/


































































































































































































































Author: Мысливец С.Г.
Tags: анализ математический анализ функциональный анализ математика
ISBN: 5-7638-0491-0
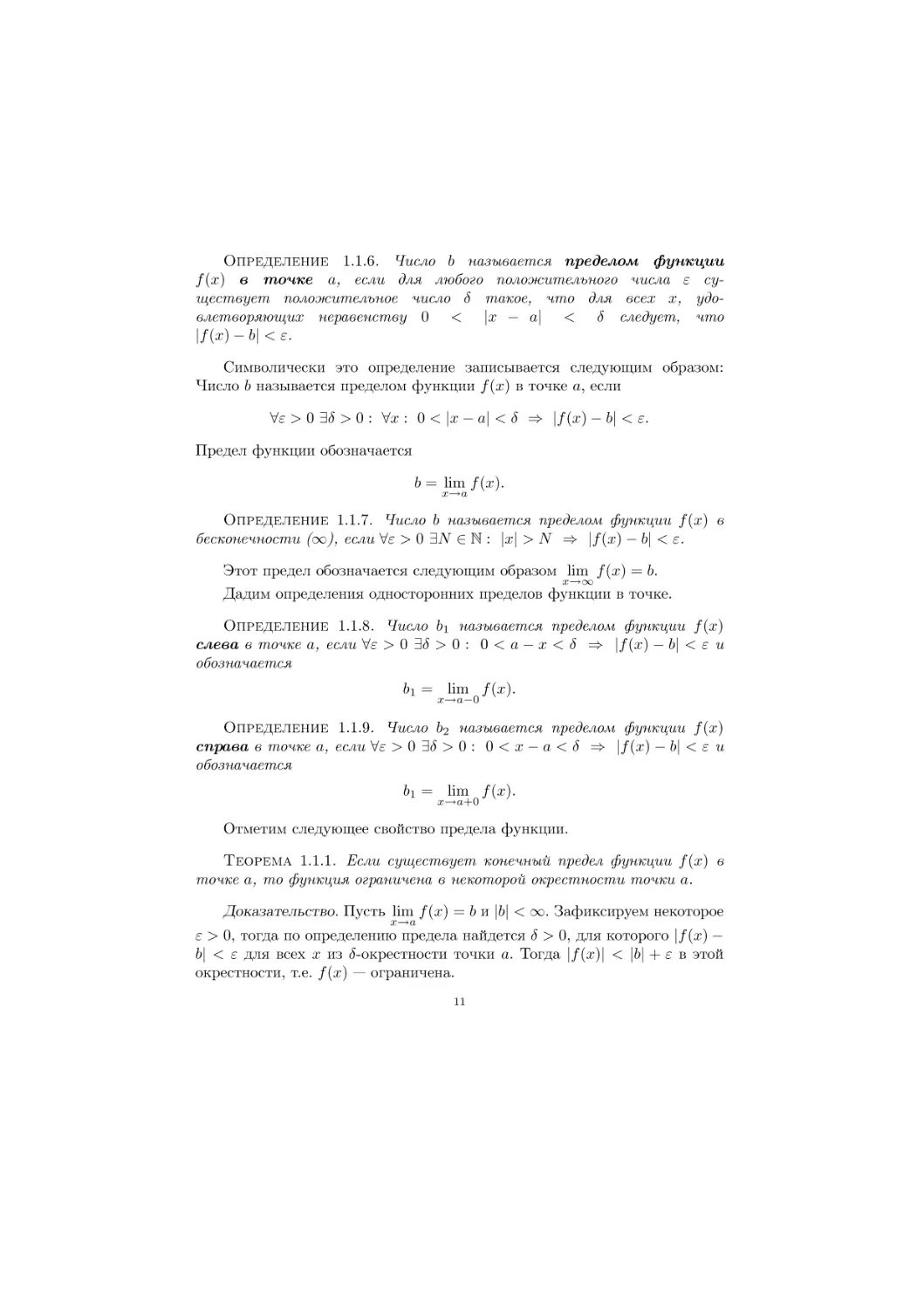
Year: 2004




Text
МИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ
ФЕДЕРАЦИИ
КРАСНОЯРСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ
С.Г.Мысливец
МАТЕМАТИЧЕСКИЙ АНАЛИЗ
Рекомендовано НМС по математике и механике УМО университетов РФ
в качестве учебного пособия
Красноярск 2004
УДК 517.5
ББК 22.161
М 952
Рецензенты: зав. кафедрой прикладной математики КГТУ,
профессор М.В.Носков; зав. кафедрой ВЭПОМ
КГТУ, профессор В.В.Слабко
Мысливец С.Г.
М 952 Математический анализ: Учеб. пособие для экон. специальностей
/С.Г.Мысливец; Краснояр. гос. ун-т.- Красноярск, 2004.- 276 с.
ISBN 5-7638-0491-0
Предназначено для студентов первого и второго курсов экономического
факультета Красноярского госуниверситета. Содержит изложение курса
математического анализа. Основные понятия и теоремы даются с доказательствами. Рассмотрено большое количество примеров и задач, способствующих усвоению материала.
ISBN 5-7638-0491-0
ББК 22.161
c С.Г.Мысливец, 2004
°
c Красноярский госуни°
верситет, 2004
Оглавление
Предисловие
9
Глава 1. Дифференциальное исчисление функций одного переменного
1.1. Понятие функции, предел функции
1.1.1. Предел функции
1.1.2. Теоремы о пределах
1.1.3. Предел числовой последовательности
1.1.4. Замечательные пределы
1.1.5. Сложные проценты
1.2. Бесконечно малые. Сравнение бесконечно малых
1.3. Непрерывные функции. Свойства функций, непрерывных на
отрезке
1.3.1. Точки разрыва
1.3.2. Свойства функций, непрерывных на отрезке
1.4. Производная функции
1.4.1. Механический смысл производной
1.4.2. Геометрический смысл производной
1.4.3. Дифференцируемость функций
1.4.4. Производные элементарных функций
1.4.5. Производная постоянной, суммы, произведения и частного
функций
1.4.6. Производная сложной функции
1.4.7. Производная неявной функции
1.4.8. Логарифмическая производная
1.4.9. Производная обратной функции
1.4.10. Производная функции, заданной параметрически
1.5. Дифференциал
1.5.1. Свойства дифференциала
1.5.2. Дифференциал сложной функции
1.5.3. Геометрический смысл дифференциала
3
10
10
10
12
13
14
17
18
24
26
27
27
28
28
29
30
32
34
35
36
36
37
38
39
40
40
1.5.4. Применение дифференциала в приближенных вычислениях
1.6. Производные и дифференциалы высших порядков
1.6.1. Неинвариантность формы второго дифференциала
1.6.2. Высшие производные неявной и параметрической функций
1.7. Приложение дифференциального исчисления
1.7.1. Теоремы о среднем
1.7.2. Правило Лопиталя
1.8. Формула Тейлора
1.8.1. Разложение функций по формуле Маклорена
1.9. Возрастание и убывание функций. Экстремумы функций
1.9.1. Максимум и минимум функций
1.9.2. Схема исследования функции на экстремум, возрастание и
убывание.
1.9.3. Исследование функции на экстремум с помощью второй
производной
1.9.4. Нахождение наибольшего и наименьшего значений функции
на отрезке
1.10. Выпуклость, вогнутость кривой, точки перегиба
1.10.1. Точки перегиба
1.11. Асимптоты кривой. Полное исследование функции
1.11.1. Вертикальные асимптоты
1.11.2. Наклонные асимптоты
1.11.3. Полное исследование функции
Глава 2. Неопределенный интеграл
2.1. Понятие неопределенного интеграла и его свойства
2.1.1. Первообразная, ее свойства
2.1.2. Неопределенный интеграл
2.1.3. Свойства неопределенного интеграла
2.1.4. Метод непосредственного интегрирования
2.1.5. Замена переменной в неопределенном интеграле
2.1.6. Интегрирование по частям
2.2. Интегрирование рациональных функций
2.2.1. Интегрирование простейших рациональных дробей
2.2.2. Интегрирование рациональных дробей
2.2.3. Метод неопределенных коэффициентов
2.2.4. Схема интегрирования рациональной дроби
2.3. Интегрирование тригонометрических выражений
2.4. Интегрирование иррациональных функций
4
41
42
44
44
45
45
47
51
54
57
58
60
61
61
62
64
64
64
65
67
72
72
72
72
74
75
76
77
80
81
83
84
86
88
92
Глава 3.
Определенный интеграл и его приложения. Несобственный
интеграл
99
3.1. Понятие определенного интеграла, основные свойства
определенного интеграла
99
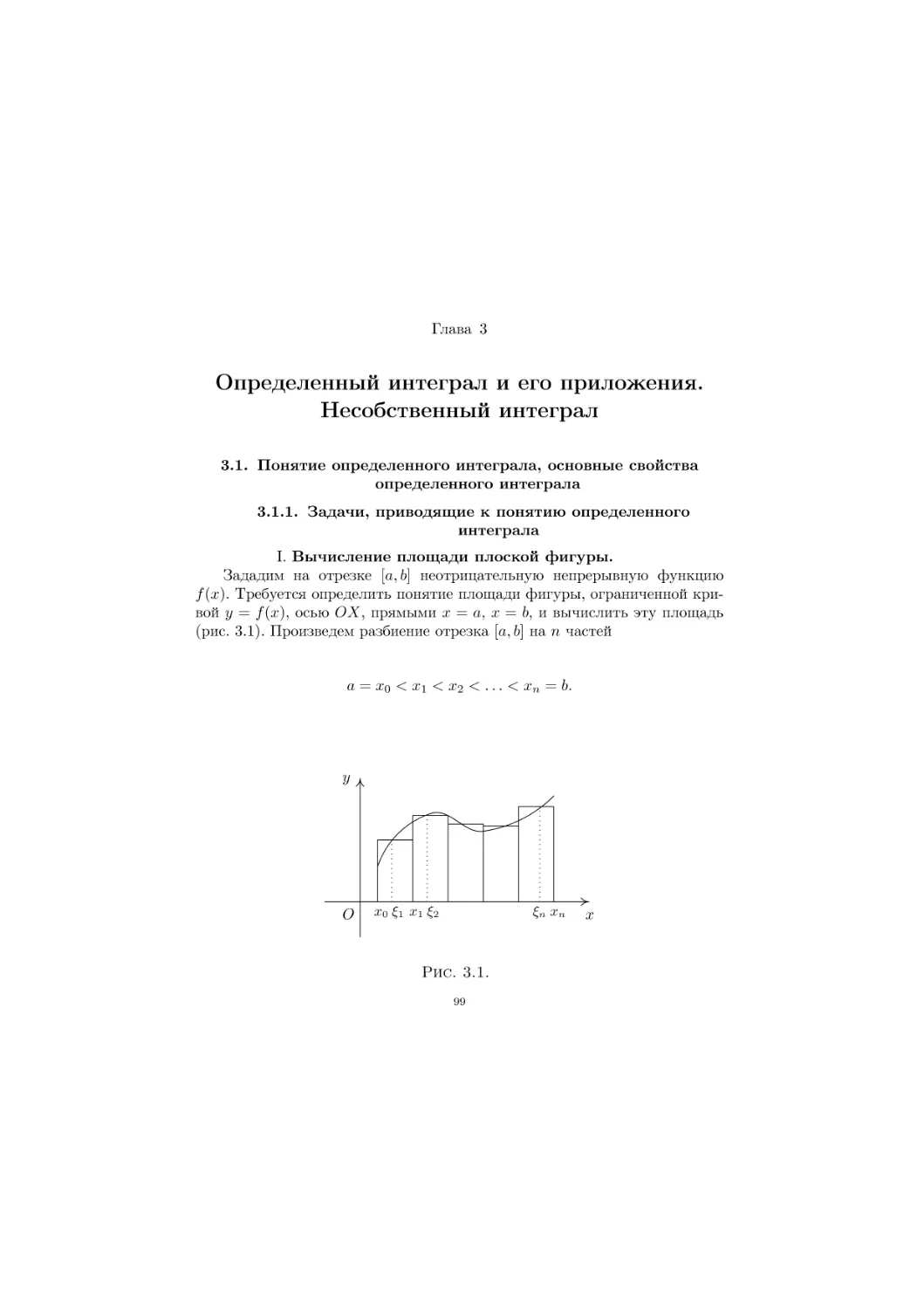
3.1.1. Задачи, приводящие к понятию определенного интеграла
99
3.1.2. Понятие определенного интеграла
100
3.1.3. Основные свойства определенного интеграла
101
3.2. Формула Ньютона-Лейбница. Замена переменной в
определенном интеграле. Интегрирование по частям.
104
3.2.1. Формула Ньютона-Лейбница
107
3.2.2. Замена переменной в определенном интеграле
108
3.2.3. Интегрирование по частям в определенном интеграле
110
3.3. Приложения определенного интеграла
111
3.3.1. Вычисление площадей плоских фигур в прямоугольной
системе координат
111
3.3.2. Площадь криволинейной трапеции, ограниченной кривой,
заданной в параметрической форме
113
3.3.3. Площадь криволинейного сектора в полярной системе
координат
114
3.3.4. Длина дуги кривой
115
3.3.5. Вычисление объема тел по площадям параллельных сечений119
3.4. Несобственные интегралы
121
3.4.1. Несобственные интегралы с бесконечными пределами
интегрирования
121
3.4.2. Несобственный интеграл от неограниченной функции
125
Глава 4. Функции нескольких переменных
128
4.1. Понятие функции нескольких переменных, предел функции
нескольких переменных
128
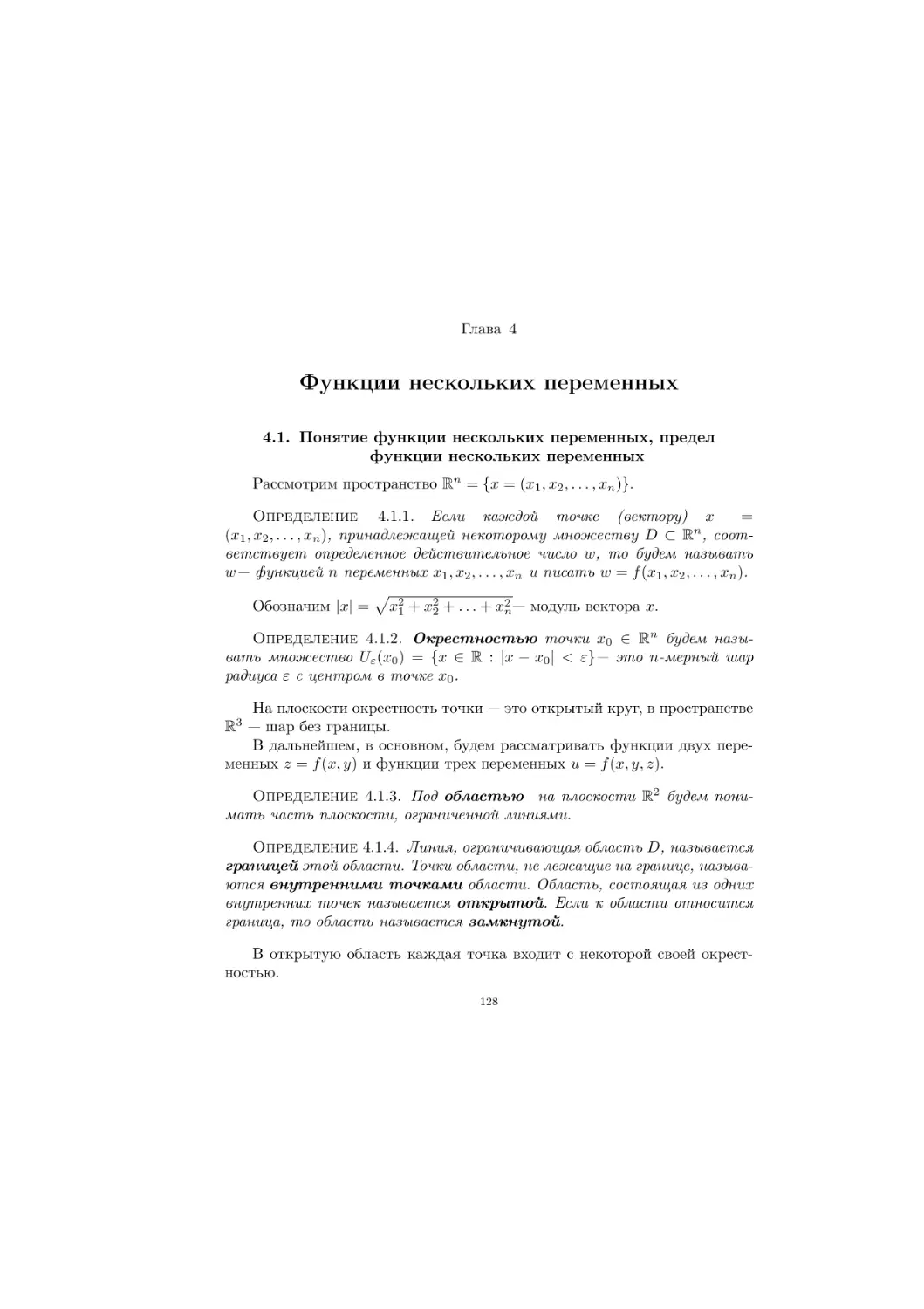
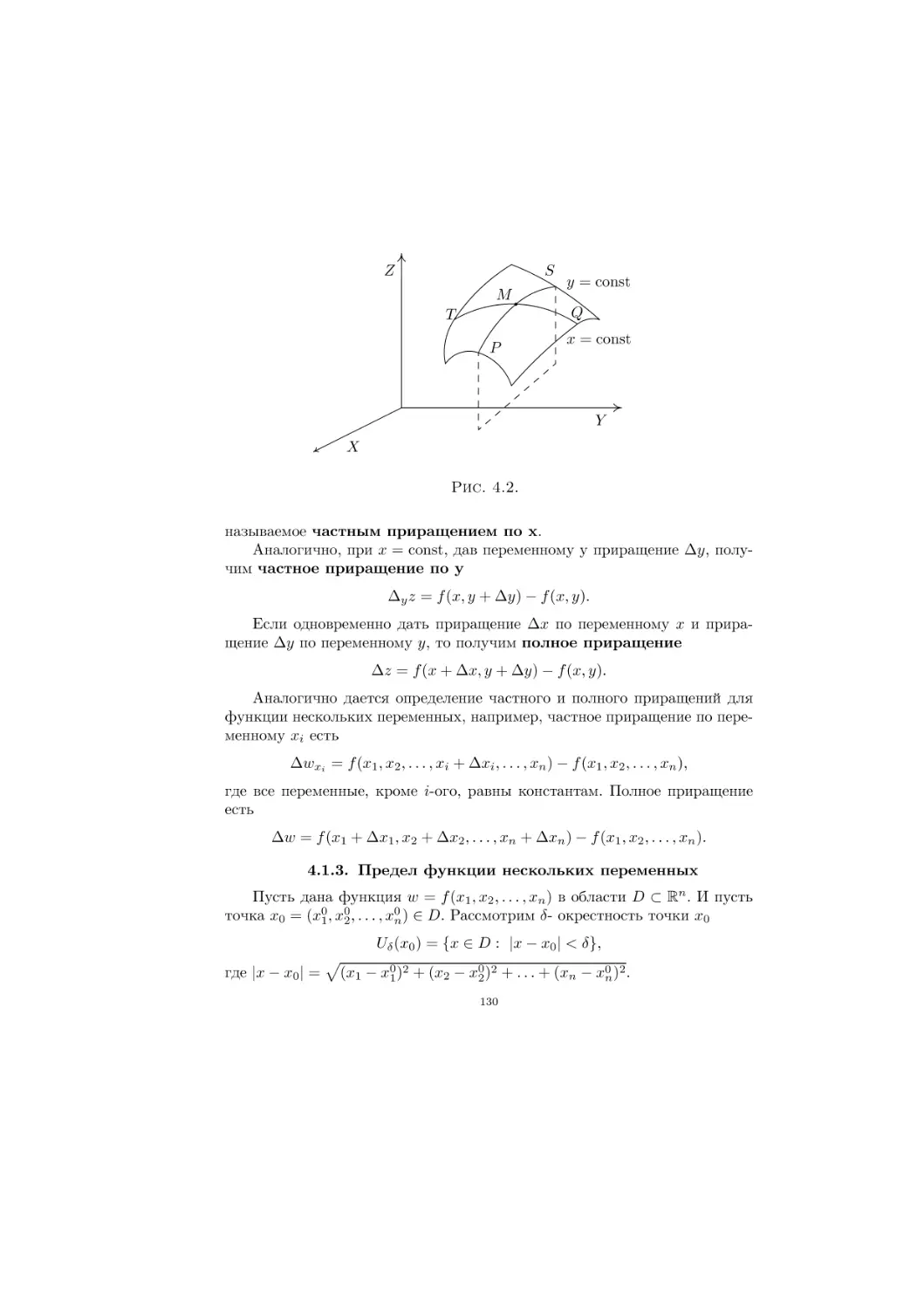
4.1.1. Геометрическое изображение функции 2-х переменных
129
4.1.2. Частное и полное приращения функции нескольких
переменных
129
4.1.3. Предел функции нескольких переменных
130
4.1.4. Непрерывность функции нескольких переменных
131
4.1.5. Свойства функций, непрерывных в замкнутой ограниченной
области
131
4.2. Частные производные функции нескольких переменных
132
4.2.1. Геометрическая интерпретация частных производных
133
4.2.2. Полный дифференциал функции нескольких переменных
133
5
4.3. Производная сложной функции нескольких переменных
135
4.3.1. Полная производная функции нескольких переменных
136
4.4. Частные производные высших порядков
137
4.4.1. Дифференциалы высших порядков функции нескольких
переменных
140
4.5. Приложения дифференциального исчисления функций
нескольких переменных
143
4.5.1. Производная по направлению
143
4.5.2. Градиент функции
144
4.5.3. Касательная плоскость и нормаль к поверхности
146
4.6. Локальный экстремум функции нескольких переменных
148
4.7. Условный экстремум функции нескольких переменных
151
4.7.1. Нахождение наибольшего и наименьшего значений функции
в замкнутой ограниченной области
155
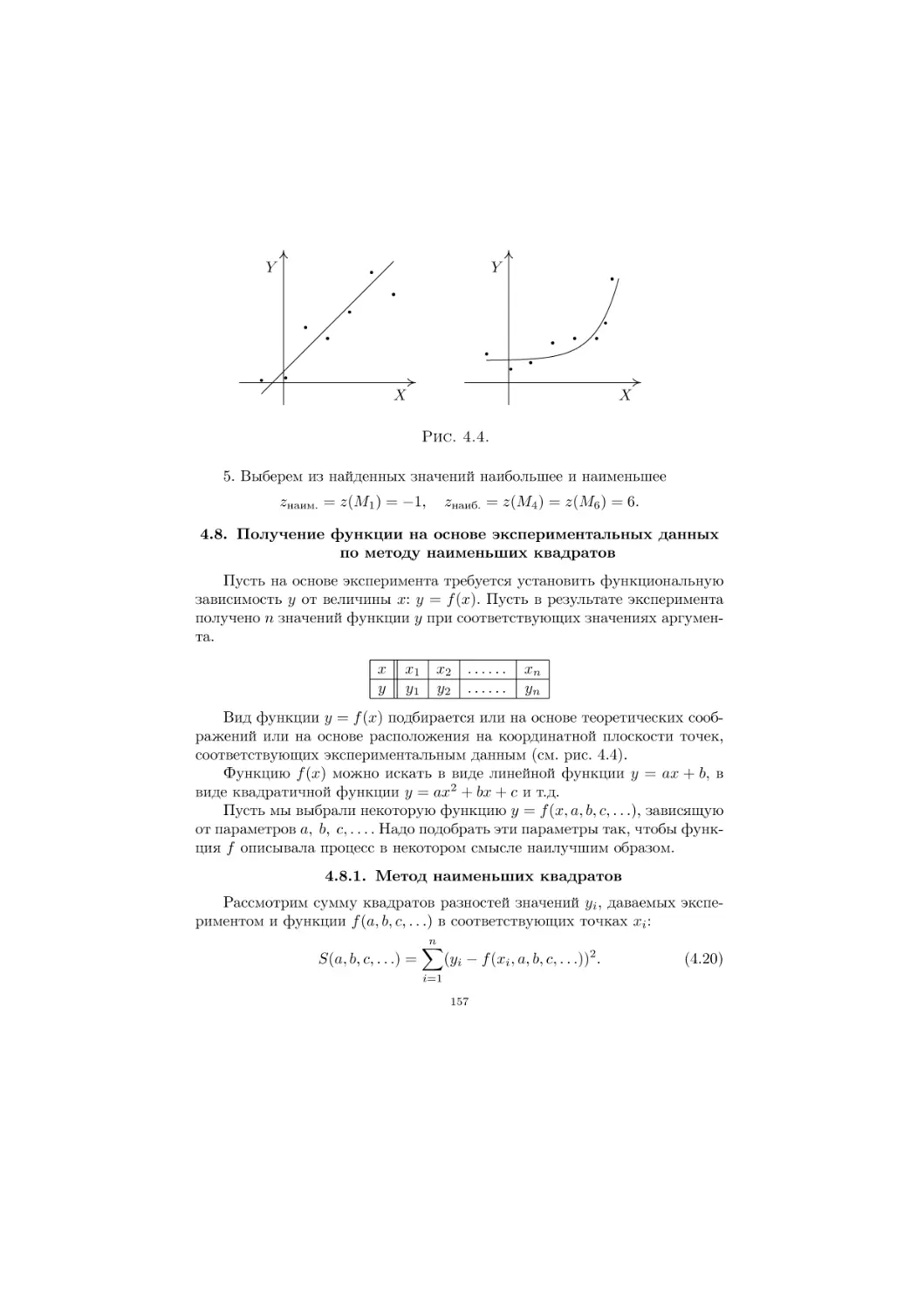
4.8. Получение функции на основе экспериментальных данных по
методу наименьших квадратов
157
4.8.1. Метод наименьших квадратов
157
Глава 5. Кратный интеграл и его приложения
5.1. Двойной интеграл и его свойства
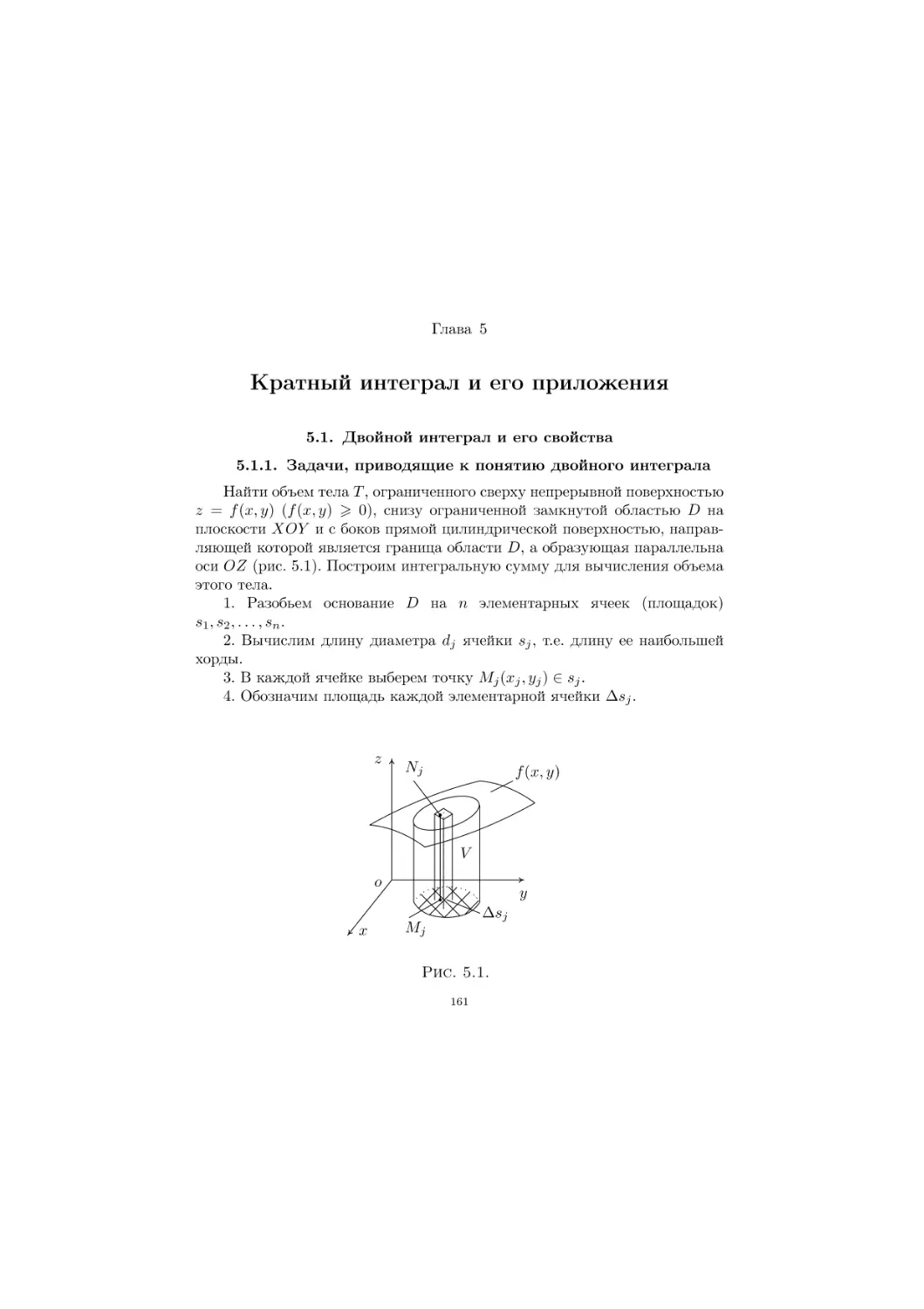
5.1.1. Задачи, приводящие к понятию двойного интеграла
5.1.2. Понятие двойного интеграла
5.1.3. Свойства двойных интегралов
5.1.4. Вычисление двойного интеграла
5.2. Приложения двойного интеграла
5.2.1. Объем тела
5.2.2. Площадь плоской фигуры
5.2.3. Замена переменных в двойном интеграле
5.2.4. Двойной интеграл в полярной системе координат
5.3. Тройной интеграл
5.3.1. Свойства тройного интеграла
5.3.2. Замена переменных в тройном интеграле
5.3.3. Цилиндрические координаты
5.3.4. Сферические координаты
5.4. n-мерные интегралы
5.5. Кривые и поверхности второго порядка
5.5.1. Кривые второго порядка
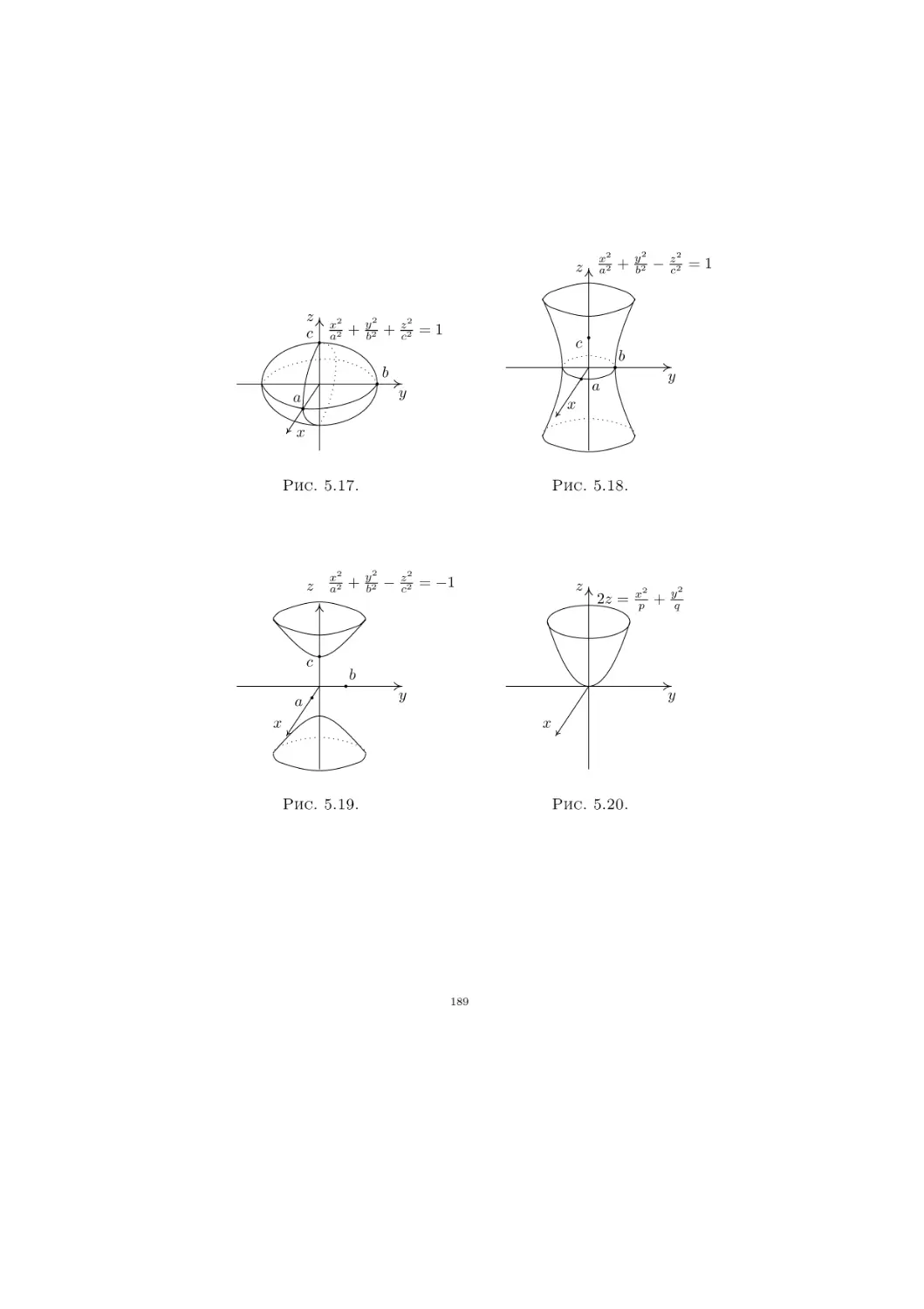
5.5.2. Поверхности второго порядка
6
161
161
161
162
163
164
168
168
170
171
174
176
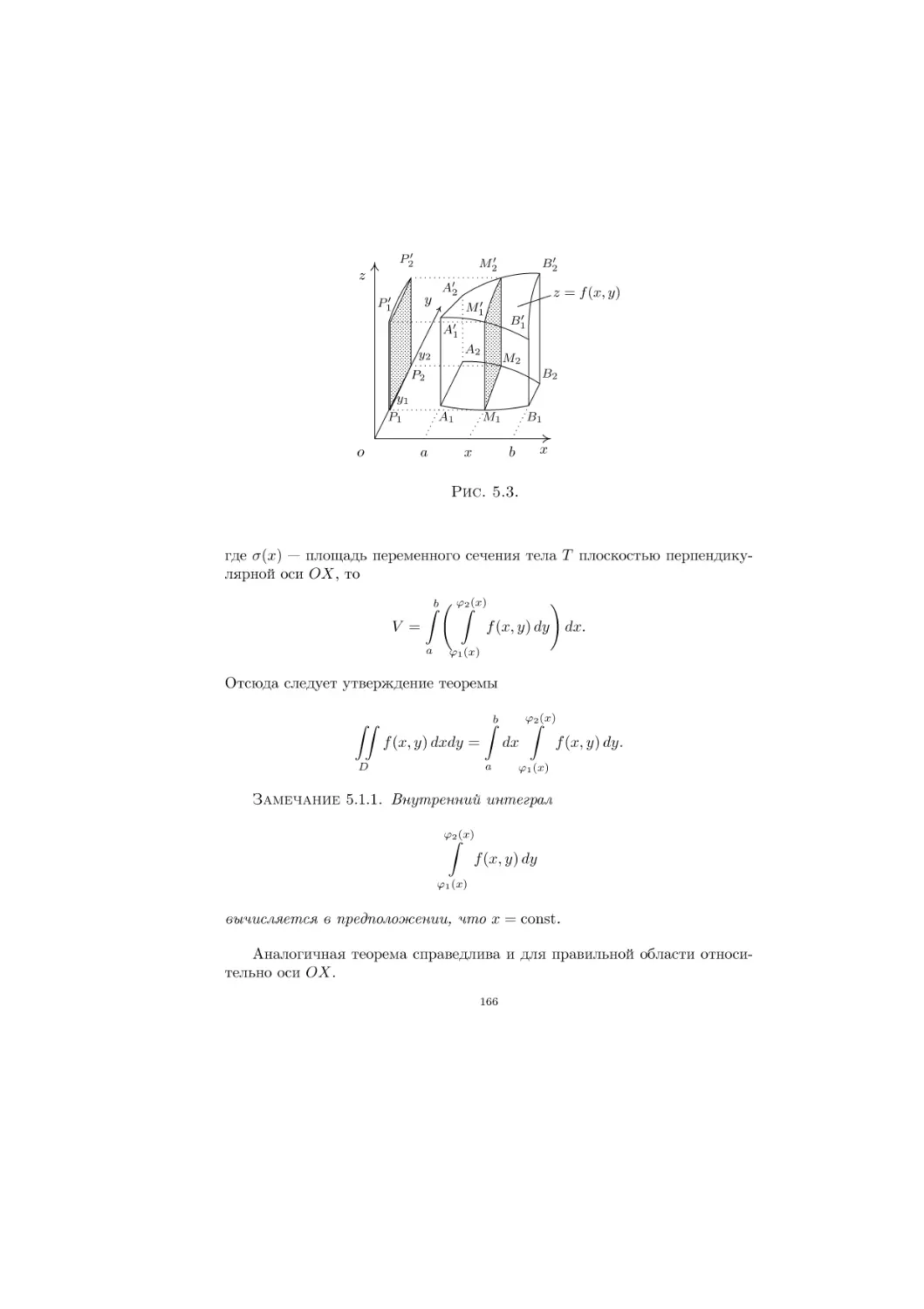
178
180
181
181
183
184
185
186
Глава 6. Дифференциальные уравнения
191
6.1. Основные понятия теории дифференциальных уравнений
191
6.1.1. Задачи, приводящие к понятию дифференциальных
уравнений
191
6.1.2. Основные понятия
191
6.2. Дифференциальные уравнения первого порядка
192
6.3. Дифференциальные уравнения с разделяющимися
переменными
194
6.3.1. Дифференциальные уравнения, сводящиеся к уравнениям с
разделяющимися переменными
197
6.4. Однородные уравнения
198
6.4.1. Решение однородного уравнения
198
6.4.2. Дифференциальные уравнения, сводящиеся к однородным 200
6.5. Линейные дифференциальные уравнения превого порядка
201
6.5.1. Метод подстановки решения линейного уравнения
202
6.5.2. Метод вариации решения линейного уравнения
202
6.6. Дифференциальное уравнение Бернулли
204
6.7. Дифференциальные уравнения в полных дифференциалах
206
6.8. Дифференциальные уравнения второго порядка
209
6.9. Дифференциальные уравнения второго порядка, допускающие
понижение порядка
211
6.10. Линейные однородные дифференциальные уравнения второго
порядка с постоянными коэффициентами
215
6.10.1. Структура общего решения однородного уравнения
216
6.10.2. Решение однородного уравнения второго порядка
218
6.10.3. Решение линейных однородных дифференциальных
уравнений n-го порядка с постоянными
коэффициентами
221
6.11. Неоднородные линейные дифференциальные уравнения
второго порядка с постоянными коэффициентами
222
6.12. Метод вариации произвольных постоянных решения
неоднородного линейного уравнения второго порядка
224
6.13. Метод неопределенных коэффициентов нахождения частного
решения неоднородного уравнения со специальной правой
частью
225
6.14. Решение систем обыкновенных дифференциальных
уравнений
231
6.14.1. Системы однородных линейных дифференциальных
уравнений с постоянными коэффициентами
234
7
Глава 7. Ряды
7.1. Числовые ряды
7.1.1. Действия над рядами
7.1.2. Необходимый признак сходимости ряда
7.2. Числовые ряды с положительными членами
7.2.1. Признак Даламбера
7.2.2. Признак Коши
7.2.3. Интегральный признак сходимости числового ряда
7.3. Знакопеременные числовые ряды
7.3.1. Знакочередующиеся ряды. Признак Лейбница
7.4. Функциональные ряды
7.4.1. Свойства равномерно сходящихся рядов на отрезке
7.5. Степенные ряды
7.6. Ряд Тейлора
7.6.1. Разложение функций в ряд Маклорена
7.7. Применение рядов в приближенных вычислениях
7.7.1. Применение рядов к приближенному вычислению значения
функции
7.7.2. Приближенное вычисление определенных интегралов
7.7.3. Приближенное решение дифференциальных уравнений
240
240
241
243
244
246
249
250
251
252
254
256
259
263
265
270
Список обозначений и сокращений
274
Литература
275
8
270
270
272
ПРЕДИСЛОВИЕ
Данное учебное пособие представляет собой достаточно сжатый курс
лекций по математическому анализу. Хотя в него входят почти все темы
стандартного курса, излагаются они в сокращенном виде. Основные понятия и теоремы, тем не менее, даются с доказательствами. В пособии
рассматривается большое количество примеров и задач, способствующих
усвоению материала. Изложение материала рассчитано на достаточно малое количество часов в курсе математического анализа. Поэтому это пособие может быть полезно при изучении этого курса и другими специальностями ВУЗов, например, биологами, химиками, психологами и т.д
Это учебное пособие состоит из семи глав. В первую главу вошли понятия функции, предела функции, непрерывности, а также дифференциальное исчисление функции одного переменного и его приложения к исследованию функций. Во второй и третьей главах излагаются основы интегрального исчисления. Даются основные приемы интегрирования, а также определенный интеграл и его приложения и несобственный интеграл.
Четвертая глава посвящена функциям нескольких переменных: частные
производные, дифференциал, производная по направлению, локальный и
условный экстремум, метод наименьших квадратов. В пятой главе рассматривается кратный интеграл и его приложения. В шестой главе рассматриваются обыкновенные дифференциальные уравнения первого и второго
порядков, дифференциальные уравнения с постоянными коэффициентами
и системы дифференциальных уравнений. Седьмая глава посвящена изучению числовых и степенных рядов.
9
Глава 1
Дифференциальное исчисление функций
одного переменного
1.1. Понятие функции, предел функции
Напомним понятия интервала и отрезка на числовой прямой R.
Определение 1.1.1. Интервалом (a, b) называется множество
всех действительных чисел, заключенных между данными числами a и
b (a < b), при этом сами эти числа не принадлежат рассматриваемому
множеству чисел.
Определение 1.1.2. Отрезком [a, b] называется множество всех
действительных чисел, заключенных между данными числами a и b (a 6
b), причем оба числа a, b принадлежат рассматриваемому множеству
чисел.
Определение 1.1.3. Окрестностью U (a) точки a ∈ R называется
произвольный интервал, содержащий эту точку.
Сформулируем определение понятия числовой функции.
Определение 1.1.4. Если каждой точке x, принадлежащей некоторому множеству D из R соответствует одно значение y ∈ R, то говорят, что y есть функция от x и обозначают y = f (x).
Определение 1.1.5. Функция f (x) называется ограниченной на
некотором множестве D ⊂ R, если существует константа M такая,
что |f (x)| < M для любого x ∈ D.
1.1.1. Предел функции
Пусть функция y = f (x) определена в некоторой окрестности U (a)
точки a ∈ R (за исключением может быть самой точки a).
10
Определение 1.1.6. Число b называется пределом функции
f (x) в точке a, если для любого положительного числа ε существует положительное число δ такое, что для всех x, удовлетворяющих неравенству 0 < |x − a| < δ следует, что
|f (x) − b| < ε.
Символически это определение записывается следующим образом:
Число b называется пределом функции f (x) в точке a, если
∀ε > 0 ∃δ > 0 : ∀x : 0 < |x − a| < δ ⇒ |f (x) − b| < ε.
Предел функции обозначается
b = lim f (x).
x→a
Определение 1.1.7. Число b называется пределом функции f (x) в
бесконечности (∞), если ∀ε > 0 ∃N ∈ N : |x| > N ⇒ |f (x) − b| < ε.
Этот предел обозначается следующим образом lim f (x) = b.
x→∞
Дадим определения односторонних пределов функции в точке.
Определение 1.1.8. Число b1 называется пределом функции f (x)
слева в точке a, если ∀ε > 0 ∃δ > 0 : 0 < a − x < δ ⇒ |f (x) − b| < ε и
обозначается
b1 = lim f (x).
x→a−0
Определение 1.1.9. Число b2 называется пределом функции f (x)
справа в точке a, если ∀ε > 0 ∃δ > 0 : 0 < x − a < δ ⇒ |f (x) − b| < ε и
обозначается
b1 = lim f (x).
x→a+0
Отметим следующее свойство предела функции.
Теорема 1.1.1. Если существует конечный предел функции f (x) в
точке a, то функция ограничена в некоторой окрестности точки a.
Доказательство. Пусть lim f (x) = b и |b| < ∞. Зафиксируем некоторое
x→a
ε > 0, тогда по определению предела найдется δ > 0, для которого |f (x) −
b| < ε для всех x из δ-окрестности точки a. Тогда |f (x)| < |b| + ε в этой
окрестности, т.е. f (x) — ограничена.
11
1.1.2. Теоремы о пределах
Сформулируем теорему об основных свойствах пределов функции в
точке и в бесконечности.
Теорема 1.1.2 (Арифметические операции над пределами). Если существуют
lim f (x) = b и lim ϕ(x) = c,
x→a
x→a
то существуют
1. lim (f (x) ± ϕ(x)) = lim f (x) ± lim ϕ(x) = b ± c,
x→a
x→a
x→a
2. lim mf (x) = m · lim f (x) = mb
x→a
x→a
∀m ∈ R,
3. lim (f (x) · ϕ(x)) = lim f (x) · lim ϕ(x) = bc,
x→a
x→a
x→a
lim f (x)
f (x)
b
= x→a
= , если c 6= 0.
4. lim
x→a ϕ(x)
lim ϕ(x)
c
x→a
Доказательство. Докажем только первое утверждение теоремы.
Остальные доказываются аналогично. Зафиксируем некоторое ε > 0. Из
существования пределов функций f (x) и ϕ(x) в точке a следует выполнение следующих утверждений:
ε
для ε1 =
∃δ1 : ∀x : |x − a| < δ1 ⇒ |f (x) − b| < ε1 и
2
ε
для ε2 =
∃δ2 : ∀x : |x − a| < δ2 ⇒ |ϕ(x) − c| < ε2 .
2
Для этого ε возьмем δ такое, что δ < δ1 и δ < δ2 , тогда для всех x,
удовлетворяющих условию |x − a| < δ, будет выполняться
|(f (x) + ϕ(x)) − (b + c)| < |(f (x) − b) + (ϕ(x) − c)| 6
ε ε
6 |f (x) − b| + |ϕ(x) − c| < + = ε.
2 2
Что и доказывает первое утверждение теоремы.
Пример 1.1.1.
x2 − 1
= lim (x + 1) = 2.
x→1 x − 1
x→1
lim
Пример 1.1.2.
lim
x→0
sin x
= 0.
x+1
Теорема 1.1.3. Если существуют lim f (x) = b и lim ϕ(x) = b и в
x→a
x→a
некоторой окрестности точки a выполняется
f (x) 6 ψ(x) 6 ϕ(x),
12
то lim ψ(x) = b.
x→a
Доказательство. Из неравенства f (x) 6 ψ(x) 6 ϕ(x) следует, что f (x)−
b 6 ψ(x) − b 6 ϕ(x) − b. Возьмем произвольное ε > 0. Тогда из определения
предела функции следует, что для этого ε ∃δ1 : ∀x : |x − a| < δ1 ⇒
|f (x) − b| < ε, т.е. −ε < f (x) − b. Аналогично для этого же ε ∃δ2 : ∀x :
|x − a| < δ2 ⇒ |ϕ(x) − b| < ε, т.е. ϕ(x) − b < ε. Тогда ∀ε ∃δ : δ < δ1 , δ <
δ2 : ∀x : |x − a| < δ ⇒ −ε < f (x) − b 6 ψ(x) − b 6 ϕ(x) − b < ε,
то −ε < ψ(x) − b < ε или |ψ(x) − b| < ε. Что и доказывает утверждение
теоремы.
Теорема 1.1.4. Если существует lim f (x) = b и f (x) > 0 в некоторой
x→a
окрестности точки a, то b > 0.
Теорема 1.1.5. Если существуют lim f (x) = b и lim ϕ(x) = c и
x→a
f (x) > ϕ(x) в некоторой окрестности точки a, то b > c.
x→a
1.1.3. Предел числовой последовательности
Определение 1.1.10. Числовой последовательностью называется
функция натурального аргумента, т.е. un = u(n), где n ∈ N, или если
каждому натуральному числу n поставлено в соответствие некоторое
действительное число un , то говорят, что задана числовая последовательность {un }.
Пусть даны две числовые последовательности {un } и {vn }, тогда определены сумма последовательностей —½{un¾+ vn }, разность — {un − vn },
un
произведение — {un · vn } и частное —
.
vn
Дадим некоторые определения, касающиеся числовых последовательностей.
Определение 1.1.11. Числовая последовательность {un } называется ограниченной сверху, если ∃M ∈ R : ∀n ⇒ un 6 M и числовая последовательность {un } называется ограниченной снизу, если
∃m ∈ R : ∀n ⇒ un > m.
Числовая последовательность называется ограниченной, если она
ограничена и сверху и снизу.
Определение 1.1.12. Числовая последовательность {un } называется монотонно возрастающей, если ∀n ∈ N выполняется un 6 un+1 .
Числовая последовательность {un } называется монотонно убывающей, если ∀n ∈ N выполняется un > un+1 .
13
½ ¾
1
является ограниченной и моn
1
1
нотонно убывающей, так как ∀n 0 < un 6 1 и >
.
n
n+1
Пример 1.1.4. Последовательность {sin n} является ограниченной последовательностью, но не является монотонной.
Пример 1.1.5. Последовательность {n} является монотонно возрастающей и ограниченной снизу последовательностью.
Пример 1.1.3. Последовательность
Определение 1.1.13. Число a называется пределом числовой последовательности {un } при n → ∞, если ∀ε > 0 ∃N ∈ N : ∀n > N ⇒
|un − a| < ε, т.е. начиная с некоторого номера N все члены последовательности попадают в ε-окрестность Uε (a) точки a.
Числовая последовательность имеющая предел называется сходящейся.
Теорема 1.1.6. Монотонно возрастающая, ограниченная сверху (или
монотонно убывающая, ограниченная снизу) числовая последовательность {un } имеет предел, т.е. она сходится.
Теоремы 1.1.2–1.1.5 верны и для числовых последовательностей.
½ ¾
1
Пример 1.1.6. Так как числовая последовательность
при p >
np
0 является монотонно убывающей и ограниченной, то она имеет предел.
1
Очевидно, что lim p = 0.
n→∞ n
Пример 1.1.7.
3n3
n
1
1
1
+ 3+ 3
3+ 2 + 3
3
3
3n + n + 1
3
n
n
n
n
n
lim
= lim
= lim
= .
1
n→∞ 2n3 + n2
n→∞
n→∞
2
2n3
n2
2+
+ 3
3
n
n
n
Пример 1.1.8.
¶
µ
1
n−1
3
+
3
1 + 3n
1
3n−1
Ã
! = .
lim n−1
=
lim
µ
¶
n+1
n−1
n→∞ 2
n→∞
+3
3
2
3n−1
+9
3
1.1.4. Замечательные пределы
1. Докажем первый замечательный предел:
sin x
lim
= 1.
x→0 x
14
Рассмотрим окружность радиуса 1 с центром в точке O. Пусть знаπ
\
чение центрального угла M
OA = x, где 0 < x < . Построим вспо2
могательный прямоугольный треугольник 4OCA (см. рис.1.1). Тогда
M
C
1
x
o
1 B
A
Рис. 1.1.
высота M B в треугольнике 4OM A будет равна |M B| = sin x, дуга
^ M A = x и сторона |CA| = tg x. Очевидно, что S4OM A < SсекOM A <
S4OCA . Найдем значения этих площадей:
|OA||M B|
1
1
=
· 1 · sin x =
sin x,
2
2
2
1
1
1
· 1 · x = x,
SсекOM A = |OA| · (^ M A) =
2
2
2
1
1
S4OCA = |OA| · |CA| =
· 1 · tg x.
2
2
Из предыдущего неравенства получим: sin x < x < tg x. Разделим это
неравенство почленно на sin x. Получим
x
1
sin x
1<
<
или cos x <
< 1.
sin x
cos x
x
Поскольку lim cos x = 1, то по теореме 1.1.3 получим, что
S4OM A =
x→0
sin x
= 1.
x
Аналогично доказывается более общий случай первого замечательного
предела, где вместо x стоит произвольная функция, стремящаяся к нулю:
lim
x→0
lim
α(x)→0
sin α(x)
= 1.
α(x)
15
Пример 1.1.9.
tg x
sin x
1
sin x
= lim
= lim
·
= 1.
x→0 x
x→0 x cos x
x→0 cos x
x
Пример 1.1.10.
k sin kx
sin kx
sin kx
= lim
= k · lim
= k.
lim
x→0
x→0 kx
x→0
x
kx
Пример 1.1.11.
sin kx
k · mx sin kx
k
sin kx
mx
k
lim
= lim
=
lim
·
= .
x→0 sin mx
x→0 kx · m sin mx
m x→0 kx
sin mx
m
2. Приведем без доказательства второй замечательный предел:
µ
¶x
1
lim 1 +
= e,
x→∞
x
lim
и в более общей форме
1
lim (1 + α(x)) α(x) = e.
α(x)→0
Пример 1.1.12.
¶n+5
¶n µ
¶5
µ
µ
1
1
1
lim 1 +
= lim
1+
= e · 15 = e.
1+
n→∞
n→∞
n
n
n
Пример 1.1.13.
µ
¶3x
¶x ¶3
µµ
1
1
lim 1 +
= e3 .
= lim
1+
x→∞
x→∞
x
x
Пример 1.1.14.
µ
¶x+3
¶x+3
¶x+3
µ
µ
x+3
x−1+4
4
lim
= lim
= lim 1 +
=
x→∞ x − 1
x→∞
x→∞
x−1
x−1
õ
= lim
1+
x→∞
4
x−1
x+3
!4 x−1
¶ x−1
4
x+3
lim 4 x−1
= ex→∞
= e4 .
Пример 1.1.15.
³
´−x
x
1
lim (−x)
lim (3 − x) x−2 = lim (1 + (2 − x)) 2−x
= ex→2
= e−2 .
x→2
x→2
Приведем второй замечательный предел в логарифмической форме
lim
x→0
ln(1 + x)
= 1,
x
lim
α(x)→0
16
ln(1 + α(x))
= 1.
α(x)
1.1.5. Сложные проценты
Показательная функция с основанием e возникает при выводе количественных законов, которым подчиняются многие естественные процессы:
рост народонаселения, рост количества древесины, радиоактивный распад.
Рассмотрим формулу сложных процентов
³
p ´t
Q(t) = Q0 1 +
,
100
где Q(t) — сумма, наращенная за t лет, Q0 — начальная сумма, p — процентная такса (прирост суммы в процентах за год). При этом предполагается,
что проценты присоединяются в конце года.
Если ввести условие присоединение процентов по отдельным частям го1
да, например, равным доли года, а процентную таксу относить ко всему
n
году, то по истечении каждой его части наращенные суммы соответственно
составят:
³
³
p ´
p ´2
Q1 = Q0 1 +
, Q2 = Q0 1 +
,...,
100n ´
100n
³
n
p
Qn = Q0 1 +
.
100n
³
p ´n
,
По прошествии года начальная сумма Q0 перейдет в Q0 1 +
100n
³
´
2n
p
по прошествии двух лет в Q0 1 +
, по прошествии t лет в
100n
³
p ´tn
Q0 1 +
.
100n
Если предположить, что прирост процентов происходит непрерывно,
т.е. когда n → ∞, то величина наращенной суммы будет
³
p ´tn
Q(t) = Q0 lim 1 +
=
n→∞
100n
ptn
µ³
¶ 100n
pt
p ´ 100n
p
= Q0 lim
1+
= Q0 e 100 .
n→∞
100n
Пример 1.1.16. Найти приблизительное количество населения Земли в
2000 году, предполагая, что в 1900 году население было около 1 миллиарда
человек и ежегодный прирост составлял 2%.
Имеем Q0 = 109 , p = 2, t = 2000 − 1900 = 100. Тогда
Q(100) = 109 · e
2·100
100
= e2 ≈ 7.3441.
Это означает, что в 2000 году население Земли составит около 7 миллиардов человек.
17
1.2. Бесконечно малые. Сравнение бесконечно малых
Определение 1.2.1. Функция α(x) называется бесконечно малой при
x → a, если lim α(x) = 0. То есть
x→a
∀ε > 0 ∃δ > 0 : ∀x : |x − a| < δ ⇒ |α(x)| < ε.
Аналогично, функция α(x) называется бесконечно малой при x → ∞,
если lim α(x) = 0.
x→∞
Пример 1.2.1. Функция α(x) = (x − 1)2 бесконечно малая при x → 1,
так как lim (x − 1)2 = 0.
x→1
1
Пример 1.2.2. Функция α(x) =
бесконечно малая при x → ∞, так
x
1
как lim
= 0.
x→∞ x
Докажем следующую теорему о существовании предела функции в
точке.
Теорема 1.2.1. Для того, чтобы функция y = f (x) имела предел при
x → a равный b, т.е. lim f (x) = b, необходимо и достаточно, чтобы
x→a
f (x) = b + α(x), где α(x) функция бесконечно малая при x → a.
Доказательство. 1. Достаточность. Пусть f (x) = b + α(x) покажем, что
lim f (x) = b.
x→a
Так как |f (x)−b| = |α(x)| и по определению бесконечно малой функции
∀ε > 0 ∃δ > 0 : ∀x : |x − a| < δ ⇒ |α(x)| < ε,
тогда и |f (x)−b| = |α(x)| < ε, а это и означает, что существует lim f (x) = b.
x→a
2. Необходимость. Наоборот, пусть существует lim f (x) = b. Тогда
x→a
∀ε > 0 ∃δ > 0 : ∀x : |x − a| < δ ⇒ |f (x) − b| < ε.
Обозначим f (x) − b = α(x), тогда и |α(x)| < ε, а это значит, что α(x) —
бесконечно малая функция при x → a и f (x) = b + α(x).
Дадим определение бесконечно большой функции.
Определение 1.2.2. Функция β(x) называется бесконечно большой
при x → a, если lim β(x) = ∞. То есть
x→a
∀M > 0 ∃δ > 0 : ∀x : |x − a| < δ ⇒ |β(x)| > M.
Аналогично, функция β(x) называется бесконечно большой при x →
∞, если lim β(x) = ∞.
x→∞
18
Сформулируем теорему о связи бесконечно малой и бесконечно большой функций.
Теорема 1.2.2. Если функция α(x) бесконечно малая при x → a (x →
1
∞) и α(x) 6= 0, то функция β(x) =
— бесконечно большая при x →
α(x)
a (x → ∞) и обратно.
Доказательство. Так как α(x) → 0 при x → a, то
1
1
∃δ > 0 : ∀x : |x − a| < δ ⇒ |α(x)| < ε =
,
∀ε =
M
M
¯
¯
¯ 1 ¯
¯
¯ > M , отсюда следует, что lim β(x) = lim 1 = ∞.
тогда ¯
x→a
x→a α(x)
α(x) ¯
Теорема 1.2.3. Сумма конечного числа бесконечно малых есть функция бесконечно малая при x → a.
Доказательство. Докажем эту теорему для случая двух функций.
Пусть функции α(x) → 0, β(x) → 0 при x → a, покажем, что
lim (α(x) + β(x)) = 0.
x→a
Зафиксируем некоторое ε > 0. Тогда для
ε
ε
ε1 = ∃δ1 : ∀x : |x − a| < δ1 ⇒ |α(x)| < ε1 = ,
2
2
для
ε
ε
ε2 = ∃δ2 : ∀x : |x − a| < δ2 ⇒ |β(x)| < ε2 = .
2
2
Из этих двух утверждений мы получаем, что для произвольного
ε > 0 ∃δ = min{δ1 , δ2 } : ∀x : |x − a| < δ ⇒ |α(x) + β(x)| 6
ε ε
6 |α(x)| + |β(x)| < ε1 + ε2 6 + = ε.
2 2
Что и доказывает теорему.
Теорема 1.2.4. Произведение любого конечного числа бесконечно малых функций есть функция бесконечно малая при x → a.
Доказательство. Доказательство этой теоремы очевидно.
Теорема 1.2.5. Произведение бесконечно малой функции α(x) на
функцию u(x), ограниченную при x → a, есть функция бесконечно малая
при x → a.
19
Доказательство. Из ограниченности функции u(x) следует, что
∃M ∃δ1 > 0 : ∀x : |x − a| < δ1 ⇒ |u(x)| < M.
Возьмем произвольное ε > 0, тогда из бесконечной малости функции α(x)
для
ε
∃δ2 : ∀x : |x − a| < δ2 ⇒ |α(x)| < ε1 .
ε1 =
M
Тогда для этого
ε ∃δ = min{δ1 , δ2 } : ∀x : |x − a| < δ ⇒ |α(x) · u(x)| = |α(x)||u(x)| <
ε
< ε1 · M =
· M = ε.
M
Отсюда следует, что lim α(x)u(x) = 0.
x→a
Следствие 1.2.1. Если α(x) → 0 при x → a и c = const, то
lim cα(x) = 0.
x→a
Теорема 1.2.6. Частное бесконечно малой функции и функции, имеющей предел отличный от нуля при x → a есть функция бесконечно
малая.
Сравнение бесконечно малых. Эквивалентность бесконечно
малых
Определение 1.2.3. Пусть α(x) и β(x) — бесконечно малые при
x → a. Если
β(x)
lim
= A 6= 0, 6= ∞,
x→a α(x)
то бесконечно малые α(x) и β(x) называются бесконечно малыми одного порядка при x → a.
Пример 1.2.3. Функции α(x) = x, β(x) = sin 3x — бесконечно малые
одного порядка при x → 0, так как
lim
x→0
sin 3x
sin 3x
= lim 3
= 3.
x→0
x
3x
Определение 1.2.4. Если α(x) и β(x) — бесконечно малые при x → a
и
lim
x→a
β(x)
= 0,
α(x)
20
то бесконечно малая β(x) называется бесконечно малой более высокого порядка, чем α(x). А α(x) называется бесконечно малой более
низкого порядка, чем β(x) при x → a.
