/


























































































































































































































































































































































































































Author: Рангаян Р.М.
Tags: математика кибернетика медицина практическая медицина издательство физматлит биомедицинские сигналы
ISBN: 978-5-9221-0730-3
Year: 2007




Text
II
Р22.
Р.М. РАНГАЙЯН
АНАЛИЗ
БИОМЕДИЦИНСКИХ
СИГНАЛОВ
ПРАКТИЧЕСКИЙ ПОДХОД
УДК 51.761, 615.47
ББК 32.81, 53.4
Р22
Издание осуществлено при поддержке
Российского фонда фундаменталь-
ных исследований по проекту 06-01-
02017д
Рангайян Р. М. Анализ биомедицинских сигналов. Практический под-
ход / Пер. с англ, под ред. А.П. Немирко. — М.: ФИЗМАТЛИТ, 2007. — 440 с. —
ISBN 978-5-9221-0730-3.
Книга известного канадского учёного Рангараджа М. Рангайяна представляет собой
практичное и современное пособие по математическим методам и алгоритмам автоматического
анализа биомедицинских сигналов. Методы цифровой обработки сигналов излагаются с учё-
том специфических особенностей сигналов биологического происхождения и рассматриваются
на конкретных примерах, иллюстрирующих их практическое применение. Основное внимание
уделено обработке и анализу сигналов во временной и частотной областях, а также распо-
знаванию образов и моделированию биологических систем, порождающих биомедицинские
сигналы.
Предназначена студентам и аспирантам, обучающимся по специальностям, связанным с
биомедицинской техникой и автоматической обработкой сигналов, будет также полезна ин-
женерам, специализирующимся в области разработки электронной медицинской аппаратуры,
и врачам, интересующимся современными методами компьютерного анализа биомедицинских
данных.
Рекомендовано УМО вузов РФ по образованию в области радиотехники, электроники,
биомедицинской техники и автоматизации в качестве учебного пособия для студентов ву-
зов, обучающихся по направлению подготовки по специальностям «Биомедицинская техни-
ка», «Биомедицинские и медицинские аппараты и системы», «Инженерное дело в медико-
биологической практике» и направлению подготовки бакалавров и магистров «Биомедицинская
инженерия».
ISBN (рус.) 978-5-9221-0730-3
ISBN (англ.) 0-471-20811-6
© ФИЗМАТЛИТ, 2007
© John Wiley & Sons, Inc., 2002
СОДЕРЖАНИЕ
Предисловие к русскому изданию................................................ 11
Об авторе..................................................................... 12
Благодарности................................................................. 14
Предисловие................................................................... 17
Обозначения и сокращения...................................................... 22
Глава 1. Введение в биомедицинские сигналы.................................... 27
1.1. Природа биомедицинских сигналов........................................ 27
1.2. Примеры биомедицинских сигналов......................................... 30
1.2.1. Потенциал действия (30). 1.2.2. Электронейрограмма (ЭНГ) (33). 1.2.3. Элек-
тромиограмма (ЭМГ) (34). 1.2.4. Электрокардиограмма (ЭКГ) (39). 1.2.5. Элек-
троэнцефалограмма (ЭЭГ) (45). 1.2.6. Потенциалы, связанные с событиями
(ПСС) (49). 1.2.7. Электрогастрограмма (ЭГГ) (50). 1.2.8. Фонокардиограмма
(ФКГ) (51). 1.2.9. Каротидный пульс (КП) (56). 1.2.10. Сигналы с катетерных
датчиков (56). 1.2.11. Речевой сигнал (57). 1.2.12. Вибромиограмма (ВМГ) (60).
1.2.13. Виброартрограмма (ВАГ) (60). 1.2.14. Сигналы отоакустической эмис-
сии (63).
1.3. Цели анализа биомедицинских сигналов...................................... 63
1.4. Трудности, встречающиеся при снятии и анализе биомедицинских сигналов .... 66
1.5. Компьютерная диагностика.................................................. 69
1.6. Замечания ................................................................ 71
1.7. Контрольные вопросы и задания............................................. 71
1.8. Упражнения и лабораторные работы.......................................... 73
Глава 2. Анализ одновременных, парных и коррелированных процессов........... 74
2.1. Постановка задачи......................................................... 74
2.2. Иллюстрация задачи на примерах............................................ 75
2.2.1. Электрокардиограмма и фонокардиограмма (75). 2.2.2. Фонокардиограмма и
каротидный пульс (76). 2.2.3. ЭКГ и электрограмма предсердий (77). 2.2.4. Кардио-
респираторное взаимодействие (79). 2.2.5. Электромиограмма и вибромиограм-
ма (79). 2.2.6. Сигналы коленного сустава и мышечной вибрации (80).
2.3. Применение: сегментация ФКГ на систолическую и диастолическую части... 81
2.4. Замечания.............................................................. 82
2.5. Контрольные вопросы и задания.......................................... 83
2.6. Упражнения и лабораторные работы....................................... 83
Глава 3. Фильтрация для устранения артефактов................................. 84
3.1. Постановка задачи...................................................... 84
3.1.1. Случайный шум, структурированный шум и физиологические помехи (85).
3.1.2. Стационарные и нестационарные процессы (91).
3.2. Иллюстрация задачи на примерах......................................... 94
3.2.1. Помехи в потенциалах, связанных с событиями (94). 3.2.2. Высокочастотные
помехи в ЭКГ (94). 3.2.3. Двигательные артефакты в ЭКГ (95). 3.2.4. Сетевая
наводка в ЭКГ (96). 3.2.5. Интерференция ЭКГ плода и ЭКГ матери (97). 3.2.6. По-
мехи от мышечных сокращений в сигнале ВАГ (97). 3.2.7. Возможные подходы к
решению задачи (100).
8
Содержание
3.3. Фильтрация во временной области....................................... 101
3.3.1. Синхронное усреднение (101). 3.3.2. Фильтры скользящего среднего (105).
3.3.3. Операторы для устранения низкочастотных артефактов, основанные на произ-
водной (111).
3.4. Фильтрация в частотной области........................................ 117
3.4.1. Устранение высокочастотных шумов: фильтры нижних частот Баттервор-
та (118). 3.4.2. Устранение низкочастотных шумов: фильтры верхних частот
Баттерворта (126). 3.4.3. Устранение периодических артефактов: режекторные и
гребенчатые фильтры (128).
3.5. Оптимальная фильтрация: фильтр Винера................................. 131
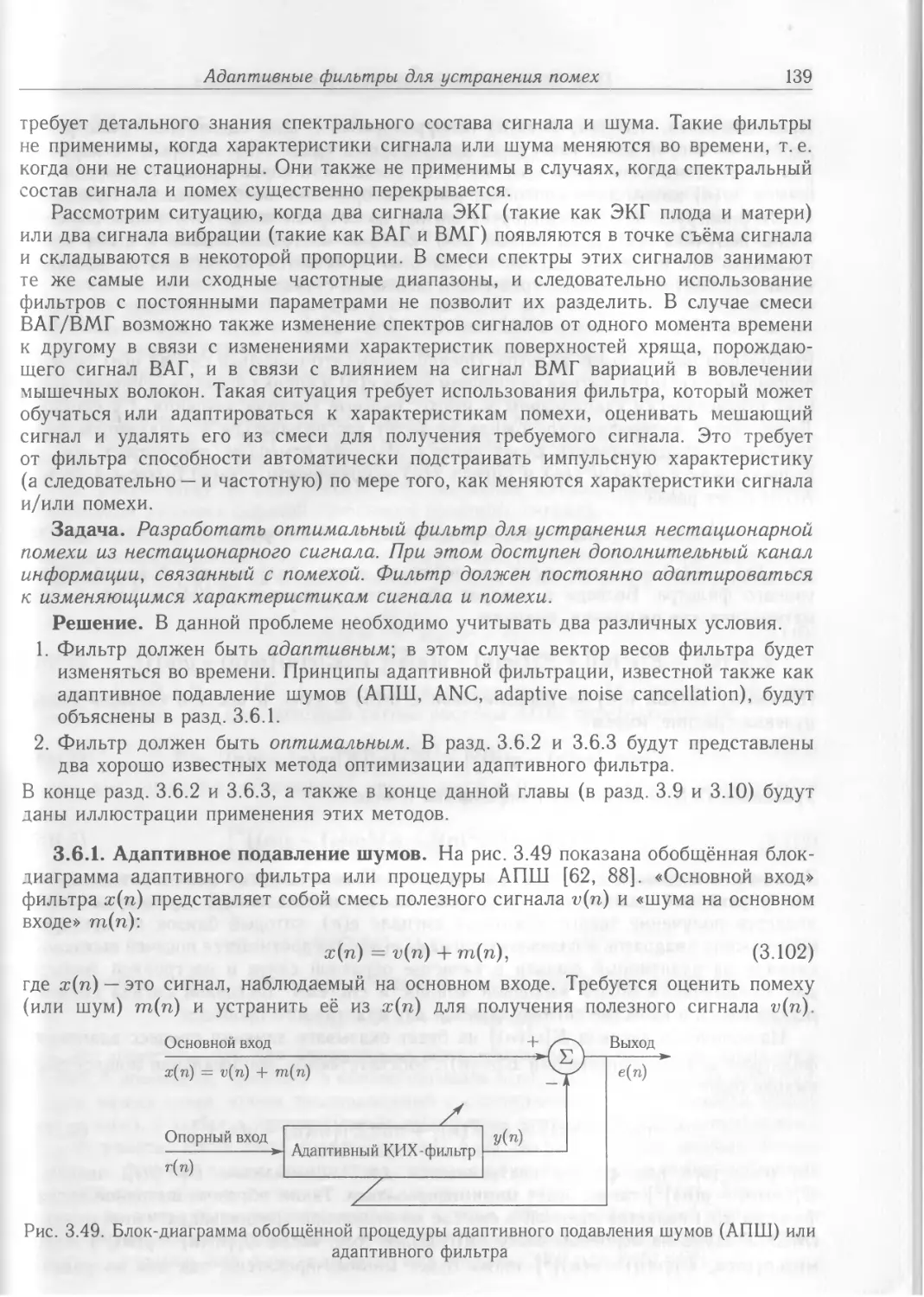
3.6. Адаптивные фильтры для устранения помех............................... 138
3.6.1. Адаптивное подавление шумов (139). 3.6.2. Адаптивный фильтр на основе
метода наименьших средних квадратов (142). 3.6.3. Адаптивный фильтр на основе
рекурсивного метода наименьших квадратов (143).
3.7. Выбор подходящего фильтра............................................. 150
3.8. Применение: устранение артефактов из ЭКГ.............................. 151
3.9. Применение: адаптивное устранение ЭКГ матери для получения ЭКГ плода .... 153
3.10. Применение: адаптивное устранение миографической помехи из сигнала вибра-
ции коленной чашечки...................................................... 154
3.11. Замечания............................................................ 157
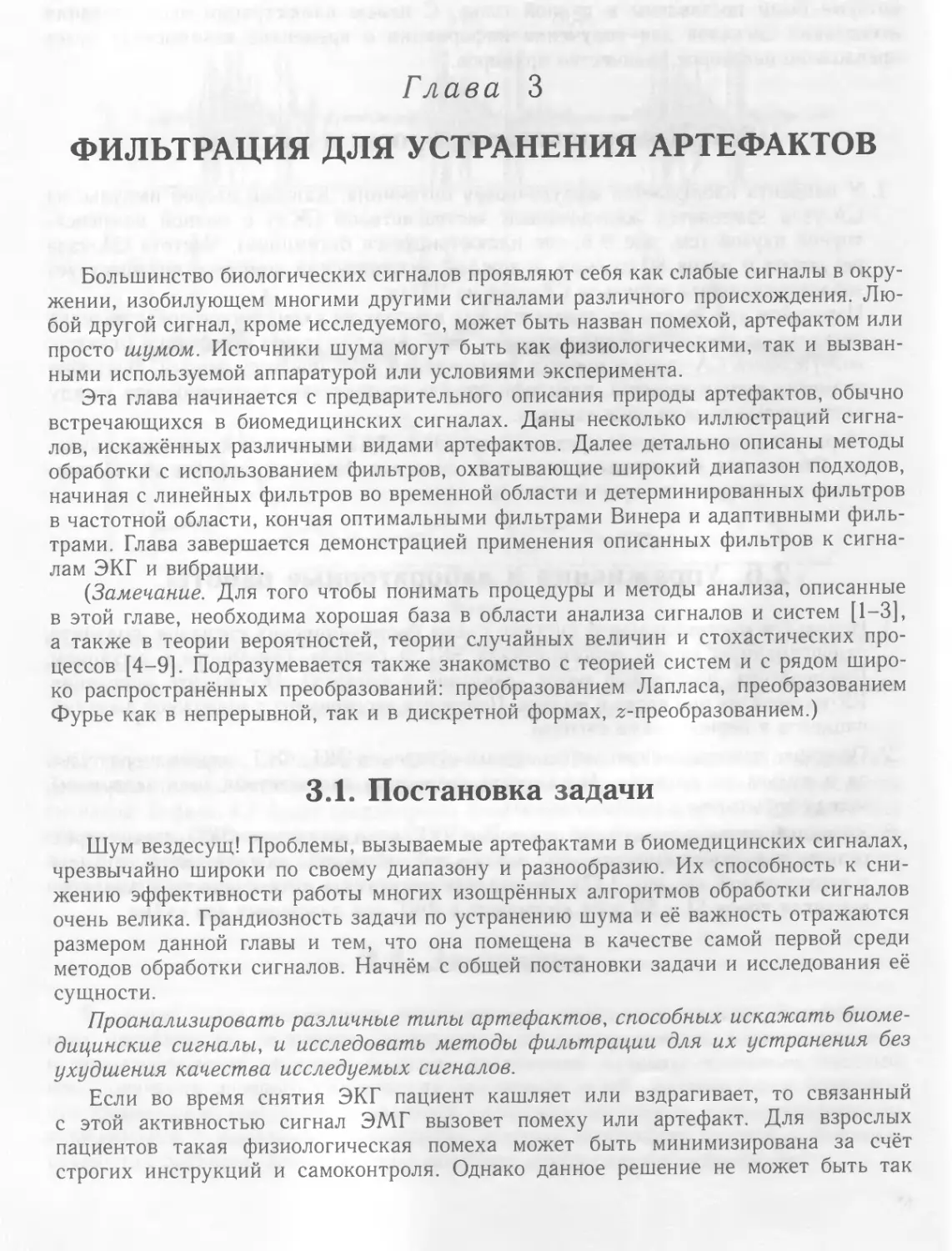
3.12. Контрольные вопросы и задания........................................ 157
3.13. Упражнения и лабораторные работы..................................... 161
Глава 4. Обнаружение событий............................................... 164
4.1. Постановка задачи..................................................... 164
4.2. Иллюстрация задачи на примерах........................................ 164
4.2.1. Волны Р на QRS и Т на ЭКГ (164). 4.2.2. Первый и второй тоны сердца (165).
4.2.3. Дикротическая выемка в каротидном пульсе (166). 4.2.4. Ритмы, волны и
преходящие события на ЭЭГ (166).
4.3. Обнаружение событий и волн............................................ 168
4.3.1. Методы обнаружения QRS-комплекса, основанные на производной (169).
4.3.2. Алгоритм обнаружения QRS-комплекса Пана-Томпкинса (172). 4.3.3. Об-
наружение дикротической выемки (175).
4.4. Корреляционный анализ каналов ЭЭГ..................................... 177
4.4.1. Обнаружение ритмов ЭЭГ (178). 4.4.2. Обнаружение комплекса спайк-волна
в сигнале ЭЭГ на основе сопоставления с образцом (180).
4.5. Методы на основе взаимного спектра.................................... 184
4.5.1. Когерентный анализ каналов ЭЭГ (184).
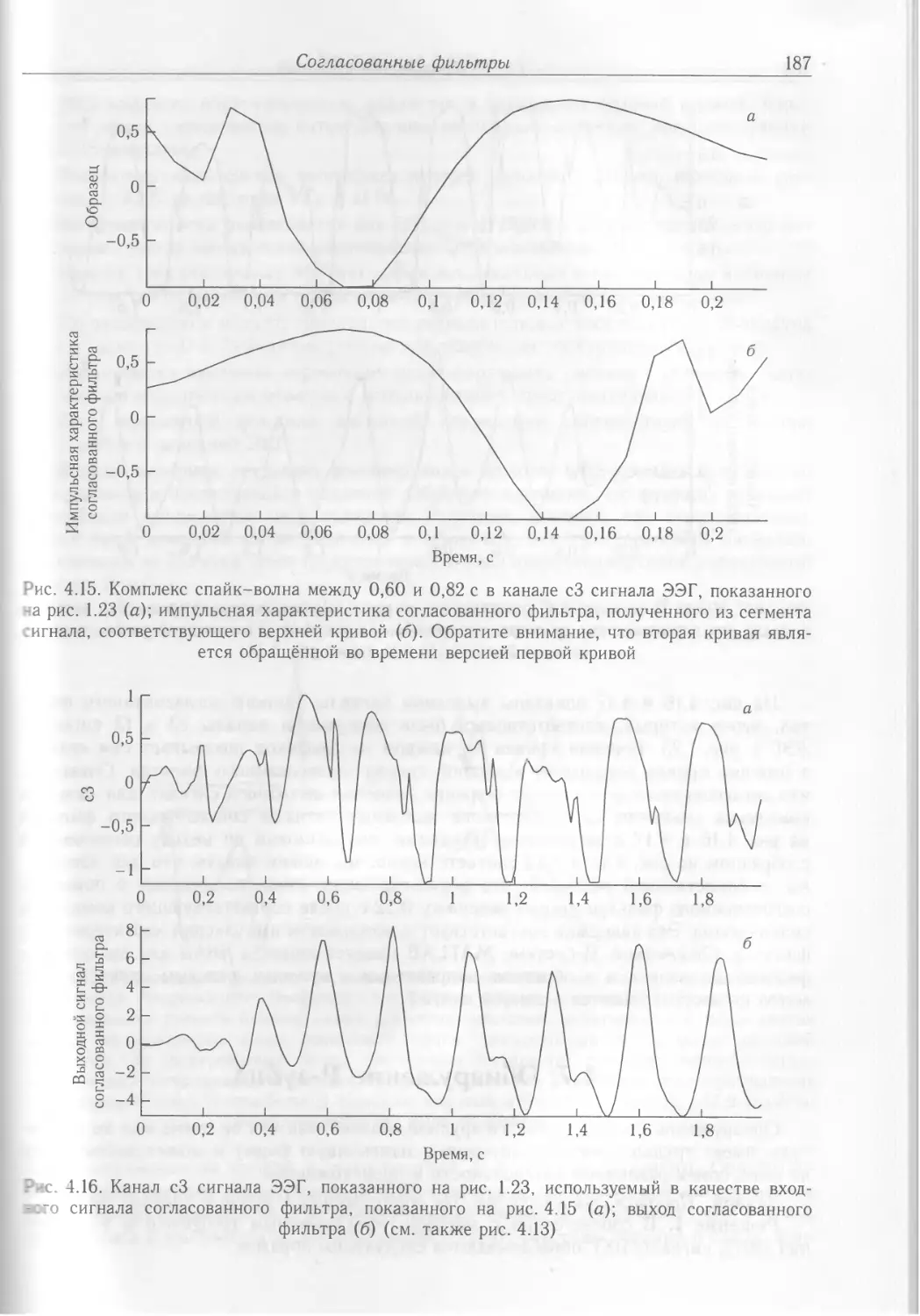
4.6. Согласованные фильтры................................................. 185
4.6.1. Обнаружение комплексов спайк-волна на ЭЭГ (186).
4.7. Обнаружение Р-зубца................................................... 188
4.8. Гомоморфная фильтрация и комплексный кепстр........................... 191
4.8.1. Обобщённая линейная фильтрация (191). 4.8.2. Гомоморфная деконволю-
ция (193). 4.8.3. Получение характеристики голосового тракта (194).
4.9. Применение: анализ ритма ЭКГ.......................................... 200
4.10. Применение: идентификация звуков сердца.............................. 203
4.11. Применение: обнаружение аортальной компоненты второго тона сердца.... 206
4.12. Замечания............................................................ 208
4.13. Контрольные вопросы и задания........................................ 209
4.14. Упражнения и лабораторные работы..................................... 210
Глава 5. Анализ форм волн и их сложности................................... 212
5.1. Постановка задачи..................................................... 212
5.2. Иллюстрация задачи на примерах........................................ 212
5.2.1. QRS-комплекс при блокаде проводящих путей (212). 5.2.2. Влияние ише-
мии и инфаркта миокарда на форму QRS-комплекса (213). 5.2.3. Эктопические
комплексы (213). 5.2.4. Сложность формы сигнала ЭМГ (213). 5.2.5. Уровень
интенсивности сигнала ФКГ (214).
Содержание
9
5.3. Анализ потенциалов, связанных с событиями.............................. 214
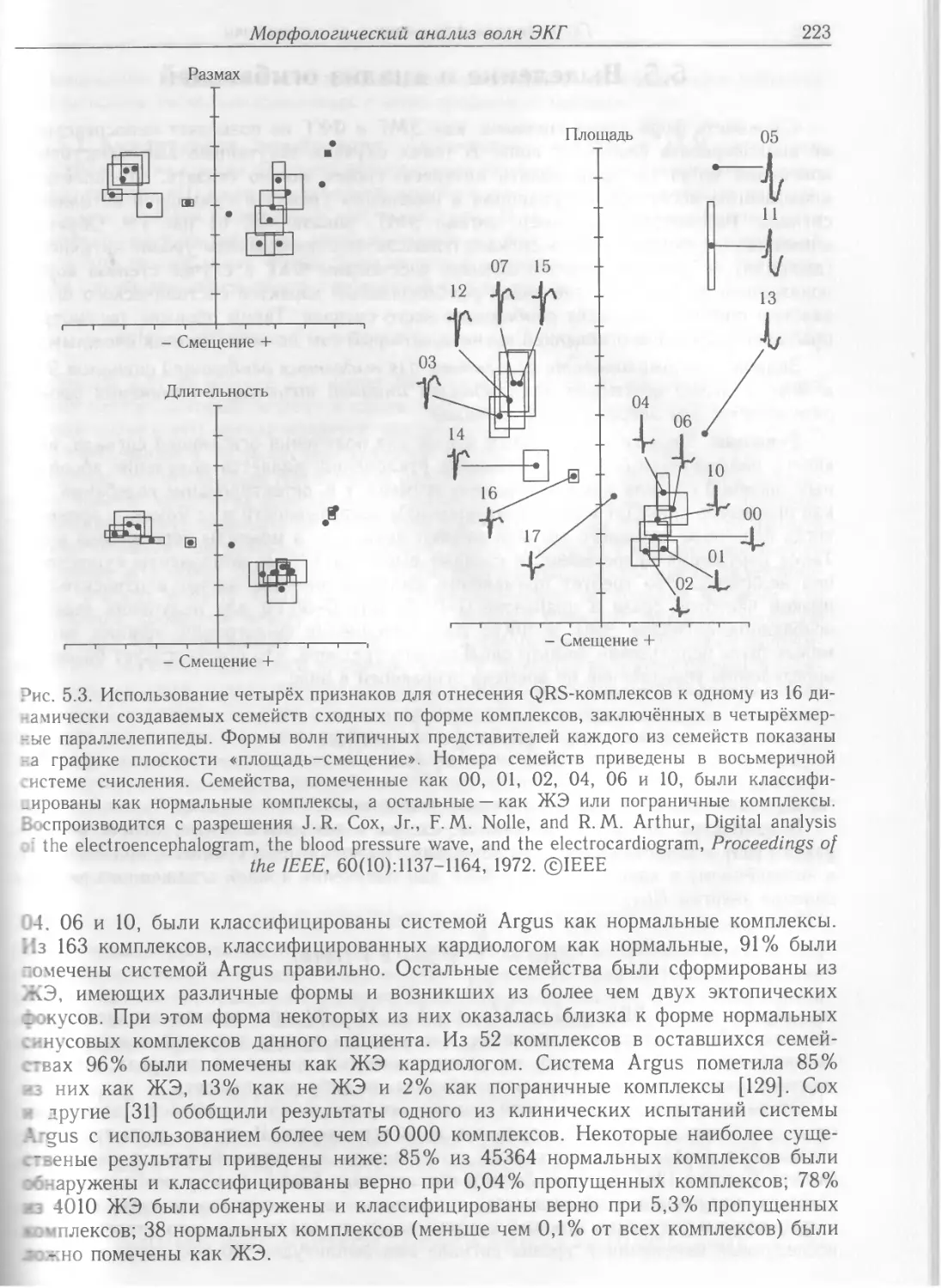
5.4. Морфологический анализ волн ЭКГ........................................ 215
5.4.1. Коэффициент корреляции (215). 5.4.2. Минимально-фазовое согласование и
длина сигнала (215). 5.4.3. Анализ форм волн ЭКГ (222).
5.5. Выделение и анализ огибающей........................................... 224
5.5.1. Амплитудная демодуляция (225). 5.5.2. Синхронное усреднение огибающих
ФКГ (226). 5.5.3. Энвелограмма (227).
5.6. Анализ активности...................................................... 230
5.6.1. Среднеквадратичное значение (231). 5.6.2. Частота пересечений нуля (232).
5.6.3. Подсчёт поворотов (232). 5.6.4. Коэффициент формы (233).
5.7. Применение: параметризация нормальных и эктопических комплексов ЭКГ.... 235
5.8. Применение: анализ ЭКГ при физической нагрузке......................... 236
5.9. Применение: анализ дыхания............................................. 237
5.10. Применение: электрические и механические корреляты мышечных сокращений . 238
5.11. Замечания............................................................. 241
5.12. Контрольные вопросы и задания......................................... 241
5.13. Упражнения и лабораторные работы...................................... 243
Глава 6. Исследование характеристик сигналов и систем в частотной области 245
6.1. Постановка задачи...................................................... 246
6.2. Иллюстрация задачи на примерах......................................... 246
6.2.1. Влияние эластичности миокарда на спектр звуков сердца (246). 6.2.2. Частот-
ный анализ шумов сердца для диагностики дефектов клапанов (248).
6.3. Спектр Фурье........................................................... 251
6.4. Оценка функции спектральной плотности мощности......................... 254
6.4.1. Периодограмма (255). 6.4.2. Необходимость усреднения (257). 6.4.3. Исполь-
зование окон: спектральное разрешение и утечка (258). 6.4.4. Оценка автокорреля-
ционной функции (265). 6.4.5. Синхронное усреднение спектров ФКГ (265).
6.5. Характеристики, получаемые из функций спектральной плотности мощности . . . 269
6.5.1. Моменты функций СПМ (269). 6.5.2. Отношения спектральных мощно-
стей (271).
6.6. Применение: оценка протезов сердечных клапанов......................... 273
6.7. Замечания.............................................................. 274
6.8. Контрольные вопросы и задания.......................................... 275
6.9. Упражнения и лабораторные работы....................................... 276
Глава 7. Моделирование процессов и систем, порождающих биомедицинские
сигналы..................................................................... 278
7.1. Постановка задачи...................................................... 278
7.2. Иллюстрация задачи на примерах......................................... 279
7.2.1. Типы форм волн сокращений двигательной единицы (279). 7.2.2. Сердечный
ритм (280). 7.2.3. Форманты и высота тона речевого сигнала (281). 7.2.4. Хруст
коленной чашечки (282).
7.3. Точечные процессы...................................................... 282
7.4. Параметрическое моделирование систем................................... 289
7.5. Авторегрессионное или полюсное моделирование........................... 291
7.5.1. Спектральное согласование и параметризация (296). 7.5.2. Оптимальный поря-
док модели (299). 7.5.3. Взаимосвязь между авторегрессионными и кепстральными
коэффициентами (304).
7.6. Моделирование с использованием полюсов и нулей......................... 306
7.6.1. Последовательная оценка полюсов и нулей (309). 7.6.2. Итеративная иденти-
фикация системы (311). 7.6.3. Гомоморфное предсказание и моделирование (315).
7.7. Электромеханические модели генерации сигналов.......................... 319
7.7.1. Генерация звуков в коронарных артериях (319). 7.7.2. Генерация звуков в
коленных суставах (321).
7.8. Применение: анализ вариабельности сердечного ритма..................... 323
7.9. Применение: спектральное моделирование и анализ сигналов ФКГ........... 326
7.10. Применение: выявление заболеваний коронарных артерий.................. 331
10 Содержание
7.11. Замечания............................................................. 332
7.12. Контрольные вопросы и задания......................................... 333
7.13. Упражнения и лабораторные работы...................................... 334
Глава 8. Анализ нестационарных сигналов...................................... 336
8.1. Постановка задачи...................................................... 337
8.2. Иллюстрация задачи на примерах......................................... 337
8.2.1. Сердечные звуки и шумы (337). 8.2.2. Волны и ритмы ЭЭГ (337). 8.2.3. По-
вреждения суставного хряща и вибрации коленного сустава (338).
8.3. Динамические системы................................................... 340
8.3.1. Характеристики нестационарных сигналов и динамических систем (341).
8.4. Фиксированная сегментация.............................................. 344
8.4.1. Преобразование Фурье для коротких интервалов (344). 8.4.2. Соображения по
анализу коротких интервалов (346).
8.5. Адаптивная сегментация................................................. 350
8.5.1. Мера спектральной ошибки (МСО) (351). 8.5.2. Расстояние по АКФ (355).
8.5.3. Обобщённое отношение правдоподобия (ООП) (357). 8.5.4. Сравнительный
анализ методов АКФ, МСО и ООП (358).
8.6. Использование адаптивных фильтров для сегментации ..................... 360
8.6.1. Мониторинг РНК-фильтра (361). 8.6.2. Решётчатый РНК-фильтр (363).
8.7. Применение: адаптивная сегментация сигналов ЭЭГ........................ 373
8.8. Применение: адаптивная сегментация сигналов ФКГ........................ 375
8.9. Применение: динамический анализ вариабельности сердечного ритма........ 378
8.10. Замечания............................................................. 381
8.11. Контрольные вопросы и задания......................................... 381
8.12. Упражнения и лабораторные работы...................................... 382
Глава 9. Классификация образов и диагностические решения..................... 383
9.1. Постановка задачи...................................................... 384
9.2. Иллюстрация задачи на примерах......................................... 384
9.2.1. Диагностика блокады проводящих путей (384). 9.2.2. Нормальный или экто-
пический QRS-комплекс? (385). 9.2.3. Имеется ли а-ритм? (385). 9.2.4. Имеется
ли шум? (386).
9.3. Классификация образов................................................. 386
9.4. Обучение с учителем................................................... 387
9.4.1. Дискриминантные и решающие функции (387). 9.4.2. Функции расстоя-
ния (389). 9.4.3. Правило ближайшего соседа (389).
9.5. Обучение без учителя .................................................. 390
9.5.1. Методы поиска кластеров (390).
9.6. Вероятностные модели и статистические решения......................... 394
9.6.1. Функции правдоподобия и статистические решения (394). 9.6.2. Классифика-
тор Байеса для классов с нормальными распределениями (396).
9.7. Логистический регрессионный анализ..................................... 398
9.8. Этапы обучения и тестирования.......................................... 399
9.8.1. Метод исключения (399).
9.9. Нейронные сети......................................................... 400
9.10. Характеристики точности и цены диагностики............................ 402
9.10.1. Рабочие характеристики (ROC-кривые) (404). 9.10.2. Тест симметрии Мак-
немара (407).
9.11. Надёжность классификаторов и систем принятия решений.................. 408
9.12. Применение: нормальные или эктопические QRS-комплексы ЭКГ............. 409
9.13. Применение: выявление патологии хряща коленной чашечки................ 413
9.14. Замечания............................................................. 416
9.15. Контрольные вопросы и задания......................................... 417
9.16. Упражнения и лабораторные работы...................................... 419
Список литературы............................................................ 420
Предметный указатель......................................................... 433
ПРЕДИСЛОВИЕ
Предыстория и постановка задачи. Внедрение электрокардиографии (ЭКГ)
в клиническую практику датским врачом Уильямом Эйнтховеном в 1903 г. ознамено-
вало начало новой эры в методах медицинской диагностики, связанной с использо-
ванием электроники в медицинской технике. С тех пор электроника, а впоследствии
и компьютеры, стали неотъемлемыми компонентами систем анализа биомедицин-
ских сигналов, выполняя различные задачи, начиная от регистрации данных и их
предварительной обработки с целью устранения артефактов и до выделения диагно-
стических признаков и их интерпретации. Электронное оборудование и компьютеры
начали применяться для исследования широкого спектра биологических и физиоло-
гических систем и явлений, таких как электрическая активность сердечно-сосуди-
стой системы, мозга, нейромышечной системы и системы пищеварения; изменения
давления в сердечно-сосудистой системе; звуки и сигналы вибрации от сердечно-
сосудистой, мышечно-скелетной и дыхательной систем; магнитные поля мозга. И это
далеко не полный перечень.
Первым шагом в исследовании физиологических систем является разработка
соответствующих датчиков и аппаратуры для преобразования изучаемых явлений
в электрический сигнал, поддающийся измерению. Следующий шаг — анализ
сигналов — не всегда является простой задачей для врача или специалиста в области
биологических наук. Клинически важная информация в сигнале часто замаскирована
шумами и наводками. Кроме того, как правило, параметры сигналов не могут
быть непосредственно восприняты визуальной и звуковой системами человека-
наблюдателя. Большая часть энергии звуков сердца, например, сосредоточена вблизи
или ниже порога восприятия звука большинством людей. Вид поверхностного
электромиографического (ЭМГ) сигнала слишком сложен, чтобы был возможен
его визуальный анализ. Некоторые многократно повторяющиеся или требующие
непрерывного внимания задачи, такие как непрерывный текущий контроль ЭКГ тя-
желых кардиологических больных с нарушениями сердечного ритма, могут оказаться
скучными и утомительными для человека-наблюдателя. Более того, в сигналах
такого типа наблюдается изменчивость от одного пациента к другому. Кроме того,
вариабельность, порождаемая субъективностью анализа различными врачами или
аналитиками, делает надёжную и состоятельную оценку и понимание наблюдаемых
явлений затруднительной или даже невозможной задачей. Эти факторы определяют
потребность не только в более совершенной аппаратуре, но также и в разработке
методов для объективного анализа сигналов с использованием алгоритмов обработки,
реализованных с помощью электронной аппаратуры или компьютеров.
Обработка биомедицинских сигналов до недавнего времени была, в основном,
направлена на решение следующих видов задач: фильтрацию шумов или сетевой
наводки; спектральный анализ для выявления частотных характеристик сигнала;
моделирование для представления свойств и параметризации исследуемых процес-
сов. Тенденции последнего времени направлены на количественный и объективный
анализ физиологических систем и явлений через анализ сигналов. Направление,
связанное с анализом биомедицинских сигналов, достигло такого уровня, когда
2 Р. Рангайян
18
Предисловие
возможно практическое применение методов обработки сигналов и распознавания
образов для эффективной и совершенной неинвазивной диагностики, текущего
непрерывного наблюдения за состоянием тяжело больных пациентов, реабилитации
и сенсорной поддержки инвалидов. Методы, разработанные инженерами, находят всё
большее применение у практических врачей, а роль техники в диагностике и лечении
завоевала заслуженное уважение.
Основные усилия при применении компьютеров для анализа биомедицинских
сигналов направлены на использование обработки сигналов и методов моделирования
для количественного, или объективного, анализа. Анализ сигналов наблюдателем-
человеком почти всегда сопряжён с ограничениями восприятия, межличностными
различиями, ошибками, вызванными утомлением, ошибками, вызванными очень
низкой частотой распространения определенных признаков нарушений, отвлечени-
ем внимания из-за окружающей обстановки и так далее. Интерпретация сигнала
экспертом в большой степени определяется опытностью и квалифицированностью
аналитика, следовательно такой анализ почти всегда субъективен. Компьютерный
анализ биомедицинских сигналов, если он выполняется с использованием адекватной
логики, потенциально способен усилить объективную составляющую интерпретации,
даваемой экспертом. Таким образом становится возможным усилить достоверность
или точность диагностики, даже проводимой экспертом с многолетним опытом. Этот
подход к повышению уровня медицинской помощи может быть назван диагностикой,
поддерживаемой компьютером.
Разработка алгоритма для анализа биомедицинского сигнала, однако, является
непростой задачей; довольно часто это даже не целенаправленный процесс. Инженер
или компьютерный аналитик часто бывает поражён изменчивостью и разнообразием
признаков в биомедицинских сигналах и системах, где эти факторы проявляются
в большей степени, чем в физических системах или наблюдениях. Доброкаче-
ственные заболевания часто маскируют признаки злокачественных; злокачественные
заболевания могут давать характерные признаки, появление которых, однако, не
всегда гарантировано. Учёт всех возможностей и степеней свободы в биомедицин-
ских системах является наиболее сложной проблемой для большинства применений.
Методы, показавшие свою пригодность для работы с определёнными системами или
наборами сигналов, могут оказаться несостоятельными в других, на первый взгляд
похожих, ситуациях.
Подход, основанный на решении практических задач. Подход, которого я при-
держивался при изложении представленного в данной книге материала, заключается
прежде всего в разработке алгоритмов для решения определённых задач. Про
инженеров часто говорят (я полагаю — с восхищением), что они «решают задачи».
Однако проработка постановки задачи и достижение её хорошего понимания может
потребовать значительного объёма подготовительной работы. Для представления
в этой книге я отобрал логически связанные группы задач из многочисленных
конкретных случаев, с которыми я сталкивался в моей исследовательской работе.
Каждая глава посвящена определённому типу задач, касающихся биомедицинских
сигналов. Каждая глава начинается с постановки задачи, непосредственно за этим
приводятся несколько иллюстраций с использованием реальных практических при-
меров и соответствующих сигналов. Затем описываются обработка сигналов, а также
модели или методы анализа, начиная с относительно простых «азбучных» методов,
кончая более сложными исследовательскими подходами, направленными на реше-
ние специфических проблем. Каждую главу замыкает один или более примеров
применения описанных методов для решения важных практических задач. Книга
обильно снабжена рисунками реальных биомедицинских сигналов и результатами их
обработки.
Предисловие
19
Изучение представленных в книге методов требует достаточно высокого уровня
технической подготовки. Для понимания описываемых процедур и методов анализа
требуется хорошо владеть основами анализа сигналов и систем [1-3], а также
теории вероятностей, теории случайных величин и процессов, теории стохастических
процессов [4-9]. Подразумевается также знакомство с теорией систем и преоб-
разованиями Лапласа и Фурье, причём для последнего — как в непрерывной, так
и в дискретной формах. Мы не будем вдаваться в детальное рассмотрение датчиков
и аппаратных средств, которые, несомненно, очень важны для сбора биомедицин-
ских сигналов [10-13]; вместо этого мы будем изучать проблемы, присутствующие
в сигналах после того, как они были получены, концентрируя внимание на том,
как решать эти проблемы. Также настоятельно рекомендуется одновременное или
предварительное изучение физиологических явлений, связанных с анализируемыми
и исследуемыми сигналами.
Для кого предназначена эта книга. Эта книга предназначена для студентов
последних курсов, обучающихся по инженерным специальностям, а также для ас-
пирантов. Студенты электротехнических специальностей с хорошей базой в области
сигналов и систем [1-3] являются наиболее хорошо подготовленным контингентом
в отношении материала этой книги. Студенты, специализирующиеся по другим
техническим дисциплинам (компьютерам, физике, математике или геофизике), также
могут оказаться подготовленными к восприятию материала этой книги. Неплохим
связующим звеном мог бы служить курс по цифровой обработке сигналов и циф-
ровым фильтрам [14], но способные студенты, даже не знакомые с этой темой, не
встретят больших трудностей.
Практические инженеры, специалисты по компьютерам и информационным техно-
логиям, врачи, специалисты по обработке данных, работающие в различных сферах,
таких как телекоммуникации, сейсмические и геофизические применения, биомеди-
цинские применения, медицинские информационные системы, могут найти эту книгу
полезной с точки зрения освоения наиболее совершенных методов анализа сигналов.
Они могут иметь источник своего интереса в других областях обработки и анализа
сигналов и удовлетворять любознательность, изучая применение компьютеров в ме-
дицине и медицинской диагностике.
План преподавания и изучения. Книга начинается с представленного в гла-
ве 1 иллюстрированного введения, касающегося биомедицинских сигналов. Глава 2
продолжает введение, но с упором на анализ многоканальных или взаимосвязанных
сигналов. Эта часть книги может быть пропущена в учебном плане, если студенты
ранее прослушали курс по биомедицинским сигналам и аппаратуре. В подобном
случае глава должна быть изучена лишь как обзорный материал, для того чтобы
дать ориентиры по примерам, приводимым далее в книге.
Глава 3 посвящена исключительно фильтрации с целью устранения артефактов —
важному предварительному этапу перед анализом сигналов. Там, где это требуется,
и в той мере, в какой это требуется, приводятся обзор и описание основных
свойств систем и преобразований, а также методов обработки сигналов. Данная глава
написана с таким расчетом, чтобы люди, имеющие базовую подготовку по сигналам,
системам и преобразованиям [1-3], могли без труда освоить этот материал. Упор
сделан на практическом применении методов анализа биомедицинских сигналов для
решения определённых задач, а не на самих методах. Для обеспечения визуального
восприятия и возможности оценки эффективности описываемых методов фильтрации
приведено большое количество иллюстраций.
В главе 4 представлены методы, которые особенно полезны для выявления собы-
тий в биомедицинских сигналах. Глава 5 фокусируется на анализе формы сигналов
и отдельных волн, связанных с событиями и информативными компонентами в сигна-
лах. В главе 6 представлены методики оценки параметров биомедицинских сигналов
2*
20
Предисловие
в частотной области. Основное внимание уделено характеристике задач, с которыми
приходится сталкиваться при анализе и интерпретации биомедицинских сигналов,
а не специфическим вопросам, связанным с применением анализа определённых
сигналов для диагностики.
Материал первой части книги, включая главу 6, более чем достаточен для
курса лекций на один семестр, рассчитанного на уровень инженерной подготовки
старших курсов (четвертый год обучения). Мой собственный опыт преподавания
показывает, что этот материал требует примерно 36 часов лекций, дополненных
12 часами практических занятий (рассмотрение решения задач) и 10 лабораторными
работами.
Темой главы 7 является моделирование процессов формирования биомедицинских
сигналов и систем для их параметрического представления и анализа. Глава 8
посвящена анализу нестационарных сигналов. Темы, рассматриваемые в этой главе,
имеют гораздо более высокую математическую сложность, чем это принято в курсах,
читаемых студентам. Некоторые разделы могут быть выборочно включены в началь-
ный курс по анализу биомедицинских сигналов, если к данным темам по каким-либо
причинам существует особый интерес. В противном случае эти две главы могут быть
предложены для самостоятельного изучения тем, кто нуждается в данных методах,
либо включены в расширенный курс.
В главе 9 представлены итоги анализа биомедицинских сигналов и даётся вве-
дение в методы распознавания образов и принятия диагностических решений. Хотя
эта тема относится по уровню к расширенному курсу и может сама по себе служить
основой для курса, ориентированного на аспирантов, материал подаётся так, чтобы
представить завершённый пример практического использования, демонстрирующий
процесс анализа биомедицинских сигналов вплоть до финальной стадии — принятия
диагностического решения. Стоит порекомендовать включить некоторые разделы
этой главы даже в начальный курс, для того чтобы студенты имели возможность
ощутить вкус конечного результата.
Тема сжатия данных была намеренно оставлена за пределами круга вопросов,
рассматриваемых в данной книге. Более сложные темы, такие как нелинейная
динамика, частотно-временные распределения, анализ на основе вейвлет-преобразо-
ваний, теория хаоса и фракталы, не рассматриваются в этой книге. По адаптивным
фильтрам и методам анализа нестационарных сигналов в книге дана только вводная
информация, хотя эти темы заслуживают более внимательного, глубокого и ши-
рокого рассмотрения. Перечисленные вопросы будут предметом следующей книги,
которую я намерен ещё написать.
Каждая глава содержит некоторое количество контрольных вопросов и заданий
для обеспечения подготовки к тестам и экзаменам. Кроме того, в конце каждой главы
предлагаются лабораторные работы, которые могут быть использованы как готовые
упражнения с записями реальных сигналов. Файлы данных, относящиеся к заданиям
и упражнениям в конце каждой главы, доступны на сайте
ftp://ftp.ieee.org/uploads/press/rangayyan/.
В случаях, где это необходимо, предлагаются также программы для чтения
данных на MATLAB.
Настоятельно рекомендуется, чтобы первые одно или два лабораторных занятия
по курсу были визитами в местную клинику, центр медицинских исследований или
клиническую лабораторию, для того чтобы увидеть сбор и анализ биомедицинских
сигналов в реальных (клинических) условиях. Сигналы, регистрируемые с самих
студентов и преподавателей, также могут представлять интересный и мотивирующий
материал для лабораторных упражнений и должны использоваться для дополнения
Предисловие
21
файлов данных, доступных с указанного сайта. Необходимо также включить в курс
несколько семинаров, проводимых врачами, нейрофизиологами и кардиологами, для
того чтобы представить студентам не только инженерный, но и медицинский взгляд
на данный предмет.
Практический опыт работы с реальными сигналами является ключевым элемен-
том для понимания и оценки важности методов анализа биомедицинских сигналов.
Это иногда может показаться трудным и обескураживающим, но даёт в результате
профессиональное удовлетворение и удовольствие от учёбы.
Рангарадж Мандаям Рангайян
Калгари, провинция Альберта, Канада
Сентябрь 2001 г.
ОБОЗНАЧЕНИЯ И СОКРАЩЕНИЯ
Замечание. Переменные, выделенные жирным шрифтом, обозначают вектор-
ную или матричную форму соответствующих переменных, обозначенных курсивом.
Переменные или символы, используемые в пределах ограниченного контекста, не
включены в данный список: они описаны внутри соответствующего контекста.
Приведённые в списке математические символы могут использоваться в качестве
других значений или переменных в различных применениях; в списке приведены
только самые основные употребления.
Список условных обозначений и аббревиатур (английских)
AI недостаточность аортального клапана (aortic insufficiency)
AR интервал между периодом активности желудочка и соответствующим
QRS-комплексом
AS стеноз аортального клапана (aortic stenosis)
au безразмерные единицы (arbitrary units)
aV{F, L, R} усиленные отведения ЭКГ
A2 аортальная компонента второго тона сердца
CD компакт-диск (compact disk)
D дикротическая выемка в каротидном пульсе
DC постоянный ток, нулевая частота (direct current)
DW дикротическая волна в каротидном пульсе
HSS гипертрофический субаортальный стеноз
(hypertrophic subaortic stenosis)
MI недостаточность митрального клапана (mitral insufficiency)
MR недостаточность митрального клапана, митральная регургитация
(mitral regurgitation)
MS стеноз митрального клапана (mitral stenosis)
Р волна сокращения предсердий в ЭКГ
Р волна перкуссии в сигнале каротидного пульса
PDA открытый артериальный проток (patent ductus arteriosus)
PI недостаточность лёгочного клапана (pulmonary insufficiency)
PLP митральная регургитация с задним пролапсом лепестков
(posterior leaflet prolapse)
PQ изоэлектрический сегмент ЭКГ перед сокращением желудочков
PS стеноз клапана лёгочной артерии (pulmonary stenosis)
Р2 лёгочный компонент второго тона сердца
QRS волна сокращения желудочков в ЭКГ
ROC ROC-кривые, рабочие характеристики (receiver operating characteristics)
RR интервал между двумя последовательными QRS-комплексами в ЭКГ
SNR отношение сигнал-шум (signal-to-noise ratio)
ST изоэлектрический сегмент в ЭКГ во время сокращения желудочков
S1 первый тон сердца
S2 второй тон сердца
S3 третий тон сердца
Обозначения и сокращения
23
S4 Т т TI TS V1-V6 1D 2D 3D I, П, П четвёртый тон сердца волна фазы расслабления желудочков в ЭКГ приливная волна в каротидном пульсе недостаточность трёхстворчатого клапана (tricuspid insufficiency) стеноз трёхстворчатого клапана (tricuspid stenosis) грудные отведения ЭКГ одномерный двумерный трёхмерный конечностные (стандартные) отведения ЭКГ Список аббревиатур (русских)
АВ АД АКФ AM АО АПШ АР АРСС АЦП БДГ БИХ БПФ ВАГ ВКГ ВКФ ВМГ ВСП ВСР ВЧР ДЕ ДМЖП ДМПП дпф дс дш жэ ИНС ио иод ип ипд КБИ ких КП КФ лж ло лод лп лп лп атрио-вентрикулярный артериальное кровяное давление автокорреляционная функция амплитудная модуляция аорта, аортальный (клапан или давление) адаптивное подавление шумов авторегрессионный (фильтр или модель) авторегрессии — скользящего среднего (фильтр или модель) аналого-цифровой преобразователь быстрое движение глаз бесконечная импульсная характеристика (тип фильтра) быстрое преобразование Фурье виброартрограмма векторокардиограмма взаимная корреляционная функция (функция кросс-корреляции) вибромиограмма взаимная спектральная плотность, кросс-спектр вариабельность сердечного ритма время-частотное распределение двигательная единица дефект межжелудочковой перегородки дефект межпредсердной перегородки дискретное преобразование Фурье длина сигнала диастолический шум желудочковая экстрасистола искусственная нейронная сеть истинноотрицательный истинноотрицательная доля истинноположительный истинноположительная доля коленно-бедренная последовательность импульсов конечная импульсная характеристика (тип фильтра) каротидный пульс коэффициент формы левый желудочек ложноотрицательный ложноотрицательная доля левое предсердие линейное предсказание (модель) ложноположительный
24
Обозначения и сокращения
лпд ложноположительная доля
МПС максимальное произвольное сокращение
МИИ межимпульсный интервал
мнк метод наименьших квадратов
МП миографическая помеха
МСКО минимальная среднеквадратичная ошибка
мео мера спектральной ошибки
МФС минимально-фазовое соответствие
ОАЭ отоакустическая эмиссия
око общая квадратичная ошибка
ООП обобщённое отношение правдоподобия
ОПФ обратное преобразование Фурье
пд потенциал действия
ПДДЕ потенциал действия двигательной единицы
ПДОДЕ потенциал действия отдельной двигательной единицы
пж правый желудочек
поп показатель отрицательного предсказания
пп правое предсердие
ппп показатель положительного предсказания
псс потенциалы, связанные с событиями
ПФ преобразование Фурье
ПФКИ преобразование Фурье для коротких интервалов
РНК рекурсивный метод наименьших квадратов
РРНК решётчатый алгоритм рекурсивного метода наименьших квадратов
СА сино-атриальный
ско среднеквадратичная ошибка
епм спектральная плотность мощности (спектральная мощность)
сс скользящее среднее (тип фильтра)
ссвп соматосенсорные вызванные потенциалы
сш систолический шум
ФКГ фонокардиограмма
ФПВ функция плотности вероятности
хкч физиологический хруст коленной чашечки
ЦАП цифро-аналоговый преобразователь
цне центральная нервная система
чпн частота пересечений нуля
чсс частота сердечных сокращений
эгг электрогастрограмма
ЭКГ электрокардиограмма, электрокардиография
ЭКоГ электрокортикограмма
ЭМГ электромиограмма
энг электронейрограмма
ЭЭГ электроэнцефалограмма
Список обозначений переменных и специальных символов
Латинские
аь коэффициенты модели авторегрессии или фильтра
Az площадь под ROC-кривой
bi коэффициенты модели или фильтра скользящего среднего
С ковариационная матрица
Ci г-й класс в задаче классификации образов
Сху ковариация между х и у
е(п),Е(ш) ошибка модели или оценки
Обозначения и сокращения
25
л
h(t), h(n)
н
H(s)
H(z)
Я(си)
Я(Ч)
i
j
j
Lij
m
m
M
N
N
Pk
p(x)
p(x | Ci)
P
P
P(Ci\x)
Q
r, r
rj(x)
s
S(w),S(k)
S+
s~
t
T
т
T+
T~
Th
w
w
x(t), x(n)
X
X(f),
X(k)
X(z)
X(t,O>)
общая энергия сигнала
оператор математического ожидания
переменная частоты, обычно в Гц
частота среза фильтра в Гц (обычно на уровне —3 дБ)
частота дискретизации в Гц
импульсная характеристика фильтра
Эрмитова (комплексно-сопряжённая) матрица
передаточная функция фильтра
преобразование Лапласа от h(t)
^-преобразование от h(n)
частотная характеристика фильтра
преобразование Фурье от h(t)
индекс последовательности дискретных отсчётов
индекс последовательности дискретных отсчётов сигнала
функция проигрыша в классификации образов
среднее
вектор средних значений для класса образов
число отсчётов
число отсчётов
порядок фильтра
полюс модели
функция плотности вероятности случайной переменной х
функция правдоподобия для класса Ci или текущая условная ФПВ
от х
порядок модели или число полюсов
вероятность события
апостериорная вероятность того, что наблюдение х принадлежит
классу Ci
порядок модели или число нулей
опорный вход адаптивного фильтра
средний риск или проигрыш в классификации образов
переменная области значений Лапласа
спектральная плотность или взаимная спектральная плотность,
спектральная плотность мощности
чувствительность теста
специфичность теста
переменная времени
интервал дискретизации
в качестве верхнего индекса: транспозиция вектора или матрицы
положительный результат теста
отрицательный результат теста
порог
весовой коэффициент фильтра, весовая функция
вектор весовых коэффициентов фильтра
сигнал во временной области, обычно относится ко входу
векторное представление сигнала х(п)
вектор признаков в классификации образов
преобразование Фурье от x(t)
дискретное преобразование Фурье от х(п)
^-преобразование от х(п)
преобразование Фурье по коротким интервалам или
время-частотное распределение x(t)
26 Обозначения и сокращения
y(t), y(ri) У Y(f), У(а>) Y(fc) V(z) z z~[ Zl z сигнал во временной области, обычно относится к выходу векторное представление сигнала у(п) преобразование Фурье от y(t) дискретное преобразование Фурье от у(п) ^-преобразование от у(п) переменная ^-преобразования оператор единичной задержки в дискретных системах нули системы вектор-прототип при классификации образов
Греческие a /3 7 Уху Уг Г J- xy 6 6 8 'П 0 0 0 о, e A p p p p (7 (7 ф, Ф Q волна ЭЭГ волна ЭЭГ волна ЭЭГ коэффициент корреляции между х и у коэффициент отражения когерентность между х и у волна ЭЭГ дельта-функция (импульсная функция) Дирака общая квадратичная ошибка случайная величина или шумовой процесс угол порог волна ЭЭГ функция взаимной корреляции коэффициент забывания в фильтре РНК среднее значение случайной величины ритмическая волна в ЭЭГ величина шага в фильтре НСК коэффициент корреляции вещественная часть переменной Лапласа s (частота Непера) стандартное отклонение случайной величины дисперсия случайной величины интервал времени, задержка или сдвиг автокорреляция переменная частоты в радианах в секунду переменная частоты в радианах в секунду
Специальные символы
* * в строке: операция свёртки верхний индекс: комплексное сопряжённое
* среднее или нормализованное значение переменной комплексный кепстр сигнала (для функции от времени)
комплексный логарифм сигнала (для функции от частоты)
/ и 5 оценка переменной, указанной под данным символом первая и вторая производные указанной перед
V 6 II соответствующим символом функции для всех принадлежность к множеству или вхождение в множество абсолютная величина или значение модуля
Z аргумент или фазовый угол
Глава 1
ВВЕДЕНИЕ В БИОМЕДИЦИНСКИЕ СИГНАЛЫ
1.1. Природа биомедицинских сигналов
Живые организмы состоят из многих взаимосвязанных систем — человеческое
тело, например, включает нервную, сердечно-сосудистую и мышечно-скелетную си-
стемы, а также некоторые другие. Каждая система построена из нескольких подси-
стем, которые отвечают за многочисленные физиологические процессы. Например,
сердечно-сосудистая система выполняет важную задачу ритмичного прокачивания
крови через тело для обеспечения доставки питательных веществ, а также прокачи-
вания крови через дыхательную систему для насыщения кислородом самой крови.
Физиологические процессы являются сложными явлениями, включающими в себя
нервную или гормональную стимуляцию и управление; входные и выходные потоки,
которые могут быть представлены в форме физических веществ, нейротрансмиттеров
или информации; действия, которые могут быть механическими, электрическими
и биохимическими. Большинство физиологических процессов либо сопровождаются
сигналами, либо проявляют себя в виде сигналов, отражающих природу и протека-
ние этих процессов. Сами по себе сигналы могут быть многих типов, в том числе
биохимические в форме гормонов и нейротрансмиттеров, электрические в форме
потенциала или тока и физические в форме давления и температуры.
Болезни или дефекты какой-либо биологической системы вызывают изменения
в нормальных физиологических процессах, приводящие к патологическим процес-
сам, которые влияют на эффективность работы, состояние и общее благополучие
системы. Патологические процессы обычно связаны с сигналами, которые в некото-
рых отношениях отличаются от соответствующих нормальных сигналов. Если мы
хорошо понимаем исследуемую систему, то существует возможность наблюдения
соответствующих сигналов и оценки состояния данной системы. Эта задача не
слишком сложна, когда сигналы являются простыми и могут регистрироваться на
внешней поверхности тела. Например, большинство инфекций вызывает повышение
температуры тела, которое можно очень просто ощутить ладонью руки, хотя такой
способ является относительным и качественным. Объективное, или количествен-
ное, измерение температуры требует использования какого-нибудь прибора, напри-
мер простого термометра.
Единичное измерение х температуры является скаляром и представляет тем-
пературное состояние тела в определённый или единичный момент времени t
(и в определённой точке тела). Если в какой-либо форме записывать температуру
непрерывно, например в виде ленточной диаграммы, мы получим сигнал как функ-
цию времени', такой сигнал может быть выражен в непрерывной или аналоговой
форме как x(t). Если температура измерена в дискретные моменты времени, она
28
Гл. 1. Введение в биомедицинские сигналы
может быть выражена в дискретной форме, как х(пТ) или х(п), где п является
индексом или номером отсчёта массива измеренных величин, а Т представляет собой
постоянный временной интервал между моментами измерений. Дискретно-временной
сигнал, который может содержать амплитудные величины только из ограниченного
числа уровней квантования, называется цифровым сигналом. Однако различие
между дискретными и цифровыми сигналами часто игнорируется.
При мониторинге в случае интенсивной терапии для измерения температуры
барабанной перепонки уха иногда используется инфракрасный датчик. Те же датчики
могут применяться и для других целей, например, они могут быть введены с помо-
щью катетеров в артерию или в сердце для измерения внутренней температуры тела.
В этом случае появляется возможность получить непрерывное измерение темпера-
туры, хотя для последующего анализа могут сохраняться лишь несколько отсчётов,
полученных с интервалом в несколько минут. На рис. 1.1 показано представление
измерений температуры в форме скаляра, массива, а также сигнала, представляю-
щего собой функцию от времени. Очевидно, что графическое представление даёт
33,5 °C
а
Время 08:00 10:00 12:00 14:00 16:00 18:00 20:00 22:00 24:00
Рис. 1.1. Измерения температуры пациента, представленные как: скаляр с единственным из-
мерением температуры х в момент времени t (а); массив х(п), составленный из нескольких
измерений в разные моменты времени (б); сигнал х(п) или x(t) (в). Горизонтальная ось
графика представляет время в часах, вертикальная — температуру в градусах Цельсия. Данные
предоставлены больницей Foothills, Calgary
возможность более простого и быстрого понимания тенденции в изменении тем-
пературы, чем цифровой формат. Продолжительные записи температуры позволяют
анализировать механизмы температурной регуляции [15, 16].
Рассмотрим другое основное измерение в лечебном процессе и мониторинге:
измерение артериального кровяного давления (АД). В данном случае измеряются
две величины — систолическое давление и диастолическое давление. Хотя междуна-
Природа биомедицинских сигналов
29
родной стандартной единицей измерения давления является паскаль, в клинической
практике АД измеряется в миллиметрах ртутного столба (мм рт. ст.). Таким образом,
одиночное измерение АД может рассматриваться как вектор х = [xi,Z2]T, включа-
ющий две компоненты: %i, показывающую систолическое давление, и Х2, показы-
вающую диастолическое давление. Когда АД измеряется для нескольких моментов
времени, мы получаем массив векторных величин х(п). При мониторном наблюдении
в интенсивной терапии и при хирургических процедурах датчик давления иногда
может быть вставлен в артерию (одновременно с другими внутриартериальными
и внутривенными устройствами). В этом случае появляется возможность получать
систолическое и диастолическое АД как непрерывную во времени запись, хотя
величины могут быть переданы в компьютер и сохранены только как отсчёты,
соответствующие моментам времени, отстоящим друг от друга на несколько минут.
Такой сигнал может быть выражен как функция времени х(£). На рис. 1.2 показаны
а
Время 08:00 10:00 12:00 14:00 16:00 18:00 20:00 22:00 24:00
Систолическое АД 122 102 108 94 104 118 86 95 88
Диастолическое АД 66 59 60 50 55 62 41 52 48
180
160
140
120
100
80
60
40
20
-1_____1________1_______1_____1________।
14 16 18 20 22 24
Время, час
Рис. 1.2. Измерения артериального давления пациента, представленные как единичная пара
или вектор систолического и диастолического значений х в мм рт. ст. в определённый момент
времени t (а)\ массив х(п), состоящий из нескольких измерений в различные моменты
времени (б); сигнал х(£) или х(п) (в). Обратите внимание на использование жирного шрифта
для обозначения переменной х с целью подчеркнуть, что каждое измерение представляет
собой вектор, содержащий две компоненты. Горизонтальная ось представляет время в часах,
вертикальная — систолическое давление (верхняя кривая) и диастолическое давление (нижняя
кривая) в мм рт. ст. Данные предоставлены больницей Foothills, Calgary
измерения АД в форме единственного двухкомпонентного вектора, в форме массива
и в виде функции времени. Очевидно, что график функции от времени позволяет
легко и быстро оценить тенденции изменения давления во времени.
30 Гл. 1. Введение в биомедицинские сигналы
1.2. Примеры биомедицинских сигналов
Предыдущий пример с температурой тела в качестве сигнала является относи-
тельно простым примером биомедицинского сигнала. Несмотря на его простоту, мы
можем оценить его важность и значимость для оценки состояния ребёнка с высокой
температурой или тяжело больного пациента в больнице. В следующих разделах
описываются происхождение и природа нескольких других биомедицинских сигналов
различного типа с краткой характеристикой их значимости для диагностики. Более
детальное обсуждение некоторых из этих сигналов будет дано в последующих главах
в контексте их анализа для решения различных практических задач.
1.2.1. Потенциал действия. Потенциал действия (ПД) — это электрический сиг-
нал, который сопровождает механическое сокращение единичной клетки, стимули-
руемой электрическим током (нейронного происхождения или внешним) [10, 17-21].
ПД вызывается потоком ионов натрия (Na ), ионов калия (К+), ионов хлора (С1~)
и других ионов через мембрану клетки. Потенциал действия является базовой
компонентой всех биоэлектрических сигналов. Он даёт информацию о природе фи-
зиологической активности на уровне единичной клетки. Запись потенциала действия
требует изоляции единичной клетки и использования микроэлектродов толщиной
порядка нескольких микрон для стимуляции клетки и записи отклика [10].
Потенциал покоя. Нервные и мышечные клетки заключены в полупроницаемую
мембрану, которая позволяет некоторым определённым веществам проходить на-
сквозь, в то время как другие вещества задерживаются. Физиологические жидкости,
окружающие клетки, являются проводящими растворами, содержащими заряженные
атомы, известные как ионы. В состоянии покоя мембраны возбуждённых клеток лег-
ко пропускают ионы К+ и СГ, но эффективно блокируют ионы Na+ (проницаемость
для К+ в 50-100 раз выше, чем для Na+). Различные ионы пытаются восстановить
баланс между внутренней и наружной средами клетки в соответствии с их зарядом
и концентрацией. Неспособность ионов Na+ проникать через клеточную мембрану
создаёт следующие условия [17]:
• концентрация Na+ внутри клетки намного ниже, чем снаружи;
• наружная среда клетки является намного более положительной, чем внутренняя;
• для того чтобы уравновесить заряд, в клетку проникают дополнительные ио-
ны К+, вызывая внутри клетки более высокую концентрацию ионов К+, чем
снаружи;
• баланс заряда не может быть достигнут из-за разницы в проницаемости мембраны
для различных ионов.
• состояние равновесия устанавливается при наличии разности потенциалов, при
этом внутренняя сторона клетки заряжена отрицательно по отношению к наруж-
ной.
Клетка в состоянии покоя называется поляризованной. До тех пор пока некото-
рое внешнее воздействие или стимул не нарушат равновесия, большинство клеток
поддерживают потенциал покоя, который составляет от —60 до —100 мВ.
Деполяризация. Когда клетка возбуждается ионным током или внешним сти-
мулом, мембрана меняет свои характеристики и начинает позволять ионам Na+
проникать внутрь клетки. Это движение ионов Na+ создаёт ионный ток, который
далее снижает мембранный барьер для ионов Na+, что ведёт к лавинообразному
эффекту: ионы Na+ врываются внутрь клетки. Ионы К+ стараются покинуть клетку,
поскольку их концентрация внутри клетки в предшествующем состоянии покоя была
Примеры биомедицинских сигналов
31
выше, но они не могут двигаться так же быстро, как ионы Na+. Суммарным резуль-
татом этих процессов является установление положительного заряда внутри клетки
по отношению к наружной среде из-за нарушения баланса ионов К+. Состояние
равновесия вновь достигается после завершения прорыва ионов Na+. Это изменение
представляет собой начало потенциала действия с пиковой величиной, равной для
большинства клеток примерно +20 мВ. Возбуждённая клетка, порождающая потен-
циал действия, называется деполяризованной, а сам процесс — деполяризацией.
Реполяризация. После некоторого периода пребывания в состоянии деполяри-
зации клетка снова поляризуется и возвращается к потенциалу покоя посредством
процесса, известного как реполяризация. Реполяризация происходит примерно ана-
логично процессу деполяризации, за исключением того, что вместо ионов Na+
основными вовлечёнными в реполяризацию ионами являются ионы К+ [19]. Мем-
бранная деполяризация, повышая проницаемость для ионов Na+, также повышает
проницаемость мембраны для ионов К+ посредством особого класса ионных каналов,
известных как потенциалозависимые К+-каналы. Хотя на первый взгляд это может
показаться парадоксальным, ключом к механизму реполяризации является различная
зависимость от времени и от напряжения изменения проницаемости мембраны
для ионов К и ионов Na . Изменение проницаемости для ионов К+ во время
деполяризации происходит существенно медленнее, чем для ионов Na+, в то время
как начальная деполяризация вызывается прорывом ионов Na+. Однако изменение
проницаемости мембраны для Na+ спонтанно снижается вблизи пика деполяризации,
в то время как для ионов К+ это изменение начинает возрастать. Следовательно,
во время реполяризации доминирует мембранная проницаемость для ионов К+.
Поскольку концентрация ионов К+ внутри клетки намного выше, чем снаружи,
возникает результирующий поток ионов К+ из клетки, который делает внутреннюю
среду клетки более отрицательной, вызывая таким образом реполяризацию до уровня
потенциала покоя.
Следует отметить, что зависящее от напряжения изменение проницаемости для
ионов К связано с совершенно другим классом ионных каналов, чем те, которые
ответственны за установление потенциала покоя. Механизм, известный как Na+/K+-
насос, выталкивает ионы Na в обмен на перемещение ионов К обратно внутрь
клетки. Однако этот механизм перемещения создаёт очень маленький ток по срав-
нению с ионными каналами, и, следовательно, вносит ничтожный вклад в процесс
реполяризации. Na+/K+-Hacoc важен для восстановления баланса Na+/K+ в клетке,
но этот процесс протекает намного дольше, чем существует потенциал действия.
Нервные и мышечные клетки реполяризуются быстро с продолжительностью
существования потенциала действия примерно 1 мс. Клетки сердечной мышцы ре-
поляризуются медленно с продолжительностью существования потенциала действия
примерно 150-300 мс.
Потенциал действия всегда постоянен для данной клетки, независимо от метода
возбуждения и интенсивности стимула, превышающего порог: это явление известно
как феномен всё или ничего (all-or-none). Вслед за существованием потенциала
действия есть период, в течение которого клетка не способна отвечать на новый
стимул. Он известен как абсолютный рефрактерный период (около 1 мс для нерв-
ных клеток). За ним следует относительный рефрактерный период (несколько мс
для нервных клеток), когда новый потенциал действия может быть вызван намного
более сильным стимулом, чем в обычной ситуации.
На рис. 1.3 показан потенциал действия, записанный с изолированных миоцитов
(мышечных клеток) желудочка и предсердия кролика [19]. На рис. 1.4 изображен
желудочковый миоцит в состояниях расслабления и полного сокращения. Эти ткани
32
Гл. 1. Введение в биомедицинские сигналы
Рис. 1.3. Потенциал действия миоцитов желудочка (а) и предсердия сердца кролика (б). Дан-
ные любезно предоставлены R. Clark, Department of physiology and 0,9 Biophysics, University
of Calgary
были первоначально выдержаны в питательном физиологическом растворе (на основе
коллагена) и далее разделены на отдельные клетки путём лёгкого механического
перемешивания. Записывающие электроды представляли собой стеклянные пипетки;
для получения потенциала действия использовался метод записи сигнала целиком
со всей клетки. Клетки стимулировались с низкой частотой (1 раз в 8 секунд), что
значительно ниже, чем физиологическая частота. Кроме того, клетки находились при
постоянной температуре 20°C, а не при температуре тела. Тем не менее, главные
характеристики полученного потенциала действия оказались сходными с наблюдае-
мыми в физиологических условиях.
Рис. 1.4. Изолированный миоцит желудочка кролика в (а) расслабленном и (б) в полностью
сокращённом состояниях. Длина миоцита примерно 25 мкм. Кончик стеклянной пипетки,
слегка видный в правой верхней части миоцита, имеет ширину примерно 2 мкм. Фотографии
любезно предоставлены R. Clark, Department of physiology and Biophysics, University of Calgary
Примеры биомедицинских сигналов
33
Потенциал покоя мембраны клетки (от 0 до 20 мс на графиках рис. 1.3) равен
примерно —83 мВ. Через записывающий электрод и через клеточную мембрану был
пропущен прямоугольный импульс тока с длительностью 3 мс и амплитудой 1 нА,
который вызвал быструю деполяризацию клетки. Желудочковый миоцит даёт по-
тенциал деполяризации примерно -1-40 мВ, затем потенциал за интервал, примерно
равный 500 мс, снова медленно снижается до уровня потенциала покоя. Быстрая
начальная деполяризация клетки предсердия сходна с аналогичным процессом для
клетки желудочка, но не настолько выходит за пределы нулевого потенциала мембра-
ны, как потенциал действия желудочка; реполяризация происходит намного быстрее,
чем в случае клетки желудочка.
Распространение потенциала действия. Потенциал действия распространяет-
ся вдоль мышечной ткани или вдоль нервного волокна, не покрытого оболочкой
миелина, следующим образом [22]: будучи инициирован стимулом, потенциал рас-
пространяется вдоль всей длины волокна без понижения по амплитуде за счёт
нарастающей деполяризации мембраны. Ток протекает из деполяризованной зоны
через внутриклеточную жидкость к соседним неактивным зонам, деполяризуя их.
Кроме того, ток протекает через внеклеточную жидкость, через деполяризованную
мембрану и обратно во внутриклеточное пространство, замыкая локальную цепь.
Энергия для поддержания проводимости обеспечивается самим волокном.
Ткань нерва покрыта изолирующей оболочкой миелина. Оболочка прерывается
через каждые несколько миллиметров участками, известными как перехваты Ранвье
(nodes of Ranvier), где волокно открыто для внутритканевой жидкости. Места воз-
буждения и изменения проницаемости мембраны существуют только в этих точках,
и ток протекает скачками от одного перехвата к другому посредством процесса,
известного как салътаторная проводимость (saltatory conduction).
1.2.2. Электронейрограмма (ЭНГ). ЭНГ представляет собой электрический сиг-
нал, наблюдаемый в тот момент, когда стимул и связанный с ним потенциал
действия нерва распространяются вдоль нерва. ЭНГ может быть использована для
измерения скорости распространения (или скорости проведения) стимула или потен-
циала действия в нерве [10]. Для записи ЭНГ могут применяться концентрические
игольчатые электроды или хлор-серебряные электроды (Ag-AgCl), располагаемые на
поверхности тела.
Скорость проведения в периферическом нерве может быть измерена путём стиму-
лирования двигательного нерва и измерения вызванной стимулом активности в двух
точках, расположенных на определённом расстоянии вдоль пути распространения
импульса. Для того чтобы уменьшить мышечное сокращение и другие нежелатель-
ные эффекты, конечность должна находиться в расслабленном состоянии. Стимул
подаётся в виде сильного, но короткого импульса с амплитудой примерно 100 В
и длительностью в диапазоне 100-300 мкс [10]. Разница в задержках сигналов
ЭНГ, записанных с различных вовлечённых в процесс мышц, даёт время проведения.
Зная расстояние, разделяющее точки подачи импульса и регистрации ЭНГ, можно
определить скорость проведения в нерве [10]. ЭНГ имеет амплитуду порядка 10 мкВ
и поэтому сильно подвержена воздействию сетевой наводки и шумов аппаратуры.
На рис. 1.5 показаны ЭНГ, записанные в ходе исследования скорости проведения
нерва. Стимул был подан на локтевой нерв. ЭНГ записывались с использованием
поверхностных электродов на запястьях (помечены как Зп на рисунке), непосред-
ственно ниже локтя (НЛ) и непосредственно выше локтя (ВЛ). Все сигналы были
усилены с коэффициентом 2000 и профильтрованы в полосе частот 10-10 000 Гц.
Эти три кривые на рисунке показывают возрастающую задержку по отношению
к моменту стимуляции, которому соответствует левая граница графика. Представлен-
3 Р Ряыгяйян
34
Гл. 1. Введение в биомедицинские сигналы
ные на рисунке сигналы соответствуют норме. Они показывают задержку НЛ-Зп,
равную 3,23 мс, и позволяют определить скорость проведения нерва как 64,9 м/с.
Рис. 1.5. Измерение скорости проведе-
ния нерва (СПН) путём электрической
стимуляции локтевого нерва. Шаг раз-
метки графика соответствует 3 м/с по
горизонтали и 2 мкВ по вертикали.
ВЛ — выше локтя. НЛ — ниже локтя;
О — начало, Р — пик, Т — завершающая
фаза; R — восстановление базовой ли-
нии. Данные любезно предоставлены
М. Wilson and С. Adams, Alberta Chil-
dren’s Hospital. Calgary
волокон в каждой ДЕ; мышцы для
Типичными величинами скорости проведе-
ния нерва являются следующие [10, 22, 23]:
• 45-70 м/с в нервных волокнах;
• 0,2-0,4 м/с в сердечной мышце;
• 0,03-0,05 м/с в задерживающих волокнах
между предсердием и желудочком.
Невралгические заболевания могут вызы-
вать снижение скорости проведения.
1.2.3. Электромиограмма (ЭМГ). Счита-
ется, что скелетные мышцы состоят из со-
кращающихся волокон, которые дают харак-
терный отклик на одиночный стимул в форме
механического сокращения и генерируют рас-
пространяющийся потенциал действия. Ске-
летные мышцы представляют собой совокуп-
ность двигательных единиц (ДЕ), каждая из
которых состоит из передней роговой клетки
(двигательного нейрона или мотонейрона), её
аксона и всех мышечных волокон, иннерви-
руемых этим аксоном. Двигательная единица
является наименьшим мышечным элементом,
который может быть активизирован усилием
воли. Волокна, составляющие двигательную
единицу, активизируются синхронно. Эти во-
локна вытянуты свободными пучками вдоль
мышцы. В сечении можно видеть, что волокна
каждой отдельной двигательной единицы пе-
ремежаются с волокнами других двигательных
единиц [10, 22, 24]. На рис. 1.6 (в верхней
части) схематично изображена двигательная
единица [24].
Крупные мышцы, служащие для выполне-
ния больших движений, насчитывают сотни
точных движений имеют меньшее количество
волокон в каждой единице. Количество мышечных волокон, приходящихся на одно
двигательное нервное волокно, известно как коэффициент иннервации (innervation
ratio). Например, в работе [22] приводится следующая оценка: подкожная мышца
шеи имеет 1826 больших нервных волокон, контролирующих 27 100 мышечных воло-
кон, объединенных в 1 096 двигательных единиц, что даёт коэффициент иннервации
равный 15, тогда как первая тыльная мышца пальца имеет 199 больших нервных
волокон и 40 500 мышечных волокон, объединённых в 119 двигательных единиц
(соответственно, её коэффициент иннервации равен 203). Механический отклик
(сокращение) мышцы является суммарным результатом стимуляции и сокращения
нескольких её двигательных единиц.
При стимуляции нейронным сигналом каждая двигательная единица сокраща-
ется и вызывает электрический сигнал, который представляет собой сумму по-
тенциалов действия всех вовлечённых в процесс клеток. Этот потенциал известен
Примеры биомедицинских сигналов
35
Последовательность Потенциал Физиологический
импульсов ^-функции действия миоэлектрический
Дирака (возбуждение двигательной сигнал
мотонейрона) единицы
-------------------------------------------Место записи-
Записанный
миоэлектрический
сигнал
Электроды Шум системы
и аппаратура записи
Рис. 1.6. Схематическое представление двигательной единицы и модели генерации сигнала
ЭМГ. Верхний рисунок: отдельная двигательная единица включает переднюю роговую клет-
ку или мотонейрон (показан на разрезе спинного мозга), аксон и несколько соединенных
мышечных волокон. Заштрихованные волокна относятся к одному моторному элементу, не
заштрихованные — к другому. Показан также игольчатый электрод. Средний рисунок: резуль-
тат возбуждения каждого моторного нейрона представлен в виде серии импульсов. Каждая
из систем hi(t) представляет собой активизированную двигательную единицу, генерирующую
последовательности ПДОДЕ. Результирующая ЭМГ представляет собой сумму нескольких
последовательностей ПДОДЕ. Нижний рисунок: воздействие аппаратуры на снимаемый сиг-
нал ЭМГ. Наблюдаемый сигнал ЭМГ является функцией от времени t и производимой
мышечной силы F. Воспроизводится с разрешения C.J. de Luca, Physiology and mathematics
of myoelectric signals, IEEE Transactions of Biomedical Engineering, 26:313-325, 1979, ©IEEE
-ак потенциал действия отдельной двигательной единицы (ПДОДЕ или просто
ПДДЕ, single-motor-unit action potential, SMUAP или MUAP). Он может быть
записан с использованием игольчатых электродов, введённых в исследуемый участок
мышцы. В норме ПДОДЕ обычно бывают двухфазными или трёхфазными, имеют
длительность 3-15 мс, амплитуду 100-300 мкВ и появляются с частотой в пределах
от 6 до 30 раз в секунду [10, 22]. Форма регистрируемых ПДОДЕ зависит от типа
36
Гл. 1. Введение в биомедицинские сигналы
Рис. 1.7. Серии ПДОДЕ, записанные с использованием игольчатых электродов одновременно
по трём каналам. Обратите внимание на различие формы одних и тех же ПДОДЕ, про-
ецируемых на оси трёх разных каналов. В период, равный длительности показанных сигна-
лов, активизируются три различные двигательные единицы. Воспроизводится с разрешения
В. Mambrito and С. J. de Luca, Acquisition and decomposition of the EMG signal, in Progress
in Clinical Neurophysiology, V. 10: Computer-aided Electromyography, Editor: J. E. Desmedt,
pp. 52-72, 1983. ©S. Karger AG, Basel, Switzerland
используемого игольчатого электрода, его положения по отношению к активной
двигательной единице и от проекции электрического поля этой активности на
электроды. На рис. 1.7 показана одновременная запись активности нескольких дви-
гательных единиц по трём каналам с использованием игольчатых электродов [25].
Хотя наблюдаемые ПДОДЕ являются двухфазными или трёхфазными, одни и те же
ПДОДЕ имеют разную форму в разных каналах. (Замечание. Потенциал действия
на рис. 1.3 является монофазным; первые два ПДОДЕ в канале 1 на рис. 1.7—
двухфазные, а третий в том же сигнале — трёхфазный.)
Некоторые заболевания влияют на форму ПДОДЕ. На рис. 1.8 приведены
последовательности ПДОДЕ для пациента в норме и для пациентов, страдающих
нейропатией и миопатией. Нейропатия приводит к медленному проведению и/или
десинхронизированной активности волокон, что проявляется в полифазных ПДОДЕ
с большей, чем в норме, амплитудой. При этом можно наблюдать, что одна и та же
двигательная единица возбуждается с большей частотой, чем должно быть в норме,
и до того, как будут вовлечены другие двигательные единицы. Под миопатией
понимают выход из строя мышечных волокон в двигательных единицах. При этом
предполагается, что нейроны остаются неповреждёнными. Расщепление ПДОДЕ
возникает из-за асинхронности активации в результате частичного разрушения
волокон (например, при мышечной дистрофии), что проявляется в виде полифазных
ПДОДЕ с большей, чем в норме, амплитудой. При этом можно наблюдать, что при
невысоком уровне усилия вовлекается большее число двигательных единиц.
Градация уровней мышечных сокращений. Уровни мышечных сокращений
управляются двумя способами:
• пространственным охватом путём активизации новых двигательных единиц по
мере возрастания усилия;
Примеры биомедицинских сигналов
37
в
Рис. 1.8. Примеры серий ПДОДЕ. От правой дельтовидной мышцы (deltoid) мальчика 11 лет
в норме; ПДОДЕ в основном двухфазные с длительностью в диапазоне 3-5 мс (а). От
дельтовидной мышцы шестимесячного мальчика с повреждением плечевого сплетения (ней-
ропатия); ПДОДЕ полифазные и большие по амплитуде (800 мкВ), та же самая двигательная
единица возбуждается с относительно высокой частотой при возрастании усилия от низкого до
среднего уровня (б). От правой двуглавой мышцы (бицепса) 17-летнего мужчины с миопатией;
ПДОДЕ полифазные и показывают ранний охват большего количества двигательных единиц
при более низком уровне усилий (в). Сигналы были записаны с помощью комплекта из
20 игольчатых электродов. Шаг градуировки на графике по абсциссе соответствует 20 мс,
а по ординате — амплитуде 200 мкВ. Данные любезно предоставлены М. Wilson and С. Adams,
Alberta Children’s Hospital. Calgary
• временным охватом путём увеличения частоты разряда (частоты возбуждения)
каждой двигательной единицы по мере возрастания усилия.
Двигательные единицы активизируются в различные моменты времени и с раз-
личными частотами, вызывая асинхронное сокращение. Сократительные движения
отдельных двигательных единиц суммируются и сливаются, формируя тетаническое
(tetanic) сокращение с возрастающей силой. Слабые волевые усилия заставляют дви-
гательные единицы возбуждаться примерно 5-15 раз в секунду. При возрастании на-
пряжения формируется интерференционный тип ЭМГ, при котором составляющие
активные двигательные единицы возбуждаются с частотой 25-50 раз в секунду. По
мере утомления мышцы наблюдается группирование MUAP, что ведёт к снижению
доли высокочастотных составляющих и повышенной амплитуде ЭМГ [24].
Пространственно-временное суммирование ПДДЕ всех активных двигательных
единиц приводит к возрастанию ЭМГ мышцы. Сигнал ЭМГ, записанный с исполь-
зованием поверхностных электродов, представляет собой сложный сигнал, включа-
ющий интерферирующие составляющие, вызванные несколькими сериями ПДДЕ,
и очень труден для анализа. Сигнал ЭМГ показывает уровень активности мышцы
и может быть использован для диагностики нейромышечных заболеваний, таких как
нейропатия и миопатия.
На рис. 1.9 показан сигнал ЭМГ, записанный с диафрагмы собаки с использова-
нием электродов в виде тончайших проволочек, зашитых вдоль мышечных волокон
и расположенных на расстоянии 10 мм друг от друга [26]. Этот сигнал соответствует
одному периоду дыхания (с точки зрения рассмотрения мышечных сокращений
и ЭМГ фаза вдоха является активной частью). Видно, что общий уровень активности
сигнала на начальной фазе вдоха повышается. На рис. 1.10 показан начальный
фрагмент того же сигнала с растянутой временной шкалой. На начальной стадии
38
Гл. 1. Введение в биомедицинские сигналы
Рис. 1.9. Сигнал ЭМГ, записанный с диафрагмы собаки с использованием имплантированных
электродов из тончайшей проволоки. Данные любезно предоставлены R. S. Platt and Р. A. Eas-
ton, Department of Clinical Neurosciences, University of Calgary
Рис. 1.10. Начальная часть сигнала, показанного на рис. 1.9, с растянутой временной шкалой.
Обратите внимание на ПДОДЕ на начальной стадии сокращения, за которым следуют участ-
ки сигнала, являющегося результатом интерференции всё более возрастающей сложности,
включающие несколько ПДДЕ. Данные любезно предоставлены R. S. Platt and Р. A. Easton,
Department of Clinical Neurosciences, University of Calgary
Примеры биомедицинских сигналов
39
сокращения можно видеть ПДОДЕ, после чего следуют всё более сложные образцы
интерференции нескольких ПДДЕ.
В разд. 5.2.4, 5.6, 5.9, 5.10, 7.2.1 и 7.3 будут обсуждаться методы обработки
сигнала для анализа ЭМГ.
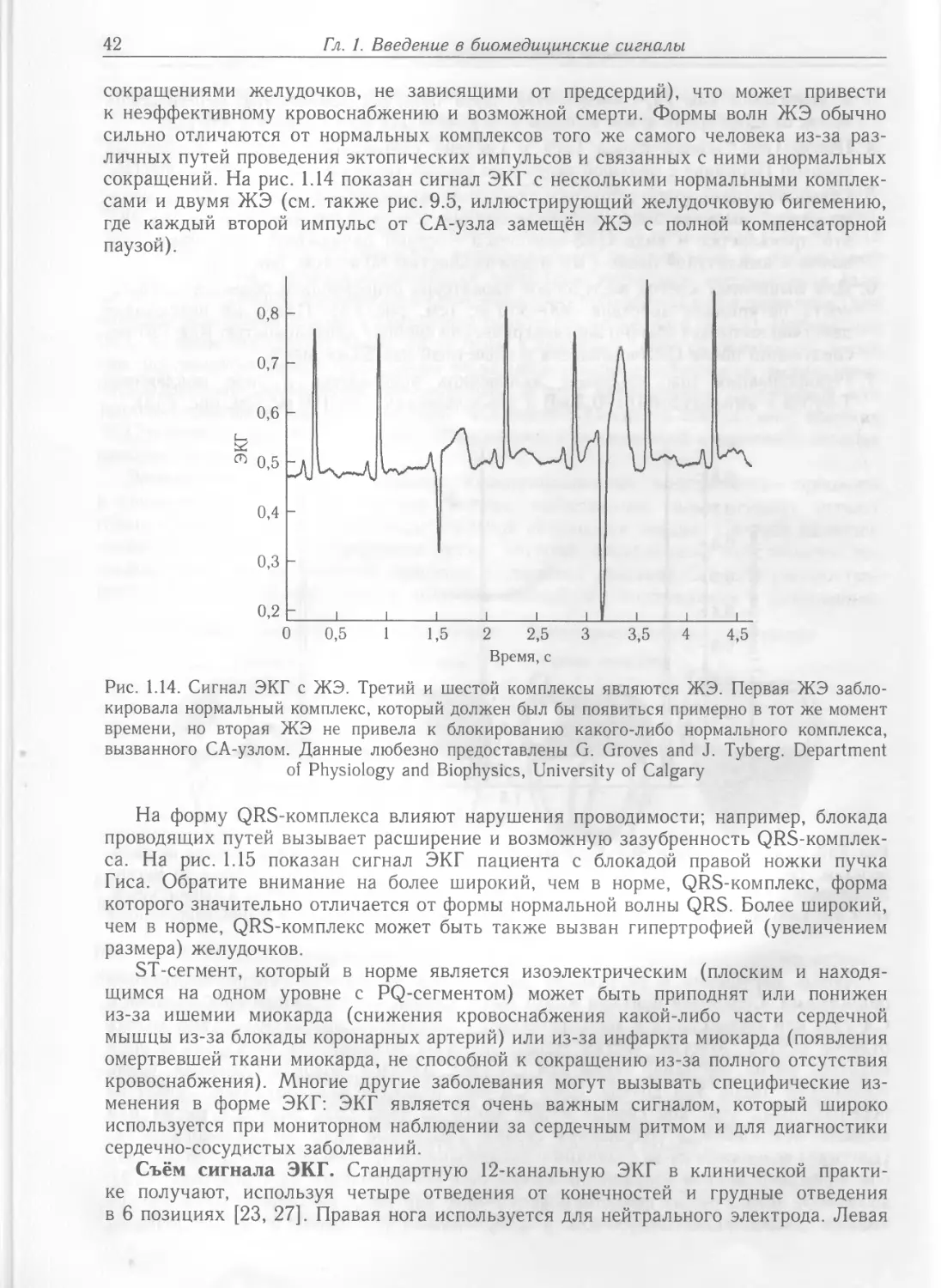
1.2.4. Электрокардиограмма (ЭКГ). ЭКГ является электрическим проявлени-
ем сократительной активности сердца и может быть достаточно легко записана
с помощью поверхностных электродов, помещённых на конечности или на грудь.
ЭКГ, возможно, является наиболее широко известным, признанным и используемым
биомедицинским сигналом. Частота сердечного ритма, измеряемая в ударах в минуту
(уд./мин), может быть легко оценена подсчётом хорошо различимых волн. Более
важным является тот факт, что форма волн ЭКГ изменяется под действием сердеч-
но-сосудистых заболеваний и патологий, таких как ишемия миокарда и инфаркт,
гипертрофия желудочков, а также нарушения проводимости.
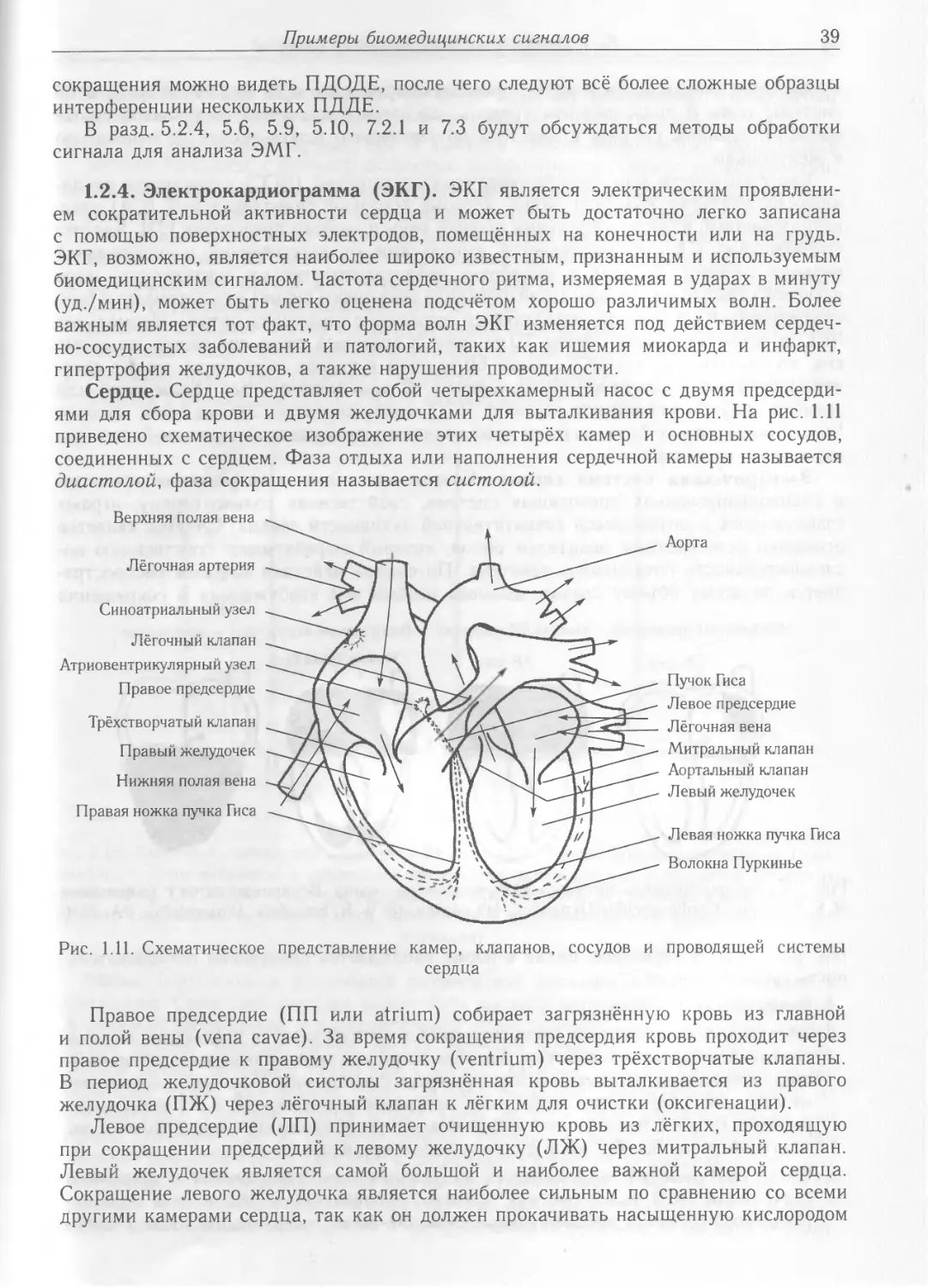
Сердце. Сердце представляет собой четырехкамерный насос с двумя предсерди-
ями для сбора крови и двумя желудочками для выталкивания крови. На рис. 1.11
приведено схематическое изображение этих четырёх камер и основных сосудов,
соединенных с сердцем. Фаза отдыха или наполнения сердечной камеры называется
диастолой, фаза сокращения называется систолой.
Верхняя полая вена
Лёгочная артерия
Синоатриальный узел
Лёгочный клапан
Атриовентрикулярный узел
Правое предсердие
Трёхстворчатый клапан
Правый желудочек
Нижняя полая вена
Правая ножка пучка Гиса
Аорта
Левая ножка пучка Гиса
Волокна Пуркинье
Пучок Гиса
Левое предсердие
Лёгочная вена
Митральный клапан
Аортальный клапан
Левый желудочек
Рис. 1.11. Схематическое представление камер, клапанов, сосудов и проводящей системы
сердца
Правое предсердие (ПП или atrium) собирает загрязнённую кровь из главной
и полой вены (vena cavae). За время сокращения предсердия кровь проходит через
правое предсердие к правому желудочку (ventrium) через трёхстворчатые клапаны.
В период желудочковой систолы загрязнённая кровь выталкивается из правого
желудочка (ПЖ) через лёгочный клапан к лёгким для очистки (оксигенации).
Левое предсердие (ЛП) принимает очищенную кровь из лёгких, проходящую
при сокращении предсердий к левому желудочку (ЛЖ) через митральный клапан.
Левый желудочек является самой большой и наиболее важной камерой сердца.
Сокращение левого желудочка является наиболее сильным по сравнению со всеми
другими камерами сердца, так как он должен прокачивать насыщенную кислородом
40
Гл. 1. Введение в биомедицинские сигналы
кровь через клапан аорты в аорту, преодолевая давление всей остальной сосудистой
системы тела. В силу того что уровень важности сокращений желудочков самый
высокий, термины систола и диастола по умолчанию используются по отношению
к желудочкам.
Сердечный ритм или частота сердечных сокращений (ЧСС) управляется специ-
альными клетками водителя ритма, которые образуют синоатриальный (СА) узел,
расположенный в месте соединения главной вены и правого предсердия [23]. Частота
срабатывания СА-узла управляется импульсами от вегетативной и центральной
нервной системы, приводя к выработке нейротрансмиттерами ацетилхолина (для
вагусной стимуляции, вызывающей снижение сердечного ритма) или адреналина (для
симпатической стимуляции, вызывающей повышение сердечного ритма). Нормальная
ЧСС в покое составляет около 70 уд./мин. Сердечный ритм снижается во время
сна, но слишком низкая ЧСС, менее 60 уд./мин в период активности, может озна-
чать нарушение, называемое брадикардией. В ходе интенсивных упражнений или
занятий спортом мгновенное значение ЧСС может достигать 200 уд./мин; высокая
ЧСС в покое может быть вызвана заболеванием или сердечной аномалией, которая
называется тахикардией.
Электрическая система сердца. Координированные электрические процессы
и специализированная проводящая система, свойственная только сердцу, играют
главную роль в ритмической сократительной активности сердца. СА-узел является
основным естественным водителем ритма, который вырабатывает собственную по-
следовательность потенциалов действия. Потенциал действия СА-узла распростра-
няется по всему объёму сердца, вызывая особый вид возбуждения и сокращения
Узловая АВ-задержка Возбуждение желудочков — завершение
Рис. 1.12. Распространение импульса возбуждения по сердцу. Воспроизводится с разрешения
R. F. Rushmer, Cardiovascular Dynamics, 4th edition, © W. B. Saunders, Philadelphia, PA, 1976
(см. рис. 1.12). В сердечном цикле в норме наблюдается следующая последователь-
ность событий и волн.
1. Возбуждение СА-узла.
2. Электрическая активность распространяется по мускулатуре предсердия со срав-
нительно небольшой скоростью, вызывая медленно продвигающуюся деполяриза-
цию (сокращение предсердия). Это приводит к появлению Р-зубца в кардиограм-
ме (см. рис. 1.13). Ввиду медленного сокращения предсердий и их небольшого
размера, Р-зубец представляет собой медленную низкоамплитудную волну с ам-
плитудой около 0,1-0,2 мВ и длительностью примерно 60-80 мс.
3. Волна возбуждения наталкивается на задержку распространения в артриовен-
тикулярном (АВ) узле, что, как правило, проявляется в ЭКГ в виде изоэлек-
трического сегмента продолжительностью 60-80 мс, следующего после Р-зубца
Примеры биомедицинских сигналов
41
и известного как PQ-сегмент. Эта пауза помогает завершению перемещения
крови от предсердий к желудочкам и оканчиваться возбуждением АВ-узла.
4. Пучок Гиса, ножки пучка Гиса и система специализированных проводящих
волокон Пуркинье с большой скоростью распространяют стимул по желудочкам.
5. Стимулирующая волна с большой скоростью распространяется от верхушки серд-
ца наверх, вызывая быструю деполяризацию (сокращение желудочков). На ЭКГ
это проявляется в виде QRS-комплекса — острой двухфазной или трёхфазной
волны с амплитудой около 1 мВ и длительностью 80 мс (см. рис. 1.13).
6. Для мышечных клеток желудочков характерна относительно большая длитель-
ность потенциала действия 300-350 мс (см. рис. 1.3). Плато на потенциале
действия вызывает обычно изоэлектрический сегмент длительностью 100-120 мс,
следующий после QRS-комплекса и известный как ST-сегмент.
7. Реполяризация (расслабление) желудочков проявляется в виде медленного
Т-зубца с амплитудой 0,1-0,3 мВ и длительностью 120-160 мс (см. рис. 1.13).
Рис. 1.13. Типичный сигнал ЭКГ (мужчина 24 лет). (Замечание. Значения сигнала не кали-
брованы. т. е. не выражены в каких-либо физических единицах, что встречается во многих
применениях. Так же как и на этом рисунке, значения сигналов на графиках в данной книге,
если это специально не оговаривается, приводятся в произвольных или нормализированных
единицах)
Любые нарушения в регулярной ритмической активности сердца называются
аритмиями. Сердечная аритмия может быть вызвана нерегулярным срабатыванием
СА-узла или анормальной и дополнительной стимулирующими активностями других
отделов сердца. Многим частям сердца присуща возможность выступать в роли
водителя ритма, например таким как СА-узел, АВ-узел, волокна Пуркинье, ткань
предсердий, ткань желудочков. Если СА-узел подавлен или неактивен, любой из
перечисленных участков сердца может взять на себя роль водителя ритма или
вызвать эктопические сокращения сердца. Различные виды анормального ритма
(аритмии) возникают из-за различий в локализации и частоте формирования импуль-
сов. Преждевременные сокращения желудочков (желудочковые экстрасистолы, ЖЭ),
вызванные эктопическим фокусом в желудочках, нарушают регулярный ритм и могут
вызвать диссоциацию желудочков и фибрилляцию (состояние с беспорядочными
42
Гл. 1. Введение в биомедицинские сигналы
сокращениями желудочков, не зависящими от предсердий), что может привести
к неэффективному кровоснабжению и возможной смерти. Формы волн ЖЭ обычно
сильно отличаются от нормальных комплексов того же самого человека из-за раз-
личных путей проведения эктопических импульсов и связанных с ними анормальных
сокращений. На рис. 1.14 показан сигнал ЭКГ с несколькими нормальными комплек-
сами и двумя ЖЭ (см. также рис. 9.5, иллюстрирующий желудочковую бигемению,
где каждый второй импульс от СА-узла замещён ЖЭ с полной компенсаторной
паузой).
Рис. 1.14. Сигнал ЭКГ с ЖЭ. Третий и шестой комплексы являются ЖЭ. Первая ЖЭ забло-
кировала нормальный комплекс, который должен был бы появиться примерно в тот же момент
времени, но вторая ЖЭ не привела к блокированию какого-либо нормального комплекса,
вызванного СА-узлом. Данные любезно предоставлены G. Groves and J. Tyberg. Department
of Physiology and Biophysics, University of Calgary
На форму QRS-комплекса влияют нарушения проводимости; например, блокада
проводящих путей вызывает расширение и возможную зазубренность QRS-комплек-
са. На рис. 1.15 показан сигнал ЭКГ пациента с блокадой правой ножки пучка
Гиса. Обратите внимание на более широкий, чем в норме, QRS-комплекс, форма
которого значительно отличается от формы нормальной волны QRS. Более широкий,
чем в норме, QRS-комплекс может быть также вызван гипертрофией (увеличением
размера) желудочков.
ST-сегмент, который в норме является изоэлектрическим (плоским и находя-
щимся на одном уровне с PQ-сегментом) может быть приподнят или понижен
из-за ишемии миокарда (снижения кровоснабжения какой-либо части сердечной
мышцы из-за блокады коронарных артерий) или из-за инфаркта миокарда (появления
омертвевшей ткани миокарда, не способной к сокращению из-за полного отсутствия
кровоснабжения). Многие другие заболевания могут вызывать специфические из-
менения в форме ЭКГ: ЭКГ является очень важным сигналом, который широко
используется при мониторном наблюдении за сердечным ритмом и для диагностики
сердечно-сосудистых заболеваний.
Съём сигнала ЭКГ. Стандартную 12-канальную ЭКГ в клинической практи-
ке получают, используя четыре отведения от конечностей и грудные отведения
в 6 позициях [23, 27]. Правая нога используется для нейтрального электрода. Левая
Примеры биомедицинских сигналов
43
Время, с
Рис. 1.15. Сигнал ЭКГ пациента с блокадой правой ножки пучка Гиса и гипертрофией (трёх-
месячный младенец). QRS-комплекс шире, чем в норме, и имеет анормальную зазубренную
форму из-за десинхронизированных сокращений желудочков (Кроме того, сигнал имеет дрейф
изолинии, который не был устранён.)
рука, правая рука и левая нога используются для получения отведений I, II и III.
«Условная нулевая точка» Вильсона (центральная терминаль Вильсона, Wilson’s
central terminal) формируется как комбинация отведений с правой руки, левой руки
и левой ноги и используется в качестве опорной точки для грудных отведений.
Усиленные отведения от конечностей известны как aVR, aVL и aVF (aV — усиленные
отведения, R —от правой руки, L —от левой руки, F —от левой ноги). Каждое из
этих отведений получают как разность между потенциалом центральной терминали
Вильсона и потенциалом электрода на конечности, соответствующей последней букве
в обозначении отведения.
Рис. 1.16 показывает направления осей, образуемых этими 6 отведениями от
конечностей. Гипотетический эквипотенциальный треугольник, формируемый отве-
дениями I, II и III известен как тре-
угольник Эйнтховена. Центр этого
треугольника представляет собой цен-
тральную терминаль Вильсона. Услов-
но предполагается, что сердце распо-
ложено в центре этого треугольника.
Шесть отведений соответствуют проек-
циям трёхмерного сердечного электри-
ческого вектора на оси, изображенные
на рис. 1.16. Эти 6 осей разбивают диа-
пазон от 0 до 180° с шагом примерно
в 30°. Получаемые проекции позволя-
ют наблюдать и анализировать элек-
трическую активность сердца во фрон-
тальной плоскости с использованием
Отведение I
Правая рука — -|- Левая рука
электрод
Рис. 1.16. Треугольник Эйнтховена и оси 6 отве-
дений ЭКГ, получаемых с использованием 4 ко-
шести различных перспектив.
нечностных электродов
44
Гл. 1. Введение в биомедицинские сигналы
Шесть грудных отведений (обозначенные V1-V6) получают с 6 стандартизиро-
ванных позиций на грудной клетке [23] с использованием в качестве опорной точки
центральной терминали Вильсона. Позиции для расположения грудных электродов
показаны на рис. 1.17. Электроды VI и V2 помещают в 4-м межреберном промежутке,
непосредственно справа и слева от грудины соответственно. V4 записывается с 4-го
межреберного промежутка на левой средней ключичной линии. Электрод V3 помеща-
ют посередине между V2 и V4. Электроды V5 и V6 устанавливают на том же самом
уровне, что и V4, но соответственно на передней подмышечной линии и средней
подмышечной линии. Эти 6 грудных отведений позволяют наблюдать сердечный
электрический вектор при различной ориентации плоскости сечения. Отведения V5
и V6 наиболее чувствительны к активности левого желудочка; V3 и V4 лучше
всего показывают активность сердечной перегородки; VI и V2 отражают активность
правой половины сердца.
Область каротидного пульса
Область венного пульса
Область аорты
Среднеключичная линия
Передняя подмышечная линия
Средняя подмышечная линия
VI V2 V3 V4 V5V6
Рис. 1.17. Позиции для наложения грудных электродов V1-V6 для ЭКГ, зоны наложения
датчиков для записи звуков сердца и позиции каротидного и шейного датчиков пульсового
сигнала. МРП — межрёберный промежуток
Область лёгочной артерии
2-й МРП
Область трёхстворчатого
клапана
5-й МРП
Область митрального
клапана
Несмотря на свою избыточность, система из 12 отведений ЭКГ используется как
основа для стандартных клинических исследований ЭКГ. Клиническая интерпрета-
ция ЭКГ в большой степени является эмпирической, основанной на эксперименталь-
ных знаниях. Компактной и эффективной системой представления ЭКГ является век-
торокардиография (ВКГ) [23, 28], которая позволяет отображать и анализировать
траектории, описываемые трёхмерным сердечным электрическим вектором на трёх
взаимно ортогональных плоскостях: фронтальной, горизонтальной и сагиттальной.
Тем не менее, наиболее широко используемой процедурой в клинической практике
является скалярная ЭКГ в 12 отведениях.
Примеры биомедицинских сигналов
45
Поскольку поверхностная ЭКГ представляет собой проекцию внутреннего трёх-
мерного сердечного электрического вектора, получаемые записи не являются незави-
симыми. Имеются следующие взаимозависимости между отведениями [23, 27]:
• II = I + III,
• aVL - (I - Ш)/2.
Стандартная клиническая ЭКГ имеет следующие наиболее важные характерис-
тики.
• Стандартный прямоугольный калибровочный импульс 1 мВ по амплитуде
и 200 мс по длительности должен соответствовать на графике 1 см по высоте.
• Используемая скорость движения бумаги равна 25 мм/с, что даёт шкалу на гра-
фике 0,04 с/мм или 40 мс/мм. В этом случае ширина калибровочного импульса
будет соответствовать 5 мм.
• Размах сигнала ЭКГ в норме равен примерно 1 мВ.
• Используемый коэффициент усиления усилителя равен 1 000.
• Клиническая ЭКГ обычно фильтруется в полосе частот 0,05-100 Гц с рекоменду-
емой для диагностической ЭКГ частотой дискретизации 500 Гц.
• Искажения в форме калибровочного импульса могут свидетельствовать о непра-
вильной настройке фильтра или о низком качестве системы съёма сигнала.
• Для мониторинга сердечного ритма может использоваться более узкая полоса
частот 0,5-50 Гц.
• Для ЭКГ высокого разрешения необходима более широкая полоса частот,
0,05-500 Гц.
На рис. 1.18 приведена ЭКГ мужчины в норме в 12 отведениях. Для получения
этой иллюстрации использовалась система записи группами по три канала. Наборы
отведений I, II, III; aVR, aVL, aVF; VI, V2, V3 и V4, V5, V6 записывались no
трём каналам одновременно. Иногда отведения записываются по одному. Обратите
внимание на различия в форме волн ЭКГ в различных отведениях. Квалифицирован-
ный кардиолог может определить ориентацию трёхмерного электрического вектора
сердца, анализируя формы волн в 6 отведениях от конечностей. В случае наличия
каких-либо дефектов сердца, они могут быть локализованы путём анализа 6 грудных
отведений.
На рис. 1.19 показана ЭКГ в 12 отведениях пациента с блокадой правой ножки
пучка Гиса и изменениями вторичной реполяризации. Увеличенная ширина и иска-
жение формы QRS-комплекса являются индикаторами эффекта асинхронной активи-
зации желудочков, что является следствием блокады пучка Гиса.
Методы обработки сигнала для фильтрации ЭКГ будут представлены в разд. 3.2,
3.3, 3.4, 3.5 и 3.8. Алгоритмы обнаружения волн ЭКГ будут обсуждаться в разд. 4.2.1,
4.3.2, 4.7 и 4.9. Анализу форм волн ЭКГ и классификации QRS-комплексов будут
посвящены разд. 5.2.1, 5.2.2, 5.2.3, 5.4, 5.7, 5.8, 9.2.1 и 9.12. Анализ вариабельности
сердечного ритма будет описан в разд. 7.2.2, 7.8 и 8.9. В работах Jenkins [29, 30],
а также Сох и др. [31] даны обзоры применения компьютеров для анализа ЭКГ.
1.2.5. Электроэнцефалограмма (ЭЭГ). ЭЭГ (которую часто называют волнами
мозга) представляет собой запись электрической активности мозга [32-34]. Органи-
зация мозга имеет несколько следующих важных аспектов. Главными частями мозга
являются: кора головного мозга, мозжечок, ствол мозга (включающий средний мозг,
продолговатый мозг и ретикулярное образование) и таламус (между средним мозгом
и полусферами). Головной мозг делится на две полусферы, разделённые продоль-
ной бороздой, поперёк которой находится большая соединительная полоса волокон,
46
Гл. 1. Введение в биомедицинские сигналы
Рис. 1.18. Стандартная ЭКГ мужчины в норме в 12 отведениях. Данные любезно предоставле-
ны Е. Gedamu and L. В. Mitchell, Foothills Hospital, Calgary
^WhbhoctI?кмногочислётннfix’ малёнькй’х зон поверхности коры под
В клинической практике для сравнительного анализа активности различных отде-
лов мозга используется одновременная запись нескольких каналов ЭЭГ с различных
В клинической практике для сравнительного анализа активности различных отде-
лов мозга используется одновременная запись нескольких каналов ЭЭГ с различных
В клинической практике для сравнительного анализа активности различных отде-
лов мозга используется одновременная запись нескольких каналов ЭЭГ с различных
Рис. 1.19. Стандартная ЭКГ в 12 отведениях пациента с блокадой правой ножки пучка Гиса. Данные любезно предоставлены L. В. Mitchell,
Foothills Hospital, Calgary
48
Гл. 1. Введение в биомедицинские сигналы
и клинической нейрофизиологии (International Federation of Societies for Electroen-
cephalography and Clinical Neurophysiology) рекомендована для записи клинической
ЭЭГ система электродов «10-20» [32], которая схематически показана на рис. 1.20.
Наименование «10-20» отражает то обстоятельство, что электроды располагают-
ся вдоль центральной линии со значениями шага равными 10, 20, 20, 20, 20
и 10% от общего расстояния между носом и затылком; остальные цепочки элек-
тродов также располагаются в позициях, соответствующих аналогичным долям
Рис. 1.20. Система наложения электродов
для записи ЭЭГ «10-20» [32]. Пояснения
к обозначениям каналов: pg — носоглоточ-
ный (naso-pharingeal), а — ушной (auricu-
lar, мочки уха), fp — передне-лобный (pre-
frontal), f — лобный (frontal), р —темен-
ной (parietal), с — центральный (central),
о —затылочный (occipital), t — височный
(temporal), cb — мозжечковый (cerebellar),
z — средняя линия (midline); нечётные но-
мера слева по отношению к пациенту,
чётные — справа
расстояния. Межэлектродные расстояния
равны между собой как вдоль передне-зад-
ней линии, так и вдоль поперечной линии.
Кроме того, позиции электродов симметрич-
ны. Сигнал ЭЭГ может быть использован для
изучения нервной системы, мониторного на-
блюдения стадий сна, биологической обрат-
ной связи и управления, а также для диагно-
стики таких заболеваний, как эпилепсия.
Типичная комплектация оборудования
для ЭЭГ включает низкочастотный фильтр
с частотой среза 75 Гц и устройство для
регистрации сигнала на бумаге с масштаба-
ми по амплитуде и по времени 100 мкВ/см
и 30 мм/с соответственно. Длительность за-
писей обычно составляет 10-20 минут одно-
временно по 8-16 каналам. Наблюдение ста-
дий сна и выявление преходящих событий,
связанных с эпилептическими припадками,
может потребовать многоканальной записи
ЭЭГ на протяжении нескольких часов. Спе-
циализированные методики съёма ЭЭГ пред-
полагают использование игольчатых элек-
тродов, носоглоточных электродов, записи
электрокортикограммы (ЭКоГ) от вскрытой
части коры мозга и использование интраце-
ребральных электродов. Методика регистра-
ции отклика на вызванные события вклю-
чает первоначальную запись в покое (глаза
открыты, глаза закрыты), гипервентиляцию (после эпизода глубокого дыхания с ча-
стотой 20 вдохов-выдохов в минуту на протяжении 2-4 минут), фотостимуляцию
(1-50 вспышек света в секунду), аудиостимуляцию громкими щелчками, сон (раз-
личные стадии) и фармакологические (лекарственные) пробы.
В сигналах ЭЭГ могут наблюдаться несколько типов ритмической или периодиче-
ской активности. (Замечание. Термин ритм относится к совсем разным явлениям
или событиям на ЭКГ и на ЭЭГ.) Для ЭЭГ обычно используются следующие
названия диапазонов частоты:
• дельта (<5): 0,5 < f < 4 Гц,
• тета (в): 4 < f < 8 Гц,
• альфа (се) 8 < f 13 Гц,
• бета (/3): f > 13 Гц.
На рис. 1.21 показаны записи сигнала ЭЭГ для перечисленных выше ритмов.
Ритмы ЭЭГ связаны с различными физиологическими и ментальными процессами
Примеры биомедицинских сигналов
49
в vy^^v^'^vwwvv''v~'^v\a/vvVV^V\^v'VVVvvvW^/vv\a^
I
д —-------------
Глаза открываются
Глаза закрываются
—--------------------- I 50 мкВ
Рис. 1.21. Сверху вниз: 6-ритм (а); 0-ритм (б); а-ритм (в); /3-ритм (г); блокирование «-ритма
при открывании глаз (б); масштабные маркеры 1 с и 50 мкВ (е). Воспроизводится с разрешения
R. Cooper, J. W. Osselton, and J. C. Shaw, EEG Technology, 3rd Edition, 1980. © Butterworth
Heinemann Publishiers, a division of Reed Educational & Professional Publishing Ltd., Oxford, UK
[33, 34]. Например, «-ритм является основным ритмом покоя и характерен для
взрослого бодрствующего человека в состояния покоя, особенно в затылочной обла-
сти при билатеральной синхронии. Выполнение задач, связанных со слушанием или
арифметическими вычислениями в уме с закрытыми глазами, вызывает сильные а-
волны, которые подавляются при открытии глаз (т. е. при возникновении визуальных
стимулов); см. рис. 1.21 д [32].
Волны «-ритма заменяются более медленными ритмами на различных стадиях
сна 0-волны появляются на начальной стадии сна 6-волны появляются на стадии
глубокого сна. Высокочастотные /3-волны проявляются как фоновая активность
в состоянии напряжения или возбуждения. Подавление или отсутствие нормального
(ожидаемого) ритма в определённом состоянии человека может означать нарушение
нормы. Присутствие в- или 6-волн (медленных) у бодрствующего человека может
рассматриваться как нарушение нормы. Очаговые повреждения мозга и опухоли при-
водят к анормальным медленным волнам в соответствующих зонах. Односторонняя
депрессия (асимметрия левой и правой частей) ритма может отражать нарушение
корковых путей. Выбросы (спайки) и острые волны могут означать присутствие
эпилептогенных зон в соответствующих частях мозга.
На рис. 1.22 показан пример 8 каналов ЭЭГ, одновременно записанных со скальпа
человека. Все каналы показывают высокий уровень «-активности. На рис. 1.23 пока-
заны 10 каналов ЭЭГ человека с наличием комплексов «спайк-волна». Обратите вни-
мание на отчётливо заметную разницу в форме волн и остроте выбросов на рис. 1.23
по сравнению с гладкими волнами на рис. 1.22. Сигналы ЭЭГ также включают
выбросы, преходящие события и другие виды волн и форм сигнала, связанные
с различными нервными расстройствами (см. рис. 4.1 и разд. 4.2.4). Распознавание
событий и ритмов в сигнале ЭЭГ будет обсуждаться в разд. 4.4, 4.5 и 4.6. Разд. 6.4.3
и 7.5.2 посвящены спектральному анализу сигнала ЭЭГ. Адаптивная сегментация
сигналов ЭЭГ будет описана в разд. 8.2.2, 8.5 и 8.7.
1.2.6. Потенциалы, связанные с событиями (ПСС). Термин потенциалы, свя-
занные с событиями (ПСС), является более общим и более предпочтительным
4 Р. Рангайян
50
Гл. 1. Введение в биомедицинские сигналы
сЗ
о1
°1 2
1 с
Рис. 1.22. Восьмиканальная ЭЭГ человека с выраженным «-ритмом. См. рис. 1.20, поясня-
ющий обозначения каналов. Данные любезно предоставлены Y. Mizuno-Matsumoto, Osaka
University Medical School, Osaka, Japan
по отношению к термину вызванные потенциалы и означает ЭНГ или ЭЭГ, воз-
никающие в ответ на световые, звуковые, электрические или какие-либо другие
внешние стимулы. Коротко-латентные ПСС главным образом зависят от физических
характеристик стимулов, в то время как на длинно-латентные ПСС, в основном,
влияют условия предъявления стимула.
Регистрация соматосенсорных вызванных потенциалов (ССВП) используется для
неинвазивной оценки нервной системы, начиная от периферических рецепторов и до
коры головного мозга. Коротко-латентные ПСС медианного нерва получают путём
размещения стимулирующих электродов на расстоянии 2-3 см друг от друга поверх
медианного нерва на запястье при электрической стимуляции с частотой 5-10 им-
пульсов в секунду; длительность каждого импульса менее 0,5 мс и амплитуда —
около 100 В (это приводит к заметному вздрагиванию большого пальца). ПСС
записываются с поверхности скальпа. Измеряется латентность, продолжительность
и амплитуда отклика.
ПСС и ССВП являются очень слабыми сигналами, обычно скрытыми среди
сопутствующей активности других систем. Примеры ПСС даны на рис. 3.2 и 3.12.
Улучшение отношения сигнал-помеха (SNR, signal-to-noise ratio) обычно достигается
путём синхронного усреднения и фильтрации, которые будут описаны в разд. 3.3.1.
1.2.7. Электрогастрограмма (ЭГГ). Электрическая активность желудка состоит
из ритмических волн деполяризации и реполяризации гладких мышечных клеток,
составляющих желудок [35-37]. У человека активность возникает в средней части
желудка с интервалом примерно 20 с. Волны этой активности всегда присутствуют
и не связаны непосредственно с сокращениями; они связаны с пространственной
и временной организацией сокращений.
Примеры биомедицинских сигналов
51
Рис. 1.23. Десятиканальная ЭЭГ человека, содержащая комплексы «спайк-волна». См.
рис. 1.20, поясняющий обозначения каналов. Обратите внимание на то, что шкала времени
расширена по сравнению с рис. 1.22. Данные любезно предоставлены Y. Mizuno-Matsumoto,
Osaka University Medical School, Osaka, Japan
С использованием наружных (кожных) электродов можно записать сигнал, из-
вестный как электрогастрограмма (ЭГГ). Chen и др. [38] применили следующую
процедуру для записи поверхностного сигнала ЭГГ. Пациент неподвижно находится
в лежачем положении на спине. Для локализации желудка используется ультразву-
ковой сигнал с частотой 5 МГц, при этом ориентация дистальной части желудка
помечается на поверхности живота. На животе вдоль антральной оси желудка
размещаются три активных электрода с расстоянием между соседними электро-
дами 3,5 см. Общий опорный электрод располагается на удалении 6 см в верхнем
правом квадранте. Снимаются три биполярных сигнала от трех активных электродов
по отношению к общему опорному электроду. Сигналы усиливаются и фильтруются
в полосе частот от 0,02 до 0,3 Гц с крутизной спада частотной характеристики 6 дБ
на октаву в переходной полосе и дискретизуются с частотой 2 Гц.
Считается, что поверхностная ЭГГ отражает общую электрическую активность
желудка, в том числе управляющую электрическую активность и электрический
отклик на неё. Chen и др. [38] показали, что анализ ЭГГ позволяет выявить арит-
мию желудка. Другие исследователи предполагают, что диагностический потенциал
этого сигнала пока недостаточно обоснован [35, 36]. Точное и надёжное измерение
электрической активности требует имплантации электродов внутрь желудка [39], что
:~раничивает практическое применение этого метода.
1.2.8. Фонокардиограмма (ФКГ). Шумы сердца являются, возможно, наиболее
традиционным биомедицинским сигналом, что подтверждается тем фактом, что сте-
тоскоп является самым важным инструментом, постоянно носимым и используемым
тзачами. Фонокардиограмма представляет собой вибрации или звуковые сигналы,
<•
52
Гл. 1. Введение в биомедицинские сигналы
связанные с сократительной активностью сердца и системы кровеносных сосудов
(как сердца, так и крови) [23, 40-44] и является записью сигнала звуков сердца.
Запись сигнала ФКГ требует наличия датчика для преобразования вибрации или
звукового сигнала в электрические сигналы: для этого на поверхность грудной
клетки могут быть наложены микрофоны, датчики давления или акселерометры.
Звуки сердца в норме позволяют оценивать общее состояние сердца по его ритму
и сократимости. Сердечно-сосудистые заболевания и дефекты вызывают изменения
или дополнительные звуки и шумы, которые помогают в их диагностике.
Происхождение звуков сердца. В настоящее время считается общепринятым,
что записанные с поверхности тела звуки сердца вызываются не самими по себе
движениями лепестков клапанов, как считалось ранее, а вибрациями всей сердечно-
сосудистой системы, вызываемыми градиентами давления [23]. Сердечно-сосудистую
систему можно сравнить с сосудом, наполненным жидкостью, который, будучи сти-
мулируемым в какой-нибудь точке, вибрирует целиком. Однако снаружи компоненты
сердечного звука лучше всего прослушиваются в определённых отдельных позициях
на груди, и эта локализация привела к концепции вторичных источников на груди,
связанных с хорошо известными зонами аускультации: мембранная, аортальная,
лёгочная и в области нижней части грудины [23]. Стандартные зоны аускультации
показаны на рис. 1.17. Митральная зона находится около верхушки сердца, аорталь-
ная зона расположена параллельно грудине во втором межрёберном промежутке.
Зона нижней части грудины расположена в четвёртом межрёберном промежутке
около правой границы грудины. Лёгочная зона лежит на левой парастернальной
линии во втором или третьем межрёберном промежутке [23].
Нормальный сердечный цикл содержит два основных звука (тона) — первый тон
сердца (S1) и второй тон сердца (S2). На рис. 1.24 показан сигнал ФКГ в норме
Рис. 1.24. Одновременная трёхканальная запись ФКГ, ЭКГ и сигнала каротидного пульса
взрослого мужчины в норме
Примеры биомедицинских сигналов
53
одновременно с кривыми ЭКГ и каротидного пульса. Тон S1 возникает в начале
сокращения желудочков и по времени соответствует QRS-комплексу в сигнале ЭКГ.
Первоначальные вибрации S1 возникают, когда первые сокращения миокарда
желудочков перемещают кровь по направлению к предсердиям, перекрывая атрио-
вентикулярные (АВ — митральный и трёхстворчатый) клапаны (см. рис. 1.25). Вторая
компонента S1 начинается в момент резкого напряжения закрытых АВ-клапанов, за-
медляющих кровь. Далее открываются полулунные (аортальный и легочный) клапа-
ны и кровь выталкивается из желудочков. Третья компонента S1 может быть вызвана
А. Компоненты первого тона сердца
Рис. 1.25. Схематическое представление происхождения сердечных звуков. Показана только
левая часть сердца, так как она является главным источником сердечных звуков. Соответ-
ствующие события в правой части также вносят свой вклад в звуки сердца. Предсердия
практически не вносят никакого вклада в сердечные звуки. Воспроизводится с разрешения
R. F. Rushmer, Cardiovascular Dynamics, 4th edition, © W. B. Saunders, Philadelphia, PA, 1976
колебанием крови между основанием аорты и стенками желудочков. За этим следует
четвёртая компонента S1, которая может быть связана с вибрациями, вызванными
турбулентностью вытолкнутой крови, быстро проходящей через нисходящую аорту
и лёгочную артерию.
Второй тон S2, следующий за систолической паузой в нормальном сердечном
цикле ФКГ, вызывается закрытием полулунных клапанов. В то время как первичные
вибрации возникают в артериях из-за замедления крови, желудочки и предсердия
также вибрируют из-за передачи вибрации через кровь, клапаны и кольца клапа-
нов. S2 имеет две компоненты: первая связана с закрытием аортального клапана
А2), а вторая — с закрытием лёгочного клапана (Р2). Аортальный клапан обычно
закрывается раньше лёгочного клапана, следовательно, А2 опережает Р2 на несколь-
ко миллисекунд. Патологические состояния могут приводить к расширению этого
54
Гл. 1. Введение в биомедицинские сигналы
промежутка, либо к изменению порядка появления А2 и Р2. Промежуток А2-Р2
расширяется также в норме во время вдоха. (Замечание. В сигнале ФКГ на рис. 1.24
нет возможности различить компоненты А2 и Р2 по отдельности.)
В некоторых случаях может быть слышен третий тон сердца S3, соответствующий
внезапному завершению фазы быстрого наполнения желудочков. В связи с тем,
что в этой части диастолы желудочки наполнены кровью и их стенки расслабле-
ны, вибрация S3 имеет очень низкую частоту. Иногда в поздней диастоле может
прослушиваться четвёртый тон сердца (S4), вызванный сокращениями предсердий,
перемещающих кровь в расширенные желудочки. Часто вдобавок к этим звукам
слышны щелчки и стуки клапанов.
Шумы сердца. Интервалы между S1 и S2, а также S2 и S1 следующего цикла
(относящиеся к систоле и диастоле желудочков соответственно) обычно не содержат
звуков. На этих интервалах могут возникать шумы, которые вызываются различ-
ными дефектами и болезнями сердечно-сосудистой системы. Шумы представляют
собой высокочастотные звуки, напоминающие помехи и возникающие из-за того, что
скорость крови возрастает при протекании через нерегулярности (сужения или пре-
пятствия). В сердечно-сосудистой системе типичными состояниями, вызывающими
турбулентность потока крови, являются стеноз и неэффективность клапанов. При
стенозе клапанов из-за недостатка кальция или других причин лепестки клапанов
теряют гибкость и не открываются полностью и, таким образом, создают препятствие
на пути выталкиваемой крови. Неэффективность клапана означает его неполное
закрытие и вызывает обратный ток крови через узкое отверстие.
Систолические шумы (СШ) вызываются такими состояниями, как дефект межже-
лудочковой перегородки (ДМЖП, VSD, ventricular septal defect — отверстие в стенке
между левым и правым желудочками), стеноз аортального клапана (AS, aortic
stenosis), стеноз клапана лёгочной артерии (PS, pulmonary stenosis), недостаточность
митрального клапана (MI, mitral insufficiency) и недостаточность трёхстворчатого
клапана (TI, tricuspid insufficiency). Стеноз полулунных клапанов (стеноз аорты
и лёгочный стеноз) создают препятствие на пути крови, выталкиваемой во время си-
столы. Недостаточность АВ-клапанов (недостаточность митрального клапана, недо-
статочность трёхстворчатого клапана) вызывает обратный ток крови к предсердию
во время сокращения желудочков.
Диастолический шум (ДШ) может вызываться следующими состояниями: недо-
статочность аортального или лёгочного клапанов (Al, aortic insufficiency и PI,
pulmonary insufficiency) и стеноз митрального или трёхстворчатого клапанов (MS,
mitral stenosis и TS, tricuspid stenosis). Другие состояния, вызывающие шумы, это
дефект межпредсердной перегородки (ДМПП, ASD, atrial septal defect), откры-
тый артериальный проток (PDA, patent ductus arteriosus), а также определённые
физиологические и функциональные состояния, которые приводят к повышенному
сердечному выбросу или повышенной скорости крови.
На параметры звуков и шумов сердца (такие как интенсивность, частотное
содержание и временные интервалы) оказывают влияние многие физические и фи-
зиологические факторы: позиции записи на груди, вмешательство структур груд-
ной клетки, сократимость левого желудочка, положение клапанов сердца в начале
систолы, степень имеющихся дефектов, частота сердечных сокращений и скорость
крови. Например, тон S1 является громким и задержанным при стенозе митрального
клапана; блокада правой ножки пучка Гиса вызывает широкое расщепление S2,
блокада левой ножки пучка Гиса вызывает реверсное расщепление S2; острый ин-
фаркт миокарда вызывает патологический тон S3, а серьёзная форма недостаточности
митрального клапана (митральной регургитации, MR, mitral regurgitation) ведёт
к увеличению S4 [40-44]. Хотя шумы очень напоминают помехи, их параметры
Примеры биомедицинских сигналов
55
помогают в распознавании причин их возникновения. Например, стеноз аортального
клапана вызывает межсистольный шум ромбоидальной формы, в то время как стеноз
митрального клапана вызывает между диастолой и систолой спадающе-нарастающий
тип шума. На рис. 1.26 показаны сигналы ФКГ, ЭКГ и каротидного пульса пациента
со стенозом аортального клапана. На ФКГ виден типичный ромбоидальный шум
в систоле.
Время, с
Рис. 1.26. Одновременная трёхканальная запись ФКГ, ЭКГ и сигнала каротидного пульса па-
циента (девочки 11 лет) со стенозом аортального клапана. Обратите внимание на присутствие
типичного систолического шума ромбоидальной формы и на расщеплённый характер тона S2
в сигнале ФКГ
Запись сигнала ФКГ. Сигналы ФКГ обычно записываются с использованием
пьезоэлектрических контактных датчиков, которые чувствительны к перемещению
или ускорению на поверхности кожи. Сигналы ФКГ, показанные в этой главе,
были получены с использованием датчика Hewlett Packard НР21050А с полосой
пропускания от 0,05 до 1000 Гц. Сигналы каротидного пульса, показанные в этом
разделе, были записаны с использованием пульсового датчика НР21281А с номиналь-
ной полосой пропускания 0-100 Гц. Запись ФКГ обычно осуществляется в тихой
комнате. Пациент должен лежать на спине с опущенной на подушку головой.
Датчик ФКГ прочно закрепляется в требуемой позиции на груди с использованием
присасывающегося кольца или резиновой ленты.
Использование сигналов ЭКГ и каротидного пульса при анализе сигналов ФКГ
будет описано в разд. 2.2.1, 2.2.2 и 2.3. Сегментация ФКГ, основанная на собы-
тиях, обнаруженных в сигналах ЭКГ и каротидного пульса, будет обсуждаться
- разд. 4.10. Специальный вид синхронного усреднения для выделения А2 в S2 будет
темой разд. 4.11. Спектральный анализ ФКГ и его применение будут представлены
56
Гл. 1. Введение в биомедицинские сигналы
в разд. 6.2.1, 6.4.5, 6.6 и 7.10. Параметрическое моделирование и обнаружение SI, S2
будет описано в разд. 7.5.2 и 7.9. Моделирование происхождения звука при стенозе
коронарной артерии будет обсуждаться в разд. 7.7.1. Адаптивная сегментация сигна-
лов при отсутствии другого опорного сигнала будет исследоваться в разд. 8.8.
1.2.9. Каротидный пульс (КП). Каротидный пульс — это сигнал давления, за-
писанный над сонной артерией в том месте на шее, где она проходит вблизи
поверхности кожи. В результате получают пульсовой сигнал, показывающий изме-
нения артериального кровяного давления и объёма крови с каждым ударом сердца.
Благодаря близости точки записи к сердцу сигнал каротидного пульса по своей
морфологии очень напоминает сигнал давления в основании аорты, однако его нельзя
использовать для измерения абсолютной величины давления [41]. Каротидный пульс
является полезным дополнением к ФКГ и может оказывать помощь в идентификации
тона S2 и его компонент.
Каротидный пульс резко возрастает в момент выталкивания крови из левого
желудочка в аорту, достигая пика, называемого волной перкуссии (Р, см. рис. 1.24).
После этого следует плато или вторичная волна, известная как приливно-отлив-
ная волна (Т, tidal wave), вызванная отражённым импульсом, возвращающимся от
верхней части тела. Далее закрытие каротидного клапана приводит к образованию
небольшой впадины на сигнале, известной как дикротическая выемка (D, dicrotic
notch). За дикротической выемкой может следовать дикротическая волна (DW,
dicrotic wave, см. рис. 1.24), связанная с отражённым от нижней части тела им-
пульсом [41]. На кривую каротидного пульса влияют дефекты клапанов, такие как
недостаточность митрального клапана и стеноз аортального клапана [41]; однако это
обстоятельство не нашло широкого применения в клинической диагностике.
Сигналы каротидного пульса, приведённые в данном разделе, были записаны
с использованием пульсового датчика НР21281А с номинальной полосой пропускания
0-100 Гц. Сигнал каротидного пульса обычно записывается одновременно с сигнала-
ми ФКГ и ЭКГ. При установке датчика каротидного пульса необходимо тщательно
выбирать позицию на шее: как можно ближе к сонной артерии, где пульс ощущается
наиболее сильно (см. рис. 1.17). Обычно это делает квалифицированный специалист.
В разд. 2.2.2 и 2.3 подробно рассматриваются интервалы, измеряемые в сигнале
каротидного пульса, а также их использование для сегментации сигнала ФКГ.
В разд. 4.3.3 описаны методы обработки сигнала для обнаружения дикротической
выемки. В разд. 4.10 и 4.11 исследуется использование дикротической выемки для
сегментации сигнала ФКГ. В разд. 6.4.5 предложено применение сигнала каротидно-
го пульса для усреднения спектра ФКГ в систоле и диастоле.
1.2.10. Сигналы с катетерных датчиков. Для наиболее детального и точного
мониторного контроля сердечной функции непосредственно в камеру сердца могут
быть введены датчики, помещённые на кончике катетера. В этом случае появляется
возможность получить несколько сигналов: давление в левом желудочке, давление
в правом предсердии, давление в аорте (АО) и внутрисердечные звуки [43, 44]. Хотя
такие сигналы дают точную и ценную информацию, подобные процедуры являются
инвазивными и связаны с определёнными рисками.
На рис. 1.27 и 1.28 показаны многоканальные записи давления в аорте, в левом
желудочке и в правом желудочке собаки, полученные с помощью катетерных датчи-
ков. Также показан сигнал ЭКГ. Обратите внимание, что на рис. 1.27 давление как
в правом желудочке, так и в левом желудочке возрастает именно в момент появления
каждого QRS-комплекса. Давление в аорте имеет пик чуть позже возрастания
давления в левом желудочке. Провал (инцизура, лат. incisura) в сигнале давления
в аорте связан с закрытием аортального клапана. (Тот же самый провал распростра-
Примеры биомедицинских сигналов
57
0,5 1 1,5 2 2,5 3 3,5 4 4,5 5
ЯШШШ.
*
0,5 1 1,5 2 2,5 3 3,5 4 4,5 5
0,5 1 1,5 2 2,5 3 3,5 4 4,5 5
Время, с
Рис. 1.27. Записи ЭКГ и внутрисердечного давления собаки в норме. АО обозначает давление
в аорте вблизи аортального клапана. Данные любезно предоставлены R. Sas and J. Tyberg.
Department of Physiology and Biophysics, University of Calgary
няется по сосудистой системе и проявляется в сигнале каротидного пульса в форме
дикротической выемки.) Диапазон давления в левом желудочке (10-110 мм рт. ст.)
намного больше, чем диапазон давления в правом желудочке (5-25 мм рт. ст.).
Диапазон давления в аорте ограничен диапазоном кровяного давления в сосудах
от 80 до 120 мм рт. ст.
Сигналы на рис. 1.28 показывают влияние желудочковых экстрасистол (ЖЭ).
Обратите внимание на пониженный ST-сегмент в сигнале ЭКГ на этом рисунке,
что, скорее всего, связано с ишемией миокарда. (Следует заметить, что сегменты PQ
и ST сигнала ЭКГ на рис. 1.27 являются изоэлектрическими, даже несмотря на то что
вертикальная шкала на графике показывает ненулевой уровень. С другой стороны,
на рис. 1.28 ST-сегмент ЭКГ несколько опущен по отношению к изоэлектрическому
PQ-сегменту.) Комплексы ЭКГ, появляющиеся сразу после отметок, соответствую-
щих 2-й и 3-й секундам, являются желудочковыми экстрасистолами, возникающими
из различных эктопических очагов, что подтверждается их явно различными фор-
мами. ЖЭ вызывают заметно меньшее, чем в норме, повышение давления в левом
желудочке и совсем не вызывают повышения давления в аорте, поскольку во время
эктопического комплекса кровь выталкивается из левого желудочка неэффективно.
1.2.11. Речевой сигнал. Люди — по природе своей существа социальные и име-
ют врождённую потребность в общении. Сама природа одарила нас совершенной
голосовой системой. Речевой сигнал является очень важным сигналом, хотя чаще
всего рассматривается скорее как сигнал для общения, чем биомедицинский сигнал.
