/




















Author: Черторижський К.В.
Tags: авіація авіаційна техніка літаки




Text
К. В. Чертормжський
ЮНОМУ
АВІАМОДЕЛІСТУ
ЗМІС
Передмова................................. З
Основні відомості з аеродинаміки літаючих
моделей ............................. 4
Обтікання тіл повітрям............... 7
Аеродинамічні сили.................. 12
Крило................................16
Повітряний гвинт.....................64
Гумові мотори для літаючих моделей 74
Політ моделі.........................79
Проектування літаючої моделі.............118
Конструкції літаючих моделей.............129
Профілі літаючих моделей.................158
Додатки..................................163
Література...............................188
ОСНОВНІ ВІДОМОСТІ
З АЕРОДИНАМІКИ ЛІТАЮЧИХ МОДЕЛЕЙ
ВЛАСТИВОСТІ ПОВІТРЯ
Аеродинаміка (від грецьких слів аег — повітря і дупатікоз — сила) —
це наука про сили, що виникають під час руху тіл у повітрі.
Повітря завжди створює опір твердим тілам, які переміщаються в
ньому. Сили взаємодії, що виникають між тілом і повітрям, і вивчає
аеродинаміка. Аеродинаміку поділяють на теоретичну, яка грунтується
на законах теоретичної механіки, і експериментальну, що грунтується на
експериментах, проведених в аеродинамічних трубах та у вільному
польоті. Оскільки аеродинаміка вивчає сили, що виникають під час руху
тіл у повітряному середовищі, властивості якого змінюються, насампе-
ред треба ознайомитись з властивостями повітря.
Повітря — це суміш газів і водяної пари, кількість якої в повітрі
коливається від 0,1 до 2,8% за об’ємом. Стан нерухомого повітря визна-
чається тиском, температурою і густиною.
Густина позначається буквою р (ро) і може бути визначена за фор-
мулою*
кГ сек2 \
М /
де т — маса повітря; V — об’єм повітря.
В системі СІ густина вимірюється в кілограмах на кубічний метр:
1 кг/уи3 = 0,102 кГ • сек2/м4.
Питома вага позначається буквою у (гама) і може бути визначена
за формулою:
(1)
р =
(2)
де О — вага повітря; V — об’єм повітря.
В системі СІ питома вага вимірюється в ньютонах на кубічний метр:
1 н/уи3=0,102 кГ/м\
Питому вагу повітря можна визначити і за формулою:
ї = 0,465
т\мл,
де В — тиск; Т — абсолютна температура.
(3)
4
Неважко встановити залежність між питомою вагою і густиною. Для
цього в формулу (1) підставимо замість маси величину — :
О
(4)
С
V
Кпя Vпплл^г^тттл
можна визначити за фор-
мулою:
(5)
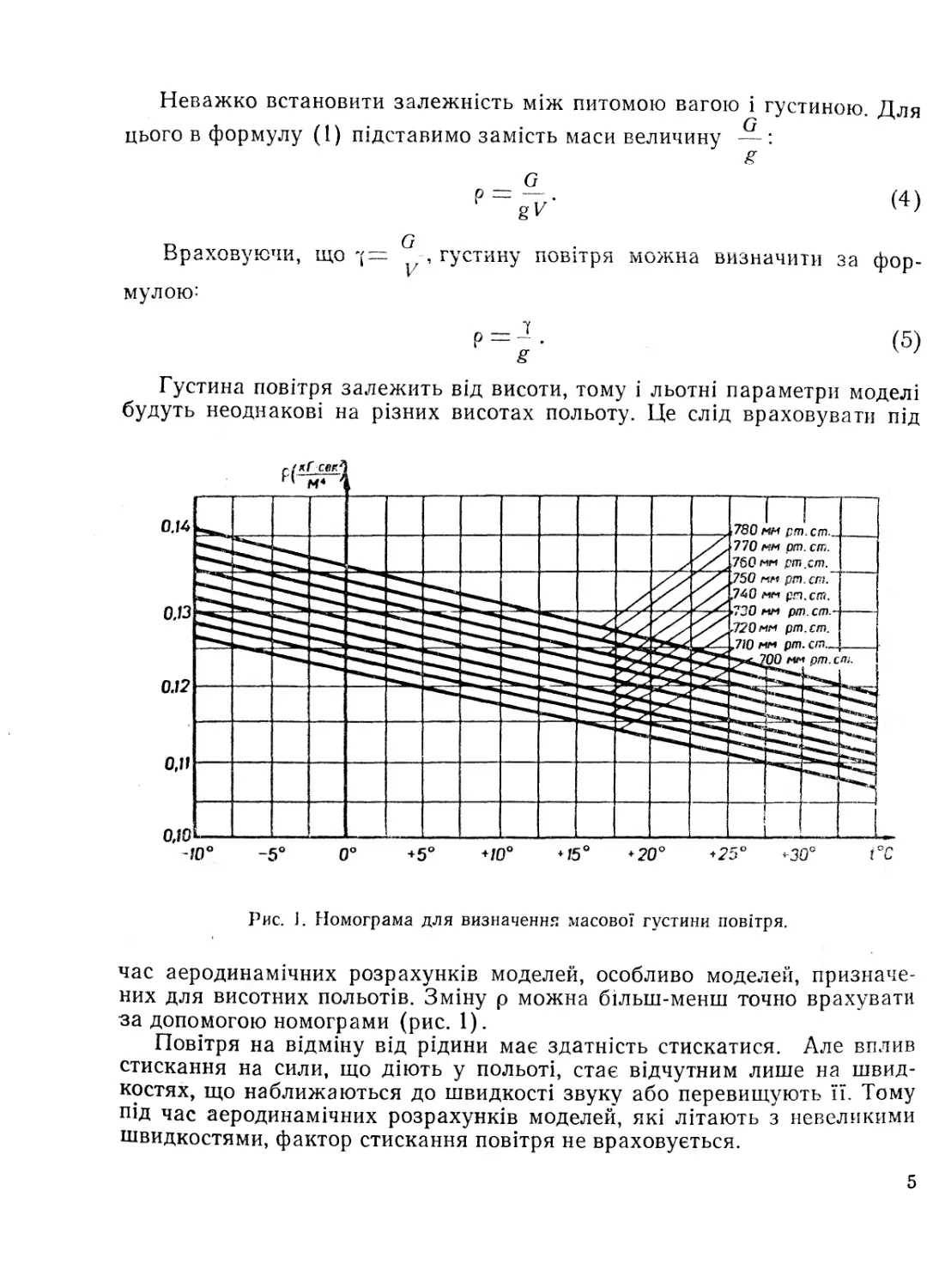
Густина повітря залежить від висоти, тому і льотні параметри моделі
будуть неоднакові на різних висотах польоту. Це слід враховувати під
Рис. 1. Номограма для визначення масової густини повітря.
час аеродинамічних розрахунків моделей, особливо моделей, призначе-
них для висотних польотів. Зміну р можна більш-менш точно врахувати
за допомогою номограми (рис. 1).
Повітря на відміну від рідини має здатність стискатися. Але вплив
стискання на сили, що діють у польоті, стає відчутним лише на швид-
костях, що наближаються до швидкості звуку або перевищують її. Тому
під час аеродинамічних розрахунків моделей, які літають з невеликими
швидкостями, фактор стискання повітря не враховується.
5
Внаслідок сил внутрішнього тертя, що виникають між окремими
частинами повітря під час його руху, повітря має в’язкість. В’яз-
кість— це властивість рідин і газів чинити опір взаємному переміщен-
ню частинок. Різні речовини мають різну в’язкість. Наприклад нітроклей
(емаліт) має велику в’язкість, вода — меншу, а повітря — ще меншу
В’язкість залежить від температури: із збільшенням температури повітря
збільшується і його в’язкість. В’язкість повітря характеризується коефі-
цієнтом в’язкості її (мю); при 15° С він дорівнює 1,82 • 10~6 кГ'Секїлг
В системі СІ ц= 17,84 • 10~6 н • сек/м1.
Оскільки в’язкість залежить від густини повітря, в аеродинаміці для
оцінки сил в’язкості користуються кінематичним коефіцієнтом в’язкості,
або модулем в’язкості, V (ню):
ї==_ —. (6)
р \сек)
Модуль в’язкості повітря при 15° С і тиску 760 мм рт. ст. дорівнює
14,56 • 10“6 яїісек.
Під час руху літаючої моделі в повітрі між ними виникає сила
взаємодії, яка за другим законом Ньютона виражається співвідно-
шенням*-
(7)
де М — маса повітря, яку модель рухає в якийсь момент часу; а — при-
скорення руху цієї маси повітря.
В аеродинаміці обчислення за допомогою формули (7) виконуються
в окремих випадках, бо ні маса, ні прискорення руху повітря невідомі.
Якщо користуються цією формулою, то їй надають зручнішої форми.
м
праву частину рівняння ділять і множать на час і. Тоді виража-
тиме масу повітря, що відкидається за 1 сек, а Отже,
г — ~аі~ іпч. (8)
Добуток пи) називається кількістю руху за 1 сек.
Якщо швидкість повітря була Vі, а внаслідок взаємодії з моделлю
стала VI, то сила дорівнює
Р — ти2 — . (9)
Зрозуміло, якщо сила додатня; якщо ^2<^і—вона від’ємна
і заважає руху моделі.
Залежність між тиском і швидкістю виражається законом Бернуллі.
Р1 + = Рг + ~ = СОП8І , (10)
Де р — статичний тиск; -----швидкісний напір, який позначається
буквою д (ку).
6
Із закону Бернуллі випливає, що із збіль-
шенням швидкості руху тиск у повітрі (ріди-
ні) зменшується і навпаки.
Закон Бернуллі справедливий не тільки
для руху рідини або газу в трубках змінного
перерізу, а й для будь-якого випадку звужен-
ня або розширення потоку. Проілюструвати
дію закону Бернуллі можна за допомогою та-
кого досліду (рис. 2). Якщо продувати повіт-
ря між зігнутими аркушами паперу, то вони
наближатимуться один до одного. Відбуваєть-
ся це внаслідок зменшення тиску між ними.
Швидкість руху повітря між аркушами має
певну величину, тоді як повітря, ЩО ЗНаХО'
диться зовні, майже нерухоме.
Якщо повітря (рідина) рухається в зігну-
тих трубках або обтікає тіло з криволінійною
поверхнею, тиск змінюється не тільки внаслі-
док зміни швидкості потоку, а й внаслідок ви-
никнення відцентрових сил.
Рис. 2. Дослід, що ілю-
струє дію закону Бер-
нуллі.
ОБТІКАННЯ ТІЛ ПОВІТРЯМ
Відомо, що під час руху будь-якого тіла в повітрі (рідині) внаслідок
взаємодії їх, виникають сили опору. Щоб визначити величину і напрям
аеродинамічних сил, користуються методами експериментальної аероди-
наміки. Ці методи дають змогу за допомогою спеціальних установок
(аеродинамічних труб) точно визначити сили взаємодії тіл і повітря, яке
рухається з відповідною швидкістю.
Аеродинамічна труба (рис. 3) являє собою установку для утворення
Рис. 3. Аеродинамічна труба:
1—дифузор; 2 — робоча частина; 3 — модель літака; 4 — колектор; 5 — електродвигун;
6 — вентилятор: 7 — напрямні лопатки; 8 — решітка; 9 — датчик швидкості.
7
повітряного потоку. На модель, яку встановлюють у робочій частині тру-
би, діють такі самі сили, що й під час польоту, але в трубі їх можна виз-
начити за допомогою спеціальних аеродинамічних вагів.
Деяким недоліком випробування в аеродинамічних трубах є підви-
щена турболентність потоку, але більшість моделей майже завжди літає
у неспокійному повітрі, і тому можна припустити, що умови в трубі від-
повідають умовам польоту моделі в повітрі. Величина аеродинамічних
Збурений потік
Пограничний шар
Нездуренаи
потік
Ва*и.
Потенціальний шар
Погран^чнии ішц
Потенціальний шар
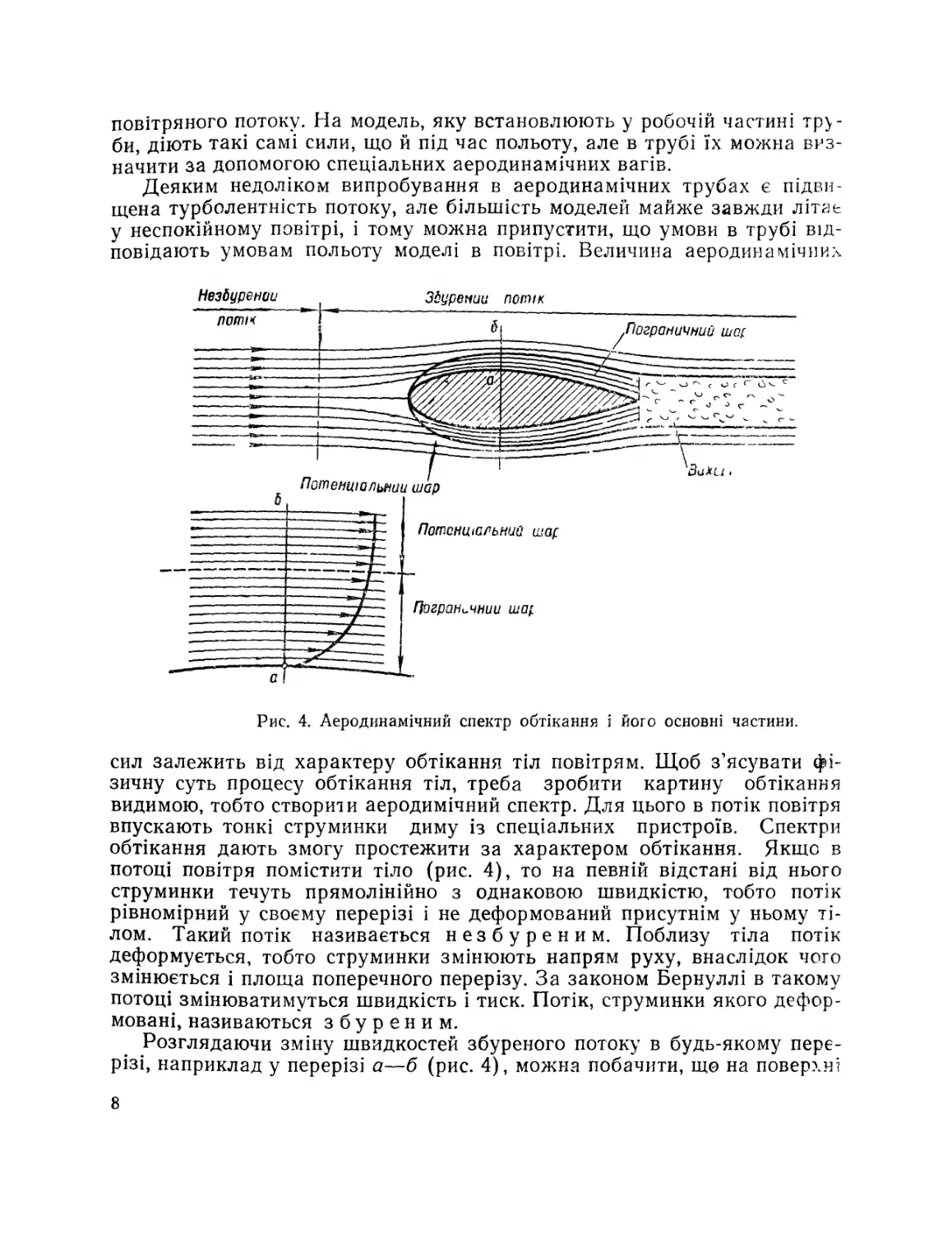
Рис. 4. Аеродинамічний спектр обтікання і його основні частини.
сил залежить від характеру обтікання тіл повітрям. Щоб з’ясувати фі-
зичну суть процесу обтікання тіл, треба зробити картину обтікання
видимою, тобто створити аеродимічний спектр. Для цього в потік повітря
впускають тонкі струминки диму із спеціальних пристроїв. Спектри
обтікання дають змогу простежити за характером обтікання. Якщо в
потоці повітря помістити тіло (рис. 4), то на певній відстані від нього
струминки течуть прямолінійно з однаковою швидкістю, тобто потік
рівномірний у своєму перерізі і не деформований присутнім у ньому ті-
лом. Такий потік називається незбуреним. Поблизу тіла потік
деформується, тобто струминки змінюють напрям руху, внаслідок чого
змінюється і площа поперечного перерізу. За законом Бернуллі в такому
потоці змінюватимуться швидкість і тиск. Потік, струминки якого дефор-
мовані, називаються збуреним.
Розглядаючи зміну швидкостей збуреного потоку в будь-якому пере-
різі, наприклад у перерізі а—б (рис. 4), можна побачити, що на поверхні
8
тіла частинки повітря ніби «прилипають» до нього внаслідок взаємногс
зчеплення. Тому швидкість цих частинок дорівнює нулю.
Внаслідок в’язкості повітря розміщені поряд шари повітряного потоку
взаємно гальмуються. Гальмуюча дія тіла на швидкість руху шарів
повітря в міру віддалення їх від тіла поступово зменшується і на певній
відстані зовсім зникає.
Отже, при обтіканні тіла утворюється тонкий шар повітря, швид-
кість якого змінюється від нуля до величини, що дорівнює швидкості по-
току. Цей шар називається пограничним шаром. Шар повітря, в
якому відсутні сили внутрішнього тертя, називається потенціаль-
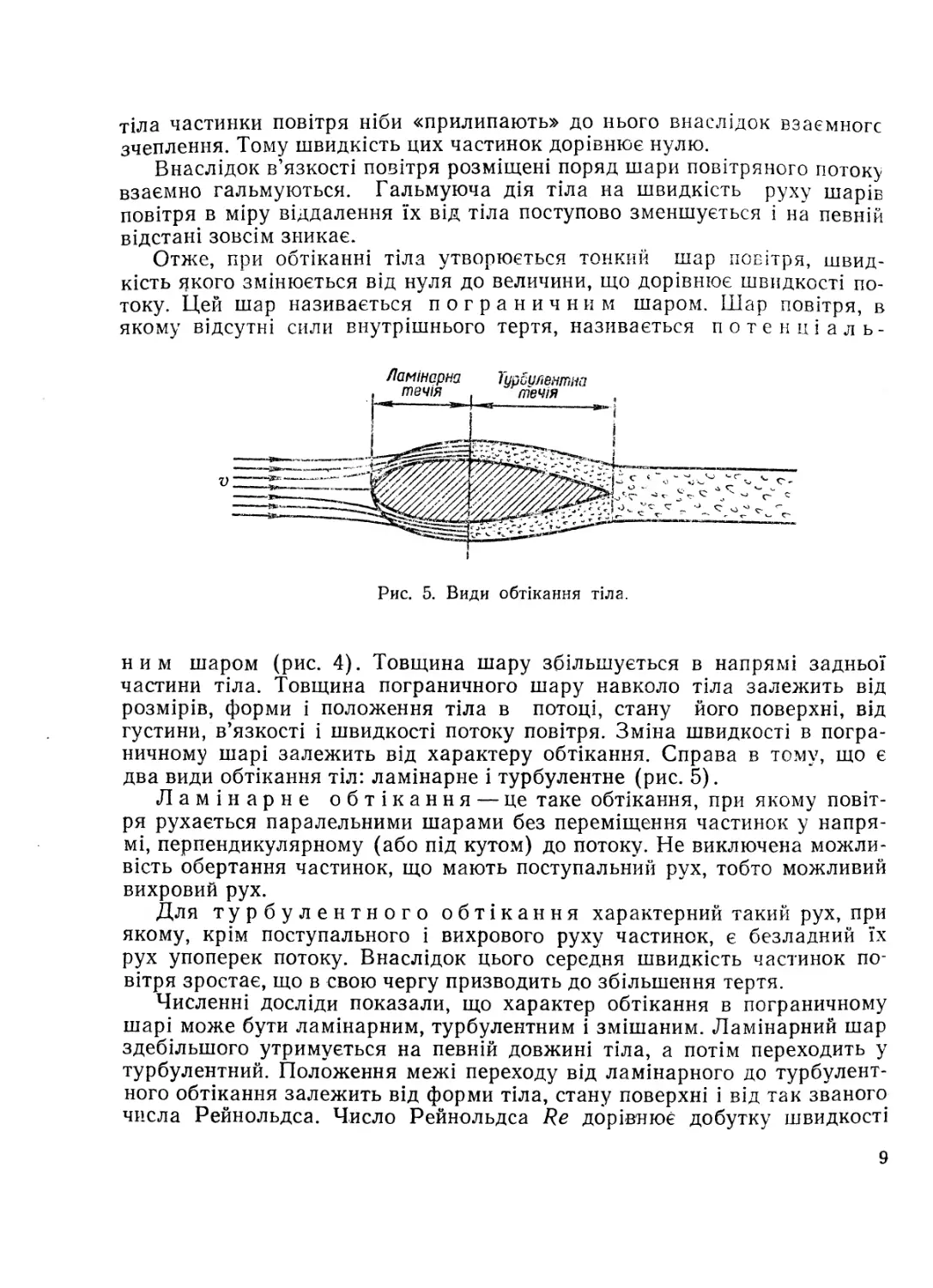
Рис. 5. Види обтікання тіла.
ним шаром (рис. 4). Товщина шару збільшується в напрямі задньої
частини тіла. Товщина пограничного шару навколо тіла залежить від
розмірів, форми і положення тіла в потоці, стану його поверхні, від
густини, в’язкості і швидкості потоку повітря. Зміна швидкості в погра-
ничному шарі залежить від характеру обтікання. Справа в тому, що є
два види обтікання тіл: ламінарне і турбулентне (рис. 5).
Ламінарне обтікання — це таке обтікання, при якому повіт-
ря рухається паралельними шарами без переміщення частинок у напря-
мі, перпендикулярному (або під кутом) до потоку. Не виключена можли-
вість обертання частинок, що мають поступальний рух, тобто можливий
вихровий рух.
Для турбулентного обтікання характерний такий рух, при
якому, крім поступального і вихрового руху частинок, є безладний їх
рух упоперек потоку. Внаслідок цього середня швидкість частинок по-
вітря зростає, що в свою чергу призводить до збільшення тертя.
Численні досліди показали, що характер обтікання в пограничному
шарі може бути ламінарним, турбулентним і змішаним. Ламінарний шар
здебільшого утримується на певній довжині тіла, а потім переходить у
турбулентний. Положення межі переходу від ламінарного до турбулент-
ного обтікання залежить від форми тіла, стану поверхні і від так званого
числа Рейнольдса. Число Рейнольдса Не дорівнює добутку швидкості
9
потоку на
повітря:
лінійні розміри тіла, поділеному
на
модуль в’язкості
VI
V
(11)
де у —швидкість потоку; / — лінійні розміри тіла; V — модуль в’язкості.
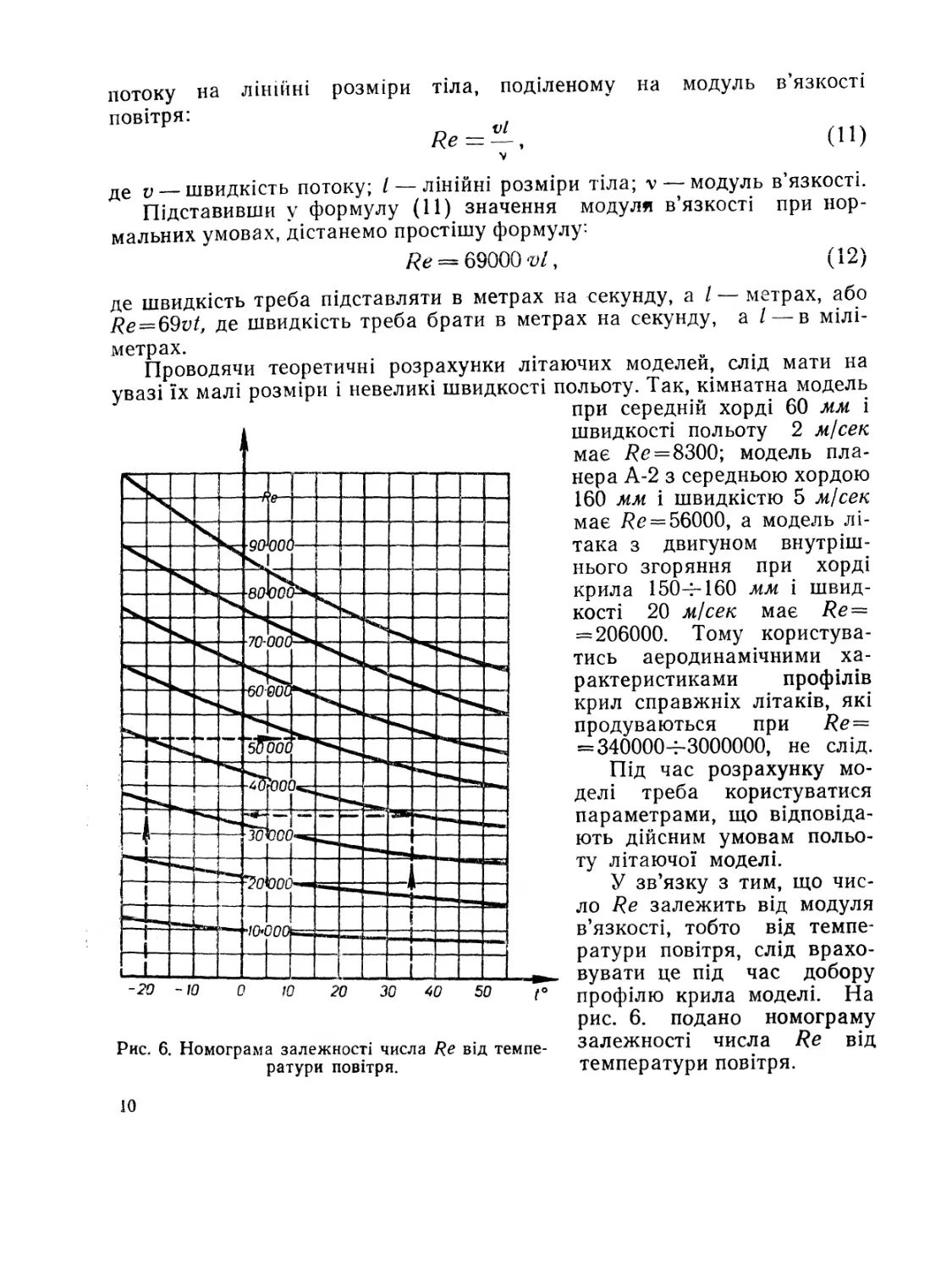
Підставивши у формулу (11) значення модуля в’язкості при нор-
мальних умовах, дістанемо простішу формулу:
г~» - ґ'г\г\г\г\ / (Ч О X
ке = оЖдю ‘Vі,
де швидкість треба підставляти в метрах на секунду, а І — метрах, або
7?є = 69у/, де швидкість треба брати в метрах на секунду, а І — в мілі-
Рис. 6. Номограма залежності числа від темпе-
ратури повітря.
