/































































































































































































































































































































































































































Author: Лернер А.Я.
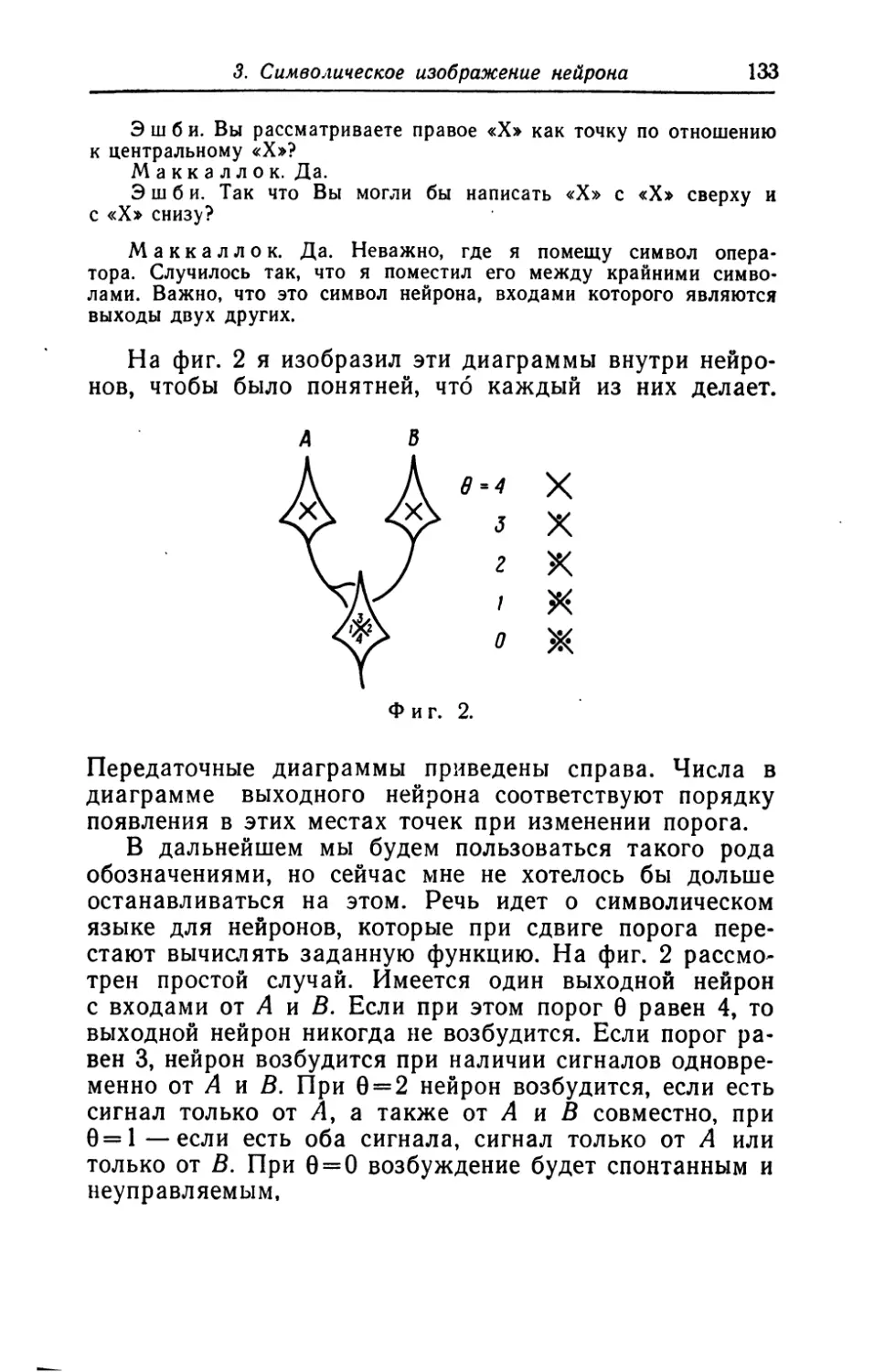
Tags: астрономия астрофизика исследование космического пространства геодезия психология менеджмент социология тайм-менеджмент
Year: 1966




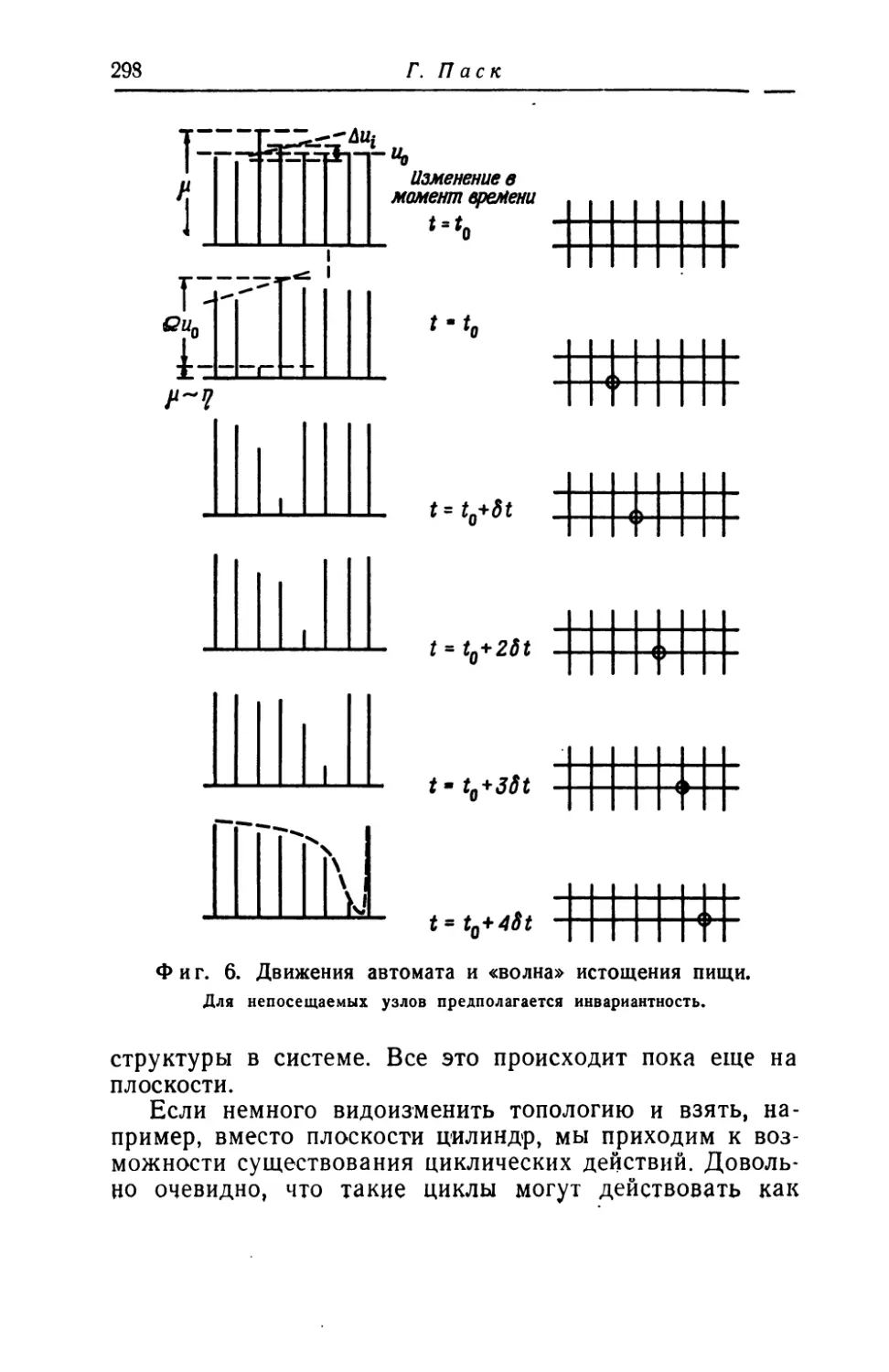
Text
ПРИНЦИПЫ
САМООРГАНИЗАЦИИ
ИЗДАТЕЛЬСТВО
«МИР»
PRINCIPLES OF
SELF-ORGANISATION
Transactions of the
University of Illinois
Symposium on Self-Organisation
8—9 June, 1961
EDITORS
HEINZ VON FOERSTER
and
GEORGE W. ZOPF, JR.
Symposium Publication Division
Pergamon Press
Oxford — London — New York — Paris
1962
ПРИНЦИПЫ
САМООРГАНИЗАЦИИ
ПЕРЕВОД С АНГЛИЙСКОГО
Под редакцией и с предисловием
д-ра техн, наук А. Я. Лернера
ИЗДАТЕЛЬСТВО <МИР> МОСКВА 1966
УДК: 52.506
Самоорганизация — удивительное свойство живых
организмов, к пониманию которого настойчиво продви-
гается современная наука. Изучение процессов само-
организации имеет не только принципиальное, но и
большое практическое значение, открывая возможность
использовать природные механизмы при создании со-
временных технических устройств.
В книге собрано 22 доклада видных американских
и английских ученых, в том числе таких всемирно из-
вестных исследователей, как Эшби, Розенблатт, Мак-
каллок, Паск и др. Тематика докладов чрезвычайно
разнообразна, она охватывает пограничные вопросы ма-
тематики, физики, техники, биологии, психологии и фи-
лософии. Особую ценность придает книге помещенная
в конце докладов дискуссия.
Материал книги весьма интересен для специалистов
различного профиля — математиков, инженеров, био-
логов, нейрофизиологов, психологов, философов и всех,
кто интересуется проблемами современной кибернетики
и бионики.
Редакция литературы по новой технике
ПРЕДИСЛОВИЕ
Несмотря на огромную распространенность самоор-
ганизующихся систем и настойчивые попытки ученых
понять явления, происходящие в таких системах, само-
организация остается на протяжении многих веков, по-
жалуй, самым загадочным явлением, самой сокровен-
ной тайной природы.
Наблюдая существующие в природе разнообразные
высокоорганизованные системы, их приспособляемость
к изменяющейся среде, их развитие и самовоспроизве-
дение, мы вынуждены считать, что в основе всех этих
удивительных явлений лежит некоторый универсальный
механизм, придающий этим системам способность не
растрачивать свою упорядоченность (обеспечивающую
выполнение функций системы), но с течением времени
даже повышать ее. Класс систем такого типа имеет
смысл выделить из всей массы физических систем, для
чего и вводится понятие самоорганизующиеся системы.
Разумеется, сказанное отражает лишь интуитивное
представление о самоорганизующейся системе, но хотя
мы пока и не располагаем строгим определением само-
организующихся систем, мы по крайней мере можем
быть уверены в их существовании.
Шансы на открытие принципов самоорганизации по-
явились только в самое последнее время в связи с успе-
хами кибернетики и молекулярной биологии. Симпо-
зиум, результатом которого явился настоящий сборник,
представляет собой одну из попыток продвинуться в
направлении раскрытия принципов самоорганизации.
В этом сборнике много блестящих, глубоких и остроум-
ных высказываний, интересных и плодотворных науч-
ных результатов, новых идей, но читатель не найдет
6
/7 р е д ис до в и е
в нем ни одной работы, которая претендовала бы на рас-
крытие принципов самоорганизации. И это понятно, ибо
наука находится еще только на подступах к неприступ-
ной крепости, какую представляет собой самоорганиза-
ция. Наступление на эту крепость ведется в различных
направлениях: путем изучения структуры и функций
управляющих систем в живых организмах, путем тео-
ретических и экспериментальных исследований искус-
ственных систем, обладающих некоторыми простейшими
чертами самоорганизации, таких, как, например, обу-
чающиеся системы, путем исследования возможностей
логических сетей противостоять помехам и разруше-
ниям.
Каждое из разрабатываемых направлений может
внести определенный вклад в решение главной пробле-
мы и доказало свою плодотворность полученными про-
межуточными результатами. Существование различных
подходов к проблеме самоорганизации не могло не ска-
заться на составе участников симпозиума (достаточно
пестром, но весьма представительном) и на характере
докладов, составляющих содержание сборника.
Основные, принципиальные положения, определяю-
щие подход к изучению самоорганизующихся систем,
изложены в докладах Эшби и Цопфа, блестящих по
форме и глубоких по содержанию. Главным достоин-
ством этих докладов является то, что они привлекают
внимание ученых к фундаментальным проблемам тео-
рии организации вообще и самоорганизующихся систем
в частности. В этих работах обращается внимание на
относительность таких понятий, как «организованность»
и «упорядоченность». В науке уже давно в качестве
меры упорядоченности системы используется весьма об-
щее и глубокое понятие энтропии. Энтропия и связанное
с ней понятие о количестве информации адекватно опи-
сывают «организованность» системы с точки зрения
статистической физики и шенноновской теории инфор-
мации. Однако величина энтропии отнюдь не однознач-
но характеризует организованность системы с точки
зрения соответствия ее поведения некоторым заданным
критериям. Не исключена возможность, что эти за-
труднения будут преодолены сейчас, после того как
Предисловие
7
А. Н. Колмогоровым была предложена количественная
мера индивидуальной организованности (в отличие от
организованности в среднем по ансамблю, даваемой тео-
рией Шеннона), имеющая глубокое обоснование в со-
временной теории алгоритмов.
Связывая понятие организованности с зависимостью
между подсистемами, Эшби утверждает, что основным
математическим аппаратом, призванным выразить ко-
личественные закономерности в самоорганизующихся
системах, явится предложенный Гарнером и Мак-Гил-
лом метод анализа неопределенности. Сущность этого
метода состоит в том, что для исследования статистиче-
ской зависимости и взаимной обусловленности величин
используются такие понятия, заимствованные из шенно-
новской теории информации, как условная энтропия,
условная информация в одной случайной величине о
другой при задании третьей и т. п. Эти понятия исполь-
зуются аналогично понятию условной дисперсии в дис-
персионном анализе Фишера. Однако, хотя метод ана-
лиза неопределенности в ряде случаев обладает неко-
торыми преимуществами по сравнению с дисперсион-
ным анализом, нам представляется, что его не следует
переоценивать, поскольку в нем не содержится суще-
ственно важных идей, выходящих за пределы теории
Шеннона.
Отдавая должное этим интересным докладам, мы,
как мне кажется, поступим мудро, если отнесемся кри-
тически как к оптимизму Эшби, заявляющему в резюме
своего доклада, что «в настоящее время принципы, ле-
жащие в основе самоорганизующихся систем, известны
достаточно полно...», так и к скептицизму Цопфа, кото-
рому «больше по душе отрицание, чем утверждение».
Быть может, нам достаточно довольствоваться конста-
тацией того, что в результате проделанной работы в об-
ласти теории самоорганизующихся систем мы уже
знаем, «где копать», хотя не вырыли еще ни одного
ценного «клада».
В докладах Бира и Паска излагаются попытки авто-
ров создать модели самоорганизующихся систем. Паск,
развивая теоретико-игровой подход к самоорганизации,
предлагает структуру модели эволюции, состоящей из
8
Предисловиб
абстрактных «игроков», способных принимать решения,
образовывать коалиции и самовоспроизводящиеся
структуры, борясь за некоторую, также абстрактную,
«пищу». Модель показывает, как в среде с ограничен-
ным количеством пищи у жизнеспособных автоматов
вырабатывается способность к коллективным дей-
ствиям.
Подход Бира к построению модели самоорганизую-
щейся системы отличается в методическом отношении
от подхода Паска тем, что он строится на основе тео-
ретико-множественных понятий. Кроме того, в отличие
от работы Паска работа Бира построена на примере
решения конкретной прикладной задачи на основе тех
сведений о структуре мозга, которыми мы пока распо-
лагаем. Модель Бира включает в себя Т-машину— ана-
лог сенсорной области коры, V-машину — аналог мо-
торной области, (7-машину — аналог таламуса, осуще-
ствляющую согласование работы Г- и V-машин на
основе гомеостазиса. Далее Бир предлагает /?-машину
в качестве системы, осуществляющей «эмоциональное»
стимулирование (Т — V)-машины, сопоставляя ее с дея-
тельностью ретикулярной формации мозга.
Плодотворность как той, так и другой попытки смо-
делировать самоорганизующуюся систему не вызывает
сомнений, хотя их авторы, как нам кажется, исходили
из прямо противоположных целей: Паск хотел показать,
что даже в самом простом случае самоорганизующаяся
система обладает весьма сложным поведением, а Бир
стремился продемонстрировать, что весьма простыми
средствами можно осуществить то, что происходит в
самой сложной самоорганизующейся системе.
Четыре доклада (Новиков, Розенблатт, Шимбел и
Платт) посвящены различным аспектам задачи распо-
знавания образов. Внимание симпозиума по самоорга-
низующимся системам к распознаванию образов и более
общим задачам — классификации сложных ситуаций и
созданию обучаемых машин — вполне понятно, если
учесть, что элементы самоорганизации в технических
устройствах впервые появились именно в связи с созда-
нием систем для распознавания образов. Несмотря на
то что это научное направление очень молодо, в нем
Предисловие
9
уже успела сформироваться своя особая терминология.
При изучении докладов, относящихся к распознаванию
образов, читателю полезно будет ознакомиться с опре-
делением понятий, используемых в работах по распо-
знаванию образов, данным в недавно вышедшей в рус-
ском переводе книге основоположника этого направле-
ния Фрэнка Розенблатта !).
В этой группе докладов содержатся несомненно ин-
тересные идеи. Так, может оказаться полезным выска-
зывание Розенблатта о значении работ по распознава-
нию образов для выяснения механизма биологической
памяти. Представляет интерес предложение Новикова
об использовании при построении распознающих машин
(или программ) методов интегральной геометрии. Весь-
ма остроумны соображения, высказанные Шимбелом
относительно некоторых свойств зрительных образов,
инвариантных по отношению к линейным преобразова-
ниям. Возможно, что эти соображения помогут продви-
нуться в решении одного из сложнейших вопросов рас-
познавания — избавиться от влияния сдвига и поворота
изображения на рецепторном поле. Еще дальше в том
же направлении пошел Платт, показав на примере рас-
познавания глазом «самоконгруэнтных» образов (обра-
зов, самосовпадающих при передвижении изображения
по сетчатке), что свойства образов, инвариантные к ли-
нейным преобразованиям, могут не только помочь изба-
виться от влияния сдвига на распознавание, но даже
использовать сдвиг (в частности, сдвиг, возникающий в
результате тремора глазного яблока) для распознава-
ния некоторых зрительных образов.
Нельзя оставить без возражения утверждение Розен-
блатта об общем подходе к исследованиям в области
построения кибернетических машин. Розенблатт считает,
что выгоднее аксиоматизировать систему, а затем изу-
чать ее поведение, чем аксиоматизировать поведение и
синтезировать соответствующую систему. Нам представ-
ляется, что предпочтение, отдаваемое здесь задачам
анализа по сравнению с задачами синтеза, является не-
*) Розенблатт Ф., Принципы нейродинамики. Перцептроны
и теория механизмов мозга, изд-во «Мир», 1965.
10
Предисловие
правомерным и методически никак не обоснованным.
Кроме того, оно не соответствует стремлению к переходу
в этой области от общих рассуждений к решению акту-
альных практических проблем, что требует в первую оче-
редь решения задач синтеза систем по заданным требо-
ваниям к их поведению.
Наиболее тесно связанная общей проблематикой
группа докладов рассматривает задачи построения са-
мокорректирующихся и самовосстанавливающихся логи-
ческих сетей как простейших самоорганизующихся сис-
тем. К этой группе относятся доклады Маккаллока,
Блюма, Коуэна, Лёфгрена, Вербика, Бёрла и Виллиса.
Большинство авторов этих докладов (Маккаллок,
Блюм, Коуэн, Вербик) составляют группу сотрудников
Массачусетского технологического института, возглав-
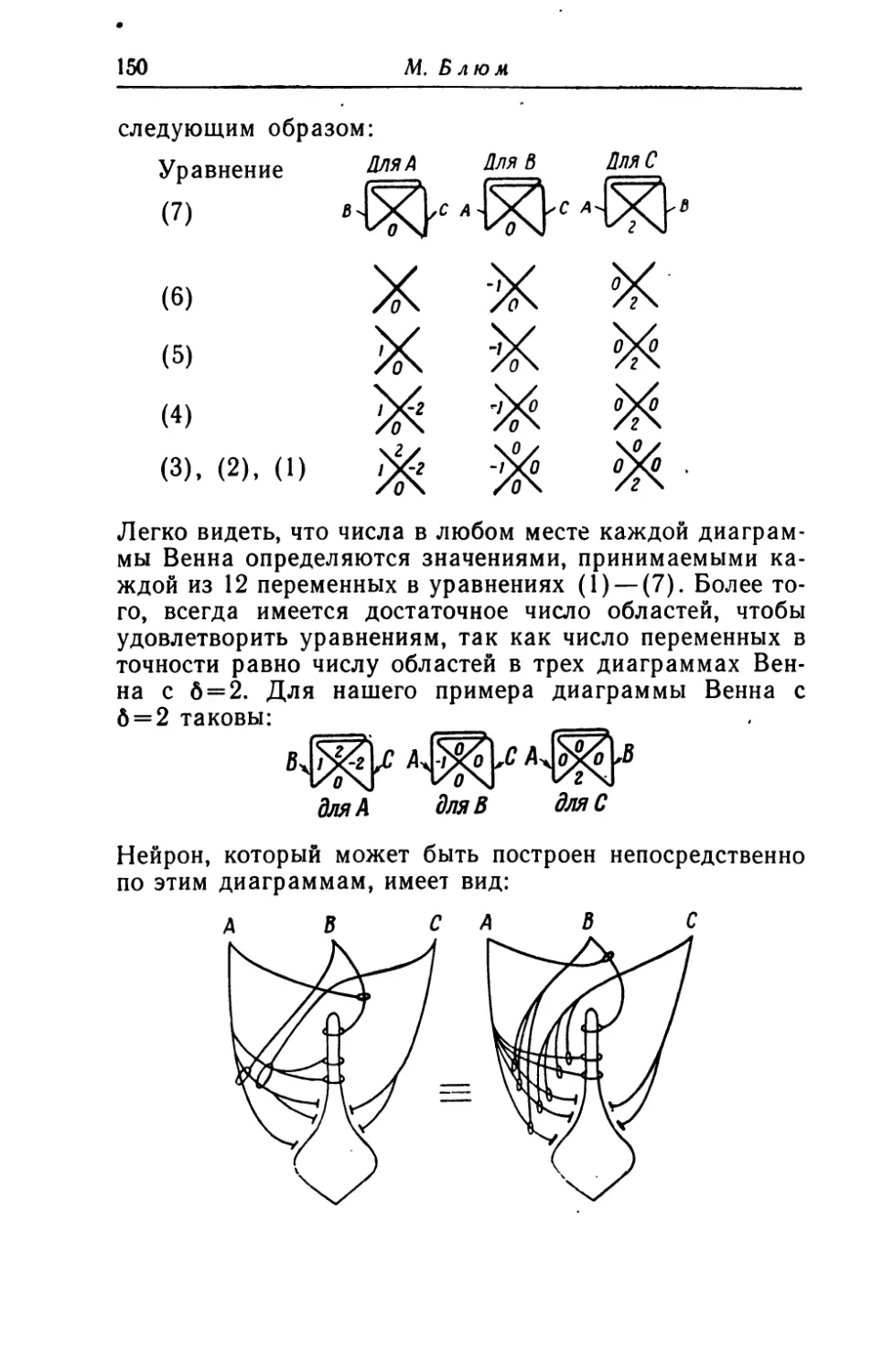
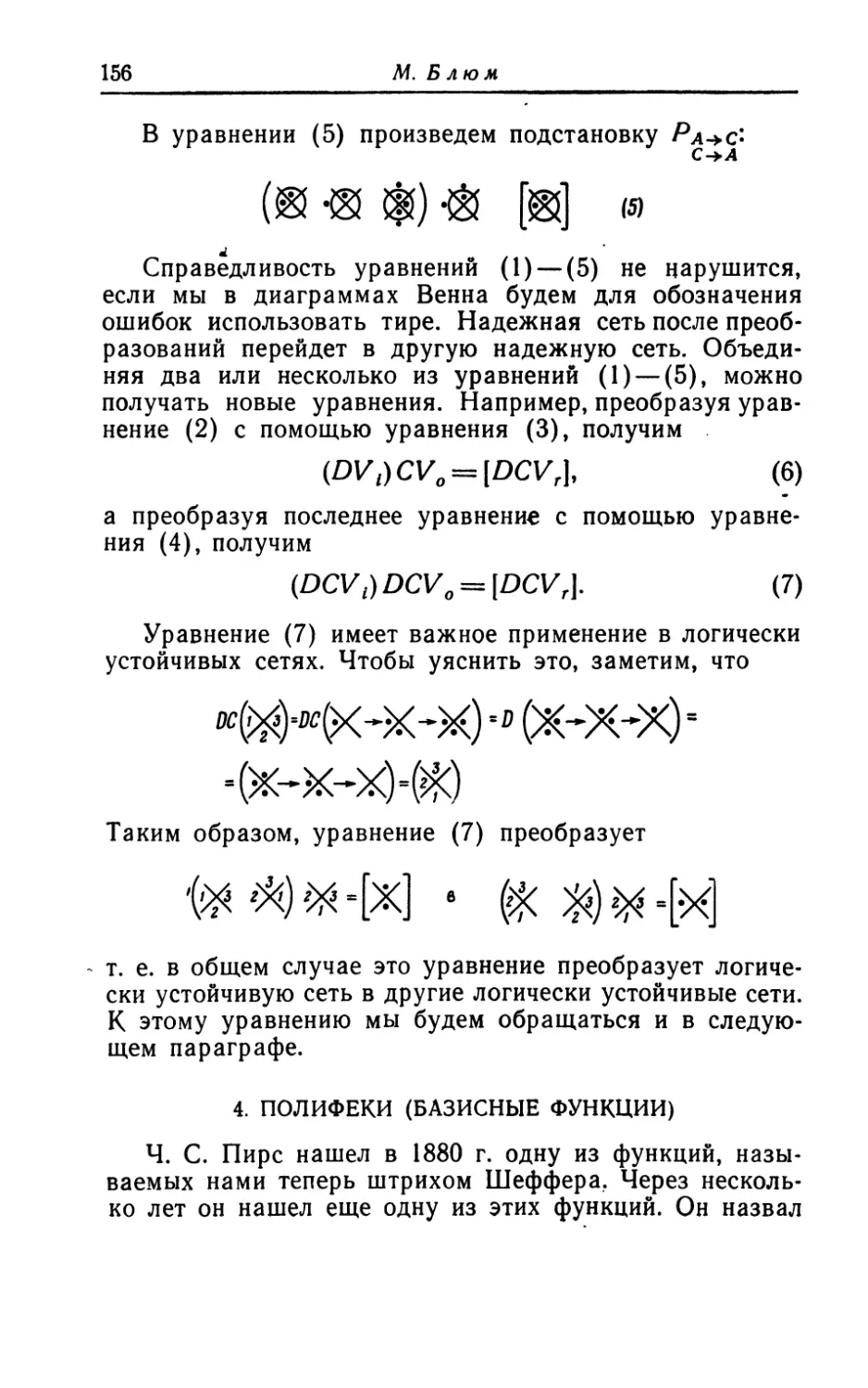
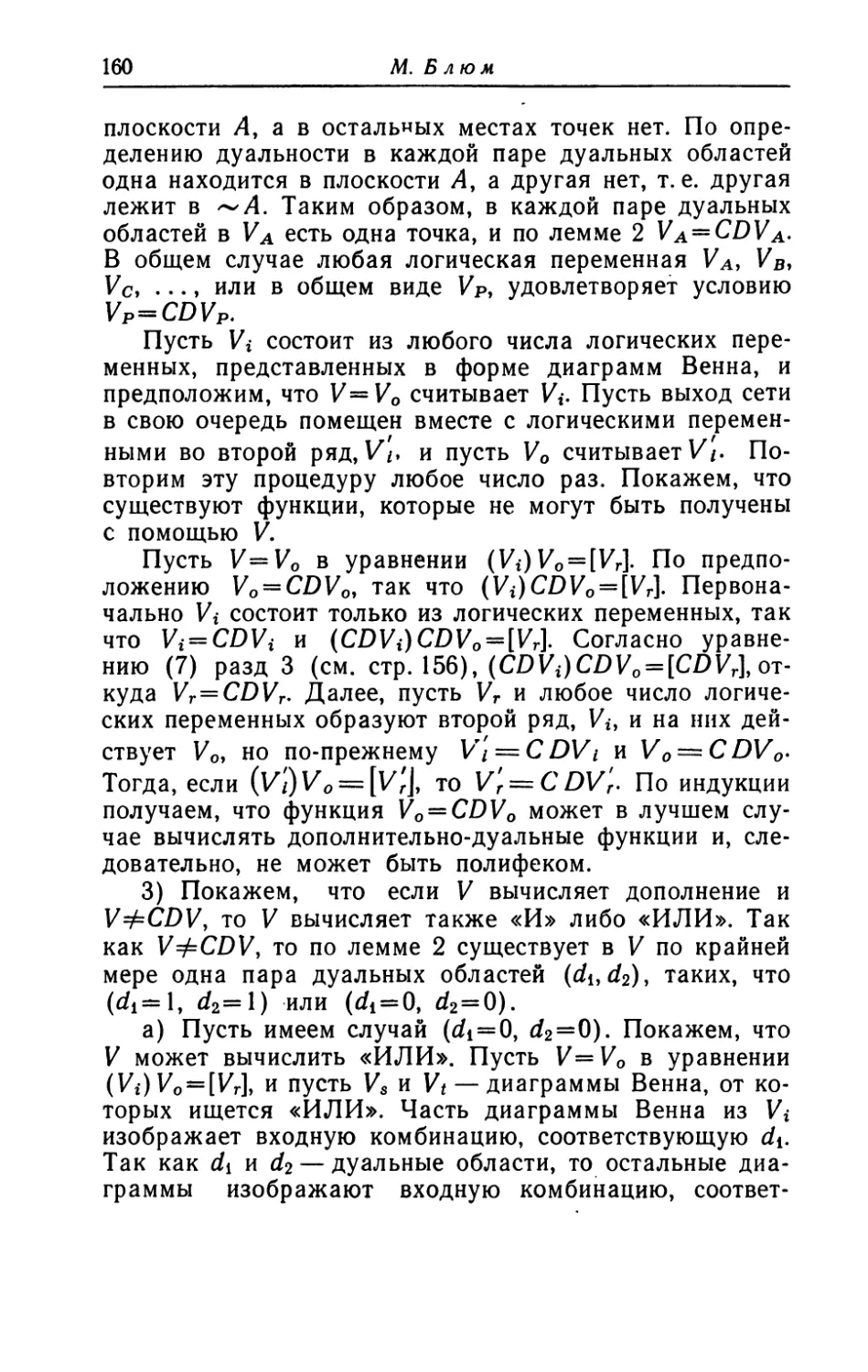
ляемую Маккаллоком. В докладе Блюма, последовав-
шем за кратким выступлением Маккаллока, приведены
результаты математического исследования свойств ней-
рона со многими входами в связи с задачей фон Ней-
мана о построении надежных логических сетей из не-
надежных элементов.
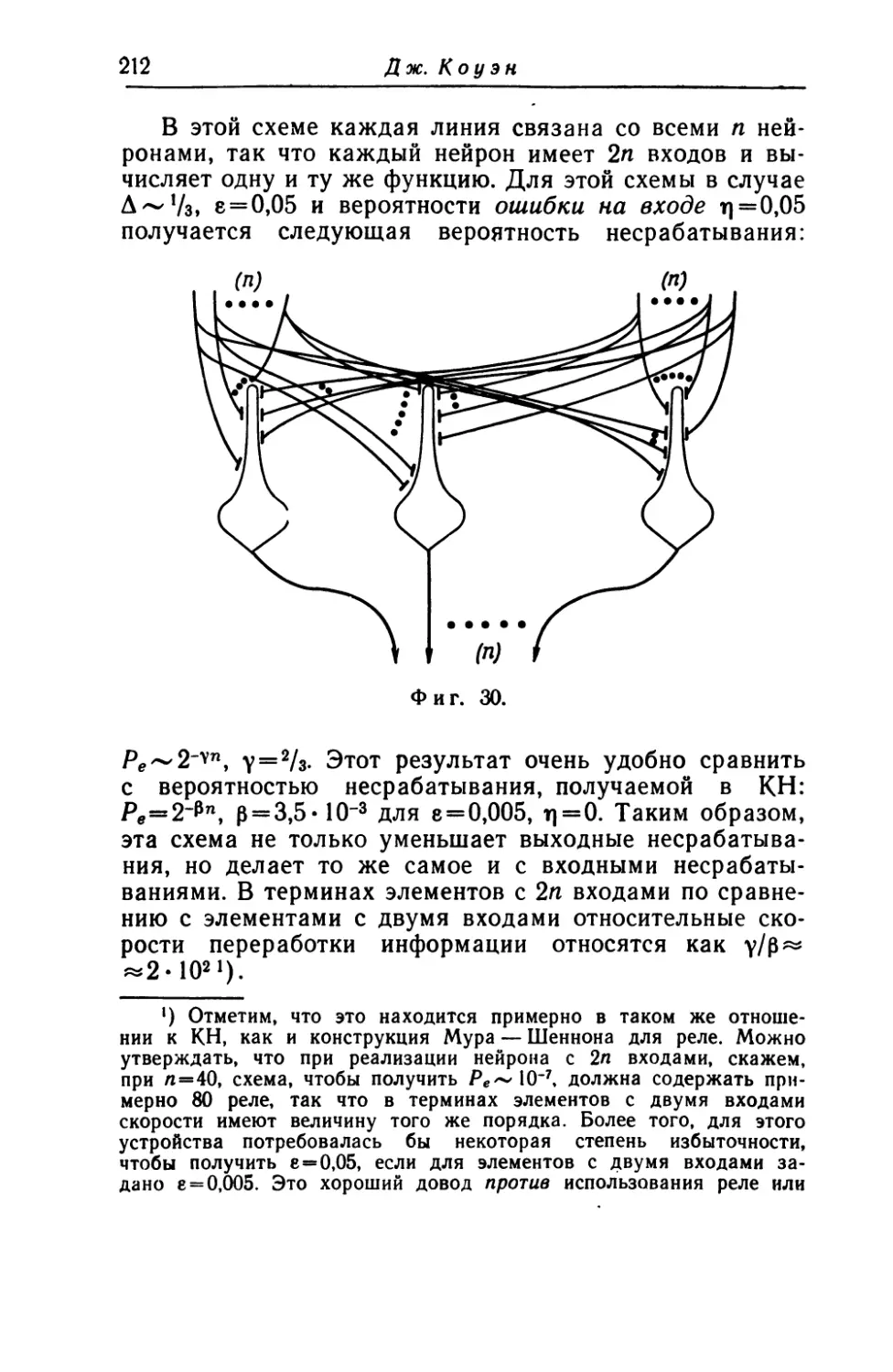
В весьма содержательном докладе .Коуэна проблема
надежности автоматов впервые исследуется с помощью
аппарата многозначной логики. Важные результаты по-
лучены Коуэном при сопоставлении схем фон Неймана
и Элайса и выяснении возможностей создания более
эффективных схем для повышения надежности цепей с
использованием пороговых элементов со многими вхо-
дами и соединений типа «все со всеми».
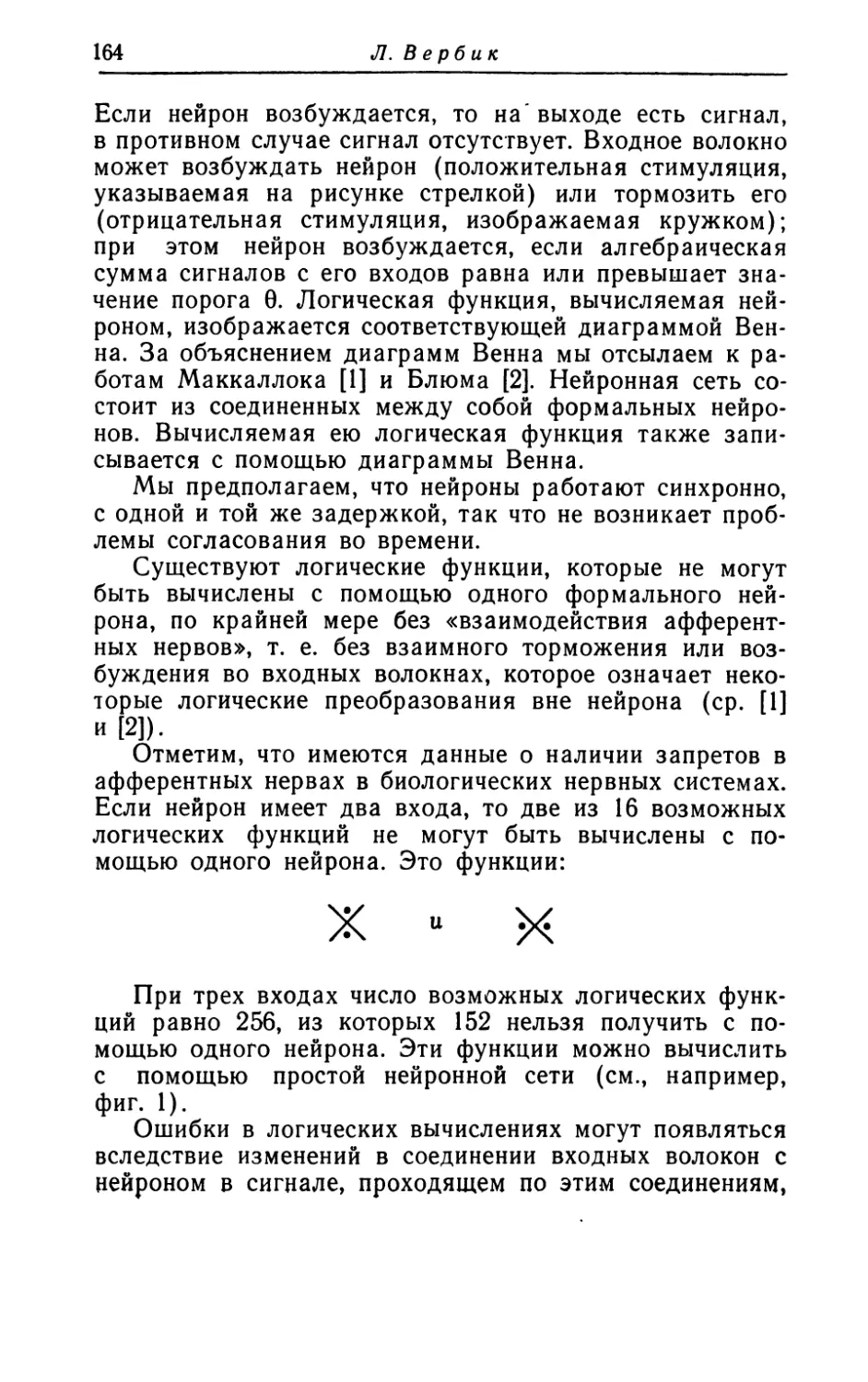
Проблемы анализа и синтеза сетей из элементов
с ошибками (обрыв в выходном волокне нейрона) рас-
смотрены в докладе Вербика, получившего интересные
результаты, существенно отличающиеся от результатов,
полученных в свое время фон Нейманом, решавшим ана-
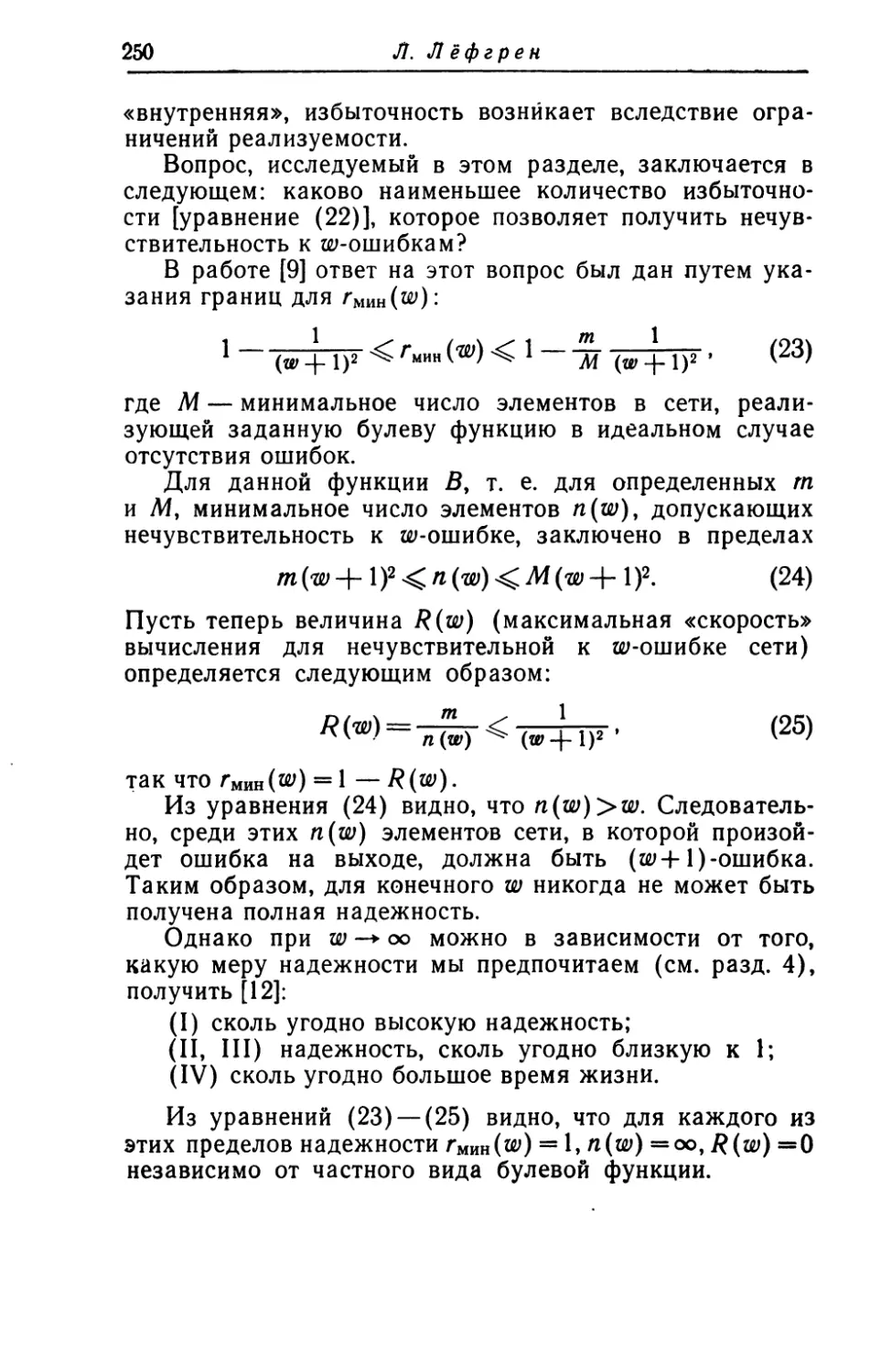
логичную задачу. Шведский ученый Лёфгрен, провед-
ший несколько лет в США, развивает оригинальный
подход к проблеме надежности автоматов, основанный
на идее придания системам свойств самовосстановления
и даже самовоспроизведения.
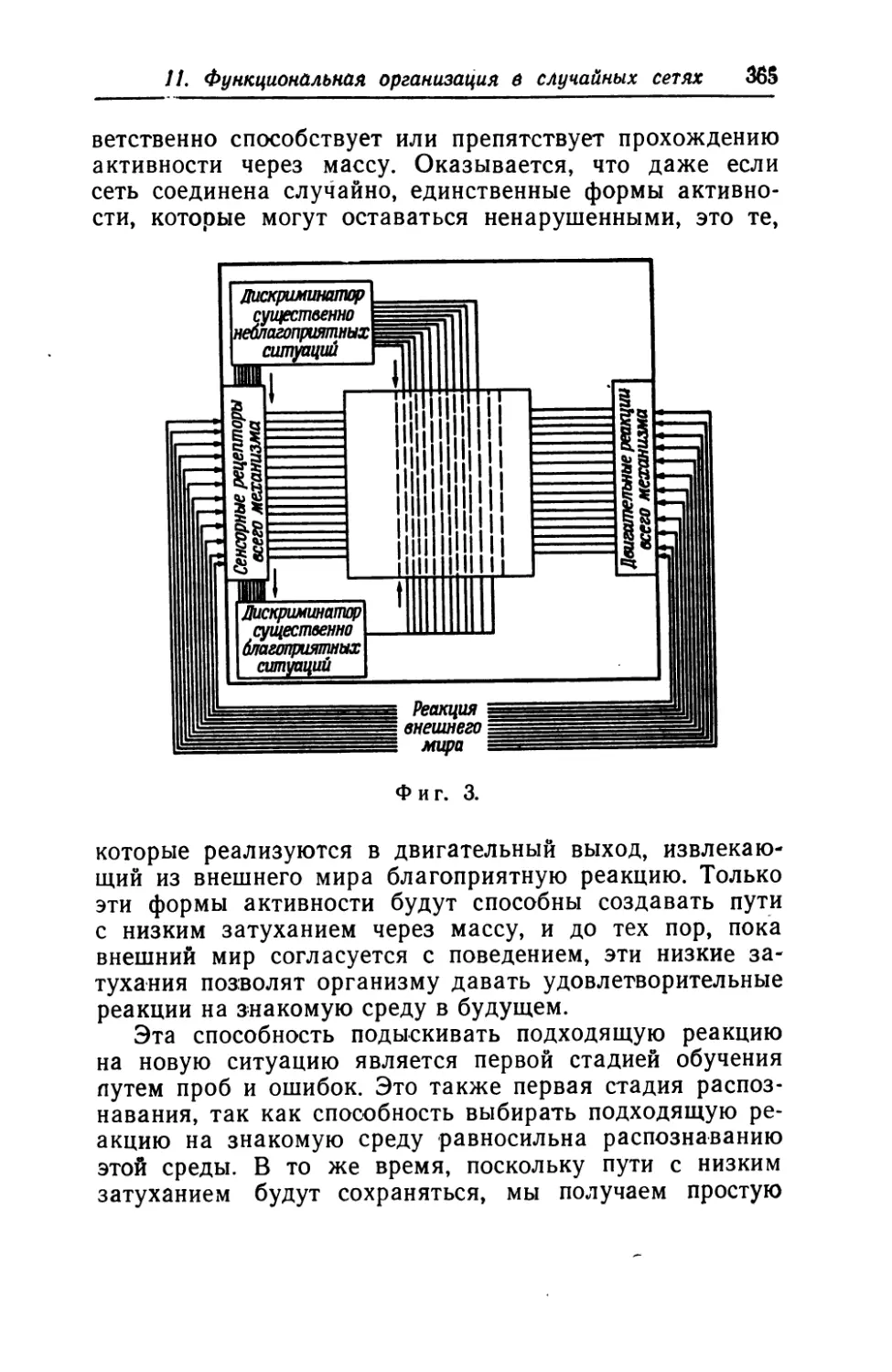
Работа Бёрла направлена на выяснение того, как в
массе клеток, первоначально соединенных случайным
Предисловие
И
образом, в результате взаимодействия со средой воз-
никает внутренняя организация, способствующая выбо-
ру поведения, повышающего шансы системы выжить.
В работе обсуждаются проблемы стабилизации актив-
ности, возникновения способности обучаться, взаимоот-
ношения между различными видами оперативной и
долговременной памяти в терминах случайных сетей. То
обстоятельство, что в этом докладе не освещены ни ха-
рактер, ни методика экспериментов, не дает возмож-
ности отделить обсуждение экспериментальных данных
от спекулятивных рассуждений. В докладе Виллиса по-
казано, что кибернетические системы не могут и не
должны реализовать все булевы функции и переменных,
если п превышает величину порядка нескольких десят-
ков.
Исследованиям, основанным на наблюдениях над
живыми самоорганизующимися системами, посвящены
доклады Рапопорта, Сперри и Грина. Рапопорт в своем
докладе приводит данные о явлениях самоорганизации
в группах испытуемых, когда перед ними ставятся та-
кие задачи, решение которых гораздо эффективнее при
коллективных, согласованных действиях членов группы.
К сожалению, автор не приводит объяснений существен-
ных различий в поведении отдельных групп испытуе-
мых. Близкие к описанным в этом докладе опыты,
проведенные в СССР !), показали, что фактором, опре-
деляющим сотрудничество членов группы, является фор-
мирование в ней лидера, если таковой потенциально со-
держится в данной группе испытуемых.
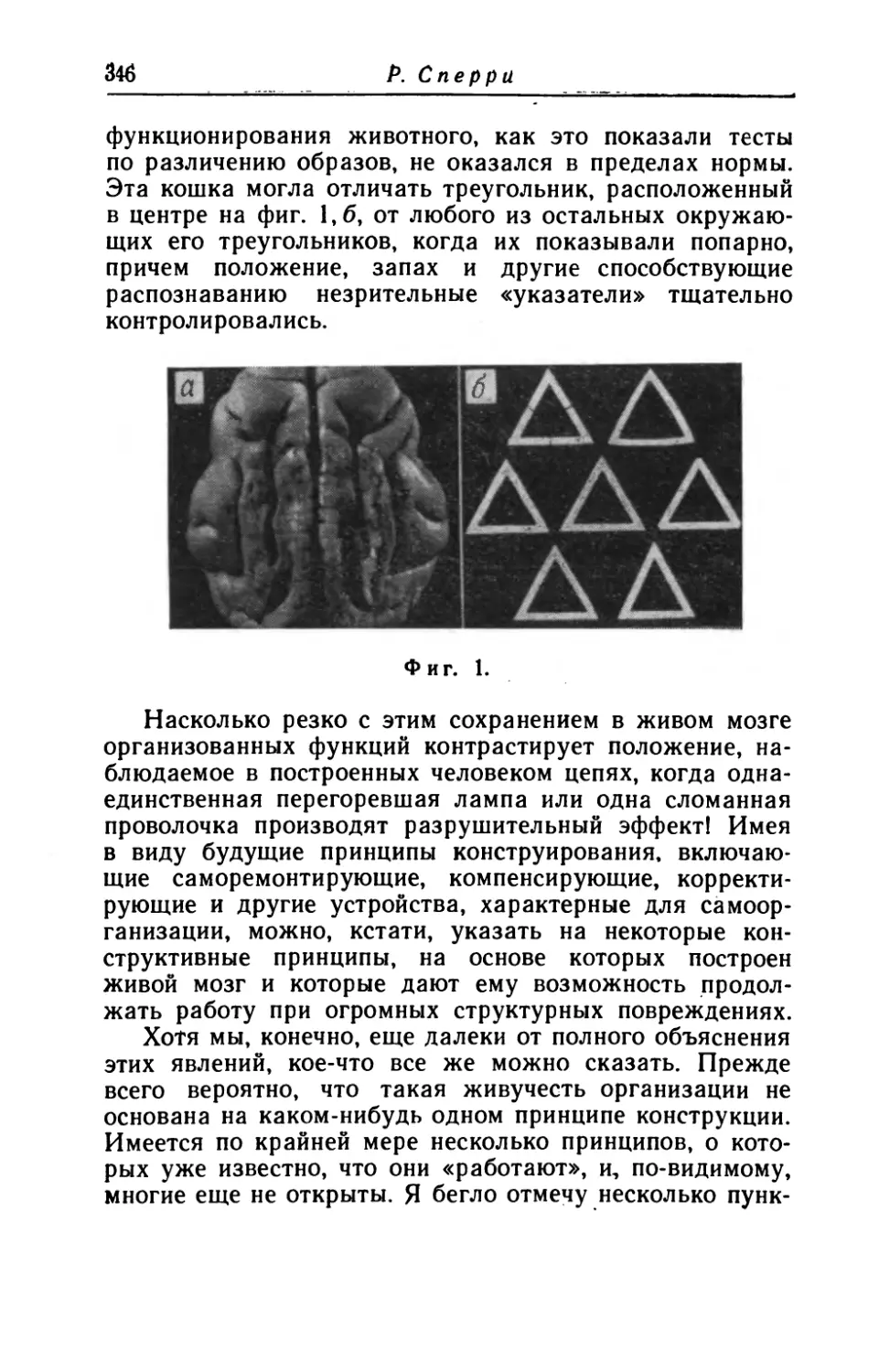
Рассматривая вопросы надежности работы мозга
при различных повреждениях, Сперри выявляет струк-
турные и топологические свойства мозга, обеспечиваю-
щие поистине изумительную и пока недостижимую в
искусственных системах надежность его функционирова-
ния. Грин выдвигает гипотезу о существовании врож-
денных стереотипов восприятия и поведения, служащих
для анализа окружающей среды и приспособления к
ней. Вызывает интерес предложенная им формальная
!) Цыбулевский А. И., см. Тезисы докладов на съезде
психологов, Л., 1963.
12
Предисловие
модель представления информации в нервной системе
и схема ее реализации.
Различным вопросам, связанным с проблемами само-
организации, посвящены доклады остальных участников
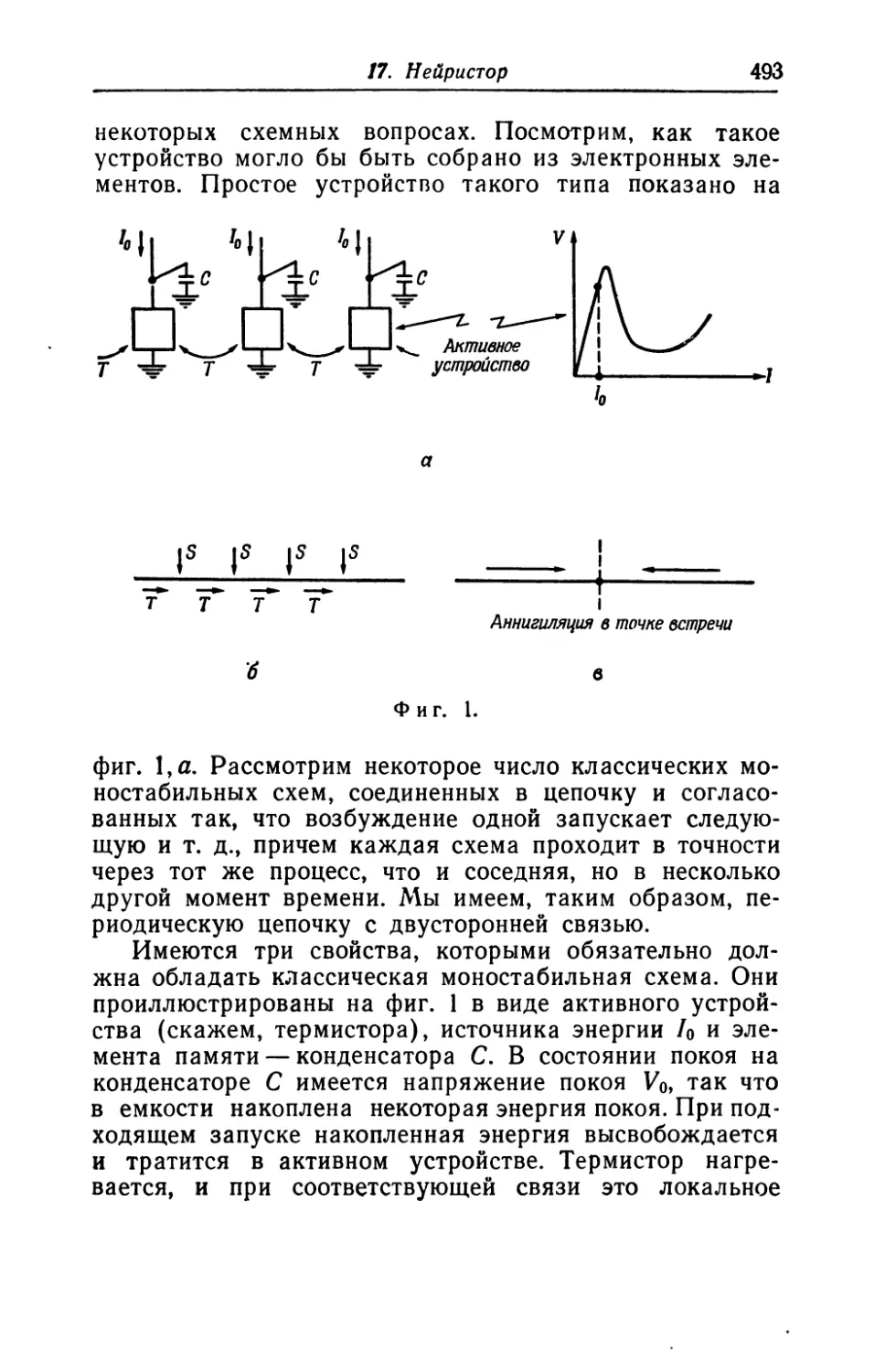
симпозиума. Так, Крейн описывает принципы построе-
ния, свойства и возможные применения таких элемен-
тов, как нейристоры, обладающие рядом характерных
свойств нейронов: порогом срабатывания, наличием ре-
фрактерного периода, отсутствием затухания и постоян-
ной скоростью распространения сигнала.
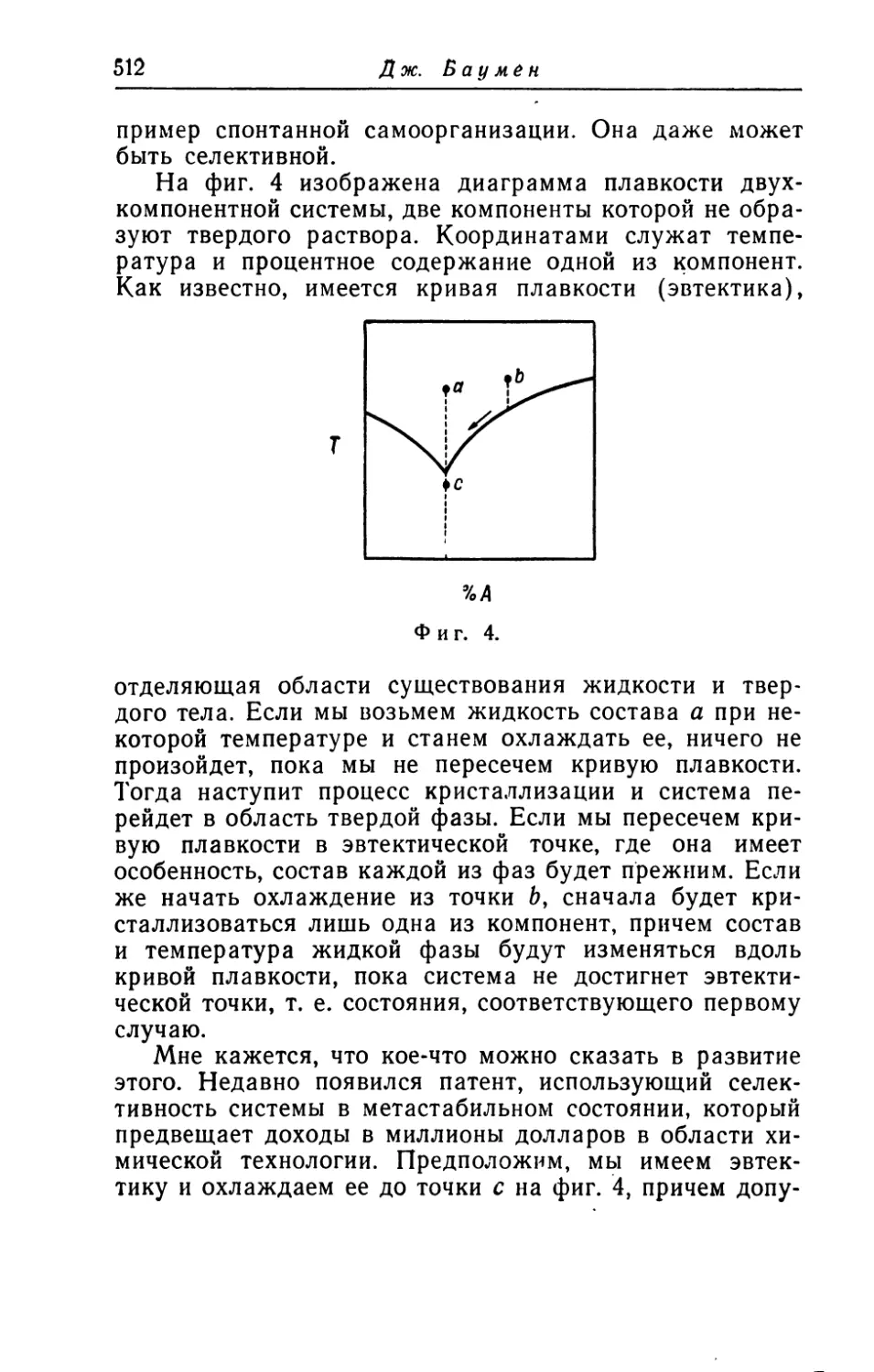
В докладе Баумена заслуживает внимания мысль
о рассмотрении процесса образования кристаллов как
процесса спонтанной самоорганизации. Небезуспешная
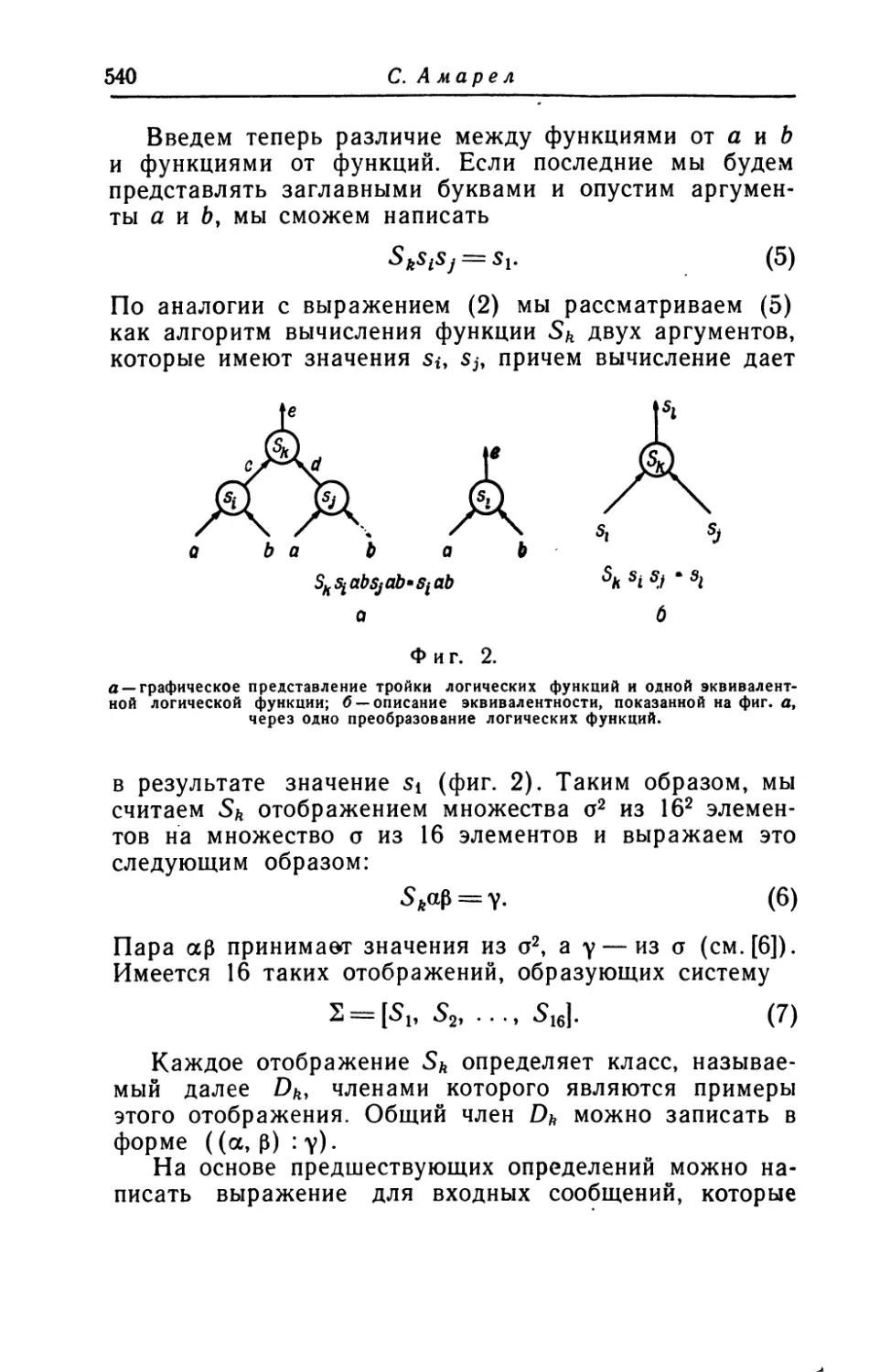
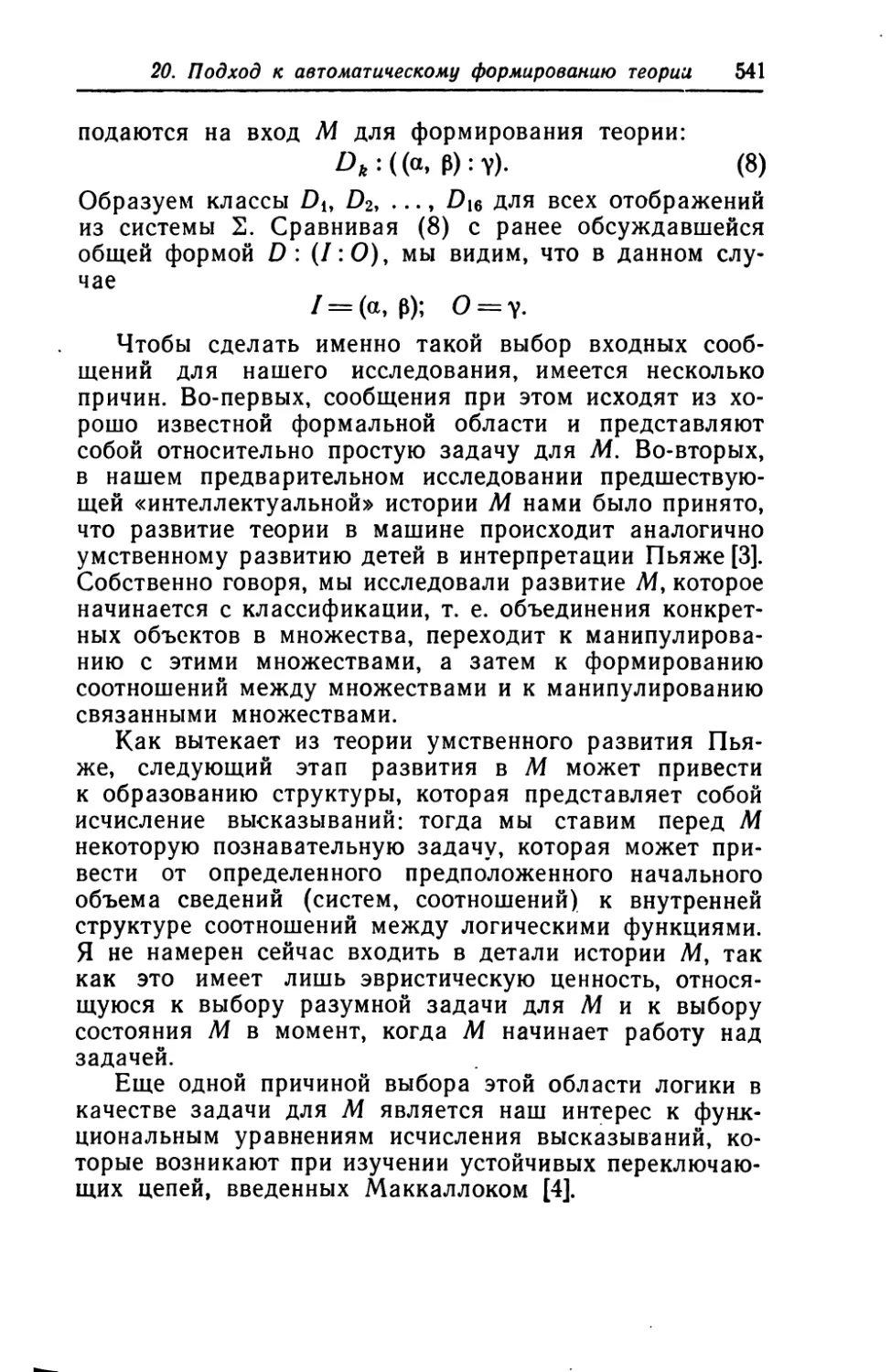
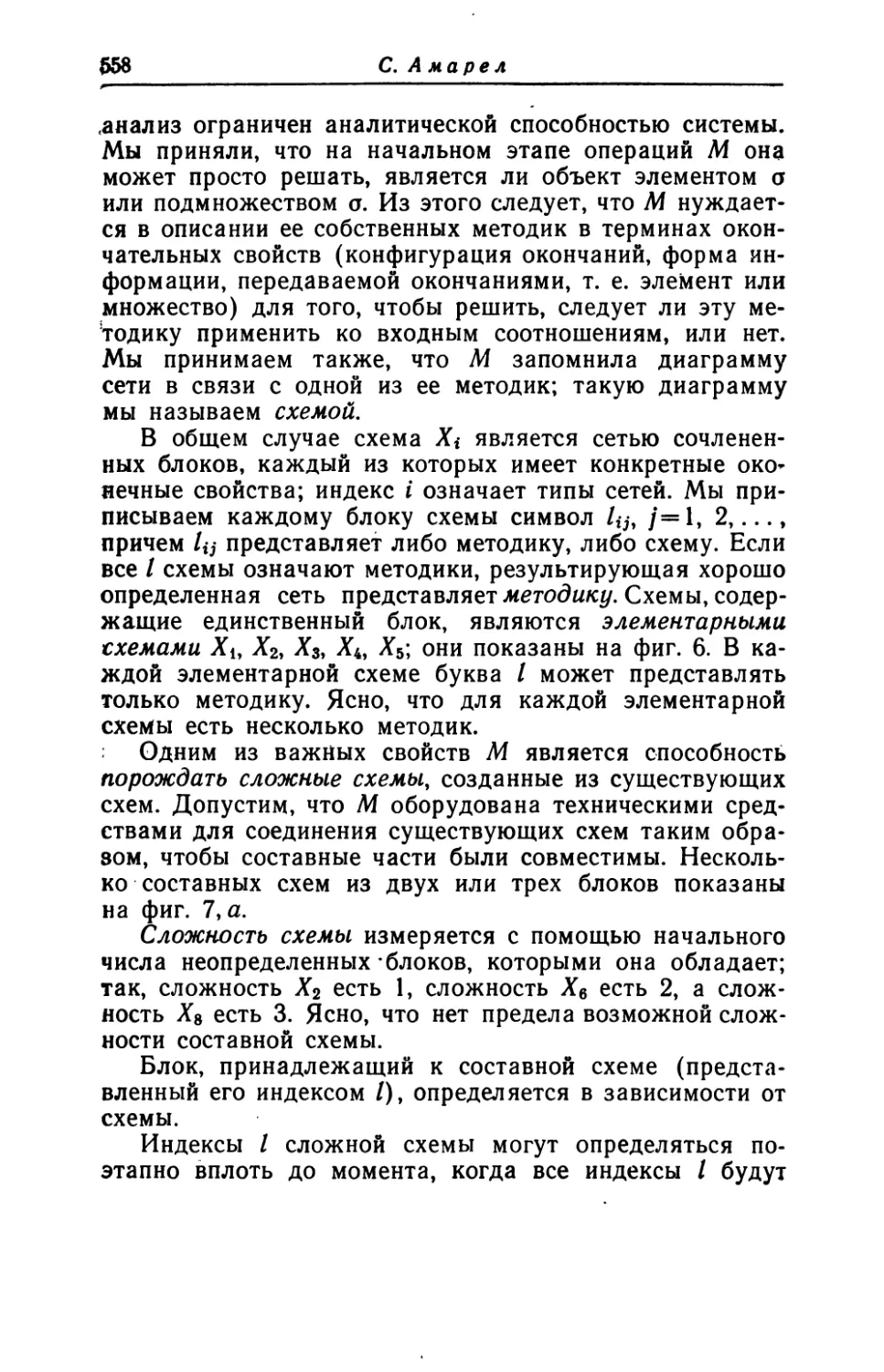
попытка автоматического формирования теории описана
в докладе Амарела, в котором теория строится на про-
стой формальной среде, в качестве которой избрана ал-
гебра логики. Основой самоорганизации здесь являются
эвристические правила, ограничивающие постулирование
разумными пределами. При этом в машине создаются
промежуточные структуры — гипотезы, конкурирующие
за право стать работающей теорией. Отдавая должное
плодотворности предлагаемого Амарелом подхода к
формированию теорий, следует обратить внимание на
его методологическую концепцию, на основании которой
рекомендуется прежде всего постулировать свойства
самоорганизующихся систем, а затем уже переходить
к экспериментальным и теоретическим исследованиям.
Кроме докладов, в публикуемом сборнике содер-
жатся также дискуссии, представляющие большой инте-
рес и не только способствующие лучшему пониманию
содержания докладов, но и позволяющие представить
себе характер обсуждения научных проблем рядом вы-
дающихся ученых.
То обстоятельство, что большинство работ представ-
ляет собой обработку стенографической записи устных
сообщений их авторов, не могло не сказаться на форме
изложения материала. Некоторые работы изложены не-
брежно, в ряде работ встречаются неясные или слишком
экстравагантные выражения. Переводчики и редактор
стремились сохранить особенности изложения, прису-
щие каждому автору, там, где это удавалось сделать
Предисловие
13
без существенных отступлений от точной передачи смыс-
ла излагаемых автором положений. Поэтому некоторые
фразы, возможно, выглядят несколько необычно для на-
ших читателей.
В заключение хотелось бы выразить озабоченность
тем обстоятельством, что в нашей научной литературе
проблемы самоорганизации обсуждаются далеко не в
той мере, которая соответствовала бы важности про-
блемы. Ведь самоорганизация — это именно тот меха-
низм, который лежит в основе эволюции биологических
систем и определяет ряд важных закономерностей раз-
вития экономических и социальных систем. Эти про-
блемы представляются нам благодарным объектом для
исследования с диалектико-материалистических пози-
ций, тем более что ряд докладов, публикуемых в этом
сборнике, требует критического разбора с методологи-
ческой точки зрения.
По трудности разрешения и последствиям для науки
и практики атаку на проблемы самоорганизации можно
сравнить с наступлением на тайну атомного ядра.
И если первая половина XX века войдет в историю нау-
ки как эпоха фундаментальных открытий в области
ядерной физики, то вторая половина нашего века, мы
надеемся, будет ознаменована разрешением централь-
ной проблемы кибернетики — проблемы самоорганиза-
ции.
А. Лернер
ВВЕДЕНИЕ
Я убежден, что придет время,
когда физиолог, поэт и философ бу-
дут говорить на одном языке и бу-
дут понимать друг друга,
Клод Бернар
«О частностях уже сказано и написано много, — жа-
ловался Федр две с половиной тысячи лет назад перед
собранием друзей Агафона, пришедших, чтобы отпразд-
новать его недавний поэтический триумф. — Рынок за-
вален описаниями мельчайших подробностей жизни Ге-
ракла или Гомера, но кто обсуждает такую комплекс-
ную проблему, как, например, любовь?» Так в доме
Агафона было положено начало бессмертному первому
симпозиуму по проблемам, стоящим на стыке не-
скольких наук, в котором приняли участие философы,
государственные деятели, драматурги, поэты, социо-
логи, лингвисты, врачи и студенты различных специ-
альностей.
Описание Платона не оставляет сомнений в успехе
этой встречи. Ее существенными особенностями были
дружба между участниками, вдохновляющая атмосфера
и, конечно, всеобщая заинтересованность в предмете об-
суждения.
Тема, которая была и остается близкой сердцам со-
трудников Лаборатории применения вычислительных
машин в биологии Иллинойсского университета, заклю-
чается в выяснении проблем, связанных с «самооргани-
зацией». Не является ли это словечко лишь неудачным
символом для обозначения в общем-то тривиального
процесса и не находит ли в нашем интересе к самоорга-
низации выражение лишь тот нечеткий способ мышле-
ния, когда мы систематически не замечаем отверстия в
16
Введение
кажущейся замкнутой адиабатической поверхности? ’)
Или же «самоорганизация» — полезное понятие, помо-
гающее разъяснению множества проблем, тесно свя-
занных с «искусственным интеллектом», «механизацией
мышления», «автоматизацией восприятия», «усилением
мыслительных способностей», с машинами для индук-
тивного вывода, с клеточной организацией, ростом,эво-
люцией и т. д.?
Чтобы ответить на эти вопросы, мы последовали зна-
менитому примеру античных времен. Дом Агафона за-
менила расположенная в 25 милях от университетского
городка усадьба Аллертон, в которую под покровитель-
ством Отдела информационных систем Управления
военно-морских исследований съехалось около тридцати
гостей со всего света. Эти люди уже были друзьями
еще до того, как они познакомились, ибо знали друг
друга по опубликованным работам. Они создали вдох-
новляющую атмосферу и отнеслись к нашей проблема-
тике с не меньшим интересом, чем участники встреч в
доме Агафона к своей.
Одним из осязаемых результатов симпозиума яв-
ляется книга, которую вы держите в руках. В ней со-
браны двадцать три доклада, представленные и обсуж-
денные во время жестко расписанных встреч в течение
двух дней, 8 и 9 июня 1961 г.
Другие столь же осязаемые результаты в настоящее
время еще не могут быть представлены в виде точного
отчета. Эти результаты появятся рано или поздно как
плоды замечательного воодушевления, проникновенное
описание которого ожидает своего Платона. Это вооду-
шевление было характерно для всех участников, чье со-
трудничество, плодотворная критика, уважение к сохра-
нению в целости идей их коллег и энтузиазм нашли
отражение в том, что неофициальные заседания симпо-
зиума затягивались до глубокой ночи. Доказал ли кто-
нибудь из нас к четырем часам утра «первую теорему
Баумена», утверждающую, что число людей, пожимаю-
щих нечетное число рук, четно? Или нашел ли кто-
1) См. по этому поводу статью Г. Фёрстера в сб. «Самоорга-
низующиеся системы», ИЛ, 1964, стр. 113.
Введение
17
нибудь правильное продолжение последовательности
йг<100:8, 18, 80, 88, 85, ...
в виде
84, 89, 81, 87, ... ?
Возможно, что да, если он был склонен мыслить «лекси-
кографически».
Здесь, однако, озадаченный читатель может спросить,
какое все это имеет отношение к принципам самоорга-
низации? Помещенные ниже статьи дадут ответ на этот
вопрос. Пожалуй, нет таких областей, которые не вхо-
дят в круг проблем, связанных с самоорганизацией. Не-
которые задачи сначала кажутся неразрешимыми —
как, например, приведенная выше бессмысленная после-
довательность,— до тех пор пока мы к ним не подсту-
пимся с совершенно иной точки зрения1).
Существует 23! различных способа, которыми можно
было бы разместить в этой книге собранные в ней
статьи. И существуют различные возможные выборы
такого размещения, которые могут претендовать на то,
чтобы считаться наилучшими. В конце концов мы рас-
положили их в той последовательности, в какой они до-
кладывались во время наших встреч. Так как симпо-
зиум «самоорганизовался» в ходе своего проведения,
такое расположение, по-видимому, действительно вос-
производит по крайней мере некоторые из естественных
«потоков идей». Однако гид, который взялся бы про-
вести читателя через лабиринт докладов, выделил бы
пять областей средоточия интересов и указал бы на до-
кладчиков, которые в своих выступлениях осветили эти
области. Такая классификация имела бы примерно сле-
дующий вид:
I. Теоретические и экспериментальные основы само-
организации:
1. Эшби
2. Сперри
3. Бёрл
4. Рапопорт
*) Названия чисел этой последовательности на английском
языке оказываются расположенными в алфавитном порядке. —
Прим. ред.
5. Баумен
6. Паск
7. Виллис
8. Розен
2 Ззк 106
18
Введение
II. Теории поведения сложных систем:
1. Бир 3. Розенблатт
2. Амарел 4. Цопф
III. «Иммунология» самоорганизующихся систем:
1. Маккаллок
2. Блюм 4. Коуэн
3. Вербик 5. Лёфгрен
IV. «Предорганизация» в познающих системах:
1. Платт 3. Грин
2. Шимбел 4. Новиков
V. Компоненты самоорганизующихся систем
1. Крейн 2. Тули1)
Восемь статей первой группы можно рассматривать
как краткое введение в «эпистемологию» самоорганиза-
ции. Докладчики развивают основные понятия, связан-
ные с процессами такого рода, и подробно описывают
некоторые системы, в которых обнаруживается самоор-
ганизация.
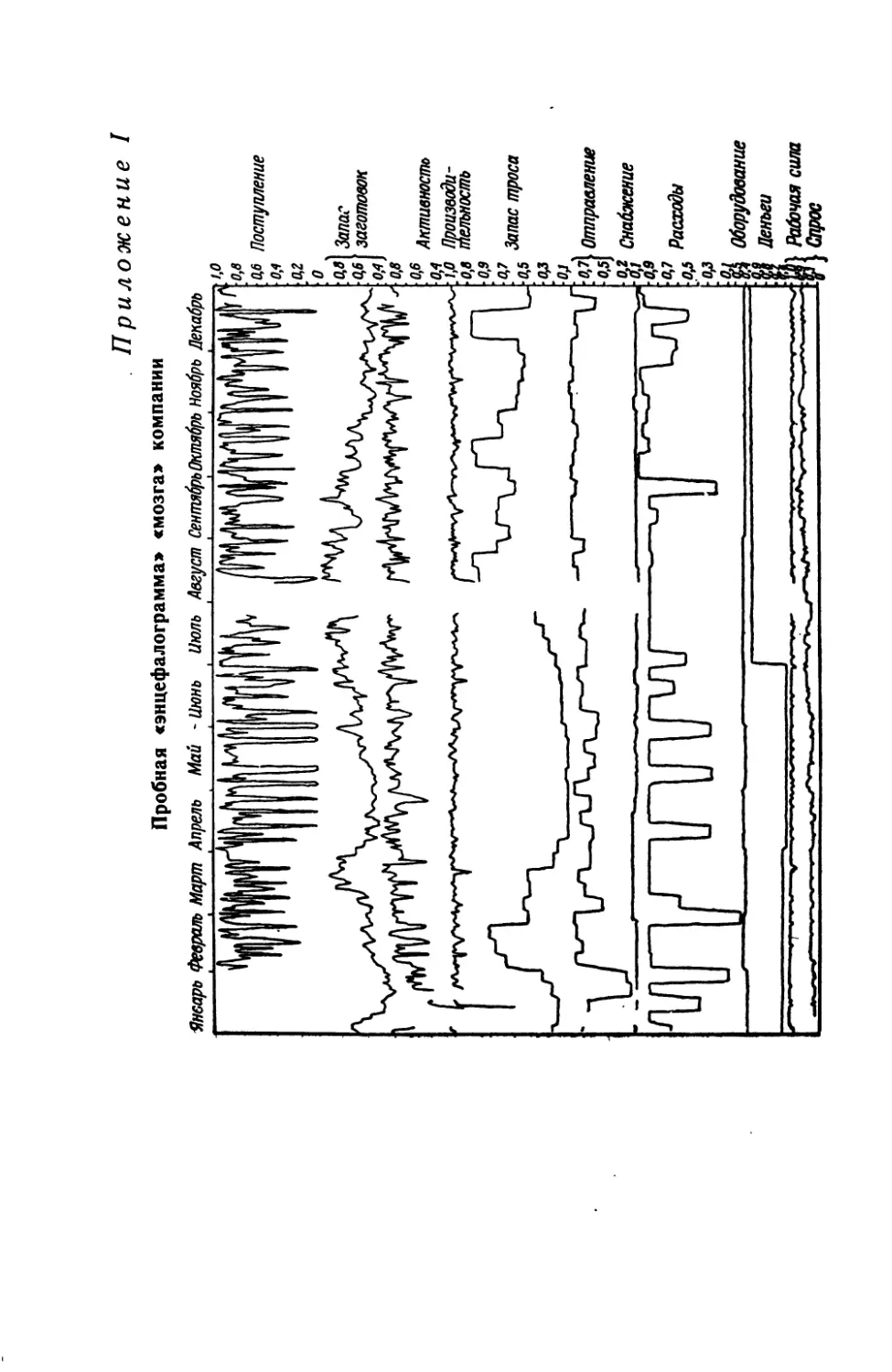
Во второй группе Бир открывает обсуждение общих
проблем анализа сложных систем рассмотрением «элек-
троэнцефалограммы» одного из крупнейших английских
сталелитейных заводов. В четырех статьях этой группы
представлен ряд «стратегий» для подхода к изучению
сложных систем.
Наиболее тесно связаны между собой, пожалуй,
статьи, объединенные в третью группу. Эти пять работ
вполне можно рассматривать как монографию по инте-
реснейшему вопросу: какие структуры делают сложные
системы нечувствительными («иммунными») к ошибкам
любого вида? В качестве дополнительной награды чита-
тель получает чрезвычайно ясное изложение проблемы
многозначных логик (Коуэн). То, что эта проблема дол-
1) Статья Дж. Тули, посвященная успехам микроминиатюриза-
ции, исключена из русского перевода ввиду того, что она в на-
стоящий момент явно устарела. — Прим, ред.
Введение IS
жна была возникнуть на симпозиуме, посвященном прин-
ципам самоорганизации, становится совершенно ясным
после ознакомления с соображениями, постепенно раз-
виваемыми в предыдущих статьях.
Эволюция и опыт представляют собой процессы упо-
рядочивания на разных уровнях. Эволюция вырабаты-
вает те структуры, на которых затем может разверты-
ваться опыт. Четыре статьи четвертой группы охваты-
вают проблемы предварительной организации в самоор-
ганизующихся и познающих системах, начиная от су-
губо частных примеров и до весьма общих теорем. Если
бы время на конференции и место в этой книге были ме-
нее ограниченными, мы включили бы в качестве допол-
нения к работе Новикова по интегральной геометрии не-
которые из наших работ1) по использованию методов
дифференциальной геометрии для нахождения инвари-
антов в множестве стимулов.
Хотя только две статьи специально посвящены ком-
понентам и «технологии» самоорганизующихся систем
(пятая группа), мы полагаем, что объединение их в
особую группу вполне оправдано. Содержание этих ста-
тей и перспективы, которые они открывают для искус-
ственных нейронных сетей, значительны.
Теперь остается выразить признательность всем, кто
откликнулся на наше приглашение и столь великодушно
отдал свое время, энергию и воодушевление этому сим-
позиуму.
В особенности хочется поблагодарить Ст. Бира,
Дж. Баумена, Ф. Хэйека, У. Маккаллока и А. Рапопор-
та, взявших на себя труд председательства на различ-
ных обсуждениях — задачу, казавшуюся перед нача-
лом симпозиума безнадежной, а после его окончания —
невероятной, если учесть огромное количество информа-
ции, переработанной нами в течение каких-нибудь 36 ча-
сов.
9 Babcock М. L., Inselberg A., Lofgren L., von
Foerster Н., Weston Р., Zopf G. W., Jr., «Some principles of
preorganization in self organizing systems*, Tech. Rep. № 2, Contract
Nonr 1834 (21). Electr. Eng. Res. Lab., Eng. Exper. Stat., Univ.
Illinois, Urbana, Illinois, 1960.
2*
20 Введение
Я не могу закончить эти вводные слова, не воздав
должное д-ру М. С. йовитсу из Отдела информацион-
ных систем Управления военно-морских исследований
США, благодаря усилиям которого только и мог со-
стояться этот симпозиум.
С благодарностью мы отмечаем также дух сотрудни-
чества, проявленный во всех организационных вопросах
издателями этой книги, которые терпеливо ожидали ча-
стей рукописи, поступавших «через час по чайной лож-
ке», и выпустили книгу в таком привлекательном виде.
Г, фон Фёрстер
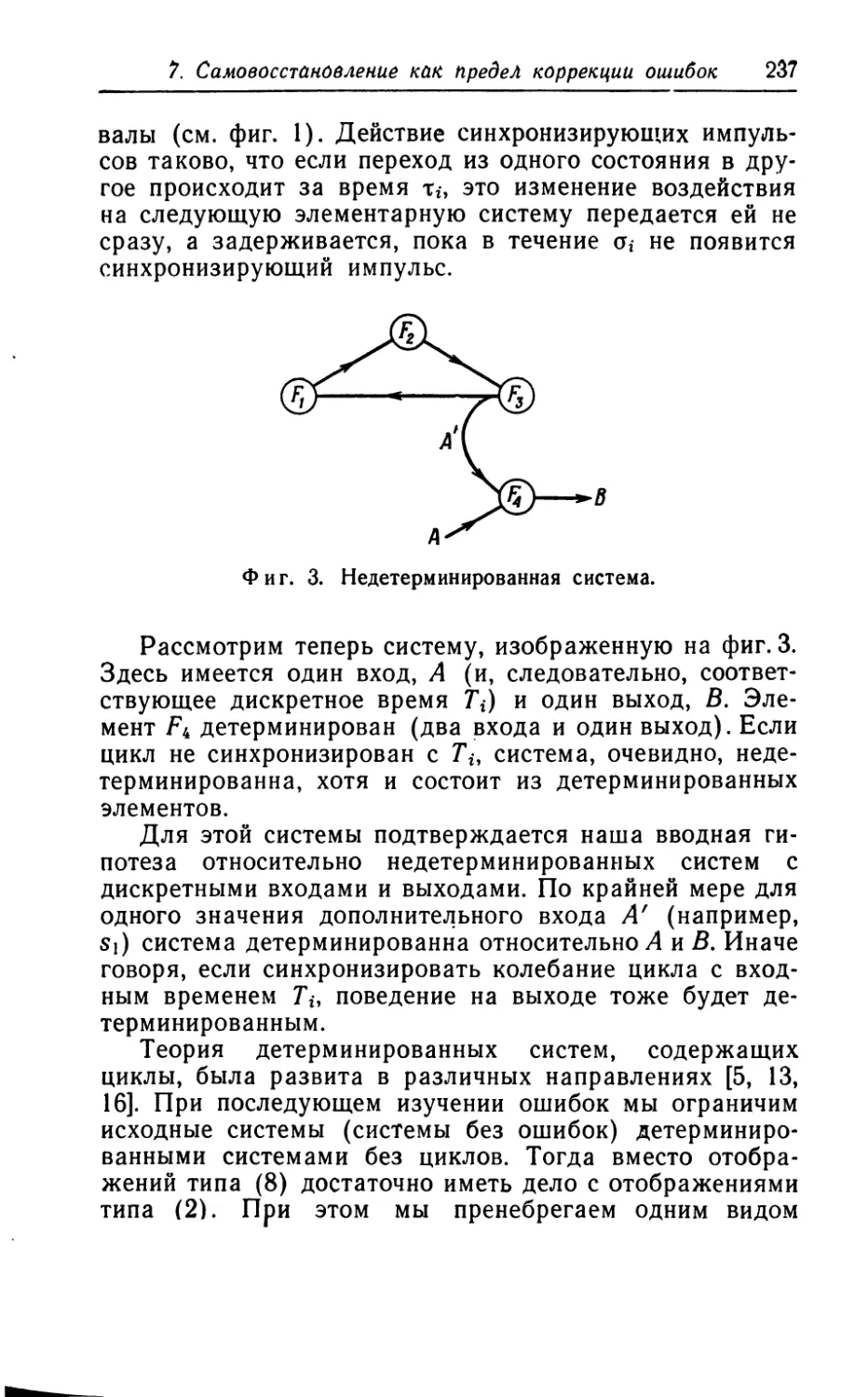
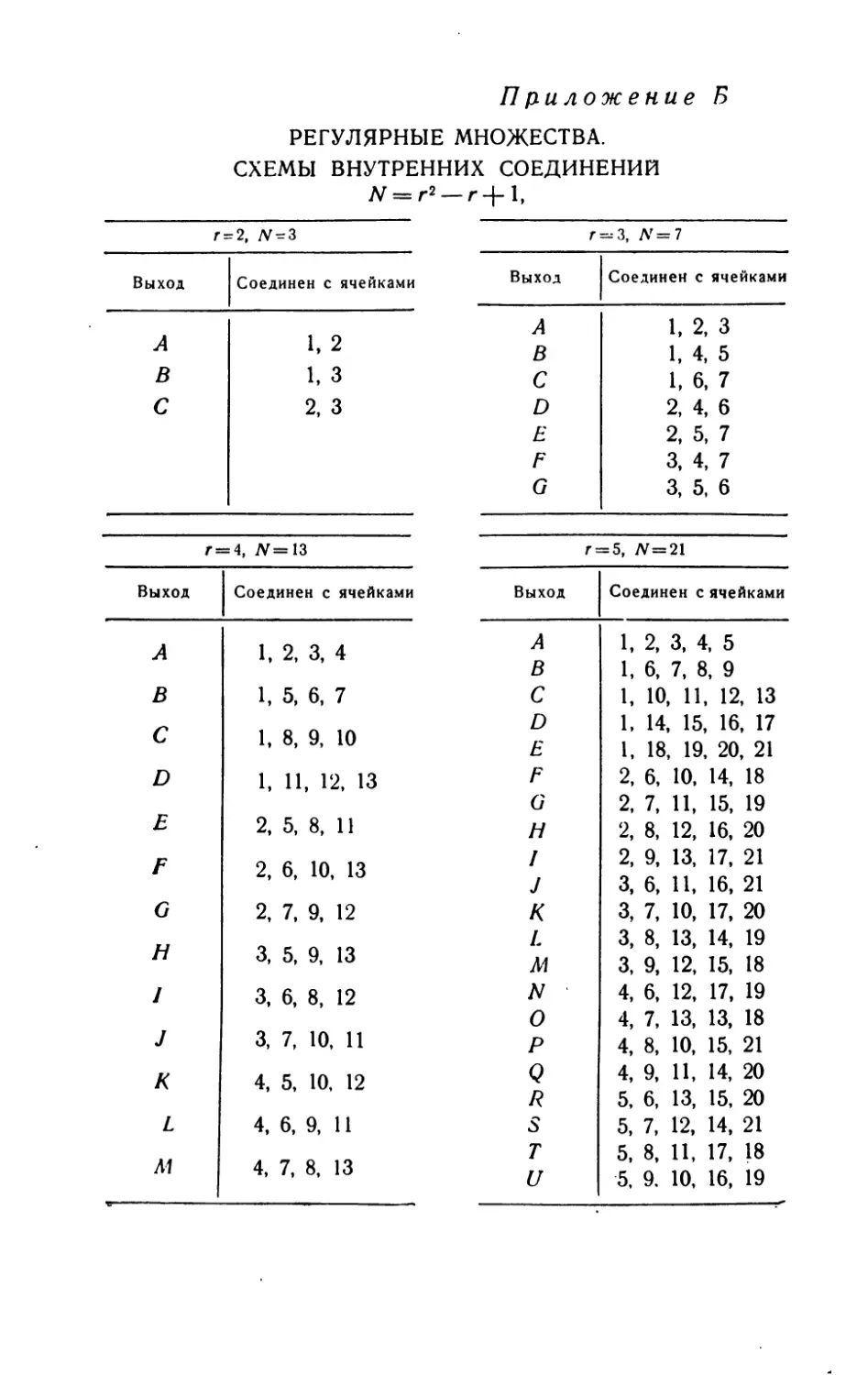
1. ЭКСПЕРИМЕНТАЛЬНОЕ ИССЛЕДОВАНИЕ ПАРАМЕТРОВ
САМООРГАНИЗАЦИИ В ГРУППАХ ИЗ ТРЕХ ИСПЫТУЕМЫХ
А. РАПОПОРТ
(Мичиганский университет)
1. ВВЕДЕНИЕ
Мы изложим здесь два эксперимента, проведенные с
группой из трех испытуемых. В каждом эксперименте
поведение группы описывалось определенными парамет-
рами. Некоторые из этих параметров могут служить по-
казателями того, до какой степени группа «самооргани-
зовалась» для более эффективного выполнения постав-
ленной ей задачи (в первом эксперименте) или для обе-
спечения «максимального выигрыша» всем испытуемым
(во втором эксперименте). Одна из целей этих экспери-
ментов как раз и состояла в отыскании таких «парамет-
ров самоорганизации». После того как такие параметры
выявлены, сами собой напрашиваются другие экспери-
менты для изучения зависимости этих параметров от
экспериментальных условий, состава группы и от других
контролируемых или наблюдаемых переменных.
2. ЭКСПЕРИМЕНТ НА ЗАПОМИНАНИЕ
В нашем первом эксперименте группа из трех испы-
туемых должна была научиться совместно реагировать
на каждый из некоторого множества стимулов, предъ-
являемых экспериментатором в очень быстрой последо-
вательности (с интервалами в несколько секунд). За-
дача была поставлена таким образом, что члены группы
могли разделить между собой функции хранения необхо-
димой для решения задачи информации, причем пред-
полагалось, что в процессе обучения они сообщали друг
Другу какие-то сведения. Если-бы испытуемые не обща-
лись во время эксперимента, группа также могла бы
выполнить задачу, но при этом каждому испытуемому
22
А. Рапопорт
пришлось бы запоминать всю информацию в полном
объеме. Иначе говоря, в этом случае информация, хра-
нимая отдельными членами группы, максимальным об-
разом перекрывалась бы. Напротив, когда вся информа-
ция свободно обращается внутри группы, «перекрытие»
хранимой информации вообще может свестись к нулю:
каждый член группы может хранить в памяти ровно од-
ну треть всей информации. Тогда фактическое совпаде-
ние (перекрытие) или, скорее, степень несовпадения хра-
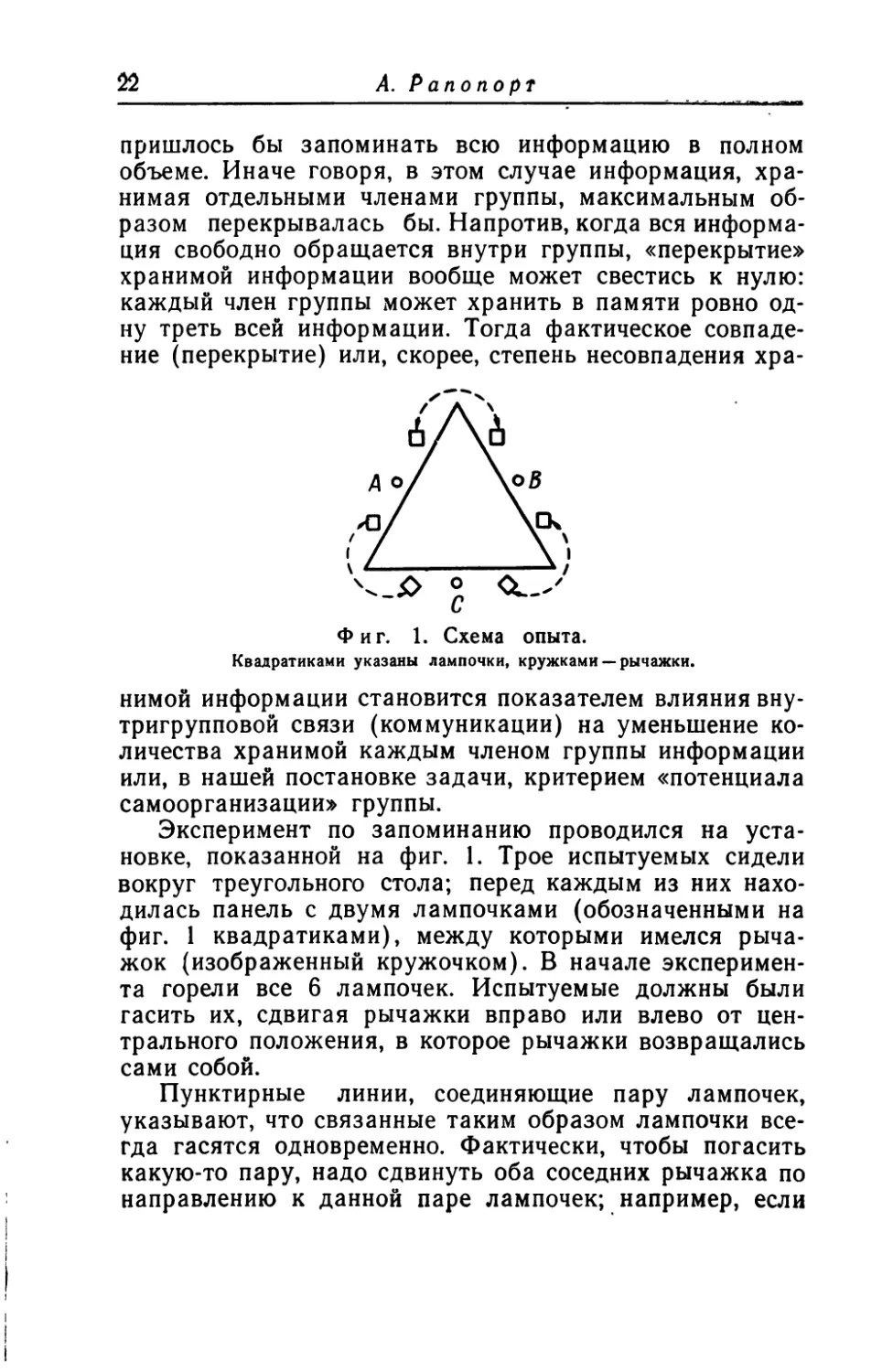
Фиг. 1. Схема опыта.
Квадратиками указаны лампочки, кружками —рычажки.
нимой информации становится показателем влияния вну-
тригрупповой связи (коммуникации) на уменьшение ко-
личества хранимой каждым членом группы информации
или, в нашей постановке задачи, критерием «потенциала
самоорганизации» группы.
Эксперимент по запоминанию проводился на уста-
новке, показанной на фиг. 1. Трое испытуемых сидели
вокруг треугольного стола; перед каждым из них нахо-
дилась панель с двумя лампочками (обозначенными на
фиг. 1 квадратиками), между которыми имелся рыча-
жок (изображенный кружочком). В начале эксперимен-
та горели все 6 лампочек. Испытуемые должны были
гасить их, сдвигая рычажки вправо или влево от цен-
трального положения, в которое рычажки возвращались
сами собой.
Пунктирные линии, соединяющие пару лампочек,
указывают, что связанные таким образом лампочки все-
гда гасятся одновременно. Фактически, чтобы погасить
какую-то пару, надо сдвинуть оба соседних рычажка по
направлению к данной паре лампочек; например, если
1. Параметры самоорганизации в группах из трех лиц 23
испытуемый А сдвигает свой рычажок влево и если в то
же время испытуемый В передвигает свой рычажок
вправо, пара ламп между А и В гаснет.
Отсюда следует, что порядок, в котором передви-
гаются рычажки, определяет и порядок, в котором гас-
нут лампочки. Существует 6 возможных порядков гаше-
ния трех пар лампочек. Назовем их А, В. Произ-
вольно перенумеруем порядки гашения цифрами 1,
2, ...» 6. Нахождение заданного соответствия между
порядками гашения и их номерами составляет одну за-
дачу, решаемую испытуемыми. В дальнейшем каждый
номер будет называться «опознаваемым числом» («tar-
get number»).
Считается, что группа «выучила» поставленную за-
дачу, если в ответ на каждую цифру, называемую экспе-
риментатором, испытуемые гасят лампы в порядке, со-
ответствующем данному «опознаваемому числу».
Обратная связь процесса обучения заключается в
словесном поощрении («правильно») и наказании («не-
правильно») после каждого ответа. Так как имеется 6!
перестановок из 6 цифр, то существует 720 возможных
задач. Отдельный опыт состоял в нашем случае из вось-
ми таких задач и процесс обучения считался закончен-
ным, когда группа испытуемых правильно реагировала
(т. е. гасила лампы в предписанном порядке) в ответ на
каждое опознаваемое число в каждой из восьми задач.
В нашем эксперименте мы на практических занятиях
разъяснили испытуемым устройство установки, так что
их задача состояла лишь в том, чтобы усвоить правиль-
ную ассоциацию между надлежащим образом коорди-
нированными движениями рычажков и соответствующим
им надлежащим опознаваемым числом. Результаты экс-
перимента представлены в виде суммарной кривой оши-
бок: по оси ординат откладывается суммарное число не-
правильных реакций, а по оси абсцисс — число предъ-
явлений стимулов. Очевидно, что все такие кривые мо-
нотонно возрастают и, ввиду того что ошибки к концу
обучения практически исчезают, кривая стремится к го-
ризонтальной асимптоте1).
!) На практике в большинстве случаев наблюдалась неболь-
шая остаточная случайная ошибка, на которую'вводилась поправка.
24
А. Рапопорт
Теоретическая кривая, выведенная из описанной ни-
же математической модели, приводилась в соответствие
с экспериментальными данными подбором двух свобод-
ных параметров. Один из них можно рассматривать как
показатель скорости накопления информации, а дру-
гой — как показатель эффективности внутригрупповой
связи («эффективность» — в смысле уменьшения на-
грузки на память для каждого испытуемого). Приводи-
мые ниже определения и рассуждения пояснят смысл
этих интерпретаций.
Допустим, что совокупностью номеров порядков га-
шения А, В, , F с a priori равной вероятностью яв-
ляется любая перестановка шести цифр 1, 2, ..., 6, на-
хождение которой и составляет одну определенную за-
дачу. Тогда решение этой задачи состоит в выборе од-
ной из 720 перестановок. Так как априорная вероят-
ность такого выбора равна 1/720, начальная энтропия
задачи равна log2 720 = 9,5 бит. Поскольку задачи вы-
бираются независимо, общая энтропия опыта равна
8X9,5 = 76 бит.
Обозначим эту теоретическую энтропию через/7*. Ког-
да обучение полностью закончено, реакция на каждое «опо-
знаваемое число» однозначно определена. Следовательно,
конечная энтропия задачи равна 0, так что группа испы-
туемых при этом использовала 76 бит информации.
Пусть на промежуточной стадии процесса обучения
еще имеется какая-то остаточная энтропия, меньшая
/7* (поскольку правильные ответы теперь даются с ча-
стотой, превышающей случайную). Обозначим эту оста-
точную энтропию через U(t), где t — число предъявлен-
ных стимулов на этой стадии. В общем случае {/(/)—
монотонно убывающая функция от t. Поэтому функция
h(t) = H*— U(t) (1)
представляет собой количество информации, накоплен-
ное группой за «время» t (время здесь измеряется чис-
лом предъявленных стимулов).
Наша математическая модель строится на следую-
щих двух допущениях:
1) скорость накопления информации (приращение
информации на одну ошибку) постоянна;
1. Параметры самоорганизации в группах из трех лиц 25
2) остаточная энтропия всегда равномерно распре-
делена между всеми «опознаваемыми числами».
Обозначим полное число ошибок, сделанных за вре-
мя t, через w(t). Тогда наше первое допущение может
быть записано в следующем виде:
= k (const). (2)
Поскольку w(t) — полное число ошибок, величина
может быть принята за вероятность ошибки в момент t.
Поэтому 1 —-^- представляет собой вероятность пра-
вильной реакции в момент t. Тогда наше второе допуще-
ние принимает вид
- г/(о=лг1п(1 - (3)
где М — число различных стимулов во всем опыте1).
Для удобства вычислений мы оперируем здесь с нату-
ральными логарифмами. Тогда наша единица инфор-
мации будет называться «нит» («натуральный бит»;
1 бит=\п2 нит).
Замечание. Уравнение (3) записано на основа-
нии допущения о том, что остаточная энтропия равно-
мерно распределена среди всех М стимулов. Но при де-
тальном исследовании реакции обнаруживается, что это
допущение ложно. Некоторые правильные ответы уста-
навливаются уже в самом начале обучения. Следова-
тельно, эти ответы фиксируются, и мы уже не можем
утверждать, что остаточная энтропия распределена рав-
номерно. Однако наше допущение становится значи-
тельно более оправданным при усреднении результатов
по нескольким группам испытуемых, ибо в различных
группах правильные реакции обычно устанавливаются
в другом порядке. Кроме того, уравнение (3) в любом
случае является хорошей аппроксимацией действитель-
ной остаточной энтропии реакций, принимая во внима-
ние значительные флуктуации вероятностей правильных
!) Непонятно, откуда автор получил выражение для энтропии
(3)fBo всяком случае, оно не удовлетворяет начальным условиям
(/=0, U=H*).— Прим, перев.
26
А. Рапопорт
реакций для различных стимулов. В приводимых нами
данных проведено усреднение результатов по несколь-
ким группам; поэтому мы надеемся, что использование
допущения 2 достаточно оправдано.
Интегрируя (2) и налагая начальное условие
®(0) = 0, имеем
h = k-w; (4)
тогда из уравнений (1), (3) и (4) получаем
*да=Я»+Л11п(1—(5)
Потенциирование этого уравнения дает
( kw—н* \ , dw
(6)
Это дифференциальное уравнение легко интегрируется.
Полагая •а/(0) = 0, окончательно получаем формулу
= (7)
представляющую собой уравнение нашей теоретической
суммарной кривой ошибок.
Здесь величина Л4 — общее число различных стиму-
лов — определяется в ходе эксперимента (в нашем слу-
чае М — 6X8 = 48), а общая энтропия Я*, как мы уже
видели, вычисляется теоретически. Поэтому свободным
параметром в этом уравнении является только пара-
метр k. который подбирается так, чтобы теоретическая
кривая как можно ближе соответствовала эксперимен-
тальным данным.
Однако раньше мы говорили о двух свободных пара-
метрах. За второй параметр может быть принята общая
энтропия опыта. Этот шаг становится понятен в свете
следующих рассуждений. Предположим, что мы пы-
таемся подогнать кривую, определенную уравнением
(7), к экспериментальным данным, т. е. к суммарной
кривой ошибок. Мы фиксировали начальный момент при
0,(0)= 0, что, конечно, соответствует нашим данным.
Из (7) получаем
(8)
/. Параметры самоорганизации в группах из трех лиц 27
Отсюда где значение Я* вычислено теорети-
чески, a W получено из эксперимента как суммарное
число ошибок. Таким образом, теоретическая асимптота
совмещается с асимптотой экспериментальной кривой.
Остается проверить, совпадают ли остальные точки. Не
рассматривая пока случая, когда промежуточные экспе-
риментальные точки располагаются как выше, так и ни-
же теоретической кривой, выведем следствия для сле-
дующих гипотетических случаев:
Случай 1. Все экспериментальные точки располо-
жены ниже теоретической кривой.
Случай 2. Все экспериментальные точки располо-
жены выше теоретической кривой.
Допустим, что общей энтропией всего опыта является
не фиксированная, теоретически вычисленная неопреде-
ленность Я*, а некий свободный параметр Я. Из ура-
внения (7) легко показать, что
(Hhw) °’ <9)
т. е. если асимптотическое значение W фиксировано и
допускается значение Я, большее, чем Я*, вся теорети-
ческая кривая сдвигается вверх, и наоборот. Поэтому,
допуская, что существуют значения общей энтропии Я,
большие или меньшие, чем теоретически вычисленное
значение Я*, можно «подогнать» теоретическую кривую
так, чтобы получить более точное соответствие с экспе-
риментальными данными при условии, что все экспери-
ментальные точки лежат выше или ниже теоретической
кривой.
Раскроем теперь смысл «значений Я, больших или
меньших, чем Я*». Ясно, что значения Я, меньшие, чем
Я*, брать нельзя, ибо теоретически вычисленное значе-
ние Я* является присущей эксперименту энтропией, т. е.
минимально допустимой энтропией. Отсюда следует, что
если все экспериментальные точки ложатся ниже теоре-
тической кривой, определяемой этим минимальным зна-
чением Я*, наша модель должна быть отвергнута.
Совсем иначе обстоит дело, если экспериментальные
точки лежат над теоретической кривой. Выбор значений
28
А. Рапопорт
H, больших, чем Я*, не противоречит нашей модели. Эти
большие значения можно истолковать как указание на
то, что испытуемые не распознали содержащейся в за-
даче избыточности и поэтому вынуждены были исполь-
зовать больше информации, чем это соответствует вну-
тренне присущей данной задаче энтропии Н*.
Но возможна и такая интерпретация: каждый член
группы в среднем использовал больше, чем 7з общей ин-
формации, следовательно, общая накопленная информа-
ция больше, чем присущая эксперименту энтропия.
Мы склоняемся к последней интерпретации. Как мы
увидим ниже, этот избыток накопленной информации
является следствием неполного использования внутри-
групповых связей, а следовательно, и неиспользования
возможности уменьшения до минимума индивидуальной
«памяти» каждого испытуемого.
Определим критерий эффективности следующим об-
разом:
<10>
Тогда, если Н принимает свое минимальное значение
Я*, имеем £=!, а когда Я = ЗЯ*, т. е. когда каждый
член группы хранит в своей памяти всю информацию,
Е = 0. Для всех промежуточных значений Н величина Е
представляет собой некоторую дробь, которую можно
рассматривать как показатель эффективности обучения.
Покажем, что каждый член группы, правильно реа-
гируя на опознаваемые числа, сообщает эксперимента-
тору столько же информации, сколько и целая группа.
Это означает, что по движениям рычажка одного пра-
вильно реагирующего испытуемого можно однозначно
определить движения рычажков остальных членов
группы.
Рассмотрим схему последовательности движений ры-
чажков, гасящих лампочки в определенном порядке, за-
данном данным опознаваемым числом в некоторой
задаче (фиг. 2). Три столбца изображенной на этом ри-
сунке таблички (матрицы) соответствуют трем моментам
времени. Строки матрицы соответствуют трем членам
группы. Символы R и L обозначают движения рычажка
1. Параметры самоорганизации в группах из трех лиц 29
вправо (Right) и влево (Left). Символ X означает, что
в данный момент времени позиция соответствующего
рычажка не существенна (так как оба других члена
группы гасят расположенные между ними лампы).
В данном примере сначала гасятся лампы между А
и В, затем — между А и С и, наконец, между В и С.
Следует, однако, отметить, что последовательность дви-
жений каждого испытуемого единственна для каждого
опознаваемого числа. Действительно, существуют 6 та-
ких последовательностей, а именно: LRX. LXR, XLR,
RLX, RXL и XRL. Отсюда следует, что в предложенной
задаче последовательность движений каждого игрока
полностью представляет заданное опознаваемое число,
и, таким образом, в этой последовательности содержится
вся информация о действиях группы.
Однако из этого отнюдь не следует, что каждый игрок
должен хранить в своем мозгу всю информацию. Коли-
чество хранимой информации зависит от схемы, которой
пользуется группа для запоминания движений. Предпо-
ложим, что используется следующая схема: каждый
игрок запоминает в данной задаче те опознаваемые чис-
ла из 6 возможных, в которых он должен двигать ры-
чажок в первый и второй моменты времени. Исходя из
свойств симметрии, каждому члену группы нужно за-
помнить два таких опознаваемых числа. Выбор из 6 по
2 может быть осуществлен пятнадцатью различными
способами. Это означает, что каждый игрок по этой
схеме должен хранить log2 15=3,91 бит на задачу. Кро-
ме того, он должен помнить, в ответ на какое из двух
опознаваемых чисел ему следует сначала передвинуть
30
А. Рапопорт
рычажок влево (или вправо). Это дает еще 1 бит
информации, так что в целом получается 4,91 бит. Это-
го количества информации достаточно для решения за-
дачи, ибо при этом данный игрок может сигнализировать
направление движения рычажка тому партнеру, с кото-
рым он должен кооперироваться в первый момент вре-
мени, сообщая тем самым третьему игроку, что он в этот
момент ничего не должен предпринимать. Следователь-
но, действия всех членов группы логически вытекают
одно из другого и запоминать их нет необходимости.
Таким образом, по этой схеме каждый игрок для ре-
шения каждой задачи должен хранить 4,91 бит инфор-
мации. Это значительно меньше, чем 9,5 бит, содержа-
щихся в задаче, но значительно больше, чем 9,5/3 =
= 3,2 бит, которые нужно было бы хранить, если бы
информация, накопленная каждым из игроков, не пере-
крывалась.
Рассмотрим теперь другую схему, дающую более эф-
фективное распределение информации между испытуе-
мыми. Пусть каждый игрок запоминает те три опозна-
ваемых числа из 6, в которых его первым движением
является движение влево (или вправо). Это все, что
ему нужно помнить, так как сдвиг рычажка в другую
сторону производится, когда соответствующая лампочка
гаснет. Следовательно, движение рычажка не зависит
от хранимой информации, потому что члены группы со-
общают друг другу при помощи самой установки, когда
нужно сдвигать рычажок.
Так как сочетания из 6 по 3 дают двадцать различ-
ных вариантов, количество хранимой информации равно
log2 20 = 4,32 бит. Это меньше, чем 4,91 бит, требуемых
по предыдущей схеме, но все же больше, чем 3,32. Сле-
дует отметить, что в только что описанной схеме не тре-
буется запоминать направления первого движения, так
как три опознаваемых числа, которые нужно запомнить,
отличаются тем, что первое движение для них всегда
совершается влево (или вправо).
Мы видим, таким образом, что количество хранимой
каждым членом группы информации лежит в пределах от
Н*/3 до Н*, даже если использована вся избыточность,
содержащаяся в опыте. Избыток общей хранимой ин-
1. Параметры самоорганизации в группах из трех лиц 31
формации (в случае, когда,каждый игрок хранит боль-
ше, чем Н*1%) является следствием недостаточно эффек-
тивного разделения «памяти» между испытуемыми.
Замечание. В нашей теории не учитывается воз-
можная «утечка» хранимой информации, аналогичная
шуму в канале связи. Поэтому эффективность можно
приравнять пропускной способности канала. Очевидно,
что при наличии такой утечки перекрывание в распреде-
лении «памяти» среди членов группы становится весьма
полезным, ибо в этом случае они могут в нужный мо-
мент помогать друг другу.
Перейдем к результатам эксперимента. Использова-
лась следующая схема предъявлений стимулов: в ка-
ждой задаче шесть опознаваемых чисел предъявлялись
по три раза каждое в порядке натурального ряда чисел,
например 1, I, 1, 2, 2, 2, ..., 6, 6, 6 и т. д. В соответ-
ствии с каждой реакцией испытуемых экспериментатор
(видящий на отдельной панели то опознаваемое число,
которое соответствует действительным движениям ры-
чажков) выносит свое решение: «верно» или «неверно».
После предъявления опознаваемого числа восьмой за-
дачи все повторялось сначала, т. е. процесс шел цик-
лами. Каждый цикл содержал 6X3X8=144 предъявле-
ний стимулов и занимал около 30—60 мин. В типичном
случае обучение группы требовало от шести до десяти
циклов. Экспериментальными точками служили числа
ошибок, накапливающихся к концу каждого цикла.
Обозначим три реакции на каждое из трех повто-
ряющихся предъявлений опознаваемого числа соответ-
ственно как а-, Ь- и с-реакции. Суммарное число ошибок
для реакций каждого типа можно вычислить отдельно
или для всех типов совместно. При анализе эксперимен-
та исследовались кривые, проведенные только по точ-
кам, являющимся суммарными ошибками в а-реакциях
(a-кривые), и кривые, точки которых соответствуют сум-
марным ошибкам в а-, Ь- и с-реакциях (суммарная кри-
вая).
Однако описанная выше теория не рассматривает
особенностей последовательности предъявления стиму-
лов; это чрезвычайно грубая теория. Поэтому можно
ожидать, что, если теория в общем правильна, каждую
32
А. Рапопорт
из различных суммарных кривых можно аппроксимиро-
вать кривой, описываемой уравнением типа (7). Разу-
меется, при этом в каждом отдельном случае значения
Фиг. 3. Графическое представление данных табл. 1.
Получены следующие значения параметров: Л*=0,33; £'* = 0,17.
параметров, подбираемых для подгонки теоретической
кривой к фактическим данным, будут иными. Например,
значение параметра k, определяющего скорость накоп-
ления информации, зависит от обратной связи процесса
обучения. В a-кривых зарегистрированный сигнал об-
ратной связи (решение «верно» или «неверно») полу-
чается фактически по трем опытам, ибо каждой а-реак-
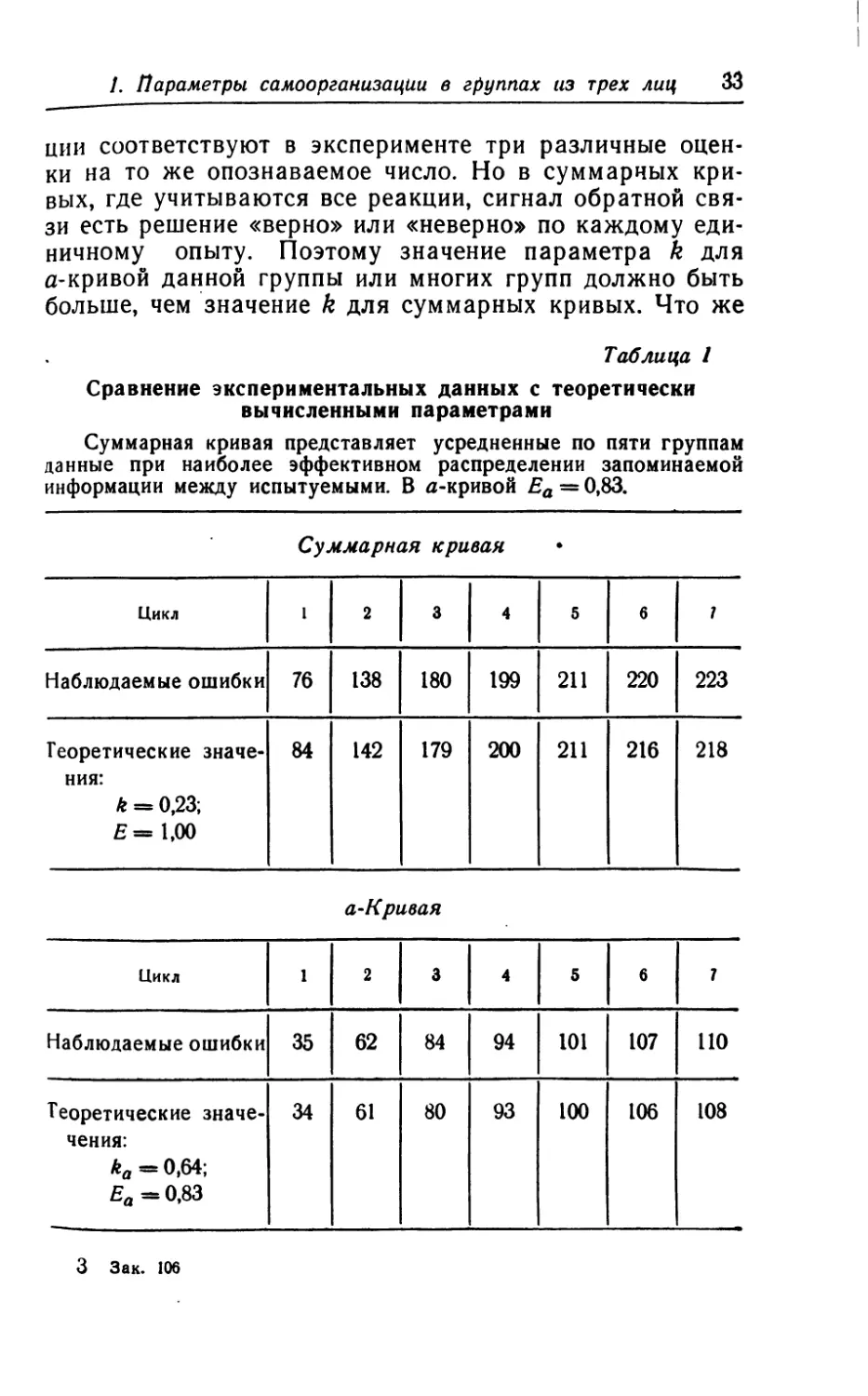
1. Параметры самоорганизации в группах из трех лиц 33
ции соответствуют в эксперименте три различные оцен-
ки на то же опознаваемое число. Но в суммарных кри-
вых, где учитываются все реакции, сигнал обратной свя-
зи есть решение «верно» или «неверно» по каждому еди-
ничному опыту. Поэтому значение параметра k для
a-кривой данной группы или многих групп должно быть
больше, чем значение k для суммарных кривых. Что же
Таблица 1
Сравнение экспериментальных данных с теоретически
вычисленными параметрами
Суммарная кривая представляет усредненные по пяти группам
данные при наиболее эффективном распределении запоминаемой
информации между испытуемыми. В д-кривой Еа = 0,83.
Суммарная кривая
Цикл 1 2 3 4 5 6 7
Наблюдаемые ошибки 76 138 180 199 211 220 223
Теоретические значе- ния: k = 0,23; Е= 1,00 84 142 179 200 211 216 218
а-Кривая
Цикл 1 2 3 4 5 6 7
Наблюдаемые ошибки 35 62 84 94 101 107 110
Теоретические значе- чения: ka = 0,64; Ед =0,83 34 61 80 93 100 106 108
3 Зак. 106
34
A. P a no no p t
касается параметра E, даваемого уравнением (10), то
следует ожидать, что его значение для a-кривой должно
быть меньше, чем для суммарной кривой, ибо а-кривая
дает количество ошибочных реакций при первом из трех
одинаковых предъявлений стимула, т. е. таких реакций,
в которых не использовались внутригрупповые связи.
Таким образом, следует ожидать, что значение па-
раметра k в a-кривой для группы или в усредненной
a-кривой для нескольких групп в данных условиях бу-
дет выше, чем для соответствующих суммарных кривых,
а значение Е для суммарной кривой будет выше, чем
для a-кривой. Обозначив параметры a-кривых индек-
сом а, введем следующие определения:
(11)
ка
И
(12)
Первый из введенных параметров, £*, может быть
интерпретирован как степень использования группой
обратной связи в процессе обучения (поощрения и нака-
зания, получаемые от экспериментатора) для исправле-
ния ошибок. Второй параметр, Е*, может рассматри-
ваться как степень использования внутригрупповых
связей для эффективного распределения общей памяти.
В табл. 1 и на фиг. 3 представлены выборочные дан-
ные экспериментов, проведенных в Институте психиат-
рии при Мичиганском университете.
3. ИГРЫ ТРЕХ ЛИЦ С НЕНУЛЕВОЙ СУММОЙ
В нашем втором эксперименте три члена группы
участвовали в ряде игр с ненулевой суммой, принадле-
жащих к типу, в котором все игроки выигрывают, если
они выбирают стратегии, обеспечивающие координацию
действий.
Платежная матрица каждой игры (за одним исклю-
чением, упоминаемым ниже) была составлена таким об-
разом, что для каждого игрока существовало «искуше-
ние» отступить от выгодной всему коллективу стратегии
1. Параметры самоорганизации в группах из трех лиц 35
в целях получения большего индивидуального выигрыша.
Назовем такого игрока «штрейкбрехером». Эта ситуация
лучше всего иллюстрируется типом игры двух лиц с не-
нулевой суммой, называемой «дилемма заключенного».
В этом классе игр каждый игрок может выбрать одну
из двух стратегий, названных стратегией сотрудничества
и стратегией состязания. Характерной чертой этих игр
является то обстоятельство, что один штрейкбрехер воз-
награждается (добивается преимущества по сравнению
с тем выигрышем, который он получил бы, следуя кол-
лективной стратегии), но если оба игрока выступают в
роли штрейкбрехеров, то они оба наказываются. Обоб-
щая этот принцип на игры с тремя участниками, полу-
чаем следующие варианты:
Тип I. Один штрейкбрехер вознаграждается, два —
тоже вознаграждаются.
Тип II. Один штрейкбрехер вознаграждается, два —
наказываются.
Тип III. Один штрейкбрехер наказывается, два —
вознаграждаются.
Чтобы сохранить основные черты «дилеммы», во всех
трех типах игр по меньшей мере один случай «штрейк-
брехерства» должен вознаграждаться, но «штрейк-
брехерство» всех трех игроков, разумеется, должно на-
казываться. Существует, однако, другой интересный
класс игр, в котором вознаграждается как единодушное
«штрейкбрехерство» всех игроков, так и единодушное их
сотрудничество. В этом случае, очевидно, нельзя гово-
рить о «штрейкбрехерстве», а имеется ситуация, в кото-
рой вознаграждается всякий единодушный выбор, и
группе предстоит только решить (при отсутствии внутри-
групповых связей), какой из вариантов соглашения пред-
почесть [1]. Поэтому мы включили в эксперимент один
пример такой игры, а именно:
Тип IV. Один штрейкбрехер наказывается, два —
тоже наказываются, три — вознаграждаются.
Как и в игре типа «дилемма заключенного», един-
ственный способ выиграть за длительное время игры
заключается в объединении с другими игроками и вы-
работке общей стратегии сотрудничества для каждого
3*
36
А. Рапопорт
типа игры. (В игре типа IV стратегией сотрудничества
считается любая единодушно выбранная стратегия.) Та-
ким образом, перед группой стоит задача самоорганиза-
ции. Если внутригрупповая связь разрешена, самоорга-
низация, по-видимому, может быть достигнута откры-
тым соглашением (сговором). Но если общение между
игроками не допускается, такой сговор может быть
только безмолвным. В этом случае каждый игрок дол-
жен безоговорочно доверять своим двум партнерам, ве-
рить, что они в свою очередь будут так же полагаться на
него и друг на друга и не поддаваться искушению преус-
петь за счет других, изменив стратегии сотрудничества.
В нашем эксперименте испытуемых отделили друг от
друга, запретив им обмениваться информацией во время
игры. В предварительной беседе им рассказали, каким
образом коллективный выбор одной из двух кнопок
(правой или левой) воздействует на все три платежа
в каждой из 8 игр. Каждый игрок имел перед собой пла-
тежную матрицу, которую он мог изучать в течение
получаса во время предварительной беседы и трениро-
вочных опытов.
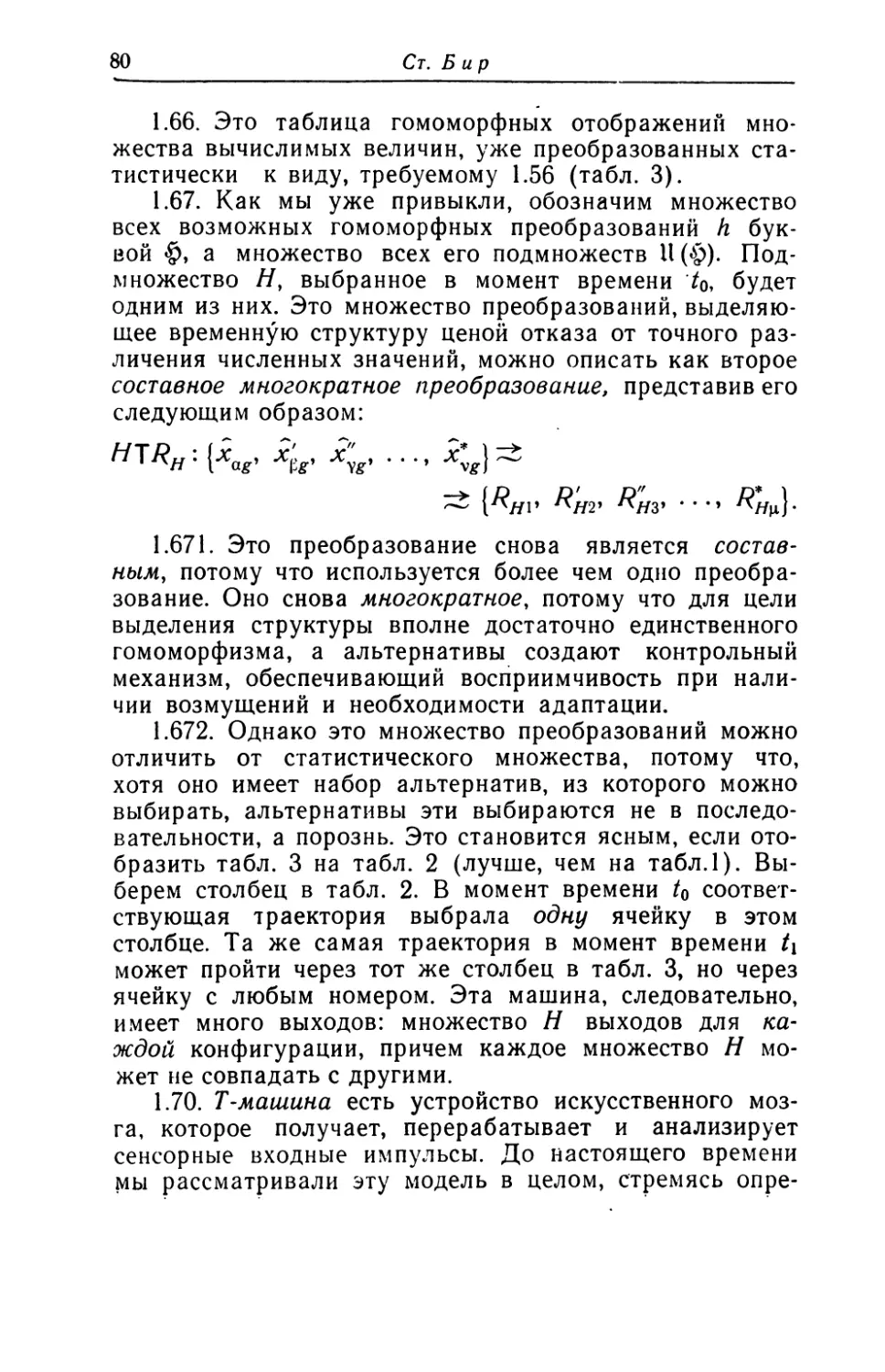
В каждом опБгге на демонстрационной доске, кото-
рую могли видеть все игроки, появлялся номер очеред-
ной игры. Испытуемым предоставлялось 6 сек для того,
чтобы сделать выбор. После того, как нажимались все
три кнопки, на доске появлялись платежи для всех игро-
ков, причем выигрыши и проигрыши каждого добавля-
лись к соответствующим нарастающим итогам плате-
жей, которые также были доступны для всеобщего обо-
зрения. Итог выплачивался деньгами из расчета 0,1 цен-
та за очко.
В каждом эксперименте каждая из 8 игр проводи-
лась 150 раз; всего было сыграно 1200 игр (что заняло
около 6 час). Игры проводились в случайном порядке,
определяемом таблицей случайных чисел, несколько ви-
доизмененной лишь с тем, чтобы уравнять общие часто-
ты для каждой из 8 игр. Платежная матрица экспери-
мента приведена в табл. 2.
Всего в эксперименте участвовало 16 групп по 3 че-
ловека в каждой. В одной из групп (№ 18) испытуемым
не разрешалось общаться даже во время перерыва.
Таблица 2
Платежи игрокам Д, В и С при выборе каждым из них правой (R) или левой (L) кнопки
в различных играх
А в с Игра I, тип 1 Игра II. тип 2 Игра III, тип 3 Игра IV, тип без состязания Игра V, тип 1 Игра VI, тип 2 Игра VII, тип 3 Игра VIII, тип 2
А в с Д в с А в с Д в с д в с А В с Д в с А в с
R R R —1 —1 —1 1 1 1 —1 —1 —1 1 1 1 1 1 1 —2 —2 —2 1 1 1 —2 —2 3
R R L 2 2 —2 2 —2 6 2 2 —2 0 0 —1 —1 —1 3 —1 —1 1 1 1 —1 1 1 1
R L R 2 —2 2 —2 6 —2 2 —2 2 0 —1 0 —1 3 —1 —1 1 —1 1 —1 1 1 —2 —2
R L L 3 —2 —2 1 —2 —2 —2 1 1 —1 0 0 —1 2 2 6 —1 —1 —3 3 3 —2 3 -2
L L L 1 1 1 —1 —1 —1 1 1 1 1 1 1 —2 —2 —2 1 1 1 —2 —2 —2 —2 —2 1
L L R —2 —2 3 —2 —2 1 1 1 —2 0 0 —1 2 2 —1 —1 —1 6 3 3 —3 —1 —1 -1
L R L —2 3 —2 —2 • 1 —2 1 —2 1 0 —1 0 2 —1 2 —1 6 —1 3 —3 3 3 —2 —2
L R R —2 2 2 6 —2 —2 —2 2 2 —1 0 0 3 —1 —1 1 —1 —1 —1 1 1 —2 1 —2
38
А. Рапопорт
В остальных 15 группах испытуемые могли разговари-
вать друг с другом только в перерывах. Испытуемым не
делалось никаких предложений о возможности достиже-
ния соглашения относительно стратегии в играх после
перерыва.
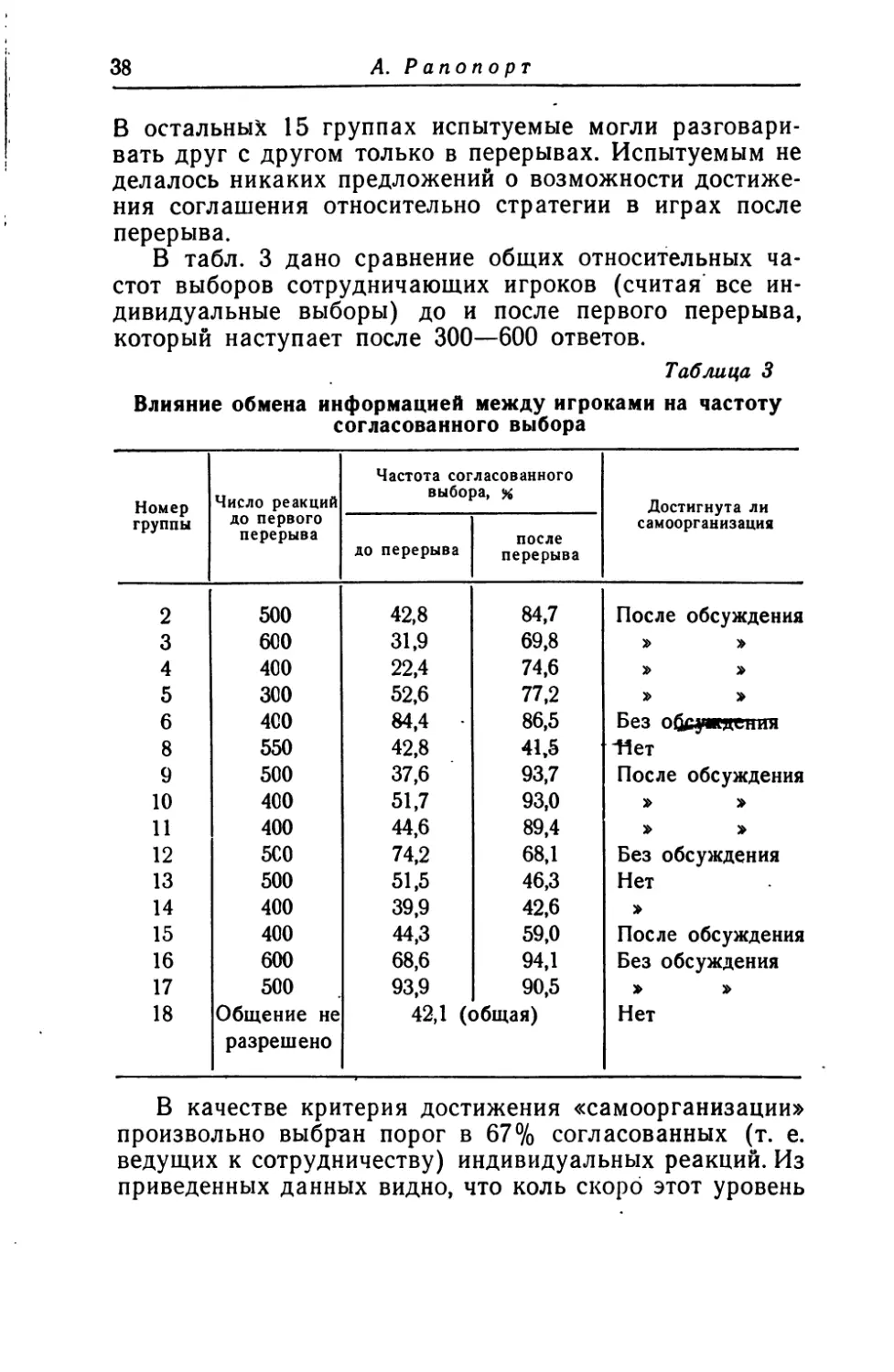
В табл. 3 дано сравнение общих относительных ча-
стот выборов сотрудничающих игроков (считая все ин-
дивидуальные выборы) до и после первого перерыва,
который наступает после 300—600 ответов.
Таблица 3
Влияние обмена информацией между игроками на частоту
согласованного выбора
Номер группы Число реакций до первого перерыва Частота согласованного выбора, % Достигнута ли самоорганизация
до перерыва после перерыва
2 500 42,8 84,7 После обсуждения
3 600 31,9 69,8 » »
4 400 22,4 74,6 » »
5 300 52,6 77,2 » >
6 400 84,4 86,5 Без обсуждения
8 550 42,8 41,5 "Нет
9 500 37,6 93,7 После обсуждения
10 400 51,7 93,0
11 400 44,6 89,4
12 5С0 74,2 68,1 Без обсуждения
13 500 51,5 46,3 Нет
14 400 39,9 42,6
15 400 44,3 59,0 После обсуждения
16 600 68,6 94,1 Без обсуждения
17 500 93,9 90,5
18 Общение не разрешено 42,1 (общая) Нет
В качестве критерия достижения «самоорганизации»
произвольно выбран порог в 67% согласованных (т. е.
ведущих к сотрудничеству) индивидуальных реакций. Из
приведенных данных видно, что коль скоро этот уровень
/. Параметры самоорганизации в группах из трех Лиц 39
достигается, он обычно существенно превосходится.
В 15-й группе порог в 67% правильных реакций не был
достигнут, но исследование хода опыта показывает, что
на самом деле после перерыва была достигнута полная
кооперация игроков, которая, однако, распалась к концу
опыта, в результате чего средняя частота правильных
реакций оказалась ниже критерия.
Усредняя частоты реакции до и после перерыва, по-
лучаем 51% согласованных реакций до перерыва и
74% —после. В аналогичной работе М. Дейтча [2] для
игры двух лиц с ненулевой суммой указаны цифры 36
и 70% для случаев, когда игрокам соответственно не
разрешалось и разрешалось общаться между собой,
причем игроков настраивали на «индивидуалистический
лад», т. е. на достижение максимума их индивидуаль-
ных выигрышей. Данные усреднялись по 8100 реакциям
до перерыва и почти по вдвое большему числу после
перерыва. Выборка Дейтча, полученная из одного экс-
перимента, намного меньше по объему. Поэтому сравне-
ние данных не заслуживает особого доверия. Однако,
если полученные различия имеют объективный смысл,
следует сделать вывод, что в нашем эксперименте на-
блюдалась большая склонность к сотрудничеству, чем
в экспериментах Дейтча.
Наблюдаемую большую тенденцию к сотрудничеству
в игре трех партнеров можно приписать либо какой-то
характерной черте самой игры, либо большей продолжи-
тельности наших опытов. Обе гипотезы кажутся разум-
ными. Вполне вероятно, что в игре с тремя партнерами
дух соперничества не проявляется столь резко, как это
происходит в игре двух лиц, но может и оказаться, что
длительный опыт наказаний за нежелание сотрудничать
вынуждает игроков искать выход из тупика, чего не
наблюдается при сравнительно более коротких опытах.
Займемся теперь поисками критерия большего или
меньшего стремления к сотрудничеству в таких играх.
Исследование относительных частот согласованного вы-
бора показывает, что эти частоты значительно меняются
от игры к игре и что порядок, в котором можно распо-
ложить игры в соответствии с частотами согласованного
выбора, приблизительно одинаков для всех 16 групп.
40
А. Рапопорт
Поэтому для всех 7 игр с состязанием можно найти та-
кой числовой показатель, который был бы строго корре-
лирован с частотой согласованного выбора1).
Мы постулировали следующие критерии:
Критерий 1 (ожидаемые выигрыши). Если каж-
дый игрок рассматривает каждую игру как выбор ме-
жду двумя простыми играми, каждая из которых имеет
4 равновероятных исхода (связанных с четырьмя воз-
можностями для орт^льных двух игроков), то с каж-
дым выбором связан некоторый ожидаемый выигрыш.
Если теперь игрок сравнивает выигрыш, который ему
дает «штрейкбрехерство», с ожидаемым выигрышем при
сотрудничестве, то преимущество, получаемое при
штрейкбрехерстве, дает выигрыши, показанные в табл. 4.
Таблица 4 Преимущество, получаемое от «штрейкбрехерства» по срав- нению с сотрудничеством Таблица 5 Среднее преимущество над честно играющими игроками
Игра Ожидаемый выигрыш Игра Ожидаемый выигрыш
1 11 1 4,5
V 7 V 3,5
II, VII 3 11, VI 2,5
VII 2,0
VI 2 VIII 1,0
III, VIII 0 III 0,5
Критерий 2 (преимущество перед другими игро-
ками). Отступая от стратегии сотрудничества, игрок не
знает, как будут вести себя другие партнеры. Предполо-
жим, что он вычисляет преимущество (разность очков),
которое ему даст штрейкбрехерство над честно играю-
щим партнером, усредняя это преимущество по двум
’) Как уже указывалось, игра типа IV — игра без состязания.
Здесь сразу устанавливается единодушный выбор, который впо-
следствии уже не меняется. Поэтому в данной работе исследование
этой игры не представляет интереса.