58
Гл. 1. Введение в биомедицинские сигналы
1 2 3 4 5 6 7
1 2 3 4 5 6 7
Время, с
Рис. 1.28. Записи ЭКГ и внутрисердечного давления собаки, у которой наблюдаются ЖЭ.
Данные любезно предоставлены R. Sas and J. Tyberg. Department of Physiology and Biophysics,
University of Calgary
Однако в случаях, когда необходимо исследовать нарушение звукового и речевого
трактов, речевой сигнал может использоваться как диагностический [45].
Звуки речи образуются за счёт прохождения выдыхаемого воздуха из лёгких
в голосовой тракт (а также для некоторых звуков — через носовой тракт) [46].
Голосовой тракт начинается голосовыми нитями или голосовой щелью в горле
и заканчивается губами и ноздрями. Форма голосового тракта меняется, производя
различные типы звуковых элементов или фонем, которые, складываясь, формиру-
ют речь. Фактически голосовой тракт действует как фильтр, который модулирует
спектральные характеристики входящих потоков воздуха. Очевидно, что эта система
является динамической и что данный фильтр и, следовательно, производимый им
сигнал имеют изменяющиеся во времени характеристики, т. е. они являются неста-
ционарными (см. разд. 3.1.2).
Звуки речи в самом общем виде могут быть классифицированы как гласные,
фрикативные и взрывные [46]. В формировании гласных звуков участвует голосовая
щель: воздух проталкивается через голосовые нити, которые поддерживаются в со-
стоянии некоторого напряжения. Результатом является серия квазипериодических
импульсов воздуха, которые проходят через голосовой тракт. Входной поток голо-
сового тракта может рассматриваться как последовательность импульсов, которые
являются почти периодическими. За счёт свёртки с импульсной характеристикой
голосового тракта, который постоянно поддерживается в определённой конфигурации
на протяжении всей длительности гласного звука, формируется некоторый квазипе-
риодический сигнал с характерными повторяющимися формами волн. На рис. 1.29
Примеры биомедицинских сигналов
59
Рис. 1.29. Речевой сигнал слова «safety», произнесённого мужчиной. Приблизительные вре-
менные интервалы для различных фонем в этом слове: [С] —0,2—0,35 с; [Э] — 0,4-0,7 с; [Ф]:
0,75-0,95 с; [Т] — кратковременный всплеск при 1,1 с; [И] — 1,1-1,2 с. В сигнале также заметен
фоновый шум перед началом и после окончания речи, а также во время паузы перед взрывным
звуком [Т]
показан звуковой сигнал слова «safety», произнесённого мужчиной. На верхней кри-
вой рис. 1.30 показана часть сигнала, соответствующая звуку [Э] (буква «а» в слове).
Квазипериодическая природа этого сигнала очевидна. Исследуемыми характеристи-
ками гласного сигнала являются тон (средний интервал повторения импульсной
характеристики звукового тракта или базовой волновой формы) и резонансные или
формантные частоты системы голосового тракта.
Фрикативные звуки образуются за счёт проталкивания постоянного потока воз-
духа через узкое отверстие или препятствие, которое формируется в определённой
позиции голосового тракта. Результатом является турбулентный сигнал, который
выглядит почти как случайный шум. Фактически, входным потоком голосового
тракта является широкополосный случайный сигнал, который для получения тре-
буемого звука фильтруется голосовым трактом. В образование фрикативных звуков
не вовлекается вибрация голосовых нитей. Примерами фрикативных звуков являются
такие фонемы как [С], [Ш], [3] и [Ф]. Нижняя кривая на рис. 1.30 показывает часть
сигнала, соответствующую звуку [С] в слове «safety». Этот сигнал не имеет никакой
идентифицируемой структуры и кажется случайным (см. рис. 3.1, 3.3 и 3.4, а также
разд. 3.1.2). Как видно по спектру самого сигнала, при анализе фрикативных звуков
наибольший интерес представляет передаточная функция голосового тракта.
Взрывные звуки, известные также как задержки, образуются за счёт полного
закрытия голосового тракта, после чего следует резкий выдох, благодаря накоплен-
ному давлению. Примерами взрывных звуков являются фонемы [П], [Т], [К] и [Д].
На рис. 1.29 внезапный всплеск активности примерно в районе 1,1 с показывает
взрывной характер звука [Т]. Взрывные звуки трудно анализировать, поскольку они
являются преходящими. Кроме того, на их свойства воздействуют предшествующие
им фонемы. Для более подробного изучения речевого сигнала см. книгу Рабинера
(Rabiner) и Шафера (Schafer) [46].
Примеры биомедицинских сигналов
61
Передняя
крестообразная
связка (ПКС)
Задняя
крестообразная
связка (ЗКС)
Боковой
мениск
Боковая
вспомогательная
связка
Вид спереди
ПКС
Бедро -
Коленная
чашечка
Сухожилие
четырёхглавой
мышцы
Суставной
хрящ
Шероховатость
из-за разрушения
суставного хряща
Срединный мениск
Срединная вспомогательная
связка
Сухожилие коленной
чашечки
Большеберцовая кость
Малоберцовая кость
Вид большеберцовой
кости сверху
Рис. 1.31. Вид спереди и вид сбоку коленного сустава (эти два вида не являются взаимно
ортогональными). На вставке внизу слева показан вид сверху на большеберцовую кость
и мениски
Разрыв в мениске
зкс
Вид сбоку
с одновременной возможностью вращения до угла 20-30° на мыщелке бедра. Этот
сустав имеет четыре важных составных элемента: 1) полость тазобедренного сустава
(joint cavity), 2) суставной хрящ (articular cartilage), 3) синовиальную мембрану
(synovial membrane) и 4) волокнистую капсулу (fibrous capsule) [49, 50]. Коленный
сустав известен как синовиальный сустав, так как он содержит смазывающее веще-
ство, называемое синовиальной жидкостью. Коленная чашечка, сесамовидная кость
(sesamoid bone), защищает сустав и очень точно выровнена, чтобы скользить по
углублению бедра при движении ноги. Коленный сустав состоит из трёх сегментов:
1) коленно-бедренного (patello-femoral), 2) бокового большеберцово-бедренного (lat-
eral tibio-femoral) и 3) внутреннего большеберцово-бедренного (medial tibio-femoral).
Коленно-бедренный сустав является синовиальным скользящим суставом, а боковой
большеберцово-бедренный — синовиальным блоковидным суставом (hinge joint) [51].
Передняя и задняя крестовидные связки, а также боковая и внутренняя связки,
соединяют вместе бедро и большеберцовую кость, поддерживают коленный сустав
и ограничивают его движение. Различные мышцы, окружающие сустав, помогают
его движению и вносят вклад в его устойчивость.
Физиологическое движение и характерный механизм качения-скольжения при
сгибании и вытягивании ноги обеспечиваются благодаря шести степеням свободы
колена: трём для смещения и трём для вращения. Смещение колена происходит
вдоль трёх осей: передней-задней, боковой-внутреней и ближней-периферической.
Вращательные движения включают сгибание-вытягивание (flexion-extension) ноги,
вращение стопой наружу-внутрь (internal-external) и отведение ноги в сторону
и обратно (abduction-adduction).
Хотя основными структурами колена, несущими нагрузку, являются площадки
большеберцовой кости (tibial plateaus), такие компоненты сустава, как хрящ, мениск
62
Гл. 1. Введение в биомедицинские сигналы
и связки, также испытывают нагрузки. Коленная чашечка помогает вытягиванию
колена за счёт удлинения плеча рычага четырёхглавой (quadriceps) мышцы во всём
диапазоне движения и позволяет лучше распределять усилие сжатия в бедре [52].
Суставной хрящ. В коленном суставе имеются два типа хрящей: суставной хрящ
(articular cartilage), покрывающий концы костей, и волокнисто-хрящевые структуры
клиновидной формы, называемые менисками (menisci), расположенные между бе-
дром и большеберцовой костью [53]. Мениски (срединный мениск и боковой мениск),
основной функцией которых является поглощение удара, представляют собой две
пластинки в форме полумесяца, лежащие на суставной поверхности большеберцовой
кости.
Суставные поверхности коленного сустава включают большие изогнутые мы-
щелки бедра, выровненные мыщелки (срединное и боковое плато) большеберцовой
кости и суставные поверхности коленной чашечки. Существуют три типа движения
сустава: промежуточное движение между коленной чашечкой и бедром, а также
боковое и срединное движения между бедром и большеберцовой костью. Суставные
поверхности покрыты суставной тканью, как и все другие основные суставы тела.
Эта хрящевая ткань играет жизненно важную роль в функции сустава, так как она
защищает покрытую ею кость во время движения. Утрата этой тканью своих функ-
ций приводит к болям, пониженной подвижности и, в ряде случаев, к деформациям
и неустойчивости сустава.
Нарушения в коленном суставе. Колено — наиболее часто повреждаемый сустав
тела. Артритная деградация повреждённого колена — это хорошо известное явление,
которое обычно представляет собой следствие различных травм. Повреждение стаби-
лизирующих связок колена или поглощающих удар волокнисто-хрящевых подушечек
(менисков) — две наиболее широко известные причины деградации поверхностей
коленного сустава. Ударная травма самих поверхностей суставного хряща может при-
водить к деградации других суставных поверхностей и к вторичному остеоартриту.
Среди нетравматических нарушений в коленном суставе наиболее широко известно
спонтанное (идиопатическое) размягчение хряща коленной чашечки (chondromalacia
patella), при котором суставной хрящ размягчается, истончается и обнажает поверх-
ность коленной чашечки. Сходным образом может заметно размягчаться волокнисто-
хрящевая ткань менисков, что способно привести к дегенеративным разрывам и к ло-
кальным вторичным изменениям покрытых гиолином (hyaline) поверхностей.
Звуки коленного сустава. Наличие значительного шума часто связано с де-
градацией поверхностей сустава. ВАГ представляет собой сигнал вибрации сустава,
записанный во время его движения. В норме поверхности сустава являются гладкими
и либо создают незначительный шум, либо не создают никакого. В то же время,
поражение суставов остеоартритом или другими заболеваниями, вызывающими де-
градацию, может привести к разрушению повреждённого хряща и к появлению звука,
напоминающего скрежет. Выявление проблем с коленным суставом путём анализа
сигнала ВАГ может оказать помощь в предотвращении неоправданного хирурги-
ческого вмешательства с целью уточнения картины заболевания, а также в более
обоснованном отборе пациентов, которым показана хирургическая операция [54-60].
Однако сигнал ВАГ пока до конца не понят и представляет большие трудности для
анализа, что связано с его сложными характеристиками и нестационарностью.
В разд. 2.2.6, 3.2.6 и 8.2.3 приведены дополнительные подробности, касающиеся
сигнала ВАГ. В разд. 7.2.4, 7.3 и 7.7.2 рассматривается моделирование специфиче-
ского типа сигнала ВАГ, известного как коленно-бедренный хруст (patello-femoral
crepitus). В разд. 3.6.2, 3.6.3 и 3.10 рассматривается адаптивная фильтрация для
устранения помех от мышечных сокращений. В разд. 8.6.1 и 8.6.2 иллюстрируется
адаптивная сегментация сигнала ВАГ на квазистационарные сегменты. В разд. 9.13
обсуждается роль анализа сигнала ВАГ в выявлении заболеваний суставного хряща.
Цели анализа биомедицинских сигналов
63
1.2.14. Сигналы отоакустической эмиссии. Сигнал отоакустической эмиссии
(ОАЭ) представляет собой акустическую энергию, которая испускается барабанной
перепонкой либо спонтанно, либо в ответ на акустические стимулы. Открытие
существования этого сигнала показывает, что барабанная перепонка не только
принимает звук, но также и производит акустическую энергию [61]. Сигнал ОАЭ
может давать объективную информацию о микромеханической активности пред-
нейронных (preneural) или сенсорных компонент барабанной перепонки, которые
являются периферийными по отношению к окончаниям нервных волокон. Анализ
сигнала отоакустической эмиссии может помочь улучшить методики неинвазивного
исследования системы слуха. Этот сигнал также может помочь в скрининге слуховой
функции и диагностике нарушений слуха.
1.3. Цели анализа биомедицинских сигналов
Представление биомедицинских сигналов в электронной форме даёт возможность
компьютерной обработки и анализа этих данных. На рис. 1.32 показаны типовые
этапы и порядок осуществления компьютерной диагностики и терапии, основанной
на анализе биомедицинских сигналов.
Физиологическая
система (пациент)
-----------------------------Съём сигналов-------------------------------►
Врач или
медицинский -<-------------Анализ сигнала--------------► -------Обработка сигнала-------
специалист
Рис. 1.32. Компьютерная диагностика и терапия на основе анализа биомедицинских сигналов
Главными целями биомедицинской техники и анализа сигналов являются
[10-13, 17]:
• сбор информации — количественная оценка явлений для интерпретации исследу-
емой системы;
• диагностика — выявление нарушений, патологий и анормальностей;
• мониторинг — получение непрерывной или периодической информации о системе;
• терапия и управление — модификация поведения системы, основанная на дан-
ных, полученных при выполнении перечисленных выше этапов, для обеспечения
определенных результатов;
• оценка — объективный анализ для определения возможности удовлетворения
функциональных требований, для получения подтверждения правильности ра-
боты, для контроля качества, для количественной оценки эффекта лечения.
64
Гл. 1. Введение в биомедицинские сигналы
Процедуры съёма сигнала могут быть подразделены на следующие категории:
инвазивные или неинвазивные, активные или пассивные.
Инвазивные и неинвазивные процедуры. Инвазивные процедуры предполага-
ют помещение внутрь тела датчиков или других устройств, таких как игольчатые
электроды для записи ПДДЕ, а также введение катетерных датчиков внутрь сердца
через главную артерию или вену для записи интракардиальных сигналов. Неин-
вазивные процедуры более предпочтительны, а также позволяют минимизировать
риск для пациента. Запись ЭКГ с использованием электродов, помещённых на ко-
нечности и грудь, запись ЭМГ с использованием поверхностных электродов или
ФКГ с помощью микрофонов или акселерометров, помещённых на грудь, являются
неинвазивными процедурами.
Заметим, что получение измерений или изображений с использованием рент-
геновских лучей, ультразвука и т.п. может быть классифицировано как инвазивная
процедура, поскольку это предполагает проникновение в тело радиации, управляемой
снаружи, даже несмотря на то что эта радиация невидима и нет никаких проколов
или внедрений в тело.
Активные и пассивные процедуры. Активные процедуры съёма данных требу-
ют приложения к субъекту внешних стимулов или выполнения субъектом опреде-
лённых действий с целью стимулирования исследуемой системы, для того чтобы она
выработала требуемый отклик или сигнал. Например, запись сигнала ЭМГ требует
сокращения исследуемой мышцы (например, сжимания кулака); запись сигнала ВАГ
от коленной чашечки требует сгибания ноги в определённом диапазоне углов; запись
сигнала ПСС требует воздействия на пациента вспышками света. Хотя эти стимулы
могут показаться безвредными, они в определённых ситуациях могут быть опасны
для испытуемых: сгибание колена более определённого угла у некоторых людей
может вызвать боль, стробоскопический свет может служить у некоторых пациентов
пусковым механизмом для эпилептических припадков. Исследователю следует знать
об этих рисках, исследовать их, анализируя соотношение риск/полъза, и быть
готовым к тому, чтобы принять защитные меры.
Пассивные процедуры не требуют от субъекта выполнения каких-либо действий.
Запись ЭКГ с использованием конечностных или грудных электродов, ЭЭГ во
время сна с использованием электродов, наложенных на скальп, или регистрация
ФКГ с помощью микрофонов или акселерометров, помещённых на грудь, являются
пассивными процедурами, но требуют контакта между субъектом и аппаратурой.
Заметьте, что хотя сама по себе процедура является пассивной, исследуемая система
является активной, под своим собственным естественным управлением. Получение
изображения субъекта с использованием отражённого естественного света (без
вспышек от камеры) или с использованием естественной инфракрасной (тепло-
вой) эмиссии может быть отнесено к категории пассивных или бесконтактных
процедур.
Многие учреждения при проведении экспериментальных процедур с вовлечением
людей или животных, с целью минимизации риска и дискомфорта для них и макси-
мизации пользы как для исследуемого субъекта, так и для исследователя, требуют
разрешения от специальных комитетов по этике.
Система человек-машина. В систему человек-машина входят следующие
компоненты [10-13, 17].
• Субъект или пациент. Всегда важно помнить, что главной целью использования
биомедицинской аппаратуры и процедур анализа сигналов является получение
некоторой пользы для субъекта или пациента. Все системы и процедуры должны
быть спроектированы так, чтобы не доставлять неоправданных неудобств субъек-
ту, не причинять ему какого-либо вреда и не создавать опасности. При проведении
Цели анализа биомедицинских сигналов
65
инвазивных или рискованных процедур всегда важно выполнять анализ соотно-
шения риск/польза и принимать решение о том, действительно ли предполагаемая
польза от этой процедуры стоит того, чтобы подвергать пациента риску.
• Стимулы или активные процедуры. Применение к субъекту стимулов в актив-
ных процедурах требует специальной аппаратуры, например стробоскопических
генераторов света, звуковых генераторов или генераторов электрических им-
пульсов. Проведение пассивных процедур требует стандартизованного протокола
требуемой активности, для того чтобы обеспечить воспроизводимость и достовер-
ность эксперимента.
• Первичные преобразователи сигналов', электроды, датчики, сенсоры.
• Аппаратура кондиционирования сигналов', усилители, фильтры.
• Аппаратура отображения', осциллоскопы, самопишущие приборы, мониторы
компьютеров, принтеры.
• Аппаратура для записи, обработки и передачи данных', аналоговые и ленточ-
ные регистраторы, аналого-цифровые преобразователи (АЦП), цифро-аналоговые
преобразователи (ЦАП), цифровые ленты, компакт-диски (CD), дискеты, компью-
теры, телеметрические системы.
• Управляющие устройства', аппаратура стабилизации напряжения питания и изо-
лирующая аппаратура, системы воздействия на пациента.
Наука об измерении физиологических переменных и параметров известна как
биометрия. Ниже приведены некоторые аспекты, которые необходимо принимать во
внимание при проектировании, разработке технических требований или использова-
нии биомедицинской аппаратуры [10-13, 17].
• Изоляция субъекта или пациента — это вопрос огромной важности, так как
пациент не может подвергаться риску поражения электрическим током.
• Рабочий диапазон — минимальные и максимальные величины сигналов или па-
раметров, которые предполагается измерять.
• Чувствительность — минимальные изменения сигнала, которые могут быть из-
мерены. Это определяет разрешение системы.
• Линейность — необходима по крайней мере на какой-то части диапазона работы.
Любая присутствующая нелинейность может потребовать коррекции на более
поздних стадиях обработки сигнала.
• Гистерезис — некоторая задержка в измерении, связанная с направлением из-
менения измеряемого процесса. Гистерезис может добавить систематическую
ошибку измерений и требует коррекции.
• Частотная характеристика — представляет собой изменение чувствительности
в зависимости от частоты. Большинство встречающихся на практике систем
ведут себя как низкочастотные, т. е. их чувствительность уменьшается по мере
того, как возрастает частота входного сигнала. Для компенсации этого снижения
чувствительности на высоких частотах могут потребоваться специальные методы
восстановления сигнала.
• Стабильность — нестабильные системы могут ухудшить воспроизводимость и до-
стоверность измерений.
• Отношение сигнал-шум (signal-to-noise ratio, SNR) — сетевая помеха, проблемы
с заземлением, тепловые шумы и т.п. могут ухудшить качество регистрируемого
сигнала. Для того чтобы разработать подходящие методы фильтрации и способы
коррекции, необходимо хорошо понимать явления, приводящие к ухудшению
сигнала в данной системе.
5 Р. Рангайян
66
Гл. 1. Введение в биомедицинские сигналы
• Точность —это понятие включает ошибки, связанные с такими факторами, как
допуски, движения или механические погрешности; дрейф, связанный с измене-
ниями температуры, влажности или давления; ошибки чтения, связанные, напри-
мер, с параллаксом; ошибки обнуления или калибровки.
1.4. Трудности, встречающиеся при снятии и анализе
биомедицинских сигналов
Несмотря на долгую историю биомедицинской техники и ее широкое применение
в здравоохранении и медицинских научных исследованиях, при снятии, обработке
и анализе биомедицинских сигналов встречается большое число практических труд-
ностей [17, 10-13]. Особенности проблем и, следовательно, их возможные решения
уникальны для каждого вида сигнала. Особое внимание следует обращать на следу-
ющие вопросы.
Доступность изучаемых параметров для измерения. Большинство исследуе-
мых систем и органов, таких как сердечно-сосудистая система или головной мозг,
расположены внутри тела. Сигнал ЭКГ может быть легко снят при помощи электро-
дов, помещённых на конечности. Однако полученный таким способом сигнал явля-
ется всего лишь проекцией электрического сердечного вектора на оси электродов.
Такой сигнал может быть достаточным для контроля ритма сердца, однако он может
не удовлетворять более специфически кардиологическим исследованиям, таким как,
например, изучение электрической активности предсердий. Для получения такого
сигнала непосредственно от источника требуется разместить электроды у поверхно-
сти предсердий или даже внутри них.
Точно так же, измерение кровяного давления с использованием манжеты, надетой
на руку, дает лишь оценку плечевого артериального давления. Более детальное
изучение изменения давления в отделах сердца или артериях на протяжении всего
сердечного цикла требует введения катетеров с датчиками давления внутрь сердца.
Такие инвазивные методы в большинстве случаев позволяют снимать требуемые
сигналы непосредственно от источников, однако связаны с высокими рисками.
Поверхностная ЭМГ представляет собой результат интерференции сигналов от
нескольких двигательных единиц даже при очень низком уровне мышечных сокра-
щений. Регистрация сигнала потенциала действия отдельной двигательной единицы
(ПДОДЕ) требует доступа к определенным мышечным слоям или двигательным
единицам путем введения тонких проволочных или игольчатых электродов. Эта
процедура влечет за собой риск инфицирования и повреждения мышечных волокон,
а также причиняет боль пациенту во время мышечной активности.
Исследователь должен оценивать исследуемую систему и её параметры с боль-
шой осторожностью и заранее определять минимальный уровень вмешательства,
абсолютно необходимый для получения данных. Приходится делать выбор между
полнотой и качеством получаемой информации, с одной стороны, и болью и риском
для пациента —с другой.
Непостоянство источника сигнала. Из предыдущих разделов видно, что си-
стемы, которые включают человеческое тело, являются динамическими системами
с несколькими параметрами. Биомедицинские сигналы показывают динамическую
активность физиологических систем и несут информацию об их параметрах. Про-
исхождение этих процессов может быть детерминированным или случайным (сто-
хастическим); особым вопросом является периодичность или квазипериодичность
сигналов.
Трудности, встречающиеся при снятии и анализе биомедицинских сигналов
67
ЭКГ в норме представляет собой регулярный ритм с легко узнаваемыми формами
волн (такими, например, как QRS-комплекс) в каждом периоде. С этой точки зрения
сигнал можно рассматривать как детерминированный и периодический. Однако сер-
дечно-сосудистая система кардиологического больного может не оставаться в таком
состоянии на всем протяжении значительного периода времени, форма сигнала
и ритм могут изменяться.
Поверхностная ЭМГ представляет собой сумму потенциалов действия двигатель-
ных единиц (ПДДЕ), которые активны в конкретный момент времени. В зависимости
от требуемого уровня сокращений (определяемого усилием воли пациента), число
активных двигательных единиц изменяется, увеличиваясь с увеличением усилия.
Более того, интервалы возбуждения или частота возбуждения каждой двигательной
единицы также изменяются в зависимости от желаемого уровня сокращения и обла-
дают свойствами, присущими случайному сигналу. В то время как отдельный потен-
циал действия двигательной единицы (ПДДЕ) обладает легко узнаваемой и простой
однофазной, двухфазной или трехфазной формой, суммарный сигнал нескольких
двигательных единиц с различными уровнями возбуждения приводит к появлению
случайного сигнала, в котором фактически отсутствуют визуально распознаваемые
формы волн.
Динамическая природа биологических систем приводит к тому, что большинство
биомедицинских сигналов являются по своему характеру случайными и нестацио-
нарными. Это означает, что такие характеристики сигналов, как среднее значение,
дисперсия и спектральная плотность мощности, изменяются во времени. По этой
причине сигналы динамических систем следует анализировать в течение больших
периодов времени, включающих различные возможные состояния системы, а резуль-
таты должны оцениваться в контексте соответствующих состояний.
Связь и взаимодействие между физиологическими системами. Различные
системы, составляющие человеческое тело, не являются независимыми между со-
бой, правильнее было бы сказать, что они взаимосвязаны и взаимодействуют раз-
личными способами. Вот лишь несколько примеров взаимодействия: компенсация,
обратная связь, причинно-следственная связь, побочные эффекты, функциональная
взаимозаменяемость некоторых систем или их частей. Например, второй тон сердца
человека в норме имеет расщепление при вдохе из-за пониженного давления внутри
грудной клетки и пониженного венозного возврата в левую половину сердца [41] (но
не во время выдоха); это связано с нормальными физиологическими процессами.
Однако второй тон сердца бывает расщеплен как при вдохе, так и при выдохе, из-
за задержки сокращения правого желудочка при блокаде правой ножки пучка Гиса,
стенозе или недостаточности лёгочного клапана, а также из-за других причин [41].
Игнорирование этих взаимодействий может привести к неправильной интерпретации
сигнала.
Влияние оборудования и процедуры на объект исследования. Наложение пре-
образователя сигнала или подключение изучаемой системы к оборудованию может
елиять на результат, изменять поведение системы и вызывать ложные изменения изу-
чаемых параметров. Методика проведения эксперимента или действия, необходимые
для получения требуемого сигнала, могут приводить к определенным эффектам, ко-
торые изменяют характеристики сигнала. Этот аспект становится очевидным только
если на него обращено пристальное внимание. Например, применение достаточно
"яжелого акселерометра может воздействовать на вибрационные характеристики
мышц и нарушать целостность измеряемых сигналов вибрации или звука. В резуль-
тате многократного повторения процедуры у пациента может появиться усталость,
"оследующие измерения могут необъективно отражать поведение системы в целом;
для системы необходим период отдыха между процедурами или их повторением.
68
Гл. 1. Введение в биомедицинские сигналы
Физиологические артефакты и помехи. Одним из обязательных предвари-
тельных требований для получения хорошего сигнала ЭКГ является расслабленное
и спокойное состояние пациента при отсутствии движений. Кашель, напряжение
мышц, движения конечностей вызывают соответствующие сигналы ЭМГ, играющие
роль нежелательных артефактов. При отсутствии каких бы то ни было движений,
единственной мышечной активностью, остающейся у пациента, будет деятельность
сердечной мышцы. При использовании грудных отведений даже нормальное дыха-
ние может вызвать сопутствующую ему ЭМГ грудных мышц, накладывающуюся
на изучаемую ЭКГ. Также следует отметить, что дыхание вызывает изменения
RR-интервала, которые не следует путать с синусовой аритмией. Эффективным реше-
нием данной проблемы является задержка дыхания пациентом на несколько секунд.
Однако это предложение неприемлемо при длительном мониторном наблюдении
пациентов в критическом состоянии или при записи ЭКГ младенцев; в таких случаях
для удаления артефактов используются методы цифровой обработки сигналов.
Интересная ситуация возникает при снятии ЭКГ плода с использованием по-
верхностных электродов, устанавливаемых на животе матери: в этой ситуации
ЭКГ матери является помехой. Какие-либо волевые или внешние способы удаления
этой помехи либо неосуществимы, либо нежелательны, поэтому здесь требуется
применение достаточно сложных методов адаптивной фильтрации с использованием
нескольких каналов сигнала [62].
Другим примером физиологической помехи является миографическая помеха
(МП) при записи сигнала виброартрограммы коленного сустава [63]. При качаю-
щихся движениях ноги, требующихся для получения сигнала вибрации сустава, та-
зобедренная мышца активна (сокращается). ВМГ мышцы распространяется к колену
и проявляется в виде помехи. Возможным решением может служить искусственное
раскачивание ноги с помощью механического устройства, однако при такой неесте-
ственной ситуации могут появиться дополнительные артефакты от аппаратуры.
Более приемлемым решением является адаптивная фильтрация с многоканальным
снятием сигналов с различных точек [63].
Ограничения энергии. Большинство биомедицинских сигналов генерируется
на уровне милливольт или микровольт. Запись таких сигналов требует высокой
чувствительности преобразователей, а также использования оборудования с низким
уровнем шумов. Соединения и кабели необходимо экранировать, чтобы избежать
наводки от окружающих электромагнитных сигналов. Некоторые применения могут
потребовать использования первичных преобразователей со встроенными в них
усилителями и схемами кондиционирования сигнала, чтобы сигнал, принимаемый
от преобразователя, был мощнее, чем потенциальный внешний источник наводки.
В случаях, когда для получения определенной реакции системы необходим внеш-
ний стимул, уровень стимуляции ограничивается соображениями безопасности и фи-
зиологическими пределами. Электрическая стимуляция для записи ЭНГ должна быть
ограничена по напряжению таким образом, чтобы не вызывать локальных ожогов
и не оказывать влияния на управляющие электрические сигналы сердечной или
нервной систем. Звуковые и визуальные стимулы ограничены нижними порогами,
связанными с различимостью, и верхними, связанными с частотными характеристи-
ками, насыщением или болью.
Безопасность пациента. Защита пациента от опасности поражения электриче-
ским током или радиации — это безусловное требование первостепенной важности.
В случае, когда возможен выбор между различными процедурами, необходимо оце-
нить относительные уровни связанных с ними рисков и сопоставить с достигаемыми
результатами. Соображения безопасности пациента могут препятствовать использо-
ванию процедуры, которая даст лучшие результаты по сравнению с другими, или
Компьютерная диагностика
69
потребовать такой модификации процедуры, которая может привести к ухудшению
сигнала. В этом случае может потребоваться дальнейшая обработка сигнала с целью
улучшить его качество или скомпенсировать первоначальные потери.
1.5. Компьютерная диагностика
Врачи, кардиологи, специалисты по нейрофизиологии и медицинским техно-
логиям здравоохранения, как правило, обладают богатым практическим опытом
и высокой квалификацией. Почему же тогда мы хотим использовать компьютеры
и электронную технику для анализа биомедицинских сигналов? В приведённых ниже
соображениях предложен ряд аргументов в пользу применения компьютеров для
обработки и анализа биомедицинских сигналов.
• Люди способны легко и быстро анализировать визуальные образы и формы
сигналов, но арифметические операции с большим количеством чисел выпол-
няют относительно медленно. Например, сигнал ЭКГ, описывающий один цикл
сокращения сердца, содержит до 200 чисел, а сигнал ФКГ — до 2000. Если такие
сигналы требуется обработать для устранения шума или вычисления некоторых
параметров, то вряд ли может оказаться практичным поручать эту задачу че-
ловеку. Компьютеры способны выполнять миллионы арифметических операций
в секунду. Однако следует заметить, что распознавание образов и форм волн
с использованием математических процедур обычно требует огромного количе-
ства операций, что может приводить к слишком долгому ожиданию ответа при
использовании недостаточно мощных компьютеров.
• На людей могут оказывать влияние утомление, отсутствие интереса, внеш-
ние факторы. Кроме того, людям свойственно совершать ошибки. Длительное
непрерывное мониторное наблюдение сигналов оператором-человеком (например,
наблюдение по экрану осциллоскопа за сердечным ритмом и ЭКГ тяжёлых
кардиологических больных) не может быть ни экономически оправданным,
ни практически осуществимым. Оператора-человека может отвлечь что-либо,
происходящее вокруг него, и он может пропустить короткие эпизоды сигнала, со-
держащие значимые для диагностики преходящие события. Компьютеры, будучи
неодушевлёнными, но математически точными и последовательными машинами,
могут быть разработаны с ориентацией на специфические в вычислительном
отношении и повторяющиеся задачи.
• Анализ, выполняемый человеком, обычно бывает субъективным и носит каче-
ственный характер. В случаях, когда требуется сравнительный анализ сигнала
от некоторого пациента с сигналом от другого пациента, либо со стандартным
образцом, наблюдатель-человек склонен давать качественный ответ. Например,
если анализируется ширина QRS-комплекса ЭКГ, наблюдатель-человек может
отметить, что QRS-комплекс данного пациента шире, чем референтный или
нормальный. Более объективное сопоставление с точностью порядка несколь-
ких миллисекунд потребовало бы использования электронной аппаратуры или
компьютера. Вычисление количественных или численных параметров сигналов,
содержащих большое число отсчётов, определённо потребовало бы применения
компьютеров.
• Для анализа, выполняемого человеком, характерны как разброс между результа-
тами, получаемыми разными людьми, так и различия в результатах, получаемых
одним и тем же исследователем в разные моменты времени. С учётом того, что
большинство процедур анализа, выполняемых людьми, базируются на суждениях
70
Гл. 1. Введение в биомедицинские сигналы
качественного характера, они подвержены изменчивости во времени для данного
наблюдателя и изменчивости от одного наблюдателя к другому. Первое из этих
обстоятельств может быть также связано с отсутствием необходимой аккурат-
ности или с непоследовательным применением знаний, а второе — с различиями
в опыте и уровне понимания. Компьютер может выполнять некоторую процедуру
многократно, получая каждый раз совершенно одинаковый результат. Кроме
того, существует возможность закодировать знания (или точнее — логику) многих
экспертов в виде одной вычислительной процедуры и, таким образом, наделить
компьютер коллективным разумом нескольких специалистов в данной конкретной
области.
• Большинство биологических сигналов являются относительно медленными (низ-
кочастотными) с ограничением полосы частот от нескольких десятков до несколь-
ких тысяч герц. Следовательно, типичная частота дискретизации для цифровой
обработки биомедицинских сигналов лежит в диапазоне от 100 Гц до 10—20 кГц.
При таких частотах возможна обработка сигнала в режиме реального времени
даже с использованием относительно маломощного компьютера. Отметим, что
термин «анализ в реальном времени» может использоваться как для случая
обработки каждого отсчёта сигнала до прихода следующего отсчёта, так и для
обработки какого-либо интервала или периода появления сигнала (например,
QRS-комплекса ЭКГ) до того, как следующий отрезок сигнала полностью ока-
жется во входном буфере. Мониторное наблюдение за сердечным ритмом тяжело
больных пациентов определённо требует анализа ЭКГ в реальном времени. Од-
нако в некоторых применениях анализ в реальном времени (в режиме «on-line»)
не является необходимым: например, обработка сигнала ВАГ для диагностики
деградации хряща или анализ длительных записей ЭКГ, полученных с помощью
амбулаторной системы на протяжении нескольких часов, не требуют немедлен-
ной обработки и получения результатов. В таких случаях компьютеры могут
использоваться для анализа предварительно полученных записей сигналов в ре-
жиме «off-line» с применением сложных в вычислительном отношении методов
обработки сигналов и моделирования. Как скорость вычислений, необходимая
для обработки сигналов в реальном времени, так и вычислительная сложность
методов моделирования, используемых при анализе сигналов в режиме «off-line»,
исключают саму возможность выполнения этих задач человеком.
Одним из важных моментов, которые следует упомянуть в связи с обсужде-
нием данных вопросов, является то, что применение компьютеров для обработки
биомедицинских сигналов обеспечивает возможность количественного анализа.
Логика медицинской или клинической диагностики на основе анализа сигналов
может быть в этом случае объективно запрограммирована и последовательно
использована при решении рутинных или повторяющихся задач. Однако здесь необ-
ходимо подчеркнуть, что конечной целью анализа биомедицинских сигналов является
диагностика с помощью компьютера, а не автоматическая диагностика. Врач или
специалист-медик обычно использует значительную долю информации в дополнение
к сигналам и измерениям, включая общее физическое и психическое состояние,
семейные обстоятельства и наследственность, а также социально-экономические
факторы, влияющие на пациента, многие из которых не поддаются численному
выражению и обработке с использованием логических правил. Биомедицинские
сигналы, в лучшем случае, являются косвенными индикаторами состояния пациента.
Кроме того, зачастую отсутствует прямая и однозначная связь между сигналом
и патологией [31]. Результаты анализа сигналов должны интегрироваться врачом
с другими клиническими признаками, симптомами и данными. И что важнее всего,
в постановке окончательного диагноза важную роль играет интуиция специалиста.
Контрольные вопросы и задания 71
По этим причинам (а также с учётом специфических для данной области проблем,
связанных с лицензированием, обязательствами врачей и особым юридическим регу-
лированием) право принятия окончательных диагностических решений лучше всего
оставить врачу или медицинскому специалисту. Ожидается, что количественный
и объективный анализ, который становится возможным благодаря использованию
компьютеров, позволит врачу принять более точное диагностическое решение.
О важности количественного анализа.
«Когда вы можете измерить то, о чём говорите, и выразить в виде чисел, вы кое-что
знаете об этом, но когда вы не можете это измерить и выразить в численном виде,
ваше знание скудно и неудовлетворительно: это может быть началом знания, но в этих
рассуждениях вы вряд ли уже приблизились к тому, что называется наукой.»
— Лорд Кельвин (Уильям Томсон, 1824-1907) [64]
О предположениях, которые можно сделать на основе количественного анализа.
«На существующих в природе вещах не проштампованы параметры, как, например,
вместимость на кузове грузовика; требуется определённое количество исследований
для выяснения того, каковы эти параметры ... То, что экспериментаторы считают
само собой разумеющимся до начала экспериментов, неизмеримо интереснее, чем те
результаты, к которым могут привести их эксперименты.»
— Норберт Винер (1894-1964)
1.6. Замечания
В этой главе дан общий обзор природы биомедицинских сигналов и приведены
несколько примеров с целью ознакомления с типичными для этих сигналов видами
и характеристиками. В последующих главах будут рассмотрены подробности, каса-
ющиеся характеристик сигналов, а также их обработки и анализа.
Мы также сформулировали цели биомедицинской техники и анализа биомеди-
цинских сигналов. С целью привлечь внимание к соответствующим практическим
аспектам, мы обсудили некоторые трудности, связанные с исследованием биоме-
дицинских сигналов. Обсуждены также уместность и желательность применения
компьютеров для анализа биомедицинских сигналов. При этом упор сделан на объ-
ективном и количественном анализе, конечной целью которого является диагностика
с помощью компьютера. Дальнейшие главы будут посвящены конкретным методам
и применениям.
1.7. Контрольные вопросы и задания
(Замечание. Некоторые из приведённых ниже вопросов могут потребовать ба-
зовой подготовки и использования другой литературы по ЭКГ (например, Рашмер
(Rushmer) [23]), по ЭМГ (например, Гудголд и Эберстем (Goodgold and Eber-
stem) [22]), и биомедицинской аппаратуре (например, Уэбстер (Webster) [10].)
1. Назовите две причины, которые оправдывают применение электронной аппара-
туры и компьютеров в медицине.
2. Назовите любые две цели использования биомедицинской аппаратуры и анализа
сигналов.
72
Гл. 1. Введение в биомедицинские сигналы
3. Сформулируйте различие между мониторным наблюдением за пациентом по
принципам разомкнутого контура и замкнутого контура.
4. Перечислите три наиболее распространённых вида источников артефактов в био-
медицинской аппаратуре.
5. Нервная клетка имеет потенциал действия длительностью 10 мс, включая ре-
фрактерный период. Какова максимальная частота (в импульсах в секунду),
с которой данная клетка способна передавать электрическую активность?
6. Рассмотрим клетку миокарда с потенциалом действия длительностью 300 мс,
включая рефрактерный период. Какова максимальная частота, с которой могут
быть вызваны сокращения данной клетки?
7. Сформулируйте различие между пространственным и временным охватом двига-
тельных единиц для достижения возрастающего уровня мышечной активности.
8. Рассмотрим три двигательных единицы с потенциалами действия (ПДОДЕ),
имеющими двухфазную и трёхфазную формы. Рассмотрим начальные стадии
сокращения соответствующей мышцы. Нарисуйте три графика результирующей
ЭМГ для возрастающих уровней сокращения с феноменами пространственного
и временного охвата, вызванного по отдельности и в комбинации. При этом пред-
полагается, что уровень сокращения невысок и что ПДОДЕ не перекрываются.
9. Нарисуйте типичную форму ЭКГ для одного кардиоцикла, указав на нём важ-
нейшие составляющие волны, их типичные длительности и типичные величины
интервалов между ними. Укажите для каждой волны или интервала соответству-
ющее кардиологическое событие или действие.
10. Нарисуйте кривую, соответствующую двум циклам типичного сигнала ЭКГ
и отметьте следующие волны и периоды: а) волны Р, QRS и Т, б) RR-интервал,
в) сокращение предсердий, г) расслабление предсердий, д) сокращение желудоч-
ков и е) расслабление желудочков.
11. Объясните, почему волны Р и Т являются относительно низкочастотными сиг-
налами, тогда как комплекс QRS — более высокочастотный сигнал. Используйте
для ваших объяснений диаграммы потенциала действия и формы волн ЭКГ.
12. Объясните, почему при определённых заболеваниях сердца комплекс QRS может
расширяться.
13. Приведите два примера задач, решение которых требует использования электрон-
ной аппаратуры и/или компьютеров для анализа ЭКГ.
14. У кардиологического пациента наблюдаются регулярный ритм, исходящий из
СА-узла, и имеется эктопический очаг. На протяжении периода длительностью
10 с наблюдалось регулярное возбуждение СА-узла в моменты времени t = 0,1, 2,
3, 4, 5, 6, 7, 8, и 9 с. Возбуждение эктопического очага наблюдалось в моменты
времени t = 1,3, 2,8, 6,08 и 7,25 с.
Нарисуйте две последовательности импульсов, соответствующие процессам воз-
буждения СА-узла и эктопического очага. Схематично изобразите форму кривой
результирующей ЭКГ. Объясните источник происхождения каждого комплекса
(СА-узел или эктопический очаг) и поясните, почему это так.
15. У пациента наблюдается желудочковая бигеминия, при которой каждый второй
импульс из СА-узла замещается желудочковой экстрасистолой с полной ком-
пенсаторной паузой (см. рис. 9.5, иллюстрирующий бигеминию). СА-узел возбу-
ждается регулярно с частотой 80 импульсов в минуту и каждый эктопический
комплекс опережает заблокированный импульс из СА-узла на 100 мс.
а) Нарисуйте схематично кривую ЭКГ для 10 QRS-комплексов, детально разме-
тив шкалу времени.
Упражнения и лабораторные работы
73
б) Нарисуйте гистограмму RR-интервалов для данной ЭКГ.
в) Чему будет равен средний RR-интервал, рассчитанный для 10 QRS-комплек-
сов?
16. Нарисуйте типичную ФКГ (сигнал сердечного звука) для одного сердечного цик-
ла, указав на ней важнейшие составляющие волны, их типичные длительности
и типичные величины интервалов между ними. Укажите для каждой волны или
интервала соответствующее сердечное событие или действие.
17. Приведите два примера задач, решение которых требует использования электрон-
ной аппаратуры и/или компьютеров для анализа ЭЭГ.
18. Сформулируйте различие между ритмами ЭКГ и ЭЭГ. Сделайте примерный
набросок для каждого из них.
1.8. Упражнения и лабораторные работы
1. Посетите ЭКГ, ЭМГ или ЭЭГ лабораторию в вашей местной больнице или
в исследовательском медицинском центре. Понаблюдайте за тем, как снимают-
ся различные биомедицинские сигналы. Расспросите специалистов о том, как
они интерпретируют эти сигналы. Добровольно станьте исследуемым пациентом
и испытайте на себе процедуру снятия биомедицинских сигналов!
2. Включите систему снятия ЭКГ и пронаблюдайте воздействие на качество и ха-
рактер сигнала следующих состояний или действий: не подсоединённых к па-
циенту электродов; недостатка электродного геля; задержки пациентом дыхания
или свободного дыхания в ходе процедуры записи; кашля, разговора или движе-
ния пациента в ходе процедуры записи.
3. Используя стетоскоп, послушайте ваши собственные тоны сердца и тоны сердца
ваших товарищей. Исследуйте зависимость звука от места наложения датчика.
Исследуйте воздействие глубокого дыхания и разговора пациента на прослуши-
ваемые вами звуки сердца.
4. Запишите звуковые сигналы гласных звуков (а, и, у, э, о), дифтонгов (эй, оу),
согласных (с, ф) и глухих согласных (т, п), а также слов со всеми тремя типами
звуков (например, safety, explosive, hearty, heightened, house). Этот эксперимент
можно проделать, используя микрофон вашего компьютера. Исследуйте формы
волн и характеристики каждого из сигналов.
Глава 2
АНАЛИЗ ОДНОВРЕМЕННЫХ, ПАРНЫХ
И КОРРЕЛИРОВАННЫХ ПРОЦЕССОВ
Человеческое тело представляет собой сложный комплекс большого числа биоло-
гических систем с несколькими физиологическими, функциональными и, возможно,
патологическими процессами. Большинство биологических процессов внутри тела
не являются независимыми друг от друга. Скорее они взаимно коррелированы
и связаны друг с другом посредством физического и физиологического управления
и особыми коммуникационными системами. Если анализировать один единственный
процесс, не принимая во внимание другие, которые могут быть связаны и корре-
лированы с ним, то можно получить только частичную информацию и усложнить
понимание изучаемого процесса. Следовательно, проблема заключается в том, как
распознать существование этих взаимосвязанных и коррелированных явлений, как
получить соответствующие сигналы и идентифицировать коррелированные признаки.
К сожалению, не существует простого и универсального правила для решения этой
проблемы.
В идеальном случае, для того чтобы идентифицировать несколько потенциальных
источников информации, исследователь должен рассматривать интересующую его
систему или процесс со всех возможных точек зрения и использовать мультидис-
циплинарные подходы. Получаемые таким образом сигналы могут быть электриче-
скими, механическими, биохимическими или физическими, а также могут проявлять
взаимосвязи, усложнённые особенностями преобразования, временными задержка-
ми, наличием нескольких путей передачи или отражения, искажениями форм волн
и эффектами фильтрации, которые необходимо принимать во внимание для их одно-
временного анализа. Исследуемые события или волны в сигнале могут не иметь спе-
цифических особенностей и быть весьма сложными для идентификации и анализа.
Как же следует исследовать параллелизм, взаимозависимость и коррелированность,
существующие между процессами и связанными с ними сигналами, для лучшего
понимания системы?
2.1. Постановка задачи
Определить соответствие, коррелированность и взаимосвязи, существующие
между одновременными сигналами, порождаемыми общими системами или про-
цессами, и исследовать возможность их потенциального применения.
Вышеприведённая формулировка представляет собой достаточно расплывчатую
общую задачу, которую на данной стадии обсуждения всё же необходимо рассмо-
Иллюстрация задачи на примерах
75
треть. Примеры и возможные применения, рассмотренные в следующих разделах,
дают некоторые наглядные образцы решения такого рода специфических проблем.
В последующих главах будут разрабатываться методы обработки сигналов для раз-
личных задач, сформулированных в конкретных примерах. Обратите внимание, что
эти примеры охватывают широкий диапазон систем, процессов и сигналов. Однако
конкретная проблема, исследуемая вами, вполне возможно, не будет непосредственно
связана с каким-нибудь из представленных здесь примеров. Ожидается, что рассмо-
трение данных примеров расширит диапазон вашей профессиональной квалификации
аналитика и поможет вам в поиске лучших решений конкретных проблем.
2.2. Иллюстрация задачи на примерах
2.2.1. Электрокардиограмма и фонокардиограмма. Клиническая ЭКГ обычно
включает 12 каналов последовательно или одновременно записанных сигналов и мо-
жет сама по себе использоваться для диагностики многих кардиологических заболе-
ваний. В основном, это связано с простотой идентификации волн ЭКГ, а также с на-
личием большого числа исследований, в результате которых клиническая ЭКГ стала
стандартной (хотя и эмпирической) процедурой. С другой стороны, ФКГ является
более сложным сигналом. Формы волн ФКГ невозможно анализировать визуально, за
исключением наиболее общих характеристик, таких как присутствие шумов, наличие
временных задержек (как в случае расщеплённого тона S2) и вид огибающих для
шумов. Преимуществом ФКГ является то, что её можно слышать; аускультация
шумов сердца используется гораздо чаще, чем визуальный анализ сигнала ФКГ.
Однако объективный анализ ФКГ требует идентификации ряда компонент, таких как
S1 и S2, и их последующего анализа с целью выяснения природы этих компонент.
Если имеется запись сигнала ФКГ, охватывающая несколько циклов сердца, то
визуальная идентификация S1 и S2 возможна лишь при отсутствии шумов между
этими тонами, а также, если частота сердечных сокращений (ЧСС) настолько низка,
что интервал S2-S1, относящийся к следующему сокращению сердца, продолжи-
тельнее, чем текущий интервал S1-S2 (что обычно и ожидается в нормальной
ситуации). В случае высокой ЧСС, а также при наличии шумов или экстрасистол,
идентификация S1 и S2 может оказаться сложной задачей.
Задача. Идентифицировать начало тона S1 в сигнале ФКГ и выделить
звуковой сигнал, охватывающий первый сердечный цикл.
Решение. Сигналы ЭКГ и ФКГ — это одновременные явления с явным различи-
ем, заключающемся в том, что первый из них электрический сигнал, а второй —
механический (звук, вибрации). Очень часто запись ЭКГ делают одновременно
с записью ФКГ (см., например, рис. 1.24 или 1.26).
QRS-комплекс ЭКГ непосредственно связан с сокращением желудочков как сум-
марный эффект от потенциала действия клеток мышц желудочков (см. разд. 1.2.4).
Во время сокращения желудочков напряжение сухожильных хорд (chordae tendineae)
и давление обратного потока крови по направлению к предсердию перекрывают
АВ-клапаны, вызывая таким образом начальные вибрации S1 [23] (см. разд. 1.2.8).
Таким образом, S1 начинается непосредственно после QRS-комплекса. С учётом
неспецифической природы сигналов вибрации, а также наличия различных возмож-
ностей передачи звуков сердца к точке записи на груди, выделение S1 само по себе
является сложной проблемой.
Как будет показано в разд. 3.3.1, 4.3.1 и 4.3.2, обнаружение QRS-комплексов — это
относительно несложная задача, так как QRS-комплекс является наиболее острой
76
Гл. 2. Анализ одновременных, парных и коррелированных процессов
волной в кардиоцикле ЭКГ; действительно, волны Р и Т могут быть почти не
видны во многих записях ЭКГ. Таким образом, QRS-комплекс ЭКГ представляет
собой надёжный индикатор начала S1 и может быть использован для сегментации
записей ЭКГ по отдельным сердечным циклам от начала одного QRS-комплекса
(и, следовательно, S1) до начала следующего QRS-комплекса и S1. Этот метод можно
использовать как при визуальном анализе, так и при обработке сигнала. Первый
подход не требует дальнейших пояснений, но будет несколько расширен в разд. 2.3;
второму подходу посвящён разд. 4.10.
2.2.2. Фонокардиограмма и каротидный пульс. В некоторых применениях сер-
дечно-сосудистой диагностики может потребоваться идентификация диастолического
сегмента ФКГ [65]. Систола желудочков заканчивается закрытием аортального и лё-
гочного клапанов, что проявляется в виде аортальной (А2) и лёгочной (Р2) компонент
второго сердечного тона S2 (см. 1.2.8). Окончание сокращения индицируется также
Т-зубцом в ЭКГ, а тон S2 появляется чуть позже окончания Т-зубца (см. рис. 1.24).
S2 может рассматриваться как окончание систолы и начало релаксации желудочков
или диастолы (Замечание. Shaver и др. [43], а также Reddy и др. [44] включали
S2 в состав систолической части сигнала). Однако, как и в случае S1, тон S2 также
имеет характер неспецифических вибраций, которые сложно идентифицировать (да-
же визуально), особенно в случае наличия шумов сердца.
Поскольку известно временное соотношение между Т-зубцом и S2, то может
показаться, что первый можно использовать для идентификации второго. Однако на
практике это не всегда возможно, так как Т-зубец часто представляет собой низко-
амплитудную и гладкую волну, а иногда не регистрируется совсем (см. рис. 1.14).
Поднятие (как на рис. 1.14) или снижение (как на рис. 1.28) ST-сегмента может
затруднить даже визуальную идентификацию момента окончания Т-зубца. Таким
образом, Т-зубец не является надежным индикатором для идентификации S2.
Задача. Идентифицировать начало тона S2 в сигнале ФКГ.
Решение. Поскольку Т-зубец не является адекватным идентификатором диасто-
лы, необходимо найти другие возможные источники информации. Закрытие аорталь-
ного клапана сопровождается замедлением и возвратом потока крови в аорту. Это
вызывает внезапное падение кровяного давления внутри аорты, которое к этому мо-
менту и так спадает вследствие окончания систолической активности. Это внезапное
изменение кровяного давления вызывает инцизуру (incisurd) или выемку в волне
давления в аорте (см. рис. 1.27 и рис. 1.28). Сигнал давления в аорте мог бы быть по-
лучен с использованием катетерных датчиков [43, 44], но эта процедура являлась бы
инвазивной. К счастью, эта выемка передаётся по артериальной системе и может на-
блюдаться в сигнале каротидного пульса (см. 1.2.9), регистрируемом с шеи человека.
Эта дикротическая выемка D в сигнале каротидного пульса будет иметь времен-
ную задержку по отношению к соответствующей выемке в сигнале давления в аорте,
но её преимуществом является неинвазивный способ получения. (Подобные события
происходят и в лёгочной артерии, но они не производят какого-либо эффекта,
наблюдаемого снаружи). См. рис. 1.24 и 1.26, на которых показан пример трёхканаль-
ной записи сигналов ФКГ-ЭКГ-каротидного пульса, иллюстрирующий взаимосвязи
между D, S2 и Т. Таким образом, дикротическая выемка может быть использована
в качестве надёжного индикатора окончания систолы и начала диастолы, причём этот
индикатор может быть получен неинвазивным методом. Установлено, что средняя
величина задержки S2-D составляет 42,6 мс со стандартным отклонением 5 мс [66]
(см. также Tavel [41]). Для определения точки начала S2 эту величину следует
вычесть из временного интервала, соответствующего положению дикротической
выемки.
Иллюстрация задачи на примерах
77
Методы обработки сигнала для обнаружения дикротической выемки и сегмента-
ции ФКГ будут описаны в разд. 4.3.3, 4.10 и 4.11.
2.2.3. ЭКГ и электрограмма предсердий. В большинстве исследований ЭКГ
и ФКГ активности желудочков уделяется гораздо большее внимание, чем актив-
ности предсердий, и даже в этом случае гораздо большее внимание — активности
левого желудочка, чем правого. Обычно при анализе ритма QRS-комплексы ЭКГ
используют для определения значения интервала между комплексами, известного
как RR-интервал. При таком анализе пренебрегают активностью предсердий.
Напомним, что АВ-узел вносит задержку между сокращением предсердий, вы-
званным импульсом СА-узла, и последующим сокращением желудочков. Эта за-
держка играет важную роль в координации сокращений предсердий и желудочков.
Определённые патологические состояния могут нарушать эту координацию и даже
вызывать АВ-диссоциацию [23]. Таким образом, необходимо изучать предсердную
активность независимо от желудочковой активности и устанавливать их связь или
отсутствие таковой. Следовательно, при анализе ритма интервал между Р-зубцом
и QRS-комплексом, называемый PR-интервалом, может являться ценным дополне-
нием к RR-интервалу. К сожалению, предсердия, будучи относительно небольшими
камерами со слабой сократительной активностью, вызывают в поверхностной ЭКГ
небольшой по величине и гладкий Р-зубец. Довольно часто в записи поверхностной
ЭКГ Р-зубец не удаётся отчётливо различить даже визуально (см., например, отве-
дения I и V3-V6 на рис. 1.18).
Задача. Получить индикатор сокращения предсердий для измерения PR-uh-
тервала.
Решение. Одна из причин потери различимости Р-зубца — это влияние передачи
от предсердия к точкам регистрации поверхностной ЭКГ. Очевидным решением
было бы введение электрода в одно из предсердий через катетер и запись сиг-
нала непосредственно вблизи источника. Эта процедура, конечно, являлась бы
инвазивной. Дженкинс (Jenkins) и др. [29, 30, 67, 68] предложили уникальную
и очень интересную процедуру для получения сильного и чистого сигнала активности
предсердий: они разработали электрод в виде таблетки, которая проглатывается
пациентом и опускается через пищевод в позицию, близкую к левому предсердию
(биполярные электроды-таблетки в таком случае находятся в подвешенном состоянии
на тонкой проволоке длиной примерно 35 см, отсчитывая от губ пациента). В каком-
то смысле эту процедуру можно назвать инвазивной, так как объект вводится внутрь
тела (и удаляется после процедуры), хотя единственное требуемое действие —это
просто проглатывание объекта в форме таблетки. Коэффициент усиления, требуемый
для получения хорошего сигнала из предсердий, должен быть примерно в 2-5 раз
выше, чем обычно используемый в усилителях ЭКГ. Применяя полосовой фильтр
с полосой пропускания 5-100 Гц, Дженкинс и др. получили отношение сигнал-шум,
равное десяти.
На рис. 2.1 показаны электрограмма предсердий от электрода-таблетки и од-
но отведение поверхностной ЭКГ, полученные от пациента в норме. Сокращение
предсердий чётко идентифицируется в виде резкого пика в электрограмме пред-
сердий. Измерение PR-интервала (или AR-интервала, как он был назван Jenkins
и др.) теперь становится очень простой задачей, поскольку идентификация этого
пика в предсердной электрограмме (волны А, как она была названа Дженкинсом
и др.) намного легче, чем даже идентификация QRS-комплекса в поверхностной ЭКГ.
На рис. 2.2 показаны электрограмма предсердий и поверхностная ЭКГ паци-
ента с эктопическими QRS-комплексами. Желудочковым экстрасистолам (ЖЭ) не
предшествует непосредственно активность предсердий. Первая ЖЭ блокировала
78
Гл. 2. Анализ одновременных, парных и коррелированных процессов
; -- ГН- r=r mrx
гг —: :— — rk- '4:
ГЧт ... — — ~::l и “ГЛ 1—1 L—“ — «...
'Г'" •т* .. ::— ~ 1 г: • > Я "4 —
V и. 1 -J — rrr • - J- • г- t
V П’Г — —
-*• 4— 7л: nrJ -u.
i
-AR- 17 ** “-- - d
.L_ M -- ... -- -г.
Рис. 2.1. Запись предсердной электрограммы с электрода-таблетки (нижняя кривая) и по-
верхностной электрокардиограммы (верхняя кривая) от пациента в норме. Интервалу 1 с на
рисунке соответствует 5 делений. Воспроизводится с разрешения J.M. Jenkins, D. Wu and
R. Arzbaecher, Computer diagnosis of abnormal cardiac rhythms employing a new P-wave detector
for interval measurement, Computers and Biomedical Research, 11:17-33, 1978. ©Academic Press
Рис. 2.2. Электрограмма предсердий (нижняя кривая) и поверхностная ЭКГ (верхняя кривая)
пациента с эктопическими комплексами. Интервалу 1 с на рисунке соответствует 5 делений.
Воспроизводится с разрешения J.M. Jenkins, D. Wu and R. Arzbaecher, Computer diagnosis of
abnormal cardiac rhythms employing a new P-wave detector for interval measurement, Computers
and Biomedical Research, 11:17-33, 1978. ©Academic Press
проведение предсердной активности, возникшей сразу после неё, что привело к ком-
пенсаторной паузе перед следующим нормальным QRS-комплексом. Вторая ЖЭ не
блокировала последующую предсердную волну, но привела к АВ-задержке, пре-
вышающей норму, и к аберрантному пути проведения, что объясняет различные
формы волн последующих комплексов. Третья ЖЭ не повлияла на время появления
Иллюстрация задачи на примерах
79
последующего импульса, инициированного СА-узлом, но вызвала изменение в фор-
ме волны результирующего QRST-комплекса за счёт изменения пути проведения
[29, 30, 67, 68].
Дженкинс и др. разработали четырёхзначный цифровой код для каждого ком-
плекса, который иллюстрируется на рис. 2.2. Первая цифра кодируется следующим
образом:
0 — анормальная форма волны или
1 — нормальная форма волны,
что оценивается с использованием коэффициента корреляции между текущим ком-
плексом и образцом нормы (см. разд. 3.3.1, 4.4.2 и 5.4.1). Остальные три цифры
кодируют характер интервалов RR, AR и АА, соответственно, как
0 — укороченный,
1 — нормальный или
2 — удлинённый.
Отсутствие волны А, предшествующей анализируемому комплексу, помечается ко-
дом «х» в четвёртой цифре (в этом случае AR-интервал длиннее, чем RR-интервал).
На рис. 2.2 показан код для каждого комплекса. Основываясь на коде для каждого
комплекса, Jenkins и др. смогли разработать автоматизированный метод определения
широкого набора различных аритмий.
2.2.4. Кардио-респираторное взаимодействие. Дыхание оказывает влияние на
сердечный ритм, что объясняется взаимосвязью и взаимодействием, существующими
между сердечной и дыхательной системами [69-74]. Дыхание также влияет на
передачу сердечных звуков от камер сердца к поверхности груди. Durand и др. [75]
записывали сигналы ФКГ у собак интракардиально и с поверхности груди и по-
лучили динамическую передаточную функцию системы сердце — грудная клетка.
Исследование синхронизации и взаимосвязи в кардио-респираторной системе требует
тщательного анализа нескольких сигналов, получаемых одновременно от сердечной
и дыхательной систем [76]. В разд. 7.2.2, 7.8 и 8.9 будут описаны несколько методов
анализа вариабельности сердечного ритма (ВСР), основанные на данных о длитель-
ности RR-интервалов.
2.2.5. Электромиограмма и вибромиограмма. Сигнал ЭМГ хорошо изучен.
В результате установлены взаимосвязи между параметрами сигнала ЭМГ и уровнем
мышечных сокращений [22, 24]. Хорошо известно, что для ЭМГ как среднеква-
дратичное, так и среднее значения частоты возрастают с увеличением мышечного
сокращения до тех пор, пока не наступает утомление, а далее обе величины
начинают уменьшаться. Хотя результат работы мышцы является в данном случае
механическим сокращением, анализируемый сигнал (получаемый с использованием
датчиков усилия или напряжения) является по своей природе электрическим. Но
в некоторых ситуациях желательно иметь непосредственно механический сигнал,
связанный с базовыми явлениями в мышечных волокнах и двигательных единицах.
Задача. Получить механический сигнал, который является непосредствен-
ным индикатором активности мышечных волокон или двигательных единиц
с целью исследования сокращения мышц и развития усилий.
Решение. Сигнал ВМГ, как описывалось в разд. 1.2.12, представляет собой сиг-
нал вибрации, измеряемый в сокращающейся мышце. Этот сигнал является прямым
проявлением сокращения мышечных волокон и отражает механическую активность
на уровне мышечных волокон или двигательных единиц. Сигнал ВМГ является ме-
ханическим дубликатом сигнала ЭМГ и возникает одновременно с ним. Хотя не было
установлено прямой взаимосвязи между силой, развиваемой отдельной двигательной
единицей, и суммарной развиваемой силой мышцы, было показано, что среднеквадра-
80
Гл. 2. Анализ одновременных, парных и коррелированных процессов
тичное и среднее значения частоты сигнала ВМГ увеличиваются по мере возрастания
развиваемого усилия мышцы параллельно тому, как это происходит в сигнале ЭМГ.
Таким образом, сигнал ВМГ может быть использован для количественной оценки
мышечного сокращения [47].
Ввиду простоты и неинвазивного характера измерения ЭМГ и ВМГ, одновре-
менный анализ этих двух сигналов представляет собой задачу, привлекательную
с практической точки зрения. Подобные методы могут найти применение в биологи-
ческой обратной связи и реабилитации [48]. На рис. 2.3 показаны одновременные
записи ЭМГ и ВМГ на двух уровнях сокращения тазобедренной мышцы [48].
_ 100 ------1-----।------1-----1------1-----1 -100 --------1-----1------I-----1------1-----1
0 0,2 0,4 0,6 0,8 1 1,2 0 0,2 0,4 0,6 0,8 1 1,2
-150 -------1-----«------1-----*------1-----1 -150--------1------1------------1------1-----1
0 0,2 0,4 0,6 0,8 1 1,2 0 0,2 0,4 0,6 0,8 1 1,2
Время, с
Рис. 2.3. Одновременные записи сигналов ВМГ и ЭМГ на двух уровнях сокращения та-
зобедренной мышцы: сигнал ВМГ при 40% от максимального произвольного сокращения
(МПС, MVC, maximal voluntary contraction) (а); ЭМГ при 40% от МПС (б); ВМГ при
60% от МПС (в); ЭМГ при 60% от МПС (г). Воспроизводится с разрешения Y. Т. Zhang,
С. В. Frank, R. М. Rangayyan, and G. D. Bell, Relationships of the vibromiogram to the surface
electromiogram of the human rectus femoris muscle during voluntary isometric contraction,
Journal of Rehabilitation research and Development, 33(4): 395-403, 1996. ©Department of
Veteran Affairs
Оба сигнала представляют собой результат интерференции сигналов от нескольких
активных двигательных единиц (даже при низком уровне мышечного усилия) и не
могут быть проанализированы визуально. Однако при переходе от низкого усилия
к более высокому можно наблюдать общее увеличение уровня мощности сигналов.
В разд. 5.10 будут описаны методы обработки для одновременно зарегистрированных
сигналов ВМГ и ЭМГ.
2.2.6. Сигналы коленного сустава и мышечной вибрации. Мы могли видеть
в разд. 1.2.13, что сигналы вибрации, производимые коленными суставами во время
активных колебательных (маятниковых) движений ноги, могут нести диагностиче-
скую информацию. Однако сигнал ВМГ, снятый с прямой мышцы бедра (rectus
femoris), которая непременно должна быть активна при вытягивании ноги, может
играть роль помехи и искажать сигнал вибрации [63].
Применение', сегментация ФКГ на систолическую и диастолическую части
81
Задача. Предложить подход для устранения помехи, вызванной мышечными
сокращениями, из сигнала вибрации коленного сустава.
Решение. Сигнал помехи ВМГ передаётся от мышцы, являющейся её источ-
ником, к точке записи сигнала вибрации, расположенной на поверхности кожи на
коленной чашечке, через встречающиеся на пути прохождения сигнала мышцы
и кости (см. рис. 3.11 и разд. 3.2.6). Хотя, как выяснилось, сигнал помехи имеет
очень низкую частоту (порядка 10 Гц), частотное содержание этого сигнала меняется
по мере изменения мышечного усилия и угла сгибания коленного сустава. Прямая
мышца бедра и коленный сустав являются взаимосвязанными динамическими си-
стемами с изменяющимися в зависимости от уровня активности (и, следовательно,
от времени) характеристиками вибрации. Таким образом, простая высокочастотная
или низкочастотная фильтрация сигнала вибрации не может являться приемлемым
решением.
Эта проблема может быть решена благодаря следующему подходу. Сигнал ВМГ
прямой мышцы бедра записывается одновременно с сигналом вибрации с коленной
чашечки. Далее могут быть применены методы адаптивной фильтрации и подавления
помех [62, 63, 77], при которых сигнал вибрации является первичным входом, а сиг-
нал ВМГ является опорным входом. С учётом того, что сигнал ВМГ, появляющийся
в коленной чашечке, сильно коррелирован с сигналом ВМГ прямой мышцы бедра
и не коррелирован с исследуемым сигналом вибрации, адаптивный фильтр должен
удалять помеху и оценивать требуемый сигнал вибрации. Подробности, касающиеся
адаптивной фильтрации, будут рассмотрены в разд. 3.6 и 3.10.
2.3. Применение: сегментация ФКГ на систолическую
и диастолическую части
Задача. Показать, как сигналы ЭКГ и каротидного пульса могут быть
использованы для разбиения сигнала ФКГ на систолическую и диастолическую
части.
Решение. С точки зрения желудочковой активности, кардиоцикл может быть
разделён на две основные части: систолу и диастолу. Систолическая часть начина-
ется с S1 и заканчивается с началом S2. Она включает в себя любой систолический
шум, который может присутствовать в сигнале. Диастолическая часть начинается
с S2 и заканчивается сразу после начала S1 следующего сердечного цикла. (Аорталь-
ные и лёгочные клапаны закрываются чуть раньше появления компонент А2 и Р2
участка S2; таким образом, можно считать, что систола оканчивается как раз
перед S2. Хотя Shaver и др. [43], а также Reddy и др. [44] рассматривали тон S2
в своих работах в качестве части систолического звука, мы будем включать S2
в диастолическую часть ФКГ.) Диастолическая часть включает в себя любой диасто-
лический шум, который может присутствовать в сигнале. Он также может включать
компоненты S3 и S4, если они имеются, а также щелчок открытия АВ-клапана, если
он присутствует.
В разд. 2.2.1 мы видели, что QRS-комплекс ЭКГ может быть использован в ка-
честве надёжного маркера начала S1. В разд. 2.2.2 мы видели также, что для
локализации начала S2 может быть использована дикротическая выемка в сигнале
каротидного пульса. Таким образом, если мы имеем и ЭКГ, и сигнал каротидного
пульса одновременно с фонокардиограммой, то становится возможным разбить ФКГ
на систолическую и диастолическую части.
6 Р. Рангайян
82
Гл. 2. Анализ одновременных, парных и коррелированных процессов
На рис. 2.4 показана трёхканальная запись сигналов ФКГ, ЭКГ и каротидного
пульса пациента с систолическим шумом, вызванным стенозом аортального клапана
(та же самая запись, что на рис. 1.26). Систолическая и диастолическая части
SYS. DIAS.
:| JUk L ШТ,, 'la I
Время, с
Рис. 2.4. Разметка систолической (SYS.) и диастолической (DIAS.) частей сигнала ФКГ,
показанного на рис. 1.26, с использованием сигналов ЭКГ и каротидного пульса в качестве
опорных. На кривых ЭКГ и сигнала каротидного пульса помечены соответственно QRS-
комплекс и дикротическая выемка D
ФКГ размечены по отношению к QRS-комплексу ЭКГ и элементу D сигнала ка-
ротидного пульса. Разметка была выполнена вручную в ходе визуального просмотра
сигналов. В разд. 4.3 будут рассмотрены некоторые методы обработки сигналов для
обнаружения QRS-комплекса и волны D. В разд. 8.8 будет рассмотрена методика
адаптивной фильтрации для разделения сигнала ФКГ на стационарные сегменты без
использования каких-либо других опорных сигналов.
2.4. Замечания
В данной главе рассмотрено использование нескольких каналов биомедицин-
ских сигналов для получения информации об одновременных, взаимосвязанных
и коррелированных явлениях с целью достижения лучшего понимания системы
или получения опорного сигнала для различных целей. Важнее всего отметить,
что физиологические системы являются сложными системами с многочисленными
переменными и выходными параметрами, которые необходимо изучать с помощью
различных подходов, для того чтобы получить многогранную информацию.
Упражнения и лабораторные работы 83
Часть проблем была сформулирована в достаточно общем виде, что связано со
вступительным характером этой главы. В последующих главах представлены допол-
нительные иллюстрации специфических проблем и применений для тех вопросов,
которые были поставлены в данной главе. С целью иллюстрации использования
нескольких сигналов для получения информации о временной взаимосвязи будет
предложено некоторое количество примеров.
2.5. Контрольные вопросы и задания
1. У пациента наблюдается желудочковая бигеминия. Каждый второй импульс из
СА-узла заменяется желудочковой экстрасистолой (ЖЭ) с полной компенса-
торной паузой (см. рис. 9.5, где иллюстрируется бигеминия). Частота СА-узла
регулярна и равна 80 уд./мин, а каждый эктопический комплекс предшествует
заблокированному импульсу СА-узла на 100 мс.
Нарисуйте для десяти последовательных комплексов схематичное представление
сигналов по следующим трём каналам: ЭКГ, электрограмма предсердий (процесс
возбуждения СА-узла) и процесс возбуждения эктопического фокуса. Подробно
разметив шкалу времени, идентифицируйте соответствия и взаимосвязи между
активностью во всех трёх каналах.
2. Нарисуйте схематическое представление ЭКГ, ФКГ и сигнала каротидного пуль-
са. Обозначьте все волны в этих трёх сигналах. Идентифицируйте их взаимо-
связь с событиями в сердечном цикле.
2.6. Упражнения и лабораторные работы
1. Используя многоканальную систему съёма биомедицинских сигналов, получите
одновременную запись одного канала ЭКГ и сигнала, связанного с дыханием
(температура, воздушный поток, давление в ноздрях). Исследуйте изменение
RR-интервалов при вдохе и выдохе. Повторите эксперимент с задержкой дыхания
пациента в период съёма сигнала.
2. Получите одновременную запись одного отведения ЭКГ, ФКГ, каротидного пуль-
са и пульса на запястье. Исследуйте временные соответствия (или задержки)
между событиями в разных каналах.
3. Запишите одновременно одно отведение ЭКГ, а также сигнал ФКГ из двух-трёх
разных зон съёма (митральной, аортальной, лёгочной, нижней части грудины
и верхушечной: см. рис. 1.17). Исследуйте различия в интенсивности и характе-
ристиках тонов S1 и S2 и их компонент в ФКГ для различных зон съёма.
Глава 3
ФИЛЬТРАЦИЯ ДЛЯ УСТРАНЕНИЯ АРТЕФАКТОВ
Большинство биологических сигналов проявляют себя как слабые сигналы в окру-
жении, изобилующем многими другими сигналами различного происхождения. Лю-
бой другой сигнал, кроме исследуемого, может быть назван помехой, артефактом или
просто шумом. Источники шума могут быть как физиологическими, так и вызван-
ными используемой аппаратурой или условиями эксперимента.
Эта глава начинается с предварительного описания природы артефактов, обычно
встречающихся в биомедицинских сигналах. Даны несколько иллюстраций сигна-
лов, искажённых различными видами артефактов. Далее детально описаны методы
обработки с использованием фильтров, охватывающие широкий диапазон подходов,
начиная с линейных фильтров во временной области и детерминированных фильтров
в частотной области, кончая оптимальными фильтрами Винера и адаптивными филь-
трами. Глава завершается демонстрацией применения описанных фильтров к сигна-
лам ЭКГ и вибрации.
(Замечание. Для того чтобы понимать процедуры и методы анализа, описанные
в этой главе, необходима хорошая база в области анализа сигналов и систем [1-3],
а также в теории вероятностей, теории случайных величин и стохастических про-
цессов [4-9]. Подразумевается также знакомство с теорией систем и с рядом широ-
ко распространённых преобразований: преобразованием Лапласа, преобразованием
Фурье как в непрерывной, так и в дискретной формах, ^-преобразованием.)
3.1. Постановка задачи
Шум вездесущ! Проблемы, вызываемые артефактами в биомедицинских сигналах,
чрезвычайно широки по своему диапазону и разнообразию. Их способность к сни-
жению эффективности работы многих изощрённых алгоритмов обработки сигналов
очень велика. Грандиозность задачи по устранению шума и её важность отражаются
размером данной главы и тем, что она помещена в качестве самой первой среди
методов обработки сигналов. Начнём с общей постановки задачи и исследования её
сущности.
Проанализировать различные типы артефактов, способных искажать биоме-
дицинские сигналы, и исследовать методы фильтрации для их устранения без
ухудшения качества исследуемых сигналов.
Если во время снятия ЭКГ пациент кашляет или вздрагивает, то связанный
с этой активностью сигнал ЭМГ вызовет помеху или артефакт. Для взрослых
пациентов такая физиологическая помеха может быть минимизирована за счёт
строгих инструкций и самоконтроля. Однако данное решение не может быть так
Постановка задачи
85
легко применено к младенцам и детям. Интересным примером физиологической
интерференции является ЭКГ матери, которая регистрируется одновременно с ЭКГ
плода, в том случае когда исследуется именно последняя. При этом невозможно
и нежелательно какое-либо внешнее управление и исследователь вынужден искать
новые решения для выделения интересующего его сигнала.
Так как уровень большинства биомедицинских сигналов в их исходном виде
оказывается достаточно низким, требуется использовать аппаратуру с коэффици-
ентом усиления, составляющим от нескольких сотен до нескольких тысяч. Элек-
тронные шумы аппаратуры также усиливаются вместе с полезным сигналом. Хотя
теоретически существует возможность уменьшить термическую компоненту шума за
счёт охлаждения устройств до очень низкой температуры, в большинстве случаев
этот путь не может быть использован на практике, так как цена его реализации
неприемлемо высока. Для съёма биомедицинских сигналов требуются малошумящие
источники питания и современные электронные усилители с высоким входным
импедансом, высоким уровнем подавления помехи общего вида, высоким уровнем
подавления сетевой наводки [10].
Окружающее пространство наполнено электромагнитными волнами как есте-
ственного происхождения, так и вызванными человеческой деятельностью. Электро-
магнитные волны, излучаемые радио и телевизионными станциями, а также флюо-
ресцентными осветительными устройствами, компьютерными мониторами и другими
системами, используемыми в лаборатории или на производстве, наводятся на кабели,
устройства и их соединения. Наиболее дурной репутацией пользуется сетевая навод-
ка с частотой 50 или 60 Гц, так как существует очень много путей, которыми она
может смешиваться с исследуемым сигналом и искажать его. Такие помехи можно
назвать «помехами, связанными с условиями эксперимента». Простое электромаг-
нитное экранирование кабелей и заземление шасси оборудования в большинстве
случаев уменьшает электромагнитные помехи и помехи от сетей питания. Однако
в случае экспериментов, когда имеют дело с очень слабыми сигналами, такими как
вызванные потенциалы или сигнал ЭЭГ, может потребоваться применение специ-
альных проволочных клеток, в которые заключают как объект исследования, так
и аппаратуру.
ЭКГ является относительно сильным сигналом с легко различимыми волнами.
Большинство типов помех, которые воздействуют на сигнал ЭКГ, могут быть устра-
нены с помощью полосовых фильтров. Для обработки других сигналов, имеющих
менее распознаваемую форму и более широкую полосу частот, простые процедуры
фильтрации могут оказаться неэффективными. В случае таких сигналов, как вызван-
ные потенциалы и соматосенсорные вызванные потенциалы, уровень помех может
оказаться намного выше, чем уровень самого сигнала, что делает невозможным
распознавание последнего в отдельно взятых записях. Очень важно заранее (до того
как пытаться фильтровать сигнал или подвергать его предобработке) иметь хорошее
представление о шумовых процессах, связанных с данным сигналом.
3.1.1. Случайный шум, структурированный шум и физиологические поме-
хи. Детерминированным сигналом называется такой, величина которого в данный
момент времени может быть рассчитана с использованием определённых математиче-
ских функций от времени или предсказана с использованием информации о несколь-
ких предыдущих значениях этого сигнала. Сигнал, который не удовлетворяет этим
условиям, может быть назван недетерминированным сигналом или случайным
сигналом.
Тест на случайность. Обычно предполагается, что случайные сигналы более
склонны демонстрировать отклонения относительно определённого опорного уровня
86
Гл. 3. Фильтрация для устранения артефактов
в пределах некоторого интервала, чем сигналы, которые считаются предсказуемыми.
Kendall [78], а также Challis и Kitney [79] рекомендовали тест на случайность, осно-
ванный на количестве пиков или впадин в сигнале. Пик или впадина определяются
с использованием трёх последовательных отсчётов сигнала с центральным отсчётом,
являющимся либо максимумом, либо минимумом соответственно. Поскольку направ-
ление изменения сигнала в пиках и впадинах меняется, такие точки обобщённо
названы точками поворота. Простым тестом на наличие точки поворота является
неравенство знака первой разности (производной) для определённого отсчёта сигнала
знаку аналогичной величины для предыдущего отсчёта. Если сигнал содержит N
отсчётов, то он может быть назван случайным в том случае, когда количество точек
поворота больше пороговой величины, равной (2/3)(7V — 2) [78, 79]. В случае сигнала
с изменяющимися характеристиками, т. е. нестационарного, этот тест необходимо
выполнять с использованием скользящего окна размером N отсчётов. Ширина
этого окна выбирается исходя из наименьшей длительности интервала времени, на
протяжении которого сигнал продолжает сохранять ту же форму. Метод, подобный
описанному выше, был использован Mintchev и др. [39] для изучения динамики
уровня случайности в сигнале ЭКГ.
На рис. 3.1 показано изменение числа точек поворота в скользящем окне размером
50 мс (400 отсчётов при частоте дискретизации fs = 8 кГц) для речевого сигнала
слова «safety». Порог для случайности при N = 400 в соответствии с описанным вы-
ше правилом должен равняться 265. Как видно из рисунка, данный тест показывает,
Рис. 3.1. Верхняя кривая: речевой сигнал слова «safety», произнесённого мужчиной. Нижняя
кривая: график изменения счётчика точек поворота в скользящем окне длительностью 50 мс
(400 отсчётов при fs = 8 кГц). Порог для теста на случайность при N = 400 составляет 265
что, как и ожидалось, сигнал является случайным для фрикативов [С] (на интервале
приблизительно 0,2-0,4 с) и [Ф] (на интервале 0,7-0,9 с) и не является случайным
для остальных частей записи (см. также 1.2.11 и рис. 1.29 и 1.30).
Постановка задачи
87
Случайный шум. Термин случайный шум относится к помехе, которая возни-
кает из случайного процесса, такого, например, как тепловой шум в электронных
устройствах. Случайный процесс характеризуется функцией плотности вероятности
(ФПВ), представляющей собой вероятности появления всех возможных значений
случайной переменной. (См. Papoulis [4] или Bendat и Piersol [5] для ознакомления
с базовым материалом по вероятностям, случайным переменным и стохастическим
процессам.) Рассмотрим случайный процесс ту, который характеризуется ФПВ РтДту).
Среднее значение случайного процесса у задаётся моментом первого порядка
ФПВ, определяемым как
оо
Мт? = £'[’?]= | ’nprt{'n)dr], (3.1)
— ОО
где Е['] представляет собой оператор статистического ожидания. Общепринятым
считается предположение о равенстве нулю средней величины случайного шума.
Величина среднего квадрата случайного процесса у задаётся моментом второго
порядка ФПВ, определяемым как
оо
Е[т?2] = | rfprjtr]) dr). (3.2)
— ОО
Дисперсия процесса а2 определяется как центральный момент второго порядка:
оо
= Е[(л ~ Мт?)2] = | (.Т) - Мт?)2Мт?(7?) dr). (3.3)
— ОО
Квадратный корень из дисперсии даёт стандартное отклонение стТ1 для этого процес-
са. Заметим, что а2 = Е[у2] — р2. Если среднее значение равно нулю, то из этого
следует, что сг^ = JE7[?72], т. е. дисперсия и среднеквадратичная величина равны между
собой.
Когда значения случайного процесса у формируют временную последовательность
или функцию от времени, мы имеем случайный сигнал (или стохастический про-
цесс) y(t). Описанные выше статистические характеристики имеют в этом случае
следующий физический смысл: среднее значение представляет собой постоянную
составляющую, величина среднего квадрата — среднюю мощность, а корень ква-
дратный из величины среднего квадрата даёт среднюю амплитуду шума или его
уровень. Эти характеристики полезны для вычисления отношения сигнал-шум,
которое обычно определяется как отношение размаха сигнала к среднеквадратичному
значению шума, или как отношение средней мощности сигнала к мощности шума.
Обратите внимание на использование одного и того же символа у для представле-
ния случайной переменной, случайного процесса и случайного сигнала как функции
от времени. Нижний индекс ФПВ или вычисляемого статистического параметра ин-
дицирует исследуемый случайный процесс. Точный смысл этого символа становится
ясным из контекста обсуждения или из приводимого выражения.
Изучаемый биомедицинский сигнал x(t) может также для общности рассматри-
ваться как реализация случайного процесса х. Например, хотя звук сердца в норме
слышен как одно и то же успокаивающее тук-тук для каждого цикла, соответ-
ствующие формы вибрации ФКГ не являются точно одинаковыми от одного цикла
к другому. Сигнал ФКГ может быть представлен как случайный процесс, демонстри-
рующий определённые характеристики в среднем.
88
Гл. 3. Фильтрация для устранения артефактов
Когда (случайный) сигнал x(t) наблюдается в окружении случайного шума, изме-
ряемый сигнал y(t) тоже может рассматриваться как реализация другого случайного
процесса у. В большинстве случаев шум является аддитивным и наблюдаемый
сигнал может быть выражен как
y(t) = x(t) + (3.4)
Оба случайных процесса х и у характеризуются собственными ФПВ рх(х) и ру(у)
соответственно.
В большинстве практических применений случайный процесс, являющийся изу-
чаемым сигналом, и шум, воздействующий на сигнал, могут рассматриваться как
статистически независимые процессы. Два случайных процесса х и у считаются
статистически независимыми, если их совместная ФПВ Px^fap) равна произведе-
нию их ФПВ, рассчитанных по отдельности: px(x)Pt](j])’ Момент первого порядка
и центральный момент второго порядка сигналов x(t) и y(t) связаны следующим
образом:
Е ы = Ру + Ptj = Е [ж] = рх, (3.5)
если рт) = 0 и
Е[(у - Р-у)2] = ^ = 0-2 + (3.6)
где р представляет собой среднее значение, а ст2 — дисперсию случайного процесса,
помеченного нижним индексом.
Усреднение по ансамблю. Когда ФПВ изучаемых случайных процессов не
известна заранее, принято аппроксимировать операцию статистического ожидания
с помощью средних значений, рассчитанных с использованием набора или ансамбля
выборочных наблюдений случайного процесса. Такие средние значения известны как
средние по ансамблю. Предположим, что мы имеем М наблюдений случайного
процесса х как функцию от времени: a?i(t),X2(t), ... ,®м(0« Мы можем оценить
среднее значение процесса в определённый момент времени t\ как
। м
Их (й) = lim Т7 ^^(й)- (3.7)
к=]
На рис. 3.2 показаны десять выборочных реализаций ПСС, вызванных изоли-
рованными вспышками (см. также рис. 3.12). Вертикальные линии при t = t\
и t = t2 = t\ + т иллюстрируют процедуру усреднения по ансамблю для двух
различных моментов времени.
Автокорреляционная функция (АКФ) фхх(1\,1\ +т) случайного процесса х. пред-
ставляющего собой временную последовательность, задаётся выражением
оо оо
+ т) = E[x(t!)x(t! + г)] = | I xix2pXltX2(xl,X2)dxldx2, (3.8)
— 00 —00
где xi и Х2 представляют собой случайные переменные, соответствующие процессам
x(t\) и x(t\ + т) соответственно, а рхцх2(я1, ^2) — это совместная ФПВ данных двух
процессов. АКФ может быть оценена следующим образом:
। м
+ т) = lim — Va;fe(ti)xfe(ti+т), (3.9)
7И->оо М
к=\
где т — параметр задержки. Если сигналы являются комплексными, то одна из функ-
ций в приведённом выше выражении должна быть взята в комплексно сопряжённом
виде; в данной книге мы будем ‘иметь дело с физиологическими сигналами, которые
всегда являются вещественными. Две вертикальные линии на рис. 3.2 при t = t\
Постановка задачи
89
Рис. 3.2. Десять выборочных реализаций (от х\ до з?ю) для ПСС, вызванных изолированными
вспышками, снятых в позиции центральной затылочной линии (oz) у взрослого мужчины в
норме (у автора этой книги!). В качестве опорного отведения (а1а2) были использованы отведе-
ния от мочек уха, а левая часть лба была использована как референтная точка (см. рис. 1.20).
Эти сигналы можно рассматривать как десять реализаций случайного процесса в форме
временных последовательностей сигналов. Вертикальные линии при t = t\ и t = t<2 = t\ 4- т
иллюстрируют процедуру усреднения по ансамблю для двух различных моментов времени.
Последняя кривая (обведённая в рамку) даёт среднее по ансамблю или прототип x(t) для
десяти отдельных сигналов. Горизонтальный прямоугольник, нарисованный поверх третьей
кривой, отмечает процесс вычисления временных статистик для интервала времени от t = t$ до
t = t4 выборочной реализации ПСС x^(t). См. также рис. 3.12. Данные любезно предоставлены
L. Alfaro and Н. Darwish, Alberta Children’s Hospital, Calgary
и t = = t\ + т иллюстрируют процедуру усреднения по ансамблю для вычисления
АКФ показывает, как значения сигнала в определённый момент времени
статистически связаны (или имеют общие характеристики) со значениями того же
самого сигнала в другой момент времени.
В случаях, когда рассматриваются случайные процессы, наблюдаемые как функ-
ции от времени (или стохастические процессы), среднее по ансамблю может быть
рассчитано для каждого момента времени. В этом случае мы получаем усреднённую
функцию от времени x(t) как
। м
w) =
k=\
(3.10)
для всех моментов времени t. Сигнал x(t) может быть использован в качестве прото-
типа для представления случайного процесса х\ см. последнюю кривую (обведённую
ь рамку) на рис. 3.2.
90
Гл. 3. Фильтрация для устранения артефактов
Усреднение по времени. Когда имеется выборочная реализация случайного про-
цесса xk(t), заданная как функция от времени, средние по времени или временные
статистики можно рассчитать путём интегрирования вдоль оси времени:
j Т/2
px(k) = lim — xk(t) dt.
T-^-OQ 1 J
-T/2
(3.11)
В случае дискретизованного во времени сигнала интеграл может быть заменён
суммированием. Усреднённая по времени АКФ фхх (г, к) задаётся выражением
1 Т/2
Фхх(т,к)= lim — f xk(t)xk(t + r)dt. (3.12)
Т—>оо 1 J
-T/2
(См. разд. 6.4, где приводятся подробности оценки автокорреляционной функции для
последовательностей данных ограниченной длины.) Горизонтальный прямоугольник,
нарисованный поверх третьей кривой на рис. 3.2, отмечает процесс вычисления
временных статистик на протяжении интервала времени от t = до t = t4 для вы-
борочной реализации вызванных потенциалов хз(Г), взятой из ансамбля показанных
на этом рисунке кривых.
Таким образом, случайный шум можно охарактеризовать как в терминах ста-
тистик по ансамблю, так и в терминах статистик по времени. Среднее значение
не играет существенной роли: обычно его полагают равным нулю или его можно
вычесть, если оно не является нулевым. АКФ играет важную роль в оценке ха-
рактера случайных процессов. Преобразование Фурье (ПФ) от АКФ даёт функцию
спектральной плотности мощности (СПМ), которая используется для спектрального
анализа и проектирования фильтров.
Ковариация и функция взаимной корреляции. Когда требуется сравнить два
случайных процесса х и у, то между ними может быть рассчитана ковариация
оо оо
Сху = Е[(х - цх)(у - Ну)] = | | (х - Нх)(у - Vy)Px,y(x,y)dxdy, (3.13)
— оо —оо
где рХуУ (т, у) является совместной функцией плотности вероятности этих двух про-
цессов. Ковариация может быть нормализована, с тем чтобы получить коэффициент
корреляции, определяемый как
значение которого лежит в пределах —1 < рху +1. Высокое значение ковариации
показывает сходство статистической вариабельности или поведения двух заданных
процессов. Про процессы х и у говорят, что они не коррелированны, если рху = 0.
Два статистически независимых процесса также являются не коррелированными,
однако противоположное утверждение в общем случае не является истинным.
При рассмотрении случайных процессов хну как функций от времени, взаимная
корреляционная функция или кросс-корреляция для этих процессов определяется
следующим образом:
оо оо
0xy(ti,ti + т) = E[x(ti)y(ti + т)] = | | x(fi)y(ti + т)рх,у(х,у) dx dy. (3.15)
— оо —оо
Постановка задачи
91
Корреляционные функции оказываются полезными при исследовании природы ва-
риабельности и спектральной полосы сигналов, а также для обнаружения событий
методом сравнения с образцом. Обсуждение случайных процессов будет продолжено
в следующем разделе.
Структурированный шум. Сетевая наводка с частотой 50 или 60 Гц является
примером структурированного шума: типичная форма этой наводки известна зара-
нее. Однако следует отметить, что фаза этой интерферирующей волны обычно не
бывает известна. Более того, интерферирующая волна может не являться точной
синусоидой, что проявляется присутствием в спектре сигнала гармоник от основной
частоты 50 или 60 Гц.
Физиологическая помеха. Как мы уже отмечали, человеческое тело представля-
ет собой сложный конгломерат нескольких систем и процессов. В любой заданный
момент времени активными могут быть несколько физиологических процессов. Каж-
дый из них порождает множество сигналов различных типов. Пациент или субъект
эксперимента не всегда бывает в состоянии контролировать все физиологические
процессы и системы. Появление сигналов от тех процессов и систем, которые не
являются в данный момент объектами исследования, может рассматриваться как
физиологическая помеха; несколько таких примеров перечислено ниже:
• сигнал ЭМГ, влияющий на ЭКГ и связанный с кашлем, дыханием или вздраги-
ванием пациента;
• ЭГГ, смешивающаяся с прекордиальной ЭКГ;
• материнская ЭКГ, накладывающаяся на ЭКГ плода, когда предметом исследова-
ния является последняя;
• ЭКГ, накладывающаяся на ЭЭГ;
• текущая ЭЭГ в сигналах вызванных потенциалов;
• звуки от дыхания, лёгких или кишечника, смешивающиеся со звуками сердца
(ФКГ);
• сердечные звуки, смешивающиеся со звуками дыхания или лёгких;
• мышечные звуки (ВМГ), смешивающиеся со звуками суставов (ВАГ);
• активность в начале записи ЭМГ, вызванная введением иглы при использовании
игольчатых электродов.
Физиологические помехи не могут быть охарактеризованы какой-либо специфи-
ческой формой волны или спектральным составом и, как правило, являются динами-
ческими и нестационарными (изменяющимися в соответствии с уровнем активности
порождающих их систем и, следовательно, со временем; см. также следующий раз-
дел, где обсуждается стационарность). Таким образом, простые линейные полосовые
фильтры обычно не позволяют эффективно устранять физиологические помехи.
3.1.2. Стационарные и нестационарные процессы. Мы видели в предыдущем
разделе, что случайные процессы могут характеризоваться как в терминах стати-
стик по ансамблю, так и в терминах временных статистик. Случайный процесс
называют стационарным в строгом смысле или узкостационарным, если на его
статистики не влияет сдвиг начала отсчёта по времени. На практике используются
только средние первого и второго порядков. Случайный процесс называется слабо
стационарным или стационарным в широком смысле, если его среднее значение по
ансамблю и АКФ не меняются во времени. В этом случае из выражений (3.7) и (3.9)
мы имеем px(ti) = цх и фхх(1\, t\ + г) = фхх(т). Теперь АКФ является функцией
только от параметра задержки т. СПМ этого процесса не меняется во времени.
Стационарный процесс называется эргодическим, если его временные статистики
не зависят от наблюдаемой выборки, т. е. если один и тот же результат получается
92
Гл. 3. Фильтрация для устранения артефактов
из любой выборки Средние по времени в уравнениях (3.11) и (3.12) в таком
случае не зависят от к: рх(к) = рх и фхх(г, к) = фХх(т\ В случае анализа эрго-
дического процесса все статистики по ансамблю могут быть заменены статисти-
ками по времени. Эргодические процессы являются важным типом стационарных
случайных процессов, поскольку их статистики как функции от времени могут
быть рассчитаны по единственной реализации. В разд. 3.3.1 и 3.3.2 соответственно
будет показано использование средних по ансамблю и по времени для фильтрации
шума.
Сигналы или процессы, которые не удовлетворяют условиям, описанным выше,
могут быть в общем случае названы нестационарными процессами. Нестационар-
ные процессы обладают статистиками, которые меняются во времени. На рис. 1.15
(см. также рис. 3.6) хорошо видно, что средний уровень (базовая линия) сигнала
меняется в течение времени регистрации этого сигнала. Следовательно, сигнал
является нестационарным по отношению к среднему значению, которое представляет
собой статистическую величину первого порядка. На рис. 3.3 показана дисперсия ре-
чевого сигнала слова «safety», рассчитанная в скользящем окне длительностью 50 мс
(400 отсчётов при fs = 8 кГц). Поскольку дисперсия существенно изменяется от
0,01
§ 0,008
| 0,006
0,004
0,002
0,2 0,4 0,6 0,8
Время, с
Рис. 3.3. Верхняя кривая: речевой сигнал слова «safety», произнесённого мужчиной. Ниж-
няя кривая: дисперсия, рассчитанная с помощью скользящего окна длительностью 50 мс
(400 отсчётов при fs = 8 кГц)
одной части сигнала к другой, можно заключить, что сигнал является нестацио-
нарным в смысле статистики второго порядка (дисперсии, стандартного отклонения
или среднеквадратичного значения). Хотя речевой сигнал стационарен в смысле
среднего значения, это не является важной характеристикой, поскольку среднее
значение обычно удаляется из речевого сигнала (постоянная составляющая не несёт
информации, относящейся к вибрациям или звукам).
Постановка задачи
93
Заметим, что дисперсия демонстрирует поведение, которое почти противоположно
тому, что показывает счётчик точек поворота на рис. 3.1. Дисперсия чувствительна
к изменениям в амплитуде, т. е. большие отклонения относительно среднего ведут
к большим значениям дисперсии. В свою очередь, процедура выявления точек
поворота анализирует присутствие пиков и впадин, не принимая во внимание их от-
носительных амплитуд; низкоамплитудные пределы изменения сигнала фрикативов
приводят к низкому значению дисперсии, хотя показание счётчика точек поворота
оказывается высоким.
Большинство биомедицинских систем являются динамическими и генерируют
нестационарные сигналы (например, ЭМГ, ЭЭГ, ВМГ, ФКГ, ВАГ и речевой сигнал).
Однако любая физическая или физиологическая система имеет ограничения диапа-
зона возможного изменения её характеристик. Эти ограничения дают возможность
разбивать сигнал на сегменты небольшой длительности (обычно несколько десятков
миллисекунд), на протяжении которых изучаемые статистики не меняются и могут
рассматриваться как постоянные. Такой сигнал называется квазистационарным
процессом, а такой подход к анализу известен как анализ по коротким интер-
валам. На рис. 3.4 показана спектрограмма речевого сигнала слова «safety». Эта
спектрограмма была получена путём расчёта амплитудного спектра сигнала в окне
Рис. 3.4. Спектрограмма речевого сигнала слова «safety», произнесённого мужчиной. (Этот
сигнал также показан на рис. 1.29, 3.1 и 3.3.) Каждая кривая представляет собой амплитудный
спектр сигнала в скользящем окне длительностью 64 мс (512 отсчётов при fs = 8кГц), с шагом
перемещения окна 32 мс. Спектрограмма построена с использованием линейной шкалы, чтобы
лучше продемонстрировать принципиальное различие между гласными и согласными звуками
длительностью 64 мс; при этом перекрытие между последовательными сегментами
составляло 32 мс. Очевидно, что спектральные характеристики сигнала изменяются
по мере продвижения вдоль него: фрикативы демонстрируют более высокочастотное
содержание, чем гласные, а также отсутствие формантных (резонансных) структур.
Таким образом, сигнал является нестационарным с точки зрения его СПМ; посколь-
ку СПМ связана с АКФ, сигнал также не стационарен с точки зрения статистики
второго порядка, какой является АКФ.
94 Гл. 3. Фильтрация для устранения артефактов
Дальнейшее обсуждение и примеры методик подобного типа будут представлены
в разд. 8.4.1 и 8.5. Для выявления изменений в определённых статистических харак-
теристиках наблюдаемого сигнала могут быть также разработаны адаптивные методы
обработки сигналов; при этом сигнал может быть разбит на квазистационарные
сегменты переменной длительности, каждый из которых удовлетворяет условиям ста-
ционарности. Методы анализа нестационарных сигналов будут обсуждаться в гл. 8.
Адаптивная сегментация сигналов ЭЭГ, ВАГ и ФКГ будет обсуждаться в разд. 8.5,
8.6, 8.7 и 8.8.
Некоторые системы (например, такие как сердечно-сосудистая система) обычно
выполняют ритмические действия. Результирующие сигналы, такие как ЭКГ, ФКГ
или каротидный пульс, являются в таком случае почти периодическими и могут быть
названы циклически стационарными сигналами. Статистические характеристики
сигнала ФКГ изменяются на протяжении всего кардиоцикла (особенно в случае,
когда имеется шум), но повторяются через регулярные интервалы. Циклическое
повторение процесса даёт возможность выполнить усреднение по ансамблю, ис-
пользуя эпохи или события, извлечённые из наблюдений сигнала на протяжении
многих циклов (при этом сам сигнал является, строго говоря, единственной функ-
цией времени). Использование циклической природы сигнала ЭКГ для синхронного
накопления с целью уменьшения шума будет показано в разд. 3.3.1. Применение той
же самой концепции для оценки огибающей сигнала ФКГ будет описано в разд. 5.5.2.
Дальнейшее расширение этого подхода для извлечения А2 и S2 из сигнала ФКГ
будет продемонстрировано в разд. 4.11; использование этого же метода для оценки
СПМ сегментов ФКГ в систоле и диастоле будет представлено в разд. 6.4.5.
3.2. Иллюстрация задачи на примерах
Представленные ниже конкретные случаи демонстрируют несколько примеров
различных видов помех в биомедицинских сигналах разного происхождения. Цель
этого раздела — дать представление о различных возможных помехах и об их общих
характеристиках. В последующих разделах будут описаны методы фильтрации для
устранения разных видов помех.
3.2.1. Помехи в потенциалах, связанных с событиями. Потенциалы, связан-
ные с событиями (ПСС), —это сигнал, получаемый в ответ на некоторый стимул.
Данный ответ обычно имеет очень низкую амплитуду (порядка 10 мкВ) и скрыт
сопутствующей активностью ЭЭГ и шумом. Форму волны единичного отклика
среди фоновой активности очень трудно распознать. На рис. 3.2 показаны десять
отдельных сигналов ПСС, вызванных вспышкой. Все эти сигналы были записаны
в позиции затылочной средней линии (oz); при этом для получения референтного
отведения (а1а2) использовались левая и правая мочки уха. Левая лобная часть
использовалась в качестве опорной точки. Сигнал ПСС скрыт сопутствующей ЭЭГ
и сетевой наводкой (60 Гц) и не может быть проанализирован с использованием
какой-либо одной из показанных на этом рисунке записей.
3.2.2. Высокочастотные помехи в ЭКГ. На рис. 3.5 показан сегмент сигнала
ЭКГ с высокочастотными помехами. Эти помехи могут быть вызваны усилителями,
записывающей системой, наводкой от сопутствующего электромиографического сиг-
нала и т. д. Кроме того, показанный сигнал был искажён сетевой наводкой 60 Гц
(и её гармониками), которую, ввиду низкочастотного характера самого сигнала ЭКГ,
также можно рассматривать как часть высокочастотного шума.
Иллюстрация задачи на примерах
95
Время, с
Рис. 3.5. Сигнал ЭКГ с высокочастотными помехами
3.2.3. Двигательные артефакты в ЭКГ. Низкочастотные артефакты или дрейф
изолинии в сигналах ЭКГ, снимаемых с грудных отведений, могут быть вызваны
кашлем или дыханием, сопровождающимися сильным движением грудной клетки.
При съёме ЭКГ с конечностей обычным источником артефактов являются движения
рук или ног. Низкочастотные артефакты также могут вызываться плохим контактом
электродов с кожей или поляризацией электродов. Иногда дрейф изолинии также
вызывается изменениями температуры и систематическими погрешностями аппара-
туры и усилителей. На рис. 3.6 показан сигнал ЭКГ с низкочастотными артефактами.
Из-за наличия дрейфа изолинии анализ положения ST-сегмента относительно изо-
Рис. 3.6. Сигнал ЭКГ с низкочастотными артефактами
96
Гл. 3. Фильтрация для устранения артефактов
электрического уровня затруднён. Кроме того, при сильном дрейфе изолинии по-
ложительные или отрицательные пики ЭКГ могут быть обрезаны усилителями или
АЦП.
3.2.4. Сетевая наводка в ЭКГ. Наиболее часто встречающийся тип периоди-
ческих артефактов в биомедицинских сигналах — это сетевая наводка с частотой 50
или 60 Гц. Если из-за искажения или усечения сигнала форма волны сетевой наводки
не является чистой синусоидой, то могут также появляться гармоники основной
частоты. Кроме того, гармоники могут появляться, если сам периодический сигнал
не является синусоидой (например, имеет вид прямоугольных импульсов).
Если полезный сигнал не имеет специфической формы волны, как, например, для
случаев ФКГ или ЭМГ, сетевую наводку не всегда просто распознать визуально;
однако такая помеха хорошо видна, если присутствует на чётко структурированном
сигнале, таком, например, как ЭКГ или сигнал каротидного пульса. В обоих этих
случаях спектр мощности сигнала даст чёткую индикацию присутствия сетевой
наводки в виде импульса или пика на частоте 50 или 60 Гц; однако, если существуют
гармоники, то они проявятся в виде дополнительных пиков на частотах, кратных
основной частоте.
На рис. 3.7 показан сегмент ЭКГ с помехой на частоте 60 Гц. Обратите внимание
на регулярную, или периодическую, структуру помехи, которая появляется на верши-
нах волн ЭКГ. На рис. 3.8 показан спектр мощности этого сигнала. Периодическая
2,5
2
1,5
0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1
Время, с
Рис. 3.7. Сигнал ЭКГ с сетевой помехой 60 Гц
помеха чётко видна не только как пик на основной частоте 60 Гц, но также и как
пики на частотах 180 и 300 Гц, которые представляют собой третью и пятую
гармоники соответственно. (Рекомендованная частота дискретизации для ЭКГ со-
ставляет 500 Гц; в данном случае была использована более высокая частота, равная
1000 Гц, так как ЭКГ записывалась в качестве опорного сигнала для ФКГ. Более
широкая полоса пропускания позволяет также лучше проиллюстрировать артефакты
и фильтрацию.)
Поскольку при исследовании сигнала ЭКГ обычно используется полоса пропус-
кания 0,05-100 Гц, которая включает компоненту 60 Гц, использование простого
Иллюстрация задачи на примерах
97
Рис. 3.8. Спектр мощности показанного на рис. 3.7 сигнала ЭКГ с сетевой наводкой. В спектре
наблюдаются пики на основной частоте 60 Гц, а также на частотах, являющихся третьей и
пятой гармониками этой частоты (соответственно 180 и 300 Гц)
фильтра нижних частот для устранения сетевой помехи не является подходящим
решением. Фильтрация нижних частот в ЭКГ с частотой среза ниже 60 Гц может
сгладить QRS-комплекс, а также оказать влияние на характеристики сегментов
PQ и ST. Идеальным решением является удаление составляющей 60 Гц без того,
чтобы приносить в жертву другие компоненты.
3.2.5. Интерференция ЭКГ плода и ЭКГ матери. На рис. 3.9 показан сигнал
ЭКГ, записанный с абдоминальной области беременной женщины. Одновременно на
том же рисунке показана ЭКГ, записанная с груди женщины. Сравнивая эти два
сигнала, мы видим, что на абдоминальной ЭКГ наблюдаются многочисленные пики
(QRS-комплексы), соответствующие материнской ЭКГ (возникающие в те же самые
моменты времени, что и QRS-комплексы в грудном отведении), а также несколько
других пиков с более низкой амплитудой и с более высокой частотой повторения.
QRS-комплексы, которые не являются материнскими, относятся к ЭКГ плода. Обра-
тите внимание, что QRS-комплексы материнской ЭКГ в грудном и в абдоминальном
отведениях имеют различную форму, что связано с различием проекций сердечного
вектора на разные оси. В связи с тем, что эти два комбинирующиеся сигнала имеют
почти одинаковую полосу частот, возникает вопрос: как можно отделить их друг
от друга и получить отдельно ЭКГ плода, которая как раз и является исследуемым
сигналом?
3.2.6. Помехи от мышечных сокращений в сигнале ВАГ. На рис. 3.10 показа-
на экспериментальная установка, использованная Zhang и др. [63] для исследования
возможности появления сигнала ВМГ в качестве помехи от мышечных сокращений
в сигнале ВАГ. Левая колонка на рис. 3.11 показывает сигнал ВМГ, записанный
с использованием акселерометров, помещённых на мышце бедра, на коленной ча-
шечке, на верхнем переднем утолщении большеберцовой кости и на уровне середины
большеберцовой кости испытуемого в ходе изометрического сокращения прямой
Р Рангайян
98
Гл. 3. Фильтрация для устранения артефактов
Рис. 3.9. Сигнал ЭКГ беременной женщины с грудного (а) и абдоминального (б) отведений.
Первое показывает материнскую ЭКГ, в то время как второе содержит комбинацию материн-
ской ЭКГ и ЭКГ плода (см. также рис. 3.58). Воспроизводится с разрешения В. Widrow, J.R.
Glover, Jr., J.M. McCool, J. Kaumtz, C. S. Williams, R. H. Hearn, J. R. Zeidler, E. Dong, Jr.,
R. C. Goodlm, Adaptive noise canceling: Principles and applications, Proceedings of the IEEE,
63(12): 1692-1716, 1975. ©IEEE
Рис. 3.10. Экспериментальная установка для снятия сигналов ВМГ и ВАГ с различных точек
ноги [63]
Иллюстрация задачи на примерах
99
Рис. 3.11. Левая колонка: сигнал ВМГ, записанный у испытуемого одновременно с позиций
(сверху вниз) на мышце бедра (а), на коленной чашечке (б), на верхнем переднем утол-
щении большеберцовой кости (в) и на уровне середины большеберцовой кости (г) в ходе
изометрического сокращения (без каких-либо перемещений ноги или колена). Правая колонка:
сигналы вибрации, записанные одновременно в тех же самых точках в ходе изотонического
сокращения (колебательное движение ноги). Обратите внимание на помеху от мышечных
сокращений, появляющуюся в фазе вытягивания ноги (вторые половины кривых) каждого из
с лгналов ВАГ (кривые б-г) в правой колонке [63]. Установка для записи показана на рис. 3.10.
Воспроизводится с разрешения Y. Т. Zhang, R. М. Rangayyan, С. В. Frank, and G. D. Bell,
Adaptive cancellation of muscle-contraction interference from knee joint vibration signals, IEEE
Transactions on Biomedical Engineering, 41(2): 181-191, 1994. ©IEEE
100
Гл. 3. Фильтрация для устранения артефактов
мышцы бедра (rectus femoris) без каких-либо перемещений ноги или колена. Правая
колонка рисунка показывает сигналы вибрации, записанные в тех же самых точках
с использованием тех же самых акселерометров, но в ходе изотонического сокраще-
ния (колебательное движение ноги). Верхняя кривая а в правой колонке показывает
сигнал ВМГ, генерируемый прямой мышцей бедра во время съёма сигнала ВАГ;
кривые б-г правой колонки показывают сигналы ВАГ.
Сигналы ВАГ трудно анализировать, так как формы их волн не являются за-
ранее известными или распознаваемыми; и даже ещё сложнее идентифицировать
возможное присутствие в сигнале каких-либо шумов или помех. Кривые, приве-
дённые на рис. 3.11, показывают, что сигнал ВМГ может складываться с сигналом
ВАГ, особенно при вытягивании ноги, когда активна прямая мышца бедра (вторые
половины сигналов ВАГ на кривых б-г правой колонки). Левая колонка сигналов
ВМГ на рис. 3.11 иллюстрирует тот факт, что ВМГ, генерируемая мышцей бедра,
передаётся вдоль ноги вниз и появляется в других точках записи. В сигналах
ВАГ, показанных в правой колонке, можно наблюдать, что в каналах ВАГ б-г во
время вытягивания ноги (вторые половины) присутствуют сравнимые с ВМГ сигналы
вибрации, но не так заметно, как при сгибании (первые половины). Достаточно инте-
ресно, что сигналы «хрустов» и щелчков, появляющиеся в первой половине сигнала
ВАГ в позиции коленной чашечки (кривая б справа), передались вдоль ноги вниз
в позиции верхнего переднего утолщения большеберцовой кости (кривая в справа)
и середины большеберцовой кости (кривая г справа) предположительно вдоль боль-
шеберцовой кости, но не вверх к точке на прямой мышце бедра (кривая а справа).
Следует также отметить, что нельзя ожидать, что сигнал ВАГ будет одинаков
во время фаз вытягивания и сгибания полного цикла качания ноги: вытягивание
вызывает большее напряжение или усилие на единицу площади коленно-бедрен-
ного сустава, чем сгибание. Более того, сигналы ВАГ и ВМГ не стационарны:
характеристики ВАГ меняются в зависимости от качества поверхностей хрящей,
которые входят в контакт при различных углах сгибания сустава, в то время как
ВМГ меняется в соответствии с уровнем сокращения вовлечённых в этот процесс
мышц. Ещё более усложняет проблему перекрытие полосы частот этих двух сигналов
в диапазоне 0-100 Гц. Все эти факторы делают устранение ВМГ или помех от
мышечных сокращений из ВАГ весьма сложной задачей.
3.2.7. Возможные подходы к решению задачи. Теперь, когда мы достигли по-
нимания природы и особенностей нескольких источников артефактов в биомедицин-
ских сигналах, мы можем приступить к решению конкретных проблем и разработать
эффективные методы фильтрации. В следующих разделах исследуются артефакты
различных типов и демонстрируются возрастающие по сложности методики обра-
ботки сигнала для их устранения. Постановка задачи в начале каждого раздела
описывает в наиболее общих терминах характер проблемы и, насколько это воз-
можно, формулирует условия и ограничения, а также определяет диапазон дальней-
ших исследований. Предлагаемые решения демонстрируют детали, соответствующие
рассматриваемым методам фильтрации. Каждое решение иллюстрируется примером
его применения. В конце главы приводятся дополнительные примеры применения
исследуемых методов. Кроме того, везде, где это уместно, даётся сравнительная
оценка методов фильтрации.
Практические задачи, с которыми может столкнуться исследователь в определён-
ной области, могут не совсем точно совпадать с конкретными задачами, рассмотрен-
ными в данной главе. Однако ожидается, что полученное из данной главы знание
нескольких методов и оценки результатов их применения поможет в разработке
новых, наиболее подходящих, решений других задач.
Фильтрация во временной области
101
3.3. Фильтрация во временной области
Определённые виды помех могут быть отфильтрованы непосредственно как вре-
менные зависимости с использованием методов обработки сигналов или цифровых
фильтров. Преимуществом фильтрации во временной области является то, что
знание спектральных оценок сигнала и помех может не потребоваться (по крайней
мере в явном виде). Кроме того, обработка во временной области во многих случаях
может быть выполнена быстрее, чем фильтрация в частотной области.
3.3.1. Синхронное усреднение
Задача. Предложить метод обработки во временной области для устранения
случайного шума в условиях, когда имеется возможность получения многочис-
ленных реализаций исследуемого сигнала или события.
Решение. В случае, когда спектры сигнала и шума перекрываются, линейные
фильтры оказываются неэффективными. Отделить повторяющийся сигнал от шума
без искажения самого сигнала можно с использованием синхронного усреднения
[27, 79]. Записи определённых отрезков сигналов ПСС и ССВП могут быть получены
многократно путём повторения подачи стимулов; далее они могут быть усреднены
с использованием стимулирующего сигнала для их синхронизации (выравнивания).
Сигнал ЭКГ можно отфильтровать, определив сначала позиции QRS-комплексов
и далее используя эти позиции для выравнивания кардиоциклов перед выполне-
нием синхронного усреднения. Если шум является случайным процессом с нулевым
средним и не коррелирован с сигналом, то усреднение улучшит отношение сигнал-
шум.
Пусть ук(п) представляет собой одну реализацию сигнала, где k = 1,2, ..., М —
это номер реализации в ансамбле, а п= 1,2, ... ,7V — индекс отсчётов. (Некоторые
авторы используют в качестве индекса дискретизованного сигнала обозначение пТ,
Т = \/fs — интервал дискретизации, где fs — это частота дискретизации; мы в этой
книге будем использовать просто п, номер отсчёта.) М — это количество доступных
копий (событий, эпох или реализаций) сигнала, a N — количество отсчётов в каждой
копии этого сигнала (в каждом событии). Мы можем выразить наблюдаемый сигнал
как
ук(п) = хк(п) + Tjk(n), (3.16)
где Хк(п) представляет собой исходный неискажённый сигнал и тдДп) представляет
собой шум в к-й копии наблюдаемого сигнала. Теперь, если для каждого момента
времени п мы сложим М копий сигнала, получим
МММ
^2ук(п) = n=l,2, (3.17)
fc=i fc=i fc=i
Если повторяющиеся реализации сигнала идентичны и выровнены по времени,
то Хк(п) = Мх(п). Если шум является случайным и имеет нулевое среднее
и дисперсию сг^, то ^^^(п) будет стремиться к нулю по мере увеличения М.
При этом его дисперсия будет составлять Ма^. Среднеквадратичное значение шу-
ма в усреднённом сигнале будет у/Ма^. Таким образом, отношение сигнал-шум
з сигнале будет увеличиваться с коэффициентом М/\/М или \/М. Чем больше
количество усредняемых эпох или реализаций, тем лучше будет отношение сигнал-
шум для результата. Заметим, что синхронное усреднение является разновидностью
усреднения по ансамблю.
102
Гл. 3. Фильтрация для устранения артефактов
Алгоритм синхронного усреднения можно представить следующим образом.
1. Получить некоторое количество реализаций исследуемого сигнала или события.
2. Определить опорную точку для каждой реализации сигнала. Эта точка доступна
непосредственно, если сигнал получается благодаря внешней стимуляции (напри-
мер, в случае ПСС или ССВП), или может быть получена путём обнаружения
повторяющихся событий в сигнале, если сигнал является квазипериодическим
(как например QRS-комплекс в ЭКГ или составляющие S1 и S2 в сигнале ФКГ).
3. Извлечь фрагменты сигнала, относящиеся к исследуемому событию, и сложить
их в буфере. Отметим, что разные фрагменты сигнала могут иметь различные
длительности. Выравнивание разных реализаций по точке синхронизации очень
важно; конечные части всех сигналов обычно выровнять не удаётся.
4. Поделить получившийся в буфере результат на количество просуммированных
реализаций.
Две верхние кривые рис. 3.12 показывают две отдельные записи сигнала ПСС.
На том же рисунке третья и четвёртая кривые показывают результаты усредне-
ния по 10 и 20 вспышкам соответственно. Процесс усреднения дал возможность
10
0 125 250 мс
Ch N80 Р120 N145
S4 85,0 100,7 117,0
Рис. 3.12. Два примера реализаций ПСС, полученных как реакции на вспышки и снятых
со среднезатылочной позиции (oz) взрослого мужчины в норме (кривые 1 и 2). Для по-
лучения референтного отведения (а1а2) были использованы мочки уха, а левая часть лба
была использована в качестве опорной точки (см. рис. 1.20). Усреднение 10 ПСС (кривая 3).
Усреднение 20 ПСС (кривая 4). Изучаемые значения латентности были помечены на кривой 4
специалистом по ЭЭГ (см. также рис. 3.2). Данные любезно предоставлены L. Alfaro and
Н. Darwish, Alberta Children’s Hospital, Calgary
с полной определённостью идентифицировать первую положительную волну, а также
предшествующую ей и следующую далее впадины (помечены на четвёртой кривой);
соответствующие элементы сигнала нельзя надёжно различить при однократном
Фильтрация во временной области
103
снятии сигнала (см. также одиночные записи ПСС на рис. 3.2). При визуальном
анализе сигнала ПСС выделяются следующие компоненты: латентность (задержка)
первого главного положительного пика, которая обозначается как Р120, в связи
с тем фактом, что ожидаемая в норме латентность для взрослых составляет 120 мс;
зпадина или отрицательная волна перед Р120, обозначаемая как N80, и впадина,
следующая за Р120, обозначаемая как N145. Параметры латентности N80, Р120
и N145, измеренные по усреднённому сигналу на четвёртой кривой рис. 3.12, равны
соответственно 85,7, 100,7 и 117 мс. Для взрослого человека такие значения счита-
ются находящимися в пределах нормы.
Иллюстрация применения. Верхняя кривая на рис. 3.13 показывает зашумлён-
ный сигнал ЭКГ, включающий несколько циклов. Для получения точки синхро-
низации из первого цикла сигнала был выбран и использован в качестве образца
Время, с
Рис. 3.13. Сигнал ЭКГ с шумом (верхняя кривая), результат взаимной корреляции (нижняя
• ривая) с образцом QRS-комплекса, выбранным из 1-го цикла. Коэффициент взаимной корре-
ляции нормализован в диапазоне от —1 до +1
отдельный QRS-комплекс длительностью 86 мс (86 отсчётов при частоте дискрети-
зации 1000 Гц). Сопоставление с образцом выполнялось с использованием нормали-
зованного коэффициента корреляции, определяемого следующим образом [79]:
/,х Е„=0 И«) - - N + 1 + п) - yfc]
Уху(к) = / „ , = = ------>
V Еп=о И”) - ^12 Еп=о -N + 1+п)- ук]2
где х — образец; у — сигнал ЭКГ; х — среднее значение сигнала х для N рассма-
эиваемых отсчётов; к — временной индекс сигнала у, соответствующий отсчёту,
~о которому образец совмещён с сигналом, а ук = (1/N) У2п=о ~ N + 1 + п),
* е. ук — это среднее значение той части сигнала у, которая используется для
104
Гл. 3. Фильтрация для устранения артефактов
согласования с образцом при заданном k. (Jenkins и др. [67] использовали для
сопоставления сегментированных циклов ЭКГ с образцом характеристику, похожую
на 7Ж2/(А;), но без вычитания среднего и без параметра сдвига к.) Нижняя кривая
на рис. 3.13 показывает ху(к), где видно, что функция взаимной корреляции в местах
локализации QRS-комплексов даёт пики, достигающие величины, близкой к единице.
Усреднение по п отсчётам, присущее формуле взаимной корреляции, уменьшает
влияние шума при сопоставлении с образцом.
Выбором подходящего порога можно получить точку синхронизации для локали-
зации QRS-комплекса в сигнале ЭКГ. (Замечание. Образец QRS-комплекса согла-
суется с волнами Р и Т с коэффициентом взаимной корреляции порядка 0,5. Более
широкий QRS-комплекс может дать более высокую величину взаимной корреляции
с высокими волнами Р и Т. Порог необходимо выбрать так, чтобы выделять только
QRS-комплексы.) Для уху(к) был выбран порог равный 0,9, и далее положение всех
12 QRS-комплексов в сигнале было определено с использованием этого порога.
На рис. 3.14 показаны два цикла ЭКГ, извлечённые с использованием точек
синхронизации, полученных путём применения порога к функции взаимной кор-
реляции, а также результат усреднения первых 11 циклов сигнала. Хорошо видно,
Рис. 3.14. Два цикла ЭКГ, извлечённые из сигнала, показанного на рис. 3.13 (две верхние
кривые). Результат синхронного усреднения 11 циклов того же самого сигнала ЭКГ (нижняя
кривая)
что с помощью синхронного усреднения шум эффективно подавляется. Низкие по
уровню колебания базовой линии и сетевая наводка, присутствующие в сигнале,
вызвали незначительные артефакты в результирующей кривой, которыми в данном
случае можно пренебречь.
Наиболее важное требование при синхронном усреднении подчёркивается первым
словом в названии этого процесса: реализации сигнала, которые предполагается
складывать для усреднения должны быть выровнены так, чтобы повторяющиеся
в каждой реализации части сигнала появлялись точно в одни и те же моменты
времени. Если это условие не выполняется, то волна сигнала, представляющая какое-
либо событие, будет размыта или сглажена по оси времени.
Главным преимуществом синхронного усреднения является отсутствие какой-
либо фильтрации в частотной области (как в явном, так и в скрытом виде). Никакие
спектральные компоненты сигнала не теряются, как это происходит в случае филь-
трации в частотной области (фильтрации нижних частот) или при использовании
Фильтрация во временной области
105
какого-либо другого вида фильтрации во временной области, например усреднения
в скользящем окне.
Структурированный шум, например такой как сетевая наводка, может быть
подавлен синхронным усреднением только в случае, если фаза помехи в каждой
реализации различна. Для обеспечения этого условия частота следования повторяю-
щихся стимулов должна быть выбрана так, чтобы она не имела прямого отношения
к частоте сетевой наводки (например, вспышки, использованные для получения
усреднённых ПСС на рис. 3.12, производились с частотой 0,1 имп./сек). Методом
синхронного усреднения также может быть подавлена и физиологическая помеха,
например фоновая ЭЭГ в сигналах ПСС и ССВП, поскольку такого рода активность
не имеет взаимозависимости в разных периодах изучаемого сигнала.
3.3.2. Фильтры скользящего среднего
Задача. Предложить метод обработки во временной области для устранения
случайного шума при условии, что имеется только одна реализация изучаемого
сигнала или события.
Решение. Когда ансамбль из нескольких реализаций события недоступен, син-
хронное усреднение становится невозможным. В этом случае мы вынуждены исполь-
зовать для устранения помех временное усреднение, предполагая, что исследуемый
процесс является эргодическим, т. е. вместо статистик по ансамблю могут быть ис-
пользованы статистики по времени. Поскольку статистики по времени вычисляются
с использованием нескольких отсчётов сигнала по оси времени и для получения
выходного сигнала в различные моменты времени временное окно отсчётов про-
двигается вдоль оси времени, такая процедура фильтрации в общем виде называ-
ется усреднением с помощью фильтра скользящего среднего (СС); термин фильтр
скользящего среднего является общепринятым. Общая форма фильтра СС задаётся
следующим образом:
N
у(п) = ^bkx(n-k), (3.19)
k=0
где х и у — входной и выходной сигналы фильтра соответственно. Величины bk
представляют собой коэффициенты фильтра или веса, к = 0,1,2, ..., N, где N —
это порядок фильтра. Операция деления на число используемых отсчётов (N + 1)
учитывается в значениях коэффициентов фильтра. Структурная схема обобщённого
фильтра СС показана на рис. 3.15.
Рис. 3.15. Структурная схема фильтра скользящего среднего порядка 7V. Каждый блок с сим-
волом z~l представляет собой задержку на один отсчёт и служит элементом памяти соответ-
ствующих входных отсчётов сигнала
106
Гл. 3. Фильтрация для устранения артефактов
Рис. 3.16. Структурная схема фильтра Хен-
нинга
Применяя ^-преобразование, получаем передаточную функцию H(z) фильтра
в виде
Y(z\ N
H(z) = -Ц = V bkz-k = b0 + blZ~l + b2z-2 + ... + bNz~N, (3.20)
k—0
где X(z) и Y(z) являются ^-преобразованиями от x(n) и y(n) соответственно.
(См. Lathi [1], Oppenheim и др. [2] или Oppenheim и Schafer [14] для детального
ознакомления с необходимыми сведениями по системному анализу с использованием
^-преобразования и преобразования Фурье.)
Простым фильтром СС для фильтрации помех является фильтр СС фон Ганна
(von Hann) или Хеннинга (Hanning) [27], задаваемый выражением
X/(zz) = - [.т(п) + 2х(п — 1) + х(п — 2)]. (3.21)
Структурная схема фильтра Хеннинга показана на рис. 3.16. Импульсную характе-
ристику этого фильтра можно получить
при условии х(п) = 6(п)\ она имеет вид
Л(п) = | [<5(n) + 2<5(п - 1) + 5(п - 2)].
Передаточная функция фильтра Хеннинга
определяется выражением
Я(г) = l(l + 2z-’ +z~2). (3.22)
Эта передаточная функция имеет двойной
нуль при z = — 1.
Фильтр СС представляет собой фильтр с конечной импульсной характеристикой
(КИХ) и имеет следующие атрибуты и достоинства:
• импульсная характеристика h(k} имеет конечное число членов: h(k) =
к = 0,1,2, ...,7V.
• КИХ-фильтр может быть реализован нерекурсивно, т. е. без обратной связи;
• выход фильтра зависит только от текущего отсчёта входного сигнала и от
нескольких последних входных отсчётов;
• фильтр представляет собой просто набор весовых коэффициентов и операций
задержки, как показано на рис. 3.15;
• передаточная функция фильтра не имеет полюсов за исключением z = 0, т. е.
фильтр по своей природе является устойчивым;
• фазовая характеристика фильтра является линейной при условии, что набор ве-
совых коэффициентов фильтра является симметричным или антисимметричным.
Частотная характеристика фильтра получается путём подстановки z = е?шТ в вы-
ражение для Н(г), где Т — интервал дискретизации в секундах, а ш — частота
в радианах (си = 2тг/, где / — циклическая частота в Гц). Заметим, что мы можем
положить Т = 1 и иметь дело с нормализованной частотой в диапазоне 0^cj^2tt
и 0^ / 1; тогда / = 1 или ш = 2тг представляют собой частоту дискретизации; при
этом более низкие значения частот будут представлять нормализованные частоты
в пределах частоты дискретизации.
Частотная характеристика фильтра Хеннинга задаётся выражением
= | [1 + + е->2ы]. (3.23)
Фильтрация во временной области
107
Полагая е = cos(cj) — jsin(cj), получим
H(cv) = |[{2 + 2cos(W)}e-^].
Амплитудные и фазовые характеристики задаются как
|Я(ч)| =
- {1 +cos(w)}
(3.24)
(3.25)
(3.26)
И
ЛН(и>) = -си.
Амплитудная и фазовая частотные характеристики фильтра Хеннинга показаны
на рис. 3.17. Хорошо видно, что данный фильтр является фильтром нижних частот
с линейной фазовой характеристикой.
Рис. 3.17. Амплитудная и фазовая характеристики сглаживающего фильтра Хеннинга
Заметим, что хотя мы начали с описания фильтра Хеннинга во временной обла-
сти, последующий анализ этого фильтра был выполнен в частотной области с исполь-
зованием ^-преобразования и частотной характеристики. Системный анализ проще
выполнять в г-области в терминах полюсов и нулей передаточной функции и в ча-
стотной области в терминах амплитудной и фазовой характеристик. Амплитудная
и фазовая характеристики помогают представить, как фильтр влияет на частотные
компоненты сигнала (и шума).
Из амплитудной характеристики фильтра Хеннинга хорошо видно (рис. 3.17),
что компоненты ниже примерно 20% от частоты дискретизации, равной 1000 Гц,
уменьшаются по амплитуде более чем на 3 дБ, что составляет меньше половины от
их уровня на входе. Высокочастотные компоненты в полосе ниже 40% от частоты
дискретизации подавляются более чем на 20 дБ по отношению к их входному
.ровню. Фильтр будет выполнять адекватную фильтрацию сигнала ЭКГ, дискретизо-
ванного с частотой 200 Гц, с коэффициентом усиления ниже —20 дБ за пределами
108
Гл. 3. Фильтрация для устранения артефактов
частоты 80 Гц. Однако, если сигнал дискретизован с частотой 1000 Гц (как в дан-
ном примере), коэффициент усиления останется выше —20 дБ для частот вплоть
до 400 Гц; такой фильтр нижних частот не годится для адекватной фильтрации
сигнала ЭКГ, но может подойти для других сигналов, например для ФКГ или ЭМГ.
Более существенное сглаживание может быть достигнуто путём усреднения
отсчётов сигнала в более продолжительном временном окне за счёт увеличения за-
держки фильтра. Если отсчёты сигнала усреднять в окне длительностью 8 отсчётов,
получим выходной сигнал
1 7
у(«) = g А:). (3.27)
0 fc=0
Импульсная характеристика такого фильтра равна
h(n) = - [5(n) + 5(n - 1) + 5(п — 2) + 5(n —3) + 5(п — 4) + 5(п — 5) + 5(п — 6) + 5(п - 7)].
Передаточная функция этого фильтра задаётся выражением
Я(2) = |^^, (3.28)
° к=0
а частотная характеристика задаётся формулой
1 7 1
Н(ш) = - y^exp(-jgifc) = -[l+exp(-J4w){l + 2cos(w) + 2cos(2w) + 2cos(3w)}].
k=0
(3.29)
Частотная характеристика 8-точечного фильтра СС показана на рис. 3.18; диаграмма
нулей и полюсов этого фильтра показана на рис. 3.19. Видно, что этот фильтр имеет
Рис. 3.18. Амплитудная и фазовая характеристики 8-точечного сглаживающего фильтра сколь-
зящего среднего
Фильтрация во временной области
109
нули на частотах fs/8 = 125 Гц, /5/4 = 250 Гц, 3/s/8 = 375 Гц, и Д/2 = 500 Гц.
Сравнивая частотные характеристики 8-точечного фильтра СС с характеристиками
фильтра Хеннинга, показанными на рис. 3.17, мы
видим, что первый из них даёт более высокое
подавление в диапазоне 90-400 Гц, по сравнению
с последним. Заметим, что подавление, обеспечи-
ваемое примерно после 100 Гц, является неравно-
мерным, что в некоторых применениях может быть
нежелательным. Более того, фазовая характери-
стика этого фильтра не является линейной, хотя
она является кусочно-линейной.
Связь фильтра скользящего среднего с ин-
тегрированием. Если не принимать во внимание
коэффициент 1/8, то операция, соответствующая
уравнению (3.27), может интерпретироваться как
суммирование или интегрирование сигнала на ин-
тервале от п — 7 до п. Сравнимая с действием
Рис. 3.19. Диаграмма нулей и по-
люсов 8-точечного сглаживающего
фильтра скользящего среднего
этого фильтра операция непрерывного во времени
интегрирования сигнала x(t) на интервале от t\ до может быть выражена следую-
щей формулой:
t2
y(t) = j x(t) dt.
(3.30)
Общее определение интеграла сигнала задаётся выражением
y(t) =
x(t) dt
(3.31)
или, если сигнал является каузальным,
t
y(t) = j x(t) dt.
о
(3.32)
Преобразование Фурье для сигнала в приведённом выше выражении может быть
записано следующим образом [1, 2]:
У(ш) = Дх(ш) + 7rX(O)<5(w). (3.33)
Частотная характеристика оператора интегрирования задаётся выражением
= 4-
3^
с амплитудно-частотной характеристикой
IW)I= -
(3.34)
(3.35)
газовой характеристикой
ZK(W) =
(3.36)
но
Гл. 3. Фильтрация для устранения артефактов
Из частотной характеристики можно видеть, что усиление фильтра уменьшается
(нелинейно) по мере возрастания частоты; следовательно, соответствующий фильтр
имеет характеристики фильтра нижних частот.
Интегрирование или накопление дискретного во времени сигнала для всех от-
счётов вплоть до текущего даёт передаточную функцию Н(г) = 1/(1-г"1) [1, 2].
Такая операция редко используется на практике. Вместо этого используется сумма
в скользящем окне в соответствии с выражением (3.27). Восьмиточечный фильтр СС
может быть записан как
у(п) = у(п - 1) + |х(п) - |ж(п - 8). (3.37)
О о
Рекурсивная форма, приведённая выше, подчёркивает интегрирующий характер этого
фильтра. Передаточная функция этого фильтра может быть легко получена в виде
выражения
1 П _ z-8l
Я(г) = g -------зу .
О [1 — z J
Частотная характеристика данного фильтра задаётся уравнением
х 1 Г1 - е->8ы1 1 ? Г sin(4w) 1
8 |_sin(cv/2)J ’
Н(г) =
(3.38)
(3.39)
которое эквивалентно выражению (3.29). Суммирование в пределах ограниченного во
времени дискретного окна приводит к куполообразным частотным характеристикам,
как показано на рис. 3.18. Другие типы интеграторов подробно рассматриваются
в работе Tompkins [27].
Иллюстрация применения. На рис. 3.20 показан сегмент сигнала ЭКГ с вы-
сокочастотным шумом. На рис. 3.21 -показан результат фильтрации этого сигнала
Рис. 3.20. Сигнал ЭКГ с высокочастотным шумом; fs = 1000 Гц
с помощью описанного выше восьмиточечного фильтра СС. Хотя уровень помех
понизился, некоторый шум в результирующем сигнале всё-таки присутствует. Это
Фильтрация во временной области
111
1,5
1
0,5
СП
0
-0,5
-1
-1,5
-2
0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8
Время, с
Рис. 3.21. Сигнал ЭКГ с высокочастотным шумом, приведённый на рис. 3.20, после фильтра-
ции с использованием 8-точечного фильтра СС, показанного на рис. 3.18
связано с тем, что ослабление простого восьмиточечного фильтра СС на большинстве
частот (за исключением частот вблизи нулей фильтра) составляет не более —20 дБ.
3.3.3. Операторы для устранения низкочастотных артефактов, основанные
на производной
Задача. Разработать метод обработки во временной области для устране-
ния дрейфа базовой линии в сигнале ЭКГ.
Решение. Оператор производной во временной области удаляет постоянную со-
ставляющую входного сигнала. При использовании оператора производной большие
изменения во входном сигнале ведут к высоким значениям выходного сигнала.
Лучшее понимание операции дифференцирования можно получить, изучая его пре-
образование в частотной области.
Идеальный оператор d/dt во временной области приводит к умножению преоб-
разования Фурье первоначального сигнала на Jcj = j2nf в частотной области. Ес-
ли X(f) представляет собой преобразование Фурье сигнала x(t)t то преобразование
Фурье от dx/dt соответствует j2?rfX(f) или jwX(w). Частотная характеристика
этой операции соответствует = jw. Можно видеть, что коэффициент усиления
частотной характеристики линейно возрастает с частотой, начиная с = 0 при
jc = 0. Таким образом, постоянная составляющая удаляется оператором производной,
а более высокие частоты линейно усиливаются: операция представляет собой фильтр
верхних частот. Оператор производной может использоваться для устранения посто-
янной составляющей и подавления низкочастотных компонент (а также для усиления
высокочастотных компонент).
Легко убедиться, что оператор второй производной d2/dt2 имеет частотную харак-
теристику Н(ш) = —о;2 с квадратичным возрастанием коэффициента усиления для
более высоких частот. Оператор производной второго порядка может использоваться
для получения ещё более существенного усиления высоких частот, чем оператор
производной первого порядка; первый из них может быть реализован как каскадное
соединение двух операторов последнего типа.
112
Гл. 3. Фильтрация для устранения артефактов
При цифровой обработке базовое определение производной даётся оператором
первой разности [27]:
j/(n) = ^7 [ж(п) - x(n - 1)]. (3.40)
Коэффициент усиления, содержащий интервал дискретизации Т, требуется для того,
чтобы получить скорость изменения сигнала по отношению к истинному времени.
Передаточная функция этого оператора будет иметь вид
Фильтр имеет нуль при z = 0, что соответствует постоянной составляющей.
Частотная характеристика этого оператора задаётся выражением
1
Я(о?) = i [1 - exp(-jw)] = exp(-j^
откуда
\Н(ш)\ =
(3.41)
(3.42)
(3.43)
И
= ^~^. (3.44)
Частотная и фазовая характеристики оператора первой разности показаны на
рис. 3.22. Коэффициент усиления фильтра возрастает для более высоких частот до
частоты свёртывания Д/2 (половины частоты дискретизации Д). Этот коэффициент
усиления можно рассматривать приблизительно равным коэффициенту для идеаль-
Рис. 3.22. Амплитудная и фазовая характеристики оператора первой разности. Амплитудная
характеристика показана с использованием линейной шкалы с тем, чтобы лучше проиллю-
стрировать её пропорциональность частоте
Фильтрация во временной области
113
ного оператора дифференцирования, который составляет |cv| для низких значений ы.
Если в сигнале присутствует высокочастотный шум, то он будет существенно усилен:
результат будет, таким образом, очень зашумлён.
Проблема усиления шума оператором первой разности, задаваемым выражени-
ем (3.40), может быть преодолена путём использования среднего двух последова-
тельных выходных отсчётов:
Уз(п) = 2 Мп) + &(п _ 0] = 2у [{ж<п) _ х(п ~ 0} + - 1) - х(п - 2)}] =
= [ж(п) - х(п - 2)]. (3.45)
Передаточная функция описанного выше оператора, известного как трёхточечная
центральная разность [27], определяется выражением
Я(г) = ^(1-г-2)= Ц(1-г->)
|(1+г-1)
(3.46)
Обратите внимание, что передаточная функция трёхточечной центральной разно-
сти — это произведение передаточных функций простого оператора первой разности
и двухточечного фильтра СС. Следовательно, оператор трёхточечной центральной
разности может быть реализован путём каскадного соединения простого оператора
первой разности и двухточечного фильтра СС.