метрах.
Проводячи теоретичні розрахунки літаючих моделей, слід мати на
увазі їх малі розміри і невеликі швидкості польоту. Так, кімнатна модель
при середній хорді 60 мм і
швидкості польоту 2 м/сек
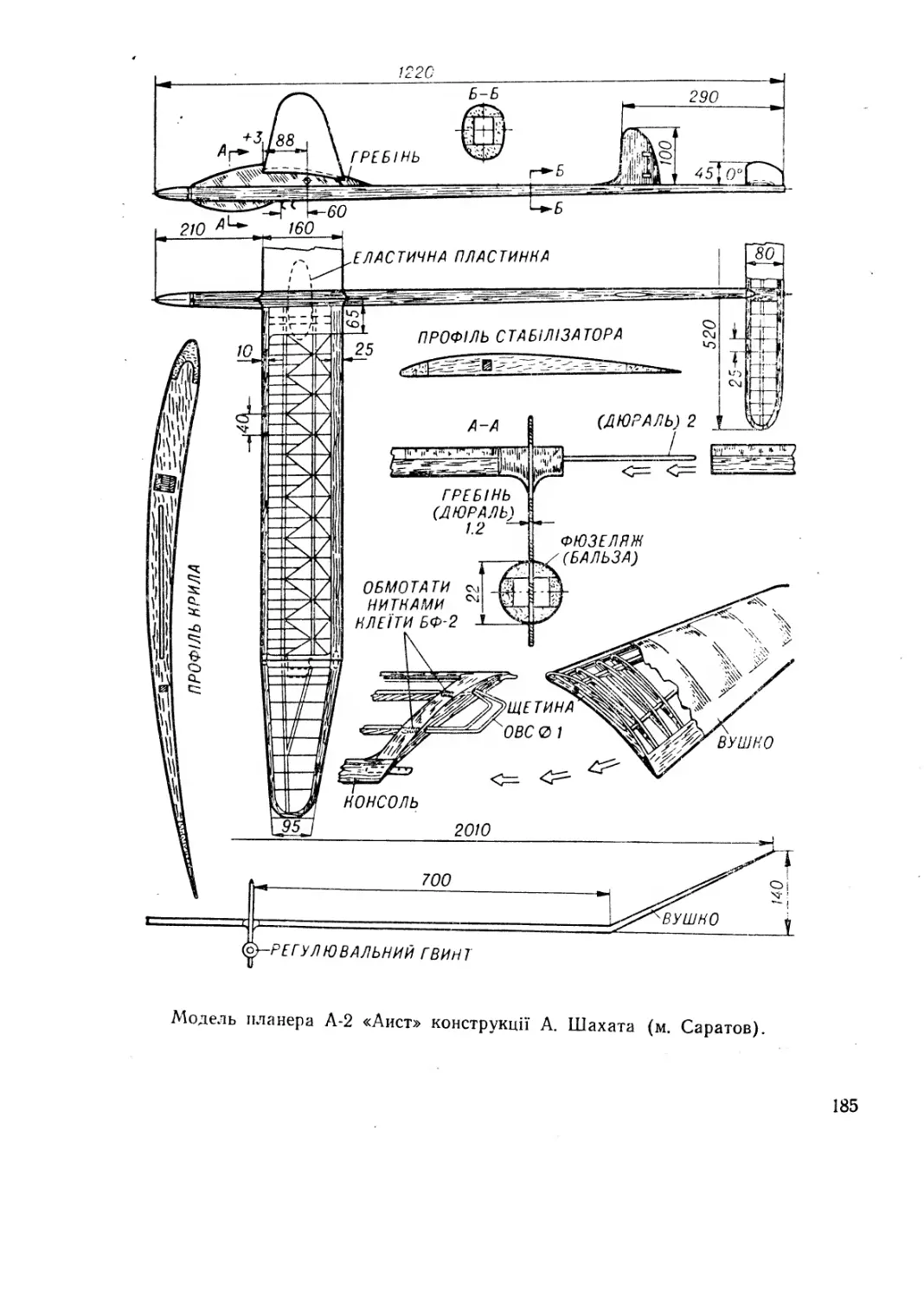
має /?е = 8300; модель пла-
нера А-2 з середньою хордою
160 мм і швидкістю 5 м/сек
має Ке = 56000, а модель лі-
така з двигуном внутріш-
нього згоряння при хорді
крила 1504-160 мм і швид-
кості 20 м/сек має =
= 206000. Тому користува-
тись аеродинамічними ха-
рактеристиками профілів
крил справжніх літаків, які
продуваються при =
= 3400004-3000000, не слід.
Під час розрахунку мо-
делі треба користуватися
параметрами, що відповіда-
ють дійсним умовам польо-
ту літаючої моделі.
У зв’язку з тим, що чис-
ло Ке залежить від модуля
в’язкості, тобто від темпе-
ратури повітря, слід врахо-
вувати це під час добору
профілю крила моделі. На
рис. 6. подано номограму
залежності числа Ке від
температури повітря.
ю
Розглянувши основні питання обтікання тіл повітрям, можна зробити
певні висновки. Аеродинамічний спектр будь-якого тіла складається з
яезбуреного і збуреного потоків. Збурений потік складається з погра-
ничного і потенціального шарів. Аеродинамічні спектри за своїм хараю
тером бувають плавні і вихрові, симетричні і несиметричні. Для біль-
шої наочності розглянемо деякі характерні спектри тіл.
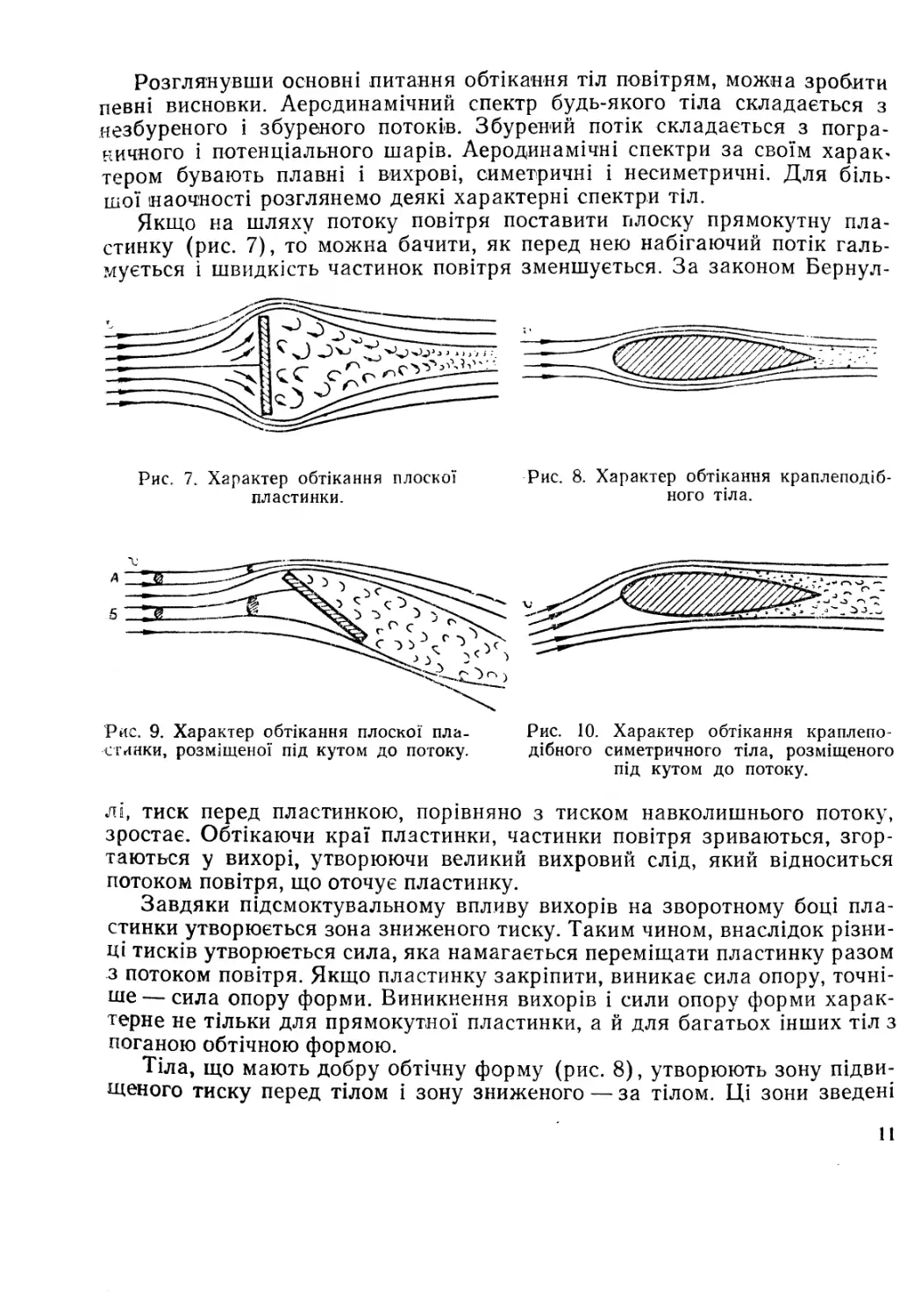
Якщо на шляху потоку повітря поставити плоску прямокутну пла-
стинку (рис. 7), то можна бачити, як перед нею набігаючий потік галь-
мується і швидкість частинок повітря зменшується. За законом Бернул-
Рис. 7. Характер обтікання плоскої
пластинки.
Рис. 8. Характер обтікання краплеподіб-
ного тіла.
Рис. 10. Характер обтікання краплепо-
дібного симетричного тіла, розміщеного
під кутом до потоку.
Рис. 9. Характер обтікання плоскої пла-
стинки, розміщеної під кутом до потоку.
лі, тиск перед пластинкою, порівняно з тиском навколишнього потоку,
зростає. Обтікаючи краї пластинки, частинки повітря зриваються, згор-
таються у вихорі, утворюючи великий вихровий слід, який відноситься
потоком повітря, що оточує пластинку.
Завдяки підсмоктувальному впливу вихорів на зворотному боці пла-
стинки утворюється зона зниженого тиску. Таким чином, внаслідок різни-
ці тисків утворюється сила, яка намагається переміщати пластинку разом
з потоком повітря. Якщо пластинку закріпити, виникає сила опору, точні-
ше— сила опору форми. Виникнення вихорів і сили опору форми харак-
терне не тільки для прямокутної пластинки, а й для багатьох інших тіл з
поганою обтічною формою.
Тіла, що мають добру обтічну форму (рис. 8), утворюють зону підви-
щеного тиску перед тілом і зону зниженого — за тілом. Ці зони зведені
II
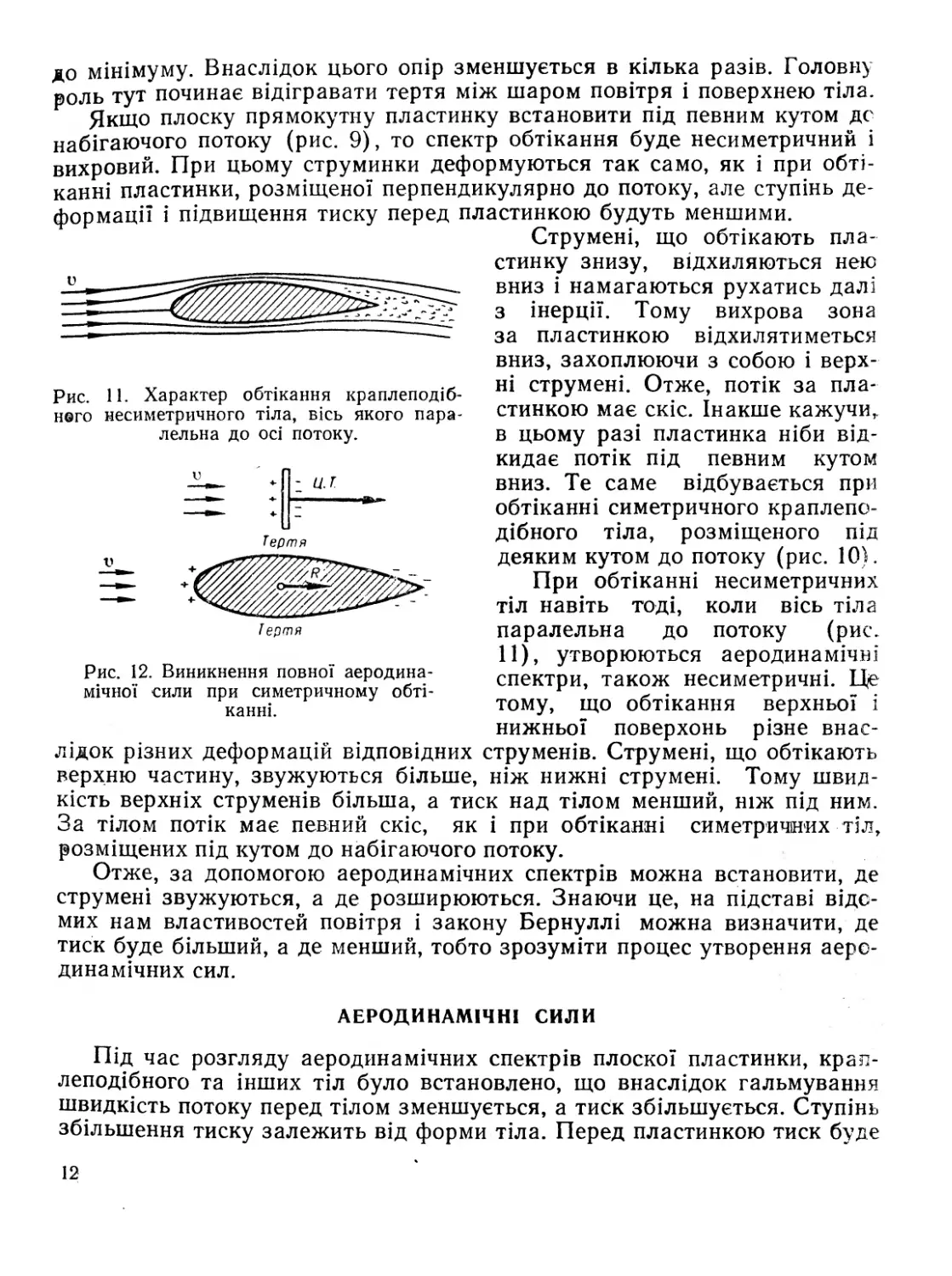
Рис. 11. Характер обтікання краплеподіб-
ного несиметричного тіла, вісь якого пара-
лельна до осі потоку.
до мінімуму. Внаслідок цього опір зменшується в кілька разів. Головну
роль тут починає відігравати тертя між шаром повітря і поверхнею тіла.
Якщо плоску прямокутну пластинку встановити під певним кутом де
набігаючого потоку (рис. 9), то спектр обтікання буде несиметричний і
вихровий. При цьому струминки деформуються так само, як і при обті-
канні пластинки, розміщеної перпендикулярно до потоку, але ступінь де-
формації і підвищення тиску перед пластинкою будуть меншими.
Струмені, що обтікають пла-
стинку знизу, відхиляються нею
вниз і намагаються рухатись далі
з інерції. Тому вихрова зона
за пластинкою відхилятиметься
вниз, захоплюючи з собою і верх-
ні струмені. Отже, потік за пла-
стинкою має скіс. Інакше кажучи,
в цьому разі пластинка ніби від-
кидає потік під певним кутом
вниз. Те саме відбувається при
обтіканні симетричного краплепо-
дібного тіла, розміщеного під
деяким кутом до потоку (рис. 10).
При обтіканні несиметричних
тіл навіть тоді, коли вісь тіла
паралельна до потоку (рис.
11), утворюються аеродинамічні
спектри, також несиметричні. Це
тому, що обтікання верхньої і
нижньої поверхонь різне внас-
лідок різних деформацій відповідних струменів. Струмені, що обтікають
верхню частину, звужуються більше, ніж нижні струмені. Тому швид-
кість верхніх струменів більша, а тиск над тілом менший, ніж під ним.
За тілом потік має певний скіс, як і при обтіканні симетричних тіл,
розміщених під кутом до набігаючого потоку.
Отже, за допомогою аеродинамічних спектрів можна встановити, де
струмені звужуються, а де розширюються. Знаючи це, на підставі відо-
мих нам властивостей повітря і закону Бернуллі можна визначити, де
тиск буде більший, а де менший, тобто зрозуміти процес утворення аеро-
динамічних сил.
Рис. 12. Виникнення повної аеродина-
мічної сили при симетричному обті-
канні.
АЕРОДИНАМІЧНІ СИЛИ
Під час розгляду аеродинамічних спектрів плоскої пластинки, крап-
леподібного та інших тіл було встановлено, що внаслідок гальмування
швидкість потоку перед тілом зменшується, а тиск збільшується. Ступінь
збільшення тиску залежить від форми тіла. Перед пластинкою тиск буде
12
більший, ніж перед краплеподібним тілом (рис. 12). За тілом внаслідок
розрідження повітря тиск зменшується, але по-різному: у плоскої пла-
стинки інтенсивніше. Отже, перед тілом і за ним утворюється різниця
тисків, внаслідок чого виникає результуюча аеродинамічна сила, напрям-
лена проти руху тіла. Вона позначається буквою і називається повною
аеродинамічною силою.
Іншою причиною виникнення аеродинамічної сили є тертя повітря в
пограничному шарі: сили тертя, як відомо, завжди напрямлені проти
руху тіла.
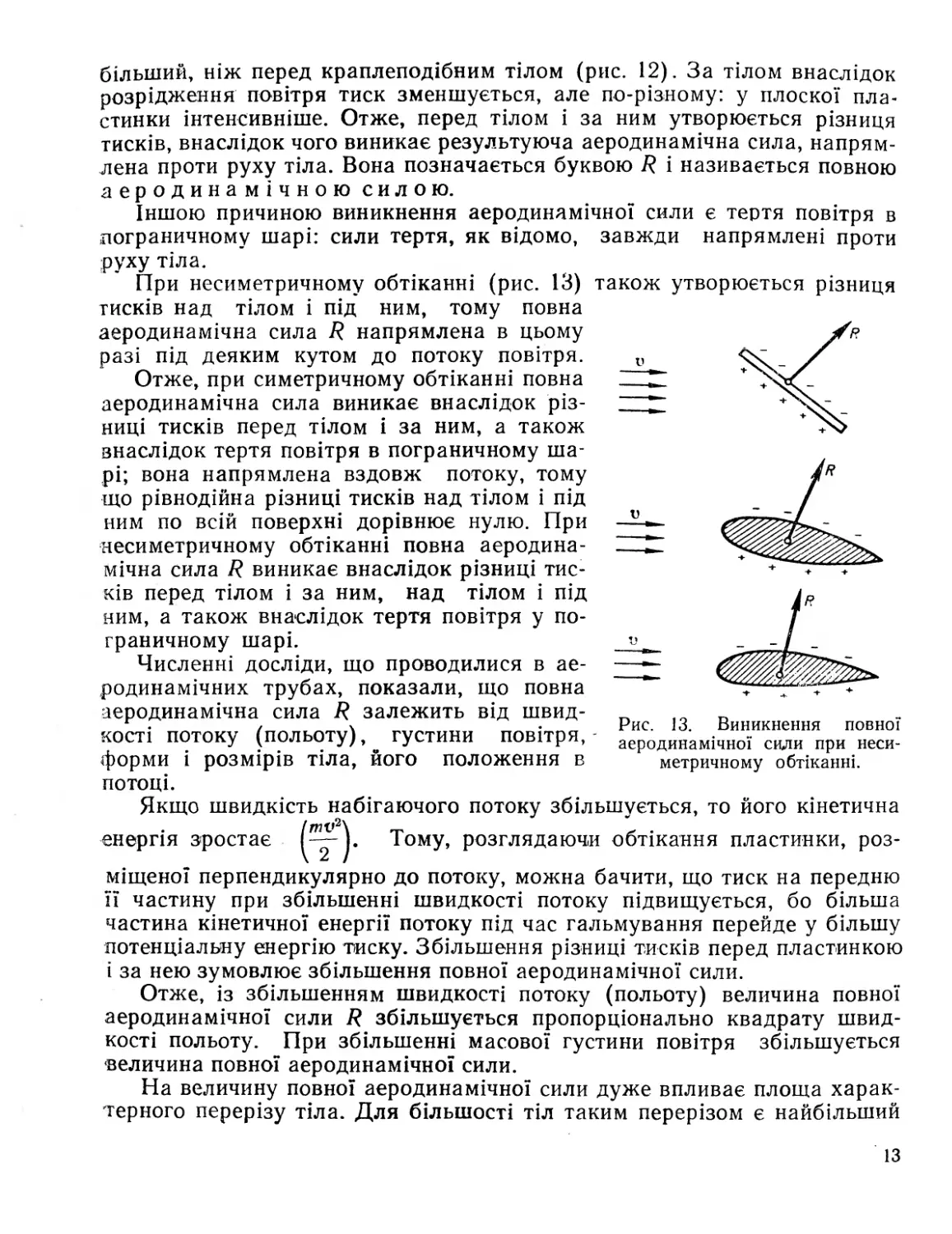
При несиметричному обтіканні (рис. 13) також утворюється різниця
тисків над тілом і під ним, тому повна
аеродинамічна сила напрямлена в цьому
разі під деяким кутом до потоку повітря.
Отже, при симетричному обтіканні повна
аеродинамічна сила виникає внаслідок різ-
ниці тисків перед тілом і за ним, а також
внаслідок тертя повітря в пограничному ша-
рі; вона напрямлена вздовж потоку, тому
що рівнодійна різниці тисків над тілом і під
ним по всій поверхні дорівнює нулю. При
несиметричному обтіканні повна аеродина-
мічна сила У? виникає внаслідок різниці тис-
ків перед тілом і за ним, над тілом і під
ним, а також внаслідок тертя повітря у по-
граничному шарі.
Численні досліди, що проводилися в ае-
родинамічних трубах, показали, що повна
аеродинамічна сила /? залежить від швид-
кості потоку (польоту), густини повітря,
форми і розмірів тіла, його положення в
потоці.
Рис. 13. Виникнення повної
аеродинамічної сили при неси-
метричному обтіканні.
Якщо швидкість набігаючого потоку збільшується, то його кінетична
енергія зростає
ті»2
V
Тому, розглядаючи обтікання пластинки, роз-
міщеної перпендикулярно до потоку, можна бачити, що тиск на передню
її частину при збільшенні швидкості потоку підвищується, бо більша
частина кінетичної енергії потоку під час гальмування перейде у більшу
потенціальну енергію тиску. Збільшення різниці тисків перед пластинкою
і за нею зумовлює збільшення повної аеродинамічної сили.
Отже, із збільшенням швидкості потоку (польоту) величина повної
аеродинамічної сили /? збільшується пропорціонально квадрату швид-
кості польоту. При збільшенні масової густини повітря збільшується
величина повної аеродинамічної сили.
На величину повної аеродинамічної сили дуже впливає площа харак-
терного перерізу тіла. Для більшості тіл таким перерізом є найбільший
13
поперечний переріз тіла, розміщений перпендикулярно до потоку. Цей
переріз називається міделевим перерізом, або м і д е л е м.