Пример 1.2.4. Рассмотрим функции α(x) = x, β(x) = xn при x → 0 и
n > 1. Тогда
β(x)
xn
lim
= lim
= lim xn−1 = 0.
x→0 α(x)
x→0 x
x→0
Значит β(x) — бесконечно малая более высокого порядка, чем α(x).
Определение 1.2.5. Бесконечно малая β(x) называется бесконечно
малой k-ого порядка относительно бесконечно малой α(x) при x → a,
если β(x) и (α(x))k бесконечно малые одного порядка, т.е. если
lim
x→a
β(x)
= A 6= 0, 6= ∞.
(α(x))k
Пример 1.2.5. Рассмотрим функции α(x) = x, β(x) = sin3 x. Тогда β(x)
есть бесконечно малая 3 порядка относительно α(x) при x → 0, так как
β(x)
sin3 x
=
lim
= 1.
x→0 (α(x))3
x→0 x3
lim
Определение 1.2.6. Бесконечно малые α(x) и β(x) называются эквивалентными бесконечно малыми α(x) ∼ β(x) при x → a, если
lim
x→a
β(x)
= 1.
α(x)
Пример 1.2.6.
sin kx
= 1.
x→0 kx
sin kx ∼ kx при x → 0, так как lim
Пример 1.2.7.
tg kx ∼ kx при x → 0, так как lim
x→0
tg kx
= 1.
kx
Пример 1.2.8. ln(1 + x) ∼ x при x → 0, так как
¯
¯
¯
¯
1
ln(1 + x)
1
lim
= lim ln(1 + x) x = ¯¯y = , y → ∞¯¯ =
x→0
x→0
x
x
µ
¶y
1
= lim ln 1 +
= ln e = 1.
y→∞
y
21
Пример 1.2.9. 1 − cos x ∼
x2
при x → 0, так как
2
x
x
x
2 sin2
sin
sin
1 − cos x
2 = lim
2
2
lim
= lim
x · x = 1.
x→0
x→0
x→0
x2
x2
2
2
2
2
Пример 1.2.10.
√
n
1+x−1 ∼
x
при x → 0, n = 1, 2, ...
n
Теорема 1.2.7. Если α(x) и β(x) — эквивалентные бесконечно малые
при x → a, то α(x) − β(x) — бесконечно малая более высокого порядка,
чем α(x) и β(x). И обратно, если α(x) − β(x) есть бесконечно малая более
высокого порядка чем α(x) или β(x), то α(x) эквивалентно β(x).
Доказательство. 1. Предположим, что α(x) − β(x) бесконечно малая
более высокого порядка, чем α(x). Тогда
α(x) − β(x)
=0
x→a
α(x)
lim
Отсюда легко получить,что lim
x→a
или
¶
µ
α(x)
= 0.
1−
x→a
β(x)
lim
α(x)
= 1, а значит функция α(x) эквиваβ(x)
лентна функции β(x).
2. Обратно. Пусть α(x) эквивалентна β(x). Тогда
α(x) − β(x)
α(x)
= lim 1 − lim
= 1 − 1 = 0,
x→a
x→a
x→a β(x)
α(x)
lim
т.е. α(x) − β(x) — бесконечно малая более высокого порядка, чем α(x).
Аналогично доказывается и для функции β(x).
Следствие 1.2.2. Сумма конечного числа бесконечно малых эквивалентна бесконечно малой самого низкого порядка малости из всех слагаемых.
Пример 1.2.11. x + x3 ∼ x при x → 0, так как x — бесконечно малая
3
более низкого порядка,
√ чем x при
√ x → 0.
√
Пример 1.2.12. x + x ∼
x при x → 0, так как x — бесконечно
малая более низкого порядка чем x при x → 0.
22
Пример 1.2.13. Рассмотрим бесконечно малые α(x) =
x+1
1
и β(x) =
2
x
x
при x → ∞. Тогда α(x) эквивалентна β(x), так как
x+1 1
−
2
α(x) − β(x)
x = lim x + 1 − x = lim 1 = 0.
lim
= lim x
1
1
x→∞
x→∞
x→∞
x→∞ x
β(x)
x2 ·
x
x
Аналогично доказывается и для бесконечно малой α(x), что
α(x) − β(x)
lim
= 0, т.е. α(x) эквивалентна β(x) при x → ∞.
x→∞
α(x)
Теорема
1.2.8.
Если
α(x)
эквивалентна
β(x)
при
x
→
a
и
существует
lim (α(x) · f (x)) = A, то существует и lim (β(x) · f (x)) и выполняx→a
ется lim (α(x) · f (x)) = lim (β(x) · f (x)) = A.
x→a
x→a
x→a
Доказательство. Пусть существует lim (α(x) · f (x)) = A. Так как
x→a
α(x)
lim
= 1, то
x→a β(x)
α(x)
lim (β(x) · f (x)) = 1 · lim (β(x) · f (x)) = lim
· lim (β(x) · f (x)) =
x→a
x→a β(x) x→a
µ
¶
α(x)
= lim
· β(x)f (x) = lim (α(x)f (x)) = A.
x→a β(x)
x→a
Рассмотрим примеры вычисления пределов с помощью эквивалентных
бесконечно малых.
Пример 1.2.14. Так как sin kx ∼ kx при x → 0, то
sin 5x
5x
lim
= lim
= 5.
x→0
x→0 x
x
Пример 1.2.15.
x + x2 + x3
x
lim
= lim = 1,
x→0 x
x→0
x
так как x + x2 + x3 ∼ x при x → 0.
Пример 1.2.16.
24x2
arcsin 3x · sin 8x
3x · 8x
= lim 2 = 24,
lim
= lim 2
2
3
4
x→0 x
x→0
x→0 x − 2x + x
(x − x2 )
x→a
так как при x → 0 следующие функции эквивалентны:
¡
¢2
arcsin 3x ∼ 3x, sin 8x ∼ 8x, x − x2 = x2 − 2x3 + x4 ∼ x2 .
23
1.3. Непрерывные функции. Свойства функций, непрерывных
на отрезке
Пусть функция y = f (x) определена в окрестности U (x0 ) точки x0 ∈ R
и y0 = f (x0 ). Для x ∈ U (x0 ) обозначим ∆x = x − x0 и ∆f = f (x) − f (x0 ).
Тогда x = x0 + ∆x, а f (x) = f (x0 ) + ∆f .
Определение 1.3.1. Функция y = f (x) называется непрерывной в
точке x0 , если
1. lim f (x0 + ∆x) = f (x0 )
или
∆x→0
2. lim f (x) = f (x0 )
x→x0
или
3. lim ∆f = 0.
∆x→0
Пример 1.3.1. Покажем, что функция f (x) = x2 непрерывна в произвольной точке x0 ∈ R. Так как ∆f = f (x0 + ∆x) − f (x0 ), то получим
∆f = (x0 + ∆x)2 − x20 = x20 + 2x0 ∆x + (∆x)2 − x20 = 2x0 ∆x + (∆x)2 . Тогда
¡
¢
lim ∆f = lim 2x0 ∆x + (∆x)2 =
∆x→0
∆x→0
= 2x0 lim ∆x + lim (∆x)2 = 0 + 0 = 0,
∆x→0
∆x→0
отсюда вытекает, что функция f (x) = x2 непрерывна в произвольной точке
области определения.
Определение 1.3.2. Пусть функция u = u(x) определена на множестве D, а функция f = f (x) определена на множестве G ⊂ u(D), тогда
говорят, что задана сложная функция F (x) = f (u(x)) = f (u).
Предложение 1.3.1. Всякая элементарная функция непрерывна в
каждой точке, в которой она определена.
Таким образом функции y = sin x, y = cos x, y = tg x, y = ctg x, y =
xn , y = ex , y = ax , y = ln x, y = loga x и т.д. непрерывны в каждой точке
области определения.
Теорема 1.3.1. Если функции f1 (x) и f2 (x) непрерывны в точке x0 ,
то функции
1. f (x) = f1 (x) ± f2 (x),
2. ϕ(x) = f1 (x) · f2 (x),
f1 (x)
, f2 (x0 ) 6= 0,
3. ψ(x) =
f2 (x)
непрерывны в точке x0 .
24
4. Если функция u = u(x) непрерывна в точке x0 , а функция f (u)
непрерывна в соответствующей точке u0 = u(x0 ), то сложная функция
F (x) = f (u(x)) непрерывна в точке x0 .
Доказательство. Докажем только первое утверждение теоремы. Пусть
функции f1 (x) и f2 (x) непрерывны в точке x0 , тогда существуют
lim f1 (x) = f1 (x0 ) и lim f2 (x) = f2 (x0 ). По теореме 1.1.2 имеем
x→x0
x→x0
lim f (x) = lim (f1 (x) + f2 (x)) = lim f1 (x) + lim f2 (x) =
x→x0
x→x0
x→x0
x→x0
= f1 (x0 ) + f2 (x0 ) = f (x0 ).
Значит функция f (x) = f1 (x) + f2 (x) непрерывна в точке x0 .
Пример 1.3.2. Используя эту теорему, а также предложение 3.1 легко
показать, что функция y = x+sin x непрерывна в каждой точке из области
определения.
Определение 1.3.3. Всякая функция непрерывная в каждой точке
области D ⊂ R (интервала (a, b)) называется непрерывной в этой
области (непрерывной на этом интервале).
Пример 1.3.3. Рассмотрим функцию
½ 2
x , 0<x<1
y=
2
, x > 2.
Она непрерывна на интервале (0, 1) и на интервале (2, +∞).
Определение 1.3.4. Если существует
lim
x→x0 −0
f (x) = f (x0 ), то го-
ворят, что функция f (x) непрерывна слева в точке x0 , если существует lim f (x) = f (x0 ), то говорят, что функция f (x) непрерывна
x→x0 +0
справа в точке x0 .
Дадим определение функции непрерывной на отрезке.
Определение 1.3.5. Если функция f (x) непрерывна на интервале
(a, b) и непрерывна в точке a справа, а в точке b — слева, то говорят,
что она непрерывна на отрезке [a, b].
Предложение 1.3.2. Для того, чтобы функция f (x) была непрерывна в точке x0 ∈ R необходимо и достаточно, чтобы выполнялось
lim
x→x0 −0
f (x) =
lim
x→x0 +0
f (x) = lim f (x) = f (x0 ).
x→x0
Без доказательства.
25
1.3.1. Точки разрыва
Определение 1.3.6. Рассмотрим точку x0 , если
1. в точке x0 функция f (x) не определена или
2. не существует lim f (x) или
x→x0
3. lim f (x) 6= f (x0 ) или
4.
x→x0
lim
x→x0 −0
f (x) 6=
lim
x→x0 +0
f (x),
то говорят, что функция f (x) разрывна в точке x0 .
Рассмотрим следующие примеры функций, разрывных в точке.
1
Пример 1.3.4. Функция y =
разрывна в точке x0 = −1, так как
x+1
1
= −∞,
x+1
lim
x→−1−0
Пример 1.3.5. Функция
y=
x
=
|x|
½
lim
x→−1+0
−1
1
1
= +∞.
x+1
, x<0
, x>0
разрывна в точке x0 = 0, так как
lim (−1) = −1 6= lim 1 = 1.
x→−0
x→+0
Пример 1.3.6. Функция y = e
lim e
x→3−0
1
x−3
1
x−3
= 0, а
разрывна в точке x0 = 3, так как
1
lim e x−3 = +∞.
x→3+0
Определение 1.3.7. Если существуют конечные пределы функции
f (x) справа и слева в точке x0 , т.е.
∃
lim
x→x0 −0
f (x) = b1 6= ∞ и
lim
x→x0 +0
f (x) = b2 6= ∞
и либо
1. b1 6= b2 , либо
2. b1 = b2 , но функция f (x) не определена в точке x0 ,
то говорят, что функция f (x) имеет в точке x0 разрыв I рода (конечный разрыв).
В противном случае, т.е. если хотя бы один предел равен бесконечности или не существует, то говорят, что точка x0 — точка разрыва
II рода.
26
В примерах 1.3.4 и 1.3.6 функции имели разрыв II рода, а в примере
1.3.5 функция имела разрыв I рода.
sin x
, она не определена в 0,
Пример 1.3.7. Рассмотрим функцию y =
x
но
sin x
sin x
lim
= lim
= 1,
x→−0 x
x→+0 x
поэтому x0 = 0 — точка разрыва I рода.
1.3.2. Свойства функций, непрерывных на отрезке
Дадим без доказательства теоремы о свойствах функций, непрерывных
на отрезке.
Теорема 1.3.2. Если функция f (x) определена и непрерывна на отрезке [a, b], то она ограничена на нем. То есть
∃M = const : ∀x ∈ [a, b] ⇒ |f (x)| 6 M.
Теорема 1.3.3. Если функция f (x) определена и непрерывна на отрезке [a, b], то она достигает своего наибольшего и наименьшего значений
на нем. То есть
∃c ∈ [a, b] : f (c) > f (x) ∀x ∈ [a, b],
∃d ∈ [a, b] : f (d) 6 f (x) ∀x ∈ [a, b].
Теорема 1.3.4. Если функция f (x) определена и непрерывна на отрезке [a, b] и на концах этого отрезка принимает значения разных знаков,
то на интервале (a, b) найдется точка, в которой функция равна нулю.
То есть пусть
f (a)f (b) < 0, ⇒ ∃c ∈ (a, b) : f (c) = 0.
Теорема 1.3.5. Непрерывная на отрезке [a, b] функция f (x) принимает все промежуточные значения между ее наименьшим и наибольшим
значениями на этом отрезке. Пусть m и M — наименьшее и наибольшее
значения функции f (x) на отрезке [a, b], тогда
∀µ : m 6 µ 6 M ∃c ∈ [a, b] : f (c) = µ.
1.4. Производная функции
Пусть дана функция f (x). Рассмотрим точки x и x+∆x, тогда ∆f =
f (x + ∆x) − f (x).
27
Определение 1.4.1. Производной данной функции y = f (x) по аргументу x называется предел отношения приращения функции ∆f к приращению аргумента ∆x, когда последний стремится к нулю, т.е.
∆y
f (x + ∆x) − f (x)
= lim
.
∆x ∆x→0
∆x
Используются следующие обозначения для производной функции:
dy
.
f 0 (x), y 0 (x), yx0 ,
dx
1.4.1. Механический смысл производной
f 0 (x) = lim
∆x→0
Рассмотрим прямолинейное движение некоторой материальной точки.
Пусть в некоторый начальный момент времени t0 расстояние точки от начала отсчета было s0 . Тогда за время ∆t = t − t0 точка пройдет расстояние
∆s
∆s = s(t) − s0 . Средняя скорость движения точки будет vср. =
. То∆t
гда мгновенная скорость движения точки будет определяться как предел
средней скорости движения точки при условии, что приращение времени
стремится к нулю:
∆s
vмг. = lim
.
∆t→0 ∆t
Таким образом, механический смысл производной заключается в том, что
она является мгновенной скоростью любого движения.
1.4.2. Геометрический смысл производной
Рассмотрим график функции y = f (x) (см. рис. 1.2.). На этом графике
возьмем две точки M (x, y), где y = f (x) и M1 (x + ∆x, y + ∆y). Проведем
секущую l через точки M и M1 . Если при неограниченном приближении
точки M1 к точке M с любой стороны секущая стремится занять положение
определенной прямой m, то прямая m называется касательной к кривой
в точке M . Обозначим угол наклона с положительным направлением оси
OX касательной через α, а секущей через ϕ. Устремим точку M1 по кривой
к точке M , тогда секущая l устремится к касательной m, а угол ϕ к углу
α.
∆y
Очевидно, что tg ϕ =
. Тогда по определению производной получим
∆x
∆y
y 0 = lim
= lim tg ϕ(x) = tg α.
∆x→0 ∆x
∆x→0
Другими словами, значение производной f 0 (x) при данном значении
x равно тангенсу угла, образованного с положительным направлением
28
Y
m
l
M1
y + ∆y
∆y
M
y
∆x
ϕ
α
o
x
x + ∆x
X
Рис. 1.2.
оси OX касательной к графику функции f (x) в соответствующей точке
M (x, f (x)).
1.4.3. Дифференцируемость функций
Определение 1.4.2. Если функция y = f (x) имеет производную в
точке x0 , то будем говорить, что при x = x0 функция дифференцируема.
∆f
0
= f−
(x), то он на∆x
зывается левой производной функции f (x) в точке x. Если существу∆f
0
ет lim
= f+
(x), то он называется правой производной функции
∆x→+0 ∆x
f (x) в точке x.
Определение 1.4.3. Если существует
lim
∆x→−0
Определение 1.4.4. Если функция f (x) дифференцируема в каждой
точке интервала (a, b), то она называется дифференцируемой на этом
интервале.
Если функция f (x) дифференцируема на интервале (a, b) и дифференцируема справа в точке a и слева в точке b, то она называется дифференцируемой на отрезке [a, b].
Теорема 1.4.1. Если функция f (x) дифференцируема в точке x, то
она непрерывна в этой точке.
Доказательство. По определению производной
f 0 (x) = lim
∆x→0
29
∆f
.
∆x
Тогда по теореме 1.2.1 будем иметь
∆f
= f 0 (x) + α(x),
∆x
где α(x) → 0
при ∆x → 0.
Отсюда ∆f = f 0 (x) · ∆x + α(x) · ∆x. Найдем
lim ∆f = lim (f 0 (x) · ∆x + α(x) · ∆x) = 0.
∆x→0
∆x→0
Таким образом мы получили, что функция f (x) непрерывна в точке x.
Обратное неверно, т.е. из непрерывности функции в точке x0 не следует
ее дифференцируемость в этой точке. Приведем пример подтверждающий
это.
√
Пример 1.4.1. Рассмотрим функцию y = 3 x в точке x0 = 0. Тогда
p
√
√
3
∆y = 3 x0 + ∆x − 3 x0 = ∆x.
Легко найти, что
√
3
∆y
∆x
1
lim
= lim
= lim p
= ∞.
∆x→0 ∆x
∆x→0 ∆x
∆x→0 3 (∆x)2
√
Значит у данной функции y = 3 x не существует производной в точке
x0 = 0, хотя она непрерывна в этой точке.
Теорема 1.4.2. Необходимым и достаточным условием дифференцируемости функции f (x) в точке x0 является существование пределов:
lim
x→x0 −0
∆f
∆f
∆f
= lim
= lim
= f 0 (x0 ).
∆x x→x0 +0 ∆x x→x0 ∆x
1.4.4. Производные элементарных функций
Пример 1.4.2. Покажем, что производная функции y = x2 равна y 0 =
2x. Найдем ∆y = y(x+∆x)−y(x) = (x+∆x)2 −x2 = x2 +2x∆x+(∆x)2 −x2 =
2x∆x + (∆x)2 . Тогда
∆y
2x∆x + (∆x)2
= lim
= lim (2x + ∆x) = 2x.
∆x→0 ∆x
∆x→0
∆x→0
∆x
y 0 = lim
Пример 1.4.3. Аналогично предыдущему примеру легко получить, что
производная функции y = xn равна y 0 = nxn−1 .
30
Пример 1.4.4. Покажем, что производная функции y = sin x равна
y 0 = cos x. Поскольку
∆y = y(x + ∆x) − y(x) = sin(x + ∆x) − sin x =
x + ∆x − x
x + ∆x + x
= 2 sin
cos
=
2 µ
¶ 2
∆x
∆x
= 2 sin
cos x +
.
2
2
Тогда
y 0 = lim
∆x→0
∆y
= lim
∆x ∆x→0
2 sin
µ
¶
∆x
∆x
· cos x +
2
2
=
∆x
2
2
∆x
µ
¶
2 · lim cos x + ∆x = 1 · cos x = cos x.
∆x
∆x→0
2
2
sin
= lim
∆x→0
Таблица производных основных элементарных функций
1. c0 = 0, где c = const
2. x0 = 1, где x − независимый аргумент
3. y = xn ,
y 0 = nxn−1 ,
n 6= −1
√
1
0
y = √
4. y = x,
2 x
5. y = sin x,
y 0 = cos x
6. y = cos x,
y 0 = − sin x
1
7. y = tg x,
y0 =
cos2 x
1
8. y = ctg x,
y0 = − 2
sin x
1
9. y = arcsin x,
y0 = p
,
|x| < 1
1 − x2
1
10. y = arccos x,
y0 = − p
,
|x| < 1
1 − x2
1
11. y = arctg x,
y0 =
1 + x2
1
12. y = arcctg x,
y0 = −
1 + x2
13. y = ax ,
y 0 = ax · ln a,
a > 0, a 6= 1
31
14. y = ex ,
y 0 = ex
1
y0 = ,
x>0
x
1
y0 =
,
a > 0, a 6= 1, x > 0.
x · ln a
15. y = ln x,
16. y = loga x,
1.4.5. Производная постоянной, суммы, произведения и
частного функций
Теорема 1.4.3. Производная константы равна нулю.
Доказательство. Пусть функция y = c = const, тогда ∆y = y(x + ∆x) −
y(x) = c − c = 0. Поэтому
y 0 = c0 = lim
∆x→0
∆y
= 0.
∆x
Теорема 1.4.4. Постоянный множитель можно выносить за знак
производной, т.е. если функция y = c · f (x), то y 0 = c · f 0 (x).
Доказательство. Для этой функции ∆y = c · f (x + ∆x) − c · f (x) =
c(f (x + ∆x) − f (x)) = c · ∆f. Поэтому
y 0 = lim
∆x→0
c · ∆f
∆f
= c · lim
= c · f 0 (x).
∆x→0 ∆x
∆x
Теорема 1.4.5. Производная суммы конечного числа дифференцируемых функций равна сумме производных этих функций.
Доказательство. Рассмотрим случай суммы двух функций. Пусть
функция y = u(x) + v(x). Тогда ∆y = y(x + ∆x) − y(x) = u(x + ∆x) +
v(x + ∆x) − u(x) − v(x) = u(x + ∆x) − u(x) + v(x + ∆x) − v(x) = ∆u + ∆v.
Найдем
∆y
∆u + ∆v
y 0 = lim
= lim
= u0 (x) + v 0 (x).
∆x→0 ∆x
∆x→0
∆x
Пример 1.4.5. Пусть функция
√
1
y = x4 − 3 x = x4 − x 3 ,
тогда
´0 ¡ ¢0 ³ 1 ´0
³
1
1 2
1
y 0 = x4 − x 3 = x4 − x 3 = 4x3 − x− 3 = 4x3 − √
.
3
3
3 x2
32
Теорема 1.4.6. Производная произведения двух функций равна сумме
производной первой функции на вторую функцию и производной второй
функцию на первую, т.е. если
y = u(x) · v(x),
то
y 0 = u0 (x) · v(x) + u(x) · v 0 (x).
Доказательство. Для функции y = u(x) · v(x) найдем
∆y = y(x + ∆x) − y(x) = u(x + ∆x) · v(x + ∆x) − u(x) · v(x) =
= u(x + ∆x) · v(x + ∆x) − u(x) · v(x + ∆x) + u(x) · v(x + ∆x)−
− u(x) · v(x) = v(x + ∆x)[u(x + ∆x) − u(x)] + u(x)[v(x + ∆x)−
− v(x)] = ∆u · v(x + ∆x) + u(x) · ∆v.
Тогда
y 0 = lim
∆x→0
= v(x) · lim
∆x→0
∆u · v(x + ∆x) + u(x) · ∆v
∆y
= lim
=
∆x ∆x→0
∆x
∆u
∆v
+ u(x) lim
= u0 (x) · v(x) + u(x) · v 0 (x).
∆x→0 ∆x
∆x
Теорема 1.4.7. Производная частного двух функций равна дроби, у
которой знаменатель есть квадрат второй функции, а числитель есть
разность между произведением производной числителя на знаменатель
и произведением числителя на производную знаменателя, т.е. если
y=
u(x)
,
v(x)
то
y0 =
u0 (x) · v(x) − u(x) · v 0 (x)
,
v 2 (x)
v(x) 6= 0.
Эта теорема доказывается аналогично предыдущей.
Пример 1.4.6. Найдем производную функции
y = tg x =
sin x
.
cos x
По теореме 1.2.1 получим
y0 =
(sin x)0 cos x − sin x(cos x)0
cos x cos x − sin x(− sin x)
=
=
cos2 x
cos2 x
=
cos2 x + sin2 x
1
=
.
2
cos x
cos2 x
33
1.4.6. Производная сложной функции
Пусть дана сложная функция:
y = F (x) = f (u(x)),
где y = f (u), u = u(x).
Теорема 1.4.8. Производная сложной функции равна произведению
производной данной функции по промежуточному аргументу на производную этого промежуточного аргумента по переменному x, т.е. если
функция u = u(x) имеет производную u0x (x) в точке x, а функция f (u)
имеет производную fu0 (u) при соответствующем значении u = u(x), то
сложная функция y = F (x) имеет в точке x производную, которая равна
Fx0 (x) = fx0 (u(x)) = fu0 (u) · u0x (x).
Доказательство. Рассмотрим сложную функцию y = F (x) = f (u(x)) =
f (u). Тогда ∆u = u(x + ∆x) − u(x), ∆f = f (u + ∆u) − f (u). Так как
функции u(x) и f (u) имеют производную в точках x и u, соответственно,
то u(x) и f (u) непрерывные функции и поэтому, если ∆x → 0, то и ∆u →
0, ∆f → 0.
Поскольку
∆f
fu0 (u) = lim
,
∆u→0 ∆u
то по теореме 1.2.1 имеем
∆f
= fu0 (u) + α(∆u),
∆u
где α(∆u) → 0 при ∆u → 0, а значит и при ∆x → 0.
Так как ∆y = ∆F = ∆f, то
∆F = ∆f = fu0 (u) · ∆u + α(∆u) · ∆u.
Отсюда легко получить, что
∆F
f 0 (u)∆u + α(∆u)∆u
= lim u
=
∆x→0 ∆x
∆x→0
∆x
Fx0 (x) = lim
∆u
+ u0x (x) · lim α(∆u) = fu0 (u) · u0x (x) + 0 = fu0 (u) · u0x (x).
∆x→0
∆x
Пример 1.4.7. Рассмотрим функцию y = sin x2 . Обозначим y =
sin u, а u = x2 . Тогда
= fu0 (u) · lim
∆x→0
yu0 = cos u = cos x2 , u0x = 2x,
отсюда следует, что
y 0 = 2x · cos x2 .
34
Пример 1.4.8. Рассмотрим функцию
³p
´
y = arcsin2
x2 + 1 − ln(2x + 3) .
Не будем как в предыдущем примере вводить промежуточные функции,
вычислим производную этой функции сразу, используя правило дифференцирования сложной функции и теоремы об арифметических операциях
над производной. Тогда получим, что
³
³p
´´0
y 0 = arcsin2
x2 + 1 − ln(2x + 3)
=
³p
´³
³p
´´0
= 2 arcsin
x2 + 1 − ln(2x + 3) arcsin
x2 + 1 − ln(2x + 3)
=
¡√
¢0
³p
´
x2 + 1 − ln(2x + 3)
2
q
= 2 arcsin
x + 1 − ln(2x + 3)
¡√
¢2 =
1−
x2 + 1 − ln(2x + 3)
= 2 arcsin
³p
2x
2
√
−
2
2 x + 1 2x + 3
¡√
¢2 =
2
1−
x + 1 − ln(2x + 3)
´
x2 + 1 − ln(2x + 3) q
´
x2 + 1 − ln(2x + 3) ×
√
2x2 + 3x − 2 x2 + 1
q
×
√
¡√
¢2 .
(2x + 3) x2 + 1 1 −
x2 + 1 − ln(2x + 3)
= 2 arcsin
³p
1.4.7. Производная неявной функции
Неявные функции задаются уравнением F (x, y) = 0. Примером неявной функции может служить уравнение x2 + y 2 = 1.
Рассмотрим правило дифференцирования неявной функции:
дифференцируем обе части уравнения, считая y = y(x) функцией от
x, пользуясь правилом дифференцирования сложной функции. Получим
уравнение, из которого можно выразить y 0 .
Пример 1.4.9. Рассмотрим неявную функцию x2 + y 2 = 1. Продифференцируем обе части этого уравнения, считая y функцией от x, получим
2x
x
=− .
2y
y
Пример 1.4.10. Найдем производную показательной функции. Пусть
y = ax , тогда ln y = x · ln a. Возьмем производную от обеих частей
2x + 2y · y 0 = 0 или
(ln y)0 = (x · ln a)0 ,
35
y0 = −
получим
1 0
y0
· y = x0 · ln a + x · (ln a)0 ,
= 1 · ln a + 0
y
y
y 0 = y · ln a = ax ln a.
или
1.4.8. Логарифмическая производная
Рассмотрим показательно-степенную функцию y = [u(x)]v(x) .
Теорема 1.4.9. Если y = uv , где u = u(x), v = v(x), то
0
y 0 = (uv ) = v · uv−1 · u0 + uv · v 0 ln u.
Доказательство. Прологарифмируем обе части функции y = uv , получим ln y = v · ln u. Возьмем производную от обеих частей
y0
vu0
= v 0 ln u +
, тогда
y
u
µ
¶
vu0
uv vu0
0
0
y = y v ln u +
= uv v 0 ln u +
=
u
u
(ln y)0 = (v · ln u)0 ,
= uv v 0 ln u + vuv−1 u0 .
Пример 1.4.11. Рассмотрим функцию y = (sin x)x , прологарифмируем
ее и возьмем производную от обеих частей, получим (ln y)0 = (x ln sin x)0 .
Тогда
x cos x
y0
= ln sin x +
= ln sin x + x ctg x, тогда
y
sin x
y 0 = y(ln sin x + x ctg x) = (sin x)x (ln sin x + x ctg x).
1.4.9. Производная обратной функции
Рассмотрим строго возрастающую (строго убывающую) функцию y =
f (x) на отрезке [a, b]. Пусть f (a) = c, f (b) = d. Если x1 < x2 , то для строго возрастающей функции будет выполняться f (x1 ) < f (x2 ), а для строго
убывающей — f (x1 ) > f (x2 ). Другими словами различным значениям аргумента x соответствуют различные значения функции y. Это означает,
что можно задать функцию x = ϕ(y), которая называется обратной к
функции y = f (x).
Теорема 1.4.10. Если строго возрастающая или убывающая функция
y = f (x) непрерывна на отрезке [a, b], то определена и непрерывна на
отрезке [c, d], где c = f (a), d = f (b), обратная функция x = ϕ(y).
Без доказательства.
Докажем теорему о производной обратной функции.
36
Теорема 1.4.11. Если для функции y = f (x) существует обратная
функция x = ϕ(y), которая в точке y имеет производную ϕ0 (y) 6= 0, то
функция y = f (x) имеет производную равную
1
fx0 (x) = 0
ϕy (y)
в соответствующей точке x.
Доказательство. Рассмотрим приращение ∆x и соответствующее ему
приращение функции ∆y. Тогда
∆y
1
=
.
∆x
∆x
∆y
Отсюда получим
∆y
1
1
1
y 0 = lim
= 0 = 0
= lim
.
∆y
xy
ϕy (y)
∆x→0 ∆x
∆x→0
∆y→0
∆y→0 ∆x
Пример 1.4.12. Найдем производную функции y = arcsin x. Так как
обратной функцией для y = arcsin x является x = sin y и x0 = cos y, то
1
1
1
1
(arcsin x)0 = y 0 = 0 =
=√
.
=p
2
x
cos y
1 − x2
1 − sin y
Пример 1.4.13. Аналогично получим производную функции y =
arctg x. Имеем
1
x = tg y, x0 =
.
cos2 y
Тогда
1
1
1
1
1
y0 = 0 =
=
=
.
=
1
x
1 + x2
1 + tg2 y
cos2 y + sin2 y
cos2 y
cos2 y
1.4.10. Производная функции, заданной параметрически
Рассмотрим функцию, заданную параметрически
½
x = ϕ(t)
t ∈ T.
(1.1)
y = ψ(t)
Пусть функции ϕ(t) и ψ(t) имеют производные и, кроме того, функция
x = ϕ(t) имеет обратную t = Φ(x), которая также имеет производную.
Тогда, определенную параметрическим уравнением (1.1), функцию y =
37
f (x) можно рассматривать как сложную функцию: y = ψ(t), t = Φ(x), t —
промежуточный аргумент. Тогда по правилу дифференцирования сложной
функции имеем:
y 0 = yt0 · t0x = ψt0 (t) · Φ0x (x).
Поскольку по теореме о производной обратной функции выполняется
1
Φ0x (x) = 0 .
ϕt (t)
То мы получим
y0
ψ 0 (t)
yx0 = 0
= t0 .
ϕ (t)
xt
Пример 1.4.14. Рассмотрим параметрическую функцию
½
x = 2 cos t
y = t sin t.
Поскольку x0t = −2 sin t, yt0 = sin t + t cos t, то
sin t + t cos t
1
t
yx0 =
= − − ctg t.
−2 sin t
2 2
1.5. Дифференциал
Пусть функция y = f (x) — дифференцируема на отрезке [a, b]. Тогда
для x ∈ (a, b) существует
∆y
f 0 (x) = lim
.
∆x→0 ∆x
Теорема 1.5.1. Для того, чтобы функция f (x) была дифференцируема в точке x, необходимо и достаточно, чтобы ∆f = A∆x + α(∆x)∆x,
где A = const при фиксированном x и α(∆x) → 0 при ∆x → 0.
Доказательство. Необходимость. Пусть существует f 0 (x), тогда по теореме 1.2.1
∆y
= f 0 (x) + α(∆x),
∆x
где α(∆x) → 0 при ∆x → 0. Тогда
∆y = f 0 (x) + α(∆x)∆x = A∆x + α(∆x)∆x,
где A = f 0 (x) = const при фиксированном x.
Достаточность. Пусть ∆f = A∆x + α(∆x)∆x, покажем, что функция
f (x) имеет производную в фиксированной точке x. Найдем
lim
∆x→0
∆y
A∆x + α(∆x)∆x
= lim
= lim (A + α(∆x)) = A,
∆x→0
∆x ∆x→0
∆x
38
так как α(∆x) → 0 при ∆x → 0. Таким образом функция f (x) дифференцируема в точке x.
Что вносит основной вклад в приращение функции ∆y? Рассмотрим
первое слагаемое в ∆y. В общем случае почти всегда f 0 (x) 6= 0. Поэтому
f 0 (x)∆x
= f 0 (x) 6= 0,
∆x→0
∆x
то есть f 0 (x)∆x есть бесконечно малая 1 порядка по сравнению с ∆x.
Рассмотрим второе слагаемое. Так как
α(∆x)∆x
= lim α(∆x) = 0,
lim
∆x→0
∆x→0
∆x
то поэтому α(∆x)∆x есть величина более высокого порядка малости по
сравнению с ∆x. Следовательно при фиксированном x и ∆x → 0, основной
вклад в ∆y вносит первый член f 0 (x)∆x.
lim
Определение 1.5.1. Выражение f 0 (x)∆x, называемое главной линейной частью приращения функции ∆y, и называют дифференциалом функции f (x) и обозначают
dy = f 0 (x)∆x.
Пример 1.5.1. Пусть y = x, тогда y 0 = 1 и следовательно dy = dx = 1 ·
∆x. Поэтому dx = ∆x, если x — независимое переменное. Отсюда получаем
выражение для дифференциала функции
dy = f 0 (x)dx.
Тогда
dy
,
dx
то есть производная f 0 (x) есть отношение дифференциала функции к дифференциалу независимого переменного.
Рассмотрим примеры вычисления дифференциала функции.
1
dx
Пример 1.5.2. Пусть y = tg x, тогда y 0 =
и dy =
.
cos2 x
cos2 x
2
arctg
x
Пример 1.5.3. Пусть y = arctg2 x, тогда dy =
dx.
1 + x2
1.5.1. Свойства дифференциала
f 0 (x) =
Поскольку дифференциал функции это производная функции умноженная на дифференциал независимого переменного, то все свойства производной переносятся и на дифференциал. Поэтому справедлива следующая теорема.
39
Теорема 1.5.2. Пусть u(x) и v(x) — дифференцируемые функции, тогда
1. d(u ± v) = du ± dv,
2. d(uv) = vdu + udv,
³ u ´ vdu − udv
3. d
=
.
v
v2
Доказательство. Докажем второе утверждение теоремы. Поскольку
(uv)0 = u0 v + vu0 , то
d(uv) = (uv)0 dx = (u0 v + vu0 )dx = vu0 dx + uv 0 dx = vdu + udv,
так как u0 dx = du, v 0 dx = dv.
Пример 1.5.4. Пусть y = sin x + cos x, тогда y 0 = cos x − sin x и dy =
(cos x − sin x)dx.
Пример 1.5.5. Рассмотрим функцию y = x2 sin x, тогда
dy = sin x d(x2 ) + x2 d(sin x) = 2x sin x dx + x2 cos x dx.
1.5.2. Дифференциал сложной функции
Рассмотрим сложную функцию y = f (u), u = u(x), то есть y =
f (u(x)) = f (x). Тогда по определению дифференциала имеем
dy = fx0 (x) dx.
Но поскольку производная сложной функции равна fx0 = fu0 · u0x , то dy =
fu0 · u0x dx. Используя равенство u0x dx = du, получим
dy = fu0 (u) du.
Таким образом, форма дифференциала не зависит от того, является
ли аргумент независимой переменной или функцией другого аргумента.
Это свойство дифференциала называется инвариантностью формы 1
дифференциала.
1.5.3. Геометрический смысл дифференциала
Рассмотрим функцию y = f (x) и ее график. Проведем в точке
M0 (x0 , y0 ) касательную к этой кривой. Возьмем на графике точку M (x0 +
∆x, y0 + ∆y), тогда ∆y = |M N | (см.рис. 1.3). Поскольку
то
dy
|N T |
= f 0 (x0 ) = tg α =
,
dx
∆x
dy = |N T |.
Таким образом, мы получили
40
Y
M
T
∆y
M0
N
∆x
α
o x0
x + ∆x
X
Рис. 1.3.
Определение 1.5.2. Дифференциал функции y = f (x), соответствующий данным значениям точки x0 и приращения ∆x, равен приращению ординаты касательной к кривой y = f (x) в точке x.
1.5.4. Применение дифференциала в приближенных
вычислениях
Рассмотрим приращение функции ∆y = f 0 (x)∆x + α(∆x)∆x = dy +
α(∆x)∆x. Пусть f 0 (x) 6= 0. Тогда
lim
∆x→0
∆y
dy + α(∆x)∆x
α(∆x)∆x
= lim
= 1 + lim
= 1 + 0 = 1.
∆x→0
∆x→0 f 0 (x)∆x
dy
dy
Поэтому ∆y ' dy эквивалентные бесконечно малые при ∆x → 0. Так как
∆y = f (x + ∆x) − f (x) ≈ dy = f 0 (x)∆x, то
f (x + ∆x) ≈ f (x) + f 0 (x)∆x
при достаточно малых ∆x. Это и есть формула приближенного вычисления
значения функции.
Пример 1.5.6. Пусть y = sin x, найти приближенно значение sin 310 .
π
.
Возьмем x = 300 , тогда x + ∆x = 310 , поэтому ∆x = 310 − 300 = 10 =
1800
По формуле приближенного вычисления имеем
sin(x + ∆x) ≈ sin x + cos x · ∆x.
41
Поэтому мы получим
√
π
1
3 3, 14
sin 31 ≈ sin 30 + cos 30 ·
≈ +
·
≈
0
180
2
2
180
≈ 0, 5 + 0, 865 · 0, 017 = 0, 5 + 0, 014705 = 0, 514705.
√
Пример 1.5.7. Найти приближенно значение 1, 01. Рассмотрим функ√
1
цию y = x, тогда y 0 = √ и
2 x
√
1
y(x + ∆x) ≈ y(x) + y 0 (x)∆x = x + √ ∆x.
2 x
0
0
0
Возьмем x = 1, x + ∆x = 1, 01, тогда ∆x = 0, 01. Поэтому
p
√
1
1, 01 ≈ 1 + √ · 0, 01 = 1 + 0, 5 · 0, 01 = 1, 005.
2 1
1.6. Производные и дифференциалы высших порядков
Пусть функция y = f (x) дифференцируема на интервале (a, b). Значения y = f 0 (x) зависят от x, то есть производная f 0 (x) есть опять функция
от x. Поэтому ее также можно дифференцировать.
Определение 1.6.1. Производная от первой производной функции
y = f (x) называется производной второго порядка или второй производной, то есть y 00 = (y 0 )0 .
Обозначения второй производной: f 00 , y 00 .
Пример 1.6.1. Пусть y = x5 , тогда y 0 = 5x4 , а y 00 = 20x3 .
Определение 1.6.2. Производной n-ого порядка от функции f (x) называется производная от производной (n − 1)-ого порядка и обозначается
y (n) = f (n) = (f (n−1) )0 .
Пример 1.6.2. Пусть y = xn , тогда
y 0 = nxn−1 , y 00 = n(n − 1)xn−2 , . . . , y (n) = n!.
Теорема 1.6.1. Пусть u(x) и v(x) — n раз дифференцируемые
функции, тогда
1. (u ± v)(n) = u(n) ± v (n) ,
n(n − 1) (n−2) 00
n
u
v + . . . + uv (n) (формула
2. (u · v)(n) = u(n) v + u(n−1) v 0 +
1
1·2
Лейбница).
42
Доказательство. Докажем второе утверждение теоремы по индукции.
Пусть y = u · v, тогда y 0 = u0 v + uv 0 , а y 00 = u00 v + u0 v 0 + u0 v 0 + uv 00 = u00 v +
2u0 v 0 + uv 00 . Пусть утверждение теоремы выполняется для производной
(n − 1) порядка, докажем, что оно верно и для порядка n. Найдем
³
´0 µ
n − 1 (n−2) 0 (n − 1)(n − 2) (n−3) 00
(uv)(n−1) = u(n−1) v +
u
v +
u
v +
1
1·2
´0
n − 1 (n−1) 0 n − 1 (n−2) 00
+ . . . + uv (n−1) = u(n) v + u(n−1) v 0 +
u
v +
u
v +
1
1
(n − 1)(n − 2) (n−2) 00
+
u
v + . . . + uv (n) =
1·2
= u(n) v +
1 + n − 1 (n−1) 0 (n − 1)(2 + n − 2) (n−2) 00
u
v +
u
v + . . . + uv (n) =
1
1·2
n (n−1) 0 n(n − 1) (n−2) 00
u
v +
u
v + . . . + uv (n) .
1
1·2
Таким образом утверждение теоремы верно.
Пусть y = f (x) дифференцируемая функция, тогда dy = f 0 (x) dx, где
dx не зависит от x.
= u(n) v +
Определение 1.6.3. Дифференциал от первого дифференциала функции f (x) называют вторым дифференциалом этой функции и обозначают
d2 y = d(dy).
Найдем выражение для второго дифференциала функции.
d2 y = d(d(y)) = d(f 0 (x) dx) = (f 0 (x) dx)0 dx = f 00 (x) dx · dx =
= f 00 (x)(dx)2 = f 00 (x) dx2 .
Аналогично можно дать определение n-ого дифференциала функции.
Тогда
dn y = d(dn−1 y) = f (n) (x) dxn .
Пример 1.6.3. Пусть y = sin2 x. Найдем второй дифференциал d2 y этой
функции. Поскольку
y 0 = 2 sin x · cos x = sin 2x,
y 00 = 2 cos 2x,
тогда
d2 y = 2 cos 2x dx2 .
43
1.6.1. Неинвариантность формы второго дифференциала
Дифференциал функции второго и более высокого порядков свойством
инвариантности не обладает. Покажем это. Пусть дана сложная функция
y = f (u), u = u(x), то есть y = f (u(x)) = f (x). Второй дифференциал
функции f (x) как функции независимого переменного x есть
d2 y = f 00 (x) dx.
Найдем второй дифференциал этой же функции как функции зависимого
переменного u. Поскольку dy = fu0 (u) du и du = u0x (x) dx — зависит от x, то
d2 y = d(fu0 (u) du) = d(fu0 (u)) du + fu0 (u)d(du) =
00
= fuu
du2 + fu0 (u) d2 u,
где d2 u = u00uu dx2 .
Таким образом, мы видим, что форма или вид второго дифференциала
сложной функции не обладает свойством инвариантности.
1.6.2. Высшие производные неявной и параметрической
функций
Правило. Чтобы найти вторую производную неявной функции, нужно выражение для первой производной еще раз продифференцировать по
x, считая y и y 0 функциями от x и выразить из него y 00 .
Пример 1.6.4. Найдем вторую производную функции x2 +y 2 = 1. Возьмем первую производную, получим
2x + 2yy 0 = 0.
Тогда
y 02 + 1
.
y
Рассмотрим функцию, заданную параметрически:
2 + 2y 0 y 0 + 2yy 00 = 0
½
Поскольку yx0 (t) =
скую функцию
или y 00 = −
x = ϕ(t)
y = ψ(t)
t ∈ T.
ψ 0 (t)
, то мы можем рассмотреть новую параметричеϕ0 (t)
½
x = ϕ(t)
y = yx0 (t)
44
t ∈ T.
Тогда по правилу дифференцирования параметрической функции, получим
µ 0 ¶0
µ 0 ¶0
yt
ψt
0
0
0 0
x
ϕ
(y
)
t t
t t
00
00
yxx
= (yx0 )0x = x0 t
или
yxx
=
=
.
xt
x0t
x0t
Отсюда получаются формулы для нахождения второй производной параметрической функции:
x0 y 00 − y 0 x00
00
yxx
= t tt 0 3 t tt
(xt )
или
ϕ0 ψ 00 − ψ 0 ϕ00
00
yxx
= t tt 0 3 t tt .
(ϕt )
1.7. Приложение дифференциального исчисления
1.7.1. Теоремы о среднем
Теорема 1.7.1 (Ролля). Если функция f (x) непрерывна на отрезке
[a, b], дифференцируема на интервале (a, b) и f (a) = f (b), то существует
точка c ∈ (a, b) такая, что f 0 (c) = 0.
Доказательство. Так как функция f (x) непрерывна на отрезке [a, b],
то по теореме 1.3.3 она достигает на этом отрезке своего наибольшего M
и наименьшего m значений.
1. Если M = m, то f (x) = const = M , тогда f 0 (x) = 0 для любого
x ∈ (a, b). И поэтому теорема доказана.
2. Пусть M 6= m. Поскольку f (a) = f (b), то одно из значений M или
m достигается внутри отрезка [a, b], то есть на интервале. Будем считать,
что это значение M . Пусть точка c ∈ (a, b) такая, что f (c) = M . Поскольку
теперь f (c) это наибольшее значение, то
f (c + ∆x) − f (c) 6 0
для любых
∆x > 0, ∆x < 0.
Тогда
f (c + ∆x) − f (c)
60
при ∆x > 0,
∆x
f (c + ∆x) − f (c)
>0
при ∆x < 0.
∆x
Так как функция f (x) дифференцируема на интервале (a, b), то существуют
f (c + ∆x) − f (c)
lim
= f 0 (c) 6 0
при ∆x > 0 и
∆x→+0
∆x
45
Y
o
a
b X
c
Рис. 1.4.
f (c + ∆x) − f (c)
= f 0 (c) > 0
∆x
Отсюда следует, что f 0 (c) = 0.
lim
∆x→−0
при ∆x < 0.
Замечание 1.7.1. Геометрический смысл этой теоремы заключается в том, что существует точка A(c, f (c)) на графике функции, в которой касательная параллельна оси OX. Причем f (a) = f (b) = B не обязательно равное 0 (см.рис. 1.4).
Теорема 1.7.2 (Лагранжа). Если функция f (x) непрерывна на отрезке [a, b] и дифференцируема на интервале (a, b), то существует точка
c ∈ (a, b) такая, что
f (b) − f (a) = f 0 (c)(b − a).
Геометрический смысл теоремы (см.рис. 1.5).
Y
f (x)
f (c)
ϕ
α
o
a
c
Рис. 1.5.
46
x b X
f (b) − f (a)
= tg ϕ есть тангенс угла наклона хорды,
b−a
соединяющей точки (a, f (a)) и (b, f (b)) на графике функции f (x). А f 0 (c) =
tg α есть тангенс угла наклона касательной к графику функции в точке
(c, f (c)). Поскольку по теореме Q = f 0 (c), то это значит, что найдется точка
c такая, что касательная в точке (c, f (c)) параллельна хорде, проходящей
через точки (a, f (a)), (b, f (b)).
Доказательство. Введем функцию F (x) = f (x)−f (a)−(x−a)Q, которая
равна разности значений функции в точке x и соответствующего значения
на хорде. Очевидно, что эта функция непрерывна на отрезке [a, b] и дифференцируема на интервале (a, b). Причем
Величина Q =
F (a) = f (a) − f (a) − (a − a)Q = 0,
f (b) − f (a)
= 0.
b−a
Поэтому функция F (x) удовлетворяет условиям теоремы Ролля на отрезке [a, b]. Следовательно существует точка c ∈ (a, b) такая, что F 0 (c) = 0.
Поскольку F 0 (x) = f 0 (x) − Q, то f 0 (c) − Q = 0 или
F (b) = f (b) − f (a) − (b − a)
f 0 (c) =
f (b) − f (a)
.
b−a
И теорема доказана.
Теорема 1.7.3 (Коши). Если функции f (x) и ϕ(x) непрерывны на отрезке [a, b] и дифференцируемы на интервале (a, b), причем ϕ0 (x) 6= 0 при
x ∈ (a, b), то найдется точка c ∈ (a, b) такая, что
f (b) − f (a)
f 0 (c)
= 0
ϕ(b) − ϕ(a)
ϕ (c).
Без доказательства.
1.7.2. Правило Лопиталя
Теорема 1.7.4 (Неопределенность 00 ). Пусть функции f (x) и ϕ(x)
непрерывны на отрезке [a, b] и дифференцируемы на интервале (a, b) и
пусть f (a) = ϕ(a) = 0 и ϕ0 (x) 6= 0 для любого x ∈ (a, b), тогда если
существует предел
f 0 (x)
lim 0
= A,
x→a ϕ (x)
то существует и предел
f (x)
f 0 (x)
lim
= lim 0
= A.
x→a ϕ(x)
x→a ϕ (x)
47
Доказательство. Возьмем x ∈ (a, b). Применим теорему Коши к функциям f (x) и ϕ(x) на отрезке [a, x]. Получим, что существует точка c ∈ (a, x)
такая, что
f (x) − f (a)
f 0 (c)
= 0 .
ϕ(x) − ϕ(a)
ϕ (c)
Но f (a) = ϕ(a) = 0, поэтому
f 0 (c)
f (x)
= 0 .
ϕ(x)
ϕ (c)
f 0 (x)
= A, то сущеx→a ϕ0 (x)
Поскольку при x → a точка c → a и существует lim
f 0 (c)
= A. Тогда получим
c→a ϕ0 (c)
ствует и lim
f (x)
f 0 (c)
f 0 (c)
f 0 (x)
= lim 0
= lim 0
= lim 0
= A.
x→a ϕ(x)
x→a ϕ (c)
c→a ϕ (c)
x→a ϕ (x)
lim
И теорема доказана.
Замечание 1.7.2. Точка a может быть равна и бесконечности a =
∞.
Замечание 1.7.3. Если f 0 (a) = ϕ0 (a) = 0 и производные f 0 (x) и ϕ0 (x)
удовлетворяют условиям теоремы, наложенным на функции f (x) и ϕ(x),
f 0 (x)
то применяя правило Лопиталя к отношению 0
, приходим к формуле
ϕ (x)
f (x)
f 0 (x)
f 00 (x)
= lim 0
= lim 00
.
x→a ϕ(x)
x→a ϕ (x)
x→a ϕ (x)
lim
И т.д.
Пример 1.7.1. Рассмотрим
sin 7x
(sin 7x)0
7 cos 7x
7
= lim
= lim
= .
0
x→0 5x
x→0 (5x)
x→0
5
5
lim
Теорема 1.7.5 (Неопределенность ∞
∞ ). Пусть функции f (x) и ϕ(x)
непрерывны и дифференцируемы при всех x 6= a в окрестности точки a,
причем ϕ0 (x) 6= 0 и пусть lim f (x) = ∞, lim ϕ(x) = ∞ и существует
x→a
x→a
0
lim
x→a
f (x)
= A,
ϕ0 (x)
48
тогда существует
lim
x→a
f (x)
= A.
ϕ(x)
Без доказательства.
Пример 1.7.2. Вычислим
ex
(ex )0
ex
lim
= lim
= ∞.
= lim
0
x→+∞ x
x→+∞ (x)
x→+∞ 1
Пример 1.7.3. Найдем
2x2 + 2
4x
4
= lim
= = 2.
x→∞ x2 + 1
x→∞ 2x
2
lim
К предыдущим случаям сводятся неопределенности вида:
1). 0 · ∞, 2). 00 , 3). ∞0 , 4). 1∞ , 5). ∞ − ∞.
1. Рассмотрим неопределенность вида 0 · ∞, тогда
lim f (x) = 0,
lim ϕ(x) = ∞.
x→a
x→a
По правилу Лопиталя получим
lim f (x) · ϕ(x) = lim
x→a
x→a
f (x)
=
1
ϕ(x)
µ ¶
0
(f (x))0
= lim µ
¶0 .
x→a
0
1
ϕ(x)
2. Рассмотрим неопределенность вида 00 , тогда
lim f (x) = 0,
lim ϕ(x) = 0.
x→a
x→a
Прологарифмируем функцию y = (f (x))ϕ(x) , имеющую неопределенность
указанного вида 00 , получим функцию ln y = ϕ(x) · ln f (x), имеющую
неопределенность вида 0 · (−∞). Тогда
ln f (x) ³ ∞ ´
(ln f (x))0
lim ln y = lim
=
= lim µ
¶0 = A.
1
x→a
x→a
x→a
∞
1
ϕ(x)
ϕ(x)
Отсюда
lim y = lim (f (x))ϕ(x) = eA .
x→a
x→a
3. Рассмотрим неопределенность вида ∞0 , тогда
lim f (x) = +∞,
lim ϕ(x) = 0.
x→a
x→a
49
Прологарифмируем функцию y = (f (x))ϕ(x) , имеющую неопределенность
указанного вида ∞0 , получим функцию ln y = ϕ(x) · ln f (x), имеющую
неопределенность вида 0 · ∞. Тогда
ln f (x) ³ ∞ ´
(ln f (x))0
lim ln y = lim
=
= lim µ
¶0 = A.
1
x→a
x→a
x→a
∞
1
ϕ(x)
ϕ(x)
Отсюда
lim y = lim (f (x))ϕ(x) = eA .
x→a
x→a
4. Рассмотрим неопределенность вида 1∞ , тогда
lim f (x) = 1,
lim ϕ(x) = ∞.
x→a
x→a
Прологарифмируем функцию y = (f (x))ϕ(x) , имеющую неопределенность
указанного вида 1∞ , получим функцию ln y = ϕ(x) · ln f (x), имеющую
неопределенность вида ∞ · 0. Тогда
µ ¶
ln f (x)
0
(ln f (x))0
lim ln y = lim
=
= lim µ
¶0 = A.
1
x→a
x→a
x→a
0
1
ϕ(x)
ϕ(x)
Отсюда
lim y = lim (f (x))ϕ(x) = eA .
x→a
x→a
5. Рассмотрим неопределенность вида ∞ − ∞, тогда
lim f (x) = ∞,
lim ϕ(x) = ∞.
x→a
x→a
f (x)
= 1. Используя правило Лопиталя, получим
x→a ϕ(x)
µ
¶
f (x)
lim (f (x) − ϕ(x)) = lim f (x) 1 −
= (∞ · 0) =
x→a
x→a
ϕ(x)
Будем считать, что lim
f (x)
µ ¶
0
ϕ(x)
= lim
=
1
x→a
0
f (x)
1−
= lim
x→a
50
µ
¶0
f (x)
1−
ϕ(x)
µ
¶0 = A.
1
f (x)
Пример 1.7.4. Вычислим lim (sin x)x . Прологарифмируем эту функцию
x→0
получим ln y = x ln sin x. Тогда
ln sin x ³ ∞ ´
=
=
1
x→0
x→0
x→0
∞
x
³
0
2
(ln sin x)
x · x´
x cos x
= lim µ ¶0 = lim
= lim −
= lim (−x) = 0.
x→0
x→0
x→0
x→0 (−1) sin x
sin x
1
x
lim ln y = lim x ln sin x = (0 · ∞) = lim
Отсюда
lim (sin x)x = e0 = 1.
x→0
1.8. Формула Тейлора
Формула Тейлора позволяет решать проблему приближенного вычисления значения функции, путем замены самой функции более простой
функцией, в некотором смысле близкой к данной функции. В случае формулы Тейлора этой вспомогательной функцией является многочлен.
Пусть функция f (x) — (n + 1) раз дифференцируема. Найдем многочлен Pn (x) степени не выше n, значение которого в некоторой точке a
равны значению функции f (x), и все производные до порядка n функции
f (x) и многочлена Pn (x) в точке a также совпадают:
Pn (a) = f (a),
Pn0 (a) = f 0 (a),
...,
Pn(n) (a) = f (n) (a).
(1.2)
Будем искать многочлен Pn (x) в виде
Pn (x) = c0 + c1 (x − a) + c2 (x − a)2 + . . . + cn (x − a)n
(1.3)
по степеням (x − a).
Определим коэффициенты в (1.3) так, чтобы выполнялись условия
(1.2). Найдем производные многочлена Pn (x):
Pn (x) = c0 + c1 (x − a) + c2 (x − a)2 + . . . + cn (x − a)n ,
Pn0 (x) = c1 + 2 · 1 · c2 (x − a) + . . . + n · cn (x − a)n−1 ,
Pn00 (x) = 2 · 1c2 + 3 · 2 · 1c3 (x − a) + . . . + n(n − 1)cn (x − a)n−2 ,
...
Pn(n) (x) = n · (n − 1) · . . . · 2 · 1cn .
51
(1.4)
Используя условия (1.2) и подставляя в (1.4) x = a, получим
Pn (a)
Pn0 (a)
Pn00 (a)
=
=
=
f (a) = c0 ,
f 0 (a) = c1 ,
f 00 (a) = 2 · 1c2 ,
Pn(n) (x)
...
=
f (n) (a) = n · (n − 1) · . . . · 2 · 1cn .
Отсюда следует, что
c0 = f (a),
c1 =
f 0 (a)
,
1!
c2 =
f 00 (a)
,
2!
...,
cn =
f (n) (a)
.
n!
(1.5)
Подставляя (1.5) в (1.3), получим выражение для многочлена Pn (x):
Определение 1.8.1. Многочлен
Pn (x, a) = f (a) +
f 0 (a)
f 00 (a)
f (n) (a)
(x − a) +
(x − a)2 + . . . +
(x − a)n
1!
2!
n!
называется многочленом Тейлора функции f (x) в точке a.
Обозначим Rn (x, a) = f (x) − Pn (x, a), тогда
f (x) = Pn (x, a) + Rn (x, a).
(1.6)
Определение 1.8.2. Rn (x, a) — называется остаточным членом
между функцией f (x) и ее многочленом Тейлора Pn (x, a).
Если Rn (x, a) — достаточно мал, то многочлен Pn (x, a) приближает
функцию f (x) (достаточно близок к ней).
Оценим остаток Rn (x, a).
Теорема 1.8.1 (Формула Тейлора). Пусть функция f (x) — (n + 1)
раз дифференцируема в некоторой окрестности U (a) точки a и пусть
x ∈ U (a), тогда найдется точка c ∈ (a, x) такая, что
f (x) = f (a) +
f 0 (a)
f (n) (a)
(x − a) + . . . +
(x − a)n + Rn (x, a),
1!
n!
Rn (x, a) =
f (n+1) (c)
(x − a)n+1 .
(n + 1)!
(Остаточный член в форме Лагранжа.)
52
где
(1.7)
Доказательство. Чтобы доказать формулу Тейлора, надо найти такую
точку c ∈ (x, a), чтобы выполнялось условие (1.7). Зафиксируем точку
x ∈ U (a). Запишем остаточный член в виде
Rn (x, a) =
(x − a)n+1
Q(x)
(n + 1)!
и найдем функцию Q(x).
Введем вспомогательную функцию
F (t) = f (x) − Pn (x, t) − Rn (x, t),
где x — фиксированное, а t ∈ (a, x) или
f 0 (t)
f 00 (t)
(x − t) −
(x − t)2 −
1!
2!
f (n) (t)
Q(x)
−
(x − t)n −
(x − t)n+1 .
n!
(n + 1)!
F (t) = f (x) − f (t) −
(1.8)
Функция F (t) — дифференцируема по t на интервале t ∈ (a, x), так как
f (t) — дифференцируема (n + 1) раз и тогда каждый член в (1.8) имеет
хотя бы одну производную. Найдем
f 0 (t) f 0 (t) f 00 (t)(x − t) 2f 00 (t)(x − t)
+
−
+
−
1!
1!
1!
2!
f 000 (t)(x − t)2
f (n) (t)(x − t)n−1
nf (n) (t)(x − t)n−1
−
+ ... −
+
−
2!
(n − 1)!
n!
F 0 (t) = −
−
f (n+1) (t)(x − t)n
(n + 1)Q(x)(x − t)n
+
=
n!
(n + 1)!
f (n+1) (t)(x − t)n
Q(x)(x − t)n
+
.
n!
n!
Видно, что все слагаемые кроме двух последних сокращаются.
Покажем, что функция F (t) удовлетворяет условиям теоремы Ролля
на отрезке [a, x]. Действительно,
=−
F (x) = f (x) − Pn (x, x) −
(x − x)n+1 Q(x)
= f (x) − f (x) − 0 = 0
(n + 1)!
в силу (1.2),
F (a) = f (x) − Pn (x, a) − Rn (x, a) = 0
в виду (1.6).
53
Тогда по теореме Ролля, существует точка c ∈ (a, x) такая, что F 0 (c) =
0, то есть
(x − c)n (n+1)
(x − c)n
F 0 (c) = −
f
(c) +
Q(x) = 0,
n!
n!
поэтому
Q(x) = f (n+1) (c).
Используя это, мы получим остаточный член в форме Лагранжа:
Rn (x, a) =
f (n+1) (c)
(x − a)n+1 .
(n + 1)!
И теорема доказана.
Запишем остаточный член в форме Лагранжа в другом виде. Пусть
точка c = a + θ(x − a), где 0 < θ < 1, тогда получим
f (n+1) (a + θ(x − a))
(x − a)n+1 .
(n + 1)!
Остаточный член также можно получить и в форме Коши:
Rn (x, a) =
f (n+1) (a + θ(x − a))(1 − θ)
(x − a)n+1 .
n!
Определение 1.8.3. Формулой Тейлора функции f (x) в точке a
называется формула
Rn (x, a) =
f 0 (a)
f (n) (a)
(x − a) + . . . +
(x − a)n +
1!
n!
f (n+1) (a + θ(x − a))
+
(x − a)n+1 .
(n + 1)!
f (x) = f (a) +
При n = 1 получаем формулу Лагранжа.
Определение 1.8.4. Если в формуле Тейлора a = 0, то получаем формулу Маклорена для функции f (x):
f (x) = f (0) +
f 0 (0)
f (n) (0) n f (n+1) (θx) n+1
x + ... +
x +
x
.
1!
n!
(n + 1)!