Амплитудная и фазовая характеристики оператора трёхточечной центральной
разности показаны на рис. 3.23. Передаточная функция имеет нули при z = 1 и при
z — — 1, где последний нуль приравнивает к нулю коэффициент усиления при частоте
свёртывания: оператор представляет собой полосовой фильтр. Хотя данный оператор
не имеет проблемы усиления шума, характерной для оператора первой разности,
аппроксимация операции d/dt становится неудовлетворительной на частотах вы-
ше Л/10 [27].
Рис. 3.23. Амплитудная и фазовая характеристики оператора трёхточечной центральной раз-
ности. Амплитудная характеристика показана с использованием линейной шкалы
? Р Рангайян
114
Гл. 3. Фильтрация для устранения артефактов
Иллюстрация применения. На рис. 3.24 и 3.25 приведены результаты фильтра-
ции показанного на рис. 3.6 сигнала ЭКГ с низкочастотным шумом с использованием
оператора первой разности и трёхточечной центральной разности, соответственно.
Рис. 3.24. Результат фильтрации показанного на рис. 3.6 сигнала ЭКГ с низкочастотным
шумом с использованием оператора первой разности
Можно видеть, что дрейф базовой линии был устранён, при этом вторая кривая
оказывается гораздо менее шумной, чем первая. Однако очевидно, что свойства филь-
тра верхних частот и усиление высокочастотных составляющих, присущие обоим
операторам, устранили медленные Р- и Т-волны и изменили QRS-комплекс до такой
Рис. 3.25. Результат фильтрации показанного на рис. 3.6 сигнала ЭКГ с низкочастотной
помехой с использованием оператора трёхточечной центральной разности
Фильтрация во временной области
115
степени, что получившийся сигнал перестал быть похожим на ЭКГ. (В разд. 4.3 мы
увидим, что хотя эти операторы производной не подходят для данного применения,
они в то же время оказываются полезными для выделения QRS-комплекса и дикро-
тической выемки.)
Задача. Как можно улучшить работу базового оператора первой разности
в качестве фильтра для устранения низкочастотной помехи или дрейфа изоли-
нии без искажения QRS-комплекса?
Решение. Недостатком операторов первой разности и трёхточечной центральной
разности является то, что фактически их амплитудные характеристики имеют низкие
значения для значительной части частот далеко за пределами полосы, относящейся
к дрейфу изолинии. Для оператора первой разности нуль при z = 1 необходим
для устранения постоянной составляющей и очень низких частот. Однако было бы
желательно поддерживать достаточно высокие уровни компонент, присутствующих
в сигнале при частотах выше 0,5-1 Гц, т. е. было бы желательно иметь коэффициент
усиления фильтра близким к единице после частоты примерно 0,5 Гц.
Коэффициент усиления фильтра при каких-то частотах может быть увеличен
путём размещения полюсов в соответствующих местах вдоль единичной окружности
на z-плоскости. Для обеспечения устойчивости фильтра эти полюса должны быть
размещены внутри единичной окружности. Поскольку мы заинтересованы в под-
держании высокого коэффициента усиления при очень низких частотах, мы можем
поместить полюс на реальную ось (нулевую частоту), предположим, при значении
z = 0,995 [80]. Передаточная функция такого модифицированного фильтра первой
разности будет тогда задаваться выражением
(з-47)
или эквивалентно
= Т г — 0,995 ’ (3'48)
Соотношение вход-выход во временной области будет определяться разностным
уравнением
у(п) = [ж(п) - х(п - 1)] + 0,995г/(п - 1). (3.49)
Две эквивалентные структурные схемы этого фильтра показаны на рис. 3.26. (Заме-
чание. Данный фильтр уже не является КИХ-фильтром; подробности, касающихся
фильтров с бесконечной импульсной характеристикой, или БИХ-фильтров, будут
представлены позже, в разд. 3.4.1.)
Форма H(z) в уравнении (3.48) с переменной z помогает в понимании графи-
ческого метода оценки частотной характеристики фильтров, заданных в дискретно-
зременной области [1, 2, 27]. Частотные характеристики системы получают путём
оценки его передаточной функции в различных точках на единичной окружно-
сти z-плоскости, т. е. полагая z = exp(jcv) и оценивая H(z) для различных величин
переменной частоты си. Числитель в выражении (3.48) представляет собой векторное
расстояние между какой-либо точкой на z-плоскости и нулём при z = 1; знаменатель
даёт расстояние до полюса при z = 0,995. Амплитудная передаточная функция
системы для какого-либо определённого значения z получается как произведение
расстояний от соответствующей точки на z-плоскости до всех нулей передаточной
тункции, поделенное на произведение расстояний до всех полюсов. Фазовая харак-
теристика получается как сумма всех углов для векторов, соединяющих точку со
116
Гл. 3. Фильтрация для устранения артефактов
Рис. 3.26. Две эквивалентные структурные схемы фильтра для устранения низкочастотной
помехи или дрейфа изоэлектрической линии. В варианте а используются две задержки, в то
время как в варианте б — только одна задержка
всеми нулями, минус сумма всех углов для векторов, соединяющих точку со всеми
полюсами [1, 2, 27]. Очевидно, что амплитудная характеристика фильтра, задан-
ного выражениями (3.47) и (3.48), равна нулю при z = 1, благодаря присутствию
нуля в этой точке. Более того, для величин z, отличных от z = 1, расстояние до
нуля при z = 1 и до полюса при z = 0,995 будет почти одинаково; следовательно
коэффициент усиления фильтра будет близок к единице для частот, больших чем
примерно 1 Гц. Амплитудная и фазовая характеристики этого фильтра показаны
на рис. 3.27 и подтверждают эти наблюдения: фильтр представляет собой фильтр
верхних частот с нелинейной фазой.
0 50 100 150 200 250 300 350 400 450 500
Рис. 3.27. Нормализованные амплитудная и фазовая характеристики заданного уравнени-
ем (3.47) фильтра для удаления дрейфа изолинии. Амплитудная характеристика показана
с использованием линейной шкалы
Фильтрация в частотной области
117
Рис. 3.28. Результат обработки показанного на рис. 3.6 сигнала ЭКГ с низкочастотным шумом
с использованием заданного уравнением (3.47) фильтра для устранения дрейфа изолинии
(сравните с результатами, представленными на рис. 3.24 и 3.25)
Результат применения данного фильтра к показанному на рис. 3.6 сигналу ЭКГ
с низкочастотной помехой приведён на рис. 3.28. Очевидно, что низкочастотный
артефакт базовой линии был удалён без какого-либо существенного искажения
формы ЭКГ (в отличие от результата дифференцирования, показанного на рис. 3.24
и 3.25). Однако более близкое рассмотрение выявляет, что была искажена волна S
(стала более глубокой) и что после Т-волны появился отрицательный выброс.
Устранение низкочастотного артефакта базовой линии было достигнуто за счёт
некоторого искажения волн ЭКГ, вызванного использованием фильтра, основанного
на производных, и нелинейностью его фазовой характеристики.
3.4. Фильтрация в частотной области
Фильтры, описанные в предыдущем разделе, выполняют относительно простые
:перации во временной области. Хотя нами и рассматривались характеристики этих
фильтров в частотной области, эти операторы не были специально разработаны так,
чтобы в результате обладать какой-нибудь определённой частотной характеристикой.
В частности, частотная характеристика фильтра СС оказалась не особенно привле-
кательной: ослабление в полосе задержки было невысоким и не было равномерным,
а коэффициент усиления был ниже —20 дБ только вблизи нулей передаточной
г у нкции.
Для получения фильтра с заданной частотной характеристикой, соответствую-
щей фильтру верхних частот, фильтру верхних частот, полосовому фильтру или
гежекторному фильтру, разработка фильтра может выполняться в частотной области.
Фильтры, работающие в частотной области, могут быть реализованы программно
“осле получения преобразования Фурье входного сигнала, либо могут быть преобра-
эованы в эквивалентные фильтры, работающие во временной области, и применены
-епосредственно к отсчётам входного сигнала.
118 Гл. 3. Фильтрация для устранения артефактов
В литературе описываются многочисленные процедуры разработки различных ти-
пов фильтров: наиболее известными из них являются фильтры Баттерворта, фильтры
Чебышева, эллиптические фильтры и фильтры Бесселя [14, 26, 81-85]. Поскольку все
эти методы синтеза фильтров были хорошо проработаны для аналоговых фильтров,
чаще всего разработку начинают с аналогового фильтра и для получения цифрового
фильтра в z-области применяют билинейное преобразование. Кроме того, часто
разрабатывают фильтр нижних частот с требуемыми характеристиками в полосе
пропускания, в переходной полосе и в полосе задержки для нормализованной частот-
ной оси, а затем преобразовывают его в требуемый фильтр нижних частот, фильтр
верхних частот, полосовой фильтр или режекторный фильтр [14, 81]. Фильтры
для частотной области также могут быть заданы непосредственно через величины
требуемой частотной характеристики для определённых значений частоты, а затем
с использованием обратного преобразования Фурье преобразованы в эквивалентный
набор коэффициентов фильтра во временной области.
3.4.1. Устранение высокочастотных шумов: фильтры нижних частот Баттер-
ворта
Задача. Разработать фильтр в частотной области для устранения высоко-
частотных шумов с минимальными потерями компонент сигнала в заданной
полосе частот.
Решение. Фильтр Баттерворта, возможно, является наиболее широко используе-
мым фильтром в частотной области, благодаря его простоте и максимально плоской
амплитудной характеристике в полосе пропускания. Для фильтра нижних частот
Баттерворта порядка N первые 2А7 — 1 производных от квадрата амплитудно-частот-
ной характеристики равны нулю при Q = 0, где Q представляет собой аналоговую
частоту в радианах. Амплитудно-частотная характеристика фильтра Баттерворта
является монотонной как в полосе пропускания, так и в полосе задержки.
Базовая функция фильтра нижних частот Баттерворта задаётся следующим вы-
ражением [14, 86]:
|Н.№)12= 1 (3.50)
1 + (jfi/
где На является частотной характеристикой аналогового фильтра и Qc - частотой
среза (рад/с). Фильтр Баттерворта полностью определяется его частотой среза Qc
и порядком N. С увеличением порядка N частотная характеристика фильтра стано-
вится более плоской в полосе пропускания, а переходная полоса становится короче
2 1
и круче. \На (jQc)| = - для всех N.
Переходя к переменной Лапласа $, получаем
= 1 + Wk)2"' (351)
Полюса квадрата передаточной функции расположены на одинаковом расстоянии
друг от друга вдоль окружности с радиусом Пс на плоскости s и распределены
симметрично по обеим сторонам мнимой оси s = JQ. На самой мнимой оси нет
ни одного полюса; при нечётных значениях N полюса появляются на вещественной
оси. Угловое расстояние между полюсами составляет к/N. Если Ha(s)Ha (—s) имеет
полюс при s = sp, эта функция также имеет полюс и при s = —sp. Более того,
для того чтобы коэффициенты фильтра были вещественными, комплексные полюса
должны появляться в виде сопряжённых пар. Для получения стабильного каузаль-
ного фильтра необходимо сформировать передаточную функцию На (s), имеющую
Фильтрация в частотной области
119
только N полюсов в левой части s-плоскости. Положение полюсов на «-плоскости
задаётся выражением
Sk = Qc ехр
/1 (2fc-l)V
Y2 + 2ДГ / ] ’
(3.52)
к = 1,2, ...,2ЛГ[81].
После того как определено положение полюсов на «-плоскости, они могут быть
скомбинированы для получения передаточной функции в аналоговом пространстве
Лапласа в виде
На{8) (8-px)(s-p2)(8-p3)...(s-pN)'
(3.53)
где pk, к = 1,2, ... ,7V, являются N полюсами передаточной функции в левой поло-
вине «-плоскости, a G представляет собой коэффициент усиления, заданный так, как
это необходимо, или нормализованный так, чтобы привести коэффициент усиления
для постоянной составляющей (« = 0) к единице.
Если мы используем билинейное преобразование
2 /1 — z-1\
Tkl + z-1/’
(3.54)
то окружность Баттерворта в «-плоскости отображается в окружность в z-плоскости
2 - Q Г 2 4- Q Т
с точками пересечения вещественной оси при z = и z = -—болюса
при « = «р и « = —«р в «-плоскости отображаются в позиции z = zp и z = \/zp
соответственно. Эти полюса в z-плоскости не являются равномерно распределёнными
вокруг трансформированной окружности Баттерворта. Для обеспечения устойчиво-
сти все полюса H(z) на z-плоскости должны лежать внутри единичной окружности.
Рассмотрим единичную окружность z-плоскости, заданную выражением z = е3^.
Для точек на единичной окружности имеем
_ 2/1 —e-JW\ 2j ш
s-0+j - у + e-jo, J - 2'
(3.55)
Для единичной окружности су = 0, следовательно мы получаем соотношение между
частотной переменной Q в непрерывном времени (в «-области) и частотной перемен-
ной ш в дискретном времени (в z-области) в виде
2 а;
= Ttg 2
(3.56)
w = 2tg
(3.57)
Эти выражения представляют собой нелинейные соотношения, которые трансформи-
руют величины частот при их переносе с мнимой (вертикальной оси) в «-плоскости
на единичную окружность в z-плоскости (или наоборот), и должны быть приняты во
внимание при задании частот среза.
Передаточная функция Ha\s) может быть отображена на z-плоскость путём
2 /
'□именения билинейного преобразования, т. е. путём подстановки « = — I -j—j-—zy )•
G
! QT
120
Гл. 3. Фильтрация для устранения артефактов
Передаточная функция H(z) может быть тогда упрощена до вида
G/(l + z-1)w
—k
2^=о a*z
(3.58)
где afc, k = 1,2, ...,N, являются коэффициентами фильтра или весами (при «о = 1),
a G' является коэффициентом усиления (обычно рассчитанным так, чтобы получить
|Я(г)| = 1 для постоянной составляющей, т. е. при z = 1). Обратите внимание, что
этот фильтр, благодаря использованию билинейного преобразования, имеет N нулей
при z = — 1. Теперь фильтр имеет знакомую форму БИХ-фильтра. На рис. 3.29 и 3.30
показаны две формы реализации обобщённого БИХ-фильтра: первый представляет
собой прямую реализацию, использующую 2N задержек и 2N -h 1 умножителей (при
ао = 1), в то время как второй использует только N задержек и 2N + 1 умножителей.
я(п)
у(п)
Рис. 3.29. Структурная схема прямой реализации обобщённого фильтра с бесконечной им-
пульсной характеристикой (БИХ-фильтра). Эта форма использует 2N задержек и 2N 4-1
умножителей для фильтра порядка N
Если фильтр должен быть использован для отсчётов данных непосредственно
во временной области, то необходимо получить его представление во временной
области. Используя передаточную функцию H(z), заданную уравнением (3.58), легко
представить фильтр во временной области в виде разностного уравнения
N N
у(п) = ^bkx(n-k)- ^aky(n-k). (3.59)
fc=o fc=l
Коэффициенты bk получают, раскрывая выражение G'(l + z~x)N. Команда MATLAB
butter (и её варианты) [87] позволяет получать фильтры Баттерворта на основе
описанной выше процедуры.
Можно также непосредственно задать фильтр Баттерворта в виде
1Я(< = , + , / <3-6°)
1 + (ы/ис)
где щ — нормализованная частота в диапазоне (0,2тг) для дискретизованного или
дискретно-временного сигнала; в этом случае данное выражение справедливо только
Фильтрация в частотной области
121
Рис. 3.30. Структурная схема реализации БИХ-фильтра, который использует только N задер-
жек и 2N + 1 умножителей для фильтра порядка N
для диапазона (О,тг), так как функция в диапазоне (тг,2тг) является отражением
функции в диапазоне (0,7г). Частота среза шс должна быть задана в диапазоне (О,тг).
Если для получения преобразования Фурье фильтрованного сигнала используется
дискретное преобразование Фурье (ДПФ), то выражение (3.60) может быть изменено
следующим образом:
|н(< = ”60
где к — индекс массива ДПФ, обозначающий дискретную частоту. Если К — это
число точек в массиве ДПФ, то кс — индекс массива, соответствующий часто-
те среза (т. е. кс = К(а>с/и8)). Приведённое выше равенство справедливо для
к = 0,1,2, ..., К/2, при этом вторая половина (К/2 + 1, К - 1) является отраже-
нием первой половины (т. е. Н(к) = Н(К — к), к = К/2 + 1, ..., К — 1). Заметим,
что ДПФ включает два особых значения: компоненты постоянной составляющей
при Я(0) и компоненты частоты свёртывания при Н(К/2). Переменная к в урав-
нении для фильтра также может быть использована для представления нормализо-
ванной частоты в диапазоне (0,1), где единица соответствует частоте дискретиза-
ции, 0,5 соответствует максимальной частоте, присутствующей в дискретизованном
сигнале (т. е. частоте свёртывания), а переменная кс задана в диапазоне (0,0,5).
(Замечание. MATLAB нормализует половину частоты дискретизации до единицы;
максимальная нормализованная частота, присутствующая в дискретизованном сиг-
нале, в таком случае соответствует единице. MATLAB и некоторые другие языки
программирования не допускают использования индекса массива, равного нулю, т. е.
в этом случае все упомянутые выше индексы должны быть увеличены на единицу.)
Для получения фильтрованного сигнала можно рассчитать ДПФ данного сиг-
нала, умножить результат на |Я(&)| и вычислить обратное преобразование Фурье.
Преимуществом этой процедуры является то, что никаких фазовых изменений не
происходит: данный фильтр является функцией, выполняющей чисто амплитудные
преобразования. Описанная ранее реализация во временной области будет включать
фазовую характеристику, которая может оказаться нежелательной. Однако реализа-
ция фильтра во временной области может оказаться необходимой для применений,
где обработка сигнала выполняется в режиме on-line.
122
Гл. 3. Фильтрация для устранения артефактов
Пример разработки фильтра нижних частот Баттерворта. Для того чтобы
разработать фильтр Баттерворта, необходимо задать два параметра: шс и N. Эти два
параметра могут быть заданы на основе информации о характеристиках фильтра,
а также на основе сведений о характеристиках сигнала и помех. Также существует
возможность задать требуемый минимальный коэффициент усиления при определён-
ной частоте в полосе пропускания и требуемое минимальное подавление на некоторой
другой частоте в полосе задержки. Эти две величины могут быть использованы
совместно с уравнением (3.50) для получения двух уравнений с двумя неизвестными,
шс и N. Решение этих уравнений позволяет получить параметры фильтра [86].
Если принять частоту среза fc на уровне —3 дБ и порядок N, то процедура
разработки фильтра Баттерворта будет выглядеть следующим образом.
1. Преобразовать заданную на уровне —3 дБ частоту среза fc в радианы в норма-
лизованном диапазоне частот (0,2тг): = (fc/fs)2iv. Тогда Т = 1. Трансформи-
ровать частоту среза шс с использованием выражения (3.56) и получить Qc.
2. Определить положение полюсов фильтра в s-плоскости в соответствии с уравне-
нием (3.52).
3. Сформировать передаточную функцию Ha(s) фильтра нижних частот Баттер-
ворта в области Лапласа с использованием только полюсов из левой половины
плоскости, определяемых уравнением (3.53).
4. Применить билинейное преобразование в соответствии с уравнением (3.54)
и получить передаточную функцию фильтра H(z) в ^-области в соответствии
с уравнением (3.58).
5. Получить определение фильтра в виде последовательности коэффициентов
и ак в соответствии с уравнением (3.59).
Теперь спроектируем фильтр нижних частот Баттерворта при /с = 40 Гц,
fs = 200 Гц и N = 4. Мы имеем шс = (40/200)2тг = 0,4тг рад/с. Предварительно
преобразованная частота среза в s-области Qc = (2/Т) tg(cuc/2) = 1,453085 рад/с.
Полюса Ha(s)Ha(—s) расположены вдоль окружности радиуса 1,453085 с угловым
расстоянием тг/N = тг/4 рад. Анализируемые полюса расположены на углах 5тт/8
и 7тг/8, а также в соответствующих сопряжённых положениях. На рис. 3.31 показано
Мнимая ось
Левая половина
s-плоскости
Правая половина
5-плоскости
Вещественная ось
Радиус окружности Баттерворта
равен 1,453085 рад
Рис. 3.31. Расположение полюсов в s-плоскости для квадрата амплитудной характеристики
фильтра нижних частот Баттерворта при /с = 40 Гц, fs = 200 Гц и N = 4
положение полюсов Ha(s)Ha(—s) на плоскости Лапласа. Координаты этих полюсов
равны (-0,556072 ±jl,342475) и (-1,342475 ±j0,556072). Передаточная функция
Фильтрация в частотной области
123
этого фильтра задана следующим образом:
4,458247
На^ (s2 + 1,112143s + 2,111456)(s2 + 2,684951s + 2,111456) ’
Применяя билинейное преобразование, получим
0,046583(1 + г-1)4
(3.62)
(3.63)
{0,0465829; 0,186332; 0,279497; 0,186332;
Рис. 3.32. Расположение полюсов и нулей на
г-плоскости для фильтра нижних частот Бат-
терворта при /с = 40 Гц, fs = 200 Гц и N = 4
Я(г) (1 - 0,447765г-1 + 0,460815г-2)(1 - 0,328976г-1 + 0,064588г-2)'
Данный фильтр имеет четыре полюса в точках (0,223882 ±j0,640852) и (0,164488 ±
± j0,193730) и четыре нуля при — 1+jO. Коэффициенты аь этого фильтра в со-
ответствии с уравнением (3.59) равны
0,046583}, а коэффициенты Ьь равны
{1; -0,776740; 0,672706; -0,180517;
0,029763}. График расположения ну-
лей и полюсов и частотные харак-
теристики этого фильтра показаны
на рис. 3.32 и 3.33 соответственно.
Частотная характеристика показывает
ожидаемое монотонное снижение ко-
эффициента усиления, а также уро-
вень —3 дБ по мощности (или 0,707 по
усилению) на частоте 40 Гц.
На рис. 3.34 сравниваются АЧХ
трёх фильтров нижних частот Баттер-
ворта при /с = 40 Гц и fs = 200 Гц,
с порядком, возрастающим от N = 4
(точечная линия) до N = 8 (пунктир-
ная линия) и N = 12 (сплошная линия). Все эти три фильтра имеют точку по-
ловинной мощности (усиление 0,707) на частоте 40 Гц, но спад характеристики
в переходной полосе становится по мере возрастания порядка N более крутым.
Рис. 3.33. Амплитудно-частотная характеристика фильтра нижних частот Баттерворта при
fc = 40 Гц, fs = 200 Гц и N = 4
124
Гл. 3. Фильтрация для устранения артефактов
Рис. 3.34. Амплитудно-частотные характеристики трёх фильтров нижних частот Баттерворта
при fc = 40 Гц, fs = 200 Гц и разных значениях порядка: N = 4 (точечная линия), N = 8
(пунктирная линия) и N = 12 (сплошная линия)
Фильтры Баттерворта очень популярны, благодаря их простоте, монотонно снижа-
ющейся амплитудно-частотной характеристике и максимально плоской АЧХ в полосе
пропускания. Их главным недостатком является широкая переходная полоса (мед-
ленный переход от полосы пропускания к полосе задержки) и нелинейная фазовая
характеристика. Нелинейная фаза может быть скорректирована путём пропускания
выходного сигнала фильтра повторно через тот же самый фильтр, но в обратном
по времени направлении [82]. Однако этот процесс ведёт к тому, что амплитудная
характеристика представляет собой квадрат той характеристики, которая получается
при первоначальной разработке фильтра. Эффект возведения в квадрат может быть
скомпенсирован на стадии первоначальной разработки. Однако в любом случае такой
метод фильтрации не может использоваться при обработке сигнала в реальном мас-
штабе времени. Метод разработки эллиптических фильтров даёт крутую переходную
полосу ценой появления пульсаций в полосе пропускания и в полосе задержки.
Метод Бесселя даёт групповую задержку, которая является максимально плоской
для постоянной составляющей, и фазовую характеристику, которая аппроксимирует
линейную фазовую характеристику. Детали разработки фильтров Бесселя, фильтров
Чебышева, эллиптических фильтров и других фильтров могут быть найдены в других
источниках по цифровой фильтрации [14, 26, 81-85].
Иллюстрация применения. На верхней кривой рис. 3.35 показан сигнал каро-
тидного пульса с высокочастотным шумом и эффектом ограничения. Нижняя кривая
на том же самом рисунке иллюстрирует результат обработки данного сигнала во
временной области с помощью команды MATLAB filter, при этом были использованы
коэффициенты фильтра нижних частот Баттерворта, рассчитанные в предыдущем
параграфе и определяемые уравнением (3.63) (/с = 40 Гц, fs = 200 Гц и TV = 4).
Можно видеть, что высокочастотный шум был эффективно устранён; более того,
эффект ограничения был сглажен. Однако низкочастотные артефакты в сигнале
остались (например, в районе метки 14 с).
На рис. 3.36 показан результат фильтрации зашумлённого сигнала ЭКГ (приве-
дённого на рис. 3.20) с использованием фильтра нижних частот Баттерворта 8-го
Фильтрация в частотной области
125
Время, с
>ис. 3.35. Сигнал каротидного пульса с высокочастотным шумом и эффектом ограничения
верхняя кривая). Результат фильтрации с использованием фильтра нижних частот Баттер-
орта при /с = 40 Гц, fs = 200 Гц и N = 4 (нижняя кривая). Фильтрации была выполнена во
временной области с использованием команды MATLAB filter
Зг
2,5 -
2 -
1,5 -
1 -
Время, с
Рис. 3.36. Результат фильтрации в частотной области зашумленного сигнала ЭКГ, показан-
ного на рис. 3.20, с использованием фильтра нижних частот Баттерворта 8-го порядка с
частотой среза 70 Гц
126
Гл. 3. Фильтрация для устранения артефактов
Частота, Гц
Рис. 3.37. Частотная характеристика фильтра нижних частот Баттерворта 8-го порядка с
частотой среза fc = 70 Гц и fs = 1000 Гц
порядка, заданного уравнениями (3.60) и (3.61) при частоте среза 70 Гц. Частотная
характеристика |Я(о?)| этого фильтра показана на рис. 3.37. Хорошо видно, что
высокочастотный шум был эффективно подавлен фильтром.
3.4.2. Устранение низкочастотных шумов: фильтры верхних частот Баттер-
ворта
Задача. Разработать фильтр в частотной области для устранения низкоча-
стотных помех с минимальной потерей компонент сигнала в полосе пропуска-
ния.
Решение. Фильтры верхних частот могут быть рассчитаны сами по себе или
получены путём преобразования нормализованных фильтров-прототипов нижних ча-
стот [86, 81]. Последний подход более прост, поскольку фильтры-прототипы нижних
частот с различными характеристиками широко доступны, так же как и преобразова-
ния, необходимые для получения фильтров нижних частот, пропускающих полосовых
фильтров и заграждающих полосовых фильтров [86, 81]. MATLAB рассчитывает
фильтры верхних частот с помощью простой команды butter(N, fc, ‘high’).
Так же как и в случае фильтра нижних частот Баттерворта (уравнение (3.61)),
фильтр верхних частот Баттерворта может быть задан непосредственно в дискретной
частотной области как
(3-64)
Иллюстрация применения. На рис. 3.6 показан сегмент сигнала ЭКГ с низ-
кочастотным шумом, проявляющимся в форме дрейфа базовой линии. На рис. 3.38
приведён результат фильтрации этого сигнала с помощью фильтра верхних частот
Баттерворта 8-го порядка, задаваемого уравнением (3.64), с частотой среза 2 Гц.
Частотная характеристика этого фильтра показана на рис. 3.39. Необходимо отме-
тить, что в то время как низкочастотные артефакты этим фильтром удаляются, он не
оказывает никакого влияния на присутствующий в сигнале высокочастотный шум.
Фильтрация в частотной области
127
Рис. 3.38. Результат фильтрации в частотной области сигнала ЭКГ с низкочастотным шумом
(показанного на рис. 3.6) с использованием фильтра верхних частот Баттерворта 8-го порядка
с частотой среза 2 Гц (сравните с результатами на рис. 3.24, 3.25 и 3.28)
Обратите внимание, что результат фильтрации оставляет характеристики QRS-
комплекса без изменений, в отличие от случая использования фильтров во временной
области, основанных на производной (сравните рис. 3.38 с рис. 3.24 и 3.25). Это
преимущество объясняется тем фактом, что коэффициент усиления использованного
здесь фильтра верхних частот Баттерворта близок к единице в диапазоне частот
3-100 Гц; фильтры, основанные на производной, серьёзно подавляют эти компоненты
Рис. 3.39. Частотная характеристика фильтра верхних частот Баттерворта 8-го порядка с
-зстотой среза 2 Гц; fs = 1000 Гц. Частотная характеристика показана с растянутой шкалой
и только для диапазона 0-10 Гц
128
Гл. 3. Фильтрация для устранения артефактов
и, следовательно, искажают QRS-комплекс. Однако необходимо отметить, что дан-
ный фильтр в некоторой степени исказил зубцы Р и Т. Показанный на рис. 3.38 ре-
зультат полезно сравнить с результатом, показанным на рис. 3.28, полученным с ис-
пользованием намного более простого БИХ-фильтра, заданного уравнением (3.47).
(Сравните частотные характеристики, показанные на рис. 3.39, 3.22, 3.23 и 3.27.)
3.4.3. Устранение периодических артефактов: режекторные и гребенчатые
фильтры
Задача. Разработать фильтр в частотной области для устранения периоди-
ческих артефактов, таких как сетевая наводка.
Решение. Простейшим методом для удаления периодических артефактов являет-
ся вычисление преобразования Фурье сигнала, удаление нежелательных компонент
из спектра и затем вычисление обратного преобразования Фурье. Нежелательные
частотные компоненты могут быть сделаны равными нулю или, что ещё лучше,
среднему уровню нескольких частотных компонент сигнала вблизи удаляемой ком-
поненты. Первый из этих методов будет удалять шумовые компоненты одновременно
с компонентами сигнала на той же самой частоте, в то время как при использовании
второго метода предполагается, что спектр сигнала на рассматриваемом участке
является гладким.
Периодическая помеха может также быть удалена с использованием режекторных
фильтров, у которых нули на единичной окружности в г-плоскости расположены на
тех самых частотах, которые должны быть удалены. Если /о ~ это частота помехи,
то углы, соответствующие комплексно-сопряжённым нулям, должны иметь значения
±2тг(/0/Л); радиус, соответствующий нулям, должен быть единичным. Если, кроме
того, в сигнале присутствуют гармоники, то требуется несколько нулей на часто-
тах ±2тг(п/о/Л), где переменная п представляет собой порядок присутствующих
гармоник. Углы нулей ограничены диапазоном (—тг, тг). Такие фильтры называются
гребенчатыми фильтрами. В некоторых ситуациях гармоники высокого порядка за
пределами частоты Д/2 могут появиться в позициях, соответствующих эффекту
наложения (см. рис. 3.8 и (3.57)); в этом случае нули следует поместить также
и на этих частотах.
Пример разработки режекторного фильтра. Рассмотрим сигнал с сетевой
наводкой /о = 60 Гц и частотой дискретизации fs = 1000 Гц (см. рис. 3.7 и 3.8).
В данном случае требуется режекторный фильтр с нулями при cjq = ±2tt(/o//s) =
= ±0,337 рад = ±21,6°. Положение нулей задаётся выражением coscuo ± j sinu/o или
zx = 0,92977 ± J0,36812 и z2 = 0,92977 -
— JO,36812. Передаточная функция задаётся
выражением
H(z) = (1 - - г-1г2) =
Рис. 3.40. Нули режекторного фильтра
для удаления наводки с частотой 60 Гц,
частота дискретизации составляет 1000 Гц
= 1 - 1,85955г-1 + г-2. (3.65)
Если необходимо, чтобы коэффициент уси-
ления для постоянной составляющей (z = 1)
был равен единице, то H(z) необходимо
поделить на 0,14045.
На рис. 3.40 показан график расположе-
ния нулей этого режекторного фильтра на z-
плоскости. На рис. 3.41 приведены ампли-
тудная и фазовая характеристики данного
Фильтрация в частотной области
129
Рис. 3.41. Амплитудная и фазовая характеристики режекторного фильтра на 60 Гц с нулями,
показанными на рис. 3.40; fs = 1000 Гц
режекторного фильтра, рассчитанного с использованием MATLAB. Обратите внима-
ние, что эти фильтры подавляют не только компоненту 60 Гц, но также и частоты
в некоторой области частот около 60 Гц. Крутизна провалов частотной характери-
стики может быть увеличена путём размещения нескольких полюсов рядом или
симметрично вокруг нулей и внутри единичной окружности [1, 80]. Заметим также,
что максимум коэффициента усиления этого фильтра достигается на частоте fs/2',
в случае применения этого фильтра к сигналу ЭКГ необходима дополнительная
низкочастотная фильтрация, чтобы уменьшить коэффициент усиления на частотах
выше примерно 80 Гц.
Пример разработки гребенчатого фильтра. Рассмотрим теперь случай присут-
ствия периодической помехи с основной частотой 60 Гц и с нечётными гармониками
на частотах 180, 300 и 420 Гц. Предположим, что fs = 1000 Гц, и будем считать, что
отсутствуют какие-либо ошибки, вызванные наложением. В этом случае необходимы
нули для частот 60, 180, 300 и 420 Гц, что соответствует углам ±21,6°, ±64,8°,
±108° и ±151,2° (при значении угла 360°, соответствующем 1000 Гц). В этом
случае координаты нулей будут следующими: 0,92977±j0,36812, 0,42578 ±j'0,90483,
-0,30902 ±j0,95106 и -0,87631 ±j'0,48175. Передаточная функция этого фильтра
будет задаваться уравнением
H(z) = G(1 - 1,85955г-1 + г-2)(1 - 0,85156г-1 + г-2) х
х (1 + 0,61803г-1 + г-2)(1 + 1,75261г-1 + г-2), (3.66)
где G —требуемый коэффициент усиления или коэффициент масштабирования.
В случае, если величина G рассчитана так, чтобы коэффициент усиления для посто-
янной составляющей был равен единице, передаточная функция фильтра примет вид
Н(г) = 0,6310 - 0,2149г-1 + 0,1512г-2 - 0,1288г-3 + 0,1227г-4 -
- 0,1288г-5 + 0,1512г-6 - 0,2149г-7 + 0,6310г-8. (3.67)
9 Р. Рангайян
130
Гл. 3. Фильтрация для устранения артефактов
График расположения нулей на г-плоскости показан на рис. 3.42. Частотная харак-
теристика этого гребенчатого фильтра показана на рис. 3.43. Обратите внимание
Рис. 3.42. Нули гребенчатого фильтра для устранения помехи 60 Гц с нечётными гармоника-
ми; частота дискретизации соответствует 1000 Гц
на низкий коэффициент усиления не только для частот, где встречаются провалы,
а также и на соседних участках частотного диапазона.
Рис. 3.43. Амплитудная и фазовая характеристики гребенчатого фильтра с нулями, показан-
ными на рис. 3.42
Иллюстрация применения. На рис. 3.44 показан сигнал ЭКГ с сетевой наводкой
(/о = 60 Гц). На рис. 3.45 показан результат применения режекторного фильтра,
заданного уравнением (3.65), к этому сигналу. Помеха 60 Гц эффективно подавлена
без какого-либо заметного искажения формы ЭКГ.
Оптимальная фильтрация’, фильтр Винера
131
2,5 -
1,5
1
СП
0,5
-0,5
2 -
o
I______I_____L_JZ___I_____I______I_____I______I_____I______I
1
0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9
Время, с
Рис. 3.44. Сигнал ЭКГ с помехой 60 Гц
Рис. 3.45. Сигнал ЭКГ, показанный на рис. 3.44, после фильтрации с использованием режек-
торного фильтра сетевой наводки 60 Гц, показанного на рис. 3.40 и 3.41
Иллюстрация применения гребенчатого фильтра будет дана в конце данной главы,
в п. 3.8.
3.5. Оптимальная фильтрация: фильтр Винера
При проектировании фильтров, описанных в предыдущих разделах, принимается
о внимание только ограниченная информация о временных и спектральных харак-
теристиках сигнала и шума. Такие фильтры часто рассматриваются как эмпирически
132
Гл. 3. Фильтрация для устранения артефактов
подобранные: можно попробовать несколько вариантов параметров и остановиться
на таком фильтре, который, как представляется, даёт полезный результат. При этом
получаемый результат не является гарантированно наилучшим достижимым: он не
оптимизирован ни в каком смысле.
Задача. Разработать оптимальный фильтр для устранения шума из сиг-
нала при условии, что сигнал и шум являются независимыми стационарными
случайными процессами. При этом можно предполагать, что «требуемые» или
идеальные характеристики неискажённого сигнала известны. Характеристики
шума могут также рассматриваться как известные.
Решение. Теория фильтров Винера даёт возможность получить оптимальную
фильтрацию, принимая во внимание статистические характеристики сигнала и шу-
ма. Параметры фильтра оптимизированы с использованием некоего критерия
эффективности. При этом гарантируется, что на выходе появляется наилучший
достижимый результат при данных условиях и при данной доступной информации.
Фильтр Винера является мощным концептуальным инструментом, который изменяет
традиционные подходы к обработке сигнала.
Рассматривая задачу фильтрации биомедицинских сигналов для устранения
шума, ограничимся БИХ-фильтром с одним входом и одним выходом, с веще-
ственным входным сигналом и вещественными коэффициентами. На рис. 3.46
показана обобщённая структурная схема фильтра с коэффициентами или весами
Рис. 3.46. Структурная схема фильтра Винера
Wi, г = 0,1,2, L.. ,М — 1, входом х(п) и выходом d(ri) [77]. Обычно выход фильтра
обозначается d(n), так как он рассматривается как оценка некоторого «желаемого»
сигнала d(n), представляющего собой идеальный неискажённый сигнал. Если
предположить, что желаемый сигнал доступен, то можно рассчитать оценку ошибки
между выходом и требуемым сигналом как
е(п) = d(n) — d(n). (3.68)
Поскольку оценка d(ri) является выходом линейного КИФ-фильтра, она может
быть выражена как свёртка входного сигнала х(п) с последовательностью весов Wi
(которая одновременно является импульсной характеристикой фильтра) следующим
образом:
М-1
d(n) = Wkx(n — к).
к=0
(3.69)
Оптимальная фильтрация’, фильтр Винера
133
Для упрощения процедур оптимизации последовательность весов может быть описа-
на как весовой вектор размерностью М х 1:
W — [w0, W1, W2, • • • , Wm-\\TЧ (3.70)
где обозначенная жирным шрифтом величина w представляет собой вектор, а верх-
ний индекс Т обозначает транспонирование вектора. Поскольку веса в выражении
свёртки комбинируются с М значениями входного сигнала, то можно также запи-
сать М входных величин как вектор размерностью М х 1:
x(n) = [ж(n), х(п — 1), ..., х(п — М + 1)]Т. (3.71)
Отметим, что вектор х(п) меняется во времени: в данный момент времени п вектор
содержит текущий входной отсчёт х(п) и предыдущие (М — 1) входных отсчётов,
начиная с х(п — 1) до х(п — М + 1). В этом случае выражение для свёртки (3.69)
может быть записано в более простой форме, как скалярное произведение векторов
w и х(п):
d(n) = wTx(n) = xT(n)w = (x,w). (3.72)
Ошибка оценки задаётся выражением
е(п) = d(n) — wTx.(ri). (3.73)
Теория фильтров Винера оценивает последовательность весовых коэффициентов,
которые минимизируют среднеквадратичную величину ошибки оценки; в этом случае
выход можно назвать оценкой минимальной среднеквадратичной ошибки (МСКО)
требуемого отклика, фильтр в этом случае называется оптимальным фильтром.
Среднеквадратичная ошибка (СКО) определяется как
J(w) = E[e2(n)] = E[{d(n) - wTx(n)}{d(n) - xT(n)w}] =
= E[d2(n)] - wTE[x(n)d(n)] — E[d(n)xT(n)] w + wTE [x(n)xT(n)] w. (3.74)
Отметим, что оператор математического ожидания не применим к переменной w,
поскольку w не является случайной величиной.
Приняв во внимание предположение, что входной вектор х(п) и требуемый отклик
i(n) совместно стационарны, можно отметить, что выражения для математического
гжидания в приведённом выше уравнении имеют следующие интерпретации [77].
• E[d2(n)] является дисперсией d(n), записанной как a2d с последующим предполо-
жением, что среднее значение d(n) равно нулю.
• E[x(n)d(n)] представляет собой взаимную корреляцию между входным век-
тором х(п) и требуемым откликом d(n), являющуюся вектором размерностью
М х 1:
0 = E[x(n)d(n)]. (3.75)
Отметим, что 0 = [0(0),0(—1), ... ,0(1 — М)]Т, где
6(-k) = Е[х(п - Jfe)d(n)], к = 0,1,2, ..., М - 1. (3.76)
• E[d(n)x.T(п)] является просто транспонированием E[fi(n)x(n)], следовательно
0Т = E[d(n)xT(n)]. (3.77)
• Е[х(п)хт(п)] представляет собой автокорреляцию входного вектора х(п), рассчи-
танную как векторное произведение вектора с самим собой и записанную в виде
Ф - Е[х(п)хт(п)] (3.78)
134
Гл. 3. Фильтрация для устранения артефактов
или в виде матрицы полной размерности М х М в форме
Ф(0) ФМ ... Ф(М-1)1
ф(-\) ф(0) ... ф(М — 2)
ф(-М + 1) ф(-М + 2) ф(0)
с элементами строки к и столбца г, которые заданы выражением
</>(г — к) = Е [х(п — к)х(п — г)],
(3.79)
(3.80)
с тем свойством, что ф(г — к) = ф(к — г). (Заметим’, ф = фхх-) С учётом предпо-
ложения о стационарности в широком смысле, матрица Ф размерностью М х М
полностью задаётся М величинами автокорреляции </>(0),</>(1), ...,ф(М — 1) для
сдвигов 0,1,2, ..., М — 1.
С учётом перечисленных выше интерпретаций, выражение (3.74) для СКО может
быть упрощено до вида
J(w) = — wT0 — 0Tw + wT$w. (3.81)
Это выражение показывает, что СКО является функцией второго порядка от век-
тора весовых коэффициентов w. Для определения оптимального весового вектора,
обозначенного wo, следует дифференцировать J(w) по w, приравнять его к нулю
и решить результирующее уравнение.
Для того чтобы выполнить это дифференцирование, необходимо записать следу-
ющие производные:
(€ w) = О,
dw
-^-(wT0) = 0,
dw
——(wтФw) = 2Ф?у.
dw
Теперь получим производные от J(w) по w как
dJ(w)
—— = -20 + 2Фw. (3.82)
dw
Приравнивая это уравнение к нулю, получаем условие для оптимального фильтра
в виде
Фwo = 0. (3.83)
Это уравнение известно как уравнение Винера-Хопфа (Wiener-Hopf). Оно также
известно как нормальное уравнение, так как можно показать, что для оптимального
фильтра каждый элемент входного вектора х(п) и ошибка оценки е(п) взаимно ор-
тогональны и, более того, что выходной сигнал фильтра d(n) и ошибка е(п) взаимно
ортогональны (т. е. математическое ожидание их произведения равно нулю [77]).
Оптимальный фильтр получается как
wo = Ф 10.
(3.84)
Оптимальная фильтрация', фильтр Винера
135
В расширенной форме имеем уравнение Винера-Хопфа в виде
Г Ф(0) <м-1) _ф(-М+\) </•(1) ф(-М + 2) . . . ф(М - 1)' ... Ф(М - 2) ... ф(0) . = WOQ wo\ _wo(M - 1)_ = Г ^(0) 1 0(-1) 0(1 - М)_ (3.85)
или как М-1
г=0 - к) =е (-к), к = 0,1,2, 1. (3.86)
Минимум СКО задаётся выражением
Лип = <Л- етф-'©.
(3.87)
При условии, что все рассматриваемые сигналы стационарны, имеем ф(г — к) =
= ф(к — г) и в(—к) = в(к). Тогда мы можем записать уравнение (3.86) как
М-1
^2 wo^(i - к) =0(к), к = 0,1,2, ..., М - 1. (3.88)
г=0
Таким образом, мы имеем соотношение свёртки
wok * Ф(к) = 0(к). (3.89)
Применяя преобразование Фурье к приведённому выше выражению, получаем
W(w)Sxx(w) = Sxd(u), (3.90)
что может быть модифицировано для получения частотной характеристики фильтра
Винера TV(о;) в виде
TV(o>) =
3>xd (w )
8хх (w )
(3.91)
где Sxx(w) — СПМ входного сигнала, a Sxd(w) — взаимная спектральная плотность
ВСП, cross-spectral density, CSD) между входным сигналом и требуемым сигналом.
Обратите внимание, что вывод оптимального фильтра требует достаточно специ-
фических знаний о входном сигнале и требуемой характеристике в виде автокорреля-
ционной функции Ф входного сигнала х(п) и функции взаимной корреляции О между
входным сигналом х(п) и требуемым откликом d(n). На практике, хотя требуемый
-клик d(n) может быть не известен, должна существовать возможность получения
его временных или спектральных статистик, которые могли бы быть использованы
для оценки ©. Для достоверной оценки упомянутых выше характеристик требуется
: ольшое число отсчётов соответствующих сигналов.
(Замечание. Haykin [77] допускает, что все используемые величины могут быть
- мплексными. Векторное транспонирование Т в этом случае представляет собой
эрмитово (Hermitian) или комплексно-сопряжённое транспонирование Н. Для пере-
• -ожения двух величин требуется, чтобы одна из них была взята в комплексно-
.ряжённом виде: например, е2(п) получают как е(п)е*(п); в уравнении (3.69)
з есто Wk будет использоваться и так далее. Более того, d/dw(0Hw) = 0
и I dw(wH©) = 20. Однако в окончательной форме уравнение Винера-Хопфа упро-
щается до того же вида, который был задан уравнением (3.86).)
136
Гл. 3. Фильтрация для устранения артефактов
Рассмотрим теперь проблему устранения шума из искажённого входного сигнала.
Пусть для данного случая входной сигнал х(п) содержит смесь требуемого (исход-
ного) сигнала d(n) и шума т/(п), т. е.
х(п) = d(n) + 7/(п). (3.92)
Используя такие же векторные обозначения, как и раньше, получим
х(п) = d(n) + Tj(n), (3.93)
где ту(п) — векторное представление функции шума т](п). Автокорреляционная ма-
трица входного сигнала задаётся выражением
Ф = Е[х(п)хт(п)] = E[{d(n) + 7?(n)}{d(n) + 7)(n)}T]. (3.94)
Если теперь предположить независимость процессов, порождающих шум и входной
сигнал, а также равенство нулю среднего хотя бы для одного из этих процессов, то
имеем
E[d(n)i]T(n)] = E[T]T(n)d(n)] = 0. (3.95)
Тогда
Ф = E[d(n)dT(n)] + Е [??(n)?7T(n)] = $d + Ф^, (3.96)
где $d и Фг) — автокорреляционные матрицы размерностью М х М для сигнала
и шума соответственно. Более того,
© = E[x(n)d(n)] = E[{d(n) + T](n)}d(n)] = E[d(n)d(n)] = Фи, (3.97)
где Ф^ — автокорреляционный вектор требуемого сигнала размерностью М х 1. Тогда
оптимальный фильтр Винера задаётся выражением
wo = (Фа + Ф„)-'Ф1а. (3.98)
Частотная характеристика фильтра Винера может быть получена путём модификации
уравнения (3.91) с учётом спектральных соотношений
ы $хх(^) — Sd(^) 4“ ^ту(^) (3.99)
Г1 Sxd(v) = Sd(u)) (3.100)
что даёт W(cd) = $d(w) _ 1 (3.101)
v > sd(w) + ~ 1 + S^)/Sd^) ’
где Sd(w) и — СПМ требуемого сигнала и шумового процесса соответственно.
Отметим, что для проектирования оптимального фильтра необходимо знать СПМ
требуемого сигнала и шумового процесса (или их моделей).
Иллюстрация применения. На верхней кривой рис. 3.47 показан один цикл
ЭКГ, извлечённый из зашумлённого сигнала, приведённого на рис. 3.5. Путём
конкатенации линейных сегментов была создана кусочно-линейная модель, опи-
сывающая волны Р, QRS и Т с амплитудами, длительностями и интервалами,
близкими к тем, которые наблюдаются в зашумлённом сигнале. Уровень базовой
линии в модельном сигнале был приведён к нулю. Свободный от шумов модельный
сигнал показан на средней кривой рис. 3.47. СПМ в логарифмическом масштабе для
Оптимальная фильтрация-, фильтр Винера
137
100 200 300 400 500 600 700
Рис 3.47. Сверху вниз: один цикл зашумлённого сигнала ЭКГ, показанного на рис. 3.5
Позначен как Исходный сигнал); кусочно-линейная модель свободного от шума требуемого
сигнала (Модель); выходной сигнал фильтра Винера (Восстановленный сигнал)
зашумлённого сигнала и свободной от шумов модели, где последняя соответствует
5у(о?) в уравнении 3.101, показаны в виде двух верхних кривых на рис. 3.48.
Интервалы Т-Р между последовательными циклами ЭКГ могут быть использо-
ваны для представления изоэлектрической базовой линии. Тогда любая активность,
~писутствующая на этих интервалах, является шумом. Из кривой зашумлённого
сигнала ЭКГ на рис. 3.5 были выбраны четыре Т-Р интервала, для которых был рас-
считан усреднённый спектр мощности Фурье с целью получения СИМ шума S^cj),
-еобходимой для фильтра Винера (уравнение (3.101)). Оценка СИМ в логарифмиче-
1 л.ом масштабе для шума показана на третьей кривой рис. 3.48. Обратите внимание
относительно высокий уровень энергии в СИМ шума на частотах выше 100 Гц
~ сравнению с СИМ исходного зашумлённого сигнала и модели. Обратите так-
же внимание на пики в СПМ исходного сигнала и шума вблизи частот 180, 300
420 Гц, которые представляют собой третью, пятую и седьмую гармоники от 60 Гц,
тветственно. Пик на частоте 460 Гц является результатом эффекта наложения для
святой гармоники с частотой 540 Гц. Сама компонента с частотой 60 Гц, вероятно,
была эффективно устранена режекторным фильтром, использовавшимся в аппарату-
ре съёма сигнала. (Более подробно эти вопросы рассмотрены в разд. 3.2.4 и 3.4.3.)
На четвёртой кривой рис. 3.48 показана частотная характеристика фильтра Ви-
вера, полученная из выражения (3.101). Обратите внимание на низкий коэффициент
-пения этого фильтра вблизи частот 180, 300, 420 и 460 Гц, соответствующих
лк-ам в спектре шума. Как показывает уравнение (3.101), усиление фильтра Винера
обратно связано с СПМ шума и прямо связано с СПМ сигнала. Результат при-
менения фильтра Винера к данному сигналу показан на третьей кривой рис. 3.47.
Очевидно, что почти весь шум был эффективно устранён этим фильтром.
138
Гл. 3. Фильтрация для устранения артефактов
Частота, Гц
Рис. 3.48. Сверху вниз: СПМ в логарифмическом масштабе (в дБ) для заданного зашум-
лённого сигнала (обозначен как Исходный сигнал); СПМ в логарифмическом масштабе для
свободной от шума модели (Модель); оценка СПМ в логарифмическом масштабе для шума
(Шум); частотная характеристика в логарифмическом масштабе для фильтра Винера (фильтр
Винера); СПМ в логарифмическом масштабе для выходного сигнала фильтра (Восстановлен-
ный сигнал)
Здесь важнее всего отметить, что фильтр был разработан с использованием
моделей процессов шума и сигнала (их СПМ), которые в настоящем случае были
получены из самого данного сигнала. Для разработки фильтра Винера не потре-
бовалось задавать какую-либо частоту среза, в то время как разработка фильтра
Баттерворта требует задания частоты среза и порядка фильтра.
Большинство систем съёма сигналов должны обеспечивать возможность изме-
рения по меньшей мере дисперсии или уровня мощности присутствующего шума.
В этом случае легко получить модель с равномерной СПМ (соответствующей белому
шуму). Также можно получить модели идеального сигнала и шумового процесса
на основе параметрических моделей Гаусса или Лапласа как во временной области
(в виде АКФ), так и непосредственно в частотной области (в виде СПМ).
3.6. Адаптивные фильтры для устранения помех
Как можно было видеть в предыдущих разделах, фильтры с постоянными па-
раметрами (весами или коэффициентами) наиболее хорошо подходят для случаев,
когда характеристики сигнала и шума (случайного или структурированного) явля-
ются стационарными и известными. Разработка фильтров для частотной области
Адаптивные фильтры для устранения помех
139
требует детального знания спектрального состава сигнала и шума. Такие фильтры
не применимы, когда характеристики сигнала или шума меняются во времени, т. е.
когда они не стационарны. Они также не применимы в случаях, когда спектральный
состав сигнала и помех существенно перекрывается.
Рассмотрим ситуацию, когда два сигнала ЭКГ (такие как ЭКГ плода и матери)
или два сигнала вибрации (такие как ВАГ и ВМГ) появляются в точке съёма сигнала
и складываются в некоторой пропорции. В смеси спектры этих сигналов занимают
те же самые или сходные частотные диапазоны, и следовательно использование
фильтров с постоянными параметрами не позволит их разделить. В случае смеси
ВАГ/ВМГ возможно также изменение спектров сигналов от одного момента времени
к другому в связи с изменениями характеристик поверхностей хряща, порождаю-
щего сигнал ВАГ, и в связи с влиянием на сигнал ВМГ вариаций в вовлечении
мышечных волокон. Такая ситуация требует использования фильтра, который может
обучаться или адаптироваться к характеристикам помехи, оценивать мешающий
сигнал и удалять его из смеси для получения требуемого сигнала. Это требует
от фильтра способности автоматически подстраивать импульсную характеристику
(а следовательно — и частотную) по мере того, как меняются характеристики сигнала
и/или помехи.
Задача. Разработать оптимальный фильтр для устранения нестационарной
помехи из нестационарного сигнала. При этом доступен дополнительный канал
информации, связанный с помехой. Фильтр должен постоянно адаптироваться
к изменяющимся характеристикам сигнала и помехи.
Решение. В данной проблеме необходимо учитывать два различных условия.
1. Фильтр должен быть адаптивным', в этом случае вектор весов фильтра будет
изменяться во времени. Принципы адаптивной фильтрации, известной также как
адаптивное подавление шумов (АПШ, ANC, adaptive noise cancellation), будут
объяснены в разд. 3.6.1.
2. Фильтр должен быть оптимальным. В разд. 3.6.2 и 3.6.3 будут представлены
два хорошо известных метода оптимизации адаптивного фильтра.
В конце разд. 3.6.2 и 3.6.3, а также в конце данной главы (в разд. 3.9 и 3.10) будут
даны иллюстрации применения этих методов.
3.6.1. Адаптивное подавление шумов. На рис. 3.49 показана обобщённая блок-
диаграмма адаптивного фильтра или процедуры АПШ [62, 88]. «Основной вход»
фильтра х(п) представляет собой смесь полезного сигнала v(n) и «шума на основном
входе» ш(п):
х(п) = v(n) -Т m(n), (3.102)
где х(п) — это сигнал, наблюдаемый на основном входе. Требуется оценить помеху
(или шум) т(п) и устранить её из х(п) для получения полезного сигнала v(n).
Рис. 3.49. Блок-диаграмма обобщённой процедуры адаптивного подавления шумов (АПШ) или
адаптивного фильтра
140
Гл. 3. Фильтрация для устранения артефактов
Предполагается, что г(п) и т(п) некоррелированы. Для адаптивной фильтрации
необходим второй вход, известный как «опорный вход» г(п), который не коррели-
рован с полезным сигналом v(n), но тесно связан или коррелирован с помехой или
шумом т(п) каким-либо способом, знать который нет необходимости. Процедура
АПШ фильтрует или модифицирует сигнал на опорном входе г(п) таким образом,
чтобы получить некоторый сигнал у(п), который настолько близок к шуму ш(п),
насколько это возможно. Далее сигнал у(п) вычитается из сигнала на основном
входе для получения оценки требуемого полезного сигнала:
v(n) = е(п) = х(п) — у(п). (3.103)
Рассмотрим работу этого фильтра. Предположим, что полезный сигнал v(n), шум на
основном входе m(n), сигнал на опорном входе г(п) и оценка шума на основном входе
у(п) статистически стационарны и имеют нулевые средние значения. (Замечание.
Далее, когда математическое ожидание будет рассчитываться в скользящем окне,
требование стационарности будет снято.) Мы уже отмечали, что сигнал v(n) не
коррелирован с т(п) и г(п) и сигнал г(п) коррелирован с т(п).Выходной сигнал
АПШ будет равен
е(п) = х(п) — у(п) = v(n) + т(п) — у(п), (3.104)
где у(п) = т(п) — оценка шума на основном входе, полученная на выходе адап-
тивного фильтра. Возведя в квадрат обе части уравнения (3.104) и взяв от них
математические ожидания, получим
Е[е2(п)] = Е[г?2(п)] + 2?[{m(n) — 2/(n)}2] + 22?[??(n){m(n) — ?/(n)}]. (3.105)
Поскольку сигнал v(ri) не коррелирован с т(п) и у(п), и все эти сигналы имеют
нулевые средние, имеем
Е[г?(п){ш(п) — т/(п)}] = 7?[w(n)].E[m(n) — ?;(п)] = 0. (3.106)
Уравнение (3.105) может быть переписано в виде
E[e2(n)] = E[v2(n)] +Е[{т(п) -у(п)}2]. (3.107)
Заметим, что выходной сигнал е(п) на рис. 3.49 используется (как обратная связь)
для управления адаптивным фильтром. Целью использования процедуры АПШ
является получение такого выходного сигнала е(п), который близок по критерию
наименьших квадратов к полезному сигналу v(n). Это достигается подачей выходного
сигнала на адаптивный фильтр в качестве обратной связи и настройкой фильтра
для минимизации общей выходной мощности системы. Выходной сигнал системы
используется в качестве сигнала ошибки для адаптивного процесса.
На мощность сигнала Е[г?2(п)] не будет оказывать влияния процесс адаптации
фильтра с целью минимизации Е[е2(п)]; соответственно, минимальная мощность на
выходе будет равна
min Е[е2(п)] = E[v2(n)] + min £?[{m(n) - ?/(n)}2]. (3.108)
По мере того как фильтр настраивается для минимизации Е[е2(п)], значение
E[{m(n) — т/(п)}2] также будет минимизироваться. Таким образом, выходной сигнал
фильтра у(п) является оценкой в смысле минимальной среднеквадратичной ошибки
(МСКО) шума на основном входе ш(п).Более того, когда Е[{т(п) — 2/(п)}2] мини-
мизируется, Е[{е(п) — г?(п)}2] также будет минимизироваться, так как из уравне-
Адаптивные фильтры для устранения помех
141
ния (3.104) следует:
e(n) — v(n) = т(п) — у(п). (3.109)
Следовательно, настройка или адаптация фильтра с целью минимизации общей
выходной мощности эквивалентна тому, что выходной сигнал е(п) является оценкой
полезного сигнала v(n) в смысле МСКО для данной структуры фильтра и его
способности к настройке, а также для данного опорного сигнала.
Выходной сигнал е(п) будет содержать полезный сигнал v(n) и какую-то долю
шума. Из уравнения (3.109) следует, что выходной шум определяется выражением
e(n) — v{n) = v(n) — v(n) = т(п) — у(п). Так как при минимизации £?[е2(п)] мини-
мизируется также Е[{т(п) — ?/(п)}2], то минимизация общей выходной мощности
минимизирует мощность шума на выходе. Поскольку компонента v(n) остаётся
в выходном сигнале неизменной, то минимизация общей выходной мощности
максимизирует отношение сигнал-шум (SNR, signal-to-noise ratio) на выходе.
Из выражения (3.107) следует, что выходная мощность минимальна, когда
Е[е2(п)] = Е[г?2(п)]. При достижении этого условия Е[{т(п) — у(п)}2] = 0. Тогда
имеем у(п) = т(п) и е(п) = г(п), т. е. выходной сигнал является наилучшей
и свободной от помех оценкой требуемого полезного сигнала.
Оптимизацию фильтра можно выполнить, выразив ошибку в терминах вектора
весовых коэффициентов и применив процедуру выбора. Выходной сигнал адаптивно-
го фильтра у(п) в ответ на входной сигнал г(п) определяется разностным уравнением
М-1
у(п) = ^Wkr(n-k), (3.110)
k=o
где Wk, k = 0,1,2, ..., М - 1, — весовые коэффициенты, а М — порядок фильтра.
Ошибка оценки е(п) или выходной сигнал системы АПШ определяется как
е(п) = х(п) — у(п). (3.111)
Пусть для упрощения обозначений вектор весов в момент времени п определяется
как
w(n) = [w0(n), wi(n), ... .WM-i(n)]T, (3.112)
Аналогично, вектор входных значений в момент времени п можно определить
•.ак М-мерный вектор
r(n) = [r(n),r(n — 1), ...,г(п — М + 1)]Т- (3.113)
Тогда ошибка оценки, задаваемая уравнением (3.111), может быть переписана как
е(п) = х(п) — wT(n)r(n). (3.114)
Следует отметить, что для приведённых выше выкладок не требуется каких-либо
знаний о процессах, лежащих в основе сигналов v(n), т(п) и г(п), либо о взаимо-
связях между ними, кроме предположений о статистической независимости между
{п) и m(n), а также о наличии какой-либо формы корреляции между т(п) и г(п).
Эти аргументы могут быть распространены и на ситуации, когда сигналы на ос-
новном и опорном входах содержат аддитивные случайные шумы, которые взаимно
не коррелированны и также не коррелированны с v(n), т(п) и г(п). Также эти
-роцедуры могут быть распространены на случаи, когда сигналы т(п) и т(п) явля-
ются скорее детерминированными или структурированными, чем стохастическими,
такими, например, как сетевая наводка или сигналы ЭКГ или ВМГ [62].
142 Гл. 3. Фильтрация для устранения артефактов
Известны несколько методов максимизации SNR на выходе; два из них, основан-
ные на наименьших средних квадратах (МНК, LMS, least-mean-squares) и рекур-
сивном методе наименьших квадратов (РНК, RLS, recursive least-squares) описаны
в следующих разделах.
3.6.2. Адаптивный фильтр на основе метода наименьших средних квадра-
тов. Целью алгоритмов адаптивной фильтрации является настройка вектора весовых
коэффициентов для минимизации среднеквадратичной ошибки (СКО). Возводя в ква-
драт выражение для ошибки оценки е(п), задаваемой уравнением (3.114), получим
е2(п) = ж2(п) — 2х(п)тТ (n)w(n) + wT(n)r(n)rT(n)w(n). (3.115)
Эта квадратичная ошибка является функцией второго порядка от вектора весовых
коэффициентов (и входных сигналов) и может быть изображена как вогнутая гипер-
параболическая поверхность (чашеобразной формы), которая всегда неотрицательна.
Целью процедуры оптимизации фильтра является достижение дна этой чашеобраз-
ной функции. Для этого могут использоваться методы, основанные на градиенте.
Используя ожидаемые значения величин, входящих в уравнение (3.115) и беря
производные по отношению к вектору весовых коэффициентов, получим уравнение
Винера-Хопфа для данного случая. В алгоритме на основе МНК используется более
простой подход, который заключается в том, что в качестве оценки СКО принимают-
ся квадраты мгновенных значений ошибки, определяемые выражением (3.115) [62].
Алгоритм МНК основан на методе наикратчайшего спуска, где новый весовой вектор
w(n + 1) задаётся как текущий весовой вектор w(n) плюс поправка, пропорциональ-
ная взятому с обратным знаком градиенту квадрата ошибки V(n):
w(n + 1) = w(n) — /zV(n). (3.116)
Параметр p определяет стабильность и скорость сходимости алгоритма: чем больше
значение р, тем больше градиент вносимого шума и быстрее сходимость алгоритма,
и наоборот.
Алгоритм МНК аппроксимирует V(n) посредством взятия производной квадрата
ошибки, определяемой выражением (3.115), по отношению к вектору весовых коэф-
фициентов как
V(n) = —2ж(п)г(п) 4- 2{wT(n)r(n)}r(n) = — 2e(n)r(n). (3.117)
Используя эту оценку градиента в уравнении (3.116), получим
w(n 4- 1) = w(n) 4- 2ре(п)г(п). (3.118)
Это выражение известно как алгоритм МНК Уидроу-Хоффа (Widrow-Hoff).
Преимуществами алгоритма МНК являются простота и лёгкость реализации:
хотя метод основан на оптимизации с использованием СКО и градиентов, в самом
по себе уравнении фильтра отсутствуют операции дифференцирования, возведения
в квадрат или усреднения. Показано, что ожидаемые величины вектора весовых
коэффициентов, получаемые с помощью алгоритма МНК, сходятся к оптимальному
решению Винера, когда входные векторы не коррелированны во временной области
[62, 89]. Эта процедура может быть начата при произвольном значении вектора
весовых коэффициентов; она будет сходиться в среднем и оставаться устойчивой
до тех пор, пока р больше нуля, но меньше обратной величины от наибольшего
собственного значения (eigenvalue) автокорреляционной матрицы опорного входного
сигнала [62].
Адаптивные фильтры для устранения помех
143
Иллюстрация применения. Zhang и др. [63] использовали для устранения
помехи от мышечных сокращений из сигналов ВАГ адаптивный МНК-фильтр, вклю-
чающий две стадии. Первая стадия использовалась для удаления шумов измерения
в акселерометрах и связанных с ними усилителях, а вторая стадия была разработана
для устранения мышечного сигнала.
Zhang и др. [63] также предложили процедуру для оптимизации величины
шага р с использованием (среди других параметров) коэффициента рассогласования
на основе среднеквадратичной ошибки и динамической оценки мощности входного
сигнала. Алгоритм МНК был реализован как
w(n + 1) = w(n) + 2//(n)e(n)r(n). (3.119)
Величина шага р рассматривается как переменная, значение которой динамически
определяется следующим образом:
) (7И + 1)ж2(п)(а, г(п), ж2(п — 1)) ’
(3.120)
0 < р < 1. В процесс адаптации введён также коэффициент забывания а, 0< 1;
ожидается, что это позволит преодолеть проблемы, связанные с высоким уровнем
нестационарности сигнала; х2(п) — динамическая оценка мощности входного сигна-
ла, рассчитываемая как х2(п) = аг2(п) 4- (1 — а)х2(п — 1).
На рис. 3.50 приведены фильтрованные сигналы ВАГ, записанные с позиций на
коленной чашечке и на верхнем переднем утолщении большеберцовой кости, как
показано на рис. 3.11 (кривые бив, правая колонка). В качестве опорного входного
з--------1-----1------1------1------1-----1 -3--------1------1------1-----1------1------1
0 0,2 0,4 0,6 0,8 1 1,2 0 0,2 0,4 0,6 0,8 1 1,2
Время, с
Рис. 3.50. Версии сигналов ВАГ, фильтрованные с использованием алгоритма МНК, запи-
санные с позиций на коленной чашечке и на верхнем переднем утолщении большеберцовой
•ости, как показано на рис. 3.11 (кривые бив, правая колонка). В качестве опорного входного
сигнала использовался сигнал мышечных сокращений, записанный в позиции на мышце бедра
(рис. 3.11 а, правая колонка). Установка для записи показана на рис. 3.10. Воспроизводится с
: азрешения Y. Т. Zhang, R. М. Rangayyan, С. В. Frank, and G. D. Bell, Adaptive cancellation
muscle-contraction interference from knee joint vibration signals, IEEE Transactions on
Biomedical Engineering, 41(2):181-191, 1994. ©IEEE
сигнала использовался сигнал мышечных сокращений, записанный в позиции на
' ышце бедра (рис. 3.11 а, правая колонка). Видно, что низкочастотные артефакты
' ышечных сокращений были успешно удалены из сигналов ВАГ (сравните вторые
половины каждого из сигналов на рис. 3.50 с соответствующими частями сигналов
на рис. 3.11).
3.6.3. Адаптивный фильтр на основе рекурсивного метода наименьших
квадратов. Когда входной процесс адаптивной системы является стационарным
144 Гл. 3. Фильтрация для устранения артефактов
(или квазистационарным), наилучшую работу в установившемся режиме обеспе-
чивает медленная адаптация. Однако когда статистики входного сигнала меняют-
ся во времени (нестационарны), наилучшая работа обеспечивается путём компро-
мисса между быстрой адаптацией (необходимой для отслеживания изменений во
входном процессе) и медленной адаптацией (необходимой для ограничения шума
процесса адаптации). Алгоритм МНК является простым и эффективным подходом
к реализации процедуры АПШ. Однако он не подходит для быстро меняющихся
сигналов из-за его медленной сходимости и из-за трудности выбора правильной
величины шага р. Альтернативным подходом, основанным на точной минимизации
среднеквадратичного критерия, является рекурсивный метод наименьших квадратов
(РНК, RLS, recursive least squares) [77, 90]. Алгоритм РНК широко используется
в системах реального времени для идентификации и устранения помех, благодаря
его быстрой сходимости, которая примерно на порядок выше, чем для метода МНК.
(Приведённый в этом разделе вывод выражений для РНК фильтра заимствован
у Sesay [90] и Krishnan [88] с разрешения авторов.)
Важными чертами алгоритма РНК является использование им информации,
содержащейся во входных данных, и повторный возврат к моменту времени, когда
алгоритм был инициализирован [77]. Если известна оценка вектора весовых коэф-
фициентов фильтра для момента времени п— 1, рассчитанная по методу наименьших
квадратов, то с приходом новых данных рассчитывается обновлённая оценка этого
вектора для момента времени п.
При выводе алгоритма величина £(п), подлежащая минимизации по критерию
наименьших квадратов и называемая индексом эффективности (performance index)
или целевой функцией (objective function), определяется как
£(п)= £Лп-‘|е« (3-121)
г=1
где 1 < z < п — интервал наблюдения, е(г) — ошибка оценки, определяемая урав-
нением (3.114), а Л —весовой коэффициент (известный также как коэффициент
забывания), 0 < Л 1. Значения Хп~г < 1 придают больший «вес» более поздним
(недавним) величинам ошибки. Такое взвешивание необходимо для случая неста-
ционарных данных, когда изменения в статистиках сигнала делают нежелательным
включение в процесс более ранних данных. Величина, обратная (1 — Л), является
характеристикой памяти алгоритма.
Уравнение Винера-Хопфа является необходимым и достаточным условием [77]
для минимизации индекса эффективности в среднеквадратичном смысле и для
получения оптимальных значений весовых коэффициентов и может быть получено
аналогично тому, как было показано в разд. 3.5 для фильтра Винера. Нормальное
уравнение, которое должно быть решено для процедуры РНК, имеет вид
4>(n)w(n) = 0(п), (3.122)
где w(n) — оптимальный вектор весовых коэффициентов, при котором индекс эффек-
тивности достигает минимума, Ф(п) — это усреднённая по времени (и взвешенная)
матрица коэффициентов автокорреляции (размерности М х М) для сигнала на опор-
ном входе r(i), определяемая выражением
Ф(п) = ^А-'г(г)гт(г), (3.123)
г=1
а 0(тг) — усреднённая по времени (и взвешенная) матрица коэффициентов взаимной
корреляции (размерностью М х 1) между сигналом на опорном входе г(г) и сигналом
Адаптивные фильтры для устранения помех
145
на основном входе ж(г), определяемая выражением
0(п) = An-ir(i)a;(z). (3.124)
г=1
На рис. 3.51 показана общая схема РНК-фильтра.
Рис. 3.51. Общая структура адаптивного фильтра, реализующего алгоритм РНК
Ввиду сложности решения нормального уравнения для оптимального вектора
весовых коэффициентов, необходимо использовать рекурсивную методику. Для по-
лучения рекурсивного решения мы можем изолировать член, соответствующий г = п,
от остальной суммы в правой части уравнения (3.123) и получить
Ф(п) = Л
г=1
4- r(n)rT(n).
(3.125)
В соответствии с определением, приведённом в уравнении (3.123), выражение внутри
квадратных скобок в правой части уравнения (3.125) равно усреднённой по време-
ни и взвешенной автокорреляционной матрице Ф(п — 1). Следовательно, уравнение
(3.125) может быть переписано в рекурсивной форме:
Ф(п) = АФ(п - 1) 4- r(n)rT(n). (3.126)
Аналогично, уравнение (3.124) может быть записано как рекурсивное равенство:
0(п) = АО(п — 1) 4- т(п)х(п). (3.127)
Чтобы вычислить среднеквадратичную оценку w(n) для вектора весовых коэф-
фициентов в соответствии с уравнением (3.122), необходимо определить матрицу,
обратную корреляционной матрице Ф(п). На практике такая операция потребует
очень большого времени вычислений (особенно при больших значениях М). Для
снижения сложности вычислений может быть использована лемма инверсии матриц,
известная как «ABCD-лемма» (сходную форму этой леммы можно найти в работе
Haykin [77]). В соответствии с ABCD-леммой, для заданных матриц А, В, С и D
(А + BCD)1 = А-1 - A-‘B(DA-1B + C_1)_1DA-1. (3.128)
10 Р. Рангайян
146
Гл. 3. Фильтрация для устранения артефактов
Предполагается, что матрицы А, С, (A+BCD) и (DA-lB + C-1) обратимы. В пред-
положении, что корреляционная матрица Ф(п) является положительно определённой
и, следовательно, несингулярной, мы можем применить лемму инверсии матриц
к уравнению (3.126), предполагая
А = АФ(п—1), В = г(п), C=l, D = гт(п).
Тогда имеем
1)-
(и) [А-1гт(п)Ф-1(п — 1)г(п) + 1] 1 А-1гт(п)Ф-1(п — 1). (3.129)
уравнении
(3.130)
Ф-1(п) = А-1Ф-1(п —
- А-1Ф_1(п - l)n
Поскольку выражение внутри квадратных скобок в приведённом выше
является скалярным, это уравнение может быть переписано как
^-1, А п А-2Ф-1(п — 1)г(п)гт(п)Ф-1(п — 1)
Ф (п) = А Ф (п - 1)-------------rf- ч—-г-------——------.
1 + А гт(п)Ф (п — 1)г(п)
Пусть для удобства обозначений
Р(п) = Ф-1(п)
при Р(0) = 5-11, где 6 — это некоторая небольшая по величине константа, al —
единичная матрица. Далее, пусть
(3.131)
P(n — 1)г(п)
(3.132)
( ) 1 + А 1rT(n)P(n — l)r(n) ’
k(n) аналогичен вектору коэффициентов усиления Калмана в теории фильтров
Калмана [77]. Уравнение (3.130) может быть переписано в более простой форме:
P(n) = А-1Р(п - 1) - A-lk(n)rT(n)P(n — 1). (3.133)
Умножая обе части уравнения (3.132) на знаменатель его правой части, получим
k(n) [1 + A-1rT (n)P(n — l)r(n)] = A-1P(n — l)r(n) (3.134)
или
k(n) = [А-1Р(п — 1) — A-1k(n)rT(n)P(n — l)]r(n). (3.135)
Сравнивая выражение внутри скобок в правой части приведённого выше уравнения
с уравнением (3.133), имеем
k(n) = P(n)r(n). (3.136)
Р(п) и k(n) имеют размерности М х М и М х 1 соответственно.
Используя уравнения (3.122), (3.127) и (3.131), можно получить рекурсивное
уравнение для обновления среднеквадратичной оценки w(n) вектора весовых ко-
эффициентов:
w(n) = Ф-1(п)©(п) = Р(п)0(п) = АР(п)0(п — 1) + Р(п)г(п)ж(п). (3.137)
Подставляя уравнение (3.133) для Р(п) в первый член уравнения (3.137), получим
w(n) = Р(п — 1)0(п — 1) — k(n)rT(n)P(n — 1)0(п — 1) + Р(п)г(п)ж(п) =
= Ф-1(п — 1)©(п — 1) — к(п)гт(п)Ф-1(п — 1)0(п — 1) + P(n)r(n)x(n) =
= w(n — 1) — k(n)rT(n)w(n — 1) + Р(п)г(п)ж(п). (3.138)
Адаптивные фильтры для устранения помех
147
Окончательно, из уравнения (3.136), используя тот факт, что Р(п)г(п) равняется
вектору коэффициентов усиления k(n), приведённое выше уравнение может быть
переписано как
w(n) = w(n — 1) — k(n) [ж(п) — rT(n)w(n — 1)] = w(n — 1) + k(n)a(n), (3.139)
где w(0) = 0, a
a(n) = x(n) — rT(n)w(n — 1) = x(n) — wT(n — l)r(n). (3.140)
Величину a(ri) часто называют априорной ошибкой, подчёркивая тот факт, что эта
ошибка получена с использованием «старого» фильтра (т. е. фильтра до обновления
новыми данными в момент времени п). Очевидно, что в случае применения в алго-
ритмах АПШ, а(п) после завершения процесса схождения фильтра будет оценкой
полезного сигнала v(n), т. е.
а(п) = v(n) = х(п) — wT(n — l)r(n). (3.141)
Более того, после того как фильтр сойдётся, оценку шума на основном входе, т. е.
выходной сигнал адаптивного фильтра у(п), можно записать как
у(п) = т(п) = — l)r(n). (3.142)
Подставив уравнения (3.104) и (3.142) в уравнение (3.141), получим
й(п) = v(n) + т(п) — т(п) = v(n) + т(п) — wT(n — l)r(n) = х(п) — wT(n — l)r(n).
(3.143)
Уравнение (3.139) представляет собой рекурсивное соотношение для получения оп-
тимальных величин весовых коэффициентов, которые, в свою очередь, дают возмож-
ность получить среднеквадратичную оценку полезного сигнала й(п) в соответствии
с уравнением (3.143).
Иллюстрация применения. На рис. 3.52 показаны графики сигнала ВАГ от
пациента в норме (а) и одновременно записанный канал миографической поме-
хи (помеченный как МП, кривая б). Характеристики сигналов вибрации в этом
оимере отличаются от характеристик сигнала на рис. 3.11, что связано с другим
’эотоколом записи по отношению к скорости и диапазону колебательных движений
-оги [88]. Также на рис. 3.52 показаны результаты адаптивной фильтрации сигнала
ВАГ с использованием сигнала миографической помехи в качестве опорного: кривая в
демонстрирует результат МНК-фильтрации, а кривая г —фильтрации по алгоритму
-НК. Использовался одноступенчатый фильтр МНК с переменной величиной шага
.(п) в соответствии с уравнением (3.120); никаких попыток устранения инстру-
ментального шума не предпринималось. В фильтре МНК использовались значения
^раметров М = 7, р = 0,05 и коэффициент забывания а = 0,98; другие значения
хавали неудовлетворительные результаты. В фильтре РНК использовались значения
параметров М = 7 и X = 0,98.
Относительно низкочастотная миографическая помеха была лучше устранена
z льтром на основе алгоритма РНК, чем фильтром МНК; последний из них не
:<ладает способностью отслеживать нестационарность помехи и в результате вызвал
дополнительные артефакты. Спектрограммы исходного сигнала, опорного сигнала
в сигнала, фильтрованного на основе алгоритма РНК, показаны на рис. 3.53, 3.54
в 3.55 соответственно (чтобы лучше показать незначительные отличия между спек-
: граммами, использована логарифмическая шкала). Хорошо видно, что преимуще-
ственно низкочастотный артефакт (о чём свидетельствует высокий уровень энергии
ва низких частотах на всём протяжении спектрограмм на рис. 3.53 и 3.54) был
гностью удалён фильтром на основе алгоритма РНК.
148
Гл. 3. Фильтрация для устранения артефактов
б
к
2
s
S
!
ей
§
ж
5
§
5
К
§
40 -
20
О
-20
-40 -
О
40 -
20
О
-20
-40
О
40 -
20 -
О
-20 -
-40 -
0,5 1 1,5 2 2,5 3 3,5 4
в
0,5 1 1,5 2 2,5 3 3,5 4
г
О 0,5 1 1,5 2 2,5 3
3,5 4
Время, с
Рис. 3.52. Сигнал ВАГ пациента в норме (а). Миографическая помеха (МП) (б). Результат
фильтрации по методу МНК (в). Результат фильтрации с помощью алгоритма РНК (а).
Аппаратура, использованная для получения этой записи, показана на рис. 3.10
Рис. 3.53. Спектрограмма сигнала ВАГ, показанного на рис. 3.52 а. Использовано окно Хен-
нинга длительностью 256 отсчётов (128 мс); перекрытие между смежными сегментами соста-
вляет 32 отсчёта (16 мс)
Адаптивные фильтры для устранения помех
149
Рис. 3.54. Спектрограмма сигнала помехи мышечных сокращений, показанного на рис. 3.526.
Использовано окно Хеннинга длительностью 256 отсчётов (128 мс); перекрытие между смеж-
ными сегментами составляет 32 отсчёта (16 мс)
Рис. 3.55. Спектрограмма сигнала ВАГ, показанного на рис. 3.52 б, фильтрованного с помо-
щью алгоритма РНК. Использовано окно Хеннинга длительностью 256 отсчётов (128 мс);
перекрытие между смежными сегментами составляет 32 отсчёта (16 мс)
150 Гл. 3. Фильтрация для устранения артефактов
3.7. Выбор подходящего фильтра
До сих пор рассматривалось пять подходов к устранению шума и помехи: 1) син-
хронное усреднение или усреднение по ансамблю для множества реализаций или
копий сигнала, 2) фильтрация по методу скользящего среднего, 3) фильтрация в ча-
стотной области, 4) оптимальная фильтрация (фильтрация по Винеру) и 5) адап-
тивная фильтрация. При использовании первых двух подходов сигнал обрабаты-
вается непосредственно во временной области. Фильтрация в частотной области
выполняется над спектром сигнала. Отметим, что импульсная характеристика филь-
тра, разработанного в частотной области, может быть использована для реализации
фильтра во временной области в виде БИХ-фильтра или КИХ-фильтра. Более того,
фильтры, предназначенные для фильтрации во временной области, для лучшего
понимания их характеристик и воздействия на входной сигнал могут анализиро-
ваться в частотной области с помощью их передаточной функции или частотной
характеристики. Фильтр Винера может быть реализован либо во временной области
в виде нерекурсивного (трансверсального, КИХ) фильтра, либо в частотной обла-
сти. Адаптивные фильтры воздействуют непосредственно на сигнал во временной
области, но динамически меняют свои характеристики в ответ на изменение помехи.
Таким образом, их частотная характеристика варьирует от одной временной точки
к другой.
Какими же принципами следует руководствоваться для решения вопроса о том,
какие из перечисленных фильтров являются наилучшими для данного применения?
Для принятия такого решения могут оказаться полезными следующие положения.
Синхронное усреднение или усреднение по ансамблю возможно, когда:
• сигнал является статистически стационарным, (квази-) периодическим или ци-
клически-стационарным;
• доступны многочисленные реализации или копии изучаемого сигнала;
• существует или может быть определена точка синхронизации или временной
маркер для извлечения и выравнивания усредняемых фрагментов сигнала;
• шум является стационарным случайным процессом, который не коррелирован
с сигналом и имеет нулевое (или известное) среднее значение.
Фильтр скользящего среднего во временной области подходит в случаях,
когда:
• сигнал является статистически стационарным по крайней мере в пределах сколь-
зящего окна;
• помеха является случайным процессом с нулевым средним, который является
стационарным, по крайней мере в пределах длительности скользящего окна, и не
зависит от сигнала;
• сигнал представляет собой относительно медленное (низкочастотное) явление;
• необходима быстрая фильтрация в реальном масштабе времени.
Фильтрация в частотной области применяется в случаях, когда:
• сигнал является статистически стационарным;
• шум является стационарным случайным процессом, который статистически не
зависит от сигнала;
• спектр сигнала ограничен по полосе частот по сравнению со спектром помехи
(или наоборот);
• потеря информации в полосе частот, удаляемой фильтром, не оказывает серьёз-
ного воздействия на сигнал;
Применение-, устранение артефактов из ЭКГ
151
• не требуется фильтрация в реальном масштабе времени (для случая обработки
в частотной области с использованием преобразования Фурье).
Оптимальный фильтр Винера может быть разработан в случае, если:
• сигнал является статистически стационарным;
• шум является стационарным случайным процессом, который статистически не
зависит от сигнала;
• известны особые детали (или модели), относящиеся к АКФ или СПМ сигнала
и шума.
Адаптивная фильтрация необходима и возможна, когда:
• шум (или помеха) нестационарен и не обязательно является случайным процес-
сом;
• шум некоррелирован с сигналом;
• неизвестна информация о спектральных характеристиках сигнала и шума; кроме
того, эти характеристики могут существенно пересекаться;
• доступен второй источник или точка записи сигнала для получения опорного
сигнала, который сильно коррелирован с помехой, но некоррелирован с сигналом.
Следует отметить, что в ситуации, когда сигнал и шум являются стационарными,
даптивный фильтр действует как фильтр с фиксированными параметрами. Адап-
’ивный фильтр может также действовать как режекторный или гребенчатый фильтр
в случае, если помеха является периодической. Следует также отметить, что все
упомянутые фильтры применимы только в случаях, когда шум является аддитивным.
Для отделения друг от друга сигналов, которые комбинируются не аддитивно,
в каким-нибудь другим способом, в качестве предобработки могут использоваться
такие методы, как гомоморфная фильтрация (см. разд. 4.8).
3.8. Применение: устранение артефактов из ЭКГ
Задача. На рис. 3.56 (верхняя кривая) показан сигнал ЭКГ с комбинацией
ссейфа изолинии, высокочастотной помехи и сетевой наводки. Требуется разра-
жать фильтры для устранения этих артефактов.
Решение. Спектр мощности данного сигнала показан на самом верхнем графике
: .унка 3.57. Обратите внимание на относительно высокую долю спектральной
энергии, присутствующей в области нулевой частоты, от 100 до 500 Гц и на частотах,
’ветствующих сетевой наводке и её гармоникам, т. е. 60, 180, 300 и 420 Гц.
[хавная компонента сетевой наводки на частоте 60 Гц оказалась ниже, чем третья,
~ая, седьмая гармоники, что, возможно, связано с наличием в составе системы
ъёма сигнала режекторного фильтра, который оказался недостаточно эффективным.
Для фильтрации сигнала были последовательно использованы следующие филь-
ы: фильтр нижних частот Баттерворта, имеющий порядок N = 8 и fs = 70 Гц
разд. 3.4.1 и уравнение (3.61)), фильтр верхних частот Баттерворта, имеющий
-док N = 8 и fs = 2 Гц (см. разд. 3.4.2 и уравнение (3.64)) и гребенчатый фильтр
-алями на частотах 60, 180, 300 и 420 Гц (см. разд. 3.4.3 и уравнение (3.67)).
>е:-:тр сигнала показывает присутствие более высоких гармоник сетевой наводки
девятой и одиннадцатой) на частотах 540 и 660 Гц, которые вызваны наложением
к отношению к пикам, присутствующим на частотах 460 и 340 Гц соответственно.
'_-ако гребенчатый фильтр в данном примере не был рассчитан на устранение
компонент. Фильтры нижних и верхних частот были применены в частот-
области к преобразованию Фурье сигнала с использованием форм, заданных
152
Гл. 3. Фильтрация для устранения артефактов
Исходная ЭКГ
Мл Ал Ал Ал АлииАлАлАлАлАл1А*
После фильтра нижних частот
4 Ли Дл Д_л Ли Aj Ли д_л д д д Д Д
После фильтра верних частот
м Д-ч Дч Дч Дч Дч Дч Дч Да Дч Дч Да Д~
После гребенчатого фильтра
*ч Дч Дч Дч Дч Дч Дч Дч Да Дч Да Да Д
Рис. 3.56. Сигнал ЭКГ с комбинацией артефактов на разных стадиях фильтрации. Длитель-
ность сигнала составляет 10,7 с
50 100 150 200 250 300 350 400 450 500
Частота, Гц
Рис. 3.57. Спектр мощности сигналов ЭКГ, показанных на верхнем и нижнем графиках
рис. 3.56 (верхний и нижний графики). Частотная характеристика комбинации фильтров
нижних частот, верхних частот и гребенчатого фильтра (средний график). Частота среза
фильтра верхних частот составляет 2 Гц; часть частотной характеристики, относящаяся к
фильтру верхних частот на этом графике видна недостаточно хорошо
Применение-, адаптивное устранение ЭКГ матери для получения ЭКГ плода 153
уравнениями (3.61) и (3.64). Гребенчатый фильтр был реализован во временной
области с использованием команды MatLab filter и коэффициентов, задаваемых
равнением (3.67).
Результирующая частотная характеристика показана на центральном графике
рис. 3.57. Спектр сигнала ЭКГ после применения всех трёх фильтров показан на ниж-
нем графике рис. 3.57. Спектр фильтрованного сигнала не содержит существенных
составляющих на частотах выше 100 Гц и демонстрирует значительное ослабление
энергии на частоте 60 Гц.
Выходной сигнал после фильтра нижних частот, фильтра верхних частот и гре-
бенчатого фильтра показан на рис. 3.56. Обратите внимание, что дрейф изолинии
-рисутствует в выходном сигнале фильтра нижних частот, а сетевая наводка при-
сутствует в выходных сигналах фильтров нижних и верхних частот. Нижняя кривая
свободна от всех трёх типов помехи. Отметим, однако, что фильтр верхних частот
вызывает существенные искажения (отрицательные выбросы) волн Р и Т.
3.9. Применение: адаптивное устранение ЭКГ матери
для получения ЭКГ плода
Задача. Предложить адаптивный подавляющий фильтр для устранения сиг-
нала материнской ЭКГ из отведения ЭКГ, снятого с абдоминальной области
показанного на рис. 3.9, с целью получения ЭКГ плода. Сигнал ЭКГ с грудного
отведения матери может быть использован в качестве опорного.
Решение. Уидроу (Widrow) и др. [62] описывают фильтр АПШ с несколькими
спорными сигналами для устранения материнской ЭКГ с целью получения ЭКГ
плода. Комбинированная ЭКГ была получена с единственного абдоминального от-
ведения, в то время как материнская ЭКГ снималась с использованием четырёх
эудных отведений. Была разработана модель, которая позволяла учесть не только
- ногочисленные источники помехи, но также и компоненты требуемого сигнала,
присутствующие на опорных входах, и далее рассматривать присутствие некорре-
лированных шумовых компонент в опорных сигналах. Следует отметить, что мате-
ринский сердечный вектор проецируется на оси различных отведений ЭКГ разными
способами. Следовательно, характеристики материнской ЭКГ в абдоминальном отве-
дении будут отличаться от характеристик, полученных для грудных сигналов ЭКГ,
используемых в качестве опорных входов.
Каждый из каналов фильтра, использованного Уидроу и др. [62], имел 32 весо-
вых коэффициента и задержку 129 мс. Сигналы были предварительно фильтрованы
Рис. 3.58. Результат адаптивного устранения материнской ЭКГ из абдоминального отведения
?КГ. показанной на рис. 3.9. Выделенные QRS-комплексы соответствуют ЭКГ плода. Воспро-
-зьодится с разрешения В. Widrow, J. R. Glover, Jr., J.M. McCool, J. Kaumtz, C.S. Williams,
Й H. Hearn, J. R. Zeidler, E. Dong, Jr., R. C. Goodlm, Adaptive noise canceling: Principles and
applications, Proceedings of the IEEE, 63(12): 1692-1716, 1975. ©IEEE
154 Гл. 3. Фильтрация для устранения артефактов
в полосе частот от 3 до 35 Гц, и использовалась частота дискретизации 256 Гц.
Оптимальный фильтр Винера (см. разд. 3.5) включал в себя передаточные функции
и векторы взаимных спектров между входным источником и каждым из опорных
входов. Было рассмотрено также дальнейшее расширение этого метода устранения
помех для более общего случая — наличия нескольких источников и нескольких
опорных входов.
Результат устранения материнской ЭКГ из абдоминального отведения ЭКГ, приве-
дённого на рис. 3.9, показан на рис. 3.58. Сравнение этих двух рисунков показывает,
что на выходе фильтра достигнуто существенное выделение ЭКГ плода и одновремен-
ное подавление ЭКГ матери. Описание подробностей, относящихся к этому методу,
см. в работе Widrow и др. [62], а также в работе Ferrara и Widrow [91].
3.10. Применение: адаптивное устранение
миографической помехи
из сигнала вибрации коленной чашечки
Задача. Исследовать применимость фильтров адаптивной компенсации по-
мех для устранения миографической помехи, вызванной прямой мышцей бедра,
в сигнале ВАГ, записанном с коленной чашечки.
Решение. Рангайян (Rangayyan) и др. [92] провели исследование влияния устра-
нения миографических помех на моделирование и классификацию сигналов ВАГ
и дальнейшую классификацию фильтрованных сигналов на нормальные и анор-
мальные. Были исследованы два метода: метод МНК (см. разд. 3.6.2) и алгоритм
РНК (см. разд. 3.6.3). В результате был выбран алгоритм РНК, так как была
продемонстрирована способность более эффективно отслеживать нестационарности
во входном и опорном сигналах.
На рис. 3.59 показаны графики сигнала ВАГ пациента, страдающего повре-
ждением внутренней поверхности коленной чашечки (chondromalacia patella) сте-
пени II, (кривая а) и одновременно записанного сигнала миографической помехи
(обозначенного как МП, кривая б). На рис. 3.59 также показан результат адап-
тивной фильтрации сигнала ВАГ с использованием канала миографической помехи
в качестве опорного входа: кривая в показывает результат фильтрации по методу
МНК, а кривая г показывает результат фильтрации с использованием алгорит-
ма РНК. Использовался однокаскадный фильтр МНК с изменяемым шагом р(п)
в соответствии с уравнением (3.120), с величинами параметров М = 7, р = 0,05
и а = 0,98. В фильтре, основанном на алгоритме РНК, использовались параметры
М = 7 и А = 0,98.
Так же как и в приведённом ранее на рис. 3.52 примере, можно видеть, что
миографическая помеха хорошо устраняется фильтром, основанным на алгоритме
РНК; в то же время, фильтр МНК работает неудовлетворительно в связи с его
ограниченной способностью отслеживать нестационарности в шуме. Спектрограммы
исходного сигнала, опорного сигнала и сигнала, фильтрованного с использованием
алгоритма РНК, показаны на рисунках 3.60, 3.61 и 3.62 соответственно. (Чтобы
лучше показать незначительные различия в спектрограммах, использована лога-
рифмическая шкала.) Отчётливо видно, что частотные компоненты миографической
помехи хорошо подавляются фильтром на основе алгоритма РНК.
В исследовании Рангайяна и др. [92] (см. гл. 8) были адаптивно сегментированы
и промоделированы исходные и фильтрованные сигналы ВАГ 53 пациентов. При этом
наблюдалось, что для исходных и фильтрованных сигналов ВАГ границы сегментов
Применение', адаптивное устранение миографической помехи из сигнала ...
155
03 а & § 100 ; о а
< CQ О U I -100 5 -200 1 1 1 I I I । 1
О ) 0,5 1 1,5 2 2,5 3 3,5 4
100
£
-100 -
Время, с
Рис. 3.59. Сверху вниз: сигнал ВАГ пациента, страдающего повреждением внутренней по-
верхности коленной чашечки степени II (а); миографическая помеха (МП) (б); результат
2 чьтрации с использованием фильтра МНК (в); результат фильтрации с использованием
алгоритма РНК (г). Аппаратура для записи сигнала показана на рис. 3.10
3.60. Спектрограмма исходного сигнала ВАГ, показанного на рис. 3.59 а. Использовано
- Хеннинга длительностью 256 отсчётов (128 мс); перекрытие между смежными сегмента-
ми составляет 32 отсчёта (16 мс)
156
Гл. 3. Фильтрация для устранения артефактов
Рис. 3.61. Спектрограмма сигнала миографической помехи, показанного на рис. 3.59 6. Ис-
пользовано окно Хеннинга длительностью 256 отсчётов (128 мс); перекрытие между смежными
сегментами составляет 32 отсчёта (16 мс)
Рис. 3.62. Спектрограмма сигнала ВАГ, показанного на рис. 3.59 а, после фильтрации с
использованием алгоритма РНК. Использовано окно Хеннинга длительностью 256 отсчётов
(128 мс); перекрытие между смежными сегментами составляет 32 отсчёта (16 мс)
оказались существенно различными. Ожидалось, что параметры, полученные из
фильтрованных сигналов ВАГ, будут обладать более высокой дискриминирующей
способностью для классификации образов, по сравнению с теми же параметрами,
полученными из нефильтрованных или исходных сигналов ВАГ. Однако экспери-
Контрольные вопросы и задания
157
менты по классификации показали противоположное: точность классификации для
фильтрованных сигналов оказалась ниже почти на 10%. Это было вызвано тем,
что после устранения доминирующей низкочастотной помехи мышечных сокраще-
ний представляющие клинический интерес преходящие сигналы ВАГ недостаточно
хорошо моделировались с использованием методов, основанных на предсказании.
Был сделан вывод о том, что использованная в данном случае процедура адаптивной
фильтрации не является подходящим методом предобработки перед моделированием
сигнала для распознавания образов. Однако было отмечено, что перед спектраль-
ным анализом сигнала ВАГ устранение миографических помех может оказаться
полезным.
3.11. Замечания
Мы исследовали проблемы, вызываемые артефактами, шумами и помехами раз-
личных видов при съёме и анализе нескольких биомедицинских сигналов. Были по
этдельности идентифицированы и проанализированы случайный шум, структуриро-
ванная помеха, физиологическая помеха. Основное внимание было уделено различ-
ным характеристикам всевозможных видов шумов, таким как частотное содержание
и нестационарность. Для нескольких применений были разработаны в частотной
и временной областях фильтры с постоянными параметрами, оптимальные фильтры
и адаптивные фильтры. Были сформулированы соображения, с целью помочь в вы-
боре подходящего фильтра для различных видов артефактов. Более совершенные
методы для адаптивного устранения помех, основанные на вейвлет-преобразовании
время-частотной декомпозиции, в этой главе не рассматривались, однако они
описаны в работе Krishnan и Rangayyan [93] для фильтрации сигналов ВАГ. Другая
категория фильтров, которые не были рассмотрены в этой главе, это морфологи-
ческие фильтры [94, 95], которые включают нелинейные операции, основанные на
статистиках, и при определённых условиях могут быть сформулированы так, что
будут включать также операции линейной фильтрации.
Очень важно отметить, что каждую практическую проблему необходимо тща-
тельно проанализировать, чтобы определить тип и характеристики присутствующих
артефактов, природу сигнала, его взаимосвязи с артефактами и взаимодействия
с ними, а также влияние рассматриваемого фильтра на требуемый сигнал или
характеристики, вычисляемые из результата фильтрации. Для различных последова-
тельных шагов анализа сигнала могут потребоваться различные цифровые фильтры.
Маловероятно, что какой-нибудь один-единственный вид фильтра может позволить
решить все проблемы и удовлетворить всем требованиям при широком разнообразии
практических ситуаций и применений. Независимо от квалификации исследователя
в области фильтрации необходимо помнить, что профилактика лучше, чем лечение'.
'ольшинство фильтров, удаляя артефакты, могут вносить другие. Следует в самом
начале попытаться получить настолько свободный от артефактов сигнал, насколько
это возможно.
3.12. Контрольные вопросы и задания
(Замечание. Некоторые вопросы связаны с фундаментальными понятиями теории
сигналов и систем и могут потребовать базовой подготовки с использованием других
источников, таких как Lathi [1] или Oppenheim и др. [2]. Такого рода вопросы
включены для напоминания о соответствующих теоретических концепциях.)
158 Гл. 3. Фильтрация для устранения артефактов
1. Что является потенциальными источниками инструментальных и физиологиче-
ских артефактов при записи сигнала ФКГ? Предложите неэлектронные методы
для предотвращения или подавления этих типов артефактов.
2. Перечислите четыре потенциальных источника инструментальных и физиологи-
ческих артефактов при записи сигнала ЭКГ. Опишите методы для предотвраще-
ния или устранения каждого из артефактов. Назовите возможные нежелательные
воздействия предложенных вами процедур на сигнал ЭКГ.
3. Назовите по меньшей мере три потенциальных источника физиологических
артефактов при записи сигнала ЭЭГ.
4. При записи ЭЭГ в клинической лаборатории оказалось, что некоторые каналы
содержат ЭКГ в качестве артефакта. Смогут ли фильтры нижних частот или
полосовые фильтры помочь в устранении этого артефакта? Почему (нет)? Пред-
ложите схему для устранения артефакта.
5. Биомедицинский сигнал профильтрован в полосе 0-150 Гц. Предположите, что
фильтр идеальный, и опишите, каким должен оказаться характер распределения
спектральной энергии по полосе частот сигнала.
а) Какую следует выбрать минимальную частоту дискретизации сигнала, чтобы
избежать ошибок, вызванных наложением?
б) Исследователь выполнил дискретизацию сигнала с частотой 500 Гц. Нари-
суйте схематическое представление спектра дискретизованного сигнала.
в) Другой исследователь выполнил дискретизацию сигнала с частотой 200 Гц.
Нарисуйте схематическое представление спектра дискретизованного сигнала.
Объясните разницу между случаем (б) и случаем (в).
6. Объясните разницу между средним по ансамблю и средним по времени. Назо-
вите какие-либо применения средних первого порядка и второго порядка обоих
типов для анализа сигнала ЭКГ.
7. Объясните, как можно использовать среднее по ансамблю и среднее по времени
для обработки сигнала ЭКГ. Назовите какие-либо применения средних первого
и второго порядков обоих типов для анализа ЭКГ.
8. Объясните, как вы примените синхронное усреднение для устранения шума
из
а) сигналов ЭКГ,
б) потенциалов, связанных с событиями (вызванных потенциалов),
в) сигналов сердечных звуков (ФКГ),
г) сигналов ЭМГ.
В каждом случае объясните
О как вы получите информацию, необходимую для синхронизации эпох сигна-
лов или эпизодов;
И) источники артефактов и как вы будете справляться с ними;
ii i) ограничения и практические трудности и
iv ) возможности для успешного применения данного метода.
9. Нарисуйте типичный цикл ЭКГ, на котором показаны наиболее важные компо-
ненты кривой. Как изменится кривая ЭКГ при прохождении через
а) фильтр нижних частот с частотой среза 40 Гц?
б) фильтр верхних частот с частотой среза 5 Гц?
Нарисуйте схематическое представление ожидаемых выходных сигналов и объ-
ясните их характеристики.
Контрольные вопросы и задания
159
10. Запишите ^-преобразование сигнала, отсчёты которого заданы следующей после-
довательностью {4,3,2,1,0, —1,0,1,0}?
(Во всех массивах отсчётов сигнала, заданных в данном разделе, первый отсчёт
соответствует нулевому моменту времени, если не указано противоположное.)
11. Для обработки сигнала с частотой дискретизации 2000 Гц используется цифро-
вой фильтр.
а) Нарисуйте единичную окружность в комплексной z-плоскости и обозначьте
частоты, соответствующие точкам z = (1 + j0), z = (0 + jl), z = (—1 + jO),
z = (0 — jl), а также снова точку z = (1 + j0) при приближении к ней в на-
правлении против часовой стрелки.
б) Какие частоты будут соответствовать тем же самым точкам при частоте
дискретизации 500 Гц?
12. Какой будет передаточная функция инвариантной к сдвигу линейной си-
стемы, импульсная характеристика которой задаётся последовательностью
{2,1,0,0,-1,0,1,0} для п = 0,1,2, ...,7?
13. Задана импульсная характеристика цифрового фильтра: {1,—2,1}. Каким будет
отклик фильтра на единичный ступенчатый сигнал?
14. Задана импульсная характеристика цифрового фильтра: {3, —2,2}. Каким будет
отклик фильтра на входную последовательность {6,4,2,1}?
15. Передаточная функция фильтра H(z) = z~x — 3z-2 + 2г-4 — z~6. Как будет вы-
глядеть разностное уравнение, связывающее выход со входом? Какой будет
импульсная характеристика этого фильтра?
16. Импульсная характеристика фильтра задаётся последовательностью величин:
{3,2,1,0,—1,0,0,1}. Какой будет передаточная функция?
17. Импульсная характеристика цифрового фильтра задана последовательностью
отсчётов: {3,1, —1,1}.
а) Каким будет отклик этого фильтра на входной сигнал, заданный отсчётами
{4, 4, 2, 1}?
б) Является ли полученный отклик линейной свёрткой или циклической свёрт-
кой от входного сигнала и импульсной характеристики?
в) Каким будет отклик с использованием типа свёртки, противоположного тому,
который вы назвали в качестве ответа на предыдущий вопрос?
г) Как бы вы выполнили свёртку двух приведённых выше сигналов с исполь-
зованием БПФ? Какой вид свёртки будет давать эта процедура? Как бы вы
получили другой тип свёртки для сигналов, приведённых в этом задании, при
использовании процедуры, основанной на БПФ?
18. Ожидается, что биомедицинский сигнал ограничен в полосе частот 100 Гц,
при этом существенные исследуемые компоненты содержатся вплоть до 80 Гц.
Однако этот сигнал искажён периодической помехой с базовой частотой 60 Гц
и существенными третьей и пятой гармониками. Исследователь выполнил дис-
кретизацию этого сигнала с частотой 200 Гц без предварительной фильтрации
сигнала.
Нарисуйте схематические представление спектра сигнала и покажите компонен-
ты, связанные с артефактами. Точно разметьте ось частот в герцах.
Какой тип фильтра вы бы рекомендовали для устранения данного артефакта?
19. Биомедицинский сигнал был дискретизован с частотой 500 Гц, и выяснилось,
что он содержит существенную долю наводки с частотой 60 Гц.
а) Разработайте режекторный фильтр с двумя нулями для устранения этой
наводки.
160
Гл. 3. Фильтрация для устранения артефактов
б) Каким будет воздействие данного фильтра на сигнал, дискретизованный
с частотой 100 Гц?
20. Два фильтра с передаточными функциями H\(z) = (1/3)(1 +г-1 + z-2) и
Hz(z) = 1 — z~[ соединены каскадно.
а) Какой будет передаточная функция всей системы?
б) Какой будет импульсная характеристика?
в) Каким будет усиление на нулевой частоте и на частоте свёртывания
(т.е. Л/2)?
21. Фильтр имеет передаточную функцию H(z) = (1 + 2г-1 + z-2)/(l — z~2).
а) Напишите разностное уравнение, связывающее выход со входом.
б) Нарисуйте диаграмму реализации этого фильтра.
в) Нарисуйте диаграмму нулей и полюсов.
22. Цифровой фильтр имеет нули при 0,5±J0.5 и полюса при —0,6± j0,3.
а) Получите выражение для передаточной функции этого фильтра.
б) Запишите разностное уравнение во временной области, связывающее выход
со входом для этого фильтра.
в) Если данный фильтр используется при частоте дискретизации 1000 Гц, каки-
ми будут частоты, на которых коэффициент усиления фильтра будет макси-
мальным и минимальным?
23. Два фильтра с передаточными функциями H\(z) = (1 — z~2)/(2T) и Hz(z) =
= 1/(1 — z~[/2) соединены каскадно.
а) Какой будет передаточная функция всей системы?
б) Нарисуйте диаграмму нулей и полюсов.
в) Запишите разностное уравнение, связывающее выход с входом.
г) Нарисуйте диаграмму реализации этого фильтра.
д) Просчитайте первые шесть величин импульсной характеристики этого филь-
тра.
е) Данный фильтр используется для обработки сигнала, дискретизованного
с частотой 1000 Гц. Каким будет коэффициент усиления на частотах 0, 250
и 500 Гц?
24. Фильтр описывается разностным уравнением у(п) = у(п—1) + (1/4)#(п) —
-(1/4Нп-4).
а) Какой будет передаточная функция?
б) Нарисуйте диаграмму реализации этого фильтра.
в) Нарисуйте диаграмму нулей и полюсов.
25. При каких условиях синхронное накопление не будет уменьшать шум?
26. Сигнал, дискретизованный с частотой 100 Гц, имеет отсчёты {0,10,0, —5,0}
в мВ. Сигнал проходит через фильтр, передаточная функция которого равна
H(z) = (1 - z~')/T.
Какой будет выходная последовательность? Нарисуйте выход фильтра и точно
разметьте оси амплитуды и времени в соответствующих единицах.
27. Сигнал, дискретизованный с частотой 100 Гц, имеет отсчёты {0,10,0, —5,0}
в мВ. Предполагалось, что этот сигнал должен быть обработан дифференциа-
тором, задаваемым разностным уравнением у(п) = [х(п) — х(п — 1)]/Т и затем
возведён в квадрат. По ошибке операция возведения в квадрат была выполнена
до дифференцирования. Какой будет выходная последовательность? Нарисуйте
Упражнения и лабораторные работы
161
выход для обоих случаев и точно разметьте оси амплитуды и времени с исполь-
зованием соответствующих единиц.
Объясните разницу между этими двумя результатами.
28. Некоторая методика анализа сигнала требует использования нескольких опе-
раций в следующем порядке: а) дифференцирование, б) возведение в квадрат,
в) низкочастотная фильтрация с использованием фильтра Н(ш). Рассматривая
обобщённый сигнал x(t) в качестве входа, напишите выражения во временной
области и в частотной области для выхода на каждой из стадий.
Будет ли изменение порядка операций изменять окончательный результат? Поче-
му (нет)?
29. Сигнал, дискретизованный с частотой 100 Гц, имеет отсчёты {0,10,0, —5,0}
в мВ. Сигнал обрабатывается дифференциатором с использованием разностного
уравнения у(п) = [х(п)—х(п — 1)]/Т, и затем фильтруется с помощью четырёх-
точечного фильтра скользящего среднего.
а) Выведите выражения для передаточной функции и частотной характеристики
каждого из фильтров и системы в целом.
б) Выведите выражения для величины отсчётов сигнала на каждой стадии.
в) Имеет ли значение, какой фильтр используется первым? Почему (нет)?
г) Нарисуйте выходной сигнал и точно разметьте оси амплитуды и времени
с использованием соответствующих единиц.
30. Объясните разницу между средним по ансамблю и средним по времени.
Объясните возможное применение средних первого и второго порядков обоих ти-
пов для сигналов сердечного звука (ФКГ). Объясните, как вы получите опорную
точку для синхронизации.
31. Является ли сигнал сердечного звука (ФКГ) стационарным или нет? Дайте ваш
ответ в контексте рассмотрения полного сердечного цикла и объясните причины.
Если вы решаете, что сигнал ФКГ является нестационарным, то покажите
части (сегменты), которые, возможно, могут быть стационарными, рассматривая
возможность появления шумов как в систоле, так и в диастоле.
32. Сигнал x(t) передаётся через некоторый канал. Принятый сигнал y(t) пред-
ставляет собой масштабированый, сдвинутый и зашумлённый вариант z(t),
задаваемый как y(t) = ax(t — t^) + где a — коэффициент масштабирования,
to — временная задержка и rj(t) — шум. Предположим, что шум имеет нулевое
среднее и статистически не зависящий от сигнала и что оба процесса являются
стационарными.
Получите выражение для СПМ y(t) как зависимость СПМ от х и от гр
33. Сигнал х(п), наблюдаемый в некотором эксперименте, моделируется как за-
шумлённая версия требуемого сигнала d(n) в виде х(п) = d(n) + т/(п). Шумовой
процесс т] является случайным процессом с нулевым средним, единичной дис-
персией и некоррелированными отсчётами («белый» шум, с АКФ ^(т) = 5(т)),
он статистически не зависит от процесса сигнала d. АКФ фа(т) от сигнала d
задаётся последовательностью {1,0, 0,6, 0,2} для т = 0,1,2 соответственно.
Запишите уравнение Винера-Хопфа и найдите коэффициенты оптимального
фильтра Винера.
3.13. Упражнения и лабораторные работы
Замечание. Необходимые для выполнения упражнений файлы с данными доступ-
ны на сайте ftp://ftp.ieee.org/uploads/press/rangayyan/.
11 Р. Рангайян
162 Гл. 3. Фильтрация для устранения артефактов
1. Файл ecg2x60.dat содержит сигнал ЭКГ, дискретизованный с частотой 200 Гц,
с существенным содержанием сетевой наводки 60 Гц (см. также файл ecg2x60.m).
а) Разработайте режекторный фильтр с двумя нулями и реализуйте его с помо-
щью MATLAB.
б) Добавьте 2 полюса на тех же частотах, на которых имеются нули, но
с радиусом меньше единичного. Исследуйте воздействие полюсов на выходной
сигнал фильтра, изменяя радиус от 0,8 до 0,99.
2. В файле ecg_hfn.dat содержится зашумлённый сигнал ЭКГ (см. также файл
ecg_hfn.m). Частота отсчетов этого сигнала составляет 1000 Гц.
Разработайте в среде MATLAB программу, выполняющую синхронное усредне-
ние, как описано в разд. 3.3.1. Выберите из сигнала какой-нибудь QRS-комплекс
в качестве образца и используйте подходящий порог взаимной корреляционной
функции (выражение (3.18)) для обнаружения комплексов. Постройте график
полученного усреднённого QRS-комплекса. Убедитесь, что усреднённый сигнал
включает один полный кардиоцикл. Постройте для сравнения график какого-
либо кардиоцикла зашумлённого сигнала.
Выберите другой QRS-комплекс в качестве образца и повторите эксперимент.
Наблюдайте результат в случаях, когда порог взаимной корреляционной функции
невысок (например, 0,4) и достаточно высок (например, 0,95) и прокомментируй-
те их.
3. Профильтруйте зашумлённый сигнал ЭКГ из файла ecg_hfn.dat (см. также файл
ecg_hfn.m; fs = 1000 Гц), используя четыре различных фильтра нижних частот
Баттерворта (по отдельности), реализованные с помощью MATLAB и имеющие
следующие характеристики:
а) порядок 2, частота среза 10 Гц;
б) порядок 8, частота среза 20 Гц;
в) порядок 8, частота среза 40 Гц;
г) порядок 8, частота среза 70 Гц.
Используйте команды MATLAB «help butter» и «help filter» для выяснения
деталей, касающихся фильтров Баттерворта.
Сравните результаты, полученные с использованием каждого из четырёх филь-
тров Баттерворта (по отдельности) с результатами, полученными методом син-
хронного накопления и прокомментируйте улучшения и искажения в выходном
сигнале. Обсудите специфические особенности, наблюдаемые на графиках сиг-
налов.
4. В файле ecg_lfn.dat содержится сигнал ЭКГ с сильным дрейфом нулевой линии
(с низкочастотной помехой) (см. также файл ecgjfn.m). Профильтруйте этот
сигнал с помощью описанных в разд. 3.3.3 фильтров, основанных на произ-
водной, и исследуйте результаты. Исследуйте воздействие на сигнал изменения
положения полюса для фильтра, заданного выражением (3.47).
5. Профильтруйте сигнал ЭКГ из файла ecg_lfn.dat., используя фильтры верх-
них частот Баттерворта со значениями порядка 2-8 и частоты среза 0,5-5 Гц
(см. также файл ecgjfn.m). Исследуйте эффективность этих фильтров с точки
зрения удаления дрейфа нулевой линии и воздействия на форму волн самой ЭКГ.
Определите наиболее приемлемый компромиссный вариант.
6. Разработайте фильтр Винера для устранения артефактов из сигнала ЭКГ, содер-
жащегося в файле ecg_hfn.dat (см. также файл ecg_hfn.m). Уравнение требуемого
фильтра задано выражением (3.101). Необходимая модель СПМ может быть
получена следующим образом.
Упражнения и лабораторные работы
163
Создайте кусочно-линейную модель сигнала требуемой формы путем конкате-
нации линейных сегментов для получения волн Р, QRS и Т с амплитудами,
длительностями и интервалами примерно такими же, как и в заданном зашум-
лённом сигнале. Вычислите СПМ для модели сигнала.
Выберите несколько сегментов из заданного сигнала ЭКГ, которые предположи-
тельно являются изоэлектрическими (например, интервалы Т-Р). Вычислите их
СПМ и получите усреднённые по всем сегментам оценки спектра. Выбранные
зашумлённые сегменты должны иметь нулевое среднее (либо из них необходимо
вычесть среднее значение).
Сравните результаты использования фильтра Винера с результатами, получен-
ными при помощи синхронного усреднения и низкочастотной фильтрации.
Глава 4
ОБНАРУЖЕНИЕ СОБЫТИЙ
Биомедицинские сигналы несут в себе признаки физиологических событий. Фраг-
мент сигнала, связанный с каким-либо изучаемым событием, часто называют эпохой
(epoch). Анализ сигнала для мониторного наблюдения или диагностики требует иден-
тификации эпох и исследования соответствующих событий. После того как было иден-
тифицировано какое-нибудь событие, может осуществляться сегментация и анализ
соответствующей волны сигнала с использованием таких характеристик, как амплиту-
туда, форма волны (морфологии), длительность, интервалы между событиями, распре-
деление энергии, частотное содержание и т. д. Следовательно, обнаружение событий
является одним из наиболее важных шагов в анализе биомедицинских сигналов.
4.1. Постановка задачи
Общая постановка задачи, рассматриваемой в данной главе, может быть сформу-
лирована следующим образом.
Идентифицировать дискретные эпохи рассматриваемого биомедицинского
сигнала и соотнести их с событиями в соответствующих физиологических
процессах.
В следующем разделе мы сначала рассмотрим несколько примеров эпох различ-
ных биомедицинских сигналов с целью анализа природы соответствующих физиоло-
гических событий. Понимание этого окажется полезным в последующей разработке
методов обработки сигнала для обнаружения нарушений и анализа эпох.
4.2. Иллюстрация задачи на примерах
В следующих разделах приводятся иллюстрации нескольких типов событий в био-
медицинских сигналах. Целью этих иллюстраций является достижение понимания
природы событий в сигнале. Хорошее понимание событий в сигнале поможет в раз-
работке наиболее подходящих методов обработки сигнала для обнаружения этих
событий.
4.2.1. Волны Р на QRS и Т на ЭКГ. Как мы уже отмечали в разд. 1.2.4, сер-
дечный цикл отражается в повторяющемся сигнале ЭКГ в виде периода, состоящего
из последовательности волн (зубцов), обозначаемых Р, QRS и Т. Если мы будем
рассматривать сердечный цикл как последовательность событий, мы можем выделить
следующие эпохи в сигнале ЭКГ.
Иллюстрация задачи на примерах
165
• Р-зубец. Сокращение предсердий инициируется импульсом из СА-узла. В от-
личие от желудочков, предсердия не имеют специальных проводящих нервов,
так что сокращение мышц предсердий происходит в виде медленного сжатия,
при этом импульсы возбуждения проводятся самими мышечными клетками.
Поэтому Р-зубец представляет собой медленную волну с длительностью при-
мерно 80 мс. Амплитуда Р-зубца намного меньше (примерно 0,1-0,2 мВ), чем
амплитуда QRS-комплекса, так как предсердия меньше, чем желудочки. Р-зубец
представляет собой эпоху, соответствующую событию сокращения предсердий.
(Расслабление предсердий не даёт какой-либо различимой волны в ЭКГ, посколь-
ку эта волна перекрывается следующим далее QRS-комплексом.)
• PQ -сегмент. АВ-узел обеспечивает задержку, необходимую для того, чтобы
перед тем как начнётся сокращение желудочков, успело завершиться сокращение
предсердий и перемещение крови к желудочкам. Результирующий PQ-сегмент
длительностью примерно 80 мс является, таким образом, «не событием»; однако
он важен для распознавания базовой линии, поскольку этот интервал почти
всегда является изоэлектрическим.
• QRS -комплекс. Специализированная система волокон Пуркинье в быстрой по-
следовательности стимулирует сокращение мышц желудочков, начиная с вер-
хушки сердца по направлению вверх. Почти одновременное сокращение всей
мускулатуры желудочков приводит к резкому и высокому QRS-комплексу, имею-
щему амплитуду примерно 1 мВ и длительность 80-100 мс. Событие сокращения
желудочков представлено в кардиоцикле эпохой QRS-комплекса.
• ST -сегмент. В норме плоский (изоэлектрический) ST-сегмент связан с плато
в потенциале действия клеток мышц левого желудочка (см. рис. 1.3). Длитель-
ность этого плато в потенциале действия составляет приблизительно 200 мс;
длительность ST-сегмента обычно бывает 100-120 мс. Так же как и для случая
PQ-сегмента, ST-сегмент может быть назван «не событием». Однако ишемия
или инфаркт миокарда могут изменить потенциал действия части мускулатуры
левого желудочка и вызвать депрессию (снижение) ST-сегмента (см. рис. 1.28)
или его элевацию (повышение). В случаях, когда требуется измерить положение
ST-сегмента относительно изоэлектрической линии, в качестве опорной точки
обычно используется PQ-сегмент.
• Т-зубец. Т-зубец проявляется в нормальной ЭКГ как отдельная волна, отде-
лённая от QRS-комплекса изоэлектрическим ST-сегментом. Однако он относится
к последней фазе потенциала действия клеток мышц желудочков, когда потенци-
ал возвращается с плато, соответствующего состоянию деполяризации, к потен-
циалу покоя через процесс реполяризации [23]. Обычно говорят, что Т-зубец
соответствует расслаблению, релаксации желудочков. Хотя по существу это
верно, необходимо отметить, что релаксация через реполяризацию является всего
лишь конечной фазой сокращения: сокращение и релаксация проявляются в виде
подъёма и спуска одного и того же потенциала действия. По этой причине можно
сказать, что Т-зубец не соответствует какому-либо специфическому событию.
Т-зубец является в каком-то смысле трудноуловимым элементом ЭКГ, поскольку
он низок по амплитуде (0,1-0,3 мВ) и представляет собой медленную волну, про-
стирающуюся по длительности до 120-160 мс. Т-зубец практически отсутствует
во многих записях ЭКГ. Вместо того чтобы пытаться обнаружить почти не раз-
личимый Т-зубец, можно просто выделить сегмент ЭКГ на расстоянии 80-360 мс
от начала QRS-комплекса и рассматривать его как ST-сегмент и Т-зубец.
4.2.2. Первый и второй тоны сердца. Мы видели в разд. 1.2.8, что обычный
сердечный цикл проявляется в сигнале ФКГ в виде последовательности первого
166
Гл. 4. Обнаружение событий
и второго тонов сердца —S1 и S2. При наличии сердечно-сосудистых заболеваний
или дефектов сердца, могут появляться шумы и дополнительные звуки. Сейчас мы
сконцентрируем внимание только на тонах SI, S2 и шумах.
• Первый тон сердца SI. S1 отражает последовательность событий, связанных
с сокращением желудочков — закрытие атриовентикулярных клапанов, сокраще-
ние при постоянном объёме, открытие полулунных клапанов и выталкивание кро-
ви из желудочков [23]. Эпоха S1 непосредственно связана с событием сокращения
желудочков.
• Второй тон сердца S2. S2 связан с окончанием сокращения желудочков, со-
провождающимся закрытием аортального и легочного клапанов. Так же как
и в случае с Т-зубцом, окончание сокращения желудочков не может само по себе
рассматриваться как специфическое событие. Однако, в случае тона S2, мы всё
же имеем дело со специфическими событиями закрытия аортального и легочного
клапанов, связанных с тоном S2, что проявляется соответствующими компонен-
тами А2 и Р2. К сожалению, раздельная идентификация А2 и Р2 затруднена
тем, что в нормальном сигнале они обычно перекрываются. Если компоненты А2
и Р2 разделены во времени из-за какого-либо сердечно-сосудистого заболевания,
то для идентификации каждой из этих компонент по отдельности требуется
запись ФКГ из нескольких позиций, так как они могут иметь обратный порядок
(см. Tavel [41] и Rushmer [23]).
• Шумы. Шумы, если они присутствуют, могут рассматриваться как специфиче-
ские события. Например, систолический шум при стенозе аорты связан с собы-
тием турбулентного выталкивания крови из левого желудочка через не полно-
стью открытый аортальный клапан. Диастолический шум, в случае аортальной
недостаточности, соответствует событию обратного тока крови из аорты в левый
желудочек через неплотно закрытый аортальный клапан.
4.2.3. Дикротическая выемка в каротидном пульсе. Как мы видели в
разд. 1.2.9 и 1.2.10, закрытие аортального клапана вызывает внезапный спад дав-
ления в аорте, наблюдающийся на нисходящем склоне в конце систолы желудочков.
Дикротическая выемка, вписанная в волну каротидного пульса, представляет собой
задержанное и направленное вверх проявление впадины в волне давления аорты.
Дикротическая выемка представляет собой специфический признак на относительно
невыразительном сигнале каротидного пульса и может рассматриваться как эпоха,
относящаяся к событию закрытия аортального клапана (хотя и с задержкой во
времени); кроме того, то же самое событие означает окончание систолы желудочков
и выброса крови, а также —начало S2 и диастолы.
4.2.4. Ритмы, волны и преходящие события на ЭЭГ. В разд. 1.2.5 мы уже
рассматривали некоторые основные характеристики ЭЭГ и отметили природу ритмов
а, (3, 6 и 0. Теперь мы рассмотрим несколько видов преходящих событий, которые
могут появляться в сигналах ЭЭГ [32-34, 96-98]. На рис. 4.1 показаны перечислен-
ные ниже типичные проявления активности [32].
• К-комплекс. Это преходящая медленная волна, содержащая иногда острые ком-
поненты, за которой часто следуют волны с частотой 14 Гц. Эта волна имеет
амплитуду примерно 200 мкВ и возникает спонтанно или в ответ на внезапный
стимул во время сна.
• A-волны. Они представляют собой монофазные положительные редкие волны
с амплитудой менее 50 мкВ, которые проявляются в затылочных отведениях. Они
вызваны движением глаз и связаны с визуальным восприятием.
Иллюстрация задачи на примерах
167
а
б
в
г
д
г., hvT^OAA^WVVV^1
F
Рис. 4.1. Сверху вниз: К-комплекс (а); A-волна (б), //-ритм (в); спайк (а); острая волна (б);
комплекс спайк-волна (е); веретено состояния сна вертекс-потенциал или V-волна (з);
разряды, состоящие из нескольких спайков (и). Горизонтальная линия снизу показывает
длительность 1 с; вертикальные линии справа показывают амплитуды по 100 мкВ Воспроиз-
водится с разрешения R. Cooper, J.W. Osselton, and J. С. Shaw, EEG Technology. 3rd Edition,
1980. ©Butterworth Hememann Publishers, a division of Reed Educational & Professional
Publishing Ltd., Oxford, UK
• дх-ритм. Этот ритм проявляется в виде наблюдающихся в центральных отведе-
ниях групп волн в диапазоне частот 7-11 Гц, имеющих форму арки или гребня,
//-ритм обычно имеет амплитуду менее 50 мкВ и блокируется либо ослабляется
движениями с противоположной стороны, мыслью о движении, готовностью
к движению или осязательной стимуляцией.
• Спайк. Спайк определяется как преходящая волна с острым пиком, имеющая
длительность в диапазоне 20-30 мс.
168
Гл. 4. Обнаружение событий
• Острая волна. Острая волна — это также преходящая волна с острым пиком, но
с большей, чем для спайка, длительностью в диапазоне 70-200 мс.
• Ритм спайк-волна. Ритмом спайк-волна называют последовательность медлен-
ных отрицательных волн в частотном диапазоне от 2,5-3,5 Гц, имеющих спайки,
связанные с каждой волной, Возможно наличие нескольких спайков с амплитудой
до 1000 мкВ в каждом комплексе. В этом случае ритм называется комплексом
«полиспайк-волна».
• Веретено состояния сна. Это эпизодический ритм с частотой примерно 14 Гц
и амплитудой 50 мкВ, максимально проявляющийся во фронтально-центральных
областях во время определённых стадий сна. Веретено определяется, как правило,
как короткая последовательность одинаковых по форме волн, огибающая которых
имеет веретенообразный вид [33].
• Вертекс-потенциал или V-волна. Эта волна представляет собой резкий всплеск
потенциала, который максимален в области макушки (vertex), имеет амплитуду
примерно 300 мкВ и знак, противоположный по отношению к ЭЭГ в других
областях. Она возникает спонтанно во время сна или в ответ на сенсорный стимул
во время сна либо бодрствования.
В дополнение к сказанному выше, используется термин «вспышка» (burst) для
обозначения феномена, состоящего из двух или более волн, которые отличаются от
основной (фоновой) активности по амплитуде, частоте или форме волн. Вспышка
возникает внезапно и имеет относительно небольшую длительность [33].
Запись ЭЭГ описывается через следующие характеристики [32]:
• наиболее явно выраженный ритм (например, а);
• присутствие признаков других ритмов, таких как 5, 0 или (3;
• дискретные признаки относительно большой длительности, такие как эпизоды
активности вида спайк-волна;
• дискретные признаки относительно небольшой длительности, такие как изолиро-
ванные спайки или острые волны;
• активность, оставшаяся после того, как все предыдущие признаки были описаны,
и называемая фоновой активностью;
• артефакты (если они имеются), которые могут привести к двусмысленности
в интерпретации.
Каждый вид волн ЭЭГ или активности описывается в хронологической последова-
тельности через следующие величины: амплитуда; частота, если присутствуют рит-
мические признаки; форма волны, в случае, если присутствуют и ритмические и пре-
ходящие признаки; локализация или пространственное распределение; случайный
характер или вариабельность во времени; право-левая симметрия в локализации ак-
тивности; отзывчивость к стимулам, таким как открывание и закрывание глаз. Сна-
чала вышеуказанным способом даётся описание записи ЭЭГ в покое; далее через те
же величины даётся описание реакции на воздействие. Кроме того, отмечаются изме-
нения в поведении или состоянии пациента, такие как сонливость или засыпание [32].
В сигнале ЭЭГ на рис. 1.22 наблюдается присутствие «-ритма во всех каналах. В сиг-
нале ЭЭГ на рис. 1.23 почти во всех каналах наблюдаются комплексы спайк-волна.
4.3. Обнаружение событий и волн
Теперь мы увидим, как полученные только что знания о событиях в нескольких
биомедицинских сигналах могут быть применены для разработки методов обработки
сигнала с целью их обнаружения. Каждый из следующих разделов будет посвящен
Обнаружение событий и волн
169
проблеме обнаружения определённого типа событий. Описанные методы могут найти
применение для обнаружения других видов событий со сходными характеристиками.
4.3.1. Методы обнаружения QRS-комплекса, основанные на производной
Задача. Разработать метод обработки сигнала, который позволяет обна-
руживать QRS-комплекс, учитывая что он является наиболее острой волной
в цикле ЭКГ.
Решение 1. В разд. 1.2.4 мы отмечали, что для QRS-комплекса характерна
наибольшая крутизна наклона сигнала (скорость изменения напряжения) в сердечном
цикле, в связи с тем что желудочки обладают свойствами быстрого проведения и де-
поляризации. Поскольку скорость изменения задаётся оператором производной, то
операция d/dt является наиболее логичной отправной точкой в попытке разработать
алгоритм для обнаружения QRS-комплекса.
В разд. 3.3.3 мы говорили, что оператор производной усиливает QRS-комплекс,
хотя результирующая волна не имеет никакого сходства с типичным QRS-комплек-
сом. Обратите внимание на рис. 3.24 и 3.25, что относительно медленные зубцы Р и Т
подавляются оператором производной, в то время как наиболее высокие значения вы-
ходного сигнала наблюдаются на участке, соответствующем QRS-комплексу. Однако,
учитывая шумовой характер сигнала, получаемого на выходе операторов, основанных
-а производной, также очевидно, что перед тем как будет выполняться последующая
обработка, потребуется существенное сглаживание.
Baida и др. [99] предложили основанный на производной алгоритм выделения
QRS-комплекса, который позже был исследован и оценен Alhstrom и Tompkins [100],
Friesen и др. [101] и Tompkins [27]. Алгоритм работает следующим образом. Спо-
собом, сходным с уравнением (3.45), аппроксимируется сглаженная трёхточечная
ервая производная уо(п) от данного сигнала х(п):
уо(п) = |я(п) - х(п - 2)|. (4.1)
Вторая производная аппроксимируется следующим образом:
У1(п) = |ж(п) — 2х(п — 2) + х(п — 4)|. (4.2)
Эти два результата взвешиваются и комбинируются, что даёт
у2(п) = 1,3уо(п) + 1,Ь1(^)« (4.3)
Результирующий сигнал у2(п) сканируется с использованием порога равного 1,0.
Во всех случаях, когда этот порог пересекается с сигналом, последующие восемь
отсчётов также проверяются с использованием того же самого порога. Если по
еньшей мере шесть из восьми точек проходят тест с использованием порога, данный
сегмент, состоящий из восьми отсчётов, считается частью QRS-комплекса. В ре-
.льтате этой процедуры получается импульс, имеющий ширину, пропорциональную
ширине QRS-комплекса; однако этот метод весьма чувствителен к шуму.
Иллюстрация применения. Верхняя кривая на рис. 4.2 иллюстрирует два цикла
фильтрованного сигнала ЭКГ, показанного на рис. 3.5. Сигнал был пропущен че-
рез фильтр нижних частот Баттерворта восьмого порядка с fc = 90 Гц, прорежен
в пять раз и профильтрован с использованием режекторного фильтра с /о = 60 Гц.
Эффективная частота дискретизации составляет 200 Гц. Сигнал был нормализован
делением на его максимальную величину.
Вторая и третья кривая на рис. 4.2 показывают производные уо(п) и у\(п)
соответственно; четвёртая кривая иллюстрирует комбинированный результирующий
сигнал у2(п). Обратите внимание на относительно высокие величины результирую-
щего сигнала после применения производных в зоне расположения QRS-комплекса;
170
Гл. 4. Обнаружение событий
Рис. 4.2. Сверху вниз: два цикла фильтрованного сигнала ЭКГ, показанного на рис. 3.5;
выходной сигнал уо(п) основанного на первой производной оператора, заданного уравне-
нием (4.1); выходной сигнал у\(п) основанного на второй производной оператора, задан-
ного уравнением (4.2); комбинированный результирующий сигнал у2(п), полученный после
использования уравнения (4.3); результирующий сигнал т/з(п), полученный в результате
пропускания сигнала у2(п) через восьмиточечный фильтр скользящего среднего, заданный
уравнением (3.27)
выходной сигнал значительно ниже или пренебрежимо мал в местах расположения
зубцов Р и Т, несмотря на то что в исходном сигнале имелись необычно крутые
и высокие Т-зубцы. Также видно, что результирующий сигнал имеет многочисленные
пики на всём протяжении QRS-комплекса, что связано с наличием у QRS-комплекса
в данном примере трех основных склонов: Q-R, R-S и S-ST (в других сигналах ЭКГ
может также присутствовать дополнительный склон PQ-Q).
Последняя кривая на рис. 4.2 показывает результат сглаживания уз(п), получен-
ный после прохождения сигнала у2(п) через фильтр 8-точечного скользящего средне-
го, задаваемый уравнением (3.27). В результате мы получили единственный импульс
с амплитудой, превышающей 1,0 на всем интервале регистрации соответствующего
QRS-комплекса. Для обнаружения QRS-комплекса может быть использован простой
алгоритм поиска пиков. Для определения истинной локализации соответствующего
QRS-комплекса необходимо вычесть из найденных точек локализации QRS-комплек-
са суммарную задержку, вносимую фильтрами.
Отметим, что процедура поиска пика не может быть выполнена непосредственно
по сигналу ЭКГ: QRS-комплекс может быть не самой высокой по амплитуде волной
в кардиоцикле, а имеющиеся артефакты могут легко сделать процедуру поиска
Обнаружение событий и волн
171
неэффективной. Обратите внимание, что сигнал ЭКГ в данном примере перед вы-
числением производных был профильтрован для ограничения полосы частот в полосе
до 90 Гц и что он был свободен от дрейфа базовой линии.
Решение 2. Murthy и Rangaraj [102] предложили алгоритм обнаружения QRS-
комплекса, основанный на взвешенном и возведённом в квадрат операторе первой
производной и на фильтре скользящего среднего. В этом случае основанный на
производной оператор определяется следующим образом:
N
gi(n) = ^2 |х(п — г + 1) — х(п — г)|2(?/— г + 1), (4.4)
г=1
где х(п) — сигнал ЭКГ, N — ширина окна, в пределах которого разность первого
порядка вычисляется, возводится в квадрат и взвешивается с использованием ко-
эффициента (TV — г 4-1). Взвешивающий коэффициент линейно спадает, начиная от
текущей разности до разности, вычисленной на N отсчётов ранее по времени, что
обеспечивает сглаживающий эффект. Дальнейшее сглаживание результата выполня-
ется с использованием фильтра скользящего среднего по М точкам:
। м-1
g(n) = ту (4.5)
j=o
При частоте дискретизации 100 Гц ширина окна фильтра устанавливается как
Al = N = 8. Данный алгоритм даёт единственный пик для каждого QRS-комплекса
и подавляет зубцы Р и Т.
Поиск пика в обработанном сигнале g(n) может быть выполнен с помощью
простого алгоритма поиска пиков следующим образом.
1. Сканирование фрагмента сигнала g(n), на котором ожидается наличие пика,
и определение максимальной величины gmax. Максимальное значение g(n) на
всём протяжении анализируемого участка может быть также принято рав-
ным gmax-
2. Определение порога как некоторой доли от максимума, например, Th = 0,5gmax.
3. Для всех g(n) > Th выбираются те отсчёты, для которых соответствующие
величины g(n) больше, чем определённое заданное число М предыдущих или
последующих отсчётов g(n), т. е.
{р} = [n I g(^) > Th] И
[g(n) > g(n — г), i = 1,2, ... ,М] И (4.6)
[g(n) > g(n + г), i = 1,2, ..., М].
Определённый таким образом набор {р} содержит индексы всех найденных в сигнале
-(п) пиков.
Для того чтобы отбраковать пики, вызванные артефактами, могут использоваться
дополнительные условия, такие, например, как минимальный интервал между двумя
соседними пиками. Более сложный алгоритм поиска пиков будет описан в разд. 4.3.2.
Иллюстрация применения. Верхняя кривая на рис. 4.3 иллюстрирует два цик-
'.а фильтрованного сигнала ЭКГ, показанного на рис. 3.5. Фильтрация сигнала
Еьтолнялась с использованием фильтра нижних частот Баттерворта 8-го порядка
с fc = 40 Гц. Далее сигнал был прорежен в 10 раз, в результате чего эффективная
-.астота дискретизации составила 100 Гц, что соответствует параметрам, исполь-
з. ванным Murthy и Rangaraj [102]. Сигнал был нормализован делением на его
уаксимальную величину.
172
Гл. 4. Обнаружение событий
Рис. 4.3. Сверху вниз: два цикла фильтрованного сигнала ЭКГ, показанного на рис. 3.5;
выходной сигнал gi(n) оператора взвешивания и возведения в квадрат первой производной,
заданного уравнением (4.4); выходной сигнал g(n) сглаживающего фильтра, заданного урав-
нением (4.5)
Вторая и третья кривые на рис. 4.3 показывают выходные сигналы основанно-
го на производной оператора и сглаживающего фильтра. Обратите внимание, что
окончательный выходной сигнал содержит единственный гладкий пик для каждого
QRS-комплекса и что зубцы Р и Т не дают никаких существенных значений
выходного сигнала. Для детектирования и сегментации каждого комплекса может
быть использован простой алгоритм поиска пиков [102].