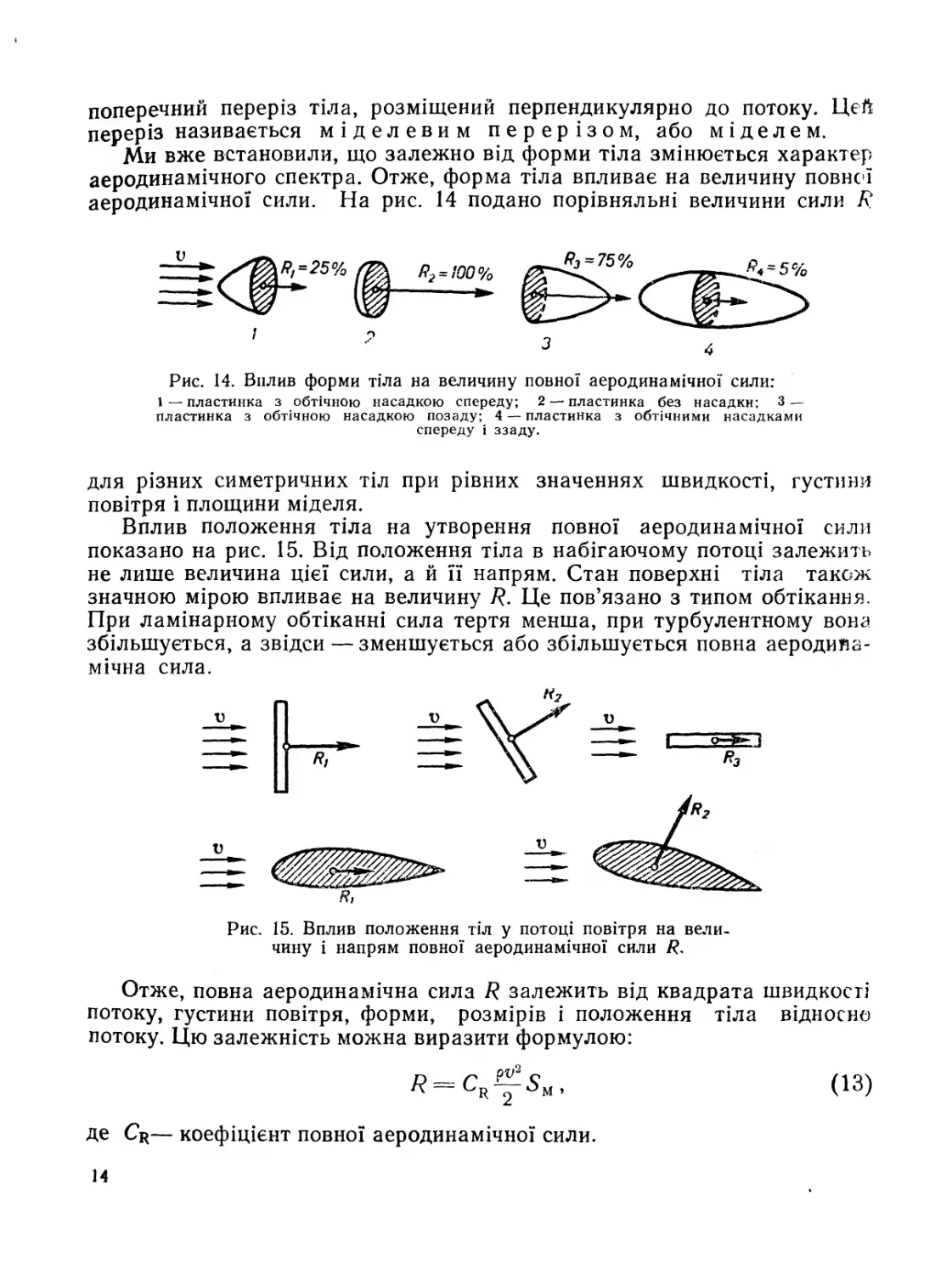
Ми вже встановили, що залежно від форми тіла змінюється характер
аеродинамічного спектра. Отже, форма тіла впливає на величину повної
аеродинамічної сили. На рис. 14 подано порівняльні величини сили К
Рис. 14. Вплив форми тіла на величину повної аеродинамічної сили:
1 — пластинка з обтічною насадкою спереду; 2 — пластинка без насадки; 3 —
пластинка з обтічною насадкою позаду; 4 — пластинка з обтічними насадками
спереду і ззаду.
для різних симетричних тіл при рівних значеннях швидкості, густини
повітря і площини міделя.
Вплив положення тіла на утворення повної аеродинамічної сили
показано на рис. 15. Від положення тіла в набігаючому потоці залежить
не лише величина цієї сили, а й її напрям. Стан поверхні тіла також
значною мірою впливає на величину /?. Це пов’язано з типом обтікання.
При ламінарному обтіканні сила тертя менша, при турбулентному вона
збільшується, а звідси — зменшується або збільшується повна аеродина-
мічна сила.
Рис. 15. Вплив положення тіл у потоці повітря на вели-
чину і напрям повної аеродинамічної сили /?.
Отже, повна аеродинамічна сила залежить від квадрата швидкості
потоку, густини повітря, форми, розмірів і положення тіла відносно
потоку. Цю залежність можна виразити формулою:
м »
(13)
де Ср— коефіцієнт повної аеродинамічної сили.
14
Іноді цю залежність визначають за формулою:
(14)
де
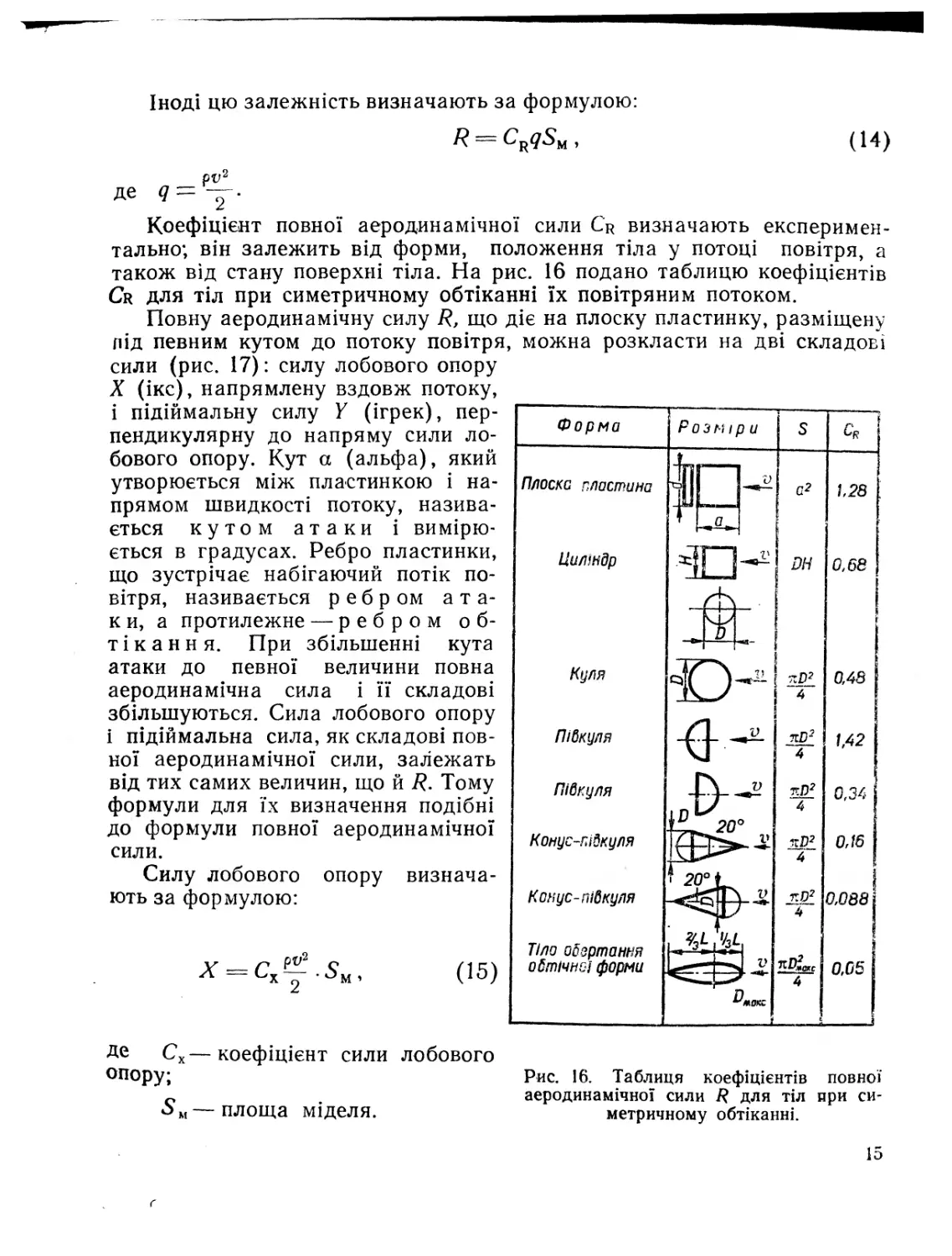
Коефіцієнт повної аеродинамічної сили Сц визначають експеримен-
тально; він залежить від форми, положення тіла у потоці повітря, а
також від стану поверхні тіла. На рис. 16 подано таблицю коефіцієнтів
Ск для тіл при симетричному обтіканні їх повітряним потоком.
Повну аеродинамічну силу /?, що діє на плоску пластинку, разміщену
лід певним кутом до потоку повітря, можна розкласти на дві складові
сили (рис. 17): силу лобового опору
X (ікс), напрямлену вздовж потоку,
і підіймальну силу У (ігрек), пер- пендикулярну до напряму сили ло- бового опору. Кут а (альфа), який утворюється між пластинкою і на- прямом швидкості потоку, назива- ється кутом атаки і вимірю- ється в градусах. Ребро пластинки, що зустрічає набігаючий потік по- вітря, називається ребром ата- ки^ протилежне — ребром об- тікання. При збільшенні кута атаки до певної величини повна аеродинамічна сила і її складові Форма Розміри 5
Плоска пластина Т’І 1 V с2 Е28
І .^аЛ
Циліндр .X он 0,68
Куля ЯР2 4 і і І' । 0,48 | І
— і д
збільшуються. Сила лобового опору
і підіймальна сила, як складові пов- ної аеродинамічної сили, залежать від тих самих величин, що й /?. Тому формули для їх визначення подібні до формули повної аеродинамічної сили. Силу лобового опору визнача- ють за формулою: Півкуля Півкуля Конус-підкуля Конус-півкуля Т 20° \ *У 20° у *Т\ у 1 тгГ“ 4 г.Р2 4 ТІЇ)2 “4 1,42 0,34 і 0,16 1 0,088 і
Х = С^.8„, (15) Тіло обертання обтічні- і форми сгі ? і) І | "КОлакс | 4 1 0,05 □
Рис. 16. Таблиця коефіцієнтів повної
аеродинамічної сили для тіл при си-
метричному обтіканні.
Де Сх—коефіцієнт сили лобового
опору;
5М — площа міделя.
15
Рис. 17. Розкладання повної аеродинамічної сили Я на
складові: силу лобового опору X і підіймальну силу У;
а — кут атаки.
Підіймальну силу визначають за формулою-
У__р ог»2
г ~~Су 1Г дт ’
(16)
де Су—коефіцієнт підіймальної сили; 5Т—площа тіла.
крило
Під час польоту літаючої моделі на всі її частини діють аеродинамічні
сили. Основною частиною моделі, яка підтримує її у повітрі, є крило.
Льотні якості моделі в основному залежать від якості крила. Йдеться
як про аеродинамічну якість крила, так і про якість його виготовлення.
Щоб правильно спроектувати крило, авіамоделіст повинен добре розу-
міти і розбиратись у його характеристиках, вміло використовувати набуті
знання під час конструювання літаючої моделі.
Характеристики крила моделі поділяють на геометричні і
аеродинамічні.
Геометричні характеристики крила
Величина і напрям аеродинамічних сил, що діють на крило, значною
мірою визначаються формою профілю, його обрисом у плані та виглядом
спереду, оскільки зміна цих геометричних характеристик крила впливає
на зміну спектра обтікання.
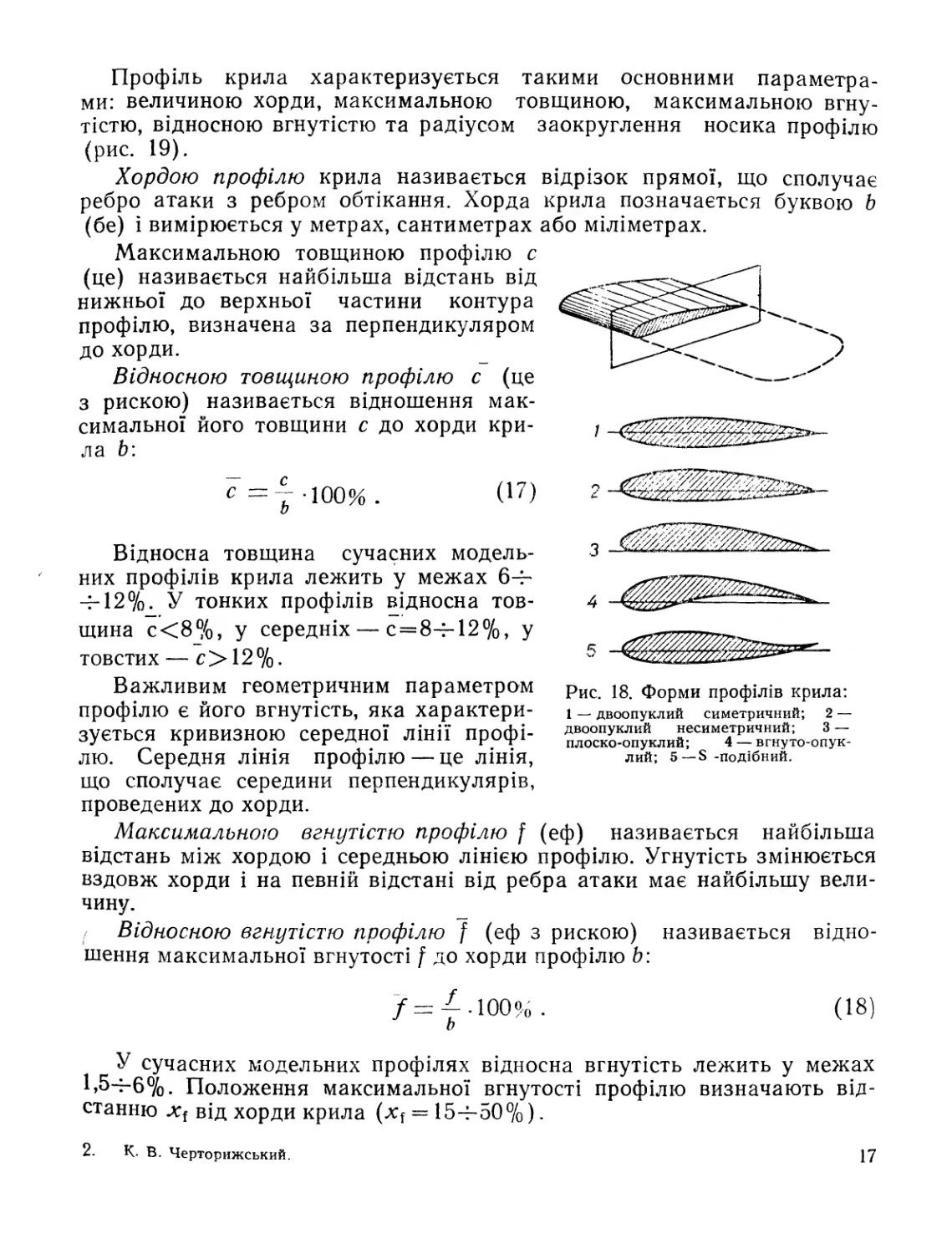
Профілем крила називається форма його поперечного перерізу (рис.
18). Всі профілі, які використовують на літаючих моделях, поділяють на
симетричні і несиметричні. Несиметричні профілі в свою чергу поділя-
ють на двоопуклі, плоско-опуклі, вгнуто-опуклі і 8-подібні.
16
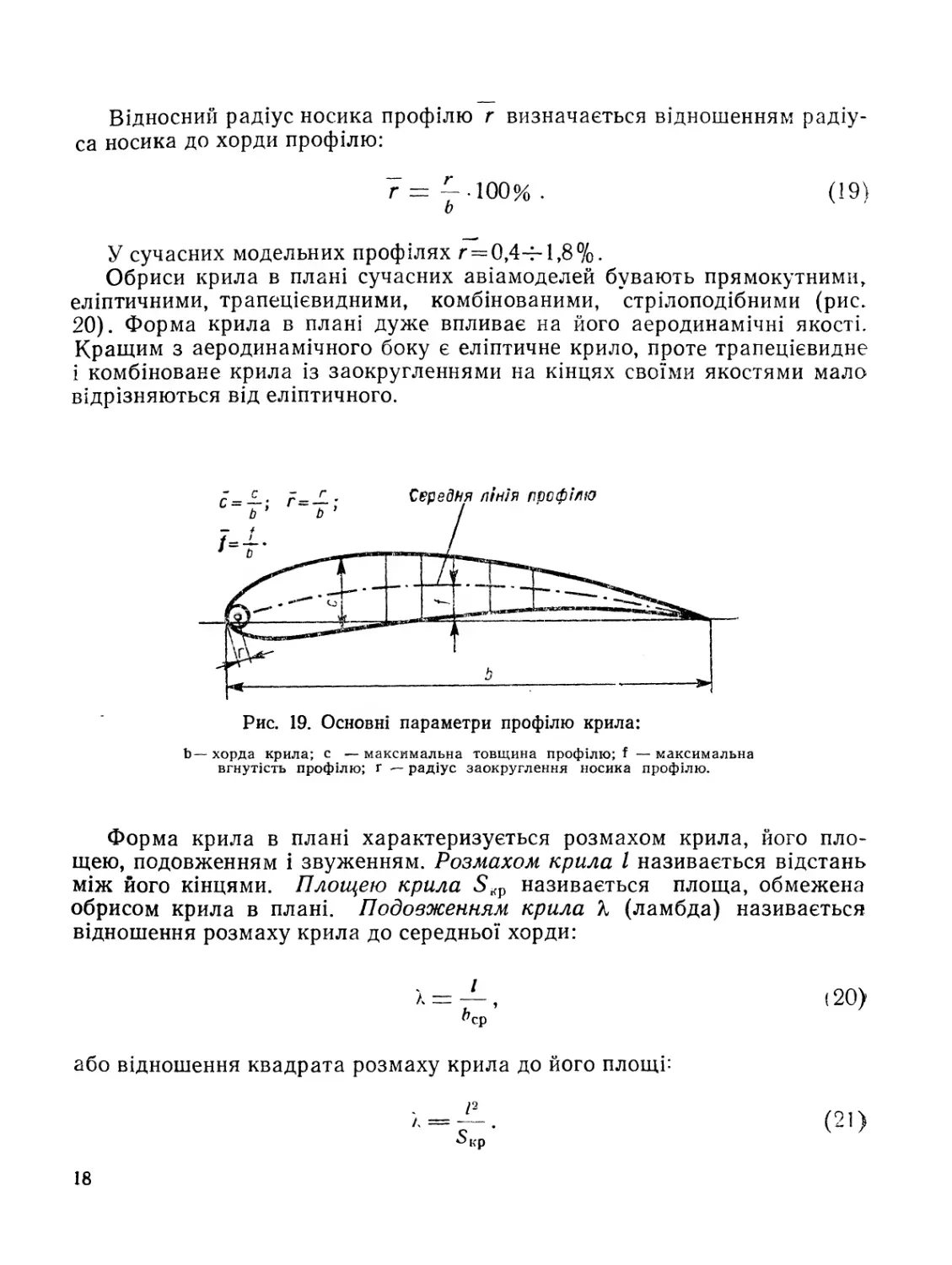
Профіль крила характеризується такими основними параметра-
ми: величиною хорди, максимальною товщиною, максимальною вгну-
тістю, відносною вгнутістю та радіусом заокруглення носика профілю
(рис. 19).
Хордою профілю крила називається відрізок прямої, що сполучає
ребро атаки з ребром обтікання. Хорда крила позначається буквою Ь
(бе) і вимірюється у метрах, сантиметрах або міліметрах.
Максимальною товщиною профілю с
(це) називається найбільша відстань від
нижньої до верхньої частини контура
профілю, визначена за перпендикуляром
до хорди.
Відносною товщиною профілю с (це
з рискою) називається відношення мак-
симальної його товщини с до хорди кри-
ла Ь:
(17)
V
Відносна товщина сучасних модель-
них профілів крила лежить у межах 64-
4-12%. У тонких профілів відносна тов-
щина с<8%, у середніх — с=84-12%, у
товстих — с > 12 % •
Рис. 18. Форми профілів крила:
1 — двоопуклий симетричний; 2 —
двоопуклий несиметричний; 3 —
плоско-опуклий; 4 — вгнуто-опук-
лий; 5—8 -подібний.
Важливим геометричним параметром
профілю є його вгнутість, яка характери-
зується кривизною середної лінії профі-
лю. Середня лінія профілю — це лінія,
що сполучає середини перпендикулярів,
проведених до хорди.
Максимальною вгнутістю профілю І (еф) називається найбільша
відстань між хордою і середньою лінією профілю. Угнутість змінюється
вздовж хорди і на певній відстані від ребра атаки має найбільшу вели-
чину.
Відносною вгнутістю профілю (еф з рискою) називається відно-
шення максимальної вгнутості / до хорди профілю Ь:
^-100%
ь
(18)
У сучасних модельних профілях відносна вгнутість лежить у межах
1,54-6%. Положення максимальної вгнутості профілю визначають від-
станню від хорди крила (хт = 154-50%).
К- В. Черторижський.
17
Відносний радіус носика профілю г визначається відношенням радіу-
са носика до хорди профілю:
г = — 100%. (19)
ь
У сучасних модельних профілях г = 0,44-1,8%.
Обриси крила в плані сучасних авіамоделей бувають прямокутними,
еліптичними, трапецієвидними, комбінованими, стрілоподібними (рис.
20). Форма крила в плані дуже впливає на його аеродинамічні якості.
Кращим з аеродинамічного боку є еліптичне крило, проте трапецієвидне
і комбіноване крила із заокругленнями на кінцях своїми якостями мало
відрізняються від еліптичного.
Рис. 19. Основні параметри профілю крила:
Ь— хорда крила; с — максимальна товщина профілю; Т — максимальна
вгнутість профілю; г — радіус заокруглення носика профілю.
Форма крила в плані характеризується розмахом крила, його пло-
щею, подовженням і звуженням. Розмахом крила І називається відстань
між його кінцями. Площею крила 5кр називається площа, обмежена
обрисом крила в плані. Подовженням крила X (ламбда) називається
відношення розмаху крила до середньої хорди:
. _ і
(20)
або відношення квадрата розмаху крила до його площі-
(21)
18
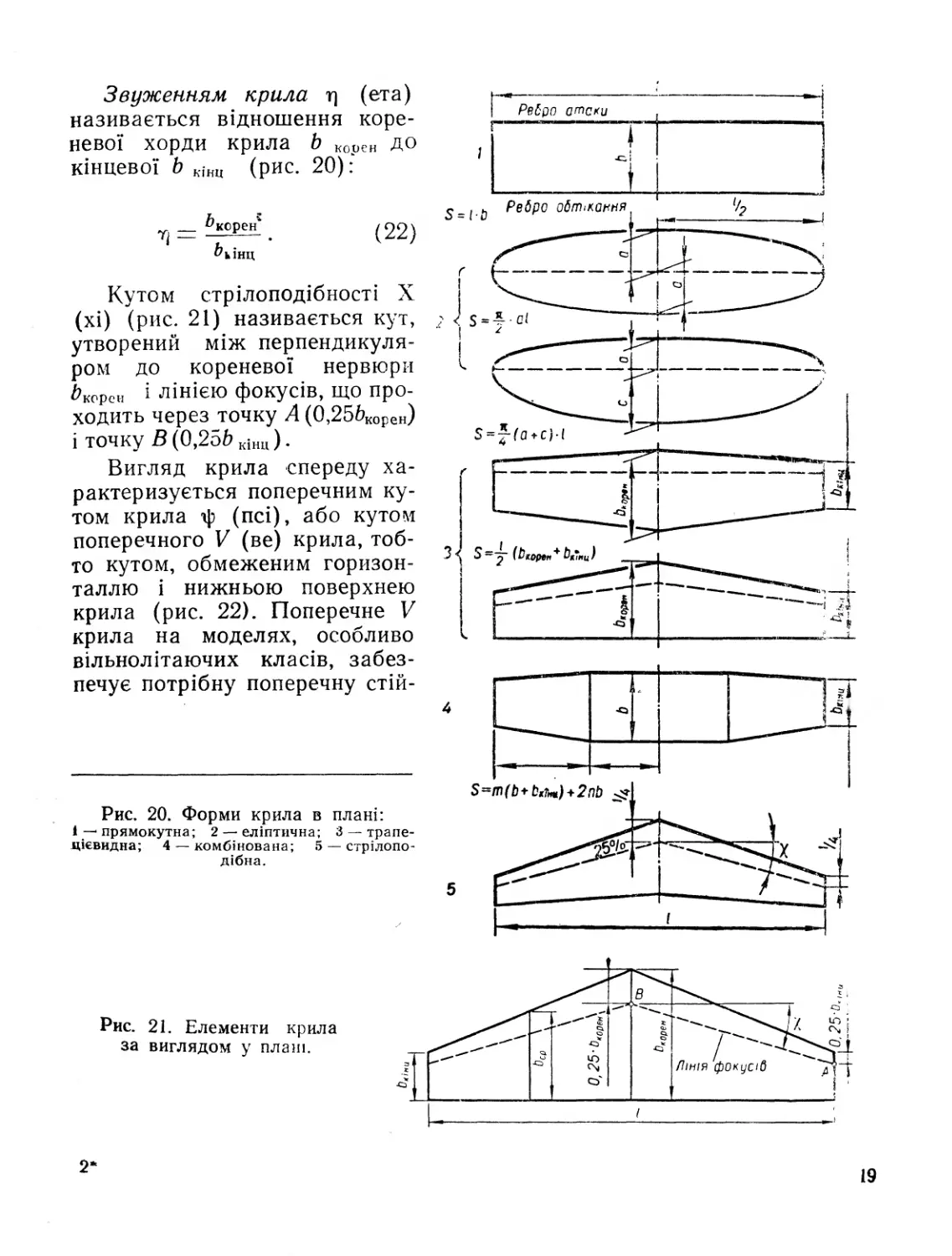
Звуженням крила т] (ета)
називається відношення коре-
невої хорди крила Ь К0Рен до
кінцевої Ь кінц (рис. 20):
т; — . (22)
^кІНЦ
Кутом стрілоподібності X
(хі) (р ис. 21) називається кут,
утворений між перпендикуля-
ром до кореневої нервюри
Корон і лінією фокусів, що про-
ходить через точку А (0,25&корен)
і точку В (0,256 КІНц).
Вигляд крила спереду ха-
рактеризується поперечним ку-
том крила ф (псі), або кутом
поперечного V (ве) крила, тоб-
то кутом, обмеженим горизон-
таллю і нижньою поверхнею
крила (рис. 22). Поперечне V
крила на моделях, особливо
вільнолітаючих класів, забез-
печує потрібну поперечну стій-
Рис. 20. Форми крила в плані:
і а—* прямокутна; 2 — еліптична; 3 — трапе-
цієвидна; 4 — комбінована; 5 — стрілопо-
дібна.
Рис. 21. Елементи крила
за виглядом у плані.