1.8.1. Разложение функций по формуле Маклорена
1. Найдем разложение по формуле Маклорена для функции
f (x) = ex .
Поскольку a = 0 и f (x) = f 0 (x) = f 00 (x) = . . . = f (n) (x) = ex , то
f (0) = f 0 (0) = f 00 (0) = . . . = f (n) (0) = e0 = 1.
54
Поэтому формула Маклорена для функции ex имеет вид:
ex = 1 +
x
x2
xn
eθx
+
+ ... +
+
xn+1 ,
1!
2!
n!
(n + 1)!
где 0 < θ < 1.
(1.9)
При x = 1 по этой формуле можно приближенно вычислять значение числа
e.
Покажем, что в формуле (1.9) остаток Rn (x) → 0 при n → ∞ для люxn+1 θx
e
бого числа x ∈ R. Зафиксируем некоторое x. В остатке Rn (x) =
(n + 1)!
при фиксированном x сомножитель eθx = const. Поэтому осталось покаxn+1
зать, что
→ 0 при n → ∞.
(n + 1)!
|x|
= q,
Пусть |x| < N , где N некоторое натуральное число. Обозначим
N
тогда 0 < q < 1. Оценим
¯ n+1 ¯ ¯
¯
¯ x
¯ ¯x x
¯
¯
¯ = ¯ · · ... · x · x · x · ... · x · x ¯ 6
¯ (n + 1)! ¯ ¯ 1 2
N −1 N N +1
n n + 1¯
¯
¯ N −1
¯ x
x
x ¯¯
|x|N −1
¯
·
· ... · ¯ =
· q n−N +2 = cN q n−N +2 .
6¯
(N − 1)! N
N
(N − 1)!
Поэтому
¯ n+1
¯
¯ x
¯
lim |Rn (x)| = lim ¯¯
eθx ¯¯ 6 eθN · cN lim q n−N +2 = 0,
n→∞
n→∞ (n + 1)!
n→∞
так как 0 < q < 1.
Следовательно, функцию f (x) = ex можно приближать многочленом
Pn (x) с любой степенью точности для любого x ∈ R.
2. Пусть f (x) = sin x и a = 0. Тогда
f (x) = sin x
³
π´
f 0 (x) = cos x = sin x +
µ 2
¶
2π
00
f (x) = − sin x = sin x +
2
...
³
nπ ´
f (n) (x) = sin x +
,
2
55
следовательно
nπ
.
2
Используя это, можно написать разложение Маклорена для функции
f (x) = sin x:
µ
¶
x3
x5
x7
xn
nπ
xn+1
(n + 1)π
sin x = x −
+
−
+ ... +
sin
+
sin c +
.
3!
5!
7!
n!
2
(n + 1)!
2
¯ µ
¶¯
¯
(n + 1)π ¯¯
¯
Так как ¯sin c +
¯ 6 1, то, аналогично предыдущему, легко
2
показать, что для функции f (x) = sin x выполняется lim Rn (x) = 0 для
n→∞
любого x ∈ R.
Пример 1.8.1. Найдем приближенно значение sin 180 с точностью ε =
0, 001. Возьмем n = 3, тогда
f (0) = 0,
sin 180 = sin
f 0 (0) = 1,
f 00 (0) = 0,
...
f (n) (0) = sin
π
π
π3
≈
−
= 0, 314 − 0, 005198 ≈ 0, 3036.
10
10 1000 · 3!
Оценим ошибку
¯ ³ ´
¯ ³ π ´¯ ¯¯³ π ´4 1
¯
π 4 1
¯
¯ ¯
sin(c + 2π)¯¯ 6
≈ 0, 000405 < 0, 001.
¯R 3
¯6¯
10
10 4!
10 4!
3. Аналогично предыдущему пункту напишем формулу Маклорена для
функции f (x) = cos x, получим
µ
¶
x2
x4
xn
nπ
xn+1
(n + 1)π
cos x = 1 −
+
− ... +
cos
+
cos c +
.
2!
4!
n!
2
(n + 1)!
2
И также мы получаем, что lim Rn (x) = 0 для любого x ∈ R.
n→∞
4. Напишем формулу Маклорена для функции f (x) = ln(1 + x) при
−1 < x 6 1:
ln(1 + x) = x −
x2 x3 x4
xn
xn+1
+
−
+ . . . + (−1)n−1
+ (−1)n
.
2
3
4
n
(n + 1)(1 + θx)n+1
Для −1 < x 6 1 легко получить, что остаток |Rn (x)| <
1
и поэтому он
n+1
стремиться к 0 при n → ∞.
5. Напишем формулу Маклорена для функции f (x) = (1 + x)α , где α
— действительное число:
(1 + x)α = 1 +
α
α(α − 1) 2
α(α − 1) . . . (α − n + 1) n
x+
x + ... +
x +
1!
2!
n!
56
α(α − 1) . . . (α − n)
(1 + θx)α−(n+1) xn+1 .
(n + 1)!
При α = n получим формулу бинома Ньютона:
+
n(n − 1) 2
n
x+
x + . . . + xn .
1!
2!
Очевидно, что в этой формуле при xk стоит биномиальный коэффициент
n!
Cnk =
.
k!(n − k)!
Можно написать и более общий вид предыдущей формулы:
³
x ´n
(a + x)n = an 1 +
=
a
µ
³ x ´n ¶
n ³ x ´ n(n − 1) ³ x ´2
= an 1 +
+
+ ... +
=
1! a
2!
a
a
n
n(n − 1) n−2 2
= an + an−1 x +
a
x + . . . + xn .
1!
2!
(1 + x)n = 1 +
1.9. Возрастание и убывание функций. Экстремумы функций
Напомним определение возрастающей и убывающей функции на отрезке:
функция f (x) возрастает (убывает) на отрезке [a, b], если для любых
x1 , x2 ∈ [a, b] таких, что x1 < x2 выполняется f (x1 ) < f (x2 ) (f (x1 ) >
f (x2 )).
Теорема 1.9.1. 1. (Необходимость) Если функция f (x) дифференцируема на отрезке [a, b] и возрастает на нем, то f 0 (x) > 0 для любого
x ∈ [a, b].
2. (Достаточность) Если функция f (x) непрерывна на отрезке [a, b]
и дифференцируема на интервале (a, b) и f 0 (x) > 0 при x ∈ (a, b), то
функция f (x) возрастает на отрезке [a, b].
Доказательство. 1. Пусть f (x) возрастает на отрезке [a, b], докажем,
что f 0 (x) > 0 на нем.
Рассмотрим выражение
f (x + ∆x) − f (x)
.
∆x
Так как функция f (x) возрастает, то
f (x + ∆x) > f (x)
при ∆x > 0,
f (x + ∆x) < f (x)
при ∆x < 0
57
и, следовательно,
Тогда по теореме 1.4
f (x + ∆x) − f (x)
> 0.
∆x
f (x + ∆x) − f (x)
> 0.
∆x→0
∆x
2. Пусть f 0 (x) > 0 для любого x ∈ (a, b), докажем, что функция f (x)
возрастает.
Возьмем произвольные x1 , x2 ∈ [a, b] такие, что x1 < x2 . К функции
f (x) применим теорему Лагранжа на отрезке [x1 , x2 ]. Получим, что существует точка c ∈ (x1 , x2 ) такая, что выполняется
f 0 (x) = lim
f (x2 ) − f (x1 ) = f 0 (c)(x2 − x1 ).
Так как по условию f 0 (c) > 0 и x2 − x1 > 0, то
f (x2 ) > f (x1 )
и поэтому функция f (x) возрастает на отрезке [a, b].
Сформулируем аналогичную теорему для убывающей функции
Теорема 1.9.2. 1. (Необходимость) Если функция f (x) дифференцируема на отрезке [a, b] и убывает на нем, то f 0 (x) 6 0 для любого x ∈ [a, b].
2.(Достаточность) Если функция f (x) непрерывна на отрезке [a, b]
и дифференцируема на интервале (a, b) и f 0 (x) < 0 при x ∈ (a, b), то
функция f (x) убывает на отрезке [a, b].
1.9.1. Максимум и минимум функций
Определение 1.9.1. Функция f (x) в точке x = x1 имеет максимум (max), т.е. f (x1 ) = fmax , если для любых достаточно малых
∆x > 0, ∆x < 0 выполняется
f (x1 + ∆x) 6 f (x1 ).
Функция f (x) в точке x = x2 имеет минимум (min), т.е. f (x2 ) =
fmin , если для любых достаточно малых ∆x > 0, ∆x < 0 выполняется
f (x2 + ∆x) > f (x2 ).
Замечание 1.9.1. Максимумы и минимумы не обязательно наибольшее и наименьшее значения функции на отрезке. Максимумы и минимумы определяются в достаточно малой окрестности точки.
Определение 1.9.2. Максимумы и минимумы функции называются
экстремумами или экстремальными значениями функции.
58
Теорема 1.9.3 (Необходимое условие существования экстремума). Если дифференцируемая функция f (x) имеет в точке x = x1 — максимум
или минимум, то производная в этой точке обращается в ноль, т.е.
f 0 (x1 ) = 0.
Доказательство. Пусть в точке x = x1 у функции f (x) будет максимум,
тогда для достаточно малых ∆x, имеем
f (x1 + ∆x) 6 f (x1 )
или
f (x1 + ∆x) − f (x1 ) 6 0.
Поэтому при ∆x < 0 будет
f (x1 + ∆x) − f (x1 )
>0
∆x
при ∆x > 0
f (x1 + ∆x) − f (x1 )
6 0.
∆x
Отсюда по теореме 1.4, получим
0
f−
(x1 ) =
и
0
(x1 ) =
f+
lim
∆x→−0
∆f
>0
∆x
∆f
60
∆x→+0 ∆x
lim
Поэтому f 0 (x1 ) = 0.
Аналогично теорема доказывается и для минимума функции.
Замечание 1.9.2. Обратное неверно. Если f 0 (x1 ) = 0, то отсюда не
следует, что x1 — экстремальная точка.
Пример 1.9.1. Рассмотрим функцию y = x3 . В точке x = 0 производная
этой функции y 0 = 3x2 = 0, но эта точка не является экстремальной для
этой функции.
Замечание 1.9.3. Экстремум функции может существовать и в
тех точках, в которых производная этой функции не существует.
Пример 1.9.2. Примером такой функции может служить функция y =
|x|, которая имеет минимум в точке x = 0, но не дифференцируема в этой
точке.
Определение 1.9.3. Точки, в которых производная функции обращается в ноль или не существует, называются критическими точками
функции.
59
Теорема 1.9.4 (Достаточное условие существования экстремума).
Пусть функция f (x) непрерывна на интервале (a, b) и x1 ∈ (a, b) — критическая точка и пусть f (x) дифференцируема во всех точках этого интервала за исключением быть может точки x1 . Если при переходе через
точку x1 слева направо производная меняет знак с + на −, то x = x1 —
точка максимума (max), если меняет знак с − на +, то точка x = x1 —
точка минимума (min).
Доказательство. Пусть f 0 (x) меняет знак с плюса на минус при переходе через точку x1 . Покажем, что в этой точке у функции будет максимум.
Имеем
f 0 (x) > 0
при x < x1 ,
f 0 (x) < 0
при x > x1 .
Применим теорему Лагранжа на отрезке [x, x1 ]. Получим
f (x) − f (x1 ) = f 0 (c)(x − x1 ),
где c ∈ (x, x1 ).
Пусть x < x1 , тогда
f 0 (c) > 0, x − x1 < 0 ⇒ f (x) − f (x1 ) < 0
и значит f (x1 ) > f (x).
Пусть
f 0 (c) < 0, x − x1 > 0 ⇒ f (x) − f (x1 ) < 0
и значит f (x1 ) > f (x).
Отсюда по определению x1 — точка максимума.
Аналогично доказывается и для точки минимума.
1.9.2. Схема исследования функции на экстремум,
возрастание и убывание.
1. Находим f 0 (x).
2. Находим критические точки: f 0 (x) = 0 или f 0 (x) не существует.
3. Определяем интервала знакопостоянства f 0 (x) и экстремальные точки.
4. Вычисляем значения f (x) в экстремальных точках.
Пример 1.9.3. Рассмотрим функцию y = x3 − 12x.
1. Найдем y 0 = 3x2 − 12.
2. Найдем критические точки:
3x2 − 12 = 0, x2 = 4, x1 = 2, x2 = −2.
3. Заполним таблицу:
60
x
y0
y
(−∞; −2)
+
%
−2 (−2; 2)
2
(2; +∞)
0
−
0
+
max
&
min
%
4. Найдем экстремальные значения функции
ymax = y(−2) = −8 + 24 = 16,
ymin = y(2) = 8 − 24 = −16.
1.9.3. Исследование функции на экстремум с помощью
второй производной
Сформулируем теорему, которая позволяет исследовать функцию на
экстремум с помощью второй производной.
Теорема 1.9.5. Пусть функция f (x) дважды непрерывно дифференцируема в окрестности точки x1 . Если
f 0 (x1 ) = 0,
то при
x = x1
функция имеет max, если f 00 (x1 ) < 0 и
функция имеет min, если f 00 (x1 ) > 0.
Доказательство. Докажем первую часть теоремы.
Пусть f 0 (x1 ) = 0 и f 00 (x1 ) < 0. Поскольку функция f 00 (x) непрерывна
в окрестности точки x1 , то найдется достаточно малый интервал (a, b) 3
x1 , содержащий точку x1 , в котором f 00 (x) < 0. Но тогда функция f 0 (x)
убывает на интервале (a, b). Поскольку f 0 (x1 ) = 0, то при x < x1 f 0 (x) >
0, а при x > x1 f 0 (x) < 0. Это означает, что первая производная меняет
знак с плюса на минус при переходе через точку x1 . Поэтому у функции
f (x) в точке x1 максимум.
Аналогично теорема доказывается и для точки минимума.
1.9.4. Нахождение наибольшего и наименьшего значений
функции на отрезке
Непрерывная на отрезке функция достигает своего наибольшего и наименьшего значений, поэтому рассмотрим схему нахождения этих значений.
Пусть функция f (x) непрерывна на отрезке [a, b].
1. Находим все критические точки xi ∈ [a, b], i = 1, . . . n, принадлежащие отрезку [a, b].
2. Находим значение функции f (xi ) в этих точках.
3. Находим f (a) и f (b).
4. Находим наибольшее и наименьшее среди всех найденных значений.
61
Пример 1.9.4. Найти наибольшее и наименьшее значения функции y =
−x4 + 8x2 − 1 на отрезке [−1, 3].
1. Найдем критические точки:
y 0 = −4x3 + 16x = 0 или
x(x2 − 4) = 0,
тогда
x1 = 0, x2 = −2, x3 = 2.
Из этих критических точек отрезку [−1, 3] принадлежат точки x1 =
0 и x3 = 2.
2. f (x1 ) = f (0) = −1, f (x3 ) = f (2) = 15.
3. f (a) = f (−1) = 6, f (b) = f (3) = −10.
4. fнаиб = f (2) = 15, fнаим = f (3) = −10.
1.10. Выпуклость, вогнутость кривой, точки перегиба
Рассмотрим кривую y = f (x), являющуюся графиком дифференцируемой функции f (x).
Определение 1.10.1. Говорят, что кривая обращена выпуклостью
вверх, на интервале (a, b), если все точки кривой лежат ниже любой ее
касательной на этом интервале.
Говорят, что кривая обращена выпуклостью вниз, на интервале
(a, b), если все точки кривой лежат выше любой ее касательной на этом
интервале.
Кривую, обращенную выпуклостью вверх будем называть выпуклой,
а обращенную выпуклостью вниз — вогнутой.
Теорема 1.10.1 (Достаточное условие). Если на интервале (a, b) вторая производная функции f (x) отрицательна, т.е. f 00 (x) < 0 ∀x ∈ (a, b),
то кривая y = f (x) выпукла на этом интервале, т.е. обращена выпуклостью вверх.
Доказательство. Пусть точка x0 ∈ (a, b). Проведем касательную к кривой y = f (x) в точке x0 . Надо показать, что все точки кривой лежат ниже
этой касательной, т.е. что ордината любой точки кривой y = f (x) меньше
ордината ȳ касательной при одном и том же значение x (см.рис. 1.6).
Напишем уравнение касательной к кривой y = f (x) в точке x0 :
ȳ − f (x0 ) = f 0 (x0 )(x − x0 )
или
ȳ = f (x0 ) + f 0 (x0 )(x − x0 ).
62
Y
ȳ
y
o
a
x0
x b X
Рис. 1.6.
Вычтем из уравнения кривой почленно уравнение касательной, получим
y − ȳ = f (x) − f (x0 ) − f 0 (x0 )(x − x0 ).
Применим теорему Лагранжа к функции f (x) на отрезке [x, x0 ], получим
y − ȳ = f 0 (c)(x − x0 ) − f 0 (x0 )(x − x0 ),
где c ∈ (x, x0 ) или
y − ȳ = (f 0 (c) − f 0 (x0 ))(x − x0 ).
К первой производной f 0 (x) опять применим теорему Лагранжа на
отрезке [x0 , c], получим
y − ȳ = f 00 (c1 )(c − x0 )(x − x0 ),
(1.10)
где c1 ∈ (x0 , c) ⊂ (x0 , x).
Пусть x > x0 , тогда x0 < c1 < c < x, поэтому c − x0 > 0 и x − x0 > 0.
Поскольку по условию теоремы f 00 (c1 ) < 0, то в (1.10) получим y − ȳ < 0
или y < ȳ.
Пусть теперь x < x0 , тогда x < c < c1 < x0 , поэтому теперь c − x0 < 0 и
x − x0 < 0. Поскольку, по-прежнему, f 00 (c1 ) < 0, то в (1.10) опять получим
y − ȳ < 0 или y < ȳ.
Таким образом, мы получили, что ордината любой точки кривой y =
f (x) меньше ординаты ȳ касательной при одном и том же x. А значит
касательная лежит выше кривой и она выпукла вверх.
63
Теорема 1.10.2. Если на интервале (a, b) вторая производная функции f (x) положительна, т.е. f 00 (x) > 0, то кривая y = f (x) вогнута на
этом интервале.
1.10.1. Точки перегиба
Определение 1.10.2. Точка M (c, f (c)) называется точкой перегиба кривой y = f (x), если существует окрестность точки c, в которой
точка M отделяет выпуклую часть кривой от вогнутой.
Замечание 1.10.1. Заметим, что в точке перегиба касательная пересекает кривую.
Теорема 1.10.3 (Необходимое условие существования точки перегиба). Пусть функция f (x) дважды непрерывно дифференцируема в окрестности точки c и график функции f (x) имеет перегиб в точке M (c, f (c)),
тогда f 00 (c) = 0.
Доказательство. Предположим, что f 00 (c) 6= 0 и пусть для определенности f 00 (c) < 0. Тогда, в силу непрерывности функции y = f 00 (x), найдется
достаточно малая окрестность точки c, в которой f 00 (x) < 0. Поэтому по
теореме 10.1, кривая y = f (x) будет выпукла на этом интервале, что противоречит условию теоремы. Аналогично теорема доказывается в случае,
если f 00 (c) > 0.
Теорема 1.10.4 (Достаточное условие существования точки перегиба).
Пусть кривая определяется уравнением y = f (x). Если f 00 (c) = 0 или
не существует и при переходе через значение x = c вторая производная
f 00 (x) меняет знак, то точка M (c, f (c)) — точка перегиба.
Доказательство очевидно.
1.11. Асимптоты кривой. Полное исследование функции
Определение 1.11.1. Прямая l = {(x, y) : y = kx + b} называется
асимптотой кривой y = f (x), если расстояние δ от переменной точки
M кривой до этой прямой l, при удалении точки M по кривой в бесконечность, стремиться к нулю.
1.11.1. Вертикальные асимптоты
Предложение 1.11.1. Пусть x = a вертикальная асимптота кривой y = f (x). Тогда либо lim f (x) = ∞, либо lim f (x) = ∞, либо
x→a−0
x→a+0
lim f (x) = ∞, и обратно, если выполняется одно из написанных равенств,
x→a
то x = a вертикальная асимптота.
64
Пример 1.11.1. Найти вертикальные асимптоты функции y =
Найдем
lim
x→1+0
3
= +∞,
x−1
lim
x→1−0
3
.
x−1
3
= −∞.
x−1
Поэтому x = 1 — вертикальная асимптота.
1.11.2. Наклонные асимптоты
Будем считать в дальнейшем, что x → +∞, аналогичные утверждения
справедливы и для x → −∞.
Лемма 1.11.1. Для того, чтобы прямая y = kx + b была наклонной
асимптотой к графику функции y = f (x), необходимо и достаточно чтобы
f (x) = kx + b + α(x),
где
α(x) → 0
при
x → +∞.
Доказательство. Пусть ȳ = kx + b наклонная асимптота к графику
функции y = f (x) (см.рис. 1.7).
Y
M
y
δ
P
ȳ
N
ϕ
o
x
X
Рис. 1.7.
Пусть M (x, y) — произвольная точка кривой, δ = |M P | — расстояние
до асимптоты. Тогда по условию теоремы
lim |M P | = 0,
x→+∞
65
но |M N | =
|M P |
, где | cos ϕ| > c > 0 и поэтому
cos ϕ
lim |M N | = lim
x→+∞
x→+∞
|M P |
= 0.
cos ϕ
Но поскольку |M N | = y − ȳ = f (x) − kx − b, то
lim (f (x) − kx − b) = 0.
x→+∞
Тогда по теореме 1.2.1
f (x) − kx − b = α(x),
где α(x) → 0
при x → +∞.
Наоборот, пусть f (x) = kx + b + α(x), где α(x) → 0 при x → +∞. Тогда
lim |M N | = lim (y − ȳ) = lim (f (x) − kx − b) = lim α(x) = 0.
x→+∞
x→+∞
Но поскольку |M N | =
x→+∞
x→+∞
|M P |
, поэтому
cos ϕ
lim |M P | = lim |M N | cos ϕ = 0.
x→+∞
x→+∞
Следовательно, прямая ȳ = kx+b — асимптота к графику кривой y = f (x).
Теорема 1.11.1. Для того, чтобы график функции y = f (x) при x →
+∞ имел наклонную асимптоту y = kx + b, необходимо и достаточно,
чтобы существовали пределы
lim
x→+∞
f (x)
=k
x
и
lim (f (x) − kx) = b.
x→+∞
Доказательство. Необходимость. Пусть график функции y = f (x) имеет при x → +∞ наклонную асимптоту y = kx + b. Тогда по лемме 10.1
для функции f (x) справедливо представление f (x) = kx + b + α(x), где
α(x) → 0 при x → +∞. Используя это представление, легко получить, что
¶
µ
f (x)
α(x)
kx + b + α(x)
b
lim
= lim
= lim
k+ +
= k,
x→+∞ x
x→+∞
x→+∞
x
x
x
lim (f (x) − kx) = lim (b + α(x)) = b.
x→+∞
x→+∞
Достаточность. Пусть существуют пределы
f (x)
=k и
lim (f (x) − kx) = b.
x→+∞
x
Из второго предела по теореме 1.2.1 следует, что
lim
x→+∞
f (x) − kx = b + α(x),
где α(x) → 0
66
при x → +∞.
Поэтому f (x) = kx + b + α(x) и по лемме 10.1 отсюда следует, что прямая
y = kx + b — наклонная асимптота к графику функции y = f (x).
1.11.3. Полное исследование функции
Схема исследования функции.
1. Найти область определения функции.
2. Найти область изменения функции (по возможности).
3. Найти нули функции.
4. Определить четность, нечетность функции.
5. Определить периодичность функции.
6. Исследовать на непрерывность и точки разрыва.
7. Исследовать на возрастание, убывание и точки экстремума.
8. Исследовать на выпуклость, вогнутость и точки перегиба.
9. Найти вертикальные и наклонные асимптоты.
10. Нарисовать график функции.
Пример 1.11.2. Провести полное исследование и нарисовать график
функции
4+x
y=
.
x2
1. Область определения: D = x ∈ (−∞, 0) ∪ (0, +∞).
1
2. Область изменения: E = y ∈ (− 16
, +∞).
3. y = 0 при x = −4.
4. Функция ни четная, ни нечетная, так как
4−x
y(−x) =
.
x2
5. Функция не периодическая.
6. Функция непрерывна при x ∈ (−∞, 0) ∪ (0, +∞) как частное двух
элементарных функций. Рассмотрим точку x = 0.
4+x
4+x
lim
= +∞,
lim
= +∞,
x→−0 x2
x→+0 x2
поэтому x = 0 — точка разрыва II рода.
7. Найдем первую производную данной функции
x2 − (4 + x)2x
x − 8 − 2x
−x − 8
=
=
.
x4
x3
x3
Найдем критические точки
y0 =
y0 = 0
⇒
67
x = −8,
y 0 − не существует
Заполним таблицу
x
y0
y
⇒
(−∞; −8) −8 (−8; 0)
−
0
+
&
min
%
x = 0.
0
@
@
(0; +∞)
−
&
Найдем минимальное значение функции
1
.
16
8. Найдем вторую производную данной функции
ymin = y(−8) = −
−x + 3x + 24
2x + 24
−x3 + (x + 8)3x2
=
=
.
x6
x4
x4
Найдем критические точки
y 00 =
y 00 = 0
⇒
00
x = −12,
y − не существует
Заполним таблицу
x
y 00
y
(−∞; −12)
−
_
−12
0
т.п.
⇒
x = 0.
(−12; 0) 0
+
@
^
@
(0; +∞)
+
^
Найдем значение функции в точке перегиба
1
y(−12) = − .
18
9. Поскольку x = 0 — точка разрыва второго рода с бесконечными
пределами, то прямая x = 0 — вертикальная асимптота.
Найдем наклонные асимптоты этой кривой
4+x
k = lim
= 0,
x→±∞ x3
4+x
b = lim
= 0.
x→±∞ x2
Поэтому y = 0— горизонтальная асимптота данной кривой.
4+x
10. Нарисуем график кривой y =
x2
1
Пример 1.11.3. Исследовать функцию y = e x2 −1 и построить ее график.
68
Y
−12
−8 −4
X
Рис. 1.8.
1.
2.
3.
4.
Область определения D = (−∞, −1) ∪ (−1, 1) ∪ (1, +∞).
Область изменения E = (0, +∞).
Функция в ноль не обращается.
Функция четная, так как
1
1
y(−x) = e (−x)2 −1 = e x2 −1 = y(x).
5. Функция не периодическая.
6. Функция непрерывна при x ∈ (−∞, −1) ∪ (−1, 1) ∪ (1, +∞) как сложная функция элементарных функций.
Рассмотрим точку x = −1
lim
x→−1−0
1
e x2 −1 = +∞,
lim
1
x→−1+0
e x2 −1 = 0.
Поэтому x = −1 — точка разрыва II рода.
Теперь рассмотрим точку x = 1
1
1
lim e x2 −1 = 0,
x→1−0
lim e x2 −1 = ∞.
x→1+0
Поэтому x = 1 — точка разрыва II рода.
7. Найдем первую производную этой функции
1
−2x
y 0 = e x2 −1 2
.
(x − 1)2
Найдем критический точки, где производная равна нулю или не существует:
x1 = 0, x2 = −1, x3 = 1.
69
Заполним таблицу
x
y0
y
(−∞; −1) −1
+
@
%
@
(−1; 0)
0
+
0
%
max
(0; 1)
−
&
1
@
@
(1; ∞)
−
&
Найдем максимальное значение функции
ymax = y(0) = e−1 .
8. Найдем вторую производную данной функции
µ
¶2
1
1
−2x
−2(x2 − 1)2 + 4x(x2 − 1)2x
y 00 = e x2 −1
+ e x2 −1
=
2
2
(x − 1)
(x2 − 1)4
µ 2
¶
1
1
6x4 − 2
4x − 2x4 + 4x2 − 2 + 8x4 − 8x2
2 −1
x
x2 −1
=
e
.
=e
(x2 − 1)4
(x2 − 1)4
Найдем критические точки второй производной
p
p
x1 = − 4 1/3, x2 = 4 1/3, x3 = −1, x4 = 1.
Заполним таблицу
x
y 00
y
x
y 00
y
(−∞; −1)
+
^
p
p
(− 4 1/3; 4 1/3)
−
_
−1
@
@
p
4
1/3
0
т.п.
p
(−1; − 4 1/3)
+
^
p
( 4 1/3; 1)
+
^
p
− 4 1/3
0
т.п.
1
@
@
(1; +∞)
+
^
Найдем значение функции в точках перегиба
p
p
y(− 4 1/3) = y( 4 1/3) = e−3 .
9. Поскольку x = −1 и x = 1 — точки разрыва второго рода с бесконечным разрывом, то прямые x = ±1 — вертикальные асимптоты данной
кривой.
Найдем наклонные асимптоты этой кривой
1
1
e x2 −1
k = lim
= 0, b = lim e x2 −1 = 1.
x→±∞
x→±∞
x
Поэтому прямая y = 1 — горизонтальная асимптота функции.
10. Построим график этой функции
70
Y
1
−1
0
1
Рис. 1.9.
71
X
Глава 2
Неопределенный интеграл
2.1. Понятие неопределенного интеграла и его свойства
2.1.1. Первообразная, ее свойства
Определение 2.1.1. Функция F (x) называется первообразной от
функции f (x) на интервале (a, b) (отрезке [a, b]), если для любого x ∈ (a, b)
(x ∈ [a, b]) выполняется равенство F 0 (x) = f (x).
Пусть F (x) – первообразная функции f (x), тогда (F (x) + C)0 = F 0 (x) +
0 = f (x).
Теорема 2.1.1. Любые две первообразные F1 (x) и F2 (x) функции f (x)
отличаются друг от друга на константу, т.е.
F1 (x) = F2 (x) + C.
Доказательство. Для любого x ∈ [a, b] имеем
F10 (x) = f (x)
и
F20 (x) = f (x).
Обозначим функцию ϕ(x) = F1 (x) − F2 (x). Тогда ϕ0 (x) = F10 (x) − F20 (x) =
f (x) − f (x) ≡ 0. Поскольку на отрезке [a, b] функция ϕ(x) удовлетворяет
теореме Лагранжа, поэтому для любого x ∈ (a, b) выполняется
ϕ(x) − ϕ(a) = ϕ0 (c)(x − a),
где a < c < x. Так как ϕ0 (c) = 0, то ϕ(x) ≡ ϕ(a) = C = const, поэтому
F1 − F2 = C или F1 = F2 + C.
2.1.2. Неопределенный интеграл
Определение 2.1.2. Если функция F (x) является первообразной для
функции f (x), то выражение F (x)+C, где C — произвольная константа,
называется
неопределенным интегралом от функции f (x) и обозначается
R
f (x)dx, т.е.
Z
f (x)dx = F (x) + C.
72
R
Здесь символ — знак интеграла; f (x) — подынтегральная функция;
f (x)dx — подынтегральное выражение.
Неопределенный интеграл существует не для всех функций, но есть
класс функций, который можно интегрировать всегда — это непрерывные
функции.
Теорема 2.1.2. Если функция f (x) непрерывна на отрезке [a, b], то
для нее существует на этом отрезке первообразная, а значит неопределенный интеграл.
Рассмотрим элементарные свойства неопределенного интеграла.
Теорема 2.1.3. (Элементарные свойства неопределенного интеграла)
¡R
¢0
1. ¡Rf (x)dx ¢= f (x).
2. d
f (x)dx = f (x)dx.
R
3. dF (x) = F (x) + C.
Доказательство. Самостоятельно.
Поскольку для сложной функции f (x) = f (u(x)) = f (u) выполняется свойство инвариантности формы первого дифференциала f 0 (u)du =
f 0 (x)dx, то таблицу неопределенных интегралов мы запишем в более общем
виде, когда аргументом функции f будет являться функция u(x), которая,
в частности, может быть равна u = x.
Таблица неопределенных интегралов
73
1.
R
du = u + C,
R α
uα+1
2. u du =
+ C,
α+1
R du
3.
= ln |u| + C,
u
R
4. sin udu = − cos u + C,
R
5. cos udu = sin u + C,
10.
11.
12.
13.
14.
R
du
= tg u + C
cos2 u
R du
7.
= − ctg u + C,
sin2 u
R
8. tg udu = − ln | cos u| + C,
R
9. ctg udu = ln | sin u| + C,
6.
15.
16.
17.
18.
R
R
R
R
R
R
R
R
R
C.
eu du = eu + C,
au
au du =
+ C,
ln a
du
= arctg u + C,
1 + u2
du
1
u
= arctg + C,
2
2
a +u
a
¯ a ¯
¯a + u¯
du
1
¯
¯ + C,
ln
=
a2 − u2
2a ¯¯ a − u ¯¯
¯u − a¯
du
1
¯
¯ + C,
=
ln
u2 − a2
2a ¯ u + a ¯
du
√
= arcsin u + C,
1 − u2
du
u
√
= arcsin + C,
2
2
a
a −u
p
du
√
= ln |u + u2 ± a| +
u2 ± a
2.1.3. Свойства неопределенного интеграла
Теорема
2.1.4. Справедливы
следующие
соотношения:
R
R
R
1. R (f1 (x) ± f2 (x))dx
=
f
(x)dx
±
f
(x)dx.
1
2
R
2. af (x)dx
= a f (x)dx, где a = const.
R
3. Если f (x)dx = F (x) + C, то
Z
f (ax + b)dx =
1
F (ax + b) + C,
a
где a, b = const.
Доказательство. Докажем первое и третье утверждения. Второе доказывается аналогично. По первому элементарному свойству имеем
µZ
¶0
(f1 ± f2 )dx
µZ
¶0
Z
f1 dx ±
f2 dx
µZ
=
= f1 ± f2 ,
¶0
f1 dx
µZ
±
¶0
f2 dx
= f1 ± f2 .
Поскольку равны правые части этих выражений, то равны и левые. Значит,
первое утверждение верно.
74
Докажем третье утверждение
Z
Z
1
f (ax + b)dx = f (ax + b) d(ax + b) =
a
Z
1
1
=
f (ax + b)d(ax + b) = F (ax + b) + C.
a
a
И теорема доказана.
Рассмотрим вычисление некоторых интегралов.
Пример 2.1.1.
¶
Z µ
Z
Z
√
1
3
1
4
√ + x3 dx = x− 2 dx + x 4 dx =
x
1
=
x2
1
2
7
+
x4
7
4
√
4√
4
+C =2 x+
x7 + C.
7
Пример 2.1.2.
Z
Z
1
1
cos 5xd(5x) = sin 5x + C.
cos 5xdx =
5
5
Пример 2.1.3.
Z
Z
dx
d(x + 1)
=
= ln |x + 1| + C.
x+1
x+1
2.1.4. Метод непосредственного интегрирования
Рассмотрим метод непосредственного интегрирования или метод внесения функции под знак дифференциала. Будем использовать определение
дифференциала функции u0 (x)dx = du. Тогда
Z
Z
0
f (u(x))u (x)dx = f (u)du.
Покажем использование этого приема на примерах.
Пример 2.1.4.
Z
Z
Z
cos xdx
d(sin x)
ctg xdx =
=
= ln | sin x| + C.
sin x
sin x
Пример 2.1.5.
Z
Z
ex sin ex dx = sin ex d(ex ) = − cos ex + C.
Пример 2.1.6.
Z
Z
Z
2
2
2
1
1
1 2
ex xdx =
ex 2xdx =
ex d(x2 ) = ex + C.
2
2
2
75
2.1.5. Замена переменной в неопределенном интеграле
1. Рассмотрим первый
тип замены в неопределенном интеграле. Пусть
R
дан интеграл f (x)dx и мы хотим сделать в этом интеграле замену
x = ϕ(t), где функция ϕ(t) непрерывно дифференцируема и имеет
обратную функцию
t = t(x). Тогда
Z
¯
¯ x = ϕ(t)
f (x)dx = ¯¯
dx = ϕ0 (t)dt
¯ Z
¯
¯ = f (ϕ(t))ϕ0 (t)dt.
¯
Докажем, что это равенство верно. Действительно,
µZ
¶0
f (x)dx
= f (x),
x
аналогично
µZ
¶0
µZ
¶0
f (ϕ(t))ϕ0 (t)dt
=
f (ϕ(t))ϕ0 (t)dt t0x =
x
t
1
= f (ϕ(t)) = f (x).
ϕ0 (t)
Поскольку правые части равны, то равны и левые.
Пример 2.1.7.
¯
¯ Z
Z
¯ x = t2 , t = √x ¯
dx
2tdt
¯
¯=
√ =¯
=
¯
dx
=
2tdt
1+t
1+ x
Z
Z
Z
(t + 1 − 1)dt
d(t + 1)
=2
= 2 dt − 2
=
t+1
t+1
√
√
= 2t − 2 ln |t + 1| + C = 2 x − 2 ln | x + 1| + C.
= f (ϕ(t))ϕ0 (t)
Пример 2.1.8.
¯
¯ Z
√
Z
¯ x + 1 = t2 , t = x + 1 ¯
√
¯ = t 2t dt =
x + 1dx = ¯¯
x = t2 − 1, dx = 2tdt ¯
Z
2
2p
= 2 t2 dt = t3 + C =
(x + 1)3 + C.
3
3
2. Второй тип замены в неопределенном интеграле — это, по сути, метод непосредственного интегрирования, рассмотренный выше. А именно:
¯
¯ Z
Z
¯ u = u(x)
¯
¯ = f (u)du.
f (u(x))u0 (x)dx = ¯¯
0
du = u (x)dx ¯
76
Пример 2.1.9.
¯
¯
Z
Z
¯ u = sin x
¯
cos x
¯=
ctg xdx =
dx = ¯¯
du = cos xdx ¯
sin x
Z
du
= ln |u| + C = ln | sin x| + C.
=
u
Пример 2.1.10.
¯
¯
Z
¯ u = ln x ¯ Z
¯
¯
2 dx
ln x
=¯
dx ¯ = u2 du =
¯du =
¯
x
x
u3
ln3 x
=
+C =
+ C.
3
3
Пример 2.1.11.
¯
¯
Z
¯ u = x2 , du = 2xdx ¯ 1 Z
xdx
du
¯
¯
=¯ 4
=
du ¯ =
¯ 2
¯x = u2 , xdx =
1 + x4
1 + u2
2
1
1
= arctg u + C = arctg x2 + C.
2
2
2.1.6. Интегрирование по частям
Пусть u(x) и v(x) — непрерывно дифференцируемые функции. Тогда
дифференциал произведения этих функций равен
d(uv) = udv + vdu.
Проинтегрировав это равенство, получим
Z
Z
Z
d(uv) = udv + vdu
или
Z
Z
udv = u · v − vdu.
Последнее равенство есть формула интегрирования по частям. Она применяется, если интеграл в правой части является либо табличным, либо
вычисляется проще интеграла в левой части.
Рассмотрим основные типы неопределенных интегралов, которые вычисляются по частям. Отметим, что есть еще и другие интегралы, которые
берутся по частям.
Обозначим
Pn (x) = a0 xn + a1 xn−1 + . . . + an−1 x + an
многочлен степени n.
77
(I)
¯
¯
¯ u = Pn (x) du = Pn0 (x)dx¯
¯
¯
1
Pn (x)e dx = ¯
¯=
¯dv = eax dx
v = eax ¯
a
Z
1
1
ax
= Pn (x)e −
Pn0 (x)eax dx = . . . .
a
a
Далее интегрируем по частям еще n − 1 раз.
Z
ax
(II)
¯
¯
¯ u = Pn (x)
du = Pn0 (x)dx¯¯
¯
1
Pn (x) cos axdx = ¯
¯=
¯dv = cos axdx v = sin ax ¯
a
Z
1
1
= Pn (x) sin ax −
Pn0 (x) sin axdx = . . . .
a
a
Далее интегрируем по частям еще n − 1 раз.
Z
¯
¯
¯ u = Pn (x)
du = Pn0 (x)dx ¯¯
¯
1
Pn (x) sin axdx = ¯
¯=
¯dv = sin axdx v = − cos ax¯
a
Z
1
1
Pn0 (x) cos axdx = . . . .
= − Pn (x) cos ax +
a
a
Далее интегрируем по частям еще n − 1 раз.
Z
(III)
¯
¯
dx
¯
¯
¯ u = ln x
¯
du =
Pn (x) ln xdx = ¯
¯=
x
R
¯dv = P (x)dx v(x) = P (x)dx¯
n
n
Z
v(x)dx
= ... .
= v(x) ln x −
x
¯
¯
¯
¯
Z
dx
¯ u = arcsin x
¯
du = √
¯
2
Pn (x) arcsin xdx = ¯¯
R 1−x ¯=
¯dv = Pn (x)dx v(x) = Pn (x)dx¯
Z
v(x)dx
√
= ... .
= v(x) arcsin x −
1 − x2
¯
¯
¯
¯
Z
dx
¯ u = arctg x
¯
du
=
¯
¯=
2
Pn (x) arctg xdx = ¯
R1 + x
¯
¯dv = Pn (x)dx v(x) = Pn (x)dx¯
Z
78
Z
= v(x) arctg x −
(IV)
v(x)dx
= ... .
1 + x2
¯
¯
¯ u = eax
du = aeax dx¯¯
¯
1
eax cos bxdx = ¯
¯=
¯dv = cos bxdx v = sin bx ¯
b
Z
1
a
= eax sin bx −
eax sin bxdx = . . . .
b
b
Далее интеграл в правой части еще раз берется по частям, и мы
приходим к исходному интегралу. Перенося его в левую часть,
решаем уравнение относительно этого интеграла.
Z
¯
¯
¯ u = eax
du = aeax dx ¯¯
¯
1
e sin bxdx = ¯
¯=
¯dv = sin bxdx v = − cos bx¯
b
Z
1
a
= − eax cos bx +
eax cos bxdx = . . . .
b
b
Далее поступаем как в предыдущем примере.
Рассмотрим некоторые примеры вычисления интегралов по частям.
Пример 2.1.12.
¯
¯
Z
¯ u = x2 + 1
du = 2xdx ¯¯
¯
1
(x2 + 1) sin 3xdx = ¯
¯=
¯dv = sin 3xdx v = − cos 3x¯
3
Z
1 2
2
= − (x + 1) cos 3x +
x cos 3xdx =
3
3
¯
¯
u=x
du = dx ¯¯
2 ¯¯
1 2
1
= − (x + 1) cos 3x + ¯
¯=
3
3 ¯dv = cos 3xdx v = sin 3x¯
3
Z
2
2
1 2
sin 3xdx =
= − (x + 1) cos 3x + x sin 3x −
3
9
9
1
2
2
= − (x2 + 1) cos 3x + x sin 3x +
cos 3x + C.
3
9
27
Пример 2.1.13.
¯
¯
Z
dx ¯
¯
¯
¯
u = ln 5x
du =
(2x + 3) ln 5xdx = ¯
¯=
¯dv = (2x + 3)dx v = x2 +x3x¯
Z
Z
(x2 + 3x)dx
= (x2 + 3x) ln 5x −
= (x2 + 3x) ln 5x − (x + 3)dx =
x
Z
ax
79
= (x2 + 3x) ln 5x −
x2
− 3x + C.
2
Пример 2.1.14.
¯
¯
Z
¯ u = e2x
du = 2e2x dx¯¯
¯
2x
1
e cos 3xdx = ¯
¯=
¯dv = cos 3xdx v = sin 3x ¯
3
Z
1 2x
2
= e sin 3x −
e2x sin 3xdx =
3
3
¯
¯
2x
du = 2e2x dx ¯¯
2 ¯¯ u = e
1 2x
1
= e sin 3x − ¯
¯=
3
3 ¯dv = sin 3xdx v = − cos 3x¯
3
Z
1 2x
2 2x
4
= e sin 3x + e cos 3x −
e2x cos 3xdx.
3
9
9
Теперь перенесем интеграл из правой части равенства в левую, получим
Z
13
1
2
e2x cos 3xdx = e2x sin 3x + e2x cos 3x + C.
9
3
9
Или, окончательно,
µ
¶
Z
9 1 2x
2 2x
2x
e cos 3xdx =
e sin 3x + e cos 3x + C.
13 3
9
Рассмотрим пример, который не относится к приведенным выше типам
интегралов.
Пример 2.1.15.
¯
¯
Z
¯ u=x
du = dx¯¯
xdx
¯
=¯
dx
¯=
cos2 x ¯dv =
v = tg x¯
cos2 x
Z
= x tg x − tg xdx = x tg x + ln | cos x| + C.
2.2. Интегрирование рациональных функций
Pn (x)
, где Pn (x) и Qm (x)
Qm (x)
— многочлены степени n и m соответственно, называется рациональной
функцией или рациональной дробью.
Определение 2.2.1. Функция вида R(x) =
Определение 2.2.2. Рациональная дробь называется правильной, если степень числителя строго меньше степени знаменателя, т.е. n < m,
и называется неправильной, если n > m.
80
Если дробь неправильная, то, разделив числитель на знаменатель, мы
можем представить эту дробь в виде суммы многочлена (целой части) и
правильной дроби.
Pn (x)
Fs (x)
= M (x) +
,
Qm (x)
Qm (x)
где
s < m.
2.2.1. Интегрирование простейших рациональных дробей
Определение 2.2.3. Рациональные дроби вида:
A
,
1.
x−a
A
2.
, где n > 2,
(x − a)n
Ax + B
, где дискриминант знаменателя D < 0,
3. 2
x + px + q
Ax + B
4. 2
, где n > 2 и D < 0, —
(x + px + q)n
называются простейшими рациональными дробями.
Рассмотрим интегрирование всех четырех типов этих дробей.
1. Рассмотрим первый тип дробей
Z
Z
A
d(x − a)
dx = A
= A ln |x − a| + C.
x−a
x−a
2. Рассмотрим второй тип дробей
Z
Z
A
dx
=
A
(x − a)−n d(x − a) =
(x − a)n
(x − a)−n+1
A
+C =
+ C.
−n + 1
(1 − n)(x − a)n−1
3. Третий тип дробей разобьем на два случая. При интегрирование в
знаменателе будем выделять полный квадрат.
Z
Z
A
dx
=
a)
dx = A
2
2
2
2
x + px + q
(x + px + p4 − p4 + q)
¯
¯
¯ u = x + p2 ¯
Z
¯
¯
dx
³
´ = ¯¯ dx = du ¯¯ =
=A ¡
¢
2
2
2
¯q 0 = q − p ¯
x + p2 + q − p4
4
Z
x + p2
A
u
A
du
√
√
√
√ 0 + C.
=A
=
arctg
+
C
=
arctg
u2 + q 0
q0
q0
q0
q
=A
81
Во втором случае также выделим полный квадрат, сделаем аналогичную замену переменной и разделим интеграл на два.
Z
Z
Z
Z
Ax + B
Au + B 0
udu
du
0
b)
dx =
du = A
+B
=
x2 + px + q
u2 + q 0
u2 + q 0
u2 + q 0
Z
Z
2udu
d(u2 + q 0 )
A
B0
u
A
B0
u
√
√
√
=
+
arctg
=
+
arctg √ 0 =
2
0
2
0
0
0
0
2
u +q
2
u +q
q
q
q
q
p
0
0
x
+
A
u
A
B
B
= ln |u2 +q 0 |+ √ 0 arctg √ 0 +C = ln |x2 +px+q|+ √ 0 arctg √ 02 +C.
2
2
q
q
q
q
4. Рассмотрим последний тип простейших дробей. Аналогично третьему случаю выделим полный квадрат в знаменателе и сделаем такую же
замену переменной:
Z
Z
Ax + B
Au + B 0
dx
=
du =
2
n
(x + px + q)
(u2 + q 0 )n
Z
Z
2udu
B0
(u2 + q 0 ) − u2
A
+
du =
=
2
0
n
0
2
(u + q )
q
(u2 + q 0 )n
Z
Z
Z
A
d(u2 + q 0 ) B 0
du
B0
u2 du
=
+
−
=
2
0
n
0
2
0
n−1
0
2
2
(u + q )
q
(u + q )
q
(u + q 0 )n
Z
B0
du
A
+
−
=
2
0
n−1
0
2
2(1 − n)(u + q )
q
(u + q 0 )n−1
¯
¯
¯
¯
t
=
u
dt
=
du
0 ¯
¯
B
¯=
1
udu
− 0 ¯¯
¯
v=
q ¯dv = 2
(u + q 0 )n
2(1 − n)(u2 + q 0 )n−1 ¯
Z
B0
du
B0u
A
+
−
+
=
2(1 − n)(u2 + q 0 )n−1
q0
(u2 + q 0 )n−1
2q 0 (1 − n)(u2 + q 0 )n−1
Z
B0
du
+ 0
=
2q (1 − n)
(u2 + q 0 )n−1
µ 0
¶Z
A
B
B0
du
=
+
+
−
2
0
n−1
0
0
2
2(1 − n)(u + q )
q
2q (1 − n)
(u + q 0 )n−1
B0u
− 0
= ... .
2q (1 − n)(u2 + q 0 )n−1
Оставшийся интеграл со степенью в знаменателе на 1 меньше вычисляется аналогично исходному интегралу, постепенно мы дойдем до интеграла, у которого знаменатель будет в первой степени.
Рассмотрим примеры вычисления интегралов от простейших рациональных дробей третьего и четвертого типа.
82
Пример 2.2.1.
Z
Z
Z
(x + 3)dx
(x + 3)dx
(x + 3)dx
=
=
=
x2 + 4x + 13
x2 + 4x + 4 − 4 + 13
(x + 2)2 + 9
¯
¯
¯u = x + 2 ¯ Z
Z
Z
¯
¯
(u − 2 + 3)du
udu
du
= ¯¯ du = dx ¯¯ =
=
+
=
2
2
2
u +9
u +9
u +9
¯x = u − 2¯
Z
1
d(u2 + 9) 1
u
1
u
1
=
+ arctg = ln |u2 + 9| + arctg + C =
2
2
u +9
3
3
2
3
3
1
1
x
+
2
+ C.
= ln |x2 + 4x + 13| + arctg
2
3
3
Пример 2.2.2.
Z
Z
Z
(x + 1)dx
xdx
dx
=
+
=
2
2
2
2
2
(x + 1)
(x + 1)
(x + 1)2
Z
Z
1
d(x2 + 1)
(x2 + 1 − x2 )dx
=
+
=
2
(x2 + 1)2
(x2 + 1)2
Z
Z
1
dx
x · xdx
=−
+
−
=
2(x2 + 1)
x2 + 1
(x2 + 1)2
¯
¯
¯
¯
u
=
x
du
=
dx
¯
¯
1
¯
¯=
1
xdx
=−
+
arctg
x
−
¯
¯
2
2(x + 1)
¯dv = (x2 + 1)2 v = − 2(x2 + 1) ¯
Z
x
1
dx
1
+
arctg
x
+
−
=
=−
2
2
2
2(x + 1)
2(x + 1) 2
x +1
=−
x
1
1
+ arctg x + +
− arctg x + C =
2(x2 + 1)
2(x2 + 1) 2
=−
1
1
x
+ arctg x + +
+ C.
2(x2 + 1) 2
2(x2 + 1)
2.2.2. Интегрирование рациональных дробей
Теорема 2.2.1. Любой многочлен Qm (x) разлагается на произведение
линейных множителей вида (x − a) и (x − b)l и квадратных трехчленов с
отрицательным дискриминантом вида (x2 + px + q) и (x2 + sx + t)k , т.е.
Qm (x) = (x − a) · . . . · (x − b)l (x2 + px + q) · . . . · (x2 + sx + t)k ,
где l, k > 2.
83
Pn (x)
, где n < m и
Qm (x)
Qm (x) = (x − a) · . . . · (x − b)l (x2 + px + q) · . . . · (x2 + sx + t)k , может быть
представлена в виде суммы простейших дробей, причем
A
• множителю (x − a) соответствует дробь
,
x−a
l
• множителю (x − b) соответствует сумма l дробей
Теорема 2.2.2. Правильная рациональная дробь
B1
B2
Bl
+
+ ... +
,
2
x − b (x − b)
(x − b)l
Cx + D
,
x2 + px + q
• множителю (x2 + sx + t)k соответствует сумма k дробей
• множителю (x2 + px + q) соответствует дробь
E1 x + F1
E2 x + F2
Ek x + Fk
+ 2
+ ... 2
,
2
2
x + sx + t (x + sx + t)
(x + sx + t)k
тогда
Pn (x)
A
B1
Bl
Cx + D
=
+
+ ... +
+ 2
+ ...+
l
Qm (x)
x−a x−b
(x − b)
x + px + q
Ek x + Fk
E1 x + F1
+ ... + 2
.
(2.1)
2
x + sx + t
(x + sx + t)k
Коэффициенты A, B1 , . . . , Bl , C, D, E1 , F1 , . . . , Ek , Fk находятся по методу
неопределенных коэффициентов.
+
2.2.3. Метод неопределенных коэффициентов
Pn (x)
на сумму простейших дроQm (x)
бей с неопределенными коэффициентами, получим равенство вида (2.1).
Приводим правую часть равенства (2.1) к общему знаменателю.
Числитель полученной дроби приравниваем к числителю Pn (x),
получим тождество.
Приравниваем коэффициенты при одинаковых степенях x в левой
и правой частях полученного тождества, получим систему уравнений для определения неопределенных коэффициентов.
Решая эту систему, найдем все неопределенные коэффициенты.
(1) Разлагаем правильную дробь
(2)
(3)
(4)
(5)
Рассмотрим пример разложения дроби по методу неопределенных коэффициентов на простейшие дроби.
84
Пример 2.2.3.
2x2 + 4x + 1
A
Bx + C
A(x2 + 4) + (Bx + C)(x − 1)
=
+ 2
=
=
2
(x − 1)(x + 4)
x−1
x +4
(x − 1)(x2 + 4)
Ax2 + 4A + Bx2 − Bx + Cx − C
(A + B)x2 + (C − B)x + (4A − C)
=
.
2
(x − 1)(x + 4)
(x − 1)(x2 + 4)
Приравняем числители исходной и полученной дробей
=
2x2 + 4x + 1 = (A + B)x2 + (C − B)x + (4A − C).
Приравняем коэффициенты при одинаковых степенях x, получим систему
¯
x2 ¯¯ 2 = A + B
x1 ¯¯ 4 = C − B
x0 ¯ 1 = 4A − C.
7
3
Решая эту систему, найдем неопределенные коэффициенты A = , B = ,
5
5
23
, тогда
C=
5
23
3
2x2 + 4x + 1
7
5x + 5
=
+
.
(x − 1)(x2 + 4)
5(x − 1)
x2 + 4
Находить неопределенные коэффициенты можно приравнивая не только коэффициенты при одинаковых степенях x левой и правой частей последнего тождества в пункте 3, но и значения левой и правой частей этого
тождества при одинаковых значениях x. Этим удобно пользоваться, если у знаменателя исходной дроби есть действительные корни. Рассмотрим
следующий пример.
Пример 2.2.4.
x+3
A
B
C
=
+
+
=
(x + 2)(x − 1)2
x + 2 x − 1 (x − 1)2
=
A(x − 1)2 + B(x + 2)(x − 1) + C(x + 2)
.
(x + 2)(x − 1)2
Тогда
x + 3 = A(x − 1)2 + B(x + 2)(x − 1) + C(x + 2).
Возьмем x = 1, x = −2 — это корни знаменателя и еще, например, x = 0.
Получим
¯
x = 1 ¯¯ 4 = 3C
x = −2¯¯ 1 = 9A
x = 0 ¯ 3 = A − 2B + 2C.
85
1
1
4
, B = − , C = , тогда
9
9
3
x+3
1
1
4
=
−
+
.
2
(x + 2)(x − 1)
9(x + 2) 9(x − 1) 3(x − 1)2
Решая эту систему, найдем A =
2.2.4. Схема интегрирования рациональной дроби
Пусть нам дан интеграл от рациональной функции
Z
Pn (x)
dx.
Qm (x)
(1) Если n > m, т.е. дробь неправильная, то выделить целую часть:
Pn (x)
Fs (x)
= M (x) +
.
Qm (x)
Qm (x)
(2) Разложить знаменатель Qm (x) на линейные множители и квадратные трехчлены с отрицательным дискриминантом.
Fs (x)
(3) Дробь
разложить на простейшие дроби с неопределенныQm (x)
ми коэффициентами.
(4) Найти эти неопределенные коэффициенты по методу неопределенных коэффициентов.
(5) Проинтегрировать функцию M (x) и полученные простейшие дроби.
Пример 2.2.5. Вычислить интеграл
Z 4
x + 2x2 + 1
dx.
x2 − x − 2
Поскольку исходная дробь неправильная, то выделим целую часть:
x4
x4 − x3
x3
x3
+ 2x2
+ 1 x2 − x − 2
2
− 2x
x2 + x + 5
2
+ 4x
+1
− x2 − 2x
.
5x2 + 2x + 1
5x2 − 5x − 10
7x + 11
Получим
7x + 11
x4 + 2x2 + 1
= x2 + x + 5 + 2
.
x2 − x − 2
x −x−2
86
7x + 11
на простейшие:
−x−2
7x + 11
7x + 11
A
B
=
=
+
=
x2 − x − 2
(x − 2)(x + 1)
x−2 x+1
Разложим дробь
x2
=
A(x + 1) + B(x − 2)
.
(x − 2)(x + 1)
Тогда
7x + 11 = (A + B)x + (A − 2B).
Приравнивая коэффициенты при одинаковых степенях x, получим
¯
x1 ¯¯ 7 = A + B
.
x0 ¯ 11 = A − 2B
25
иB=
Решая эту систему, найдем неопределенные коэффициенты A =
3
4
− . Вычислим исходный интеграл:
3
Z 4
Z
Z
Z
x − 2x2 + 1
25
dx
4
dx
2
dx
=
(x
+
x
+
5)dx
+
−
=
2
x −x−2
3
x−2 3
x+1
x3
x2
25
4
+
+ 5x +
ln |x − 2| − ln |x + 1| + C.
3
2
3
3
Пример 2.2.6. Вычислить интеграл
Z
3x + 1
dx.
(x + 1)(x2 + 6x + 13)
Поскольку рациональная дробь правильная и квадратный трехчлен в знаменателе имеет отрицательный дискриминант, то исходная дробь раскладывается на простейшие следующим образом:
3x + 1
A
Bx + c
=
+
=
(x + 1)(x2 + 6x + 13)
x + 1 x2 + 6x + 13
=
A(x2 + 6x + 13) + (Bx + c)(x + 1)
.
(x + 1)(x2 + 6x + 13)
Приравняем числители этих дробей:
=
3x + 1 = (A + B)x2 + (6A + B + C)x + (13A + C).
Приравняем коэффициенты при одинаковых степенях x, получим систему
¯
x2 ¯¯ 0 = A + B
x1 ¯¯ 3 = 6A + B + C
x0 ¯ 1 = 13A + C.
87
1
1
17
Решая эту систему, найдем коэффициенты A = − , B = и C =
, тогда
4
4
4
Z
Z
Z
3x + 1
1
dx
1
(x + 17)dx
dx = −
+
=
(x + 1)(x2 + 6x + 13)
4
x+1 4
x2 + 6x + 13
¯
¯
¯x + 3 = u¯
Z
¯
(x + 17)dx
1
1
1 ¯¯
1
= − ln |x + 1| + ¯ dx = du ¯¯ =
= − ln |x + 1| +
4
4
(x + 3)2 + 4
4
4¯
x = u − 3¯
Z
Z
Z
1
1
(u − 3 + 17)du
1
1
2udu 14
du
= − ln |x+1|+
=
−
ln
|x+1|+
+
=
4
4
u2 + 4
4
8
u2 + 4 4
u2 + 4
Z
1
1
d(u2 + 4) 7
u
= − ln |x + 1| +
+ arctg =
4
8
u2 + 4
4
2
1
1
7
x
−3
+ C.
= − ln |x + 1| + ln |x2 + 6x + 13| + arctg
4
8
4
2
2.3. Интегрирование тригонометрических выражений
Рассмотрим некоторые типы интегралов от тригонометрических выражений. Пусть в дальнейшем R(y, z) — рациональная функция двух переменных.
I. Рассмотрим интеграл первого типа
Z
R(sin x, cos x)dx.
Если функция R(sin x, cos x) не удовлетворяет никаким специальным условиям, то делают универсальную тригонометрическую подстановку:
tg
2 tg x2
1 − tg2
x
2t
= t, sin x =
=
,
cos
x
=
2
1 + t2
1 + tg2 x2
1 + tg2
x = 2 arctg t, dx =
Тогда
x
2
x
2
=
1 − t2
,
1 + t2
2dt
.
1 + t2
¯
¯
2t ¯
¯
¯ tg x2 = t
¯
sin x =
¯
1 + t2 ¯¯ =
R(sin x, cos x)dx = ¯
2
1−t
2dt ¯
¯
dx =
¯cos x =
¯
2
1+t
1 + t2
¶
µ
Z
1 − t2
2dt
2t
,
,
= R
1 + t2 1 + t2 1 + t2
и мы получили интеграл от рациональной функции. Далее он решается
стандартным методом.
Z
88
Пример 2.3.1.
¯
¯
¯
2dt ¯ Z
x
Z
¯
¯
tg
=
t
dx
=
dx
2dt
2
¯
1 + t2 ¯¯ =
³
´=
=¯
2t
¯
sin x + 1 ¯sin x = 2t
2
(1
+
t
)
+
1
¯
¯
1+t2
1 + t2
Z
Z
dt
2
2
dt
=2
=−
+C =− x
+ C.
=2
t2 + 2t + 1
(t + 1)2
t+1
tg 2 + 1
Рассмотрим частные случаи интеграла первого типа.
1. Пусть исходная рациональная функция нечетна по функции sin x,
т.е.
R(− sin x, cos x) = −R(sin x, cos x),
тогда в интеграле делается следующая замена:
t = cos x, dt = − sin xdx.
2. Пусть исходная рациональная функция нечетна по функции cos x,
т.е.
R(sin x, − cos x) = −R(sin x, cos x),
тогда в интеграле делается следующая замена:
t = sin x, dt = cos xdx.
3. Пусть исходная рациональная функция четна по функциям sin x и
cos x, т.е.
R(− sin x, − cos x) = R(sin x, cos x),
тогда в интеграле делается следующая замена:
t2
1
dt
, cos2 x =
, dx =
.
1 + t2
1 + t2
1 + t2
Пример 2.3.2. Вычислить интеграл
Z
sin xdx
.
2 + cos x
Подынтегральная функция нечетна по sin x, так как
sin x
− sin x
=−
.
2 + cos x
2 + cos x
Поэтому
¯
¯
Z
Z
¯ cos x = t ¯
sin xdx
dt
¯=−
= ¯¯
=
− sin xdx = dt¯
2 + cos x
2+t
t = tg x, sin2 x =
= − ln |2 + t| + C = − ln |2 + cos x| + C.
89
Пример 2.3.3. Вычислить интеграл
Z
dx
.
2 − sin2 x
Подынтегральная функция четна по функциям sin x и cos x одновременно,
так как
1
1
=
.
2 − (− sin x)2
2 − sin2 x
Поэтому
¯
¯
¯
¯
t = tg x
¯
¯ Z
2 ¯
Z
¯
t
dx
dt
¯sin2 x =
¯
³
´=
=¯
2¯ =
1
+
t
2
t2
¯
2 − sin x ¯¯
(1 + t2 ) 2 − 1+t
dt
2
¯
¯ dx =
¯
1 + t2
Z
Z
(1 + t2 )dt
dt
=
=
=
(1 + t2 )(2 + 2t2 − t2 )
2 + t2
t
1
tg x
1
= √ arctg √ + C = √ arctg √ + C.