4.3.2. Алгоритм обнаружения QRS-комплекса Пана-Томпкинса
Задача. Предложить алгоритм для обнаружения QRS-комплексов в текущем
сигнале ЭКГ.
Решение. Пан и Томпкинс (Pan и Tompkins) [27, 103] предложили алгоритм
обнаружения QRS-комплексов, рассчитанный на работу в реальном времени и осно-
ванный на анализе наклона, амплитуды и ширины QRS-комплексов. Этот алгоритм
состоит из следующей последовательности фильтров и методов: фильтр нижних
частот, фильтр верхних частот, оператор производной, возведение в квадрат, ин-
тегрирование, адаптивная пороговая процедура и процедура поиска. На рис. 4.4
в схематической форме показаны основные этапы этого алгоритма.
Рис. 4.4. Блок-диаграмма алгоритма обнаружения QRS-комплекса Пана-Томпкинса
Обнаружение событий и волн
173
Фильтр нижних частот. Рекурсивный фильтр нижних частот, использованный
в алгоритме Пана-Томпкинса, имеет целые коэффициенты для снижения его вычис-
лительной сложности и передаточную функцию следующего вида:
1 (1 - z-6)2
(47)
(См. также уравнения (3.37) и (3.38).) Выходной сигнал у(п) связан с входным
сигналом х(п) разностным уравнением
у(п) = 2у(п - 1) - у(п - 2) + Т [ж(п) - 2х(п - 6) + х(п - 12)1. (4.8)
OZ
При частоте дискретизации 200 Гц этот фильтр имеет довольно низкую частоту
среза fc = 11 Гц и вносит задержку, составляющую 5 отсчётов или 25 мс. Этот
фильтр имеет ослабление более 35 дБ на частоте 60 Гц и эффективно подавляет
сетевую наводку, если она существует.
Фильтр верхних частот. Фильтр верхних частот, используемый в данном ал-
горитме, реализован как всепропускающий фильтр минус фильтр нижних частот.
Компонента фильтра нижних частот имеет передаточную функцию следующего вида:
(1 — Z~ 32)
Н;р(г) = (4.9)
(1 -г )
отношение между входом и выходом задаётся разностным уравнением
у(п) = у(п — 1) 4- х(п) — х(п — 32). (4.10)
Передаточная функция Hhp(z) фильтра верхних частот задаётся следующим образом:
Hhp(z) = г’16 - ^Я/р(г). (4.11)
Аналогично, выходной сигнал р(п) фильтра верхних частот задаётся разностным
.равнением
р(п) = р(п - 1) - ^х(п) + х(п - 16) - х(п - 17) + -^х(п - 32), (4.12)
oZ oZ
~де х(п) и у(п) связаны между собой в соответствии с уравнением (4.10). Этот
гильтр верхних частот имеет частоту среза 5 Гц и вносит задержку 80 мс.
Оператор производной. Операция дифференцирования, использованная Паном
Томпкинсом, задаётся следующим образом:
у(п) — - [2ж(п) + х(п — 1) — х(п — 3) — 2х(п — 4)], (4.13)
• при частотах до 30 Гц аппроксимирует идеальный оператор d/dt. Эта процедура
взятия производной подавляет низкочастотные компоненты зубцов Р и Т и имеет
высокий коэффициент усиления для высокочастотных компонент, появляющихся
из-за крутых склонов QRS-комплекса. (См. разд. 3.3.3, где подробно описываются
.войства фильтров, основанных на производных.)
Возведение в квадрат. Операция возведения в квадрат делает результат по-
ожительным и усиливает большие разности, возникающие из-за QRS-комплек-
сов; маленькие разности, возникающие на Р- и Т-зубцах, при этом подавляются.
Высокочастотные компоненты в сигнале, связанные с QRS-комплексом, ещё более
• силиваются.
174
Гл. 4. Обнаружение событий
Интегрирование. Как можно было наблюдать в предыдущем разделе, выходной
сигнал операции, основанной на производной, демонстрирует многочисленные пики
в пределах длительности отдельного QRS-комплекса. Алгоритм Пана-Томпкинса
выполняет сглаживание выходного сигнала предыдущих операций с использованием
интегрирующего фильтра типа скользящего окна, задаваемого уравнением
?/(п) = [ж(п - (7V - 1)) + х(п - (АГ - 2)) + ... + х(п)]. (4.14)
Выбор ширины окна N должен выполняться с использованием следующих со-
ображений: при выборе слишком большой ширины выходные сигналы, связанные
с QRS-комплексом и Т-зубцом будут сливаться, в то время, как слишком маленькая
ширина приведёт к нескольким пикам для единственного QRS-комплекса. Для
частоты дискретизации fs = 200 Гц была выбрана величина N = 30. На рис. 4.5
Рис. 4.5. Взаимосвязь QRS-комплекса и выходного сигнала интегратора, основанного на
скользящем окне: схематичное изображение сигнала ЭКГ (а); выходной сигнал интегратора,
основанного на скользящем окне (б). QS — ширина QRS-комплекса, W — ширина окна инте-
гратора, заданная как N/fsc. Заимствовано из Tompkins [27]
показано влияние ширины окна на выходной сигнал интегратора и его связь с ши-
риной QRS-комплекса. (См. разд. 3.3.2, где подробно описаны свойства фильтров
скользящего среднего и интеграторов.)
Адаптивная пороговая процедура. Пороговая процедура в алгоритме Пана-
Томпкинса адаптируется к изменениям в сигнале ЭКГ путём вычисления скользящих
оценок пиков, связанных с сигналом и шумом. Считается, что пик обнаружен
каждый раз, когда выходной сигнал изменяет своё направление в пределах заданного
интервала. В ходе дальнейшего рассмотрения SPKI будет означать уровень пика,
который на этапе обучения алгоритма был интерпретирован как пик, соответству-
ющий QRS, a NPKI будет обозначать уровень пика, связанного с событиями, не
являющимися QRS-комплексами (шум, ЭМГ и т. д.). Величины THRESHOLD II
и THRESHOLD 12 — это два значения порогов, которые используются для отнесения
обнаруженных пиков к одной из двух категорий: сигналу (QRS-комплекс) или шуму.
Каждый новый обнаруженный пик относится либо к категории «пик сигнала»,
либо к категории «пик шума». Если пик превышает THRESHOLD II во время
первого шага анализа, он классифицируется как пик QRS-комплекса (сигнала). Если
используется процедура обратного поиска (описанная в следующем параграфе), то
данный пик, для того чтобы быть названным QRS-комплексом, должен быть выше
Обнаружение событий и волн
175
HRESHOLD 12. После того как обнаружен каждый пик, уровни пиков и порогов
обновляются и классифицируются следующим образом:
SPKI = 0, VlbPEAKI + 0.875SPKI, если PEAKI- пик сигнала;
NPKI = 0Д25РЕАК1+ 0.875NPKI, если PEAKI-пик шума; (415)
THRESHOLD II = NPKI+ 0,25(SPKI- NPKI);
THRESHOLD 12 = ^THRESHOLD II. (416)
Для случая процедуры обратного поиска с использованием величины THRESHOLD
12 формула обновления величины SPKI в случае обнаружения QRS-комплекса изме-
няется на следующую
SPKI = Q,2bPEAKI + QJ8SPKL (4.17)
Процедура обратного поиска. Алгоритм Пана-Томпкинса постоянно обно-
вляет две средние величины RR-интервала: RR AVERAGE] — это среднее для
восьми последних комплексов и RR AVERAGE2 — это среднее для восьми по-
следних комплексов, имеющих RR-интервалы в диапазоне, заданном пределами
RR LOW LIMIT = 0,92 х RR AVERAGE2 и RR HIGH LIMIT = 1,16 x RR AVERAGE2.
Каждый раз, когда QRS-комплекс не обнаружен на определённом интервале, задан-
ном как RR MISSED LIMIT = 1,66 х RR AVERAGE2, за QRS-комплекс принимается
пик, амплитуда которого лежит в диапазоне между порогами, установленными для
процедуры обратного поиска.
Данный алгоритм продемонстрировал очень низкую степень ошибки, составля-
ющую 0,68%, или 32 комплекса в час на базе данных, содержащей пример-
но 116 000 QRS-комплексов, полученных из 24-часовых записей ЭКГ от 48 пациентов
(подробности см. в работе Tompkins [27]).
Иллюстрация применения. Верхняя кривая на рис. 4.6 иллюстрирует тот же
самый сигнал, что и на рис. 4.2. Описанный выше алгоритм Пана-Томпкинса был ре-
ализован в системе MATLAB. На том же самом рисунке показаны выходные сигналы
различных этапов алгоритма. Подробное рассмотрение этого рисунка приводит при-
мерно к тем же выводам, что и для метода, основанного на производной. Оператор
производной подавляет Р и Т зубцы и даёт большой выходной сигнал на участках
сигнала, где находятся QRS-комплексы. Операция возведения в квадрат преимуще-
ственно увеличивает большие значения и усиливает высокочастотные компоненты.
Результирующий сигнал содержит многочисленные пики для каждого QRS-ком-
плекса и, следовательно, должен быть сглажен. Окончательным выходным сигналом
интегратора является единственный гладкий импульс для каждого QRS-комплек-
са. Обратите внимание на сдвиг между истинным положением QRS-комплекса
и выходным импульсом, вызванный суммарными задержками различных фильтров.
Пороговая процедура, а также процедура поиска и её результаты не иллюстриру-
ются. Другие примеры методов обнаружения QRS-комплекса будут представлены
в разд. 4.9 и 4.10.
4.3.3. Обнаружение дикротической выемки
Задача. Предложить метод обнаружения дикротической выемки в сигнале
каротидного пульса.
Решение. Ленер и Рангайян (Lehner и Rangayyan) [66] предложили метод для
обнаружения дикротической выемки, в котором используется оценка по методу
-аименьших квадратов величины второй производной р(п) от сигнала каротидного
пульса у(п), определяемой как
р(п) = 2у(п - 2) - у(п - 1) - 2у(п) - у(п + 1) + 2у(п + 2). (4.18)
176
Гл. 4. Обнаружение событий
Рис. 4.6. Результаты работы алгоритма Пана-Томпкинса. Сверху вниз: два цикла фильтрован-
ного сигнала ЭКГ, показанного на рис. 3.5 (тот же самый сигнал, что показан на рис. 4.2),
выходной сигнал полосового фильтра (комбинация низкочастотного и высокочастотного филь-
тров); выход оператора, основанного на производной; результат возведения в квадрат; резуль-
тат интегрирования, умноженный на 100
Обратите внимание, что это выражение не является каузальным; его можно преоб-
разовать к каузальному виду путём добавления задержки, равной двум отсчётам.
Вторая производная была выбрана в связи с тем, что дикротическая выемка
появляется в виде короткой волны, расположенной на ниспадающем склоне сигнала
каротидного пульса (см. также Starmer и др. [104]). Оператор первой производной
мог бы дать на ниспадающем склоне почти постоянный выходной сигнал. Операция
второй производной устраняет влияние ниспадающего склона и усиливает саму
выемку. Результат был возведён в квадрат и сглажен для получения
м
s(n) = У^р2(п — fe ± l)w(fc), (4.19)
fc=i
где w(k) = (М — к 4-1) является линейной взвешивающей функцией и М = 16 для
частоты дискретизации fs = 256 Гц.
Данный метод даёт два пика для каждого периода сигнала каротидного пульса.
Первый пик в результирующем сигнале представляет начало каротидного подъёма.
Второй пик, возникающий в результирующем сигнале в пределах кардиоцикла, свя-
зан с дикротической выемкой. Для того чтобы локализовать дикротическую выемку,
необходимо определить местоположение локального минимума в каротидном пульсе
в пределах интервала ±20 мс от второго пика.
Корреляционный анализ каналов ЭЭГ
177
Иллюстрация применения. Верхняя кривая на рис. 4.7 иллюстрирует два цикла
сигнала каротидного пульса. Сигнал был пропущен через фильтр нижних частот
с частотой среза 100 Гц и дискретизован с частотой 250 Гц. Результат применения
Рис. 4.7. Два цикла сигнала каротидного пульса и результат работы метода обнаружения
дикротической выемки, предложенного Ленером и Рангайяном
метода Ленера и Рангайяна к этому сигналу показан на нижней кривой. Очевидно,
что вторая производная успешно выделила дикротическую выемку. Для определения
первого и второго пиков в сигнале может быть использован простой алгоритм поиска
пиков. Дикротическая выемка может быть локализована путём поиска минимума
в сигнале каротидного пульса в пределах интервала ±20 мс в окрестности второго
пика.
Обратите внимание, что результаты, проиллюстрированные на рис. 4.7 могут
быть улучшены за счёт дальнейшего сглаживания путём увеличения ширины окна,
задаваемого уравнением (4.19). Ширину окна, фильтр нижних частот и частоту дис-
кретизации необходимо выбирать в соответствии с характеристиками исследуемого
сигнала. Дальнейшие иллюстрации обнаружения дикротичекой выемки будут даны
в разд. 4.10.
4.4. Корреляционный анализ каналов ЭЭГ
Сигналы ЭЭГ обычно снимаются одновременно по нескольким каналам. Обнару-
жение событий и анализ эпох в сигналах ЭЭГ представляют собой более сложные
задачи, чем те, с которыми мы встречались до сих пор при рассмотрении одноканаль-
ных сигналов ЭКГ и каротидного пульса, в связи с необходимостью обнаруживать
сходные события по многочисленным каналам. Этим потребностям удовлетворяют
методы автокорреляции и взаимной корреляции как во временной, так и в частотной
областях.
2 Р. Рангайян
178
Гл. 4. Обнаружение событий
4.4.1. Обнаружение ритмов ЭЭГ
Задача. Предложить метод для обнаружения наличия а-ритма в канале ЭЭГ.
Как можно было бы расширить этот метод для обнаружения наличия того же
самого ритма одновременно в двух каналах ЭЭП
Решение. Для выявления общих характеристик, присутствующих в двух сигна-
лах, их можно сравнивать с использованием скалярного произведения (известного
также как внутреннее произведение), определяемого как
tv— 1
X • у = (х, у) = х(п)у(п), (4.20)
п=0
где сигналы х(п) и у(п) имеют каждый по N отсчётов. Скалярное произведение
представляет собой проекцию одного сигнала на другой, где каждый из сигналов
рассматривается как TV-мерный вектор. Скалярное произведение может быть нор-
мализовано геометрическим средним энергий этих двух сигналов для получения
коэффициента корреляции в виде [67]
7, = 7-------(4.21)
[Е"» у1 (»)]
Если необходимо, средние значения этих сигналов можно вычесть из них с исполь-
зованием уравнения (3.18).
В случае двух непрерывных во времени сигналов, х(Г) и у (Г), проекция одного
сигнала на другой определяется выражением
л.
ОС
0ху = j x(t)y(t)dt. (4.22)
—оо
Когда в положении исследуемых эпох двух сравниваемых сигналов может присут-
ствовать сдвиг или задержка по времени, появляется необходимость ввести пара-
метр временного сдвига, что позволяет вычислить проекцию для любой возможной
величины перекрытия двух сигналов. Этот параметр сдвига даёт возможность иссле-
довать какой-либо один сигнал с целью выявления в нём событий, соответствующих
событиям в другом сигнале в какой-нибудь момент времени в пределах доступной
продолжительности обоих сигналов. Взаимная корреляционная функция (ВКФ) меж-
ду двумя сигналами для величины сдвига или задержки г секунд (или к отсчётов)
может быть получена как
оо
0ху(т) = j x(t)y(t 4- г) dt, или (4.23)
— оо
0ху(к) = У^х(п)</(п + к).
п
(4.24)
Пределы суммирования в последнем случае должны быть ограничены диапазоном
доступных перекрывающихся данных. Для получения истинной ВКФ необходимо
учитывать масштабный коэффициент, зависящий от количества используемых отсчё-
тов данных, но здесь мы будем пренебрегать этим коэффициентом (см. разд. 6.4).
Уравнение (3.18) даёт расширенную версию (включающую сдвиг по времени) коэф-
фициента корреляции 7Ж2/, задаваемого уравнением (4.21).
Корреляционный анализ каналов ЭЭГ
179
Когда рассчитывается АКФ или ВКФ для различных значений сдвига, возникает
вопрос о тех отсчётах в одном сигнале, которые лежат за пределами длительности
другого. Мы можем добавить нули к одному из сигналов и увеличить его длитель-
ность на максимальный изучаемый сдвиг, либо мы можем использовать истинные
отсчёты данных из исходной записи сигнала, когда они доступны. В последующих
и ллюстрациях везде, где это возможно, используется последний метод.
В случае случайных сигналов мы должны взять математическое ожидание
или выборочное среднее векторного произведения векторов, сформированных
из доступных отсчётов сигналов. Пусть х(п) = [х(п),ж(п — 1), ... ,ж(п — N + 1)]т
у(п) = [т/(п), у(п — 1), ..., у(п — N 4- 1)]т представляют собой TV-мерную век-
торную форму двух сигналов х(п) и у(п) с доступными в момент времени п
последними N отсчётами каждого из сигналов. Если х(п) и у(п) — выборочные
наблюдения случайного процесса, то их ВКФ определяется как
@ху = Е [х(п)ут(п)], (4.25)
в форме, знакомой нам по уравнениям (3.78) и (3.79). Векторное произведение
-редставляет собой матрицу размерностью N х 7V, содержащую элементы, которые
соответствуют всем возможным задержкам (сдвигам) в пределах длительности сиг-
налов.
Все приведённые выше уравнения могут быть модифицированы для получения
АКФ путём замены второго сигнала у первым сигналом х. В этом случае сигнал х
будет сравниваться сам с собой.
В функции АКФ наблюдаются пики с интервалами, соответствующими периодам
«и следовательно целым кратным от величин этих периодов) любых периодических
ли повторяющихся волновых форм, присутствующих в сигнале. Это свойство даёт
возможность выделения ритмов в таких сигналах как ЭЭГ: на наличие а-ритма
должен указывать пик вблизи значения 0,1 с. АКФ большинства сигналов зату-
хает и достигает пренебрежимо малых величин при задержках, превышающих
-есколько миллисекунд, за исключением периодических сигналов неопределённой
ли бесконечной длительности, для которых АКФ также содержит периодические
пики. Кроме того, в АКФ наблюдаются многочисленные пики, когда одно и то же
событие повторяется через регулярные или нерегулярные интервалы. Рассчитывать
АКФ необходимо только для значений задержек, лежащих в определённых пределах,
зависящих от ожидаемых характеристик анализируемого сигнала.
ВКФ содержит пики с периодами, соответствующими любой периодической
волновой форме, присутствующей одновременно в обоих анализируемых сигналах.
Следовательно, ВКФ может быть использована для обнаружения общих ритмов,
-рисутствующих в двух сигналах, например в двух каналах ЭЭГ. В случаях, когда
здна из функций, используемых для вычисления ВКФ, представляет собой образец
волновой формы, соответствующий некоторому событию, такому, например как цикл
ЭКГ в разд. 3.3.1, или комплекс спайк-волна ЭЭГ в разд. 4.4.2, процедуру называют
согласованием с образцом.
Иллюстрация применения. Верхняя кривая на рис. 4.8 показывает АКФ сег-
мента сигнала из канала р4 ЭЭГ, приведённого на рис. 1.22, в интервале времени
4.67-5,81 с. АКФ содержит пики при временных задержках, равных 0,11 и целым
- атным от этого значения. Обратная величина от задержки, соответствующей
первому пику, равняется 9 Гц, что лежит в пределах полосы частот, характерной
зля a-ритма. (Графики СПМ, приведённые в нижних частях рис. 4.8 и следующих
-етырёх рисунков, будут описаны в разд. 4.5.) Следовательно, становится очевидным,
-то анализируемый сегмент сигнала содержит a-ритм. Для обнаружения пиков,
соответствующих каким-либо определённым значениям задержек, или по всему
т -апазону АКФ может использоваться простой алгоритм поиска пиков.
180
Гл. 4. Обнаружение событий
Рис. 4.8. АКФ для интервала 4,67-5,81 с для канала р4 сигнала ЭЭГ, показанного
на рис. 1.22 (а)\ СПМ сегмента сигнала в дБ, полученная с помощью преобразования Фурье
от АКФ (б)
Для того чтобы продемонстрировать контраст с предыдущим примером, верхняя
кривая на рис. 4.9 показывает АКФ для сегмента 4,2-4,96 с из канала f3 сигнала
ЭЭГ, показанного на рис. 1.22. Эта АКФ не имеет каких-либо пиков в диапазоне
0,08-1,25 с, что свидетельствует об отсутствии а-ритма в анализируемом сегменте
сигнала.
На рис. 4.10, 4.11 и 4.12 показаны результаты вычисления ВКФ, сравнивающие
участки сигналов ЭЭГ, показанные на рис. 1.22 в приведённом ниже порядке: каналы
рЗ и р4 на интервале 4,72-5,71 с, когда оба канала содержат a-ритм; каналы о2
и с4 для отрезка 5,71-6,78 с, когда первый из них содержит a-ритм, а второй —нет;
и каналы f3 и f4 для интервала 4,13-4,96 с, где ни в одном из каналов a-ритм не
наблюдается. Относительная величина пиков в диапазоне а, как отмечалось ранее,
согласуется с совместным присутствием, единичным присутствием или отсутствием
a-ритма в различных анализируемых сегментах (каналах).
4.4.2. Обнаружение комплекса спайк-волна в сигнале ЭЭГ на основе сопо-
ставления с образцом. В разд. 3.3.1 мы уже видели использование сопоставления
с образцами при выделении циклов ЭКГ для синхронного усреднения. Теперь мы
рассмотрим другое применение сопоставления с образцами.
Задача. Предложить метод для обнаружения комплексов спайк-волна в сиг-
нале ЭЭГ. Можно предположить, что имеется сегмент сигнала, представляю-
щий собой образец комплекса спайк-волна.
Решение. Комплекс спайк-волна — это хорошо известное событие в сигнале
ЭЭГ. Этот комплекс состоит из острого спайка, за которым следует волна с частотой
порядка 3 Гц; эта волна может содержать половину периода или полный период
почти синусоидального вида. Таким образом, из какого-либо канала ЭЭГ можно
Корреляционный анализ каналов ЭЭГ
181
ВСП,дБ Взаимная корреляция СПМ, дБ Автокорреляция
АКФ для интервала 4,2-4,96 с для канала f3 сигнала ЭЭГ, показанного на
рис. 1.22 (а); СПМ этого сегмента сигнала в дБ (б)
Частота, Гц
~ . 4.10. ВКФ между отрезками 4,72-5,71 с для каналов рЗ и р4 сигнала ЭЭГ, показанного
ка рис. 1.22 (а); взаимная спектральная плотность (ВСП) сегментов сигнала в дБ, рассчитан-
ная с помощью преобразования Фурье от ВКФ (б)
182
Гл. 4. Обнаружение событий
Рис. 4.11. ВКФ между отрезками 5,71-6,78 с для каналов о2 и с4 сигнала ЭЭГ, показанного
на рис. 1.22 (а); взаимная спектральная плотность сегментов сигнала в дБ (б)
Рис. 4.12. ВКФ между отрезками 4,13-4,96 с для каналов f3 и f4 сигнала ЭЭГ, показанного
на рис. 1.22 (а); взаимная спектральная плотность сегментов сигнала в дБ (6)
Корреляционный анализ каналов ЭЭГ
183
Рис. 4.13. Канал сЗ сигнала ЭЭГ, показанного на рис. 1.23 (а); результат сопоставления
с образцом (б). В качестве образца использовался комплекс спайк-волна в диапазоне
от 0,60 до 0,82 с
Время, с
Рис. 4.14. Канал f3 сигнала ЭЭГ, показанного на рис. 1.23 (а); результат сопоставления
? образцом (б). В качестве образца был использован комплекс спайк-волна в диапазоне
от 0,60 до 0,82 с из канала сЗ (см. рис. 4.13)
184
Гл. 4. Обнаружение событий
выделить эпоху, соответствующую комплексу спайк-волна, для использования её
при сопоставлении с образцом с помощью той же самой формулы (3.18) (см. также
Barlow [97]). Полученный образец может быть коррелирован с тем же самым кана-
лом, из которого он был извлечён, для обнаружения сходных событий, появляющихся
в более поздние моменты времени, или с другим каналом для поиска похожих
событий. Применение простого порогового правила к результату может дать момент
времени, когда произошло событие.
Иллюстрация применения. На верхней кривой рис. 4.13 приведён канал сЗ
сигнала ЭЭГ, показанного на рис. 1.23. В качестве образца был выбран комплекс
спайк-волна в промежутке между 0,60 и 0,82 с. Далее выполнялось сопоставление
с образцом сигнала того же самого канала с использованием формулы, приведённой
в уравнении (3.18). Результирующая нижняя кривая на рис. 4.13 демонстрирует
сильные и чёткие пики для каждого случая появления комплекса спайк-волна
в сигнале ЭЭГ. Пики в результирующем сигнале появляются в те же самые моменты
времени, что и соответствующие комплексы спайк-волна.
На рис. 4.14 показан канал f3 сигнала ЭЭГ, приведённого на рис. 1.23, а также
результат сопоставления с образцом. При этом использовался тот же самый образец
из канала сЗ, что и в предыдущем примере. Результирующая кривая показывает, что
канал f3 также содержит комплексы спайк-волна, которые соответствуют образцу.
4.5. Методы на основе взаимного спектра
Многочисленные пики, появляющиеся в функциях АКФ или ВКФ, могут вызвать
сложности в определении ритмов; исследователю может потребоваться отбросить
пики, которые возникают при задержках, являющихся целыми кратными по отноше-
нию к базовой частоте. Эквиваленты функций АКФ и ВКФ в области Фурье дают
возможность выполнять в частотной области более простой и более интуитивно
понятный анализ, чем во временной области. Понятие ритмов значительно проще
ассоциировать с частотами, выраженными в отсчетах в секунду или в герцах, чем
с соответствующими периодами, выраженными обратными величинами (см. также
вводный раздел гл. 6).
4.5.1. Когерентный анализ каналов ЭЭГ
Задача. Описать подход в частотной области для анализа присутствия
ритмов в нескольких каналах сигнала ЭЭГ.
Решение. Эквивалентами функций АКФ и ВКФ в области Фурье являются СПМ
(также известная как автоспектр) и взаимный спектр (или взаимная спектральная
плотность, ВСП), соответственно. СПМ Sxx(f) сигнала связана с его АКФ через
преобразование Фурье:
Sxx(f) = РТ[фхх(г)] = = |Х(/)|2. (4.26)
Преобразование Фурье от ВКФ между двумя сигналами даёт ВСП:
Sxy(f) = FT[exy(r)] = Х*(/)У(7). (4.27)
(Для простоты двойные нижние индексы хх и уу могут быть заменены их оди-
ночными версиями или полностью опущены, когда они не важны для дальнейшего
обсуждения.)
СПМ имеет пики на частотах, соответствующих периодической активности в сиг-
нале. Это свойство даёт возможность обнаружения ритмов в таких сигналах как ЭЭГ:
Согласованные фильтры
185
на присутствие «-ритма должны указывать один или несколько пиков в области
частот 8—13 Гц. СПМ также можно анализировать для локализации присутствую-
щей в сигнале активности, распределённой по определённой полосе частот, такой,
например, как форманты в речевом сигнале или шумы в сигнале ФКГ.
ВСП содержит пики на частотах, которые присутствуют в обоих сопоставляемых
сигналах. ВСП можно использовать для обнаружения ритмов, совместно присутству-
ющих в двух каналах ЭЭГ.
Нормализованный амплитудный когерентный спектр двух сигналов задаётся
выражением [5, 32]
Г’(Л ’ [зйзд] <428>
Фаза когерентного спектра определяется как 'фху(Г) — ZSxy(f), что представляет
собой среднюю фазовую разность (по отношению к временной задержке) между
общими частотными компонентами двух сигналов.
Иллюстрация применения. Когерентность между сигналами ЭЭГ, записанными
в различных позициях на скальпе, зависит от структурных соединений или функци-
ональной взаимосвязи между соответствующими областями мозга. Когерентный ана-
лиз может содействовать исследованию нейрофизиологии эпилептических припадков
и видов поведения, которые, как считается, вызваны дезорганизацией корковой функ-
ции мозга [32]. С помощью ВСП или функции когерентности можно исследовать
симметрию или её отсутствие между двумя каналами ЭЭГ, записанными в анало-
гичных позициях с левой и с правой стороны головы (например, каналы сЗ и с4).
На нижних кривых рис. 4.8 и 4.9 показаны графики СПМ для сегментов ЭЭГ,
на которых, соответственно, присутствует и отсутствует «-ритм. Первый из них
показывает сильный и чёткий пик на частоте примерно 9 Гц, свидетельствующий
о присутствии «-ритма. Обратите внимание, что СПМ содержит единственный пик,
в то время как соответствующая АКФ имеет многочисленные пики при временных
задержках, соответствующих двум, трём и четырём значениям основного периода
«-волны в сигнале. СПМ на рис. 4.9 не содержит никаких пиков в диапазоне се,
показывая тем самым отсутствие «-ритма в данном сигнале.
Нижние кривые на рис. 4.10, 4.11 и 4.12 показывают графики ВСП, соответству-
ющие ВКФ в верхних кривых на тех же рисунках. Из рис. 4.10 опять же видно,
что одновременное присутствие «-активности в каналах рЗ и р4 значительно проще
выявить из ВСП, чем из ВКФ. Единственный пик на частоте 9 Гц в графике ВСП
значительно проще интерпретировать, чем многочисленные пики соответствующей
ВКФ. В ВСП на рис. 4.11 отсутствует чёткий пик в диапазоне се, даже несмотря
на то что соответствующая ВКФ содержит пик при задержке примерно 0,1 с, хотя
и менее значительной, чем пик на рис. 4.10. Данный результат согласуется с тем
фактом, что один из каналов проявляет «-активность, в то время как другой —
нет. И наконец, на графике ВСП на рис. 4.12 явно отсутствует пик в диапазоне
«: оба сегмента сигнала не имеют «-активности. Дальнейшие методы для анализа
«-активности будут представлены в разд. 6.4.3 и 7.5.2.
4.6. Согласованные фильтры
В случае, когда в наличии имеется пример какого-либо наблюдения или об-
разец типичной версии события в сигнале, появляется возможность разработать
фильтр, который согласован с характеристиками события Если сигнал, содержащий
186
Гл. 4. Обнаружение событий
повторения события с почти одинаковыми характеристиками, пропускается через
согласованный фильтр, выход этого фильтра должен давать пики в те же самые
моменты времени, когда появляются события в сигнале. Согласованные фильтры
обычно используются для обнаружения скрытых в шумах сигналов с известными
характеристиками [105, 106]. Они разработаны так, чтобы выполнять корреляцию
между входным сигналом и образцом сигнала и поэтому также называются корреля-
ционными фильтрами.
4.6.1. Обнаружение комплексов спайк-волна на ЭЭГ
Задача. Разработать согласованный фильтр для обнаружения комплексов
спайк-волна в сигнале ЭЭГ. При этом доступен образец комплекса спайк-волна.
Решение. Пусть x(t) — данный опорный сигнал, представляющий собой иде-
альный образец изучаемого события. Пусть X(f) — преобразование Фурье от x(t).
Рассмотрим прохождение x(t) через линейный инвариантный во времени фильтр,
импульсная характеристика которого h(t); передаточная функция этого филь-
тра H(f) = FT[h(t)]. Выходной сигнал в этом случае задаётся выражениями
y(t) = x(t) * h(t) или У(/) = Х(/)Я(/).
Можно показать, что выходная энергия максимизируется, когда
Я(Л = KX*(f) exp(-J27r/to), (4.29)
где К — это масштабирующий коэффициент и to — временной момент или задерж-
ка [105]. Это соответствует импульсной характеристике вида
h(t) = Kx(t$ - t). (4.30)
Таким образом, передаточная функция согласованного фильтра пропорциональна
комплексно сопряжённому преобразованию Фурье обнаруживаемого сигнала. Во
временной области импульсная характеристика представляет собой просто обращён-
ную или отражённую версию опорного сигнала, который был промасштабирован
и задержан. Для того чтобы сделать фильтр каузальным, необходимо добавить со-
ответствующую величину задержки, которая определяется длительностью опорного
сигнала.
Поскольку импульсная характеристика представляет собой обращённую версию
х(Г), операция свёртки, выполняемая согласованным фильтром, эквивалентна корре-
ляции: выходной сигнал в этом случае равен функции взаимной корреляции между
входным сигналом и опорным сигналом. Когда фрагмент входного сигнала, отличного
от x(t), сопоставляется с опорным сигналом, выходной сигнал аппроксимирует АКФ
фхх от опорного сигнала при соответствующей временной задержке. Соответствую-
щий результат в частотной области будет
У(Л = Х(/)Я(/) = %(/)%*(/) = Sxx(f), (4.31)
что представляет собой СПМ опорного сигнала без учёта временной задержки
и масштабирующего коэффициента. Таким образом, выходной сигнал достигает
максимума в момент появления сигнала, являющегося аппроксимацией опорного
сигнала (см. также Barlow [97]).
Иллюстрация применения. Для сравнения с методом согласования с образ-
цом, в качестве опорного сигнала с целью получения согласованного фильтра был
использован комплекс спайк-волна сигнала ЭЭГ между 0,60 и 0,82 с в канале сЗ
(см. рис. 1.23). На верхней кривой рис. 4.15 показан использованный опорный сигнал.
На нижней кривой того же самого рисунка показана импульсная характеристика
согласованного фильтра, которая представляет собой просто обращённую во време-
ни версию опорного сигнала. Данный согласованный фильтр был реализован как
КИХ-фильтр с использованием команды filter системы MATLAB.
Согласованные фильтры
187
Рис. 4.15. Комплекс спайк-волна между 0,60 и 0,82 с в канале сЗ сигнала ЭЭГ, показанного
на рис. 1.23 (а); импульсная характеристика согласованного фильтра, полученного из сегмента
сигнала, соответствующего верхней кривой (б). Обратите внимание, что вторая кривая явля-
ется обращённой во времени версией первой кривой
Время, с
Рис 4.16. Канал сЗ сигнала ЭЭГ, показанного на рис. 1.23, используемый в качестве вход-
вого сигнала согласованного фильтра, показанного на рис. 4.15 (а); выход согласованного
фильтра (б) (см. также рис. 4.13)
188
Гл. 4. Обнаружение событий
О 0,2 0,4 0,6 0,8 1 1,2 1,4 1,6 1,8
Время, с
Рис. 4.17. Канал 13 сигнала ЭЭГ, показанного на рис. 1.23, используемый в качестве входного
сигнала для согласованного фильтра, показанного на рис. 4.15 (а); выходной сигнал согласо-
ванного фильтра (б) (см. также рис. 4.14)
На рис. 4.16 и 4.17 показаны выходные сигналы данного согласованного филь-
тра, через который, соответственно, были пропущены каналы сЗ и f3 сигналов
ЭЭГ с рис. 1.23. Верхняя кривая на каждом из графиков показывает сам сигнал,
а нижняя кривая показывает выходной сигнал согласованного фильтра. Очевидно,
что согласованный фильтр даёт большие значения выходного сигнала для каждого
комплекса спайк-волна. Сопоставляя выходные сигналы согласованного фильтра
на рис. 4.16 и 4.17 с выходными сигналами, полученными по методу согласования
с образцом на рис. 4.13 и 4.14 соответственно, мы можем видеть, что они идентич-
ны, с единственной разницей, что результирующие пики, полученные с помощью
согласованного фильтра, имеют задержку 0,22 с после соответствующего комплекса
спайк-волна. Эта задержка соответствует длительности импульсной характеристики
фильтра. (Замечание. В системе MATLAB имеется команда filtfilt для выполнения
фильтрации вперёд и в обратном направлении с нулевым фазовым сдвигом; этот
метод не рассматривается в данной книге.)
4.7. Обнаружение Р-зубца
Обнаружение Р-зубца является трудной задачей, так как он очень мал по ампли-
туде, имеет трудно идентифицируемую и изменчивую форму и может наблюдаться
на фоне помех различной интенсивности и происхождения.
Задача. Предложить алгоритм для обнаружения Р-зубца в сигнале ЭКГ.
Решение 1. В соответствии с методом, предложенным Hengeveld и van Веш-
mel [107], сигналы ВКГ обрабатываются следующим образом.
Обнаружение Р-зубца
189
1. QRS-комплекс обнаруживается, удаляется и заменяется базовой линией. Базо-
вая линия определяется путём анализа нескольких отсчётов, предшествующих
QRS-комплексу.
2. Результирующий сигнал пропускается через полосовой фильтр, имеющий уро-
вень —3 дБ на частотах 3 Гц и 11 Гц.
3. Интервал поиска определяется как QTmax = (2/9)/?/? + 250 мс, где /?/? —это ин-
тервал между двумя последовательными QRS-комплексами.
4. Во всех трёх отведениях ЭКГ находятся максимальные и минимальные величины
на участке от окончания предыдущего Т-зубца до начала QRS-комплекса.
5. По отношению к модулю полученного сигнала используется пороговая процедура
с уровнями 50 и 75% от максимума для получения трёхуровневого сигнала.
6. Выполняется взаимная корреляция результирующего сигнала с образцом, полу-
ченным аналогичным образом с использованием представительного Р-зубца.
7. Пик полученной функции взаимной корреляции соответствует положению
Р-зубца в исходной ЭКГ.
Данный алгоритм устраняет доминирующее влияние QRS-комплекса путём его
обнаружения и последующего удаления. Обратите внимание, что функция взаимной
корреляции вычисляется не с исходным Р-зубцом, который, как было отмечено,
может быть довольно плохо различим и изменчив, а с трёхуровневым сигналом,
полученным из Р-зубца. Этот трёхуровневый сигнал представляет собой упрощённый
образец Р-зубца.
Рис. 4.18 иллюстрирует разные стадии алгоритма обнаружения Р-зубца, предло-
женного Hengeveld и van Bemmel [107] Обратите внимание, что на исходном сигнале
Рис. 4.18. Иллюстрация результатов выполнения последовательных этапов метода обнаруже-
ния Р-зубца, предложенного Hengeveld и van Bemmel: исходный сигнал ЭКГ (/); после замены
QRS-комплекса уровнем базовой линии (2); после полосовой фильтрации (3); после взятия
модуля (4), пунктирная линия показывает пороги; трёхуровневый сигнал после пороговой
процедуры (5); трёхуровневый сигнал для образца Р-зубца (6); результат взаимной корре-
ляции между сигналами, показанными на кривых 4 и 5 (7). Воспроизводится с разрешения
S. J. Hengeveld and J. Н. van Bemmel, Computer detection of P waves, Computers and Biomedical
Research, 9:125-132, 1976. ©Academic Press
ЭКГ, показанном на кривой / этого рисунка, Р-зубец едва различим. Обработан-
ные версии сигнала после удаления QRS-комплекса, фильтрации и взятия модуля
показаны на кривых 2, 3 и 4. Трёхуровневый сигнал 5 показывает, что Р-зубец
превратился в два импульса, которые соответствуют участкам подъёма и спада. Кри-
190
Гл. 4. Обнаружение событий
вая 7 представляет собой результат взаимной корреляции с образцом, показанным на
кривой 6. Для обнаружения пиков в результирующем сигнале и, следовательно, для
определения позиции Р-зубца может быть использован простой пороговый алгоритм
поиска экстремумов.
Обратите внимание, что результирующий сигнал 4 содержит также и другие
волны, предшествующие тем, которые относятся к Р-зубцу. Для того чтобы отбро-
сить нежелательные компоненты, необходимо установить соответствующий интервал
поиска.
Обнаружение Р
_Iп_______п_____п _ п п
Обнаружение Т
Обнаружение QRS
л п п п п п.
Рис. 4.19. Обнаружение QRS-комплекса и зубцов Р и Т по трёхканальному сигналу ЭКГ с ис-
пользованием преобразования по длительности. Нижние три кривые показывают три канала
сигнала ЭКГ Верхние три кривые показывают точки начала и конца для QRS-комплекса
и зубцов Р и Т, обнаруженных с помощью данной процедуры, в форме последовательности
импульсов. Первый Р-зубец и последний Т-зубец не были обработаны. Воспроизводится
с разрешения F. Gritzali, G. Frangakis, G. Papakonstantinou, Detection of the P and T waves in an
ECG, Computers and Biomedical Research, 22:83-91, 1989. ©Academic Press. See Willems et al.
[109, 110] for details on the ECG database used by Gritzali et al.
Решение 2. Gritzali и др. [108] предложили общий подход к обнаружению
QRS-комплекса и Р-зубца в многоканальном сигнале ЭКГ, основанный на пре-
образованиях, которые они назвали преобразования «по длительности». Если дан
набор сигналов ЭКГ, снятых одновременно с N каналов, . ,£tv(Q, то
преобразование по длительности определяется следующим образом:
L(7V,w,Q =
t+w
\
(4.32)
Гомоморфная фильтрация и комплексный кепстр
191
где w — это ширина временного окна, на протяжении которого выполняется интегри-
рование. Фактически данная процедура подсчитывает сумму квадратов производных
от сигналов по всем доступным каналам и интегрирует эту суммарную величину
в скользящем временном окне. Преимуществом применения оператора, основанного
на производной, для многоканального сигнала ЭКГ является то, что зубцы Р и Т
могут оказаться хорошо различимыми только в каком-нибудь одном из каналов.
В соответствии с процедурой обнаружения волн, предложенной Gritzali и др., сна-
чала обнаруживается QRS-комплекс путём применения порога к функции L(N, w,t),
со значением w, равным средней длительности QRS-комплекса. Как показано
на рис. 4.19, точки начала и окончания QRS-комплексов представляются в виде
импульсов. Далее QRS-комплекс в каждом из сигналов заменяется соответствующей
изоэлектрической линией и процедура повторяется со значением w, равным средней
длительности Т-зубца. Таким способом обнаруживается Т-зубец. Аналогичные
шаги повторяются для обнаружения Р-зубца. На рис. 4.19 показано обнаружение
QRS-комплекса, а также зубцов Т и Р с использованием трёхканального сигнала
ЭКГ. Gritzali и др. также предложили процедуру определения требуемых порогов,
основанную на корреляционном анализе и моделировании по методу наименьших
квадратов. Здесь эти методы не рассматриваются.
4.8. Гомоморфная фильтрация и комплексный кепстр
В гл. 3 мы рассматривали линейные фильтры, предназначенные для разделения
сигналов, получившихся в результате сложения. Вопрос стоял так: как выделить
только сигнал x(f), если имеется сигнал y(t) = x(t) + Так как преобразование
Фурье является линейным, то преобразования Фурье сигналов тоже складываются
аддитивно: У(cu) = Х(си) + Следовательно, линейный фильтр позволяет раз-
делить Х(си) и при условии, что они имеют значительную долю энергии
в различных частотных диапазонах.
Теперь предположим, что имеется сигнал, который содержит произведение двух
сигналов, например у(t) = x(t)p(t). Из мультипликативного свойства, или свойства
свёртки преобразования Фурье, имеем У(си) = X(cu) * F(cu), где * представляет собой
свёртку в частотной области. Каким образом можно отделить x(t) от p(t)?
Более того, предположим, что имеется y(t) = x(t) * h(t), где * обозначает свёртку,
как и в случае прохождения последовательности импульсов голосовой щели (или
случайного возбуждающего сигнала x(t)) через систему голосового тракта с импульс-
ной характеристикой h(t). Преобразования Фурье этих сигналов связаны следующим
образом: У (си) = Х(си)Я(си). Как можно попытаться разделить х(Г) и h(t\?
4.8.1. Обобщённая линейная фильтрация. Поскольку линейные фильтры хоро-
шо изучены и понятны, кажется заманчивым расширить их применение на сигналы,
которые комбинируются в результате операций, отличных от сложения. Как отме-
чалось в предыдущих параграфах, это особенно важно для операций умножения
и свёртки. Интересной возможностью достижения этой цели является преобра-
зование (с помощью одной или более трансформаций) операции комбинирования
:игналов в операцию сложения. Если предположить, что преобразованные сигналы
занимают различные области пространства преобразования, то для их разделения
могут быть применены линейные фильтры. Преобразования, обратные тем, что
были использованы первоначально, дадут нам возможность вернуться в исходное
-цостранство сигналов. Данный подход был предложен в серии публикаций Bogert
др. [111] и Oppenheim и др. [112, 113]. Так как данная процедура расширяет
192
Гл. 4. Обнаружение событий
применение линейных фильтров на перемноженные или свёрнутые сигналы, она была
названа обобщённой линейной фильтрацией. Более того, поскольку эти операции
могут быть представлены с помощью алгебраических линейных преобразований
между входными и выходными векторными пространствами, они были названы
гомоморфными системами.
В качестве простой иллюстрации гомоморфной системы для перемноженных
сигналов рассмотрим снова сигнал
y(t) = x(f)p(t). (4.33)
Поскольку целью является преобразование операции умножения в сложение, то
очевидно, что для этого подходит простое логарифмическое преобразование:
log[?/(0] = log[z(*W)] = log[^(0] + log[p(0]; Ф 0, p(t) 0 Vt. (4.34)
Теперь логарифмы этих двух сигналов складываются аддитивно. Взяв преобразова-
ние Фурье, получим
УДщ) = Хг(щ) + РДщ), (4.35)
где нижний индекс I показывает, что преобразование Фурье было применено к версии
сигнала, подвергнутой логарифмическому преобразованию.
Предполагая, что логарифмическое преобразование не влияет на разделимость
компонент преобразования Фурье двух сигналов x(t) и p(t), для их разделения
можно применить к сигналу линейный фильтр (низкочастотный, высокоча-
стотный и т. д.). Обратное преобразование Фурье переведёт фильтрованные сигналы
во временную область. Экспоненциальная операция завершит процедуру обратного
преобразования (если она требуется).
Рис. 4.20 иллюстрирует операции, используемые в мультипликативной гомоморф-
ной системе (или фильтре). Символ на входе или выходе каждого блока показывает
операцию, которая комбинирует компоненты сигнала на соответствующем шаге.
сигнал
Рис. 4.20. Операции, используемые в мультипликативной гомоморфной системе или фильтре.
Символ на входе или выходе каждого блока показывает операцию, которая комбинирует
компоненты сигнала на соответствующем шаге
Система такого типа бывает полезной при обработке изображений, где изображение
можно рассматривать как произведение функции освещённости и функции передачи
или отражения. Гомоморфный фильтр даёт возможность отделения функции осве-
щённости и коррекции неравномерности освещения. Данный метод был использован
для одновременного достижения сжатия динамического диапазона и улучшения
контраста [86, 112, 114].
Гомоморфная фильтрация и комплексный кепстр 193
4.8.2. Гомоморфная деконволюция
Задача. Предложить гомоморфный фильтр для разделения двух сигналов,
которые были скомбинированы с помощью операции свёртки.
Решение. Рассмотрим случай, выражаемый соотношением
y(t) = x(t) * h(t). (4.36)
Так же, как в случае мультипликативной гомоморфной системы, целью является
преобразование операции свёртки в сложение. Из свойства свёртки преобразования
Фурье известно, что
У(щ) = Х(и)Н(и). (4.37)
Таким образом, применение преобразования Фурье преобразует свёртку в умноже-
ние. Теперь очевидно, что для преобразования умножения в сложение можно ис-
пользовать мультипликативную гомоморфную систему. Взяв комплексный логарифм
от У(щ), получим
log[y(w)] = log[X(w)] + log; X(w) 0, Я(а>) 0 Vw. (4.38)
(Заметим: log[X(a?)] = Х(ш) = log |X(w)| + j'ZX(u>).)
Теперь для разделения преобразованных компонент х и h может быть использован
линейный фильтр, в предположении, что сигналы, как и ранее, являются разделимы-
ми в пространстве преобразования. Последовательность преобразований, обратных
использованным в начале, позволит вернуться к исходному пространству.
Хотя используемое здесь обсуждение велось в отношении применения преобразо-
вания Фурье, общая формулировка гомоморфного фильтра, предложенная Oppenheim
и Schafer [86], даётся в терминах ^-преобразования. Однако преобразование Фурье
эквивалентно z-преобразованию, вычисленному для единичной окружности z-плос-
кости. Кроме того, преобразование Фурье используется в обработке сигналов чаще,
чем ^-преобразование.
На рис. 4.21 показана блок-диаграмма шагов, входящих в гомоморфный фильтр
для двух свёрнутых сигналов. Обратите внимание, что путь, сформированный
первыми тремя блоками (верхний ряд) преобразует операцию свёртки на входе
сигнал
Рис. 4.21. Операции, используемые в гомоморфном фильтре для свёрнутых сигналов. Символ
на входе или выходе каждого блока показывает операцию, которая комбинирует компоненты
сигнала на соответствующем шаге
в сложение. Набор последних трёх блоков (нижний ряд) выполняет обратную транс-
формацию, преобразуя сложение в свёртку. Таким образом, фильтр, находящийся
между этими двумя группами блоков, работает с (преобразованными) сигналами,
которые комбинируются простым сложением.
13 Р. Рангайян
194
Гл. 4. Обнаружение событий
4.8.3. Получение характеристики голосового тракта
Задача. Разработать гомоморфный фильтр для получения базовой волновой
формы, соответствующей отклику голосового тракта для гласного звука рече-
вого сигнала.
Решение. Мы отмечали в разд. 1.2.11, что гласные звуки генерируются путём
возбуждения голосового тракта (в то время как он удерживается в определён-
ной конфигурации) с помощью особой волновой формы голосовой щели, которая
(волновая форма) может быть аппроксимирована последовательностью импульсов.
Таким образом, сигнал гласного звука может быть выражен в дискретной форме как
у(п) = х(п) * h(n), где у(п) — речевой сигнал, х(п) — форма сигнала голосовой щели
(возбуждающая последовательность), a h(n) — импульсная характеристика голосово-
го тракта (базовая волновая форма). Символ * обозначает свёртку, в предположении
что фильтр голосового тракта может быть аппроксимирован линейным, инвари-
антным к сдвигу фильтром. Для разделения h(n) и х(п) мы можем использовать
гомоморфный фильтр для свёрнутых сигналов, описанный в предыдущем разделе.
Возбуждающая последовательность голосовой щели далее может быть выра-
жена как х(п) = р(п) * g(n), где р(п) — последовательность идеальных импульсов
(5-функций Дирака), a g(n) — сглаживающая функция. Это необходимо для того,
чтобы показать, что физическая система голосовых волокон не может генерировать
идеальные импульсы, а даёт в действительности импульсы с конечной длительно-
стью и крутизной склонов [86]. В нашем обсуждении мы будем пренебрегать этим
обстоятельством.
Практическое применение гомоморфного фильтра не является простым. На
рис. 4.22 даётся подробная блок-диаграмма этой процедуры [86, 115]. Некоторые
более тонкие детали и практические методики будут объясняться в последующих
параграфах.
Рис. 4.22. Подробная блок-диаграмма операций, используемых в процедуре деконволюции на
основе комплексного кепстра
Комплексный кепстр. Согласно формальному определению, комплексный кепстр
представляет собой обратное ^-преобразование комплексного логарифма z-преоб-
разования входного сигнала [115, 86]. (Название «кепстр» было получено путём
перестановки символов в слове «спектр»; другие полученные таким способом тер-
Гомоморфная фильтрация и комплексный кепстр
195
мины [86, 111, 115] используются реже.) Если у(п) — входной сигнал и Y(z) — его
^-преобразование, то комплексный кепстр у(п) определяется как
у(п) =
dz.
(4.39)
Контурный интеграл выполняет обратное ^-преобразование и должен оцениваться
внутри кольцевой области на комплексной z-плоскости, где Y(z) = log[F(z)] пред-
ставляет собой однозначную и аналитическую функцию [2, 86]. Единицу измерения
аргумента п функции у(п) в кепстральной области часто называют «quefrency» — это
термин, полученный путём перестановки символов в слове «frequency» (частота).
Из условия у(п) = х(п} * h(n) следует, что
= X(z) + Н(г)или f'(w) = Х(о>) + #(w), (4.40)
и далее, что комплексные кепстры сигналов связаны просто как
у(п) = х(п) + h(n).
(4.41)
Здесь символ л над функцией от z или и обозначает комплексный логарифм от
соответствующей функции от z или о/, в то время как тот же самый символ
над функцией от времени (п) показывает комплексный кепстр соответствующего
сигнала. Следует отметить, что если исходный сигнал у(п) является вещественным,
то его комплексный кепстр у(п) является вещественным} префикс комплексный
используется для того, чтобы продемонстрировать тот факт, что предшествующие z-
и логарифмическое преобразования вычисляются как комплексные функции. Более
того, следует отметить, что комплексный кепстр является функцией от времени.
При оценке комплексного логарифма от Y(z) и Y(yj) некоторые важные сообра-
жения относятся к фазе сигнала. Фазовый спектр, рассчитанный как его главное
по . -1 Г мнимое{У(ш)} 1
значение в диапазоне 0-2тг, заданное выражением tg --------------—
будет почти всегда иметь нарушения непрерывности, которые будут конфликтовать
мнимое{У(щ)}
действительное{У(^)} J ’
с требованиями дальнейшего использования обратного ^-преобразования и обратного
преобразования Фурье.
Следовательно, необходимо в функции Y(ш) отделить друг от друга амплитудную
и фазовую компоненты, применить логарифмическую операцию к амплитуде, а фазу
скорректировать так, чтобы она была непрерывной, путём добавления корректирую-
щих коэффициентов ±2тг при нарушениях непрерывности больших, чем тг, и далее
эти две компоненты должны быть скомбинированы снова перед последующим обрат-
ным преобразованием. Такая коррекция фазового спектра называется распаковкой
।развёртыванием} фазы (phase unwrapping) [86, 115]. Было показано, что если
б спектре входного сигнала присутствует член с линейной фазой, то он может
вызвать быстро спадающие колебания в комплексном кепстре [115]. Во время проце-
дуры фазовой распаковки рекомендуется удалить этот член с линейной фазой, если
он присутствует. Если это необходимо, данный член с линейной фазой может быть
добавлен к результирующему фильтрованному сигналу в виде временного сдвига.
Экспоненциальные сигналы определяются как сигналы, которые имеют раци-
ональные ^-преобразования, т. е. их ^-преобразования могут быть выражены как
отношения полиномов от z. Такие сигналы эффективно представляются как взвешен-
-ые суммы экспонент. Ниже обобщается несколько важных свойств комплексного
^епстра экспоненциального сигнала [86].
196
Гл. 4. Обнаружение событий
• у(п) будет иметь бесконечную длительность, даже если у(п) имеет конечную
длительность и существует в общем случае в пределах —ос < п < ос.
• Комплексный кепстр у(п) затухает по меньшей мере как \/п.
• Если у(п) представляет собой минимально-фазовый сигнал (т. е. все его полюса
или нули расположены на z-плоскости внутри единичной окружности), тогда
у(п) = 0 для п < 0.
• Если у(п) представляет собой максимально-фазовый сигнал (т. е. он не имеет
полюсов или нулей внутри единичной окружности на z-плоскости), тогда у(п) = 0
для п > 0.
Если мы ограничимся каузальными сигналами с ограниченной энергией, то нет
необходимости рассматривать наличие полюсов на единичной окружности или вне
её на z-плоскости. Однако z-преобразование сигнала с ограниченной энергией может
иметь нули за пределами единичной окружности. Такой композитный сигнал может
быть разделён на минимально-фазовую и максимально-фазовую компоненты путём
выделения из его комплексного кепстра каузальной части (п > 0) и антикаузаль-
ной части (п < 0) соответственно, после чего следуют противоположные проце-
дуры. Такой композитный сигнал эквивалентен свёртке его минимально-фазовой
и максимально-фазовой компонент (см. также разд. 5.4.2).
Влияние эха или повторения волновых форм. Рассмотрим упрощённый сигнал
у(п) = х(п) * h(n), где
х(п) = б(п) + а<5(п — по), (4.42)
в котором а и по — две константы. (В данном примере интервал дискретизации Т
игнорируется или считается нормализованным к единице.) Данный сигнал может
быть также выражен как
у(п) = h(n) + ah(n — по). (4.43)
Таким образом, в этом сигнале присутствуют два эпизода появления базовой волно-
вой формы h(n) при п = 0 и п = по. Коэффициент а показывает амплитуду второго
появления базовой волновой формы (называемого в сейсмических применениях эхо),
а по показывает её задержку (высота тона в случае гласного звука речевого сигнала).
На верхней кривой рис. 4.23 показан синтезированный сигнал, который содержит
волновую форму и эхо, имеющее половинную амплитуду (т. е. а = 0,5) от первой
волны и появляющееся при по = 0,01125 с.
Взяв z-преобразование от этого сигнала, имеем
F(z) = (1 + az“n°)77(z). (4.44)
Если это z-преобразование оценивается на единичной окружности, получаем выра-
жение, основанное на преобразовании Фурье:
Y(w) = [1 + аехр(—jumo)]H(z). (4.45)
Взяв логарифм, имеем
Y (ш) = Н (cj) + log [1 + а ехр(—jamo)] • (4.46)
Если а < 1, то логарифмический член может быть разложен в степенной ряд, что
даёт
а2 а3
Y(u) = Я(и) + aexp(-jWo) - у exp(-2jom0) + — exp(-3jam0) - ... . (4.47)
Гомоморфная фильтрация и комплексный кепстр
197
!. .. Хт
_J____________I
0,05 0,06
0,03 0,04
0,05 0,06
Время, с
Рис. 4.23. Сверху вниз: композитный сигнал, включающий волновую форму и эхо; комплекс-
ный кепстр сигнала (масштаб по оси амплитуды увеличен, для того чтобы были лучше видны
пики в момент появления эха и при кратных временных задержках; значения, превышаю-
щие 1,5, были ограничены); базовая волновая форма, полученная в результате короткополосной
фильтрации кепстра; возбуждающая последовательность, полученная в результате длиннопо-
лосной фильтрации кепстра
Взяв обратное преобразование Фурье, получим
а2 а3
у(п) = h(n) + aS(n - по) - — 2п0) + - Зпо) - ... . (4.48)
Л о
Полученные выше выражения показывают, что комплексный кепстр сигнала, имею-
щего базовую волновую форму и эхо, эквивалентен комплексному кепстру базовой
волновой формы плюс последовательность импульсов с задержкой, соответствующей
эху, и задержками, соответствующими целым кратным от этой задержки [115, 86].
Амплитуды этих импульсов пропорциональны амплитуде эха (коэффициент а) и за-
тухают для повторений более высокого порядка (если а < 1). Легко можно видеть,
что если эхо или базовая волновая форма многократно повторяются в сигнале, то
его кепстр будет представлять собой последовательность импульсов, возникающих
в момент появления каждой волновой формы и в моменты, соответствующие целым
кратным от первоначальной задержки. В случае гласного звука речевого сигнала,
положение первого пика даёт высоту тона. Вторая кривая на рис. 4.23 показывает
комплексный кепстр сигнала, приведённого на первой кривой того же самого рисун-
ка. Видно, что кепстр имеет пик при значении 0,01125 с, что соответствует моменту
появления эха. На рисунке также виден меньший по амплитуде (отрицательный) пик
в момент времени, соответствующий удвоенному времени появления эха.
198
Гл. 4. Обнаружение событий
Если предположить, что комплексный кепстр базовой волновой формы затуха-
ет до пренебрежимо малых величин до появления первого импульса а6(п — по),
относящегося к эху, то h(n) может быть получено из комплексного кепстра у(п)
композитного сигнала путём простого использования окна, которое имеет единичные
значения для |п| < пс, где пс является точкой среза. (Этот фильтр иногда называют
короткополосным (shortpass), поскольку кепстр является функцией от времени; его
также можно назвать фильтром нижних частот.) Обратные процедуры дадут h(n).
Оставшаяся доля кепстра (полученная с использованием длиннополосного (longpass)
или высокочастотного фильтра) даст ж(п), которое после применения обратных про-
цедур позволит получить х(п). Третья и четвёртая кривые на рис. 4.23 показывают
базовую волновую форму h(n) и возбуждающую последовательность х(п), получен-
ные путём фильтрации кепстра с использованием точки среза при пс = 0,005 с.
В случае, когда а 1, можно показать, что комплексный кепстр будет содержать
последовательность импульсов вдоль его отрицательной временной оси, т. е. при
(n + fcno), к = 1,2,... [115, 86]. Для получения условия а < 1 может быть исполь-
зована подходящая взвешивающая экспоненциальная последовательность; в этом
случае последовательность импульсов появится на положительной оси кепстра. Если
взвешенный сигнал удовлетворяет условиям для минимально-фазового сигнала, то
кепстр будет каузальным.
Кепстр мощности. В литературе предлагается несколько вариантов кепстра;
Childers [115] даёт обзор соответствующих методик. Одним из наиболее широко
используемых вариантов является вещественный кепстр или кепстр мощности,
который определяется как квадрат обратного ^-преобразования от логарифма ква-
драта амплитуды ^-преобразования данного сигнала. На практике, в приведённом
выше определении z-преобразование заменяется быстрым преобразованием Фурье —
БПФ. Кепстр мощности имеет преимущество в вычислительном отношении, так как
не требует фазовой распаковки, но не обеспечивает разделения компонент сигнала.
Оценивая обратное z-преобразование на единичной окружности z-плоскости,
можно получить кепстр мощности Ур(п) сигнала у(п) как
УР(п) = j>log|y(z)|2zn-1dz} . (4.49)
Если, как и ранее, положить у(п) = х(п) * h(n), то получим |У(z)|2 = |JC(z)|2|/f(z)|2,
из чего следует, что log|F(z)|2 = log|JC(z)|2 + log|/f(z)|2. Применяя обратное
z-преобразование к этому выражению, получим
ур(п) = хр(п) + hp(n), (4.50)
где hp(n) является кепстром мощности базовой волновой формы и хр(п) является
кепстром мощности возбуждающего сигнала. Отметим, что в приведённом выше
выражении мы пренебрегли членом, содержащим взаимное произведение; этот член
будет равен нулю, если две компоненты кепстра мощности занимают непересекающи-
еся частотные диапазоны. В некоторых определениях кепстра мощности последняя
операция возведения в квадрат в уравнении (4.49) опускается; в этом случае член,
содержащий взаимное произведение, не появляется и выражение (4.50) является
правильным.
Кепстр мощности не сохраняет информацию о фазе исходного сигнала. Однако
он является полезным для идентификации присутствия эха в сигнале и для оценки
времени его появления. Кепстр мощности связан с комплексным кепстром следую-
щим образом [115]:
Ур(п) = [у(п) + з/(-п)]2. (4.51)
Гомоморфная фильтрация и комплексный кепстр
199
Рассмотрим ситуацию с сигналом, содержащим два появления базовой волновой
формы h(n) при п = 0 и п = по, как в уравнениях (4.42) и 4.43. Тогда [115]
|У(г)|2 = |#(z)|2|l + az~no|2. (4.52)
Взяв логарифм от обеих частей этого выражения и подставив z = exp(jcd), получим
log|y (cj) |2 = log|7T(cj)|2 + log [1 + a2 + 2acos(amo)] =
= loglH(cc)I2 + log(l + a2) + log (1 4-cos(cjno)^ . (4.53)
\ 1 + a J
Теперь видно, что логарифм СПМ сигнала будет иметь синусоидальные компоненты
(пульсации), связанные с присутствием эха. Амплитуды и частоты этих пульсаций
связаны с амплитудой эха а и его временной задержкой по.
Иллюстрация применения. Гласный звук речевого сигнала у(п) является ре-
зультатом свёртки медленно меняющегося отклика голосового тракта h(n) с отно-
сительно быстро меняющейся последовательностью импульсов голосовой щели х(п):
у(п) = х(п) * h(n). При этих условиях можно продемонстрировать, что вклад h(n)
в комплексный кепстр у(п) будет ограничен небольшими величинами п в пределах
диапазона, соответствующего периоду высоты тона речевого сигнала [86]. Ком-
плексный кепстр у(п) будет иметь импульсы с периодом, соответствующим высоте
тона и его целым кратным. Следовательно, используя фильтр, который выделяет
долю комплексного кепстра для низких значений п, и используя затем обратные
преобразования, получим оценку h(n).
Когда повторения базовой волновой формы имеют амплитуды, почти равные
амплитуде первой волновой формы данной записи сигнала (или даже большие, чем
эта амплитуда), вклад компоненты от последовательности импульсов в комплекс-
ный кепстр может не оказаться быстро затухающим и может вызвать артефакты,
связанные с наложением, когда кепстр подсчитывается для отрезка с ограничен-
ной длительностью. Сходная ситуация возникает в случае, когда задержки между
моментами появления множественных версий базовой волновой формы представля-
ют собой существенную долю от длительности данного сигнала. Ситуация может
быть несколько улучшена за счёт применения экспоненциального веса ап к по-
следовательности данных, где а < 1. Childers и др. [115] рекомендуют величины
а в диапазоне 0,99-0,96, в зависимости от характеристик сигнала, о которых
говорилось выше. Более того, они рекомендовали дополнение входного сигнала
нулями, с целью обеспечить вычисление кепстра большей длительности, чем сам
сигнал, чтобы избежать ошибок наложения и двусмысленности в оценке временных
задержек (см. рис. 4.22, иллюстрирующий последовательность шагов при гомоморф-
ной фильтрации свёрнутых сигналов).
На рис. 4.24 показаны сегмент гласного звука речевого сигнала (взятого из сиг-
нала, показанного на рис. 1.30) и базовая волновая форма, извлечённая с использо-
ванием короткополосной фильтрации его комплексного кепстра при пс = 0,003125 с.
Сигнал был дополнен нулями до двойной длительности; было также использовано
экспоненциальное взвешивание при а = 0,99. Видно, что базовая волновая форма,
соответствующая отклику речевого тракта, была успешно выделена. Выделение
отклика речевого тракта даёт возможность выполнить спектральный анализ без
появления эффекта квазипериодических повторений в речевом сигнале.
Четвёртая кривая на рис. 4.24 показывает волновую форму голосовой щели (воз-
буждение), полученную путём длиннополосной фильтрации кепстра с теми же самы-
ми параметрами, что и в предыдущем параграфе. Результирующая кривая показывает
импульсы в моменты времени появления каждой волновой формы в композитном
200
Гл. 4. Обнаружение событий
Рис. 4.24. Сверху вниз: сегмент гласного звука речевого сигнала, включающий шесть периодов
основного тона (извлечённый из сигнала, показанного на рис. 1.30 и пропущенный через
фильтр нижних частот); комплексный кепстр сигнала (масштаб по оси амплитуды увеличен,
чтобы были лучше видны пики в момент появления эха и при кратных временных задержках;
значения, превышающие 1,0, были ограничены); (сдвинутая) базовая волновая форма, получен-
ная в результате короткополосной фильтрации кепстра; возбуждающая последовательность,
полученная в результате длиннополосной фильтрации кепстра
речевом сигнале. Эти пики убывают по амплитуде, что вызвано использованием
экспоненциального взвешивания (q = 0,99) до вычисления кепстра. Для восстанов-
ления импульсов до их первоначального уровня может быть использовано обратное
экспоненциальное взвешивание; однако артефакт в конечной части возбуждающего
сигнала усиливается до значительно более высокого уровня, чем искомые импульсы,
из-за прогрессивно более высоких значений а~п для больших п. Поэтому в насто-
ящей иллюстрации операция обратного взвешивания не была использована. Тем не
менее, результаты показывают, что информация о высоте тона также может быть
восстановлена путём гомоморфной фильтрации гласных звуков речевого сигнала.
4.9. Применение: анализ ритма ЭКГ
Задача. Описать метод для измерения ЧСС и среднего RR-интервала по
сигналу ЭКГ.
Решение. Для анализа ритма ЭКГ и для мониторного контроля частоты сер-
дечных сокращений (ЧСС) необходимо использовать алгоритм обнаружения QRS-
комплекса, например такой, как метод Пана-Томпкинса, описанный в разд. 4.3.2.
Применение: анализ ритма ЭКГ
201
Выходной сигнал последнего сглаживающего фильтра может быть использован алго-
ритмом поиска пиков для получения временного маркера для каждого QRS-комплек-
са. Процедура поиска, предложенная Паном и Томпкинсом, объяснялась в разд. 4.3.2.
Промежутки времени между двумя такими последовательными маркерами дают
RR-интервалы, которые могут быть усреднены по некоторому количеству комплексов,
что представляет собой хорошую оценку среднего интервала между комплексами.
Частота сердечных сокращений (ЧСС) может быть рассчитана в ударах в минуту
•ак 60, делённое на среднее значение RR-интервала в секундах. Частота сердечных
сокращений также может быть определена путём подсчёта количества комплексов,
обнаруженных за определенный период, например за 10 с, и умножения результата
-а требуемый коэффициент (в данном случае — на 6) для получения количества
•.омплексов за одну минуту.
Верхняя кривая на рис. 4.25 показывает результат фильтрации зашумлённого
сигнала ЭКГ, приведённого на рис. 3.5. Зашумлённый сигнал был отфильтрован с ис-
“ользованием низкочастотного фильтра Баттерворта 8-го порядка с частотой среза
Рис. 4.25. Результаты работы алгоритма Пана-Томпкинса: сигнал, показанный на рис. 3.5,
еле низкочастотной фильтрации (а); нормализованный результирующий сигнал конечного
интегратора (б)
«О Гц, и далее сигнал был прорежен в пять раз для получения эффективной частоты
г-‘Скретизации 200 Гц. Нижняя кривая показывает выходной сигнал метода Пана-
7 мпкинса. Результирующий сигнал метода Пана-Томпкинса был нормализован пу-
тём деления на максимальное значение по всей доступной записи данных (поскольку
ванный пример записывался в режиме off-line). В простой поисковой процедуре, кото-
рая успешно осуществила обнаружение всех QRS-комплексов в данном сигнале, был
пользован фиксированный порог 0,1 и мёртвая зона длительностью 250 мс. (Мёрт-
вач зона означает период, на протяжении которого обнаружение приостанавливается
202
Гл. 4. Обнаружение событий
после того, как произошло превышение порога.) Рассчитанное значение среднего
RR-интервала составило 716 мс, что дало эффективную величину ЧСС 84 уд./мин.
Результаты работы различных стадий алгоритма Пана-Томпкинса для зашум-
лённого сигнала ЭКГ, дискретизованного с частотой 200 Гц, показаны на рис. 4.26.
Полосовой фильтр эффективно устранил низкочастотные артефакты в этом сигнале.
| % 0,006 Н- I
| § 0,004 И-
IX СО II 1
1 “ 0,002 L.ij 111 l ijjjJijj lljj.jjjjjjиj 11jjj-i
2 4 6 8 10 12 14 16 18 20
1
0,5
2 4 6 8 10 12 14 16 18 20
Время, c
Рис. 4.26. Результаты обработки зашумлённого сигнала ЭКГ с использованием алгоритма
Пана-Томпкинса (сверху вниз): сигнал ЭКГ, дискретизованный с частотой 200 Гц; выход-
ной сигнал полосового фильтра; выходной сигнал оператора дифференцирования; результат
возведения в квадрат; нормализованный выходной сигнал конечного интегратора
Окончательный выходной сигнал имеет два пика, которые намного больше, чем все
остальные: один в самом начале сигнала, из-за артефактов фильтрации, и второй
примерно в момент времени 7,5 с, связанный с артефактом в самом сигнале. Более
того, выходной сигнал содержит два пика (для комплекса и артефакта) в момент
времени 7,5 с. Использование простой процедуры поиска пиков, объяснённой в пре-
дыдущем параграфе, привело к обнаружению 46 комплексов: на один больше, чем
45, явно присутствующих в сигнале, что связано с артефактом в момент времени
примерно 7,5 с. Подсчитанный средний RR-интервал составил 446,6 мс, что дало
эффективную ЧСС 137 уд./мин.
Эта иллюстрация показывает необходимость предварительной фильтрации сигна-
ла ЭКГ для устранения артефактов и необходимость применения адаптивного порога
к выходному сигналу алгоритма Пана-Томпкинса для обнаружения QRS-комплексов.
Совершенно очевидно, что прямое применение порога к первоначальному сигналу
ЭКГ не будет давать успешного обнаружения всех QRS-комплексов в этом сигнале.
Применение', идентификация звуков сердца
203
4.10. Применение: идентификация звуков сердца
Задача. Разработать алгоритм обработки сигнала для идентификации ком-
понент S1 и S2 в сигнале ФКГ и дальнейшей сегментации сигнала ФКГ на его
систолическую и диастолическую части. В качестве опорных сигналов доступны
сигнал ЭКГ и сигнал каротидного пульса.
Решение. В разд. 2.3 мы могли видеть, как сигнал ЭКГ и сигнал каротид-
ного пульса могут быть использованы для разметки точек начала компонент S1
и S2 в сигнале ФКГ; однако данная процедура не была основана на обработке
сигнала, а выполнялась путём визуального анализа сигнала. В данной главе мы
разработали методику обработки сигнала для обнаружения QRS-комплекса в ЭКГ
и дикротической выемки в сигнале каротидного пульса. Следовательно, мы можем
использовать эти методы с целью получения временной синхронизации от сигналов
ЭКГ и каротидного пульса для анализа сигнала ФКГ. Чтобы решить эту задачу,
требуется распознать несколько временных соотношений между сигналами [41, 66].
За начало тона S1 может быть принят тот же самый момент, что и начало
QRS-комплекса. Сам QRS-комплекс может быть обнаружен с использованием одного
из трёх методов, описанных в настоящей главе, например с помощью метода Пана-
Томпкинса.
Обнаружение точки начала тона S2 — более сложная задача. Обозначим частоту
сердечных сокращений HR уд./мин. Период, предшествующий выбросу крови (pre-
ejection period, PEP), определяется как интервал от начала QRS-комплекса до
начала соответствующего подъёма в сигнале каротидного пульса. Скорректированное
с учётом ЧСС значение РЕР определяется как РЕРС = PEP+0,4HR (в мс). Значение
РЕРС для взрослого человека в норме должно лежать в диапазоне 131 ±13 мс [41].
Время выброса (ejection time, ET) — это интервал от начала подъёма в сигнале
-.аротидного пульса до дикротической выемки. Время выброса в мс, скорректирован-
-ое с учётом ЧСС, равняется ЕТС = ЕТ ± 1,6Я7? и в норме находится в диапазонах
395 ± 13 мс для взрослых мужчин и 415 ± 11 мс для взрослых женщин.
Используя РЕРСтах = 144 мс и Я7?т1п = 60 уд./мин, получим РЕРтах = 120 мс.
При HRmin = 60 уд./мин и ЕТСтах = 425 мс, получим ЕТтах = 325 мс. При этих
значениях параметров максимальный интервал между QRS-комплексом и дикроти-
ческой выемкой равняется 380 мс. Согласно процедуре обнаружения дикротической
выемки, предложенной Lehner и Rangayyan [66], рекомендуется её поиск в выходном
сигнале, который получен с использованием метода, основанного на производной
।описан в разд. 4.3.3), в интервале 500 мс после QRS-комплекса. После того как
обнаружена дикротическая выемка, необходимо вычесть временную задержку между
моментом начала S2 и точкой D для получения момента времени, где начинается S2.
^ehner и Rangayyan [66] провели измерения средней задержки S2-D в сигнале ФКГ
каротидного пульса для 60 пациентов и получили значение 42,6 мс со стандартным
тклонением 5,0 мс.
Для сегментирования сигнала ФКГ на его систолическую и диастолическую
-асти могут быть использованы следующие процедуры.
1. Использование метода Пана-Томпкинса, описанного в разд. 4.3.2, для локализа-
ции QRS-комплексов в ЭКГ.
2. Идентификация одного периода ФКГ как интервала между точками локализации
двух последовательных QRS-комплексов. Отметим, что для получения начальной
точки QRS-комплекса из точки локализации обнаруженного пика должны быть
вычтены все задержки, вносимые фильтрами, используемыми в методе Пана-
Томпкинса.
204
Гл. 4. Обнаружение событий
3. Использование метода Ленера и Рангайяна, описанного в разд. 4.3.3, для обна-
ружения дикротической выемки в сигнале каротидного пульса.
4. Пусть стандартизованная задержка S2-D будет равняться среднему значению
плюс удвоенное стандартное отклонение, полученное Lehner и Rangayyan [66], т. е.
52,6 мс. Необходимо вычесть стандартизованную задержку S2-D из точки лока-
лизации обнаруженной дикротической выемки для получения точки начала S2.
5. Интервал S1-S2 даёт систолическую часть цикла ФКГ.
6. Интервал между точкой S2 и следующим обнаруженным S1 даёт диастолическую
часть цикла ФКГ.
На рис. 4.27 и 4.28 показаны результаты применения описанной выше процедуры
к сигналам ФКГ, ЭКГ и каротидного пульса для пациента в норме и для пациента,
имеющего расщепление S2, шум систолического выброса и щелчок открытия мит-
рального клапана. (Клинический диагноз показывает возможность наличия дефек-
та перегородки желудочков, стеноза лёгочного клапана или лёгочной гипертензии
для четырнадцатимесячной девочки, имеющей шумы сердца.) Положения пиков,
Рис. 4.27. Результаты сегментации сигнала ФКГ на систолическую и диастолическую части
с использованием сигналов ЭКГ и каротидного пульса в качестве опорных (сверху вниз):
сигнал ФКГ у пациента в норме (мужчина, 23 года); сигнал ЭКГ; у(п), выходной сигнал метода
Пана-Томпкинса для обнаружения QRS-комплекса после нормализации в диапазоне (0,1);
сигнал каротидного пульса; s(n), выходной сигнал метода Ленера и Рангайяна для обна-
ружения дикротической выемки, нормализованный в диапазоне (0,1). Пики, обнаруженные
в выходных сигналах этих двух методов, отмечены символом *; позиции QRS-комплексов
и дикротической выемки D отмечены треугольниками и ромбиками соответственно; позиции
S1 и S2 отмечены на кривой ФКГ треугольниками и ромбиками соответственно; последний
кардиоцикл не обрабатывался
Применение', идентификация звуков сердца
205
Время, с
Рис. 4.28. Результаты сегментации сигнала ФКГ на систолическую и диастолическую части
с использованием сигналов ЭКГ и каротидного пульса в качестве опорных (сверху вниз):
сигнал ФКГ с расщеплённой компонентой S2, шумом систолического выброса и щелчком
открытия митрального клапана (девочка, 14 месяцев); сигнал ЭКГ; у(п) — выходной сигнал
метода Пана-Томпкинса для обнаружения QRS-комплекса; сигнал каротидного пульса; у(п) —
выходной сигнал метода Ленера и Рангайяна для обнаружения дикротической выемки. Пики,
обнаруженные в выходных сигналах этих двух методов, отмечены значками *; позиции QRS
и D отмечены треугольниками и ромбиками соответственно; позиции S1 и S2 отмечены на
кривой ФКГ треугольниками и ромбиками соответственно
обнаруженных в выходном сигнале методом Пана-Томпкинса (третья кривая на
каждом рисунке) и в выходном сигнале методом Ленера и Рангайяна (пятая кривая),
помечены значком *. В качестве порога для определения пиков в выходном сигнале
метода Пана-Томпкинса был использован простой порог, составляющий 0,75 от
максимального значения при продолжительности мёртвой зоны 250 мс.
Позиции QRS-комплексов и дикротическрой выемки (D) были помечены на
кривых ЭКГ и каротидного пульса, соответственно, треугольниками и ромбиками.
Найденные в итоге позиции S1 и S2 на кривой ФКГ были отмечены, соответственно,
треугольниками и ромбиками. В процессе маркировки событий были учтены отме-
ченные выше задержки фильтров и временные соотношения между тремя каналами
сигналов. Обратите внимание на то, как результаты обнаружения событий сигналов
ЭКГ и каротидного пульса были использованы для локализации соответствующих
событий в сигнале ФКГ. Lehner и Rangayyan [66] использовали сходную процедуру
для разделения сигнала ФКГ на систолический и диастолический сегменты; эти сег-
менты затем анализировались по отдельности во временной и в частотной областях
(см. также разд. 6.4.5 и 7.9).
206
Гл. 4. Обнаружение событий
4.11. Применение: обнаружение аортальной
компоненты второго тона сердца
Разные звуки сердца по-разному передаются в различные позиции на груди.
Аортальная и лёгочная компоненты А2 и Р2 тона S2 лучше всего слышны в области
аорты (справа от грудины, во втором межрёберном пространстве) и в лёгочной
области (левая парастернальная линия в третьем межрёберном промежутке) соот-
ветственно (см. рис. 1.17). А2 вызывается закрытием аортального клапана в конце
систолы и обычно бывает громче, чем Р2 во всех позициях на груди. Более ранние
теории происхождения сердечных звуков приписывали эти звуки непосредственно
открытию и закрытию лепестков клапана. В настоящее время общепринятой является
теория, описанная Rushmer [23], см. разд. 1.2.8.
Относительное временное положение компонент А2 и Р2 зависит от разности
давлений по разные стороны соответствующих клапанов в левой и правой системах
циркуляции желудочков. Для человека в норме временное положение Р2 по отноше-
нию к А2 изменяется с дыханием; положение компоненты А2 не зависит от дыхания.
Дыхательное давление (давление внутри грудной клетки) снижается во время вдоха,
что ведёт к задержке закрытия лёгочного клапана и, следовательно, к увеличенному
(видимому и слышимому) промежутку между А2 и Р2 [23, 41, 42]. При выдохе (для
человека в норме) этот промежуток уменьшается, А2 и Р2 перекрываются. Каждая
из компонент А2 и Р2 имеет собственную длительность, равную примерно 50 мс.
В норме промежуток между А2 и Р2, вызванный вдохом, имеет порядок 30-40 мс,
хотя иногда регистрировалось расщепление, достигающее 100 мс [41].
Расщепление компоненты S2, достигающее во время затяжного выхода более
40 мс, рассматривается как отклонение от нормы [41]. Полная блокада правой ножки
пучка Гиса может вызвать задержанную активацию правого желудочка и, следо-
вательно, задержанное закрытие лёгочного клапана, задержанную компоненту Р2
и, соответственно, широко расщеплённую компоненту S2. Кроме того, широкое рас-
щепление компоненты S2 может быть вызвано следующими состояниями: дефектом
перегородки предсердий, дефектом перегородки желудочков и стенозом лёгочного
клапана. Блокада левой ножки пучка Гиса ведёт к задержке сокращения левого
желудочка и закрытию аортального клапана (по отношению к правому желудочку
и лёгочному клапану), что приводит к появлению компоненты А2 после Р2, т. е.
обратному расщеплению этих двух компонент. Обратное расщепление компоненты
S2 может быть вызвано также следующими причинами: недостаточностью аорталь-
ного клапана и анормально ранним закрытием лёгочного клапана. Из сказанного
видно, что идентификация компонент А2 и Р2 и их временных соотношений может
оказать помощь в диагностике ряда сердечно-сосудистых дефектов и заболеваний.
МасСапоп и др. [116] провели эксперименты на собаке для непосредственного
определения и измерения временных интервалов закрытия аортального клапана.
Они разработали катетер с электрическим контактным устройством, которое может
быть помещено рядом с аортальным клапаном для определения точного момента его
закрытия. Также они измеряли давление в аорте и ФКГ в третьем левом межрё-
берном промежутке. Они продемонстрировали, что аортальный клапан закрывается,
по меньшей мере, за 5-13 мс до того, как появляется впадина в волне давления
аорты (см. рис. 1.27 и 1.28, где показаны волны давления в аорте, записанные
от собаки). В результате был сделан вывод, что компонента S2 вызывается не
столкновением самих лепестков клапана, а отдачей или рикошетом столбика крови
аорты от стенок после закрытия клапана. МасСапоп и др. также выдвинули гипотезу,
что относительно высокочастотные характеристики этой впадины и компоненты S2
Применение', обнаружение аортальной компоненты второго тона сердца 207
являются результатом упругой отдачи стенок аорты и клапанов в ответ на расшире-
ние, вызванное рикошетом столбика крови в аорте.
Stein и др. [117, 118] провели эксперименты, в которых анализировали звуки,
записанные внутри сердца и внутри артерий. Их эксперименты показали, что ком-
понента S2 начинается после того, как закрывается клапан аорты. Они утверждали,
что компонента S2, кроме прочих, зависит от следующих факторов: растяжимости
аортального и лёгочного клапанов; гемодинамических факторов, которые заставляют
клапаны растягиваться и вибрировать; вязкости крови и её способности замед-
лять диастолические движения клапанов; конфигурации аорты, лёгочной артерии
и желудочков. Было показано, что лёгочный клапан, благодаря большей площади
его поверхности, чем у аортального клапана, более растяжим и, следовательно,
производит более сильный звук, чем аортальный клапан, даже при том же самом
'радиенте давления по разные стороны клапана. Утверждается также, что в случае
лёгочной гипертензии лёгочный клапан будет ещё больше растягиваться при более
высокой скорости: скорость нарастания градиента диастолического давления по
разные стороны от закрытого лёгочного клапана будет более высокой, чем в норме.
Задача. Учитывая то, что второй сердечный тон S2 состоит из аортальной
компоненты А2 и лёгочной компоненты Р2 с изменяющимися временными соот-
ношениями, предложить метод для обнаружения только компоненты А2.
Решение. В предыдущем разделе мы видели, как дикротическая выемка в сиг-
нале каротидного пульса может быть использована для обнаружения начала компо-
ненты S2. Как объяснялось выше, этот метод основан на прямой взаимосвязи между
закрытием аортального клапана и аортальной впадиной и, следовательно, дикроти-
ческой выемкой. Теперь, если мы сможем обнаружить сегмент S2 для нескольких
кардиоциклов и нескольких дыхательных циклов, мы можем выполнить синхронное
Рис. 4.29. Синхронное усреднение S2 для обнаружения А2 и подавления Р2. На рисунке пока-
заны девять (1-9) последовательных сегментов S2 (длительность 300 мс) пациента (девочка,
" лет) с дефектом перегородки предсердий, приводящим к переменному расщеплению в компо-
ненте S2. Кривая 10 представляет собой компоненту S2, усредненную по 21 последовательному
кардиоциклу
208
Гл. 4. Обнаружение событий
усреднение S2. Компонента А2 должна появляться в один и тот же момент времени
для каждого сегмента S2 и должна быть усилена процессом синхронного усреднения.
С другой стороны, компонента Р2 будет появляться в различные моменты времени
и должна быть устранена (подавлена) процессом усреднения.
На рис. 4.29 показаны сегменты длительностью по 300 мс, содержащие компо-
ненты S2, выделенные из девяти последовательных кардиоциклов ФКГ пациента,
страдающего дефектом перегородки предсердий. Сегментирование сигнала ФКГ вы-
полнялось с использованием ЭКГ и сигнала каротидного пульса в качестве опорных
сигналов. При этом использовался метод, похожий на тот, который иллюстри-
руют рис. 4.27 и 4.28. Сигнал ФКГ записывался во втором левом межрёберном
промежутке, который ближе к лёгочной области, чем к аортальной области. Эти
девять сегментов S2 отчётливо показывают фиксированное временное положение
компоненты А2 и изменяющееся временное положение компоненты Р2. Последний
график показывает усреднение компонент S2, извлечённых из 21 последовательного
кардиоцикла. Этот усреднённый сигнал очень хорошо показывает компоненту А2,
в то время как компонента Р2 подавлена.
Обнаружение компоненты А2, возможно, могло бы быть выполнено лучше, если
бы сигнал ФКГ записывался в аортальной области, где А2 должна быть сильнее,
чем Р2. После того как найдена компонента А2, она может быть вычтена из каждой
записи тона S2 для получения индивидуальных оценок компоненты Р2. Sarkady
и др. [119], Baranek и др. [120], и Durand и др. [121] предложили методы усреднения,
близкие к описанному выше, с использованием или без использования обнаружения
огибающей (но без использования сигнала каротидного пульса); эти методы были
названы усреднением по ансамблю с выравниванием для обнаружения волновых
форм или когерентным обнаружением и усреднением.
4.12. Замечания
Теперь мы установили связи между характеристиками определённых эпох в неко-
торых биомедицинских сигналах и соответствующими физиологическими и пато-
логическими событиями в изучаемых биомедицинских системах. Мы видели, как
операторы, основанные на производной, могут быть использованы для обнаружения
QRS-комплексов в сигнале ЭКГ, а также дикротической выемки в сигнале каротид-
ного пульса. Также было продемонстрировано использование функции корреляции
и спектральной плотности для обнаружения ритмов и событий в сигнале ЭЭГ.
Мы исследовали, как сигналы, содержащие повторения определённых событий или
волновых форм (такие как гласные звуки речевого сигнала), можно анализировать
с использованием комплексного кепстра и гомоморфной фильтрации. И наконец,
мы видели, как события, обнаруженные в одном сигнале, могут быть использованы
для локализации соответствующих событий в другом сигнале: задача обнаружения
S1 и S2 в сигнале ФКГ была существенно упрощена за счёт использования сигналов
ЭКГ и каротидного пульса, где волны QRS и D могут быть обнаружены значительно
проще, чем сами по себе тоны сердца.
Обнаружение событий является важным шагом, который необходим до того, как
соответствующие волны или волновые формы будут подвергнуты более детальному
анализу. После того как обнаружена, изолирована и выделена специфическая изу-
чаемая волна, для анализа соответствующих физиологических или патологических
явлений могут быть использованы методы, направленные на ожидаемые характе-
ристики события. В этом случае анализ событий в полученном сигнале не будет
затруднён или запутан другими событиями или артефактами.
Контрольные вопросы и задания
209
4.13. Контрольные вопросы и задания
1. Докажите, что автокорреляционная функция (АКФ) фхх(г) любой функции x(t)
максимальна при т = 0.
{Подсказка', начните с рассмотрения выражения E{[x(t + r) ±x(i)]2} > 0.)
2. Для стационарного процесса х докажите, что АКФ является чётно симметрич-
ной, т. е. фхх(т) = фхх(—т). Вы можете использовать математическое ожидание
или определение временного усреднения АКФ.
3. Начав с определения АКФ как непрерывного усреднения по времени, докажите,
что преобразование Фурье от АКФ представляет собой спектральную плотность
мощности (СПМ) сигнала.
4. Что является эквивалентами автокорреляционной функции и функции взаимной
корреляции в области преобразования Фурье? Опишите их общие свойства
и различия. Перечислите их применения в анализе биомедицинских сигналов.
5. Сигнал x(t) передаётся по некоторому каналу. Принимаемый сигнал y(t) пред-
ставляет собой масштабированный, смещённый и зашумлённый вариант сигна-
ла x(t), заданный как y(t) = ax(t — io) + ^(i), где « — коэффициент масштаби-
рования, io — задержка по времени и z/(i) — шум. Предположим, что шумовой
процесс имеет нулевое среднее, статистически не зависим от сигнала и что все
процессы являются стационарными.
Выведите выражения для среднего значения и АКФ сигнала y(t) через статисти-
ки а; и ту.
6. Выведите выражение для АКФ сигнала x(t) = sin(cuoi). Используйте определение
усреднённой по времени АКФ.
Из АКФ выведите выражение для СПМ сигнала. Продемонстрируйте все шаги.
7. Ритмический эпизод 0-волны в сигнале ЭЭГ был аппроксимирован исследова-
телем с помощью синусоидальной волны с частотой 5 Гц. Этот сигнал был
дискретизован с частотой 100 Гц.
Нарисуйте схематическое представление АКФ этого эпизода для задержек
до 0,5 с.
Разметьте ось времени в отсчётах и секундах.
Нарисуйте схематическое представление СПМ для этого эпизода. Разметьте ось
частот в герцах.
8. Значения сигнала, дискретизованного с частотой 100 Гц, задано последователь-
ностью {0,0,0,0,10,10,10,0,0,0,0,0,5,5,5,0,0,0,0,0, -3, -3, -3,0,0,0}.
Исследователь выполняет согласование с образцом, заданным последовательно-
стью {0,5,5,5,0}. Первый отсчёт в каждом массиве соответствует нулевому
моменту времени.
Нарисуйте выходной сигнал операции согласования с образцом и интерпретируй-
те результат. Разметьте ось времени в секундах.
9. Двухфазный сигнал х(п) представлен последовательностью отсчётов х{п) =
= {0,1,2,1,0,-1,-2,-1,0} для п = 0,1,2, ...,8.
а) Нарисуйте график х(п).
б) Создайте сигнал у{п), определённый как у(п) = Зж(п)+2ж(п - 12)—х(п — 24).
Нарисуйте график у(п).
в) Разработайте согласованный фильтр для обнаружения присутствия х(п)
в у(п). Объясните, как импульсная характеристика h(n) и частотная ха-
рактеристика Н(ш) этого фильтра связаны с х(п). Нарисуйте h(n).
14 Р. Рангайян
210
Гл. 4. Обнаружение событий
г) Рассчитайте выходной сигнал этого фильтра и нарисуйте его. Интерпретируй-
те выходной сигнал фильтра.
10. Исследователь использует оператор производной (фильтр), заданный как
w(n) = х(п) — х(п — 1), где х(п) — входной сигнал, a ы(п) — выходной сиг-
нал. Далее результат пропускается через фильтр скользящего среднего
у(п) = (1/3)[w(n) -I- w(n — 1) — w(n — 2)], где у(п) — требуемый окончательный
выходной сигнал.
а) Выведите передаточную функцию (в г-области) этих двух фильтров по от-
дельности, а также в комбинации.
б) Имеет ли значение, какой из этих двух фильтров используется первым?
Почему (нет)?
в) Выведите импульсную характеристику каждого из фильтров и их комбина-
ции. Нарисуйте все три сигнала.
г) Сигнал, описываемый отсчётами {0.0, ..., 0,6,6,6,6,6,6,6,6,0,0,...}, по-
даётся на вход данной системы. Рассчитайте значения отсчётов выходного
сигнала. Объясните воздействие этих двух операций на сигнал.
4.14. Упражнения и лабораторные работы
Замечание. Необходимые для выполнения упражнений файлы с данными доступ-
ны на сайте ftp://ftp.ieee.org/uploads/press/rangayyan/.
1. Используя MATLAB, примените метод Пана-Томпкинса для обнаружения QRS-
комплекса. Вы можете использовать простой пороговый метод обнаружения
QRS-комплекса, так как процедура выполняется в режиме off-line.
Примените эту процедуру к сигналам, содержащимся в файлах ECG3.dat,
ECG4.dat, ECG5.dat и ECG6.dat, дискретизованным с частотой 200 Гц (см. файл
ECGS.m). Вычислите среднюю частоту сердечных сокращений и ширину
QRS-комплекса для каждой записи. Проверьте ваши результаты, измерив эти же
параметры вручную по графикам сигналов.
2. Файлы eegl-xx.dat (где «хх» — наименование канала ЭЭГ) содержат восемь од-
новременно записанных сигналов ЭЭГ с a-ритмом. (Вы можете прочесть эти
сигналы с помощью программы из файла eegl.m). Частота отсчётов для каждого
из каналов равна 100 Гц. Вырежьте порцию сигнала, где явно присутствует
a-ритм, для её использования в качестве образца или опорного сигнала. Выпол-
ните операцию взаимной корреляции этого образца с текущим окном (небольшой
длительности) для различных каналов и исследуйте возможность использования
результатов для обнаружения присутствия а-ритма.
3. Файлы eeg2-xx.dat (где «хх» — наименование канала ЭЭГ) содержат десять од-
новременно записанных сигналов ЭЭГ с комплексами спайк-волна. (Вы можете
прочесть эти сигналы с помощью программы из файла eeg2.m.) Частота отсчётов
для каждого из каналов равна 100 Гц. Вырежьте один комплекс спайк-волна из
какого-нибудь канала ЭЭГ и используйте его в качестве образца. Выполните
согласованную фильтрацию с помощью взаимной корреляции или с помощью
специально разработанного согласованного фильтра Примените эту процедуру
к тому каналу, откуда был взят образец, а также к другим каналам. Исследуйте
результаты и объясните, как они могут быть использованы для обнаружения
комплексов спайк-волна.
Упражнения и лабораторные работы 211
4. Файлы pecl.dat, pec33.dat и pec52.dat содержат трёхканальные записи ФКГ, ЭКГ
и сигнала каротидного пульса, дискретизованные с частотой 1000 Гц (вы можете
прочесть эти сигналы с помощью программы из файла plotpec.m). Сигналы из
файлов pecl.dat (взрослый мужчина) и pec52.dat (мужчина 23 лет) являются
нормальными; сигнал ФКГ из файла pec33.dat имеет систолический шум и полу-
чен от пациента с подозрением на стеноз лёгочного клапана, дефект перегородки
желудочков и лёгочную гипертензию (девочка, 14 месяцев).
Примените метод Пана-Томпкинса для обнаружения QRS-комплекса в канале
ЭКГ, а метод Ленера и Рангайяна для обнаружения дикротической выемки
в канале каротидного пульса. Экстраполируйте временную информацию из ка-
нала ЭКГ и из. канала каротидного пульса для обнаружения начала S1 и S2
в канале ФКГ. Какая коррекция необходима для компенсации задержки между
соответствующими событиями во всех трёх каналах?
Глава 5
АНАЛИЗ ФОРМ ВОЛН И ИХ СЛОЖНОСТИ
Некоторые биомедицинские сигналы, такие как ЭКГ или сигнал каротидного
пульса, имеют простые формы волн (хотя волна QRS часто упоминается как «слож-
ная»!). Легко идентифицируемые признаки ЭКГ и сигнала каротидного пульса могут
видоизменяться под воздействием аномальных событий и патологических процессов.
Следовательно, анализ форм волн может оказаться полезным при диагностике.
Такие сигналы, как ЭМГ и ФКГ, не имеют форм волн, которые могут быть легко
идентифицированы. Действительно, сигнал ЭМГ представляет собой смешение бес-
численного количества ПДОДЕ (см. разд. 1.2.3). Сигналы ФКГ представляют собой
волны вибрации, которые не обладают какими-либо специфическими формами. Тем
не менее, даже сложность таких форм волн, как ЭМГ и ФКГ, меняется в зависимости
от физиологических и патологических явлений. Анализ сложности форм волн таких
сигналов может помочь в достижении понимания процессов, которые они отражают.
5.1. Постановка задачи
Объяснить, как формы волн и связанные с ними сложные биомедицинские
сигналы соотносятся с характеристиками физиологических и патологических
явлений, порождающих эти волны. Предложить методики для параметризации
и анализа идентифицируемых признаков сигнала.
Как и в предыдущих главах, такая постановка задачи является общей и пред-
ставляет собой тему настоящей главы. В последующих разделах даются иллюстра-
ции задачи на различных примерах, которые позволяют дать более конкретные ее
определения по отношению к различным исследуемым сигналам. Остальные разделы
этой главы описывают методы, которые предназначены для решения поставленных
задач. Необходимо ещё раз отметить, что хотя методы анализа сигнала предлагаются
в контексте специфических сигналов и приложений, они могут найти применение
в других областях, где можно встретить сигналы со сравнимыми характеристиками
и поведением.
5.2. Иллюстрация задачи на примерах
5.2.1. QRS-комплекс при блокаде проводящих путей. Мы видели в разд. 1.2.4,
что пучок Гиса и его ветви проводят импульс сердечного возбуждения от АВ-узла
к желудочкам. Блокада одной из проводящих ветвей вызывает асинхронность между
Иллюстрация задачи на примерах
213
сокращениями левого и правого желудочков. Это, в свою очередь, вызывает суммиро-
вание с определённым смещением потенциалов действия миоцитов левого и правого
желудочков на протяжении времени, превышающего норму. Результатом является
более продолжительный и, возможно, зазубренный QRS-комплекс, как показано на
сигнале ЭКГ пациента с блокадой правой ножки пучка Гиса на рис. 1.15.
5.2.2. Влияние ишемии и инфаркта миокарда на форму QRS-комплекса. За-
купорка коронарной артерии или какой-либо её ветви, связанная с отложением жира,
кальция и т. д., приводит к пониженному снабжению кровью какой-то части муску-
латуры сердца. Та часть миокарда, которая обслуживается повреждённой артерией,
далее страдает от ишемии, т. е. от недостаточного снабжения кровью. Продолжи-
тельная ишемия ведёт к инфаркту миокарда, когда повреждённая ткань отмирает.
Погибшие миоциты не могут более сокращаться и вырабатывать потенциал действия.
Потенциал действия тех желудочковых миоцитов, которые недостаточно снаб-
жаются кровью, отражают изменённые характеристики реполяризации: потенциал
действия имеет меньшую амплитуду и укороченную длительность [10, 122]. Таким
образом, полученная в результате сумма всех потенциалов действия всех актив-
ных миоцитов желудочков будет отличаться от нормального QRS-комплекса. Эти
первичные изменения отражаются на ЭКГ в виде модифицированного ST-сегмента,
который либо приподнят, либо опущен, в зависимости от используемого отведения
и местоположения повреждённой части сердца; Т-зубец может также быть инверти-
рован. Хронический инфаркт миокарда вызывает возврат к нормальному ST-сегменту
и выраженный Q-зубец [23].
5.2.3. Эктопические комплексы. Эктопические комплексы генерируются сер-
дечной тканью, обладающей аномальной способностью брать на себя функцию
водителя ритма. Эктопические комплексы, возникающие из фокусных точек пред-
сердий, могут вызвать изменённые формы Р-зубца, связанные с различными путями
распространения импульса возбуждения и, следовательно, с различной последо-
вательностью активизации мышечных единиц предсердия. Однако QRS-комплекс
предсердного эктопического комплекса окажется нормальным, поскольку проведение
возбуждения после узла АВ будет нормальным.
Эктопические комплексы, возникающие в желудочках (которые всегда бывают
преждевременными, т. е. являются желудочковыми экстрасистолами), обычно имеют
причудливую форму волны QRS, связанную с изменяющимися в широких пределах
путями проведения и возбуждения мышечных единиц желудочка. На рис. 1.14 пока-
зан вид ЭКГ с желудочковыми экстрасистолами (ЖЭ). У ЖЭ обычно отсутствует
предшествующий им Р-зубец; однако эктопическому комплексу, возникшему в пе-
риод нормальной задержки АВ-узла, может предшествовать нормальный Р-зубец.
ЖЭ, возникшие из эктопических фокусов, расположенных близко к АВ-узлу, могут
иметь почти нормальную форму QRS-комплекса, поскольку путь проведения может
быть почти таким же, как в случае нормального импульса из АВ-узла. С другой
стороны, комплексы, возникшие из эктопических фокусов вблизи верхушки сердца,
могут иметь изменяющиеся в широких пределах пути распространения, что приводит
к сильно отличающейся от нормы форме QRS-комплекса. В дополнение к форме
волны, важную роль в определении природы эктопического комплекса играют пред-
шествующий и следующий за ним RR-интервалы.
5.2.4. Сложность формы сигнала ЭМГ. В разд. 1.2.3 мы видели, что двигатель-
ные единицы вовлекаются за счёт двух механизмов — пространственного и времен-
ного, что необходимо для создания повышенных уровней сокращения и мускульной
силы. По мере того как всё больше и больше двигательных единиц вовлекают-
214
Гл. 5. Анализ форм волн и их сложности
ся в действие и их индивидуальные уровни возбуждения возрастают (в рамках
определённых пределов), ПДОДЕ активных двигательных единиц перекрываются
и создают сложный интерференционный тип сигнала. На рис. 1.9 и 1.10 показан
сигнал ЭМГ, полученный с диафрагмы собаки на протяжении одного нормального
цикла дыхания. Повышение сложности формы волны с усилением уровня дыхания
ясно видно на рис. 1.10 на графике, приведённом в увеличенном масштабе.
Хотя вид поверхностного сигнала ЭМГ обычно слишком сложен для визуального
анализа, общее повышение уровня активности («занятости») обычно хорошо заметно.
Очень часто в лабораториях сигнал ЭМГ подключают ко входу звукового усилителя:
низкий уровень активности, когда ПДОДЕ не перекрываются (т. е. разделены во
времени), даёт дискретные «вспышки» звука; повышающийся уровень сокращений
приводит к возрастающему «треску» в производимом звуке. Сигналы ЭМГ можно
анализировать для получения параметров сложности форм волн, которая возрастает
с усилением мышечного сокращения. В результате, из электрического проявления
механической активности мышц удаётся получить коррелят этой активности.
5.2.5. Уровень интенсивности сигнала ФКГ. Хотя волны вибрации сигнала
ФКГ могут не поддаваться непосредственному визуальному анализу, общий вид
изменения интенсивности этого сигнала на протяжении сердечного цикла можно
легко оценить путём прослушивания или визуального просмотра. Определённые сер-
дечно-сосудистые заболевания и дефекты изменяют относительную интенсивность
компонент S1 и S2, вызывают дополнительные звуки или шумы и/или расщепляют
S2 на две раздельные компоненты, как уже описывалось в разд. 1.2.8. В то же
время, многие заболевания могут вызывать систолические шумы, например, характер
изменения интенсивности или огибающая шума могут оказаться полезными для
постановки некоторых диагнозов. Также следует отметить, что определённые виды
диагностики, основанные на ФКГ, требуют сравнительного анализа сигналов ФКГ,
полученных с нескольких позиций на груди. На рис. 1.24, 1.26, 2.4, 4.27 и 4.28
показаны сигналы ФКГ у человека в норме и у пациентов с систолическим шу-
мом, расщеплённым тоном S2 и щелчком открытия митрального клапана. Различия
в кривой изменения интенсивности этих сигналов очевидны. Однако для преобра-
зования сигнала в огибающую, имеющую положительный знак, которая может рас-
сматриваться как распределение энергии сигнала во времени, необходима отдельная
методика обработки. Такое преобразование даёт возможность рассматривать кривую
интенсивности сигнала как функцию плотности вероятности (ФПВ), что позволяет
вычислять различные статистические характеристики и моменты.
5.3. Анализ потенциалов, связанных с событиями
Наиболее важным параметром, получаемым в результате визуального анализа
потенциалов, связанных с событиями (ПСС), является временное положение или
латентность первой главной положительной волны. Поскольку для взрослого чело-
века в норме средняя величина этой латентности обычно имеет значение пример-
но 120 мс, её принято обозначать как Р120 (см. рис. 3.12). Также представляют ин-
терес латентности впадин перед и после Р120, которые соответственно названы N80
и N145. Амплитуды сигнала ПСС в соответствующие моменты времени представляют
меньший интерес. Задержки в латентности, которые находятся далеко за пределами
нормальных рамок, могут служить индикаторами нарушений в зрительной системе.
Асимметрия в латентности левой и правой частей зрительной системы также может
быть индикатором нарушений.
Морфологический анализ волн ЭКГ
215
Нижняя кривая на рис. 3.12 представляет собой записанную от нормального
взрослого мужчины реализацию ПСС, которая является реакцией на световую
вспышку. На данном сигнале отмечены точки N80, Р120 и N145. Соответствующие
фактические латентности для данного пациента равны 85, 100,7 и 117 мс.
Звуковые ПСС являются гораздо более слабыми и более сложными, чем визуаль-
ные ПСС, что требует усреднения по нескольким сотням или даже нескольким тыся-
чам стимулов. В звуковых ПСС анализируются латентности и амплитуды нескольких
пиков и впадин. Обычно клинический анализ ПСС выполняется вручную, поскольку,
за исключением синхронного усреднения, не существует насущной необходимости
в какой-либо ещё компьютерной обработке сигнала.
5.4. Морфологический анализ волн ЭКГ
Форма волны цикла ЭКГ может изменяться под воздействием многочисленных
нарушений, включая ишемию миокарда или инфаркт, блокаду проводящих путей
и эктопические комплексы. Невозможно предложить единственный метод анализа,
который может помочь в классификации всех возможных причин аномальных из-
менений форм волн. Следующие далее разделы посвящены нескольким наглядным
частным случаям.
5.4.1. Коэффициент корреляции
Задача. Предложить обобщённый показатель, служащий признаком изме-
нения формы QRS-комплекса. В вашем распоряжении имеется образец QRS-
комплекса в норме.
Решение. Jenkins и др. [67] использовали коэффициент корреляции уху, опреде-
ляемый уравнением (4.21), для классификации циклов ЭКГ на нормальные комплек-
сы и комплексы с аномальной морфологией. Для каждого обнаруженного комплек-
са нормальный комплекс при вычислении уху использовался в качестве образца.
Они обнаружили, что большинство нормальных комплексов даёт величины уху
выше 0,9 и что величины, получаемые для ЖЭ и комплексов с аномальной формой,
значительно ниже. Для присвоения каждому комплексу идентифицирующего кода,
характеризующего форму волны (0 — анормальная форма и 1 —нормальная форма),
был использован порог, равный 0,9. На рис. 2.2 показан сигнал ЭКГ с пятью
аномальными комплексами, у которых первый символ в четырёхсимвольном коде
равен 0, что указывает на аномальную форму, связанную с генерацией комплекса
в эктопическом фокусе или с аберрантным проведением импульса, генерируемого
СА-узлом. Для нормальных комплексов первый символ кода равен 1, что указывает
на высокую корреляцию с образцом нормы.
5.4.2. Минимально-фазовое согласование и длина сигнала. Сигнал ЭКГ
в норме содержит эпохи активности, в которых сконцентрирована основная доля
энергии сигналов. Если отбросить обычно низкоамплитудные зубцы Р и Т, то
большая часть энергии нормального сигнала ЭКГ сконцентрирована в пределах
интервала, равного примерно 80 мс, который соответствует QRS-комплексу. Изоэлек-
трические в норме сегменты PQ, ST и ТР не содержат никакой энергии, поскольку
в пределах этих интервалов амплитуда сигнала равна нулю. Мы уже наблюдали,
-то определённые аномальные состояния приводят к расширению QRS-комплексов
• ли к смещению ST-сегмента относительно нуля. В таком случае можно сказать,
что энергия сигнала распределена в пределах более продолжительного участка.
216
Гл. 5. Анализ форм волн и их сложности
Рассмотрим теперь, как можно извлечь и исследовать эту информацию и может ли
она быть использована для анализа формы волны.
Задача. Исследовать влияние распределения энергии вдоль временной оси
на характеристики сигналов. Предложить параметры, характеризующие это
влияние, и исследовать возможность их использования для классификации QRS-
комплексов ЭКГ.
Решение. Сигнал x(f) может рассматриваться как распределение амплитуды
какой-либо переменной вдоль оси времени. Квадрат этого сигнала х2(Г) может ин-
терпретироваться как мгновенная энергия процесса, порождающего сигнал. С учётом
того что общая энергия сигнала определяется выражением
т
Ех =
о
(5.1)
функция х2(Г), 0 < £ Г, может рассматриваться как распределение энергии или
функция плотности.
Такое представление даёт возможность получить определение моментов распре-
деления энергии, что ведёт к центроидальному времени
Jo
и дисперсии энергии по отношению к центроидальному времени:
2 Jo - tx)2X2(t)dt
= J^Jdt
(5.2)
(5.3)
Обратите внимание на сходство между приведёнными выше выражениями и уравне-
ниями (3.1) и (3.3): нормализованная функция
Px(t) =
Jo x2(t)dt
(5.4)
теперь интерпретируется как ФПВ. Для получения характеристик и исследова-
ния распределения x2(t) вдоль временной оси могут быть также получены другие
моменты. Предыдущие выражения были сформулированы в непрерывном времени
ради сохранения общности; они также справедливы и для дискретных во времени
сигналов с простой заменой t на п и J dt на
Минимально-фазовые сигналы. Распределение энергии сигнала во времени
связано с его амплитудным спектром и, что более важно, с его фазовым спек-
тром. Понятие минимальной фазы оказывается полезным при анализе характеристик
сигналов. Свойство минимально-фазовости сигналов может быть описано как во
временной, так и в частотной областях [86, 102, 123-127].
Во временной области сигнал х(п) является минимально-фазовым, если как
сам сигнал, так и инверсный сигнал жДп) являются односторонними (т. е. полно-
стью каузальными или антикаузальными) сигналами с ограниченной энергией, т. е.
52П=О х2(п) < оо и х2(п) < ос. (Замечание. Инверсный сигнал определяется
так, что х(п) * Xi(n) = ё(п); эквивалентно: Xi(z) = \/X(z).)
Минимально-фазовые сигналы имеют следующие важные свойства.
• Для данного амплитудного спектра существует один и только один минимально-
фазовый сигнал.
Морфологический анализ волн ЭКГ
217
• Для всех односторонних сигналов с конечной энергией и с идентичными ампли-
тудными спектрами энергия минимально-фазового сигнала оптимально концен-
трируется в направлении начала координат, и этот сигнал имеет наименьший
фазовый сдвиг, а также наименьшую производную фазового сдвига на каждой
частоте.
• ^-Преобразование минимально-фазового сигнала имеет все полюса и нули
внутри единичной окружности на z-плоскости.
• Комплексный кепстр минимально-фазового сигнала является каузальным (см.
также разд. 4.8.3).
Предельным случаем минимально-фазового сигнала является дельта функция
^(£), вся энергия которой сконцентрирована в точке t = 0. Амплитудный спектр
'-функции является вещественным и равным единице для всех частот; фазовый
сдвиг на любой частоте равен нулю.
Минимально-фазовые и максимально-фазовые компоненты. Сигнал x(n),
который не удовлетворяет условиям минимально-фазовости, обычно называют компо-
зитным сигналом или смешанно-фазовым сигналом. Путём фильтрации его комплекс-
ного кепстра х(п) он может быть разделён на минимально-фазовую и максимально-
фазовую компоненты [86, 115, 128]. Для получения минимально-фазовой компоненты
каузальная часть комплексного кепстра (см. разд. 4.8.3) выбирается следующим
образом:
'0,
< 0,5£(п),
кж(п),
п < 0,
п = 0,
п > 0.
(5-5)
Использование инверсных процедур даёт минимально-фазовую компоненту a?min(^).
Аналогично, максимально-фазовая компонента получается путём применения инверс-
ных процедур к антикаузальной части кепстра, выбранной как
Хтях(п) = 0,5i(n),
10,
п < 0,
п = 0,
п > 0.
(5-6)
Минимально-фазовая и максимально-фазовая компоненты сигнала удовлетворяют
следующим соотношениям:
х(п) = £min(n) + £max(n)
(5.7)
х(п) = ^min(n) * Жтах(п). (5.8)
Минимально-фазовое соответствие (МФС). Смешанно-фазовый сигнал может
быть преобразован в минимально-фазовый сигнал, который имеет ту же самую
спектральную амплитуду, что и исходный сигнал, путём фильтрации комплексного
кепстра исходного сигнала
^мфс(^) = х(п).
кж(п) + .т(—п),
п < 0,
п = 0,
п > 0.
(5.9)
^min(^) —
и применения инверсных процедур [86, 115, 128]. Получаемый результат известен
как минимально-фазовое соответствие (minimum phase correspondent, МРС) или
МФС исходного сигнала [102]. МФС будет обладать оптимальной концентрацией
218
Гл. 5. Анализ форм волн и их сложности
энергии вокруг начала координат при условии выполнения ограничений, накладыва-
емых заданным амплитудным спектром (исходного смешанно-фазового сигнала).
Обратите внимание, что жмфс(^) равно удвоенной части х(п) для п > 0. Это
даёт возможность использовать следующую более простую процедуру для вычис-
ления МФС. Предположим, что функция X(z) = iogX(z) является аналитической
в пределах единичной окружности на г-плоскости. Мы можем написать выражение
X(w) = Xr(w) + jXj(u), где нижние индексы R и I соответственно обозначают
вещественную и мнимые части. XR(w) и Xj(cu) являются соответственно логарифми-
ческим амплитудным и фазовым спектром от х(п). Теперь обратное преобразование
Фурье от X(cj) равно чётной части х(п), определённой как хе(п) = [ж(п) + х(—п)]/2.
Таким образом, имеем
(°,
£мфс(™) =
^Xein),
П < 0,
п = 0,
п > 0.
(5.10)
Этот результат означает, что нет необходимости рассчитывать комплексный кепстр,
для которого требуется иметь развёрнутый фазовый спектр сигнала, а необходимо
только рассчитать вещественный кепстр с использованием логарифмического ам-
плитудного спектра. Более того, при условии, что СПМ является преобразованием
Фурье от АКФ, мы имеем log{РТ[фхх(n)]} = 2XR(w). Из этого следует, что в кеп-
стральной области фхх(п) = 2хе(п) и, таким образом, [128],
^мфс(^) = <
0,
0£фхх
Фхх^Р^у
П < 0,
п = 0,
п > 0,
(5.П)
где фхх(п) является кепстром АКФ фхх(п) от х(п).
Длина сигнала. Понятие длины сигнала (ДС, signal length, SL), определённое
Berkhout [124], отличается от длительности сигнала. Длительность сигнала — это
промежуток времени, на протяжении которого сигнал существует, т. е. имеет нену-
левые значения (пренебрегая периодами внутри длительности сигнала, когда сигнал
может оказаться равным нулю). Понятие ДС связано с тем, как энергия сигнала
распределена по его длительности. ДС зависит как от амплитудного, так и от
фазового спектра сигнала. Для односторонних сигналов минимум ДС подразумевает
минимальную фазу; противоположное утверждение также справедливо [124].
Общее определение ДС сигнала х(п) задаётся как [124]
£2п=0 w(n)x (п)
SL =
(5.12)
где w(ri) является неубывающей положительной весовой функцией с w(0) = 0.
Определение ш(п) зависит от конкретного применения и от требуемых характеристик
ДС. Хорошо видно, что отсчёты сигнала по мере удаления от начала координат
(п = 0) имеют нарастающие значения весов за счёт ш(п). Приведённое выше опре-
деление ДС может рассматриваться как нормализованный момент от х2(п). Если
ш(п) — п, мы получаем центроидальный момент времени от ж2(п), как это задаётся
уравнением (5.2).
Для данного амплитудного спектра и, следовательно, общей энергии энергия
минимально-фазового сигнала оптимально сконцентрирована вблизи начала коорди-
нат. Таким образом, минимально-фазовый сигнал будет иметь наименьшее значение
Морфологический анализ волн ЭКГ
219
ДС из всех сигналов с заданным амплитудным спектром. Сигналы с увеличенной
фазовой задержкой будут иметь энергию, распределённую по более длительному
отрезку, и будут иметь более высокие значения ДС, что связано с увеличенными
весами w(n).
Примеры применения. Волна QRS-T является результатом пространственно-
временного суммирования потенциалов действия миоцитов желудочков. Дли-
тельность QRS-T-волн в норме лежит в диапазоне 350-400 мс, при этом сам
QRS-комплекс ограничен примерно 80 мс, что связано с быстрой и координированной
деполяризацией двигательных единиц желудочков за счёт волокон Пуркинье. Однако
ЖЭ в общем случае имеют комплексы QRS-T, которые шире, чем в норме, т. е.
энергия в них распределена по более длительному промежутку времени в пределах
общей длительности. Это связано с другой и, возможно, более медленной и неор-
ганизованной последовательностью возбуждения двигательных единиц желудочков:
эктопические импульсы возбуждения могут проводиться не через систему Пуркинье,
а через сами мышечные клетки желудочков. Следовательно, ЖЭ, как правило, не
имеют отдельного QRS-комплекса и отдельного Т-зубца, т. е. у них отсутствует
изоэлектрический ST-сегмент.
Безотносительно упомянутых выше различий, комплексы ЭКГ в норме и ЖЭ
имеют сходные амплитудные спектры, что указывает на возможную причину разли-
чий между сигналами — их фазу. ДС зависит как от амплитудного спектра, так и от
фазового спектра данного сигнала, и характеризует распределение энергии по дли-
тельности сигнала. Основываясь на приведённых аргументах, Мёрфи и Рангарадж
(Murthy и Rangaraj) [102] предложили применение ДС для классификации комплек-
сов ЭКГ на нормальные и эктопические (или ЖЭ с одновременным использованием
RR-интервалов для анализа преждевременности). Более того, чтобы избавится от
двусмысленностей в определении начала каждого комплекса, они рассчитывали ДС
от МФС сигнала ЭКГ (сегментированного так, чтобы включить волны Р, QRS и Т
каждого цикла). Использование МФС привело к «переупорядочиванию» волн так,
что доминирующая волна QRS появилась в МФС в начале координат.
На рис. 5.1 показан нормальный сигнал ЭКГ и три ЖЭ от пациента с многочис-
ленными эктопическими фокусами, генерирующими ЖЭ разнообразных форм [102].
На этом рисунке также показаны соответствующие МФС и приводятся значения ДС
всех сигналов. Величины ДС для МФС аномальных волн более высокие, чем ДС для
МФС от нормального сигнала (см. правую колонку сигналов на рис. 5.1). Величины
ДС исходных ЖЭ не дают такого хорошего разделения от ДС нормального сигнала
см. левую колонку сигналов на рис. 5.1). Использование МФС позволило избавиться
т двусмысленностей, связанных с присутствием сегмента базовой линии различной
длины в начале каждого из сигналов. Полученные МФС имеют в каждом случае
доминирующие волны в начале координат, отражая такое перераспределение энергии
или волн, которое удовлетворяет критериям минимально-фазовости.
На рис. 5.2 показаны графики RR-интервалов и величин ДС, рассчитанных
с использованием исходных сигналов ЭКГ и их МФС для нескольких комплек-
тов одного и того же пациента, представительные формы ЭКГ которого показаны
а рис. 5.1 [102]. Величины ДС нормальных сигналов и эктопических комплексов
существенно перекрываются в диапазоне 28-35 (график а на рис. 5.2). Однако
□еличины ДС, рассчитанные из МФС ЖЭ имеют более высокие значения, чем
аналогичные величины для нормальных комплексов, что даёт возможность их клас-
сификации (график б на рис. 5.2).
Мёрфи и Рангарадж [102] применили разработанный ими метод обнаружения
^RS-комплексов (описанный в разд. 4.3.1) к сигналам ЭКГ двух пациентов с эктопи-
-ескими комплексами и использовали ДС от МФС для классификации комплексов
220
Гл. 5. Анализ форм волн и их сложности
-14,7
Рис. 5.1. Нормальный комплекс ЭКГ (а) и три эктопических комплекса (б-г) (ЖЭ) пациента,
имеющего многочисленные эктопические фокусы; МФС сигналов, показанных на рисун-
ках а-г (д-з). Также показаны значения ДС этих сигналов [102]. Отметим, что ось абсцисс
размечена в отсчётах с интервалом дискретизации 10 мс. Ось ординат никак не калибрована.
Сигналы имеют различные длительности и амплитуды, хотя на рисунке они имеют одинаковый
размер. Воспроизводится с разрешения I.S.N. Murthy and М. R. Rangaraj, New concepts for
PVC detection, IEEE Transactions on Biomedical Engineering, 26(7): 409-416, 1979. ©IEEE
SL = 30,88
0
SL = 14,02
О
100
_I
НО
с помощью линейной дискриминантной функции (описанной в разд. 9.4.1). Они
проанализировали 208 комплексов от первого пациента (сигнал которого показан
на рис. 5.1 и 5.2): 132 из 155 нормальных и 48 из 53 ЖЭ были правильно классифи-
цированы; один комплекс был пропущен алгоритмом обнаружения QRS-комплекса.
Ошибочная классификация нормальных комплексов как ЖЭ была связана с более
широкой, чем в норме, длительностью QRS-комплексов и пониженным ST-сегментом
в некоторых нормальных комплексах данного пациента (см. рис. 5.2). Сигнал второго
пациента содержал 89 нормальных комплексов и 18 ЖЭ, из которых все были обна-
ружены и классифицированы верно. Было отмечено, что вычисление МФС в случае
второго пациента не требовалось: величины ДС, полученные из исходных сигналов,
давали адекватное разделение между нормальными и эктопическими комплексами.
Сегменты циклов ЭКГ в норме, использовавшиеся Мёрфи и Рангараджем, вклю-
чали Р-зубец. Возможно, лучшие результаты можно было бы получить, используя
только QRS-комплекс и Т-зубец, поскольку большинство ЖЭ не содержат чётко
различимого Р-зубца и в большой степени соответствуют QRS-комплексу и Т-зубцу
в нормальном сигнале ЭКГ.
Следует отметить, что ширина QRS-комплекса может оказаться увеличенной
и при других анормальных состояниях (таких, например, как блокада проводящих
путей). В этом случае определение значения ДС так, как это было описано выше,
будет приводить к более высоким значениям ДС для QRS-комплексов, имеющих
ширину выше нормы. Более того, поднятие или понижение сегмента ST будет ин-
терпретироваться при вычислении ДС как присутствие энергии в соответствующем
временном интервале. Аномально высокие Т-зубцы могут также приводить к значе-
Морфологический анализ волн ЭКГ
221
1100
1000
х — Нормальный комплекс
° — ЖЭ
800
600
о о
I_________________I______________I _____________I_______________L
20 25 30 35 40
Рис. 5.2. RR-интервалы и ДС для нескольких комплексов пациента с многочисленными
эктопическими фокусами (как на рис. 5.1) (а). То же самое, но с ДС, рассчитанными по
ЧФС этих сигналов (б). Показаны также несколько представительных циклов ЭКГ. Показана
использованная линейная дискриминантная (решающая) функция [102]. Воспроизводится
с разрешения I.S.N. Murthy and М. R. Rangaraj, New concepts for PVC detection, IEEE
Transactions on Biomedical Engineering, 26(7):409-416, 1979. ©IEEE
ниям ДС, которые больше, чем значения для нормального сигнала. Для того чтобы
исключить эти возможности и подтвердить классификацию комплекса как эктопи-
ческого, должны использоваться более сложные логические правила и добавочные
параметры в дополнение к величинам ДС.
222
Гл. 5. Анализ форм волн и их сложности
5.4.3. Анализ форм волн ЭКГ. Такие показатели, как коэффициент корреляции
и ДС, описанные в предыдущих разделах, являются обобщёнными параметрами,
которые могут помочь при сравнении форм волн. Однако представление сигналов
при этом получается в обобщённых характеристиках, и многие различные формы
волн могут обладать сходными значениями этих параметров. Более детальный анализ
форм волн ЭКГ потребует использования нескольких признаков или характери-
стик для точного определения категории формы каждого QRS-комплекса и для
установления корреляции с сердечно-сосудистыми заболеваниями. Поскольку форма
ЭКГ зависит от используемой системы отведений, может потребоваться получение
набора признаков для ЭКГ по многим отведениям, вплоть до 12 общепринятых
отведений, используемых в клинической практике. Можно перечислить следующие
шаги, необходимые для анализа форм волн ЭКГ [31].
1. Обнаружение волн ЭКГ, в первую очередь QRS-комплекса, и, возможно, зубцов
Р и Т.
2. Определение границ волн, включая волны Р, QRS и Т.
3. Измерение интервалов между волнами, таких как интервалы RR, PQ, QT, ST,
QQ и РР.
4. Получение характеристик морфологии (формы) волн.
Последний из перечисленных выше шагов может быть реализован с использова-
нием таких параметров, как коэффициент корреляции и ДС, как описывалось выше,
или путём детальных измерений пиков волн Р, Q, R, S и Т (некоторые из них могут
быть отрицательными), длительностей волн Р, Q, R, S, QRS и Т и перечисленных
выше интервалов между волнами [31]. Требуется также документировать природу
сегментов PQ и ST с точки зрения их соответствия изоэлектрическому уровню.
В случае ST-сегмента необходимо, кроме того, указать, является ли он положи-
тельным или отрицательным, а также возрастающим или понижающимся. Однако
большое количество таких параметров могло бы сделать разработку дальнейших
правил классификации образов достаточно сложной задачей.
Сох и др. [31, 129] предложили следующие четыре параметра, характеризующие
QRS-комплексы.
1. Длительность — длительность или ширина QRS-комплекса.
2. Размах — разность между максимальной амплитудой и минимальной амплитудой
QRS-комплекса.
3. Смещение — положительное или отрицательное расстояние по вертикали между
средней точкой базовой линии и центром QRS-комплекса. Базовая линия опреде-
ляется как прямая линия, соединяющая граничные точки QRS-комплекса. Центр
определяется как средняя точка между самой высокой и самой низкой границами
QRS-комплекса по амплитуде.
4. Площадь — площадь под кривой QRS-комплекса, взятая по модулю по отноше-
нию к прямой линии, проходящей через среднюю точку базовой линии.
Поскольку перечисленные параметры не зависят от времени, они менее чувствитель-
ны к предшествующим процедурам обнаружения и определения опорной точки.
Эти характеристики были использованы для разработки системы монитор-
ного контроля аритмий известной как Argus (название Argus произошло от
Arrhythmia Guard System — Система контроля аритмий) для использования в палатах
кардиологического наблюдения. На рис. 5.3 показана группировка более чем
200 QRS-комплексов пациента, имеющего многочисленные фокусы возникновения
ЖЭ на 16 динамических семейств, выполненная системой Argus с использованием
четырёх описанных выше параметров [31]. Семейства, помеченные как 00, 01, 02,
Морфологический анализ волн ЭКГ
223
Рис. 5.3. Использование четырёх признаков для отнесения QRS-комплексов к одному из 16 ди-
намически создаваемых семейств сходных по форме комплексов, заключённых в четырёхмер-
-ые параллелепипеды. Формы волн типичных представителей каждого из семейств показаны
-а графике плоскости «площадь-смещение». Номера семейств приведены в восьмеричной
истеме счисления. Семейства, помеченные как 00, 01, 02, 04, 06 и 10, были классифи-
цированы как нормальные комплексы, а остальные — как ЖЭ или пограничные комплексы.
Воспроизводится с разрешения J.R. Сох, Jr., F. М. Nolle, and R. М. Arthur, Digital analysis
‘ the electroencephalogram, the blood pressure wave, and the electrocardiogram, Proceedings of
the IEEE, 60(10):1137-1164, 1972. ©IEEE
04. 06 и 10, были классифицированы системой Argus как нормальные комплексы.
Из 163 комплексов, классифицированных кардиологом как нормальные, 91% были
домечены системой Argus правильно. Остальные семейства были сформированы из
ЖЭ, имеющих различные формы и возникших из более чем двух эктопических
Фокусов. При этом форма некоторых из них оказалась близка к форме нормальных
•нусовых комплексов данного пациента. Из 52 комплексов в оставшихся семей-
_твах 96% были помечены как ЖЭ кардиологом. Система Argus пометила 85%
з них как ЖЭ, 13% как не ЖЭ и 2% как пограничные комплексы [129]. Сох
другие [31] обобщили результаты одного из клинических испытаний системы
-.'gus с использованием более чем 50 000 комплексов. Некоторые наиболее суще-
твеные результаты приведены ниже: 85% из 45364 нормальных комплексов были
хчаружены и классифицированы верно при 0,04% пропущенных комплексов; 78%
з 4010 ЖЭ были обнаружены и классифицированы верно при 5,3% пропущенных
• мплексов; 38 нормальных комплексов (меньше чем 0,1% от всех комплексов) были
* но помечены как ЖЭ.
224 Гл. 5. Анализ форм волн и их сложности
5.5. Выделение и анализ огибающей
Сложность форм таких сигналов, как ЭМГ и ФКГ не позволяет непосредствен-
но анализировать форму их волн. В таких случаях запутанные высокочастотные
колебания могут не представлять интереса; скорее можно сказать, что полезную
информацию несёт общая тенденция в изменении уровня и суммарной активности
сигнала. Рассмотрим, например, сигнал ЭМГ, показанный на рис. 1.9. Обратите
внимание, что общий уровень сигнала повышается с повышением уровня активности
(дыхания). В качестве другого примера рассмотрим ФКГ в случае стеноза аорты,
показанную на рис. 1.26, где виден ромбоидальный характер систолического шума:
важную информацию несёт огибающая всего сигнала. Таким образом, рассмотрим
проблему выделения огибающей сигнала, который сам по себе кажется сложным.
Задача. Сформулировать алгоритмы для выделения огибающей сигналов ЭМГ
и ФКГ с целью обеспения возможности анализа тенденций изменения уровня
активности или энергии этих сигналов.
Решение. Первым необходимым шагом для получения огибающей сигнала, име-
ющего положительные и отрицательные отклонения, является получение абсолют-
ных значений сигнала в каждый момент времени, т. е. детектирование колебаний. Та-
кая процедура приведёт к резким нарушениям непрерывности в те моменты времени,
когда величины исходного сигнала меняют знак, т. е. в моменты пересечения нуля.
Такие нарушения непрерывности создают высокочастотные компоненты существен-
ной величины. Это требует применения фильтров нижних частот с относительно
низкой частотой среза в диапазоне 0-10 Гц или 0-50 Гц для получения гладких
огибающих сигналов ЭМГ и ФКГ. Для выполнения фильтрации нижних частот
может быть использован фильтр скользящего среднего, что соответствует базовому
определению усреднённой по времени огибающей в виде
|#(£)|d£, (5.13)
где Та — длительность окна скользящего усреднения.
В процедуре, которая, в принципе, сходна с описанной выше, Lehner и Ran-
gayyan [66] использовали фильтр взвешенного скользящего среднего, применённый
к возведённому в квадрат сигналу ФКГ для получения кривой сглаженного распре-
деления энергии Е(п) как
м
Е(п) = х2(п — к 4- l)w(fc), (5.14)
к=\
где х(п) — сигнал ФКГ, w(k) = М — к 4- 1 и = 32 при частоте дискретизации
сигнала 1024 Гц. Обратите внимание, что разница между энергией и мощностью
заключается просто в делении на рассматриваемый временной интервал, который
можно считать коэффициентом масштабирования либо игнорировать.
Огибающая представляет собой суммарную усреднённую активность (электриче-
скую, акустическую и т. д.) в пределах окна усреднения. В случае, если требуется
сглаженная огибающая, необходимо использовать улучшенный фильтр, например
фильтр Бесселя [26]. Данный фильтр обеспечивает баланс между необходимостью
сгладить нарушения непрерывности, получаемые во взятом по модулю сигнале,
и требованием получения хорошей чувствительности для правильного представлений
исследуемых изменений в уровне сигнала или амплитуде. Это процедура известна
Выделение и анализ огибающей
225
ак выделение огибающей или амплитудная демодуляция. В следующих разделах
будут описаны несколько связанных с этим процедур и методов.
5.5.1. Амплитудная демодуляция. Амплитудная модуляция (AM, amplitude
modulation) сигналов для передачи радиосигнала включает в себя умножение переда-
ваемого сигнала x(t) на радиочастотную несущую cos(cjc£), где — несущая частота.
AM-сигнал задаётся выражением y(t) = x(t) cos(cjc£) [1, 2]. Если на приёмном конце
2 точности известна несущая волна (включая её фазу), то становится возможной
синхронная демодуляция путём перемножения принятого сигнала y(t) с несущей.
3 этом случае мы имеем демодулированный сигнал в виде
Xd(t) = y(t) cos(ajct) = x(t) cos2(cjct) = ^rr(t) 4- ^x(t) cos(2cjct). (5.15)
Компонента AM на частоте 2cjc может быть удалена путём использования фильтра
-ижних частот, который оставит в нашем распоряжении требуемый сигнал x(t).
Если сигнал x(t) всегда является положительным или с целью удовлетворения
этого требования к сигналу прибавляется постоянная составляющая, становится
:чевидным, что огибающая AM-сигнала равна x(t). В этом случае возможна чрезвы-
-айно простая процедура асинхронной демодуляции, которая не требует несущей:
-еобходимо только следовать за огибающей y(t). При условии, что несущая частота
-сс намного выше, чем максимальная частота, присутствующая в x(f), положительная
сгибающая y(f) может быть получена путём выполнения полуволнового детектиро-
вания. Фильтр нижних частот с подходящим значением постоянной времени для
• заполнения провалов» между пиками волн несущей позволит получить хорошую
щенку x(t). Различие между случаями использования однополупериодного выпрям-
ления или двухполупериодного выпрямления (т. е. большая величина провалов меж-
д\ пиками несущей волны, получаемой после каждого из типов выпрямления) может
Сыть легко устранено за счёт увеличения постоянной времени фильтра. Основное
различие между разными детекторами огибающей состоит в способе, которым вы-
полняется операция выпрямления, и в используемом фильтре нижних частот [1, 2].
В случае использования похожей процедуры, известной как комплексная демоду-
ляция, заданный произвольный сигнал демодулируется для получения изменяющихся
з времени амплитудных и фазовых характеристик для каждой из анализируемых
-астотных полос [130-132]. В случае такого подхода произвольный сигнал x(f)
выражается как
x(f) = a(t) cos[cjo£ 4- V’W] + (5.16)
де ~ анализируемая частота, a(i) и — изменяющиеся во времени амплитудная
фазовая компоненты на частоте cjq» a xr(t) — остаток сигнала x(t) после того, как
компонента с частотой wq будет удалена. Предполагается, что a(t) и ^(t) изменяются
уедленно по отношению к анализируемой частоте. Эквивалентно сигнал x(t) может
быть выражен через комплексные экспоненты как
= ta(£){exp{j[w0£ +V’(t)]} + exp{-j [woi + C(t)]}} +xr(t). (5.17)
Б “роцедуре комплексной демодуляции сигнал сдвигается по частоте на — а>0 путём
- -множения с 2 ехр(—JcjoO для получения результирующего сигнала y(t) как
= 2x(t) ехр(—joint) =
= a(t)exp[7VW] 4-a(t)exp{-j[2a?o^ + 4- 2xr(t) exp{-juot}. (5.18)
- Рангайян
226
Гл. 5. Анализ форм волн и их сложности
Второй член в этом выражении центрирован относительно частоты 2а>о, в то время
как третий член центрирован относительно частоты cuq; только первый член располо-
жен на частоте, соответствующей постоянному току. Следовательно, для выделения
первого члена и получения окончательного результата у$(Г), может использоваться
фильтр нижних частот, заданный следующим образом:
Уо(О « a(t) expfjVW] • (5.19)
Требуемые составляющие далее могут быть получены, как a(t) « |з/о(О| и
V>(i) « Zyo(f).
Частотное разрешение данного метода зависит от полосы пропускания исполь-
зуемого фильтра нижних частот. Эта процедура может быть повторена для каждой
из исследуемых частотных полос. Получаемый результат может интерпретироваться
как огибающая сигнала для заданной полосы частот. Метод был использован Shin
и др. [130] для анализа ВСР, а также Науапо и др. [131] для анализа вариабельности
сердечного ритма и вариабельности артериального кровяного давления.
При применении выделения огибающей к биомедицинским сигналам (например,
к ФКГ и ЭМГ) необходимо отметить, что в этом случае в сигнале отсутствует
базовая радиочастотная несущая: огибающая проходит по относительно высокоча-
стотной акустической или электрической активности, которая имеет сложный спектр.
Различие в частотном составе между огибающей и «несущей активностью» нельзя
в этом случае сравнивать с методом AM. Тем не менее, мы можем ожидать по
меньшей мере десятикратную разницу в частотном составе: огибающая сигналов
ЭМГ или ФКГ максимально может быть ограничена полосой частот 0-20 Гц, в то
время как лежащий в основе сигнал имеет компоненты по меньшей мере до 200 Гц,
если не до 1000 Гц. В разд. 5.9 будет проиллюстрировано использование выделения
огибающей для анализа ЭМГ, связанной с дыханием.
5.5.2. Синхронное усреднение огибающих ФКГ. Сигналы ЭКГ и ФКГ пред-
ставляют собой хорошую пару сигналов для выполнения синхронного усреднения:
последний из них может быть усреднён по нескольким сердечным циклам с исполь-
зованием первого для синхронизации. Однако сигнал ФКГ непригоден для непосред-
ственного синхронного усреднения, поскольку волны вибрации могут интерфериро-
вать и взаимно уничтожать друг друга. Karpman и др. [133] предложили сначала
детектировать сигнал ФКГ, сглаживать результирующий сигнал с использованием
фильтра нижних частот, а затем выполнять синхронное усреднение полученных
таким образом огибающих с использованием ЭКГ для синхронизации. Для полу-
чения повторяющейся усреднённой огибающей, огибающие ФКГ были усреднены
по 128 кардиоциклам. Необходимо отметить, что хотя синхронное усреднение может
уменьшить воздействие шума, дыхания, кашля и т. д., оно также смазывает вре-
менные границы сердечных событий, если во время процедуры усреднения частота
сердечных сокращений не является постоянной.