1. Параметры самоорганизации в группах из трех лиц 41
возможным ситуациям, когда остальные игроки все сле-
дуют стратегии сотрудничества или когда еще один иг-
рок, кроме него, является штрейкбрехером. (Если все
три игрока становятся штрейкбрехерами, преимущество
исчезает, ибо в этом случае все платежи равны.) В табл.5
указан порядок, в котором можно расположить игры в
соответствии с этим критерием.
Очевидно, что можно применить и сравнить много
других критериев. Однако мы ограничимся сравнением
результатов с помощью показателей, полученных из
этих двух критериев. Откладывая по оси абсцисс пока-
затели для каждого из этих критериев, а по оси орди-
нат— наблюдаемые частоты согласованного выбора,
усредненные по 16 группам, получаем графики, изобра-
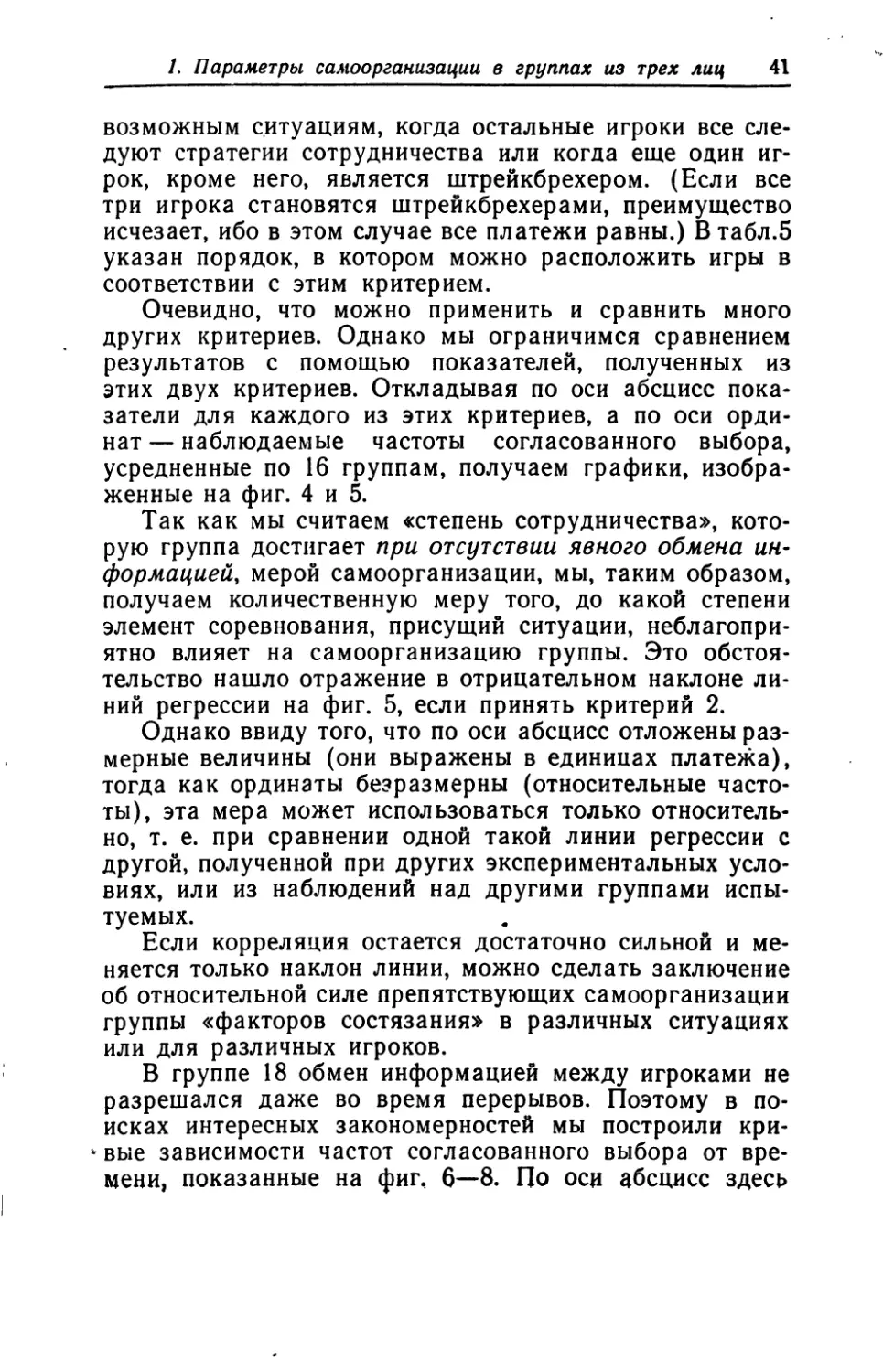
женные на фиг. 4 и 5.
Так как мы считаем «степень сотрудничества», кото-
рую группа достигает при отсутствии явного обмена ин-
формацией, мерой самоорганизации, мы, таким образом,
получаем количественную меру того, до какой степени
элемент соревнования, присущий ситуации, неблагопри-
ятно влияет на самоорганизацию группы. Это обстоя-
тельство нашло отражение в отрицательном наклоне ли-
ний регрессии на фиг. 5, если принять критерий 2.
Однако ввиду того, что по оси абсцисс отложены раз-
мерные величины (они выражены в единицах платежа),
тогда как ординаты безразмерны (относительные часто-
ты), эта мера может использоваться только относитель-
но, т. е. при сравнении одной такой линии регрессии с
другой, полученной при других экспериментальных усло-
виях, или из наблюдений над другими группами испы-
туемых.
Если корреляция остается достаточно сильной и ме-
няется только наклон линии, можно сделать заключение
об относительной силе препятствующих самоорганизации
группы «факторов состязания» в различных ситуациях
или для различных игроков.
В группе 18 обмен информацией между игроками не
разрешался даже во время перерывов. Поэтому в по-
исках интересных закономерностей мы построили кри-
* вые зависимости частот согласованного выбора от вре-
мени, показанные на фиг, 6—8. По оси абсцисс здесь
Частота согласованного выбора * Частота согласованного выбора
иг. 4. Зависимость частоты согласованного выбора от показа*
теля успеха для критерия 1.
Фиг. 5. Зависимость частоты согласованного выбора
от показателя успеха для критерия 2,
1. Параметры самоорганизации в группах из трех лиц 43
отложены периоды времени по 200 реакций в каждом.
При этом можно отметить следующее.
Только в игре III достигнуто почти полное сотруд-
ничество даже при отсутствии обмена информацией.
Фиг. 6. Зависимость частоты согласован-
ного выбора от времени в играх I, III и V.
Игра III имеет самый низкий показатель по обоим кри-
териям и, следовательно, побуждает к максимальному
сотрудничеству. В остальных играх (кроме VII) всю-
ду наблюдается характерный .U-образный график за-
висимости частоты правильных реакций от времени.
Время, периоды
Фиг. 7. Зависимость частоты согласованного
выбора от времени в играх II и VI.
Фиг. 8. Зависимость частоты согласованного
выбора от времени в играх VII и VIII.
/. Параметры самоорганизации в группах из трех лиц 45
Следовательно, частота правильных реакций обычно
уменьшается в течение большей части эксперимента, но
увеличивается к его концу. Однако в игре VII этого
увеличения не наблюдается.
Так как в группах 8, 13 и 14 сотрудничество между
игроками вообще не было достигнуто, интересно было
исследовать графики зависимости частоты согласован-
ных ответов от времени в опытах с этими группами, что-
бы установить, присущи ли им особенности, характерные
для группы 18. Однако в этих графиках не было обна-
ружено ни характерного начального наклона, ни после-
дующего подъема кривых. Имевшиеся флуктуации ча-
стот согласованных реакций по периодам были явно слу-
чайными во всех трех группах.
Однако один интересный результат, относящийся к
игре III, явился подтверждением нашей теории. Для всех
трех групп, для которых не было достигнуто сотрудниче-
ство в остальных играх, оно все же было достигнуто в
игре III, давшей для согласованных выборов соответ-
ственно результаты 98, 90 и 67% после первого пере-
рыва. Исследуя все ранние реакции, можно видеть, что
сотрудничество между игроками часто устанавливается
на отдельных этапах, показанных в табл. 6. Кроме того,
отметим тот факт, что только в игре III было достиг-
нуто молчаливое соглашение между игроками, причем
всеобщее сотрудничество достигнуто все же не было.
Резюмируя, можно сказать, что показателем самоор-
ганизации группы является ее способность к сотрудниче-
ству, т. е. желание членов группы противостоять искуше-
ниям штрейкбрехерства для получения большего лич-
ного выигрыша. Когда не разрешается обмен информа-
цией между игроками, сотрудничество обычно не дости-
гается— по крайней мере в первых 500 опытах. (Сле-
дует, однако, иметь в виду, что наши опыты состояли не
в повторении игры какого-то одного типа, а включали
несколько типов игр, сходных в общих чертах, но отли-
чающихся в деталях.) Но даже при отсутствии обмена
информацией самоорганизация была достигнута в 4 из
16 групп. Вместе с тем в трех из 16 групп самооргани-
зация не была достигнута, несмотря на то что обмен ин-
формацией был разрешен.
46
А. Рапопорт
Таблица 6
Достижение «молчаливого» соглашения в игре III
Номер группы Число опытов до первого перерыва Частота согласован- ного выбора в игре III, % Достигнуто ли устойчивое сотрудничество
2 500 57 Нет
3 600 35
4 400 16
5 300 91')
6 400 95 Да
8 550 52 Нет
9 500 39 »
10 400 67')
11 400 61
12 500 89 Да
13 500 811) Нет
14 400 54
15 400 85»)
16 600 74 Да
17 500 96
18 Общение 751) Нет
не разрешено
*) Случаи, где сотрудничество было достигнуто только в игре III.
В опытах, когда всеобщая самоорганизация не была
достигнута, частота индивидуальных выборов при уста-
новившемся сотрудничестве значительно и довольно по-
следовательно менялась от игры к игре. Располагая че-
тыре типа игр в порядке возрастания частоты согласо-
ванного выбора, мы получим наиболее устойчивый ряд:
I, V, VIII, III.
Игры II, VI и VII обычно размещаются между иг-
рами V и VIII. Их порядок не постоянен, но обычно
игра II идет впереди игры VI.
Для объяснения этих отклонений было предложено
два показателя. Обе результирующие линии хорошо со-
ответствуют экспериментальным данным. Среднее квад-
1. Параметры самоорганизации в группах из трех лиц 47
ратичное отклонение наблюдаемых частот согласован-
ного выбора от теоретической линии регрессии равно
4,1% по критерию 1 и 1,9% по критерию 2.
4. ЗАКЛЮЧЕНИЕ
Показатели группового повёдения, которые можно
рассматривать как параметры, отражающие стремление
группы к самоорганизации, могут быть установлены в
лабораторных экспериментах, выявляющих количествен-
ные соотношения между переменными, описывающими
поведение группы. Если эти количественные соотноше-
ния выражены в виде уравнений, такими показателями
являются константы этих уравнений. При этом следует
ожидать, что значения параметров изменятся при изме-
нении экспериментальных условий или другом составе
игроков, но общая форма уравнения останется той же.
Если это ожидание оправдается, мы сможем изучать
количественные соотношения между этими параметрами
и некоторыми показателями, относящимися к экспери-
ментальным условиям или к составу участников игры.
Эти соотношения в свою очередь могут быть описаны
уравнениями, имеющими свои параметры, а эти пара-
метры второго порядка можно затем тоже рассматри-
вать как переменные и т. д.
ЛИТЕРАТУРА
1. Schelling Т. С., «Bargaining, Communication, and Limited
War>, Conflict Resolution, 3, 114—119 (1959).
2. Deutsch M., «Trust and Suspicion», Conflict Resolution, 2, 265—
279 (1958).
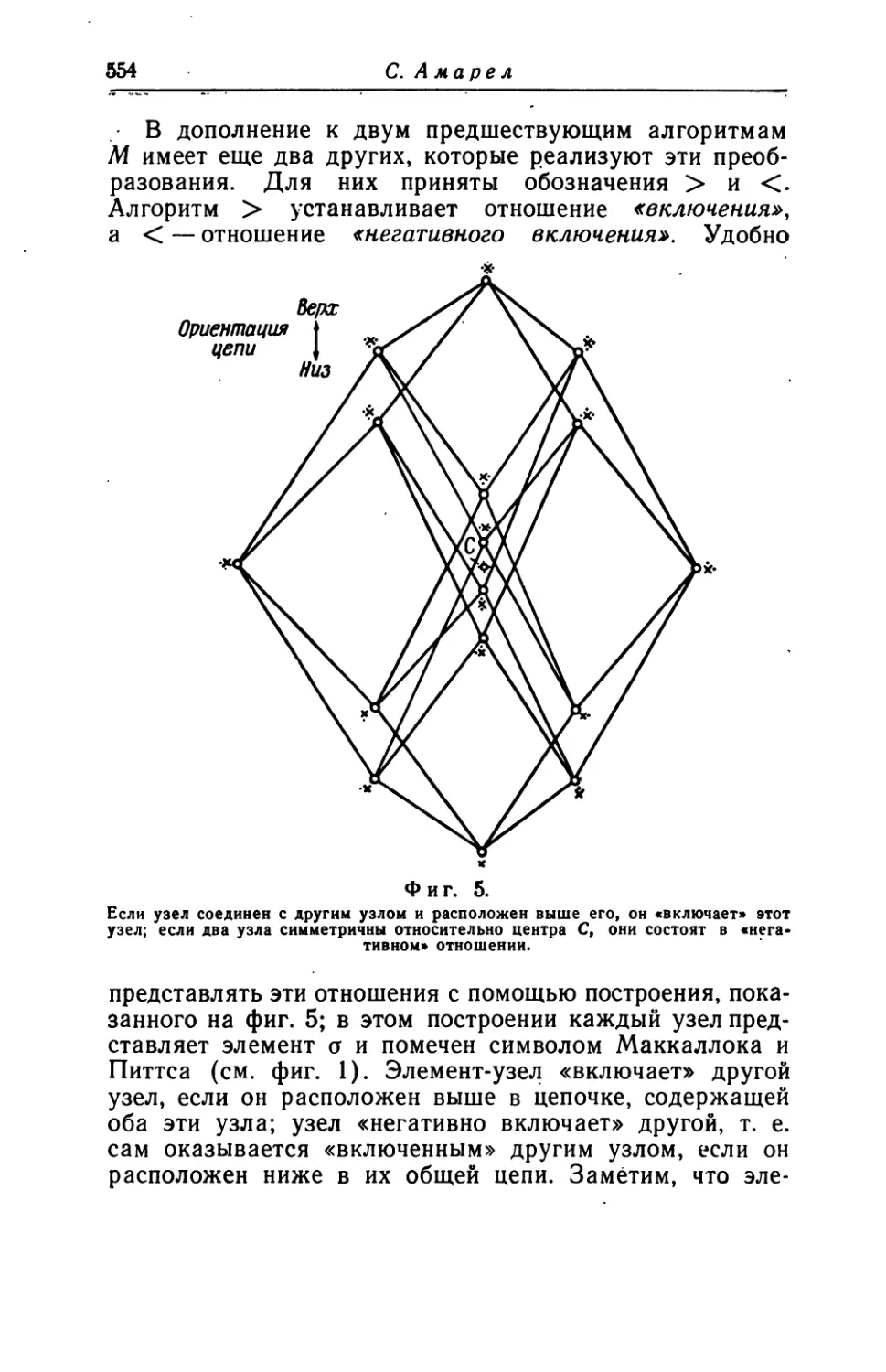
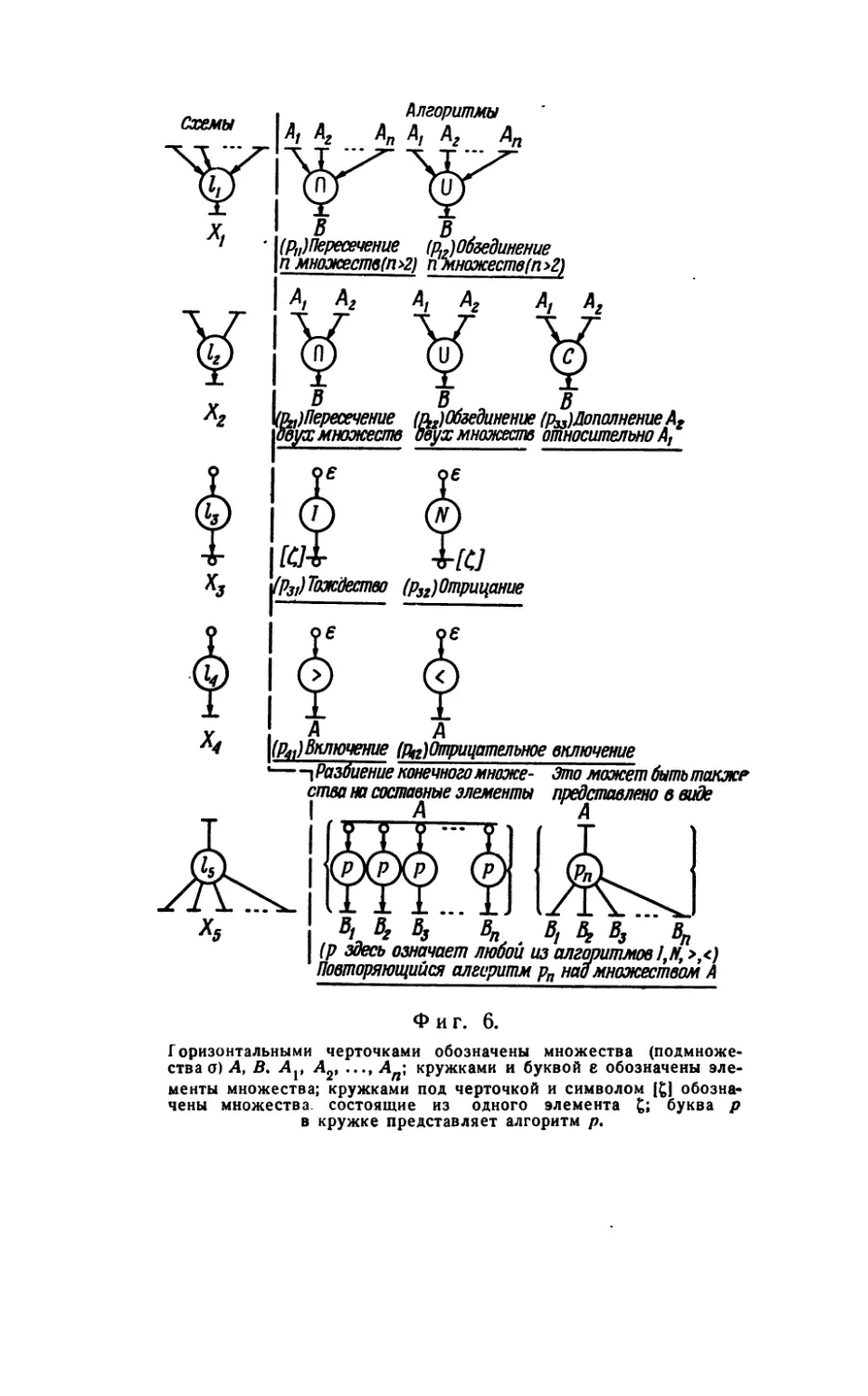
2, НА ПУТИ К КИБЕРНЕТИЧЕСКОМУ ПРЕДПРИЯТИЮ
Ст. БИР
(Отдел исследования операций и кибернетики
фирмы «Юнайтед Стил К°», Шеффилд)
Часть 1
ВВОДНЫЕ ЗАМЕЧАНИЯ
1. ПОНЯТИЕ КИБЕРНЕТИЧЕСКОГО ПРЕДПРИЯТИЯ
Кибернетическая система отличается тремя харак-
терными чертами. Она чрезвычайно сложна — до такой
степени, что ее структура в деталях не поддается опре-
делению. Она чрезвычайно вероятностна — до такой сте-
пени, что, будучи сложной по строению, она становится
неделимой и каждая траектория движения системы рав-
новероятна. Нереально предполагать, что такого рода
система может управляться посредством предписанных
извне правил. Дело в том, что такая система по опреде-
лению не поддается анализу, и поэтому не существует
никакого теста, посредством которого соответствие этим
правилам могло бы быть доказано. Третья характерная
черта кибернетической системы состоит поэтому в том,
что коренное свойство организации, проявляющейся в
ней, возникает изнутри: система является самооргани-
зующейся.
Любая промышленная компания, согласно этим пред-
варительным критериям, представляет собой кибернети-
ческую систему. Можно пойти дальше и рассматривать
ее как целостный организм, действующий в некоторой
среде. Этот организм физически воплощен в заводах
(его тело) и ряде взаимодействующих систем, которые
питают, снабжают энергией и регулируют его (его пи-
щеварительная, сердечно-сосудистая и эндокринная си-
стемы). Он имеет некоторую скорость оборота (его об-
мен веществ), он может расти путем воспроизведения
на клеточном уровне (митоз) и может дублировать себя
в дочерних компаниях посредством целостного воспро-
изведения.
2. На пути к кибернетическому предприятию
49
Помимо этого, он должен тесно взаимодействовать
со средой: существует целая экология промышленности,
которая еще мало исследована. Обычно рассматривают-
ся лишь несколько формальных каналов, обеспечиваю-
щих эту связь между компанией и внешним миром, кото-
рые отнюдь не отражают всего богатства действительно
существующих взаимодействий. Папки официальной кор-
респонденции якобы регистрируют поток информации;
но они не отражают ни личных контактов, стоящих за
письмами, ни намеков, которые они могут содержать
для получателя, ни соглашений, с помощью которых
скрываются истинные намерения, ни информацию о по-
ставщике, заключенную в самом продукте и в способе
его доставки, ни информацию о покупателе, содержа-
щуюся в том, как он принимает не вполне стандартный
продукт. Людям могут быть понятны интимные взаимо-
отношения между компанией и ее окружением, но у них
нет формальной модели, чтобы адекватно выразить
это.
Отыскание аналогий между компанией и организ-
мом можно продолжать таким литературным путем не-
определенно долго. И я уверен, что, если необходимо,
модель компании, оперирующая понятиями предложе-
ния, спроса, рынка рабочей* алы, делового доверия
и т. д., может быть с научной? точностью скопирована с
организма, живущего в своей среде. Но мы лишь при-
мем, что не существует серьезных возражений против
проведения такой аналогии, поскольку ее морфология не
будет нами использована в деталях, и перейдем к во-
просу о более высоких уровнях управления, посредством
которых система, уже способная к жизни в пассивном
смысле, достигает целеустремленной активности.
Это предполагает рассмотрение нервной системы. По-
ток информации между промышленным концерном и его
средой и внутри концерна, влияющий на его собствен-
ное поведение, должен рассматриваться как аналог по-
тока информации, проходящего через сенсорные рецеп-
торы, нервные сети и двигательные органы организма.
Снова нашим целям отвечает довольно свободная анало-
гия на более низких уровнях, так как сравнение это не
будет использоваться в деталях,
4 Зак. 10$
50
Ст. Бир
Рассмотрим автоматизированное предприятие. Оно
очень напоминает собаку без головного, а с одним лишь
спинным мозгом: оно содержит некоторые внутренние
соединения и обладает по крайней мере способностью к
рефлексам. Когда процесс автоматизации доведен до
конца, аналогия может быть продолжена и в область
патологии организма. Ведь машина со слишком сильной
(сверхчувствительной) обратной связью начинает «рыс-
кать» — иными словами, в ней развивается атаксия; кро-
ме того, весь организм может быть настолько специали-
зирован по отношению к определенной среде, что поте-
ряет способность к адаптации, так что радикальное из-
менение рынка приведет к его гибели. Именно поэтому
«автоматизация» в обычном инженерном словоупотреб-
лении применима только в тяжелой промышленности
(например, автомобильной), где имеются гарантирован-
ный спрос, довольно жесткие условия конструирования
и довольно поверхностная чувствительность к сравни-
тельно медленным циклам изменений (например, в моде
на цвет или форму кузова автомобиля). Кибернетиче-
ское предприятие нуждается в более адаптивной, лучше
реагирующей автоматической системе, способной управ-
лять любой промышленной компанией.
Когда люди почти полностью устраняются, а произ-
водство гладко и эффективно управляется автоматиче-
ски при помощи обратной связи по рассогласованию и
программированной реакции на определенные и ограни-
ченные изменения в обстановке, мы имеем дело с «жи-
вым организмом» компании, аналогичным, скажем, жи-
вотному, развитие нервной системы которого останови-
лось на мозжечке. Оно ощущает, «сознает» в смысле
способности автономно реагировать на состояния сво-
его собственного тела и на ограниченную совокупность
внешних стимулов, но оно серьезно или даже фатально
страдает от отсутствия высшего нервного центра. В на-
стоящее время такое автоматическое предприятие выну-
ждено полагаться на некоторое количество людей, оста-
вленных во главе его для выполнения функций голов-
ного мозга. При этом, даже если они представляют
группу с высокими интеллектуальными способностями,
мы имеем в целом довольно странный организм: ведь
2. На пути к кибернетическому предприятию 51
его мозг связан с остальной нервной системой лишь в
отдельные моменты времени и притом весьма слабыми
связями. Способность к выживанию такого создания
оказывается не очень высокой.
Концепция кибернетического предприятия состоит в
том, что промышленная компания, как единое целое,
представляет собой живой организм; поэтому, чтобы
быть жизнеспособной, она должна обладать и характер-
ными чертами живого организма. В прошлом промыш-
ленные компании были именно таковы: это были само-
организующиеся системы, и они были жизнеспособны.
Но по мере возрастания экономического и социального
давления, они вынуждены были становиться более эф-
фективными, более специализированными, более авто-
матичными и т. д. и каждая из этих тенденций угрожала
их длительному существованию. Конкуренция в совре-
менном обществе вынуждает руководство стремиться к
высокой и быстро достигаемой прибыли, в экологиче-
ских терминах — к преобладанию, доминированию, а с
экологическим доминированием связано (факт, извест-
ный из естественных наук) уменьшение приспособляемо-
сти. Только человеку благодаря появлению сознания и
способности к предвидению удалось приостановить эту
тенденцию эволюции (мы надеемся, что это так; однако
современное положение в мире говорит о том, что при-
рода может еще наложить свое вето на доминирующий
вид), так как человек — это высокоспециализированное
существо, которое тем не менее сохранило приспособляе-
мость благодаря большому мозгу и приобретенной спо-
собности к волевому управлению собой во взаимодей-
ствиях со средой. Так, благодаря специализации он
потерял хватательные пальцы на ногах и хвост, но он
изобрел машину, называемую лифтом, которая все же по-
зволяет ему безопасно взбираться на Эйфелеву башню.
Если мы обратимся к современной теории руковод-
ства предприятием (management theory), то нас не дол-
жно удивлять, что предусматриваются меры для кратко-
временного доминирования. Размер доходов — вот что
является первостепенным, а пятилетний план рассматри-
вается как триумф проницательности. От бухгалтеров
ожидают организации надлежащей информации для
4*
52
Ст. Бир
обеспечения максимальной прибыли; специалисты по ли-
нейному программированию призваны решать проблемы
планирования и транспортировки при условии миними-
зации функционала издержек; специалистам по рекламе
выплачиваются крупные вознаграждения за уменьшение
изменчивости среды, к которой организм не может при-
способиться. Если динозавр не может больше жить в
этом мире, то мир следует превратить в заповедник для
динозавров.
Но этого не произойдет. Подобно собаке с одним
лишь спинным мозгом, автоматическое предприятие ли-
шено органически встроенного головного мозга. Иссле-
дование, обсуждаемое в этой работе, направлено на со-
здание искусственного мозга, способного указывать путь
компании с точки зрения эволюционного критерия выжи-
вания. Если эта цель была бы достигнута, руководство
освободилось бы для решения задач евгеники: для уско-
рения или замедления естественных процессов роста и
изменения организмов и для управления преднамерен-
ным процессом порождения или подавления целых ви-
дов.
2. ЭВРИСТИЧЕСКИЙ ПОДХОД
Над проблемами создания кибернетического пред-
приятия можно размышлять, сидя за письменным сто-
лом, но Гораздо полезнее изучать их на реальном за-
воде. Нам посчастливилось получить такую возмож-
ность.
Эта компания представляла собой сравнительно не-
большую замкнутую фирму, выпускавшую стальной трос
различных размеров и качества. Ко времени начала ра-
боты в компанию как раз пришла новая группа старших
руководителей, горевших желанием модернизировать и
усовершенствовать уже процветающую фирму. Мой от-
дел принял участие в решении этой проблемы, и было
предпринято наступление в трех направлениях с исполь-
зованием методов изучения процесса труда, исследова-
ния операций и кибернетики. Управление основными
•фондами, запасами, финансами, затратами и другие
функции руководства были подвергнуты исследованию.
Были выработаны предложения, принятые и проведен-
2. На пути к кибернетическому предприятию 53
ные в жизнь. Интенсивному изучению подвергся сам за-
вод: некоторое оборудование было заменено, и был раз-
работан (совместно с инженерами-консультантами) стан
нового типа, революционизирующий технологию про-
катки, который ныне проходит испытания. Руководство
широко внедрило автоматизацию, причем некоторые
совершенно новые типы электронных управляющих
устройств были изобретены исследовательской группой.
Такова грубая информация, рисующая дело в общих
чертах, но мы видим, что под новым руководством ком-
пания быстро достигла положения перворазрядного со-
временного концерна с вытекающими отсюда выгодами
для ее экономики и стабильности.
Кибернетический анализ, начатый с уже изложенных
концепций, был продолжен с целью построить модель ор-
ганизма компании в характерной для нее среде и выде-
лить «мозговые» аспекты в управлении ею. В качестве
теоретической основы для машины, могущей взять на се-
бя функции автоматического мозга, была развита обоб-
щенная модель искусственного мозга. Одновременно,
чтобы связать развитую теорию с реальной жизнью,
была построена специализированная модель, соответ-
ствующая управлению промышленной компанией. Эта
специальная теория возникла из детального анализа,
проведенного методами исследования операций с исполь-
зованием реальных данных, в котором произвольно вы-
бранное множество целенаправленных действий искус-
ственного мозга использовалось для непосредственных
расчетов, выполняемых вручную. Результаты предлага-
лись руководству в качестве по крайней мере «частично
мозговой» информации и имели непосредственную прак-
тическую значимость и ценность.
Таким образом, теоретическая модель направляла
развитие и использование ее собственного воплощения
в реальной жизни, в то время как это ее реальное во-
площение помогало формировать и проверять теорию.
Работа эта фактически закончена. Следующая и заклю-
чительная стадия — построение системы, которая могла
бы дать практическую интерпретацию полной теории.
Другими словами, такой эвристический подход при-
зван был изучить, что происходит в действительности,
54
Ст. Б U0
используя язык органической кибернетики, чтобы при-
дать ему структуру и развить при этом как специаль-
ную, так и общую теорию, описывающую происходящие
явления. Специальная теория формулируется ad hoc1).
Она реализуется посредством эмпирических методов: за-
писи, анализа и синтеза реальных данных; статистиче-
ского, математического и логического исследования этих
данных; использования графических методов, счетно-
аналитических и вычислительных машин, построения фи-
зических моделей, кинофотосъемки модели приспособ-
ляющегося организма в его среде.
Что касается общей теории, то она претендует на
«общность» в двух отношениях. Она не исходит из ка-
ких-либо предположений о физической природе реаль-
ного объекта, как это приходится делать в любой спе-
циальной теории, и она в отличие от специальной тео-
рии применима не только к одной определенной промыш-
ленной компании.
3. ЗАМЕЧАНИЯ ОТНОСИТЕЛЬНО ИЗЛОЖЕНИЯ
ОБЩЕЙ И СПЕЦИАЛЬНОЙ ТЕОРИЙ
Изложение общей теории до специальной, как это
сделано здесь, не дает никаких особых преимуществ. Од-
нако возможно, что для специалиста по кибернетике бо-
лее естественно рассмотреть сначала общие аспекты,
дающие более законченное представление о предмете,
а специальную теорию рассматривать как частный слу-
чай. Человек же, более сведущий в промышленности, мо-
жет предпочесть сначала овладеть специальной теорией,
дающей осязаемые примеры для размышления. В этом
случае он должен постараться не упускать из виду, что
с вопросами, которые там решаются эмпирически, посту-
пают совсем иначе, рассматривая их в общей теории.
Это заставляет нас остановиться на одном трудном
для понимания пункте. Специальная теория имеет дело
с искусственным мозгом кибернетического предприятия,
а общая теория — с живым мозгом и его искусствен-
ными подобиями. Здесь невозможно изложить каждую
Специально для данного случая (лат.). — Прим. перев.
2. На пути к кибернетическому предприятию
55
теорию целиком (обе они, безусловно, не полны). По-
этому в ч. II работы фактически излагается лишь часть
общей теории, имеющая отношение к этому промышлен-
ному проекту, а в ч. III разъясняется частный пример
специальной теории (которая в свою очередь является
частным примером в общей теории). Это тонкое разли-
чие следует хорошо уяснить себе, чтобы понять статус
кибернетической машины, которую мы собираемся
строить. Она является реализацией специальной теории,
но лишь частным примером общей теории.
Эти замечания указывают на важное различие ме-
жду последующими двумя частями в нашем изложении.
Часть II неполна постольку, поскольку она касается не
всех областей общей теории. Например, теория содер-
жит исследования, касающиеся воспроизводящихся ло-
гических машин и усиления мыслительных способностей,
что непосредственно к делу не относится. Эти разделы
здесь просто опущены. Но ч. III неполна и в том другом
смысле, что невозможно перечислить все частные слу-
чаи специальной теории, которые могут быть воплощены
в физических устройствах. Поэтому в ч. III мы услов-
ливаемся попытаться вывести специальную теорию из
указанного частного примера.
В заключение скажем несколько слов относительно
специальной теории и ее физического воплощения. От
читателя предполагается хорошее знакомство с рабо-
тами Эшби [1, 2]. В частности, я заимствовал у него
фундаментальную идею о том, что реальная система бы-
стро производит разнообразие; что для того, чтобы осу-
ществлять управление, это разнообразие должно «по-
глощаться» равным или большим («необходимым») раз-
нообразием; что это может осуществляться посредством
генерирования соответствующего разнообразия и что это
генерирование не должно быть искусственным (как, на-
пример, введение случайного белого шума), а должно
достигаться посредством «самоопределения» системы
так, чтобы ее части находились в гомеостатическом рав-
новесии и вся система была бы ультраустойчива1).
!) Автор, по-видимому, имеет в виду следующее. Кибернетиче-
ская система в каждый последующий момент времени может прийти
в любое из большого числа состояний. Чтобы управлять системой,
56
Ст. Бир
Предполагается также хорошее знакомство с работой
Паска [3]. В особенности я обращаю внимание на по-
строенную им коллоидальную машину с нитчатой струк-
турой (которая является подходящей самоорганизую-
щейся системой с большим разнообразием), а также на
мои собственные [4] изыскания в этой же области. Мы
продолжаем ныне наше сотрудничество по созданию фи-
зического устройства для этого проекта.
Наконец, следует несколько слов сказать относитель-
но общей теории и ее приложимости к нейрофизиологии.
В начале этой работы я старался провести различие ме-
жду моим пониманием живого мозга, с одной стороны,
и изобретением искусственного мозга — с другой. Такой
термин, как продолговатый мозг (medulla), относится к
чему-то находящемуся в голове. Искусственный «продол-
говатый мозг» не есть подлинный продолговатый мозг.
Но приходится употреблять этот термин, так как в тех-
нике ему нечего противопоставить, и поэтому мы упо-
требляем его в кавычках. Но я не являюсь нейрохирур-
гом. Известные мне свойства продолговатого мозга, не-
сомненно, представляют лишь малозначительную часть
его реальных свойств. Выше слова «продолговатый
мозг» напечатаны курсивом или в кавычках. Но со вре-
менем я так вжился в круг вопросов, касающихся одно-
временно и мозга, и промышленной компании, и искус-
ственных устройств, и логики, что стало невозможно с
уверенностью определить, о чем именно я думал. Преж-
ние условности оказались разрушены и были отбро-
шены. В результате ч. II изложена так, как если бы не
существовало разницы между любыми реализациями
нужно в каждый момент осуществлять выбор одного определен-
ного состояния из всех возможных. Для этого необходимо, чтобы
разнообразие управляющих сигналов было не меньше разнообразия
возможных состояний системы (точнее, согласно теореме Шеннона
о «канале коррекции», количество информации, переносимое
управляющими сигналами, должно быть не меньше прироста энтропии
системы). В противном случае неопределенность состояния системы
(ее энтропия) будет необратимо возрастать, и система выйдет из-
под управления. Кроме того, необходимо, чтобы управляющий
сигнал выбирался из некоторого разнообразия не случайно, а опре-
делялся на основе информации о состоянии системы. Это осуще-
ствляется в высокоорганизованных системах посредством сформу-
лированного Эшби механизма ультраустойчивости. — Прим. пере$.
2. На пути к кибернетическому предприятию
57
мозга — в действительности, в математической модели,
в кибернетических машинах и т. д.
И действительно, это не имеет значения. Наша цель—
получить отображение мозга на машину, и, поскольку
это сделано, они фактически совпадают. Решающим
здесь является слово «поскольку». Существуют формаль-
ные гомоморфизмы (хотя очень много элементов отобра-
жается на один) и существуют операционные эквивален-
ты (хотя и на тривиальном уровне изоморфизма). Го-
воря о «мозге», я говорю только о полезном взгляде на
полезные аспекты мозга. Страшно подумать, что незна-
ние заставляет меня совершить предательство по отно-
шению к тому живому желе, которое содержится у ка-
ждого из нас в голове, но я верю в сочувствие моих кол-
лег, ибо они сами сталкивались с теми же трудностями
В объяснении.
Часть 11
ФРАГМЕНТЫ ОБЩЕЙ ТЕОРИИ:
ТЕОРЕТИКО-МНОЖЕСТВЕННАЯ ФОРМУЛИРОВКА
МОДЕЛИ МОЗГА
1. ПАССИВНАЯ ЧУВСТВИТЕЛЬНОСТЬ
1.00 . Общее замечание. Первым свойством искус-
ственного мозга, которое следует рассмотреть, является
пассивная чувствительность. Она определяется как со-
вокупность входов, информирующих мозг о состоянии
мира, определяемого в свою очередь как состояние всего
организма в его отношении к среде. Слово «пассивная»
должно означать, что эти входы являются чисто сенсор-
ными: они регистрируются в сенсорной области коры, не
вызывают каких-либо двигательных рефлексов и не вы-
полняют познавательных функций.
1.10. Сенсорная область коры. Любой мозг или ис-
кусственный мозг, поскольку он представляет собой фи-
зическую систему, должен обладать конечной общей про-
пускной способностью по отношению к сенсорным вход-
ным сигналам, имеющим разнообразие W. Рассмотрим
интервал времени б/, который будем называть квантом
времени t. В момент времени /о каждый сенсорный
58
Ст. Бир
входной канал доставляет в кору некоторое ощущение,
включая случай, когда регистрируемое ощущение за-
ключается в «отсутствии ощущения». В живом мозге ка-
ждый сенсорный вход представлен большим числом аф-
ферентных нервов, каждый из которых передает 1 бит
информации в момент времени t0. В искусственном моз-
ге мы рассмотрим аналогичный вход, который сокра-
щает число афферентных каналов и обеспечивает об-
щее разнообразие W, позволяя каждому входу выби-
рать величину х из некоторого континуума.
Теперь мы можем дать теоретико-множественное опи-
сание сенсорной области коры.
1.11. Символом s обозначается сенсорный вход, пред-
ставляющий собой элемент множества сенсорных вхо-
дов <5.
1.12. Каждому элементу s из S соответствует плот-
ное счетное бесконечное множество (х), эквивалентное
естественно упорядоченному множеству рациональных
чисел на сегменте (0, 1), элементы которого х суть вели-
чины из континуума, приписываемые $.
1.121. х£(х) определяется единственным образом
для каждого /о-
1.13. Множество S сенсорных входов s счетно и ко-
нечно. Поэтому оно может быть упорядочено в соответ-
ствии с последовательностью натуральных чисел и мо-
жет быть записано в виде вполне упорядоченного мно-
жества:
<S= {sb s2, ..$„}
с кардинальным числом | <S |.
1.131. Правило упорядочения должно быть таким,
чтобы сенсорные входы, исходящие из самого организма
(в данном случае — компании), принадлежали подмно-
жеству Ssr, определяемому через sr.
1.132. Сенсорные входы, относящиеся к среде, при-
надлежат к дополнению в <5, а именно к оставше-
муся подмножеству.
1.133. Так, например:
sn£&— &Sf.
2. На пути к кибернетическому предприятию
59
1.20. Сенсорные конфигурации. Возникает вопрос,
могут ли отдельные элементы s множества входов S
рассматриваться как независисмые по отношению друг
к другу или нет. Ибо ясно, что определенное множество
входов образует в некотором смысле сенсорный образ
(Gestalt), который проявляется как единая сущность.
1.201. Например, сенсорный образ, воспринимаемый
как «роза», представляет собой конфигурацию зритель-
ных, осязательных и обонятельных ощущений. Если за-
пах розы удалить из этой конфигурации, она может вос-
приниматься и как «роза», и как «искусственная роза».
1.21. Можно утверждать, что для искусственного моз-
га, так же как и для живого мозга, ни один элемент s
множества $ не является независимым от любого дру-
гого элемента $из$. Картина мира структурна, а вме-
сте с ней структурен и язык объектов, посредством ко-
торого мозг моделирует мир с помощью аксиом относи-
тельно различных видов конфигураций.. Например:
1.211. Как следует из логики,
($! • s2 • ~s3) v ($1 • S2 • $3 • ~з4) • => ~s5,
где возбуждение (s) или отсутствие возбуждения (~з)
сенсорного входа относится просто к альтернативной
ВОЗМОЖНОСТИ присутствия ИЛИ отсутствия S1 — прокат-
ного стана, s2 — рабочей силы, з3—нужного сырья,
s4 — определенной продукции, s5 — определенного до-
хода.
1.212. Или, как следует из математики,
x(s4) = f[x($i), х($6)],
где х — переменная величина, характеризующая з4 —
продукцию, Si — скорость прокатного стана, з6 — тол-
щину заготовки.
1.213. Или, как известно из статистики,
г _ соу (х (s-i), х (s4)) з ।
V(var х (s7) var x (s4))
где x — случайная величина, измеряющая уровень s7 —
заработной платы и s4 — продукции, для системы с де-
нежным стимулированием.
60
Ст. Бир
1.22. Такие аксиомы конфигурации задаются на язы-
ке, моделирующем мир. Они задаются, так сказать, на
языке самих объектов, а не на синтаксическом языке
(используя карнаповское определение этих терминов),
несмотря на приведенные выше попытки указать при-
меры, в которых язык, очевидно, является синтаксиче-
ским. Язык объектов есть язык самого мозга (согласно
определению, к которому часто обращался фон Ней-
ман), которым должна пользоваться и искусственная ки-
бернетическая система.
1.221. Мозг воспринимает эти конфигурации как об-
разы: будучи аксиомами языка объектов, они должны
развиваться, так как мозг «учится говорить». Это пред-
полагает наличие сравнительно короткой программы
обучения для «детского» мозга, которая устанавливает
эти структуры как постоянные черты познаваемого
мира.
1.2211. Например, таблица умножения может рассма-
триваться как сенсорная конфигурация. Если задан мозг
с языком (т. е. «взрослый» мозг), его математические
суждения будут аналитическими по отношению к аксио-
матической структуре его собственного языка и (так как
мы начинаем с взрослого мозга и так как все аналити-
ческие суждения являются по определению априорны-
ми) математические суждения всегда являются априор-
но аналитическими. Но если нам задан неопытный мозг,
язык которого еще развивается, мы должны рассматри-
вать его поведение операционально, В этом случае мате-
матические суждения познаются им апостериори из при-
меров, использующих совокупность чисел, и (так как мы
начинаем с неопытного мозга и так как все опытные су-
ждения являются по определению синтетическими) ма-
тематические суждения всегда являются апостериорно
синтетическими. (Это кибернетическое и существенно
операциональное исследование проблемы проливает,
быть может, свет на дискуссию относительно доктрины
Канта о том, что математические суждения всегда яв-
ляются априорно синтетическими.)
1.222. Существуют две главные причины, по которым
структурное построение языка объектов, согласно аксио-
мам конфигураций, которым соответствуют познава-
2. На пути к кибернетическому предприятию
61
тельные структуры образов, является существенным для
живого или искусственного мозга:
1.2221. Они сильно ограничивают свободу, с которой
определенная точка, представляющая важное событие в
мире, может перемещаться в многомерном фазовом про-
странстве, и таким образом увеличивают скорость и точ-
ность распознавания и идентификации этого события.
1.2222. Без этого механизма мозг, вероятно, тратил
бы большую часть своей, энергии, открывая и познавая
(случайным образом) каждую встретившуюся ему но-
вую реализацию аксиоматического соотношения. В этом
случае мозг переоткрывал бы в бесконечно новых обли-
чиях структуры, с самого начала присущие картине ми-
ра на языке объектов, и, несомненно, потерпел был не-
удачу, пытаясь открыть жизненно важные операционные
соотношения, касающиеся того, каким образом эти фак-
тически априорные структуры оказываются (случайно)
эффективными.
1.23. Поэтому предположим, что мозг для того, что-
бы выносить быстрые, точные и нетривиальные сужде-
ния о внешнем мире, должен включать механизм для мо-
делирования аксиом конфигураций из множества вхо-
дов в.
1.231. Эти конфигурации в некоторых случаях могут
зависеть от времени (потому что адекватный язык объ-
ектов постоянно видоизменяется и обогащается); поэто-
му наше обсуждение конфигураций будет проводиться
сначала для времени (о-
1.24. Проблема конфигураций не требует рассмотре-
ния передачи количественных непрерывных данных, по-
лученных из множества <S (X) !). Вместо этого мы рас-
смотрим формальные кортикальные сети, порождаемые
S, для которых Z-й элементарный сенсорный вход либо
возбужден (Si), либо не возбужден (~S;).
1.25. Сенсорная конфигурация является подмноже-
ством <5, а именно множеством S элементов s. Так как
каждое подмножество вполне упорядоченного множе-
!) &(Х)— множество входов с заданной на каждом входе s{
величиной «ощущения» x(s<). X — набор определенных значений
х($») (*= 1,2,..., п). — Прим, перев.
62
Ст. Бир
ства само вполне упорядочено, то
S= {$у, Sq}
для всех подмножеств ®.
В частности, сенсорной конфигурацией может быть:
1.251. Любое собственное подмножество: Sa cz®.
1.252. Несобственное подмножество: Sn Е®.
1.253. Единичное множество: 5д={$ц}.
1.254. Пустое множество: So= ®— Sn.
1.26. Поэтому совокупность всех возможных сенсор-
ных конфигураций является множеством всех подмно-
жеств ®; назовем его U(6).
1.261. Число их равно 2п (потому что |®|=и;
см. 1.13).
1.27. Таким образом, все возможные сенсорные кон-
фигурации даются вполне упорядоченным множеством
всех подмножеств ®:
U(®)={SP S2, S3, ...» S2«)
с кардинальным числом 2|@| = 2Л.
1.28. Тогда любая сенсорная конфигурация может
служить для мозга удобным инструментом для удаления
аксиоматических структур с его сенсорного входа (см.
1.23).
1.281. В качестве иллюстрации можно рассмотреть
выход продукции (в тоннах) за данный интервал вре-
мени, совместно с толщиной прокатываемой заготовки.
Допустив постоянную скорость прокатки, можно с по-
мощью конфигурации So={$4, s6} получить сеть, позво-
ляющую мозгу (при заданном подходящем преобразо-
вании для соответствующих множеств этой упорядо-
ченной пары входов) измерить относительную эффектив-
ность, которая сама по себе, конечно, недоступна непо-
средственному ощущению.
1.282. Мозг может воспользоваться любым подходя-
щим для него числом сенсорных конфигураций в любой
момент времени to, вплоть до верхнего предела числа
возможных конфигураций, а именно 2П.
1.29. В любой момент времени to поэтому в искус-
ственном мозге всегда будет существовать с -С 2п сен-
2. На пути к кибернетическому предприятию
63
сорных конфигураций, причем по нейрофизиологиче-
ским соображениям можно себе представить, что эти
конфигурации существуют в виде кортикальной сети
в четвертом слое сенсорной области коры. Распознава-
ние же, которое мозг может произвести на основании
непосредственных ощущений, будет происходить в дру-
гом месте, например в первом (молекулярном) слое, к
которому непосредственно подходят некоторые аффе-
рентные нервы.
1.30. Четвертый слой сенсорной области коры, по
крайней мере частично, определяется множеством гомо-
морфных отображений в в U(<5). Одним из таких ото-
бражений является Sb — подмножество множества* <5
элементов s (см. 1.25), названное сенсорной конфигура-
цией.
1.31. В момент времени to в четвертом слое суще-
ствует некоторое множество [S] подмножеств S множе-
ства 6, которое является подмножеством множества
«(6):
[S]={S6, .... Sr]cU(S).
1.32. Поэтому независимо от времени во втором слое
может существовать любое такое множество [S] эле-
ментов S, а все возможные состояния четвертого слоя
заданы множеством множеств подмножеств S:
UU(6)=([SI], [S2], [S3], ..., [S2„]}
с кардинальным числом 22,@,=22Л.
1.33. Несмотря на большое разнообразие, на этой
стадии следует ожидать (это представляется вполне ре-
альным для искусственного мозга), что вся гибкость,
которую она обеспечивает, ценна только в период «дет-
ства» организма. Имеются основания полагать, что гру-
бые структуры «макросети» формируются живым моз-
гом довольно скоро: они должны рано образовываться и
в искусственном мозге. Механизм для образования ка-
тегорических ассоциаций (например, 2+2 = 4) и связи
соответствующие фундаментальным типам поведения
(т. е. гнекоторым условным двигательным рефлексам),
могут образоваться очень рано и никогда впоследствии
не меняться.
64
Ст. Бир
1.331. Но высокий уровень избыточности, присущий
«взрослому» мозгу в этом аспекте его поведения, яв-
ляется резервом, имеющимся в распоряжении на слу-
чай, если бы потребовались тонкие модификации макро-
сетей (конечно, большая травма может привести к тому,
что потребуется вся эта избыточность, чтобы заново осу-
ществить адаптацию).
1.34. Следует рассмотреть механизм, обладающий
свойством совершать эти операции, приписываемые нами
четвертому кортикальному слою искусственного мозга,
который, по-видимому, действительно в точности имити-
рует соответствующую деятельность коры живого мозга
(см.* 1.35).
1.341. Афферентные входные импульсы должны при-
бывать и регистрироваться в четвертом слое таким обра-
зом, чтобы допускать сканирование, группировку и опо-
знавание образов, необходимые для создания постули-
рованной системы сенсорных конфигураций и оперирова-
ния с ней (см. 1.355).
1.342. Они должны регистрироваться в соединениях
различных типов, чтобы обеспечивать гибкость в их
взаимодействиях с отходящими аксонами (см. 1.351).
1.343. Суммирование возбуждений во времени неиз-
бежно приводит к ритмическим возбуждениям, которые
отражают периодичность во внешнем мире, и эта рит-
мичность должна быть обнаружимой.
Если искусственный мозг продолжает имитировать
свой живой прототип и в том отношении, что существует
горизонтально расположенная сеть афферентных нервов
и дендритов пирамидальных нейронов в первом слое, то
он должен проявлять эти ритмы внешним образом
(см. 1.354).
1.3431. Достаточно сильный внешний стимул будет
поэтому вызывать внешнюю реакцию, как это происхо-
дит в живой ткани, и искусственный механизм должен
также учитывать это (см. 1.352).
1.344. Обсуждаемый механизм связан главным обра-
зом с идентификацией и разделением сенсорных конфи-
гураций, информация о которых посылается затем об-
ратно в средний мозг через аксоны пирамидальных
клеток Но имеется перекрестная корреляция и должно
2. На пути к кибернетическому предприятию 65
проводиться сравнение между такими выходами. Про-
тотип такой активности мог бы быть найден в более глу-
боких слоях коры (пятый слой?), но это предполагало
бы предварительные «перекрестные переговоры» между
выходами четвертого слоя. Каков может быть механизм
для распространения этой информации через слой пира-
мидальных клеток? Конечно, это является искусствен-
ным аналогом глубинной реакции на внешний стимул,
которая распространяется на пирамидальном уровне и
впоследствии обнаружится внешне где-либо в другом
месте (см. 1.353) *)•
1.35. На схеме фиг. 1 мы пытаемся описать механизм
четвертого слоя коры в форме, пригодной для перера-
ботки информации искусственным мозгом кибернетиче-
ского предприятия, как утверждается в 1.34. Это ком-
бинированная схема, опирающаяся в основном на иссле-
дование Экклса [5], но использующая также работу Ло-
рана де Но по интракортикальным цепям нейронов [6] и
процессы группового сканирования, описанные Винером
[7] с ссылкой на Маккаллока.
1.351. Схема содержит одиннадцать в основном по-
добных элементов. Пара афферентных входных нервов
достигает коры и восходит до четвертого слоя. Здесь
они ветвятся и заканчиваются в синаптических контак-
тах на дендритах пирамидальных клеток или на проме-
жуточных нейронах (указанных кружками). Необходи-
мые связи, посредством которых афферентные нервы и
соседние дендриты могут соединяться друг с другом, ука-
заны в канале В (ср. 1.342). В каналах 0—8 та же сеть
изображена упрощенно: показаны только апикальные
(вершинные) дендриты, исходящие из глубинных пира-
мидальных клеток.
1.352. У левого края показана пара стимулирующих
электродов (Si), приложенных к коре, и видно, как вол-
на внешней реакции распространяется вдоль коры из
1 Под «разделением сенсорных конфигураций» автор понимает
распознавание образов. Эта проблема усиленно разрабатывалась в
последние годы многими исследователями в США, СССР, Италии
и Англии. Литературу по проблеме распознавания образов см. в
энциклопедии «Автоматизация производств и промышленная элек-
троника». т. III, 1964, статья «Распознавание образов». — Прим. ред.
5 Зак. 106
Фиг.
2. На пути к кибернетическому предприятию
67
точки X вправо. Механизм, порождающий эту реакцию,
постулированный Экклсом, состоит в том, что аксоны
горизонтальных клеток (или афферентные нервы) про-
водят импульсы в направлении, указанном стрелками, и
образуют синаптические контакты не только с дендри-
том, на котором каждый из них оканчивается, но и с ка-
ждым дендритом, который они встречают на своем пути.
На схеме показаны (только для X) линии внешнего
тока, возникающего в глубинных источниках и зату-
хающего в апикальном дендрите. Следует мысленно
представить себе подобные же линии, достигающие по-
следующих дендритов, причем интенсивность тока убы-
вает в соответствии с уменьшением внешнего распро-
странения импульсов по мере того, как горизонтальные
аксоны достигают своего конца (ср. 1.3431).
1.353. В канале А восходящий аксон (намеченный на
рисунке пунктиром) появляется в точке У; по нему, как
полагает Экклс, глубинная реакция распространяется к
поверхности. Постулированный Экклсом механизм глу-
бинной реакции начинается с сильного стимула в S2,
который проходит по дендриту пирамидальной клетки,
расположенной между 1 и 0, к телу клетки и распро-
страняется вдоль ее аксона и коллатерального аксона.
Показаны особые нейроны с короткими аксонами, через
которые импульсы распространяются к двум соседним
пирамидальным клеткам — реакция, которая продол-
жает распространяться вправо.
Синапсы, возбужденные на этих глубоких уровнях,
обеспечивают точки поглощения (sinks) внешнего тока,
и’дущего от источников к апикальному дендриту (ср.
1.344).
1.354. У правого края, в канале В, афферентный по-
ток импульсов порождает первичную положительную
волну на поверхности коры в соответствии с третьим ме-
ханизмом, постулированным Экклсом. Здесь показан
внешний ток из источников как на поверхностном уровне
апикального дендрита Z, так и в теле клетки, идущий к
точкам поглощения на уровне глубоких дендритов (ср.
1.343).
1.355. Между каналами 0—8 показаны новые связи,
обеспечивающие механизм отбора и группового скани-
5*
68
Ст. Бир
рования. Канал 0 должен рассматриваться как про-
извольно выбранный центральный фокус; показанные
пунктиром соединения, идущие влево, симметрично рас-
пространяются также вправо. Они производят логариф-
мическое преобразование афферентных входных импуль-
сов, как это требуется для процесса отбора конфигура-
ций и группового сканирования. Слои промежуточных
нейронов (I) — (IV) циклически сканируются. Каждый
последующий слой построен из меньших клеток, распре-
деленных более плотно, чем предшествующий. Клетки,
участвующие в конкретном механизме, изображенном
на данной схеме (т. е. с центром в 0), отмечены кре-
стиком (ср. 1.341).
1.36. Вернемся теперь к выходам четвертого корти-
кального слоя искусственного мозга и рассмотрим некое
множество выходов следующего вида:
[5J = {S„ SJcU(6)cUU(S).
1.361. Как следует из 1.31, это одно из возможных
множеств выходов, состоящих из сенсорных конфигура-
ций: подмножество множества всех подмножеств Й(<5)
множества ощущений S.
1.362. Но, как следует из 1.32, множество [S] яв-
ляется элементом зависящей от времени совокупности
всевозможных конфигураций самих конфигураций, т. е.
элементом множества UU (S).
1.363. Другими словами, некоторая конфигурация S
и некоторое множество конфигураций [S] определены
для некоторого момента времени t. Если значения S и
[S] определены для момента времени /0, то они могут из-
мениться к моменту времени ti (это имеет отношение к
1.40).
1.364. С другой стороны, как следует из 1.33, для до-
статочно короткого промежутка времени «взрослый» ис-
кусственный мозг на самом деле не будет менять ни
прочно установленную конфигурацию S, ни конфигура-
цию таких конфигураций [S] (это имеет отношение к
1.50 и след.).
1.40. Вычислимые величины мер конфигураций. Ка-
ждый элемент s каждой конфигурации Sn, являющейся
подмножеством множества конфигураций [Sa], есть сен-
2. На пути к кибернетическому предприятию
69
сорный вход. С каждым s в каждый момент времени t
ассоциирована переменная меры х, представляющая со-
бой элемент совокупности мер (х), количественно опре-
деляющей s во времени (см. 1.12).
1.41. Таким образом, для любого множества элемен-
тов s, образующего любую конфигурацию Sn, суще-
ствует взаимно однозначное соответствие с множеством
мер Хп, выражаемое соотношением эквивалентности:
• <>„={$, s„}-{<*>. (х").......<xW))=X„.
1.411. В момент времени /0, когда х£(х) однозначно
определено,
S„ (А>) = {^» Sj, $2» • • • > $„} ~ {х, х , х', ..., х-'| = Хп (/0).
1.42. Множество Хп имеет, вообще говоря, вычи-
слимую величину, обозначаемую хл. Это число, кото-
рое придает количественное значение величине Sn и
изменяется со временем.
1.421. Для Xn(t0)
xM = f(x> х', х", .... х<я>).
1.422. Но утверждение 1.421 не допускает, обоб-
щения. В общем случае, даже при надлежащих огра-
ничениях,
Х„>?Ь/(Х, х’> •••’ •*тах)
для всех t с учетом 5Я.
1.4221. Д о к а з а т е л ь с т в о. Предположим, что
xn = f(x, х', х!', ..., хтах) для всех t. Тогда X„(/0)c:
<=. X n(t)—{x, х', х", хтах). Тогда, если х„(^) вы-
числимо, оставшееся множество есть пустое множество:
1-Хл(Л) = А,
вследствие чего
АЯ(/)~5Л(Л),
тогда как
Xn(t0)~Sn(t0) (см. 1.411).
Предположим, однако (ср. 1.363), что
^л (Л)= lS2» •••> 5л}>
70
Ст. Бир
тогда
Sn (/j) cz Sn (tQ) (по определению),
в то время как
Xn (/0) С Xn (t) (по определению).
Следовательно,
*л(0~$л(Л) = ЗД0)
и
sm~xmcXm.
Поэтому, согласно теореме эквивалентности Берн-
штейна,
Xn(t)~S„(t0) = [х, х', х",..., х™*) — {$, $!, s2, ..., sn),
что справедливо, если п=шах, а это весьма специаль-
ный случай. Следовательно,
хп #=f(x, х', х", ..., хтах).
1.4222. Из сказанного вытекает, что, хотя-величина
меры любой конфигурации может быть записана мате-
матически как алгебраическая функция, аргументами
которой служат переменные х, для заданного момента
времени t (для которого может быть исследована ло-
гическая структура конфигураций), это утверждение
для данного S нельзя обобщить на все t. Ибо, хотя су-
ществует математический способ (а именно, положив
ха = 0), позволяющий провести корректно вычисление
для частного случая в рамках этой общей модели, та-
кое использование модели разрушает тонкую, завися-
щую от времени, логическую структуру S. Подобно
тому, как бессмысленно понятие «множества всех карди-
нальных чисел», так становится бессмысленным и «мно-
жество всех переменных х, ассоциированных со всеми
входами s», если это утверждается относительно неко-
торого определенного S. (Мы уделили этому вопросу
так много внимания, так как это главная причина, по
которой мы для нашего изложения выбрали язык тео-
рии множеств.)
1.43. Таким образом, согласно 1.41, имеем Sn~Xn>
что определяет конфигурацию количественно, а соглас-
2. На пути к кибернетическому предприятию
71
но 1.42, Хп имеет вычислимую величину хп, определяе-
мую в момент времени /о алгебраической функцией со-
гласно 1.421. Но эта функция либо не может быть
записана в общем виде для всех t с учетом Sn, либо не
может быть задана в специальном виде для фиксиро-
ванного Sn, принимая во внимание все I. Иначе говоря,
если конфигурация сохраняет свою тождественность во
времени, то она не может быть выражена общей алгеб-
раической функцией; если же она может быть выраже-
на в таком виде, она не может сохранить свою тожде-
ственность. Этот закон называется законом неопреде-
ленности структуры конфигураций.
1.44. Несмотря на эту неопределенность, величина
хп, однако, вычислима в любой момент времени /о, и
единственное общее замечание по поводу этой величины
состоит в том, что она представляет собой численную
«смесь» множества величин, обозначаемых для данного
момента времени символом Хп.
1.50. Статистическая однородность вычислимых ве-
личин. Из 1.4 следует, что если мы рассматриваем ко-
личественное определение Sn в течение некоторого пе-
риода квантованного времени, мы получим множество
вычислимых величин, элементом которого является хп.
Эти величины можно считать статистически распреде-
ленными относительно их среднего значения, и получае-
мые таким образом распределения весьма примечатель-
ны по крайней мере в трех отношениях.
1.501. Из рассуждений, приведенных в 1.2, очевидно,
что конфигурация вносит относительную, а не абсолют-
ную меру. Чтобы удалить аксиоматические структуры с
ее сенсорных входов (см. 1.28), конфигурация образует
«смеси», которые в действительности представляют со-
бой отношения величин. Это должно приводить к иска-
жению распределения хп. Оно будет не симметричным,
а скошенным.
1.502. Закон неопределенности, по-видимому, под-
разумевает наличие приближенного механизма для вы-
числения хп, но мы не обращались ни к какому аде-
кватному механизму, который отфильтровывал бы
первоначальные сенсорные входы от шума. Кажется
72
Ст. Бир
вероятным, что статистический временной ряд, дающий
множество значений, будет обнаруживать значительные
случайные флуктуации.
1.503. Оценка вычислимых величин производится
для каждой конфигурации в данном множестве конфи-
гураций и нет оснований предполагать, что получаемые
числа изменяются в сравнимых пределах для всех кон-
фигураций из множества.
1.51. Допустим теперь, что искусственный мозг на-
ходит известную степень статистической однородности,
подходящую для обработки этих чисел. Чтобы выпол-
нить это, необходима последовательность статистиче-
ских преобразований.
1.511. Существуют различные преобразования (на-
пример, 0 = arc sin Ух/Х), с помощью которых скошен-
ное распределение, основанное на отношениях величин,
может быть обратно переведено в нормальное. Имеются
различные преобразования (например, отбрасывание
крайних квантилей), которые сглаживают временной
ряд, выражающий распределение, с целью избавления
от случайных флуктуаций. Наконец, существуют мас-
штабные преобразования (произвольные отображения),
которые переводят большую или меньшую изменчи-
вость, присущую различным конфигурациям из всего
множества, в однородную меру отклонения.
1.512. Чтобы улучшить статистическую однородность
выходов конфигураций, мы введем теперь преобразова-
ния подобного типа, не предопределяя в точности их
вида и числа.
1.52. Базисным множеством таких выходов, которое
мы согласились рассматривать (см. 1.36) как неизмен-
ное для коротких интервалов времени (см. 1.364), яв-
ляется:
[Se] = {S„ .... Sr]cU(®)cUU(S).
1.521. Было рассмотрено эквивалентное упорядочен-
ное множество вычислимых величин, заданное в момент
времени что записывается в виде
(х, х', х", ..x*j ~ Sc, Sd, ..SJ.
2. На пути к кибернетическому предприятию 73
1.53. Ниже приводится таблица, представляющая со-
бой первую матрицу (т=1) таких статистических пре-
образований, 1Т (табл. 1).
1.531. Строки этой таблицы соответствуют последо-
вательным преобразованиям начальных конфигураций,
указанных в столбцах. Слова «первый вариант» указы-
вают на то, что если задано преобразование Tgi приро-
да которого определяется индексом g (например, ис-
правляющее скошенность), то существует много раз-
личных вариантов такого преобразования (например,
арксинус), из которых только один может входить в
первую матрицу.
1.532. Теперь можно рассмотреть последующие ма-
трицы т = 2, ..., m=f. Они содержат в каждой строке
преобразование того же типа, что и матрица /п=1, но
другого конкретного вида. Так, пг = 2 дает нам после-
довательность трансформант 2Т1, ..., 2Tg и т. д. вплоть
до m=f, что дает /Гр ...» fTg.
1.54. Последовательность матриц образует куби-
ческую решетку, «основанием» которой служит следую*
щая таблица (табл. 2),
74
Ст. Бир
Таблица 2
x'g x2g хч x2g xlg X2g 29 * 2^ * Первый вариант преобразования Второй вариант преобразования £-го £-го
• ''U /-й вариант £-го образования
xfg xfg xfg xfg пре-
1.541. Очевидно, первоначальное множество X а =
= {х, ...» х*}будет подвергаться преобразованиям, за-
даваемым множеством траекторий (общим числом*),
проходящих через кубическую решетку, создавая ото-
бражение, например, такого сохраняющего порядок
вида:
= {x2g, xlg, xfg, ..., x4J.
1.55. Этот механизм статистических преобразований
имеет некоторые особенности, на которых следует оста-
новиться.
1.551. Мы можем считать эту кубическую решетку
лингвистической структурой, т. е. формальной системой,
в которой задание трех координат само по себе опре-
деляет, какой процесс происходит в данной точке фазо-
вого пространства. Это в высшей степени структуризо-
ванный язык, могущий многое сказать о мире, с кото-
рым он имеет дело, хотя он и лишен какого-либо
содержания (решетку можно представлять себе состоя-
щей из пустых ячеек). Вычислимая величина, движу-
щаяся по некоторой траектории, проходя через данную
ячейку, автоматически подвергается преобразованию.
1.552. Это позволяет нам считать, что содержимое
каждой ячейки — это вероятность переходов, влияющая
на траекторию вычислимой величины. Каждая вероят-
ность изменяется, грубо говоря, пропорционально ис-
пользованию данной ячейки траекторией соответствую-
2. На пути к кибернетическому предприятию 75
щего столбца, что обеспечивает (в стохастической
форме) положительную обратную связь. Короче: это
обучающаяся машина. В ней будут устанавливаться
предпочтительные пути (paths of facilitation).
1.553. «Слой» кубической решетки, соответствующий
одной конфигурации, сам также является матрицей
(в третьем измерении, не изображенном в таблице).
Эта матрица представляет собой машину для достиже-
ния внутренней статистической однородности и для на-
хождения, посредством изменения переходных вероят-
ностей, оптимального пути. Но вероятности стремятся
к единице асимптотически: путь никогда не бывает пол-
ностью детерминирован. При получении нового стимула
извне (посредством механизма, который будет обсу-
жден ниже), например аналогичного болевому ощуще-
нию, может постепенно устанавливаться новый путь.
Это значит, что эта часть всей машины многократно
повторяет свои преобразования и восприимчива по от-
ношению к внешнему возмущению.
1.554. Однако машина в целом представляет собой
кубическую решетку, и можно постулировать механизм,
посредством которого она может обучаться, чтобы до-
биться однородности также между конфигурациями —
по всему множеству конфигураций. Ибо переходные ве-
роятности, относящиеся к некоторому частному вариан-
ту некоторых преобразований, могут быть сделаны
взаимодействующими. Однородность в этом измерении
увеличивает устойчивость всего устройства, не нанося
при этом ущерба его «поворотливости», ибо теперь мно-
гократное повторение оказывается в гораздо большей
степени полезным. То, что вносит связность и устойчи-
вость в возрастающую корреляцию вероятностей ме-
жду «слоями», может сразу превратиться в новые
(многократно повторенные) степени свободы, если
внешние стимулы предупреждают машину об опасности
сверхспециализации или о чересчур негибком пове-
дении.
1.555. Понятно, что некоторые преобразования в ре-
зультате изменений, вызываемых этими внешними сти-
мулами, могут обратиться в тождественные преобразо*
вания.
%
Ст. Бир
1.556. Этот механизм в целом мы считаем чрезвы-
чайно важным и будем еще не раз обращаться к нему
в другом контексте.
В качестве примера укажем, что мы работали с
устойчивым множеством устойчивых конфигураций
(см. 1.52) и в то же время всегда допускали (ср. 1.363)
возможность изменений. Механизм, подобный предло-
женному здесь для обработки вычислимых величин кон-
фигураций, мог бы также объяснить эти жизненные
черты структуры и отбора конфигураций.
1.56. Резюмируя полученные результаты, можно оха-
рактеризовать кубическую решетку как множество Эй*
элементами которого являются все возможные матри-
цы пг. Множество всех подмножеств множества 2Й
обозначим через U(9№). Нужная нам решетка М есть
подмножество множества П(5Й), имеющее g элементов
ть ..., trig. Множество преобразований, поддерживаю-
щих статистическую однородность, можно определить
как составное многократное преобразование, записан-
ное таким образом:
AfTg: {х, х', х", ..., х } {ха/г, Xfe, ..., Xvg}-
1.561. Стрелка здесь символизирует процесс отобра-
жения, а сочетание ее со знаком эквивалентности ука-
зывает, что отображение взаимно однозначное: упоря-
доченность сохраняется.
1.562. Этот результат является обобщением частного
случая, приведенного в 1.541. Заметим, что порядок со-
храняется в самих компонентах х. Индексы ведут себя
различным образом. Для первого индекса а, 0, у, ...
монотонное возрастание не является обязательным, а
второй индекс всегда g, так как решетка не может по-
глотить траекторию, и все траектории появляются в
g-м преобразовании. (Вполне естественно, что величи-
на х, представляющая входную переменную, появилась
бы как некий инвариант, и она действительно должна
появиться. Решетка может поглотить все разнообразие,
но она не может поглотить само существование коли-
чественно определенной конфигурации.)
1.60. Временная структура вычислимых величин. Из-
меримое множество Хп, ассоциированное с Sn, имеет
2. На пути к кибернетическому предприятию
77
вычислимую величину хп, которая может определяться
алгебраической функцией в момент времени tQ (см.
1.42). Эта вычислимая величина изучалась выше как
элемент множества вычислимых величин, ассоциирован-
ного с [5а] в тот же момент времени to. Рассмотрим, од-
нако, снова одиночную конфигурацию Sn и множество
вычислимых величин, ассоциированных с нею одной на
протяжении некоторого периода квантованного времени.
Это счетное бесконечное множество, упомянутое в 1.50,
которое мы определим здесь следующим образом:
Н„] = (хЛЛ), xn(t2), ...).
1.61. Элементы этого множества, как установлено в
1.5, подвергаются составному статистическому преобра-
зованию, определяемому в 1.56, и могут быть располо-
жены в виде распределения частот, если использовать
шкалу их собственных преобразованных величин в
качестве случайной величны. Для конечного подмноже-
ства [Хп] это просто изоморфное отображение этого под-
множества на самое себя. Однако в этом разделе мы
будем придерживаться порядка, в котором они возни-
кают, и рассматривать их как временной ряд.
1.62. Информация, даваемая временным рядом [Х„],
имеет две составляющие: первая — численные данные,
передаваемые в каждый квант времени; вторая — струк-
турные данные, передаваемые на протяжении времени.
1.621. Иными словами, данные 2, 8, 3, 7, 2, 9, 4, 8, 1, 6
могут иметь непосредственное численное значение (на-
пример, их среднее значение равно 5), которое на этой
стадии может быть абстрагировано и использовано ис-
кусственным мозгом. Но эти данные имеют структурное
значение независимо от их точной численной величины:
этот короткий ряд обнаруживает заметную периодич-
ность, которую при наличии полйой совокупности дан-
ных можно было бы подвергнуть статистическому изу-
чению. Ученый, работающий с элекгроэнцефалографом,
сочтет эту структурную компоненту информации (ритм
мозга) даже более важной, чем его амплитуду или на-
пряжение.
1.622. Структурная информация предоставляет моз-
гу или искусственному мозгу новый тип конфигураций
78
Ст. Бир
или образов, которые могут быть жизненно важными
для него, особенно в вопросах предсказания. Требуется
механизм, который отказывался бы от дискретной чис-
ленной информации (если она применяется) в пользу
структурной информации, которая нуждается в особом
выделении.
1.63. Множество [Хп], вполне упорядоченное во вре-
мени, но не упорядоченное относительно вычислимых
величин, могло бы быть упорядочено относительно вы-
числимых величин (ср. 1.61) в соответствии с естествен-
но упорядоченным множеством рациональных чисел.
Отсюда следует, что это множество допускает арифме-
тические операции.
1.631. В частности, сложение двух элементов множе-
ства [Хп] определяет третий элемент; эта операция удо-
влетворяет ассоциативному закону и обеспечивает су-
ществование нулевого элемента и элемента, обратного
каждому данному элементу. Следовательно, это множе-
ство — группа. Кроме того, эта операция, разумеется,
коммутативна.
1.632. Множество [Хп] есть, следовательно, абелева
группа.
1.6321. Сочетательная операция для простоты была
сформулирована относительно сложения. Если возник-
нет необходимость, может быть использована мульти-
пликативная операция, хотя в этом случае потребовалось
бы определенное соглашение, чтобы исключить из груп-
пы нуль (так как он не имеет обратного элемента отно-
сительно умножения), а это может оказаться неудоб-
ным.
1.64. Мы можем теперь утверждать, что требуемое
преобразование, выделяющее структуру и отбрасываю-
щее численную информацию, будет гомоморфным ото-
бражением ф множества [Хп] на группу рациональных
чисел Af, так что множество ф([Хп]) с N является под-
группой W.
1.641. Для любого конечного подмножества [Хп] мас-
штабное преобразование позволяет нам рассматривать,
в частности, группу целых чисел и осуществить гомо-
морфное отображение на циклическую подгруппу по-
рядка а. Как хорошо известно, множество остатков, по-
2. На пути к кибернетическому предприятию
79
рождаемое таким отображением, гомоморфно группе
целых чисел.
1.65. Таким образом, требуемое гомоморфное ото-
бражение имеет вид
<р( [) • хп 7?(mod а).
1.651. Не существует априорных соображений, кото-
рые могли бы установить оптимальное значение для
модуля а: это зависит от изменчивости входных данных
и от природы статистических преобразований, которые
к ним применяются.
1.652. Минимальное значение для модуля а, очевид-
но, равно 2.
1.653. Таким образом, мы поступили бы более осто-
рожно, если бы снабдили искусственный мозг множе-
ством возможных гомоморфных преобразований, опти-
мальное применение которых он мог бы изучить
посредством испытаний в процессе эволюции. Они мо-
гут быть изображены в виде простой таблицы, так как
траектории каждой вычислимой величины будут теперь
выбирать одно или более преобразований (а не опреде-
ленную комбинацию вариантов каждого преобразова-
ния), которые, как показал опыт, дают структурную ин-
формацию.
Таблица 3
80
Ст. Бир
1.66. Это таблица гомоморфных отображений мно-
жества вычислимых величин, уже преобразованных ста-
тистически к виду, требуемому 1.56 (табл. 3).
1.67. Как мы уже привыкли, обозначим множество
всех возможных гомоморфных преобразований h бук-
вой ф, а множество всех его подмножеств 11(£)). Под-
множество //, выбранное в момент времени 70, будет
одним из них. Это множество преобразований, выделяю-
щее временную структуру ценой отказа от точного раз-
личения численных значений, можно описать как второе
составное многократное преобразование, представив его
следующим образом:
' I-1-..,.- xyg, ..
ZJ (Я„„ R’„r R’m.......
1.671. Это преобразование снова является состав-
ным, потому что используется более чем одно преобра-
зование. Оно снова многократное, потому что для цели
выделения структуры вполне достаточно единственного
гомоморфизма, а альтернативы создают контрольный
механизм, обеспечивающий восприимчивость при нали-
чии возмущений и необходимости адаптации.
1.672. Однако это множество преобразований можно
отличить от статистического множества, потому что,
хотя оно имеет набор альтернатив, из которого можно
выбирать, альтернативы эти выбираются не в последо-
вательности, а порознь. Это становится ясным, если ото-
бразить табл. 3 на табл. 2 (лучше, чем на табл.1). Вы-
берем столбец в табл. 2. В момент времени /0 соответ-
ствующая траектория выбрала одну ячейку в этом
столбце. Та же самая траектория в момент времени t\
может пройти через тот же столбец в табл. 3, но через
ячейку с любым номером. Эта машина, следовательно,
имеет много выходов: множество Н выходов для ка-
ждой конфигурации, причем каждое множество Н мо-
жет не совпадать с другими.
1.70. Т-машина есть устройство искусственного моз-
га, которое получает, перерабатывает и анализирует
сенсорные входные импульсы. До настоящего времени
мы рассматривали эту модель в целом, стремясь опре-
2. На пути к кибернетическому предприятию
81
делить ее в наиболее общем виде. Теперь мы даем ре-
зюме механизма Т-машины, начиная с множества сен-
сорных конфигураций, кристаллизующихся в момент
времени /0, и следуя за их превращением в выходные
импульсы в момент /0+д/:
(S.| = |S.. S.------5,|~ (1.52)
~X,= \x,x',i'.......x'}xl (1.521)
..........................O- (1.56) (.
ЛНТК„-. (Л„„ R„„ R"H,.....................R-„v\. (1.67) 6,+M.
1.71. Т-машина регистрирует множество всех до-
ступных сенсорных входов s, которые затем смеши-
ваются, статистически преобразуются и гомоморфно
отображаются на множество [3] выходов Этр множе-
ство эквивалентно множеству конфигураций, а не эле-
ментарным входам s. Аналогично множество конфигу-
раций эквивалентно множеству выходов, а не элемен-
тарным выходам £. Ибо точно так же, как ряд входов s
сочетается, чтобы образовать входную конфигурацию S,
так и выходная конфигурация 3 расщепляется на ряд
выходов £, т. е. на различные гомоморфные отображе-
ния, использующие остатки по различным модулям. Та-
ким образом, выходная величина (например) Rh^ пред-
ставляет собой множество отображений, использующих
(например) модуль 5, модуль 3 и модуль 2. Эти вели-
чины затем распределялись бы по выходным каналам
£2 и £3, образуя вместе выходную конфигурацию В.
То же самое построение применяется к выходным вели-
чинам, полученным из более высоких уровней в Т-ма-
шине, которые также могут отображаться на В.
1.711. Таким образом, получаем следующие опреде-
ления. Выходная конфигурация:
= {£1» • • •» •
1.712. Множество выходных конфигураций в момент
времени t$\
l^a] — • • • »
О we
82
Ст. Бир
1.713. Эквивалентность структурных и вполне упоря-
доченных соответствий вход/выход:
1$„]~ [Зл].
1.72. Всем процессам, протекающим в живом или
искусственном мозге, свойственны неопредёленность,
стохастическое поведение, шум, ошибки и произволь-
ность отдельных преобразований. И все же выход ока-
зывается связным, точным и ясным. Мы утверждаем,
что это достигается благодаря избыточности в виде мно-
гократного повторения.
1.721. В самом грубом смысле это означает быстрое
возрастание количества связующих линий в нервной
сети и узлов, с которыми они соединены.
1.722. Но это означает также то, что Маккаллок на-
звал «избыточностью потенциального командования»:
способность любого, богатого связями ганглия занять
центральное положение в любой сети и для этой цели
легко изменять свое положение.
1.723. Этот механизм находит свое отражение в
Т-машине, и можно отметить, что следует ожидать на-
дежности выходов, несмотря на все виды возмущений.
Это, как уже было сказано, достигается благодаря обу-
чению, при котором в машине постепенно облегчаются
пути прохождения сигналов.
1.73. Необходимой частью поведения Т-машины яв-
ляется поэтому то, что разнообразие траекторий должно
быть эквифинальным. Например, какой-либо выход
должен быть инвариантен относительно многих различ-
ных преобразований некоторого подмножества из S.
Таково формальное условие для удовлетворительной
эмпирической реализации Т-машины.
1.731. Именно это формальное условие и дает нам
возможность видеть мозг, который работает, или рас-
сматривать искусственный мозг, который может быть
построен. Ибо это означает, что Т-машина может в
принципе избежать ограничений, связанных с произ-
вольными решениями, принятыми при ее постройке.
2. На пути к кибернетическому предприятию
83
2. АКТИВНАЯ ЧУВСТВИТЕЛЬНОСТЬ
2.00 . Общее замечание. Наша модель касалась до
сих пор только афферентных импульсов и церебрально-
го механизма ощущений. Теперь необходимо перейти к
эфферентным импульсам и понятию двигательной ак-
тивности.
2.10. Моторную область коры надо представлять
себе как дополнительную к сенсорной области и (как
это имеет место в мозге) тесно связанную с ней. Таким
образом, центральную борозду надо представлять себе
отделяющей постцентральную извилину (сенсорную об-
ласть коры) от прецентральной извилины (моторной
области коры).
2.101. Здесь предполагается знание последних ис-
следований относительно деятельности коры. Ибо зада-
ча введения в модель усовершенствований, которые
устранили бы незрелость прежних утверждений, может
оказаться несоразмерной с общим уровнем законченно-
сти модели в целом.
2.102. Так, например, считается само собой разумею-
щимся наличие взаимодействия между сенсорной и мо-
торной областями, поскольку известно, что «20% экспе-
риментов по раздражению постцентральной извилины
коры имеют своим результатом в большей степени дви-
жение, чем ощущение» (Шолл [8]).
2.103. Но это упрощение не превосходит тех, кото-
рые до последнего времени полагались в основу боль-
шей части нейрофизиологии. Мы надеемся, что эта мо-
дель может быть развита в таком направлении, которое,
хотя формально и не включает последних открытий, все
же на деле не противоречит им.
2.104. Введем постулат, который, между прочим,
дает готовый способ для изучения в будущем такой сен-
сорно-моторной двойственности функции мозга.
2.11. Постулируется, что существует теоретико-мно-
жественная логическая эквивалентность между сенсор-
ной и моторной архитектоникой коры.
2.111. Ощущения рассматриваются как находящиеся
в параллели с управляющими процессами, а сенсорные
каналы, обозначавшиеся до сих пор через $, эквива-
6*
84
Ст. Бир
лентны каналам управления d, каждый из которых есть
элемент множества D.
2.112. Заметим, что нумерация этих абзацев следует
схеме нумерации раздела 1.00. Таким образом, для пол-
ного понимания, например, п. 2.12 следует еще раз об-
ратиться к 1.12.
2.12. Каждому элементу d из 3) соответствует изме-
римое множество (х).
2.13. 3) = {db d2, d3, ..., dn} ~ <5.
2.131. Каналы управления, исходящие из самого ор-
ганизма, принадлежат подмножеству 3)d (—<S5r), опре-
деляемому элементом dr.
2.132. Каналы управления, исходящие из среды, при-
надлежат дополнению Ddr в 3), т. е. остающемуся под-
множеству.
2.133. Таким образом, например:
d\ €
£ £) — S)df.
2.20—2 .24. Моторные конфигурации. Приложимы
рассуждения, приведенные в 1.20—1.24, mutatis mutan-
dis !).
2.25. Моторная конфигурация D есть подмножество
множества 3), состоящее из элементов d:
D = {dY, d6, ..., d0)
для всех подмножеств 3).
2.26. Совокупность всех возможных моторных кон-
фигураций представляет собой множество всех подмно-
жеств множества D, обозначаемое U (3)).
2.27. U(£>) = {DP Dv Dv ..., D2h)~U(®).
2.30. Четвертый слой моторной области коры, по
крайней мере частично, определяется множеством гомо-
морфных отображений 3) на 11(3)). Одно такое отобра-
жение есть моторная конфигурация Db-
2.31. В момент времени /о в четвертом слое суще-
ствует некоторое определенное множество [D] подмно-
1 С соответствующими изменениями (лат.). — Прим, перев.
2. На пути к кибернетическому предприятию
85
жеств D множества D, эквивалентное [S]:
[S]~. [D]=(Dt, .... Dr], сUCD)~U(<5).
2.32. Все возможные состояния четвертого слоя за-
даны множеством множеств подмножеств S):
UU(D) = {[D1], [D2], [D3J..[D2„]}~UU(S).
2.33. Рассуждения, приведенные в 1.33—1.672, при-
ложимы mutatis mutandis.
2.672. Совокупности преобразований Т поставим те-
перь в соответствие эквивалентную совокупность V.
2.70. V-машина есть устройство искусственного моз-
га, которое получает, перерабатывает и анализирует
моторные входные импульсы. Вследствие эквивалентно-
сти ее Г-машине ее механизм может быть резюмирован
следующим образом:
— {Db> Dc^ Dd, ..., Dr]~
~Xa={x, x', x!\ x^ tQ
: (Д„„ ....ta +Ы
2.71. Выход V-машины гомоморфно отображается на
множество [Z] выходов Это множество эквивалентно
множеству конфигураций [£>], но входы d не эквива-
лентны выходам £ (ср. 1.71).
2.711. Таким образом, получаем следующие опреде-
ления. Выходная конфигурация:
с2) ..., U-
2.712. Множество выходных конфигураций в момент
времени tQ:
lZa]={Zb, Zr].
2.713. Эквивалентность структурных и вполне упо-
рядоченных соответствий вход/выход:
2.72—2 .731. Рассуждения, приведенные в 1.72—1.731,
приложимы mutatis mutandis.
86
Ст. Бир
3. ИНТЕГРАЦИЯ НА УРОВНЕ ТАЛАМУСА
3.00 . Общее замечание. Как Т-машина, так. и У-ма-
шина являются устройствами для организации опыта,
афферентного и эфферентного соответственно. Каждая
из них способна организовывать этот опыт в двух фор-
мах: относящейся к организму и относящейся к среде.
Ясно, что эта четырехкратная система должна быть
уравновешена весьма сложными и тесными связями.
3.01 . Невзирая на возможное взаимодействие на
уровне самой коры, необходим более глубокий уровень
интеграции, и мы постулируем, что это происходит на
таламическом уровне.
3.10. Итак, рассмотрим четыре множества выходов,
отражающие сенсорную активность, относящуюся к ор-
ганизму [Но] и к среде [Ее], и соответствующую мотор-
ную активность [Zo] и [ZE] коры.
3.101. Система, объединяющая эти множества, пред-
ставляет собой, очевидно, некоторый вид ультраустой-
чивой машины Эшби [1, 9], и мы будем следовать здесь
примеру Эшби, употребляя теоретико-множественные
обозначения Бурбаки.
3.1011. Это позволит нам рассматривать «произведе-
ние» четырех множеств, которое не является ни обыч-
ной суммой, ни пересечением, но представляет собой
упорядоченное «сверхмножество» !).
3.102. Выходные конфигурации являются элемента-
ми четырех множеств, определяющих систему, что обо-
значается следующим образом:
[Sol X [S£] х [z0] X [ZE] = uto.
3.103. Элемент u£UtQ представляет собой структур-
ное состояние системы в целом, определяемое как упо-
рядоченная четверка (квадруплет) исходных конфигу-
раций. й/о = (Е0л, 3£л, ZOn, ZEn).
3.104. Остается решить, действительно ли Т-машина
способна различать относящиеся к организму и относя-
щиеся к среде подмножества ее выходов. Эти два аспек-
’) Так называемое «прямое произведение множеств». — Прим,
перев.
2. На пути к кибернетическому предприятию
87
та различались в <5 как подмножество, определяемое
sr, и как остающееся подмножество, но на практике су-
ществует значительная неясность в распределении вхо-
дов по этим назначениям. Сама Т-машина вносит ана-
логичную неясность, пытаясь сохранить такое различе-
ние, что объясняется законом неопределенности струк-
туры конфигураций (см. 1.43). Но хотя это и так, для
большинства s в S это разбиение может быть произве-
дено, как и для большинства S в U(®). Таким образом,
можно обеспечить приблизительно правильное различе-
ние для большинства 3.
3.1041. Большинство дихотомических разбиений функ-
ций в реальном мире становятся двусмысленными
по крайней мере в некоторых областях фазового про-
странства, и это особенно имеет место в мозге (ср. сен-
сорную и моторную области коры). Но отвергать на
этом основании какую-либо схему классификации было
бы не строгой наукой, а патологией, при условии что
эта схема справедлива в главном, полезна и от нее не
требуется, чтобы она не допускала никаких исключений.
3.1042. В этом особом случае кора, по крайней мере
частично, локализована (ср. хорошо известные корти-
кальные гомункулусы Пенфилда) и обсуждаемые нами
отделы ее не являются только логическими абстрак-
циями, но занимают определенные ячейки в мозге и в
машине.
3.20. U-машина представляет собой агрегат, право-
мочный управлять четырехкратным сверхмножеством U
квадруплетных элементов и таким образом, чтобы орга-
низм и среда находились и оставались во взаимно
приемлемых состояниях.
3.21. Для этой цели [7-машина имеет множество вы-
ходов Й, представляющее все возможные взаимодей-
ствия мозга с состоянием мира, которое само обеспечи-
вает неисчерпаемое разнообразие, проходящее через Т-
и V-машины.
3.22. Эфферентные импульсы возникают в моторной
области коры и изменяют поведение организма непо-
средственно («двигай левой рукой», «выключи второй
двигатель»), а состояние среды — косвенно («открой
дверь», «напиши покупателю»). [7-машина контролирует
88
Ст. Бир
всю эту деятельность относительно сенсорных образов.
Таким образом, выход (/-машины является сигналом
подкрепления, который подает сведения об одобрении
или неодобрении, полученные из самой картины мира,
обратно на вход (7-машины.
3.221. Множество выходов Q есть, таким образом,
подкрепляющая функция (reward function). Оно стре-
мится укрепить входные комбинации, способствующие
выживанию, и разрушить не способствующие этому.
Это достигается преимущественно целенаправленным,
а не случайным образом в силу высокой детерминиро-
ванности Т- и V-машин.
3.2211. Этот механизм сильно изменяет понятие слу-
чайных мутаций, на котором основаны гомеостат Эшби
и неодарвинистская генетика. Эшби предлагает про-
цедуру для создания в Г- и V-машинах механизма, в
чем-то аналогичного предложенному Уоддингтоном [11]
для эмбрионального развития, — механизма «эпигенети-
ческого ландшафта».
3.23. Таким образом, в момент времени (7-машина
может быть описана следующим образом:
Uio = [So] х [S£] х [Zo] x [ZE\ (CM. 3.102).
3.231. Элемент u£Utli отражает структурное состоя-
ние:
~ ('~lOn> “Ел> ZOn, ZEn).
3.232. Элемент un — вычислимая величина, соответ-
ствующая un, чьи элементы суть вычислимые величи-
ны х упорядоченного квадруплета исходных конфигура-
ций, образующих и:
Ип={ХАп, -Х-вп, ХСп, -^Dn)' ' Нп.
3.2321. Вычислимые величины х» аналогичны хп в
1.4. В частности,
Xn(^o) = f(X, х', Х", •••> X*).
где
S„(/0)=(S, -----{X, х', Х", •••, Xя}
и X = х V Xag у (ср. 1.70)
как определено для Т-машины,
2. На пути к кибернетическому предприятию
89
3.24. [7-машина может быть теперь описана в общем
виде:
как объединение множеств где / — множество
всех возможных состояний во времени, являющееся
произведением в смысле Бурбаки четырех множеств вы-
ходных конфигураций (ср. 3.23).
3.241. Элемент и £ U — структурное состояние:
И/о = U ^о) и [и] = и М»’
nGJ n^J
где J — множество всех возможных состояний во вре-
мени каждой выходной конфигурации (ср. 3.231),
а [и]= ([Но] и т. д.). _
3.242. Элемент и — вычислимая величина для всей
системы, соответствующая ил
n^J n£J
где
[«1 = ( [Хд|. •• •)•
3.25. Во всех этих формулировках время считается
квантованным. При обсуждении работы [7-машины ее
состояние будет описываться в момент /0, а время будет
меняться квантами.
3.251. Существует вычислимая величина х» относя-
щаяся к любой выходной конфигурации (см. 3.232).
Индексы Л, В, С, D уже использовались для обозначе-
ния четырех частей упорядоченного квадруплета, и мы
сохраним их в дальнейшем. Рассмотрим теперь полное
множество конфигураций в момент времени /о (т. е.
[So]), а не каждую конфигурацию в отдельности (т. е.
Нол), и множество вычислимых чисел х» относящихся к
каждому такому множеству, обозначим [хд], что являет-
ся квантованным состоянием ансамбля
00
Ст. Бир
3.2511. Строго говоря, [%] представляет собой вектор
множества конфигураций, но удобно считать его одной
величиной. Это оказывается возможным; например, [%]
само есть вычислимая величина, если каждому множе-
ству величин % приписано единственное гёделево число.
Фиг. 2.
3.26. Работа (/-машины, (/-машина представляет со
бой гомеостат Эшби [9]. На фиг. 2 изображены некото-
рые наиболее важные попарные соединения, входящие
в нее. Они сходны по виду, и достаточно обсудить ра-
боту одного соединения: между относящейся к организ-
му моторной (входы IZoltJ и относящейся к организму
сенсорной (входы [20]/о) частями.
2. На пути к кибернетическому предприятию
91
3.261. Относящаяся к организму моторная часть
имеет множество состояний
иьш=с)
Z
и в момент времени /0 находится в состоянии [%с]. Отно-
сящаяся к организму сенсорная часть находится в со-
стоянии [Хл], которое является элементом множества со-
стояний этой части
и13оЬ(=Л).
I
Предполагается, что моторное состояние отличается
от сенсорного; иными словами, мозг предлагает, чтобы
организм действовал, но осуществит свое намерение
лишь в случае, если предлагаемое состояние приемлемо
для сенсорной области коры (в соответствии с извест-
ными ей образами и способностью к предсказанию).
3.262. Чтобы осуществить это, С должна информи-
ровать сенсорную область коры Д, что она считает пред-
лагаемое состояние [xd благоприятным для себя. Это
решается на основе внутреннего критерия — обучения
V-машины. Затем А решает на основе своего собствен-
ного критерия Т-машины, является состояние приемле-
мым или нет.
3.2621. [xd -*Yi Для неприемлемого состояния и
-> у2 Для приемлемого состояния,
где количественная мера выживания определяется множе-
ством Г={у1, Уг]. давая операцию g.
3.263. Существует пара отображений А на А: |xa]V1 и
[Ха]?,, таких, что ^-операция дает точку покоя (invariant
point) для приемлемого состояния:
[Xa1v,(|Xa + 1|) = ([Xa+1]).
где время возрастает на один квант при ^-операции и
новое состояние А записывается в виде [%л +1]. Для не-
приемлемого состояния не существует точки покоя:
|Хд1У1 ( [Ха + 1])*(1Ха+ И)-
92
Ст. Бир
3.264. Существует множество отображений С на С:
[Хс]а, которые, если это требуется, приспосабливают А
к С. Это потребуется, если А изменяет состояние, в про-
тивном же случае не потребуется.
3.265. Состояние этой (упрощенной) [7-машины
СхА в момент времени /0 определяется упорядоченной
парой
« = ([ХсЬ [Хд]).
величина элементов которой изменяется в каждый квант
времени, когда одновременно индуцируются операции
1Хд1у и [Хс1А-
3.266. Это преобразование таково:
(|ХсЬ 1Хд])->([Хс1д([Хс-НЛ). [Хд|г([хс+1])[Хд + 1])•
3.267. Состояние равновесия достигается, когда вся
машина СхА находится в покое, что может быть опре-
делено следующим соотношением:
[Хд]? ([хс+р]) (|Хд 4- я]) = ([Хд + q) L
так что
g( [Хс -Н] ) = V2.
или
[хс + ?] = g~l (Y2)
после того, как истекут q квантов времени.
3.268. Отметим, что, как заметил Эшби ([9], исправ-
ленный вариант), его механизм должен быть разрабо-
тан так, чтобы использовать случайную переменную. Но
описанная им машина, будучи однажды возмущена, не
получает более входных импульсов, так что ей предо-
ставлена возможность беспрепятственно достичь равно-
весия. Надо признать, что в [7-машине случайные
возмущения непрерывно поступают из внешнего мира
через Г- и V-машины, причем машина способна их пе-
рерабатывать.
3.269. В состоянии равновесия машина задается сле-
дующим образом:
14+9=(1хс-г4 1хд+ <?]).
2. На пути к кибернетическому предприятию 93
Это выражение описывает предпочтительное состоя-
ние системы при заданных множествах конфигураций
входов для Т и V.
3.2691. Чтобы распространить это описание работы
машины на все возможные соединения частей в маши-
не, нужно было бы весь этот раздел (3.25) целиком пе-
реписать много раз с различными символами — поисти-
не совершенно излишний труд. Затем потребовалось бы,
чтобы все операции, посредством которых состояния
каждого агрегата отображаются на себя, были пра-
вильно прослежены по всей системе. Каким образом
эффект изменения одного соединения отражается по-
всюду в системе, легко себе представить, но трудно
формализовать. Например, хотя можно представить
себе однородный отклик во всех частях системы, ясно,
что некоторые связи будут различным образом блоки-
роваться сильными местными воздействиями, подавляю-
щими слабое влияние отдаленной активности. Поэтому
я в виде опыта предполагаю, что отклики могут трак-
товаться как случайные пути через сеть операций, вы-
зывающие решающие отображения. Они могут фор-
мально толковаться как цепи Маркова.
3.27. Выход U-машины — это множество Q элемен-
тов со, на которое отображается последовательность
элементов [и] произведения множеств в смысле Бурба-
ки, представляющего систему в целом (заданную для
момента времени /о в 3.23).
3.271. Таким образом, множество элементов [и], оп-
ределяющее {7-машину, и множество элементов со, опре-
деляющее выход, связаны их общей эквивалентностью
множеству
П IxL,
где К — любой возможный агрегат (такой, как [So]),
входящий в состав [7-машины.
3.272. Как однозначно определенные гёделевы числа
могут рассматриваться не только множества конфигу-
раций [%] (см. 3.2511), но и их произведения; таким об-
разом, контрольный сигнал, связанный с множеством Q,
имеет меру, соответствующую каждому элементу со. Про-
94
Ст. Бир
пускная способность канала, требуемая для передачи Й,
должна быть действительно очень велика и должна су-
ществовать возможность оценки вариаций этой меры.
3.2721. В Г-машине все возможные состояния чет-
вертого слоя коры даются множеством UU(<S) с карди-
нальным числом
22'®1. (см. 1.32)
а в V-машине эквивалентным кардинальным числом яв-
ляется
221®1. (см. 2.32)
3.2722. Но (2.13), так что |<5| = |©| = /г,
где п — общее число возможных входов. Следовательно,
максимальное структурное разнообразие двух входных
машин, совмещенных в (/-машине, равно
2 (г2").
3.2723. Однако информационная емкость этой сово-
купности входных сетей зависит от бесконечных счетных
измеримых множеств, каждое с кардинальным числом
3%. Кроме того, (7-машина осуществляет выбор из
обоих входных источников совместно. Выражение для
необходимой пропускной способности выхода трудно
сформулировать (хотя оно должно допускать такую
формулировку).
3.2724. Коль скоро это выражение может быть опре-
делено и поскольку приблизительная пропускная спо-
собность для механизмов входа и выхода реального
мозга может быть оценена (ср. Баумен [12]), можно по-
лучить приблизительную меру сокращения разнообразия
в мозгу. Это представляет интерес, поскольку могло
бы пролить свет на величину модулей, используемых
Т- и V-машинами при редуцировании непрерывных из-
мерений к дискретной шкале (пробные вычисления по-
казывают, например, что трансфинитное кардинальное
число на практике должно быть редуцировано до кар-
динального числа 4 или 5). Одновременно это помогло
бы также объяснить (через распознавание образов по-
средством сенсорных конфигураций) j почему способ-
ность человека к субъективному различению так жестко
ограничена лишь несколькими (скажем, пятью) точка-
2. На пути к кибернетическому предприятию 05
ми на шкале ощущений. Эти вопросы, по-видимому,
важны, хотя, строго говоря, не имеют отношения к це-
лям настоящей работы.
4. КОНТРОЛЬ НА УРОВНЕ РЕТИКУЛЯРНОЙ ФОРМАЦИИ
4.00 . Общее замечание. Не пытаясь умалить важность
самой коры, необходимо отметить, что много поучитель-
ного содержится в последних работах, посвященных ре-
тикулярной формации ствола мозга. Ей должно быть
предоставлено место в модели и в искусственном мозге,
хотя в настоящее время о ней можно сказать лишь не-
многое.
4.10. Восходящая ретикулярная формация должна,
безусловно, воспринимать важную часть выходного
множества Q, а также прямых кортикальных связей.
В организме она выполняет задачу посредничества в
гипоталамической и бульбарной регуляции висцераль-
ных функций, и контролирующий выход (7-машины дол-
жен быть, конечно, приспособлен к выполнению анало-
гичной функции в искусственном мозге.
4.11. Восходящая ретикулярная формация как раз
предоставляет нам механизм, необходимый для возбу-
ждения системы Т—U—V, которая в отсутствие значи-
тельной активности коры должна оставаться в покое.
Ясно, что в такой «рутинной» ситуации Г- и V-входы
(7-машины были бы совершенно неподвижны, (7-маши-
на нашла бы состояние равновесия и сохраняла бы его
и энтропия всей системы неуклонно возрастала бы. Об-
наружилось бы уменьшение склонности к тому, чтобы
что-нибудь происходило. Входной сигнал, сообщающий,
например, об опасности, мог бы в этом случае быть вос-
принят на кортикальном уровне и поглощен: легко ви-
деть, что системой Т—U—V овладела бы привычка^ она
функционировала бы циклически в неизменном, сонном
ритме. Но поскольку восходящая ретикулярная система
получает по афферентным коллатералям импульсы и
если она способна проверять эти афферентные импуль-
сы (как это, по-видимому, имеет место), сигнал опас-
ности может быть введен прямо в (7-машину и нарушит
ее равновесие.
96
Ст. Бир
4.12. Это рассмотрение, в высшей степени подходя-
щее для нашей теории, предполагает знание работ та-
ких исследователей, как Мэгун [13]. Оно важным обра-
зом связано с идеей (см. 1.722) «избыточности потен-
циального командования», и Маккаллок употребил этот
термин именно по отношению к ретикулярной форма-
ции. Но мне не удалось распространить на эту область
формальные положения изложенной общей теории, так
как анатомическая и физиологическая картина, извест-
ная до настоящего времени, претерпевает теперь быст-
рое и коренное изменение.
4.121. Например, диффузная структура ретикуляр-
ной формации, на основе которой создавалась предва-
рительная модель, оказалась мифом. Согласно Брода-
ЛУ [14], ретикулярная формация «подразделяется на
несколько областей, различающихся своей цитоархитек-
турой, нервными связями и внутренней организацией»—
областей, которые, по-видимому, независимы.
4.13. R-MatuuHa. Несмотря на это обстоятельство и
на отсутствие формального описания, /?-машина все же
может быть постулирована и построена. Ибо, безуслов-
но, возможно представить себе замкнутые цепи управ-
ления, которые не могут быть замкнуты в пределах
системы Т—U—V. R-машину можно в предварительном
виде определить как механизм, осуществляющий такое
замыкание.
4.131. Гасто [15] предположил, например, что обуче-
ние условным рефлексам (с которым работоспособный
искусственный мозг должен иметь дело) не может за-
мыкаться внутри коры, поскольку экспериментальные
повреждения коры не препятствуют замыканию. Если
уже упоминавшиеся коллатерали возбуждают ретику-
лярную формацию при безусловном стимуле и если
имеются связи между ретикулярной формацией и корой,
как и на таламическом уровне, то возможен тонкий ме-
ханизм условных реакций. Вместо установления прямых
связей в самой коре существует таламо-кортикальное
отображение на /?-машину, которое вводит в [7-машину
случайные возмущения, вызванные безусловными сти-
мулами. Таким образом, процесс обусловливания ста-
новится гомеостатической борьбой за доминирование
2. На пути к кибернетическому предприятию
97
между организованной и случайной реакциями на тала-
мическом уровне, в конце концов разрешающейся в
установлении равновесия, которое служит точной мерой
соответствия этого обусловливания общему опыту орга-
низма.
4.1311. Это моя интерпретация предположения Гасто
в рамках излагаемой теории, хотя механизм /?-маши-
ны, изображенный на фиг. 3, — это модель Гасто, на-
ложенная на мою. Указываемые Гасто связи, проходя-
щие через кору, на рисунке не показаны, так как они
подразумеваются в моем определении Г- и V-машин.
4.132. Ранее уже упоминалось (см. 3.221) о подкреп-
ляющей функции, которая мыслилась как роль, отве-
денная выходу Q. Это другой кандидат на роль кон-
тролера на ретикулярном уровне, и этот контроль можно
задать более определенно при конкретизации /?-ма-
шины, которая может быть построена (несмотря на не-
формализованную структуру). /?-замыкание само по
себе может возбуждать и тормозить «метаболизм»
Г7-машины.
4.1321. Такая идея особенно напрашивается из рас-
смотрения возбуждающего механизма восходящей ре-
тикулярной формации (4.11), а также механизма обус-
ловливания (4.131).
4.1322. Кроме того, представляется важным меха-
низм болевого ощущения как заключающий в себе об-
ратное (отрицательное) подкрепление. Механизм цен-
тральной боли легко может быть введен в нашу модель
(ср. данные, приводимые Норденбосом [16], по которым
повреждения, происходящие где-либо вдоль афферент-
ных путей в нервных волокнах, могут быть причиной
спонтанной боли без раздражения области, в которой
они локализованы). Механизмы висцеральной и упомя-
нутой выше боли также могут быть легко представлены
в модели. Но в свете приведенных выше рассуждений
может оказаться, что и боль, исходящая от перифери-
ческих рецепторов, тоже не представляет особой про-
блемы для модели, как могло бы показаться вначале.
4.133. Таким образом, мы пришли к тому, чтобы
рассмотреть расширение уже введенного понятия под-
крепляющей функции и включить в теорию рассмотрение
7 Зак. 106
98
Ст. Бир
Фиг. 3.
альгедонической!) системы управления, которая при-
нимала бы широкое участие вс всех функциях искусст-
венного мозга. Это предварительное предложение, кото-
рое здесь не может быть развито подробнее.
*) Algedonic — образовано от слов algesis —боль (лат.) и he-
done — удовольствие (греч.). — Прим. ред.
2. На пути к кибернетическому предприятию
99
4.2. Общая картина теории в целом, показывающая,
как отдельные ее части соответствуют друг другу, дана
на фиг. 3. Искушение придать рисунку очертания выс-
ших отделов живого мозга оказалось непреодолимым, и
я прошу прощения у мозга за подобную дерзость.
Часть III
ФРАГМЕНТЫ СПЕЦИАЛЬНОЙ ТЕОРИИ:
ЧАСТНАЯ РЕАЛИЗАЦИЯ Т-МАШИНЫ
И ЗАЯВКА НА ИСКУССТВЕННЫЙ МОЗГ
1. ЦЕПЬ СИСТЕМ
Компания производит стальные тросы. Она получает
стальные заготовки (2*/4 кв. дюйма из стали различного
качества) и прокатывает их в тросы небольшого круг-
лого сечения (различных размеров). Прокатный стан
двухручьевой, т. е. две стальные заготовки движутся в
нем параллельно друг другу. Тросы, нагретые до крас-
ного каления, выдаются со скоростью приблизительно
70 м в час и затем наматываются спиралью, охла-
ждаются и осматриваются перед отправкой.
Основное производство состоит из: а) нагреватель-
ной печи для заготовок и приспособлений для подачи
их в стан; б) трех связанных групп клетей прокатных
станов (грубой, промежуточной и окончательной обра-
ботки), расположенных в виде спрямленной буквы S,
причем сталь делает петлю вокруг двух изгибов, чтобы
дважды сменить направление; в) соответствующей мо-
талки, которая может работать с непрерывным прокат-
ным станом; г) механизмов для удаления намотанных
бухт и холодильного рольганга; д) приспособлений для
возвращения и складывания бухт. Это «производящая
система», показанная на фиг. 4.
Производящая система связана с внешним миром
через два аккумулятора. Входной аккумулятор содер-
жит заготовки и служит для производящей системы как
бы буфером, ограждающим ее от капризов внешней си-
стемы снабжения. Выходной аккумулятор содержит го-
товые тросы и снабжает внешнюю систему потребле-
ния — рынок.
7*
100
Ст. Бир
Связи внутри компании являются квазидетермини-
рованными. Входной запас должен, очевидно, быть вве-
ден в производящую систему, чтобы получить выходной
запас. Но количество и качество используемых мате-
риалов зависит от принимаемых решений, а последние
сами по себе не определяют, к каким именно заготов-
кам (или тросам) они относятся. Однако две связи со
средой являются всецело вероятностными: отсутствует
гарантия как относительно предложения (со стороны
компаний, производящих сталь), так и относительно
спроса (со стороны рынка). Тем не менее эти связи уже
интенсивно изучены методами исследования операций
и могут быть эффективно описаны как стохастические
процессы.
В этой цепи систем действуют обратные связи, и че-
тыре из них показаны на рисунке. Более сложные об-
ратные связи, не включающие сам завод, соединяют
непосредственно системы предложения и спроса, так что
прежде, чем реализовать потенциальные возможности
изменения в одной из них, нужно принять во внимание
другую.
2. СОГЛАШЕНИЕ ОТНОСИТЕЛЬНО ИЗЛОЖЕНИЯ
Мы имеем дело с действительной, конкретной реа-
лизацией Т-машины, созданной, как объяснялось в ч. I,
для исследовательских целей. Это значит, что пришлось
принять большое количество решений относительно
структуры «сенсорной коры» — решений, которые в ко-
нечном счете должен будет принимать сам искусствен-
ный мозг посредством составных многократных преоб-
разований. Однако исследовательская группа, работав-
шая в этой области, опиралась при принятии решений
на информацию, полученную методами исследования
операций. Короче, было проведено операционное изуче-
ние компании, а результатом явилась операционная мо-
дель как компании, так и Т-машины.
Было бы слишком утомительно постоянно оговари-
вать в высказываемых ниже утверждениях, как они
должны выражаться в терминах Т-машины. Это уже
было сделано в ч. II. Необходимо лишь иметь схему
Запас в qI
тоннах? \
Спрос в
тоннах
Поставки
в тоннах
*
\ гЗапас / (Продажа
\ \тоннах-
в тоннах
Зак. 106
Фиг. 4.
Система
снабже-.
Стохастй
Щчёская.'щ
’ связь-.' О
Поставки]
I в тоннах)
Издержки
=на =
=сырье —
к
Баланс
'Суждения
пф
Г (бу)
‘Система
входных.
-запасов
Издержки
= на =
-= запасы=
\\На личные
в банке и
и ит
:Квазидетермйнйро:
ванная -сеязьуЦ
'Издержки
на время
и тоннаж^
Стоимость
W№||||—\\ запасов}
:^Ж1 кшШЖШ
Стоимость
!кре£и777Я|!|
|1Ш||||||1!1|||||
-.Производя.
=щая=:
система
издержки hciz
=завода----
Экономия-
11 Стоимость
специальных
Стоимость
капитало-
вложений
Обобщенная образная память
г-=г=г
Функция ncreoHocmuzzziz
запасов
Функция активности _
Квабидётермйнйрр;
:: '-.ванная 'связь :• •: •
I'.Система,
выходных
-.запасов z
iCmoxdcmu
Щ^ескаяд
• ;.:<:Св^Зд;‘ '
m
производил \
^тельноеть) х
Обучающее
/ преобразование
Функция поступления.
тельных
состояний
‘Функция производительности
[Функция ^полезности запасов
——
Функция отправления
Издержки на
—рабочую=
=силу=
Издержки на
-выходной
—запас
Выручка
= от=-
продажи
Прибыль
Стоимость
основных I -
ГППГТГП11111Н
Стоимость
Стоимость
запасов III ||^олгсв|||
iiiiiiiiiiiiIIII 111н11шшЛ
Остаток!
m тм и и 11
Пассив
Обобщенная образная память
/7~Z~ZZ
Множество
Алъгедоническое
управление
Замкнутая
гомеостатическая
цепь
:/Щ
Замкнутая гомео-
статическая цепь
множеств*
предпочтительных
> z состояний
Обучающее
функция снаол
|КЯЙ&,111Ш!^
I fej И 1^! Фикция расходов
ml \7&№ункция обору до-'
f(6e)
f(<£)
2. На пути к кибернетическому предприятию
101
для указания пунктов, считающихся «известными» из
исследования операций, но которые на самом деле не
могли бы быть известны без реальной Т-машины. На-
пример, в этой первой реализации имеется 19 ощуще-
ний. «В действительности», однако, ощущений не 19; на
деле дальнейшие экспериментальные реализации уже
довели число ощущений, рассматриваемых в этой ра-
боте, до 36, и это число также не является окончатель-
ным.
Чтобы можно было точно указывать, в каких слу-
чаях применимы высказываемые утверждения, усло-
вимся о следующем. В этой первой реализации действи-
тельно имеется 19 ощущений: я «декларирую», что это
«правильное» число. Это означает: «я утверждаю, что
Т-машина при функционировании, как оказалось, ис-
пользует эти 19 ощущений». Слово «декларировать»
означает примерно то же, что и «торжественно заяв-
лять», и будет употребляться здесь как технический тер-
мин в только что указанном значении. Все декларации,
сделанные в этой части, могут быть устранены из опи-
сания, если обратиться к механизмам, формально опи-
санным в ч. II.
3. КОНКРЕТНАЯ РЕАЛИЗАЦИЯ Т-МАШИНЫ
Декларируется, что имеется 19 ощущений: 11 исхо-
дящих из компании, и 8 — из окружающей среды. Они
обозначены кружками на фиг. 4. Были изготовлены
устройства для непрерывного измерения этих ощуще-
ний, и большое количество данных было собрано и про-
должает собираться.
Для 12 из этих ощущений были изобретены адек-
ватные вычислительные системы, представляющие мо-
дель сознательного процесса извлечения фактов из до-
ступной информации. Система издержек рассматрива-
лась как отражающая операции внутри компании: как
показывает рисунок, внешняя информация определяет
входные издержки, из которых на заводе образуются
полные издержки. Эти полные издержки сравниваются
с дальнейшей внешней информацией о продажной цене
продукции, давая прибыль (или убыток). Однако
102
Ст. Бир
в финансовых расчетах организм рассматривается с точ-
ки зрения среды: сравниваются суммы актива и пассива,
оцениваемые с точки зрения внешнего мира, что в итоге
дает балансовый остаток (или дефицит). Расчеты —
это сознательный уровень умозаключений о состоянии
дел. (Здесь не требуется деклараций, ибо это само по
себе условно. Тем не менее баланс воспринимается де-
ловым миром и законодательными органами как мера
способности к выживанию, что отчасти напоминает ан-
кету, заполняемую при страховании жизни, как меру
долголетия.)
Далее в нашей реализации освещаются процессы при-
нятия решений, не опирающиеся на сознательные умо-
заключения. Этот уровень сенсорных конфигураций в
модели мозга и составляет собственно Т-машину.
Декларируется, что имеется 12 сенсорных конфигу-
раций и 6 из них относятся первоначально к компании,
а 6 — к среде. Каждая из них характеризует сочетание
некоторого числа сенсорных входов. Декларируется, что
соответствующие входы известны и что в нашем распо-
ряжении имеется достаточно гибкая математическая
функция, определяющая каждое из сочетаний.
Шесть сенсорных конфигураций, относящихся к ком-
пании, количественно задаются следующими деклари-
руемыми функциями, о каждой из которых мы добавим
несколько замечаний.
а) Функция поступления. Оптимальный уровень по-
ступления определяется post hoc!) как уровень дей-
ствительного потребления заготовок, и была придумана
математическая модель, чтобы измерять эффективность
действительного поступления на основании процедуры
предсказания.
б) Функция полезности запаса заготовок. Эта функ-
ция сравнивает действительные запасы в данный мо-
мент с оптимальными запасами, вычисленными на осно-
ве операционной модели, учитывающей различия между
марками стали. Полезность запасов уменьшается, если
компания либо недостаточно, либо с избытком обеспе-
чена на случай возможных перебоев. Таким образом, в
1) После этого, впоследствии (лат.). — Прим, перев.
2. На пути к кибернетическому предприятию
103
каждом из этих случаев функция опускается ниже сво-
его идеального значения, равного единице.
в) Функция активности. Она базируется на слож-
ной модели производства и указывает отвлеченную
меру эффективности, принимая в расчет все перемен-
ные факторы. Можно провести различие между техни-
ческими и человеческими соображениями для измене-
ний уровня активности.
г) Функция производительности. Она также вычис-
ляет оптимальный уровень производимой в каждом
случае продукции, учитывая неизбежные потери из-за
окисления и обрезки заготовок и бухт троса, и сравни-
вает его с действительной производительностью.
д) Функция полезности запасов троса. Запасы тро-
са возникают из-за целого ряда причин: необходимости
проверки, наличия бракованных материалов, аннулиро-
ванных заказов, оптимального буферного запаса, необ-
ходимого для выполнения договоров по поставкам.
Имеется также сложная компонента запаса, возни-
кающая благодаря запаздыванию в приспособлении
программы проката к спросу. Все они промоделиро-
ваны.
е) Функция отправления. Она по существу измеряет
соответствие между активностью и отправкой. Но эта
функция содержит дополнение отношения между из-
держками по перевозке для каждого заказа (которые
оплачиваются компанией) и внутренней прибылью. По-
этому она обеспечивает решение с точки зрения орга-
низма относительно использования существующего
рынка.
Шесть конфигураций, связанных со средой, количе-
ственно задаются подобным же образом посредством
декларируемых функций, о которых заметим следующее.
ж) Функция снабжения. Сложная модель снабжения
измеряет эффективность поставок от каждого постав-
щика, учитывая как среднюю надежность, так и колеба-
ния вокруг среднего, и включает меру качества постав-
ляемых материалов.
з) Функция расходов. Это мера экономической по-
лезности «накладных», т. е. непроизводительных рас-
ходов.
104
Ст. Бир
и) Функция оборудования. Измеряя меняющуюся до-
ступность и цену нового оборудования, эта функция вы-
ражает связанную со средой желательность осуществле-
ния капиталовложений в новое оборудование в любой
данный момент времени.
к) Денежная функция. Эта функция также основы-
вается на измерении изменения доступности и цены, на
этот раз самих денег. Она отражает целесообразный
уровень капиталовложений в промышленность и вклю-
чает в себя модель (местного) влияния изменения бан-
ковского процента.
л) Функция рабочей силы. Подобно предыдущим,
эта модель базируется на доступности и затратах. При-
нимаются во внимание прогулы и уровень безрабо-
тицы.
м) Функция спроса. Это наиболее сложная функция
из всех. С ее помощью мы стремимся измерить рынок и
возможность получения прибыли на нем, используя все
относящиеся сюда входные ощущения и умозаключения.
Количество предварительных заказов, доходность каж-
дого заказа (согласованная с такими факторами, как
затраты на перевозку, скидки и оптовые уступки) и
«солидность портфеля заказов» — все это включается
в модель.
Полные операционные модели, декларируемые для
каждой из этих двенадцати функций, здесь не приво-
дятся: для этого не хватило бы места. Но сказанного
достаточно, чтобы показать область деятельности кон-
кретизированной Г-машины, метод обработки информа-
ции о каждой входной конфигурации для получения со-
размерных отвлеченных чисел в качестве выхода, а так-
же подчеркнуть тот факт, что все эти функции зависят
от отношений (как декларировано) некоторых количе-
ственных характеристик ожидаемого поведения к ха-
рактеристикам действительного поведения.
Этот последний пункт весьма важен, так как он вво-
дит общий для всех кибернетических машин метод «чер-
ного ящика» для выявления неизвестных и не поддаю-
щихся учету величин. Ибо модель поведения может быть
не адекватна оригиналу в какой-либо области, а осно-
ванные на ней предсказания и оценки имеют силу лишь
2. На пути к кибернетическому предприятию
105
в том случае, если модель является адекватной. Но в
исключительно сложной и вероятностной системе ника-
кая аналитическая модель не может быть адекватной.
Способ разрешения этого противоречия, который я ус-
пешно применял в течение десяти лет, состоит в том,
чтобы наложить на грубые предсказания любой анали-
тической модели непрерывную обратную связь, изме-
ряющую эффективность самой модели, как предсказа-
теля. При этом все, что осталось неизвестным при ана-
литическом исследовании, все неуловимые тонкости,
даже ошибки, вкравшиеся в вычисления, отсылаются в
«черный ящик», где они подвергаются не поддающемуся
анализу «взвешиванию», приводящему к коррекции
ошибок.
Величины этих 12 функций могут быть вычислены в
принципе через каждые 8 часов, хотя в некоторых слу-
чаях (например, денежная функция) изменения должны
происходить с гораздо меньшей частотой. В настоящее
время результатом практической работы группы орга-
низации и управления является довольно эффективная
канцелярская система для собирания этих данных и
для обработки их (в будущем мы надеемся получать
многие из этих входных данных автоматически). В ре-
зультате совокупность 12 величин стала при существую-
щей практике доступной каждый день. Они наносятся
на графики в штабе операций как побочный продукт
этого исследования для помощи администрации, а для
анализа их применяются различные общепринятые ме-
тоды,чкак упоминалось в ч. I.
До сих пор в этом расчете первой конкретной реа-
лизации рассматривалась работа Т-машины на уровне
четвертого слоя сенсорной области коры. Так возникает
декларируемая двенадцатиканальная «энцефалограм-
ма». Образец записи такой информации за целый год
приведен в приложении 1.
Затем декларируется, что необходимы три статисти-
ческих преобразования. Прежде всего производится
преобразование с целью улучшить статистическую одно-
родность записанных значений каждой функции, при-
чем декларируется, что существует преобразование,
приводящее каждое распределение полученных величин
106
Ст. Бир
к нормальному (гауссову) виду. Во-вторых, вводится
преобразование с целью улучшить статистическую одно-
родность по всему множеству функций и получаются
масштабные преобразования, которые, как можно де-
кларировать, осуществляют это. В-третьих, случайные
флуктуации устраняются из временных последователь-
ностей посредством фильтрации их согласно некоторому
критерию шума, статистически значимый уровень кото-
рого декларируется в результате изучения отдельных
реализаций.
Работа Т-машины завершается, как указывается в
ч. II, рассмотрением множества групповых изоморфиз-
мов, сохраняющих структуру каждой статистически пре-
образованной временной последовательности в отличие
от скалярной информации в ней. В этом случае, как де-
кларируется, оказываются полезными три различных
гомоморфных преобразования. Два из них, дающие ос-
татки по модулю 5 и по модулю 2, показаны для фак-
тических годовых данных в приложении 2. Они пред-
ставляют собой окончательные выходные данные этой
реализации Т-машины, к которой приложена конкретная
совокупность возможных преобразований. Формальное
сравнение информации, заключающейся в исходной
энцефалограмме (приложение 1), с представлённой
здесь конечной формой все еще продолжается. Преоб-
разованные записи получены в данном случае для об-
легчения неформальных сравнений.
4. СЛЕДУЮЩИЙ ШАГ В КОНКРЕТНОЙ РЕАЛИЗАЦИИ
Величина, найденная для каждой функции в каждый
квант времени, является оценкой, которая может рас-
сматриваться как среднее значение распределения ве-
роятностей. С течением времени для каждой функции
накапливается совокупность таких распределений, об-
разуя квантованную хронологическую память, относя-
щуюся к соответствующему опыту. Все множество этих
записей для функций, относящихся к компании, с одной
стороны, и для функций, относящихся к среде,— с дру-
гой, образует обобщенную образную память, как изо-
бражено на фиг. 4.
На пути к кибернетическому предприятию
10?
Далее декларируется, что, хотя изменения во време-
ни средних значений величин в этих образах могут быть
важными и хотя они могут быть изучены и оптимизиро-
ваны Т-машиной, главная компонента оценки является
функцией дисперсии. Этот механизм в настоящее время
пристально изучается, и дальнейшее его эмпирическое
познание станет в конечном счете доступным через уже
упоминавшийся штаб операций.
Между тем остальная часть устройства, представлен-
ного в ч. II, может быть конкретизирована в модельной
гомеостатической системе, изображенной на фиг. 4. На
ней показана упрощенная форма взаимодействий,
имеющих место в [/-машине и относящихся только к
возникающему из сенсорных конфигураций гомеостату
«компания — среда». Характер поведения во времени
каждого обобщенного образа определяет два фазовых
пространства, в которых соответственно компания и сре-
да могут действовать. Ясно, что каждая из них обу-
чается множеству предпочтительных состояний: обучаю-
щее преобразование, приложенное к вектору, заданному
функциями «в данный момент», отображает множество
решений на себя, производя поиск точек покоя, которые
задают два множества предпочтительных состояний
(изображенных на фиг. 4 в виде n-мерпых полиэдров).
Формальный механизм этого процесса дан в ч. II, как
и взаимно запрещающая система, благодаря которой
гомеостатическая замкнутая цепь продолжает действо-
вать до тех пор, пока точки, изображающие состояния
компании и среды в фазовом пространстве (представ-
ляющие собой вектор-функции), не перейдут в соответ-
ствующие множества предпочтительных состояний.
Работа /?-машины с ее механизмом возбуждения,
подкрепляющей функцией и т. д. изображена на фиг. 4
как «альгедоническое управление», возбуждающее или
подавляющее активность гомеостата (коррелятом дея-
тельности /?-машины в сознании должны быть, как по-
казано на рисунке, конечно, чувства, а не ощущения
или суждения).
Экспериментальное исследование продолжается.
Вспомним, что Т-машина, как было сказано, должна
быть теоретико-множественно эквивалентна V-машине.
103
Ст. Бир
Таким образом, поведение обеих машин, подающих
входные импульсы в гомеостат [7-машины, где V-реше-
ния аппроксимируются (через d-управляющие воздей-
ствия и s-ощущения) как Т-конфигурации после времен-
ной задержки, может изучаться в штабе операций, ибо
показатели, выставленные там, суть выходы (конкрет-
ной реализации) Т-машины, тогда как проектируемые
действия, обсуждаемые на основе этих показателей,
суть мгновенные выходы V-машины. Само руководство
играет роль [7-машины, контролируемой своим собствен-
ным штатом в роли /?-машины.
Следовательно, теперь существует некоторая кон-
кретная реализация всего устройства. В настоящее вре-
мя имеются истинные реализации Т- и V-машин и мни-
мые реализации [7- и /?-машин (ибо они представляют
собой модели моделей реальной системы управления, а
именно саму эту реальную систему!). Однако теперь
возможно продолжать эмпирическое изучение [7- и /?-
машин в свете действительных реализаций Т* и Рома-
шин, а это самое важное.
Что касается конструкции всей кибернетической сис-
темы, то ясно, что первой компонентой, которой надле-
жит выйти за пределы просто частной реализации,
должна быть [7-машина. Ибо реализации Г- и У-выхо-
дов уже имеются и могут быть введены в [7-машину на-
ряду с их эквивалентами, докладываемыми руководству,
которое может тогда играть роль контролирующей /?-
машины для кибернетической [7-машины. Добившись
успеха с кибернетической [7-машиной, исследование об-
ратится к построению кибернетических Т- и V-машин.
Только на последней стадии будет построена /?-машина.
После этого руководство впервые в истории окажется
свободным для управления не компанией на языке ор-
ганизма, а управляющим агрегатом Т—U—V(R) на
метаязыке. (Это слово употреблено в строгом смысле,
ибо наконец станет возможным обсуждать Т—U —
V(R) -теоремы как неразрешимые на прямом языке
управления. Руководители, которые пытаются делать
это сегодня, обсуждают свой собственный мозг, интуи-
цию и побуждения и должны обращаться за консульта-
цией к психиатрам.)
2. На пути к кибернетическому предприятию
109
5. ЗАЯВКА НА ИСКУССТВЕННЫЙ МОЗГ
В течение ряда лет многие исследователи предпри-
нимали эксперименты по созданию систем, обладающих
свойствами самоорганизации. Большинство из них
имело дело с устройствами, использующими стандарт-
ную электронную технику (включая использование
транзисторов) и стандартную технику вычислительных
машин (включая наиболее разработанные машины для
деловых операций и промышленности). Эти исследова-
ния во многом расширили наши познания, но основной
их вывод, пожалуй, состоит в том, что эти стандартные
подходы (как я их только что назвал) не годятся для
системы, рассматриваемой в этой статье.
Нет нужды приводить здесь детальные возражения
против таких подходов. Самое беглое рассмотрение аб-
солютных размеров «стандартного», подобного вычисли-
тельной машине устройства для управления кибернети-
ческой фабрикой исключает его. Но, следуя работе по
логическому статусу электронных аналогов мозга, ко-
торая была доложена мною четыре года назад [17],
я пришел к выводу, что секрет заключается на самом
деле не в прагматическом анализе возможности построе-
ния системы, а в логической структуре самого аналого-
вого материала [4]. Мне кажется, это не тривиальное
утверждение. Как создатель машин, человек привык
считать свои материалы инертными кусками материи,
которые ему приходится формовать и сочетать, чтобы
сделать полезную вещь. Он обычно не думает о мате-
риалах в первую очередь как о чем-то обладающем
внутренне присущим ему огромным разнообразием, ко-
торое должно быть ограничено.
Однако в физике твердого тела имеются новые изы-
скания, которые могут снять возражения против «стан-
дартной электроники». Благодаря микромодулям элект-
ронный блок можно, по крайней мере на первое время,
представлять себе в виде вафли из ячеек материала
однородных размеров и формы, которые скорее доста-
точно спрессовать, чем сформировать, чтобы они функ-
ционировали желаемым образом. Однако при этом все
еще остается существенным критерий размеров, если не
110 Ст. Б up
свойств материала: ведь микромодули должны еще быть
объединены в электронное устройство. Следующая сту-
пень достигнута молекулярной электроникой, в которой
роль отдельных блоков выполняют области молекул
внутри единого кристалла. Снова, однако, ударение де-
лается на размеры и снова устройство должно быть то-
пологически скомпоновано.
Ясно, что подчеркивание вопроса о размерах выте-
кает из военного и астронавтического значения этих от-
крытий, и здесь нечего возразить. Но от кибернетика
потребуется интеллектуальное усилие, чтобы перенести
центр тяжести на изменение структуры материала, ко-
торый здесь подразумевается. Необходимое усилие так
велико, что я не в состоянии увидеть, как «конструиро-
вание» может быть устранено молекулярной электрони-
кой. ГУ-машина должна быть способна конструировать
свои собственные части, и этот подвижный и эволюцио-
нирующий процесс самоконструирования не должен
быть необратимым. Кроме того, технология изготовле-
ния, доступная в настоящее время («диффузия, напыле-
ние, обработка электронным пучком, травление, выреза-
ние, облучение, введение примесей и фотографический
процесс»), подразумевает массивное оборудование, и
трудно представить себе, чтобы им могла управлять
ГУ-машина с целью изменения ее собственного внутрен-
него механизма.
Быть может, наиболее подходящим для наших целей
устройством среди тех, которые до сих пор разработаны
для применения в реальной кибернетической машине,
является упомянутый ранее коллоид, разработанный
Паском. Вообще электрохимические системы являются
гораздо более податливым материалом, чем физические
полупроводники, и ряд исследователей в Англии также
работает в этом направлении. Сюда относятся и экспе-
рименты Джорджа с хлопчатобумажными нитями, про-
питанными едким натром, которые измеряют условную
вероятность путем изменения своей проводимости, когда
через них проходят импульсы. Выдвигались также идеи
использования органических веществ, таких, как липои-
ды, для получения полупроницаемых мембран как тонко
реагирующего аналогового материала. Вообще поверх-
2. На пути к кибернетическому предприятию
Ш
ности раздела между жидкостями представляют сред-
ство для топологической организации недифференциро-
ванного или обладающего большим разнообразием ма-
териала.
Это не исчерпывающий обзор работ, проведенных в
данной области; я остановился лишь на некоторых
идеях, которые, собранные вместе, дают представление
о важных, с моей точки зрения, свойствах, какими дол-
жен обладать любой аналоговый материал искусствен-
ного мозга для промышленности. Требуется материал
с большим разнообразием параметров, который допу-
скает обратимую топологическую организацию посред-
ством простых входных сигналов малой энергии. Струк-
турность полученного таким образом материала должна
давать необходимое разнообразие для поглощения
входного разнообразия. Эта структурность и ассоцииро-
ванная с ней мера информации должны допускать
«считывание», но не в том, тривиальном (сегодня) смыс-
ле, чтобы давать цифровой выход, а чтобы отображать
себя на внешнюю ситуацию, откуда может быть подана
на вход обратная связь.
Никакая из этих активностей не должна непременно
быть линейной функцией, ни даже определимой функ-
цией входа. Весь агрегат представляет собой «черный
ящик» и не нуждается в конструировании. Решения за-
дач в нем просто вырастают, как растут металлические
нити Паска. И возвращаясь снова к физике твердого
тела, укажем, что если можно будет заставить выра-
стать из расплава кристалл германия с дифференциро-
ванными областями (утверждают, что это возможно),
то полупроводники снова станут подходящими материа-
лами, если включить в состав нашей системы и рас-
плавы.
Все это говорится для того, чтобы показать, что мы,
возможно, находились на ложном пути при кибернети-
ческих поисках искусственного мозга. Быть может, мы
придавали слишком большое значение созданию уст-
ройств и тому, чтобы заставлять материалы подчиняться
этому намерению. Если я правильно истолковываю
факты, почти любое недифференцированное вещество
годится в качестве материала для (7-мащины, и я хотел
112
Ст. Бир
бы коротко перечислить несколько направлений, по ко-
торым мы развиваем эту мысль в нашем отделе.
В области электроники Точер сооружает большой
аппарат для построения почти бесконечного разнообра-
зия «черных ящиков» из восьмидесяти блоков, состоя-
щих из нелинейных электрических сетей. Входы и вы-
ходы могут выбираться произвольно из возможных уз-
лов системы, которая управляется информацией, исхо-
дящей от чрезвычайно быстродействующего генератора
случайных чисел, в котором источниками шума служат
электронные диоды. Мы намерены исследовать гомео-
статические структуры с точки зрения времени, необхо-
димого машине для достижения равновесия. Формаль-
ные логические свойства растущей системы исследуются
Канингэм-Грином на вычислительной машине «Пегас».
По идее разрабатываемая программа должна выяснить
совокупность свойств, которыми должен обладать ана-
логовый материал, пригодный для устройства типа
^-машины; имея такую спецификацию, на ней затем
можно было бы основываться при поисках реальных
материалов.
Пока же наиболее многообещающий путь, на мой
взгляд, связан с использованием самих органических
систем. Упомянув липоиды, я только что вторгся в об-
ласть органических веществ. Могут задать вопрос, зачем
рассматривать такой материал, как лецитин, когда им
так трудно управлять по сравнению с различными сте-
рильными веществами такой же молекулярной струк-
туры. Но я подчеркиваю, что говорю теперь не об орга-
нических субстанциях, а о животных и микроорганиз-
мах. Не служат ли колонии живых существ, которые
являются самовоспроизводящимися (и поэтому в каче-
стве материала «саморемонтирующимися»), с их тро-
пизмом индивидов и таксисом групп, тем материалом,
который удовлетворяет ранее перечисленным свойствам?
Даже молекулярная электроника не может конкуриро-
вать с живым организмом в отношении размеров и еще
меньше в отношении цены.
Следуя этой идее, я предпринял ряд экспериментов,
особенно с людьми, поскольку их всегда можно иметь
в распоряжении, да к тому же они способны к самона-
2. На пути к кибернетическому предприятию 113
блюдению и анализу по окончании эксперимента. За-
дача состояла в том, чтобы использовать естественное
поведение системы с живыми компонентами для оты-
скания состояния равновесия другой системы, о кото-
рой эти компоненты ничего не знали.
Этим способом я получил решения системы линей-
ных уравнений от сгруппированных попарно субъектов,
которые воображали, что они ищут равновесие в неко-
торой чрезвычайно простой буквенной игре, служившей
фиктивной целью эксперимента. Дети, никогда не слы-
шавшие об уравнении, могут достичь тех же результа-
тов, и я не вижу причин, почему бы, например, мышей
нельзя было использовать подобным же образом, если
«игру с буквами» заменить «игрой с сыром». Теоретиче-
ской основой этой работы является преобразование
языка реальной задачи в гомоморфные ему отображе-
ния на языке другой, более простой задачи, отыскание
решений которой естественно для участников. Это озна-
чает усилить их умственные способности в точном смыс-
ле Эшби [9]. Использованное устройство было альгедо-
нической системой, регистрирующей боль и удоволь-
ствие участников. Эти условия легко создать для людей,
которым просто сообщается, что они должны восприни-
мать красный свет как удовольствие, а зеленый — как
боль. Для животных альгедонический механизм потре-
бовал бы большего размышления, хотя я уже доклады-
вал в другом месте [4] о пока, быть может, недостаточно
убедительных опытах с пресноводным рачком дафнией.
Цель этого краткого обзора — просто подчеркнуть
важность использования аналогового материала для со-
здания систем типа обсуждаемых в этой работе. Здесь
не место перечислять всю проделанную в этой области
работу, но я пытался наметить широту подходов, ко-
торая здесь представляется необходимой. Вскоре будет
принято решение, какой материал использовать для пер-
вой попытки построить [7-машину из реальных радио-
деталей (или коллоида, или протеина), и я обращаюсь
к симпозиуму за советом.
Описанная здесь работа не завершена и отчет о ней
не свободен от изъянов. Я убежден, что некоторые ас-
пекты разработаны надлежащим образом, в то время
8 Зак. 106
Приложение I
Пробная «энцефалограмма» «мозга» компании
Январь Февраль Март Апрель Май ~ Июнь июль Август Сентябрь Октябрь Ноябрь Декабрь
-----.---1----1---------1--__1_--1----1----1----1----1--
0,6 Поступление
0,4
0,2
о
.0,8
0,6
0,4
0,8
0,6
0,4
J>0
0,8
0,9
0,7
0,5
0J
0J
: 4 Я Отправление
Снабжение
о',в
°’7 Расходы
РА
оа
Ц Оборудование
Й Деньги
Ш Рабочая сила
F) Спрос
Запас
заготовок
Активность
Производи-
тельность
Запас троса
Приложение II
Гомоморфные преобразования «энцефалограммы»
Январь Февраль Март Апрель Май июнь июль Август СентябрьОктябрь Ноябрь Декабрь
(spoui)y.l (грош) у 1
116
Ст. Бир
как другие существуют только в набросках: они погру-
жены в сумрак, где ничего еще не ясно и отчетливо не
видно. Но проект, хотя и незаконченный, имеет то пре-
имущество, что он очень жизнен. Самоорганизующаяся
система должна быть всегда жизненной и незакончен-
ной. Ибо законченность — синоним смерти.
ЛИТЕРАТУРА
1. Ashby W. R., Design for a Brain (2nd ed.), Chapman a. Hall,
London, 1960; русский перевод: Э ш б и У. P., Конструкция мозга,
ИЛ, 1962.
2. A s h b у W. R., «The mechanism of habituation», Mechanisation
of Thought Processes, N. P. L. Symp. № 10, H. M. S. O., Lon-
don, 1959.
3. P a s k G., «Physical analogues to the growth of a concept», Me-
chanisation of Thought Processes, N. P. L. Symp. № 10, H. M. S. O.,
London, 1959.
4. Beer St., Cybernetics and Management, English Univ. Press,
London, 1959; русский перевод: Бир Ст., Кибернетика и управ-
ление производством, Физматгиз, 1963; изд-во «Наука», 1965.
5. Eccles J. С., Interpretation of action potentials evoked in
the cerebral cortex, EEG a. Clin. Neurophysiol., 3, 499—564
(1951).
6. Lorente de No R., «Cerebral cortex: architecture, intracorti-
cal connections, motor projections», cm. Physiology of the Nervous
System (ed. J. F. Fulton), Oxford Univ. Press, 1943.
7. Wiener N., Cybernetics, Wiley, New York, 1948; русский пере-
вод: Винер H., Кибернетика, изд-во «Сов. радио», 1958.
8. S h о 11 D. A., The Organization of the Cerebral Cortex, Methuen,
London, 1956.
9. Ashby W. R., «Design for an intelligence amplifier», cm. Auto-
mata Studies (Annals of Math. Studies, № 34), Princeton Univ.
Press, 1956; русский перевод: Эшби У. Р., «Схема усилителя
мыслительных способностей», сб. «Автоматы», ИЛ, 1956.
10. Bourbaki N., Theorie des Ensembles; fascicule de rdsultats,
A. S. E. I. № 1141, Hermann, Paris, 1951; русский перевод: Бур-
баки H., Теория множеств, ИЛ, 1964; сводку результатов см.
также в кн. Б у р б а к и Н., Общая топология. Основные струк-
туры, Физматгиз, 1958.
11. W a d d i n g t о n С. H., Strategy of the Genes, Allen a. Unwin,
London, 1957.
12. Bowman J. R., «Reduction of the number of possible Boolean
Functions», Trans. Ninth Amer. Conf, on Cybernetics (ed. von
Foerster H.), Josiah Macy Jr. Found., New York, 1953.
2. На пути к кибернетическому предприятию 117
13. Magoun Н. W., The Waking Brain, Thomas, Illinois, 1958; рус-
ский перевод: Мэгун Г., Бодрствующий мозг, ИЛ, 1961; изд-во
«Мир», 1965.
14. В г о d а 1 A., The Reticular Formation of the Brain Stem, Oliver
a. Boyd, Edinburgh, 1957.
15. Gastaut H., «Neurophysiological basis of conditioned reflexes
and behaviour», Neurological Basis of Behaviour, Ciba Symp.,
Ciba, London, 1957.
16. Noordenbos W., Pain, Elsevier, Amsterdam, 1959.
17. Beer St., «А technical consideration of the cybernetic analogue
for planning and programming», Proc. First Intern. Conf, on
Cybernetics, Namur, 1956.
ДИСКУССИЯ
Виллис. Кое-что сказанное Вами меня несколько беспокоит.
Быть может, я не совсем понял, как именно Вы этим пользуетесь.
Число 2гЛГ очень велико, как отметил Маккаллок при обсужде-
нии нейронов с пятью входами. Мне кажется совершенно ясным,
что если Вы хотите проверить все функции N переменных, которых
всего , Вы, вероятно, могли бы это сделать, когда W равно
пяти. 225 приблизительно равно 1010. С помощью большой вычис-
лительной машины, которая могла бы проверять миллион функций
в секунду, всю работу можно выполнить немного быстрее, чем за
два часа. Если перейти к шести переменным, число функций воз-
растет до 264, т. е. приблизительно до 1020. Несложный расчет по-
казывает, что если Вы возьмете 30 000 таких вычислительных ма-
шин, пустите их на полный ход и согласитесь подождать чуть
больше продолжительности Вашей жизни, Вы сможете это сделать.
Если же число переменных превышает шесть, задача становится
абсурдной.
Итак, что Вы собираетесь делать с этим? Таков мир Ваших
функций. Как Вы с этим справляетесь?
Бир. Разрешите мне ответить Вам.
Фон Фёрстер. Мне кажется, Джек Коуэн хочет что-то до-
бавить.
Коуэн. Лишь пару слов. Вы предполагаете, что имеется дву-
значная булева логика без избыточности. Но Стаффорд Бир гово-
рил об эволюции совокупности систем, на которые наложены огра-
ничения (т. е. в которые внесена избыточность). На основании ре-
зультатов Эшби нам известно, что такие ограничения всегда можно
использовать для повышения эффективности процедуры поиска.
Следовательно, простое сканирование методом проб и ошибок, мар-
ковское сканирование, может быть улучшено применением проце-
дуры поиска, использующей эти ограничения. На деле действитель-
но существуют некоторые многозначные логики с такими ограниче-
118
Ст. Бир
ниями в структуре, что они допускают определение нескольких ви-
дов мер или критериев длины пути, которые могут применяться
для вычисления «тенденций». Разумной можно назвать такую про-
цедуру поиска, которая использует критерий длины пути, чтобы
попасть в область, где имеется большая вероятность найти реше-
ние, а затем ищет решение с помощью марковской техники. Такой
процесс был бы гораздо более быстрым, чем просто применение
марковской процедуры, так что Ваши замечания не вполне спра-
ведливы.
Я хотел бы высказать замечание по поводу того, что, как я
полагаю, является важной частью работы Бира, а именно насчет
неопределенности представления. На первый взгляд, мне представ-
ляется, что это не что иное, как другая формулировка принципа
неопределенности Габора, гласящего, что невозможно одновременно
с произвольной точностью осуществить анализ физического сигнала
по времени и частоте, независимо от того, задан ли он как функ-
ция времени, или как функция частоты. Иными словами, хотя ана-
лиз по времени или частоте можно произвести с любой степенью
точности, невозможно произвести его одновременно иначе, как с
некоторой ограниченной точностью. Если это так, то что мы выиг-
раем, если по-новому назовем этот принцип и будем оперировать
с вполне упорядоченными счетными множествами?
Бир. Я не отрицаю такого сходства. Эти принципы, безуслов-
но, аналогичны.