2
2
2
2
II. Рассмотрим интеграл второго типа
Z
sinm x · cosn xdx,
где m, n — целые числа.
1. Если m — нечетное число, то в интеграле делается замена:
t = cos x, dt = − sin xdx, sin2 x = 1 − t2 .
2. Если n — нечетное число, то в интеграле делается замена:
t = sin x, dt = cos xdx, cos2 x = 1 − t2 .
3. Если m + n — четное отрицательное число, то в интеграле делается
замена:
t = tg x, sin2 x =
t2
1
dt
, cos2 x =
, dx =
.
2
2
1+t
1+t
1 + t2
4. Если m, n — неотрицательные числа и m + n — четное число, то
применяются формулы понижения степени:
sin2 x =
1 + cos 2x
1
1 − cos 2x
, cos2 x =
, sin x · cos x = sin 2x.
2
2
2
90
Пример 2.3.4. Вычислить интеграл
Z
dx
.
sin x · cos3 x
Подынтегральная функция удовлетворяет условию, что m + n = −4 —
четное отрицательное число. Поэтому
¯
¯
¯
¯
t = tg x
¯
¯
Z
Z
¯
¯
1
dx
dx
¯cos2 x =
¯
2¯ =
=
=
¯
1
+
t
sin x
¯
¯
sin x · cos3 x
dt
cos4 x ¯
¯
¯ dx =
¯
cos x
cos2 x
¶
Z
Z 2
Z µ
dt
1
(t + 1)dt
=
=
=
t+
dt =
1
t
t
t
1 + t2
t2
tg2 x
=
+ ln |t| + C =
+ ln | tg x| + C.
2
2
Пример 2.3.5. Вычислить интеграл
Z
sin2 x · cos2 xdx.
Подынтегральная функция удовлетворяет условию, что m, n — неотрицательные числа и m + n = 4 — четное число. Поэтому
Z
Z
Z
1 − cos 2x 1 + cos 2x
1 − cos2 2x
sin2 x · cos2 xdx =
·
dx =
dx =
2
2
4
Z
Z
Z
1
1
1
1
1 + cos 4x
=
dx −
cos2 2xdx = x −
dx =
4 Z
4
4
4
2
Z
1
1
1
x x
1
= x−
dx −
cos 4xd(4x) = − −
sin 4x + C =
4
8
32
4
8 32
x
1
= −
sin 4x + C.
8 32
III. Рассмотрим интеграл третьего типа
Z
sinp x · cosq xdx,
где p, q — рациональные числа. В этом интеграле тогда делают замену
p
t = sin x, cos x = 1 − t2 , dt = cos xdx.
Эта замена приводит к довольно сложным интегралам от иррациональных
выражений.
IV. Рассмотрим интегралы четвертого типа.
91
Z
Z
Z
1.
¯
¯
¯
¯
1
¯
sin ax · sin bxdx = ¯sin ax · sin bx = [cos(a − b)x − cos(a + b)x]¯¯ = . . . .
2
2.
¯
¯
¯
¯
1
¯
sin ax · cos bxdx = ¯sin ax · cos bx = [sin(a − b)x + sin(a + b)x]¯¯ = . . . .
2
3.
¯
¯
¯
¯
1
¯
cos ax · cos bxdx = ¯cos ax · cos bx = [cos(a − b)x + cos(a + b)x]¯¯ = . . . .
2
Пример 2.3.6. Вычислить интеграл
Z
sin 5x · sin 3xdx.
Применим первую подстановку:
Z
Z
1
sin 5x · sin 3xdx =
(cos 2x − cos 8x)dx =
2
Z
Z
1
1
1
1
=
cos 2xd(2x) −
cos 8xd(8x) = sin 2x −
sin 8x + C.
4
16
4
16
2.4. Интегрирование иррациональных функций
I. В первом типе интегралов рассмотрим три случая.
1. Рассмотрим интеграл
Z
¡
m
r¢
R x, x n , . . . , x s dx,
где R — символ рациональной функции. Пусть k — общий знаменатель
m
r
дробей , . . . , , тогда в интеграле делается замена:
n
s
¯
¯
Z
¯ x = tk
¯
¡
m
r¢
¯
R x, x n , . . . , x s dx = ¯¯
k−1 ¯ = . . . .
dx = kt
dt
2. Рассмотрим интеграл
Z
¡
m
r¢
R x, (ax + b) n , . . . , (ax + b) s dx.
92
Делаем следующую замену:
¯
¯
¯
tk − b ¯¯
k
¯
ax
+
b
=
t
x
=
¡
¢
m
r
¯
a ¯¯ = . . . ,
R x, (ax + b) n , . . . , (ax + b) s dx = ¯
ktk−1 dt
¯
¯
¯dx =
¯
a
r
m
где k — общий знаменатель дробей , . . . , .
n
s
3. Рассмотрим интеграл
à µ
¶m
¶r !
µ
Z
ax + b n
ax + b s
R x,
,...,
dx
cx + d
cx + d
Z
и в нем делаем следующую замену:
Z
Ã
R x,
µ
ax + b
cx + d
¶m
n
µ
,...,
ax + b
cx + d
¶ rs !
¯
¯
¯ ax + b
dtk − b ¯¯
k
¯
=t x=
¯
a 0− ctk ¯¯ = . . . ,
¶
dx = ¯¯ cx + d µ k
¯
¯ dx = dt − b dt ¯
¯
¯
a − ctk
m
r
где k — общий знаменатель дробей , . . . , .
n
s
Рассмотрим примеры.
Пример 2.4.1. Вычислить интеграл
Z √
xdx
√
.
4
x+1
1
3
Это интеграл первого типа, общий знаменатель k дробей
и
равен 4,
2
4
поэтому
¯
¯ Z 2 3
Z √
√
2¯
¯ x = t4
xdx
t 4t dt
x=
t
¯
¯=
√
√
=¯
=
3
4
¯
4
dx
=
4t
dt
t
=
x
t3 + 1
x+1
¶
Z
Z µ
Z
Z
t5 dt
t2
4
3t2 dt
2
2
=4
=
4
t
−
dt
=
4
t
dt
−
=
3
3
t +1
t +1
3
t3 + 1
Z
√
d(t3 + 1)
4
4
4√
4
4t3 4
4
4
−
= t3 − ln |t3 + 1| + C =
x3 − ln | x3 + 1| + C.
=
3
3
3
t +1
3
3
3
3
Пример 2.4.2.
¯
¯ Z
Z √
¯x − 4 = t2 x = t2 + 4 ¯
t · 2t dt
x−4
¯=
√
dx = ¯¯
=
dx = 2tdt t = x − 4¯
x
t2 + 4
Z 2
Z
Z
(t + 4 − 4)dt
dt
=2
=
2
dt
−
8
=
t2 + 4
4 + t2
93
√
√
t
x−4
= 2t − 4 arctg + C = 2 x − 4 − 4 arctg
+ C.
2
2
II. Второй тип интегралов — это интегралы от дифференциального
бинома вида
Z
p
xm (a + bxn ) dx,
где m, n, p — рациональные числа. Этот интеграл вычисляется только в
трех случаях.
1. Если p — целое число, то в интеграле делается следующая замена:
¯
¯
Z
¯ x = tk
¯
m
n p
¯
¯
x (a + bx ) dx = ¯
k−1 ¯ = . . . ,
dx = kt
dt
где k — общий знаменатель дробей m и n.
m+1
2. Если
— целое число, то в интеграле делается замена:
n
¯
¶ n1 ¯¯
µ k
¯
t
−
a
¯
¯
¯a + bxn = tk x =
¯
Z
¯
¯
b
m
n p
¯
¯ = ...,
Ã
!
0
1
x (a + bx ) dx = ¯
¶n
µ k
¯
t −a
¯
¯
dt ¯
¯ dx =
¯
¯
b
где k — знаменатель p.
m+1
3. Если
+ p — целое число, то в интеграле делается замена:
n
¯
µ
¶ n1 ¯¯
¯
a
¯
¯ a + bxn
¯
¯
= tk x = k
Z
n
¯
¯
x
t
−
b
m
n p
¯ = ...,
¯
Ã
!
x (a + bx ) dx = ¯
µ
¶ n1 0
¯
a
¯
¯
dt
¯
¯ dx =
tk − b
¯
¯
где k — знаменатель p.
Пример 2.4.3.
¯
¯
¯
m = −1
n=5
p = − 12 ¯
Z
¯
¯
dx
m+1
1¯
¯
√
=¯
=0
x5 − 1 = t2 x = (t2 + 1) 5 ¯ =
¯
n
x x5 − 1 ¯¯
√
4
¯
dx = 25 t(t2 + 1)− 5 dt t = x5 − 1
Z
1
4
2
(t2 + 1)− 5 t−1 t(t2 + 1)− 5 dt =
=
5
Z
p
2
2
2
dt
= arctg t + C = arctg x5 − 1 + C.
=
2
5
t +1
5
5
94
III. Рассмотрим два вида интегралов третьего типа.
1. Рассмотрим интеграл
Z
(M x + N ) dx
√
.
ax2 + bx + c
Выделим в знаменателе полный квадрат
¶2 µ
¶
µ
b2
b
2
+ c−
.
ax + bx + c = a x +
2a
4a
Тогда в исходном интеграле делается следующая замена:
¯
¯
¯
b
b2 ¯
0
¯ t=x+
¯
c
=
c
−
¯
Z
2a
4a ¯¯
¯
(M x + N ) dx
b ¯
√
=¯
=
dx = dt
x=t−
ax2 + bx + c ¯¯
2a ¯¯
Mb
¯ 0
¯
¯N = N −
¯
2a
Z
Z
Z
M
2at dt
dt
(M t + N 0 ) dt
0
√
√
√
=
+N
=
=
2
0
2
0
2a
at + c
at + c
at2 + c0
Z
Z
M
dt
d(at2 + c0 )
√
√
=
+ N0
= ... .
2
0
2a
at + c
at2 + c0
2. Рассмотрим интеграл второго вида:
Z
dx
√
.
(M x + N ) ax2 + bx + c
Этот интеграл с помощью замены сводится к интегралу предыдущего типа
µ
¶¯
¯
¯
¯
1 1
1
Z
¯
¯
x
=
−
N
M
x
+
N
=
dx
¯
¯
t
M t
√
=¯
¯=
2
1
dt
1
¯
¯
(M x + N ) ax + bx + c ¯ dx = −
¯
t
=
2
Mt
Mx + N
Z
dt
1
√
= ... .
=−
0
2
M
a t + b0 t + c0
Пример 2.4.4.
¯
¯
¯x + 2 = t ¯
Z
Z
¯
¯
x dx
x dx
√
p
= ¯¯x = t − 2¯¯ =
=
2
2
x + 4x + 13
(x + 2) + 9 ¯ dx = dt ¯
Z
Z
Z
1
dt
2t dt
(t − 2) dt
√
√
=
−2 √
=
=
2
t2 + 9
t2 + 9
t2 + 9
95
=
1
2
Z
p
p
p
d(t2 + 9)
√
− 2 ln |t + t2 + 9| = t2 + 9 − 2 ln |t + t2 + 9| + C =
t2 + 9
=
p
p
x2 + 4x + 13 − 2 ln |x + 2 + x2 + 4x + 13| + C.
Пример 2.4.5.
Z
¯
¯
¯ x= 1
dx
¯
t
√
=¯
x 3x2 + 2x − 1 ¯¯dx = − dt
t2
Z
=−
t2
√
¯
1 ¯¯
Z
t= ¯
t dt
x¯ = −
q
=
¯
t2 t32 + 2t − 1
¯
t · t dt
=−
3 + 2t − t2
= − arcsin
Z
p
d(t − 1)
4 − (t − 1)2
=
t−1
1−x
+ C = − arcsin
+ C.
2
2x
IV. Рассмотрим интегралы четвертого типа
Z
p
R(x, ax2 + bx + c) dx,
где R — символ рациональной функции.
В этом интеграле аналогично предыдущему пункту выделяется полный квадрат:
s
Ã
¶!
µ
Z
Z
2
p
b
b
dt = I.
R(x, ax2 + bx + c) dx = R t − , at2 + c −
2a
4a
Чтобы эти интегралы вычислить, применяются следующие тригонометрические замены.
b2
b2
1. Пусть a > 0 и c −
> 0, тогда обозначим a = m2 , c −
= n2 .
4a
4a
Получим
¯
¯
n
¯
¯
tg z
t=
¯
¯
µ
¶
m
Z
¯
¯
n dz
b p 2 2
¯
¯
2
I = R t− , m t +n
dt = ¯ dt =
¯ = ... .
¯
m cos2 z ¯
2a
¯ 2
1 ¯
¯tg z + 1 =
¯
cos2 z
96
b2
b2
2. Пусть a > 0 и c −
< 0, тогда обозначим a = m2 , c −
= −n2 .
4a
4a
Получим
¯
¯
n 1
¯
¯
t=
¯
¯
¯
¯
µ
¶
m
cos
z
Z
p
¯
n sin z dz ¯¯
b
= ... .
I = R t − , m2 t2 − n2 dt = ¯¯ dt =
m cos2 z 2 ¯¯
2a
¯
sin z ¯
¯ 1
¯
¯ 2 −1=
cos z
cos2 z
b2
b2
3. Пусть a < 0 и c −
> 0, тогда обозначим a = −m2 , c −
= n2 .
4a
4a
Получим
¯
¯
¯ t = n sin z
¯
¯
¯
µ
¶
Z
m
¯
¯
b p 2
n
2
2
¯
¯ = ... .
I = R t− , n −m t
dt = ¯ dt =
cos
z
dz
¯
2a
m
¯
¯
¯1 − sin2 z = cos2 z ¯
Пример 2.4.6.
¯
¯
¯ x = 2 sin z ¯ Z
Z
¯
¯
dx
2 cos z dz
p
q
= ¯¯dx = 2 cos z dz ¯¯ =
=
2
3
2
(4 − x )
3
¯ z = arcsin x ¯
(4
−
4
sin
z)
2
Z
Z
Z
dz
cos z dz
cos z dz
q
√
=
=
=
= tg z + C =
6
cos2 z
cos z
(1 − sin2 z)3
x
x
x
= tg arcsin + C = q
+C = √
+ C.
2
2
4 − x2
2 1− x
4
Пример 2.4.7.
¯
¯
¯x + 1 = t ¯
Z p
Z √ 2
2
¯
¯
(x + 1) − 4 dx ¯
x + 2x − 3 dx
=
= ¯x = t − 1¯¯ =
x+1
x+1
¯ dx = dt ¯
¯
¯
¯ t= 2
¯
r
¯
¯
Z √2
cos z ¯ Z
t − 4 dt ¯¯
4
cos z · 2 sin z dz
¯
= ¯dt = 2 sin z dz ¯ =
−4·
=
=
2
t
cos z
cos2 z
2z ¯
¯
cos
¯ z = arccos 2 ¯
t
¯
¯
¯
¯
dz
Z
Z
¯
¯
2
=
du
tg
z
=
u
sin z dz ¯
u2 du
2z
¯
cos
=
=
=4
=
4
¯
¯
2
¯sin2 z = u
¯
cos2 z
1 + u2
¯
¯
1 + u2
97
Z
Z
du
= 4u − 4 arctg u + C = 4 tg z − 4z + C =
1 + u2
p
2
2
2
= 4 tg arccos
− 4 arccos
+ C = 2 x2 + 2x − 3 − 4 arccos
+ C.
x+1
x+1
x+1
=4
du − 4
98
Глава 3
Определенный интеграл и его приложения.
Несобственный интеграл
3.1. Понятие определенного интеграла, основные свойства
определенного интеграла
3.1.1. Задачи, приводящие к понятию определенного
интеграла
I. Вычисление площади плоской фигуры.
Зададим на отрезке [a, b] неотрицательную непрерывную функцию
f (x). Требуется определить понятие площади фигуры, ограниченной кривой y = f (x), осью OX, прямыми x = a, x = b, и вычислить эту площадь
(рис. 3.1). Произведем разбиение отрезка [a, b] на n частей
a = x0 < x1 < x2 < . . . < xn = b.
y
O
x0 ξ1 x1 ξ2
ξn xn
Рис. 3.1.
99
x
Выберем на каждом полученном отрезке [xj−1 , xj ] (j = 1, . . . , n) произвольную точку ξj ∈ [xj−1 , xj ]. Вычислим значение f (ξj ) и составим сумму
Sn =
n
X
f (ξj )∆xj ,
j=1
где ∆xj = xj − xj−1 , которая называется интегральной суммой. Сумма
Sn равна сумме площадей прямоугольников с основанием ∆xj и высотой
f (ξj ).
Будем все ∆xj стремить к нулю так, чтобы max ∆xj → 0. Если при
этом величина Sn стремится к определенному пределу, то этот предел S
называется площадью фигуры
n
X
S=
lim
f (ξj )∆xj .
max ∆xj →0
j=1
II. Работа.
Пусть к движущейся по прямой точке приложена направленная вдоль
этой оси переменная сила F (x), где F (x) есть непрерывная функция от x
— абсциссы движущейся точки. Работа силы F при передвижении точки
от a до b равна
n
X
W =
lim
F (ξj )∆xj ,
max ∆xj →0
j=1
где разбиение отрезка и выбор точек происходит как в предыдущем пункте.
III. Масса стержня переменной плотности.
Будем считать, что отрезок [a, b] оси OX имеет массу с переменной
плотностью ρ(x) > 0, где ρ(x) — непрерывная на отрезке [a, b] функция.
Общая масса этого стержня равна
n
X
M=
lim
ρ(ξj )∆xj ,
max ∆xj →0
j=1
где разбиение отрезка и выбор точек происходит аналогично.
3.1.2. Понятие определенного интеграла
Во всех предыдущих задачах мы пришли к понятию интегральной суммы. Пусть функция f (x) определена на отрезке [a, b].
(1) Разобьем отрезок [a, b] на n частей:
a = x0 < x1 < . . . < xn = b.
(2) Вычислим длину каждого отрезка ∆xj = xj − xj−1 .
100
(3) Возьмем произвольную точку ξj ∈ [xj−1 , xj ].
(4) Вычислим значение функции в этих точках f (ξj ).
(5) Составим интегральную сумму
Sn =
n
X
f (ξj )∆xj .
j=1
Определение 3.1.1. Если при любых разбиениях отрезка [a, b] на
n частей, таких, что max ∆xj → 0, и при любом выборе точек ξj ∈
[xj−1 , xj ] интегральная сумма Sn стремится к одному и тому же пределу S, то этот предел называют определенным интегралом от функции
f (x) на отрезке [a, b] и обозначают
S=
lim
max ∆xj →0
n
X
Zb
f (ξj )∆xj =
j=1
f (x) dx.
(3.1)
a
Число a называют нижним пределом интеграла, а b — верхним пределом интеграла.
Определение 3.1.2. Если для функции f (x) предел (3.1) существует,
то функцию f (x) называют интегрируемой на отрезке [a, b].
Теорема 3.1.1. Если функция f (x) интегрируема на отрезке [a, b],
то она ограничена на нем.
Сформулируем основную теорему для класса интегрируемых функций.
Теорема 3.1.2. Если функция f (x) непрерывна на отрезке [a, b], то
она интегрируема на этом отрезке.
Из этих двух теорем видно, что класс функций, ограниченных на отрезке, шире класса интегрируемых функций, а этот класс, в свою очередь,
шире класса непрерывных функций.
3.1.3. Основные свойства определенного интеграла
Теорема 3.1.3. Пусть функции f (x) и g(x) интгерируемы на отрезке
[a, b], тогда:
Rb
Ra
1. f (x) dx = − f (x) dx,
a
2.
Ra
b
f (x) dx = 0,
a
101
3.
4.
Rb
a
Rb
Cf (x) dx = C
Rb
f (x) dx, где C = const,
a
(f (x) ± g(x)) dx =
a
Rb
f (x) dx ±
a
Rb
g(x) dx.
a
Доказательство. Докажем четвертое утверждение этой теоремы,
остальные доказываются аналогично. По определению определенного интеграла имеем
Zb
(f (x) ± g(x)) dx =
lim
max ∆xj →0
a
=
n
X
lim
max ∆xj →0
f (ξj )∆xj ±
j=1
lim
n
X
max ∆xj →0
j=1
Zb
=
n
X
(f (ξj ) ± g(ξj ))∆xj =
g(ξj )∆xj =
j=1
Zb
f (x) dx ±
g(x) dx.
a
a
Утверждение 1 последней теоремы говорит о том, что при перемене
пределов интегрирования в определенном интеграле надо сменить знак
перед интегралом, свойство 3 — о том, что постоянный множитель можно
выносить за знак определенного интеграла, а последнее утверждение — о
том, что определенный интеграл от суммы или разности функций равен
сумме или разности интегралов от каждой функции.
Теорема 3.1.4. Если на отрезке [a, b], где a 6 b, функции f (x) и g(x)
удовлетворяют условию f (x) 6 g(x),то
Zb
Zb
f (x) dx 6
a
g(x) dx.
a
Доказательство. Рассмотрим разность интегралов
Zb
Zb
g(x) dx −
a
Zb
f (x) dx =
a
=
lim
max ∆xj →0
(g(x) − f (x)) dx =
a
n
X
(g(ξj ) − f (ξj ))∆xj .
j=1
102
Поскольку по условию g(ξj ) − f (ξj ) > 0 и ∆xj > 0, то каждое слагаемое
суммы неотрицательно. Тогда неотрицательна и вся сумма, отсюда следует,
что и предел есть величина неотрицательная, т.е.
Zb
Zb
g(x) dx −
a
f (x) dx > 0.
a
Тогда
Zb
Zb
g(x) dx >
a
f (x) dx.
a
Что и доказывает теорему.
Теорема 3.1.5. Если m и M — наименьшее и наибольшее значения
функции f (x) на отрезке [a, b] и a 6 b, то
Zb
m(b − a) 6
f (x) dx 6 M (b − a).
a
Доказательство. По условию теоремы m 6 f (x) 6 M , тогда по теореме 1.4 имеем
Zb
Zb
Zb
m dx 6 f (x) dx 6 M dx.
a
a
a
Поскольку
Zb
Zb
m dx = m(b − a),
M dx = M (b − a),
a
a
то мы получаем нужное неравенство.
Теорема 3.1.6 (Теорема о среднем). . Если функция f (x) непрерывна
на отрезке [a, b], то на этом отрезке найдется такая точка ξ ∈ [a, b],
что
Zb
f (x) dx = f (ξ)(b − a).
a
Доказательство. Пусть a < b. Поскольку функция f (x) непрерывна на
отрезке [a, b], то она достигает на нем своего наименьшего m и наибольшего
103
M значений. По теореме 1.5 имеем
Zb
1
m6
b−a
Обозначим
1
b−a
Rb
f (x) dx 6 M.
a
f (x) dx = µ, отсюда m 6 µ 6 M . Но непрерывная на
a
отрезке функция принимает все промежуточные значения между наименьшим и наибольшим, поэтому существует точка ξ ∈ [a, b], такая, что
f (ξ) = µ. Тогда
Zb
f (x) dx = f (ξ)(b − a).
a
Теорема 3.1.7. Для любых трех чисел a, b, c справедливо равенство
Zb
Zc
Zb
f (x) dx =
f (x) dx +
a
a
f (x) dx,
c
если эти три интеграла существуют.
Доказательство. Рассматрим только случай a < c < b. Составим интегральную сумму для функции f (x) на отрезке [a, b]. Так как предел интегральной суммы не зависит от способа разбиения отрезка [a, b], то будем
считать, что точка c принадлежит каждому разбиению. Всю интегральную сумму разобьем на две суммы: сумму, соответствующую отрезку [a, c],
и сумму, соответствующую отрезку [c, b]. Получим
b
X
f (ξj )∆xj =
a
c
X
f (ξj )∆xj +
b
X
a
f (ξj )∆xj .
c
Переходя к пределу при max ∆xj → 0, получим нужное равенство.
3.2. Формула Ньютона-Лейбница. Замена переменной в
определенном интеграле. Интегрирование по частям.
Пусть на отрезке [a, b] задана интегрируемая функция f (x). Заметим,
что
Zb
Zb
f (x) dx =
a
Zb
f (t) dt =
a
f (u) du.
a
104
Пусть x ∈ [a, b], будем в интеграле
Rb
f (t) dt менять верхний предел, полу-
a
чим функцию
Zx
Φ(x) =
f (t) dt.
a
Отметим, что
Za
Φ(a) =
Zb
f (t) dt = 0,
Φ(b) =
a
f (t) dt.
a
Если f (t) > 0, то значение Φ(x) численно равно площади криволинейной
трапеции AXxa (рис. 3.2).
y
f (x)
A
X
F (x)
o
a
x b x
Рис. 3.2.
Теорема 3.2.1. (Теорема о производной интеграла по переменному
верхнему пределу). Если f (x) — непрерывная функция на отрезке [a, b] и
Zx
Φ(x) =
f (t)dt,
a
то
Φ0 (x) = f (x).
(Производная от определенного интеграла по переменному верхнему
пределу равна подынтегральной функции, в которой вместо переменной
интегрирования подставлено значение верхнего предела.)
Доказательство. По определению производной мы должны получить
Φ0 (x) = lim
∆x→0
∆Φ
= f (x).
∆x
105
Дадим аргументу x приращение ∆x и рассмотрим
x+∆x
Z
Φ(x + ∆x) =
Zx
f (t) dt =
a
x+∆x
Z
f (t) dt +
a
f (t) dt.
x
Тогда
Zx
∆Φ = Φ(x + ∆x) − Φ(x) =
x+∆x
Z
f (t) dt +
a
Zx
f (t) dt −
x
f (t) dt,
a
поэтому
x+∆x
Z
∆Φ =
f (t) dt.
x
Применим теорему о среднем к ∆Φ, получим
x+∆x
Z
∆Φ =
f (t) dt = f (ξ)(x + ∆x − x) = f (ξ)∆x,
x
f (ξ)∆x
∆Φ
=
= f (ξ). Отметим, что при
где ξ ∈ [x, x + ∆x]. Найдем
∆x
∆x
∆x → 0, ξ → x. Поэтому
Φ0 (x) = lim
∆x→0
∆Φ
= lim f (ξ) = lim f (ξ) = f (x),
∆x→0
ξ→x
∆x
поскольку функция f (x) непрерывна на отрезке [a, b]. Мы получили, что
Φ0 (x) = f (x).
Следствие 3.2.1. Из теоремы 3.2.1 следует, что всякая непрерывная
функция имеет первообразную.
Доказательство. Если функция f (x) непрерывна на отрезке [a, x], то по
Rx
теореме 3.1.2 она интегрируема на этом отрезке, т. е. существует f (t) dt,
а значит, существует функция Φ(x) =
Rx
a
a
f (t) dt. Тогда по теореме 3.2.1
Φ0 (x) = f (x), следовательно, функция Φ(x) есть первообразная функции
f (x).
106
3.2.1. Формула Ньютона-Лейбница
Теорема 3.2.2. Если F (x) есть какая-либо первообразная от непрерывной на отрезке [a, b] функции f (x), то справедлива формула
Zb
f (x) dx = F (b) − F (a).
a
Доказательство. Пусть F (x) — некоторая первообразная функции f (x)
Rx
на отрезке [a, b]. По теореме 3.2.1 функция f (t) dt есть также первообa
разная функции f (x). Но две любые первообразные от данной функции
отличаются на постоянное число C. Поэтому
Zx
f (t) dt = F (x) + C.
a
Это равенство справедливо для всех x ∈ [a, b]. Положим x = a, тогда
Za
0=
f (t) dt = F (a) + C,
a
отсюда C = −F (a). Следовательно,
Zx
f (t) dt = F (x) − F (a).
a
Положим x = b, получим
Zb
Zb
f (x) dx =
a
f (t) dt = F (b) − F (a).
a
И теорема доказана.
¯b
¯
Введем обозначения F (b) − F (a) = F (x)¯ , тогда
a
Zb
¯b
¯
f (x) dx = F (x)¯ = F (b) − F (a).
a
a
107
Пример 3.2.1. Вычислим определенный интеграл
Z2
¯2
x3 ¯¯
8
8
x dx =
= −0= .
¯
3 0
3
3
2
0
Пример 3.2.2.
Z2
¯2
¯
ex dx = ex ¯ = e2 − e0 = e2 − 1.
0
0
Пример 3.2.3.
Z2
0
´ π
dx
1
x ¯¯2
1
1
1³π
=
=
arctg
arctg
1
−
arctg
0
=
−
0
= .
¯
4 + x2
2
2 0
2
2
2 4
8
Пример 3.2.4.
Z5
2
dx
1
=
2x + 3
2
Z5
2
¯5
d(2x + 3)
1
1
1
1 13
¯
= ln |2x + 3|¯ = ln 13 − ln 7 = ln .
2x + 3
2
2
2
2
7
2
3.2.2. Замена переменной в определенном интеграле
Теорема 3.2.3. Пусть дан интграл
Zb
f (x) dx,
a
где функция f (x) непрерывна на отрезке [a, b]. Если x = ϕ(t) и выполняется
1. ϕ(α) = a, ϕ(β) = b, a 6 φ(t) 6 b,
2. ϕ(t) и ϕ0 (t) непрерывны на отрезке [α, β],
3. f (ϕ(t)) определена и непрерывна на отрезке [α, β], то
Zb
Zβ
f (ϕ(t))ϕ0 (t) dt.
f (x) dx =
a
α
Доказательство. Если F (x) первообразная функции f (x), то
Z
f (x) dx = F (x) + C.
108
По формуле замены переменной в неопределенном интеграле имеем
Z
f (ϕ(t))ϕ0 (t) dt = F (ϕ(t)) + C.
Тогда
Zb
f (x) dx = F (b) − F (a),
a
а
Zβ
f (ϕ(t))ϕ0 (t) dt = F (ϕ(t))|βα = F (ϕ(β)) − F (ϕ(α)) = F (b) − F (a).
α
Так как равны правые части двух
Теорема доказана.
Пример 3.2.5.
¯
¯ x = t2
¯
√
Z9 √
¯t = x
xdx
√ = ¯¯
1+ x ¯ a=4
4
¯ b=9
Z3 µ
=2
t−1+
2
1
t+1
¶
последних равенств, то равны и левые.
¯
dx = 2t dt ¯¯
Z3 2
¯
t dt
¯=2
√
=
α = √4 = 2¯¯
1+t
2
β = 9 = 3¯
¡
¢¯¯3
dt = t2 − 2t + 2 ln |t + 1| ¯ =
2
4
= 9 − 6 + 2 ln 4 − 4 + 4 − 2 ln 3 = 3 + 2 ln .
3
Пример 3.2.6.
¯
¯
¯ x = 2 sin t
t = arcsin x2 ¯¯
¯
Z2 p
¯
¯dx = 2 cos t dt
¯=
4 − x2 dx = ¯¯
a=0
α = arcsin 0 = 0 ¯¯
¯
0
¯
b=2
β = arcsin 1 = π2 ¯
π
π
=
Z2 p
π
Z2
4 − 4 sin2 t · 2 cos t dt = 4
0
Z2
cos2 t dt = 4
0
π
2
Z
=2
0
1 + cos 2t
dt =
2
¯ π2
¯ π2
¯
¯
(1 + cos 2t) dt = 2t¯ + sin 2t¯ = π + 0 = π.
0
0
109
0
3.2.3. Интегрирование по частям в определенном интеграле
Теорема 3.2.4. Пусть u(x) и v(x) непрерывно дифференцируемые
функции на отрезке [a, b], тогда
Zb
¯b Zb
¯
u(x) · v (x) dx = u(x) · v(x)¯ − u0 (x) · v(x) dx,
0
a
a
a
или
Zb
¯b Zb
¯
u dv = u · v ¯ − v du.
a
a
a
Доказательство. Для дифференцируемых функций справедливо равенство
(u · v)0 = u0 v + v 0 u.
Проинтегрируем обе части этого равенства на отрезке [a, b], получим
Zb
Zb
0
(u · v) dx =
a
Zb
0
v 0 u dx.
u v dx +
a
a
Так как
Zb
¯b
¯
(u · v)0 dx = u · v ¯
a
a
и u0 dx = du, v 0 dx = dv, то мы получим
Zb
¯b Zb
¯
u dv = u · v ¯ − v du.
a
a
a
Пример 3.2.7.
π
Z2
¯
¯
¯ u=x
dv = cos xdx¯¯
x · cos x dx = ¯¯
=
du = dx
v = sin x ¯
0
π
¯ π2
¯ π2 Z2
π
π
¯
¯
= x · sin x¯ − sin x dx = + cos x¯ = − 1.
2
2
0
0
0
110
y
y
f (x)
g(x)
f (x)
a
O
b x
a
O
Рис. 3.3.
Рис. 3.4.
Пример 3.2.8.
Z1
0
b x
¯
dv = x dx¯¯
x2 ¯¯ =
v=
2 ¯
¯
¯ u = arctg x
¯
x · arctg x dx = ¯¯
dx
¯du = 1 + x2
¯1
Z1 2
Z1 2
¯
x2
π 1
1
x dx
(x + 1 − 1) dx
¯
=
arctg x¯ −
= −
=
2
2
2
1+x
8
2
1 + x2
0
0
0
π 1
= −
8
2
=
Z1
0
1
dx +
2
Z1
0
dx
=
1 + x2
¯1
π 1 ¯¯1 1
π 1 π
π 1
¯
− x¯ + arctg x¯ = − + = − .
8
2 0 2
8
2
8
4
2
0
3.3. Приложения определенного интеграла
3.3.1. Вычисление площадей плоских фигур в
прямоугольной системе координат
1. Пусть на отрезке [a, b, ] задана непрерывная функция f (x) > 0
(рис. 3.3). Тогда площадь криволинейной трапеции, ограниченной кривой y = f (x), осью OX и прямыми x = a, x = b, равна
Zb
S=
f (x) dx.
a
111
Если функция f (x) 6 0 на отрезке [a, b], то
Rb
f (x) dx 6 0. Тогда пло-
a
щадь криволинейной трапеции будет равна
Zb
S=−
f (x) dx.
a
2. В случае, когда f (x) конечное число раз меняет знак на отрезке
[a, b], площадь криволинейной трапеции, ограниченной кривой y = f (x),
прямыми x = a, x = b и y = 0, будет состоять из суммы интегралов, взятых
со знаком "+ если функция f (x) > 0 на соответствующем отрезке, и со
знаком "− если функция f (x) 6 0 на соответствующем отрезке. Например,
площадь может быть равна
Za1
S=
Za2
f (x) dx −
a
Zb
f (x) dx +
a1
f (x) dx,
a2
если функция f (x) положительна на отрезках [a, a1 ] и [a2 , b], и отрицательна на отрезке [a1 , a2 ].
Пример 3.3.1. Вычислить площадь S фигуры, ограниченной кривыми
y = sin x, y = 0 при 0 6 x 6 2π. Получим
Zπ
S=
Z2π
sin x dx −
¯π
¯2π
¯
¯
sin x dx = − cos x¯ + cos x¯ = 1 + 1 + 1 + 1 = 4.
0
π
π
0
3. Вычислим площадь плоской фигуры, ограниченной кривыми y =
f (x), y = g(x), прямыми x = a, x = b, причем g(x) > f (x) на отрезке [a, b]
(рис. 3.4). Тогда
Zb
S=
Zb
g(x) dx −
a
Zb
f (x) dx =
a
(g(x) − f (x)) dx.
a
4. Вычислим площадь плоской фигуры, ограниченной на отрезке [a, b]
кривой y = f (x) > 0, на отрезке [b, c] кривой y = g(x) > 0, причем f (b) =
g(b), и прямыми x = a, x = c, y = 0 (рис. 3.5). Получим
Zb
S=
Zc
f (x) dx +
a
g(x) dx.
b
112
y
√
3 x
y
3x
1
a b
O
2
g(x)
f (x)
O
c x
Рис. 3.5.
x
1
Рис. 3.6.
Пример 3.3.2. Найти площадь фигуры (рис. 3.6), ограниченной√кривыми y 2 = 9x и y = 3x. Найдем точки пересечения кривых y = 3 x и
y = 3x:
√
3 x = 3x,
x2 − x = 0.
Получим
Тогда
x1 = 0,
x2 = 1.
!¯1
à 3
Z1 √
3x2 ¯¯
1
6x 2
3
S = ( 9x − 3x) dx =
−
¯ =2− = .
3
2 ¯
2
2
0
0
3.3.2. Площадь криволинейной трапеции, ограниченной
кривой, заданной в параметрической форме
Пусть криволинейная трапеция ограничена замкнутой кривой, заданной параметрическим уравнением
½
x = ϕ(t),
y = ψ(t), α 6 t 6 β.
Пусть эта параметрическая функция определяет явную функцию y = f (x)
и ϕ(α) = a, ϕ(β) = b, тогда
Zb
S=
Zb
f (x) dx =
a
¯
¯ Zβ
¯ x = ϕ(t)
¯
y
=
ψ(t)
¯ = ψ(t)ϕ0 (t) dt.
y dx = ¯¯
0
¯
dx = ϕ (t) dt
a
α
Пример 3.3.3. Найти площадь фигуры (рис. 3.7), ограниченной одной
аркой циклоиды
½
x = a(t − sin t),
y = a(1 − cos t), 0 6 t 6 2π,
113
y
2
1
o
2πa x
Рис. 3.7.
и прямой y = 0. Найдем x0 = a(1 − cos t), тогда
Z2π
Z2π
a(1 − cos t)a(1 − cos t) dt = a
(1 − 2 cos t + cos2 t) dt =
2
S=
0
Z2πµ
= a2
0
cos 2t
3
− 2 cos t +
2
2
0
¶
dt =
¯2π a2 sin 2t ¯2π
3a2 ¯¯2π
¯
¯
t¯ −2a2 sin t¯ +
¯ = 3a2 π.
2 0
4
0
0
3.3.3. Площадь криволинейного сектора в полярной системе
координат
Полярная система координат задается началом координат — точкой
O и полярной полуосью, выходящей из точки O. Координаты точки M
на плоскости задаются длиной ρ радиуса-вектора и углом наклона ϕ
радиуса- вектора к полярной оси. Рассмотрим кривую, заданную непрерывной функцией ρ = f (ϕ), α 6 ϕ 6 β в полярной системе координат.
Найдем площадь криволинейного сектора
ρ = f (ϕ)
OAB, ограниченного кривой ρ = f (ϕ) и радиусвекторами ϕ = α и ϕ = β (рис. 3.8).
1. Разобьем данный сектор радиусвекторами α = ϕ0 < ϕ1 < ϕ2 < . . . < ϕn = β.
2. Обозначим ∆ϕj = ϕj − ϕj−1 , j =
1, 2, . . . , n, углы между радиус-векторами.
o
β α θi
3. Возьмем угол θj ∈ [ϕj−1 , ϕj ].
Рис. 3.8.
4. Вычислим ρj = f (θj ) длину радиусвектора, соответствующего углу θj .
5. Вычислим площадь кругового сектора с радиусом ρj и центральным
углом ∆ϕj
1
∆Sj = ρ2j ∆ϕj .
2
114
y
M2
π/4
Mi
M1
B
A
−π/4
a x1 x2
o
Рис. 3.9.
xi
b
x
Рис. 3.10.
6. Составим интегральную сумму
n
n
1X
1X 2
ρj ∆ϕj =
(f (θj ))2 ∆ϕj ,
Sn =
2 j=1
2 j=1
которая дает площадь ступенчатого сектора.
Поскольку ρ = f (ϕ) непрерывная функция, то существует предел интегральной суммы
n
n
1X
1
1X 2
lim
(f (θj ))2 ∆ϕj =
ρj ∆ϕj =
max ∆ϕj →0 2
2
2
j=1
j=1
Zβ
(ρ(ϕ))2 dϕ.
α
Таким образом, площадь криволинейного сектора равна
1
S=
2
Zβ
(ρ(ϕ))2 dϕ.
α
√ Пример 3.3.4. Вычислить площадь фигуры, ограниченной кривой ρ =
a cos 2ϕ (рис. 3.9). Эта фигура — двухлепестковая роза, площадь будем
π
4 R4 2
искать по наименьшей симметричной части. Тогда S =
a cos 2ϕ dϕ =
20
¯ π4
¯
a2 sin 2ϕ¯ = a2 .
0
3.3.4. Длина дуги кривой
Найдем длину дуги кривой AB в прямоугольных координатах. Пусть
кривая AB задана функцией y = f (x), непрерывно дифференцируемой на
отрезке [a, b] и A = f (a), B = f (b) (рис. 3.10).
115
1. Возьмем разбиение отрезка [a, b] на n частей точками
a = x0 < x1 < x2 < . . . < xn = b,
им соответствуют точки на кривой
A = f (a), M1 = f (x1 ), . . . , Mj = f (xj ), . . . , B = f (b).
2. Проведем хорды AM1 , M1 M2 ,. . . ,Mn−1 B. Длины этих хорд обозначим ∆l1 , ∆l2 ,. . . ,∆ln .
3. Найдем длину ломаной AM1 M2 . . . Mj . . . B:
Ln =
n
X
∆lj .
j=1
Определение 3.3.1. Длиной L дуги кривой называется предел, к которому стремится длина вписанной ломаной, когда длина ее наибольшего
звена стремится к нулю:
L=
lim
max ∆lj →0
n
X
∆lj .
(3.2)
j=1
Теорема 3.3.1. Если функция y = f (x) непрерывно дифференцируема
на отрезке [a, b], то предел (3.2) существует и длина дуги кривой равна
Zb p
L=
1 + (f 0 (x))2 dx.
a
Доказательство. Введем
p обозначения ∆yj = f (xj ) − f (xj−1 ), тогда по
теореме Пифагора ∆lj = (∆xj )2 + (∆yj )2 =
s
µ
¶2
∆yj
= 1+
∆xj . По теореме Лагранжа имеем
∆xj
∆yj
f (xj ) − f (xj−1 )
=
= f 0 (ξj ),
∆xj
xj − xj−1
p
где ξj ∈ [xj−1 , xj ]. Поэтому ∆lj = 1 + (f 0 (ξj ))2 ∆xj . Тогда
Ln =
n q
X
1 + (f 0 (ξj ))2 ∆xj .
j=1
116
y
√
x3
o
5 x
Рис. 3.11.
Поскольку f 0 (x) непрерывная функция, то предел интегральных сумм Ln
существует и
L=
lim
n q
X
max ∆x→ 0
1+
(f 0 (ξj ))2 ∆xj
j=1
=
Zb p
1 + (f 0 (x))2 dx.
a
Пример 3.3.5. Найти длину дуги полукубической параболы y 2 = x3
3
от начала координат до точки x = 5 (рис. 3.11). Поскольку y = x 2 , то
1
y 0 = 32 x 2 . Тогда
Z5 r
L=
0
9
4
1 + x dx =
4
9
¶ 12 µ
¶
Z5 µ
9
9
1+ x
d
x+1 =
4
4
0
µ
¶ 32 ¯
µ ¶3
8
9
8
335
¯5 8 49 2
1+ x
−
=
.
¯ =
27
4
27 4
27
27
0
Длина дуги кривой, заданной параметрически
Пусть задана кривая
½
x = ϕ(t),
y = ψ(t), α 6 t 6 β,
=
где функции ϕ(t) и ψ(t) непрерывно дифференцируемы на отрезке [α, β] и
ϕ0 (t) 6= 0 на этом отрезке. Найдем длину дуги этой кривой:
¯
¯
¯x = ϕ(t) dx = ϕ0 (t) dt ¯
Zb p
¯
¯
ψ 0 (t) ¯¯ =
L=
1 + (yx0 )2 dx = ¯¯
0
¯y = ψ(t) yx (t) = ϕ0 (t) ¯
a
s
µ 0 ¶2
Zβ
Zβ p
ψ (t)
0
=
1+
ϕ (t) dt =
(ϕ0 (t))2 + (ψ 0 (t))2 dt.
ϕ0 (t)
α
α
117
Пример 3.3.6. Найти длину дуги одной арки циклоиды (рис. 3.7)
½
x = a(t − sin t)
y = a(1 − cos t), 0 6 t 6 2π.
Найдем x0 = a(1 − cos t) и y 0 = a sin t, тогда длина дуги равна
Z2πq
Z2πp
2
2
2
L=
a (1 − 2 cos t + cos t + sin t) dt = a
2(1 − cos t) dt =
0
0
Z2πr
2 · 2 sin2
=a
0
t
dt = 2a
2
Z2π
sin
0
t
t ¯¯2π
dt = −4a cos ¯ = 4a + 4a = 8a.
2
2 0
Длина дуги кривой в полярных координатах
Пусть задана кривая в полярной системе координат ρ = ρ(ϕ) и α 6 ϕ 6
β. Тогда в параметрическом виде кривая будет задаваться уравнениями
½
x = ρ(ϕ) cos ϕ
y = ρ(ϕ) sin ϕ.
Вычислим x0 = ρ0 (ϕ) cos ϕ − ρ(ϕ) sin ϕ и y 0 = ρ0 (ϕ) sin ϕ + ρ(ϕ) cos ϕ.
Тогда
(x0 )2 + (y 0 )2 = (ρ0 )2 cos2 φ − 2ρ0 ρ cos ϕ sin ϕ + ρ2 sin2 ϕ + (ρ0 )2 sin2 ϕ+
+2ρ0 ρ sin ϕ cos ϕ + ρ2 cos2 ϕ =
= (ρ0 )2 (cos2 ϕ + sin2 ϕ) + ρ2 (cos2 ϕ + sin2 ϕ) = (ρ0 )2 + ρ2 .
Получаем формулу длины дуги в полярной системе координат
Zβ p
(ρ0 (ϕ))2 + (ρ(ϕ))2 dϕ.
L=
α
Пример 3.3.7. Найти длину кардиоиды ρ = 1 + cos ϕ. Построим эту
кривую (рис. 3.12). Найдем ρ0 = − sin ϕ. Тогда
Zπ q
sin2 ϕ + 1 + 2 cos ϕ + cos2 ϕ dϕ =
L=2
0
=2
¶
Zπ s µ
1 + cos ϕ
dϕ =
2 + 2 cos ϕ dϕ = 2
4
2
Zπ p
0
0
118
ρ = 1 + cos ϕ
z
y
o
xi−1 ξi xi
Рис. 3.12.
x
Рис. 3.13.
Zπ r
Zπ
ϕ
ϕ ϕ
ϕ ¯¯π
2
cos
dϕ = 8 cos d = 8 sin ¯ = 8.
=4
2
2 2
2 0
0
0
3.3.5. Вычисление объема тел по площадям параллельных
сечений
Пусть есть тело T и известна площадь S любого сечения этого тела
плоскостью, перпендикулярной оси OX (рис. 3.13) Эта площадь S будет
зависеть от координаты x, поэтому S = S(x). Пусть S(x) — непрерывная
функция на отрезке [a, b]. Вычислим интегральную сумму.
1. Проведем плоскости x = x0 = a, x = x1 , . . . , x = xn = b. Эти
плоскости разобьют тело T на слои.
2. Выберем точки ξj ∈ [xj−1 , xj ], j = 1, 2, . . . , n.
3. Вычислим ∆xj = xj − xj−1 .
4. Построим цилиндры: с основанием, являющимся сечением тела T
плоскостью x = ξj и высотой ∆xj .
5. Найдем объем j цилиндра Vj = S(ξj )∆xj .
n
P
6. Найдем объем всех цилиндров Vn =
S(ξj )∆xj .
j=1
Поскольку S(x) — непрерывная функция, то существует предел интегральных сумм Vn , и он равен объему тела T :
V =
lim
max ∆xj →0
Vn =
n
X
lim
max ∆xj →0
Zb
S(ξj )∆xj =
j=1
Объем тела вращения
119
S(x) dx.
a
y
a
o
x
b
x
Рис. 3.14.
Рассмотрим тело T , образованное вращением вокруг оси OX криволинейной трапеции, ограниченной кривой y = f (x), прямыми y = 0, x = a,
x = b (рис. 3.14). Тогда произвольное сечение этого тела плоскостью, перпендикулярной оси OX, есть круг, и его площадь будет равна
S(x) = π(f (x))2 .
Поэтому объем тела T равен
Zb
(f (x))2 dx.
VOX = π
a
Пример 3.3.8.
√ Найти объем тела, полученного вращением вокруг оси
OX кривой y = x при 2 6 x 6 4. Имеем
Z4
VOX = π
x dx = π
2
x2 ¯¯4
¯ = 8π − 2π = 6π.
2 2
Составлением специальной интегральной суммы можно получить объем тела, полученного вращением криволинейной трапеции, которая ограничена кривой y = f (x), прямыми y = 0, x = a, x = b, вокруг оси OY , а
именно,
Zb
VOY = 2π
x · |f (x)| dx.
a
120
3.4. Несобственные интегралы
3.4.1. Несобственные интегралы с бесконечными пределами
интегрирования
Пусть функция f (x) определена и непрерывна на луче x ∈ [a, +∞).
Рассмотрим интеграл
Zb
I(b) = f (x) dx.
a
Функция I(b) определена для любого b ∈ [a, +∞) и является непрерывной
функцией на этом промежутке.
Определение 3.4.1. Если существует конечный предел
Zb
lim
f (x) dx,
b→+∞
a
то он называется несобственным интегралом от функции f (x) на интервале [a, +∞)(несобственным интегралом первого типа) и обозначается
+∞
Z
f (x) dx,
a
т.е.
+∞
Z
Zb
f (x) dx = lim
f (x) dx.
b→+∞
a
a
Аналогично определяются несобственные интегралы:
Zb
Zb
= lim
f (x) dx,
a→−∞
−∞
+∞
Z
f (x) dx =
−∞
a
Zb
lim
a→−∞
f (x) dx.
a
b→+∞
Определение 3.4.2. Если конечный предел существует, то несобственный интеграл называется сходящимся, если конечный предел не существует, то несобственный интеграл называется расходящимся.
121
y
f (x)
a
o
x
Рис. 3.15.
Пусть f (x) > 0, тогда несобственный интеграл
+∞
R
f (x) dx выражает
a
площадь неограниченной фигуры, задаваемой кривой y = f (x) и прямыми
y = 0, x = a (рис. 3.15)
Пример 3.4.1. Исследовать на сходимость интеграл
+∞
Z
0
dx
= lim
x2 + 2x + 2 b→+∞
Zb
0
dx
=
(x + 1)2 + 1
¯b
π π
π
= lim arctg(x + 1)¯0 = lim (arctg(b + 1) − arctg 1) = − = .
b→+∞
b→+∞
2
4
4
Поэтому данный интеграл сходится.
Пример 3.4.2. Исследовать на сходимость интеграл
1
Рассмотрим случай, когда α 6= 1, тогда
+∞
Z
1
dx
= lim
b→+∞
xα
·
= lim
b→+∞
Zb
+∞
R
dx
.
xα
x1−α ¯¯b
¯ =
b→+∞ 1 − α 1
x−α dx = lim
1
¸ (
1
b1−α
1
, α > 1,
−
=
α−1
1−α 1−α
+∞
α < 1.
Рассмотрим случай α = 1
+∞
Z
1
¯b
dx
= lim ln x¯1 = lim ln b = +∞.
b→+∞
b→+∞
x
Поэтому данный интеграл расходится при α 6 1 и сходится при α > 1.
122
Пример 3.4.3. Исследовать на сходимость
+∞
Zb
Z
Zb
2
2
2
1
xe−x dx = lim −
xe−x dx = lim
e−x d(−x2 ) =
b→+∞
b→+∞
2
0
0
0
¶
µ
µ
¶
1 −b2 1
1 −x2 ¯¯b
1
= lim − e
+
= .
¯ = lim − e
b→+∞
b→+∞
2
2
2
2
0
2
Поскольку lim e−b = 0, то данный интеграл сходится.
b→+∞
Теорема 3.4.1. Если для любого x ∈ [a, +∞) выполняется неравенство
+∞
+∞
R
R
0 6 f (x) 6 ϕ(x) и интеграл
ϕ(x) dx сходится, то интеграл
f (x) dx
a
a
также сходится и выполняется неравенство
+∞
+∞
Z
Z
f (x) dx 6
ϕ(x) dx.
a
a
Доказательство. Поскольку для определенного интеграла верно неравенство
Zb
Zb
f (x) dx 6 ϕ(x) dx,
a
a
то, применяя предельный переход, получим
+∞
+∞
Z
Zb
Zb
Z
f (x) dx = lim
f (x) dx 6 lim
ϕ(x) dx =
ϕ(x) dx < +∞.
b→+∞
a
b→+∞
a
a
a
Пример 3.4.4. Исследовать на сходимость интеграл
+∞
Z
1
dx
.
x2 (1 + ln x)
Заметим, что для любого x ∈ [1, +∞) выполняется неравенство
1
1
6 2 . И поскольку интеграл
x2 (1 + ln x)
x
+∞
µ
¶ ¯b
¶
µ
Z
1 ¯¯
dx
1
= lim −
= lim − + 1 = 1
b→+∞
x2
x ¯1 b→+∞
b
1
123
сходится, то сходится и исходный интеграл
+∞
Z
1
dx
< 1.
x2 (1 + ln x)
Теорема 3.4.2. Если для любого x ∈ [a, +∞) выполняется неравенство
+∞
R
0 6 ϕ(x) 6 f (x) и интеграл
ϕ(x) dx расходится, то интеграл
+∞
R
a
f (x) dx также расходится.
a
Пример 3.4.5. Исследовать на сходимость интеграл
+∞
Z
1
x+2
√
dx.
3
x5
x+2
x
1
Поскольку для x ∈ [1, +∞) выполняется √
> √
= √
, а интеграл
3
3
3
5
5
x
x
x2
+∞
Z
√ ¯¯+∞
dx
√
= lim 3 3 x¯ = +∞
3
b→+∞
1
x2
1
расходится, то и исходный интеграл
+∞
R (x
1
Теорема 3.4.3. Если интеграл
интеграл
+∞
R
+∞
R
+ 2) dx
√
расходится.
3
x5
|f (x)| dx сходится, то сходится и
a
f (x) dx.
a
Определение 3.4.3. Если интеграл
грал
+∞
R
+∞
R
|f (x)| dx сходится, то инте-
a
f (x) dx называется абсолютно сходящимся.
a
Пример 3.4.6. Исследовать на сходимость интеграл
+∞
Z
1
cos x
dx.
x2
124
¯ cos x ¯
+∞
R dx
1
¯
¯
Поскольку ¯ 2 ¯ 6 2 при x ∈ [1, +∞), а интеграл
= 1 сходится, то
2
x
x
1 x
¯
¯
+∞
+∞
R ¯ cos x ¯
R cos x
сходится интеграл
dx
¯ 2 ¯ dx, а поэтому исходный интеграл
x
x2
1
1
сходится абсолютно.
3.4.2. Несобственный интеграл от неограниченной функции
Пусть функция f (x) определена и непрерывна на интервале [a, c) и при
x = c функция либо разрывна, либо не определена. Тогда определенный
интеграл на отрезке [a, c] от функции f (x) может не существовать.
Определение 3.4.4. Если существует конечный предел
Zb
lim
f (x) dx,
b→c−0
a
то он называется несобственным интегралом (несобственным интегралом второго типа) от разрывной в точке c функции и обозначается
Zc
Zb
f (x) dx = lim
f (x) dx.
b→c−0
a
a
Если конечный предел существует, то интеграл от разрывной функции
называется сходящимся, в противном случае называется расходящимся.
Аналогично даются определения: если функция f (x) разрывна в точке a,
то
Zc
Zc
f (x) dx = lim
f (x) dx;
b→a+0
a
b
если f (x) разрывна в точке b ∈ (a, c), то
Zc
Zb1
f (x) dx =
lim
f (x) dx + lim
b1 →b−0
a
Zc
f (x) dx.
b2 →b+0
a
b2
Пример 3.4.7. Исследовать на сходимость интеграл
R2
0
√
dx
dx. Осо2−x
бенность подынтегральной функции в точке x = 2, поэтому
Z2
0
dx
√
dx = lim
b→2−0
2−x
Zb
√
0
¯b
√
dx
dx = − lim 2 2 − x¯0 =
b→2−0
2−x
125
√
√
√
= − lim (2 2 − b − 2 2) = 2 2.
b→2−0
Следовательно, данный интеграл сходится.
R1 dx
. Поскольку
2
−1 x
особенность подынтегральной функции в точке x = 0, то
Пример 3.4.8. Исследовать на сходимость интеграл
Z1
−1
b→−0
Zb
−1
dx
+ lim
x2 a→+0
Z1
a
dx
=
x2
Ã
¯b !
¯1 !
µ
¶
µ
¶
1 ¯¯
1
1 ¯¯
1
+ lim − ¯
= lim − − 1 + lim −1 +
− ¯
= ∞.
a→+0
a→+0
b→−0
x −1
x a
b
a
Ã
= lim
dx
= lim
b→−0
x2
Для несобственных интегралов второго типа верны теоремы о сравнении, как и для интегралов первого типа.
Теорема 3.4.4. Если на отрезке [a, c] функции f (x) и ϕ(x) разрывны в
точке c и для любого x ∈ [a, c) выполняется неравенство 0 6 f (x) 6 ϕ(x)
Rc
Rc
и интеграл ϕ(x) dx сходится, то сходится и интеграл f (x) dx.
a
a
Теорема 3.4.5. Если на отрезке [a, c] функции f (x) и ϕ(x) разрывны в
точке c и для любого x ∈ [a, c) выполняется неравенство 0 6 f (x) 6 ϕ(x)
Rc
Rc
и интеграл f (x) dx расходится, то расходится и интеграл ϕ(x) dx.
a
Rc
a
Теорема 3.4.6. Если функция f (x) разрывна в точке c и интеграл
Rc
|f (x)| dx сходится, то сходится и интеграл f (x) dx.
a
a
Пример 3.4.9. Исследовать на сходимость интеграл
Zc
dx
.
(c − x)α
a
Рассмотрим случай, когда α 6= 1:
¯b
Zc
Zb
dx
dx
(c − x)1−α ¯¯
=
lim
=
lim
−
=
b→c−0
b→c−0
(c − x)α
(c − x)α
1 − α ¯a
a
a
¶ (c − a)1−α
µ
(c − a)1−α
(c − b)1−α
, α < 1,
+
=
= lim −
∞,1 − α
b→c−0
1−α
1−α
α > 1.
126
Рассмотрим случай, когда α = 1:
Zc
a
dx
= lim
c − x b→c−0
Zb
a
¯b
dx
= lim (− ln(c − x)¯a ) =
c − x b→c−0
= lim (− ln(c − b) + ln(c − a)) = ∞.
b→c−0
Поэтому данный интеграл сходится при α < 1 и расходится при α > 1.
R1
dx
Пример 3.4.10. Исследовать на сходимость интеграл √
. По3
2
x + x2
0
скольку для x ∈ (0, 1] выполняется неравенство
1
1
0< √
< √
,
3
3
2
2
x +x
x2
R1 dx
2
а интеграл √
сходится, так как α = , то исходный интеграл также
3
2
3
x
0
сходится.
127
Глава 4
Функции нескольких переменных
4.1. Понятие функции нескольких переменных, предел
функции нескольких переменных
Рассмотрим пространство Rn = {x = (x1 , x2 , . . . , xn )}.
Определение 4.1.1. Если каждой точке (вектору) x
=
(x1 , x2 , . . . , xn ), принадлежащей некоторому множеству D ⊂ Rn , соответствует определенное действительное число w, то будем называть
w— функцией n переменных x1 , x2 , . . . , xn и писать w = f (x1 , x2 , . . . , xn ).
p
Обозначим |x| = x21 + x22 + . . . + x2n — модуль вектора x.
Определение 4.1.2. Окрестностью точки x0 ∈ Rn будем называть множество Uε (x0 ) = {x ∈ R : |x − x0 | < ε}— это n-мерный шар
радиуса ε с центром в точке x0 .
На плоскости окрестность точки — это открытый круг, в пространстве
R3 — шар без границы.
В дальнейшем, в основном, будем рассматривать функции двух переменных z = f (x, y) и функции трех переменных u = f (x, y, z).
Определение 4.1.3. Под областью на плоскости R2 будем понимать часть плоскости, ограниченной линиями.
Определение 4.1.4. Линия, ограничивающая область D, называется
границей этой области. Точки области, не лежащие на границе, называются внутренними точками области. Область, состоящая из одних
внутренних точек называется открытой. Если к области относится
граница, то область называется замкнутой.
В открытую область каждая точка входит с некоторой своей окрестностью.
128
Определение 4.1.5. Область D называется ограниченной, если
найдется
такое число C, что для любой точки (x, y) ∈ D выполняетp
ся x2 + y 2 6 C.
Аналогично, для пространства Rn под областью будем понимать некоторое тело, ограниченное поверхностями.
Определение 4.1.6. Совокупность точек x ∈ Rn , для которых определяется значение функции w = f (x), называется областью определения функции f (x).
4.1.1. Геометрическое изображение функции 2-х переменных
Графиком функции z = f (x, y) является некоторая поверхность в пространстве R3 . Это точки с координатами M (x, y, f (x, y)).
Пример 4.1.1. Например, графиком функции z = (x − x0 )2 + (y − y0 )2
является эллиптический параболоид (см. рис. 4.1).
z
x
y
(x0 , y0 )
Рис. 4.1.
4.1.2. Частное и полное приращения функции нескольких
переменных
На примере функции двух переменных z = f (x, y) рассмотрим понятия
частного и полного приращения функции нескольких переменных. Функция z = f (x, y) задает поверхность в R3 . Пусть точка M (x, y) принадлежит
этой поверхности.
Рассмотрим пересечение поверхности z = f (x, y) плоскостью y = const,
проходящую через точку M (x, y) (см. рис. 4.2). В пересечении получим
кривую P S. На этой кривой изменяется только переменное x. Дадим этому
переменному приращение ∆x, тогда функция z(x, y) получит приращение
∆x z = f (x + ∆x, y) − f (x, y),
129
Z
S
M
y = const
Q
T
P
x = const
Y
X
Рис. 4.2.
называемое частным приращением по x.
Аналогично, при x = const, дав переменному y приращение ∆y, получим частное приращение по y
∆y z = f (x, y + ∆y) − f (x, y).
Если одновременно дать приращение ∆x по переменному x и приращение ∆y по переменному y, то получим полное приращение
∆z = f (x + ∆x, y + ∆y) − f (x, y).
Аналогично дается определение частного и полного приращений для
функции нескольких переменных, например, частное приращение по переменному xi есть
∆wxi = f (x1 , x2 , . . . , xi + ∆xi , . . . , xn ) − f (x1 , x2 , . . . , xn ),
где все переменные, кроме i-ого, равны константам. Полное приращение
есть
∆w = f (x1 + ∆x1 , x2 + ∆x2 , . . . , xn + ∆xn ) − f (x1 , x2 , . . . , xn ).
4.1.3. Предел функции нескольких переменных
Пусть дана функция w = f (x1 , x2 , . . . , xn ) в области D ⊂ Rn . И пусть
точка x0 = (x01 , x02 , . . . , x0n ) ∈ D. Рассмотрим δ- окрестность точки x0
где |x − x0 | =
Uδ (x0 ) = {x ∈ D : |x − x0 | < δ},
p
(x1 − x01 )2 + (x2 − x02 )2 + . . . + (xn − x0n )2 .