На рис. 5.4 показаны огибающие, полученные для случая нормы и для семи
случаев систолического шума, связанного со следующими нарушениями: стеноз
аортального клапана (AS, aortic stenosis), дефект межпредсердной перегородки
(ASD, atrial septal defect), гипертрофический субаортальный стеноз (HSS, hyper-
trophic subaortic stenosis), недостаточность митрального клапана (MR, mitral regur-
gitation, митральная регургитация), дефект межжелудочковой перегородки (VSD,
venticular septal defect), митральная регургитация с задним пролапсом лепестков
(PLP, posterior leaflet prolapse). Типичная ромбовидная огибающая в случае стеноза
аортального клапана из-за детектирования даёт огибающую в форме равнобедрен-
ного треугольника. Митральная регургитация приводит к прямоугольной огибающей
систолического шума.
Выделение и анализ огибающей
227
Рис. 5.4. Усреднённые огибающие сигналов ФКГ пациента в норме и пациентов со следующи-
ми нарушениями: стеноз аортального клапана (AS, aortic stenosis), дефект межпредсердной
перегородки (ASD, atrial septal defect), гипертрофический субаортальный стеноз (HSS, hy-
pertrophic subaortic stenosis), недостаточность митрального клапана (MR, mitral regurgitation,
митральная регургитация), дефект межжелудочковой перегородки (VSD, venticular septal de-
fect), митральная регургитация с задним пролапсом лепестков (PLP, posterior leaflet prolapse).
Воспроизводится с разрешения L. Karpman, J. Cage, С. Hill, A. D. Forbes, V. Karpman, and
К. Cohn, Sound envelope averaging and the differential diagnosis of systolic murmurs, American
Heart Journal, 90(5):600-606, 1975. ©American Heart Association
Карпман и другие проанализировали 400 случаев систолического шума, связан-
ного с шестью типами заболеваний и дефектов, и получили точность анализа оги-
бающей 89%. Они предложили дерево решений для классификации систолического
шума, основанное на форме огибающей шума и её связи с огибающими S1 и S2
(см. рис. 5.5).
5.5.3. Энвелограмма. Sarkady и др. [119] предложили для получения огибающей
сигнала ФКГ алгоритм в Фурье-области. Они определили энвелограмную оценку как
амплитуду аналитического сигнала y(t), сформированного с использованием сигнала
ФКГ x(t) и его преобразования Гильберта зд(£) следующим образом:
у(г) = x(t) + jxH (t). (5.20)
(Замечание. Аналитическая функция —это комплексная функция от времени, име-
ющая преобразование Фурье, которое обращается в нуль для отрицательных частот
[5, 86]). Преобразование Гильберта сигнала определяется как свёртка этого сигнала
величиной 1/тг£:
ОС
®н(*) = х dr.
J 7Г(* - Т)
— со
(5.21)
Преобразование Фурье от 1/(тг£) есть —Jsgn(w), где
ш < 0,
ш = 0,
ш > 0.
sgn(w) = <
0,
1,
(5.22)
228
Гл. 5. Анализ форм волн и их сложности
Рис. 5.5. Дерево решений для классификации систолического шума, основанное на анализе
огибающей. Детали используемых обозначений приведены в тексте и в подписи под рис. 5.4.
Воспроизводится с разрешения L. Karpman, J. Cage, С. Hill, A. D. Forbes, V. Karpman, and
К. Cohn, Sound envelope averaging and the differential diagnosis of systolic murmurs, American
Heart Journal, 90(5):600-606, 1975. ©American Heart Association
Далее, мы имеем У(си) = А’(щ)[1 4- sgn(cu)]. У(сэ) —это односторонняя (или одно-
полосная) функция от си, содержащая только члены с положительными частотами.
Основываясь на определениях и свойствах, описанных выше, Sarkady и др. [119]
предложили следующий алгоритм для определения энвелограммной оценки.
1. Вычислить ДПФ от сигнала ФКГ.
2. Положить члены с отрицательными частотами равными нулю, т. е. Х(к) = 0 для
N/2 4- 2 < к < N, с индексами ДПФ в диапазоне 1 < к < 7V, как это принято
в MATLAB.
3. Умножить на 2 все члены для положительных частот, т. е. Х(к) для 2 < к <
N/2 + 1; член Х(1), соответствующей постоянной составляющей, остаётся
неизменным.
4. Рассчитать обратное ДПФ.
5. Амплитуда результирующего сигнала даёт энвелограммную оценку.
Описанная выше процедура, названная также Sarkady и др. комплексной демоду-
ляцией, даёт огибающую входного сигнала с высоким разрешением. Энвелограммы
и СПМ, рассчитанные из сигнала ФКГ по одному сердечному циклу, имеют тенден-
Выделение и анализ огибающей
229
цию быть зашумлёнными и подвержены воздействию дыхания и мышечных шумов.
Sarkady и др. рекомендовали выполнять синхронное усреднение как энвелограмм,
так и СПМ по нескольким сердечным циклам. Сходный метод был использован
Baranek и др. [120] для получения огибающих сигналов ФКГ с целью обнаружения
аортальной компоненты А2 тона S2.
Иллюстрация применения. Верхние кривые на рис. 5.6 и 5.7 показывают
один цикл сигнала ФКГ пациента в норме и пациента, у которого наблюдается
систолический шум, расщеплённый тон S2 и щелчок открытия митрального клапана.
0,2 0,4 0,6 0,8 1 1,2
Время, с
Рис. 5.6. Сверху вниз: сигнал ФКГ пациента в норме (мужчина 23 года); энвелограммная
щенка показанного сигнала; энвелограмма, усреднённая по 16 кардиоциклам; усреднённая
по 16 кардиоциклам огибающая. Сигнал ФКГ начинается с компоненты S1. См. рис. 4.27,
иллюстрирующий сегментацию того же самого сигнала
Сигналы ФКГ были сегментированы путём использования метода Пана-Томпкинса
для обнаружения QRS-комплекса в сигнале ЭКГ, как показано на рис. 4.27 и 4.28
для тех же самых сигналов. На втором и третьем сверху графиках рис. 5.6 и 5.7
соответственно показаны энвелограммы циклов ФКГ и усреднённые энвелограммы
”О 16 циклам для сигнала в норме и 26 циклам для случая сигнала с шумом). Эти
энвелограммы были получены с использованием метода Sarkady и др. [119]. Обратите
внимание, что хотя расщепление S2 видно на отдельно взятом сигнале и энвело-
•дамме, показанной на рис. 5.6, это расщепление не наблюдается на усреднённой
?чвелограмме и огибающей. Возможно, это связано с вариациями, вызванными
дыханием во время записи и усреднения сигнала.
Более того, на основе методе Karpman и др. [133] были рассчитаны усреднённые
:~ибающие путём взятия абсолютных величин сигнала для каждого кардиоцикла,
230
Гл. 5. Анализ форм волн и их сложности
Рис. 5.7. Сверху вниз: сигнал ФКГ пациента (девочка 14 месяцев) с систолическим шумом
(примерно 0,1-0,3 с), расщеплённой компонентой S2 (0,3-0,4 с) и щелчком открытия мит-
рального клапана (0,4-0,43 с); энвелограммная оценка показанного сигнала; усреднённая
по 26 кардиоциклам энвелограмма; усреднённая по 26 кардиоциклам огибающая. Сигнал ФКГ
начинается с компоненты S1. См. рис. 4.28, иллюстрирующий сегментацию того же самого
сигнала
сглаживания с использованием фильтра нижних частот Баттерворта, имеющего пара-
метры N = 8 и fc = 50 Гц, и синхронного усреднения. Последние кривые на рис. 5.6
и 5.7 показывают усреднённые огибающие. (Фильтр Баттерворта внёс небольшую за-
держку в огибающие; этой задержки можно избежать путём использования команды
MATLAB filtfilt.) Усреднённые энвелограммы и усреднённые огибающие для случая
нормы показывают огибающие S1 и S2; отдельные компоненты S1 и S2 при этом
были сглажены и слились в результирующем усреднённом сигнале. Усреднённые
энвелограммы и усреднённые огибающие для случая с шумом чётко показывают
огибающие компоненты S1, систолического шума, расщеплённой компоненты S2
и щелчка открытия митрального клапана.
5.6. Анализ активности
Задача. Предложить показатели сложности или активности форм волн,
которые могут быть использованы для анализа степени вариабельности таких
сигналов, как ФКГ и ЭМГ.
Решение. Отсчёты заданного сигнала ЭМГ или ФКГ могут для большей общ-
ности рассматриваться как случайная переменная х. В этом случае дисперсия
Анализ активности
231
о-2 = Е[(х — /Аг)2] представляет собой усреднённую характеристику вариабельности
или активности сигнала относительно его среднего. В случае если сигнал имеет
нулевое среднее или был предварительно обработан так, чтобы удовлетворять этому
требованию, мы имеем а2 = R[x2]; т. е. дисперсия равна средней мощности сигнала.
Взяв корень квадратный, мы получим стандартное отклонение сигнала, равное его
среднеквадратичному значению. Таким образом, среднеквадратичное значение может
использоваться как показатель уровня активности относительно среднего значения
сигнала. Более простым индикатором активности является число пересечений нуля
в пределах заданного интервала; частота пересечения нуля (ЧПН, ZCR, zero-crossing
rate) возрастает с ростом энергии высокочастотных компонент сигнала. В следующих
разделах описаны несколько характеристик, связанных с представленной выше кон-
цепцией, а также иллюстрации их применения.
5.6.1. Среднеквадратичное значение. Среднеквадратичное значение сигнала
х(п) на всем его протяжении, соответствующем N отсчётам, задаётся выражением
RMS =
1 TV—1 “I 2
п=0
(5.23)
Эта общая характеристика уровня сигнала (связанная с мощностью) не является,
однако, полезной для анализа тенденций в нестационарных сигналах. В качестве
полезного индикатора средней мощности сигнала как функции времени может
использоваться скользящая оценка среднеквадратичного значения сигнала, рассчи-
танная в окне размером М отсчётов, следующим образом:
RMS(n) =
1 М-1
М
к=0
1
2
(5-24)
Длительность окна М необходимо выбирать в соответствии с шириной полосы частот
сигнала, а также с учётом условия М «С 7V. Такой подход к вычислению скользящих
параметров сигналов соответствует общей схеме анализа сигнала на коротких
интервалах для нестационарных сигналов [46].
Gerbarg и др. [134, 135] получали кривые зависимости мощности от времени
для сигналов ФКГ путём вычисления средней мощности смежных сегментов дли-
тельностью 10 мс и использовали эти кривые для идентификации систолических
и диастолических сегментов в сигналах. Они отметили, что в пределах записи ФКГ
-.родолжительностью 10 с по меньшей мере один диастолический сегмент оказывает-
:я длиннее, чем соответствующий систолический сегмент, и что все систолические
тегменты в этой записи оказываются примерно одинаковыми по длительности. Было
обнаружено, что физиологически безвредный систолический шум у детей ограничен
первой и средней третями систолического интервала между S1 и S2, в то время как
патологический систолический шум, связанный с обратным током крови митрального
лапана, как было отмечено, является холосистолическим (простирается на весь
систолический период). Основываясь на этих наблюдениях, Gerbarg и др. рассчитали
_тношение средней мощности последней трети систолы к средней мощности
систолы, а также к определённому «стандартному» уровню шума. Кроме того, было
сассчитано отношение средней энергии систолы к средней энергии ФКГ для пол-
ного кардиоцикла. Для различных групп пациентов было достигнуто согласование
5 пределах 78-91% между компьютерной классификацией, основанной на этих трёх
.'ношениях, и клиническим диагнозом.
232
Гл. 5. Анализ форм волн и их сложности
В разд. 5.10 будет продемонстрировано использование среднеквадратичной функ-
ции для анализа сигналов ЭМГ и ВМГ и, соответственно, мышечной активности.
5.6.2. Частота пересечений нуля. Интуитивно ясно, что индикатором насыщен-
ности изменениями сигнала может являться число пересечений им уровня нулевой
активности или какого-нибудь другого опорного уровня. Частота пересечений нуля
(ЧПН) определяется как число раз, которое сигнал пересекает опорный уровень
в пределах заданного интервала. Однако на величину ЧПН может легко повлиять
постоянное смещение, дрейф базовой линии и низкочастотные артефакты. По этой
причине можно рекомендовать вычислять величину ЧПН от производной сигнала,
что будет похоже на определение поворотных точек в тесте на случайность, опи-
санном в разд. 3.1.1. В работе [136] Saltzberg и Burch обсуждают взаимоотношения
между ЧПН и моментами СПМ и их применение для анализа ЭЭГ.
Несмотря на свою простоту, параметр ЧПН используется в таких практических
применениях, как анализ речевого сигнала, чтобы различать речь и молчание, и для
различения между гласными и согласными звуками [46] (см. также рис. 3.1), а также
для анализа ФКГ с целью обнаружения шумов. Jacobs и др. [137] использовали ЧПН
для классификации сигналов ФКГ как нормальных или патологических (с использо-
ванием сигнала ЭКГ для синхронизации) и получили уровень правильной классифи-
кации 95% для нормы (58/61) и 94% для патологии (77/82). Они определили порог
принятия решения равным 20 пересечениям нуля на протяжении одного кардиоцик-
ла. Yokoi и др. [138] предложили систему массового скрининга, основанную на из-
мерении максимальной амплитуды и ЧПН на сегменте сигнала ФКГ длительностью
8 мс (дискретизованного с частотой 2 кГц). Они получили уровень правильной клас-
сификации 98% для 4809 пациентов в норме и 76% для 1217 пациентов с шумами.
5.6.3. Подсчёт поворотов. Виллисон (Willison) [139] предложил анализировать
уровень активности ЭМГ путём определения количества пиков, имеющихся на
отрезке сигнала (см. также [22, 140, 141]). Вместо подсчёта числа пересечений нуля
метод Вильсона исследует значимость каждого изменения фазы (направления или
наклона) сигнала ЭМГ, называемого поворотом (turn). Подсчитываются повороты,
превышающие 100 мкВ. Порог выбран так, чтобы избежать подсчёта несущественных
колебаний, связанных с шумами. Данный метод похож на метод подсчёта поворотных
точек, который используется в тесте на случайность, описанном в разд. 3.1.1, но
предполагается, что благодаря использованию порога он более устойчив при наличии
шумов. Данный метод нечувствителен непосредственно к отдельным ПДОДЕ, но при
этом подсчитываются существенные изменения фазы, вызванные накладывающимися
друг на друга ПДОДЕ. Виллисон [139] обнаружил, что при сравнимом уровне
волевого усилия сигналы ЭМГ пациентов с миопатией имеют более высокую частоту
поворотов, чем аналогичный параметр для пациентов в норме.
Иллюстрация применения. На верхнем графике рис. 5.8 приведен сигнал ЭМГ
с диафрагмы собаки за два цикла дыхания, записанный с помощью имплантиро-
ванных электродов из тонкой проволоки [26]. Приведённые графики показывают
(сверху вниз): среднеквадратичные значения для коротких интервалов; повороты,
подсчитанные с помощью метода Виллисона; сглаженную огибающую сигнала. Сред-
неквадратичные значения и значения частоты поворотов подсчитывались с исполь-
зованием скользящего окна длительностью 70 мс (210 отсчётов). Длительность окна
должна выбираться так, чтобы обеспечить баланс между степенью сглаживания,
необходимой для последовательности значений счётчика поворотов, и точностью
отражения нестационарной природы сигнала (в данном примере — это возрастающий
уровень активности при вдохе). Огибающая была получена путём взятия абсолютных
величин сигнала (эквивалентно двухполупериодному выпрямлению) с последующим
Анализ активности
233
Н'4
У 50- лУГ-Л/ V L
j" го -——J_I_____I__I—— 1 —J _।_____। V *
0
1 2 3 4 5
О 1 2 3 4 5
Время, с
Рис. 5.8. Сверху вниз: сигнал ЭМГ, включающий два цикла дыхания, записанный с диафраг-
мы собаки с помощью имплантированных электродов из тонкой проволоки; среднеквадратич-
ные значения для коротких интервалов; счётчик поворотов с использованием метода Вильсона;
сглаженная огибающая этого сигнала. Среднеквадратичные значения и значения счётчика
поворотов были рассчитаны с использованием скользящего окна длительностью 70 мс. Сигнал
ЭЭГ любезно предоставлен R. S. Platt and Р. A. Easton, Department of Clinical Neurosciences,
University of Calgary
использованием фильтра нижних частот Баттерворта порядка N = 8 с частотой среза
fc = 8 Гц. Видно, что все три полученных показателя демонстрируют ожидаемый
рост в соответствии с уровнем сокращения (дыхания) и могут служить корреля-
тами или индикаторами мышечных сокращений и сопутствующей этому сложности
сигнала ЭМГ. При необходимости полученные сигналы могут быть дополнительно
сглажены (пропущены через фильтр нижних частот).
На рис. 5.9 показан сегмент длительностью 70 мс сигнала ЭМГ, приведённого
на рис. 5.8, на котором граничные точки существенных поворотов, определённые
с помощью метода Виллисона помечены символом «*». Начальным этапом данной
процедуры было вычисление производной сигнала ЭМГ и выявление точек изменения
её знака. Поворот отмечался всякий раз, когда сигнал производной ЭМГ между
последовательными точками смены знака изменялся по меньшей мере на 100 мкВ.
Обратите внимание на рис. 5.9, что для подсчёта поворотов сигнала ЭМГ нет необ-
ходимости в пересечении сигналом нулевой линии и что пересечения нуля с колеба-
-иями напряжения меньше 100 мкВ не подсчитывались как повороты.
5.6.4. Коэффициент формы. Основываясь на понятии дисперсии как меры
зчтивности сигнала, Hjorth [142-144] (см. также [32]) предложил метод для анализа
з злн ЭЭГ. В соответствии с этим методом анализировались кратковременные сегмен-
234
Гл. 5. Анализ форм волн и их сложности
250
200
150
100
-150 -
-200 -
_I_________I_______I________I_______I
1,35 1,36 1,37 1,38 1,39
Время, с
Рис. 5.9. Определение поворотов в окне длительностью 70 мс для сигнала ЭМГ, показанного
на рис. 5.8. Сегменты сигнала между парами «*» были идентифицированы как существенные
повороты
ты длительностью 1 с или более и рассчитывались три параметра. Первый параметр
назван активностью и представляет собой просто дисперсию сегмента сигнала
х(п). Второй параметр, названный мобильностью Мх, рассчитывался как корень
квадратный из отношения активности первой производной сигнала к активности
исходного сигнала:
Мх
(5.25)
где х' означает первую производную от х. Третий параметр, названный сложностью
или коэффициентом формы (КФ, form factor, FF), определялся как отношение
мобильности от первой производной сигнала к мобильности самого сигнала:
ФФ =
_ Cfx"/(Jxr
Мх (7xf/Сх
(5.26)
где х" означает вторую производную сигнала. Сложность синусоидальной волны
является единичной; другие формы волн имеют значения сложности, возрастающие
в соответствии со степенью присутствия в них изменений.
Hjorth [143, 144] описал математически соотношения между активностью, мо-
бильностью, сложностью и СПМ сигнала и применил их для моделирования и ге-
нерации сигнала ЭЭГ. Binnie и др. [145, 146] описали применение КФ и анализа
спектра для исследования ЭЭГ с целью выявления эпилепсии. Однако вследствие
того, что вычисление КФ основывается на первой и второй производных сигнала
и их дисперсиях, данная мера чувствительна к шуму. Такой сложный и относительно
широкополосный сигнал, как ЭМГ, не пригоден для анализа с использованием
КФ. В разд. 5.7 будет показано применение показателя КФ для различения между
нормальными и эктопическими комплексами ЭКГ.
Здесь мы исследовали несколько параметров, характеризующих сложность форм
волн. Многие авторы предлагают ряд других параметров, отличных от перечислен-
Применение’, параметризация нормальных и эктопических комплексов ЭКГ
235
них выше, и других интерпретаций сложности форм волн или систем. Примеры
этих подходов включают параметры, основанные на нелинейной динамике, на кор-
реляционной размерности (correlation dimension) [147] и на размерности вложения
(embedding dimension) меняющихся во времени динамических систем [148].
5.7. Применение: параметризация нормальных
и эктопических комплексов ЭКГ
Задача. Разработать параметр для различения между нормальными форма-
ми ЭКГ и эктопическими комплексами (ЖЭ).
Решение. Несколько раз мы наблюдали, что эктопические комплексы, связанные
с аномальными путями распространения соответствующих импульсов возбуждения,
обычно обладают существенно отличной от нормальных формой волн QRS-комплек-
сов того же самого человека. Чаще всего эктопические комплексы имеют причуд-
ливые и сложные формы волн. Параметр КФ (коэффициент формы), описанный
в разд. 5.6.4, является показателем, характеризующим понятие сложности формы
волны, давая величину, которая возрастает с увеличением сложности. Таким обра-
зом, параметр КФ, по всей видимости, подходит для различения между нормальными
и эктопическими комплексами. Отметим, что сам по себе RR-интервал не может
индицировать эктопические комплексы, поскольку может изменяться в связи с си-
нусовой аритмией или с нарушениями проводимости, а также в связи с вариациями
сердечного ритма.
На рис. 5.10 показан сегмент ЭКГ пациента с эктопическими комплексами; этот
сегмент соответствует началу эпизода желудочковой бигеминии, при которой за
Рис. 5.10. Сегмент ЭКГ пациента (мужчина, 65 лет) с эктопическими комплексами. Символы
«ромбик» и «кружочек» показывают соответственно начальную и конечную точки каждого
комплекса, обнаруженного с использованием алгоритма Пана-Томпкинса для обнаружения
QRS-комплексов. Для каждого комплекса указаны значения RR-интервала (мс) и коэффици-
ента формы КФ
236 Гл. 5. Анализ форм волн и их сложности
каждым нормальным комплексом следует эктопический комплекс [23]. ЭКГ данного
пациента была обработана с использованием алгоритма Пана-Томпкинса для обна-
ружения QRS-комплексов (см. разд. 4.3.2). Опорные точки QRS-комплексов были
определены с использованием простого порогового правила, применённого к выход-
ному сигналу алгоритма Пана-Томпкинса. Для каждого комплекса был взят сегмент
от точки, расположенной на 160 мс раньше опорной точки, до точки, расположенной
на 240 мс позже опорной точки; символы «ромбик» и «кружочек» на ЭКГ на рис. 5.10
показывают начальную и конечную точки соответствующего комплекса. Для ка-
ждого сегментированного комплекса были подсчитаны значения параметра КФ.
На рис. 5.10 для каждого комплекса показаны значения RR-интервала (в мс) и КФ.
Хорошо видно, что значения КФ для ЖЭ выше, чем для нормальных комплексов.
Обратите внимание на рис. 5.10, что RR-интервалы для ЖЭ меньше, чем интер-
валы для нормальных комплексов и что нормальные комплексы, которые следуют
за ЖЭ, имеют RR-интервалы с длительностью, превышающей норму, что связано
с компенсаторной паузой. В разд. 9.12 будет описана процедура классификации ком-
плексов ЭКГ данного примера как нормы или ЖЭ с использованием RR-интервалов
и параметра КФ.
5.8. Применение: анализ ЭКГ
при физической нагрузке
Задача. Разработать алгоритм для анализа изменений ST-сегмента ЭКГ во
время физической нагрузки.
Решение. Хсиа (Hsia) и др. [149] разработали метод для анализа изменения ST-
сегмента сигнала ЭКГ в ходе выполнения человеком физических упражнений. Этот
анализ выполнялся как часть процедуры радионуклидной вентрикулографии. В ходе
этой процедуры изображения с левого желудочка получались до и после выполнения
пациентом упражнений с использованием беговой дорожки или велоэргометра. Изо-
бражения были получены в различных фазах сердечного цикла путём стробирования
радиоактивного излучения (7-лучей) с помощью электрокардиограммы; изображе-
ния для каждой фазы были усреднены по нескольким кардиоциклам. Анализ ЭКГ
при физической нагрузке усложняется из-за артефактов базовой линии, вызванных
эффектами дыхания, изменениями сопротивления кожи, связанными с потением
и движениями мягких тканей, воздействующими на контакт электродов. Выявление
изменений ST-сегмента при наличии таких артефактов представляет собой сложную
проблему.
Один из главных параметров, предложенный Хсиа и др., связан с коэффициентом
корреляции, определяемым уравнением (3.18). Однако на этот показатель влияют ко-
лебания базовой линии. Для того чтобы справиться с этой проблемой, был определён
модифицированный коэффициент корреляции, задаваемый следующим образом:
7, = £^)||*.)-Ч' . (5.27)
VE-о М«)]2Е""о [?/(«)- А]2
Здесь х(п) — образец, у(п) — анализируемый сигнал ЭКГ, А — коэффициент коррек-
ции базовой линии, определяемый как разность между базовой линией у(п) и базо-
вой линией х(п), и N — это длительность (число отсчётов) образца и анализируемого
сигнала. Образец был сгенерирован путём усреднения 20 QRS-комплексов, которые
удовлетворяли заданным ограничениям на значения RR-интервалов.
Применение-, анализ дыхания
237
Хсиа и др. предложили метод определения базовой линии каждого комплекса
ЭКГ путём поиска PQ-сегмента в обратном направлении от обнаруженной точки R
(которая используется для стробирования изображений). В качестве базовой линии
выбирался участок, включающий три последовательных отсчёта с минимальными
изменениями (т. е. максимально плоский участок). (Замечание. PQ-сегмент почти
всегда изоэлектрический, в то время как ST-сегмент в случае некоторых заболеваний
сердца может изменяться.) В результате этой процедуры поиска также устанавлива-
ется ширина QRS-комплекса, которая далее используется при сопоставлении с образ-
цом (7V в уравнении (5.27)). Комплексы со значениями уху < 0,85 рассматриваются
как аномальные. Коэффициент коррекции изолинии в уравнении (5.27) обеспечивает
необходимую устойчивость алгоритма.
Для получения представительной формы волны группы, содержащие по 16 по-
следовательных нормальных комплексов, были выровнены по времени и усредне-
ны. Уровень ST-сегмента рассчитывался как разница между значением сигнала
в опорной точке ST-сегмента и изоэлектрическим уровнем для текущего усред-
нённого комплекса. Процедура усреднения включает условие, которое позволяет
отбрасывать комплексы с аномальной морфологией, такие как ЖЭ. Опорная точка
/ 200 - HR\
ST-сегмента определяется как R 4- 64 4- max 4,--—---- х 4 (мс) или S 4- 44 4-
\ 16 /
/ 200-HR\
4- max 4,----—---- х 4 (мс), где R или S показывают положение волн R или S
\ 16 J
в текущем комплексе в миллисекундах, a HR — это частота сердечных сокращений,
ударов в минуту. Программа выдавала сообщение в случае существенного отклоне-
ния ST-сегмента (диагностически значимым считается отклонение, превышающее
0,2 мВ). Более того, рассчитывался наклон ST-сегмента с использованием двух
отсчётов до и двух отсчётов после найденной опорной точки ST-сегмента (т. е. по
участку длительностью 16 мс при частоте дискретизации 250 Гц).
В дополнение к анализу ST-сегмента метод Hsia и др. выполнял анализ ритма,
идентификацию ЖЭ и других аномальных комплексов, а также помогал отбрасывать
из процедуры получения изображений данные радиоактивного излучения, относящи-
еся к аномальным комплексам. Ожидается, что совместное использование изобра-
жений ядерной медицины и анализа ЭКГ позволит улучшить точность диагностики
ишемии миокарда.
5.9. Применение: анализ дыхания
Задача. Предложить метод для определения связи активности ЭМГ с пото-
ком воздуха во время вдоха.
Решение. Платт (Platt) и др. [26] записывали сигналы ЭМГ из парастернального
межрёберного пространства и мышечной диафрагмы собак. Один из сигналов ЭМГ
был получен от пары электродов, помещённых на фиксированном расстоянии 2 мм
между волокнами в третьем левом парастернальном межрёберном промежутке при-
мерно в 2 см от края грудины. ЭМГ с диафрагмы была получена с использованием
электродов из тонкой проволоки, зашитых параллельно с мышечными волокнами
• размещённых на расстоянии 10 мм друг от друга Во время эксперимента по съёму
сигнала собака дышала через надетую на морду маску, а для измерения потока
воздуха использовалась пневмотахограмма. Примеры сигналов ЭМГ, полученных
таким образом, показаны на рис. 1.9, 1.10 и 5.8.
238 Гл. 5. Анализ форм волн и их сложности
Хотя сигнал ЭМГ очень часто используется во многих физиологических исследо-
ваниях, включая анализ дыхания, сложные вариации сигнала часто не представляют
интереса. В большинстве случаев требованиям анализа удовлетворяют показатели
общей или интегральной электрической активности, идеально отражающие суммар-
ную активность в группе активных двигательных единиц мышц [26]. Поскольку сиг-
нал ЭМГ является нестационарным, требуется использовать параметры для коротких
промежутков времени. При таких обстоятельствах обычно используется сглаженная
огибающая сигнала ЭМГ.
Платт и др. заметили, что обычно используемые фильтры для сглаживания детек-
тированного сигнала ЭМГ имеют недостаточно хорошее подавление высоких частот,
что приводит к зашумлённой огибающей. Они предложили применять к сигналу ЭМГ
после двухполупериодного выпрямления модифицированный фильтр Бесселя; этот
фильтр сильно ослабляет частоты за пределами 20 Гц с коэффициентом < —70 дБ
и даёт намного более гладкую огибающую ЭМГ, чем при использовании других
фильтров.
Огибающие ЭМГ, полученные Платтом и др., очень хорошо согласуются с ха-
рактером изменения кривой вдоха. На рис. 5.11 показаны графики парастернального
межрёберного сигнала ЭМГ на протяжении двух циклов дыхания, соответствующие
фильтрованной огибающей и кривой воздушного потока. На рис. 5.12 показана
корреляция между амплитудой фильтрованной огибающей ЭМГ и потоком воздуха,
выраженным в литрах в секунду. Очевидно, что полученная таким методом огибаю-
щая является отличной коррелятой к вдыхаемому потоку.
5.10. Применение: электрические и механические
корреляты мышечных сокращений
Задача. Получить параметры из электрических и механических проявлений
мышечной активности, которые коррелируют с уровнем сокращений или произ-
водимым усилием.
Решение. Zhang и др. [47, 48] исследовали применимость одновременно за-
писанных сигналов ЭМГ и ВМГ для анализа мышечной силы, развиваемой при
сокращении мышцы. В их экспериментальной процедуре человек выполнял изомет-
рические, т. е. без какого-либо движения соответствующей ноги, сокращения прямой
мышцы бедра (rectus femoris) с различным уровнем вращающего момента, который
контролировался с использованием динамометра Cybex II. Выполнялись сокращения,
соответствующие четырем уровням от 20 до 80% максимального произвольного
сокращения (МПС, MVC — maximal voluntary contraction) для данного человека.
Эксперименты выполнялись при трёх углах сгибания коленного сустава, 30, 60
и 90°. Каждое сокращение удерживалось на протяжении 6 с, и в промежутках
между экспериментами человек отдыхал для предотвращения развития мышечного
утомления. Сигнал ВМГ записывался с использованием акселерометра Dytran 3115а,
а поверхностный сигнал ЭМГ записывался с использованием одноразовых электродов
Ag-AgCl. Сигнал ВМГ фильтровался в полосе частот 3-100 Гц, а сигнал ЭМГ
фильтровался в полосе частот 10-300 Гц. Дискретизация сигналов ВМГ и ЭМГ
выполнялась с частотами 250 и 1000 Гц соответственно. На рис. 2.3 показаны
образцы записей сигналов ВМГ и ЭМГ при двух уровнях сокращений.
Для каждого уровня сокращений на протяжении 5 с подсчитывались среднеква-
дратичные значения. На рис. 5.13 показаны вариации среднеквадратичных значений
сигналов ВМГ и ЭМГ, полученных при угле коленного сустава 60° и усреднённых
Применение’, электрические и механические корреляты мышечных сокращений 239
Рис. 5.11. Сверху вниз: сигнал ЭМГ за два цикла дыхания с парастернальной межрёберной
мышцы собаки, записанный с помощью имплантированных электродов; огибающая ЭМГ,
полученная с помощью модифицированного фильтра Бесселя с постоянной времени 100 мс;
поток вдыхаемого воздуха. Длительность сигналов, изображённых на графике, составляет 5 с.
Некоторые незначительные пики, появляющиеся на огибающих, связаны с ЭКГ, которая играет
роль артефакта по отношению к сигналу ЭМГ. Данные любезно предоставлены R. S. Platt and
Р. A. Easton, Department of Clinical Neurosciences, University of Calgary [26]
0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8
Поток воздуха, л/с
Рис. 5.12. Корреляция между амплитудой ЭМГ, полученной из огибающей, обработанной
фильтром Бесселя, и вдыхаемым потоком. Для фильтрации огибающей ЭМГ был исполь-
зован модифицированный фильтр Бесселя с постоянной времени 100 мс. Данные любезно
предоставлены R. S. Platt and Р. A. Easton, Department of Clinical Neurosciences, University of
Calgary [26]
240
Гл. 5. Анализ форм волн и их сложности
Рис. 5.13. Среднеквадратичные значения сигналов ВМГ и ЭМГ для четырёх уровней сокраще-
ния прямой мышцы бедра (rectus femoris) при угле коленного сустава 60°, усреднённые для
четырёх пациентов. Воспроизводится с разрешения Y. Т. Zhang, С. В. Frank, R. М. Rangayyan,
and G. D. Bell, Relationships of the vibromyogram to the surface electromyogram of the human
rectus femoris muscle during voluntary isometric contraction, Journal of Rehabilitation research
and Development, 33(4):395-403, 1996. ©Department of Veteran Affairs
Рис. 5.14. Зависимость среднеквадратичных значений ЭМГ от уровня мышечных сокращений,
выраженных в процентах от МПС для каждого из обследованных пациентов. Зависимости
показаны для трёх мышц. FDI —спинная мышца (first dorsal interosseus); N — количество
мышц в исследовании. Воспроизводится с разрешения J.H. Lawrence and С. J. de Luca,
Myoelectric signal versus force relationship in different human muscles, Journal of Applied
Physiology, 54(6)4653-1659, 1983. ©American Physiological Society
Контрольные вопросы и задания
241
для четырёх пациентов. Почти линейный характер изменения среднеквадратичных
значений для обоих сигналов в зависимости от силы мышечных сокращений по-
казывает полезность этого параметра для анализа мышечной активности. Однако
следует заметить, что соотношение между среднеквадратичными значениями и со-
кращениями не обязательно должно следовать тому же самому (линейному) закону
изменения для различных мышц. На рис. 5.14 показаны зависимости среднеквадра-
тичных значений от процента МПС для трёх разных мышц: эта зависимость линейна
для спинной мышцы first dorsal interosseus (FDI) и в то же время не соответствует
линейному закону для бицепсов и дельтовидных мышц [150].
5.11. Замечания
Теперь мы достигли такой стадии в нашем исследовании, когда мы можем по-
лучать параметры из сегментов биомедицинских сигналов. Мы сфокусировали наше
внимание на характеристиках, которые могут быть получены во временной области.
Рассмотренные параметры были разработаны с целью различения между разнообраз-
ными типами форм волн или для представления изменения сложности форм волн во
время физиологических или патологических процессов. Мы видели, как различные
параметры, исследованные в настоящей главе, могут оказать помощь в различе-
нии между нормальными и эктопическими комплексами ЭКГ и как определённые
характеристики могут служить коррелятами физиологической активности, такой,
например, как дыхание.
Однако необходимо помнить, что в большинстве практических применений какой-
либо отдельный параметр или пара характеристик не могут адекватно соответство-
вать целям анализа сигнала или принятия диагностических решений. Одиночный па-
раметр, например такой как коэффициент формы или длина сигнала, может оказать
помощь в различении некоторых типов ЖЭ от нормальных комплексов ЭКГ; однако
изменения в сигнале ЭКГ, которые могут вести к одинаковым изменениям в величи-
нах КФ и ДС, могут быть вызваны несколькими различными сердечно-сосудистыми
заболеваниями и патологиями. Практические применения могут потребовать исполь-
зования широкого диапазона методов анализа и нескольких параметров для обнару-
жения различных возможных аномалий. Как всегда, исследователь должен рассма-
тривать возможность того, что параметр, который считается полезным, например, при
анализе сигнала ЭКГ во временной области, может служить потребностям анализа
каких-либо других сигналов, таких, например, как ФКГ или ЭМГ в другой области.
5.12. Контрольные вопросы и задания
1. Докажите, что коэффициент формы (КФ) синусоидальной волны равен единице.
2. На интервале времени 0-10 с определены следующие дискретные во времени
сигналы с частотой дискретизации 1 Гц:
• х\(п) = и(п) — и(п — 5),
• х%(п) = 2и(п — 3) — 2и(п — 8),
• а?з(п) = и(п — 2) — и(п — 9),
• х$(п) = и(п — 2) — и(п — 10),
где и(п) представляет собой дискретную во времени единичную ступенчатую
функцию.
16 Р. Рангайян
242
Гл. 5. Анализ форм волн и их сложности
Длина сигнала (ДС) х(п) определяется как
пг _ SnJo w(n)x2(n)
где w(n) — неубывающая взвешивающая функция, a N — число отсчётов в сиг-
нале. Пусть w(n) = n, п = 0,1,2, ... ,N — 1.
Сделайте приблизительные наброски каждого из сигналов, на которые наложена
весовая функция w(n). Рассчитайте величины ДС для четырёх данных сигналов.
Интерпретируйте ваши результаты и сравните характеристики этих четырёх
сигналов с точки зрения значений ДС.
3. Дан сигнал с отсчётами {0,0,2,2,3, — 3,2,0,0} и образец с отсчётами {1,-1}.
Выполните операцию сопоставления с образцом и получите выходные отсчёты.
Дайте интерпретацию полученного результата.
4. Обсудите сходство и различие между следующими проблемами:
i) обнаружение преходящих событий типа спайков в сигнале ЭЭГ;
и) обнаружение QRS-комплексов в сигнале ЭКГ.
5. Вам поручено разработать монитор сердечного ритма для использования в па-
лате кардиологического наблюдения. Разработайте систему для ввода сигнала
ЭКГ от пациента, его фильтрации с целью устранения артефактов и шумов,
дискретизации сигнала, измерения сердечного ритма и выдачи сигнала тревоги
в необходимых случаях. Нарисуйте блок-диаграмму этой системы, детально
указав стадии обработки сигнала, которые должны быть выполнены в каждом
блоке. Задайте все наиболее важные параметры для каждого этапа обработки.
6. С помощью игольчатых электродов получен сигнал ЭМГ при низком уровне
мышечных сокращений, содержащий смесь трёх последовательностей ПДДЕ.
Одна из этих последовательностей содержит квазипериодический монофазный
ПДДЕ, вторая содержит двухфазный ПДДЕ и третья содержит трёхфазный
ПДДЕ. Также отмечено, что эти ПДДЕ не перекрываются в сигнале ЭМГ.
Предложите процедуру анализа для того, чтобы:
а) обнаружить наличие (локализацию во времени) каждого ПДДЕ каждого типа
отдельно и
б) определить скорость возбуждения каждой двигательной единицы.
Заметим, что для каждого ПДДЕ требуется его обнаружить и отметить, является
ли он монофазным, двухфазным или трёхфазным.
Ваше решение должно включать следующие компоненты:
i) графики сигналов ЭМГ (в соответствии с приведённым выше описанием)
с метками для всех компонент;
ii) графики сигнала на различных стадиях вашей процедуры анализа;
ii i) выражения для наиболее важных шагов вашей процедуры анализа;
iv) список утверждений, объясняющих причину или логику, которые стоят за
каждым предложенным вами этапом обработки.
7. Исследователь пытается разработать систему цифровой обработки сигнала для
съёма и анализа сигналов сердечных звуков (сигналов ФКГ). Постарайтесь
оказать исследователю помощь в решении следующих вопросов или проблем.
а) Какова типичная полоса частот нормального сигнала ФКГ и сигнала с шума-
ми? Какую можно рекомендовать частоту дискретизации?
б) Какие источники артефактов необходимо учитывать при записи сигналов ФКГ?
Назовите один физиологический источник и ещё один какой-нибудь другой
источник и рекомендуйте методы для ограничения или устранения обоих.
Упражнения и лабораторные работы
243
в) Как можно идентифицировать расположение первого и второго сердечных
тонов (S1 и S2)? Какие другие биомедицинские сигналы вы порекомен-
дуете использовать для решения этой проблемы? Нарисуйте схематичные
диаграммы этих сигналов и отметьте соответствующие сердечные события
и временные соотношения между ними.
г) Предложите метод для получения огибающей сигнала ФКГ. Перечислите все
этапы предложенного вами метода и приведите необходимые параметры.
д) Нарисуйте схематичное изображение сигналов ФКГ и огибающих для этих
сигналов за время одного кардиоцикла для случая нормы, для случая с систо-
лическим шумом и для случая с диастолическим шумом. Отметьте каждое
событие в каждом из случаев.
8 У Вас имеется база данных записей ПДОДЕ, содержащая несколько типов
образцов нормы и патологии. Каждая запись содержит один ПДОДЕ. Типы
образцов и параметры сигнала следующие:
i) монофазные ПДОДЕ;
ii) двухфазные ПДОДЕ;
iii) трёхфазные ПДОДЕ;
iv) полифазные ПДОДЕ, содержащие более чем три фазы.
а) Предложите два параметра (рассчитываемые компьютером), которые могут
помочь в разделении этих четырёх классов ПДОДЕ. Предложите требуемые
уравнения или процедуры и объясните их взаимосвязь с характеристиками
описанных выше сигналов. Опишите, какие необходимы условия или этапы
предварительной обработки, для того чтобы ваши методы хорошо работали.
б) Нарисуйте схематичный график пространства вектора признаков и отметьте
на нём области, где, как вы ожидаете, расположатся параметры всех четырёх
типов ПДОДЕ.
в) Сформулируйте решающие правила для классификации этих четырёх типов
ПДОДЕ с использованием двух предложенных вами параметров.
9. Почему ST-сегмент ЭКГ имеет большую значимость для диагностики? Пореко-
мендуйте методы анализа сигнала для анализа изменения ST-сегмента в клини-
ческих применениях.
5.13. Упражнения и лабораторные работы
Замечание. Необходимые для выполнения упражнений файлы с данными доступ-
ны на сайте ftp://ftp.ieee.org/uploads/press/rangayyan/.
1. Сигнал, содержащийся в файле emg_dog2.dat, был записан с диафрагмы собаки
с использованием электродов из тончайшей проволоки, зашитых вдоль мышеч-
ных волокон и расположенных на расстоянии 10 мм друг от друга. Сигнал соот-
ветствует двум циклам дыхания и дискретизован с частотой 10 кГц. (См. также
файл emg_dog2.m).
Напишите программу на MATLAB, выполняющую двухполупериодное выпрям-
ление (вычисление абсолютного значения) или однополупериодное выпрямле-
ние (порог на уровне нуля, за который принимается среднее значение сигна-
ла). Примените к полученному результату фильтр нижних частот Баттерворта
с порядком, равным четырём, и частотой среза в диапазоне от 10 до 20 Гц.
Исследуйте и оцените результаты этих двух методов выпрямления как минимум
16*
244
Гл. 5. Анализ форм волн и их сложности
для двух различных значений частоты среза. Сравните результаты с огибающей,
приведённой в файле emg_dog2_env.dat.
2. Среднеквадратичное значение в пределах определённого фрагмента сигнала
соответствует среднему уровню мощности сигнала. Напишите программу на
MATLAB для вычисления среднеквадратичного значения в каждый момент
времени для сигнала ЭМГ, содержащегося в файле emg_dog2.dat, используя
небольшое временное окно произвольного размера (в пределах 50-150 мс).
Используйте по меньшей мере два значения размера окна и исследуйте
результаты (см. также файл emg_dog2.m).
3. Разработайте программу на MATLAB, вычисляющую число поворотов сигнала
во временном окне произвольного размера (в пределах 50-150 мс). Примените
этот метод к сигналу, содержащемуся в файле emg_dog2.dat (см. также файл
emg_dog2.m). Исследуйте результаты для различных значений порога в диапа-
зоне 0-200 мкВ.
Сравните кривые огибающей, среднеквадратичного значения и числа поворотов
с точки зрения их пригодности для представления вдыхаемого потока (данные
приведены в файле emg_dog2_flo.dat).
4. Файл safety.wav содержит дискретизованный с частотой 8 кГц речевой сигнал
для слова «safety», произнесённого мужчиной (см. также файл safety.m). Сигнал
имеет значительную долю фонового шума (так как он был записан в обычных
условиях компьютерной лаборатории). Разработайте процедуры для получения
среднеквадратичного значения для коротких интервалов, числа поворотов и чис-
ла пересечений нуля в скользящем окне продолжительностью 10-100 мс. Иссле-
дуйте изменения параметров, соответствующие участкам сигнала, содержащим
гласные и согласные звуки, а также в период молчания (фоновый шум).
Каких результатов этих процедур можно ожидать, если их применить к первой
производной сигнала? Подтвердите ваши предположения или ожидания проведе-
нием такого исследования.
5. Разработайте программу для получения графика огибающей. Примените эту про-
грамму к сигналам ФКГ, содержащимся в файлах pecl.dat, pec33.dat и pec52.dat
(см. файл plotpec.m).
Расширьте функции этой процедуры за счёт усреднения кривой огибающей для
нескольких кардиоциклов, используя ЭКГ для синхронизации. Как вы предпо-
лагаете справиться с вариациями длительности (числа отсчётов) сигналов от
комплекса к комплексу?
6. Сигнал ЭКГ, содержащийся в файле ecgpvc.dat, содержит большое число желу-
дочковых экстрасистол (ЖЭ), включая эпизоды бигеминии (см. файл ecgpvc.m).
Примените процедуру Пана-Томпкинса для обнаружения и сегментирования
каждого комплекса. По результатам визуального просмотра отметьте каждый
комплекс как нормальный или ЖЭ. Запишите количество пропущенных вашей
процедурой обнаружения комплексов (если такие были).
Рассчитайте RR-интервал и сформируйте коэффициент формы (КФ) для каждого
комплекса. Используйте длительность 80 отсчётов (400 мс), охватывающую
фрагмент QRS-Т каждого кардиоцикла для вычисления КФ. Волна Р в данном
упражнении не рассматривается.
Рассчитайте средние и стандартные отклонения величин КФ и RR-интервалов
для нормальных комплексов и для ЖЭ. Оцените изменения этих двух параметров
для двух категорий комплексов.
Глава 6
ИССЛЕДОВАНИЕ ХАРАКТЕРИСТИК СИГНАЛОВ
И СИСТЕМ В ЧАСТОТНОЙ ОБЛАСТИ
Многие биологические системы демонстрируют присущие им ритмы и перио-
дичности, которые значительно более наглядно могут быть выражены и оценены
с использованием единиц частоты, а не времени. В качестве типичного примера
эассмотрим сердечную функцию: более удобно для нас выражать сердечный ритм
в ударах в минуту — через частоту появлений или частоту повторений, чем через
длительность интервалов между комплексами в секундах (RR-интервалов). Сер-
дечный ритм, выраженный как 72 уд./мин, легче воспринимается человеком, чем
утверждение о соответствующей длительности RR-интервала 0,833 с. По той же
самой причине понятие о ритме ЭЭГ удобнее выражать как число циклов в секунду
или герц (Гц). Даже инженеры нашли бы представление некоторых процессов с ис-
пользованием понятий о частоте (частотной области) более простым для понимания,
чем с использованием понятий о длительности (временной области). Сравните,
например, такой термин как а-ритм, имеющий частоту 11,5 Гц, с эквивалентным
утверждением о периоде колебаний 0,087 с.
В случае, когда исследуемый сигнал состоит из дискретных (т. е. разделённых или
эазличимых) во времени событий (например, сигнал ЭКГ или последовательность
ПДОДЕ в сигнале ЭМГ), базовый ритм или частота активности, присутствующие
в сигнале, действительно могут быть оценены непосредственно во временной обла-
сти. С другой стороны, такие сигналы как ФКГ выглядят сложными или запутанны-
ми во временной области, что не даёт возможности простой оценки их характеристик
в частотной области; более того, формы волн во временной области могут отличаться
эт одного цикла сигнала к другому (как, например, QRS-комплексы ЭКГ).
Сигнал ФКГ представляет собой интересный пример сигнала с многими частот-
ными характеристиками: в дополнение к периодичности от комплекса к комплексу
(сердечному ритму), звуки сердца внутри отдельного кардиоцикла демонстрируют
сезонанс. В связи с тем, что сердечная система содержит несколько отделов, можно
i-кидать, что звуки сердца обладают многочисленными резонансными частотами:
это ведёт к необходимости описывать сигнал ФКГ не только в терминах ритма
« частоты сердечных сокращений) или единственной резонансной частоты, но также
в виде композитного спектра нескольких доминирующих или резонансных частот.
Более того, сдерживаемый поток крови через какое-либо отверстие, такое, например,
как дефект перегородки, или через поражённый стенозом клапан, действующий
- ак препятствие, может приводить к турбулентности, результатом которой является
широкополосный шум. В случае сердечных шумов, напоминающих помехи, мы не
сможем идентифицировать ни ритмы, ни резонансные частоты: возникает необходи-
мость рассматривать энергию сигнала или мощность в широкой полосе частот, что
везёт к понятию функции спектральной плотности.
246 Гл. 6. Исследование характеристик сигналов и систем в частотной области
В гл. 3 мы видели, что часто более удобно и оправдано описывать фильтры
с использованием их частотной характеристики — H(z), Н(ш} или чем через
их импульсную характеристику h(t) или соотношение вход-выход во временной
области (разностное уравнение). Более того, в п. 4.4 мы видели, что проще интер-
претировать СПМ волн ЭЭГ, чем интерпретировать теоретически эквивалентную
ей АКФ. Преобразование Фурье и другие сходные с ним преобразования дают
обратимые преобразования из временной области в частотную область (и наоборот).
Следовательно, может возникнуть предположение, что в процессе перевода данного
сигнала из временной области в частотную не создаётся никакой новой информации.
Однако распределение энергии или мощности сигнала в частотной области, которое
получается с помощью преобразования Фурье (спектр или СПМ сигнала) позволяет
осуществить лучший анализ и описание характеристик сигнала в частотной области.
СПМ сигнала оказывается полезной не только для анализа сигнала, но также и для
разработки усилителей, фильтров, систем съёма и передачи данных и систем обра-
ботки сигналов, так как даёт информацию, необходимую для адекватной обработки
сигнала. В разд. 3.5 мы видели, что для обеспечения возможности использования
оптимального фильтра Винера иногда необходимо знать не только СПМ сигнала, но
также и СПМ помех.
Рассмотрение биомедицинских сигналов как стохастических процессов придаёт
анализу гибкость и большую обобщённость, но накладывает определённые условия
и требования при оценке их статистик, включая АКФ и СПМ. В данной главе мы
исследуем методы оценки СПМ и параметров биомедицинских сигналов и систем
в частотной области. Мы будем изучать методы получения спектральных параметров,
которые могут характеризовать исследуемый сигнал, а также систему, генерирующую
этот сигнал. Мотивацией для данного исследования, как всегда, будет служить
необходимость различения между нормальными и аномальными сигналами или
системами и возможное использование этих методов в диагностике.
6.1. Постановка задачи
Исследовать потенциальные возможности использования спектра Фурье и по-
лучаемых с помощью этого метода параметров для анализа биомедицинских
сигналов. Идентифицировать физиологические и патологические процессы, ко-
торые могут изменять частотное содержание соответствующих сигналов.
Сформулировать задачи обработки сигналов, для которых необходимо выпол-
нять спектральный анализ биомедицинских сигналов и систем.
Так же как и в предшествующих главах, приведённая выше постановка задачи
даётся в общем виде и представляет собой тему настоящей главы. Различные
методы анализа сигналов, описанные в последующих разделах, и используемые для
иллюстрации примеры будут относиться к различным сторонам сформулированной
проблемы. При этом внимание будет сконцентрировано на наиболее характерных
задачах и методиках.
6.2. Иллюстрация задачи на примерах
6.2.1. Влияние эластичности миокарда на спектр звуков сердца. Первый
и второй тоны сердца (S1 и S2) обычно состоят из низкочастотных компонент.
Этого можно ожидать в связи с тем, что по своей природе гемодинамическая система
Иллюстрация задачи на примерах
247
является эластичной системой, наполненной жидкостью. Sakai и др. [151] обработали
записанные сигналы сердечных звуков с использованием регулируемого полосового
фильтра (с шириной полосы пропускания 20 Гц и настройкой в диапазонах от
20-40 Гц до 400-420 Гц) и оценили частотное распределение для S1 и S2. Они
установили, что спектр сердечных звуков максимален в полосе 20-40 Гц, что S1
имеет тенденцию к формированию в спектре пиков на более низких частотах, чем S2,
и что спектр S2 содержит незначительные пики в диапазоне от 60 до 220 Гц.
Gerbarg и др. [134, 135] разработали компьютерную программу для модели-
рования банка фильтров и получили усреднённые спектры мощности S1 и S2
от 1000 взрослых мужчин, 32 учащихся старших классов и 75 пациентов в боль-
ницах. Полученные ими усреднённые СПМ для компонент S1 и S2 продемонстриро-
вали пиковую мощность в диапазоне 60-70 Гц и относительные уровни мощности
ниже —10 дБ за пределами 150 Гц. СПМ для S2 оказалась немного более высокоча-
стотной, чем для S1.
Frome и Frederickson [152] использовали БПФ для анализа первого и второго
тонов сердца. Они предложили метод, согласно которому сегментированные компо-
ненты S1 и S2 комбинируются в один комплексный сигнал и далее с помощью БПФ
единого сигнала получают раздельные БПФ этих двух сигналов. Ими была описана
компьютерная методика обработки данных (см. далее в разд. 6.4.1) для получения
сглаженной усреднённой периодограммы компонент S1 и S2 по отдельности.
Yoganathan и др. [153] использовали БПФ для анализа компоненты S1 29 па-
циентов в норме. Для каждого пациента были получены спектры БПФ, усред-
нённые по 15 комплексам и рассчитанные на отрезке 250 мс. Было обнаружено,
что частотный спектр S1 содержит пики в низкочастотном диапазоне (10-50 Гц)
л в среднечастотном диапазоне (50-140 Гц) [153]. В том же самом исследова-
нии было установлено, что спектр S2 содержит пики в низкочастотном диапазоне
110-80 Гц), среднечастотном диапазоне (80-220 Гц) и высокочастотном диапазоне
>220-400 Гц) [154]. Было высказано предположение, что резонансные пики спектра
могут быть связаны с эластичными свойствами сердечных мышц и динамическими
событиями, вызывающими различные компоненты в тонах S1 и S2 (см. разд. 1.2.8).
Адольф (Adolph) и др. [155] использовали динамический анализатор спектра для
- сследования частотного состава S1 в период сокращения сердца с неизменным
объёмом (iso-volumic contraction period). Центральная частота фильтра с шириной
~олосы пропускания 20 Гц первоначально устанавливалась равной 30 Гц и затем
менялась с шагом 10 Гц до 70 Гц. Выходные сигналы этих фильтров были усреднены
по тем же самым 10 последовательным (предварительно записанным) комплексам.
В качестве окончательного результата подсчитывалось отношение между усреднён-
-ой величиной пика фильтрованного выходного сигнала к аналогичной величине для
всего сигнала S1, записанного в период сокращения сердца с неизменным объёмом.
Авторами была выдвинута гипотеза о том, что частотное содержание S1 во время
периода сокращения с неизменным объёмом должно зависеть от относительного
вклада массы и эластичности левого желудочка. Масса левого желудочка вместе
с кровью, содержащейся в нём, во время сокращения с неизменным объёмом остаётся
"остоянной. Исходя из этого можно предположить, что частотное содержание S1
должно снижаться (т. е. сдвигаться по направлению к более низким частотам) в слу-
-ае заболеваний, которые снижают эластичность желудочков (таких как инфаркт
миокарда).
На рис. 6.1 показаны усреднённые спектры S1 пациента в норме и пациен-
та с острым или с вылеченным инфарктом миокарда; видно, что пониженная
эластичность, связанная с инфарктом миокарда, снизила относительное содержание
v щности вблизи 40 Гц. Однако было также отмечено, что увеличение массы же-
248
Гл. 6. Исследование характеристик сигналов и систем в частотной области
Рис. 6.1. Спектр первого сердечного тона для нормы, для острого инфаркта миокарда и для
вылеченного инфаркта миокарда. Последние два случая демонстрируют повышенный процент
низкочастотных компонент. Воспроизводится с разрешения R. J. Adolph, J. F. Stephens, and
К. Tanaka, The clinical value of frequency analysis of the first heart sound in myocardial infarction,
Circulation, 41:1003—1014, 1970. ©American Heart Association
лудочков у тренированных спортсменов или снижение эластичности в комбинации
с увеличением массы, как бывает в случае миокардиопатии, могут вызвать сходное
смещение частотного содержания S1. Тем не менее, они установили, что частотный
анализ S1 имеет ценность для дифференциации острой лёгочной эмболии от острого
инфаркта миокарда. Clarke и др. [156] также обнаружили, что снижение спек-
тральной энергии S1 является характерным сопутствующим фактором при ишемии
миокарда.
6.2.2. Частотный анализ шумов сердца для диагностики дефектов клапа-
нов. Как мы отмечали в разд. 1.2.8, дефекты и заболевания сердечных клапанов
вызывают высокочастотные звуки, напоминающие помехи и известные как шумы. За-
частую шумы являются единственными индикаторами ранних стадий определённых
сердечно-сосудистых заболеваний; своевременная диагностика может предотвратить
дальнейшее ухудшение состояния и возможные осложнения.
В разд. 5.6.2 мы отмечали, что Jacobs и др. [137] и Yokoi и др. [138] в качестве
метода обнаружения шумов использовали анализ числа пересечений нуля (ЧПН) во
временной области. Хотя значение ЧПН возрастает в присутствии высокочастотных
компонент, оно не даёт возможности непосредственно оценить частотное содержание
или спектр сигнала.
В начале 50-х годов для анализа частотного содержания звуков сердца и шумов
начали применять методы электронной фильтрации сигнала. Geckeler и др. [157]
и McKusick и др. [158, 159] исследовали возможность применения звукового спек-
трографа для анализа звуков сердца и шумов. Звуковой спектрограф был разрабо-
тан в конце 40-х годов фирмой «Bell Telephone Laboratories» в качестве средства
для получения того, что было названо видимой речью. В этом спектрографе для
определения мощности данного сигнала в каждом изучаемом частотном диапазоне
использовался полосовой фильтр (или банк полосовых фильтров). Обычно сигнал
записывался и многократно проигрывался, в то время как центральная частота
Иллюстрация задачи на примерах
249
полосового фильтра варьировалась. Выходной сигнал записывался на теплочув-
ствительной или на светочувствительной бумаге с целью получения двумерного
распределения частотного содержания сигнала в каждый момент времени в виде
изображения типа шкалы серого цвета (собственно время-частотное распределение
будет обсуждаться в разд. 8.4.1). Winer и др. [160] вместо использования серой
шкалы изменения интенсивности предложили контурный график интенсивности
спектрограммы; они обнаружили, что в то время как нормальные звуки сердца демон-
стрируют присутствие регулярности в контурах равной интенсивности, аномальные
звуки и шумы дают нерегулярные структуры контурных линий с многочисленными
«заворотами» и неровностями. Было высказано предположение, что кардиоспектро-
граммы (или спектральные фонокардиограммы) могут дать больше физиологической
и патологической информации, чем может быть получено за счёт аускультации, при
этом данный метод не подвержен психологическим и акустическим ограничениями,
которые свойственны человеку.
Yoshimura и др. [161] использовали для обработки записей сигналов ФКГ
регулируемый полосовой фильтр с низкой и высокой частотами среза в диапа-
зоне 18-1425 Гц. Они определили, что диастолический гул (rumble), связанный
со стенозом митрального клапана, занимает диапазон 20-200 Гц, в то время как
диастолический удар (blow) обратного тока крови аорты занимает гораздо более
высокочастотный диапазон 200-1600 Гц (хотя наиболее характерным диапазоном
является 400-800 Гц).
Gerbarg и др. [134, 135] разработали компьютерную программу для моделиро-
вания банка фильтров и получения спектров мощности сердечных звуков и шу-
мов с целью разработки систем массового скрининга для выявления сердечно-
сосудистых заболеваний. Они утверждали, что безвредный (физиологический) си-
столический шум у детей ограничен первой и второй третями систолического
интервала между S1 и S2, в то время как патологический систолический шум,
связанный с недостаточностью митрального клапана (митральной регургитацией)
занимает весь систолический период. Соответственно, они рассчитывали отношение
средней мощности последней трети систолы к средней мощности систолы, а также
к определённому «стандартному» уровню шума. Также рассчитывалось отношение
средней энергии систолы к средней энергии ФКГ на протяжении полного сердечного
цикла. Для различных групп пациентов было получено соответствие компьютерной
классификации, основанной на определённых выше трёх отношениях, с клиническим
диагнозом недостаточности митрального клапана в пределах 78-91%. Хотя они
и не утверждали, что была разработана полностью автоматическая программа для
диагностики недостаточности митрального клапана, они показали, что компьютерная
диагностика является осуществимой и что частично было достигнуто моделирование
аускультации врачом.
Van Vollenhoven и др. [162] рассматривали специфическую проблему обнаружения
шумов, связанных с недостаточностью аортального клапана, в присутствии шумов,
вызванных стенозом митрального клапана. Недостаточность аортального клапана
вызывает ранний диастолический шум (имеющий характер удара или шипения),
-оторый лучше всего прослушивается в аортальной области (второй правый меж-
рёберный промежуток непосредственно справа от грудины), в то время как средне-
диастолический шум типа гула, связанный со стенозом митрального клапана, лучше
всего прослушивается в области верхушки сердца. Для исследования частотного
содержания записи сигнала ФКГ в окне длительностью 100 мс во время диасто-
лической фазы использовали регулируемый полосовой фильтр с шириной полосы
пропускания 50 Гц и центральной частотой, настраиваемой с шагом 50 Гц. Они
становили, что шум стеноза митрального клапана ограничен частотным диапазоном
250 Гл. 6. Исследование характеристик сигналов и систем в частотной области
не выше 400 Гц, в то время как шум в случае аортальной недостаточности в со-
четании с митральным стенозом содержит значительную высокочастотную энергию
в диапазоне 300-1000 Гц.
Sarkady и др. [119] предложили синхронное усреднение СПМ, рассчитанной
с помощью алгоритма БПФ, для сигналов ФКГ на протяжении нескольких сердечных
циклов. Johnson и др. [163, 164] исследовали СПМ, рассчитанные с помощью
БПФ, для систолического шума, связанного со стенозом аорты. Они рассчитывали
СПМ в окнах длительностью 86, 170 и 341 мс, охватывающих систолическую фазу,
и усредняли результаты по десяти кардиоциклам. Была высказана гипотеза, что
более высокочастотные шумы порождаются при большей тяжести стеноза аорты. Они
исследовали пациентов с использованием катетеризации и флюороскопии сердца.
0 25 75 150 250
0 25 75 150 250
0 25 75 150 250
0 25 75 150 250
Частота, Гц
Рис. 6.2. Усреднённые и нормализованные СПМ четырёх пациентов со стенозом аорты раз-
личной степени тяжести. Каждая СПМ сегментирована на две части: постоянная зона СА
(constant area) и зона предсказания РА (predictive area). Для каждого случая показаны: гра-
диент систолического давления в зоне клапана (измеренный путём катетеризации, в мм рт. ст.)
и отношение спектральных мощностей РА/СА. Воспроизводится с разрешения American
College of Cardiology: G.R. Johnson, R. J. Adolph, and D.J. Campbell, Estimation of the seventy
of aortic valve stenosis by frequency analysis of the murmur, Journal of the American College of
Cardiology, 1(5): 1315-1323, 1983. ©Elsevier Science
Спектр Фурье
251
При этом градиент систолического давления в зоне клапана измерялся в момент
вытягивания катетера из левого желудочка через аортальный клапан. Было уста-
новлено, что этот градиент лежит в диапазоне 10—140 мм рт. ст. Рассчитывались
отношения спектральных мощностей (описанные в разд. 6.5.2). При этом диапазон
частот 25-75 Гц рассматривался как постоянная зона (СА, constant area), связанная
с нормальными звуками, а полоса частот 75-150 Гц рассматривалась как зона
предсказания (РА, predictive area), связанная с шумами.
На рис. 6.2 показан СПМ четырёх пациентов со стенозом аорты различной
степени тяжести. Графики СПМ на рисунке были сегментированы на зоны СА
и РА, как было описано выше. Также для каждого из случаев показан градиент
систолического давления в зоне клапана (в мм рт. ст.) и спектральное отношение
РА/СА. Авторы установили, что отношение спектральных мощностей линейно воз-
растает с возрастанием градиента систолического давления в зоне клапана и, следо-
вательно, хорошо коррелированно с тяжестью стеноза аортального клапана. Кроме
того, были рассмотрены такие вопросы, как важность записи ФКГ в аортальной
зоне, предварительная фильтрация ФКГ в полосе 25-1500 Гц и выбор подходящего
окна для систолического шума. Хотя и существуют некоторые факторы, вызывающие
затруднения, было показано, что неинвазивная методика, основанная на ФКГ, может
оказаться полезной для обоснования необходимости катетеризации, а также для
наблюдения за пациентами со стенозом аорты.
6.3. Спектр Фурье
Преобразование Фурье является наиболее широко используемым преобразовани-
ем для исследования характеристик сигналов в частотной области [1, 2, 14, 86].
В основном, это связано с тем, что в качестве базисных функций в преобразова-
нии Фурье используются синусоидальные функции. При этом с учётом того, что
exp(jojt) = cos(utf) + j sin(cvZ), рассчитываются проекции данного сигнала x(t) на
комплексную экспоненциальную базисную функцию от частоты uj (рад/с):
ос
X(cj) = j x(t) ехр(— jujt) dt, (6.1)
— оо
или для переменной частоты f (Гц) как
ОС
X(f) = j x(t)exp(-j2nft)dt. (6.2)
— ОО
'При вычислении проекции комплексная экспоненциальная функция берётся в со-
пряженном виде. В некоторых областях применения прямые преобразования Фурье
определяются с использованием exp(+jutf) под знаком интеграла.) Приведенные
выше выражения можно интерпретировать как анализ сигнала x(t) по отношению
к комплексным экспоненциальным базисным функциям. Нижний предел интегриро-
вания будет равен 0, если сигнал является каузальным. Верхний предел, в случае
сигнала с ограниченной длительностью, будет равен продолжительности сигнала.
Значение или Х(/) для каждой исследуемой частоты си = 2nf представляет
собой «долю» соответствующих косинусных и синусных функций, присутствующих
о сигнале x(t). Отметим, что в общем случае является комплексной функцией
для вещественного сигнала и включает в себя амплитуды и фазы соответствующих
комплексных экспонент.
252
Гл. 6. Исследование характеристик сигналов и систем в частотной области
Обратное преобразование, которое можно интерпретировать как синтез сигна-
ла x(t) в виде взвешенной комбинации комплексных экспоненциальных базисных
функций, задаётся в виде
оо оо
a:(t) = — f Х(ш) exp(jut) dw = f X(f) exp(J2Ttft) df. (6.3)
Z7T J J
— oo i~°°
Второй вариант приведенного выше выражения с переменной частоты в герцах может
в некоторых ситуациях оказываться более удобным, чем первый с переменной ш
с размерностью радиан в секунду, благодаря отсутствию множителя 1/2тг. (Если
прямое преобразование Фурье определено через exp(+jcjt), то обратное преобразо-
вание Фурье будет содержать под знаком интеграла ехр(—Jcct); однако это различие
не является существенным.) В случае дискретно-временного сигнала х(п) мы всё
же можем вычислить преобразование Фурье с непрерывной переменной частоты сс
как X(cj):
X(cj) = х(п) ехр(—jam), (6.4)
п= — оо
с нормализованным частотным диапазоном 0 < си < 2тг (эквивалентно 0 < / /5),
в этом случае п в приведенном выше выражении должно быть умножено на
интервал дискретизации Т в секундах. Преобразование Фурье эквивалентно
^-преобразованию. оцениваемому на единичной окружности при z = exp(jcj). От-
метим, что преобразование Фурье от дискретно-временного (дискретизированного)
сигнала является периодическим, с периодом, равным частоте дискретизации cjs
или 2тг, для нормализованной шкалы частот.
При обработке цифрового сигнала с использованием компьютера, переменная ча-
стоты сс также будет дискретизована, как ш = 2Tr(fs/N)k или сс = (2тг/N)k в случае
нормализованной частоты, где к — индекс отсчета по частоте, a N — число отчетов
в пределах одного периода периодического спектра В этом случае мы имеем
соотношение для прямого ДПФ (анализа) в виде:
/ 27Г \
Х(А;) = У2 ж(п) ехр ( — j —fen J, к = 0,1,2, ..., N — 1. (6.5)
п=0 '
В приведённом выше выражении предполагается, что рассматриваемый сигнал
имеет 7V отсчётов. Можно показать, что дискретно-временной сигнал, содержащий 7V
отсчётов, полностью определяется N отсчётами преобразования Фурье, равномерно
распределёнными по единичной окружности в z-плоскости [86].
Выражение для обратного ДПФ (синтеза) задаётся уравнением
1 / 2тг \
ж(п) = — ^2 X(fe) exp f j —fen V п = 0,1,2, ..., N — 1. (6.6)
к=о ' '
Дискретизация переменной частоты является причиной периодичности сигнала во
временной области. Приведённые выше выражения определяют прямое и обратное
ДПФ для одного периода.
Отметим, что
( 2тг \ (2тг \ (2тт \
ехр И — кп I = cos I —knj sin I —кп J (о.7)
представляет собой функции синуса и косинуса от нормализованный частоты
f = (i/N)k, к = 0,1,2, ..., N — 1. Нормализованная частота лежит в диапазоне
Спектр Фурье
253
О < f < 1 и может быть преобразована в реальную частоту в герцах умножением на
частоту дискретизации fs в герцах. Уравнение (6.5) представляет собой скалярное
произведение или проекцию заданного сигнала х(п) на каждую комплексную
экспоненту или синусоиду exp I j — knj, взятую в комплексно-сопряженном виде.
Уравнение (6.6) представляет собой синтез сигнала х(п) как линейную взвешенную
комбинацию комплексных экспоненциальных базисных функций, веса которых
являются коэффициентами ДПФ Х(к).
Ниже перечислены несколько важных свойств ДПФ [1, 2, 14, 86].
• Сигнал х(п), так же как и его ДПФ Х(к), являются периодическими последова-
тельностями.
• Если сигнал х(п) содержит N отчетов, его ДПФ Х(к) должно рассчитываться
с использованием по меньшей мере N отчетов равномерно распределенных по
диапазону нормализованной частоты 0 С и С 2тг (или, что эквивалентно, вдоль
единичной окружности на z-плоскости), для того чтобы обеспечить полное пред-
ставление и определение Х(со) и, следовательно, полную реконструкцию х(п)
через обратное ДПФ от Х(к). Конечно, можно использовать и более N отчетов
для вычисления Х(к) для обеспечения возможности использования алгоритма
БПФ при L = 2м N отсчётов, где М — целое число, или для получения Х(ш)
с меньшим, чем 2тг/АГ, шагом по частоте.
• ДПФ линейно: ДПФ от ах(п) + Ьу(п) равно аХ(к) + bY(k), где Х(к) и Y(k) —
ДПФ от х(п) и у(п) соответственно.
/ 2тг \
• ДПФ от х(п — по) равняется exp I — j — kno I Х(к), где Х(к) — ДПФ от х(п).
Временной сдвиг приводит к тому, что к фазе исходного сигнала добавляется
линейная составляющая. Поскольку все последовательности в ДПФ являются
периодическими, операция сдвига должна быть определена как циклический или
периодический сдвиг. Если в конечной части сигнала имеются (или специально
добавлены перед выполнением операции сдвига) по меньшей мере по нулей, то
циклический сдвиг будет эквивалентен линейному сдвигу.
• ДПФ от х(п) * h(n) равняется Х(к)Н(к), где Х(к) и Н(к) — это ДПФ от х(п)
и h(n) соответственно. Обратное ДПФ от Х(к)Н(к) дает х(п) * h(n). Аналогично,
x(n)h(n) и Х(к)*Н(к) дают пару ДПФ. Свертка в одной области аналогична
умножению в другой. В приведенных выше соотношениях все сигналы должны
иметь одно и то же число отчетов N.
Поскольку все последовательности в ДПФ являются периодическими, то опера-
ции свертки в приведенных выше соотношениях являются операциями периоди-
ческой, а не линейной свертки. Отметим, что циклическая или периодическая
свертка определена для сигналов, имеющих одинаковый период, и результат
также будет периодическим с тем же самым периодам, что и у каждого из
входных сигналов.
Результат линейной свертки двух сигналов х(п) и h(n) различной длительности,
Nx и Nh соответственно, будет иметь длительность Nx + Nh — 1 отсчётов. Если
требуется получить линейную свертку с использованием обратного ДПФ от
X(k)H(k), то ДПФ должно быть рассчитано для L Nx + Nh — 1 отсчётов.
Для уравнивания эффективных длительностей каждый из сигналов должен быть
дополнен нулями на конце, чтобы обеспечить возможность вычисления ДПФ
и перемножения результатов преобразования. В этом случае все сигналы и их
ДПФ будут периодическими, с результирующим периодом, равным L отсчетов.
254 Гл. 6. Исследование характеристик сигналов и систем в частотной области
• ДПФ от вещественного сигнала х(п) будет обладать комплексно-сопряженной
симметрией, т. е. Х(—к) = Х*(к). Вследствие этого вещественная часть и ампли-
туда Х(к) будут чётными последовательностями, в то время как мнимая часть
и фаза Х(к) будут нечётными последовательностями.
• В соответствии с теоремой Парсеваля общая энергия сигнала должна оставаться
неизменной до и после преобразования Фурье. Тогда мы имеем следующие
равенства:
| \x(t)dt = — | |X(cj)12dcu,
— оо —оо
^2 |ж(«)|2 = 2^ [ |^(w)|2dw, (6.8)
п = —ОО _7Г
ЕЖ12 = ^
п=0 к=0
Поскольку интеграл от |X(cj)|2 по всем значениям ш или сумма |X(fc)|2 по
всем значениям к представляют собой энергию сигнала (или среднюю мощность,
если эта величина поделена на длительность сигнала), то |X(cj)|2 и |X(fc)|2
представляют собой распределение или плотность мощности сигнала вдоль оси
частот.
6.4. Оценка функции спектральной
плотности мощности
Мы уже сталкивались с функциями АКФ и ВКФ в уравнениях (3.9), (3.12),
и (4.24): первые два из этих равенств дают общее определение АКФ как стати-
стического ожидания или интеграла по длительности сигнала, стремящейся к оо;
третье рассматривает ВКФ как проекцию одного сигнала на другой и пренебрегает
масштабирующим коэффициентом, который в данном применении не имеет особого
значения. Исследуем теперь более тщательно процедуры, необходимые для оценки
АФК (и следовательно — СПМ) по записям сигнала ограниченной длительности.
Рассмотрим запись сигнала, содержащую N отсчетов: х(п), п = 0,1,2, ..., N — 1.
Для вычисления усредненной по времени АКФ фхх(тп), соответствующей задержке,
равной т отсчетам, необходимо получить произведение х(п)х(п ± т) и выполнить
суммирование по всему доступному диапазону отсчетов данных. Истинная АКФ за-
дается как фхх(т) = Е[х(п)к(п 4- тп)]. Отметим, что в случае, если сигнал является
комплексным, одна из копий сигнала на входе процедуры вычисления АКФ должна
быть взята в комплексно-сопряженном виде.
Можно легко заметить, что вычисляя фхх(0) при х(п)х(п) = х2(п), мы можем
выполнять суммирование от п = 0 до n = N — 1. Однако, вычисляя фхх(1) при
х(п)х(п -I- 1), мы можем выполнять суммирование только в диапазоне от п = 0
до п = N — 2. Поскольку для вычисления фхх(±т) мы применяем к одной из копий
сигнала линейный сдвиг в т отсчетов, то т отсчетов одной из копий сигнала будут
оказываться за пределами окна анализа, определяемого зоной перекрытия обеих
копий сигналов. Следовательно, при величине сдвига ±т отсчетов для оценки АКФ
будут доступны только N — |т| пар отсчетов данных. Тогда мы получим выборочную
Оценка функции спектральной плотности мощности
255
</>1М = \ |
А — |т|
среднюю оценку АКФ в виде
N-\m\-\
У2 х(п)х(п + т). (6.9)
п=0
В приведенном выше выражении нижний индекс хх опущен, а индекс 1 показывает
использование одного типа усредняющего масштабного коэффициента при оценке
АКФ. Oppenheim и Shafer [86] показали, что ф\(т) является состоятельной оцен-
кой фхх(т\ она имеет нулевое смещение и дисперсию, стремящуюся к нулю при
.V —> оо. Однако дисперсия этой оценки становится исключительно большой при
приближении величины т к N: при этом для вычисления АКФ оказывается доступ-
ным слишком малое число ненулевых пар отсчётов и оценка становится бесполезной.
Альтернативное определение АКФ игнорирует отсутствие |т| ненулевых пар
отсчетов и использует один и тот же масштабирующий коэффициент для всех
задержек, что дает
]
^г(т) = — 52 х(п)х(п + m). (6.10)
п—0
Отметим, что верхний предел суммирования в приведённом выше выражении может
быть принят равным N — 1 без всякого влияния на результат; первые или последние
т| отсчётов х(п) не будут перекрываться с х(п ± т) и дадут члены с нулевыми
произведениями. Oppenheim и Schafer [86] показали, что ^(т) имеет смещение,
равное (тп/Ы)фхх(т): это смещение стремится к истинной величине оценки по
мере приближения т к 7V, хотя дисперсия почти не зависит от т и стремится
к нулю при N оо. Тем не менее, обе эти оценки АКФ являются асимптотически
несмещенными (смещение ф?(гп) стремится к нулю при N —> оо) и дают хорошие
оценки АКФ, если число отсчетов N достаточно велико и т <С N.
Отметим, что эти две оценки АКФ, ф\(т) и ^(т), связаны следующим соотно-
шением:
.у _ |ш|
ФЛтп) =--——(6.11)
Таким образом, ^(т) является масштабированным вариантом ф\(т). Однако, по-
скольку коэффициент масштабирования является функцией от т, то его часто на-
зывают окном; более подробное обсуждение этой интерпретации будет представлено
в разд. 6.4.1. Стоит также обратить внимание, что различие между ф1(т) и фъ^тп)
сравнимо с различием между несмещенной и смещенной величинами выборочной
дисперсии, где деление выполняется на N — 1 или N соответственно (N — число
доступных отсчётов).
6.4.1. Периодограмма. Поскольку СПМ и АКФ являются парой преобразований
Фурье, мы можем рассчитать оценку СПМ как
Лг-1
S2 (w) = 52 ^2(m)exp(-jwm), (6.12)
m=-(N-l)
"гедполагая, что в действительности АКФ рассчитывается или доступна для значе-
-ий \т\ вплоть до N — 1. Преобразование Фурье сигнала х(п), п = 0,1,2, ...,N — 1
задается как
N-1
Х(ш) = ^2 ж(п) ехр(—jccn). (6.13)
п=0
256
Гл. 6. Исследование характеристик сигналов и систем в частотной области
Можно показать, что
S2M = ^|XM|2. (6.14)
Оценка СПМ Sz(u) известна как периодограмма сигнала х(п) [86]. Oppenheim
и Schafer [86] показали, что ^(о;) является смещенной оценкой СПМ с
e[s2(cv)] = £
т= — (N— 1)
---—Фхх(т) exp(-jwm).
(6.15)
Если мы рассмотрим преобразование Фурье от ф\(т), то получим другую оценку
СПМ в виде
7V-1
Si(w) = ^2 ^i(TO) exp(-jwm),
т= — (N—1)
со значением математического ожидания [86]
7V-1
Е [Si (о>)] = 52 ^(m)exp(-jwm).
тп= — (N—1)
(6.16)
(6.17)
Из-за конечности пределов суммирования Si(cj) является смещенной оценкой СПМ.
Эти две оценки S2(^) и Si(cj) могут рассматриваться как преобразования Фурье
от АКФ, умноженных на окно. При этом функция окна является в первом случае
треугольной и известна как окно Бартлетта (Bartlett window) а во втором
случае — прямоугольным окном
wB(m) = <
N — |m|
N
0,
при |m| < N
в противном случае,
1,
0,
при \т\ < N
в противном случае.
(6.18)
(6.19)
Отметим, что определенные выше окна имеют длительности, равные (27V — 1) отсчё-
тов.
Так как АКФ умножается на оконную функцию, СПМ свёртывается с преоб-
разованием Фурье оконной функции, что ведет к спектральной утечке и к потере
разрешения (более подробное рассмотрение окон будет дано в разд. 6.4.3). Преоб-
разования Фурье окна Бартлета и прямоугольного окна, соответственно, задаются
выражениями [86]:
Wb(cv) = 1
’ sin(aJV/2)' 2
sin(cj/2)
ИШ) =
sin[u>(27V — 1)/2]
sin(cj/2)
(6.20)
(6.21)
Oppenheim и Schafer [86] показали, что периодограмма имеет дисперсию, которая не
приближается к нулю при N —> оо; наоборот, дисперсия периодограммы имеет поря-
док независимо от N. Таким образом, периодограмма не является состоятельной
оценкой СПМ.
Оценка функции спектральной плотности мощности
257
6.4.2. Необходимость усреднения. Общепринятым подходом к снижению дис-
персии оценки является усреднение по некоторому числу статистически независимых
оценок. В разд. 3.3.1 мы видели, как дисперсия шума в зашумленном сигнале может
быть уменьшена за счет синхронного усреднения по какому-то количеству наблюде-
ний искаженного сигнала. По аналогии с этим, для нескольких наблюдений сигнала
могут быть рассчитаны несколько периодограмм и далее усреднены для получения
лучшей оценки СПМ. При этом необходимо, чтобы процесс был стационарным, по
крайней мере на протяжении периода, для которого рассчитывается и усредняется
периодограмма.
Задача. Как получить усреднённую периодограмму, когда имеется лишь одна
запись сигнала конечной длительности?
Решение. Oppenheim и Schafer [86] описали следующую процедуру, приписыва-
емую Бартлетту, для усреднения периодограммы сегментов заданной записи сигнала.
1. Разделить заданную последовательность отсчётов .т(п), п = 0,1,2, ..., N — 1,
на К сегментов по М отсчетов каждый. В этом случае мы получим сегменты,
заданные как
Xi(n) = х(п 4- (г — 1)М),
О^п^М-1,
1 < i К.
(6.22)
2. Рассчитать периодограмму для каждого сегмента как
5г (w) =
^Xi(n) exp(-jwn)
n=0
(6.23)
1 < i К.
На практике преобразование Фурье в приведенном выше выражении оценивается
как ДПФ (с использованием алгоритма БПФ).
3. Если значения АКФ фхх(т) для \т\ > М пренебрежимо малы, периодограммы К
сегментов длительностью по М отсчетов каждый можно полагать взаимно
независимыми. Затем рассчитывается оценка СПМ Бартлетта как выборочное
среднее К независимых наблюдений периодограммы:
1 к
5B(w) = - (6.24)
1=1
Oppenheim и Schafer [86] показали, что ожидаемая величина оценки Бартлетта
Sb(cj) является сверткой истинной СПМ Sxx(w) с преобразованием Фурье окна
Бартлетта, задаваемым уравнением (6.20) (с заменой N на М). Соотношение для
свертки указывает на смещение в этой оценке и даёт эффект спектрального размы-
вания и утечки; таким образом, это смещение можно интерпретировать как потерю
разрешения. Хотя Sb(w) является смещенной оценкой, ее дисперсия стремится к ну-
лю при увеличении числа сегментов К. Следовательно, она является состоятельной
оценкой.
Когда имеется (стационарный) сигнал с фиксированной длительностью N отсче-
тов, то существует возможность столкнуться с ограничениями по числу доступных
сегментов К. Хотя дисперсия оценки будет снижаться с ростом К, можно отметить,
что это приведет к неизбежному снижению числа отсчетов М, приходящихся на
один сегмент. С уменьшением М главный лепесток преобразования Фурье окна Бар-
тлетта (см. уравнение (6.20)) расширяется и частотное разрешение соответственно
ухудшается, так как получаемая оценка представляет собой свертку истинной СПМ
с частотной характеристикой окна. В конце разд. 6.4.3 будет дана иллюстрация
применения процедуры Бартлетта.
17 Р. Рангайян
258
Гл. 6. Исследование характеристик сигналов и систем в частотной области
Циклически стационарные сигналы, такие как ФКГ, предоставляют уникаль-
ную и интересную возможность использовать синхронное усреднение периодограмм
по некоторому числу циклов без возникновения противоречия между снижением
дисперсии и потерей разрешения, которое неизбежно при описанном выше ме-
тоде сегментации. Этот подход представлен в качестве иллюстрации применения
в разд. 6.4.5.
6.4.3. Использование окон: спектральное разрешение и утечка. Процедуру
Бартлетта можно рассматривать как подход, основанный на усреднении по ансамблю
с целью снижения дисперсии периодограммы (при этом дисперсию можно интерпре-
тировать как шум).
Другим подходом к получению гладкого спектра является свертка периодограм-
мы S(w) с фильтром или сглаживающей функцией VT(cj) в частотной области (анало-
гично использованию фильтра СС во временной области). Сглаженная оценка Ss(w)
задается выражением
ss(w) = f s(v)w(w
Z7T J
v) dv.
(6.25)
где v — переменная времени для интегрирования.
Поскольку СПМ является неотрицательной функцией, сглаживающая функция
VT(cj) должна удовлетворять условию VT(cj) 0, —тг < ш < тг. Преобразование Фурье
окна Бартлетта VVb(^) удовлетворяет этому требованию. Oppenheim и Schafer [86]
показали, что дисперсия периодограммы снижается с коэффициентом, примерно
равным
1 1 7
- £ w2(m)=^
m= —(М —1)
(6.26)
по отношению к дисперсии исходной периодограммы; здесь N — общее число отсче-
тов в сигнале и (27И — 1) — число отсчетов в сглаживающей оконной функции. Пря-
моугольное окно дает коэффициент снижения дисперсии примерно равный 2М/N,
в то время как коэффициент для окна Бартлетта составляет 2M/(3N) [86]. Следует
отметить, что сглаживание спектра (снижение дисперсии) достигается ценой потери
частотного разрешения.
Поскольку периодограмма представляет собой преобразование Фурье от оценки
АКФ </>(т), оператор свертки в частотной области в соответствии с уравнением (6.25)
эквивалентен умножению ф(т) на w(m) (обратное преобразование Фурье от VT(cj)).
Этот результат позволяет предположить, что такая же точно оценка СПМ Ss(w)
может быть получена путем применения окна к оценке АКФ и взятия затем преобра-
зования Фурье от результата. Так как АКФ является чётной функцией, окно также
должно иметь вид чётной функции.
Основываясь на приведенных выше аргументах, Уэлч (Welch) [165] (см. также
Oppenheim и Schafer [86]) предложил метод усреднения модифицированных перио-
дограмм. В соответствии с процедурой Уэлча, заданный сигнал сегментируется так
же как и для процедуры Бартлетта, но окно применяется непосредственно к сег-
ментам сигнала до преобразования Фурье. Периодограмма сегментов, обработанных
с использованием окна, определяется как
2
i = 1,2, (6.27)
= W
М-1
Xi(n)w(n) ехр(— jam) ,
п=0
Оценка функции спектральной плотности мощности
259
где Ew — это средняя мощность окна, задаваемая выражением
1 М-1
S«- = ^Ew2(n). (6.28)
п=0
Отметим, что длительность окна составляет теперь М отсчетов. Оценка СПМ по
Уэлчу Sw(^) получается усреднением модифицированных периодограмм как
1 к
= - (6.29)
Уэлч [165] показал, что если сегменты не перекрываются, то дисперсия усред-
ненной модифицированной периодограммы обратно пропорциональна К (т. е. числу
используемых сегментов). Уэлч предложил также использовать перекрывающиеся
сегменты. В этом случае модифицированные периодограммы не являются взаим-
но независимыми. Спектральное окно, которое эффективно свертывается с СПМ
в частотной области, пропорционально квадрату амплитуды преобразования Фурье
окна, используемого во временной области. Следовательно, независимо от типа
окна, используемого для обработки данных, спектральная сглаживающая функция
будет неотрицательной, гарантируя, таким образом, что оценка СПМ также будет
неотрицательной.
Ниже определяются некоторые широко используемые окна [86,166]; эти окна
имеют длительность N отсчётов и являются каузальными, определёнными для
О С п N — 1. Прямоугольное окно:
w(n) = 1.
(6.30)
Окно Бартлетта (треугольное):
2п
w(n) = <
Д' — Г
о 2п
N-
N— 1
2
(6.31)
Окно Хемминга (Hamming):
w(n) — 0,54 — 0,46 cos
2тгп
N-1)
Окно Хеннинга (фон Ганна) (Hanning (von Hann)):
w(n) = 2
1 — cos
Окно Блекмана (Blackman):
z ч ~ ~ r- ( 2 7m \ _ ( 4?m \
w(n) = 0,42 — 0,5 cos ( ——- j + 0,08 cos I ——- j.
(6.32)
(6.33)
(6.34)
На рис. 6.3 показано прямоугольное окно, а также окна Бартлетта, Хеннинга
и Хемминга для N = 256 отсчетов. Также показано окно Хеннинга для N = 128
отсчетов (центрировано по отношению к окнам с большей длительностью).
Использование окон со спадом на концах (т. е. всех описанных выше, кроме
прямоугольного окна) даёт то преимущество, что анализируемый сигнал на концах
уменьшается до нуля (кроме случая окна Хемминга, для которого крайние значения
17*
260 Гл. 6. Исследование характеристик сигналов и систем в частотной области
Рис. 6.3. Наиболее часто используемые оконные функции: прямоугольная, Бартлетта, Хем-
минга, Хеннинга, а также окно Хеннинга при N = 256 отсчётам (Хеннинг 1) и окно Хеннинга
при N = 128 отсчётам (Хеннинг 2). Все окна центрированы относительно 128-го отсчёта
не равны нулю, а составляют 0,08). Это свойство означает, что исключаются
нарушения непрерывности в периодическом варианте сигнала, используемом для
выполнения процедур, основанных на ДПФ. Все перечисленные оконные функции
являются симметричными (чётными) функциями и, следовательно, имеют линейную
фазовую характеристику (или вещественный спектр с нулевой фазой, если окно
центрировано относительно начала координат).
На рис. 6.4-6.8 изображены логарифмические амплитудные частотные характе-
ристики оконных функций, показанных на рис. 6.3. Эти частотные характеристики
Нормализованная частота
Рис. 6.4. Логарифмическая амплитудно-частотная характеристика прямоугольного окна, пока-
занного на рис. 6.3. Ширина окна N = 256 отсчётов
Оценка функции спектральной плотности мощности
261
Рис. 6.5. Логарифмическая амплитудно-частотная характеристика окна Бартлетта, показан-
ного на рис. 6.3. Ширина окна N = 256 отсчётов
были рассчитаны с использованием БПФ после дополнения окон нулями до общей
длительности L = 2048 отсчётов. Графики построены с использованием растянутой
шкалы для ограниченного участка нормализованной оси частот (от 0 до 0,1 Гц)
с целью более наглядной иллюстрации характеристик главного и боковых лепестков.
Нарушения непрерывности в частотных характеристиках прямоугольного окна и окна
Бартлетта на рис. 6.3 и 6.5 связаны с логарифмами от нулевых значений при
значениях характеристик, соответствующих —оо.
Прямоугольное окно имеет наиболее узкий главный лепесток с шириной 4tt/7V;
более широкий лепесток, соответствующий 8тг/7У, имеют окна Бартлетта, Хеннинга
и Хемминга; самым широким главным лепестком характеризуется окно Блекмана
Рис. 6.6. Логарифмическая амплитудно-частотная характеристика окна Хемминга, показан-
ного на рис. 6.3. Ширина окна N = 256 отсчётов
262
Гл. 6. Исследование характеристик сигналов и систем в частотной области
Нормализованная частота
Рис. 6.7. Логарифмическая амплитудно-частотная характеристика окна Хеннинга (Hanningl),
показанного на рис. 6.3. Ширина окна N = 256 отсчётов
(12тг/7\7) [86]. Уменьшение ширины окна будет приводить к увеличению ширины
главного лепестка, как это можно видеть по приведённым на рис. 6.7 и 6.8 частотным
характеристикам двух вариантов окна Хеннинга. Отметим, что чем шире главный
лепесток, тем сильнее спектральное сглаживание и, следовательно, более серьёзной
является потеря спектрального разрешения.
Наиболее высокие пиковые значения боковых лепестков (—13 дБ) из всех пе-
речисленных окон имеет прямоугольное окно, в то время как для окон Бартлет-
та, Хемминга, Хеннинга и Блекмана эти значения соответственно равны —25 дБ,
—31 дБ, —41 дБ и —57 дБ [86]. Более высокий уровень боковых лепестков вызывает
повышенную спектральную утечку (взвешенное суммирование спектральных компо-
Нормализованная частота
Рис. 6.8. Логарифмическая амплитудно-частотная характеристика окна Хеннинга (Hanning2),
показанного на рис. 6.3. Ширина окна N = 128 отсчётов
Оценка функции спектральной плотности мощности
263
нент со значительными весами по широкому диапазону частот вследствие свёртки
з частотной области), что приводит к более искажённому спектру. Отметим, что
_ меньшение утечки за счёт использования окон со спадом на концах достигается
ценой увеличения ширины главного лепестка и, следовательно, более серьёзной
потери спектрального разрешения (более сильного сглаживания).
Иллюстрация применения. По отношению к каналу о2 сигнала ЭЭГ, пока-
занного на рис. 1.22, был использован метод Уэлча, заключающийся в применении
к сегментам сигнала окна и в усреднении получаемых оценок СПМ. Число отсчётов
з сигнале N = 750, при частоте дискретизации fs — 100 Гц. Отметим, что отдельные
записи ЭЭГ, имеющие относительно небольшую длительность 7,5 с, могут рассма-
триваться как стационарные сигналы. Доминирующей активностью в данном сигнале
является а-ритм, который присутствует на всём протяжении записи.
Сначала была рассчитана СПМ всего сигнала без использования какого-либо
окна (что соответствует неявному использованию прямоугольного окна); БПФ рас-
считывалось для L = 1024 отсчёта. Полученная СПМ показана на верхнем графике
на рис. 6.9.
Для выполнения первой из процедур, основанных на усреднённой периодограмме,
сигнал ЭЭГ был сегментирован при М = 64 отсчёта на каждый сегмент, с подразуме-
ваемым использованием прямоугольного окна (это эквивалентно методу Бартлетта).
Было получено общее количество сегментов К = 11. Каждый сегмент был дополнен
Частота, Гц
Рис. 6.9. Оценки СПМ для канала о2 сигнала ЭЭГ, показанного на рис. 1.22, полученные
с использованием метода Бартлетта. Верхняя кривая: СПМ для всей записи сигнала. Средняя
кривая: СПМ для 11-го сегмента. Нижняя кривая: усреднённая СПМ для К = 11 сегментов
сигнала. Во всех случаях использовалось (неявно) прямоугольное окно. Число отсчётов
в записи сигнала: N = 750. Число отсчётов в каждом сегменте: М = 64. Все массивы БПФ
были рассчитаны для L = 1024 отсчётов. Частота дискретизации fs = 100 Гц
264 Гл. 6. Исследование характеристик сигналов и систем в частотной области
нулями до длительности L = 1024 с целью обеспечения возможности использования
алгоритма БПФ. Затем СПМ всех сегментов были усреднены, после чего нормали-
зованы и преобразованы к логарифмической шкале. На втором и третьем графиках
на рис. 6.9 показаны СПМ для отдельного сегмента (а именно —для 11-го сегмента)
и усреднённая СПМ (оценка Бартлетта) соответственно.
Можно видеть, что усреднённая СПМ (третий график) даёт гладкую спектраль-
ную оценку с отчётливо различимым доминирующим пиком на частоте около 10 Гц,
представляющим в данном сигнале a-ритм. СПМ для отдельного сегмента (сред-
ний график) содержит многочисленные пики и впадины, которые могут оказаться
ложными либо незначащими и подавляются (сглаживаются) в результате процесса
усреднения. Единственная оценка СПМ, рассчитанная по всему сигналу (верхний
график), имеет многочисленные вариации значений, которые могут не иметь отноше-
ния к исследуемому процессу и поэтому могут затруднять визуальный или автомати-
ческий анализ. (Замечание. В данном случае возможно прямое сопоставление оценок
СПМ, так как они имеют равное число отсчётов, т. е. одинаковую дискретизацию по
частоте.)
На рис. 6.10 показан второй набор СПМ, сходный с приведённым на рис. 6.9, но
с использованием в процедуре Уэлча окна Хеннинга. Эффект использования окна
Рис. 6.10. Оценки СПМ для канала о2 сигнала ЭЭГ, показанного на рис. 1.22, полученные
с использованием метода Уэлча. Верхняя кривая: СПМ для всей записи сигнала Средняя
кривая: СПМ для 11-го сегмента. Нижняя кривая: усреднённая СПМ для К = 11 сегментов
сигнала. Во всех случаях использовалось окно Хеннинга. Число отсчётов в записи сигнала
и размер окна Хеннинга для расчёта СМП всей записи сигнала: N = 750. Число отсчётов
в каждом сегменте и размер окна Хеннинга, использованного в методе усреднённой пери-
одограммы: М = 64. Все массивы БПФ были рассчитаны для L = 1024 отсчётов. Частота
дискретизации fs = 100 Гц
Оценка функции спектральной плотности мощности
265
Хеннинга не так значителен в случае расчёта СПМ для всего сигнала (верхний
график), так как длина окна достаточно велика (N = 750). Однако окно Хеннинга
явно сглаживает многочисленные (возможно ложные) пики и впадины в показанной
на среднем графике СПМ для отдельного сегмента. Более широкий главный лепесток
частотной характеристики окна Хеннинга вызывает более существенную потерю ча-
стотного разрешения (сглаживание), чем прямоугольное окно для соответствующей
СПМ, показанной на рис. 6.9. И наконец, усреднённая СПМ на нижнем графике
рис. 6.10 отчётливо показывает преимущество применения окна Хеннинга, которое
проявляется в существенно пониженном уровне мощности на частотах, превышаю-
щих 30 Гц. Относительно невысокий уровень боковых лепестков для окна Хеннинга
обеспечил меньшую спектральную утечку, чем в случае применения прямоугольного
окна, что хорошо видно при сравнении с соответствующим графиком на рис. 6.9.
Однако заплаченная за это цена сказывается в большей ширине пика в усреднённой
СПМ, полученной с использованием окна Хеннинга, который по уровню —10 дБ
простирается на диапазон от 5 до 15 Гц. Два отчётливых пика на частотах 10 Гц
и 12 Гц, которые хорошо заметны на верхних графиках рис. 6.9 и 6.10, а также
на сглаженной СПМ на нижнем графике рис. 6.9, более не удаётся различить на
нижнем графике рис. 6.10. Тем не менее, усреднённая СПМ с использованием окна
Хеннинга представляется более сглаженной и лучше поддающейся анализу, чем
соответствующий результат, полученный с помощью прямоугольного окна.
6.4.4. Оценка автокорреляционной функции. В таких задачах, как разработ-
ка оптимального фильтра Винера и оценка статистик стохастических процессов,
требуется получать хорошие оценки АКФ. Если каким-нибудь способом получить
оценку СПМ, например с использованием процедур Бартлетта или Уэлча, то можно
взять обратное преобразование Фурье от результата и использовать результат как
оценку АКФ. Для согласования с СПМ или с эквивалентной моделью АКФ можно
использовать какую-нибудь гладкую кривую или параметрическую модель (гауссову,
лапласову и т. п.).
Рассмотрим снова выражение
j
</>2(^) = -у х(п)х(п + т). (6.35)
п=0
Поскольку АКФ является чётной функцией, то необходимо выполнить вычисления
только для положительных т. Очевидно, что оценка АКФ представляет собой просто
результат линейной свёртки х(п) с х{—п) (с масштабирующим коэффициентом 1/N).
Если ДПФ от х(п) — это Х(к), то ДПФ от х(—п) — это Х*(к). Так как свёртка
во временной области соответствует умножению в частотной области, мы можем
рассчитать ДПФ Х(к) от х(п), получить Х(к)Х*(к) = |Х(&)|2 и взять обратное
ДПФ Однако процедура ДПФ даёт циклическую свёртку, а не линейную свёртку.
Следовательно, нам необходимо дополнить ж(п), по меньшей мере, М — 1 нулями,
где М — наибольшая задержка, для которой необходимо рассчитать АКФ. Далее
ДПФ должно быть рассчитано, по меньшей мере, для L = N + М — 1 отсчётов,
где N — число отсчётов в исходном сигнале. Если это требование приложить к про-
цедурам вычисления периодограммы или усреднённой периодограммы, то обратное
ДПФ от окончательной оценки СПМ может быть использовано, как оценка АКФ
(с коэффициентом масштабирования 1/N или путём деления на фхх(0) для получе-
ния нормализованной АКФ).
6.4.5. Синхронное усреднение спектров ФКГ. Каждому известны успокаиваю-
щие звуки биения его собственного сердца; любые будущие родители получают удо-
266
Гл. 6. Исследование характеристик сигналов и систем в частотной области
вольствие, слушая пульсирующее сердце ребёнка, который вот-вот должен родиться.
Использование звуков сердца чрезвычайно широко распространено в клинической
практике: стетоскоп является наиболее широко известным признаком и инструмен-
том врача. Однако за этим широко известным сигналом скрываются множество
сложных и потенциально запутанных характеристик.
ФКГ является нестационарным сигналом, ввиду того что количество крови в каж-
дой сердечной камере и состояние процесса сокращений мышц постоянно изменяется
во время каждого сердечного цикла. Тон S2 обычно имеет более высокочастотное
содержание, чем S1: СПМ нормального сигнала ФКГ изменяется в пределах при-
мерно 300 мс. Звуки открытия и закрытия клапана, имея короткую, порядка 10 мс,
длительность представляют собой преходящие и высокочастотные сигналы. Присут-
ствие шумов является ещё одной причиной нестационарности с высокочастотным
содержанием далеко за пределами того, что наблюдается в нормальном сердечном
звуке: СПМ аномальной ФКГ может изменяться в течение каждых 100 мс или
менее. Отдельные эпохи, соответствующие SI, S2, щелчкам срабатывания клапанов
и шумам, имеют ограниченную длительность порядка 10-300 мс. Эти особенности
сигнала ФКГ не позволяют использовать усреднение по сегментам, как это рекомен-
дуется процедурами Бартлетта или Уэлча.
Однако, помимо всех перечисленных в предыдущем абзаце факторов, наиболее
сильно на свойства сигнала влияет изменение передаточной характеристики груди
в процессе дыхания. (Живые системы являются динамическими!) Для сигналов ФКГ,
записанных в различных точках груди, также характерно различие передаточных
характеристик для разных путей. В то время как взрослые люди могут помогать
съёму сигнала ФКГ, задерживая своё дыхание или выполняя какие-либо другие
манёвры, эти возможности не могут быть реализованы в случае новорождённых
детей или маленьких детей в тяжёлом состоянии. При анализе и съёме сигнала
ФКГ возникает больше проблем, чем в случае большинства других биомедицинских
сигналов, с которыми мы до сих пор сталкивались [40].
Задача. Предложить метод для получения усреднённых оценок СПМ систо-
лических и диастолических сердечных звуков.
Решение. Циклическая стационарность сигнала ФКГ предоставляет уникальную
возможность для усреднения сегментов ФКГ, соответствующих одним и тем же
фазам сердечного цикла многочисленных сокращений сердца. Если пациент будет
задерживать своё дыхания на протяжении всего периода съёма записи ФКГ, то
передаточные характеристики грудной стенки будут стационарны на протяжении
всех сердечных циклов в данной записи. Следовательно, мы можем сегментировать
тоны SI, S2 или любую другую часть изучаемого сердечного цикла для доступного
числа сокращений сердца и усреднить их оценки СПМ с использованием процедур,
сходных с методами Бартлетта или Уэлча. (Замечание. Непосредственное усреднение
самих сигналов ФКГ или их комплексных преобразований Фурье может привести
к нежелательному устранению шумов, имеющих характер помех или асинхронных
частотных компонент, и к их исчезновению из получаемых результатов! В разд. 4.11
и 6.6 обсуждается вопрос целенаправленного устранения асинхронных компонент
ФКГ с использованием синхронного усреднения.)
В разд. 5.5.2 и 5.5.3 мы видели, как огибающая или энвелограмма ФКГ может
быть усреднена для нескольких сердечных циклов. Однако при анализе огибающей
не было необходимости сегментировать различные участки сердечного цикла: неста-
ционарность сигнала в пределах сердечного цикла не представляла интереса. В дан-
ном применении анализа СПМ существует необходимость сегментировать ФКГ.
В п. 4.10 была описана процедура для сегментации систолической и диастоличе-
ской частей ЭКГ, основанная на детектировании QRS-комплекса ЭКГ и на обнаруже-
Оценка функции спектральной плотности мощности
267
нии дикротической выемки в сигнале каротидного пульса. Дальнейшая сегментация
систолической или диастолической частей на S1 или систолический шум, S2 или
диастолический шум, соответственно, должна потребовать более сложных методов,
которые будут предметом рассмотрения восьмой главы. Сейчас рассмотрим задачу
получения усреднённой СПМ для систолической и диастолической частей сигнала
ФКГ.
На рис. 6.11 показан сигнал ФКГ для одного сердечного цикла нормального
пациента, сегментированный с использованием процедуры, описанной в разд. 4.10
и иллюстрируемой на рис. 4.27. Также на этом рисунке показаны периодограммы для
Время, с
50 100 150 200 250 300 350 400 450
Частота, Гц
Рис. 6.11. Сверху вниз: Образец сигнала ФКГ для одного кардиоцикла от пациента в норме
(мужчина, 23 года, см. также рис. 4.27 и 5.6); периодограмма систолической части сигнала
(приблизительно 0-0,4 с); усреднённая периодограмма систолической части для 16 сердечных
циклов, сегментированных, как показано на рис. 4.27; периодограмма диастолической части
сигнала, показанного на первом графике (примерно 0,4-1,2 с); усреднённая периодограмма
диастолической части для 16 сердечных циклов. Периодограммы приведены с использованием
логарифмической шкалы (дБ)
систолической и диастолической частей цикла ФКГ. Для получения лучших оценок
СПМ периодограммы для каждой из частей сигнала (систолической и диастоли-
ческой) были рассчитаны по отдельности и усреднены для 16 сердечных циклов.
Никакого окна для данных не было использовано (фактически было использовано
прямоугольное окно), следовательно, данная процедура сходна с методом Бартлетта.
Отдельные систолические или диастолические сегменты могли иметь различную дли-
тельность; для данной иллюстрации все периодограммы были рассчитаны с исполь-
зованием одинакового числа отсчётов, которое было взято равным максимальному
268 Гл. 6. Исследование характеристик сигналов и систем в частотной области
RR-интервалу в записи ФКГ для данного пациента. На рис. 6.11 показаны усред-
нённые систолические и диастолические оценки СПМ. Процедура усреднения даёт
более гладкие оценки СПМ за счёт устранения вариаций от комплекса к комплексу,
которые не являются существенными и не представляют интереса. В усреднённой
периодограмме чётко обозначены спектральные пики, которые можно рассматривать
как более надёжные оценки явления резонанса, чем пики, получаемые из отдельных
периодограмм.
На рис. 6.12 иллюстрируется цикл сигнала ФКГ, а также показаны отдельные
и усреднённые систолические и диастолические оценки СПМ для пациента
с систолическим шумом, расщеплённым тоном S2 и щелчком открытия митрального
клапана (см. также рис. 4.28 и 5.7). Маловероятно, что пациент задерживал
Рис. 6.12. Сверху вниз: Образец сигнала ФКГ для одного сердечного цикла от пациента
с систолическим шумом, расщеплённым S2 и щелчком открытия митрального клапана (де-
вочка, 14 месяцев, см. также рис. 4.28 и 5.7); периодограмма систолической части сигнала
(приблизительно 0-0,28 с); усреднённая периодограмма систолической части для 26 сердечных
циклов, сегментированных, как показано на рис. 4.28; периодограмма диастолической части
сигнала, показанного на первом графике (примерно 0,28-1,62 с); усреднённая периодограмма
диастолической части для 26 сердечных циклов. Периодограммы приведены с использованием
логарифмической шкалы (дБ)
своё дыхание на протяжении всего времени съёма данных. В усреднённой
систолической СПМ явно присутствует повышенная высокочастотная мощность
в диапазоне 120-250 Гц, связанная с систолическим шумом. Диастолическая СПМ
сопоставима с соответствующей нормальной диастолической СПМ, показанной
на рис. 6.11.
Характеристики, получаемые из функций спектральной плотности мощности 269
6.5. Характеристики, получаемые из функций
спектральной плотности мощности
Спектр Фурье или СПМ даёт функцию распределения плотности амплитуды,
мощности или энергии сигнала по частоте. В типичном случае мы получаем большое
количество отсчётов СПМ, распределённых в широком частотном диапазоне, что
не является простым материалом для анализа. Конечно, мы можем исследовать
форму спектра графически и наблюдать его общие характеристики. Такой подход
часто называют непараметрическим спектральным анализом. Спектральные модели,
которые будут рассматриваться позже в разд. 7.4, характеризуются небольшим чис-
лом параметров, Поэтому такой подход называется параметрическим спектральным
анализом или моделированием.
Задача. Получить из спектра Фурье или СПМ параметры или характери-
стики, которые могут помочь охарактеризовать спектральные изменения или
содержащиеся в спектре признаки.
Решение. Поскольку СПМ одновременно является неотрицательной функцией
и функцией плотности, мы легко можем рассматривать её как ФПВ и рассчитывать
для неё статистические характеристики, используя моменты. Мы также можем
выявить пики, соответствующие резонансу, измерить для них полосу частот или
добротность и получить характеристики концентрации мощности в определённых
частотных диапазонах, представляющих интерес для исследования. Хотя сама по
себе функция СПМ является непараметрической, мы можем получить несколь-
ко параметров, которые хоть и не представляют полностью СПМ, могут помочь
в идентификации физиологических и/или патологических явлений. В последующих
разделах мы исследуем несколько различных подходов к решению этой задачи.
6.5.1. Моменты функций СПМ. Поскольку площадь под кривой СПМ предста-
вляет собой общую мощность или энергию сигнала, которая не обязательно должна
быть равна единице, нам необходимо нормализовать все моменты общей мощностью
или энергией сигнала Ех, задаваемой выражением
Ех = Ё Ё 1Х<*)12 = j 1Х^12 = f lW dfH. (6.36)
n=° k=0 Q fJ=Q
Заметим, что переменные частоты и /н в приведённых выше выражениях явля-
ются нормализованными. Предполагая, что СПМ была получена с использованием
одного из методов, описанных в предыдущих разделах, мы можем заменить |Х(-)|2 в
приведённом выше выражении на Sxx(-).
В качестве простой характеристики концентрации мощности сигнала по частот-
ному диапазону можно рассчитать среднюю частоту /н как первый момент:
0,5
2 г
/н = — fHSxx(fH)dfH (6.37)
t^X J
A=o
или как
7 = Ш A
/Гц \ N J Ex
N/2
YkSxx(k), (6.38)
fc=0
270 Гл. 6. Исследование характеристик сигналов и систем в частотной области
N — это число отсчётов в представлении СПМ, основанном на ДПФ, а /Гц —
средняя частота в герцах. Верхний предел интегрирования 0,5 соответствует ин-
тегрированию от нулевой частоты до максимальной частоты, присутствующей в
сигнале, которая составляет половину от частоты дискретизации при условии, что
переменная частоты нормализована к диапазону 0 < fH < 1. Отметим, что интегриро-
вание или суммирование выполняется по половине периода периодических функций
Sxx(fH) или Sxx(k), которые для вещественных сигналов также обладают свойством
чётной симметрии по отношению к половине частоты дискретизации.
Медианной частотой ymed называют частоту, которая делит СПМ пополам:
т
/med == Jy/sj
(6.39)
с наибольшим m таким, что (6.39)
2 /1Х 1 п N
NEX Ъ < 2: 0 т ~2 ’
Также мы можем рассчитать статистики более высокого порядка, такие как:
• дисперсия /Ш2 как момент второго порядка с использованием (/н — /н)2 вместо /н
(функция частоты, умноженная на Sxx(fH)) в уравнении (6.37) или эквивалентное
выражение для к в уравнении (6.38), т. е.
f = А
J т-п
0,5
j (/н-7н)2^ж(/н)^н,
(6.40)
или
\2 2 N/2
— V(k-k)2Sxx(k),
/ гьх *—<
(6-41)
где к = Nfr^/fs является индексом отсчёта частоты, соответствующей /Гц.
• асимметрия:
skewness =------
(Лп2)3/2
/m3 рассчитывается с использованием (/н
т. е.
0,5
[ (/н-7н)35ет(/н)С
(6.42)
_2
Е.
(6.43)
где момент третьего порядка
вместо /н в уравнении (6.37),
/m3 ~
/н=0
ИЛИ
7 Г X 3 О N/2
-ЕГ^(к- k)3Sxx(k). (6.44)
\NJ Е*
• эксцесс кривой плотности распределения (kurtosis) как
kurtosis = --~™4 , (6.45)
(/m2)
Характеристики, получаемые из функций спектральной плотности мощности 271
где момент четвёртого порядка /Ш4 рассчитывается с использованием (/н — /н)4
вместо /н в уравнении (6.37), т. е.
2 °’г -
/т4 = — (/н - fH)4Sxx(fH) dfH (6.46)
/н=0
ИЛИ
/ f \ 4 9 N/2
/-4=1^1 —<6-47)
' ' х к=0
Средняя частота является полезной характеристикой концентрации мощности
сигнала и может означать резонансную частоту в случае унимодального распре-
деления. Однако если СПМ имеет распределение, близкое к равномерному, то
средняя частота может соответствовать половине максимальной частоты, что вряд
ли может быть полезным представлением СПМ. Если в распределении присутствуют
многочисленные резонансные частоты, то средняя частота также вряд ли окажется
полезной характеристикой. Мультимодальные СПМ гораздо лучше могут быть оха-
рактеризованы с использованием набора пиковых частот, а также характеристик их
относительного уровня и ширины полосы частот или добротности (что будет описано
в следующем разделе).
Корень квадратный из /т2 даёт характеристику спектрального распределения
(стандартное отклонение относительно среднего значения) и показывает ширину
полосы частот (но не по отношению к уровню —3 дБ) относительно средней частоты.
Асимметрия (или скошенность) равна нулю, если функция плотности симметрична
относительно средней частоты; в противном случае она показывает степень асим-
метрии распределения. Эксцесс показывает, обладает ли функция СПМ длинным
«хвостом».
Моменты СПМ могут быть полезны для того, чтобы в общем охарактеризовать
тенденции в распределении мощности сигнала по частотному диапазону. Моменты
более высокого порядка чувствительны к шуму или к ложным изменениям в оценке
СПМ и не могут быть надёжными характеристиками СПМ, если она не является
простой функцией или, если оценка СПМ недостаточно достоверна (имеет высокую
дисперсию). Надёжность моментов может быть улучшена путём сглаживания оценки
СПМ или путём согласования её с гладкой параметрической кривой (гауссовой,
лапласовой, сплайном и т. д.) для её использования в качестве модели оценки СПМ
и вычисления моментов для этой модели. Saltzberg и Burch [136] рассматривали
соотношения между моментами СПМ и ЧПН и их использование для анализа
сигнала ЭЭГ.
6.5.2. Отношения спектральных мощностей. Описанные в предыдущем разде-
ле моменты дают общие статистические характеристики СПМ, рассматриваемой как
ФПВ. В случае анализа биомедицинских сигналов более полезным может оказаться
определение специфических характеристик на основе априорной информации или
эмпирического знания о сигналах, системах, а также об изучаемых физиологических
и патологических процессах. Например, в случае анализа ФКГ с целью выявления
шумов мы можем специально исследовать присутствие мощности сигнала в области
частот за пределами частотных диапазонов для S1 и/или S2. Если известно, что
какой-то специфический тип изучаемой патологии вызывает сдвиг в частотном
содержании в пределах определённой полосы частот, мы можем измерить отношение
272 Гл. 6. Исследование характеристик сигналов и систем в частотной области
спектральных мощностей разных частей исследуемого диапазона. Мы уже видели
в разд. 6.2.1. и 6.2.2, как такие характеристики могут быть использованы для
анализа эластичности желудочков, диагностики инфаркта миокарда и выявления
шумов.
Доля мощности сигнала в исследуемом частотном диапазоне (Д : Д) может быть
рассчитана как
(6.48)
где к\ и къ являются индексами ДПФ для частот Д и Д соответственно. Рассчитан-
ные таким способом, доли мощности могут быть получены для нескольких изучае-
мых частотных полос, которые могут либо перекрываться, либо не перекрываться по
всему частотному диапазону.
В качестве одного из вариантов описанных выше характеристик частичной
мощности, Johnson и др. [163] сравнивали интеграл амплитудного спектра си-
столического шума, связанного со стенозом аортального клапана в полосе частот
75-100 Гц с аналогичной величиной для полосы частот 25-75 Гц. Они рассматривали
высокочастотную полосу как зону предсказания (predictive area, РА) спектра по
отношению к аортальному стенозу, а низкочастотную полосу как постоянную зону
(constant area, СА), которая характерна для всех систолических сегментов сигнала
ФКГ. Отношение РА к СА определяется как
ра _ w)i<y
СА- ( ’
с Д = 25 Гц, Д = 75 Гц и Д = 150 Гц. На рис. 6.2 приведено отношение РА/СА для
СПМ систолического шума четырёх пациентов; было показано, что это отношение
хорошо коррелировано с тяжестью стеноза аорты.
Binnie и др. [145, 146] описали применение спектрального анализа ЭЭГ для
обнаружения эпилепсии. Их метод основан на разбиении полосы частот спектра
ЭЭГ не только на традиционные полосы для ритмов 6, 0, а и /3, но также на семь
других не равных по ширине полос, заданных как 1-2, 2-4, 4-6, 6-8, 8-11, 11-
14 и > 14 Гц. Использовались также дополнительные параметры, связанные с ко-
эффициентом формы КФ (см. разд. 5.6.4). Исследование было выполнено на сиг-
налах от 275 пациентов, у которых подозревалась эпилепсия. При использовании
данного метода 90% сигналов пациентов с патологией были классифицированы как
аномальные; наоборот, 86% пациентов, ЭЭГ которых были классифицированы как
аномальные, имели подтверждённую патологию.
Анализируя спектральный пик, мы можем также вычислить ширину полосы ча-
стот на уровне —3 дБ от этого пика и, следовательно, его добротность как отношение
частоты пика к ширине полосы частот для пика. Такие характеристики могут быть
рассчитаны не только для доминирующего пика, но также для нескольких других
пиков с постепенно снижающимся уровнем мощности сигнала. По сути дела, каждый
потенциальный резонансный пик рассматривается и характеризуется как полосовой
фильтр. Durand и др. [167] использовали такие параметры с целью охарактеризовать
СПМ звуков, производимых протезом сердечных клапанов (это будет обсуждаться
в разд. 6.6).
Применение', оценка протезов сердечных клапанов
273
6.6. Применение: оценка протезов
сердечных клапанов
Эффективное открытие и закрытие сердечных клапанов имеет первостепенную
важность для правильного выполнения насосной функции сердца. Когда собственные
клапаны выходят из строя, они могут быть заменены механическими протезами
клапанов или биопротезами клапанов, взятыми у свиней. Механические протезы кла-
панов склонны к внезапному выходу из строя из-за разрушения деталей. Биопротезы
клапанов выходят из строя постепенно из-за деградации и кальцификации тканей.
Наблюдения за ними проводились в течение последних 7-12 лет [167]. Наблюдение
за здоровыми пациентами с протезами клапанов требует периодической неинвазивной
оценки функциональной целостности клапанов.
Задача. Отложения кальция приводят к тому, что гибкие и эластичные
в норме лепестки биопротезов клапанов становятся жесткими. Предложить
метод для оценки функциональной целостности биопротезов клапанов.
Решение. Если основываться на теоретическом предположении, что открытие
и закрытие сердечных клапанов непосредственно вносит вклад в звуки сердца, то
анализ компонент ФКГ представляет собой неинвазивный и пассивный метод оценки
протезов клапанов. Как ожидается, повышенная жёсткость клапанов ведёт к появ-
лению высокочастотных компонент в звуках, сопровождающих открытие и закрытие
клапанов. Дюран (Durand) и др. [167] исследовали спектр всего сегмента сигнала,
соответствующего тону S1, для оценки звуков, вносимых закрытием биопротеза
клапана, взятого от свиньи и имплантированного в позицию митрального клапана
человека. Они показали, что в то время как нормальный спектр тона S1 ограничен
полосой частот примерно до 100 Гц, вырожденный биопротез клапана даёт значи-
тельную спектральную энергию в полосе 100-250 Гц. На рис. 6.3 показаны отно-
сительные спектры мощности тона S1 для случая нормального и деградировавшего
биопротеза клапана.
Дюран и др. получили из спектра S1 несколько параметров и использовали их для
различения нормальных и вырожденных биопротезов клапанов. Ниже перечислены
некоторые из параметров, использованные ими: первый и второй доминирующие
частотные пики; ширина полосы частот и добротность доминирующего пика; инте-
грированная средняя площадь выше уровня —20 дБ; наибольшая частота, найденная
на уровне —3 дБ; общая площадь и величина СКО спектра; площадь и величина
СКО в частотных диапазонах 20-100 Гц, 100-200 Гц и 200-300 Гц; медианная
частота. Была достигнута достаточно высокая точность классификации нормальных
и вырожденных клапанов, составляющая примерно 98%.
Дюран и др. [121] также исследовали звуки биопротезов клапанов, установленных
в позицию аортального клапана. Они утверждали, что аортальная и дыхательная
компоненты (А2 и Р2 соответственно) тона S2, каждая из которых продолжается
приблизительно 50 мс, не коррелированы по времени при нормальном дыхании. Эти
две компоненты тона S2 разделены интервалом в 30-60 мс во время вдоха, но
становятся ближе и могут перекрываться во время выдоха. Следовательно, Р2 слабее
чем А2, если ФКГ записана в аортальной области. Таким образом, компонента Р2
может быть подавлена, а А2 усилена за счёт использования когерентного обнару-
жения и усреднения S2 на протяжении нескольких сердечных циклов и циклов
дыхания; см. разд. 4.11. Дюран и др. выполнили спектральный анализ компонен-
ты А2, полученной как было описано выше, с целью оценки биопротезов клапанов,
установленных в позицию аортального клапана. Среди возможного выбора мето-
дов спектрального анализа — базового периодограмного метода, метода усреднённых
18 Р. Рангайян
274 Гл. 6. Исследование характеристик сигналов и систем в частотной области
Частота, Гц
Рис. 6.13. Спектр первого сердечного тона в случаях нормального и деградировавшего свиного
биопротеза, имплантированного в позицию митрального клапана. Воспроизводится с разре-
шения L. G. Durand, М. Blanchard, G. Cloutier, H.N. Sabbah, and P. D. Stein, Comparison of
pattern recognition methods for computer-assisted classification of spectra of heart sounds in
patients with porcine bioprosthetic valve implanted in the mitral position, IEEE Transactions on
Biomedit Engineering, 37(12): 1121—1129, 1990. ©IEEE
периодограмм Уэлча, полюсного моделирования (см. разд. 7.5) и полюсно-нулевого
моделирования (см. разд. 7.6) — они выбрали в качестве наилучшего базовый пери-
одограммный метод, поскольку он обеспечивает наилучший компромисс для оценки
как спектрального распределения, так и доминирующего частотного пика в звуках
биопротеза клапана.
Cloutier и др. [168] исследовали смещение и вариабельность нескольких диа-
гностических спектральных параметров, рассчитанных из моделированных звуков
закрытия биопротезов клапанов, расположенных в позиции митрального клапана.
Они установили, что частота доминирующего спектрального пика и его добротность
лучше всего оцениваются с использованием основанной на БПФ оценке СПМ с при-
менением прямоугольного окна. Однако ширина полосы частот доминирующего спек-
трального пика на уровне —3 дБ, частота второго доминирующего пика и несколько
других параметров лучше оценивались с использованием метода полюсно-нулево-
го моделирования Steiglitz-McBride (см. разд. 7.6.2). Некоторые другие параметры
лучше оценивались с использованием полюсного моделирования и ковариационного
метода (см. разд. 7.5). Был сделан вывод, что какой-то один метод не может дать
наилучших оценок всех возможных исследуемых спектральных параметров.
6.7. Замечания
Мы исследовали характеристики из частотной области для нескольких биомеди-
цинских сигналов и соответствующих физиологических систем, уделяя особое вни-
мание ФКГ и сердечно-сосудистой системе. Анализ в частотной области с использо-
ванием СПМ и параметров, получаемых из СПМ, может дать возможность взглянуть
Контрольные вопросы и задания
275
на сигнал с иной, чем при анализе во временной области, точки зрения. Некоторые
сигналы, такие как ФКГ и ЭЭГ, могут не поддаваться простой интерпретации во
временной области, и следовательно перенос анализа в частотную область может
дать определённый выигрыш.
СПМ и их параметры дают возможность исследования поведения физиологиче-
ских систем с учетом ритма, резонанса и параметров, которые могут быть связаны
с физическими характеристиками анатомических элементов (например, потерей эла-
стичности мышц миокарда в связи с ишемией или инфарктом, степенью стеноза
аортального клапана или степенью отложения кальция и жёсткостью биопротезов
клапанов). Кроме того, возможно выявление или моделирование патологических со-
стояний путём модификации спектральных параметров или представления в частот-
ной области соответствующих нормальных физиологических состояний и сигналов.
На этой стадии исследования стоит сделать паузу и признать важность темы,
представленной в предыдущих главах. До того как мы приступим к обработке сиг-
налов, первостепенное значение имеет хорошее понимание физиологических систем,
которые порождают биомедицинские сигналы, обрабатываемые нами, а также патоло-
гических процессов, которые изменяют их характеристики. Перед тем как получать
параметры, обеспечивающие анализ сигнала во временной и/или частотной областях,
очень важно предварительно обработать сигнал с целью устранения артефактов
и выявления событий. Разработка методов анализа биомедицинских сигналов требует
полного понимания характеристик и свойств биомедицинских систем, порождающих
эти сигналы, в дополнение к глубокому знанию математических принципов компью-
терной техники и алгоритмов цифровой обработки сигнала.
6.8. Контрольные вопросы и задания
1. Импульсная характеристика фильтра задана последовательностью величин от-
счётов {3, — 1,1}.
а) Каким будет отклик фильтра на входную последовательность следующего
вида: {4,4,2,1}?
б) В результате какого из двух видов свёртки (линейной или циклической)
между входным сигналом и импульсной характеристикой получен выходной
сигнал фильтра?
в) Каким будет отклик фильтра с использованием другого типа свёртки по
сравнению с тем, который Вы назвали в качестве ответа на предыдущий
вопрос?
г) Как бы Вы выполнили свёртку приведённых выше двух сигналов с использо-
ванием БПФ? Какой тип свёртки даст эта процедура? Как бы Вы получили
другой тип свёртки для тех же самых сигналов с использованием процедур,
основанных на БПФ?
2. Симметрично (чётно) сопряжённый сигнал хе(п) определён как сигнал, обла-
дающий свойством хе(п) = х*(—п). Антисимметрично (нечётно) сопряжённый
сигнал хо(п) определён как сигнал, обладающий свойством хо(п) = —х^(—п).
Произвольный сигнал х(п) может быть выражен как сумма его симметрично со-
пряжённой и антисимметрично сопряжённой частей в виде х(п) = хе(п) + х$(п),
где хе(п) = -[ж(п) + х*(—п)] и хо(п) = — [ж(п) — х*(—п)]. Докажите, что
FT[xe(n)] = real [X (си)],
18*
276
Гл. 6. Исследование характеристик сигналов и систем в частотной области
и
FT[rr0(n)] = jimag[X(w)],
где FT[a?(n)] = X(cv), и FT обозначает преобразование Фурье [86].
3. Сигнал x(t) передаётся по некоторым каналам. Принимаемый сигнал y(t) пред-
ставляет собой масштабированный сдвинутый и зашумлённый вариант сигнала
x(t) и задаётся как y(t) = ax(t — to) + где a — коэффициент масштабирова-
ния, to — временная задержка и y(t) — шум. Предположим, что шумовой процесс
имеет нулевое среднее и статистически не зависим от процесса, порождающего
сигнал, и что все процессы являются стационарными. Получите выражение для
СПМ от y(t) в виде зависимости СПМ от х и от rj [5, 105].
4. Рассмотрим непрерывный во времени синусоидальный сигнал с частотой 10 Гц.
а) Получите аналитическое выражение для АКФ этого сигнала.
б) Нарисуйте схематический график АКФ, подробно разметив ось времени.
в) Сформулируйте соотношение между СПМ и АКФ.
г) Получите аналитическое выражение для СПМ данного сигнала.
д) Нарисуйте схематический график СПМ, подробно разметив ось частот.
5. Два вещественных сигнала х\(п) и Х2(п) комбинируются таким образом, что
образуют комплексный сигнал, определённый как у(п) = x\(n) + jx^in). Предло-
жите процедуру для получения ДПФ Х\(к) и Х%(к) от х\(п) и xz(n), соответ-
ственно, из ДПФ Y(k) от у(п).
6. Сформулируйте, в чём состоит отличие между средним по ансамблю и средним
по времени. Назовите примеры применения средних первого порядка и второго
порядка обоих типов для анализа ФКГ.
7. Предложите процедуру обработки сигналов ФКГ с целью идентификации воз-
можного присутствия шумов, связанных со стенозом аортального клапана.
8. Предложите алгоритм для обнаружения присутствия а-ритма в сигнале ЭЭГ.
Предложите расширение этого алгоритма для обнаружения совместного присут-
ствия того же самого ритма в четырёх одновременно записанных каналах ЭЭГ.
6.9. Упражнения и лабораторные работы
Замечание. Необходимые для выполнения упражнений файлы с данными доступ-
ны на сайте ftp://ftp.ieee.org/uploads/press/rangayyan/.
1. Используя MATLAB, сгенерируйте сигнал, содержащий сумму двух косинусои-
дальных волн равной амплитуды с частотами 40 и 45 Гц. Пусть частота отсчётов
будет равна 1 кГц.
а) Рассчитайте спектр мощности сигнала с прямоугольным окном длительно-
стью 2 с.
б) Рассчитайте спектр мощности сигнала с окном Хемминга длительностью 2 с.
в) Рассчитайте спектр мощности сигнала с прямоугольным окном длительно-
стью 0,5 с.
г) Рассчитайте спектр мощности сигнала с окном Хемминга длительностью
0,5 с.
Для получения спектра мощности вы можете использовать БПФ и возвести
результат в квадрат. Сравните спектры для пунктов а)-г) и прокомментируйте их
сходство и/или различие. Для того чтобы четко визуализировать эти различия,
Упражнения и лабораторные работы
277
используйте БПФ для 2048 точек и постройте график спектра, откладывая по
ординате логарифм квадрата амплитуды и используя растянутую шкалу частот
в диапазоне от 0 до 100 Гц. Убедитесь, что шкала частоты отградуирована в Гц!
На что должен быть похож этот идеальный спектр?
2. В файлах vagl.dat и vagl.dat содержатся два сигнала виброартрограммы (ВАГ),
(см. также файл vag.m). Частота отсчётов равна 2 кГц. Получите, используя
MATLAB, графики спектральной плотности мощности (СПМ) для этих сигналов.
Отградуируйте шкалу частоты в Гц!
Рассчитайте среднюю частоту как первый момент СПМ для каждого сигнала.
Рассчитайте также дисперсию (второй центральный момент) для каждой СПМ.
В каких единицах выражены эти параметры?
Сравните полученные спектры и параметры и дайте вашу оценку частотному
составу заданных сигналов.
3. Файл safety.wav содержит дискретизованный с частотой 8 кГц речевой сигнал
для слова «safety», произнесённого мужчиной (см. также файл safety.m). Сигнал
имеет значительную долю фонового шума (так как он был записан в обычных
условиях компьютерной лаборатории). Разработайте процедуры для разбиения
сигнала на участки, соответствующие гласным и согласным звукам и перио-
дам молчания (фонового шума) с использованием методов среднеквадратичного
значения для коротких интервалов, числа поворотов и числа пересечений нуля.
Рассчитайте СПМ для каждого полученного сегмента и исследуйте её характе-
ристики.
4. Файлы pecl.dat, pec33.dat и pec52.dat содержат трёхканальные записи ФКГ,
ЭКГ и сигнала каротидного пульса, дискретизованные с частотой 1000 Гц.
Вы можете прочесть эти сигналы с помощью программы из файла plotpec.m).
Сигналы из файлов pecl.dat и pec52.dat являются нормальными; сигнал ФКГ из
файла pec33.dat имеет систолический шум и получен от пациента с подозрением
на стеноз лёгочного клапана, дефект перегородки желудочков и дыхательную
гипертензию.
Примените метод Пана-Томпкинса для обнаружения QRS-комплекса в канале
ЭКГ, а метод Lehner и Rangayyan — для обнаружения дикротической выемки
в канале каротидного пульса. Экстраполируйте временную информацию из ка-
нала ЭКГ и канала каротидного пульса для сегментирования сигнала ФКГ на
две части: систолическую часть от начала компоненты S1 до начала следующей
компоненты S2 и диастолическую часть от начала компоненты S2 до начала
следующей компоненты S1. Рассчитайте СПМ для каждого из этих сегментов
Расширьте эту процедуру за счёт усреднения систолической и диастолической
СПМ по нескольким кардиоциклам. Сравните СПМ, полученные для всех трёх
случаев. ъ
5. Рассчитайте среднюю частоту и отношение энергии в диапазоне от 100 до 300 Гц
к общей энергии для каждой из СПМ, полученных в предыдущем упражнении.
Какую информацию дают вам эти величины?
6. Рассчитайте СПМ для нескольких каналов сигнала ЭЭГ, содержащегося в файле
eegl-xx.dat, используя процедуру Уэлча (см. также файл eegl.m). Исследуйте
изменения в СПМ, вызываемые различиями в ширине окна, числе усредняемых
сегментов, типе используемого окна. Сравните результаты с СПМ, рассчитанной
по всей записи сигнала в каждом канале. Рассмотрите результаты с точки зрения
влияния процедур и параметров на разрешение и утечку.
Глава 7
МОДЕЛИРОВАНИЕ ПРОЦЕССОВ И СИСТЕМ,
ПОРОЖДАЮЩИХ БИОМЕДИЦИНСКИЕ
СИГНАЛЫ
До сих пор мы концентрировали своё внимание на обработке и анализе биоме-
дицинских сигналов. При этом сигналы рассматривались сами по себе как носители
диагностической информации. В предыдущих главах неоднократно подчёркивалось,
что разработка и применение процедур анализа сигналов требует понимания физио-
логических и патологических процессов и систем, генерирующих сигналы. Однако
в тех методах, которые исследовались до сих пор, какие-либо специальные модели
для представления процессов генерирования сигналов не использовались.
Теперь мы рассмотрим подход, основанный на моделировании, когда для пред-
ставления процесса или системы, генерирующих изучаемый сигнал, используется
явная математическая модель. В этом случае исследуются параметры модели с це-
лью их последующего использования в анализе сигналов, в распознавании образов
и в процессе принятия решений. Как мы увидим, параметры модели также могут
быть связаны с физиологическими или патологическими аспектами соответствующих
систем. Подход, основанный на параметрическом моделировании, часто позволяет
получить компактное и эффективное представление сигналов и систем. Несмотря на
то что упор делается на моделировании, окончательной целью описанных в данной
главе методов является анализ исследуемых сигналов.
7.1. Постановка задачи
Предложить математические модели, представляющие процесс генерации
биомедицинских сигналов. Идентифицировать возможные взаимосвязи между
математическими моделями и физиологическими и патологическими процессами
и системами, которые порождают сигналы. Исследовать возможности использо-
вания параметров модели в анализе сигналов, распознавании образов и принятии
диагностических решений.
Учитывая многообразие биомедицинских сигналов, как тех, с которыми мы уже
столкнулись, так и многих других, нельзя ожидать, что какая-либо обобщённая мо-
дель может представлять большое количество различных сигналов. Действительно,
для каждого сигнала часто требуется очень специфическая модель. Такие биоэлек-
трические сигналы как ЭКГ и ЭМГ могут моделироваться с использованием базового
потенциала действия или ПДОДЕ в качестве элементарного строительного блока.
Звуковые сигналы и сигналы вибрации, такие как ФКГ или речевой сигнал, могут
Иллюстрация задачи на примерах 279
моделироваться с использованием заполненных жидкостью резонирующих камер,
турбулентных потоков через перегородку или через сужение, вибрирующих трубок
и акустического или вибрационного возбуждения тракта переменной формы. В сле-
дующих разделах мы рассмотрим несколько представительных сигналов и моделей,
а затем исследуем методы моделирования, которые на основе получаемых параметров
позволяют выполнять анализ сигналов.
7.2. Иллюстрация задачи на примерах
7.2.1. Типы форм волн сокращений двигательной единицы. В разд. 1.2.3 мы
видели, что поверхностная ЭМГ активной скелетной мышцы представляет собой
пространственно-временное суммирование потенциалов действия большого количе-
ства двигательных единиц, вовлеченных в процесс сокращения мышцы (см. рис. 1.6).
Если мы рассмотрим ЭМГ отдельной двигательной единицы, мы увидим последова-
тельность ПДОДЕ; одна и та же базовая волна (пик, импульс или волновая форма)
повторяются в квазипериодической последовательности. Для общности рассмотре-
ния мы можем представить интервалы между ПДОДЕ как случайные переменные.
Хотя существует общая периодичность и она представлена в частоте возбуждения,
выражаемой в импульсах в секунду, интервалы между импульсами, известные как
межимпульсные интервалы (МИИ, inter-pulse interval, IPI), могут не быть точно
одинаковыми от одного ПДОДЕ к другому.
Agarwal и Gottlieb [169] моделировали ЭМГ отдельной двигательной единицы как
свёртку последовательности единичных импульсов или ^-функций Дирака, известной
как точечный процесс [170-173], с базовой волной ПДОДЕ. При этом после-
довательность ПДОДЕ y(t) может моделироваться как выход линейной системы,
импульсная характеристика которой h(t) представляет собой ПДОДЕ, а входной
сигнал — точечный процесс x(t)\
t
2/(0 = | h(t - т)х(т) dr. (7.1)
о
Физиологические условия диктуют, что последовательные потенциалы действия
от одной и той же двигательной единицы не могут перекрываться: интервал между
любыми двумя импульсами должен быть больше, чем длительность ПДОДЕ. При
нормальной мышечной активации длительность ПДОДЕ имеет порядок 3-20 мс,
а частота возбуждения двигательной единицы лежит в диапазоне 7-25 имп./с;
следовательно, МИИ будет лежать в диапазоне 40-140 мс, что существенно больше,
чем длительность ПДОДЕ. Таким образом, последовательность ПДОДЕ состоит из
дискретных (отдельных или разделённых) событий или волн.
