
des extrémités de la trajectoire) satisfait au principe du maximum;
toute portion de cette trajectoire située sur le bord de G vérifie le théorème
22; en tout point de jonction est remplie la condition de saut (théorè-
me 24).
I xelnple 1.
Les conditions de saut sont valables aussi pour le problème
optimal suivant.
Supposons que l'espace de phase X est divisé en deux parties,
notées X 1 et X 2' par 1 'hypersurface g (x) == O. Supposons que dans
la partie X 1 l'équation du mouvement du point représentatif est
= j (x, u),
18*
276
PROCESSUS A VEC CONTRAINTES SUR LES COORDONNÉES
[CH. 6
et dans la partie .LY 2
=12 (x, u).
On demande de choisir une cOlnmande admissible telle que le point
représentatif, en partant de Xi E X i aboutisse sur une droite TI c X
parallèle à l'axe XO et que soit minimale la coordonnée XO de l' extré.
mi té de la trajec toire.
Dans chaque partie .K i et X 2' les trajectoires du mouven1ent
satisferont au principe du maximlun et lors de la traversée de la
frontière g (x) == 0 sera remplie la condition de santo
En déduisant la condition de saut dans le cas considéré, le dépla-
cement initial de la trajectoire variée doit se trouver rigourenseInent
sur la frontière g (x) == O. C'est pourquoi il est impossible d'utiliser
le lemme de la page 266, et la démonstration du 36 ne passe que
si aucun des vecteurs f.i (x (1'), U (1' - 0)), /.2 (x (1'), U (1' -+- 0))
n'est tangent à l'hypersurface g (x) == 0 au point de jonction x (1').
E x e ID pIe 2.
Si l'on étudie un problème variationnel ordinaire, les conditions
connues de réfraction des extrémales découlent immédiatement des
conditions de saut. Ce que nous allons voir sur un problème varia-
tionnel simple.
Supposons que le plan engendré par les variables x ot y est partagé
en deux parties, notées Xi et X 2' par la ligne g (x, y) == 0 et soient
deux points (Xi' Yi) E Xi' (x 2 , Y2) E X 2 . On demande de relier ces
points par une ligne Y == Y (x) continue et contini'unent différen-
X2
tiable par morceaux qui minimise la fonctionnelle J F (x, y, y') dx,
Xi
OÙ (fi et f 2 sont des fonctions continûment dérivables)
F ( ') == { fi (x, y, y') pour (x, y) E Xi
x, y, y f 2 (x, y, y') pour (x, y) E X 2.
Posons
X2
XO = J F (x, y, yr) dx, Xl = x, x 2 = y,
Xi
,
u==y.
Le domaine de commande U est un ouvert de la droite nurnérique.
Le principe du maximum s'écrit (on dérnontre aisén1ent que
1Po =1= 0, et donc on peut prendre 1Po == -1):
dx O dx 1 dx 2
dt == F (x, y, y'), dl == 1, dt == II == y' ;
d,po _ d1Pi oF d1!'2 aF.
dt - 0, dl == iJx ' dt Dy'
QJB == - F (x, y, y') + 'Pi -1-'P2Y' == max == O.
37.] FORMULATION DU RÉSULTAT FONDAMENTAL. EXEMPLES 277
Les conditions Q)£ === max et QJ[ === 0 donnent respectivement:
aF F ap ,
...."" 2 - , ....""1 === - 8y ' Y ·
'Y - d!J' 'Y
De la condi tion de saut 11'+ === 11'- + f.1 grad g (x, y) il résulte:
t - iJf2 ( + ) ' === f _ aft (y - ) ' + IINI 8f2 === 8ft + 11N2
2 8!J' Y 1 8y' r' iJy' 8y' r ,
où (NI, N2) est le vecteur de la normale à la ligne g (x, y) === 0 au
point de réfraction de la trajectoire. Soit Y' l'inclinaison de la
tangente à g === 0 au point de réfraction. Nous avons:
8f2 8ft
---
iJy' 8y' 1
/ -f + aft ( - ) '_ 8f2 ( y+ ) ' === -¥',
2 1 8y' Y 8y'
d'où nous déduisons une formule connu (voir Gunter « Cours de
calcul variationnel ». 1'l.-L., 1941)
fi + :; (Y' - (y-)') = f2 + ; (Y' - (y+)').
E x e m p 1 e 3.
A titre d'illustration considérons le problème géométrique sui-
vant. Dans un espace euclidien X de dimension n, engendré par
la variable x === (Xl, . . ., Xn), on définit un fermé B par g (x) 0,
le bord
g (x) === 0
(99)
du fermé B étant une surface régulière continûment différentiable
à courbure continue, i.e. la fonction g (x) est deux fois continûment
différentiable et le vecteur grad g (x) ne s'annule en aucun point
de g (x) === O. On donne par ailleurs deux points Xo et Xi dans B et
on demande de trouver dans B une courbe C de longueur minimale
reliant les points Xo et Xi.
Nous allons montrer que du théorème 25 découle le résultat
géométrique évident suivant. Supposons que la courbe C de longueur
minimale est constituée de plusieurs portions tantôt contenues dans
un noyau ouvert de B (à l'exception peut-être des extrémités de
toute portion) tantôt sur le bord (99). Les portions contenues dans
un noyau ouvert de B sont alors des segments de droite et celles
situées sur le bord (99) sont des géodésiques sur la surface (99),
le vecteur de la principale normale à la courbe C étant dirigé vers
l'extérieur de B; enfin, la portion droite contenue dans un noyau
ouvert du domaine B est tangente à la surface (99) aux points de
jonction de deux portions contiguës. La courbe C ne possède donc
pas de points anguleux.
278
PROCESSUS AVEC CONTRAINTES SUR LES COORDONNÉES
[CH. 6
Pour les besoins de la démonstration considérons le problème
optimal suivant. Etant donné un système d'équations
dx i i
dt == u, i == 1, ..., n,
où le vecteur de commande u == (u l , . . ., un) est assujetti à la
condi tion
n
(u, u)== (Ui)2 1,
i=1.
i.e. le domaine de commande U est une boule unitaire, on demande
de trouver dans B une trajectoire qui relie en tenlps minimal le
point Xo au point Xi.
Soit x (t), t o t t b une telle trajectoire optilnale possédant
un nombre fini de portions tantôt contenues dans un noyau ouvert
de G, tantôt situées sur son bord. Désignons par u (t) la commande
optimale correspondante. Des conditions de maximum (théorènles 2
et 22), il vient immédiatement 1 u (t) 1 == 1 et le paramètre test
donc la Ion g u e u r d e l'a r c sur la ligne X (t). Il s'ensuit
que la ligne x (t) est solution du problème géolnétrique posé.
Prouvons maintenant les propriétés de la courbe C énoncées
ci-dessus. Le fait que les portions de courbe contenues dans un noyau
ouvert de B sont des segments de droite découle ilTImédiatement
du théorème 2.
Considérons maintenant la portion située entièrenl0nt sur le
bord du domaine B. Le domaine de comlnande U est défini par une
seule relation
q (u) == (u, u) - 1 O. (100)
D'autre part, la fonction p (x, u) (voir (6)) est de la forme
p (x, u) == (gr a d g (x), u). ( 101 )
Sur la portion de courbe x (t) considérée on a
p (x, u) == (grad g (x), u) == O. (102)
Le système d'équations par rapport aux variables (voir (10)) s'écrit
n
d'Pi == Â !.L == Â ô 2 g (x (t)) ua == Â ag (x (t)) ,
dt ôxi 8xi axa dt ôxi
a=l
i == 1, ..., n,
ou
d'f' d
di: == Â dt grad g (x (t)).
( 103)
On a
QJ8 == 'Po + ('P, u),
(104)
37.] FORMULA'rION DU RÉSULTAT FONDAMENTAL. EXEMPLES 279
et donc 'lpo =1= 0 (dans le cas contraire 'lIJ =1= 0 et le maximum de la
quantité ('lIJ, u) serait non nul, ce qui contredit la relation (11)).
Par suite, nous pouvons poser 'lIJo == -1 et la condition de maxi-
mlun (11) s'écrit:
('lIJ, u) == max == 1.
(105)
(106)
En vertu de (100),
grad q (u) == 2u,
et donc (voir (104), (8), (101), (106))
iJQJC f) p iJq
- ==-= '1h === Â - _L V - == Â g rad g ( x ) -'- 2vu.
iJu iJu iJu T
( 107)
En multipliant scalairement par u l'expression 1P == Â grad g (x) +
+ 2vu, nous obtenons, compte tenu de (105) et (102):
1 == ('lp, u) == À (u, grad g (x)) + 2v == 2v.
La formule (107) s' écri t donc
'lIJ == À grad g (x) + u,
d'où (voir (103))
; grad g (x (t)) + = O.
C .. . f . 1 d 2 .x(t) du(t) dÎv d ( ( ))
e qUI sIgnl le que e vecteur dt 2 === dt == - dt gra g x t
est colinéaire avec la normale à la surface (99), et la courbe x (t) est
donc une..géodésique sur la portion considérée, le vecteur de sa nor-
male principale d ;t) étant dirigé vers l'extérieur du domaine B
(voir condition c) du théorème 22).
Enfin, de la condition de saut on déduit sans peine que la courbe
x (t) ne possède pas de points anguleux.
CHAPITI-,E 7
Un problème statistique
de commande optimale
Dans les chapitres précédents on a vu comment résoudre le problè-
me optimal consistant à transférer un objet con1mandé d'une posi-
tion donnée à une autre (ou sur une variété donnée). Ce problème
peut être interprété comme un problème consistant à faire atteindre
à un objet commandé un objet immobile en temps optimal.
En technique, cependant, on est conduit dans de non1breux cas
à poser un autre problème, celui de la poursuite d'un objet mobile
par un objet commandé. On peut faire les suppositions les plus diver-
ses quant au mouvement de l'objet poursuivi. On peut par exen1ple
supposer qu'il est con1mandé (cf. 28). Soit un objet x dont le mouve-
ment est régi par le système d'équations différentielles ordinaires
. . .
x == t (Xl, x 2 ,
n 1 2 r )
., X , U , U, . . ., U ,
i == 1, . . ., n,
et un objet y dont le mouvement est régi par le système
. . .
_ ( 1 2 n 1 2 S )
y - g y, y , . . ., y , v , V, . . ., v ,
i == 1, . . ., n,
où u i sont les paramètres de commande de x et Vi ceux de y, et x, y
des vecteurs d'un même espace de phase X.
On peut alors poser le problème suivant. Connaissant les perfor-
mances techniques de l'objet y (i.e. son système d'équations diffé-
rentielles) et sa position à chaque instant t, choisir la commande u
de l'objet x à chaque instant t telle que l'objet x atteigne l'objet y
en un temps optimal (ou, selon un autre critère d'optin1alité), la
commande de y - et ceci est très important - n'étant pas supposée
connue pendant les instants à droite de t.
Tel qu'il a été énoncé le problème de poursui te n'a encore pas
été résolu à notre connaissance.
Dans le présent chapitre nous nous proposons de résoudre un
problème de poursuite légèrement différent. Plus précisément, nous
supposons connue la loi pro b ab i 1 i s t i que du comportement
de l'objet poursuivi y, cette loi étant m a r k 0 vie n n e et décrite
par une équation du type Focker-Planck-Kolmogorov.
Pour résoudre ce problème nous ferons appel à quelques notions
et résultats de la théorie des probabilités. Dans les 38 et 40 nous
citerons ces résultats sans toutefois les démontrer entièrement, nous
bornant simplement à quelques éclaircissements.