Фон Фёрстер. Я думаю, это было очень полезное замеча-
ние, так как теперь мы можем ссылаться на некоторые уже из-
вестные факты. Когда Стаффорд говорил об этом, он был слегка
увлечен полемикой: он чувствовал, что ему приходится изо всех
сил защищать свой третий уровень неопределенности, введенный по
определению. Но теперь у нас есть чудесная возможность просле-
дить, откуда это берется. Мы можем вывести этот принцип из
принципа неопределенности Габора и из теории информации.
Бир. Но, Гейнц, тогда скажут, что это неверно. Скажут, что
это не имеет отношения к данному случаю. Я попытался изложить
этот принцип в его непосредственном контексте. Я согласен, что по
существу это тот же самый вопрос, но я пытался изложить его
здесь в модели мозга как таковой, и, думаю, это стоит сделать.
Я хотел бы высказаться по поводу вопроса Виллиса и заме-
чания Коуэна об этом — которое, разумеется, совершенно правиль-
но. Мы должны сохранять полную ясность в вопросе о возрастании
разнообразия. Как известно, согласно четкой и изящной формули-
ровке Эшби, нужно иметь «необходимое разнообразие», чтобы уп-
равлять системой.
То, чем мы пытаемся управлять в мозге или в промышленной
компании, или в экономике, — это быстро возрастающее разнооб-
разие. Здесь мы сталкиваемся с поистине колоссальным разнообра-
зием. Поэтому прежде всего я был прав, когда говорил об эквива-
лентном разнообразии, которое необходимо генерировать в процессе
управления. Далее Вы, однако, сказали, что такое разнообразие не-
2. На пути к кибернетическому предприятию
119
возможно получить в вычислительной машине, и это, конечно, вер-
но. Именно поэтому Гордон Паск и я работаем в течение ряда лет
над тем, что я всюду в докладе называю «аналоговым материа-
лом». Была выполнена очень большая работа по аналоговым ме-
ханизмам и аналогам неопределенности (используя статистику, ква-
зипсевдослучайные числа и т. д.). Но, что касается самого анало-
гового материала, сделано еще недостаточно. В чем мы по
существу нуждаемся — это в обладающем большим разнообразием,
недифференцированном материале, на который мы могли бы на-
кладывать ограничения. Мы не хотим иметь дело с кучей элементов
и деталей, которые нам приходится определенным образом компо-
новать. Ибо в этом случае нам понадобится чертеж. Мы будем
вынуждены создать детальный проект всей этой проклятой штуко-
вины, а это как раз то, чего мы хотим избежать.
Коуэн. Для меня остается сомнительным вопрос: если Вы
нашли путь через фазовое пространство, упомянутое Виллисом, и
достигли точки, соответствующей гомоморфному образу окружаю-
щей среды, имеется ли у Вас нечто вроде значимой меры среды,
о которой идет речь?
Б и р. Я этого не предполагаю, и для меня это безразлично.
Видите ли, дело в том, что если наше внимание будет занято пе-
реходными функциями и тем, чтобы быть в состоянии определять
объекты и получать значимые меры, мы будем создавать описатель-
ную, а не управляющую науку. Для последовательности изложения
я ввел гомоморфные образы реального мира, потому что мы хо-
рошо это знаем и понимаем. Но мне кажется, что фактически ус-
ловия, задаваемые нами для реальной управляющей системы, весьма
и весьма просты. Вы связываете управляющий блок и внешний мир
линиями прямой и обратной связи, по которым должны переда-
ваться воздействия их друг на друга, неважно, какие именно. В ре-
зультате эта система будет стремиться к устойчивому состоянию.
Я думаю, именно это показал Эшби. Нам не нужно знать, каковы
эти переходные функции. Нас мало заботит, например, вопрос, не
являются ли они нелинейными. Специалисты по электронике стали
усиленно разрабатывать эти вопросы. Какое они имеют значение?
Если наш замысел состоит в том, чтобы создать самоорганизую-
щуюся систему, зачем нам предпринимать такие аналитические
шаги, чтобы навязывать ей организацию?
Виллис. Позвольте мне сделать еще одно замечание по этому
поводу. Я думаю, что то же самое препятствие, которое останавли-
вает Вас, когда Вы пытаетесь получить нужное разнообразие с по-
мощью вычислительных машин, встанет на Вашем пути и при лю-
бом другом способе достигнуть этого. Просто у Вас слишком боль-
шие числа. В этом пункте мы расходимся.
Бир. Хорошо. Но я настаиваю на своем праве ответить Вам.
При том подходе, который я избрал, на уровне ничем не ограни-
ченной, недифференцированной глыбы вещества «вычисление»
120
Ст. Бир
происходит автоматически, без доступа к нему извне, на молеку-
лярном урогне. Машины Паска...
Виллис. Я утверждаю, что Вам не хватит и молекул.
Бир. Ну, если Вы действительно собираетесь исчерпать за-
пасы молекул, я признаю, что мы находимся в затруднении!
Виллис. Когда N достигнет 100, я думаю, Вы исчерпаете за-
пас молекул во всей Вселенной.
Фон Фёрстер. Я думаю, одна из существенных проблем,
к которой Стаффорд привлекает внимание в этой частной дискус-
сии, состоит в том, как установить внутренние связи в множе-
стве 2гЛГ.
Виллис. Это невозможно сделать. Необходимо сделать что-то
другое.
Бир. Поймите мое утверждение правильно и точно. Я не го-
ворю, что нужно связать каждую из 22?v функций с каждой. Я го-
ворю, что нужно создать конечную, ограниченную систему связей.
Но, с другой стороны, не требуется знать заранее, как и где про-
легают эти связи. Моя модель Т-машины ограничена как следует,
но только своим собственным опытом, своим собственным эпигене-
тическим ландшафтом. Она не ограничена несведущим конструк-
тором, который не имеет представления, какова будет жизнь в
будущем.
Виллис. Вам придется отыскать некоторое подмножество.
Я убежден в этом.
Бир. Да, но Вы не должны сами выбирать его. Вот что я
утверждаю: его должна выбрать «машина метаязыка».
Виллис. Возможно, что это так, но мне кажется, я смогу
показать Вам, что это невозможно, когда W велико.
Бир. Концепция, которую я выдвигаю в этом вопросе, заим-
ствована из генетики. В конце концов посмотрите, как эта же про-
блема возникает в генетике. Подумайте о разнообразии, которое
мы составляем как человеческие существа, а также и о том, ка-
кова была бы задача выполнить все перестановки для имеющегося
в наличии разнообразия вдоль всей родословной. Мы ведь этого не
делаем. Мы составляем, как Вы отметили, подмножество всего на-
личного разнообразия. И способом, которым это достигается без
детального расчета строения хромосом, является механизм, заим-
ствованный мной у генетика Уоддингтона: эпигенетический ланд-
шафт. Это нечто, что накладывает ограничения. Существует гипер-
поверхность реакций, ограничивающая совокупное разнообразие, но
не детерминированным образом. Это, я полагаю, очень ценное за-
имствование.
2. На пути к кибернетическому предприятию
121
Баумен. Я просидел около двух часов над Вашей рукописью,
но не принес ее с собой. Я не знал, что Вы собирались доклады-
вать сегодня утром. Имеется несколько мелких вопросов, которые
беспокоят меня. Разрешите мне выбрать один из них, быть может,
тривиальный. Одну минуточку.
Раздел 1.12. «Каждому элементу s из® соответствует плотное,
счетное бесконечное множество». Почему счетное? Должны ли мы
все делать на цифровой машине? Я боюсь, мы столкнемся с не-
которыми трудностями упорядочивания, если мы будем говорить
о плотном счетном бесконечном множестве, каковым, например, яв-
ляется множество рациональных чисел. Его нельзя расположить в
каком-либо порядке, который имел бы большой смысл, хотя оной
счетное.
Это было одной из мелочей, на которых я споткнулся. Почему
же Вы употребили здесь слово «счетное»?
Бир. Да, я сознаю эту трудность. Мой ответ состоит просто
в том, что я сделал это, чтобы опереться на понятие вполне упо-
рядоченного множества, и, мне кажется, ничто не теряется, если
с этой целью проквантовать континуум.
М а л л и н. Это не проблема. Он просто хотел обратиться к не-
которым свойствам несепарабельного матричного пространства. Это
просто современное математическое изобретение. Известно много
математических результатов, использующих этот принцип. Это хо-
рошо известный математический принцип; он называется сепара-
бельностью. Все это можно легко проделать.
Баумен. Понимаю. Меня это несколько смутило, потому что
я полагаю, что освещенность этой комнаты — настоящая непрерыв-
ная несчетная переменная, которая может принимать трансцендент-
ные значения, не обязательно...
Новиков. Это спорный вопрос.
' Баумен. Это вопрос, который мне очень хотелось обсудить.
Вы, конечно, вправе выдвигать собственные гипотезы, имея в виду
конечный результат. Это дозволено всем нам, но я очень хотел
выяснить этот вопрос.
Бир. Вполне резонно.
Эшби. Я хотел бы получить разъяснение относительно об-
щего проекта. В каком виде представляете Вы себе конечную цель
или диапазон допустимых действий?
Предположим, например, что Вы занимаетесь сталелитейным
заводом, а управляющий рабочей силой ведет дела таким образом,
что повсюду вспыхивают стачки, все вооружаются ломами, и про-
дажа стали растет, давая большую прибыль. Где, согласно Вашей
формулировке, принимается решение о том, хорошо это или плохо?
Допускаете ли Вы, что система просто растет, или имеется что-то,
что говорит: «Нет, мы хотим не этого, а хотим того-то»?
122
Ст. Бир
Фон Фёрстер. Прежде, чем Вы ответите, я хотел бы пре-
доставить слово для вопроса Шервуду.
Шервуд. Если разрешите, поскольку это, возможно, то же,
о чем говорит Эшби. Мне кажется, Ваш «мозг» не имеет религии 1).
Для чего существует это предприятие? Если стальные брусья вый-
дут из употребления, перейдет ли оно к текстильному или к хи-
мическому производству? Если так, то как оно реорганизует само
себя? Оно создано только для производства стали. Далее, если оно
создано для производства стали, стремитесь ли Вы получить боль-
шую прибыль или Вы стремитесь получить сталь высокого каче-
ства? Хотите ли Вы производить дорогие товары в малом количе-
стве или дешевые товары в большом количестве, и так далее и
тому подобное? Я допускаю, что все эти соображения всегда вво-
дятся в управляющую систему посредством некоторого рода обрат-
ной связи, но если рынок стали потеряет почву, займется ли она
вместо этого жилищным строительством и бросит производить аэро-
планы, и т. д. и т. п.?
В этом и состоит трудность. Ибо порядок, введенный на пред-
приятии, каков бы он ни был, есть в известном смысле религия.
Бир. Да, но этот порядок должен быть самовводящимся. Ви-
дите ли, это одна из тех вещей, которые я не хочу...
Шервуд. Но прежде всего предприятие построено, чтобы
производить сталь.
Бир. Завод — да. Но не компания.
Я думаю, дело здесь вот в чем. Отвечу сперва Россу Эшби.
Мне кажется, мы еще слишком мало знаем в области телеологии.
Является ли то, что мы называем задачами и целями в таких си-
стемах, просто названиями состояний равновесия — неизбежным
следствием попытки описать систему такого рода?
Шервуд. Однако Вы говорили же, что цель всей системы —
выживание, или гомеостазис. Но стремится ли она быть дурной или
хорошей?
Бир. Это часть проблемы выживания, разумеется: одобряет
ли среда поведение, которое Вы бы назвали дурным или хорошим?
Это оценочное суждение.
Но вопрос, который я пытаюсь выяснить, состоит в следую-
щем: то, что эта система будет делать, может быть лишь непосред-
ственной функцией того, что она знает. Это проблема теории игр.
Я считаю, такой взгляд вполне приемлем. Это игра при ограничен-
ном количестве информации. Далее, если входы сообщают системе
только то, что касается стали и крахов в сталелитейной промыш-
1) Здесь и далее под «религией», естественно, подразумевается
не вера в бога, а наличие какой-то руководящей философско-этиче-
ской или целеполагающей концепции. — Прим. ред.
2. На пути к кибернетическому предприятию 123
ленности, то все, что такой организм может сказать себе, сводится
к выводу: «Я нахожусь перед резким скачком конъюнктуры», — и
он сможет предсказать это быстрее, чем люди. В этом случае, я
полагаю, желательно было бы расширить его (организма) знания
так, чтобы он мог принимать решения и о каких-либо иных дей-
ствиях. Это представляется вполне возможным. Однако в настоя-
щее время моя модель ограничена в этом отношении. Поэтому сей-
час я могу лишь ответить Эшби, что именно для того в моей мо-
дели имеется руководство (люди), чтобы принимать высшие ре-
шения такого рода. Эти люди могут сказать: «Да, все в порядке,
сталелитейный завод работает хорошо. Но я намерен отныне про-
изводить мороженое».
Дело в том, что существует целая иерархия языков, на кото-
рых мы можем говорить. Суть дела в этой системе, как и во всех
системах, состоит в том, что мы всегда можем передвинуть гра-
ницы так, чтобы включить несколько больше иерархических уров-
ней, после чего дело принимает совсем другой оборот.
Но утверждение относительно проблемы выживания, которое я
хотел бы доказать, состоит в том, что когда я подвергал критике
наш образ действий в настоящее время и выражал недовольство
оптимизацией по отношению к одному фактору, у нас явно отсут-
ствовал критерий поведения, подобный тем, которые инженеры —
специалисты по регулированию имеют для систем такого рода, для
жизнеспособных организмов с системой п переменных на входе.
В промышленности многие положения, осознаваемые как цели, яв-
ляются несовместимыми. Некоторые из них явно противоречат друг
другу. При таких обстоятельствах единственное, что я мог сделать,
это очертить круг, охватывающий все это множество возможных
целей, и говорить о выживании в том смысле, в каком этот термин
можно считать применимым ко всем этим целям одновременно.
Фон Фёрстер. Могу я на минуту прервать Вас? Я думаю,
Вам следовало бы провести различие между жизнью (или живым
состоянием) и выживанием. Это, как ни странно, две разные за-
дачи. Можно создать нечто, что будет жить, но, вероятно, не бу-
дет выживать, так как не сможет воспринимать изменений среды,
поскольку они окажутся слишком быстрыми, или что-нибудь в этом,
роде. Я думаю, что религия, на которую здесь указывали, это про-
сто одна из подцелей, используемых для того, чтобы решить
проблему выживания. Религия становится ближайшей целью, ко-
торая помогает выбрать образ действий, необходимых в данный
момент для того, чтобы выжить. Один лишь факт существования
в живых не дает этого. Однако, если у Вас есть критерий выжи-
вания, Вы можете, как это ни странно, оказаться на высоте поло-
жения со своим производством мороженого, если организм будет
достаточно сложен.
Баумен. Откуда берется этот критерий?
Фон Фёрстер. О, из самой задачи. Вы вводите его в фор-
мулировку задачи.
124
Ст. Бир
Маккаллок. Мне кажется, что вопрос о религии стоит не-
сколько иначе, если можно так выразиться. Я считаю, что решаю-
щим является то, что машина, если она может осознать свой
эпигенетический ландшафт, относится к нему серьезнее, чем к себе
самой, и это полезно для выживания. Это решающее обстоятель-
ство.
Бир. Да. Для наблюдателя это может выглядеть так, как
будто машина приобретает набор оценочных суждений. Я имею в
виду, что мы не знаем, как на самом деле описывать явления в
этой области, не так ли?
Фон Фёрстер. Мы этого еще не можем.
Баумен. Я не хочу отнимать слишком много времени, но бе-
седа подошла к Вашей идее о более или менее однородном мате-
риале для машины, подлежащем некоторым ограничениям.
Позвольте мне подхватить эту идею. Она кажется мне, в том
виде, как она сформулирована, глубокой и прогрессивной, но весьма
туманной. Позвольте мне встать на противоположную позицию и
высказаться о том же самом, быть может, с инженерной точки зре-
ния. В настоящее время существует рутинная программа для по-
строения универсальной цифровой вычислительной машины. Мы
начинаем с блок-схемы, которая обычно имеет мало смысла для
всех, кроме человека, набросавшего эту схему, так как он обычно
забывает дать описание функций блоков и узлов. Однако всегда,
без исключения, будет изображен один прямоугольник, помеченный
как «арифметическое устройство», и другой, обозначенный словом
«накопитель» или, как здесь говорят, «память». Часто изображаются
они на разных сторонах листа. Я полагаю, что идея ограничивае-
мого материала очень сходна с тем, чтобы перестать проводить
различие между этими двумя черными ящиками.
Возьмем в качестве простого примера машину, с которой я
работал последнее время. У этой машины очень громоздкая и мед-
ленно действующая память на магнитных барабанах. Но ее ариф-
метическое устройство помещается на ладони, оно состоит из двух-
разрядного сумматора и линии задержки на один импульс.
Далее, если Вы хотите произвести умножение (эта машина,
надо сказать, работает только в двоичной системе счисления), муль-
типликатор автоматически становится частью арифметического уст-
ройства. Порядок операций следующий: сдвиг, сложение, сдвиг без
сложения, сдвиг без сложения, сдвиг, сложение, сдвиг, сложение,
сдвиг, сложение и так далее в зависимости от двоичных разрядов
множителя.
В целом операция умножения в двоичной машине гораздо
сложнее. Здесь и контроль четности, и установление знака, и за-
дача округления — программа на программе! Ныне вошел в упо-
требление термин «микропрограммирование».
Далее, все эти микропрограммы записаны на барабанах и хра-
нятся там наравне с числами. Но именно они. задают условия, оп-
ределяющие, что будет делать машина. И я лишь полагаю, что
2. На пути к кибернетическому предприятию
125
различие между оператором и операндом стало уже чересчур рез-
ким, и считаю, что Вы делаете большой шаг к ликвидации этого,
когда говорите об однородном, но подчиненном определенным ус-
ловиям материале.
Бир. Да, надеюсь, что это так. Видите ли, эта аналогия с вы-
числительными машинами не нравится мне по двум причинам
(я имею в виду саму аналогию, а не изложение Баумена). Прежде
всего, я, право, не выношу (не знаю, согласятся ли со мной осталь-
ные), когда память представляют себе так, будто нечто засовывают
в ящик до востребования или как сверток сдают в камеру хра-
нения.
Вы видите, что в системе моего типа память представляется
предпочтительными траекториями в фазовом пространстве. Вы засе-
каете эту траекторию в нескольких местах и, увы, тут же должны
решить задачу распознавания. Это, по-моему, гораздо ближе к фи-
зиологической памяти. Другое важное положение касается больших
электронных машин, которые, я считаю, являются прямо-таки ди-
нозаврами...
Баумен. И которых ожидает та же участь?
Б и р. Я думаю, да. Это то, что я имел в виду. Они целиком
заняты цифровой выборкой данных. Но почему это так? Всегда
возможно, задав выходной канал, который вы можете установить
где угодно, определить, что происходит именно в этом месте, и
получить огромное количество выходных данных. Итак, мы заин-
тересованы не в цифровой выборке данных, а в цифровом выходе.
Почему же мы платим столько денег, чтобы сделать это доступ-
ным?
В таких машинах, какими занимались Гордон (Паск) и я, не
удается получить промежуточный ответ. Посредством гордоновской
чаши с коллоидом можно фактически обращать матрицы порядка
двухсот тысяч. Стоимость этой вычислительной машины, наверно,
десять центов. Единственное затруднение состоит в том, что вы не
знаете каков ответ.
Такое заявление звучит наивно до абсурда, но Вы согласитесь,
что это не так, потому что Вы вовсе и не хотите знать ответ.
Единственное, чего Вы хотите, — это использовать ответ. Так за-
чем же придавать ему цифровую форму? Если молекулы в нашей
системе «подхватывают» ответ, то мы имеем все нужное нам раз-
нообразие, чтобы вводить сигналы обратно в систему для целей
управления. Непонимание этого обстоятельства послужило ужасной
западней в развитии техники управления, п я полагаю, что экспо-
ненциальное возрастание стоимости управляющих систем в про-
мышленности — прямой результат того, что мы думали, будто не
владеем чем-то, если не можем его измерить, скажем, измеритель-
ной линейкой. То, что наука — это измерение и тому подобные рас-
суждения, — это все несомненная истина. Но это стали понимать
в том смысле, будто нет измерения, если нельзя получить цифры.
Такой взгляд, по-моему, неправомерен.
126
Ст. Бир
Эшби. Мне вспоминается, как говорил д-р Тьюринг: половина
труда в высшей математике уходит на то, чтобы заставить людей
понять, чего они на самом деле хотят, а не думают, что хотят.
Баумен. Могу привести вам чудесный пример, так сказать,
из первых рук. Один химик, притом очень хороший, пришел к нам
и попросил рассчитать на машине кривую, которую он хотел вы-
чертить. После многих десятков часов машинного времени мы вы-
дали ему кучу чисел. Тогда он сел и кропотливо стал наносить
точки на миллиметровку.
Я спросил его: «Ну, что же Вы намерены с этим делать?» —
«О, мне нужно только найти точку перегиба этой кривой». Ему
нужно было получить одно число, и машина дала бы ему это
число, но ему пришлось построить всю кривую, а остальную ра-
боту проделать вручную. Он просто не знал, как поставить вопрос.
Б и р. Я хотел бы привести мой излюбленный пример о про-
блеме цифровой выборки данных в отношении мозга, потому что
хотелось бы услышать замечания специалистов по мозгу, присут-
ствующих здесь. Очевидно, мы можем производить в своей голове
огромный объем вычислений. Мы обладаем всем необходимым раз-
нообразием. Я часто лавирую среди потока машин на площади
Пикадилли, и меня все еще ни разу не сшибла машина. А ведь
это требует хорошеньких вычислений! Но если я попытаюсь полу-
чить цифровую выборку данных из моего собственного мозга, я не
получу этого. Если вы спросите меня, далеко ли эта стена, я оши-
бусь на 20, быть может, на 50%. Здесь дело безнадежно. Пример
же, который я хотел привести, следующий.
Вы рисуете на доске уходящую вдаль дорогу и хотите распо-
ложить вдоль нее телеграфные столбы. Вы могли бы сказать: «Пер-
вые два столба отстоят друг от друга на один фут, дайте мне, по-
жалуйста, числа, определяющие остальные интервалы». Что ж, по-
пытаемся. Мы получим ответ, правильный лишь в той степени, в
какой нам известно, что интервалы монотонно убывают. Если нане-
сти эти численные оценки на рисунок, мы сразу увидим, что они
неправильны.
Но если Вы попросите кого-либо нарисовать, как расположены
эти столбы, почти каждый сделает это на глаз абсолютно точно.
Итак, я утверждаю, что у нас в голове имеется аппарат, исполь-
зующий проективную геометрию, даже если мы никогда о ней не
слышали. Мы можем это проделать, но не можем получить числен-
ный ответ.
Итак, вопрос к неврологам: означает ли это, что у нас нет
цифрового выхода, соединенного с нужным местом, или это озна-
чает, что такого места, в некотором смысле, фактически не суще-
ствует?
Шервуд. Нет, ответ состоит в том, что, когда Вы пытаетесь
получить количественную меру, Вам приходится переходить от сим-
вола к объекту. У Вас в голове имеется некоторый символ.
Бир, Хорошо, тогда это просто отображение?
2. На пути к кибернетическому предприятию
127
Фон Фёрстер. Нет, это должно быть идентификацией сим-
вола. Это проблема интерпретации. Символ означает то, что Вы
ищете, что Вам требуется найти. А Вам нужна интерпретация сим-
вола, которая представляет собой процесс. Вы должны заново дать
оценку множеству различных возможных состояний: что это
могло бы означать и тому подобное.
Шервуд. Существует по меньшей мере два перевода на
другой язык.
Фон Фёрстер. Именно.
Бир. До чего я добрался, это тот факт, что эти расстояния,
когда вы их наконец нарисуете, окажутся очень точными, как если
бы они были получены на вычислительной машине с помощью
проективной геометрии. Что это означает?
Шервуд. Вы просите меня изложить Вам термодинамику и
точное приложение сил и все, что сюда относится. Но, хотя Вы
можете перепрыгнуть через ручей и приземлиться на камне, что
находится на другом берегу на ферме Уоррена, вы и в этом случае
такого анализа не сможете провести. Все мы можем совершить этот
прыжок. Но большинство из нас не имеет понятия, чего стоит вы-
числить силы, действующие на ступню ноги, или что необходимо
для равновесия. Это чистая физика, т. е. здесь нужно осуществить
перевод некоторого действия на совершенно другой язык — на язык
науки. Точно так же мало пользы будет от того, если мы сообщим
кому-либо, что он должен делать, воспользовавшись для этого
языком техники.
Маккаллок. Если приподнять кошку, перевернуть ее лапами
вверх и отпустить достаточно высоко от пола, она приземлится
на все четыре лапы. Если Вы преподаватель физики, Вам потребо-
валось бы много времени, чтобы убедить учеников, что при этом
сохраняется момент количества движения.
Баумен. Кошка может свертываться калачиком, вращаться и
разворачиваться. При этом все сохраняется.
Фон Фёрстер. Георг Цопф хочет что-то сказать.
Ц о п ф. Возьмем ли мы кошку или задачу Шервуда о точном
прыжке на камень, мне кажется, Бир говорит о том, что мы не
можем исследовать психические процессы и указать: здесь сооб-
щается о вычислении расстояния, здесь — о вычислении момента
количества движения и т. д. и сказать, что затем все это объеди-
няется, чтобы определить, каким должен быть двигательный акт.
Другими словами, эти частичные вычисления не имеют индивидуаль-
ных представлений.
Маккаллок. Мы задаем вопросы вроде: в какой из ламп
моего приемника находится голос Руди Вэлли.
128
Ст. Бир
Бир. Нет, нет. Это совсем не то, что я имел в виду.
Розен. Я хочу вернуться к вопросу, который Вы подняли не-
которое время назад.
Вы описали несколько типов самоорганизующихся машин, изго-
товленных из определенного материала, причем полезные данные,
выдаваемые машиной, являются результатом наложенных ограни-
чений. Интересно знать (это мне подсказывает моя интуиция), не
представляет ли система ограничений, которые вы должны знать
и накладывать на материал, такую же сложную проблему, как
проблема о том, что происходит в каждом из Ваших блоков, пред-
ставляющих машину. Поэтому мы, может быть, просто поменяли
местами проблемы, выдвинув столь же сложную задачу определения
специфических ограничений.
Бир. Мне кажется, Ваша ошибка в том, что, по-вашему, мы
должны знать систему ограничений. Мы их не знаем, и в этом
все дело.
Розен. Прошу прощения, но из многих высказанных здесь за-
мечаний я сделал вывод, что задача этой машины — управлять
определенным заводом. Как только Вы формулируете эти цели, если
Вы можете их сформулировать...
Бир. Вы не можете. Понимаете, в этом-то как раз все дели.
Один управляющий говорит Вам: «Мы здесь для того, чтобы про-
изводить прибыль», другой говорит Вам: «Мы здесь служим об-
ществу». И все они действуют так, как если бы они были здесь
для того, чтобы удить форель. Вы не сможете сформулировать
эти цели.
Розен. Если Вы не можете их сформулировать и они явля-
ются ограничениями, накладываемыми извне на эти большие чер-
ные ящики, способные создавать некоторую организацию внутри
себя, я не понимаю, как Вы собираетесь накладывать какие-то
ограничения, которые выделят оптимальное множество процедур
самоорганизации, чтобы дать Вам определенные результаты.
Бир. Эти входы и есть ограничения. Они и являются тем, что
я называю ограничениями.
Коуэн. Розен совершает ошибку, когда считает эти ограниче-
ния абсолютными. Их надо на Самом деле понимать в относитель-
ном смысле.
Розен. Они переменные? Являются эти ограничения перемен-
ными?
Коуэн. Они становятся в конечном итоге переменными.
Розен. Если это так, то перед Вами та же проблема: опре-
делить, какие из этих множеств переменных будут что-либо озна-
чать, если эта проблема вообще имеет какой-то смысл. Я готов
2. На пути к кибернетическому предприятию
129
согласиться, что если эти ограничения можно сформулировать
в форме, которая проще внутреннего механизма машины, то мы
упростили всю проблему. Однако я этого не вижу.
Маккаллок. Зачем нужно формулировать ограничения?
Розен. Зачем затевать строительство этих самоорганизующих-
ся машин?
Коуэн. Она не будет самоорганизующейся, если Вы сформу-
лируете ограничения.
Розен. Но, я полагаю, Вы начинаете с заявления, что хотите
улучшить работу отрасли промышленности или предприятия. Это
то, из чего Вы исходите.
Фон Фёрстер. Это означает отказаться от заранее задан-
ны* ограничений.
Розен. Если Вы отказываетесь от задания ограничений, не бу-
дете ли Вы иметь дело со столь же сложной проблемой, какую Вы
пытаетесь решить?
Фон Фёрстер. Быть может, Анатоль Рапопорт поможет нам.
Рапопорт. В каком смысле?
Фон Фёрстер. В смысле данной дискуссии.
Рапопорт. Прошу прощения, но я с трудом успеваю следить
за тем, что здесь говорится. Я пасую.
Розен. Давайте все спасуем.
Фон Фёрстер. Давайте не будем еще пасовать. У нас есть
пятнадцать минут, мы еще можем до чего-нибудь договориться.
Эшби. Один метод принятия решения состоит просто в том,
что имеется кто-то, кто заявляет: «Я управляющий, вы спраши-
ваете меня, хорошо ли то-то и то-то или плохо, и я отвечаю вам.
Я не привожу никаких доводов, давайте мне только предложения,
и я буду ставить на них клеймо: «хорошо» или «плохо».
Детальное перечисление того, что происходит внутри системы,
не является необходимым. Необходимо принятие решения.
Бир. Вот именно. Это альгедоническая замкнутая цепь, опре-
деленная в моем докладе.
Розен. Можно мне возразить на это? Действительно, в этом
все дело. Итак, именно управляющий, обладая мозгом, определяет,
нравятся ли ему те или иные вещи или нет. Таким образом, мы
по существу перенесли проблему на механизм, который является
самоорганизующимся и как раз столь же сложен или даже еще
более сложен, чем тот, который мы проектируем.
9 Зак. 106
130
Ст. Бир
Эшби. Я предполагаю, что эта личнОсть, в некотором смысле
автомат, избирается держателями акций. Они знают, что он за
парень, знают, какого рода решения он будет принимать. Для них
он просто очень сложная функция рабочей силы, денег, прибылей,
торгового оборота — очень сложная функция. Все, чего они хотят, —
это чтобы он был решающей функцией всех этих переменных и го-
ворил бы: эта комбинация плохая, эта — хорошая и т. д. Он не
организует: он определяет то, что Зоммергофф называет «фокаль-
ными условиями».
Розен. Он накладывает ограничения на систему. Значит, су-
ществует организм, функционирование которого заключается в том,
чго он накладывает ограничения на систему, а такой организм так
же сложен, как и тот, что мы создаем.
Коуэн. Дело в том, что система сместит его и заменит дру-
гим, если он не будет давать нужных результатов.
Розен. Вы надеетесь, что проблема в каком-то месте начи-
нает постепенно упрощаться, а не остается на том же уровне слож-
ности.
Фон Фёрстер. Я думаю, это поистине тема для двух люби-
телей поспорить. Мне кажется, к чему стремится д-р Розен, так это
то, что он хотел бы изложить проблему совершенно ясно. Как
вчера отметил Маккаллок, совершенно ясных совокупностей ответов
можно ожидать лишь при очень ясных совокупностях стимулов —
изменение освещенности, появление прямого края предмета в поле
зрения и т. п.
Прекрасные вопросы, разумеется. Но чего мы, собственно, хо-
тим: объяснить данную лягушку, какой она есть, или объяснить,
как она стала этой лягушкой? Конкретные особенности, действи-
тельные ограничения, свойственные данной лягушке, являются ре-
зультатом случая. Никем не было определено свыше, как должна
была произойти эта лягушка, и эти ограничения не были заранее
установлены.
По отношению к работающей фабрике внешний наблюдатель
или несколько внешних наблюдателей придут, быть может, к опре-
деленному заключению о ее свойствах. Это данный тип системы.
Но затем вы приходите к развивающейся фабрике мороженого, и
они воспримут все это как проблему совсем другого рода. Я думаю,
Стаффорд пытался подчеркнуть именно проблему перехода одной
системы в другую. Он говорит: «Имеется прокатный стан, но этот
прокатный стан не обладает мозгом. Давайте же приведем его в со-
стояние, в котором он в конце концов приобретет мозг». Конечно,
это просто процесс эволюции. Это система, которая развивалась
бы согласно ее внутренним ограничениям и становилась бы луч-
шим прокатным станом. А это было бы как раз то, что сказал бы
ваш собственный совет директоров: «Давайте станем лучшим про-
катным станом!»
3. СИМВОЛИЧЕСКОЕ ИЗОБРАЖЕНИЕ НЕЙРОНА
В ВИДЕ НЕКОТОРОЙ ЛОГИЧЕСКОЙ ФУНКЦИИ
У. МАКК АЛ Л ОК
(Лаборатория электроники Массачусетского
технологического института)
Я хотел бы, несколько злоупотребив своим правом
председателя сегодняшнего заседания, сказать перед
следующим докладом пару слов о наших символах, с
которыми не все достаточно хорошо знакомы.
С 1952 по 1957 г. я работал над этими проблемами
один, и лишь в 1959 г. ко мне присоединился Мануэль
Блюм. Поэтому способ символической записи, которым
я пользовался, в какой-то мере отражает мои личные
пристрастия. Он явился развитием метода кругов Эй-
лера, выражающих отношения между классами, с ис-
пользованием диаграмм Венна, в которых особо обозна-
чены истинные высказывания. Таким образом, применяе-
мые мною идеограммы являются фактически развитием
таблиц истинности Виттгенштейна. Итак, я вначале ис-
пользовал круги (фиг. 1,а). Потом мне надоело вычер-
чивать круги полностью и я стал указывать только часть
их, выделенную пунктиром на фиг. 1,6, так что в конце
концов получился символ в виде косого креста или бук-
вы «икс» (фиг. 1, в).
С помощью этих диаграмм можно, записывая что-то
в одном, двух, трех или четырех положениях или вообще
ни в одном, сразу записать любую логическую функцию
от двух переменных. Диаграммы воздействуют друг на
друга следующим образом.
Предположим, имеются три символа, изображенные
на фиг. 1,г; А и В здесь входят в крайние символы, яв-
ляющиеся операндами, а средний символ представляет
собой воздействующий на них оператор. Рассмотрим
простой случай. Пусть имеется какое-то А и какое-то В,
9*
132
У. Маккаллок
Оператор с точкой в положении «и Л, и В» должен оста-
вить только общую обоим операндам точку, т. е. точку в
«ни Л, ни В». Если же оператор имеет точку в положе-
нии «ни Л, ни В», то он поставит точку в верхнем поло-
жении, в месте, которое пусто в обоих операндах. Если
в операторе точка слева, то он берет лишь то, что со-
держится в одном только левом операнде, и аналогично,
Только А и А, и В Только В
а 6
иА,
Только\/Только
А В
ниВ
6
Фиг. 1.
если точка в операторе справа, то он берет лишь то, что
содержится в одном только правом операнде.
Эти правила легко распространить на случай любого
числа переменных; при этом придется только рисовать
символы более сложной формы.
Эшби. Если я правильно понял, среднее «X» имеет другое зна-
чение, нежели «X» справа и слева?
Маккаллок. Среднее «X» — это диаграмма работы выход-
ного нейрона, а боковые — это, если хотите, диаграммы входных
нейронов. Выходной нейрон производит данную функцию от этих
двух аргументов,
3. Символическое изображение нейрона
133
Эшби. Вы рассматриваете правое «X» как точку по отношению
к центральному «X»?
Маккаллок. Да.
Эшби. Так что Вы могли бы написать «X» с «X» сверху и
с «X» снизу?
Маккаллок. Да. Неважно, где я помещу символ опера-
тора. Случилось так, что я поместил его между крайними симво-
лами. Важно, что это символ нейрона, входами которого являются
выходы двух других.
На фиг. 2 я изобразил эти диаграммы внутри нейро-
нов, чтобы было понятней, что каждый из них делает.
Д 5
Фиг.
2.
Передаточные диаграммы приведены справа. Числа в
диаграмме выходного нейрона соответствуют порядку
появления в этих местах точек при изменении порога.
В дальнейшем мы будем пользоваться такого рода
обозначениями, но сейчас мне не хотелось бы дольше
останавливаться на этом. Речь идет о символическом
языке для нейронов, которые при сдвиге порога пере-
стают вычислять заданную функцию. На фиг. 2 рассмо-
трен простой случай. Имеется один выходной нейрон
с входами от А и В. Если при этом порог 0 равен 4, то
выходной нейрон никогда не возбудится. Если порог ра-
вен 3, нейрон возбудится при наличии сигналов одновре-
менно от А и В. При 0 = 2 нейрон возбудится, если есть
сигнал только от Л, а также от А и В совместно, при
0=1—если есть оба сигнала, сигнал только от А или
только от В. При 0 = 0 возбуждение будет спонтанным и
неуправляемым,
134
У. М акка л лок
Таким образом, наши символы очень просты. Их мо-
жно распространить на любое число аргументов с по-
мощью введенных Селфриджем и Минским диаграмм
Венна, которые имеют очень простой вид.
Над чем я до последнего времени работал и над чем
мы продолжаем думать сейчас — это различные способы
соединения таких нейронов. Нейроны эти должны обла-
дать следующими обязательными свойствами (фиг. 3).
Торможение
Афферентное
торможение
Возбуждение
Фиг. 3.
Они могут возбуждаться афферентными нервами, выхо-
дящими из тела нейрона. Они могут тормозиться аффе-
рентными нервами, которые в общем случае поднимаются
по апикальным дендритам. Таким образом, в данном
случае мы пользуемся знакомыми нам терминами.
Далее, мы знаем, что импульсы в некоторых волок-
нах могут воспрепятствовать другим импульсам пойти к
телу нейрона. И это как раз тот вид торможения, кото-
рый уничтожается стрихнином. Мы знаем, где это тор-
можение возникает.
Я рассматривал изменения величины 0 как у группы
нейронов совместно, так и у отдельных нейронов. Рас-
сматривались также изменения силы сигналов, измене-
ния в самих синапсах, скажем, если у них появляются
два соединения вместо одного. В общем меня в первую
очередь интересовали те свойства нейронов, которые
могли бы явиться источниками неприятностей в по-
строенной на них машине.
3. Символическое изображение нейрона
135
Такими свойствами являются: изменение величины
порога, изменение силы сигналов, изменения в соедине-
ниях между нейронами. Из нейронов с тремя или более
входами очень легко собирать чрезвычайно надежные
схемы, способные выдержать все виды возмущений.
Неприятности возникают, когда ошибка появляется
где-либо на выходе нейрона, несмотря на то что все
остальное работает правильно. Это то, чем я раньше не
занимался и чем мы должны заняться теперь. Эту си-
туацию можно рассматривать как появление шума на
входе некоторого другого нейрона совершенно незави-
симо от того, работает ли сам этот нейрон правильно
или неправильно.
Именно этим вопросам и посвящена наша совместная
работа, которую мы здесь собираемся доложить; она на-
столько совместна, что, я думаю, ни один из нас не смог
бы определить, что сделано одним, а что другим. Я пре-
доставляю слово Мануэлю Блюму.
4. СВОЙСТВА НЕЙРОНА СО МНОГИМИ ВХОДАМИ
М. БЛЮМ
(Лаборатория электроники Массачусетского
технологического института)
1. ВВЕДЕНИЕ
Формальный нейрон — логическое устройство со
строго определенными свойствами. В этой статье при-
ведены некоторые теоремы о нейронах, помогающие вы-
яснить интересные свойства цепей, построенных на ней-
ронах.
В своей статье по вероятностной логике [7] фон Ней-
ман ставит и пытается решить проблему надежности це-
пей, построенных из машинных элементов с двумя или
тремя входами. Однако его решение требует использо-
вания в цепях лучших элементов, чем те, которые пред-
положительно имеются в мозгу.
Поиски решения были продолжены Маккаллоком
[1—3]. Маккаллок сформулировал свойства формального
нейрона, который мы в дальнейшем будем называть про-
сто «нейроном», и физиологически обосновал выбор мо-
дели. Он соединил нейроны в цепи более надежные, чем
составляющие их нейроны. Эта статья является матема-
тическим исследованием использованных в этих цепях
нейронов со многими входами.
Формальный нейрон — элемент вычислительной ма-
шины, обладающий следующими свойствами:
1. К нему подходят нервные волокна от д входов, а
сам он имеет один выход.
2. Каждый вход и единственный выход могут нахо-
диться только в двух состояниях: возбужденном или не-
возбужденном.
3. Нервные волокна от некоторого входа могут раз-
ветвляться, но не могут объединяться с волокнами дру-
гого входа.
4. Свойства нейрона со многими входами 137
4. Волокна могут быть возбуждающими и тормозя-
щими. По возбуждающему волокну нейрон получает по-
ложительную единицу возбуждения ( + 1), а по тормо-
зящему— отрицательную (—1). Волокно может также
запирать сигнал, идущий по другому волокну (фиг. 1).
Фиг. 1. Схематическое изображение нейрона и входных
волокон.
5. Сигналы могут проходить через нейрон только в
одном направлении.
6. Имеется некоторое запаздывание в передаче сиг-
нала от входа к нейрону.
7. При правильной работе нейрон возбуждается,
если арифметическая1) сумма возбуждающих и тормо-
зящих сигналов превосходит некоторый определенный
порог (0).
В исчислении высказываний операция «И» может быть
обозначена точкой •, операция «ИЛИ» — значком V и
операция «НЕТ» — значком Еще удобнее записывать
1) Здесь, по-видимому, имеется в виду алгебраическая сумма.—
Прим. ред.
138
М. Блюм
выражения исчисления высказываний с помощью диа-
грамм Венна, Логические переменные представляют-
ся в этом случае некоторыми областями. Пересечение
А и в
НиА,ниВ
Фиг. 2. Диаграммы Вгнаа и Минского — Селфриджа.
а —диаграммы Венна для двух и трех переменных, б —число переменных;
б —диаграмма Минского —Селфриджа, которая является обобщением диа-
граммы Венна для любого числа переменных.
нескольких областей соответствует произведению соот-
ветствующих логических переменных (фиг. 2). Для изо-
бражения логической функции в диаграмме Венна в со-
ответствующем месте ставится точка. Так, запишем с
4. Свойства нейрона со многими входами
139
помощью диаграмм Венна 16 логических функций для
исчисления высказываний от других переменных:
v „0“ или „противоре-
А чие«
X А~В
X А- В, или „И**
X — А-В
\/ —А •—В, или
«штрих Шеффера*
X А
X в
* ~А
% АВ\/~А-~В
X А-~В\/ ~А-В
Ж А\/~В
jjK А\/В, или включи-
тельное «ИЛИ*
Ж ~A\JB
—AV — В, или
«штрих Шеффера*
«1*, или тавтология
— В
Диаграммы Венна используются для записи логиче-
ских функций, вычисляемых нейроном. Вид функции
определяется соединением волокон и порогом нейрона.
В общем случае необходимо рисовать для разных значе-
ний порога 0 различные диаграммы Венна (см., напри-
мер, фиг. 3).
Каждый нейрон имеет д входов, и каждый вход мо-
жет быть в одном из двух состояний: возбужден или не-
возбужден. Таким образом, возможны 2е входных ком-
бинаций. Каждой комбинации соответствует область в
диаграмме Венна для данного нейрона.
Логические функции, вычисляемые некоторым ней-
роном при’ различных значениях порога, удобно изобра-
жать с помощью одной диаграммы Венна. Укажем для
этого два возможных способа:
1) При каждой комбинации сигналов на входах ней-
рон получает некоторое количество возбуждения, кото-
рое может быть выражено числом. Будем записывать
это число в той области диаграммы Венна, которая со-
ответствует данной входной комбинации. Каждый ней-
рон на фиг. 3 может быть тогда изображен одной диа-
граммой так, как показано на фиг. 4.
140
М. Блюм
2) Числа на диаграмме Венна могут отражать поря-
док, в котором появляются точки при возрастании по-
рога нейрона. Тогда каждый нейрон на фиг. 3 будет изо-
бражен диаграммой Венна так, как показано на фиг. 5.
Ф и г. 3. Нейроны и соответствующие диаграммы Венна для
различных значений порогов.
Легко заметить разницу между диаграммами фиг. 4
и 5. На диаграммах фиг. 4 в отличие от диаграмм фиг. 5
на месте ~А • ~В стоит нуль.
Сети Маккаллока [4]. Соединим б входов с б нейро-
нами, а выходы этих нейронов в свою очередь соединим
со следующим рядом нейронов. Подобным образом мож-
но соединить любое желаемое число рядов нейронов. По-
следний ряд пусть состоит из одного выходного нейрона.
Подобное соединение, состоящее из четырех или более
рядов и не содержащее обратных связей, называется
сетью Маккаллока (фиг. 6).
Фиг. 4. В каждой области диаграммы Венна указана вели-
чина возбуждения при соответствующей входной комбинации.
Фиг. 5. В каждой области диаграммы Венна указано число,
соответствующее порядку появления точек при возрастании
величины порога.
Фиг. 6. Сеть Маккаллока для д = 2.
4. Свойства нейрона со многими входами
143
Правила пользования диаграммами Венна для описа-
ния сетей Маккаллока. Рассмотрим случай с б = 2. Вве-
дем сначала определение: назовем «общим множеством>
для ряда диаграмм Венна множество всех областей диа-
грамм, которые соответствуют некоторой входной ком-
бинации для ряда нейронов. Таким образом, приведен-
ное ниже множество областей Д • есть общее мно-
жество:
Логическая функция для данного нейрона сети записана
в форме Венна внутри этого нейрона. Выход нейрона
записан в форме Венна в скобках сбоку от нейрона.
В диаграмме Венна для выхода нейрона стоит точка
для каждой комбинации на входах первого ряда нейро-
нов, при которой данный нейрон возбуждается.
При рассмотрении следующих правил обращения с
диаграммами Венна читателю следует обращаться к
фиг. 6.
Правила: 1) Выход нейрона первого ряда совпадает
с его логической функцией.
2) Выход нейрона второго ряда может быть полу-
чен следующим образом:
Сначала следует рассмотреть область А • В диаграм-
мы Венна одного из нейронов второго ряда. Если в этом
месте нет точки, то следует перейти к области А • ~В
той же диаграммы. Если же в области А • В точка
имеется, следует рассмотреть выходные диаграммы Вен-
на нейронов первого ряда. Среди выходных диаграмм
первого ряда нужно найти все общие множества, в кото-
рых и в левой, и в правой диаграммах имеются точки.
Затем в выходной диаграмме Венна рассматриваемого
нейрона второго ряда надо поставить точку (точки) в
области (областях), соответствующей каждому общему
множеству.
Перейдем теперь к области Д- диаграммы Вен-
на для нейрона второго ряда. Если в этой области от-
сутствует точка, следует перейти к области
144
М. Блюм
если же точка имеется, нужно найти среди выходных
диаграмм Венна первого ряда все общие множества, в
которых в левой диаграмме Венна имеется точка, а в
правой точки нет. В выходной диаграмме Венна рассма-
триваемого нейрона второго ряда нужно поставить точ-
ки в областях, соответствующих каждому общему мно-
жеству.
Затем перейдем к области ~А • ~В диаграммы Вен-
на для нейрона второго ряда. Последовательность дей-
ствий остается той же, что и в рассмотренных выше слу-
чаях, но только теперь мы ищем те общие множества,
которые не имеют точек в соответствующих областях
выходных диаграмм Венна первого ряда. Затем перехо-
дим к области ~Л-В, повторяем опять ту же после-
довательность действий, но отыскиваем те общие мно-
жества в первом ряду, в которых есть точка в правой
выходной диаграмме и нет точки в левой.
3) Выход нейрона третьего ряда находится так же,
как и выходы нейронов второго ряда.
Этот процесс легко может быть обобщен для любых
б (ср. фиг. 8).
Ошибки в сетях. Было исследовано много различных
типов сетей. Здесь мы можем лишь упомянуть о них
и привести несколько примеров. Заинтересованному чи-
тателю мы рекомендуем обратиться к большому числу
специальных статей по этому вопросу.
Логически устойчивой сетью называется сеть, в кото-
рой значения порогов нейронов изменяются одновремен-
но. Пример такой сети приведен на фиг. 7. Мы нашли,
что всегда может быть построена логически устойчивая
сеть, вычисляющая любую заданную функцию при ко-
лебаниях порогов составляющих ее нейронов на
(1—2"6) • 102%. Для логически устойчивой сети было по-
лучено также точное значение допустимой области ко-
лебаний порога составляющих нейронов, если на логи-
ческие функции нейронов, записанные в форме диа-
грамм Венна, наложено условие, что они должны со-
держать одно и то же число точек. Можно, например,
показать, что для б>3 всегда можно получить диапа-
зон изменения порога в (1 —1/6) • 102%.
4. Свойства нейрона со многими входами
145
Сети, состоящие из нейронов, пороги которых флук-
туируют независимо друг от друга, изучались Дж. Прейн-
джем в Кембриджском исследовательском центре ВВС.
Фиг. 7. Сеть Маккаллока, сохраняющая логическую устойчи-
вость при колебаниях порога в пределах 75%.
Он нашел допустимые границы колебаний порогов ней-
ронов в сети без ошибок. Границы получены для всех 6.
На фиг. 8 использованы его обозначения. Точки, пустые
места и тире в диаграммах Венна соответственно изо-
бражают комбинации на входах, при которых нейрон
всегда возбуждается, никогда не возбуждается и возбу-
ждается с ошибкой.
Маккаллок изучил изменения в силе сигнала и
в синапсах волокон, идущих к нейрону [5]. При этом
10 Зак. 106
146
М. Блюм
Фиг. 8. Устойчивая сеть из нейронов, величины порогов которых
изменяются независимо друг от друга.
рассмотрена также возможность ошибки из-за непра-
вильного подсоединения волокон к нейрону. Другой
метод изучения ошибок такого типа предложен Коуэном,
который рассматривает систему волокон некоторого ней-
рона как особый случай релейных сетей Шеннона — Му-
ра [6].
4. Свойства нейрона со многими входами
147
Вербик1) изучал ошибки в выходном волокне ней-
рона. Ошибки того же типа рассматривал фон Нейман
[7], но подход Вербика к проблеме надежности дал дру-
гие и притом очень интересные результаты.
2. НЕЙРОН КАК ЭЛЕМЕНТ ВЫЧИСЛИТЕЛЬНОЙ МАШИНЫ
Для каждой сети, вычисляющей заданную функцию,
нам до сих пор приходилось заново создавать схемы
составляющих ее нейронов, так как у нас не было спо-
соба убедиться в том, что нейрон, вычисляющий задан-
ную логическую функцию при каждом значении порога,
обязательно существует. Сейчас мы покажем, что ка-
ждой диаграмме Венна, в которой поставлены величины
возбуждения, как на фиг. 4, обязательно соответствует
некоторый нейрон. Кроме того, мы приведем алгоритм
построения нейрона по диаграмме Венна и исследуем
проблему построения «самых дешевых» нейронов (в том
смысле, что они имеют минимум входных волокон).
Сначала мы рассмотрим построение нейрона для при-
веденной на фиг. 10 диаграммы Венна с 6 = 3. Затем этот
метод будет обобщен на случай диаграмм Венна с лю-
бым б.
Пусть сумма возбуждений, полученных нейроном при
комбинации на входе А • ~В« ~С, равна А (в рассма-
триваемом случае А = 1), и пусть эта сумма при комби-
нации на входе А -В - ~С равна АВ (в нашем случае
АВ =—2). Аналогично определяются величины всех дру-
гих сумм возбуждений. Волокна входа А могут быть
разделены на четыре части:
1) Авс — сумма возбуждений, приходящих со входа
А по волокнам, на которых нет запрещений ни от вхо-
да В, ни от входа С.
2) Ав —сумма возбуждений, приходящих со входа
А по волокнам, на которых нет запрета со входа В, но
может быть запрет со входа С.
3) Ас определяется аналогично Ав.
4) А — просто общая сумма возбуждений со вхо-
да А.
Ч См. стр. 163 настоящего сборника. — Прим. ред.
10*
148
М. Б л ю м
Чтобы читателю стало понятней, что заставило нас
ввести подобные определения, рассмотрим частный слу-
чай диаграммы Венна для 6 = 2 и изобразим ее следую-
щим образом:
для А
Представим себе, что волокна со входа Л, прежде
чем подойти к нейрону, должно распасться на четыре
части и пройти через диаграмму Венна с 6 = 2, как по-
казано на фиг. 9. После выхода из диаграммы Венна
Фиг. 9. Запреты
со входов В и С
можно представить
в виде диаграммы
Венна.
каждое волокно может распасться на
много частей и стать для нейрона или
возбуждающим, или тормозящим.
Границы областей на диаграмме Вен-
на изображают запреты, налагаемые
на волокна, проходящие через данные
площади, со входов В и С. В соот-
ветствующем месте диаграммы Венна
с 6 = 2 будем писать число, равное
величине возбуждения, которое ней-
рон получает от волокна, проходяще-
го через этот участок диаграммы.
В качестве примера заполним циф-
рами диаграмму с 6 = 2, показанную
на фиг. 9, через которую проходят к
нейрону волокна со входа Л:
для А
Для этого случая Лвс = 3, Лв = 3+1=4, Лс = 3 + 2 = 5,
Л = 2+1+3—1=5. Аналогично можно представить все
три входа нейрона.
Вернемся теперь к проблеме построения нейрона по
диаграмме, приведенной на фиг. 10. Тогда мы можем,
например, написать ЛВ=Лв+ВА, так как при комбика-
4. Свойства нейрона со многими входами
149
ции на входе А • В • ~ С возбуждать нейрон будут толь-
ко те волокна со входа А, на которых нет запрета со
входа В, и те волокна со входа В, на которых нет за-
прета со входа А. Очевидно, что в области диаграммы,
Уравнения Переменные
(1) Л = 1 = А
(2) В = — 1 = В
(3) С = 2 = С
(4) АВ = -2 = Ав + Ва
(5) ЛС = 3 = Лс + Сд
(6) вс=1 = вс + св
(7) АВС = 2~Авс + Вас+Сав
Фиг. 10. Пример
диаграммы Венна,
по которой дол-
жен быть построен
нейрон.
соответствующей • ~В • ~С, должен быть нуль, так
как в этом случае нейрон не получает возбуждения. Из
уравнений, приведенных на фиг. 10, следует, что значе-
ния пяти переменных могут выбираться независимо. На-
пример, пусть
Л_ = -2, что приводит к ВА = 0,
1, > сА = 2,
— 1, » > СВ = 2,
А вс = ВАС = ^ » » ^АВ = 2.
Для каждого входа нейрона существует диаграмма
Венна с 6 = 2, дающая число возбуждений и торможений,
получаемых нейроном, и картину запретов, налагаемых
на волокна с других входов.
Таким образом, если мы имеем три диаграммы Вен-
на с 6 = 2, удовлетворяющие вышеприведенным уравне-
ниям, то нейрон наверняка может быть построен. Най-
дем три диаграммы Венна, удовлетворяющие сначала
только уравнению (7), затем еще и уравнению (6)
и т. д. до уравнения (1). Это могло бы быть выполнено
150
М. Блюм
следующим образом:
Уравнение
(7)
ДЛЯ А
Легко видеть, что числа в любом месте каждой диаграм-
мы Венна определяются значениями, принимаемыми ка-
ждой из 12 переменных в уравнениях (1) —(7). Более то-
го, всегда имеется достаточное число областей, чтобы
удовлетворить уравнениям, так как число переменных в
точности равно числу областей в трех диаграммах Вен-
на с 6 = 2. Для нашего примера диаграммы Венна с
6 = 2 таковы: ____
bJ/S^zU AAJ^olB
l/o\j l/oXJ
для А для В для С
Нейрон, который может быть построен непосредственно
по этим диаграммам, имеет вид:
4. Свойства нейрона со многими входами
151
В общем случае число переменных, таких, как А, Ав,
САв и т. д„ равно
Число областей в одной диаграмме Венна с (б — 1) вхо-
дами равно 26-1. Отсюда общее число областей в б диа-
граммах этого типа равно б(26”1)- Можно показать, что
(^ + 2(’)+...+б(’)=б(2«-).
Следовательно, чтобы построить требуемые диаграммы
Венна с (б— 1) входами, всегда могут быть произволь-
но выбраны переменные, подобные переменным в урав-
нениях (1) — (7), и для каждого такого выбора может
быть построен нейрон.
В результате получаем следующую теорему.
Теорема. Для построения нейрона, вычисляющего за-
данную логическую функцию при изменяющемся пороге,
описываемую любой диаграммой Венна, которая тре-
бует спонтанного возбуждения нейрона при О^СО, до-
статочно построить возбуждающие и тормозящие во-
локна к нейрону плюс запрещающие пересечения между
ними.
Интересна проблема построения «самых дешевых»
нейронов, т. е. таких, которые имеют минимальное число
входных волокон. Предположим, например, что каждое
запрещающее и тормозящее волокно и каждый запрет,
наложенный на входное волокно, стоят 1 цент. В част-
ном случае при 6 = 3 три диаграммы Венна с 6 = 2 имеют
вид
152
М. Блюм,
и общая стоимость (Р) всех приходящих к нейрону
волокон равна
Р = I Авс 1 + 21 Ас — Авс 14- 21 Ав — Авс | 4~
+ 31А — Ав — Ас + Авс | +1ВАС14- 21 Вс — ВАС14-
4~ 21ВА — ВАС14- 31В — ВА — Вс-\- ВАС14~ IСАВ14-
4- 21 Св САВ14~ 21СА — САВ14~ 31С — СА — Св-±- САВ |.
Произведя подстановку из уравнений (1) — (7), получим
Р = I Авс 14- 21 Ас — Авс 14- 21 Ав — Авс 14-
4" 31А — Ав — Ас 4~ Авс 14~ IВАС14- 21 Вс — В АС14“
4" 21 АВ Ав ВАС14- 3 |В 4" Ав — АВ — Вс 4- ВАС14~
4-1 АВС—Авс—ВАС14“ 2 \ВС—Вс 4- Авс 4- Вас—АВС 14-
+ 2|ЛС-Лс + Лвс + Влс-ДЯС|4-
4" 31С4“ Ас — АС 4- Вс — ВС4- АВС — Авс — ВАС |.
По этому уравнению может быть найден самый дешевый
нейрон. Точного метода решения этого уравнения для
любых б нет.
3. ПРЕОБРАЗОВАНИЯ
Преобразования изменяют логические функции, вы-
числяемые сетью и (или) составляющими сеть нейро-
нами, но не меняют надежности сети.
Любая логическая функция может быть записана с
помощью одних только символов «•», «V» и «~». Пусть
X — логическая переменная, соответствующая наличию
возбуждения на входе, а ~ У — отрицание переменной,
или отсутствие возбуждения на входе. Тогда мы можем
записать логическую функцию (V) ввиде7(Х, ~У, V, •)•
Если теперь V(X, ~Y, V, •) означает А-В-~СУ
\/А • -В • С, то V (X, У, •, •) есть (Д • В • С) • (Д • В • С) =
=А • В • С. В терминах диаграмм Венна
превращается в
4. Свойства нейрона со многими входами
153
Пользуясь данной функциональной записью, определим
дополнения, дуальные выражения и подстановки:
CV(X, ~Г, V. .) = И(~Х, Г, ..V),
DV(X, — Г, V. -) = V(~X, Г, V, •),
px^rV(x, ~r, V, V, •).
Y-+S
Ниже приведены примеры этих преобразований:
Из этих определяющих уравнений можем получить
CDV(X, ~Г, V, •) =
= CV(~X, Y, V, «) = У(Х,~Г, -, V),
DCV(X, ~У, V, •) =
= DV(~X, У, V)=V(X, ~Г, ., V),
следовательно, CDV=DCV. Аналогично можно показать,
что CPV=PCV, DPV=PDV, а также, что CCV=V,
DDV—V, PPV=V.
Теперь мы можем представить сеть в виде простого
уравнения и, преобразуя уравнение, получить преобра-
зования сети. Пусть Vi представляет диаграмму Венна
для первого, или входного, ряда нейронов, a Vo — диа-
грамму Венна для выходного нейрона. Пусть Vr — пере-
даточная диаграмма данной сети. Тогда сеть, состоящая
из одного ряда входных нейронов и из выходного
нейрона, может быть символически представлена
154
М. Блюм
выражением (Vz)Vo = [Vr], Например, сеть, показанная
на фиг. 7, запишется в виде
Пусть С Vi, DVi и PVt означают соответственно допол-
нение, дуальное выражение и подстановку для всех диа-
грамм Венна ряда Vi. Покажем, что
если (Vz)V0 = [VrJ, (1)
то (Vt)CV0 = [CVr], (2) (DVz)V0 = |DVr|, (3) (CVZ)DVO = [K|, (4) (^)У0=иЧ1. (5)
Будем говорить, что Vo считывает некоторое общее мно-
жество из Vu если выходной нейрон возбуждается в от-
вет на входную комбинацию, соответствующую этому об-
щему множеству. В общем случае для каждого общего
множества, считываемого Vo, в диаграмме для Vr стоит
точка; для каждого общего множества, которое не счи-
тано, точка отсутствует.
В справедливости уравнения (2) нас убеждает сле-
дующее соображение: общее множество ряда Vi, кото-
рое считано благодаря наличию точки в некоторой об-
ласти Vo, не будет считано, если точка в этой области
отсутствует. И наоборот, общее множество, которое не
было считано из-за отсутствия точки в некоторой обла-
сти Vo, будет считано, если точка в этой области по-
явится. Итак, при взятии дополнения к Vo в каждой об-
ласти Vr, где точка отсутствовала, появится точка, и на-
оборот, там, где были точки, они исчезнут.
Покажем далее справедливость уравнения (5). PVi
соответствует перестановке мест в каждой диаграмме
Венна ряда Vi. Эта перестановка одна и та же для лю-
бой диаграммы. Таким образом, общие множества ока-
зываются переставленными, но в остальном они оста-
4. Свойства нейрона со многими входами
155
лись.без изменений. Коль скоро Vo осталось без измене-
ний, точки в Vr должны быть переставлены в соответ-
ствии с общими множествами в Vi.
Уравнение (3) непосредственно вытекает из уравне-
ния (5), так как дуальность есть частный случай под-
становки. Следовательно,
DV(X, -Г, V, .) = Px->~xV(X, ~Г, V, •)•
Г->~К
Покажем, наконец, справедливость уравнения (4).
При взятии дополнения от Vi происходит преобразова-
ние общего множества
Или в общем случае нули заменяются единицами, а еди-
ницы нулями. При замене VQ дуальным выражением
переходит в
В общем случае точка в Vo считывает общее множество
(множества) Vi в соответствии с некоторой определенной
комбинацией на входе/ Vo будет считывать те же самые
общие множества после преобразования Vi и Vo по ура-
внению (4).
Чтобы лучше понять смысл этих уравнений, ниже
приведены примеры их применения. Порядок следования
примеров соответствует порядку уравнений (1) — (5).
(& IS $) - И (и
IS $) - Вй и
(Ф $ -is) & - [Й ' ®
(«••!§• IS) W
156
М. Блюм
В уравнении (5) произведем подстановку Ра-+с-
(8! « И №)
Справедливость уравнений (1) — (5) не нарушится,
если мы в диаграммах Венна будем для обозначения
ошибок использовать тире. Надежная сеть после преоб-
разований перейдет в другую надежную сеть. Объеди-
няя два или несколько из уравнений (1) — (5), можно
получать новые уравнения. Например, преобразуя урав-
нение (2) с помощью уравнения (3), получим
(DVl)CVo = [DCVr]t (6)
а преобразуя последнее уравнение с помощью уравне-
ния (4), получим
(DCVt)DCVo = \DCVr\. (7)
Уравнение (7) имеет важное применение в логически
устойчивых сетях. Чтобы уяснить это, заметим, что
» (Х-х-х)
Таким образом, уравнение (7) преобразует
т. е. в общем случае это уравнение преобразует логиче-
ски устойчивую сеть в другие логически устойчивые сети.
К этому уравнению мы будем обращаться и в следую-
щем параграфе.
4. ПОЛИФЕКИ (БАЗИСНЫЕ ФУНКЦИИ)
Ч. С. Пирс нашел в 1880 г. одну из функций, назы-
ваемых нами теперь штрихом Шеффера, Через несколь-
ко лет он нашел еще одну из этих функций. Он назвал
4. Свойства нейрона со многими входами
157
их «амфеками» (amphecks) (от греческого apq)T)XT]g, что
значит «пресекающий оба пути») и показал, что любой
из этих функций достаточно для записи любой формулы
исчисления высказываний. На деле таких функций су-
ществует много. Мы будем называть их «полифеками»
(polyphecks). Полифеки удобны тем, что любая функ-
ция может быть вычислена с помощью сети, использую-
щей конечное число или даже только одну такую функ-
цию.
Было показано, что для записи любой формулы ис-
числения высказываний достаточно операции «~»плюс
либо «•», либо «V». Следовательно, достаточно также
иметь любую функцию, берущую дополнение, и «ИЛИ»
либо «И». Найдем все функции, или полифеки, обладаю-
щие этим свойством для всех б. Следующая лемма дает
необходимые и достаточные условия того, что некоторая
функция есть дополнение.
Лемма 1. Если даны логические переменные Л, В,
С, ..., то для того, чтобы некоторая функция (V) могла
давать дополнение любой функции (В), необходимо и
достаточно, чтобы ее диаграмма Венна содержала точ-
ку в области (~А-~В-~С- ...), а в области
(Л • В • С • ...) точка бы отсутствовала.
Доказательство, а) Необходимость. Пусть
имеем три логические переменные Л, В, С, или, что то
же самое,
И пусть F= —та функция, к которой ищется до-
полнение. Поместим любое число этих диаграмм Венна
(логические переменные и/или F) в ряд Vt, и пусть V= Vo
есть диаграмма Венна для оператора над Vi. В общем
случае Vo может иметь любое б в зависимости от числа
диаграмм в V,-. Покажем, что Vo должна содержать точ-
ку в области (~Д • ~В • ~С • ...) и не содержать точ-
ки в (Д-В-С’ ...),
158
М. Блюм
Очевидно, что если Vo имеет точку в (Д • В • С • ...),
то в Vr в области (Л • В • С • ...) также точка, так как
в этой области в каждой диаграмме Vi есть точка. Да-
лее, мы можем поместить Vr совместно с любым числом
логических переменных в другой ряд (У?) и воздейство-
вать на него функцией Vo- С помощью того же анализа
можно показать, что если в Vo есть точка в области
(А • В • С • ...), то в передаточной диаграмме Vr она
также будет. По индукции, наличие точки в области
(Д • В • С • ...) Vo всегда влечет за собой наличие точки
в той же области в передаточной диаграмме Vr. Таким
образом, если Vo имеет точку в (Д-В-С* ...), то она
не может дать дополнения исходной функции. Анало-
гично, если в Vo в области (~Д • ~В- ~С • ...) точка
отсутствует, то она отсутствует и в Vr. По индукции, в
передаточной диаграмме Vr точка в (~Д-~В-
~С«...) всегда будет отсутствовать. Таким образом,
чтобы давать дополнение, функция Vo должна иметь в
области (~Д-~В-~С* ...) точку.
Достаточность. Возьмем любую функцию, к которой
ищем дополнение, и запишем ее б раз в ряд Vi. Точки
этой функции не могут быть считаны функцией Уо, так
как в Vo в области (Д • В • С • ...) нет точки. Остаю-
щиеся в этой функции области представляют собой до-
полнение, и они-то и будут считаны функцией Уо, так
как в Vo в области (~Д • ~В- ~С- ...) стоит точка.
Что и требовалось доказать.
Любая функция (V), которая дает дополнение и удо-
влетворяет условию V^=CDV, есть полифек. Например,
если число переменных равно двум (6 = 2), найдутся че-
тыре функции, удовлетворяющие условиям леммы:
Ж Ж Ж Ж >из них > DC(^=K ’
тогда как
х(х)-х- ° кИ=х
Последние две функции — штрихи Шеффера. Чтобы не-
которая функция (V) была полифеком, необходимо и
4. Свойства нейрона со многими входами 159
достаточно, чтобы выполнялись два условия: 1) V=£CDV
и 2) эта функция давала дополнение. Чтобы доказать
это, нам потребуется лемма, которая будет рассмотрена
ниже.
Пусть V* — любая диаграмма Венна, в которой есть
только одна точка. Тогда та область в V*, в которой
имеется точка, и та область в DV*, в которой имеется
точка, — дуальные области. Из определения дуальности
следует, что каждой области в диаграмме Венна соот-
ветствует одна и только одна дуальная область.
Лемма 2. Если d\ и d2— любые две дуальные обла-
сти в некоторой диаграмме Венна, то V=CDV тогда и
только тогда, когда в di есть точка, а в d2 точки нет (или
наоборот).
Доказательство. Пусть в di есть точка, а в d2
точки нет. В DV точка есть в d2, а в di ее нет. В CDV
точка есть в di и ее нет в d2. di и d2 — любые две дуаль-
ные области, так что можно считать, что рассмотрены
все области диаграммы и что V=CDV.
Пусть в обеих дуальных областях есть точки (нет
точек) Тогда в DV в этой паре есть точки (или нет то-
чек). В CDV в этой паре нет точек (или есть точки). Та-
ким образом, V=kCDV. Что и требовалось доказать.
Теорема. Логическая функция (V) есть полифек (т. е.
при данных логических переменных А, В, С, ... с ее по-
мощью может быть выражена любая логическая функ-
ция исчисления высказываний) тогда и только тогда,
когда в диаграмме V есть точка в области (~А •
• ~С • ...) и нет точки в области (Л • В • С • ...) и вы-
полняется условие V^CDV.
Доказательство. 1) Нужно показать, что V
дает дополнение и «И», либо «ИЛИ». Согласно лемме 1,
V дает дополнение тогда и только тогда, когда в обла-
сти (~А'~В-~С- ...) есть точка, а в области
(Л • В • С • ...) ее нет.
2) Покажем, что если V=CDV, то V не может быть
полифеком. Логическая переменная, скажем Л, в форме
диаграммы Венна (Уд) имеет точки в каждом месте на
160
М. Блюм
плоскости А, а в остальных местах точек нет. По опре-
делению дуальности в каждой паре дуальных областей
одна находится в плоскости А, а другая нет, т. е. другая
лежит в -~Д. Таким образом, в каждой паре дуальных
областей в Va есть одна точка, и по лемме 2 Va = CDVa-
В общем случае любая логическая переменная Va, Vb,
Vc, ..., или в общем виде VP, удовлетворяет условию
Vp=CDVp.
Пусть Vi состоит из любого числа логических пере-
менных, представленных в форме диаграмм Венна, и
предположим, что V=V0 считывает Vi. Пусть выход сети
в свою очередь помещен вместе с логическими перемен-
ными во второй ряд, Vz, и пусть Vo считывает V/. По-
вторим эту процедуру любое число раз. Покажем, что
существуют функции, которые не могут быть получены
с помощью V.
Пусть V=V0 в уравнении (К)У0 = [К]. По предпо-
ложению VO = CDVO, так что (Vi)CDV0 = [Vr]. Первона-
чально Vi состоит только из логических переменных, так
что Vi = CDVi и (CDVi)C£>V0 = [I/r]. Согласно уравне-
нию (7) разд 3 (см. стр. 156), (CDVi)CDV0 = [CDVr], от-
куда Vr=CDVr. Далее, пусть Vr и любое число логиче-
ских переменных образуют второй ряд, V, и на них дей-
ствует Vo, но по-прежнему V't = C DVt и V0 = CDV0-
Тогда, если (Vi)V0 = [V^, то VT = CDV'r- По индукции
получаем, что функция V0 = CDV0 может в лучшем слу-
чае вычислять дополнительно-дуальные функции и, сле-
довательно, не может быть полифеком.
3) Покажем, что если V вычисляет дополнение и
V^CDV, то V вычисляет также «И» либо «ИЛИ». Так
как V^CDV, то по лемме 2 существует в V по крайней
мере одна пара дуальных областей (di, di), таких, что
(di=\, d2=l) или (di = 0, d2==0).
а) Пусть имеем случай (di=0, d2=0). Покажем, что
V может вычислить «ИЛИ». Пусть V=V0 в уравнении
(V,) V'0 = [lzr], и пусть Vs и Vt — диаграммы Венна, от ко-
торых ищется «ИЛИ». Часть диаграммы Венна из Vi
изображает входную комбинацию, соответствующую dt.
Так как di и d2— дуальные области, то остальные диа-
граммы изображают входную комбинацию, соответ-
4. Свойства нейрона со многими входами 161
ствующую d2. Поместим Vs в ряду Vi на место диа-
грамм, считываемых функцией a Vt — на все осталь-
ные места, считываемые функцией d2. Vo не может счи-
тывать точки Vs и/или Vt, так как в ней отсутствуют
точки в областях di, d2 и (Д • В • С • ...). Vo содержит
точку в области (~А»~В-~С- ...), так что в Vr
точки будут только в тех областях, соответствующих
областям в обеих диаграммах и Vt, в которых точки
отсутствуют. Действуя на Vr функцией Vo, получим по
лемме 1 дополнение, иначе говоря, получим «ИЛИ» от
Vs и Vt.
б) Пусть теперь di=l, б/г=1- Покажем, что можно
взять «И» от Vs и Vt. Поместим Vs на место тех диа-
грамм из Vi, которые соответствуют du a Vt — на место
тех, которые соответствуют d2. Vo не считает содержа-
щиеся в Vs и Vt точки, так как в Vo отсутствует точка в
области (А • В • С • ...). Vo считает все оставшиеся об-
ласти в Vs и Vt, так как в Vo точки имеются в областях
dlt d2 и (~Д • ~ С • ..В результате в Vr точки
отсутствуют только в тех областях, соответствующих
обеим диаграммам Vs и Vt, в которых имеются точки.
Действуя на Vr функцией Vo, получим дополнение, ина-
че говоря, получим «И» от Vs и Vt. Что и требовалось
доказать.
Насколько важна эта теорема, станет понятно, если
мы подсчитаем число полифенов для любого б. Общее
число функций от б аргументов равно 22*. Из них 22б~2
имеют точку в (~Д-~В-~С-...) и не имеют точки
в (Д • В • С • ...). По лемме 2 функция, удовлетворяю-
щая условию V=CDV, обязательно имеет точку в одной
из пары дуальных областей, или, если говорить на язы-
ке диаграмм Венна, такие функции наполовину запол-
нены точками. Первая точка может оказаться в любой
из 2б областей диаграммы Венна, а в соответствующей
дуальной области точка будет отсутствовать. Вторая точ-
ка может оказаться в любой из 26 — 2 областей, а в со-
ответствующей дуальной области точка будет отсутство-
вать. Таким образом, число диаграмм Венна, для ко-
торых V=CDV, равно
26(2* —2)... 2
И Зак. 106
162
М. Блюм
где (26”1)! — число перестановок из 26"1 точек. Итак,
Z = 22&~1. Ровно у половины из этого числа диаграмм
имеется точка в области (~А-~В-~С- ...) и нет
точки в области (А • В • С • ...). Поэтому число поли-
феков равно
1
2.22е-1
Отсюда можно сделать очень важный вывод: если
имеется некоторая произвольная функция, то вероят-
ность того, что она является полифеком при больших б,
почти равна 1/4 [точно она равна г/4—1/(2 • 226”1)].
ЛИТЕРАТУРА
1. McCulloch W. S., «What is a number, that a man may know
it, and a man, that he may know a number?», Ninth Annual Alfred
Korzybski Memorial Lecture, March 12, 1960, будет опубликовано
в /. Inst. General Semantics.
2. McCulloch W. S., «The stability of biological systems. Homeo-
static Mechanisms», Brookhaven Symposia in Biology, № 10, Off.
Tech. Serv., U. S. Dept, of Commerce, Washington, 1958.
3. McCulloch W. S., «Biological computers», IRE Trans., EC6,
190—192 (1957).
4. McCulloch W. S., «Agathe Tyche of nervous nets — the lucky
reckoners», Mechanization of Thought Processes, N. P. L., Symp.
№ 10, H. M. S. 0., London, 1959.
5. McCulloch W. S., «Infallible nets of fallible formal neurons»,
Quart. Progr. Rep., Res. Lab. Electron., MIT, July 1959, p. 189—196.
6. M о о r e E. F., Shannon С. E., Reliable circuits using less re-
liable relays», J. Franklin Inst., 262, Part I, 191—208; Part II,
281—297 (1956); русский перевод: M у p Э. Ф. и Шеннон К. Э.,
Надежные схемы из ненадежных реле, Кибернетический сборник,
вып. 1, ИЛ, 1960.
7. von Neumann J., «Probabilistic logics and the synthesis of
reliable organisms from unreliable components», Automata Studies
(eds. С. E. Shannon and J. McCarthy), Princeton, 1956; рус-
ский перевод: Нейман Дж., Вероятностная логика и синтез
надежных организмов из ненадежных компонент, сб. «Автоматы»,
ИЛ, 1956.
8. Р е i г с е С. S., Collected Papers, Vol. IV (Eds. C. Hartshorne
and P. Weiss), Harvard, 1933, p. 13, 215—216.
5. О НЕЙРОННЫХ СЕТЯХ С МИНИМИЗАЦИЕЙ ОШИБКИ
Л. ВЕРБ И к
(Лаборатория электроники Массачусетского
технологического института)
1. ВВЕДЕНИЕ
В литературе встречаются самые различные способы
анализа и синтеза сетей из элементов с ошибками. То,
что они приводят к неодинаковым результатам, объяс-
няется различиями в передаточных функциях элемен-
тов, месте и виде рассматриваемой ошибки и различием
передаточных функций сетей. Обзор и оценка этих спо-
собов не входят в наши задачи.
Мы рассмотрим ошибки определенного типа в фор-
мальных нейронах (пороговых устройствах) и укажем
способ сведения к минимуму влияния ошибки на работу
сети из таких нейронов. Место и характер ошибки вы-
браны с учетом возможного разрыва связей между ней-
ронами, т. е. ошибки могут быть в самой структуре сети.
Мы будем отчасти пользоваться терминологией, за-
имствованной из нейрофизиологии. Введение вероятност-
ных соотношений оказывает влияние на формулировку
результатов и дает удобный способ описания явлений.
Я высоко ценю помощь и поддержку, оказанную мне
при проведении данных исследований У. Маккалоком,
М. Блюмом и Дж. Коуэном.
2. СЛУЧАЙ, КОГДА СИГНАЛ ПЕРЕДАЕТСЯ
ПО ОДНОМУ ВОЛОКНУ
Формальный нейрон — пороговое устройство со мно-
гими входами и однихм выходом, причем его выход яв-
ляется логической функцией входов. Входные и выход-
ные нервные волокна могут быть в одном из двух воз-
можных состояний: есть сигнал (1) и нет сигнала (0).
11*
164
Л. В е рб и к
Если нейрон возбуждается, то на'выходе есть сигнал,
в противном случае сигнал отсутствует. Входное волокно
может возбуждать нейрон (положительная стимуляция,
указываемая на рисунке стрелкой) или тормозить его
(отрицательная стимуляция, изображаемая кружком);
при этом нейрон возбуждается, если алгебраическая
сумма сигналов с его входов равна или превышает зна-
чение порога 0. Логическая функция, вычисляемая ней-
роном, изображается соответствующей диаграммой Вен-
на. За объяснением диаграмм Венна мы отсылаем к ра-
ботам Маккаллока [1] и Блюма [2]. Нейронная сеть со-
стоит из соединенных между собой формальных нейро-
нов. Вычисляемая ею логическая функция также запи-
сывается с помощью диаграммы Венна.
Мы предполагаем, что нейроны работают синхронно,
с одной и той же задержкой, так что не возникает проб-
лемы согласования во времени.
Существуют логические функции, которые не могут
быть вычислены с помощью одного формального ней-
рона, по крайней мере без «взаимодействия афферент-
ных нервов», т. е. без взаимного торможения или воз-
буждения во входных волокнах, которое означает неко-
торые логические преобразования вне нейрона (ср. [1]
и [2]).
Отметим, что имеются данные о наличии запретов в
афферентных нервах в биологических нервных системах.
Если нейрон имеет два входа, то две из 16 возможных
логических функций не могут быть вычислены с по-
мощью одного нейрона. Это функции:
/К u
При трех входах число возможных логических функ-
ций равно 256, из которых 152 нельзя получить с по-
мощью одного нейрона. Эти функции можно вычислить
с помощью простой нейронной сети (см., например,
фиг. 1).
Ошибки в логических вычислениях могут появляться
вследствие изменений в соединении входных волокон с
нейроном в сигнале, проходящем по этим соединениям,
5. О нейронных сетях с минимизацией ошибки
165
и в величине порога нейрона. Краткий обзор этих слу-
чаев можно найти в работе [2]. Мы не будем заниматься
здесь этими источниками ошибок, а рассмотрим непра-
вильную работу самого нейрона: иногда он возбуждается,
когда не нужно, а иногда, наоборот, не возбуждается,
когда нужно. Будем называть такую ошибку аксонной.
Это аналогично явлению пароксизма (судорожного воз-
буждения) или смерти в биологических нейронах, кото-
рые и послужили основой для всех наших исследований.
Аксонную ошибку формального нейрона можно рассма-
тривать как скачок в величине порога (временный или
постоянный) до величины +оо (смерть) или —оо (па-
роксизм).
Поскольку аксонная ошибка приводит к ошибочным
вычислениям при правильных значениях аргументов, нам
здесь приходится иметь дело с вероятностной логикой, а
не с логикой от вероятностных аргументов. Аксонную
ошибку можно учесть, приписав выходному волокну
166
Л. В е рб и к
каждого формального нейрона некоторую вероятность
ошибки е и введя два предположения. Во-первых, пред-
полагается, что для всех нейронов сети вероятность
ошибки одна и та же и равна е. Если имеются основа-
ния полагать, что значения вероятностей для различных
нейронов не совпадают, можно взять наибольшее из
этих значений, что не влияет на общий результат. Во-
вторых, предполагается, что вероятность ошибки не за-
висит от предшествующей и настоящей работы как дан-
ного нейрона, так и всех нейронов сети. Такая стоха-
стическая независимость предполагается для упрощения
проблемы.
Полная корреляция ошибок в виде одновременного
изменения значений порогов всех нейронов сети была
рассмотрена Маккаллоком и Блюмом [1, 2]. Обсуждае-
мая в этой статье аксонная ошибка совпадает с ошиб-
кой, рассмотренной фон Нейманом [4]. Наши дальнейшие
рассуждения в какой-то мере являются продолжением
его работы.
Пусть вероятность ошибки на выходе логической
схемы, состоящей из нейронной сети, равна тр Величина
т] зависит от вероятности ошибки е составляющих сеть
формальных нейронов. Она, очевидно, превосходит ве-
роятность ошибки последнего, выходного нейрона сети,
т. е. т]>е.
Рассмотрим некоторую избыточную сеть, вычисляю-
щую ту же функцию, но с вероятностью ошибки т/, при-
ближающейся к е. Наиболее очевидным способом вне-
сения избыточности в структуру сети является ее запа-
раллеливание. Относительно структуры сетей с ошибками
см. работу Коуэна [5]. Требуемая функция вычисляется
с помощью наиболее простой сети, подходящей для дан-
ного случая, общая вероятность ошибки которой т]>е.
Так, например, сеть для вычисления логической функ-
ции Ж показана на фиг. 1. Вычисляя эту функцию т раз
и подавая полученные т выходов на вход некоторого
«мажоритарного органа», мы можем получить оконча-
тельную вероятность ошибки rf меньше т). Мажоритар-
ный орган — это формальный нейрон с т входами, ко-
5. О нейронных сетях с минимизацией ошибки
167
торый возбуждается, если на большинстве входов есть
сигнал. Мы рассматриваем только нечетные т, поэтому
большинство составляет (/п+1)/2 или больше. (Для
четного ш результат тот же, что для нечетного, умень-
шенного на единицу.)
Фиг. 2.
Так как вероятность ошибки для каждого из tn
входов мажоритарного органа равна -q, то вероятность
р того, что в большинстве из них есть ошибка, пред-
ставляет собой кумулятивную биномиальную вероят-
ность:
m
Р = 2
* = (m + l)/2
На фиг. 2 построена зависимость р отт] для tn= 1,3,7,
25 и 49, а на фиг. 3 — зависимость окончательной ве-
роятности ошибки т]'=е(1—р) + (1—е)р от т]Дляе = 0,2
при тех же значениях т. Из сказанного выше и фиг. 3
можно сделать следующие выводы:
•f ’J И ф
5. О нейронных сетях с минимизацией ошибки 169
а) Метод /n-кратного параллельного вычисления за-
данной функции и использования мажоритарного органа
Треугольники изображают мажоритарные органы
приводит для данного е при достаточно больших m
к желаемому результату т)'<т]. Ограничение, наклады-
ваемое на е при заданном ш, может быть записано
170
Л. В е рб ик
1
е < ег — 2
т
в виде
2т“2
т— 1 Г ’
(m — 1)/2 J
График зависимости ес от т представлен на фиг. 4.
б) При данном т и е<ес дальнейшее уменьшение т/
может быть получено повторным применением мажори-
тарного органа. Метод иллюстрируется фиг. 5. Результат
такой итерации изображен пунктирной линией на фиг. 3,
которая показывает, что окончательная вероятность
ошибки т|' быстро падает с ростом числа итераций.
Описанный выше метод с использованием мажори-
тарного органа с т входами является развитием идей
фон Неймана [4], который использовал мажоритарные
органы только с тремя входами. В нашей схеме то же
уменьшение общей вероятности ошибки может быть по-
лучено с помощью значительно меньшего числа элемен-
тов, что объясняется использованием элементов с боль-
шим числом входов; в этом случае влияние ошибки на
одном входе значительно меньше, чем в случае трех вхо-
дов. Однако чрезвычайно важно отметить, что при уве-
личении числа входов нейрона становится труднее удер-
живать значение порога внутри соответствующих границ.
Порог мажоритарного органа в — т/2± <0,5; из этого
выражения ясно, что чем больше т> тем меньше вели-
чина допустимого относительного изменения значения
порога, хотя абсолютное изменение и не зависит от т.
3. ПЕРЕДАЧА СИГНАЛА ПУЧКОМ ВОЛОКОН.
ПРИНЦИП СВЯЗИ «ВСЕХ СО ВСЕМИ»
Итак, мы показали, что при многократном вычисле-
нии некоторой логической функции и использовании
мажоритарного органа или, если необходимо, итераций
с рядом мажоритарных органов можно уменьшить веро-
ятность ошибки сети и довести ее в пределе до е — ве-
роятности ошибки выходного нейрона.
Чтобы уменьшить результирующую вероятность
ошибки до произвольно малой величины, нужно иначе
внести избыточность в структуру сети. Следуя методу
5. О нейронных сетях с минимизацией ошибки 171
фон Неймана, объединим волокна в «пучки». Двоичная
логическая переменная передается теперь не одним во-
локном, как раньше, а пучком из N волокон. При этом
значение переменной равно 1 (есть сигнал), если число
волокон в пучке, в которых есть сигнал, равно (1—А)У
или более, где А — некоторый фиксированный уровень
(0<Д<0,5). Если число волокон с сигналом равно A-.V
или меньше, то значение переменной есть 0 (сигнал от-
сутствует). В промежуточном случае, когда число воло-
кон с сигналом лежит между &-N и (1—A)W, перемен-
ная не определена, не несет информации.
При вычислениях с логическими переменными, пере-
даваемыми пучками волокон, желательно полностью
использовать возможности, которые дает подобная избы-
точность. Это достигается при использовании в струк-
туре нейронной сети принципа связи «всех со всеми».
Это означает, что все волокна всех входных пучков со-
единены со всеми нейронами, вычисляющими функцию
от данного входа. При этом вся имеющаяся во входных
пучках информация поступает на все решающие элемен-
ты. Обсуждение этого принципа с точки зрения много-
значной логики проведено в работе [5]. Чтобы разъяс-
нить его идею, рассмотрим следующий пример.
Пусть нам нужно вычислить логическое «И», т. е. X»
от двух пучков, каждый из которых состоит из десяти
волокон. Сделаем все волокна каждого пучка возбуж-
дающими для ряда из десяти идентичных нейронов, как
показано на фиг. 6. Предположим на мгновение, что
нейроны работают без ошибок. Тогда число волокон с
ошибками не может превышать ДУУ, если величина по-
рога нейронов выбрана так, что 10-ЬA/V<0<20—2\N.
Эта величина может быть получена, если А<7зЛ^ По-
ложим Д-М = 3; тогда 0=13,5±<О,5. Отметим, однако,
что подобное ограничение колебаний значений порога
может оказаться слишком сильным при синтезе фор-
мальных нейронов. Чем большие мы допускаем колеба-
ния порога, тем меньше должно быть А. В нашем случае
во всех волокнах выходного пучка не будет ошибок, если
ошибки имеются не более чем в трех из десяти волокон
каждого входного пучка.
172
Л. Be рб ик
Чтобы учесть ошибку формальных нейронов, припи-
шем каждому из них независимую вероятность ошибки е.
Тогда общая вероятность ошибки Ре, т. е. вероятность
того, что в более чем Д-W волокнах выходного пучка
имеется ошибка, может быть вычислена по формуле
ю
р.= V (‘>(1 -г)”-*.
Л=4
Для е = 0,005 получим Ре«1,3- 10-7.
Из этого примера видно, что соединением волокон в
пучки и применением принципа связи «всех со всеми»
можно сделать общую вероятность ошибки Ре меньше
вероятностей ошибки е отдельных нейронов.
Фон Нейман рассматривал нейроны с двумя входа-
ми и с вероятностью ошибки е = 0,005. Если использо-
вать в схеме пучки по 5000 волокон, т. е. 15 000 нейро-
нов, получим вероятность ошибки Ре~4-10”6.
Уже рассмотренного нами примера достаточно, чтобы
показать, насколько наша схема проще. Улучшение до-
стигается в результате применения в .схеме нейронной
5. О нейронных сетях с минимизацией ошибки
173
сети принципа связи «всех со всеми». Такая схема менее
чувствительна благодаря наличию в пучках относительно
большого числа волокон без ошибок (A<1/3, в то время
как у фон Неймана чаще всего Д = 0,07). Кроме того, мы
используем нейроны со значительно большим числом
входов (20 вместо 2), так что, по-видимому, будет не-
правильным полагать, что е = 0,005, как у фон Неймана.
Для нейрона с большим числом входов более ограничена
величина относительного колебания порога, хотя абсо-
лютное допустимое изменение остается тем же. В нашем
примере 0=13,5±<О,5, а в схеме фон Неймана 0 рав-
нялось бы —1,5 + <0,5. Очень заманчиво и интересно
провести полное сравнение этих двух схем, но этот во-
прос слишком сложен, чтобы мы могли его здесь рас-
смотреть, и мы отсылаем читателя к работе Коуэна [5].
Имеет, однако, смысл указать, что рассмотренный
пример сразу же может быть обобщен, что позволяет
сформулировать следующее утверждение: любая логиче-
ская функция v переменных (каждая из которых пере-
дается пучком из N волокон), изображаемая диаграм-
мой Венна с одной точкой (и 2Г — 1 нулями) или с од-
ним нулем (и 2V—1 точками), может быть вычислена
без ошибок с помощью ряда из N работающих без оши-
бок нейронов, если число волокон без ошибок в каждом
пучке равно ДМ<Л7(г>+1).
Доказывается это утверждение следующим образом.
Пусть содержащая точку область в диаграмме Венна
есть пересечение и переменных. Соединим нейрон с и
возбуждающими и v—и тормозящими пучками волокон.
Пусть максимальное число волокон без ошибок в пучке
равно &N. При этом функция будет вычислена без ошиб-
ки тогда и только тогда, когда порог нейрона удовлетво-
ряет соотношению
(и — 1) W + Д7У < 0 < и (N — ДАТ) — — и) ДАТ.
Отсюда следует, что ДМ<М(и+1). Аналогично прово-
дится доказательство для функций, в диаграмме Венна
которых имеется один нуль.
Вероятность ошибки в такой сети, Ре, как раз и есть
кумулятивная биномиальная вероятность, выражение
для которой было приведено выше. Среди этих функций
174
Л. В ерб и к
много универсальных, или «полифеков» (см. [2]), так
что можно утверждать, что любое логическое вычисле-
ние может быть осуществлено с высокой степенью на-
дежности с помощью сети, в которой сигнал передается
пучками волокон и применяется принцип связи «всех
со всеми».
ЛИТЕРАТУРА
1. McCulloch W. S., «Agathe Tyche of nervous nets — the lucky
reckoners», Mechanization of Thought Processes, N. P. L. Symp.
№ 10, H. M. S. O., London, 1959.
2. Blum M., «Properties of a neuron with many inputs»; русский
перевод см. настоящий сборник, стр. 136.
3. Howland, Let tvin, McCulloch, Pitts, Wall, «Reflex
inhibition by dorsal root interaction», J. Neurophysiol, 18, 1—17
(1955).
4. V о n Neuman J., «Probabilistic logic and the synthesis of reli-
able organisms from unreliable components», Automata Studies,
Princeton Univ. Press, 1956; русский перевод: Нейман Дж.,
Вероятностная логика и синтез надежных организмов из ненадеж-
ных компонент, сб. «Автоматы», ИЛ, 1956.
5. Cowan J. D., «Many valued logics and reliable automata»; рус-
ский перевод см. настоящий сборник, стр. 178.
ДИСКУССИЯ
Фон Фёрстер. Что касается афферентного торможения, то
почему бы не сделать нейрон, выполняющий эту работу?
В ерб и к. Об этом я не говорил как раз потому, что это при-
водит к новому типу нейрона.
Фон Фёрстер. Это верно, но если вы хотите ввести
большее афферентное торможение, вы вводите дополнительные ней-
роны, и тогда ваши вычисления для N нейронов применимы для
каждой сети, в которой может быть афферентное взаимодействие.
Маккаллок. Дело в том, что если мы заменяем афферент-
ное торможение нейронами, мы отбрасываем нечто, чем воспользо-
валась природа. Хотя мы и очень рады отбросить это, мы знаем,
что, поступая так, мы вместе с добавочным нейроном вводим и
ошибку — еще один «эпсилон». Следовательно, мы увеличиваем при
этом шум в устройствах.
Баумен. Мне хотелось бы задать чисто формальный, матема-
тический вопрос. Построим систему, сильно напоминающую теорию
5. О нейронных сетях с минимизацией ошибки
175
групп, но не являющуюся таковой. Исследовали ли вообще мате-
матики теоретико-групповые отношения, при которых новый элемент
группы получается из сочетания трех, а не двух элементов? Мне
кажется, что это нечто новое, хотя я признаю, что у меня очень
скудные познания в области теории групп и родственных вопросов.
Но я лишь спрашиваю, изучались ли формально эти вещи?
Коуэн. Насколько мне известно, Карл Менгер показал, что
определенные подмножества в этих случаях образуют группы, и
его сын занимается этим.
Баумен. Я не имел в виду группы в обычном смысле, потому
что комбинация двух произвольных элементов не порождает третий.
Комбинация нечетного числа элементов должна порождать новый
элемент группы. Это не теория групп, но что-то очень близкое к ней.
А м а р е л. Я занимался такими тернарными соотношениями.
Их структура легко может быть описана в терминах решеток.
Я использовал эти соотношения в моих исследованиях по авто-
матическому формированию теории и собираюсь подробнее оста-
новиться на этом позднее, в своем докладе.
Новиков. Я с интересом жду выступления Амарела о ре-
шетках. Следовало бы указать, что решетка есть алгебраическая
система с бинарными операциями. Был задан вопрос: проводилось
ли формальное изучение тернарных или более высоких п-нарных
операций? Если понимать вопрос в самом широком смысле, то от-
вет будет утвердительным. Мне известны по меныпей мере две
различные тернарные системы, которые уже изучены: одна пред-
ставляет собой ослабленный вариант алгебры Ли, использующий
для воспроизведения сочетание трех элементов, другая включает
введение более абстрактного алгебраического понятия и имеет
дело с тернарными и, если хотите, n-нарными операциями. Так что,
очевидно, математически вопрос о том, можно ли выйти за пре-
делы бинарных отношений, уже обсуждался.
М а л л и н. Возвращаясь к этим нейронным сетям, я хочу
коснуться концепции статистической независимости, чтобы подчерк-
нуть то, о чем здесь уже говорилось. Мне кажется, — хотя это
зависит от точки зрения, — что огромный прогресс, достигнутый бла-
годаря концепции статистической независимости в первые пятьде-
сят лет нашего столетия, будет в точности скомпенсирован тем
сковывающим действием, которое эта концепция окажет в течение
последующих пятидесяти лет.
А м а р е л. Я хотел бы пояснить случай, рассмотренный Блю-
мом. Он задал вопрос: «Какова полная вариация порога, которая
все еще дает устойчивую функцию?» Можно было бы задать и та-
кой вопрос: «Если задано некоторое вероятностное распределение
порогов, то какова вероятность правильного выхода?» Это ближе
к той форме вопроса, которую использовал Вербик.
176
Л. В е р б и к
Маккаллок. Первый вопрос, мне кажется, относится к то-
му, что называется логически устойчивой схемой, устойчивой отно-
сительно простого изменения порога.
А м а р е л. Вопросы поставлены совсем по-разному. В первом
случае вы интересуетесь полной изменяемостью, которую вы можете
допустить в системе, и вы имеете точный ответ на то, что вас
интересует. Во втором случае спрашивается о вероятности того,
что функция, которой вы интересуетесь, будет правильной. Это
другой подход к проблеме.
В сети, которую вы рассматривали, имеются нейроны. Вы
предполагаете затем, что переход от одной функции к другой про-
исходит в соответствии с некоторым определенным порядком, зада-
ваемым способом, который определяется соответствием функций
нейрона последовательным значениям порога. В общем виде пред-
положим, что у вас имеется случай, когда распределение состоя-
ний, логических состояний, не совпадает с распределением таковых
для нейрона. Например, случай, когда возможен переход от «ИЛИ»
или «исключающее ИЛИ»...
Маккаллок. Я не могу придумать такого примера.
А м а р е л. Хорошо, мы можем найти элементы такого типа
в технике: это могут быть, например, определенного типа схемы
с выпрямителями на полупроводниках. Замечание, которое я хочу
сделать, состоит в том, что для различных распределений логиче-
ских состояний (которые зависят от того конкретного устройства,
с которым мы имеем дело) имеются различные свойства логиче-
ской устойчивости. Мы изучали логическую устойчивость в моделях,
отличных от формальных нейронов. В нашей лаборатории демон-
стрировались свойства логической устойчивости в системах с выпря-
мителями на полупроводниках при плохих условиях работы вы-
прямителей.
Коуэн. Это имеет отношение к работе Шутценбергера, прове-
денной им в Массачусетском технологическом институте на част-
ных типах функций, которые реализуются случайно выбранным
множеством переключательных элементов. Он нашел некую разно-
видность эргодической теоремы для этой системы. Лишь в очень
специальных случаях при этом получается что-либо отличное от
тавтологии и противоречия.
Фон Берталанфи. Вы имеете в виду определенный тип
нейродинамики. Не можете ли Вы привести один или два примера
тех физиологических механизмов, по которым они работают?
Маккаллок. Пожалуйста. Мы проделали большую работу по
изучению афферентного взаимодействия, впервые открытого Мэтью-
зом и потом использованного в работе Ллойда, который объясняет
им торможение в тех случаях, когда это явление в принципе не
могло быть отнесено за счет действия нейронов ввиду краткости
5. О нейронных сетях с минимизацией ошибки 177
промежутка времени. Сейчас мы столкнулись с этим и показали,
что если в спинальном нерве кошки при первом ветвлении аксона,
когда он входит в дорзальный столб, наблюдается закупорка и мы
даем этому животному стрихнин, то у животного начинаются кон-
вульсии. Мы знаем, что это важный метод «переключения». Стрих-
нин лишь запускает такое «переключение». Тело все время поль-
зуется этим методом, и мы знаем, что благодаря этому — как выте-
кает из работы Блюма, — а также благодаря прямому возбуждению
и торможению клетки можно получить диаграмму, которая пере-
водит точки в любую диаграмму Венна в любой заданной последо-
вательности. Без этого природа не сумела обойтись.
12 Зак. 106
6. МНОГОЗНАЧНЫЕ ЛОГИКИ И НАДЕЖНЫЕ АВТОМАТЫ
ДЖ. КОУЭН
(Лаборатория электроники Массачусетского
технологического института)
1. ВВЕДЕНИЕ
Уже стало привычным применять теорию информа-
ции (вернее, ту основную часть теории, которая имеет
дело с созданием, хранением, передачей и обработкой
некоторой величины, описываемой особой мерой инфор-
мации {1]) к изучению живых организмов и, в частности,
к изучению нервной системы. Но обычно упускается из
вида тот факт, что нервная система — это вычислитель-
ное устройство, работающее в среде, в которой имеются
как значащие, так и незначащие стимулы !). Более того,
это — вычислительное устройство, которое надежнее
реагирует на более значащие, чем на менее значащие
стимулы и которое длительный период времени сохра-
няет эту надежность вычислений в присутствии как
внешних, так и внутренних шумов. Но результаты, до-
стигнутые до сих пор в проблеме получения надежного
вычисления на ненадежных элементах (т. е. результаты,
связанные с решением проблемы внутреннего шума), но-
сят иной характер, чем результаты теории кодирования,
полученные в теории информации, которая, за исключе-
нием одного довольно частного результата [4], допускает
надежную связь в присутствии шума. На языке теории
информации можно сказать, что надежность, достигае-
мая за счет избыточности вычисления, не получается за
счет избыточности кода или канала. Мы попытаемся
проникнуть глубже в эту довольно неожиданную ситуа-
цию.
1 Значимость (meaning) применяется здесь в смысле Мак-
кея [2, 3].
6. Многозначные логики и надежные автоматы
179
Вероятностные логические функции могут быть вве-
дены несколькими способами, в том числе с помощью
символики Маккаллока. Так, например, символ
изображает бинарный логический функтор (фиг. 1). Его
выход у\ с относительной частотой 1—е равен «1» вся-
кий раз, когда вход функтора есть xb х2 или Xj и х2, и
хг
Фиг. 1.
с относительной частотой 1—е равен «О», когда вход
не есть ни хь ни ,х2. Иначе говоря, этот символ можно
интерпретировать как функцию «Xf или х2»:
так что с каждым возможным отношением вход-выход
связывается определенная вероятность ошибки 8. Дру-
гое представление этой функции может быть получено
с помощью символики Шеннона для канала с шумом [1]
(фиг. 2). Ясно, что здесь мы имеем дело с такими вы-
числительными устройствами, для которых реализуемая
ими функция случайна, а не с функциями от случайных
аргументов [7—9], и, следовательно, ошибка всегда про-
является на выходе (фиг. 3).
Теперь можно поставить следующий вопрос: суще-
ствует ли некоторая избыточная схема /+, организован-
ная так, чтобы она для данного класса входов с относи-
тельной частотой, приближающейся к 1, давала выход
«1», а для дополнительного класса входов также с ча-
стотой, приближающейся к 1, давала выход «О»?
Ответ на этот вопрос был дан различными путями
в работах фон Неймана [10], Элайса [11], Питерсона [12],
12*
180
Д ж. Коуэн
Идена [4] и Маккаллока с сотр. [13—15]. Их результаты,
за исключением результатов Идена, качественно одина-
ковы и гласят, что вероятность ошибки стремится к нулю
лишь в том случае, когда отношение информационно
существенных элементов к общему числу элементов
стремится к нулю. Это отношение выражает по существу
(используя термины теории информации) количество
двоичных единиц информации на канальный символ или
скорость вычисления, и, таким образом, все эти резуль-
таты обладают следующим свойством: вероятность ошиб-
ки стремится к нулю вместе со скоростью (фиг. 4).
Фиг. 3.
Это свойство кажется довольно неожиданным в свете
результатов теории информации для надежной связи в
присутствии шума[1]. Действительно, теорема о кодиро-
вании для каналов с шумом может быть сформулирована
следующим образом: если для системы передачи сооб-
щений существует некоторая максимальная скорость пе-
редачи информации (пропускная способность С), то для
скоростей передачи, меньших С, можно ввести избыточ-
ность, не зависящую от величины скорости, так что ве-
роятность ошибки Ре стремится к нулю, обратно пропор-
6. Многозначные логики и надежные автоматы
181
ционально избыточности. При скоростях, больших С,
величина Ре увеличивается пропорционально разности
R—C (фиг. 5).
Из результатов же фон Нейман [10] и других [11—15]
следует, что максимальная скорость для надежного вы-
числения в присутствии шума равна нулю. Это означает,
что в общем случае пропускная способность канала для
вычисления в присутствии шума равна нулю.
2. СРАВНЕНИЕ СХЕМ ЭЛАЙСА И ФОН НЕЙМАНА
Рассмотрим более детально некоторые из упомяну-
тых выше исследований. Прежде всего остановимся на
работе Элайса [11] — не из соображений исторической
последовательности, а потому что она прекрасно иллю-
стрирует различные требования к схемам кодирования
в теории информации. Основная идея этих схем заклю-
чается в том, что для каналов с шумом входные сигна-
лы подбираются так, чтобы минимизировать ошибки,
вызванные шумом в каналах. Иначе говоря, из множе-
ства возможных входов необходимо выбрать подмноже-
ство таких, которые дают после передачи минимальную
вероятность ошибки. Следовательно, в системе должно
существовать кодирующее устройство. Точно так же
должно существовать и декодирующее устройство, кото-
рое из множества возможных выходов восстанавливает
требуемые выходы. Избыточность может осуществляться
в коде или в канале или и в том и в другом. В терминах
182
Дж. Коуэн
Фиг. 6.
вычислительной модели это означает одну лишь избы-
точность аргумента. Избыточность же вычисления (функ-
ции) несколько иного характера и будет рассмотрена
ниже. Таким образом, получается схема, иллюстрируе-
мая фиг. 6.
6. Многозначные логики и надежные автоматы
183
Здесь используется блочный код, а кодирующие
устройства fin, £t2 превращают соответственно входные
последовательности хь х2 длиной k каждая в последо-
вательности длины п. Декодирующее устройство Di сно-
ва превращает последовательности длины п в последо-
вательности длины k. При этом вводятся следующие
предположения: а) отображение входных последователь-
ностей на выходные постоянно {2:1} и не зависит от
прошлых входов и действий вычислительной машины;
б) кодирующее и декодирующее устройства являются
устройствами без шума, и в них совсем не происходит
вычислений вида
v е z
Таким образом, эти устройства осуществляют отобра-
жение {1:1} (от k к п п от п к k соответственно).
Процесс кодирования удобно описывать через харак-
теристики последовательностей двоичных чисел, а именно
использовать термины вес и расстояние [16, 17]. Вес по-
следовательности w(a). определяется как число содер-
жащихся в ней единиц. Расстояние между двумя после-
довательностями d(a,b) задается весом их суммы (по
модулю2), т. е. d(a, b) = w(a®b). Кодирование состоит
в выборе последовательностей длины п, соответствую-
щих данным ^-последовательностям и обладающих тем
свойством, что их взаимные расстояния, задаваемые как
ш(а®Ь), максимальны. Декодирование состоит посуще-
ству в отождествлении определенных подмножеств мно-
жества 2П выходов с множествами п-последовательно-
стей, соответствующих данным ^-последовательностям,
причем расстояние между отождествляемыми последо-
вательностями минимально. Рассмотрим, например, код
с п = 3, /? = 1/з. Кодирование задается схемой {1->111,
О—>000}, а декодирование — схемой {111, 110,101,011—>1;
ООО, 001, 010, 100—>0}. Таким образом, все 3-последова-
тельности с весом 2 и более декодируются как 1, а все
3-последовательности с весом не более 1 декодируются
как 0.
184
Дж. Коуэн
Но 16 функций двух переменных в двузначной логике
могут быть классифицированы в соответствии с четно-
стью числа точек в их представлении в символике Мак-
каллока [6], т. е. в терминах их веса. Существуют, таким
образом, 8 функций с четным весом (а) и 8 функций
с нечетным весом (б):
Xj Xg
х^ & Xg Xf St ~хг
X^XZ
*»<•%
CL
Важными функциями являются: сложение по моду-
лю 2: Xi©%2, амфек Пирса Xiyx2 и штрих Шеффера
Xi |х2, причем две последние являются универсальными
(базисными). Теперь могут быть сформулированы ре-
зультаты Элайса. Они заключаются в том, что теорети-
ко-информационный код может быть получен только для
функций с четным весом. Так, если п — длина блока, а
k — число информационных символов в блоке, то k^n—1
и величина —1/п может быть сделана постоянной, так
что ИшРе = 0 для /?<С, где С — пропускная способ-
л->оо
ность канала. Действительно, />? = 2“ал/(у?’ С) (а = const).
Однако для функций с нечетным весом и, следо-
вательно, Кроме того, Ре = 2”а//?, так что
Пш Ре==0, т. е. Ре стремится к нулю вместе с /?, так как
универсальные элементы являются функциями с нечет-
ным весом; последний результат остается справедливым
и в общем случае. На основании этого Элайс высказал
гипотезу, что при данных предположениях пропускная
способность вычисления равна нулю.
Сравним теперь с описанной схемой конструкцию
фон Неймана для надежного автомата из менее надеж-
ных элементов, которую мы в дальнейшем для краткости
и
Фиг. 7.
Фиг. 8.
186
Дж. Коуэн
будем обозначать КН. Для этого сначала кратко ре-
зюмируем существенные особенности КН. Используе-
мые базисные функции — орган типа штриха Шеффера и
тройной оператор или мажоритарный орган (смеситель,
см. [10]):
(x&i/) v(y&2) V(2&x)=(x V г)&(г Vx).
Мы ограничим наше исследование схемами, основан-
ными на первом из этих органов. Результаты, получен-
ные при использовании мажоритарных органов, отлича-
ются лишь в некоторых второстепенных деталях.
^быход
Л
(восстановление)
Фиг. 9.
Единичная линия автомата (фиг. 7) заменяется много-
кратной линией, содержащей п линий в пучке (фиг. 8).
Доверительный уровень Д установлен таким образом,
что если возбуждены не менее (1—Д)п линий, то это
интерпретируется как «1», если же возбуждены не бо-
лее Д-n линий, то это интерпретируется как «0»; если,
наконец, имеется некоторый средний уровень возбужде-
ния, это интерпретируется как несрабатывание. Поэтому
вводится понятие информационного ограничения, что
дает одну двоичную единицу на пучок, т. е. скорость
равна 1/п двоичной единицы на канальный символ.
В силу принятого метода кодирования (даже когда
основные органы, реализующие штрих Шеффера, рабо-
6. Многозначные логики и надежные автоматы
187
тают без ошибки), если только вход не состоит целиком
из единиц или нулей (что обозначается как информация
^выход
Фиг. 10.
{1,0}), такой вход иногда отображается в «несрабаты-
вание» {/}. Фон Нейман назвал это вырождением ин-
формации и ввел так называемые восстанавливающие
Фиг. 11.
органы, чтобы нейтрализовать это явление. Этот про-
цесс может быть представлен, как показано на фиг. 9.
Очевидно, здесь требуется восстанавливающий процесс,
188
Дж. Коуэн
характеристика которого представлена на фиг. 10. Та-
кое восстановление достигается применением схемы,
изображенной на фиг. 11, и двойной итерацией, чтобы
получить требуемую функцию, показанную на фиг. 10.
Необходимы два этапа, так как вырождается и вос-
станавливается. Вообще ф<2*> (k конечно) операций на
пучок восстанавливают всю деградированную информа-
цию. Природа перестановки такова: а) перестановка
гарантирует, что |Вход является статистически независи-
мой случайной величиной; поэтому для получения £Выход
может быть использована статистическая аппроксима-
ция; б) перестановка совместима со следующей схемой,
обеспечивающей статистическую независимость случай-
ных величин |*ход, 11вход’ и может быть получена из нее
как особый случай, в котором ^ход^Лвход (фиг. 12).
Количественные результаты для КН заключаются
в следующем. Пусть т|, £— относительные уровни
возбуждения пучков для х1г х2 и уу соответственно.
Предположим, что | и т) — статистически независимые
нормально распределенные случайные величины.
6. Многозначные логики и надежные автоматы
189
а) Допустим, что в основных органах нет шума.
Тогда t, — почти нормально распределенная величина
со средним значением С=1—и среднеквадратич-
ным отклонением
a = [Ul-£)n(l-n)№'/’-
Пусть относительный уровень возбуждения ф2*у, ра-
вен Со- Тогда Со определяется из равенства
1 -11 - (1 - £т))2]2 = 1 - (2СП - W-
б) Пусть теперь основные органы — органы с шу-
мом, с вероятностью ошибки е. Тогда
С = (1-^) + 2е(сг|-у)
И
о= {[(1 -2е)Ц(1 -0п(1 — л)4- е(1 -е)]/п}'\
Аналогично при данном а
Со=1-(1 — {(1 — £п)Ч-2е (£Т) — 4) }2)2-
Значение величины Ре может быть теперь получено
следующим выбором величин А и п. Требуемое по-
ведение сети описывается, конечно, таблицей:
У 1 0 : х2
1 0 1
0 11
Для достаточных малых в и достаточно больших п
Со=1-(2£т]-В2П2)2,
что приводит к следующей таблице:
Со | >1-А <А :П
> 1 - А 0 {А2) 1—0 (А2}
<А 1—0 {А2} 1— 0 |А4}
190
Дж. Коуэн
При достаточно малых Д можно получить нужное нам
поведение. На деле оказывается, что наиболее благо-
приятное значение Д равно 0,007, что приводит к оценке
8<Д),0107. Для е = 0,005, Д = 0,07 результирующая веро-
ятность ошибки 3,5-10“3 (ср. работу
Блюма), т. е. Pe=2'p/R, что аналогично результатам,
полученным в конструкции Элайса (КЭ).
Теперь можно, используя теоретико-информационную
триаду, состоящую из кодирующего устройства, кана-
ла и декодирующего устройства, сравнить КЭ и КН. Мы
уже указали, что является кодирующей и декодирующей
функциями для КЭ и КН. Из этого вытекает следующая
простая интерпретация. Операция кодирования состоит
просто в расщеплении одной линии на и линий, т. е. в
отображении 1 в 111... 11 и 0 в 000... 0. Операция деко-
дирования (в указанной выше работе фон Неймана ни-
где в явном виде не упомянутая) состоит в отображении
значений £п>(1—Д)п в 1, а значений ^п^Ди в 0; проме-
жуточные же значения отображаются в 1 или 0 про-
извольно, т. е. для этих значений Ъд существуют «без-
различные» условия. В терминах кодов это означает,
что все n-последовательности веса (1—Д)и и больше де-
кодируются как 1, все n-последовательности веса Дп и
меньше декодируются как 0, а все и-последовательности
промежуточного веса декодируются произвольно либо
как 1, либо как 0.
Причины существования этих «безразличных» усло-
вий ясны. Когда число п велико, и-последовательности
промежуточного веса встречаются с исчезающе малой
вероятностью, так что декодирующее устройство может
ими пренебречь. В отличие от этого декодирующее уст-
ройство КЭ получает с конечной вероятностью и-после-
довательности всех возможных весов и преобразует их
в требуемые /^-последовательности. Таким образом, мо-
жно сказать, что КН перед операцией декодирования
достигает вероятности несрабатывания, равной 2”P/R.
Поэтому методологически КН отличается от КЭ тем,
что первое устройство представляет собой по существу
комбинацию «исправления канала» («channel-matching»)
и «исправления источника» («source-matching»), в то
время как второе устройство — это обычная теоретике-
6. Многозначные логики и надежные автоматы
191
информационная схема исправления источника. Одна-
ко, как будет показано ниже, структуры этих двух
схем, если не учитывать различия декодирующих
устройств, по существу эквивалентны.
Введем следующее удобное представление для КЭ и
КН. Множества возможных входных конфигураций мо-
гут быть представлены в виде вершин n-мерных гипер-
кубов (фиг. 13) или, что эквивалентно, в виде булевых
(ПО)
1100)
1000)
Фиг. 14.
решеток (фиг. 14; см. также Приложение). Тогда КН и
КЭ могут быть представлены, как на фиг. 15. Сразу
видна существенная структурная эквивалентность двух
кодов.
192
Дж. Коуэн
Сложность £>4 и D5 является кажущейся. Очевидно,
имеем:
так что {Е'4, £>4} и {£5, О'ь}, как и следовало ожидать,
имеют просто вид
Х‘®‘Х'НЗ.»вХ>
Конечно, использование безразличных условий для
таких небольших значений п приводит к дополнитель-
ным ошибкам в КН, и поэтому полная выгода от схемы
не может быть получена, пока п не достигнет величины
порядка 103 или 104. Для небольших значений п вместо
безразличных условий необходимо ввести дополнитель-
ный символ, скажем е, для промежуточных значений,
так же как и в КЭ.
Итак, для небольших значений п обе схемы исполь-
зуют декодирующие устройства с тремя состояниями;
для больших же п только в КЭ используется такое
устройство, в КН же используется декодирующее
п=2
R -i/г
Фиг. 15.
Зак. 106
00
6. Многозначные логики и надежные автоматы
193
устройство с двумя состояниями. Таким образом, для вы-
числений с логической глубиной 1 единственное разли-
чие КЭ и КН состоит только в относительно неболь-
шом отличии структуры декодирующих устройств. Обе
схемы могут быть представлены, как показано нафиг. 16.
Шум в этой схеме целиком заключен в С. Это не
приводит к каким-либо проблемам, связанным с Е\, так
как именно здесь происходит расщепление линий. Од-
нако декодирующее устройство Db как мы видели, об-
ладает по крайней мере такой же сложностью, как и С,
и должно быть по сравнению с С относительно надеж-
ным. Так как кодирование и декодирование для этого
органа не должно вводить противоречия, то нужно при-
нять, что D\ сделано относительно надежным за счет
некоторой избыточности на микроуровне (Лёфгрен [18]).
Поэтому нужно применить эффективное декодирующее
устройство без шума, которое не вызывает каких-либо
проблем в случае вычислений с логической глубиной 1.
Но в случае ситуаций, включающих вычисление с про-
извольной логической глубиной, возникают определен-
ные осложнения.
Рассмотрим вычислительную систему, изображенную
на фиг. 17. Следуя схеме КЭ и заменив в ней каждый
элемент триадой, получим следующую сеть (фиг. 18).
В этом случае необходимо, чтобы шумом обладали
только элементы вычисляющих рядов Сц. Как и раньше,
это не вызывает проблем для так как мы приняли,
что расщепление линий происходит без шума. Но теперь
последующие декодирующие устройства не должны
иметь шума относительно С^\ в противном случае, ошибки
смогут распространиться по сети. Так как обладают
по крайней мере такой же сложностью, как и j, выше-
приведенное требование вызывает довольно нежелатель-
ное ограничение локализации ошибок в сети. Оно, не-
сомненно, было бы более приемлемым, если бы до-
пускало равномерное распределение ошибок в сети.
В действительности КН допускает это и отсюда выте-
кает следующая схема действий: заменяем 11 и 12 на
{Еи, Сц} и {Е12, Ci2}, включаем восстанавливающие ор-
ганы ф/у» рандомизируем их входы и выходы (см.
стр. 188), заменяем 21 на C2i, рандомизируем, вклю-
13 Зак. 106
f(xJtxZ9x3)
Фиг. 17.
6. Многозначные логики и надежные автоматы
195
Г 1ХцХ2,а;3) Г (х1>хг>хз)
Фиг. 18.
Фиг. 19.
чаем затем добавляем D2l. Таким образом, мы по-
лучаем следующую сеть (фиг. 19).
В КН только D2l не должно иметь шума относитель-
но Сц, а все остальные вычислительные элементы
— — могут быть элементами с шумом. Очевидно,
эта схема более удовлетворительна, чем КЭ, и причины
этого достаточно ясны. Как мы уже отмечали, для вы-
числений с логической глубиной 1 в КН прежде, чем
выполняется операция декодирования, с помощью функ-
ции, приведенной на стр. 189, достигается вероятность
Pe = 2~$IR- Очевидно, что это может быть повторено для
любой требуемой глубины и конечное декодирующее
устройство необходимо только для отображения
п$>(1—Д)п в 1 и в 0. Система КЭ не может до-
стигнуть этого потому, что она должна восстанавливать
^-последовательности из всех возможных и-последо-
13*
196 '
Л ж. Коуэн
вательностей на каждом этапе с помощью устройств
с шумом. Можно, конечно, рассматривать ф/у как Раз‘
новидность декодирующего устройства, так как эти эле-
менты отображают все возможные п-последовательно-
сти на ограниченное подмножество этих последователь-
ностей, соответствующее ^-последовательностям, но эти
элементы обязательно должны быть органами без шума.
Таким образом, в некотором отношении КН предпо-
чтительнее КЭ. Однако КН несколько проигрывает от
того, что, прежде чем вероятность Ре станет действи-
тельно малой, п должно быть порядка 103—104. Так, если
л = 2-104, рв = 2-310-3х210"4 « Ю"18. К тому же да-
же в случае отсутствия шума происходит вырождение
информации, и с этим необходимо бороться введением
восстанавливающих органов. Конечно, было бы очень
желательно сконструировать схемы, использующие зна-
чительно меньшее число элементов и не приводящие к
вырождению информации при отсутствии шума. Чтобы
исключить эти обстоятельства, мы детальнее разберемся
в структуре КН. Для этого нам понадобится более аб-
страктное описание. Мы получим его, используя вместо
традиционного двузначного многозначные исчисления
высказываний. Нужные свойства этих исчислений крат-
ко изложены в Приложении.
3. СХЕМЫ МНОГОЗНАЧНОЙ логики
Рассмотрим снова КН, и пусть пучок состоит из двух
линий (фиг. 20). Теперь мы характеризуем уровни воз-
буждения в пучке уже не посредством некоторого дове-
рительного уровня как 1 и 0, а при помощи полного
множества значений истинности. Так, уровни (11, 10, 01,
00) соответствуют значениям истинности (1, 2, 3, 4).
Кроме того, вся эта сеть понимается как прямое произ-
ведение двух двузначных систем, т. е.
6. Многозначные логики и надежные автоматы
197
и, учитывая соответствие
(11, 10, 01, 00,)->(1, 2, 3, 4),
получаем четырехзначную логическую матрицу
"4321“
3 3 11
2 12 1
1111
которая является обобщенным штрихом Шеффера. Ана-
логично используя сети, изображенные на фиг. 21, мо-
жно построить обобщенные функции «И», «ИЛИ» и
«НЕ». Эти сети реализуют следующие логические мат-
198
Дж. Коуэн
Но эти матрицы представляют собой как раз функ-
ции Льюиса &, * и Г. Обобщенная функция Шеффе-
ра | является также функцией Льюиса, что легко можно
видеть, сравнивая таблицы и условия, приведенные в
Приложении.
Отсюда с совершенной очевидностью следует, что
все многократные автоматы фон Неймана (исключая
Фиг. 21.
восстанавливающие и рандомизирующие органы) поро-
ждаются обобщенной функцией Шеффера X\Y. Так,
X | Y = X * ”| Г, X & Y = (X | X) | (Г | Г),
“1 X = X | X, X * Y = П (“1 X & П Г).
Если использовать понятие двузначной функции Шеф-
фера х\у, становится ясным, что выражение
A'lK —(x1|t/1)®(x2|i/2)
и вообще
п
X\nY=®(xi\yi)
Z = 1
является 2п-значной функцией Шеффера. Эта функция
(или пары {&, Г} или {*, Г}) порождают не все 22"6
возможные функции Льюиса от б переменных, а только
подмножество 226 функций. Это подмножество в дей-
ствительности является множеством всех возможных
функций Буля — Шрёдера от б переменных, и оно изо-
морфно. множеству всех возможных булевых функций
6. Многозначные логики и надежные автоматы
199
от б переменных. Отсюда следует, что все исполнитель-
ные органы в КН реализуют функции Буля — Шрёдера
и вместе с тем, конечно, функции Льюиса. Заметим, что
такой же результат получился бы, если бы мы исполь-
зовали обобщенную ампек-функцию Пирса
Х|-К=® (xz|yz) = -lX&-|r.
1=1
Полное множество функций Льюиса реализуется только
тройкой {&, Г, О}, последний элемент которой мы еще
не рассматривали. Однако для п = 2, ф2 восстанавливаю-
щий орган КН может быть сконструирован, как пока-
зано на фиг. 22. В терминах многозначных логических
систем приведенные выше схемы реализуют следующие
логические матрицы:
"1~ "1“
4 1
4 1
_4_ _4_
которые как раз являются функциями Льюиса /Z(X) =
=“| О ~\Х и О X соответственно. (С этого момента мы
будем иметь дело с функцией х | у, общность при этом,
конечно, не теряется.) Аналогично при п = 3 имеем для ф2
схему, изображенную на фиг. 23. При условии
(111, 110, 101, 100, 011, 010, 001, 000)
->(1, 2, 3, 4, 5, 6, 7, 8)
эта схема реализует логическую функцию
“Г
1
1
7
1
4
6
.8.
Фиг. 22.
Фиг. 23.
6 Многозначные логики и надежные автоматы
201
Аналогичные функции могут быть построены и для слу-
чаев и=4 и и = 5.
Можно показать, что все эти функции являются
функциями Льюиса, причем действие этих функций мо-
жет быть охарактеризовано, как показано на фиг. 24.
Заметим, что все эти функции (для и = 2, 3, 4, 5, ...)
являются изотонными, или сохраняющими порядок (or-
der-preserving). Кроме того, при увеличении п эти
функции становятся непрерывно упорядоченными (or-
der-continuous) [19]. Было показано, что это множе-
ство изотонных непрерывно упорядоченных функций
является подмножеством множества всех возможных
функций Льюиса [27]. Отсюда следует, что все восста-
навливающие органы в КН представляют собой не функ-
ции Буля — Шрёдера, а более общие функции Льюиса.
Наконец, операцию рандомизации пучка можно ха-
рактеризовать свойством сохранения веса. Это, очевид-
но, означает сохранение порядка, а также непрерывной
упорядоченности. Таким образом, и эта операция также
является функцией Льюиса, аналогичной восстанавли-
вающим функциям. Следовательно, все автоматы, реа-
лизуемые с помощью КН, могут быть описаны с по-
мощью многозначных логических функций Льюисц.
202
Дж. Коуэн
Используем теперь это положение для исследования
оснований для рандомизации (которой мы намеренно до
сих пор избегали) и природы вырождения, которое
предварительно уже обсуждалось.
Рассмотрим «обобщенные функции Шеффера и Пирса
для п=2 и выберем доверительный уровень Л<*/2, так
что (1—>1, 2—и, 3-*t, 4—*0). Достаточно взять A=’/4. Та-
ким образом, имеем
1 2 3 4 1 1 i i 0
1 4 3 2 1 1 0 i i 1
2 3 3 1 1 i i i 1 1
3 2 1 2 1 1 i 1 i 1
4 1 1 1 1 0 1 1 1 1
Отождествляя I, получаем
1 1 I 0
1 0 i 1
I i i 1 1
1 i
0 1 1 1
Но что нам делать с двусмысленным символом Z|Z,
который иногда отображается в 1, а иногда в 0? Взяв
среднее значение (г-|-1)/2, получим
1 1 I 0
1 0 l 1
i i 2 1
0 1 1 1
6 Многозначные логики и надежные автоматы
203
Перейдя теперь обратно от (1, I, 0} к относительным
уровням возбуждения, т. е. к |1->1, 0—>0|,
получим
С 1 1 0 :т]
0 111
Но это как раз дает £=1 —что было получено
фон Нейманом как среднее значение С, когда | иц —
статистически независимые случайные величины. Ана-
логично отображение
| 1
1 4
2 4
3 4
4 4
2 3 4 | | 1
4 4
3 4
4 2
3 2
i
О
i
О
i
i
О
О
i
i
О
О
I
i
1
1 1 i 0
1 0 0 0
-> 1 0 Z/2 i
0 0 i 1
4 1 О
3 i О
2 i О
1 О О
приводит к
С 1 7 о :Т|
1 000
1 n 1 1
2 0 4 2
0 0-11
что равносильно £ = (1—£)(1—Л)- Если бы фон Ней-
ман произвел статистический анализ своего органа,
он получил бы среднее значение £ = (1 —1)(1 — п)> со-
ответствующее приведенному выше результату.
204
Дж. Коуэн
Подобным же образом можно исследовать и обоб-
щенные функции с четным весом. Например,
12 3 4
1 i i 0
приводит к
1 I 0
1
i
0
0/1 1 0 у 1
; ± • t 1 1 1 1
1 2 1 2 2 2 2
1/0 0 1 у о
т. е.
^ = (1 -В)714-(1-л)^ = ^ + п-2|т].
Очевидно, что для больших п справедлива та же
формула, и становится ясной природа приближений
фон Неймана. Если дано, что случайные величины £
и л независимы, то наиболее вероятным значением и
наилучшим приближением к f(i, /) является, конечно,
среднее значение величины %. Однако в случае функ-
ций с нечетным весом f(i, /) иногда отображается в 1
или в 0, или наоборот. Для функций с четным весом
f (i, /) всегда отображается в 1 или 0, и f(l, 0) также
отображается в 1 или 0. Таким образом, в некоторых слу-
чаях функции с нечетным весом приводят к вырождению:
1U 0—>/, тогда как функции с четным весом всегда вос-
станавливают. Следовательно, для функций с четным
весом не нужно дополнительных восстанавливающих
органов, в то время как для функций с нечетным весом
такие органы необходимы. Мы можем рассматривать
6. Многозначные логики и надежные автоматы
205
эти восстанавливающие органы не только как декодирую-
щие устройства для выходов некоторой ступени, но и
как кодирующие устройства для следующей ступени.
При проведении этого анализа мы имели дело только
с отказами, вызванными вырождением информации,
которая происходит в отсутствие шума в вычислении.
Другими словами, мы рассматривали только кодовые
несрабатывания и пренебрегали вычислительными несра-
батываниями. Так как восстанавливающие органы дей-
ствуют при несрабатывании независимо от его происхо-
ждения, то в случае вычислительного несрабатывания
ими производятся те же операции, что и в случае кодо-
вого несрабатывания. Таким образом, этими органами,
которые мы представляем себе как соединение кодирую-
щих и декодирующих устройств, восстанавливаются все
несрабатывания.
4. О БОЛЕЕ ЭФФЕКТИВНЫХ СХЕМАХ
Теперь можно поставить ряд вопросов, относящихся
к функциям с нечетным весом: а) в чем именно состоит
Фиг. 25.
кодовое несрабатывание? б) можно ли избежать кодо-
вых несрабатываний? в) можно ли сделать восстановле-
ние несрабатываний более эффективным?
Ответ на п. «а» легко найти с помощью нашего мно-
гозначного логического изображения. Из изложенного
206
Дж. Коуэн
ясно, что промежуточные стадии КН за вычетом восста-
навливающих органов и т. п. могут быть представлены,
как на фиг. 25.
Требуемое отображение вход — выход (для системы,
реализующей обобщенный штрих Шеффера) описы-
вается следующей таблицей:
1 i 0
1 0 i 1
I i i 1
0 1 1 1
Но, как легко видеть, из-за особенностей структуры вы-
числительного устройства все, что мы можем полу-
чить,—это функции Буля — Шрёдера или Льюиса, на-
пример функцию
|2 | 1 2 3 4
1 4 3 2 1
2 3 3 1 1
3 2 12 1
4 1111
которая несовместима с требуемой нам трехзначной
функцией. Это верно для всех обобщенных 2п-значных
функций Буля — Шрёдера. Следовательно, в общем слу-
чае кодовая логика несовместима с вычислительной ло-
гикой.
Теперь возможен и ответ на п. «б». Мы должны либо
изменить вычислительную логику в соответствии с кодо-
вой, либо кодовую в соответствии с вычислительной,
либо изменить обе и придумать совершенно новую схе-
му. Рассмотрим первую из этих возможностей. Ясно,
что если упорядочить {1, z, 0} линейно, то можно выра-
зить нужную трехзначную функцию вход — выход в виде
f(x, у) = min (Xе; if),
6. Многозначные логики и надежные автоматы
207
где с означает следующую операцию:
С
1 0
i 0 1 1
Но это как раз многозначное отрицание Поста — Лука-
шевича (см. Приложение), так что
min (л* ус) = х\ру = хс • ус.
где |р означает обобщение штрих-функции Шеффера в
логике Поста — Лукашевича, а точкой обозначена дизъ-
юнкция Поста — Лукашевича. Очевидно, что если мы
заменим функции Буля — Шрёдера функциями Поста —
Лукашевича:
1 2 3 1 2 3 4 1 2 3 4 5
1 3 2 1 1 4 3 2 1 1 5 4 3 2 1
2 1 2 1 2 3 3 2 1 2 4 4 3 2 1
3 1 1 1 3 2 2 2 1 3 3 3 3 2 1
4 1 1 1 1 4 2 2 2 2 1
5 11111
то мы сможем получить требуемую совместимость вы-
числительной и кодовой логик.
Возможны две реализации этих схем: одна — вклю-
чающая образование пучков и другая — включающая
элементы с многими состояниями. Последняя реализация
получается путем замены двоичной схемы фиг. 7 п-ичной
схемой, изображенной на фиг. 26. Кодирование является
просто вопросом усиления, восстановление же осущест-
вляется так же, как и ранее. В действительности же те-
перь для выполнения этого имеется больше возможно-
стей, чем раньше [20]. Однако произвольно низкую
вероятность ошибки мы получаем только в том случае,
208
Дж. Коуэн
если колебания амплитуды выхода увеличиваются вме-
сте с и1). Так как мы по существу имеем дело с огра-
ниченными элементами, мы будем впредь рассматривать
У/
Фиг. 26.
лишь схемы с малыми ограниченными колебаниями ам-
плитуды, дающими только два состояния.
Чтобы с помощью этих схем реализовать функции
Поста — Лукашевича, необходимо выяснить природу
н н
Сеть
н
У1
Фиг. 27.
ограничений, с которыми мы встречаемся в различных
многозначных логиках. Рассмотрим следующую схему
(фиг. 27).
!) Это отмечено в другой статье [21] и является специальным
случаем анализа зависимости отношения сигнала к шуму от по-
лосы пропускания, проведенного Оливером, Пирсом и Шенноном
[22].
6. Многозначные логики и надежные автоматы
209
Пусть в пучке имеется п линий, так что существует
22п возможных входных конфигураций и 2п возможных
выходных конфигураций. Вообще говоря, тогда сущест-
вует (2л)2(2л) возможных отображений, если только на
структуру сети не наложено никаких ограничений. Если
ввести обозначение т = 2л, мы получим mm2 возмож-
ных функций, что как раз равно числу функций Поста
от двух переменных. Полагая и = 2, можно представить
Фиг. 28L
это, как показано на фиг. 28. Требуемые функции Поста
получаются при условии, что каждый формальный ней-
рон производит вычисления независимо от остальных.
Для того чтобы реализовать функции Поста — Лука-
шевича, число которых равно 2(2л) • \ нужно толь-
ко ввести ограничение f (1, m) С Ш т. Мы сделаем это,
потребовав, чтобы все диаграммы Венна были верти-
кально изоморфны. Таким образом, мы реализуем ука-
занную выше штрих-функцию Шеффера в логике По-
ста— Лукашевича следующим образом: *
|4 ^ак. 106
210
Дж. Коуэн
Заметим, что как только точка появляется вдоль верти-
кальной оси V], она появляется и в У2, и наоборот.
Что касается других многозначных логик, то функ-
ции Льюиса и Буля-Шрёдера могут быть реализованы
совершенно аналогичным образом с добавлением сим-
метричных ограничений в каждой диаграмме Венна,
Так, мы получаем следующую реализацию указанной
выше функции Шеффера в логиках Льюиса и Буля —
Шрёдера:
Здесь симметричность в Vi относительно осей (1, 3) пе-
реходит в симметричность в У2 относительно осей (2, 4).
Очевидно, что это можно свести к
что представляет собой первоначальную
Окончательно, потребовав выполнение
схему КН.
тождества
?х
«
получим двузначную булеву логику. На деле сущест-
вуют различные другие пути получения функций, отли*
чающихся от функций Буля—Шрёдера, например согласно
схеме фиг. 29. Эта схема реализует общую функцию
Поста, но здесь мы не можем касаться этого вопроса.
Во всяком случае, мы видим, как можно реализовать
функции Поста — Лукашевича и исключить, таким об-
разом, кодовые несрабатывания, используя нормальные
нейроны, каждый с 2п возможными входами вместо 2
или 3 входов в КН, и допуская вычисление этими ней-
6. Многозначные логики и надежные автоматы.
211
ронами различных функций (даже в одном и том же
ряду).
Элемент со многими входами был действительно ис-
пользован, правда в несколько ином аспекте, Алансо-
ном [9]. Он утверждал, что, насколько можно судить по
данным нейрофизиологии, локализация ошибок фон
Нейманом как ошибок на выходе является неверной и
что ошибки на входе встречаются значительно чаще и
являются более важными. Таким образом, Алансон, так
же как Мур и Шеннон [7], рассматривал проблему, свя-
занную с функциями от случайных аргументов. Отметив,
что нейроны обычно вместо двух или трех имеют много
афферентных синапсов, он исследовал нейроны со мно-
гими входами и с ошибками в синапсах. Полученные
результаты заключаются в том, что увеличение числа
афферентных синапсов на пучок, вообще говоря, умень-
шает влияние ошибок в синаптической передаче. (Этот
результат по существу качественно аналогичен резуль-
тату Мура — Шеннона, так как нейрон со многими
входами можно рассматривать как эквивалент небеспо-
вторной релейной сети.) Отсюда следует, что такие
формальные нейроны полезны именно тогда, когда рас-
сматривается проблема шума на входе.
Маккаллок, Блюм, Вербик [13—15] и Коуэн показали,
что значительно более эффективная схема, уменьшаю-
щая ошибки, получается при использовании конструк-
ции, изображенной на фиг. 30.
14*
212
Дж. Коуэн
В этой схеме каждая линия связана со всеми п ней-
ронами, так что каждый нейрон имеет 2п входов и вы-
числяет одну и ту же функцию. Для этой схемы в случае
Д~Уз, 8 = 0,05 и вероятности ошибки на входе т]=0,05
получается следующая вероятность несрабатывания:
Ре~2'уп, у=2/з- Этот результат очень удобно сравнить
с вероятностью несрабатывания, получаемой в КН:
Pe=2"Pn, р = 3,5-10'3 * * * для 8 = 0,005, т]=0. Таким образом,
эта схема не только уменьшает выходные несрабатыва-
ния, но делает то же самое и с входными несрабаты-
ваниями. В терминах элементов с 2и входами по сравне-
нию с элементами с двумя входами относительные ско-
рости переработки информации относятся как у/Р~
«2-Ю21).
1) Отметим, что это находится примерно в таком же отноше-
нии к КН, как и конструкция Мура — Шеннона для реле. Можно
утверждать, что при реализации нейрона с 2п входами, скажем,
при л=40, схема, чтобы получить Ре~ 10~7, должна содержать при-
мерно 80 реле, так что в терминах элементов с двумя входами
скорости имеют величину того же порядка. Более того, для этого
устройства потребовалась бы некоторая степень избыточности,
чтобы получить е=0,05, если для элементов с двумя входами за-
дано е = 0,005. Это хороший довод против использования реле или
6. Многозначные логики и надежные автоматы
213
Мы не будем касаться деталей этого анализа и от-
сылаем читателя к вышеупомянутой работе Вербика.
Хотелось бы только прокомментировать логическую
структуру этих схем.
Благодаря соединению «всех со всеми» при отсутст-
вии шума в вычислении выход двузначен и состоит или
из 1 на каждой линии, или из 0. Таким образом, эта
структура является структурой булевой логики1), и эта
схема, как и функции с четным весом, восстанавливает
в течение процесса вычисления все входные несрабаты-
вания. Например, схема
реализует функцию
12 3 4
1 4 4 4 4
2 4 111
3 4 111
4 1111
так что, если (2, 3)==z, то z—* *1.
Таким образом, используя схемы с соединениями
типа «все со всеми», можно устранить кодовые несра-
батывания. Эти схемы отличаются от схем Поста —
Лукашевича в том, что последние только устраняют выро-
ждение, в то время как первые не только устраняют его,
сходных устройств с двумя входами в качестве основного кон-
структивного узла и в пользу применения в качестве узла для на-
дежных автоматов нейронов с 2п входами со всеми их прекрас-
ными свойствами. Однако промышленность пока еще не производит
таких устройств, и лишь природа умеет это делать.
*) Следует отличать эту схему, которая подчиняется булевой
логике только в случае отсутствия шума, а при наличии шума под-
чиняется логике Поста, от бесповторных схем фиг. 7, которые и в
отсутствие и в присутствии шума являются схемами в булевой ло-
гике.
214
Дж. Коуэн
но и восстанавливают все несрабатывания. Таким обра-
зом, схемы Поста — Лукашевича являются ответом на
вопрос «б», а схемы с соединениями «все со всеми»
дают ответ не только на вопрос «б», но и на вопрос «в».
В случае вычислений с произвольной логической глу-
биной для проверки распространения ошибок в КН вве-
дены восстанавливающие органы. Оказывается, что ана-
логичные восстанавливающие органы, но с соединениями
«все со всеми» гораздо более эффективны, чем восста-
навливающие органы в КН. Для мажоритарных органов
(или полифеков) Вербиком получены результаты, пред-
ставленные на фиг. 31. Так, для п~40 почти все вос-
станавливается сразу же после одного-единственного
исправления. Поэтому при таком значении п для сетей
произвольной логической глубины, вплоть до последнего
ряда восстанавливающих органов, можно получить ве-
роятность ошибки Ре~ Ю"7, и мы, как и раньше, ограни-
чены только шумом в последнем ряду. Таким образом,
мы получили значительно более эффективную, чем КН,
схему, уменьшающую ошибки, и ответили на вопрос
«в». Ясно, что такое улучшение получено в результате
полного использования информации в каждом ряду и
максимального ее перерабатывания. Более того, благо-
даря этому отпадает необходимость в рандомизации и
получается гораздо более простая структура.
Вместо схемы 19 мы теперь получаем схему фиг. 32,
в которой Eijy как и раньше, означает расщепление ли-
6. Многозначные логики и надежные автоматы
215
ний, tpij — восстанавливающие органы с соединениями
«все со всеми», а Сц могут быть устройствами с соеди-
нениями «все со всеми», вычисляющими одну и ту же
функцию, или устройствами с соединениями «все со
всеми», вычисляющими разные функции. На самом деле
Фиг. 32.
Фиг. 33.
последнее различие является чисто теоретическим, так
как наличие делает его несущественным и все не-
срабатывания будут эффективно исправлены.
Однако представляется возможным получить даже
еще более изящную структуру. Заметим, что Сг;- эффек-
тивно уменьшают влияние как входных, так и выходных
ошибок, так что можно обойтись совсем без восстанав-
ливающих органов.
Так, для ц = 8 = 0,05 получаем Ре~2-^п. Это приво-
дит к заключению, что при достаточно больших п ошиб-
ки не будут распространяться по сети, даже при отсут-
ствии восстанавливающих органов. Можно сказать, что
сети с соединениями «все со всеми» являются в некото-
ром смысле самовосстанавливающимися. В этом случае
во избежание кодового несрабатывания, которое могло
бы распространяться, нужно использовать скорее булеву
функцию, чем функцию «все со всеми» Поста — Лукаше-
216
Д ж. Коуэн
вича, что приводит к схеме фиг. 33, в которой Ец—
снова расщепление линий, Сц— булевы функции «все со
всеми», a D2i — сравнительно надежное декодирующее
устройство; несрабатывания имеют место с вероятно-
стью ошибки Pe~2-Yn. Заметим, что теперь вся слож-
ность содержится в Сц, которые в некотором смысле
являются не только вычисляющими, но и кодирующими
устройствами, ибо это самовосстанавливающиеся уст-
ройства.
5. ВЫВОДЫ
Теперь мы завершили наш довольно извилистый
путь, зачастую даже не имевший прямой связи с исход-
ным обсуждением информационных скоростей и вероят-
ностей ошибок. Проблема получения ненулевых скоро-
стей для надежного вычисления (особенно для схем с
произвольной логической глубиной) все еще не решена,
так как даже в последних из рассмотренных нами схем
вероятность несрабатывания, очевидно, стремится к нулю
вместе со скоростью. Единственное, чего мы достигли, —
это более низкой вероятности несрабатывания и возмож-
ности использовать меньшее число элементов и притом
более низкого качества. Стоит отметить два обстоя-
тельства.
Во-первых, для вычислений произвольной логической
глубины не очень осмысленным представляется разре-
шение включать после каждого вычисления декодирую-
щее устройство без шума, и здесь, по-видимому, необ-
ходим какой-то новый подход, отличный от обычного
теоретико-информационного подхода. В этом отношении
кажется многообещающей обсуждавшаяся булева схема
«все со всеми», поскольку в ней каждый ряд вычисляю-
щих элементов сочетает функции кодирования и декоди-
рования с функцией вычисления. Эта схема такова, что
вся прежняя сложность восстанавливающих структуру
и рандомизирующих органов может быть исключена за
счет большой сложности самих вычисляющих рядов. Это
не вызывает трудностей, так как ошибки не зависят от
функции.
Во-вторых, не исследован соответствующим образом
ропрос о кодовой логике. Мы придерживались «пучко-
6. Многозначные логики и надежные автоматы
217
вых» схем КЭ и КН, которые, очевидно, ограничены
условием R^2!n. Может случиться, что какие-то иные
кодовые логики в сочетании с более общими функциями
Поста — обобщение в направлении схем Поста — Лука-
шевича — будут более плодотворными. В настоящее вре-
мя этот вопрос исследуется. Во всяком случае, мы пока-
зали, что избыточные автоматы могут быть описаны с
помощью различных систем многозначных логик, в ко-
торых не все значения истинности являются информа-
ционно существенными, и что эти логики имеют различ-
ную структуру в соответствии с различными методами
кодирования и переработки информации. Нам представ-
ляется, что использование этих логик облегчает поиски
путей получения надежных вычислений с ненулевыми
скоростями в присутствии шума.