Модель, подобная предложенной выше, позволяет выполнять независимый анализ
формы волны ПДОДЕ и процесса возбуждения: действительно, эти два процесса
физиологически являются раздельными. Форма волны ПДОДЕ зависит от про-
странственного расположения мышечных волокон, которые составляют двигательную
единицу, в то время как процесс возбуждения определяется двигательным нейроном,
который стимулирует мышечные волокна. Для исследования процесса мышечной
активации независимо от форм волн ПДОДЕ может использоваться представление
МИИ в виде статистического или точечного процесса. В п. 7.3 будет представлено
подробное рассмотрение точечных процессов и их применения к моделированию
ЭМГ.
280 Гл. 7. Моделирование процессов и систем, порождающих биомедицинские сигналы
7.2.2. Сердечный ритм. ЭКГ представляет собой квазипериодический сиг-
нал, который в случае нормы является, кроме того, циклически стационарным
(см. разд. 1.2.4). Каждый комплекс запускается импульсом из СА-узла. Р-зубец
является суммарным результатом потенциалов действия двигательных единиц
предсердия, в то время как QRS-комплекс и Т-зубец формируются в результате
пространственно-временного суммирования потенциалов действия двигательных
единиц желудочков.
При анализе ритма больший интерес представляют временные соотношения
между комплексами, чем индивидуальные формы их волн (за исключением ЖЭ).
Заболевания, влияющие на СА-узел, могут нарушать нормальный ритм и вести
к аномальной вариабельности RR-интервалов. Без учёта специфических особенно-
стей форм волн ЭКГ, относящихся к предсердиям и к желудочкам, ритм ЭКГ может
быть смоделирован в виде точечного процесса, представляющего процесс возбужде-
ния СА-узла. Далее, рассматривая распределение и статистические характеристики
RR-интервалов, можно исследовать синусовую аритмию и вариабельность сердечного
ритма (ВСР).
На рис. 7.1 показан фрагмент ЭКГ и три варианта представления сердечного рит-
ма: в виде мгновенных значений, определённых для каждого комплекса как обратные
величины от RR-интервалов; в виде последовательности значений RR-интервалов
и в виде последовательности 5-функций, появляющихся в момент возбуждения
СА-узла [72]. Путём взятия равноотстоящих отсчётов от сигнала, показанного
на рис. 7.16, может быть получен дискретно-временной сигнал. Однако этот сигнал
*0 t2 t3 t4
Рис. 7.1. Последовательность комплексов ЭКГ (а) представлена в виде мгновенных значений
сердечного ритма, определённых как обратные величины от RR-интервалов для каждого
комплекса (6); последовательность величин RR-интервалов (известная как интервальная по-
следовательность) (в); последовательность 5-функций, определённых в момент возбуждения
СА-узла (г). Воспроизводится с разрешения R. W. DeBoer, J.M. Karemaker, and J. Strackee,
Comparing spectra of a series of point events particularly for heart rate variability studies, IEEE
Transactions on Biomedical Engineering, 31(4):384-387, 1984. ©IEEE
Ммюсищащдя задачи на гцшмеуах
281
может не быть непрерывным или дифференцируемым [72]. Сигнал, показанный
на рис. 7.1 в и известный как интервальная последовательность, принимает значения
Ik = tk где tk представляют собой моменты времени, в которые в ЭКГ появ-
ляются QRS-комплексы. Последовательность Ik определена как функция от номера
интервала, а не от времени, и, следовательно, представляет большую трудность для
интерпретации в частотной области. В конечном итоге, представленный на рис. 7.1
сигнал определён как последовательность ^-функций Дирака s(t) = ^5(t — tk). Эта
последовательность импульсов представляет собой точечный процесс, который, как
будет показано в п. 7.3, относительно легко анализировать и интерпретировать. По-
следние две формы представления могут быть использованы для анализа сердечного
ритма и ВСР, что будет описано в п. 7.8 (см. также п. 8.9).
7.2.3. Форманты и высота тона речевого сигнала. Речевой сигнал формиру-
ется за счёт возбуждения голосового тракта либо последовательностью импульсов,
либо случайным сигналом, порождаемыми голосовой щелью. Возможны также ком-
бинации этих двух вариантов (см. разд. 1.2.11). Форма голосового тракта меняется
в соответствии с природой вырабатываемого звука или фонемы; следовательно
система является динамической. Мы можем моделировать выходной сигнал как
свёртку импульсной характеристики (динамической) голосового тракта с формой
входной волны голосовой щели. Этот входной сигнал может моделироваться как
случайный процесс для согласных звуков и как точечный процесс для гласных
звуков. Очевидно, что речевой сигнал является нестационарным; однако на коротких
интервалах времени, в течение которых вырабатывается какая-нибудь одна фонема,
этот сигнал может рассматриваться как квазистационарный.
Рис. 7.2 иллюстрирует широко используемую модель порождения речи [46]. Ре-
чевой сигнал может моделироваться с использованием того же самого выражения
свёртки, которое задаётся уравнением (7.1), с тем ограничением, что это выражение
А. Точечный процесс
Б. Случайный шум
Изменчивая во времени
фильтрующая система
голосового тракта
А. Гласные звуки
Б. Согласные звуки
Рис. 7.2. Модель порождения речи, рассматривающая голосовой тракт как динамическую ли-
нейную систему. Входной сигнал в форме точечного процесса порождает квазипериодические
гласные звуки, в то время как входной сигнал в форме случайного шума порождает согласные
звуки
справедливо только на том промежутке времени, в течение которого голосовой
тракт удерживается в фиксированном положении и на него поступает один и тот
же входной сигнал возбуждения голосовой щели. Тогда h(t) представляет собой
импульсную характеристику системы голосового тракта (фильтра) для рассматри-
ваемого интервала времени и x(t) представляет собой форму волны голосовой щели,
которая является входным сигналом для этой системы. В случае гласных звуков
статистические характеристики МИИ входного точечного процесса, особенно его
среднее значение, связаны с высотой тона. Более того, частотная характеристика
фильтра Н(ш), представляющая голосовой тракт, определяет спектральное содержа-
ние речевого сигнала: в случае гласных звуков доминирующие частоты, или пики,
известны как форманты.
В п. 7.3 будут описаны точечные процессы. В пп. 7.4, 7.5 и 7.6 рассматриваются
параметрическое спектральное моделирование и методы анализа, предназначенные
для выделения формантов.
Точечные процессы
283
Преобразование Фурье от точечного процесса задаётся уравнением
°°( N N
exp(-jut) dt = У2 exp(-jwtj).
-ОО
(7.4)
Х(ш) является функцией от случайной переменной tiy которая, в свою очередь,
является функцией от i случайных переменных ti,T2, ... ,7$, следовательно Х(ш)
является случайной величиной. Среднее по ансамблю от Х(сс) может быть получено
путём расчета его математического ожидания с учётом ФПВ от ti следующим
образом [169]:
N
Х(ш) = Е X(w)] = ^E’fexpC-jwtj)],
то
E[exp(-j^tt) = expi-jut^pt^t^dti.
Используя уравнение (7.2) для вычисления получим
Е [exp(-Jwti)]
ехр(—jwti) exp
(ti ip)
2ia2
(7.5)
(7.6)
(7.7)
(7.8)
Подставляя ti — ip = г, где
г является переменной времени, получим
£?[exp(-jwti)] =
exp(-juip)
г2
—2 exp(-jwr) dr.
2icr
Используя то свойство преобразования Фурье, что ехр
W =
E[exp(-jwti)| = ехр(—jwip) ехр
(7.9)
Окончательно, имеем
Х(о?) = ^2 ехР (-Л’ф) ехР I ) • (7-Ю)
\ /
Среднее по ансамблю преобразование Фурье для последовательности ПДОДЕ зада-
ётся выражением
У(сс) = (7.11)
где Н(ш) — преобразование Фурье отдельного ПДОДЕ. Следовательно, преобразова-
ние Фурье последовательности ПДОДЕ является мультипликативной комбинацией
преобразования Фурье для точечного процесса, представляющего процесс возбужде-
ния двигательного нейрона, и преобразования Фурье для отдельного ПДОДЕ.
284 Гл. 7. Моделирование процессов и систем, порождающих биомедицинские сигналы
Иллюстрация применения для ЭМГ. На рис. 7.3 показан сигнал ЭМГ, синте-
зированный с помощью описанной выше модели на основе точечного процесса для 1,
20, 40 и 60 двигательных единиц, каждой из которых соответствует одинаковая
двухфазная форма ПДОДЕ с длительностью 8 мс и статистиками МИИ: д = 50 мс
Рис. 7.3. Синтез сигнала ЭМГ, представляющего собой интерференцию последовательности
ПДОДЕ с использованием модели на основе точечного процесса. Сверху вниз: последова-
тельность ПДОДЕ отдельной двигательной единицы и результат интерференции для 20,
40 и 60 двигательных единиц. Длительность ПДОДЕ —8 мс. Статистики МИИ: р = 50 мс
и а = 6,27 мс. Длительность каждого сигнала составляет 250 мс. Воспроизводится с разреше-
ния G C. Agarwal and G.L. Gottlieb, An analysis of the electromyogram by Fourier, simulation
and experimental techniques, IEEE Transactions on Biomedical Engineering, 22(3):225-229,
1975. ©IEEE
и a = 6,27 мс [169]. Хорошо видно, что сложность сигнала ЭМГ возрастает по мере
того, как активизируется всё большее количество двигательных единиц. Процесс
интерференции скрывает форму использованных для генерации сигналов ПДОДЕ;
при этом общий вид процесса близко напоминает реальный сигнал ЭМГ.
На рис. 7.4 показан амплитудный спектр синтезированного сигнала ЭМГ для
одной двигательной единицы и для 15 двигательных единиц (при двухфазных
ПДОДЕ длительностью 8 мс, р = 20 мс и а = 4,36 мс) [169]. Гладкая кривая на
рис. 7.4, наложенная на второй спектр, получена из математической модели, опи-
санной в предыдущем разделе. Здесь важно отметить, что усреднённый амплитуд-
ный спектр нескольких идентичных двигательных единиц приближается к спектру
отдельной волны ПДОДЕ. Как огибающая спектра последовательности ПДОДЕ,
так и огибающая спектра процесса интерференции нескольких последовательностей
с идентичными формами ПДОДЕ определяются формой спектра для отдельной волны
ПДОДЕ.
Точечные процессы
285
О 50 100 150 200 250 300 350 400 450 500 0 50 100 150 200 250 300 350 400 450 500
Частота, Гц
Рис. 7.4. Амплитудные спектры синтезированных сигналов ЭМГ для одной двигательной
единицы (а), для 15 двигательных единиц с использованием бифазной ПДОДЕ длительно-
стью 8 мс (б), р = 20 мс и ст = 4,36 мс. Гладкая кривая, наложенная на спектр была получена
из модели точечного процесса для 10 ПДОДЕ. Воспроизводится с разрешения G. С. Agarwal
and G. L. Gottlieb, An analysis of the electromyogram by Fourier, simulation and experimental
techniques, IEEE Transactions on Biomedical Engineering, 22(3):225-229, 1975. ©IEEE
На рис. 7.5 показаны амплитудные спектры поверхностных сигналов ЭМГ,
записанных с мышцы gastrocnemius-solus, усреднённые по 1, 5 и 15 записям
сигнала [169]. Спектры на рис. 7.4 и 7.5 показывают сопоставимые характеристики.
Если все активные двигательные единицы в результирующей записи ЭМГ имеют
з 0 50 100 150 200 250 300 350 400 450 500 0 50 100 150 200 250 300 350 400 450 500
X
Частота, Гц
Рис. 7.5. Амплитудные спектры поверхностных сигналов ЭМГ, записанных с мышцы
gastrocnemius-solus, усреднённые для 1 (а), 5 (б) и 15 (в) записей сигнала. Воспроизво-
дится с разрешения G.C. Agarwal and G. L. Gottlieb, An analysis of the electromyogram by
Fourier, simulation and experimental techniques, IEEE Transactions on Biomedical Engineering,
22(3):225-229, 1975. ©IEEE
286 Гл. 7. Моделирование процессов и систем, порождающих биомедицинские сигналы
одинаковые или идентичные ПДОДЕ, то огибающая спектра этого сигнала может
дать информацию о форме волны ПДОДЕ (через обратное преобразование Фурье).
Как отмечалось ранее в разд. 1.2.3, форма ПДОДЕ может оказаться полезной для
диагностики нейромышечных заболеваний. Однако на практике многие двигательные
единицы с различными формами ПДОДЕ могут вносить вклад в сигнал ЭМГ
даже при низком уровне усилий, и анализ, подобный описанному выше, может
иметь ограниченную применимость. Тем не менее, модель, основанная на точечном
процессе, представляет собой интересный подход к моделированию сигнала ЭМГ.
Та же самая модель может найти применение для генерации речевого сигнала, как
показано на рис. 7.2. С другими моделями представления характеристик ЭМГ можно
познакомиться в работах Parker и др. [178], Lindserom и Magnusson [179], Zhang
и др. [180], Parker и Scott [181], Shwedyk и др. [182], Person и Libkind [183], Person
и Kudina [184], de Luca [185, 24], Lawrence и de Luca [150] и de Luca и van Dyk [186].
Иллюстрация применения для ХКЧ. Zhang и др. [174] предложили модель на
основе точечного процесса для представления сигнала ХКЧ коленного сустава, ко-
торую назвали последовательностью или сигналом КБИ (см. разд. 7.2.4). На рис. 7.6
изображены СПМ двух точечных процессов, которые моделировались со средней
80 160 240 320 400 480
0 80 160 240 320 400 480 0
Частота, Гц
Рис. 7.6. Нормализованные СПМ синтезированных точечных процессов для рг = 21 имп./с
и CVr = 0,1 (а) и рг = 21 имп./с и CVr = 0,5 (б). Воспроизводится с разрешения Y. Т. Zhang,
С. В. Frank, R. М. Rangayyan, and G. Е. Bell, Mathematical modelling and spectrum analysis of
the physiological patello-femoral pulse train produced by slow knee movement, IEEE Transactions
on Biomedical Engineering, 39(9) :971-979, 1992. ©IEEE
частотой повторений pr = 21 имп./с и коэффициентом вариации CVr = гуг/Гг — 0,1
и 0,05, где суг — стандартное отклонение частоты повторений. Для моделирования
статистик МИИ использовано гауссово распределение. Спектр наглядно показывает
доминирующий пик, соответствующий средней частоте повторений точечного про-
цесса, за которым следуют меньшие по величине пики на частотах, соответствующих
гармоникам первого пика. Гармоники более высокого порядка лучше определены
в случае низкого значения CVr\ в пределе (когда точечный процесс является точно
периодическим, т. е. CVr = 0, сгг = 0) СПМ будет периодической последовательно-
стью импульсов, в которой все импульсы имеют одинаковую амплитуду.
Zhang и др. [174] смоделировали последовательность КБИ для различных ста-
тистик МИИ с использованием образца формы волны КБИ из реальной записи
сигнала ВАГ, полученной с коленной чашечки пациента в норме с использованием
акселерометра. Длительность формы волны КБИ составляла 21 мс и статистики
МИИ рг и CVr были ограничены так, чтобы синтезированная последовательность
КБИ имела неперекрывающиеся волны КБИ и напоминала реальные сигналы КБИ.
На рис. 7.7 и 7.8 показаны СПМ синтезированных сигналов КБИ для различных
значений рг, но при одном и том же CVr и для одних и тех же значений рг, но
Точечные процессы
287
О 60 120 180 240 300 360 420 480
Частота, Гц
Рис. 7.7. Нормализованные СПМ синтезированной последовательности КБИ с использова-
нием реальных форм волн КБИ длительностью 21 мс, CVr = 0,05, рг = 16 имп./с (а),
рг = 21 имп./с (б) и рг = 31 имп./с (в). Воспроизводится с разрешения Y. Т. Zhang,
С. В. Frank, R. М. Rangayyan, and G. Е. Bell, Mathematical modelling and spectrum analysis of
the physiological patello-femoral pulse train produced by slow knee movement, IEEE Transactions
on Biomedical Engineering, 39(9):971-979, 1992. ©IEEE
с различными CVr соответственно. СПМ наглядно иллюстрирует влияние статистик
МИИ на спектральные характеристики сигналов, генерируемых с использованием
точечного процесса. Здесь необходимо сделать следующие важные наблюдения.
• Огибающие СПМ последовательности КБИ похожи друг на друга безотноситель-
но статистик МИИ.
• Огибающая СПМ последовательности КБИ определяется СПМ отдельной волны
КБИ.
• Огибающая СПМ последовательности КБИ модулирована последовательностью
импульсов с характеристиками, определяемыми статистиками МИИ. Первый
импульс показывает среднюю частоту повторений.
• Точечный процесс даёт эффект высокочастотной фильтрации: низкочастотные
компоненты СПМ базовой КБИ подавляются в результате перемножения с СПМ
точечного процесса.
• Физиологические сигналы редко имеют точную периодичность. Величина CVr
будет достаточно велика, ограничивая тем самым влияние повторений на низкие
частоты в СПМ для последовательности КБИ.
Сделанные выше наблюдения справедливы для всех сигналов, генерируемых с ис-
пользованием точечных процессов, включая последовательности ПДОДЕ и речевые
сигналы для гласных звуков.
Zhang и др. [174] верифицировали модель точечного процесса для сигнала КБИ
путём вычисления статистик МИИ и СПМ реальных сигналов КБИ, записанных
от пациента в норме. На рис. 7.9 показаны гистограммы МИИ, рассчитанные из
сигналов КБИ, которые получены от двух пациентов в норме. Статистики МИИ, рас-
288 Гл. 7. Моделирование процессов и систем, порождающих биомедицинские сигналы
Частота, Гц
Рис. 7.8. Нормализованные СПМ синтезированных последовательностей КБИ с использо-
ванием форм волн реальной КБИ с длительностью 21 мс, рг = 21 имп./с, CVr = 0,1 (а),
CVr = 0,05 (б), CVr = 0,01 (в). Воспроизводится с разрешения Y. Т. Zhang, С. В. Frank,
R. М. Rangayyan, and G. Е. Bell, Mathematical modelling and spectrum analysis of the phys-
iological patello-femoral pulse train produced by slow knee movement, IEEE Transactions on
Biomedical Engineering, 39(9):971-979, 1992. ©IEEE
считанные для этих двух случаев, были следующими: рг = 25,2 имп./с и CVr = 0,07
для первого и рг = 16,1 имп./с и CVr = 0,25 для второго сигнала. В то время как
гистограмма МИИ для первого сигнала оказалась близкой к гауссову распределению,
для второго сигнала это было не так. СПМ для этих двух сигналов показаны
на рис. 7.10. Эти СПМ реальных сигналов демонстрируют характеристики, которые
Рис. 7.9. Гистограммы МИИ, рассчитанные для последовательностей КБИ, записанных от
двух различных пациентов в норме. Рассчитывались следующие статистики: рг = 25,2 имп./с
и CVr = 0,07 (а), рг = 16,1 имп./с и CVr = 0,25 (б). Воспроизводится с разрешения
У. Т. Zhang, С. В. Frank, R. М. Rangayyan, and G. Е. Bell, Mathematical modelling and spectrum
analysis of the physiological patello-femoral pulse train produced by slow knee movement, IEEE
Transactions on Biomedical Engineering, 39(9):971-979, 1992. ©IEEE
Рис. 7.10. Нормализованные СПМ реальных последовательностей КБИ, записанных от двух
пациентов в норме, гистограммы для которых были показаны на рис. 7.9. Статистики МИИ
для этих двух случаев: рг = 25,2 имп./с и CVr = 0,07 (а), цг = 16,1 имп./с и CVr = 0,25 (б).
Воспроизводится с разрешения Y. Т. Zhang, С. В. Frank, R. М. Rangayyan, and G. Е. Bell,
Mathematical modelling and spectrum analysis of the physiological patello-femoral pulse train
produced by slow knee movement, IEEE Transactions on Biomedical Engineering, 39(9):971-
979, 1992. ©IEEE
сравнимы с характеристиками, полученными для СПМ синтезированных сигналов,
и согласуются с перечисленными выше наблюдениями. На огибающих этих двух
СПМ наблюдаются незначительные различия, так как базовая форма КБИ в этих
двух случаях не идентична.
7.4. Параметрическое моделирование систем
В гл. 6 отмечалась важность спектрального анализа биомедицинских сигналов.
Однако описанные методы базировались на вычислении и использовании спектра
Фурье; хотя данный подход, прежде всего, является непараметрическим, мы видели,
что из спектра Фурье могут быть рассчитаны несколько параметров. В гл. 6 также
обсуждались ограничения данного подхода. Теперь мы исследуем методы для пара-
метрического моделирования и анализа, которые, хотя изначально и базируются на
моделях и данных временной области, дают возможность параметрической оценки
спектральных свойств сигналов и систем.
Задача. Исследовать возможность параметрического моделирования харак-
теристик сигнала с использованием обобщённой модели линейной системы.
Решение. Разностное уравнение, которое описывает выход обобщённой линейной
инвариантной к сдвигу (или инвариантной ко времени) дискретно-временной систе-
мы, задаётся следующим образом:
Р Q
у(п) = - ^2 аку(п ~k) + G ^2 bix(n ~ 0, (7.12)
fc=l 1=0
где Ьо = 1. (Замечание. Преимущество отрицательного знака перед операцией сум-
мирования с параметром аь станет понятным позже в этом разделе; в некоторых
случаях при описании модели используют положительный знак, что не имеет су-
щественного значения для всех последующих математических выводов.) Входным
сигналом этой системы является ж(п); выходным сигналом является у(п)', парамет-
ры bi, I = 0,1,2, ... , Q, показывают, как текущий и Q последних отсчётов входного
19 Р. Рангайян
290 Гл. 7. Моделирование процессов и систем, порождающих биомедицинские сигналы
сигнала комбинируются линейно для генерации текущего выходного отсчёта; пара-
метры а/с, к = 1,2, ... , Р, показывают, как последние Р отсчётов выходного сигнала
линейно комбинируются (в цепи обратной связи) для формирования текущего вы-
ходного отсчёта; G — коэффициент усиления; Р и Q определяют порядок системы.
Суммирование по х представляет собой часть системы, называемую скользящим
средним (СС, МА, moving-average); суммирование по у представляет собой часть
системы, называемую авторегрессией (АР, AR, autoregressive); вся система целиком
может рассматриваться как комбинированная система авторегрессии — скользящего
среднего, или система АРСС (ARMA system). Часть системы, содержащая обратную
связь, делает импульсную характеристику этой системы бесконечно длинной; в этом
случае система может рассматриваться как БИХ-фильтр (см. рис. 3.29 и 3.30).
Уравнение (7.12) показывает, что выходной сигнал системы является простой
линейной комбинацией текущего входного отсчёта, нескольких последних входных
отсчётов и нескольких последних выходных отсчётов. Использование последних
входных и выходных отсчётов при вычислении текущего выходного отсчёта предста-
вляет собой память системы. Эта модель также показывает, что текущий выходной
отсчёт может быть предсказан как линейная комбинация текущего отсчёта,
нескольких последних входных отсчётов и нескольких последних выходных отсчётов.
По этой причине данная модель часто называется моделью линейного предсказания
(ЛП, linear prediction, LP) [46, 77, 187].
Применяя ^-преобразование к уравнению (7.12), мы можем получить передаточ-
ную функцию системы в виде
H(z) =
И*) г1 + ^М-г
(7.13)
(Преимущество отрицательного знака перед суммированием с коэффициентами
в уравнении (7.12) здесь проявляется в том, что числитель и знаменатель стали
в уравнении (7.13) симметричны). Данная система полностью характеризуется па-
раметрами ак, к = 1,2, ... , Р, bi, Z = 1,2, ...,Q, и G. В большинстве применений
коэффициент усиления G не является существенным; следовательно, если исключить
коэффициент усиления, то система полностью характеризуется параметрами а и Ь.
Более того, мы можем разложить полиномы, содержащиеся в числителе и знамена-
теле уравнения (7.13), и выразить передаточную функцию следующим образом:
Я(г) = G
n^id-^-1)
пЛл1-рьг-1)’
(7.14)
где zi, Z = l,2, представляют собой нули системы и рк, к = 1,2, ... , Р, —
полюса системы. Такую модель теперь можно назвать полюсно-нулевой моделью
(pole-zero model). Из уравнения (7.14) видно, что данная система (если не учиты-
вать коэффициент усиления) может быть полностью охарактеризована её полюсами
и нулями.
Уравнения (7.12), (7.13) и (7.14) демонстрируют применимость одной и той же
концептуальной модели как во временной, так и в частотной областях. Параметры а
и b непосредственно применимы как во временной области, так и в частотной обла-
сти — для отношения вход-выход или передаточной функции системы. Рассмотрение
полюсов и нулей более характерно для частотной области, хотя вклад каждого
полюса или нуля в импульсную характеристику во временной области для данной
системы может быть получен непосредственно из координат на г-плоскости [1].
Авторегрессионное или полюсное моделирование
291
Имея какой-нибудь входной сигнал х(п) и соответствующий выходной сигнал
системы у(п), мы можем получить их ^-преобразования X(z) и У (г) и, следователь-
но, получить в некоторой форме передаточную функцию системы H(z). Трудности
возникают при величинах г, для которых X(z) = 0; поскольку система является
линейной и У (г) = H(z)X(z), то в таких точках мы имеем также У (г) = 0. Тогда
H(z) не может быть определена при соответствующих величинах z. (Простейшим
тестовым сигналом является единичная импульсная функция х(п) = <5(п), для ко-
торой X(z) = 1 для всех z: отклик линейной инвариантной к сдвигу системы на
импульс полностью характеризует систему соответствующей последовательностью
у(п) = h(n) или её эквивалентном в г-области H(z).) В следующих разделах будут
описаны методы определения параметров модели АР или АРСС для заданного сигна-
ла в случае, когда соответствующий вход системы неизвестен (либо предполагается
в виде точечного или случайного процессов).
7.5. Авторегрессионное или полюсное моделирование
Задача. Как получить АР-моделъ (или модель ЛП), когда входной сигнал
системы, вызвавший данный выходной сигнал, неизвестен?
Решение. В случае АР-модели или полюсной модели [187, 46] выходной сигнал
моделируется как линейная комбинация Р последних величин выходного сигнала
и текущего входного отсчёта в виде
р
у(п) = - акУ(п ~k) + Gx(n). (7.15)
к=\
(Обсуждение АР-моделирования здесь в большой степени связано с работой
Makhoul [187], с разрешения автора.) В некоторых формулировках модели в дан-
ном уравнении вместо отрицательного знака перед суммированием используется
положительный знак. Следует отметить, что модель, заданная уравнением (7.15), не
принимает в расчёт присутствие шумов.
Полюсная передаточная функция, соответствующая уравнению (7.15), задаётся
выражением
H(z) =
G
1 + sXi а^~к
(7-16)
В случае биомедицинских сигналов, таких как ЭКГ или ФКГ, входной сигнал
системы абсолютно неизвестен. Тогда мы можем только приблизительно предсказать
текущий отсчёт выходного сигнала с использованием последних величин как
р
У(п) = - ^Гаку(п - к),
к=1
(7.17)
где значок ~ означает, что представленная величина является всего лишь прибли-
жением. Ошибка предсказанной величины (известной также как остаток) будет
р
е(п) = у(п) - у(п) = у(п) + ^2 акУ(™ ~ к). (7.18)
к=1
На рис. 7.11 показана обобщённая структурная схема АР-модели, рассматриваемой
как фильтр предсказания или фильтр ошибки.
19*
282 Гл. 7. Моделирование процессов и систем, порождающих биомедицинские сигналы
7.2.4. Хруст коленной чашечки. Среди различных типов сигналов ВАГ, произ-
водимых коленным суставом (см. разд. 1.2.13), наиболее широко распространённым
является сигнал, известный как физиологический хруст коленной чашечки (ХКЧ,
patello-femoral crepitus) [59, 174-177]. Сигнал ХКЧ представляет собой случайную
последовательность импульсов вибраций, генерируемых между поверхностями ко-
ленной чашечки и бедра, обычно наблюдаемую во время медленного движения
коленного сустава. Сигнал ХКЧ может нести информацию о состоянии и смазке
коленного сустава. В разд. 7.7.2 будет описана предложенная Beverland и др. [176]
механическая модель поверхности коленного сустава, генерирующая ХКЧ.
Zhang и др. [174] предложили модель генерации сигнала ХКЧ, основанную на
точечных процессах, сходную с моделью, описанной в разд. 7.2.1 для последова-
тельности ПДОДЕ. По отдельности анализировалось влияние на спектр сигнала
ХКЧ частоты повторений (или МИИ) и базовой формы волны коленно-бедренного
импульса (КБИ, patello-femoral pulse). Предполагалось, что эта модель может пред-
ставлять взаимосвязи между физиологическими параметрами (такими как среднее
и стандартное отклонение МИИ, а также форма волны КБИ) и параметрами, которые
могут быть получены из сигнала ХКЧ (такими как среднее значение СКО и характе-
ристики, полученные на основе СПМ). В конце п. 7.3 будут даны иллюстрации этого
применения.
7.3. Точечные процессы
Задача. Сформулировать математическую модель, представляющую процесс
генерации последовательности ПДОДЕ, и получить выражение для СПМ этого
сигнала.
Решение. В модели генерации сигнала ЭМГ, предложенной Agarwal и Got-
tlieb [169], точечный процесс использовался для представления последовательности
возбуждения двигательных нейронов, а последовательность ПДОДЕ моделировалась
с использованием интеграла свёртки, задаваемого уравнением (7.1). Последователь-
ность МИИ рассматривалась как серия независимых случайных переменных с ФПВ,
идентичной нормальной (гауссовой).
Пусть интервал между г-м и предшествующим ему ПДОДЕ равняется и пусть
за начальный момент времени (г = 0 и то = 0) принят момент появления перво-
го ПДОДЕ. В таком случае время появления г-го ПДОДЕ задаётся величиной
ti = т\ + т<2 + ... + ъ. Переменная представляет собой сумму i независимых слу-
чайных величин; отметим, что тг > 0. Предполагается, что среднее значение р
и дисперсия а2 от случайной переменной будут для каждого МИИ одинаковыми.
Тогда среднее значение ti будет равно ip, а его дисперсия — гсг2. Более того, ti также
является случайной переменной с гауссовой ФПВ:
(ti ip) ,7
2ш2 J ’
Если последовательность ПДОДЕ содержит N +1 ПДОДЕ, с индексами г = 0,1,2, ...
... Д, то последовательность, соответствующая возбуждению двигательного нейро-
на, будет представлена точечным процессом
N
x(t) = ^5(t-ti). (7.3)
2=0
z ч 1
Pti(ti) — у-—- ехр
V 27Г2СГ
292 Гл. 7. Моделирование процессов и систем, порождающих биомедицинские сигналы
Рис. 7.11. Блок-диаграмма прохождения сигнала для АР-модели
р \
^2 aky(n - к) 1 . (7.19)
t=i /
Метод наименьших квадратов. В случае метода наименьших квадратов пара-
метры ак получаются путём минимизации СКО по отношению ко всем параметрам.
Эта процедура похожа на ту, которая используется для получения оптимального
фильтра Винера (см. п. 3.5 и Haykin [77]).
При условии, что в качестве наблюдаемого сигнала используется ?/(п), для мини-
мизации СКО применима следующая процедура [187]. Общая квадратичная ошибка
(ОКО, total squared error) е задаётся выражением
e2(n) = {У(п) +
п п \
(Замечание. ОКО — это то же самое, что и СКО, за исключением коэффициента
усиления.) Хотя диапазон суммирования в уравнении (7.19) и является важным, мы
можем выполнять минимизацию г, не задавая какого-либо определённого диапазона
для времени. Минимизация величины е выполняется путём применения условий
де
— = 0, 1 k Р, (7.20)
дак
к уравнению (7.19), что даёт
р
52 у^п ~ “ 0 = - 52 У^У^п - 0, 1 г F. (7.21)
fc=l п п
Для данного сигнала у(п) уравнение (7.21) даёт набор из Р уравнений с Р
неизвестными ак, к = 1,2,...,Р, известное как нормальное уравнение', сходство
между данными нормальными уравнениями и теми, которые использовались в случае
фильтра Винера (см. п. 3.5), будет пояснено позже.
Раскрывая уравнение (7.19) и используя уравнение (7.21), получим минимальное
значение ОКО ер для модели порядка Р в виде
£Р = Еу(”)у(п - к). (7.22)
п к=\ П
В последующих разделах выражение для ОКО будет упрощено.
Автокорреляционный метод. Если в уравнениях (7.19) и (7.21) задан диапазон
суммирования —оо < п < оо, то ошибка минимизируется на интервале бесконечной
длительности и мы имеем
оо
фу^ = ^2 у№Уу(п - (7-23)
п=—оо
Авторегрессионное или полюсное моделирование 293
где фу(г) является АКФ от у(п). На практике сигнал у(п) доступен только на ограни-
ченном интервале, например 0 < п < Л' — 1; в этом случае можно предполагать, что
заданный сигнал равен нулю за пределами этого диапазона и рассматривается (как
мы уже видели в п. 6.4) как обработанная с использованием окна версия истинного
сигнала. Тогда АКФ может быть выражена следующим образом:
N—\—i
Фу(г) = 52 у(пУу(п “О, « > 0, (7.24)
n=i
где коэффициент усиления 1/N опущен. (Позже станет ясно, что коэффициент
усиления не является существенным для получения коэффициентов модели.) Тогда
нормальное уравнение будет иметь вид
52 акфу(г -к) = -фу(Г), 1 < i Р. (7.25)
fc=l
Теперь мы видим, что АР-модель может быть получена для сигнала только на основе
знания его АКФ; сами отсчёты сигнала в этом случае не требуются. Из этого стано-
вится понятным, почему игнорирование коэффициента усиления 1/N в определении
АКФ не приводит ни к каким последствиям при получении коэффициентов модели.
Более предпочтительно использовать нормализованные величины АКФ, заданные
как фу(г) = фу(г)М(О), которые обладает тем свойством, что 1^(01 1-
Минимум ОКО определяется выражением
ер = фу(0) + 52 аьФу(к). (7.26)
fc=i
Применение к случайным сигналам. Если сигнал у(п) является выборкой
случайного процесса, то ошибка е(п) также является выборкой случайного процесса.
В этом случае для получения СКО мы должны использовать операцию взятия
математического ожидания:
р
у(п) + 52 ai<y(n -
fe=i
Применяя так же как в уравнении (7.20) условия для минимума ошибки, получим
нормальные уравнения в виде
р
^^акЕ[у(п- k)y(n-i)] = -Е[у(п)у(п - i)], 1 i < Р. (7.28)
fc=i
Минимальная СКО имеет вид
р
еР = Е[j/2(n)] + 52 акЕ[у(п)у(п - к)]. (7.29)
к=\
Если сигнал представляет собой выборку стационарного случайного процесса, мы
имеем Е[у(п — к)у(п — г)] = ФуИ — к). Это даёт такие же точно нормальные уравне-
ния, как и в случае уравнения (7.25). Если процесс является эргодическим, то АКФ
может быть рассчитана как среднее по времени, аналогично уравнению (7.24).
Если сигнал представляет собой выборку нестационарного случайного процесса,
то Е[у(п — к)у(п — i)] = фу(п — к,п — i), т. е. АКФ является функцией не только
е = £^[е2(п)] = Е
(7.27)
294 Гл. 7. Моделирование процессов и систем, порождающих биомедицинские сигналы
сдвига, но также и времени. В этом случае мы должны рассчитывать параметры
модели для каждого момента времени п, поскольку мы имеем динамическую модель.
Рассмотрение задач моделирования и анализа нестационарных сигналов будет отло-
жено до гл. 8.
Вычисление коэффициента усиления G. Поскольку мы предположили ранее,
что входной сигнал моделируемой системы неизвестен, то определение значения
коэффициента усиления G не является существенным. Тем не менее, получение G
демонстрирует несколько важных моментов. Уравнение (7.18) может быть переписано
в следующем виде:
р
у(п) = - ^Раку(п- к) + е(п). (7.30)
fc=i
Сравнивая это уравнение с уравнением (7.15), мы видим, что условие Gx(n) = е(п)
задаёт единственный входной сигнал ж(п), вызывающий получение на выходе сиг-
нала у(п). Это условие показывает, что входной сигнал пропорционален ошибке
предсказания, когда оцениваемые параметры модели равны параметрам реальной
системы. Независимо от сигнала на входе может быть применено условие, что
энергия выходного сигнала должна равняться энергии моделируемого сигнала у(п).
Поскольку передаточная функция H(z) является неизменной, мы можем применить
условие, что общая энергия входного сигнала должна быть равна общей энергии
ошибки ер.
Как показано на рис. 7.2 на примере модели генерирования речи, двумя типами
исследуемого входного сигнала является импульсная функция и случайный процесс,
представляющий собой стационарный белый шум. В случае, когда х(п) = 5(п) мы
имеем на выходе импульсную характеристику h(n) и
р
h(n) = — а^Ь(п — к) + GS(n). (7.31)
fc=i
Умножая обе части этого выражения на h(n — i) и суммируя по всем п, мы получаем
выражение в терминах АКФ фн(1) от h(n) в виде
р
<Мг) = ~ -к), 1 < |г| < оо, (7.32)
fc=i
р
<l>h(0) = - ^aMk)+G2. (7.33)
к=\
В силу того условия, что энергия выходного сигнала системы должна быть равна
энергии у(п), должно удовлетворяться и условие </>h(0) = фу(0). Сравнивая уравне-
ния (7.32) и (7.25), далее имеем
Фи(г) = Фу№, 0 i Р. (7.34)
Следовательно, для модели порядка Р первые Р + 1 членов АКФ от импульсной
характеристики h(n) должны равняться соответствующим членам АКФ от модели-
руемого сигнала у(п). Из уравнений (7.33), (7.34) и (7.26) следует, что
р
G2 = е р = фу(0) + 1^акфу(к). (7.35)
Когда входной сигнал представляет собой последовательность некоррелированных
отсчётов случайного процесса (белого шума) с нулевым средним и единичной
Авторегрессионное или полюсное моделирование
295
дисперсией, мы можем использовать ту же самую процедуру, что и для случая
импульсного входного сигнала, с той разницей, что вместо суммирования по всем п
необходимо брать математическое ожидание. (В этом случае необходимо отметить
следующие условия: Е'[ж(п)] = 0 и Е[х(п)х(п — г)] = <5(г).) В итоге получатся такие
же точно соотношения, как и для случая импульсного входного сигнала (см. выше).
Идентичный характер результатов для этих двух случаев объясняется тем фактом,
что два данных типа входных сигналов имеют идентичные АКФ и СПМ. Эти
характеристики относятся к модели речевого сигнала, показанной на рис. 7.2.
Вычисление параметров модели. При невысоких порядках модели уравне-
ние (7.25) может быть решено непосредственно. Однако, когда значение Р велико,
прямые методы не могут быть использованы.
Нормальные уравнения, задаваемые уравнением (7.25), могут быть записаны
в матричной форме в виде
Г Фу(Я) Фу(Х)
</>„(1) фу(О)
.фу(Р-1) фу(Р — 2)
Фу(Р-Щ
фу(Р-2)
ai
«2
Фу(Р) J LaP.
Фу(2)
(7.36)
L^(P)J
Для вещественных сигналов матрица АКФ размерностью Р х Р является симмет-
ричной и элементы вдоль любой диагонали идентичны, т. е. это матрица Теплица.
Необходимо отметить следующие общие черты и различия между нормальными
уравнениями для случая фильтра Винера (уравнение (3.85)) и описанным выше
случаем, определяемым уравнением (7.36).
• В случае фильтра Винера матрица с левой стороны представляет собой АКФ
входного сигнала фильтра, в то время как в настоящем случае АКФ представляет
собой выход фильтра предсказания.
• В обоих случаях вектор фильтра с левой стороны содержит коэффициенты
разрабатываемого фильтра — оптимального фильтра или оптимального предска-
зывающего фильтра.
• Вектор с правой стороны представляет собой ВКФ между входным сигналом
и требуемым откликом в случае фильтра Винера, в то время как в настоящем
случае он представляет собой АКФ выхода предсказывающего фильтра.
Haykin [77] даёт более детальное рассмотрение соответствия между АР-моделью
и фильтром Винера.
Процедура, известная как метод Дурбина (Durbin) [188, 189] или алгоритм
Левинсона-Дурбина (Levinson-Durbin) (см. Makhoul [187], Rabiner и Schafer [46]
или Haykin [77]), представляет собой рекурсивный метод решения нормальных
уравнений (7.36). Эта процедура начинается с порядка модели, равного 1; далее рас-
считываются параметры модели, ошибка и вторичный набор параметров, известный
как коэффициенты отражения; порядок модели и параметры обновляются; процедуру
повторяют до тех пор, пока не будет получен требуемый порядок модели. Ниже
в обобщённой форме излагается алгоритм Левинсона-Дурбина.
Инициализируется модель с порядком i = 0 и ошибкой ео = </>^(0). Рекурсивно
выполняются следующие шаги для i = 1,2, ..., Р.
1. Увеличение порядка модели i на единицу и расчёт z-го коэффициента отраже-
ния 7^:
7г = “
г—1
Фу&) 4" О^-^ФуО' ~ j)
J=1
(7.37)
1
296 Гл. 7. Моделирование процессов и систем, порождающих биомедицинские сигналы
где ai-ij обозначает J-й коэффициент модели для итерации (i — 1); индекс
итерации представляет собой также рекурсивно обновляемый порядок модели.
2. Пусть aifj = ц.
3. Обновление коэффициентов предсказателя:
cii j — 1,«—j? 1 j' i 1. (7.38)
4. Вычисление величины ошибки:
Si = (1 - (7.39)
Окончательные параметры модели задаются как ак = ар,k, 1 к < Р. Алгоритм
Левинсона-Дурбина вычисляет параметры модели для всех порядков вплоть до
требуемого порядка Р. По мере того как порядок модели возрастает, ОКО уменьша-
ется, и следовательно мы имеем 0 < е* Коэффициенты отражения могут быть
также использованы для проверки устойчивости разрабатываемой модели (фильтра):
|7i| < 1, i = 1,2, что является необходимым условием устойчивости модели
порядка Р.
Ковариационный метод. При выводе автокорреляционного метода в урав-
нениях (7.19) и (7.21) был задан диапазон суммирования ошибки предсказания
—оо < п < оо. Если, наоборот, мы зададим диапазон суммирования как конечный
интервал, например 0 < n < TV — 1, то получим
р
акС(к, i) = -С(0, г), 1 < г Р (7.40)
к=\
вместо уравнения (7.25), основанного на АКФ, и минимальную величину ОКО,
заданную как
р
ер = С(0,0) + 52 акС(0, к), (7.41)
вместо уравнения (7.26), где
N-1
C(i, к) = У(п - Оу(»г - к) (7.42)
п=0
является ковариацией сигнала у(п) в заданном интервале. Матрица, формируемая
ковариационной функцией, является симметричной, т. е. C(i, к) = С(к,г), что ана-
логично матрице АКФ в уравнении (7.36); однако элементы вдоль каждой диа-
гонали не будут равны, так как С(г + 1, к + 1) = C(i, к) + ?/(-/- 1)у(-к - 1) -
— y(N — 1 — i)y(N — 1 — к). Для вычисления коэффициентов ковариации требуется
также, чтобы значения у(п) были известны для диапазона — Р п N — 1. Эти раз-
личия исчезают по мере того, как заданный интервал суммирования (минимизации
ошибки) стремится к бесконечности.
7.5.1. Спектральное согласование и параметризация. В предыдущем разделе
АР-модель была получена на основе формул для временной области с использо-
ванием автокорреляционного и ковариационного методов. Теперь мы увидим, что
в частотной области может быть получен эквивалентный вывод, что ведет к другой
интерпретации этой модели. Применяя ^-преобразование к уравнению (7.18), мы
имеем
1 + У^акг к
E(z) =
Y(z) = A(z)Y(z)
(7.43)
Авторегрессионное или полюсное моделирование
297
и
Н(г) _ (7.44)
где
р
AU) = 1+ ^akz~k, (7.45)
к=\
a E(z) представляет собой ^-преобразование от е(п). Теперь мы можем интерпрети-
ровать ошибку е(п) как результат прохождения моделируемого сигнала у(п) через
фильтр A(z), который может рассматриваться как инверсный фильтр. В случае,
когда у(п) является детерминированным сигналом, можно, используя теорему Пар-
севаля, записать минимизируемую величину ОКО в виде
р 1 "г 9
е = £ e2(n) = — J \E(w)\da>, (7.46)
п=-°о
где Е(ш) получается путём оценки E(z) на единичной окружности z-плоскости.
Используя в качестве представления СПМ у(п), имеем
1 7 2
£ = к- S>)|A(u>)|2dw, (7.47)
Z7T J
где А(си) — частотная характеристика инверсного фильтра, которая получается путём
оценки A(z) на единичной окружности z-плоскости.
Из уравнений (7.15), (7.16) и (7.44) имеем
§У(Ш) = I Н(< = гтгтр = —-р--------------——2. (7.48)
1Л(Ш)| |1+ 2jfc=1afeexp(-jM|
Здесь §у(ш) представляет собой СПМ моделируемого сигнала у(п), который является
аппроксимацией у(п) в уравнении (7.17). Из уравнения (7.43) имеем
Q , ч _ l^(w)|2 (- Q.
|АМ|2'
Теперь — полученная с помощью модели аппроксимация Sy(w). Сравнивая
уравнения (7.48) и (7.49), мы видим, что ошибка СПМ |E(cj)|2 моделируется с помо-
щью равномерной (т. е. «плоской» или «белой») СПМ, равной G2. По этой причине
фильтр A(z) известен также как «отбеливающий» фильтр.
Из уравнений (7.47), (7.48) и (7.49) мы получаем величину ОКО как
G2
е = —
Sy^)
2тг §у(и)
(7.50)
Поскольку модель получена путем минимизации ОКО е, мы видим, что эта модель
эффективно минимизирует интегрированное отношение СПМ сигнала Sy(w) к его
аппроксимации Sy(w). Makhoul [187] описывает эквивалентность этой модели следу-
ющим образом.
298 Гл. 7. Моделирование процессов и систем, порождающих биомедицинские сигналы
• По мере того как порядок модели Р —> оо, ОКО минимизируется, т. е. ер —> 0.
• Для модели порядка Р первые (Р + 1) значений АКФ от его импульсной харак-
теристики равны аналогичным значениям моделируемого сигнала. Увеличение Р
увеличивает диапазон параметра задержки (времени), для которого АКФ модели
равна АКФ сигнала.
• С учетом того что СПМ и АКФ являются парой преобразований Фурье, из пре-
дыдущего пункта можно сформулировать утверждение, что в частотной области
увеличение Р ведёт к наилучшему согласованию между Sy(w) и §у(ш). По мере
того как Р —> оо, АКФ и СПМ модели становятся идентичными АКФ и СПМ
сигнала соответственно. Таким образом, любой спектр может быть аппрок-
симирован с использованием полюсной модели соответствующего порядка
(см. разд. 7.5.2, где рассматривается оптимальный порядок модели).
Если отметить из уравнения (7.35), что G2 = ер, то уравнение (7.50) даёт другое
важное свойство этой модели в виде
1 Г
2тг J
Sy(w)
Sy(yj)
1.
(7.51)
du =
Уравнения (7.50) и (7.51) дают следующие свойства спектрального согласования АР-
модели [187].
• Благодаря тому факту, что ОКО определяется отношением истинной СПМ к СПМ
модели, процесс спектрального согласования выполняется равномерно по всему
частотному диапазону, независимо от формы спектра. (Если бы оценка ошибки
зависела от разницы между истиной СПМ и СПМ модели, то спектральное
согласование выполнялось бы лучше на частотах с высокой энергией, чем на
частотах с более низкой энергией.)
• Sy(w) будет больше, чем §у(ш) на одних частотах и меньше на других, удовле-
творяя в то же время уравнению (7.51) в целом; для случая, когда Sy(w) > Sy(w),
вклад в значение ОКО является более существенным, чем в противоположном
случае. Таким образом, когда ошибка минимизируется, лучшее согласование
между Sy(w) и Sy(w) достигается на частотах, где Sy(w) > Sy(w). Следовательно,
СПМ модели лучше согласуется с СПМ сигнала в области пиков.
• Предыдущий пункт позволяет дать другую интерпретацию: спектр АР-модели
Sy(yS) является хорошей оценкой спектральной огибающей СПМ сигнала. Это
оказывается особенно полезным при моделировании квазипериодических сигна-
лов, таких как речевой сигнал, ФКГ и других сигналов, имеющих высокие
пики в спектре, представляющие гармоники, форманты или резонанс. За счёт
отслеживания огибающей устраняется влияние повторений, т. е. влияние функции
возбуждения точечного процесса (см. п. 7.3).
Поскольку СПМ модели полностью задаётся её параметрами (в соответствии
с уравнением (7.48)), мы имеем теперь параметрическое представление СПМ
данного сигнала (с точностью до влияния ошибки в этой модели). Величина ОКО
связана с СПМ сигнала, как описано ниже [187]. Уравнение
1 7
>(0) = ] log[S»]dw (7.52)
представляет собой нулевой коэффициент кепстра (кепстра мощности или веще-
ственного кепстра) от у(п) (см. разд. 4.8.3 и 5.4.2). С использованием соотношений,
Авторегрессионное или полюсное моделирование
299
задаваемых уравнением (7.48), получаем
у(0) = logG2 - 2^ | 10g|^(w)|2dw.
(7.53)
Поскольку все корни (нули) A(z) находятся внутри единичной окружности на
2-плоскости (для обеспечения устойчивости АР-модели), интеграл в приведённом
выше уравнении равен нулю [187]. Мы имеем также G2 = ер. Следовательно,
еР = ехр[у(0)]. (7.54)
Минимум ер достигается, когда Р —> оо, и определяется как
£min = £оо = ехр [у(0)]. (7.55)
Это соотношение означает, что ОКО ер является геометрическим средним СПМ
модели Sy(w), которое всегда положительно для положительно определённой СПМ.
Величина ер представляет собой ту долю содержания информации в сигнале, которая
не может быть предсказана с помощью модели порядка Р.
7.5.2. Оптимальный порядок модели. Если АР-модель работает всё лучше
и лучше по мере возрастания порядка F, то где же тогда следует остановиться?
Makhoul [187] показал, что если данный сигнал является выходом системы, содержа-
щей Р полюсов, то АР-модель порядка Р будет оптимальной моделью с минимальной
ошибкой. Но как можно на практике выяснить, действительно ли данный сигнал
порожден системой с Р полюсами?
Одной из возможностей для определения оптимального порядка моделирования
данного сигнала является анализ тренда значений ОКО по мере того, как увеличива-
ется порядок модели Р. Это вполне реализуемо для рекурсивных процедур, таких как
алгоритм Левинсона-Дурбина, где в процессе расчёта модели порядка Р рассчиты-
ваются и модели всех более низких порядков, поэтому ошибка для каждого порядка
известна. Данная процедура может быть остановлена, когда никакого существенного
снижения в ошибке с ростом порядка не наблюдается.
Makhoul [187] описывает использование нормализованной оценки ошибки ёру
определяемой как
gp = ехр[у(0)]
^>3/(0)
Когда порядок модели Р —> оо,
- _ ехР[у(°)1
£min — £оо ,
0^(0)
(7.56)
(7-57)
Величина emin является монотонно убывающей функцией от Р при ёо = 1 и
^оо = £mini более того, она может быть выражена как функция от СПМ-модели
в виде
ехр
[(l/27T)£jog do>]
(1/2тг) JSv(w)dw
(7.58)
300 Гл. 7. Моделирование процессов и систем, порождающих биомедицинские сигналы
Очевидно, что ёр зависит только от формы СПМ модели и £min зависит только
от СПМ сигнала. Величину ёр можно рассматривать как отношение геометриче-
ского среднего СПМ модели к её среднему арифметическому значению, которое
представляет собой меру разброса СПМ: чем меньше разброс, тем ближе это
отношение к единице; чем больше этот разброс, тем ближе это отношение к нулю.
Если данный сигнал порождён полюсной системой с Ро полюсов, то ёр = ёр0 для
Р Ро, т. е. данная зависимость остаётся плоской. На практике это инкрементное
снижение нормализованной ошибки может быть проверено с помощью следующего
условия:
1 _ ef+l < Д) (7 59)
где Д — небольшой по величине порог. В случае, когда это условие удовлетворяется
для нескольких последовательных значений порядка модели, можно считать, что
оптимальный порог достигнут.
Другая мера, основанная на информационном критерии и предложенная Акаике
(Akaike) [190], может быть выражена как [187]
2Р
I(P) = log6F + —, (7.60)
где Ne — эффективное число отсчётов сигнала с учётом использования окна (на-
пример, Ne = 0,47V для окна Хемминга, где N — число отсчётов данных). По мере
увеличения Р первый член в приведённом уравнении уменьшатся, в то время как
второй — увеличивается. Критерий Акаике 1(Р) может быть рассчитан вплоть до
максимального исследуемого порядка Р или до максимального достижимого порядка,
и далее в качестве оптимальной модели выбирается модель такого порядка, для
которого значение 7(Р) будет минимальным.
Параметры модели. АР-модель (полюсная модель) H(z) и её инверсия A(z)
полностью определяются любым из следующих наборов параметров [187]:
• параметры модели а^, к = 1,2, ... , Р. Последовательность также эквивалентна
импульсной характеристике инверсного фильтра;
• импульсная характеристика h(n) АР-модели;
• полюса H(z), которые также являются корнями (нулями) от A(z);
• коэффициенты отражения 7^ г = 1,2, ..., Р;
• АКФ (или СПМ) от коэффициентов с^;
• АКФ (или СПМ) от h(n);
• кепстр от аь или /г(п).
С учётом коэффициента G, который также необходимо включить, каждый из пере-
численных выше наборов имеет одинаковое число параметров, равное Р +1 и все
эти наборы являются эквивалентными в том смысле, что любой из них может быть
выведен из любого другого. В зависимости от возможной интерпретации или от
взаимосвязи с реальной моделируемой системой, может быть использован любой из
перечисленных наборов параметров.
Иллюстрация применения к сигналам ЭЭГ. Важным аспектом анализа ЭЭГ
является идентификация наличия ритмов на различных специфических частотах.
Прямая взаимосвязь между полюсами АР-модели и резонансными частотами делает
эту методику привлекательным инструментом для анализа сигналов ЭЭГ.
Авторегрессионное или полюсное моделирование
301
Рис. 7,12. Снизу вверх: спектры, полученные с помощью БПФ- и АР-модели с порядком Р = 6
и Р = 10 для канала о! сигнала ЭЭГ, показанного на рис. 1.22
Рис. 7.13. Полюса АР-модели с поряд-
ком Р = 10 для канала о1 сигнала
ЭЭГ, показанного на рис. 1.22 (см. так-
же рис. 7.12)
На рис. 7.12 показаны БПФ-спектр и спектры, полученные с помощью АР-модели
с порядком Р = 6 и Р = 10 для канала о1 сигнала ЭЭГ, приведённого на рис. 1.22.
Спектр БПФ, показанный на нижней кривой рис. 7.12, содержит много ложных ва-
риаций, которые затрудняют его интерпретацию. С другой стороны, на АР-спектрах
имеются чёткие пики при частоте примерно
10 Гц, что соответствует a-ритму; пик на ча-
стоте 10 Гц отчётливо виден даже при низ-
ком порядке модели, Р = 6 (средняя кривая
на рис. 7.12).
На рис. 7.13 показаны полюса АР-моде-
ли с порядком Р = 10. Доминирующий по-
люс (ближайший к единичной окружности на
г-плоскости) появляется на частоте 9,9 Гц,
что соответствует пику, наблюдаемому в спек-
тре на верхнем графике рис. 7.12. Радиус это-
го доминирующего полюса |г| = 0,95; другая
комплексно-сопряженная пара полюсов имеет
радиус |г| < 0,76. Модель с порядком Р = 6
имеет две комплексно-сопряжённые пары по-
люсов и два вещественных полюса Доминиру-
ющая пара соответствует частоте 10,5 Гц при
z\ < 0,91. Амплитуда для двух других полюсов равна 0,74. Таким образом, простой
поиск доминирующих (комплексных) полюсов позволяет определить превалирующий
ритм ЭЭГ даже при достаточно низких значениях порядка АР-модели.
302 Гл. 7. Моделирование процессов и систем, порождающих биомедицинские сигналы
Рис. 7.14. Снизу вверх: спектр, полученный с помощью БПФ для систолической части ФКГ
пациента в норме (мужчина, 23 года); спектр, полученный с использованием АР-модели
порядка Р = 10; спектр, полученный с использованием АР-модели порядка Р = 20 (см. также
рис. 4.27, 5.6 и 6.11)
Рис. 7.15. Полюса АР-модели порядка
Р = 20 для систолической части ФКГ
пациента в норме (см. также рис. 7.14)
Иллюстрация применения для сигналов ФКГ. Применение авторегрессионного
моделирования является очень привлекательной возможностью для анализа сигналов
ФКГ, вследствие того что существует необходимость идентификации существен-
ных резонансных частот в присутствии мно-
гочисленных компонент, артефактов и шу-
мов. Хотя сами по себе коэффициенты мо-
дели не являются физическими коррелятами
или существенными признаками, полюса могут
быть непосредственно связаны с физическими
или физиологическими характеристиками зву-
ков и шумов сердца.
На рис. 7.14 изображены следующие вари-
анты спектров: полученный на основе БПФ
спектр сегмента, содержащего тон S1 и сле-
дующую за ним систолическую часть сигнала
ФКГ от пациента в норме, а также спектр,
полученный с использованием АР-моделей по-
рядков Р = 10 и Р = 20. На рис. 7.15 показаны
полюса для модели порядка Р = 20 (см. также
рис. 4.27, 5.6 и 6.11). На рис. 7.16 и 7.17 соответственно иллюстрируются те же самые
графики для сегмента, содержащего тон S2 и следующую за ним диастолическую
Авторегрессионное или полюсное моделирование
303
Частота, Гц
Рис. 7.16. Снизу вверх: спектр, полученный с помощью БПФ для диастолической части ФКГ
пациента в норме (мужчина, 23 года); спектр, полученный с помощью АР-модели порядка
Р = 10; спектр, полученный с помощью АР-модели порядка Р = 20 (см. также рис. 4.27,
5.6 и 6.11)
часть сигнала для того же самого пациента. Очевидно, что авторегрессионные спек-
тры отслеживают доминирующие пики в спектре исходных сигналов. Спектры для
модели порядка Р = 20 дают более близкое совпадение, чем для Р = 10; пики при
Р = 10 сглаживают многочисленные пики в ис-
ходном спектре. Обратите внимание на присут-
ствие полюсов вблизи единичной окружности
в z-плоскости на частотах, соответствующих
пикам в спектре сигналов. Спектры, получен-
ные с помощью АР-модели, являются более
гладкими и их проще интерпретировать, чем
спектры, полученные на основе периодограммы
и показанные на рис. 6.11 для того же самого
пациента. Спектры для диастолической части
сигнала, как и ожидалось, показывают боль-
ше энергии в среднем диапазоне частот, чем
аналогичные спектры для систолической части
сигнала. Коэффициенты модели или полюса да-
ют компактное параметрическое представление
Рис. 7.17. Полюса АР-модели порядка
Р = 20 для диастолической части ФКГ
пациента в норме (см. также рис. 7.16)
сигналов и их спектров.
На рис. 7.18 и 7.19 показаны следующие графики: полученный с помощью БПФ
спектр сегмента, содержащего тон S1 и следующую за ним систолическую часть сиг-
304 Гл. 7. Моделирование процессов и систем, порождающих биомедицинские сигналы
Частота, Гц
Рис. 7.18. Снизу вверх: спектр, полученный с помощью БПФ для систолической части ФКГ
пациента с систолическим шумом, расщеплённым тоном S2 и щелчком открытия митрального
клапана (девочка, 14 месяцев); спектр, полученный с помощью АР-модели порядка Р = 10;
спектр, полученный с помощью АР-модели порядка Р = 20 (см. также рис. 4.28, 5.7 и 6.12)
нала ФКГ для пациента с систолическим шумом, расщеплённым тоном S2 и щелчком
открытия митрального клапана (см. также рис. 4.28, 5.7 и 6.12); спектры, полученные
с помощью АР-моделей порядков
Рис. 7.19. Полюса АР-модели порядка
Р = 20 для систолической части ФКГ
пациента с систолическим шумом, рас-
щеплённым тоном S2 и щелчком от-
крытия митрального клапана (см. так-
же рис. 7.18)
Р = 10 и Р = 20; полюса для модели порядка
Р = 20. На рис. 7.20 и 7.21 показаны те же
самые графики для сегмента, содержащего тон
S2 и следующую за ним диастолическую часть
для того же самого пациента. Систолический
шум привёл к появлению большего числа сред-
нечастотных компонент, чем для случая паци-
ента в норме на рис. 7.14. Спектры, получен-
ные с помощью АР-модели, чётко показывают
дополнительные мощные пики на частотах 150
и 250 Гц, что подтверждается близкими к еди-
ничной окружности полюсами на соответству-
ющих частотах на рис. 7.19.
7.5.3. Взаимосвязь между авторегресси-
онными и кепстральными коэффициента-
ми. Если полюса функции H(z) находятся
внутри единичной окружности на комплексной
z-плоскости, то из теории функции комплекс-
305
Авторегрессионное или полюсное моделирование
о
£-10
-20
-30
-40
ф
с
о
ё
150 200 250 300 350 400 450 500
Частота, Гц
Рис. 7.20. Снизу вверх: спектр, полученный с помощью БПФ для диастолической части ФКГ
пациента с систолическим шумом, расщеплённым тоном S2 и щелчком открытия митрального
клапана (девочка, 14 месяцев); спектр, полученный с помощью АР-модели порядка Р = 10;
спектр, полученный с помощью АР-модели порядка Р = 20 (см. также рис. 4.28, 5.7 и 6.12)
ной переменной следует, что InF(z) может быть разложен в ряд Лоренца как
ln#(z) =
72 = 1
(7.61)
Если принять во внимание определение ком-
плексного кепстра как обратного г-преобразо-
вания от логарифма ^-преобразования сигнала
и тот факт, что левая часть приведённого выше
выражения представляет собой z-преобразова-
ние от А(п), то становится очевидным, что
коэффициенты последовательности h(n) явля-
ются кепстральными коэффициентами от h(n).
Если H(z) аппроксимирована авторегрессион-
ной моделью с коэффициентами ак, 1 < к F,
то имеем
Рис. 7.21. Полюса АР-модели порядка
Р = 20 для диастолической части ФКГ
пациента с систолическим шумом, рас-
щеплённым тоном S2 и щелчком от-
крытия митрального клапана (см. так-
же рис. 7.20)
= h(n)z~n. (7.62)
72=1
20 Р. Рангайян
306 Гл. 7. Моделирование процессов и систем, порождающих биомедицинские сигналы
Дифференцируя обе части приведённого выше выражения по z \ получим
- J+1) = (7.63)
1 akZ п=\
или
Р / Р \ оо
— kakZ~k+i =11+ T^akZ~k I У2 nh(n)z~n+i. (7.64)
k=\ \ k=\ / n=l
Путём приравнивания постоянного члена и подобных степеней z~x для обеих частей,
можно получить следующие соотношения [191]:
А(1) = -ai, (7.65)
П —1 Z . к
h(n) = — ап — > (1-----]а^Н(п — ?'), 1 < п Р.
\ п J
Как мы видели в разд. 4.8.3, фазовое развёртывание является важным пунктом
в оценке кепстральных коэффициентов с использованием инверсного преобразования
Фурье от логарифма преобразования Фурье данного сигнала [115]. Оценивание
кепстральных коэффициентов с использованием авторегрессионных коэффициентов
имеет то преимущество, что оно не требует фазового развёртывания. Хотя кепстраль-
ные коэффициенты выводятся из авторегрессионных коэффициентов, ожидается, что
нелинейные характеристики этого преобразования могут привести к улучшению
классификации сигнала с использованием первого из этих двух наборов коэффи-
циентов, по сравнению с вариантом использования второго из них. При обработке
речи [191], ЭМГ [192] и ВАГ [58] кепстральные коэффициенты дают лучшую
классификацию, чем авторегрессионные коэффициенты.
7.6. Моделирование с использованием полюсов
и нулей
Хотя авторегрессионное или полюсное моделирование может давать хорошие
спектральные модели для любого вида спектров при достаточно высоком порядке
модели, оно имеет несколько ограничений. АР-модель, в основном, отслеживает
пики в СПМ моделируемого сигнала, и таким образом резонансные характеристики
представлены хорошо. Однако если сигнал имеет спектральные нули или провалы
(антирезонанс), то спектр, полученный с помощью АР-модели, не даст хорошего
согласования для таких спектральных сегментов. Для моделирования определённых
сигналов спектральные нули являются очень важными, например в случае носовых
звуков речевого сигнала [193]. Более того, полюсная модель предполагает, что
сигнал должен быть минимально-фазовым или максимально-фазовым, и не позволяет
анализировать смешанно-фазовые сигналы [128].
Главной концептуальной трудностью, которая возникает при моделировании с ис-
пользованием полюсов и нулей (полюсно-нулевого моделирования), является то,
что это моделирование по своей сути не уникально, поскольку нуль может быть
аппроксимирован большим количеством полюсов, и наоборот [187]. Однако, если
моделируемая система имеет некоторое количество нулей, оказывающих большое
влияние, то количество требуемых полюсов для полюсной модели может оказаться
очень большим. По этим причинам моделирование с помощью АРСС-модели или
полюсно-нулевое моделирование в определённых применениях оказывается очень
важным [80, 128, 187, 193-195].
Моделирование с использованием полюсов и нулей
307
Нормальные уравнения для модели АРСС. Для АРСС-модели, представленной
уравнением (7.13), мы можем записать модель СПМ как [187]
с л л _ - r2lBM2 _ r2
Sy( ) _ ~ |A(W)|2 sa(u)’
(7.66)
где
Sa(u) = 1+ ^Pakexp(-jku)
k=l
(7.67)
2
Sb(w) = 1+ ^bi exp(-jluj) .
(7.68)
Общая ошибка спектрального согласования задаётся выражением
(7.69)
которое может рассматриваться как остаточная энергия после прохождения моде-
лируемого сигнала через инверсный фильтр A(z)/B(z). Rjin того чтобы получить
оптимальную полюсно-нулевую модель, необходимо определить такие коэффициенты
ак и bi, для которых ошибка е будет минимизирована.
Перед тем как брать производные от е по и fy, необходимо упомянуть
о следующих соотношениях. Взяв частную производную от Sa(oj) в уравнении (7.67)
по ai, получим
9Sa(bj) г »\ 1
—------= 2 > ак cos [(г - к)и\
Oai к=о
при ао = 1. Аналогично из уравнения (7.68) получим
dSb(iv) Q
dbi
(7.70)
(7.71)
z=o
и
1
£~ 2тг
2
Q
Q ( j
Пусть
Q( JSa^)]0
(7.72)
причем фуоо(г) является обратным преобразованием Фурье от Sy(w) и, следовательно,
просто фу(г).
Теперь мы можем взять частную производную от е в уравнении (7.69) по аг\
де 1 f Sy(u) d _ J_ Г
dai ~ 2tt J Sb^)dai а(Ш) 2тг J
— 7Г —7Г
Sy^)
Sb(cv)
p
2 52 ak cos [(« ~ k) duj
k=0
p
= 2 afc<^io(z -k), 1 i P. (7.73)
k=0
20*
308 Гfi. 7. Моделирование процессов и систем, порождающих биомедицинские сигналы
Таким же способом мы можем получить:
де
dbi
Q
= -2 bi(j)y2\(i — /),
z=o
(7.74)
Ц Q.
Так как фу\ъ(г — к) в уравнении (7.73) не является функцией от а&, то приравнивая
окончательное выражения уравнения (7.73) к нулю, имеем систему линейных урав-
нений. Для получения коэффициентов эта система уравнений может быть решена
способом, сходным с процедурой, использованной для АР-моделирования. Однако
Фу2\(^ — 1) в уравнении (7.74) является функцией коэффициентов bi, что приводит
к системе нелинейных уравнений, которая должна быть решена для получения
коэффициентов Ьр нули модели затем могут быть получены из коэффициентов
модели bi. Таким образом, получение АРСС-модели требует решения Р линейных
уравнений и Q нелинейных уравнений.
Итеративное решение нормальных уравнений АРСС. Makhoul [187] описыва-
ет следующую итеративную процедуру для решения Р 4- Q нормальных уравнений
модели АРСС, основанную на методе Ньютона-Рафсона (Newton-Raphson).
Пусть а = [«1, «2, • • •, ар]т, b = [bi, , bQ]T и с = [сц, а2, ..., ар, Ьц 62, • • •
. • •, bQ]T — искомые коэффициенты модели, представленные в векторной форме. Век-
тор для итерации т + 1 получается из вектора для итерации т как
- _ т-1^
^т+1 — ^тп
(7.75)
где J является матрицей Гессе (Hessian matrix) размерностью (Р 4-Q) х (Р 4-Q),
д2е
определённой как J = - Т. Вектор с может быть разделён на части как
деде
ст = [ат,Ьт], и итеративная процедура может быть выражена как
Г а2
е
дадат
д2е
д2е
дадЪт
д2е
да
де
(7 76)
-ЭЬЭат
9Ь0Ьт-1
ь=ьт
L аь-1
ь=ь,
(7.77)
Уравнения (7.73) и (7.74) дают требовавшиеся выше частные производные первого
порядка. Частные производные второго порядка задаются следующим образом [187]:
д2е
- j),
д2е р Q
я. = -2 52 V akbi [(f>y2o(j + i — l — k) + фуго(з -i-l + k)],
aa'a+ fc=0 z=o
d2e p Q
= ~2Фу21(г - j) + 4 52 52 bkbl Ifalij + i-l-k) + -i-l + k)].
at>ia^ fc=0 z=o
(7.79)
(7.78)
Данная итеративная процедура хорошо работает, если первоначальная оценка близка
к оптимальной модели; в противном случае следует рассматривать один из неитера-
тивных методов, описанных в следующих разделах.
Моделирование с использованием полюсов и нулей
309
7.6.1. Последовательная оценка полюсов и нулей. Ввиду трудностей, связан-
ных с нелинейным характером непосредственного полюсно-нулевого моделирования,
было предложено несколько методов, позволяющих разделить эту проблему на две
части: идентифицировать сначала полюса для АР-модели, а затем рассматривать
остаточную ошибку тем же самым способом для получения нулей [80, 128, 187, 193-
195]. (Замечание. Существуют некоторые различия в обозначениях между ссылками,
приведёнными здесь. В приведенных далее выражениях используются обозначения,
согласующиеся с теми, которые до сих пор использовались в настоящей главе.)
Метод Шенкса (Shanks). Рассмотрим слегка модифицированный вариант урав-
нения (7.13):
ГЫ _/ВЫ _ i + ESi'w'1
хЫ АЫ
где коэффициент усиления G принят равным единице: G = 1. Разностное уравнение,
связывающее выходной сигнал с входным сигналом, задаётся путём небольшого
изменения уравнения (7.12):
р Q
у(п) = - ^аку(п-к)+ ^bix(n-l). (7.81)
fc=i г=1
Полиномы в числителе и в знаменателе в уравнении (7.80) могут быть разделены
путём рассмотрения Y(z) = V(z)B(z), где V(z) = X(z)/A(z). Это приводит к описы-
ваемой только нулями или СС-части системы в виде
Q
у(п) = 52 b,v(n ~ (7.82)
г=1
где v(n) задаётся полностью полюсной или АР-частью модели:
р
v(n) = - '^akv(n - к)+х(п). (7.83)
к=\
Рассмотрим случай определения коэффициентов ак и bi (соответственно полюсов
и нулей) системы H(z), заданной её импульсной характеристикой. Напомним, что
у(п) = h(n), когда х(п) = 8(п), следовательно мы имеем X(z) = 1 и Y(z) = H(z).
Импульсная характеристика системы задаётся выражением
р Q
h(n) = - 52 akh(n - *) + 52 ь^п -(7.84)
fc=l l=\
которое упрощается до
p
h(n) = — akh(n — k), n> Q. (7.85)
k=\
Отклик на импульсный входной сигнал не продолжается за пределами некоторого
количества нулей в системе. Выходной сигнал в данном случае является полностью
предсказуемым по предшествующим Р отсчётам, следовательно АР- или полюсная
модель адекватна модели h(n) для п > Q. Как следствие этого, уравнение (7.32)
модифицируется к виду
р
<М.г) = - ^Гакфк(г -к), i> Q. (7.86)
fc=i
310 Гл. 7. Моделирование процессов и систем, порождающих биюмедицимские сигналы
Эта система уравнений может быть решена путём рассмотрения Р уравнений для
Q 4-1 < i < Q 4- Р. Таким образом, коэффициенты и, следовательно, полюса
данной системы могут быть рассчитаны независимо от коэффициентов bi или нулей
путём ограничения анализа ошибки АР до пределов п > Q.
В практических применениях должна рассматриваться ошибка предсказания,
поскольку порядок модели Р может быть неизвестен или в оценке может присутство-
вать некоторый шум. Корее и др. [193] рекомендовали использовать ковариационный
метод, описанный в п. 7.5 для АР-модели, рассматривая ошибку предсказания как
е(п) = h(n) + — к)
(7.87)
и минимизируя величину ОКО, определённую как
(7.88)
£= ъ
n=Q+l
Первые Q точек пропускаются, поскольку они не могут быть предсказаны с помощью
полюсной модели.
Предположим, что часть, связанная с АР-моделированием, была успешно выпол-
нена с использованием описанной выше процедуры. Пусть
Л(г) = 1+
(7.89)
fc=i
представляет собой полином, находящийся в знаменателе оцениваемой системы. ОКО
при моделировании h(n) задаётся уравнением
оо Q
g = 57 h(n>> ~ 52 bii)(n ->
2
(7.90)
п=0
1=0
где v(n) является импульсной характеристикой полученной АР-модели при
V(z) = 1/A(z). Минимизация приведённой выше величины е даёт систему линейных
уравнений:
Q
(l,j) = фьг, (0, j) ,
1=0
(7.91)
где
ОО
Фм>(!Л) = ^h(n - l)v(n - j)
n=0
представляет собой ВКФ между h(n) и v(n) и ф™ является АКФ от v(n).
Эквиваленты в частотной области для описанных выше шагов могут анализиро-
ваться следующим образом. ОКО равняется
(7.92)
7Г
1 '
2тг
Q
bi ехр(—jZo;)
i=\
2
|V(w)|2dw =
(7.93)
Моделирование с использованием полюсов и нулей
311
где En(z) = H(z)A(z) является ошибкой АР-модели в г-области. (Напомним, что
спектр Фурье сигнала получается путём оценки соответствующей функции от z
при z = ехрО’о;).) Следовательно, описанный выше метод, который первоначально
приписывался Шенксу (Shanks) [80] и был описан в приведённом выше виде Корее
и др. [193], оценивает полином числителя модели путём согласования полинома
(спектральной функции) с ^-преобразованием ошибки АР- или полюсной модели.
Makhoul и др. [187] и Корее и др. [193] предложили другой метод, назван-
ный инверсным ЛП моделированием (ЛП — линейное предсказание), где предметом
полюсного моделирования является обратная величина ошибки АР-модели е^[(п)у
заданная как обратное ^-преобразование от Е^Чп). Полученные таким способом
полюса являются нулями первоначальной моделируемой системы.
7.6.2. Итеративная идентификация системы
Задача. При известном наблюдении шумового сигнала на выходе линейной си-
стемы в ответ на определённый входной сигнал разработать метод для оценки
полиномов числителя и знаменателя рациональной модели системы в z-области.
Решение. Учитывая сложность решения нелинейных проблем, связанных
с АРСС-моделированием или полюсно-нулевым оцениванием, Steiglitz и McBride
[194] предложили итеративную процедуру, основанную на начальной оценке
полинома знаменателя (АР). Так как их подход к идентификации системы слегка
отличается от подхода, основанного на линейном предсказании, использовавшегося
нами до сих пор в этой главе, то уместно будет заново поставить проблему.
Метод Штеглитца-Мак-Брайда (Steiglitz-McBride). На рис. 7.22 показана
блок-диаграмма, иллюстрирующая задачу идентификации системы. Система пред-
ставлена её передаточной функцией Я(г), входным сигналом х(п), выходным сиг-
налом у(п) = h(n) * х(п) и наблюдением шума w(n) = у(п) 4- где является
шумовым процессом, который статистически независим от рассматриваемого сигна-
ла. H(z) представлена как рациональная функция от г в виде
_ У (г) _ В(г)
^oakZ^
Минимизируемая ошибка может быть записана как [194]
Ее2(п) = - W(Z) 2 (7.95)
27rj J А(г)
где правая часть представляет собой обратное ^-преобразование от используемой
функции от г, a N — число доступных отсчётов данных. Функции от г, находящиеся
под знаком интеграла, сравнивают предсказанный выходной сигнал модели с наблю-
даемым выходным сигналом физической системы.
Как было показано раньше, данный подход ведёт к проблемам нелинейности.
Эта проблема может быть упрощена (линеаризована) путём использования подхода,
который заключается в раздельной идентификации полиномов числителя и знамена-
теля: процедура оценки, иллюстрируемая на рис. 7.23, рассматривает A(z) и B(z) как
отдельные системы. В таком случае минимизируемая ошибка может быть записана
как [194]
N-i 1 р j
£e2(n) = — o|X(z)B(z)- WW)|2-. (7.96)
27Г^
(Данный подход впервые был использован Калманом (Kalman) [196].)
312 Гл. 7. Моделирование процессов и систем, порождающих биомедицинские сигналы
Рис. 7.23. Схематическое представление иден-
тификации системы с раздельной оценкой
A(z) и B(z). Заимствовано из Steiglitz and
McBride [194]
Рис. 7.22. Схематическое представление иден-
тификации системы. Заимствовано из Steiglitz
and McBride [194]
Ошибка модели задаётся в виде
Q р
= У? bix(n — I) — akw(n — k) — w(n). (7.97)
1=0 к=\
Коэффициенты модели, а также входные-выходные отсчёты данных могут быть
записаны в векторной форме как
с = [Ьо, b\, -.-,bQ, -ац -а2, ..., -ар]Т (7.98)
и
d(n) = [ж(п),ж(п — 1), ..., ж(п — Q), w(n — 1), w(n — 2), ..., w(n — Р)]Т, (7.99)
при размерах векторов, равных Р + Q + 1. Тогда ошибка задаётся уравнением
е(п) = d7(n)c — w(n). (7.100)
Условие для минимизации ОКО выражается следующим образом:
£е2(п) = 2 £ ^е(п) = 2 £ d(n)e(®> = 0. (7.101)
ос ос
п=0 п=0 п=0
Подстановка ошибки, заданной уравнением (7.100), в приведённое выше условие даёт
(7V-I \ ЛГ-1
y2<l(n)dT(n) 1 с = w(n)d(n). (7.102)
п=0 / п=0
Если мы предположим, что
7V-1
Ф= d(n)dT(n) (7.103)
п=0
представляет собой корреляционную матрицу размерностью (P + Q + 1) х (P + Q + 1)
комбинированного потока отсчётов входных-выходных данных d(n) и предположим,
Моделирование с использованием полюсов и нулей
313
что
N-1
0= ^w(n)d(n) (7.104)
71 = 0
представляет собой корреляцию между сигналом w(n) и вектором данных d(n)
размера Р + Q + 1, то получим решение задачи оценки в виде
с = ф-1©. (7.105)
Хотя вектора и матрицы, связанные с коэффициентами фильтра и корреляцион-
ными функциями сигнала, определены различным способом, представленное выше
решение сравнимо с тем, которое было получено для оптимального фильтра Винера
(см. п. 3.5 и уравнение (3.84)).
Ограничением приведённого выше
подхода является то, что используе-
мая ошибка не имеет физического смы-
сла. Разделение функций для числителя
и знаменателя, выполненное как это по-
казано на рис. 7.23, хотя, с одной сто-
роны, и упрощает проблему оценивания,
ведёт к ситуации, которая далека от ре-
альной.
Для улучшения согласования между
реальной физической ситуацией и про-
блемой оценивания Штеглитц и Мак-
Брайд [194] предложили итеративную
процедуру, которая схематично иллю-
стрируется на рис. 7.24. Базовый подход
заключается в том, чтобы рассматривать
идентифицируемую систему с исполь-
зованием упрощённой процедуры, опи-
санной выше в качестве первоначаль-
ной оценки, обозначенной как A[(z)
Рис. 7.24. Схематическое представление иден-
тификации системы с использованием итера-
тивной предварительной фильтрации. Заим-
ствовано из Steiglitz and McBride [194]
и Bi (г); фильтровать исходные сигналы
х(п) и w(n) с использованием системы 1/Ai(z); использовать фильтрованные сигна-
лы для получения оценок Аг(г) и В2(г); итеративно повторять данную процедуру до
тех пор, пока не будет достигнута сходимость.
Минимизируемая ошибка может быть описана как [194]
7V-1
71=0
А(^) ТТ7/ \ AGO
---- - W(z)----т—-
A-iCO A-i(O
J
2 dz
Z
лм - "(2)
2
AGO
А-10)
2 dz
(7.106)
1
Z
при Aq(z) = 1. Очевидно, что в случае сходимости, когда Д(г) = A~i(z), проблема
минимизации, описанная выше, упрощается до идеальной (хотя и нелинейной)
ситуации, выражаемой уравнением (7.95) и иллюстрируемой на рис. 7.22.
Штеглитц и Мак-Брайд [194] предложили модифицированную итеративную про-
цедуру для дальнейшего улучшения этой оценки путём введения условия, что част-
ные производные от истинного критерия ошибки по отношению к коэффициентам
314 Гл. 7. Моделирование процессов и систем, порождающих биомедицинские сигналы
модели должны быть равны нулю при сходимости процесса. Истинная (идеальная)
ошибка модели задаётся в г-области как (см. рис. 7.22)
E(z) = - W^- (7-Ю7)
А(г)
V(z) представляет собой выходной сигнал модели для входного сигнала х(п). Про-
изводные от E(z) по отношению к коэффициентам модели задаются выражениями
—545“ 1 * 08)
И
Ж = <7109)
obi AZ(z)
где волнистая черта ~ над переменными означает фильтрованный вариант соответ-
ствующего сигнала, передаточная функция фильтра при этом будет 1/A(z). Новый
вектор данных определяется как
d\(n) = [ж(п),ж(п — 1), ... ,ж(п — Q), v(n — 1), v(n — 2),.../D(n — F)]T. (7.110)
Градиент ошибки в уравнении (7.101) модифицируется к виду
д N~} де(п} N~{ N~{
— 52e2(n) = 2 ^2 = 2 ^d](n)e(n) = 2 52 [di (n)df (n)c “ w(n)di(n)],
n=0 n=0 n=0 n=0
(7.Ш)
где последнее равенство справедливо только при завершении сходимости. Остав-
шаяся часть процедуры остаётся такой же как и раньше, но с корреляционными
функциями, определёнными как
N-1
Ф) = 52di(n)df(n) (7.112)
п=0
И
N-1
©! = J2w(n)di(n). (7.113)
п=0
После того как найдены коэффициенты аь и bi, могут быть решены соответству-
ющие полиномы для получения полюсов и нулей моделируемой системы. Более того,
эти полиномы могут быть использованы для получения спектральных моделей изу-
чаемой системы или сигнала. Отметим, что записанные выше процедуры применимы
только к особому случаю идентификации систем, когда задана импульсная харак-
теристика h(n): нам только необходимо выполнить замену х(п) = 5(п) и X(z) = 1.
Не было представлено никакого доказательства сходимости метода; однако было
продемонстрировано, что этот метод успешно работает во многих практических
применениях.
Joo и др. [197] применили метод Штеглитца-Мак-Брайда в моделировании
и идентификации сигналов ФКГ. В модельном спектре выделялись первый и второй
частотные пики, которые использовались для анализа функции протеза сердечного
клапана, взятого от свиньи. Murthy и Prasad [198] применили метод Штеглитца-
Мак-Брайда к сигналам ЭКГ. Полюсно-нулевые модели, полученные из записей ЭКГ,
включающих несколько сердечных циклов, были использованы для реконструкции
и идентификации форм ЭКГ для одиночного цикла, а также для реконструкции по
отдельности (т. е. для сегментации) волн Р, QRS и Т.
Моделирование с использованием полюсов и нулей
315
7.6.3. Гомоморфное предсказание и моделирование
Задача. Можно ли, учитывая относительную простоту полюсного моделиро-
вания, преобразовать нули системы в её полюса?
Решение. Как уже отмечалось раньше, полюсная модель предполагает, что мо-
делируемый сигнал должен быть минимально-фазовым или максимально-фазовым,
и не позволяет иметь дело со смешанно-фазовыми сигналами [128]. Мы видели
в разд. 4.8.3 и 5.4.2, что гомоморфная фильтрация даёт возможность разделения
минимально-фазовой и максимально-фазовой компонент смешанно-фазового сигнала
и далее даёт возможность получения минимально-фазовой версии или соответствия
(МФС) от смешанно-фазового сигнала. Makhoul [187], Oppenheim и др. [128] и Корее
и др. [193] предложили методы объединения гомоморфной фильтрации и линейного
предсказания в процедуру, которая была названа гомоморфным предсказанием или
кепстральным предсказанием.
Интригующим обстоятельством, связанным с использованием гомоморфного
предсказания, является то, что если сигнал х(п) имеет рациональное z-преобра-
зование, тогда пх(п) (где х(п) — комплексный кепстр от х(п)) имеет рациональное
^-преобразование, полюса которого соответствуют полюсам и нулям х(п). Одно
из базовых свойств ^-преобразования, которое необходимо здесь учитывать, это
то, что если X(z) — ^-преобразование от х(п), то ^-преобразование от nx(ri) будет
—z(dX{z)/dz). Теперь комплексный кепстр х(п) от х(п) определяется как обратное
^-преобразование от X(z) = logX(z). Следовательно, мы имеем
г z . dX(z) 1 dX(z)
ZT[nx(n)] = -z—— = -z-^7-\—j—, (7.114)
L J dz X(z) dz
где ZT[ ] представляет собой оператор ^-преобразования. Если X(z) = B(z)/A(z),
получаем
Ч М A(z)B\z)-B(z)A'(z)
ZT[nxW] = -г--------дйвй----------’ <7"5)
где значок ' означает производную по z соответствующей функции. Общее представ-
ление рациональной функции от z (которая представляет собой экспоненциальный
сигнал в г-области) через её полюса и нули задаётся следующим образом [128]:
XCz} — Azr Пги О ~ ZilZ Пп=1 0 ~
\Z) JX.Z р _р у (/.11 о)
П/с=1 (1 ~ PikZ ) Пт=1 (1 ” РОт^)
при амплитудах всех коэффициентов Zi,ZQ,pi и ро, меньших единицы. Величины
Pi и Z{ в приведённом выше выражении дают соответственно Pi полюсов и Qi
нулей системы, которые находятся внутри единичной окружности на г-плоскости;
1/ро и 1/го дают соответственно Pq полюсов и Qq нулей, которые лежат снаружи
единичной окружности. Конечно, каузальная и стабильная система не должна иметь
каких-либо полюсов за пределами единичной окружности; приведённое выше об-
щее представление позволяет анализировать и моделировать максимально-фазовые
сигналы, которые являются антикаузальными. Вычисление комплексного кепстра
требует удаления любой присутствующей в сигнале компоненты с линейной фазой,
и следовательно можно наложить условие г = 0. Тогда имеем
Q i Qo
X(2) = logX(z) = logA+ £log(l - ZilZ *)+ Elogd - zOnz) -
l=\ n=l
Pi Po
- El°g(l -PikZ~') - E10^1-^0"1^ (7.П7)
316 Гл. 7. Моделирование процессов и систем, порождающих биомедицинские сигналы
и, более того,
~ dX(г) _ гиг ул ZQnz у\ Pzkz 1 у^ P0mz
dz ^ (l-ZQnZ) (1 -pikZ~l) 2^ (l-p0mZ)
(7.118)
Из приведённого выше выражения очевидно, что nx(ri) имеет простые (первого
порядка) полюса для любого полюса, а также для любого нуля х(п). Следовательно,
мы можем использовать процедуру полюсного моделирования для пх(п) и далее
разделить полученные таким образом полюса на искомые полюса и нули от х(п).
Первоначальная полюсная модель х(п) может оказать помощь в решении задачи раз-
деления полюсов и нулей. Oppenheim и др. [128] показали далее, что даже если X(z)
не является рациональной функцией, пх(п) имеет рациональное ^-преобразование
с полюсами первого порядка, соответствующими каждому из иррациональных коэф-
фициентов X(z).
Иллюстрация применения для синтеза речевого сигнала. На рис. 7.25 и 7.26
показаны примеры применения нескольких полюсно-нулевых и полюсных методов
моделирования для синтеза речевого сигнала [128]. На рис. 7.25 а показана импульс-
ная характеристика системы синтеза с двумя полюсами на частотах 292 и 3500 Гц
в
Рис. 7.25. Сигналы во временной области: импульсная характеристика четырёхполюсной двух-
нулевой синтезирующей системы (а); синтезированный речевой сигнал, полученный в резуль-
тате возбуждения данной системы последовательностью импульсов (б); результат выделения
базовой волновой формы с применением гомоморфной фильтрации к сигналу, приведённому на
графике б (в); импульсная характеристика четырёхполюсной, двухнулевой модели сигнала, по-
казанного на кривой в, полученная с помощью метода Шенкса (г); импульсная характеристика
шестиполюсной АР-модели (б). Воспроизводится с разрешения А. V. Oppenheim, G.E. Kopec,
and J.M. Tribolet, Signal analysis by homomorphic prediction, IEEE Transactions on Acoustics,
Speech, and Signal Processing, 24(4):327-332, 1976. ©IEEE
Моделирование с использованием полюсов и нулей
317
с шириной полосы частот 79 и 100 Гц и одним нулём на частоте 2000 Гц с ши-
риной полосы частот 200 Гц. На рис. 7.26 а показан в логарифмическом масштабе
амплитудный спектр для этой системы. Спектральные пики наглядно демонстрируют
формантную или резонансную структуру данного сигнала. (Частота дискретизации
Рис. 7.26. Логарифмический амплитудный спектр показанного на рис. 7.25 сигнала во вре-
менной области: фактическая спектральная характеристика четырёхполюсной двухнулевой
синтезирующей системы (а); спектр синтезированного речевого сигнала, полученного в ре-
зультате возбуждения системы последовательностью импульсов (б); спектр базовой волновой
формы, полученной с применением гомоморфной фильтрации к сигналу, соответствующему
кривой б (в); спектральная характеристика четырёхполюсной, двухнулевой модели сигнала,
соответствующего кривой в, полученная с помощью метода Шенкса (г); спектральная харак-
теристика шестиполюсной АР-модели (б). Воспроизводится с разрешения A.V. Oppenheim,
G.E. Kopec, and J.M. Tribolet, Signal analysis by homomorphic prediction, IEEE Transactions
on Acoustics, Speech, and Signal Processing, 24(4):327-332, 1976. ©IEEE
составляет 12 кГц.) Возбуждение данной системы последовательностью импульсов
с частотой повторения 120 Гц даёт сигнал, показанный на рис. 7.25 6, спектр которого
приведён на рис. 7.266. В спектре отчётливо просматривается эффект повторения
базовой волновой формы в серии волн, которые накладываются на базовый спектр
волновой формы. Применение гомоморфной фильтрации к сигналу, показанному
на рис. 7.256, даёт оценку базовой волновой формы, приведённую на рис. 7.25 в,
с соответствующим спектром, показанным на рис. 7.26 в.
К результату гомоморфной фильтрации, показанному на рис. 7.25 в, был приме-
ненен метод полюсно-нулевого моделирования Шенкса с использованием четырёх
полюсов и двух нулей. Импульсная характеристика этой модели и соответствующий
спектр показаны на рис. 7.25 г и рис. 7.26 г соответственно. Видно, что два пика
и один провал в исходном спектре достоверно воспроизводятся в моделируемом
спектре. Частоты нулей (и значения ширины полосы частот для них), задаваемые
этой моделью были 291 (118) и 3498 (128) Гц; аналогичные параметры для нуля
были 2004 (242) Гц, что хорошо согласуется с перечисленными в предыдущем абзаце
характеристиками системы синтеза речи.
Применение автокорреляционного метода ЛП-моделирования с шестью полюсами
к исходному сигналу, показанному на рис. 7.25 а, дало импульсную характеристику
318 Гл. 7. Моделирование процессов и систем, порождающих биомедицинские сигналы
модели и спектр, приведённые на рис. 7.25 д и 7.26 д. В то время как спектр
полюсной модели хорошо отслеживал спектральные пики, он оказался неудачным
для представления впадин, связанных с нулями.
Иллюстрация применения для анализа реального речевого сигнала.
На рис. 7.27 а показан логарифмический амплитудный спектр реального речевого
сигнала (предварительно усиленного) для носового гласного звука [U:] в слове
«тооп» [123]. Часть б того же самого рисунка показывает спектр после гомоморфной
Частота, кГц
Рис. 7.27. Сверху вниз: логарифмический амплитудный спектр предварительного усиленного
реального речевого сигнала носового гласного звука [U:] в слове «тооп» (а); спектр после
гомоморфной фильтрации для удаления эффекта повторения базовой волновой формы (б);
спектр десятиполюсной, шестинулевой модели, полученной с помощью метода Shanks (в);
спектр десятиполюсной, шестинулевой модели, полученной с помощью обратного ЛП-модели-
рования (г). Воспроизводится с разрешения G. Е. Kopec, А. V. Oppenheim, and J.M. Tribolet,
Speech analysis by homomorphic prediction, IEEE Transactions on Acoustics, Speech, and Signal
Processing, 25(1):40-49,1977. ©IEEE
фильтрации для удаления эффекта повторения базовой волновой формы. Части в и г
показывают спектры модели с 10 полюсами и 6 нулями, полученные соответственно
с использованием метода Шенкса и инверсного ЛП-моделирования. Спектры этих
моделей успешно отслеживали как пики, так и впадины в спектре сигнала.
Murthy и др. [199] применили метод Шенкса для минимально-фазовых и мак-
симально-фазовых компонент сигнала ЭКГ, полученных с помощью гомоморфной
фильтрации. Акау и др. [200] использовали методику АРСС для моделирования
диастолических звуков сердца с целью обнаружения коронарных заболеваний сердца;
однако для анализа образов использовались только доминирующие полюса этой
модели (см. подробное описание этого метода в п. 7.10).
Электромеханические модели генерации сигналов
319
7.7. Электромеханические модели генерации сигналов
Хотя чисто математические модели генерации сигнала, такие как точечные
процессы и модели линейных систем, и обладают преимуществом теоретической
элегантности и удобства, они могут быть не в состоянии представлять некоторые
физические и физиологические аспекты систем, генерирующих сигналы. Например,
модели, которые мы видели в предыдущих разделах, не могут быть непосредственно
приспособлены к физическим размерам сосудов или клапанов, к потере гибкости
лепестков клапанов в связи со стенозом или к смазке (или её отсутствию) между
поверхностями суставов, к трению в суставах.
Sikarskie и др. [201] предложили модель, описывающую вибрацию аортального
клапана с целью анализа его вклада в тон S2. В дополнение к математическим соот-
ношениям, они включили физические факторы, такие как функция усилий клапана,
масса клапана и жёсткость клапана. Было показано, что амплитуда и частота ком-
поненты А2 сильно зависят от функции усилий клапана и жёсткости клапана. Было
также показано, что масса клапана вносит очень небольшой вклад в амплитуду и ча-
стоту А2, а плотность крови на эти параметры не влияет. Теперь мы рассмотрим два
характерных применения электромеханического моделирования, где механические
модели и их электрические аналоги используются для описания процесса генерации
и описания изменения характеристик звуков в артериях и коленных суставах.
7.7.1. Генерация звуков в коронарных артериях
Задача. Предложить электромеханическую модель, описывающую характери-
стики звуков, производимых потоком крови в артериях, поражённых стенозом.
Решение. Обычно кровеносные сосуды являются гибкими и эластичными и име-
ют гладкие внутренние поверхности. Когда какой-то сегмент кровеносного сосуда
затвердевает из-за отложения кальция и других минералов, этот сегмент стано-
вится жёстким. Более того, развитие бляшки внутри сосуда вызывает сужение
или напряжение сосуда, которое затрудняет движение крови. Результатом является
турбулентный поток крови с сопровождающими его высокочастотными звуками.
Wang и др. [202, 203] предложили модель источника звука, сочетающую в себе
свойства инкрементной сети для дерева сосудов левой коронарной артерии и пере-
даточной функции, описывающей резонансные характеристики артериальных камер.
Модель сети, показанная на рис. 7.28, предсказывает поток крови в нормальных,
т. е. не поражённых стенозом, артериях. Было отмечено, что ветви, поражённые
стенозом, могут из-за больших геометрических вариаций потребовать деления
модели на многочисленные сегменты. Более того, наблюдалось, что поражённые
стенозом сегменты могут демонстрировать пост-стенозное расширение, как показано
на рис. 7.29, в связи с повышенными флуктуациями давления, вызванными турбу-
лентностью в точках стеноза.
Резонансная частота сегмента зависит от длины и диаметра этого сегмента, а так-
же от дистального (периферического по отношению к сердцу) гидравлического дав-
ления, нагружающего этот сегмент. Необходимые для модели физические параметры
были получены из артериограмм исследуемого пациента. Терминальные резисторы,
помеченные буквами Z на рис. 7.28, представляют нагрузку сопротивления арте-
риолярных сосудов, которые считаются непосредственно связанными с областями,
обслуживающими терминальные ветви.
Wang и др. связали элементы сети (резистор R, инертность или индуктивность L
и ёмкость С) с физическими параметрами сегментов артерий следующим образом:
7? = 87tp-4, L=p4, C = Alh^, (7.119)
Az A E
320 Гл. 7. Моделирование процессов и систем, порождающих биомедицинские сигналы
Рис. 7.28. Электромеханическая модель дерева коронарных артериальных сосудов. Дерево
коронарных сосудов левой артерии, разделённое на 14 ветвей (а); модель сегмента в виде
схемы (б); модель дерева артериальных сосудов в виде схемы (в). Воспроизводится с разреше-
ния J. Z. Wang, В. Tie, W. Welkowitz, J. L. Semmlow, and J. B. Kostis, Modeling sound generation
in stenosed coronary arteries, IEEE Transactions on Biomedical Engineering, 37(11): 1087—1094,
1990, ©IEEE; and J.Z. Wang, B. Tie, W. Welkowitz, J. Kostis, and J. Semmlow, Incremental
network analogue model of the coronary artery, Medical & Biological Engineering & Computing,
27:416-422, 1989. ©IFMBE
где — 0,04 г • см-1 • с —вязкость крови, p = 1,0 г • см-3 — плотность крови.
Е = 2 х 106 г-см-1 - с2 — модуль Янга для кровеносного сосуда, D — диаметр данного
сегмента, А = 7rD2/4 — площадь сечения данного сегмента, h « 0,08Р — толщина
стенки этого сегмента и I — длина сегмента. Wang и др. [203] отметили, что хотя
элементы сети могут считаться примерно постоянными в период диастолы, такое
предположение не может быть справедливым в период систолы из-за изменений
параметров сегментов.
S1 — сегмент, ближайший к поражённому
стенозом сегменту
S2 — поражённый стенозом сегмент
S3 — расширение в сегменте, следующем
за поражённым стенозом
S4 — сегмент, периферический по
отношению к расширенному
Рис. 7.29. Гипотетический пример стеноза 9-й ветви коронарной артерии. Воспроизводите-
с разрешения J.Z. Wang, В. Tie, W. Welkowitz, J. L. Semmlow, and J.B. Kostis, Modeling
sound generation in stenosed coronary arteries, IEEE Transactions on Biomedical Engineering
37(11): 1087—1094, 1990, ©IEEE
Электромеханические модели генерации сигналов
321
При анализе сетевой модели артерии напряжение аналогично давлению Р и ток
аналогичен потоку крови Q. Wang и др. [203] использовали дифференциальные
уравнения для изменяющихся состояний с целью определения потока через модель
в виде артериального дерева для различных форм волны давления. Была высказана
гипотеза, что точка стеноза порождает возбуждающую мощность и поражённый сте-
нозом сегмент, а также периферический по отношению к точке стеноза расширенный
сегмент (см. рис. 7.29) действуют как резонирующие камеры.
Wang и др. [202] использовали следующие соотношения для вычисления средне-
квадратичных значений флуктуаций давления (см. также Fredberg [204]):
(P2)max = 10-4ри2/(ж),
/(ж) = 25,1 - 37,1а: + 15,5ж2 - 0,08а:3 - 0,89ж4 + 0,12ж5,
, / т^\ 0,75
. q иа ( D \
ж = 10-3 — —
и у a J
(7.120)
где и — скорость крови в поражённом стенозом сегменте, a d — диаметр поражённого
стенозом сегмента. Эта модель в виде инкрементной сети использовалась для оценки
скорости крови в каждом сегменте.
Широкополосный спектр звука, связанного с турбулентным потоком, моделиро-
вался следующим образом (см. также Fredberg [204]):
0,7(d/t7)<P2)max
1+ 0,5 [/(d/P)]10/3 ’ Ь '
где U — это скорость крови в нормальном сегменте и f — частота в герцах. Wang
и др. использовали функцию S(f), определённую как показано выше, в качестве
источника возбуждающей мощности для получения отклика их сетевой модели.
При этом наблюдалось, что спектр модели содержит две резонансные частоты,
значения амплитуд и частот которых зависят от геометрии и нагрузки соответ-
ствующих сегментов. Авторы [202] предостерегали, что результаты моделирования
весьма чувствительны к ошибкам в оценке требуемых параметров с использованием
артериограмм и других источников.
На рис. 7.30 представлен модельный спектр для сегмента 12 модели дерева ар-
териальных сосудов, показанной на рис. 7.28, при отсутствии стеноза и при стенозе
двух различных степеней. Сужение сегмента, вызванное повышающимся уровнем
стеноза, явно сдвигает второй пик в спектре в область более высоких частот, в то
время как амплитуда и частота первого пика уменьшаются. Данный результат был
подтверждён сопоставлением модельного спектра со спектром сигналов, записанных
от нескольких пациентов со стенозом коронарных артерий. В п. 7.10 будут представ-
лены примеры спектрального анализа сигналов, записанных от пациентов до и после
ангиопластики, выполнявшейся для устранения стеноза.
7.7.2. Генерация звуков в коленных суставах
Задача. Разработать механический аналог коленного сустава для моделиро-
вания генерации последовательности импульсов, связанных с физиологическим
хрустом коленной чашечки.
Решение. Beverland и др. [176] исследовали сигнал ХКЧ, производимый во
время очень медленного движения ноги (примерно 4°/с). Сигналы записывались
с использованием акселерометров, приклеенных к коже над верхней и/или нижней
оконечностью коленной чашечки. В этом эксперименте были записаны воспроиз-
водимые последовательности всплесков вибрации. На рис. 7.31 показаны два ка-
21 Р. Рангайян
322 Гл. 7. Моделирование процессов и систем, порождающих биомедицинские сигналы
Рис. 7.30. Сдвиг частотных компонент, предсказанный моделью передаточной функции для
случая стеноза в элементе 12 модели коронарных артерий, показанной на рис. 7.28. Воспро-
изводится с разрешения J. Z. Wang, В. Tie, W. Welkowitz, J. L. Semmlow, and J. B. Kostis.
Modeling sound generation in stenosed coronary arteries, IEEE Transactions on Biomedica.
Engineering, 37(ll):1087-1094, 1990, ©IEEE
нала одновременно записанных сигналов ХКЧ от верхней и нижней оконечностей
коленной чашечки во время разгибания и сгибания ноги. В этих сигналах при
сопоставлении сгибания и разгибания или при сопоставлении верхней оконечности
и нижней оконечности коленной чашечки наблюдается зеркальное подобие.
Для объяснения генерации сигналов ХКЧ была предложена механическая модель
В этой модели коленная чашечка рассматривается как качели в виде уравновешенной
в центре доски. Это можно обосновать тем обстоятельством, что в средней точке
коленной чашечки существует точка опоры. Предложенная конструкция, как пока-
зано на рис. 7.32, включает в себя резиновое колесо, представляющее блоковидную
поверхность бедра, на вершине которого расположен прямоугольный кусок доски,
представляющий коленную чашечку.
Разгибание
Сгибание
Рис. 7.31. Одновременно записанные сигналы ХКЧ в верхней и нижней оконечностях коленной
чашечки во время разгибания и сгибания ноги. Длительность сигнала не обозначена. Воспро-
изводится с разрешения D. Е. Beverland, W. G. Kernohan, G. F. McCoy, and R. A. B. Mollan.
What is physiological patellofemoral crepitus?, Proceedings of XIV International Conference
on Medical and Biological Engineering and VII International Conference on Medical Physics,
pp. 1249-1250, Espoo, Finland, 1985
Применение', анализ вариабельности сердечного ритма
323
Рис. 7.32. Конструкция для моделирования генерации сигналов ХКЧ с использованием модели
трения по принципу прилипание-скольжение. Воспроизводится с разрешения D. Е. Beverland,
W. G. Kernohan, G. F. McCoy, and R. A. B. Mollan, What is physiological patellofemoral crepitus?,
Proceedings of XIV International Conference on Medical and Biological Engineering and VII In-
ternational Conference on Medical Physics, pp. 1249-1250, Espoo, Finland, 1985. ©IFMBE
Утверждается, что в этой модели при медленном вращении колеса по направ-
лению часовой стрелки (разгибание ноги) оно первоначально прилипает к находя-
щейся сверху чашечке (доске) за счёт статического трения. Это должно вызывать
вращательное движение против часовой стрелки, так как вращающееся зубчатое
колесо сообщает противоположное направление вращения зубцу, находящемуся
с ним в контакте (как показано в верхнем правом углу рис. 7.32). Верхний конец
чашечки будет затем двигаться по направлению к колесу. В конце концов будет
достигнута точка, где статическое трение будет преодолено, коленная чашечка начнёт
скользить и вращение внезапно примет обратное направление, при этом верхний
конец коленной чашечки дёрнется в наружном направлении, а нижний конец — во
внутреннем. В случае сгибании ноги действия будут противоположны тем, которые
были описаны выше. Было показано, что эта механическая модель генерирует сигна-
лы, похожие на сигналы, записанные от пациентов, что подтверждает правильность
модели прилипание-скольжение для генерации сигналов ХКЧ.
7.8. Применение: анализ вариабельности
сердечного ритма
Задача. Исследовать применимость спектрального анализа по методу Фурье
для исследования сигнала сердечного ритма.
Решение. Дебур (DeBoer) и др. [72] применили методы анализа Фурье к двум
типам данных, полученным из сердечного ритма (см. также Akselrod и др. [205]).
Они отметили, что стандартные методы анализа Фурье не могут быть непосредствен-
но применены к последовательности точечных событий. Тем не менее, они получили
из последовательности комплексов ЭКГ три типа сигналов, показаных на рис. 7.1.
21*
324 Гл. 7. Моделирование процессов и систем, порождающих биомедицинские сигналы
Интервальный спектр был получен путём вычисления спектра Фурье от по-
следовательности интервалов, нормализованных как Д = (Д — /)//, где / — средняя
длина интервала. Масштаб по оси частот был выбран в предположении, что во
временной области данные распределены на расстояниях, равных средней длине
интервала /, т. е. эффективная частота дискретизации равняется 1/1.
Спектр отсчётов был получен путём выполнения преобразования Фурье
от представления данных в виде последовательности импульсов, полученной из
RR-интервалов, как показано на рис. 7.1. Сигнал был нормализован и масштабирован
так, что s(t) = — tk)] —N, где N — число отсчётов данных, и далее было
рассчитано преобразование Фурье. Рассчитанный спектр был сглажен с исполь-
зованием прямоугольного окна размером 27 точек. Дебур и др. показали, что
эти два спектра демонстрируют сходные характеристики при условии медленной
и незначительной модуляции данных относительно средней частоты сердечных
сокращений.
О 50 100 150 200 250 300 350
Время, с
Рис. 7.33. Значения 400 RR-интервалов свободно дышащего здорового пациента (а). Интер-
вальный спектр, рассчитанный с использованием всех 940 интервалов, включая 400 интерва-
лов, показанных на графике а (б). Спектр отсчётов (в). Спектры показаны только в диапазоне
частот 0-0,5 Гц. Воспроизводится с разрешения R. W. DeBoer, J. М. Karemaker, and J. Strackee,
Comparing spectra of a series of point events particularly for heart rate variability studies, IEEE
Transactions on Biomedical Engineering, 31(4):384-387, 1984. ©IEEE
На рис. 7.33 показаны последовательность RR-интервалов свободно дышащего
пациента и два спектра, полученные из этой последовательности. В обоих спектрах
видны три пика, которые были объяснены следующим образом [72]:
• воздействие дыхания на частоте 0,3 Гц;
Применение’, анализ вариабельности сердечного ритма
325
• пик на частоте 0,1 Гц, связанный с десятисекундными волнами, заметными
в сигнале кровяного давления;
• пик на частоте ниже 0,1 Гц, вызванный системой терморегуляции.
На рис. 7.34 показаны последовательность RR-интервалов и спектры для пациен-
та, дышащего с фиксированной частотой 0,16 Гц. Этот спектр демонстрирует хорошо
заметные пики, как на средней частоте сердечных сокращений (1,06 Гц), так и на
Рис. 7.34. Величины 340 RR-интервалов здорового пациента, дышащего с частотой 0,16 Гц (а).
Спектр отсчётов для диапазона частот 0-2,5 Гц (б). Спектр отсчётов для диапазона ча-
стот 0-0,5 Гц (в). Интервальный спектр (г). Воспроизводится с разрешения R. W. DeBoer,
J. М. Karemaker, and J. Strackee, Comparing spectra of a series of point events particularly for
heart rate variability studies, IEEE Transactions on Biomedical Engineering, 31(4):384-387, 1984.
©IEEE
частоте дыхания, а также на частотах, соответствующих гармоникам этих пиков.
Этот спектр наглядно иллюстрирует влияние дыхания на ритм сердца и может
быть использован для анализа связи между сердечно-сосудистой и дыхательной
системами.
Отметим, что непосредственный анализ сигналов ЭКГ по методу Фурье не даёт
той информации, о которой было сказано выше. Показанное на рис. 7.1 упрощённое
представление (модель) последовательности RR-интервалов позволяет выполнять
анализ сердечного ритма и его взаимосвязи с дыханием по методу Фурье. Такие
методы находят применение в исследованиях ВСР [69-71, 73, 74].
326 Гл. 7. Моделирование процессов и систем, порождающих биомедицинские сигналы
7.9. Применение: спектральное моделирование
и анализ сигналов ФКГ
Iwata и др. [206, 207] применили АР-моделирование и методику параметриче-
ского спектрального анализа к сигналам ФКГ для обнаружения шумов, а также
для обнаружения начала тонов S1 и S2. Их методики включали АР-моделирование,
определение доминирующих полюсов для классификации образов и спектральное
отслеживание, которое объясняется в следующих разделах.
Доминирующие полюса. После того как рассчитаны коэффициенты аь,
к = 1,2, ...,Р, для полюсной или АР-модели порядка Р, может быть факторизован
и решён полином A(z) с целью определения положения полюсов а^, fc = 1,2,... ,Р,
для данной системы. Чем ближе полюс к единичной окружности на z-плоскости,
тем уже будет соответствующая полоса пропускания и тем сильнее будет его вклад
в импульсную характеристику системы. Полюса, находящиеся близко к единичной
окружности, могут быть связаны с резонансными частотами системы и поэтому
могут использоваться для идентификации системы и для распознавания образов.
Учитывая нестационарную природу сигнала, Iwata и др. [206] вычисляли новую
модель порядка Р = 8 для каждого окна сигнала длительностью 25 мс, допуская
при этом перекрытие 12,5 мс межу смежными окнами (при частоте дискретизации
fs = 2 кГц). Частота полюса рк рассчитывалась следующим образом:
fk = (7.122)
Z7F
а ширина его полосы пропускания как
bwk = bg|pfc|/g (7.123)
7Г
Для того чтобы сегментировать каждый сигнал ФКГ на четыре фазы (S1; систоли-
ческая фаза, охватывающая интервал S1-S2; S2; диастолическая фаза, охватываю-
щая интервал от S2 до следующего S1), были использованы условия, основанные
на разнице в оценках спектральной мощности модели от одного окна к другому
и на существовании полюсов при Д < 300 Гц с минимальной шириной полосы для
рассматриваемой модели (см. также п. 4.10.)
На рис. 7.35 и 7.36 показаны сигналы ФКГ, спектральные контуры, оценки спек-
тральной мощности и доминирующие полюса для пациента в норме и для пациента
с шумом, связанным с неполным закрытием артериального протока (patent ductus
arteriosus, PDA). Большинство доминирующих полюсов модели для пациента в норме
находятся на частотах ниже 300 Гц; для модели сигнала пациента, страдающего
PDA, характерно большое число доминирующих полюсов на частотах выше 300 Гц.
Для классификации образов были рассчитаны и использованы среднее значение
и стандартное отклонение полюсов при bwk < 80 Гц в моделях каждой из фаз ФКГ.
В качестве признаков были также использованы пять коэффициентов полинома
четвёртого порядка, согласованного с последовательностью оценок спектральной
мощности модели для каждой фазы. Правильно были классифицированы 26 из
29 обучающих образцов и 14 из 19 контрольных образцов. Однако количество случаев
было относительно низким по сравнению с количеством признаков, использованным
в большинстве из этих шести категорий.
Спектральное отслеживание. В другом применении АР-моделирования для
анализа сигналов ФКГ Iwata и др. [207] предложили для обнаружения S1 и S2
использовать процедуру спектрального отслеживания, основанную на АР-моделиро-
вании. Сигналы ФКГ записывались в районе верхушки сердца с использованием
Применение', спектральное моделирование и анализ сигналов ФКГ
327
600 п
500 "
400 -
g 300 - •
200 -
100 -
___________________________I—
0 0,5
Время, с
Рис. 7.35. Определение признаков на основе полюсного моделирования сигнала ФКГ в норме.
Сверху вниз: сигнал ФКГ; модельный спектр в форме контуров одинаковой интенсивности;
оценка модельного спектра мощности где г относится к номеру окна; частоты Fj до-
минирующих полюсов с шириной полосы частот В] <80 Гц. Воспроизводится с разрешения
A. Iwata, N. Suzumara, and К. Ikegaya, Pattern classification of the phonocardiogram using linear
prediction analysis, Medical & Biological Engineering & Computing, 15:407-412, 1977. ©IFMBE
такого фильтра верхних частот, что при частоте 100 Гц он имел коэффициент
усиления —40 дБ по отношению к его максимальному коэффициенту усиления
на частоте 300 Гц (помеченному как Ар-Н). Сигналы были обработаны фильтром
нижних частот с коэффициентом усиления —20 дБ при 1000 Гц и дискретизованы
с частотой 2 кГц. Рассчитывалась АР-модель порядка Р — 8 для окон длительностью
25 мс; шаг передвижения окна был всего 5 мс. Модель СПМ была рассчитана как
5(щ) = —р-----------------,
2?г Efc=o cos(wT)
(7.124)
328 Гл. 7. Моделирование процессов и систем, порождающих биомедицинские сигналы
Номер фрагмента
600
500
а 400
I 300
I 200
100
о
Время, с
Рис. 7.36. Определение признаков на основе полюсного моделирования сигнала ФКГ в норме.
Сверху вниз: сигнал ФКГ; модельный спектр в форме контуров одинаковой интенсивности;
оценка модельного спектра мощности дг, где i относится к номеру окна; частоты FJ до-
минирующих полюсов с шириной полосы частот < 80 Гц. Воспроизводится с разрешения
A. Iwata, N. Suzumara, and К. Ikegaya, Pattern classification of the phonocardiogram using linear
prediction analysis, Medical & Biological Engineering & Computing, 15:407-412, 1977. ©IFMBE
Применение', спектральное моделирование и анализ сигналов ФКГ
329
где
р-к
Фа(к') = Q'jQ'j+k' (7.125)
>=о
Здесь ак — коэффициенты АР-модели, Р = 8, Т = 0,5 мс, — остаточная энергия
модели (ошибка) и ао = 1.
Основываясь на исследовании спектров сигналов ФКГ 69 пациентов в норме
и с нарушениями, Iwata и др. [207] обнаружили, что главная пиковая частота для S1
составляет 127 Гц, а для S2-170 Гц; следует отметить, что во время съёма данных
сигналы ФКГ были подвергнуты высокочастотной фильтрации (как описывалось
в предыдущем параграфе). Спектральная мощность модели при 100 Гц использова-
лась в качестве отслеживающей функции для обнаружения S1: пик в отслеживающей
функции после местоположения в ЭКГ R-зубца (tR) использовался в качестве
позиции S1. Отслеживающая функция для обнаружения S2 основывалась на спек-
тральной мощности при 150 Гц; пик в интервале tR + 0,25/27? С t С £/? + 0,6/?/?, где
/?/? — это интервал между комплексами, рассматривался как позиция S2. Для пре-
одоления проблем, связанные с наличием шумов близких к S2, было рекомендовано
использование нормализованной функции спектральной плотности, основанной на
коэффициентах АР-модели, но без коэффициента в уравнении (7.124).
Рис. 7.37 демонстрирует работу процедуры отслеживания для сигнала ФКГ в нор-
ме. Пики на частотах 100 и 150 Гц для спектральной функции отслеживания
।_____।_____।______।_____।_____।_____।______।_____।_____।_____।
0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1
Время, с
Рис. 7.37. Обнаружение компонент S1 и S2 с помощью спектрального отслеживания, осно-
ванного на полюсном моделировании сигнала ФКГ в норме. Сверху вниз: сигнал ЭКГ;
сигнал ФКГ; функция спектрального отслеживания при частоте 100 Гц для S1 и 150 Гц
для S2. Позиции S1 и S2, обнаруженные с помощью этого метода, помечены, как t\ и tn
соответственно. Воспроизводится с разрешения A. Iwata N. Ishii, N. Suzumara, and К. Ikegaya,
Algorithm for detecting the first and the second heart sounds by spectral tracking, Medical &
Biological Engineering & Computing, 18:19-26, 1980. ©IFMBE
(нижняя кривая) хорошо совпадают с моментами времени S1 и S2 соответствен-
но. На рис. 7.38 показано применение процедуры отслеживания для сигнала ФКГ
пациента с недостаточностью митрального клапана. Систолический шум полностью
заполняет интервал между S1 и S2, и визуально нельзя различить никакого разде-
330 Гл. 7. Моделирование процессов и систем, порождающих биомедицинские сигналы
ФКГ (Ар-Н)
L ФКГ(ЗЬ-Н)
...........-------------------—----------------
I_____I___I____I____I___I____I____I____I____I___I
0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1
Время, с
Рис. 7.38. Обнаружение S1 и S2 с использованием спектрального отслеживания, основанного
на полюсном моделировании сигнала ФКГ с систолическим шумом, вызванным недоста-
точностью митрального клапана. Сверху вниз: сигнал ЭКГ; сигнал ФКГ (Ар-Н); функция
спектрального отслеживания при частоте 100 Гц для S1 и 150 Гц для S2; нормализованная
функция спектрального отслеживания при 150 Гц для S2; сигнал ФКГ (Ap-L), снятый с вер-
хушки сердца и содержащий больше низкочастотных компонент; сигнал ФКГ (3L-H), снятый
в третьем межрёберном промежутке с использованием тех же самих фильтров, что и для
сигнала Ар-Н. Позиции S1 и S2 помечены как t\ и t\\ соответственно
ления между этими тонами и шумом. В то время как на частоте 150 Гц функция
спектрального отслеживания, обозначенная на рисунке как б, не имеет чётко вы-
раженного пика, связанного с тоном S2, нормализованная функция спектрального
отслеживания, обозначенная на рисунке как в, имеет такой чётко выраженный
пик, соответствующий тону S2. Два дополнительных канала ФКГ, приведённые
на нижней части рисунка (помеченные как Ap-L для канала верхушки сердца,
включающего более низкочастотные компоненты с коэффициентом усиления —20 дБ
при 40 Гц, и помеченные 3L-H для канала, записанного в третьем левом межрёбер-
ном промежутке с той же самой полосой частот, что и сигнал Ар-Н), показывают S2
более отчётливо, чем сигнал Ар-Н, подтверждая тем самым расположение пика
в функции спектрального отслеживания, обозначенной на рисунке как в.
Применение-, выявление заболеваний коронарных артерий
331
7.10. Применение: выявление заболеваний
коронарных артерий
Диастолический сегмент нормального сигнала ФКГ после S2 обычно является
бесшумным; в частности, бесшумной является центральная часть диастолическо-
го сегмента после возможного появления щелков открытия атриовентрикулярного
клапана. Акау и др. [65] предположили, что поток крови в коронарных артериях
максимален во время средней диастолы и что заболевания коронарных артерий
(закупорка, стеноз и т. д.) могут создавать в этом периоде высокочастотные звуки,
связанные с турбулентным потоком крови (см. разд. 7.7.1).
Акау и др. [65] исследовали спектры сегментов ФКГ в середине диастолы,
усреднённые по 20-30 циклам сердца, для нормальных пациентов и пациентов с за-
болеваниями коронарных артерий, подтверждёнными ангиографическим способом.
Было выявлено, что сигналы ФКГ в случае заболевания коронарных артерий демон-
стрируют более высокое содержание энергии на частотах выше 300 Гц, чем сигналы
в норме. На рис. 7.39 изображены спектры, полученные с помощью АР-модели для
двух пациентов в норме и двух пациентов с заболеваниями коронарных артерий.
---- P РНК-предсказание
20
-----Градиентное предсказание
15
10
5
0 200 400 600 800 1000
Частота, Гц
Рис. 7.39. Спектр диастолических звуков сердца для двух пациентов в норме (а, б) и для
двух пациентов с заболеваниями коронарных артерий (в, г). Метод оценки АР-моделей,
обозначенный на рисунке как РРНК, будет описан в разд. 8.6.2; метод градиентного предска-
зания («gradient prediction») в данной книге не обсуждается. Воспроизводится с разрешения
А. М. Акау, J. L. Semmlow, W. Welkowitz, М. D. Bauer, and J. В. Kostis, Detection of coronary
occlusions using autoregressive modeling of diastolic heart sounds, IEEE Transactions on
Biomedical Engineering, 37(4):366-373, 1990. ©IEEE
332 Гл. 7. Моделирование процессов и систем, порождающих биомедицинские сигналы
Сигналы, связанные с заболеванием коронарных артерий, явно обладают высокоча-
стотными пиками в диапазоне 400-600 Гц, чего не наблюдается в случае нормы.
Акау и др. [208] далее выяснили, что относительно высокие уровни мощности
резонансных частот в диапазоне 400-600 Гц, которые явно наблюдаются у паци-
ентов с заболеваниями коронарных артерий, уменьшаются после ангиопластики.
На рис. 7.40 показаны спектры диастолических сердечных звуков пациентов до
и после того, как закупорка коронарных артерий была исправлена с использованием.
Частота, Гц
Рис. 7.40. Спектр диастолических звуков сердца до и после ангиопластики для пациента,
у которого была излечена закупорка коронарных артерий. (Метод оценки СПМ «минимум-
норма», использованный Акау и др. [208] и обозначенный на рисунке как «MINORM»,
в данной книге не обсуждается.) Воспроизводится с разрешения А. М. Акау, J. L. Semmlow,
W. Welkowitz, М. D. Bauer, and J. В. Kostis, Nomnvasive detection of coronary stenoses before
and after angioplasty using eigenvector methods, IEEE Transactions on Biomedical Engineering,
37(ll):1095—1104, 1990. ©IEEE
ангиопластики. Легко можно видеть, что высокочастотные компоненты, которые
присутствовали до проведения хирургической операции не присутствуют после ле-
чения. (Метод оценки СПМ «минимум-норма», использованный Акау и др. [208]
и обозначенный на рисунке как «MINORM», в этой книге не обсуждается.)
7.11. Замечания
В данной главе мы изучили, как могут быть получены математические модели,
представляющие физиологические процессы, которые генерируют биомедицинские
сигналы, и, более того, как эти модели могут быть соотнесены с изменениями
в характеристиках сигнала, связанными с функциональными и патологическими
процессами. Очень важным свойством подхода, основанного на моделировании,
является то, что модель даёт небольшое количество параметров, характеризующих
сигнал и/или изучаемую систему; следовательно основанный на моделировании
подход является полезным при параметрическом анализе сигналов и систем. Так
как количество получаемых параметров обычно намного меньше, чем количество
Контрольные вопросы и задания
333
отсчётов сигнала, то основанный на моделировании подход может также оказать
помощь в сжатии данных и в компактном представлении сигналов и связанной с ним
информации.
Для рассмотрения физиологических систем как систем управления могут быть
использованы полюсно-нулевые модели. Путём изменения параметров соответству-
ющих моделей можно смоделировать некоторые патологические состояния. Модели
сигналов и систем также полезны при разработке протезов и управлении ими.
Комбинация математического моделирования с электромеханическим моделирова-
нием может дать возможность включить физические параметры, такие как диаметр
кровяного сосуда, напряжение, связанное с образованием бляшки, жёсткость, свя-
занная со стенозом, и коэффициент трения. Хотя точная оценка таких параметров
для человека не всегда бывает возможной, модели могут позволить лучше понять
соответствующие биомедицинские сигналы и системы.
7.12. Контрольные вопросы и задания
1. Рассмотрите простую линейную модель предсказания, заданную как у(п) =
= ау(п— 1). Определите ошибку предсказания и получите оптимальные значения
для а, минимизируя общую квадратичную ошибку.
2. Коэффициенты авторегрессионной модели сигнала: «о = 1» «1 = 1, «2 = 0,5. Ка-
кова передаточная функция этой модели? Нарисуйте диаграмму полюсов и нулей
для этой модели. Каковы будут резонансные частоты этой системы?
3. Вам доступны вектора коэффициентов модели для некоторого числа сигналов.
Предложите две характеристики для сопоставления сигналов по их сходству (а)
и их различию (б).
4. Для авторегрессионного моделирования сигналов покажите, почему приравни-
вание к нулю производной общей квадратичной ошибки, взятой по отношению
к любому коэффициенту, всегда будет приводить к минимуму (а не к максимуму)
ошибки.
5. Какой тип фильтра может преобразовать автокорреляционную матрицу сигнала
к диагональной матрице?
6. Некоторый биомедицинский сигнал был дискретизован с частотой 500 Гц и смо-
делирован с использованием АР-модели. Полюса модели были определены сле-
дующим образом: 0,4±j0,5 и —0,7 ±J0,6.
а) Определите передаточную функцию модели.
б) Получите разностное уравнение во временной области.
в) Каковы резонансные частоты системы, порождающей данный сигнал?
7. Модель описывается соотношением
у(п) = х(п) + 0,5ж(п — 1) + 0,25х(п — 2),
где х(п) — входной сигнал, а у(п) — выходной сигнал.
Каков тип этой системы (АР, СС или АРСС)?
Каков порядок модели?
Какова передаточная функция?
Нарисуйте для данной системы диаграмму полюсов и нулей.
Прокомментируйте устойчивость системы.
334 Гл. 7. Моделирование процессов и систем, порождающих биомедицинские сигналы
8. Модель описывается соотношением
у(п) = — 0)5у(п — 1) — у(п — 2) -Г х(п) + 0,5ж(п — 1) — х(п — 2),
где х(п) — входной сигнал, а у(п) — выходной сигнал.
Каков тип этой системы (АР, СС или АРСС)?
Каков порядок модели?
Какова передаточная функция?
Нарисуйте для данной системы диаграмму полюсов и нулей.
Прокомментируйте устойчивость этой системы.
7.13. Упражнения и лабораторные работы
Замечание. Необходимые для выполнения упражнений файлы с данными доступ-
ны на сайте ftp://ftp.ieee.org/uploads/press/rangayyan/.
1. Файл safety.wav содержит дискретизованный с частотой 8 кГц речевой сигнал
для слова «safety», произнесённого мужчиной (см. также файл safety.m). Сигнал
имеет значительную долю фонового шума (так как он был записан в обычных
условиях компьютерной лаборатории). Разработайте процедуры для разбиения
сигнала на участки, соответствующие гласным звукам, согласным звукам и пери-
одам молчания (фонового шума) с использованием методов среднеквадратичного
значения, числа поворотов и числа пересечений нуля.
Примените процедуру АР-моделирования к каждому сегменту, используя ко-
манду «1рс» в MATLAB. Рассчитайте СПМ АР-модели для каждого сегмента.
Для каждого из сегментов сравните эти СПМ модели с СПМ, полученными на
основе БПФ. В чём заключаются преимущества и недостатки СПМ, основанной
на модели, для случаев гласных и согласных звуков?
2. Найдите полюса для модели, полученной в предыдущем упражнении. Выразите
каждый полюс не только в терминах координат на z-плоскости, но и через его
частоту и ширину полосы частот. Исследуйте изменение положения полюсов по
мере того, как тип звука меняется от сегмента к сегменту при продвижении
вдоль всей записи сигнала.
3. Файлы pecl.dat, pec33.dat и pec52.dat содержат трёхканальные записи ФКГ,
ЭКГ и сигнала каротидного пульса (дискретизованные с частотой 1000 Гц;
вы можете прочесть эти сигналы с помощью программы из файла plotpec.m).
Сигналы из файлов pecl.dat и pec52.dat являются нормальными; сигнал ФКГ из
файла pec33.dat имеет систолический шум и получен от пациента с подозрением
на стеноз лёгочного клапана, дефект перегородки желудочков и дыхательную
гипертензию.
Разбейте каждый из сигналов на систолическую и диастолическую части. При-
мените процедуру АР-моделирования к каждому сегменту и получите модель
СПМ. Сравните результаты с соответствующими СПМ, которые были получены
с использованием процедуры Уэлча.
4. Найдите полюса для модели, полученной в предыдущем упражнении. Выразите
каждый полюс не только в терминах координат на z-плоскости, но и через его
частоту и ширину полосы частот. Исследуйте изменение положения полюсов
от систолической части к диастолической для каждого из сигналов. В чём
состоят главные отличия между картами полюсов для случая нормы и для случая
наличия шума.
Упражнения и лабораторные работы 335
5. Файлы ECG3.dat, ECG4.dat, ECG5.dat и ECG6.dat содержат сигнал ЭКГ, дис-
кретизованный с частотой 200 Гц (см. файл ECGS.m). Примените метод Пана-
Томпкинса для обнаружения QRS-комплекса в каждой из записей. Создайте
для всех четырёх записей последовательность импульсов, каждый из которых
представляет собой дельта-функцию, определённую в момент времени, соот-
ветствующий положению QRS-комплекса. Создайте также последовательность
интервалов для каждого из сигналов, как показано на рис. 7.1. Рассчитайте
спектры, соответствующие этим двум представлениям сердечного ритма, и иссле-
дуйте их связь с сердечным ритмом и его вариабельностью в каждом из случаев.
Глава 8
АНАЛИЗ НЕСТАЦИОНАРНЫХ СИГНАЛОВ
Стационарный (гомогенный) сигнал — это такой сигнал, который имеет одни и те
же статистические характеристики на протяжении всего времени или, по крайней
мере, на протяжении времени наблюдения. В предыдущих главах мы видели, что
большинство биомедицинских сигналов, будучи проявлением динамических систем
и патофизиологических процессов, являются нестационарными (или гетерогенны-
ми): на рис. 3.3 показано, что дисперсия речевого сигнала, использованного в ка-
честве примера, меняется во времени; на рис. 3.4 показано, что спектральное или
частотное содержание речевого сигнала также существенно меняется за время его
существования. На рис. 6.11 и 6.12 показано, что спектр сигнала сердечных звуков
или ФКГ меняется от систолы к диастоле и может также меняться между двумя
этими событиями.
Когда характеристики изучаемого сигнала существенно меняются на протяжении
исследуемого интервала, тогда параметры и преобразования, рассчитанные по всем\
интервалу, не несут полезной информации: они сглаживают динамические изменения
сигнала. Одна единственная СПМ, рассчитанная из длительных записей ЭМГ, ФКГ.
ВАГ или речевого сигнала, не имеет практической ценности. Такая СПМ не даёт
информации о локализации частотных компонент сигнала по времени. Мы уже
рассматривали подобный случай при анализе сигнала ФКГ в разд. 1.4.5, сегментируя
ФКГ на систолическую и диастолическую части с использованием сигналов ЭКГ
и каротидного пульса для временной синхронизации. Но возникает вопрос: как спра-
виться с ситуацией, когда шумы присутствуют в систоле и диастоле и необходимо
анализировать спектр шумов отдельно от вклада S1 и S2?
Более того, сигнал ЭЭГ меняет свои свойства в отношении ритмов, волновых
форм, преходящих событий и веретён, для которых недоступны независимые опорные
сигналы. Действительно, сигнал ЭЭГ представляет собой конгломерат большого
количества умственных и физиологических процессов, происходящих в мозгу в лю-
бой данный момент времени. Сигнал ВАГ имеет нестационарные характеристики,
связанные с поверхностями хрящей, которые входят в контакт в зависимости от
выполняемых действий. Не существует никакого другого источника информации,
который мог бы помочь в идентификации моментов времени, когда свойства сигна-
ла изменяются. Действительно, сигнал ВАГ не содержит никаких специфических
событий, которые как таковые могли бы быть идентифицированы, но представля-
ет собой конкатенацию неспецифических вибраций (за исключением, возможно,
щёлчков). Можем ли мы распространить применение хорошо разработанных ме-
тодов анализа сигнала, рассматривавшихся до сих пор, на такие нестационарные
сигналы?
Иллюстрация задачи на примерах
337
8.1. Постановка задачи
Разработать методы изучения динамических характеристик нестационар-
ных биомедицинских сигналов. Предложить схемы для применения хорошо раз-
работанных методов Фурье и авторегрессионного моделирования для анализа
и параметризации нестационарных сигналов.
Чтобы ограничить диапазон рассматриваемых в настоящей главе проблем, мы
будем рассматривать только расширение спектрального анализа Фурье и АР-мо-
делирования на нестационарные сигналы. Рассмотренные в последующих разделах
методы продемонстрируют возможные подходы к анализу на примере исследования
нескольких характерных биомедицинских сигналов.
Упор в данной главе сделан на подходе к анализу нестационарных сигналов,
основанном на сегментации. Такие темы, как фильтры Калмана, время-частотные
распределения и вейвлеты (wavelets) здесь не рассматриваются.
8.2. Иллюстрация задачи на примерах
8.2.1. Сердечные звуки и шумы. Мы отмечали в разд. 6.4.5, что спектральное
содержание S1 и S2 различно, что объясняется различием состояний сокращения
и расслабления желудочковых мышц и разницей в их кровяном наполнении в ходе
соответствующих сердечных фаз. В случае нормы, для разделения сигнала ФКГ
на участки, соответствующие S1 и S2, могут быть использованы QRS-комплекс
в сигнале ЭКГ и дикротическая выемка в сигнале каротидного пульса. Далее для
найденных таким образом участков сигнала могут быть получены отдельные СПМ,
как это иллюстрируется в разд. 6.4.5. Однако когда сигнал ФКГ содержит шумы
в систоле и/или диастоле, а также возможно наличие щелчков открытия клапана
(см. рис. 6.12), то может потребоваться более детальное разделение такого сигнала
на отдельные фрагменты.
Iwata и др. [206] применили к сигналу ФКГ АР-моделирование, используя
разбиение сигнала на фиксированные сегменты длительностью по 25 мс (см. п. 7.9).
Хотя данный подход может оказаться удовлетворительным, всё же возникает вопрос
о его оптимальности. Какова должна быть длительность окна? Необходимо ли
разбивать интервалы между S1 и S2 на многочисленные сегменты? Не будет ли
более эффективно вычислять единственную АР-модель для каждого из тонов SI, S2,
систолического шума и диастолического шума, т. е. всего только четыре модели?
Понятно, что каждая из таких моделей должна оказаться более точной, так как
если сигнал был предварительно адаптивно сегментирован по предложенному выше
принципу, то для оценки требуемой АКФ будут использованы все доступные отсчёты
сигнала.
8.2.2. Волны и ритмы ЭЭГ. Снятая с головы ЭЭГ представляет собой комбина-
цию многочисленных видов активности различных маленьких зон на поверхности
коры головного мозга, расположенных под каждым из электродов. Этот сигнал
изменяет свои характеристики в соответствии с умственными задачами, внешними
стимулами и физиологическими процессами. Как мы отмечали в разд. 1.2.5 и на-
блюдали на рис. 1.2.1, зрительные стимулы блокируют Q-ритм; по мере того как
пациент переходит в более глубокую стадию сна, медленные волны становятся более
заметными; у пациентов с эпилепсией могут наблюдаться острые спайки и по-
следовательности комплексов спайк-волна. Описание записи ЭЭГ, как отмечалось
в разд. 1.2.5 и 4.2.4, требует идентификации нескольких типов волн и ритмов. Это
22 Р. Рангайян
338
Гл. 8. Анализ нестационарных сигналов
предполагает, что сигнал первоначально может быть разбит на сегменты, каждый
из которых обладает определёнными свойствами, остающимися неизменными на
протяжении данного сегмента. Затем каждый сегмент может быть описан через его
характерные признаки.
8.2.3. Повреждения суставного хряща и вибрации коленного сустава. Дви-
жение коленного сустава представляет собой сочетание продольного перемещения
и вращения. Конфигурация коленной чашечки такова, что некоторая часть поверхно-
сти сустава находится в контакте с бедром от согнутого состояния колена до почти
полностью вытянутого положения (см. разд. 1.2.13 и рис. 1.31). Goodfellow и др. [209]
показали, что начальное коленно-бедренное взаимодействие имеет место при угле
сгибания колена примерно 20° от угла, при котором вовлекаются и срединная,
и периферийная суставные поверхности. На рис. 8.1 показаны поверхности контак-
та коленной чашечки при различных значениях угла сгибания сустава. По мере
сгибания колена коленно-бедренная контактная поверхность постоянно сдвигается
вперёд, вовлекая как срединную, так и периферийную суставные поверхности. При
Периферийная суставная
поверхность
Срединная суставная
поверхность
Боковая суставная
поверхность
Верхняя оконечность
Нижняя оконечность
Рис. 8.1. Контактные поверхности коленной чашечки и бедренной кости в процессе коленно-
бедренной артикуляции. Заимствовано с разрешения автора из S. Krishnan, Adaptive Signal
Processing Techniques for Analysis of Knee Joint Vibroarthrographic Signals, Ph. D. Thesis,
University of Calgary, 1999
угле сгибания 90° полоса контакта охватывает верхнюю оконечность коленной ча-
шечки. Периферийная суставная поверхность не сочленяется с боковой оконечностью
среднего мыщелка бедра до достижения угла сгибания бедра примерно 120-130°.
Суставной хрящ состоит из твердой субстанции (matrix) и синовиальной жидко-
сти [210]; он не содержит нервов, кровеносных или лимфатических сосудов и пита-
ется за счёт синовиальной жидкости, покрывающей его свободную поверхность. Во
время движения сустава трение между костями снижается благодаря смазке, обес-
печиваемой вискозной синовиальной жидкостью [49, 52]. Как прочность материала
суставного хряща, так и его толщина различны не только для разных суставов, но
и в пределах одного и того же сустава В случаях аномальных изменений в структуре
твёрдой субстанции хряща, таких как повышенная насыщенность жидкостью, про-
исходит разрушение волоконной коллагеновой структуры и разложение или потеря
протеогликана. По мере ухудшения композиционных и биомеханических свойств
изменённого суставного хряща, неизбежно происходит потеря хрящевой субстанции.