38.]
NOTION DE PROCESSUS MARKOVIEN
281
38. Notion de processus markovien.
L'équation différentielle de Kolmogorov
Supposons qu'un point se déplace aléatoirement dans un espace
de phase R de dilnension n. La connaissance de sa position x à l'ins-
tant cr définit univoquement la pro b ab i 1 i t é, notée P (cr, x, 't, E)
qu'il soit contenu dans un sous-ensemble mesurable E de l'espace R
à un instant arbitraire 't > cr. Dans ce cas, le mouvement de ce
point aléatoire est appelé processus sans effet ultérieur ou processus
markovien. Le mouvement de ce point est entièrement caractérisé
par la fonction
p (cr, x, 't, y), (1)
égale à la densité de probabilité P (cr, X, 't, E) au point y. La fonc-
tion p (cr, x, 't, y) vérifie de toute évidence la relation suivante
\ p (cr, x, 1:, y) dy = 1 (2)
&i
(ici et dans la suite l'intégration s'opère sur l'espace R tout entier,
si le domaine d'intégration n'est pas spécifié à priori). L'autre exprps-
sion dont le sens est clair porte le nom d'identité de A1arkov
p (cr, x, 1:, y) = p (cr, x, s, z) p (s, z, 1:, y) dz. (3)
Un processus aléatoire est continu si pour de petits intervalles
de temps, les coordonnées du point aléatoire ne subissent des varia-
tions sensibles qu'à une faible probabilité. Nous exigerons d'un
processus markovien une continuité plus forte à savoir: quel que
soit ô > 0, on doit avoir
1 i m Ai \ p ( cr - !1 cr, X, cr, y) dy == O.
o-o Llcr J
1 y-x 1;>.6
(4)
Nous allons maintenant déduire une équation différentielle qui
(sous certaines conditions supplémentaires) est satisfaite par la
fonction p (cr, x, 't, y). Cette équation obtenue pour la prelnière fois
par I(olmogorov porte le nom d'équation de f(olmogorov.
Supposons que:
a) les dérivées partielles
8 p (cr, x, 't, y) 8 2 P (cr, x, 't, y)
8xi 8x i 8x j
i, j==1, ..., Il.
existent et sont continues quels que soient cr, X, 't > 0, y;
b) quel' que soit ô > 0, existent les limites
lim Ai r (yi-xi)p(cr-l1cr, x, cr, y)dy==
a-O Llcr J
ly-x/<6
==bi(a, x), i===1, 2, ..., n; (5)
282
UN PROBLÈME STATISTIQUE
[Ch. 7
lim 8. 1 (J \ (yi - xi)(yj - x j ) P (a - a, x, a, g) dg =
(J- 0 ·
/lJ- x /<6
=2a ij (cr, x), i, j=1, 2 ..., n, (6)
la convergence étant uniforme en x dans les expressions (5) et (6).
Prouvons que dans ces conditions la fonction p (cr, x, 't, y) de cr
et x obéit à l'équation différentielle du deuxième ordre de type paraboli-
que (équation de [(olmogorov)
n n
iJp + )l a ij (cr, x) + b i (cr, x) iJ p . == O. (7)
iJO' LJ iJx1, iJx J L.J iJx1,
i, j=l i=1
D é D1 0 n s t rat ion. En vertu de l'identité de Iarkov (3),
il vient:
p (a - a, x, T, y) = ) p (a - a, x, a, z) p (a, z, T, y) dz. (8)
Compte tenu de (8) et de
) p (a - a, x, a, z) dz = 1, (9)
nous obtenons:
p (cr - cr, x, 't, y) - P (cr, x, 't, y) =
= J p (a - a, x, a, z) p (a, z, T, y) dz -
- p (a, x, T, y) J p (a - a, x, a, z) dz =
= J [p (a, z, T, y) - p (a, x, T, y)] P (a - a, x, a, z) dz.
En décolnposant l'intégrale sur R en deux intégrales respectivement
sur les domaines 1 z - x 1 < ô et 1 z - x 1 ô, et en développant
la différence p (cr, z, 't, y) - P (cr, x, 't, y) suivant les puissances de
Zi _ Xi, nous obtenons
p (cr-8O', x, 't, y)- P (cr, x, 't, y)
80'
=--= 8. 1 (J ) [p (a, z, T, g) - p ( a, x, T, y)] p ( a - a, x, a, z) dz +
1 Z-x 1>6
n
+ âp ((J x: 1", y) A1(J \ (Zi_Xi) P (a- a, x, a, z) dz+
x1. ü ...
i=l 1 z-x 1<6
n
+ 1 f)2 p (cr, x, 't, y) 1 ) ( i i ) ( j j )
- - z -x z -x X
2 iJxiiJxj 8cr
i,j=1 IZ-x/<ô
38.]
NOTION DE PROCESSUS MARKOVIEN
283
n
x p (cr - !1cr, x, cr, z) dz +
1 ô 2 P (cr, X, T, y)
L.J _ 2 .. X
ÔX ôx J
i, j=1
x lcr J 0 [/Z_XI2] p(cr- cr, x, cr, z)dz, (10)
1 z-x 1<6
Dans l'expression (10) passons maintenant à la limite pour
cr O. En vertu de (4) le premier terme du second membre
admet une lilnite nulle; la limite du deuxième terme est égale
(voir (5)) à:
n
bi(cr, x) ap(cr, x: 1:, y) ;
ôx 1
i=1
le troisième terme, con1pte tenu de (6), est égal à la limite
n
a ij (cr, x) a 2 p (cr,. x, , y) .
ÔX1 ôxJ
i, j=l
Le dernier tern1e, enfin, tend vers 0 pour ô O. Comme le premier
melnbre de l'égalité (10) ne dépend pas de ô, la limite du second
1nelnbre est
n n
a ij ( cr, x) a 2 p (cr,. x, , y) + b i (cr, x) a p. .
. . ôx 1 ôxJ. ôx'L
1, J=1 1=1
D'où nous déduisons que le premier melnbre de l'égalité (10) admet
pour ô 0 une lin1ite égale à
âp (cr, x, 't, y)
ôcr
La fonction p (cr, X, 't, y) est donc solution de l'équation (7).
Il s'avère même que p (cr, X, 't, y) est une solution fondamentale
de l'équation (7). Ce qui veut dire que la solution u == u (cr, x) de
l'équation (7) satisfaisant à la condition initiale donnée à l'avance
u (cr, x) - F (x), ( 11 )
O'-'t
où F (x) est une fonction donnée de n variables Xl, x 2 , . . ., .1: n ,
s'exprilne par la formule
u (cr, x) = J P (cr, x, "t, y) F (y) dy. (12)
En effet en dérivant l'intégrale du second membre de (12) par rapport
à cr et x et en utilisant l'équation (7) nous obtenons
n n
au x) + aH (cr, x) a 2 u (cr, x) + bi (cr, x) au (cr,. x) = 0,
L! ôxi ôxj L! ôx'L
i, j=l i=l
284
UN PROBLÈME STATISTIQUE
[Ch. 7
expression qui montre que la fonction u (cr, x) est bien solution de
l'équation (7).
La formule (11) se démontre de la manière suivante. Déconlpo-
sons l'intégrale sur R figurant dans le second membre de l'égalité (12)
en deux intégrales que nous prendrons respectivement sur les régions.
1 y - x 1 < ô et 1 y - x 1 ô. Puisque pour 1 y - x 1 ô nous
avons évidemment
p(cr, x, 'r, Y)---70,
O' 't
en vertu de la continuité du processus, il vient
lim r p(cr, x, L", y)F(y)dy==lim r p(cr, x, L", y)F(y)dy.
O'-'t J O'-'t J
1 x-y 1<6
En utilisant la relation (2) et le fait que la limite à gauche ne dépend
pas de ô, nous déduisons
lim r p (cr, x, L", y) F (y) dy == F (x),
0'- 't J
ce qu'il fallait démontrer.
Soulignons encore une im portan te propriété de la fonction
p (cr, x, L", y) qui nous sera utile pour la suite. Soit à résoudre l' équa-
tion parabolique non hon10gène
n n
B u . . 8 2 u . iJ u , 3
- + LJ a J (cr, x) . . -t-- LJ b ( cr, x) ---:- == p (cr, x), 1 ( '1 )
Ba .. {)x âxJ. {)x
, J=1 =1
la fonction cherchée devant satisfaire à une condition initiale nulle.
1 l s' avère que si p (cr, x, L", y) est une so lution fondamen tale de l' équa-
tion homogène correspondante, alors la solution cherchée est donnée
par la formule
't
u (cr, x, 1:) = - ) ds J p ( cr, x, s, y) p (s, y) d Y . ( 14 )
0'
Ce qu'on démontre immédiatement par une dérivation.
9 39. Formulation exacte du problème statistique
Dans ce chapi tre nous désignerons par Zl, . . ., zr les coordonnées
de phase du point commandé. Ainsi, dans l'espace R le mouvement
du point z est décrit par le système d'équations différentielles ordi-
naIres
.
i _ f i ( 1 2 n 1 r ) . 1 2 ( 15)
z - z , z, . . . , z , u , . . ., u , l == , ,..., n,
où Ul, u 2 , . . ., ur sont les paramètres de commande. Comn1e précé-
demment nous supposerons que les fonctions fl (z, u) sont continues
:HL]
FORMULA'rION EXACTE DU PROBLÈME STATISTIQUE
285
en toutes leurs variables et continûment dérivables par rapport
'" 1 2 n
a z , z , . . ., z .
Supposons que dans l'espace R le point représentatif Q se déplace
aléatoirelnent, rnais de telle sorte que son mouvement soit un proces-
sus lnarkovien satisfaisant aux condi tions de continuité forte. Nous
avons vu dans le paragraphe précédent que le processus était caracté-
risé probabilistiquement par la fonction p (cr, X, 't, y) que nous
appellerons densité de transfert du point aléatoire Q. La densité
de transfert est donc solution fondamentale de l'équation (7). Nous
snpposerons dans la suite que le mouvement du point aléatoire est
donné par la fonction p (cr, x, 't, y).
Quant aux coefficients de l'équation (7) nous supposerons que:
1) aU (cr, x) et b i (cr, x), i, j == 1, 2, . . ., n, sont définis, conti-
nns et bornés pour cr > 0 quel que soit x ER; ..
2) toutes les valeurs propres de la matrice Il a 1J (cr, x) Il pour
ces valeurs des argulnents sont bornées supérieurement et inférieure-
ruont par des constantes positives.
Supposons que dans l'espace R le point commandé z se déplace
avec l'un de sos voisinages z, par exelnple une boule ou un domaine,
linlité par une surface quelconque continûment dérivable et bornée,
variant continûment avec z. Si l'on donne la loi de commande du
point z, i.e. le paramètre de cornmande u comme une fonction u ==
== II (t) continue par lnorceaux, le système d'équations différentiel-
los (15) définit d'une manière univoque ]e mouvement continu du
point z dans l'espace R. Si donc sont données les positions initiales
du point commandé zet du point aléatoire Q, alors est univoquement
définie la probabilité de rencontre du point Q avec le voisinage z
sur un intervalle fini de temps cr t 't ou sur un intervalle infi-
ni cr t < 00, etc. Cette probabilité est donc une fonctionnelle
de u (t). Et il est tout naturel de poser le problème qui consiste
à choisir la commande u (t) de z qui maximise cette fonctionnelle.