130
Определение 4.1.7. Число b называется пределом функции f (x) =
f (x1 , x2 , . . . , xn ) при x стремящемся произвольным образом к x0 , если
∀ε > 0 ∃δ > 0 : ∀x : x ∈ Uδ (x0 ) ⇒ |f (x) − b| < ε
и обозначается
lim f (x) = b,
x→x0
где x стремится к x0 произвольным образом, оставаясь в окрестности
точки x0 .
4.1.4. Непрерывность функции нескольких переменных
Пусть функция f (x) = f (x1 , x2 , . . . , xn ) определена в области D ⊂ Rn .
Обозначим ∆x = (∆x1 , ∆x2 , . . . , ∆xn ) приращение переменного x.
Определение 4.1.8. Функция f (x) называется непрерывной в
точке x0 ∈ D, если
1. lim f (x) = f (x0 ), где точка x стремится к x0 произвольным обраx→x0
зом, оставаясь в области D либо
2. lim f (x0 + ∆x) = f (x0 ), либо
∆x→0
p
3. lim ∆f = 0, где ∆ρ = (∆x1 )2 + . . . + (∆xn )2 .
∆ρ→0
Заметим, что если ∆ρ → 0, то все ∆xi → 0 при i = 1, 2, . . . , n и наоборот,
если все ∆xi → 0, то ∆ρ → 0.
Определение 4.1.9. Точка x0 называется точкой разрыва функции
f (x), если
1. функция f (x) не определена в точке x0 , либо
2. функция f (x) определена в точке x0 , но не существует lim f (x),
x→x0
либо
3. функция f (x) определена в точке x0 и существует lim f (x), но
x→x0
lim f (x) 6= f (x0 ).
x→x0
4.1.5. Свойства функций, непрерывных в замкнутой
ограниченной области
Теорема 4.1.1. Если функция f (x) определена и непрерывна в замкнутой ограниченной области D ⊂ Rn , то она достигает в этой области
своего наибольшего и наименьшего значений, т.е.
∃x1 , x2 ∈ D : f (x1 ) > f (x), f (x2 ) 6 f (x) ∀x ∈ D.
131
Теорема 4.1.2. Если функция f (x) определена и непрерывна в замкнутой ограниченной области D ⊂ Rn и если M и m наибольшее и наименьшее значения этой функции в области D, то для любого числа c такого,
что m < c < M найдется точка x0 ∈ D такая, что f (x0 ) = c.
Теорема 4.1.3. Если функция f (x) определена и непрерывна в замкнутой ограниченной области D ⊂ Rn и принимает в ней как положительные, так и отрицательные значения, то найдется точка x0 ∈ D такая,
что f (x0 ) = 0.
4.2. Частные производные функции нескольких переменных
Рассмотрим понятие частных производных на примере функции двух
переменных.
Определение 4.2.1. Частной производной по x от функции z =
f (x, y) называется предел отношения частного приращения ∆x z по x к
приращению ∆x при ∆x → 0 и обозначается
∂z
∆x z
f (x + ∆x, y) − f (x, y)
= lim
= lim
.
∆x→0
∂x ∆x→0 ∆x
∆x
Другие обозначения для частной производной по переменному x:
∂f
.
∂x
Частная производная по x от функции f (x, y) вычисляется в предположении, что y = const.
zx0 ,
fx0 (x, y),
Определение 4.2.2. Частной производной по переменному y от
функции z = f (x, y) называется предел отношения частного приращения
∆y z по y к приращению ∆y, когда ∆y → 0
∂z
∆y z
f (x, y + ∆y) − f (x, y)
= lim
= lim
.
∆y→0
∂y ∆y→0 ∆y
∆y
Другие обозначения для частной производной по переменному y:
zy0 ,
fy0 (x, y),
∂f
.
∂y
Частная производная по y от функции z = f (x, y) вычисляется в предположении, что x = const.
Пример 4.2.1. Найти частные производные функции z = x3 sin y.
zx0 = 3x2 sin y,
132
zy0 = x3 cos y.
Пример 4.2.2. Найти частные производные функции z = tg(x2 y 3 ).
2xy 3
3x2 y 2
0
,
z
=
.
y
cos2 (x2 y 3 )
cos2 (x2 y 3 )
Частные производные функции большего числа переменных определяются аналогично. Например, частная производная по переменному x от
функции трех переменных u = f (x, y, z, ) вычисляется в предположение,
что два других переменных y и z константы.
Пример 4.2.3. Найти все частные производные функции u = (xy 2 )z .
zx0 =
u0x = zxz−1 y 2z ,
u0y = xz 2zy 2z−1 ,
u0z = (xy 2 )z ln(xy 2 ).
4.2.1. Геометрическая интерпретация частных производных
Пусть дана функция двух переменных z = f (x, y), задающая некоторую поверхность в пространстве R3 и точка M принадлежит этой поверхности. Проведем плоскость y = const через точку M , тогда в сечении с
поверхностью получим кривую P S.
∂z
Частная производная
(M ) в точке M равна тангенсу угла накло∂x
на, образованного касательной, проведенной в точке M к кривой P S, с
положительным направлением оси OX.
Аналогично, пусть через точку M проведена плоскость x = const, которая в сечении с поверхностью дает кривую T Q. Тогда частная производная
∂z
(M ) в точке M равна тангенсу угла, образованного касательной, прове∂y
денной в точке M к кривой T Q, с положительным направлением оси OY
(см. рис.4.2).
4.2.2. Полный дифференциал функции нескольких
переменных
Рассмотрим функцию двух переменных z = f (x, y). Пусть она имеет
непрерывные частные производные по x и по y. Выразим полное приращение
∆z = f (x + ∆x, y + ∆y) − f (x, y)
(4.1)
этой функции через частные производные. Пусть
∆z = (f (x + ∆x, y + ∆y) − f (x, y + ∆y)) + (f (x, y + ∆y) − f (x, y)).
По переменному y ко второй разности применим теорему Лагранжа,
получим
∂f (x, ȳ)
f (x, y + ∆y) − f (x, y) = ∆y ·
,
∂y
133
где ȳ ∈ (y, y + ∆y).
Аналогично, применяя теорему Лагранжа к первой разности по переменному x, получим
∂f (x̄, y + ∆y)
f (x + ∆x, y + ∆y) − f (x, y + ∆y) = ∆x ·
,
∂x
где x̄ ∈ (x, x + ∆x). Тогда, подставляя данные выражения в (4.1), получим
∂f (x̄, y + ∆y)
∂f (x, ȳ)
+ ∆y ·
.
(4.2)
∂x
∂y
Так как частные производные непрерывные функции и при ∆x →
0, ∆y → 0 ⇒ x̄ → x, ȳ → y, то существуют пределы
∆z = ∆x ·
lim
∆x→0
∂f (x̄, y + ∆y)
∂x
=
∂f (x, y)
∂x
(4.3)
∂f (x, ȳ)
∂y
=
∂f (x, y)
.
∂y
(4.4)
∆y→0
lim
∆x→0
∆y→0
По теореме 1.2.1 о пределе функции из (4.3) и (4.4) получим
∂f (x̄, y + ∆y)
∂f (x, y)
=
+ α1 (∆x, ∆y)
(4.5)
∂x
∂x
∂f (x, ȳ)
∂f (x, y)
=
+ α2 (∆x, ∆y),
(4.6)
∂y
∂y
где α1 (∆x, ∆y) → 0, α2 (∆x, ∆y) → 0 бесконечно малые функции при
∆x → 0 и ∆y → 0. Подставляя (4.5) и (4.6) в выражение (4.2) для полного
приращения функции, получим
∂f (x, y)
∂f (x, y)
∆z =
∆x +
∆y + α1 ∆x + α2 ∆y.
(4.7)
∂x
∂y
Величины α1 ∆x и α2 ∆y являются бесконечно малыми более высокого порядка по сравнению с ∆x и с ∆y.
Определение 4.2.3. Функция z = f (x, y), полное приращение ∆z которой в данной точке (x, y), может быть представлено в виде двух слагаемых: выражения линейного относительно ∆x и ∆y и величины бесконечно малой высшего порядка по сравнению с ∆x и ∆y называется дифференцируемой в данной точке, а линейная часть приращения называется
полным дифференциалом и обозначается dz или df .
134
Тогда
dz =
∂f
∂f
(x, y)∆x +
(x, y)∆y.
∂x
∂y
Из (4.7) следует, что
∆z = dz + α1 ∆x + α2 ∆y,
из этой формулы видно, что если ∆x → 0 и ∆y → 0, то полное приращение
∆z эквивалентно полному дифференциалу этой функции dz, т.е. ∆z ≈ dz.
Поскольку для независимых переменных ∆x = dx, ∆y = dy, то мы
получим следующее выражение для полного дифференциала функции
dz =
∂f
∂f
dx +
dy.
∂x
∂y
Аналогично, для функции трех переменных u = f (x, y, z) выражение
для полного дифференциала функции имеет вид
du =
∂f
∂f
∂f
dx +
dy +
dz.
∂x
∂y
∂z
Пример 4.2.4. Найти полный дифференциал функции u = ex
Найдем сначала частные производные этой функции
2
2
∂u
= 2xex +y sin z,
∂x
2
2
∂u
= 2yex +y sin z,
∂y
2
+y 2
sin z.
2
2
∂u
= ex +y cos z.
∂z
Тогда полный дифференциал этой функции есть
du = 2xex
2
+y 2
sin z dx + 2yex
2
+y 2
2
sin z dy + ex
+y 2
cos z dz.
4.3. Производная сложной функции нескольких переменных
Пусть дана сложная функция двух переменных
z = F (u, v),
u = ϕ(x, y),
v = ψ(x, y).
Пусть функции F, u, v имеют непрерывные частные производные по всем
∂z ∂z
своим аргументам. Найдем выражения для частных производных
и
.
∂x ∂y
Дадим приращение ∆x переменному x. Тогда функции u и v получат
частные приращения ∆x u и ∆x v по переменному x. Так как функция z
зависит от переменных u и v, то она получит полное приращение ∆z. Используем для него формулу полного приращения (4.7)
∆z =
∂z
∂z
∆x u +
∆x v + α1 ∆x u + α2 ∆x v,
∂u
∂v
135
где α1 → 0 и α2 → 0 при ∆x u → 0, ∆x v → 0. Разделим все на ∆x,
получим
∆z
∂z ∆x u ∂z ∆x v
∆x u
∆x v
=
+
+ α1
+ α2
.
(4.8)
∆x
∂u ∆x
∂v ∆x
∆x
∆x
Поскольку функции u и v непрерывны, то ∆x u → 0, ∆x v → 0 при ∆x →
0. Перейдем в равенстве (4.8) к пределу при ∆x → 0, получим
∆z
∂z
∆x u
∂u
∆x v
∂v
=
,
lim
=
,
lim
=
,
∆x→0 ∆x
∆x→0 ∆x
∆x
∂x
∂x
∂x
∆x u
∂u
∆x v
lim α1
=
lim α1 = 0,
lim α2
= 0.
∆x→0
∆x→0
∆x
∂x ∆x→0
∆x
Из этих равенств следует формула для частной производной по переменному x сложной функции
∂z
∂z ∂u ∂z ∂v
=
·
+
·
.
(4.9)
∂x
∂u ∂x ∂v ∂x
Аналогично получается и формула для частной производной по переменному y
∂z
∂z ∂u ∂z ∂v
=
·
+
·
.
∂y
∂u ∂y
∂v ∂y
Используя этот принцип, можно получить формулы частных производных для любой сложной функции. Например, пусть дана сложная функция
lim
∆x→0
w = F (u, v, t),
Тогда
u = ϕ(x, y),
∂w
∂w ∂u ∂w
=
·
+
∂x
∂u ∂x
∂v
∂w
∂w ∂u ∂w
=
·
+
∂y
∂u ∂y
∂v
v = ψ(x, y),
t = θ(x, y).
∂v
∂w ∂t
+
·
.
∂x
∂t ∂x
∂v
∂w ∂t
·
+
·
.
∂y
∂t ∂y
·
4.3.1. Полная производная функции нескольких переменных
Пусть дана сложная функция u = F (x, y, z), причем y = f (x), z =
ϕ(x). Тогда функция u—функция одного переменного x и у нее существует обычная производная по x, которая и называется полной производной.
Используем формулу (4.9), получим
du
∂u ∂x ∂u ∂y
∂u ∂z
=
·
+
·
+
·
,
dx
∂x ∂x ∂y ∂x ∂z ∂x
но поскольку
∂x
= 1,
∂x
∂y
dy
=
,
∂x
dx
136
∂z
dz
=
,
∂x
dx
то окончательно получим следующую формулу полной производной
du
∂u ∂u dy
∂u dz
=
+
·
+
·
.
dx
∂x ∂y dx ∂z dx
∂z ∂z
и
, если z = ln(u+v 2 ),
Пример 4.3.1. Найти частные производные
∂x ∂y
u = x2 + y, v = x2 y. Найдем частные производные
∂z
1
2v
∂z
=
,
=
,
∂u
u + v2
∂v
u + v2
∂u
∂v
∂v
∂u
= 2x,
= 1,
= 2xy,
= x2 .
∂x
∂y
∂x
∂y
Отсюда получим искомые частные производные
∂z
1
2v
=
· 2x +
· 2xy,
∂x
u + v2
u + v2
1
2v
∂z
=
·1+
· x2 .
2
∂y
u+v
u + v2
√
Пример 4.3.2. Найти полную производную функции u = x2 + yz, если
y = sin x, z = cos x. Найдем
∂u
∂u
z
∂u
y
= 2x,
= √ ,
= √ ,
∂x
∂y
2 yz
∂z
2 yz
Тогда
dy
= cos x,
dx
dz
= − sin x.
dx
du
z
y
= 2x + √ · cos x − √ · sin x.
dx
2 yz
2 yz
4.4. Частные производные высших порядков
∂z
Пусть дана функция z = f (x, y). Частные производные
=
∂x
∂z
fx0 (x, y),
= fy0 (x, y) являются функциями переменных x и y. Поэтому
∂y
их можно дифференцировать и по x и по y. Получим четыре производных
второго порядка
µ ¶ функции f (x, y).
∂2z
∂
∂z
00
=
= fxx
(x, y) — функция f (x, y) дифференцируется два ра2
∂x
∂x ∂x
за по x, µ ¶
∂2z
∂ ∂z
00
=
= fyy
(x, y) — функция f (x, y) дифференцируется два раза
∂y 2
∂y ∂y
137
по y,
∂2z
∂x∂y
ла по
∂2z
∂y∂x
ла по
µ ¶
∂ ∂z
00
=
= fxy
(x, y) — функция f (x, y) дифференцируется снача∂y ∂x
x, а затем
по y,
µ ¶
∂ ∂z
00
=
= fyx
(x, y) — функция f (x, y) дифференцируется снача∂x ∂y
y, а затем по x.
∂2z
∂2z
,
называются смешанными производными.
∂x∂y
∂y∂x
Производные второго порядка можно опять дифференцировать, получим производные третьего порядка:
Производные
∂3z
,
∂x3
∂3z
,
∂x2 ∂y
∂3z
,
∂x∂y∂x
∂3z
,
∂x∂y 2
∂3z
,
∂y∂x2
∂3z
,
∂y∂x∂y
∂3z
,
∂y 2 ∂x
∂3z
.
∂y 3
И так далее, например, в производной
∂nz
∂xp ∂y n−p
функция f (x, y) дифференцируется p раз по x и n − p раз по y.
Пример 4.4.1. Найти частные производные второго порядка функции
z = x2 + y 2 + x2 y 3 .
∂z
= 2x + 2xy 3 ,
∂x
∂2z
∂
=
(2x + 2xy 3 ) = 2 + 2y 3 ,
∂x2
∂x
∂
∂2z
=
(2x + 2xy 3 ) = 6xy 2 ,
∂x∂y
∂y
Заметим, что
∂z
= 2y + 3x2 y 2 ,
∂y
∂2z
∂
=
(2y + 3x2 y 2 ) = 2 + 6x2 y,
∂y 2
∂y
∂2z
∂
=
(2y + 3x2 y 2 ) = 6xy 2 .
∂y∂x
∂x
∂2z
∂2z
=
.
∂x∂y
∂y∂x
Определение 4.4.1. Функцию w = f (x1 , x2 , . . . , xn ) называют n раз
дифференцируемой в точке M0 (x01 , x02 , . . . , x0n ), если все частные производные (n − 1) порядка являются дифференцируемыми функциями в точке
M0 .
Теорема 4.4.1. Если функция z = f (x, y) и ее частные производные
00
00
fx0 , fy0 , fxy
, fyx
определены и непрерывны в окрестности точки M (x, y),
138
то в этой точке равны смешанные производные
∂2f
∂2f
(M ) =
(M ).
∂x∂y
∂y∂x
Доказательство. Рассмотрим выражение
F = [f (x + ∆x, y + ∆y) − f (x + ∆x, y)] − [f (x, y + ∆y) − f (x, y)].
(4.10)
Введем функцию
ϕ(x) = f (x, y + ∆y) − f (x, y),
(4.11)
тогда
F = ϕ(x + ∆x) − ϕ(x).
Поскольку частная производная fx0 определена и непрерывна в окрестности точки M (x, y), то функция ϕ(x) дифференцируема на отрезке [x, x +
∆x]. Применим к F теорему Лагранжа на этом отрезке, получим
F = ϕ(x + ∆x) − ϕ(x) = ϕ0 (x̄)∆x,
(4.12)
где x̄ ∈ [x, x + ∆x]. Из выражения (4.11) найдем производную
ϕ0 (x̄) = fx0 (x̄, y + ∆y) − fx0 (x̄, y).
(4.13)
00
fxy
Поскольку
определена и непрерывна в окрестности точки M (x, y),
то fx0 дифференцируема на отрезке [y, y + ∆y]. Применим теорему Лагранжа к разности (4.13), тогда
00
ϕ0 (x̄) = fx0 (x̄, y + ∆y) − fx0 (x̄, y) = fxy
(x̄, ȳ)∆y,
где ȳ ∈ [y, y + ∆y]. Подставляя это выражение в (4.12), получим
00
F = fxy
(x̄, ȳ)∆x∆y.
(4.14)
В выражении (4.10) поменяем местами средние слагаемые, тогда
F = [f (x + ∆x, y + ∆y) − f (x, y + ∆y)] − [f (x + ∆x, y) − f (x, y)].
Введем функцию
ψ(y) = f (x + ∆x, y) − f (x, y),
которая дифференцируема на отрезке [y, y + ∆y]. Тогда
(4.15)
F = ψ(y + ∆y) − ψ(y).
Применим к этой разности теорему Лагранжа, получим
F = ψy0 (ỹ)∆y,
где ỹ ∈ [y, y + ∆y]. В силу равенства (4.15) имеем
ψy0 (ỹ) = fy0 (x + ∆x, ỹ) − fy0 (x, ỹ).
139
(4.16)
00
Поскольку fyx
определена и непрерывна в окрестности точки M (x, y),
0
то fy дифференцируема на отрезке [x, x + ∆x]. Поэтому мы можем опять
применить теорему Лагранжа к выражению (4.16) на этом отрезке, будем
иметь
00
(x̃, ỹ)∆x,
ψy0 (ỹ) = fy0 (x + ∆x, ỹ) − fy0 (x, ỹ) = fyx
где x̃ ∈ [x, x + ∆x]. Тогда
00
F = fyx
(x̃, ỹ)∆x∆y.
(4.17)
Поскольку выражение (4.17) равно выражению (4.14), то мы получим
00
00
(x̄, ȳ)∆x∆y = fyx
(x̃, ỹ)∆x∆y
fxy
или
00
00
(x̄, ȳ) = fyx
(x̃, ỹ).
fxy
00
00
непрерывные функции в
А поскольку смешанные производные fxy и fyx
окрестности точки M (x, y), то существуют пределы
lim
00
fxy
(x̄, ȳ) =
lim
∆x→0
∆x→0
∆y→0
∆y→0
00
fyx
(x̃, ỹ).
Но при ∆x → 0, ∆y → 0 точки x̄, x̃ → x, ȳ, ỹ → y. Поэтому окончательно
мы имеем
00
00
fxy
(x, y) = fyx
(x, y).
Таким образом, мы показали, что смешанные производные равны между собой.
Отсюда следует, что смешанные производные более высокого порядка
равны между собой, если у них одинаковое число раз бралось производных
по x и по y неважно в каком порядке. Например,
∂nf
∂nf
=
,
k
n−k
n−k
∂x ∂y
∂y
∂xk
для любого k = 1, 2, . . . , n.
4.4.1. Дифференциалы высших порядков функции
нескольких переменных
Не нарушая общности, рассмотрим опять функцию двух переменных
z = f (x, y). Пусть она дважды непрерывно дифференцируема в окрестности некоторой точки M (x, y).
Рассмотрим дифференциал первого порядка этой функции
∂f
∂f
dz =
(x, y)dx +
(x, y)dy.
∂x
∂y
140
Поскольку x, y независимые переменные, то dx, dy — постоянные, независящие от x и y. Поэтому дифференциал dz — это функция переменных
x и y в достаточно малой окрестности точки M (x, y). Определим дифференциал второго порядка.
Определение 4.4.2. Вторым дифференциалом функции называется
дифференциал от первого дифференциала этой функции
d2 z = d(dz).
Найдем выражение для второго дифференциала функции двух переменных.
µ
¶
µ ¶
µ ¶
∂f
∂f
∂f
∂f
2
d z=d
dx +
dy = d
dx + d
dy =
∂x
∂y
∂x
∂y
µ ¶
µ ¶
µ ¶
µ ¶
∂ ∂f
∂ ∂f
∂ ∂f
∂ ∂f
=
dx · dx +
dy · dx +
dx · dy +
dy · dy =
∂x ∂x
∂y ∂x
∂x ∂y
∂y ∂y
∂2f 2
∂2f
∂2f
∂2f 2
dx
+
dxdy
+
dydx
+
dy .
∂x2
∂x∂y
∂y∂x
∂y 2
Но поскольку по теореме (4.4.1) смешанные производные равны между
∂2f
∂2f
собой
=
, то выражение для второго дифференциала функции
∂x∂y
∂x∂y
имеет вид
∂2f
∂2f
∂2f 2
dx + 2
dxdy + 2 dy 2 .
d2 z =
2
∂x
∂x∂y
∂y
Введем понятие дифференциального символа
µ
¶
∂
∂
d=
dx +
dy .
∂x
∂y
=
Тогда
µ
d2 =
∂
∂
dx +
dy
∂x
∂y
¶2
=
∂2
∂2
∂2
dx2 + 2
dxdy + 2 dy 2 .
2
∂x
∂x∂y
∂y
Применяя эти дифференциальные символы к функции z = f (x, y), получим обычные выражения для первого и второго дифференциала функции.
Например,
µ
¶
∂
∂
∂z
∂z
dz =
dx +
dy z =
dx +
dy.
∂x
∂y
∂x
∂y
Аналогично получается и выражение для второго дифференциала.
141
Определение 4.4.3. Дифференциалом n-ого порядка функции называется дифференциал от дифференциала (n − 1)-ого порядка
dn z = d(dn−1 z).
Можно ввести понятие дифференциального символа n-ого порядка
¶n
µ
∂
∂
dn =
dx +
dy ,
∂x
∂y
где выражение для него получается с помощью формулы бинома Ньютона.
Например,
d3 =
∂3
∂3
∂3
∂3 3
3
2
2
dx
+
3
dx
dy
+
3
dxdy
+
dy .
∂x3
∂x2 ∂y
∂x∂y 2
∂y 3
Для функции большего числа переменных тоже можно ввести понятие
дифференциального символа
µ
¶k
∂
∂
∂
k
d =
dx1 +
dx2 + . . . +
dxn .
∂x1
∂x2
∂xn
Тогда дифференциал порядка k функции нескольких переменных можно
записать в виде
µ
¶k
∂
∂
∂
dk w =
dx1 +
dx2 + . . . +
dxn w.
∂x1
∂x2
∂xn
Пример 4.4.2. Найти выражение для третьего дифференциала функции z = x3 y 4 . Найдем сначала все частные производные третьего порядка.
∂z
= 3x2 y 4 ,
∂x
∂z
= 4x3 y 3 ,
∂y
∂3z
= 6y 4 ,
∂x3
∂2z
= 6xy 4 ,
∂x2
∂3z
= 24xy 3 ,
∂x2 ∂y
∂2z
= 12x3 y 2 ,
∂y 2
∂3z
= 36x2 y 2 ,
∂x∂y 2
∂2z
= 12x2 y 3
∂x∂y
∂3z
= 24x3 y.
∂y 3
Тогда
d3 z = 6y 4 dx3 + 3 · 24xy 3 dx2 dy + 3 · 36x2 y 2 dxdy 2 + 24x3 y dy 3 =
= 6y 4 dx3 + 72xy 3 dx2 dy + 108x2 y 2 dxdy 2 + 24x3 y dy 3 .
142
4.5. Приложения дифференциального исчисления функций
нескольких переменных
Пусть в области D ⊂ R3 задана функция u = u(x, y, z), тогда говорят,
что в области D задано скалярное поле.
Определение 4.5.1. Поверхности u(x, y, z) = C = const называются
поверхностями уровня функции u.
Пример 4.5.1. Пусть дана функция u =
y2
z2
x2
+
+ , тогда поверх4
9
16
x2
y2
z2
ностями уровня
+
+
= C этой функции являются эллипсоиды с
4
9
16
центром в начале координат.
Пусть задана функция двух переменных z = z(x, y) в некоторой области D на плоскости.
Определение 4.5.2. Линии z(x, y) = C = const называются линиями уровня функции z.
Пример 4.5.2. Пусть дана функция z = y − 2x2 . Тогда линиями уровня
этой функции являются y = 2x2 + C параболы, сдвигаемые по оси OY .
4.5.1. Производная по направлению
Рассмотрим в области D ⊂ R3 функцию u = u(x, y, z) и точку
M (x, y, z). Проведем из точки M вектор s̄, с направляющими косинусами
cos α, cos β, cos γ. Если вектор s̄ = (a1 , a2 , a3 ), то
q
a1
a2
a3
cos α =
, cos β =
, cos γ =
, где |s̄| = a21 + a22 + a23 .
|s̄|
|s̄|
|s̄|
Рассмотрим на расстоянии ∆s̄
pот точки M на векторе s̄ точку M1 (x +
∆x, y + ∆y, z + ∆z). Тогда ∆s̄ = (∆x)2 + (∆y)2 + (∆z)2 .
Пусть функция u(x, y, z) непрерывна и имеет непрерывные частные
производные в области D. Тогда полное приращение этой функции будет
∆u =
∂u
∂u
∂u
∆x +
∆y +
∆z + α1 ∆x + α2 ∆y + α3 ∆z,
∂x
∂y
∂z
(4.18)
где α1 → 0, α2 → 0, α3 → 0 при ∆x → 0, ∆y → 0, ∆z → 0. Разделим
выражение (4.18) на ∆s̄, получим
∆u
∂u ∆x ∂u ∆y ∂u ∆z
∆x
∆y
∆z
=
+
+
+ α1
+ α2
+ α3
.
∆s̄
∂x ∆s̄
∂y ∆s̄
∂z ∆s̄
∆s̄
∆s̄
∆s̄
143
Поскольку
∆x
= cos α,
∆s̄
то
∆y
= cos β,
∆s̄
∆z
= cos γ,
∆s̄
∆u
∂u
∂u
∂u
=
cos α +
cos β +
cos γ + α1 cos α + α2 cos β + α3 cos γ.
∆s̄
∂x
∂y
∂z
∆u
при ∆s̄ → 0 называется
∆s̄
производной от функции u(x, y, z) в точке M (x, y, z) по направлению
вектора s̄ и обозначается
Определение 4.5.3. Предел отношения
∆u
∂u
∂u
∂u
∂u
(M ) = lim
=
(M ) cos α +
(M ) cos β +
(M ) cos γ.
∆s̄→0 ∆s̄
∂s̄
∂x
∂y
∂z
Пример 4.5.3. Пусть s = (1, 0, 0). Тогда cos α = 1, cos β = cos γ = 0.
Поэтому
∂u
∂u
=
.
∂s̄
∂x
Пример 4.5.4. Найти производную функции u = x2 + y + z 3 в направлении вектора s̄ = (2, −3, 4) в точке M (1, 1, 1).
2
3
4
Имеем cos α = √ , cos β = − √ , cos γ = √ . Найдем частные
29
29
29
производные функции u:
∂u
= 2x,
∂x
∂u
(M ) = 2,
∂x
∂u
= 1,
∂y
∂u
(M ) = 1,
∂y
∂u
(M ) = 3.
∂z
∂u
= 3z 2 ,
∂z
Тогда
∂u
4
3
12
13
(M ) = √ − √ + √ = √ .
∂s̄
29
29
29
29
4.5.2. Градиент функции
Пусть в области D ⊂ R3 задана функция u = u(x, y, z).
Определение 4.5.4. Вектор, проекции на оси координат которо∂u ∂u ∂u
го являются значениями частных производных
,
,
функции
∂x ∂y ∂z
144
u(x, y, z) в точке M (x, y, z), называется градиентом этой функции в
точке M и обозначается
µ
¶
∂u
∂u
∂u
∂u
∂u
∂u
(M )ī +
(M )j̄ +
(M )k̄ =
(M ),
(M ),
(M ) .
grad u(M ) =
∂x
∂y
∂z
∂x
∂y
∂z
Если градиент функции находится не в фиксированной точке M , то
этот вектор называется полем градиента функции u.
Теорема 4.5.1. Пусть дано скалярное поле u = u(x, y, z). Определим
поле градиента
∂u
∂u
∂u
grad u =
k̄.
ī +
j̄ +
∂x
∂y
∂z
∂u
Тогда производная
по направлению вектора s̄ равна проекции вектора
∂s̄
grad u на вектор s̄, т.е.
∂u
(grad u, s̄)
= прs̄ grad u =
.
∂s̄
|s̄|
Доказательство этого утверждения тривиально.
Следствие 4.5.1. Производная в данной точке по направлению вектора s̄ имеет наибольшее значение, если направление вектора s̄ совпадает
с направлением градиента в этой точке. Это наибольшее значение равно | grad u|. Наименьшее значение производная по направлению имеет в
направлении противоположном градиенту, т.е в направлении − grad u.
Следствие 4.5.2. Производная по направлению вектора s̄, перпендикулярного вектору градиента grad u в точке M , равна нулю.
Доказательство. Поскольку скалярное произведение перпендикулярных векторов равно нулю, то (grad u, s̄) = 0. Поэтому и производная по
направлению равна нулю.
Теорема 4.5.2. Вектор grad u(M ) в точке M направлен перпендикулярно к поверхности уровня u(x, y, z) = const функции u = u(x, y, z),
проходящей через точку M . Для функции двух переменных z = z(x, y)
вектор grad z направлен перпендикулярно к линии уровня этой функции.
Доказательство. Докажем это утверждение для функции двух переменных. Уравнение z(x, y) = C = const неявно задает функцию y = y(x).
Угловой коэффициент касательной к этой кривой в точке M (x, y) есть
k1 = y 0 = −
145
zx0
.
zy0
Угловой коэффициент вектора grad z = (zx0 , zy0 ) равен
k2 =
zy0
.
zx0
Тогда k1 k2 = −1 и касательная к кривой перпендикулярна вектору grad z
в точке M . Значит, вектор градиента направлен перпендикулярно линии
уровня в точке M .
Пример 4.5.5. Пусть дана функция u = x2 + y + z 3 , найти grad u(M ) в
точке M (1, 2, 3). Имеем
∂u
= 2x,
∂x
∂u
= 1,
∂y
Тогда
∂u
∂u
(M ) = 2,
(M ) = 1,
∂x
∂y
Поэтому grad u(M ) = (2, 1, 27).
∂u
= 3z 2 .
∂z
∂u
(M ) = 27.
∂z
4.5.3. Касательная плоскость и нормаль к поверхности
Пусть задана поверхность F (x, y, z) = 0 в пространстве R3 .
Определение 4.5.5. Прямая линия называется касательной к поверхности в точке M (x, y, z), если она является касательной к какойнибудь кривой, лежащей на поверхности и проходящей через точку M .
Так как кривых, проходящих через точку M бесконечно много, то и
касательных в точке M к поверхности бесконечно много.
Определение
4.5.6. Если в точке M (x, y, z) на поверхности
∂F
∂F
∂F
F (x, y, z) = 0 все три частные производные
(M ),
(M ),
(M )
∂x
∂y
∂z
равны нулю или хотя бы одна из них не существует, то точка M называется особой точкой этой поверхности. Если все три частные производные существуют и хотя бы одна из них отлична от нуля, то точка
M называется обыкновенной точкой поверхности.
Теорема 4.5.3. Все касательные к данной поверхности F (x, y, z) = 0
в ее обыкновенной точке M (x, y, z) лежат в одной плоскости.
Определение 4.5.7. Плоскость, в которой лежат все касательные
прямые к кривым на поверхности F (x, y, z) = 0, проходящим через точку
M (x, y, z), называется касательной плоскостью к этой поверхности
в точке M .
146
Z
n
M0
P
F (x, y, z) = 0
Y
X
Рис. 4.3.
Рассмотрим функцию (см. рис. 4.3)
u(x, y, z) = F (x, y, z) + C,
где C = const .
Тогда F (x, y, z) = 0 — поверхность уровня функции u = y(x, y, z). Напишем
уравнение касательной плоскости P в обыкновенной точке M0 (x0 , y0 , z0 ).
Пусть M (x, y, z) — произвольная точка касательной плоскости. Тогда вектор M0 M = (x − x0 , y − y0 , z − z0 ) лежит в касательной плоскости. Но по
теореме 4.5.2 вектор
µ
¶
∂F
∂F
∂F
grad F (M0 ) = grad u(M0 ) =
(M0 ),
(M0 ),
(M0 )
∂x
∂y
∂z
перпендикулярен поверхности F (x, y, z) = 0. Поэтому скалярное произведение
(grad F (M0 ), M0 , M ) = 0.
Из этого условия мы получаем уравнение касательной плоскости P в точке
M0
∂F
∂F
∂F
(M0 )(x − x0 ) +
(M0 )(y − y0 ) +
(M0 )(z − z0 ) = 0.
∂x
∂y
∂z
Если уравнение поверхности задано явным уравнением z = f (x, y), то
получаем уравнение касательной плоскости в виде
∂f
∂f
z − z0 =
(M0 )(x − x0 ) +
(M0 )(y − y0 ).
∂x
∂y
Определение 4.5.8. Прямая, проведенная через точку M0 к поверхности F (x, y, z) = 0 перпендикулярно касательной плоскости, называется
нормалью к этой поверхности.
147
Вектор grad F (M0 ) будет направляющим вектором этой прямой, поэтому уравнение нормали n, проведенной через точку M0 к поверхности
F (x, y, z) = 0 (см. рис. 4.3) будет иметь вид
x − x0
y − y0
z − z0
=
=
.
∂F
∂F
∂F
(M0 )
(M0 )
(M0 )
∂x
∂y
∂z
Если поверхность задана уравнением z = f (x, y), то уравнение нормали
имеет вид
y − y0
z − z0
x − x0
=
=
.
∂f
∂f
1
− (M0 )
− (M0 )
∂x
∂y
Пример 4.5.6. Написать уравнения касательной плоскости и нормали
к поверхности x2 + y 3 + z 2 = 2 в точке M0 (1, −2, 3).
Найдем частные производные в точке M0 :
Fx0 = 2x, Fy0 = 3y 2 , Fz0 = 2z,
тогда Fx0 (M0 ) = 2, Fy0 (M0 ) = 12, Fz0 (M0 ) = 6.
Уравнение касательной плоскости будет иметь вид
P :
2(x − 1) + 12(y + 2) + 6(z − 3) = 0
или 2x + 12y + 6z + 4 = 0,
а нормали
n:
x−1
y+2
z−3
=
=
.
2
12
6
4.6. Локальный экстремум функции нескольких переменных
Пусть функция u = f (x1 , x2 , . . . , xn ) задана на множестве D ⊂ Rn .
Определение 4.6.1. Функция u = f (x1 , x2 , . . . , xn ) имеет локальный максимум в точке M0 (x01 , x02 , . . . , x0n ), если для любой точки
M (x1 , x2 , . . . , xn ), принадлежащей некоторой окрестности точки M0 , выполняется
f (M0 ) > f (M ).
Функция u = f (x1 , x2 , . . . , xn ) имеет в точке M0 (x01 , x02 , . . . , x0n ) локальный минимум, если для любой точки M (x1 , x2 , . . . , xn ), принадлежащей некоторой окрестности точки M0 , выполняется
f (M0 ) 6 f (M ).
Локальные минимумы и максимумы функции называются локальными экстремумами этой функции.
148
Теорема 4.6.1. (Необходимое условие существования локального
экстремума) Пусть функция u = f (x1 , x2 , . . . , xn ) имеет в точке
M0 (x01 , x02 , . . . , x0n ) локальный экстремум. Тогда если в этой точке существуют частные производные первого порядка, то все они равны нулю:
∂f
∂f
∂f
(M0 ) =
(M0 ) = . . . =
(M0 ) = 0.
∂x1
∂x2
∂xn
∂f
Доказательство. Докажем, что
(M0 ) = 0. Пусть переменные
∂x1
x2 , . . . , xn зафиксированы и равны соответственно x02 , . . . , x0n . Получим
функцию u = f (x1 , x02 , . . . , x0n ) одной переменной. Поскольку функция f (x)
имеет в точке M0 локальный экстремум и существуют частные производ∂f
ные, то как для функции одного переменного выполняется
(M0 ) = 0.
∂x1
Аналогично доказывается, что и все остальные производные равны нулю
∂f
∂f
(M0 ) = . . . =
(M0 ) = 0.
∂x2
∂xn
Естественно, эта теорема не является достаточной.
Пример 4.6.1. Пусть задана функция u = xy. В точке M0 = (0, 0)
∂u
∂u
частные производные
= y,
= x равны нулю
∂x
∂y
∂u
∂u
(0) = 0,
(0) = 0.
∂x
∂y
Но функция u = xy не имеет экстремума в этой точке. Это седловая точка.
Определение 4.6.2. Точки M (x1 , . . . , xn ), в которых частные производные функции u = f (x1 , . . . , xn ) равны нулю или не существуют, называются критическими точками или стационарными точками функции.
Теорема 4.6.2. (Достаточное условие существования локального экстремума) Пусть точка M0 — критическая точка функции u = f (x) =
f (x1 , x2 , . . . , xn ) и функция f (x) дважды непрерывно дифференцируема в
окрестности точки M0 . Тогда если в точке M0 второй дифференциал
d2 u(M0 ) < 0 для любых значений dx1 , dx2 , . . . , dxn , одновременно не обращающихся в нуль, то в точке M0 функция u = f (x) имеет локальный максимум, а если d2 u(M0 ) > 0 для любых значений dx1 , dx2 , . . . , dxn ,
также одновременно не обращающихся в нуль, то в точке M0 функция
u = f (x) имеет локальный минимум. Если d2 u(M0 ) принимает как положительные так и отрицательные значения для различных значений
149
дифференциалов dx1 , dx2 , . . . , dxn , то в точке M0 функция не имеет локального экстремума.
Замечание 4.6.1. Для установления знакоопределенности второго дифференциала существует критерий Сильвестра. Обозначим aij =
∂2u
(M0 ), i, j = 1, 2, . . . , n, для того, чтобы d2 u(M0 ) > 0 необходимо и
∂xi ∂xj
достаточно, чтобы
¯
¯
¯ a11 . . . a1n ¯
¯
¯
¯
¯a11 a12 ¯
¯
¯ > 0, . . . , ¯ . . . . . . . . . ¯ > 0.
a11 > 0, ¯¯
¯
¯
¯
a21 a22
¯an1 . . . ann ¯
Для того, чтобы d2 u(M0 ) < 0 необходимо и достаточно, чтобы
¯
¯
¯
¯
¯ a11 . . . a1n ¯
¯a11 a12 ¯
¯
¯
¯ > 0, . . . , (−1)n ¯ . . . . . . . . . ¯ > 0.
a11 < 0, ¯¯
¯
¯
¯
a21 a22
¯an1 . . . ann ¯
Пусть дана функция двух переменных z = f (x, y) в некоторой области
D ⊂ R2 . Сформулируем теорему о достаточном условии существования
локального экстремума в случае двух переменных.
Теорема 4.6.3. Пусть в некоторой области D, содержащей точку
M0 (x0 , y0 ) функция z = f (x, y) имеет непрерывные частные производные
до второго порядка и пусть точка M0 — критическая точка, т.е.
∂f
∂f
(M0 ) =
(M0 ) = 0.
∂x
∂y
Обозначим
A=
∂2f
(M0 ),
∂x2
B=
∂2f
(M0 ),
∂x∂y
C=
∂2f
(M0 ).
∂y 2
Тогда
1. Функция f (x, y) имеет локальный максимум в точке M0 , если
∆ = AC − B 2 > 0
и
A<0
(или
C < 0),
2. Функция f (x, y) имеет локальный минимум в точке M0 , если
∆ = AC − B 2 > 0
и
A>0
(или
C > 0),
3. Функция f (x, y) не имеет экстремума в точке M0 , если
∆ = AC − B 2 < 0,
150
4. Функция f (x, y) может иметь или не иметь экстремума в точке M0 ,
если
∆ = AC − B 2 = 0.
Пример 4.6.2. Найти локальные экстремумы функции z = x3 +y 3 −3xy.
1. Найдем критические точки функции
∂z
= 3x2 − 3y = 0
∂x
∂z
= 3y 2 − 3x = 0
∂y
или
½
y = x2
4
x −x = 0
Решим уравнение
x(x3 − 1) = 0,
x1 = 0,
x2 = 1.
Тогда критические точки будут
M1 (0, 0)
и M2 (1, 1).
2. Найдем
∂2z
∂2z
= 6x,
= −3,
2
∂x
∂x∂y
3. Рассмотрим точку M1 (0, 0)
A = 0, B = −3, C = 0,
∂2z
= 6y.
∂y 2
тогда ∆ = AC − B 2 = −9 < 0.
Поэтому функция в этой точке не имеет ни максимума, ни минимума.
4. Рассмотрим точку M2 (1, 1)
A = 6, B = −3, C = 6,
тогда ∆ = AC − B 2 = 36 − 9 = 27 > 0.
Поэтому в точке M2 (1, 1) функция имеет минимум
zmin = z(1, 1) = 1 + 1 − 3 = −1.
4.7. Условный экстремум функции нескольких переменных
Пусть требуется найти максимум и минимум функции z = f (x, y) при
условии, что ϕ(x, y) = 0.
1 способ. Выражаем, если можно, переменное y = ψ(x) из уравнения
ϕ(x, y) = 0 и подставляем в функцию z = f (x, y) = f (x, ψ(x)). Получим
функцию одного переменного x. И решаем задачу обычными методами
для функции одного переменного.
151
2 способ. Составляем функцию Лагранжа
F (x, y, λ) = f (x, y) + λϕ(x, y).
Находим частные производные функции F (x, y, λ) по переменным x, y, λ и
приравниваем их к нулю. Таким образом найдем критические точки функции Лагранжа.
∂f
∂ϕ
∂F
=
+λ
=0
∂x
∂x
∂x
∂F
∂f
∂ϕ
=
+λ
=0
(4.19)
∂y
∂y
∂y
∂F = ϕ(x, y) = 0
∂λ
Покажем, что эта система возникает, если использовать определение
критических точек функции одного переменного, а именно, если производная равна нулю. Рассмотрим функцию z = f (x, y) и условие ϕ(x, y) = 0,
которая неявно задает y как функцию от x, т.е. y = y(x).
Приравняем полную производную функции f (x, y) к нулю, получим
∂f
∂f dy
+
=0
∂x
∂y dx
или
∂f
∂f
dx +
dy = 0.
∂x
∂y
Поскольку ϕ(x, y) = 0, то и dϕ(x, y) = 0, т.е.
∂ϕ
∂ϕ
dx +
dy = 0.
∂x
∂y
Умножим это равенство на λ и прибавим к предыдущему, получим
µ
¶
∂f
∂f
∂ϕ
∂ϕ
dx +
dy + λ
dx +
dy = 0
∂x
∂y
∂x
∂y
или
µ
¶
µ
¶
∂f
∂ϕ
∂f
∂ϕ
+λ
dx +
+λ
dy = 0.
∂x
∂x
∂y
∂y
Отсюда легко получить систему (4.19), поскольку дифференциал равен
нулю, если равны нулю коэффициенты при dx и dy:
∂f
∂ϕ
+λ
= 0
∂x
∂x
∂f
∂ϕ
+λ
= 0
∂y
∂y
ϕ(x, y) = 0
Уравнение связи в эту систему мы добавили сами.
152
Система (4.19) это необходимое условие существования условного экстремума. Решая ее мы получим условно критические точки функции
z = f (x, y).
Для выяснения характера критических точек необходимы дальнейшие исследования. Рассмотрим критическую точку M0 (x0 , y0 ), λ0 функции
Лагранжа F . Поскольку
µ 2
¶
µ
¶
∂2F
∂ F
∂2F
∂ϕ
∂ϕ
=0и
dx +
dy dλ =
dx +
dy dλ = 0,
∂λ2
∂x∂λ
∂y∂λ
∂x
∂y
то второй дифференциал функции F (x, y) имеет вид
d2 F (x, y, λ) =
∂2F 2
∂2F 2
∂2F
dx
+
2
dxdy
+
dy
∂x2
∂x∂y
∂y 2
при условии, что дифференциалы dx и dy связаны соотношением
∂ϕ
∂ϕ
dx +
dy = 0.
∂x
∂y
Тогда
1. Функция z = f (x, y) имеет условный максимум в точке M0 (x0 , y0 ),
если d2 F (x0 , y0 , λ0 ) < 0.
2. Функция z = f (x, y) имеет условный минимум в точке M0 (x0 , y0 ),
если d2 F (x0 , y0 , λ0 ) > 0.
Второй способ исследования критических точек для функции двух переменных. Пусть M0 (x0 , y0 ), λ0 критическая точка, рассмотрим определитель
¯
¯
¯ 00
¯
00
00 ¯
¯Fλλ Fxλ
¯ 0
Fyλ
ϕ0y (M0 ) ¯¯
ϕ0x (M0 )
¯
¯ 00
¯
00
00
00
00 ¯
(M0 , λ0 ) Fxy
(M0 , λ0 )¯¯ .
Fxy
∆ = − ¯¯Fxλ Fxx
(M0 , λ0 ) = − ¯¯ϕ0x (M0 ) Fxx
¯
00
00
00 ¯
00
¯F 00 Fxy
¯ϕ0y (M0 ) Fxy
(M0 , λ0 )¯
(M0 , λ0 ) Fyy
Fyy
yλ
Тогда функция z = f (x, y) имеет в точке M0 условный максимум, если
∆ < 0 и условный минимум, если ∆ > 0.
Пример 4.7.1. Найти экстремум функции z = 6 − 4x − 3y при условии,
что x2 + y 2 = 1.
Напишем функцию Лагранжа
F (x, y, λ) = 6 − 4x − 3y + λ(x2 + y 2 − 1).
Найдем частные производные
∂F
∂F
∂F
= −4 + 2λx,
= −3 + 2λy,
= x2 + y 2 − 1.
∂x
∂y
∂λ
153
Получим систему
2λx − 4 =
2λy − 3 =
2
x + y2 − 1 =
0
0
0
Решая эту систему, найдем
3
2
25
, y=
, λ2 =
.
λ
2λ
4
Тогда критические точки будут
¶
µ
¶
µ
4 3
5
4 3
5
M1
,
, λ1 =
и M2 − , −
, λ1 = − .
5 5
2
5 5
2
x=
Найдем вторые производные функции Лагранжа
∂2F
= 2λ,
∂x2
∂2F
= 0,
∂x∂y
∂2F
= 2λ.
∂y 2
Поэтому
d2 F = 2λ(dx2 + dy 2 ).
µ
¶
4 3
5
1. Рассмотрим точку M1
,
и λ1 = , тогда d2 F = 5(dx2 + dy 2 ) >
5 5
2
0 для любых dx и dy. Поэтому функция z имеет в точке M1 условный
минимум
µ
¶
4 3
zy. min = z
,
= 1.
5 5
µ
¶
4 3
5
2. Рассмотрим точку M2 − , −
и λ2 = − , тогда d2 F = −5(dx2 +
5 5
2
dy 2 ) < 0 для любых dx и dy. Поэтому функция z имеет в точке M2 условный максимум
µ
¶
4 3
zy. max = z − , −
= 11.
5 5
Пусть требуется найти максимумы и минимумы функции u =
f (x1 , x2 , . . . , xn ) при условии, что переменные x1 , x2 , . . . , xn связаны m
уравнениями
ϕ1 (x1 , x2 , . . . , xn ) = 0
ϕ2 (x1 , x2 , . . . , xn ) = 0
.
.....................
ϕm (x1 , x2 , . . . , xn ) = 0.
154
Составим функцию Лагранжа
F (x1 , . . . , xn , λ1 , . . . , λm ) =
= f (x1 , . . . , xn ) + λ1 ϕ1 (x1 , . . . , xn ) + . . . + λm ϕm (x1 , . . . , xn ).
Приравняем к нулю частные производные по x1 , . . . , xn , λ1 , . . . , λm функции Лагранжа, получим систему уравнений
∂ϕ1
∂ϕm
∂f
+ λ1
+ . . . + λm
= 0
∂x1
∂x1
∂x1
∂f
∂ϕ1
∂ϕm
+ λ1
+ . . . + λm
= 0
∂x
∂x
∂x
2
2
. . . . . . . . . . . . . . . . . . . . . . . .2. . . . . . . .
∂f
∂ϕ1
∂ϕm
+ λ1
+ . . . + λm
= 0
∂xn
∂xn
∂xn
ϕ1 (x1 , . . . , xn ) = 0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..................
ϕm (x1 , . . . , xn ) = 0.
Из этой системы найдем критические точки функции Лагранжа. Затем исследуем второй дифференциал функции Лагранжа d2 F в найденных
критических точках при условии, что дифференциалы dx1 , dx2 , . . . , dxn
связаны между собой системой
dϕ1 = 0
dϕ2 = 0
.
.........
dϕm = 0.
4.7.1. Нахождение наибольшего и наименьшего значений
функции в замкнутой ограниченной области
Теорема 4.7.1. Функция z = f (x, y), дифференцируемая в замкнутой
ограниченной области D ⊂ R2 , достигает своего наибольшего и наименьшего значений или в критических точках или в точках границы области.
Пусть граница области D задается одним уравнением ϕ(x, y) = 0 или
несколькими такими уравнениями.
Схема нахождения наибольшего и наименьшего
значений функции
1. Найти все критические точки функции z = f (x, y).
2. Найти критические точки, которые лежат внутри области D.
3. Найти в этих точках значение функции f (x, y).
155
4. Найти условно критические точки функции f (x, y) на границе области
D.
5. Найти значение функции f (x, y) в этих точках.
6. Выбрать из всех найденных значений функции наибольшее и наименьшее.
Пример 4.7.2. Найти наибольшее и наименьшее значения функции z =
x2 + y 2 − xy + x + y в области D : x 6 0, y 6 0, x + y > −3.
1. Найдем критические точки функции z, принадлежащие области D.
zx0 = 2x − y + 1,
Составим систему
½
2x − y + 1
2y − x + 1
= 0
= 0
zy0 = 2y − x + 1.
½
или
2x + 1 =
3x + 3 =
y
0.
Решая последнюю систему, получим критическую точку M1 (−1, −1) ∈ D,
принадлежащую области D.
Найдем значение функции в этой точке
z(M1 ) = 1 + 1 − 1 − 1 − 1 = −1.
2. Найдем критические точки на границе x = 0, y ∈ [−3, 0]. Тогда
z = y2 + y
и z 0 = 2y + 1 = 0 или
y = −1/2.
Поэтому критическая точка M2 (0, −1/2) ∈ D. Найдем значения функции
в угловых точках M3 (0, 0), M4 (0, −3) и в точке M2
z(M2 ) = −1/4,
z(M3 ) = 0,
z(M4 ) = 6.
3. Найдем критические точки на границе y = 0, x ∈ [−3, 0]. Тогда
z = x2 + x и z 0 = 2x + 1 = 0 или
x = −1/2.
Поэтому критическая точка M5 (−1/2, 0) ∈ D. Найдем значения функции
в угловой точке M6 (−3, 0) и в точке M5
z(M5 ) = −1/4,
z(M6 ) = 6.
4. Найдем критические точки на границе x+y = −3 или y = −3−x, x ∈
[−3, 0]. Тогда
z = 3x2 + 9x + 6
и z 0 = 6x + 9 = 0 или x = −3/2.
Поэтому критическая точка M7 (−3/2, −3/2) ∈ D. Найдем значение функции в этой точке
z(M7 ) = −3/4.
156
Y
Y
X
X
Рис. 4.4.
5. Выберем из найденных значений наибольшее и наименьшее
zнаим. = z(M1 ) = −1,
zнаиб. = z(M4 ) = z(M6 ) = 6.
4.8. Получение функции на основе экспериментальных данных
по методу наименьших квадратов
Пусть на основе эксперимента требуется установить функциональную
зависимость y от величины x: y = f (x). Пусть в результате эксперимента
получено n значений функции y при соответствующих значениях аргумента.
x
y
x1
y1
x2
y2
......
......
xn
yn
Вид функции y = f (x) подбирается или на основе теоретических соображений или на основе расположения на координатной плоскости точек,
соответствующих экспериментальным данным (см. рис. 4.4).
Функцию f (x) можно искать в виде линейной функции y = ax + b, в
виде квадратичной функции y = ax2 + bx + c и т.д.
Пусть мы выбрали некоторую функцию y = f (x, a, b, c, . . .), зависящую
от параметров a, b, c, . . . . Надо подобрать эти параметры так, чтобы функция f описывала процесс в некотором смысле наилучшим образом.
4.8.1. Метод наименьших квадратов
Рассмотрим сумму квадратов разностей значений yi , даваемых экспериментом и функции f (a, b, c, . . .) в соответствующих точках xi :
n
X
S(a, b, c, . . .) =
(yi − f (xi , a, b, c, . . .))2 .
(4.20)
i=1
157
Подберем параметры a, b, c, . . . так, чтобы функция S(a, b, c . . .) имела минимальное значение. Из необходимого условия экстремума следует тогда,
что
∂S
= 0,
∂a
∂S
= 0, . . .
∂b
или
P
n
∂f
(yi − f (xi , a, b, c, . . .)
∂a
i=1
n
P
∂f
(yi − f (xi , a, b, c, . . .)
∂b
i=1
.........
= 0
(4.21)
= 0
В этой системе уравнений ровно столько сколько параметров a, b, c, . . ..
Решая эту систему найдем критические точки, которые надо исследовать
на минимум.
Рассмотрим два случая.
1. Пусть y = f (x, a, b) = ax + b линейная зависимость. Тогда
S(a, b) =
n
X
(yi − (axi + b))2 .
i=1
Используя систему (4.21), получим
n
P
∂S
(yi − (axi + b))xi
∂a = −2
I=1
n
P
∂S
= −2
(yi − (axi + b))
∂b
I=1
= 0
=
0
или
P
n
n
n
P
P
xi yi − a
x2i − b
xi
i=1
n
P
i=1
i=1
yi − a
n
P
i=1
= 0
i=1
xi − bn
(4.22)
= 0.
Поскольку xi , yi это числа, то эта система есть система двух линейных
уравнений с двумя неизвестными a и b. Решая ее, найдем a и b. Очевидно,
158
что в этой точке будет локальный минимум. Поскольку
n
P
∂2S
=
2
x2i = A > 0,
∂a2
i=1
∂2S
∂b2
∂2S
∂a∂b
=
2n
=
2
n
P
i=1
то определитель
2
∆ = AC − B = 4n
n
X
x2i
−4
i=1
xi
à n
X
i=1
=
C > 0,
=
B,
!2
xi
=4
X
(xi − xj )2 > 0.
i<j
И поэтому в найденной критической точке будет минимум функции S.
2. Рассмотрим квадратичную зависимость y = f (x, a, b, c) = ax2 +bx+c.
Тогда
n
X
S(a, b, c) =
(yi − (ax2i + bxi + c))2 .
i=1
Система (4.21) для этой зависимости имеет вид
n
P
(yi − (ax2i + bxi + c))x2i = 0
i=1
P
n
(yi − (ax2i + bxi + c))xi = 0
i=1
n
P
(yi − (ax2i + bxi + c))
= 0.
i=1
Преобразуя эту систему, получим
n
n
n
n
P 2
P
P
P
4
3
x
y
−
a
x
−
b
x
−
c
x2i
i
i
i
i
i=1
i=1
i=1
i=1
P
n
n
n
n
P
P
P
xi yi − a
x3i − b
x2i − c
xi
i=1
i=1
i=1
i=1
P
n
n
n
P
P
yi − a
x2i − b
xi − cn
i=1
i=1
= 0
= 0
= 0
i=1
Решая систему относительно a, b, c найдем эти параметры. Функция
S(a, b, c) будет иметь минимум в этой точке.
Пример 4.8.1. Пусть функциональная зависимость y = f (x) задана
экспериментальными данными
159
x
y
1
4,3
2
3
4
5,3 3,8 1,8
5
2,3
здесь n = 5.
Требуется найти функцию вида y = ax + b аппроксимирующую функцию y = f (x). Для этого используем систему (4.22). Составим таблицу
xi
1
2
3
4
P 5
15
yi
x2i
4,3
1
5,3
4
3,8
9
1,8 16
2,3 25
17,5 55
По таблице составим систему
½
45 − 55a − 15b
17, 5 − 15a − 5b
xi yi
4,3
10,6
11,4
7,2
11,5
45
= 0
= 0.
Решая эту систему найдем, что a = −0, 75, b = 5, 75. Поэтому мы получим
следующую линейную зависимость
y = −0, 75x + 5, 75.
Построим на графике найденную линейную зависимость и нанесем на
него исходные данные (см. рис. 4.5.).
Y
6
5, 75
4
2
7, 6 X
0
2
4
Рис. 4.5.
160
6
8
Глава 5
Кратный интеграл и его приложения
5.1. Двойной интеграл и его свойства
5.1.1. Задачи, приводящие к понятию двойного интеграла
Найти объем тела T , ограниченного сверху непрерывной поверхностью
z = f (x, y) (f (x, y) > 0), снизу ограниченной замкнутой областью D на
плоскости XOY и с боков прямой цилиндрической поверхностью, направляющей которой является граница области D, а образующая параллельна
оси OZ (рис. 5.1). Построим интегральную сумму для вычисления объема
этого тела.
1. Разобьем основание D на n элементарных ячеек (площадок)
s1 , s 2 , . . . , s n .
2. Вычислим длину диаметра dj ячейки sj , т.е. длину ее наибольшей
хорды.
3. В каждой ячейке выберем точку Mj (xj , yj ) ∈ sj .
4. Обозначим площадь каждой элементарной ячейки ∆sj .
z
Nj
f (x, y)
V
o
x
∆sj
Mj
Рис. 5.1.
161
y
5. Вычислим объем Vj прямого цилиндрического столбика с основанием sj и высотой |Mj Nj | = f (xj , yj ):
Vj = ∆sj · f (xj , yj ).
6. Найдем сумму объемов всех цилиндрических столбиков
Vn =
n
X
f (xj , yj )∆sj .
j=1
Определение 5.1.1. Объемом данного тела T назовем предел, если он
существует, к которому стремится интегральная сумма Vn при стремлении к нулю наибольшего из диаметров dj , т.е.
V =
n
X
lim
max dj →0
f (xj , yj )∆sj .
j=1
К составлению аналогичных сумм приводят многие прикладные задачи.
5.1.2. Понятие двойного интеграла
Определение 5.1.2. Двумерной интегральной суммой от данной
функции f (x, y) по области D называется сумма произведений площадей
элементарных ячеек ∆sj области D на значения f (xj , yj ) функции f (x, y)
в выбранных точках этих ячеек
Sn =
n
X
f (xj , yj )∆sj .
j=1
Определение 5.1.3. Двойным интегралом от функции f (x, y) по области D называется предел двумерной интегральной суммы при неограниченном возрастании числа элементарных ячеек и стремлении к нулю
их наибольшего диаметра при условии, что этот предел существует и
не зависит от способа разбиения и выбора точек, т.е.
ZZ
n
X
f (x, y) dS = lim
f (xj , yj )∆sj .
max dj →0
D
j=1
Определение 5.1.4. Функция z = f (x, y) называется интегрируемой
по области D, если существует двойной интеграл по этой области.
Сформулируем основную теорему для двойных интегралов.
162
Теорема 5.1.1. Пусть D — замкнутая ограниченная область с
кусочно-гладкой границей и функция f (x, y) непрерывна в этой области,
тогда функция f (x, y) интегрируема по области D.
Таким образом, класс интегрируемых по области D функций шире
класса непрерывных в этой области функций.
Значение интеграла не зависит от вида элементарных ячеек, поэтому область D можно разбивать на элементарные ячейки прямыми параллельными осям координат. Пусть i — номер вертикальной полосы (i =
1, 2, . . . , n), а j — номер горизонтальной (j = 1, 2, . . . , m). Тогда в пересечении этих полос будет элементарная ячейка (прямоугольник) sij , а точка
Mij (xi , yj ) ∈ sij . Площадь элементарных ячеек будет равна ∆sij = ∆xi ∆yj .
Аналогично, дифференциал площади ds = dxdy, поэтому
ZZ
n X
m
X
f (x, y) dxdy =
lim
lim
f (xi , yj )∆xi ∆yj .
max ∆xi →0 max ∆yj →0
D
i=1 j=1
5.1.3. Свойства двойных интегралов
Сформулируем все свойства в виде одной теоремы, поскольку они аналогичны свойствам определенного интеграла.
Теорема 5.1.2. 1. Аддитивность относительно подынтегральных
выражений
ZZ
ZZ
ZZ
(f (x, y) ± g(x, y)) dxdy =
f (x, y) dxdy ±
g(x, y) dxdy.
D
D
D
2. Аддитивность относительно областей. Пусть области D1 и D2
не имеют общих внутренних точек и D = D1 ∪ D2 , то
ZZ
ZZ
ZZ
f (x, y) dxdy =
f (x, y) dxdy +
f (x, y) dxdy.
D
D1
D2
3. Постоянный множитель можно выносить за знак интеграла
ZZ
ZZ
αf (x, y) dxdy = α
f (x, y) dxdy.
D
то
D
4. Если для любой точки M (x, y) ∈ D выполняется f (x, y) 6 g(x, y),
ZZ
ZZ
f (x, y) dxdy 6
g(x, y) dxdy.
D
D
163
y
A2
!
y
d
ϕ2 (x)
y2
M2
B2
N1
D
y1
ϕ1 (x)
A1
o
ψ1 (y)
B1
M1
a
x
N2
D
ψ2 (y)
c
b
x
o
x
Рис. 5.2.
5. Пусть функция f (x, y) интегрируема по области D, тогда |f (x, y)|
также интегрируема по D и
¯Z Z
¯ ZZ
¯
¯
¯
¯
¯
¯
¯f (x, y)¯ dxdy.
f (x, y) dxdy ¯6
¯
¯
¯
D
D
6. Пусть m и M соответственно наименьшее и наибольшее значения
функции f (x, y) в области D и ∆S площадь области D, тогда
ZZ
m∆S 6
f (x, y) dxdy 6 M ∆S.