Приложение
МНОГОЗНАЧНЫЕ ЛОГИКИ
/Многозначные (или, как их иногда называют, неари-
стотелевы) логики впервые были построены Постом [23]
и независимо от него Лукашевичем [24]. Схема Поста
является прямым обобщением булевой логики. Анало-
гично булевым функциям, которые принимают значения
из множества {0,1} или из эквивалентного множества
{1, 2}, функции Поста принимают значения из множе-
ства {1, (/и—1)//и, ..., 1/т, 0} или из эквивалентного
множества {1, 2, ..., m—1, m}. Различных функций По-
ста от п переменных существует самое большее пгтП,
так же как булевых функций п переменных может быть
22 . Многие функции Поста являются естественным об-
общением булевых функций. Например, булева дизъюнк-
ция и конъюнкция могут быть представлены в форме
таблиц значений истинности:
I1 2
1 1 2
2 2 2
1 2
V
1
2
1 1
1 2
218
Дж. Коуэн
Соответствующие функции
дующими таблицами:
12 3 4
Поста представляются еле
1
2
3
4
12 3 4
2 2 3 4
3 3 3 4
4 4 4 4
V 12 3 4
1 2 3 4 1111 12 2 2 12 3 3 12 3 4
Дизъюнкция и конъюнкция и в булевой логике, и в ло
гике Поста могут быть представлены функциями значе
ний истинности:
х •y = df max (х, у),
х\/у = df min(x, у).
Аналогично отрицание в булевой логике и в логике По-
ста может быть представлено функцией значений истин-
ности:
~x = d/(m+ 1 —х).
Заметим, однако, что в m-значной логике Поста сущест-
вует пгт функций одной переменной, что следует сопо-
ставить с 22 булевыми функциями одной переменной.
Наиболее полезным среди функций Поста является мно-
жество функций Л(*й) (« = 1, 2, ..., т), определенных
следующим образом:
(1, xk = i,
Л(хА) = *
‘ я \ т, xt4=i.
В логике Поста существует также теорема, аналогичная
фундаментальной теореме булевой логики и утверждаю-
щая, что любая функция Поста может быть представ-
лена как конъюнкция дизъюнкций /-функций, т. е.
f(Xi, ..., хя) = V V ••• V ПЛ. Л.................Л»)Х
Л=1 <2=i
X Jix (-*i) • Л2 (х2) • ... • Jin (хп).
Так как существует ттП функций Поста от п пере-
менных, то это означает, что каждая таблица значений
6. Многозначные логики и надежные автоматы
219
истинности является функцией Поста от двух перемен-
ных и т. д. Поэтому говорят, что логика Поста функцио-
нально полна.
Многозначная логика Лукашевича имеет те же дизъ-
юнкции, конъюнкции и /-функции, что и логика Поста,
но логика Лукашевича является функционально непол-
ной. Таким образом, не каждая функция Поста является
функцией Лукашевича. Действительно, функции Лука-
шевича удовлетворяют ограничению
f(l, т],
т. е. множество значений истинности А={1, гп} при лю-
бом соответствующем функции Лукашевича законе ком-
позиции является замкнутым. Вследствие этого ограни-
чения существует только 22" •tn™""2'1 возможных функ-
ций Лукашевича от п переменных.
Следующая форма многозначной логики была по-
строена Льюисом [25]. Логика Льюиса является по су-
ществу булевой логикой произведений, структура кото-
рой изоморфна структуре булевой алгебры порядка 26
[26]. Таким образом, 2б-значная логика Льюиса п пе-
ременных имеет структуру, изоморфную структуре буле-
вой логики переменных. Существует 22бп = 2т" воз-
можных /n-значных функций Льюиса от п переменных.
Логика Льюиса функционально неполна, т. е.
f(l, т) £ {1, т}. Кроме того, благодаря вышеупомяну-
той структуре логика Льюиса обладает другими усло-
виями симметрии. Так, для т=4 f(2)=f(3), а для
m=8 f(2)=f(3)=f(5), f(4)=f(6)=f(7). Точная природа
этих условий симметрии будет выяснена ниже.
Примерами функций Льюиса при /п = 4 являются
следующие функции:
& 12 3 4
1
2
3
4
12 3 4
2 2 4 4
3 4 3 4
4 4 4 4
V
1
2
3
4
12 3 4
1111
12 12
113 3
12 3 4
220
Дж Коуэн
Различия между этими функциями и функциями По-
ста— Лукашевича были уже отмечены.
Важными функциями одной переменной являются
/ функции Льюиса, определенные следующими табли-
цами истинности:
а также модальная
функция Льюиса «возможно х»
vO *) =
1
2
3
4
I
1
1
4
т. е.
Х#=4, ==1;
х = 4.
Фундаментальная теорема для логики Льюиса сходна
с теоремой для логики Поста с добавлением ограниче-
ний, наложенных на «2» • • •, in)- Иначе говоря, лю-
бая функция Льюиса может быть представлена с по-
мощью некоторой комбинации тройки (&, V. О). Более
обширное обсуждение этих логик можно найти в рабо-
тах [25—27].
Многозначные логики могут быть описаны и на язы-
ке теории решеток [28, 29]. Все логики, упомянутые до
сих пор, могут быть представлены в виде дополнитель-
ных, дистрибутивных, модальных решеток (ср. Биркгоф
[28]). Так, 27 функций одной переменной трехзначной
6. Многозначные логики и надежные автоматы
221
логики Поста могут быть изображены следующей ре-
шеткой (фиг. 34).
12 функций одной переменной логики Лукашевича
могут быть показаны на этой же решетке или на
решетке фиг. 35. Очевидно, эта решетка является также
подрешеткой решетки Поста.
Решетка 22-значных функций одной переменной, ко-
торых всего 16, может быть изображена, как на фиг. 36.
Фиг. 36.
Эта решетка является также изображением булевой ре-
шетки двух переменных. Она является подрешеткой ре-
шетки 64 четырехзначных функций одной переменной
Лукашевича, которая в свою очередь является подре-
шеткой 256-элементной решетки Поста для четырехзнач-
ных функций одной переменной.
222
Дж. Коуэн
Может быть дано и другое (особенно полезное для
наших целей) изображение этих многозначных логик в
терминах теории решеток. В этом случае функции рас-
сматриваются как отображения решетки переменных на
Фиг. 37. Функции Поста-Лукашевича,
Фиг. 38. Четырехзначные функции Льюиса.
(или в) решетку значений истинности [27]. Таким обра-
зом, наши функции одной переменной могут быть пред-
ставлены следующими схемами:
/
2
5
1
2
J
для функций Поста — Лукашевича и
1 1
для функции Льюиса.
6. Многозначные логики и надежные автоматы
223
Теперь очевидны дополнительные условия симмет-
рии, которыми обладает логика Льюиса. Решетка зна-
чений истинности в логике Льюиса образует частично
упорядоченное множество [28] и, конечно, решетку.
Фиг. 39.
В логике Поста — Лукашевича решетки значений истин-
ности все являются цепями и не обладают этими усло-
виями симметрии.
Аналогично могут быть изображены и многозначные
функции двух переменных (фиг. 37 и 38).
Окончательно, хотя схемы значений истинности По-
ста — Лукашевича монотонно возрастают с возраста-
нием /и:
/о '? '
зА з| —►з
4 4
5
схемы Льюиса последовательно усложняются так, как
показано на фиг. 39.
224
Дж. Коуэн
ЛИТЕРАТУРА
1. Shannon С. Е., Weaver W., The Mathematical Theory of
Communication, Univ. Illinois Press, Urbana, Ill., 1948; русский
перевод см. Шеннон К., Работы по теории информации и ки-
бернетике, ИЛ, 1963.
2. Mackay D. М., «The place of meaning in the theory of informa-
tion», 3rd London Sympos. Inform. Theory (ed. E. C. Cherry),
1956.
3. Mackay D. M., «The informational analysis of questions and
commands», 4th Sympos. Inform. Theory (ed. E. C. Cherry),
London, 1961.
4. Eden M., «А note on error detection in noisy logical computers»,
J. Inf. a. Contr., 2, 310 (1959).
5. McCulloch S. W., «The reliability of biological systems», Self-
organizing Systems (eds. Yovitts a. Cameron), Pergamon,
London, 1958; русский перевод см. сб. «Самоорганизующиеся
системы», ИЛ, 1964.
6. М с С u 11 о с h W. S., The Stability of Biological Systems. Ho-
meostatic Mechanisms, Brookhaven Symposia in Biology, № 10,
Off. Tech. Serv., U. S. Dept, of Comm., Washington, 1957.
7. Moore E., Shannon С. E., «Reliable circuits using less reli-
able relays», J. Franklin Inst., 262, 191—208, 281—297 (1956);
русский перевод: Мур Э. Ф., Шеннон К. Э., Надежные
схемы из ненадежных реле, Кибернетический сборник, вып. 1,
ИЛ, 1960.
8. К о с h е n М., «Extension of Moore-Shannon model for relay cir-
cuits», IBM J. Res. Devel., 3, 2 (1959).
9. A 11 a n s о n J., «The reliability of neurons», Proc. First Intern.
Congr. Cybern., Namur, 1956.
10. von Neumann J., «Probabilistic logics, and the synthesis of
reliable organisms from unreliable components», Automata Stu-
dies (eds. С. E. Shannon and J. McCarthy), Princeton,
1956; русский перевод: Нейман Дж., Вероятностная логика
и синтез надежных организмов из ненадежных компонент, сб.
«Автоматы», ИЛ, 1956.
11. Elias Р., «Computation in the presence of noise», IBM J. Res.
Devel., 2, 4 (1958).
12. Petersen W., «On codes for checking logical operations», IBM
J. Res. Devel., 3, 2 (1959).
13. McCulloch W. S., «Symbolical representation of the neuron»,
русский перевод см. наст, сборник, стр. 131.
14. Blum М., «Properties of a neuron with many inputs», Bionics
Symposium, Wright-Patterson Air Force Base, Off. Tech. Serv.,
U. S. Dept, of Comm., Washington, 1960.
15. Verbeek L. A. M., «Reliable computation with unreliable cir-
cuitry», Bionics Symposium, Wright-Patterson Air Force Base,
Off. Tech. Serv., U. S. Dept, of Comm., Washington, 1960.
6. Многозначные логики и надежные автоматы
225
16. Н amming R., «Error detecting and error correcting codes», Bell
Sy st. Tech. J., 29, 147—160 (1950); русский перевод см. сб. «Коды
с обнаружением и исправлением ошибок», ИЛ, 1956.
17. Elias Р., «Cooling for noisy channels», IRE Convent. Rec.,
Pt. 4, 37—44 (1955).
18. Lofgren L., «Automata of high complexity and methods of in-
creasing their reliability by redundancy», Inf. a. Contr., 1, 127
(1958).
19. McShane E. J., Order-preserving maps and integration proces-
ses, Ann. Math. Studies, № 31, Princeton, 1942.
20. L о w e n s c h u s s O., «Restoring organs in redundant automata»,
Inf. a. Contr., 2, 113 (1959).
21. Cowan J. D., «Towards a proper logic for parallel computation
in the presence of noise», Bionics Symposium, Wright-Patterson
Air Force Base», Off. Tech. Serv., U. S. Dept, of Comm., Washing-
ton, 1960.
22. 01 i v e г В. M., Pierce J. R., Shannon С. E., «The philo-
sophy of РСМ», Proc. IRE, 38, 3577 (1950).
23. Post E. L., «Introduction to a general theory of elementary pro-
positions», Amer. J. Math., 43, 163—185 (1921).
24. Lukasiewicz J., «Philosophische Bemerkungen zu mehrwerti-
gen Systemen des Aussagenkalkiils», Compt. rend. Soc. Sci. et
Lettres Varsovie, 23, Cl. Ill, 51—77 (1930).
25. Lewis C. L, Langford С. E., Symbolic Logic, New York,
London, 1932; Dover Publ., New York, 1959.
26. К i s a S. L, Transformations on Lattices and Structures of Logic,
New York, 1947.
27. Cowan J. D., «Many-valued logics and problem solving mecha-
nisms», диссертация, Imperial College, London, 1959.
28. В i r k h о f f G., Lattice Theory, Amer. Mathem. Soc. Colloq.
Publ., Vol. 25, New York, rev. ed., 1948; русский перевод: Б и p к-
г о ф Дж., Теория структур, ИЛ, 1952.
29. Rose A., «Systems of logic whose truth-values form lattices»,
Math. Ann., 123, 152—165 (1951).
15 Зак. 106
7. САМОВОССТАНОВЛЕНИЕ КАК ПРЕДЕЛ
ДЛЯ АВТОМАТИЧЕСКОЙ КОРРЕКЦИИ ОШИБОК
Л. ЛЕФ ГРЕН
(Иллинойсский университет)
1. ВВЕДЕНИЕ
Бросив общий взгляд на взаимодействие человека и
природы, мы заметим, что многое из того, что делаем
мы, люди, с таким же успехом может быть выполнено
машинами. Мы уже начинаем создавать такие машины,
пытаемся направить некоторые события в природе в со-
ответствии с нашими желаниями. Однако мы не можем
полностью изолировать эти события от других собы-
тий в природе и обнаруживаем, что наши машины не
делают в точности того, чего мы от них хотим. Тогда мы
говорим об ошибках в машинах. Однако на короткие
промежутки времени вероятность правильного их пове-
дения может быть достаточно большой. Фактически мы
хотим иметь такие машины, которые выполняли бы как
можно большую часть нашей работы, т. е. стремимся
в максимально возможной степени изолироваться от на-
ших машин, ограничив связь с ними только тем взаимо-
действием, при котором мы их используем. В частности,
мы стремимся уменьшить и время, затрачиваемое нами
на ремонт машин.
Но, помимо этого, мы хотим уменьшить и взаимодей-
ствие с машинами в течение периода их создания. Оче-
видно, что наше стремление иметь самовосстанавливаю-
щиеся, самоконструирующиеся машины неосуществимо,
если мы понимаем приставку «само» в ее прямом смысле,
имея в виду, что машины совершенно изолированы от
нас (за исключением тех случаев, когда мы их исполь-
зуем). Заметим, что мы при этом исключаем из рассмо-
трения услуги, которые природа ежедневно оказывает
человеку. Например, с определенной уверенностью можно
7. Самовосстановление как предел коррекции ошибок 227
говорить о плоде дикой яблони, как о самоконструирую-
щейся пище. Мы, однако, требуем значительно больших
услуг. Поэтому где-то должен быть поставлен предел
нашим желаниям, и мы обнаружим, что, за исключе-
нием строго определенных случаев, идея самовосстанов-
ления не имеет смысла.
Только в классической физике можно в принципе го-
ворить о каких-то детерминированных событиях, как о
событиях, полностью изолированных от других событий.
Мы можем тогда в принципе говорить также об экспе-
риментальных устройствах, точно следующих некоторым
физическим законам, т. е. об устройствах, действие, или
выход, которых строго определяется причинами, или
входами. В принципе можно говорить поэтому и о без-
ошибочном поведении некоторого устройства или ма-
шины.
Однако в соответствии с квантовой теорией такая
изоляция невозможна даже в принципе. Следовательно,
безошибочная машина с самовосстановлением является
идеализацией, за исключением тривиальных случаев,
когда нормальное поведение машины не определено или
когда оно определено таким образом, что всякое пове-
дение считается нормальным, так что снова не остается
места для ошибок.
Ошибка — это отклонение от «истины». Но «истина»
обычно неизвестна или не может быть известна. Тогда
необходимо вводить какие-то предположения. Мы сде-
лаем предположение, что «истина» — это детерминиро-
ванное поведение (поведение детерминированной си-
стемы). Определение детерминированных систем будет
дано ниже, в разд. 2.
Величины, относящиеся к детерминированным систе-
мам, следует рассматривать в принципе как дискретные
величины, т. е. как переменные, определенные только
для некоторых устойчивых состояний Si, разделенных не-
устойчивыми областями переходов Это положение
является следствием того факта, что физическая вели-
чина, рассматриваемая как непрерывная переменная, не
может быть определена с бесконечной точностью в ко-
нечное время без нарушения непрерывности величины.
Поэтому, измеряя величину Q, которая принимается
15*
228
Л. Л ё ф г р е н
нами за непрерывную переменную, мы должны указать
точность измерения.
Например, если измерение дает значение q, можно
предположить, что величина Q заключена в замкнутом
интервале [7—61, ^ + 62]. Если же измерение такого типа
должно рассматриваться как детерминированное, то мы
должны быть в состоянии дать четкий ответ на следую-
щий вопрос: если два измерения величины Q дали зна-
чения q' и q", равны ли тогда два соответствующих зна-
чения Q или нет? Но единственный определенный ответ,
который можно дать, если считать Q непрерывной пере-
менной величиной, состоит в том, что если \q'—q"\>
>(6i + 62), то эти два значения Q не равны. Если же
\q'—q"|^(6i + 62), мы не можем вынести никакого реше-
ния. Можно, конечно, говорить о вероятностях каждого
из двух ответов, но такой подход не согласуется с детер-
министской точкой зрения. Таким образом, мы должны
в принципе запретить неопределенность в случае
I/—1^(61+ 62), что означает, что мы должны считать
величину Q сосредоточенной в некоторых устойчивых
состояниях Si, разделенных неустойчивыми переходными
областями Ui, каждая из которых имеет ширину, боль-
шую, чем (61+ 62). Только в этом случае мы можем с
уверенностью утверждать, что если \q'—q" 1^(61 + 62).
два соответствующих значения Q равны в том смысле,
что они принадлежат к одному и тому же устойчивому
состоянию. Из измерений в течение переходного периода
мы принципиально не вправе делать какие-либо заклю-
чения, и отличительной чертой переходных периодов в
принципе можно считать именно их, по определению,
неустойчивый характер.
Устойчивые состояния могут быть определены на ин-
тервалах
= 0)
где
вН-А)>о.
Общее описание конечного (дискретного) детерминиро-
ванного события может быть формализовано в виде
следующего отображения:
(2)
7. Самовосстановление как предел коррекции ошибок 229
где
А = Si X X ••• X S&»
S = SlXSi+iX ••• X Si+n^
Область определения А и множество значений В отобра-
жения F образуются как декартовы произведения мно-
жеств Sj. Эти последние множества определяются эле-
ментами Si типа (1). Для каждого конкретного отобра-
жения F можно синтезировать переключательную сеть
с k входами и п выходами, имеющую детерминированное
поведение, определяемое этим отображением. Переклю-
чатель, или переключательная сеть, — это устройство,
состояния выходов которого определяются состояниями
входов. Поведение же последовательностной сети опи-
сывается в терминах входных и выходных временных
последовательностей, т. е. последовательностей, обла-
дающих упорядоченностью во времени. Каждое конеч-
ное детерминированное поведение последовательност-
ной сети может быть изображено переключательной
сетью, так что упорядоченность во времени заменяется
упорядоченностью входов. Возможны только две раз-
личные структуры однородной переключательной сети:
g-структура и с-структура [10]. Состояния с-сети только
двух- и трехзначны, т. е. индекс i в (1) может прини-
мать только два или три значения. Для g-сетей таких
ограничений не существует.
Классификацию ошибок (разд. 3) мы получим как
отрицание данного в разд. 2 определения детерминиро-
ванной системы. Относительно статистической природы
ошибок будут сделаны некоторые предположения. Будут
рассмотрены как временные, так и постоянные ошибки.
Временная ошибка имеет вероятность появления, ко-
торая не зависит от возбуждений. Если такая ошибка
в течение некоторого возбуждения происходит в эле-
менте с вероятностью р, то к следующему возбуждению
этот же элемент с вероятностью (1—р) свободен от
ошибки. Поэтому можно сказать, что сами элементы
обладают свойствами самовосстановления. То, что в си-
стеме из элементов с самовосстановлением может
быть получена сколь угодно высокая надежность (т. е.
самовосстановление), не является неожиданным. Однако
230
Л. Л ё ф г р е н
мы уделим внимание этим временным ошибкам в связи
с вопросом о минимальной избыточности элементов, ко-
торая необходима для заданной общей надежности
(разд. 6 и 7). Некоторые измерения надежности предла-
гаются в разд. 4.
Когда в элементе имеется постоянная ошибка, она
остается при всех последующих возбуждениях элемента.
В разд. 5 будет показано, что при наличии постоянных
ошибок обычными методами введения избыточности
нельзя добиться, чтобы долговечность (надежность) си-
стемы превзошла долговечность элементов. Однако в
случае временных ошибок время жизни всей системы
может быть увеличено. Следовательно, для увеличения
надежности системы необходимо ввести некий механизм
замены элементов. Действие механизма замены опреде-
ляется системой, которая вычисляет местоположение
ошибок. В элементах этой системы также могут возни-
кать постоянные ошибки.
Вопрос о возможности вычисления места ошибок
ошибающимися элементами исследуется в разд. 8. Утвер-
дительный ответ получен как для с-сетей, так и для
g-сетей. В с-сетях ошибки определенного класса, так
называемые ошибки передачи, допускают определение
места ошибок произвольного веса, в то время как в
g-сетях могут быть обнаружены лишь все одиночные
ошибки.
На основании этих результатов о возможности
вычисления местоположения ошибки в разд. 9 обсу-
ждается понятие самовосстановления. В частности,
показано, что система с-сети с самовосстановлением мо-
жет быть построена так, чтобы она имела максимальное
время жизни Г(/), зависящее от времени жизни / ее
элементов. Т(/) больше, чем /, но не бесконечно, когда
t конечно.
2. ДЕТЕРМИНИРОВАННЫЕ СИСТЕМЫ
На основании идей, развитых в разд. 1, введем сле-
дующие определения.
Определить (determine) физическую величину q —
значит указать физическую размерность величины, раз-
7. Самовосстановление как предел коррекции ошибок 231
бить множество всех возможных значений q рассматри-
ваемой размерности на непересекающиеся классы экви-
валентности (состояния) Si и установить, к какому клас-
су эквивалентности принадлежит q. Понятие классов
эквивалентности определяет отношение эквивалентности
£, являющееся рефлексивным, симметричным и тран-
зитивным отношением. Отношение Е может быть опре-
делено над измеряющей функцией Л4, такой, что
M(q)=Mi (Mi^Mj, если £=#=/) тогда и только тогда,
когда q принадлежит классу эквивалентности $г. Следо-
вательно, определение величины q означает измерение q
измеряющей функцией М. Если величина q является
непрерывной переменной в том смысле, что любое q при-
надлежит некоторому классу эквивалентности, то
должны существовать два значения q, бесконечно близ-
кие (над измеряющей функцией М) друг другу и при-
надлежащие различным классам. Однако, как только
в измерение вводится квантованность действия, стано-
вится принципиально невозможным определить из двух
измерений (в течение конечного промежутка времени),
являются ли два значения q Е-эквивалентными или нет.
Следовательно, для того чтобы в любом случае можно
было измерить (определить) величину q. она должна
мыслиться как дискретная, т. е. как величина, имеющая
устойчивые состояния четко разделенные неустойчи-
выми переходными областями.
Детерминированная система — система с определен-
ными состояниями входов и выходов, причем состояния
выходов определяются состояниями входов (уравнение
(2)]. Входы и выходы дискретны, т. е. имеют некоторые
устойчивые состояния ($г-, уравнение (1)], для которых
определено отображение F (уравнение (2)]. Устойчивые
состояния не пересекаются и разделены неустойчивыми
переходными областями. В таком случае говорят, что
система «Е-детерминированна».
Детерминированное поведение — поведение [ото-
бражение по уравнению (2)] детерминированной си-
стемы.
Недетерминированная система — система с опреде-
ленными входами и выходами, причем выходы не во
всех случаях определяются заданными входами.
232
Л. Л ё ф г р е н
Гипотеза. Любая недетерминированная физическая
система с определенными дискретными входами и выхо-
дами А и В [как в уравнении (2)] содержит такую си-
стему с входами ЛхЛ' и выходами В, что, по крайней
мере для одного элемента из Л', соответствующая си-
стема является детерминированной по отношению к
множествам Л и В (В-детерминированной).
Данное выше определение детерминированной систе-
мы совпадает, например, с аспектом детерминирован-
ности цифровых вычислительных машин. Однако в отно-
шении измерения физической величины мы склонны
говорить, что определили (determined) величину, лишь
тогда, когда получили некоторое численное значение и
можем с уверенностью сказать, что это значение верно
в пределах некоторого заданного интервала. Если вели-
чина предполагается непрерывной, то при таком подходе
мы не всегда сможем ответить на вопрос об эквивалент-
ности. Для того чтобы построить теорию детерминиро-
ванных систем, важно иметь хорошо определенное отно-
шение эквивалентности, а это приводит нас к данным
выше определениям.
В детерминированных системах можно смотреть на
входные и выходные величины соответственно как на
причины и следствия, т. е. рассматривать причины и
следствия как события, которые относительно обсуждае-
мого детерминизма полностью определяются как эле-
менты множеств входных и выходных состояний, для
которых определено отображение системы.
Когда мы изучаем Е-детерминированную физическую
систему, можно, конечно, мысленно представлять себе
другие аспекты детерминизма. Например, если состояние
выхода при измерении электрического тока задается
электрическим напряжением (которое само определяется
несколькими входами) на некотором сопротивлении, то
сопротивление, очевидно, является одной из причин,
влияющих на выход. Если сопротивление на протяжении
всего времени наблюдения принадлежит к одному и
тому же классу эквивалентности (т. е. постоянно), то
причины, влияющие на него, нас не интересуют. Однако
нас может интересовать изучение физической системы и
помимо ее F-детерминизма, т. е. изучение действитель-
7. Самовосстановление как предел коррекции ошибок 233
ных физических систем и их истории вместо изучения
F-систем. В таком случае оказывается уместным вопрос
о причинах, влияющих на сопротивление. Мы можем
обнаружить, что одной из этих причин является какой-то
конкретный техник. Мы можем пойти дальше и заинте-
ресоваться причинами, повлиявшими на этого техника,
и т. д. Вообще имеется большое число последовательно-
стей причина — следствие, исходящих от каждого след-
ствия. Все эти последовательности можно прервать на
некотором следствии и говорить о непосредственно пред-
шествующих причинах как о входах. Число этих входов
обычно очень велико, и для того, чтобы исследовать воз-
можный детерминизм относительно их, приходится рас-
сматривать большой класс объектов.
С точки зрения классической физики детерминизм
описывается как принцип, согласно которому все пол-
ностью определяется последовательностью причин. Это
совместимо с данными выше определениями, если при-
дать понятию «все» характер дискретности. Когда относи-
тельно причин происходящего явления выясняется по-
следовательность причина — следствие, кажется, что
такая последовательность должна быть бесконечной.
Например, представляется невозможным дать конечное
детерминистское объяснение сотворения мира. Однако
могут существовать последовательности причина — след-
ствие иного типа, которые являются конечными. Такие
последовательности образуют циклы. Для того чтобы
придать циклу причинно-следственных отношений смысл,
нужно определить F-функцию.
До сих пор мы ничего не говорили о промежутке вре-
мени между причиной А и следствием В. Мы могли
предположить, что это время равно нулю, что является
удовлетворительным, если F не содержит циклов. Если
же мы, придерживаясь более реальных условий, припи-
сываем времени выполнения Z-го элементарного отобра-
жения из совокупности отображений, образующих F,
некоторое значение б/, то вследствие различия глубин
(длин) причинно-следственных траекторий внутри си-
стемы затруднения могут возникнуть даже в том слу-
чае, когда F не содержит циклов,
234
Л. Л ёф гр е н
Выход из этих затруднений состоит в том, чтобы
сделать и входы и выходы дискретными во времени.
Условимся (фиг. ?), что все входы находятся в устойчи-
вых состояниях (принадлежат элементу из А) в тече-
ние интервалов времени Тг (классы эквивалентности).
Фиг. 1. Квантование времени.
Длины ИГЛ этих интервалов не зависят от индекса ^ко-
торый присваивается интервалам в соответствии с есте-
ственным ходом времени. Каждому интервалу 7\
непосредственно предшествует ог-интервал (интервал
синхронизации, значение которого будет объяснено ниже).
Длина Hoill независима от индекса i. Каждому (^-интер-
валу непосредственно предшествует переходный интер-
вал в котором и только в котором может происходить
переход между двумя устойчивыми входными состоя-
ниями. Аналогично Т/ определяется как переходный
интервал, в котором и только в котором может происхо-
дить переход между двумя устойчивыми состояниями
выхода, т/ перекрывает Оба они непосредственно
предшествуют ^-интервалу. Каждому тгинтервалу
(т/ ит/) предшествует, но не непосредственно, Гг_гин-
тервал, определенный выше. Расстояние между двумя
последовательными 7\-интервалами (период) есть Д2 —
максимальное время выполнения отображения для си-
стемы. Разность между длинами т/- и rt- - интервалов
равна
<3’
где Д1 — минимальное время выполнения отображения
для системы. Мы будем пользоваться следующими обо-
7. Самовосстановление как предел коррекции ошибок 235
значениями для множества упорядоченных пар (т', ТА
»«. т,-у
Г(0={(г;. Л). т,(4)
Г'(о = [«. 7-,). (<;„ г,t,(5)
7'(')=((’/ г<)- W • ••)• (6)
где
h/ii=ir;ii+o-!)»<'• (?)
Здесь I—максимальная длина интервала между <Уг+1 и
Т<. Для заданного I имеется конечное число возможных
значений индекса /.
Рассмотрим класс К таких систем, каждая из кото-
рых обладает дискретным временем ТЦ1). Если система,
предварительно описанная отображением F : А -> В
[уравнение (2)], при учете времени выполнения отобра-
жения принадлежит классу Л, то ее можно описать
отображением
F-.AxT^BxT^+l) (8)
(вход, принадлежащий А в определяет выход, при-
надлежащий В в Ti+i). Отображение по уравнению (8)
формально эквивалентно отображению по уравнению
(2), если в множества А и В включено также дискрет-
ное время. Следовательно, формальное определение де-
терминированной системы, данное выше, не нуждается
в изменениях и в том случае, когда принимается во вни-
мание время выполнения отображения.
Рассмотрим две системы, предварительно описывае:
мые отображениями Л : А—*В и F2:A'~такие, что В
содержится в А'. Если при учете времени выполнения
отображения они обе принадлежат классу Л, то они мо-
гут быть объединены в систему [Fb F2]:
[Л, Л]: А х т} (0 А' х Ti+1 (Z + 1) -> С X Т> +2 (I + 2),
(9)
которая снова принадлежит классу К, если только
/'=/ + 2 удовлетворяет неравенству (7).
235
Л. Л ё ф г р е н
Дискретное время 7\ можно рассматривать как
входную величину системы. Система, однако, может не
иметь Д-входов (извне системы) и все-таки обнаружи-
вать некоторое поведение на выходе. В этом случае
причинно-следственная траектория образует цикл. При
Фиг. 2. Система с циклической
причинно-следственной траекторией.
отсутствии А-входов пропадает естественное соответ-
ствие для 7\-входов. Таким образом, в этом случае
можно предвидеть некоторые трудности с понятием вре-
мени.
Рассмотрим, например, систему [Fb F2, F3, /4], пока-
занную на фиг. 2. Пусть каждая элементарная система
Fj определена следующим образом:
М.-М
Если в момент Л выход А находится в состоянии Si,
получается следующее поведение:
($i, 7\)->(s2, T2)->(sl, 7з)-»($2, F4)->(Sy Г5)-> ...
Подчеркнутые пары представляют последовательность
состояний, которые появятся на выходе. Но это справед-
ливо только до тех пор, пока индекс v в отображении
ЛХГ(1)->ЛхГ'(2)-> ... ->ДХГ(У)
удовлетворяет неравенству (7), т. е. только для конеч-
ного числа колебаний.
Мы можем, однако, снабдить систему входным вре-
менем 7\, т. е. синхронизировать колебания с входом
с помощью импульсов, которые происходят в Oj-интер-
*1. Самовосстановление как предел коррекции ошибок 237
валы (см. фиг. 1). Действие синхронизирующих импуль-
сов таково, что если переход из одного состояния в дру-
гое происходит за время тг-, это изменение воздействия
на следующую элементарную систему передается ей не
сразу, а задерживается, пока в течение ог- не появится
синхронизирующий импульс.
Фиг. 3. Недетерминированная система.
Рассмотрим теперь систему, изображенную на фиг. 3.
Здесь имеется один вход, А (и, следовательно, соответ-
ствующее дискретное время 7\) и один выход, В. Эле-
мент детерминирован (два входа и один выход). Если
цикл не синхронизирован с 7\, система, очевидно, неде-
терминированна, хотя и состоит из детерминированных
элементов.
Для этой системы подтверждается наша вводная ги-
потеза относительно недетерминированных систем с
дискретными входами и выходами. По крайней мере для
одного значения дополнительного входа А' (например,
$i) система детерминированна относительно А и В. Иначе
говоря, если синхронизировать колебание цикла с вход-
ным временем Тг, поведение на выходе тоже будет де-
терминированным.
Теория детерминированных систем, содержащих
циклы, была развита в различных направлениях [5, 13,
16]. При последующем изучении ошибок мы ограничим
исходные системы (системы без ошибок) детерминиро-
ванными системами без циклов. Тогда вместо отобра-
жений типа (8) достаточно иметь дело с отображениями
типа (2). При этом мы пренебрегаем одним видом
238
Л. Л ё ф г р е н
ошибок, а именно ошибкой во времени выполнения ото-
бражения. Однако такая ошибка эквивалентна ошибке в
обычном состоянии и, следовательно, будет учтена. В де-
терминированных системах с циклами мы можем иметь
дело с входными и выходными временными последова-
тельностями (Л X Р(0)- Однако, если ограничиться
конечными временными последовательностями, можно
заменить упорядоченность во времени параллельной
упорядоченностью: упорядоченностью самих входов и
выходов (Л ХЛ/ХЛ"Х...). Другими словами, мы заме-
няем последовательную упорядоченность параллельной.
Таким образом, физическая система без циклов F.A—>В
может рассматриваться как каноническая форма модели
любого конечного детерминированного события.
Поведение вида (2) является характерным поведе-
нием переключательной сети, которую мы по этой при-
чине и примем в качестве основы для последующего
изучения ошибок. Имеются две и только две различные
структуры однородной составной переключательной сети:
с-структура и g-структура [10]. Говорят, что любая на-
правленная сеть имеет g-структуру. с-Сеть — вырожден-
ный случай g-сети, а именно это сеть, в которой един-
ственными направленными элементами являются «про-
вода». «Провод» — это двухполюсный элемент, такой,
что Л=0 для всех Т. Действительные числа А и Т яв-
ляются «поперечными» и «продольными» величинами,
связанными с полюсами. Л-величинами, которые изме-
ряются между парой точек соединения, могут быть: элек-
трическое напряжение, разность температур и т. д. Г-ве-
личинами, которые измеряются как протекающие через
соединение, могут быть: сила тока, тепловой поток и т. д.
Состояние с-сети может быть определено только изме-
рением обеих величин, А и Г, для полюсной пары. Суще-
ствуют только три возможных состояния с-сети [10]. Они
могут быть определены над А- и Г-величинами с по-
мощью отношений /?1, /?2, /?з. Измерение определяется
над четвертым отношением /?, так что Ri R—(Ah 7\)
(для различных индексов, Лг=#Л;-, Тi=/=Tj). Измеренные
таким образом величины Ai (или 7\) могут быть взяты
в качестве ^-величин и могут определять состояния $ь
s2, S3 в соответствии с уравнением (1). Величины si и s2
7. Самовосстановление как предел коррекции ошибок 239
вводятся при помощи соотношений
S,: /?!= {(Л, Г)| Т = 0 для всех Л),
$2:/?2={(Д, Г)|Л = 0 для всех Г). (10)
Двузначные с-сети могут, таким образом, иметь состоя-
ния с размерностью электрического сопротивления (пол-
ной проводимости), магнитного сопротивления и т. д.
Третье соотношение (10), определяющее состояние s3,
дает реализуемую с-сеть, которая может быть описана
трехзначной алгеброй Поста. Обычно требуется, чтобы
входные величины в с-сети были А- или Т-величинами.
Тогда требуются (1 — 1)-переключатели, которые превра-
щают эти величины в величины с-состояний. Для дву-
значных с-сетей в качестве (1 — 1)-переключателей обыч-
но используются реле и криотрон.
g-Сеть может иметь любое число состояний. Все соот-
ветствующие направленные элементы нелинейны относи-
тельно элементарной алгебры над действительными
числами.
3. ОШИБКИ ЭЛЕМЕНТА
Ошибка определяется как отклонение от «истины».
Однако «истина» обычно неизвестна и не может быть
известна и должна быть введена в виде некоторого
предположения. Мы, как уже указывалось, сделаем
предположение, что «истина» — это детерминированное
поведение.
Следует заметить, что хотя мы и дали определение
понятия детерминированного поведения, это еще не
позволяет нам с уверенностью утверждать, что некая
физическая система детерминированна. В конце концов
может оказаться, что она недетерминированна относи-
тельно определенных входов и выходов. Но если мы не
можем сказать, что система недетерминированна, то мы
не можем и быть уверены в том, что она детерминиро-
ванна, пока мы не проверим ее относительно всех буду-
щих воздействий. Но так как это невозможно, нам в этой
ситуации не остается ничего лучшего, как предположить,
что система детерминированна.
240
Л. Л ё ф г р е н
Исследуем теперь, как могут быть нарушены опре-
деления детерминированности; это даст нам классифи-
кацию ошибок. Особый интерес для нас представляют
ошибки элементов, т. е. ошибки в нелинейных элемен-
тах канонической модели детерминированной системы.
Этими элементами являются направленные элементы в
^-сети и (1 — 1)-переключатели в с-сети. Предполагается,
что соединения проводами сделаны без ошибок.
По причинам, которые будут выяснены позднее в
этом разделе, мы будем рассматривать сети, составлен-
ные из простейших элементов, т. е. элементов примерно
одинаковой сложности (примерно с одинаковым числом
входов и единственным выходом каждый).
Прежде всего мы приходим к следующей классифи-
кации ошибок элементов:
Ai. На определенное воздействие, т. е. при опреде-
ленных устойчивых (без ошибок) состояниях
входа, элемент дает на выходе устойчивое состоя-
ние, которое принадлежит множеству Sm возмож-
ных состояний выхода, но отличается от того
определенного состояния, которое предписывается
в ответ на поданное воздействие детерминирован-
ным поведением элемента (нарушение отобра-
жения).
Л2. Элемент дает на выходе устойчивое состояние,
которое не принадлежит множеству Sm (детер-
минированных) состояний выхода (нарушение
дискретности).
Л3. Элемент дает на выходе непрерывно изменяю-
щееся (неустойчивое) состояние, не содержащееся
в некоторых элементах из Sm (нарушение ди-
скретности).
Ошибки элементов типа Л2 и Л3 могут быть обнару-
жены путем измерения только состояния выхода элемен-
та. Ошибка же типа Л1 может быть обнаружена лишь
измерением состояний как выхода, так и входа с после-
дующим комбинаторным анализом. В дальнейшем мы
будем рассматривать ошибки типа Ль С ошибками типа
Л2 и Л3 легче иметь дело, так как в этом случае выход
элемента содержит в себе информацию р случившейся
7. Самовосстановление как предел коррекции ошибок 241
ошибке. Но и в этом случае можно предвидеть некото-
рые проблемы комбинаторного характера, касающиеся
локализации ошибающегося элемента. (Ошибка типа .43
может быть также обнаружена в виде Л3-ошибок на вы-
ходах последующих элементов.)
Учитывая причину ошибки в элементе (ср. предполо-
жение разд. 2, которое постулирует существование при-
чины для каждой ошибки), установим следующую клас-
сификацию ошибок Лр
Ошибка элемента может быть определена изме-
рением состояний входов и состояния выхода
элемента при любом однократном воздействии.
В2- Ошибка элемента может быть определена изме-
рением состояний входов и состояния выхода
только при определенного вида воздействиях.
Например, в случае двоичного состояния [индекс i в
уравнении (1) двузначен] Вгошибка может быть пред-
ставлена состоянием s'( (отрицание $г), где St— правиль-
ное состояние выхода элемента. Примеры В2-ошибок мо-
гут быть найдены в пороговых элементах g-типа [1,11].
Если в двоичном элементе «И» порог 0, равный 2, изме-
няется ошибкой до 0=1, элемент превращается в эле-
мент «ИЛИ». Однако такая пороговая ошибка не может
быть обнаружена (она не влияет на выход) при воздей-
ствии, когда оба входа или возбуждены, или не возбу-
ждены. Но при всех остальных воздействиях эта ошибка
влияет на выход.
В2-ошибки одни еще не характеризуют реального по-
ведения физического элемента. Они подразумевают, что
для некоторого класса воздействий элементы являются
идеальными (совершенно безошибочными). Естественно
принять, однако, что вероятность ошибки на выходе
элемента определенной конструкции зависит от воздей-
ствия на элемент, причем эта вероятность не должна
в точности равняться нулю ни для какого воздействия.
Поэтому мы в последующем будем заниматься главным
образом ошибками типа В\. В разд. 7 дается пример
избыточной схемы для g-сети, нечувствительной к
В2-ошибкам. Для этой сети можно избежать применения
пучков линий фон Неймана [17], что может показаться
16 Зак. 106
242
Л. Л ё ф г р е н
неожиданным. Однако нужно иметь в виду, что В2-ошиб-
ки представляют идеализированную ситуацию.
В отношении статистической природы причин ошибки
рассмотрим следующие случаи:
Ci. Временные ошибки. При приложенном воздей-
ствии в простейшем элементе с вероятностью р
возникает причина ошибки. Появления причин
ошибок (при воздействии) в различных простей-
ших элементах не зависят друг от друга.
С2. Постоянные ошибки. При приложенном воздей-
ствии в простейшем элементе с вероятностью р
возникает причина ошибки, если при предыдущем
воздействии в этом элементе не возникла причина
ошибки. Первые появления причины ошибки (при
воздействии) в различных простейших элементах
не зависят друг от друга. После первого появле-
ния в элементе причина ошибки появляется в
этом элементе при всех последующих воздей-
ствиях.
В этой (Ci—С2)-классификации мы рассматривали
элементы как простейшие. Идея заключается в том, что
разумно принять одинаковую вероятность ошибки для
элементов примерно одинаковой сложности, т. е. с при-
мерно одинаковым количеством причин ошибок. Иначе
говоря, разумно принять примерно одинаковую вероят-
ность ошибки для простейших «И»-, «ИЛИ»- и «НЕ»-
элементов (с двумя или одним входом) g-сети с двоич-
ными состояниями при условии, что эти элементы едино-
образно сконструированы с помощью нелинейных
устройств. Однако «И»-элемент, имеющий, скажем, 100
входов и построенный с помощью нелинейного устрой-
ства того же типа, будет иметь большую вероятность
ошибки, чем простейший (с двумя входами) «И»-эле-
мент.
Относительно элементов порогового типа в этой свя-
зи нужно сделать особые замечания. В пороговом эле-
менте алгебраическая сумма А образуется линейными
элементами. Эта сумма сравнивается с порогом 0. Если
Д>0, элемент проводит. Если 4<0, элемент не прово-
дит. Если мы относим ошибки к нелинейной части эле-
7. Самовосстановление как предел коррекции ошибок 243
мента, т. е. к механизму проводимости, то может пока-
заться, что к элементу можно было бы добавлять все
больше и больше входов, сохраняя ту же надежность.
То, что это не так, может быть показано следующим
образом. Рассмотрим два воздействия и а2 на поро-
говый элемент с пт входами:
щ-.Sj, sb s„:At = e,
$1» * • • > $п • ^2 <
Воздействия и а2 отличаются только относительно
одного из пт входов. При воздействии а\ на этот вход
подано состояние sj, а при а2 — отличное от Sj состояние
[ср. уравнение (1)]. Алгебраическая сумма А в случае
воздействия достаточно велика, чтобы элемент про-
водил. При воздействии а2 элемент не проводит. Прини-
мая во внимание уравнение (1), получаем
min Д = 2 q't = q'} + 2' q't,
min (Ai — A2) — min Aj — max A2 =
< 4'j — q"k — (m — i) min (q'l — q'().
Если min (g, — q'^ > 0, то для достаточно большого чис-
ла входов m величина Af может быть меньше А2, а это
означает, что пороговый элемент будет работать непра-
вильно. Очевидно, что устойчивые состояния в порого-
вом элементе должны быть определены так, что
min(^' — q'^ больше нуля, а не в точности равен нулю.
Если рассматривать случайные ошибки в значении по-
рога, то вероятность ошибки для порогового элемента
будет увеличиваться с увеличением числа входов.
Таким образом, (Ci—С2)-классификация уместна
только в том случае, когда рассматриваются простей-
шие элементы в том смысле, что они единообразно скон-
струированы и имеют примерно одинаковое количество
входов.
В случае Bi-ошибок и g-сетей с многозначными со-
стояниями [такими, что индекс i в уравнении (1) может
16*
244
Л. Л ё ф г р е Н
принимать более двух значений] влияние ошибки на со-
стояние выхода выражается более сложным образом,
чем в двоичном случае. Мы вернемся к этой ситуации в
разд. 7. Пока же достаточно определить вероятность по-
явления причины ошибки, как это сделано в (С\—С2)-
классификации.
4. НАДЕЖНОСТЬ
Начнем с несколько неточного определения надежно-
сти системы, как некоторой меры сходства между пове-
дением системы (в смысле зависимости вход — выход)
и ее предполагаемым детерминированным поведением.
Относительно (Ль Ви С<, С2) -ошибок мы уже ввели ве-
роятностную меру надежности простейшего элемента:
7=1— Р-
Основной задачей настоящей статьи является каче-
ственное исследование того, каким образом из ненадеж-
ных простейших элементов {т. е. детерминированных эле-
ментов, ошибки в которых представляются как (Ль
В2, G, С2)-ошибки] можно так синтезировать системы,
что системы в целом оказываются более надежными, чем
простейшие элементы.
Сформулированная проблема приводит к изучению
методов обеспечения избыточности, т. е. к вопросу о том,
как некоторое число простейших элементов, большее,
чем необходимо для функционирования системы в идеаль-
ном случае отсутствия ошибок, может быть использо-
вано для уменьшения влияния ошибок в элементах на
выходы системы.
Другая проблема состоит в изучении того, как может
быть повышена надежность отдельного элемента, т. е.
в изучении того, насколько успешно детерминированное
поведение элемента может быть получено путем изоля-
ции элемента от нарушающих его поведение событий
в окружающей среде. Это также связано с избыточ-
ностью. Однако в наиболее общем случае мы должны
допустить у объектов такие виды избыточности, которые
совсем не используются в идеальном случае отсутствия
ошибок. Примером применения такого рода избыточно-
сти является экранирование элемента, которое в некото-
рой степени защищает его от нарушающих воздействий.
7. Самовосстановление как предел коррекции ошибок 245
В последующем изложении мы будем считать, что по-
добное увеличение надежности произведено для всех
элементов одинаковым образом, так что вероятность по-
явления причины ошибки в каждом простейшем эле-
менте, как было определено в разд. 3, равна р.
Важно подчеркнуть, что осуществление избыточно-
сти на разных уровнях сложности позволяет получить
для надежности системы совершенно различные резуль-
таты [6]. Сформулированная нами основная задача до-
пускает применение избыточности на уровне простейших
элементов и на более высоких уровнях (избыточность
совокупностей простейших элементов). Простейшие эле-
менты в противоположность соединяющим «проводам»
определяются как нелинейные устройства. Система со-
стоит только из простейших элементов и «проводов».
С каждым простейшим элементом [направленным эле-
ментом в правильной g-сети или (1 — 1)-переключателем
в с-сети] мы связываем некоторую ошибку.
Относительно ошибок может быть сделано и более
слабое допущение, а именно, что ошибка связана лишь
с каждым нелинейным подэлементом простейшего эле-
мента, так что все линейные подэлементы работают без
ошибок. Например, ошибку в каждом диоде можно свя-
зывать с диодным вентилем, а сопротивления и емкости
считать безошибочными. Тогда можно применять избы-
точность на уровне нелинейного подэлемента и получить,
таким образом, результат, весьма отличающийся от ре-
зультата, полученного применением избыточности на
уровне элемента в целом. Относительно (Ль Ct) -оши-
бок в последнем случае (избыточность на уровне эле-
мента) для получения произвольно высокой надежности
системы необходимо применить пучки линий фон Ней-
мана [17]. В первом же случае (избыточность на микро-
уровне) такая же надежность системы может быть по-
лучена и без этого приема [6]. Метод пучков линий не
вполне удовлетворителен, поскольку он вносит в вычис-
ления некоторую неопределенность.
В дальнейшем мы будем преимущественно рассма-
тривать основную задачу так, как она сформулирована
выше, т. е. с применением избыточности на уровне
простейших элементов.
246
Л. Л ё ф г р е н
Чтобы получить некоторые определения надежности,
рассмотрим Лi-ошибки в системе F. Эта ситуация мо-
жет быть описана отображением
F-.А ХЕ~>В, (11)
где Е — множество причин ошибок. Каждый элемент е
из Е является набором п чисел:
= (^1, ^2» •••> ^л)’ (12)
таких, что вг = 1, если в i-м простейшем элементе суще-
ствует причина ошибки, и = 0 в противном случае. Си-
стема состоит из п простейших элементов.
Обозначим через w вес е, т. е. w есть число единиц
в е. Пусть Ew — подмножество Е, такое, что Ew содер-
жит все е из Е с весом, меньшим или равным w.
Рассмотрим отображение
Fw: Л XEW->B, (13)
которое определяет функцию FW(A), такую, что функ-
ция F, определяемая уравнением (И), является расши-
рением функции FW(A) для каждого w. Мы говорим,
что система F нечувствительна к до-ошибкам, если
Е0(Л)=Е„(Л)№+1(Л).
В случае Сгошибок вероятность е-ошибки веса v
равна pv(l—p)n~v и не зависит от воздействия сц (эле-
мента из Л). В зависимости от характера воздействия
и структуры системы эта е-ошибка может порождать
или не порождать ошибку в общем поведении системы
при этом воздействии. Таким образом, вероятность
ошибки на выходе при воздействии а; равна
л
P(aO=2^,vPV(l-PrV’ (И)
v=l
где Hi, v — количество е-ошибок веса v, которые при
данном воздействии дают ошибку на выходе.
Вероятность ошибки на выходе при воздействии
в системе, нечувствительной к до-ошибкам, равна
л
2 nl>vpv(\ —P)n-V=
V = W 4 1
= ^,о)Ир«- + 1 + 0(/>«’ + 2)< (15)
7. Самовосстановление как предел коррекции ошибок 247
В частности, нас интересует асимптотическая вероят-
ность ошибки при р, стремящемся к нулю. В этом слу-
чае в уравнении (15) преобладает член с pw+1. В смысле
асимптотического поведения можно сказать, что любая
система, нечувствительная к ^-ошибке, более надежна,
чем система, нечувствительная к (w—1)-ошибке. Од-
нако, если мы хотим сравнить две системы, нечувстви-
тельные к ^-ошибке, с одинаковыми функциями Го(Л),
необходимо ввести меру коэффициента nit w+1 из уравне-
ния (15). Единственно возможной является мера
Afj = max(nZia,+1). (16)
Таким образом, мы приходим к следующим мерам на-
дежности:
I. Нечувствительность к w-ошибке (Сгошибки)
II. [См. уравнение (16)] (Сгошибки)
(П. 1 — max Р (az) i [См. уравнение (14)] (Сгошибки)
IV. Среднее время жиз- ни системы (Средняя безошибоч- [(<?!—С2)-ошибки] ная траектория или среднее число между двумя ошибками на вы- ходе)
Первые три меры надежности не зависят от каких-
либо специальных предположений относительно стати-
стического распределения воздействий В следующем
разделе мы охарактеризуем в этом отношении и четвер-
тую меру надежности.
5. ВРЕМЕННЫЕ И ПОСТОЯННЫЕ ОШИБКИ ЭЛЕМЕНТА
В СИСТЕМАХ С ОБЫЧНЫМ ОСУЩЕСТВЛЕНИЕМ
ИЗБЫТОЧНОСТИ
Ниже мы исследуем надежность (время жизни) си-
стемы с обычным осуществлением избыточности в слу-
чае (Дь Ci, С2) -ошибок.
248
Л. Л ёф г ре н
Предполагается, что система нечувствительна к
^/-ошибке. Тогда при некотором воздействии вероятность
правильного поведения равна
Q = Q(q\p')=l-P=l-Ml(pT+'-t о((р^2). (17)
В случае временных ошибок р* означает вероятность
p-ошибки в элементе при некотором воздействии
(<7* = 1—р*). Для постоянных же ошибок вероятность
того, что при v-м воздействии элемент свободен от оши-
бок, равна ?*=(! —p)v, так как в этом случае необхо-
димо потребовать, чтобы ошибок не происходило и в
течение всех предшествующих (v—1) воздействий
(р* = 1—q*). Таким образом, вероятность PJv) по край-
ней мере одной ошибки на выходе в течение v воздей-
ствий для временных ошибок и соответствующая вероят-
ность Pst(y) для постоянных ошибок равны
Pt (V) 1 - Qt(y) = 1 - [Q (1 - р, р)\\ (18)
P*(v)= 1 - QUv)= 1 - Q[(l ~P)\ 1 -(1 -Р)1- (19)
В уравнении (19) Q не возводится в степень, отличную
от единицы, так как, если при v-м воздействии на вы-
ходе нет ошибки [вероятность ее равна Q(<?*, р*)], то
в случае постоянных ошибок на выходе не могло быть
ошибок и при предыдущих воздействиях. Это рассужде-
ние накладывает ограничения в случае, когда для Q
используется мера [уравнение (16)], т. е. когда все v
воздействий рассматриваются как переключения между
наиболее чувствительными к ошибкам состояниями
входа.
Подставляя Q по уравнению (17), получим:
— (20)
Р^)~М^рГ+'- (21)
Из этих уравнений видно, что при малых значениях v
для обоих типов ошибок вероятности ошибок примерно
одинаковы. Однако очень скоро, уже при небольших из-
менениях v, величина Pst(v) превзойдет Pt (у). Для вре-
менных ошибок мы действительно можем без ограниче-
ний увеличивать среднюю длину траектории между
7. Самовосстановление как предел коррекции ошибок 249
двумя ошибками на выходе [12, 17]. Однако для постоян-
ных ошибок это не так. Время жизни v системы будет
примерно таким же, как и время жизни простейшего
элемента, т._е. v~ 1/2р. Если в уравнении (19) положить
^*=(1 —p)v, получим
____ 1 _
q = 2=р>
что соответствует полной неопределенности.
Таким образом, для повышения надежности системы
с постоянными ошибками необходим механизм замены
элементов. Это приводит к проблемам вычисления ме-
стоположения ошибки и самовосстановления, которые
рассматриваются в разд. 8 и 9.
6. с-СЕТИ С МИНИМАЛЬНОЙ ИЗБЫТОЧНОСТЬЮ,
НЕЧУВСТВИТЕЛЬНЫЕ К ВРЕМЕННЫМ ^-ОШИБКАМ
Мы будем иметь дело главным образом с двоич-
ными сетями. В этом случае отображение F-.A-+B
удобно представить в виде системы булевых функций.
Сначала рассмотрим систему с одним-единственным вы-
ходом, т. е. одну булеву функцию. Пусть ш — число
бесповторных символов в функции (буква, или перемен-
ная х, соответствует одному символу, если х утверж-
дается, и другому, если х отрицается). Пусть п — число
элементов [(1 — 1)-переключателей] в с-сети. Каждый
символ булевой функции В соответствует одному или
нескольким элементам.
Избыточность сети
r = i=^-=l — —. (22)
п п ' '
Избыточность равна нулю, если n = m, т. е. для беспо-
вторных сетей. Однако не все булевы функции могут
быть реализованы бесповторными сетями. Вопрос реа-
лизуемости с этой точки зрения исследован нами в ра-
ботах [7, 8].
Для функций, для которых не существует бесповтор-
ных сетей, иМин>^. Соответствующая остаточная, или
250
Л. Л ёфгрен
«внутренняя», избыточность вознйкает вследствие огра-
ничений реализуемости.
Вопрос, исследуемый в этом разделе, заключается в
следующем: каково наименьшее количество избыточно-
сти [уравнение (22)], которое позволяет получить нечув-
ствительность к до-ошибкам?
В работе [9] ответ на этот вопрос был дан путем ука-
зания границ для Гмин(ау):
1 (w + I)2 Гмин М (w-j-l)2 ’ (23)
где М — минимальное число элементов в сети, реали-
зующей заданную булеву функцию в идеальном случае
отсутствия ошибок.
Для данной функции В, т. е. для определенных гп
и Л4, минимальное число элементов п(ш), допускающих
нечувствительность к до-ошибке, заключено в пределах
/и(-ш+ 1)2<л(ад)<Л1(ад + I)2. (24)
Пусть теперь величина R(w) (максимальная «скорость»
вычисления для нечувствительной к до-ошибке сети)
определяется следующим образом:
= (25)
так что Гмин(^) = 1 —/?(до).
Из уравнения (24) видно, что и (до) > до. Следователь-
но, среди этих и (до) элементов сети, в которой произой-
дет ошибка на выходе, должна быть (до4-1)-ошибка.
Таким образом, для конечного до никогда не может быть
получена полная надежность.
Однако при до —► оо можно в зависимости от того,
какую меру надежности мы предпочитаем (см. разд. 4),
получить [12]:
(I) сколь угодно высокую надежность;
(П, Ш) надежность, сколь угодно близкую к 1;
(IV) сколь угодно большое время жизни.
Из уравнений (23) —(25) видно, что для каждого из
этих пределов надежности Гмин(и^) = 1, n(w) =оо, R(w) =0
независимо от частного вида булевой функции.
7. Самовосстановление как предел коррекции ошибок 251
В случае конечной надежности (конечного w) из
уравнения (23) видно, что для булевых функций, реали-
зуемых бесповторнымисетями (М = т), величина гМин(^)
однозначно определяется своими пределами. Для осталь-
ных булевых функций точное определение гМин(^) более
затруднительно.
Единственный метод, как это подчеркнуто в рабо-
тах [7, 9], заключается в том, чтобы начать с уточнен-
ного распределения избыточности. Это вместе с булевой
функцией и нечувствительностью к ^-ошибке задает
часть таблицы истинности для избыточной сети. Воз-
можная достаточность принятой избыточности устанав-
ливается изучением реализуемости тех кольцевых мат-
риц, которые задают таблицу истинности (два необхо-
димых и достаточных условия: с-условие и подпереста-
новочная теорема). Если избыточность rt=(n— пг)1п
достаточна, а г2 — (п — m — 1)/п — 1 недостаточна, то
минимальная избыточность равна Однако, даже если
число вариантов, исследуемых подобным образом, мо-
жет быть еще несколько сокращено по сравнению с ука-
занным выше числом, метод остается эффективным
только для небольших значений m и w.
Рассматривая близость R(w) к верхней границе
/?в.г(о>), определяемой уравнением (25), можно сделать
следующее утверждение. Существует счетное бесконеч-
ное множество возрастающих целых чисел w. для кото-
рых x(tei) =R(w)/RB, г(до)<Л является невозрастающей
функцией. В этом легко убедиться, заменив каждый эле-
мент сети, нечувствительной к догошибке, сетью, нечув-
ствительной к ^-ошибке и реализующей тождество
В(а)=а [такая сеть содержит (до2+1)2 элементов]. По-
лученная сеть будет нечувствительной к (i0ia>2++ w2) -
ошибке и будет иметь то же х, что и первоначальная
сеть.
В качестве иллюстрации рассмотрим пороговую функ-
цию от трех переменных:
В = ab U be U са. (26)
Минимальное число элементов 2И, необходимых для реа-
лизации В, равно пяти. Чтобы сделать всю сеть нечуВ*
ствительной к одиночной ошибке, нужно каждый элемент
252
Л. Л ё ф г р е н
заменить сетью, нечувствительной к одиночной ошиб-
ке и реализующей тождественную функцию (такая
сеть содержит четыре элемента; относительно их соеди-
нения см. работу [7]). Это дает п = 20, что соответствует
верхней границе в уравнении (24). Нижняя граница в
уравнении (24) дает п=12. Действительное минималь-
ное значение и(1) равно 14. Соответствующая сеть пока-
зана на фиг. 4. Этот пример (и дальнейшие итерации)
Фиг. 4. Нечувствительная к
одиночной ошибке с-сеть с ми-
нимальной избыточностью для
пороговой функции уравне-
ния (26).
булевых функций). Пусть
ясно показывают, что в об-
щем случае метод добавле-
ния избыточности в струк-
туре, реализующей заданную
функцию В, при котором эта
основная структура сохра-
няется и в небесповторной
сети, не является оптималь-
ным.
Обратимся теперь к си-
стеме F : Л—с более чем
одним выходом (к системе
снова число бесповторных
символов равно т (каждый из т символов бесповторен
относительно по крайней мере одной из функций систе-
мы). Предположим, что система может быть реализована
обычной полюсной сетью [8], содержащей т элементов,
т. е. бесповторной сетью. Сеть будет нечувствительна
к до-ошибке относительно каждого выхода, если каждый
элемент, взятый отдельно, предохранен от до-ошибки.
Для этого необходимо п(до)=т(до+1)2 элементов. Это
минимальная сложность, так как система имеет беспо-
вторную сеть. Следовательно, /?(до) = 1/(до+1)2 [см.
уравнение (25)]. В случае когда система не имеет беспо-
вторной сети, R(w) меньше этого значения или равно ему.
Итак, в случае системы булевых функций можно по-
лучить сколь угодно высокую надежность (до—юо),
только если /?—►(). Этот результат не зависит от
конкретной системы функций, которая рассматри-
вается.
Интересно сравнить этот результат с теоремой Шен-
нона о пропускной способности [3, 14] для надежной
связи в случае двоичного симметричного канала с шу-
7. Самовосстановление как предел коррекции ошибок 253
мом. Обычно связь рассматривается как упорядоченная
во времени последовательность передач, однако с таким
же успехом можно считать связь и параллельной опе-
рацией F: А —► В. Множества А и В (декартовы произ-
ведения) равны, и сколь угодно надежная связь озна-
чает, что элемент а из Л отображается в тот же
самый элемент а из В с вероятностью, сколь угодно
близкой к 1.
Более детально устройство системы связи состоит
в следующем. А и В представляют собой входы и вы-
ходы системы в целом. Сначала А кодируется в А' сво-
бодным от ошибок кодирующим устройством. Затем Л'
передается по каналу с шумом и в результате получает-
ся В', Наконец, В' декодируется в В декодирующим
устройством без ошибок. Если передаваемое сообщение
представляет собой пг двоичных символов, то соответ-
ствующий элемент из Л является набором из m чисел
(Л и В — множества наборов из пг чисел). А' и В' яв-
ляются множествами наборов из п чисел (n>m). Со-
гласно теореме о пропускной способности, для значений
скорости R = m!n, меньших пропускной способности С
канала, может быть получена сколь угодно надежная
связь, если только пг достаточно велико (т—>оо). Та-
ким образом, R может быть положительной величиной,
отличной от нуля (т. е. избыточность г меньше и не
равна единице), и все же будет возможна сколь угодно
надежная связь.
Это резко противоречит случаю вычислений, где, как
мы уже видели, для сколь угодно высокой надежности
необходимо выполнение условия /? = 0. Пропускная спо-
собность канала С определяется как максимальная ско-
рость, при которой возможна сколь угодно надежная
связь. Используя аналогичное определение пропускной
способности вычислений для с-сетей, мы приходим, та-
ким образом, к выводу, что эта пропускная способность
должна быть равна нулю.
Эти различные результаты в случае вычисления и в
случае связи не являются, однако, неожиданными, если
учесть различное распределение ошибок. Действительно,
в случае связи только канал подвержен шуму. Прини-
мается, что кодирующее и декодирующее устройства
254
Л. Л ёф г р е н
работают совершенно без ошибок. В случае же вычисле-
ний все вычисляющие элементы, конечно, подвергаются
действию шума.
7. g-СЕТИ С МИНИМАЛЬНОЙ ИЗБЫТОЧНОСТЬЮ,
НЕЧУВСТВИТЕЛЬНЫЕ К ВРЕМЕННЫМ ^-ОШИБКАМ
Фиг. 5. g-Сеть поро-
гового типа, нечувстви-
тельная к одиночным
В2-ошибкам (предпола-
гается, что ошибка уве-
личивает порог элемента
на единицу).
Рассмотрим g-сеть (не обязательно двоичную) с од-
ним выходом. Этот выход должен осуществляться как
выходное состояние функционального элемента. Поэто-
му в случае (Дь Bi, Ct)-ошибок
вероятность ошибки на выходе
при воздействии должна быть по
меньшей мере равна р. Никакое
осуществление избыточности не
может дать исправление даже
единичной ошибки.
Однако для некоторых (Дь
Bi, СО-ошибок в g-сети с одним
выходом может быть получена
нечувствительность к ^-ошибке.
Примером является сеть на
фиг. 51). Предполагается, что ка-
ждый из
является
порогом
в целом
элемента
что В2-ошибки таковы, что порог
изменяется (независимо) с 1 на 2.
трех элементов «ИЛИ»
пороговым элементом с
6=1. Поведение сети
аналогично поведению
«ИЛИ». Предположим,
О с вероятностью р
В результате элемент, в котором произошла ошибка,
превращается в элемент «И». Легко проверить, что
сеть в целом нечувствительна к одиночным ошибкам.
Далее, если сеть снова итерировать так, что каждый
элемент сети на фиг. 5 заменяется тройкой элементов, то
полученная сеть будет нечувствительной к 3-ошибке.
Для v итераций получается сеть, нечувствительная к
(2V—1)-ошибке.
!) Эта сеть была предложена Амарелом [1] как особый случай
введенного Маккаллоком [11] понятия логической устойчивости.
7. Самовосстановление как предел коррекции ошибок 255
Если свободное от ошибок значение порога элемен-
тов на фиг. 5 равно 2, т. е. это «И»-элементы, то поведе-
ние сети в целом такое же, как и «И»-элемента. Если бы
В2-ошибки были таковы, что 0 изменяется (независимо)
до 1, то сеть была бы нечувствительной к одиночным
ошибкам. Тогда с помощью дальнейших итераций мож-
но было бы достигнуть аналогичных результатов.
Как указывалось выше, В2-ошибки представляют не-
сколько нереальную ситуацию, поскольку предполагает-
ся, что при некоторых воздействиях элементы совершен-
но свободны от ошибок. Поэтому мы вернемся к
(Л!, Bi, Ci)-ошибкам.
Чтобы удалить оставшуюся ошибку (ошибку из ко-
нечного выходного элемента), фон Нейман [17] предло-
жил статистическое представление состояний пучками
линий. Каждый выход g-системы в этом случае пред-
ставляется пучком, например, из N линий (проводов,
выходов). В случае двоичных состояний, с которыми и
имел дело фон Нейман, выбирается положительное число
Д<У2. Говорят, что пучок находится в состоянии Si,если
(1—Д)ДО или более линий в пучке находятся в состоя-
нии $i. Если ДМ или менее линий находятся в со-
стоянии S1, то говорят, что пучок находится в состоя-
нии s2. Если же любое другое число линий находится
в состоянии $i, то говорят, что в пучке имеется ошибка.
Таким образом, ни один выход (состояние пучка) не
определяется единственным элементом, и надежность
системы может быть сделана сколь угодно большой
(сколь угодно близкой к 1) [17].
Однако в случае представления состояний в виде
пучка линий нельзя сказать, что система полна. Пове-
дение системы имеет характер комбинаторного вычис-
ления. Часть системы, которая упускается при использо-
вании представления в виде пучков линий, является
пороговым устройством (снова с комбинаторным вычис-
лением). Таким образом, если мы действительно хотим
иметь нечувствительную к до-ошибке полную систему,
можно присоединить каждый пучок к исправляющему
до-ошибку пороговому устройству с-типа (ср. сеть на
фиг. 4). Тогда результирующая сеть будет смешанного
g- и с-типа. Иначе говоря, можно соединить пучки
256
Л. Л ёф г р ен
с пороговым устройством g-типа и предположить, что со-
ответствующие элементы в достаточной мере свободны
от ошибок. Тогда некоторые элементы должны быть со-
вершенно свободны от ошибок, что противоречит на-
шему предшествующему предположению, что ошибки
(шум) распределены равномерно по всем элементам си-
стемы.
Продолжим, однако, рассмотрение идеи о представ-
лении состояний пучками линий. Хотя мы и отступаем
при этом от привычного способа мышления, идея эта
может быть оправдана тем, что свободный от ошибок
наблюдатель, который собирается использовать выходы
системы, должен иметь в себе какой-то «мажоритарный»
орган. Однако в цепи подобных рассуждений должен
быть некоторый предел, так как иначе мы должны бы
раз и навсегда предположить, что наблюдатель имеет
в самом себе целую комбинаторную систему и только
наблюдает входы в нее (свободные от ошибок).
Итак, рассмотрим систему с двоичными элементами
и одним выходом. Пусть выходное состояние представ-
лено состоянием пучка линий, так что выход Z-й линии
в пучке есть Вг. Потребуем, чтобы в случае отсутствия
ошибок каждое Вг несло полную информацию о пра-
вильном выходе В. В этом случае для каждого В^ имеют-
ся только две возможности. Оно должно быть равно
либо В, либо В' (отрицание В). Примем, что Bi рав-
ны В. Тогда возникает вопрос: какое минимальное коли-
чество линий N(w) в пучке допускает получение нечув-
ствительности к до-ошибке? Очевидно, М(до)=2до+1.
Если бы N(ш) было бы меньше, например 2w, можно
было бы получить для выходов со значениями Bi
до-ошибку, которая в то же время является до-ошибкой
для выходов со значениями отрицания Вг-. Другими сло-
вами, для всех до-ошибок нельзя решить, соответствует
ли данное множество Вг- значению B = s{ или B = s2.
Если поведение данной системы задано в виде буле-
вой функции В(хь х2, •••, хц), то наиболее простым
способом получения избыточной системы с нужным пуч-
ком из (2до+1) выходов, такой, что вся система в целом
нечувствительна к до-ошибке, является изготовление
(2до+1) экземпляров бесповторной сети для В.
7. Самовосстановление как предел коррекции ошибок 257
Следует, однако, помнить, что нечувствительность к
^-ошибке является асимптотической мерой надежности
(для малых значений р). В случае же, если вероят-
ность р ошибки в элементе велика и велико число эле-
ментов m в бесповторной сети, реализующей В, то выше-
приведенный способ получения избыточности может ока-
заться неэффективным.
Но если тр мало по сравнению с V2» вероятность
ошибки на выходе можно оценить следующим образом:
(2^ + 1)!
w! (w 4~ 1)!
(вероятность ошибки на выходе в каждом из 2до+1 эк-
земпляров сети равна тр). Фон Нейман [17] предложил
избыточную схему (с избыточностью, намного превы-
шающей 2ш+1), с помощью которой в случае, если р
меньше некоторой не зависящей от т величины, можно
получить произвольную надежность.
Примем, однако, что тр мало по сравнению с V2»
и исследуем, может ли быть получена нечувствитель-
ность к ^-ошибке с избыточностью, меньшей, чем 2^+1
[или с г, меньшим, чем 1 — 1/(2^+1); ср. уравнение
(22)]. Пока мы показали только, что избыточная систе-
ма должна содержать пучок выходов из (2до+1) линий.
Рассмотрим систему для нечувствительной к одиноч-
ной ошибке реализации функции В. Система имеет три
выхода Si, В2, В3, каждый из которых при отсутствии
ошибок реализует В. Пусть минимальная сложность
(число элементов) одной реализующей В сети равна т.
Известно, что система, состоящая из трех таких сетей,
т. е. система со сложностью Зги, является нечувствитель-
ной к одиночной ошибке. Мы хотим исследовать, можно
ли еще уменьшить сложность, т. е. могут ли сети иметь
некоторые общие элементы и все-таки быть нечувстви-
тельными к одиночной ошибке.
Допустим, что сети для Вг и Bj имеют общую под-
сеть, реализующую функцию ф'. Тогда Вг = ВДхь х2,...
..., ф')> Bj = Bj(xi, х2, • • •, ф')- Предположим, что ф' (но
не- ф) является состоянием (состоянием входа или со-
стоянием выхода элемента), внутренним для сетей с вы-
ходами Bi и Bj. Тогда, если ошибка в ф' приводит к
17 Зак. 106
258
Л. Л ёфг рен
ошибке в Ви она должна также приводить и к ошибке
в Bj, т. е. две из выходных линий будут содержать
ошибку. Такая общая ошибка должна происходить по
крайней мере при одном воздействии, в противном слу-
чае подсеть, реализующая <р\ была бы избыточной, что
противоречит нашему предположению, что (Вг, В;)-сеть
обладает минимальной сложностью. Ситуация, при ко-
торой ошибка в <р' приводит к ошибке в В^ но не при-
водит к ошибке в Bj, не может иметь места. Если пред-
положить, что состоянием сети является ср', а не ф, то
должна иметь место одна из следующих трех форм вы-
ходных функций:
Вi = Вj = ф'Т?! U /?о»
В/ — Bj = ф/?2 U /?о» (27)
Bt — Bj = ф'/?] U ф/?2»
где /?0, #2 — функции от х2, ..., не зависящие
от ф или ф'. (Ошибка в ф' влечет за собой ошибку на
выходе, потому что ф', а не ф является состоянием.)
Однако если не только ф', но и ф является состоя-
нием, то может случиться, что ошибка в ф', но не в ф,
приведет к ошибке в В^, но не в Bj. В этой ситуации
можно, однако, сразу же заключить, что ф должно быть
входным состоянием, т. е. одним из хг-. ф'-Состояние мо-
жет быть получено из ф-состояния с помощью после-
дующего инвертирующего элемента (или наоборот). Но
если ф-состояние является соответствующим выходом
элемента, в нем может быть ошибка, и тогда в получае-
мом ф'-состоянии также может быть ошибка. Таким об-
разом, ф должно быть (свободным от ошибок) вход-
ным состоянием, и тогда ошибка будет присутствовать
уже только в ф'. Запишем В; и Bj в следующем виде:
Bi = фЯ/, 1U 2, (28)
= (1 и ф'/?л г)')' = (ф/?;г! и ф'Т?;, г)'. (29)
где Rit 1, Rl<2, Rj.i, Rj,2 являются функциями от х1?
х2, но не от ф, которое, согласно приведенным
выше соображениям, является входным состоянием,
7. Самовосстановление как предел коррекции ошибок 259
скажем, Если ошибок нет, то
= (30)
Ri, 2 = Rj, 2- (31)
Если ошибка есть в <р' (но не в ф), т. е. <р'-хр, по-
требуем, чтобы ошибка могла быть самое большее
в одном из Bt и Вj, т. е.
i U 2 = 4R'jt! U ф/?', 2,
или
Rit 1 U ^1, 2 = Rj, 1 U , 2‘ (32)
Уравнения (30) — (32) имеют единственное решение:
^,i=^;,2=^,i=^,2> (зз)
т. е.
Bt = в. = ф/?; 2иф'/?л2=ф©Ri,2 (mod2)- (34)
Это единственный тип функции, который в конце концов
позволяет понизить сложность до величины меньшей Зш.
Если Rif 2 не является ни входным состоянием, ни сум-
мой по модулю 2 входного состояния и функции вход-
ных состояний, то для избыточного устройства, в кото-
ром ф'-элемент принадлежит Вг и Bj-сетям, сложность
снова равна Зиг. Если же /?г, 2 является состоянием вхо-
да ф или имеет форму ффрг->2, то с помощью одного
инвертирующего элемента можно получить уменьшение
сложности, так как ф'-элемент и ф'-элемент могут быть
разделены. Два элемента могут быть разделены между
Вг и Bj-сетями, или один отнесен к Вг и Вгсетям, а
другой к Bj- и Bfc-сетям. Последний случай показан на
фиг. 6 для функции В=хфу. Если сеть х ф у будет
утроена, сложность будет равна 3x5=15 элементам.
Покажем теперь, что можно уменьшить эту сложность
на один элемент и все же получить сеть, нечувствитель-
ную к одиночной ошибке.
При каждом последующем разбиении остатка на
сумму по модулю 2 для входного состояния и новый
17*
260
Л. Л ё ф г р е н
остаток получается экономия одного элемента. Наимень-
шая сложность сети, нечувствительной к одиночной
ошибке, для наиболее удобной функции
6=2^ (mod 2) (35)
z=o
равна (3x5Xv—v) элементов. Наименьшая сложность
сети, не обладающей нечувствительностью к ошибкам и
реализующей ту же функцию В, равна 5v элементов.
Фиг. 6. Нечувствительная к одиночной
ошибке g-сеть с указанием возможности раз-
деления элементов.
В этом случае избыточность г [ср. уравнение (22)] рав-
на В 9/±4, что меньше избыточности г = 2/3, соответствующей
чистому утроению.
Перейдем теперь к g-сетям с одним выходом, нечув-
ствительным к до-ошибке. Если в этом случае элемент
находится в двух из 2до+1 Вг-сетей, так что одиночная
ошибка в нем приводит к ошибке на выходе в обеих
сетях, то дополнительная (w — 1)-ошибка может дать
ошибки на выходах w — 1 других сетей. Сеть не являет-
ся нечувствительной к до-ошибке. Подсеть ср' только то-
гда может принадлежать двум Bi сетям, если ошибка
в <р' приводит к ошибке в какой-нибудь одной, но не в
обеих Bj-сетях. Следовательно, наиболее удобной
функцией для получения минимальной сложности сети
7. Самовосстановление как предел коррекции ошибок 261
является сумма по модулю 2 в соответствии с уравнениехМ
(35), точно так же как эта функция была наиболее
удобной для получения нечувствительности к одиноч-
ной ошибке.
В сетях, реализующих функцию по уравнению (35),
имеются инвертирующие элементы (которые необхо-
димы, чтобы сделать возможным разделение элементов
между сетями), а также элементы «ИЛИ» и «И». Чтобы
не ограничивать себя особым выбором «ИЛИ»- и
«И»-элементов, обозначим через С2 сложность подсети,
реализующей функцию В(х, у, z, w)=xy U zw. Сумма
по модулю 2 реализуется такими подсетями вместе с ин-
вертирующими элементами. Сложность инвертирующего
элемента равна Сь
Минимальная сложность одной сети, реализующей В
[уравнение (35)], равна (2Ci + C2)v. Чтобы было воз-
можно разделение, о>+1 сетей могут иметь такую же
сложность, а остальные w сетей сложность (2Ci + C2)v +
4-Сь Общая сложность 2до+1 сетей будет, таким обра-
зом, равна (2о>+1) (2Cl + C2)v + wCl. В этом случае в
каждой сети имеется v+1 инвертирующих элементов, ко-
торые могут быть объединены с допустимыми инвер-
тирующими элементами в других сетях. Один допусти-
мый элемент может быть отнесен только к двум сетям.
Таким образом, приведенная выше сложность может
быть уменьшена в лучшем случае на (v+l)wCb т. е.
минимальная сложность будет равна
(2w + 1) (2Сх + С2) v —
Следовательно, для произвольной булевой функции ма-
ксимальное значение отношения R(w) [ср. уравнение
(25)] ограничено следующим образом:
Ямакс(®)< (2®4-1)_w/(2+C^C,) • <36)
Эта оценка зависит от С4 и С2. Полагая Сг=0, получим
следующую верхнюю границу, не зависящую от какого-
либо определенного выбора элементов:
Ямакс (w) < 3f2W _|_ 1 • (37)
262
Л. Л ё ф г р е н
Таким образом, минимальная сложность (минималь-
ное число простейших элементов) в сети, нечувстви-
тельной к до-ошибке, больше w (следовательно, должна
существовать (до +1) -ошибка, для которой эта сеть
даст ошибку на выходе) и произвольная надежность
возможна только при w —► оо. Но тогда максимальная
скорость вычисления равна нулю, т. е. для любой двоич-
ной функции, реализуемой g-сетью, пропускная способ-
ность вычисления равна нулю.
В случае g-сетей, реализующих систему двоичных
функций, не существует полного множества простейших
элементов, позволяющих вычислить с ненулевой про-
пускной способностью произвольную систему двоичных
функций. Действительно, достаточно рассмотреть си-
стему:
(mod 2),
/=0
v-l
B2=^x1 (mod 2), (38)
z=o
1
£v=Sxz (mod 2).
z=o
Система нечувствительна к до-ошибке, если каждая из
функций Bi нечувствительна к до-ошибке. Известно, что
максимальная скорость /?Макс(^) вычисления функции
Bf определяется неравенством (36). Сеть для вычисле-
ния с такой скоростью функции Bt содержит также все
выходы сетей, реализующих В2, В3, ..., BY и нечувстви-
тельных к до-ошибке. Следовательно, максимальная ско-
рость вычисления для всей системы равна /?Макс(^).Та-
ким образом, равенства (38) дают пример системы, для
которой пропускная способность вычисления должна
быть равна нулю.
Рассмотрим, наконец, недвоичную g-сеть. Предполо-
жим, что каждый простейший элемент функционально
полного множества имеет v-значные состояния: sz,
s3, s4, ..., sY. Пусть с каждой ошибкой, переводящей
правильное состояние i в неправильное состояние свя-
7. Самовосстановление как предел коррекции ошибок 263
зана вероятность Ро(¥=0). В случае v = 2^ каждому эле-
менту (с одним выходом и двумя входами) можно сопо-
ставить сеть из двоичных элементов с одним выходным
и двумя входными пучками, причем каждый пучок со-
стоит из ц линий. 2» различных состояний пучка соот-
ветствуют Si состояниям. Если вероятность, соответ-
ствующая ошибке в одной линии выходного пучка эле-
мента, равна р, то вероятность перехода из одного со-
стояния в другое заключена между р(1—р)**”1 и р^.
Если мы выбираем р так, что р(1 —р)ц-1 будет равно
наименьшему значению рг;- для данных v-значных эле-
ментов, то синтезированная с избыточностью из v-знач-
ных элементов g-сеть не может быть более надежной,
чем структурно эквивалентная ей двоичная g-сеть. Если
v-значная сеть синтезирована с минимальной избыточ-
ностью, обеспечивающей нечувствительность к ^-ошибке,
то соответствующая избыточная структура для двоичной
сети не обязательно является минимальной. Этим пу-
тем, изменяя структуру из пучков таким образом, чтобы
получить минимально избыточную структуру для двоич-
ных сетей, можно получить даже более хороший резуль-
тат с точки зрения минимальной избыточности. Но из
предыдущего известно, что пропускная способность вы-
числений для произвольной системы двоичных функций
не может быть отлична от нуля; следовательно, это тем
более верно для ¥( = 2*г)-значных g-сетей. Некоторые
вопросы, связанные с многозначными сетями, рассма-
триваются в работе [2].
8. ВОЗМОЖНОСТЬ ВЫЧИСЛЕНИЯ МЕСТОПОЛОЖЕНИЯ
ОШИБКИ
Исследуем сначала возможность вычисления место-
положения ошибки для с-сетей. Задача состоит в сле-
дующем: при каких условиях возможно синтезировать
с-сеть для реализации некоторой булевой функции, не-
чувствительной к U^-ошибкам, которая, не прерывая
нормального вычисления булевой функции, вычисляла
бы также местоположение до-ошибок?
Рассмотрим простой пример: с-сеть для функции
В(а)=а при W=w=l. Нечувствительная к одиночной
264
Л. Л ёфгрен
ошибке функция для тождественной операции (ср. [7])
имеет следующий вид:
В — аха2 U 0за4» (39)
где di — а, если не происходит ошибки. Для того чтобы
локализовать ошибку в этих четырех элементах, у нас
должно быть по крайней мере пять возможностей: от-
сутствие ошибки или же ошибка в любом из четырех
элементов. В двоичном случае для этого требуются три
выхода, указывающие ошибку. Система функций, обна-
руживающих ошибку, может быть такой:
Z?i = ^2»
= а? 4“ я3» (40)
= а3 4~ ^4»
где + означает сложение по модулю 2. Если ошибки
нет, то все Вг- равны нулю независимо от значений а.
Все одиночные ошибки дают различные результаты, так-
же не зависящие от значений а.
Однако сконструировать многополюсник с взаимно
однозначным соответствием между его элементами и пе-
ременными невозможно (ср. условия реализуемости
по [8]). Кроме того, мы хотим, чтобы определение оши-
бок было полностью декодировано. Так, система (40)
дает информацию о том, где произошла одиночная
ошибка, но для того, чтобы можно было использовать
эту информацию для замены элемента, она должна
быть декодирована, что означает дальнейшее комбина-
торное вычисление. А мы хотим, чтобы все комбина-
торные вычисления производились элементами, одина-
ково подверженными шуму.
Если же мы отказываемся от требования вычислить
местоположение ошибки и интересуемся лишь определе-
нием подмножества элементов, содержащего ошибаю-
щиеся элементы, то в этом и только в этом случае мож-
но получить решение обеих проблем, обсуждавшихся в
предыдущем примере, но лишь ценой дальнейших огра-
ничений, налагаемых на ошибки.
Рассмотрим один из декодированных выходов, обна-
руживающих ошибку. Реализуемые функции могу г
7. Самовосстановление как предел коррекции ошибок 265
быть заданы таблицей истинности:
4^2 а3 ... CLf
а 1 1 1 ... 1 О
0 0 0 0 ... О О
8 1 О 1 ... О 1
Две переменные комбинации чисел аир соответ-
ствуют случаю отсутствия ошибок, для которого значе-
ния Bi должны быть равны нулю. Пусть число 8 соот-
ветствует ошибке с весом, меньшим или равным w.
Тогда Bi(e) = l. Число 8 называется импликативным чис-
лом и должно содержать по крайней мере одну единицу.
Число а, которое не является импликативным чис-
лом, покрывает 8, являющееся импликативным числом.
Следовательно (ср. [9]), функция Вг- должна содержать
отрицание переменных аг-, т. е. Врсеть должна содержать
элементы, соответствующие этим отрицаниям перемен-
ных. Но это противоречит концепции ошибок, которой
мы до сих пор придерживались. Так, если у нас есть
элемент аг- и элемент аг то ошибка в одном из них
означает, что у нас уже не будут выполняться соотно-
шения aia'i = 0, ai и а\\= 1.
Таким образом, для того чтобы получить решение
задачи, необходимо предположить, что постоянные
ошибки, которыми мы интересуемся, не влияют на до-
полнительные соотношения между аг- и a't. Если мы
имеем дело лишь с реле с переключающими контак-
тами, т. е. такими, что в одном и том же реле имеется
как a-контакт, так и а'-контакт, причем они имеют одну
общую вершину, то это ограничение ошибок не очень
существенно. Источник постоянной ошибки всегда нахо-
дится в обмотке реле. Например, короткое замыкание
в обмотке влияет как на а, так и на а' и, следовательно,
является допустимой ошибкой. С другой стороны, ча-
стицы пыли, влияющие на один из контактов, носят
характер временной ошибки, которая не требует ре-
монта, т. е. не требует и локализации ошибки. Описан-
ный выше избыточный синтез делает сеть нечувствитель’
hqh к такого рода ошибкам»
266
Л. Л ё ф г р е н
Переключающий элемент с-типа имеет два нормаль-
ных состояния — переключение влево или вправо. Ошиб-
ки, которые мы будем рассматривать, принадлежат к
типу Alf т. е. они приводят к состояниям, которые снова
содержатся в множестве нормальных состояний. Ошиб-
ка в переключении влево означает переключение вправо,
и наоборот.
На фиг. 7 показаны типы сетей из переключающих
элементов, которые удовлетворяют вышеприведенной
таблице истинности, т. е. определяют любую ш-ошибку.
Фиг. 7. Передающие контактные сети для обнаружения w-ошибки.
Мы можем убедиться, что для любой булевой функ-
ции одинаково возможно синтезировать нечувствитель-
ную к F-ошибке с-сеть, которая также локализует лю-
бую ^-ошибку. В этом случае необходимо использовать
особую избыточную защиту каждого элемента, т. е. со-
хранить основную структуру сети для F = 0. Для избы-
точной защиты каждый элемент основной структуры за-
меняется сетью длиной I и шириной v (ср. [12]), напри-
мер, в соответствии с фиг. 8, а или б (где каждая ветвь
представляет только один из двух переключающих кон-
тактов). Каждая сеть наверняка нечувствительна к
I^-ошибке, если />1^+1 и u>F+l.
Следующий шаг в конструировании состоит в за-
мене каждого из элементов сети фиг. 8 соответствую-
щим элементом сети фиг. 7, т. е. во вложении локали-
зующих ошибку сетей в основную вычислительную
структуру. В случае W = w наиболее эффективный спо-
соб такого вложения состоит в использовании обнару-
7. Самовосстановление как предел коррекции ошибок 267
живающих (t^+1)-ошибку сетей типа фиг. 7,в для ос-
новной избыточной защиты сети фиг. 8,6, в которой
l=w + 2, и = ш+1 (фиг. 9,а). Заметим, что нужные нам
Фиг. 8. Предохранение основных элементов с помощью избы-
точности для нечувствительных к ошибке и обнаруживающих
ошибку сетей.
Фиг. 9. Нечувствительная к w-ошибке и обнаруживающая
w-ошибку сети для тождества В (а) — а.
Показана только одна обнаруживающая ошибку сеть.
свойства локализующих ошибку сетей фиг. 7 были уста-
новлены только в том случае, когда эти сети работали
одни. Присоединяя с помощью двух вершин к основной
структуре сеть, локализующую ошибку, мы должны быть
268
Л. Л ё ф г р е н
уверены в том, что через эти две вершины вне локали-
зующей сети не образуется нарушающей работу прово-
дящей цепи. Из фиг. 9, а видно, что, если а = 0 [состоя-
ние S2 в равенстве (10)], проводящая цепь вне присо-
единенных вершин какой-либо из локализующих сетей
может возникнуть только в случае (до+1)-ошибки (на-
пример, если до+1 из до + 2 ветвей aw+i » проводят).
Указание
ошибки
Фиг. 10. Обнаруживающая
одиночную ошибку £-сеть.
Предполагается, что изме-
ряющие ветви Та, i не про-
водят (см. разд. 9).
Если М есть минималь-
ное число единичных контак-
тов в сети, реализующей В,
приведенная конструкция
требует в целом Л! (до+ 2)2
переключающих элементов.
Синтезированная таким об-
разом сеть позволяет обна-
ружить одиночную ошибку в
множестве до + 2 элементов
и, следовательно, в наибо-
лее трудном случае—до-ошиб-
ку в до (до+ 2) элементах. Так как в следующем разделе
мы хотим допустить, чтобы в случае Bj=l производи-
лась замена всех до + 2 элементов соответствующего под-
множества и чтобы к тому же в течение всей замены
сохранялось ненарушенным нормальное вычисление, нам
придется использовать большее количество избыточно-
сти. В соответствии со схемой фиг. 9, а одиночная ошиб-
ка эквивалентна (до+1)-ошибке в течение операции за-
мены. Поэтому мы будем использовать локализующие
ошибку сети по фиг. 7, а. Они могут быть вложены в
сеть длиной / и шириной IF+1, например, как на
фиг. 9,6. Следовательно, общее число переключатель-
ных элементов будет равно Л4(№+1) (до+1)/, где
/>(до+2), />(Г+1).
Исследуем теперь возможность вычисления положе-
ния ошибки в g-сетях. Сначала рассмотрим подсеть,
которая показывает в декодированной форме наличие
в ней самой одиночной ошибки. Пусть подсеть содер-
жит четыре элемента обычной сети: (фиг. 10).
7. Самовосстановление как предел коррекции ошибок 260
Благодаря избыточному синтезу в обычной сети четыре
элемента должны всегда иметь равные выходы, если
только нет ошибок. Подсеть фиг. 10 обнаруживает лю-
бую одиночную ошибку в ней самой (включая одиноч-
ную ошибку в каком-либо из элементов сложения по мо-
дулю 2). Обнаруживающая сеть только для двух ^-эле-
ментов содержит один элемент сложения по модулю 2.
Элемент для трех ^-элементов является элементом дру-
гого типа.
Элемент общего
вида
Элемент общего
вида
Указание ошибки
(двоичное состояние)
Фиг. 11. Выход обнаруживающей ошибки ^-сети
общего вида (к доказательству невозможности
обнаружения в декодированной форме двойной
ошибки).
Декодированное обнаружение одиночной ошибки —
наибольшее, что мы можем сделать. Пару ошибок не-
возможно обнаружить в декодированной форме. В этом
легко убедиться из фиг. 11, на которой показан выход-
ной элемент обнаруживающей сети и непосредственно
предшествующие элементы. Выход выходного элемента
двоичен (нет ошибки или есть ошибка). Но непосред-
ственно предшествующие элементы не обязательно
должны быть двоичными. Одиночная ошибка в одном
из предшествующих элементов должна быть обнару-
жена на выходе как наличие ошибок. Но тогда двойная
ошибка, включая ошибку в выходном элементе, ошибоч-
но проявляется как отсутствие ошибок. Отсюда вытекает
сделанное выше заключение.
9. О ПОНЯТИИ САМОВОССТАНОВЛЕНИЯ
Когда мы восстанавливаем (ремонтируем) систему,
допустившую ошибку, это обычно означает, что мы ло-
кализуем источник ошибки в части системы и заменяем
эту часть новой или, возможно, добавляем новую часть,
270
Л. Л ё ф г р е н
не убирая старой. Эти части не обязательно означают
физические объекты, но могут быть также и отноше-
ниями. Например, разорванная веревка может быть вос-
становлена завязыванием узла на ней, т. е. с помощью
связывающего отношения.
На самовосстанавливающуюся систему можно смот-
реть с двух точек зрения. Систему ячеек с фиксирован-
ными связями, синтезированную с большим количеством
избыточности, можно рассматривать как самовосстанав-
ливающуюся в том смысле, что, если некоторые ячейки
работают неправильно, функционирование системы мо-
жет быть передано другим, ранее не работавшим ча-
стям, так что этим достигается длительное правильное
поведение. Другим примером самовосстанавливающейся
системы является способность обнаруживать ошибки и
выделять неправильно работающие ячейки как некото-
рое подмножество множества всех ячеек и, кроме того,
существование механизма для замены ячеек выделен-
ного подмножества новыми ячейками. В большинстве
случаев мы имеем дело со вторым типом систем глав-
ным образом потому, что мы не можем уклониться от
вопроса: кто восстанавливает самовосстанавливающую-
ся систему? Очевидно, что гораздо более соответствует
общепринятым взглядам наличие контролера, который
держит под наблюдением запасы новых ячеек и, если
надо, заказывает их производственному отделу, вместо
того чтобы возложить все бремя на конструкторский от-
дел, потребовав, чтобы он создал гигантскую фиксиро-
ванную систему, содержащую такое количество ячеек,
которое соответствовало бы желаемому времени жизни
системы.
В связи с первой точкой зрения следует прежде все-
го указать на необходимость некоторого внешнего ре-
монта самовосстанавливающейся системы.
Известно, что динамическое действие физической си-
стемы с сосредоточенными параметрами можно предста-
вить в виде линейного графа [15]. Процедура замены
означает передачу (transmission) между резервным эле-
ментом и (действующим) элементом, принимающим
участие в нормальной работе системы. Эта передача
должна регулироваться механизмом обнаружения оши-
7. Самовосстановление как предел коррекции ошибок 271
бок в действующих элементах. Таким образом, восста-
навливающее действие может быть представлено с по-
мощью множества ветвей в графе системы, каждая из
которых имеет два состояния: передающее и непередаю-
щее. Другими словами, это такой же тип ветвей, как
и в графе, представляющем какую-нибудь двоичную
комбинаторную функцию. Мы видим, что самовосста-
навливающуюся систему можно рассматривать как си-
стему, представляемую фиксированным графом с двоич-
ными ребрами. Это справедливо при условии, что ошиб-
ка в замене означает отсутствие замены, и наоборот.
Мы будем различать активные элементы (являю-
щиеся активными постоянно) и резервирующие (запас-
ные) элементы, которые не являются активными (они
выключаются активными элементами). Относительно
вероятности постоянной ошибки в активных элементах
примем те же предположения, что и раньше, а именно
что независимая вероятность ошибки в элементе равна р
для любого воздействия при условии, что предыдущая
ошибка исправлена. Для резервирующих элементов, ко-
торые не являются активными, примем, что вероятность
появления ошибки равна нулю. (Некоторая доля резер-
вирующих элементов может находиться и в ошибочном
состоянии при условии, однако, что доля эта постоянна.)
Покажем теперь, что не существует неограниченно
самовосстанавливающейся двоичной комбинаторной сети
для нетривиального нормального вычисления, если толь-
ко ошибочное состояние ветви (элемента) принадлежит
множеству ее двух нормальных состояний. Для этого
достаточно рассмотреть необходимую заменяющую
структуру для одной обнаруживающей одиночную
ошибку ячейки и для аналогичной резервирующей
ячейки С2 в соответствии с фиг. 12. Для нормального
вычисления ячейка Ci должна быть присоединена ме-
жду вершинами А и В сети. Воздействия элементов
ячейки С2 нормально выключены. Даже если бы ячей-
ка С2 содержала два передающих элемента, провода,
несущие соответствующие аг-сигналы, могли бы иметь
один общий провод. Если этот провод соединен каска-
дом с 7\, это приводит к тому, что в случае безошибоч-
ного функционирования С\ ячейка С2 будет находиться
272
Л. Л ё ф г р е н
Состояния S должны
Фиг. 12. Граф, изоморфный
операции замены.
в покое, как запасная. Но такое отсутствие связи не
является достаточным. Для нормального вычисления
Ct и С2 должны быть двухполюсными устройствами. Они
могут иметь одну вершину (полюс) А постоянно соеди-
ненной, но остальные полюсы, В' и В", должны быть
соединены с В с помощью передающего элемента S.
> такими: Si=l, S2=0 для
Л=0 и Si = 0, S2=l для
7’1=1. Очевидно, что в Л
невозможно вложить S (пе-
редающий элемент с тремя
полюсами). Следовательно,
мы получили причинно-след-
ственное отношение, которое
реализуется в виде переда-
ющего элемента S, снова
подверженного ошибке. По-
этому нужно предусмотреть
устройство для обнаруже-
ния одиночной ошибки и
провести для его соединений
(вместе с соединениями ре-
зервирующей ячейки) те же
рассуждения, что и для соединений ячейки Ср Следова-
тельно, если ошибочные состояния элемента принадле-
жат множеству нормальных состояний, никакая конеч-
ная комбинаторная двоичная переключательная сеть
для нетривиального нормального вычисления не может
быть самовосстанавливающейся.
Однако если мы ослабим требование, чтобы нор-
мальное вычисление было нетривиальным, и рассмот-
рим сеть, синтезированную только для «реализации»
короткого замыкания между ее выходными полюсами,
то в этом случае вышеприведенные доводы становятся
тривиальными. Прежде всего, элементы в этом случае
имеют только одно нормальное состояние: «передача
направо» (или «проводимость»). Следовательно, ошиб-
ка, определяемая как «передача налево» (или «непро-
водимость»), является состоянием, не принадлежащим
множеству нормальных состояний. Передающий элемент
5(5Ъ S2) не будет являться необходимым» так как во-
7. Самовосстановление как предел коррекции ошибок 273
обще нет необходимости в отключении ошибающихся
ячеек, которые в случае ошибки становятся просто не-
проводящими. Кроме того, запасная ячейка в этом слу-
чае может быть постоянно присоединена. Вершины В'
и В" можно объединить с В. Это могло бы служить ука-
занием на существование в этом случае самовосстанав-
ливающейся системы. Однако, если нет никаких воздей-
ствий, кроме тех случаев, когда возникает ошибка, нет
необходимости делать различие между активными и
резервирующими ячейками. Вероятность ошибки при от-
сутствии воздействий равна нулю, и если элементы в
некоторый момент времени работают правильно, то оши-
бок не будет и в последующие моменты времени.
Представляется целесообразным ввести следующие
различия. Систему, в которой ошибочные состояния эле-
мента содержатся в множестве нормальных состояний
элемента (Дгошибки), назовем системой первого рода.
Если же ошибочные состояния не содержатся в множе-
стве нормальных состояний (Д2-ошибки), мы будем го-
ворить о системе второго рода. В случае восстанавли-
вающейся системы второго рода нет необходимости в
каком-либо вычислении местоположения ошибок. В ка-
честве примеров можно указать на самовосстанавли-
вающуюся автомобильную шину, самовосстанавливаю-
щийся электрический предохранитель..
В случае систем первого рода мы для нетривиаль-
ного вычисления показали необходимость какого-то не-
идеального поведения для того, чтобы «самовосстанов-
ление» было возможным. Сначала предположим, что
операция замены идеальна. Тогда с ограничением, что
заменяющий механизм не осуществляет никакого ком-
бинаторного вычисления, мы получим некоторое основа-
ние для введения понятия «самовосстановление». Заме-
тим, что здесь локализация ошибки должна быть прове-
дена в полностью декодированном виде. Это означает,
что если имеется N положений для ячеек в активной
области, должно быть N обнаруживающих ошибку выхо-
дов с взаимно однозначным соответствием с положениями
ячеек. Рассматривая систему первого рода со второй точ-
ки зрения (с точки зрения действительной физической
замены ячеек), можно представить себе ее следующим
18 Зак. IQQ
274
Л. Л ё ф г р е н
образом. Ячейка состоит из (w + 1) передающих эле-
ментов, соединенных между собой согласно фиг. 7, в.
Все провода, подводящие к ячейке воздействующие сиг-
налы, и все провода от выходных полюсов и от обнару-
живающей ошибки структуры выведены для соединений
на поверхность ячейки. Представим себе, что. запасные
ячейки плавают в озере. На дне озера имеется некоторое
число отверстий, которым точно соответствуют ячейки.
Течение жидкости (примерно с таким же удельным ве-
сом, что и ячейки) сквозь отверстия приводит к тому,
что в каждом отверстии будет расположена одна ячей-
ка. Когда ячейка находится в таком положении, ее
элементы соединяются соответствующими контактами с
слоем проводов, который вмонтирован в дно озера в со-
ответствии с фиг. 9, б. Если в ячейке произойдет ошибка,
возникнет контакт между ее Т-полюсами. Этот контакт
вызовет появление тока, который за счет теплового эф-
фекта освободит ячейку, так что она выскользнет из
отверстия. Течение жидкости снова заполнит отверстие
новой ячейкой.
Единственный вопрос, на который осталось ответить,
чтобы было доказано существование самовосстанавли-
вающихся систем первого рода, состоит в следующем.
В предшествующем разделе мы приняли, что 7\-состоя-
ния можно измерять таким образом, чтобы процесс из-
мерения не влиял на состояние. Но возможно ли в дей-
ствительности одновременно измерять 7\-состояния в
многополюсной сети так, чтобы один процесс измерения
не влиял на другой? Ответ положителен, но для осу-
ществления этого требуется небольшая хитрость. Пре-
жде всего невозможно ввести батарею между каждой
парой 7\-полюсов, так как батарея обладает небольшим
сопротивлением и процессы измерения будут влиять
друг на друга. В конце концов можно было бы вста-
вить батареи с обратной полярностью между последо-
вательно соединенными Л-полюсами, но при этом нуж-
но быть уверенным, что все батареи одинаковы. Метод,
иллюстрируемый фиг. 13, основан на измерении с по-
мощью переменного тока, частота которого превышает
частоту воздействия. Емкости С закорачивают измеряю-
щий ток, но при измерении общего состояния сети (нор-
7. Самовосстановление как предел коррекции ошибок 275
мального выхода) при любом воздействии они работают
как разомкнутая цепь. Если f-я ячейка находится в
ошибочном состоянии, ток высокой частоты проходит
через сопротивление R и за счет теплового действия
Фиг. 13. Ячейка самовосстанавливающейся с-си-
стемы первого рода (а) и соединения ячеек (б).
освобождает ячейку. Заметим, что поворот каждой сле-
дующей ячейки необходим; в противном случае нормаль-
ное состояние а = 0, а'=1 ошибочно освободило бы ячей-
ку. При весьма специальных условиях может случиться,
что ошибка в ьй ячейке также вызовет освобождение
одной и только одной из соседних ячеек. Если нормаль-
ным является состояние а = 0, а'=1, ошибка в (а — а')’
передаче (см. фиг. 9, б) в ячейке 7\ (/ нечетно) вызовет
освобождение также и ячейки Ti+t. Однако, даже если
18*
276
Л. Л ёфгрен
до-ошибка может освободить 2w ячеек, это не нарушит
нормального вычисления при условии, что освобожде-
ние какой-нибудь ячейки не освобождает ячейки в дру-
гой цепи избыточной структуры фиг. 9, 6. Выполнение
этого условия обеспечивается соединением ячеек, пока-
занным на фиг. 13. Такое соединение требует четного
числа ячеек для каждой из (F+1) цепей на фиг. 9,6.
Порог теплового механизма освобождения следует
выбрать таким образом, чтобы короткие ошибочные им-
пульсы тока, которые могут возникнуть в течение пере-
ходного периода между двумя воздействиями (передача
в одном элементе может произойти как раз перед пере-
дачей в другом элементе), не вызвали освобождения.
Может также случиться, что когда ячейка заняла свое
положение, некоторые ее элементы получат воздействую-
щие сигналы от сети проводов раньше других элементов.
Предохранение от ложного тока ошибки может быть
осуществлено либо с помощью механической конструк-
ции, которая гарантирует, что контакт с источником
высокочастотной энергии устанавливается в последнюю
очередь, либо с помощью достаточно большого порога в
механизме освобождения.
Чтобы резюмировать обсуждение вероятности общего
повреждения системы, используем следующие обозначе-
ния:
/1 — время освобождения ячейки;
/2— среднее время освобождения — замены ячейки;
w — вес ошибки, при котором вычисление локализа-
ции правильно;
W—.вес ошибки, при котором нормальное вычисле-
ние правильно.
Предположим, что возникновение ошибок не синхро-
низировано с воздействиями на элементы. Примем далее,
что все элементы являются идеальными в том смысле,
что время переключения для них может быть сделано
равным нулю. В этом случае можно получить произволь-
ную надежность или сколь угодно продолжительное вре-
мя жизни, если ti устремить к нулю таким образом,
чтобы в пределе ti было достаточно велико по сравне-
нию со временем переключения. Это предохраняет от
7. Самовосстановление как предел коррекции ошибок W
ложного освобождения в течение периода нормального
изменения передачи. Тогда можно надежно выбрать
до=1 и все-таки быть уверенным, что локализация ошиб-
ки правильна. Вероятность двойной ошибки за время G
равна нулю, когда стремится к 0 (предполагается, что
токи ошибки не синхронизированы). Следовательно, взяв
конечное /2 такого же порядка, что и время воздействия,
мы сведем проблему к случаю временных ошибок. Те-
перь каждая ячейка имеет вероятность 2р находиться
в ошибочном состоянии (р — вероятность ошибки в ка-
ждом передающем элементе). Таким образом, при
2р<7г можно получить сколь угодно высокую надеж-
ность.
Более реальным является допущение, что ошибочные
события синхронизированы с нормальными воздействия-
ми. Предположим также, что величина больше, чем
время переключения, но меньше, чем /2. Если же /2 ве-
личина того же порядка, что и время воздействия, мож-
но грубо оценить общую вероятность ошибки следую-
щим образом.
Вероятность <?*(v) того, что ячейка, появляющаяся
в некотором отверстии, в течение v воздействий не имеет
(до +1)-ошибки, равна
^‘(v) = (l-r+I)V- (41)
Вероятность p*(v) того, что в течение у воздействий про-
изойдет ошибка, препятствующая замене ячейки, равна
/ (у) = 1 — / (у) ~ ypw+ie (42)
Если на минуту пренебречь в ячейке ошибками с весом,
меньшим или равным до, которые благодаря механизму
замены являются временными ошибками, получим для
вероятности общей ошибки в течение v воздействий
оценку
P(v) —Mi(vp«’+>)1F+1 (43)
[ср. (17) и (21)]. Следовательно, верхняя граница вре-
мени жизни v всей самовосстанавливающейся системы
равна
(44)
278
Л. Л ё ф г р е н
Однако если вернуться к временным событиям замены
ячеек, то вероятность того, что восстанавливаемая
ячейка в течение воздействия будет совершать нормаль-
ное вычисление, равна
^ = (1-рГ+1- (45)
Следовательно, вероятность р* освобождения ячейки при
воздействии равна
р* = 1 — / — р^1 ~ (w + 1) р. (46)
Так как мы приняли, что время замены имеет величину
того же порядка, что и время действия, то замена имеет
то же влияние, что и временная ошибка, возникающая
с вероятностью р*. Поэтому для того, чтобы получить
вообще какую-либо надежность, нужно потребовать [ср.
равенство (18)], чтобы выполнялось неравенство
(®+1)р<4- (47)
Пределы неравенств (47) и (44) указывают на не-
возможность получения сколь угодно продолжительного
времени жизни самовосстанавливающейся системы в
случае, когда ошибочные события синхронизированы с
воздействиями системы. Для фиксированного р величи-
на w. ограничена (47), и, следовательно, ограничено
время жизни v (44). Однако для небольших значений р
можно получить время жизни системы, которое значи-
тельно больше времени жизни единичного элемента
(v«-i р, ср. разд, б).
Вполне реальным значением величины времени жиз-
ни переключающего элемента является 107 срабатыва-
ний. Рассмотрим комбинаторную сеть, состоящую из
#=1000 элементов, для каждого из которых р=10~7.
Можно ожидать, что сеть будет работать без ошибок
только в течение vo=5000 срабатываний (#¥ор=1/г).
Пусть требуется построить самовосстанавливающую си-
стему для того же нормального вычисления, но с време-
нем жизни порядка 109 срабатываний (больше, чем вре-
7. Самовосстановление как предел коррекции ошибок 279
мя жизни отдельного элемента). Выберем w = 1 и W= 1.
Система будет содержать N(W+1)2 = 4000 ячеек, в каж-
дой из которых находится о>+1=2 передающих эле-
мента.
Вероятность того, что при возбуждении произойдет
предохраняющая от (до +1)-ошибки замена ячейки, рав-
на pw+1. Таким образом, после 109 воздействий будет
около 109(И^+ l)2A^pw+1 = 0,04<l ячеек во всей системе,
для которых механизм замены не работает. Следова-
тельно, достаточно рассмотреть только ошибки, возни-
кающие при нормальной замене, причем эти ошибки по
своей природе являются временными:
Pir(v) = Al1v[(«>+l)p]w'+1
[ср. равенства (46) и (20)]. Для W=1 получим Mi = 4W
и (109) =0,16< V2, что означает, что время жизни бу-
дет в желаемых пределах 109 срабатываний.
Предел в неравенстве (47) позволяет в этом при-
мере сделать значение w значительно больше 1, а уве-
личив также значение W, можно фактически достигнуть
астрономических значений времени жизни!
Мы выяснили, что максимальное время жизни Tc(t)
самовосстанавливающейся с-системы из элементов, каж-
дый из которых имеет время жизни /( = 1/2Р), ограниче-
но, если только t конечно. Грубая оценка сверху для
Tc(t) получается из неравенств (44) и (47):
Tc(t)<±(2ty. (48)
Ранее было сделано предположение, что заменяю-
щий механизм является идеальным в том смысле, что
если от ячейки получен сигнал об обнаружении ошибки,
то ячейка заменяется. Однако нет необходимости делать
столь сильное предположение. Если ячейка оказывается
разомкнутой при срабатывании, это дает только одно
выключение. Следовательно, с помощью обычного осу-
ществления избыточности в выключающем механизме
каждой ячейки можно сделать функцию размыкание —
срабатывание сколь угодно надежной.
280
Л. Л ё ф г р е н
10. ВЫВОДЫ
Мы обнаружили, что максимальное время жизни T(t)
самовосстанавливающейся с-системы из передающих
элементов (каждый из которых имеет время жизни /),
хотя и ограниченно, но, вообще говоря, больше /. Это
могло бы подсказать возможность суперподстановки,
приводящей к самовосстанавливающейся системе, эле-
ментами которой являются также самовосстанавливаю-
щиеся системы. Однако такая подстановка невозможна,
так как мы потребовали, чтобы элементы (самовосста-
навливающиеся подсистемы) были передающего типа,
так что ошибка в определенной передаче выражается в
передаче в противоположном направлении. А это тре-
бование может быть выполнено лишь с помощью про-
стейших элементов.
Аналогичные соображения делают невозможным су-
перподстановку для самовосстанавливающихся g-сетей.
Мы видели, что могут быть в лучшем случае лишь об-
наруживающие одиночную ошибку g-сети. Поэтому
самовосстанавливающиеся g-сети имеют максимальное
время жизни Г(/), ограниченное величиной /2, т. е. вре-
мя жизни, вообще говоря, значительно меньшее, чем
величина Гс(/) из неравенства (48). Надежная g-сеть
в случае Вгошибок должна иметь выход, представлен-
ный в виде состояния пучка линий (недекодированный
выход). Следовательно, если в случае суперподстановки
мы хотим обнаружить ошибку в выходном состоянии
пучка подсистемы с помощью обнаруживающей g-сети,
которая является частью подсистемы, то обязательно
должен существовать механизм обнаружения ошибки в
одной линии пучка, которая сама по себе не является
ошибкой в состоянии пучка (именно из этих соображе-
ний и было выбрано представление состояний пучками
линий).
Подведем итоги. Мы определили ошибки как откло-
нения от безошибочного поведения, которое мы предпо-
ложительно определили как детерминированное поведе-
ние. Детерминированное поведение мы определили таким
образом, чтобы существовала разумная возможность его
реализации физическими системами, но чтобы оно при
7. Самовосстановление как предел коррекции ошибок 2S1
этом оставалось совместимым с некоторыми общими
аспектами детерминизма. Путем отрицания определения
детерминированности была получена классификация
ошибок. Мы расположили ошибки в элементе в следую-
щей последовательности: а) временные ошибки, распре-
деленные в части системы; б) временные ошибки, рас-
пределенные по всей системе; в) постоянные ошибки
передачи, распределенные во всех активных частях си-
стемы (с-сети), в том числе и в отключающем механиз-
ме; г) постоянные ошибки передачи, распределенные во
всех активных частях системы (с-сети), включая весь
механизм замены; д) постоянные ошибки, распределен-
ные во всех активных частях g-системы, в том числе и
в отключающем механизме. В этой последовательности
идеальная надежность возможна лишь для случаев «а»
и «б» — для «а» с избыточностью, меньшей 1 (случай
связи), а для «б» с избыточностью, равной 1 (случай
вычисления); Для случаев «в» и «д» возможно лишь
конечное увеличение полного времени жизни системы.
Для случая «г» (ср. фиг. 12) равномерное исправле-
ние ошибок невозможно (однако некоторое увеличение
времени жизни возможно даже и в этом случае, так
как вероятность ошибки в элементе определяется отно-
сительно воздействия на элемент и заменяющее воздей-
ствие имеет меньшую частоту, чем нормальное воздей-
ствие).
Постоянные ошибки являются наиболее реальным
видом ошибок. Поэтому результат, что система, подвер-
женная такого рода ошибкам, может иметь лишь конеч-
ное время жизни, является разочаровывающим. Чтобы
превзойти этот предел, нужно потребовать, чтобы неко-
торые элементы были идеальными; фактически это озна-
чает, что допускается взаимодействие системы с нами
(кроме взаимодействий, которые соответствуют желае-
мому использованию нами этой системы). Вопрос, как
уменьшить это нежелательное взаимодействие в действи-
тельности, является весьма важной проблемой, особенно
когда мы расширяем понятие взаимодействия, включая
туда также стадию конструирования нашей системы
(машины). . -
282
Л. Л ёф грен
Если смягчить условия и не требовать, чтобы детер-
минированная система была точно локализована (имела
определенные входы и выходы), можно, по-видимому,
увеличить приведенные пределы времени жизни, если
самовосстанавливающаяся система обладает также
свойствами самовоспроизведения. Действительно, такая
система связала бы воедино понятия самовосстановле-
ния и самовоспроизведения; эта связь была предсказана
еще в работе [6].
Дополним (но не завершим) наши выводы цитатой
из «Кассандры» Шиллера:
«Жизнь заключается в ошибках,
Познанье означает смерть...»
ЛИТЕРАТУРА
1. Amarel S., «Ап approach to automatic theory formation», рус-
ский перевод см. наст, сборник, стр. 533.
2. Cowan J., «Many-valyed logics and reliable automata», русский
перевод см. наст, сборник, стр. 178.
3. Elias Р., «Computation in the presence of noise», IBM J. Res.
Devel., 2, 346 (1958).
4. Firestone F., «А New analogy between mechanical and electri-
cal systems», J. Acoust. Soc. Amer., 4, 249 (1932—1933).
5. H u f f m a n D., «The synthesis of sequential switching circuits»,
J. Franklin Inst., 257, 161, 275 (1954).
6. Lofgren L., «Automata of high complexity methods of increa-
sing their reliability by redundancy», Inform, a. Control, 1, 127
(1958).
7. Lofgren L., «Irredundant and redundant Boolean branch-net-
works», Trans. IRE, IT-5, Spec. Supplmt., 158, May (1959).
8. Lofgren L., «Solution to the realizability problem for irredun-
dant Boolean branch-networks», J. Franklin Inst., 268, 352 (1959).
9. Lofgren L., «Redundancy bounds for ay-error correcting contact
networks for a Boolean function», Quart. Progr. Rep. MIT, RLE,
Oct. 1959, p. 119.
10. Lofgren L., «The structures of switching nets», доклад, Fifth
Midwest Sympos. on Circuit Theory, Univ. Illinois, May 1961
(передано для публикации в Trans. IRE EC).
11. McCulloch W., «Agathe Tyche of nervous nets —the lucky
reckoners», Mechanization of Thought Processes, N. P. L. Sympos.
№ 10, H. M. S. O., London, 1959.
12. Moore E., Shannon C., «Reliable circuits using less reliable
relays», /. Franklin Inst., 262, 191, 281 (1956); русский перевод:
7. Самовосстановление как предел коррекции ошибок 283
Мур Э. Ф., и Шеннон К. Э., Надежные схемы из ненадеж-
ных реле, Кибернетический сборник, вып. 1, ИЛ, 1960.
13. М u 11 е г D., В а г t к у S., «А theory of asynchronous circuits»,
Proc. Intern. Sympos. on the Theory of Switching, Harvard Univ.
Press, 1959.
14. Shannon С., «А mathematical theory of communication», Bell
Syst. Tech. J., 27, 379 (1948); русский перевод см. Шеннон К.,
Работы по теории информации и кибернетике, ИЛ, 1963.
15. Trent Н., «Isomorphisms between oriented linear graphs and
lumped physical systems», J. Acoust. Soc. Amer., 27, 500 (1955).
16. Turing A., «On computable numbers, with an application to the
Entscheidungsproblem», Proc. London Math Soc., 42, 230 (1936).
17. v о n Neumann J., «Probabilistic logics and the synthesis of
reliable organisms from unreliable components», Automata Studies
(eds. C. Shannon and J. McCarthy), Princeton Univ. Press, Prin-
ceton, New Jersey, 1956; русский перевод. Нейман Дж., Ве-
роятностная логика и синтез надежных организмов из ненадеж-
ных компонент», сб. «Автоматы», ИЛ, 1956.
8. МОДЕЛЬ ЭВОЛЮЦИИ
Г. ПАСК
(Фирма «Системе ризерч»)
Я надеюсь, вы простите мне нестрогость моего изло-
жения, связанную с тем, что я намерен втиснуть в до-
клад четыре разные темы и сделать это за минимальное
время.
Во-первых, мне хотелось бы объяснить, почему мы
вынуждены допускать в исследуемых системах суще-
ствование элементов, принимающих решения, ибо, по
моему убеждению, только в этом случае системы можно
называть самоорганизующимися.
Во-вторых, мне хотелось бы, разумеется очень крат-
ко, описать общее применение модели, получаемой, ко-
гда мы рассматриваем системы с этой точки зрения.
В-третьих, я хотел бы рассмотреть, хотя и не входя
в детали, более детализованную модель, и вы должны
извинить меня за то, что я при этом обойдусь без всяких
формул. Я надеюсь, что вы верите в мою способность
складывать числа (хотя на самом деле это, может быть,
и не так); мои уравнения всегда пишутся для другой
цели, но они, так сказать, работают.
Наконец, мне хотелось бы сделать несколько необыч-
ных замечаний, чтобы связать воедино некоторые, если
можно так сказать, повисшие в воздухе вопросы и уста-
новить некую общность обсуждаемого предмета. Я не
надеюсь здесь сделать очень много, но, мне кажется, что
исходя из такого рода моделей можно высказать кое-ка-
кие соображения, позволяющие внести некоторое един-
ство в различные подходы к проблеме, о которых мы
слышали сегодня и, несомненно, еще услышим на зав-
трашнем заседании.
8. Модель эволюции
285
Итак, первый вопрос таков: почему мы считаем, что
в системах содержатся элементы, принимающие реше-
ния?
Мы сами являемся самоорганизующимися система-
ми и блуждаем в мире, полном загадочных черных
ящиков, ящиков д-ра Эшби. Одни из них — черепахи,
другие — горлицы, третьи — пересмешники; одни изда-
ют «пип!», другие — «фьюить!»; некоторые из них —
цифровые вычислительные машины. Так обстоят дела.
И вот эти объекты мы будем классифицировать не-
сколько необычным способом.
К некоторым черным ящикам я подхожу и говорю:
«Это случайная машина». Что я понимаю под этим?
Только то, что я, будучи сам самоорганизующейся си-
стемой, знаю, какое исследование я хочу провести над
этим черным ящиком. Я знаю, что это колесо лотереи,
колесо рулетки, что в некоторых положениях оно может
останавливаться, и мне известно (и именно поэтому я
называю этот предмет случайной машиной), что при
длительном наблюдении я не смогу сказать, в каком по-
ложении оно остановится в следующий раз. В этом смы-
сле я не знаю, что произойдет, но я знаю, за чем мне
следует наблюдать.
Теперь мы подходим к нашей старой знакомой, вы-
числительной машине, и говорим: «Ага, ты — детермини-
рованная машина», и так оно и есть; ее можно разо-
брать на части и выяснить, что происходит внутри нее.
Что касается шума, то мы не будем его учитывать, так
как он не относится к числу вопросов, которые мы за-
даем о вычислительных машинах, как таковых.
Но наконец мы сталкиваемся с небольшим, но про-
тивным классом систем, которые мы, по-моему, как раз
и называем «самоорганизующимися» и которые вклю-
чают вас, джентльмены. Я подхожу к вам и беседую с
вами. Вы, несомненно, в высшей степени случайные ма-
шины, потому что несете всякий вздор. Но, с другой
стороны, если мы все же можем наладить беседу, по-
ложение меняется. Почему? Да потому, конечно, что
моя неуверенность в том, что вы скажете мне в следую-
щий момент, такова же, как и неуверенность, в каком
положении остановится «случайное» колесо. Но в отно-
286
Г. Паск
шении вас мое незнание идет еще дальше: я не знаю
даже, какие исследования мне следует предпринять над
вами.
Это может полностью обескуражить меня, так что я
не смогу вообще обращаться к вам. Но может и ока-
заться, что, будучи самоорганизующейся системой, я
смогу так приспособиться к вам, т. е., выражаясь мате-
матически, смогу так изменить свое «представление»
(representation), изменить исследования, которые я на-
мерен провести над вами, что сумею вас понять.
Другими словами, это сознательная уловка, ибо по
той или иной причине для меня целесообразно вступить
в разговор с вами. Я принимаю эту специфическую про-
цедуру изменения моего представления, чтобы выявить
согласованность в поведении системы, которую можно
описать любым способом, указав на наличие группового
свойства в преобразовании самой системы.
Системы такого рода мы будем называть самоорга-
низующимися. Всякий раз, когда оказывается, что мы
вынуждены прибегнуть к такой уловке, нравится нам
это или нет, мы имеем дело с самоорганизующимися си-
стемами. Но это определение неясно и туманно, потому
что имеется много случаев, когда мы можем прибегнуть
к указанной процедуре, если пожелаем, но вовсе не обя-
заны это делать. Я не уточняю, с каким случаем мы
здесь имеем дело. Думается, что абсолютное различение
может быть проведено на основе теории Габора—Мак-
кея. Вы можете заметить, что если бы я рассуждал с
точки зрения информации в смысле Шеннона, я не смог
бы провести те различения, которые я сделал. Они стали
возможными лишь потому, что я разделяю метрические
и логические аспекты информации. Я говорю о «лого-
нах» и «метронах» отдельно. И мне кажется, что в дан-
ном случае такое разделение играет очень важную роль.
Но эта проблема наверняка еще будет обсуждаться с
большей компетентностью, чем это могу сделать я. Кста-
ти, на данном симпозиуме этот вопрос уже затрагивался
Коуэном, и я надеюсь, что он еще даст некоторые разъ-
яснения по этому поводу.
При рассмотрении самоорганизующихся систем мы
сталкиваемся с некоторыми странными явлениями. Сод-
8. Модель эволюции
287
ной стороны, если мы говорим, что они обучаются, то
в силу смешения структурной и метрической информа-
ции мы не можем четко отделить это утверждение от
утверждения, что они эволюционируют; в своем сегод-
няшнем сообщении я в основном как раз и буду рас-
сматривать эволюцию механизма, который при некото-
рых стационарных условиях может быть назван обучаю-
щимся механизмом.
Другими словами, те сети, которые группа Маккал-
лока, а на физиологическом уровне Леттвин называют
логическими фильтрами, я рассматриваю как структуры,
которые мы можем понять, если находим эти структуры.
Модель, которую я сейчас собираюсь обсудить, не имеет
ни малейшего отношения к тому, как работают такие
структуры, а относится лишь к тому, как они могут по-
явиться в системе, которая сначала была бесструктур-
ной или лишь слабо организованной в структуру.
Система, которую мы рассматриваем как самоорга-
низующуюся, это такая система, «элементарные ча-
стицы» которой не являются элементарными частицами
физиков. В нашем случае роль этих частиц играют еди-
ничные элементы, которые могут быть автоматами, игро-
ками, элементами, принимающими решение, «нейрона-
ми» и т. п. Они могут возбуждаться и посылать сигнал
другому элементу, в результате чего состояние какого-то
удаленного элемента при возбуждении данного элемента
меняется.
Чтобы элементы могли возбуждаться, они должны
питаться. Мне все равно, как вы представляете себе это
питание; важно только, что оно имеет место. Это скорее
условие, налагаемое на измеримость системы, чем на ее
энергетику, но для объяснения удобно считать, что для
возникновения сигнала в систему действительно должна
поступить пища или энергия. Эта величина является ме-
рой системы в том смысле, что мы рассматриваем си-
стему именно с этой точки зрения и с ее помощью оце-
ниваем состояние системы. «Количество пищи» — вели-
чина, подчиняющаяся закону сохранения.
Мы будем считать, что пища поступает в систему
и проходит через сеть питания («диффузионную сеть»).
Под такой сетью я понимаю, например, систему
288
Г. Паск
труб и резервуаров, вдоль которой можно описать
локальное распределение пищи. Формальное представле-
ние диффузионной сети дано на фиг. 1. Это ориентирован-
ный граф с узлами. Линиям, связывающим узлы, припи-
сывается некоторое число, представляющее собой «импе-
данс» пищи, т. е. величину сопротивления проходу пищи
между узлами. Верхние узлы являются источниками пи-
щи, нижние — узлами, из которых питаются наши эле-
менты. Такое формальное представление необходимо
Фиг. 1. Формальное представление
сети питания.
лишь, чтобы обеспечить возможность описания локаль-
ного распределения пищи: питание некоторого элемента
из данного узла приводит к уменьшению количества
пищи, доступной другому элементу, питающемуся из со-
седнего узла, но не влечет за собой истощение пищи в
более удаленной зоне.
Введем теперь в дополнение к нашим элементам и
сети распределения пищи еще такую среду, в которой
обмен сигналами создает и поддерживает каналы пере-
дачи информации за счет расходования пищи. Таким
образом, элементы соединены между собой сигнальной
связью, и в каждой стадии активности этой системы воз-
никает некоторая структура, которая определяется, со-
здается и поддерживается расходом пищи. Эта структура
не может существовать, и поддерживаться независимо
от активности системы,, онавозникает именно как резуль-
тат этой активности и поддерживается ею. Отключите
систему питания —и структура исчезнет!.
8. Модель Эволюции,
289
На фиг. 2 представлена схема всей системы. Важно
подчеркнуть, что формы структур, посредством которых
элементы становятся связанными, создаются в резуль-
тате активности элементов системы. Поэтому элементы,
между которыми устанавливается связь, приобретают
способность коррелировать свои стратегии.
Меня в особенности интересуют те соединения, по
которым элементы могут взаимно обмениваться сигна-
лами. Такая связь на графе соединений представляется
Поток поступающей
пищи
Фиг. 2. Диаграмма модели.
циклом. В этой ситуации два элемента могут полностью
согласовать свои стратегии.
Важно помнить, так как это обстоятельство является
решающим на следующей стадии развития модели, что
мы условились называть эти элементы «элементами,
принимающими решение» по причинам, основанным ис-
ключительно на наших личных соображениях относи-
тельно полезности этого термина для наших исследова-
ний. Мы не стремимся узнать, что на самом деле Йахо-
дится внутри этих элементов. Это в данном случае не
относится к делу.
Поэтому, если я назову такой элемент игроком, а со-
единение в виде цикла затем назову коалицией двух
игроков, вы, возможно, не станете мне возражать. Си-
стема теперь состоит из спаренных элементов, и если я
19 Зак. 106
290
Г. Паск
рассматриваю элементы как игроков, я назову такую
структуру «структурой, в которой может образоваться
коалиция». При этом прошу вас иметь в виду, что под
коалицией в этой системе понимается нечто, чему долж-
на быть присуща некоторая структура, ибо бессмыслен-
но говорить о корреляции стратегии игроков, если они не
могут обмениваться информацией, а обмен информацией
между ними возможен только при наличии и поддержа-
нии требуемой для этого структуры, что обеспечивается
за счет расходования пищи. Существует как бы стои-
мость образования коалиции, связанная с расходом не-
обходимой для этого пищи.
На этой стадии, при рассмотрении первой, весьма
общей модели, и прежде чем перейти к более строгой
модели, хотелось бы подчеркнуть, что для любой дан-
ной «функции платежа» можно сделать интересные за-
ключения о соответствующих ей коалиционных структу-
рах, которые могут существовать в сети питания.
Если функция платежа, которая выводится из по-
требления пищи в сети питания (диффузионной сети),
Является функцией платежа «состязательной игры», так
что игроки не получают никакой выгоды от коалиции,
неразумно полагать, что может образоваться самоорга-
низующаяся система. Самоорганизующаяся система —
это нечто, возникающее, когда коалиция игроков дает
преимущество или, более строго, когда существенная
стратегия определяется функцией платежа. Но когда
это имеет место, необходимо считаться еще с одним
ограничением, налагаемым на возможные в этом случае
коалиционные структуры; это ограничение вводится уста-
новлением разумной стоимости поддержания этих коа-
лиционных структур.
На фиг. 3 представлены примеры коалиционных
структур, включающих коалиции а, р и у. Вторая коа-
лиция содержит цикл (единственный), стоимость под-
держания которого равна стоимости поддержания четы-
рех независимых структур. Остальные структуры также
могут реализовать как эти коалиции, так и многие дру-
гие, но стоят они дороже.
Внимательно изучая фиг. 3, можно заметить, что
существуют различные стоимости поддержания, припи-
8. Модель эволюции
291
санные различным коалициям линейных элементов; на-
пример, имеются тривиальные коалиции только а или
только 0 при N=2 (Af —число игроков). Таким обра-
зом, здесь существует только одна цена для коалиции а
и р, это единственное решение.
В случае коалиции трех имеется стоимость а, 0 и у
порознь, а кроме того, стоимости коалиций а, р, у, ко-
торые могут быть двух видов, и т. д. для четырех и пяти
игроков.
Другими словами, имеются дискретные уровни стои-
мости поддержания коалиции, которые могут осуще-
ствляться в этой системе. Можно наложить на нее даль-
нейшие ограничения, подобные Ч'-функции Люса, опре-
деляющие, какие коалиционные структуры могут воз-
никнуть.
Рассматривая вопрос о том, каким образом можно
было бы сделать точные заключения относительно со-
стояния такой системы, мы приходим к некоторым край-
не интригующим выводам. Интересно, например, нанести
на графики различные уровни стоимости, при которой
могут образовываться коалиционные структуры (фиг. 4),
и выяснить, что произойдет, если мы уменьшим избы-
точное количество пищи, £/*, доступное системе. Нане-
сем на тот же график в функции времени вероятность Р
того, что данная наблюдаемая структура, т. е. данное
«связанное сообщество» Р является коалиционной струк-
турой С, — другими словами, вероятность того, что дан-
ная наблюдаемая структура соответствует некоторой
функции.
19*
292
Г. Паск
Ясно, что если существует уровень, на котором мо-
жет наблюдаться, скажем, коалиция X, и мы спускаемся
к той стоимости, при которой она как раз может иметь
место (если таковая существует), то эта коалиция на-
верняка и используется, так как в противном случае
коалиции вообще не будет.
Фиг. 4. Наблюдение коалиций.
Следовательно, на кривой Р имеется локальный мак-
симум. Мы знаем, что когда [7* уменьшается, X не мо-
жет существовать, но У, тю-видимому, может. Предпо-
ложим, что У действительно существует; тогда мы по-
лучим другой максимум при достижении этой точки.
В общем мы получили кривую, где с уменьшением I/*
локальные максимумы Р будут точками существования,
определенных структур — точками, в которых мы можем
делать определенные высказывания о системе.
Такое явление наблюдается и в социологии. Его под-
твердит и каждый, имеющий дело, например, с сетями
Поля Вестона, построенными на ионных сопротивлениях
и неоновых лампах: с уменьшением установленного по-
тенциала вся схема запирается в устойчивом состоянии.
Но это, возможно, тривиальный случай. Более инте-
ресны с этой точки зрения, скажем, Ваши системы,
д-р Бёрл, где существуют критические значения, при
которых могут поддерживаться определенные формы,
определенные типы структур^
8. Модель эволюции
293
Вот все, что я фактически хотел сказать об этой
самой общей модели, так как я полагаю, что в дискус-
сию вносится некоторая ясность, когда мы рассматри-
ваем наиболее простые модели из всех, которые мы
только можем себе представить.
Для этой цели я выбрал в качестве мира «Плоско-
ляндию» Эдвина Абботта. Если вы помните, Абботт
написал небольшую фантастическую повесть о простран-
ственных измерениях, в которой сам он был двумерной
фигурой — квадратом. Там была иерархия таких пло-
ских фигур, различавшихся по числу сторон, которыми
они обладали, причем предполагалось, что некогда, в
отдаленные времена, они развились из одномерных су-
ществ, и он даже совершил путешествие в одномерную
Линеляндию. Было возможно также существование фи-
гур, живших в трехмерном пространстве (проповедники
говорили о существовании сферы). Именно по этому
образцу я создал свою небольшую модель, и вы должны
извинить ее несовершенства, которые в значительной
степени связаны с тем, что я не имел вычислительной
машины, а мог прибегнуть лишь к помощи вычисли-
теля, работающего на простом арифмометре.
Мы предположили существование сети распределения
пищи, в которой подсеть узлов, доступных нашим авто-
матам для питания, была расположена в одной плоско-
сти. Эту доступную подсеть я называю полем. Очевид-
но, что мы могли бы наложить и другие ограничения на
поле, например, могли бы считать его поверхностью
сферы или тора, и при этом соответственным образом
изменились бы типы возможных коммуникационных
структур.
Представим себе теперь маленькие элементарные ав-
томаты нулевого измерения, среди которых мы, посколь-
ку сами мы по меньшей мере двумерные образования,
можем различить устройства двоякого рода — движу-
щиеся в продольном и в поперечном направлениях.
Но что, собственно, делает автомат? Я в соответ-
ствии с целью данного исследования определил автомат
как нечто созданное для того, чтобы выжить в некото-
ром конкретном мире. Это означает, что сам автомат
будет находиться в тех же условиях, в которых
294
Г. Паск
находятся коалиционные структуры, о которых мы толь-
ко что говорили. Автомат не есть нечто существующее и
сохраняющееся само по себе; он должен платить за свое
создание и существование. Я предполагаю, что его соз-
дание происходит в процессе, который я называю «ну-
клеацией» (nucleation). Если количество пищи, накоп-
ленной в каком-либо узле, достигает критической вели-
чины, там возникает автомат.
Возникнув, автомат тут же начинает поглощать
пищу и строит из этой пищи коммуникационную струк-
туру, которая подвержена деградации и поэтому дол-
жна все время поддерживаться. Скорость подпитки за-
висит от локальной концентрации пищи; иначе говоря,
скорость поступления пищи зависит от того, как много
пищи имеется налицо.
Здесь необходимо подчеркнуть важную особенность
этих автоматов — любого автомата, о котором можно
утверждать, что он предназначен для выживания, для
соревнования. С этой целью следует установить разли-
чие между двумя классами автоматов. Первый из них
включает такие автоматы, с которыми мы наиболее ча-
сто встречаемся. Это устройства, способные принимать
решения, производить движения, выдавать сигналы
и т. п. Они делают это, накапливая сведения об активно-
сти других автоматов и, возможно, об изменениях в усло-
виях окружающей их среды, вызываемых причинами,
отличными от активности их товарищей автоматов. Эти
сведения обозначаются неким вектором, и величины, ха-
рактеризующие этот вектор, вводятся в правило приня-
тия решения, на выходе которого получается движение,
сигнал и т. п.
Можно представить себе — и заметим, что мы дол-
жны представлять себе дело именно таким образом в
мире, где мы, по определению, интересуемся прежде все-
го соревнованием, — что такой автомат может встре-
титься с «неразрешимой» ситуацией, т. е. с ситуацией, в
которой невозможно принятие решения. В таком случае
автомату этого класса — типа тех, которые мы встре-
чаем в «взбирающихся на гору» устройствах, — извне
дается новая стратегия. Они нуждаются в независимой
информации извне, так что уже не образуют более зам-
8. Модель эволюции
295
кнутой системы. В их поведение вторгается колесо ру-
летки или таблица случайных чисел. Они лишь запра-
Вид bob
Фиг. 5. Движения примитивных и эволюциони-
ровавших автоматов.
Но в моей модели я имею дело не с этим типом
автоматов. Мои автоматы принадлежат к другому клас-
су, и, встретившись с той же дилеммой, они либо эво-
люционируют, либо гибнут. Если автомат имеет в своем
распоряжении достаточно субстанции, он эволюциони-
рует, если не имеет —он должен добыть ее!
Характер эволюции можно довольно точно выразить
либо в терминах Эшби, либо в терминах Рашевского —
296
Г. Паск
в первом случае через состояния, во втором — через био-
логические функции и их графики. Результат эволюции
всегда будет тот, что автомат, который встретился с
какой-то неразрешимой ситуацией, станет более круп-
ным, более сложным, способным «понять» более обшир-
ный мир, в котором данная ситуация уже не является
неразрешимой.
В нашем тривиальном «малом» мире, в котором блу-
ждают эти существа, мы не предоставили больших воз-
можностей нашим эволюционирующим автоматам. На
фиг. 5 я показал возможные движения примитивных ав-
томатов. Как я уже указывал, имеется два вида авто-
матов, а и Ь, способных к перемещениям в продольном
(вертикальном) и поперечном (горизонтальном) направ-
лениях. Каждый из этих примитивных автоматов может
сделать только три движения — вверх, вниз или остать-
ся на месте (автомат Ь) или же вправо, влево или
остаться на месте (автомат а). Если автомат остается
там, где находился, то он поглощает всю пищу и поги-
бает.
Эволюционировавшие автоматы (некоторые из них
также показаны на фиг. 5) возникли как сочетание двух
или более примитивных автоматов. Если соединить два
автомата одного и того же вида, то получатся созда-
ния, способные совершать пять движений вместо трех.
Еще более жизнеспособными будут автоматы, получив-
шиеся путем соединения двух автоматов разных видов.
Они могут совершать 9 движений и имеют важное пре-
имущество по сравнению с предыдущими — двумерное
поле движений. Автоматы можно соединять до бесконеч-
ности, причем каждый новый вид будет совершать все
движения своих предшественников. Хотя поле движений
никогда не может быть ничем, кроме квадрата или тре-
угольника, индивидуальные движения могут быть край-
не своеобразны.
Закон эволюции сказывается, когда автоматы попа-
дают в затруднительное положение и, попав в такое
положение, собираются вместе. Трудности для автома-
тов создаются характеристиками окружающей их среды,
распределением автоматов в поле и распределением
пищи у доступных узлов сети питания.
8. Модель эволюции
297
Теперь мне хотелось бы рассказать вам о характери-
стиках, которые мы присвоили сети питания, чтобы
обеспечить, что из этой, модели возникнет система, ко-
торая, будучи воплощена в материале, образует само-
организующуюся систему. Налагаемые ограничения
таковы: мы говорим, что когда автомат питается у
доступных узлов сети питания, импеданс пищи, т. е. импе-
данс между этим доступным узлом и всеми недоступ-
ными узлами, с которыми связан доступный узел, яв-
ляется функцией количества поглощенной пищи и про-
должительности кормления автомата. Вес соединений
доступного узла с другими узлами меняется как функ-
ция активности при кормлении у этого узла.
Мне хочется рассказать вам о некоторых уловках,
к которым начинают прибегать автоматы, когда вы за-
ставляете их реализовать эту модель. Представим себе
такой автомат на плоскости и рассмотрим одну только
линию на этой плоскости (фиг. 6). Концентрация пищи
в узлах вдоль этой линии представлена на графиках
слева, положение автомата—справа.
Пусть у нас вначале имеется некоторое локальное
возмущение концентрации пищи. Так как ее количество
в одном месте становится немного меньше, чем в сосед-
нем, возникает определенная направленность; автомат
получает возможность почувствовать, что концентрация
пищи в одном месте выше, а в другом — ниже. Это опре-
деляет направление движения автомата в сторону боль-
шей концентрации пищи. Правильно определив направ-
ление, он питается, что в свою очередь определяет его
последующие шаги. Если плоскость бесконечна, то так
продолжается до тех пор, пока автомат не натолкнется
на преграду или на другой автомат, и он оставляет по-
сле себя «волну» истощения запасов пищи, показанную
на самой нижней схеме фиг. 6.
Если в системе много автоматов, то при этом обра-
зуются структуры, напоминающие цепи. Это происходит
из-за того, что автоматы, стремясь к «нуклеации», со-
бираются в один район, где они сближаются друг с
другом и отражаются друг от друга, так что получаются
цепи колеблющихся автоматов, образующих когерентные
298
Г. Паск
t = tQ+5t
t*t0+46t
Фиг. 6. Движения автомата и «волна» истощения пищи.
Для непосещаемых узлов предполагается инвариантность.
структуры в системе. Все это происходит пока еще на
плоскости.
Если немного видоизменить топологию и взять, на-
пример, вместо плоскости цилиндр, мы приходим к воз-
можности существования циклических действий. Доволь-
но очевидно, что такие циклы могут действовать как
8. Модель эволюции
299
устройства памяти, но они могут работать и как филь-
тры.
Пусть в цилиндрическом поле я устанавливаю цикл
(фиг. 7) и создаю градиент вдоль этого бесконечно
длинного цилиндра, так что автоматы стремятся под-
няться в направлении градиента; тогда цикл автомата
Фиг. 7. Цилиндрическое поле модели.
в поперечной плоскости селективно разрешает или за-
прещает другим автоматам проходить в нужном направ-
лении. Следовательно, таким путем легко создаются
«фильтроподобные» структуры, построенные из автома-
тов. Например, автомат, образуемый соединением авто-
матов aoaobob, может целиком перепрыгнуть через этот
цикл, по крайней мере определенный процент их сможет
сделать это, причем все зависит от того, находились ли
автоматы в четных или нечетных узлах.
В целом, если немного потрудиться, и особенно если
детальнее определить локальное распределение пищи в
узлах, в такой системе можно вызвать как коалицию,
так и конкуренцию. Пунктирная линия на фиг. 8 изо-
бражает источник пищи, причем оказывается, что в ци-
линдрическом поле существуют два альтернативных и
энергетически эквивалентных цикла, yt и уг, которые
могут быть созданы в этой системе и легко могут пере-
ходить друг в друга. Особенно интересна система много-
связного тороидального поля, на которой я не буду
здесь останавливаться, но о которой, как мне кажется,
300
Г. Паск
стоит упомянуть в связи со структурами, рассматривае-
мыми ниже. В этой системе возможно существование
независимых циклов, где могут объединяться различные
Фиг. 8. Колебательное движение автомата в цилиндрическом
поле.
виды автоматов (фиг. 9). Пока это только предположе-
ние, ибо до сих пор у нас не было ни времени, ни воз-
можности осуществить модель такого поля, но это был
Фиг. 9. Многосвязное тороидальное
поле.
Пунктиром показаны независимые циклы; за-
штрихованные области —районы с высокой
вероятностью объединения видов автоматов,
для которых характерны эти независимые
циклы.
бы очень интересный эксперимент. Здесь же я хотел
только высказать следующее предположение, которое
прошу рассматривать всего лишь как догадку: возможно,
8. Модель эволюции
301
что одним из путей введения в систему априорных син-
тетических свойств является создание такого рода топо-
логии.
Теперь я перейду к рассмотрению следующего воп-
роса: что произойдет в том случае, если от сети пита-
ния кормится множество автоматов. Ясно, что в некото-
ром смысле деятельность автоматов, в особенности дея-
тельность их вида, развившегося в результате эволюции,
которая в свою очередь является результатом их преды-
дущего кормления, построит вокруг себя такую внеш-
нюю среду, которая будет благоприятствовать выжива-
нию только этого вида.
Такая система (и это может быть вполне строго
доказано) является самовоспроизводящейся системой.
Более того, так как на эти структуры наложены гео-
метрические ограничения, то образующиеся структуры
будут иметь конечные размеры и поэтому будут «де-
литься» по достижении этого критического предела.
Хотелось бы как-то назвать эти странные структуры,
образованные тесным взаимодействием множества авто-
матов со средой, в которой они живут. Я буду называть
их «доменами» (domain). Здесь невозможно детально
обсуждать эти вопросы, поэтому я просто буду предпо-
лагать, что в таких системах действительно существуют
«домены».