En vue de formuler rigoureusement le problème, introduisons
la fonction h (t) non négative et non supérieure à l'unité, définie
pour 0 t < 00. Soit d'autre part 'i'u (cr, x, t) la probabilité que
le point aléatoire Q qui se trouve en x à l'instant cr rencontre pendant
l'inlervalle de ternps cr t 't le voisinage z du point commandé z
(on suppose évidelnment que la position initiale du point z, i.e.
z (cr), est donnée). On demande de choisir la commande u (t) du point
z qui lnaximise la fonctionnelle
00
J = , h ( s) :s ['Pu (cr, x, s)] ds. ( 16)
b
I a fonction h (t) définit le problèllle optimal, SI par exemple
h (t) = { 1, cr t 't,
0, t > T,
286
UN PROBLÈME S':rATISTIQUE
[Ch. 7
alors
J = 'i'u (cr, X, 't),
i.e. la fonctionnelle (16) est tout simplement la probabilité de la
rencontre du voisinage z avec le point Q sur l'intervalle cr t 'r.
La comn1ande u (t) et la trajectoire correspondante z (t) du systè-
me (15) qui réalisent l'extrémum de la fonctionnelle (if)) seront
di tes optimales. La résolution du problème se ramène donc au calcul
de la fonctionnelle (16), puis à l'application du principe du nlaxÏ1nzan.
La fonctionnelle (16) dépend évidemment des dimensions et de
la forme du voisinage z du point commandé z. Nous verrons dans
le paragraphe suivant que pour la calculer il faut résoudre le problè-
me aux limites pour l'équation parabolique aux dérivées partiel-
les (7). En outre, nous ne nous intéresserons pas tant à l'existence
de la solution qu'à une formule efficace qui nous donnera, ne fût-ce
qu'approxin1ativement, cette solution. On verra que cette formule
peut être établie si seulement le voisinage z est pris pet i t.
Mais le problème qui se pose est justement celui qui consiste à
« recouvrir » le point aléatoire Q par lIn petit voisinage cOll1n1andé.
Ainsi donc, dans la suite, à partir du 41, nous considérerons
que le voisinage z est petit. Pour simplifier, nous supposerons que
z est une boule de dimension n de rayon E et de centre au point z.
Cependant, le lecteur attentif remarquera que nos raisonneJnents
et le résultat obtenu ne changent pratiquement pas si pour z on
prend un domaine arbitraire de « rayon» petit, délimité par une
surface continûment différentiable et variant contin1Îment avec z.
9 40. Calcul de la fonctionnelle J par résolution
du problème aux limites pour l'équation de I(olmogorov
Avant d'indiquer une approche de calcul de la fonctionnelle (1 G),
faisons encore lIne remarque sur les processus lllarkoviens. Choisissons
dans l'espace R un domaine r fixe délimité par une surfaee S
continûment différentiable de dimension n - 1. Désignons par
q (cr, X, 't, y) la densité de probabilité pour que le point aléatoire
de x à l'instant cr soit transféré en y à l'instant 't sans ponr cela
pénétrer dans le domaine r pendant l'intervalle de telnps cr t 't
tout entier.
Il s'avère que partout à l'extérieur du domaine r la fonction
q (cr, x, 't, y) obéit à la même équation (7) que la fonction
p (cr, x, 't, y) et aux conditions aux limites suivantes:
lim \ q(cr, X, 't, y)dy=lim \ p(Œ, x, 't, y)dy==l, (17)
11-1' J 0'-1' .J
R-r R-r
, q(a, x, 1:, y)dy O pour x xoES. (18)
R':"'r
40.]
CALCUL DE LA FONCTIONNELLE J
287
On trouvera la démonstration rigoureuse de ce que nous venons
d'avancer dans les ouvrages consacrés à la théorie des probabilités.
Nous ferons simplement quelques suggestions qui permettront au
lecteur de s'assurer de la validité des propositions énoncées.
La relation (17) est relativement évidente.
La relation (18) devient évidente si l'on considère que le mouve-
ment du point aléatoire Q est un mouvement brownien (ce modèle
généralise tout processus markovien). Si la particule Q se trouve
sur le bord d'un domaine imaginaire r d'un vase, la probabilité
pour qu'elle pénètre dans ce domaine pendant le temps cr t 't'
est égale à l'uni té. C'est ce qu'exprime la relation (18).
Il nous reste à vérifier que la fonction q (cr, X, 't, y) obéit partout
en dehors du domaine f à l'équation (7). Pour cela il suffit de réexa-
miner attentivement con1ment a été déduite l'équation (7) dans
le 38. Cette déduction reposait entièrement sur l'identité de
Nlarkov (3) qui évidemment est valable pour la fonction q (cr, x 't, y).
Outre l'identité (3) nous avons utilisé la relation (9). Ici
) q(cr-!1cr, x, cr, y)dy:f=.1. (19)
R-r
Or la condition de continuité forte (4) entraîne
) q (cr - !1cr, x, cr, y) dy = 1 + 0 (!1cr), (20)
R-r
ce qu'il fallai t montrer.
Jusqu'ici le domaine f était considéré fixe. Supposons à présent
que f n'est pas fixe, mais qu'il se déplace, i.e. nous avons un groupe
à un paramètre de domaines ft. Désignons par q (cr, x, 't, y) la
densité de probabilité que le point aléatoire Q, de x à l'instant cr
soit transféré en y à l'instant 't, sans rencontrer aucun domaine mobile
ft durant l'intervalle cr t 'ta Il est alors évident que la fonction
) q (cr, x, .., y) dy (21)
est solution de l'équation (7) el satisfait à la condition aux limites:
) q (cr, x, .., y) dy -+ 0 pour X -+ Xo E Sa. (22)
Jaintenant nous sommes en n1esure d'indiquer une n1éthode de
calcul de la fonctionnelle (16). Supposons que le domaine mobile rt
soit un voisinage du point commandé z (t). Désignons ce voisinage
par z<t) conformément au 9 39. Posons
'p (cr, x, ..) = 1 - ) q (cr, x, .., y) dy. (23)
L'équation (7) étant linéaire, la fonction 'lJJ (cr, x, 't) des variab]es cr
et x obéit à l'équation (7). D'autre part, de (17) et (22), il résulte
288
UN PROBLÈME STATISTIQUE
[Ch. 7
que la valeur initiale de cette fonction est nulle (pour cr == 't) et
sa valeur frontière est égale à l'unité sur le bord du voisinage z (0"),
soi t :
'lIJ ('t, X, 't) == 0, }
'i' (cr, X, 't) IsO" == 1.
De la définition il résulte immédiatement que la fonction
'l' (cr, X, 't) est la probabilité pour que le point aléatoire Q, qui
à l'instant cr se trouve en x, soit « recouvert » par le voisinage Z(t>
du point cOffilnandé z durant l'intervalle de temps cr t 'ta
Donc la fonction 'i' (cr, X, 't) définie par la formule (23) est confondue
avec la fonction "-Pu qui figure dans la fonctionnelle (16), si bien que
pour calculer la fonctionnelle (16) nous devons résoudre l'équation
(24)
n n
a ) t- ij ( ) 82'1) + 2: b i ( ) thl) -- 0
-- y a cr, x cr, x --
8a . 8xi 8x j . 8xi
1, J=1 1=1
(25)
avec les conditions aux limites suivantes:
'lIJ (cr, X, 't) ---?- 0,
o-+'t
'tp(cr, x, 't) 1 pour x xoESo.
(26)
(27)
Comme nous l'avons déjà mentionné, nous allons résoudre ce
problème pour le cas où le voisinage l du point commandé z est
une boule de rayon E. Nous verrons que dans ce cas la solution du
problème (25), (26), (27) est de la forme
1P (cr, X, 't) == 8 11 - 2 '¥ (cr, X, 't) + 0 (8 n - 2 ), (28)
et nous calculerons la fonctionnelle 8 n - 2 1[f (cr, X, 't) qui est le terlne
principal de la probabilité 'i' (cr, X, 't). Soulignons immédiatement
que la formule (28) n'est valable que pour n > 2. Jusqu'à la fin
du présent chapitre nous supposerons donc que l'espace de phase R
est de dimension n > 2.
41. Calcul de la fonctionnelle I dans le cas
où l'équation de Kolmogorov est à coefficients constants
Dans ce paragraphe nous allons calculer approxin1ativement la
probabilité 'i' (cr, X, 't) et par conséquent la fonctionnelle (16) dans
le cas particulier important où l'équation (25) est à coefficients
constants. Dans les calculs nous allons utiliser des éléments de théorie
des équations intégrales ainsi que la notion do potentiel de double
couche. Le lecteur pourra se référer à la théorie des équations diffé-
rentielles à dérivées partielles et notamment à l'ouvrage S. Sobolev
« Equations de la physique mathématique » (en russe). Les défini-
41.] CALCUL DE LA FONCTIONNELLE J DANS UN CAS PARTICULIER 289
tions et les théorèmes utilisés seront formulés au moment opportun.
Soit donc à résoudre l'équation
n n
+ aij a 'I". + b i ô 'l'. == 0 (29)
ôa . ax ax3 .LJ ax
, 3=1 =1
(où a ij et b i sont des coefficients constants) pour les conditions
aux limites (26), (27) que nous écrirons dans la suite sous la forme
'1' (T, X, T) = 0, (30)
,p(a, x, T)ls(J==1; (31)
par St nous désignerons la boule de rayon B et de centre au point z (t).
Passons tout d'abord de ce problème à celui avec une condition
frontière donnée sur une sphère de rayon B et de centre à l'origine
des coordonnées. A ces fins, introduisons dans l'espace (z, t) les
nouvelles coordonnées:
z = + z (t), a t s,
(32)
de sorte que
x = + z (a), }
y = f) + z (s).
(33)
Ce changement de coordonnées transforme la sphère Sa en la sphère
S 8 définie par l'équation
( 1)2 + ( 2)2 + . . . + ( n)2 == B2.
Cf) (0', , 't) == '1' (0', + z (cr), 't).
(34)
(35)
Posons
Nous obtenons immédiatement l'équation différentielle relative-
ment à Cf) (0', , 1:)
n
ôcp ..
aa + L.J a 13
i, j=1
n
2ep . + [bi-z i ' (a)] Bep. ==0
ô 1. ô 3 .LJ ô 1.
1=1
(36)
et les conditions
cp(T, , 't)=O,
cp (cr, , T) fs = 1.
e
(37)
(38)
Certaines constructions complémentaires sont nécessaires afin de
résoudre l'équation (36) avec les conditions (37) et (38).
Nous allons commencer par celle d'une solution spéciale de l'équa-
tion
n
8cpo + a ij 8 2 cpo = 0
acr .. a i a j
1, 3=1
(39)
19-01339
290
UN PROBL:E:ME STATISTIQUE
[Ch. 7
avec la condition initiale
({Jo ('t, , 't) = O.
(40)
Des coordonnées 1, . . ., n passons moyennant une transfor-
mation linéaire aux coordonnées 1 , . . ., n
tl tn tl "tn
':, , · · ., ':, '0 , · ..., '0 ,
(41)
en lesquelles l'équation (39) prend la forme:
Bq:>o -
aa + ({Jo == 0,
(42)
où est le laplacien. Sous l'effet de cette transformation la sphère
Se devient évidemment un ellipsoïde S e d'équation
} ( £1 )2 + . . . + Â,n ( n )2 = 82,
Î'}' . . ., Â,n
(43)
(44)
"
ou
sont les valeurs propres de la matrice (a ij ).