Иллюстрация задачи на примерах
339
Эти явления могут носить точечный характер или быть рассеянными, быть ограни-
ченными поверхностным износом и образованием сгустков волокон или приводить
к потере толщины хряща (от частичной до полной). В некоторых случаях локальное
набухание хряща или образование волдырей может наблюдаться до возникновения
износа суставной поверхности [211].
Хондромаляция коленной чашечки (размягчение хряща) представляет собой
состояние, при котором происходит деградация хряща коленной чашечки, часто
связанное с болями внутри колена. Обнажённая поверхность субхондральной кости
и сгустки волокон на суставном хряще наблюдаются при хондромаляции на задней
поверхности коленной чашечки [212]. По степени серьёзности повреждений хондро-
маляция обычно подразделяется следующим образом [213, 214]:
• степень /: размягчение, наличие трещин и волдырей, но без потери суставного
хряща;
• степень II: умеренное повреждение с частичной потерей хряща;
• степень III: серьёзное повреждение волокнистой структуры хряща, но поверх-
ность кости не обнажена;
• степень IV: хрящ разъеден и обнажена субхондральная кость.
Остеоартрит представляет собой заболевание, связанное с деградацией хряща,
при котором наблюдается на только повреждение хряща, но также и специфиче-
ские изменения в кости. На поздней стадии остеоартрита происходит деградация
суставного хряща по всей толщине и обнажение кости. К другим структурным изме-
нениям относятся изменения волокон синовиальной оболочки, утолщение суставной
оболочки и дальнейшие изменения кости, такие как формирование остеофита [216].
Хондромаляция высокой степени может быть отнесена к остеоартриту.
При нормальной двигательной активности мениски подвергаются вертикальному
сжатию, горизонтальному расслаблению, а также воздействию вращательных и сре-
зывающих сил различной интенсивности [216]. В процессе старения как суставного
хряща, так и волокнистого хряща прогрессивно развивается склонность к поврежде-
ниям, носящим характер горизонтального расщепления [216].
Для диагностики патологии хряща часто используется полуинвазивная процедура
артроскопии (оптоволоконное обследование поверхности сустава, обычно проводи-
мое с использованием анестезии). В ходе артроскопии хирург обычно имеет воз-
можность видеть коленно-бедренный сустав, мыщелки бедра, мениски, внутренние
крестообразные связки, а также срединные и периферийные синовиальные обла-
сти. Артроскопия может рассматриваться как «золотой стандарт» для относительно
безопасной оценки поверхностей сустава с целью определения прогноза и выбора
лечения для различных патологических состояний. На рис. 8.2 показаны артроско-
пические изображения для различных стадий хондромаляции коленной чашечки.
Аномальные структуры и поверхности коленной чашечки являются более вероят-
ными источниками звуков при сгибательных и разгибательных движениях ноги, чем
нормальные структуры. Размягчённый суставной хрящ при хондромаляции коленной
чашечки, а также трещины, расколы или утолщённые области при остеоартрите
почти наверняка повышают трение между суставными поверхностями и, следова-
тельно, являются вероятными причинами повышения уровня звуков при нормальных
движениях сустава [54, 217]. Повреждения мениска в форме разрыва вызывают
нерегулярности в форме и плавности движения сустава и могут производить резкие
щелчки при его нормальном движении [54, 59, 218].
Из приведённых выше рассуждений очевидно, что сигнал ВАГ является неста-
ционарным. Различные компоненты движущихся суставных поверхностей вступают
в контакт при различных углах сгибания сустава; их свойства, а именно наличие
22*
340
Гл. 8. Анализ нестационарных сигналов
в г
Рис. 8.2. Артроскопические изображения коленно-бедренного сустава: поверхность хряща
в норме (а); хондромаляция коленной чашечки II степени (б); хондромаляция коленной
чашечки III степени (в); хондромаляция коленной чашечки и бедра IV степени; поверхности
костей обнажены (а). Нижняя поверхность коленной чашечки располагается в верхней части
рисунка, а мыщелок бедра — в нижней. Фотографии любезно предоставлены G. D. Bell, Sport
Medicine Centre, University of Calgary
смазки и функциональная целостность могут изменяться от одного положения
к другому. Внимательный просмотр сигналов ВАГ и их спектрограмм, приведённых
в разд. 3.6.3 и 3.10, показывает, что характер сигнала ВАГ существенно изменяется
на всем его протяжении. Поскольку недоступна какая-либо априорная или неза-
висимая информация об изменениях в структурах коленного сустава, приводящих
к вибрациям, то перед тем как сигнал может быть проанализирован с использованием
описанных ранее методов, необходимо выполнить его адаптивную сегментацию.
В разд. 8.6.1 и 8.6.2 будет дана иллюстрация адаптивной сегментации сигналов ВАГ
8.3. Динамические системы
Модель линейной системы, представленная уравнением (7.1), является моделью
стационарной системы. Коэффициенты этой системы и bi не изменяются во
времени, и следовательно полюса и нули этой системы остаются постоянными на
протяжении всего времени. Нестационарные (или динамические) системы будут
иметь коэффициенты, которые изменяются во времени: мы видели в разд. 3.6.2
и 3.6.3, что вектора коэффициентов (весов) адаптивных фильтров НСК и РНК выра-
жены как функции от времени. {Замечание. Фильтр Винера, описанный в разд. 3.5,
Динамические системы
341
после того как он был оптимизирован для данного сочетания сигнала и статистик
шума, является не изменяющимся во времени фильтром.) Поскольку коэффициенты
фильтра ИСК или РНК изменяются во времени, то изменяются также и передаточная
функция и частотная характеристика этого фильтра. Из этого следует, что будет
меняться во времени и импульсная характеристика такой системы.
Для простоты рассмотрим полюсный фильтр; характеристики этого фильтра
определяются положением полюсов с учётом коэффициента усиления. Если полюса
выражаются через их полярные координаты, их углы соответствуют (резонансным)
частотам, и их радиусы связаны с соответствующими полосами частот. Следова-
тельно, мы можем охарактеризовать динамическую или нестационарную систему
и сигналы, описав положение их полюсов в комплексной z-плоскости или, что
эквивалентно, соответствующие частоты и значения ширины полосы частот как
функций от времени. Описание изменения или модуляции параметров полюсов во
времени может, таким образом, отражать нестационарность или динамическую при-
роду системы или сигнала. Изменение коэффициента усиления часто ведёт к неста-
ционарности в сигналах, порождаемых системой. Appel и v. Brandt [219, 220] описали
моделирование различных типов нестационарного поведения сигналов и систем.
В общем случае нестационарной системы, представляющей собой АР-процесс, мы
может модифицировать уравнение (7.17), для того чтобы подчеркнуть, что коэффи-
циенты модели являются функциями от времени:
р
у(п) = - ^2 ak(n)y(n - к). (8.1)
t=i
Для анализа таких систем могут быть использованы методы, связанные с фильтром
Калмана или со среднеквадратичным подходом [77, 221-223] (в данной книге не
рассматриваются). Для анализа ЭЭГ [224], ЭКГ [38] и ВСР [225] используются
методы АР- и АРСС-моделирования динамических систем; применение для сигнала
ВСР будет обсуждаться в п. 8.9.
8.3.1. Характеристики нестационарных сигналов и динамических си-
стем. Выходной сигнал динамической системы будет нестационарным. Система
может быть охарактеризована через коэффициенты её динамической модели, переда-
точной функции или связанных с ней параметров. Для того чтобы охарактеризовать
нестационарный сигнал, могут использоваться различные статистические параметры
для коротких интервалов времени, рассчитываемые по скользящим окнам; эти
параметры также могут быть использованы для тестирования какого-либо сигнала
на стационарность или её отсутствие.
• Среднее значение. Среднее значение, рассчитанное по короткому интервалу,
представляет собой среднюю величину или постоянную составляющую сигнала
в окне анализа. Изменение среднего значения от одного окна к другому обычно
является индикатором присутствия дрейфа базовой линии или низкочастотного
артефакта, как в случае сигнала ЭКГ на рис. 3.6. Очевидно, что сигнал, показан-
ный на рис. 3.6, является нестационарным по его среднему значению. Однако для
многих сигналов среднее значение не является важной характеристикой и обычно
блокируется на стадии съёма сигнала с использованием разделяющих ёмкостей
и/или фильтров верхних частот. Более того, поскольку уровень постоянной соста-
вляющей не несёт никакой информации о звуках или вибрации, его устранение
не приводит ни к каким последствиям при анализе таких сигналов, как сердечные
звуки, речь, ВАГ и ВМГ.
• Дисперсия. На рис. 3.3 иллюстрируется рассчитанная по короткому интервалу
дисперсия для речевого сигнала. Очевидно, что дисперсия высока в тех зонах, где
342
Гл. 8. Анализ нестационарных сигналов
сигнал обладает высокой вариабельностью относительно среднего значения (в нём
присутствуют существенные скачки или отклонения), как в случае гласных в сиг-
нале. На участках сигнала, связанных с фрикативами (шипящими), дисперсия
невелика, так как отклонения амплитуды малы, несмотря на их высокочастотную
природу. Поскольку среднее значение сигнала равно нулю, дисперсия равна
среднеквадратичной величине и представляет собой средний уровень мощности
в соответствующем окне сигнала. Хотя изменения по уровню мощности речевых
сигналов могут быть полезны для принятия решений о наличии гласных звуков,
согласных звуков и зон молчания, этот параметр не несёт большой информации
и даёт лишь ограниченное представление об общей статистической вариабель-
ности характеристик сигнала. Независимо от интерпретации этого параметра,
видно, что речевой сигнал на рис. 3.3 является нестационарным по его дисперсии
(и по связанным с ней характеристикам стандартного отклонения, среднего
квадрата и среднеквадратичного отклонения). Из обсуждения, приведённого
в разд. 1.2.11, ясно также, что система голосового тракта, которая порождает
речевой сигнал, является динамической системой с изменяющимися во времени
конфигурацией и характеристиками фильтрации.
• Характеристики активности. В главах 3 и 5 мы изучали несколько характери-
стик активности, которые являются индикаторами «занятости» данного сигнала,
таких как точки поворота, ЧПН и подсчёт поворотов. На рис. 3.1 показан ре-
зультат подсчёта точек поворота по коротким интервалам для речевого сигнала:
очевидно, что в периоды, относящиеся к фрикативам, этот сигнал более активен
или «занят», чем в периоды, связанные с гласными (данная тенденция проти-
воположна по отношению к кратковременной дисперсии того же самого сигнала,
показанной на рис. 3.3). График подсчёта точек поворота по коротким интервалам
для сигнала ЭМГ, показанный на рис. 5.8, демонстрирует возрастающий уровень
сложности сигнала с повышением интенсивности дыхания. Хотя точки поворота,
ЧПН и подсчёт поворотов не относятся к традиционным статистическим характе-
ристикам, получаемым из ФПВ, они характеризуют вариабельность сигнала и его
сложность с разных точек зрения. Оба приведённые выше примера иллюстрируют
изменчивость параметров, измеренных на протяжении соответствующего сигнала:
таким образом, эти сигналы являются нестационарными с точки зрения подсчёта
числа точек поворота.
• АКФ. В разд. 3.1.1 АКФ была в общем виде определена как фхх(1\,1\ 4- г) =
= E[x(t\)x{t\ + г)]. В разд. 3.1.2 одно из условий для стационарности (в широком
смысле или второго порядка) было определено как отсутствие зависимости АКФ
от времени, т. е. фхх(1\,1\ + т) = фхх(т). Нестационарный сигнал не удовлетворяет
этому условию и имеет АКФ, которая меняется во времени. Поскольку АКФ
основана на математическом ожидании пары отсчётов сигнала, разделённых
определённым промежутком времени или задержкой, оно является более общей
характеристикой вариабельности сигнала, чем дисперсия и связанные с ней
характеристики. Отметим, что АКФ при нулевой задержке является среднеква-
дратичным значением сигнала.
При вычислении АКФ для короткого сегмента сигнала с целью исследования
(не)стационарности возникают некоторые ограничения: чем меньше размер окна
анализа, тем короче максимальная задержка, до которой может быть надёжно
оценена величина АКФ. Тем не менее, АКФ, рассчитанная по короткому интер-
валу, может быть использована для отслеживания нестационарностей в сигнале.
Если сигнал является выходом динамической АР-системы, то её параметры могут
быть получены из АКФ (см. разд. 7.5).
Динамические системы
343
• СПМ. СПМ и АКФ сигнала связаны между собой преобразованием Фурье.
Следовательно, сигнал, который является (не)стационарным по отношению к его
АКФ является также (не)стационарным по отношению к СПМ. Однако, как
мы видели в главе 6, СПМ проще интерпретировать, чем АКФ. Спектрограмма
речевого сигнала, приведённая на рис. 3.4, показывает существенные вариации
в его СПМ, рассчитанной по коротким интервалам: речевой сигнал явно является
нестационарным по отношению к СПМ (и к АКФ). Спектрограммы сигналов ВАГ,
приведённые в разд. 3.6.3 и 3.10, показывают нестационарную природу сигналов
ВАГ.
• Статистики более высокого порядка. Главным ограничением при анализе сиг-
нала с использованием АКФ (и эквивалентно — СПМ) является то, что теряется
информация о фазе. Важность фазовой информации в сигналах обсуждается
Oppenheim и Lim [226]. Hayes и Oppenheim [227] и Oppenheim и Lim [226]
описывают условия, при которых сигнал может быть реконструирован только по
его амплитудному спектру и только по его фазовому спектру. Анализ, основанный
только на АКФ, не может применяться к сигналам, которые являются смешанно-
фазовыми (т. е. не минимально-фазовыми), порождаются нелинейными системами
или подчиняются ФПВ, отличной от гауссовской [228].
В общем виде момент порядка п для случайного сигнала x(t) в момент времени t\
определяется как [77, 228, 229]
+ti,«i +т2, ... ,<1 +r„_j) = +Т1)я(£1 +т2), ... +rn_j)],
(8.2)
где Ti,T2, ... ,rn-i являются различными сдвигами или задержками. Очевидно,
что АКФ является особым случаем приведённого выше выражения при п = 2,
т. е. АКФ является моментом второго порядка.
Набор параметров, известных как кумулянты, может быть связан с этими момен-
тами следующим образом: кумулянты второго порядка и третьего порядка равны
соответствующим моментам. Кумулянт четвёртого порядка связан с моментом
четвёртого порядка как [77, 228, 229]
4(ii,ti +r2,ti + т3) = mx(ti,ti +ri,ti +r2,ii + т3) -
+rl)m2x(ti +r2,ti +r3) + r2)mx(ti + r3,ti + ry) -
+ri)m2x(t\ +Ti,fj + т2). (8.3)
Преобразования Фурье от кумулянтов дают соответствующие спектры более
высоких порядков или полиспектры (для которых число частотных перемен-
ных на единицу меньше порядка). Преобразования Фурье кумулянтов второго,
третьего и четвёртого порядков известны как спектр мощности (СПМ), бис-
пектр, триспектр соответственно. Гауссовский процесс имеет статистики только
первого и второго порядка: моменты и спектры порядков больших, чем два,
равны нулю. Моменты, кумулянты и спектры более высоких порядков могут
использоваться в качестве характеристик нелинейных, смешанно-фазовых и не
гауссовских сигналов [77, 228, 229]. Вариации этих характеристик во времени
могут использоваться для выявления соответствующих типов нестационарностей.
• Параметры системы. Когда динамическая модель системы, порождающей сиг-
нал, задана с учетом её коэффициентов (таких как а^(п) в уравнении (8.1)),
существует возможность отслеживать изменения этих коэффициентов во време-
ни. Существенные изменения в параметрах модели показывают соответствующие
изменения в выходном сигнале.
344
Гл. 8. Анализ нестационарных сигналов
8.4. Фиксированная сегментация
Если имеется какой-нибудь нестационарный сигнал, то простейшим подходом
к разбиению его на квазистационарные сегменты могло бы быть рассмотрение
небольших по длительности окон фиксированной длины. Если имеется сигнал х(г)
для i = 0,1,2, ...— 1, мы можем рассматривать сегменты с фиксированной дли-
тельностью М отсчётов при М N и разбить сигнал на К частей следующим
образом:
хк(п) = х(п + (к- 1)М), 0 < п М - 1, 1 < к К. (8.4)
Предполагая, что сигнал не изменяет своих характеристик в сколько-нибудь суще-
ственной степени в пределах длительности, соответствующей М отсчётам (или M/fs
секундам), можно рассматривать каждый из сегментов как квазистационарный.
Отметим, что сегментация, о которой здесь идёт речь, сходна с той, кото-
рая используется в процедурах Бартлетта и Уэлча (Bartlett, Welch), описанных
в разд. 6.4.2 и 6.4.3. Однако теперь мы не будем усреднять спектры сегментов,
а будем рассматривать их по отдельности. В этом случае изучавшиеся до сих пор
методы обработки сигнала могут быть использованы для анализа каждого отдельного
сегмента.
8.4.1. Преобразование Фурье для коротких интервалов. После того как дан-
ный сигнал был сегментирован на квазистационарные фрагменты хк(п), для каждого
сегмента можно рассчитать спектр Фурье:
М-1
Xfe(w) = ^xk(n)exp(-jwn). (8.5)
n=0
Массив спектров для К = 1,2, ... ,/С будет описывать изменяющиеся во
времени спектральные характеристики сигнала.
Сегментация данного сигнала по описанному выше принципу может интерпрети-
роваться как применение к нему скользящего окна; fc-й сегмент хк(п) может быть
выражен как произведение сигнала х(п) на функцию окна w(n), позиционированного
в начале сегмента:
хк(п) — x(ri)w(n — (к — 1)М), 1 < к С К, (8.6)
где
, . [1, ДЛЯО^П^М-I, /0 74
w(n) = (8.7)
[О, для всех других п.
На рис. 8.3 а иллюстрируется ФКГ пациента, имеющего систолический шум
и щелчок открытия митрального клапана, с использованием скользящего прямо-
угольного окна анализа длительностью 64 мс, наложенного на сигнал в три раз-
личные момента времени. Длительность каждого окна составляет 64 отсчёта, что
эквивалентно 64 мс при fs = 1 кГц. Эти три окна позиционировались в зонах,
приблизительно соответствующих следующим событиям в сигнале: компоненте S1,
систолическому шуму и компоненте S2. На рис. 8.3 б показана в логарифмиче-
ском масштабе СПМ сегментов сигнала, полученных с помощью этих трёх окон
анализа. Видно, что данные СПМ существенно различаются, при этом во втором
окне наблюдается наибольшее содержание высокочастотной мощности, связанной
с шумом. В третьем окне можно отметить большее количество среднечастотных
Фиксированная сегментация
345
Время, с
а
50 100 150 200 250 300 350 400 450 500
А,-
_I_I_I_I_I_I |\
у
-20 -
-30
-40 -
50 ЮО 150 200 250 300 350 400 450 500
/V^A^
50 ЮО 150 200 250 300 350 400 450 500
Частота, Гц
б
Рис. 8.3. Сигнал ФКГ пациента (девочка, 14 месяцев) с систолическим шумом и щелчком
открытия (OS) митрального клапана (а); для анализа по коротким интервалам на сигнал
были наложены три окна, каждое из которых представляет собой прямоугольное окно дли-
тельностью 64 мс. СПМ в логарифмическом масштабе для трёх сегментов сигнала, к которым
были применены окна (б). Каждое из БПФ было рассчитано с дополнением нулями до общей
длительности 256 отсчётов; fs = 1 кГц. См. также рис. 6.12
346 Гл. 8. Анализ нестационарных сигналов
составляющих, чем в первом. Очевидно, что сигнал ФКГ является нестационарным
по отношению к СПМ.
В общем виде окно может быть позиционировано в любой момент времени т
и результирующий сегмент может быть выражен как x(n)w(n — т). Необходимо
выбрать определённое значение шага перемещения окна от одного сегмента к друго-
му. В предельном случае окно может перемещаться на один отсчёт в один момент
времени; при этом смежные окна будут перекрываться на (М — 1) отсчётов. Далее
для каждого сегмента можно рассчитать преобразование Фурье как
М-1
Х(т,сс) = ^^x(n)w(n — тп) ехр (—jam). (8.8)
п=0
В случае, когда и переменная времени, и переменная частоты являются непрерывны-
ми, мы можем записать приведённое выше выражение в более понятной форме:
оо
Х(т, = J x(t)w(t — г) ехр(— jwt) dt. (8.9)
— оо
Теперь спектр выражен не только как функция от частоты о/, но так же как
и функция от времени т. Несмотря на то что в данном случае установлены пределы
интегрирования (—оо, оо), окно конечного размера, позиционированное в момент
времени т, будет выполнять сегментацию сигнала так, как это требуется.
Спектральное представление сигнала как функции от времени в соответствии
с уравнениями (8.8) и (8.9), известно как время-частотное распределение (ВЧР,
time-frequency distribution, TFD) [230-233]. Поскольку в описанной выше процедуре
преобразование Фурье применяется к небольшому по длительности окну сигнала
во времени, данный результат известен как преобразование Фурье для коротких
интервалов (ПФКИ, short-time Fourier transform, STFT). Метод анализа неста-
ционарных сигналов в окне небольшой длительности в общем виде известен как
анализ по коротким интервалам. Амплитуда ПФКИ (возведённая в квадрат и/или
представленная в логарифмическом масштабе, если это требуется) известна как
спектрограмма сигнала.
На рис. 8.4 показана спектрограмма сигнала ФКГ пациента с систолическим
шумом и щелчком открытия митрального клапана: параметры сигнала и окна те же
самые, что и для рис. 8.3, но теперь спектр изображён для каждого положения окна
с шагом перемещения 32 мс. На этой спектрограмме отчётливо заметна относительно
высокочастотная природа шума по сравнению с компонентами S1 и S2.
Ранее нам уже приходилось сталкиваться со спектрограммами речевого сигнала
и сигнала ВАГ: см. рис. 3.4, а также разд. 3.6.3 и 3.10. В конце данного раздела
и позже в данной главе будут представлены дальнейшие примеры спектрограмм.
8.4.2. Соображения по анализу коротких интервалов. Анализ сигналов по
коротким интервалам может оказаться очень громоздким в вычислительном отноше-
нии. В случае расчёта ПФКИ преобразование Фурье должно быть рассчитано для
каждого сегмента сигнала. На практике обычно нет необходимости рассчитывать
преобразование Фурье для каждого возможного положения окна, т. е. для любого
значения т в уравнении (8.8). Мы можем передвигать окно анализа на М отсчётов,
в этом случае соседние окна не будут перекрываться. Наиболее часто используемой
методикой является передвижение окна анализа на М/2 отсчётов. При этом соседние
окна будут перекрываться на М/2 отсчётов. Некоторое перекрытие желательно, так
как оно позволяет обеспечить непрерывность рассчитываемых ПФКИ и ВЧР.
Возникает также важный вопрос о выборе длительности окна анализа М. Это
окно должно быть достаточно коротким, чтобы обеспечить стационарность сегмента,
Фиксированная сегментация
347
Рис. 8.4. Спектрограмма сигнала ФКГ пациента (девочка, 14 месяцев) с систолическим шумом
и щелчком открытия митрального клапана, рассчитанная с использованием скользящего окна
короткой длительности, равной 64 отсчётам (64 мс при fs = 1 кГц), с интервалом перемещения
окна, равным 32 отсчётам. Каждое БПФ было подсчитано с дополнением нулями до общей
длительности 256 отсчётов; fs = 1 кГц. См. также рис. 6.12 и 8.3
и достаточно длинным, чтобы мог быть выполнен осмысленный анализ. В разд. 6.3
мы видели, что короткое окно обладает широким главным лепестком в частотной
характеристике. Поскольку данный сигнал перемножается во временной области
с окном анализа, спектр сигнала свёртывается со спектральной характеристикой окна
в частотной области. Свёртывание в частотной области с функцией, имеющей широ-
кий центральный лепесток, ведёт к существенной потере спектрального разрешения.
Ограничения, накладываемые при использовании окна, связаны с принципом
неопределённости или с произведением времени на ширину полосы частот, выра-
жаемым как [231]
(8.10)
At х Aw
где
(8.П)
оо
(8.12)
t= | t\x(t) |2rft,
— оо
(Ди.)2 = | (w — w)2|X(w)|2dw,
(8.13)
cu|X(w)|2dw.
— oo
(8.14)
348
Гл. 8. Анализ нестационарных сигналов
Рис. 8.5. Речевой сигнал слова «safety», произнесённого мужчиной, во временной области
(этот сигнал также показан на рис. 1.29, 3.1 и 3.3) (а). Спектрограмма (СПМ в логариф-
мическом масштабе) данного сигнала, рассчитанная с использованием скользящего окна для
анализа коротких интервалов длительностью 16 мс (128 отсчётов при fs = 8 кГц), с шагом
перемещения окна, равным 8 мс (б)
Здесь At и Ащ представляют собой протяжённость во времени (длительность)
и протяжённость по частоте (ширина полосы) сигнала x(t) и его преобразования
Х(щ) соответственно. Суть ограничения, сформулированного выше, состоит в том,
что как сигнал, так и его преобразование Фурье не могут быть сделаны произвольно
узкими. Влияние этого ограничения на анализ, основанный на ПФКИ и ВЧР,
заключается в том, что мы не можем одновременно получить произвольно высокое
разрешение как по временной оси, так и по частотной оси.
Фиксированная сегментация
349
Время, с
Рис. 8.6. Спектрограммы (СПМ в логарифмическом масштабе) речевого сигнала, показанного
на рис. 8.5 а с использованием скользящего окна длительностью 64 мс (512 отсчётов при
fs = 8 кГц), с шагом перемещения окна равным 32 мс (а); со скользящем окном длитель-
ностью 128 мс (1024 отсчёта), с шагом перемещения окна равным 64 мс (б)
В предельном случае непрерывный по времени сигнал x(t) даёт бесконечное вре-
менное разрешение, но никакого частотного разрешения: значение сигнала известно
в любой момент времени t, но ничего не известно о частотном содержании этого
сигнала. И наоборот, СПМ Sxx(f) даёт бесконечное частотное разрешение, но не
обеспечивает никакого временного разрешения: общая мощность синусоид для лю-
бой частоты /, присутствующей в сигнале на протяжении всего времени t, известна,
но ничего не известно о том, когда точно по времени данная частотная компонента
350 Гл. 8. Анализ нестационарных сигналов
начинается и заканчивается. (Фазовый спектр содержит эту информацию, но его
трудно интерпретировать и использовать для решения рассматриваемых здесь задач.)
В случае дискретного сигнала и дискретного спектра интервалы дискретизации
по времени At и в частотной области А/ будут конечными и ограниченными
неравенством Гейзенберга, как было показано выше. Повышение разрешения по
времени для ПФКИ путём использования окна анализа меньшей длительности будет
ухудшать частотное разрешение; с другой стороны, увеличение длительности окна
приведёт к потере разрешения по времени.
В общем случае функция окна w(n), включённая в уравнение (8.8), не обяза-
тельно должна быть прямоугольной: может быть использована любая из оконных
функций, перечисленных в разд. 6.4.3. После того как выбрано какое-нибудь окно,
совместное время-частотное разрешение будет одинаково для всей время-частотной
плоскости.
В выражении (8.8) для ПФКИ используется каузальное окно анализа, начина-
ющееся в момент времени т, который является аргументом ПФКИ. Часто также
используется симметричное некаузальное окно, определённое для —M/2 М/2.
В этом случае опорной точкой окна анализа будет центр окна.
Иллюстрация применения. На рис. 8.5 и 8.6 приведены спектрограммы речевого
сигнала, показанного на рис. 1.29 для различных параметров окон. Спектрограммы
показаны как монохромные изображения, на которых глубина чёрного цвета в каж-
дой точке пропорциональна логарифмической СПМ для соответствующего положе-
ния временного окна анализа и частотной координаты. Очевидно, что увеличение
длины окна анализа даёт лучшее частотное разрешение (более высокая чёткость ча-
стотных компонент). В то же время при этом снижается временное разрешение (т. е.
наблюдается размывание изображения во временном измерении). Уменьшение длины
окна вызывает противоположные эффекты. Спектрограмма на рис. 8.5 б с окном
анализа длительностью 16 мс ясно иллюстрируют высокочастотную (широкополос-
ную) природу фрикативов. Также отчётливо виден преходящий и широкополосный
характер взрывного звука [Т]. С другой стороны, на спектрограмме, приведённой
на рис. 8.6 б, где окно анализа достаточно велико (128 мс), те же самые черты видны
недостаточно отчётливо. Однако здесь чётко просматривается структура формантов
гласных компонент речи, которые почти не различимы на рис. 8.5 б.
8.5. Адаптивная сегментация
Одним из ограничений анализа по коротким интервалам является использование
окна фиксированной длительности. Хотя сигнал может оставаться стационарным на
протяжении значительно большего отрезка времени, чем выбранная длительность
окна, на всем протяжении данного участка он будет разбит на множество сегментов.
И наоборот, сигнал может менять свои характеристики на всем протяжении длитель-
ности фиксированного окна: анализ по коротким интервалам не может гарантировать
стационарности сигнала даже за период относительно короткой длительности ис-
пользуемого окна анализа. Было бы желательно адаптировать окно анализа к измене-
ниям в данном сигнале, давая возможность окну быть настолько длинным, насколько
это возможно на протяжении того времени, пока сигнал остаётся стационарным,
и начиная новое окно точно в тот момент времени, когда сигнал (или связанная
с ним система) изменяет свои характеристики.
Задача. Предложить методы для разбиения нестационарного сигнала на
квазистационарные сегменты переменной длительности.
Адаптивная сегментация
351
Решение. Мы видели в п. 7.5, что сигнал, который может быть представлен или
смоделирован как линейная комбинация небольшого количества его прошлых значе-
ний, подвержен некоторой незначительной ошибке предсказания. Из этого следует,
что если сигнал изменяет своё поведение, то он не может быть далее предсказан по
его предшествующим отсчётам, поскольку они будут соответствовать предыдущему
состоянию динамической системы, генерирующей нестационарный сигнал. Следова-
тельно, мы можем ожидать большого скачка в ошибке предсказания в те моменты
времени, когда сигнал изменяет свои характеристики. Более того, параметры АР-
модели представляют систему, генерирующую сигнал, и дают полюса этой системы.
Если какая-либо система изменяется, в смысле изменения положения её полюсов,
то модель перестаёт соответствовать системе; в такой момент изменений должна
быть инициирована новая модель. Это предполагает, что мы можем оценивать
АР-модель на основе анализа по коротким интервалам и отслеживать параметры
модели от сегмента к сегменту. Существенное изменение параметров модели будет
в этом случае указывать на точку изменения в сигнале. (Мы видели в п. 7.9, как
аналогичный подход был использован Iwata и др. [207] для обнаружения компонент
S1 и S2 в сигнале ФКГ.) Смежные сегменты, имеющие одинаковые или сходные
параметры модели, могут быть объединены путём конкатенации для формирования
более длительных сегментов. Поскольку АР-модель даёт несколько параметров
и может быть интерпретирована несколькими различными путями (см. разд. 7.5.2),
отслеживание поведения этой модели на протяжении периода анализа с использова-
нием скользящего окна может быть выполнено различными способами. В следующих
разделах представлено более подробное описание нескольких подходов к адаптивной
сегментации, основанной на высказанных выше соображениях.
8.5.1. Мера спектральной ошибки (МСО). Боденштайн и Преториус (Boden-
stein, Praetorius) [98, 234] использовали для адаптивной сегментации сигналов ЭЭГ
на квазистационарные сегменты, а также для дальнейшего выделения признаков,
полюсную ЛП-модель или АР-модель (см. разд. 7.5). Они сделали следующие на-
блюдения о применении АР-моделирования к сигналам ЭЭГ.
• Временная область', текущее значение ошибки предсказания указывает на мгно-
венную степень «неожиданности» в сигнале.
• Автокорреляционная область', ошибка предсказания не коррелирована.
• Спектральная область', если ошибка предсказания является белым шумом, то
АР-модель даёт полюсное представление спектра сигнала, что особенно хорошо
подходит для моделирования резонанса.
Данные свойства полезны для решения следующих задач:
• обнаружение и устранение преходящих событий;
• сегментация ЭЭГ на квазистационарные сегменты;
• выделение признаков и распознавание образов (диагностика).
Ferber [235] даёт описание нестационарностей в сигнале ЭЭГ и предлагает
несколько подходов к решению тех же самых проблем.
Анализ спектральных изменений. Пусть СПМ данного нестационарного сигна-
ла будет 5(0, о;) в нулевой момент времени и 5(£,о>) в момент времени t. Спектраль-
ную ошибку от S(t,ca) по отношению к 5(0, о;) можно рассматривать как функцию
разности между соответствующими СПМ в логарифмическом масштабе, т. е. она
пропорциональна log[5(t,cu)] — log[5(0, си)], или, что эквивалентно, пропорциональна
5(£,cv)/5(0,a>). Рассмотрим такое состояние, когда АР-модель адаптирована к спек-
тру сигнала 5(0, о;) в нулевой момент времени. Если мы пропустим сигнал в момент
времени t через АР-модель, то ошибка предсказания будет иметь мгновенный спектр,
352
Гл. 8. Анализ нестационарных сигналов
задаваемый выражением
с / ч _ S(t,cv)
5е(ш) - 5(0,о;)’ (8Л
которое сходно со спектральным отношением, задаваемым уравнением (7.50). Таки
образом, проблема сравнения двух произвольных СПМ от нестационарного сигнала
в два различных момента времени может теперь быть сформулирована как проверка
величины Se(u) на отклонение от равномерной СПМ.
Пусть ац(к), к = 1,2, ... ,Р представляет собой опорную АР-модель. Когда теку-
щий сигнал у(п) пропускается через фильтр, представленный этой АР-моделью, мы
получаем ошибку предсказания
р
е(п) = ^aR(k)y(n - к). (8.16
к=0
Эта ошибка показывает отклонение текущего сигнала от предварительно рассчитан-
ной модели. Рассмотрим интеграл
в — j [1 — 5е(а;)]2с?щ, (8.17)
— оо
где Se(w) представляет собой СПМ ошибки предсказания. В идеальном случае, когда
АР-модель была оптимизирована для рассматриваемого сигнала, ожидается, что
ошибка предсказания имеет равномерную СПМ. Однако если сигнал является неста-
ционарным, то в спектральных характеристиках сигнала могут произойти какие-то
изменения, которые должны будут отразиться на значении СПМ ошибки. Если фе(к)
является АКФ, соответствующей Se(cj), то последняя получается из преобразования
Фурье от первой. Однако, поскольку обе функции являются вещественными и чёт-
ными, мы имеем
Se(cj) = </>е(0) 4- 2 ^2 Фе(к) cos(2ttcjA;). (8.18)
к=\
Тогда
ОО ж
е= [1 -фе(0) — 2 y^^e(fc)cos(27rwfc)]2dw. (8.19)
-оо fe='
В силу ортогональности тригонометрических функций, получаем
оо
е= [1-<М0)]2 + 2 (8.20)
На практике суммирование может быть выполнено вплоть до некоторой величины
задержки, например М. Боденштайн и Преториус [98] рекомендуют нормализовать
меру ошибки путём деления на </>i(0), что ведёт к мере спектральной ошибки (МСО.
spectral error measure, SEM)
" 1 “I 2 Л/ r / /1 \ "I 2
SEM= ^-1 +2£ . (8.21)
0e(B) 0e(O)
•" k=1 •"
Здесь первый член представляет собой изменение в общей мощности ошибки пред-
сказания; второй член зависит только от изменений в форме спектра. Отметим,
Адаптивная сегментация
353
что ожидаемая ошибка предсказания имеет равномерную (плоскую) СПМ до тех
пор, пока сигнал остаётся стационарным по отношению к разработанной АР-модели.
Было показано, что МСО существенно изменяется в ответ на изменение спектраль-
ных характеристик сигналов ЭЭГ и является полезной для разбиения сигналов на
квазистационарные участки. На рис. 8.7 показана общая схема сегментации ЭЭГ
с использованием МСО.
Рис. 8.7. Адаптивная сегментация сигналов ЭЭГ с использованием МСО: исходный сигнал
ЭЭГ (а); в начале каждого адаптивного сегмента показано фиксированное прямоугольное
окно, по которому оптимизируется АР-модель. Ошибка предсказания; начальная АКФ ошиб-
ки рассчитывается по фиксированному окну; скользящая АКФ ошибки рассчитывается по
скользящему окну (б). Порог сегментации (в). МСО (г). Вертикальные линии показывают
границы сегментации. Воспроизводится с разрешения G. Bodenstein and Н. М. Praetorius,
Feature extraction from the electroencephalogram by adaptive segmentation, Proceedings of the
IEEE, 65(5):642-652, 1977. ©IEEE
Алгоритм для адаптивной сегментации [98]. Пусть п = 0 представляет собой
начальную точку анализа, где первое опорное или фиксированное окно анализа
для каждого адаптивного сегмента позиционируется так, как показано на рис. 8.7 а.
Перед произвольно выбранной начальной точкой при п = 0 должно быть доступно
по меньшей мере N 4- Р отсчётов сигнала у(п), где 2N 4- 1 — размер окна анализа,
а Р — порядок используемой АР-модели.
1. С использованием отсчётов сигнала от y(—N) до y(N) рассчитывается АКФ
сигнала вплоть до сдвига, равного Р.
2. Строится соответствующая АР-модель порядка Р.
3. С использованием значений сигнала от y(—N — Р) до у(п 4- N) рассчитывается
ошибка предсказания от е(—N) до е(п 4- N) и рассчитывается скользящая АКФ
для короткого интервала фе(п,т) от ошибки предсказания
। N—m
фе(п,т) = 1 5л е(п + к)е(п + к + т). (8.22)
k= — N
Отметим, что теперь АКФ имеет два индекса: первый индекс п показывает
положение окна анализа для коротких интервалов, а второй индекс т показывает
сдвиг, для которого рассчитывается АКФ.
23 Р. Рангайян
354
Гл. 8. Анализ нестационарных сигналов
4. Рассчитывается фе(О,т) для т = 0,1,2, ... , М. Это соответствует фиксирован-
ному окну в начале каждого адаптивного сегмента на рис. 8.7 а.
Для каждой точки данных выполняются следующие три шага:
5. Рассчитывается фе(п,т) для скользящего окна (см. рис. 8.7 6) с использование*/
рекурсивного соотношения
фе(п,т) =фе(п — 1,т) + е(п + N)e(n + N — т) — е(п — N — l)e(n — N — 1 — т).
(8.23)
На рис. 8.7 6 это соответствует скользящему окну.
6. Рассчитывается МСО для момента времени п как
SfiW(n) =
'^(0,0) ,]2 , оуЧ^Л)]2
</>е(тг,О) Фе(п,0)
*- J кА
(8.24)
где </>е(0,0) отражает тот факт, что сигнал может иметь произвольный уровень
мощности.
7. Проверяется неравенство SEM(n) > Th\, vji£ Th\ представляет собой порог.
Если данное условие не удовлетворяется, то п увеличивается на единицу и про-
исходит возврат к шагу 5. Если данное условие удовлетворяется, считается, что
граница данного сегмента обнаружена в момент времени п, как это показано
вертикальными линиями на рис. 8.7. После этого процедура сбрасывается в на-
чальное состояние следующим шагом:
8. Выполняется сдвиг по оси времени путём замены п к на к — N и процедура
начинается снова с шага 1.
Исследования, проведённые Боденштайном и Преториусом [98], показали, что
если используется окно длительностью 2 с (27V + 1 = 101 отсчёт при fs = 50 Гц),
то в МСО наблюдаются резкие скачки на тех участках, где преходящие события
длительностью менее 100 мс входят в пределы окна и выходят из него. Такие
скачки могут приводить к неправильной сегментации, особенно при эпизодах ЭЭГ
типа «вспышка-угнетение» (burst-suppression) (см. рис. 8.8). Для преодоления этой
проблемы, было предложено ограничивать (усекать) ошибку е(п) с использованием
порога Th?.
если <8-25>
[sgn[e(n)]77i2, если |е(п)| > Тп<2.
Порог Th<2 показан на рис. 8.8 в пунктирной линией. На рис. 8.8 г показана МСО,
рассчитанная с использованием усечённой величины е(п). Это значение МСО при
сравнении с исходным значением порога Th\ даёт правильные границы сегментации.
На рис. 8.8 д показан сигнал, восстановленный из усечённой ошибки предсказания,
что показывает, что процедура усечения подавляет эффект преходящих событий, не
воздействуя при этом не остальную часть сигнала.
Несмотря на использование усечения в соответствии с уравнением (8.25), было
отмечено [98], что данная процедура была слишком чувствительна и вызывала
ложные сигналы тревоги. С целью дополнительного ограничения влияния случайных
флуктуаций в ошибке предсказания, для тех отсчётов е(п), которые не удовлетворяли
условию |e(n)| > Th^, рассчитывалась сглаженная версия квадрата ошибки предска-
зания:
es(n) = е2(п — 1) + 2e2(n) + e2(n + 1).
(8.26)
Адаптивная сегментация
355
1 2
Рис. 8.8. Устранение преходящих событий путём усечения ошибки предсказания. Исходный
сигнал ЭЭГ, содержащий событий типа «вспышка-угнетение» (а); за острой волной, помечен-
ной стрелкой 1, следует начало вспышки, помеченной стрелкой 2. МСО, содержащая внезап-
ные скачки в точках, отмеченных стрелками 3 и 4, в те моменты, когда острая волна входит
в пределы окна анализа и выходит из него (б). Усечение ошибки предсказания с использовани-
ем порога Th2 (в). МСО после усечения ошибки предсказания. Пунктирная линия показывает
порог Th\ (г). Сигнал, восстановленный из усечённой ошибки предсказания (б). Воспроизво-
дится с разрешения G. Bodenstein and Н. М. Praetorius, Feature extraction from the electroen-
cephalogram by adaptive segmentation, Proceedings of the IEEE, 65(5):642-652, 1977. ©IEEE
К значениям es(ri) применялся другой порог Th%. При этом тройка отсчётов
{у(п — 1),у(п),у(п 4- 1)} рассматривалась как часть преходящего события только
в случае, если es(n) > Ths. Метод Боденштайна и Преториуса объединяет в себе
адаптивную сегментацию сигналов ЭЭГ с обнаружением преходящих событий,
поскольку обе эти задачи взаимосвязаны.
Иллюстрация применения. На рис. 8.9 показан сигнал ЭЭГ ребёнка в стадии
сна I. В сигнале наблюдаются веретёна с частотой 14 Гц. Также на рисунке показаны
МСО и её компоненты. Вертикальные линии показывают обнаруженные границы
сегментов. Bodenstein и др. [236] и Creutzfeldt и др. [237] описали дальнейшее
расширение данного подхода к компьютерной классификации образов в сигнале ЭЭГ,
включающее кластеризацию сходных сегментов и присвоение меток в соответствии
с определённым по записи ЭЭГ типом активности.
Tavathia и др. [55] использовали метод МСО для адаптивной сегментации сигна-
лов ВАГ. Было отмечено, что каждый сегмент может быть охарактеризован частотой
доминирующего полюса, полученного с использованием АР-моделирования, и отно-
шением спектральной мощности 2?40:120 в соответствии с выражением (6.48); однако
каких-либо экспериментов по классификации выполнено не было. В разд. 8.5.4 и 8.7
будут представлены другие примеры применения методики МСО.
8.5.2. Расстояние по АКФ. Майкл и Хаучин (Michael, Houchin) [238] предло-
жили метод, который имеет много общего с методом Боденштайна и Преториуса
[98], но основан на более простой схеме с использованием АКФ. Следует отметить,
что коэффициенты АР-модели действительно получаются из АКФ и что спектр,
используемый для вычисления МСО, связан с соответствующей АКФ преобразо-
ванием Фурье. Однако прямое использование АКФ устраняет подразумеваемое при
АР-моделировании предположение, что сигнал является результатом АР процесса.
В методе Майкла и Хаучина АКФ рассматривается как статистическая харак-
теристика данного сигнала и в качестве критерия для обнаружения нестационар-
23*
356
Гл. 8. Анализ нестационарных сигналов
Рис. 8.9. Использование меры спектральной ошибки МСО для сегментации сигнала ЭЭГ.
Исходный сигнал ЭЭГ ребёнка в стадии сна I (а)\ в сигнале наблюдаются веретёна с частотой
14 Гц; порог сегментации (б); МСО (в); отклонения в мощности ошибки предсказания (г);
отклонения в форме спектра ошибки предсказания (б). Вертикальные линии показывают
границы сегментации. Воспроизводится с разрешения G. Bodenstein and Н. М. Praetorius,
Feature extraction from the electroencephalogram by adaptive segmentation, Proceedings of the
IEEE, 65(5):642-652, 1977. ©IEEE
ностей используются существенные вариации в АКФ. В начале каждой процедуры
сканирования выбирается опорное окно и входной сигнал (ЭЭГ) наблюдается через
скользящее окно. Длительность окна должна быть выбрана так, чтобы оно было
короче, чем наиболее короткий ожидаемый квазистационарный сегмент данного сиг-
нала, но достаточно длинным для того, чтобы достоверно характеризовать наимень-
шую присутствующую частоту. Если разница между статистиками сигнала (АКФ)
в скользящем окне и в опорном окне является существенной, то отмечается граница
сегмента и процедура начинается сначала.
Пусть фя(к) — АКФ опорного окна в начале нового шага сегментации, где к —
задержка или сдвиг. Пусть фт(п, к) — АКФ тестового окна, позиционированного
в момент времени п. Учитывая, что АКФ для нулевого сдвига представляет собой
мощность сигнала, Майкл и Хаучин предложили рассчитывать нормализованное рас-
стояние по мощности dp(n) между автокорреляционными функциями как (см. также
Appel и v. Brandt [220])
, , . - У^д(0)|
аР(п) = —J—f ... —. (o.Z7)
min{V<M«,0), VMfi)}
Спектральное расстояние dp(n) (только до задержки, равной q) рассчитывалось
с использованием коэффициентов АКФ как
dF(n) 0,5 + n=imin{v^M,V^W}’
Предел задержки q был установлен как наименьшее значение задержки, при котором
значения автокорреляционных функций в первый раз изменяются от положительных
к отрицательным. Итоговое расстояние по АКФ d(n) рассчитывалось как
<!(„) + (8.29)
Адаптивная сегментация
357
где Thp и Th,F — пороги. В качестве показателя наличия значительных изменений
в АКФ рассматривалось условие d(ri) > 1, в случаях выполнения которого отмеча-
лись границы сегмента.
Благодаря использованию скользящего окна конечного размера истинная граница
или точка изменения в характеристиках сигнала будет лежать внутри последнего
тестового окна перед тем окном, для которого будет отмечена граница сегмента. Для
компенсации такого смещения Майкл и Хаучин использовали процедуру линейной
интерполяции, основанную на оценке крутизны получаемой функции расстояния по
АКФ. Barlow и др. [239] дали иллюстрации применения этого метода к клиническим
записям ЭЭГ. Предложенный ими метод включает кластеризацию сходных сегмен-
тов, основанную на значениях средней амплитуды и средней частоты, использование
«дендрограмм», иллюстрирующих кластеризацию сегментов, а также процедуру при-
своения меток различным состояниям, найденным в записи ЭЭГ. В п. 8.5.4 будет
дана иллюстрация применения метода АКФ.
8.5.3. Обобщённое отношение правдоподобия (ООП). Метод обобщённого
отношения правдоподобия (ООП, generalized likelihood ratio, GLR), предложенный
Аппелем и ван Брандтом (Appel and v. Brandt) [219], использует опорное окно,
которое постоянно увеличивается в размерах до тех пор, пока не будет отмечена
новая граница. В качестве тестового окна, как и в случае методов МСО и АКФ,
используется скользящее окно с постоянной длительностью. На рис. 8.10 показаны
используемые окна. Преимуществом расширяющегося опорного окна является то,
Расширяющееся опорное окно
Скользящее
тестовое окно
Объединённое окно
Рис. 8.10. Окна, используемые при адаптивной сегментации по методу ООП: расширяющееся
опорное окно, скользящее тестовое окно и объединённое окно
что оно содержит максимальное количество информации, доступной от начала но-
вого сегмента до текущего момента времени. Определяются три различных набора
данных: расширяющееся опорное окно, скользящее тестовое окно и объединенное
окно, сформированное путём конкатенации двух первых. Затем с использованием
ошибки предсказания АР-модели вычисляется мера расстояния для этих трёх набо-
ров данных.
Пусть е(т : п) представляет собой энергию ошибки предсказания (ОКО е как
в уравнении (7.19)) в пределах произвольного набора данных или окна с границами т
и п. Максимальная логарифмическая оценка правдоподобия Н(т : п) для этого окна
определяется как
Н(т : п) = (п — т + 1) In
е(т: п)
(п — т 4-1)
(8.30)
358 Гл. 8. Анализ нестационарных сигналов
Для трёх описанных выше наборов данных рассчитываются три оценки: Я(1 : т — 1)
для расширяющегося опорного окна, Н(т\п) для тестового окна и Н(\ : п) для
составного или объединённого окна. Здесь опорное окно обозначено так, что оно
начинается от момента времени или отсчёта 1, т — это последний отсчёт расширя-
ющегося опорного окна, а текущее тестовое окно охватывает длительность от т до
текущего момента времени п (см. рис. 8.10). Оценка расстояния ООП определяется
как
d(n) = Я(1 : п) - [Н(1 : т - 1) + Н(т : п)]. (8.31)
Здесь первая величина представляет собой ОКО в случае, если тестовое окно
добавляется к расширяющемуся опорному окну; вторая величина представляет собой
ОКО опорного окна, которое всё ещё расширяется, и третья величина представляет
собой ОКО при моделировании самого тестового окна. Оценка d(n) отвечает на
следующий вопрос: «Насколько велико увеличение ОКО, если мы добавим тестовое
окно к расширяющемуся опорному окну?»
Аппель и ван Брандт [219] и Кохен (Cohen) [173] сообщают дополнительные
подробности о методе ООП. Расстояние по ООП является мерой статистического
сходства опорного и тестового наборов данных в предположении, что коэффициенты
их авторегрессионных моделей имеют нормальное (гауссовское) распределение. Рас-
стояние ООП является также мерой потери информации, происходящей в случае,
если никакие границы сегмента не установлены в соответствии с положением
тестового окна, т. е. если предполагается, что нулевая гипотеза о сходстве между
собой данных двух последовательностей является истинной.
Аппель и ван Брандт [219] рассматривают вопросы, связанные с выбором пара-
метров, используемых в методе ООП, включая порядок АР-модели, длину тестового
окна и порог для оценки расстояния ООП. Метод ООП был также использован
Willsky и Jones [240] для обнаружения резких изменений (спорадических аномалий
и провалов) в переменных параметрах стохастических линейных систем, a Bas-
seville и Benveniste [241] — для сегментации нестационарных сигналов (см. также
Кохен [173]). В разд. 8.5.4 будет дана иллюстрация применения метода ООП.
8.5.4. Сравнительный анализ методов АКФ, МСО и ООП. Аппель и ван
Брандт [220] провели сравнительный анализ эффективности методов адаптивной
сегментации на основе АКФ, МСО и ООП, использовав при этом синтезированные
сигналы, а также сигналы ЭЭГ. Моделирование нестационарных сигналов было
выполнено с помощью простой двухполюсной системы. Коэффициент усиления,
радиус полюса и угол полюса по отдельности варьировались в обе стороны между
двумя наборами значений. Подавая на вход этой динамической системы случайный
сигнал (белый шум с гауссовским распределением) авторы получили несколько
вариантов выходных сигналов. Сигналы обрабатывались методами адаптивной сег-
ментации на основе АКФ, МСО и ООП, при этом анализировалась вариабельность
обнаружения границ сегментов для различных реализаций нестационарного (слу-
чайного) выходного сигнала при одних и тех же последовательностях параметров
системы.
На рис. 8.11 показаны результаты, соответствующие изменениям углов полюсов,
т. е. резонансных частот системы. Угол полюса в верхней половине z-плоскости
изменялся с 20 до 40° и обратно в моменты времени, соответствующие отсчётам
200 и 400; комплексно сопряжённый полюс менялся при этом точно так же. Те же
самые изменения были повторены для отсчётов 700 и 800. В верхней части рисунка
показаны позиции полюсов и соответствующие СПМ. На средней части графика
продемонстрирован образец одного из 200 сгенерированных тестовых сигналов: на
Адаптивная сегментация
359
Нормализованная частота
б
100 200 300 400 500 600 700 800 900 1000
Число отсчётов
Рис. 8.11. Сравнительный анализ методов адаптивной сегментации на основе АКФ, МСО
и ООП при изменении угла полюса. Варианты положения полюсов (а) и соответствующие
им кривые СПМ (б). (Замечание. Нормализованная частота выбрана так, что наибольшая
присутствующая в дискретизованном сигнале частота соответствует единице.) Образец те-
стового сигнала (в). Вариабельность индексов обнаружения сегмента (пунктирные кривые)
и оценок позиций границ сегмента (сплошные кривые) для всех трёх методов по результатам
анализа 200 реализаций тестовых сигналов (г); см. подробности в тексте. Воспроизводится
с разрешения U. Appel and A. v. Brandt, A comparative analysis of three sequential time series
segmentation algorithms, Signal Processing, 6:45-60, 1984. ©Elsevier Science Publishers В. V.
(North Holland)
интервалах 200-400 и 700-800 отсчётов хорошо заметен более высокочастотный ха-
рактер сигнала, что связано со сдвигом полюса (т. е. с изменением угла с 20° на 40).
Нижние графики иллюстрируют вариабельность индексов обнаружения сегмента
। пунктирные кривые) и оценок позиций границ сегмента (сплошные кривые) для
всех трёх методов по результатам анализа 200 реализаций тестовых сигналов.
Индексы сегментов и их границы имеют следующие истинные значения: 1:200,
360 Гл. 8. Анализ нестационарных сигналов
2 : 400, 3 : 700 и 4 : 800; в идеальном случае на данных кривых должны наблюдаться
скачки в точках изменения.) Очевидно, что метод ООП даёт наиболее состоятельные
и точные результаты сегментации, хотя и ценой повышенной вычислительной слож-
ности. Метод МСО работает лучше, чем метод АКФ, при этом последний показывает
наименее точные результаты.
На рис. 8.12 показаны результаты, связанные с изменением расстояния полюсов
от начала координат, т. е. с изменением ширины полосы для резонансной частоты
системы. Расстояние полюсов от начала координат менялось от 0,7 до 0,9 и обратно
при отсчётах 200 и 400. Те же самые изменения были повторены при отсчётах 700
и 800. По кривым СПМ можно видеть, что перемещение полюсов по направлению
к единичной окружности приводит к большей выраженности спектрального пика.
При распознавании границ нестационарностей этого типа для тестовых сигналов
метод АКФ дал неудовлетворительные результаты. Метод ООП позволил получить
более точную сегментацию, чем метод МСО.
На рис. 8.13 показаны результаты применения этих трёх методов к сигналу
ЭЭГ. Хотя для сигнала ЭЭГ неизвестна точная локализация тех мест, где сигнал
меняет свои характеристики, границы, определённые методом ООП, выглядят более
точными. В реальных применениях более желательно иметь ошибки в сторону избы-
точной сегментации; последующий шаг кластеризации может позволить объединить
смежные сегменты со сходными параметрами модели.
8.6. Использование адаптивных фильтров
для сегментации
Мы видели в разд. 3.6.2 и 3.6.3, что векторы коэффициентов (весов) адаптивных
фильтров МНК и РНК выражаются как функции от времени. Фильтры адаптиру-
ются к изменениям в статистических свойствах первичного и опорного сигналов.
Следовательно, возникает вопрос: можно ли использовать весовой вектор w(n) для
обнаружения нестационарностей в сигнале?
Задача. Исследовать потенциальную возможность использования адаптив-
ного фильтра РНК для адаптивной сегментации нестационарных сигналов.
Решение. Когда в нашем распоряжении имеется только один сигнал (тот са-
мый сигнал, который должен быть сегментирован), возникает вопрос: откуда мы
можем получить два входных сигнала, а именно первичный и опорный сигналы
для адаптивного фильтра? Если мы предположим, что сигнал, который требуется
сегментировать (подаваемый на первичный вход), был сгенерирован АР-системой, то
тогда можно использовать тот же самый сигнал с задержкой в качестве опорного
входного сигнала для адаптивного фильтра. Задержка должна быть установлена
таким образом, чтобы опорный вход в любой заданный момент времени не был
коррелирован с первичным входом; задержка может также быть выбрана на основе
порядка фильтра. (Кроме того, в качестве опорного входного сигнала можно исполь-
зовать белый шум.) В сущности, адаптивный фильтр в этом случае играет роль
адаптивной АР-модели. Вектор весов фильтра постоянно адаптируется к изменениям
в статистических характеристиках (АКФ) входного сигнала. Выход фильтра пред-
ставляет собой ошибку предсказания. Значительные изменения в векторе весов или
в ошибке предсказания могут быть использованы как точки, отмечающие существен-
ные нестационарности в сигнале. На рис. 8.14 показана диаграмма обработки сигнала
адаптивным фильтром, используемым в соответствии с описанным выше принципом;
структура фильтра лишь слегка отличается от показанной на рис. 3.51.
Использование адаптивных фильтров для сегментации
361
100 200 300 400 500 600 700 800 900 1000
Число отсчётов
г
Рис. 8.12. Сравнительный анализ методов адаптивной сегментации на основе АКФ, МСО
и ООП при изменении радиуса полюса. Варианты положения полюсов (а) и соответствующие
им кривые СПМ (б). (Замечание. Нормализованная частота выбрана так, что наибольшая
присутствующая в дискретизованном сигнале частота соответствует единице.) Образец те-
стового сигнала (в). Вариабельность индексов обнаружения сегмента (пунктирные кривые)
и оценок позиций границ сегмента (сплошные кривые) для всех трёх методов по результатам
анализа 200 реализаций тестовых сигналов (г); см. подробности в тексте. Воспроизводится
с разрешения U. Appel and A. v. Brandt, A comparative analysis of three sequential time series
segmentation algorithms, Signal Processing, 6:45-60, 1984. ©Elsevier Science Publishers В. V.
(North Holland)
8.6.1. Мониторинг РНК-фильтра. РНК-фильтр, показанный на рис. 8.14, пред-
назначен для предсказания отсчётов текущего сигнала на основе доступной ин-
формации о предыдущих отсчётах, хранящихся в элементах памяти фильтра. Если
в сигнале происходят существенные изменения, ошибка предсказания соответствен-
но показывает большие величины. В ответ на это алгоритм РНК модифицирует
вектор весовых коэффициентов фильтра.
362
Гл. 8. Анализ нестационарных сигналов
Рис. 8.13 Сравнительный анализ методов адаптивной сегментации на основе АКФ, МСО
и ООП для сигнала ЭЭГ. Воспроизводится с разрешения U. Appel and A. v. Brandt, A compara-
tive analysis of three sequential time series segmentation algorithms, Signal Processing, 6:45-60,
1984. ©Elsevier Science Publishers В. V. (North Holland)
Рис. 8.14. Адаптивный РНК-фильтр для сегментации нестационарных сигналов
Муссави (Moussavi) и др. [56] использовали РНК-фильтр для сегментации
сигналов ВАГ. Порядок фильтра был выбран равным 5, что, с одной стороны,
является достаточно низким значением для обнаружения преходящих изменений,
а с другой — обеспечивает быструю сходимость. Значение коэффициента забывания
А было выбрано равным 0,98, что позволяло считать условия работы фильтра
почти стационарными. Задержка между входным и опорным сигналами составляла
7 отсчётов, т. е. 3,5 мс при fs=2 кГц.
Алгоритм адаптивной сегментации Муссави и др. включает следующие основные
этапы.
1. Инициализация РНК алгоритма.
Использование адаптивных фильтров для сегментации 363
2. Определение квадратичного евклидова расстояния между текущим весовым век-
тором w(n) и предшествующим вектором весов w(t? — 1) как
Д(п) = |w(n) - w(n - 1)|2. (8.32)
3. Расчёт стандартного отклонения для величин Д(п) после вычисления Д(п) для
всех доступных отсчётов сигнала (при обработке в режиме off-line). Определение
порога, равного утроенному значению стандартного отклонения.
4. Присвоение всем номерам отсчётов п, для которых Д(п) превышает порог,
статуса предварительных границ сегмента.
5. Вычисление предварительных длительностей сегмента как разностей между по-
следовательными предварительными границами сегмента. Отмена статуса пред-
варительных границ сегмента для тех случаев, когда рассчитанные значения
длительностей сегментов оказываются меньше, чем предварительно заданный
минимум (определённый в работе Муссави и др. [56] как 120 отсчётов или 60 мс,
что соответствует углу сгибания колена приблизительно 4°).
6. Оставшиеся граничные точки считаются окончательными границами сегментов.
Главным преимуществом метода РНК по сравнению с методами АКФ, МСО
и ООП является то, что при этом не требуются в явном виде опорный вход и тестовое
окно. Метод РНК рассчитывает новый вектор весов фильтра для каждого отсчёта
входящего сигнала. Было показано, что данный метод позволяет эффективно обна-
руживать как постепенные изменения сигнала ВАГ в виде тренда, так и внезапные
изменения характера сигнала.
Иллюстрация применения. На рис. 8.15 и 8.16 показана сегментация сигналов
ВАГ для пациента в норме и для пациента с подтверждённой артроскопическим
исследованием патологией хряща соответственно. На этих рисунках также показаны
спектрограммы данных двух сигналов. В то время как сегментация патологического
сигнала на рис. 8.16 может на первый взгляд показаться избыточной, вниматель-
ное рассмотрение соответствующей спектрограммы показывает, что спектральные
характеристики этого сигнала действительно изменяются в пределах коротких ин-
тервалов. Как можно видеть, использование метода РНК позволило обнаружить
различные типы нестационарностей, присутствующих в сигналах. Moussavi и др. [56]
выполнили тестирование данного метода с использованием 46 записей сигналов ВАГ
и установили, что границы сегментации хорошо согласуются с природой суставных
звуков, которые слышны при аускультации с использованием стетоскопа, а также
с наблюдаемыми в спектрограммах этих сигналов спектральными изменениями.
8.6.2. Решётчатый РНК-фильтр. Для адаптивной сегментации с помощью ме-
тода РНК в условиях нестационарности требуется использование некоторого быстро-
го рекурсивного алгоритма решения среднеквадратичной задачи. Хорошим решением
этой проблемы является применение решётчатого алгоритма рекурсивного мето-
да наименьших квадратов (РРНК, recursive least-squares lattice, RLSL). Поскольку
метод РРНК использует решётчатый фильтр и основан на предсказании вперёд и на-
зад, а также на меняющихся во времени коэффициентах отражения, необходимо дать
определение некоторых процедур, связанных с перечисленными выше понятиями.
Предсказание вперёд и назад. Перепишем уравнение (7.17), относящееся к ЛП-
и АР-моделированию, в виде
м
у(п) = - ^2aM,ky(n-k), (8.33)
fc=i
364
Гл. 8. Анализ нестационарных сигналов
Время, с
б
3000 х.
2500 х
Рис. 8.15. Сегментация сигнала ВАГ пациента в норме с использованием метода РНК (а); от-
мечен щелчок, слышимый при аускультации коленного сустава. Спектрограмма (ПФКИ) этого
сигнала (б). Воспроизводится с разрешения Z.M. К. Moussavi, R. М. Rangayyan, G. D Bell,
С. В. Frank, К. О. Ladly, and Y. Т. Zhang, Screening of vibroarthrographic signals via adaptive
segmentation and linear prediction modeling, IEEE Transactions on Biomedical Engineering,
43(1):15—23, 1996. ©IEEE
где порядок модели M использован в качестве индекса для коэффициентов мо-
дели а^. В этой процедуре для предсказания текущего отсчёта у(п) в направ-
лении вперёд используется линейная комбинация М последних отсчётов сигнала
у(п — 1), у(п — 2), , у(п — М\ Ошибка предсказания вперёд будет равна
М
ем j(n) = у(п) - у(п) = ам,кУ(п - к) (8.34)
к=0
при «м,о = 1- Данное равенство повторяет уравнение (7.18) с включением порядка
модели М в качестве индекса для ошибки е, а также индекса /, отмечающего, что
предсказание выполняются в направлении вперёд (от англ, forward).
Термин предсказание назад относится к предсказанию оценки у(п — М) по
отсчётам у(п), у(п — 1), ..., у(п — М + 1):
М-1
у(п - М) = - ам,кУ(п - к)> (8.35)
к=О
Использование адаптивных фильтров для сегментации
365
Время, с
3000 х
Рис. 8.16. Сегментация сигнала ВАГ пациента с патологией хряща с использованием метода
РНК (а); на рисунке отмечены щелчки и скрипы, которые прослушиваются при аускультации.
Спектрограмма (ПФКИ) этого сигнала (б). Воспроизводится с разрешения Z.M.K. Moussavi,
R. М. Rangayyan, G. D. Bell, С. В. Frank, К. О. Ladly, and Y. Т. Zhang, Screening of vibroarthro-
graphic signals via adaptive segmentation and linear prediction modeling, IEEE Transactions on
Biomedical Engineering, 43(1): 15-23, 1996. ©IEEE
где k — коэффициенты предсказания назад. Применение метода наименьших ква-
дратов, описанного в разд. 7.5 для стационарных сигналов, приводит к результату:
~ ам,м-к) к = 0,1,2, ..., Л/, (8.36)
т. е. коэффициенты предсказания назад те же самые, что и коэффициенты для пред-
сказания вперёд, но располагаются в противоположном порядке [77]. Следовательно,
ошибка предсказания назад (англ, backward) определяется выражением
м м
ем,ь(п) = У(п - М) - у(п - М) = ^2 ам,кУ(п ~ fc) = 52 ам,м-кУ(п - к). (8.37)
к=О к-0
Решётчатый метод Берга. Решётчатый метод Берга [77] основан на миними-
зации суммы квадратов ошибок предсказания вперёд и назад. Предполагая, что
входной сигнал у(п) является эргодическим, коэффициент эффективности
Гл. 8. Анализ нестационарных сигналов
366
можно задать в виде
N
Ьп = 52 [emj(n)
n=m+l
(8.38)
где emj(n) — ошибка предсказания вперёд, ет^(п) — ошибка предсказания назад для
порядка модели М, рекурсивно обновляемого как т = 1,2, ..., М. Длина доступного
блока данных составляет N отсчётов.
Рис. 8.17. Базовый элемент решётчатой
структуры, который выполняет рекурсив-
ные операции в соответствии с уравне-
ниями (8.41) и (8.42), а также рекурсив-
ные операции в соответствии с уравне-
ниями (8.52) и (8.53). В первом из двух
случаев, в связи со стационарностью про-
цесса, коэффициенты отражения вперёд
и назад имеют одинаковые величины и не
Если для оценки коэффициентов пред-
сказания вперёд использовать метод Левин-
сона-Дурбина, то имеем (см. п. 7.5 и урав-
нение (7.38)):
= &т — 1,/с 4“ 'Утп^'т— 1,т — кч (8.39)
где 7т — коэффициент отражения для по-
рядка т. Аналогично, для случая предска-
зания назад имеем
^т,т—к = 0"т—1,т—к 4“ 7mflm-l,m? (8.40)
•• it
с учетом замены а* к = ат,т~к.
Комбинация соотношений, задаваемых
уравнениями (8.34), (8.38), (8.39) и (8.40),
даёт решётчатую структуру для вычисления
ошибок предсказания вперёд и назад, где
эти две последовательности ошибок пред-
сказания рекурсивно взаимосвязаны в соот-
ветствии со следующими выражениями:
em,/(^) ~ ^т — l,f (^) 4“ Ут^т— l,b(^ 0
(8.41)
и
зависят от времени. Заимствовано с раз-
решения автора из S. Krishnan, Adaptive
Signal Processing Techniques for Analysis
of Knee Joint Vibroarthrographic Signals,
Ph. D. Thesis, University of Calgary, 1999
—l,b(^ D 4“
(8.42)
(При выводе этих выражений предполага-
лось, что все коэффициенты являются веще-
ственными величинами; Haykin [77] пред-
полагал, что все коэффициенты — комплексные величины.) На рис. 8.17 показан
базовый элемент решётчатой структуры, выполняющей рекурсивные операции в со-
ответствии с уравнениями (8.41) и (8.42). Коэффициент отражения 7т может быть
выбран так, чтобы минимизировать коэффициент эффективности, определяемый
уравнением (8.38), т. е. путём задания следующего условия:
N
demJ(n) .дет^ь(п)'
^тп^уТЧ д 4“ ет,ь(п)
n=m+l
= 0.
(8.43)
Частные производные по переменной 7т от уравнений (8.41) и (8.42) дают
дето,/(п)
д^т
(8.44)
Использование адаптивных фильтров для сегментации
367
и
дет ъ(п) z ч
= em-i,/(n). (8.45)
Подставляя полученные выше результаты в уравнение (8.43), получаем
N
[еш,/1,б(п 1) 4" (^)] = О* (8.46)
п=т+1
Подставляя уравнения (8.41) и (8.42) в уравнение (8.46), получаем
N
[{^m-[ f (п) 4" угпет—1,ь(п l)}em—i^(n 1) 4~
п=т+1
4“ {Ст —1,б(^ 1) 4“ 7тет—Ц/О^)}^™—1,/(^)] = 0. (8.47)
Тогда коэффициент отражения 7т может быть рассчитан как
_ 9 I2n=m+1 em-l,/(»)em-l,b(n ~ 1)
'т Z V^N г 2 / \ 2 / .м’ (0.40)
Z^m=m+1 lem—1,/(^) 4“ em—l,b(^ — D]
Значения коэффициентов отражения меньше единицы. Формула Берга всегда даёт
минимально-фазовое решение для решётчатого алгоритма предсказания.
Коэффициенты предсказания или параметры АР-модели могут быть рассчитаны
по коэффициентам отражения с использованием соотношения, заданного уравне-
нием (8.39). Порядок т рекурсивно обновляется как т = 1,2, ...,М при am,o = 1
и ат_\,к = 0 для к>т— 1. Из уравнения (8.39) и рис. 8.17 можно видеть, что
коэффициенты АР-модели могут быть рассчитаны для любого порядка модели путём
простого добавления одного или более решётчатых каскадов. При этом вычисленные
ранее значения для более низких порядков остаются неизменными. Это является
одним из главных преимуществ решётчатого алгоритма АР-моделирования Берга,
особенно в ситуациях, когда порядок моделируемой системы заранее не известен.
РРНК алгоритм для адаптивной сегментации. На рис. 8.18 показано общее
схематичное представление структуры РРНК-фильтра. В алгоритме РРНК использу-
ются два уровня обновления.
1. Обновление порядка. Эта процедура включает в себя обновление ошибки пред-
сказания вперёд emj(n), ошибки предсказания назад ет,ь(п), мощности ошибки
предсказания вперёд ет^(п) и мощности ошибки предсказания назад £т,ь(п).
Здесь т обозначает порядок модели, ап — момент времени.
2. Обновление по времени. Эта процедура включает в себя обновление по времени
параметров, обеспечивающих адаптацию, включая коэффициенты отражения
вперёд 7m,f(n) и коэффициенты отражения назад 7т,ь(п)- Заметим, что в общем
случае в условиях нестационарности 7m,/(n) 7т,ь(п).
Совместное использование обновления порядка и обновления по времени обеспе-
чивает для алгоритма РРНК чрезвычайно высокую скорость сходимости и хорошую
отслеживающую способность.
Алгоритм РРНК включает в себя три основных этапа [77, 88, 90].
1. Инициализация алгоритма и решётчатой структуры фильтра порядка М.
Параметры алгоритма инициализируются при п = 0 и для каждого порядка
т=1,2, ...,М следующим образом: мощности ошибки предсказания вперёд
sm-i,/(O) и мощности ошибки предсказания назад ет-1,ь(0) присваиваются зна-
чения, равные небольшой положительной константе; коэффициенты отражения
368
Гл. 8. Анализ нестационарных сигналов
Решётчатая часть
Оценка у(п)
Рис. 8.18. Общее схематическое представление структуры фильтра РРНК для адаптивной
сегментации нестационарных сигналов. Заимствовано с разрешения автора из S. Krishnan.
Adaptive Signal Processing Techniques for Analysis of Knee Joint Vibroarthrographic Signals
Ph. D. Thesis, University of Calgary, 1999
вперёд 7m,/(0) = 0; коэффициенты отражения назад 7тД0) = 0; коэффициен~
конверсии 7о,с(О) = 1; вспомогательная переменная Am~i(0) = 0.
Для каждого момента времени п 0 генерируются следующие переменные ну-
левого порядка: ошибка предсказания вперёд ео,/(п), равная значению входного
сигнала у(п); ошибка предсказания назад еоДп) = у(п); eoj(n) = £о,ь(^) =
= Аео,/(^ — 1) + \у(п)|2, где А — коэффициент забывания и 70,с(п) = 1.
Используемые в совместном процессе оценивания переменные для каждого
порядка т = 0,1,2, ..., М инициализируются следующим образом: в момен-
времени п = 0 скалярная величина рт(0) = 0, а для каждого момента времени
п 1 априорная ошибка оценивания (переменная нулевого порядка) ео = d(n i
где d(n) — требуемый отклик системы.
2. Часть алгоритма РРНК, связанная с предсказанием. Для п = 1,2, ... ,NS, гд
Ns — это количество доступных отсчётов сигнала, последовательность значении
для различных порядков т = 1,2, ..., М, где М — окончательный порядок моде-
ли предсказания по методу наименьших квадратов, рассчитывается следующим
образом:
д / \ _ ХА / 1Х ет — 1,б(^ — l)em—/q
^т-ifa) — AAm_i(n 1) + 3 тт , (8.49
7m — 1}
где Am-i(n) — коэффициент взаимной корреляции между задержанной ошибко-
предсказания назад ет_1Дп — 1) и ошибкой предсказания вперёд em_ij(n) для
решётчатого фильтра.
Использование адаптивных фильтров для сегментации
369
Коэффициент отражения вперёд 7ш,/(п) далее обновляется как
7m,/(n) = —------7-г. (8.50)
£т — 1,6 W
Аналогично, коэффициент отражения назад обновляется как
7т,ь(п) =-------------7Г. (8.51)
£т—1,/(^ 1)
В общем случае ет-1,/(^) и ет_1,ь(п — 1) не равны, так что в алгоритме РРНК,
в отличие от алгоритма Берга, описанного ранее в этом разделе, мы имеем
7m,/(™) / 7m,d(n).
Из решётчатой структуры, описанной ранее в контексте уравнений (8.41) и (8.42)
и показанной на рис. 8.17, а также отметив, что коэффициенты отражения
7m,/W и 7m,bW теперь являются различными и изменяющимися во времени
параметрами, мы можем записать рекурсивное выражение для обновления по-
рядка ошибки предсказания вперёд следующим образом (см. рис. 8.17):
ет,/(^) ~ е?п—1./(^) 4" 7т,/(^)ет—1,б(^ 0? (8.52)
и рекурсивное выражение для ошибки предсказания назад как
ет,ь(п) = em_i,b(n - 1) 4- 7m,b(n)em-i j(n). (8.53)
Мощности ошибки предсказания обновляются как
^т,/(^) = ^m-l./W + 7т,/(п)Дт-1(п), (8.54)
и
£т,б(^) ст —l.b(^ 1) 4" 7т,б(^)^т—1(^)« (8.55)
Коэффициент конверсии 7т,с(п — 1) обновляется как
7m,c(n) = -m_l,c(n)---ТО~‘,Ь^ (8.56)
£m—
Уравнения, приведённые для этого этапа, представляют собой базовые рекурсив-
ные выражения для обновления порядка РРНК-предсказателя. Эти рекурсивные
выражения порождают две последовательности ошибок предсказания: ошибки
предсказания вперёд и ошибки предсказания назад. Эти две последовательности
играют ключевую роль в рекурсивном решении линейной задачи наименьших
квадратов.
3. Часть РРНК-алгоритма, связанная с фильтрацией. Для п = 1,2, ...,2Ув об-
новлённые значения для различных порядков т = 1,2, ...,М рассчитываются
следующим образом:
(8.57)
Рт(п) = Хрт(п - 1) + вт’Ь^ ет-1(п).
7т,с\^4
Коэффициенты регрессии кт(п) совместного процесса оценивания определяются
с использованием скалярной величины pm(n) как
, ч рт(п)
^m,b(^)
(8.58)
Рекурсивное выражение обновления порядка апостериорной ошибки оценки
ет(п) задаётся далее как
ет(^) — ет—1(^) 4- (п)ет,б(^)•
(8.59)
24 Р. Рангайян
370
Гл. 8. Анализ нестационарных сигналов
Динамика входного сигнала, т. е. статистические изменения, происходящие в сиг-
нале, отражаются в параметрах решётчатого фильтра. Следовательно, такие
параметры, как коэффициенты отражения (7/ и 7^) и среднеквадратичная вели-
чина ошибки оценивания (т. е. Е,[е^г(п)]), могут использоваться для мониторинга
статистических изменений.
Появляющийся в алгоритме коэффициент конверсии 7С может быть использован
как хороший статистический показатель обнаружения «неожиданности» послед-
них по времени отсчётов данных. До тех пор пока данные принадлежат одному
и тому же распределению, переменная 7С будет близка к единице. Если последние
по времени отсчёты данных принадлежат к различным распределениям, значение
7с будет иметь тенденцию к удалению от единицы. Это приведёт к тому, что
возрастёт величина коэффициента 1/7с, появляющегося в формуле обновления
по времени (уравнение (8.49)), что приведёт к резким изменениям параметров
решётчатой модели. Величины 7С, \/^с или 1/(1 — ус) могут быть использованы
для быстрого отслеживания изменений во входных данных и для оценки границ
сегмента в условиях нестационарности.
Иллюстрация применения. Преимуществом использования РРНК-фильтра для
сегментации сигналов ВАГ является то, что статистические изменения в сигнале
хорошо отражаются в параметрах фильтра, и следовательно границы сегмента могут
быть определены путём мониторинга любого одного из параметров фильтра (таких
как СКО, коэффициент конверсии или коэффициенты отражения). Krishnan и др.
[57, 88] использовали коэффициент конверсии (7J для отслеживания статисти-
ческих изменений в сигнале ВАГ. В условиях стационарности коэффициент 7С
начинается с низкого начального значения и остаётся небольшим по величине на
протяжении ранней стадии периода инициализации. После нескольких итераций ус
начинает быстро возрастать, стремясь к окончательной величине, равной единице.
В случае нестационарных сигналов (как, например, сигнал ВАГ), значение 7С, как
только в статистиках сигнала будут происходить изменения, начнёт быстро уходить
от устойчивого единичного состояния. Это может быть использовано для сегмен-
тации сигналов ВАГ на квазистационарные фрагменты. Предложенную Krishnan
и др. [57, 88] процедуру сегментации можно обобщить следующим образом.
1. Сигнал ВАГ дважды пропускается через сегментирующий фильтр: первый проход
используется для того, чтобы фильтр мог сойтись, а второй — для сопоставления
величины 7с для каждого отсчёта с пороговой величиной для обнаружения
границ сегмента.
2. Всякий раз, когда во время второго прохода величина ус для какого-нибудь
отсчёта оказывается меньшей чем порог, отмечается предварительная граница
сегмента.
3. Если разница между двумя последовательными границами сегмента меньше, чем
требуемая минимальная длина сегмента (120 отсчётов в работе Krishnan и др.),
то последняя из двух границ удаляется.
На рис. 8.19 и 8.20 показаны результаты применения метода сегментации РРНК
к двум сигналам ВАГ. На этих рисунках также показаны графики изменения 7с(п).
Можно наблюдать, что значения 7с(п) снижаются всякий раз, когда в характеристи-
ках сигнала происходят значительные изменения. В то время как прямое применение
порогового правила к величине 7с(п) будет приводить к избыточной сегмента-
ции, введение условия о минимальной длине сегмента (выбираемой применительно
к конкретной ситуации) даёт практически полезную сегментацию. Оказалось, что
количество сегментов в среднем составляет 8 сегментов на 1 сигнал ВАГ. Было
также отмечено, что в сигналах пациентов, имеющих патологию хряща, получалось
больше сегментов, чем в нормальных сигналах.
Использование адаптивных фильтров для сегментации
371
60
40
СЗ
£ 20
_60______1___1__________L____1____1____Illi । I
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000
Временные отсчёты
0,9985 -----------------------------------------------------------
0,998 -
0,9975 -
0,997 -
0,9965 -
0,996 -
0,9955 - 6
0,995 ------1----1-----------1-----1-----1-----1-----1-----1-----1
О 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000
Число итераций
Рис. 8.19. Сигнал ВАГ пациента в норме с окончательными границами сегмента, полученными
с помощью метода РРНК и отмеченными вертикальными пунктирными линиями (а). График
коэффициента конверсии 7с(п); горизонтальная пунктирная линия показывает фиксированный
порог, использованный для обнаружения границ сегмента (б). Длительность сигнала 5 с,
частота дискретизации fs(n) = 2 кГц. Воспроизводится с разрешения S. Krishnan, R. М. Ran-
gayyan, G.D. Bell, С. В. Frank, and К. О. Ladly, Adaptive filtering, modelling, and classification
of knee joint vibroarthrographic signals for non-invasive diagnosis of articular cartilage pathology,
Medical and Biological Engineering and Computing, 35(6):677-684, 1997. ©IFMBE
Преимуществом метода адаптивной сегментации РРНК является то, что может
использоваться фиксированное значение порога; Krishnan и др. установили, что хо-
рошую сегментацию для сигналов ВАГ даёт фиксированное значение порога, равное
24=
372
Гл. 8. Анализ нестационарных сигналов
и । hi и
и । hi и
hi hi и
QQQ Illi НН_______HI ।___I__LJJ_I_I
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000
Временные отсчёты
g 0,9985
1 0,998
О
к 0,9975 -
CD
S
I 0,997 -
-tr
g 0,9965 -
0,996 -
0,9955 -
0,995 ------1-----1-----1-----•------------1-----1-----и-----1------1
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000
Число итераций
Рис. 8.20. Сигнал ВАГ пациента с патологией хряща с окончательными границами сегмента
полученными с помощью метода РРНК и отмеченными вертикальными пунктирными линия-
ми (а). График коэффициента конверсии 7с(п); горизонтальная пунктирная линия показывает
фиксированный порог, использованный для обнаружения границ сегмента (б). Длительность
сигнала 5 с, частота дискретизации Д(п) = 2 кГц. Воспроизводится с разрешения S. Krishnan.
R. М. Rangayyan, G. D. Bell, С. В. Frank, and К. О. Ladly, Adaptive filtering, modelling, and clas-
sification of knee joint vibroarthrographic signals for non-invasive diagnosis of articular cartilage
pathology, Medical and Biological Engineering and Computing, 35(6):677-684, 1997. ©IFMBE
0,9985. Было установлено, что процедура адаптивной сегментации даёт сегменты,
которые хорошо согласуются с ручной сегментацией, основанной на аускультации
и/или артроскопии. В разд. 9.13 будет описан адаптивный анализ сигналов ВАГ.
Применение', адаптивная сегментация сигналов ЭЭГ
373
8.7. Применение: адаптивная сегментация
сигналов ЭЭГ
Задача. Предложить метод для параметрического представления нестацио-
нарных сигналов ЭЭГ.
Решение. Боденштайн и Преториус (Bodenstein и Praetorius) [98] применили пред-
ложенную ими процедуру адаптивной сегментации, основанную на МСО (см. п. 8.5.1),
для представления и анализа сигналов ЭЭГ с учётом следующих предположений.
1. Сигнал ЭЭГ состоит из квазистационарных сегментов, на которые накладывают-
ся преходящие события.
2. Сегмент описывается временем его появления, длительностью и СПМ (представ-
ленной коэффициентами АР-модели). Преходящее событие описывается време-
нем его появления и набором графо-элементов (или непосредственно набором
его отсчётов).
3. Сигнал ЭЭГ состоит из конечного числа повторяющихся состояний.
Следует отметить, что хотя адаптивные сегменты имеют различную дли-
тельность, каждый из них представлен одним и тем же числом коэффициентов
АР-модели. Следовательно, число параметров не зависит от длительности сегмента,
что очень удобно в случае, если к сегменту применяются методы распознавания
образов. Поскольку АР-модель рассчитывается один раз в начале каждого сегмента
и допускается некоторая ошибка предсказания в скользящем окне анализа, то
начальная АР-модель может неадекватно представлять весь адаптивный сегмент.
С использованием отсчётов сигнала по всей длительности каждого адаптивного сег-
мента может быть рассчитана новая модель. Вместо этого, Боденштайн и Преториус
использовали для каждого адаптивного сегмента первоначальную АР-модель поряд-
ка Р и дополнительный корректирующий предсказатель порядка М, полученный
для каждого адаптивного сегмента с использованием АКФ ошибки предсказания,
которая (АКФ) легко может быть рассчитана в процедуре сегментации. Далее
каждый адаптивный сегмент был представлен Р + М коэффициентами АР-модели,
а также связанными с ними значениями среднеквадратичных ошибок предсказания
и длительностью сегмента. Из этих двух наборов коэффициентов АР-модели может
быть рассчитана СПМ сегмента.
При условии, что сигналы ЭЭГ были подвержены полосовой фильтрации в диапа-
зоне 1-25 Гц и дискретизованы с частотой 50 Гц, в работе Боденштайна и Пре-
ториуса [98] длина окна АКФ была установлена равной 2 с, что соответствует
2N -h 1 = 101 отсчёту. Боденштайн и Преториус выбрали порядок АР-модели из
практических соображений, с таким расчётом, чтобы он по меньшей мере вдвое
превосходил число ожидаемых резонансных частот в СПМ сигнала. На коротких
сегментах сигнала ЭЭГ редко встречаются более чем два спектральных пика, что
означает, что порядок АР-модели Р = 5 может считаться достаточным. Тем не менее,
Боденштайн и Преториус использовали Р = 8, что также отвечает критерию Акаике
(Akaike) (см. разд. 7.5.2). Порядок АКФ ошибки предсказания и связанного с ней
корректирующего предсказателя был установлен равным более низкой величине
М = 3, что допускает наличие только одного спектрального пика (в идеальном слу-
чае ошибка должна иметь плоскую СПМ). Пороговые значения были определены как
Th\ = 0,5 (эмпирически) и Th^ = 2,5<т, где ст — значение СКО ошибки предсказания
(см. разд. 8.5.1). Для порога Th? был рекомендован диапазон от 20<т2 до 40<т2. С це-
лью предотвращения включения спектральных компонент одного сегмента в следую-
щий сегмент, между каждой границей сегментации и начальной точкой следующего
фиксированного окна допускалась переходная задержка, равная 25 отсчётам.
374
Гл. 8. Анализ нестационарных сигналов
На рис. 8.21 показаны несколько примеров адаптивной сегментации сигналов
ЭЭГ. Для удаления ложных границ была использована процедура кластеризации,
некоторые из примеров которой можно видеть на рис. 8.21г: соседние сегменты со
сходными параметрами были объединены на следующем шаге. Визуальный анализ
100 мкВ
Рис. 8.21. Примеры сегментации сигналов ЭЭГ. Новорождённый в стадии сна «не БДГ»
(БДГ —быстрое движение глаз) (а). Ребёнок 7 лет в стадии сна I (б). Ребёнок 8 лет в ста-
дии сна III (в). q-Ритм взрослого (г). ЭЭГ взрослого с пароксизмами (б). Вертикальные
линии представляют границы сегментов. Воспроизводится с разрешения G. Bodenstein and
Н.М. Praetorius, Feature extraction from the electroencephalogram by adaptive segmentation,
Proceedings of the IEEE, 65(5):642-652, 1977. ©IEEE
результатов показывает, что большинство адаптивных сегментов являются стацио-
нарными (т. е. они выглядят одинаково) на всём их протяжении. Следует отметить,
что самый большой по длительности сегмент на рис. 8.21г длительностью 16 с или
800 отсчётов представлен всего лишь 12 параметрами.
На рис. 8.22 показаны примеры обнаружения преходящих событий в двух боко-
вых каналах ЭЭГ пациента, страдающего эпилепсией. Ожидается, что сигнал ЭЭГ
между приступами должен содержать большое количество острых волн. Для того
чтобы показать, насколько существенным данное событие оказалось с точки зрения
алгоритма, длина показанных на рисунке стрелок была сделана пропорциональной
суммарной надпороговой части ошибки предсказания, возведённой в квадрат.
Впоследствии Bodenstein и др. [236] и Creutzfeldt и др. [237] распространили
этот метод на параллельный анализ многоканальных сигналов ЭЭГ. Были предло-
жены процедуры для компьютерной классификации образов и разметки сигналов
ЭЭГ, включая кластеризацию сходных сегментов и построение диаграмм состояний,
показывающих последовательности типов активности, обнаруженных в записи ЭЭГ.
На рис. 8.23 представлен итоговый документ, полученный в результате применения
Применение-, адаптивная сегментация сигналов ФКГ
375
t ♦ I i y
• • • •
it t
50 мкВ
1 с
Рис. 8.22. Пример обнаружения преходящих событий в сигнале ЭЭГ пациента, страдающего
эпилепсией. Показанные сигналы получены в противоположных боковых каналах в промежут-
ках между приступами. Чем длиннее стрелка, тем более выраженным является обнаруженное
преходящее событие в соответствующий момент времени. Точками помечены преходящие
события, обнаруженные одновременно в двух противоположных каналах. Воспроизводится
с разрешения G. Bodenstein and Н.М. Praetorius, Feature extraction from the electroencephalo-
gram by adaptive segmentation, Proceedings of the IEEE, 65(5):642-652, 1977. ©IEEE
данной процедуры к двухканальному сигналу ЭЭГ. В верхней части рисунка слева
и справа показаны типичные сегменты ЭЭГ, принадлежащие к четырём обнару-
женным в сигнале кластерам. Для каждого сегмента сигнала отмечены частота
(FRQ, Гц) и амплитуда (АМР, мкВ) резонансных компонент, обнаруженных с ис-
пользованием АР-модели восьмого порядка. В центральной колонке верхней части
рисунка приведены СПМ соответствующих сегментов, показанных с левой стороны
(сплошная линия) и с правой стороны (пунктирная линия). Центральная часть
данного рисунка содержит диаграмму состояний, показывающую переходы между
четырьмя обнаруженными в двух каналах сигнала состояниями (представленными
четырьмя кластерами сегментов ЭЭГ). Различаются следующие состояния: 1—фо-
новый сигнал, 2 — глаза открыты, 3 — пароксизм и 4 — эпилептическая форма ком-
плекса спайк-волна. Числа справа от диаграммы состояний показывают процент от
общей длительности, соответствующий времени пребывания сигнала ЭЭГ в каждом
из состояний. Нижняя часть рисунка показывает единичные события, т. е. такие
сегменты, которые не могли быть сгруппированы ни с одним из четырёх кластеров.
Было показано, что сегменты большинства сигналов ЭЭГ могут быть объединены не
более чем в пять кластеров состояний и что обобщённое представление результатов,
подобное показанному на рис. 8.23, может оказать врачам эффективную помощь при
анализе продолжительных записей ЭЭГ.
8.8. Применение: адаптивная сегментация
сигналов ФКГ
Несколько раз мы отмечали, что сигнал ФКГ является нестационарным. Теперь
оценим применимость адаптивной сегментации к сигналам ФКГ с использованием
метода РРНК, при условии что никакой другой сигнал не используется в качестве
референтного.
376
Гл. 8. Анализ нестационарных сигналов
СН2
Длительность 7 мин 30 с
СН4
Рис. 8.23. Пример применения сегментации и анализа образов к сигналу ЭЭГ пациента, у ко-
торого наблюдается эпилептическая активность. См. подробности в тексте. Воспроизводится
с разрешения G. Bodenstein, W. Schneider, and C.V. D. Malsburg, Computerized EEG pattern
classification by adaptive segmentation and probability-density-function classification. Description
of the method, Computers in Biology and Medicine, 15(5):297-313, 1985. ©Elsevier Science
Применение’, адаптивная сегментация сигналов ФКГ
377
Рис. 8.24. Адаптивная сегментация сигнала ФКГ пациента в норме с использованием метода
РРНК. Сверху вниз: сигнал ФКГ (границы сегмента отмечены вертикальными пунктирными
линиями и треугольными маркерами); коэффициент конверсии 7С (горизонтальная линия
показывает используемый порог); ЭКГ; каротидный пульс (усечённый в связи с насыщением)
На рис. 8.24 показаны результаты сегментации сигнала ФКГ пациента в норме.
Верхняя кривая показывает сигнал ФКГ на протяжении трёх сердечных циклов;
обнаруженные границы сегментов отмечены вертикальными пунктирными линиями,
а также треугольными маркерами на оси времени. Вторая кривая иллюстрирует
график коэффициента конверсии 7С. В каждом случае, когда происходят изменения
в характеристиках сигнала (особенно в точках, соответствующих границам S1 и S2),
коэффициент конверсии резко снижается по отношению к единичному значению.
Для получения границ сегмента к величине 7С был применён порог, равный 0,995
(показанный горизонтальной линией, наложенной на второй график), а на длину
сегмента было наложено условие, что её минимальное допустимое значение соста-
вляет 50 отсчётов (50 мс). Третья и четвёртая кривая иллюстрируют сигналы ЭКГ
и каротидного пульса того же самого пациента, снятые одновременно с сигналом
ФКГ. Полученные с помощью метода РРНК границы сегмента хорошо согласуются
с отчётливо заметными границами S1 и S2, а также с QRS-комплексом и с положе-
нием дикротической выемки (см. также разд. 1.2.8, 2.3 и 4.10).
На рис. 8.25 иллюстрируются результаты адаптивной сегментации сигнала ФКГ
пациента с систолическим шумом, связанным со стенозом аорты. Однако в данном
случае результат не настолько очевиден и не настолько легко поддаётся интерпрета-
ции, как в предыдущем случае. Данный метод действительно идентифицировал нача-
ло S1 и S2. Более того, благодаря дополнительной границе сегмента внутри каждой
компоненты S2 был хорошо идентифицирован её расщеплённый характер. Однако
378
Гл. 8. Анализ нестационарных сигналов
1
0,99
0,98
0,97
0 0,5
1,5 2 2,5 3
Время, с
Рис. 8.25. Адаптивная сегментация сигнала ФКГ пациента (девочка, 11 лет) с систолическим
шумом, вызванным стенозом аортального клапана. Сверху вниз: сигнал ФКГ (границы сегмен-
та отмечены вертикальными пунктирными линиями и треугольными маркерами); коэффициент
конверсии 7с (горизонтальная линия показывает используемый порог); ЭКГ; каротидный пульс
данный метод недостаточно чётко идентифицировал границы между эпизодами S1
и систолическим шумом: условие минимальной длительности сегмента повлияло на
положение границы сегмента после начала S1. Использование других условий для ус
может позволить получить более правильные результаты сегментации.
8.9. Применение: динамический анализ
вариабельности сердечного ритма
Сердечный ритм контролируется как вегетативной, так и центральной нервной
системой: вагусная активность и симпатическая активность вызывают, соответствен-
но, снижение или возрастание сердечного ритма (см. разд. 1.2.4). В разд. 7.8 мы
видели, как дыхание влияет на сердечный ритм и как анализ по методу Фурье может
быть расширен для анализа ВСР. Если сигнал сердечного ритма, представляющий
собой последовательность RR-интервалов, накапливается на протяжении длительно-
го периода времени (несколько часов), то можно ожидать, что такой сигнал будет
нестационарным.
Bianchi и др. [225] использовали метод АР-моделирования для динамического
(адаптивного по времени) анализа СПМ сигнала сердечного ритма с целью
исследовать эпизоды сигнала, относящиеся к ишемическим приступам. С использо-
ванием коэффициента забывания выполнялось взвешивание ошибки предсказания
Применение', динамический анализ вариабельности сердечного ритма
379
__I
200
__I_
400
Е
__1_____________I______________I__________
600 800 1000 п
£
C
Рис. 8.26. Последовательность RR-интервалов, включающая ишемический эпизод: В — нача-
ло и Е — конец этого эпизода. Воспроизводится с разрешения A.M. Bianchi, L. Mainardi,
Е. Petrucci, М. G. Signorini, М. Mainardi, and S. Cerutti, Time-variant power spectrum analysis
for the detection of transient episodes in HRV signal, IEEE Transactions on Biomedical
Engineering, 40(2):136-144, 1993. ©IEEE
0,05
0,04
0,03
0,02
0,01
0
1
0 0,12 0,24 0,36 0 л8 0,6
Частота. Гц
Рис. 8.27. Спектрограмма последовательности RR-интервалов, показанной на рис. 8.26. Время
возрастает от верхней части рисунка к нижней. В — начало и Е — конец ишемического эпизода.
Воспроизводится с разрешения А. М. Bianchi, L. Mainardi, Е. Petrucci, М. G. Signorini,
М. Mainardi, and S. Cerutti, Time-variant power spectrum analysis for the detection of transient
episodes in HRV signal, IEEE Transactions on Biomedical Engineering, 40(2): 136-144, 1993.
©IEEE
и далее рассчитывалась динамическая АР-модель. Обновление коэффициентов
АР-модели для каждого значения RR-интервала (т. е. для каждого сердечного цикла)
выполнялось с помощью алгоритма РНК. Далее коэффициенты АР-модели были
использованы для расчета динамической СПМ. Было показано, что при анализе
СПМ RR-интервалов интерес представляют следующие частотные диапазоны: очень
низкие частоты (VLF, very-low-frequency) в диапазоне 0-0,04 Гц, связанные с гумо-
зальными или терморегуляторными факторами; низкие частоты (LF, low-frequency)
380
Гл. 8. Анализ нестационарных сигналов
Рис. 8.28. Сверху вниз: последовательность RR-интервалов, включающая ишемический эпи-
зод; дисперсия; отношение низкочастотной (LF) к высокочастотной (HF) мощности; процент
мощности LF; процент мощности HF; мощность LF; мощность HF. В —начало и Е —конец
эпизода. Воспроизводится с разрешения А. М. Bianchi, L. Mainardi, Е. Petrucci, М. G. Sig-
norini, M. Mainardi, and S. Cerutti, Time-variant power spectrum analysis for the detection of
transient episodes in HRV signal, IEEE Transactions on Biomedical Engineering, 40(2): 136-144,
1993. ©IEEE
Контрольные вопросы и задания
381
в диапазоне 0,04-0,15 Гц, связанные с симпатической активностью; высокие частоты
(HF, high-frequency) в диапазоне 0,15-0,4 Гц, связанные с дыхательной или вагусной
активностью.
На рис. 8.26 показана последовательность RR-интервалов, включающая ишеми-
ческий эпизод (ограниченный буквами В в начале и Е в конце соответственно).
На рис. 8.27 показана динамическая СПМ в форме спектрограммы. На рис. 8.28
показан сегмент последовательности RR-интервалов и несколько параметров, рас-
считанных из этих данных.
Авторы сделали следующие важные наблюдения (которые иллюстрируются спек-
трограммой на рис. 8.27 и параметрами на рис. 8.28).
• Примерно за 1,5-2 минуты до ишемического события наблюдается увеличение
мощности LF.
• Дисперсия RR-интервалов понижается с развитием эпизода.
• В конце ишемического эпизода наблюдается доминирующий подъём мощности
компоненты LF.
• Ближе к концу эпизода появляется небольшая компонента HF.
• Ранняя активация компоненты LF предшествует тахикардии и смещению сег-
мента ST в ЭКГ, которые обычно являются индикаторами начала ишемического
эпизода.
• Эти результаты позволяют предположить повышение активности симпатической
системы перед острой ишемической атакой.
Динамический метод АР-моделирования также был применён для анализа сиг-
налов ЭЭГ [224]. Динамический метод АРСС-моделирования был использован для
анализа сигналов ЭКГ [38].
8.10. Замечания
Теперь мы достигли такой с-адии. когда смогли распространить применение ряда
методов обработки, моделирования и анализа сигналов на нестационарные биомеди-
цинские сигналы. Было показано, что фиксированная или адаптивная сегментация
сигналов на квазистационарные сегменты представляет собой необходимый пред-
варительный этап анализа. При этом было исследовано несколько подходов к сег-
ментации. Адаптивная сегментация даёт не только возможность идентифицировать
отдельные и различные события в неизвестные моменты времени, но также и воз-
можность характеризовать события различной продолжительности с использованием
одного и того же числа параметров. Это очень важно для задач классификации
образов (которые будут исследоваться в гл. 9), а также для эффективного сжатия
данных.
8.11. Контрольные вопросы и задания
1. Опишите те характеристики сигналов ФКГ, которые обусловливают их неста-
ционарность. Предложите стратегию обработки сигнала для разбиения сигнала
ФКГ на квазистационарные сегменты.
2. Обсудите те черты сигнала ЭЭГ, которые делают этот сигнал нестационарным.
Предложите стратегию обработки сигнала для обнаружения каждого типа неста-
ционарностей и для разбиения сигнала ЭЭГ на квазистационарные сегменты.
382
Гл. 8. Анализ нестационарных сигналов
3. Исследуйте характеристики сигнала ЭМГ, которые делают этот сигнал нестаци-
онарным. Предложите стратегию обработки сигнала для отслеживания меняю-
щихся во времени характеристик этого сигнала. При каких условиях этот сигнал
может быть разбит на квазистационарные сегменты? Какие физиологические
признаки вы можете извлечь из каждого сегмента?
8.12. Упражнения и лабораторные работы
Замечание. Необходимые для выполнения упражнений файлы с данными доступ-
ны на сайте ftp://ftp.ieee.org/uploads/press/rangayyan/.
1. Файл safety.wav содержит дискретизованный с частотой 8 кГц речевой сигнал
для слова «safety». Вы можете использовать программу safety.m для чтения
этих данных. Исследуйте использование кратковременных статистик, таких как
ЧПН (число пересечений нуля) и среднеквадратичное значение, для сегментации
этого сигнала. Исследуйте влияние длительности окна для анализа по коротким
интервалам на тенденции изменения вычисляемых параметров и на сегментацию.
2. Файлы pecl.dat, pec22.dat, pec33.dat и pec52.dat содержат трёхканальные записи
ФКГ, ЭКГ и сигнала каротидного пульса для двух пациентов в норме и для
двух пациентов с систолическим шумом. Вы можете использовать программу
plotpec.m для чтения этих данных. Исследуйте использование статистик для
коротких интервалов, таких как ЧПН, среднеквадратичное значение и коэффици-
енты АР-модели, для сегментации этих сигналов. Оцените полученные границы
сегментов по отношению к событиям в сигналах ФКГ, а также по отношению
к соответствующим событиям в каналах ЭКГ и каротидного пульса.
Глава 9
КЛАССИФИКАЦИЯ ОБРАЗОВ
И ДИАГНОСТИЧЕСКИЕ РЕШЕНИЯ
Конечной целью анализа биомедицинских сигналов является классификация дан-
ного сигнала с целью отнесения его к одной из нескольких известных категорий
и получение диагностического решения, относящегося к состоянию пациента. Врач
или медицинский специалист может достигнуть этой цели путём визуального или
слухового анализа представленного сигнала: в таком процессе принятия решений
ему оказывает помощь сравнительный анализ данного сигнала с другими сигналами,
для которых известны диагностические заключения. Кроме того, специалисты ис-
пользуют общепринятые протоколы и наборы правил. Существенную роль в этом
процессе играют базовые знания, клинический опыт, квалификация и интуиция
врача. Некоторые виды измерений, которые могут быть сделаны по данному сигналу,
также могут оказать помощь в его анализе. Например, врач может измерить по
графику ЭКГ ширину QRS-комплекса.
Когда анализ сигнала выполняется с использованием компьютерных алгоритмов,
типичным результатом является получение некоторого набора численных параметров.
Когда численные параметры относятся непосредственно к характеристикам сигнала,
таким как ширина QRS-комплекса или длительность RR-интервала в сигнале ЭКГ,
клинический специалист имеет возможность использовать эти параметры в логике
принятия диагностических решений. Даже косвенные параметры, такие как частот-
ное содержание сигналов ФКГ и шумов, могут найти подобное непосредственное при-
менение. Однако когда вычисляются такие параметры, как коэффициенты АР-модели
или спектральные статистики, человек-аналитик вряд ли окажется в состоянии
понять и использовать их. Более того, по мере увеличения числа рассчитываемых
компьютером параметров связанная с ними диагностическая логика становится
слишком сложной и неприемлемой для анализа, выполняемого человеком. В таких
случаях желательно, чтобы процессы классификации и принятия решений могли
выполняться компьютером.
Прежде всего, необходимо иметь в виду, что биомедицинские сигналы являются
лишь одним из источников информации для постановки диагноза: классификация
данного сигнала с точки зрения его принадлежности к одной из многочисленных
категорий может помочь в процедуре диагностики, но почти никогда не является
единственным фактором. Тем не менее, классификация образов, основанная на
анализе сигнала, действительно является важным аспектом анализа биомедицинских
сигналов. Именно эта задача и является темой данной главы. Оставаясь в рам-
ках концепции диагностики с помощью компьютера, как это было представлено
на рис. 1.32 и в п. 1.5, было бы предпочтительным разрабатывать такие методы,
384
Гл. 9. Классификация образов и диагностические решения
которые бы в большей степени помогали медицинским специалистам в постановке
диагнозов, чем выдавали готовые решения.
9.1. Постановка задачи
Из биологических сигналов может быть получено большое количество при-
знаков и параметров. Исследовать методы для классификации сигнала с точки
зрения его принадлежности к одной из нескольких заданных категорий. Ис-
следовать пригодность признаков и методов классификации для достижения
диагностических решений о пациенте.
Обратите внимание, что признаки могут быть получены как вручную, так и с ис-
пользованием компьютерных методов. Отметим различие между классификацией
данного сигнала и получением диагноза, относящегося к пациенту: связь между эти-
ми двумя задачами или шагами не всегда бывает прямой. Другими словами, методы
классификации образов могут дать возможность идентифицировать принадлежность
данного сигнала к определённому классу; получение диагноза о состоянии пациента,
возможно, потребует анализа нескольких других видов клинической информации.
Хотя наиболее типичны ситуации, когда количество классов образов заранее извест-
но, существует множество задач, где априори количество классов неизвестно.
В следующих разделах представлено несколько наглядных практических приме-
ров. Рассматривается и иллюстрируется большое количество методов классификации
образов, принятия решений и оценки результатов классификации.
9.2. Иллюстрация задачи на примерах
9.2.1. Диагностика блокады проводящих путей. Блокада проводящих путей
влияет на распространение импульса возбуждения по проводящей системе сердца
к желудочкам. Блокада левого проводящего пучка приводит к задержанной актива-
ции левого желудочка по отношению к правому; блокада правого проводящего пучка
даёт противоположный эффект. Существенным является то, что сокращения двух
желудочков сердца становятся асинхронными. В результирующей ЭКГ обычно на-
блюдаются более широкие, чем в норме, QRS-комплексы (100-120 мс или более), ко-
торые, кроме того, могут иметь зазубренную или нечёткую форму [23]; см. рис. 1.15.
Блокада проводящих путей может влиять также и на ориентацию электродви-
жущих сил сердца. При блокаде левого проводящего пучка силы на начальной
стадии сокращения имеют выраженное лево-заднее направление, в то время как
силы на конечной стадии имеют передне-левое и заднее направления [23]. Блока-
да левого проводящего пучка приводит к исчезновению Q-зубца в отведениях I,
V5 и V6.
Для диагностики неполной блокады левого проводящего пучка могут быть пред-
ложены следующие логические правила [242]:
ЕСЛИ (длительность QRS > 105 мс и 120 мс) И
(амплитуда QRS отрицательна в отведениях VI и V2) И
(длительность Q или S 80 мс в отведениях VI и V2) И
(нет Q-зубца в любом из двух отведений I, V5 и V6) И
(длительность R > 60 мс в любых двух из отведений I, aVL, V5 и V6), ТОГДА
пациент имеет неполную блокаду левого проводящего пучка.
Иллюстрация задачи на примерах
385
Неполная блокада правого проводящего пучка определяется следующими услови-
ями [242]:
ЕСЛИ (длительность QRS 91 мс и 120 мс) И
(длительность S 40 мс в любых двух из отведений I, aVL, V4, V5 и V6) И
в отведении VI или V2 ЛИБО
[(длительность R > 30 мс) И (амплитуда R > 100 мкВ) И (нет S-зубца)] ЛИБО
[(длительность R' > 30 мс) И (амплитуда R' > 100 мкВ) И (нет S'-зубца)]
ТОГДА
пациент имеет неполную блокаду правого проводящего пучка.
(Замечание. Первое положительное отклонение QRS-комплекса обозначают как
R-зубец, а второе положительное отклонение — как R'-зубец. Аналогично, обозна-
чения S и S' относятся к первому и ко второму отрицательным отклонениям после
R-зубца.)
Отметим, что вышеупомянутые логические, или решающие правила могут быть
использованы либо человеком-аналитиком, либо в компьютерном алгоритме после из-
мерения или расчёта длительностей и амплитуд упомянутых волн ЭКГ. Кардиологи,
имеющие хорошую подготовку и богатый опыт, могут принимать такие решения пу-
тём только визуального анализа записи ЭКГ, не прибегая к фактическим измерениям.
9.2.2. Нормальный или эктопический QRS-комплекс? Преждевременные же-
лудочковые сокращения (желудочковые экстрасистолы, ЖЭ), вызванные возбужде-
нием эктопического фокуса, могут быть предвестниками более серьёзных аритмий.
Следовательно, обнаружение таких комплексов весьма важно при кардиологическом
мониторном наблюдении. Как показано в разд. 5.4.2 и 5.7, а также на рис. 5.1
и 5.10, желудочковым экстрасистолам предшествует более короткий RR-интервал,
чем в случае нормальных комплексов. Кроме того, они имеют причудливую форму
волны, которая заметно отличается от форм волн нормальных QRS-комплексов
того же самого пациента. Следовательно, для обнаружения ЖЭ или эктопических
комплексов может быть предложено следующее простое правило.
ЕСЛИ (RR-интервал комплекса меньше, чем нормальный при текущей частоте
сердечных сокращений) И (форма волны QRS-комплекса существенно отличается
от нормального QRS-комплекса для данного пациента), ТОГДА этот комплекс
является ЖЭ.
Так же, как и в предыдущем примере, относящемся к блокаде проводящих
путей, приведённое выше логическое правило может быть легко использовано при
визуальном анализе сигнала ЭКГ врачом или опытным наблюдателем. Компьютерная
реализация первой части правила, связанная с объективным и количественным
измерением RR-интервалов, достаточно проста. Однако реализация второго условия,
касающегося формы волны, не является простой и очевидной задачей, так как
это правило носит качественный и субъективный характер. Тем не менее, в гл. 5
мы видели, каким образом можно количественно охарактеризовать форму волны.
На рис. 5.1 и 5.10 показано применение анализа форм волн для количественной
оценки разницы между формами волн нормальных QRS-комплексов и эктопических
комплексов. На рис 5.2 предлагается разделение двумерного пространства призна-
ков с использованием простого линейного решающего правила для классификации
комплексов на нормальные и эктопические. Далее в данной главе мы будем более
подробно рассматривать подобные методы.
9.2.3. Имеется ли а-ритм? q-Ритм проявляется в записи ЭЭГ как почти сину-
соидальная волна (см. рис. 1.22). Опытный специалист по ЭЭГ или врач может легко
25 Р. Рангайян
386 Гл. 9. Классификация образов и диагностические решения
распознать такой образ с одного взгляда на запись ЭЭГ, сделанную с использованием
стандартных масштабов. Если требуется оценка доминирующей частоты этого ритма,
то может быть подсчитано количество циклов такой волны за одну или две секунды.
При компьютерном анализе сигналов ЭЭГ для обнаружения присутствия «-ритма
могут использоваться АКФ или СПМ. Мы видели в гл. 4, что эти две функции
имеют пики с базовым периодом или доминирующей частотой этого ритма, соответ-
ственно (см. рис. 4.8). К АКФ может быть применён алгоритм обнаружения пиков:
присутствие существенных пиков в диапазоне 75-125 мс может быть использовано
как индикатор наличия альфа ритма. Если доступна СПМ, то может быть рассчитана
доля мощности сигнала в полосе частот 8—12 Гц (см. уравнение (6.48)): высокое
значение данного показателя свидетельствует о наличии «-ритма. Отметим, что
логические правила, описанные выше, включают количественный термин «значитель-
ный». Численные величины, характеризующие степень «значительности» описанных
признаков, могли бы быть экспериментально определены в результате исследований
с использованием большого объёма записей сигналов, верифицированных специали-
стами.
9.2.4. Имеется ли шум? Обнаружение шумов сердца является для опытного
врача или кардиолога достаточно простой задачей: при выполнении аускультации
пациента с использованием стетоскопа кардиологу необходимо определить присут-
ствие шумоподобных высокочастотных звуков в промежутке между низкочастотными
компонентами S1 и S2. При этом необходимо принять адекватные меры для исклю-
чения появления высокочастотных шумов от других источников (таких как дыхание,
сопение или трение стетоскопа о кожу или волосы). Кардиологу также необходимо
отличать безвредные физиологические шумы от тех, которые связаны с дефектами
и заболеваниями сердечно-сосудистой системы. Дальнейшее различение разнообраз-
ных типов шумов требует более тщательного анализа: на рис. 5.5 показано дерево ре-
шений для классификации систолических шумов на основе анализа огибающей ФКГ.
В главах 6 и 7 мы видели, как при анализе сигнала в частотной области могут
быть получены различные параметры, связанные с присутствием шумов в сигнале
ФКГ. Если удаётся получить такие численные параметры для большого количества
сигналов, относящихся к известной категории заболеваний (диагнозов), то появ-
ляется возможность разработать и обучить классификатор для различения новых
сигналов и отнесения их к одному из предварительно определённых классов.
В предыдущих примерах предполагалось, что классификация форм волн в сиг-
налах может в некоторых случаях основываться на порогах, применяемых к количе-
ственным показателям, получаемым из сигнала. В других ситуациях классификация
может быть основана на получаемых из сигнала объективных параметрах, которые
могут служить количественными оценками определённых характеристик сигналов,
принадлежащих к различным категориям. Классификация также может быть осно-
вана на различии между определёнными параметрами, полученными из исследуемого
сигнала, и аналогичными параметрами образцов сигналов, относящихся к известным
категориям. В последующих разделах данной главы описываются процедуры класси-
фикации сигналов, основанные на предложенных выше подходах.
9.3. Классификация образов
Распознавание или классификацию образов можно определить как отнесение
входных данных к какому-либо из идентифицируемых классов посредством диф-
ференциации существенных признаков или атрибутов данных от фонового сигнала
Обучение с учителем
387
и от деталей, не относящихся к изучаемому явлению [243-249]. После того как из
заданного сигнала были получены количественные признаки, сигнал может быть
представлен вектором признаков х = (жьжг, • • • известным также как век-
тор параметров или вектор образца. Когда величины Xi являются вещественными
числами, вектор х представляет собой точку
в n-мерном евклидовом пространстве. Ожида-
ется, что векторы сходных объектов формиру-
ют кластеры, как это показано на рис. 9.1.
Для эффективной классификации образов
необходимы такие признаки, которые могут
дать непересекающиеся наборы или кластеры
для векторов параметров. Это обстоятельство
подчёркивает важность правильного выбора
процедур предварительной обработки и вы-
деления признаков. Признаки или свойства,
являющиеся общими для всех образцов, при-
надлежащих к определённому классу, извест-
ны как внутриклассовые признаки. Дискри-
минирующие признаки, которые характеризу-
ют различия между классами образов, назы-
ваются межклассовыми признаками.
Проблема классификации образов заклю-
чается в определении оптимальных разделяю-
щих границ или в разработке решающих про-
Рис. 9.1. Двумерные векторы признаков
классов С\ и Сг- Прототипы этих двух
классов представлены векторами zi и Z2.
Показанная оптимальная линейная ре-
шающая функция d(x) (сплошная линия)
представляет собой перпендикуляр, про-
ведённый через середину прямой линии,
соединяющей прототипы данных двух
классов (пунктирная линия)
цедур, для отнесения данных к различным
классам образов, основанных на векторах признаков. На рис. 9.1 иллюстрируется
простая линейная решающая функция, или граница, для разделения двумерных
векторов признаков на два класса.
9.4. Обучение с учителем
Задача. Имеется некоторое количество векторов признаков, которые отно-
сятся к различным классам. Предложить метод определения границ, разделяю-
щих эти классы.
Решение. Заданный набор векторов признаков с известной классификацией ча-
сто называют обучающей выборкой. В случае наличия обучающей выборки суще-
ствует возможность разработки математических функций, которые могут характери-
зовать разделение между классами. Эти функции могут быть далее использованы
для классификации или распознавания новых векторов признаков, для которых
принадлежность к какому-либо классу заранее не известна. Такой подход известен
как обучение с учителем. Набор векторов признаков с известной классификацией,
используемый для оценки разработанного подобным способом классификатора, назы-
вается контрольной выборкой. Следующие разделы посвящены описанию несколь-
ких методов, которые могут быть использованы для разработки дискриминантных
или решающих функций.
9.4.1. Дискриминантные и решающие функции. Обобщённая линейная дис-
криминантная или решающая функция задаётся в форме
d(x) = W\X\ + W2^2 + ... + wnxn + wn+\ =
(9.1)
25*
388
Гл. 9. Классификация образов и диагностические решения
где х = (xi,а?2, ...,хп, 1)т — вектор признаков, дополненный добавочным членом,
равным единице, и w = (wi,W2, ... ,wn,wn+i)T — соответственно, дополненный ве-
совой вектор. Правило классификации образов на два класса может быть выражено
как
т/ \ т О,
d(x) = w х S < q
если х е Ci,
если х е С2,
(9.2)
где С\ и С% представляют данные два класса. Дискриминантную функцию можно ин-
терпретировать как границу, разделяющую классы С\ и С2, как показано на рис. 9.1.
В общем случае задачи классификации на М классов для принятия решений
необходимо иметь М весовых векторов и М решающих функций:
j / \ т О,
с/Дх) = w- х | < 0
если х 6 G,
в противном случае,
i = 1,2, (9.3)
где Wi = (wh, ыя, ..., Win, Wi,n+i)T — это весовой вектор для класса Ci.
При решении данной задачи возникают три случая [243].
Случай 1. Любой класс может быть отделён от всех остальных с использованием
единственной решающей поверхности:
если с/Дх) > 0, тогда х е Ci. (9.4)
Случай 2. Любой класс может быть отделён от любого другого класса с исполь-
зованием отдельной решающей поверхности, т. е. классы являются попарно разде-
лимыми. При этом существует М(М — 1)/2 решающих поверхностей, определяемых
выражением d^x = Решающие правила, соответственно, имеют вид:
если d^ (x) > О V? / г, тогда х е Ci. (9.5)
(Замечание. dij(x) = —dij(x.).)
Случай 3. Существуют М решающих функций d/Дх) = wj^x, & = 1,2, ...,7И,
обладающих тем свойством, что
если йДх) > с/Дх) VJ i, тогда х е Ci, (9.6)
Это представляет собой особый вариант 2-го случая. Мы можем определить
d^(x) = t/Дх) - d7(x) = (w; - w7-)Tx = w^x. (9.7)
Если классы являются разделимыми в соответствии со случаем 3, то они разделимы
и в соответствии со случаем 2; обратное утверждение в общем случае не является
истинным.
Образы, которые могут быть разделены с использованием описанных выше ли-
нейных решающих функций, называются линейно разделимыми. В других ситуа-
циях может потребоваться неопределённое множество сложных решающих границ
с использованием обобщённых решающих функций, основанных на нелинейных
функциях от векторов признаков:
</(х) = Wi/i(x) + w2/2(x) + ... + WkJk(x) + WK+\ (9.8)
или
К+1
d(x) = ^2wJi(x). (9.9)
г=1
Здесь {/Дх)}, г = 1,2, ..., К являются вещественными однозначными функциями от
х; /к+1(х) = 1.
Обучение с учителем
389
В то время как функции Л(х) в n-мерном пространстве векторов х могут
быть нелинейными, решающие функции могут быть сформулированы как ли-
нейные функции путём определения преобразованного вектора признаков х^ =
= (/1(х),/г(х), Тогда d(x)=wTxt при w = (wi,w2, ... ,wK, wK+1)T.
Будучи однажды оцененным, набор функций {fi(x)} является просто набором
числовых значений, а х^ является просто JC-мерным вектором, дополненным членом,
равным единице.
9.4.2. Функции расстояния. Рассмотрим М классов образов, представленных
их прототипами zj,Z2, ... ,2]и. Прототип какого-либо класса обычно рассчитывается
как среднее для всех векторов признаков, принадлежащих данному классу. На
рис. 9.1 схематично показаны прототипы zi и Z2 двух представленных классов.
Евклидово расстояние между произвольным вектором х и г-м прототипом опре-
деляется как
Di = ||х - Zi|| = \/(x-Zi)T(x-Zi). (9.10)
Простейшим правилом для классификации вектора х должно быть правило выбора
того класса, для которого этот вектор соответствует наименьшему расстоянию:
если Di < Dj тогда х е Ci. (9.11)
Между дискриминантными функциями и функциями расстояний может быть опре-
делено следующее простое соотношение [243]:
D? = ||х — Zi||2 = (x-Zi)T(x - = хтх-2xTZi + zf= xTx-2^xTZi - ^zfz^.
(9.12)
Выбор минимального значения D? эквивалентен выбору минимального значения Di
(так как все Di > 0). Более того, из приведённого выше выражения следует, что
выбор минимума D? эквивалентен выбору максимума выражения (xTZi — (l/2)zfzj.
Следовательно, мы можем определить решающую функцию следующим образом:
di(x) = ^xTZi - ^zfz^, i = 1,2, (9.13)
Тогда решающее правило может быть сформулировано в виде
если di(x) > dj(x) Vj г, тогда xeQ. (9.14)
Эта функция представляет собой линейную дискриминантную функцию, что стано-
вится очевидным из следующих представлений: если переменные j = 1,2, ...,п,
являются компонентами Zi, то пусть Wij = Zij, j = 1,2, ...,n, Wi,n+\ = — (l/2)zfzi
и x = (a?i,a?2,... ,жп, 1)T- Тогда di(x) = wfx, i = 1,2, ..., M, где Wi = (wa,Wi2, ...
..., Win, Wijn+i)T. Следовательно, функции расстояния могут быть выражены в форме
линейных дискриминантных или решающих функций.
9.4.3. Правило ближайшего соседа. Предположим, что задана выборка из N
образцов {si, S2, ... ,sjv} с известной классификацией: каждый образец принадлежит
к одному из М классов {Ci, С2, ..., См}. Далее задан вектор признаков х, класс
которого требуется определить. Теперь рассчитаем расстояние Z)(si,x) между векто-
ром х и каждым из образцов заданной выборки. Тогда правило ближайшего соседа
соответствует утверждению о том, что вектор х должен быть отнесён к тому классу,
390
Гл. 9. Классификация образов и диагностические решения
который является ближайшим к х:
х е Ci, если D(si,x) = min{Z)(s/,x)}, Z = 1,2, ...,N. (9.15)
Главным недостатком описанного выше метода является то, что решение о клас-
сификации основывается на единственном выборочном векторе с известной класси-
фикацией. Ближайший сосед может оказаться пограничным образцом, который для
своего класса не является представительным. Было бы более надёжным основывать
классификацию на нескольких образцах: мы можем рассматривать некоторое число к
ближайших к классифицируемому образцу соседей. И затем принимать решение по
большинству. Это приводит к так называемому правилу k ближайших соседей или
к правилу k-NN (NN —от англ, nearest neighbour, ближайший сосед): определить к
ближайших соседей для вектора х и отнести х к тому классу, к которому относится
наибольшее число соседей.
9.5. Обучение без учителя
Задача. Задан набор векторов признаков с неизвестной заранее классифи-
кацией. При этом недоступна никакая обучающая априорная информация. Как
можно сгруппировать векторы по нескольким категориям?
Решение. Определение функций расстояний или решающих границ требует
наличия обучающей выборки векторов признаков с известной классификацией. Полу-
ченные таким образом функции могут затем быть использованы для классификации
нового набора векторов признаков или образцов. Такая процедура известна как
обучение с учителем, так как она имеет начальную стадию обучения. В некоторых
ситуациях обучающий этап может оказаться невозможным. В то же время может
существовать необходимость в классификации заданного набора векторов признаков
либо на предварительно определённое, либо на неизвестное число категорий. Такая
проблема известна как обучение без учителя и может быть решена с использованием
методов поиска кластеров.
9.5.1. Методы поиска кластеров. Если задан набор векторов признаков, то мы
можем проверить, формируются ли в этом наборе группы или кластеры сами по
себе. Это является простой задачей в случае двумерных векторов, когда мы можем
нарисовать их и визуально идентифицировать группы, а далее пометить каждую
группу как класс образов. При этом, возможно, должно быть сделано допущение об
отнесении к одному и тому же классу некоторых несвязанных групп. Такой подход
может быть использован даже тогда, когда количество классов заранее не извест-
но. Когда векторы имеют размерность более трёх, визуальный анализ становится
невозможным. В этом случае становится необходимым определить критерии для
группировки заданных векторов на основе их сходства, различия или мер расстояния.
Некоторыми примерами таких мер являются следующие [243].
• Евклидово расстояние:
de = IIх - ZH2 = (х ~ z)T(x - z) = У2 - Zi^2- (916)
г—1
Здесь х и z являются двумя векторами признаков; последний из них (если он
есть) может быть прототипом класса. Меньшее значение De показывает большее
сходство между двумя векторами, чем большее значение De-
Обучение без учителя
391
• Расстояние Махаланобиса:
D2m = (х — m)TC-1(x — m), (9.17)
где х — это вектор признаков, сравниваемый с классом образов, для которого
ш —средний вектор класса, а С — ковариационная матрица. Малая величина
Dm соответствует более высокой потенциальной принадлежности вектора х
к данному классу, чем большая величина Dm-
• Нормализованное скалярное произведение (косинус угла между векторами х и z):
Большая величина скалярного произведения показывает большую степень сход-
ства между двумя векторами, чем меньшая.
Матрица ковариации определяется как
С = Е[(у — m)(y — т)т], (9.19)
где операция математического ожидания выполняется для всех векторов признаков у,
которые принадлежат к данному классу. Ковариационная матрица даёт ковариацию
всех возможных пар признаков в векторе признаков по всем образцам, принадлежа-
щим к данному классу. Элементы вдоль главной диагонали ковариационной матрицы
дают дисперсию отдельных признаков, составляющих вектор признаков Ковариаци-
онная матрица представляет рассеивание значений признаков, принадлежащих к дан-
ному классу. По мере того как к данному классу в ходе процедуры кластеризации
добавляются следующие образцы, среднее значение и ковариацию следует обновлять.
При необходимости расчёта расстояния Маханалобиса между вектором образца
и некоторым числом классов, представленных их средними и матрицами ковариации,
в случае, если число членов в различных классах неодинаково и невелико, может
быть использована объединённая ковариационная матрица [246]. Например, если
Ci и С2 — ковариационные матрицы двух классов, а количество членов в этих двух
классах —М и Лг2, то объединённая ковариационная матрица задаётся следующим
выражением:
(M-pc, + W-l)Cg
N, + Л'2 - 2
Для оценки успешности процедуры кластеризации могут быть разработаны различ-
ные признаки эффективности [243]. Мера плотности кластера представляет собой
индекс эффективности, основанный на вычислении суммы возведённых в квадрат
ошибок:
J= X £||х -m.il2, (9.21)
ji=l xESj
где Nc — число кластерных областей (кластеров), a Sj — набор образцов в j-m кла-
стере,
»> - 4? Е х. (9-22)
i xeSj
является вектором выборочного среднего для Sj, a Nj — число образцов в Sj.
Ниже приведено несколько других примеров индексов эффективности:
• среднее значение квадратов расстояний между образцами в области кластера;
• внутрикластерная дисперсия;
392
Гfi. 9. Классификация образов и диагностические решения
• среднее значение квадратов расстояний между образцами в различных кластер-
ных областях;
• межкластерное расстояние;
• матрицы разброса;
• ковариационные матрицы.
Простой алгоритм поиска кластеров [243]. Предположим, что имеется N
выборочных образцов {xi,X2, ... , Х/у}.
1. Пусть центр первого кластера zi будет равен какому-нибудь одному из выбороч-
ных образцов, например zi = хь
2. Выберем неотрицательный порог в.
3. Рассчитаем расстояние D21 между хг и zj. Если D21 < в, отнесём Х2 к области
(классу) с центром кластера zi; в противном случае, начнём новый кластер с его
центром, определённым как Z2 = Х2. Для каждого последующего шага будем
предполагать, что был установлен новый кластер с центром Z2.
4. Рассчитаем расстояние D31 и D32 от следующего выборочного образца хз до zi
и Z2 соответственно. Если оба значения D31 и D32 больше чем в, сформируем
новый кластер с его центром Z3 = хз; в противном случае отнесём хз к области,
относящейся к ближайшему кластеру.
5. Продолжим выполнение шагов 3 и 4, вычисляя и проверяя расстояния от каждо-
го нового (неклассифицированного) вектора образца до каждого установленного
центра кластера и применяя правило отнесения к кластеру или правило создания
нового кластера.
6. Прекратим процедуру, когда каждый из заданных векторов будет отнесён
к какому-либо кластеру.
Отметим, что данная процедура не требует априорного знания о количестве
кластеров. Отметим также, что данная процедура не связывает с каждым кластером
какой-либо реально существующий класс: она только группирует заданные векторы
в несвязанные между собой кластеры. Для отнесения каждого кластера к какому-
то классу, связанному с реальной проблемой, требуется некоторый дополнительный
этап анализа. Некоторые кластеры могут оказаться связанными с одним и тем же
реально существующим классом. Поэтому далее может потребоваться слияние таких
кластеров.
Главным недостатком этого простого алгоритма поиска кластеров является то,
что его результат зависит от:
• первого центра кластера, выбранного для каждой области или класса;
• порядка, в котором рассматриваются образцы;
• величины порога в\
• геометрических свойств (распределений) данных (или пространства векторов
признаков).
Алгоритм кластеризации по максимальному расстоянию [243]. Данный метод
сходен с предыдущим «простым» алгоритмом, но он способен идентифицировать
области кластеров, которые наиболее далеко расположены друг от друга. Термин
«максимин» (maximin) относится к комбинированному использованию максимальных
и минимальных расстояний между данными векторами и центрами уже сформиро-
ванных кластеров.
1. Пусть Xi — это центр первого кластера zj.
2. Определим наиболее удалённый от xi образец и назовём его кластером с цен-
тром Z2.
Обучение без учителя
393
3. Рассчитаем расстояние между каждым из оставшихся образцов до zi и до Z2. Для
каждой пары из этих вычисленных значений сохраним минимальное расстояние
и выберем максимум из этих минимальных расстояний. Если это «максимин-
ное» расстояние представляет собой существенную долю от расстояния между
центрами кластеров zi и Z2, то создадим новый кластер с центром Z3, равным
соответствующему образецу; в противном случае прекратим формирование новых
кластеров и перейдём к шагу 5.
4. Если в результате шага 3 был сформирован новый кластер, то повторим шаг 3
с использованием для сравнения «типичного» (например, среднего) расстояния
между установленными центрами кластеров.
5. Отнесём каждый из оставшихся образцов к области с ближайшим центром
кластера.
Алгоритм К-средних (Tf-means) [243]. Предшествующие «простой» и «мак-
симинный» алгоритмы представляли собой интуитивные процедуры. Алгоритм
К-средних основан на итеративной минимизации индекса эффективности, который
определяется как сумма квадратов расстояний от каждой точки в области кластера
до центра кластера.
1. Выберем К начальных центров кластеров zi(l),Z2(l), . ..,zk(1). Индекс в скоб-
ках представляет собой номер итерации.
2. На к-м шаге итерации распределим образцы {х} между К областями кластеров
с использованием выражения
xeSj(A:), если ||х - zj(fc)|| < ||х - Zj(fc)|| Vi = 1,2, ..., К, (9.23)
где Sj(k) обозначает множество образцов, для которых центром кластера явля-
ется Zj(k).
3. Из результатов шага 2 рассчитаем новый центр кластера zj(fc + 1), j = 1,2, ...
. ..,/С, такой что сумма квадратов расстояний от всех точек в Sj(k) до нового
центра кластера является минимальной. Другими словами, новый центр кластера
Zj(k + 1) рассчитывается так, что индекс эффективности
Jj= Е ||x-Zja + l)||2, j = (9.24)
xESj{k)
является минимальным. Величина Zj(k 4- 1), которая минимизирует индекс эф-
фективности, является просто выборочным средним по множеству Sj(k). Следо-
вательно, новый центр кластера задаётся выражением
Zj(fc + 1) = 4- Е х’ > = 1,2,...,К, (9.25)
3 x€Sj(k)
где Nj — число образцов в Sj(k). Термин «К-средних» отражает способ, исполь-
зуемый для последовательного обновления центров кластеров.
4. Если Zj(k + 1) = Zj(k) для j = 1,2, ..., К, то считаем, что процесс схождения ал-
горитма завершён и заканчиваем процедуру; в противном случае идём к шагу 2.
На поведение алгоритма /f-средних влияют следующие факторы:
• количество заданных центров кластеров;
• выбор первоначальных центров кластеров;
• порядок, в котором рассматриваются образцы;
• геометрические свойства (распределения) данных (или пространства векторов
признаков).
394 Гл. 9. Классификация образов и диагностические решения
9.6. Вероятностные модели и статистические решения
Задача. Такие методы классификации образов, как дискриминантные функ-
ции, зависят от имеющейся обучающей выборки. Успешность их применения
к новым случаям будет зависеть от точности представления различных классов
образов с помощью обучающей выборки. Как можно разработать методику
классификации образов, которая не зависит от конкретной обучающей выборки
и оптимальна в широком смысле?
Решение. Для представления частоты появления и статистических характери-
стик классов образов могут быть разработаны функции вероятности и вероятностные
модели. Такие функции могут быть основаны на большом наборе данных, историче-
ских записях или математических моделях генерации образов. В случае отсутствия
перечисленной выше информации, для оценки требуемых параметров модели необхо-
дим шаг обучения с использованием образцов, относящихся к известным категориям.
Часто допускают предположение о том, что распределение признаков для каждого
класса соответствует гауссовой ФПВ, и оценивают требуемые значения среднего
и дисперсии по обучающей выборке. Если известны ФПВ для классов образов и их
признаков, то на основе статистических функций и теории принятия решений могут
быть разработаны оптимальные решающие функции. Несколько методов, относящих-
ся к этой категории, описываются в следующих разделах.
9.6.1. Функции правдоподобия и статистические решения. Пусть P(CJ —
вероятность появления класса Ci, i = 1,2, . ..,М, которая известна как априорная
или безусловная вероятность. Апостериорная вероятность того, что наблюдаемый
образец х относится к Ci, выражается в виде P(Ci |х). Если классификатор прини-
мает решение, что образец х относится к Cj в случае, когда он в действительности
относится к Ci, тогда говорят, что имеют место потери (стоимость принятия реше-
ния) Lij при Ьц = 0 и Lij > Ьц \/j i. Поскольку х может принадлежать любому из
рассматриваемых М классов, то ожидаемые потери, известные как средний условный
риск, или потери при отнесении х к Cj, будет равен [243]:
м
RjM = ^LijP(Ci\^. (9.26)
2 = 1
Классификатор может вычислить ЯДх), j = 1,2, ..., М, для каждого образца х и за-
тем отнести х к классу, для которого условные потери окажутся наименьшими. Такой
классификатор будет минимизировать общие ожидаемые потери по всем возможным
решениям и называется байесовским классификатором. Со статистической точки
зрения байесовский классификатор представляет собой оптимальный классификатор.
В соответствии с формулой Байеса, имеем [243, 244]
F(G)P(x|G) (9 27)
р(х)
где р(х | Ci) называется функцией правдоподобия класса Ci или условной (за-
висящей от состояния) ФПВ от х, а р(х) является ФПВ от х, независимо от
принадлежности к классу (безусловной ФПВ). (Замечание. Р(у) используется для
обозначения вероятности появления события у; р(у) используется для обозначения
ФПВ случайной переменной у. Вероятности и ФПВ, связанные с многомерными
векторами признаков, являются многомерными функциями с размерностями, равны-
ми размерности вектора признаков.) Формула Байеса показывает, как наблюдение
образца х изменяет априорную вероятность P(Ci) на апостериорную вероятность
Вероятностные модели и статистические решения 395
P(Ci |х). Другими словами, формула Байеса даёт механизм для изменения априор-
ной вероятности P(G) на апостериорную вероятность P(G | х) в связи с наблюде-
нием образца х. Тогда мы можем выразить ожидаемые потери как [243]
। м
RjM = Еь°р(х 1 Ci)m)- (9-28)
Поскольку 1/р(х) является общим для всех J, мы можем модифицировать РДх)
следующим образом:
м
г,Ы = £ LijP(x I G)F(G). (9.29)
г=1
В случае двух классов при М = 2, получаем следующие выражения [243]:
П(х) = Lnp(x | G)P(Ci) + L2ip(x | С2)Р(С2); (9.30)
r2(x) = Р12р(х I Ci)P(Ci) + L22p(x I С2)Р(С*2); (9.31)
х € Ci, если ri(x) < г2(х), (9.32)
т. е.
X е Cl, если Рцр(х I С1)Р(С1) + p2ip(x | С2)Р(С2) <
< Р12р(х | Ci)P(Ci) + Р22Р(х | С2)Р(С2), (9.33)
что эквивалентно
xgCi, если (1/21-Ь22)р(х|С2)Р(С2)< (Р12-Lu)p(x|Ci)P(Ci). (9.34)
Это выражение может быть переписано как [243]
хе С, если р(х|С,|) ; Р(Сг) '7-' ~га та
Р(х\С2}> P(C,HLK-LnY (935)
Левую часть приведённого выше неравенства, которое представляет собой отношение
двух функций правдоподобия, часто называют отношением правдоподобия:
, / ч р(х I Cl)
12(х) р(х|С2)’ (936)
Тогда решающее правило Байеса для М = 2 [243] будет следующим.
1. Отнести х к классу если Zi2(x) > #12, где #12 — порог, задаваемый формулой
а - (^21 ~
12 “ P(G) (L12 - Ln) •
2. Отнести х к классу С2, если Zi2(x) < 012.
3. Принять произвольное или эвристическое решение, если Zi2(x) = #12.
Данное правило может быть обобщено для случая М классов следующим обра-
зом [243]:
м м
^eCi, если ^Lkip(ic\Ck)P(Ck) < Lg>p(x| C9)P(CQ), (9.37)
k=\ q=\
j = 1,2, ... j i.
В большинстве задач классификации образов для правильных решений потери
являются нулевыми. Можно предположить, что для всех ошибочных решений потери
396 Гл. 9. Классификация образов и диагностические решения
будут равны определённой величине. Тогда Lij = 1 — 5^-, где
= еслиг = 7, (9.38)
J [0, в противном случае
и
м
гДх) = £(1 - ^)р(х I Ci)P(Ci) = р(х) - р(х I С,)Р(СД (9.39
г=1
поскольку
М
^p(x|C'i)P(Ci)=p(x). (9.40)
г=1
Классификатор Байеса будет относить образец х к классу С», если
р(х)-р(х|Сг)Р(Сг)<р(х)-р(х|С'>)Р(С>), j = l,2,...,M, j/i, (9.41)
т. е.
xgQ, если р(х|СаР(Са>р(х|С;)Р(С7), j = 1,2, ...,М, j / i. (9.42)
Это представляет собой не что иное, как использование решающих функций
(х) = р(х I G)P(G), i = 1,2, ..., М, (9.43)
где образец х относится к классу G, если для этого образца сЦх) > d7(x) Vj / г.