2
19
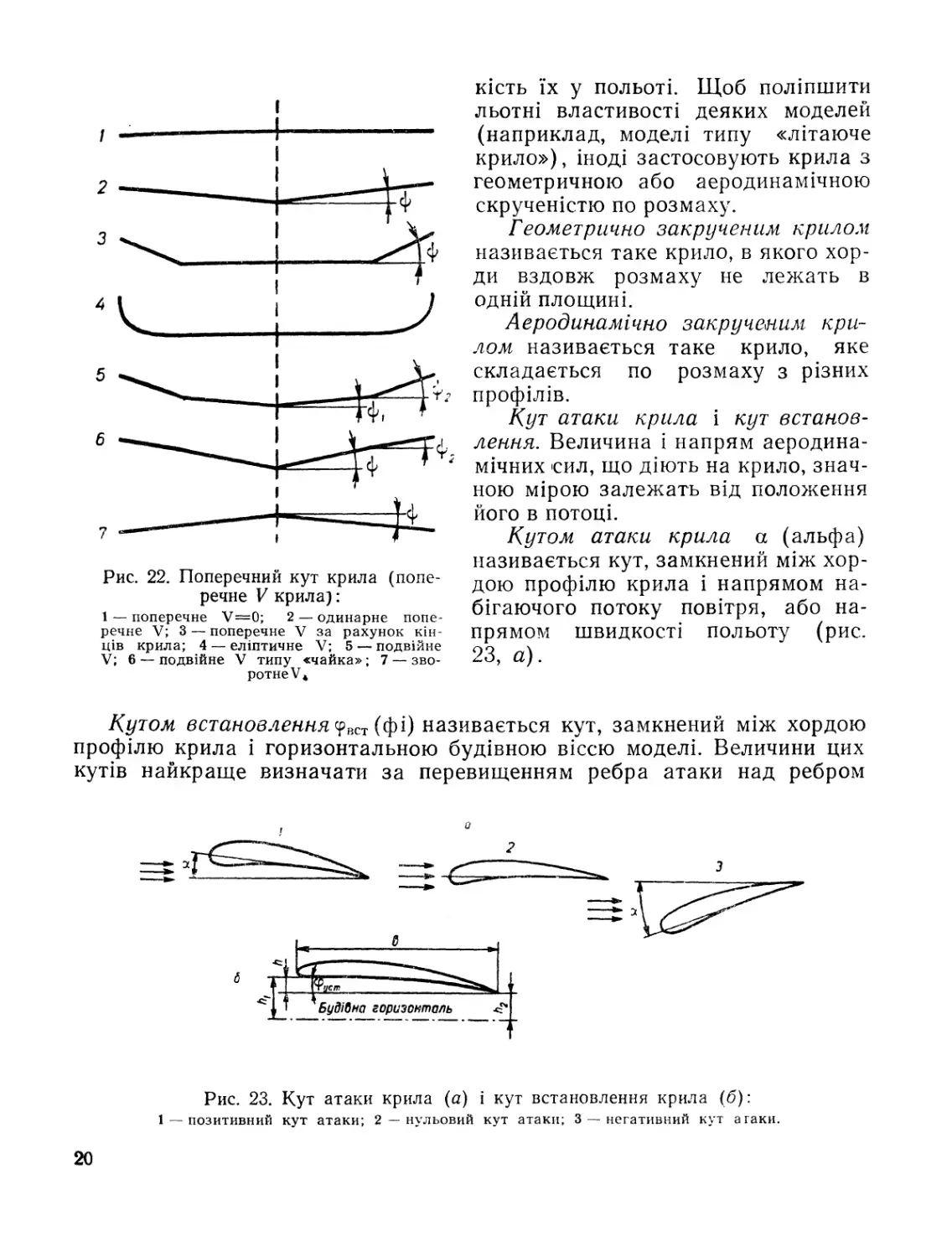
Рис. 22. Поперечний кут крила (попе-
речне V крила):
1 — поперечне У=0; 2 — одинарне попе-
речне V; 3 — поперечне V за рахунок кін-
ців крила; 4 — еліптичне V; 5 — подвійне
V; 6 — подвійне V типу «чайка»; 7 — зво-
ротне V*
кість їх у польоті. Щоб поліпшити
льотні властивості деяких моделей
(наприклад, моделі типу «літаюче
крило»), іноді застосовують крила з
геометричною або аеродинамічною
скрученістю по розмаху.
Геометрично закрученим крилом
називається таке крило, в якого хор-
ди вздовж розмаху не лежать в
одній площині.
Аеродинамічно закрученим кри-
лом називається таке крило, яке
складається по розмаху з різних
профілів.
Кут атаки крила і кут встанов-
лення. Величина і напрям аеродина-
мічних сил, що діють на крило, знач-
ною мірою залежать від положення
його в потоці.
Кутом атаки крила а (альфа)
називається кут, замкнений між хор-
дою профілю крила і напрямом на-
бігаючого потоку повітря, або на-
прямом швидкості польоту (рис.
23, а).
Кутом встановлення <рвст (фі) називається кут, замкнений між хордою
профілю крила і горизонтальною будівною віссю моделі. Величини цих
кутів найкраще визначати за перевищенням ребра атаки над ребром
Рис. 23. Кут атаки крила (а) і кут встановлення крила (б):
1 — позитивний кут атаки; 2 — нульовий кут атаки; 3 — негативний кут а гаки.
20
обтікання (рис. 23, б). Знаючи розмір хорди Ь і перевищення Іг, неважко
визначити кут встановлення
Ьіп <ркст = - = —---------
твст ь ь
(23)
Знаючи синус кута, за таблицею синусів можна визначити і сам кут.
Аеродинамічні характеристики крила
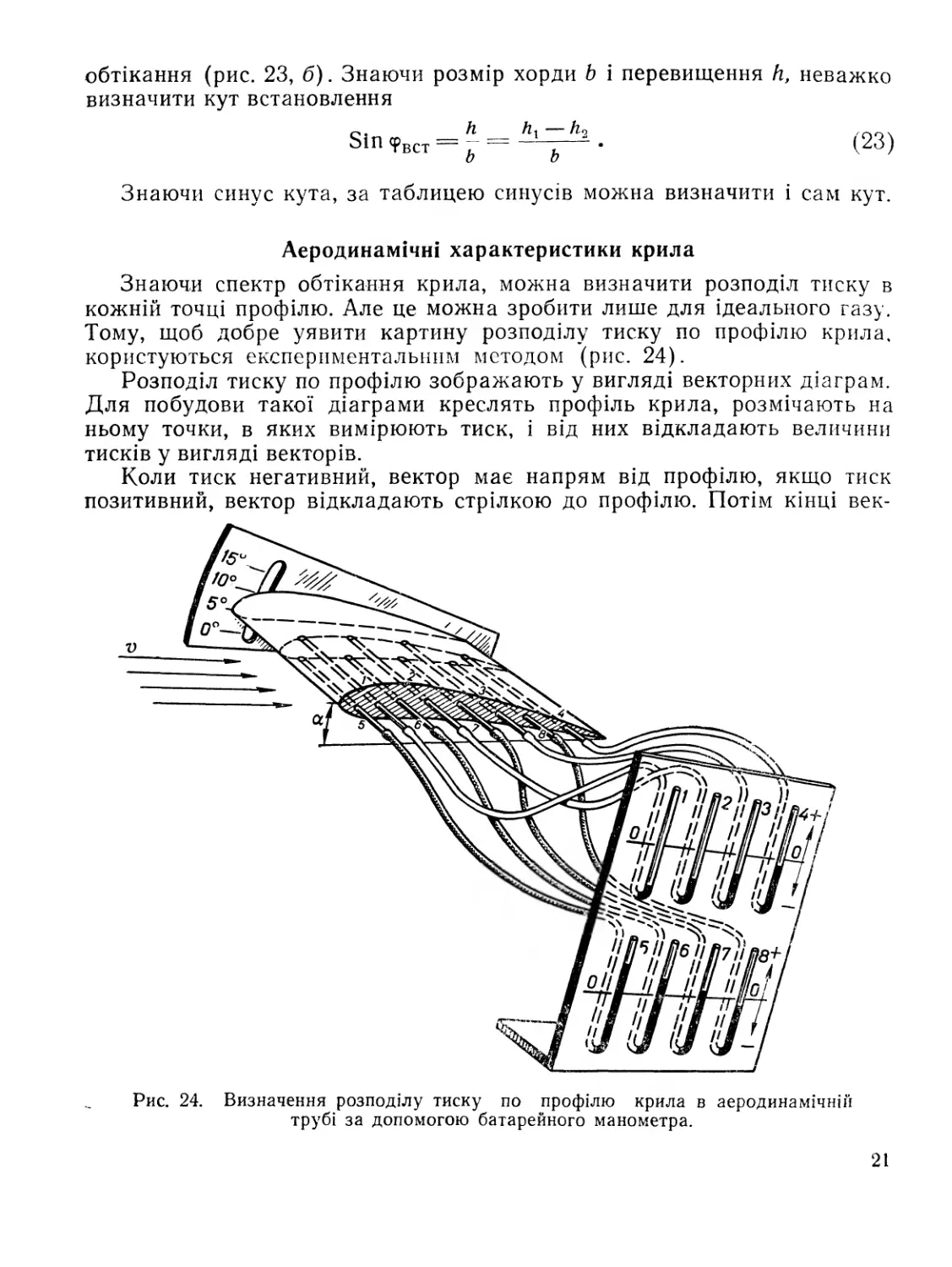
Знаючи спектр обтікання крила, можна визначити розподіл тиску в
кожній точці профілю. Але це можна зробити лише для ідеального газу.
Тому, щоб добре уявити картину розподілу тиску по профілю крила,
користуються експериментальним методом (рис. 24).
Розподіл тиску по профілю зображають у вигляді векторних діаграм.
Для побудови такої діаграми креслять профіль крила, розмічають на
ньому точки, в яких вимірюють тиск, і від них відкладають величини
тисків у вигляді векторів.
Коли тиск негативний, вектор має напрям від профілю, якщо тиск
позитивний, вектор відкладають стрілкою до профілю. Потім кінці век-
Рис. 24. Визначення розподілу тиску по профілю крила в аеродинамічній
трубі за допомогою батарейного манометра.
21
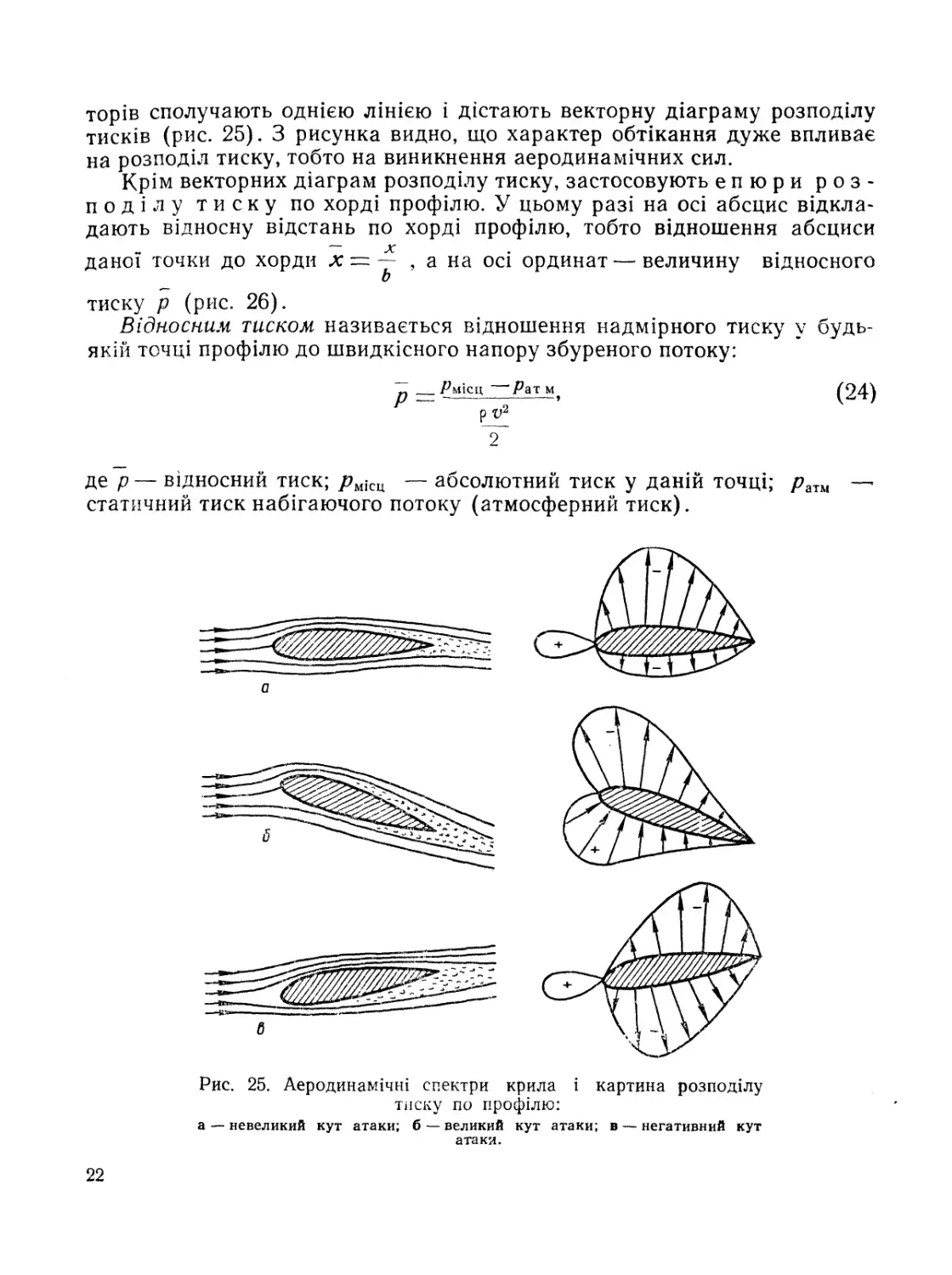
торів сполучають однією лінією і дістають векторну діаграму розподілу
тисків (рис. 25). З рисунка видно, що характер обтікання дуже впливає
на розподіл тиску, тобто на виникнення аеродинамічних сил.
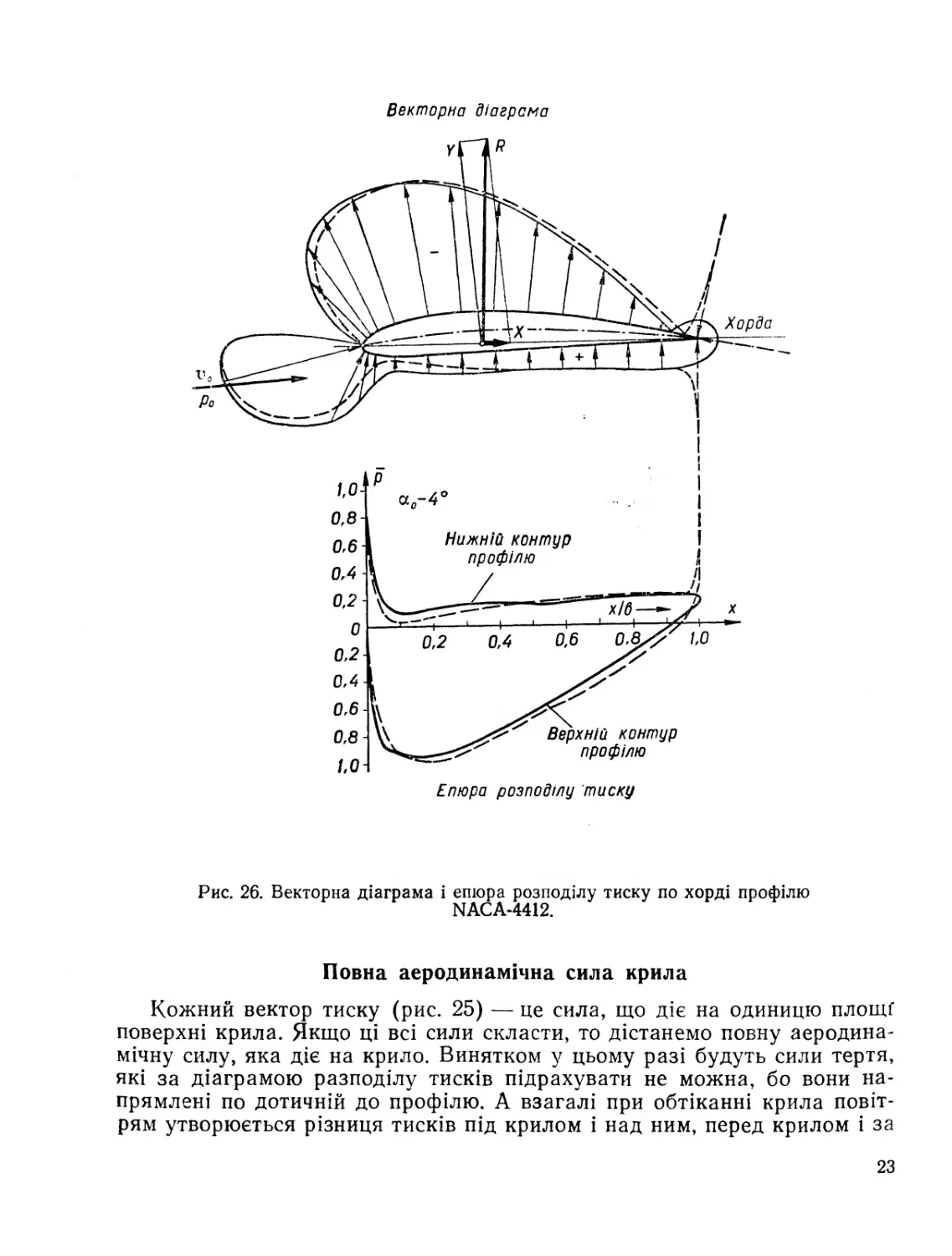
Крім векторних діаграм розподілу тиску, застосовують епюри роз-
поділу тиску по хорді профілю. У цьому разі на осі абсцис відкла-
дають відносну відстань по хорді профілю, тобто відношення абсциси
даної точки до хорди х~х , а на осі ординат — величину відносного
ь
тиску р (рис. 26).
Відносним тиском називається відношення надмірного тиску у будь-
якій точці профілю до швидкісного напору збуреного потоку:
___Амісц Рат м
---------------—»
р V2
(24)
де р — відносний тиск; рм1сц — абсолютний тиск у даній точці; /?атм —>
статичний тиск набігаючого потоку (атмосферний тиск).
Рис. 25. Аеродинамічні спектри крила і картина розподілу
тиску по профілю:
а — невеликий кут атаки; б — великий кут атаки; в — негативний кут
атаки.
22
Векторна діаграма
Епюра розподілу тиску
Рис. 26. Векторна діаграма і епюра розподілу тиску по хорді профілю
МАСА-4412.
Повна аеродинамічна сила крила
Кожний вектор тиску (рис. 25) — це сила, що діє на одиницю площі'
поверхні крила. Якщо ці всі сили скласти, то дістанемо повну аеродина-
мічну силу, яка діє на крило. Винятком у цьому разі будуть сили тертя,
які за діаграмою разподілу тисків підрахувати не можна, бо вони на-
прямлені по дотичній до профілю. А взагалі при обтіканні крила повіт-
рям утворюється різниця тисків під крилом і над ним, перед крилом і за
23
ним, а також виникають сили тертя у пограничному шарі, внаслідок чого
виникає повна аеродинамічна сила 7?кр.
Повна аеродинамічна сила крила /?кр напрямлена під деяким кутом
до набігаючого потоку, причому вона відхилена трохи назад. Це поясню-
ється тим, що в пограничному шарі водночас існують різниці тисків і
тертя. Величину повної аеродинамічної сили крила визначають за фор-
мулою, аналогічною до формули повної аеродинамічної сили будь-якого
тіла*
^кр —
(25)
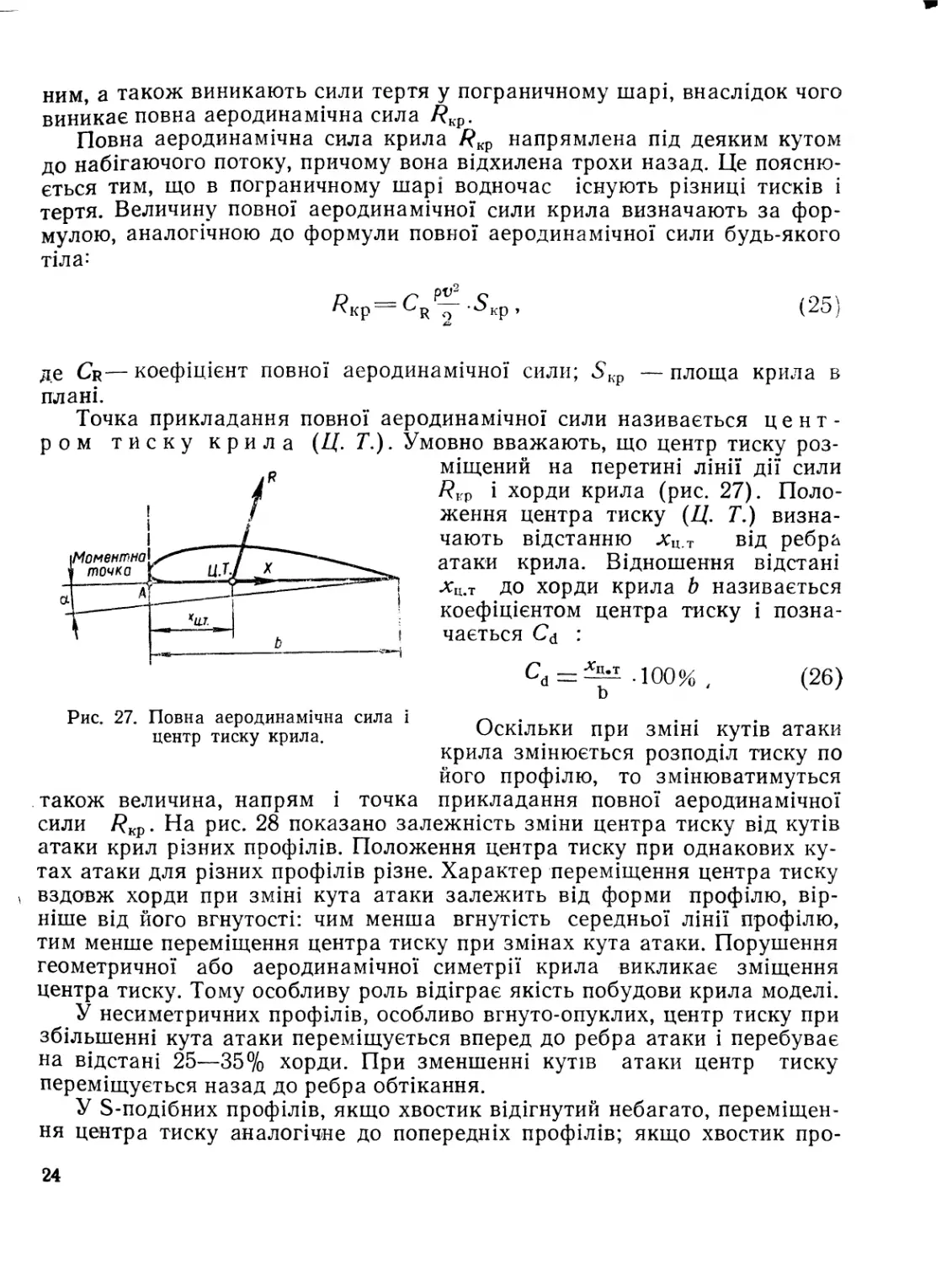
Рис. 27. Повна аеродинамічна сила і
центр тиску крила.
також величина, напрям і точка
сили На оис. 28 показано
де Ср—коефіцієнт повної аеродинамічної сили; 5кр —площа крила в
плані.
Точка прикладання повної аеродинамічної сили називається цент-
ром тиску крила (Ц. Т.). Умовно вважають, що центр тиску роз-
міщений на перетині лінії дії сили
/?кр і хорди крила (рис. 27). Поло-
ження центра тиску (Ц. Т.) визна-
чають відстанню Хц.т від ребра
атаки крила. Відношення відстані
хц.т до хорди крила Ь називається
коефіцієнтом центра тиску і позна-
чається Са :
Са = ^ .100% , (26)
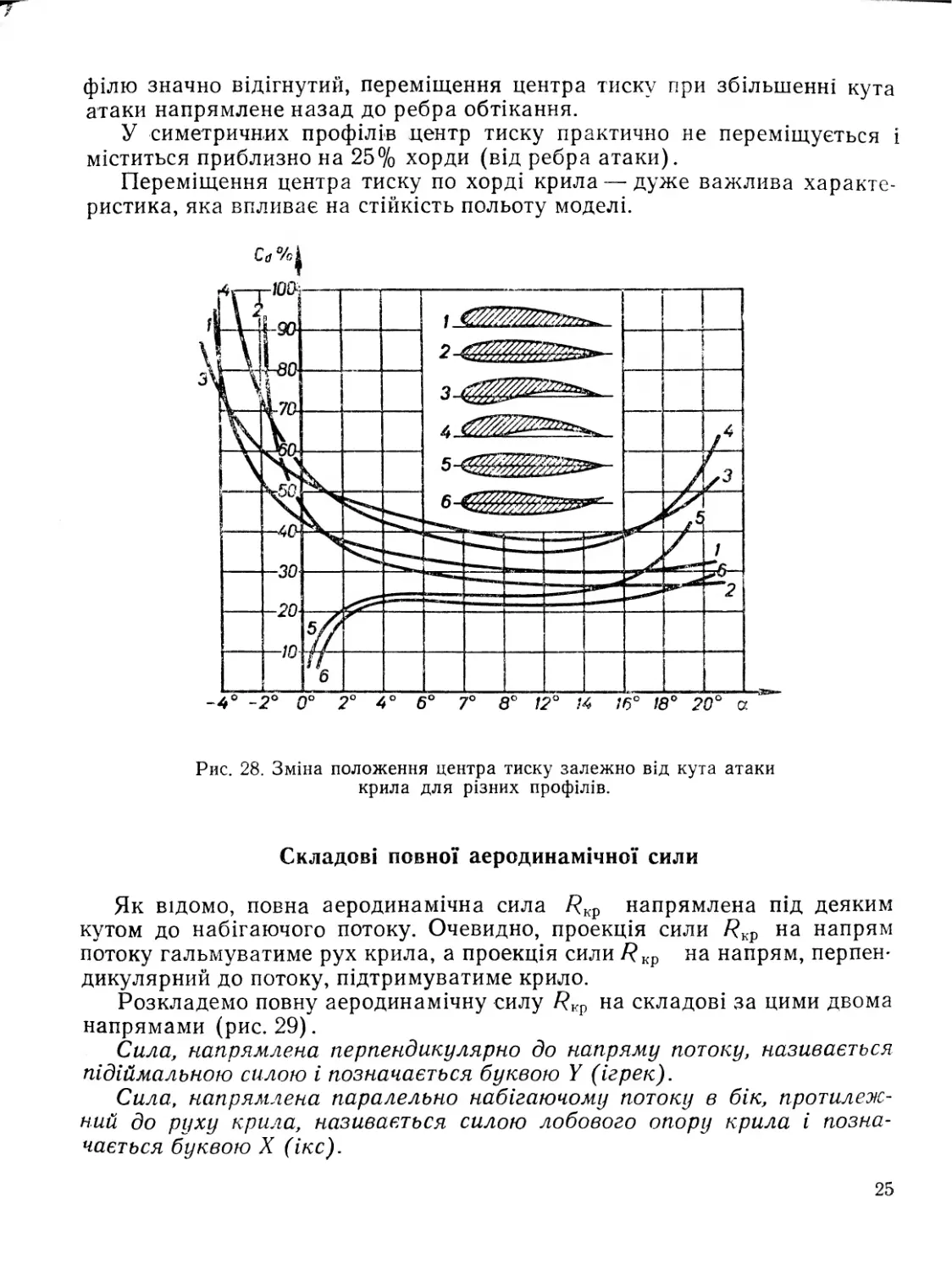
Оскільки при зміні кутів атаки
крила змінюється розподіл тиску по
його профілю, то змінюватимуться
прикладання повної аеродинамічної
джність зміни центра тиску від кутів
атаки крил різних профілів. Положення центра тиску при однакових ку-
тах атаки для різних профілів різне. Характер переміщення центра тиску
і вздовж хорди при зміні кута атаки залежить від форми профілю, вір-
ніше від його вгнутості: чим менша вгнутість середньої лінії профілю,
тим менше переміщення центра тиску при змінах кута атаки. Порушення
геометричної або аеродинамічної симетрії крила викликає зміщення
центра тиску. Тому особливу роль відіграє якість побудови крила моделі.