Démontrons tout d'abord la proposition suivante.
Lem m e 1. La solution s'éloignant à l'infini du problème
extérieur de Dirichlet pour l'équation
- ; 8 2 ;
v = - 2 + ... + - 2 :=: 0 ( 45)
a l a n
avec la condition aux limites
v ( ) 18 == 1
B
(46)
est sur l'ellipsoïde (43) de la forme
v(£) ==8 n - 2 CG _ +n(s, 8),
r n - 2 ( )
a étant une constante positive univoquement définie par les dimensions
de l'ellipsoïde (43) ; r ( ) la distance du point 1 à l'origine des coordon-
!Zées; la fonction Jt ( , 8) satisfaisant aux inégalités suivantes pour
111 < 1 :
1 n (£, 8) 1 < NI 8n- , 1 â. n ( , 8) < M 8n- , ( 48)
r n - 1 ( ) 8 r n (6)
i==1, ..., n (M==const).
(47)
Pour démontrer ce lemme, il nous faut utiliser la notion de
potentiel de double couche. Rappelons sa définition et quelques unes
de ses propriétés.
41.] CALCUL DE LA FONCTIONNELLE J DANS UN CAS PARTICULIER 291
Soit S une surface fermée continûment différentiable contenue
dans un espace de dimension n et x = (Xl, . . ., x n ) un point non
situé sur S. Les coordonnées des points situés sur la surface S seront
toujours désignées par yI, . . ., yn. Posons
p (x, y) = V(x 1 - yl)2 + . . . + (X n _ yn)2. (49)
La fonction
- Î a ( p;'z )
n(x)= J l-t (y) dS,
s ôn
(50)
où : représente la dérivée suivant une normale extérieure à la
an
surface S, est appelée potentiel de double couche, engendré par la
surface S au point x, et la fonction l-t (y) sa densité. Les propriétés
suivantes du potentiel de double COllche se démontrent aisément:
1. Partout à l'extérieur de S la fonction n (x) est harmonique:
n (x) = o.
(51)
2. Le potentiel de double couche a un sens si on remplace x
par un point quelconque y de S. La valeur prise par la fonction
Je (x) sur la surface S sera désignée par n o (y).
3. La fonction n (x) admet une ,limite lorsque le point x tend
de l'extérieur vers un point quelconque de S. Si cette limite est dési-
gnée par ne (y), on a alors
ne (y) = -v (n) l-t (y) + no (y), V (n) = const > O. (52)
-+
4. Désignons par cr (n, p) l'angle formé par la normale extérieure'
à S en un point quelconque y et le rayon vecteur p reliant le point y.
au point x. Le potentiel de double couche peut alors être mis sous.
la forme
- r cos cr
Jt (x) = (n - 2) J l-t (y) pn-l dS.
s
Toutes ces propriétés se déduisent immédiatement de la défini-
tion du potentiel de double èouche., Le lecteur pourra lui-même,
les démontrer ou se référer alors à un quelconque ouvrage sur la'
théorie des équations différentielles à dérivées partielles, par exemule\
l'ouvrage déjà mentionné de S. Sobolev.
D é ID 0 n s t rat ion d u' 1 e m ID e 1. Nous allons chercher-
la solution de l'équation (45) avec la condition aux limites (46)
sous la forme suivante
- 'CG --
v (s) = E n - 2 _ +n ( )
r n - 2 ( ) ,
(53) ;
19 *
292
UN PROBLÈME STATISTIQUE
[Ch. 7
où a est une constante à déterminer, et n ( ) le potentiel de double
couche engendré par l'ellipsoïde (43) au point à densité à déterminer
1-1 (r}) (par tl_nous désigne rons les coordonnées des points situés sur
l'ellipsoïde S r;J. Puisque n ( ) est, en vertu de la propriété 1, solu-
tion de l'équation (45) et que la fonction
1
r n - 2 ( )
obéit également à l'équation (45) (ce qu'on vérifie aisément par
dérivation), la fonction v ( ), définie par la formule (53), obéit
à l'équation (45).
La condition aux limites (46) donne
- - B n - 2
ne('t'])==1-ex _ (54)
r n - 2 (11)
quel que soit fi E Se- Or, en vertu de la propriété 3 et en utilisant
la formule (52), il vient:
- - - B n - 2
- l' (n) 1-1 (11) + no ('t']) == 1 - ex - . ( 55 )
r n - 2 (11)
En
introduisant les notations:
- - 1 (n-2)coscp -
K ('f), 'f)t) = l' (n) pn-l (11, ti1) , 'f),
- 1 [ Bn-2 J
<D('t'])== ex -1
l' (n) - r n - 2 (11) ,
)
't']1 E Se,
(56)
J
nous obtenons une équation intégrale non homogène relativement
à la densité (fi ) :
( 'f) ) = \ K ( 'f) , 'f) t) ( 'f)t ) a s e + <I> ( 'f)) .
..
Se
(57)
L'équation (57) est l'équation intégrale de Fredholm du deuxième
genre. Pour de telles équations a lieu le
Thé 0 r è m e d e F r e d h 0 1 m. Pour que l'équation (57)
soit résoluble il est nécessaire et suffisant que son terme libre soit ortho-
gonal à toutes les fonctions propres de l'équation intégrale homogène
conjuguée
" ( 'f)) = K ( 'f) t> 'f)) ('f) t) a s e .
Se
(58)
Le lecteur trouvera également la démonstration de ce théorème
dans l'ouvrage déjà cité. On y démontre aussi que si le noyau
9 41.] CALCUL DE LA FONCTIONNELLE J DANS UN CAS PARTICULIER 293
K (''1 , 11 1) est défini par la formule (56), l'équation (58) possède
une seule fonction propre. Désignons-la par "0 (11 ) et supposons-la
connue.
La condition d' orthogonalité dont il est question dans l'énoncé
du théorème de Fredholm permet de calculer la constante a pour
laquelle l'équation (57) est résoluble relativement à fl (11 ).
En effet, écrivons la condition d' orthogonali té
1 J r gn-2 J --
() L a - - 1 "0 (11) dS e = o.
l' n _ r n - 2 (11)
se
D'où
J 'Vo (rJ) dS e
a==
S
e
(59)
gn-2 r "0 ( d S e
) r n - 2 (11)
Se
Dans cette formule la quantité a semble dépendre de E. Ce n'est
pourtant qu'une apparence, car si l'on désigne par S l'ellipsoïde
Âl ( 111 )2 + Â2 ( 112 )2 + . . . + À n (l1 n )2 == 1
(60)
déduit de l'ellipsoïde Se par une homothétie de rapport 1/E, nous
constatons sans peine que
). 'Vo ( 1')) d S
s
a==
r Vo (11) dS
J r n - 2 (11)
s
(61)
Le nombre a ne dépend donc pas de E, il est entièrement défini
par les valeurs propres de la matrice (a ii ). Dans la formule (61),
"0 (11) représente la fon cti on propre de l'équation intégrale (58)
composée pour la surface S.
La fonction v (s ) définie par la formule (53) (voir (47» pour la
valeur de a définie de (61) est donc solution du problème (45) et (46).
Les inégalités (48) peuvent être démontrées en étudiant plus en
détail les propriétés du potentiel de double couche n (s ) défini par
la formule (50) .
Nous utiliserons plus loin le lemme démontré. Pour l'instant
nous allons nous servir de .la constante a déterminée pendant la
démonstration du lemme. La constante a sera appelée dimension
294
UN PROBLÈME STATISTIQUE
[Ch. 7
de l'ellipsoïde (60); cette dimension. 9.épendra donc continûment
des valeurs propres de la matrice (a :J).
Voyons maintenant comment construire une solution spéciale
de l'équation (39) satisfaisant à la condition initiale (40).
Soit g (0-, , 't, 11 ) une solution fondamentale de l'équation de
la chaleur d'ordre n
a; a 2 v a 2 ü
acr + - 2 + ... + - 2 == O. (62)
as 1 as n
On sait que cette solution fondamentale est de la forme explicite
suivante:
1 { lïï- 12 }
g ( 0-, s, 't, 1') == !!:- exp - 4 ('t _ cr) ·
[4n ('t - cr)] 2
(63)
Posons maintenant
<pci ( 0-, , 't) == ë n - 2 CG _ +
r n - 2 (s)
+ n ( , ë) - j . g (0-, I, T, 1] ) [ ë n - 2 CG _ + n ( 1] , ë) ] d'YI ,
r n - 2 (1'}) ,
(64)
ou encore
cpci (cr, , T) == CPo (cr, , T) + ô CP: ( 0-, , -r),
(65)
où
CPo (cr, s, 't) == ë n - 2 CG _ - r g (cr, , -r, 11 ) ë n - 2 CG _ d1]. (66)
r n - 2 ( ) J r n - 2 (11)
Il est évident que la fonction CP: (cr, . , 't) est solution de l'équation
(62) et qu'elle vérifie la condition initiale
cP (cr, s, T) = 0 pour cr == 'te (67)
Passons maintenant des coordonnées "[1, . . .t S n aux coordon-
, tl tn
nees '0 , · · ., '0 .
Supposons, ceci étant, que les fonctions
cp ci (cr, s, T), CP o (cr, s, T), ô cp (0-, s, -r), g (cr, s, T, 1')
se transforment respectivement en les fonctions
l cpci (cr, , T), CPo (cr, s, T), ôCP: (cr, s, 't), g (0-, s, 't', 'YI).
Dans la suite nous aurons besoin de la fonction {j)o (0-, , 't)
sous sa forme explicite. Pour cela nous devons savoir comment
exprimer en les coordonnées 1, . . ., n les fonctions r ( ) et
g (0-,1, 't, 1') . Ce qui est simple. En effet.. si l'on désigne par aij
41.] CALCUL DE LA FONCTIONNELLE J DANS UN CAS PARTICULIER 295
les éléments de la matrice inverse de (a ij ), de sorte que
n
aijajk == ô1.
j=1
On s'assure immédiatement que
(68)
n 1
r ( s) == ( L aijsisj) 2 ,
i, j=1
n ..!..
l 'Y) -1, == [ aij ('Y)i - Si) (l1 j - sj)] 2 .
i, j=1
Compte tenu de
(69)
d1] = V 1v 1 1v 2 . . . 1v nd1], (70)
la fonction q>o (cr, S, 't) s'écrit sous la forme explicite suivante:
<Po ( cr, S, 't) == ê n-2
a
n n-2
( aij i j) 2
i, j=l
- J g (cr, S, 't, '1']) B»-2
aVÂl...Ân
n n-2
( aijll i ll j ) 2
i, j=1
d'rl ,
(71)
où
g (cr, s, 't, 1]) ==
1 { C aU (T]i- 1;i) (T]i-1;i)] }
1, .1=1
n exp -- 4 Ct-a) ·
[4n Ct-a)] 2
(72)
Nous venons ainsi de démontrer le
L e ID m e 2. La fonction cp = CPo (cr, s, 't) + ôcp: définie par
les jorlnules (65), (71), (72) est so lution de l'équation
n
a<:p +
ôa L.J
i. j=1
ô 2 *
a ij <:Po = 0
a i a j
(73)
et satisfait à la condition initiale nulle
cP ('t, S, 't) = o.
(74)
Il ilnporte de souligner que la fonction cp: (cr, s, 't) n'est pas
égale à l'unité sur la sphère S e. Cependant, nous ,verrons dans la
suite que dans un certain sens sa valeur frontière est très proche de
1'unité.