Особенно интересно было бы узнать, что происходит
с «доменом», когда мы, например, создаем для элемен-
тов обилие пищи. Я особенно заинтересован в этом, так
как мне кажется, что это как раз один из тех случаев,
где теория игр способна внести некоторую ясность в
вопрос, перед которым другие подходы оказались бес-
сильными.
Пусть имеется, например, трехмерное пространство,
в котором случайным образом блуждают автоматы, и
пусть у нас имеется «домен» (фиг. 10). Предположим,
что я, как наблюдатель, каким-то чудом могу указать
пальцем на эти эфемерные создания и сказать, что это
некая блуждающая организация, что в кубе совершает
блуждания система, состоящая из автоматов в равнове-
сии со своей средой, которую они видоизменяют. Если
бы я выдал этим автоматам добавочное количество
302
Л Пас к
пищи, создал бы для них более благоприятные условия,
то я бы осуществил операцию, эквивалентную линей-
ному преобразованию платежной функции игры. Это хо-
рошо разработанная процедура. Я просто добавляю к
каждому элементу платежной матрицы малое положи-
тельное число. В результате этого внутри «домена» мо-
жет жить большее число автоматов и это будут как
I I
Фиг. 10. Наблюдение за «доменом».
раз те автоматы, которые находились в этом районе.
Я создал более благоприятные условия именно этим
игрокам.
Или, если хотите, можно считать, что для всей си-
стемы имеется одна гигантская функция платежа, и то-
гда моя деятельность как бы благоприятствует некото-
рой данной коалиции, так как действительно существует
некоторое тождество, вернее, некоторое подобие между
понятием «домена» и введенным ранее понятием «коа-
лиции».
Итак, пусть я произвожу такую процедуру (я вполне
признаю, что это не очень-то просто); тогда концентра-
ция автоматов в данном районе увеличивается. Здесь,
мне кажется, наша модель дает очень интересный ре-
зультат, который повторялся достаточно часто, чтобы
принять его как достоверный. На некоторой критической
стадии «домен» пространственно замыкается. На этой
стадии мы должны изменить наше фантастичное, хотя и
небесполезное описание событий. Вместо того чтобы го-
8. Модель эволюции
303
ворить об автоматах в области этого «домена», харак-
теризуемой высоким вознаграждением, мы должны те-
перь говорить о цепях и структурах, обнаруживающих
в точности логические характеристики модели нервной
системы.
В системе имеются рефрактерный интервал, период
относительной рефрактерности, импульс, который пере-
дается с волной истощения пищи. Если мы воздействуем
на один конец цепи нейронов способом, который я про-
иллюстрировал на доске, то получаемый на другом
конце результат передается процессом локальных исто-
щений энергии. Не имеет большого значения, куда дви-
жутся автоматы, потому что им не разрешается отхо-
дить слишком далеко. Они ограничены присущим им
образом. Но весьма большое значение имеет порядок
движения автоматов.
«Домен» всегда пространственно замкнут, и в конце
цепей имеются нарушения связей, которые вполне оче-
видно имеют временно и пространственно суммирую-
щиеся характеристики, которые, как мне кажется, мож-
но отождествить с синаптическими узлами.
Представляет интерес, по-моему, то обстоятельство,
что выполнение этой гипотетической процедуры всегда
приведет нас (при соответствующем выборе парамет-
ров, совершаемом, быть может, интуитивно) к следую-
щему результату: центр «домена», рассматриваемый как
организм, блуждающий в среде, в которой он кормится,
приобретает структуру, сетеподобное строение, напоми-
нающее нервную систему.
Мне кажется интересен и тот факт, что я не могу
на самом деле описать происходящие явления с моей
позиции наблюдателя, но могу дать весьма точное опи-
сание в рамках модели теории игр.
Мне хотелось бы напоследок затронуть еще один-
два вопроса. Я построил модель, пользуясь теорией игр.
Для этой модели я составил небольшую программу (ра-
ботающую, как мне кажется, вполне удовлетворительно)
с целью описать развитие популяции небольшой амебы,
клеточной плесени, обладающей чертами социального
животного. Условия, в которые была поставлена модель,
включали случайное блуждание этих существ в среде
304
Г. Паск
с местными участками истощения пищи, причем была
предусмотрена возможность передачи информации. За-
тем я дал им «акразин»1). Результат этого эксперимен-
та довольно интересен, хотя недостаток времени не по-
зволяет подробно описать его. На фиг. 11 показано поле
для этого эксперимента. Оказывается, что в заданных
Фиг. 11. Эксперимент с лабиринтом,
район, бедный пищей; /Гц —район. бога-
тый пищей.
экспериментальных условиях, когда имеются район с
недостатком пищи, район с изобилием пищи и структур-
ная сеть, причем возможность передачи информации
исключена, для перехода из одного района в другой не-
обходимо образование коалиции, объединения. Мы не
знаем, как будет обстоять дело, если автоматы будут
иметь возможность обмениваться информацией, т. е. ко-
гда сигналы каждой «особи» несколько различны, так
что они могут отыскивать подобные себе автоматы. Та-
кая модель была бы очень интересна с точки зрения
получающейся структуры.
Наконец, мне хочется дать разъяснение о платежах;
мы условились, что они состоят в получении пищи, а
1 См. дискуссию. — Прим. ред.
8. Модель эволюции
305
это в некоторых отношениях может оказаться нелепым.
С другой стороны, вполне возможно, что в «домене»
окажется достаточно пищи, чтобы накормить автоматы.
Нет никаких оснований, почему только пища должна
являться причиной, ограничивающей и вызывающей кон-
куренцию в кубе на фиг. 10. Подобным же образом в
Фиг. 12. Диаграмма миграции «домена».
качестве источника пищи можно рассматривать мигра-
цию в другие «домены» определенных «семейств» авто-
матов или, если угодно, считать такую деятельность
своего рода катализом, так как специфичность этих
автоматов по отношению к «домену», в который они
мигрируют, может вызвать усиливающее действие, что,
как мне кажется, довольно легко понять.
Соответствующая этим положениям схема показана
на фиг. 12. Здесь я предполагаю наличие двух диффу-
зионных сетей, двух полей и автоматов, которые могут
мигрировать, например, внутрь кубической решетки, в
другое поле, где имеются другие «домены» и где мигра-
ция этих автоматов приведет к выживанию или гибели
«доменов».
Таким образом, мы вступили в царство платежных
функций, которые определяются разными способами.
Эта область исследования также очень интересна.
А в конце зададим вопрос, к чему все это, зачем нам
возиться с этими автоматами? Я думаю,.что делаем мы
это для того, чтобы выяснить, как возникают струк-
туры, которые описаны в литературе как структуры,
порождающие логическую устойчивость, избыточность
2Q Зак. 106
306
Г. Паск
потенциального командования и избыточность вычисле-
ний, как они возникают в желе и нитях, с которыми мы экс-
периментируем, в сетях д-ра Бёрла или где угодно еще.
Как возникают такие системы, существенной харак-
теристикой которых является ненулевая сумма частич-
но состязательной игры, в которой дополнительно опла-
чивается также и структура?
Каким образом эти «домены» приобретают, — а они
действительно приобретают, как это видно из обсужде-
ния,— именно такие характеристики? Я не знаю, как
это происходит, но я надеюсь, что с помощью более
тонко разработанной и более точно сформулированной
модели мы добьемся ответа на эти вопросы.
ДИСКУССИЯ
Фон Фёрстер. Спасибо, Гордон, за замечательный доклад.
Я думаю, что если кто и дремал вначале, то теперь он давно уже
проснулся. Мне хотелось бы попросить Вас, Гордон, несколько
подробнее описать этот эксперимент с амебами — так, чтобы все
действительно представили себе, каковы были условия опыта и
что происходит в каждый отдельный момент.
Паск. Условия были таковы: мы хотели промоделировать
популяцию клеточной плесени, водящейся в иле; если вы помните,
жизненный цикл этой плесени очень сложен. Эти создания начи-
нают свой жизненный путь в виде амеб, которые живут повсюду
и ищут пищу. Они имеют весьма интересную систему сигнализации.
Они вырабатывают вещество, называемое акразином, моделью
которого могут служить некоторые стероиды. Это вещество рас-
сеивается вовне и по достижении другой амебы вызывает ее дви-
жение по направлению к источнику, наподобие хемотаксиса. По-
этому, глядя на культуру, мы можем увидеть образовавшиеся
агрегаты и потоки движущихся к ним амеб. Когда их собирается
достаточное количество, они образуют организованное целое, в ко-
тором разные клетки выполняют, по-видимому, различные функции.
Во всяком случае имеются явно выраженные задняя, средняя и
передняя части. В конце концов — и это как раз та часть модели,
которую я не осуществил, так как мне необходимо было ввести
правило удвоения, о котором я даже не упоминал, — агрегат вы-
деляет споры на конце некоторого рода структуры, зависящей от
вида амеб; оэд образуют самые различные клеточные структуры.
Разносимые ветром и водой, эти споры дают начало следующим
поколениям.
Таков их жизненный цикл, и мне хотелось промоделировать его
развитие, просто наложив ограничение, заключающееся в том, что
во внешней среде с недостатком пищи, где не могут существовать
8. Модель эволюции
307
отдельные члены популяции, может выжить некоторая структура,
образованная ими. Мне хотелось посмотреть, как их существование
определяется наличием акразиновой сигнальной системы, побуждаю-
щей их менять свое местоположение.
Эксперимент проводился следующим образом. Я взял поле, по-
казанное на фиг. 11. Концентрация пищи в районах Ец была до-
статочно высока. Еще где-то существовал район с истощенными
запасами пищи, причем пища все время убывала из него неболь-
шими порциями. Автоматы, имевшиеся в районе с недостатком
пищи, хотя и существовали как простые автоматы, но выжить они
могли только в том случае, если могли переместиться в районы Ец.
Поэтому, чтобы пройти через голодные районы, они должны были
объединяться. Эксперимент был, по сути, чрезвычайно прост и со-
стоял в нанесении на график числа выживших амеб как функции
даваемых количеств акразина.
Рапопорт. Почему они должны были объединяться, чтобы
пройти через голодные районы?
Паск. Автоматы, введенные в голодные районы лабиринта,
были видов а и Ь. Чтобы достичь районов Ец, они должны объ-
единяться в автоматы aob.
Рапопорт. Это относится к живым амебам?
Паск. Я моделирую жизненный цикл амебы. Вопрос просто
в том, что для того, чтобы выбраться из центрального района ла-
биринта с недостатком пищи, автомат должен обогнуть по край-
ней мере один угол. А чтобы он мог обогнуть угол, он должен
быть комбинированным видом.
йовит. Вы имеете в виду геометрическую комбинацию?
Паск. Да, это геометрическая комбинация.
й о в и т с. Она настолько велика, что часть ее остается в рай-
оне с пищей, Вы это имеете в виду?
Паск. Нет, существуют районы с недостатком пищи, где такие
автоматы все же жизнеспособны.
й о в и т с. Если автомат целиком находится внутри района с не-
достатком пищи, то он погибнет?
Паск. Пусть вначале у нас имеются простые автоматы. Когда
они съедят всю пищу, они должны погибнуть. Чтобы выбраться, они
должны были бы пройти через этот район, где они погибнут преж-
де, чем проскочат через него. Поэтому им, чтобы действительно
выбраться из этого района, надо обогнуть по крайней мере один
угол.
й о в и т с. Как через этот район пробираются комбинированные
автоматы?
20*
308
Г. Паск
Паск. Граничное условие здесь фактически состоит в требо-
вании обогнуть угол. Они должны стать комбинированными авто-
матами, чтобы выбраться наружу.
Новиков. Не означает ли это, что потребности в пище ком-
бинированного автомата меньше, чем простого?
Паск. Нет, никоим образом. В другой моей модели дело об-
стоит так, как Вы говорите, но в данной модели автомат должен
уметь огибать угол.
Розенблатт. В этой задаче данная модель действительно
приводит к истощению пищи в окружающей среде?
Паск. Я использую для моделирования мои маленькие тупые
автоматы. Почему я поступаю так? Потому что это самая простая
из известных мне систем, где наблюдается определенная коопера-
ция, которая возрастает; иными словами, кооперация наблюдается
в условиях истощения пищи, а определенный кооперативный орга-
низм образуется в условиях изобилия пищи.
й о в и т с. Это Ваша гипотеза, что если автоматы обогнут угол,
они выберутся?
Маккаллок. Разрешите, я отвечу? Насколько я понимаю,
имеется такой зверь «амеба», но он говорит не об этом звере,
а о модели, составленной из прямых линий.
Розенблатт. Но как справляются с этой задачей реальные
амебы? Они тоже должны организовываться, чтобы выбраться?
Паск. Да, они так поступают и выбираются, объединившись
в одну массу. Акт поворота за угол в моей модели эквивалентен
акту объединения реальных амеб.
Фон Фёрстер. У меня особый вопрос. Мы сейчас говорили
о реальных живых системах, но я думаю, что с помощью модели
Паска, в которой можно использовать математический способ функ-
ционального описания, или, если угодно, второй закон термодина-
мики для открытых систем, можно было бы приписать модели точ-
ные числовые значения, требуемые для подтверждения этих выво-
дов. С этой точки зрения, мы можем действительно получить
взаимно однозначное соответствие.
В этой простой модели было бы, мне кажется, не так уж слож-
но начать с простой корреляции между этими двумя полями, а за-
тем развить ее или попытаться применить к реальной системе.
Паск. Другими словами, сделать это без всякой надежды
на то, что модель может быть как-то проверена.
Баумен. Разрешите одно только короткое замечание. Я хочу
сказать несколько слов не по существу доклада, а с точки зрения
8. Модель эвдлюции
309
биолога. Я лично наблюдал движения амебы*) в стадии плазмо-
дия, пересекающей пыльную грязную дорогу. Что вызывало это
движение, я понять не мог. Ведь у животного нет глаз и, по-ви-
димому, нет структурной организации, и все же оно выказывало
несомненное желание переползти дорогу.
Эддисон. Ползает ли она когда-нибудь вдоль дороги?
Баумен. Не знаю. Мое исследование было неполным.
Шервуд. А вы не пытались отклонить ее с пути?
Баумен. Пытался, она обходила препятствие и продолжала
двигаться в первоначальном направлении.
Шервуд. А на 180° Вы ее поворачивали?
Баумен. Нет, этого я не делал, я просто положил на ее
пути сухую щепку, через которую амеба не стала переползать,
а обошла ее и затем продолжала свой путь.
Й о в и т с. Что она делала после того, как переползла дорогу?
Баумен. Я следил за ней почти 10 дней. В конце концов
амеба нашла старое, прогнившее бревно и образовала споры.
Эддисон. Вы не пытались разрыть землю, на которой на-
ходилось животное, и повернуть его?
Баумен. Нет, мои исследования не были столь полны.
Бир. Каков был размер колонии?
Баумен. Она была размером с мою ладонь и примерно той
же формы.
Паск. Довольно большая колония.
Розен. Мне хотелось бы сказать пару слов о росте доменов
в ферромагнетиках и ферроэлектриках. Им присущи многие из
описанных здесь свойств, а эквивалентом Вашей пищи здесь яв-
ляется энергия всей системы.
Паск. Пожалуй.
Розен. С точки зрения описываемого геометрического кри-
терия выживания действительно интересно следующее: если у нас
!) Паск разъяснил, что Баумен здесь, по-видимому, описывает
одну из бесклеточных амеб, модель же Паска относится только
к клеточной амебе с «акразиновой» системой сигнализации.— Прим,
ред. англ, издания.
310
Г. Паск
имеются два домена, ориентированных под углом 90° друг к другу,
то это очень устойчивая конфигурация, с ней ничего не происходит.
Если же имеются два домена, ориентированных под углом 180°,
то под воздействием градиента, аналогом которого в модели Паска
является поле, больший домен может поглотить меньший, причем
делает он это довольно оригинально, с помощью клиньев, охваты-
вающих другой домен.
й о в и т с. Но то ли это явление? Ведь целью объединения
доменов является образование домена с минимумом энергии?
А те «домены», о которых Вы говорите, не стремятся к минимуму
энергии.
Розен. Мне хотелось бы сделать еще одно замечание, а имен-
но, что ничего не происходит, пока вы не добьетесь значительной
кооперации в связке диполей. Отдельный индивидуум ничего не
может сделать. Это очень просто.
Й о в и т с. Потому что ему не посчастливилось быть конфигу-
рацией с минимумом энергии.
Розен. В физике вы обычно ссылаетесь на какой-нибудь слав-
ный закон. Возможно, что и здесь тоже можно найти такой слав-
ный, простой и общий закон.
Паск. Я думаю, д-р Розен, что описываемое Вами явление
весьма напоминает то, о чем говорил я, но все же между ними
есть и разница.
Розен. Одна модель намного проще другой.
Рапопорт. Мне хотелось бы задать два вопроса. Во-первых,
относительно взгляда на модель с точки зрения теории игр. Как
я понял, модель рассматривается как теоретико-игроьая в связи
с тем, что в ней образуются коалиции, каждая из которых опреде-
ляет платеж. Это напоминает теорию игр в форме характеристи-
ческих функций, где каждая коалиция определяет платеж. Но как
только мы зададим вопрос, какая именно коалиция образовалась,
мы оказываемся в тупике, ибо «лобовой» ответ, что образуется
коалиция с максимальным платежом, совершенно непригоден. Обра-
зование такой коалиции означает также образование антикоалиции,
так как это наилучшая стратегия противоположной стороны, и это
обусловит наименьший платеж. Поэтому перед нами стоит дилемма:
если образовалась коалиция с наибольшим платежом, то почему
образуется другая коалиция — с наименьшей функцией платежа?
Суть теории образования коалиций заключается в состязании
игроков. Поэтому совершенно неверно, что будет образовываться
коалиция, приводящая к наибольшему платежу, и действительно,
теория игр в форме характеристических функций, как Вы хорошо
знаете, в своей первоначальной формулировке вообще не давала
ответа на этот вопрос. За исключением решений, найденных фон
Нейманом, она не дает абсолютно ничего и крайне беспомощна.
8. Модель эволюции
311
В большинстве случаев всякая коалиция является решением. По-
этому совершенно нельзя предсказать, что произойдет.
Но мне хотелось бы спросить у Вас, помимо этих общих про-
цессов естественного отбора, о которых Вы говорили, имеется ли
что-либо еще, что может пролить свет на этот вопрос?
Второй мой вопрос касается Вашего определения самооргани-
зующихся систем. Вы сказали, что эти системы характеризуются
той особенностью, что мы не знаем, какие вопросы такой системе
задавать. Я Вас правильно понял?
Паск. Я сказал, что существует класс систем, относительно
которых мы не знаем, какие им нужно задавать вопросы.
Рапопорт. Вот именно. Сначала я подумал, что Вы говорите
о ситуации, подобной следующей. Речь идет о марсианине, приле-
тевшем на Землю, который стал наблюдать за игроками в шахматы,
не зная правил игры. После наблюдения над 10000 игроков он ре-
шил, что в состоянии развить математическую теорию игры в шах-
маты; он создал такую теорию, и эта теория была просто велико-
лепна. Она предсказывала с большой точностью скорость, с какой
выходят из игры различные фигуры, причем как в первых 10 000,
так и в следующих 10 000 игр скорость выбывания будет той же
самой. У него получилась система дифференциальных уравнений,
решения которой давали значения скоростей выбывания фигур. Он
вывел также дифференциальные уравнения, из которых можно
было получить распределение длин партий, вероятность победы
белых в каждом варианте, и наоборот. В общем он развил все
мыслимые статистические закономерности и построил очень интерес-
ную систему аксиом, на основе которой получалась вся эта мате-
матическая теория шахматной игры. Но когда он показал свою
теорию земному шахматисту, тот сказал, что это не теория шах-
мат, что марсианин задавал не те вопросы. Имеет ли это отношение
к тому, о чем Вы думаете?
Паск. Действительно, кое-что общее есть.
Рапопорт. Может быть, Вы остановитесь на этом подробнее
и ответите также на мой первый вопрос?
Паск. Согласен, что Ваши замечания относительно фон-ней-
мановской игры п партнеров и образования коалиций совершенно
справедливы, и лучший способ ответить на этот вопрос, а заодно
и на вопрос, на что способна наша модель, заключается, как мне
кажется, в том, чтобы несколько развить возникающие в модели
условия.
Во-первых, я думаю, моя модель ближе не к модели фон Ней-
мана, а к модели Люса, в которой главную роль играет Ч'-функция.
Пусть В — коалиционная структура игры, т. е. агрегат коалиций
(всего множества коалиций) в момент времени Т = Т0\ пусть р обо-
значает принятые коррелированные стратегии в состоянии равно-
весия, которые являются каким-то решением при данном числе
312
Г. Паск
данных коалиций. Тогда Ч^р) является множеством структур коа-.
лиций пар общей стратегии, достижимых в момент времени То+бГ.
Нас это особенно интересует в связи с тем, что в социологии
нам обычно приходится лишь догадываться о том, какова Ч'-функ-
ция, выражающая социальную инерцию. В случае наших автоматов
наше положение значительно лучше, ибо из чего бы эти автоматы
ни были сделаны, Ч'-функция нам известна, мы знаем, какие допу-
стимые коалиционные структуры могут возникнуть. Они вытекают
из инерционных параметров системы.
Рапопорт. В системе имеется разрешенный переход.
Паск. Это разрешенный переход, даваемый инерционными па-
раметрами на данной стадии.
То же справедливо, конечно, и здесь, в том смысле, что, если
у меня имеется определенная коалиционная структура, я могу,
например, взять К-игру и добавить единицу или что-либо иное
в соответствии с существующим правилом для данной игры. Но
в К-игре это будет сложнее, чем просто добавить или убрать
единицу или что-либо в этом роде. Это в действительности на-
много сложнее и будет определяться характеристиками используе-
мого материала, зависит от постоянных времени и т. п. Таким пу-
тем может образоваться некоторая структура.
Во-вторых, мы, конечно, можем сделать некоторые утверждения
(хотя я согласен, что они весьма шатки) относительно функций
платежа, которые могут быть уравновешены посредством данной
общей стратегии некоторой коалиционной парой. Грубо говоря, мы
можем говорить о состояниях равновесия, образуемых последова-
тельностью платежных функций, которая вытекает из существова-
ния данной коалиционной структуры и возникающей благодаря это-
му другой структуры, и, наконец, о формировании коалиционной
структуры, обусловленной этими функциями платежа. Если оказы-
вается, что преобразование Т в применении к G\ и G2 образует
циклическую группу, мы получаем условия устойчивости, и эти виды
условий устойчивости аналогичны резонансйым гибридам, поскольку
стоимость пищи при одной коалиционной структуре всегда должна
быть связана с другой, если стоимость пищи (или средний платеж)
постоянна по множеству различных G.
Второй вопрос — насчет марсианина. Мне кажется, что когда
он наблюдает за игрой в шахматы, он имеет дело с самооргани-
зующейся системой. Я думаю, что он делает нечто прямо противо-
положное тому, что делал Льюис Кэррол, когда он наблюдал за
шахматной игрой. Марсианин, по-видимому, статистик, так что я
был неправ, когда выдвинул предположение, что он глядит на это,
как на самоорганизующуюся систему. Он статистик, который строит
математическую модель, подобную модели обучения, или чему-то
в этом роде. Он говорит, что это обучение, но он задает не те
вопросы, потому что у него нет никакого представления о шахматах.
У него не было опыта игры, общего с существами, игравшими в нее.
Когда же мы говорим о самоорганизующихся системах, мы
обычно знаем многое о том, какие вопросы следует задавать, и
8. Модель эволюции 313
это будут вопросы вроде тех, которые интересуют нас в игре
в шахматы. Льюис Кэррол, размышляя о симметрии шахмат, напи-
сал «Алису в Зазеркалье», но он, конечно, лишь поставил себя на
место шахматиста. Он притворялся, что он — это тот, кто принимает
решения, или что он — это шахматы. Конечно, он был слабым
шахматистом, но в основном он ставил вопросы о шахматной игре
так, как их формулирует шахматист.
Я полагаю, что если мы смотрим на систему под таким углом
зрения, мы смотрим на нее как на самоорганизующуюся систему.
Если мы рассматриваем ее с макроскопической или какой-либо
другой выбранной нами точки зрения, представляющей собой фор-
мализм, в котором не подразумевается наше подобие людям, играю-
щим в шахматы по общепринятым правилам, то мы не смотрим
на систему как на самоорганизующуюся, а просто описываем ее
на неподходящем метаязыке.
ft. ПРИНЦИПЫ САМООРГАНИЗАЦИИ
У. Р. ЭШБИ
(Иллинойсский университет)
1. ВВЕДЕНИЕ
Часто считают, что для практиков принципиальные
вопросы не играют большой роли, но я полагаю, что это
никак не относится к данному случаю. Масштабы яв-
лений, которые мы должны исследовать, столь широки,
что, изучая их только на уровне техники и практики,
мы спасовали бы просто перед их количеством и слож-
ностью. Детально могут быть исследованы только неко-
торые системы, причем среди них имеются системы,
гомоморфные сложному целому, которое можно назвать
«абстрактной теорией» или «общими принципами». Лишь
они позволяют окинуть единым взглядом это огромное
поле и тем самым определить направление поисков. По-
добный обзор «с птичьего полета» я и собираюсь вам
предложить.
2. ЧТО ТАКОЕ «ОРГАНИЗАЦИЯ»?
Сердцевину нашей работы образует фундаментальное
понятие «организация». Что мы понимаем под этим сло-
вом? В биологии это довольно сложное понятие, по-
строенное из нескольких более простых. Это понятие
трудно определить именно из-за его содержательности.
Интересно, что хотя Марч и Саймон [15] назвали свою
книгу «Организации», они не дали формального опреде-
ления этому термину. Я думаю, что они были правы,
ибо слово это имеет множество значений. Можно также
предположить, что в будущем мы будем слышать это
слово реже, хотя важность операций, которым оно соот-
ветствует, будет в мире цифровых машин и «мозгопо-
добных» механизмов повседневно возрастать.
9. Принципы самоорганизации
315
Самым «твердым орешком», по-моему, является по-
нятие «обусловленности», или «зависимости» (conditio-
nality). Как только связь между двумя величинами А
и В начинает зависеть от значения или состояния ве-
личины С, необходимый компонент «организации» ока-
зывается налицо. Таким образом, теория организации
частично совпадает с теорией функций более чем одного
переменного.
Можно подойти к вопросу и с другой стороны, спро-
сив: «Что является противоположным понятием?». По-
нятием, противоположным «зависимости», является по-
нятие «независимости»; поэтому понятием, противопо-
ложным «организации», должно быть, как это ясно
показывает математическая теория, понятие «сводимо-
сти» (reducibility) или, иначе, «разделимости» (separa-
bility). В математике это понятие возникает в тех
случаях, когда то, что сначала казалось функцией не-
скольких переменных (возможно, очень многих), при
ближайшем рассмотрении оказывается состоящим из
независимых частей, т. е. из частей, действие которых не
зависит от состояния других частей. В прикладной ме-
ханике оно появляется тогда, когда то, что казалось од-
ной машиной, на деле оказывается двумя (или боль-
ше) «субмашинами», действующими независимо друг
от друга.
Конечно, вопросы «зависимости» и «разделимости»
можно исследовать различными математическими и ло-
гическими методами. О них я скажу несколько слов
ниже. Сейчас же мне хотелось бы указать на то, что
введенный Гарнером и Мак-Гиллом [11] метод анализа
«неопределенности» дает нам способ исследовать «зави-
симость» не только совершенно строго, но и в самом
общем виде. Большая общность этого метода и возмож-
ность его применения к сложному поведению связана с
тем, что он приложим к любому, произвольно опреде-
ленному множеству состояний. Его применение не тре-
бует ни линейности, ни непрерывности, ни метричности,
ни даже упорядоченности. Пользуясь им, можно изме-
рить и проанализировать степень зависимости между
двумя величинами, причем можно даже учесть влияние
различных факторов и взаимодействий, подобно тому
316
У. Р. Эшби
как это делается в дисперсионном анализе Фишера.
При этом существенно только значение частот различ-
ных комбинаций состояний и не требуется введения
метрики в пространство переменных. Мне кажется, что
подобно тому, как идея дисперсионного анализа Фи-
шера проливает свет на сложные зависимости, которые
могут существовать между вариациями в метрическом
пространстве, так и идея анализа неопределенности
Мак-Гилла и Гарнера может помочь нам лучше понять,
как интерпретировать эти сложные зависимости между
переменными, когда в пространстве не введена метрика.
В психологии и биологии такие переменные весьма
обычны; без сомнения, они присущи и «мозгоподобным»
процессам в цифровых машинах. Я предвижу время,
когда методы Мак-Гилла и Гарнера станут общеприня-
тым языком для описания и количественного исследо-
вания таких проблем.
Исследование «зависимости» (с помощью функций
многих переменных, корреляционным анализом, анали-
зом неопределенности или другими способами) приводит
нас к пониманию той основной идеи, что сначала имеет-
ся абстрактное пространство, — пространство возможно-
стей, — внутри которого находится некоторое подмноже-
ство точек, соответствующих действительно происходя-
щим событиям.
Такой взгляд на «зависимость» приводит к тому, что
мы начинаем осознавать связь этого понятия с понятием
«обмена информацией», «коммуникации» (communica-
tion). Поэтому кажется весьма правдоподобным, что мы
должны определять «упорядоченность», или «организа-
цию», частей как состояние, при котором между частями
имеет место «коммуникация» (в некотором обобщенном
смысле). И снова обратным понятием является понятие
независимости, т. е. отсутствие обмена информацией.
Передача информации от А к В необходимо подра-
зумевает наличие некоторых ограничений, некоторой
корреляции между событиями в А и В. Если, например,
при данном событии в А в точке В может произойти
любое из возможных событий, то из А в В нет передачи
и на все возможности пары состояний (Д, В) не нало-
жено ограничений. Таким образом, наличие «организа-
9. Принципы самоорганизации
317
ции» между переменными эквивалентно существованию
ограничений в пространстве возможностей. Я подчерки-
ваю это положение, потому что если в прошлом биоло-
ги считали организацию чем-то добавочным по отноше-
нию к элементарным переменным, современная теория,
основанная на логике обмена информацией, рассматри-
вает организацию как некое ограничение.
Таким образом, существуют две диаметрально проти-
воположные точки зрения, и сказать, что одна из них
целиком неверна, нельзя: каждая может быть справед-
лива в правильном контексте. Чтобы окончательно не
запутаться при обсуждении этих вопросов, следует быть
осторожными с терминами.
Этот экскурс может показаться несколько сложным,
но я уверен, что он необходим, ибо теории организации
присуща одна особенность, которой лишены более пред-
метные науки, такие, как физика и химия. Эта особен-
ность вносится тем абстрактным пространством, о кото-
ром я только что упомянул. Главная черта пространства
возможностей состоит в том, что оно содержит больше,
чем существует в реальном физическом мире, потому
что последний представляет собой ограниченное подмно-
жество в этом пространстве.
Реальный мир образует подмножество, заключающее
то, что существует, тогда как пространство возможно-
стей представляет неопределенность, с которой сталки-
вается наблюдатель. Поэтому, когда меняется наблюда-
тель, меняется и пространство возможностей, так что
два наблюдателя вполне законно могут, рассматривая
разные пространства возможностей, отмечать внутри
них одно и то же подмножество действительных собы-
тий в реальных объектах. «Ограничение» является, таким
образом, отношением между наблюдателем и этим под-
множеством, и свойства любого отдельного ограничения
зависят как от реального объекта, так и от наблюда-
теля. Отсюда следует, что существенная часть теории
организации касается свойств, которые не являются вну-
тренне присущими реальным объектам, а зависят от от-
ношения между наблюдателями и объектами. Позднее
мы познакомимся с некоторыми красноречивыми при-
мерами этого.
318
У. Р. Эшби
3. ЦЕЛОЕ И ЧАСТИ
Если понятие зависимости является существенной со-
ставной частью понятия организации, то ту же роль
играет и допущение, что целое состоит из частей. Это
допущение стоит того, чтобы остановиться на нем под-
робнее, потому что в настоящее время разрабатывается
теория динамики, которая рассматривает не части и их
взаимодействия, а систему как единое неделимое целое
(Эшби [3]). В физике мы, конечно, начиная описание
системы, говорим: «Пусть имеются переменные
х2, . — и, таким образом, полагаем, что целое со-
стоит из п функциональных частей. Однако другой ме-
тод заключается в том, чтобы рассматривать неразло-
жимые состояния целого Si, S2, ..., без явного указа-
ния на вклад каждой части в общее состояние. Динамика
такой системы может быть определена и описана мате-
матически, и в одной из работ [5] я показал полезность
такого, подхода. Здесь мне хотелось бы отметить, что
мы можем создать тонко разработанную динамику
сколь угодно сложного и богатого связями целого, в ко-
торой нет ссылок на какие-либо части системы и кото-
рая поэтому не пользуется понятием организации. Та-
ким образом, понятие «динамики» и «организации» су-
щественно независимы, так что возможны все четыре
комбинации их наличия и отсутствия.
Этот факт поясняет положение о том, что «организа-
ция» до некоторой степени существует только в предста-
влении наблюдателя. Если два человека изучают одну
и ту же реальную материальную систему, например пче-
линый улей, то один из них может считать, что пчелы
«организованы», рассматривая улей как взаимодействие
50 тысяч пчел — частей системы, тогда как другой, на-
блюдая состояния системы, например активность, спяч-
ку, роение и т. д., может увидеть не организацию, а
только траектории этих (неразложимых) состояний.
Другим примером независимости «организации» и
«динамики» может служить тот факт, что организован-
ность реальной системы до некоторой степени зависит
от точки зрения наблюдателя. Хорошо известно, напри-
мер, что организованная (т. е. взаимодействующая) ли-
9. Принципы самоорганизации
319
нейная система из п частей, такая, как система из маят-
ников и пружин, может рассматриваться и с другой
точки зрения, в так называемых «нормальных» коорди-
натах, в которых все (заново определенные) части пол-
ностью разделены, так что целое не организовано. По-
этому нет ничего неестественного в том, что я настаи-
ваю на относительности организации, и преимущество
такого подхода часто используется при изучении самых
обычных динамических систем.
Наконец, чтобы подчеркнуть, насколько организация,
приписываемая системе, зависит от исследователя, ко-
торый ее изучает, я хотел бы высказать следующее ут-
верждение: в заданном целом с данным произвольным
поведением может быть найдено огромное число произ-
вольных «частей»; ибо единственно, что требуется, чтобы
указать какую-либо произвольную часть, это допуще-
ние, что данная часть может быть объединена с другой
подходящей частью таким образом, чтобы они совмест-
но были изоморфны данному целому. Пусть, например,
целое W, имеющее 10 возможных состояний, ведет себя
в соответствии с преобразованием:
pqrstuv'wxy
vqrsqsttx у у.
Тогда его кинетический граф имеет вид
y(t->s->q<-p
г
w^x^-yЭ
Предположим, что мы хотим «увидеть» в этой системе
часть Р с внутренними состояниями Е и входами А:
Е
| 1 2
1 2 1
2 1 1
520
eV P. 5 tu б и
Проявив немного изобретательности, мы найдем, что
если объединить часть Р с частью Q [которая имеет
состояния (F, О) и вход В] посредством преобразова-
ния Q:
1 1,1 1,2 1,3 2,1 2,2 2,3 1
в 1 2 2,1 1,2 1,2 2,1 1,2 1,2 | Q’ • 2,3 • 2, 1 2, 2 2, 2 |
где мы положили А = F и В — Е, то новое целое W'
имеет преобразование
1, 1, 1 1, 1,2 1, 1,3 1,2, 1 и т. д.,
W' • 1
2, 2, 1 2, 1,2 2, 1,2 1,2, 1 и т. д.,
которое изоморфно W при одно-однозначном соответ-
ствии
1, 1, 1 1, 1,2 1, 1,3 1,2, 1 и т. д„
w s р у и т. д.
Следовательно, любая динамическая система, подчи-
няющаяся определенным требованиям (например, что
равновесное состояние переходит в равновесное же),
может быть представлена таким образом, что она будет
обнаруживать разнообразие произвольно определенных
«частей» просто за счет изменения точки зрения наблю-
дателя.
4. МАШИНЫ В ОБЩЕМ
Описанный только что метод объединения двух «ча-
стей» в единое «целое» вызывает вопрос: что мы пони-
маем под «машиной» в общем случае? Здесь мы, оче-
видно, вторгаемся в пределы так называемой «общей
теории систем», относительно которой мне всегда было
неясно, имеет ли она дело с физическими системами, и
поэтому связана условиями реального мира, или с ма-
тематическими системами, единственное требование к ко-
торым заключается в их внутренней непротиворечиво-
сти. Я думаю, что одним из важных достижений послед-
9. Принципы самоорганизации
321
него десятилетия является полученное, наконец, опре-
деление существенных черт «машины вообще».
Но прежде чем приступить к рассмотрению этих су-
щественных черт, нужно исключить из рассмотрения
два не относящихся к делу фактора. Первым из них
является «материальность» — идея о том, что машина
должна быть сделана из реальных материалов, т. е. из
сотни существующих в настоящее время элементов. Это
неверно, и ряд примеров (которые легко привести, см.
[3]) показывает нам, что существенно только то обстоя-
тельство, является ли поведение системы детерминиро-
ванным и машиноподобным, а не то, как она построена,
будь она хоть из божественной субстанции. Точно так
же не относится к делу любая ссылка на энергию, ибо
на примере любых счетно-решающих устройств видно,
что значение имеет только регулярность поведения, а
не выигрыш или потеря (или даже выделение) энергии.
Фундаментальная формулировка понятия «машина»,
как оказывается, была дана по крайней мере столетие
назад, но, насколько я знаю, она почти никогда не ис-
пользовалась. «Машиной» называется то, что ведет себя
«машиноподобно», а это означает, что внутреннее со-
стояние машины и состояние окружающей среды одно-
значно определяют последующее состояние машины.
Это определение, формально предложенное 15 лет
назад [1], выдержало испытание временем и ныне при-
нято повсеместно [12]. Оно проявляется в различных фор-
мах. В случае непрерывных переменных оно соответ-
ствует описанию динамической системы системой обык-
новенных дифференциальных уравнений, где независи-
мой переменной является время. Фундаментальная при-
рода такого представления (в отличие от просто удоб-
ного) была признана многими учеными, работавшими
в этой области, например Пуанкаре, Лотка [14] и фон
Берталанфи ([9] и ранее).
Однако такое описание системы дифференциальными
уравнениями слишком ограниченно для того, чтобы ис-
пользовать его в биологических системах и вычислитель-
ных машинах, отличательной чертой которых является
их не-непрерывностъ. Отсюда возникает современное
определение, включающее как непрерывность, так и
21 Зак. 106
322
V. P. 5ui6u
не-непрерывность и даже дискретность, без малейшей
потери в строгости. «Машина со входом» (Эшби [3]) или
«конечный автомат» (Джеффри [12]) сегодня определяют-
ся множеством S внутренних состояний, множеством 1
значений входов или состояний внешней среды и отобра-
жением, скажем, f, произведения множеств /XS в S.
Такое определение, по-моему, отражает самую сущность
понятия «машины»; оно включает все известные типы
машин, причем все интересные отклонения от концепции
«машины» получаются при соответствующих отклоне-
ниях от этого определения.
Теперь мы в состоянии недвусмысленно и без увер-
ток сказать, что мы понимаем под «организацией» ма-
шины. Уточним сначала систему, о которой идет речь,
определив ее состояния S и входы /. Если S является
произведением множеств, так что, например, 5 = ПгТг-, то
каждая часть i определяется своим множеством состоя-
ний Tit Тогда «организация» между этими частями
определяется отображением f. С изменением f меняется
организация. Другими словами, возможные организации
между частями могут быть поставлены в одно-однознач-
ное соответствие с множеством возможных отображений
/XS в S. Таким образом, «организация» и «отображе-
ние» являются двумя точками зрения на одно и то же:
организацию замечает исследователь реальной системы,
а отображение — тот, кто описывает поведение системы
математическими или иными символами.
5. «ХОРОШАЯ» ОРГАНИЗАЦИЯ
Здесь некоторые из вас, особенно биологи, могут по-
чувствовать некоторую неловкость, ибо в определении
организации ничего не говорится о полезности органи-
зации. Оно требует только зависимости между частями
и детерминированности поведения.
Мне кажется, что в этом отношении определение пра-
вильно, потому что вопрос о том, «хороша» или «плоха»
данная организация, совершенно не зависит от первона-
чального теста, определяющего, организована система
или нет. Я считаю необходимым подчеркнуть это поло-
жение, так как инженеры и биологи склонны по-разному
9. Принципы самоорганизации
323
мыслить об этих вещах. Инженер, собрав какое-то элек-
тронное устройство и обнаружив, что в схеме наблю-
дается высокий уровень шумов, привык к мысли, что
данная организация «плоха» и надо искать «хорошую»
организацию. Биолог же изучает главным образом жи-
вотных, выживших в результате длительного процесса
естественного отбора; поэтому почти все организации,
которые он наблюдает, были уже отобраны как «хоро-
шие», и он склонен думать, что «организация» по необ-
ходимости должна быть «хорошей организацией». В био-
логии эта точка зрения часто может быть оправдана, но
она совершенно не соответствует действительности в том
мире, в котором работают собравшиеся здесь исследова-
тели. Мы должны признать, что
1) большинство организаций — плохие;
2) следует искать хорошие организации;
3) то, что мы понимаем под «хорошей» организацией,
должно быть четко определено (если нужно — в
строгом виде) в каждом отдельном случае.
Что мы понимаем под «хорошей» организацией в
мозгоподобных механизмах и вычислительных машинах?
При ответе на этот вопрос следует соблюдать осто-
рожность, ибо это понятие по необходимости предпола-
гает наличие некоторой оценки, происхождение которой
еще не было рассмотрено.
В некоторых случаях различие между «хорошей» и
«плохой» организацией очевидно, — в том смысле, что
в этих случаях все используют один и тот же критерий
и потому не требуется точного разъяснения этого поня-
тия. Например, обычно считают, что мозг животного ор-
ганизма имеет «хорошую» организацию, если организа-
ция (врожденная или приобретенная) способствует
выживанию организма. Это положение легко обобщается
на все те случаи, когда организация (будь то кошка,
автопилот или нефтеочистительный завод) считается
«хорошей» тогда и только тогда, когда она действует
так, чтобы удерживать определенное множество пере-
менных — «существенные» переменные — в определенных
границах. Таковы все механизмы гомеостазиса, как в
первоначальном смысле Кэннона, так и в обобщенном
21*
324
У. Р. Эшби
смысле. Из этого критерия вытекает то положение, что
организация «хороша», если она делает систему устой-
чивой относительно некоторого состояния равновесия.
Большое количество примеров из разных областей
биологии и механики дал Зоммергоф [18], который пока-
зал, что идея «хорошей организации» во всех случаях
является по существу идеей о взаимодействии частей
системы для достижения некоторого данного «фокаль-
ного условия». Мне хотелось бы здесь сказать, что вклад
Зоммергофа в эту область не был, по-моему, достаточно
оценен. Его определение того, что в точном смысле сле-
дует понимать под координацией и интеграцией, может,
по-моему, быть приравнено к определению сходимости,
данному Коши. Открытие Коши было подлинным откры-
тием и явилось огромным подспорьем для последующих
поколений, дав им в руки строго определенное понятие,
которое могло использоваться в самых разнообразных
контекстах и всегда с одинаковым значением. Я уверен,
что открытие Зоммергофа непременно сыграет подобную
же роль и в наших областях науки. Его работа иллю-
стрирует и подчеркивает положение, которое мне хоте-
лось бы сформулировать следующим образом: Не суще-
ствует такой вещи, как «хорошая организация» в каком-
то абсолютном смысле. Она всегда относительна; и
организация, хорошая в одном смысле или при одном
критерии, может быть плохой в другом смысле или при
другом критерии.
Иногда это утверждение настолько очевидно, что не
вызывает возражений. Если у нас имеется полдюжины
линз, которые можно собрать тем или иным способом,
чтобы получить телескоп или микроскоп, то суждение
о полученной организации существенно зависит от того,
собираемся ли мы рассматривать луну или сырного
клеща.
Но этим содержание вопроса не исчерпывается! Наше
утверждение говорит о том, что не существует мозга
(естественного или искусственного), хорошего в любом
абсолютном смысле — все зависит от обстоятельств и
требований. Любая способность, проявляемая мозгом,
«хороша» только условно, потому что существует по
крайней мере одна внешняя среда, такая, что по
9. Принципы самоорганизации
325
отношению к ней мозг окажется в невыгодном положе-
нии именно в силу обладания этой способностью. Фор-
мулировка Зоммергофа дает возможность сразу же
показать это: что бы ни было достигнуто в такой небла-
гоприятной среде с помощью некоторой способности или
организации, это будет не при фокальных условиях.
Конечно, мы знаем множество примеров, когда спра-
ведливость этого положения до некоторой степени три-
виальна. Любопытство — вещь хорошая, но много анти-
лоп погибло, остановившись поглядеть на шляпу охот-
ника. Должна ли организация мозга антилопы быть
такой, чтобы в результате привести (или не привести)
к временной неподвижности, зависит, очевидно, от того,
насколько многочисленны в окружающем мире охотники
с ружьями.
С другой точки зрения, следует отметить результаты
Прибрама [16], обнаружившего, что обезьяны с опериро-
ванным мозгом набирали в некоторых тестах большее
количество очков, чем нормальные. (Оперированные
были терпеливы и усидчивы, тогда как нормальные про-
являли беспокойство и все время отвлекались.) Как бы
то ни было, нельзя сказать, какой мозг (нормальный
или оперированный) имел «лучшую» организацию, пока
не принято решения, какой тип темперамента следует
считать желательным.
Вы все еще находите это положение спорным? Тогда
я готов отстаивать ту идею, что человек не обладает ни
одной умственной способностью, которая была бы «хо-
рошей» в абсолютном смысле. Если какое-либо качество
обычно хорошо, то это происходит лишь из-за недо-
статка разнообразия условий внешней среды на Земле.
Измените окружающую среду, и обладание этой спо-
собностью в изменившихся условиях может оказаться
вредным. А это означает, что «плоха» та организация
мозга, которая явилась причиной такого несоответствия.
Я уверен, что нет ни одного свойства или способно-
сти мозга, обычно считаемых желательными, которые не
становятся нежелательными при другом типе окружаю-
щей среды. Приведу несколько примеров.
Первым из них является память. Хорошо это или пло-
хо, что мозг обладает памятью? Это хорошо только,
326 У. Р. Эшби
если внешняя среда устроена так, что будущее часто
повторяет прошлое; если бы события будущего часто
были бы противоположны, память была бы невыгодна.
Такая ситуация наблюдается, когда крыса, обитающая
в канализационных трубах, сталкивается с окружающей
средой, называемой системой «предприманки». Наивная
крыса очень подозрительна и берет незнакомую пищу
только маленькими порциями. Однако, если вкусная
пища появляется в одном и том же месте три дня под^
ряд, крыса обучается, и на четвертый день отравляется
и умирает. Крыса же, лишенная памяти, будет на чет-
вертый день так же подозрительна, как и в первый, и
выживет. Таким образом, в данных условиях память
явно невыгодна. Длительное существование в подобной
среде приведет при прочих равных условиях к эволю-
ции в направлении уменьшения емкости памяти.
В качестве второго примера рассмотрим саму по себе
организацию в смысле связности. Разве не хорошо, что
между частями мозга существуют такие богатые функ-
циональные связи? Я утверждаю, что нет, не вообще;
это хорошо только тогда, когда сама среда богата свя-
зями. Когда части окружающей среды не очень связаны
(другими словами, когда они независимы), приспособле-
ние будет идти быстрее, если части мозга также будут
независимы [8]. Таким образом, степень организации.мо-
жет быть как слишком высокой, так и слишком низкой;
степень, которой обладаем мы, люди, вероятно, устано-
вилась где-то вблизи оптимума для обычных земных
условий. Но отсюда никоим образом не следует, что
эта степень будет оптимальной или хорошей для меха-
нического мозга, работающего в условиях, сильно от-
личающихся от земных, — например, существующего
только внутри большой цифровой машины.
Можно упомянуть также об «организации», на кото-
рую всегда с гордостью указывает биолог, — об эволю-
ционном развитии специализированных органов, таких,
как мозг, кишечник, сердце и кровеносные сосуды. Разве
они не хороши? Хороши или нет, но несомненно, что мы
имеем дело с высокой специализацией, ставшей возмож-
ной только из-за существования атмосферы на Земле;
без нее нас непрерывно бомбардировали бы крошечные
9. Принципы самоорганизации 32?
метеориты, любой из которых, пробив грудь, мог бы по-
рвать большой кровеносный сосуд и убить нас. В таких
условиях формой, наиболее приспособленной к выжи-
ванию, явилась бы протоплазма, которая может течь
даже через сито, не теряя своих функций. Таким об-
разом, развитие наших органов отнюдь не безусловно
хорошее, а специализировано применительно к миру,
свободному от летающих частиц.
Приведя эти взятые из жизни примеры, мы можем
вернуться к теории. Именно здесь формулировка Зом-
мергофа помогает нам понять суть дела. Зоммергоф по-
казывает, что всегда прежде всего должны быть даны
и конкретизированы, во-первых, множество возмущений
(значения его «кинетической переменной») и, во-вторых,
цель (его «фокальное условие»); возмущения угрожают
вывести систему за пределы фокального условия. Тогда
смысл «хорошей» организации состоит в некотором от-
ношении между множеством возмущений и целью.
Стоит изменить множество возмущений, как оставшаяся
неизменной организация из «хорошей» станет «плохой».
Как я уже сказал, у организации не существует свой-
ства быть «хорошей» в некотором абсолютном смысле;
все зависит от данной среды, или от данного множества
опасностей и возмущений, или от данного множества
задач.
6. САМООРГАНИЗУЮЩИЕСЯ СИСТЕМЫ
Я надеюсь, что не утомил вас слишком долгими раз-
говорами об относительности понятия «хороший», но все
это крайне существенно и слишком часто забывается,
когда имеют дело с биологическими организациями или
их моделями. Помня об этом, давайте рассмотрим так
называемые «самоорганизующиеся» системы. Здесь надо
быть очень осторожными, чтобы не запутаться, ибо это
прилагательное, применяемое слишком свободно, яв-
ляется неопределенным, а если его применяют слишком
точно — противоречивым.
Сказать, что система является «самоорганизующей-
ся», значит придавать этому слову два совершенно
различных значения. Первое из них — простое и неос-
поримое. Оно относится к системе, все части которой
328
У. Р. Эшби
в начале работы отделены друг от друга (так что пове-
дение каждой из них не зависит от состояний других ча-
стей), а затем эти части работают таким образом, что
между ними устанавливаются некоторые связи. Такая
система является «самоорганизующейся» в том смысле,
что она изменяется от системы с «разделенными частями»
до системы со «связанными частями». Примером может
служить нервная система эмбриона, клетки которой вна-
чале почти не воздействуют друг на друга, а затем, с
ростом дендритов и образованием синапсов, соединяют-
ся в систему, в которой поведение каждой части в силь-
ной степени зависит от других частей. В качестве вто-
рого примера рассмотрим систему электролитических
центров Паска, в которой рост нитей на одном электроде
сначала мало зависит от роста нитей на других элек-
тродах, а затем по мере того, как нити приближаются
к противоположным электродам, процессы роста начи-
нают все более и более влиять друг на друга. В общем
случае такие системы могут быть названы «самосвяз///о-
щимися», потому что переход от системы с независи-
мыми частями к системе с зависящими друг от друга
частями осуществляется за счет «связи», даже если это
чисто функциональная связь, существующая, напри-
мер, между радиопередатчиком и радиоприемником.
Таким образом, в данном случае мы получаем дей-
ствительно в прямом смысле самоорганизующиеся си-
стемы, но я должен подчеркнуть, что пока не может
быть сделано никакого допущения относительно того,
будет ли полученная организация «хорошей». Если мы
хотим, чтобы организация была «хорошей», нам следует
прежде всего выработать критерий для различения «хо-
роших» и «плохих» организаций, а затем уже мы дол-
жны будем убедиться, что сделали правильный выбор.
Теперь мы подходим ко второму значению «самоор-
ганизации» [2]. «Организация» (как процесс) может
означать, как и в первом случае, «переход от неоргани-
зованной системы к организованной». Но это слово так-
же может означать «переход от плохой организации к
хорошей», и именно этот случай мне хотелось бы обсу-
дить здесь подробнее. Jto особенно интересует нас по-
тому, что такая система сама переходит от «плохого»
9. Принципы самоорганизации
329
поведения к «хорошему». Широко известным примером
является ребенок, организация мозга которого вначале
такова, что он тянется к огню; затем в результате про-
исшедших изменений появляется новая организация,
благодаря которой ребенок уже избегает огня. Другим
примером мог бы служить случай, когда автопилот и
самолет ошибочно соединены таким образом, что поло-
жительная обратная связь приводит вместо исправления
ошибки к ее усугублению. Организация такой системы
плохая. Система являлась бы «самоорганизующейся»,
если бы положительная обратная связь автоматически
изменялась бы на отрицательную; вся система перешла
бы от плохой организации к хорошей. Ясно, что этот
тип «самоорганизации» представляет для нас особый
интерес. Что это означает?
Перед тем как ответить на этот вопрос, следует ука-
зать, если мы не хотим постоянно находиться в замеша-
тельстве, что никакая машина не может быть самоорга-
низующейся в этом смысле. Причины этого очень про-
сты. Определим множество состояний S так, чтобы было
ясно, о какой машине идет речь. Тогда «организация»,
как я уже говорил, должна быть отождествлена с f —
отображением $ в S, которое накладывается на систему
ее основной движущей силой (какой бы она ни была).
Логическая связь здесь заключается в том, что f опре-
деляет изменения в S : f определено как множество пар
(Sj, Sj), таких, что внутренняя движущая сила системы
будет переводить состояние St в sj. Но если f является
функцией состояния, вся идея теряет смысл.
Так как этот довод существен в теории самооргани-
зующихся систем, мне хочется привести еще один при-
мер. Ньютоновский закон тяготения гласит, что
F = MiM2ld2, т. е., в частности, что сила тяготения ме-
няется обратно пропорционально квадрату расстояния.
Если бы она менялась обратно пропорционально кубу
расстояния, это был бы другой закон. Но предположим,
что не сила F, а закон меняется с расстоянием, так что
степень равнялась бы не двум, а некоторой функции от
расстояния, qp(rf). Это допущение алогично, потому что|
теперь F = M\M2jd^ и это представляет собой не закон,
меняющийся с расстоянием, д один закон для всех
330
У. Р. Эшби
расстояний; иначе говоря, в этом случае нам следовало бы
переопределить закон. Аналогично, €сли бы в машине f
являлось некоторой функцией состояния S, нужно было
бы переопределить нашу машину. Выразим все эти по-
ложения в более явной форме на примере. Пусть S
имеет три состояния: а, Ь, с. Если бы f зависело от 5,
мы имели бы три функции: fa, /с. Если теперь имеет-
ся таблица переходов
а b с
fa ь а Ь
fb с а а
fc b b а
то переход а должен осуществляться преобразованием
fa, так что а переходит в Ь; поэтому все множество пре-
образований f сведется к единственному преобразова-
нию
а b с
i А
Y Ь а а
Очевидно, не имеет смысла говорить, что f является
функцией S, ибо это приводило бы нас к операциям
вроде fa(b), которые на самом деле невозможны.
Но если ни одну машину нельзя считать самоорга-
низующейся, то что можно сказать, например, о гомео-
стате, который перестраивает свои собственные обмот-
ки? Или о вычислительной машине, которая пишет свою
собственную программу?
Новая наука —логика машин — позволяет нам стро-
го рассмотреть эту проблему. Пусть дано множество S
состояний, и пусть f меняется, превращаясь, скажем,
в g. Мы на самом деле имеем в таком случае перемен-
ную, скажем, а(/)—функцию времени, принимающую
сначала значение Д а позднее значение g. Это измене-
ние, как мы только что видели, не может быть припи-
сано какой-либо причине в множестве S; поэтому такой
причиной может быть только некоторый внешний агент,
воздействующий на систему S как ее вход. Если систему
9. Принципы самоорганизации
331
должна быть в каком-то смысле «самоорганизующейся»,
понятие «само» должно быть расширено так, чтобы
включать переменную а, причем для того, чтобы целое
было ограниченно, необходимо, чтобы причина измене-
ний а находилась в 5 (или а). Таким образом, «само-
организующейся» может быть названа только та маши-
на S, которая соединена с другой машиной (из одной
части)
5
а
Тогда часть S может быть названа «самоорганизующей-
ся» внутри целого S + a.
Только в этом частном и строго определенном смыс-
ле мы можем признать, что система является «само-
организующейся», не будучи одновременно «самопро-
тиворечивой».
Так как ни об одной системе нельзя строго утвер-
ждать, что она является самоорганизующейся, и так как
выражение «самоорганизующаяся» ведет к укоренению
весьма путаного и противоречивого представления о дан-
ной проблеме, это выражение, вероятно, вообще не сле-
довало бы употреблять.
7. СПОНТАННОЕ ВОЗНИКНОВЕНИЕ ОРГАНИЗАЦИИ
Когда я говорю, что ни об одной системе нельзя в
точном смысле слова сказать, что она является само-
организующейся, читатель может остаться неудовлетво-
ренным. Он может спросить: а как быть с изменениями,
которые произошли миллиард лет назад и привели к
тому, что бесчисленные атомы углерода, рассеянные в
небольших молекулах двуокиси углерода, метана, кар-
бонатов и т. д., сталкивались до тех пор, пока не обра-
зовали белков, а затем не сформировали те крупные
активные глыбы плоти, которые мы называем сегодня
«животными»? Разве этот процесс, происходивший к
тому же на изолированной планете, не был процессом
«самоорганизации»? И если он имел место на поверх-
ности Земли, то почему этот процесс не может происхо-
дить в вычислительной машине? Сейчас я, конечно,
332
У. Р. Эшби
обсуждаю вопрос о происхождении жизни на Земле. Мо-
жет ли современная теория систем сказать что-нибудь
по этому вопросу?
Она может многое сказать, и в том числе нечто та-
кое, что решительно противоречит всем высказываниям
по этому вопросу с момента возникновения теории эво-
люции. В прошлом при рассмотрении этой проблемы
обычно предполагалось, что возникновение жизни — ред-
кое и странное явление, а затем делались попытки по-
казать, каким образом это редкое и странное явление
все же могло произойти. Ученые пытались доказать, что
имеется какой-то путь перехода от двуокиси углерода
к аминокислоте, от него — к белку, а затем путем есте-
ственного отбора и эволюции — к разумным существам.
Я утверждаю, что такие поиски специфических условий
совершенно ошибочны. Справедливо как раз обратное —
каждая динамическая система дает начало своей соб-
ственной форме разумной жизни и является в этом
смысле самоорганизующейся (сейчас я докажу это по-
ложение). Мы долго не понимали этого факта по той
причине, что до недавнего времени не имели опыта об-
ращения с системами средней сложности; они либо были
похожи на часы или маятник и тогда их свойства каза-
лись нам немногочисленными и тривиальными, либо же
они являлись нам в виде собаки или человека, и тогда
их свойства представлялись нам настолько богатыми и
удивительными, что мы склонны были считать их сверх-
естественными. Только за последние годы универсаль-
ная цифровая машина предоставила в наше распоряже-
ние систему, достаточно богатую связями, чтобы пред-
ставить для нас интерес, и вместе с тем достаточно
простую, чтобы мы могли ее понять. С цифровой маши-
ной в качестве наставника мы можем теперь начинать
задумываться над системами, достаточно простыми, что-
бы их можно было понять в деталях, и притом доста-
точно богатыми свойствами, чтобы давать пищу для
размышлений. С их помощью мы сможем убедиться в
справедливости утверждения о том, что каждая изоли-
рованная детерминированная динамическая система,
подчиняющаяся неизменяющимся законам, создает ^ор-
ганизмы», приспособленные к их «окружающей среде».
9. Принципы самоорганизации 333
Доказательство этого положения в принципе очень
просто. Начнем с того, что системы в общем стремятся
к равновесию. Но большинство состояний системы яв-
ляются неравновесными (если исключить крайний слу-
чай системы в безразличном равновесии). Поэтому, пе-
реходя из любого состояния к состоянию равновесия,
система переходит от большего числа состояний к мень-
шему. Таким путем система совершает выбор — в том
чисто объективном смысле, что некоторые состояния ею
отвергаются (те, которые она покидает), а некоторые
сохраняются (те, в которые она переходит). Таким
образом, в той степени, в какой каждая детерминиро-
ванная система стремится к равновесию, она совершает
и выбор. Нам до тошноты часто приходилось слышать
утверждение, что машина не способна к выбору, но
справедливо как раз обратное: каждая машина, стре-
мящаяся к равновесию, совершает соответствующий
акт выбора.
Равновесие в простой системе обычно тривиально и
неинтересно; это вертикально висящий маятник, часы
с раскрутившейся пружиной, куб, покоящийся на одной
из своих граней. Теперь мы, однако, уже знаем, что в
более сложной динамичной системе состояние равнове-
сия и устойчивость около него могут быть значительно
более интересными. Тут и автопилот, успешно преодоле-
вающий воздушные вихри, и человеческий организм, пе-
рераспределяющий поток крови после тяжелого крово-
излияния, и фирма, пополняющая свои запасы после
внезапного роста потребления, и экономическая система,
восстанавливающая распределение продуктов после вне-
запной гибели урожая, и, наконец, человек, который
умудряется есть, по крайней мере один раз в день, в те-
чение всей своей жизни, полной тяжкого труда и без-
работицы.
Изменение нашей оценки состояния равновесия — от
тривиального до интересного — зависит просто от мас-
штаба событий. Переход к равновесию тривиален в про-
стом маятнике, потому что состояние равновесия пред-
ставлено одной точкой в фазовом пространстве. Но
когда система более сложна, когда, например, эконо-
мика целой страны переходит от методов военного
334
X Р. Эшби
времени к мирной жизни, тогда область устойчивости
обширна и в ее пределах может разыгрываться много
интересных событий. В этом смысле вычислительная ма-
шина как бы действительно послана нам небом, ибо она
дает возможность перебросить мост через пропасть, от-
деляющую понятия простого и тривиального от понятий
сложного и интересного. Она позволяет нам существен-
но продвинуться вперед в понимании так называемого
спонтанного возникновения жизни, наблюдая, как в вы-
числительной машине возникают несколько более про-
стые варианты тех же явлений.
8. СОСТЯЗАНИЕ
Рассмотрим пример такого более простого варианта.
Состязание, конкуренция между видами часто считает-
ся существенно биологическим процессом, тогда как на
самом деле это лишь выражение значительно более об-
щего процесса. Пусть у нас имеется вычислительная
машина, память которой, скажем, заполнена случайным
образом цифрами от 0 до 9. Пусть она работает таким
образом, что цифры все время попарно перемножаются
и крайняя правая цифра произведения ставится на место
первого сомножителя. Запустим машину и дадим ей
«эволюционировать». Что произойдет? По законам этого
мира четное, умноженное на четное, дает четное; нечет-
ное, умноженное на нечетное, дает нечетное. Но четное,
умноженное на нечетное, дает четное, поэФому после
ряда смешанных встреч четные числа имеют больше
шансов «выжить», т. е. остаться в памяти машины. Та-
ким образом, по мере эволюционирования системы мы
увидим, как события, которым эволюция благоприятст-
вует, а именно четные числа, постепенно будут замещать
нечетные числа в памяти машины и в конце концов вы-
теснят их.
Но появление различных четных чисел в нашем мире
не равновероятно, и среди них наибольшей «выживаемо-
стью» обладают нули. Поэтому с течением времени нули
вытеснят все остальные четные числа и в конце концов
останутся единственными обитателями этой своеобраз-
ной «Земли».
9. Принципы самоорганизации
335
Эти явления служат примером одного чрезвычайно
общего положения. С одной точки зрения, мы просто
имеем хорошо определенный оператор (подчиняющийся
законам умножения и замещения), который гонит си-
стему к равновесию. Одновременно он автоматически
отбирает те операнды, которые обладают особой устой-
чивостью по отношению к производимым им изменениям
(ибо только нули не меняются при умножении). Этот
процесс перехода к особо устойчивым формам является
процессом чрезвычайной общности, требующим только,
чтобы оператор (или физические законы любой физиче-
ской системы) был детерминирован и неизменен. Таков
общий или абстрактный взгляд на вещи.
Биолог наблюдает частное проявление этого закона,
когда анализирует ход эволюции, выживание наиболее
приспособленных и неизбежное возникновение высших
биологических функций и разума. Поэтому, когда мы
спрашиваем, что явилось необходимым условием воз-
никновения жизни и разума, ответом будет не «угле-
род» или «аминокислоты» или какие-либо другие кон-
кретные вещи, а лишь то, что динамические законы про-
цесса должны были быть неизменными, т. е. что система
должна была быть изолированной. В любой изолиро-
ванной системе неизбежно развиваются жизнь и разум
(правда, в вырожденных случаях они могут развиться
лишь до нулевой степени).
Поэтому ответ на вопрос, каким образом можно ис-
кусственно создать разумную жизнь, будет таков. Возь-
мем динамическую систему с неизменяющимися и одно-
значными динамическими законами и настолько боль-
шую, что после того, как система придет к равновесию,
которое включает только небольшую часть всех состоя-
ний, эта малая часть будет все же достаточно велика
для того, чтобы дать простор значительным изменениям
и разнообразному поведению системы. Пусть переход к
такому равновесию занимает достаточно долгое время.
Исследуем равновесие детально. При этом мы обнару-
жим, что существующие состояния или формы замеча-
тельным образом способны выжить при изменениях,
вызываемых законами. Разобьем систему в состоянии
равновесия на две части и назовем одну часть «орга-
336
У. Р. Эшби
низмом», а другую — «окружающей средой»; тогда мы
обнаружим, что этот «организм» отличается способ-
ностью выжить, несмотря на возмущения в «окружаю-
щей среде». Степень адаптации организма к среде и
сложность, которую может развить этот организм, огра-
ничиваются только размером всей динамической системы
и временем, имеющимся в ее распоряжении для дости-
жения равновесия. Таким образом, как я уже говорил, ка-
ждая изолированная детерминированная динамическая
система разовьет организмы, приспособленные к внешней
среде. Это значит, что в принципе не существует пре-
пятствий для создания искусственных организмов сколь
угодно высокой степени сложности или разумности.
Таким образом, в этом смысле каждая машина может
считаться «самоорганизующейся», так как она разо-
вьет— в той степени, в какой это допускают ее размеры
и сложность, — некоторые функциональные структуры,
гомологичные «приспособленному организму». Но дает
ли это нам то, что нас интересует на данной конферен-
ции? Только отчасти, ибо все, что до сих пор было ска-
зано, не имеет отношения к вопросу о том, будет ли эта
организация хорошей или плохой. Критерий, согласно
которому можно было бы провести различение между
плохой и хорошей организацией, еще не был введен.
Верно, конечно, что развившийся организм, как устой-
чивая система, будет иметь свои существенные перемен-
ные и проявит свою устойчивость в виде энергичных
реакций, направленных на сохранение его существова-
ния. Для него самого его собственная организация все-
гда будет хорошей по определению. Для осы ее жаля-
щий рефлекс — вещь хорошая, и то же полагает пиявка
относительно своей способности к кровососанию. Но эти
критерии возникают после образования организации для
выживания; увидев, что выживает, можно указать на
«хорошие» черты этой формы. Получившаяся организа-
ция зависит просто от того, каковы законы системы и
каково было исходное состояние; но нет никаких ука-
заний на то, что развитая организация будет «хорошей»
в некотором абсолютном смысле или согласно критерию
некоторого внешнего по отношению к системе существа,
вроде нас, например,
9. Принципы самоорганизации
337
Итак, подводя итоги, можно сказать, что не сущест-
вует принципиальных препятствий к созданию искус-
ственных организмов любой желаемой сложности и
разумности. Но при этом следует отметить два фундамен-
тальных ограничения: во-первых, разумность этих орга-
низмов будет весьма специализирована и явится при-
способлением к определенной внешней среде и только
к этой среде и, во-вторых, разумность этих организмов
будет направлена на поддержание их существенных пе-
ременных в некоторых пределах. Организмы будут весь-
ма эгоистичны. Поэтому теперь следует спросить: можем
ли мы в свете указанных ограничений извлечь выгоду
из этих процессов?
9. НЕОБХОДИМОЕ РАЗНООБРАЗИЕ
Мне кажется, что в этом вопросе не было обращено
должного внимания на десятую теорему Шеннона [17]
или на более простой «закон необходимого разнообра-
зия», в котором я выразил ту же основную идею [3].
Теорема Шеннона гласит, что если канал коррекции об-
ладает пропускной способностью Н, то количество устра-
ненной неопределенности может быть равно Я, но не
может быть большим. Шеннон сформулировал свою тео-
рему в связи с передачей информации по телефонной
или подобной ей сети, но эта формулировка справедлива
и относительно канала биологической регуляции, осуще-
ствляющего некое корректирующее управление. Шеннон
думал о случае, когда по каналу должно быть передано
большое количество информации, но с малой ошибкой,
биолог же сталкивается со случаем, когда «сообщение»
несет мало информации, а возмущающие ошибки много-
численны и велики. Тогда теорема может быть приме-
нена к мозгу (или любому другому регулирующему или
осуществляющему выбор устройству) в той его части,
где утверждается, что количественная мера регуляции и
отбора, которой может достичь мозг, абсолютным об-
разом ограничена его пропускной способностью как ка-
нала передачи информации [4]. Иначе ту же мысль
можно выразить, сказав, что любое разнообразие
выбора К требует передачи или переработки количе-
Зак. 10§
338
У. Р. Эшби
ства информации, равного К [6]. Выбор не производится
даром.
Я думаю, что об этом принципе мы еще много услы-
шим в будущем, потому что он является основопола-
гающим во всех исследованиях сложных систем. Для них
этот закон является тем же, чем закон сохранения энер-
гии является для энергетики. Когда этот последний за-
кон впервые был сформулирован, а это было примерно
100 лет назад, он принес разочарование многим инжене-
рам, ибо положил конец всем надеждам на вечный дви-
гатель. Тем не менее он на самом деле привел к вели-
кому триумфу техники в XIX столетии, ибо поставил
энергетику на реальную почву.
Мне кажется, что когда будут осознаны все послед-
ствия десятой теоремы Шеннона, это сначала отрезвит
нас, а затем поможет нам, потому что тогда мы сможем
сосредоточить нашу деятельность на действительно ре-
альных и действительно разрешимых задачах.
10. БУДУЩЕЕ
Итак, я закончил обзор принципов, управляющих
самоорганизующимися системами. Я надеюсь, что мне
удалось доказать правомерность моего убеждения в том,
что эти принципы, базирующиеся на логике машин и
теории информации, теперь обладают.существенной пол-
нотой в том смысле, что уже не осталось места каким-
либо таинственным явлениям.
Однако, прежде чем закончить, мне хотелось бы
очень кратко указать направления будущих исследова-
ний, кажущиеся мне наиболее перспективными.
Одним из направлений, где, по моему убеждению,
можно быстро получить существенные результаты, яв-
ляется открытие новых видов динамических процессов.
Большинство из известных в настоящее время процес-
сов, происходящих в машинах, очень специализировано
и зависит от того, какие именно части системы исполь-
зуются и как они соединены. Но существуют системы,
более напоминающие информационные сети, события в
которых могут быть истолкованы только статистически.
Существуют и такие процессы, как распространение эпи-
J
9. Принципы сймодрганизйции
339
демий, флуктуации в количестве животных на некоторой
территории, распространение волн по нервной сети. Эти
процессы сами по себе не являются плохими или хоро-
шими, но они существуют со всеми своими необычными
свойствами, и у меня нет сомнений, что они должны вхо-
дить составной частью в работу мозга, если они в ка-
ком-то смысле выгодны. Здесь мне хотелось бы лишь
подчеркнуть, что эти процессы часто обнаруживают чрез-
вычайно удивительные и неожиданные свойства: на-
пример, эпидемии имеют тенденцию распространяться
волнами. Такие новые удивительные свойства могут ока-
заться именно тем, что хочет, но не может найти кон-
структор машин.
Изучение таких систем должно быть существенно
статистическим, но это не означает, что каждая система
должна быть индивидуально стохастической. Напротив,
недавно было показано [7], что никакая система не мо-
жет иметь эффективность, большую, чем детерминиро-
ванная система, работающая как регулятор; таким об-
разом, поскольку регуляция является одной из биоло-
гических функций, можно было бы ожидать, что мозг в
результате естественного отбора станет в максимально
возможной степени детерминированным. Отсюда сле-
дует, что мы можем сузить область наших интересов
до выборочного пространства, заключающего множе-
ство механизмов, каждый из которых индивидуально
детерминирован.
Особым случаем можно считать систему, заслужи-
вающую более глубокого изучения, а именно боль-
шую систему, построенную из частей, каждая из кото-
рых имеет много состояний равновесия. Такие системы
чрезвычайно распространены в нашем мире; они суще-
ствуют повсеместно вокруг нас. В противном случае воз-
никновение «разума» в том виде, как мы его знаем, было
бы почти невозможно [8]. Таков другой подход к систе-
мам, переменные которых ведут себя таким образом, что
в основном отражают функционирование частей. В дру-
гом месте я показал [5], что такие системы склонны при-
выкать и стремятся к прогрессивной адаптации [8].
Имеются основания полагать, что некоторые хорошо
известные, но еще неясные биологические явления, на-
22*
340
У. Р. Эшби
пример условные рефлексы, ассоциации и закон Джен-
нингса [13], могут оказаться более или менее сложными
и прямыми следствиями существования множественности
положений равновесия. Сейчас я занимаюсь исследова-
нием возможности того, что перенос в динамическую
систему «структуры», подобной структуре трехмерного
пространства (этот вид обучения специально рассма-
тривал Пьяже), может быть автоматическим процессом,
когда входное воздействие приложено к системе со мно-
гими состояниями равновесия. Но в любом случае можно
не сомневаться в том, что изучение таких систем, по-
видимому, откроет ряд новых динамических процессов,
дав нам новые возможности, которыми мы сегодня не
располагаем.
Особым типом системы со многими состояниями
равновесия является система, части которой имеют вы-
сокий «порог», т. е. стремятся остаться в некотором
«основном» состоянии, если только некоторая функция
входа не превосходит некоторого значения. Общие свой-
ства таких систем в основном неизвестны, хотя Бёрл
своими очень интересными работами [10] положил на-
чало изучению таких систем. Эти системы заслуживают
самого внимательного изучения, ибо они обладают тен-
денцией развивать лавиноподобные волны активности, и
их динамические свойства, по-видимому, окажутся весь-
ма необычными и даже драматичными. Тот факт, что
мозг млекопитающих повсюду использует это свойство,
говорит о том, что оно должно иметь некоторые особые
и полезные черты, которые нелегко получить каким-
либо другим путем.
Упоминание о системе со многими состояниями равно-
весия приводит меня ко второму направлению исследо-
ваний, которое кажется мне в высшей степени много-
обещающим — я имею в виду открытие механизма
памяти живого организма: отождествление его физиче-
ской природы.
В настоящее время наши знания о живом мозге в
значительной степени разрозненны. С точки зрения того,
что там происходит от одной миллисекунды до другой,
мы знаем очень много, причем множество лабораторий
работают только для того, чтобы добавить к этим сведе-
9. Принципы сймборганизации
341
ниям еще больше деталей. Но когда мы спрашиваем,
что происходит в мозгу на протяжении часов или лет,
то здесь практически ничего неизвестно. Между тем,
в человеческом поведении важны именно эти «долго-
срочные» изменения.
Поэтому мне кажется, что уж если существует вещь,
которую действительно необходимо исследовать, так это
физическая основа памяти мозга. Было время, когда
«память» была очень неопределенным и метафизиче-
ским понятием, но эти дни канули в прошлое. «Память»
как ограничение, наложенное на события прошлого и
настоящего, и как отношение между ними теперь твердо
вошла в логику механизмов. Мы точно знаем, что мы
подразумеваем под этим понятием с бихевиористской
и операционной точек зрения. Теперь мы нуждаемся в
подходящих средствах для ее изучения. Не настало ли
время, чтобы мир объединил свои усилия для решения
этих проблем?
11. ЗАКЛЮЧЕНИЕ
В настоящее время принципы, лежащие в основе
самоорганизующихся систем, известны достаточно полно
в том смысле, что над большей частью вопросов при-
поднята завеса «таинственности».
Мы стоим на прочной основе. Мы уже точно знаем,
что мы понимаем под «машиной», «организацией», «ин-
теграцией» и «самоорганизацией». Мы понимаем эти
термины столь же полно и строго, как математик пони-
мает слова «непрерывность» и «сходимость».
На этой основе мы теперь можем видеть, что ис-
кусственное создание динамических систем, наделенных
«жизнью» и «разумом», не только просто, но и неизбеж-
но, если только соблюдаются некоторые основные тре-
бования. Таковыми являются не углерод, вода или лю-
бые другие вещества, а постоянство в течение долгого
времени любого действия оператора, являющегося неиз-
меняемым и однозначным. Каждый такой оператор
вызывает развитие своей собственной формы жизни и
разума.
Но будут ли эти формы полезны для нас? Здесь по-
ложение определяется основным законом необходимого
342
У. Р. Эшби
разнообразия (и десятой теоремой Шеннона), который
гласит, что нужный выбор (не являющийся случайным)
абсолютным образом зависит от передачи по крайней
мере равного количества информации. Все последующие
изыскания должны считаться с этим законом, если не
хотят оказаться бесполезными еще до того, как они бу-
дут начаты.
Наконец, я всячески рекомендую в качестве про-
граммы исследований установление физической основы
памяти в мозге. Наши знания о законах работы мозга
сегодня весьма неполны. Правда, очень многое известно
о том, как мозг переходит от состояния к состоянию
в течение миллисекундных интервалов, но когда мы
сталкиваемся с проблемой долгосрочных изменений, мы
убеждаемся, что не знаем об этом практически ничего.
Я думаю, что настало время сделать решительную по-
пытку и атаковать эту проблему. Не пришло ли время,
чтобы объединить усилия в этом направлении?
ЛИТЕРАТУРА
1. Ashby W. R., «The physical origin of adaptation by trial and
error», J. Gen. Psychol., 32, 13—25 (1945).
2. A s h b у W. R., «Principles of the self-organizing dynamic sys-
tem», J. Gen. Psychol., 37, 125—128 (1947).
3. A s h b у W. R., An Introduction to Cybernetics, Wiley, New York,
1958; русский перевод: Эшби У. Р., Введение в кибернетику,
ИЛ, 1959.
4. A s h b у W. R., «Requisite variety and its implications for the
control of complex systems», Cybernetica, 1, 83—99 (1958).
5. A s h b у W. R., «The mechanism of habituation», cm. The Mechani-
zation of thought processes N. P. L. Sympos. № 10, H. M. S. O.,
London, 1960.
6. Ashby W. R., «Computers and decision-making», New Scientist,
7, 746 (1960).
7. Ashby W. R., «The brain as regulator», Nature, 186, 413 (1960).
8. Ashby W. R., Design for a Brain; the Origin of Adaptive Beha-
vior, Wiley, New York, 1960; русский перевод: Эшби У. Р., Кон-
струкция мозга, ИЛ, 1962.
9. von Bertalanffy L., «Ап outline of general system theory»,
Brit. J. Phil. Sci., 1, 134—165 (1950).
10. В e u r 1 e R. L., «Properties of a mass of cells capable of re-
generating pulses», Proc. Roy. Soc., B240, 55—94 (1956).
9. Принципы самоорганизации
343
11. Garner W. R., McGill W. J., «The relation between informa-
tion and variance analyses», Psychometrika, 21, 219—228 (1956).
12. Jeffrey R. C., «Some recent simplifications of the theory of
finite automata», Tech. Rep. 219, Res. Lab. Electron., M. I. T.,
27 May 1959.
13. Jennings H. S., Behavior of the Lower Organisms, New York,
1906.
14. L о t к a A. J., Elements of Physical Biology, Williams a. Wilkins.
Baltimore, 1925.
15. March J. G., Simon J. A., Organizations, Wiley, New York,
1958.
16. P r i b r a m К. H., доклад, Fifteenth International Congress of
Psychology, Brussels, 1957.
17. S h a n n о n С. E., Weaver W., The Mathematical Theory of
Communication, Univ. Illinois Press, Urbana, Ill., 1948; см. Шен-
нон К., Работы по теории информации и кибернетике, ИЛ,
1963.
18. Sommerhoff G., Analytical Biology, Oxford Univ. Press, Lon-
don, 1950,
10. УПОРЯДОЧЕННОСТЬ ФУНКЦИОНИРОВАНИЯ
В НЕУПОРЯДОЧЕННЫХ СТРУКТУРАХ
Р. СПЕРРИ
(Калифорнийский технологический институт)
Я постараюсь высказаться как можно короче, потому
что я подозреваю, что тема моего сообщения лишь кос-
венно относится к теме симпозиума. У меня вначале
сложилось представление, что большинство участвую-
щих — инженеры, которых интересуют разные хитроум-
ные цепи для сервомеханизмов и тому подобные вещи
или которых волнует актуальная проблема создания
компактных управляющих устройств, продолжающих
управлять и после облучения или после того, как в них
попало несколько пуль или даже угодил метеорит.
Имея это в виду, я собираюсь начать с напоминания
об изумительной способности механизма мозга про-
должать функционировать эффективно и относительно
упорядоченно даже при весьма серьезных повреждени-
ях в его структуре.
Большинству из вас известно, что когда в мозгу
имеется рана или даже когда удалена целая доля полу-
шария, например височная или передняя доля, механизм
мозга может продолжать работать настолько хорошо,
что трудно даже заподозрить наличие какого-либо функ-
ционального изменения. Действительно, часто для того,
чтобы обнаружить даже большие односторонние повре-
ждения, требуются чрезвычайно чувствительные тесты,
тогда как для некоторых областей мозга даже не
разработаны тесты, которые позволили бы обнаружить
дефект.
С точки зрения сохранения функций после больших
повреждений интересны также факты, говорящие о том,
что соседние с раной кортикальные сети обычно продол-
10. Упорядоченность функционирования структур
345
жают эффективно работать вплоть до самого края по-
врежденной ткани. Например, в поле зрения можно про-
следить очертания слепого пятна, образовавшегося в
результате кортикального повреждения, заставив боль-
ного следить глазом за движущимся объектом, который
приближается с разных сторон к слепому пятну и исче-
зает в нем.
Замечательное сохранение функций наблюдается так-
же после диффузного повреждения, подобного тому,
которое возникает с наступлением старости или после
болезни, и заключающегося в том, что огромное число
клеток, разбросанных по всей системе, выходит из строя.
До тех пор пока хоть некоторый довольно умеренный
процент остающихся нейронных элементов выживает и
нормально работает, восстанавливаются и организован-
ные функции. В некоторых работах, проведенных в на-
шей лаборатории, мы буквально изрешетили зрительную
и соседнюю с ней области коры мозга кошки с помощью
иголок и булавок из танталовой проволоки. Мы вты-
кали в ткань коры дюжины иголок, пока она не стала
похожа на густо истыканную подушечку для булавок
и пока наше терпение не истощилось. Так как эти игол-
ки были биологически инертны, мы их просто оста-
вили в мозгу. И несмотря на это, в последующих тестах
на околопороговое различение образов характеристики
зрения были практически такими же хорошими, как и
раньше.
Может быть, нигде способность коры функциониро-
вать вблизи краев повреждений так не поражает, как в
экспериментах со множественными пересекающимися
разрезами. Оказалось, что многочисленные разрезы но-
жом, сделанные крест-накрест на расстоянии всего в
несколько миллиметров и простирающиеся в вертикаль-
ном направлении через всю толщу коры, оказали очень
небольшое влияние на функции в отмеченной области.
Такая рассеченная зрительная область мозга кошки по-
казана на фиг. 1,а. В первые четыре дня после опера-
ции животное казалось совершенно слепым, но по мере
того, как начал проходить послеоперационный отек,
зрение восстановилось и продолжало улучшаться в те-
чение последующих полутора месяцев, пока уровень
346
Р. Сперри
функционирования животного, как это показали тесты
по различению образов, не оказался в пределах нормы.
Эта кошка могла отличать треугольник, расположенный
в центре на фиг. 1,6, от любого из остальных окружаю-
щих его треугольников, когда их показывали попарно,
причем положение, запах и другие способствующие
распознаванию незрительные «указатели» тщательно
контролировались.
Фиг. 1.
Насколько резко с этим сохранением в живом мозге
организованных функций контрастирует положение, на-
блюдаемое в построенных человеком цепях, когда одна-
единственная перегоревшая лампа или одна сломанная
проволочка производят разрушительный эффект! Имея
в виду будущие принципы конструирования, включаю-
щие саморемонтирующие, компенсирующие, корректи-
рующие и другие устройства, характерные для самоор-
ганизации, можно, кстати, указать на некоторые кон-
структивные принципы, на основе которых построен
живой мозг и которые дают ему возможность продол-
жать работу при огромных структурных повреждениях.
Хотя мы, конечно, еще далеки от полного объяснения
этих явлений, кое-что все же можно сказать. Прежде
всего вероятно, что такая живучесть организации не
основана на каком-нибудь одном принципе конструкции.
Имеется по крайней мере несколько принципов, о кото-
рых уже известно, что они «работают», и, по-видимому,
многие еще не открыты. Я бегло отмечу несколько пунк-
10. Упорядоченность функционирования структур
347
тов, которые в этой связи сразу приходят на ум, не обра-
щая особого внимания ни на порядок, ни на их относи-
тельную важность, будучи уверен, что те из вас, кото-
рые ближе соприкасаются с этими проблемами, смогут
продолжить список. Имеется, например, простой фактор
множественного соединения. Каждое нервное волокно
центральной нервной системы обычно оканчивается не
на одном или двух окончаниях, а на десяти или, что бо-
лее типично, на сотнях или даже тысячах элементов.
Точно так же на другом конце каждое волокно обра-
зуется из десятков или сотен окончаний.
Вторым фактором является существование широкого
перекрытия связей соседних элементов. Для любых двух
волокон, расположенных рядом в данном нервном кабеле
или тракте, перекрытие между множеством их оконча-
ний на обеих сторонах может достигать, грубо говоря,
порядка 60 и более процентов. При таком интенсивном
перекрытии само собой очевидно, что при повреждении
или выходе из строя значительного числа элементов
потеря остается незамеченной. В некоторых частях цен-
тральной нервной системы или во всей нервной системе
у некоторых видов нейронные элементы обладают реге-
неративной способностью, результат которой выражается
в быстрой «починке» повреждения в центральной цепи.
Образованные таким путем новые соединения столь же
упорядоченно и точно подсоединены, как и старые, так
как регенерация происходит в результате действия ста-
рых сил роста. Процесс протекает так, как если бы
каждый нейронный элемент имел некий встроенный план
«навигации» или свой собственный «инстинкт наведе-
ния», который дает ему возможность восстановить соот-
ветствующие окончания.
Это хорошо видно при изучении регенерации зри-
тельного нерва, о чем уже ранее упомянул на этом сим-
позиуме д-р Маккаллок. После полной перерезки нерва
и образования рубца, в котором перепутались все нервы,
каждый данный нерв при приближении к той точке вну-
три мозга, где зрительный нерв расходится на медиаль-
ную и латеральную ветви, выбирает нужную ветвь в
соответствии с расположением начала нерва, находяще-
гося либо в дорзальном, либо в вентральном квадранте
348
Р. Сперри
сетчатки. Медиальные и латеральные пучки охватывают
соответственно медиальные и латеральные края зритель-
ной доли мозга, причем по всему пути следования от
переднего к заднему полюсам доли от них отходят нер-
вы. Данный регенерирующий нерв, выбрав правильную
ветвь вдоль периферии доли, правильно выбирает и
нужный пункт, в котором входит в долю. Нервы, выхо-
дящие из центральной сетчатки, входят около центра
доли, нервы из назальной сетчатки входят сзади, в то
время как нервы из височных долей сетчатки входят
спереди.
Как только нерв входит в зрительную долю, или тек-
тум, нервы идут от периферии к центру в поверхностных
слоях. И снова перед ними огромное множество возмож-
ностей: они должны выбрать некоторую точку, в кото-
рой им следует покинуть параллельные слои и про-
никнуть глубоко внутрь расположенного ниже слоя,
богатого переплетениями. Волокна из периферальной сет-
чатки быстро «закапываются» сразу же около перифе-
рии зрительной доли. Те нервы, что идут из центральной
сетчатки, остаются в параллельном слое, пересекают
периферические части доли и проникают внутрь только
по достижении центра доли. В слое переплетений ка-
ждый нерв ветвится и образует множественные кон-
такты с дендритами и телами зрительных нейронов.
И опять, по-видимому, необходимо ввести выбор од-
ного из многочисленных вариантов в процессе образо-
вания синапсов. Это предположение основывается глав-
ным образом на том факте, что после регенерации нерва
при последующем обучении различению красного, си-
него, желтого, зеленого и серого цветов в большом разно-
образии сочетаний отмечалось полное восстановление
функции различения [1]. (Интересно отметить, что вновь
восстановленная конфигурация центральных синапсов
достаточна для реактивации памяти относительно на-
выков зрительного распознавания, приобретенных в про-
цессе обучения со старыми синаптическими соединения-
ми, существовавшими до перерезки нерва. Кроме того,
восстанавливающаяся способность к различению цветов
не теряется даже при одновременном удалении перед-
него мозга и мозжечка.)
10. Упорядоченность функционирования структур
349
Все предшествующее описание основано на изучении
нервной системы рыб. Конечно, у млекопитающих
центральная нервная система почти не способна к ре-
генерации. Однако известно, что даже в коре мозга
млекопитающих детальная схема синаптических связей
непрерывно изменяется и что в норме эта схема не пе-
реходит в состояние случайного хаоса лишь благодаря
постоянному действию специфических биохимических
сил внутри индивидуальных элементов, подобных силам,
ответственным за упорядоченную регенерацию централь-
ной нервной системы у низших позвоночных.
Четвертым фактором, способствующим сохранению
активности организации, является множественное под-
крепление любой данной функции из многочисленных и
разнообразных источников, каждый из которых способен
самостоятельно поддерживать свою активность. Простым
примером этого являются локомоторные движения (бег,
галоп или трусца) лошади и собаки. Оказывается, что
обратная связь каждой из движущихся четырех конеч-
ностей достаточна для того, чтобы сохранить движение
всей системы. Действительно, эксперименты по управ-
лению передвижением амфибий показывают, что можно
удалить сенсорные нервы всей спинальной системы, за
исключением одного или двух дорзальных корней, и этого
будет достаточно для того, чтобы локомоторное движе-
ние сохранилось [5]. Более того, не имеет значения, ка-
кие два нерва оставлены — любые два дают одинако-
вый эффект. Таким образом, при нормальных условиях
существует множественное подкрепление одной и той
же схемы из многих разнообразных источников.
По-видимому, данная церебральная схема может так-
же активироваться и поддерживаться в этом состоя-
нии благодаря многочисленным «умственным ассоциа-
циям». Возможно, чю при этом играет важную роль
избыточность, но, конечно, этот вид множественного под-
крепления включает нечто гораздо большее, чем просто
избыточность.
Часть проблемы поддержания организованной актив-
ности заключается в контроле и предотвращении разру-
шающих схему возмущений со стороны других, посто-
ронних функций. С этой точки зрения важную роль
350
Р. Сперри
должны играть такие факторы функционального упра-
вления и контроля, как «реципрокное торможение» и
«тормозящее окружение».
Другим обстоятельством, правда несколько менее от-
носящимся к самой сущности самоорганизации, является
тот факт, что управление и регуляция непрерывной ак-
тивности в нервной системе в общем случае не зависят
от какого-либо централизованного расписания или точ-
ного времени каждого происходящего акта, за исключе-
нием, быть может, случая очень простых циклов или
чрезвычайно быстрых последовательностей, например
быстрой смены пальцев при игре на рояле. Гораздо
более общий метод церебрального управления возможен,
если представить себе, что каждый акт вызывается и
поддерживается только соответствующими условиями,
которые обычно являются результатом предшествующего
акта в последовательности. Таким образом, последова-
тельность сама себя поддерживает. К тому же при
подобном типе управления наличие многих видов возму-
щений и изменения таких величин, как скорость, время
акта и т. п., не разрушает общую схему. Цепи, по кото-
рым происходит управление, могут быть уподоблены
обширной системе, состоящей из подсистем с отрица-
тельной обратной связью, которые многократно перепле-
таются друг с другом и образуют, таким образом, в со-
ответствии с некоторым иерархическим планом огром-
ную сеть взаимосвязанных участков возбуждения и
торможения, пронизанную гомеостатическими «петлями».
Менее важный фактор безопасности заключается в
организации кортикальных цепей по вертикали, а не по
горизонтали. Этим отчасти и объясняется удивительная
способность небольших участков рассеченных областей
и участков по соседству с крупными очагами поражения
продолжать упорядоченную деятельность.
Другим простым и очевидным фактором безопасности
является дублирование. Центры мозга, подобно почкам,
легким, половым железам, функционируют парами. По-
вреждение или полная потеря одного из двух парных
органов часто не критично, потому что функция* которую
несут эти органы, может выполняться другим органом,
находящимся с противоположной стороны. По-видимо-
10. Упорядоченность функционирования Структур
351
му, это справедливо для передних и височных долей
мозга большинства млекопитающих и для многих гипо-
таламических и других гомеостатических центров упра-
вления.
В результате исследований последствий удаления по-
лушария мозга и отделения одного полушария от дру-
гого установлено, что вполне можно представить себе
мозг млекопитающих как орган, состоящий из двух су-
щественно раздельных мозгов, т. е. из двух законченных
систем управления, каждая из которых способна нести
свои функции независимо от другой. Точно так же веро-
ятность того, что посланный в космос спутник выйдет
из строя, можно уменьшить вдвое, снабдив его незави-
симыми и изолированными системами управления, ори-
ентированными должным образом.
Отсюда возникает еще одна проблема цепей управле-
ния. Если имеется два полных набора систем управле-
ния, то можно ли добиться каких-то преимуществ за
счет перекрестных соединений между ними? Ответом,
по-видимому, должно быть «да», если пример мозга
млекопитающих вообще хоть что-нибудь значит. В мозге
млекопитающих самым большим одиночным нервным
волокном является мозолистое тело — система нервов,
благодаря которой перекрестно соединяется неокортекс
двух полушарий.
Это подводит нас к «загадке мозолистого тела», не-
которые аспекты которой имеют прямое отношение к
проблеме самоорганизации. Во-первых, следует указать,
что эта загадка не носит уже того оттенка таинственно-
сти, какой она имела немногим более 10 лет назад, когда
д-р Маккаллок до некоторой степени шутливо, но не без
достаточных оснований констатировал, что единственной
известной функцией этой структуры является ее вспомо-
гательная роль при передаче импульсов, возникающих
при эпилептических припадках, от одной половины тела
к другой. Почти в то же время Лэшли, рассуждая при-
мерно так же, предположил, что единственная очевид-
ная функция, которую можно приписать мозолистому
телу, по-видимому, чисто механической природы, т. е.
это тело препятствует расположению двух полушарий
слишком далеко друг от друга.
352
А Сперри
Сегодня можно прямо сказать, что об анатомии и
физиологии этой частной кортико-кортикальной системы
волокон известно больше, чем о любой другой системе
мозга. Так как окончания каждого конца кортикальной
сети глубоко зарываются в толщу мозга, любая инфор-
мация о плане соединения и функциях системы должна
дать представление о секретах кортикальной организа-
ции в целом. Такая информация о функции мозолистого
тела и других церебральных соединений была полу-
чена при опытах на животных за последние 6 или 7 лет,
но я не буду здесь детально разбираться в этих данных,
так как они недавно обсуждались [3, 4, 6]. Для настоя-
щих целей достаточно указать, что при отсутствии це-
ребрального соединения (это равносильно рассечению
мозга по средней линии) кошка или обезьяна во многих
отношениях подобны животному с двумя мозгами вме-
сто одного.
Однако, по-видимому, обладание двумя мозгами вме-
сто одного не вносит сколько-нибудь заметной разницы
в поведение животных при обычных условиях. Действи-
тельно, кошку или обезьяну после глубокого двойного
сечения мозга по четверохолмию и мозжечку при обыч-
ных обстоятельствах с трудом можно отличить от
нормальных экземпляров. Но при надлежащих условиях
теста, при независимом возбуждении и тренировке ка-
ждого полушария можно показать, что в отсутствие
мозговых соединений каждое полушарие характеризуется
своими собственными процессами восприятия, обучения
и запоминания, т. е. своей собственной познавательной
или психической системой. Дело обстоит так, как если
бы ни одно из разделенных полушарий не получало
никакой непосредственной информации об умственной
деятельности другого и в нем отсутствовала память обо
всем, что творилось в другом полушарии непосредствен-
но перед сечением. При этих условиях управление по-
ведением животного может осуществляться из одного
полушария, если оно заметно доминирует над другим,
или же центр управления будет попеременно перехо-
дить от одного полушария к другому. Наконец, два по-
лушария могут продолжать работать одновременно и
параллельно столь долго, что при этом достигается со-
10. Упорядоченность функционирования структур 353
Фиг. 2. Гомотопный принцип
перекрестных соединений через
мозолистое тело соответствую-
щих точек правого и левого
полушарий.
остается до некоторой сте-
гласованность работы их нижних уровней. С помощью
соответствующих тестов можно показать, что два полу*
шария могут действовать одновременно при обучении
различению отдельных — и даже противоположных —
особенностей.
Возможно, что имеются некоторые преимущества в
обладании двумя церебральными системами управления,
работающими независимо одна от другой; но, пожалуй,
недостаток такого разделе-
ния намного перевешивает
его преимущества. Отделен-
ное полушарие не получает
никаких выгод от обучения
и опыта другого. В некото-
ром смысле соединения слу-
жат, таким образом, для
того, чтобы каждое полуша-
рие было в курсе «новостей»
другого. По-видимому, они
также облегчают некоторые
сенсорно-сенсорные и сен-
сорно-моторные интеграции;
например, так происходит
при произвольных движе-
ниях руки через среднюю
линию поля зрения.
Но существует еще один
аспект функционирования
мозолистого тела, который
пени подлинной загадкой, — это проблема значения би-
латеральной симметрии его перекрестных соединений.
Физиологические и анатомические исследования указы-
вают, что огромное большинство (хотя не все) волокон
мозолистого тела гомотопно, т. е. волокна, выходящие
из данного пункта в одном полушарии, проецируются
через среднюю линию в ту же самую точку в противо-
положном полушарии [4]. Этот принцип проиллюстриро-
ван на фиг. 2. Более того, оказывается, что в этих сим-
метричных локусах волокна, выходящие из различных
слоев мозга, оканчиваются преимущественно в том же
самом слое на противоположной стороне [6].
23 Зак. 106
354
Р. Сперри
Таким образом, вопрос стоит так: «Какую выгоду с
инженерной точки зрения дает обладание этой огромной
системой пересекающихся волокон, связывающих иден-
тичные точки в двух полушариях?». Оказывается, что
любая организация в коре головного мозга одного полу-
шария дублируется при посредстве мозолистого тела в
другом, т. е. что мозолистое тело способствует «симме-
тризации» всей мозговой
деятельности.
Какую выгоду мы полу-
чаем от наличия перекрест-
ных соединений в коре го-
ловного мозга между точка-
ми — представителями иден-
тичных областей в правой и
левой половинах поля зре-
ния?
Тот же вопрос можно
задать и относительно то-
чек, соответствующих пра-
вой и левой сторонам тела.
За исключением редких слу-
чаев, когда две половины
поля зрения или тела явля-
ются зеркальными отражениями друг друга, такое
взаимодействие, по-видимому, только запутывает
дело.
Заранее ясно, что вместо симметричных перекрестных
соединений разумнее было бы «встроить» комплемен-
тарные по природе перекрестные соединения, как это
предполагается на фиг. 3. Эта фигура иллюстрирует
одно раннее представление, сложившееся у меня отно-
сительно мозолистого тела и ожившее в моей памяти
благодаря данному симпозиуму. Эта схема носит весьма
спекулятивный характер и существует очень мало дока-
зательств в ее пользу. Вместо того чтобы соединить
обратными перекрестными связями точки, соответствую-
щие правой и левой половинам поля зрения, на этой
схеме каждая половина перекрестно проецируется та-
ким образом, что является дополнением к прямой про-
екции.
10. Упорядоченность функционирования структур
355
Это равносильно существованию целой зрительной
области в каждом полушарии — или ее представлению
на следующей ступени системы переработки информа-
ции.
То же относится к представлению в коре мозга по-
верхности тела и других сенсорных областей, а также
к более глубокой ассоциативной деятельности полуша-
рия. Пытаясь идти в ногу с идеями современной физики,
я назвал бы этот принцип «принципом дополняющей
дополнительности».
В настоящее время нет доказательств, которые за-
ставили бы полностью отказаться от такого рода схемы.
Есть что-то загадочное и недетерминированное в связях,
осуществляемых мозолистым телом между зрительными
зонами мозга. В тех зонах кортикальной карты, которые
относятся к поверхности тела, контралатеральные и
ипсилатеральные представления, по-видимому, фиксиро-
ваны, так что было бы трудно отдифференцировать
схему, работающую по принципу дополнительности,
от схемы, работающей по принципу обратной сим-
метрии.
В прошлом исследователи, занимавшиеся мозолистым
телом, не задавались такими вопросами, но теперь уже
пришло время для более детального исследования зна-
чения перекрестного соединения. Считается общеизвест-
ным, что меньшая часть соединений, осуществляемых
мозолистым телом, по своей природе гетеротопна, и из-
вестно несколько примеров того, что нервы из корти-
кальной области проецируются в совершенно другие
области на другой стороне.
Возможно, что в мозолистом теле работают как сим-
метричная, так и дополнительная схемы, а может быть,
и какие-нибудь еще. Не исключено, что именно симме-
тричная система является главным детектором играющей
столь важную роль асимметрии, но в любом случае за-
дача перед вами поставлена; по существу это задача
теории цепей, и ответ на нее может быть быстрее полу-
чен при исследовании логики искусственного интеллекта,
чем при нейрофизиологическом подходе.
23*
356
Р. Сперри
ЛИТЕРАТУРА
1. А гог а Н. L., Sperry R. W., «Studies on color discrimination
following optic nerve regeneration in the cichlid fish», Astranotus
ocellatus, Anat. Rec., 131, 529 (1958).
2. Attardi D., Sperry R. W., Central routes taken by regenera-
ting optic fibers», Physiologist, 3, 12 (1960).
3. Bremer F., Brihaye J., Andre-Balisaux G., «Physiolo-
gic et pathologie du corps calleux», Arch. Suisses Neurol. Psychiatr.,
78, 31 (1956).
4. G r a f s t e i n B., «Organization of callosal connections in supra-
sylvian gyrus of cat», J. Neurophysiol., 22, 504—515 (1959).
5. Gray J., L i s s m a n H. W., «Further observations on the effect
of deafferentation on the locomotory activity of amphibian limbs»,
J. Exp. Biol., 23, 121—132 (1946).
6. M у e г s R. E., «Interhemispheric interconnections between occipi-
tal poles of the monkey brain», Anat., 136, 249 (1960).
7. Sperry R. W., «Some developments in brain lesion studies of
learning», Fed. Proc, (в печати).
8. S p e г г у R. W., «Cerebral organization and behavior», Science,
133, 1749 (1961),
ДИСКУССИЯ
Й о в и т с. Что происходит, когда отдельные полушария дают
совершенно противоположные приказы телу животного? Обучается
ли животное «не обращать внимания» на один из таких приказов?
Сперри. Да, обычно то или иное полушарие стремится до-
минировать над нижними центрами и моторными выходами, кото-
рые устойчиво выполняют приказы доминирующего центра упра-
вления. Несовместимые приказы, исходящие из другого полушария,
игнорируются или тормозятся. Одной из важнейших черт органи-
зации мозга является тот факт, что такие приказы не смешиваются.
Существует только одна альтернатива: тот или этот приказ, но
никогда не наблюдается их «гибрид». Имеются, конечно, и исключе-
ния, но это как раз те исключения, которые подтверждают правило.
Существует некоторый присущий мозгу механизм, в принципы дей-
ствия которого входит, может быть, упоминавшаяся выше «реци-
прокная иннервация» и «тормозящее окружение», в результате чего
реакция организма едина. Как только один тип реакций начинает
доминировать, он исключает тысячи других возможностей. Если
встроить такой механизм в машину, можно было бы получить ту
многосторонность, которую мы видим в мозге и которую можно
определить как «много машин в одной».
Шервуд. Мне кажется, что возникает ряд проблем в связи
с результатами проведенных одним ученым в Англии хирургических
10. Упорядоченность функционирования структур 357
операций и экспериментов на. человеке. Он сделал ряд сечений
полушарий у детей по поводу повреждений мозга при родах с кро-
воизлиянием в одно из полушарий. Вопрос состоит в следующем:
хотя у таких детей удаляется все полушарие, за исключением ба-
зальных ганглиев, которые оставляются, различение на децентрали-
зованной части после сечения улучшается.
По-моему, это указывает на то, что повреждение машины, при-
водящее к ее плохой работе, хуже, чем отсутствие машины.
Председательствующий Баумен. Есть ли еще замечания по
докладу д-ра Сперри?
Маккаллок. Да, если разрешите. Мое утверждение относи-
тельно мозолистого тела было сделано не «с кондачка». С начала
30-х до середины 40-х годов я работал над анатомией и физиоло-
гией этой системы, и в то время было много больных, у которых
были рассечены мозолистое тело и передние спайки, чтобы воспре-
пятствовать распространению кровоизлияний из одного полушария
в другое, причем, если одновременно рассекались и мозолистое
тело и передние спайки, то больной обычно больше не имел крово-
излияний. Были и некоторые исключения. Но мне кажется, что
интереснее всего не гомеопроекция. Интереснее всего то обстоя-
тельство, что, скажем, от области 8, от области 6 и некоторых
частей, расположенных сзади центра коры, отходят намного более
широко разветвленные афферентные окончания к противополож-
ному полушарию. Чем дальше область удалена от прямых сенсор-
ных и прямых моторных проекций, тем больше отходит от них
смещенных нервов, и я думаю, что это, вероятно, именно то, что
мы ищем. Я чувствую, что все это разумно организовано.
Еще одно замечание. Когда вы разрезаете два полушария,
вы получаете пародию на логику Поста. До тех пор пока полуша-
рия спарены точка с точкой, можно удалить часть, можно упро-
стить логическую структуру машины. Фактически вы из этого сде-
лали симметричные диаграммы Венна, это ясно. При этом вы по-
лучили логику Поста.
11. ФУНКЦИОНАЛЬНАЯ ОРГАНИЗАЦИЯ
В СЛУЧАЙНЫХ СЕТЯХ
Р. БЕР Л
(Фирма «Инглиш электрик, уолв компани»)
1. ВВЕДЕНИЕ
Целью нашей более ранней работы [1] было показать,
что масса нервных клеток, соединенных случайным об-
разом, может содействовать пластичности поведения
организма, частью которого она является. Хотя началь-
ная структура этой массы определяется случайными
факторами, постепенно, в результате взаимодействия
со средой в такой массе может возникнуть внутренняя
организация, придающая ей способность выбирать по-
ведение, содействующее выживанию.
Возможность такого процесса существенным образом
зависит от свойств клеток, из которых состоит данная
масса. Мы прежде всего опишем свойства, которые с
самого начала предполагаем в этих нервных клетках, а
затем обсудим два аспекта первоначальной темы, кото-
рые требуют дальнейших исследований. Первый из них
касается необходимости и характера управляющей дея-
тельности стабилизирующего механизма в клеточной
массе, второй — возможности замкнутых взаимосвязей
между длительной и кратковременной памятью.
2. ОСНОВНЫЕ СВОЙСТВА КЛЕТОК
Наше первоначальное исследование [1] было пред-
принято, исходя из нескольких соображений:
1) Большинство существующих теорий обучения не
способны объяснить замечательную способность мозга
принимать огромное количество входной информации и
все же выносить быстрые решения с высокой степенью
целесообразности. Наш мозг придает нам удивительную
И. Функциональная организация в случайных сетях 359
способность обучаться и использовать факты, языки и
сложные методы принятия решений, накопленные че-
ловечеством в течение многих поколений, т. е. наделяет
нас «здравым смыслом».
2) Необходима теория, которая перекинула бы мост
между разнообразными эмпирическими фактами, касаю-
щимися различных форм обучения, с одной стороны, и
анатомическими и физиологическими данными — с дру-
гой. Различные группы исследователей подчеркивали
важность различных процессов обучения с помощью проб
и ошибок, интуитивного поведения, процессов размыш-
ления, логики и т. д., не делая какой-либо попытки пред-
ставить все в виде разных аспектов единого целого.
3) В мозгу имеются клеточные массы (например,
кора), в которых обнаруживается очень большая роль
случайного фактора в распределении и взаимосвязи нер-
вных клеток и волокон. Для таких параметров, как
плотность распределения клеток и волокон, существует
согласованность, но для многих участков нет никаких
данных, которые говорили бы о том, что индивидуаль-
ные связи образуют точную или единообразную кар-
тину [2].
4) Так как наследственная информация, определяю-
щая структуру этих клеточных масс, содержится в отно-
сительно малом объеме хромосом, естественно было бы
рассчитывать найти структуру, которая допускает до-
статочно экономное задание и описание. К типам струк-
тур, требующим для своего описания минимума инфор-
мации, с одной стороны, относятся те, которые обладают
большой степенью упорядоченности, а с другой — те, в
которых детализация структуры является случайной.
Поскольку имеется мало данных, которые подтверждали
бы детальную упорядоченность связей во многих участ-
ках, а данные о большой степени упорядоченности во-
обще отсутствуют, можно предположить, что вторая
альтернатива более вероятна.
Возникает естественный вопрос: можно ли объяснить,
по крайней мере частично, поведение живых организмов
в терминах активности случайно связанной сети? По
отношению к клеточным массам коры головного мозга
трудность при ответе на этот вопрос состоит в недостатке
360
Р. Б ёрл
точной и полной информации о свойствах корковых
нейронов. Чтобы преодолеть эту трудность, мы в своем
подходе решили рассмотреть деятельность гипотетиче-
ской случайной сети, состоящей из клеток, для которых
можно было бы постулировать точно определенные свой-
ства. Эти свойства выбирались как можно более близ-
кими к предполагаемым свойствам корковых нейронов.
В соответствии с этим предполагалось наличие следую-
щих свойств:
1. Пространственное распределение клеток носит
случайный характер.
2. Связывающие волокна ветвятся и заканчиваются
случайным образом в соответствии с вероятностным рас-
пределением, измеренным Шоллом [2].
3. Связи устанавливаются между соседними клет-
ками случайно, вероятность связи между любыми двумя
клетками убывает с их расстоянием друг от друга, если
не учитывать данных работы Шолла о плотности ассо-
циированных систем волокон.
4. Каждая клетка, становясь активной, возбуждает
соседние клетки, к которым присоединены ее аксоны.
5. Клетки суммируют получаемое возбуждение и мо-
гут становиться активными, если оно превышает порог
[3, 4].
6. Каждая клетка, становясь активной, испытывает
небольшое изменение, в результате которого она легче
возбуждается в следующий раз [3, 4].
7. После рефрактерного периода, следующего за ак-
тивностью, к клетке возвращается чувствительность, и
она снова может принять участие в общей деятельности
клеточной массы [3, 4].
3. СВОЙСТВА МАССЫ В ЦЕЛОМ
а) Устойчивость. Как легко заметить, ничего не было
сказано о каких-либо тормозящих взаимодействиях ме-
жду клетками. Хотя к тому времени и имелись данные
о торможении в периферических нервных клетках, было
очень мало данных относительно того, каким образом
торможение (если оно вообще существует) может функ-
ционировать в коре, и биологи не были склонны допу-
И. Функциональная организация в случайных сетях 361
Фиг. 1.
скать наличие торможений, не имея фактов, подтвержу
дающих это допущение. По этой причине много внима-
ния было уделено тому, чтобы избежать допущения о
наличии прямого тормозящего воздействия.
В результате, когда были изучены свойства клеточ-
ной массы в целом, оказалось, что актирность внутри
362
Р. Б ё р л
нее имеет весьма неустойчивый характер. Если в массе
возникает активность, то она либо быстро падает до
нуля, либо быстро возрастает до тех пор, пока в нее не
вовлекаются все клетки массы, что в нашей первона-
чальной работе было названо насыщенной волной актив-
ности (фиг. 1). Если имеется сеть из взаимодействующих
Фиг. 2.
элементов, единственным взаимодействием в которых
является возбуждение, то активность сети неизбеж-
но стремится к неустойчивости. Однако в реальной коре
никто не обнаруживает этой всеобъемлющей — «все или
ничего» — насыщенной волны активности. Кроме того,
трудно понять, как такой вид реакции может объяснять
различные тонкости поведения, тогда как при наличии
средств стабилизации или управления степенью актив-
ности на некотором промежуточном уровне, дающих
«ненасыщенную» волну активности (фиг. 2), получаются
разнообразные интересные виды поведения. Таким обра-
зом, рассмотрение вопроса устойчивости является су-
щественным.
В первом исследовании в связи со стремлением избе-
жать постулирования непосредственных тормозящих
эффектов единственно возможным было введение ста-
билизации с помощью полисинаптической цепи событий.
В действительности это, однако, оказалось наименее
удовлетворительной стороной первоначального подхода.
11. Функциональная организация в случайных сетях 363
Если мы можем допустить существование прямого тор-
можения, то оно объясняет стабилизацию активности
массы и нет необходимости вводить неуклюжее понятие
полисинаптической цепи. В настоящее время биологи,
по-видимому, гораздо больше склонны верить в возмож-
ность прямого торможения, проявляющегося либо как
синаптический эффект, либо как эффект поля. Эффекта
любого вида было бы достаточно для объяснения ста-
билизации активности, но до сих пор отсутствуют убе-
дительные данные о том, как это происходит на самом
деле.
Тем не менее, чтобы открыть новые факты, мы дол-
жны задавать вопросы, и нам хотелось бы подчеркнуть,
что существует интересная анизотропность, вводимая
апикальными дендритами. Известно, что когда значи-
тельная часть клеток в одной области коры активна, то
на кортикальном слое возникает разность потенциалов
в направлении апикальных дендритов. Известно также,
что если разность потенциалов приложена искусственно,
кора может возбуждаться или тормозиться в зависимо-
сти от направления приложенной разности потенциалов.
Возникает вопрос: возможна ли комбинация этих двух
эффектов, дающая стабилизацию, о которой только что
шла речь?
б) Затухание. Если проверить реакцию при наличии
некоторого стабилизирующего фактора, то мы обнару-
жим, что, как и прежде, очень слабый стимул, поданный
один раз, производит лишь слабое локальное возбужде-
ние, которое быстро угасает. Однако если подавать бо-
лее сильный стимул или поддерживать первоначальный
слабый стимул, то можно вызвать более сильную и
устойчивую реакцию, которая может некоторое время
сохраняться и распространяться. Это поведение сильно
напоминает реакцию поверхности коры на электриче-
ское возбуждение. Интересно также отметить, что тот
же вид возбудимости обнаруживается в колонии корал-
ловых полипов, одной из наиболее простых «нервных
систем» [5].
Природа стабилизирующего фактора и конкретный
способ его проявления могут заметно отразиться на
364
Р. Бёрл
форме волны активности. При наличии стабилизирую-
щего фактора форма волны может сильно отличаться от
формы волны, полученной в нашей первоначальной ра-
боте для клеточной массы без стабилизации. Возможна
даже размытая волна активности вместо четко очерчен-
ной, однако это не нарушает основных принципов, ко-
торые мы стремились выделить.
Количественные аспекты возбудимости массы и их
зависимость от прошлого опыта наиболее важны по от-
ношению к обучению и памяти. В частности, как след-
ствие из шестого свойства клеток затухание клеточной
массы для данной волны активности несколько убывает
всякий раз, когда эта волна распространяется в среде.
Именно это дает нам первый основной процесс адапта-
ции — обучение путем проб и ошибок.
4. ФУНКЦИОНАЛЬНЫЕ СВОЙСТВА КЛЕТОЧНОЙ МАССЫ
В ОРГАНИЗМЕ
а) Обучение1) и память — пробы и ошибки. Нетруд-
но видеть, что зависимость затухания от прошлого опы-
та дает простую основу для обучения (learning) путем
проб и ошибок. В первоначальной трактовке это изо-
бражалось с помощью фиг. 3, на которой показан гипо-
тетический организм. Эта схема умышленно максималь-
но упрощена для того, чтобы показать, что в принципе
способность обучаться путем проб и ошибок является
свойством массы клеток. Некоторые сенсорные входы
определяются дискриминатором, и дискриминатор соот-
!) Русское слово «обучение» несколько двусмысленно, так как
может пониматься и как внутренний процесс усвоения, приобрете-
ния знаний или навыков обучающимся, и как процесс передачи,
сообщения знаний и навыков учителем обучаемому. В англо-аме-
риканской литературе в первом случае употребляется термин «lear-
ning», во втором — «teaching», «tutoring», «tuition», «instruction».
В нашей литературе там, где требуется различать оба понятия, ча-
сто в первом случае применяется термин «научение» (learning) во
втором — «обучение» (teaching). Но иногда эти два термина упо-
требляются как раз в обратном смысле. Чтобы избежать путаницы,
мы везде при переводе передаем слово «learning» как «обучение»
(а также «заучивание» или «выучивание»), a «tuition» — как «обучи-
вание». — Прим. ред.
1L Функциональная организация в случайных сетях 365
ветственно способствует или препятствует прохождению
активности через массу. Оказывается, что даже если
сеть соединена случайно, единственные формы активно-
сти, которые могут оставаться ненарушенными, это те,
Фиг. 3.
которые реализуются в двигательный выход, извлекаю-
щий из внешнего мира благоприятную реакцию. Только
эти формы активности будут способны создавать пути
с низким затуханием через массу, и до тех пор, пока
внешний мир согласуется с поведением, эти низкие за-
тухания позволят организму давать удовлетворительные
реакции на знакомую среду в будущем.
Эта способность подыскивать подходящую реакцию
на новую ситуацию является первой стадией обучения
путем проб и ошибок. Это также первая стадия распоз-
навания, так как способность выбирать подходящую ре-
акцию на знакомую среду равносильна распознаванию
этой среды. В то же время, поскольку пути с низким
затуханием будут сохраняться, мы получаем простую
366
Р. Б ё р л
форму долговременной памяти, а именно запоминание
поведения, которое дает удовлетворительные результаты
в определенных знакомых средах. Важно отметить, что
даже небольшого изменения, порога, если только оно
произошло в достаточно большом числе клеток, доста-
точно, чтобы повлечь за собой понижение затухания. Не
обязательно ожидать большого изменения в каких-либо
клетках.
Абстрагирование существенных свойств в среде.
Обычно в реальной жизни все не так просто, как в эле-
ментарных экспериментах по обучению. Ситуации, с ко-
торыми приходится иметь дело, редко совпадают во всех
отношениях с ситуациями, которые встречались в прош-
лом. В этом смысле каждая среда является новой, и,
следовательно, каждую реакцию, даже если она осно-
вана на предшествовавшем обучении, следует рассмат-
ривать как пробную и подлежащую в дальнейшем уси-
лению или подавлению в зависимости от того, окажется
она успешной или нет. Отношение успеха к неудаче за-
висит от степени, в которой реакции вызываются именно
теми свойствами среды, которые существенны. Вторая
стадия обучения путем проб и ошибок представляет
собой, следовательно, постепенный рост способности вы-
делять как раз те существенные свойства среды, кото-
рым соответствует заученная реакция, и способности
игнорировать несущественные и случайные детали. Это
неизбежно вызывает дальнейшие пробы и ошибки, так
как только путем эксперимента можно установить, какие
свойства являются существенными для выбора реакции.
Что происходит в массе клеток в течение второй ста-
дии? Предположим, что мы воздействуем на массу кле-
ток рядом различных сред, причем все они обладают
некоторыми устойчивыми свойствами, которым соответ-
ствует некоторая конкретная реакция. Масса будет по-
лучать возбуждающие стимулы из трех источников:
1) постоянный стимул от устойчивых свойств;
2) переменный стимул от несущественного фона;
3) любое случайное рассеянное возбуждение, кото-
рое может присутствовать в то же время.
Возбуждение от пп. 2 и 3 можно считать переменным
и не имеющим отношения к выводу конкретной реакции,
И. Функциональная организация в случайных сетях 367
которую мы рассматриваем. В результате рассеянного
возбуждения возникает постоянная флуктуация пути
активности через массу клеток, и только постепенно, пу-
тем проб и ошибок, устраняется тенденция рассеянного
возбуждения, или «шума», отклонять активность в сто-
рону неблагоприятных реакций. Процесс приспособле-
ния не должен происходить слишком резко. Если шум
слишком велик, то нить будет потеряна и организм
опять окажется на стадии поиска вслепую, на ощупь.
Рост избирательности. По мере того как этот про-
цесс продолжается, присутствие шума вместе со стабили-
зирующими факторами способствует устранению неко-
торой избыточной активности, которая сначала неизбеж-
но возникает в случайно связанной сети. Обучение путем
проб и ошибок включает в себя цикл событий, в кото-
рых порождение благоприятной реакции является суще-
ственным и клетки, которые не участвуют в осуществле-
нии этой реакции, будут возбуждаться все реже и
постепенно отпадут. Это дает экономию энергии, посте-
пенно возрастающую до тех пор, пока активность не
будет ограничена несколькими параллельными взаимо-
связанными путями, причем ее флуктуация на этих пу-
тях будет происходить в соответствии с характером рас-
сеянного возбуждения.
При медленном течении процесса на него может
влиять постепенно возрастающий шум, величина кото-
рого в конечном итоге может стать гораздо больше кон-
кретных существенных признаков, вызвавших реакцию.
С накоплением опыта, включающего пробы и ошибки,
способность к различению будет расти до тех пор, пока
клеточная масса не станет вести себя как фильтр с вы-
сокой избирательностью, реагирующий на некоторый,
возможно узкий, но крайне важный набор признаков
даже при наличии в среде большого числа переменных
факторов. Всякий раз, когда появляется этот знакомый
набор, будет в качестве первой пробной реакции вос-
производиться и эта конкретная реакция, даже если
фон является незнакомым. Это —начало обобщения:
среды объединяются в один класс, заслуживающий
одной и той же конкретной реакции, если все они со-
держат один и тот же набор знакомых признаков.
368
Р. Б ё р л
Память и выбор. Теперь мы имеем организм с до-
вольно многосторонними возможностями реагирования
на новую среду, которая в значительной степени незна-
кома, при условии что имеется некоторый распознава-
тельный набор признаков, реакция на которые уже за-
учена. Ясно, что иногда могут появиться сразу два
набора признаков, для которых в прошлом были най-
дены различные реакции. В такой ситуации выбор той
или иной реакции определяется значимостью каждого
набора признаков и глубиной соответствующего следа в
памяти. Что же произойдет, если распознаваемого на-
бора признаков, для которых заучен ответ, не суще-
ствует? Именно тогда и появляется условный рефлекс.
б) Память, интуиция и выбор — условный рефлекс.
При рассмотрении того, как условный рефлекс может
возникнуть в случайной массе клеток, нам при первона-
чальном анализе мешала использовавшаяся нами неудо-
влетворительная концепция стабилизирующего механиз-
ма. По этой причине возможность порождения массой
условного рефлекса иллюстрировалась в крайне ограни-
ченной форме — в форме двух плоских волн, пересекаю-
щихся в нелинейной среде. Если допускается прямой
тормозящий фактор, вводящий в массу внутреннюю
устойчивость, то взаимодействие между двумя волнами
активности и средой принимает менее ограниченную
форму. Две компоненты волны активности, возникающие
в результате некоторого внешнего стимула, могут взаи-
модействовать друг с другом и со средой, оставляя след
в памяти, который фиксирует их одновременное появле-
ние. Для того чтобы это привело к осмысленному по-
ведению— как в условном рефлексе, — важно, чтобы
клеточная масса уже имела некоторое предваритель-
ное «образование» (education) в форме обучения пу-
тем проб и ошибок.
Наблюдая, как может возникать условный рефлекс,
мы должны учитывать структуру реакции, которая обра-
зуется в клеточной массе в ходе обучения путем проб и
ошибок. В массе появляются установившиеся пути, по
которым могут распространяться волны активности.
Волны активности всегда взаимодействуют, и обычно
11. Функциональная организация в случайных сетях 369
имеется несколько параллельных взаимосвязанных пу-.
тей, ведущих от стимула к реакции, причем в каждый
момент активна только часть путей. На фиг. 4 дана
упрощенная схема нескольких клеток, в которых актив-
ность возникает в результате импульсов возбуждения
от трех стимулов:
1) Стимул Д, для которого существует установив-
шаяся реакция А'. На схеме изображено два параллель-
ных пути от А к Д'.
Фиг. 4.
2) Два стимула В и С, которые не имеют прочно ус-
тановившейся реакции, так как они в прошлом не по-
являлись достаточно часто.
3) Случайный возбуждающий стимул S, который
иногда возбуждает, а иногда не возбуждает данную
клетку.
Предположим теперь для простоты, что среднее зна-
чение рассеянного возбуждения — один импульс на три
клетки и что эти клетки имеют порог 3 импульса. Ве-
роятность того, что любая данная клетка получит рас-
сеянное возбуждение более чем в один импульс, опреде^
ляется в соответствии с распределением Пуассона:
1— г-‘/з = 0,28.
Аналогично вероятность возбуждения более чем двумя
импульсами равна
1 1 ./, = о,О45,
О
§4 Зак. 109
370
Р. Б ё р л
а более чем тремя импульсами
1 — е* — 4- е'!> — е'Л - 0,005.
о 1о
Чтобы выяснить, как эта небольшая группа клеток будет
реагировать по отношению к условному рефлексу, до-
пустим, что Л, В и С появляются с одной и той же ча-
стотой, но В всегда появляется одновременно с Л, тогда
как С появляется независимо. Если появилась комбина-
ция Л и В, то клетке АВ для возбуждения достаточно
одного случайного импульса, поэтому частота ее возбу-
ждения составляет 0,28 частоты появления Л и В. С дру-
гой стороны, клетки ВС и СА требуют двух случайных
импульсов, и частота их возбуждения составляет 0,045
частоты появления Л и В. В случаях, когда появляется
только С, клетке АВ требуется три случайных импульса,
а частота ее возбуждения будет составлять 0,005 ча-
стоты С. Клетки ВС и СЛ, требующие двух импульсов,
будут возбуждаться с частотой, равной 0,045 частоты С.
Так как частоты совместного появления Л и В и появ-
ления С одинаковы, то общая вероятность возбуждения
клетки АВ равна
Рлд=.9”+'М|«‘=О,14.
Аналогично вероятность возбуждения ВС и СА равна
Рве = Рса °’045+0-045 = 0,045.
Таким образом, клетка ЛВ, которая, как легко ви-
деть, представляет собой элемент ассоциации между В
и Л, возбуждается в три раза чаще, чем клетки ВС и
СЛ. Это различие целиком обусловлено тем фактом, что
Л и В появляются одновременно. Если бы В появлялось
независимо, клетка ЛВ возбуждалась бы с той же ве-
роятностью, что и остальные. Если, как мы предполо-
жили, клетка становится более чувствительной каждый
раз, когда она возбуждается (например, путем пониже-
ния порога), то порог клетки АВ после нескольких одно-
временных появлений Л и В будет ощутимо меньше по-
рога какой-либо другой клетки. Следует также помнить,
И. Функциональная организация в случайных сетях 371
что мы ограничили рост чувствительности сети в целом,
допустив существование стабилизирующего механизма,
который управляет общим уровнем активности. Поэтому
средний порог будет сохраняться примерно на исходном
уровне, но порог клетки АВ будет все же ниже осталь-
ных.
Предположим, что порог АВ стал на единицу ниже
остальных и стимул В появился без Л, как и в тради-
ционном эксперименте с условным рефлексом. Тогда
для клетки АВ потребуется один случайный импульс, в
то время как для клетки ВС их потребуется два. Таким
образом, при появлении В клетка АВ будет возбуждать-
ся с частотой, равной 0,28/0,045 частоты ВС, т. е. при-
близительно в 6 раз чаще. Что же касается стимула С,
то он не обнаружит тенденции возбуждать АС намного
чаще, чем ВС.
Этот пример намеренно упрощен, и следует отметить,
что тенденция к преимущественному возбуждению АВ
будет проявляться медленно, даже если порог изменил-
ся лишь ненамного. Но и медленная тенденция все же
важна, если она имеет место для числа «клеток ЛВ»,
достаточно большого, чтобы суммарный эффект дал ста-
тистически надежный путь ассоциации от стимула В к
волне А. И дело не только в том, что все эти ассоциа-
тивные клетки будут действовать параллельно, вызывая
волну А при стимуле В; раз вызвана хотя бы слабая
волна А, объединенное действие стимула В и всех «кле-
ток АВ» с уменьшенным порогом будет понижать сопро-
тивление среды волне А и способствовать ее возникнове-
нию. Таким образом, небольшого изменения достаточно,
чтобы получить след в памяти, до тех пор, пока это
изменение имеет место в большом числе клеток, рас-
сеянных в массе.
Теперь становится ясным отношение между обуче-
нием путем проб и ошибок и условным рефлексом. По
мере развития обучения путем проб и ошибок несуще-
ственные детали фона становятся все менее важными,
и ответ вызывается именно знакомыми признаками. Ус-
ловный рефлекс делает это на порядок лучше. Оказы-
вается, что если фон содержит признаки, которые яв-
ляются существенными в том смысле, что они в течение
24*
Wi
Р. В ер л
значительного периода времени были коррелированы с
исходным (обусловливающим) стимулом, то такие при-
знаки как бы становятся частью этого стимула. В ре-
зультате наличие этих новых признаков не только спо-
собствует продолжению реакции, но и может вызвать ее
возникновение, если исходный стимул по каким-либо
причинам исчезнет. Как бы ни был устроен мир, в этом
случае данная реакция часто оказывается благоприят-
ной, и если это действительно так, то она будет не по-
давляться, а усиливаться. В подобных ситуациях способ-
ность вызывать реакцию таким путем будет давать
большую экономию времени и энергии, сохраняя в то
же время высокую степень пластичности. Часто может
случиться, что новая ситуация коррелирована с несколь-
кими реакциями, заученными в прошлом. При возник-
новении такого конфликта первая пробная реакция бу-
дет соответствовать, вообще говоря, более сильной кор-
реляции. Если она оказывается неблагоприятной, то по
очереди пробуются другие реакции.
Почему пробные реакции, вызываемые условным
рефлексом, дают экономию? Этот вопрос мог бы повести
к глубоким философским рассуждениям, но достаточно
заметить, что здесь имеется сходство между критериями,
определяющими условный рефлекс, и критериями, ука-
зываемыми теоремой Байеса. Согласно этой теореме, мы
можем написать следующее выражение.
Вероятность того, что действие А является благо-
приятной реакцией на стимул S,
Р(А I __________;____? । ____________
' 1' ' Сумма всех произведений Р (S | Л/) • Р (Л/) ’
Иными словами, вероятность того, что данная реакция
будет благоприятной при некоторых свойствах среды,
пропорциональна измеренной прошлым опытом частоте
одновременного появления стимула и реакции. (Пред-
полагается, что реакция либо удовлетворительна, либо
больше не появляется.) Эту величину нужно разделить
на нормирующий множитель, чтобы сумма вероятностей
была равна единице.
Это очень похоже на то, что происходит в массе
клеток, где можно считать, что сила связи стимула
11. Функциональная организация в случайных сетях 373
условного рефлекса с реакцией возрастает примерно
пропорционально частоте одновременного появления.
Тогда снова уже само наличие стабилизирующего меха-
низма, управляющего общим уровнем активности, дает
тормозящий эффект, величина которого должна зави-
сеть от общего возбуждения, произведенного всеми кон-
курирующими корреляциями. Этот тормозящий эффект
до некоторой степени аналогичен действию знаменателя
в теореме Байеса. Правда, непосредственно применить
теорему Байеса к практической задаче часто бывает
трудно, однако представляет интерес отметить очевид-
ную связь между условным рефлексом в той форме, как
он здесь описан, и структурой теоремы.
Согласно теореме Байеса, можно было бы, оправды-
вая введение стабилизирующего фактора, утверждать,
что как возбуждающий, так и тормозящий факторы оди-
наково необходимы. Тот факт, что в вышеприведенном
уравнении как числитель, так и знаменатель содержат
величины, зависящие от стимула, означает, что при вы-
боре наиболее подходящего способа действия стимул
должен вызывать как возбуждающее, так и тормозящее
действие.
в) Мыслительные процессы — ретроспекция и спеку-
ляция. До сих пор мы обсуждали только элементарные
процессы обучения, дающие пробную реакцию, которая
следует за стимулом с небольшой задержкой. Однако
вместе с тем хорошо известно, что длительные мысли-
тельные процессы играют большую роль в выборе реак-
ций у человека и (в меньшей степени) у других прима-
тов. Именно вдесь становится важной способность внут-
реннего воспроизведения последовательности внешних
событий. Возможный механизм такого воспроизведения
был указан в уже упоминавшейся работе. В результате
неоднократной циркуляции активности через одну и ту
же область массы клеток события, разделенные во вре-
мени, фиксируют свои временные взаимоотношения в ви-
де следа памяти, аналогичного следу, вызывающему ус-
ловный рефлекс. Так, если В часто следует за 4, то воз-
никает след А-^В. Более того, опять-таки по аналогии с
условным рефлексом, волна активности, соответствующая,
374
Р. Б ё р л
скажем, событию А во внешнем мире, сочетаясь со
следом А-+В, может вызвать воспроизведение актив-
ности, являющейся внутренним представлением собы-
тия В, которое часто следует за А. Затем за внутренним
представлением В может в свою очередь последовать
внутреннее представление С и т. д.
Способность воспроизводить последовательность со-
бытий в том порядке, в котором они происходили в
прошлом, соответствует ретроспекции. Еще большее зна-
чение имеет тот факт, что тот же фундаментальный про-
цесс способен воспроизводить такую последовательность
наиболее вероятных последующих событий, которая це-
ликом никогда в прошлом не встречалась. В наиболее
вероятной последовательности событий за каждым собы-
тием следует событие, которое в прошлом наиболее ча-
сто за ним следовало. Такая последовательность, в ко-
торой порядок определяется вероятностью следования,
измеренной в прошлом опыте, является по самой своей
природе цепочкой мыслей относительно будущего.
Нетрудно видеть, что этот процесс можно было бы
описать более подробно, учитывая не только вероятность
пар событий, но также и вероятности более длинных
комбинаций. Как условный рефлекс в сочетании с обу-
чением путем проб и ошибок дает экономию времени и
энергии, так и способность мыслить о будущем, прежде
чем действовать, может дать огромную экономию уси-
лий. У человека и высших приматов можно наблюдать
совместное действие этих трех процессов, причем важ-
ность последнего возрастает по мере накопления инфор-
мации.
5. КРАТКОВРЕМЕННАЯ ПАМЯТЬ
Какие свидетельства мы имеем в пользу существова-
ния кратковременной памяти в отличие от долговремен-
ной, которую мы обсуждали до сих пор? Некоторые из
них получены из экспериментов по обучению и подтвер-
ждаются тем фактом, что потрясение или шок могут
иногда стереть из памяти недавние события, не повлияв
на память о более давних событиях. Это должно свиде-
тельствовать о существовании некоторой формы памяти,
которая может погружаться в глубокий сон или кому.
И. Функциональная организация в случайных сетях 375
Часто утверждалось, что кратковременную память
можно объяснить на основании циркуляции активности
в цепях нервных клеток. Кроме того, было показано, что
такие реверберационные цепи нейронов могут возникать
в случайно связанных сетях. На фиг. 5 дана простая
Фиг. 5.
иллюстрация этого явления. Не обязательно иметь спе-
циальные цепи для каждого перцептуального элемента.
Правда, локальная анизотропия, изменения в связях
или другие параметры в случайной сети могут способ-
ствовать образованию таких цепей, однако это не то же
самое, что иметь регулярные наборы цепей.
Объяснение кратковременной памяти в терминах
случайных сетей кажется заманчивым, но такое объяс-
нение на первый взгляд сталкивается с одной непреодо-
лимой трудностью. Если сеть, в которой возникают эти
реверберационные цепи, является случайно связанной,
то кек можно соотносить активность в какой-либо цепи
376
Р. Б ё р л
с явлением во внешнем мире, которое вызывает эту ак-
тивность? Бесполезно фиксировать информацию, если у
нас нет средств, чтобы выдать ее в осмысленной форме.
Каждое недавнее явление во внешнем мире будет вызы-
вать активность в какой-либо одной реверберационной
цепи, и нетрудно видеть, что аксоны, отходящие от ней-
ронов в каждой реверберационной цепи, несут импуль-
сы, показывающие, что цепь находится в активном со-
стоянии. Если мы выбрали эти аксоны, мы знаем, ко-
гда их цепи активны, но откуда мы знаем, как цепи
связаны с аксонами и как сенсорные входы связаны
с реверберационными цепями, если все связи слу-
чайны?
К счастью, на все эти вопросы есть очень простой
ответ. Дело в том, что механизм долговременной памяти,
обсуждавшийся в предыдущем разделе и сам по себе
основанный на случайно связанной массе клеток, спосо-
бен воспринимать информацию, идущую по случайно
связанным волокнам. Вначале эта информация не ис-
пользуется, но с течением времени долговременная па-
мять способна использовать ее путем приспособления в
ходе процесса обучения. Таким образом, если мы рас-
сматриваем кратковременную память в качестве посред-
ника между рецепторами и долговременной памятью, то
последняя решает проблему случайной связности для
первой. Это соотношение схематически представлено на
фиг. 6.
Концепция кратковременной памяти, действующей
как временное хранилище информации между рецепто-
рами и долговременной памятью, хорошо устраняет
одну трудность, которая еще не была затронута нами
при обсуждении долговременной памяти. Эта трудность
заключается в следующем. Концепция в целом основана
на том, что затухание какой-либо волны активности в
массе значительно уменьшается, если эта волна про-
ходит через массу во многих ситуациях. Но тогда можно
спросить, как же таким путем объяснить тот факт, что
важное событие, происшедшее лишь однажды, все же
запоминается на долгие годы, а может быть, и до кон-
ца жизни? Введение временного хранилища информации
объясняет это очень просто, потому что информация о
1L Функциональная организация в случайных сетях 377
важном событии может оставаться некоторое время во
временном хранилище, и в течение всего этого времени
она может непрерывно подаваться в долговременную
память. Это также хорошо согласуется с приведенными
выше фактами потери памяти о недавних событиях.
Фиг. 6.
Речь, видимо, идет о событиях, которые еще не запе-
чатлелись прочно в долговременной памяти и поэтому
исчезают из памяти, если что-либо разрушает информа-
цию, хранящуюся в кратковременной памяти.
Другое явление, хорошо согласующееся с этой кон-
цепцией,—сжатие масштаба времени в памяти. Когда
воспроизводится последовательность прошлых событий,
это происходит на отрезке времени, гораздо более корот-
ком по сравнению с реальным временем осуществления
этих событий. При этом отбираются все важные черты
основных событий, а протекание самого времени и три-
виальные события опускаются. Это можно объяснить
тем, что в кратковременной памяти хранятся и посту-
пают в долговременную только «вспышки» и важные
события.
378
Р. В ё р л
6. ОБСУЖДЕНИЕ ВЗАИМООТНОШЕНИЙ МЕЖДУ
РАЗЛИЧНЫМИ ВИДАМИ ПАМЯТИ
Одна из главных задач этой работы состояла в том,
чтобы представить различные формы поведения как раз-
личные аспекты поведения одного основного элемента —
массы клеток. Поскольку нашей целью было подчерк-
нуть основные принципы и отношения, диаграмма на
фиг. 3 была умышленно упрощена. Если поведение, ко-
торое здесь рассматривалось, в принципе можно полу-
чить из такой простой взаимосвязи составных частей, то
не должно вызывать удивления, что такая сложная
структура, как человеческий мозг, может вести себя
гораздо более сложным образом.
Мы видели, что различные обсуждавшиеся функцио-
нальные свойства — обучение путем проб и ошибок, об-
разование ассоциаций путем условного рефлекса, про-
цессы мышления и кратковременная память — тесно свя-
заны друг с другом. При обсуждении первых двух
свойств обучение путем проб и ошибок рассматривалось
раньше условного рефлекса, потому что это облегчило
доказательство зависимости второго от первого. Этот
порядок является также и хронологическим. Мы начи-
наем с бесхарактерной массы клеток, не имеющей ни
знаний, ни способностей, ни склонностей, ни интуиции,
обладающей только стремлениями, представленными
соответствующими дискриминаторами. При таких усло-
виях поведение организма в неизвестной среде может
вначале вырабатываться только путем проб и ошибок.
Без руководящей помощи опыта реакции будут случай-
но выхватываться из широкого круга возможностей.
Позднее, с приобретением небольшого опыта, важное
значение начинает играть условный рефлекс.
Роль условного рефлекса состоит в том, что он
позволяет организму, попавшему в плохо знакомую сре-
ду, выбирать реакцию, которая оказывалась удовлетво-
рительной в аналогичных ситуациях в прошлом. Как бы
ни был устроен мир, это, как правило, ускоряет процесс
обучения путем проб и ошибок благодаря тому, что
прежде всего выбираются более подходящие реакции.
Концепция условного рефлекса, содержащаяся в этом
11. Функциональная организация в случайных сетях 379
описании, несколько отличается от ее традиционной
формы, но, по-видимому, она дает более правдоподобную
и в то же время более полезную картину.
Таким образом, условный рефлекс может вступить
в действие, как только организм начинает обучаться
путем проб и ошибок. Сначала он может казаться мало-
важным, но по мере того, как происходит обучение все
большему числу основных реакций, условный рефлекс
становится все более эффективным в ограничении вы-
бора альтернатив, которые требуется рассматривать в
ходе дальнейшего обучения методом проб и ошибок.
Таким образом, между тем и другим существует тесная
связь. Обучение путем проб и ошибок создает возмож-
ности для возникновения условных рефлексов; условные
рефлексы в свою очередь делают обучение более эко-
номным, сохраняя массу времени и усилий, которые
пришлось бы потратить на пробы и ошибки при неогра-
ниченном выборе альтернатив.
Эта тесная связь между обучением путем проб и
ошибок и условным рефлексом особенно резко прояв-
ляется при рассмотрении последовательности событий
в традиционных экспериментах с условным рефлексом.
Их можно описать следующим образом:
1) В начале эксперимента обнаруживается, что уже
имеется удовлетворительная реакция на некоторую сре-
ду, содержащую признаки, которые мы обозначим че-
рез Л.
2) Вводится новый признак В. В действительности
это означает, что мы имеем дело с новой средой, сходной
с первой в том, что А в ней все еще присутствует. Теперь
путем проб и ошибок организм должен обучиться благо-
приятной реакции на эту новую среду, и продолжаю-
щееся присутствие А способствует этому процессу, если
реакция, заученная для Л, годится также для А и В сов-
местно. Это часто имеет место, хотя и отнюдь не всегда.
3) Затем исходный признак Л исчезает, а В остается.
Теперь мы имеем дело с новой средой, реакции на ко-
торую должны быть заучены путем проб и ошибок.
И опять процесс ускоряется, если реакция, заученная на
стадии 2 для Л и В, будет годиться и для В без Л. Это
опять-таки имеет место часто, хотя и не всегда.
380
Р. Б ё р л
Стадии 2 и 3 можно рассматривать как пример того,
как путем проб и ошибок происходит обучение реакции
в среде, которая является новой, но похожей на среду
предшествующей стадии. Однако первые две стадии
можно также рассматривать как начальные стадии в
развитии условного рефлекса, кульминацией которого
является третья стадия.
Возникает вопрос: не являются ли обучение путем
проб и ошибок и условный рефлекс просто двумя аспек-
тами одной формы обучения? Это действительно так.
У развитых животных эти два процесса идут рука об
руку, причем условный рефлекс приобретает все более
важную роль до тех пор, пока не достигается, так ска-
зать, зрелость, когда значительная доля пробных реак-
ций оказывается благоприятной. При наблюдении пове-
дения, которое выглядит как вполне установившееся
«разумное» поведение, эти два компонента иногда те-
ряются из виду, и только когда мы удивлены успешным
выбором пробной реакции, мы говорим об «интуитивном
озарении». Но поведение является вполне установив-
шимся лишь постольку, поскольку оно в разумном
смысле согласуется со средой, а поскольку мир измен-
чив, то в характере поведения часто происходят неболь-
шие исправления и видоизменения.
Причина, почему обучение на этой последней стадии
оказывается таким различным, заключается в том, что
новое поведение строится на основе существующих хо-
рошо развитых форм поведения путем известных доба-
влений к ним и их комбинирования, и, следовательно,
обучение является здесь гораздо более тонким процес-
сом, чем на первой стадии. Теперь мы подходим к роли
процессов мышления.
Процессы мышления являются еще более мощным
средством экономии времени и сил, чем обучение путем
проб и ошибок. Мы уже видели, что их эффективность
зависит от способности воспроизводить наиболее веро-
ятные последовательности и от влияния кратковременной
памяти, действующей как промежуточное звено между
рецепторами и долговременной памятью. Кратковремен-
ная память важна потому, что она позволяет фиксиро-
вать отдельные важные события в сжатом масштабе
11. Функциональная организация в случайных сетях 381
времени, из которого выброшены несущественные от-
резки. Длительная память важна потому, что она дает
хорошую основу для относительно непрерывного фикси-
рования событий в форме, позволяющей составить по
частям всю необходимую «наиболее вероятную последо-
вательность» в некий более поздний момент. Об этих
двух формах памяти говорилось так, как будто они су-
ществуют совершенно раздельно. Это было сделано
умышленно, для большей ясности. Конечно, нельзя
исключать возможность того, что эти два явления в
действительности могут происходить в тесной простран-
ственной взаимосвязи внутри одной массы клеток. Пучок
связующих волокон на фиг. 5 был бы тогда излишним.