У несиметричних профілів, особливо вгнуто-опуклих, центр тиску при
збільшенні кута атаки переміщується вперед до ребра атаки і перебуває
на відстані 25—35% хорди. При зменшенні кутів атаки центр тиску
переміщується назад до ребра обтікання.
У 8-подібних профілів, якщо хвостик відігнутий небагато, переміщен-
ня центра тиску аналогічне до попередніх профілів; якщо хвостик про-
24
філю значно відігнутий, переміщення центра тиску при збільшенні кута
атаки напрямлене назад до ребра обтікання.
У симетричних профілів центр тиску практично не переміщується і
міститься приблизно на 25% хорди (від ребра атаки).
Переміщення центра тиску по хорді крила — дуже важлива характе-
ристика, яка впливає на стійкість польоту моделі.
Рис. 28. Зміна положення центра тиску залежно від кута атаки
крила для різних профілів.
Складові повної аеродинамічної сили
Як відомо, повна аеродинамічна сила /?кр напрямлена під деяким
кутом до набігаючого потоку. Очевидно, проекція сили /?кр на напрям
потоку гальмуватиме рух крила, а проекція сили /?кр на напрям, перпен-
дикулярний до потоку, підтримуватиме крило.
Розкладемо повну аеродинамічну силу /?кр на складові за цими двома
напрямами (рис. 29).
Сила, напрямлена перпендикулярно до напряму потоку, називається
підіймальною силою і позначається буквою ¥ (ігрек).
Сила, напрямлена паралельно набігаючому потоку в бік, протилеж-
ний до руху крила, називається силою лобового опору крила і позна-
чається буквою X (ікс).
25
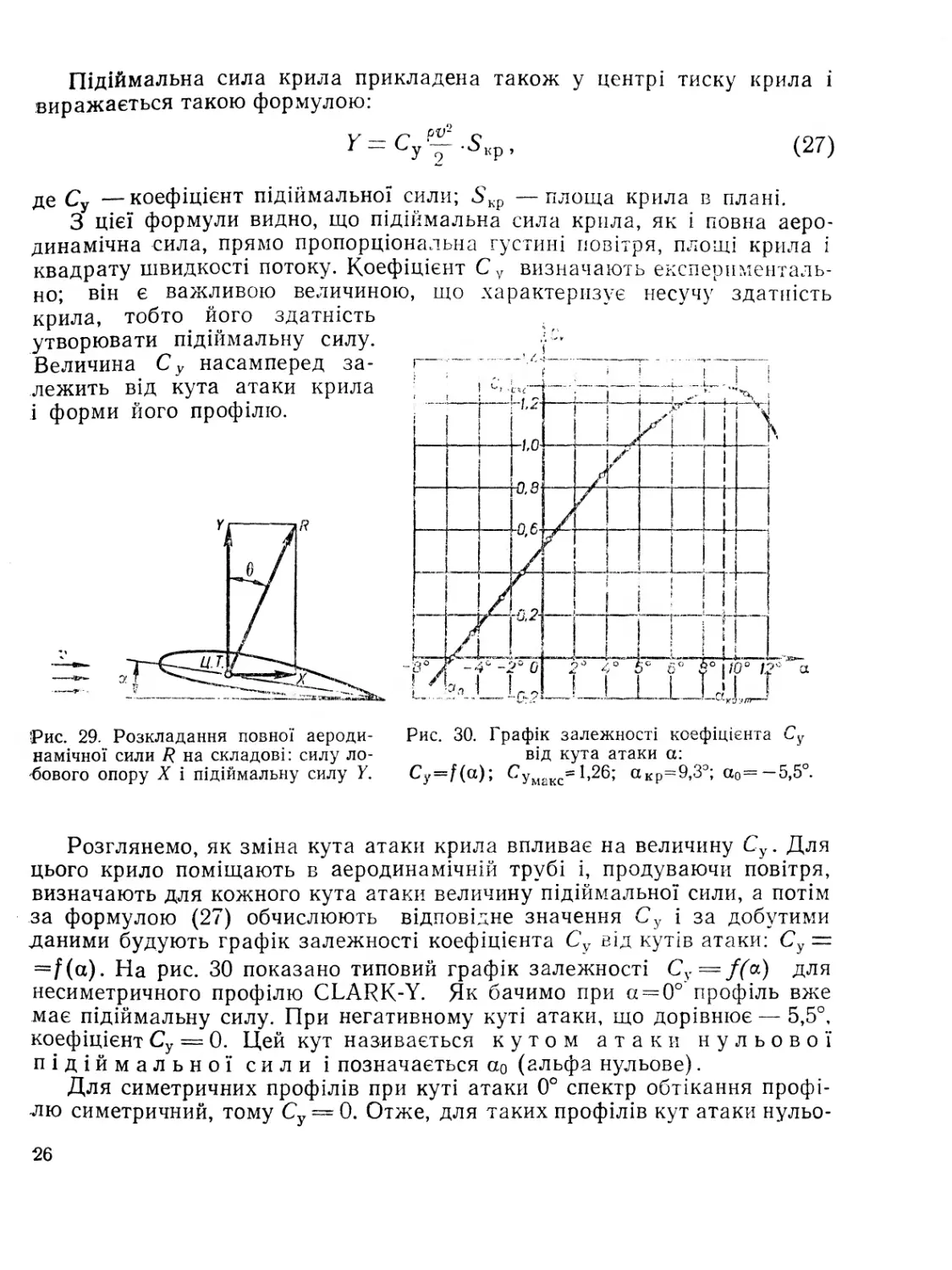
Підіймальна сила крила прикладена також у центрі тиску крила і
виражається такою формулою:
Г=Сур|:.5кр> (27)
де Су —коефіцієнт підіймальної сили; 5кр —площа крила в плані.
З цієї формули видно, що підіймальна сила крила, як і повна аеро-
динамічна сила, прямо пропорціональна густині повітря, площі крила і
квадрату швидкості потоку. Коефіцієнт Су визначають експерименталь-
но; він є важливою величиною, що характеризує несучу здатність
Рис. 29. Розкладання повної аероди-
намічної сили на складові: силу ло-
бового опору X і підіймальну силу У.
Рис. ЗО. Графік залежності коефіцієнта Су
від кута атаки а:
Су=/(а); СУмак<г1,26; акр=9,33; а0==-5,5°.
Розглянемо, як зміна кута атаки крила впливає на величину Су. Для
цього крило поміщають в аеродинамічній трубі і, продуваючи повітря,
визначають для кожного кута атаки величину підіймальної сили, а потім
за формулою (27) обчислюють відповідне значення Су і за добутими
даними будують графік залежності коефіцієнта Су від кутів атаки: Су ~
=/(а). На рис. ЗО показано типовий графік залежності Су = /(а) для
несиметричного профілю СЬАКК-¥. Як бачимо при а = 0° профіль вже
має підіймальну силу. При негативному куті атаки, що дорівнює — 5,5°,
коефіцієнт Су — 0. Цей кут називається кутом атаки нульової
підіймальної сили і позначається а0 (альфа нульове).
Для симетричних профілів при куті атаки 0° спектр обтікання профі-
лю симетричний, тому Су = 0. Отже, для таких профілів кут атаки нульо-
26
вої підіймальної сили «о і крива Су = /(а) пройде через початок коор-
динат.
Із збільшенням кута атаки коефіцієнт Су збільшується спочатку
(& = 2°4-15о) за лінійним законом. При дальшому збільшенні кута атаки
коефіцієнт Су зростає за криволінійним законом. Це пояснюється тим,
що на великих кутах атаки починається інтенсивне вихроутворення на
верхній поверхні крила.
Кут атаки, при якому коефіцієнт підіймальної сили набуває макси-
мального значення Су с .називається критичним кутом атаки
позначається акрі!Т.
Величина критичного кута атаки лежить у межах 124-18°. Величина
коефіцієнта Су залежить також від відносної товщини профілю с і від-
носної вгнутості
При кутах атаки, більших від акрнт, спостерігають зменшення коефі-
цієнта підіймальної сили Су, що пояснюється інтенсивним зривом потоку
з крила. Діапазон кутів атаки між а0 і акрит називається діапазоном
льотних кутів атаки. У сучасних моделей оптимальне польотне значення
Су перебуває поблизу £умакс> але ПІДХ°ДИТИ дуже близько до Су с не
бажано, бо модель може ввійти в штопор.
Дуже важливим є характер зміни кривої Су поблизу макси-
муму. Найкращими для моделей є такі профілі, в яких криваСу = /(«)
поблизу Су с і на кутах, більших від акрит , має плавний характер.
Така властивість кривої залежить від форми носика профілю і розмі-
щення максимальної вгнутості по хорді. Профілі з тупим заокругленим
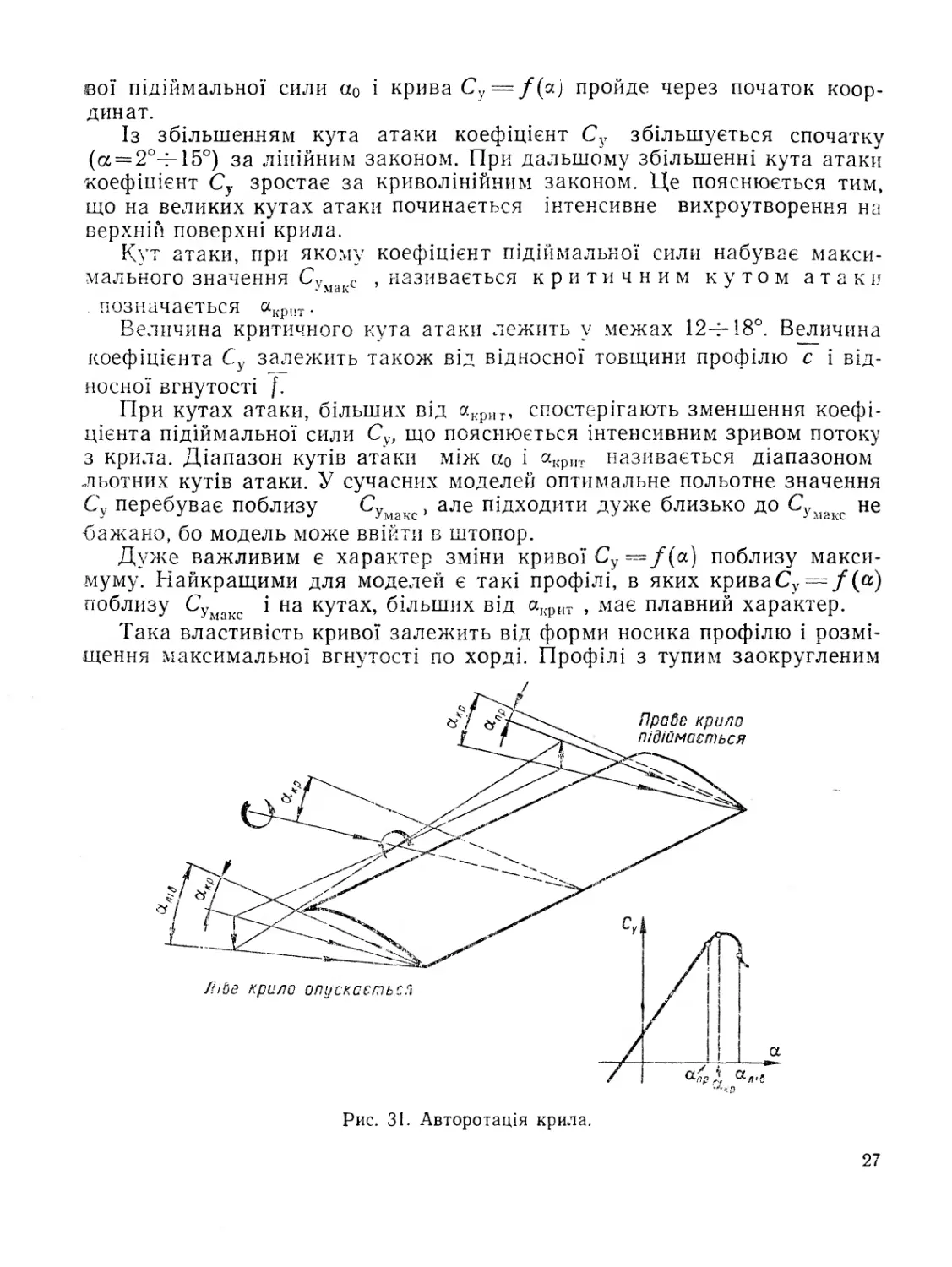
Рис. 31. Авторотація крила.
27
носиком і максимальною вгнутістю, розміщеною ближче до середини
хорди, характеризуються плавною зміною Су=/(а) для кутів атаки,
більших від критичних. Різке падіння Су за акрит мають профілі з гост-
рим носиком. Звалювання моделі при
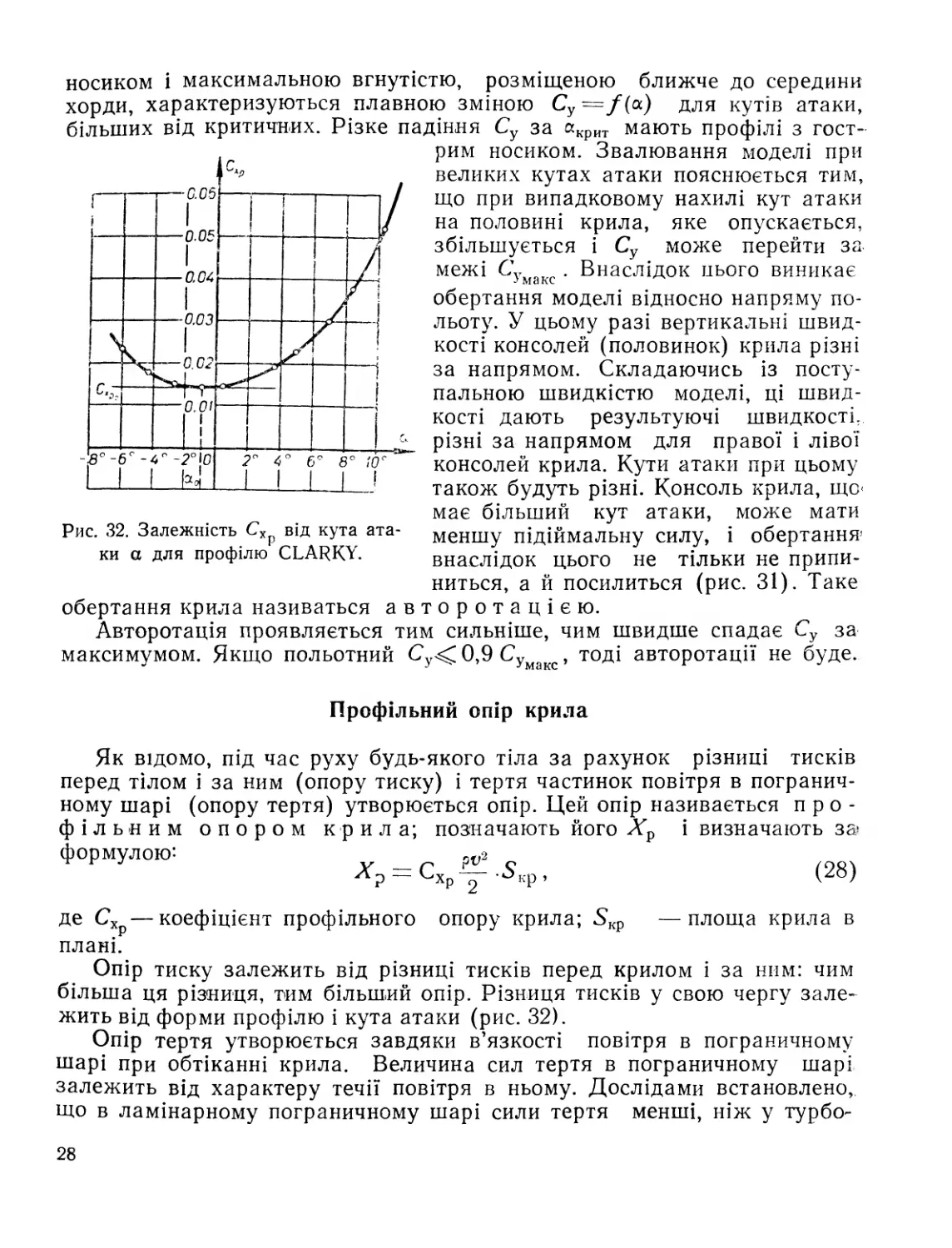
Рис. 32. Залежність Сх від кута ата-
ки а для профілю СЬАККУ.
великих кутах атаки пояснюється тим,
що при випадковому нахилі кут атаки
на половині крила, яке опускається,
збільшується і Су може перейти за
межі СУмакс . Внаслідок нього виникає
обертання моделі відносно напряму по-
льоту. У цьому разі вертикальні швид-
кості консолей (половинок) крила різні
за напрямом. Складаючись із посту-
пальною швидкістю моделі, ці швид-
кості дають результуючі швидкості,
різні за напрямом для правої і лівої
консолей крила. Кути атаки при цьому
також будуть різні. Консоль крила, що<
має більший кут атаки, може мати
меншу підіймальну силу, і обертання-
внаслідок цього не тільки не припи-
ниться, а й посилиться (рис. 31). Таке
обертання крила називаться авторотацією.
Авторотація проявляється тим сильніше, чим швидше спадає Су за
максимумом. Якщо польотний Су<; 0,9 СУмакс, тоді авторотації не буде.
Профільний опір крила
Як відомо, під час руху будь-якого тіла за рахунок різниці тисків
перед тілом і за ним (опору тиску) і тертя частинок повітря в погранич-
ному шарі
ф і л ь н и м
формулою-
(опору тертя) утворюється опір. Цей опір називається п р о -
опором крила; позначають його і визначають за
де СХр — коефіцієнт профільного опору крила; 5кр —площа крила в
плані.
Опір тиску залежить від різниці тисків перед крилом і за ним: чим
більша ця різниця, тим більший опір. Різниця тисків у свою чергу зале-
жить від форми профілю і кута атаки (рис. 32).
Опір тертя утворюється завдяки в’язкості повітря в пограничному
шарі при обтіканні крила. Величина сил тертя в пограничному шарі
залежить від характеру течії повітря в ньому. Дослідами встановлено,
що в ламінарному пограничному шарі сили тертя менші, ніж у турбо-
28
лентному. Отже, чим більшу частину профілю обтікатиме ламінарна
течія, тим менший опір чинитиме цей профіль набігаючому потоку. Таким
чином, положення точки переходу ламінарного пограничного шару в
турбулентний і визначає величину опору тертя. Щоб ламінарний шар
охоплював більшу части-
ну профілю, треба, щоб
його максимальна товщи-
на знаходилась на 50—
60% хорди від ребра
атаки.
Коефіцієнт профільно-
го опору крила СХрврахо.
вує вплив на величину
профільного опору форми
профілю і стану поверхні
крила. Практично в ме-
жах малих кутів атаки
коефіцієнт профільного
опору від кутів атаки не
залежить. На великих ку-
тах атаки, коли опір тиску
зростає за рахунок зриву
потоку, коефіцієнт про-
фільного опору також зро-
стає.
Рис. 33. Картина обтікання крила кінцевого
розмаху:
а — перетікання повітряного потоку; б — вихрові
джгути на кінці крила.
%
Рис. 34. Розподіл вертикальної швидкості и по роз-
маху крила.
Індуктивний опір крила
Під час обтікання кри-
ла потоком повітря утво-
рюється різниця тисків під
крилом і над ним, внаслі-
док чого повітря переті-
кає через кінці крила з
області більшого тиску (з
нижньої поверхні крила)
в область меншого (на верхню поверхню крила) (рис. 33, а) і утворю-
ються так звані вихрові джгути, або вільні вихори (рис. 33, б), які яв-
ляють собою не що інше, як маси повітря, що обертаються. Завдяки
в’язкості повітря обертання цих мас у вільному вихорі тягне за собою
навколишнє повітря. Оскільки наступні шари повітря, які тягне вихор,
не мають між собою значного зчеплення, кожний зовнішній шар під час
обертання дещо відставатиме від внутрішнього. В міру віддалення від
осі вільного вихору швидкість обертання, а отже, і вертикальна швид-
кість и частинок повітря зменшується (рис. 34).
29
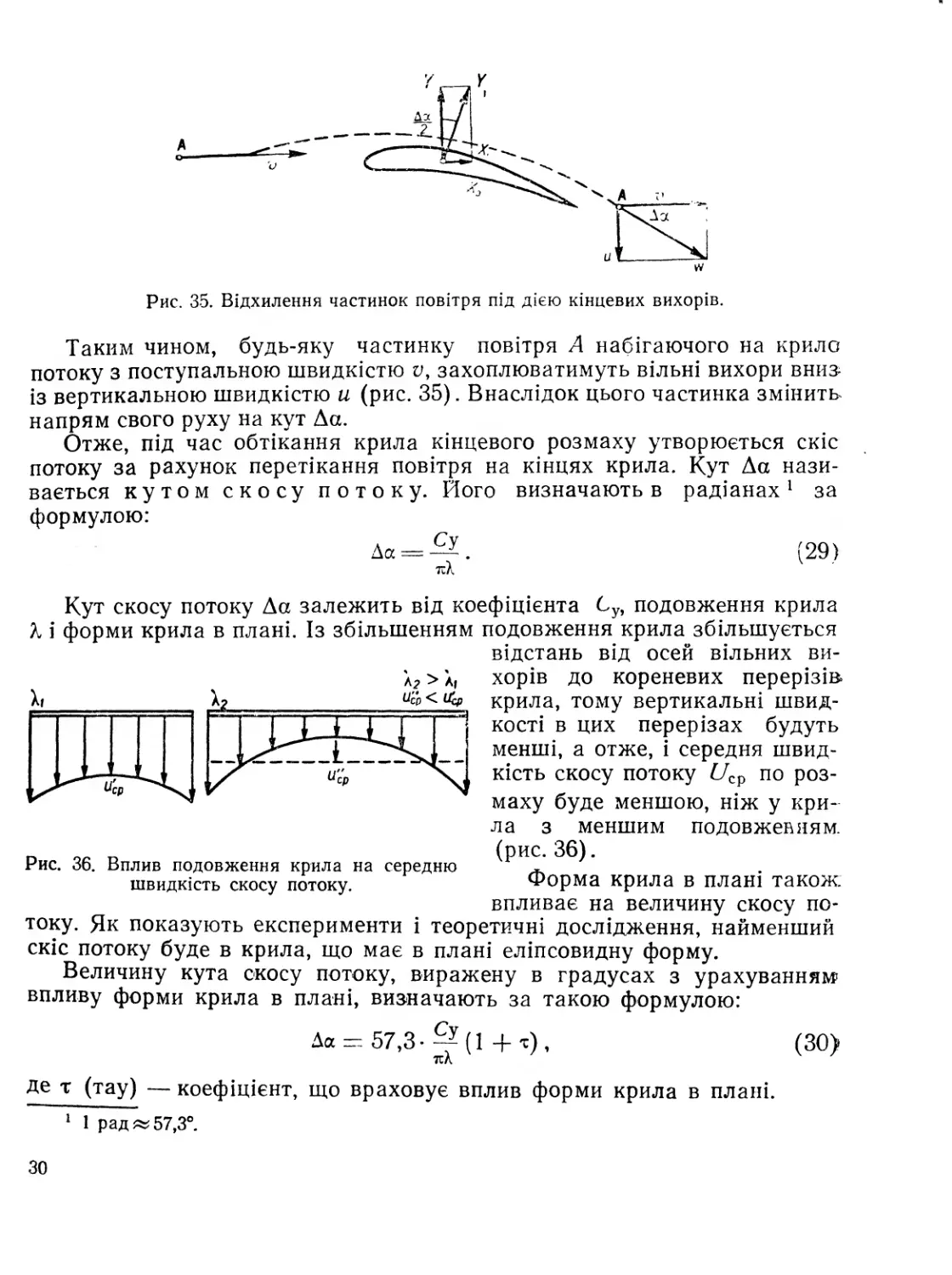
Рис. 35. Відхилення частинок повітря під дією кінцевих вихорів.