D
7. Теорема о среднем значении. Пусть функция f (x, y) непрерывна в
области D, тогда существует точка M0 (x0 , y0 ) ∈ D, такая, что
ZZ
f (x, y) dxdy = f (x0 , y0 )∆S.
D
Все свойства доказываются аналогично определенному интегралу.
5.1.4. Вычисление двойного интеграла
Рассмотрим область D, ограниченную прямыми x = a, x = b и кривыми
y = ϕ1 (x) и y = ϕ2 (x), где ϕ1 (x) и ϕ2 (x) — непрерывные на отрезке [a, b]
функции (рис. 5.2).
Определение 5.1.5. Область D = {(x, y) : a 6 x 6 b, ϕ1 (x) 6 y 6
ϕ2 (x)} называется правильной относительно оси OY .
164
Прямая, проходящая через точку x ∈ (a, b) параллельно оси OY ,
пересекает границу области D только в двух точках M1 (x, ϕ1 (x)) и
M2 (x, ϕ2 (x)).
Пусть область D ограничена прямыми y = c, y = d и кривыми x =
ψ1 (y), x = ψ2 (y), где ψ1 (y) и ψ2 (y) — непрерывные на отрезке [c, d] функции.
Определение 5.1.6. Область D = {(x, y) : ψ1 (y) 6 x 6 ψ2 (y), c 6 y 6
d} называется правильной относительно оси OX.
Прямая, проходящая через точку y ∈ (c, d) параллельно оси OX, пересекает границу области D только в двух точках N1 (ψ1 (y), y) и N2 (ψ2 (y), y).
Теорема 5.1.3. Пусть D — область, правильная относительно оси
OY , и функция z = f (x, y) непрерывна по области D, тогда
!
ϕZ2 (x)
Zb à ϕZ2 (x)
Zb
ZZ
f (x, y) dxdy =
D
f (x, y) dy dx =
a
dx
a
ϕ1 (x)
f (x, y) dy,
ϕ1 (x)
т.е. двойной интеграл может быть вычислен в результате двух последовательно проведенных простых интегрирований.
Доказательство. Проведем доказательство только в случае, когда
функция f (x, y) > 0 в области D. Тогда
ZZ
f (x, y) dxdy = V,
D
где V — объем тела T , ограниченного снизу областью D, сверху поверхностью z = f (x, y) и с боков прямой цилиндрической поверхностью.
Пересечем это тело плоскостью, перпендикулярной оси OX, которая проходит через точку x ∈ (a, b) (рис. 5.3). Пусть M1 M2 M20 M10 — это сечение,
а P1 P2 P20 P10 — его проекция на плоскость ZOY . Обозначим σ(x) площадь
сечения M1 M2 M20 M10 , очевидно, что σ(x) = SP1 P2 P20 P10 . Тогда
Zy2
σ(x) = SP1 P2 P20 P10 =
f (x, y) dy
y1
как площадь криволинейной трапеции, где y1 = ϕ1 (x) и y2 = ϕ2 (x). Поскольку
Zb
V = σ(x) dx,
a
165
z
"
P20
M20
y
P10
B20
A02
M10
B10
A01
A2
y2
M2
B2
P2
y1
P1
o
z = f (x, y)
A1
a
M1
x
B1
x
b
Рис. 5.3.
где σ(x) — площадь переменного сечения тела T плоскостью перпендикулярной оси OX, то
!
Zb à ϕZ2 (x)
V =
f (x, y) dy dx.
a
ϕ1 (x)
Отсюда следует утверждение теоремы
ZZ
ϕZ2 (x)
Zb
f (x, y) dxdy =
dx
a
D
f (x, y) dy.
ϕ1 (x)
Замечание 5.1.1. Внутренний интеграл
ϕZ2 (x)
f (x, y) dy
ϕ1 (x)
вычисляется в предположении, что x = const.
Аналогичная теорема справедлива и для правильной области относительно оси OX.
166
Теорема 5.1.4. Пусть область D правильная относительно оси OX
и функция z = f (x, y) непрерывна по области D, тогда
ZZ
ψZ2 (y)
Zd
f (x, y) dxdy =
dy
c
D
f (x, y) dx.
ψ1 (y)
Замечание 5.1.2. Внутренний интеграл
ψZ2 (y)
f (x, y) dx
ψ1 (y)
вычисляется в предположении, что y = const.
Замечание 5.1.3. Если область D неправильная ни по какой оси, то
ее разбивают на конечное число правильных областей и берут сумму интегралов.
RR 2
Пример 5.1.1. Вычислить
x y dxdy, где область D — треугольник
D
с вершинами A(0, 0), B(2, 0), C(2, 1) (рис. 5.4 ). Область D правильная по
обеим осям. Будем ее рассматривать как правильную по оси OY . Поскольку прямая AB задается уравнением y = 0, прямая CB — уравнением x = 2,
x
прямая AC — уравнением y = , то по оси OY нижней границей будет яв2
x
ляться прямая y = 0, а верхней — y = , по оси OX нижняя граница a = 0,
2
а верхняя — b = 2. Поэтому
ZZ
x2 y dxdy =
D
Z2
x
Z2
Z2
x2 y dy =
dx
0
x
Z2
0
Z2
x2 dx
0
y dy =
0
¯x
¯2
Z2
Z2
2
y 2 ¯¯ 2
1
1 x5 ¯¯
4
2 x
4
x · ¯ dx = x ·
dx =
x dx =
= .
2 0
8
8
8 5 ¯0 5
2
=
0
0
Пример 5.1.2. Вычислить
RR
0
(x+y 2 ) dxdy, где область D задается урав-
D
нениями y = x2 , y = 0, x + y = 2. Эта область правильная по оси OX
(рис. 5.5). Границами по оси OY являются c = 0, d = 1, где последняя гра√
ница находится как точка пересечения кривой x = y и прямой x = 2 − y.
167
#$
y
y
C
o
A
1
B
x
o
Рис. 5.4.
Z
2
(x + y ) dxdy =
Z1
=
0
³
x
√
y и верхняя — прямая
Z 1³ 2
´¯¯2−y
x
2
dy =
(x + y ) dx =
+ y x ¯¯
√
2
0
y
2−y
Z
1
2
dy
0
D
2
Рис. 5.5.
Границами по оси OX будут нижняя — кривая x =
x = 2 − y, поэтому
ZZ
1
√
y
Z1 ³
´
´
5
5
y2 y
5
5
2
3
2 − 2y +
2 − y + y 2 − y 3 − y 2 dy =
− + 2y − y − y 2 dy =
2
2
2
2
0
¯1
³
5
5
1
2 7 ´¯
22
5 5 1 2
= 2y − y 2 + y 3 − y 4 − y 2 ¯¯ = 2 − + − − =
.
4
6
4
7
4
6
4
7
21
0
5.2. Приложения двойного интеграла
5.2.1. Объем тела
1. По определению из предыдущего пункта объем тела T , ограниченного сверху поверхностью z = f (x, y), f (x, y) > 0, снизу — областью D на
плоскости XOY , с боков — цилиндрической поверхностью, направляющей
которой является граница области D, а образующая параллельна оси OZ,
равна двойному интегралу от функции f (x, y) по области D, т.е.
ZZ
V =
f (x, y) dxdy.
D
2. Пусть тело T ограничено снизу поверхностью z = f (x, y), сверху
поверхностью z = g(x, y) и g(x, y) > f (x, y), причем проекцией на плоскость
XOY обеих поверхностей является область D (рис. 5.6), тогда
ZZ
ZZ
ZZ
V =
g(x, y) dxdy −
f (x, y) dxdy =
(g(x, y) − f (x, y)) dxdy.
D
D
D
168
z
% &
z
g(x, y)
2
x+y+z =2
y = x2
f (x, y)
o
y
D
x
o
x
y
2
Рис. 5.6.
Рис. 5.7.
Пример 5.2.1. Найти объем тела T , ограниченного поверхностями y =
0, z = 0, y = x2 , x + y + z = 2 (рис. 5.7). Тело T ограничено сверху
плоскостью z = 2−x−y, снизу областью D на плоскости XOY , задаваемой
уравнениями y = 0, y = 2 − x и y = x2 . Поскольку прямая y = 2 − x и
парабола y = x2 пересекаются в точке x = 1, то
ZZ
V =
Zx
Z1
0
D
2−x
Z
Z2
1
0
(2 − x − y) dy =
dx
(2 − x − y) dy +
dx
(2 − x − y) dxdy =
2
0
¯x2
¯2−x
Z1 ³
Z2 ³
y 2 ´¯¯
y 2 ´¯¯
=
(2 − x)y −
dx
+
(2
−
x)y
−
dx =
2 ¯0
2 ¯0
0
1
Z1 ³
=
0
x4 ´
dx +
2x − x −
2
2
3
Z2 ³
x2 ´
2 − 2x +
dx =
2
1
¯1
¯2
³ 2x3
x4
x5 ´¯¯ ³
x3 ´¯¯
2
=
−
−
+ 2x − x +
=
3
4
10 ¯0
6 ¯1
=
2 1
1
4
1
29
− −
+4−4+ −2+1− =
.
3 4 10
3
6
60
169
'
y=x
√
-2
o
22
1
y = 2 − x2
Рис. 5.8.
5.2.2. Площадь плоской фигуры
Пусть f (x, y) ≡ 1 в области D, тогда двойной интеграл от этой функции
по данной области будет равен площади области D, т.е.
ZZ
S=
dxdy.
D
Пример 5.2.2. Вычислить площадь области D, ограниченной параболой y = 2 − x2 и прямой y = x (рис. 5.8). Решая систему
½
y = 2 − x2
y = x,
найдем точки пересечения x1 = −2, x2 = 1. Поэтому
ZZ
S=
dxdy =
D
Z1
=
−2
2
2−x
Z
Z1
dx
−2
Z1
dy =
x
¯2−x2
y ¯x dx =
−2
¯1
³
1 1
1
1 ´¯
8
7
(2 − x2 − x) dx = 2x − x3 − x2 ¯¯ = 2 − − + 4 − + 2 = .
3
2
3 2
3
2
−2
170
()
M 0 (u, v)
∆S 0
v
M (x, y)
u
D
M4
∆v
L0
v
∆S
o
L
u
u
u + ∆u
D0
∆u
v + ∆v
y
o
u + ∆u
M1 M2
M3
v + ∆v
v
x
Рис. 5.9.
5.2.3. Замена переменных в двойном интеграле
Пусть в плоскости XOY дана область D, ограниченная линией L
(рис. 5.9). Рассмотрим двойной интеграл по этой области
ZZ
f (x, y) dxdy.
D
Сделаем замену переменных:
(
x = ϕ(u, v)
y = ψ(u, v),
(5.1)
где функции ϕ(u, v), ψ(u, v) непрерывны и имеют непрерывные частные
производные по u, v в некоторой области D0 переменных (u, v). Будем
считать, что каждой паре значений (u, v) ∈ D0 соответствует по формулам (5.1) единственная пара значений (x, y) ∈ D, и наоборот. Т.е. каждой точке M (x, y) на плоскости XOY соответствует единственная точка
M 0 (u, v) на плоскости U OV . Координаты u, v называются криволинейными координатами точки M . Таким образом, формулы (5.1) устанавливают
взаимно-однозначное соответствие между точками областей D и D0 .
В области D0 рассмотрим прямые u = const = c. По формулам (5.1) в
плоскости XOY им соответствуют кривые
(
x = ϕ(c, v)
y = ψ(c, v).
171
Аналогично, прямым v = const = C в плоскости U OV соответствуют кривые
(
x = ϕ(u, c)
y = ψ(u, c).
Область D0 этими прямыми разобьется на прямоугольники, соответственно, кривыми область D разобьется на криволинейные четырехугольники.
Рассмотрим в плоскости U OV прямоугольник s0 , ограниченный прямыми
u = const, u + ∆u = const, v = const, v + ∆v = const, его площадь равна
∆s0 = ∆u∆v. Этому прямоугольнику соответствует криволинейная площадка s, ее площадь обозначим ∆s.
Каждому значению функции z = f (x, y) в области D соответствует
значение этой функции z = F (u, v) = f (ϕ(u, v), ψ(u, v)) в области D0 . Тогда
X
X
f (x, y)∆s =
F (u, v)∆s.
(5.2)
Вычислим площадь ∆s криволинейного четырехугольника M1 M2 M3 M4 .
Координаты его вершин будут следующими:
M1 (x1 , y1 ) : x1 = ϕ(u, v),
y1 = ψ(u, v)
M2 (x2 , y2 ) : x2 = ϕ(u + ∆u, v),
y2 = ψ(u + ∆u, v)
(5.3)
M3 (x3 , y3 ) : x3 = ϕ(u + ∆u, v + ∆v), y3 = ψ(u + ∆u, v + ∆v)
M4 (x4 , y4 ) : x4 = ϕ(u, v + ∆v),
y4 = ψ(u, v + ∆v).
В выражениях (5.3) заменим приращение функций соответствующими
дифференциалами, пренебрегая бесконечно малыми более высокого порядка, чем ∆u и ∆v. Получим
M1 (x1 , y1 ) : x1 = ϕ(u, v),
y1 = ψ(u, v)
∂ψ
∂ϕ
M2 (x2 , y2 ) : x2 = ϕ(u, v) +
∆u,
y2 = ψ(u, v) +
∆u
∂u
∂u
∂ϕ
∂ϕ
∂ψ
∂ψ
M3 (x3 , y3 ) : x3 = ϕ(u, v) +
∆u +
∆v, y3 = ψ(u, v) +
∆u +
∆v
∂u
∂v
∂u
∂v
∂ψ
M4 (x4 , y4 ) : x4 = ϕ(u, v) + ∂ϕ ∆v,
y4 = ψ(u, v) +
∆v.
∂v
∂v
(5.4)
Площадь ∆s криволинейного четырехугольника приближенно равна площади параллелограмма с вершинами M1 M2 M3 M4 , которая равна модулю
векторного произведения векторов M1 M2 и M1 M4 , т.е.
¯
¯
∆s ≈ ¯[M1 M2 , M1 M4 ]¯.
172
Из формул (5.4) найдем вектор
n³
´ ³
´ o
∂ϕ
∂ψ
M1 M2 =
ϕ(u, v) +
∆u − ϕ(u, v) , ψ(u, v) +
∆u − ψ(u, v) , 0 =
∂u
∂u
=
n ∂ϕ
∂u
∆u,
o
∂ψ
∆u, 0 ,
∂u
аналогично найдем вектор
M1 M4 =
Тогда
¯
¯
¯¯ ī
¯¯ ∂ϕ
¯¯
∆s ≈ ¯¯ ∂u ∆u
¯¯ ∂ϕ
¯
∆v
¯
∂v
¯
¯¯ ∂ϕ
¯¯
¯¯ ∂u
= ¯¯ ∂ϕ
¯¯
¯
∂v
n ∂ϕ
∂v
∆v,
o
∂ψ
∆v, 0 .
∂v
¯
¯
¯
j̄
k̄ ¯¯ ¯
¯¯
¯¯ ∂ϕ
∂ψ
¯
¯
¯
¯
∂ψ
∆u
∆u¯¯ ¯¯
¯ ¯
∆u 0¯¯ ¯¯= ¯k̄ ¯¯¯¯¯ ∂u
∂u
¯ ¯=
∂u
¯¯
¯¯ ∂ϕ ∆v ∂ψ ∆v ¯ ¯
∂ψ
¯
¯
¯
∆v 0¯
∂v
∂v
∂v
¯
¯
¯
¯¯ ∂ϕ ∂ϕ ¯ ¯
∂ψ ¯¯ ¯¯
¯¯
¯¯
∂u ¯¯ ¯¯∆u∆v = ¯¯¯¯ ∂u ∂v ¯¯ ¯¯∆u∆v.
∂ψ ¯ ¯
¯¯ ∂ψ ∂ψ ¯ ¯
¯
¯
¯
∂v
∂u ∂v
Определение 5.2.1. Обозначим
¯
¯ ∂ϕ
¯
¯ ∂u
I = ¯ ∂ψ
¯
¯
∂u
¯
∂ϕ ¯¯
∂v ¯
∂ψ ¯¯
¯
∂v
определитель Якоби функций ϕ(u, v) и ψ(u, v) или якобиан перехода от
переменных (x, y) к переменным (u, v).
¯ ¯
Подставляя ∆s ≈ ¯I ¯∆s0 в равенство (5.2), получим
X
X
¯ ¯
f (x, y)∆s ≈
F (u, v)¯I ¯∆s0 .
Переходя к пределу в последнем равенстве, получим формулу замены переменных в двойном интеграле:
ZZ
ZZ
¯ ¯
f (x, y) dxdy =
F (u, v)¯I ¯ dudv.
D
D0
173
*
y
ϕ=β
ρ = Φ2 (ϕ)
ϕ=α
ρ = Φ1 (ϕ)
o
x
Рис. 5.10.
5.2.4. Двойной интеграл в полярной системе координат
Рассмотрим двойной интеграл в декартовой системе координат
ZZ
f (x, y) dxdy.
D
Перейдем в этом интеграле в полярную систему координат
½
x = ρ cos ϕ
y = ρ sin ϕ.
Будем предполагать, что область D (рис. 5.10) при этой замене перейдет
в область D0 , заданную лучами ϕ = α, ϕ = β и кривыми ρ = Φ1 (ϕ),
ρ = Φ2 (ϕ), причем Φ1 (ϕ) 6 Φ2 (ϕ).
Вычислим якобиан перехода от декартовой системы координат к по∂x
∂x
∂y
лярной системе координат. Поскольку
= −ρ sin ϕ,
= cos ϕ,
=
∂ϕ
∂ρ
∂ϕ
ρ cos ϕ,
∂y
= sin ϕ, то
∂ρ
¯
¯ ∂x
¯
¯
I = ¯ ∂ϕ
¯ ∂y
¯
∂ϕ
¯
∂x ¯ ¯
¯
¯
∂ρ ¯¯ = ¯¯−ρ sin ϕ cos ϕ¯¯ = −ρ sin2 ϕ − ρ cos2 ϕϕ = −ρ.
∂y ¯ ¯ ρ cos ϕ sin ϕ ¯
¯
∂ρ
174
Поэтому |I| = ρ. Таким образом, двойной интеграл в полярной системе
координат будет иметь вид
ZZ
ZZ
f (x, y) dxdy =
F (ϕ, ρ)ρ dρdϕ =
dϕ
α
D0
D
ΦZ2 (ϕ)
Zβ
F (ϕ, ρ)ρ dρ.
Φ1 (ϕ)
Пример 5.2.3. Вычислить интеграл
ZZ
(x − y + 1) dxdy,
D
2
где область D = {(x, y) : x +y 2 6 1} — круг единичного радиуса. Перейдем
в полярную систему координат
½
x = ρ cos ϕ
y = ρ sin ϕ.
Тогда граница круга будет задаваться уравнением
ρ2 cos2 ϕ + ρ2 sin2 ϕ = 1
или ρ = 1. Внутри круга ρ будет изменяться от ρ = 0 до ρ = 1, а угол ϕ от
ϕ = 0 до ϕ = 2π. Поэтому
ZZ
ZZ
(x − y + 1) dxdy =
(ρ cos ϕ − ρ sin ϕ + 1)ρ dρdϕ =
D0
D
Z2π
=
Z2πµ
Z1
2
dϕ
0
(ρ (cos ϕ − sin ϕ) + ρ) dρ =
0
Z2πµ
=
0
0
1
1
(cos ϕ − sin ϕ) +
3
2
¶
dϕ =
¶¯1
1 3 1 2 ¯¯
(cos ϕ − sin ϕ) ρ + ρ ¯ dϕ =
3
2
0
¯2π 1 ¯2π
1
¯
¯
(sin ϕ + cos ϕ)¯ + ϕ¯ = π.
3
2 0
0
Пример 5.2.4. Найти площадь фигуры, ограниченной кривой (x2 +
y 2 )2 =
= axy 2 , где a > 0 произвольное число. Перейдем в полярную систему
координат, получим ρ4 = aρ3 cos ϕ sin2 ϕ. Тогда фигура в полярной системе
координат будет ограничена кривой ρ = a cos ϕ sin2 ϕ. Эта фигура есть два
лепестка в первой и четвертой четвертях (рис. 5.11). Поэтому мы вычислим
площадь одного лепестка и умножим ее на два, пределы интегрирования
π
по ϕ будут от ϕ = 0 до ϕ = , а по ρ от ρ = 0 до ρ = a cos ϕ sin2 ϕ. Тогда
2
175
+
π
2
ρ = a cos ϕ sin2 ϕ
0
Рис. 5.11.
ZZ
π
ZZ
S=
dxdy =
Z2
ρ dρdϕ = 2
D0
D
π
2
Z
=2
0
dϕ
0
ρ dρ =
0
π
2
¯a cos ϕ sin2 ϕ
Z
1 2 ¯¯
ρ ¯
dϕ = a2 cos2 ϕ sin4 ϕ dϕ =
2 0
0
π
2
Z
= a2
0
a2
=
16
a cosZϕ sin2 ϕ
π
2
Z
0
1
1
sin2 2ϕ · (1 − cos 2ϕ) dϕ =
4
2
π
a2
(1 − cos 4ϕ) dϕ −
16
Z2
sin2 2ϕ d sin 2ϕ =
0
¯π
¯ π2
¯ π2
¯
¯
a2 ¯¯ 2 a2
a2
a2
3
¯
= − ϕ¯ − sin 4ϕ¯ − sin 2ϕ¯¯ =
.
16 0 64
48
32
0
0
5.3. Тройной интеграл
Пусть в пространстве R3 задана замкнутая область V , ограниченная
поверхностью σ. Пусть в области V определена непрерывная функция u =
f (x, y, z). Построим интегральную сумму.
1. Разобьем область V на элементарные области Vj , j = 1, 2, . . . , n.
2. Вычислим объем ∆vj подобластей Vj .
3. Выберем точки Pj (xj , yj , zj ) в подобластях Vj .
176
4. Составим интегральную сумму
Vn =
n
X
f (Pj )∆vj .
j=1
Обозначим dj диаметр подобласти Vj , т.е. ее наибольший линейный
размер.
Определение 5.3.1. Если существует предел интегральных сумм
lim
max dj →0
Vn =
lim
n
X
max dj →0
f (Pj )∆vj ,
j=1
не зависящий от способа разбиения области V и выбора точек Pj , то он
называется тройным интегралом по области V от функции f (x, y, z) и
обозначается
ZZZ
ZZZ
f (P ) dv =
f (x, y, z) dxdydz =
V
V
=
lim
max dj →0
n
X
f (Pj )∆vj .
j=1
Определение 5.3.2. Область V называется правильной относительно оси OZ, если:
1. всякая прямая, параллельная оси OZ пересекает границу σ области
V только в двух точках;
2. область V проектируется на плоскость XOY в правильную область D.
Правильная область V (рис. 5.12) задается уравнениями
V = {(x, y, z) : ψ1 (x, y) 6 z 6 ψ2 (x, y)},
причем область D, проекция области V на плоскость XOY , может задаваться одним из двух способов:
D = {(x, y) : a 6 x 6 b, ϕ1 (x) 6 y 6 ϕ2 (x)}
либо
D = {(x, y) : ϕ1 (y) 6 x 6 ϕ2 (y), c 6 y 6 d}.
177
,
ψ2 (x, y)
z
V
ψ1 (x, y)
a
b
o
ϕ1 (x)
y
ϕ2 (x)
D
x
Рис. 5.12.
Определение 5.3.3. Выражения
IV =
dy
dx
a
ϕ1 (x)
f (x, y, z) dz,
ψ1 (x,y)
ϕZ2 (y)
Zd
IV =
ψ2Z(x,y)
ϕZ2 (x)
Zb
dy
c
ψ2Z(x,y)
dx
ϕ1 (y)
f (x, y, z) dz
ψ1 (x,y)
называются трехкратным интегралом от функции f (x, y, z) по области
V.
5.3.1. Свойства тройного интеграла
Теорема 5.3.1. Если область V разбить на две области V1 и V2 , то
тройной интеграл по области V равен сумме интегралов по областям V1
и V2 .
Теорема 5.3.2 (Теорема об оценке). Если m и M — наименьшее и наибольшее значения функции f (x, y, z) в области V , то выполняется неравенство
ZZZ
mV 6
f (x, y, z) dxdydz 6 M V,
V
где V — объем области V .
178
Теорема 5.3.3 (Теорема о среднем). Тройной интгерал от непрерывной функции f (x, y, z) по области V равен произведению объема V этой
области на значение функции в некоторой точке P = (x0 , y0 , z0 ) области
V , т.е.
ZZ
f (x, y, z) dxdydz = f (P )V.
V
Замечание 5.3.1. Теоремы 5.3.1 — 5.3.3 справедливы и для трехкратного интеграла I.
Теорема 5.3.4. Тройной интеграл от функции f (x, y, z), непрерывной
в правильной области V , равен трехкратному интегралу по этой области, т.е.
ZZZ
f (x, y, z) dxdydz =
либо
ϕZ2 (x)
Zb
a
ZZZ
Zd
f (x, y, z) dxdydz =
ψ1 (x,y)
ϕ1 (x)
ϕZ2 (y)
dy
c
V
f (x, y, z) dz
dy
dx
V
ψ2Z(x,y)
ψ2Z(x,y)
dx
ϕ1 (y)
f (x, y, z) dz.
ψ1 (x,y)
Доказательство. Рассмотрим трехкратный интеграл I. Разобьем область V на n правильных подобластей Vj , j = 1, 2, . . . , n. По замечанию
n
P
5.3.1 и по теореме 5.3.1 интеграл I =
IVj , где IVj — трехкратные интеj=1
гралы по областям Vj . По теореме 5.3.3 имеем IVj = f (Pj )∆Vj , где ∆Vj —
объем подобласти Vj , а Pj — некоторая точка этой подобласти. Тогда
I=
n
X
f (Pj )∆Vj .
j=1
Это есть интегральная сумма для тройного интеграла. Так как функция
f (x, y, z) непрерывна в области V , то предел интегральных сумм существует, и поэтому тройной интеграл равен трехкратному.
Это основная теорема для вычисления тройного интеграла.
Замечание 5.3.2. Если f (x, y, z) ≡ 1 в области V , то объем этой
области будет равен тройному интегралу, т.е.
ZZZ
V =
dxdydz.
V
179
Пример 5.3.1. Вычислить тройной интеграл от функции f (x, y, z) = xy
по области V , задаваемой уравнениями x = 0, y = 0, z = 0, x + y + z = 1.
Имеем
1−x−y
1−x
ZZZ
Z1
Z
Z
xy dxdydz = dx
dy
xy dz =
0
V
Z1
=
=
=
1−x
Z1
Z
¯1−x−y
¯
xyz ¯
dy = dx
xy(1 − x − y) dy =
dx
0
0
0
0
1−x
Z
Z 1³
1 2 1 2 2 1 3 ´¯¯1−x
dx =
xy − x y − xy ¯
(xy − x y − xy ) dy =
2
2
3
0
0
2
dx
0
0
1−x
Z
0
Z1
0
0
2
Z 1³
Z 1³
´
1
1
1
1
1
1
1 ´
x(1−x)2 − x2 (1−x)2 − (1−x)3 dx =
x− x2 + x3 − x4 dx =
2
2
3
6
2
2
6
0
0
³1
´¯
1
1
1
1 1
1
1
¯1 1
=
x2 − x3 + x4 − x5 ¯ =
− + −
=
.
12
6
8
30
12 6 8 30
120
0
5.3.2. Замена переменных в тройном интеграле
Аналогично замене переменных в двойном интеграле можно вывести
правило для замены переменных в тройном интеграле. Пусть дан тройной
интеграл в декартовой системе координат
ZZZ
f (x, y, z) dxdydz
V
и замена переменных
x = ϕ(u, v, t)
y = ψ(u, v, t)
z = χ(u, v, t),
где функции ϕ, ψ, χ взаимно-однозначно отображают область V 0 в криволинейных координатах u, v, t на область V в декартовых координатах
x, y, z. Тогда
ZZZ
ZZZ
f (x, y, z) dxdydz =
f (u, v, t)|I| dudvdt,
V0
V
180
где |I| — модуль якобиана перехода
¯
¯
¯ ∂x ∂x ∂x ¯
¯
¯
¯ ∂u ∂v
∂t ¯¯
¯ ∂y ∂y ∂y
¯
I = ¯¯
∂t ¯¯
¯ ∂u ∂v
¯ ∂z ∂z ∂z ¯
.¯
¯
∂u ∂v ∂t
Рассмотрим некоторые частные случаи замены переменных в тройном
интеграле.
5.3.3. Цилиндрические координаты
Цилиндрические координаты задаются уравнениями
x = ρ cos ϕ
y = ρ sin ϕ
z = z,
где ϕ, ρ — полярные координаты точки M — проекции точки P на плоскость XOY . Вычислим якобиан перехода от декартовой системы координат
к цилиндрической:
¯
¯
¯ ∂x ∂x ∂x ¯
¯
¯
¯
¯ ∂ρ ∂ϕ ∂z ¯ ¯¯
¯
¯ ∂y ∂y ∂y ¯ ¯cos ϕ −ρ sin ϕ 0¯¯ ¯¯
cos ϕ −ρ sin ϕ¯¯
¯
¯ ¯
I=¯
= ρ,
¯ = ¯ sin ϕ ρ cos ϕ 0¯¯ = ¯¯
sin ϕ ρ cos ϕ ¯
¯ ∂ρ ∂ϕ ∂z ¯ ¯
0
0
1¯
¯ ∂z ∂z ∂z ¯
¯
¯
¯ ∂ρ ∂ϕ ∂z ¯
поэтому
ZZZ
ZZZ
f (x, y, z) dxdydz =
f (ρ, ϕ, z)ρ dρdϕdz.
V0
V
5.3.4. Сферические координаты
Сферические координаты задаются следующими уравнениями:
x = ρ cos ϕ cos θ
y = ρ sin ϕ cos θ
z = ρ sin θ,
здесь
ρ — длина радиус-вектора точки P , т.е. расстояние от начала координат
до точки P ;
ϕ — угол между проекцией радиус-вектора точки P на плоскость XOY
и осью OX;
181
z
x2 + y 2 = 3z
y
x
x2 + y 2 + z 2 = 4
Рис. 5.13.
θ — угол между радиус-вектором точки P и его проекцией на плоскость
XOY .
Данные переменные изменяются в следующих пределах: 0 6 ρ < +∞,
π
π
0 6 ϕ < 2π, − 6 θ 6 . Вычислим якобиан перехода от декартовой
2
2
системы координат к сферической системе координат
¯
¯
¯cos ϕ cos θ −ρ sin ϕ cos θ −ρ cos ϕ sin θ¯
¯
¯
I = ¯¯ sin ϕ cos θ ρ cos ϕ cos θ −ρ sin ϕ sin θ ¯¯ = ρ2 cos θ.
¯ sin θ
¯
0
ρ cos θ
Тогда
ZZZ
ZZZ
f (ρ, ϕ, θ)ρ2 cos θ dρdϕdθ.
f (x, y, z) dxdydz =
V
V0
Пример 5.3.2. Вычислить объем тела, ограниченного сферой x2 + y 2 +
z 2 = 4 и параболоидом x2 + y 2 = 3z (рис. 5.13). Найдем проекцию тела на
плоскость XOY . Имеем
4 − z 2 = 3z,
z 2 + 3z − 4 = 0,
z1 = −4, z2 = 1,
√
поэтому проекцией будет круг x2 + y 2 = 3 радиуса 3. Перейдем в цилиндрическую систему координат
x = ρ cos ϕ
y = ρ sin ϕ
z = z.
182
Объем можно искать, в силу симметрии тела, только в первой четверти,
√
π
поэтому 0 6 ϕ 6 , 0 6 ρ 6 3. Нижней границей по оси OZ будет
2
p
1
параболоид z = ρ2 , а верхней — сфера z = 4 − ρ2 . Тогда
3
√ 2
√
√
π
π
ZZZ
Z2
Z3
Z4−ρ
Z2
Z 3 ³p
1 ´
dz = 4 dϕ ρ
4 − ρ2 − ρ2 dρ =
V =
dxdydz = 4 dϕ ρ dρ
3
0
V
π
Z2
=2
0
0
0
1 2
3ρ
√
0
π
√
Z 3p
Z2 ³
1 2
2p
1 4 ´¯¯ 3
2
2
2
3
dϕ ( 4 − ρ − ρ ) d(ρ ) = 2
−
(4 − ρ ) − ρ ¯ dϕ =
3
3
6
0
0
0
π
Z2 ³
=2
0
1 16 3 ´
19 ¯¯ π2 19
− +
−
dϕ =
ϕ¯ =
π.
3
3
2
3 0
6
5.4. n-мерные интегралы
Рассмотрим ограниченную область D ⊂ Rn , и пусть функция
f (x) = f (x1 , x2 , . . . , xn ) определена и непрерывна на D. Определим интеграл от функции f (x) по области D.
1. Проведем разбиение области D (n−1)-мерными гиперповерхностями
на конечное число подобластей Vj , j = 1, 2, . . . , n.
2. Пусть существует n-мерный объем этих подобластей, равный ∆Vj .
3. Выберем в каждой подобласти точку P (xj ) = P (xj1 , xj2 , . . . , xjn ).
4. Составим интегральную сумму
Vn =
n
X
P (xj )∆Vj .
j=1
Обозначим dj диаметр подобласти Vj , т.е. ее наибольший линейный
размер.
Определение 5.4.1. n-мерным интегралом по области D ⊂ Rn от
функции f (x) = f (x1 , x2 , . . . , xn ) называется предел интегральных сумм
lim
max dj →0
Vn =
lim
max dj →0
183
n
X
j=1
P (xj )∆Vj ,
не зависящий от способа разбиения области D на частичные подобласти
и выбора точек P (xj ), и обозначается
Z
ZZ
Z
f (x)dx =
· · · f (x1 , x2 , . . . , xn ) dx1 dx2 · · · dxn .
D
D
Теорема 5.4.1. Пусть функция f (x1 , . . . , xn ) непрерывна в области D и область D удовлетворяет условию, что любая прямая, параллельная оси Oxn , пересекает ее границу не более чем в 2-х точках ϕ1 (x1 , x2 , . . . , xn−1 ) и ϕ2 (x1 , x2 , . . . , xn−1 ) (т.е. область D ограничена (n − 1)-мерными поверхностями xn = ϕ1 (x1 , x2 , . . . , xn−1 ) и xn =
ϕ2 (x1 , x2 , . . . , xn−1 )), тогда
ZZ
Z
· · · f (x1 , . . . , xn ) dx1 dx2 · · · dxn =
D
ZZ
=
ϕ2 (x1Z
,...,xn−1 )
Z
···
f (x1 , . . . , xn ) dxn ,
dx1 · · · dxn−1
Dn−1
ϕ1 (x1 ,...,xn−1 )
где Dn−1 проекция области D на координатную гиперплоскость
Ox1 x2 · · · xn−1 .
Замечание 5.4.1. Если проекция Dn−1 опять обладает этим свойством по отношению к xn−1 и так далее, то можно свести n-мерный
интеграл к n-кратному интегралу
ZZ
Z
· · · f (x1 , . . . , xn ) dx1 · · · dxn =
D
dx2
dx1
a
ϕ1n−1 (x1 )
ϕ12 (x1Z
,...,xn−1 )
Z
Z
Zb
=
(x1 ,x2 )
ϕn−2
2
(x1 )
ϕn−1
2
dx3 · · ·
f (x1 , . . . , xn ) dxn .
ϕ11 (x1 ,...,xn−1 )
ϕ1n−2 (x1 ,x2 )
Свойства n-мерного интеграла аналогичны свойствам двойного интеграла, и мы их не будем повторять.
5.5. Кривые и поверхности второго порядка
Данный материал дается в качестве дополнительного. Рассмотрим
кривые второго порядка на плоскости. Общее уравнение кривых второго
порядка имеет вид
Ax2 + 2Bxy + Cy 2 + 2Dx + 2Ey + F = 0.
184
./
2
b
y
2
x
y
+ 2 =1
a2
b
o
y2
x2
−
=1
a2
b2
x
a
Рис. 5.14.
Если определитель
y2
x2
− 2 =1
2
b
a
Рис. 5.15.
¯
¯A
δ = ¯¯
B
¯
B ¯¯
6= 0,
C¯
то с помощью переноса и поворота системы координат общее уравнение
сводится к одному из канонических видов.
5.5.1. Кривые второго порядка
Эллипс
Каноническое уравнение эллипса имеет вид (рис. 5.14)
x2
y2
+
= 1,
a2
b2
где a — большая полуось; b — малая полуось эллипса.
Гипербола
Каноническое уравнение гиперболы имеет вид (рис. 5.15)
x2
y2
−
= 1,
a2
b2
где a — действительная полуось; b — мнимая полуось гиперболы. Уравнение сопряженной гиперболы есть
y2
x2
−
= 1.
b2
a2
185
0
y
y2 = −2px
y 2 = 2px
−p/2
x
p/2
Рис. 5.16.
b
Асимптотами этих гипербол являются прямые y = ± x.
a
Парабола
Каноническое уравнение параболы имеет вид (рис. 5.16)
y 2 = 2px,
p > 0.
Другими каноническими уравнениями параболы являются уравнения
y 2 = −2px,
x2 = 2px,
x2 = −2px.
5.5.2. Поверхности второго порядка
Рассмотрим поверхности второго порядка (рис. 5.17-5.25).
Эллипсоид
Каноническое уравнение эллипсоида (рис. 5.17) имеет вид
x2
y2
z2
+
+
= 1,
a2
b2
c2
здесь a, b, c — полуоси эллипсоида.
Однополостной гиперболоид
Однополостные гиперболоиды (рис. 5.18) имеют следующие уравнения:
x2
y2
z2
+
−
= 1;
a2
b2
c2
x2
z2
y2
+
−
= 1;
a2
c2
b2
2
2
2
y
z
x
+ 2 − 2 = 1.
2
b
c
a
186
Двуполостной гиперболоид
Двуполостные гиперболоиды (рис. 5.19) имеют следующие уравнения:
x2
y2
z2
+ 2 − 2 = −1;
2
a
b
c
x2
z2
y2
+ 2 − 2 = −1;
a2
c
b
z2
x2
y2
+ 2 − 2 = −1.
b2
c
a
Эллиптический параболоид
Эллиптические параболоиды (рис. 5.20) имеют следующие уравнения:
2z =
y2
x2
+ ;
p
q
x2
z2
+ ;
p
q
y2
z2
2x =
+ .
p
q
2y =
Гиперболический параболоид
Гиперболические параболоиды (рис. 5.21) имеют следующие уравнения:
2z =
x2
y2
− ;
p
q
x2
z2
− ;
p
q
2
y
z2
2x =
− .
p
q
2y =
Конусы второго порядка
Конусы второго порядка (рис. 5.22) имеют следующие уравнения:
x2
y2
z2
+
−
= 0;
a2
b2
c2
x2
z2
y2
+ 2 − 2 = 0;
2
a
c
b
z2
x2
y2
+ 2 − 2 = 0.
b2
c
a
187
Цилиндры второго порядка
В пространстве R уравнение f (x, y) = 0 задает цилиндрическую поверхность, образующая которого — прямая параллельная оси OZ, а направляющая — кривая, лежащая в плоскости XOY . Аналогично, уравнение
f (x, z) = 0 задает цилиндрическую поверхность с образующей параллельной оси OY и направляющей — кривой в плоскости XOZ, а уравнение
f (y, z) = 0 задает цилиндрическую поверхность с образующей параллельной оси OX и направляющей — кривой в плоскости Y OZ. Поэтому уравнения всех кривых второго порядка задают в пространстве R3 цилиндрические поверхности. Рассмотрим некоторые из них.
3
Эллиптический цилиндр
Эллиптические цилиндры (рис. 5.23) задаются в пространстве уравнениями
x2
y2
y2
z2
x2
z2
+
=
1,
+
=
1,
+
= 1.
a2
b2
b2
c2
a2
c2
Гиперболический цилиндр
Гиперболические цилиндры (рис. 5.24), например, могут задаваться уравнениями
x2
y2
y2
z2
x2
z2
−
=
1,
−
=
1,
−
=1
a2
b2
b2
c2
a2
c2
и уравнениями, сопряженными к ним.
Параболический цилиндр
Параболические цилиндры (рис. 5.25) задаются уравнениями
y 2 = 2px,
x2 = 2pz,
188
z 2 = 2py.
12
34
z
z
c
x2
a2
+
y2
b2
+
z2
c2
=1
c
b
+
y2
b2
−
z2
c2
b
y
a
y
a
x2
a2
x
x
Рис. 5.17.
z
c
x2
a2
+
Рис. 5.18.
y2
b2
−
z2
c2
= −1
z
2z =
x2
p
+
y2
q
b
a
y
y
x
x
Рис. 5.19.
Рис. 5.20.
189
=1
56
78
9
z
2z =
2
x
p
−
x2
a2
+
y2
b2
−
z2
c2
2
y
q
z
y
x
x
y
Рис. 5.21.
z
x2
a2
+
Рис. 5.22.
y2
b2
=1
z
y2
a2
−
y
=1
y
x
x
Рис. 5.23.
Рис. 5.24.
z
z2
b2
x2 = 2py
y
x
Рис. 5.25.
190
=0
Глава 6
Дифференциальные уравнения
6.1. Основные понятия теории дифференциальных уравнений
6.1.1. Задачи, приводящие к понятию дифференциальных
уравнений
Установлено, что скорость роста населения прямо пропорциональна
его количеству в каждый данный момент. Определить закон изменения
населения Земли в зависимости от времени, если при t = 0 население было
m0 .
Скорость роста определяется следующим образом. Пусть в момент времени t население было m, в момент времени t + ∆t стало равно m + ∆m.
∆m
За время ∆t население увеличилось на ∆m. Отношение
есть средняя
∆t
скорость роста населения. Предел этого отношения при ∆t → 0
∆m
dm
lim
=
∆t→0 ∆t
dt
есть скорость роста населения в момент времени t. По условию задачи
dm
= km,
dt
где k — коэффициент пропорциональности (k > 0). При увеличении t наdm
селение увеличивается, поэтому
> 0. Решая это дифференциальное
dt
уравнение найдем, что
m = m0 ekt .
6.1.2. Основные понятия
Определение 6.1.1. Дифференциальным уравнением называется
уравнение, связывающее независимую переменную x, искомую функцию
y = f (x) и ее производные y 0 , y 00 , . . . , y (n) , т.е.
F (x, y, y 0 , y 00 , . . . , y (n) ) = 0
191
или
³
dy d2 y
dn y ´
F x, y, , 2 , . . . , n = 0.
dx dx
dx
Например, дифференциальным уравнением является уравнение
2
y 0 − 2xy 0 = x2
или
(x2 + y 2 )dy = 2xydx.
Определение 6.1.2. Порядком дифференциального уравнения называется порядок наивысшей производной, входящей в уравнение.
Например, дифференциальное уравнение y 0 − 2xy 2 + 5 = 0 есть дифференциальное уравнение превого порядка. Уравнение y 00 + 2y 0 + 3y = 5x
имеет второй порядок.
Определение 6.1.3. Решением дифференциального уравнения называется всякая функция y = ϕ(x), которая, будучи подставлена в уравнение,
превращает его в тождество.
6.2. Дифференциальные уравнения первого порядка
Дифференциальное уравнение первого порядка имеет вид
F (x, y, y 0 ) = 0.
Если это уравнение можно разрешить относительно y 0 , то его можно записать в виде
y 0 = f (x, y)
или
f (x, y)dx + g(x, y)dy = 0,
и его тогда называют разрешенным относительно производной.
Теорема 6.2.1 (Коши, теорема существования и единственности). Если в дифференциальном уравнении
y 0 = f (x, y)
∂f
по y непрерывны в неко∂y
торой области D на плоскости XOY , содержащей некоторую точку
M0 (x0 , y0 ), то существует единственное решение этого уравнения
функция f (x, y) и ее частная производная
y = ϕ(x),
удовлетворяющее условию, что при x = x0 значение y = y0 = ϕ(x0 ), т.е.
кривая y = ϕ(x) проходит через точку M0 .
192
Геометрическим смыслом этой теоремы является факт, что существует
единственная функция y = ϕ(x), являющаяся решением этого уравнения,
и график которой проходит через точку (x0 , y0 ).
Определение 6.2.1. Условие, что при x = x0 , функция y равна заданному числу y0 , называется начальным условием.
Начальные условия могут быть записаны в одном из следующих видов:
¯
x = x0 , y = y0 ;
y(x0 ) = y0 ;
y ¯x=x0 = y0 .
Определение 6.2.2. Общим решением дифференциального уравнения
первого порядка называется функция
y = ϕ(x, C),
зависящая от x и произвольной константы C и удовлетворяющая условиям:
1. функция ϕ(x, C) удовлетворяет дифференциальному уравнению при
любом C;
2. при любых начальных условиях x = x0 , y = y0 можно найти значение константы C = C0 , такое, что y0 = ϕ(x0 , C0 ).
Решение y = ϕ(x, C0 ) называется частным решением дифференциального уравнения.
Определение 6.2.3. Равенство вида Φ(x, y, C) = 0, неявно задающие
общее решение дифференциального уравнения, называется общим интегралом этого уравнения. Соотношение Φ(x, y, C0 ) = 0 называется частным интегралом дифференциального уравнения.
Геометрически общий интеграл представляет собой семейство кривых
на плоскости XOY , зависящее от одной произвольной постоянной C. Эти
кривые называются интегральными кривыми данного дифференциального уравнения. Частному интегралу соответствует одна кривая этого семейства, проходящая через точку (x0 , y0 ).
Определение 6.2.4. Задачей Коши для дифференциального уравнения называется задача нахождения частного решения дифференциального уравнения, удовлетворяющего заданным начальным условиям.
Чтобы решить задачу Коши надо:
1. найти его общее решение y = ϕ(x, C);
2. найти частное решение y = ϕ(x, C0 ).
193
Геометрическая интерпретация решения дифференциального уравнения первого порядка заключается в следующем. Пусть дано дифференциальное уравнение
y 0 = f (x, y)
(6.1)
и функция y = ϕ(x, C) есть его общее решение. Оно определяет семейство
интегральных кривых. Уравнение (6.1) для каждой точки A(x, y) определяет значение производной y 0 в этой точке, т.е. угловой коэффициент
касательной к интегральной кривой, проходящей через эту точку A. Таким образом, уравнение (6.1) определяет поле направлений на плоскости
XOY . Следовательно, с геометрической точки зрения задача интегрирования дифференциального уравнения заключается в нахождении кривых,
направления касательных к которым совпадают с направлением поля в
соответствующих точках.
6.3. Дифференциальные уравнения с разделяющимися
переменными
Определение 6.3.1. Дифференциальное уравнение вида
y 0 = f (x) · g(y)
или
dy
= f (x) · g(y)
dx
называется дифференциальным уравнением с разделяющимися переменными.
Характеристикой этого типа уравнений является представление правой части в виде произведения функции, зависящей только от x, на функцию, зависящую только от y.
Найдем общее решение этого уравнения. Разделим переменные в уравdy
нении
= f (x)g(y). Для этого обе части уравнения разделим на g(y) и
dx
умножим на dx, получим
dy
= f (x)dx.
g(y)
В полученном уравнении левая часть не зависит от правой, поэтому мы
можем интегрировать это уравнение
Z
Z
dy
= g(x) dx + C.
g(y)
Вычисляя полученные интегралы и прибавляя в правую часть константу,
мы получим общее решение этого уравнения.
194
Заметим, что при делении на функцию g(y) мы могли потерять решения g(y) = 0, поэтому является ли функция g(y) = 0 решением уравнения
— проверяется отдельно.
Дифференциальное уравнение вида
f1 (x)g1 (y)dx + f2 (x)g2 (y)dy = 0
также является дифференциальным уравнением с разделяющимися переменными. Разделим переменные в этом уравнении:
g2 (y)
f1 (x)
dx = −
dy.
f2 (x)
g1 (y)
Интегрируя обе части, получим
Z
Z
f1 (x)
g2 (y)
dx = −
dy + C.
f2 (x)
g1 (y)
В этом уравнении мы делили на функции f2 (x) и g1 (y), поэтому надо проверять, являются ли функции f2 (x) = 0 и g1 (y) = 0 решением исходного
уравнения.
Пример 6.3.1. Найти общее решение уравнения и построить семейство
интегральных кривых:
y
y0 = .
x
Разделим переменные в этом уравнении, получим
dy
y
dy
dx
= ,
=
.
dx
x
y
x
Проинтегрируем обе части и вычислим полученные интегралы:
Z
Z
dy
dx
=
,
ln |y| = ln |x| + ln |C|,
y = Cx.
y
x
Таким образом, y = Cx есть общее решение исходного уравнения. Поскольку мы делили на y и y = 0 является решением исходного уравнения, то его
надо включить в ответ. Но при C = 0 из общего решения мы получаем решение y = 0, поэтому дополнительно писать это решение не надо, мы его
не потеряли. Интегральные кривые этого уравнения показаны на рис. 6.1.
Пример 6.3.2. Найти общее решение уравнения
dx 1 + x2
−
dy = 0.
y3
y
Разделим переменные и проинтегрируем полученное уравнение:
Z
Z
dx
dx
2
=
y
dy
=
y 2 dy.
1 + x2
1 + x2
195
:
y
c=2
c=1
c = 1/2
o
x
c = −1
c = −2
Рис. 6.1.
Вычислим интегралы:
y3
= arctg x + C,
3
y=
p
3
3 arctg x + C.
При решении этого уравнения мы ничего не потеряли.
Пример 6.3.3. Найти частное решение уравнения
tg x · y 0 = y + 1,
при x =
π
, y = 2. Найдем общее решение этого уравнения:
6
Z
Z
dy
dy
= ctg xdx,
= ctg xdx,
y+1
y+1
ln |y + 1| = ln | sin x| + ln |C|,
y + 1 = C sin x,
y = C sin x − 1.
В полученное общее решение подставим начальные условия
π
−1
6
тогда частное решение имеет вид
или
2 = C sin
y = 6 sin x − 1.
196
C = 6,
6.3.1. Дифференциальные уравнения, сводящиеся к
уравнениям с разделяющимися переменными
Дифференциальные уравнения вида
y 0 = f (ax + by)
сводятся к уравнениям с разделяющимися переменными с помощью замены
u = ax + by,
u − ax
u0 − a
где u(x) новая неизвестная функция от x. Тогда y =
и y0 =
.
b
b
Поэтому исходное уравнение примет вид
u0 = bf (u) + a,
которое является уравнением с разделяющимися переменными.
Пример 6.3.4. Найти общее решение уравнения y 0 = cos2 (2x + 3y).
u0 − 2
Сделаем замену 2x + 3y = u, тогда y 0 =
. Подставив эту замену
3
в уравнение, получим:
du
du
= 3 cos2 u + 2,
= dx.
dx
3 cos2 u + 2
Проинтегрируем это уравнение
Z
Z
du
=
dx,
3 cos2 u + 2
тогда
¯
¯
¯
1 ¯
Z
¯
¯
t = tg u
du =
du
¯
1 + t2 ¯¯ =
x=
=
¯
¯
3 cos2 u + 2 ¯cos2 u = 1
¯
¯
1 + t2
Z
Z
Z
dt
1
dt
dt
=
=
=
³ 3
´=
5
2
5
+
2t
2
+
t2
2
(1 + t2 )
+
2
1 + t2
√
√
1
2t
1
2 tg u
= √ arctg √ + C = √ arctg √
+ C.
10
5
10
5
Подставив вместо u выражениеu = 2x + 3y, получим общее решение исходного уравнения
√
1
2(2x + 3y)
√
+ C.
x = √ arctg
10
5
u0 = 3 cos2 u + 2,
197
6.4. Однородные уравнения
Определение 6.4.1. Функция f (x, y) называется однородной функцией n-го порядка относительно переменных x и y, если при любом t справедливо тождество
f (tx, ty) = tn f (x, y).
p
Пример 6.4.1. 1. Функция f (x, y) = 3 x3 + y 3 — однородная функция
первого порядка, так как
p
p
f (tx, ty) = 3 t3 x3 + t3 y 3 = t 3 x3 + y 3 = tf (x, y).
x
y
2. Функция f (x, y) = + sin — однородная функция нулевого порядy
x
ка, так как
tx
ty
x
y
f (tx, ty) =
+ sin
= + sin = t0 f (x, y).
ty
tx
y
x
3. Функция f (x, y) = xy − x — неоднородная функция, так как
f (tx, ty) = tx · ty − tx = t(txy − x) 6= f (x, y).
Определение 6.4.2. Дифференциальное уравнение вида
dy
y 0 = f (x, y)
или
= f (x, y)
dx
называется однородным, если функция f (x, y) есть однородная функция
нулевого порядка.
Легко показать, что дифференциальное уравнение вида
f (x, y)dx + g(x, y)dy = 0
будет однородным, если функции f (x, y) и g(x, y) есть однородные функции
одного и того же порядка.
6.4.1. Решение однородного уравнения
Рассмотрим дифференциальное уравнение вида
y 0 = f (x, y),
где функция f (x, y) — однородная функция нулевого порядка, т.е. f (x, y) =
³ y´
1
f (tx, ty). Возьмем t = , тогда f (x, y) = f 1,
. Исходное дифференциx
x
альное уравнение будет иметь вид
³ y´
y 0 = f 1,
.
x
198
В этом уравнении сделаем замену y = ux, где u = u(x) новая неизвестная
функция, тогда y 0 = u0 x + u. Получим дифференциальное уравнение
u0 x + u = f (1, u)
или
u0 x = f (1, u) − u
с разделяющимися переменными. Решим его:
du
dx
du
= f (1, u) − u,
=
.
x
dx
f (1, u) − u
x
y
Интегрируя это уравнение и сделав обратную замену u = , получим обx
щее решение исходного уравнения.
Пример 6.4.2. Найти общее решение уравнения
dy
y
=
.
dx
x−y
ty
y
Поскольку f (tx, ty) =
=
= f (x, y), то исходное уравнение
tx − ty
x−y
однородное. Сделаем замену
dy
du
y = ux,
dy = xdu + udx,
=x
+ u.
dx
dx
Тогда
xu
du
u
du
+u=
или
x
=
− u,
x
dx
x − xu
dx
1−u
du
u − u + u2
du
u2
x
=
,
x
=
,
dx
1−u
dx
1−u
Z
Z
Z
1−u
dx
du
du
dx
du =
,
−
=
,
2
2
u
x
u
u
x
1
1
1
− − ln |u| = ln |x| + ln |C|,
− = ln |uxC|,
= − ln |uxC|.
u
u
u
y
Поскольку u = , то общее решение уравнения имеет вид
x
x
= − ln |Cy|,
или
x = −y ln |Cy|.
y
Пример 6.4.3. Найти частное решение дифференциального уравнения
(x2 + y 2 )dx − 2xydy = 0,
при x = 1, y = 2.
Поскольку функции x2 + y 2 и 2xy — однородные функции второго порядка, то исходное уравнение однородное. Поэтому сделаем замену
y = xu,
dy = xdu + udx,
199
тогда
(x2 +x2 u2 )−2xxu(xdu+udx) = 0,
x2 (1+u2 )dx−2x2 uxdu−2x2 u2 dx = 0,
x2 (1 + u2 − 2u2 )dx − 2uxdu = 0,
Разделив переменные, получим
Z
2u
dx
=
du,
x
1 − u2
dx
=
x
ln |x| = − ln |1 − u2 | + ln |C|,
x=
C
1−
y2
x2
(1 − u2 )dx = 2uxdu.
Z
2u
du,
1 − u2
x=
C
,
1 − u2
x2 − y 2 = Cx.
,
Подставим в общее решение начальные условия C = 1−4, C = −3. Частное
решение исходного уравнения будет иметь вид
y 2 − x2 = 3x.
6.4.2. Дифференциальные уравнения, сводящиеся к
однородным
Дифференциальные уравнения вида
µ
¶
ax + by + c
dy
=f
dx
a1 x + b1 y + c1
сводятся к однородным с помощью замены переменных
½
x = x1 + h
y = y1 + k,
где h и k находятся из системы
½
ah + bk + c = 0
a1 h + b1 k + c1 = 0.
¯
¯
¯a b¯
¯ = 0, то делается замена
Если определитель последней системы δ = ¯¯
a1 b1 ¯
z = ax + by.
Пример 6.4.4. Найти общее решение уравнения
dy
x+y−3
=
.
dx
x−y−1
200
¯
¯
¯1 1 ¯
¯ = −2, то, сделав замену x = x1 + h,
Поскольку определитель δ = ¯¯
1 −1¯
y = y1 + k, получим
½
½
h+k−3=0
h=2
h − k − 1 = 0,
k = 1.
Тогда
½
x = x1 + 2
y = y1 + 1,
dy = dy1 ,
dx = dx1 .
Подставив эту замену в уравнение, получим однородное уравнение
dy1
x1 + y1
=
.
dx1
x1 − y1
Сделаем в нем замену
y1 = ux1 ,
dy1
du
= u + x1
,
dx1
dx1
получим
u + x1
du
1+u
=
,
dx1
1−u
1−u
dx1
du =
,
1 + u2
x1
Z
1−u
du =
1 + u2
Z
dx1
,
x1
p
¯
¯
1
ln |1 + u2 | = ln |x1 | + ln C,
arctg u = ln¯Cx1 1 + u2 ¯,
2
p
Cx1 1 + u2 = earctg u .
y1
y−1
Поскольку u =
=
, то мы получим общее решение исходного уравx1
x−2
нения
p
y−1
C (x − 2)2 + (y − 1)2 = earctg x−2 .
arctg u −
6.5. Линейные дифференциальные уравнения превого порядка
Определение 6.5.1. Линейным дифференциальным уравнением первого порядка называется уравнение, линейное относительно неизвестной
функции y и ее производной y 0 , оно имеет вид
y 0 + P (x)y = Q(x),
здесь P (x) и Q(x) — непрерывные функции.
201
6.5.1. Метод подстановки решения линейного уравнения
Будем искать решение в виде произведения двух функций y = u(x)v(x),
тогда y 0 = u0 v + uv 0 . Подставляя эту замену в уравнение, получим
u0 v + uv 0 + P (x)uv = Q(x),
u0 v + u(v 0 + P (x)v) = Q(x).
Выберем функцию v так, чтобы v 0 + P (x)v = 0, тогда
dv
dv
= −P (x)v,
= −P (x)dx,
dx
v
Z
R
ln v = − P (x) dx,
v = e− P (x) dx .
Подставим найденную функцию v(x) в уравнение:
Q(x)
du
=
,
dx
v(x)
Z
Q(x)
Q(x)
du =
dx,
u=
dx + C.
v(x)
v(x)
Тогда общее решение уравнения будет иметь вид
µZ
¶ R
Q(x)
y=
dx + C e− P (x) dx .
v(x)
u0 v(x) = Q(x),
6.5.2. Метод вариации решения линейного уравнения
Рассмотрим метод вариации произвольной постоянной решения линейного дифференциального уравнения. Решим однородное уравнение
y 0 + P (x)y = 0,
которое является уравнением с разделяющимися переменными, тогда
dy
dy
y 0 = −P (x)y,
= −P (x)y,
= −P (x)dx,
dx
y
Z
Z
Z
R
dy
− P (x) dx,
ln y = − P (x) dx + ln C,
y = Ce− P (x) dx .
y
Будем считать
константу C функциейR от x, т.е. варьировать
ее, получим
R
R
y = C(x)e− P (x) dx . Найдем y 0 = C 0 e− P (x) dx − Ce− P (x) dx P (x). Подставим y и y 0 в исходное уравнение, получим
C 0 e−
R
P (x) dx
Обозначим v = −
R
C0 =
− Ce−
R
P (x) dx
P (x) + Ce−
R
P (x) dx
P (x) = Q(x).
P (x) dx, тогда
Q(x)
,
v(x)
dC
Q(x)
=
,
dx
v(x)
202
dC =
Q(x)
dx,
v(x)
Z
Q(x)
dx + C1 ,
v(x)
где C1 = const. Общее решение исходного уравнения будет иметь вид
µZ
¶ R
Q(x)
y=
dx + C1 e− P (x) dx .
v(x)
C(x) =
Аналогично решаются уравнения линейные по переменному x. Такое
dx
.
уравнение имеет вид x0 + P (y)x = Q(y), в этом уравнении x0 =
dy
y
Пример 6.5.1. Найти общее решение уравнения y 0 − = x + 1. Решим
x
его методом подстановки. Пусть y = uv, y 0 = u0 v + uv 0 , тогда
³
uv
v´
u0 v + uv 0 −
= x + 1,
u0 v + u v 0 −
= x + 1.
x
x
Сначала решим уравнение
v0 −
v
= 0,
x
dv
v
= ,
dx
x
ln v = ln x,
dv
dx
=
,
v
x
v = x.
Подставим найденную функцию v в уравнение, получим
du
x+1
=
,
dx
x
u0 x = x + 1,
Z
du =
x+1
dx,
x
x+1
dx,
u = x + ln |x| + C.
x
Тогда общим решением исходного уравнения будет
u=
y = x(x + ln |x| + C).
Пример 6.5.2. Найти общее решение уравнения
(y + y 3 + 2xy)y 0 = 1 + y 2 .
Преобразуем это уравнение
y + y 3 + 2xy =
поскольку
1 + y2
,
y
1
= x0 , то
y0
x0 =
y + y 3 + 2xy
,
1 + y2
x0 = y +
203
2xy
,
1 + y2
x0 −
2y
x = y.
1 + y2
Последнее уравнение линейное по x, решим его методом вариации.
2y
2y
2ydy
dx
dx
x0 −
=
=
x = 0,
x,
,
1 + y2
dy
1 + y2
x
1 + y2
Z
Z
2y dy
dx
=
,
ln x = ln(1 + y 2 ) + ln C,
x = C(1 + y 2 ).
x
1 + y2
Будем считать C функцией от y, тогда x0 = C 0 (1 + y 2 ) + C2y. Подставляя
в уравнение, получим
y
y
dC
C 0 (1 + y 2 ) + 2Cy − 2yC = y,
C0 =
,
=
,
1 + y2
dy
1 + y2
Z
y
y dy
1
dy,
C
=
,
C = ln(1 + y 2 ) + C1 .
dC =
1 + y2
1 + y2
2
Общее решение имеет вид
µ
¶
1
2
x=
ln(1 + y ) + C (1 + y 2 ).
2
6.6. Дифференциальное уравнение Бернулли
Рассмотрим дифференциальное уравнение Бернулли
y 0 + P (x)y = Q(x)y n ,
где P (x) и Q(X) — непрерывные функции. Разделим это уравнение на y n ,
получим уравнение
y −n + P (x)y 1−n = Q(x).
Это уравнение сводится к линейному уравнению с помощью замены
z = y 1−n ,
z 0 = (1 − n)y −n y 0
или
y −n y 0 =
z0
.
1−n
Подставляя эту замену в уравнение, получим
z0
+ P (x)z = Q(x),
z 0 + (1 − n)P (x)z = (1 − n)Q(x).
1−n
Последнее уравнение линейное по z.
Аналогично доказывается, что уравнение Бернулли по x
x0 + P (y)x = Q(y)xn
сводится к линейному.