Внутреннее воспроизведение наиболее вероятной по-
следовательности событий относится к условному ре-
флексу, поскольку механизм в нем тот же самый. В том
же смысле, в котором теорема Байеса имеет отношение
к условному рефлексу, она будет иметь отношение и
к выбору, который происходит подсознательно на каждом
шаге при составлении наиболее вероятной последова-
тельности. Воспроизведение наиболее вероятной после-
довательности имеет также очень тесную связь с обуче-
нием путем проб и ошибок, так как последнее должно
быть главным фактором, определяющим характер, а
следовательно, и структуру внутреннего воспроизведения
событий. Важность этого становится очевидной, когда
мы рассматриваем проблему целенаправленного обуче-
ния— «обучивания» (tuition) 1).
При рассмотрении простых процессов обучения (lear-
ning) у человека легко упустить из виду важность его
«обучивания» (tuition), и все же является фактом, что
основная часть знаний, накопленных цивилизацией, пе-
редается либо путем инстинктивного учения детей у
взрослых, либо в форме некоторого сознательного обу-
чивания. Обучивание — это процесс учения, исходящий
извне, но идущий рука об руку с внутренними процес-
сами обучения, обсуждавшимися выше. При обучивании
поощряет или наказывает не внешний мир по себе, а
некий учитель. Ему помогает то обстоятельство, что
1) См. примечание на стр. 364. — Прим, ред.
382
Р. Б ёр л
совместная умственная деятельность уже сама по себе
приносит удовлетворение (т. е. определяется как благо-
приятная дискриминатором на фиг. 3). Преимущество
обучивания заключается в том, что обучение (усвоение
знаний и навыков) при этом может быть несравненно
быстрее, чем обучение посредством простого общения
с миром, потому что в распоряжении ученика, научив-
шегося (или наученного) учиться, находится весь сово-
купный опыт поколений. Человек был бы беспомощен в
современном мире без такого обучивания.
В обучивании большое применение — иногда бессо-
знательно — находят принцип условного рефлекса и
способность запоминать и составлять последовательно-
сти. Последовательным мышлением и оценкой интуитив-
ных догадок управляет очень мощная структура, накла-
дывающаяся на все поведение в целом в результате со-
знательного обучивания принятым математическим и
логическим формулам и зачастую менее сознательного
обучивания этическим принципам. Кроме того, методы,
с помощью которых мы обучались, имеют огромное
влияние на наш подход к дальнейшим занятиям.
Задачей науки о преподавании является дать учени-
ку подлинные основы существующих знаний, не нарушая
при этом его способности к самостоятельному мышле-
нию. Трудно оценить, как сильно налагаемая структура
ограничивает наше мышление, направляя его по прото-
ренным путям, преимущество которых заключается в
том, что они уже испытаны и проверены, хотя в то же
время, возможно, нарушают широту наших взглядов
Сходные логические структуры налагаются человеком
на вычислительную машину при программировании. До
некоторой степени это является ответом на много обсу-
ждавшийся вопрос о сходстве между цифровой машиной
и мозгом. Ответ заключается в том, что один и тот же
тип логической структуры мышления в обоих случаях
более или менее успешно накладывается человеком.
Многие из участников данного симпозиума, насколько
мне известно, больше интересуются искусственным со-
зданием самоорганизующихся систем, чем анализом си-
стем, уже имеющихся в природе. Я не претендую на то,
что рассмотренная мной система является в каком-то
И. Функциональная организация в случайных сетях 383
смысле идеальной. Я просто попытался изложить неко-
торые принципы, которые могут оказаться полезными,
когда мы будем больше знать о степени организации в
массах нервных клеток, находящихся в мозгу. Возмож-
но, что, изучив естественную систему в действии, мы
получим некоторые намеки на то, как могла бы действо-
вать искусственная система. И не будет удивительно,
если именно так и случится.
ЛИТЕРАТУРА
1. Beurle R. L., «Properties of a mass of cells capable of regene-
rating pulses», Phil. Trans. Roy. Soc., B240, 55 (1956).
2. S h о 11 D A., The Organization of the Cerebral Cortex, Methuen,
1956.
3. Eccles J. C., The Neurophysiological Basis of Mind, Oxford
Univ. Press, 1956.
4. Eccles J. C., The Physiology of Nerve Cells, Oxford Univ. Press,
1957; русский перевод: Э к к л с Дж., Физиология нервных кле-
ток, ИЛ, 1959.
5. Н о г г i d g е G. A., «The co-ordination of the protective retraction
of coral polyps», Phil. Trans. Roy. Soc., B240, 495 (1956).
ДИСКУССИЯ
Платт. Скажите, д-р Бёрл, не думали ли Вы над тем, как
можно было бы построить аналог такого поведения или предста-
вить его вход?
Бёрл. Я пользовался цифровой машиной для моделирования
сравнительно небольшой совокупности взаимодействующих клеток.
Не считая этого, у меня нет никаких практических соображений
о построении аналога. Я думаю, что мы тогда узнали бы больше
о системе, которую мы исследуем, и в то же время исследовали бы
логику практических задач, которые мы хотим решить. Сближение
этих двух подходов в конечном счете могло бы привести к прак-
тической «думающей машине».
Мне кажется, что одной из причин стремления создать ду-
мающую машину является крайняя ограниченность наших собствен-
ных умственных способностей. Иногда я задаю себе вопрос, от-
кроем ли мы когда-нибудь действительно эффективный метод ком-
муникации, который позволил бы нам объединять умственные воз-
можности людей гораздо лучше, чем мы это в состоянии делать
в настоящий момент?
384
Р. Б ё р л
Баумен. Это уже пытались делать в очень несовершенных
формах, называемых правительствами.
Шервуд. Я хотел бы задать несколько вопросов. Во-первых,
как Вы локализуете волну в реальном времени и пространстве?
Во-вторых, не отождествляете ли Вы эти волны с ЭЭГ-актив-
ностью? !) Этого не следует делать, ибо для этого у нас нет доста-
точных оснований. Альфа-активность не коррелирует достаточно
хорошо с входной активностью, даже если стимул локализован.
Далее, какова природа вашего стимулирования? Является ли
оно локальным электрическим воздействием на мозг или нервную
систему, или это так называемое физиологическое воздействие вклю-
чения и выключения света, звука или чего-либо в этом роде?
Отождествление волн в мозге с действительной обработкой сигнала
представляет собой очень большую трудность.
Б ё р л. Что касается волн ЭЭГ, то я не отождествляю их
сколько-нибудь определенно с волнами, о которых шла речь. В дей-
ствительности у меня есть три альтернативных объяснения альфа-
ритма.
Розенблатт. Модели, которые описал д-р Бёрл, очень по-
хожи на некоторые из тех, которые мы исследовали в нашей про-
грамме перцептрона. Я мог бы привести несколько доказательств
того, что описанное им усиление действительно имеет место. Мы
исследовали некоторые классы систем, выходящих по своей глу-
бине за пределы перцептронов, которые мы обычно рассматриваем
и которые представляют собой трехслойные системы, состоящие
из мозаики сенсорных элементов, слоя ассоциативных клеток и
слоя выходных преобразователей. Если ввести дополнительные
ассоциативные слои, расширив эту часть в форме длинного ряда
клеток, и если в этот ряд ввести торможение, которое, как обна-
ружил д-р Бёрл, необходимо для контроля уровня активности и
предотвращения взрыва всеобщей активности, то мы действительно
получим устойчивую деятельность, т. е. найдем уровень актив-
ности, на котором эта деятельность устанавливается. Наиболее
существенное свойство, которое, по-видимому, здесь возникает, —
это улучшение распознающей деятельности системы. Образы, пода-
ваемые на вход, которые обычно очень трудно распознать, стано-
вятся довольно легко распознаваемыми.
С другой стороны, распознавание образов, которые вначале
распознавались очень легко, становится несколько более затрудни-
тельным. Мы проверяли это предъявлением горизонтальных и вер-
тикальных линий. Нужно было отнести все горизонтальные линии
в один класс, а все вертикальные — в другой. Для обычного трех-
слойного перцептрона это оказалось очень легкой задачей. Задача
становится несколько более трудной, когда мы начинаем увеличи-
вать число ассоциативных слоев системы. Однако мы можем дать
другой тест для тех же линий и потребовать, чтобы каждая линия
!) ЭЭГ (EEG) — электроэнцефалограмма. — Прим, пере в.
11. Функциональная организация в случайных сетях 385
с нечетным номером, занумерованная в соответствии со своим по-
ложением, относилась в один класс, а каждая линия с четным но-
мером — в другой. Для системы с одним ассоциативным слоем это
обычно оказывается более трудной задачей, однако она становится
столь же легкой, как и первая, когда мы увеличиваем число ассо-
циативных слоев. Задачи, очевидно, становятся одинаковыми по
трудности с помощью дискриминации. Кроме того, мы здесь полу-
чаем инвариант относительно уровня достижимых характеристик.
Мы получаем и инвариант относительно размеров стимулов и типа
пересечений, которые возможны между ними на сетчатке. Если уве-
личить число стимулов, имеющихся в среде, то задача становится
более трудной, но деятельность системы при этом становится не-
зависимой от дихотомии и от относительной различимости классов,
заданных на сетчатке системы, а за это приходится расплачи-
ваться. Мы добиваемся распознаваемости ценой потери обобщае-
мости.
Рапопорт. Мне хотелось бы выяснить один вопрос, который
беспокоит меня уже в течение нескольких лет. Он связан с дру-
гими очень сходными моделями обучения путем проб и ошибок,
предложенными Шимбелом в 1950 г. Если вы помните, его стимул
с помощью случайных связей приводит к серии реакций; в прин-
ципе его реакция является случайной, но в действительности опа
зависит от флуктуации порога. Как только порог оказывается низ-
ким, появляется реакция. Имеется центр, который посылает сооб-
щение «всем, кого это касается» — сообщение о низком пороге. Но
те связи, где имелась активность, принимали этот сигнал наиболее
эффективно. Другими словами, там был наиболее низкий порог, и
это, как легко показать, приводило к сужению класса возможных
реакций до наиболее успешной реакции.
В этой модели меня беспокоит специально введенное допуще-
ние, что порог существенно понижается всякий раз, но наиболее
сильно — именно там, где имеет место активность. Я хотел бы
спросить следующее: вводится ли это допущение в явной форме
в Вашу модель, или это допущение как-то исключается посредством
самозатухающей волны активности?
Б ё р л. Нет, я не делал такого допущения. Я умышленно его
избегал, потому что не считаю его необходимым. Никакого допу-
щения относительно общего сигнала вроде того, о котором Вы
говорили, не было. Просто каждый нейрон обладает свойством
становиться более чувствительным всякий раз, когда он становится
активным. Проблема заслуживает внимания ввиду того, что запо-
минание осуществляется только в результате очень большого числа
повторений.
Шимбел при своем допущении мог добиться эффективного за-
поминания при небольшом числе повторений. В данной же теории
требуется большое их число. Каждое повторение уменьшает зату-
хание лишь очень ненамного и только для данной волны актив-
ности. Другими словами, оно становится все более селективным
фильтром для данной волны активности.
25 Зак. 106
386
Р. Берл
Рапопорт. Я не уверен, что в модели Шимбела возможно
запоминание за один раз, поскольку средний порог понижается
ненамного. Тогда низкий порог становится до некоторой степени
формальной проблемой.
Сперри. Вы говорили, что, чем чаще А и В появляются
совместно, тем прочнее укореняется новая комбинация. Существует
так называемое «апериодическое подкрепление», когда пища или
удар даются не каждый раз, а только в некоторых эксперимен-
тах, выбираемых случайно. Эта процедура вызывает более силь-
ный условный рефлекс, чем в том случае, когда они даются ка-
ждый раз. Учитывает ли это Ваша модель?
Бёрл. В этой очень простой ее форме — нет. Как уже гово-
рилось, я сделал эту модель крайне простой, потому что главное,
что мне хотелось установить, — это основные принципы. Я уверен,
что мозг неизмеримо сложнее. Установив эти основные принципы,
вы получаете кирпичи, из которых можно построить гораздо более
сложную сеть, если вы пожелаете.
Сперри. Всего лишь одно слово в защиту неслучайных се-
тей. В нервной системе имеется много мест, которые выглядят под
микроскопом как случайное переплетение подобных друг другу
нервных элементов, но которые, как можно показать, состоят из
специфических, качественно отличных элементов, взаимосвязанных
друг с другом весьма селективным образом — хотя относительно
некоторых областей коры головного мозга млекопитающих у нас
под ногами более твердая почва. Я часто думаю, что для такого
построения моделей гораздо целесообразнее было бы использовать
средний мозг рыбы. Зрительная доля среднего мозга имеет раз-
меры большой булавочной головки, и при этом она способна к вос-
приятию, обучению, запоминанию цветов, образов и ко многому
другому. Ее гистология очень хорошо разработана, и в ней, по-
видимому, относительно мало случайных соединений.
12. КАК СЛУЧАЙНОЕ МНОЖЕСТВО КЛЕТОК
МОЖЕТ НАУЧИТЬСЯ РАСПОЗНАВАТЬ ПРЯМУЮ ЛИНИЮ1)
Дж. ПЛАТТ
(Физическое отделение Чикагского университета)
Под микроскопом строение сетчатки глаза кажется
случайным. Удивительным было бы, если бы это было
не так. Большинство наших тканей имеет, по-видимому,
случайное строение. Это естественно, ибо какая-то клет-
ка может погибнуть в результате воздействия космиче-
ских лучей или может делиться более быстро, чем ее
соседи. В результате этого после многих клеточных де-
лений, имеющих место в процессе эмбрионального раз-
вития, в структуре ткани должна появиться определен-
ная случайность.
Эта случайность озадачила меня, когда я размышлял
о проблемах распознавания образов, потому что при
этом возникает вопрос: как мы можем различать геоме-
трические образы или обнаруживать, действительно ли
данная линия является, скажем, прямой? Кто-нибудь
может подумать, что линия кажется прямой одному че-
ловеку потому, что она пересекает определенное множе-
ство элементов сетчатки, о которых его мозгу с самого
начала известно, что они находятся на прямой линии.
Но предположим, что человек имеет близнеца с наслед-
ственностью, предельно близкой к его собственной, но
с несколько другой историей развития, или с другой
локализацией в клетках повреждений от космических
лучей. Тогда следовало бы ожидать, что «соответствую-
щие клетки» в сетчатках этих близнецов, если бы мы
могли провести какую-нибудь идентификацию между их
сетчатками, должны располагаться чуть-чуть по-другому
*) Краткое изложение работ автора [1, 2].
25*
388
Дж. Платт
и линия, которая кажется прямой одному из близнецов,
должна казаться зигзагообразной другому, и наоборот.
Короче говоря, вопрос сводится к следующему: каким
образом мозг «знает» и с какой точностью он знает, где
находятся отдельные клетки сетчатки, и может ли он
улучшить свое «знание» в процессе обучения? Гельм-
гольц говорил, что мозг знает об этом по «локальным
признакам».
Все вы читали в ноябре прошлого года драматиче-
скую и захватывающую статью Леттвина, Маккаллока
и др. «Что сообщает глаз лягушки мозгу лягушки» [3],
в которой показано, что отдельные точки сетчатки со-
единены с отдельными точками коры мозга, по крайней
мере насколько можно утверждать при точности их
эксперимента в один дуговой градус. Тем не менее сле-
дует все же допустить, что из-за нерегулярности в раз-
витии существует некоторая неопределенность локали-
зации одной отдельной клетки или расположения по
прямой отдельного множества клеток, которые в соот-
ветствии с генетическим кодом должны находиться на
прямой линии. И степень этой неопределенности должна
определять величину зигзагов, которые каждый из нас
должен был бы видеть, глядя на прямую линию.
Но в действительности мы этих зигзагов не видим
(за исключением редких случаев повреждения сетчатки
глаза в юности). По-видимому, эти зигзаги сглаживаются
в результате деятельности какого-то более точного меха-
низма, развивающегося позднее. Наша способность рас-
познавать прямую линию просто фантастична. Мы не
можем отличить прямую линию от слегка изогнутой, но
мы можем распознать прямую при наличии в ней раз-
рывов и зигзагов, а также отличить ее от S-образных
кривых.
Идея относительно возможного принципа работы та-
кого механизма пришла мне в голову, когда я услышал,
как Дитчбёрн говорил о сканирующих движениях, ко-
торые наш глаз все время совершает и которые слишком
тонки и быстры, чтобы мы их могли заметить [4—7]. Он
классифицировал эти движения на три типа. Первый из
них — тремор (дрожание) с амплитудой. 72 угловой ми-
нуты имеет частоту от 50 до 200 гц. Второй тип —
12. Распознавание прямой случайным множеством клеток 389
медленные движения (дрейф); эти движения таковы,
что при фиксации глаза на точке она буквально «плы-
вет» через фовею (центральная ямка сетчатки). Третье
движение, которое было названо «перескоком», состоит
во внезапной установке фовеи таким образом, что точка
фиксации движется обратно к центру.
Обсуждение этих движений и тот факт, что мы пере-
стаем видеть, если эти движения ограничивают для по-
лучения «фиксированного ретинального изображения»,
как это показали Дитчбёрн, Риггс и их сотрудники, за-
ставили меня задуматься о том, не являются ли эти ска-
нирующие движения причиной того, что случайно со-
ставленная мозаика клеток может распознать прямую
линию во внешнем поле. Оказалось, что в принципе это
возможно и что с помощью сканирующих движений,
смещая сетчатку вдоль образов и не зная места лока-
лизации любой из клеток, можно определить, является
ли линия прямой, а также и особенности некоторых дру-
гих геометрических образов.
Эта модель динамическая, но я не смог придумать ни
одной статической модели, которая с той же точностью
осуществляла бы те же различения и на которую не
влияла бы неопределенность расположения отдельных
клеток. Динамический характер модели приводит к то-
му, что ребенок или визуально неопытный взрослый
(например, человек с только что удаленной катарактой)
должен потратить некоторое время на тренировку ска-
нирующих операций для того, чтобы локализация клеток
была точно установлена и можно было точно судить о
том, является ли линия прямой. Но я не знаю и таких
данных, которые говорили бы о возможности избежать
периода обучения. Подчеркиваю, я не утверждаю, что
человеческий глаз действительно учится опознавать
прямолинейность или другое геометрическое свойство
образа с помощью сканирования, хотя из такого допу-
щения вытекает много интересных следствий. Но я дей-
ствительно утверждаю, что механически составленное
множество., или мозаика, рецепторных клеток в фокусе
оптической системы может научиться отличать прямо-
линейность и другие геометрические свойства образов
при помощи таких сканирующих операций, даже если
390
Дж. Платт
эта мозаика образовалась случайным образом, ее клет-
ки случайным образом соединялись и расположение ин-
дивидуальных клеток было заранее неизвестно.
Если имеется случайное множество клеток, которое
пересекает прямая линия, можно сместить мозаику этих
клеток вдоль линии или линию вдоль клеток таким обра-
зом, что после смещения линия будет пересекать те же
клетки, что и до смещения. В отличие от этого S-образ-
ная или зигзагообразная кривая после смещения обяза-
тельно ляжет на другое множество клеток. Поэтому
прямая линия отличается тем, что она имеет свойство
быть «самосовпадающей» (самоконгруэнтной), что озна-
чает, что она совпадает с самой собой после произволь-
ного перемещения линии вдоль себя.
Это свойство «самосовпадения после перемещения»,
очевидно, является инвариантом образа прямой линии.
Таким образом, проблема обнаружения этой инвариант-
ности сводится к проблеме обнаружения инвариантности
множества сенсорных сигналов, что, очевидно, является
чуть ли не самым слабым требованием, которое мы
могли бы наложить на мозаику рецепторных элементов,
так как это требование не включает исследование дета-
лей сигналов. В случае прямой линии с разрывом этот
разрыв может быть обнаружен благодаря тому, что
производимые сигналы не инвариантны относительно
перемещения, что уже давно было показано Веймутом
с сотр. [8, 9].
Кроме прямых линий, свойством самосовпадения при
перемещении обладают кривые с постоянной кривизной,
если перемещение включает и вращение. Но глазное
яблоко может вращаться относительно своих оптических
осей на довольно большие углы, так что не существует
присущих глазу свойств, делающих невозможным исполь-
зование сканирующих методов для определения наличия
постоянной кривизны. Еще одним самоконгруэнтным об-
разом является множество параллельных линий. Если
линии не параллельны, они не самоконгруэнтны (я го-
ворю здесь только о малых образах, занимающих два
или три градуса по диаметру и расположенных на пло-
ской поверхности, перпендикулярной оптической оси, что
является самым простым случаем). При установлении
12. Распознавание прямой случайным множеством клеток 391
отношения образов с помощью метода самосовпадения
параллельные линии будут иметь уникальное свойство,
не присущее всем прочим линиям. Другие примитивные
восприятия такого мозаичного рецептора, очевидно, бу-
дут включать восприятие концентричности круговых дуг
или кругов, восприятие эквидистантности при дискрет-
ных смещениях и т. д. При обнаружении эквидистант-
ности мы должны зафиксировать узор возбужденных
клеток сетчатки, а затем, дискретно сместив глаз, посмот-
реть, повторяется ли первоначальный узор возбужденных
клеток. Эта процедура может служить тестом на то, что
второе множество элементов образа так же распола-
гается в пространстве, как и первое множество. Короче
говоря, сетчатку можно использовать для установления
метрики.
Для физика и математика очевидно, каковы свойства
образов, самоконгруэнтных при линейных и угловых
смещениях. Поэтому мы можем продолжать перечисле-
ние некоторых из тех преимуществ, которые дает при-
менение метода смещения в распознавании образов —
преимуществ, которые заслуживают рассмотрения при
использовании искусственно созданной случайной мо-
заики и поэтому, по-видимому, полезны и в естественной
системе, например глазе.
Мы уже обсудили первое, главное, преимущество, за-
ключающееся в том, что распознавание при помощи
метода смещения не требует знания расположения инди-
видуальных клеток. Второе, связанное с предыдущим,
преимущество состоит в том, что при этом не требуется
знания закона распределения чувствительности в инди-
видуальных клетках. Если клетка вышла из строя в ре-
зультате космического облучения, то пересекающий ее
образ может все же оставаться самоконгруэнтным после
смещения. Если клетки отличаются по своей чувствитель-
ности, как это обычно и происходит с фотоэлементами
серийного производства, их все же вполне можно исполь-
зовать при этом методе распознавания образов. Конечно,
следует ожидать, что и биологические клетки отличаются
как по своей чувствительности, так и по размерам и
форме.
392
Дж. Платт
Третьим важным свойством является то обстоятель-
ство, что выходной сигнал, сообщающий мозгу о наличии
образа, может не зависеть от структуры мозаики. Вся
информация, которую должен нести выходной сигнал,
состоит в констатации: «Это то же множество!» И хотя
при этом могут наблюдаться ошибки, связанные с раз-
мером «зерна», — возможные ошибки, сравнимые по ве-
личине с размерами зерна, — эти ошибки или эта моза-
ичная структура никогда не являются элементами вос-
приятия. Мозаичность структуры не воспринимается
потому, что единственный сигнал, который мы в конце
концов получаем, является сигналом конгруэнтности или
неконгруэнтности. По-видимому, с помощью тремора мо-
жно было бы получить зависящее от времени множество
начальных сигналов, осуществляющих намного более
тонкую дискриминацию граничных положений, чем мо-
жно добиться с помощью самой мозаичной структуры,
как это и предположили Маршалл и Талбот [10]. В этом
случае зависящее от времени множество сигналов в один
момент времени можно сравнить с множеством сигналов
после большого смещения и таким образом получить
сверхтонкое различение. Точность различений ограничи-
вается скорее соображениями отношения сигнала к шуму
во время исследования образа или за время сравнения,
чем тонкостью мозаичной структуры. Но в любом слу-
чае мозаичная структура не обязана входить в явном
виде в восприятие.
Четвертое и наиболее наталкивающее на размышле-
ния свойство состоит в том, что восприятие прямолиней-
ности образа с помощью сканирования не зависит от
действительной формы изображения на сетчатке. Без-
различно, лежит ли изображение линии, являющейся
прямой во внешнем поле, на сетчатке на прямой линии,
на кривой или на зигзагообразной линии. Оно не должно
лежать даже на связной области сетчатки (например,
когда оно пересекает слепое пятно). Это происходит по-
тому, что при сканировании глазом от одной части пря-
мой линии к другой необходимо знать только одно: яв-
ляются ли полученные сигналы теми же, что и раньше.
Если первоначально изображение прямой линии на сет-
чатке выглядело как S-образная кривая, то после ска-
12. Распознавание прямой случайным множеством клеток, 393
нирования вдоль нее мы получаем ту же самую S-образ-
ную кривую. Это происходит не из-за действительной
прямолинейности изображения, а из-за его, так сказать,
«операционной» прямолинейности.
Таким образом, обнаруживаемая нами прямоли-
нейность является таковой во внешнем поле, а не в ка-
ком-либо внутреннем поле, т. е. прямолинейность во
внутреннем поле не необходима. Я думаю, что это об-
стоятельство может пролить свет на одну из старых
биологических загадок, смысл которой состоит в следую-
щем: как получается, что отображение прямой линии на
коре головного мозга отнюдь не является прямой линией,
а отображение множества эквидистантных точек на коре
также не является эквидистантным? При описанном ме-
тоде распознавания образов такие вопросы не имеют
смысла, и, что самое важное, они не имеют смысла для
пластической биологической системы.
Далее из того, что при восприятии прямой линии ва-
жно лишь, является ли она прямой во внешнем поле,
вытекает в качестве следствия возможность публичного
обсуждения проблем распознавания образов без обра-
щения к индивидуальным свойствам «распознающих».
Так, прямая линия, которую видите вы, является той же
прямой, которую вижу я. Обе они находятся в наших
внешних полях. И нет ничего субъективного в этой ее
прямизне, в параллелизме, эквидистантности или кон-
центричности. Наши нервные сети, распознающие пря-
мые линии, могут быть сколь угодно индивидуальны и
своеобразны, но сама прямизна линии является инвари-
антным свойством во внешнем поле. Именно это позво-
ляет нам делать эти образы предметом публичного об-
суждения и обучения, а также пользоваться для их
описания общедоступным языком. Если удастся указать
другие способы, благодаря которым рецептор, являю-
щийся случайной мозаикой, мог бы осуществлять рас-
познавание образов, то важно было бы провести сравне-
ние таких методов с нашим в отношении этих более
общих выводов.
Другой важный вывод состоит в том, что такой ме-
тод распознавания необходимо требует обучения. Тот
факт, что определенное множество клеток возбуждается
394
Дж. Платт
самоконгруэнтно, означает, что (если на характер об-
раза наложены некоторые другие, очевидно необходи-
мые, ограничения) они лежат на прямой линии. Их
«адреса» в сети и их взаимное расположение в прост-
ранстве заучиваются путем их ассоциирования в вос-
приятии прямой линии; таким образом, мозг определяет
их относительные «адреса» в ходе их использования.
Если множество клеток состоит из миллионов элементов,
то значительно выгоднее определять адреса именно та-
ким образом, вместо того чтобы помещать каждую клет-
ку первоначально в соответствующее правильное поло-
жение и индивидуально соединять клетки между собой
в строго определенном порядке. Именно из-за использо-
вания этого второго способа столь дороги наши сего-
дняшние вычислительные устройства и распознающие
системы. Вся эта предварительная информация должна
быть вложена в устройство высококвалифицированными
рабочими на сборочных линиях, а это отнимает месяцы
и годы. По сравнению с такими системами младенец —
очень дешевое и простое устройство. Он появляется на
свет со всеми этими случайными множествами клеток,
и единственная цена, которую мы уплачиваем, состоит
в том, что проходит двадцать лет, прежде чем они рас-
полагаются в надлежащем порядке и он превращается
во взрослого, осуществляющего необходимые различе-
ния. Не правда ли, как хорошо было бы, если бы мы
умели создавать механизмы, которые делали бы то же
самое!
ЛИТЕРАТУРА
1. Platt J. R., «Functional geometry and the determination of pat-
tern in mosaic receptors», Information Theory in Biology (Eds.:
Yockey, Quastler and Platzman), Pergamon Press, New York,
1958, pp. 371—398; русский перевод: Платт Дж., Функцио-
нальная геометрия и восприятие формы мозаичными рецепто-
рами, сб. «Теория информации в биологии», ИЛ, 1960.
2. Platt J. R., «How we see straight lines», Sci. American, 202,
№ 6, 121 — 129, June (1960).
3. Lettvin J. Y., Maturana H. R., McCulloch W. S.,
Pitts W. H., «What the frog’s eye tells the frog’s brain», Proc.
IRE, 47, № 11, 1940—1951 (1959); русский перевод в жури.
12. Распознавание прямой случайным множеством клеток 395
Труды ИРИ, 47, № 11 (1959), а также в сб. «Электроника и ки-
бернетика в биологии и медицине», ИЛ, 1963.
4. Ditchburn R. W., «Eye-movement in relation to retinal action»,
Optica Acta, 1, 171—176 (1955).
5. Ditchburn R. W., Fender D. H., «The stabilized retinal
image», Optica Acta, 2, 128—133 (1955).
6. Riggs L. A. et al., «The disappearance of steadily fixated visual
test object», J. Opt. Soc. Amer., 43, 495—501 (1953).
7. Riggs L. A. et al., «Motions of the retinal image during fixa-
tion», J. Opt. Soc. Am., 44, 315—321 (1954).
8. Andersen E. E., Weymouth F. W., Amer. J. Physiol., 64,
561-594 (1923).
9. A v e r i 1 1 H. L., Weymouth F. W., J. Comp. Psychol., 5,
147—176 (1925).
10. M a r s h a 11 W H., Talbot S. A., «Visual mechanisms», Bio-
logical Symposia, Vol. 7 (Ed. H. Kliiver, J. Cattell), Lancaster,
Pa, 1942, pp. 117—164.
ДИСКУССИЯ
Розенблатт. Мне кажется, что когда теория достигает та-
кой степени разработанности, можно и нужно предпринять коли-
чественный анализ, чтобы выяснить, соответствует ли эта теория
на самом деле известным количественным данным. Мне предста-
вляется правдоподобным, что зрительный тремор действительно
может являться причиной остроты зрения. С другой стороны, это
отнюдь не непосредственно очевидно. Острота зрения позволяет
нам обнаруживать мельчайшие относительные смещения двух от-
резков линии, значительно меньшие, чем диаметр элемента сет-
чатки, поэтому сначала могло бы показаться, что если перенести
эту линию таким образом, чтобы получить самоконгруэнтность, то
оба участка, как тот, что чуточку смещен по отношению к линии,
так и другой, пересекут при смещении то же множество
клеток.
Однако очевидно, что между выбранными множествами клеток
все же имеется небольшое различие. При переносе линии слегка
смещенный участок будет пересекать края нескольких клеток, кото-
рые сами смещены относительно других, так что предлагаемая тео-
рия в какой-то мере правдоподобна. С другой стороны, вопрос
заключается в следующем: действительно ли имеется достаточно
большая вероятность выбора добавочных клеток или достаточного
количества их при треморе с амплитудой 30" или любой другой
амплитудой, чтобы обеспечить возможную здесь степень точности
различения? Это одно соображение.
Второе соображение состоит в том, что имеется ряд весьма
хитроумных экспериментов по распознаванию образов человеком,
осуществляемому за очень короткое время, порядка 4 микросекунд
396
Дж. Платт
и менее. После 3—4 микросекунд экспозиции оказывается возмож-
ным утверждать, что было предъявлено изображение человека, или
описать показанную сценку. Ясно, что частота зрительного тремора
не приближается к мегагерцам, что было бы необходимо, если бы
действительный механизм распознавания был именно таков. Эти
замечания не относятся к остроте зрения, которая, очевидно, в этих
условиях не имеет места. За 4 микросекунды нельзя достигнуть
такой разрешающей способности, которая достижима при экспози-
ции в несколько секунд. С другой стороны, если я правильно по-
нимаю точку зрения, изложенную Вами в журнале «Scientific Ame-
rican», то, мне кажется, там предполагается, что развитие той же
техники анализа фигур может привести к распознаванию более
сложных образов, восприятию углов и т. д., что явно играет важ-
ную роль при распознавании сценок, фигур и тому подобных ве-
щей. Можете ли вы сказать что-либо относительно количествен-
ных исследований и объяснить, что происходит в случае очень
коротких экспозиций, при которых все же возможно распознавание?
Платт. Да. Справедливо, что «обученный» глаз взрослого
человека может разглядеть фигуру или читать текст под углом
в 1 градус при экспозиции в тахистоскопе, длящейся несколько
микросекунд, в то время как «необученному» глазу взрослого че-
ловека, скажем, человека, которому удалили катаракту и подобрали
нужные очки, обеспечивающие нормальное (по мнению глазного
врача) зрение, требуются месяцы, прежде чем он сможет отли-
чить треугольник от квадрата или дерево от книги на столе или
даже красный треугольник от синего. Поэтому, я думаю, что глаз
должен изучить свою организацию и что при распознавании на
тахистоскопе без сканирования мы, возможно, сравниваем образ
с другим образом, которому мы научились несколько лет назад.
По-видимому, мы сравниваем образ человека с другим множеством
образов человека, виденных давным-давно. Таков один возмож-
ный ответ.
Справедливо, что эта общая теория распознавания в высшей
степени специфична и предполагает проведение огромного числа
экспериментов, ни один из которых не был сделан. Например,
можно измерить движения глаза при сканировании определенных
образов или при сканировании в случае зрительных иллюзий, на-
пример иллюзии Цольнера. В теории сканирования допускается, что
определенные движения глаза должны повторяться с очень высо-
кой вероятностью. Исследователи, измеряющие движения глаз, ни-
когда не обращали внимание на тремор и дрейф на линейных об-
разах. Я думаю, что измерение движений при сканировании об-
разов, особенно измерение вращения вокруг оптических осей,
которым мы совершенно не занимались, будет особенно
важным.
Я вовсе не хочу утверждать, что мой метод функциональной гео-
метрии и есть тот способ, которым видит глаз. Но он может быть
таковым, и тогда он указывает путь создания искусственной мо-
заичной системы для распознавания образов. Конечно, остается во-
просом, действительно ли глаз видит именно таким образом.
12. Распознавание прямой случайным, множеством клеток 397
Сперри. Еще одно замечание относительно процесса «обу-
чения адресам клеток», происходящего между глазом и мозгом
Я думаю, достаточно ясно, что напоминающая карту топографиче-
ская проекция сетчатки сперва на три чередующихся слоя колен-
чатого тела, а затем на зрительную область коры, равно как и
проекция на зрительную долю среднего мозга и верхнего collicu-
lus' а возникает под действием упорядочивающих сил роста, и об-
учение при этом не нужно. Кроме того, можно показать, что более
тонкие аспекты зрительной организации, которые нельзя продемон-
стрировать анатомически и которые значительно сложнее, чем
свойство различения «прямизны» линий, удается обнаружить в виде
некоторых врожденных механизмов у различных видов. Вспомним,
например, эксперименты д-ра Гибсона и его коллег, навигацию
по звездам перелетных птиц и т. д.
Я не уверен, что можно положиться на доказательства, полу-
ченные при наблюдении больных, оперированных по поводу ката-
ракты, или в экспериментах с люситовыми присосками и другими
приспособлениями с рассеянным светом, потому что в зрительной
системе имеются такие элементы, возбуждение которых, а может
быть и их нормальное развитие и «созревание», по-видимому, за-
висит от границ, контрастных эффектов и быстрых включений и
выключений света. Эти и другие такие же элементы, используемые
при распознавании, могут поэтому атрофироваться от бездействия
при продолжительном освещении диффузным светом, как это про-
исходит с большей частью сетчатки при продолжительном пребы-
вании в темноте.
Платт. Конечно, я согласен с тем, что значительная часть
зрительной системы и возможных систем восприятия, например вос-
приятия цвета, закодированы генетически. В низших организмах
генетическое кодирование распознавания образов кажется весьма
желательным. Естественно, мы должны были бы сохранить воз-
можно больше черт любой такой желательной генетической схемы.
Но мне представляется, что такие восприятия, как чрезвычайно
точно осуществляемое распознавание прямой линии, не входящей
в обычную внешнюю среду рыбы или обезьяны, являются след-
ствием обучения, которое может накладываться на генетически де-
терминированную систему распознавания с предварительной адре-
сацией.
Точно так же частью любой искусственной мозаичной системы
распознавания, как мне кажется, должна являться система пред-
варительной адресации, элементы которой с самого начала должны
быть правильно соединены для того, чтобы она вообще работала.
Только по достижении этих условий в системе могут возникнуть
какие-то сложные явления обучения.
Маккаллок. Две недели назад я посетил лабораторию
Риггса. С ним работает одна девушка, которая весьма тщательно
исследовала восприятие неподвижных изображений. При фиксации
изображения имеется короткий промежуток времени до того мо-
мента, как оно погаснет. Эта сотрудница смогла доказать, что наша
398
Д ж. Платт
разрешающая способность за такой короткий промежуток времени
по крайней мере столь же хороша или, может быть, даже
чуточку лучше, чем при изображении, движущемся относительно
глаза. Следовательно, мы здесь для человеческого глаза впервые
узнали, что движение объекта, пожалуй, вовсе не обязательно.
Движение необходимо для запоминания, но не для решения о том,
что изображено, или для определения формы. К сожалению, я за-
был имя этой сотрудницы1).
9 По поводу замечания Маккаллока Платт обращает внима-
ние на обмен письмами между ним и Риггсом, см. Sci. American,
№ 11 (1960). — Прим. ред. англ, издания.
13. ОТНОШЕНИЕ И КОНТЕКСТ
Г. Ц О П Ф (мл.)
(Лаборатория электротехники Иллинойсского
университета)
1. НАДЕЖДЫ И ПРЕДУБЕЖДЕНИЯ
Хотя я в течение 10 лет имел дело с самоорганизую-
щимися системами и 5 лет активно занимался их изуче-
нием, я испытываю некоторое смущение. Конечно, мое
замешательство в значительной степени связано с тем,
что это чрезвычайно запутанный предмет. Однако я по-
дозреваю, что частично оно должно быть отнесено не за
счет сложности и запутанности этой новой области ки-
бернетики самой по себе, а за счет деятельности кибер-
нетиков. Действительно, когда я сообщил одному из
участников нашего симпозиума, что собираюсь говорить
об ограничениях кибернетики, он усмехнулся и посове-
товал вместо этого рассказать об ограниченности кибер-
нетиков. Я не мог так просто отказаться от своего пер-
воначального намерения, но несомненно, что он был
прав. Быть может, я смогу неявно воздать должное и
его теме.
Нейрофизиолог Б. Д. Бёрнс [1] однажды написал,
пожалуй, скорее с отчаянием, чем с надеждой: «Было
бы полезно... если бы авторы статей о высших отделах
центральной нервной системы, прежде чем писать о ме-
тодах, сообщали о своих предубеждениях и ожиданиях.
В конце концов, удручающе легко найти то, что ищешь,
и чрезвычайно трудно увидеть то, что заранее не ожи-
даешь или не стремишься найти».
На просьбу, выраженную с такой мольбой, нужно
откликнуться. Я хотел бы изложить мои ожидания и
предубеждения, насколько они доступны моему разуме-
нию, и таким путем ограничить размеры пространства,
внутри которого я выношу суждения и согласен стать
объектом обсуждения,
400
Г. Цопф
Мое первое ожидание просто. Я всего лишь надеюсь,
что кибернетика и тот ее раздел, который касается само-
организующихся систем, могут осветить одну-единствен-
ную кибернетическую проблему: проблему управления
и связи внутри человека и между людьми. Вы можете
поэтому ожидать, что я буду ерзать на стуле, пока здесь
описываются разные занимательные, мудреные или тех-
нически полезные вещи. Я намерен рассматривать сим-
волы и черные ящики, слизи и лишайники, заводы, вы-
числительные устройства и ракетные системы только
в надежде, что результаты такого рассмотрения можно
будет как-то применить к тому, что меня интересует.
Мое первое предубеждение сродни моему ожиданию.
Оно состоит в том, что нет проблемы, логически или
практически предшествующей пониманию самих себя.
И с той и с другой точки зрения я на вопрос типа: «Как
или что мы можем знать об х?» могу ответить: «Сна-
чала познай познающего».
Я убежден, что познание самих себя логически пред-
шествует любым проблемам, так как многие наши про-
блемы не объективны и не должны решаться в предпо-
ложении, что все происходит «вне нас». В действитель-
ности многие наши проблемы являются проблемами
только потому, что мы требуем полностью объективного
описания.
Я убежден, что познание самих себя практически
предшествует любым проблемам, так как вижу, что
каждый вопрос типа: как устранять ошибки в наведении
ракет, как корректировать пространственное запаздыва-
ние, как изменить режим, чтобы перейти с шага на га-
лоп,— включает в себя вопрос о познании познающего.
Почему мы задаем такие вопросы? Почему мы действи-
тельно поступаем так, как если бы они были необхо-
димы и важны? В чем заключается их связь с главной
проблемой, проблемой расширения наших знаний о са-
мих себе и о нашей взаимосвязи с миром?
Это, действительно, сильное предубеждение, настоль-
ко сильное, что я не терплю тех, кто считает всю сово-
купность биологических данных, явлений биологической
организации и разума не более, чем мешком деда-моро-
за, из которого можно извлекать технические конфетки.
13. Отношение и контекст
401
Моя нетерпимость смягчается только убеждением, что
такое случайное извлечение не может быть успешным.
Не поймите меня превратно. У меня нет сомнения
в наших способностях построить когда-нибудь не только
просто автоматы, но и мыслящие автоматы. Однако я
сомневаюсь, чтобы мы могли многого достичь в их объ-
яснении и использовании путем одного только случай-
ного отбора биологических частностей. Тем, кто заинте-
ресован в создании полезных автоматов, следовало бы
помнить, что биологические системы могут служить нам
лишь ориентирами; они редко являются системами,
действительно выполняющими те задачи, выполнения
которых мы требуем от машин, и до сих пор они не
являются системами, которые выполняли бы эти задачи
в изоляции, in vacuo. Это можно сформулировать в
виде парадокса: в настоящее время машины делают
многое лучше, чем человек, но это такие вещи, которые
человек вообще не делает.
Я все же надеюсь, что мы не попадемся в ловушку,
в которой на некоторое время оказался один из моих
друзей, который, говоря о созданном им устройстве, с
невозмутимым видом заявил: «Если бы условный реф-
лекс состоял только в этом, тогда то, что я построил,
есть модель условного рефлекса».
2. ОБ ОБЪЕКТИВНОСТИ
Не подлежит сомнению, что мы исторически доби-
лись значительного успеха в объективизации, «овнешне-
влении» (externalisation) сущностей. Науку можно было
бы даже охарактеризовать как деятельность, осущест-
вляющую именно это. Чтобы привести соответствую-
щий пример, укажем, что мы сумели истолковать «по-
рядок» как нечто присущее и принадлежащее системам
внешнего мира самого по себе. Порядок и беспорядок,
воплотившиеся в энтропии, были превращены в функ-
цию состояния. Отметим, однако, что энтропия является
несовершенным понятием. Она описывает порядок гомо-
морфно, а не изоморфно. Она становится измеримым,
объективным свойством только в предположении про-
извольного начала отсчета, начальной упорядоченности.
2$ Зак. 10Q
402
Г. Цопф
Мы не можем говорить просто о порядке, а только об
относительном порядке: какую-то максимальную или
минимальную упорядоченность мы должны выбрать со-
вершенно произвольно. Поппер [2] мудро заметил, что
мы не можем оценить упорядоченность чего-либо, мы
можем только констатировать, что тот или иной кон-
кретный порядок существует или не существует, или же,
в некоторых случаях, установить его степень.
Вот что необходимо было сказать об идее приспо-
сабливающейся или самоорганизующейся системы как
чего-то, что, говоря самым общим образом, ищет, нахо-
дит и поглощает порядок окружающей среды. Чтобы не
поддаться действию этой метафорической характери-
стики, необходимо лишь иметь в виду, что мы мо-
жем обнаружить только те порядки, которыми мы уже
обладаем; в лучшем случае мы можем обнаружить толь-
ко разницу между нашими относительными порядками
и порядками «в» окружающей среде. Мы сами и наши
друзья самоорганизующиеся системы служим подтвер-
ждением того, что такой-то и такой-то порядок может
существовать в окружающей нас среде. В этом мы по-
добны фильтру, отличаясь от него лишь тем, что нам
доступны различные способы обнаружения одного итого
же порядка и различные порядки, которые мы можем
обнаружить. Но мы не настолько свободны, чтобы оты-
скать любой порядок и упорядочить все, что мы отыска-
ли, мы — ограниченные существа. Этой темы я еще кос-
нусь, когда будут обсуждать игру 22\
Подобно этому мы пытались рассматривать память,
обучаемость, разум как свойства, внутренне присущие
объектам или системам, и тем самым поставили пре-
грады на пути к пониманию этих явлений. Все это, ко-
нечно, свойства не той или иной системы, а нашего
отношения к этим системам. Действительно, приписыва-
ние этих свойств какой-либо системе всегда означает
либо признание нашего невежества, констатацию, что
наши знания о существующем в данный момент сочета-
нии входов и внутренних состояний системы недостаточ-
ны, либо изменение определения понятий.
Последнее происходит в том случае, когда мы гово-
рим о «памяти» цифровой вычислительной машины. Как
13. Отношение и контекст
403
бы сильно мы ни сожалели, что не используем менее
обязывающий нас термин «склад», остается верным, что
мы можем говорить о памяти вычислительной машины
вполне ясно и точно. Неприятности возникают лишь то-
гда, когда нам не удается убедиться, что процессы в
вычислительной машине зависят только от состояния ее
частей в настоящий момент, включая состояние блока
памяти, или когда мы пытаемся сравнивать память ма-
шины с ее человеческим аналогом. Сказать, что система
«имеет» память, — значит сказать лишь то, что мы не
знаем или не можем (или не хотим) узнать полное опи-
сание ее состояния в настоящий момент, но мы можем
сделать ее поведение объяснимым путем обращения к
предшествовавшим состояниям на входе. Эшби доста-
точно прояснил этот вопрос, и мне нет надобности про-
странно на нем останавливаться.
Сказать, что система «разумна», — значит сказать
лишь то, что мы не можем получить достаточно дока-
зательств для определения ее поведения в некоторых
ситуациях по «решению задач». Это значит сказать, что
система разумна потому, что мы должны допустить ее
разумность для того, чтобы сделать ее поведение до-
ступным разуму. Восхитительный (но неизбежный) по-
рочный круг! Заметьте, у скольких вычислительных ма-
шин падает их I.Q1), как только приподымают их
крышку! Заметьте и то, что само присхождение разум-
ных машин требует от нас не позволять правой руке
знать, что делает левая. Чтобы построить сложную ма-
шину, мы должны знать детерминированно, во всех де-
талях, что мы делаем; но чтобы назвать такую машину
разумной, требуется, чтобы мы забыли или игнориро-
вали наши знания как раз о том, как она делает то, что
она делает. Возможно, нам удобнее описывать устрой-
ства как разумные, когда мы начинаем пользоваться
системами, рекомендованными Паском и Биром, где
невозможно (или по крайней мере неудобно) определить
именно то, каким образом устройство решает ту или
иную задачу.
9 I. Q. («Intelligence Quotient»)—количественный показатель,
применяемый для оценки умственного развития и способностей че-
ловека. Вычисляется посредством метода тестов. — Прим, перев.
26*
404
Г. Цо пф
Заметьте также наше скрытое самомнение. Не счи-
тая шуток в своем кругу, мы редко отрицаем наш соб-
ственный интеллект и склонны приписывать интеллект
тем машинам, с которыми мы можем отождествить са-
мих себя, в том, что касается предложенной задачи, до-
стигнутого решения и степени незнания происходящих
процессов.
Мы говорим, что система обучается, когда она, не-
смотря на то что несомненно остается «той же самой»
системой, функционирует сейчас так, как не функциони-
ровала раньше. Это сводится к допущению, что вход ее
«сейчас» тождествен входу «тогда» и что система сохра-
нила свою формальную тождественность. И в этом слу-
чае наше допущение основано или на незнании, или на
невозможности исследовать со всей полнотой внутрен-
ние состояния системы.
Некоторые из нас склонны требовать более широкого
определения обучаемости, чем то, с которым согласно
большинство. Они хотели бы включить в обучаемость
даже такие вещи, как приобретение пластичности или
хрупкости, утверждая, что приработка двигателя или
растягивание долго носимой перчатки по руке — это при-
меры обучения. Но это не так. Я могу продемонстриро-
вать без ссылок на опыт, что машина и перчатка в этом
случае становятся другими. Лишь если вы принесете мне
две неразличимые перчатки, т. е. неразличимые во всех
отношениях, за исключением того, что одна очень удоб-
но подойдет к моей руке, и скажете мне, что эта пер-
чатка имеет большой опыт в обращении с руками, тогда
я соглашусь, что перчатки обучаются.
Или же вы приводите ко мне двух человек и сооб-
щаете мне, что один из них изучил санскрит. Будь я
самым талантливым нейрофизиологом и в придачу че-
ловеком, хорошо разбирающимся в санскрите, все равно
в наше время нет способа, посредством которого я мог
бы установить, который из них лингвист, не подвергнув
его испытанию. Мы не знаем состояний машины, кото-
рые указывают на «знание санскрита». Я не люблю та-
кие экстраполяции, но я сомневаюсь, чтобы мы когда-
либо вообще достигли такого знания о состояниях. Но
я сомневаюсь и в том, что у нас когда-нибудь появится
13. Отношение и контекст
405
нужда или желание достигнуть этого. Верить в то. что
мы должны знать такие состояния, — это объективист-
ская, аналитическая ересь.
Я думаю, что именно это Гордон Паск имеет в виду,
когда он предоставляет нам право по нашему выбору
считать систему состоящей из элементов, которые ведут
себя так, «как если бы они не могли иначе», или так,
«как если бы они сами решали». Я уверен, что эта воз-
можность выбора взволнует все аналитические умы, а
также тех, кто видит одну из главных задач науки в
том, чтобы расправляться с драконами антропоморфиз-
ма и патетических заблуждений. Но это не заблуждение,
это сознательный вымысел: это не мистика, а если угод-
но, эвристика. Я уверен, Паск не утверждает, что эле-
менты должны обладать волей, хотеть и выбирать и
что они действительно таковы; утверждать это так же
абсурдно, как и придерживаться взгляда, что они дей-
ствительно подчиняются строгому и могущему быть от-
крытым детерминизму. Он говорит, как мне кажется, о
том, что имеются некоторые невероятно сложные си-
стемы, о которых мы можем получить практически по-
лезные знания и успешно взаимодействовать с ними,
если допустим, что они обладают своевольной внутрен-
ней направленностью. Он предполагает, что такой от-
носительный подход, несмотря на то, что он не дает нам
всего богатства данных и такой определенности состоя-
ния системы, которые мог бы дать нам аналитический
подход, оправдан, если он дает то, что нам нужно, а
не то, что мы, по нашему мнению, должны иметь.
Такой подход полезен лишь в случае, если мы дей-
ствительно хотим продвинуться в решении проблемы,
хотим выиграть, а не просто играть. Если мы считаем,
что объяснение или понимание могут заключаться толь-
ко в аналитическом и атомарном расчленении проблемы,
то методика Паска так же бесполезна для нас, как тен-
нисная сетка для шахматиста. Но если нас интересуют
практические применения, успешное взаимодействие с
системами, называемыми самоорганизующимися, тогда
его методика становится многообещающей.
Вчера Стаффорд Бир упоминал одну из коллоидных
систем Гордона Паска, осуществляющую обращение
406
Л Цопф
матриц почти астрономического порядка. Я говорю, чю
это и так и не так. Это так в том смысле, что если бы
от нас потребовали (с помощью или без помощи вы-
числительной машины) аналитически воспроизвести опе-
рации, выполненные коллоидом, мы были бы вынужде-
ны на каком-то этапе вычислений прибегнуть к мате-
матической операции, известной как обращение матриц.
Но это и не так, потому что ни в какой момент вре-
мени, ни в каком месте нельзя выделить часть системы,
которая могла бы быть однозначно идентифицирована
с оператором обращения матриц.
Если мы будем считать знание игрой, проводимой
некоторыми фиксированными способами с определен-
ными фиксированными правилами подсчета очков, то
оно всегда останется неудобно ограниченным.
3. РАЗДЕЛИМОСТЬ, ОПИСЫВАЕМОСТЬ И БЕСПОЛЕЗНОСТЬ
У меня имеются и некоторые второстепенные пред-
убеждения, формулировкой которых я вначале прене-
брег. Они второстепенны в том смысле, что для меня не
так уже важно, окажусь ли я прав, но, подобно боль-
шинству второстепенных качеств, они окрашивают целое
сильнее, чем можно было ожидать, исходя из их доли
в целом. Я предубежден, например, против предположе-
ния о высокой упорядоченности во Вселенной и про-
тив допущения, что какой бы ни существовал порядок,
он познаваем в рамках ныне доступных нам методов.
Я убежден, что по отношению к миру мы находимся
скорее в положении изобретателей, чем исследователей.
Как заметила Сюзанна Лангер [10]: «Наш мир «разби-
вается на факты» потому, что мы так разбиваем его».
Мы имеем выбор в способе такого разбиения, разнооб-
разие возможных решений об описании мира, но наш
выбор не безграничен. Мы не можем положить в основу
какой-либо вид или какую-либо степень упорядоченно-
сти, кроме тех, которыми мы обладаем. Мы являемся
конечными подобластями Вселенной, которая сама мо-
жет быть либо конечной, либо бесконечной, а следова-
тельно, понятия «разнообразия» Эшби или «информа-
ции» Шеннона можно применять только по отношению
13. Отношение и контекст
407
к нам, но не к миру. Конечно, главной сутью обоих по-
нятий является идея о множестве сообщений, о конеч-
ном множестве. Разнообразие, которое мы можем выра-
зить, всегда меньше, чем разнообразие мира. То, что мы
выражаем, не может быть чем-либо большим, чем ка-
ким-то гомоморфизмом мира; только потому, что мы
можем выбирать (или вынуждены выбирать) среди не-
скольких гомоморфных отображений, нескольких описа-
ний или интерпретаций, мы можем рассматривать самих
себя как самоорганизующиеся или обнаруживающие
упорядоченность системы.
Отсюда следует, что я предубежден против излиш-
него «аналитизма». Герберт Рид сформулировал сле-
дующее различие: художник заинтересован в том, чтобы
изобразить мир, а ученый — чтобы объяснить его. Я по-
нимаю научное объяснение как чрезмерно «правильный»
вид изображения. Генри Эйринг заметил, что ученый
озабочен не тем, чтобы быть правым, а лишь тем, чтобы
найти доказательство. Возможно, что наш интерес к до-
стоверным знаниям помешал нам увидеть пользу недо-
стоверных знаний и осознать тот смущающий нас факт,
который ныне беспокоит многих в игре с искусственным
разумом, что для того, чтобы оценить достоверность зна-
ний, надо уже иметь какие-то знания. Наше допущение,
что мы знаем критерии достоверности, что они такие-то
и такие-то, привели нас к заблуждению, которое я на-
зову заблуждением единственной системы отсчета.
Я уверен, что все мы посмеялись бы над идеей не-
большого конечного набора правил, который можно
было бы записать на карточке, умещающейся в жилет-
ном кармане или в портмоне, и который при этом был бы
универсально приложим к каждому конкретному случаю.
И все же среди тех из нас, кто смеется, имеются и та-
кие, кто не только предан идее некоторого универсаль-
ного способа описания, но и уверен также в своем пред-
видении, какой будет форма этого описания и с по-
мощью каких процедур мы его найдем.
Метод и форма, на которые они ссылаются, носят
аналитический характер. Такая вера эквивалентна вере
в универсальный язык; в то, что может существовать
такой расширенный язык, в котором то, что не может
4Э8
Г. Цопф
произойти, не может быть и сказано; язык, в котором
любая законная комбинация его символов дает выраже-
ние, отображающее действительное или возможное со-
стояние дел в описываемом мире; язык, в котором лю-
бое выражение может быть однозначно разложено на
основные элементы, отображающие необходимые и до-
статочные атомы описываемого мира.
Некоторые из нас полагали, что таким языком яв-
ляется математика, но математика избыточна в смысле
определений: она содержит очень много случаев, кото-
рым не может соответствовать никакая реальность, и в
рамках своей формальной структуры не предоставляет
нам средств, с помощью которых мы могли бы провести
различие между действительным и возможным. Чтобы
сделать математику в полной мере пригодной, мы долж-
ны часто выходить за ее пределы, возвращаясь в «им-
перию эмпирики». Те, кто возмущаются такими экскур-
сами— сумасшедшие или явные лицемеры. Внттген-
штейн, будучи сам, несомненно, аналитиком, говорит [6]:
«Идея состоит в том, чтобы выразить в соответствую-
щем символизме то, что на обычном языке ведет к по-
стоянным недоразумениям... Итак, мы можем лишь за-
менять неточный символизм точным — путем обследо-
вания явлений, которые мы хотим описать... Атомисти-
ческая форма не может быть предвидима. И было бы
удивительно, если бы реальные явления больше ничему
не могли научить нас относительно своей структуры».
Понятие аналитичности подразумевает уверенность в
существовании единственного способа описания, универ-
сального контекста. Одной из существенных сторон этого
понятия является независимость (independence) и раз-
делимость (separability). Одна из возможных точек зре-
ния на историю физических наук, в частности физики, —
это рассматривать их как поиски разделимости, как
охоту за такой «системой отсчета» (способом описания),
в которой допускается независимое изменение элемен-
тов. Мы уже достигли замечательного успеха в игре та-
кого рода; возможно, именно поэтому мы принимаем ее
за панацею. Забегая вперед, я приведу цитату из текста,
который будет дан ниже: мы вынуждены «воспринимать
как истину то, что является только преимуществом».
13, Отношение и контекст
409
Я не философ и редко стремлюсь к таким категори-
ческим утверждениям. Меня, право, мало заботит, яв-
ляется ли мир с необходимостью аналитическим, или,
что сводится к тому же, ограничивается ли достоверно
познаваемое аналитическим. Однако меня раздражает,
когда предполагается само собой разумеющимся, что мы
должны ограничиваться аналитическим взаимодействием
с миром.
Утверждение, что разделимость есть вопрос контек-
ста, является сейчас вопросом практики. Мы обнаружи-
ваем, что величины можно изменять независимо только
в том случае, если мы выбираем соответствующий кон-
текст. Что же нам надлежит делать, когда мы не мо-
жем найти или еще не нашли соответствующего кон-
текста? Ответ, конечно, заключается в том, что мы
используем различные паллиативы. Мы предполагаем,
что отсутствуют некоторые «малые» параметры и поль-
зуемся аппроксимациями. Мы обнаруживаем, что, если
мы пренебрегаем некоторыми факторами или связями,
оставшаяся часть становится разделимой. Другими сло-
вами, мы иначе разбиваем мир на части и ищем новую
систему, в которой становится возможной разделимость.
Несомненно, что каждая из этих недостаточных
моделей верна в рамках ограниченного контекста. Мое
предположение состоит в том, что процесс мышления
включает отыскание такого языка общения с миром, ко-
торый является аналитическим только в рамках ограни-
ченного контекста. Наша задача состоит не в том, чтобы
найти контекст, в рамках которого организм может сде-
лать мир доступным пониманию, а скорее в том, чтобы
установить, каким образом он делает мир доступным
пониманию при наличии потока контекстов. Полезно
рассматривать организм не столько как прибор, стремя-
щийся достичь состояния, в котором мир, рассматривае-
мый как возмущение, является вполне регулируемым,
сколько выяснить, каким образом прибор, безостано-
вочно блуждающий среди контекстов, может составить
такое понятие о мире, которое не справедливо ни в од-
ном из них, но каким-то образом оказывается разумным
в нескольких контекстах, взятых последовательно или
параллельно.
410
Л Цопф
4. ВИДЕТЬ И ВЕРИТЬ 1)
Говоря о психологии и теории множеств, Виттген-
штейн заметил, что у первой имеются эксперименталь-
ный метод и путаница в понятиях, а у второй — пута-
ница в понятиях и методы доказательств. Я. сказал бы
то же самое о нашей трактовке самоорганизации или,
более узко, о нашем подходе к моделированию «выс-
ших» психических функций.
Ничто так не раздражает меня, как повсеместно рас-
пространенная практика конструирования «видящих»
машин, «думающих» машин, машин, «играющих в шах-
маты», машин-«переводчиков»; когда же их создателям
указывают, что это не зрение, не игра в шахматы, не
мышление и не перевод в том смысле, как эти вещи де-
лаем мы, они утверждают, что и не имели серьезного,
к чему-то обязывающего намерения промоделировать
наше «зрение» и т. д., а хотели только показать возмож-
ный другой вариант «зрения». Мне трудно понять, что
именно это означает. У меня большое искушение при-
нять догматический взгляд, что не существует другого
«зрения», что все, что мы знаем о зрении, все его кри-
терии применимы только к нашему зрению или к тому,
которое мы из вежливости распространяем и на суще-
ства, с которыми можем себя отождествить.
Конечно, я готов допустить, что функция такой видя-
щей машины похожа на зрение, так же как я готов до-
пустить, что существуют машины, которые делают нечто
похожее на игру в шахматы или мышление. Но я точно
так же готов допустить, что галлюцинация похожа на
зрение, что сновидение похоже на восприятие общедо-
ступного мира или даже — и этот случай окончательно
убеждает нас, — что думать, будто ты знаешь ответ,
похоже на знание ответа. Мы должны постоянно напо-
минать самим себе, что мы знаем очень мачо о нашем
собственном зрении, мышлении или игре в шахматы.
Я уверен, что мы в конце концов будем в состоянии
построить думающие и все прочие машины, отличимые
*) В оригинале «seeing and believing» — намек на английскую
поговорку» «Seeing is believing» — «Пока не уйижу, не поверю». —
Прим, перев.
13. Отношение и контекст
411
в их поведении только тем, что они построены, а не
рождены. Но я все-таки настаиваю, что тест, проверяю-
щий, насколько успешно они выполняют эти функции,
будет нести на себе печать нашей неспособности обра-
щаться с машинами иначе, чем мы обращаемся с их
двойниками из крови и плоти: мы понизим голос в при-
сутствии думающей машины, когда она думает, попы-
таемся обмануть, запугать или разволновать машину,
играющую в шахматы, и побеспокоимся о том, как на-
ложить цензуру на входы и выходы читающей машины.
Тест, разумеется, будет «операциональным»: машины
будут проявлять требуемую функцию только в том слу-
чае, если мы распространим на них взаимодействие, со-
ответствующее этой функции. Я снова повторяю: если
я могу наиболее эффективно обращаться с машиной
только при допущении, что она думает, то она думает.
Но этот тест будет, очевидно, «экстенсиональным»:
мы не будем утверждать, что машина думает, если она
и несомненно мыслящее существо не смогут свободно за-
менять друг друга в той широкой совокупности ситуа-
ций, в которой у этого существа потребовалось бы на-
личие мышления.
Я думаю, что наша путаница в этом вопросе отчасти
объясняется сведением всех видов мышления к логиче-
скому. В своем стремлении верить, что для всего имеет-
ся аналитическое выражение, и желании найти это выра-
жение в каждом отдельном случае мы ошибаемся в
природе этой «высшей» человеческой деятельности. Даже
демонстрация того, что наши разумные действия можно
имитировать строго детерминистским способом, напри-
мер комбинационной машиной, говорит только о том,
что любое ограниченное поведение, если оно вполне
определено, может быть воспроизведено машиной. Од-
нако это может ничего или почти ничего не дать для
понимания совершающихся в нас процессов.
Пусть я, например, в течение ограниченного периода
времени сумел классифицировать овец, ягнят, коз и коз-
лят как членов одного и того же множества. Сейчас
мало кто из нас, наверное, сомневается в том, что в прин-
ципе возможно построить машину, которая выполняла
бы точно такую же классификацию. Но теперь оказы-
412
Г. Цопф
вается, что в эту классификацию я также включаю «ба-
раны»— гидравлические тараны1)- Возникает вопрос,
насколько похожей на первоначальную машину была бы
машина, включающая в классификацию также и гидра-
влические тараны? Или иначе: каким образом мы стали
бы строить машину, которая только с первоначальными
знаниями об овцах, ягнятах, козах и т. д. относит к тому
же классу и гидравлические тараны? Мы стремились
избежать проблем, подобных этим, и сосредоточить наше
внимание только на тех задачах, где объективизацию
можно считать само собой разумеющейся, где — пра-
вильно или неправильно — можно считать, что критерии
для решения даны в «свойствах» совокупности входов.
5. ИГРА 22ЛГ
Начиная рассмотрение одного из возможных ограни-
чений, я поступлю по методу апостола Петра и отрекусь
от него по крайней мере трижды. Я буду делать это в
рамках игры 22ЛГ. Я вполне отдаю себе отчет в том, что
эта игра всеми признается как проблема; но я надеюсь
показать, что в качестве проблемы (problem) она яв-
ляется не более значительной для реального мира, чем
шахматная задача (chess problem), и даже менее прав-
доподобной.
Даже если мы встанем на утилитарную точку зрения
и будем смотреть на игры, как на репетицию действи-
тельности, необходимо признать, что даже генеральная
репетиция существенно отличается от самого спектакля.
Обычно разница заключается в степени и типе ограни-
чений. Игра 22/v испорчена в качестве образа действи-
тельности именно тем, что она столь слабо ограничена,
и только игра LmN еще более свободна от ограничений.
Мы начнем с игрока — черного ящика — и его про-
тивника — природы. Ящик имеет N входов и один выход.
В каждый данный момент природа может независимо
возбуждать или не возбуждать каждый вход. Таким
образом, возможны 2N различных комбинаций входов.
Для каждой из этих комбинаций выход черного ящика
*) «Ram» (англ.)—баран, а также таран. — Прим, перев.
13. Отношение и контекст
413
может быть возбужден или невозбужден. Следовательно,
существует 22/v различных способов, которыми ящик мо-
жет сочетать состояния выхода с комбинациями входов.
Игра не полностью свободна от ограничений. Мы
должны, например, принять, что природа точно знает,
чего она хочет в качестве ответа на выходе ящика; она
должна быть последовательной относительно той функ-
ции, которую имеет в виду. Мы должны также принять,
что она сурова и непреклонна; одна ошибка со стороны
ящика — и она выигрывает.
В настоящее время имеется несколько способов
играть в эту игру, различающихся типом черного ящика,
который мы используем. В скромном варианте нам дан
ящик с фиксированной или единственной функцией, при-
чем выход ящика считается булевой функцией от N вхо-
дов как двузначных переменных. В той ситуации, в ко-
торую мы поместили наш ящик, природа играет со
входами, как ей вздумается, а мы молим, чтобы красный
свет, означающий ошибку, не вспыхнул по эту сторону
вечности.
В роскошном варианте у нас есть ящик с переклю-
чателем, каждое из 22ЛГ положений которого задает
определенную функцию. Таким образом, мы можем
предварительно выбирать функцию, но затем игра про-
исходит так же, как и раньше.
В королевском варианте добавляется возможность пред-
программирования позиций переключателя как некоторой
функции текущих состояний входа и выхода. Это равно-
сильно утверждению, что ящик может быть запрограм-
мирован как любая машина последовательного действия
с 22?v состояниями входа и с таким же числом внутрен-
них состояний. Математики, к которым я обращался,
сообщили не очень уверенно, что будет Мм2 таких ма-
шин или программ, где М = 22\ Тем, кто испытывает
трепет уже перед величиной 227V, это новое число должно
доставить нестерпимо острые ощущения:
2^)\
Рискуя умерить их восторг, я должен заметить, что мно-
гие из этих последовательных машин, различаясь как
414
Г. Цопф
матричные представления, не отличаются существенно
по своему действию.
Какой бы вариант игры мы ни взяли, она в сущности
состоит в оценке шансов черного ящика на выживание.
Удивительно, но факт, что любой ящик имеет конечное
число шансов выжить в конечное время. Хотя природа
обязана иметь в виду только одну функцию, она ограни-
чена эргодичностью в появлении комбинаций. Для слу-
чая, когда iV = 4, если природа ожидает, что только одна
из шестнадцати возможных комбинаций будет подтвер-
ждена, а все другие будут отвергнуты, ящик, настроен-
ный на неподтверждение всех комбинаций, может вы-
жить навеки, если она никогда не представит эту един-
ственную комбинацию.
Еще более любопытно, что выбор более сложных ва-
риантов игры не дает совершенно никаких преимуществ;
эти варианты годятся лишь для того, чтобы тешить чей-
либо снобизм. Поскольку природа непреклонна и под-
вергает нас смертной казни за единственную ошибку,
любое число предпрограмм или обратных связей, моди-
фицирующих программу, бесполезно. Чтобы поступать
правильно, надо иметь возможность совершать ошибки
без немедленной гибели.
Я попытался только что привести эту игру к абсурду,
описав процесс игры. Дэв Виллис, судя по его замеча-
ниям на вчерашний доклад Бира, намерен критиковать
игру с точки зрения ее структуры. Он стремится дока-
зать, что даже если бы природа была менее непреклонна
или действовала медленнее, мы все же не могли бы по-
строить такой ящик, для которого N равнялось бы, ска-
жем, пяти или больше. Таким образом, существует два
способа приведения игры к абсурду.
Я уже говорил, что эта игра исключает ограничения.
Ограничение было исключено, когда мы разрешили при-
роде выбирать совершенно произвольную функцию и
представлять комбинации в совершенно произвольном
порядке. Оно было вновь отвергнуто, когда мы потре-
бовали, чтобы одна ошибка означала смерть.
Третий раз, и наиболее сильно, оно отвергалось вся-
кий раз, когда подразумевалось, что игра имеет что-то
общее с реальными проблемами успешной адаптации
13. Отношение и контекст
415
или выживания реального организма или устройства в
реальном мире. Например, в ней имеется N независи-
мых предикатов. Я был бы весьма удивлен, если бы кто-
нибудь из вас смог представить хотя бы два таких пре-
диката, чтобы один из них мог быть изменен, тогда как
все* остальные останутся прежними. Мы, безусловно,
можем говорить о розовых слонах и лиловых крокоди-
лах и, возможно, представлять их себе, но подобные
изменения не вызовут других изменений только в раз-
говоре и мысленном представлении.
В мире, в котором неожиданно исчезли слоны, все
остальное будет казаться прежним — но лишь на время.
Мир без слонов есть мир без их питания и помета. Из-
менилась бы сама форма некоторых африканских де-
ревьев и по меньшей мере нам пришлось бы потрудить-
ся над переименованием таких вещей, как слоновые
мухи и слоновья трава (это приводит к попутному во-
просу, вносит ли смена названия какое-либо различие.
Для человека это несомненно так; в ней даже может
заключаться все различие).
Мне кажется, мы с уверенностью можем сказать, что
полная независимость конечного числа свойств как раз
не является существенной. Каждый из нас знает, что
имеется некоторый смысл, контекст, в котором два свой-
ства не связаны, и смысл или контекст, в котором они
связаны. Кто, однако, может утверждать, что суще-
ствует окончательный, наиболее общий контекст, в ко-
тором имеется некоторое конечное число свойств, не
ограничиваемых друг другом?
Аналогичные соображения ограничивают свободу
природы представлять комбинации в совершенно произ-
вольной последовательности без временных ограничений.
Только там, где мы можем наложить какую-то законо-
мерность на последовательность ее действий, мы можем
надеяться придать им смысл и выжить. Здесь целесооб-
разно указать, что, так как группа перестановок не ци-
клична и, следовательно, не может быть воспроизведена
с помощью повторения одной и той же операции, мир
даже при слабейших ограничениях последовательности
действий не может воспроизводить все комбинации с
равной вероятностью и поэтому стал бы с течением
416
Г. Цопф
времени более пригоден для жизни, так как это улуч-
шает шансы черного ящика на то, что не встретятся
неожиданно такие комбинации, для которых его вычисле-
ния не справедливы.
Другая причина, по которой игра не годится в каче-
стве модели мира, состоит в том, что эта игра не дает
черному ящику средств воздействовать на мир. Никакие
его усилия не имеют ни малейшего влияния на будущую
последовательность комбинаций, которую он получит. Не
существует возможности взаимодействия, обмена. Игра
предполагает, таким образом, что ящик не есть часть
природы, а нечто вне ее. Мы можем снять весь вопрос,
указав, что нельзя противопоставить произвольный чер-
ный ящик произвольному миру. Любой реальный ящик
принадлежит своему миру и несет в себе по крайней ме-
ре часть его особенностей. Само его строение воспроиз-
водит некоторые ограничения этого мира, и постольку
он обладает преимуществами в приспособлении к миру,
к которому он уже частично приспособлен.
Я не могу придумать ничего более жестокого или
глупого, чем Природу, которая создавала бы своих де-
тей, вооруженных только логикой. И я не знаю более
плодотворной мысли, чем то, что толстые пласты при-
способляемости (к данному конкретному миру) от ро-
ждения встроены в каждый организм. Наиболее неиз-
менные свойства мира, его самые жесткие ограничения
организму не приходится открывать, они даны a priori,
воплощенные в нем самом. Такие свойства, как готов-
ность к индукции, предпочтение определенных крите-
риев подобия, склонность к определенному расчлене-
нию мира заложены в структуре живой машины. Ма-
шина не изучает все 22/v возможных миров — большин-
ство из них она не может принять как возможные, да и
не нуждается в этом.
Каждый организм живет в мире так, как будто он
его уже постиг или его постигли его предки.
В целом я не могу понять, почему эта игра вообще
серьезно предлагалась как проблема, если, конечно, она
предлагалась серьезно. Возможно ли, что существуют
люди, которые верят в мир N свойств, к которым реаль-
ное устройство может окончательно приспособиться?
13. Отношение и контекст
417
Есть ли люди, которые думают, что эта игра есть нечто
такое, во что живые организмы играют и решением чего
они занимаются?
6. «А ВСЕ-ТАКИ ОНА ВЕРТИТСЯ!>
Одно из общих наблюдений над живыми системами,
вновь и вновь привлекающее наше внимание, состоит
в том, что все или почти все постоянные свойства, обна-
руживаемые в них, имеют место только благодаря дина-
мическому равновесию. Легко забывается, что не только
постоянство функций (поведение), но также и постоян-
ство формы (структура) имеют место только через ак-
тивное взаимодействие нескольких переменных. Таким
образом, уровень, на котором существует гомеостазис,
часто ниже, чем можно было бы предположить.
То, что мы с вами стоим прямо, происходит не по-
тому, что мы являемся твердыми телами, которые могут
находиться в равновесии, опираясь на свои основания.
Мы стоим прямо благодаря постоянному тоническому
взаимодействию многочисленных групп мышц. То, что
живая кость имеет постоянную форму, указывает не на
то, что она была сформирована раз и навсегда в такой
форме, а объясняется стационарными состояниями в по-
стоянном соперничестве остеобластов и остеокластов.
Если бы пришлось моделировать такие низкие и неопре-
деленные уровни гомеостазиса посредством электронных
устройств, то потребовалось бы динамически поддержи-
вать в определенных состояниях не только так называе-
мые активные элементы, но и пассивные элементы, в том
числе провода, рукоятки и шасси. Подобную модель
нельзя было бы безнаказанно выключить; сделав это,
мы могли бы прекратить ее существование как опреде-
ленной структуры.
Я думаю, что это соображение в соответствии с эрго-
дической гипотезой должно было хотя бы один раз
прийти в голову каждому из нас. Приходится, однако,
лишь удивляться, насколько мало оно нас задело. Когда
мы подходим к биологической системе с намерением
промоделировать ее — для объяснения или использо-
вания— мы начинаем упорно переводить большинство
27 Зак. 106
418
Г. Ц о пф
динамических постоянных свойств в их статические
эквиваленты или же, когда это сделать нелегко, исклю-
чаем из существенных условий модели сохранение ее
динамических постоянных.
При моделировании нейрона мы замечаем, что вну-
тренность реального нейрона проявляет значительное
постоянство остаточной поляризации относительно вне-
клеточной среды. Тогда мы подаем такой остаточный по-
тенциал с помощью батареи или другого источника пи-
тания со столь же постоянным выходом, но проявляем
при этом заботу о том, чтобы сохранение поляризации
ни в коей мере не являлось функцией состояний модели
нейрона. Но подобная процедура приемлема лишь тогда,
когда мы можем показать, что важные или существен-
ные виды активности нейрона — те, которые мы хотим
моделировать, — действительно независимы как от сте-
пени, так и от типа регуляции в его внутриклеточных
механизмах или независимы относительно всех внекле-
точных влияний, кроме входа нерва.
Другими словами, чтобы отделить эти постоянные
свойства, характеризующие низкий уровень гомеоста-
зиса, мы должны показать, что они либо не находятся
под управлением нерва, либо регулируются нервными
подсистемами, независимыми от той, которая нас инте-
ресует. Мы с такой готовностью пользуемся математи-
ческими, техническими методами разделения перемен-
ных, что иногда возникает подозрение, не привержены
ли мы к Прокрустову образу мышления, когда желаем
силой затолкать слона в чайник, вместо того чтобы
найти пригодное для слонов вместилище. Совсем непло-
хо упорство в отыскании тех рамок, в которых данный
набор переменных разделим, но заранее выбирать рам-
ки или требовать, чтобы здесь были именно такие рам-
ки, гораздо менее похвально.
Иногда мне кажется, что мы упускаем один важный
пункт, когда так ревностно пытаемся вытаскивать сла-
сти из мешка с биологическими гостинцами. Дело в том,
что это вовсе не мешок рождественского деда. Все пред-
меты в нем взаимосвязаны, и за попыткой выхватить
только одно блестящее обобщение тянется хвост из мно-
жества противоречий. Как видно, многие из нас верят,
13. Отношение и контекст
419
что мы можем моделировать «высшие мыслительные
функции», не принимая во внимание низшие мыслитель-
ные функции и тем более «немыслительные» функции
какого угодно уровня. Мозг (или его «интересные» ча-
сти, если здесь вообще уместно пользоваться словом
«часть») представляет собой неотъемлемую подсистему,
не только связанную с остальной системой, но, веро-
ятно, и специфичную для нее. Слепое выхватывание
его из целого может дать нам совсем не то, что мы
ожидаем.
Даже когда мы признаем, что нервную систему
нельзя выдернуть как волос и успешно пересадить на
другую почву, мы продолжаем игнорировать, что основ-
ная масса нервной системы не предназначена для тех
«полезных» видов деятельности, которые мы хотим
воспроизвести. Она предназначена не для наслаждений
чистого мышления о произвольных проблемах, а скорее
для ограниченной, грязной ежедневной работы — под-
держания и координации некоторых скучных и незамет-
ных мелких констант. Можно привести сильные доводы
в пользу того взгляда, что «высшие» умственные функ-
ции определенно служат грубым низшим процессам. Эта
точка зрения изложена в словах Альберта Сент-Дьердя:
«Мозг есть не орган мышления, а орган выживания, как
клыки или когти. Он устроен таким образом, чтобы за-
ставить нас воспринимать как истину то, что является
только преимуществом, и тот, кто логически доводит
мысли до конца, совершенно не заботясь о последствиях,
должен обладать исключительной, почти патологической
конституцией. Из таких людей выходят мученики, апо-
столы или ученые, и большинство из них кончает на
костре или же на стуле — электрическом или академи-
ческом».
Я думаю, пора уже согласиться с тем, что многие из
тех действий, которых мы добиваемся от машин, многое
из того, к чему нас неизбежно приведут современные
методы и современный уровень понимания, — представ-
ляют собой функции, которые в лучшем случае можно
найти лишь в человеке с патологической психикой.
Можно даже определить типы патологий, к которым мы
стремимся: это патологические состояния, свойственные
27*
420
Г. Ц о пф
ученому и рабу. Поскольку мы хотим иметь обоих
сразу, нам придется искать ключи к нашим конструк-
циям где-нибудь вне человека. Я не говорю ничего боль-
шего, чем сказал вчера вечером Росс Эшби, а именно:
мы должны учитывать неизбежную эгоистичность адап-
тивных систем, сделанных из плоти или из металла, ро-
жденных или построенных.
Тем не менее я по-прежнему уверен, что мы можем
построить «самоорганизующуюся» систему, полезную
для нас. Есть только две оговорки: во-первых, мы
должны обеспечить, чтобы полезность была полезностью
одновременно для нас и для системы, и, во-вторых, что
до сих пор «построить» такую систему вовсе не значит,
что это может быть сделано посредством точно детер-
минированных схем, которые в настоящее время связы-
ваются у нас с мыслями о практическом синтезе. Это
будут системы, функциональная полезность которых до-
стигнута с помощью ограничений, а не вложена в них
при синтезе.
7. «ЧЕМ БОЛЕЕ ОНО ИЗМЕНЯЕТСЯ...»1)
Идея адаптации имеет телеологический привкус. Но,
как прогресс в направлении к большей приспособлен-
ности, она предполагает улучшение, так что трудно при-
дать адаптации уничижительный смысл. Я предлагаю
заменить адаптацию идеей стремления к равновесию, со-
хранив это понятие там, где мы совершенно уверены,
что имеем в виду улучшение и можем установить его
смысл. Разумеется, ясно, что понятие равновесия вклю-
чает в себя стационарные состояния, циклы и динами-
ческие равновесия всех типов.
Говорить о равновесии системы — значит утверждать,
что происходит такое изменение, которое не лишает нас
возможности рассматривать ее как первоначальную си-
стему. Следовательно, равновесие есть относительное
свойство системы, свойство не только ее, но также и на-
шей точки зрения на нее.
’) Начало известной французской поговорки; «Чем более оно
изменяется, тем более остается тем же». — Прим, перев.
13. Отношение и контекст
421
Существует старый философский пример. «Тит выше,
чем Кай». Справедливость этого утверждения нарушает-
ся, если Тит уменьшается в росте, или Кай растет, или
происходит и то и другое. Сказать, что система остается
той же и в то же время приспосабливается, — значит
сделать одно из двух утверждений: или наше определе-
ние системы не является исчерпывающим и окончатель-
ным, так что она может иметь по крайней мере два со-
стояния, оставаясь «той же» системой, причем одно из
состояний в некотором контексте лучше; или это озна-
чает утверждение, что наши критерии того, что соста-
вляет систему, контекст, в котором мы рассматриваем
систему, меняются на протяжении наблюдения. «Если
мы хотим, чтобы вещи оставались теми же самыми, мы
должны внести некоторые изменения» [5].
Я предлагаю вам считать, что это последнее условие
является единственным, которое мы используем, когда
говорим о «самоорганизующихся» системах. Динамизм,
изменение упорядоченности, не есть в чистом виде свой-
ство системы, но может также отражать изменения кон-
текста, в котором мы ее рассматриваем. Кибернетика
самоорганизующихся систем есть изучение изменения
этого контекста.
Я полагаю, что эта интерпретация может прояснить
некоторые проблемы порядка и организации, в частности
некоторые особенности восприятия, эволюции гомоморф-
ного представления не полностью определенного и по-
стоянно меняющегося мира.
Эта интерпретация может быть проведена на раз-
личных уровнях. Возьмем лингвистический парадокс,
приведенный вчера Стивом Шервудом: «Кошка моется»
(т. е. моет себя). Выразим его экстенсионально в форме
aRb\
тогда, замечая, что, очевидно, а = &, допускаем экстен-
сиональные замены
aRa.
bRb,
ни одна из которых не передает смысла оригинала. То-
ждественность не есть очевидное понятие; ее справедли-
422
Г. Цопф
вость также зависит от контекста. Ее характеристика
Фреге:
\а = *1 = [(Л/7)(5л = Я>)]
делает нашу точку зрения на тождественность одно-
временно и олимпийской и нетерпимой; лишь вопросом
опыта является то, что мы благополучно постулируем
тождественность в таких случаях, которые далеко не удо-
влетворяют всем ее строгим требованиям. Мы делаем
это столь благополучно благодаря молчаливому изме-
нению нашей точки зрения; ситуация понимается то
синкатегорически, то как атомарно экстенсиональная.
Только тогда, когда, как говорит Виттгенштейн, «язык
ленится», мы истолковываем выражение «кошка моется»
как aRb; когда же «язык трудится», мы истолковываем
это утверждение еще и как (Rb(a)).
В случае, может быть более существенном для кибер-
нетики, мы в замешательстве карабкаемся вверх и вниз
по лестнице, перекинутой от системы, у которой все со-
стояния различаются, к системе, состояния которой сли-
ты воедино. Многие из нас чувствуют, что в этой шкале
должно существовать одно «правильное» положение, что
существуют некий способ разбиения системы и одно ис-
тинное функциональное отношение между элементами
этого разбиения. Мне кажется, что отыскание этого по-
ложения не существенно, что имеется слишком много
важных ситуаций, где мы не можем характеризовать си-
стему единым способом разбиения или единой функ-
цией. Мы не можем охарактеризовать любую ситуацию,
указав то, что инвариантно во всех ее состояниях: часто
мы должны исследовать, каким образом определение ее
состояния может быть изменено.
Возьмем утверждение: «Я узнаю Цезаря». Обычно
принято считать, что при достаточно широком, но огра-
ниченном диапазоне различных ситуаций я могу вы-
брать, отождествить комплекс, называемый Цезарем.
Или, говоря на профессиональном жаргоне, я могу вы-
делить Цезаря как нечто инвариантное относительно из-
менений размера, положения, искажения формы и т. д.
Тогда это означает, что существует нечто инвариантное
в комплексах, о которых мы говорим: «Цезарь здесь».
13. Отношение и контекст
423
Это в свою очередь означает, что мы можем путем ра-
ционального исследования предложенных зрительных
комплексов прийти к открытию конфигураций, класси-
фицированных как Цезарь. Все, что мы должны затем
сделать, это создать искусственный сенсорный аппарат
с логической сетью, воспроизводящей то, что свойствен-
но Цезарю.
Бесспорно, что для широкого разнообразия наблюде-
ний над восприятием и узнаванием возможно такое объ-
ективное построение через одни только элементы ком-
плекса-образца. Я ставлю вопрос, является ли эта си-
туация общей или хотя бы обычной?
Вы, вероятно, помните другую формулировку, кото-
рую Оливер Селфридж [7] предложил для распознава-
ния образа: «Образ эквивалентен системе правил его
распознавания». Я понимаю это так, что факт распозна-
вания включает в себя то, что организм должен делать,
чтобы образ мог быть отнесен к некоторому классу. Не-
важно, имеет ли устройство возможность выбора дей-
ствий или операций, которое оно может выполнять над
сенсорным образом. Важно то, что во время узнавания
образа устройство не обязательно должно быть комби-
национной машиной. Устройство не ограничено един-
ственным контекстом, единственной отображающей функ-
цией для всех образов, которые называются Цезарем.
Его понимание подобия не обязательно должно оста-
ваться постоянным в течение процессов, которые мы на-
зываем узнаванием (распознаванием). Найти то, что на-
зывается Цезарем, не означает, что существует един-
ственное свойство внутреннего состояния, такое, что все
объекты, именуемые Цезарем, отображаются на опре-
деленный набор ответных реакций, называемый «виде-
нием Цезаря». Тот факт, что мы можем обнаружить раз-
рыв линии, ни в коей мере не означает ни того, что
в нас есть единый и постоянный детектор разрыва, ни
даже того, что семейство внутренних состояний, дающих
возможность определить обрыв, обладает очевидным по-
добием. По-моему, например, ясно, что тахистоскопи-
ческое зрение только номинально связано и отожде-
ствляется с нормальным, спокойным. Видение в течение
коротких промежутков времени и непрерывное, спокой-
424
Л Цопф
ное видение связываются только описательно. То, что мы
оба процесса называем «видением Цезаря», не указы-
вает на функциональное единство этих процессов.
Здесь мы снова возвращаемся к мысли, что воспри-
нимающий и приспосабливающийся организм рассма-
тривает мир в контекстах, применяемых одновременно
или последовательно. Отождествление, узнавание пред-
ставляют собой явления не одного контекста, а несколь-
ких. Наша работа должна заключаться в том, чтобы
раскрыть природу тех контекстов, в которых мы вос-
принимаем мир, установить, конечно ли их число, обна-
ружить правила, определяющие их последовательность.
Мне кажется соблазнительным отождествить измене-
ния контекста со ступенчатыми функциями Эшби [4], но
с этим придется повременить до более тщательного ис-
следования. Мне представляется, что процесс восприя-
тия включает в себя именно такие системы конкурирую-
щих или альтернативных отображений и что организм
ищет такое соединение их, последовательное или парал-
лельное, которое указывает название образа.
Я употребляю слово «название, имя» (name) совер-
шенно буквально. Если распознавание объекта эквива-
лентно набору правил для его распознавания, то приме-
нение правил приводит к снабжению образа ярлыком.
Мы и наши четвероногие друзья классифицируем вещи
не ради чистой радости от их раскладывания по ящи-
кам, а чтобы создать то простейшее положение, при
котором мы имеем дело только с этикетками на ящиках,
не беспокоясь о разнообразии внутри них. Мы являемся,
по выражению Медавара [9], «избирающими» (elective)
устройствами; разнообразие, проявляемое нами, не го-
ворит о степени отбора, который мы произвели, а, по-
видимому, является более значительным.
Поразительно низкая пропускная способность нерв-
ных каналов снова наводит на мысль о том, что набор
сообщений, из которого выбираются нервные сигналы,
не может быть обнаружен исключительно путем изуче-
ния самих сигналов или наших ответов на них. Данная
последовательность импульсов и промежутков между
ними, одновременно интерпретируемая с нескольких то-
13. Отношение и контекст
425
чек зрения, полученных, возможно, посредством измене-
ния порога, может передать меньше, чем это кажется
с точки зрения одного контекста, и больше — с точки
зрения всех контекстов совместно. Код нейронов может
иметь достаточно ограничений для того, чтобы быть
шифром Бэкона; сообщение не есть в действительно-
сти одно сообщение, а несколько, в зависимости от кон-
текста. И если шум нервной системы является скорее
серым, чем белым, так что в том или ином контексте
сообщение относительно свободно от шума, то орга-
низм должен перебирать разные контексты, пока он
не обнаружит контекст, в котором сообщение относи-
тельно свободно от двусмысленности. Но все это вопро-
сы, требующие более полного развития, что будет сде-
лано в другом месте. Здесь я лишь надеялся показать,
что нет одного нервного кода с единственным опреде-
ленным способом декодирования, а скорее есть схема,
которая может быть интерпретирована перекрывающи-
мися, но различными способами.
8. SUMMA SINE LAUDE1)
Из того, что я здесь говорил, по-видимому, следует,
что мне больше по душе отрицание, чем утверждение.
Я испытываю соблазн приписывать большую ценность
слову «нет», чем слову «да», при оценке достаточности
штрихов Шеффера. Но, возможно, мне следовало бы
спросить присутствующих здесь медиков: какова смерт-
ность среди штрихов Шеффера?
Выставив напоказ свои предрассудки и показав то,
к чему я слепо привержен, я хотел бы на прощание
продемонстрировать мою терпимость. В конце концов,
некоторые мои лучшие друзья являются кибернети-
ками.
Зоммергоф [8] цитирует Куайна, который говорит,
что чем моложе наука, тем больше ее терминология опи-
рается на некритическое предположение взаимного по-
нимания. Хотя это то, о чем я должен был бы в прин-
ципе сожалеть, я не уверен, что этот грех молодости
9 Букв. «Итог без похвал», беспристрастный итог, вывод
(лат.) —Прим, перев.
426
Г. Цопф
является столь же необходимым, как сама молодость.
Я должен допустить определенную терпимость от-
носительно некритического взаимодействия. Строгость,
примененная слишком рано, может оказаться смер-
тельной !)•
Хочу закончить в том же стиле, как я вел изложе-
ние, — анекдотом. Во-первых, я буду вынужен совершить
грех анахронизма. То, о чем я расскажу, произошло
лишь в ходе симпозиума, но как редактор его трудов,
я имел доступ к материалам и к ошибкам в тран-
скрипции, сделанным нашими стенографистами. Неко-
торые из них я рассматриваю как глубоко творческие и
поучительные. Я был поражен, когда нашел «интеграл
Лебега» превращенным в «смутный интервал»* 2), но
подлинный восторг, конечно, я испытал от замены «Ка-
ратеодори» на «паратеоретик».
Я искренне рекомендую вам использовать этот нео-
логизм. Для его объяснения с помощью притчи я сообщу
вам наблюдение о том, что туземцы острова Мон-Сен-
Мишель разработали метод хождения по зыбучим пе-
скам. Он состоит в том, чтобы ступать легко и быстро,
не допуская, чтобы полный вес долго приходился на
одну точку. Джентльмены, я предлагаю вам «паратео-
рию», которая не выдержит полновесной критики ни
в одной точке, но которая все-таки годится для того,
чтобы перенести нас с места на место.
А в качестве чтения на ночь я предлагаю «Новое
платье короля» Ганса Христиана Андерсена. Собратья
короли и ткачи, уподобимся тому мальчишке!
ЛИТЕРАТУРА
1 Burns В. D., The Mammalian Cerebral Cortex, Arnold, 1958.
2. Popper K. R., The Logic of Scientific Discovery, Basic Books,
1959.
3 A s h b у W. R., Introduction to Cybernetics, Wiley, 1958; русский
перевод: Эшби У. Р., Введение в кибернетику, ИЛ, 1959.
9 Игра слов: rigor (лат.) — строгость, rigor mortis (лат.) — по-
смертное окоченение. — Прим, перев.
2) Lebesgue — Лебег; a vague — туманный, смутный.—Прим,
перев.
13. Отношение и контекст
427
4. Ashby W. R., Design for a Brain, Wiley, 1950; русский пере-
вод: Эшби У. Р., Конструкция мозга, ИЛ, 1962.
5. Di Lampedusa G., The Leopard, Pantheon, 1960; русский
перевод: Дж. ди Лампедуза, Леопард, ИЛ, 1961.
6. W i 11 g e n s t e i n L., «Some remarks on logical form», Aristo-
telian Soc. Suppl., 9, 163—164 (1929).
7. Selfridge O., «Pattern recognition and learning», Third Lon-
don Symposium on Information Theory, Academic Press, 1956.
8. Sommerhoff, Analytical Biology, Oxford Univ. Press, 1950.
9. Med aw а г P. В., В. В. C., Reith Lectures, 1959.
10. Langer S., Philosophy in a New Key, Harvard Univ. Press,
1942.
14. РАСПОЗНАВАНИЕ ОБРАЗОВ С ПОМОЩЬЮ
ИНТЕГРАЛЬНОЙ ГЕОМЕТРИИ
А. НОВИКОВ
(Станфордский исследовательский институт, Менло-Парк,
игтл Калифорния)
Мой доклад будет весьма дидактичен в том отноше-
нии, что речь пойдет об относительно хорошо известной
части математической литературы, однако известной,
как я надеюсь, не до такой степени, чтобы я говорил
вещи, которые вы уже знаете. Поэтому я думаю, что
вы простите меня за мой менторский тон, но мне хоте-
лось бы, чтобы некоторые простые вещи стали абсо-
лютно ясны прежде, чем мы обратимся к более слож-
ным проблемам.
В докладе имеется и более интересная часть, а имен-
но мое предположение о том, что эта область матема-
тики играет важную роль при конструировании распо-
знающих машин. Я начал работать над этими пробле-
мами в связи с попыткой объяснить некоторые детали,
касающиеся перцептрона Розенблатта. Мне говорили,
что суть метода, при помощи которого перцептрон раз-
личает, скажем, круг и квадрат одинаковой площади,
заключается, грубо говоря, в том, что в его собственном
внутреннем «механизме восприятия» имеется копия, на-
пример, круга, с которой он как бы рыскает по сетчатке
в поисках перекрытия, и что в некотором смысле круги
предпочитают круги квадратам той же площади с точки
зрения площади их перекрытия. Кто-то мне рассказал
эту идею — я не говорю, что это был Розенблатт, потому
что я никогда не мог прочесть ни одной статьи Розен-
блатта и, чтобы усвоить их содержание, вынужден был
прибегать к своего рода «фильтрам»; при этом на деле
один из этих «фильтров»-пересказов оказался ошибоч-
ным.
14. Распознавание образов и интегральная геометрия 429
Почуяв недоброе, я обратился к интегральной гео-
метрии как к науке, в которой можно точно выяснить
разницу между пересечением (перекрытием) кругов
с кругами и пересечением кругов с квадратами. Я дей-
ствительно нашел то, что мне нужно, но перцептрон тут
оказался ни при чем. Может быть, после доклада мы
сможем сформулировать, что же на самом деле делает
перцептрон, потому что здесь все же имеется некая
связь. Но во всяком случае именно так все это началось.
Предлагаемое мной устройство не похоже на все дру-
гие и очень просто. Мы предполагаем, что существует
заранее заданный алфавит образов, которые нужно рас-
познать, и что конструктор машины очень хорошо знает,
что собой представляет этот алфавит; в его распоряже-
нии имеется полное его геометрическое описание. Однако
он ничего не знает о расположении и ориентации образа
на сетчатке распознающей машины. Экспериментатор
хочет уметь различать образы, т. е. быть в состоянии
сказать, какой представитель алфавита находится на
сетчатке. Мои замечания касаются вопроса о том, как
сконструировать такое устройство.
Теперь я приведу пример методики распознавания
образов, которым я постоянно буду пользоваться в даль-
нейшем. Пример этот выбран главным образом потому,
что решение задачи интуитивно ясно; оно, как и все, о
чем я буду говорить ниже, основывается на теоремах
интегральной геометрии, но этот частный пример, по-
мимо того, связан с легко понятной и хорошо известной
теоремой, в то время как я не уверен, что большинство
других теорем, на которые я буду ссылаться, столь же
общеизвестны. В действительности, пример этот не на-
столько прост, чтобы по нему одному можно было уяс-
нить себе суть интегральной геометрии, как целого, но,
взятый сам по себе, он все же достаточно прост для по-
нимания.
Предположим, что нужно распознать два образа, ко-
торыми являются решетки из бесконечного числа па-
раллельных линий бесконечной длины, отличающиеся
расстояниями между линиями: у одного образа расстоя-
ние это равно d, у другого — d'. Пусть d<d' (фиг. 1).
Каким образом можно распознать, который из двух
430
А. Новиков
образов предъявлен, если мы не знаем ориентации ли-
ний? Вспомним известную теорему, доказанную еще в
1760 г. вместе с другими блестящими идеями, обычно
связываемыми с именем Бюффона. Теорема эта известна
под названием «задача об иголке»; в привычных терми-
нах геометрической вероятности теорема утверждает, что
Z = d< d'
Фиг. 1.
если мы бросаем иголку, т. е. ориентированную линию
длиной /, которая меньше или по крайней мере не боль-
ше расстояния между параллельными линиями, случай-
ным образом на эти линии, то вероятность того, что
иголка пересечет линию (а не просто упадет между
ними), равна (2/n)(//d). Тогда конструктор распознаю-
щей машины просто выбирает иголку с длиной, равной
меньшему расстоянию между параллельными линия-
ми rf, много раз кидает ее на плоскость, покрытую парал-
лельными линиями, и усредняет число случаев, когда
иголка пересекла линию. Если полученное число близко
к (2/л), то это была сетка параллельных линий с мень-
шим расстоянием между ними. Если же это число при-
мерно равно (2/л) (d/d') или явно меньше, чем (2/л), он
заявит, что наблюдает систему линий с большим рас-
стоянием между ними.
Таким образом видно, что описанный тут грубо ме-
тод не зависит от ориентации и расположения показан-
ных линий. Если способ распознавания не зависит от
ориентации и параллельного смещения образа, то, стало
быть, сам объект может претерпевать такие изменения
ориентации и переносы.
14. Распознавание образов и интегральная геометрия 431
Фактически можно было бы наметить точную стати-
стическую проверку гипотез, которые должен перебрать
конструктор, чтобы принять необходимое решение. Но я
опущу эти вопросы, связанные с проверкой гипотез и
принятием решения. Сказанное выше призвано лишь
дать представление о том, как в принципе конструктор
мог бы принимать такие решения.
Рассмотрим теперь следующие факты. Об одном из
из них я уже упоминал: метод не зависит от ориентации
и смещения образа. Далее, конструктор должен иметь
возможность оценить число бросаний иголки, необходи-
мое для получения ответа с заданной достоверностью.
Это, однако, относится к тем проблемам статистики, ко-
торых я не буду касаться в дальнейшем, но кое-какие
разумные замечания все же могут быть высказаны по
данному вопросу. (К несчастью, чтобы сделать эти
разумные замечания, часто нужно иметь более высокие,
чем первый, моменты случайной величины, а многие тео-
ремы, о которых я собираюсь здесь рассказать, дают
только первые моменты; однако это лишь указывает на
то, что еще надлежит решить ряд важных проблем, и я
не думаю, что это обстоятельство умаляет ценность
моего предложения.) Важнее всего здесь то, что этот
метод требует знания некоторой теоремы. Мы знаем
теорему Бюффона, которая говорит нам о том, каково
математическое ожидание числа пересечений иголкой
параллельных линий, т. е. знаем числа (2/л) и (2/л) X
X (dld'). Чем больше таких теорем известно, тем разно-
образнее могут быть машины для распознавания обра-
зов, чувствительные ко все более и более интересным
и сложным образам.
Например, можно показать, что совсем не обязатель-
но бросать именно иголку, т. е. ориентированный отрезок
длины d. Можно бросать произвольно ориентированную'
кривую той же длины d, например круг радиуса d/2,
причем, как это ни странно, вероятность пересечения
остается той же, что и при бросании иголки, и, следова-
тельно, гибкость машины для распознавания зависит от
числа теорем подобного рода, которые имеются в нашем
распоряжении. Таким образом, перед нами стоит пробле-
ма получения возможно большего числа таких теорем.
432
А. Новиков
Другое замечание. В нашем случае не сущестовавало
«сетчатки», на которую проецировалось изображение
(или, точнее, такой сетчаткой являлась вся плоскость).
В общем случае распознающим машинам присущи сво-
его рода краевые эффекты, связанные с определенной ко-
нечной локализацией предъявляемого изображения. Ка-
ким образом можно учесть этот факт? Я подробнее ска-
жу об этом позднее. Чтобы построить физическую ма-
шину, осуществляющую распознавание образов по этой
идее, необходимо иметь машину, которая прежде всего
умеет случайным образом бросать иголку. Она должна
также уметь подсчитывать число пересечений. Вопросы
частоты повторения и способности к подсчету пересече-
ний являются чисто техническими проблемами, и по-
этому я не буду говорить о них в дальнейшем, но смысл
понятия «случайного» бросания иголки отнюдь не оче-
виден и требует дальнейших пояснений.
Я закончу этот вступительный раздел доклада приме-
ром того, какие опасности влечет за собой нестрогое
мышление в области геометрической вероятности, и, как
и раньше, этот пример приводится с единственной
целью: ввести слушателей в курс дела. Этот пример так-
же очень хорошо известен, но я думаю, что на нем осо-
бенно ясно можно увидеть, почему нам необходимо
иметь четкое представление о понятии случайного бро-
сания, прежде чем приступать к постройке машины, осно-
ванной на этом принципе. Этот пример известен под на-
званием «парадокса Бертрана» и восходит к середине
XIX столетия. Задача поставлена так: мы бросаем слу-
чайным образом хорду на круг и хотим знать, какова
вероятность того, что хорда имеет длину, превышающую
длину стороны вписанного в этот круг равностороннего
треугольника. Конечно, в круг можно вписать много
равносторонних треугольников, но длина стороны ка-
ждого из них не зависит от выбора треугольника. Ре-
шение задачи таково. Из соображений симметрии ясно,
что если зафиксировать положение одного конца хорды,
то ее длина определяется только положением второго
конца. Окружность может быть рассечена на три дуги,
вероятности попадания на которые при случайном бро-
сании хорды равны между собой (фиг. 2, а). Если вто-
14. Распознавание образов и интегральная геометрия 433
рой конец хорды лежит на любой из двух прилегаю-
щих дуг, то эта хорда упала «неудачно», если же ко-
нец хорды попал на противолежащую дугу, то это
«удачная» хорда. Так как вероятности попадания на
любую дугу равны, то вероятность получения нужной
хорды равна 7з.
а
Второе решение таково. Из соображений симметрии,
зафиксировав диаметр, к которому перпендикулярны
хорды, можно считать фиксированным угол наклона
хорды и исследовать только одно семейство параллель-
ных хорд. Мы хотим знать, какая часть этого семейства
хорд удачно расположена с нашей точки зрения
(фиг. 2,6). В этом случае элементарное исследование
вписанного в круг равностороннего треугольника пока-
зывает, что если разделить диаметр на 4 части, то хор-
ды, пересекающие его в двух крайних четвертях, не
отвечают нашим требованиям, тогда как хорды, пересе-
кающие центральные две четверти, — «удачны». Таким
образом, из четырех равновероятных сечений диаметра
два «удачны», а два нет. Это означает, что вероятность
«успеха» равна V2.
Наконец, длина хорды полностью определена поло-
жением ее центра. Рассмотрим, при каких расположе-
ниях центра хорды падают «удачно» и при каких нет,
J8 Зак. |0ф
434
А. Новиков
Мы видим, что центры «удачных» хорд лежат в малом
круге радиуса г/2 (фиг. 2, в). Вероятность того, что слу-
чайно выбранная в большом круге точка находится в
малом круге, дается отношением площадей, которое в
этом случае равно !/4.
Таким образом, можно получить ответы !/2л Уз и У4.
Каждый из них соответствует определенному физиче-
скому устройству, «генерирующему» случайные хорды.
Если принцип работы устройства заключается в имита-
ции метода выбора, при котором фиксируется один ко-
нец хорды и случайно выбирается другой, то при этом
правильным является ответ У3.
Я не буду больше надоедать вам этим; ясно, что
можно сконструировать физические устройства, осно-
ванные на различных понятиях «случайного» выбора,
что приведет к трем разным решениям. Таким образом,
без особых пояснений не ясно, что понимать под «слу-
чайным бросанием» хорды. Существует много вероят-
ностных мер, которые могут быть использованы при опи-
сании семейства хорд, проведенных в круге. Так как я
буду ссылаться на теоремы, которые относятся к поня-
тию случайного бросания прямой, кривой или дуги, то
в каждом отдельном случае придется уточнять, что по-
нимается под словом «случайный», — так чтобы при по-
строении устройства, основанного на данной теореме, не
возникало двусмысленности. В самих теоремах двусмыс-
ленности нет; мы требуем только, чтобы используемое
в них понятие случайности обладало тем свойством, что
из всех возможных вероятностных мер выбирается толь-
ко одна.
Грубо говоря, мы налагаем на наши меры то усло-
вие, что они должны быть инвариантны по отношению
к параллельному переносу и вращению. В случае хорд
круга, о которых я только что упоминал, это условие
означает следующее. Понятие «случайности» здесь та-
ково, что вероятность пересечения хордой некоторых фи-
гур в круге будет та же, что и вероятность пересечения
этих фигур при их параллельном переносе или повороте
где-либо в круге. (Из трех решений, о которых мы го-
ворили выше, только второе удовлетворяет этому допол-
нительному условию.) Перейдем теперь к вопросу о слу-
14. Распознавание образов и интегральная геометрия 435
чайной прямой, так как в моих первых теоремах речь
идет именно об этом.
Рассмотрим сначала основное понятие случайной
точки. Что понимается под понятием случайного выбора
точки на плоскости? Это как раз такой случай, когда
большую помощь оказывает ограничение задачи опреде-
ленного размера сетчаткой. Что понимается под случай-
ным выбором точки на сетчатке, мне известно. Мы пред-
полагаем, что площадь всей сетчатки равна единице, и
затем используем площадь частных областей на сетчат-
ке в качестве меры вероятности («мера Лебега»). Но
что означает случайный выбор точки на всей плоскости?
Я задаю этот вопрос, потому что во многих теоремах я
не ограничиваюсь только «ретинальными» (т. е. отно-
сящимися к сетчатке) теоремами — речь идет о линиях,
проведенных на всей плоскости, а не в подобласти, кото-
рую мы называем сетчаткой.
Обратимся к более простому вопросу, а именно: что
понимается под случайной точкой на плоскости? Мы об-
наруживаем следующее: какое бы значение мы ни при-
давали понятию случайной точки на плоскости, мы хо-
тим, чтобы вероятность того, что точка лежит в данном
множестве Д, была одинакова с вероятностью того, что
точка лежит в этом множестве при любом его парал-
лельном переносе или повороте. Я настаиваю, что имен-
но таково должно быть условие, которое следует нало-
жить на искомые меры.
Очевидно, что плоскость достаточно велика для того,
чтобы содержать бесконечно много несвязанных пере-
носов данного множества, так что, если это множество
характеризуется некоторой вероятностью, то всей пло-
скости соответствует бесконечная вероятность. Мы
должны или приписать нулевую вероятность каждому
конечному множеству, или отказаться от поисков инва-
риантной при повороте и смещении вероятностной меры
для случайных точек на плоскости. Такова жизнь. По-
этому мы отказываемся от поисков, и в дальнейшем я
не буду пользоваться словами «вероятностная мера» на
плоскости в целом, но буду незаконно говорить о «слу-
чайной» точке, хотя у меня и нет на это права.
28*
436
А. Новиков
Введем некоторую меру на плоскости, но такую, что
на всей плоскости она будет бесконечна, а не равна 1;
это не будет вероятностная мера. Но это еще не причина
для беспокойства. Позднее мы вновь встретимся с веро-
ятностными мерами, когда речь пойдет о сетчатках;
кроме того, я убежден, и хотя это еще не было подтвер-
ждено экспериментом, но, по всей видимости, может
быть подтверждено, что когда такой меры нет, мы все
же можем строить устройства и не обращаясь к конеч-
ным мерам. Мне придется при этом проводить «экспери-
ментальное» численное интегрирование, которое не соот-
ветствует конечным мерам, но я буду все же иметь
дело с конечными интегралами. Поэтому мы ищем не
вероятностные меры, а только некоторые общие меры.
Итак, желательно, чтобы эта мера на плоскости
была инвариантна при вращении и параллельном пере-
носе. Для наших целей такую меру дает способ, при ко-
тором множествам точек на плоскости приписываются
неотрицательные числа. Эта мера обладает следующими
свойствами. Если имеется счетное множество непересе-
кающихся множеств точек Aif А29...9АП9 то мера их
объединения — разрешите мне использовать специфиче-
ское обозначение суммы, чтобы указать на дизъюнктив-
ность: Е'ДП, — должна быть равна сумме меры т(Ап),
т. е. наша мера обладает свойством аддитивности:
m^'An) =2т(Ап). Таким образом, мера неотрицатель-
на (хотя она для некоторых множеств может быть равна
бесконечности). Мера пустых множеств (без точек) дол-
жна быть равна 0. Таковы три условия, автоматически
накладываемые на функцию множества раньше, чем ее
можно назвать мерой. Четвертое, решающее, условие
таково: если А конгруэнтно В, то я требую, чтобы мера
А была равна мере В.
Данные множества А и В называются конгруэнтны-
ми, если один элемент группы перемещений твердого
тела может перевести А в В. Теперь (вспомним, что я
обсуждаю введение меры на точках для того, чтобы
ввести меру на линиях) я могу коротко описать, как
получить эту меру. Как вы знаете, точки имеют простую
систему координат. Мы можем ввести на плоскости ко-
ординатную систему (х, у), и я покажу, как можно най-
14. Распознавание образов и интегральная геометрия 437
ти меру, удовлетворяющую всем этим свойствам. На
самом деле такая мера вам давно известна. Ее формула
такова:
m (А) = k | J dx dy.
А
(Я опускаю вопросы, касающиеся определения класса
множеств Л, на котором может быть введена мера. Это
меня очень устраивает. Я знаю теорию мер и предпола-
гаю, что вы или знаете ее, или вам это все равно. В лю-
бом случае мои действия оправданы. Кроме того, класс
фигур, на которых я буду применять эту меру, есть
класс элементарных геометрических фигур. Я не заме-
чал, чтобы в настоящее время кого-нибудь как-то зани-
мал вопрос о распознавании образов, на которых не
введена мера.)
Эта формула обладает желаемыми свойствами, но
она не дает единственной меры. Можно ввести произ-
вольную константу k и менять ее. При этом возникает
вопрос, существуют ли другие формулы введения метри-
ки для точек на плоскости, которые также будут ин-
вариантны по отношению к перемещению твердого тела?
Ответ, являющийся ключом ко всей проблеме, таков: не
существует других мер, которые в добавление к основ-
ным условиям, накладываемым, чтобы получить эту
меру, удовлетворяли бы еще и условию инвариантности.
Если ограничиться только первыми тремя условиями,
то можно ввести много различных мер. Например, что-
нибудь вроде
m (Д) = J J ф (х, у) dx dy
А
также будет мерой, где ф — интегрируемая неотрица-
тельная функция, причем даже эта формула не исчерпы-
вает все возможные меры. Условие инвариантности вы-
бирает из функций ф те, которые являются неотрица-
тельными константами.
В общем случае, когда группа преобразований тран-
зитивна на множестве (т. е. может перевести любую
точку в любую другую), должно быть не больше одной
инвариантной меры, кроме масштабной константы. Мо-
438
А. Новиков
жет случиться, что такой меры нет вообще, так как груп-
па может быть сильно транзитивна. Это означает, что не-
сколько преобразований группы могут перевести точку А
в точку В. Например, группа преобразований, состоя-
щая из переноса, вращений и растяжений («дилата-
ций»), сильно транзитивна, и поэтому легко видеть, что
на плоскости нет меры, инвариантной этим преобразо-
ваниям. Я почти ничего не могу сказать о распо-
знавании образов, которые могут «разбухать», дилати-
ровать.
Вот все, что мне хотелось бы сказать о «случайных
точках» на плоскости. Для меня понятие случайной точ-
ки на плоскости означает построение функции меры, не
являющейся вероятностной мерой, и понимание того, что
существует только это одно семейство возможных функ-
ций меры. Инвариантная мера существенно одна; эти
слова означают, что существует только произвольная
мультипликативная константа. Так как мы всякий раз
будем иметь дело с отношениями мер, эта мультипли-
кативная константа не будет беспокоить нас. Что же мы
понимаем под «случайной линией»?
Здесь я просто хочу повторить всю процедуру. Я хочу
определить понятие меры в пространстве всех линий. По
аналогии хорошей кажется идея ввести систему коорди-
нат в пространстве всех линий гак, чтобы я мог иметь
нечто вроде dxdy для написания результирующей меры.
Ввести систему координат в пространство всех линий
легко. (В действительности это слишком легко, как в
проблеме Бертрана, которая показывает, что «легко»
случайным образом выбрать хорды... Существует больше
одного способа введения такой системы координат.) На-
пример, можно использовать два отрезка (а, &), чтобы
описать линию х/а+у/Ь = 1, или их обратные дроби
(и, у) в записи ux+vy=l. Однако наиболее удобная
система координат—(р, 0), при которой линия запи-
сывается выражением
xcos 0-|- у sin 0 =р.
Здесь 0 и р — соответственно угол наклона перпенди-
куляра к линии и расстояние линии от начала. Среди
различных мер, которые мы испытываем, имеются та-
14. Распознавание образов и интегральная геометрия 439
кие, которые приписывают множеству А линий соответ-
ственно меры ^dadb, J j dudv, J J dpdQ, или в бо-
А А А
лее общем виде
J J Ф1(я, b)dadb', | J <р2(и, v)dudv, и т. д.
А А
Существуют и другие возможности. Если
<р2(а, = 0) t(p,e) ’
то последние две меры равны и т. д.
В общем виде мы сокращаем обозначения и, чтобы
обозначить нужную меру, пишем dadb, dudv, dp d0,
ф(а, b) dadb и т. д. Как найти меру, удовлетворяющую
четвертому условию, условию ин-
вариантности при переносах и s'
вращениях?
Не сообщая вам доказатель-
ства (что, конечно, очень мило с Р s'
моей стороны, но я вынужден по-
ступить так из-за недостатка вре- q
мени), я утверждаю, что форму-
ла kdpdQ с неотрицательной Фиг*
константой точно описывает
единственную инвариантную при вращении и переносе
меру, которая может быть наложена на семейство пря-
мых линий. Легко видеть, что dudv, например, не являет-
ся такой мерой; если вы перенесете множество линий
так, что оно окажется вдали от начала, вы уменьшите
его меру. В действительности du dv J = (\!p3)dp dQ, так
что если dpdQ действительно инвариантно при переносе,
то так как р не инвариантно, то и dudv не может обла-
дать этим свойством. На деле этот способ определения
меры не зависит от выбора начала координат на пло-
скости и от выбора осей координат, которые дают нам
возможность определить р и 0, если мы имеем дело с
геометрическими образами (фиг. 3). Доказательство
свойства инвариантности dpdQ можно было бы осно-
вать, хотя бы только на этом факте,
440
А. Новиков
Возвратимся теперь к сетчатке; пусть она имеет фор-
му прямоугольника, и пусть мы рассматриваем только
те прямые линии, которые пересекают этот прямоуголь-
ник (фиг. 4). Семейство прямых линий является подмно-
жеством множества всех прямых линий на плоскости, и
только это подмножество, которое мы используем для
распознавания образов при известном их характере, бу-
дет показано на сетчатке. На фиг. 5 показаны точки
в
(р, 0), соответствующие этому подмножеству. Так как
мы интегрируем dpdQ по этой области, то ее площадь
соответствует мере всех прямых линий, пересекающих
прямоугольник. Как вычислить эту площадь?
В случае сетчатки простой прямоугольной формы вы-
числение может быть проведено «в лоб». Интегральная
геометрия, которую не я изобрел и которую я не считаю
своей собственностью, дает другой способ вычисления
этой площади, отвечая фактически на значительно бо-
лее общий вопрос. Мы не только вычисляем меру всех
прямых линий, которые пересекают прямоугольник, а
вычисляем меру всех прямых линий, которые пересекают
любую выпуклую кривую, прямоугольник же — только
один из представителей этого семейства кривых. Ответ
на поставленный вопрос дается ответом на слегка видо-
измененный вопрос. Вычислим взвешенную меру всех
прямых линий, пересекающих любую спрямляемую кри-
вую, замкнутую или открытую, выпуклую или нет.
Я прямо напишу результат. Он таков: пусть п(р, 0)
обозначает число пересечений (оно может быть беско-
нечным) линии (р, 0) с кривой С. Вычислим
j | пс(Р> tydpdO.
14. Распознавание образов и интегральная геометрия 441
Для выпуклых кривых легко показать, что линия либо
вообще не пересекает выпуклую кривую, либо пересе-
кает ее дважды, либо же касается ее. Можно показать
также, что «касающиеся» линии дают множество меры
нуль, и поэтому ими при интегрировании можно прене-
бречь. За исключением этого «тангенциального» случая,
можно утверждать, что когда прямая вообще пересекает
выпуклую кривую, она пересекает ее дважды, так что,
если я применю эту формулу для линии С, которая яв-
ляется выпуклой кривой, мы получим
J J Пс(р> tydpd& = 2 j J AcdpdQ.
где Ас — множество всех линий, пересекающих С. Тем
самым я вычислю формулу, которую искал для моей
сетчатки. Результат, имеющий огромную общность, за-
ключается в том, что
j | пс (р, 0) dp dQ
равен удвоенной длине С. Я сделаю только следующее
замечание. Какова бы ни была С — будь то чрезвычай-
но извилистая или, наоборот, растянутая кривая, — ре-
зультат будет тот же, что на первыр взгляд кажется
странным, так как больше прямых линий пересекают
«незакрученную» кривую, чем «туго закрученную». Но
когда пересекается «закрученная» кривая, она пересе-
кается более часто. Вот почему формула имеет такой
вид. Способ доказательства, очень изящный сам по себе,
является ключом ко всей задаче; но будучи вынужден
выбирать между ним и изложением остальных вопросов,
я его здесь не привожу, разве что кто-нибудь спросит
меня об этом, чем доставит мне огромное удовольствие.
Итак, мы знаем следующее. Для замкнутых выпук-
лых кривых мера прямых линий, пересекающих зам-
кнутые выпуклые кривые, т. е.
J J Ас dpdd,
точно равна длине С. Теперь я с чистой совестью могу
ввести вероятностную меру на множестве всех прямых
445
А. Новиков
линий, пересекающих выпуклую сетчатку/?. Делается это
так: моя честная вероятностная мера равна dpdQ[l/l(R)].
Она имеет вид kdpdti, где выбранное k равно !//(/?).
Если теперь принять, что А есть множество всех линий
на всей сетчатке, эта мера дает т(А) = 1.
Таким образом, я сконструировал честную вероят-
ностную меру. В этом случае легко можно построить,
по крайней мере в принципе, такое устройство, которое
сможет вычислять длину фигуры, предъявленной на сет-
чатке в любом месте и при любой ориентации.
Пусть, например, у меня имеется алфавит образов,
отличающихся своей длиной. Между прочим, они могут
и не быть кривыми в обычном смысле. Например, буква
у не является кривой в обычном смысле (она не являет-
ся непрерывным изображением отрезка прямой линии),
и три круга также не являются кривой в обычном смыс-
ле. Если мой алфавит образов (который обладает этой
степенью общности) имеет то свойство, что его члены
существенно различаются только по своей длине, я могу
использовать этот единственный геометрический пара-
метр и сконструировать устройство, в котором исполь-
зуется нечто вроде изощренного метода Монте-Карло,
чтобы выяснить, на какой образ я гляжу. Я думаю, что
нет нужды детально выяснять, как можно построить та-
кое устройство. На практике приходится иметь дело
только с конечным числом линий. Среднее число пересе-
чений с высокой достоверностью будет близко к средне-
му числу всех ретинальных линий, которые по приведен-
ному выше результату равны удвоенной длине исследуе-
мой фигуры.
Формула, на которой основан принцип работы такого
устройства, гласит, что математическое ожидание слу-
чайной переменной пс(р> 0), определенной как число пе-
ресечений случайной линии (р, 0) с С, равно удвоенной
длине С по длине сетчатки. В общем случае, чем более
странным будет устройство, тем более странными будут
формулы. Предположим, например, что я не рассматри-
ваю случайную переменную, значение которой равно
числу пересечений. Пусть я имею дело только с обра-
зами, настолько гладкими, что можно говорить о их кри-
визне, и пусть я при каждом пересечении подсчитываю
14. Распознавание образов и интегральная геометрия 443
не число точек пересечения, а суммы кривизны в этих
точках. (Между прочим, когда я однажды упомянул об
этой идее, в основном исходя лишь из педагогических со-
ображений, и в то же время высмеял ее как физически
нереализуемую, мне сказали, что практически вполне
тривиально мерить кривизну с помощью электростатики,
так что можно даже построить прибор, осуществляющий
это.) Если считать случайной переменной сумму кри-
визны, то можно доказать, что математическое ожида-
ние этой случайной величины равно удвоенной кривиз-
не С. На математическом языке это будет выглядеть так:
/ / Кс(Р> 0) dp dQ = 2 (С),
где Кс{р, 0)—сумма кривизны в точках пересечения
случайной линии (р, 0) и кривой С, а /((С) —общая
кривизна С, т. е. общее изменение угла касательной к С
по мере того, как С полностью пересекается. Эти два
числа сильно отличаются друг от друга для двух кри-
вых, Ci и С2, хотя длины этих кривых могут быть рав-
ны, так что может оказаться, что удобнее провести рас-
познавание по критерию кривизны, чем по длине.
Имеется еще много других замечаний, которые мне
очень хотелось бы втиснуть в этот доклад, но, к сожале-
нию, у меня нет на это времени. Например, каково ма-
тематическое ожидание случайной величины тс(р, 0),
которая равна 1, когда случайная прямая линия (р, 0)
пересекает фигуру С, и равно 0 в противном случае?
В этом случае
J j тс(р, Q)dpdQ
равен, по-видимому, J j AcdpdQ, а не J J nc(p,Q)dpdQ.
Я уже отмечал, что когда вы вычисляете это для замкну-
той выпуклой кривой, вы имеете опять дело с ее
длиной.
Что произойдет, если кривая С не обязательно зам-
кнутая или выпуклая? При этом мы получаем длину вы-
пуклой оболочки D (D — наименьшая выпуклая фигу-
ра, содержащая С). Поэтому, если две фигуры имеют
444
А. Новиков
достаточно разные выпуклые оболочки Di и Д2, то прин-
цип работы моего устройства основан на двух случай-
ных величинах тсх(р, 0) и тс2(Р> 0)- Буква «А» имеет
выпуклую оболочку, которая не зависит от точного рас-
положения и угла наклона пересекающей линии. В не-
котором смысле у меня имеется машина, которая знает,
как выглядит буква «А», даже если она не очень тща-
тельно воспроизведена.
Теперь мне хотелось бы упомянуть об одной важной
задаче, с которой сталкиваешься, когда приходится кон-
струировать устройство и возникает вопрос: сколько раз
следует бросать случайную линию, чтобы получить с вы-
сокой достоверностью очень точное среднее? При этом
необходимо знать вторые моменты случайных величин,
а не только их математическое ожидание. Но вторые
моменты никогда не вычислялись. Интегральная геоме-
трия обычно не очень интересуется ими. Я могу вычис-
лить вторые моменты для п,сх(р> 0), когда Ci— отрезок
прямой, и могу вычислить их для ПсАР> 9), когда С2 —
полукруг. Оба случая элементарны. Но я не могу столь
же легко вычислить второй момент для буквы «D», со-
стоящей из полукруга и прямолинейного отрезка, пото-
му что случайные величины Псх и некоррелированы,
так что их вторые моменты не складываются.
Как только дело касается построения распознающего
устройства, возникает целый ряд интересных и, как мне
кажется, ответственных вопросов. Мне хотелось бы ука-
зать на тот факт, что необходимые для проектирования
ответы на эти вопросы могут быть получены с помощью
моделирования. Нет никаких разумных оснований для
вычисления аналитической оценки числа требуемых бро-
саний, если распознаваемые образы вам заранее из-
вестны. В этом случае можно просто прибегнуть к моде-
лированию.
Позвольте мне вкратце развить эти идеи. Можно вве-
сти меру на множестве не линий, а пар точек. Это в выс-
шей степени удобное множество. Этакая приятная четы-
рехмерная штука. Очевидно, инвариантной мерой здесь
является dXi dyi dx2 dy2i однако можно ввести и другую
систему координат — не обязательно использовать четы-
ре декартовы координаты. На деле доказательство неко-
14. Распознавание образов и интегральная геометрия 445
торых теорем никогда не проводится в декартовых ко-
ординатах, для этой цели используются другие системы.
Между прочим, самое остроумное доказательство
приведенной выше фундаментальной теоремы заклю-
чается в том, что вместо вычисления математического
ожидания пс(р, 0) по заданным р и 0 производится за-
мена переменных в новой координатной системе, отве-
чающей требованиям доказательства. В другой коор-
динатной системе для семейства пар точек прямая ли-
ния, соединяющая две точки, является как бы точкой
этой системы, так что можно использовать результаты
для прямых линий, приведенные мною выше.
В терминах множества, состоящего из пар точек,
естественно считать переменной г(Рь Р2) —расстояние
между Pi и Р2. Если рассмотреть подмножество пар то-
чек Pi и Р2, лежащих в данной выпуклой области £>, то
можно, как показано выше, ввести единственную инва-
риантную вероятностную меру на подмножестве, и тогда
будет оправдано то обстоятельство, что мы назвали
г(Рь Р2) случайной величиной. Она очень близка к слу-
чайной величине о(р, 0), где а — длина хорды на D, об-
разуемой линией (р, 0), проходящей через Pi и Р2. Эти
величины связаны между собой соотношением:
J ]>(р, G)dpdQ = п(п-1) (1) j J г"~3(Рх, P2)dPx dP2,
где п=2, 3, ... . Легко убедиться в том, что
11 а (р, B)dpdQ = л X (Площадь D),
а раньше мы видели, что
J J dpdQ = 2\ (Периметр D).
Эти результаты соответственно относятся к случаям
п=1 и п=0. Для п = 2 получаем
о2 (р, 0) dp dQ = J j г"1 dPx dP2,
что равно собственному потенциалу однородного слоя на
Р, а для п = 3
(р, 0) dp dQ = 3 J j dPi dP2 = 3 X (Площадь D)2.
446
А. Новиков
Из этих формул мы можем вывести первые три момента
случайной величины сг(р, 0) в терминах геометрических
(или физических) параметров образа «О».
Следующий обширный класс формул составляют
формулы, описывающие свойства множества более об-
щего, чем множество прямых линий или множество пар
точек, и включающего эти последние как вырожденные
случаи. Это множество состоит из всех возможных рас-
положений определенной кривой. Возьмем некоторую
кривую С и рассмотрим все ее различные перемещения
на плоскости — те ее различные положения, которые мо-
гут быть получены при переносе и вращении. Каждое та-
кое положение считается точкой в новом множестве.
Введем подходящую систему координат. Этого мож-
но достичь, например вообразив себе полуось, жестко за-
крепленную в одной точке Р кривой, и использовать за-
тем в качестве системы координат декартовы коорди-
наты (х, у) и угол наклона 0 отрезка к оси х. Затем я
желаю ввести меру на этом множестве, которая не от-
личалась бы по идее от меры, введенной на множестве
прямых линий. Эта мера должна быть инвариантной при
вращении и переносе.
Нетрудно видеть, что такой мерой является
dxdydQ и что наибольшая общность достигается, когда
эта мера представляет собой просто неотрицательное
произведение членов. Конечно, можно ввести и другие
тройки координат и таким образом получить другую
меру. Когда мультипликативная константа равна 1, ре-
зультирующая инвариантная мера на множестве поло-
жений данной кривой является «кинематической мерой»
движущейся кривой. Эта мера может быть соотнесена
с введенной ранее инвариантной мерой на множестве ли-
ний (вернее, на полуосях или ориентированных линиях),
если ввести случайную ориентированную линию как
один из элементов нашего множества в другой системе
координат. Это позволяет нам использовать полученные
ранее результаты, причем порядок рассуждений будет
тот же, что и при выводе теорем, о которых речь пойдет
ниже.
Сначала, однако, разрешите мне привлечь ваше вни-
мание к тому особому случаю, когда движущейся фигу-
14. Распознавание образов и интегральная геометрия 44?
рой является отрезок ориентированной прямой («игол-
ка» Бюффона в строгой математической формулировке)
длины X. Можно показать, что кинематическая мера мно-
жества таких иголок (т. е. все положения и ориентации
подвижной иголки), пересекающих выпуклую кривую
площади А и периметра L, равна 2nA+LX. Вырожден-
ный случай, когда выпуклая кривая является дважды
пересеченным отрезком длины I (А = 0 и L = 2/), показы-
вает, что кинематическая мера Х-иголок, встречающихся
с отрезком длины /, равна 4L/.
Это обстоятельство можно интерпретировать как ре-
зультат интегрирования ис(х, у, ср) — числа пересечений
Х-иголок с отрезком длины I [интегрирование по всем
(х, у, ф), т. е. по всем расположениям иголки]; посколь-
ку, кроме как на множестве меры нуль, пс равно или О
или 1, то интеграл совпадает с мерой на множестве, где
пс не равно нулю, т. е. на множестве положений, в ко-
торых иголка пересекает отрезок линии.
В такой интерпретации результат обобщается в сле-
дующем виде: если Ci — подвижная спрямляемая кри-
вая длины Со — фиксированная спрямляемая кривая
длины L2, а Пс0(х> у, ф) — число пересечений, когда Ci
находится в положении (х, у, ф), то мерой является
/ J Яс, (X, у, ф) dx dy dtp.
Этот результат получен Пуанкаре, который на 30 лет
предвосхитил возникновение общей теории интегральной
геометрии. Он дает естественное обобщение понятия дли-
ны в случае, когда фиксированное множество не яв-
ляется спрямляемой кривой в обычном смысле, но ин-
теграл все же существует; эта «обобщенная» длина рав-
на интегралу, умноженному на величину V4L1.
Ясно, что в случае ретинального поля можно в не-
котором смысле получить вариант теоремы о Х-иголках,
который, как и раньше, позволяет нам снова нормализо-
вать инвариантную меру, превратив ее в действительно
вероятностную меру. А именно, рассмотрим все точки,
попадающие на сетчатку площадью AR с периметром Хд.
Они не обязательно должны целиком находиться внутри
сетчатки, достаточно хотя бы частичного попадания в нее.
448
А. Новиков
Тогда их общая кинематическая мера равна 2лДн + Х£д.
Теперь, принимая обратную дробь этого выражения за
мультипликатную константу, которая должна стоять
вместо единицы в формуле k dxdydq, мы получаем меру,
столь же инвариантную, как и кинематическая мера, но
которая равна 1 для всего множества иголок, «рети-
нальных» в этом, до какой-то степени искусственном,
смысле. (Конечно, желательно было бы, чтобы множе-
ство, на котором мера принимает значение 1, составляли
только точки, целиком лежащие на сетчатке, но я до сих
пор не получил кинематической меры такого множества,
хотя ее приблизительное значение можно найти для не-
которых специфических случаев сетчатки.)
После введения вероятностной меры можно ввести
случайные величины, связанные с числом и длиной пе-
ресечений случайной иголки с показанным на сетчатке
образом. Я не стану описывать здесь программу распо-
знавания, а тем более не буду касаться деталей, свя-
занных с тем, что движущиеся фигуры могут не быть
отрезками линий. Положимся лучше на вашу добрую во-
лю и способность проводить аналогии и сразу напишем
искомые результаты.
Первый из них — формула в явном виде для кине-
матической меры всех Х-иголок, пересекающих обе
стороны угла (считается, что эти стороны бесконечно
длинны или, что эквивалентно, достаточно длинны для
того, чтобы дальнейшее их продолжение не увеличи-
вало бы множества иголок, пересекающих обе стороны).
Если угол равен а, то кинематическая мера дается вы-
ражением
±-[1-|-(л — a)ctga].
Таким образом, у нас имеется устройство для изме-
рения угла, работа которого не зависит от расположе-
ния и ориентации измеряемого угла. По правде говоря,
нужно сознаться, что это — не «ретинальная» теорема,
и, по-видимому, существуют важные проблемы, касаю-
щиеся тех случаев, когда вершина угла близка к краю
сетчатки. Но мне кажется, что, если нельзя воспользо-
ваться теорией вероятности, конструктор всегда может
14. Распознавание образов и интегральная геометрия 449
отобрать конечную выборку их из семейства всех воз-
можных положений и тогда уже с уверенностью оценить
величину показанного угла.
Во-вторых, предположим, что в качестве подвижной
фигуры взята часть плоскости, ограниченная конечным
числом простых замкнутых кривых. Рассмотрим фик-
сированную область той же степени общности и иссле-
дуем дуги пересечения подвижной и фиксированной
фигур. Именно этот случай поразил меня своей анало-
гией с моим первоначальным представлением о перцеп-
троне. Оказывается, что интеграл от этого пересечения
по всем положениям подвижной фигуры (я бы назвал
его математическим ожиданием этой случайной вели-
чины, если бы у меня была «работающая» вероятност-
ная мера) равен 2л, умноженному на произведение
площадей фиксированной и подвижной фигур.
Следствие: никто не может успешно отличить круг от
квадрата той же площади, исследуя «среднюю» пло-
щадь пересечения с любой подвижной фигурой любой
формы; в этом случае результат зависит только от пло-
щадей, а не от формы.
В-третьих, если вычислить периметр пересечения, а
не площадь и снова усреднить этот результат, т. е. про-
интегрировать его, умножив на кинематическую меру
для всех положений, то в результате мы получим вели-
чину 2л(До£1+АЛ)), где индекс 0 относится к фиксиро-
ванной фигуре, а индекс 1 — к подвижной (результат
симметричен).
Если же вычислить общую кривизну пересечения для
каждого положения подвижной фигуры и снова проин-
тегрировать по всем положениям, используя кинемати-
ческую меру, то в результате мы получим 2л(Ло/<1 +
+ А1Ко + ЬоЦ). Особенно интересен случай, когда как
фиксированная, так и подвижная фигуры являются вы-
пуклыми областями; тогда их общие кривизны Ко и Ki
будут равны 2л, как и общая кривизна пересечения во
всех положениях, в каких пересечение существует. Так
как в этом случае подынтегральная функция есть кон-
станта, то множитель 2л можно вынести за скобку (как
мы это делали с постоянной 2, рассматривая пересече-
ние линий с выпуклой кривой), и тогда мы получим
29 Зак. 106
450
А. Новиков
кинематическую меру для всех локализаций выпуклой
подвижной фигуры, пересекающейся с выпуклой фиксиро-
ванной фигурой, равную 2л(Д0+/11)+ЬоМ- Это снова
позволяет нам получить «ретинальную» локализацию
произвольной выпуклой фигуры «внутри» выпуклой сет-
чатки, где, к несчастью, слово «внутри», вводящее в за-
блуждение, означает «пересекающиеся» (intersecting)
или, что эквивалентно, «накладывающиеся», «перекры-
вающиеся» (overlapping). Как и ранее, зная кинемати-
ческую меру всех ретинальных локализаций, можно раз-
делить эту меру на константу, получив таким образом
истинную вероятностную меру на подмножестве рети-
нальных локализаций.
В качестве последнего «цветочка» в этом букете тео-
рем мне хотелось бы упомянуть о несколько другом на-
правлении исследований. Рассмотрим бесконечное в
двух измерениях множество конгруэнтных фигур или
ячеек, заполняющих плоскость без пересечений, как это
имеет место с параллелограммами или шестиугольника-
ми; в каждом из них рассмотрим конгруэнтно помещен-
ную кривую длины Lc. Рассмотрим далее подвижную
кривую длины £ь не обязательно столь малую, чтобы
она содержалась в любой из отдельных ячеек. За ки-
нематическую меру этой подвижной фигуры можно
принять произведение dxdydq, где (х, у) —координаты
точки, фиксированной в подвижной фигуре. Назовем эту
точку основной точкой подвижной фигуры. Если теперь
проинтегрировать число пересечений бесконечное число
раз повторенной фиксированной фигуры с подвижной
фигурой по подмножеству всех положений подвижной
фигуры, имеющей основную точку внутри любой из от-
дельных ячеек, то результат будет равен 4L0Lb где Lo—
длина фиксированной, a Li — длина подвижной фигуры.
Это снова дает «ретинальную», или вероятностную, тео-
рему, так как кинематическая мера всех локализаций и
ориентаций подвижной фигуры внутри любой единичной
ячейки площади А равна
2л
| J J dx dy dtp = 2лА
о А
14. Распознавание образов и интегральная геометрия 451
Если разделить интеграл (или, что эквивалентно, кине-
матическую меру, входящую в подынтегральное выраже-
ние) числа пересечений на этот нормирующий множи-
тель, мы получим среднее число пересечений для слу-
чайного положения подвижной фигуры, если основная
точка находится в ячейке А. Это число равно 2L0Li/nA.
В частном случае, когда ячейки являются прямо-
угольниками со сторонами а и &, фиксированная кри-
вая представляет собой пару соседних сторон, а подвиж-
ная кривая имеет длину /, среднее число пересечений
равно 2 (a + b) Ijnab. Если а стремится к бесконечности,
для среднего числа пересечений подвижной кривой с
бесконечно длинными параллельными линиями, расстоя-
ние между которыми равно Ь, получаем величину
(2/л) (l/Ь). Таков общий вид решения задачи Бюффо-
на, о которой мы говорили вначале. Как видите, это от-
нюдь не самая простая теорема в данном рассмотрении.
Наконец, последнее замечание. В вопросе о числе
бросаний, которое необходимо в этом случайном про-
цессе для получения заданной точности, достигнут не-
который прогресс. Еще в 1841 г. Коши доказал теорему,
относящуюся к тому, что сейчас называют интеграль-
ной геометрией. Она гласит: если проецировать замкну-
тую выпуклую кривую в направлении, образующем угол
0 с осью х, и усреднить проекции, считая 0 случайной
величиной, принимающей все значения от 0 до л, то сред-
нее равно 2/л, умноженному на длину кривой.
Это обстоятельство было использовано математиком
Штейнгаузом в 1930 г., чтобы сконструировать машину,
очень близкую по идее к предложенным мной устрой-
ствам. (Когда я высказал предположение, что инте-
гральная геометрия внесет свежую струю в распознава-
ние образов, я еще не знал о работе Штейнгауза.)
Штейнгауз хотел сконструировать так называемый
лонгиметр — прибор для измерения длин в поле микро-
скопа, для чего он пытался использовать теорему о про-
екциях. Он знал, что результат Коши пригоден для сред-
них по всем углам от б до л. Его волновал вопрос о
том, какова ошибка, вызываемая численным интегри-
рованием, когда интеграл заменяется суммой из ше-
сти равноотстоящих членов. Но 6 членов — это очень
29*
452 А. Новиков
маленькая сумма, причем это не выборка из шести не-
зависимых наблюдений со всех углов. Эти члены зависят
друг от друга: выбор первого из них задает и осталь-
ные, которые определяются прибавлением 30° к преды-
дущему. Штейнгаузу удалось показать (и действи-
тельно, это довольно тривиальный факт, основанный на
точности численного интегрирования для функции ко-
синуса, к которой сразу же сводится общий случай), что
при этом полученный результат может на 2,26% быть
меньше и на 1,15% больше действительной длины.
Это говорит о том, что имеется по крайней мере ка-
кое-то свидетельство в пользу того, что некоторые ко-
нечные выборки дают очень хорошие аппроксимации к
искомым средним.
15. ОБЛАСТЬ РЕАЛИЗУЕМЫХ ФУНКЦИЙ
ДЛЯ СЛОЖНЫХ СИСТЕМ
д. виллис
(Авиационная корпорация «Локхид», Отделение
космических исследований и ракет, Саннивейл,
iut. Калифорния)
1. ВВЕДЕНИЕ
Эта статья состоит из трех разделов. В первом из
них дается краткий обзор некоторых ранее полученных
фундаментальных результатов, относящихся к системам,
которые можно было бы назвать самоорганизующимися.
Во втором с точки зрения теории переключающих
устройств представлен ряд соображений, показывающих,
что такие системы не могут реализовать все функции п
переменных, когда п велико. Наконец, в третьем раз-
деле описывается возможная область реализуемых функ-
ций для таких систем.
Существуют сложные, высокоорганизованные систе-
мы, названные самоорганизующимися системами, детали
работы которых мы понимаем очень плохо, если вообще
понимаем. Интересными примерами таких систем могут
служить человеческий мозг и породившая его система
эволюции. Теоретические исследования за последние
30 лет привели к предположению о возможности созда-
ния машин, которые до некоторой степени обладали бы
свойствами, присущими этим сложным системам. На-
пример, Тьюринг [1] исследовал и развил общее поня-
тие автомата. Он доказал существование универсаль-
ных машин, которые могут делать с информацией все
то, что может делать любая другая машина. Позднее
Маккаллок и Питтс [2] установили, что можно по-
строить машины, которые будут делать все, что может
быть точно и полно описано, используя лишь простые
элементы, весьма напоминающие нейроны, — струк-
турные ячейки биологических систем обработки инфор-
мации.
454
Д. Виллис
Фон Нейман [3] показал, что результаты Тьюринга
в принципе позволяют нам создавать машины, способ-
ные не только к воспроизведению самих себя, но и к со-
зданию других машин, более сложных, чем они сами,
теоретически доказав тем самым возможность эволюции.
Наконец, фон Нейман [4] и позднее Мур и Шеннон
[5] показали, что такие машины, имеющие сколь угодно
высокую надежность, можно построить из ненадежных
элементов.
Однако ни один из этих результатов не относится не-
посредственно к проблеме эффективности построения
очень сложных машин. С какой скоростью они будут ра-
ботать и каковы должны быть требования к физическим
элементам, из которых они построены?
В последующем изложении будет рассмотрен один
аспект этой проблемы, а именно: каковы должны быть
физические требования к машине, реализующей все
функции п двоичных переменных?
2. ФИЗИЧЕСКИЕ ТРЕБОВАНИЯ
На фиг. 1 показана схема простой модели, по-види-
мому достаточно общей, чтобы включать любую систе-
му, которая может быть названа самоорганизующейся.
Внешняя
среда
Вход
Фиг. 1. Схематическое изображение
сложной системы.
Эта модель состоит из трех частей: среды, в которой жи
вет система, механизма, воспринимающего от среды
входные сигналы и воздействующего на нее своими вы-
15. Область реализуемых функций для сложных систем 455
ходными сигналами, и управляющего устройства, кото-
рое измеряет некоторые или все сигналы на входе и вы-
ходе и имеет какие-то средства для изменения меха-
низма.
Механизм реализует любую из большого числа функ-
ций. Управляющее устройство проводит поиск требуемой
функции, который определяется информацией, получен-
ной в результате предыдущего опробования функций.
Если рассматривать эту модель как модель эволю-
ции, то механизм представляет собой определенные био-
логические виды, характеризуемые соответствующими
генетическими структурами. Управляющее устройство
является просто частью внешней среды, вызывающей из-
менения в генетической структуре и устраняющей не-
удачные генотипы путем естественного отбора. Если же
мы рассматриваем эту модель как модель мозга, то как
управляющее устройство, так и механизм являются
частью мозга. Обучение новым функциям совершается
с помощью информации, получаемой от опробования
других функций.
Нас интересует область функций, которая может
быть реализована механизмом, т. е. мы задаем вопрос,
какова область функций, которая может быть просмо-
трена управляющим устройством за одно воздействие,
направленное на изменение механизма? Мы исследуем
этот вопрос с точки зрения теории переключающих
устройств, где все переменные могут принимать два
значения. Позднее мы укажем, как могут быть обобще-
ны наши результаты, чтобы учесть случаи, когда входы
и выходы не являются двоичными переменными.
Рассмотрим простой случай, когда входы представ-
лены п двоичными переменными, а выходы — одной дво-
ичной переменной. Допустим сначала, что область реа-
лизуемых механизмом функций есть область всех воз-
можных функций п двоичных переменных. Известно, что
существует 22" таких функций. Если эта область совпа-
дает с областью реализуемых функций, можно рассмо-
треть вопросы, относящиеся к количеству элементов, из
которых должен быть построен механизм, и времени,
которое требуется сйстеме для того, чтобы • построить
или отыскать нужную функцию.
456
Д. ВиллиС
3. ОБЪЕМ ПАМЯТИ
В общем случае, если какой-либо механизм может
находиться в любом из г состояний, объем его памяти
должен быть равен по крайней мере log2f бит. Это зна-
чит, что требуется по меньшей мере такое количество за-
поминающих элементов — триггеров, магнитных сердеч-
ников и т. п.; любое меньшее количество элементов не
_ ю40
h-
§
1
О 20 40 60 80 100 120
Число переменных (п)
Фиг. 2. Объем памяти как функция числа пере-
менных п.