296
UN PROBLÈME STATISTIQUE
[Ch. 7
Nous avons maintenant réuni tous les éléments nécessaires pour
résoudre l'équation (36). Tout d'abord nous allons chercher une
solution spéciale satisfaisant à la condition initiale nulle. Nous
verrons que la valeur frontière de cette solution diffère très légère-
ment de l'unité. De là nous déduirons que cette solution spéciale
ne diffère que légèrement, d'une quantité d'un ordre supérieur de
petitesse par rapport à ê, de la solution exacte du problènle (36),
(37), (38). Ensuite, nous simplifierons la solution spéciale en élimi-
nant certains termes, ce faisant nous obtiendrons une solution appro-
chée du problème (36), (37), (38).
Mettons en œuvre le programme conç.u.
Nous allons chercher la solution spéciale de l'équation (36) qui
satisfait à la condition initiale nulle sous la forme
(1)* (a, s, 't)==cp (a, s, 't)+q>f(a, s, 't), (75)
où cp est la solution de l'équation (73) satisfaisant à la condition (74)
que nous venons' de construire, et q>: une fonction à déteruliner.
On vérifie immédiatement que la fonction q>i doit obéir à l'équation
parabolique non homogène suivante:
n
âcpf
+ aU
â cr L.J
i, j=l
n
ô cpf. + [bi _ Zi' (cr)] ôcp =
a â J . âs 2
1=1
n
c= _ [bi _ Zi' (cr)] ôcpt (cr'. ' T)
a 2
(76)
i=l
et satisfaire à la condition initiale
cpi('t, s, 't)==0. (77)
Il apparaît inlpossible de résoudre le problème (76), (77) sur
l'espace R .tout entier en utilisant une formule identique à la formu-
le (14) du 9 38, car le second membre de l'équation (76) possède
pour S = 0 un pôle d'ordre n qui apparaît lors de la dérivation de
la fonction Je ( , 8). Cependant, on peut tourner cette difficulté
puisque, ce qui nous intéresse, c'est l solution cpi (cr, s, 't) en
dehors de la boule limitée par la sphère S e. Pour cela nous allons
faire appel à la fonction q (a, x, s, y) définie dans le 9 40 et égale
à la densité de probabilité que le point àléatoire Q qui à l'instant cr
est en x, soit à l'instant s en y sans rencontrer pendant l'espace de
temps cr t s la boule Z(t> de rayon E et de centre au point
commandé z (t). Il est évident que la fonction
q* (cr, s, s, 'l1) == q (cr, s + z (cr), s, "1 + z (s)) = q (a, x, s, y) (78)
(voir formules (32), (33) est en dehors de la sphère S e une solution fonda-
mentale dé l'équation (36) et qu'elle satisfait à la condition aux lin ites
J q* (cr, , s,11) d11 !sES e = 0, (79)
41.] CALCUL DE LA FONCTIONNELLE J DANS UN CAS PARTICULIER 297
la solution du problème (76), (77) est donnée en dehors de la sphère S e
par la fonction
L n
cp!(cr, G, -r) = ) ds ) [q* (cr, G, s, YJ) (bi-.
a Re i=1
- Zi' (s)) a<pt i1'J' 't) J d'Il, (80)
où Re désigne le complémentaire relativement à R de la boule limitée
par la sphère S e. Il est évident que
cpt (cr, s, 1') IsES e === o.
Nous obtenons donc le
Lem ID e 3. La fonction
CD*(cr, , 't)===cpô(cr, , 't)+cpi(cr, £,1'), (81)
où cp;j (cr, s, 1') est définie par la formule (65) et cp (cr, s, 1') par la
formule (80), est une solution de l'équation (36) satisfaisant à la condi-
tion initiale nulle $ ('t, s, 1') = 0 et prenant les mêmes valeurs fron-
tières sur la sphère S e que la fonction cp (cr, , 1').
Nous allons maintenant prouver que la fonction $* (cr, s, 1')
approxime la solution du problème (36), (37), (38) en dehors d'une
boule de rayon ro (ro étant un nombre quelconque fini indépendant
de 8) .
Cette démonstration repose sur le lemme important concernant
la majoration des solutions de l'équation parabolique. Formulons.
ce lemme.
L e ln n1 e 4 (sur la majoration des solutions de l'équation parabo-
lique). Soit u (cr, s, 1') une solution de l'équation parabolique
n n
au ïj a 2 u au
7Jéi= - 2} a (cr, G) aGi aG j -.2} b i (cr, G) aGi - L (u), (82)
i, j=l 1=1
satisfaisant aux conditions
u ('t, s, 1') === 0, }
u (cr, G, -r) 1 ESe = W (cr, -r), (83)
où
( { const pour l' - cr 8,
W cr, 't)
Ô (8) pour l' - cr > 8
(8 (8) -+ 0 pour 8 -+ 0). On a alors
1 u (cr, S, 1') 1 < L\ (s, 8) + ô (8) X (cr, S, 1'),
(84)
(85)
298
UN PROBLÈME STATISTIQUE
[Ch. 7
où;j. ( , 8) est une fonction positive d'ordre 0 (8 n - 2 ) pour tout 1 1 > ro,
et X (cr, , 't) une solution de l'équation (82), de valeur initiale nulle
pour cr = 't et égale à l'unité sur la sphère S e.
La démonstration du lemme est difficile et nécessite de laborieux
calculs. Elle fait appel à de nombreuses majorations des solutions
de l'équation de la chaleur
ôu [ ô2u ô 2 u ]
ôa = - ô1;i2 +... + ô n' = -l1u.
Commençons par ces majorations.
Soit
(86)
g (cr, s, 't, "1) ==
1
111- sl2
e - 4('(- 0)
n
(87)
[4rc ('r-a)] 2
une solution fondam entale de l'équati on (86). Posons comme précé-
demment r (s) = J f S12 + . . . + sn2 et introduisons les notations
suivantes:
0>1< (a, S, 1:)= r g(a, S, 1:, 1'])+-d1'],
J r (f))
(88)
't
Q Il (cr, S, 't) == r ds r g ( cr, , S,11) d f] .
J J rR(f))
(J
Pour que les intégrales des seconds membres des formules (88) et (89)
aient un sens nous devons bien sûr considérer que k < n.
Nous aurons besoin des trois inégalités Sllivantes faisant inter-
venir Wh (cr, S, 't) et Qh (cr, S, 't) sous réserve que le point S appar-
tienne à la sphère Se:
Ô (B)
Wh (cr, , 't) I ES < R. pour T- cr> ë,
e B
C
Wk(cr,S,'t)\sES <- pour T-(j ë,
. e BR.
C }ln B 1
Qh (cr, S, 't) I ES < R ·
u e B -2
Ici C désigne une constante ne dépendant pas de ë et Ô (8) -+ 0
pour 8 -+ O.
D é duc t ion des i n é gai i tés (90), (91). On voit sans
peine que
(Ok (cr, SI, ..., n,
(89)
(90)
(91)
(92)
't) == Wk (cr, r (S), 0, ..., 0, T)-==
('rIl-1.( »2+(112)2+.. .+(ll n )2 1
1 r e - 4('t-0) - dtl.
n J rk(fJ)
[4n('t-a)] 2
(93)
41.] CALCUL DE LA FONCTIONNELLE J DANS UN CAS PARTICULIER 299
Posons
ll i = r ( ) Xi, 't - cr = r 2 ( ) t.
De (93) on déduit alors
1
Wh (cr, £, 't) ==: h V (t),
r (s)
()Ù
(94)
(95)
(x 1 - 1 )2+{x 2 )2+. . . +x(n2) 1
V (t) = 1 n (' e - 4t - dx. (96)
J rh(X)
(4nt) 2
Il est évident que
V (t) -+ 1 lorsque t -+ O.
Soulignons pour la suite que lorsque t est grand, la fonction
admet l'asymptote suivante
V (t) = 0 ( t ) ·
En effet, SI nous opérons la transformation
2 VT yi = xi
dans
(96), nous obtenons
l( ) - [ ( yl_ V- ) 2 +{y2)2+. . .+(yn)2 ] 1
V (t) = - e - 2 t
. rh (y)
t
dy,
(97)
V (t)
(98)
(99)
où K est une constante, et par conséquent la relation (98). Ainsi
nous avons
1 ( 't'-cr )
Cùh (a, , T) < rh ( ) V r 2 (6) ·
Mais par ailleurs il est aisé de voir que
V( 't;a )<6(8)
pour T-a> 8, }
V( 't;a ) <const pour T-a 8,
( 1 00)
(101)
d'où résultent les inégalités (90) et (91). D'autre part, nous avons
toujours
( T) < const .
Wh cr, S,
rIt (;)
( 102)
300
UN PROBLÈME STATISTIQUE
[Ch. 7
D é duc t ion d e l'i n é gaI i t é (92). On voit aisénlent que
Qh (cr, SI, ..., k, 't) = Qh (cr, r ( ), 0, ..., 0, 't) ==
== J ' ds J 1 e -(1]1-r(W2 ; );:--. .+(1]n)2 1
n d .
rh (Y))
a
[411: (s - cr)] 2
En posant "1; === r (S) x;, s - cr === r 2 (S) t, nous obtenons
1
Qk (cr, {;, -r) = r k - 2 (£)
't-a
r 2 ( s)
J V (t) dt,
o
(103)
où V est la fonction définie par (96). En particulier,
1
Q (cr, S, 't) I ES ==
£ f,k-2
't-a
E2
J V (t) dt.
o
. ( '104 )
En tenant compte de l'asymptote de la fonction V (t) pour t grand
(voir formule (98», il vient immédiatement
't' -- a
E2
J V(t)dt<Clluel pour k=2.
o
( '105 )
't'-a
E2
J V(t)dt<C pour k>2,
o
(10G)
ce qui entraîne l'inégalité (92). Nous avons pu constater que
cons t
Qh(cr, £, 't)< J . (107)
r -2 ( )
ReIn a r que à pro p 0 s des i il é gai i tés (90), (91),
(92). Soit p* (0-, S, 't,11) une solution fondamentale de l'équation (82).
Définissons à partir de cette solution les fonctions Wh (cr, S, 't) et
QR. (cr, , 't) d'après les formules (88), (89) (en y remplaçant g par
la fonction p*). On constate que les inégalités (90), (91), (92) sont
également valables pour les fonctions Wh (0-, S, 't) et Qh (cr, S, 't)
définies ci-dessus. En effet, dans la théorie des équations paraboli-
ques on démontre que pour des contraintes sur les coefficients de
l'équation (82), limi tations que nous avons supposées renl plies au
39, toute solution fondamentale de l'équation (82) est n1ajorée
par une solution fondamentale d'une certaine équation de la chaleur,
41.] CALCUL DE LA FONCTIONNELLE'] DANS UN CAS PARTICULIER 301
l.e. a lieu 1 'inégalité
C -1' 11\- 12
p* (cr, , 't, rt) < n e 't-cr
Ct - cr) 2
OÙ Y est une constante. Cette majoration permet de reprendre point
par point les calculs opérés dans la déduction des inégalités (90),
(91), (92).
Maintenant nous pouvons passer à la
D é mon s t rat ion d u 1 e m m e 4. Posons
W (cr, 't) = Wl (cr, 't) + W 2 (cr, 't),
(108)
où les fonctions Wl (cr, 't) et W 2 (cr, 't) sont définies ainsi
- ( { C pour 't - cr 8,
Wt cr, 't) ==
o pour 't - cr > 8 ;
- ( ) { o pour 't - cr 8,
W 2 cr, 't =
Ô (8) pour,; - cr > 8.