Таким чином, будь-яку частинку повітря А набігаючого на крило
потоку з поступальною швидкістю V, захоплюватимуть вільні вихори ВНИЗ;
із вертикальною швидкістю и (рис. 35). Внаслідок цього частинка змінить
напрям свого руху на кут Да.
Отже, під час обтікання крила кінцевого розмаху утворюється скіс
потоку за рахунок перетікання повітря на кінцях крила. Кут Да нази-
вається кутом скосу потоку, його визначають в радіанах1 за
формулою:
А Су
Да = —-
(29)
Рис. 36. Вплив подовження крила на середню
швидкість скосу потоку.
Кут скосу потоку Да залежить від коефіцієнта Су, подовження крила
к і форми крила в плані. Із збільшенням подовження крила збільшується
відстань від осей вільних ви-
хорів до кореневих перерізів
крила, тому вертикальні швид-
кості в цих перерізах будуть
менші, а отже, і середня швид-
кість скосу потоку £7ср по роз-
маху буде меншою, ніж у кри-
ла з меншим подовженням,
(рис. 36).
Форма крила в плані також,
впливає на величину скосу по-
току. Як показують експерименти і теоретичні дослідження, найменший
скіс потоку буде в крила, що має в плані еліпсовидну форму.
Величину кута скосу потоку, виражену в градусах з урахуванням
впливу форми крила в плані, визначають за такою формулою:
Да — 57,3-— (1 + т) ,
(ЗО)
Де т (тау) — коефіцієнт, що враховує вплив форми крила в плані.
1 1 рад» 57,3°.
ЗО
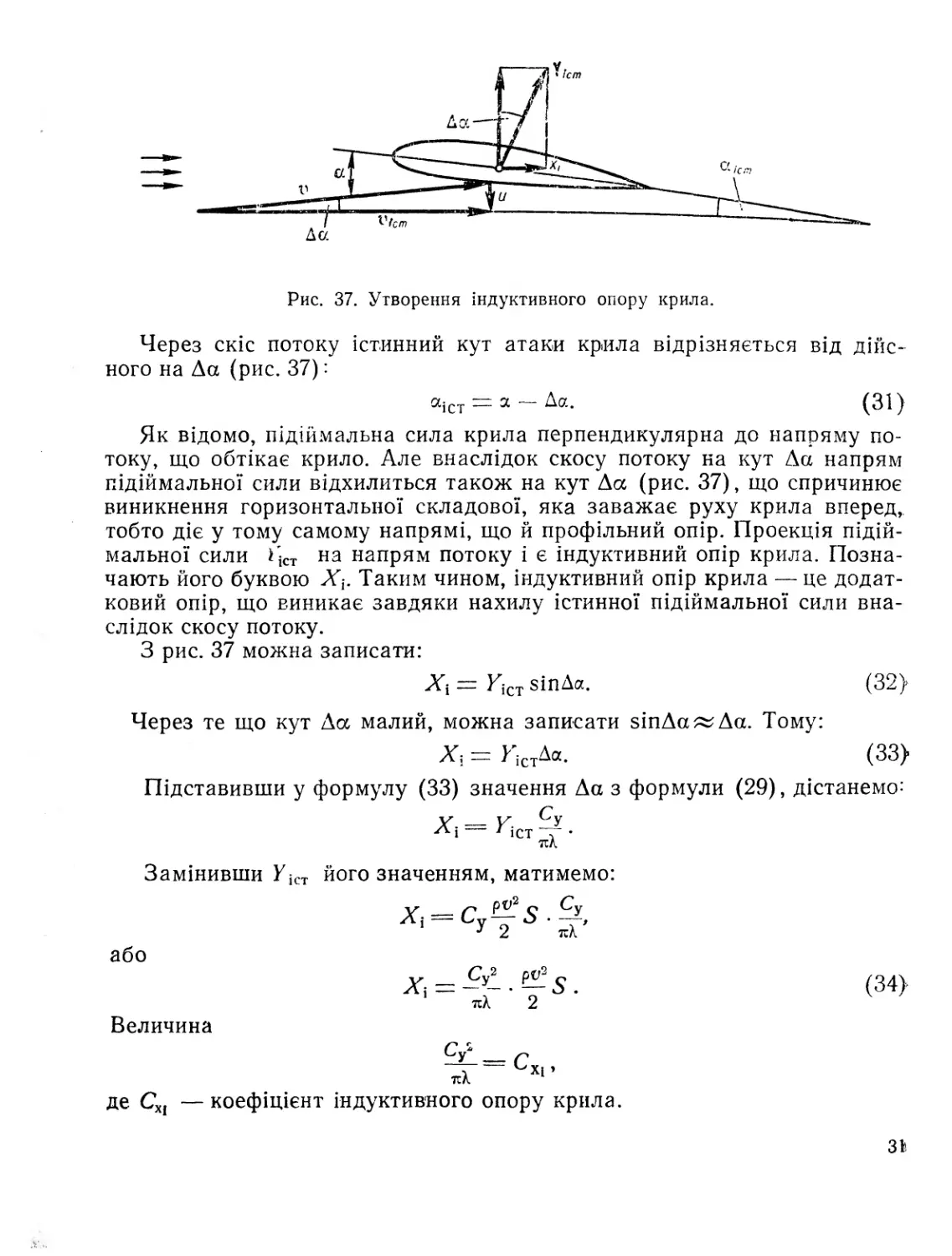
Рис. 37. Утворення індуктивного опору крила.
Через скіс потоку істинний кут атаки крила відрізняється від дійс-
ного на Да (рис. 37) -
аіст — Дос. (31)
Як відомо, підіймальна сила крила перпендикулярна до напряму по-
току, що обтікає крило. Але внаслідок скосу потоку на кут Да напрям
підіймальної сили відхилиться також на кут Да (рис. 37), що спричинює
виникнення горизонтальної складової, яка заважає руху крила вперед,
тобто діє у тому самому напрямі, що й профільний опір. Проекція підій-
мальної сили Ґіст на напрям потоку і є індуктивний опір крила. Позна-
чають його буквою Хі. Таким чином, індуктивний опір крила — це додат-
ковий опір, що виникає завдяки нахилу істинної підіймальної сили вна-
слідок скосу потоку.
З рис. 37 можна записати:
= Уіст «іпДа. (32>
Через те що кут Да малий, можна записати зіпДа^Да. Тому:
Х,: = У'істДа. (33}
Підставивши у формулу (33) значення Да з формули (29), дістанемо-
V _____________________________ у £у
1 1СТ л •
7СЛ
Замінивши Уіст його значенням, матимемо:
у __р Р^2 с
2 д
або
Хі = 5 . (34>
1 2
Величина
де СХ1 —коефіцієнт індуктивного опору крила.
Зі
Отже:
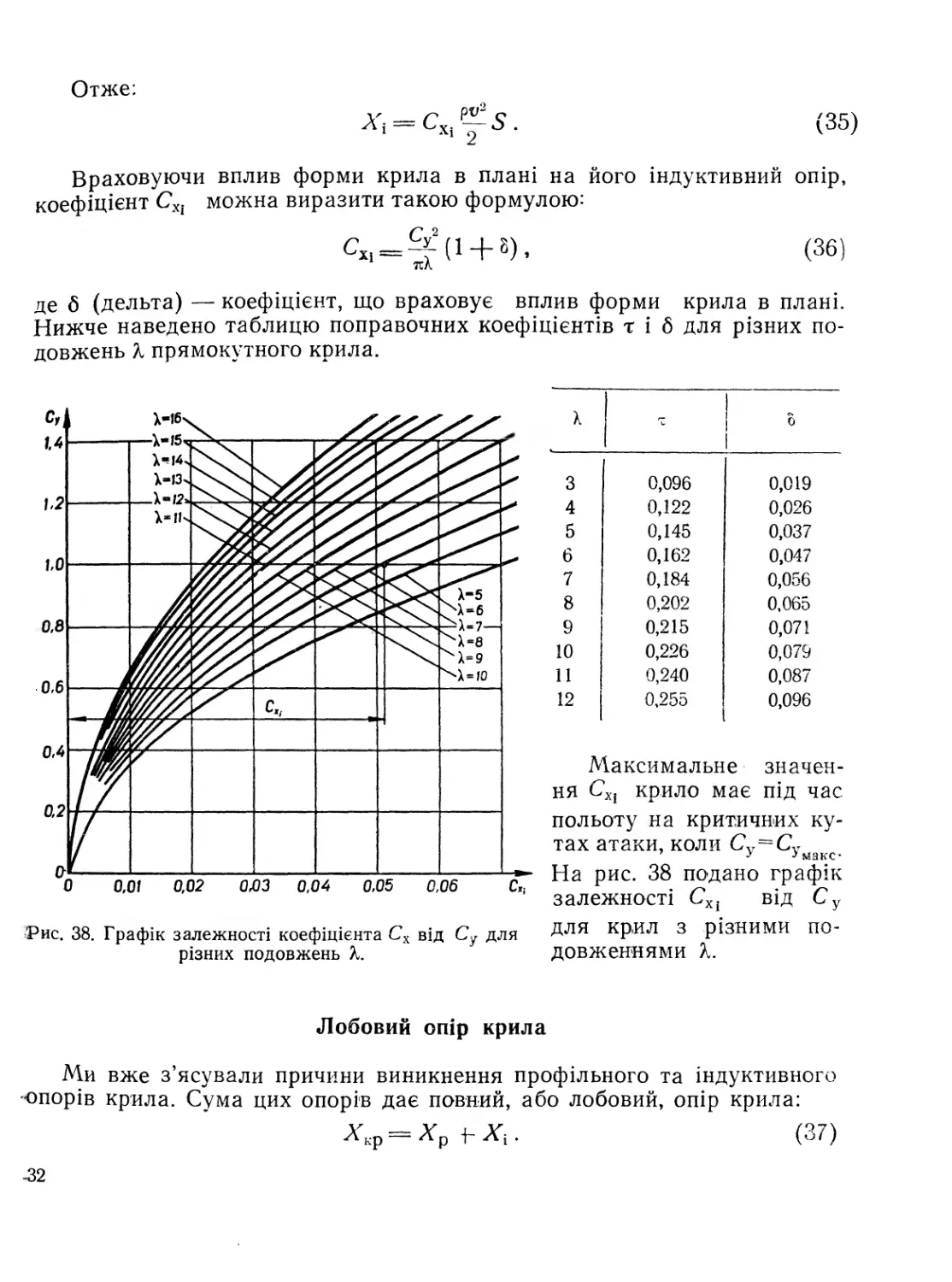
А'і = СХір^5. (35)
Враховуючи вплив форми крила в плані на його індуктивний опір,
коефіцієнт СХІ можна виразити такою формулою:
СХі==^2(1 + 3), (36)
де б (дельта) — коефіцієнт, що враховує вплив форми крила в плані.
Нижче наведено таблицю поправочних коефіцієнтів т і б для різних по-
довжень А прямокутного крила.
X 0
3 0,096 0,019
4 0,122 0,026
5 0,145 0,037
6 0,162 0,047
7 0,184 0,056
8 0,202 0,065
9 0,215 0,071
10 0,226 0,079
11 0,240 0,087
12 0,255 0,096
Рис. 38. Графік залежності коефіцієнта Сх від Су для
різних подовжень X.
Максимальне значен-
ня СХі крило має під час
польоту на критичних ку-
тах атаки, коли
На рис. 38 подано графік
залежності Сх. від Су
для крил з різними по-
довженнями X.
Лобовий опір крила
Ми вже з’ясували причини виникнення профільного та індуктивного
опорів крила. Сума цих опорів дає повний, або лобовий, опір крила:
*кр = Хр +- X,. (37)
32
Лобовий опір крила в свою чергу є складовою повної аеродинамічної
сили /?кр і виражається формулою:
^кр = Сх— • 5кр, (38)
де Сх— коефіцієнт лобового опору; 8кр — площа крила в плані.
Якщо в формулу (38) підставити значення профільного та індуктив-
ного опорів, дістанемо-*
у р О І р Р®" о
^КО — схр 2 ’ ° ’ °Хі 2 ° ’
або
х = (С + СХІ) — • 5 .
кр \ Ар І 2
(39)
Порівнюючи ці вирази, можна для коефіцієнтів записати таке порів-
няння:
Сх = СХп + Сх.
X Ар • А1 .
(40)
Таким чином, коефіцієнт лобового опору крила залежить від тих са-
мих факторів, що й СХр та СХі , тобто від кута атаки, форми профілю,
форми крила в плані, стану поверхні крила тощо.
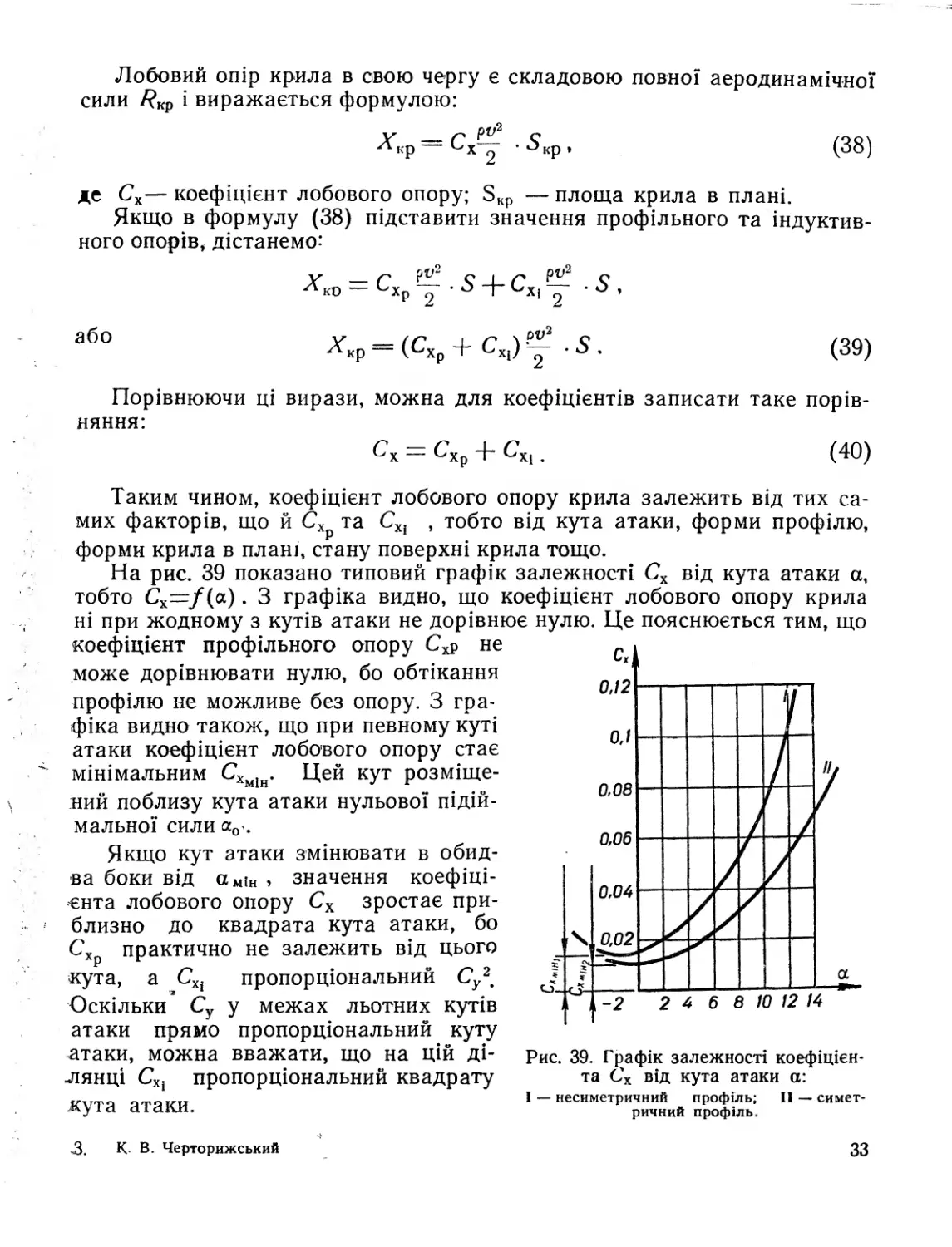
На рис. 39 показано типовий графік залежності Сх від кута атаки а,
тобто Сх=/(а). З графіка видно, що коефіцієнт лобового опору крила
ні при жодному з кутів атаки не дорівнює нулю. Це пояснюється тим, що
коефіцієнт профільного опору Схр не
може дорівнювати нулю, бо обтікання
профілю не можливе без опору. З гра-
фіка видно також, що при певному куті
атаки коефіцієнт лобового опору стає
мінімальним СХмін. Цей кут розміще-
ний поблизу кута атаки нульової підій-
мальної сили а0 -
Якщо кут атаки змінювати в обид-
ва боки від амін » значення коефіці-
єнта лобового опору Сх зростає при-
близно до квадрата кута атаки, бо
СХр практично не залежить від цього
кута, а СХі пропорціональний Су2.
Оскільки Су у межах льотних кутів
атаки прямо пропорціональний куту
атаки, можна вважати, що на цій ді-
лянці СХі пропорціональний квадрату
кута атаки.
Рис. 39. Графік залежності коефіцієн-
та сх від кута атаки а:
І — несиметричний профіль; II — симет-
ричний профіль.
.3. К- В. Черторижський
33
Зв'язок між аеродинамічними силами та їх коефіцієнтами
або
З рис. 40 видно, що V У2+Х2 .
Підставивши в цю формулу значення К, ¥ і X, дістанемо:
(41)
Ця формула показує, що співвідношення між коефіцієнтами Сц, Су і
Сх таке саме як і між силами /?, ¥ і X. Звідси випливає, що аеродина-
мічні коефіцієнти можна розглядати
як деякі одиничні сили, а тому знимі
можна оперувати, як з векторами.
Очевидно, кут 0 (тета), обмежений
векторами підіймальної сили ¥ і пов-
ної аеродинамічної сили К (його нази-
вають кутом якості крила), можна ви-
значити як кут між векторами Ср і Су*
Моментні характеристики крила
Сили, що діють на профіль крила,
Рис. 40. Зв’язок між силами і іх можна замінити однією рівноцінною,
коефіцієнтами. Якщо взяти точку обертання на носику
профілю, то рівнодійна утворюватиме
певний момент. Тоді момент крила навколо осі, яка проходить через
носик профілю, можна виразити так:
М = Ст~ 8Ь,
2
(42)
де Сш— коефіцієнт поздовжнього момента відносно носика крила; Ь —
хорда профілю.
З формули (42) можна визначити коефіцієнт Ст:
Ст= ^7 • (43)
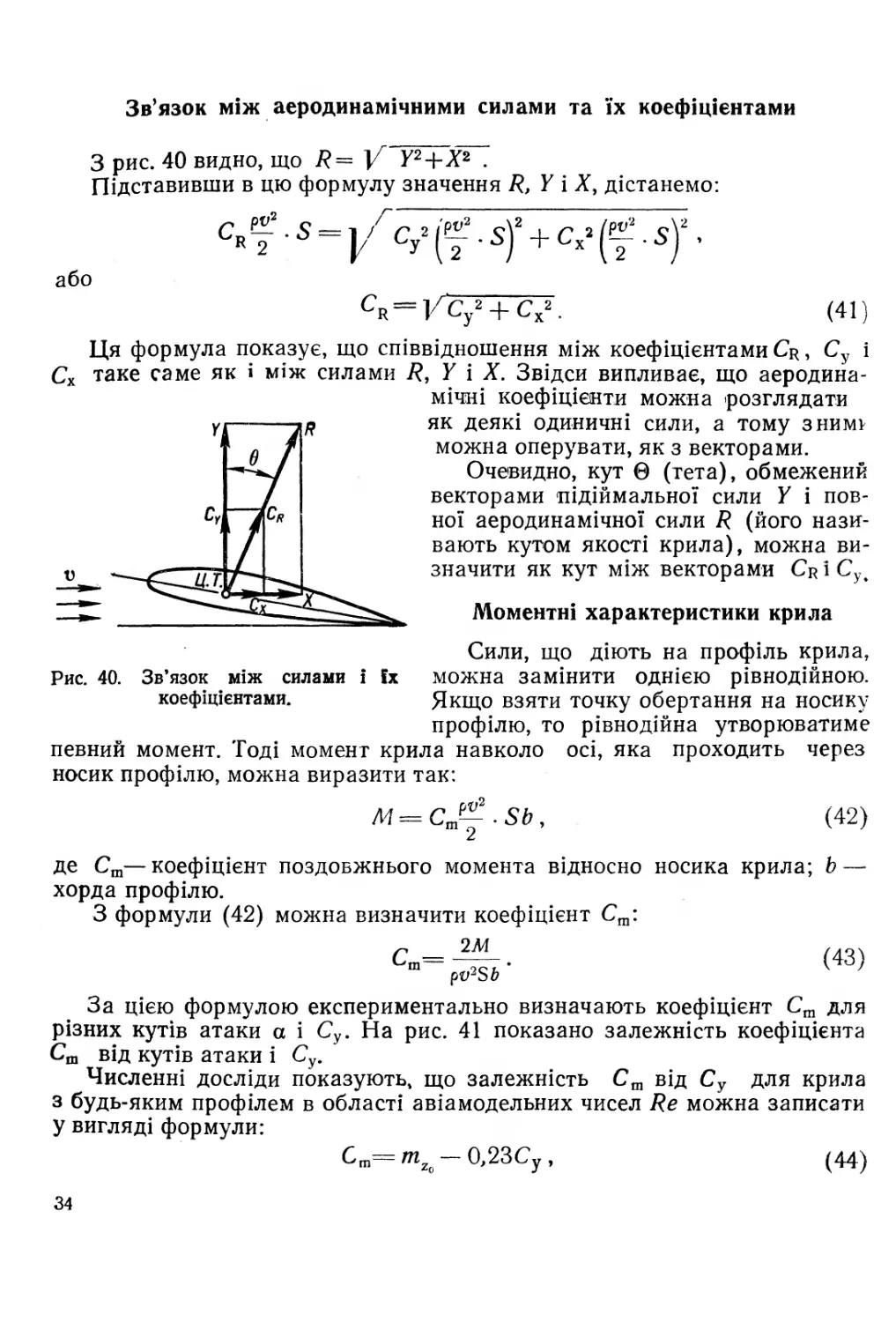
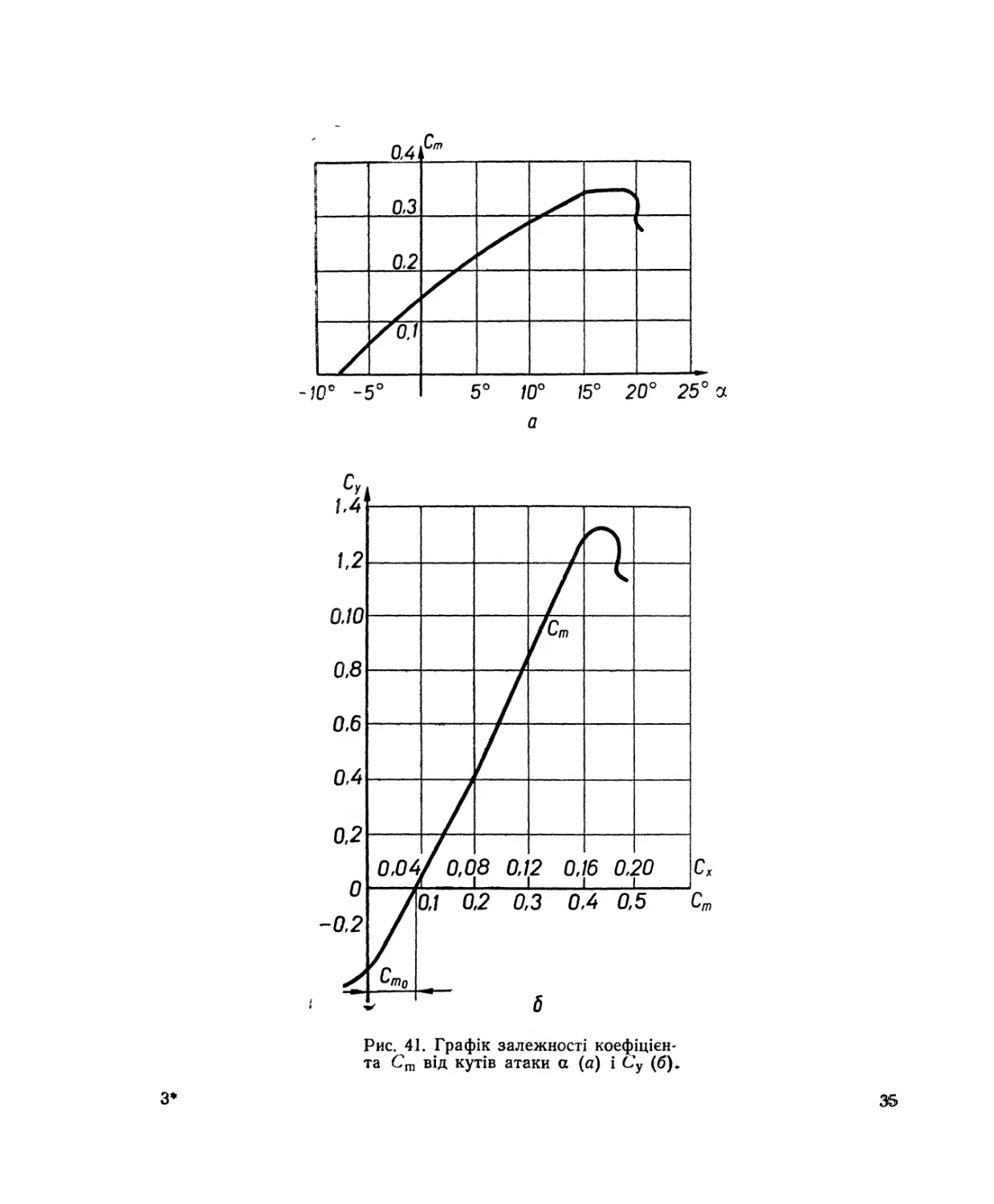
За цією формулою експериментально визначають коефіцієнт Ст для
різних кутів атаки а і Су. На рис. 41 показано залежність коефіцієнта
Ст від кутів атаки і Су.