А —приблизительное число нейронов в человеческом мозге;
В —число Авогадро (число молекул в 1 грамм-моле); С —при-
мерное число электронов, содержащихся в земном шаре.
обеспечит однозначного определения состояния, в кото-
ром находится механизм. Поэтому это число битов яв-
ляется нижним пределом объема памяти в механизме.
Ясно, что если область реализуемых функций меха-
низма на фиг. 1 является областью всех 22 функций п
двоичных переменных, то объем памяти в таком меха-
низме должен быть равен 2П бит.
На фиг. 2 дан график зависимости объема памяти в
битах от числа переменных п. В том же масштабе на
оси ординат для сравнения показан ряд очень больших
физических величин. Отсюда, по-видимому, вытекает, что
мы никогда не сможем построить машину такого рода,
оперирующую более чем с несколькими десятками пере-
менных, и вообще в природе не может быть системы,
способной оперировать со 100 переменными.
15. Область реализуемых функций для сложных систем 457
4. ВРЕМЯ ПОИСКА ТРЕБУЕМОЙ ФУНКЦИИ
Выясним теперь, каково должно быть время, требуе-
мое для того, чтобы управляющее воздействие системы
привело механизм в некоторое состояние, соответствую-
щее одной из 22 функций п двоичных переменных. Ко-
нечно, можно постулировать процедуру последователь-
ного поиска, которая, если бы нам повезло, могла бы
Фиг. 3. Время поиска одной из функций п
переменных со скоростями переработки
информации 1010, 1020 и 1030 бит/сек.
Л —примерный возраст древнейшего ископаемого
на Земле; В —примерное время, протекшее с мо-
мента появления на Земле человека.
дать ответ очень быстро, или же, в противном случае, за
очень большое время. Однако среднее время поиска
было бы слишком большим, и поэтому мы должны най-
ти значительно более эффективную процедуру поиска.
Она возникает в том случае, когда можно использовать
самым эффективным образом всю доступную инфор-
мацию. В этом случае каждый бит информации есть
ответ на вопрос «да» или «нет», сокращающий вдвое
разнообразие выбора. Более эффективно информация не
может быть использована. Если начальное разнообразие
458
Д. Виллис
равно 22", то для выбора нужной функции потребуется
2п бит информации.
Если скорость переработки информации в управ-
ляющем устройстве, определяющую его воздействия на
механизм, выбрать достаточно большой для того, чтобы
в рассмотрение была включена любая из известных
естественных систем и любая система, которую мы мог-
ли бы построить, мы получим другую оценку ограниче-
ния числа п для такого типа систем.
На фиг. 3 показана зависимость между числом лет,
которое нужно, чтобы найти одну функцию п перемен-
ных, и числом переменных п для скоростей переработ-
ки информации, равных 105 * * * * 10, 1020 и 1030 бит)сек. Самая
большая из этих скоростей по величине более чем на
20 порядков превышает самую большую скорость в со-
временных вычислительных машинах и, конечно, доста-
точна для того, чтобы достигнуть скорости процессов
любой биологической системы. Для сравнения на оси
ординат показаны два временных интервала большой
протяженности. Число переменных в таких системах ог-
раниченно.
5. ОГРАНИЧЕНИЯ ПО ЭЛЕМЕНТАМ
При нормальных давлении и температуре в 1 см3
твердого тела содержится около 1025 атомов. Каждый
атом может принадлежать одному из примерно 100 эле-1
ментов, каждый из которых в свою очередь может на-
ходиться не более чем в 100 возможных валентных со-
стояниях. Таким образом, число способов, которыми мо-
гут быть выбраны атомы, намного меньше числа
1025\
104 /
Сделаем еще одно последнее допущение, состоящее
в том, что каждый атом может занять любое из не бо-
лее чем 10100 физически существенно различных друг от
друга положений внутри 1 см3 и что он может нахо-
диться в любом из 1010 различных энергетических со-
стояний, ориентаций и т. д.
15. Область реализуемых функций для сложных систем 459
Комбинируя эти данные, находим, что должно быть
не менее, чем
Ю25^
104 )
X I IO100]1025 X 11010]1025 < [1О114]1025 < 2(2”’
различных возможных физических конфигураций вну-
три 1 см3 при нормальных условиях.
Очевидно, что при п>95 только небольшая часть всех
функций п переменных может быть отождествлена с кон-
фигурациями атомов внутри одного кубического санти-
метра. Для полного отождествления просто не хватает
возможных физических конфигураций.
Анализ легко может быть расширен так. чтобы по-
казать, что, даже приписывая разным конфигурациям
атомов внутри объема Земли функции п переменных,
мы поднимем предельное число п только до немногим
менее 155. Так как сделанные выше допущения черес-
чур либеральны, действительные пределы п значительно
меньше.
Исследуем теперь возможность преодоления этих труд-
ностей, распространив область анализа за пределы тео-
рии переключающих устройств и рассматривая функции
многозначных переменных. Если число переменных
остается то же, мы можем только увеличить число
функций, допустив, что переменные принимают больше
двух значений, и поэтому объем памяти, время поиска
и число компонентов увеличатся еще больше. С другой
стороны, если уменьшить число переменных, которые
теперь могут принимать больше двух значений, так
чтобы общее число конфигураций осталось примерно
тем же, мы все же уменьшим число функций, и поэто-
му трудности останутся прежними.
Так как непрерывная переменная является просто
предельным случаем дискретной переменной, принимаю-
щей бесконечно большое число значений, очевидно, что,
вводя непрерывные переменные, нельзя получить ника-
кого выигрыша. Отметим также, что допустимая ско-
рость переработки информации для управляющего воз-
действия модели была достаточно высока для того, что-
бы обеспечить возможное увеличение скорости из-за вве-
дения многозначных или непрерывных переменных.
460
Д. Виллис
Еще одна возможность преодоления встретившихся
трудностей состоит в том, чтобы использовать для более
эффективного и быстрого поиска случайный шум. Одна-
ко это предложение не решает проблему из-за постулата
о наиболее эффективном использовании информации.
Любые ошибки только удлинят наш процесс поиска. По-
этому мы вынуждены прийти к заключению, что область
реализуемых функций этих систем не может быть об-
ластью всех функций п переменных, когда п велико.
Отметим, что п действительно велико, и не только в
сложных системах, которые мы находим в природе, на-
пример в системе эволюции или человеческом мозге, где
число переменных в любое время может быть порядка
миллионов, но также и в очень многих системах, создан-
ных человеком, например в больших электронных маши-
нах или телефонных сетях. Так, в цепи множителя циф-
ровой вычислительной машины в качестве переменных
обычно циркулирует 60—100 бит.
Трудности, с которыми мы сталкиваемся, возникают
не из-за большого числа переменных, а потому, что
мы пытались допустить возможность получения любой
функции этих переменных. Поэтому уместно задать во-
прос: можно ли как-то охарактеризовать область тех
функций п переменных, которые эти системы реализуют
или могли бы реализовать? В следующем разделе мы
попытаемся наметить возможный ответ на этот вопрос. 6
6. РАЗЛОЖИМЫЕ ФУНКЦИИ
Исследуем природу подмножества всех функций п
переменных, образующих область реализуемых функций
сложных систем. Ясно, что это подмножество должно со-
держать часть всех 22 функций, которая становится
бесконечно малой при увеличении п. В противном
случае мы будем стоять перед той же задачей, что и
раньше.
Можно рассмотреть число классов возможных пере-
ключающих функций п переменных, которое становится
бесконечно малым при увеличении п. Например, мы мо-
жем ввести симметричные функции, пороговые функции
(толчком к созданию которых послужили исследования
15. Область реализуемых функций для сложных систем 461
нейрона) и функции, где m — минимальное число членов
в эквивалентном булевом выражении — мало. Каждый
из этих классов функций может быть относительно про-
сто реализован и достаточно мал для того, чтобы в нем
можно было провести эффективный поиск и чтобы для
его определения требовалось малое количество инфор-
мации. Однако такие классы функций все же, по-види-
мому, не обладают необходимыми свойствами, чтобы
составить интересующее нас подмножество. Но с полным
основанием можно было бы ожидать, что в это подмно-
жество входят все перечисленные классы. Эйкен [6]
предположил, что искомыми функциями п переменных,
когда п велико, являются разложимые функции. Поня-
тие «разложимости» (decomposability) переключательной
функции впервые было введено Шенноном, назвавшим
это свойство «разделимостью» (separability).
Рассмотрим переключательную функцию п перемен-
ных, /(Xi, х2, ..., хп). Говорят, что эта функция яв-
ляется дизъюнктивно разложимой, если существует дру-
гая функция g(Xi, х2, ..., Xk), такая, что
f(Xt, Х2, .... xk) = /l(g, xt + 1, хк+2, х„)
и
1 < k < п.
Разложимость такого рода была исследована Ашенхер-
стом [8]. Она характеризуется тем, что переменные Х{
могут быть разделены на два дизъюнктивных или непе-
ресекающихся множества, таких, что элементами одного
множества являются переменные функции g. Шеннон
[7] показал, что число всех дизъюнктивно разложимых
функций для больших п бесконечно мало.
Отметим, что вместо функции п переменных мы
теперь имеем одну функцию k переменных и другую
(и — £+1) переменных. Физические требования к этому
классу функций соответственно значительно меньше, чем
к функциям п переменных при больших п. Однако в об-
щем случае k или и — &+1 будут все же настолько ве-
лики, что функции, разложимые только на одну функ-
цию, все еще образуют область, слишком обширную для
реализации рассматриваемыми сложными системами.
462
Д. В и л л и с
Можно представить себе класс функций, дизъюнк-
тивно разложимых на множество функций. Например,
можно было бы выразить функцию f(xiy х2, ..., хп) че-
рез функцию k переменных ср; (г=1, 2, 3, ..., £), ка-
ждая из которых является функцией дизъюнктивного
множества k или меньшего числа из п переменных. Этот
класс функций должен образовать бесконечно малое
подмножество всего множества возможных функций.
Фиг. 4. Типичное разложение переключательных функций
на функции с меньшим числом переменных.
а-п = 6, р~3, Л = 3; б—л = 8, р=5, Л=3.
Существуют также функции, разложимые не дизъ-
юнктивно. Например, мы могли бы выразить f как
функцию k переменных, каждая из которых является
дизъюнктивно разложимой функцией исходных и пере-
менных.
Обсуждаемые понятия, по-видимому, разумно обоб-
щить следующим образом. Рассмотрим класс функций
п или меньшего числа переменных, которые могут быть
представлены как функции не более чем р функций не
более чем k переменных каждая. Тогда мы можем прий-
ти к представлениям функций, изображенным на фиг. 4.
Очевидно, что если р или k достаточно велики, любая
функция п переменных может быть выражена через та-
кого рода разложение. Поэтому следует выяснить, ка-
ковы максимальные значения р и k, при которых физи-
ческие требования еще приемлемы. Точно мы не можем
определить эти значения из-за того, что. слишком мно-
гое зависит от величины п и от сложности рассматри-
15. Область реализуемых функций для сложных систем 463
ваемой системы. Однако можно указать верхнюю гра-
ницу числа таких разложимых функций, выразив ее
через р, п и Л, и установить также верхний предел числа
пар релейных контактов, требуемых для реализации
этих функций.
Рассмотрим сначала верхнюю границу числа функ-
ций п или меньшего числа переменных, которые могут
быть выражены через р функций k переменных. Эти k
переменных любой из р функций выбираются из не бо-
лее чем п начальных переменных и р функций. Таким
образом, имеется меньше чем
(р + nf*+*’ (22Т = (р + nf*+° 2Р (2Й)
функций п переменных, которые могут быть выражены
через р функций k переменных. Это число дает нам за-
ведомо завышенную верхнюю границу, ибо мы допу-
стили большое число повторений и циклическую зависи-
мость между функциями, что в нашем случае бессмыс-
ленно.
Вспомним, что как объем памяти, так и время поиска
в нашей гипотетической системе пропорциональны дво-
ичному логарифму от числа функций. Отсюда следует,
что для рассматриваемого класса разложимых функций
верхняя граница, обусловленная этими факторами, про-
порциональна
(pk+ 1) log, (/> + «) + /> (2*),
Очевидно, что этот предел меняется приблизительно как
р и как 2*.
Шеннон показал, что любая функция k переменных
может быть реализована двухполюсником с менее чем
2(*+3)
парами релейных контактов. Если обратиться к много-
каскадным сетям, то потребуется не более р таких се-
тей. Таким образом, для реализации этого класса функ-
ций всегда нужно менее (p/к) (2fe+3) пар релейных кон-
тактов. Отсюда получаем, что верхний предел для числа
релейных контактов меняется как р и 2k/k. Из этого еле-
464
Д. Виллис
дует, что для разложимых функций большого числа
переменных физические требования могут быть удовле-
творены только в том случае, когда k намного меньше и,
а р намного меньше 2П. Поэтому теперь можно опреде-
лить класс функций п переменных, который может быть
выражен в терминах р функций k переменных, где
k п,
Для больших п функции этого класса представляют
бесконечно малую долю общего числа функций и физи-
ческие требования становятся значительно более прием-
лемыми. Поэтому такие функции представляют собой
возможную область реализуемых функций для сложных
систем. Фактически все, что мы утверждаем, сводится к
тому, что интересующими нас функциями большого чис-
ла переменных могут быть только функции, выражаемые
через приемлемое количество функций малого числа пе-
ременных.
В заключение сделаем еще ряд замечаний. Легко по-
казать, что симметричные функции п переменных могут
быть выражены р функциями k переменных, где
/г2,
k 3.
Симметричная функция п переменных может быть пол-
ностью охарактеризована таким множеством г различ-
ных целых чисел al9 а2, • • •, 0г, где г меньше п, что функ-
ция принимает значение, равное 1, когда а; (/=1,
2, ..., г) имеет значение 1. Такая функция может всегда
быть представлена так, как это сделано на фиг. 5. Ка-
ждая переменная подается в один ящик. Сигналы на
выходах ящиков несут информацию о числе переменных
слева, имеющих значение 1. Например, второй выход
/-го ящика будет иметь значение 1, если точно две из
первых i переменных имеют значение 1.
Каждый выход должен быть функцией самое боль-
шее трех переменных. Выходы n-го ящика могут комби-
нироваться, как показано, посредством функций двух
переменных, давая любую симметричную функцию. От-
15. Область реализуемых функций для сложных систем 465
сюда следует, что число элементарных функций р мень-
ше п2 и ни одна из них не является функцией более трех
переменных.
Фиг. 5. Обобщенное разложение симметрич-
ных переключательных функций.
Легко также показать, что любая функция п пере-
менных, имеющая m полиномиальных членов в эквива-
лентном булевом выражении, может быть представлена
через р функций k переменных, где
р < тпп — 1,
£<2.
Рассмотрим сначала случай т=\. Такая функция
может быть выражена, как показано на фиг. 6. Здесь
каждый ящик представляет функцию двух переменных.
хг хз xi хп
Фиг. 6. Обобщенное разложение функ-
ций при т = 1.
Выход каждого ящика несет информацию просто о том,
все ли переменные слева принимают значение, данное
единственным полиномиальным членом. Всего нужно не
более (м—1) функций. При т> 1 для каждого из членов
будет (и—1) функций. В случае симметричных функ-
30 Зак. 10§
466
Д. Виллис
ций всегда можно представить выходы т множеств
функций, комбинируя (т—1) функций двух перемен-
ных. Отсюда и получаем приведенные выше условия:
р^тп— 1,
Л<2.
7. ЗАКЛЮЧЕНИЕ
Показано, что никакая система не может реализо-
вывать произвольные функции п переменных, когда п
велико. Было определено подмножество всех функций п
переменных, которое может быть реализовано комбина-
циями р функций k переменных, где
k<^n.
Этот класс функций достаточно просто реализуем и до-
статочно мал, чтобы его можно было считать областью
реализуемых функций для сложных систем. Кроме того,
два хорошо известных класса простых переключатель-
ных функций являются членами этого класса.
По существу в данной работе утверждается только
следующее: единственными функциями п переменных,
представляющими интерес при больших п, являются
функции, которые могут быть получены комбинацией
приемлемого числа функций очень малого числа пере-
менных.
ЛИТЕРАТУРА
1. Turing А. М., «On computable numbers, with an application to
the Entscheidungs problem», Proc. London Math. Soc., Ser. 2, 42
(1936).
2. McCulloch W. S., Pitts W., «А logical calculus of the ideas
immanent in nervous activity», Bull. Math. Biophys., 5 (1943);
русский перевод: M а к к а л л о к У. С., Питтс У., Логическое
исчисление идей, относящихся к нервной активности, сб. «Авто-
маты», ИЛ, 1956.
3. von Neumann J., «The general and logical theory of automata»,
Cerebral Mechanisms in Behavior, The Hixon Symposium, Wiley,
New York, 1951.
15. Область реализуемых функций для сложных систем 467
4. von Neumann J., «Probabilistic logics and the synthesis of re-
liable organisms from unreliable components», Automata Studies,
Princeton Univ. Press, 1956; русский перевод: Нейман Дж.,
Вероятностная логика и синтез надежных организмов из нена-
дежных компонент, сб. «Автоматы», ИЛ, 1956.
5. М о о г е Е. F., Shannon С. Е., «Reliable circuits using less
reliable relays», J. Franklin Inst., 262, 191—208, 281—297 (1956);
русский перевод: M у p Э. Ф. и Шеннон К. Э., Надежные схемы
из ненадежных реле, Кибернетический сборник, вып. I, ИЛ, 1960.
6. Aiken Н., частное сообщение.
7. S h a n п о n С. Е., «The synthesis of two-terminal switching cir-
cuits», Bell Sy st. Tech. J., 28, 59—98 (1949).
8. A s h e n h u г s t R. L., «The decomposition of switching functions».
Proc. Intern. Symposium on the Theory of Switching, Annals
Comput. Lab., Harvard Univ., Vol. 29, Harvard Univ. Press, 1959,
p. 74—116.
ДИСКУССИЯ
Виллис. Разрешите сделать одно замечание. Я вовсе не
требую, чтобы все эти вещи были столь элементарны или общи, что
их описание возможно посредством одной лишь булевой алгебры,
которая имеется в нашем распоряжении.
Новиков. Могу указать на интересную задачу именно этого
типа. Один математик пытался найти самый «дешевый» способ
для вычисления полинома п-й степени, если за каждое умноже-
ние и каждое сложение уплачивается некоторая «цена». Имелось
подозрение, что весь фокус состоит, грубо говоря, в использовании
скобочной формулы. Он сумел доказать это для кубического поли-
нома, но его доказательство не представляется мне удовлетвори-
тельным для четвертой степени, и на этом все дело безнадежно
застревает. Вот пример точно поставленной, крайне простой задачи,
с трудом поддающейся решению.
X э й е к. Не хочет ли еще кто-нибудь выступить?
А м а р е л. У меня есть замечание относительно подхода к реа-
лизации переключательных функций. В общем случае имеется
2П комбинаций в таблице истинности. Например, для десяти пере-
менных получится 210 комбинаций. Это очень большое число. Если
не считаться с эффективностью, можно легко реализовать такую
функцию, но при этом придется использовать громадное число ком-
понентов. Обычно нас интересуют функции 10—20 переменных,
определяемые лишь малой частью таблицы истинности, возможно,
10—20 комбинациями. Для этих случаев существуют хорошо раз-
витые методы, особенно методы Куайна и Мотта, благодаря кото-
рым можно очень эффективно получить нормальную форму для
любого числа булевых переменных; существуют даже машинные
программы для этих методов.
30*
468
Д. Виллис
По-видимому, было бы существенно выяснить, какие функции
могут быть реализованы посредством недавно разработанных
устройств. Вероятно, имеется возможность реализовать желаемый
класс функций посредством небольшого числа новых устройств.
Я думаю, что замечания Розена близки к этой точке зрения. Мне
кажется, что подход к решению задачи обычно таков: сначала вы
исследуете данный автомат, а затем пытаетесь выяснить, может
ли он реализовать некоторую функцию. Задача не ставится так;
дана булева функция (или класс булевых функций); каковы в об-
щем виде способы ее сразложимости»?
X э й е к. Доктор Виллис, не хотите ли Вы что-нибудь ска-
зать по этому поводу?
Виллис. Я в общем согласен со всем, что здесь было ска-
зано, но позвольте мне сделать одно замечание. Я думаю, что
если мы возьмем пороговые функции, которые, конечно, достаточно
общи, чтобы можно было построить любую цепь, разовьем для них
теорию переключательных устройств и покажем, как можно ком-
бинировать их для получения других функций, то мы получим го-
раздо большую структурность, получим процедуры поиска, среди
которых сумеем найти наиболее эффективную. Тогда, я полагаю,
мы приблизимся к ответу на первый вопрос — как описать их.
16. СТРАТЕГИЧЕСКИЕ ПОДХОДЫ К ИССЛЕДОВАНИЮ
МОДЕЛЕЙ МОЗГА ’)
Ф. РОЗЕНБЛАТТ
(Корнелъский университет)
Это будет не очень строгое обсуждение. Я попытаюсь
рассказать лишь о том, что, как мне кажется, больше
всего интересует разных участников симпозиума, так как
совершенно невозможно за такое короткое время дать
полный обзор программы работ по перцептрону. Мне хо-
телось бы коснуться по крайней мере трех основных тем.
Первой из них является общая постановка нашей за-
дачи, причем заодно я хочу устранить некоторые обыч-
ные недоразумения по поводу наших действительных це-
лей и направлений исследования. Во-вторых, мне хо-
телось бы как-то показать, насколько мы продвинулись
в решении этой задачи, и обсудить с теми из вас, кто
в курсе работ по перцептрону, положение дел в настоя-
щий момент и возникающие перед нами частные задачи.
В-третьих, наконец, мне хотелось бы сказать пару слов
об отношении наших работ к проблеме биологической
памяти.
Прежде всего о цели нашей программы: нас инте-
ресуют модели мозга. Под этим я понимаю то обстоя-
тельство, что для нас более важны психологические
свойства мозгоподобных систем, чем сам биологиче-
ский мозг. Я думаю, что чем больше сходство между
нашими моделями и биологическим мозгом, тем более
важно четко различать те случаи, когда речь идет о био-
логических нейронах и тканях, от тех, где речь идет
о гипотетических нейронах и гипотетических нервных
!) Подробные математические выкладки, касающиеся затраги-
ваемых здесь вопросов, читатель найдет в работах [1, 2, 5, 6].
470
Ф. Розенблатт
сетях. Интересующие нас системы полностью аксиома-
тизированы. Они состоят из абстрактных нейронов в
абстрактных средах.
Здесь мне хотелось бы вернуться к сделанным не-
сколько минут назад замечаниям Виллиса относительно
цитаты из доклада фон Неймана на Хиксонском симпо-
зиуме. Насколько я помню, фон Нейман говорил, что
если мы действительно можем точно и недвусмысленно
определить, что должна делать система, то мы обяза-
тельно сможем построить такую систему. На это у меня
нет возражений. Если действительно можно полностью и
точно определить то поведение, которое мы требуем от
системы, то, конечно, можно построить сеть для вычис-
ления нужных функций или для управления нужным
выходом нашего устройства. Главный результат, кото-
рый я и несколько теоретиков, работающих в этой об-
ласти, получили за последние несколько лет, связан с
осознанием того факта, что эта теорема (ведущая на-
чало от Тьюринга) определяет основную стратегию при
подходе к проблемам моделирования мозга. Неявное до-
пущение состоит в том, что поведение, которое мы тре-
буем от системы, сравнительно легко определить, и весь
вопрос тогда заключается в том, чтобы построить ма-
шину или механизм, которые эффективно реализовали
бы требуемое поведение и к тому же напоминали бы
нервную систему. В дальнейшем всюду подразумевается,
что такие устройства, коль скоро мы их построили, пред-
ставляют принципиальный интерес в качестве объектов
исследования. Я придерживаюсь взгляда, что гораздо
легче и выгоднее аксиоматизировать физическую систе-
му, а затем аналитически исследовать ее для определе-
ния присущего ей поведения, чем аксиоматизировать по-
ведение, а затем с помощью логического синтеза строить
физическую систему, которая действительно могла бы
пролить свет на работу мозга. Общепризнанно, что если
поведение аксиоматизировано, то нет серьезных трудно-
стей при синтезе соответствующей гипотетической систе-
мы поведения. Однако крайне неясно, будет ли инте-
ресна эта придуманная модель.
Во-первых, прагматически очевидно, что когда мо-
дели мозга синтезируются как логические машины, т. е.
16. Стратегии исследования моделей мозга
471
для некоторой a priori заданной функции, полученные
системы не единственны. Они «переопределены» и, поль-
зуясь биологической терминологией, представляют собой
скорее «генотипы», чем «фенотипы». Я думаю, что за-
коны организации, которые нас интересуют, являются
законами, характеризующими скорее виды организмов,
чем особи внутри видов, а из того, что мы знаем об ор-
ганизации нейронного ганглия, ясно, что невозможно
найти двух представителей того же вида с одинаковыми
логическими структурами или одинаковыми «связями»
в центральных нервных системах. Таким образом, хотя
в наших исследованиях перцептронов часто полезно
представить отдельную нервную сеть в терминах нейро-
нов Маккаллока — Питтса и выяснить, каковы ее ло-
гические свойства, лучше формулировать ее общие за-
коны через очень общие ограничения в организации си-
стемы. Эти ограничения позволяют нам определять и
анализировать широкие классы систем, даже не зная
точно, какие логические функции осуществляются от-
дельными членами данного класса.
Мне кажется, что требовать точной логической струк-
туры нервной сети для предсказания ее поведения рав-
носильно тому, чтобы требовать знания точного положе-
ния и скорости каждой молекулы находящегося в со-
суде газа для предсказания его температуры.
Существует еще один аспект, помогающий различать
предложенные модели. Многие обсуждавшиеся здесь мо-
дели касаются вопроса о том, какую логическую струк-
туру должна иметь система, чтобы обладать некоторым
свойством X. По существу этот вопрос касается стати-
ческой системы. Будет или не будет данная нервная сеть
с некоторыми фиксированными свойствами организации
иметь свойство X или, иначе, как должна быть построе-
на система, чтобы иметь это свойство?
Вопрос можно поставить и по-другому: какого рода
система может развить свойство X? Мне кажется, в ряде
интересных случаев можно показать, что второй вопрос
может быть разрешен и при отсутствии ответа на пер-
вый вопрос; иначе говоря, мы можем выяснить типы
систем, которые разовьют определенные интересую-
щие нас свойства, не будучи в состоянии точно указать
472
Ф. Розенблатт
необходимые структурные ограничения в нашей готовой
системе, завершившей процесс своей эволюции.
Я думаю, эта точка зрения до некоторой степени сов-
падает с замечанием Стаффорда Бира и с тем, что пы-
тается делать Гордон Паск в своих работах по эволю-
ции. В эволюции нас интересует конечный результат,
подчиненный определенным условиям, хотя мы не
знаем, какова в деталях окончательная структура в
конце этого процесса эволюции.
Перцептрон
Фиг. 1. Экспериментальная система.
Как я уже сказал, нас интересует исследование
замкнутых, полностью аксиоматизированных систем, по-
скольку такие системы позволяют нам детально анали-
зировать их характеристики и проводить соответствую-
щие эксперименты.
Объектом анализа является система (называемая на-
ми экспериментальной системой), которая состоит в об-
щем случае из трех частей (фиг. 1). Во-первых, имеется
внешняя среда W, состоящая из конечного числа стиму-
лов, образов или последовательностей. Аксиоматика на-
чинается здесь. Мы хотим точно знать, что может воз-
действовать на нашу систему, и можем упростить это
знание до предела, если точно знаем, с чем система мо-
жет столкнуться или какова вероятность воздействия
каждого возможного стимула на систему; если на после-
довательности появления стимулов наложены ограниче-
ния, то мы хотели бы знать и эти ограничения.
Второй частью экспериментальной системы является
сеть элементов передачи сигналов, напоминающих по
16. Стратегии исследования моделей мозга
473
своим основным свойствам нейроны. Это означает, что
они воспринимают входные сигналы и выдают выходные
сигналы по соединяющим их связям. Нас в особенности
интересует класс таких сетей, которые мы назвали
перцептронами и которые состоят из трех типов ней-
роноподобных элементов. Это множества: 1) сенсорных
датчиков (S-элементы), посылающих сигналы в цен-
тральный ганглий; 2) ассоциативных элементов (4-эле-
менты), которые являются по существу нейронами Мак-
каллока — Питтса с памятью, и 3) одного или несколь-
ких реагирующих элементов (/^-элементы), к которым
идут выходы с Д-элементов.
Последней частью нашей аксиоматически замкнутой
системы является система управления подкреплением.
В общем случае она имеет два входа. Во-первых, си-
стема может наблюдать выход перцептрона и знает о
его реакциях. Кроме того, система может получать вход-
ные сигналы непосредственно из внешней среды или
от сенсорных рецепторов. В общем случае система
управления подкреплением является коррелирующим
устройством, которое решает, руководствуясь выход-
ным сигналом перцептрона и входными сигналами, по-
ступающими из окружающего мира, правильна ли ре-
акция системы в данный момент. На этой основе си
стема управления подкреплением может решить «под-
крепить» некоторую реакцию. Это решение осуществ-
ляется в перцептроне увеличением и уменьшением веса
связей, представляющих память системы.
Система управления подкреплением может быть как
человеком (если он следует аксиомам, принятым нами
для этой системы), так и частью программы вычисли-
тельной машины, как в наших программах моделирова-
ния. Для определенных целей мы можем отключить тот
или иной из этих каналов передачи информации. Напри-
мер, мы рассматривали случаи получения неполной ин-
формации от окружающей среды, когда система управле-
ния подкреплением выносит решения исключительно на
основе выхода перцептрона. Обнаружено, что хотя такие
системы могут иногда достигать интересных типов орга-
низации элементов, такое явление все же довольно не-
обычно и специфично. Вообще оказывается, что если
474
Ф. Розенблатт
нужно, чтобы система обучалась тому, что представ-
ляет интерес для нас как экспериментаторов, система
управления подкреплением нуждается в обоих инфор-
мационных каналах. Эта система должна знать, что
происходит во «внешнем мире», и должна иметь до-
ступ к выходным состояниям самого перцептрона.
Для определенности рассмотрим простой перцептрон,
состоящий из мозаики сенсорных рецепторов (сетчатка)
и одного слоя ассоциативных элементов, входы каждого
из которых связаны с точками сетчатки, а выход — с
единственным реагирующим элементом, выдающим +1
при получении строго положительного сигнала и —1 при
получении строго отрицательного сигнала. На вход /?-
элемента подается алгебраическая сумма всех сигналов,
поступающих от ассоциативных элементов в данный мо-
мент времени t. Все связи между S- и Д-элементами
имеют постоянные веса, веса же связей между А- и /?-
элементами могут меняться с помощью процедуры под-
крепления.
Проводимые нами эксперименты таковы, что их мож-
но было бы провести на любом животном, психологию
которого вы хотите исследовать. По существу этот под-
ход совпадает с подходом сравнительных психологов, пы-
тающихся выяснить, скажем, что способны воспринять
крыса или собака. Мы поставили эксперименты по раз-
личению или обнаружению. Наибольшие трудности при
изучении возможностей перцептрона связаны с разра-
боткой подходящих экспериментов, которые были бы
способны выявить его специфические психологические
свойства. Мы пытаемся уклониться от преждевремен-
ных определений того, что именно мы понимаем под
перцептроном, «сознанием» и другими терминами, кото-
рыми мы здесь пользуемся в очень свободном смысле.
Однако мы стремимся быть совершенно точными, ког-
да говорим о типах задуманных экспериментов и типах
регистрируемого поведения, которые, как мы полагаем,
должны указывать на определенные психологические
функции. Например, память физически представлена из-
менениями весов связей, но если мы зададимся вопро-
сом, что помнит система, то придется определить это
экспериментально. Мы не можем проникнуть в систему,
16. Стратегии исследования моделей мозга
475
исследовать состояние, в котором она находится, и ска-
зать, что в настоящий момент она хранит образ ква-
драта. Образ квадрата в ней может и не содержаться.
С другой стороны, если мы спросим, будет ли перцеп-
трон отличать квадрат от треугольника, то можно обна-
ружить, что он это делает, и точно так же может быть
обнаружено, что он отличает квадрат от круга. Однако
он может не отличить квадрат слева от квадрата справа.
Если он это делает, мы приходим к заключению, что в
такой системе имеется некая общая категория для ква-
дратов; она реагирует на них, как на нечто эквивалент-
ное, независимо от их размера или положения на сет-
чатке, и отличает квадраты от неквадратов. Если до
специального процесса обучения система не проявляла
такого постоянства или такого типа различения, а после
обучения проявляет, то, я думаю, мы вправе (опера-
ционно) сказать, что теперь система помнит квадраты.
Можно показать, что простой перцептрон (с трех-
слойной S—А—/^-топологией) не распознает аналити-
ческие геометрические свойства квадрата, т. е. если ему
показать четыре точки, расположенные по углам поля,
система не абстрагирует из своего опыта по распознава-
нию сплошных квадратов свойства, позволяющие ей опо-
знать эту новую конфигурацию как квадрат. Такое опо-
знание основывается на распознавании отношений, что,
как можно показать, выходит далеко за пределы воз-
можностей обсуждаемых систем.
Свойства, на которых простой перцептрон базируется
при отождествлении, связаны с пересечением фигур на
сетчатке.
Для того чтобы узнать показываемый ему квадрат,
перцептрон должен был прежде видеть нечто, весьма
напоминающее этот квадрат, поэтому на деле вообще не
совсем честно говорить, что система «обобщает», хотя
время от времени такие утверждения делаются. Что си-
стема фактически делает при этом, сводится к тому, что
она ошибается, принимая случаи частичной суперпози-
ции ретинальных изображений за полное совпадение
этих изображений. В любом случае ответ ее опреде-
ляется скорее площадью перекрытия, чем геометриче-
ским подобием.
476
Ф. Розенблатт
Чтобы закончить описание простого перцептрона, до-
пустим, что модификация памяти этой системы того ти-
па, который мы приписываем так называемой а-системе.
Это неконсервативная система. Веса связей могут без-
гранично возрастать. В такой системе под контролем си-
стемы управления подкреплением добавляется малое
приращение (положительное или отрицательное) к ве-
сам тех связей, которые проводят сигнал от активных
4-элементов.
Такая система может использовать несколько стра-
тегий. Она может подкреплять перцептрон каждый раз
при предъявлении стимула независимо от правильности
его реакции, но может и вводить подкрепление только
тогда, когда данная реакция неправильна, и не предпри-
нимать ничего, если реакция правильна (соответственно
некоторой предопределенной классификации стимулов).
Второй метод назван «методом коррекции ошибок»,
и для него мы доказали изложенную ниже теорему [5].
Если мы подкрепляем систему только в том случае, ког-
да она делает ошибку (предполагая наличие простой
a-системы, когда малое приращение подается на актив-
ные связи), и ничего не предпринимаем, когда ее реак-
ция правильна, то всегда, во всех случаях, если только
существует решение задачи на классификацию в виде
некоторого набора весов связей, система достигнет это-
го решения за конечное время.
Это означает, что система управления поощрением
должна знать только то, правильна ли данная реакция
или нет. Кроме этого, ей ничего не нужно знать о предъ-
явленном в действительности стимуле; одного этого до-
статочно, чтобы гарантировать, что система придет к
правильному решению, если оно существует. В настоя-
щее время мы не можем сказать, какова вероятность
того, что построенная таким образом система действи-
тельно даст решение каждой частной задачи. Можно
утверждать, что, если система велика, вероятность этого
очень близка к 1. Можно также сказать, что если имеет-
ся п стимулов, а число ассоциативных элементов меньше
п, то будет иметься некоторая классификация п стиму-
лов, не имеющая решения в указанном ранее смысле.
С другой стороны,, для внешних сред и классификаций
16. Стратегии исследования моделей мозга
477
действительно интересующих нас типов вероятность то-
го, что система приемлемых размеров (в которой число
ассоциативных элементов может быть намного меньше
числа стимулов) не достигнет решения, становится очень
малой.
К проблеме пропускной способности системы можно
подойти и по-иному. Мы можем исследовать кривые обу-
чения этой системы аналитически, и при этом окажется,
что с увеличением числа Д-элементов в системе вероят-
ность правильной классификации отдельного стимула с
произвольно малой ошибкой стремится к 1.
Разрешите мне теперь перейти к одной еще более ин-
тересной проблеме, над которой мы сейчас работаем.
В предыдущих статьях я выдвигал некоторые поло-
жения относительно систем, в которых система управле-
ния подкреплением не получает информации из внешней
среды, а перцептрон всегда подкрепляется, как если бы
его реакция была правильна [3, 4]. Нас интересует, про-
изводит ли перцептрон в этих условиях самопроизвольно
интересное дихотомическое деление, где понятие «ин-
тересное» определено произвольным образом экспери-
ментатором, который более не управляет поведением си-
стемы.
Оказывается, что для простого (трехслойного) пер-
цептрона «интересное» поведение чрезвычайно редко при
данных условиях, хотя оно может наблюдаться при не-
которых искусственно созданных типах внешней среды.
Например, при предъявлении горизонтальных и верти-
кальных полос некоторые типы перцептронов стремятся
провести дихотомию так, чтобы горизонтальные полосы
попадали в один класс, а вертикальные — в другой.
Этого, однако, не происходит при показе произвольно
выбранных образов, таких, как квадраты и треуголь-
ники.
В связи с этим возникает вопрос, какие типы систем
будут спонтанно распознавать подобие таких объектов,
как смещенные параллельно себе образы, независимо от
их формы и положения на сетчатке. Хотелось бы иметь та-
кую систему, которая могла бы самопроизвольно обучать-
ся тому, что треугольник, показанный на сетчатке слева,
и треугольник, сдвинутый вправо, в действительности
478
Ф. Розенблатт
подобны друг другу. Мы хотели бы иметь систему, ко-
торая распознала бы это сама. Трехуровневый (трех-
слойный) перцептрон с простой S—А—/^-топологией не
может быть такой системой независимо от налагаемых
на ретинальные связи ограничений.
Если ввести перекрестные связи между элементами
ассоциативной системы, придать этим связям перемен-
ные веса и учесть короткое запаздывание при передаче
сигнала, то мы получим систему, обнаруживающую не-
которые весьма замечательные новые свойства. Во-пер-
вых, такая система будет реагировать не только на мгно-
венные стимулы, но и на последовательности стимулов.
В такой системе сигнал, поступающий в некоторый мо-
мент времени на ассоциативный элемент, зависит от те-
кущих сигналов на выходах сетчатки, алгебраически
сложенных со всеми сигналами на входах других нейро-
нов в ассоциативной сети. Следовательно, активное
состояние ассоциативной системы является функцией
текущего состояния сетчатки и предшествующего состоя-
ния ассоциативной системы, которое в свою очередь яв-
ляется функцией состояния ассоциативной системы на
предыдущем шаге, и т. д. Следовательно, состояние ас-
социативной системы в настоящий момент (множество
ячеек, активных в этот момент) является функцией
предшествующей последовательности стимулов, а не еди-
ничного предъявленного стимула.
Ясно, что если мы сможем добиться в этой ассоциа-
тивной системе эволюционного процесса, при котором
Qij (мера пересечений Л-множеств, соответствующих S,
И Sj) становится большой для любых двух стимулов,
«подобных» друг другу, то мы тем самым создаем усло-
вия для возникновения системы, которая будет само-
произвольно распознавать подобие. Другими словами,
если мы теперь будем пытаться научить эту систему,
точно так же как мы это делали раньше, отличать кру-
ги от треугольников, то для возникновения обобщения
уже не нужно будет показывать перцептрону большой
набор кругов и треугольников. При этом нам, разумеет-
ся, хочется добиться, чтобы пересечение множеств Л-эле-
ментов, соответствующих двум кругам, было большим,
а пересечение, соответствующее показу круга и тре-
16. Стратегии исследования моделей мозга
479
угольника, было бы малым, даже если все эти стиму-
лы разнесены на сетчатке. В простом перцептроне в
этом случае не должно появиться предпочтительного
сдвига характеристик. Если мы обучаем перцептрон
распознаванию круга, то реакция будет стремиться к
обобщению как на другие круги, так и на треугольники.
В перцептроне с перекрестными связями подобная
структура может осуществиться по двум причинам. Пер-
вой из них является закон подкрепления, действующий
в перцептроне с перекрестными связями. В этом случае
подкрепление осуществляется только самопроизвольно и
уже не управляется системой управления подкрепле-
нием. Для простоты приведем закон подкрепления для
а-системы.
Если два ассоциативных элемента активны, в мо-
мент /, а а2 в момент /+1, то вес связи от к а2 уве-
личится на некоторую малую величину. Если мы хотим,
чтобы система обнаруживала нужное поведение, то дол-
жно происходить и уменьшение весов связей, иначе си-
стема будет неустойчива.
Вторая причина обусловлена внешней средой. Если
система должна научиться распознавать подобие, она
должна в некотором смысле видеть примеры этого по-
добия во внешней среде. Мы не можем, показав ей
произвольный набор беспорядочно предъявленных во
времени стимулов, ожидать, что система выработает по-
нятие подобия, эквивалентное нашему. Внешняя среда
должна быть организована во времени таким образом,
чтобы в ней имелась некоторая непрерывность, т. е. что-
бы за предъявленным стимулом с большей вероятностью
следовало бы одно из множества возможных преобразо-
ваний этого стимула, чем совсем другой образ. За тре-
угольником, вероятнее всего, должен следовать он же
или смещенный треугольник, а не слон или устрица.
Эти условия (с выбором подходящих параметров)
достаточны для того, чтобы в описанной выше модели
развить такую ассоциативную систему, в которой
для подобных форм возрастает по величине. Достигну-
тое на одной части сенсорного поля различение между
квадратами и треугольниками обобщается теперь на
другие части поля при условии, что все, что перцептрон
480
Ф. Розенблатт
раньше видел во внешнем мире (т. е, случайные конфи-
гурации точек), подвергалось в нем тем же преобра-
зованиям, которым сейчас подвергаются квадраты и
треугольники. Из своего прежнего опыта он обучился
«преобразованиям». Мы успешно демонстрировали это
явление на перцептроне со 102 Д-элементами, причем все
они были перекрестно соединены (что означает свыше
10000 соединений) связями с переменными весами.
Математические свойства этой системы никогда по-
настоящему не были сформулированы. Год назад на
Чикагском симпозиуме было доложено о попытке пред-
варительного анализа [6]. Но этот анализ фактически по-
казывает только то, что начальное смещение характери-
стик системы (на ранней стадии адаптации) происходит
в нужном направлении. Предполагается, что это началь-
ное смещение будет сохранено. На самом деле момент,
когда искомое смещение становится достаточно боль-
шим, чтобы его можно было обнаружить, является так-
же моментом, когда начинает проявляться неустойчи-
вость. Бывает, что этот эффект наблюдается несколько
ранее, так что, если бы удалось «поймать» систему как
раз перед тем, как она начнет становиться неустойчи-
вой, можно было бы сохранить это смещение характери-
стик и избежать неустойчивости, которая в конце концов
сводит все на нет.
Если мы разрешаем весам увеличиваться, внутрен-
няя сеть по существу «изолируется» от внешней среды и
предъявляемые новые стимулы могут вовсе не оказывать
воздействия на то, что происходит внутри. Поэтому хо-
чется поймать систему именно в тот момент, когда веса
достаточно велики, чтобы повлиять на характеристики,
но не настолько велики, чтобы нарушить устойчивость
системы. Это может быть осуществлено с помощью ме-
ханизма пропорционального распада связей, который
обеспечивает достижение динамического равновесия на
приемлемой стадии. В настоящее время мы продолжаем
исследование таких систем и надеемся, что скоро смо-
жем более строго проанализировать их работу.
В заключение мне хотелось бы высказать некоторые
замечания относительно применимости полученных ре-
зультатов к механизмам памяти.
16. Стратегии исследования моделей мозга 481
Во-первых, по-видимому, имеется два основных типа
динамики памяти, пригодных для перцептрона. С точки
зрения связей между 4- и /^-элементами, где мы надея-
лись использовать процедуру коррекции ошибок, самой
удачной из исследованных на сегодняшний день систем
является a-система (в которой подкрепляются только
активные связи) без распада связей, но где возможно
как положительное, так и отрицательное подкрепление
по усмотрению «внешней» системы управления подкреп-
лением. Однако с точки зрения внутренних связей между
4-элементами предпочтение следует отдать консерва-
тивной у-системе (в которой веса активных связей могут
получать приращение только за счет неактивных связей,
вес которых должен на соответствующую величину
уменьшиться), где существует постоянный распад всех
весов со скоростью, пропорциональной их текущей вели-
чине, причем непрерывно протекающий процесс подкреп-
ления основывается только на местной активности сети
и не зависит от решений любой внешней системы управ-
ления. Первый тип механизма позволяет системе обу-
чаться у внешнего «учителя» путем вознаграждения и
наказания, второй тип позволяет построить внутреннюю
модель «структуры подобия» внешней среды, определен-
ной временными отношениями движущихся стимулов.
Хотя биологическое значение этих заключений неясно,
соответствующие явления удалось отчетливо продемон-
стрировать на перцептроне.
ЛИТЕРАТУРА
1. Joseph R. D., «Contributions to Perceptron Theory», Cornell
Aeronaut. Lab., Rep. № VG-1196-G-7, Buffalo, 1960.
2. Rosenblatt F., «Perceptrons and the Theory of Brain Mecha-
nisms», Cornell Aeronaut. Lab., Rep. № VG-1196-G-8; русский пе-
ревод: Розенблатт Ф., Принципы нейродинамики. Перцеп-
троны и теория механизмов мозга, изд-во «Мир», 1965.
3. Rosenblatt F., «Two theorems of statistical separability in the
perceptron», Mechanization of Thought Processes, Vol. I, H. M. S. O.,
London, 1959.
4. Rosenblatt F., «Perceptron simulation experiments», Proc. IRE,
48, 301—309 (1960); русский перевод: Труды ИРИ, 48 (1960).
31 Зак. 106
482
Ф. Розенблатт
5. Rosenblatt F., «On the Convergence of Reinforcement Proce-
dures in Simple Perceptrons», Cornell Aeronaut. Lab., Rep.
№ VG-1196-G-4, Buffalo, Febr. 1960.
6. Rosenblatt F., «Perceptual generalization over transformation
groups», Self-Organizing Systems (Eds. M. Y о v i t s, S. Came-
ron), Pergamon, New York, 1960; русский перевод см. сб. «Са-
моорганизующиеся системы», ИЛ, 1964.
ДИСКУССИЯ
Коуэн. Хотелось бы узнать, какого рода проекция (projec-
tion) получается между Вашими сенсорными и ассоциативными
элементами?
Розенблатт. Обычно это негеометрическая проекция. Пред-
положим, что каждый ассоциативный элемент имеет некоторое фик-
сированное число входных связей. Некоторые из них являются
возбуждающими, некоторые — тормозящими, причем каждой вход-
ной связи приписывается вес, равный +1 или —1.
Коуэн. Какому правилу Вы при этом следуете?
Розенблатт. Мы его получаем. Единственное ограничение
носит параметрический характер. Мы предполагаем, что S-элемент,
От которого подходит связь к 4-элементу, выбирается случайным
образом, исходя из равномерного распределения вероятностей по
сетчатке. Это означает, что возможна любая конфигурация свя-
зей, что имеется вероятностная мера на множестве всех возмож-
ных конфигураций, определяемая допущением равной вероятности
соединения любой данной точки на сетчатке с любым ассоциатив-
ным элементом.
Далее каждому А-элементу соответствует некоторый порог.
В общем случае оказывается, что любому данному образу на сет-
чатке соответствует некоторое множество 4-элементов. Образу,
смещенному на сетчатке, соответствует другое множество 4-эле-
ментов, которое, вообще говоря, имеет пересечение с первым мно-
жеством. Если смещение незначительно, пересечение множеств бу-
дет весьма большим. Если разнести образы на сетчатке так, чтобы
они не перекрывались, то в общем случае пересечение множеств
4-элементов остается, но оно может стать малым. Если достаточно
сильно повысить пороги 4-элементов и с самого начала наложить
ограничения на связи, можно построить системы, гарантирующие
непересекающиеся множества 4-элементов для любых неидентичных
стимулов на сетчатке, но нам не хочется накладывать это ограни-
чение на систему. Поэтому в общем случае 4-элементы реагируют
на большое число альтернативных образов на сетчатке и любые
два образа независимо от того, разнесены они на сетчатке или нет,
возбуждают некоторые общие 4-элементы.
Возникающая статистическая задача состоят в следующем: мо-
жем ли мы на основе такой организации надежно различать два
16. Стратегии исследования моделей мозга
483
класса образов на сетчатке, например квадраты и треугольники?
Оказывается, что можем. Это свойство является функцией раз-
меров и параметров системы, поэтому, построив достаточно боль-
шую систему, можно различать образы с ошибкой, меньшей е,
каким бы малым оно ни было.
Рассмотрим следующий частный случай. Пусть мы соединяем
каждый Л-элемент с каждой точкой на сетчатке; пусть число воз-
буждающих связей равно числу точек сетчатки, «освещенных»
(возбужденных) данным стимулом, и пусть порог нейрона равен
числу возбуждающих связей. В этом случае, если для каждой та-
кой конфигурации имеется один Л-элемент, мы будем иметь Л-эле-
мент, реагирующий на каждый возможный стимул и ни на какой
другой. Теперь мы имеем непересекающиеся множества Л-элемен-
тов для каждого возможного стимула. Очевидно, что, следуя нашей
методике обучения, систему можно обучить чему угодно. Это, так
сказать, универсальный перцептрон с тремя уровнями элементов,
обеспечивающих дихотомию любого множества стимулов. Это не
очень интересная система, но она существует.
Коуэн. Включая и множества множеств множеств?
Розенблатт. Совершенно верно, но в настоящий момент
я говорю о простой дихотомии.
Коуэн. Мне кажется, это напоминает схему условной ве-
роятности Аттли.
Розенблатт. В этом частном случае это становится похо-
жим на схему Аттли. Я никоим образом не считаю эту систему
экономичной или особенно интересной, но это просто доказатель-
ство существования возможности различения образов простым пер-
цептроном независимо от того, насколько однородно они распре-
делены на сетчатке. Явления такого рода, по-видимому, многих еще
озадачивают.
Коуэн. Вы всегда можете суммировать ассоциации?
Розенблатт. Да.
Платт. Сколько рецепторных S-элементов в вашей системе?
Розенблатт. Я не определял их число. Мы моделировали
системы с более чем 5000 S-элементов. Действующая в настоящее
время система «Марк I» имеет 400 элементов. В ней используется
поле 20X20 элементов.
Платт. Что они собой представляют? Это фотоэлементы?
Розенблатт. В «Марк I» это фотоэлементы. В програм-
мах, моделирующих распознавание, они представляют собой логи-
ческие элементы, причем каждому рецептору сопоставляется бит
в памяти ЦВМ, так что весь образ выражается набором битов.
Коуэн. Какой критерий определяет правильность ответа?
31*
484
Ф. Розенблатт
Розенблатт. Таким критерием является произвольно вы-
бранная система классификации, установленная заранее и извест-
ная системе управления подкреплением. Если мы хотим различать
квадраты и треугольники, я, кроме того, предполагаю, что система
управления подкреплением сама может каким-то образом узнавать
квадраты и треугольники. Можно вообразить себе, например, что
в некоторой специфической среде квадраты горячие, а треугольники
холодные; тогда не обязательно зрительно различать эти фигуры.
Она может реагировать и на термическую информацию, лишь бы
это давало ей возможность решать, когда нечто попадает в класс
«1» и когда в класс «2».
Коуэн. Разрешите сделать одно замечание. Я не уверен, что
правильно понял Вас. Классификация основывается на степени
пересечения двух частных входов?
Розенблатт. Классификация, которой мы пытаемся научить
систему, произвольна.
Коуэн. Критерием подобия является просто мера пересече-
ния двух частных стимулов?
Розенблатт. Критерием подобия является мера пересече-
ния двух реагирующих множеств Л-элементов. В данных обозна-
чениях пересечение между двумя стимулами St- и Sj или, скорее,
математическое ожидание этого пересечения (если оно нормализо-
вано) имеет вероятность Qu того, что ассоциативный элемент
с данными параметрами возбудится как при S<, так и при Sj. Эти
величины в настоящее время протабулированы [2]. Они определяют
всю динамику таких простых систем. Обобщение стимула Si на
S2 зависит от Qi2. Это означает, что при правильном распознании
и единичном подкреплении стимула S] количество подкрепления,
которое дается в этой простой, неконсервативной системе при рас-
познавании стимула S2, пропорционально Qi2.
Коуэн. Если бы отображение множества S-элементов на мно-
жество Л-элементов было бы не случайным, а Вы имели бы кон-
кретную область Л-элементов, Вам не нужна была бы система
управления подкреплением; но из-за рандомизации соединений S-
и Л-элементов Вы должны выбрать ответ системы таким образом,
чтобы получить требуемое поведение. Так ли обстоит дело?
Розенблатт. Какое-то подкрепление необходимо всегда,ко-
гда вы начинаете с нулевых весов.
Коуэн. В системе Аттли подкрепление не нужно, реакция
системы основывается только на мере пересечения множеств, или
пересечении образов в данном случае.
Розенблатт. Однако же Аттли подкрепляет свою систему.
Коуэн. Однако же нет, в той мере, в какой это эквивалент-
но той системе, о которой Вы говорите. Я хочу сказать, что не
16. Стратегии исследования моделей мозга
485
говорю пока о распаде связей и о вычислениях условной вероят-
ности. В некотором смысле я говорю только об измерениях подобия
на входе.
Розенблатт. Хорошо. Я согласен, что мера подобия пока
такая же. Но внутренняя структура перцептрона значительно
проще.
Коуэн. Да. Я хочу сказать лишь то, что, пользуясь Вашей
терминологией, если бы Вы не рандомизировали связи и не ис-
пользовали бы систему управления подкреплением, Вы делали бы
в точности то же самое, что делает Аттли в своей системе. Я хочу
подчеркнуть, что если Вы не рандомизируете связи между S и 4,
то Вам нет нужды обучать систему.
Розенблатт. Нам не нужно обучать систему, если не нуж-
но получать определенные ответы на определенные множества сти-
мулов, а это как раз то, чего мы хотим от системы. Это будет
процессом обучения в любой машине. Я хочу иметь возможность
по желанию менять ответы путем процесса обучения.
Коуэн. Но так ли стоит задача? Мне кажется, что действи-
тельная задача состоит в том, чтобы квадраты попали в подмно-
жество реакций для квадратов, а треугольники — в подмножество
реакций для треугольников. Называете ли Вы их треугольниками
или квадратами, совершенно неважно, если Вы только добились
дихотомии.
Розенблатт. Примите как нечто данное, что мы пытаемся
провести эксперимент по обучению, в котором получаемая реакция
неопределенна. Это может быть реакция отдаления или реакция
приближения, как хотите, и мы хотим иметь свободу обучить си-
стему отвечать так или иначе. Мы считаем, что первоначально это
свойство не присуще системе, оно не встроено в нее заранее и
в нашем случае приобретается лишь в процессе обучения.
Фон Фёрстер. Мне кажется, что здесь как раз уместно
сказать пару слов о ходе нашего симпозиума. Мы собрались здесь
для того, чтобы в результате обмена мнениями появилось нечто но-
вое и интересное. Я прошу Фрэнка Розенблатта и всех вас обду-
мать все замечания, относящиеся к перцептрону, который мне ка-
жется очень интересным и очень важным вкладом в область на-
шей работы. Фрэнк был одним из первых ученых, указавших на
возможности, которые таят в себе такие вещи, как «обучение»,
«принятие решений» и «распознавание образов». За последние
36 часов мы получили, как мне кажется, не только физиологиче-
ские, но и некоторые другие, скажем, аналитические и структурные
свидетельства в пользу того факта, что если ввести некоторую
предварительную структуризацию в наши системы, то мы сразу,
конечно, сможем отличить квадраты от треугольников и т. п., т. е.
я хочу сказать, что тогда вообще не существует проблемы. Об
486
Ф. Розенблатт
этом говорится в докладе Новикова, в этом заключается идея
Платта. Я мог бы назвать еще две или три системы, построенные
на разных принципах и разработанные в нашей лаборатории; та
кого рода задачи могут быть решены сразу для некоторого класса
фигур в системах, где используется дифференциальная геометрия
(эта система была разработана мной), топология (система Лёф-
грена), динамика (Вестон). Обучения систем при этом не тре-
буется, потому что структурные свойства стимулов извлекаются не-
посредственно из среды, так что нам, очевидно, не нужно тратить
много сил на определение свойств таких простых классов, как тре-
угольники, квадраты и т. д. Сегодня это может быть сделано очень
легко. Однако перцептрон, конечно, обладает тем достоинством, что
раз мы уже получили некоторые классификации, мы затем можем
заложить их в другую приспособляющуюся систему, которая мо-
жет им обучиться, относя предметы к разным классам.
Мне кажется, в настоящее время вопрос стоит так: каким
образом можно использовать основной принцип перцептрона при
получении метаклассов из окружающей среды? Существует, напри-
мер, принцип, основанный на пересечении или на вычислении услов-
ной вероятности. Я не вижу, например, препятствий для приме-
нения перцептрона после ряда систем, которые вырабатывают
предварительно, скажем, определенные меры, чтобы затем при-
менить принцип условной вероятности для дальнейших абстракций.
Мне приходят на ум некоторые устройства, в которых можно было
бы использовать эти принципы, и я прошу вас помочь мне отве-
тить на мои вопросы, если только они были корректно поставлены.
Коуэн. Что касается систем Фрэнка и Аттли, то, как мне
кажется, я сейчас понимаю, в чем заключается различие между
ними. Говоря афоризмами, система Аттли классифицирует, чтобы
обучиться, тогда как система Фрэнка обучается, чтобы классифици-
ровать. Если смотреть с этой точки зрения, то все обстоит прекрас-
но. Во-вторых, эти реагирующие системы, образующие связующее
звено между внешней средой и реакцией на нее, можно уподобить
человеку-наблюдателю, который глядит на черный ящик и выби-
рает желаемую реакцию, причем его поощряют по методу Скин-
нера. Поэтому все это не особенно интересно. Но когда мы устра-
няем связь с внешним миром и заменяем ее связью с сенсорной
системой, мы получаем нечто вроде ретикулярной формации.
X э й е к. Теперь уж я окончательно запутался, какая система
обучается, чтобы классифицировать, и какая классифицирует, чтобы
обучиться!
Коуэн. Система Аттли классифицирует, чтобы обучиться, а
система Фрэнка обучается, чтобы классифицировать. Итак, если мы
действительно устраняем эту связь и образуем связь между сен-
сорной системой, системой управления реакцией и ассоциативной
областью, а затем наблюдаем за реакцией, которая в некотором
смысле все еще является несенсорной системой, то мы в целом
получаем нечто вроде ретикулярной формации. в терминах выпол-
16. Стратегии исследования моделей мозга
487
няемых ею функций и в терминах данной модели. Мне кажется,
что теперь все это очень похоже на модель Бёрла и, по-видимому,
мы могли бы на самом деле синтезировать в модели Розенблатта
необходимые ограничения, которые следовало бы наложить и на
систему, и на модель Бёрла. Я думаю, что замечание, которое сде-
лал Фрэнк о точках устойчивости и неустойчивости в определенном
частном случае системы, на самом деле совпадает с замечанием
Бёрла о затухании и распространении волны в его системе и что
все это очень связано между собой. Мы должны иметь это в виду.
Розенблатт. Эти вещи связаны, но это не совсем одно и
то же.
Коуэн. Можно мне добавить еще кое-что? Система Аттли —
несколько странная система в том смысле, что она непохожа на
все другие модели. Мне кажется, это происходит потому, что он
истолковал свою модель как такую модель, в которой частные
элементы были элементами частной системы, а не ее состояниями.
Однако если перетолковать его модель, описав ее в терминах ато-
марных состояний, что обычно не имеет места для системы Аттли,
то мы окажемся гораздо ближе к модели Бёрла. Мне кажется, что
если считать Ваши Д-элементы состояниями модели, то, может
быть, удастся получить корреляцию между моделью Бёрла и Ва-
шей моделью, и тогда многое прояснится. Я уверен, что у Питера
Грина имеется многое сказать по этому поводу, так что, может
быть, действительно стоит попытаться построить некую синтетиче-
скую модель.
Шервуд. Я не уверен, что вполне понял Вашу цель из сде-
ланных Вами вводных замечаний. Но на Вашей схеме, не должна
ли там в общем случае быть непосредственная обратная связь от
R к А и от 7? к S?
Розенблатт. В более общем случае да. Я нарисовал гру-
бую схему.
Шервуд. Потому что, если Вы хотите уподобить модель
биологическим системам, то я не знаю биологических систем, в ко-
торых бы не было непосредственной обратной связи.
Розенблатт. Да, должна быть также обратная связь от R
к №. Я ограничился системой, которую мы собирались обсуждать,
и не рисовал полной схемы.
Шервуд. Обратная связь должна иметь такие веса, чтобы
она была подкрепляющей.
Бёрл. Во время симпозиума несколько раз указывалось на
проблему, связанную с необходимостью иметь достаточно большую
память для хранения любой возможной комбинации сенсорных дан-
ных. Эта проблема становится серьезной, только если мы рассма-
триваем классифицирующую машину, выполняющую полную ц
438
Ф. Розенблатт
однозначную классификацию, т. е. машину, память которой должна
хранить любую возможную комбинацию. Эту трудность можно
преодолеть, если использовать приспосабливающуюся классифика-
ционную машину, которая может экономично использовать не-
большую память, записывая в нее только те комбинации, которые
встречаются регулярно. Тогда нет необходимости в астрономиче-
ской памяти, но появляется риск ввести случайную двусмыслен-
ность и допустить неполноту классификации. Этот принцип адап-
тивности очень широко используется в устройствах связи. Когда
мы кончаем междугородний телефонный разговор, большая часть
аппаратуры на линии связи разъединяется, и ее тут же можно
использовать для других разговоров между совсем другими горо-
дами.
По-видимому, не подлежит сомнению, что хранение информа-
ции в мозге осуществляется именно таким образом. Мы исполь-
зуем регулярность и однообразие процессов в мире для того, чтобы
удовлетворяться скромной памятью. В то же время в результате
этой ограниченности нашей памяти мы неизбежно теряем огромное
количество доступной нам информации, так как просто пребываем
в блаженном неведении об ее существовании.
Коуэн. Система Аттли является в действительности вычис-
лительной машиной, на вход которой поступают перфокарты, и
именно благодаря им в этом случае и происходит классификация.
Паск. Я целиком согласен с Вами, д-р Бёрл. Как Вы знаете,
я написал статью, посвященную этим недифференцированным си-
стемам, и я согласен, что существует некоторая степень подобия
между такими системами, как система Аттли, и, как я его пони-
маю, усовершенствованным перцептроном. Верно, конечно, что та-
кие системы более адаптивны и действительно могут отражать кон-
цептуальные категории в присущих им терминах. В этом и состоит
их назначение. Но именно поэтому мне кажется чрезвычайно важ-
ным утверждение, что если мы знаем ту среду, в которой мы хо-
тим, чтобы наша система существовала, мы должны снабдить ее
нужными ей органами восприятия. Можно, конечно, обучить ма-
шину строить фильтры, извлекающие информацию, — с помощью
более или менее тупой процедуры в зависимости от выбранного
критерия подобия, — но, джентльмены, хотя в это можно поверить
и это даже можно продемонстрировать при наличии времени, един-
ственная ценность такого эксперимента будет заключаться в его
поучительности. Поэтому воспользуемся лучше элегантными мето-
дами, о которых говорил Новиков, методами фон Фёрстера и его
коллег (в частности, методом Джерри Леттвина, использующим
другой язык по другому поводу) всюду, когда нам посчастливится
знать, какой образ окружающего мира должна создавать система.
Перцептроны, коллоиды и прочие обучаемые системы предоста-
влены самим себе, когда мы не знаем этого мира (не только не
знаем, каков этот образ, но даже не знаем, какого он должен быть
типа). Позвольте мне обрисовать вам картину, которая вовсе не
столь глупа, как кажется. Героем этой исторци может быть пер-
16. Стратегии исследования моделей мозга
489
цептрон, если вы пожелаете, или одна из моих коллоидных систем,
хотя машина Фрэнка Розенблатта намного сложнее и лучше ис-
следована.
Снабдим эту машину руками и ногами, работающими от ее
реагирующих элементов, чтобы она могла ползать в этом мире, и,
что особенно важно, пусть ее внутренние части находятся в тес-
ном контакте со средой. Эти части являются не только Л-элемен-
тами, но потенциально также и рецепторами. Если эта ползающая
штука, ограниченная в своих возможностях конструкцией своих рук
и ног,-получает подкрепление, часть Л-элементов будет специали-
зироваться, превращаясь в рецепторы, приспособленные к окру-
жающему миру, в котором они находятся. В видимом мире они
приспосабливаются к свету, в слышимом — к звуку. Между прочим,
Свобода предложил такое устройство на Втором конгрессе Между-
народной ассоциации по кибернетике в Намюре. Это — в пределах
логических возможностей системы, хотя, должен признаться, такие
компоненты нам не подходят.
Вам всем это хорошо известно, так что я не буду утомлять
вас. Позвольте мне образно описать ситуацию. То, что происходит
в нашем случае, когда этот наш ползун — назовем его «Чарли» —
развивает свои специальные органы чувств, в точности соответ-
ствует проблемам, обычно так волнующим эмбриологов: как эм-
брион, развивающийся под действием количественно определенного
градиента и фиксированного закона эволюции (закон для «Чарли»
целиком зависит от его рук, ног и Л-элементов), внезапно претер-
певает качественное изменение? Здесь возникает особый вид диф-
ференциации, такой, что мы, подобно экспериментирующим эмбрио-
логам (или наблюдателям, изучающим распознающее образы
устройство), должны использовать совсем другую эксперименталь-
ную технику.
Платт. Мне хотелось бы услышать кое-что о более слож-
ных перцептронах. Скиннеру при его экспериментах пришлось
столкнуться с возникновением у голубей «предрассудков», если они
вначале подкреплялись случайным образом или через долгие ин-
тервалы, так что у них вырабатывалась неправильная оценка. Но
благодаря первичному случайному подкреплению они никогда не
теряли этой оценки. Хотелось бы знать, способны ли усложнен-
ные перцептроны к образованию таких «предрассудков», связанных
со случайными аспектами образа, который был им предъявлен
в первый раз? Второй вопрос до некоторой степени похож на пер-
вый. Он заключается в следующем. Если при различении двух
образов исказить одно из изображений в направлении другого,
можно ли в этом случае вызвать аномальные задержки в машине
или систематические ошибки при распознавании обычных образов,
как если бы машина впала в состояние психоза?
Розенблатт. Позвольте мне сначала ответить на второй
вопрос, потому что для меня он гораздо яснее. В описанных мною
моделях временная сетка системы полностью определена незави-
симо от условий. В общем случае вероятность ошибки будет
490
Ф. Розенблатт
увеличиваться при таком искажении одного образа, что он будет
напоминать другой, хотя в реакции не будет наблюдаться ускорения
или задержек (для описываемого типа систем). С другой стороны,
было бы гораздо легче придумать такую систему, в которой наблю-
даются возрастающие задержки: если мы имеем модель, в кото-
рой реагирующие элементы вместо мгновенной реакции на сигнал
интегрируют его по некоторому периоду времени, как это делает
биологический нейрон, так что они фактически реагируют на «сме-
щение», накапливающееся за тот период времени, в течение кото-
рого возбуждающий вход в конце концов получает преобладание
над тормозящим, то при этом следует ожидать добавочных задер-
жек. Не могли бы Вы теперь еще раз сформулировать эксперимен-
тальные наблюдения Скиннера, на которые вы ссылаетесь?
Платт. Пожалуйста. Если голубь подкрепляется случайным
образом в виде зернышка, падающего в лоток, и если случится
так, что первое зернышко упадет в лоток, когда голубь, скажем,
стоит на цыпочках, то и в дальнейшем он будет становиться на
цыпочки, надеясь, что это вызовет появление зернышка. Ваша
машина, по-видимому, также может получить подкрепление за слу-
чайный первый элемент поведения и поэтому может в дальнейшем
выработать ошибочную реакцию или приобрести «предрассудки»
в том же самом смысле, как и эти голуби.
Розенблатт. Прежде всего при этом допускается существо-
вание более одной двоичной реакции. Иначе говоря, должна суще-
ствовать возможность получения добавочной выходной информации
наряду с идентифицирующей реакцией, которую от нас требуют
различать. Мы работали с системами со множественными реак-
циями. В таких случаях, конечно, может наблюдаться и побочная
реакция наряду с той основной, которую мы подкрепляем. Эти
побочные реакции будут стремиться сохраниться в последующей
активности.
17. НЕЙРИСТОР
Г. КРЕЙН
(Станфордский исследовательский институт, Менло-Парк,
шт. Калифорния)
Я должен признаться, что с большим удовольствием
слушал на этом заседании выступления по такому спор-
ному вопросу, как самоорганизующиеся системы, хотя
сам принадлежу к специалистам в более прозаической и
детерминированной области — области цифровых вычис-
лительных машин. Несмотря на то что мой доклад не
увеличит количества информации по этому предмету, я
все же совершу общий грех и упомяну слово «нейрон».
Нейристор — термин, которым называется некоторый
класс устройств. Идея устройств такого типа возникла
при рассмотрении проблемы миниатюризации электрон-
ной аппаратуры, при попытке выделить в этой области
некоторые основные проблемы. При этом очень скоро
выяснилось, что здесь следует побеспокоиться о разре-
шении проблемы соединений. Одна из неприятных сто-
рон этой проблемы — высокое сопротивление очень тон-
ких «проводов». Подобные соображения слились в ко-
нечном итоге в один общий вопрос: можно ли построить
цифровую вычислительную систему в среде, где нет хо-
роших проводников для передачи сигналов? Способ вы-
жить в такой среде заключается в использовании для
передачи сигналов активных каналов, позволяющих пре-
одолевать большое ослабление сигналов в линиях связи.
Один из результатов, который сразу привлекает интерес,
состоит в том, что, хотя активные каналы первоначаль-
но рассматривались просто как внутренние соединения
для обычных схем, при использовании таких активных
каналов (по крайней мере того типа, которые я соби-
раюсь рассматривать) обычные схемы вообще не тре-
буются. Другими словами, эти активные каналы имеют
492
Г. Крейн
значительно больше логических возможностей, чем это
нужно им, чтобы играть роль простых соединительных
проводников в обычных цепях.
Рассмотрим сначала обычный запальный шнур и по-
говорим о его общих свойствах. Можно рассматривать
его в качестве устройства, обладающего энергией «по-
коя» (потенциальной энергией) и порогом возбуждения.
Если возбудить его выше порога, зона горения будет рас-
пространяться с постоянной скоростью. Следовательно,
если рассматривать зону горения в качестве сигнала,
можно сказать, что сигнал распространяется без затуха-
ния. Однако тот факт, что запальный шнур является
одноразовым устройством, лишает нас возможности ис-
пользовать на практике его логические свойства.
Если мы теперь посмотрим на нейрон и обратим осо-
бое внимание на то, что распространение сигнала по
аксону происходит по принципу «все или ничего», то
найдем, что распространение сигнала по аксону анало-
гично тому, что имеет место в запальном шнуре. Но ак-
сон не является одноразовым устройством. Нейрон само-
восстанавливается после каждого «горения» и может
быть снова использован — фактически бесчисленное ко-
личество раз. Если мне будет позволено позаимствовать
выражение у нейрофизиолога, то время восстановления
называется периодом рефрактерности. В этом смысле
запал можно считать имеющим бесконечный период ре-
фрактерности. Итак, нейрон характеризуется: 1) поро-
гом, 2) постоянной скоростью распространения сигнала,
3) незатухающим распространением возбуждения и
4) периодом рефрактерности.
Нейристор — термин, применяемый к классу
устройств, обладающих данными свойствами. Следова-
тельно, нейрон — просто пример некоторого устройства
из этого класса, реализованного в ионной среде. С точки
зрения устройств интересно рассмотреть возможности
их реализации также и в других средах, в частности в
электронной.
Хотя различные схемные аспекты и интересны, я бы
предпочел здесь подробнее остановиться на логических
возможностях подобных устройств. Однако, чтобы вве-
сти этот материал, я должен все же остановиться и на
17. Нейристор
493
некоторых схемных вопросах. Посмотрим, как такое
устройство могло бы быть собрано из электронных эле-
ментов. Простое устройство такого типа показано на
а
I
=н-^=-
I
Аннигиляция в точке встречи
Фиг. 1.
фиг. 1,а. Рассмотрим некоторое число классических мо-
ностабильных схем, соединенных в цепочку и согласо-
ванных так, что возбуждение одной запускает следую-
щую и т. д., причем каждая схема проходит в точности
через тот же процесс, что и соседняя, но в несколько
другой момент времени. Мы имеем, таким образом, пе-
риодическую цепочку с двусторонней связью.
Имеются три свойства, которыми обязательно дол-
жна обладать классическая моностабильная схема. Они
проиллюстрированы на фиг. 1 в виде активного устрой-
ства (скажем, термистора), источника энергии /о и эле-
мента памяти — конденсатора С. В состоянии покоя на
конденсаторе С имеется напряжение покоя Vo, так что
в емкости накоплена некоторая энергия покоя. При под-
ходящем запуске накопленная энергия высвобождается
и тратится в активном устройстве. Термистор нагре-
вается, и при соответствующей связи это локальное
494
Г. Крейн
повышение температуры может привести к запуску сле-
дующей ступени и т. д.
Что касается термистора, то он используется просто
в качестве примера и не представляет специального ин-
тереса. Но легко показать, что такие структуры могут
быть выполнены и с полностью распределенными пара-
метрами — слой «одного», слой «другого» и т. д. Однако
я не собираюсь здесь входить в детали и положусь на
вашу интуицию, которая вам подскажет, что такие це-
почки можно было бы изготовить.
Я буду обозначать линию или канал такого типа от-
резком прямой, причем, когда я провожу прямую, я
имею в виду устройство с линейно распределенными па-
раметрами, обладающее сформулированными ранее че-
тырьмя свойствами. Как теперь изобразить движение
возбуждения по линии? Я представляю себе это следую-
щим образом. Мы должны обратить внимание на две
переменные. Это переменная запуска и переменная энер-
гии. Местный процесс запуска переводит нечто в актив-
ную область, что в свою очередь вызывает высвобожде-
ние энергии; энергия покоя переходит в энергию запуска,
которая возбуждает соседний участок; там в свою оче-
редь освобождается новая энергия и т. д. (фиг. 1,6).
Это очень напоминает распространение линейной элек-
тромагнитной волны, когда изменение Е создает Н, а
изменение Н создает Е. В нашем нелинейном случае
изменение Т создает S, а изменение S создает Г, где
символ S используется для обозначения переменной на-
копленной энергии, а Т обозначает переменную запуска.
Здесь нужно отметить следующее важное свойство.
Эти цепочки в большой степени нелинейны, суперпози-
ция для них невозможна. Так, если два конца линии
одновременно возбуждены, так что две зоны возбу-
ждения движутся навстречу друг другу, то они анниги-
лируют в месте столкновения (фиг. 1,в). Это происхо-
дит вследствие того, что запас энергии к моменту столк-
новения по любую сторону от точки встречи исчерпан.
Это означает, что участки линии по обе стороны от точ-
ки столкновения находятся в состоянии рефрактерности.
Таким образом, в результате столкновения оба возбу-
ждения аннигилируют, и область вокруг точки встречи
17. Нейристор
495
возвращается в состояние покоя. Мы убедимся в даль-
нейшем, что это свойство очень полезно.
Я говорил, что подобные устройства обладают доста-
точными логическими возможностями для реализации на
них логики цифровой вычислительной машины. Очевид-
но, что одно такое устройство не представляет особого
интереса. Необходимо поэтому определить способы, ко-
торыми мы будем соединять такие цепочки. Оказывает-
ся, имеется два основных способа соединения: Т-соеди-
пение и S-соединение. Т-соединение очень просто. Пред-
ставим себе, что мы соединяем концами различные
цепочки, как показано на фиг. 2. Чтобы было яснее,
Фиг. 2.
представьте себе, что несколько запальных шнуров свя-
заны в один узел. Если процесс возбуждения начнется
в любой из цепочек, он дойдет до узла и пойдет далее
по каждой из других цепочек. В принципе можно соеди-
нить любое сколь угодно большое число цепочек. Но
оказывается, что вполне достаточно трех. Я имею в виду,
что трех цепочек, соединенных по такой схеме, доста-
точно, чтобы реализовать всю логику. Это основной тип
механизма «разветвления».
Рассмотрим теперь S-соединение. Оно совсем другое.
В этом случае цепочки идут вместе, бок о бок, и делят
энергию. Рассмотрим опять грубую модель. Каждая
ступень имеет свой источник энергии покоя. Возьмем
теперь две независимые ступени и заставим их делить
один общий накопитель энергии, но так, чтобы связь для
запуска между ними отсутствовала (фиг. 3,а). Тогда
каждая из этих ступеней имеет доступ к этому источ-
нику энергии. Если одна ступень возбудится и заберет
энергию, то она до восстановления энергии перейдет в
состояние рефрактерности, но и другая ступень при этом
496
Г. Крейн
также перейдет в состояние рефрактерности, так как у
них общий источник энергии. Рассмотрим теперь соеди-
нение пары цепочек, такое, что смежные ступени каж-
дой цепочки имеют общий накопитель энергии (фиг. 3,6).
Это и есть S-соединение. На фиг. 3, в дано его симво-
лическое изображение — две линии показаны рядом, по-
перечные линии подчеркивают тот факт, что у них об-
щий накопитель энергии.
Аннигиляция
в точке
встречи
S-соединение обладает следующим очень важным
свойством. Предположим, что два импульса так соотне-
сены во времени, что они сталкиваются в соединении
(см. фиг. 3,в). Далее я утверждаю, что несмотря на то,
что импульсы распространяются по двум разным ли-
ниям, они аннигилируют так же, как если бы они встре-
тились на одной линии. Опять в момент столкновения
запас энергии по обе стороны от точки встречи исчер-
пан. Коль скоро обе линии S-соединения делят энергию,
импульс в любой линии забирает запас энергии, имею-
щийся для обеих линий. Подобная ситуация открывает
богатые логические возможности, поскольку в S-соеди-
нении сигнал на одной линии может управлять свой-
17. Нейристор
497
ствами передачи другой линии, не возбуждая при этом
на ней сигнала.
Удобно ввести еще одно соединение — комбинацию
Г- и S-соединений. Это почти не отнимет у нас времени.
Возьмем S-соединение и соединим две его линии вместе
в Т-соединение, как показано на фиг. 4. Импульс, рас-
пространяясь от Л, проходит S-соединение и возбуждает
два импульса в Г-соединении. Если теперь предполо-
жить, что петля достаточно длинная, то к тому времени,
когда импульс В' достигнет S-соединения, последнее
уже успеет восстановиться, и импульс В' пройдет со-
единение. Но допустим, что петля сокращена, так что за
а
S-соединением непосредственно начинается Т-соедине-
ние. Тогда, если импульс из А дойдет до Т-соединения,
то импульс В' не сможет распространяться в обратном
направлении, так как в этот момент S-соединение нахо-
дится в состоянии рефрактерности по левую сторону от
Т-соединения. Это удобная разветвляющаяся структура.
Итак, импульс в А (или В) возбудит импульс в С, но
не в В (или Л). Это соединение назовем (Г— 5)-соеди-
нением.
Итак, имеем два основных соединения: Т-соединение
и S-соединение. Все, что мы будем делать дальше, есть
«игра» на этих двух соединениях. С помощью этих при-
нятых типов соединений цепочек (нейристоров) мы мо-
жем строить подобные логические сети какой угодно
сложности. Как анализировать и синтезировать подоб-
ные сети? Импульс, введенный в произвольную логиче-
3? Зак. 10Q
498
Г. Крейн
скую сеть, состоящую из соединений этих двух типов,
может затухнуть, аннигилировать, только двумя спосо-
бами: либо импульс дойдет до конца открытой линии, и
в этом случае ему просто некуда идти дальше, либо он
может погибнуть в результате столкновения с другим
импульсом. И это единственно возможные варианты.
Вначале вы можете прийти в ужас при мысли о необ-
ходимости проследить пути всех этих импульсов, но ин-
тересно, что ситуация стано-
вится вполне обозримой, если
А—» В рассмотреть три класса воз-
_ можных вариантов столкнове-
ний: 1) столкновение отдель-
а ных импульсов, 2) столкнове-
ние импульса с серией импуль-
д —х сов и 3) столкновение одной
серии импульсов с другой их
серией. Мы, конечно, не соби-
раемся рассматривать здесь
6 все эти варианты, но я хотел
бы привести несколько приме-
^И1’ °* ров, чтобы показать, как под-
ходить к делу.
В качестве своего рода разминки рассмотрим сна-
чала некоторые простые примеры на случай столкнове-
ния импульс — импульс. Раньше мы рассматривали аб-
солютно симметричные (двунаправленные) линии, ска-
жем запальный шнур можно поджечь с любого конца.
Сейчас в качестве первого упражнения рассмотрим со-
единение двух исходных точек А и В, такое, что им-
пульс, идущий из В, дойдет до А, а импульс, идущий
из Л, не дойдет до В. Соединение, показанное на фиг. 5,
обладает таким свойством. В этом соединении происхо-
дит то, что я называю процессом самостолкновения.
т. е. столкновение очень тесно связанных между собой
импульсов. Примером такой тесной связи являются два
импульса, которые были одновременно возбуждены в
Т-соединении. Есть много способов, которыми мы могли
бы заставить взаимодействовать эти импульсы. Один из
этих способов показан на фиг. 5. Так, импульс, прихо-
дящий из Л, возбуждает два импульса, .Л' и Л", вГ-со-
17. Нейристор
499
единении. Затем мы заставляем эти импульсы сталки-
ваться в S-соединении, так что оба они аннигилируют
(см. фиг. 5,а). В частности, ни один импульс не дохо-
дит до В. Однако импульс, идущий из В, беспрепят-
ственно проходит S-соединение и доходит до Г-соедине-
ния, возбуждая там два импульса, один из которых
доходит до исходной точки Л, а другой распространяет-
ся назад, в S-соединение. Этот импульс приходит в
S-соединение слишком поздно,
чтобы повлиять на первона-
чальный импульс, но мы все
же должны принимать его во
внимание, так как он опреде-
ляет промежуток времени, че-
рез который соединение может
быть опять использовано. Та-
ким образом, мы должны -ду-
мать о периоде рефрактерности
всего соединения. Итак, одно-
стороннее соединение, пока-
занное на фиг. 5, является хо-
рошим примером использова-
ния самостолкновения.
Опишем теперь другой при-
мер столкновения импульс—
импульс. Рассмотрим пробле-
му осуществления непланар-
ных логических схем; при этом
обычно сталкиваются с необ-
ходимостью в трехмерной ком-
мутации. Это означает, что
пересекающиеся проводники не
должны иметь электрического
контакта друг с другом. Ана-
логично мы могли бы допустить пересечение двух линий
(нейристоров) в трехмерном пространстве, но в данном
случае их «касание» в точке пересечения не будет столь
гибельно. Действительно, мы получили бы в этом случае
Т-соединение. Но далее возникает вопрос, можно ли
найти такую структуру вокруг этого пересечения, кото-
рая давала бы возможность управлять этим соедине-
32*
500
Г. Крейн
нием? В обозначениях фиг. 6 это означает, что жела-
тельна структура, которая дала бы возможность
использовать цепь АВ, не оказывая влияние на цепь XY,
и наоборот.
У меня, по-видимому, не хватит времени, чтобы по-
казать характер требуемой структуры, но она относи-
тельно проста. (Так, на фиг. 6,6 импульс из А, достигая
Т-соединения, возбуждает три импульса. Право на су-
ществование имеет только один импульс, обозначенный
А” и идущий к В. Из характера структуры очевидно,
что два других импульса, А' и Д'", в соединениях с са-
мостолкновением аннигилируют.) Разрешите мне только
сказать, что данная проблема очень напоминает про-
блему, возникающую при пересечении железнодорожных
путей. Если пути пересекаются в одной плоскости, а
длина поезда равна тысяче футов, то пересекающий
путь должен быть закрыт в течение всего времени, ко-
торое нужно поезду, чтобы пройти тысячу футов. Это
значит, что эта железнодорожная структура обладает
периодом рефрактерности, и если вас это почему-либо
не устраивает, то вам следует пользоваться пространст-
вом трех измерений и проводить пересекающиеся пути
в разных плоскостях. То же самое относится и к струк-
турам, рассматриваемым в данном докладе. После того
как одна из линий была использована, для всей струк-
туры наступает период рефрактерности и в течение этого
времени другая линия не может быть использована.
Хотя это и не очевидно, но можно показать, что даже
с этим временным ограничением цифровая вычислитель-
ная машина произвольной сложности может быть осу-
ществлена на плоскости с надежным использованием
каждого пересечения.
Приведу последний пример взаимодействия типа им-
пульс— импульс. Если взять линию, длина которой рав-
на по меньшей мере ее периоду рефрактерности, и зам-
кнуть ее в кольцо, то это кольцо будет представлять
собой минимальное по длине кольцо для хранения им-
пульса, который, будучи однажды возбужден, будет
циркулировать по нему бесконечно долго. Иначе говоря,
к тому времени, когда импульс вернется к началу коль-
ца, линия в этом месте успеет восстановиться. Это ос-
17. Нейристор
501
новная структура для хранения двоичной переменной.
Итак, импульс может либо циркулировать в кольце,
либо отсутствовать.
Рассмотрим, каким образом мы могли бы возбудить
импульс в кольце. Предположим, что кольцо находится
в состоянии покоя. Попытка возбудить кольцо посред-
ством Т-соединения (фиг. 7, а) окончится неудачей, так
как оба возбужденных импульса просто уничтожат друг
друга на другой стороне кольца. Фактически, это простой
пример теоремы, которая утверждает, что в произ-
вольной Г-сети (т. е. сети, состоящей только из Т-соеди-
нений) невозможно создать реверберации (т. е. цирку-
ляции импульсов).Как же нам в таком случае возбудить
импульс в кольце? Это просто осуществить, напри-
мер, с помощью (Г—S)-соединения (фиг. 7,6). Из
свойств (Т—S)-соединения, рассмотренных в связи с
фиг. 4, ясно, что единичный импульс А возбудит нуж-
ную циркуляцию. Аналогично можно очень просто пога-
сить циркулирующий импульс, но мы не будем сейчас
рассматривать этот случай. Рассмотрим лучше выход-
ную линию, включенную через Т-соединение (фиг. 7,в).
В каждый из тех моментов, когда циркулирующий по
кольцу импульс достигает Т-соединения, возбуждается
выходной импульс, а также импульс, продолжающий
циркуляцию по кольцу. Таким образом, если по кольцу
циркулирует импульс, мы в выходной линии получаем
однородную серию импульсов; если же в кольце не цир-
кулирует импульс, то выходная линия не возбуждена.
Если в кольце циркулирует импульс, мы будем говорить,
что в нем хранится двоичная переменная 1, в против-
ном случае в нем хранится 0.
502
Г. Крейн
Рассмотрим, наконец, что может быть получено из
взаимодействия импульса с серией импульсов (фиг. 8).
Предположим, что сигнал (зона возбуждения) идет по
линии С. В случае, если по линии АВ не распростра-
няется сигнал, импульс в С будет продолжать распро-
страняться по своей линии, пройдет S-соединение и в
конце концов исчезнет в конце линии. Однако в течение
111Ш11Н!
Фиг. 8.
времени, которое потребуется этому импульсу на то,
чтобы пройти S-соединение, между А и В не сможет
пройти сигнал, так как он будет уничтожен в момент
столкновения с импульсом С. Поэтому мы можем ска-
зать, что единичный импульс С запирает линию (т. е.
запрещает ее использование) на некоторое время т.
Предположим, однако, что мы захотели бы запереть ли-
нию надолго. Тогда нам понадобится серия импульсов
в линии С. Пусть период серии импульсов равен Т.
Источником этой серии импульсов могло бы служить
запоминающее кольцо, показанное на фиг. 8. Если
Т<т, то ни один импульс не пройдет от Л к В без
того, чтобы не быть уничтоженным при столкновении с
серией импульсов. Однако, если бы в кольце не цирку-
лировал импульс, линия С была бы не возбуждена
и линию АВ можно было бы по желанию исполь-
зовать.
(Между прочим, можно предположить и что Т боль-
ше т. В этом случае, как вы можете заметить, серия им-
пульсов не запирает линии полностью, имеются «окна».
17. Нейристор
503
Если попытаться провести импульс из А, то имеется не-
которая вероятность, что он пройдет. Поэтому эта схема
становится интересным вероятностным клапаном. Мож-
но показать, что значение р (вероятность открытого со-
стояния клапана) может быть сделано какой угодно
функцией множества логических переменных, так что
значение вероятности р может изменяться в процессе
работы.
Если вернуться к первому случаю, Т<т, то легко
определить передаточную функцию для вентильного
устройства, показанного на фиг. 8. Она аналогична
обычной передаточной функции двоичного реле. Итак,
предположим, что в кольце хранится переменная х.
Если х=1 (по кольцу циркулирует импульс), то линия
АВ для прохождения импульсов полностью заперта.
Если х = 0 (по кольцу не циркулирует импульс), то по
линии АВ могут передаваться импульсы. Можно пока-
зать, что при использовании основного вентильного уст-
ройства, изображенного на фиг. 8, может быть приме-
нена вся классическая методика анализа и синтеза,
разработанная для релейных сетей, хотя в данном слу-
чае возможно синтезировать и сети, которые не имеют
простых аналогов среди релейных.
Наиболее интересным во всем этом (помимо забавы,
которую доставляет сама игра в эти символы) мне ка-
жется то, что мы здесь имеем методику создания сетей,
отличающуюся большой однородностью. Сами устрой-
ства являются полностью распределенными и однород-
ными. Синтезированные сети также однородны, в них
входит только один тип устройств.
Наконец, при использовании аналоговых, а не циф-
ровых соединений имеется еще одна интересная воз-
можность. Аналоговое соединение — это слабо связанное
соединение. Так, например, в слабо связанном Т-соеди-
нении отдельный импульс, скажем, может быть не в со-
стоянии сам вызвать возбуждение в других линиях; та-
кое возбуждение может начаться только при определен-
ном сочетании импульсов.
Судя по тому, что нам известно до сих пор, если
только здесь уместно суждение по аналогии, мы можем
сказать, что в нервной системе человека дискретные
504 Г. Крейн
соединения в основном отсутствуют, а доминируют
аналоговые соединения. Тем не менее я надеюсь, что в
результате этих рассуждений будет оценена возможность
создания дискретных схем с помощью таких устройств,
обладающих только дискретными связями. Станет ли
подобный подход действительно практически полезным,
зависит от того, могут ли быть сами устройства осуще-
ствлены достаточно просто. Я надеюсь, что на какой-
нибудь будущей конференции я смогу доложить, что
это возможно.
18. НОВАЯ ЛИНИЯ ПЕРЕДАЧИ, ПРИВОДЯЩАЯ
К САМОСТАБИЛИЗИРУЮЩЕЙСЯ СИСТЕМЕ
Дж. БАУМЕН
(Технологический институт Северо-Западного университета)
Часть I
Всем известно, что в линии передачи, насколько мы
знаем в настоящее время, неизбежно имеются инерция
и восстанавливающая сила. Я решил шутки ради об-
общить это. Не входя в детали, легко указать много
различных видов инерции и много видов восстанавли-
вающей силы. Результат их действия обычно интерпре-
тируется как частота, или, если угодно, несущая волна,
даже в таком простом случае, как физический стержень
с возвращающей пружиной. Толкнув один конец стер-
жня, я могу передать что-то на другой конец, после
чего стержень возвращается на место. Это можно рас-
сматривать как акустическое колебание с бесконечной
длиной волны. Если закрутить один конец, то это ска-
жется на другом конце, но уже не в виде продольной
физической волны, а в виде акустической волны круче-
ния бесконечной длины.
Чтобы ввести специфический механизм, который я
собираюсь описать, я воспользуюсь советом старого про-
фессора, поддержавшего меня перед моей первой лек-
цией. Ассистент — это очень пугливый молодой чело-
век. Я уверен, что через это прошло большинство
присутствующих. Профессор сказал: «Все очень про-
сто. Если студент приходит к вам с вопросом по тео-
рии, разберите с ним пример, а если он заинтересовал-
ся задачей, обсуждайте теорию».
Я думаю, это хороший совет, и поэтому, чтобы
ввести теорию, хочу описать простенький эксперимент,
выполненный около двух лет назад. Ныне в мелоч-
ных лавках можно примерно за десять центов купить
506
Дж. Б ay мён
компас с магнитной стрелкой размером с десятицентовую
монету. По наитию я накупил их целую пинту. Этим,
по сути, ограничились почти все капиталовложения в
данную исследовательскую программу.
Идея состояла в следующем. Прежде всего я разло-
жил компасы в ряд так, что они почти соприкасались.
N
GGQQQGQQQQ
©©©©©©©©©©
ОООООООООО
Фиг. 1.
Магнитная стрелка каждого компаса имела свою посто-
янную времени, устанавливаясь примерно в направле-
нии северного магнитного полюса за время порядка
1 сек. Однако, когда они располагались близко друг от
друга, сила их взаимодействия перекрывала действие
магнитного поля Земли, и постоянная времени станови-
лась порядка, скажем, 0,1 сек. При этом стрелки вы-
страивались в одну линию так, что северный полюс од-
ной был обращен к южному полюсу другой (фиг. 1,а).
Эксперимент ставился так, чтобы направление на север
было нормально к оси ряда; это давало весьма устой-
чивую конфигурацию. Единственное, что еще требова-
лось для эксперимента, кроме карандаша и бумаги, это
небольшой полосовой магнит. Но я не стал тратиться
на него, а просто одолжил его в физической лаборато-
18. Линия передачи со самостабилизацией
507
рии первокурсников. На фиг. 1 вертикальная стрела
указывает на север. Если теперь поднести к магнитным
стрелкам южный полюс, возникнет отталкивание, стре-
мящееся сместить крайнюю стрелку. Я уверен, что в ре-
зультате возникнет квазистатическая система, подобная
изображенной на фиг. 1,6. Углы смещения убывают,
так что после начального импульса возникает динами-
ческий процесс и сигнал распространяется вдоль ряда,
хотя и не слишком быстро.
Это одна из самых чудесных игрушек, с которой я
когда-либо играл. Можно медленно поднести магнит
вплотную, поддерживая статическое состояние, в кото-
ром установилось равновесие, так что стрелки откло-
няются одинаково. Поведение системы является точным
аналогом зубчатой передачи, т. е. одна стрелка повора-
чивается в одну сторону, соседняя — в противополож-
ную, и так далее (фиг. 1,в). Это очень похоже на то,
как если бы вы поворачивали один конец стержня и
наблюдали бы при этом, что другой конец также пово-
рачивается. Впрочем, это еще не особенно интересно.
Но, если рассматривать эту систему не как квази-
статическую, а как динамическую, то можно наблюдать
некоторые необычные явления, которые я не могу изо-
бразить на рисунке. После небольшой практики можно
научиться подносить южный полюс магнита так, чтобы
заставить первую стрелку совершить полный оборот.
При этом вдоль линии не распространяется никакого
возмущения. Совершая привычное движение, моя рука
автоматически вносит элемент случайности, так что
опыты не воспроизводимы. Тем не менее я могу пред-
сказать, что может произойти при определенных усло-
виях. Если вы некоторым определенным образом при-
близите южный полюс магнита, то вдоль цепочки рас-
пространится отчетливый сигнал, причем каждая стрел-
ка изменит направление на обратное. Мы имеем настоя-
щую двоичную систему — систему с двумя устойчивыми
состояниями.
Если вы, однако, проделаете это не в точности так,
как надо, сигнал будет распространяться (иногда, цц-
видимому, даже усиливаясь благодаря резонансу)
до тех пор, пока в каком-то месте вдоль линии одна
508
Дж. Баумен
стрелок не совершит полного оборота. Тогда сигнал от-
разится и возвратится обратно, не перейдя через неко-
торую точку. В других случаях (за час можно проделать
сотни опытов) несколько расположенных подряд стре-
лок начинают синхронно вращаться, пока, наконец, не
успокоятся. В конце концов они остановятся в одном из
двух устойчивых состояний. Повторяю, это одна из са-
мых чудесных игрушек, с которой я когда-либо играл.
Полная стоимость ее менее десяти долларов.
H-N-COOH
R-N-COOH
Фиг. 2.
Я не предлагаю эту систему для передачи информа-
ции, но полагаю, что она достаточно интересна по свое-
му принципу для исследования. Математический анализ
предполагает, конечно, составление системы очень боль-
шого числа дифференциальных уравнений. Вы можете
разложить на своем столе около пятидесяти таких ком-
пасов в ряд, и в этом случае вы получите пятьдесят
взаимозависимых угловых переменных. Хотя вы срав-
нительно легко можете записать дифференциальные
уравнения, описывающие процесс, я думаю, даже боль-
шая вычислительная машина ИБМ не скоро получила
бы численное решение. Численное решение, впрочем,
мало дает для понимания того, что же происходит на
самом деле.
Позвольте мне теперь обобщить это на случай, когда
число вращающихся вокруг своих осей диполей стано-
вится бесконечным, в то время как их размеры стре-
мятся к нулю, а отношение момента инерции к диполь-
ному моменту остается постоянным. Меня тут слегка
поддразнивали замечаниями относительно анализа раз-
мерностей, но, я думаю, все вы легко можете убедиться,
что это однопараметрическая линия передачи. Важней-
шей характеристикой является, конечно, отношение мо-
мента инерции к дипольному моменту. Затуханием я
сейчас пренебрегаю.
Электростатический аналог этого случая легко пред-
ставить себе на молекулярном уровне. Возьмем высоко-
18. Линия передачи со самостабилизацией
509
молекулярный остов и присоединим к нему побочную
аминокислотную группу (фиг. 2). Это будет, пожалуй,
самый большой дипольный момент, какой можно полу-
чить на молекулярном уровне. В других местах вдоль
остова расположены другие подобные же группы, сво*
бодно вращающиеся вокруг связи, соединяющей их с
остовом. Такое вещество можно было бы создать. Оно
обладало бы весьма замечательными диэлектрическими
свойствами, превосходя, возможно в сотни раз, найден-
ные до сих пор сегнетоэлектрики типа титаната бария.
Оно могло бы служить элементом памяти, логическим
элементом или линией передачи и могло бы найти при-
менение в ряде обсуждавшихся здесь устройств. Таково
первое возможное обобщение. Впервые я изложил эту
идею К. С. Марвелу здесь, в Иллинойсском универси-
тете, и он сказал, что если я действительно хочу полу-
чить нечто подобное, он мог бы сделать это, но это по-
требовало бы чудовищной работы.
ДИСКУССИЯ
Ц о п ф. Я мог бы указать Вам полимер, который, как мне ка-
жется, удовлетворил бы Вас в качестве аналога Вашей системы.
Диполями в нем являются побочные группы никотиновой кислоты.
Баумен. Это обязательно должен быть длинный линейный
полимер с дипольными группами, расположенными через приемле-
мые интервалы. Эффект мог бы наблюдаться только в растворе и,
возможно, только под действием вытягивающей силы, в струя-
щемся потоке, ориентирующем остовы молекул; здесь, по крайней
мере, имеются какие-то возможности получить то, на что мы
надеемся.
Ц о п ф. Сравнительно просто, пожалуй, синтезировать поли-
мер, имеющий соответствующее среднее расстояние между побоч-
ными группами вдоль цепи. Проблема заключалась бы в том, чтобы
управлять побочным взаимодействием между группами, принадле-
жащими соседним цепям. Такие полимеры часто текут тягучими
сгустками, причем их свойства упругости и вязкости зависят от
скорости.
Баумен. А теперь я предложу вам другое обобщение. Вер-
немся к нашим компасам. На этот раз я нарисую лишь их фут-
ляры в виде кружков (фиг. 3). Здесь изображена одна линия пере-
дачи и другие, расположенные рядом вдоль нее. Получилось нечто
действительно беспорядочное.
510
Дж. Баумен
Если построить такого рода структуру и затем возмущать ее
посредством полосового магнита, то пусть попробует какая угодно
машина ИБМ вычислить, что произойдет. Взаимодействие будет
в этом случае исключительно сложным. Можно сделать некоторые
обобщения. Прежде всего, если имеется структура, бесконечно про-
стирающаяся во всех направлениях, то, очевидно, каждая маг-
нитная стрелка имеет столько устойчивых состояний, сколько у нее
ближайших соседей в данной структуре: четыре в квадратной
структуре, шесть в гексагональной. Следовательно, перед нами
самостабилизирующаяся, самоорганизующаяся система. Соответ-
ствующее возмущение в какой-либо точке заставит ее перейти
в другое из ее устойчивых состояний.
Если в одном направлении протяженность структуры беско-
нечна, а в другом число ее членов равно N (фиг. 3), имеет место
— ©о -»•
I
N
4
Фиг. 3.
любопытная зависимость от N. Число устойчивых состояний, по-
видимому, проходит через максимум при значении N где-то между
50 и 100. Это очень грубая оценка. Наличие краевых эффектов
сильно искажает результаты по сравнению со случаем бесконечной
протяженности.
Если бы удалось создать полимер такого типа, вытянуть его
в тонкие нити, вроде нейлона, так, чтобы они были ориентированы,
причем длина их практически могла считаться бесконечной (по-
скольку речь идет о молекулярных размерах), а ширина соста-
вляла несколько сот активных групп (это размеры, с которыми
имеют дело специалисты по искусственному волокну), мы могли бы
получить вещество с поистине незаурядными электрическими свой-
ствами.
Ц о п ф. Насчет Ваших экспериментов с компасами: знакомы
ли Вы со статьей Крэгга и Темперли [1], опубликованной в *EEG
Journal». Они предложили модель коры мозга по аналогии со
структурой доменов магнитного материала. Это было в 1954 г.
Баумен. В пятьдесят четвертом? Они меня опередили. Не-
ужели они брали магниты и выстраивали их в ряд?
Ц о п ф. Они говорили, что это можно сделать.
Баумен. Впрочем, они не знали, где помещается ближайшая
мелочная лавочка. Моя игрушка из компасов работает, и мне ка-
жется, это одна из самых чудесных игрушек, которой вы можете
развлекаться в дождливый день.
18. Линия передачи со самостабилизацией
511
А м ар ел. Можете ли Вы вызывать какие-либо ограниченные
эффекты в малой области такой системы?
Баумен. Не вижу причин, отчего бы и нет. Вы можете нало-
жить какие угодно ограничения на микроскопическую систему или
высокополимерную систему. Я повторяю, что мой эксперимент, со
строгой точки зрения, кустарный. Приближение стержневого маг-
нита к концу линейной структуры такого вида — это невоспроиз-
водимое возмущение.
Ц о п ф. В случае Вашей структуры из нескольких рядов, на-
блюдали ли Вы, чтобы островок активности перемещался вдоль
системы?
Баумен. Однажды я выложил на столе структуру 5X50, но
не смог уследить одновременно за всем, что происходило. Это на
самом деле чертовски трудно.
Ц о п ф. А регистрирующий прибор стоил бы уже больше де-
сяти долларов!
Баумен. Если говорить серьезно, управляемый механизм, ко-
торый давал бы точные, воспроизводимые возмущения, влетел бы
в копеечку, но посредством него можно было бы получить ряд
ценных результатов.
Ча с т ь II
КРИСТАЛЛИЗАЦИЯ
Я пытался дать вам что-то, но теперь, боюсь, мне
придется взять у вас что-то ввиду незаконченности ра-
боты. Все вы знаете, что насыщенный раствор соли мо-
жет быть переохлажден, т. е. охлажден во многих
случаях значительно ниже температуры, при которой
должна произойти кристаллизация соли. Раствор тогда
является метастабильным и зачастую может поддержи-
ваться при этой температуре неограниченно долго. Вне-
запное сотрясение, частица пыли или затравочный кри-
сталл индуцируют явный самоорганизующийся процесс,
представляющий собой весьма эффектное явление. Го-
могенная фаза разделяется на две фазы, одна из кото-
рых— кристаллическая — организована едва ли не в
максимальной степени, в какой материя может быть ор-
ганизована. Здесь перед нами, быть может, простейший
512
Дж. Баумен
пример спонтанной самоорганизации. Она даже может
быть селективной.
На фиг. 4 изображена диаграмма плавкости двух-
компонентной системы, две компоненты которой не обра-
зуют твердого раствора. Координатами служат темпе-
ратура и процентное содержание одной из компонент.
Как известно, имеется кривая плавкости (эвтектика),
Фиг. 4.
отделяющая области существования жидкости и твер-
дого тела. Если мы возьмем жидкость состава а при не-
которой температуре и станем охлаждать ее, ничего не
произойдет, пока мы не пересечем кривую плавкости.
Тогда наступит процесс кристаллизации и система пе-
рейдет в область твердой фазы. Если мы пересечем кри-
вую плавкости в эвтектической точке, где она имеет
особенность, состав каждой из фаз будет прежним. Если
же начать охлаждение из точки Ь, сначала будет кри-
сталлизоваться лишь одна из компонент, причем состав
и температура жидкой фазы будут изменяться вдоль
кривой плавкости, пока система не достигнет эвтекти-
ческой точки, т. е. состояния, соответствующего первому
случаю.
Мне кажется, что кое-что можно сказать в развитие
этого. Недавно появился патент, использующий селек-
тивность системы в метастабильном состоянии, который
предвещает доходы в миллионы долларов в области хи-
мической технологии. Предположим, мы имеем эвтек-
тику и охлаждаем ее до точки с на фиг. 4, причем допу-
18. Линия передачи со самостабилизацией 513
стим, что она остается жидкой (она действительно оста-
нется жидкой, если вести охлаждение очень осторожно).
Если мы теперь добавим хоть крупинку какой-либо ком-
поненты, произойдет кристаллизация одной лишь этой
компоненты. Очевидно, имеет место селективность, обес-
печиваемая достаточным различием кристаллических
форм, вследствие чего даже в отсутствие термодинами-
ческого равновесия кинетика такова, что подобное кри-
сталлизуется лишь на подобном.
Главная тема этой конференции — самоорганизация.
Я уверен, что рост кристалла — один из ярких приме-
ров самоорганизации. Позвольте мне заявить, что само-
организация, по крайней мере насколько это известно
мне и, видимо, всем, с кем я здесь беседовал об этом,
не имеет математической, количественной меры. Именно
поэтому я говорю, что это незаконченная работа, обры-
вающаяся на пессимистической ноте. Самоорганиза-
ция— это, конечно, не энтропия, хотя, согласно обычным
понятиям, мы мыслим себе низкую энтропию как высо-
кую упорядоченность, высокую симметрию и второй за-
кон говорит нам, что природа, будучи изолирована, пе-
реходит от порядка к беспорядку. Это не то, что мы
здесь обсуждали, если вы согласитесь со мной, что спон-
танная кристаллизация из переохлажденного раствора
есть самоорганизация.
Я оставляю этот вопрос вам, но мне хотелось бы по-
вторить тройную остроту, которую я слышал недавно па
Аляске. Замечательный старик, преподающий там уже
много лет химию, Билл Уилсон, знакомил учащихся с
тремя законами термодинамики с помощью следующей
интерпретации: первый закон гласит, что вы не можете
выиграть, второй закон утверждает, что вы не мо-
жете даже остаться при своих, а третий закон говорит,
что, когда действительно холодно, вы даже не можете
играть.
ЛИТЕРАТУРА
1. Cragg В. G., Теш perley Н. N. V., «The organization of neu-
rones: a co-operative analogy», EEG Clin. Neurophysiol., 6, 84
(1954).
33 Зак. 106
19. К ВОПРОСУ О РАСПРЕДЕЛЕННОЙ ПАМЯТИ
Ч. РОЗЕН
(Станфорд с кий исследовательский институт, Менло-Парк,
шт. Калифорния)
В памяти современных вычислительных машин ин-
формация хранится в виде двоичных единиц информа-
ции, записанных статически (магнитные сердечники,
барабаны или ленты, перфокарты и т. д.) или динами-
чески (импульсы, циркулирующие по акустической ли-
нии задержки). При таких способах хранения каждая
двоичная единица информации единственным образом
соответствует одному из двух возможных состояний
некоторого физического процесса и в принципе всегда мо-
жет быть локализована в определенном пространствен-
ном объеме или временном интервале. Оказывается, од-
нако, что некоторые виды биологической памяти пред-
ставляют собой распределенную память, т. е. память,
в которой информация хранится в пространстве или во
времени в весьма рассеянном виде. Каким именно обра-
зом информация при этом обрабатывается, распреде-
ляется и хранится, нам в точности не известно.
Предположим, что некоторое количество информа-
ции, которую нужно запомнить, предварительно преоб-
разовано в двоичную форму. Тогда в распределенной
памяти каждый двоичный разряд будет храниться боль-
ше чем в одном участке памяти. В этом случае считыва-
ние хранимой информации состояло бы в выделении и
восстановлении по разбросанным следам каждого двоич-
ного разряда информации, причем желательно по па-
раллельной схеме. Какими свойствами должны обладать
ячейки такой памяти? Как следует их соединять? Каким
образом записывать и считывать информацию? Наконец,
самое главное: если дано число двоичных разрядов, ко-
19. К вопросу о распределенной памяти
515
торые нужно запомнить, то каково минимальное число
необходимых для этого ячеек памяти и насколько эта
система чувствительна к ошибкам? Различные подходы
к решению этих проблем можно в явном или неявном
виде найти у Тэйлора [1], Розенблатта [2], Аттли [3],
Виллиса [4] и др.
В настоящей статье описывается один из многих воз-
можных подходов к попытке создать систему распреде-
ленной памяти. Наш подход опирается в основном на
интуицию и до сих пор не имеет солидной математиче-
ской базы. Но поставленные проблемы, по нашему мне-
нию, можно решить, а в созданной системе заложены
возможности для дальнейшего развития. В этом напра^
влении ведется сейчас интенсивная работа.
1. ЯЧЕЙКИ ПАМЯТИ
Вначале казалось, что использовать ячейки для хра-
нения двоичных единиц информации в распределенной
памяти можно только весьма тривиальным способом —
запараллелить для хранения каждой двоичной единицы
информации достаточное число таких ячеек. Казалось,
что желательно использовать память с большим числом
уровней, или аналоговую память. Особенно эта идея
окрепла после того, как в нашей лаборатории А. Е. Брей-
ном была создана память на многодырочных магнитных
сердечниках. Ниже приведены наиболее существенные
рабочие характеристики этой памяти:
1. В пределах изменения линейности на 10% можно
получить 25 уровней памяти.
2. Считывание происходит без разрушения инфор-
мации.
3. Каждую ячейку памяти можно снабдить клапаном,
запрещающим запись и считывание, т. е. можно исклю-
чать ячейки из числа работающих.
4. Содержимое ячейки может увеличиваться или
уменьшаться, причем эти изменения просто суммируют-
ся алгебраически.
5. Сигналы, получаемые при считывании с группы
ячеек, можно алгебраически суммировать для получения
одного выходного сигнала.
33*
516
Ч. Розен
2. ВНУТРЕННИЕ СОЕДИНЕНИЯ.
СПОСОБЫ ЗАПИСИ И СЧИТЫВАНИЯ
Мы начали работу, имея ячейку памяти, функцио-
нальные свойства которой описаны выше. Мы пытались
создать структуру, анализируя которую можно было бы
решить некоторые поставленные выше вопросы. Вначале
мы пользовались случайными внутренними связями и
схемой «принудительного обучения», предложенной Ро-
зенблаттом. На фиг. 1 (см. также табл. 1) изображена
часть системы, причем ячейки памяти пронумерованы
Таблица 1
Выход или вход № ячейки Сумма прира- щений и уменьшений
А В с
Запись (двоичные знаки) 1 0 0 1 —1
Считывание (алгебраические суммы) +1 —2 4 2 3 + 1 —1
Среднее на выходе Считывание (двоичное) 1 ~5/з 0 0 \4 —2
А В с № ячейки Сумма прира- щений и уменьшений
Запись (двоичные знаки) 1 0 1 1 +1
Считывание (алгебраические 2 +1
суммы) 3 2 2 3 +1
Среднее на выходе +7з 4 0
Считывание (двоичное) 1 0 0 X
цифрами, а выходы обозначены буквами. Числа около
каждого выхода указывают, с какими ячейками связан
данный выход. Чтобы не загромождать рисунка, мы ис-
пользуем одно соединение для указания связи в следую-
щих двух направлениях.
1 — направление справа налево. Производится за-
пись. Приращения и уменьшения, соответствующие чис-
19. К вопросу о распределенной памяти 517
лу на входе, алгебраически суммируются и записывают-
ся в каждую ячейку, соединенную с несколькими вы-
ходными блоками.
2 — направление слева направо. Производится счи-
тывание. В каждом выходном блоке алгебраически сум-
мируются выходные сигналы с соединенных с ним ячеек.
Эта система ограничивается хранением и считыва-
нием двоичных единиц. Пусть на некоторый входной
Ячейки Входы или
памяти выходы
Фиг. 1. Поведение участка памяти,
состоящего из четырех ячеек с боль-
шим числом уровней трех входных и
трех выходных двоичных каналов.
блок поступает 1. Это влечет за собой посылку прира-
щений, равных +1, в каждую ячейку, соединенную с
этим блоком. И наоборот, 0 на входном блоке влечет за
собой посылку уменьшений (отрицательных прираще-
ний), равных —1, в каждую соединенную с ним ячейку.
Для иллюстрации мы выбрали одну из восьми возмож-
ных двоичных комбинаций на входах (1 0 0). В каждую
ячейку поступали соответствующие суммы приращений
и уменьшений. Суммы выходных сигналов показаны от-
дельно— это последовательные операции.
По выходным суммам ( + 1, —2, —4) нужно восста-
новить первоначально записанное число. Простейшим
способом будет сравнить значение на каждом отдельном
выходе с алгебраическим средним по всем выходам.
В рассматриваемом случае среднее равно —5/3. Выход
А больше —5/3; поэтому мы приписываем ему двоичную
единицу. Выходы В и С меньше этого значения, и им
мы приписываем нули. Таким образом, мы получили
исходную комбинацию 1 0 0.
518
Ч. Розен
Во втором примере на фиг. 1 выбрана входная ком:
бинация 101. Если схема внутренних соединений та
же, то описанная процедура приведет к неверному ре-
зультату, и мы получим 1 0 0. В общем случае для про-
извольно выбранной схемы внутренних соединений ока-
зывается, что существуют комбинации, которые не
могут быть считаны правильно.
3. РЕГУЛЯРНЫЕ МНОЖЕСТВА1)
После того как было испытано, изменено и снова
испытано большое число различных схем внутренних
соединений, стало ясно, что, по крайней мере для отно-
сительно небольшого числа ячеек памяти и двоичных
ячейки входы или
памяти выходы
0 4^— 1,2, <5
®<5 <s>® 1,4,5
®<§> 1,6,7
®^ 2,4,6
®O O-® 2,5,7
®<> g>® 5,4,7
<7) 5,5,6
Фиг. 2. Диаграмма связей в распределенной
памяти.
входов, на так называемые случайные соединения дол-
жны быть наложены ограничения и условия симметрии,
если мы хотим, чтобы все возможные двоичные комби-
нации правильно записывались и считывались. На фиг. 2
и в табл. 2 приведена одна из возможных схем соеди-
9 Недавно В. Каутцем (Стэнфордский ин-т) было указано, что
изучение таких числовых множеств насчитывает уже длительную
историю в комбинаторном анализе. В частности, сходные множе-
ства используются в форме «латинских квадратов», служащих сред-
ством расчета экспериментов. Множество, представленное на фиг. 2,
является одним из ряда множеств, известных как «штейнеровские
тройки»; см. К а р 1 a n s к у, Hall, Jr. et al., Some Aspects of Ana-
lysis and Probability, Wiley, New York, 1958.
19 К вопросу о распределенной памяти 510
нений. Она, по нашему мнению, обладает интересными
свойствами и возможностями для дальнейшего разви-
тия. Для удобства назовем такое соединение регулярным
Таблица 2
Вариант Операция Выход или вход
А В С D Е F О
(а) Запись (двоичная) Считывание (суммы) 1 0 0 0 000 —3 —7 —7 —7 —7 —7 —7
(Ь) Запись (двоичная) Считывание (суммы) 1 1 0 0 0 0 0 -1 -1 -5 -5 -5-5-5
(с) Запись (двоичная) Считывание (суммы) + Н- + 1о О L о (L © । со о
(d) Запись (двоичная) Считывание (суммы) 1111 111 +9 -1-9 +9 4-9 4-9 4-9 4-9
№ ячейки Суммы приращений и уменьшений для вариантов
(а) (Ь) (С) (d)
1 —1 + 1 +3 4-3
2 -1 —1 —1 +3
3 —1 -1 —1 +3
4 —3 —1 —1 +3
5 —3 -1 —1 +3
6 —3 —3 —1 4-3
7 —3 —3 —1 4-з
множеством. При образовании этого множества соблю-
дались следующие правила:
(1) Каждая ячейка и каждый выходной блок имеют
одно и то же число связей. Таким образом, число ячеек
памяти равно числу выходов.
520
Ч. Розен
(2) Связи каждого выхода пронумерованы. Они об-
разуют сочетания по два. Каждое из таких сочетаний
встречается по крайней мере один раз и только один
раз. Например, при А имеем сочетания (1,2), (1,3),
(2,3), при В — сочетания (1,4), (1,5), (4,5), и т. д. Соче-
тания (1,1), (2,2), (3,3) и т. д. исключены. В приложе-
нии А (случай 1) показано, что при этих условиях
соотношение между числом ячеек памяти W и числом
связей г имеет вид
ЛГ = г2 —г+1. (1)
Это уравнение дает необходимое условие, которое
должно быть выполнено, но не содержит доказатель-
ства того, что оно может быть выполнено, и указаний,
как этого добиться. В приложении Б приведены регу-
лярные множества для г = 2, 3, 4 и 5.
Вернемся опять к фиг. 2. На ней приведены резуль-
таты для четырех различных двоичных наборов на вы-
ходах— входах. Запись и считывание производится уже
описанным нами способом. Из соображений симметрии
ясно, что четырех выбранных комбинаций достаточно,
чтобы судить о любой из 27 возможных при семи входах
комбинаций. За исключением комбинаций из одних еди-
ниц, 1 1 1 1 1 1 1, и одних нулей, 0 0 0 0 0 0 0, описан-
ный способ дает правильный ответ. Но даже и эти две
особые комбинации можно различить с помощью неко-
торых простых добавочных операций. Представляют ин-
терес также приведенные ниже свойства. Они были про-
верены для регулярных множеств до г=5, но можно
вывести их справедливость и для любых г. (Перечис-
ленные ниже свойства справедливы для всех двоичных
комбинаций, кроме двух упомянутых выше, 1111111
и 0 0 0 0 0 0 0.)
1. Для любой заданной двоичной комбинации алге-
браическая сумма считываемых сигналов одна и та же
для всех единиц и одна и та же для всех нулей. Таким
образом, для случая (Ь) алгебраические суммы равны
— 1 для выходов А и В, на которых при записи были
единицы, и —5 для выходов С, О, В, F, G, на которых
были нули.
19. К вопросу о распределенной памяти
521
2. Алгебраическая разность D между суммой, соот-
ветствующей единице, и суммой, соответствующей нулю,
может быть выражена через число связей одного вы-
хода:
D = 2r — 2.
Следовательно,
для случая (a): D = (— 3) - (—7) = 4 для выходов А&8,
» '» (b): Z) = (—1) — (—5) = 4 » » А&С,
» » (с):£> = (1) — «3) = 4 » » A&D.
3. Максимальное число уровней, которое требуется
для одной ячейки, равно 2г. Можно ожидать, что с уве-
личением г положительные и отрицательные погрешно-
сти, возникающие из-за неоднократности интервалов
между уровнями, будут в процессе выходного суммиро-
вания сокращаться. С другой стороны, при росте г раз-
ность считывания D между единицей и нулем возра-
стает приблизительно как 2г. Таким образом, оказы-
вается, что точность «узнавания» может улучшаться с
увеличением размеров системы.
4. Следует отметить, что необходимое число ячеек
равно числу двоичных выходов. До настоящего времени
не найдено схемы соединений, число ячеек которой было
бы меньше числа двоичных выходов и которая при этом
давала бы возможность верно считывать все двоичные
комбинации описанным выше способом. Как будет пока-
зано ниже, обещающей является более сложная схема
«обучения» (teaching).
4. СИММЕТРИЧНЫЕ, НО НЕ РЕГУЛЯРНЫЕ
МНОЖЕСТВА
На фиг. 3 и в табл. 3 дан пример симметричной схе-
мы соединений, в которой число ячеек памяти меньше
числа выходов. В этом множестве соблюдается сформу-
лированное ранее правило относительно сочетаний по
два. Это значит, что в нем имеется любая возможная
пара, но только один раз. Дубли снова исключаются.
Опять, исходя из соображений симметрии, двоичные ком-
бинации от (а) до (f) включительно представляют все
возможные (их 26) двоичные комбинации. Если при
522
Ч. Розен
Ячейки ^Оды или
памяти выходы
Фиг. 3. Симметричное, но
не регулярное множество.
считывании используется способ сравнения значения сиг-
нала на каждом выходе со средним значением, то пра-
вильно считаны будут только комбинации, представи-
телями которых являются комбинации (Ь) и (с). Они
Таблица 3
Вариант Операция Вход или выход
А В С D Е F
(а) Запись (двоичная) Считывание (суммы) —1 0 0 0 0 0 —2 —4 —4 —4 -4 —6 ?
(Ь) Запись (двоичная) Считывание (суммы) 1 1 0 0 0 0 0 0—2—2 —4 —4 V
(с) Запись (двоичная) Считывание (суммы) 1110 0 0 +2 4-2 4-2 —2 —2 —2 V 1
(d) Запись (двоичная) Считывание (суммы) 1 0 0 0 0 1 —2 —2 —2 —2 —2 —2 X
(е) Запись (двоичная) Считывание (суммы) 1 1 0 0 0 1 0 4-2 0 0 —2 0 ?
(0 Запись (двоичная) Считывание (суммы) 111111 4-6 4-6 4-6 4-6 4-6 4-6 ?
19. К вопросу о распределенной памяти
523
Продолжение
№ ячейки Суммы приращений и уменьшений для вариантов
(а) (Ь) (С) (d) (е) (П
1 —1 +1 4-3 -1 —1 +3
2 —1 -1 —1 -1 -1 +3
3 -3 —1 —1 -1 4-3 +3
4 —3 —3 -1 -1 -1 +3
представляют 32 комбинации из 64. Эти комбинации
будут считаны верно, а остальные — с ошибкой или не-
определенно.
5. ОШИБКА ОДНОЙ ЯЧЕЙКИ РЕГУЛЯРНОГО
МНОЖЕСТВА
Предположим, что одна ячейка регулярного множе-
ства работает с ошибкой. Пусть ее ошибка состоит в
том, что сигналы считывания с нее равны нулю незави-
симо от того, правильно или неправильно были в нее за-
писаны приращения и уменьшения. Это, между прочим,
Связь с ячейками
® 1, 2. 3
® 1, 4. 5
© 1. 6, 7 (Предполагается, что
(5) 2, 4, 6 ячейка № 1 отключе-
’ на, т. е. значение ее
(?) 2, 5, 7 выхода всегда 0)
© 3, 4, 7
© 3, 5, 6
Фиг. 4. Одна ячейка отключена. Множество
регулярное.
эквивалентно полному отклонению этой ячейки. Таким
образом, этот опыт обнаруживает результат использо-
вания ячеек, число которых меньше заданного числа
двоичных выходов.
524
Ч. Розен
Таблица 4
№ ячейки Операция Выход или вход
А В С D Е в Q
(1) Запись (двоичная) 0 0 0 0 0 1 1
Считывание (суммы) (-2) (-2) (-2) -5 —5 (- -1)(- -1)
(2) То же (-2) (-2) (-2) -6 —6 (0) (0)
(3) » (-2) (-2) (-2) -7 —7 (1) (1)
(4) » (-2) (-2) (-2) -8 —8 (2) (2)
(5) » » (-2) (-2) (-2) -9 —9 (3) (3)
(6) » (-2) (-2) (-2) -10 —10 4 4
(7) > » —4 -4 —4 —13 -13 О) (1)
(8) > > (-2) (-2) (-2) -11 —11 5 5
(9) >: » —4—4—4 —14 —14 (2) (2)
(Ю) >> (-2) (-2) (-2) -12 —12 6 6
(П) » » -4—4—4 —15 -15 (3) (3)
(12) » (-2) (-2) (-2) -13 —13 7 7
(13) » > —4—4—4 —16 16 4 4
Суммы приращений и уменьшений для итераций <№
ячейки (1) (2) (3) (4) (5) (6) (7) (8) (9) (Ю) (П) (12) (13)
1 0 0 0 0 0 0 0 0 0 0 0 0 0
2 -3 —4 —5 -6 —7 -8 —9 —9 —10 —10 —11 —11 -12
3 1 2 3 4 5 6 5 7 6 8 7 9 8
4 -1 —1 —1 -1 -1 -1 -2 — 1 —2 —1 —2 —1 -2
5 —1 —1 —1 -1 —1 —1 —2 —1 -2 —1 —2 —1 -2
6 —1 —1 —1 —1 —1 —1 -2 —1 —2 —1 —2 -1 —2
7 —1 —1 —1 -1 —1 —1 -2 —1 —2 —1 —2 —1 —2
Рассмотрим фиг. 4 (см. также табл. 4). Ячейка 1
выключена или, что то же самое, при считывании дает
одни нули. Записана двоичная комбинация 0 0 0 0 0 1 1.
В случае (а) выходные суммы равны —2, —2, —2, —5,
—5, —1, —1. Среднее равно —24/7. При использовании
19. К вопросу о распределенной памяти
525
способа простого сравнения со средним мы считали бы
1110 0 11, что, очевидно, неверно. Было установлено,
что таким способом 30 из 128 возможных комбинаций
будут считаны неверно или неопределенно, причем две
из этих 30 — это комбинации 1111111и000000 0.
6. ИТЕРАТИВНАЯ «ОБУЧАЮЩАЯСЯ» СХЕМА
Для уменьшения числа неверно считываемых двоич-
ных комбинаций можно создать более мощные методы
итеративной записи и считывания. Ниже приводится
один из таких методов.
Алгебраические суммы каждого выхода сравнивают-
ся с некоторой фиксированной величиной — порогом.
Для всех тех выходов, где сумма меньше порога по аб-
солютной величине, повторяется первоначальная проце-
дура записи в соответствующие ячейки приращений и
уменьшений. Там, где на выходах суммы равны или пре-
восходят порог, оставляем связанные с ними ячейки без
изменений. В общем случае все это приведет к измене-
нию содержимого в большинстве (если не во всех) ячеек.
При считывании суммы каждого выхода опять сравни-
ваются с порогом, и описанная процедура повторяется
до тех пор, пока суммы всех выходов не станут по аб-
солютной величине равны или больше порога. Если этот
процесс сходится, то положительные выходные суммы
соответствуют единицам, а отрицательные нулям.
Вернемся к фиг. 4. Находим, что при первой итера-
ции суммы на выходах А, В, С, О, Е, F, G равны соот-
ветственно —2, —2, —2, —5, —5, —1, —1. Величина
порога, равная 4, была нами выбрана случайным обра-
зом. На выходах А, В, С, F, G суммы по абсолютной ве-
личине меньше 4, а на выходах D и Е — больше 4. Возь-
мем вторую итерацию. В ячейки, связанные с выходами
А, В и С, подается уменьшение, равное 1, так как в ис-
ходной двоичной комбинации на выходах А, В и С были
нули. В ячейки, связанные с выходами F и G, подается
приращение, равное 1, так как на этих выходах были
единицы. Выходные суммы в этом случае равны —2,
—2, —2, —6, —6, 0, 0. На выходах А, В, С, F и G их
значения все еще ниже порога. Повторяется только что
526
Ч. Розен
описанный процесс записи уменьшений и приращений.
Весь процесс повторяется 13 раз, пока сумма на всех
выходах не достигнет порога. После 13-й итерации
выходные суммы равны —4, —4, —4, —16, —16, 4, 4.
Отрицательные величины понимаем как нули, а положи-
тельные как единицы. Таким образом, вся двоичная ком-
бинация 0 0 0 0 0 1 1 считана верно.
Можно показать (см. приложение В), что описанный
итеративный метод уменьшает число неверно считывае-
мых комбинаций с 30 (считывание без итераций) до 2
из 128. Некоторые добавочные операции обеспечивают
правильное считывание и этих комбинаций. Из-за недо-
статка времени мы не проверили полностью системы,
у которых г>3, а также не исследовали результаты
более сильного изменения симметрии регулярных мно-
жеств. Однако и полученные результаты позволяют
утверждать, что при достаточно сложных методах счи-
тывания и записи удается уменьшить необходимое число
ячеек памяти и улучшить работу системы при ошибоч-
ной работе составляющих ее компонент.
Приложение А
СООТНОШЕНИЕ МЕЖДУ ЧИСЛОМ ЯЧЕЕК ПАМЯТИ
И ЧИСЛОМ СОЕДИНЕНИЙ, ПРИХОДЯЩИХСЯ
НА ОДНУ ЯЧЕЙКУ
Число ячеек памяти — N, число связей на одну ячей-
ку — /?; число выходов — п, число связей на один вы-
ход — г.
Случай 1
= $ = г.
Число сочетаний из N ячеек по две [исключаются дуб-
ли (1,1), (2,2) и т. д.] равно С^.
Для каждого выхода с г связями число сочетаний
из г связей по 2 равно С2- Общее число таких сочета-
ний п (Сг).
19. К вопросу о распределенной памяти
527
Таким образом,
Сдг =
Но
N = n.
Записав выражение для С и произведя упрощения, по-
лучаем
N = г2 — г 4- 1.
Случай 2
N = n.
Но (2V) (/?) = (п) (г), где N, R, п, г — целые числа.
Это равенство следует из того, что общее число связей,
исходящих из ячеек, должно равняться общему числу
связей, поступающих к выходам, причем предполагается,
что связи не могут делиться.
Запишем, как и в случае 1,
Сдг = пСг
или
jV(7V—1)==п (/•)(/• —1).
Таким образом, должны быть выполнены два условия,
причем все входящие в них величины — целые числа:
(1) (^(/?) = (п)(г),
(2) 7V(2V— 1) = /г (г) (г — 1).
Решения находим методом подбора. В следующей та-
бличке даны некоторые из возможных решений.
г R N п г R N п т R N п
2 1 2 1 3 1 3 1 4 4 13 13
2 2 3 3 3 3 7 7 4 5 16 20
2 3 4 6 3 4 9 12 4 8 25 50
2 4 5 10 3 6 13 26 4 9 28 63
2 5 6 15 и т. д. и т. д.
и т. д.
Приложение Б
РЕГУЛЯРНЫЕ МНОЖЕСТВА.
СХЕМЫ ВНУТРЕННИХ СОЕДИНЕНИЙ
W = г2 — г- 1"
г = 2, N^3 г = 3, N=7
Выход Соединен с ячейками Выход Соединен с ячейками
1, 2 А 1, 2, 3
А в 1, 4, 5
в 1, з с 1, 6, 7
с 2, 3 D 2, 4, 6
Е 2, 5, 7
F 3, 4, 7
G 3, 5, 6
г = = 4, 7V=13 г- = 5, 7V=21
Выход Соединен с ячейками Выход Соединен с ячейками
А 1, 2, 3, 4 А 1, 2, 3, 4, 5
в 1, 6, 7, 8, 9
в 1, 5, 6, 7 с 1, 10, 11, 12, 13
1, 8, 9, 10 D 1, 14, 15, 16, 17
с Е 1, 18, 19, 20, 21
D 1, 11, 12, 13 F 2, 6, 10, 14, 18
G 2, 7, 11, 15, 19
Е 2, 5, 8, И И 2, 8, 12, 16, 20
F 2, 6, 10, 13 / 2, 9, 13, 17, 21
J 3, 6, 11, 16, 21
G 2, 7, 9, 12 К 3, 7, 10, 17, 20
L 3, 8, 13, 14, 19
Н 3, 5, 9, 13 М 3, 9, 12, 15, 18
1 3, 6, 8, 12 N 4, 6, 12, 17, 19
О 4, 7, 13, 13, 18
J 3, 7, 10, 11 Р 4, 8, 10, 15, 21
К 4, 5, 10, 12 Q 4, 9, 11, 14, 20
Р 5, 6, 13, 15, 20
L 4, 6, 9, 11 S 5, 7, 12, 14, 21
т 5, 8, 11, 17, 18
Л1 4, 7, 8, 13 и 5, 9. 10, 16, 19
19. К вопросу о распределенной памяти
529
Приложение В
ИТЕРАТИВНОЕ «ОБУЧЕНИЕ» ДЛЯ РЕГУЛЯРНОГО
МНОЖЕСТВА С ОДНОЙ ВЫКЛЮЧЕННОЙ ЯЧЕЙКОЙ
г = 3, W = 7
Вход или выход Соединен с ячейками Вход или выход Соединен с ячейками
А 1, 2, З1) D 2, 4, 6
в 1, 4, 51) Е 2, 5, 7
с 1, 6, 7 О F 3, 4, 7
G 3, 5, 6
Предполагается, что выключена ячейка 1 (на ее выходе всегда 0).
Выходы (или входы) можно разделить на две груп-
пы: к первой группе отнесем выходы А, В, С — все они
связаны с отключенной ячейкой 1; ко второй группе —
выходы D, Е, F, G, не связанные с ячейкой 1.
Благодаря симметрии в качестве прототипа 128 воз-
можных двоичных комбинаций можно взять 10 комби-
наций, которые приводятся ниже. В правой колонке
таблицы мы вычисляем для каждого прототипа число
эквивалентных комбинаций.
10 комбинаций, являющиеся прототипом 128 Число эквивалентных комбинаций
А В с D Е F О
1 0 0 0 0 0 0 2(С*Х1) = 6
1 1 0 0 0 0 0 2(С|Х1) = 6
1 1 1 0 0 0 0 2(1 X 1)=2
1 0 0 0 0 0 1 2 (С’X С’) = 24
1 0 0 0 0 1 1 2(С*ХС1) = 36
1 1 0 0 0 0 1 2(С|ХС’) = 24
34 Зак 10§
530
Ч. Розен
Продолжение
10 комбинаций, являющиеся прототипом 128 Число эквивалентных комбинаций
А В С D Е F О
0 0 0 0 0 0 1 0 0 0 0 0 1 1 0 0 0 0 1 1 1 0 0 0 0 0 0 0 2(1 X С») = 8 2(1 X С*) =12 2(1Х<м) = 8 2 (1X1) = 2
Общее число комбинаций: 27 = 128
Пользуясь методом итеративного «обучения», мы
проверили каждую из этих десяти комбинаций. Резуль-
таты сведены в приведенную ниже таблицу.
Операция Выход или вход Вход или выход Соедине- ние с ячейками
А в С D Е F О
Запись (двоичная) Считывание, 1-я 1 0 0 0 0 0 0 А 1, 2, 3
итерация . . . Считывание, 3-я -2 —6 -6 —7 —7 —7 —7 в 1, 4, 5
итерация . . . 4 -6 —6 —4 —4 —4 —4 с D 1, 6, 7 2, 4, 6
Запись(двоичная) Считывание, 1-я 1 1 0 0 0 0 0 Е 2, 5, 7
итерация . . . Считывание, 11-я —2 —2 -6 -5 —5 —5 -5 F 3, 4, 7
итерация . . . 4 4 —18 —5 —5 —5 -5 G 3, 5, 6
Запись(двоичная) Считывание, 1-я 1 1 1 0 0 0 0 Ячейка 1 выклю- чена
итерация . . . Считывание, 2-я итерация . . . —2 —4 -2 —4 -2 -3 -4 -6 -3 -6 -6 -6 Величина порога 4
Продолжение
Операция Выход или вход Вход или выход Соеди- нение Сячейками
А в С D Е F G
Запись (двоичная) Считывание, 1-я 1 0 0 0 0 0 1
итерация . . . Считывание, 4-я 0 —4 -4 —5 -5 —5 —1
итерация . . . 6 —6 -6 —6 —6 —6 -6
Запись (двоичная) Считывание, 1-я 1 0 0 0 0 1 1
итерация . . . Считывание, 4-я 2 —2 -2 -3 -3 1 1
итерация . . . 6 —4 —4 -6 —6 4 4
Запись (двоичная) Считывание, 1-я 1 1 0 0 0 0 1
итерация . . . Считывание, 8-я 0 0 —4 -3 -3 -3 1
итерация . . . 5 5 -11 -4 -4 —4 10
Запись (двоичная) Считывание, 1-я 0 0 0 0 0 0 1
итерация . . . Считывание, 8-я —4 —4 -4 —7 —7 —7 —3
итерация . . . —4 —4 -4—10 —10 -10 6
Запись (двоичная) Считывание, 1-я 0 0 0 0 0 1 1
итерация . . . Считывание, 13-я —2 —2 -2 -5 -5 —1 —1
итерация . . . —4 —4 —4—16 -16 4 4
Запись (двоичная) Считывание, 1-я 0 0 0 0 1 1 1
итерация . . . Считывание, 33-я 0 0 0 —3 1 1 1
итерация . . . —4 —4 -4-36 4 4 4
Запись (двоичная) Считывание, 1-я 0 0 0 0 0 0 0
итерация . . . —6 —6 —6 —9 -9 —9 —9
34*
532
Ч. Розен
ЛИТЕРАТУРА
1. Taylor W. К., «Pattern recognition by means of automatic ana-
log apparatus», Proc. I EE (London), Pt B, 106 (6), 198 (1959).
2. Rosenblatt F., «The perceptron — a theory of statistical sepa-
rability in cognitive systems», Cornell Aeronaut. Lab., Rep.
VG-1196-G-1, 1958.
3. U111 e у A. M., «Conditional probability computing in a nervous
system»,. Mechanization of Thought Processes, N. P. L. Sympos.
№ 10, H. M. S. O., London, 1959.
4. W i 11 i s D. G., «Plastic neurons as memory elements», Lockheed
Missile Systems Div. — 48432, Intern. Conf, on Information Pro-
cessing, Paris, June 1959.
20. ПОДХОД К АВТОМАТИЧЕСКОМУ ФОРМИРОВАНИЮ
ТЕОРИИ
С. АМАР ЕЛ
(Лаборатории фирмы RCA, Принстон, шт. Нью-Джерси)
1. ВВЕДЕНИЕ
Мне хотелось бы обсудить в этой статье подход и
некоторые предварительные результаты исследования
процессов автоматического формирования теории.
Я предполагаю, что такие процессы присущи системам
переработки информации, которые «обучаются» (learn)
путем прямого взаимодействия со средой, описание ко-
торой является содержанием задачи, и способны разви-
вать свои собственные процедуры выполнения требуе-
мой задачи.
Если бы функцию обучающегося устройства в си-
стеме переработки информации поручили человеку, он
вероятнее всего, попытался бы на основе собранного им
ограниченного объема информации о среде развить тео-
рию, «мысленную модель» рабочей среды. Это обеспе-
чило бы его экономичным и гибким способом хранения
и использования его опыта. Я предполагаю, что анало-
гичный подход используется и в схеме самообучения
машины; в этом случае обучение машины будет экви-
валентно процессу автоматического формирования
теории.
«Теория», формируемая в машине, является инфор-
мационной структурой, в которой эффективно закоди-
рована ограниченная информация, относящаяся к опре-
деленному классу сред и которая может использоваться
для надежных предсказаний относительно этого класса.
Машинная теория класса представляет на языке ма-
шины инвариантное свойство, которым обладают все
члены класса; это некое машинное представление о
классе как о некоторой определенной сущности. Процесс
534
С. А мар ел
автоматического формирования теории класса сред есть
самоорганизующийся познавательный процесс, эквива-
лентный процессу поиска подходящей конструкции
устройства для узнавания членов класса.
Эта общая задача рассматривалась различными ис-
следователями главным образом в связи с проблемой
автоматического распознавания сенсорных образов, од-
нако за последнее время возрастает внимание к анало-
гичным задачам и в области лингвистических [1] и ма-
тематических [2] образов.
Я уверен, что при современном уровне знаний про-
цессы самоорганизации и обучения сколько-нибудь
успешно могут быть изучены лишь на относительно про-
стых и знакомых формальных средах. Таким путем
удается сосредоточить внимание на свойствах самоорга-
низующихся схем при определенных контролируемых
условиях. В частности, при этом относительно легко ре-
шаются теоретически проблемы реализуемости. Этим
путем можно a priori узнать, что возможно в принципе,
и таким образом избежать длительных бесплодных
экспериментов. Таковы причины, по которым я для дан-
ного исследования выбрал в качестве познавательной
(cognitive) среды некоторую простую область матема-
тической логики.
Я думаю, что методология исследования является
одной из важнейших проблем при изучении искусствен-
но созданных самоорганизующихся систем. Эти системы
сначала нужно постулировать, а затем они должны быть
изучены экспериментально и теоретически. Исследова-
ние постулированной системы по своему характеру лишь
несущественно отличается от изучения организма есте-
ствоиспытателем. Важно провести существенные экспе-
рименты с различными типами искусственных организ-
мов так, чтобы: а) при наличии частичных сведений об
ожидаемых задачах было возможно выбрать такой
искусственный организм, который мог бы реализовать
их, и б) если задан искусственный организм, было бы
возможно получить априорное знание о том, какие за-
дачи выполнимы для такого организма.
Чтобы добиться фундаментального понимания типов
поведения, возможных для различных структур, нам, как
20. Подход к автоматическому формированию теории 535
мне кажется, следует вступить в область, которую можно
назвать техникой эксперимента (experimental enginee-
ring). Несомненно, что любой теоретический прогресс в
области изучения самоорганизующихся систем может
оказаться важным во многих направлениях; в частности,
он может дать полезные ориентиры при постулировании
самоорганизующихся систем.
Свобода постулирования различных искусственных
организмов отличает инженера от естествоиспытателя.
Однако так как оценка заданной системы постулатов
далеко не проста, становится существенно важным иметь
эвристическое правило для ограничения постулирования
некоторыми узкими разумными пределами. Естественно,
что большинство эвристических правил основано на ана-
логии с биологическими организмами. Но и в пределах
этой руководящей аналогии важно сохранять опреде-
ленную степень свободы.
Главная цель нашего исследования состоит в изуче-
нии того, каким образом в машине создаются промежу-
точные структуры или гипотезы, которые конкурируют
за право стать «работающей» теорией, и каким образом
они в ходе познавательного процесса развиваются в сто-
рону стабилизации или исчезновения. Мы резервируем
за собой свободу постулировать, а затем оценивать раз-
личные процессы формирования теории в машине, при-
нимая во внимание лишь общие предпосылки и допуще-
ния, часть которых выводится по аналогии с фактами
психологии. В дальнейшем я более детально остановлюсь
на некоторых из принятых допущений, здесь же я из-
ложу лишь общие предпосылки.
Форма любой гипотезы, которая в определенный мо-
мент может возникнуть в машине, зависит от доступ-
ного машине в этот момент языка — от примитивных или
сложных символов и процессов. Однако накладываемые
на машину экономические ограничения (ограничения на
время переработки данных и сложность конструкции ма-
шины) приводят к тому, что действительное число гипо-
тез, порождаемых и развиваемых на определенном этапе
работы, является малым подмножеством множества ги-
потез, которые могут быть сформулированы на языке
машины. Конкретный выбор подмножества гипотез,
536
С. А мар е л
фактически осуществляемый машиной, зависит от эври-
стических правил и тенденций образования гипотез, ко-
торые определяются предшествующей активностью си-
стемы.
Конкретный этап развития языка в машине наряду
с конкретными тенденциями образования гипотез опре-
деляет состояние машины, или «этап развития». Различ-
ные последовательности задач, решаемых машиной, при-
водят к различным ее состояниям; способность машины
теоретизировать относительно данного класса среды за-
висит от ее «интеллектуальной истории».
В ходе предшествующих работ я экспериментировал
с несколькими схемами формирования теории на базе
простой логической среды, которая ниже будет описана
в деталях. Теперь исследование концентрируется на по-
знавательной системе М; в дальнейшем изложении я
опишу организацию и работу Л4, а также идеи и задачи
исследования, появившиеся при исследовании М.
2. ОБЩАЯ ПРИРОДА ВХОДОВ СИСТЕМЫ М
Мы предполагаем, что машина М воспринимает
входную информацию в форме пар (1:0), называемых
входными соотношениями. I во входном соотношении
является n-мерным вектором, /=(хь х2, ..., хп), а О
представляет собой соответствующий ему tfi-мерный век-
тор: O=(i/i, у2, .У/n), причем элементы векторов / и
О взяты из конечных алфавитов, которые хорошо из-
вестны машине М. В каждом практическом случае имеет-
ся некоторая «область интереса» для n-мерного век-
тора /, которой соответствует область /n-мерных векто-
ров О. В терминах психологии I и О представляют собой
сенсорные стимулы и элементарные понятия, в форме
которых ситуация воспринимается человеком1).
Далее, мы примем фундаментальное предположение
о том, что определенные наборы входных соотношений
принадлежат к определенным различимым классам,
произвольно именуемым Db D2 и т. д. Это предположе-
’) Буква / в некотором смысле означает «вход» (Input), а
О — «выход» (Output). — Прим. ред.
20. Подход к автоматическому формированию теории 537
ние можно рассматривать как гипотезу, и целью нашего
исследования является проверка того, в какой степени
она выполняется машиной М. Система М будет стре-
миться удовлетворить это предположение путем выра-
ботки подходящих правил принадлежности к каждому
из классов.
Первоначальная классификация входных соотноше-
ний могла быть сделана системой М на предшествую-
щем этапе работы, или же она может быть задана внеш-
ней для М средой. Подобным же образом входные
соотношения могут быть результатами либо предше-
ствующих процессов в Л4, либо прямых наблюдений за
средой системы Л4.