Используя формулу Байеса, имеем
й(х) = P(G | х)р(х), i = 1,2, ..., М. (9.44)
Поскольку р(х) не зависит от индекса класса г, это выражение может быть упрощено
до
di(x) = Р(Сг |х), г = 1,2, ...,М. (9.45)
Приведённые выше различные решающие функции дают альтернативные, но экви-
валентные подходы, зависящие от того, какая из двух величин используется (или
доступна) — р(х | Ci) или Р(С^ |х). Использование оценки p(x|G) требует наличия
обучающей выборки для каждого класса Ci. Наиболее распространенным подходоу
является принятие предположения о гауссовом распределении и использование обу-
чающей выборки для оценки его среднего и дисперсии.
9.6.2. Классификатор Байеса для классов с нормальными распределения-
ми. Одномерная нормальная или гауссова ФПВ для единственной случайной пере-
менной х задаётся выражением
р(х) =
d™exp
(9.461
которое полностью определяется двумя параметрами: средним значением
оо
т = Е(х) = j хр(х) dx
—оо
(9.47
Вероятностные модели и статистические решения
397
и дисперсией
оо
ст2 = £*[(ж — m)2] = j (ж — т)2р(ж) dx.
—оо
(9.48)
В случае, когда М классов образов и векторы образов х размерностью п подчиняются
многомерной нормальной ФПВ, имеем
р(х I Ci) =--------ту----гут- ехр
Г 1 (2тг)п/2|С^/2 Н
1
2
mi)TCi '(х-тг)
(9.49)
i = 1,2, ...,7И, где каждая ФПВ полностью определяется её вектором средних тг
и её ковариационной матрицей размерностью п х п при
mi = jE’i[x] (9.50)
и
Ci = Ei [(х - mj(x - ш;)т], (9.51)
Здесь Ei[ ] обозначает оператор математического ожидания для всех образцов,
относящихся к классу Ci.
В природе нормальные распределения встречаются достаточно часто и, кроме то-
го, удобны для аналитического рассмотрения. В случаях, когда элементы х взаимно
независимы (т. е. когда ковариационная матрица является диагональной матрицей),
многомерная нормальная ФПВ упрощается .до произведения одномерных нормальных
ФПВ.
Ранее мы формулировали решающие функции в виде
й(х) = р(х | Ci)P(Ci). i = 1,2, ..., М. (9.52)
Так как в основе нормальной ФПВ лежит показательная функция, то удобно исполь-
зовать
^(х) = 1п[р(х|сар(са] = lnp(x|G) + In P(Ci), (9.53)
что с точки зрения эффективности классификации эквивалентно, так как натураль-
ный логарифм является монотонно возрастающей функцией. Тогда [243]
</Дх) = In P(Ci) - In 2тг - | In |Cj| - [(x - mO^Cy^x - mJ], (9.54)
i = 1,2, ..., M. Второй член не зависит от i, следовательно мы можем упростить
d,(x) до
г/г(х) = 1пГ(Сг) -|1п|Сг| -|[(х-т,)тСг'(x-m,)], г = 1,2, (9.55)
Приведённые выше решающие функции представляют собой гиперквадраты; сле-
довательно лучшее, что может сделать классификатор Байеса для образцов с нор-
мальным распределением, это поместить обобщённую решающую поверхность второ-
го порядка между каждой парой из классов образов. В случае истинных нормальных
распределений образов показанные выше решающие функции будут оптимальными
в среднем — они минимизируют ожидаемые потери с использованием упрощённой
функции потерь L2J = 1 — <5^ [243].
Если все ковариационные матрицы равны, т.е. если С* = С, i = 1,2, ...,7И, то
после того как опустим все члены, зависящие от г, получим
сЦх) = InP(G) 4- хтС-1гПг — С-1Шг, г = 1,2, ... ,М. (9.56)
398 Гл. 9. Классификация образов и диагностические решения
Теперь Байесовский классификатор представлен набором линейных решающих
функций.
Перед тем как использовать описанные выше решающие функции, необходимо
с использованием статистических тестов верифицировать гауссов характер ФПВ
анализируемых переменных [5, 245]. Следовательно, необходимо для каждого класса
получить или оценить вектор средних значений и матрицу ковариации. Для этого
можно использовать выборочные статистики, рассчитанные по обучающей выборке
9.7. Логистический регрессионный анализ
Логистическая классификация представляет собой статистический метод, осно-
ванный на модели логистической регрессии, оценивающей вероятность появления
какого-либо события [250, 251, 252]. Данный метод был разработан для задач, где
образцы должны быть классифицированы на один из двух классов. Когда переменная
отклика является бинарной, теоретические и эмпирические соображения показывают,
что функция отклика часто криволинейна. Типичная функция отклика имеет форму
буквы «S», наклонённой вперёд или назад, и известна как сигмоидальная функция.
Эта функция имеет асимптоты при значениях 0 и 1.
При логистической классификации образов событие определяется как принад-
лежность вектора образца к одному из двух классов. При использовании данного
метода рассчитывается некоторая переменная, зависящая от заданных параметров
и ограниченная диапазоном (0.1). Таким образом, она может быть интерпретирована
как вероятность. Вероятность того, что вектор образца принадлежит ко второму
классу, является просто разностью между единицей и оцениваемой величиной.
Для случая единственного признака или параметра модель логистической регрес-
сии задаётся в виде
DZ « \ еХР(6° + /П К7А
Р(событие) = ------------—(9.57)
1 + ехр(&0 + М
что эквивалентно
Р(событие) = -----—~-------——, (9.58)
1 + ехр[-(Ьо + М)]
где Ьо и Ь\ — коэффициенты, оцениваемые с использованием имеющихся данных,
а х — независимая переменная (признак). Соотношение между независимой перемен-
ной и оцениваемой вероятностью является нелинейным и имеет вид кривой в форме
буквы «S», которая близко напоминает интеграл от гауссовой функции. В случае п-
мерного вектора признаков х эта модель может быть записана как
Р(соб“тие) = 1+ехр(—z)1 (9W)
где z представляет собой линейную комбинацию
z = Ьо + 61^1 4- Ь%Х2 4-... 4- Ьпхп = (Ь, х), (9.60)
т. е. z является скалярным произведением дополненного вектора признаков х и век-
тора коэффициентов или весов Ь.
В случае линейной регрессии, коэффициенты модели оцениваются с использо-
ванием метода наименьших квадратов. При этом выбираются такие коэффициенты
регрессии, которые дают наименьшее значение суммы квадратов расстояний межд\
Этапы обучения и тестирования 399
наблюдаемой и предсказанной величинами зависимой переменной. При использо-
вании логистической регрессии параметры модели оцениваются с использованием
метода максимального правдоподобия [245, 250]; выбираются те коэффициенты,
которые делают наблюдаемый результат наиболее «правдоподобным». Поскольку
модель логистической регрессии является нелинейной, для оценки коэффициентов
необходимо использовать итеративный алгоритм [251, 252]. Для разработки класси-
фикатора, основанного на логистической регрессии, необходима обучающая выборка.
9.8. Этапы обучения и тестирования
В ситуации, когда доступно ограниченное число векторов образцов с известной
классификацией, возникает вопрос: как много образцов может быть использовано
для разработки или обучения классификатора, учитывая при этом, что разработан-
ный классификатор должен быть испытан с использованием независимого набора
образцов, также с известной классификацией. Когда доступно достаточно большое
количество образцов, они могут быть разделены на два примерно равных набора —
один для использования в качестве обучающей выборки, а другой для использования
в качестве контрольной выборки. Такая процедура случайного разделения может
быть повторена несколько раз, что позволит сгенерировать несколько классификато-
ров. В качестве окончательного результата (на основе анализа эффективности как
для этапа обучения, так и для этапа тестирования) может быть выбран один из
полученных таким образом классификаторов.
9.8.1. Метод исключения. Метод исключения (leave-one-out) [245] наиболее
удобен для оценки точности классификации какого-либо метода классификации
образов в случае, когда число доступных образцов невелико. В соответствии с этим
методом один из доступных образцов исключается, и далее классификатор разраба-
тывается с использованием оставшихся образцов, а затем классификатор применя-
ется к исключённому образцу. После этого отмечается достоверность выполненной
таким образом классификации. Эта процедура повторяется для каждого доступного
образца: если доступно Л’ обучающих образцов, то в итоге будет разработано
и проверено N классификаторов. Обучающая и контрольная выборки для каждого
отдельно разработанного и проверенного таким способом классификатора являются
независимыми. Однако, в то время как число образцов в обучающей выборке для
каждого классификатора составляет N — 1, контрольная выборка состоит только из
одного образца. К заключительной стадии анализа каждый образец будет использо-
ван N — 1 раз как обучающий образец и один раз как контрольный образец. Далее
с использованием всех результатов тестирования подсчитывается средняя точность
классификатора.
Рассмотрим простой случай, когда ковариации для двух наборов образцов двух
классов равны между собой. Предположим, что даны два набора образцов S{ =
= {х^, из класса С{ и S? = {xj2\ . ..,х^} из класса С%. Здесь N\ и W2
представляют собой количества образцов в наборах S\ и соответственно. Предпо-
ложим также, что априорные вероятности для этих двух классов равны между собой.
Тогда в соответствии с определением байесовского классификатора и предполагая,
что х подчиняется многомерной гауссовой ФПВ, образец х относится к классу С\,
если
(х - гп1)т(х - mi) - (х - Ш2)т(х - m2) > 0,
(9.61)
400
Гл. 9. Классификация образов и диагностические решения
где в — порог, а выборочное среднее задаётся выражением
. = J_ Ni
mi Ni ’
j=i
(9.62 i
В соответствии с методом исключения, один из образцов исключается из
обучающей выборки, а затем используется в качестве контрольного образца. Оценка
среднего значения для класса Ci без xj^, обозначенная как ш^, может быть
рассчитана как
что даёт
U=i
(г) ~ ( (г) ~ х
4 - mifc = j-(x^ - mi).
(9.63)
(9.64
Далее тестирование образца из С] может быть выполнено как
(4° - ihlfe)T(x^ - mu) - (х<» - m2)T(x^ - m2) =
= (4° ~ А1)Т(Х^ ~ “4 - (4° - й12)Т(х^1) - m2) > 0. (9.65)
Отметим, что когда тестируется х£\ то изменяется только mi, а m2 не изменя-
ется. Аналогично, когда тестируется образец х^ из Сг, решающее правило будет
иметь вид
(Xfc2) - mi)T(xk2) - mi) - (х® - m2fc)T(xjc2) - m2fc) =
= (42> - #>-jT(4? - “О - (42) - "»2)T(x^2) - m2) < 6. (9.66)
Метод исключения даёт наименее смещённую (практически несмещённую) оценку
точности классификации для данного метода классификации и данной обучающей
выборки и является наиболее полезным, когда количество доступных образцов
с известной классификацией невелико.
9.9. Нейронные сети
Во многих практических задачах может не иметься никакой информации об
априорной вероятности принадлежности образцов к тому или иному классу. Может
также не существовать никаких общих правил классификации для рассматриваемых
образцов. Клинические знания могут не давать базовых символических знаний,
которые могли бы быть использованы для классификации образцов, имеющих какие-
то специфические свойства. В таких ситуациях для классификации векторов образ-
цов обычные методы классификации образов, подобные описанным в предыдущих
разделах, могут не подходить. Для решения таких задач классификации эффектив-
ными могут оказаться искусственные нейронные сети (ИНС), обладающие свойством
основанного на опыте обучения и устойчивостью к ошибкам [247-249, 253-256].
401
Нейронные сети
На рис. 9.2 показан перцептрон для классификации образов, имеющий один
скрытый слой и один внешний слой. Данная сеть обучается находить сходство
между образцами непосредственно по мере их предъявления в подаваемой на вход
сети обучающей выборке. Правила классификации выводятся из обучающих данных
без использования априорной информации о распределениях классов образов в этих
данных. Для обучения классификатора, основанного на ИНС, обычно используется
алгоритм обратного распространения
[247-249, 253-256]. Фактический
ИНС уь рассчитывается как
НЕФИ.
\у=1 /
fe = l,2,
где
х#
хз
выход
(9.67)
(9.68)
перцептрон
Скрытый
слой
Ук
Выходной
слой
Входной
слой
Рис. 9.2. Двухслойный
"Wij&i 0j
И
1
(9.69)
1 + ехр(-/3)’
приведённых выше выражениях 0j
являются значениями смещений для
и
В
и 0к
узлов, a Wij и w?k — весами узлов; Xi представляют собой элементы векторов
образцов (входные параметры), а 7, J и К равны числу узлов во входном, скрытом
и выходном слоях соответственно. Веса и смещения обновляются в соответствии
с выражениями:
w*fc(n + 1) = W*fc(n) + ЧшЛ - yk)(dk - yk)]x* + a[w*k(n) - w*k(n - 1)], (9.70)
+ 1) = fl£(n) + г][ук(Д - yk)(dk - yk)](-1) + a[<(n) - tf£(n - 1)], (9.71)
Wij(n + 1) = Wij(n) +
+y
x*(l ~ x?) E^1 - yk)(dk - yk)w*k}
fc=l
Wij(n - 1)]
(9.72)
Xi + a[wij(n)
и
()j(n + 1) = 0j(n) +
+ У
й ~ EW1 - yk)(dk - yk)w*k}
fc=i
(-1) + а[0Дп)-0Дп-1)],
(9.73)
где dk — требуемые выходные значения, а — член, относящийся к коэффициенту
импульса, г] — член, относящийся к коэффициенту усиления, а п —номер итерации.
Уравнения (9.70) и (9.71) представляют собой шаги обратного распространения при
величине ^(1 — Ук)х#, являющейся чувствительностью ук к Wjk, т. е. дук/ды#к.
26 Р Рангайян
402
Гл. 9. Классификация образов и диагностические решения
Алгоритм обучения классификатора повторяется до тех пор, пока ошибка междх
требуемым выходом и фактическим выходом для обучающей выборки не станет
меньше, чем некоторая предварительно установленная пороговая величина. Shen
и др. [256] предложили для определения наиболее подходящих значений парамет-
ров J, ту и а подход, основанный на методе исключения.
9.10. Характеристики точности и цены диагностики
За статистическими характеристиками точности и достоверности при принятии
решений о распознавании или классификации образов в контексте медицинской
диагностики стоит определённый смысл. Необходимо дать клиническую или диагно-
стическую интерпретацию решений, основанных на статистических характеристиках
или логических правилах и принимаемых с использованием векторов образов.
Рассмотрим простую ситуацию скрининга, которая представляет собой использо-
вание теста для установления факта наличия или отсутствия некоторого заболевания
в определённой популяции исследуемого населения. Решение, которое должно быть
принято, носит бинарный характер. Пусть А обозначает ситуацию, когда пациент
имеет определённую патологию (отличие от нормы), a 7V —ситуацию, когда пациент
не имеет этой патологии (отвечает норме). Пусть априорные вероятности Р(А)
и P(N), соответственно, обозначают доли в тестовой популяции страдающих данным
заболеванием пациентов и нормальных пациентов. Пусть Т+ представляет собой
положительный результат скрининга (показывает присутствие заболевания), а Т~
отрицательный результат. Существуют следующие возможности [257].
• Истинноположительный результат (ИП) представляет собой ситуацию, когда
тест является положительным для пациента, имеющего заболевание (известный
также как удачная попытка, hit). Истинноположительная доля (ИПД) или
чувствительность S+ определяется как Р(Т+ | А) или
$+ число ИП решений
число субъектов с заболеванием ’
Чувствительность теста отражает его способность обнаруживать присутствие
искомого заболевания.
• Истинноотрицательный результат (ИО) представляет собой случай, когда тест
является отрицательным для пациента, который не имеет заболевания. Истинно-
отрицательная доля (ИОД) или специфичность S~ задаётся как Р(Т~ | N) или
число ИО решений
число субъектов без заболевания*
Специфичность теста показывает точность определения отсутствия исследуемого
заболевания.
• Ложноотрицателъный результат (ЛО) — это ситуация, когда тест является от-
рицательным для пациента, который имеет исследуемое заболевание; т. е. данный
тест не зафиксировал этот случай. Вероятность такой ошибки известна как
ложноотрицательная доля (ЛОД) и равна Р(Т~ | А).
• Ложноположительный результат (ЛП) определяется как случай, когда результат
теста является положительным, а пациент, который тестируется, не имеет данного
заболевания. Вероятность этого типа ошибки (или ложной тревоги) известна как
ложноположительная доля (ЛПД) и равна Р(Т+ | 7V).
Характеристики точности и цены диагностики
403
В табл. 9.1 сведены все возможные результаты классификации. Отметим, что
• ЛОД + ИПД = 1,
• ЛПД + ИОД = 1,
• S~ = 1 - ЛПД = ИОД и
• S+ = 1 - ЛОД = ИПД.
Таблица 9.1. Схематическое представление матрицы классификации. S~ обозначает специ-
фичность (истинноотрицательную долю или ИОД), ЛПД обозначает ложноположительную
долю, ЛОД обозначает ложноотрицательную долю, и S+ обозначает чувствительность (истин-
ноположительную долю или ИПД)
Фактическая группа Предсказанная группа
Нормальные Аномальные
Нормальные S~ = ИОД ЛПД
Аномальные ЛОД S+ = ИПД
Суммарный показатель точности может быть определён как [257]
точность - S+P(A) + S~P(N), (9.76)
где Р(А) — доля исследуемой популяции, которая в действительности имеет данное
заболевание (т. е. распространённость этого заболевания), a P(N) — доля исследуе-
мой популяции, которая в действительности не страдает этим заболеванием.
Эффективность теста можно также охарактеризовать показателями предсказания.
Показатель положительного предсказания, ППП, данного теста определяется как
ППП = 100
ИП
ИП + ЛП
(9.77)
и представляет собой процент случаев, помеченных как положительные данным
тестом, которые в действительности являются положительными. Показатель от-
рицательного предсказания, ПОП, определяется как
ИО
поп - 100йоТло
(9.78)
и представляет собой процент случаев, помеченных тестом как отрицательные,
которые в действительности являются отрицательными.
Когда разрабатывается какой-то новый тест или метод диагностики, то для того
чтобы подтвердить присутствие или отсутствие некоторого заболевания, необходимо
использовать другой предварительно созданный метод в качестве референтного.
Такой референтный метод часто называют золотым стандартом. Когда необходимо
проверить метод, основанный на компьютерной обработке, то чаще всего в ка-
честве золотого стандарта используют диагностику или классификацию, которая
была выполнена специалистом в данной области. Для этой же цели могут также
использоваться результаты биопсии, другие хорошо опробованные лабораторные
или исследовательские процедуры или продолжительное клиническое отслеживание
данного случая для нормальных пациентов. Термин «фактическая группа» в табл. 9.1
показывает результат использования золотого стандарта, а термин «предсказанная
группа» относится к результату проведённого теста.
Медицинские работники (а также общественность) могут интересоваться инфор-
мацией о вероятности того, что пациент, у которого результат тестирования оказался
положительным, в действительности имеет данное заболевание: эта информация да-
ётся условной вероятностью Р(А | Т+). На данный вопрос можно ответить с помощью
26’
404 Гл. 9. Классификация образов и диагностические решения
теоремы Байеса [245], используя которую мы можем получить
Р(А I Т+) =_________Р(А)Р(Т | А)_________
1 1 ' Р(А)Р(Т+ | А) - P(N)P(T+ | TV) ’ * ’ J
Отметим, что Р(Т+ | А) — S+ и Р(Т+ | N) = 1 — S~. Для того чтобы определить ана-
логичное значения апостериорной вероятности, необходимо знать чувствительность
и специфичность теста, а также априорные вероятности отрицательных и положи-
тельных случаев (степень распространённости данного заболевания).
Для того чтобы охарактеризовать общую ценовую эффективность теста или
метода диагностики, может быть определена матрица цены (см. табл. 9.2). Стоимость
проведения теста и получения Ир решения характеризуется величиной С^\ эта цена
Таблица 9.2. Схематическое представление матрицы стоимости диагностического метода
Фактическая группа Предсказанная группа
Нормальные Аномальные
Нормальные cN с+
Аномальные С' СА
того, чтобы подвергнуть нормального пациента тесту с целью скрининга на данное
заболевание. Стоимость теста в случае принятия ИП решения показывает величи-
на С а’, это может включать стоимость дальнейших тестов, лечения, отслеживания
и т. д., которые являются вторичными по отношению к самому тесту, но являются
частью программы скрининга и поддержки здоровья. Величина С+ показывает
стоимость ЛП результата: она представляет собой стоимость того, что пациент,
у которого нет заболевания, будет ошибочно подвергнут дальнейшим тестам или
терапии. В то время как определение стоимости клинических тестов или лечебных
процедур может оказаться несложной задачей, гораздо сложнее бывает количествен-
но оценить травматическое и психологическое воздействие ложноположительного
результата и последующих процедур на нормального пациента. Стоимость С~ — это
цена ЛО результата: присутствовавшее заболевание у пациента не было диагности-
ровано, ситуация ухудшается со временем, пациент сталкивается с дальнейшими
трудностями данного заболевания и система здравоохранения или пациент должны
нести расходы на дальнейшие тесты и задержанную терапию.
Коэффициент проигрыша, связанный с неправильной классификацией, может
быть определён как
П = ЛПД х С+ + ЛОД х С~. (9.80)
Тогда общая стоимость программы скрининга может быть оценена как
Cs = ИПД х СА + ИОД х CN + ЛПД х С+ + ЛОД х С~. (9.81)
Более подробное описание расчёта стоимости диагностических тестов дано в работе
Metz [257].
9.10.1. Рабочие характеристики (ROC-кривые). Характеристики суммарной
правильной классификации образов, выраженные в процентах, имеют ограниченные
возможности для оценки точности какого-либо диагностического метода. Некото-
рое улучшение анализа может быть достигнуто за счёт использования отдельных
процентных оценок правильности классификации для каждой категории, таких как
чувствительность и специфичность. Однако эти характеристики не показывают
Характеристики точности и цены диагностики
405
зависимости результатов от решающего порога. Более того, не учитывается влияние
частоты встречаемости или распространённости определённого заболевания.
С другой стороны, было бы желательно иметь тест для скрининга или диагности-
ки, который одновременно был бы и высокочувствительным, и высокоспецифичным.
Однако в реальности такой тест обычно недостижим. Большинство тестов основано
на клинических характеристиках, для которых может предполагаться ограниченный
диапазон значений какой-либо переменной (или нескольких переменных). При этом
таким тестам, как правило, свойственен компромисс между чувствительностью
и специфичностью. Соотношение между чувствительностью и специфичностью ил-
люстрируется рабочей характеристикой (ROC-кривой, от receiver operating character-
istics, рабочие характеристики пользователя), которая позволяет осуществить более
качественный анализ точности классификации диагностического метода [257-259].
Рассмотрим ситуацию, показанную на рис. 9.3. Для данного диагностического
теста с решающей переменной z мы имеем предварительно определённые теку-
щие условные ФПВ от решающей переменной z для истинноотрицательных или
нормальных случаев, обозначенную как P(z | TV), и для истинноположительных или
Рис. 9.3. Зависимость текущих условных функций плотности вероятности от диагностической
решающей переменной z для нормальных и анормальных случаев. Вертикальная линия
показывает решающий порог
аномальных случаев, обозначенную как P{z\A). Как показано на рис. 9.3, эти две
ФПВ будут почти всегда перекрываться, поскольку ни один из методов не может
быть совершенным. Пользователь или оператор должен так определить решающий
порог (показанный вертикальной линией), чтобы достигнуть компромисса между
чувствительностью и специфичностью. Понижение решающего порога будет увели-
чивать ИПД за счёт увеличения ЛПД. {Замечание. ИОД и ЛОД могут быть легко
получены из ЛПД и ИПД соответственно.)
ROC-кривая — это график, который показывает точки (ЛПД, ИПД), полученные
для некоторого диапазона значений решающего порога, или точки отсечения данного
решающего метода (см. рис. 9.4). Точка отсечения может соответствовать порогу
вероятности предсказания. Изменяя решающий порог, мы получим различные доли
406
Гл. 9. Классификация образов и диагностические решения
ЛПД
Рис. 9.4. Примеры рабочих характеристик (ROC-кривых)
решений в пределах диапазона (0,1). ROC-кривая описывает свойства обнаружения
(диагностические или дискриминантные), присущие какому-либо тесту или методу:
пользователь может выбрать для работы любую точку на кривой. ROC-кривая не
зависит от распространённости исследуемого заболевания или нарушения, поскольку
она основана на нормализованных долях решений. Так как в принципе возможна
ситуация, когда все случаи будут отмечены как отрицательные или, наоборот, как по-
ложительные, то ROC-кривая обязательно должна пройти через точки (0,0) и (1,1).
В ситуации, когда от оператора или специалиста требуется принять диагностиче-
ское решение, процедура ROC-анализа обычно заключается в том, что специалист
должен отнести каждый из случаев случай к одной из пяти возможных катего-
рий [257]:
1) определённо или почти определённо отрицательный (нормальный);
2) вероятнее всего отрицательный;
3) возможно положительный;
4) вероятнее всего положительный;
5) определённо или почти определённо положительный (аномальный).
Если это необходимо, то пункт 3 может быть заменён на «неопределённый». Да-
лее рассчитываются различные величины ИПД и ЛПД путём изменения решающего
порога от уровня 5 до уровня 1 в соответствии с перечисленными выше пунктами.
Получившиеся (ЛПД, ИПД) точки наносятся затем на график и образуют ROC-кри-
вую. Для согласования бинормальной ROC-кривой с данными обычно используется
метод оценки максимального правдоподобия [260].
Суммарной характеристикой эффективности теста является площадь под ROC-
кривой, обычно обозначаемая как Az. Из рис. 9.4 видно, что величина Az огра-
ничена диапазоном (0,1). Тест, который даёт большую площадь под ROC-кривой,
означает лучший метод, чем тот, который даёт меньшую площадь: на рис. 9.4 метод,
соответствующий кривой ROC3, лучше, чем метод, соответствующий кривой ROC2;
и оба лучше, чем метод, представленный кривой ROC1, при которой Az — 0,5.
Идеальный метод будет иметь ROC-кривую, которая следует по вертикальной линии
от точки (0,0) до точки (0,1) и далее по горизонтальной линии от точки (0,1) до
Характеристики точности и цены диагностики
407
точки (1,1), и имеет Az = 1. Такой метод имеет ИПД = 1 и ЛПД = 0 и является иде-
альным. (Замечание. Это требует, чтобы кривые ФПВ, представленные на рис. 9.3,
не перекрывались.)
9.10.2. Тест симметрии Макнемара
Задача. Предположим, что имеется два метода для выполнения определён-
ного диагностического теста. Как можно сравнить эффективность классифи-
кации для этих двух методов?
Решение. Характеристики общей точности классификации, такие как процент
правильной классификации или площадь под ROC-кривой, дают простые параметры
для сравнения двух или более диагностических методов. Если требуется более
подробное рассмотрение того, как классификация групп случаев изменяется от
одного метода к другому, то наиболее подходящим инструментом для исследования
этого вопроса является тест симметрии Макнемара [261, 262].
Тест Макнемара основывается на построении таблиц сопряжённости, в которых
сравниваются результаты двух методов классификации. Строки таблицы сопряжён-
ности содержат результаты применения одного из методов, используемого в качестве
референтного и являющегося, возможно, золотым стандартом (обозначен как метод А
в табл. 9.3); столбцы содержат результаты применения другого метода, обычно
Таблица 9.3. Схематическое представление таблицы сопряжённости для теста симметрии
Макнемара
Метод А Метод В
Нормальные Промежуточные Аномальные Всего
Нормальные а(1) Ь(2) с(3) R1
Промежуточные d(4) е(5) /(6) R2
Аномальные g(7) Ь(8) г(9) R3
Всего Cl С2 СЗ N
являющегося новым методом (метод В), который необходимо оценить по отношению
к золотому стандарту. Значения в таблице представляют собой численности, которые
соответствуют какой-нибудь из определённых диагностических категорий, обозна-
ченных в табл. 9.3 как нормальная, неопределённая и анормальная. Для каждой
истинной категории образцов (например, для нормальных и аномальных) должна
быть подготовлена отдельная таблица сопряжённости. (Класс «неопределённый» мо-
жет оказаться неприменимым в качестве истинной категории.) Истинная категория
для каждого случая может быть определена каким-либо третьим методом (например,
с помощью биопсии или хирургии).
В табл. 9.3 переменные a, b, с, d, е, f, g, h и i обозначают численности в каждой
ячейке таблицы, а числа в скобках обозначают номера ячеек. Переменные Cl, С2
и СЗ обозначают суммарные значения для численностей в соответствующем столбце;
/71, R2 и R3 обозначают суммарные значения для численностей в соответствующих
строках. Суммарное число представленных в таблице случаев для истинной катего-
рии равно N = Cl 4- С2 4- СЗ = Rl 4- R2 4- R3.
Каждая ячейка из таблицы сопряжённости представляет собой парный результат.
Например, при оценке диагностической эффективности метода В по отношению
к методу А, ячейка номер 3 будет содержать количество образцов, которые были
классифицированы как нормальные методом А, но как аномальные методом В.
Суммарные значения для строк /71, R2 и R3, и для столбцов Cl, С2 и СЗ могут
быть использованы для определения чувствительности и специфичности метода.
408
Гл. 9. Классификация образов и диагностические решения
Высокие значения величин вдоль главной диагонали (а, е, г) таблицы сопряжён-
ности (см. табл. 9.3) показывают, что никаких особых отличий в эффективности
диагностики при использовании метода В по сравнению с методом А не наблюда-
ется. В таблице сопряжённости для истинноаномальных случаев высокие значение
в верхней правой части (ячейка номер 3) будут означать улучшение в диагностике
(более высокая чувствительность) метода В по сравнению с методом А. При оценке
таблицы сопряжённости для истинно нормальных случаев метод В будет иметь более
высокую специфичность, чем метод А, если в ячейке номер 7 будут наблюдаться
большие величины. Метод Макнемара на основе таблиц сопряженности може-
быт использован для выполнения детального статистического анализа улучшения
в эффективности метода, если число случаев, доступных для каждой из категорий,
достаточно велико [261, 262].
9.11. Надёжность классификаторов
и систем принятия решений
В большинстве применений анализа биомедицинских сигналов перед исследо-
вателем встаёт проблема разработки системы классификации образов и принятия
решений с использованием небольшого количества обучающих образцов (сигналов'
без каких-либо предварительных знаний о рассчитанных для этих сигналов рас-
пределениях признаков или параметров. Соотношение размера обучающей выборка
и количества используемых признаков в системе классификации образов определяе-
точность и надёжность принимаемых решений [263, 264]. Нельзя одновременно
увеличить количество используемых признаков без увеличения размера обучающе
выборки, так как эти две величины совместно влияют на смещение и дисперси-
классификатора. С другой стороны, в случае когда обучающая выборка имее~
фиксированное количество образцов, добавление дополнительных признаков сверх
определённого предела приведёт к худшей работе классификатора: это извести
как «проклятие размерности» (curse of dimensionality). Желательно иметь тако,-
способ анализа смещения и дисперсии правил классификации, который не связа
с функциональной формой распределений используемых признаков.
Raudys и Jain [264] предложили для пяти различных методов классифика-
ции образов эмпирически полученную таблицу, позволяющую выбрать такое числ
обучающих образцов при заданном количестве используемых признаков, которое
обеспечивает получение ошибки классификации, не превышающей определённого
значения. Когда имеющиеся признаки упорядочены с точки зрения их индивиду-
ального качества классификации, оптимальное число признаков, которые должны
быть использованы в определённом методе классификации и обучающей выборке
может быть определено путём расчёта несмещённых оценок точности классификации
при изменении числа признаков через единицу в порядке возрастания. Конец этой
процедуры будет достигнут, когда эффективность начнёт ухудшаться, что покаже~
оптимальное число используемых признаков. Однако этот метод не может учиты-
вать совместную работу различных комбинаций признаков: для обеспечения этого
условия необходимо использовать исчерпывающее число комбинаций всех признаков
Для оценки и выбора признаков, а также для оценки точности классификации, мог>’
быть использованы специальные пакеты программ, такие как The Statistical Package
for the Social Sciences (SPSS) [251, 252].
Durand и др. [167] сообщили о разработке и оценке нескольких методов классифи-
кации образов, которые предназначены для оценки биопротезов клапанов и основаны
Применение', нормальные или эктопические QRS-комплексы ЭКГ
409
на 18 признаках, рассчитанных из спектра ФКГ (см. разд. 6.6). Основываясь на
произвольном решении о том, что количество обучающих образцов должно быть по
меньшей мере в пять или более раз выше, чем количество используемых признаков,
и имея в своём распоряжении обучающую выборку, ограниченную записями для
20 нормальных и 28 подвергшихся перерождению клапанов, авторы использовали
для разработки и оценки алгоритмов классификации образов исчерпывающий набор
комбинаций из 18 признаков, беря при этом 2, 3, 4, 5 и 6 признаков одновре-
менно. Байесовский метод показал наилучшую эффективность (98% правильной
классификации) при использовании 6 признаков; для общего числа 511 комбинаций
из 18 признаков, из которых бралось одновременно 6, были получены показатели
правильной классификации в диапазоне от 90 до 98%. Алгоритм ближайшего соседа
с использованием расстояния Махаланобиса продемонстрировал 94% правильной
классификации при использовании только трёх признаков и не показал дальнейшего
улучшения работы при большем числе признаков.
9.12. Применение: нормальные или эктопические
QRS-комплексы ЭКГ
Раннее мы уже рассматривали различия между нормальными QRS-комплекса-
ми ЭКГ и эктопическими комплексами (ЖЭ) в нескольких различных контекстах
(см. разд. 1.2.4, 5.4.2, 5.7 и 9.2.2, а также рис. 5.1 и 5.10). Теперь посмотрим, как мы
можем объединить несколько изучавшихся до этого тем с целью обнаружения ЖЭ
в сигнале ЭКГ.
Шаг обучения. На рис. 9.5 показан сигнал ЭКГ от пациента с несколькими
эктопическами комплексами, включая эпизоды бигеминии (чередование нормальных
комплексов и ЖЭ). Комплексы для фрагмента сигнала, показанного на рис. 9.5, были
вручную отмечены как нормальные («о») или ЖЭ («х»), и использованы для обуче-
ния системы классификации образов. Обучающая выборка включала 121 нормальный
комплекс и 39 ЖЭ.
Для обнаружения каждого комплекса, вычисления признаков и разработки пра-
вил классификации образов к сигналу были применены следующие процедуры.
1. Фильтрация сигнала выполнялась с использованием фильтра нижних частот
Баттерворта, имеющего порядок 8 и частоту среза 70 Гц для устранения шума
(см. разд. 3.4.1); частота дискретизации 200 Гц.
2. Для обнаружения каждого комплекса использовал алгоритм Пана-Томпкинса
(см. разд. 4.3.2).
3. Участок QRS-Т для каждого комплекса был сегментирован с использованием
интервала между отсчётом, соответствующим 160 мс перед пиком выходного
сигнала алгоритма Пана-Томпкинса, и отсчётом, соответствующим 240 мс после
этого пика (см. рис. 5.10).
4. Для каждого комплекса был рассчитан RR-интервал (далее в формулах — /?/?)
и коэффициент формы КФ (FF, см. разд. 5.6.4 и 5.7, и рис. 5.10). На рис. 9.6
показан график значений вектора признаков для обучающей выборки.
5. Для групп нормальных комплексов и ЖЭ в обучающей выборке были рассчитаны
векторы-прототипы (средние векторы) признаков. Значения векторов-прототипов
составляли (RR.FF) = (0,66, 1,58) и (RR.FF) = (0,45, 2,74) для классов нор-
мальных комплексов и ЖЭ соответственно.
27 Р. Рангайян
Рис. 9.5. Сигнал ЭКГ пациента (мужчина, 65 лет) с ЖЭ (обучающая выбор-
ка). Каждая строчка сигнала имеет длительность 10 с; сигнал продолжается
сверху вниз. Вторая половина седьмой строки сигнала и первая половина вось-
мой строки показывают эпизод бигеминии. Каждый QRS-комплекс был вруч-
ную отмечен как нормальный («о») или ЖЭ («х»). Последний QRS-комплекс
не был обработан
Рис. 9.6. Пространство векторов признаков (RR, FF),
соответствующих ЭКГ на рис. 9.5 (обучающая выбор-
ка). Нормальные комплексы: «о», ЖЭ: «х». Прямая
линия, соединяющая два вектора прототипов, показа-
на пунктиром; также на рисунке показана перпенди-
кулярная к ней прямая (сплошная линия); последняя
представляет собой оптимальную линейную решающую
функцию
410 Гл. 9. Классификация образов и диагностические решения
Применение', нормальные или эктопические QRS-комплексы ЭКГ
411
6. Для двух векторов-прототипов были получены уравнения прямой линии, со-
единяющей эти два вектора, и перпендикулярной к ней прямой, проходящей
через центр первой линии; последняя представляет собой оптимальную линейную
решающую функцию (см. разд. 9.4.1 и рис. 9.1). На рис. 9.6 показаны обе эти
линии.
7. Уравнение для этой линейной решающей функции будет следующим: RR —
— 5,56FF + 11,44 = 0. Решающее правило может быть сформулировано как
если №-5,56^+11,44^0’ 7""“™ (9.82)
U, ЖЭ.
При использовании решающего правила, задаваемого уравнением (9.82), все
комплексы в обучающей выборке были классифицированы правильно.
Обратите внимание на рис. 9.6, что в обучающей выборке даже единственный
простой порог по КФ может обеспечить эффективное разделение ЖЭ и нормальных
комплексов. Можно также предложить вполне работоспособное правило классифика-
ции для обнаружения желудочковых экстрасистол, основанное на принципе, описан-
ном в разд. 9.2.2. Данный пример приведён здесь в качестве простой иллюстрации
к принципу разработки двумерной линейной решающей функции.
Шаг тестирования. На рис 9.7. показан фрагмент ЭКГ, непосредственно следую-
щий за фрагментом, показанным на рис. 9.5. Для обнаружения комплексов в сигнале,
Рис. 9.7. Сигнал ЭКГ пациента с ЖЭ (контрольная выборка); этот фрагмент сигнала непо-
средственно следует за сигналом, показанным на рис. 9.5. Каждая строка сигнала имеет дли-
тельность 10 с; сигнал продолжается сверху вниз. Каждый QRS-комплекс был автоматически
отмечен как нормальный («о») или ЖЭ («х») путём использования решающего правила, задан-
ного уравнением (9.82). Десятый комплекс в девятой строке сигнала (RR^FF) = (0,66,2,42)
был неправильно классифицирован. Последний комплекс не был обработан
412
Гл. 9. Классификация образов и диагностические решения
показанном на рис. 9.7, и для вычисления их признаков, которые были использованы
в качестве контрольной выборки, применялись те же самые процедуры, что были
описаны выше. Автоматическая классификация комплексов на нормальные и ЖЭ по
векторам признаков была осуществлена с помощью решающего правила, задаваемого
уравнением (9.82). На рис. 9.8 изображено пространство векторов признаков для
комплексов контрольной выборки одновременно с границей решающего правила,
Рис. 9.8. Пространство векторов признаков (RR, FF), соответствующее ЭКГ на рис. 9.7 (кон-
трольная выборка). Нормальные комплексы: «о», ЖЭ: «х». Прямая линия представляет собой
оптимальную решающую функцию, заданную уравнением (9.82). Ближайший к решающей
границе знак «х» с (RR, FF) = (0,66, 2,42) соответствует ложноположительной классификации
заданного уравнением (9.82). На рис. 9.7 показаны автоматически расставленные
метки для каждого комплекса: все 37 ЖЭ были правильно классифицированы
и только один из 120 нормальных комплексов был ошибочно классифицирован как
ЖЭ (т. е. была одна ложноположительная ошибка).
Необходимо также заметить, что ЖЭ по определению имеет более короткий
RR-интервал, чем интервал для нормального комплекса (при той же самой частоте
сердечных сокращений). Однако частота сердечных сокращений человека постоянно
меняется во времени и референтное значение RR-интервала, используемое для опре-
деления преждевременности ЖЭ, необходимо периодически обновлять. Задаваемое
уравнением (9.82) решающее правило не может использоваться постоянно даже для
одного и того же пациента. Отметим, что предложенный метод может быть рас-
пространен на идентификацию синусовых комплексов (происходящих из СА-узла),
которые удовлетворяет условию преждевременности в связи с синусовой аритмией,
но являются, тем не менее, нормальными по форме.
Значения КФ зависят от формы каждого QRS-комплекса ЭКГ, которая может
меняться от одного отведения ЭКГ к другому. Следовательно, одно и тоже решающее
правило, основанное на форме волны, не может быть применено для всех отведений
ЭКГ даже для одного и того же пациента. Более того, один и тот же пациент
Применение', выявление патологии хряща коленной чашечки 413
может иметь ЖЭ, происходящие из различных эктопических фокусов, что приводит
к широкому разнообразию форм волн даже в одном и том же отведении ЭКГ.
Коэффициент формы, предназначенный для использования при классификации форм
комплексов, одновременно должен быть способен принимать различные значения
для ЖЭ различных форм в одной группе и для нормальных комплексов, образующих
другую группу.
Предыдущая иллюстрация имела целью показать простой пример разработки
системы классификации образов; на практике могут потребоваться более сложные
решающие правила, основанные более чем на двух признаках. Кроме того, необхо-
димо отметить, что описанная выше процедура классификации образов даёт только
разметку классов формы от комплекса к комплексу; полная диагностика состояния
пациента требует учёта многих других факторов и видов клинической информации,
а также высокой квалификации кардиолога.
9.13. Применение: выявление патологии хряща
коленной чашечки
Moussavi и др. [56], Krishnan и др. [57] и Rangayyan и др. [58] предложили
последовательность методов адаптивной сегментации, моделирования и классифика-
ции образов для обнаружения патологии хряща коленного сустава с использованием
сигналов ВАГ (см. разд. 1.2.13 и 8.2.3). С учётом того факта, что сигналы ВАГ яв-
ляются нестационарными, каждый сигнал был предварительно разделён на локально
стационарные сегменты с использованием алгоритмов РНК и РРНК (см. разд. 8.6.1
и 8.6.2). Каждый сегмент рассматривался как отдельный сигнал и моделировался
с использованием линейного предсказания назад или решётчатого метода Берга
(см. разд. 8.6.2). В качестве параметров для классификации образов использовались
коэффициенты моделей или полюса.
Наиболее ярким отличием между сигналом ВАГ в норме и аномальным сигналом,
которое можно наблюдать визуально или на слух, является то, что аномальные сигна-
лы имеют намного больше вариаций амплитуды в течение всего цикла качания ноги,
чем нормальные сигналы. Однако в результате разделения сигналов на сегменты
и рассмотрения каждого сегмента как отдельного сигнала эта разница теряется. Для
преодоления этой проблемы рассчитывались средние значения (средние по времени)
сегментов сигнала для каждого пациента, а затем по различным сегментам одного
и того же сигнала рассчитывалась дисперсия этих средних значений. Дисперсия
средних значений как раз и характеризует вышеупомянутую разницу, и поэтому она
была использована в качестве одного из дискриминирующих признаков.
В дополнение к количественным параметрам, получаемым при анализе сигнала
ВАГ, были исследованы на возможную дискриминирующую способность клини-
ческие параметры (которые будут описаны в последующих абзацах), связанные
с данным пациентом. В результате, как показано на рис. 9.9, коленные суставы
пациентов в данном исследовании были подразделены на две следующие группы:
нормальные и аномальные. Нормальная группа была разделена на две подгруппы:
нормальная бесшумная и нормальная шумная. Если при аускультации не было
слышно никакого звука, то нормальный сустав рассматривался как нормальный
бесшумный; в противном случае он рассматривался как нормальный шумный. Все
используемые в исследовании суставы, относящиеся к аномальной группе, были
исследованы с использованием артроскопии (см. разд. 8.2.3 и рис. 8.2) и разделены
на две группы: артроскопически нормальные и артроскопически аномальные.
414
Гл. 9. Классификация образов и диагностические решения
Коленный сустав
клиническое
наблюдение
Норма Аномалия
Аускультация
Артроскопия
Нормально-бесшумный Нормально-шумный Артроскопически
нормальный
Рис. 9.9. Разбиение коленных суставов пациентов на категории
Артроскопически
аномальный
на основе аускультации и
артроскопии
Разметка сегментов сигнала ВАГ выполнялась путём сравнения результатов
аускультации и артроскопии для каждого из пациентов с соответствующими сегмен-
тированными сигналами ВАГ и значениями угла сгибания сустава. В ходе артроско-
пии выполнялась также локализация патологии и оценивался диапазон угла сгибания
сустава, в пределах которого повреждённая площадь могла входить в контакт с дру-
гими поверхностями сустава. Эти результаты затем сравнивались с результатами
аускультации, для того чтобы определить, действительно ли углы сгибания сустава,
при которых существует патология, соответствуют углам сгибания, при которых
слышен звук. Например, если по результатам артроскопии для данного пациента
выяснялось, что ненормальные части колена пациента могут войти в контакт при
диапазоне углов 30-90°, то сегменты сигнала ВАГ пациента, соответствующие ука-
занному диапазону углов, помечались как артроскопически аномальные; остальные
сегменты этого сигнала отмечались как артроскопически нормальные.
Описанное выше разбиение на четыре категории выполнялось на основе пред-
положения, что нормальный шумный и артроскопически аномальный сигналы раз-
личимы по их характеристикам и что нормальный бесшумный и артроскопически
нормальный коленный сустав также различимы. Кроме того, допускались следующие
возможности: артроскопически нормальный сустав может быть связан со звуками;
нормальное шумное колено может не иметь никаких связанных с ним патологий;
нормальное бесшумное колено может иметь неопределенную патологию. Krishnan
и др. [57] далее подразделили артроскопически нормальные и артроскопически ано-
мальные группы на бесшумные и шумные, получив таким образом общее количество
категорий равное шести (на рис. 9.9 это не показано).
На основе клинических данных и аускультации коленных суставов для класси-
фикации были выбраны следующие клинические параметры (в дополнение к пара-
метрам АР-модели).
Звук. Звук, слышимый при аускультации во время движения коленного сустава,
соответствующего сгибанию и вытягиванию ноги, кодировался следующим образом:
0 — бесшумный;
1 — щелчок;
2 — хлопок;
3 — скрежет;
4 — смесь вышеупомянутых звуков или другие звуки.
Каждый сегмент сигналов ВАГ был помечен одним из перечисленных выше кодов.
Уровень активности. Уровень активности для каждого пациента был закодиро-
ван следующим образом:
1 — выполнение физических упражнений один раз в неделю или реже;
Применение', выявление патологии хряща коленной чашечки
415
2 — выполнение физических упражнений два-три раза в неделю;
3 — выполнение физических упражнений более чем три раза в неделю.
Возраст. Возраст пациента в годах.
Пол. Пол пациента, который кодировался как:
О — женский;
1 — мужской.
Среди перечисленных выше параметров пол может и не являться дискриминиру-
ющим параметром; однако указание пола пациента при клиническом обследовании
является общепринятой практикой. Для сигнала ВАГ данного пациента меняться от
сегмента к сегменту может только первый из четырёх указанных параметров.
Moussavi и др. [56] сравнили эффективность различных наборов признаков для
классификации сигналов ВАГ на две группы и на четыре группы (см. рис. 9.9) при
случайном выборе случаев. С использованием набора из 540 сегментов, полученных
от 20 пациентов в норме и 16 пациентов с патологией хряща, для использования
на этапе обучения при проектировании дискриминантной функции были случайно
выбраны различные значения числа сегментов. В качестве окончательной системы
классификации был выбран тот вариант, который показал наилучшие результаты на
этапе тестирования. Были получены следующие значения точности: для классифика-
ции на две группы —в диапазоне 77—91% и для классификации на четыре группы —
в диапазоне 65-88%.
Используя комбинацию шагов классификации на две группы и на четыре группы,
Moussavi и др. [56] предложили двухэтапный метод; блок-диаграмма этого метода
показана на рис. 9.10. Сначала данный алгоритм использует обучающие выборки
для разработки классификаторов на две и на четыре группы. Получившиеся дис-
криминантные функции используются как Классификатор 1 (две группы) и Клас-
сификатор 2 (четыре группы) соответственно. Неизвестный сигнал, разделённый на
сегменты с использованием адаптивного метода, подаётся на Классификатор 1. Если
сегменты, занимающие более чем 90% общей длительности сигнала, были класси-
фицированы как нормальные, то весь данный сигнал (пациент) рассматривается как
нормальный. С другой стороны, если более чем 90% от всей длительности сигнала
классифицируется как аномальный сигнал, то данный сигнал (пациент) рассматрива-
ется как аномальный. Если более чем 10%, но менее чем 90% длительности сигнала
классифицируется как аномальный сигнал, то сигнал подаётся на Классификатор 2,
который классифицирует сигнал на четыре группы (см. рис. 9.9). На втором этапе,
если более чем 10% от длительности сигнала классифицируется как артроскопически
аномальный сигнал, то сигнал рассматривается как аномальный, в противном случае
он рассматривается как нормальный. На данной стадии доступна лишь информация
о числе сегментов, принадлежащих к каждой из четырёх категорий, показанных
на рис. 9.7, но окончательное решение принимается о принадлежности к норме всего
сигнала (т. е. пациента или коленного сустава).
Для обучения данного метода диагностики, включающего два этапа, была исполь-
зована обучающая выборка, содержащая 262 сегмента, полученных от 10 нормальных
пациентов и от 8 пациентов с патологией хряща, а для тестирования этого метода
была использована контрольная выборка, включающая 278 сегментов, полученных
из другого набора от 10 нормальных пациентов и от 8 пациентов с патологией
хряща, но без каких-либо ограничений на вид аномальности. За исключением
одного нормального сигнала, для которого алгоритм показал 12% аномальности от
всей его длительности, все остальные сигналы были правильно классифицированы.
Эти результаты также показывают, что все аномальные сигналы, включая сигналы,
связанные с хондромаляцией степеней от I до IV (см. разд. 8.2.3 и рис. 8.2), были
классифицированы правильно. На основе этих результатов было показано, что дан-
ный метод обладает способностью обнаруживать хондромаляцию коленного сустава
416
Гл. 9. Классификация образов и диагностические решения
Сигнал ВАГ
Аномалия
Норма
Рис. 9.10. Двухшаговый метод классификации для диагностики патологий хряща. АА — Ар-
троскопичски аномальный. См. также рис. 9.9. Воспроизводится с разрешения Z.M. К. Mous-
savi, R. М. Rangayyan, G. D. Bell, С. B. Frank, К. O. Ladly, and Y. T. Zhang, Screening of
vibroarthrographic signals via adaptive segmentation and linear prediction modeling, IEEE Trans-
actions on Biomedical Engineering, 43(1): 15-23, 1996. ©IEEE
как на ранних, так и на более поздних стадиях. Krishnan и др. [57] и Rangayyan
и др. [58] сообщили о продолжении работ в данном направлении.
9.14. Замечания
Тема классификации образов сама по себе является широкой областью. Темы,
представленные в данной главе, дают лишь краткое введение в этот предмет.
Здесь мы видели, как биомедицинские сигналы могут быть обработаны и про-
анализированы для извлечения количественных признаков, которые могут быть
использованы для классификации сигналов, а также для разработки диагностических
решающих функций. Практическое развитие таких методов обычно сдерживает-
ся большим количеством ограничений, связанных с объёмом дискриминирующей
информации, которая присутствует в сигналах, выбранных для анализа, а также
с ограничениями в разработанных и рассчитываемых признаках. Дополнительные
ограничения вносятся артефактами, которые могут быть как свойственны самим
сигналам, так и вызваны системами съёма сигналов.
Система классификации образов, которая разработана с использованием огра-
ниченных данных и информации о выбранных сигналах и признаках, будет давать
результаты, которые необходимо интерпретировать с должной осторожностью. Кроме
того, необходим всё время помнить о том, что окончательные диагностические
Контрольные вопросы и задания
417
решения требуют намного большей информации, чем та, которая может быть по-
лучена в результате анализа сигнала: этот аспект лучше оставить врачам и другим
медицинским специалистам в области диагностики с использованием компьютеров.
9.15. Контрольные вопросы и задания
1. Векторы прототипов двух классов сигналов заданы как Класс 1 (1,0,5) и Класс 2
(3,3). Вектор нового образца задан как (2,1). Получите уравнения для двух
характеристик сходства или различия, рассчитайте эти характеристики для
вектора образца и классифицируйте этот образец как Класс 1 или Класс 2
с использованием каждой из характеристик.
2. В задаче классификации на три класса заданы три решающие границы:
С?1(х) = ~Х\ + #2, d?(x) = Х\ + Х2 ~ 5 И С?з(х) = ~Х2 + 1.
Нарисуйте эти решающие границы на листе миллиметровки.
Классифицируйте вектор образца х = (6,5) с использованием данных решающих
функций.
3. Два вектора прототипов классов заданы, как zi = (3,4) и Z2 = (10,2). Клас-
сифицируйте вектор образца х = (4,5) с использованием а) нормализованного
скалярного произведения и б) евклидова расстояния.
4. Исследователь измеряет два параметра для каждого образца на наборе из 10
нормальных и 10 аномальных образцов.
Для нормальных образцов получен следующий набор векторов признаков:
{(2,6), (22,20), (10,14), (10,10), (24,24), (8,10), (8,8), (6,10), (8,12), (6,12)}.
Для аномальных образцов получен следующий набор векторов признаков:
{(4,10), (24,16), (16,18), (18,20), (14,20), (20,22), (18,16),(20,20), (18,18), (20,18)}.
Нарисуйте скаттерограмму образцов обоих классов в пространстве векторов
признаков (на листе миллиметровки). Нарисуйте линейную решающую функцию
для классификации этих образцов с наименьшей ошибкой неправильной класси-
фикации. Запишите данную решающую функцию как математическое правило.
Как много образцов (если такие есть) были неправильно классифицированы
с использованием полученной решающей функции? Отметьте неправильно клас-
сифицированные образцы на графике.
Вам заданы два новых вектора образцов как xi = (12,15) и Х2 = (14,15). Клас-
сифицируйте эти образцы с использованием вашего решающего правила.
Классифицируйте образцы xi и Х2, используя метод к ближайших соседей при
к = 7.
Измерьте графически расстояния на вашем графике и отметьте соседей, исполь-
зованных для каждого образца.
Прокомментируйте полученные результаты (дали ли эти два метода одинаковые
результаты классификации или нет) и объясните причины.
5. Исследователь выполняет измерения RR-интервалов (RR, в секундах) и коэффи-
циента формы (FF) для некоторого числа QRS-комплексов ЭКГ, включающего
(i) нормальные комплексы, (И) желудочковые экстрасистолы (ЖЭ) и (iii) нор-
мальные комплексы с компенсаторной паузой (НККП). Полученные величины
(обучающая выборка) приведены в табл. 9.4.
а) Нарисуйте точки для вектора признаков (/?/?, FF) для трёх классов комплек-
сов на миллиметровке.
418
Гл. 9. Классификация образов и диагностические решения
Таблица 9.4. Обучающая выборка векторов признаков (RR,FF)
Нормальные комплексы ЖЭ НККП
RR FF RR FF RR FF
0,700 1,5 0,600 5,5 0,800 1,2
0,720 1,0 0,580 6,1 0,805 1,1
0,710 1,2 0,560 6,4 0,810 1,6
0,705 1,3 0,570 5,9 0,815 1,3
0,725 1,4 0,610 6,3 0,790 1,4
б) Рассчитайте векторы прототипов для каждого класса как среднее для класса.
Отметьте прототипы на графике.
в) Получите оптимальные линейные дискриминантные функции (или решающие
функции) как перпендикуляры к прямым линиям, соединяющим прототипы,
проведённые через середины этих линий. Сформулируйте решающие правила
для каждого типа комплексов.
г) Наблюдаются три новых комплекса, имеющие параметры, указанные
в табл. 9.5. Классифицируйте каждый из этих комплексов с использованием
решающих функций, полученных по пункту в).
Таблица 9.5. Обучающая выборка векторов признаков (RR,FF)
Номер комплекса RR FF
1 0,650 5,5
2 0,680 1,9
3 0,820 1,8
6. Для обучающей выборки, заданной в предыдущей задаче, рассчитайте средние
значения и ковариационные матрицы для векторов признаков каждого класса,
а также общую ковариационную матрицу.
Разработайте классификатор, основанный на расстоянии Махаланобиса с исполь-
зованием объединённой ковариационной матрицы.
7. Вы выиграли контракт на разработку программного пакета для диагностики
сердечно-сосудистых заболеваний при помощи компьютера с использованием
сигнала звуков сердца (ФКГ) как основного источника информации. Главной
задачей является выявление присутствия шумов в систолической и/или диа-
столической фазах. В качестве референтных вы можете использовать другие
сигналы.
Предложите систему обработки сигнала, выполняющую следующие задачи:
i) съём требуемых сигналов;
ii) их предобработка, если необходимо;
iii) определение по меньшей мере двух признаков для классификации;
iv) классификация сигналов ФКГ как
Класс 1 — нормальный (без шумов),
Класс 2 — систолический шум,
Класс 3 — диастолический шум,
Класс 4 — систолический и диастолический шум.
Упражнения и лабораторные работы
419
Нарисуйте блок-диаграмму всей процедуры. Объясните причины, по которым
был использован каждый из этапов, и сформулируйте ожидаемые результаты или
выгоды. Поясните алгоритмические детали и/или математические определения,
по меньшей мере, для двух главных этапов вашей процедуры.
Нарисуйте схематический график пространства векторов признаков и покажите,
где будут располагаться образцы четырёх перечисленных выше классов. Предло-
жите в общих чертах решающие правила для классификации входного сигнала
на принадлежность к одному из данных четырёх классов.
9.16. Упражнения и лабораторные работы
Замечание. Необходимые для выполнения упражнений файлы с данными доступ-
ны на сайте ftp://ftp.ieee.org/uploads/press/rangayyan/.
1. Файл ecgpvc.dat содержит сигнал ЭКГ от пациента с желудочковыми экстраси-
столами (ЖЭ); см. рис. 9.5 и 9.7. Обратитесь к файлу ecgpvc.m для уточнения
деталей. Используйте первые 40% записи сигнала в качестве обучающих данных
для разработки системы обнаружения ЖЭ (см. разд. 9.12). Разработайте код
для сегментации QRS-Т фрагмента каждого кардиоцикла с использованием
метода Пана-Томпкинса (см. разд. 4.3.2) и рассчитайте RR-интервал, ширину
QRS-комплекса и коэффициент формы для каждого комплекса (см. разд. 5.6.4).
Разработайте линейную дискриминантную функцию, используя а) RR-интервал
и ширину QRS-комплекса и б) RR-интервал и коэффициент формы в качестве
признаков; см. рис. 9.6. Проанализируйте результаты с точки зрения получаемых
значений ИПД и ЛПД.
Вставьте полученную решающую функцию в вашу программу в качестве прави-
ла классификации. Проверьте полученную программу классификации образов
с использованием оставшихся 60% записи в качестве контрольного сигнала.
Рассчитайте точность классификации для стадии тестирования с точки зрения
получаемых значений ИПД и ЛПД.
2. Повторите предыдущее упражнение, заменив линейную дискриминантную функ-
цию на метод к ближайших соседей при к = 1, 3, 5 и 7. Оцените метод
с использованием следующих вариантов наборов признаков:
• RR-интервал и ширина QRS-комплекса;
• RR-интервал и коэффициент формы;
• RR-интервал, ширина QRS-комплекса и коэффициент формы.
Сравните работу этих трёх классификаторов и приведите доводы, объясняющие
разницу между ними.
СПИСОК ЛИТЕРАТУРЫ
1. Lathi В.Р. Signal Processing and Linear Systems. — Carmichael, CA: Berkeley-Cambridge,
1998.
2. Oppenheim A. V, Willsky A.S. and Nawab S.H. Signals and Systems. — 2nd ed. — Engle-
wood Cliffs, NJ: Prentice-Hall, 1997.
3. Papoulis A. Signal Analysis. — New York, NY: McGraw-Hill, 1977.
4. Pdpoulis A. Probability, Random Variables and Stochastic Processes. — New York, NY:
McGraw-Hill, 1965.
5. Bendat J. S. and Piersol A. G. Random Data: Analysis and Measurement Procedures. —
2nd ed. — New York, NY: Wiley, 1986. (Есть русский перевод: Бендат Дж., Пирсол А.
Прикладной анализ случайных данных / Пер. с англ. — М.: Мир, 1989. — 540 с.)
6. Aunon J.I. and Chandrasekar V. Introduction to Probability and Random Processes. — New
York, NY: McGraw-Hill, 1997.
7. Ramsey F. L. and Schafer D. W. The Statistical Sleuth — A Course in Methods of Data
Analysis. — Belmont, CA: Wadsworth Publishing Company, 1997.
8. Riffenburgh R. H. Statistics in Medicine. — San Diego, CA: Academic, 1993.
9. Bailor III J. C. and Mosteller F. (eds.). Medical Uses of Statistics. — 2nd ed. — Boston, MA:
NEJM Books, 1992.
10. Webster J. G. (ed.). Medical Instrumentation: Application and Design. —3rd ed. — New York,
NY: Wiley, 1998.
11. Bronzino J. D. Biomedical Engineering and Instrumentation. — Boston, MA: PWS Engineer-
ing, 1986.
12. Bronzino J.D. (ed.). The Biomedical Engineering Handbook. — Boca Raton, FL: CRC and
IEEE, 1995.
13. Aston R. Principles of Biomedical Instrumentation and Measurement. — Columbus, OH:
Merrill, 1990.
14. Oppenheim A. V. and Schafer R. W. Discrete time Signal Processing. — Englewood Cliffs,
NJ: Prentice Hall, 1989. (Есть русский перевод: Оппенгейм А., Шафер Р. Цифровая
обработка сигналов. — Минск: Техносфера, 2006.— 856 с.)
15. Cooper К.Е., Cranston W.l. and Snell E.S. Temperature regulation during fever in man
// Clin. Sci. - 1964. - V. 27, No. 3. - P. 345-356.
16. Cooper К. E. Body temperature and its regulation // In: Encyclopedia of Human Biology. —
New York, NY: Academic, 1997. - V. 2. - P. 73-83.
17. Cromwell L., Weibell F.J. and Pfeiffer E. A. Biomedical Instrumentation and Measure-
ments.—2nd ed. — Englewood Cliffs, NJ: Prentice-Hall, 1980.
18. Plonsey R. Action potential sources and their volume conductor fields // Proc. IEEE. —
1977. — V. 65, No. 5. — P. 601-611. (Есть русский перевод: Плонси Р. Источники, соответ-
ствующие потенциалу действия, и их поля в объемном проводнике // ТИИЭР. — 1977. —
Т. 65, №5.-С. 10-23.)
19. Clark R. Action potentials (Personal Communication). — Calgary Alberta, Canada: University
of Calgary, 1999.
20. Hille B. Membrane excitability. Action potential propagation in axons // In: Patton H,
Fuchs A., Hille B., Scher A. and Steiner R. (eds.). Textbook of Physiology. — 21st ed.—
Philadelphia, PA: WB Saunders, 1989. — P. 49-79.
Список литературы
421
21. Koester J. Action conductances underlying the action potential // In: Principles of Neural
Science I Kandel E. and Schwartz J. (eds.). — New York, NY: Elsevier North Holland,
1981.-P. 53-62.
22. Goodgold J. and Eberstein A. Electrodiagnosis of Neuromuscular Diseases. — 3rd ed. —
Baltimore, MD: Williams and Wilkins, 1983.
23. Rushmer R. F. Cardiovascular Dynamics. — 4th ed. — Philadelphia, PA: WB Saunders, 1976.
24. De Luca C.J. Physiology and mathematics of myoelectric signals // IEEE Trans. Biomed.
Eng. - 1979. - V. 26. - P. 313-325.
25. Mambrito B. and de Luca C. J. Acquisition and decomposition of the EMG signal // In:
Desmedt J. E. (ed.) Progress in Clinical Neurophysiology. Comput. Aided Electromyogr. —
Basel, Switzerland: S. Karger AG, 1983. - V. 10. - P. 52-72.
26. Platt R. S., Hajduk E. A., Hulliger M. and Easton P. A. A modified Bessel filter for amplitude
demodulation of respiratory electromyograms // J. Appl. Physiol. — 1998. — V. 84, No. 1. —
P. 378-388.
27. Tompkins W.J. Biomedical Digital Signal Processing. — Upper Saddle River, NJ: Prentice
Hall, 1995.
28. Goldberger E. Unipolar Lead Electrocardiography and Vectorcardiography. — 3rd ed. —
Philadelphia, PA: Lea & Febiger, 1954.
29. Jenkins J.M. Computerized electrocadiography // CRC Crit. Rev. Bioeng. — 1981. —Novem-
ber. - P. 307-350.
30. Jenkins J. M. Automated electrocardiography and arrhythmia monitoring // Prog. Cardiovasc.
Dis. - 1983. - V. 25, No. 5. - P. 367-408.
31. Cox Jr. J.R., Nolle F.M. and Arthur R.M. Digital analysis of the electroencephalogram, the
blood pressure wave and the electrocardiogram // Proc. IEEE. — 1972. — V. 60, No. 10. —
P. 1137-1164. (Есть русский перевод: Кокс, Нолл, Артур. Анализ электроэнцефалограмм,
кривых кровяного давления и электрокардиограмм на цифровой вычислительной машине
// В сб.: Распознавание образов при помощи цифровых вычислительных машин / Пер.
с англ. — М.: Мир, 1974. — С. 38-75.)
32. Cooper R., Osselton J. W. and Shaw J. C. EEG Technology. — 3rd ed. — London, UK: Butter-
worth, 1980.
33. Kooi K.A., Tucker R.P. and Marshall R.E. Fundamentals of Electroencephalography.—
2nd ed. — Hagerstown, MD: Harper & Row, 1978.
34. Hughes J. R. EEG in Clinical Practice. — Woburn, MA: Butterworth, 1982.
35. Verhagen M.A.M.T., van Schelven L.J., Samsom M. and Smout A.J.P.M. Pitfalls
in the analysis of electrogastrographic recordings // Gastroenterology. — 1999. — V. 117.—
P. 453-460.
36. Mintchev M. P. and Bowes K. L. Capabilities and limitations of elettrogastrograms 11 In:
Chen J.D.Z and McCallum R. W. (eds.) Electrogastrography. Principles and Applications. —
New York, NY: Raven, 1994. - P. 155-169.
37. Mintchev M. P. and Bowes K. L. Extracting quantitative information from digital electrogas-
trograms // Med. Biol. Eng. Comp. — 1996. — V. 34. — P. 244-248.
38. Chen J.D.Z., Stewart Jr. W.R. and McCallum R. W. Spectral analysis of episodic rhythmic
variations in the cutaneous electrogastrogram // IEEE Trans. Biomed. Eng. — 1993. — V. 40,
No. 2.-P. 128-135.
39. Mintchev M.P., Shekel A. and Bowes K.L. Dynamics of the level of randomness in gastric
electrical activity // Digest. Dis. Sci. — 1998. — V. 43, No. 5. — P. 953-956.
40. Rangayyan R. M. and Lehner R. J. Phonocardiogram signal processing. A review // CRC
Crit. Rev. Biomed. Eng. - 1988. - V. 15, No. 3. - P. 211-236.
41. Tavel M.E. Clinical Phonocardiography and External Pulse Recording. — 3rd ed. —Chicago,
IL: Year Book Medical, 1978.
42. Luisada A. A. and Portaluppi F. The Heart Sounds —New Facts and Their Clinical Implica-
tions. — New York, NY: Praeger, 1982.
422
Список литературы
43. Shaver J. A., Salerni R. and Reddy PS. Normal and abnormal heart sounds in cardiac
diagnosis, Part I: Systolic sounds // Curr. Prob. Cardiol. — 1985. — V. 10, No. 3. — P. 1-68.
44. Reddy P.S., Salerni R. and Shaver J. A. Normal and abnormal heart sounds in cardiac
diagnosis. Part II: Diastolic sounds // Curr. Prob. Cardiol. — 1985. — V. 10, No. 4. — P. 1-55
45. Childers D. G and Bae K. S. Detection of laryngeal function using speech and electroglotto-
graphic data // IEEE Trans. Biomed. Eng. — 1992. — V. 39, No. 1. — P. 19-25.
46. Rabiner L. R. and Schafer R. W. Digital Processing of Speech Signals. — Englewood Cliffs.
NJ: Prentice-Hall, 1978.
47. Zhang Y. T., Frank C.B., Rangayyan R.M. and Bell G.D. A comparative study of vibro-
myography and electromyography obtained simultaneously from active human quadriceps
11 IEEE Trans. Biomed. Eng. - 1992. - V. 39, No. 10. - P. 1045-1052.
48. Zhang Y. T., Frank С. B., Rangayyan R. M. and Bell G. D. Relationships of the vibromyogram
to the surface electromyogram of the human rectus femoris muscle during voluntary isomet-
ric contraction // J. Rehabil. Res. Dev. — 1996. — V. 33, No. 4 (October). — P. 395-403.
49. Ellison A. E. Athletic Training and Sports Medicine. — Chicago, IL: American Academy of
Orthopaedic Surgeons, 1984.
50. Moore K. L. Clinically Oriented Anatomy. — Baltimore, MD: Williams/Wilkins, 1984.
51. Tortora G.J. Articulations // In: Wilson C.M. and Helfgott N. (eds.) Principles of Human
Anatomy.— New York, NY: Harper and Row, 1986. — P. 167-203.
52. Frankel V.H. and Nordin M. (eds.). Basic Biomechanics of the Skeletal System. — Philadel-
phia, PA: Lea and Febiger, 1980.
53. The Lower Extremity and Spine in Sports Medicine / Nicholas J. A. and Hershman E. В
(eds.). — Missouri, KS: CV Mosby, 1986.
54. Frank С. B., Rangayyan R. M. and Bell G. D. Analysis of knee sound signals for non-invasive
diagnosis of cartilage pathology // IEEE Eng. Med. Biol. Mag. — 1990. — March. — P. 65-68
55. Tavathia S., Rangayyan R. M., Frank С. B., Bell G. D., Ladly К. O. and Zhang Y. T. Analysis
of knee vibration signals using linear prediction // IEEE Trans. Biomed. Eng. —1992. —
V. 39, No. 9. - P. 959-970.
56. Moussavi Z.M. K., Rangayyan R.M., Bell G.D., Frank C.B., Ladly К. O. and Zhang Y. T
Screening of vibroarthrographic signals via adaptive segmentation and linear prediction
modeling // IEEE Trans. Biomed. Eng. — 1996. — V. 43, No. 1. — P. 15-23.
57. Krishnan S., Rangayyan R.M., Bell G.D., Frank C.B. and Ladly К. O. Adaptive filtering,
modelling and classification of knee joint vibroarthrographic signals for non-invasive diag-
nosis of articular cartilage pathology // Med. Biol. Eng. Comput. — 1997. —V. 35, No. 6. —
P. 677-684.
58. Rangayyan R. M., Krishnan S., Bell G. D., Frank С. B. and Ladly К. O. Parametric represen-
tation and screening of knee joint vibroarthrographic signals // IEEE Trans. Biomed. Eng. —
1997. - V. 44, No. 11. - P. 1068-1074.
59. Kernohan W. G., Beverland D. E., McCoy G. F, Hamilton A., Watson P. and Mollan R. A. В
Vibration arthrometry // Acta Orthop. Scand. — 1990. — V. 61, No. 1. — P. 70-79.
60. Chu M.L., Gradisar LA. and Mostardi R. A noninvasive electroacoustical evaluation
technique of cartilage damage in pathological knee joints // Med. Biol. Eng. Comput. —
1978. - V. 16. - P. 437-442.
61. Probst R., Lonsbury-Martin B. and Martin G. K. A review of otoacoustic emissions
11 J. Acoust. Soc. Am. - 1991. - V. 89, No. 5. - P. 2027-2067.
62. Widrow B., Glover Jr.J.R., McCool J.M., Kaunitz J., Williams C.S., Hearn R.H., Zei-
dler J. R., Dong Jr. E. and Goodlin R. C. Adaptive noise cancelling: Principles and applications
// Proc. IEEE. — 1975. — V. 63, No. 12. — P. 1692-1716. (Есть русский перевод: Уидроу Б
Гловер Д., Маккул Д. и др. Адаптивные компенсаторы помех. Принципы построения и
применения // ТИИЭР. — 1975. — Т. 63, № 12. — С. 69-98.)
Список литературы
423
63. Zhang Y. Т., Rangayyan R.M., Frank С. В. and Bell G.D. Adaptive cancellation of muscle
contraction interference from knee joint vibration signals // IEEE Trans. Biomed. Eng. —
1994. - V. 41, No. 2. - P. 181-191.
64. Bartlett J. Familiar Quotations. — 15th ed. — Boston, MA: Little, Brown and Co., 1980.
65. Akay A.M., Semmlow J.L, Welkowitz IF., Bauer M.D. and Kostis J.B. Detection of
coronary occlusions using autoregressive modeling of diastolic heart sounds // IEEE Trans.
Biomed. Eng. - 1990. - V. 37, No. 4. - P. 366-373.
66. Lehner R. J. and Rangayyan R. M. A three-channel microcomputer system for segmentation
and characterization of the phonocardiogram // IEEE Trans. Biomed. Eng. — 1987. — V. 34. —
P. 485-89.
67. Jenkins J.M., Wu D. and Arzbaecher R. C. Computer diagnosis of abnormal cardiac rhythms
employing a new P-wave detector for interval measurement // Comput. Biomed. Res. —
1978.-V. 11.-P. 17-33.
68. Jenkins J.M., Wu D. and Arzbaecher R.C. Computer diagnosis of supraventricular and
ventricular arrhythmias // Circulation. — 1979. — V. 60, No. 5. — P. 977-987.
69. Sayers B.McA. Analysis of heart rate variability // Ergonomics. — 1973. — V. 16, No. 1.—
P. 17-32.
70. Kobayashi M. and Musha T. 1/f fluctuation of heartbeat period // IEEE Trans. Biomed.
Eng. - 1982. - V. 29, No. 6. - P. 456-457.
71. Rompelman 0., Snijders J.B.I.M. and van Spronsen C.J. The measurement of heart rate
variability spectra with the help of a personal computer 11 IEEE Trans. Biomed. Eng. —
1982. - V. 29, No. 7. - P. 503-510.
72. DeBoer R. W., Karemaker J. M. and Strackee J. Comparing spectra of a series of point events
particularly for heart rate variability studies // IEEE Trans. Biomed. Eng. — V. 31, No. 4. —
P. 384-387.
73. Rosenblum M. G., Kurths J., Pikovsky A., Schafer C., Tass P. and Abel H H. Synchronization
in noisy systems and cardiorespiratory interaction // IEEE Eng. Med. Biol. Mag. — 1998. —
V. 17, No. 6. - P. 46-53.
74. Pompe B., Blidh P., Hoyer D. and Eiselt M. Using mutual information to measure coupling
in the cardiorespiratory system // IEEE Eng. Med. Biol. Mag. —1998. — V. 17, No. 6. —
P. 32-39.
75. Durand L.G., Genest Jr. J. and Guardo R. Modeling of the transfer function of the heart-
thorax acoustic system in dogs // IEEE Trans. Biomed. Eng. — 1985. — V. 32, No. 8. —
P. 592-601.
76. Kantz H, Kurtis J. and Mayer-Kress G. (eds.). Nonlinear Analysis of Physiological Data. —
Berlin, Germany: Springer-Verlag, 1998.
77. Haykin S. Adaptive Filter Theory.— 3rd ed. — Upper Saddle River, NJ: Prentice-Hall, 1996.
78. Kendall M. Time-Series. — 2nd ed. — London, UK: Charles Griffin, 1976. (Есть русский
перевод: Кендалл М. Временные ряды. — М.: Финансы и статистика, 1981. — 199 с.)
79. Challis R.E. and Kitney R.I. Biomedical signal processing (in four parts): Part 1. Time-
domain methods 11 Med. Biol. Eng. Comput. — 1990. — V. 28. — P. 509-524.
80. Shanks J.L. Recursion filters for digital processing // Geophysics. — 1967. — V. 32, No. 1. —
P. 33-51.
81. Rabiner L. R. and Gold B. Theory and Application of Digital Signal Processing. — Englewood
Cliffs, NJ: Prentice-Hall, 1975. (Есть русский перевод: Рабинер Л., Голд Б. Теория и
применение цифровой обработки сигналов. — М.: Мир, 1978. — 848 с.)
82. Hamming R.W. Digital Filters.— 2nd ed. — Englewood Cliffs, NJ: Prentice-Hall, 1983.
(Есть русский перевод: Хэмминг Р. В. Цифровые фильтры / Пер. с англ.; Под ред.
О. А. Потапова. — М.: Недра, 1987.— 221 с.)
83. Antoniou A. Digital Filters: Analysis, Design and Applications. — 2nd ed. — New York, NY:
McGraw-Hill, 1993.
84. Williams C.S. Designing Digital Filters. — Englewood Cliffs, NJ: Prentice-Hall, 1986.
424
Список литературы
85. Haykin S. Modern Filters. — New York, NY: Macmillan, 1989.
86. Oppenheim A. V. and Schafer R. W. Digital Signal Processing. — Englewood Cliffs, NJ:
Prentice-Hall, 1975. (Есть русский перевод: Оппенгейм А., Шафер Р. Цифровая обработка
сигналов. — М.: Связь, 1979. — 416 с.)
87. Little J. N. and Shure L. Signal Processing Toolbox for Use with MATLAB. — Natick, MA
The Math Works, Inc., 1992.
88. Krishnan S. Adaptive filtering, modeling and classification of knee joint vibroarthrographic
signals. Master’s thesis, Department of Electrical and Computer Engineering, University of
Calgary, Calgary, AB, Canada, April 1996.
89. Riegler R. and Compton Jr. R. An adaptive array for interference rejection // Proc. IEEE. —
1973. - V. 61, No. 6. - P. 748-758.
90. Sesay A. B. ENEL 671: Adaptive Signal Processing. Unpublished lecture notes, Department
of Electrical and Computer Engineering, University of Calgary, Calgary, Alberta, Canada,
1995.
91. Ferrara E.R and Widrow B. Fetal electrocardiogram enhancement by time-sequenced
adaptive filtering // IEEE Trans. Biomed. Eng. — 1982. — V. 29, No. 6. — P. 458-460.
92. Rangayyan R.M., Krishnan S., Bell G.D., Frank C.B. and Ladly K.O. Impact of muscle
contraction interference cancellation on vibroarthrographic screening // In: Proc, of the
International Conference on Biomedical Engineering. Kowloon, Hong Kong, June 1996. —
P. 16-19.
93. Krishnan S. and Rangayyan R.M. Automatic denoising of knee joint vibration signals
using adaptive time-frequency representations // Med. Biol. Eng. Comput. — 2000. — V. 38,
No. 1. - P. 2-8.
94. Maragos P. and Schafer R. W. Morphological filters. Part I: Their set-theoretic analysis
and relations to linear shift-invariant filters // IEEE Trans. Acoust. Speech Signal Proc. —
1987. - V. 35, No. 8. - P. 1153-1169.
95. Maragos P. and Schafer R. W. Morphological filters. Part II: Their relations to median,
order-statistic and stack filters // IEEE Trans. Acoust. Speech Signal Proc. —1987. — V. 35,
No. 8.-P. 1170-1184.
96. Dumermuth G., Huber P. J., Kleiner В. and Gasser T. Numerical analysis of electroencephalo-
graphic data // IEEE Trans. Audio Electroacoust. — 1970. — V. 18, No. 4. — P. 404-411.
97. Barlow J. S. Computerized clinical electroencephalography in perspective // IEEE Trans.
Biomed. Eng. - 1979. - V. 26, No. 7. - P. 377-391.
98. Bodenstein G. and Praetorius H. M. Feature extraction from the electroencephalogram by
adaptive segmentation // Proc. IEEE. — 1977. — V. 65, No. 5. — P. 642-652. (Есть русский
перевод: Боденштайн Г., Преториус Х.М. Выделение признаков из электроэнцефало-
граммы методом адаптивной сегментации // ТИИЭР. — 1977. — Т. 65, №5. — С. 59-71.)
99. Baida R.A., Diller G., Deardorff E., Doue J. and Hsieh P The HP ECG analysis
program 11 In: Van Bemmel J.H. and Willems J.L. (eds.) Trends in Computer-processed
Electrocardiograms. — Amsterdam, The Netherlands: North Holland, 1977. — P. 197-205.
100. Ahlstrom M. L. and Tompkins W. J. Digital filters for real-time ECG signal processing using
microprocessors // IEEE Trans. Biomed. Eng. — 1985. — V. 32. — P. 708-713.
101. Friesen G.M., Jannett T.C., Jadallah M.A., Yates S.L., Quint S.R. and Nagle H. T. A
comparison of the noise sensitivity of nine QRS detection algorithms // IEEE Trans. Biomed
Eng. - 1990. - V. 37, No. 1. - P. 85-97.
102. Murthy I. S. N. and Rangaraj M. R. New concepts for PVC detection // IEEE Trans. Biomed
Eng. - 1979. - V. 26, No. 7. - P. 409-416.
103. Pan J. and Tompkins W.J. A real-time QRS detection algorithm // IEEE Trans. Biomed
Eng. - 1985. - V. 32. - P. 230-236
104. Starmer C.F., McHale P.A. and Greenfield Jr.J.C. Processing of arterial pressure waves
with a digital computer // Comput. Biomed. Res. — 1973. — V. 6. — P. 90-96.
Список литературы
425
105. Schwartz М. Information Transmission, Modulation and Noise.— 3rd ed. — New York, NY:
McGraw-Hill, 1980.
106. Wade J. G. Signal Coding and Processing: An introduction based on video systems. —
Chichester, England: Ellis Horwood, 1987.
107. Hengeveld S. J. and van Bemmel J. H. Computer detection of P waves // Comput. Biomed.
Res. - 1976. - V. 9. - P. 125-132.
108. Gritzali E, Frangakis G. and Papakonstantinou G. Detection of the P and T waves in an
ECG // Comput. Biomed. Res. — 1989. — V. 22. — P. 83-91.
109. Willems J.L., Arnaud P., van Bemmel J.H., Bourdillon P.J., Brohet C., Volta S.D.,
Andersen J.D., Degani R., Denis B., Demeester M., Dudeck J., Harms F.M.A., Macfar-
lane P. W., Mazzocca G., Meyer J., Michaelis J., Pardaens J., Poppi S.J., Reardon В. C.,
van Eck H.J.R, de Medina E. O.R., Rubel P., Talmon J.L. and Zywietz C. Assessment of
the performance of electrocardiographic computer programs with the use of a reference data
base /1 Circulation. - 1985. - V. 71, No. 3. - P. 523-534.
110. Willems J.L., Arnaud P., van Bemmel J.H., Bourdillon P.J., Degani R., Denis B.,
Harms EM. A., Macfarlane P.W., Mazzocca G., Meyer J., van Eck H.J.R., de Med-
ina E. O. R. and Zywietz C. Establishment of a reference library for evaluating computer
ECG measurement programs // Comput. Biomed. Res. — 1985. — V. 18. — P. 439-457.
111. Bogert В. P, Healy M.J.R. and Tukey J. W. The quefrency alanysis of time series forechoes:
Cepstrum, pseudo-autocovariance, cross-cepstrum and saphe cracking // In: Rosenblatt M.
(ed.) Proc, of the Symposium on Time Series Analysis. — New York, NY: Wiley, 1963.—
P. 209-243.
112. Oppenheim A. V, Schafer R. W. and Stockham Jr. T.G. Nonlinear filtering of multiplied
and convolved signals // Proc. IEEE. — 1968. — V. 56, No. 8. — P. 1264-1291. (Есть русский
перевод: Оппенхейм А., Шафер Р., Стокхем Т. Нелинейная фильтрация сигналов,
представленных в виде произведения и свертки // ТИИЭР. — 1968. — Т. 56, № 8.)
113. Oppenheim А. V. and Schafer R. W. Homomorphic analysis of speech // IEEE Trans. Audio
Electroacoust. - 1968. - V. AU-16, No. 2. - P. 221-226.
114. Gonzalez R. C. and Woods R. E. Digital Image Processing. — Reading, MA: Addison-Wesley,
1992. (Есть русский перевод: Гонсалес Р., Вудс Р. Цифровая обработка изображений.—
Минск: Техносфера, 2005. — 1072 с.)
115. Childers D.G., Skinner D.P. and Kemerait R.C. The cepstrum: A guide to processing
// Proc. IEEE. — 1977. — V. 65, No. 10. — P. 1428-1443. (Есть русский перевод: Чайл-
дерс Д.Дж., Скиннер Д.П., Кемерейт Р.Ч. Кепстр и его применение при обработке
данных // ТИИЭР. - 1977. - Т. 65, № 10.)
116. МасСапоп D.M., Arevalo F. and Meyer Е.С. Direct detection and timing of aortic valve
closure // Circ. Res. - 1964. - V. 14. - P. 387-391.
117. Stein P. D., Sabbah H. N., Anbe D. T. and Khaja F. Hemodynamic and anatomic determinants
of relative differences in amplitude of the aortic and pulmonary components of the second
heart sound // Am. J. Cardiol. — 1978. — V. 42. — P. 539-544.
118. Stein P.D. and Sabbah H. Intensity of the second heart sound: Relation of physical,
physiological and anatomic factors to auscultatory evaluation // Henry Ford Hosp. Med.
J. - 1980. - V. 28, No. 4. - P. 205-209.
119. Sarkady A. A., Clark R.R. and Williams R. Computer analysis techniques for phonocardio-
gram diagnosis // Comput. Biomed. Res. — 1976. — V. 9. — P. 349-363.
120. Baranek H.L., Lee H. C., Cloutier G. and Durand L. G. Automatic detection of sounds and
murmurs in patients with lonescu-Shiley aortic bioprostheses // Med. Biol. Eng. Comput. —
1989. - V. 27. - P. 449-455.
121. Durand L. G., de Guise J., Cloutier G., Guardo R. and Brais M. Evaluation of FFT-based and
modern parametric methods for the spectral analysis of bioprosthetic valve sounds // IEEE
Trans. Biomed. Eng. - 1986. - V. 33, No. 6. - P. 572-578.
28 P. Рангайян
426
Список литературы
122. Wallace A. G. Electrophysiology of the myocardium // In: Clinical Cardiopulmonary Physi-
ology. — 3rd ed. — New York, NY: Grune & Stratton, 1969.
123. Berkhout A. J. On the minimum phase criterion of sampled signals // IEEE Trans. Geosci.
Electron. - 1973. - V. 11. - P. 186-198.
124. Berkhout A.J. On the minimum-length property of one-sided signals // Geophysics.—
1978. - V. 38. - P. 657-672.
125. Amazeen R.L, Moruzzi R.L. and Feldman C.L. Phase detection of R-waves in noisy
electrocardiograms // IEEE Trans. Biomed. Eng. — 1972. — V. 19, No. 1. — P. 63-66.
126. Ulrych T. J. and Lasserre M. Minimum-phase // Can. J. Exploration Geophysicists. —
1966. - V. 2. - P. 22-32.
127. Treitel S. and Robinson E.A. The stability of digital filters // IEEE Trans. Geosci.
Electron. - 1964. - V. 2. - P. 6-18.
128. Oppenheim A. V., Kopec G.E. and Tribolet J. M. Signal analysis by homomorphic prediction
// IEEE Trans. Acoust. Speech Signal Proc. — 1976. — V. 24, No. 4. — P. 327-332.
129. Nolle F. ARGUS, a Clinical Computer System for Monitoring Electrocardiographic Rhythms.
PhD thesis, Washington University School of Medicine, Saint Louis, MO, December 1972.
130. Shin S. J., Tapp W. N., Reisman S. S. and Natelson В. H. Assessment of autonomic regulation
of heart rate variability by the method of complex demodulation // IEEE Trans. Biomed.
Eng. - 1989. - V. 36, No. 2. - P. 274-283.
131. Hayano J., Taylor J. A., Yamada A., Mukai S., Hori R., Asakawa T, Yokoyama K.,
Watanabe K, Takata K. and Fujinami T. Continuous assessment of hemodynamic control
by complex demodulation of cardiovascular variability // Am. J. Physiol. — 1993. — V. 264. —
P. H1229-H1238.
132. Bloomfield P. Fourier Analysis of Time Series: An Introduction. — New-York, NY: Wiley,
1976.
133. Karpman L., Cage J., Hill C., Forbes A.D., Karpman V. and Cohn K. Sound envelope
averaging and the differential diagnosis of systolic murmurs // Am. Heart J. — 1975. —
V. 90, No. 5. - P. 600-606.
134. Gerbarg D.S., Holcomb Jr.F. W., Hofler J. J., Bading C.E., Schultz G.L. and Sears R. E.
Analysis of phonocardiogram by a digital computer // Circ. Res. — 1962. — V. 11.—
P. 569-576.
135. Gerbarg D. S., Taranta A., Spagnuolo M. and Hofler J. J. Computer analysis of phonocardio-
grams // Prog. Cardiovasc. Dis. — 1963. — V. 5, No. 4. — P. 393-405.
136. Saltzberg B. and Burch N. R. Period analytic estimates of moments of the power spectrum:
A simplified EEG time domain procedure // Electroenceph. Clin. Neurophysiol. — 1971. —
V. 30. - P. 568-570.
137. Jacobs J.E., Horikoshi K. and Petrovick M.A. Feasibility of automated analysis of phono-
cardiograms // J. Audio Eng. Soc. — 1969. — V. 17, No. 1. — P. 49-54.
138. Yokoi M., Uozumi Z., Okamoto N., Mizuno K, Iwatsuka T, Takahashi H., Watanabe Y.
and Yasui S. Clinical evaluation on 5 years’ experience of automated phonocardiographic
analysis // Jap. Heart J. — 1977. — V. 18, No. 4. — P. 482-490.
139. Willison R. G. Analysis of electrical activity in health and dystrophic muscle in man
// J. Neurol. Neurosurg. Psychiatry. — 1964. — V. 27. — P. 386-394.
140. Fuglsang-Frederiksen A. and Mansson A. Analysis of electrical activity of normal muscle in
man at different degrees of voluntary effort // J. Neurol. Neurosurg. Psychiatry. — 1975. —
V. 38. - P. 683-694.
141. Dowling M.H., Fitch P. and Willison R.G. A special purpose digital computer
(BIOMAC 500) used in the analysis of the human electromyogram // Electroenceph.
Clin. Neurophysiol. - 1968. - V. 25. - P. 570-573.
142. Hjorth B. EEG analysis based on time domain properties. Electroenceph. Clin. Neurophys-
iol. - 1970. - V. 29. - P. 306-310.
Список литературы
427
143. Hjorth В. The physical significance of time domain descriptors in EEG analysis // Electroen-
ceph. Clin. Neurophysiol. - 1973. - V. 34. - P. 321-325.
144. Hjorth B. Time domain descriptors and their relation to a particular model for generation of
EEG activity // In: Dolce G. and Kiinkel H. (eds.) CEAN: Computerised EEG Analysis.—
Stuttgart, Germany: Gustav Fischer, 1975. — P. 3-8.
145. Binnie C.D., Batchelor B.G., Bowring P.A., Darby C.E., Herbert L., Lloyd D.S.L,
Smith D.M., Smith G.F. and Smith M. Computer-assisted interpretation of clinical EEGs
11 Electroenceph. Clin. Neurophysiol. — 1978. — V. 44. — P. 575-585.
146. Binnie C.D., Batchelor B.G., Gainsborough A. J., Lloyd D.S.L., Smith D.M. and
Smith G.F. Visual and computer-assisted assessment of the EEG in epilepsy of late onset
// Electroenceph. Clin. Neurophysiol. — 1979. — V. 47. — P. 102-107.
147. Hornero R., Espino P., Alonso A. and Lopez M. Estimating complexity from EEG back-
ground activity of epileptic patients // IEEE Eng. Med. Biol. Mag. — 1999. — V. 18, No. 6
(November/December). — P. 73-79.
148. Celka P., Mesbah M., Keir M., Boashash B. and Colditz P. Time-varying dimension analysis
of EEG using adaptive principal component analysis and model selection // In: World
Congress on Medical Physics and Biomedical Engineering, pages on CDROM. IFMBE/IEEE.
Chicago, IL, 2000. — P. 4.
149. Hsia P. W., Jenkins J.M., Shimoni Y., Gage K.P., Santinga J. T. and Pitt B. An automated
system for ST segment and arrhythmia analysis in exercise radionuclide ventriculography
11 IEEE Trans. Biomed. Eng. - 1986. - V. 33, No. 6. - P. 585-593.
150. Lawrence J.H. and de Luca C.J. Myoelectric signal versus force relationship in different
human muscles // J. Appl. Physiol. — 1983. — V. 54, No. 6. — P. 1653-1659.
151. Sakai A., Feigen L.P. and Luisada A.A. Frequency distribution of heart sounds in normal
man I/ Cardiovasc. Res. — 1971. — V. 5. — P. 358-363.
152. Frome E. L. and Frederickson E. L. Digital spectrum analysis of the first and second heart
sounds /1 Comput. Biomed. Res. — 1974. — V. 7. — P. 421-431.
153. Yoganathan A.P., Gupta R., Udwadia F.E., Miller J.W., Corcoran W.H., Sarma R.,
Johnson J.L. and Bing R.J. Use of the fast Fourier transform for frequency analysis of
the first heart sound in normal man // Med. Biol. Eng. — 1976. — V. 14. — P. 69-73.
154. Yoganathan A.P., Gupta R., Udwadia F.E., Corcoran W.H., Sarma R. and Bing R.J. Use
of the fast Fourier transform in the frequency analysis of the second heart sound in normal
man // Med. Biol. Eng. - 1976. - V. 14. - P. 455-459.
155. Adolph R. J, Stephens J. F. and Tanaka K. The clinical value of frequency analysis of the
first heart sound in myocardial infarction // Circulation. — 1970. — V. 41. — P. 1003-1014.
156. Clarke W.B., Austin S.M., Shah P.M., Griffen P.M., Dove J.T., McCullough J. and
Schreiner В. E. Spectral energy of the first heart sound in acute myocardial ischemia
U Circulation. - 1978. - V. 57, No. 3. - P. 593-598.
157. Geckeler G.D., Likoff W., Mason D., Riesz R.R. and Wirth C.H. Cardiospectrograms:
A preliminary report // Am. Heart J. — 1954. — V. 48. — P. 189-196.
158. McKusick V.A., Talbot S. A. and Webb G.N. Spectral phonocardiography: Problems and
prospects in the application of the Bell sound spectrograph to phonocardiography // Bull.
Johns Hopkins Hosp. — 1954. — V. 94. — P. 187-198.
159. McKusick V.A., Webb G.N., Humphries J.O. and Reid J. A. On cardiovascular sound:
Further observations by means of spectral phonocardiography // Circulation. —1955. —
V. 11.-P. 849-870.
160. Winer D.E., Perry L.W. and Caceres C.A. Heart sound analysis: A three dimensional
approach. Contour plotting of sound for study of cardiovascular acoustics // Am. J. Cardiol. —
1965.-V. 16.-P. 547-551.
161. Yoshimura S. Principle and practice of phonocardiography in reference to frequency intensity
characteristics of heart sounds and murmurs // Jap. Circ. J. — 1960. — V. 24. — P. 921-931.
28=
428
Список литературы
162. Van Vollenhoven Е., van Rotterdam A., Dorenbos T. and Schlesinger F.G. Frequency
analysis of heart murmurs // Med. Biol. Eng. — 1969. — V. 7. — P. 227-231.
163. Johnson G.R., Adolph R.J. and Campbell D.J. Estimation of the severity of aortic valve
stenosis by frequency analysis of the murmur // J. Am. Coll. Cardiol. — 1983. — V. 1, No. 5. —
P. 1315-1323.
164. Johnson G.R., Myers G.S. and Lees R. S. Evaluation of aortis stenosis by spectral analysis
of the murmur // J. Am. Coll. Cardiol. — 1985. — V. 6, No. 1. — P. 55-63.
165. Welch P. D. The use of fast Fourier transform for the estimation of power spectra: A method
based on time averaging over short, modified periodograms // IEEE Trans. Audio Electroa-
coust. - 1967. - V. 15. - P. 70-73.
166. Harris F.J. On the use of windows for harmonic analysis with the discrete Fourier transform
// Proc. IEEE. — 1978. — V. 66, No. 1. —P. 51-83. (Есть русский перевод: Харрис Ф.Дж.
Использование окон при гармоническом анализе методом дискретного преобразования
Фурье // ТИИЭР. - 1978. - Т. 66, № 1 (январь). - С. 60-96.)
167. Durand L.G., Blanchard М., Cloutier G., Sabbah H. N. and Stein P.D. Comparison of
pattern recognition methods for computer-assisted classification of spectra of heart sounds in
patients with a porcine bioprosthetic valve implanted in the mitral position // IEEE Trans.
Biomed. Eng. - 1990. - V. 37, No. 12. - P. 1121-1129.
168. Cloutier G., Durand L.G., Guardo R., Sabbah H.N. and Stein P.D. Bias and variability
of diagnostic spectral parameters extracted from closing sounds produced by bioprosthetic
valves implanted in the mitral position // IEEE Trans. Biomed. Eng. —1989. — V. 36,
No. 8. - P. 815-825.
169. Agarwal G. C. and Gottlieb G. L. An analysis of the electromyogram by Fourier, simula-
tion and experimental techniques // IEEE Trans. Biomed. Eng. — 1975. — V. 22, No. 3. —
P. 225-229.
170. Abeles M. and Goldstein Jr.M.H. Multispike train analysis // Proc. IEEE. — 1977. —V. 65,
No. 5. — P. 762-773. (Есть русский перевод: Абелес М., Ролдстайн мл. М.Х. Анализ
мультиспайковых последовательностей // ТИИЭР. — 1977. — Т. 65, №5. — С. 207-221.)
171. Landolt J. Р. and Correia M.J. Neuromathematical concepts of point process theory // IEEE
Trans. Biomed. Eng. - 1978. - V. 25, No. 1. - P. 1-12.
172. Anderson D.J. and Correia M.J. The detection and analysis of point processes in biological
signals // Proc. IEEE. — 1977. — V. 65, No. 5. — P. 773-780. (Есть русский перевод: Андер-
сон Д. Дж., Коррейя М.Дж. Обнаружение и анализ точечных процессов в биологических
сигналах // ТИИЭР. - 1977. - Т. 65, №5. - С. 221-230.)
173. Cohen A. Biomedical Signal Processing. — Воса Raton, FL: CRC Press, 1986.
174. Zhang Y.T, Frank C.B., Rangayyan R.M. and Bell G.D. Mathematical modeling and
spectrum analysis of the physiological patello-femoral pulse train produced by slow knee
movement // IEEE Trans. Biomed. Eng. — 1992. — V. 39, No. 9. — P. 971-979.
175. Beverland D.E., Kernohan W. G and Mollan R.A.B. Analysis of physiological patello-
femoral crepitus // In: By ford G. H. (ed.) Technology in Health Care. — London, UK:
Biological Engineering Society, 1985. — P. 137-138.
176. Beverland D.E., Kernohan W.G., McCoy G.F. and Mollan R.A.B. What is physiological
patellofemoral crepitus? // In: Proc, of the XIV International Conference on Medical and
Biological Engineering and VII International Conference on Medical Physics. IFMBE, Espoo,
Finland, 1985.-P. 1249-1250.
177. Beverland D.E., McCoy G.E, Kernohan W. G. and Mollan R.A.B. What is patellofemoral
crepitus? // J. Bone Joint. Surg. — 1986. — V. 68-B. — P. 496.
178. Parker P.A., Stuller J. A. and Scott R.N. Signal processing for the multistate myoelec-
tric channel // Proc. IEEE. — 1977. — V. 65, No. 5. — P. 662-674. (Есть русский перевод:
Паркер Ф.А., Сталлер Дж. А., Скотт Р.Н. Обработка сигнала для биоэлектрического
канала управления с поуровневым переключением // ТИИЭР. — 1977. — Т. 65, № 5. —
С. 83-96.)
Список литературы
429
179. Lindstrom L.H. and Magnusson R.L Interpretation of myoelectric power spectra: A model
and its applications // Proc. IEEE. — 1977. — V. 65, No. 5. — P. 653-662. (Есть русский
перевод: Линдстрём Л.Х., Магнуссон Р.И. Интерпретация спектров мощности элек-
трических сигналов мышц. Модель и ее применение // ТИИЭР. — 1977. — Т. 65, №5.—
С. 72-82.)
180. Zhang Y. Т, Parker Р.А. and Scott R.N. Study of the effects of motor unit recruitment and
firing statistics on the signal-to-noise ratio of a myoelectric control channel // Med. BioL
Eng. Comput. - 1990. - V. 28. - P. 225-231.
181. Parker P.A. and Scott R.N. Statistics of the myoelectric signal from monopolar and bipolar
electrodes // Med. Biol. Eng. - 1973. - V. 11. - P. 591-596.
182. Shwedyk E., Balasubramanian R. and Scott R. N. A nonstationary model for the electromyo-
gram 11 IEEE Trans. Biomed. Eng. - 1977. - V. 24, No. 5. - P. 417-424.
183. Person R. S and Libkind M. S. Simulation of electromyograms showing interference patterns
// Electroenceph. Clin. NeurophysioL — 1970. — V. 28. — P. 625-632.
184. Person R. S and Kudina L. P. Cross-correlation of electromyograms showing interference
patterns 11 Electroenceph. Clin. NeurophysioL — 1968. — V. 25. — P. 58-68.
185. De Luca C.J. A model for a motor unit train recorded during constant force isometric
contractions // Biol. Cybern. — 1975. — V. 19. — P. 159-167.
186. De Luca C. J. and van Dyk E. J. Derivation of some parameters of myoelectric signals
recorded during sustained constant force isometric contractions // Biophys. J. — 1975. —
V. 15.-P. 1167-1180.
187. Makhoul J. Linear prediction: A tutorial // Proc. IEEE. — 1975. — V. 63, No. 4. — P. 561-580.
(Есть русский перевод: Макхоул Дж. Линейное предсказание речи // ТИИЭР. — 1975. —
Т. 63, №4.-С. 20-44.)
188. Durbin J. The fitting of time-series models. Mimeograph Series No. 244. — Chapel Hill, NC:
Institute of Statistics, University of North Carolina, 1959.
189. Durbin J. Estimation of parameters in time-series regression models // J. Roy. Stat. Soc.,
Ser. B: Methodological. - 1960. - V. 22, No. 1. - P. 139-153.
190. Akaike H. A new look at the statistical model identification // IEEE Trans. Automatic
Control. - 1974. - V. 19. - P. 716-723.
191. Atal B.S. Effectiveness of linear prediction characteristics of the speech wave for automatic
speaker identification and verification 11 J. Acoust. Soc. Am. — 1974. — V. 55, No. 6 (June). —
P. 1304-1313.
192. Kang W.J., Shiu J.R., Cheng C.K., Lai J.S., Tsao H. W. and Kuo T.S. The application of
cepstral coefficients and maximum likelihood method in EMG pattern recognition // IEEE
Trans. Biomed. Eng. - 1995. - V. 42, No. 8. - P. 777-785.
193. Kopec G.E., Oppenheim A. V. and Tribolet J. M. Speech analysis by homomorphic prediction
I/ IEEE Trans. Acoust. Speech Signal Proc. — 1977. — V. 25, No. 1. — P. 40-49.
194. Steiglitz K. and McBride L. E. A technique for the identification of linear systems // IEEE
Trans. Automatic Control. — 1965. — V. 10. — P. 461-464.
195. Steiglitz K. On the simultaneous estimation of poles and zeros in speech analysis // IEEE
Trans. Acoust. Speech Signal Proc. — 1977. — V. 25, No. 3. — P. 229-234.
196. Kalman R. E. Design of a self-optimizing control system // Trans. ASME. — 1958. — V. 80. —
P. 468-478.
197. Joo Т.Н., McClellan J.H., Foale R.A., Myers G.S. and Lees R.A. Pole-zero modeling and
classification of phonocardiograms // IEEE Trans. Biomed. Eng. — 1983. — V. 30, No. 2. —
P. 110-118.
198. Murthy I. S. N. and Prasad G. S. S. D. Analysis of ECG from pole-zero models // IEEE Trans.
Biomed. Eng. - 1992. - V. 39, No. 7. - P. 741-751.
199. Murthy I.S.N, Rangaraj M.R., Udupa K.J. and Goyal A.K. Homomorphic analysis and
modeling of ECG signals // IEEE Trans. Biomed. Eng. — 1979. — V. 26, No. 6. — P. 330-344.
430
Список литературы
200. Akay А.М., Welkowitz W., Semmlow J.L. and Kostis J.B. Application of the ARMA
method to acoustic detection of coronary artery disease // Med. Biol. Eng. Comput. —
1991. — V. 29. — P. 365-372.
201. Sikarskie D.L., Stein P.D. and Vable M. A mathematical model of aortic valve vibration
// J. Biomech. - 1984. - V. 17, No. 11. - P. 831-837.
202. Wang J. Z., Tie B., Welkowitz W., Semmlow J. L. and Kostis J. B. Modeling sound generation
in stenosed coronary arteries // IEEE Trans. Biomed. Eng. —1990. — V. 37, No. 11.—
P. 1087-1094.
203. Wang J. Z., TieB., Welkowitz W., Kostis J.B. and Semmlow J. Incremental network analogue
model of the coronary artery // Med. Biol. Eng. Comput. — 1989. — V. 27. — P. 416-422.
204. Fredberg J. J. Origin and character of vascular murmurs: Model studies // J. Acoust. Soc.
Am. - 1977. - V. 61, No. 4. - P. 1077-1085.
205. Akselrod S., Gordon D., Ubel F.A., Shannon D.C., Barger A.C. and Cohen R.J. Power
spectrum analysis of heart rate fluctuation: A quantitative probe of beat-to-beat cardiovascular
control // Science. - 1981. - V. 213 (10 July). - P. 220-222.
206. Iwata A., Suzumara N. and Ikegaya K. Pattern classification of the phonocardiogram using
linear prediction analysis // Med. Biol. Eng. Comput. — 1977. — V. 15. — P. 407-412.
207. Iwata A., Ishii N., Suzumara N. and Ikegaya K. Algorithm for detecting the first and the
second heart sounds by spectral tracking // Med. Biol. Eng. Comput. — 1980. — V. 18. —
P. 19-26.
208. Akay A.M., Semmlow J.L., Welkowitz W., Bauer M.D. and Kostis J.B. Noninvasive
detection of coronary stenoses before and after angioplasty using eigenvector methods
// IEEE Trans. Biomed. Eng. - 1990. - V. 37, No. 11. - P. 1095-1104.
209. Goodfellow J., Hungerford D. S. and Woods C. Patellofemoral joint mechanics and pathology
// J. Bone Joint. Surg. - 1976. - V. 58B. - P. 921.
210. Injury and Repair of the Musculoskeletal Soft Tissues / Woo S. L. Y. and Buckwaiter J. A.
(eds.). —Park Ridge, IL: American Academy of Orthopaedic Surgeons, 1987.
211. Hwang W. S., Li B. and Jin L. H. Collagen fibril structure of normal, aging and osteoarthritic
cartilage Ц J. Pathology. - 1992. - V. 167. - P. 425-433.
212. Disorders of the Patello-femoral Joint / Fulkerson J. P. and Hungerford D. S. (eds.).—
Baltimore, MD: Williams/Wilkins, 1990.
213. Noyes F.R. and Stabler C.L. A system for grading articular cartilage lesions at arthroscopy
// Am. J. Sports Med. - 1989. - V. 17, No. 4. - P. 505-513.
214. Kulund D.N. (ed.). The Injured Athlete. — 2nd ed. — Philadelphia, PA: Lippincott, 1988.
215. Meisel A.D. and Bullough P.G. Osteoarthritis of the knee // In: Atlas of Osteoarthritis
/ Krieger A. (ed.) — New York, NY: Gower Medical Publishing, 1984. — P. 5.1-5.19.
216. Smillie I. S. Injuries of the Knee Joint. — 5th ed. — Edinburgh, Scotland: Churchill Living-
stone, 1978.
217. Mankin H.J. The articular cartilages, cartilage healing and Osteoarthritis // In: Adult Or-
thopaedics / Cruess R. L. and Rennie W. R.J. (eds.) — New York, NY: Churchill Livingstone,
1984. - P. 163-270.
218. McCoy G.F., McCrea J.D., Beverland D. E., Kernohan W. G. and Mollan R.A. B. Vibration
arthrography as a diagnostic aid in disease of the knee // J. Bone Joint. Surg. — 1987. —
V. 69-B, No. 2. - P. 288-293.
219. Appel U. and v. Brandt A. Adaptive sequential segmentation of piecewise stationary time
series // Inform. Sci. - 1983. - V. 29. - P. 27-56.
220. Appel U. and v. Brandt A. A comparative analysis of three sequential time series segmenta-
tion algorithms // Signal Proc. — 1984. — V. 6. — P. 45-60.
221. Arnold M., Witte H., Leger P., Boccalon H., Bertuglia S. and Colantuoni A. Time-variant
spectral analysis of LDF signals on the basis of multivariate autoregressive modelling
Ц Technol. Health Care. - 1999. - V. 7. - P. 103-112.
Список литературы
431
222. Arnold М., Miltner W.H.R., Witte И., Bauer R. and Braun C. Adaptive AR modeling of
nonstationary time series by means of Kalman filtering // IEEE Trans. Biomed. Eng. —
1998. - V. 45, No. 5. - P. 553-562.
223. Bohlin T. Analysis of EEG signals with changing spectra using a short-word Kalman
estimator // Math. Biosci. — 1977. — V. 35. — P. 221-259.
224. Gath /., Feuerstein C., Pham D. T. and Rondouin G. On the tracking of rapid dynamic
changes in seizure EEG // IEEE Trans. Biomed. Eng. — 1992. — V. 39, No. 9. — P. 952-958.
225. Bianchi A.M., Mainardi L., Petrucci E., Signorini M.G., Mainardi M. and Cerutti S.
Time-variant power spectrum analysis for the detection of transient episodes in HRV signal
I/ IEEE Trans. Biomed. Eng. - 1993. - V. 40, No. 2. - P. 136-144.
226. Oppenheim A. V. and Lim J. S. The importance of phase in signals // Proc. IEEE. — 1981. —
V. 69, No. 5.-P. 529-541.
227. Hayes M. H. and Oppenheim A. V. Signal reconstruction from phase or magnitude // IEEE
Trans. Acoust. Speech Signal Proc. — 1980. — V. 28, No. 6. — P. 672-680.
228. Nikias C.L. and Mendel J.M. Signal processing with higher-order spectra // In: Acken-
husen J. G. (ed.) Signal Processing Technology and Applications. IEEE Technology Update
Series, New York, NY, 1995. - P. 7-34.
229. Nikias C. L. and Raghuveer M. R. Bispectrum estimation — A digital signal processing frame-
work // Proc. IEEE. — 1987. — V. 75. — P. 869-891. (Есть русский перевод: Никиас X. Л.,
Рагувер М. Р. Биспектральное оценивание применительно к цифровой обработке сигналов
// ТИИЭР. - 1987. - Т. 75, № 7. - С. 5-30.)
230. Hlawatsch F. and Boudreaux-Bartels G. F. Linear and quadratic time-frequency signal
representations // IEEE Signal Proc. Mag. — 1992. — April. — P. 21-67.
231. Cohen L. Time-frequency distributions — A review // Proc. IEEE. — 1989. — V. 77.—
P. 941-981. (Есть русский перевод: Коэн Л. Время частотные распределения: Обзор
// ТИИЭР. - 1989. - Т. 77, № 10. - С. 72-121.)
232. Time-Frequency Signal Analysis I Boashash В. (ed.). — New York, NY: Wiley, 1992.
233. Time Frequency and Wavelets in Biomedical Signal Processing / Akay M. (ed.). — New York,
NY: IEEE, 1998.
234. Praetorius H.M., Bodenstein G. and Creutzfeldt O.D. Adaptive segmentation of EEG
records: A new approach to automatic EEG analysis // Electroenceph. Clin. Neurophysiol. —
1977. - V. 42. - P. 84-94.
235. Ferber G. Treatment of some nonstationarities in the EEG // Neuropsychobiology. — 1987. —
V. 17.-P. 100-104.
236. Bodenstein G., Schneider W. and Malsburg С. V. D. Computerized EEG pattern classification
by adaptive segmentation and probability-density-function classification // Description
Method. Comput. Biol. Med. - 1985. - V. 15, No. 5. - P. 297-313.
237. Creutzfeldt O.D., Bodenstein G. and Barlow J. S. Computerized EEG pattern classification
by adaptive segmentation and probability density function classification. Clinical evaluation
// Electroenceph. Clin. Neurophysiol. — 1985. — V. 60. — P. 373-393.
238. Michael D. and Houchin J. Automatic EEG analysis: A segmentation procedure based on the
autocorrelation function // Electroenceph. Clin. Neurophysiol. — 1979. — V. 46. — P. 232-235.
239. Barlow J.S., Creutzfeldt O.D., Michael D., Houchin J. and Epelbaum H. Automatic adap-
tive segmentation of clinical EEGs // Electroenceph. Clin. Neurophysiol. — 1981. — V. 51.—
P. 512-525.
240. Willsky A. S. and Jones H. L. A generalized likelihood ratio approach to the detection and
estimation of jumps in linear systems // IEEE Trans. Automatic Control. — 1976. — V. 21
(February).-P. 108-112.
241. Basseville M. and Benveniste A. Sequential segmentation of nonstationary digital signals
using spectral analysis // Inform. Sci. — 1983. — V. 29. — P. 57-73.
242. GE-Marquette Medical Systems, Inc., Milwaukee, WI. Physician’s Guide to Resting ECG
Analysis Program, 12SL-tm, 1991.
432
Список литературы
243. Той J. Т. and Gonzalez R. С. Pattern Recognition Principles. — Reading, MA: Addison-
Wesley, 1974. (Есть русский перевод: Ту Дж., Гонсалес Р. Принципы распознавания
образов / Пер. с англ. — М.: Мир, 1978.— 411 с.)
244. Duda R.O. and Hart Р.Е. Pattern Classification and Scene Analysis. — New York, NY:
Wiley, 1973. (Есть русский перевод: Дуда Р., Харт П. Распознавание образов и анализ
сцен / Пер. с англ. — М.: Мир, 1976.— 511 с.)
245. Fukunaga К. Introduction to Statistical Pattern Recognition. — 2nd ed. — San Diego, CA:
Academic, 1990.
246. Johnson R.A. and Wichern D.W. Applied Multivariate Statistical Analysis. — 3rd ed.—
Englewood Cliffs, NJ: Prentice-Hall, 1992.
247. Schurmann J. Pattern Classification — A unified view of statistical and neural approaches. —
New York, NY: Wiley, 1996.
248. Duda R.O., Hart P.E. and Stork D.G. Pattern Classification. — 2nd ed. — New York, NY:
Wiley, 2001.
249. Micheli-Tzanakou E. Supervised and Unsupervised Pattern Recognition. — Boca Raton, FL:
CRC Press, 2000.
250. Neter J., Kutner M.H., Nachtsheim C.J. and Wasserman W. Applied Linear Statistical
Models. — 4th ed. — Chicago, IL: Irwin, 1990.
251. SPSS Advanced Statistics User’s Guide. — Chicago, IL: SPSS Inc. 1990.
252. SPSS Base System User’s Guide. — Chicago, IL: SPSS Inc., 1990.
253. Pao Y. H. Adaptive Pattern Recognition and Neural Networks. — Reading, MA: Addison-
Wesley, 1989.
254. Lippmann R. P. An introduction to computing with neural nets // IEEE Signal Proc. Mag. —
1987.-April.-P. 4-22.
255. Nigrin A. Neural Networks for Pattern Recognition. — Cambridge, MA: MIT Press, 1993.
256. Shen L., Rangayyan R.M. and Desautels J.E.L. Detection and classification of mammo-
graphic calcifications // Int. J. Pattern Recognition Artif. Intell. — 1993. — V. 7, No. 6. —
P. 1403-1416.
257. Metz С. E. Basic principles of ROC analysis // Semin. Nucl. Med. — 1978. — V. VIII, No. 4. —
P. 283-298.
258. Metz C.E. ROC methodology in radiologic imaging // Invest. Radiol. — 1986. — V. 21. —
P. 720-733.
259. Swets J. A. and Pickett R.M. Evaluation of diagnostic systems: Methods from signal
detection theory. — New York, NY: Academic, 1982.
260. Dorfman D. D. and Alf E. Maximum likelihood estimation of parameters of signal detection
theory and determination of confidence intervals — rating method data // J. Math. Psychol. —
1969. - V. 6. - P. 487-496.
261. Fleiss J. L. Statistical Methods for Rates and Proportions. — 2nd ed. — New York, NY: Wiley,
1981. (Есть русский перевод: Флейс Дж. Статистические методы для изучения таблиц
долей и пропорций. — М.: Финансы и статистика, 1989. — 319 с.)
262. Zar J.H. Biostatistical Analysis. — 2nd ed. — Englewood Cliffs, NJ: Prentice-Hall, 1984.
263. Fukunaga K. and Hayes R. R. Effects of sample size in classifier design // IEEE Trans.
Pattern Anal. Machine Intell. — 1989. — V. 11, No. 8. — P. 873-885.
264. Raudys S. J. and Jain A. K. Small sample size effects in statistical pattern recognition:
Recommendations for practitioners // IEEE Trans. Pattern Anal. Machine Intell.. — 1991.—
V. 13, No. 3. - P. 252-264.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Адаптивное подавление шумов 139, 153, 154
Адаптивный фильтр 138, 151, 153, 154
— , сегментация 361
Автокорреляционный метод 292
Автокорреляция 88, 91, 136, 144, 342
— , оценка 254, 265
— , расстояние 355, 358
Активность 230, 233, 342
Алгоритм обратного распространения 401
Анализ в частотной области 245
Анализ по коротким интервалам 93, 231-233,
326, 344, 346
— , окно 346
Анализ ритма 77, 245
Анализ форм волн ЭКГ 216, 222
Аналитический сигнал 227
Апостериорная вероятность 394
Аппаратура 63
Априорная вероятность 394
Аритмия 41, 77
Артефакт 84
— двигательный 95
Асимметрия 270
Байеса формула 394
Бартлетта метод 257, 258, 266
Баттерворта фильтр
— верхних частот 126, 151
— нижних частот 118, 151, 169, 201, 230, 233,
409
Билинейное преобразование 119
Блокада пучка Гиса 206, 212, 384
ВАГ (виброартрограмма) 60, 97, 339
— , введение 60
— , классификация образов 413
— , модель точечного процесса 286
— , связь с ВМГ 81
— , сегментация 362, 363
— , спектрограмма 147, 154, 363
— , фильтрация 143, 147, 154
— , хруст коленной чашечки 282, 286
Вектор признаков 387
Векторное произведение 134, 179
Вероятностные модели 394
— , Байеса формула 394
— , условная вероятность 394
— , функция правдоподобия 394
Весовые коэффициенты 105, 132, 141, 147,
362
Взаимная корреляция 90, 133, 144, 178, 186,
189
Взаимная спектральная плотность 135, 184
Взвешивающая функция 195
Виброартрограмма, см. ВАГ
Вибромиограмма, см. ВМГ
Вильсона терминаль 43
Винера фильтр 131, 142, 151, 154, 292, 313
Винера-Хопфа уравнение 134, 142, 144
ВМГ 60, 97
— ,введение 60
— , мышечная сила 238
— , связь с ВАГ 80
— , связь с ЭМГ 79
— , среднеквадратичное значение 238
Волновая форма голосовой щели 194
Временные статистики, см. средние по вре-
мени
Время-частотное распределение 346
Вызванные потенциалы, см. ПСС
Выпрямление (детектирование) сигнала 189,
224-226, 232
Гауссова функция плотности вероятности
396
Гильберта преобразование 227
Голосовой тракт 58
— , характеристика 194
Гомоморфная
— деконволюция 193
— фильтрация 191
Гомоморфное предсказание 315
Гребенчатый фильтр 129, 151
Давление 28
— в коронарной артерии 319
— внутрисердечное (интракардиальное) 56
Двигательная единица 34
— , вовлечение, охват 34
— , тип возбуждения 279
Деконволюция 193
— речи 194
434
Предметный указатель
Демодуляция
— амплитудная 225
— асинхронная 225
— комплексная 225, 228
— синхронная 225
Деполяризация 30
Дерево решений 227
Детерминированный сигнал 85
Диагностика с использованием компьюте-
ра 69
Диагностическое решение 69, 383, 384, 415
Диаграмма обработки сигнала 105, 116, 120,
132, 292
Диастола 39, 54, 81, 203
Дикротическая выемка, см. каротидный
пульс
Динамическая система 58, 66, 91, 93, 150,
281, 340, 358, 362, 363
Дискриминантная функция 387
Дисперсия 87, 92, 230, 233, 255, 258, 270,
341
Дифференцирование, см. производная
Длина сигнала 215, 218
Дополнение нулями 199
Дрейф базовой линии 95
-устранение 111, 114, 115, 126, 151, 236
Дурбина метод 295
Дыхания анализ 237
Евклидово расстояние 390
ЖЭ, см. ЭКГ: ЖЭ
Золотой стандарт 403
Идентификация системы 311
Изоэлектрический сегмент 42, 137, 165, 189,
222, 237
Инвариантная ко времени система 289
Инверсное линейное предсказание 311
Инверсный
— сигнал 216
— фильтр 297
Интегрирование 109, 172
Инфаркт миокарда 213, 247
Истинноотрицательный 402
Истинноположительный 402
Ишемия миокарда 213, 237
К-средних (метод кластеризации) 393
Кардио-респираторное взаимодействие 79
Кардиоцикл 40, 81, 164
Каротидный пульс 56, 166, 175, 203
—, дикротическая выемка 56, 76, 166, 203
— , —, обнаружение 175
— , связь с ФКГ 53, 76, 81
— , связь с ЭКГ 53, 81
— , фильтрация 124
Квазипериодический процесс 58, 66, 102,
279, 280
Квазистационарный процесс 93, 344
Кепстр
— вещественный 195, 218, 298
— комплексный 194, 218, 315
— мощности 194
— , связь с авторегрессионной моделью 304
Кепстральное предсказание 315
Классификатор Байеса 394, 396, 399
Классификация образов 383, 384, 386
— без учителя 390
- ВАГ 413
— , контрольная выборка 387, 412
— , надёжность 408
— , обучающая выборка 387, 408, 409
— с учителем 387
- ЭКГ 409
— , этап контроля 399, 412
— , этап обучения 399, 409
Кластеризация по максимуму расстояния 392
Клинические параметры 413, 414
Ковариационная матрица 391
Ковариационный метод 296
Ковариация 90
Когерентное усреднение, см. синхронное
усреднение
Когерентность 184
Коленный сустав 60
— , анатомия 61, 338
—,артроскопия 339, 413
— , звуки, см. ВАГ
— , модель генерации звуков 322
— , патология хряща 338
— , —, обнаружение 413
— , хруст коленной чашечки 321
Компенсаторная пауза 236
Коронарная артерия
— , дерево 319
— ,заболевания 331
— ,звуки 321
— , стеноз 319
Коррелированные процессы 74
Корреляционный
— анализ 177
— фильтр 186
Коэффициент
— корреляции 90, 103, 178, 215, 236
— отражения 295, 363
— формы 233, 235
КП, см. каротидный пульс
Кровяное давление 28
Кумулянты 343
Предметный указатель
435
Левинсона-Дурбина алгоритм 295, 366
Линейное предсказание 290
— , инверсная модель 318
— инверсное 311
Логистическая регрессия 398
Ложноположительный 402
Ложноотрицательный 402
Макнемара тест симметрии 407
Максимально-фазовая компонента 196, 217
Максимально-фазовый сигнал 196, 306, 315
Махаланобиса расстояние 391
Медианная частота 270
Межимпульсный интервал 279, 282
Мера расстояния 390
— Махаланобиса 391
— евклидова 390
Мера спектральной ошибки 351, 358
Метод
— исключения 399
— наименьших квадратов 292
Минимальная фаза 215
Минимально-фазовая компонента 196, 216
Минимально-фазовое согласование 215
Минимально-фазовый сигнал 196, 216, 306,
315
Миографическая помеха 68, 80, 97
—, устранение 143, 147, 154
Миоцит 31
Мобильность 234
Модель
— авторегрессии — скользящего среднего 290,
306
— авторегрессионная 290, 291
— динамическая 340, 361, 362
--, моделирование 278
— кусочно-линейная 136
— линейного предсказания 290
— линейной системы 289
— полюсная 291
--ЭЭГ 300
--, оптимальный порядок 299
--, параметры 300
--, связь с кепстром 304
--ФКГ 302, 326
— прилипания-скольжения 322
— скользящего среднего 290
— полюсно-нулевая 290
— речевого сигнала 316
— электромеханическая 319
Модуляция амплитудная 225
Мозг
— , анатомия 45
— , волны, см. ЭЭГ
Моменты
— высоких порядков 343
— первого порядка 87, 92
— распределения энергии 216
— спектральной плотности мощности 269
— второго порядка 87, 92
Морфологический анализ 215
Мышечное сокращение 34, 238
Мышечные звуки, см. ВМГ
Недетерминированный сигнал 85
Нейронные сети 400
Нестационарный процесс 58, 62, 67, 91, 100,
139, 143, 266, 336
Нормальное уравнение 134, 144, 293, 308
Нули 106, 113, 128, 290, 306, 309, 315
Ньютона-Рафсона метод 308
Обнаружение событий 164
Обобщённая линейная фильтрация 191
Обобщённое отношение правдоподобия 357,
358
Огибающая 214
- ЭМГ 232, 238
—, выделение 224
- ФКГ 226
— спектральная 284, 298
Одновременные процессы 74
Окно
— Бартлетта 256, 258, 259
— для анализа по коротким интервалам 346
— прямоугольное 256, 258, 259, 267
— Хемминга 259
— Хеннинга 259, 261
Оптимальный фильтр 131, 139, 142, 144
Отбеливающий фильтр 297
Отношение спектральных мощностей 250,
271
Отоакустическая эмиссия 63
Пана-Томпкинса алгоритм 172, 200, 203,
229, 235, 409
Параметрическое моделирование 278, 289
Парные процессы 74
Парсеваля теорема 254, 297
ПДДЕ 35, 279, 282
— двухфазный 35, 284
— полифазный 36
— трёхфазный 35
ПДОДЕ, см. ПДДЕ
Передаточная функция 106, 290
Периодограмма 255
Перцептрон 400
Подсчёт поворотов 232
Поиск кластеров 390
— , метод К-средних 393
— , максимальное расстояние 392
436
Предметный указатель
Поиск пиков 170, 174
Показатель предсказания
— отрицательного 403
— положительного 403
Полосовой фильтр 113, 248
Полюса 107, 115, 118, 290, 309, 315, 358
— доминирующие 326
- ФКГ 302, 326
- ЭЭГ 300
Полюсно-нулевая модель 290, 306, 309
Полюсов и нулей диаграмма 109, 122, 128,
130
Помеха 84, 94
— материнская 97
---, устранение 153
— миографическая 81, 97
---, устранение 143, 147, 154
— нестационарная 139
— сетевая 91
— физиологическая 91
Последовательность интервалов 280, 323
Потенциал
— действия 30
---двигательной единицы, см. ПДДЕ
---отдельной двигательной единицы, см.
ПДДЕ
---, распространение 33
— покоя 30
Потенциалы, связанные с событием, см. ПСС
Поток воздуха 237
Правило ближайшего соседа 389
Предсказание вперёд и назад 363
Преобразование
— по длительности 190
— Фурье 251
--- для коротких интервалов 344
---, свойства 253
Принятие решений 384
Проекция 178, 251
Произведение «время-ширина полосы» 347
Производная 111, 169, 171, 172, 175, 232-234
— , трёхточечная центральная разность 113
Прототип 89, 389, 409
Процедура обратного поиска 175
ПСС, потенциалы, связанные с событиями
49, 94, 214
— , синхронное усреднение 88, 101
Рабочие характеристики (ROC-кривые) 404
Распределение энергии 216, 224, 231
— , моменты 216
Резонансная частота 245, 300, 317, 319, 326,
332, 358
Режекторный фильтр 128, 169
Рекурсивный решётчатый фильтр наимень-
ших квадратов 363
Рекурсивный фильтр наименьших квадратов
143, 154, 361
Реполяризация 31
Рефрактерный период 31
Речевой сигнал 57, 86, 92, 232
— ,введение 57
— , высота тона 281
— , гласный (звук) 194, 199
— , гомоморфная фильтрация 194
— , полюсно-нулевая модель 315
— , спектрограмма 93, 348
— , фонема 58
— , форманты 281, 317
Решающая функция 387, 411
Решающее правило 385, 411
Решётчатый метод Берга 365
Ритм сердца 39, 280
Свёртка
— линейная 253
— периодическая 253
— циклическая 253
ССВП, см. ПСС
Сдвиг по времени 253
Сегментация
— адаптивная 350, 361
- ВАГ 362, 370
— фиксированная 344
- ФКГ 375
- ЭЭГ 355, 361, 373
Сердечный ритм 39, 200
— , вариабельность 280, 323, 378
— , спектрограмма 379
Сердце
— , анатомия 39
— , дефекты клапанов 248
— , звуки, см. ФКГ
— , протезы клапанов 273
— , электрическая система 40
Сетевая помеха (наводка) 91, 94, 96, 151
— , устранение 128, 151
Сигналы с катетерных датчиков 56
Синхронное усреднение 101, 150, 207, 226,
229, 265
Систола 39, 53, 81, 203
Скалярное произведение 133, 178, 253, 398
— нормализованное 391
Скорость проведения 33
Скрининг 402
Сложность 234
— форм волн 212, 230
Случайность, тест на 85
Случайный
— сигнал 85, 293
— шум 85
Предметный указатель
437
Смешанно-фазовый 217
— сигнал 306, 315
Смещение 255, 257, 274
Согласование с образцом 91, 104, 179, 180,
186, 189, 215
Согласованный фильтр 185
Соматосенсорные вызванные потенциалы,
см. ПСС
Спайк 167
Спайк-волна 168
Спектральная огибающая 298
Спектральная плотность мощности 90, 93,
135, 184, 186, 245, 343
—, Бартлетта оценка 257, 258, 265
- , ВАГ 286
— , моменты 269
— , оценка 254
— , параметры 269, 274
— , сердечный ритм 378
— , точечный процесс 282
— , усреднение 257
— , Уэлча оценка 258, 263
- ФКГ 246, 249, 265, 344
- ЭКГ 151
- ЭМГ 284
- ЭЭГ 263, 373
Спектральная утечка 256, 257, 258
Спектральное
— отслеживание 326
— разрешение 256, 257, 258
— согласование 296
Спектральные
— контуры 327
— окна 258, 259
— параметры 269, 273, 296
Спектральный анализ
- ФКГ 302. 326
- ЭЭГ 300
Спектрограмма 346
- ВАГ 148, 155, 363
— речевого сигнала 93, 346
— сердечного ритма 379
- ФКГ 249, 346
Специфичность 402
Сравнение с порогом 172, 189
Среднее 87, 92, 255, 257, 341
Среднеквадратичное значение 87, 231, 238
Средние
— по ансамблю 88, 91, 101, 258, 283
— по времени 90, 92, 105
Средняя частота 269
Статистики высоких порядков 270, 343
Статистически независимые процессы 88
Статистическое решение 394
Стационарный процесс 91
Структурированный шум 91
Таблица сопряжённости (контингентности)
407
Температура 27
Точечный процесс 279, 282
Точки поворота 86
Точность диагностики 402
Трудности анализа сигналов 66
Уидроу-Хоффа алгоритм 142
Усреднение по ансамблю, см. синхронное
усреднение
Уэлча метод 258, 263
Фаза
—, линейная компонента 195, 315
—, развёртывание 195, 306
Физиологическая помеха 85
Фильтр
— адаптивный 138, 151, 153, 154
— в частотной области 117, 150
— верхних частот 111, 116, 126, 173
---Баттерворта 126, 151
- Винера 131, 142, 151, 154, 292, 313
— во временной области 101
— , выбор фильтра 150
— гомоморфный 191
— гребенчатый 129, 151
— инверсный 297
— наименьших квадратов
---рекурсивный 143, 154, 361
---решётчатый рекурсивный 363, 367
— наименьших средних квадратов 142, 154
— нижних частот 107, ПО, 118, 172
---Баттерворта 118, 151, 169, 171
— основанный на производной 111
— отбеливающий 297
— полосовой 113
— обобщённый линейный 191
— оптимальный 131, 139, 142, 144
— режекторный 128, 169
— с бесконечной импульсной характеристи-
кой (БИХ, рекурсивный) 115, 120
— с конечной импульсной характеристикой
(КИХ, нерекурсивный) 106
— скользящего среднего 105, 150, 170, 224,
258
---, связь с интегрированием 109
— согласованный 185
— Хеннинга 106
ФКГ 51
—, авторегрессионная модель 302, 326, 331
—, аортальная компонента 207
—, аорты стеноз 251, 272
—, блокада пучка Гиса 206
438
Предметный указатель
—,введение 51
—, второй тон сердца 52, 165, 203, 206, 246
—, —, обнаружение 76, 203, 326
—, —, расщеплённый 54, 204, 229
—, инфаркт миокарда 247
—, коронарной артерии заболевание 331
—, лёгочная компонента 207
—, огибающая 214, 226
—, первый тон сердца 52, 165, 203, 246
—, —, обнаружение 75, 203, 326
—, протезы клапанов сердца 273
—, связь с каротидным пульсом 52, 76, 81
—, связь с ЭКГ 52, 75, 81
—, сегментация 76, 77, 81, 203, 266, 326, 337,
375
—, синхронное усреднение 226
—, спектральная плотность мощности 247,
250, 271, 331, 344
—, спектральный анализ 247, 266, 302, 326
—, спектрограмма 249, 346
—, частота пересечений нуля 232
-, шум 52, 166, 226, 231, 232, 271, 386
—, —, дерево решений 227
—, —, спектральный анализ 250, 302, 326
—,эластичность миокарда 246
Фонокардиограмма, см. ФКГ
Форма волны 212
Функция
— плотности вероятности 87
--- гауссова 396
— потерь 394
— правдоподобия 394
— расстояния 389
Хеннинга фильтр 106
Хондромаляция коленной чашечки 62, 415
Цели анализа сигналов 63
Центроидальное время 216, 218
Циклически стационарные сигналы 94, 266,
280
Частота пересечения нуля 231, 232
Частотная характеристика 106, 108, ПО, 111,
116, 123, 124, 126, 127, 129, 135, 152
Человек-машина (система) 64
Чувствительность 402
Шенкса метод 309, 316
Штеглитца-Мак-Брайда метод 311
Шум 84
- в ПСС 94, 101
- на ЭКГ 94, 101, 136
— высокочастотный 94
---, устранение 118, 151
— низкочастотный 95
--, устранение 111, 114, 126
— структурированный 91
--, устранение 101, 105, 136, 139, 150
ЭГГ, электрогастрограмма 50
Эйнтховена треугольник 43
ЭКГ 39
— 12-канальная 42
— , анализ ритма 200, 280, 323
— , анализ формы 215, 222
— , бигеминия 42, 235, 409
— , блокада пучка Гиса 42, 45, 212, 384
— ,введение 39
— , Вильсона терминаль 43
— , ЖЭ (желудочковые экстрасистолы) 41,
57, 213, 215, 235, 385
— , —, классификация 409
— , зубцы (волны) 40, 164
— , ишемия миокарда 57, 213, 237
— , классификация образов 409
— материнская 97, 153
--, устранение 153
— , отведения 42
— под нагрузкой 236
— плода 97, 153
— , последовательность интервалов 280
— , связь с каротидным пульсом 51, 81
- , связь с ФКГ 51, 75, 81
— , связь с электрограммой предсердий 77
— , синхронизация 101, 226
— , синхронное усреднение 101
— , согласование с образцами 103
— , спектральная плотность мощности 153
- , фильтрация НО, 111, 117, 126, 128, 130,
136, 151, 153
— , Эйнтховена треугольник 43
— , Р-зубец 40, 165
— , —, обнаружение 188, 190
— , PQ-сегмент 41, 165
—, QRS-комплекс 41, 165
—, —, обнаружение 169, 172, 188
—, RR-интервал 79, 200, 235, 245, 280, 324
—, ST-сегмент 41, 165, 236
—, Т-зубец 41, 165
—, —, обнаружение 191
Экспоненциальные сигналы 195, 315
Эксцесс кривой плотности распределения
270
Эктопические QRS-комплексы, см. ЭКГ, ЖЭ
Эластичность миокарда 246
Электрогастрограмма, см. ЭГГ
Электрограмма предсердий 77
Электрокардиограмма, см. ЭКГ
Электромиограмма, см. ЭМГ
Электронейрограмма, см. ЭНГ
Предметный указатель
439
Электроэнцефалограмма, см. ЭЭГ
ЭМГ, электромиограмма
—, введение 34
—, дыхание 237
—, интерференционный тип 37, 214, 284
—, модель точечного процесса 282
—, мышечная сила 238
—, огибающая 232, 238
—, подсчёт поворотов 232
—, связь с ВМГ 79
—, спектральный анализ 282
—, среднеквадратичное значение 232, 238
—, тип формы волны сокращения двигатель-
ной единицы 279
—, частота пересечений нуля 232
Энвелограмма 227
ЭНГ, электронейрограмма 33
Эпоха 164
Эргодический процесс 91
Эхо 196
ЭЭГ, электроэнцефалограмма 45
—, авторегрессионная модель 300
—, альфа-ритм (а-ритм) 48, 178, 385
—, —, обнаружение 178, 184
—, —, спектральная плотность мощности
263, 300
—,введение 45
—, волны 166
—, диаграмма состояний 374
—, когерентный анализ 184
—, корреляционный анализ 177
—, коэффициент формы 233
—, описание записи 168, 373, 375
— , позиции электродов 48
— , преходящие события 166
— , —, обнаружение 374
— , ритмы 48, 166
— , —, обнаружение 178
—, спектральная плотность мощности 373
—, сегментация 338, 351, 358, 373
—,спайк 167
—, спайк-волна 168, 375
—, —, обнаружение 180, 186
Учебное издание
РАНГАЙЯН Рангарадж Мандаям
АНАЛИЗ БИОМЕДИЦИНСКИХ СИГНАЛОВ
ПРАКТИЧЕСКИЙ ПОДХОД
Редактор: Гугля Е.Б.
Оригинал-макет: Пярнпуу А.А.
Оформление переплета: Алехина А.Ю.
Подписано в печать Формат 70x100/16. Бумага офсетная. Печать офсетная.
Усл. печ. л. 35,65. Уч.-изд. л. 39,22. Тираж 400 экз. Заказ №792
Издательская фирма «Физико-математическая литература»
МАИК «Наука/Интерпериодика»
117997, Москва, ул. Профсоюзная, 90
E-mail: fizmat@maik.ru, fmlsale@maik.ru;
http://www.fml.ru
Отпечатано с готовых диапозитивов
в ОАО «Московская типография № 6»
115088, г. Москва, ул. Южнопортовая, 24
Анализ биомедицинских сигналов достиг такого
уровня, когда возможно практическое применение
методов обработки сигналов и распознавания
образов для эффективной неинвазивной
диагностики, мониторинга состояния больного,
его реабилитации и поддержки.