Désignons respectivement par ü (cr, , 't), al (cr, S, ,;), a 2 (cr, S, ,;),
les solutions de l'équation (82) satisfaisant aux conditions initiales
nulles et aux conditions limites W (cr, ,;), Wl (cr, 't), W 2 (cr, 't). Il est
évident que
(109)
(110)
ü (cr, , ,;) == Ut (cr, , 't) + u 2 (cr, , 't).
(111)
D'alltre part, en vertu du théorème du maximum des solutions des
équations paraboliques, la solution u (cr, S, 't) du problème (82),
(83) est majorée comme suit:
u (cr, , 't) a (cr, S, 't). (112)
Evaluons séparément les fonctions Ü 1 (cr, s,,;) et ü 2 (cr, s, 't).
On obtient immédiatement une majoration pour zï 2 à partir du
théorème du maximum des solutions de l'équation parabolique:
ü 2 (cr, s, 't) Ô (8) X (cr, S, 't). (113)
Pour majorer la fonction Ut il nous faut des raisonnements plus
fins. Majorons tout d'abord Üt pour 't - cr 8. Posons
gn-l
1'( )=-=K rn-l( ) , (114)
()ù K == const > C. Nous allons chercher maintenant la solution
de l'équation (82) satisfaisant à des condi tions ini tiales égales à
(s) et à des conditions frontières sur la sphère S e' égales à K, sous
la forme
v (cr, , 't) == Y ( ) + Do (cr, , 't). (115)
302
UN PROBLÈME STATISTIQUE
[Ch. 7
Nous obtenons alors immédiatement l'équation non homogène
n n
+. aij (cr, ) ô:: j +. b i (cr, ) : =L [1'( )J, (116)
1. 3=1 1.=1
que nous devons résoudre pour des conditions aux limites nulles.
Cette solution, nous le savons, est donnée en dehors de la sphère S e
par la formule
't
vo(cr, , ,;)= - J ds J q(cr, , s, 1')L[1'(1')Jd1'). (117)
a Re
Donc,
't
v(cr, s, ';)=1'( )- J ds J q(cr, , s, 1') L [1'(1')J d1'). (118)
a Re
Il est évident que
Ü 1 (cr, , 1') V (cr, , T). (119)
Il ne nous reste donc qu'à ID ajorer la fonction v (cr, , 't) lorsque
1 1 > ro. Remarquons tout d'abord que
1 L [1' (£)] 1 < 8'1-1 [ rn 1Œ) + r:!('Ç) J ' (120)
où A 1 et A 2 sont des constantes suffisamment grandes. Par ailleurs
ayant à l' espri t l'inégalité
q (cr, , 't, 11) p (cr, , 't, fi), (121)
la formule (118) entraîne
1:'
V (cr, , ,;):S; l' ( ) + J ds J P (cr, , s, 1') 8"-1 r,,+ 1(f]) d1') +
a Re
't
+ .\ ds J P (cr, , S, 1') 8"-1 r nA (;) d1'). (122)
a Re
Désignons respectivement par Ii et 1 2 les intégrales du seco.nd mem-
bre de l'inégalité (122). Nous avons
"C
Ii < A 1 8 n - 2 - v Î ds \ P (cr, , s, 1') n- d1') <
J J r (t"))
Cf Re
"C
<A 1 8 n - 2 - v J û)n-v(cr, , s)ds. (123)
a
9 Id.] CALCUL DE LA FONCTIONNELLE J DANS UN CAS PARTICULIER 303
En utilisant l'inégalité (102), il vient immédiatement
't
l <AC 1 e n - 2 - v r ds
1 1 r n - v (£) J'
(J
( 124 )
où 0 < 'V < 1. Donc, pour -r - cr e on a
n-1-v
I<IVI E
1 r n - v (£) ,
( 125 )
i.e.
/1 = 0 (Sn-2)
pour J J > ro. D'une façon analogue
/2 == 0 (e n - 2 )
(126)
(127)
pour \ 1 > ro. La fonction v (cr, , 't) qui majore sur la sphère Se
la solution zl1 (cr, , 't) pour 1 1 > ro et pour 't - cr e est de
l'ordre de 0 (sn-2). Il s'ensuit que la solution U1 elle-même est de
l'ordre de 0 (e n - 2 ) pour 't - cr e et pour 1 1 > ro. En faisant.
légèrement varier la construction précédente, on vérifie facilement
que la même lnajoration a lieu pour U 1 (cr, £, -r) lorsque -r - cr > s.
Le lemme est dém,ontré.
Désormais nous pouvons démontrer que la fonction (1)* (cr, , 't)
qui fj.gure dans l'énoncé du lemme 3 approximise la solution du
problème (36), (37), (38) en dehors d'une sphère de rayon"quelconque
fini avec tlne précision de l'ordre de 0 (sn-2). En d'autres termes
a lieu le
Lem fi e 5. Soit cr (cr, , 't) une solution de l'équation (36)
satisfaisant aux conditions aux limites (37), (38), et (1)* (cr, , 't) la
solution de l'équation (36) définie dans le lemme 3. A lors pour tout r 0
indépendant de s, pour 1 G 1 ro, la solution (1)* (cr, , 't) appro-
ximise avec une précision de l'ordre de 0 (sn-2) la solution cr (cr, , 't):
cr (cr, , 't) - cD* (cr, G, 't) == 0 (sn-2).
(128)
D é mon s t rat ion. Soit
u (cr, G, 't) == cr (cr, G, 't) - cD* (cr, £, 't). (129)
La fonction u (cr, , -r) est solution de l'équation (36) et satisfait
à une condition initiale nulle. D'autre part on voit, d'après (80)
que les valeurs frontières de la fonction u (cr, G, 't) sur S e sont con-
fondues avec les valeurs frontières de la fonction cr (cr, , 't) -
- crci (cr, , 17). Majorons ces dernières. Pour cela, mettons la dif-
304
UN PROBLÈME STATISTIQUE
[Ch. 7
férence cP - cP SOUS la forme suivante
(P (a, , T) - CPÔ (a, G, T) ==
:=.:: { cp (a, , T) - [ 8 n - 2 CG _ + n ( , 8) J } -
_ rn-2( )
- r g (a, , T, 11) [ 8»-2 CG __ +;1 (1'] , 8) J d 1'] (130)
J r n - 2 (1'))
{voir formule (64». Le terme se trouvant entre accolades dans le
second membre de la formule (130) prend des valeurs frontières nulles.
Il reste donc à majorer les valeurs frontières du deuxième terme
sur la sphère S e (en coordonnées S I, . . ., 1 n sur l' elli psoïde S e).
Puisque le potentiel de double couche n ( , 8) vérifie (48), nous
avons de toute évidence:
r g (a, , T, 1'] ) r 8 n - 2 CG _ + n ( 1'] , 8) J d1'] l
J L r n - 2 (1')
A 1 8 n - 2 W n _2 (a, , T) + A 2 8 n - 1 W n _1 (a, , T), (131)
où A 1 et A 2 sont des constantes et W n - 2 et W n -1 des fonctions définies
par la formule (88) respectivement pour k == n - 2, k = n - 1.
En utilisant les inégalités (90) et (91) nous déduisons immédiatement
que les valeurs frontières du second terme de la formule (130) et,
par conséquent, les valeurs frontières w (a, -r) de la fonction u (a, , -r)
satisfont aux conditions du lemme 4. Ce qui nous permet de conclure,
en vertu du lemme (4) sur la majoration des solutions de l'équation
parabolique, que la relation (128) est vraie. Le lemme 5 est donc
démontré.
Il ne nous reste plus qu'à simplifier la solution approchée
<1>* (a, S, 't) en y éliminant les termes en 1 si> ro d'ordre 0 (8 n - 2 ).
Pour cela mettons la solution Q>* (a, , 't) sous une forme explicite.
En utilisant les formules (63), (64), (65), (75), (80), nous pouvons
écrire:
<D* (a, G, T) == CPo (a, , T) + ôcpû (a, , -r) +
L n
+ J ds J q* (a, , s, '1']) [bi-Z i ' (s)] X
(J RB i=l
X (CPo (s, 1'], T) + ÔcpÔ] d1']. (132)
af)
Il est clair que pour 1 1 > ro
ôcpù(a, G, T)=O(8)>-2). (133)
L'intégrale figurant dans le second membre de la formule (132)
est un peu plus difficile à simplifier. On peut d'abord éliminer le
41.] CALCUL DE LA FONCTIONNELLE J DANS UN CAS PARTICULIER 305
terme
n
/i = r ds r q* (cr, , s, 1) (bi-Zi' (s)] aÔ<p (5, '1], '1") d1). (134)
J J ôll i
a Re i=l
En effet,
n
I/d J ds J p*(cr, , s, 1) 1 bi-Z i ' (s) 1
a Re i=1
ô8<p (s, T), 't)
ôT)i
1 d1). (135)
Puisque, d'autre part,
a 1 < sn-IR (1) (136)
(voir (65), (66)), où R (11) en zéro possède un pôle d' ordre n, il
vient
n
1 /il < sn-i-v J ds J p* (cr, , s, 1) 1 bi-Z i ' (s) 1\ Ri (1) 1 d1),
a Re i=1
où Ri (11) possède en zéro un pôle d'ordre n - 'V (0 < 'V < 1).
Donc
Ii = 0 (8 n - 2 ). (137)
Il ne nous reste plus qu'à simplifier le membre
TI
/2== \ ds \ q*(a, , s, 1'])>'. [bi-zi'(s)] cpo(s, 1'], T)d'Y). (138)
J J Ôll
a Re i=l
lVlontrons que pour 1 1 > ro
n
/2 = J ds J p* (cr, , s, 1) [b i - zi' (s)] / i <Po (s, 1), ,;) d1) + 0 (sn-2).
C1 i-l 11
(139)
Nous avons:
n
/2 = J ds J p* (cr, , s, 1) [b i - zi' (s)] / i <Po (s, 1), ,;) d1) +
a i= 1 11
n
+ r ds \ [p*-q*] [bi-z i ' (S)] <Po(S, 1), ,;)d1)+
J .' ôll
C1 Re i=1
n
+ r ds r p*(cr, , s,1) [bi-zi'(s)] <Po(s, 1), ,;)d1). (140)
J J ôl1
aR-Re i=1
20-01339
306
UN PROBLÈME STATISTIQUE
[Ch. 7
Le dernier terme de la formule (140) est de toute évidence d'ordre
o (8 n - 2 ). Désignons le second terme par u (a, , 't). La fonction
u (a, , '1') admet pour a = '1' des valeurs initiales nulles et obéit
à l'équation (36) dans le domaine R e. Puisque
8(p < 8 n - 2 R (11), ('141)
811J
où R ('Y}) admet un pôle d'ordre n - 1, les valeurs frontières
de la fonction u (a, , 't) sont majorées comme suit:
1 u (a, £, '1') I ESe < M 8 n - 2Q n_1 (a, £, 't) I ESe. (142)
Compte tenu de (142) et (92) nous concluons que
1 u (a, £, 't) Il Ese < Ô (8)
où Ô (8) -+ 0 pour 8 -+ O. Partout donc dans le domaine Re on a
1 u (a, , 't) 1 < Ô (8) cp (a, £, 't). (143)
Le lemme 5 et les inégalités (133), (137), (143) démontrent le
lemme suivant.