Численні досліди показують, що залежність Ст від Су для крила
з будь-яким профілем в області авіамодельних чисел Ке можна записати
у вигляді формули:
Ст= т2с - 0,23Су ,
(44)
34
Рис. 41. Графік залежності коефіцієн-
та Сга від кутів атаки а (а) і Су (б).
з»
35
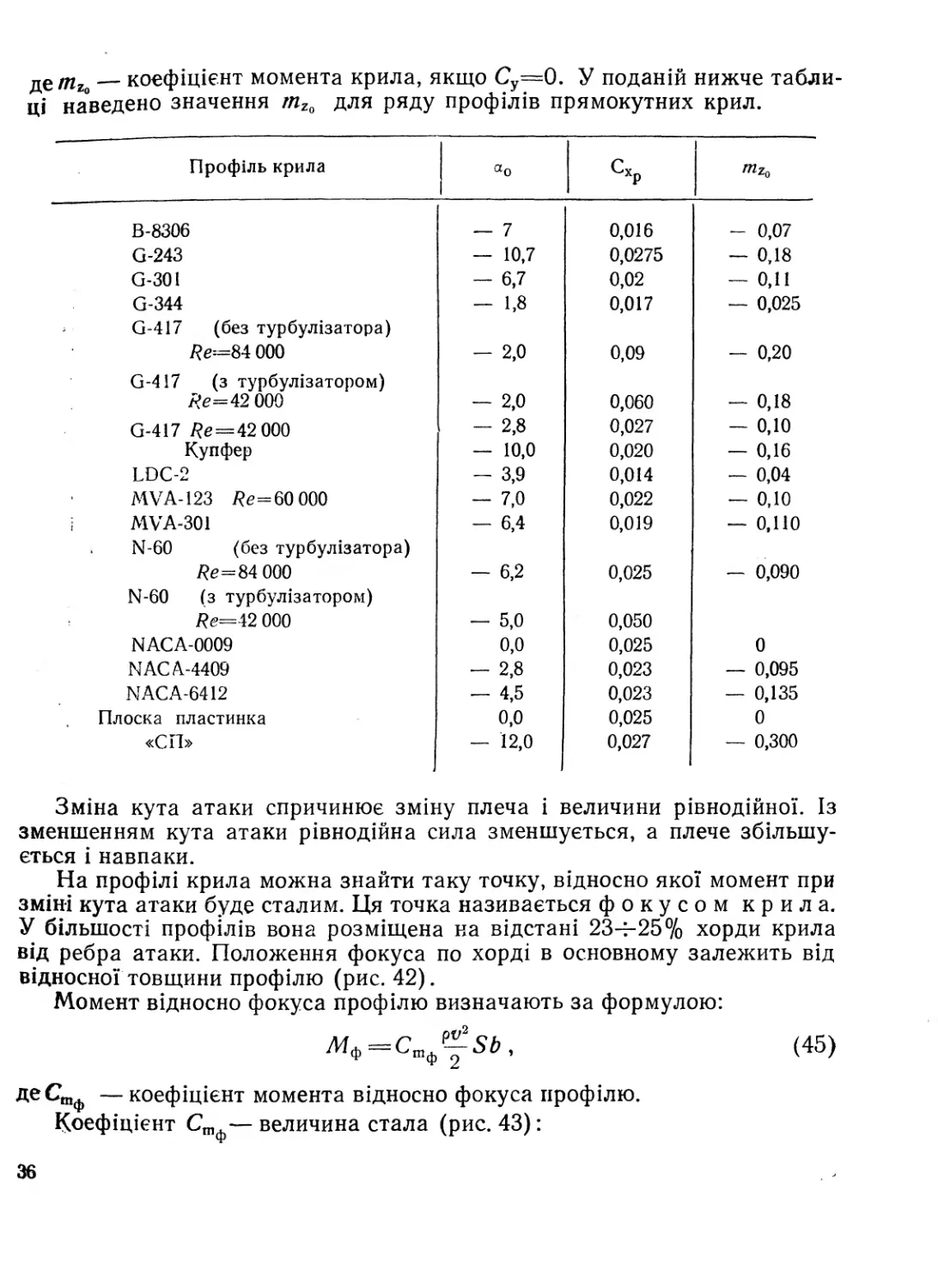
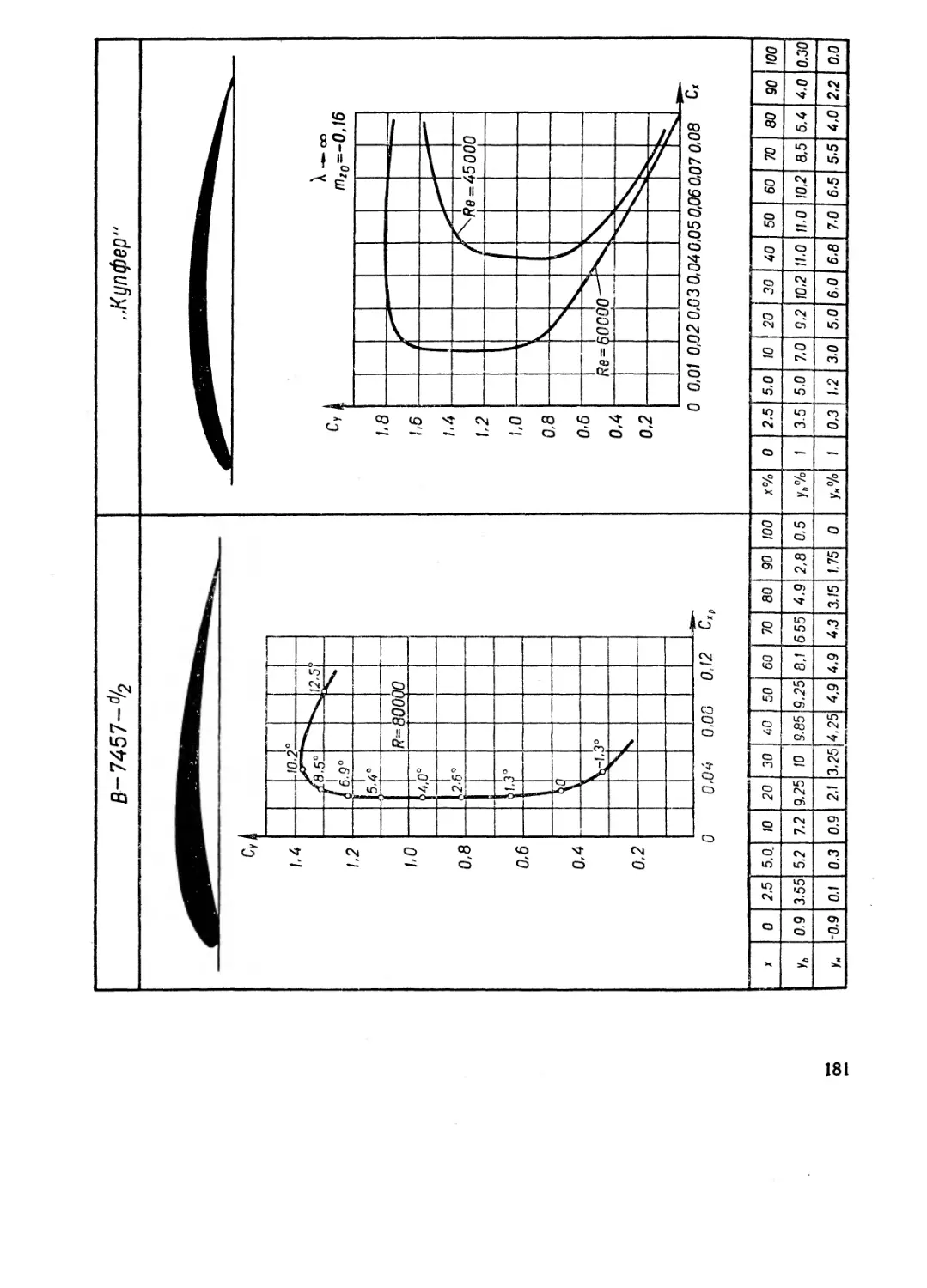
де/Пго — коефіцієнт момента крила, якщо Су=0. У поданій нижче табли-
ці наведено значення т2о для ряду профілів прямокутних крил.
Профіль крила «о СХп ХР
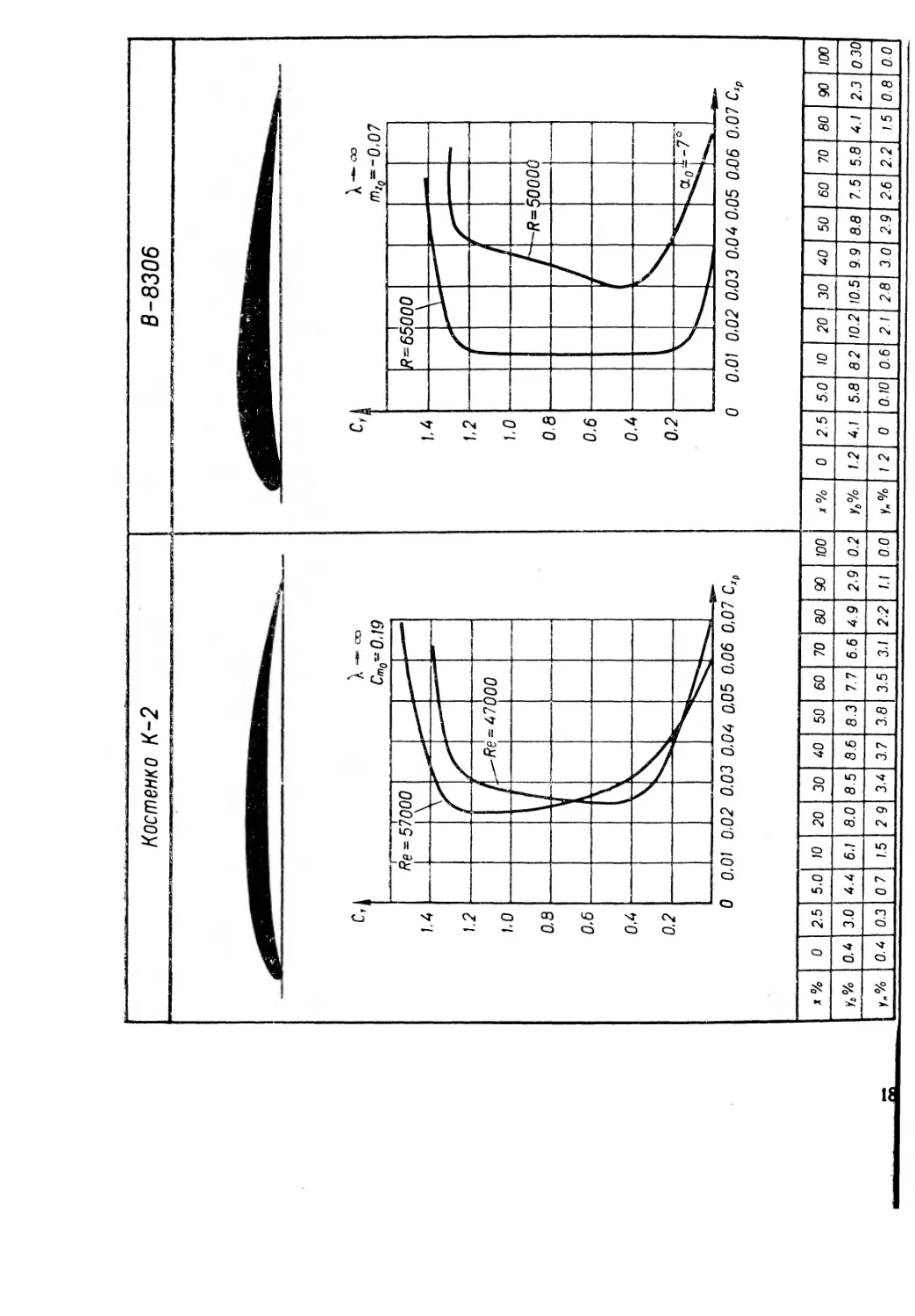
В-8306 — 7 0,016 - 0,07
6-243 — 10,7 0,0275 — 0,18
6-301 - 6,7 0,02 — 0,11
6-344 - 1,8 0,017 — 0,025
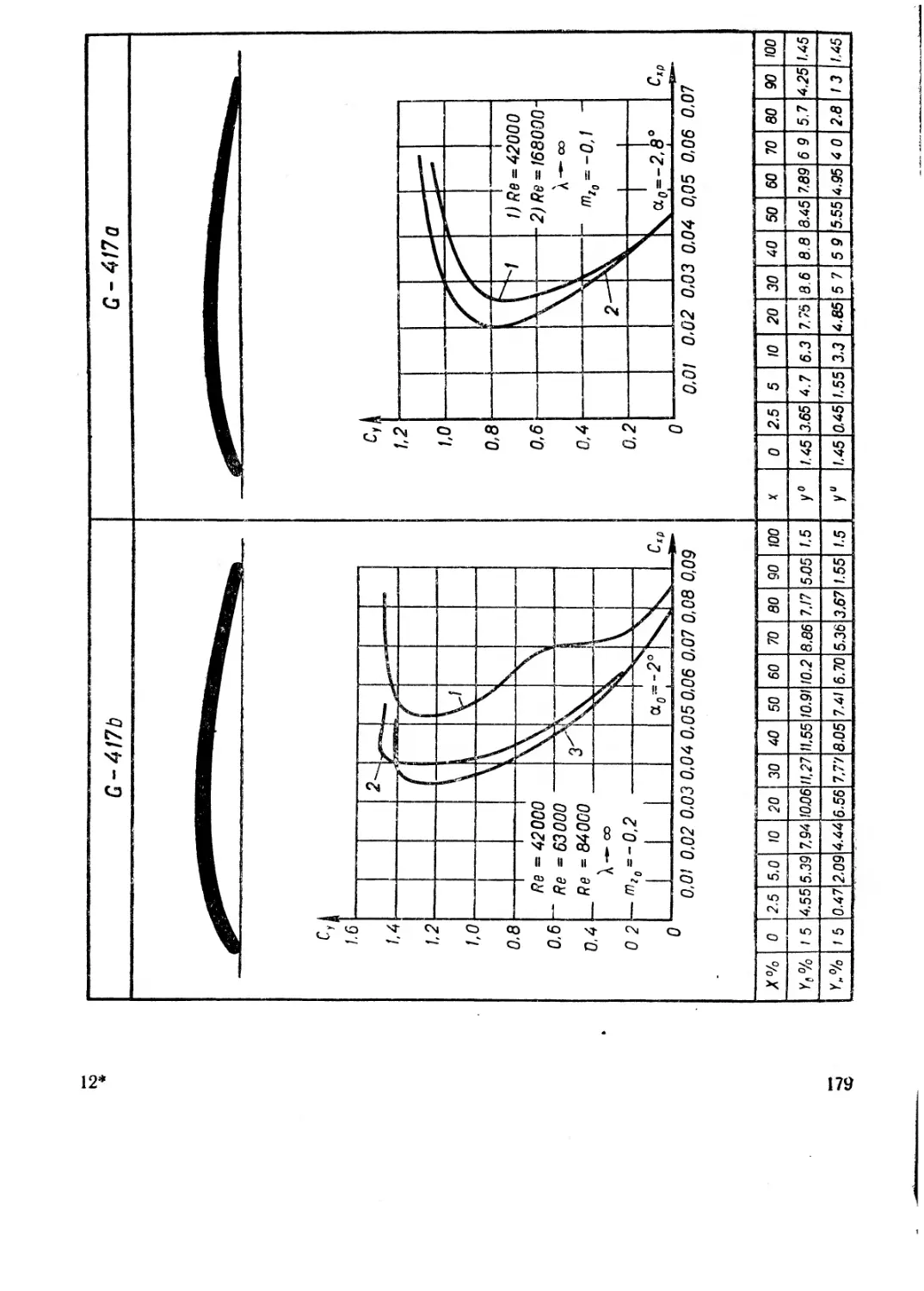
> 6-417 (без турбулізатора)
/?е==84 000 — 2,0 0,09 — 0,20
6-417 (з турбулізатором)
Яе=42 000 — 2,0 0,060 — 0,18
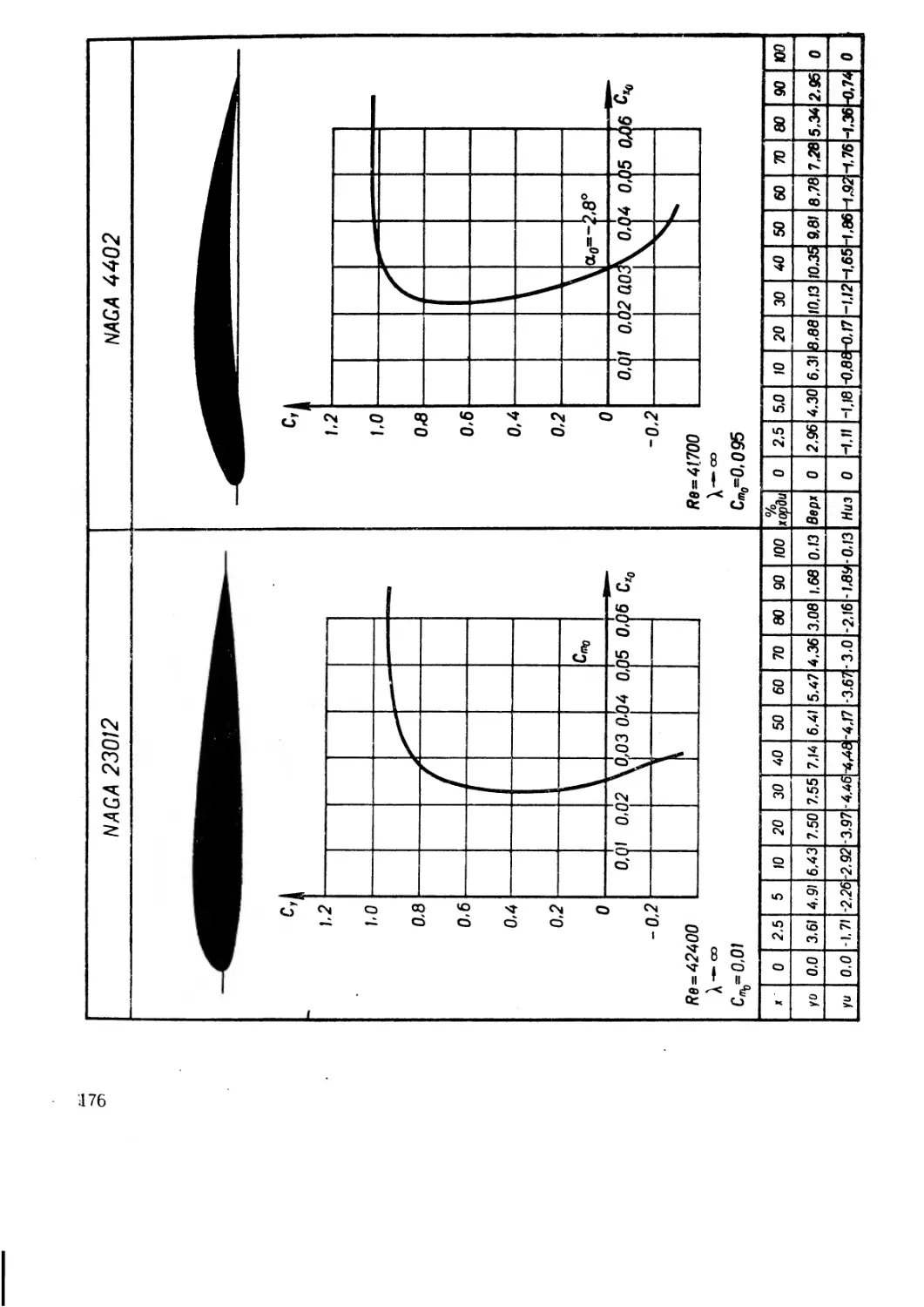
0-417/?е=42 000 - 2,8 0,027 — 0,10
Купфер — 10,0 0,020 — 0,16
ЬОС-2 — 3,9 0,014 — 0,04
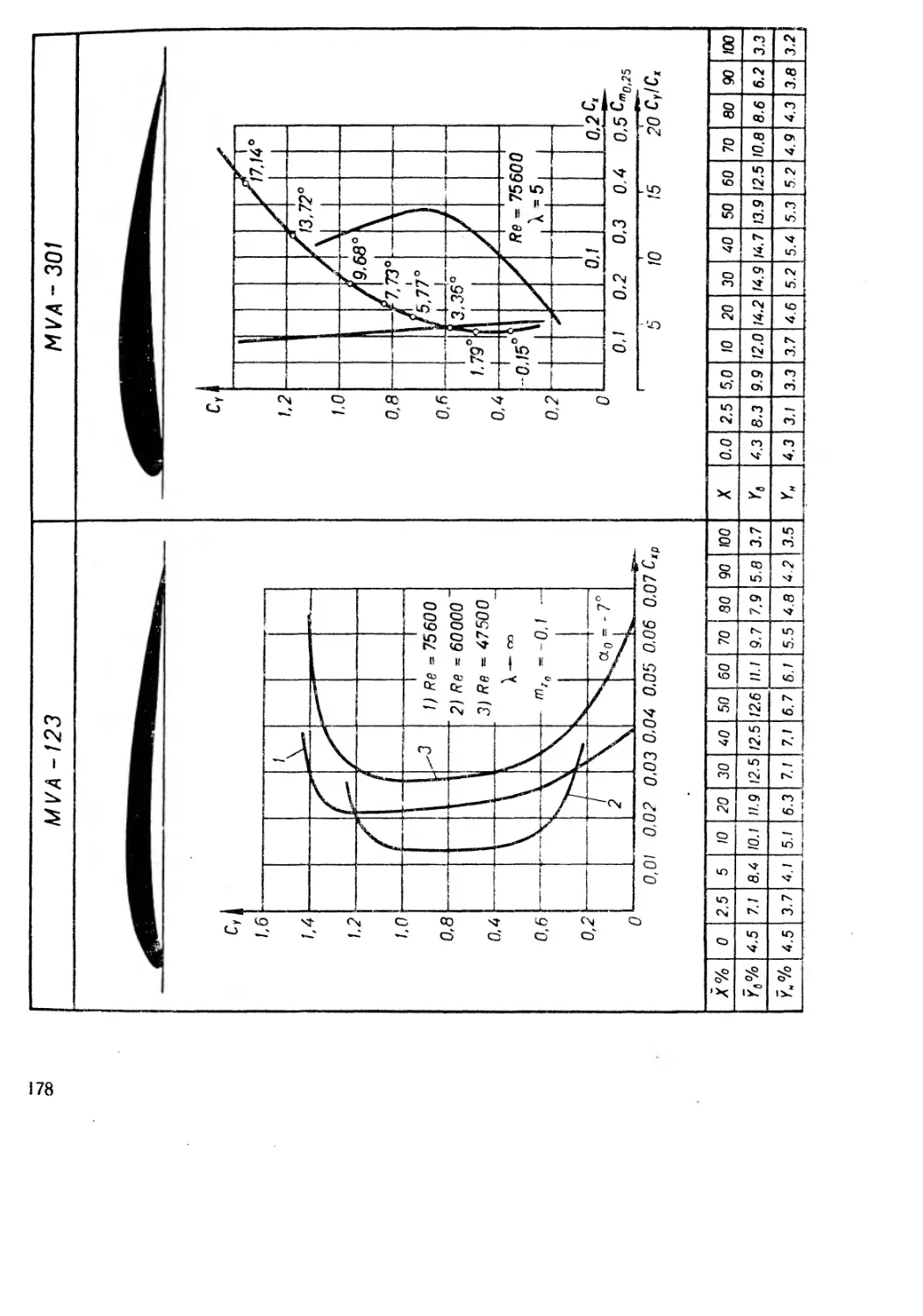
МУА-123 /?е=60 000 — 7,0 0,022 — 0,10
МУА-301 - 6,4 0,019 — 0,110
N-60 (без турбулізатора)
/?е=84 000 - 6,2 0,025 — 0,090
N-60 (з турбулізатором)
/?е=42 000 — 5,0 0,050
НАСА-0009 0,0 0,025 0
МАСА-4409 - 2,8 0,023 — 0,095
МАСА-6412 — 4,5 0,023 — 0,135
Плоска пластинка 0,0 0,025 0
«СП» — 12,0 0,027 — 0,300
Зміна кута атаки спричинює зміну плеча і величини рівнодійної. Із
зменшенням кута атаки рівнодійна сила зменшується, а плече збільшу-
ється і навпаки.
На профілі крила можна знайти таку точку, відносно якої момент при
зміні кута атаки буде сталим. Ця точка називається фокусом крила.
У більшості профілів вона розміщена на відстані 234-25% хорди крила
від ребра атаки. Положення фокуса по хорді в основному залежить від
відносної товщини профілю (рис. 42).
Момент відносно фокуса профілю визначають за формулою:
9
М*=Ст^8Ь, (45)
деСШф — коефіцієнт момента відносно фокуса профілю.