При решении конкретных уравнений необязательно сводить его к линейному, можно его сразу решать как линейное, например, методом замены.
204
Пример 6.6.1. Найти общее решение уравнения
y 0 + xy = x3 y 3 .
Сделаем замену y = uv, y 0 = u0 v + uv 0 , получим:
u0 v + uv 0 + xuv = x3 u3 v 3 ,
u0 v + u(v 0 + xv) = xu3 v 3 .
Решим уравнение
Z
dv
= −xdx,
v
dv
= −xv,
dx
v 0 + xv = 0,
1
ln v = − x2 ,
2
1
dv
=−
v
Z
x dx,
2
v = e− 2 x .
Подставляя найденную функцию v в уравнение, получим:
2
1
3
2
2
u0 e− 2 x = x3 e− 2 x u3 ,
Z
du
=
u3
u0 = x3 e−x u3 ,
Z
2
x3 e−x dx,
−
1
1
=
2u2
2
2
du
= x3 e−x dx,
3
u
Z
2
(−x2 )e−x (−2x)dx =
¯
¯
¯
¯
Z
¯ u=t
¯ t = −x2 ¯ 1
du = dt¯¯
t
¯
¯
¯
te dt = ¯
=¯
=
=
dv = et dt v = et ¯
dt = −2xdx¯ 2
=
2
2
1
1
1 t 1 t
te − e + C = − x2 e−x − e−x + C.
2
2
2
2
Тогда
³
´− 12
2
2
u = x2 e−x + e−x + C
.
2
2
1
1
= x2 e−x + e−x = C,
u2
2
Общее решение уравнения имеет вид
1
y = e− 2 x
2
³
2
2
x2 e−x + e−x + C
y=√
´− 12
,
³
´ 1
2 −2
y = x2 + 1 + Cex
,
1
x2 + 1 + Cex2
205
.
6.7. Дифференциальные уравнения в полных дифференциалах
Определение 6.7.1. Дифференциальное уравнение вида
M (x, y)dx + N (x, y)dy = 0
называется дифференциальным уравнением в полных дифференциалах, если его левая часть является полным дифференциалом некоторой функции
U (x, y), т.е.
dU =
∂U
∂U
dx +
dy = M (x, y)dx + N (x, y)dy,
∂x
∂y
∂U
∂U
= M (x, y),
= N (x, y), а общим
∂x
∂y
решением будет U (x, y) = C, где C = const.
Из определения получим, что
Теорема 6.7.1. Если M (x, y) и N (x, y) — непрерывно дифференцируемые функции, то для того, чтобы уравнение
M (x, y)dx + N (x, y)dy = 0
было уравнением в полных дифференциалах, необходимо и достаточно,
чтобы
∂M (x, y)
∂N (x, y)
=
.
∂y
∂x
Доказательство. 1. Необходимость. Пусть исходное уравнение есть
уравнение в полных дифференциалах, тогда
∂U
= M (x, y),
∂x
∂U
= N (x, y).
∂y
Продифференцируем первое равенство по y, а второе по x, получим
∂M
∂2U
=
,
∂x∂y
∂y
∂2U
∂N
=
.
∂y∂x
∂x
Поскольку функции M и N непрерывно дифференцируемы, то
∂2U
∂M
∂N
. Тогда получим, что
=
.
∂y∂x
∂y
∂x
206
∂2U
=
∂x∂y
2. Достаточность. Пусть
скольку
∂M
∂N
=
. Найдем функцию U (x, y). По∂y
∂x
∂U
= M (x, y), то определим
∂x
Zx
U (x, y) =
M (x, y)dx + ϕ(y),
x0
где x0 — любая абсцисса фиксированной точки P (x0 , y0 ) из области определения функций M и N . Найдем неизвестную функцию ϕ(y). Продифференцируем выражение для функции U по переменному y, получим
∂U
=
∂y
Поскольку
Zx
x0
Zx
x0
∂M
dx + ϕ0 (y) = N (x, y).
∂y
∂M
∂N
=
, то
∂y
∂x
¯x
N (x, y)¯x0 +ϕ0 (y) = N (x, y),
∂N
dx + ϕ0 (y) = N (x, y),
∂x
N (x, y) − N (x0 , y) + ϕ0 (y) = N (x, y),
ϕ0 (y) = N (x0 , y),
тогда
Zy
ϕ(y) =
N (x0 , y) dy.
y0
Поэтому функцию U (x, y) можно найти по формуле
Zx
U (x, y) =
Zy
M (x, y) dx +
x0
N (x0 , y) dy,
y0
где точка P (x0 , y0 ) — фиксированная точка из области определения функций M и N . И мы доказали, что исходное уравнение есть полный дифференциал некоторой функции U (x, y), значит, наше уравнение в полных
дифференциалах.
207
Из доказательства достаточности следует, что найденная функция
U (x, y) дает общее решение уравнения
Zy
Zx
M (x, y) dx +
x0
N (x0 , y) dy = C,
y0
где C = const. Поскольку в правой части присутствует произвольная константа, то в левой части можно брать неопределенные интегралы, т.е. находить общее решение уравнения по формуле
Z
Z
M (x, y) dx + N (x, y) dy = C.
Пример 6.7.1. Найти общее решение уравнения
p
p
2x(1 + x2 − y)dx − ( x2 − y − y)dy = 0.
p
p
В этом уравнении M = 2x + 2x x2 − y, N = − x2 − y + y. Проверим
∂M
∂N
условие, что
=
. Действительно,
∂y
∂x
1
∂M
x
= −2x p
= −p
,
2
2
∂y
2 x −y
x −y
2x
x
∂N
=− p
= −p
.
∂x
2 x2 − y
x2 − y
Эти производные совпадают, значит, исходное уравнение в полных дифференциалах. Тогда
Z
p
¡
¢
3
2
U (x, y) =
2x + 2x x2 − y dx = x2 + (x2 − y) 2 + ϕ(y).
3
Найдем функцию ϕ(y). Поскольку
p
∂U
= − x2 − y + ϕ0 (y),
∂y
p
а N = − x2 − y + y, то
p
p
− x2 − y + ϕ0 (y) = − x2 − y + y,
ϕ0 (y) = y,
Тогда общее решение исходного уравнения имеет вид
1
2p 2
(x − y)3 + y 2 = C.
x2 +
3
2
208
ϕ(y) =
1 2
y .
2
Пример 6.7.2. Найти частное решение уравнения
2x
y 2 − 3x2
dx +
dy = 0,
3
y
y4
при условии, что x = 2, y = 1. Найдем общее решение этого уравнения.
2x
y 2 − 3x2
Имеем M = 3 , N =
. Найдем
y
y4
6x
∂M
=− 4,
∂y
y
6x
∂N
=− 4.
∂x
y
Эти производные совпадают, поэтому исходное уравнение в полных дифференциалах. Тогда
Z
2x
x2
U (x, y) =
dx
=
+ ϕ(y).
y3
y3
Найдем функцию ϕ(y). Поскольку
∂U
3x2
y 2 − 3x2
1
3x2
= − 4 + ϕ0 (y) = N (x, y) =
= 2− 4 ,
4
∂y
y
y
y
y
1
1
то ϕ0 (y) = 2 . Поэтому ϕ(y) = − . Общее решение исходного уравнения
y
y
имеет вид
x2
1
− = C.
y3
y
Найдем частное решение. Подставив начальные условия в общее решение,
получим 4 − 1 = C или C = 3. Частное решение уравнения будет иметь вид
x2
1
− =3
y3
y
или
x2 − y 2 = 3y 3 .
6.8. Дифференциальные уравнения второго порядка
Определение 6.8.1. Дифференциальное уравнение вида
F (x, y, y 0 , y 00 ) = 0
называется дифференциальным уравнением второго порядка, оно может
быть разрешено относительно старшей производной
y 00 = f (x, y, y 0 ).
209
Теорема 6.8.1 (Коши, теорема существования и единственности). Если в уравнении
y 00 = f (x, y, y 0 )
функция f (x, y, y 0 ) и ее частные производные по аргументам y и y 0 непрерывны в некоторой области, содержащей точку
x = x0 , y = y0 , y 0 = y00 ,
то существует единственное решение y = ϕ(x) этого уравнения, удовлетворяющее условиям ϕ(x0 ) = y0 , ϕ0 (x0 ) = y00 .
Определение 6.8.2. Условия x = x0 , y = y0 , y 0 = y00 называются
начальными условиями для уравнения второго порядка.
Определение 6.8.3. Общим решением дифференциального уравнения
второго порядка
y 00 = f (x, y, y 0 )
называется функция y = ϕ(x, C1 , C2 ), зависящая от двух произвольных
констант C1 и C2 , такая, что:
1) она удовлетворяет уравнению при любых C1 и C2 ;
2) при заданных начальных условиях y(x0 ) = y0 , y 0 (x0 ) = y00 можно
подобрать константы C1 = C10 и C2 = C20 , такие, что y0 = ϕ(x0 , C10 , C20 ),
y00 = ϕ0 (x0 , C10 , C20 ).
Определение 6.8.4. Решение y = ϕ(x, C10 , C20 ), удовлетворяющее
начальным условиям y(x0 ) = y0 = ϕ(x0 , C10 , C20 ), y 0 (x0 ) = y00 =
ϕ0 (x0 , C10 , C20 ), называется частным решением дифференциального уравнения y 00 = d(x, y, y 0 ).
Задача Коши. Найти решение y = ϕ(x, C1 , C2 ) дифференциального
уравнения
y 00 = f (x, y, y 0 ),
удовлетворяющее начальным условиям x = x0 , y(x0 ) = y0 , y 0 (x0 ) = y00 .
Решение задачи Коши:
1. Найти общее решение уравнения.
2. Найти частное решение уравнения, удовлетворяющее начальным
условиям.
210
6.9. Дифференциальные уравнения второго порядка,
допускающие понижение порядка
I. Рассмотрим уравнение вида
y 00 = f (x).
Сделаем замену y 0 = p(x), тогда y 00 = p0 . Получим уравнение первого порядка p0 = f (x). Тогда
Z
Z
0
p(x) = f (x) dx + C1
или
y = f (x) dx + C1 ,
Z µZ
y=
¶
f (x) dx + C1
dx + C2 .
Аналогично решаются и уравнения более высокого порядка
y (n) = f (x),
тогда
Z µZ
y=
µZ
...
¶
¶
f (x) dx + C1 . . . dxn−1 + Cn−1 dxn + Cn .
Пример 6.9.1. Найти общее решение уравнения
y 00 = sin2 x.
Найдем сначала
Z
Z
1
1
1
2
0
y = sin x dx + C1 =
(1 − cos 2x) dx + C1 = x − sin 2x + C1 ,
2
2
4
тогда
¶
Z µ
1
1
1
1
y=
x − sin 2x + C1 dx + C2 = x2 + cos 2x + C1 x + C2 .
2
4
4
8
Пример 6.9.2. Найти общее решение уравнения
y (4) = x2 .
Имеем:
Z
1
y 000 = x2 dx + C1 = x3 + C1 ,
3
¶
Z µ
1 4
1
x3 + C1 dx + C2 =
x + C1 x + C2 ,
y 00 =
3
12
¶
Z µ
1 4
1 5
y0 =
x + C1 x + C2 dx + C3 =
x + C1 x2 + C2 x + C3 ,
12
60
211
тогда общее решение будет иметь вид
¶
Z µ
1 5
1 6
2
y=
x + C1 x + C2 x + C3 dx+C4 =
x +C1 x3 +C2 x2 +C3 x+C4 .
60
300
При решении мы использовали независимость констант друг от друга, поэтому при них нет никаких числовых коэффициентов.
II. Рассмотрим уравнение вида
y 00 = f (x, y 0 ),
его характеристикой является независимость правой части от переменного
y. Сделаем в этом уравнении замену
y 0 = p(x),
y 00 = p0 .
Получим уравнение первого порядка
p0 = f (x, p),
определяя его тип и решая, получим p = p(x, C1 ) или y 0 = p(x, C1 ). Последнее уравнение — это уравнение с разделяющимися переменными, решая
его, найдем общее решение исходного уравнения
Z
y = p(x, C1 ) dx + C2 .
Аналогично решаются дифференциальные уравнения более высокого
порядка, не содержащие переменное y.
Пример 6.9.3. Найти общее решение уравнения
y0
.
x
Сделаем замену y 0 = p(x), тогда y 00 = p0 . Получим дифференциальное
уравнение первого порядка с разделяющимися переменными
Z
Z
p
dp
dx
dp
dx
=
,
=
,
p0 = ,
x
p
x
p
x
y 00 =
ln p = ln x + ln C1 ,
тогда
p = C1 x,
Z
y 0 = C1 x,
y=
C1 x dx + C2 ,
y = C1 x 2 + C2 .
Пример 6.9.4. Найти частное решение уравнения
y 00 +
y0
=x
x
212
при условии, что при x = 1, y = 2, y 0 = 1. Сделаем замену y 0 = p(x),
y 00 = p0 , получим линейное дифференциальное уравнение первого порядка
p
p0 + = x.
x
Решим его методом замены p = uv, p0 = u0 v + uv 0 . Тогда
³
uv
v´
u0 v + uv 0 +
= x,
u0 v + u v 0 +
= x.
x
x
Решим уравнение
Z
Z
dv
v
dv
dx
v
v 0 + = 0,
=− ,
=−
,
x
dx
x
v
x
ln v = − ln x,
тогда
01
u
x
v=
1
,
x
Z
= x,
0
2
u =x ,
x2 dx + C1 ,
u=
u=
1 3
x + C1 .
3
Подставляя найденные u и v в уравнение, получим
´ 1
1 ³1 3
C1
p=
x + C1 = x2 +
.
x 3
3
x
Тогда
1
C1
y 0 = x2 +
.
3
x
1
Найдем константу C1 . Подставляя начальные условия, получим 1 = +C1 ,
3
2
C1 = . Решим уравнение:
3
Z ³
1
2
1 2
2 ´
1
1
y 0 = x2 +
,
y=
x +
dx + C2 ,
y = x3 + ln |x| + C2 .
3
3x
3
3x
9
3
1
Найдем константу C2 . Подставляя начальные условия, получим 2 = +C2 ,
9
17
тогда C2 =
. Частное решение исходного уравнения, удовлетворяющее
9
начальным условиям, имеет вид
1 3 1
17
x + ln |x| + .
9
3
9
III. Рассмотрим дифференциальное уравнение
y=
y 00 = f (y, y 0 ),
213
его характеристикой является независимость правой части от переменного
x. Сделаем в этом уравнении замену y 0 = p(y), тогда y 00 = p0 y 0 = p0 p. Подставляя ее в уравнение, получим дифференциальное уравнение первого
порядка относительно функции p(y). Определяя его тип и решая, мы найдем p = p(y, C1 ) или y 0 = p(y, C1 ). Полученное уравнение — это уравнение
первого порядка с разделяющимися переменными
dy
dy
= p(y, C1 ),
dx =
,
dx
p(y, C1 )
Z
dy
x=
+ C2 .
p(y, C1 )
Аналогично решаются и уравнения более высокого порядка, не содержащие переменного x.
Пример 6.9.5. Найти общее решение уравнения
y 00 = y 0 y.
Сделаем замену y 0 = p(y), тогда y 00 = p0 p, получим уравнение
p0 p = py,
p(p0 − y) = 0.
Получим два уравнения. Решим первое: p = 0, y 0 = 0, y = C1 , где C1 =
const.
Решим второе уравнение:
Z
dp
p0 = y,
= y,
dp = ydy,
p = y dy + C2 ,
dy
1 2
y + C2
2
Решим последнее уравнение:
p=
dy
y 2 + C2
=
,
dx
2
Тогда
или
dx =
y0 =
2dy
,
y 2 + C2
1 2
y + C2 .
2
Z
x=2
dy
.
y 2 + C2
2
y
√ arctg √
+ C3 ,
C2 > 0
C2
√C2 ¯
¯
1
¯ y − −C2 ¯
x=
√
√
ln¯
¯+C4 , C2 < 0
−C2
y + −C2
2
− + C5 ,
C2 = 0.
y
Объединим оба решения, получим общее решение исходного уравнения:
y = C1 ,
214
2
y
√ arctg √
+ C3 ,
C2 > 0
C2
√C2 ¯
¯
1
¯ y − −C2 ¯
x=
√
√
ln¯
¯+C4 , C2 < 0
−C2
y + −C2
2
− + C5 ,
C2 = 0.
y
Пример 6.9.6. Найти частное решение уравнения
2
y 00 =
y0
,
y
при условии, что x = 0, y = 1, y 0 = 2. Сделаем замену y 0 = p(y), y 00 = p0 p.
Тогда получим уравнение первого порядка с разделяющимися переменными
p2
p
dp
p
p0 p = ,
p0 = ,
= ,
y
y
dy
y
Z
Z
dp
dy
dp
dy
=
,
=
,
p
y
p
y
ln p = ln y + ln C1 ,
p = C1 y,
y 0 = C1 y.
Найдем константу C1 . Имеем 2 = C1 · 1, тогда C1 = 2. Получим уравнение
y 0 = 2y,
dy
= 2y,
dx
dy
= 2dx,
y
Z
dy
=2
dx,
ln y = 2x + ln C2 ,
y = C2 e2x .
y
Найдем константу C2 . Имеем 1 = C2 e0 , C2 = 1, тогда частное решение
исходного уравнения будет иметь вид
Z
y = e2x .
6.10. Линейные однородные дифференциальные уравнения
второго порядка с постоянными коэффициентами
Определение 6.10.1. Линейным дифференциальным уравнением второго порядка с постоянными коэффициентами называется уравнение вида
y 00 + py 0 + qy = f (x),
00
(6.2)
0
где функции y , y , y содержатся в первой степени; а p, q — константы.
Определение 6.10.2. Если f (x) 6≡ 0, то уравнение (6.2) называется
неоднородным, если f (x) ≡ 0, то уравнение (6.2) называется однородным.
215
6.10.1. Структура общего решения однородного уравнения
Рассмотрим дифференциальное уравнение вида
y 00 + py 0 + qy = 0,
(6.3)
где p и q — действительные числа.
Теорема 6.10.1. Если y1 и y2 — два частных решения линейного однородного дифференциального уравнения (6.3), то выражение C1 y1 +C2 y2 ,
где C1 и C2 — произвольные действительные числа, также есть решение
этого уравнения.
Доказательство. Поскольку y1 и y2 — решения уравнения (6.3), то
½ 00
y1 + py10 + qy1 = 0
y200 + py20 + qy2 = 0.
Подставим выражение C1 y1 + C2 y2 в уравнение (6.3):
(C1 y100 + C2 y200 ) + p(C1 y10 + C2 y20 ) + q(C1 y1 + C2 y2 ) =
= C1 y100 + C2 y200 + C1 py10 + C2 py20 + C1 qy1 + C2 qy2 =
= C1 (y100 + py10 + qy1 ) + C2 (y200 + py20 + qy2 ) = C1 · 0 + C2 · 0 = 0.
Таким образом, C1 y1 + C2 y2 есть решение однородного уравнения (6.3).
Определение 6.10.3. Два решения однородного уравнения (6.3) y1 и y2
называются линейно независимыми на отрезке [a, b], если их отношение
на этом отрезке не является постоянным, т.е. если
y1 (x)
6= const
y2 (x)
∀x ∈ [a, b].
В противном случае решения y1 и y2 называются линейно зависимыми
на отрезке [a, b], т.е. если
∃λ :
y1 (x)
=λ
y2 (x)
или
y1 = λy2
∀x ∈ [a, b].
Пример 6.10.1. Функции y1 = ex и y2 = e3x являются линейно независимыми решениями уравнения
y 00 − 4y 0 + 3y = 0,
так как
ex
= e−2x 6= const
e3x
216
∀x.
Решения этого же уравнения y1 = 3ex и y2 = ex являются линейно зависимыми, поскольку
3ex
= 3 = const
∀x.
ex
Определение 6.10.4. Если y1 (x) и y2 (x) — функции от x, то функциональный определитель
¯
¯
¯y1 y2 ¯
¯
¯ = y1 y20 − y2 y10
W (y1 , y2 ) = ¯ 0
y1 y20 ¯
называется определителем Вронского данных функций.
Теорема 6.10.2. Если функции y1 и y2 линейно зависимы на отрезке
[a, b], то определитель Вронского этих функций на этом отрезке тождественно равен нулю.
Доказательство. Поскольку функции y1 и y2 линейно зависимы на отрезке [a, b], то y2 (x) = λy1 (x), λ = const для x ∈ [a, b]. Тогда y20 = λy10 .
Вычислим определитель Вронского этих функций
¯ ¯
¯
¯
¯y1 y2 ¯ ¯y1 λy1 ¯
¯
¯ = λy1 y10 − λy1 y10 ≡ 0
¯
¯
W (y1 , y2 ) = ¯ 0
=
y1 y20 ¯ ¯y10 λy10 ¯
для любого x ∈ [a, b].
Теорема 6.10.3. Если два решения y1 и y2 дифференциального уравнения (6.3) линейно независимы на отрезке [a, b], то определитель Вронского W (y1 , y2 ), составленный из этих решений, не обращается в ноль ни
в одной точке отрезка [a, b].
Теорема 6.10.4. Если y1 и y2 — два линейно независимых решения
однородного дифференциального уравнения
y 00 + py 0 + qy = 0,
то выражение
y = C1 y 1 + C2 y 2 ,
(6.4)
где C1 , C2 — произвольные постоянные, есть общее решение этого уравнения.
Доказательство. Из теоремы 6.10.1 следует, что функция C1 y2 + C2 y2
есть решение уравнения (6.3) при любых C1 и C2 . Докажем, что это общее
решение, т.е. какими бы ни были начальные условия x = x0 , y = y0 , y 0 = y00 ,
можно подобрать значения постоянных C10 и C20 так, чтобы соответствующее частное решение C10 y1 + C20 y2 удовлетворяло заданным начальным
условиям.
217
Подставим начальные условия в равенство (6.4), получим
(
y0 = C1 y10 + C2 y20
0
0
y00 = C1 y10 + C2 y20 ,
0
(6.5)
0
где y1 (x0 ) = y10 ; y10 (x0 ) = y10 ; y2 (x0 ) = y20 ; y20 (x0 ) = y20 . Система (6.5) имеет
единственное решение, если
¯
¯ 0
¯ y1 y20 ¯
0 00
0 00
¯
¯ 0
0 = y1 y2 − y2 y1 6= 0.
¯y 0
y20 ¯
1
Но этот определитель есть определитель Вронского для функций y1 и y2 в
конкретной точке x0 . По условию теоремы y1 и y2 — линейно независимые
решения, поэтому по теореме 6.10.3 W (y1 , y2 ) 6= 0 ни в одной точке отрезка
[a, b].
Следовательно, при решении системы (6.5) мы найдем единственное
решение C10 и C20 . Тогда частное решение y = C10 y1 + C20 y2 удовлетворяет
заданным начальным условиям. И теорема доказана.
6.10.2. Решение однородного уравнения второго порядка
Будем искать решение уравнения (6.3) в виде y = ekx , где k = const.
Тогда y 0 = kekx , y 00 = k 2 ekx . Подставим найденные выражения в уравнение (6.3):
k 2 ekx + pkekx + qekx = 0,
ekx (k 2 + pk + q) = 0,
так как ekx 6= 0, то k 2 + pk + q = 0. И мы получили, что k должно удовлетворять уравнению k 2 + pk + q = 0.
Определение 6.10.5. Уравнение
k 2 + pk + q = 0
(6.6)
называется характеристическим уравнением по отношению к дифференциальному уравнению (6.3).
Найдем корни характеристического уравнения (6.6):
r
p
p2
k1,2 = ±
− q.
2
4
Возможны три случая:
I. D > 0, корни k1 и k2 — действительные числа и k1 6= k2 .
II. D = 0, корни k1 и k2 — действительные числа и k1 = k2 .
III. D < 0, корни k1 и k2 — комплексные числа.
Рассмотрим каждый случай отдельно.
218
I. Корни характеристического уравнения действительны и
различны. В этом случае частными решениями будут функции
y1 = ek1 x ,
y 2 = ek 2 x .
Эти решения линейно независимы, так как
y1
ek1 x
= k2 x = e(k1 −k2 )x 6= const,
y2
e
поскольку k1 − k2 6= 0. Следовательно, общее решение однородного уравнения в случае неравных действительных корней имеет вид
y = C1 ek1 x + C2 ek2 x .
Пример 6.10.2. Найти общее решение уравнения y 00 + y 0 − 6y = 0. Составим характеристическое уравнение k 2 + k − 6 = 0. Найдем его корни
k1 = 2, k2 = −3. Тогда общее решение имеет вид
y = C1 e2x + C2 e−3x .
Пример 6.10.3. Найти частное решение уравнения y 00 − 4y = 0 при
условии, что x = 0, y = 5, y 0 = 2. Найдем общее решение. Составим характеристическое уравнение y 00 − 4 = 0, тогда k1,2 = ±2. Общее решение имеет вид y = C1 e2x + C2 e−2x . Чтобы найти частное решение, найдем
y 0 = 2C1 e2x − 2C2 e−2x . Подставив начальные условия, получим систему
½
½
C1 + C2 = 5
C1 + C2 = 5
или
.
2C1 − 2C2 = 2,
C1 − C2 = 1
Решая эту систему, найдем C1 = 3, C2 = 2, тогда частное решение имеет
вид
y = 3e2x + 2e−2x .
II. Корни характеристического уравнения действительны и
равны. Обозначим этот корень k = k1 = k2 . Одним частным решением,
как и в предыдущем случае, будет функция y1 = ekx . Будем искать второе
решение в виде y2 = u(x)ekx , чтобы функции y1 и y2 были независимы.
Тогда
y20 = u0 ekx + kuekx = ekx (u0 + ku),
y200 = u00 ekx + ku0 ekx + ku0 ekx + k 2 uekx = ekx (u00 + 2ku0 + k 2 u).
Подставив найденные производные в уравнение (6.3), получим
ekx (u00 + 2ku0 + k 2 u + pu0 + pku + qu) = 0,
или
£
¤
ekx u00 + (2k + p)u0 + (k 2 + pk + q)u = 0.
219
Поскольку k — корень характеристического уравнения, то k 2 +pk +q = 0, и
p
поскольку дискриминант D = 0, то k = − или 2k + p = 0. Следовательно,
2
ekx u00 = 0, тогда u00 =R0. Решая это дифференциальное уравнение, получим
u0 = a = const, u = a dx = ax + b. Положим a = 1, b = 0, тогда u = x.
Мы получили второе частное решение y2 = xekx . Тогда общее решение
исходного уравнения будет иметь вид
y = C1 ekx + C2 xekx = ekx (C1 + C2 x).
Пример 6.10.4. Найти общее решение уравнения y 00 − 4y 0 + 4y = 0.
Найдем корни характеристического уравнения k 2 − 4k + 4 = 0, получим
k1 = k2 = 2. Тогда общее решение будет y = e2x (C1 + C2 x).
III. Корни характеристического
r уравнения комплексные. В
p
p2
этом случае положим α = − , β = q − . Частные решения в этом
2
4
случае имеют вид
y1 = eαx cos βx,
y2 = eαx sin βx.
Они линейно независимы, поскольку
y1
eαx cos βx
= αx
= ctg βx 6= const .
y2
e sin βx
Легко проверить, что эти частные решения удовлетворяют уравнению (6.3). Покажем это для решения y1 . Действительно,
y10 = αeαx cos βx − βeαx sin βx,
y100 = α2 eαx cos βx − 2αβeαx sin βx − β 2 eαx cos βx.
Подставляя найденные производные в уравнение, получим:
α2 eαx cos βx − 2αβeαx sin βx − β 2 eαx cos βx+
+pαeαx cos βx − pβeαx sin βx + qeαx cos βx =
= eαx cos βx(α2 − β 2 + αp + q) − eαx sin βx(2αβ + pβ) =
Ã
!
r
r
³ p2
´
2
2
2
2
p
p
p
p
2p
= eαx cos βx
−q+ − +q −eαx sin βx −
q−
+p q−
= 0.
4
4 2
2
4
4
Общее решение уравнения (6.3) в случае комплексных корней имеет вид
y = eαx (C1 cos βx + C2 sin βx).
220
Пример 6.10.5. Найти общее решение уравнения y 00 − 4y 0 + 8y = 0.
Найдем корни характеристического уравнения k 2 − 4k + 8 = 0, получим
k1,2 = 2 ± 2i. Тогда α = 2, β = 2. Общее решения уравнения имеет вид
y = e2x (C1 cos 2x + C2 sin 2x).
Пример 6.10.6. Найти частное решение уравнения y 00 + 4y = 0, при
π
условии, что x = , y = 2, y 0 = 4. Характеристическое уравнение имеет
4
вид k 2 + 4 = 0, тогда k1,2 = ±2i, и мы получим общее решение исходного
уравнения
y = C1 cos 2x + C2 sin 2x.
Найдем y 0 = −2C1 sin 2x+2C2 cos 2x. Подставив в y и y 0 начальные условия,
получим систему для нахождения C1 и C2 :
½
½
C1 cos π + C2 sin π = 2
C2 = 2
C1 = −2
2π
2π
или
или
−2C1 = 4
C2 = 2.
−2C1 sin + 2C2 cos = 4
2
2
Частное решение, удовлетворяющее начальным условиям, имеет вид
y = −2 cos 2x + 2 sin 2x.
6.10.3. Решение линейных однородных дифференциальных
уравнений n-го порядка с постоянными
коэффициентами
Пусть дано уравнение n-го порядка
y (n) + a1 y (n−1) + a2 y (n−2) + . . . + an y = 0.
Его характеристическое уравнение имеет вид
k n + a1 k n−1 + a2 k n−2 + . . . + an = 0.
Это уравнение по основной теореме алгебры имеет ровно n корней ki ,
i = 1, 2, . . . , n. Общее решение будет состоять из суммы частных решений,
соответствующих каждому корню, взятых с произвольными постоянными.
1. Пусть ki — действительный корень кратности 1, тогда ему будет
соответствовать решение
yi = Ci eki x .
2. Пусть ki — действительный корень кратности l > 1, тогда ему будет
соответствовать решение
yi = (C1 xl−1 + C2 xl−2 + . . . + Cl )eki x .
221
3. Пусть ki,i+1 = α ± iβ — пара комплексных сопряженных корней
кратности 1, тогда им соответствует решение
yi = eαx (Ci cos βx + Ci+1 sin βx).
4. Пусть ki,i+1 = α ± iβ — пара комплексных сопряженных корней
кратности l > 1, тогда им соответствует решение
¡
¢
yi = eαx (C1 xl−1 +C2 xl−2 +. . .+Cl ) cos βx+(C10 xl−1 +C20 xl−2 +. . .+Cl0 ) sin βx .
Вывод: общее решение однородного линейного дифференциального
уравнения n-го порядка с постоянными коэффициентами состоит из суммы
частных решений с произвольными постоянными, соответствующих каждому корню характеристического уравнения.
Пример 6.10.7. Найти общее решение уравнения
y (8) − 4y (7) + 2y (6) − 8y (5) + y (4) − 4y 000 = 0.
Ему соответствует характеристическое уравнение
k 8 − 4k 7 + 2k 6 − 8k 5 + k 4 − 4k 3 = 0,
у которого k1,2,3 = 0 — корень кратности 3, k4 = 4 — корень кратности 1,
k5,6,7,8 = ±i — пара сопряженных комплексных корней кратности 2. Тогда
общее решение имеет вид
y = C1 x2 + C2 x + C3 + C4 e4x + (C5 x + C6 ) cos x + (C7 x + C8 ) sin x.
6.11. Неоднородные линейные дифференциальные уравнения
второго порядка с постоянными коэффициентами
Пусть дано уравнение
y 00 + py 0 + qy = f (x),
(6.7)
где p, q — числа.
Теорема 6.11.1. Общее решение неоднородного уравнения (6.7) представляется как сумма какого-нибудь частного решения этого уравнения y ∗ и общего решения ȳ соответствующего однородного уравнения
y 00 + py 0 + qy = 0.
Доказательство. Докажем, что функция y = ȳ + y ∗ есть решение уравнения (6.7). Действительно,
(ȳ + y ∗ )00 + p(ȳ + y ∗ )0 + q(ȳ + y ∗ ) = f (x),
(ȳ 00 + pȳ 0 + q ȳ) + (y ∗ 00 + py ∗ 0 + qy ∗ ) = f (x),
222
тогда 0 + f (x) = f (x),
поскольку ȳ есть общее решение однородного уравнения, а y ∗ — частное
решение неоднородного уравнения.
Покажем, что это общее решение уравнения (6.7). Пусть даны начальные условия
y(x0 ) = y0 ,
y 0 (x0 ) = y00 .
(6.8)
По теореме 10.4 общее решение однородного уравнения ȳ можно представить в виде ȳ = C1 y1 + C2 y2 , где y1 , y2 — линейно независимые решения
однородного уравнения, а C1 и C2 — произвольные постоянные. Тогда
y = C1 y1 + C2 y2 + y ∗ .
Используя условия (6.8), получим
½
C1 y10 + C2 y20 + y0∗ = y0
C1 y 0 10 + C2 y 0 20 + y0∗ 0 = y 0 0
или
½
C1 y10 + C2 y20 = y0 − y0∗
C1 y 0 10 + C2 y 0 20 = y 0 0 − y0∗ 0 .
Это система относительно C1 и C2 . Поскольку функции y1 и y2 — линейно
независимы, то определитель Вронского
¯
¯
¯ y10 y20 ¯
¯ 0
¯
¯y 10 y 0 20 ¯ 6= 0,
поэтому полученная система имеет единственное решение C10 и C20 . Следовательно, y = ȳ + y ∗ есть общее решение уравнения (6.7).
Теорема 6.11.2 (Принцип суперпозиции). Частное решение y ∗ уравнения
y 00 + py 0 + qy = f1 (x) + f2 (x),
в котором правая часть есть сумма двух функций f1 (x) и f2 (x), можно
представить в виде суммы y ∗ = y1∗ + y2∗ , где y1∗ и y2∗ есть соответственно
частные решения уравнений
y1∗ 00 + py1∗ 0 + qy1∗ = f1 (x),
y2∗ 00 + py2∗ 0 + qy2∗ = f2 (x).
223
6.12. Метод вариации произвольных постоянных решения
неоднородного линейного уравнения второго порядка
Рассмотрим уравнение (6.7)
y 00 + py 0 + qy = f (x).
Тогда общее решение однородного уравнения y 00 + py 0 + qy = 0 имеет вид
ȳ = C1 y1 + C2 y2 . Будем искать частное решение неоднородного уравнения
в таком же виде
y ∗ = C1 (x)y1 + C2 (x)y2 ,
(6.9)
но считая C1 = C1 (x) и C2 = C2 (x) функциями от x. Продифференцируем
равенство (6.9)
y ∗ 0 = C1 y1 0 + C2 y2 0 + C1 0 y1 + C2 0 y2 .
Подберем искомые функции C1 (x) и C2 (x) так, чтобы C1 0 y1 + C2 0 y2 = 0.
Тогда y ∗ 0 = C1 y1 0 + C2 y2 0 . Найдем y ∗ 00 = C1 y1 00 + C2 y2 00 + C1 0 + y1 0 + C2 0 y2 0 .
Подставляя y ∗ , y ∗ 0 , y ∗ 00 в исходное уравнение (6.7), получим
C1 y1 00 + C2 y2 00 + C1 0 y1 0 + C2 0 y2 0 + pC1 y1 0 + pC2 y2 0 + qC1 y1 + qC2 y2 = f (x)
или
C1 (y1 00 + py1 0 + qy1 ) + C2 (y2 00 + py2 0 + qy2 ) + C1 0 y1 0 + C2 0 y2 0 = f (x).
Первые две скобки в этом равенстве обращаются в ноль, поскольку y1
и y2 — частные решения однородного уравнения. Поэтому из последнего
равенства получим условие
C1 0 y1 0 + C2 0 y2 0 = f (x).
Таким образом, функция (6.9), будет частным решением уравнения (6.7),
если функции C1 (x) и C2 (x) будут удовлетворять системе
(
C1 0 y1 + C2 0 y2 = 0
(6.10)
C1 0 y1 0 + C2 0 y2 0 = f (x).
Определитель этой системы
¯
¯
¯ y1 y2 ¯
¯ 0
¯
¯y1 y2 0 ¯
есть определитель Вронского линейно независимых решений y1 и y2 , поэтому он не равен 0. Следовательно, эта система имеет единственное решение
C1 0 (x) = ϕ1 (x), C2 0 (x) = ϕ2 (x). Интегрируя эти равенства, получим
Z
Z
C1 (x) = ϕ1 (x) dx + C1 ,
C2 (x) = ϕ2 (x) dx + C2 ,
224
где C1 = const, C2 = const. Тогда общее решение неоднородного уравнения
будет иметь вид
y = C1 (x)y1 + C2 (x)y2 .
Пример 6.12.1. Найти общее решение уравнения
y 00 + 4y 0 + 4y = e−2x ln x.
Найдем общее решение однородного уравнения y 00 + 4y 0 + 4y = 0. Имеем
k 2 +4k +4 = 0 или k1,2 = −2. Общее решение однородного уравнения имеет
вид
y = e−2x (C1 x + C2 ) = xe−2x C1 + e−2x C2 .
Подставив y1 = xe−2x и y2 = e−2x в систему (6.10), получим
(
C1 0 xe−2x + C2 0 e−2x = 0
C1 0 (e−2x − 2xe−2x ) − 2C2 0 e−2x = e−2x ln x
или
(
(
(
C1 0 x + C2 0 = 0
C2 0 = −C1 0 x
C1 0 = ln x
0
0
0
0
0
C1 (1 − 2x) − 2C2 = ln x,
C1 − 2xC1 + 2xC1 = ln x,
C2 0 = −x ln x.
Тогда, интегрируя по частям, получим:
Z
C1 (x) = ln x dx = x ln x − x + C1 ,
Z
x2
1
ln x + x2 + C2 .
2
4
Общее решение исходного уравнения имеет вид
³ x2
´
1
y = e−2x x(x ln x − x + C1 ) + e−2x − ln x + x2 + C2
2
4
или
³ x2
´
3
y = e−2x
ln x − x2 + C1 x + C2 .
2
4
C2 (x) = −
x ln x dx = −
6.13. Метод неопределенных коэффициентов нахождения
частного решения неоднородного уравнения со
специальной правой частью
Рассмотрим неоднородное уравнение (6.7) второго порядка
y 00 + py 0 + qy = f (x).
По теореме 6.11.1 его общее решение имеет вид y = ȳ + y ∗ , где ȳ — общее решение однородного уравнения; y ∗ — частное решение неоднородного уравнения. Будем искать частное решение. Обозначим k1 , k2 — корни
225
характеристического уравнения k 2 + pk + q = 0. Правую часть f (x) будем
рассматривать двух типов.
I. f (x) = Pn (x)eax , где Pn (x) — многочлен степени n.
1. Пусть параметр a не является корнем характеристического уравнения, т.е. a 6= k1 , a 6= k2 . Тогда частное решение будем искать в виде
y ∗ = Mn (x)eax ,
где Mn (x) — многочлен степени n с неопределенными коэффициентами.
Для нахождения коэффициентов подставим y ∗ в уравнение (6.7), получим
£
¤
eax Mn00 (x) + (2a + p)Mn0 (x) + (a2 + pa + q)Mn (x) = eax Pn (x),
или
Mn00 (x) + (2a + p)Mn0 (x) + (a2 + pa + q)Mn (x) = Pn (x).
(6.11)
2
Поскольку a +pa+q 6= 0, то левая часть есть многочлен степени n. Приравнивая коэффициенты при одинаковых степенях в левой и правой частях,
получим систему линейных уравнений для нахождения неопределенных
коэффициентов, которая всегда имеет единственное решение.
2. Пусть a — корень характеристического уравнения, но k1 6= k2 . Тогда
либо a = k1 , либо a = k2 . В этом случае в уравнении (6.11) a2 +pa+q = 0, и
тогда левая часть — это многочлен степени (n − 1), а правая — многочлен
степени n. Поэтому будем искать частное решение в виде
y ∗ = xMn (x)eax .
3. Пусть a — корень характеристического уравнения кратности 2, т.е.
a = k1 = k2 . В этом случае в уравнении (6.11) a2 + paq = 0 и 2a + p = 0,
поэтому левая часть этого уравнения — многочлен степени (n − 2). Следовательно, частное решение будем искать в виде
y ∗ = x2 Mn (x)eax .
II. f (x) = (Pn (x) cos bx + Qm (x) sin bx)eax , где Pn (x) и Qm (x) — многочлены степени n и m соответственно. Преобразуем правую часть по формуле Эйлера:
eibx + e−ibx
eibx − e−ibx
+ Qm (x)eax
=
2
2i
i
h1
i
h1
1
1
Pn (x) + Qm (x) e(a+ib)x + Pn (x) − Qm (x) e(a−ib)x .
2
2i
2
2i
Это правая часть I типа. Поэтому получим 2 случая.
f (x) = Pn (x)eax
226
1. Пусть сопряженные комплексные числа a ± ib не являются корнями
характеристического уравнения, т.е. a ± ib 6= k1,2 . Тогда частное решение
будем искать в виде
£
¤
y ∗ = Mr (x) cos bx + Nr (x) sin bx eax ,
где Mr (x) и Nr (x) — многочлены одинаковой степени r = max(n, m) с
неопределенными коэффициентами.
2. Пусть комплексные числа a ± ib являются корнями характеристического уравнения. В этом случае корни должны быть сопряженными комплексными числами, т.е. k1,2 = α ± iβ. Тогда a = α, b = β, порядок совпадения пар сопряженных чисел в данном случае равен 1. Поэтому частное
решение будем искать в виде
£
¤
y ∗ = x Mr (x) cos bx + Nr (x) sin bx eax ,
где Mr (x) и Nr (x) — многочлены одинаковой степени r = max(n, m) с
неопределенными коэффициентами.
Заметим, что многочлен нулевой степени имеет вид M0 (x) = A, первой
степени — M1 (x) = Ax + B, второй — M2 (x) = Ax2 + Bx + C и т.д.
Составим таблицу для всех рассмотренных случаев.
Вид f (x)
Проверка условий
Вид y ∗
ax
Pn (x)e
a 6= k1,2
Mn (x)eax
ax
Pn (x)e
a = k1 либо a = k2
xMn (x)eax
ax
2
ax
a = k1 = k2
£ Pn (x)e
£ x Mn (x)e
Pn (x) cos bx+
a ± ib 6= k1,2
Mr (x) cos bx+
¤ ax
¤ ax
+Q
(x)
sin
bx
e
+N
£m
£ r (x) sin bx e
5.
Pn (x) cos bx+
a ± ib = k1,2
x Mr (x) cos bx+
¤
¤
+Qm (x) sin bx eax
+Nr (x) sin bx eax
Пример 6.13.1. Найти общее решение уравнения
№
1.
2.
3.
4.
y 00 − 7y 0 + 12y = 2e5x .
1. Найдем общее решение однородного уравнения. Корни характеристического уравнения k 2 − 7k + 12 = 0 равны k1 = 3, k2 = 4. Тогда общее
решение имеет вид
ȳ = C1 e3x + C2 e4x .
2. Найдем частное решение. Поскольку правая часть имеет вид f (x) =
2e5x , то a = 5, n = 0. В данном случае a = 5 не является корнем характеристического уравнения, поэтому частное решение будем искать в виде
y ∗ = Ae5x .
227
Подставив его в уравнение, получим
25Ae5x − 35Ae5x + 12Ae5x = 2e5x ,
∗
2A = 2,
A = 1.
5x
Тогда y = e .
3. Общее решение исходного уравнения имеет вид
y = C1 e3x + C2 e4x + e5x .
Пример 6.13.2. Найти общее решение уравнения
y 00 − 5y 0 + 6y = (3x + 1)e2x .
1. Поскольку корни характеристического уравнения k 2 − 5k + 6 = 0
равны k1 = 2, k2 = 3, то
ȳ = C1 e2x + C2 e3x .
2. Из правой части уравнения a = 2, n = 1. Параметр a = k1 = 2.
Поэтому частное решение будем искать в виде
y ∗ = x(Ax + B)e2x = (Ax2 + Bx)e2x .
Найдем
y ∗ 0 = (2Ax + B)e2x + 2(Ax2 + Bx)e2x ,
y ∗ 00 = 2Ae2x + 4(2Ax + B)e2x + 4(Ax2 + Bx)e2x .
Подставляя в исходное уравнение и сокращая на e2x , получим равенство
2A+4(2Ax+B)+4(Ax2 +Bx)−5(2Ax+B)−10(Ax2 +Bx)+6(Ax2 +Bx) = 3x+1.
Приводя подобные члены, имеем
−2Ax + (2A − B) = 3x + 1.
Тогда
x1
x0
−2A = 3
2A − B = 1.
³ 3
´
3
Отсюда A = − , B = −4 и y ∗ = − x2 − 4x e2x .
2
2
3. Общее решение исходного уравнения имеет вид
´
³ 3
y = C1 e2x + C2 e3x + − x2 − 4x e2x .
2
Пример 6.13.3. Найти общее решение уравнения
y 00 − 2y 0 + y = (x2 + 2)ex .
228
1. Найдем общее решение неоднородного уравнения. Поскольку k 2 −
2k + 1 = 0, то k1 = k2 = 1. Тогда
ȳ = (C1 x + C2 )ex .
2. Поскольку a = k1 = k2 = 1 и n = 2, то частное решение неоднородного уравнения будем искать в виде
y ∗ = x2 (Ax2 + Bx + C)ex = (Ax4 + Bx3 + Cx2 )ex .
Тогда
y ∗ 0 = (4Ax3 + 3Bx2 + 2Cx)ex + (Ax4 + Bx3 + Cx2 )ex ,
y ∗ 00 = (12Ax2 +6Bx+2C)ex +2(4Ax3 +3Bx2 +2Cx)ex +(Ax4 +Bx3 +Cx2 )ex .
Подставляя в уравнение и сокращая на ex , получим
(12Ax2 + 6Bx + 2C) + 2(4Ax3 + 3Bx2 + 2Cx) + (Ax4 + Bx3 + Cx2 )−
−2(4Ax3 + 3Bx2 + 2Cx) − 2(Ax4 + Bx3 + Cx2 ) + (Ax4 + Bx3 + Cx2 ) = x2 + 2
или
12Ax2 + 6Bx + 2C = x2 + 2.
Приравнивая коэффициенты при одинаковых степенях x, получим систему
x2 12A = 1
x1 6B = 0
x0 2C = 2.
1
Решая систему, имеем A =
, B = 0, C = 1. Тогда
12
³1
´
y∗ =
x4 + x2 ex .
12
3. Общее решение исходного уравнения будет следующим:
³1
´
y = (C1 x + C2 )ex +
x4 + x2 ex .
12
Пример 6.13.4. Найти общее решение уравнения
y 00 − 3y 0 + 2y = ex cos x.
1. Найдем общее решение однородного уравнения. Корни характеристического уравнения k 2 − 3k + 2 = 0 равны k1 = 1, k2 = 2. Поэтому
решение имеет вид
ȳ = C1 ex + C2 e2x .
229
2. В правой части исходного уравнения a = 1, b = 1, n = 0, m =
0, поэтому a ± ib = 1 ± i 6= k1,2 , r = max(0, 0) = 0. Частное решение
неоднородного уравнения будем искать в виде
y ∗ = (A cos x + B sin x)ex .
Имеем
y ∗ 0 = (−A sin x + B cos x)ex + (A cos x + B sin x)ex ,
y ∗ 00 = (−A cos x − B sin x)ex + 2(−A sin x + B cos x)ex + (A cos x + B sin x)ex .
Подставив найденные производные в уравнение и сократив на ex , получим
(−A cos x − B sin x) + 2(−A sin x + B cos x) + (A cos x + B sin x)−
−3(−A sin x + B cos x) − 3(A cos x + B sin x) + 2(A cos x + B sin x) = cos x.
Приравнивая коэффициенты при функциях cos x и sin x, получим
cos x −A − B = 1
sin x A − B = 0.
1
1
Решая эту систему, найдем A = − , B = − . Тогда частное решение имеет
2
2
вид
1
y ∗ = − (cos x + sin x)ex .
2
3. Общее решение исходного уравнения:
1
y = C1 ex + C2 e2x − (cos x + sin x)ex .
2
Пример 6.13.5. Найти общее решение уравнения
y 00 + y = 8x cos x + 2 sin x.
1. Поскольку корнями характеристического уравнения k 2 + 1 = 0 являются комплексные числа k1,2 = ±i, то общее решение однородного уравнения следующее:
ȳ = C1 cos x + C2 sin x.
2. В правой части исходного уравнения a = 0, b = 1, n = 1, m = 0,
поэтому a ± ib = ±i = k1,2 , r = max(1, 0) = 1. Следовательно, частное
решение будем искать в виде
¡
¢
y ∗ = x (Ax + B) cos x + (Cx + D) sin x = (Ax2 + Bx) cos x + (Cx2 + Dx) sin x.
Тогда
y ∗ 0 = (2Ax + B) cos x − (Ax2 + Bx) sin x + (2Cx + D) sin x + (Cx2 + Dx) cos x,
y ∗ 00 = 2A cos x − 2(2Ax + B) sin x − (Ax2 + Bx) cos x+
+2C sin x + 2(2Cx + D) cos x − (Cx2 + Dx) sin x.
230
Подставляя найденные производные в уравнение, получим
2A cos x − 2(2Ax + B) sin x − (Ax2 + Bx) cos x + +2C sin x + 2(2Cx + D) cos x−
−(Cx2 + Dx) sin x + (Ax2 + Bx) cos x + (Cx2 + Dx) sin x = 8x cos x + 2 sin x.
Приравняем коэффициенты при функциях x cos x, x sin x, cos x, sin x, получим систему
x cos x 4C=8
x sin x -4A=0
cos x
2A + 2D = 0
sin x
−2B + 2C = 2.
Решая систему, найдем A = 0, B = 1, C = 2, D = 0. Тогда
y ∗ = x cos x + 2x2 sin x.
3. Общее решение имеет вид
y = C1 cos x + C2 sin x + x cos x + 2x2 sin x.
6.14. Решение систем обыкновенных дифференциальных
уравнений
Рассмотрим решение систем на системах двух уравнений с двумя неизвестными функциями.
Пусть дана система
dy = f (x, y, z)
dx
(6.12)
dz
= g(x, y, z),
dx
где y, z — искомые функции; x — аргумент.
Проинтегрировать систему (6.12) — значит, определить функции y и z,
удовлетворяющие этой системе и начальным условиям y(x0 ) = y0 , z(x0 ) =
z0 .
Определение 6.14.1. Система вида (6.12), у которой в левой части
производные первого порядка, а правая часть не содержит производных,
называется нормальной системой.
Рассмотрим метод решения таких систем — метод сведения к уравнению более высокого порядка.
1. Продифференцируем по x первое уравнение:
d2 y
∂f
∂f dy
∂f dz
=
+
+
.
dx2
∂x
∂y dx
∂z dx
231
2. Заменив
dy
dz
и
на функции f и g, будем иметь
dx dx
∂f
∂f
d2 y
∂f
+
f+
g.
=
dx2
∂x
∂y
∂z
(6.13)
3. Выразим z из первого уравнения системы (6.12):
³
dy ´
z = ϕ x, y,
.
(6.14)
dx
4. Подставив z в уравнение (6.13), получим дифференциальное уравнение второго порядка относительно функции y. Решая его, найдем
y = ψ(x, C1 , C2 ).
5. Подставим найденное y в выражение (6.14):
z = χ(x, C1 , C2 ).
Таким образом, мы получили общее решение исходной системы. Чтобы
получить частное решение, надо подставить начальные условия в общее
решение и определить константы C1 и C2 .
Пример 6.14.1. Найти общее решение системы
y 0 = 1 + 4x − 2y − 4z
dy = 1 + 4x − 2y − 4z
dx
или
3
dz
3
z 0 = x2 − y + z.
= x2 − y + z.
2
dx
2
1. Продифференцируем первое уравнение системы по x:
y 00 = 4 − 2y 0 − 4z 0 .
2. Подставим y 0 и z 0 из системы в это уравнение:
³3
´
y 00 = 4 − 2(1 + 4x − 2y − 4z) − 4 x2 − y + z = 2 − 8x − 6x2 + 8y + 4z.
2
3). Выразим из первого уравнения системы z:
z=
1 + 4x − 2y − y 0
,
4
тогда будем иметь
y 00 = 2 − 8x − 6x2 + 8y + 1 + 4x − 2y − y 0
или
y 00 + y 0 − 6y = −6x2 − 4x + 3.
232
Решим это уравнение. Поскольку корни характеристического уравнения
k 2 + k − 6 = 0 равны k1 = −3, k2 = 2, то общее решение однородного
уравнения имеет вид
ȳ = C1 e−3x + C2 e2x .
Так как a = 0, n = 2 и a 6= k1,2 , то частное решение неоднородного уравнения будем искать в виде
y ∗ = Ax2 + Bx + C.
Поскольку
y ∗ 0 = 2Ax + B,
y ∗ 00 = 2A,
то
2A + 2Ax + B − 6(Ax2 + Bx + C) = −6x2 − 4x + 3.
Приравнивая коэффициенты при одинаковых степенях x, получим
x2
x1
x0
−6A = −6
2A − 6B = −4
2A + B − 6C = 3.
Решая эту систему, найдем A = 1, B = 1, C = 0. Тогда частное решение
имеет вид y ∗ = x2 + x. И общее решение будет
y = C1 e−3x + C2 e2x + x2 + x.
4. Найдем функцию z. Для этого найдем y 0 = −3C1 e−3x +2C2 e2x +2x+1.
Тогда
1 + 4x − 2y − y 0
z=
=
4
=
1 + 4x − 2C1 e−3x − 2C2 e2x − 2x2 − 2x + 3C1 e−3x − 2C2 e2x − 2x − 1
=
4
C1 −3x
x2
e
− C2 e2x − .
4
2
5. Общее решение исходной системы имеет вид
y = C1 e−3x + C2 e2x + x2 + x
2
z = C1 e−3x − C2 e2x − x .
4
2
=
233
6.14.1. Системы однородных линейных дифференциальных
уравнений с постоянными коэффициентами
Рассмотрим нормальную однородную систему двух уравнений первого
порядка
dy = a11 y + a12 z
dx
(6.15)
dz
= a21 y + a22 z,
dx
где aij = const. Систему (6.15) можно решать предыдущим способом. Рассмотрим другой способ решения таких систем.
Поскольку система однородная, то ее решением и для y, и для z является сумма линейно независимых частных решений с произвольными
константами. Будем искать частные решения этой системы в виде
y = αekx ,
z = βekx .
Требуется найти α, β и k так, чтобы y и z удовлетворяли исходной системе.
Подставим их в систему (6.15), получим
(
kαekx = (a11 α + a12 β)ekx
kβekx = (a21 α + a22 β)ekx .
Сокращая ekx и перенося все в одну сторону, будем иметь
(
(a11 − k)α + a12 β = 0
a21 α + (a22 − k)β = 0.
(6.16)
Выберем α, β и k так, чтобы они удовлетворяли системе (6.16). Составим
определитель этой системы:
¯
¯
¯a11 − k
a12 ¯¯
¯
∆(k) = ¯
.
a21
a22 − k ¯
Ненулевое решение у системы (6.16) будет только в том случае, если ∆(k) =
0. Поэтому
¯
¯
¯a11 − k
a12 ¯¯
¯
= (a11 − k)(a22 − k) − a12 a21 = 0.
¯ a21
a22 − k ¯
Получим уравнение второго порядка для нахождения k.
Определение 6.14.2. Определитель
¯
¯
¯a − k
a12 ¯¯
∆(k) = ¯¯ 11
a21
a22 − k ¯
234
называется характеристическим определителем системы (6.15), а уравнение
(a11 − k)(a22 − k) − a12 a21 = 0
характеристическим уравнением системы (6.15). Его корни k1 и k2 называются характеристическими корнями.
Рассмотрим 3 случая.
I. Корни k1 , k2 — действительны и не равны, т.е. k1 6= k2 .
Для корня k1 составим систему (6.16):
(
(a11 − k1 )α + a12 β = 0
a21 α + (a22 − k1 )β = 0.
Эта система имеет ранг, равный 1, поэтому мы сами выбираем любое
α1 6= 0, тогда β1 находим из этой системы. Поэтому для корня k1 , получим
частные решения:
y1 = α1 ek1 x ,
z1 = β1 ek1 x .
Аналогично, для корня k2 составим систему (6.16), найдем α2 и β2 и
частные решения
y2 = α2 ek2 x ,
z = β2 ek2 x .
Очевидно, что частные решения y1 и y2 , а также z1 и z2 линейно независимы, поскольку k1 6= k2 .
Поэтому общее решение исходной системы будет иметь вид
(
y = α1 C1 ek1 x + α2 C2 ek2 x
z = β1 C1 ek1 x + β2 C2 ek2 x .
Пример 6.14.2. Найти общее решение системы
(
y 0 = 2y + 2z
z 0 = y + 3z.
Составим характеристическую систему
(
(2 − k)α + 2β = 0
α + (3 − k)β = 0.
Вычислим характеристический определитель
¯
¯
¯2 − k
2 ¯¯
¯
= 0.
¯ 1
3 − k¯
Тогда (2 − k)(3 − k) − 2 = 0 или k 2 − 5k + 4 = 0. Получим k1 = 4, k2 = 1.
235
1. Пусть k1 = 4. Подставив его в характеристическую систему, получим
(
−2α1 + 2β1 = 0
α1 − β1 = 0.
Если α1 = 1, то β1 = 1. Тогда y1 = e4x , z1 = e4x .
2. Пусть k2 = 1. Получим
(
α2 + 2β2 = 0
α1 + 2β2 = 0.
Если β2 = 1, то α2 = −2. Тогда y2 = −2ex , z2 = ex .
Общее решение исходной системы будет иметь вид
(
y = C1 e4x − 2C2 ex
z = C1 e4x + C2 ex .
II. Корни характеристического уравнения действительны и равны, т.е.
k1 = k2 = k.
Вначале будем делать, как в предыдущем случае. Подставим корень k
в систему (6.16) и найдем α и β. Поэтому первая группа частных решений
имеет вид
(
y1 = αekx
z1 = βekx .
Вторую группу частных решений будем искать в виде
(
y2 = (a1 x + b1 )ekx
z2 = (a2 x + b2 )ekx
для того, чтобы они были линейно независимы с первой группой частных
решений. Подставим эти решения в исходную систему (6.15), сократим на
ekx и получим
(
ka1 x + kb1 + a1 = (a1 x + b1 )a11 + (a2 x + b2 )a12
ka2 x + kb2 + a2 = (a1 x + b1 )a21 + (a2 x + b2 )a22 .
Далее, в каждом уравнении приравнивая коэффициенты при одинаковых
степенях x, получим систему, которая имеет ранг не более 2. Находим коэффициенты a1 , a2 , b1 и b2 , но так, чтобы a1 6= 0, a2 6= 0.
Общее решение исходной систему будет иметь вид
(
y = C1 αekx + C2 (a1 x + b1 )ekx
z = C1 βekx + C2 (a2 x + b2 )ekx .
236
Пример 6.14.3. Найти общее решение системы
(
y 0 = 3y + z
z 0 = −y + z.
Составим характеристическую систему
(
(3 − k)α + β = 0
−α + (1 − k)β = 0.
Вычислим характеристический определитель
¯
¯
¯3 − k
1 ¯¯
¯
¯ −1 1 − k ¯ = 0.
Тогда (3 − k)(1 − k) + 1 = 0 или k 2 − 4k + 4 = 0. Получим k1 = k2 = k = 2.
1. Для k = 2 найдем первую группу решений. Подставим k в характеристическую систему:
(
α+β =0
−α − β = 0.
Возьмем α = 1, тогда β = −1. Получим y1 = e2x , z1 = −e2x .
2. Найдем вторую группу решений, положим
(
y2 = (a1 x + b1 )e2x
z2 = (a2 x + b2 )e2x .
Подставим эти решения в исходную систему, сократим на e2x , получим
(
a1 + 2(a1 x + b1 ) = 3(a1 x + b1 ) + (a2 x + b2 )
a2 + 2(a2 x + b2 ) = −(a1 x + b1 ) + (a2 x + b2 ),
или
(
(a1 + a2 )x + (b1 − a1 − b2 ) = 0
(a1 + a2 )x + (a2 + b2 + b1 ) = 0.
Приравнивая коэффициенты при одинаковых степенях x, получим систему
a1 + a2 = 0
b − a − b = 0
1
1
2
a1 + a2 = 0
a2 + b2 + b1 = 0.
237
Эта система имеет ранг, равный 2. Поэтому два коэффициента мы должны
выбрать сами, пусть a1 = 1, b2 = 0, тогда a2 = −1, а b1 = 1. Мы получили
решения y2 = (x + 1)e2x , z2 = −xe2x .
Общее решение исходной системы будет равно
(
y = C1 e2x + C2 (x + 1)e2x
z = −C1 e2x − C2 xe2x .
III. Пусть корни характеристического уравнения комплексные, т.е.
k1,2 = a ± ib. Подставим k = a + ib в систему (6.16), найдем комплексные
решения α и β. Поэтому комплексные решения исходной системы будут
иметь вид
(
ȳ = αekx
z̄ = βekx .
Тогда действительная и мнимая части комплексных решений ȳ и z̄ будут
являться линейно независимыми частными решениями исходной системы.
Общее решение будет иметь вид
(
y = C1 Re ȳ + C2 Im ȳ
z = C1 Re z̄ + C2 Im z̄.
Пример 6.14.4. Найти общее решение системы
(
y 0 = 3y + 2z
z 0 = −y + z.
Составим характеристическую систему
(
(3 − k)α + 2β = 0
−α + (1 − k)β = 0.
Вычислим характеристический определитель
¯
¯
¯3 − k
2 ¯¯
¯
¯ −1 1 − k ¯ = 0.
Тогда (3 − k)(1 − k) + 2 = 0 или k 2 − 4k + 5 = 0. Получим k1,2 = 2 ± i.
Подставив корень k = 2 + i в характеристическую систему, получим
(
(
(3 − 2 − i)α + 2β = 0
(1 − i)α + 2β = 0
или
−α + (1 − 2 − i)β = 0
−α − (1 + i)β = 0.
Возьмем β = −1, тогда из второго уравнения α = 1 + i. Поэтому комплексные решения равны ȳ = (1 + i)e(2+i)x , z̄ = −e(2+i)x . Применяя формулу
238
Эйлера ea+ib x = eax (cos bx + i sin bx) и выделяя действительную и мнимую
часть, получим
(2+i)x
= (1 + i)e2x (cos x + i sin x) =
ȳ = (1¡ + i)e
¢
2x
= e (cos x − sin x) + i(cos x + sin x)
z̄ = −e(2+i)x = −e2x (cos x + i sin x).
Действительное общее решение исходной системы будет равно
(
¡
¢
y = e2x C1 (cos x − sin x) + C2 (cos x + sin x)
z = −e2x (C1 cos x + C2 sin x).
239
Глава 7
Ряды
7.1. Числовые ряды
Определение 7.1.1. Выражение
u1 + u2 + . . . + un + . . . ,
(7.1)
где un — числа, называется числовым рядом. При этом числа u1 , u2 , . . . ,
un , . . . , называются членами ряда.