Lem m e 6. La fonction
<D (a, £ , 't) == (Po ( cr, £ , 't) +
n
+ r ds r p* (a, , s, 1]) [bi.-z i ' (8)] 8cpo (s, ' 't) d1], (144)
J J 81P
cr i=1
où CPo (a, £, '1') est définie par la formule (71), pour 1 £ 1 > ro (ro étant
un nombre positif arbitraire indépendant de 8) avec une précision de
l'ordre de 0 (8 n - 2 ) approximise la solution cp (a, , 't) de l'équation (36)
satisfaisant aux conditions aux limites (37) et (38).
Pour clôturer le présent paragraphe il ne nous reste plus qu'à
revenir aux anciennes coordonnées x et y d'après les forlnules (32)
et (33). Après avoir procédé aux changements nécessaires, nous
pouvons, en utilisant le lemme 6, formuler la proposition suivante.
Thé 0 r è ln e 26. Supposons que le mouvement du point com-
mandé z qui, à l'instant a se trouve en z (a), est décrit par le système
d'équations différentielles (15). S up posons par ailleurs que dans l'espace
R se déplace également un point aléatoire Q dont la densité de proba-
bilité de transfert, notée p (a, x, s, y) obéit à l'équation parabolique
à coefficients constants (29). Désignons par z la boule de rayon 8,
de centre z, se déplaçant en même temps que z. Désignons enfin par
11' (a, x, '1') la probabilité que le point aléatoire Q qui se trouve en x à
l'instant a soit « recouvert» par la boule z pendant l'intervalle de
temps a t 'te Sous ces conditions, la probabilité 'lJJ (a, x, '1') qui
42.] CALCUL DE LA FONCTIONNELLE J DANS LE CAS GÉNÉRAL 307
est une fonctionnelle sur u (t) s'écrit pour 1 x - z (a) 1 > r 0 où r 0 est
un nombre positif arbitraire sous la forme
1p(a, x, T)=ë n - 2 [1Po(a, x, T)+-1Pt(a, x, 't)]+o(gn-2)
( 145)
En vue d'écrire les fonctions 1PO (a, x, 't) et 'P1 (a, x, 't) sous une forme
explicite, introduisons les notations suivantes:
a) Î'.}' Î'}, . . ., Îv n sont les valeurs propres de Ja matrice (aU);
b) (aij) est la matrice inverse de la matrice (a 1J );
c) G (a, x, 't, 11)== g(a, x-z(a), T, 11)=
{ . au (1']i_xi+zi (cr)) (1']j-xj+z; (cr)) }
1=1
exp - 4 (,;-a) - ;
[4n ('t-a)] 2
t
d) (J., est une constante indépendante du système d'équations (15)
et définie par la formule (61).
A lors
1Po ( cr, x, T) ==
ex
n n-2
( :L aij(xi-zi(a))(xi-zi(a))] 2
i, j=1
- ) G (cr, X, .., 'Y)
ex -V ÂIÂ2 ... Ân
n d'Y],
[ :L au 11ir]j] 2
i, j=1
T
1P i (cr, X, 1") = ) ds ) p ( cr, X, S,
cr
n
y) (bi - Zi' (s)] 8"'0 (s, ' "t) dy.
ay'L
i=1
Le théorèmo 26 nous donne donc sous une forme explicite le
terme principal de la probabilité 1P (a, x, 't), et par conséquent le
terme principal de la fonctionnelle (16).
S 42. Calcul de la fonctionnelle J dans le cas général
Dans ce paragraphe la probabilité 1P (a, x, 't) et par conséquent
la fonctionnelle (16) seront évaluées pour le cas où les coefficients
de l'équation de Kolmogorov sont fonctions de a et de x. Nous
supposons que ces coefficients satisfont aux conditions formulées
dans le g 39. La marche est sensiblement la même que dans le para-
graphe précédent, aussi y renverrons-nous souvent le lecteur, nous
bornant simplement à expliquer en détail les nouvelles construc-
tions.
20*-
308
UN PROBLÈME STATISTIQUE
[Ch. 7
Soit donc à resoudre l'équation
n n
â11'1 .. ) â2'1h ,..,. alh
-L+ L.J aU (cr, x . . + L.I b 1 (cr, x) =O
âcr ax 1 ax3 âx1
i, j=1 i=i
avec les conditions
( 146)
11' (T, X, T) = 0, (147)
1P (cr, X, T) IXES(j == 1. (148)
Comme dans le 9 41, moyennant les changements (32), (33), (35),
ramenons cette équation à l'équation
fa
â acp + aï; (s + z (cr), a) a cp. +
cr .. â 1 â J
1, .1=1
n
+ [bi (s+z (a), a) -zi' (a)] a = 0 (149)
i=l â 1.
avec les conditions
cP (T, , T) = 0,
cP (cr, , T) 1 E S 8 == 1.
Mettons l'équation (149) sous la forme
(150)
(151)
n
'a a + " aH (a, z (a)) a 2 ep +
v L.J â i a j
i, j=1
n
+ [aii(cr, s+z(a))-aii(a, z(a))] a: i2 :si +
i, j=1
n
+ h (hi (a, s+ z (cr)) - Zi' (a)] aep. = O.
i=1 â 1
Notre premier pas sera de construire une solution spéciale notée
<p (cr, , T) de l'équation
n
âcpo + aH (8, z (8») a cpo. == 0
âcr LJ a 1 â J
i, j=1
( 152)
avec la condition initiale
cp (T, , T) == O.
(153)
Pour obtenir cette solution spéciale, nous allons comme au 9 41
passer, moyennant une transformation linéaire, des coordonnées
42.] CALCUL DE LA FONCTIONNELLE J DANS LE CAS GÉNÉRAL 309
1, S2, . . ., n aux coordonnées l , S 2, . . ., sn en lesquelles l' équa.:..
tion (152) s'écrit
â<po -
aa + <Po == o.
Cette transformation linéaire est désormais fonction du paramètre 8.
La sphère S e se transforme alors en l'ellipsoïde Se
Âl (8) ( S1) 2 + . . . - Ân (8) ( sn )2 == e 2 , (154)
').} (8), . . ., ')..} (8) étant les valeurs propres de la matrice
(a ij (8, z (8))). En reprenant point par point les raisonnements du
paragraphe précédent on démontre le lemme suivant.
Lem m e 1'. La solution s'éloignant à l'infini du problème
extérieur de Dirichlet pour l'équation
{)2(; {J2v === 0
-2 +...+ -2
â 1 â n
avec la condition aux limites
v ( ) I ESe = 1,
où Se est l'ellipsoïde (154) est de la forme
v (s) == e n - 2 [a (82- + Jt ( , ë).
r n - 2 ( )
Cf., (8) désigne ici une constante positive dépendant continûment du
paramètre 8 et définie, univoquement par les dimensions de l'éllipsoïde
S e; r ( ) = V ( 1)2 + . . . + ( n )2, la fonction :Tt ( , B) et ses déri
vées satisfaisant aux inégalités (48).
La démonstration de ce lemme se passe de tout commentaire.
La constante Cf., (8) se calcule au moyen de la formule (61) si S
désigne l'ellipsoïde:
').} (8) ('r]1)2+ ... +Ân(8) (1']n)2 == 1.
Introduisons la fonction gS (cr, 1, 't, 11 ) d'après la formule (63) et
posons
<p e (cr,' 't) == e n - 2
a (8)
+ :Tt (S, ë)-
r n - 2 ( )
- r gS (cr, s , T, 11 ) [ e n - 2 a (8)_ + Jt (1'] , e) ] d
J . r n - 2 (Y))
ou encore
ro *S - ( p S. 1 ôro*e
't'o 0 T "ro
310
UN PROBLÈME S1."A r rISTIQUE
[Ch. 7
'"
OU
cp (cr, , 't)= e n - 2 a (6) _ r g (cr, S , 't, 'Y) e'H! a(6) d'Y).
r n - 2 ( ) J r n - 2 (11)
Il est évident que la fonction cp :e (cr,1, '1') est solution de l'équation
(152) et qu'elle satisfait à la condition initiale nulle
<p e ('t, , '1') = o.
Passons maintenant des coordonnées 1 , 1: 2 , . . ., n aux coor-
données 1, 2, . . ., n. Les fonctions cp :e (cr, , '1'), cp , ô <p e et ge
se transforment respectivement en cp:e (cr, , 't), cp , ôcp et ge.
Nous pouvons représenter la fonction <p (cr, , '1') sous une forme
explicite. Désignons comme précédemment par aij (8, z (8)) les
éléments de la matrice inverse de la matrice (aH (8, z (8))) :
n
aH (8, z (8)) ajh (8, z (8)) = Ô;t.
j=1
Alors
<p (cr,
t '1' ) == 811.-2 a (8) _
' [ J n-2
. aU (6, z (6)) i j """"2""
,J = 1
r e ( t ) 11.-2 CG (8) -V Âl (8) ... Ân (8) d
-- J g cr , , 't, 1) 8 n - 2 11 ,
[ . aU (6, Z (6)) 1 1i 1']i ] "2
, J =1.
(1,5:1)
ge (cr, , T,
1
11) = n X
[4n (,;-a)] 2
{ i, 1 aij (6, Z (6)) (1']i - i) (11] - j) }
X exp - 4 ('t-a) ·
( 156)
Considérons maintenant la fonction cp:a (cr, , '1'), i.e. la fonction
construite, en posant 8 = cr. La fonction <p:a (cr, , '1') n'obéit plus
à l'équation (152) puisque 8 = cr. Toutefois est évident le
Lem ID e 2'. La fonction cp cr (cr, , '1') = (P (cr, , 't) + ô<p:cr
où cp est définie par les formules (155), (156) est solution de l'équation
différentielle
8cp (J n 8 2 cp*cr 8
8a + aiJ(cr z(a)) 0 --[<p*81Ie=cr===O
LJ ' a i 8 j 8e 0
i, j=1
et satisfait à la condition initiale nulle (p:cr ('t, , '1') = O.
42.] CALCUL DE LA FONCTIONNELLE J DANS LE CAS GÉNÉRAL 311
Conlme dans le paragraphe précédent, nous pouvons chercher
luaintenant la solution spéciale de l'équation (149) de valeur initiale
nulle sous la forme suivante:
cD*(cr, , T)==cP <J(cr, , T)+CP!(cr, , 't),
où (P cr (cr, , 't) est la fonction que nous venons de construire, et
CP: lln8 fonc tion à dé terminer. En portant cI>* (cr, , 't) dans l' équa-
tion (149) et en tenant compte du lemme 2', nous obtenons l'équation
parabolique non homogène
n
a iJ CP (J : -!- a ij (cr, + z (cr)) a 2 cpr +
LJ a i 8 j
i, j=1
n
+ [b i (a, + z (a» -- Zi' (a)] aq> =
i=1 ô£
{ n .. acp <J(cr, , 't)
= - [aij (cr, E+z (cr))-a 1J (cr, z (cr))] . +
" â i â 3
i, j = 1
n âcp*cr (cr 't)
+ [b i (z (a), G+z(O'»-zi' (a)] 0 a : ' +
i=l
+ a [cp e (a, G, 't)J!e=u (157)
et la condition initiale
cp!(,;, G, ,;)==:0.