Форма записи входного сообщения для М во время
процесса формирования теории будет следующая:
Z? : (Z : О);
такая запись означает, что входное соотношение (/ : О)
принадлежит к классу D.
Система входных сообщений имеет вид
: (А: О,), Dy:(/2:O2), D, : (In : O„)J,
где «область интереса» /, заданная конечной системой
[Zi, /2, ..., /„], дает нам широкое определение класса Dj.
Последующими примерами я хочу проиллюстриро-
вать типы сообщений, которые могут оказаться на вхо-
де в машину Л4-типа:
а) соответствия между входными и выходными дан-
ными, определяющие конкретный характер переработки
данных;
б) примеры постановок задач и их решения, а
именно: теорема и доказательство, логическое выраже-
ние и простейший его эквивалент, стратегическая игра
и система ходов, приводящих к выигрышу;
в) примеры морфологического и синтаксического
анализа языка и перевода предложений с одного языка
на другой. В случае морфологического анализа класс D
включает примеры соответствий между основами слов
и измененными основами, иллюстрирующие конкретное
морфологическое правило;
538
С. А маре л
г) ассоциированные системы наблюдаемых перемен-
ных в физических явлениях: наблюдения облачного
покрова, связанные с наблюдениями других параметров
погоды; наблюдения закономерностей поведения эле-
ментарных частиц в ядерном эксперименте.
3. КОНКРЕТНЫЙ ВЫБОР ВХОДОВ, ИСПОЛЬЗУЕМЫХ
В НАСТОЯЩЕМ ИССЛЕДОВАНИИ
В нашем исследовании мы использовали входные
сообщения, взятые из математической логики. Конкрет-
но говоря, входные соотношения, которые мы подаем на
Л4, — это примеры из 16 типов логических функций двух
переменных. Для более ясного обсуждения процессов
в М я считаю необходимым кратко рассмотреть неко-
торые определения и понятия, используемые при зада-
нии наших входных сообщений.
Обозначив логическую функцию двух двоичных ар-
гументов а и Ь через $, зададим ее таблицей отображе-
ний одного множества [1, О]2 на другое множество [1,0].
В алгебре логики имеется 16 таких логических функ-
ций, образующих множество а:
а = [$ь $2, .... s16] (1)
(связь между нашими символами и другими системами
обозначений приведена на фиг. 1). Функция Si от а и b
записывается следующим образом:
stab = с. (2)
Здесь мы используем обозначение без скобок по Лука-
шевичу. Например, конъюнкция, а и ft, в нашей записи
представляется в виде s2aft.
Пусть даны Siab = c и Sjdb = d. Образуем SkCd=e,
причем с, d, е берем из множества [1,0], в то время как
Sj, sk принимают значения из множества о. Тогда
можно написать:
skcd = s^abs jab = е. (3)
Рассмотрим далее некоторую функцию sb такую, что
Siaft = e, где Si взята также из множества о, и запишем
функциональное уравнение
s kSfibs jab = sxab. (4)
20. Подход к автоматическому формированию теории 539
Это уравнение выражает функциональную эквивалент-
ность между тройкой логических функций и простой
логической функцией, заданной таблицей фиг. 1.
Наши обозначения: множество а Выражения исчисле- ния высказываний Обозначения Маккал- лока — Питтса [4]
F X
52 а& b Ж
5з а & b ><•
54 а& b
5в а&Ь
5в афЬ
5у а *
5« b ><•
5® b к
510 а
5ц а~Ь ж
512
513 а у b
514 aab
515 ayb
516 Т
Фиг. 1. Соответственные обозначения для исчисления
высказываний двух аргументов.
540
С. А м а р е л
Введем теперь различие между функциями от а и Ь
и функциями от функций. Если последние мы будем
представлять заглавными буквами и опустим аргумен-
ты а и Ь, мы сможем написать
^kSiSJ = si- (5)
По аналогии с выражением (2) мы рассматриваем (5)
как алгоритм вычисления функции Sk двух аргументов,
которые имеют значения Si, Sj, причем вычисление дает
а
Фиг. 2.
а —графическое представление тройки логических функций и одной эквивалент-
ной логической функции; б —описание эквивалентности, показанной на фиг. а,
через одно преобразование логических функций.
в результате значение Si (фиг. 2). Таким образом, мы
считаем отображением множества а2 из 162 элемен-
тов на множество о из 16 элементов и выражаем это
следующим образом:
Ska$ = y. (6)
Пара ар принимает значения из о2, а у— из а (см. [6]).
Имеется 16 таких отображений, образующих систему
S = [Sb s2, • •., S16]. (7)
Каждое отображение Sk определяет класс, называе-
мый далее Dk, членами которого являются примеры
этого отображения. Общий член Dh можно записать в
форме ((а, р) : у).
На основе предшествующих определений можно на-
писать выражение для входных сообщений, которые
20. Подход к автоматическому формированию теории 541
подаются на вход М для формирования теории:
:((<х, р):у). (8)
Образуем классы Z)2, ..., £>i6 для всех отображений
из системы S. Сравнивая (8) с ранее обсуждавшейся
общей формой D: (1:0), мы видим, что в данном слу-
чае
/ = (а, р); О =
Чтобы сделать именно такой выбор входных сооб-
щений для нашего исследования, имеется несколько
причин. Во-первых, сообщения при этом исходят из хо-
рошо известной формальной области и представляют
собой относительно простую задачу для М. Во-вторых,
в нашем предварительном исследовании предшествую-
щей «интеллектуальной» истории М нами было принято,
что развитие теории в машине происходит аналогично
умственному развитию детей в интерпретации Пьяже[3].
Собственно говоря, мы исследовали развитие Л4, которое
начинается с классификации, т. е. объединения конкрет-
ных объектов в множества, переходит к манипулирова-
нию с этими множествами, а затем к формированию
соотношений между множествами и к манипулированию
связанными множествами.
Как вытекает из теории умственного развития Пья-
же, следующий этап развития в М может привести
к образованию структуры, которая представляет собой
исчисление высказываний: тогда мы ставим перед М
некоторую познавательную задачу, которая может при-
вести от определенного предположенного начального
объема сведений (систем, соотношений) к внутренней
структуре соотношений между логическими функциями.
Я не намерен сейчас входить в детали истории Л4, так
как это имеет лишь эвристическую ценность, относя-
щуюся к выбору разумной задачи для М и к выбору
состояния М в момент, когда М начинает работу над
задачей.
Еще одной причиной выбора этой области логики в
качестве задачи для М является наш интерес к функ-
циональным уравнениям исчисления высказываний, ко-
торые возникают при изучении устойчивых переключаю-
щих цепей, введенных Маккаллоком [4].
542
С. А маре л
4. ПОЗНАВАТЕЛЬНАЯ ЗАДАЧА, ПОСТАВЛЕННАЯ ПЕРЕД М
РАБОТА СИСТЕМЫ В ЦЕЛОМ
Геометрическое представление преобразования
показано на фиг. 3. Каждое входное соотношение из Dk
соответствует отрезку прямой. Конкретный набор 162
отрезков прямых определяет Dk. Интересно отметить,
что общее число возможных различных наборов линей-
ных образов или отображений составляет 161б2 = 21024.
Отображение Sz: вг----б
16г элементов (ос, fl) 16 элементов (Y)
Фиг. 3.
Из этого огромного числа возможных наборов ма-
шина постепенно воспринимает (в форме последова-
тельностей частных отображений — входных соотноше-
ний) лишь 16, соответствующих классам £>2,...»Об-
общая цель познавательной деятельности М состоит в
формировании собственного представления о каждом из
этих 16 различных образов, т. е., другими словами, в
разработке «машинной теории» для каждого из 16 клас-
сов. Мы рассматриваем эту теорию как Al-толкование
каждого класса, достигнутое М путем активного поиска
порядка в классе; здесь снова «порядок» понимается с
точки зрения доступных для М структур.
По аналогии со способностью человека к экстрапо-
ляции в процессе создания теории «машинная теория»
20. Подход к автоматическому формированию теории 543
должна наряду с обеспечением текущих познавательных
потребностей обладать способностью предсказания бу-
дущих ситуаций.
Здесь возникает важный вопрос, на каком этапе по-
знавательного процесса должна возникнуть машинная
теория: после того как класс выявлен с полной очевид-
ностью или после рассмотрения лишь ограниченного
количества данных? Мне представляется, что в М при
любом объеме доступных ей данных должны вырабаты-
ваться машинные теории различной степени достоверно-
сти; однако каждая из них должна сопровождаться
своим доверительным коэффициентом, который может
использоваться в ходе принятия решений применительно
к конкретным ситуациям. Непрерывное построение тео-
рии обеспечивает более эффективный путь накопления
необработанной информации, и, кроме того, оно, по-
моему, дает удобную схему динамической эволюции
процесса формирования теории в машине.
Отметим также, что в большинстве случаев нет в
наличии полной системы данных: действительно, трудно
придумать какой-либо пример из практической жизни,
где имелось бы полное описание сложной ситуации в
тот момент, когда нужно принять решение.
В соответствии с ранее рассмотренным нами харак-
тером познавательной деятельности М мы поставили
перед М следующую общую цель первого этапа:
Цель I: а) Выработать машинное представление о
классе Dh в форме методики которая предписывает,
каким образом для всех оценок величин (а, р) из «об-
ласти интереса» о2 получать правильные значения у-
Таким образом, машина должна пытаться выработать
алгоритм для класса Dky такой, что
АоЛ(а. ₽) = Y (9)
для всех ((а, р) : у) € Dk- (Предшествующее выраже-
ние показывает, что переработка всяких входов (а, р)
’) Машинная методика (процедура) соответствует алгоритму,
который можно реализовать либо программой вычислений, либо со-
ответствующей схемой.
544
С. А маре л
согласно алгоритму hok дает соответствующее желае-
мое у.)
б) Получить простейший из возможных алго-
ритм hok-
Мы рассматриваем hDk как машинную теорию, рас-
пространяющуюся на весь класс Dk- Так как ни в одной
практической ситуации не доступны все члены Dk, hok
может охватывать только ту часть Dk. с которой стал-
кивается М. Следовательно, решение относительно того,
удовлетворяет ли hok цели I, можно вынести только на
основе индукции, опирающейся на существующие дан-
ные о работе алгоритма Ясно, что желательно по-
строить в М «гипотезы» hDkp, которые «удовлетворяют»
[в смысле выражения (10)] почти всем (желательно
всем) принятым входным соотношениям.
Ниже мы разъясним нашу интерпретацию «просто-
ты». Вообще говоря, простота АрЛ подразумевает, в тер-
минах машины, более быструю и экономичную перера-
ботку будущих задач в областях, относящихся к Dk\
как непосредственное следствие, простая ЛрЛ дает луч-
шие шансы получения полезных строительных блоков
для теории более высокого уровня.
Наряду с целью I мы назначаем для М предел ма-
ксимальной степени переработки, который задается ма-
ксимумом энергии, затрачиваемой М в процессе дости-
жения цели.
Хотя ограничение степени переработки связано с
экономией сейчас, простота машинной теории, сформи-
рованной в М. связана с экономией в будущем. Инте-
ресно изучить, каким образом различные соотношения
между этими двумя факторами оказывают воздействие
на процессы в М. Однако, так как в большинстве прак-
тических ситуаций фактор «экономии сейчас» лучше
известен и более оценим, чем трудно оценимая «эконо-
мия в будущем», разумно рассматривать это как жест-
кое ограничение при конструировании схем формирова-
ния теории.
Дополнительный аргумент, касающийся ограничения
усилий по переработке, исходит из основной проблемы
20. Подход к автоматическому формированию теории 545
реализуемости. Нет гарантии, что задача, поставлен-
ная целью I для данного произвольного класса (члены
которого являются примерами преобразования из о2
в о), будет реализуема с помощью М за любой заданный
отрезок времени. Более того, в большинстве случаев мы
не можем сказать a priori, будет ли реализуема данная
познавательная задача для М (если только не имеется
основательного теоретического понимания системы), и
единственная разумная операционная методика, имею-
щаяся в нашем распоряжении, состоит в том, чтобы
предоставить М возможность попытаться достигнуть
поставленной цели I при ограничении максимальных
усилий по переработке. Если это М не удается, мы все
же не знаем, произошло ли это потому, что эта задача
нереализуема для М, или потому, что М неспособна
найти решение, которое в принципе для М реализуемо.
Предположим, что М будет рассматривать один за
другим все классы своей среды, взятые в определенном
порядке. Порядок обработки классов имеет большое
значение как для эффективности формирования теории,
так и для формы получаемых машинных теорий; это
происходит благодаря природе познавательного про-
цесса в Л4, где алгоритмы, полученные в ходе познава-
тельной деятельности на предыдущих классах, исполь-
зуются при построении методик для классов, которые
должны обрабатываться впоследствии. Управление по-
рядком, в котором представители различных классов
поступают на вход Л1, в некотором роде аналогично
разработке программ обучения для людей — задача, ко-
торая, как известно, дает большой эффект в человече-
ском познании и усвоении знаний. Мы собираемся рас-
смотреть процесс образования теории в М для различ-
ных последовательностей представлений классов. До сих
пор мы экспериментировали с последовательностями,
начиная с D2, D13, так как эти классы соответствуют
знакомым функциям исчисления высказываний — конъ-
юнкции и дизъюнкции.
Информация о классе Dk приходит к М в форме
входных сообщений, задающих члены Dh (примеры пре-
образования S/J. Мы принимаем, что М не управляет
порядком, в котором воспринимаются входные соотно-
35 Зак. 106
546
С. А маре л
шения класса Dk. Пока цель I не удовлетворена для
данного класса Dk, а М не превзойдет максималь-
ный уровень усилий по переработке информации о
классе Dk, М будет требовать примеров Dh от своей
среды.
Для каждого воспринятого входного соотношения
класса Dk, скажем пары (($;, Sj) : Si), М имеет следую-
щую цель второго этапа.
Дель II. Выработать машинную методику hokp> та-
кую, что
hDkp(sh Sj) = Si. (10)
Отметим, что имеется 1б(16,-1) преобразований, кото-
рые удовлетворяют единственному соответствию пары
(($<,Sj): Si), и возможно, что ощутимая часть этих пре-
образований реализуема для Л4, т. е. М в принципе мо-
жет получить для них машинную методику. Задача со-
стоит в том, чтобы найти среди этих методик одну, кото-
рая удовлетворяет стольким другим входным парам,
сколько их возможно в желательно всем входным
парам, подаваемым на М. Процесс получения такого ма-
шинного алгоритма без полного исчерпания альтернатив
(в.цространстве, которое, скажем, ограничено максиму-
мом сложности методик) является трудным вопросом
всякой задачи автоматического формирования теории.
Я очерчу один из методов, принимаемый нами в про-
цессе решения этой задачи, после того как будет завер-
шено общее описание операций в Л4.
М будет активно искать алгоритм hokp для каждого
входного соотношения в пределах данных ограничений
на усилия переработки. Деятельность М прекращается
и подается новый пример из Dk лишь после того, как
получен или же если превзойден разрешенный пре-
дел усилий по переработке.
Мы ориентируем познавательную деятельность М так,
чтобы первоначально совершалась попытка «удовлетво-
рения» нового входного соотношения из Dk с помощью
алгоритмов, полученных в ходе предшествующей дея-
тельности с если это не удается, то строится новый
20. Подход к автоматическому формированию теории 547
алгоритм, «удовлетворяющий» данному входному соот-
ношению, на основе других элементарных или сложных
(или тех и других) алгоритмов, которые доступны М в
данный момент.
Имеется некоторая аналогия между этими процесса-
ми в М и процессами человеческого познания, где новый
опыт «строится умозрительно» в терминах существую-
щих понятий или преобразований существующих поня-
тий так, чтобы этот опыт мог быть усвоен.
В ходе своей познавательной деятельности на клас-
се Dk М постепенно организует ансамбли алгоритмов в
специальном типе ассоциативной памяти р (который
ниже будет описан более детально). Методики хранят-
ся в р, разбитые на свои элементарные части, которые
объединяются посредством связующих звеньев, различ-
ных для разных Dk- В дополнение к структурным ас-
пектам хранящейся в ц информации о Dk память р хра-
нит также числа, определяющие силу ассоциации ме-
жду частями хранимых методик; эти числа зависят ог
степени успеха, с которым последовательная машинная'
методика «объясняет» класс.
Из чисел силы ассоциации М выводит числа доверие
тельности, c{hDk^ АЛЯ кажД°й выработанной полной
методики (или пробной гипотезы). Числа доверитель-
ности обеспечивают основу для индукции йр*.
Если в результате успешного познавательного про^
цесса М будет последовательно предлагать Ар^ как.
алгоритм, который «объясняет» данные последователь-
ности примеров из Dh, и если в результате доверитель-
ный коэффициент ^(АоЛр) индукции
превосходит данный предуказанный уровень, можно счи-
тать, что М достигла цели I для класса Dh. Теоретическое
рассмотрение обоснованности индукции принадлежит к
области индуктивной логйки [5]. В этой области многие
проблемы остались открытыми или спорными, и мне ка-
жется, что при современном уровне знаний в области
автоматического формирования теории придется еще
проделать большую работу, по исследованию,. $ксдери<
35*
548
С. А маре л
ментированию и анализу, прежде чем можно будет
перейти к критической оценке этой проблемы.
Познавательная деятельность М на классе Dk при-
останавливается, когда достигнута цель I для Dk или
когда предел степени переработки, назначенный для
формирования теории на Dhi превзойден, либо же
когда нельзя больше получить примеров из Dh. После
того как деятельность на классе Dk приостановилась,
М переходит к другому классу, а если в среде М не су-
ществует другого класса, познавательная деятельность
вовсе прекращается.
5. ЗАДАЧИ ПРЕДСКАЗАНИЯ И РАЗБИЕНИЯ НА КАТЕГОРИИ,
ОСНОВАННЫЕ НА ВЫРАБОТАННЫХ В М
МАШИННЫХ ТЕОРИЯХ
Получив методику hok. удовлетворяющую цели I, М
может непосредственно использовать ее при решении
задач предсказания или разбиения на категории.
Задачи предсказания. Предмет определения в такой
задаче выражается входным сообщением в форме
Dk-.((a, р):?).
Смысл этого выражения следующий. Пусть дана оценка
а, р из Dk', требуется найти значение у. Получив это
входное сообщение, М использует методику hok, чтобы
осуществить процесс
₽) = Y.
который дает требуемое значение у.
Задачи разбиения на категории. Форма входного со-
общения в такой задаче будет иметь вид
?:((а, ₽):У).
Это означает следующее. Пусть дано входное соотноше-
ние (а, р, у); требуется найти, к какому классу среди
классов, имеющих машинные теории (или пробные гипо-
тезы), принадлежит данное входное соотношение. Полу-
20. Подход к автоматическому формированию теории 549
чив это входное сообщение, М осуществляет последова-
тельные процессы:
Ad,(«, 0) = Yi,
Ло2(а, ₽) = у2
для всех hok в М. Сравнивая у входного сообщения с
образованным машиной, М получает совпадение, ска-
жем, Y=Yf. Из этого делается вывод, что входное соот-
ношение принадлежит к Di или, на языке машины, что
оно подчиняется алгоритму /Ц. Возможно, что имеет
место более чем одно совпадение, другими словами, что
данный конкретный пример является общим для более
чем одного преобразования, представленного в машине
алгоритмами Adp йл2, ... Это приводит к неоднознач-
ности разделения на категории, что обычно нежелатель-
но. Однако предотвращение таких случаев зависит от
выбора подходящих дизъюнктивных преобразований, а
не от выбора процесса формирования теории; последний
лишь пытается осуществить конкретные отображения.
Ясно, что приведенные выше схемы для решения за-
дач предсказания и разбиения на категории могут быть
применены к обширной совокупности различных областей.
Схема для разбиения на категории может оказаться осо-
бенно мощным средством для задач автоматического
распознавания образов и автоматического лингвистиче-
ского анализа. Галле [6] уже применил схему такого
типа к морфологическому анализу языка; он назвал эту
схему «анализ путем синтеза». В методе Галле перечень
уместных основ слов в некоторой лингвистической форме
соответствует нашему /, сама лингвистическая форма —
нашему О, а различные правила морфологии флексий —
различным нашим хранящимся в памяти Ad.. Чтобы
проанализировать конкретную форму О, т. е. определить
специальное значение, вносимое флексивным состоянием
формы, к / применяются различные правила Adz до тех
пор, пока не будет получено О. Правило Adz, посред-
ством которого была образована форма, и дает тогда
желаемый анализ. Если имеется более чем один алго-
ритм для образования данной формы, то анализ неодно-
значен. Чтобы избежать неоднозначного анализа, может
550
С. А маре л
понадобиться предварительно изменить способ, с по-
мощью которого выбирается система / в связи с фор-!
мой О. В этом случае нужно разработать новые правила
/Ц либо с помощью лингвиста, либо путем познаватель-
ного процесса в машине М.
Наряду с «анализом путем синтеза» в качестве мето-
да распознавания образов (который может оказаться
продуктивным и в нелингвистических областях) задачу
распознавания образов можно решать и как задачу
предсказания, и фактически большинство исследований
в этой области пошло именно по этому направлению.
В этом случае класс Dj исчерпывающе определяется
соответствующими парами (1:0), где /= (xt, х2,..., xn)
является n-мерным вектором сенсорного события, а свя-
занное с ним О == у представляет собой двоичную пере-
менную, показывающую, является ли это сенсорное со-
бытие экземпляром определенного образа Pj. Если алго-
ритм Лоу каким-либо образом получен (скажем, путем
познавательного процесса в М-образной машине), то ма-
шина М узнает образ, т. е., когда ей дано определенное
/, выдаст решение (двоичное значение у) о том, являет-
ся ли 1 экземпляром Pj, или нет. Одна из обычных схем
реализации Л^, используемых в таких системах распо-
знавания образов, это пороговый переключающий эле-
мент формального нейрона; в этом случае общий про-
цесс
hDj(I) = O
выражается в явном виде:
если
п
2 airxr >0, то у = 1;
г-0
если
п
2>ajrxr<^0, то у = — 1,
г=0
где х0~ 1 и Xi, х2,... ,хп являются входными переменны-
ми (сенсорными входами), принимающими значение 1
или —1. Элементы (n+1)-мерного вектора (а^о, Oji,...
..., Gjn) — это числа, которые получают определенные
Фиг. 4.
552
С. А маре л
значения для каждого конкретного алгоритма, соответ-
ствующего классу Dj.
Заметим, что в обеих разновидностях распознавания
образов —в «анализе путем синтеза» (где hD исполь-
зуется для воссоздания входной формы из некоторых ее
элементов) и в «предсказании» (где hD используется для
непосредственного вычисления на основе измерений
входной формы, является ли эта форма примером неко-
торого определенного образа или нет) — решения прини-
маются на основе подходящей машинной теории клас-
са D, т. е. на основе алгоритма hD с определенным, соот-
ветствующим ему доверительным коэффициентом.
Схематическое представление полного процесса фор-
мирования теории в М показано на фиг. 4. Контур вну-
тренней обратной связи Л, показанный на этой фигуре,
дает алгоритмы, которые устанавливают «путь» (на
языке Л4) между /-комплексом и О-комплексом во вход-
ных соотношениях. Контур F2 дает новые схемы для
образования алгоритмов (так что увеличивается способ-
ность к синтезу) и запасает новые схемы в ассоциатив-
ной памяти р,. Внешний контур оценивает и производит
алгоритмы и поддерживает дальнейшее их производство
посредством непрерывной подачи задач (входных соот-
ношений) на внутренние контуры до тех пор, пока будет
либо достигнута познавательная цель, либо превзойден
допустимый уровень затраченных усилий.
6. МЕХАНИЗМ ДЛЯ ФОРМИРОВАНИЯ АЛГОРИТМОВ
И УПРАВЛЕНИЯ АЛГОРИТМАМИ (ГИПОТЕЗАМИ)
Рассмотрим механизм (изучаемый нами в настоящее
время), который управляет выработкой последователь-
ных алгоритмов в М в ответ на входные соотношения,
воспринятые от классов D2, . ..,£>i6.
Мы предполагаем, что в начале текущей познаватель-
ной деятельности М обладает запасом элементарных
алгоритмов. Эти исходные алгоритмы явились резуль-
татом предшествующей деятельности М над множе-
ствами и соотношениями. Алгоритмы эти следующие:
а) Алгоритмы реализации комбинаторной операции
над подмножествами а, а именно П» U , С.
20. Подход к автоматическому формированию теории 553
Мы представляем осуществление этих алгоритмов
следующим образом:
П(Д1, а2, ..An) = Bi
для операции получения пересечения Bi множеств
Ль Аг, ..., Ап\
U (Аь А2, •.., Ап) = В2
для операции получения объединения В2 множеств
Аь Аг,..., Ап\
С (Др Д2)= &з
для операции получения дополнения В3 множества А2
относительно Аь Здесь (Ab А2,...,Ап, Bi9 В2, В3) пред-
ставляют собой подмножества о.
б) Алгоритмы для реализации преобразований из
множества о в множество 2СТ, причем 2СТ представляет
собой множество всех подмножеств о. Каждый алго-
ритм дает соответствие (s : А) между элементами о (обо-
значенными е) и элементами 2СТ (множествами, обозна-
чаемыми А, где Ас: о). Множество А может иметь един-
ственный элемент; тогда мы представляем А в виде [£],
где £— обозначение элемента из о. Это интересный слу-
чай, и М имеет два элементарных алгоритма (/, Af), ко-
торые обладают этим свойством.
Алгоритм / устанавливает отношение тождества
и преобразует каждый элемент а в систему точек с
единственным элементом, равным самому себе [имеем
(в : [е])]. Алгоритм N устанавливает «отрицание» и пре-
образует элементы а следующим образом:
52 5з 54 55 5б 57 58
[51 б] [5151 [SuJ [51з] [51г] [511] [51 о] [59]
5g 5ю 5ц 512 513 514 515 516
[58] [S.J [55] [54] кз] И [511
где каждый элемент верхней строки отображается в то-
чечное множество, обозначенное под ним. Процессы осу-
ществления этих двух алгоритмов мы представляем с
помощью записи /(е) = (£) и Af(e) = (£).
554
С. А маре л
В дополнение к двум предшествующим алгоритмам
М имеет еще два других, которые реализуют эти преоб-
разования. Для них приняты обозначения > и <.
Алгоритм > устанавливает отношение «включения»,
а < — отношение «негативного включения». Удобно
Фиг. 5.
Если узел соединен с другим узлом и расположен выше его, он «включает» этот
узел; если два узла симметричны относительно центра С, они состоят в «нега-
тивном» отношении.
представлять эти отношения с помощью построения, пока-
занного на фиг. 5; в этом построении каждый узел пред-
ставляет элемент о и помечен символом Маккаллока и
Питтса (см. фиг. 1). Элемент-узел «включает» другой
узел, если он расположен выше в цепочке, содержащей
оба эти узла; узел «негативно включает» другой, т. е.
сам оказывается «включенным» другим узлом, если он
расположен ниже в их общей цепи. Заметим, что эле-
20. Подход к автоматическому формированию теории 555
мент-узел стоит в «негативном» отношении к узлу, рас-
положенному симметрично относительно центра С по-
строения.
Процессы осуществления алгоритмов > и < мы
представляем соответственно с помощью записи >(е) =
=Л и < (е) = А.
Различие, которое мы делаем между элементными и
точечными множествами, является полезным, так как мы
можем теперь рассматривать все алгоритмы преобразо-
вания как предписания о том, каким образом «двигать-
ся» от элемента определенного множества к другому
множеству. На основе изложенной выше точки зрения
можно принять, что М может определять алгоритм «дви-
жения» от набора элементов (подмножество множе-
ства а) к набору множеств (подмножество множества
2а); таким образом, у М имеется несколько более мощ-
ный алгоритм, состоящий в повторении любого из суще-
ствующих алгоритмов перехода от элемента к множеству
и дающий способ «двигаться» от одного множества к
совокупности множеств. Если такая схема с повторе-
нием использует один из ранее рассмотренных элемен-
тарных алгоритмов, мы рассматриваем ее как элемен-
тарную методику (с различными окончательными свой-
ствами). Например, если методика > используется в
схеме повторения, то >П(Л) = (Вь В2,..., Вп) предста-
вляет операцию получения n-мерного вектора системы
(Bi, В2,..., Вп) посредством повторения операции >
над п элементами системы А. Мы рассматриваем это
как элементарную операцию.
Алгоритмы, первоначально доступные Л4, в графиче-
ской форме показаны на фиг. 6. Мы примем, что М мо-
жет применять вышеуказанные алгоритмы к элементам
множества о, появляющимся во входных соотношениях,
а также к элементам о и подмножествам о, которые про-
изводятся промежуточными алгоритмами. Таким обра-
зом, М может нанизывать подобающие методики и
строить огромное число новых сложных методик, кото-
рые могут быть, потенциальными кандидатами для же-
лаемых hD.
Типичной задачей является такая: дано входное соот-
ношение ((а, р):у) из класса требуется, используя
л Алгоритмы
Схемы д, д д д д д
(^Пересечение (р„)0бзединение
п множеств(п>2) п множеств(п>2)
Ау &2 Ay &Z А/ &Z
(^Пересечение (р^Обзединение ^Дополнение Аг
двух множеств двух множеств относительно А,
(р3}) Тождество (р52)0трццание
А А
\(р41)Включение (^Отрицательное включение
*--\Разбиение конечного множе- Это может быть также
ства на составные элементы представлено в виде
1
. - 4? , н
(р здесь означает любой из алгоритмов l,Nt >,<)
Повторяющийся алгоритм рп надмножеством А
Фиг. 6.
Горизонтальными черточками обозначены множества (подмноже-
ства о) А, В, Др А2, Ад; кружками и буквой е обозначены эле-
менты множества; кружками под черточкой и символом [£] обозна-
чены множества, состоящие из одного элемента буква р
в кружке представляет алгоритм р.
20. Подход к автоматическому формированию теории 557
имеющиеся алгоритмы и способы построения, построить
такую методику hokp, что
Ч/а’ ₽) = Y«
Формальные задачи этого типа, особенно в области
доказательства теорем, в течение последних нескольких
лет привлекают к себе значительное внимание; в этой
области уже имеется много работ по автоматической
«эвристике» (см., например, [7]).
В нашем случае каждое входное соотношение пред-
ставляет собой задачу, которую требуется решить; полу-
ченное решение есть hDkp, что аналогично установлению
методики доказательства в случае доказательства тео-
рем. М будет использовать эвристические методики, или
искать стратегии для решения задачи, поставленной ка-
ждым входным соотношением. Специальной задачей в
области автоматического формирования теории является
нахождение механизма, который будет управлять эври-
стикой на основе предшествующих уже выработанных
методик решения так, чтобы можно было достичь единой
методики, применимой ко всем входным соотношениям.
Аналогичная задача возникает в области доказательства
теорем, когда ставится цель автоматически получить си-
стематическую методику, алгоритм, для доказательства
всех истинных теорем в данной области, если даны об-
разцы истинных теорем.
Мы рассматриваем элементарные методики, показан-
ные на фиг. 6, как основные строительные блоки, до-
ступные дляМ в начале ее познавательной деятельности;
их можно считать элементарными ходами, которые /И
может делать в комбинаторной игре. Система М класси-
фицирует имеющиеся строительные блоки (методики)
согласно родам объектов, между которыми они могут
быть расположены1). Это подразумевает анализ объек-
тов, появляющихся во входном соотношении, перед тем,
как принять решение о следующем ходе. Ясно, что такой
*) Это элементарный вид стратегии решения задачи: «абстраги-
руемся от некоторых частностей в постановке задачи так, чтобы
по крайней мере не пробовать методик решения совершенно нера-
зумных и несообразных задач».
658
С. А маре л
«анализ ограничен аналитической способностью системы.
Мы приняли, что на начальном этапе операций М она
может просто решать, является ли объект элементом о
или подмножеством а. Из этого следует, что М нуждает-
ся в описании ее собственных методик в терминах окон-
чательных свойств (конфигурация окончаний, форма ин-
формации, передаваемой окончаниями, т. е. элемент или
множество) для того, чтобы решить, следует ли эту ме-
тодику применить ко входным соотношениям, или нет.
Мы принимаем также, что М запомнила диаграмму
сети в связи с одной из ее методик; такую диаграмму
мы называем схемой.
В общем случае схема Xi является сетью сочленен-
ных блоков, каждый из которых имеет конкретные око-
нечные свойства; индекс i означает типы сетей. Мы при-
писываем каждому блоку схемы символ /г;, /=1, 2,...,
причем lij представляет либо методику, либо схему. Если
все Z схемы означают методики, результирующая хорошо
определенная сеть представляет методику. Схемы, содер-
жащие единственный блок, являются элементарными
схемами Хи Х2. Х3, Х4, Х5; они показаны на фиг. 6. В ка-
ждой элементарной схеме буква I может представлять
только методику. Ясно, что для каждой элементарной
схемы есть несколько методик.
Одним из важных свойств М является способность
порождать сложные схемы, созданные из существующих
схем. Допустим, что М оборудована техническими сред-
ствами для соединения существующих схем таким обра-
зом, чтобы составные части были совместимы. Несколь-
ко составных схем из двух или трех блоков показаны
на фиг. 7, а.
Сложность схемы измеряется с помощью начального
числа неопределенных блоков, которыми она обладает;
так, сложность Х2 есть 1, сложность Х6 есть 2, а слож-
ность Х3 есть 3. Ясно, что нет предела возможной слож-
ности составной схемы.
Блок, принадлежащий к составной схеме (предста-
вленный его индексом /), определяется в зависимости от
схемы.
Индексы I сложной схемы могут определяться по-
этапно вплоть до момента, когда все индексы I будут
20. Подход к автоматическому формированию теории 559
представлять методики. Тогда мы получаем определение
сложной методики. Простейшее определение сложной
схемы получается в два этапа: сначала все Z сложной
схемы определяются элементарными схемами, а затем
Схема Хб Схема Х7 Схема Хв Схема Х9
а
В В
Перми этап Второй этап определения Х8
определения Х8 приводящий к алгоритму р*(
6
Фиг. 7.
а —составные схемы сложности 2 и 3 для алгоритмов, ко-
торые должны применяться между элементами и множе-
ствами; б —этапы определения схемы Х8 и результирующий
алгоритм р^.
каждой элементарной схеме приписывается элементар-
ная методика; этот тип определения иллюстрируется
фиг. 7,6. Если на первом этапе I определено посред-
ством сложной схемы, то число этапов определения не
меньше трех и сложность полностью определенной схемы-
(составного, сложного алгоритма) возрастает.
Следовательно, имеются два направления, в кото-
рых мы можем изменять тип и сложность машинных
методик: одно — структура основной , неопределенной
560
С. А маре л
сложной схемы; другое — число этапов определения и
их характер.
Таким образом, небольшой набор элементарных мето-
дик и основных схем в комбинации со способностью осу-
ществлять иерархические конструкции до любого уровня
дает М возможность порождать очень большое число
методик. Сейчас я не знаю, каковы границы этого числа
при данных ограничениях времени и возможностей вы-
числительной техники; эта задача и ее развитие — харак-
теристика пространства построенных алгоритмов — до-
стойны изучения, так как они могут дать теоретическую
основу для оценки процессов формирования теории в
машине.
Мы предполагаем, что М хранит основные схемы и
элементарные методики в памяти ц. В начале данного
процесса ц содержит схемы Х2,..., Х5 и соответ-
ствующие методики рп, pi2,...» Рйьп, Р52,п (см. фиг. 6).
Впоследствии, по мере того как М выдает новые
сложные схемы, т. е. Х6, Х7,..., они также хранятся в ц.
Пусть число m представляет схему Xi или методику
pf, мы рассматриваем m как описание средства, с по-
мощью которого машина достигает цели. Пусть, кроме
того, е означает окончательные определения (specifica-
tions) для схемы: либо определение для полной схемы
в терминах характеристик входных сообщений [типа
£>:(/: О)], либо определение для блока в схеме (Z); мы
рассматриваем е как определение структурных целей,
т. е. окончательных свойств схемы или методики, кото-
рым она должна удовлетворять.
М устанавливает в ц ассоциативные связи между
различными m и е. Решение о выборе ассоциативной
связи в данной ситуации принимается на основе распре-
деления силы ассоциации связей. Безусловная сила ас-
социации связи (тг:е;), обозначаемая а(тг :е;), есть
число, хранимое в ц и показывающее относительное
априорное предпочтение, оказываемое М в общем слу-
чае связи (тг :е;). Если задано конкретное ej, то рас-
пределение сил связей a(m\ej) состоит из компоненты,
показывающей относительное участие связи в предше-
ствующем успешном синтезе, накладывающейся на ком-
поненту сдвига, характеризующую пристрастие к более
20. Подход к автоматическому формированию теории 561
простым схемам; последняя представляет способ введе-
ния в М общей предпочтительности для простых ме-
тодик. В дополнение к числу а(тс.е$) каждая связь,
которая ранее была использована при синтезе, ассоции-
руется с несколькими числами а(тг-: ej)/Eft, предста-
вляющими собой условные силы ассоциации для разных
условий Eft, причем Ек представляет собой цепь струк-
турных целей, начиная с высшей цели (непосредственно
выведенной из входного сообщения) и кончая целью, не-
посредственно «покрывающей» Таким образом,
a\mi\ ej)IEk указывает на относительную априорную
предпочтительность для М связи (т<: е>), если эта связь
рассматривается на определенном конкретном этапе
синтеза и этот этап хорошо определен последователь-
ностью предшествующих целей.
Если цель Cj возникает в р, вслед за последователь-
ностью целей Eft, то отбор связующего звена осуще-
ствляется на основе распределения сил ассоциации, со-
ставленного из чисел a(m : 6j)IEk для всех связей, сила
ассоциации которых обусловлена ЕА, а для остальных
связей на основе чисел а(т : причем максимум этого
распределения определяет выбор ассоциативной связи.
Связь, выбранная при этих условиях, будет, начиная с
этого момента, иметь определенное число для силы ас-
социации, обусловленной Ek (если ранее она такого чис-
ла не имела). Если условная сила связи падает ниже
определенного предела, то число выбрасывается из па-
мяти ц; таким образом, память не разрастается чрезмер-
но, а М удерживает лишь «интересную» информацию об
ассоциативных путях.
Следующий пример (фиг. 8) иллюстрирует ассоциа-
тивную деятельность в ц: входное сообщение Di: (s : А)
подано на М. После начального анализа в М устанавли-
ваются цель е0 в терминах класса Di и окончательные
характеристики / (в данном случае е) и О (в данном
случае множество Л), а затем е0 подается на вход ц.
В ходе следующего шага величины сил связей
а(/п:е0) сравниваются для всех уместных т (для всех
существующих схем). Ассоциация устанавливается по-
средством наиболее сильной связи для схемы; допустим,
что в данном примере это Х8. Параметры этой схемы
36 Зак. 106
562
С. Амаре л
4, ь 4,2» 4,з исправляются, устанавливаются их око-
нечные свойства и они используются для постановки
трех новых структурных целей е8, i, е8,2» ев,з- Эти цели
затем подаются на вход р.
Проследим за е8, ь Из распределения сил связей [со-
ставленного из чисел а((т: е8,i))/e0) для связей
(т : е8, 1), которые имеют силы, обусловленные е0, и из
чисел a(tn :e8ti) для остальных связей] находится силь-
нейшая связь, ведущая к схеме Х4. Теперь параметры 14
сети Х4 исправляются, что дает структурную цель е4 и
приводит к элементарной методике p4t i ввиду превос-
ходства силы а(р4} i:e4). Заметим, что этот последний
выбор был основан на безусловной силе ассоциации
(так как р4, i не было ранее связано с последовательно-
стью целей е01, е8,1» ^4)• Завершая процесс для двух
оставшихся ответвлений, мы получаем методику, пока-
занную на фиг. 8. На фиг. 9 приведено дерево связей,
возникшее в этом простом примере.
20. Подход к автоматическому формированию теории 563
Наша система (т : е)-ассоциаций аналогична идее
Толмэна [8] о запасе готовых сочетаний средств и целей,
управляющих человеческим целенаправленным поведе-
нием. Наше понятие силы связи как бы соответствует
толмэновскому «доверию».
Входное сообщение: [Dj :(£: А)]
[Анализ
I I I
а1РцЪ)\ A \a(PuV
A / A A
^7/ / Psi Pit
a/(P3le3))
Фиг. 9.
---постоянная ассоциация;-----регулируемая ассо-
циация, сила которой определяется величиной а.
Для данного входного соотношения из класса Dj в
М вырастает дерево ассоциаций А/, и, когда оно завер-
шается, оно представляет собой определенную методику
pi, предложенную М. pi применяется ко входному соот-
ношению, и если это оказывается успешным (т. е. если
рг.(/)=О), то все ассоциативные связи в А/ подкрепля-
ются, если же применение pi оказывается неуспешным,
эти ассоциативные связи ослабляются.
Чрезвычайно важно проверять удовлетворительность
всей методики, не ожидая, пока дерево полностью вы-
растет. Чтобы сократить число деревьев, которые долж-
ны быть выращены для получения удовлетворительной
методики, необходимы измерения частичного успеха.
Здесь решающую роль приобретают эвристические
36*
564
С. А м а р е л
правила, стратегии, определяющие назначение подцелей
в ходе синтеза методик (роста деревьев ассоциаций).
Эвристические правила управляют процессом роста
дерева следующим образом: рассмотрим схему X, кото-
рая предлагается в ответ на входное сообщение
Dj: (/ :О). На этом этапе цель состоит в том, чтобы
найти методику, которая будет удовлетворять входному
соотношению, т. е. такую, что (X] (/) =0, (Здесь конкрет-
ное определение X обозначено [X].) Схема X может со-
держать структурно совместимые подблоки Zj, не имею-
щие приданных им целей, т. е. в этом случае для lj нет
конкретного требования в форме [ZJ](/1)=O1 (где Л :
есть соответствие, которому lj должно «удовлетворять»).
Конкретные подцели устанавливаются для lj из X
с помощью эвристических правил1), точнее, постановка
подцели должна быть согласована с целью X. Но ка-
ждое lj с его подцелью могло бы породить еще одну
схему, подблоки которой предписываются новыми совме-
стимыми подцелями с помощью эвристических правил,
и т. д.
Рассмотрим самую маленькую частную методику, ко-
торая имеет назначенную подцель (самое маленькое
«поддерево» Д^, оканчивающееся у основания главного
перевернутого дерева, — «поддерево» как бы «свисает»
из определенного ek). Если при испытании этой частной
методики в пределах ее подцели эта методика оказы-
вается безуспешной, то все связующие звенья Д^ ослаб-
ляются.
Однако, так как возникает новое распределение сил
связей и некоторые из связей, которые прежде имели
максимальную силу в Д;, могли отойти на задний план,
вероятно, что из ^начнет расти другое дерево Дь Теперь
будет выработана новая частная методика, которая за-
тем будет проверена в пределах подцели В конце
концов либо будет получена успешная методика, либо
') Ожидается, что каждый выбор эвристических правил приво-
дит к различным видам ограничений для процесса роста дерева.
До сих пор мы использовали некоторые простые, произвольно вы-
бранные эвристические правила (см. иллюстративный пример в сле-
дующем разделе), но у нас все же нет способа оценки того, как
такой выбор воздействует на процесс формирования в М.
20. Подход к автоматическому формированию теории 565
будет превышен данный предел усилий. Когда появ-
ляется успешная методика, все ассоциативные связи де-
рева, происходящие из ehi усиливаются; эта частная ме-
тодика тогда является кандидатом на комбинирование
с другими частными методиками для проверки в преде-
лах более высокой цели. В конце концов набор частных
методик образует суммарную методику, которую следует
проверить на главной цели. Если это не приводит к
успеху, ассоциативные связи всего дерева, свисающего
из X, ослабляются и процесс роста дерева начинается во
всех возможных местах до тех пор, пока не будет до-
стигнут определенный предел затраченных усилий. Если
же суммарная методика является успешной, то все
ассоциативные связи соответствующего дерева усили-
ваются.
Различные стратегии подкрепления ведут к различ-
ным процессам «роста дерева» и к различным свойствам
сходимости всего познавательного процесса. До сих пор
мы принимали стратегию, при которой подкрепление выс-
шего уровня ассоциации определяется подкреплением
всех нижних уровней ассоциации, охватываемых данным
деревом ассоциаций.
Если общее распределение сил ассоциаций для кон-
кретной цели падает ниже определенной минимальной
величины и эта цель не может быть модифицирована
изменением более высокой цели (предположим, напри-
мер, что это первая или главная цель), то М порождает
новую схему, которая должна быть испробована для
этой цели; новая схема всегда входит в набор схем Л4.
Введение новых общих схем в ц является важным фак-
тором гибкости и многосторонности М и ее способно-
сти к эволюции.
В процессе формирования дерева цель е последова-
тельным сканированием просматривает конкретные ассо-
циации со схемами, двигаясь в основном от более про-
стых схем к более сложным и от априори более обещаю-
щих к априори менее обещающим схемам.
После того как сформирована успешная методика для
входного соотношения Dj, принимается новое входное
соотношение из Dj. М сначала будет стремиться пред-
ложить методику, которая оказалась успешной примени-
566
С. А маре л
тельно к предыдущему входному соотношению. Если это
•снова приведет к успеху, эта методика подкрепляется.
Если же это окажется безуспешным, будет найдена но-
вая методика, обычно более сложная, чем предыдущая.
Можно ожидать, что после переработки большого числа
входных соотношений (отобранных без специального вы-
бора из класса D;) станет преобладающей и будет оста-
ваться стабильной и многообещающей единственная
конфигурация ассоциативных связей, соответствующая
hDj . Тогда hoj р является работающей гипотезой ма-
шинной теории класса Dj. Задача понимания связи ме-
жду стратегиями подкрепления и динамическим поведе-
нием, особенно устойчивостью процесса синтеза (роста
дерева), является, как я чувствую, фундаментальной и
нуждается в усиленном дальнейшем изучении.
Если в ц нет схемы, которая бы в одном блоке пред-
ставляла общие окончательные свойства вновь получен-
ной устойчивой методики, то такая схема формулирует-
ся и вводится в набор схем. Соответствующая новая ме-
тодика входит в набор элементарных методик. Этим
способом М получает строительные блоки более высо-
кого уровня для конструирования методик в будущих
познавательных задачах. Будущее машинное представле-
ние, вырабатываемое А4, выражается на языке, который
использует более мощные «примитивы» (вновь приобре-
тенные элементарные методики), или, если это трудно,
на смешанном языке (использующем как начальные эле-
ментарные алгоритмы, так и приобретенные).
Итак, входное соотношение из класса Dj начинает
сканирование в пространстве деревьев связей. Сканиро-
вание ограничено эвристическими правилами и движется
от простых и априори более обещающих деревьев к бо-
лее сложным и априори менее обещающим деревьям.
Каждое входное соотношение оставляет след в ц,
усиливая ассоциативные связи того дерева, которое при-
водит к методике, «удовлетворяющей» этому входному
соотношению. Дерево ассоциаций, которое удовлетво-
ряет большому числу входных соотношений из класса
Du все более «затвердевает», и, когда оно достаточно
затвердеет, оно представляет собой установившийся ме-
тод синтеза, который М использует для конструирова-
20. Подход к автоматическому формированию теории 567,
ния алгоритма, являющегося машинной теорией клас-
са Dj.
Если в дальнейшем перед М будет поставлена задача
предсказания типа Dj: (/:?), то. процесс синтеза будет
начат в соответствии с индексом Dj; и этот процесс бу-
дет подчинен силам связей, которые были обусловлены
для Dj в ходе предшествовавшей познавательной дея-
тельности. Результатом синтеза явится конкретизация
алгоритма ho. который М ранее сформулировала для
Dj и который затем будет использован для вычисления
О по данному /.
7. ОБЩЕЕ ОПИСАНИЕ ПОЗНАВАТЕЛЬНОЙ
ДЕЯТЕЛЬНОСТИ В М ПРИМЕНИТЕЛЬНО
К ПОСЛЕДОВАТЕЛЬНОСТИ КЛАССОВ ИЗ МНОЖЕСТВА
£ь ^2, . • • » £16
Чтобы проиллюстрировать характер познавательной
деятельности Af, я кратко опишу процессы формирова-
ния теории для последовательности классов D2, Di3, D^
D6 [определение см. уравнение (7)] на основе предвари-
тельных экспериментов, проведенных вручную с по-
мощью предлагаемой М !).
Прежде чем перейти к операциям А4, следует повто-
рить, что М начинает с элементарных алгоритмов и схем,
показанных на фиг. 6, при таком распределении сил
ассоциации, когда простым и априори полезным схе-
мам отдается предпочтение, а также при наличии си-
стемы эвристических правил для синтеза.
Класс D2. Входное сообщение D2: (а, р:у) поступает
на вход М. Анализируются окончательные свойства
*) Интересно отметить, что наше рассуждение есть грубая ана-
логия функционирования • изучаемой М. Это можно резюмировать
так: выбираем классы D«, правила принадлежности к которым из-
вестны; пытаемся получить из исчерпывающих определений клас-
сов Di правила принадлежности к этим классам Dit используя по-
стулированный «алгоритм» М (механизм формирования теории).
В соответствии с результатами испытаний (моделирования) на-
страиваем М, затем испытываем настроенную М и т. д. до тех пор,
пока не получим М с высоким доверительным уровнем. Сейчас мы
находимся на стадии испытания настроенной А1 на системе классов
Di, D2, ...» Di6«
568
С. А маре л
Фиг. 10.
а—новые схемы, входящие в конструкцию алгоритма б —дерево
ассоциаций
для алгоритма
Лп «
U2,b
входного соотношения. Формулируется структурная цель
е0 для окончательных свойств требуемой схемы, причем
eQ формулируется в терминах окончательных свойств
входного соотношения.
Пусть в М не найдена схема, совместимая с данным
входным сообщением. Тогда формируется простая но-
20. Подход к автоматическому формированию теории 569
вая схема Ха, которая удовлетворяет eQ. Ха показана на
фиг. 10; она имеет три блока: /ai, 1а2, 1а3.
На основе входного сообщения и схемы Ха ищутся
конкретные подцепи для блоков схемы Ха. (Даже част-
ная постановка «разумных» подцелей, основанная на су-
ществующих эвристических правилах, существенно упро-
щает процесс поиска подходящего алгоритма.)
Сначала рассматривается 1аз (по эвристическому
правилу: «пытаться разработать обратный путь от ре-
зультатов к исходным предпосылкам») и формулируется
структурная цель еаз, полученная путем абстрагирова-
ния из окончательных свойств /а3.
Предлагается ассоциация (Х2:еа3), основанная на
стремлении системы сначала исследовать самые простые
схемы. Х2 имеет один блок /2 (см. фиг. 6), причем 12
определяется алгоритмом П (согласно принятому на-
чальному распределению сил ассоциации).
На основе данного входного сообщения, схемы Ха и
определения еа3 с помощью П (через ассоциации
еа3—Х2—е2— П) конкретные подцели для 1а2 и 1а3 на-
значаются следующим образом:
glai: алгоритм plai> определяющий схему lali должен
удовлетворять условию
Ав1(а) = Л. где убЛ-
gZ(j2: алгоритм ptai, определяющий схему /о2. дол-
жен удовлетворять условию
Ав2(а) = 4г. где у€А-
Ассоциации (Х4:еа1), (Х4: еа2) предложены на ос-
нове тенденции М сначала исследовать простейшие схе-
мы, совместимые с желаемыми окончательными свой-
ствами. Xt имеет единственный блок /4. В соответствии
с существующими силами ассоциации в качестве опре-
деления lai предлагается подходящий элементарный ал-
горитм ри, аналогично тому как это было сделано для
1а2*
Проверка того, как 1а1 достигает поставленной цели,
производится путем осуществления операции p4<(a)=Ai
670
С, А маре л
и проверкой, выполняется ли условие аналогично
результат операции ры(и) проверяется и для /а2.
Если gab или ga2, или ни та, ни другая не удовле-
творяются, то /аь 1а2 пробуют различные совместимые
6
Фиг. 11.
л — алгоритм ; б —схе-
ма Xgt соответствующая
hn
^2, 0-
детализации возрастающей слож-
ности. Последовательно прове-
ряются сложные схемы Х6, Х7, Х8,
Х9. Для новой предложенной
схемы [скажем, для ассоциации
(X8:eai), которая дает снова
три подблока /8,ь /8>2, /в,з] назна-
чаются новые конкретные подце-
ли подблоков, причем подблоки
первоначально получают про-
стые алгоритмы и т. д., как
делалось прежде на более вы-
соком эвристическом уровне в
дереве ассоциаций (а именно
на Ха).
Когда определение /аг, la.2
достигает определенной сложно-
сти, конструирование вдоль этих
линий прекращается и пересма-
тривается определение 1а3; осу-
ществляется новая конкретиза-
ция 1аз и процесс поиска подхо-
дящих определений для Idt, /аг
повторяется вновь подобно опи-
санному выше.
Если в ходе предшествующего
процесса все подцели для конкрет-
ного сложного алгоритма Pxa,t
удовлетворены, то этот алгоритм
проверяется на входном сообще-
нии, и если рХа f(a, р) = у, то деятельность примени-
тельно к этому сообщению прекращается, лйбо же, в об-
ратном случае, определение /аз пересматривается и ве-
дется новый процесс конкретизации Zai, 1а2- В конце кон-
цов находится сложный алгоритм для входного сообще-
ния. Если, однако, для ряда входных сообщений простой
алгоритм не найден, то это со временем; понижает силу
20. Подход к автоматическому формированию теории 571
ассоциации (Ха : е0) ниже приемлемого минимального
уровня.
Тогда М образует несколько более сложную схему
Хь (см. фиг. 10) и предлагает ассоциацию (Хь:е0). На-
чиная с этой ассоциации конструируется дерево ассоциа-
ций и получается сложный алгоритм ho2 ь который по-
следовательно удовлетворяет длинному ряду входных
соотношений, поступающих на вход М из класса D2. Де-
рево ассоциаций и результирующий сложный алгоритм
показаны на фиг. 10 и 11.
При принятии h.D2 b цель I для М на классе D2 удо-
влетворяется, т. е. йд2 b (а, р) —у для всех входных со-
отношений ((а, р) :у). которые поступают на вход М из
класса Dj. Вслед за этим М передает ho2iь на хранение
в память р. в качестве нового элементарного алгоритма.
В соответствии с йо2 # в ц хранится новая схема Хе, ко-
торая показана на фиг. 11.
Класс Аз. Следуя познавательной деятельности на
классе D2, М пробует «подтверждать» входное соотно-
шение из D13 с помощью алгоритма ho2ь после выбора
ассоциации с новой схемой Хе. Если это не удается, М
порождает новые сложные схемы, содержащие Хе
(фиг. 12), на основе которых она определяет и пробует
новые алгоритмы. Если это не приводит к успеху, М
возвращается обратно к рассмотрению схемы Хь, кото-
рая определяется через более элементарные методики.
Начиная с Хь, М строит дерево ассоциаций, которое, на-
конец, приводит к сложной методике hoi3 ь, удовлетво-
ряющей всем входным соотношениям, поступающим от
Du. Структура hDl3 ь такая же, как у Ло2 ь- Единствен-
ная разница между этими двумя алгоритмами состоит
в блоках, определяемых «включением» или «негативным
включением». Знак > в Лд2 ь появляется как знак < в
Ло13 ь- Как в случае Ad2 b, hol3 ь поступает в память р.
в качестве элементарного алгоритма; схема Хе предста-
вляет теперь какЛр,, ., так и Лл ..
* 13» О 2, О
Схема Xf
Схема Хд Схема Xh Схема X} Схема X)
Фиг. 13.
Фиг. 12.
20. Подход к автоматическому формированию теории 573
Класс Ds. М предлагает сначала ассоциацию со схе-
мой Хе\ если это не приводит к успеху, то М испытывает
сложные схемы Xfi Xg, ..., показанные на фиг. 12. Опре-
деление схемы Xg дает удовлетворительный алгоритм
йр5 g» показанный на фиг. 13).
Класс De- М сначала рассматривает Xg, Хе\ если эти
попытки терпят неудачу, она пытается применить дру-
гие, более сложные схемы (из фиг. 12). Наконец, кон-
кретизация схемы Xj приводит к удовлетворительному
алгоритму йр6 у, этот алгоритм совместно с соответ-
ствующим ему деревом ассоциаций показан на фиг. 14.
Распространяя экспериментирование с М на все ос-
тальные классы (в последовательности D7, D4, £9, DiQi
£14, £15, £з, £e, £ц, £12, £16 И £1), получаем алгоритмы
Ло_ ♦ Лр , • • •, Ар .
7» р 9, р 1» р
8. ИНТЕРПРЕТАЦИЯ И ОЦЕНКА МАШИННЫХ ТЕОРИЙ,
ПОЛУЧЕННЫХ В М ДЛЯ КЛАССОВ Db D2, .... D16
Если мы рассмотрим структуру фиг. 5, где изобра-
жены связи включения и отрицания для каждого из эле-
ментов системы а, мы можем интерпретировать любой
алгоритм йр1 р как предписание для движения от двух
узлов этой структуры к некоторому третьему узлу (эти
узлы не обязательно различны).
574 С. А маре л
Таким образом, Ар2 Да, ₽) дает «точную нижнюю
границу» или «Infimum» (сокращенно «Inf») для аир.
Если аир находятся в разных цепях, Inf (а, Р) совпа-
дает с а или р, что бы ни стояло ниже в цепи. Отметим,
что «нижняя граница», часть «точной нижней границы»,
получается при части алгоритма йр2 удовлетворяю-
щей структурным целям вь2, е&3; дополнительное
условие «точная нижняя граница» получается при ча-
сти Лр2 которая определяет еЬ9 (см. фиг. 10 и 11).
Так как члены D2 являются примерами преобразо-
вания 52ар=у (которое соответствует конъюнкции ис-
числения высказываний для двух аргументов), то Inf
имеет смысл преобразования S2 в М.
Операция hoi3, Да, р) дает «точную верхнюю грани-
цу» или «Supremum» (сокращенно «Sup») аир. Это
подобно интерпретации Лп2 ь на структуре фиг. 5 с об-
ратной полярностью, т. е. «низ» заменяется на «верх»,
а «точная нижняя граница» на «точную верхнюю гра-
ницу». В этом случае значение преобразования Sj3 (ко-
торое соответствует дизъюнкции в исчислении высказы-
ваний двух аргументов) есть Sup на элементах из а.
Интерпретация всех полученных алгоритмов hot
как операций на структуре фиг. 5 дается фиг. 15. Мы
рассматриваем операции, или «законы движениям опи-
санные на этом последнем рисунке, как машинную тео-
рию для 16 классов Dlf ..., Die. Алгоритм Лр1в, полу-
ченный М (интерпретируемый как Т-оператор), не
является простым; однако сложность процесса формиро-
вания для Лр1в (основанного на ранее сформированных
и заполненных схемах Хе, X/, ..., Х,) не более серьезна,
чем сложность процесса формирования для йр2 ь (осно-
ванного на более простых схемах, пригодных на этом
более раннем этапе). Отметим, что каждый класс опре-
деляется в терминах Inf, Sup и N,
Легко видеть, что форма теории, полученной М, яв-
ляется структурным вариантом исчисления высказыва-
ний [9]. Частично упорядоченное множество а при соот-
ношении включения образует дистрибутивную струк-
туру с единственным дополнением; любые два элемен-
20. Подход к автоматическому формированию теории 575
та из о, как мы указали выше, имеют Inf и Sup. Эта
форма теории могла бы оказаться полезной для иссле-
дования задач в настраиваемых переключающих цепях
(например, таких, как задача логической устойчивости
и надежности в переключающих сетях).
Классы (в порядке их предъявления машине М) Действия над частично упорядоченным множе- ством а, определяющие классы
d2 Inf (а, ₽) = у
О>з Sup (а, ₽)=у
О5 Inf (а, N0) = у
D, Inf [Sup (а, 0), N Inf (а, 0)] = у
d7 Sup [Inf (а, 0), Inf (a, W0)J
d4 N Sup (а, 0) = у
Da Sup [Inf (a, N0), Sup (a, 0)]
Dm Sup [AT Sup (a, N0), W Sup (a, 0)]
Dl4 Sup (a, = y
Dis AT Inf (a, 0) = Y
D3 AT Sup (a, W0) = y
Dt Sup [Inf (a, 0), AT Sup (a, АГ0)]
Du Sup [Inf (a, 0), AT Sup (a, 0)] = y
Dla Af Inf (a, Аф) = y
Dit T (a, 0)=Y = «i6
Dt P(at 0)-Af7(a, 0)=Y = Sj
Определение Т (а, 0) : Т (а, 0) = Sup [Sup [Inf (а, 0), Inf (а, ЛГ0)]»
Sup [NSup (a, W0), ^Stip (а, 0)] ]
Фиг. 15. Определения классов Db D2, •••» ^ie, интерпретируе-
мых как операции над частично упорядоченным множеством о,
структура которого показана на фиг. 5.
Образование алгебраической структуры для исчис-
ления высказываний внутри машины, начинающееся с
«этапа развития», в ходе которого машина могла мани-
пулировать системами и небольшим числом соотноше-
ний, соответствует взгляду Пьяже [10] на развитие
«структуры ансамбля» логических операций в мозгу
ребенка после стадии ознакомления с классами и отно-
шениями. Можно ожидать, что дальнейшая детализация
и моделирование М во.всем, интервале развития, кото-
рый я здесь описал, будет способствовать правильной
576
С. А м а р е л
оценке и усовершенствованию таких теорий примени-
тельно к умственному развитию человека.
Имеется также функциональное подобие между не-
которыми моделями человеческого восприятия (percep-
tion) [11] [где организм, которому не хватает информа-
ции, ищет подобие (конгруэнтность) между собственным
внутренним операторным представлением сенсорных
событий и множеством изменяющихся «фигур» собы-
тия по мере того, как оно движется относительно сен-
сорных рецепторов] и описанной здесь машиной М. Это
еще одна область, в которой дальнейшее изучение М
может обеспечить теоретическую базу для психологиче-
ских исследований.
С технической точки зрения процесс формирования
теории в машине дает подход к такому конструирова-
нию, когда запоминание ограниченного количества вход-
ных данных из некоторого класса организуется так, что
возникает возможность гибкой, быстрой и экономичной
переработки последовательных вопросов, соответствую-
щих всему классу, без необходимости в высокоскорост-
ном запоминающем устройстве, заполненном огромным
числом конкретных примеров из этого класса.
^-представление классов £>i, О2, ..., Di6 (машинная
теория этих классов) дает нам пример такой организа-
ции памяти. Она состоит из:
а) набора исходных элементарных алгоритмов, ка-
ждый из которых представляет собой хранящиеся в па-
мяти таблицы соответствия, заполненные программы
или переключающие сети (соответствующие, современ-
ным микрокомандам в вычислительной машине), а так-
же системы сложных алгоритмов, которые принимают
на себя функции элементарных алгоритмов в ходе ра-
боты М (соответствующих макрокомандам или храня-
щимся в памяти вычислительной машины микропро-
граммам) ;
б) матрицы ассоциаций с регулируемой силой хра-
нящихся в памяти ассоциаций, которая объединяет эле-
ментарные алгоритмы в сложные (и которую можно
интерпретировать как управляемый генератор программ,
выдающий различную программу для каждого из клас-
сов);
20. Подход к автоматическому формированию теории 577
в) устройства переработки, которое манипулирует
элементами из о в соответствии с предписанными алго-
ритмами и вычисляет конкретные ответы на исправлен-
ные вопросы (оно соответствует устройству управления
и арифметическому блоку современных вычислительных
машин).
Генератор программ в описанной выше схеме актив-
ной памяти представляет собой актуальную техническую
задачу; можно ожидать, что гибкие адресные системы
памяти дадут решение этой задачи. Ожидается, что ак-
тивная память описанного выше типа в большинстве
практических случаев будет более экономична, чем
сложное запоминание большой системы примеров из не-
которого класса. В добавление к этому она даст воз-
можность предсказывать неизвестную часть класса и
сулит огромную способность усвоения и иерархической
организации более сложной информации посредством
построения новых, более широких алгоритмов на основе
всех полученных ранее. Однако за это приходится рас-
плачиваться существенной затратой усилий на «вписы-
вание» в память. Эти усилия представляют собой уси-
лия формирования теории (обучения), в ходе которого
данные, прежде чем усваиваться, надлежащим образом
кодируются на «машинном языке». Как и в случае ра-
ционализации науки, цена, которую приходится пла-
тить, уравновешивается ожидаемыми выгодами в реше-
нии будущих полезных задач.
9. СОСТОЯНИЕ ИССЛЕДОВАНИЙ И БУДУЩАЯ РАБОТА
Исследование, которое я описал в этой работе, при-
вело к тому, что сформулированы общие свойства ма-
шины Л4, формирующей теорию, выбрана подходящая
формальная познавательная среда для Л4, определена
осуществимость познавательной задачи и выбрано не-
сколько главных задач, требующих дальнейшего изу-
чения.
Следующий этап исследования будет посвящен де-
тальной разработке и оценке (как экспериментальной,
так и теоретической) алгоритмизации определенных пе-
реключательных функций в М. К нему относится выра-
37 Зак. 106
578
С. Амарел
ботка новых схем для сложных алгоритмов, управление
образованием деревьев ассоциаций, управление силами
ассоциаций и воздействие этого управления на свойства
сходимости процесса формирования теории, а также
управление степенью переработки, устанавливаемой для
различных частных процессов в М.
Я уверен, что более полное понимание механизмов
формирования теории и обучения возникнет после де-
тального изучения проблем, возникающих из нашей от-
носительно простой познавательной задачи в М. Многие
из этих задач нелегки, но я убежден, что они не нераз-
решимы.
Я благодарен Л. Ковэнди за его интересные коммен-
тарии и обсуждение.
ЛИТЕРАТУРА
1. Chomsky N., Miller G. V, «Pattern conception», Rep.
№ AFCRC-TN-57-57, Aug. 7, 1957 (ASTIA Doc. № ADI 10076).
2. W a t a n a b у S., «Information theoretical aspects of inductive and
deductive inference», IBM J. Res. a. Developt, 4, № 2 (I960).
3. Piaget J., The Origins of Intelligence in Children (1936),
англ, перевод, Intern. Univ. Press, New York, 1952.
4. McCulloch W. S., «Agatha Tyche of nervous nets — the lucky
reckoners», Mechanization of Thought Processes, Vol. II, HMSO.
London, 1959, p. 611—625.
5. Carnap R., «Logical Foundations of Probability», Univ. Chicago
Press, 1950.
6. Halle M., Stevens K. N., «Analysis by synthesis», Pro-
ceedings of the Seminar on Speech Compression and Processing
(eds. W. Wathen-Dunn a. L. E. Wood), Air Force Cambridge Res.
Center, Tech. Rep. 59-198, Bedford, Mass., Dec. 1959.
7. Gelernter H. «Realization of a geometry theorem proving
machine», Proceedings of the First Intern. Conf, on Information
Processing, Paris, June 1959.
8. T о 1 m a n E. C., «Principles of purposive behavior», Psychology:
A Study of a Science (ed. S. Koch), McGraw-Hill, New York,
1959.
9. В i r k h о f f G. S., Lattice Theory, Amer. Mathem. Soc., New
York, 1948; русский перевод: Биркгоф Дж., Теория структур,
ИЛ, 1952.
10. Piaget J., «La logistique axiomatique on «риге», la logistique
operatoire on psychologique et les Realites auxquelles elles cor-
respondent», Methodos, 4 (1952).
11. Pribram К. H., «Theory in physiological psychology», Ann.
Rev. Psychol., Vol. II, 1960.
20. Подход к автоматическому формированию теории 579
ДИСКУССИЯ
Коуэн. Я должен сделать к докладу д-ра Амарела несколько
замечаний. Прежде всего, что касается некоторых задач получения
решений в таких двоичных системах, то я хотел бы указать, что
в недавнем докладе в Лондонском университете мой прежний кол-
лега Питер Госвэми предложил алгоритм для получения всех ре-
шений любых двузначных логических задач за минимальное коли-
чество шагов, и это полностью сводит любую задачу поиска к са-
мому малому числу попыток. Второй вопрос, вопрос получения
решений, связан с многозначным случаем. Если вы не можете раз-
делить данные двузначные логические системы, то имеется некая
более сильная система упорядочения, и нет нужды использовать
этот алгоритм. Для многозначных систем это становится довольно
длительной процедурой. Обычно удается показать, что для опреде-
ленных случаев алгоритм поиска лучше и эффективнее.
Другой вопрос, на котором я хотел бы остановиться, это Ваше
последнее замечание, когда Вы говорили об узнавании инвариантов
в этих системах. Я думаю, что эта задача уже полностью решена
Маутнером в статье «Логика и теория инвариантов», в которой он
дал условия получения инвариантов путем использования тензор-
ной формулировки булевой алгебры. Это может представить для
Вас интерес.
А м а р е л. Я хочу разъяснить одну вещь. Я выбрал эту за-
дачу логики не потому, что хотел найти инварианты в эквивален-
тах между тройками логических функций и единственными логи-
ческими функциями. Я выбрал ее потому, что она относительно
легка и имеется надежда, что ее можно поручить машине. Я ин-
тересовался тем, каким способом, начиная с малого числа понятий
и средств, машина может развить установившееся инвариантное
представление о среде, которое является полезным для дальней-
шей работы машины. Я интересуюсь свойствами процесса формиро-
вания гипотез.
К о у э н. Мне не ясно, зачем Вам нужен этот специальный
аппарат, который Вы тут развивали.
А м а р е л. Мне он нужен, так как все основано на манипу-
лировании с множествами и отношениями (которые, как я пред-
положил, машине известны).
Коуэн. Но зачем Вам это? Мне кажется, что исчисление,
развитое Маккаллоком, здесь работало бы идеально.
А м а р е л. Повторяю, я не пытаюсь развивать алгоритм, что-
бы получать решение различных логических задач, такие алго-
ритмы можно разработать разными способами. Я хочу использо-
вать эту задачу именно как инструмент экспериментирования, с по-
мощью которого я могу увидеть, как образуются гипотезы в ма-
шине, как они гибнут, если не подходят, и как они развиваются
в устойчивые конфигурации.
37*
580 С. Амарел
Коуэн. Но, как я уже сказал, если Вы хотите именно этого,
то тогда здесь вполне подходят работы Шутценбергера и Грау,
потому что Шутценбергер разбирает, что можно сделать, когда
перед вами произвольные композиции этих вещей, а Грау доба-
вляет к этому конкретные инварианты, которые можно узнавать
в системах такого рода. Мне кажется, что работа такого рода
была бы Вам интересна.
Амарел. Задача о том, что можно делать с данным числом
примитивов, менее интересна для меня сейчас, чем задача о том,
как осуществимое может быть выполнено машиной.
21. СЕТИ, РЕАЛИЗУЮЩИЕ МОДЕЛЬ ПРЕДСТАВЛЕНИЯ
ИНФОРМАЦИИ
П. ГРИН
(Комитет математической биологии Чикагского университета)
Распознавание и различение осмысленных стиму-
лов предполагает активное формирование устойчивых
перцептуальных элементов, которые должны быть распро-
знаны и различены. Субъект, неспособный к такому про-
цессу, комбинировал бы все виды стимулов в бессмыс-
ленные группы. Точно так же целеустремленная двига-
тельная активность предполагает формирующую стадию,
в которой из действий всевозможных групп мышц син-
тезируются осмысленные стереотипы. Как правило, ма-
тематические исследования до сих пор не касались этой
формирующей стадии по той причине, что мало было
известно о средствах представления информации в нерв-
ной системе. Столь же мало известно и относительно
представления восприятий, понятий и действий в искус-
ственно создаваемых системах. Большинство концепций,
развитых в этой области исследований, имеет дело пре-
имущественно с внешними отношениями между перцеп-
туальными элементами, которые по предположению за-
даются в форме, не выражающей их внутренней струк-
туры. Эти элементы просто служат ярлыками для наших
понятий. Таким образом, эти теории охватывают сорти-
ровку и объединение перцептуальных элементов и по-
нятий, но не касаются их смысла.
В другом месте [1] я уже приводил существующие
аргументы в пользу предположения, что одно из глав-
ных требований состоит в том, чтобы каждый элемент
информации содержал частичное представление многих
других элементов и схемы их взаимосвязи. Эти доводы,
основанные на работах ряда философов, психологов и
логиков, приводят к предположению [2], что некоторым
582
П. Грин
из этих требований можно было бы удовлетворить, если
бы информация могла быть представлена в виде векто-
ров в функциональном пространстве (таких, как типы
колебаний в сложной системе), которые могут быть раз-
ложены на компоненты в различных координатных сис-
темах. Эти системы представляют различные, точки зре-
ния, с которых может рассматриваться информация, и
в каждой системе часть информации может извлекаться
посредством вероятностного механизма для последую-
щих стадий ее переработки.
Некоторые из математических свойств этой модели,
потвидимому, сходны с определенными чертами высшей
нервной деятельности. По-видимому, существуют ана-
логии между процессом уяснения какой-либо мысли, ко-
гда она доходит до нашего сознания, процессами обра-
зования ассоциаций и обучения, процессами воображе-
ния и вообще важными схемами взаимной связи впе-
чатлений, восприятия «хороших» образов (Gestalten),
формальными свойствами инстинктивного поведения,
формальными свойствами первичных форм обдумыва-
ния [3] при возникновении мыслей и некоторыми други-
ми чертами, свойственными умственной деятельности.
Хотя в настоящее время нельзя сказать, проявляются
ли такие формальные свойства модели в тех же ситуа-
циях, что и их мыслительные аналоги, существование
такого большого числа аналогов интересных форм по-
ведения делает, по-видимому, целесообразным продол-
жение исследования этой модели в надежде найти
дальнейшие ее сходства с мыслительными процессами.
В настоящем обсуждении мы не будем заново изла-
гать указанные ранее аналогии, а ограничимся рассмот-
рением двух самостоятельных вопросов. Первый раздел
посвящен обоснованию модели векторного пространства,
а во втором указываются возможные физические реа-
лизации абстрактной структуры этой модели.
I
В этом разделе будут приведены некоторые общие
наблюдения и примеры, касающиеся поведения и допол-
няющие высказанные ранее доводы в пользу указанной
21. Модель представления информации
583
выше модели. Эти наблюдения, касающиеся активной
роли нервной системы в восприятии и других формах
поведения, помогают обосновать главное допущение аб-
страктной модели, состоящее в том, что информация
представляется в форме линейной суперпозиции некото-
рых базисных функций в функциональном простран-
стве.
Литература по сравнительной и эволюционной психо-
логии показывает, как поразительно животное реагирует
на свое окружение, приспосабливая к окружающей сре-
де определенные формы активности, заложенные в него
наследственностью или развитые в результате его пред-
шествующей деятельности. Не похоже, чтобы у живот-
ного вначале была однородная схема активности, на
которую затем накладывались бы данные опыта; скорее,
опыт возбуждает некоторые врожденные стереотипы по-
ведения, которые затем видоизменяются с целью луч-
шего приспособления. На микроскопическом уровне
именно так используются нервные импульсы, а на эво-
люционном уровне имеются доказательства [4], что
сложные структуры, возникающие в процессе биологи-
ческой эволюции, образуются путем совершенствования
в ходе естественного отбора, воздействующего на уже
имеющиеся структуры, которые, скажем, становятся су-
щественными при переселении животных в новый ареал
обитания. Однако для наших целей наиболее пригодны
примеры из области обычного поведения животного.
Например, актиния (морской анемон) имеет слож-
ную картину поведения, которая может быть изменена
путем воздействия соответствующими стимулами. Не-
продолжительное помещение ее поблизости от пищи
приводит к длительной последовательности изменений,
связанных с питанием, перевариванием и выделением.
Но, согласно Пантину [5], животное иногда без всяких
видимых внешних стимулов проходит всю эту последо-
вательность. Таким образом, сложное поведение актинии
при питании, по-видимому, возникает как результат воз-
буждения стереотипа поведения, который может осуще-
ствляться независимо от какой-либо пищи, но становит-
ся полезным лишь в определенной ситуации. Вообще,
согласно Пантину, стимулы лучше всего рассматривать
584
П. Г рин
как факторы, обусловливающие переход актинии от од-
ного стереотипа к другому.
Исследования Лоренца, Тинбергена и др. показали,
что инстинктивное поведение вообще, по-видимому, за-
висит от возбуждения аналогичных врожденных меха-
низмов специфическими «пусковыми» стимулами. Роль
обучения в инстинктивном поведении, согласно Торпу
[6], заключается в тонком приспособлении к множеству
пусковых стимулов, благодаря которому животное при-
обретает способность успешнее справляться со слож-
ными условиями внешней среды.
Другим примером активной роли нервной системы
в создании «единиц восприятия» до их подгонки и при-
способления к внешней среде является то, как дети по-
стигают формы, изображая их на рисунке. Например
[7—9], маленький ребенок отвечает на зрительные об-
разы, «рисуя» круг, квадрат и крест в виде непонятных
каракулей. Позднее он изображает круг и квадрат как
что-то округлое, а крест — в виде пересекающихся ка-
ракулей. Затем закругленная линия, изображающая
круг и квадрат, становится отчетливее и превращается
в один и тот же для обоих круговой контур. Тот же са-
мый контур служит для изображения любой замкнутой
фигуры. На этой стадии ребенок хорошо изображает
замкнутость или разомкнутость кривой и отношения
смежности. В более позднем возрасте круг по-прежнему
изображается круговым контуром, в то время как квад-
рат часто изображается круговым контуром, пересечен-
ным в том или другом месте четырьмя короткими чер-
точками.
Именно такого поведения следовало бы ожидать,
если бы перцептуальные и моторные сети ребенка со-
держали бы естественные модальности «закрученности»
и «пересечения». Они могут быть врожденными или воз-
никнуть в результате двигательной активности и пере-
мещения света по сетчатке глаза во время естественных
движений ребенка. В таком случае круг и квадрат с
большей вероятностью возбуждают модальности закру-
ченности, чем пересечения, тогда как крест возбуждает
модальности второго типа. Когда ребенок становится
немного старше, он подгоняет эти модальности своей
21. Модель представления информации
585
сети под образы, подавляя большинство излишних за-
крученностей и пересечений. Когда он еще более разо-
вьется, так что сможет, так сказать, постичь более тон-
кие аспекты вещей, он становится достаточно восприим-
чив для того, чтобы квадрат (имеющий прямые стороны
и относительно острые углы) мог возбудить и вторую
компоненту, модальность пересечения, и ребенок вклю-
чает их в рисунок. Он помещает их вблизи закругленной
кривой, так как он чувствует смежность (естественное
свойство нервных сетей), но он не объединяет обе мо-
дальности в одной и той же структуре (замкнутый и
острый), как он должен был бы сделать, чтобы точно
изобразить квадрат.
Эта независимость модальностей обнаруживается
также в независимости врожденных пусковых стимулов
в теории инстинкта. Эти специфические характеристики,
которые, будучи восприняты, приводят в действие некий
стереотип поведения, являются, вообще говоря, совер-
шенно независимо действующими стимулами, которые
могут быть легко описаны как независимые характери-
стики внешней среды [10].
Мы можем сказать, что, по-видимому, ребенок или
животное имеют некоторые изобразительные или двига-
тельные стереотипы, которые используются, если оказы-
ваются полезными, при реакциях на внешнюю среду.
По-видимому, когда ребенок изображает что-либо, про-
исходит возбуждение наиболее близкого из имеющихся
у него врожденных стереотипов. Затем он начинает
уточнять результат, добиваясь лучшего соответствия.
Подобные идеи приводят к предположению, что вос-
принимающая машина работала бы лучше, если бы она
проходила стадию, включающую такие возбуждаемые
структуры. Тогда круг был бы воспринят где-нибудь в
сети, поскольку где-то в сети могла бы возбудиться та-
кая модальность закрученности. Главная проблема со-
стоит в том, чтобы найти должный компромисс между
сетью, в которой ничего не заложено заранее и которая
не способна к значительному развитию, так как для него
нет достаточной основы, и сетью со всевозможными
«встроенными» видами специфических детекторов,
которая может реагировать на специализированные
586
П. Г рин
стимулы, но не «познавать» в подлинном смысле этого
слова. В этой связи весьма уместным является исследо-
вание Леттвина и др. [11], которые показали, что сообще-
ние, передаваемое по зрительному нерву лягушки, уже
организовано в такую «перцептуальную» информацию,
как расположение выпуклых объектов в поле зрения.
При изложении формальной модели было указано,
что по отношению к кодированию перцептуальной ин-
формации посредством модальностей, свойственных сети
(что обосновывается приведенными выше примерами),
естественно предположить суперпозицию образов или,
наоборот, разложение сложного образа на линейную
комбинацию базисных образов. Во втором разделе этой
работы предлагается возможный ответ на вопрос, откуда
берутся эти базисные образы. Здесь же мы сделаем
лишь еще несколько общих замечаний относительно вида
поведения, служащего доказательством идеи о суперпо-
зиции и разложении перцептуальных представлений.
Идея о суперпозиции базисных образов следует из
рассмотренных выше примеров инстинктивного поведе-
ния и перцептуально-моторного представления и, по
крайней мере формально, исследование о зрении ля-
гушки [11] указывает на то, что сенсорные рецепторы
могут кодировать и передавать некоторые аспекты при-
ходящего сигнала, который может быть представлен как
упорядоченный набор независимых интенсивностей. На
уровне поведения такая реакция, как бегство от объекта,
воспринятого в качестве хищника, может, как мы ви-
дели, зависеть от восприятия независимых характери-
стик [10]. Действие может быть суперпозицией более
элементарных действий, как в обычно сочетающихся
тенденциях к сближению и бегству при драке и при по-
ловом поведении у птиц и рыб [12—15]. Мимика собак
может иногда быть представлена в виде комбинации
двух или более независимых компонент, присутствующих
с различными интенсивностями [15, 16]. Наконец, снови-
дение может быть конденсацией двух или более снови-
дений [3].
Могут ли эти явления рассматриваться как линейная
суперпозиция в техническом, не метафорическом смысле,
в настоящее время неизвестно, но, по-видимому, эту
21. Модель представления информации
587
возможность стоит исследовать. В любом случае, однако,
целесообразно изучить, насколько такой механизм мог
бы объяснить факты и каким образом он мог бы это
осуществлять; это позволило бы предложить соответст-
вующие эксперименты и интерпретировать их резуль-
таты. Формальная модель, основанная на этих идеях,
предсказывает некоторые непредвиденные возможности
такого механизма и указывает роль такой простой вещи,
как чисто случайное возбуждение. Когда в мозгу впер-
вые обнаруживается то или иное физиологическое явле-
ние, хотелось бы иметь возможность связать его с пове-
дением; теоретическое исследование существующих воз-
можностей является средством, помогающим выяснить,
что именно следует искать в психологических явлениях.
II
Формальная модель возникла из взгляда на функ-
ционирование мозга, как ансамбля клеток, хотя она
впервые была изложена в связи с возможным ее исполь-
зованием при создании мыслящих машин. Сейчас много
говорят о клеточных ансамблях. Они представляют со-
бой сложные системы колебаний. Это все, что о них мо-
жно сказать. Вместо того чтобы говорить, что некоторая
мысль кодируется как «сложный образ», формальная
модель предполагает, что она является суперпозицией
«модальностей» или «типов колебаний» (или, как мы
предполагаем, других типов базисных векторов), что по
крайней мере менее неопределенно и возбуждает неко-
торые ассоциации относительно того, что могут предста-
влять собой эти модальности. Предполагая, что это
имеет место, я рассматриваю векторное пространство
этих модальностей, или ортонормированных функций, и
говорю, что мысль кодируется в виде вектора, компо-
ненты которого в различных координатных системах
(созданных различными ортонормированными наборами
векторов) представляют различные точки зрения. Ин-
формация должна извлекаться посредством процесса,
расщепляющего мысль на ее компоненты с определенной
точки зрения и выбирающего одну или более компонент
в соответствии с вероятностным процессом, включающим
588
П. Г рин
корреляцию данной модальности с дробовым шумом.
Этот процесс обосновывается психологическими сообра-
жениями и некоторым способом, который мы не будем
здесь описывать, приводит к свойствам, которые, как
упоминалось выше, по-видимому, могут быть идентифи-
цированы с интересными психологическими явлениями,
включающими интеграцию сложных образов в восприя-
тии и мышлении.
Два главных вопроса, касающихся этой модели, та-
ковы: 1) каково происхождение этих ортонормирован-
ных систем? Некоторые физические процессы должны
быть в состоянии порождать ортогональные системы век-
торов таким образом, чтобы коэффициенты в уравне-
ниях преобразования, связывающих эти системы, обла-
дали полезными свойствами с точки зрения модели;
2) чтобы векторное пространство имело ряд интересую-
щих нас свойств, оно, вероятно, должно быть комплекс-
ным. Дробовой шум также должен быть комплексным,
причем чтобы вообще мог происходить процесс селек-
ции, его действительная и мнимая части должны быть
независимы. Как эти требования могли бы реализовать-
ся в физической системе?
Желание иметь комплексное векторное пространство,
а также приведенные ниже соображения, касающиеся
сетей, приводят к следующей идее. Периодические про-
цессы могут описываться комплексными числами, но
обычно это делается с условием, что только действи-
тельной части приписывается физический смысл, так что
нет надобности сохранять две независимые компоненты;
кроме того, лишь линейные операции дают решения, со-
гласующиеся с этим условием. Однако передаточная
функция компоненты (отношение выходного сигнала на
данной частоте к входному сигналу на той же частоте
как функция частоты) может быть представлена комп-
лексным числом, которое не только имеет действитель-
ную и мнимую части с независимыми значениями, но и
с полным правом может употребляться в мультиплика-
тивных соотношениях. Например, передаточные функции
перемножаются вдоль путей в сети: передаточная функ-
ция пути есть произведение передаточных функций его
отрезков. Возникает вопрос, имеется ли способ, которым
21. Модель представления информации
589
можно было бы представить комплексный вектор, удов-
летворяющий нашей формальной модели, не через сиг-
налы на входах в сеть, а через передаточные функции
в сети? В смутных терминах, которые следует рассмат-
ривать не более как эвристические, можно сказать, что
«гештальт-свойства» и т. п. содержатся не во входных
сигналах, а в способе преобразования входных сигна-
лов сетью.
Модели переработки информации, предложенные
другими авторами, иногда используют сети, имеющие
матрицы передаточных функций, которые могут удовле-
творять формальным требованиям предлагаемой модели.
В последующей части нашей работы мы покажем, что
один такой тип сети можно рассматривать как реализа-
цию предлагаемой абстрактной модели. В настоящее
время неизвестно, полезна ли такая реализация. Может
оказаться, что формальная модель и обсуждаемая здесь
реализация порознь будут полезными, тогда как в ком-
бинации они тем не менее не дают новых преимуществ.
Ценность предлагаемого обсуждения состоит главным
образом в том, что оно дает более конкретный материал
для размышлений при попытках идентифицировать мо-
дель с психологическим поведением. Мы не утверждаем,
что абстрактная модель в современном ее состоянии яв-
ляется вкладом в наши познания о поведении. Она пред-
ложена лишь в качестве примера, чтобы показать, что
математическая модель может обладать свойствами, до-
пускающими обсуждение в тех же терминах, что и мно-
гие фундаментальные проблемы синтеза мышления,
которые еще не могут быть представлены в форме,
обеспечивающей адекватное понимание или строгое
исследование. Любой пример конкретной системы, удовле-
творяющей постулатам нашей модели, потенциально
полезен, поскольку он позволяет изучить, как модель
применяется в специфических ситуациях, и, возможно,
поможет прояснить наши туманные представления о ра-
зуме путем выяснения, чего недостает нашей системе
по сравнению с тем, что мы назвали бы настоящим мы-
шлением. Путем изучения явлений, связанных с мо-
делью в таких ситуациях, можно надеяться развить
590
П. Грин
понятия, с помощью которых удастся исследовать эти
ускользающие от изучения вопросы.
Ниже в этой статье обсуждается реализация модели,
использующей сеть, которая может выполнять матема-
тическую операцию, известную в многомерном статисти-
ческом анализе как преобразование к основным компо-
нентам [17]. Это преобразование часто бывает полезно
для сокращения количества данных, которые следует
рассмотреть в сложной ситуации, и может иногда при-
меняться в системах связи для сокращения количества
каналов, необходимых для передачи определенного чис-
ла сообщений. Естественный путь уменьшения числа
статистических переменных, которые должны рассматри-
ваться как вносящие значительный вклад в некоторую
данную задачу, состоит в линейном преобразовании пе-
ременных от системы координат, в которой они выра-
жены, к другой системе координат, в которой преобра-
зованные переменные независимы и в которой, скажем,
только несколько из преобразованных переменных имеют
большую дисперсию. В этом случае, если мы интересу-
емся индивидуальными различиями в популяции, лишь
эти немногие линейные комбинации изменяются от од-
ного члена популяции к другому достаточно сильно, что-
бы требовалось их учитывать, в то время как все ос-
тальные можно в ряде задач игнорировать. Для этого
используется унитарное преобразование, диагонализи-
рующее матрицу ковариацией исходных переменных, так
что столбцы матрицы, сопряженной с матрицей преоб-
разования, являются собственными векторами матрицы
ковариаций. Если эти столбцы расположить в порядке
убывания соответствующих им собственных значений,
то, как известно, первая преобразованная компонента
будет нормированной линейной комбинацией с макси-
мальной дисперсией и каждая последующая компонента
будет обладать наибольшей дисперсией из всех норми-
рованных линейных комбинаций, некоррелированных с
каждой из предыдущих компонент. Новые дисперсии
равны собственным значениям, которые являются диаго-
нальными элементами преобразованной матрицы кова-
риаций.
21. Модель представления информации
591
При передаче последовательности коррелированных
сигналов можно воспользоваться избыточностью, вноси-
мой корреляциями, если осуществить преобразование к
основным компонентам, отбросить некоторые выходные
каналы, которые относительно «бездейственны», пере-
дать оставшееся сокращенное число сообщений и, нако-
нец, осуществить обратное преобразование к первона-
чальным координатам, чтобы восстановить сообще-
ние [18].
Как следствие сказанного в предыдущем абзаце,
легко видеть, что для заданного числа отброшенных ка-
налов при преобразовании к основным компонентам до-
стигается меньшее среднеквадратичное расхождение ме-
жду передаваемым и принятым сигналом, чем при лю-
бой другой системе линейного кодирования. Кроме того,
если сигналы гауссовы, общая пропускная способность
(в теоретико-информационном смысле), необходимая
для того, чтобы удовлетворить заданному критерию
среднеквадратичной ошибки, также минимизируется при
преобразовании к основным компонентам. Ранг матри-
цы ковариаций уменьшился на число независимых ли-
нейных соотношений между переменными, так что «без-
действующие» переменные в системе главных компонент
служат указателями линейных соотношений.
Ясно, что любой процесс, включающий унитарное
преобразование к системе координат, в которой неко-
торая матрица диагональна, имеет нечто общее с рас-
сматриваемой моделью поведения, поскольку эта модель
всецело основана на преобразованиях между различны-
ми базисами, по отношению к которым различные опе-
раторы диагональны. Исследования Гудолла [19—21}
показывают, что эта математически тривиальная связь
может оказаться полезной в предварительной дискуссии,
предложенной нами выше. В качестве модели некоторых
зачаточных познавательных функций Гудолл рассматри-
вает возможность построения сетей, которые могут авто-
матически осуществлять преобразование к основным
компонентам или к какой-либо менее специфической
ортогональной системе координат, преобразующей кор-
релированные входные сигналы в независимые выходы
и в ряде случаев разделяющие сообщения, которые были
592
П. Грин
прежде перемешаны. Такие сети, как описано выше, вы-
являют наличие линейных зависимостей и могут приме-
няться для отыскания групповых инвариантов путем
нахождения инвариантных форм, т. е. путем выявления
наличия линейных зависимостей между определенными
одночленами, вводимыми в сеть. Два примера примене-
ния подхода Гудолла, имеющие отношение к настоя-
щему обсуждению, будут вкратце описаны ниже.
Прежде всего рассмотрим, как сеть может преобра-
зовать множество коррелированных входных сигналов
в множество независимых выходных сигналов или, что
эквивалентно, выразить множество входных сигналов в
виде множества линейных комбинаций ортонормирован-
ных выходных функций. Если Xi(t) есть п входных
функций времени, а 1/л(/)—п выходных функций, где
(yk (*) У* (0> = / Ук (0 yrj (t)dt = bkJ
(звездочками обозначены комплексно сопряженные ве-
личины), и если
Xi =
к
ТО
Aik = (Х1 W У к (0)-
Переходная матрица сети есть Л"1, где А — матрица
(Aik). Если С означает матрицу ковариаций входных
сигналов Cik — (t)x\ (/)), то ясно, что С=ЛЛ*, где
Л*— матрица, эрмитово сопряженная с Л. Ясно также,
что если при заданном множестве входных функций
Xi(t) мы можем найти такую матрицу Л, что ЛЛ* = С,
и если переходная матрица равна Л”1, то выходные
функции Ул(/) будут ортогональны и мы получим
Aik = (xl(t)y\(t)). Гудолл предложил находить это ре-
шение посредством процесса релаксации в сети с пере-
менными коэффициентами усиления. Он начинает с про-
извольной переходной матрицы Л (О)-1 и позволяет Л^
изменяться в направлении (0//* (0)* согласно урав-
нению вида
21. Модель представления информации
593
где Xi(t) предполагаются приближенно стационарными
в течение промежутков времени, значительно больших,
чем время усреднения. Подставляя А~'х вместо у и ис-
пользуя определение С, имеем (в матричных обозначе-
ниях)
Умножив это уравнение справа на Д*(/), а сопряжен-
ное уравнение слева на A(t) и сложив два полученных
равенства, получим уравнение
т =2С — А (О А* (/),
решение которого имеет вид
А (/) 4* (0 = С — e~2t/x [С — А (О 4* (/)].
Таким образом, произвольная невырожденная началь-
ная переходная матрица всегда сходится к матрице,
дающей независимые выходные функции.
Чтобы получить переходную матрицу, обратную
варьируемой матрице, Гудолл использует отрицатель-
ную обратную связь. Предположим, что линейная сеть
имеет переходную матрицу прямой связи (от входа к
выходу) F и что выходные сигналы подаются на вход
через переходную матрицу G, а получившиеся величины
вычитаются из входных сигналов, поданных на F. Тогда
переходная матрица замкнутого контура равна
Л(/О/7)'1» где / — матрица тождественного преобра-
зования. Так как мы хотим, чтобы переходная матрица
равнялась 4"1, где А стремится к матрице поло-
жим F=\ и возьмем G=A—I, так что Gih стремится к
k) ^lk*
Заметим мимоходом, что Милнер [23] в своих рассу-
ждениях о гипотетических клеточных ансамблях предпо-
лагает, что действие тормозящей обратной связи усили-
вается при упражнении и это усиление может быть
связано, как в нашем случае, с корреляцией между
входными и выходными сигналами. Кроме того, он
предположил, что в случае однозначного соответствия
38 Зак 106
594
/7. Грин
между входом и выходом, как это имеет место здесь,
тормозящая связь между выходом и соответствующим
входом слабее, чем тормозящая перекрестная связь с
другими входами. Милнер предположил, что это имеет
место для того, чтобы ансамбль не мог сам себя вы-
ключить. В предыдущем абзаце это требование, накла-
дываемое на силы торможения, выведено с несколько
иной исходной точки зрения.
Если вместо того, чтобы полагать переходную мат-
рицу прямой связи F = I, выбрать F равной очень боль-
шой скалярной величине, умноженной на I, то переход-
ная матрица замкнутого контура будет приблизительно
равна G"1, и в этом случае надо устремить Gik к
Так как для наших целей указанное ранее более слож-
ное выражение не необходимо, и так как в результатах,
которые мы можем получить, нетрудно заменить одно
выражение другим, мы в дальнейшем будем предпола-
гать, что переходная матрица прямой связи является
обращением переходной матрицы обратной связи. Это
даст нам в дальнейшем возможность находить обратные
преобразования для преобразований между системами
координат.
Когда сеть, описанная выше, преобразует данное
множество входных сигналов в множество ортогональ-
ных входных сигналов, переходная матрица обратной
связи состоит из коэффициентов входных сигналов, вы-
раженных в виде линейных комбинаций выходов. Таким
образом, можно сказать, что сеть производит разложе-
ние входных сигналов по ортонормированному базису,
определенному этими входными сигналами и начальным
состоянием сети. Мы можем видоизменить это поло-
жение, допустив, что выходные функции принимают зна-
чения из некоторой независимо выбранной ортогональ-
ной системы функций. Тогда переходная матрица об-
ратной связи сходится к коэффициентам разложения
входных функций по ортогональной системе функций,
фиксированных на выходах сети (если такие коэффи-
циенты существуют). Таким образом можно выразить
векторы в различных ортонормированных системах
координат, как этого требует абстрактная модель пове-
дения.
21. Модель представления информации
595
Хотя матрица А, удовлетворяющая соотношению
АА* = С, определена только для унитарных преобразо-
ваний, легко видеть, что возможные множества ортого-
нальных выходных функций, соответствующие данному
множеству входных функций, отличаются друг от друга
лишь унитарными преобразованиями и определяются
начальным состоянием сети. Эти ортогональные системы
могут использоваться для разложения по ним других
систем векторов и таким образом удовлетворять пред-
посылке абстрактной модели, что частная система коор-
динат, в которой выражен данный вектор, зависит в не-
котором смысле от точки зрения, т. е. как, например,
в нашем случае, от начального состояния наблюдателя.
Особенно интересна система координат, в которой,
как мы видели при обсуждении основных компонент,
матрица ковариаций диагональна. Чтобы осуще-
ствить преобразование к этой системе, Гудолл ввел вто-
рой механизм, который мы здесь кратко опишем. Пред-
положим, что C=V*AV, где V — унитарна, а А — диаго-
нальна. Тогда, если в векторных обозначениях y=Vx,
мы, как и следовало ожидать на основании сказанного
об основных компонентах, получаем
(i/t/*) = {Vxx'V*} = VCV* = А,
и далее, так как
XV = VC = {Vxx*} = ух*,
то
У = А-\ух*},
так что
v _{У1ХЪ
ik~{\yi\2} •
Если, наоборот, V—переходная матрица, которая
стремится к этому последнему выражению, то при усло-
вии, что V — унитарна, сеть начинает осуществлять пре-
образование к основным компонентам. Гудолл [21] опи-
сывает процесс релаксации посредством обратной связи,
призванный совершить это, хотя не ясно, становится ли
V с необходимостью унитарной, а сформулированное
38*
596
/7. Г рин
определение становится бессмысленным, если С выро-
ждена. Однако, так как наша цель здесь выяснить, что
может осуществлять такая сеть (и так как для этой
чисто умозрительной цели мы можем допустить, что од-
ной из компонент сети является вычислительная маши-
на, которая диагонализирует матрицы), мы допустим,
что сеть действительно осуществляет требуемое преоб-
разование.
После этого длинного вступления, призванного в об-
щих чертах обрисовать то, что по первоначальным пла-
нам должен был доложить на этом симпозиуме сам Гу-
долл, мы можем перейти к нашему главному предмету—
к связи этих сетей с абстрактной моделью поведения.
Напомним [2], что мы хотели найти способ определять
векторные пространства, в которых можно было бы от-
носить векторы к любому из некоторого числа ортонор-
мированных базисов. Чтобы давать интересные резуль-
таты, векторное пространство в некоторых случаях
должно быть комплексным (по причинам, которые мы
здесь не будем обсуждать). Вычисление средних значе-
ний переменных, выражающих различные состояния си-
стемы, которые мы хотели бы определять и иметь воз-
можность обнаруживать, привело к введению операторов,
определенных на этих векторных пространствах, причем
представляют интерес координатные системы, в которых
различные операторы диагональны. Унитарные матрицы,
переводящие одну систему координат в другую, имели
тот смысл, что квадраты их элементов представляли со-
бой некие условные вероятности обнаружения состояний
системы. Наконец, способ получения этих вероятностей
из матричных элементов заключается в вычислении ска-
лярного произведения, получающегося умножением век-
торов информации на случайный вектор (который в ис-
пользуемой процедуре должен быть комплексным).
В настоящее время не существует никаких предположе-
ний относительно происхождения системы координат, и
поэтому вся модель повисает в воздухе. Покажем, од-
нако, что сети, описанные выше, могут служить реали-
зацией любых элементов этой модели.
Один из способов получения ортонормированных
систем координат состоит в использовании сетей Гудол-
2L Модель представления информации
597
ла, выражающих множество входных функций в виде
линейной комбинации ортогональных выходных функ-
ций. Мы видели, что конкретная система координат, ко-
торая при этом возникает, зависит как от входных воз-
действий, так и от начального состояния сети, которое
мы надеемся идентифицировать с «точкой зрения» в мо-
дели. Если такой смысл может быть придан системам
координат разумным образом, то предыдущее рассужде-
ние относительно разложения входных функций по не-
зависимо выбранным ортогональным системам, фикси-
рованным на выходном конце, означает, что мы можем
изучать стимулы, разлагая их по любой из целого ряда
имеющих смысл ортогональных систем, хранящихся в
памяти (или могущих производиться чем-то, хранящим-
ся в памяти). Так как действие этих сетей заключается
в устранении корреляции между входными воздействия-
ми, то выразить одно множество входных воздействий
в координатной системе, определенной действием сети
на другое множество входных воздействий, означает,
грубо говоря, выявить, чем отличаются эти множества,
показав, какие зависимости остаются в первом множе-
стве после того, как исключены зависимости, существую-
щие во втором множестве.
К чисто механической задаче, составляющей предмет
настоящего доклада, больше нечего добавить, так как
у нас есть векторы (входные и выходные), ортогональ-
ные базисы (выходные) и операторы (переходные мат-
рицы сетей), хотя не указано ситуации, в которой какой-
либо значимый оператор становится диагональным.
К сожалению, как уже было отмечено, нельзя сразу
предложить простой способ сделать векторное простран-
ство комплексным, и это может послужить препятст-
вием. Однако случайный шум, на который должны умно-
жаться компоненты векторов, может быть реализован
в усилителях со случайными коэффициентами усиления,
и эти коэффициенты могут быть естественным образом
представлены комплексными числами.
Обсудим более подробно случай, когда векторы за-
даны строками и столбцами матрицы переходной функ-
ции. Чтобы найти обратные базисы, нам понадобятся
матрицы, обратные этим. Для обращения унитарной
598
/7. Грин
матрицы требуется только транспонирование и сопря-
жение, но мы можем обратить произвольную матрицу,
используя сеть с обратной связью и большим коэффи-
циентом усиления в прямой цепи. Общая переходная
матрица будет, как показано ранее, приближенно равна
матрице, обратной по отношению к матрице обратной
связи. Такой метод используется в первом типе сетей
с релаксацией и, вероятно, может быть применен и ко
второму типу. Так как всю программу исследования мо-
дели поведения в настоящее время можно рассматри-
вать лишь как умственное упражнение, имеющее целью
выяснить, что можно извлечь из небольшого числа ин-
гредиентов, мы в дальнейшем предположим, что каждая
переходная матрица находится в цепи обратной связи
сети, которая отыскивает матрицу, обратную данной.
Наши рассуждения применимы к любой такой матрице,
осуществляющей унитарное преобразование, включая, в
частности, и второй тип релаксационных сетей с обрат-
ной связью, которые осуществляют унитарные преобра-
зования, диагонализирующие входную матрицу ковариа-
ций. Все такие сети мы будем называть унитарными
сетями. Унитарные сети интересуют нас потому, что мы
хотим определить векторы посредством переходных
функций, так что они могут быть комплексными, а если
компоненты векторов определены как строчки или
столбцы унитарной переходной матрицы, эти векторы
будут ортонормированы.
Унитарные матрицы можно получить путем варьиро-
вания произвольной матрицы согласно уравнению
т ____д*-1 д
dt ~
путем разложения одного ортогонального базиса по дру-
гому (в первом типе сетей с релаксацией) или путем
диагонализации входных ковариаций (во втором типе
сетей с релаксацией).
Мы уже знаем, что второй и третий способы полезны
каждый по-своему и что оба они могут быть использо-
ваны в модели поведения, если включить матрицы ко-
вариаций в число матриц, которые должны быть диа-
гонализированы согласно модели.
21. Модель представления информации
590
Строки унитарной переходной матрицы ортонормиро-
ваны и могут быть выбраны в качестве базиса системы
координат, требуемой моделью поведения. Элементы
k-й строки представляют собой переходные функции
цепи прямой связи, ведущей к Л-му выходу. Согласно
нашему допущению, существует цепь обратной связи,
имеющая переходную матрицу, которая обратна матри-
це прямой связи. Ортонормированные столбцы этой ма-
трицы, как более подробно будет описано ниже, рассма-
триваются как векторы пространства, дуального про-
странству, натянутому на векторы цепи прямой связи.
Представим себе, что одно и то же множество вход-
ных элементов связано с различными унитарными се-
тями. Пусть ортонормированные векторы в каждой сети
заданы каким-либо разумным образом. Например, они
могут постоянно определяться матрицей ковариаций
входных сигналов для некоторого интервала времени в
прошлом, или же можно рассматривать некоторые сети
как непрерывно изменяющиеся, так что сигналы анали-
зируются в системе главных осей, о чем говорилось
выше.
Отождествление унитарной сети с моделью поведе-
ния— это просто вопрос выбора обозначений, в которых
функционирование сети описывается в терминах унитар-
ного пространства. Нам нужно следующее: базис, век-
торы, выраженные через этот базис, сопряженное про-
странство функционалов над заданным пространством,
скалярное произведение и операторы над пространст-
вом. Используя обычную символику и терминологию,
обозначим скалярное произведение векторов х и у через
(х, у), где (у, х) = (х, у) и (ах, у)=а(х, у), так что
(х, ау)=а(х, у). Если / — функционал, то /(х), рас-
сматриваемый как функционал либо от х, либо от /,
обозначим [х, у']. Оператор А', сопряженный операто-
ру А, определяется равенством [Ах, /] = [х, А'у'], и если
у — вектор унитарного пространства, такого, что
[х, уг\=(х, у), то сопряженному А' соответствует такой
оператор Д*, что (Ах, у) = (х, А*у). Известно, что если
задать матрицу А в некотором базисе, то матрица А'
в дуальном базисе будет транспонирована по отноше-
нию к А, тогда как матрица 4* будет соответственно
600
/7. Грин
эрмитово сопряжена с А. Имеем (аЛ)' = аЛ', тогда как
(аА) * = аА*.
Наконец, скалярное произведение в дуальном про-
странстве определяется, как обычно: если у[ и у'2 в ду-
альном пространстве соответствуют у\ и у2 в первона-
чальном пространстве, то (t/p У'^ = (У2^ по определе-
нию. В обозначениях формальной модели (обозначения
Дирака [25] для тех же вещей) векторы обозначаются
символом сопряженные им векторы — символом
(у\, а скалярное произведение — символом (х\у), что
эквивалентно введенному выше обозначению (х, у).
(Ах, у) тогда записывается как (у\А |х).
Таким образом, 7-й элемент матрицы А в базисе Xk
есть (хг|Л |хД k-я координата вектора v в системе х
есть Переход от одной координатной системы
к другой осуществляется путем использования опера-
торного тождества
3|**><**1 = 1>
k
где суммирование ведется по всем элементам некото-
рого ортонормированного базиса. Таким образом,
= S \uk){uk\xm}{xm\'v) и т. д.
k kt т
И
(х,|Д|ху)= s {xt I ит}{ит IAI ип} {ип I Xj) и т. д.
т, п
Вообще говоря, вектор v есть объект, определенный
независимо от какой-либо системы координат. Его ко-
ординаты в различных системах (или различные «пред-
ставления») являются коэффициентами разложения
Аналогично оператор не зависит от базиса, но
мы пользуемся его матрицами
Мы хотим просто напомнить здесь обычные опреде-
ления и обозначения и подробнее останавливаемся на
них отчасти для того, чтобы разъяснить обозначения
Дирака в надежде, что они покажутся удобными чита-
телю, желающему исследовать модель поведения, но
главным образом потому, что последующее отождест-
вление нашей модели с унитарными сетями с обратной
21. Модель представления информации
601
связью, будучи математически тривиальным, становится
труднопонятным, если не придерживаться строго опре-
деленных обозначений.
Мы ничего не говорим (за одним исключением) от-
носительно физической природы сети; мы лишь утвер-
ждаем, что среди множества возможных описаний сети
имеется одно, которое может быть выражено на языке
формальной модели. Существуют различные способы,
которыми можно было бы попытаться определить тре-
буемые объекты. Например, векторами могли бы быть
либо все пути, ведущие к определенному выходу, либо
все пути, исходящие от определенного входа. Цепь об-
ратной связи также может рассматриваться двояко.
Если вектор представлен всеми путями прямой связи,
ведущими к данной точке, то дуальный ему вектор мо-
жет представляться всеми путями обратной связи, исхо-
дящими из этой точки, или же всеми путями прямой
связи, исходящими из некоторой точки входа. Из этих
возможностей надо выбрать комбинацию, удовлетворяю-
щую описанным выше определениям, и такая комбина-
ция будет описана.
Поскольку вы, вероятно, сыты по горло этими скуч-
ными рассуждениями, давайте посмотрим, как элемен-
ты формальной модели могут быть представлены с по-
мощью сетевых диаграмм, и впоследствии эти легко
рисуемые схемы заменят нам все сложности обозна-
чений.
На приведенных ниже диаграммах сплошные линии
обозначают пути прямой связи, а пунктирные — пути об-
ратной связи. Все пути прямой связи направлены слева
направо, а пути обратной связи — справа налево (этим
ничего не утверждается о сетях, а только о выбранных
нами направлениях на рисунке).
Строчными латинскими буквами обозначены переход-
ные функции путей прямой связи, а соответствующими
греческими буквами — переходные функции обратных
путей между теми же парами точек. Верхним индексом
обозначен конечный пункт пути, а нижним — начальный.
Если буква имеет как верхний, так и нижний индексы,
то левый (правый) индекс указывает левый (правый)
конец пути на описываемой условной диаграмме.
Ф иг.
21. Модель представления информации
603
Условившись обо всем этом, можно нарисовать диа-
граммы для каждого элемента модели.
1. Общая модель. В качестве примера на диаграм-
ме а (см. фиг. 1) изображены три унитарные сети, со-
единенные с одними и теми же входами, без указания
всех путей в каждой сети.
2. Базис. Типичный базисный вектор обозначен че-
рез th на диаграмме б. Этот вектор образован всеми пу-
тями прямой связи, идущими к &-му выходу; /-й коор-
динатой вектора tk является (обратите внимание на
размещение индексов / и k). В целом базис представ-
ляет собой множество всех векторов типа изображен-
ных на диаграмме в.
3. Умножение на скаляр и линейная комбинация. На
диаграмме г вектор ath (где а — скалярный коэффици-
ент усиления), изображенный в виде треугольника, со-
ответствует множеству всех переходных функций путей,
исходящих из левого конца, отмеченного индексом /, в
точку Р. Линейная комбинация
k
соответствует аналогичному множеству переходных
функций на диаграмме д.
4. Линейные функционалы. Они представляются
множеством путей обратной связи, подобных изображен-
ным на диаграмме е пунктирными линиями, исходящими
из точки Л, которые могут быть соединены с путями век-
тора прямой связи (или их линейной комбинации), та-
кими, как сплошные линии, оканчивающиеся в точке В.
Значение функционала в изображенном случае равно
переходной функции из А в В. Очевидно, что функцио-
нал может рассматриваться как функционал либо от х,
либо от у'.
5. Дуальный базис. Вектором дуального базиса яв-
ляется множество путей обратной связи из некоторой
точки. Если базис образован векторами, такими, как th
на диаграмме ж, то типичный вектор дуального бази-
са — это Tj, имеющий компоненты (снова обратите
внимание на принятое размещение индексов i и /). Так
как матрица обратной связи является обращением
604
П. Грин
матрицы прямой связи, то [tk, Т{] = б<л, что является опре-
делением дуального базиса. Это соотношение изобра-
жено на диаграмме з, так как переходная функция ме-
жду i и k имеет вид
Скалярное произведение и линейные комбинации дуаль-
ных векторов определяются аналогично их определе-
ниям для векторов исходного пространства и изображе-
ны на диаграммах и и к.
6. Скалярное произведение. Чтобы выяснить, как оп-
ределить его, заметим, что ортонормированный набор
векторов должен быть дуален самому себе. Поэтому
должно выполняться равенство (/*,/*)=&*• Естествен-
но попытаться ввести определение
(г, o=s w-
а это эквивалентно
что в свою очередь равно бгл, так как в унитарной сети
Поэтому введем интерпретацию
(А
j
что является переходной функцией из i в k на диаграм-
ме з. .
Таким образом, базис, дуальный базису {/*}, есть
{tJ, но когда мы вводим скалярное произведение, базис
{/*} становится дуален сам себе, как и должно быть.
Можно естественным образом заменять числовые мно-
жители в скалярном произведении линейных комбина-
ций векторов, если принять следующее соглашение. Так
как (х, ау)=а(х, у), допустим, что переходная функция
обратной связи с усилением, такая, как изображенная
в виде компоненты с треугольником на диаграмме г,
комплексно сопряжена с переходной функцией прямой
связи. Это и есть упомянутое выше единственное физи-
21. Модель представления информации 605
ческое допущение, сделанное в модели, не накладываю-
щее, впрочем, никаких ограничений, если переходные
функции вещественны.
7. Обозначения Дирака. На диаграмме ж tk означает
как бы часть «кэт» английского слова «bracket» («скоб-
ка»): \k), а ti — часть «бра» (дуальную слогу «кэт»
\1)). Скалярное произведение бра- и кэт-векторов
образуется путем их сочетания, причем получается
«скобка» Эти обозначения, которые очень удобны
при работе с преобразованиями, включающими не-
сколько различных базисов (поскольку ряд математи-
ческих операций автоматически совершается при записи
их в такой форме и поскольку такие скобки оставляют
место для указания, к какому базису относится опера-
тор), полезны и в наших диаграммах. Если читать
скобки слева направо, «кэт» состоит из линий, сходя-
щихся в одну точку, а «бра» — из линий, выходящих
из одной точки, и это соответствует виду диаграммы.
Элементы матриц, представляющих операторы, также
выглядят правильно. Например, (Л|Д|/) изображен на
диаграмме л.
8. Операторы и сопряженные им операторы. Сеть,
образованная жирными линиями на диаграмме л, мо-
жет рассматриваться как изображение оператора Д,
действующего на вектор /». Переходная функция из k в
i представляет собой одно из двух эквивалентных вы-
ражений [At, т] = [/, А' т]. Таким образом, можно рассма-
тривать сеть жирных линий либо как Д, либо как Д'
в зависимости от того, умножаем ли мы сначала на
Д' (вектор-строку на матрицу справа), а затем умно-
жаем скалярно на /', или же берем произведение на
At* (вектор-столбец на матрицу слева). Матрица Д'
транспонирована по отношению к матрице А.
Чтобы интерпретировать матрицу Д*, эрмитово со-
пряженную с Д, нужно изменить направление движе-
ния в сети жирных линий на обратное. Так как век-
тор, сопряженный вектору путей прямой связи, сходя-
щихся в одной точке, — это вектор путей обратной свя-
зи, выходящих из одной точки, т. е. та же самая сеть,
проходимая в обратном направлении, то сеть, сопряжен-
ная сети, представляющей At*, есть та же самая сеть,
606
/7. Г рин
проходимая в обратном направлении, и если сделать
физическое допущение, что изменение направления в се-
ти оператора меняет коэффициенты усиления на ком-
плексно сопряженные, то матрица Д* эрмитово сопря-
жена с матрицей А (вспомним, что индексы транспони-
руются в соответствии с нашим соглашением, так как
начальный и конечный пункты меняются ролями).
9. Скалярное произведение дуальных векторов. Со-
храняя прежние определения, положим (а, т) = (/, $),
как изображено на диаграмме м.
10. Диады. Это просто комбинация ранее определен-
ных элементов. Диада tnxn, или \tn){tn представлена
на диаграмме я, из которой видно, что
= А
п
Диада общего вида smzn, или приведена на
диаграмме о, в которой точка Р одновременно является
пг-м концом s и n-м концом т.
Теперь мы располагаем всеми математическими по-
строениями, требуемыми формальной моделью. Как при-
мер использования таких сетей, рассмотрим в заключе-
ние диаграмму сетей, соответствующую вероятностному
выбору компонент вектора. По причинам, изложенным в
работах, описывающих формальную модель, использо-
вание информации, представленной вектором, требует
разложения вектора в некоторой системе координат и
затем выбора любой из этих компонент с вероятностя-
ми, пропорциональными квадратам коэффициентов раз-
ложения в этой системе координат. Как разъясняется
при изложении модели, это осуществляется процессом,
который, следуя идеям Винера, включает случайный
шум. В использованных обозначениях вектор, несущий
информацию, является функцией ф(/) в функциональ-
ном пространстве, которая может быть разложена по
базису фДО» фг(0 и т. д., так что
Ф(/) = 2а„Ф„(/).
п
Затем вычисляются величины
Л= J «пфл(0^в(0»
21. Модель представления информации
607
где dYa(t)—мгновенное значение выходного сигнала
комплексного генератора дробового шума, причем а —
параметр, указывающий ансамбль возможных случай-
ных шумов. Наконец, выбирается <рп(0» Для которой
|ДП| оказывается наибольшим из всех А. Этот метод,
первоначально введенный в практику просто потому, что
он оказался удобным, неожиданно привел к явлениям,
которые могут быть использованы при психологическом
изучении поведения. В скобочных обозначениях можно
рассматривать dYa(t) как а-й базисный вектор вектор-
608
П. Г рин
ного пространства случайного шума и записать
1ф)=2|ч>п><фп|Ф>»
п
так что = (фг» и Дп = <^^а|фп>(фп|ф). Следователь-
но, Ап можно рассматривать как а-ю компоненту шума
n-й ф-компоненты ф. Теперь надо только использовать
определения, которые мы ввели, чтобы выяснить струк-
туру сети из выражения {dYa |фп)(фп |ф), используя три
унитарные сети. Читая эти символы слева направо, мы
видим из фиг. 2, что надо начать с точки Р в сети, изо-
бражающей генератор шума (коэффициенты усиления
расходящихся линий представляют собой а-ю функцию
шума в некоторый момент времени), затем пойти об-
ратно по сети шума, затем снова вперед к n-й точке
сети ф, обратно через сеть ф и, наконец, вперед через
сеть, представляющую ф, к точке Q. Переходная функ-
ция от Р к Q вдоль этого пути и есть величина искомого
выражения. Следует сравнить такие величины для всех
п и выбрать фп, дающую наибольшую величину усиле-
ния.
Итак, мы достигли цели нашей работы. Она состоя-
ла в том, чтобы предложить нечто, что, по крайней мере
в принципе, являлось бы реализацией значительной ча-
сти формальной модели поведения, предложенной в пре-
дыдущих работах. Непосредственной целью является не
построение полезных сетей, а скорее построение вообще
чего-то, что одновременно могло бы быть понято в дета-
лях и могло быть как-то описано на языке восприятий.
ЛИТЕРАТУРА
1. Greene Р. Н., «Ап approach to computers that perceive, learn,
and reason», Proc. Western Joint Computer Conf., 1959,
p. 181—186.
2. Greene P. H., «А suggested model for informational represen-
tation in a computer that perceives, learns, and reasons», Proc.
Western Joint Computer Conf., 1960, p. 151—164.
3. Freud S., The Interpretation of Dreams, Basic Books Publishing
Co., New York, 1954; русский перевод с немецкого издания:
Фрейд 3., Психология сна. М., 1926.
21. Модель представления информации
609
4. М а у г Е., «The emergence of evolutionary novelties», Evolution
After Darwin, Vol. 1. The Evolution of Life (ed. S. Tax), Univ.
Chicago Press, Chicago, 1960.
5. P a n t i n C. F. A., «The elementary nervous system», Proc. Roy.
Soc. (London), B140, 147—168 (1952).
6. Thorpe W. H., Learning and Instinct in Animals, Methuen,
London, 1956.
7. P i a g e t J., I n h e 1 d e r B., The Child’s Conception of Space,
The Humanities Press, New York, 1956.
8. W e r n e r H., Comparative Psychology of Mental Development,
rev. ed., Follett Publ. Co., Chicago, 1948.
9. Bender L., «А visual motor Gestalt test and its clinical use»,
Res. Monogr. № 3, Amer. Orthopsychiatric Assoc., 1938.
10. Lorenz К.» «Comparative study of behavior» (1939), см. Instinc-
tive Behavior: The Development of a Modern Concept (ed.
С. H. Schiller), Intern. Univ. Press, New York, 1957.
11. Lettvin J. Y., Ma tu ran a H. R., McCulloch W. S.,
Pitts W. H., «What the frog’s eye tells the frog’s brain», Proc.
IRE, 47, 11, 1940—1951 (1959); русский перевод в жури. «Труды
ИРИ», 47, № 11 (1959) и в сб. «Электроника и кибернетика в
в биологии и медицине», ИЛ, 1962.
12. Hinde R. A., «The conflict between drives in the courtship and
copulation of the chaffinch», Behaviour, 5, 1—31 (1953).
13. Hinde R. A., «Appetitive behaviour, consummatory act, and the
hierarchical organisation of behavior — with special reference to
the Great Tit (Parus Major)», Behaviour, 5, 188—224 (1953).
14. Hinde R. A., «Some recent trends in ethology»; cm. Psychology:
A Study of a Science (ed. S. Koch), Study I, Vol. 2, McGraw-Hill,
New York, 1959.
15. Lorenz K., «The past twelve years in the comparative study of
behavior» (1952); cm. Instinctive Behavior: The Development of
a Modern Concept (ed. С. H. Schiller), Intern. Univ. Press, New
York, 1957.
16. Schenk el W., «Ausdrucks-Studien an Wolfen», Behaviour, 1,
81—130, 173—195 (1947).
17. Anderson T. W., An Introduction to Multivariate Statistical
Analysis, Wiley, New York, 1958, русский перевод: Андер-
сон T., Введение в многомерный статистический анализ, Физ-
матгиз, 1963.
18. Kramer Н. Р., Mathews М. V., «А linear coding for trans-
mitting a set of correlated signals», IRE Trans, on Inform.
Theory, IT-2, 41—46 (1956); Reprint: Bell Tel. Syst. Tech. Publ.,
Monogr. 2757.
19. Goodall M. C., «Performance of a stochastic net», Nature, 185,
557—558 (1960).
39 Зак. 106
610
/7. Г р ин
20. G о о d а 11 М. С., «Analytic net model of cognition», Fourth
Annual Meeting of the Biophysical Society, Febr. 24—26, 1960.
21. Goodall M. С., «А basic model of cognition», Cornell Com-
puting Center, Cornell Univ., Ithaca, N. Y., 1960 (не опублико-
вано).
22. Knight В., «Some informal remarks on analogical organization
schemes», Tech. Memo. № 9 (Project PARA), Cornell Aeronaut.
Labs., Buffalo, N. Y., 1959.
23. Milner P. M., «The cell assembly: Mark II», Psychol, Rev., 64,
242—252 (1957).
24. H a I m о s P. R., Finite Dimensional Vector Spaces, Ann. of
Math. Studies, № 7, Princeton Univ. Press, Princeton, 1948; рус-
ский перевод: X а л м о ш П., Конечномерные векторные про-
странства, Физматгиз, 1963.
25 D i г а с Р. А. М., The Principles of Quantum Mechanics, 3rd ed.,
Clarendon Press, русский перевод: Дирак П. А. М., Принципы
квантовой механики, Физматгиз, 1960.
Приложение
ЛОГИЧЕСКАЯ ПРОГРАММА ДЛЯ МОДЕЛИРОВАНИЯ
РАСПОЗНАВАНИЯ ЗРИТЕЛЬНЫХ ОБРАЗОВ1)
А. ШИ МБ ЕЛ
(Институт психиатрии штата Иллинойс)
1. ВВЕДЕНИЕ
В этой работе описывается программа распознава-
ния, которая с большим или меньшим успехом позво-
ляет получить некоторые свойства двумерных образов,
инвариантные по отношению к любому линейному пре-
образованию этих образов. При этом зрительный образ
описывается некоторой ограниченной функцией / (х, у),
определенной в конечной области первого квадранта де-
картовой системы координат. Больше никаких ограни-
чений на 1(хчу) не наложено. Эту функцию можно пред-
ставить в виде распределения интенсивности света на
черном фоне. Очевидно, что образы могут состоять из
линий, точек, непрерывных облакообразных масс или из
любой их комбинации.
Можно представить себе, что программа составляет-
ся с помощью бумаги, карандаша, транспортира и т. п.
принадлежностей, но, конечно, при ее составлении мож-
но использовать также сканирование и вычислительные
методы, привычные для инженера, занимающегося мо-
делированием.
Программа
1. Допустим, что образ локализован где-то в обла-
сти 0 х X, О I/ У, и вычислим ряд выражений
х
J /(x,yt)yt dx (i = 1, 2, 3, ..., К),
О
*) Хотя этот доклад не был представлен на данном симпозиуме,
многие участники симпозиума просили включить его в сборник, как
непосредственно относящийся к теме симпозиума. — Прим. ред.
англ, издания.
39*
612
A. Ill и мбе л
где величины определяют уровни последовательности
прямых линий, образующих нечто похожее на растр те-
левизионного экрана. Мы вычислим сумму этих интегра-
лов.
2. Вычислим
k х
I] J Цх, yi)dx.
Z = 1 о
3. Используя результаты шагов 1 и 2, вычислим у,
т. е. ^-координату центроида образа. Строго говоря, та-
ким образом может быть получена только аппроксима-
ция у, точность которой возрастает с увеличением К.
4. Аналогично найдем х.
Шаги 1—4 служат для нахождения «разделительной
точки» образа. Возможно, что другие, нецентроидные
разделительные точки в последующих исследованиях
окажутся более полезными, но в данной работе за раз-
делительную точку принимается центроид.
5. Отобразим образ в полярную систему координат
с центроидом в полюсе.
6. Пусть функции /(х, у) в полярной системе коорди-
нат соответствует (р, 0); вычислим ряд выражений
R
[l&^pdp (/=1, 2,
О
где R — радиус круга, имеющего центр в полюсе и до-
статочно большого, чтобы весь образ находился внутри
него. Углы 0; должны быть выбраны так, чтобы прямые
линии, отображенные в полярную систему координат,
образовывали пучок равноотстоящих радиальных линий,
напоминающих спицы в колесе.
7. Вычислим выражения
R
j д (р, 0У) dp.
О
8. Используя_ результаты шагов 6 и 7, вычислим мно-
жество чисел {р;}, представляющих собой радиальные
Моделирование распознавания зрительных образов
613
компоненты центроидов образа при взгляде вдоль ка-
ждой из радиальных линий.
9. Вычислим среднее {р/ (обозначим его р*) и, ис-
пользуя р* как единицу расстояния, нормализуем мно-
жество {ру}. Обозначим нормализованное множество {р>}-
10. Нанесем числа {р}} (используя соответствующие
углы 0j) в новой системе полярных координат и соеди-
ним их плавной линией.
Полученную таким образом замкнутую кривую мож-
но считать нормализованным пространственным пред-
ставлением первого момента распределения света в об-
разе относительно центроида. Теперь, используя р*
(шаг 10), чтобы нормализовать первоначальные коорди-
наты образа, можно аналогично получить «абстрактные
контуры» (abstraction contours) второго, третьего и лю-
бого момента более высокого порядка.
Рассмотрим теперь класс всех образов, который мог
бы быть адекватно изображен на телевизионном экране
с радиальным (спицеобразным) растром, имеющим
вдоль каждой радиальной линии, скажем, М дискрет-
ных фотоэлементов, работающих по принципу «все или
ничего».
Под «адекватно изображенным» следует понимать ту
особенность, что поворот растра не вызывает изменений
в показанной картине.
Важно отметить, хотя математически это очевидно,
что из-за дискретности картины вся информация, со-
держащаяся в любом показе на таком растре, будет
также содержаться в первых М абстрактных контурах
этого показа. Другими словами, класс всех линейных
преобразований 1(х,у) (за исключением поворота, о ко-
тором будет идти речь ниже) однозначно отображает
образ в М абстрактных контуров, и наоборот. Отметим
также, что так как «интенсивность образа» всегда вхо-
дит в вычисления программы линейно и все интегралы,
содержащие интенсивность, приводят в конце концов к
другим интегралам, содержащим ту же самую интен-
сивность, первые М абстрактных контуров инвариантны
также по отношению к любому изменению в общей ин-
тенсивности образа.
614
А. Ш имбел
Теперь следует ответить на вопрос, можно ли полу-
чить два различных множества абстрактных контуров
от образов, которые отличаются только некоторыми ком-
бинациями линейных преобразований. Ответ дается по-
средством попарного наложения двух множеств абс-
трактных контуров и измерения разности между общей
площадью, которую образуют наложенные пары, и пло-
щадью пересечения множеств. Обозначим эту разность
через ДЛ и будем измерять ее при повороте всех конту-
ров одного множества на 360° по отношению к другому.
Минимальное ДД, полученное в результате такого про-
цесса, является мерой «подобия» двух множеств и по-
этому является также мерой подобия начальных обра-
зов. Отметим, что наложение соответствующих пар кон-
туров должно быть осуществлено таким образом, чтобы
полюсы их координатных систем совпадали. Кроме того,
должна сохраняться угловая направленность абстракт-
ных контуров внутри любого данного множества в те-
чение процесса измерения ДД.
2. ПРИМЕНЕНИЕ ПРОГРАММЫ
Хотя описанная таким образом программа действи-
тельно дает способ распознавания инвариантности при
линейном преобразовании (включая интенсивность), с ее
применением связаны некоторые трудности. Одной из
них является тот факт, что для любого «адекватного»
растра М должно быть относительно велико, и поэтому
для получения полного множества абстрактных конту-
ров потребуются большое количество вычислений и боль-
шой объем памяти. Однако дело все же обстоит не так
плохо, как это может показаться на первый взгляд. На
самом деле большинство «картин» в нашем мире чрез-
вычайно избыточно в теоретико-информационном смыс-
ле. Поэтому вычисление полного множества абстракт-
ных контуров также будет излишним в большинстве
практических случаев.
Рассмотрим, например, класс всех «просто замкну-
тых» кривых, т. е. таких, что каждой точки на кривой
можно достичь из центроида по прямой, не задевающей
ни одной другой части кривой. Вся информация, содер-
Моделирование распознавания зрительных образов
615
жащаяся в такой кривой, содержится также в ее абс-
трактном контуре первого момента! Остающиеся М — 1
абстрактных контуров полностью излишни.
Для любого относительно простого практического
применения программы, например для распознавания
морского судна по его силуэту, интуитивно кажется
весьма неправдоподобным, чтобы для надежного узна-
вания потребовалось нечто большее, чем абстрактный
контур первого момента, даже если речь идет о не-
скольких сотнях разных силуэтов. Для распознавания
небольшого множества символов, каким является наш
печатный алфавит, это почти наверняка так.
3. ОБЩИЕ ЗАМЕЧАНИЯ
Следует помнить, что инвариантность по отношению
к линейному преобразованию не эквивалентна распозна-
ванию «подобия» образов, как его осуществляют люди и
другие млекопитающие. Например, образы на фиг. 1 бы-
стро распознаются как различные варианты двадцатой
Фиг. L
буквы английского алфавита. Они не являются линей-
ными преобразованиями друг друга. Тем не менее мы
рассматриваем их как нечто подобное.
В этой связи интересно отметить, что абстрактные
контуры первого момента всех этих образов будут в
очень большой степени подобны. Это происходит по-
тому, что ввиду линейного характера первого момента
и проведенной на шаге 9 нормализации этот контур
весьма нечувствителен к малым изменениям в общем
характере образа. Малые возмущения, так сказать, не
принимаются во внимание. Это свойство абстрактного
контура первого момента могло бы быть усилено усред-
нением прилегающих pj перед окончательным нанесе-
нием контура. Абстрактные контуры более высоких
616
А. Шимбел
моментов все более чувствительны к деталям образа
из-за нелинейности, возрастающей с расстоянием.
При анализе программы можно будет судить о том,
насколько хорошо и экономично имитируется восприя-
тие формы с помощью этой программы или ее модифи-
цированных частей, когда обучение ведется на большом
разнообразии форм или когда используются более под-
ходящие математические теоремы относительно восприя-
тия «формы». Программа сама может служить основой
для более общего определения понятия формы, чем
имеющееся ограниченное представление о форме, как
инвариантности при линейном преобразовании. В конце
концов появятся другие определения, более соответ-
ствующие нашему субъективному представлению о
форме.
4. ПРОГРАММИРОВАНИЕ И ПАМЯТЬ
При моделировании описанной логической програм-
мы следует приспособить ее к машине, чтобы можно
было проделать необходимые вычисления, хранить ре-
зультаты или сравнивать их с уже хранящимися абс-
трактными контурами. Таким образом, программирова-
ние распознавания данного образа машиной состояло
бы из «показа» ей примера.
Машина чрезвычайно расточительно расходовала бы
время, если бы для того, чтобы выяснить, что данный
образ уже ранее был ей показан, ей пришлось бы «пе-
ребрать» всю свою память. Этого можно избежать, ну-
меруя хранящиеся в памяти образы в соответствии с
некоторым простым свойством абстрактного контура
первого момента. Например, таким полезным критерием
может оказаться площадь, занимаемая абстрактным
контуром. Если окажется, что этот критерий слишком
чувствителен к форме образа, можно попытаться взять
отношение периметра к площади. Конечно, можно при-
думать и много других вариантов.
СПИСОК УЧАСТНИКОВ СИМПОЗИУМА 1)
♦А м а р е л С. Amarel S. (David Sarnoff Res. Center, Radio Corp, of America, Princeton, New Jersey, USA)
Бабкок М. Babcock M. L. (Ill Electr. Eng. Res. Lab., Univ, of Illinois, Urbana, Illinois, USA)
♦Баумен Дж. Bowman J. R. (Technological Inst., Northwestern Univ., Evanston, Illinois, USA)
Берталанфи Л. von Bertalanffy L. (3211 Sena Drive, Topeka, Kansas, USA)
♦Бёрл Р. В e u r 1 e R. L. (English Electric Valve Co, Ltd, Chelmsford, Essex, England)
♦Бир Ст. Beer St. (United Steel Co, Ltd, Sheffield, England)
♦Блюм М. Blum M. (c/o W. S. McCulloch, Massa- chusetts Inst, of Technology, Cambridge, Mass., USA)
♦В е р б и к Л. Ver bee k L. A. M. (c/o W. S. McCulloch, Massachusetts Inst, of Technology, Cam- bridge, Mass., USA)
Вестон П. Weston P. (108h Electr. Eng. Res. Lab., Univ, of Illinois, Urbana, Illinois, USA)
♦Виллис Д. Willis D. G. (Missile and Space Div. Lockheed Aircraft Corp., Sunnydale, Calif., USA)
♦Грин П. Green P. H. (Committee on Mathem. Bio- logy, Univ, of Chicago, Chicago, Illinois, USA)
’) Звездочкой отмечены авторы докладов, включенных в настоя*
щпн сборник. — Прим. ред.
618
Список участников симпозиума
Инзельберг А. Inselberg А. (107 Electr. Eng. Res. Lab., Univ, of Illinois, Urbana, Illinois, USA)
♦Й о в и т с М. Y о v 11 s M. (Code 427, Physical Sciences Div. Office of Naval Res., Washington, D. C., USA)
Камерон С. Cameron S. (Armour Res. Foundation, Chicago, Illinois, USA)
♦Коуэн Дж. Cowan J. (c/o W. S. McCulloch, Massa- chusetts Inst, of Technology, Cambridge, Mass., USA)
♦Крейн Г. Crane H. D. (Div. of Eng. Res., Stan- ford Res. Inst., Menlo Park, Calif., USA)
♦Лёф грен Л. Lofgren L. (107 Electr. Eng. Res. Lab., Univ, of Illinois, Urbana, Illinois, USA)
♦Маккаллок У McCulloch W. S. (Massachusetts Inst of Technology, Cambridge, Mass., USA)
М а л л и н А. Mullin A. A. (108d Electr. Eng. Res. Lab., Univ, of Illinois, Urbana, Illinois, USA)
♦Новиков А. N о v i k о f f A. B. J. (Div. of Eng. Res., Stanford Res. Inst., Menlo Park, Calif., USA)
♦Паск Г. P a s k G. A. (Systems Research Ltd, Rich- mond, Surrey, England)
♦Платт Дж. Platt J. R. (Dept, of Physics, Univ, of Chicago, Chicago, Illinois, USA)
♦Рапопорт А. Rapoport A. (Mental Health Res. Inst., Univ, of Michigan, Ann Arbor, Michigan, USA)
♦Розен Ч. Rosen Ch. A. (Div. of Eng. Res., Stan- ford Res. Inst., Menlo Park, Calif., USA)
♦Розенблатт Ф Rosenblatt F. (Hollister Hall, Cornell Univ., Ithaca, N. Y., USA)
♦Сперри Р. Sperry R. W. (Div. of Biology, Califor- nia Inst, of Technology, Pasadena, Calif, USA)
Стил Дж. Steele J. E. (Bioacoustics Lab., Wright
Air Development Div., Wright-Patterson Air
Force Base, Ohio, USA)
Список участников симпозиума
619
Тули Дж. Tooley J. R. (Central Res. Lab., Texas Instruments, Inc., Dallas, Texas, USA)
♦фон Фёрстер Г. von Foerster H. (215 Electr. Eng. Res., Lab., Univ, of Illinois, Urbana, Illinois, USA)
Хоуки нс Дж. Hawkins J. K. (Aeronutronic Div., Ford Motor Co, Newport Beach, Calif., USA)
X э й е к Ф. Hayek F. A. (Committee on Social Thought, Univ, of Chicago, Chicago, Illi- nois, USA)
*Ц о п ф Г. Z о p f G. W., Jr. (300c Electr. Eng. Res. Lab., Univ, of Illinois, Urbana, Illinois, USA)
Шеффер К. Schaeffer C. (Atheneum Publishers, New York, USA)
Шервуд С. Sherwood S. (Illinois State Psychiatric Inst., Chicago, Illinois, LISA)
*Ш и м б е л А. S h i m b e 1 A. (Illinois State Psychiatric Inst., Chicago, Illinois, USA)
Элькинд Дж. El kind J. I. (Bolt, Beranek and New- man, Inc., Cambridge, Mass., USA)
Эстрейхер Г. Oestreicher H. (Bioacoustics Lab., Wright Air Development Div., Wright-Patter- son Air Force Base, Ohio, USA)
♦Эшби У. Р. Ashby W. R. (300c Electr. Eng. Res. Lab., Univ, of Illinois, Urbana, Illinois, USA)
Якоби Дж. Jacoby G. T. (Armour Res. Foundation, Chicago, Illinois, USA)
СОДЕРЖАНИЕ
Предисловие ............................................ 5
Введение (Перевод Ю. И. Шму клер).......................15
I. Рапопорт А. Экспериментальное исследование параметров
самоорганизации в группах из трех испытуемых (Перевод
Ю. И. Шмуклер)..........................................21
2. Бир Ст. На пути к кибернетическому предприятию (Пере-
вод Л. Б. Левитина).....................................48
3. Маккаллок У. Символическое изображение нейрона в
виде некоторой логической функции (Перевод М. А. Оси-
повой) ............................................ ... 131
4. Блюм М. Свойства нейрона со многими входами (Пере-
вод М. А. Осиповой)....................................136
5. Вербик Л. О нейронных сетях с минимизацией ошибки
(Перевод М. А. Осиповой)...............................163
6. Коуэн Дж. Многозначные логики и надежные автоматы
(Перевод А. Я. Макаревского)...........................178
7. Лёфгрен Л. Самовосстановление как предел для автома-
тической коррекции ошибок (Перевод А. Я. Макаревского) 226
8. П а с к Г. Модель эволюции (Перевод Ю. И, Шмуклер) . 284
9. Э ш б и У. Р. Принципы самоорганизации (Перевод
Ю. И. Шмуклер).........................................314
10. Сперри Р. Упорядоченность функционирования в неупоря-
доченных структурах (Перевод Ю. И. Шмуклер) . . . 344
11. Бёр л Р. Функциональная организация в случайных сетях
(Перевод А. Я. Макаревского)...........................358
12. Платт Дж. Как случайное множество клеток может на-
учиться распознавать прямую линию (Перевод
Ю. И. Шмуклер).........................................387
13. Цопф Г. Отношение и контекст (Перевод Л. Б. Левитина) 399
СОДЕРЖАНИЕ
621
14. Новикова. Распознавание образов с помощью интеграль-
ной геометрии (Перевод Ю. И. Шмуклер)....................428
15. В и л л и с Д. Область реализуемых функций для сложных
систем (Перевод Л. Б. Левитина)..........................453
16. Розенблатт Ф. Стратегические подходы к исследованию
моделей мозга (Перевод Ю. И. Шмуклер)....................469
17. Крейн Г. Нейристор (Перевод М. А. Осиповой) .... 491
18. Баумен Дж. Новая линия передачи, приводящая к само-
стабилизирующейся системе (Перевод Л. Б. Левитина) 505
19. Розен Ч. К вопросу о распределенной памяти (Перевод
М. А. Осиповой)..........................................514
20. Амарел С. Подход к автоматическому формированию тео-
рии (Перевод С. А. Малого).........................533
21. Грин П. Сети, реализующие модель представления инфор-
мации (Перевод Л. Б. Левитина)....................581
Приложение:
Ш и м б е л А. Логическая программа для моделирования распо-
знавания зрительных образов (Перевод Ю. И. Шмуклер) 611
Список участников симпозиума.............................617
ПРИНЦИПЫ
САМООРГАНИЗАЦИИ
Редактор В. Я. ФРИДМАН
Художник Е. М. Казаков
Художественный редактор Н. А. Фильчагина
Технический редактор Е. С. Потапенкова
Корректор Т. С, Бухтина
Сдано в производство 25/П 1966 г.
Подписано к печати 6/VIII 1966 г.
Бумага 84х108,/в2=9,88 бум. л.
33,18 усл. печ. л., в т/ч вкл. 2
Уч.-изд. л, 30,65. Изд. № 20/1789
Цена 2 р. 41 к. Заказ № 106
(Темплан Изд-ва «Мир» пор. № 202)
ИЗДАТЕЛЬСТВО «МИР»
Москва, 1-й Рижский пер., 2
Ленинградская типография № 2
имени Евгении Соколовой
Главполиграфпрома
Комитета по печати при Совете
Министров СССР.
Измайловский проспект, 29.
ИЗДАТЕЛЬСТВО «МИР»
Редакция литературы по новой технике
Вышли в свет:
Розенблатт Ф„ ПРИНЦИПЫ НЕЙРОДИНАМИКИ. ПЕР-
ЦЕПТРОНЫ И ТЕОРИЯ МЕХАНИЗМОВ МОЗГА,
480 стр., цена 2 р. 22 к.
Моль А, ТЕОРИЯ ИНФОРМАЦИИ И ЭСТЕТИЧЕСКОЕ
ВОСПРИЯТИЕ, 351 стр., цена 1р. 60 к.
ОПТИЧЕСКАЯ ОБРАБОТКА ИНФОРМАЦИИ (сборникста-
тей), 379 стр., цена 1 р. 53 к.
СТАТИСТИКА ОШИБОК ПРИ ПЕРЕДАЧЕ ЦИФРОВОЙ
ИНФОРМАЦИИ (сборник статей), 304 стр., цена 1 р. 24 к.
Бриллюэн Л., НАУЧНАЯ НЕОПРЕДЕЛЕННОСТЬ И ИН-
ФОРМАЦИЯ, 269 стр., цена 1 р. 03 к.
Дума М., Сырбу М., Праницкий А., ВВЕДЕНИЕ В ПРО-
МЫШЛЕННУЮ ЭЛЕКТРОНИКУ, 390 стр., цена! р.51 к.
Хейт Ф., МАТЕМАТИЧЕСКАЯ ТЕОРИЯ ТРАНСПОРТНЫХ
ПОТОКОВ, 286 стр., цена 1 р. 20 к.
Столаров Л., ОБУЧЕНИЕ С ПОМОЩЬЮ МАШИН, с при
ложением статей Скиннера и Краудера и обзора суще-
ствующих моделей, 373 стр., цена 1 р. 49 к.
Выходят из печати:
Левийн Л., МЕТОДЫ РЕШЕНИЯ ТЕХНИЧЕСКИХ ЗАДАЧ
С ИСПОЛЬЗОВАНИЕМ АНАЛОГОВЫХ ВЫЧИСЛИ-
ТЕЛЬНЫХ МАШИН, 25 изд. л.
Мэрриэм К., ТЕОРИЯ ОПТИМИЗАЦИИ И РАСЧЕТ СИ-
СТЕМ УПРАВЛЕНИЯ С ОБРАТНОЙ СВЯЗЬЮ, 25 изд. л.
ОБЩАЯ ТЕОРИЯ СИСТЕМ (сборник докладов), 10изд. л.
Хорафас Д., СИСТЕМЫ И МОДЕЛИРОВАНИЕ, 30 изд. л.
Флорин Ж., СИНТЕЗ ЛОГИЧЕСКИХ МАШИН И ЕГО
АВТОМАТИЗАЦИЯ, 15 изд. л.
Кофман Л., МЕТОДЫ И МОДЕЛИ ОПЕРАЦИОННЫХ
ИССЛЕДОВАНИЙ, 30 изд. л.
Николау X., ВВЕДЕНИЕ В КИБЕРНЕТИКУ, 7 изд. л.
СТРУЙНАЯ ПНЕВМОГИДРОАВТОМАТИКА (сборник ста
тей), 22 изд. л.
Томас К., Дэвис И., Опеншоу Д., Бёрд Дж., ПЕРСПЕКТИВЫ
ПРОГРАММИРОВАННОГО ОБУЧЕНИЯ, 13 изд. л.
ВЫЧИСЛИТЕЛЬНЫЕ МАШИНЫ И МЫШЛЕНИЕ (методы
эвристического программирования), под ред. Фейгенба-
ума и Фельдмана, 30 изд. л.
Предварительный заказ на интересующие Вас книги мо-
жно оформить в книжных магазинах.
Помните, что своевременно сданный Вами предваритель-
ный заказ поможет правильно определить общий тираж книги
и гарантирует Вам получение нужной литературы.