Ряд (7.1) можно записать в виде
∞
X
un = u1 + u2 + . . . + un + . . . ,
n=1
где un — общий член ряда.
Пример 7.1.1. Примеры числовых рядов:
∞
P
1) 1 + 2 + 3 + . . . + n + . . . =
n;
n=1
∞ 1
P
1 1
1
2) 1 + + + . . . + + . . . =
;
2 3
n
n=1 n
n
∞
P
1 2 3 4
(−1) n
n
3) − + − + + . . . +
+ ... =
(−1)n
.
2 3 4 5
n+1
n+1
n=1
Определение 7.1.2. Числа Sn = u1 + u2 + . . . + un называются nчастичными суммами ряда (7.1).
Определение 7.1.3. Если существует конечный предел
lim Sn = S,
n→∞
то его называют суммой ряда и говорят, что ряд (7.1) сходится.
Если предел n-частичных сумм Sn не существует, то ряд (7.1) расходится и суммы не имеет.
240
Пример 7.1.2. Рассмотрим геометрическую прогрессию
∞
X
a + aq + aq 2 + . . . + aq n−1 + . . . =
aq n−1 ,
(7.2)
n=1
где a = const 6= 0.
Сумма Sn первых n чисел равна (q 6= 1)
¡
¢
a 1 − qn
a
aq n
Sn =
=
−
.
1−q
1−q 1−q
Рассмотрим четыре случая.
1. Если |q| < 1, то q n −−−−→ 0, следовательно,
n→∞
µ
¶
a
aq n
a
lim Sn = lim
−
=
.
n→∞
n→∞ 1 − q
1−q
1−q
a
Значит, при |q| < 1 ряд (7.2) сходится и его сумма равна S =
.
1
−
q
¡
¢
a 1 − qn
2. Если |q| > 1, то q n −−−−→ ∞ и тогда
−−−−→ ∞, т.е. предела
n→∞
n→∞
1−q
n-частичных сумм Sn не существует и ряд (7.2) расходится.
3. Пусть q = 1. Тогда ряд (7.2) имеет вид
a + a + a + ... .
Поэтому Sn = na и lim Sn = lim na = ∞, т.е. ряд (7.2) расходится.
n→∞
n→∞
4. Пусть q = −1. Тогда ряд (7.2) имеет вид
a − a + a − ... .
В этом случае
(
0, n = 2k
Sn =
a, n = 2k − 1,
k = 1, 2, 3, . . . .
Поэтому n-частичные суммы Sn предела не имеют и ряд (7.2) расходится.
7.1.1. Действия над рядами
Теорема 7.1.1. Если сходится ряд
∞
X
un = u1 + u2 + . . . + un + . . . ,
(7.3)
n=1
то сходится и ряд
uk+1 + uk+2 + . . . ,
241
(7.4)
полученный из ряда (7.3) отбрасыванием первых k членов, и обратно, если
сходится ряд (7.4), то сходится и ряд (7.3).
Доказательство. Обозначим ck = u1 + u2 + . . . + uk — сумму первых
k чисел. Пусть Sn — частичная сумма ряда (7.3); σn — частичная сумма
ряда (7.4) при n > k. Тогда Sn = ck + σn . Поэтому если ряд (7.3) сходится,
то существует
S = lim Sn = lim (ck + σn ) = ck + lim σn .
n→∞
n→∞
n→∞
Тогда существует σ = lim σn = S − ck , и ряд (7.4) сходится.
n→∞
И наоборот, если существует σ = lim σn , то существует
n→∞
lim Sn = lim (ck + σn ) = ck + lim σn = ck + σ = S,
n→∞
n→∞
n→∞
и ряд (7.3) сходится.
∞
P
Теорема 7.1.2. Если ряды
ряды
∞
P
n=1
aun и
∞
P
n=1
n=1
un и
∞
P
n=1
vn сходятся и a = const, то
(un ± vn ) также сходятся и
∞
X
aun
=
n=1
∞
X
(un ± vn ) =
n=1
a
∞
X
un
n=1
∞
X
∞
X
n=1
n=1
un ±
vn .
(7.5)
Доказательство. Справедливость этой теоремы следует из справедливости этих фактов для конечных сумм. Действительно,
∞
X
aun = lim
n→∞
n=1
и
∞
X
n=1
(un ± vn ) = lim
n→∞
n
X
n
X
auk = a lim
n→∞
k=1
(uk ± vk ) = lim
n→∞
k=1
n
X
k=1
n
X
uk = a
un
n=1
k=1
uk ± lim
∞
X
n
X
k=1
vk =
∞
X
n=1
un ±
∞
X
vn .
n=1
Подчеркнем, что из сходимости ряда, стоящего слева в (7.5), не следует
сходимость каждого из рядов, стоящих справа в (7.5).
Пример 7.1.3. Ряд (1 − 1) + (1 − 1) + . . . сходится, поскольку все его
∞
∞
P
P
члены равны 0, но ряды
1и−
1 расходятся.
n=1
n=1
242
Замечание 7.1.1. В сходящемся ряде можно члены группировать как
угодно, например, (u1 + u2 ) + (u3 + u4 + u5 ) + u6 + . . ., он останется сходящимся. А вот раскрывать скобки, если они есть, нельзя, ряд может
начать расходиться.
7.1.2. Необходимый признак сходимости ряда
Теорема 7.1.3. Если ряд (7.3) сходится, то его n-член стремится к
нулю при n → ∞, т.е.
lim un = 0.
n→∞
Доказательство. Пусть ряд
∞
P
n=1
и lim Sn−1 = S. Получим
un = S сходится, т.е. lim Sn = S. Тогда
n→∞
n→∞
0 = S − S = lim Sn − lim Sn−1 = lim (Sn − Sn−1 ) = lim un ,
n→∞
n→∞
n→∞
n→∞
поскольку un = Sn − Sn−1 . Поэтому lim un = 0.
n→∞
Следствие 7.1.1. Если n-член ряда не стремится к нулю при n → ∞,
то ряд расходится.
Пример 7.1.4. Рассмотрим ряд
∞
X
2n
.
n+1
n=1
Поскольку un =
2n
, то
n+1
lim un = lim
n→∞
n→∞
2n
2
= lim
n + 1 n→∞ 1 +
Поэтому исходный ряд расходится.
Пример 7.1.5. Рассмотрим ряд
расходится.
∞
P
n=1
1
n
= 2 6= 0.
n, поскольку lim n = ∞, то ряд
n→∞
Замечание 7.1.2. Этот признак является необходимым, но не является достаточным, поскольку, если lim un = 0, то отсюда не следует,
n→∞
∞
P
что ряд
un сходится, он может расходиться.
n=1
243
Пример 7.1.6. Гармонический ряд
Рассмотрим ряд
∞
X
1
1 1
1
= 1 + + + ... + + ... .
n
2 3
n
n=1
1
= 0, но ряд расходится. Докажем это.
Предел n-члена ряда lim
n→∞ n
Напишем гармонический ряд
1 1 1 1 1 1 1 1
1
+... .
1 + + + + + + + + + ... +
2 |3 {z 4} |5 6 {z 7 8} |9
16
{z
}
(7.6)
2 чл.
4 чл.
8 чл.
Напишем вспомогательный ряд
1 1 1 1 1 1 1
1
1
1+ + + + + + + +
+ ... +
+... .
(7.7)
2 |4 {z 4} |8 8 {z 8 8} |16 {z 16}
2 чл.
4 чл.
8 чл.
Пусть Sn — сумма n первых членов ряда (7.6), а σn — сумма n первых
членов ряда (7.7). Для n > 2 имеем Sn > σn , поскольку члены первого
ряда больше либо равны членам второго ряда. Для ряда (7.7) имеем:
1
1
σ2 = 1 + = 1 + 1 · ,
2 ³
2
1
1 1´
1
σ4 = 1 + +
+
=1+2· ,
2
4 4
2
..............................
1
σ 2k = 1 + k · .
2
Поэтому
³
1´
lim σ2k = lim 1 + k
= ∞.
k→∞
k→∞
2
∞
Поскольку последовательность {σ2k }k=1 есть подпоследовательность последовательности {σn }∞
n=1 , то lim σn = ∞. Поэтому ряд (7.7) расходится.
n→∞
Поскольку Sn > σn , то и lim Sn = ∞, следовательно, гармонический
ряд (7.6) также расходится.
n→∞
7.2. Числовые ряды с положительными членами
Определение 7.2.1. Ряд
∞
X
un ,
n=1
244
если un > 0 для любого натурального n, называется рядом с положительными членами.
Рассмотрим два ряда с положительными членами:
∞
X
un = u1 + u2 + . . . + un + . . . ;
(7.8)
vn = v1 + v2 + . . . + vn + . . . .
(7.9)
n=1
∞
X
n=1
Теорема 7.2.1 (Признак сравнения). Пусть члены ряда (7.8) не больше членов ряда (7.9), т.е. un 6 vn для любого n = 1, 2, 3, . . ., тогда:
1) если ряд (7.9) сходится, то сходится и ряд (7.8),
2) если ряд (7.8) расходится, то расходится и ряд (7.9).
Доказательство. Обозначим n-частичные суммы рядов (7.8), (7.9), соответственно, Sn и σn . Поскольку un 6 vn , то Sn 6 σn .
Докажем первое утверждение. Если ряд (7.9) сходится, то существует
lim σn = σ. Члены обеих рядов положительны, поэтому последователь-
n→∞
ность {σn } монотонно возрастает, а значит, σn < σ, тогда и Sn < σn < σ.
Получили, что последовательность {Sn } ограничена сверху и монотонно
возрастает, поэтому существует lim Sn = S. Значит, ряд (7.8) сходится.
n→∞
Докажем второе утверждение. Из условия теоремы имеем un 6 vn ,
тогда Sn 6 σn . Поскольку ряд (7.8) с положительными членами, то Sn
монотонно возрастает, и поскольку он расходится, то lim Sn = ∞. Но
n→∞
тогда и
lim σn = ∞, а значит, и ряд (7.9) расходится.
n→∞
Пример 7.2.1. Исследовать на сходимость ряд
∞
X
1
.
nn
n=1
∞ 1
P
1
1
. Обозначим un = n и vn = n .
n
n
2
n=1 2
∞ 1
P
есть геометрическая
При n > 2 имеем un < vn . Поскольку ряд
n
n=1 2
1
прогрессия со знаменателем q = < 1, то он сходится, а значит, сходится
2
∞ 1
P
и ряд
.
n
n=1 n
Рассмотрим вспомогательный ряд
245
Пример 7.2.2. Исследовать на сходимость ряд
∞
X
1
√ .
n
n=1
Рассмотрим вспомогательный гармонический ряд
∞ 1
P
. Он расходится.
n=1 n
1
1
и vn = √ выполняется un 6 vn для любого
n
n
∞
P
1
√ также расходится.
натурального n, то ряд
n
n=1
А поскольку для un =
Следствие 7.2.1 (Предельный признак сравнения). Если существует
0 < lim
n→∞
то ряды
∞
P
n=1
un и
∞
P
n=1
un
= A < +∞,
vn
vn сходятся или расходятся одновременно.
Пример 7.2.3. Исследовать на сходимость ряд
∞
X
n+2
.
2+3
n
n=1
∞ 1
P
, который расходится. Поскольку
n=1 n
n+2
1
(n + 2)n
n2 + 2n
для un = 2
и vn =
существует lim
=
lim
= 1,
n→∞ n2 + 3
n→∞ n2 + 3
n +3
n
то исходный ряд также расходится.
Рассмотрим вспомогательный ряд
7.2.1. Признак Даламбера
∞
P
Теорема 7.2.2. Пусть для ряда
un с положительными членами
n=1
существует
un+1
= l,
lim
n→∞ un
то:
1) если l < 1, то ряд сходится;
2) если l > 1, то ряд расходится;
3) если l = 1, то ряд надо исследовать по другому признаку.
246
Доказательство. Докажем первое утверждение. Пусть l < 1. Возьмем
число l < q < 1. Поскольку l = lim un , то из определения предела следует,
n→∞
что, начиная с некоторого номера N , выполняется
un+1
< q для любого n > N.
un
Тогда
uN +1 < quN
uN +2 < quN +1 < q 2 uN
uN +3 < quN +2 < q 3 uN
и т.д.
Рассмотрим два ряда:
u1 + u2 + . . . + uN + uN +1 + uN +2 + uN +3 + . . . ;
uN + quN + q 2 uN + q 3 uN + . . . .
(7.10)
(7.11)
Ряд (7.11) есть геометрическая прогрессия со знаменателем q < 1, поэтому
он сходится. Начиная с номера N , члены ряда (7.10) меньше либо равны
членов ряда (7.11), поэтому по признаку сравнения исходный ряд (7.10)
также сходится.
un+1
Докажем второе утверждение. Пусть l > 1. Поскольку l = lim
,
n→∞ un
un+1
> 1 при n > N , т.е.
то, начиная с некоторого номера N , дробь
un
un+1 > un . Поэтому общий член исходного ряда не стремится к нулю, а
значит, по необходимому признаку ряд расходится.
Замечание 7.2.1. Признак Даламбера дает ответ на вопрос о сходимости ряда только тогда, когда этот предел существует и отличен
от 1. В остальных случаях ряд может и сходиться и расходиться.
Пример 7.2.4. Исследовать на сходимость ряд
∞
X
n=1
Поскольку un =
n
3n+1
.
n
n+1
, un+1 = n+2 и
3n+1
3
un+1
n + 1 3n+1
(n + 1)3n+1
1
= lim n+2 ·
= lim
= < 1,
n→∞ un
n→∞ 3
n→∞
n
n3n+2
3
то ряд сходится.
lim
247
Пример 7.2.5. Исследовать на сходимость ряд
∞
X
2n
.
(n + 1)!
n=1
Поскольку un =
2n
2n+1
, а un+1 =
, то
(n + 1)!
(n + 2)!
2n+1 (n + 1)!
2 · 1 · 2 · . . . · n · (n + 1)
un+1
= lim
= lim
=
n→∞ 2n (n + 2)!
n→∞ 1 · 2 · . . . · n · (n + 1) · (n + 2)
n→∞ un
lim
= lim
n→∞
2
= 0 < 1.
n+2
Поэтому исходный ряд сходится.
Пример 7.2.6. Исследовать на сходимость ряд
∞
X
2 · 5 · 8 . . . · (3n − 1)
.
n!
n=1
Имеем un =
тогда
2 · 5 · 8 . . . · (3n − 1)
2 · 5 · 8 . . . · (3n − 1) · (3n + 2)
, а un+1 =
,
n!
(n + 1)!
lim
n→∞
2 · 5 · 8 . . . · (3n − 1) · (3n + 2)n!
un+1
= lim
=
n→∞
un
2 · 5 · 8 . . . · (3n − 1)(n + 1)!
= lim
n→∞
2 · 5 · 8 . . . · (3n − 1) · (3n + 2) · 1 · 2 . . . · n
=
2 · 5 · 8 . . . · (3n − 1) · 1 · 2 · . . . · n · (n + 1)
3n + 2
= 3 > 1.
n+1
Поэтому исходный ряд расходится.
Пример 7.2.7. Исследовать на сходимость ряд Дирихле
= lim
n→∞
∞
X
1
,
np
n=1
где p > 0. Имеем
un+1
= lim
lim
n→∞
n→∞ un
µ
n+1
n
¶p
= 1.
Поэтому о сходимости ряда ничего сказать нельзя, его надо исследовать с
помощью других признаков.
248
7.2.2. Признак Коши
Теорема 7.2.3. Пусть дан ряд с положительными членами
X
un = u1 + u2 + . . .
n→∞
и существует lim
n→∞
√
n
un = l, тогда:
1) если l < 1, то ряд сходится;
2) если l > 1, то ряд расходится;
3) если l = 1, то ряд надо исследовать с помощью других признаков.
Доказательство. 1. Пусть l < 1. Возьмем число l < q < 1. Начиная с
√
некоторого номера N выполняется неравенство n un < q или un < q n для
всех n > N . Рассмотрим два ряда:
u1 + u2 + . . . + uN + uN +1 + uN +2 + . . . ;
(7.12)
q N + q N +1 + q N +2 + . . . .
(7.13)
Поскольку q < 1, то ряд (7.13) сходится как геометрическая прогрессия.
Поскольку, начиная с номера N , члены ряда (7.12) меньше членов ряда (7.13), то по признаку сравнения исходный ряд сходится.
2. Пусть l > 1. Тогда начиная с некоторого номера N выполняется
√
n u
n > 1 или un > 1 при n > N . Поэтому общий член ряда не может
стремиться к нулю, а значит, по необходимому признаку ряд расходится.
Пример 7.2.8. Исследовать на сходимость ряд
¶n
∞ µ
X
n
.
2n + 1
n=1
µ
Поскольку un =
lim
n→∞
√
n
n
2n + 1
¶n
, то
sµ
un = lim
n→∞
n
n
2n + 1
¶n
= lim
n→∞
1
n
= < 1.
2n + 1
2
Поэтому этот ряд сходится.
Пример 7.2.9. Исследовать на сходимость ряд
¶2n
∞ µ
X
3n
.
n+1
n=1
249
µ
Поскольку un =
lim
√
n
n→∞
3n
n+1
¶2n
, то
sµ
n
un = lim
n→∞
3n
n+1
¶2n
µ
= lim
n→∞
3n
n+1
¶2
= 9 > 1.
Поэтому исходный ряд расходится.
Пример 7.2.10. Исследовать на сходимость ряд
∞
X
1
p
n
n=1
при p > 0. Имеем
lim
√
n
n→∞
r
un = lim
n
n→∞
1
= lim
n→∞
np
à r !p
n 1
= 1p = 1.
n
Поэтому этот ряд надо исследовать с помощью других признаков.
7.2.3. Интегральный признак сходимости числового ряда
Теорема 7.2.4. Пусть члены ряда
∞
X
= u1 + u2 + . . . + un + . . .
(7.14)
n=1
положительны и не возрастают, т.е.
u1 > u2 > u3 > . . . > 0,
и пусть f (x) > 0 непрерывно убывающая функция такая, что
f (1) = u1 ,
f (2) = u2 , . . . , f (n) = un , . . . .
Тогда:
+∞
R
1) если несобственный интеграл
также сходится;
2) если несобственный интеграл
также расходится.
f (x) dx сходится, то ряд (7.14)
1
+∞
R
f (x) dx расходится, то ряд (7.14)
1
Доказательство. Поскольку частичные суммы ряда являются интегральными суммами для несобственного интеграла, то они ведут себя одинаково.
250
Пример 7.2.11. Исследовать на сходимость ряд
∞
X
1
.
n
ln
n
n=1
Найдем несобственный интеграл от функции f (x) =
+∞
Z
e
dx
= lim
x ln x b→+∞
Zb
e
1
:
x ln x
¯b
d ln x
¯
= lim ln ln x¯ = lim ln ln b = +∞.
b→+∞
b→+∞
ln x
e
Поэтому исходный ряд расходится.
Пример 7.2.12. Исследовать на сходимость ряд
∞
X
1
p
n
n=1
1
при p > 0. Рассмотрим функцию f (x) = p . Исследуем несобственный
x
интеграл:
+∞
Z
Zb
1 b1−p + 1 , p 6= 1
dx
dx
1−p
p−1
=
lim
=
lim
=
b→+∞
b→+∞
xp
xp
ln b,
p=1
1
1
1 , p>1
= p−1
+∞,
p 6 1.
Поэтому исходный ряд сходится при p > 1 и расходится при p 6 1.
7.3. Знакопеременные числовые ряды
Определение 7.3.1. Числовой ряд называется знакопеременным, если среди его членов имеются как положительные, так и отрицательные
члены.
Теорема 7.3.1. Если знакопеременный ряд
u1 + u2 + . . . + un + . . .
(7.15)
такой, что ряд, составленный из абсолютных величин его членов
|u1 | + |u2 | + . . . + |un | + . . . ,
сходится, то данный знакопеременный ряд также сходится.
251
(7.16)
Доказательство. Пусть Sn и σn — сумма первых n членов рядов (7.15)
и (7.16) соответственно. Очевидно, что Sn 6 σn . По условию существует
lim σn = σ, причем σn < σ.
n→∞
Обозначим Sn0 — сумму положительных членов из n первых членов
ряда (7.15), а Sn00 — сумму абсолютных величин отрицательных членов из
n первых членов того же ряда. Тогда Sn = Sn0 − Sn00 . Поскольку Sn0 6
Sn 6 σn < σ и Sn00 6 Sn 6 σn < σ, то последовательности {Sn0 } и {Sn00 }
монотонно возрастают и ограничены сверху, поэтому они имеют предел,
т.е. существуют lim Sn0 = S 0 и lim Sn00 = S 00 . Тогда последовательность
n→∞
n→∞
{Sn } также имеет предел, и он равен lim Sn = lim (Sn0 −Sn00 ) = S 0 −S 00 = S.
n→∞
n→∞
Поэтому исходный знакопеременный ряд сходится.
Замечание 7.3.1. Из сходимости ряда (7.15) не следует сходимость
ряда (7.16).
Определение 7.3.2. Знакопеременный ряд называется абсолютно
сходящимся, если сходится ряд, составленный из абсолютных величин его членов. Если ряд (7.15) сходится, а ряд (7.16) расходится, то
ряд (7.15) называется условно сходящимся.
Пример 7.3.1. Исследовать на сходимость ряд
∞
X
sin n
.
n2
n=1
∞ | sin n|
∞ 1
P
P
| sin n|
1
. Поскольку
6 2 и ряд
сходится
2
2
2
n
n
n
n=1
n=1 n
как ряд Дирихле с показателем p = 2 > 1, то, по признаку сравнения,
ряд из абсолютных величин сходится, а значит, исходный ряд сходится
абсолютно.
Рассмотрим ряд
Замечание 7.3.2. Если ряд (7.15) сходится абсолютно, то его члены
можно как угодно переставлять, он останется абсолютно сходящимся.
Если ряд (7.15) сходится только условно, то его члены можно так переставить, что он станет расходиться.
Следствие 7.3.1. Абсолютная сходимость рядов исследуется по признакам для положительных рядов.
7.3.1. Знакочередующиеся ряды. Признак Лейбница
Определение 7.3.3. Ряд вида
u1 − u2 + u3 − u4 + . . . ,
252
где все un > 0, называется знакочередующимся рядом.
Теорема 7.3.2 (Признак Лейбница). Если в знакочередующемся ряде
u1 − u2 + u3 − u4 + . . .
(7.17)
члены ряда таковы, что un > 0 и
1) u1 > u2 > u3 > . . . монотонно убывают,
2) lim un = 0,
n→∞
то ряд (7.17) сходится и его сумма положительна и не превосходит
u1 .
Доказательство. Рассмотрим n = 2k. Тогда S2k = u1 − u2 + . . . − u2k .
Сгруппируем члены этой суммы:
S2k = (u1 − u2 ) + (u3 − u4 ) + . . . + (u2k−1 − u2k ).
В силу условий теоремы, выражения в каждой скобке больше нуля. Следовательно, S2k > 0 и {S2k } — возрастающая последовательность. Сгруппируем члены этой же суммы по-другому
S2k = u1 − (u2 − u3 ) − (u4 − u5 ) − . . . − (u2k−2 − u2k−1 ) − u2k .
В силу тех же условий каждая скобка в этом равенстве положительна,
поэтому S2k < u1 .
Мы получили, что последовательность {S2k } монотонно возрастает и
ограничена сверху, т.е. существует lim S2k = S, причем 0 < S < u1 .
k→∞
Возьмем n = 2k + 1, тогда S2k+1 = S2k + u2k+1 . Поскольку по условию
теоремы lim u2k+1 = 0, то
k→∞
lim S2k+1 = lim (S2k + u2k+1 ) = lim S2k + lim u2k+1 = S + 0 = S.
k→∞
k→∞
k→∞
k→∞
Таким образом, мы получили, что знакочередующийся ряд (7.17) сходится
и 0 < S < u1 .
Замечание 7.3.3. Признак Лейбница выясняет только условную сходимость.
Пример 7.3.2. Исследовать на условную и абсолютную сходимость ряд
∞
X
(−1)n
n=1
253
1
.
n!
Рассмотрим ряд, составленный из абсолютных величин членов исходного
∞ 1
P
ряда
. Он сходится по признаку Даламбера
n=1 n!
n!
1
= lim
= 0 < 1.
n→∞ (n + 1)!
n→∞ n + 1
lim
Поэтому исходный ряд сходится абсолютно.
Пример 7.3.3. Исследовать на условную и абсолютную сходимость ряд
∞
X
1
(−1)n .
n
n=1
∞ 1
P
, является гарn=1 n
моническим рядом, то он расходится. Значит, исходный ряд абсолютно расходится. Исследуем его на условную сходимость.
Поскольку
1
1
1) 1 > > > . . .,
2
3
1
2) lim
= 0,
n→∞ n
то исходный ряд сходится условно по признаку Лейбница.
Поскольку ряд, составленный из абсолютных величин
7.4. Функциональные ряды
Определение 7.4.1. Ряд
∞
X
un (x) = u1 (x) + u2 (x) + . . . + un (x) + . . . ,
(7.18)
n=1
членами которого являются непрерывные на некотором множестве D
функции, называется функциональным рядом.
Если брать конкретное значение x ∈ D, то будет получаться числовой
ряд. Он может сходиться или расходиться в этой точке. Если ряд (7.18)
сходится, то точка x называется точкой сходимости ряда.
Определение 7.4.2. Совокупность тех x ∈ D, при которых функциональный ряд сходится, называется областью сходимости этого ряда.
Ряд (7.18) называется сходящимся в области D. Сумма S(x) этого ряда
является функцией от x.
254
Пример 7.4.1. Рассмотрим ряд
∞
X
xn = 1 + x + x2 + . . . + xn + . . . .
n=0
Этот ряд, как геометрическая прогрессия, сходится при |x| < 1, и его сумма
1
S(x) =
.
1−x
Обозначим Sn (x) — n-частичные суммы функционального ряда (7.18).
Если ряд сходится, то его сумма равна S(x), тогда S(x) = Sn (x) + Rn (x),
где
Rn (x) = un+1 (x) + un+2 (x) + . . .
остаток ряда.
Остаток сходящегося ряда для любого x стремится к нулю, т.е.
lim Rn (x) = lim (S(x) − Sn (x)) = 0.
n→∞
n→∞
Определение 7.4.3. Если в области D сходится ряд
ряд (7.18) называется абсолютно сходящимся в D.
∞
P
n=1
|un (x)|, то
Определение 7.4.4. Сходящийся в области D ряд (7.18) называется
равномерно сходящимся в этой области, если для любого ε > 0 существует номер N (ε), такой, что для любого номера n > N и для любого x из
области D выполняется |Rn (x)| < ε, т.е.
∀ε > 0 ∃N (ε) : ∀n > N ∀x ∈ D =⇒ |Rn (x)| < ε.
Есть примеры сходящихся рядов, но не равномерно. Равномерная сходимость означает, что в ε-окрестность графика функции y = S(x) должны
попасть графики всех функций Sn (x) при n > N .
Теорема 7.4.1 (Признак Вейерштрасса). Пусть ряд (7.18) сходится в
области D и пусть существует сходящийся числовой ряд с положитель∞
P
ными членами
an , такой, что для любого x ∈ D и любого n = 1, 2, 3, . . .
n=1
выполняется
|un (x)| 6 an .
∞
P
Тогда ряд (7.18) сходится абсолютно и равномерно в D. Ряд
an назыn=1
вается мажорирующим для ряда (7.18), а ряд (7.18) — мажорируемым.
255
Доказательство. Обозначим
σ = a1 + a2 + . . .
сумму ряда
∞
P
n=1
an . Тогда σ = σn + εn , где σn — n-частичная сумма, а εn —
остаток ряда. Поскольку этот ряд сходится, то lim εn = 0. Пусть
n→∞
S(x) = Sn (x) + Rn (x) — сумма ряда (7.18). По условию |un+1 (x)| 6 an+1 ,
|un+2 (x)| 6 an+2 и т.д., поэтому
|Rn (x)| = |un+1 (x) + un+2 (x) + . . . | 6 |un+1 (x)| + |un+2 (x)| + . . . 6
6 an+1 + an+2 + . . . = εn .
Тогда
lim |Rn (x)| 6 lim εn = 0
n→∞
n→∞
сразу для всех x ∈ D. Поэтому исходный ряд (7.18) сходится равномерно
и абсолютно в области D.
Пример 7.4.2. Исследовать на равномерную и абсолютную сходимость
ряд
∞
X
xn
.
n2
n=1
Поскольку при |x| 6 1 выполняется оценка
¯ n¯
¯x ¯
¯ ¯6 1
¯ n2 ¯ n2
∞ 1
P
и ряд
сходится, то исходный ряд при |x| 6 1 сходится абсолютно и
2
n=1 n
равномерно.
7.4.1. Свойства равномерно сходящихся рядов на отрезке
Теорема 7.4.2. Сумма S(x) равномерно сходящегося на отрезке [a, b]
ряда функций (7.18), непрерывных на этом отрезке, есть непрерывная
функция.
Доказательство. Пусть S(x) = Sn (x) + Rn (x). Дадим переменному x
приращение ∆x так, чтобы точка x + ∆x ∈ [a, b]. Рассмотрим ∆S(x) =
S(x + ∆x) − S(x). Тогда
∆S(x) = ∆Sn (x) + ∆Rn (x) = ∆Sn (x) + Rn (x + ∆x) − Rn (x).
Имеем
|∆S(x)| = |∆Sn (x)| + |Rn (x + ∆x)| + |Rn (x)| 6
256
6 |∆Sn (x)| + |Rn (x + ∆x)| + |Rn (x)|.
Так как ряд (7.18)
∞
P
n=1
(7.19)
un (x) равномерно сходится, то
∀ ε > 0 ∃ N : ∀ n > N ∀x ∈ [a, b] =⇒
ε
ε
, |Rn (x + ∆x)| 6 .
(7.20)
3
3
Для данного n > N сумма ∆Sn (x) есть сумма конечного числа непрерывных функций, а значит, она непрерывна, т.е.
|Rn (x)| 6
∀ ε > 0 ∃ δ > 0 : ∀ |∆x| < δ =⇒ |∆Sn (x)| <
ε
.
3
(7.21)
Из неравенств (7.19), (7.20) и (7.21) следует, что
|∆S| 6
ε ε ε
+ + = ε.
3 3 3
Таким образом, S(x) — непрерывная функция и S(x) =
∞
P
n=1
un (x).
Теорема 7.4.3. Равномерно сходящийся на отрезке [a, b] ряд непрерывных функций
S(x) = u1 (x) + u2 (x) + . . .
можно почленно интегрировать на этом отрезке, т.е. если x0 , x ∈ [a, b],
то
Zx
Zx
Zx
S(t) dt = u1 (t) dt + u2 (t) dt + . . . .
(7.22)
x0
x0
x0
Полученный при этом ряд (7.22) равномерно сходится на отрезке [a, b] и
!
Zx à X
∞
∞ Zx
X
un (t) dt.
un (t) dt =
x0
n=1 x
n=1
0
Доказательство. Пусть S(x) = Sn (x) + Rn (x). Тогда
Zx
Zx
S(t) dt =
x0
Zx
Sn (t) dt +
x0
Rn (t) dt.
x0
257
¯ Rx
¯
¯
¯
Покажем,что lim ¯ Rn (t) dt¯ = 0. Рассмотрим произвольное ε > 0. Поn→∞ x
0
скольку исходный ряд (7.18) равномерно сходится, то для
ε
ε1 =
∃ N : ∀ n > N ∀ x ∈ [a, b] =⇒ |Rn (x)| < ε1 .
b−a
¯ Rx
¯
Rx
¯
¯
Поэтому ¯ Rn (t) dt¯ 6 |Rn (t)| dt 6 ε1 |x − x0 | 6 ε1 (b − a) = ε. Мы получили,что
x0
x0
¯Zx
¯
¯
¯
∀ ε > 0 ∃ N : ∀ n > N ∀x ∈ [a, b] =⇒ ¯ Rn (t) dt¯ < ε.
x0
Отсюда следует, что
Rx
´
Sn (t) dt = 0 или
lim
Rx
n→∞ x
Rn (t) dt
=
0. Тогда
0
lim
³ Rx
n→∞ x
0
S(t) dt −
x0
Zx
Zx
S(t) dt = lim
x
Sn (t) dt = lim
n→∞
x0
n Z
X
n→∞
x0
k=1 x
uk (t) dt.
0
Поэтому частичные суммы ряда (7.22) сходятся, и этот ряд сходится и
сходится равномерно.
Теорема 7.4.4. Пусть задан сходящийся ряд (7.18)
S(x) = u1 (x) + u2 (x) + . . .
функций, непрерывно дифференцируемых на отрезке [a, b] и пусть ряд
u01 (x) + u02 (x) + . . .
(7.23)
0
равномерно сходится на отрезке [a, b], тогда S (x) есть сумма этого ряда,
т.е.
S 0 (x) = u01 (x) + u02 (x) + . . .
или
∞
³X
∞
´0 X
un (x) =
u0n (x).
n=1
n=1
Доказательство. Обозначим
F (x) = u01 (x) + u02 (x) + . . . .
258
По условию ряд (7.23) равномерно сходится на отрезке [a, b], поэтому, по
предыдущей теореме, ряд
Zx
Zx
x0
Zx
u01 (t) dt +
F (t) dt =
x0
u02 (t) dt + . . .
x0
равномерно сходится. Тогда
Zx
F (t) dt = u1 (x) − u1 (x0 ) + u2 (x) − u2 (x0 ) + . . . =
∞
X
un (x) −
n=1
x0
Поскольку ряд (7.18) по условию сходится на отрезке [a, b], то
∞
X
un (x0 ).
n=1
∞
P
n=1
un (x0 ) =
A — число, поэтому ряд (7.18) сходится равномерно. Так как S(x) =
∞
Rx
P
un (x), то F (t) dt = S(x) + A. Продифференцируем это равенство по
n=1
x, получим
x0
F (x) = S 0 (x) = u01 (x) + u02 (x) + . . . .
И теорема доказана.
7.5. Степенные ряды
Определение 7.5.1. Степенным рядом называется функциональный
ряд вида
∞
X
2
n
a0 + a1 x + a2 x + . . . + an x + . . . =
an xn ,
(7.24)
n=0
где a0 , a1 , a2 ,. . . — числа.
Областью сходимости степенного ряда всегда является некоторый интервал.
Теорема 7.5.1 (Абель). 1. Если степенной ряд сходится при некотором значении x0 6= 0, то он абсолютно сходится при всяком значении x,
для которого |x| < |x0 |.
2. Если степенной ряд расходится при некотором значении x1 , то он
расходится при всяком значении x, для которого |x| > |x1 |.
Доказательство. Поскольку ряд
a0 + a1 x0 + a2 x20 + . . . + an xn0 + . . .
259
сходится, то существует lim an xn0 = 0. Это означает, что существует конn→∞
станта M , такая, что |an xn0 | < M для любого n. Перепишем ряд (7.24) в
виде
³x´
³ x ´2
³ x ´n
a0 + a1 x0
+ a2 x20
+ . . . + an xn0
... .
x0
x0
x0
Рассмотрим ряд из абсолютных величин
¯x¯
¯ x ¯2
¯ ¯
¯ ¯
|a0 | + |a1 x0 |¯ ¯ + |a2 x20 |¯ ¯ + . . . .
(7.25)
x0
x0
Члены ряда (7.25) меньше членов ряда
¯ x ¯2
¯x¯
¯ ¯
¯ ¯
M + M¯ ¯ + M¯ ¯ + . . . .
x0
x0
(7.26)
При ¯|x| ¯< |x0 | ряд (7.26) — геометрическая прогрессия со знаменателем
¯x¯
q = ¯ ¯ < 1, поэтому он сходится. Так как члены ряда (7.25) меньше
x0
членов ряда (7.26), то этот ряд тоже сходится, а значит, исходный ряд (7.24)
сходится абсолютно при |x| < |x0 |.
2. Пусть в точке x1 ряд (7.24) расходится, тогда он будет расходиться
и в точке x, для которой |x| > |x1 |. Действительно, если бы ряд сходился в
некоторой точке x2 , удовлетворяющей этому условию, то он сходился бы и
при всех x, для которых |x| < |x2 |, а значит, и при x1 , поскольку |x1 | < |x2 |.
Это противоречит условию теоремы.
Следствие 7.5.1. Из теоремы Абеля следует, что существует такое число R, что при |x| < R ряд (7.24) сходится, а при |x| > R расходится.
Определение 7.5.2. Интервалом сходимости степенного ряда (7.24)
называется интервал −R < x < R, что для всякой точки, лежащей
внутри интервала ряд абсолютно сходится, а вне интервала — расходится.
Из теоремы Абеля следует теорема
Теорема 7.5.2. Областью сходимости степенного ряда является интервал с центром в начале координат. На концах интервала ряд может
как сходиться, так и расходиться.
Определение 7.5.3. Число R называется радиусом сходимости степенного ряда.
260
Для нахождения радиуса сходимости степенного ряда используют признаки Даламбера и Коши. Действительно, по признаку Даламбера имеем
¯u
¯
¯a
¯
¯a
¯
¯ n+1 ¯
¯ n+1 xn+1 ¯
¯ n+1 ¯
lim ¯
=
lim
¯
¯ = lim ¯
¯
¯|x| = L|x|,
n→∞ un
n→∞
n→∞ an
an xn
¯a
¯
¯ n+1 ¯
где L = lim ¯
¯. Если L|x| < 1, то ряд сходится абсолютно, если L|x| >
n→∞ an
1
1, то ряд расходится. Если |x| < = R, то исходный ряд при этих x будет
L
сходиться абсолютно. Поэтому радиус сходимости можно определять по
формуле
¯ a ¯
¯ n ¯
R = lim ¯
¯.
n→∞ an+1
Аналогично, используя признак Коши, можно радиус сходимости искать
по формуле
1
R = lim p
.
n
n→∞
|an |
Пример 7.5.1. Исследовать на сходимость ряд
∞
X
(−1)n−1
n=1
2n xn
.
n
Найдем радиус сходимости этого ряда. Поскольку |an | =
2n+1
, то
n+1
2n
, а |an+1 | =
n
1
2n (n + 1)
n+1
= lim
= .
n→∞ n2n+1
n→∞ 2n
2
1
Поэтому ряд сходится абсолютно при |x| < . Исследуем ряд на концах
2
1
интервала сходимости. Пусть x = − , тогда получим числовой ряд
2
∞
∞
n
X
X
2 (−1)n
1
(−1)n−1
=
−
.
n
n2
n
n=1
n=1
R = lim
Поскольку это гармонический ряд, то он расходится. Пусть x =
∞
X
(−1)n−1
n=1
∞
X
1
2n
=
(−1)n−1 .
n2n
n
n=1
261
1
, тогда
2
Это знакочередующийся ряд, исследуем его по признаку Лейбница, по1
скольку абсолютно он расходится. Так как un = , то
n
1
n+1−n
1
1
=
=
> 0, поэтому после1. un − un+1 = −
n n+1
n(n + 1)
n(n + 1)
довательность {un } монотонно убывает;
1
2. lim un = lim
= 0.
n→∞
n→∞ n
По признаку Лейбница этот ряд условно сходится. Поэтому исходный
1
1
ряд абсолютно сходится при |x| < , расходится при x = − и сходится
2
2
1
условно при x = .
2
Пример 7.5.2. Исследовать на сходимость ряд
∞
X
3n n
x .
n!
n=1
Найдем радиус сходимости ряда
3n (n + 1)!
n+1
R = lim
= lim
= ∞.
n+1
n→∞ n!3
n→∞
3
Поэтому исходный ряд сходится абсолютно для всех −∞ < x < +∞.
Следствием теоремы Вейрштрасса является тот факт, что степенной
ряд сходится равномерно на любом отрезке из интервала сходимости этого
ряда. Поэтому справедлива следующая теорема.
Теорема 7.5.3. Рассмотрим степенной ряд (7.24)
∞
X
an xn .
n=0
Пусть он сходится на интервале (−R, R), тогда:
∞
P
1. Сумма этого ряда S(x) =
an xn непрерывна на интервале
n=0
(−R, R).
2. Степенной ряд (7.24) можно почленно дифференцировать на интервале (−R, R), т.е.
а) S(x) дифференцируемая функция;
б) ряд из производных
a1 + 2a2 x + 3a3 x2 + . . .
сходится на интервале (−R, R);
в) S 0 (x) = a1 + 2a2 x + 3a3 x2 + . . . .
262
2. Степенной ряд (7.24) можно почленно интегрировать на любом
отрезке [a, b] ⊂ (−R, R) и
Zb
Zb
S(x) dx =
a
Zb
a0 dx+
a
a
Zb
¯b
x2 ¯¯b
x3 ¯¯b
¯
a1 x dx+ a2 x2 dx+. . . = a0 x¯ +a1 ¯ +a2 ¯ + . . . .
2 a
3 q
a
a
Рассмотрим более общий степенной ряд по степеням (x − a):
∞
X
an (x − a)n = a0 + a1 (x − a) + a2 (x − a)2 + a3 (x − a)3 + . . . .
(7.27)
n=0
Обозначим x − a = X, тогда получим ряд
a0 + a1 X + a2 X 2 + a3 X 3 + . . . .
Он будет сходиться при |X| < R или −R < X < R. Подставим в последнее
неравенство X = x − a, получим −R < x − a < R или a − R < x < a + R.
Поэтому ряд (7.27) сходится на интервале радиуса R с центром в точке a.
Пример 7.5.3. Найти интервал сходимости ряда
∞
X
(x − 2)n
.
3n
n=1
Найдем R:
3n+1
= 3.
n→∞ 3n
Поэтому ряд будет сходиться при −3 < x − 2 < 3 или −1 < x < 5.
R = lim
7.6. Ряд Тейлора
Напишем степенной ряд для функции, имеющей производные любого
∞
P
порядка, т.е. f (x) =
an (x − a)n .
n=0
Для этого сначала найдем многочлен Pn (x), такой, что
f (a) = Pn (a), f 0 (a) = Pn0 (a), . . . , f (n) (a) = Pn(n) (a).
(7.28)
Будем искать многочлен с неопределенными коэффициентами:
Pn (x) = c0 + c1 (x − a) + c2 (x − a)2 + c3 (x − a)3 + . . . + cn (x − a)n . (7.29)
263
Неопределенные коэффициенты найдем из условия (7.28). Для этого вычислим производные многочлена Pn (x):
Pn0 (x) = c1 + 2c2 (x − a) + 3c3 (x − a)2 + . . . + ncn (x − a)n−1 ,
Pn00 (x) = 2c2 + 3 · 2(x − a) + . . . + n(n − 1)(x − a)n−2 ,
Pn000 (x) = 3 · 2 + . . . + n(n − 1)(n − 2)(x − a)n−3 ,
.................................
(n)
Pn (x) = n(n − 1)(n − 2) · . . . · 2 · 1cn .
Беря x = a, из условия (7.28) получим:
f (a) = Pn (a) = c0 ,
f 0 (a) = Pn0 (a) = 1 · c1 ,
f 00 (a) = Pn00 (a) = 2 · 1c2 ,
f 000 (a) = Pn000 (a) = 3 · 2 · 1c3 ,
........................
(n)
f (n) (a) = Pn (a) = n(n − 1) · . . . · 2 · 1cn .
Тогда
f 0 (a)
f 00 (a)
f 000 (a)
f (n) (a)
, c2 =
, c3 =
, . . . , cn =
.
1!
2!
3!
n!
Подставляя найденные коэффициенты в (7.29), получим многочлен Тейлора функции f (x):
c0 = f (a), c1 =
f 0 (a)
f 00 (a)
f (n) (a)
(x − a) +
(x − a)2 + . . . +
(x − an ).
1!
2!
n!
Обозначим Rn (x) = f (x) − Pn (x), тогда получим формулу Тейлора
Pn (x) = f (a) +
f (x) = Pn (x) + Rn (x),
Rn (x) называется остаточным членом. Остаточный член будем рассматривать в форме Лагранжа
Rn (x) =
f (n+1) (a + θ(x − a))
(x − a)n+1 ,
(n + 1)!
где 0 < θ < 1.
Если функция f (x) бесконечно дифференцируема и при n → ∞ остаток Rn (x) → 0 для некоторого x, то получим ряд Тейлора функции f (x) в
точке x:
∞
X
f (n) (a)
f (n) (a)
f (x) = f (a) + . . . +
(x − a)n + . . . =
(x − a)n .
(7.30)
n!
n!
n=0
264
Теорема 7.6.1. Если в формуле Тейлора в точке x остаток Rn (x) → 0
при n → ∞, то ряд Тейлора (7.30) сходится в точке x и его сумма равна
f (x).
Доказательство. Пусть f (x) = Pn (x) + Rn (x), где Pn (x) многочлен Тейлора функции f (x). Поскольку lim Rn (x) = 0, то f (x) = lim Pn (x) в
n→∞
n→∞
точке x. Так как Pn (x) — n-частичная сумма ряда (7.30) и ее предел равен
сумме ряда, стоящего в (7.30) в правой части, следовательно, справедливо
f (x) =
X f (n) (a)
(x − a)n .
n!
n→∞
Замечание 7.6.1. Ряд Тейлора представляет данную функцию f (x)
только тогда, когда lim Rn (x) = 0.
n→∞
Если в ряде Тейлора положить a = 0, то получим ряд Маклорена
функции f (x):
f (x) = f (0) +
∞
X
f 0 (0)
f (n) (0) n
f (n) (0) n
x + ... +
x + ... =
x .
1!
n!
n!
n=0
7.6.1. Разложение функций в ряд Маклорена
Рассмотрим разложение некоторых функций в ряд Маклорена.
I. f (x) = ex .
Поскольку f (x) = f 0 (x) = . . . = f (n) (x) = ex , то f (0) = f 0 (0) = . . . =
(n)
f (0) = e0 = 1, то разложение по формуле Маклорена имеет вид
ex = 1 +
x
x2
xn
+
+ ... +
+ Rn (x),
1!
2!
n!
eθx xn+1
и 0 < θ < 1. Покажем, что остаток для произ(n + 1)!
вольного x стремится к нулю. Действительно, для любого фиксированного
|x|
x можно найти натуральное N такое, что N > |x|. Обозначим q =
< 1.
N
Тогда при n > N получим
¯ eθN xn+1 ¯
¯x
x
x
x ¯¯
¯
¯
¯
·
· ... · ¯ 6
|Rn (x)| 6 ¯
¯ 6 C¯ · . . . ·
(n + 1)!
1
N −1 N
N
где остаток Rn (x) =
¯ xn−1 ¯
¯
¯ n−N +2
6 C¯
= C1 q n−N +2 .
¯q
(N − 1)!
265
Отсюда
lim |Rn (x)| 6 lim C1 q n−N +2 = 0.
n→∞
n→∞
Поэтому разложение экспоненты в ряд Маклорена верно на всей действительной оси
∞
X
x2
xn
x
xn
+ ... +
+ ... =
,
ex = 1 + +
1!
2!
n!
n!
n=0
где мы полагаем 0! = 1.
II. f (x) = sin x.
Поскольку
f (0) = sin 0 = 0,
f 0 (0) = cos 0 = 1,
f 00 (0) = − sin 0 = 0,
f 000 (0) = − cos 0 = −1,
и т.д.,
то разложение в ряд Маклорена будет иметь вид
sin x = x −
∞
X
x3
x5
x2n−1
x2n−1
+
+ . . . + (−1)n+1
+ ... =
.
(−1)n+1
3!
5!
(2n − 1)!
(2n − 1)!
n=0
Аналогично, как и для предыдущего случая, доказывается, что
lim |R2n (x)| = 0 для любого действительного x.
n→∞
III. f (x) = cos x.
Аналогично предыдущему пункту
f (0) = cos 0 = 1,
f 0 (0) = − sin 0 = 0,
f 00 (0) = − cos 0 = −1,
f 000 (0) = sin 0 = 0,
и т.д.,
поэтому разложение в ряд Маклорена будет иметь вид
∞
2n
X
x2
x4
x2n
n x
cos x = 1 −
+
+ . . . + (−1)
+ ... =
(−1)n
.
2!
4!
(2n)!
(2n)!
n=0
Это разложение справедливо для любого действительного x.
IV. Биномиальное разложение
f (x) = (1 + x)m = 1 +
m(m − 1) 2 m(m − 1)(m − 2) 3
m
x+
x +
x + ...+
1!
2!
3!
266
+
∞
X
m(m − 1) . . . (m − n + 1) n
m(m − 1) . . . (m − n + 1) n
x + ... =
x ,
n!
n!
n=0
где по-прежнему 0! = 1.
При m > 1 и целом начиная с некоторого шага получим многочлен.
Докажем это равенство для произвольного m. Найдем f 0 (x) = m(1+x)m−1 .
Тогда получим дифференциальное уравнение
(1 + x)f 0 (x) = mf (x) и f (0) = 1.
Пусть
f (x) = 1 + a1 x + a2 x2 + . . . + an xn + . . . ,
тогда
f 0 (x) = a1 + 2a2 x + . . . + nan xn−1 + . . . .
Подставим f (x) и f 0 (x) в дифференциальное уравнение, получим равенство
(1 + x)(a1 + 2a2 x + . . . + nan xn−1 + . . .) = m(a0 + a1 x + . . . + an xn + . . .).
Приравняем коэффициенты при одинаковых степенях x и найдем коэффициенты an :
m(m − 1) . . . (m − n + 1)
,... .
n!
Биномиальный ряд при произвольном m сходится только при |x| < 1.
Рассмотрим частные случаи этого ряда.
1) m = −1, тогда
a0 = 1, a1 = m, . . . , an =
∞
X
1
= 1 − x + x2 − x3 + . . . + (−1)n xn + . . . =
(−1)n xn .
x+1
n=0
1
, тогда
2
√
1
1 2
1·3 3
(2n − 3)!! n
1+x=1+ x−
x +
x + . . . + (−1)n+1
x + ... =
2
2·4
2·4·6
(2n)!!
2) m =
∞
X
1
(2n − 3)!! n
=1+ x+
(−1)n+1
x ,
2
(2n)!!
n=2
где (2n − 3)!! = 1 · 3 · 5 · . . . · (2n − 3), (2n)!! = 2 · 4 · 6 . . . · 2n.
1
3) m = − , тогда
2
1
1
1·3 2 1·3·5 3
(2n − 1)!! n
√
=1− x+
x −
x + . . . + (−1)n
x + ... =
2
2·4
2·4·6
(2n)!!
1+x
267
=1+
∞
X
(−1)n
n=1
(2n − 1)!! n
x ,
(2n)!!
где (2n − 1)!! = 1 · 3 · 5 · . . . · (2n − 1).
V. f (x) = arcsin x.
Чтобы получить разложение в ряд для этой функции, продифференцируем ее, получим
1
(arcsin x)0 = √
.
1 − x2
Разложим эту функцию по формуле предыдущего пункта
1
1
1·3 4
(2n − 1)!! 2n
√
= 1 + x2 +
x + ... +
x + ... .
2
2
2·4
(2n)!!
1−x
Проинтегрируем полученный ряд при x ∈ (−1, 1), получим
Zx
Zx ³
´
dt
1·3 4
(2n − 1)!! 2n
1
√
arcsin x =
t + ... +
t + . . . dt =
=
1 + t2 +
2
2·4
(2n)!!
1 − t2
0
0
=x+
1 3
1·3 5
(2n − 1)!!
x +
x + ... +
x2n+1 + . . . =
2·3
2·4·5
(2n)!!(2n + 1)
∞
X
(2n − 1)!!
=x+
x2n+1 .
(2n)!!(2n
+
1)
n=1
Этот ряд сходится только при |x| < 1.
VI. f (x) = arctg x.
Найдем производную этой функции
(arctg x)0 =
1
.
1 + x2
Разложим эту функцию в ряд
1
= 1 − x2 + x4 − x6 + . . . + (−1)n x2n + . . . .
1 + x2
Проинтегрируем полученный ряд при x ∈ (−1, 1), получим
Zx
Zx ³
´
dt
2
4
6
n 2n
arctg x =
=
1
−
t
+
t
−
t
+
.
.
.
+
(−1)
t
+
.
.
.
dt =
1 + t2
0
=x−
0
∞
X
x
x
x2n+1
x2n+1
x
+
−
+ . . . + (−1)n
+ ... =
(−1)n
.
3
5
7
2n + 1
2n + 1
n=0
3
5
7
Полученный ряд сходится при |x| < 1.
268
VII. f (x) = ln(1 + x).
Найдем производную этой функции
(ln(1 + x))0 =
1
.
1+x
Тогда
1
= 1 − x + x2 − x3 + . . . + (−1)n xn .
1+x
Проинтегрируем полученный ряд при x ∈ (−1, 1), получим
Zx
Zx
dt
ln(1 + x) =
= (1 − t + t2 − t3 + . . . + (−1)n tn + . . .) dt =
1+t
0
=x−
0
∞
X
x
x
x4
xn
xn
+
−
+ (−1)n+1
+ ... =
(−1)n+1 .
2
3
4
n
n
n=1
2
3
Полученный ряд также сходится только при x ∈ (−1, 1).
1
в точке
x2 − 3x + 2
a = 3. Разложим функцию на простейшие дроби, получим
1
1
1
=
−
.
x2 − 3x + 2
x−2 x−1
Преобразуем эти дроби и применим стандартное разложение для геометрической прогрессии:
1
1
1
1
1
1
1
y=
−
=
−
=
− ·
=
x−3
x−2 x−1
1 + (x − 3) 2 + (x − 3)
1 + (x − 3) 2
1+
2
∞
∞
∞
³
´
n
X
X
1X
(x − 3)
1
=
(−1)n (x − 3)n −
(−1)n
=
(−1)n 1 − n+1 (x − 3)n .
n
2 n=0
2
2
n=0
n=0
Пример 7.6.1. Разложить в ряд функцию y =
Мы получили нужное разложение.
1
в точке a = 0.
(2 − x)2
Проинтегрируем эту функцию на отрезке [0, x] и разложим ее в ряд
Zx
Zx
1 ¯¯x
1
1
1
y(t) dt =
dt
=
− =
¯ =
2
(2 − t)
2−t 0 2−x 2
Пример 7.6.2. Разложить в ряд функцию y =
0
0
∞
∞
1 1
1
1 1 X xn
1 X xn
=− + ·
=
−
+
=
−
+
.
2 2 1− x
2 2 n=0 2n
2 n=0 2n+1
2
269
Чтобы получить разложение исходной функции, продифференцируем полученное выражение:
∞
∞
³ 1 X
xn ´0 ³ 1 1 X xn ´0
y= − +
=
−
+
+
=
2 n=0 2n+1
2 2 n=1 2n+1
=
∞ ³
∞
∞
X
X
xn ´0 X nxn−1
(n + 1)xn
=
=
.
2n+1
2n+1
2n+2
n=1
n=1
n=0
Последнее равенство получено с помощью замены n − 1 = n0 или n = n0 + 1
и последующего переобозначения n0 снова на n.
7.7. Применение рядов в приближенных вычислениях
7.7.1. Применение рядов к приближенному вычислению
значения функции
∞
P
Пусть функция f (x) раскладывается в ряд Тейлора, т.е. f (x) =
an (x − a)n в некоторой области D = {|x − a| < R}. Пусть точка x0 ∈ D,
тогда
n=0
f (x0 ) = a0 + a1 (x0 − a) + a2 (x0 − a)2 + . . . + an (x0 − a)n + Rn (x0 ).
Для вычисления значение f (x0 ) с точностью ε, надо, чтобы |Rn (x0 )| < ε.
Если ряд, в который разложена функция, знакочередующийся, то
|Rn (x0 )| < |un+1 | = |an+1 (x0 − a)n+1 |, т.е. меньше первого отброшенного
члена. Если ряд произвольный, то оценка производится индивидуально.
Пример 7.7.1. Вычислить приближенно sin 10◦ с точностью ε = 10−5 .
π
π
1 ³ π ´3
1 ³ π ´5
Поскольку 10◦ =
и sin 10◦ =
−
+
+ . . ., то будем
18
18
3! 18
5! 18
оценивать каждое слагаемое, как только оно станет меньше ε, вычисления
закончим. Имеем
π
1 ³ π ´3
1 ³ π ´5
u1 =
≈ 0, 174533 > ε, u3 =
≈ 0, 000886 > ε, u5 =
≈
18
3! 18
5! 18
◦
0, 0000013 < ε. Поэтому sin 10 ≈ u1 − u3 ≈ 0, 174532 − 0, 000886 = 0, 173647.
7.7.2. Приближенное вычисление определенных интегралов
Определенные интегралы, которые не вычисляются в элементарных
функциях, можно вычислять приближенно с помощью разложения подын∞
P
тегральной функции в ряд. Пусть f (x) =
an (x − a)n и отрезок [a, b]
n=0
270
входит в интервал сходимости этого ряда, тогда
Zb
f (x) dx =
Zb X
∞
n
an (x − a) dx =
a n=0
a
∞
X
Zb
(x − a)n dx =
an
n=0
a
(b − a)3
(b − a)2
+ a2
+ ... .
2
3
Интеграл можно вычислить с любой степенью точности.
Ra
2
Пример 7.7.2. Вычислить e−x dx.
= a0 (b − a) + a1
0
Разложим подынтегральную функцию в ряд
e
−x2
∞
2n
X
x2
x4
x2n
nx
=1−
+
− . . . + (−1)
+ ... =
(−1)n
.
1!
2!
n!
n!
n=0
Тогда
Za
−x2
e
dx =
0
0
=
∞
³X
Za
∞
X
(−1)n
dx =
x2n dx =
(−1)
n!
n!
n=0
n=0
Za X
∞
(−1)n
n=0
nx
2n
0
x2n+1
n!(2n + 1)
∞
´¯a X
¯
(−1)n
¯ =
0
n=0
a2n+1
,
n!(2n + 1)
здесь 0! = 1. Поэтому данный интеграл при известном a можно вычислить с любой степенью точности. А поскольку ряд знакочередующийся, то
остаток ряда не превосходит первого отброшенного члена.
Ra sin x
Пример 7.7.3. Вычислить
dx.
x
0
Разложим подынтегральную функцию в ряд
∞
X
sin x
x2
x4
x2n
x2n
=1−
+
− . . . + (−1)n
+ ... =
(−1)n
.
x
3!
5!
(2n + 1)!
(2n + 1)!
n=0
Тогда
Za
0
=
sin x
dx =
x
∞
³X
n=0
(−1)n
Za X
∞
0
Z
∞
X
x2n
(−1)n
(−1)
=
x2n dx =
(2n
+
1)!
(2n
+
1)!
n=0
n=0
a
n
0
´¯a
a2n+1
x2n+1
¯
.
(−1)n
¯ =
(2n + 1)!(2n + 1) 0 n=0
(2n + 1)!(2n + 1)
∞
X
271
7.7.3. Приближенное решение дифференциальных
уравнений
Если решение дифференциального уравнения не сводится к квадратурам, то прибегают к приближенным методам интегрирования. Одним из
таких методов является метод представления решения в виде ряда Тейлора. Сумма конечного числа членов этого ряда будет приближенно равняться искомому частному решению.
Пусть требуется найти частное решение дифференциального уравнения второго порядка
y 00 = F (x, y, y 0 )
(7.31)
с начальными условиями
y 0 (x0 ) = y00 .
y(x0 ) = y0 ,
Представим решение в виде ряда Тейлора в точке x0 :
y(x) = y(x0 ) + y 0 (x0 )
(x − x0 )
(x − x0 )2
+ y 00 (x0 )
+ ....
1!
2!
Чтобы получить данное разложение, надо найти все коэффициенты этого
ряда. Первые три коэффициента нам уже известны, поскольку
y(x0 ) = y0 ,
y 0 (x0 ) = y00 ,
y 00 (x0 ) = F (x0 , y0 , y00 ).
Чтобы найти остальные коэффициенты, продифференцируем уравнение (7.31) по x, получим
y 000 = Fx0 (x, y, y 0 ) + Fy0 (x, y, y 0 )y 0 + Fy0 0 (x, y, y 0 )y 00 .
¯
Подставляя x = x0 , найдем y 000 (x0 ) = (y 000 )¯x=x0 . Остальные коэффициенты
ищутся аналогично. Там, где полученный ряд сходится, он есть частное
решение исходного уравнения.
Пример 7.7.4. Найти частное решение уравнения y 00 = −yx2 , при условии что, y(0) = 1, y 0 (0) = 0. Тогда y 00 (0) = 0.
Будем искать поочередно все производные в точке x0 = 0. Получим:
y 000 = −y 0 x2 − 2xy,
y iv = −y 00 x2 − 4y 0 x − 2y,
y v = −y 000 x2 − 6y 00 x − 6y 0 ,
y vi = −y iv x2 − 8y 000 x − 12y 00 ,
y vii = −y v x2 − 10y iv x − 20y 000 ,
y viii = −y vi x2 − 12y v x − 30y iv ,
272
y 000 (0) = 0,
y iv (0) = −2,
y v (0) = 0,
y vi (0) = 0,
y vii (0) = 0,
y viii (0) = 60.
Тогда y (k+2) = −x2 y (k) −2kxy (k−1) −k(k −1)y (k−2) . Отсюда легко получить,
что
y (4n+1) (0) = y (4n+2) (0) = y (4n+3) (0) = 0,
y (4n+4) (0) = −(4n + 2)(4n + 1)y (4n) (0) = (−1)n+1 1 · 2 · 5 · 6 · . . . · (4n + 1)(4n + 2).
Тогда
∞
X
(−1)n+1 1 · 2 · . . . · (4n + 1)(4n + 2) 4n+4
y =1+
x
.
(4n + 4)!
n=0
273
СПИСОК ОБОЗНАЧЕНИЙ И СОКРАЩЕНИЙ
N — множество натуральных чисел
R — множество вещественных (действительных) чисел
(a, b) — открытый промежуток или интервал
[a, b] — замкнутый промежуток или отрезок
∀ — для любого (для любых)
∃ — существует
: — для такого, что (для таких, что)
⇒ — следует
⇔ — тогда и только тогда
∈ — принадлежит
⊂ — содержится
∪ — объединение
∩ — пересечение
∞ — бесконечность
274
Литература
1. Ильин В.А., Позняк Э.Г. Основы математического анализа. Т.1, 2. М.: Наука, 1967.
2. Карасев А.И., Аксютина З.М., Савельева Т.И. Курс высшей математики для экономических вузов. Т.1. М.: Высш. шк., 1982.
3. Кремер Н.Ш. Высшая математика для экономистов. М.: ЮНИТИ, 1997.
4. Кудрявцев Л.Д. Краткий курс математического анализа. М.: Наука, 1989.
5. Никольский С.М. Курс математического анализа. Т.1, 2. М.: Наука, 1975.
6. Пискунов Н.С. Дифференциальное и интегральное исчисления. Т. 1, 2. М.: Наука,
1970.
275
Уче б н о е
издание
Математический анализ.
Симона Глебовна Мысливец
Редакторы А.А.Назимова, О.Ф.Александрова
Корректор Т.Е.Бастрыгина
Подписано в печать 16.02.2004.
Бумага тип.
Тираж 1000 экз.
Заказ
Формат 60x84/16.
Печать офсетная.
Уч.-изд. л. 17,1
Цена договорная.
Издательский центр
Красноярского государственного университета.
660041 Красноярск, пр. Свободный, 79.