Le second membre de l'équation (157) admettant pour = 0
un pôle d'ordre n (et non pas n + 1), nous pouvons reprendre presque
point par point tous les raisonnements du paragraphe précédent
et dénl0ntrer des lemmes identiques aux lemnles 3, 5 et 6. Le lemme
correspondant au lemme 6 se formule désormais:
L e fi fi e 6'. La fonction
T
<D(O', G, 't)=cp (O', s. 't)+ .\ ds ) p(O', G+z(O'), s, YJ+
cr
n
{ ' . . . . â 2 m cr ( 8 'Y1 't )
+ z (S)) 2.J [ a 1) (S, 11 -f- z (S)) - a 1) (S, Z (S))] 'Y 0 .' .1 : +
ârJ â11'
i, j=l
n
+- [bi (s, YJ +- z (S» - Zi' (S)] a!jJ i'll' 1") +
i=l
+ a [cp (s, YJ, 't)] le=u } dYJ,
312
UN PROBLÈME STATISTIQUE
[Ch.7
où cpg (cr, S, T) est définie par la formule (155) pour 1 si> r 0 (r 0 étant
un nombre positif arbitraire indépendant de 8) avec une précision de
l'ordre 0 (e n - 2 ) approximise la solution cp (cr, s, T) de l'équation (149)
satisfaisant aux conditions aux limites (150) et (151).
En vue de formuler le résultat définitif nous devons de nouveau
passer aux coordonnées x et y au moyen des formules (32) et (33).
Alors le lemme 6' entraîne un théorème analogue au théorème 26
du paragraphe précédent. Nous laissons au lecteur le soin d'établir
au besoin les formules finales.
Bibliographie
Chapitre 1
1. R. BELLlVIAN: Dynamis Programming. Princeton lTniv. Press. N. J.,
1957.
2. R. BELLMAN, 1. GLICKSBERG, O. GROSS: Some Aspects of the
i\Iathématical Theory of Control Processes. Santa l\10nica, 1958.
3. V. BOLTI1\NSKI, R. GAMKRÉLIDZ£, L. PONTRIAGUINE: Con-
tribution à la théorie des processus optimaux (en russe). J ourn. « Doklady
Akad. nauk S.S.S.R. », 110, N 1 (1956), pp. 7-10.
4. V. BOLTIANSKI: Le principe du maxÎInum dans la théorie des proces-
sus optimaux (en russe). J ourn. « Doklady Akad. nauk S.S.S.R. », 119,
cM 6 (1958), pp. 1070-1073.
5. V. BOLTIANSKI, R. GAl\1KRÉLIDZÊ, L. PONT RIA GUI NE: Théorie
des processus optimaux. Principe du maximum (en russe). J ourn. (< Izvestia
Akad. nauk S.S.S.R. » série mathém., 24, cM 1 (1960), pp. 3-42.
6. V. BOLTIANSKI, R. GAMKRELIDZÉ, E. lVIICHTCHENKO, L.PON-
TRIAGUINE: Le principe du maximum dans la théorie des processus optimaux
(en russe). Premier congrès de l'IFAC. 1960.
7. R. GAMKRÉLIDZE: Contribution à la théorie générale des processus
optinlaux (en russe). Journ. « Doklady Akad. nauk S.S.S.R. », 123, M 2 (1958),
pp. 223-226.
8. N. KRASSOVSKI: Contribution à la régulation optimale (en russe).
Journ. « Automatica i téléméchanica », 18, cM 11 (1957), pp. 960-970.
9. L. PONT RIA GUI NE: Processus optimaux de régulation (en russe).
J ourn. « Uspekhi mathématitchesldkh nauk », 14, 1 (1959), pp. 3-20.
10. L. ROSONOBRE: Le principe du maximum de Pontriaguine dans la
théorie des systèmes optimaux (en russe). J ourn. « Automatica i téléméchanica »,
20, MM 10-12 ,(1959), pp. 1320-1334, 1441-1458, 1561-1578.
Chapitre 2
\Toir [4], [5], [7], [9].
Chapitre 3
Voir [2], [6], [9].
11. V. BOLTIANSKI: Simulation des systèmes linéaires à temps optimal
par des schémas par tout ou rien (en russe). J ourn. « Doklady Akad. nauk
S.S.S.R. », 139, M 2 (1961), pp. 19-22.
314
BIBLIOGRAPHIE
12. BUSHA W D. vV.: Ph. D. Thesis, Department of l\fath., Princeton
Univ., 1952.
13. R. GAMKR ÉLID zE : Contribution à la théorie des processus optimaux,
.appliquée aux systèmes linéaires (en russe). J ourn. « Doklady Akad. nank
S . S . S . R. », 116, cM 1 (1957), P p. 9-11.
14. R. GAMKRÉLIDZE: La théorie des processus optiffiaux, appliquée
aux systèmes linéaires (en russe). J ourn. « Izvéstia Akad. nauk S.S.S.U. »
série mathém., 22, .N' 4 (1958), pp. 449-474.
15. LA SALLE J. P. : The Time Optimal Control Problem Contributions to
the Theory of N onlinear Oseilations, Princeton, 1959.
16. A. FELDBAUlVI: Sur la synthèse des systèmes optimaux au moyen de
l'espace de phase (en russe). Journ. « Automatica i téléméchanica », 16, cM 2
(1955), pp. 129-149.
Chapitre 4
Voir [5].
17. V. BOLTIANSKI: Processus optimaux à paramètres (en russe). J ourn.
{< Doklady Akad. nauk Ouzb. S.S.R. », cM 10 (1959), pp. 9-13.
18. V. BOLTIANSKI: Application de la théorie des processus optimaux
.à l'approximation des fonctions (en russe). Travaux de l'Institut Stéklov, 60,
pp. 82-95.
19. G. KHARA TICI-IVILI: Le principe du maximum dans la théorie des
processus à retard (en russe). Journ. « Doldady Akad. nauk S.S.S.R. », 136,
M 1 (1961), pp. 39-42.
Chapitre 5
20. G. BLIS: Lectures on the Calculus of Variations, Chicago, 1946.
21. Mc SHANE, On Multipliers for Lagrange Pl'oblenl, Anler. Journal
Math., 61 (1936), pp. 809-819.
Cha pitre 6
22. R. G AlVI K R EL ID Z E: Processus optimaux en coordonnées de phase
bornées (en russe). Journ. « Doklady Akad. nauk S.S.S.R. », 125, N 3 (1959),
pp. 475-478.
23. R. GAl\IKRELIDZE: Processus optimaux en coordonnées de phase
bornées (en russe). J ourn. « Izvestia Akad. nauk S.S.S.R. », série mathémati-
que, 24, M 3 (1960), pp. 315-356.
24. A. LERNER: Sur la rapidité limite de fonctionnement des systèmes
de commande automatique (en russe). J ourn. « Automatica i téléméchanica »,
15, M 6 (1954), pp. 461-477.
25. E. ROZENl\IAN: Sur la rapidité limite de fonctionnement des systè-
mes d'asservissement à élément exécutif limité en puissance, en couple et en
vitesse (en russe). Journ. « Automatica i téléméchanica », 19, cM 7 (1958),
pp. 633-653.
BIBLIOGRAPHIE
315
Chapitre 7
26. A. KOLMOGOROV: Uber die analitischen l\fethoden in der Wahrsche-
inlichkeitsrechnung, Math. Ann., 104, (1931), pp. 415-458.
27. E. MICHTCHENKO, L. PONTRIAGUINE: Un problème statistique
de COffilnande optimale (en russe). J ourn. « Doklady Akad. nauk S.S.S.R. »,
128, M 5 (1959), pp. 890-892.
28. E. l\IICHTCHENKO, L. PONTRIAGUINE: Sur un problème statisti-
que de commande optimale (en russe). Journ. « Izvestia Akad. nauk S.S.S.R »,
série mathématique, 25 (1961), pp. 477-498.
29. A. I(OLMOGOROV, E. MICHTCHENKO, L. PONTRIAGUINE: Sur
un problènle probabilistique de commande optimale (en russe). J ourn. « Dokla-
dy Akad. nauk S.S.S.H. », 145, cM 5 (1962), pp. 993-995.
Table des matières
Introduction
. ..V.... ..........
CHAPITRE 1. PHINCIPE DU 1\1AXIMUl\I
1. Commandes admissibles .....
2. Enoncé du problème fondamental . . . . . . . . . . . .
3. Le principe du maximum . . .
4. Discussion du principe du nlaximum ... .
5. Exemples. Problème de synthèse . . . . . . . . . . . .
6. Problème aux extrénlités libres et conditions de transversa-
Ii té .........................
7. Le principe du maxinlum pour les systèmes non autonomes
8. Problèmes à temps fixe ................
9. Lien entre le principe du maximum et la méthode de program-
mation dynamique . . . . .. ......
CHAPITRE 2. D£l\/IONSTRATION DU PRINCIPE DU MAXIMUl\1
10. Commandes admissibles ...............
11. Formulation du principe du maxinlum pour une classe quel-
conque de commandes admissibles ...........
12. Systènle d'équations aux variations et son système adjoint
13. Variations des commandes et des trajectoires
14. Lemmes fondamentaux ..........
15. Démonstration du principe du maximum
16. Conditions de tl'ansversalité
CHAPITRE 3. PROBL:ÈMES LIN£AIRES EN TEl\/IPS OPTIMAL
17.
18.
19.
20.
21.
22.
23.
Théorème du nombre de commutations
Théorèmes d'unicité ......
Théorèmes d'existence . . . . . . . . . . . .
Synthèse de la commande optimale . . . . . . . . .
Exemples ......................
Simulation des commandes linéaires en temps optimal par des
circui ts à relais ...................
Equations linéaires à coefficients variables . . . . . . . .
CHAPITRE 4. PROBLÈMES DIVERS . . . . . . . . . . .
24. Cas d'une fonctionnelle définie par une intégrale impropre
25. Processus optimaux à paramètres ...........
26. Application de la théorie des processus optimaux à l'appro-
ximation des fonctions . . . . . . . . . .
27. Processus optimaux à retard . . . . . . . . .
28. Un problème de poursuite . . . . . . . .
5
1 '1
11
13
19
22
23
43
55
61
G4
69
69
72
76
80
84
91
99
105
105
112
116
123
127
155
163
169
169
171
176
190
202
TABLE DES MATIÈRES 317
CHAPITRE 5. LE PRINCIPE DU l\;IAXIlVIUlVI ET LE CALCUL DES
VARIATIONS ............. 213
9 29. Problème fondanlental du calcul variationnel ...... 214
9 30. Problème de Lagrange ................ 221
CH1\PITRE 6. PROCESSUS OPTIl\lAUX AVEC CONTRAINTES
LSUR LES COORDONNÉES DE PHASE ..... 229
g 31. Position du problème . . . . . . . . . . . . . . . .. 230
32. Trajectoires optimales situées sur le bord du domaine . .. 235
33. Démonstration du théorème 22 (constructions fondamentales) 240
34. Démonstration du théorème 22 (suite et fin) . . . . . .. 258
35. Quelques généralisations ............. 264
36. Condition de saut . . . . . . . . . . . . 266
9 37. Formulation du résultat fondamental. Exemples 275
CHAPITRE 7. UN PROBL:8ME STATISTIQUE DE COMMANDE
OP TI MAL E ................... 280
9 38. Notion de processus markovien. L'équation différentielle de
Kolmogorov .................... 281
39. Formulation exacte du problème statistique . . . . . .. 284
9 40. Calcul de la fonctionnelle J par résolution du problème
aux limites pour l'équation de I(olmogorov . . . . . .. 286
9 41. Calcul de la fonctionnelle J dans le cas où l'équation de
Kolmogorov est à coefficients constants ........ 288
9 42. Calcul de la fonctionnelle J dans le cas général 307
Bibliogra phie
..... .............. ... ...
313