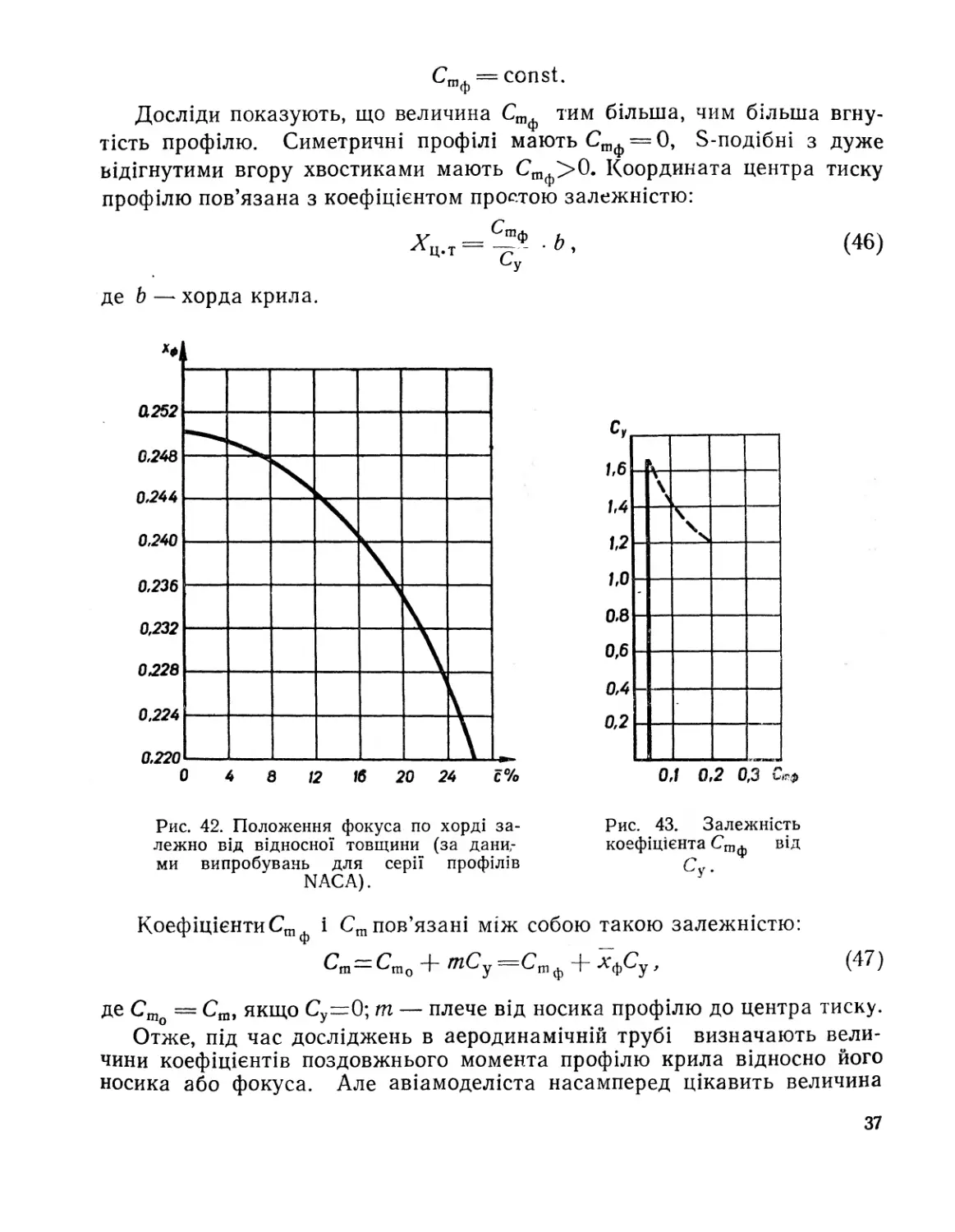
Коефіцієнт Стф— величина стала (рис. 43):
36
Ст. = С0П8І,
,иф
Досліди показують, що величина Стф тим більша, чим більша вгну-
тість профілю. Симетричні профілі мають Стф = 0, 8-подібні з дуже
відігнутими вгору хвостиками мають Стф>0. Координата центра тиску
профілю пов’язана з коефіцієнтом простою залежністю:
*ц.т = Ь, (46)
Су
де Ь — хорда крила.
Рис. 42. Положення фокуса по хорді за-
лежно від відносної товщини (за дани-
ми випробувань для серії профілів
МАСА).
Рис. 43. Залежність
коефіцієнта Ст. від
Су .
КоефіцієнтиСтф і Ст пов’язані між собою такою залежністю:
Сга—Сто -4- тСу =Ст ф ЛфСу л
(47)
де Сто = Ст, якщо Су=0; т — плече від носика профілю до центра тиску.
Отже, під час досліджень в аеродинамічній трубі визначають вели-
чини коефіцієнтів поздовжнього момента профілю крила відносно його
носика або фокуса. Але авіамоделіста насамперед цікавить величина
37
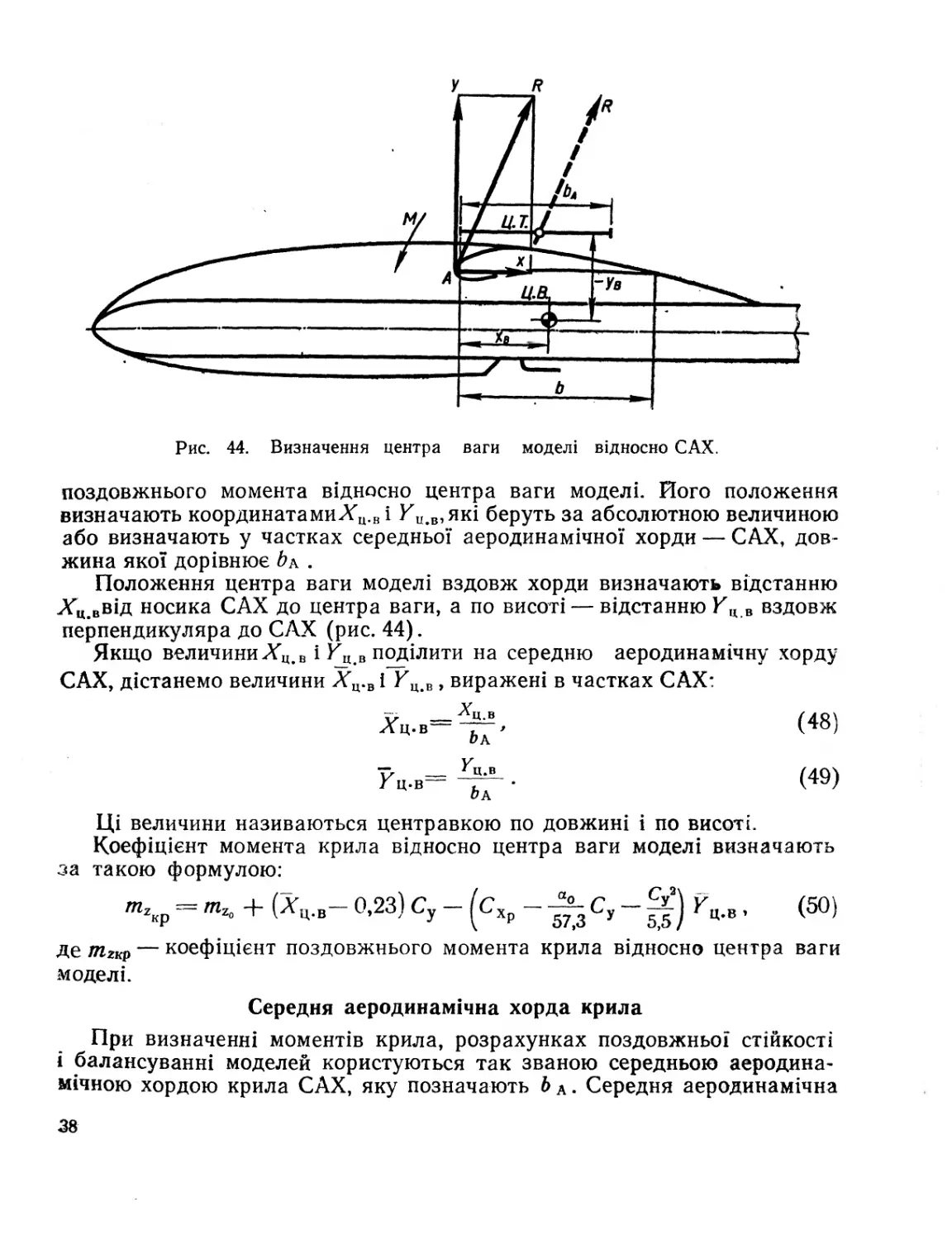
Рис. 44. Визначення центра ваги моделі відносно САХ.
поздовжнього момента відносно центра ваги моделі. Його положення
визначають координатамиХц.в і Ки.в,які беруть за абсолютною величиною
або визначають у частках середньої аеродинамічної хорди — САХ, дов-
жина якої дорівнює .
Положення центра ваги моделі вздовж хорди визначають відстанню
Хц Ввід носика САХ до центра ваги, а по висоті — відстанню Кц в вздовж
перпендикуляра до САХ (рис. 44).
Якщо величини Лц. в і Уц.в поділити на середню аеродинамічну хорду
САХ, дістанемо величини Хц-в і Кц.в, виражені в частках САХ:
(48)
рц.в= • (49)
Ьа
Ці величини називаються центравкою по довжині і по висоті.
Коефіцієнт момента крила відносно центра ваги моделі визначають
за такою формулою:
^2кр ~ С^ц-в 0»23) Су (сх —- Су —~, (50)
у 1 О/ 0,0 /
Де тгкр — коефіцієнт поздовжнього момента крила відносно центра ваги
моделі.
Середня аеродинамічна хорда крила
При визначенні моментів крила, розрахунках поздовжньої стійкості
і балансуванні моделей користуються так званою середньою аеродина-
мічною хордою крила САХ, яку позначають Ь А. Середня аеродинамічна
38
хорда крила — це хорда умовного прямокутного крила, яке має підій-
мальну силу, опір і момент, аналогічні до вихідного крила.
Розглянемо способи визначення САХ для найпоширеніших форм кри-
ла. Для трапецієвидного крила (рис. 45) величину і положення САХ
визначають так. Спочатку креслять половину крила моделі за виглядом
у плані і спереду. Потім проводять кореневу Ь\ і кінцеву &2 хорди. Кінце-
ву хорду Ь2 проводять так, щоб відрізана частина площі заокруглення
дорівнювала додатковим площинам (5з=5і+5г). Ділять хорди Ьі і Ь2
пополам і відповідні точки сполучають прямою лінією. На продовженні
хорди Ьі вниз відкладають довжину хорди Ь2, а на продовженні хорди
>2 вгору — довжину хорди Ь\. Точки А і Б сполучають прямою лінією і
дістають точку В, через яку проводять пряму паралельну до хорд &і і Ь2
Довжина цієї лінії від ребра атаки (від точки Г) до ребра обтікання
(до точки Д) і є середньою аеродинамічною хордою &а крила. Тепер пере-
носять САХ на вид крила спереду і дістають положення САХ по висоті.
Рис 45 Визначення величини і положення САХ трапецієвидного крила
ЗО
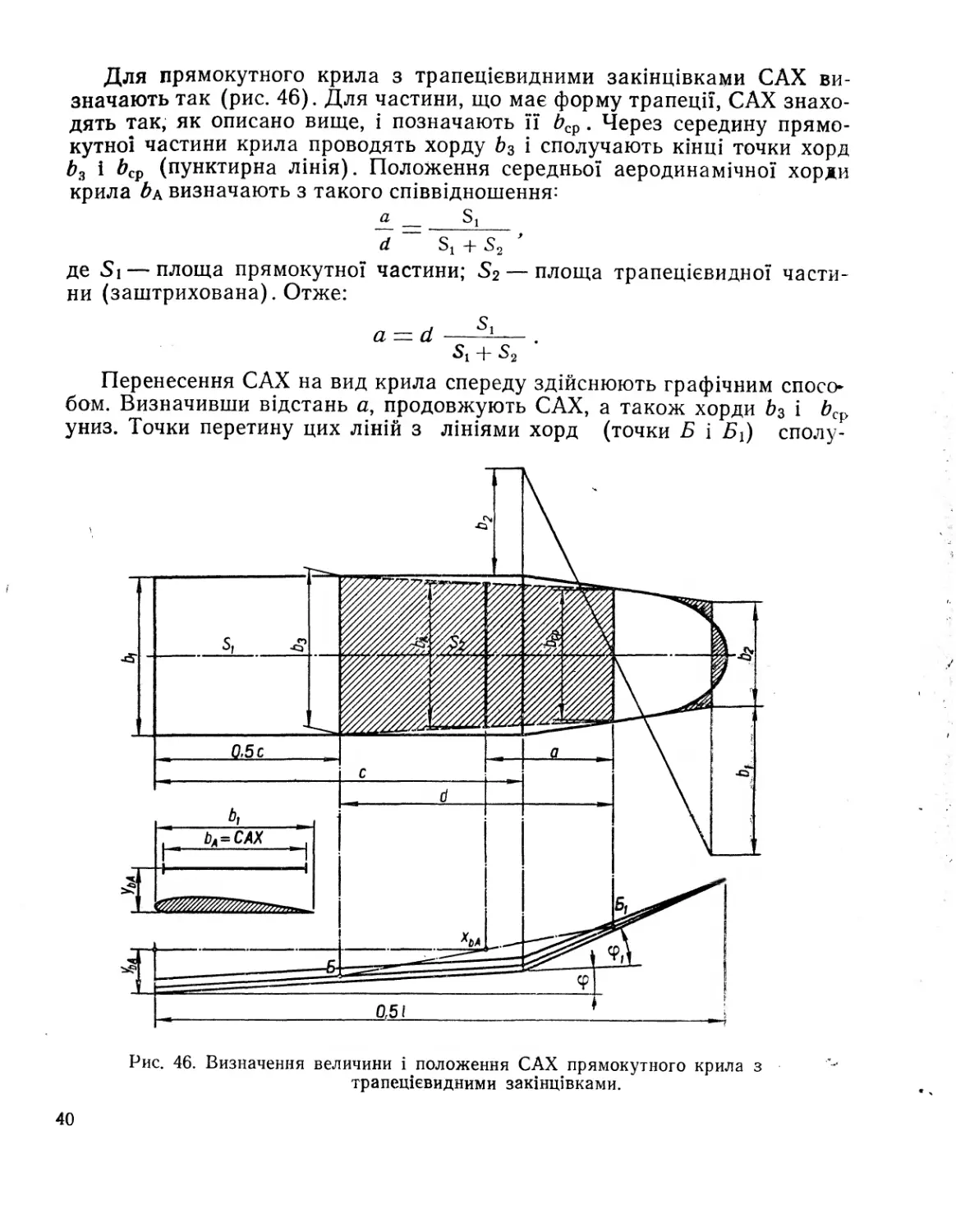
Для прямокутного крила з трапецієвидними закінцівками САХ ви-
значають так (рис. 46). Для частини, що має форму трапеції, САХ знахо-
дять так, як описано вище, і позначають її дср. Через середину прямо-
кутної частини крила проводять хорду Ь3 і сполучають кінці точки хорд
Ь3 і Ьср (пунктирна лінія). Положення середньої аеродинамічної хорди
крила Ьк визначають з такого співвідношення;
а __
(1 8| 4~
де 5і — площа прямокутної частини; 82— площа трапецієвидної части-
ни (заштрихована). Отже:
Перенесення САХ на вид крила спереду здійснюють графічним спосо-
бом. Визначивши відстань а, продовжують САХ, а також хорди Ь3 і 6ср
униз. Точки перетину ЦИХ ЛІНІЙ З ЛІНІЯМИ хорд (точки Б І Б1) сполу-
Рис. 46. Визначення величини і положення САХ прямокутного крила з
трапецієвидними закінцівками.
40
Рис. 47. Визначення САХ еліптичного крила.
Рис. 48. Визначення центра ваги
площини і САХ закінцівки крила
способом балансування
чають між собою. ТочкаХВА перетину продовження САХ з лінією ББі і
буде положенням САХ по висоті.
Величину САХ для еліптичного крила (рис. 47) визначають за фор-
мулою:
Ьа= 0,85/?,
— коренева хорда.
Найпоширеніша форма крила в сучасних моделях має прямокутну
середню частину і закінцівки, форма яких наближається до напівеліпса.
Якщо площа цих закінцівок не перевищує 30% загальної площі крила
при відсутності стрілоподібності, то САХ такого крила можна визначити
з САХ його прямокутної частини. Але якщо площа закінцівки перевищує
30%, то величину і положення САХ визначають так само, як і для пря-
мокутного крила з трапецієвидними закінцівками.
Спростити визначення САХ закінцівки можна, визначивши її центр
ваги. Для цього (рис. 48) вирізують контур закінцівки з цупкого рівного
паперу або тонкого картону (в натуральну величину або в певному
масштабі). Положення центра ваги площини цієї фігури визначають
балансуванням на нитці. Середня аеродинамічна хорда закінцівки роз-
міщена в місці знаходження центра ваги площини і орієнтована пара-
лельно поздовжній осі моделі. Якщо коренева хорда закінцівки пара-
лельна осі моделі, САХ буде паралельна цій хорді.
41
Аеродинамічна якість крила
Аеродинамічною якістю крила називається відношення підіймальної
сили крила до сили його лобового опору при певному куті атаки. Позна-
чають аеродинамічну якість крила буквою К-
К = ~. (51)
З рис. 40 видно, що
або
(52)
З цієї формули випливає, що чим більший кут якості 0, тим менша
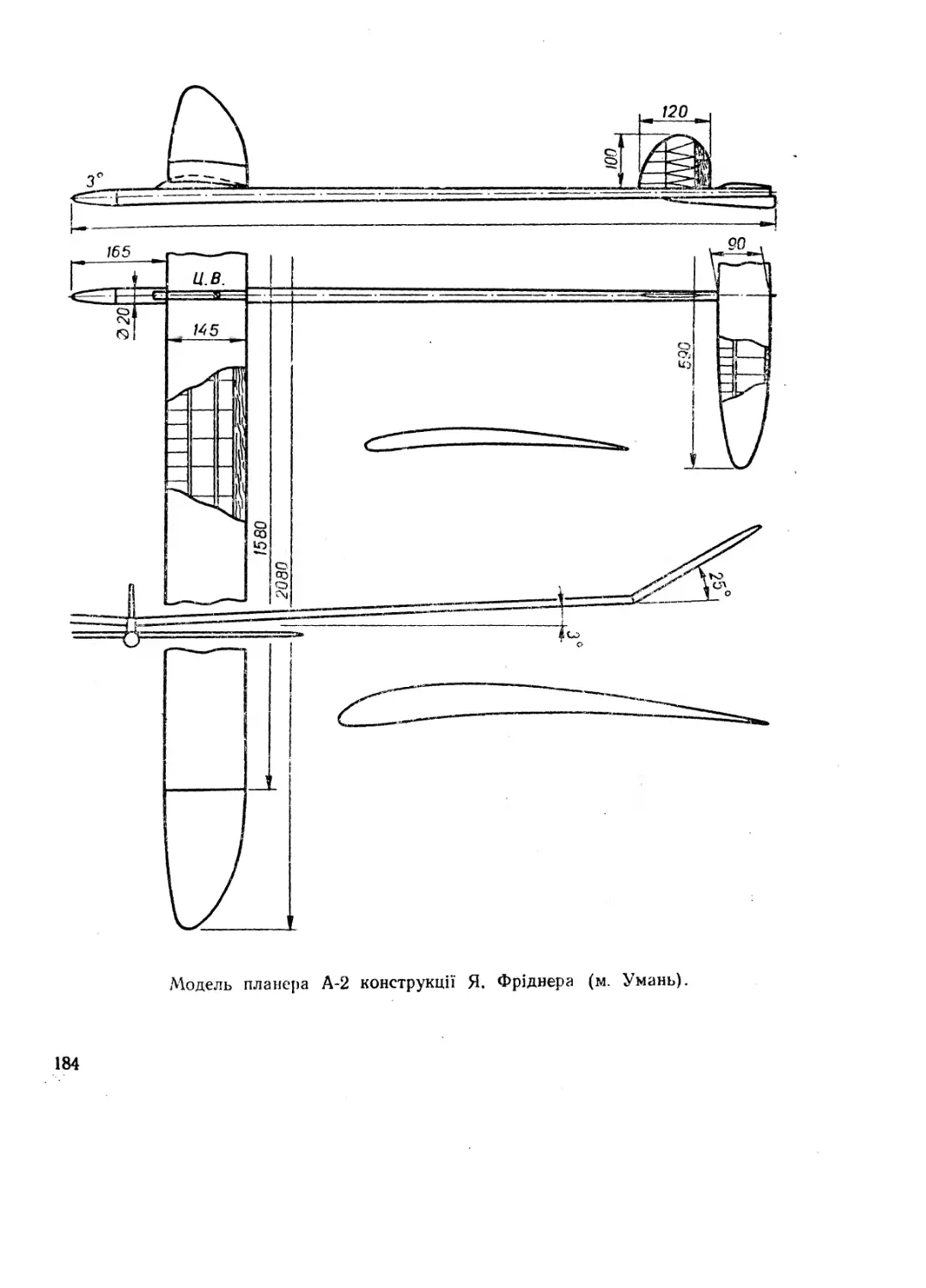
величина аеродинамічної якості крила і навпаки.
Відношення аеродинамічних сил можна замінити відношенням їх
коефіцієнтів:
рї/2
г СуУ 5 Су
х ~ с^ -з ~с*'
(53)
З цієї формули видно, що аеродинамічна якість залежить від тих
самих факторів, що й аеродинамічні коефіцієнти Су і Сх, тобто від кута
атаки, форми профілю крила, форми крила в плані і стану поверхні
крила.
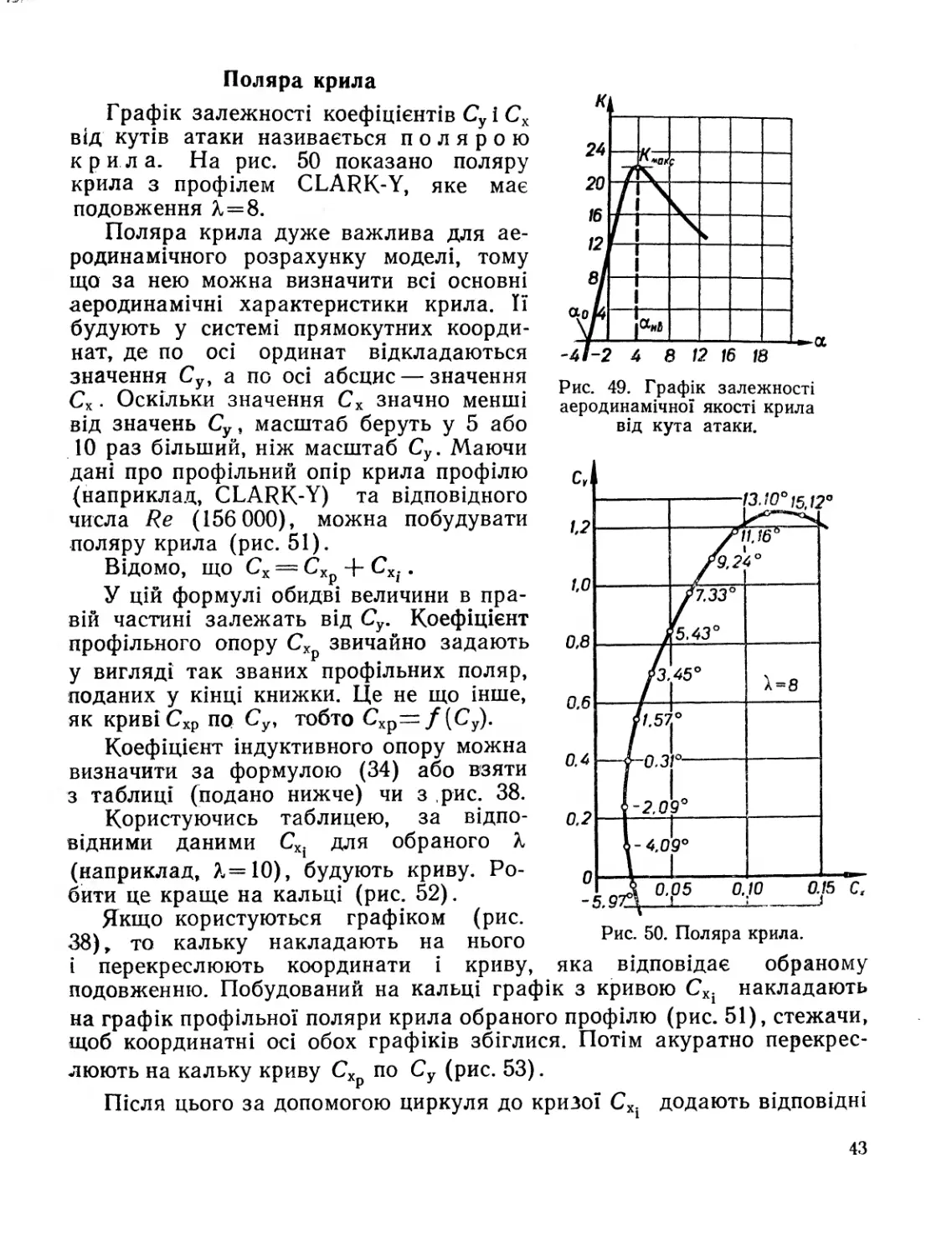
Якщо відомі значення Су і Сх для різних кутів атаки, неважко по-
будувати криву залежності аеродинамічної якості від кута атаки
(рис. 49). З графіка видно, що при куті атаки нульової підіймальної сили
якість також дорівнює нулю, бо Су=0. Із збільшенням кута атаки якість
крила збільшується, а потім починає зменшуватись. Найбільшої величи-
ни вона досягає на певному куті атаки, який називається найвигіднішим,
і позначається анв .
На величину К впливає форма профілю, а саме: його відносна тов-
щина і вгнутість. Із збільшенням с і / якість крила зменшується, тому
що коефіцієнт Сх зростає значно швидше, ніж Су. Форма крила в плані
головним чином впливає на величину індуктивного опору. Із збільшен-
ням подовження зменшується, що приводить до збільшення якості
крила.
Поляра крила
Графік залежності коефіцієнтів Су і Сх
від кутів атаки називається п о л я р о ю
крила. На рис. 50 показано поляру
крила з профілем СЬАКК-¥, яке має
подовження %=8.
Поляра крила дуже важлива для ае-
родинамічного розрахунку моделі, тому
що за нею можна визначити всі основні
аеродинамічні характеристики крила. її
будують у системі прямокутних коорди-
нат, де по осі ординат відкладаються
значення Су, а по осі абсцис — значення
Сх. Оскільки значення Сх значно менші
від значень Су, масштаб беруть у 5 або
10 раз більший, ніж масштаб Су. Маючи
дані про профільний опір крила профілю
(наприклад, СЬАКК-¥) та відповідного
числа Ее (156 000), можна побудувати
поляру крила (рис. 51).
Рис. 49. Графік залежності
аеродинамічної якості крила
від кута атаки.
яка відповідає обраному
накладають
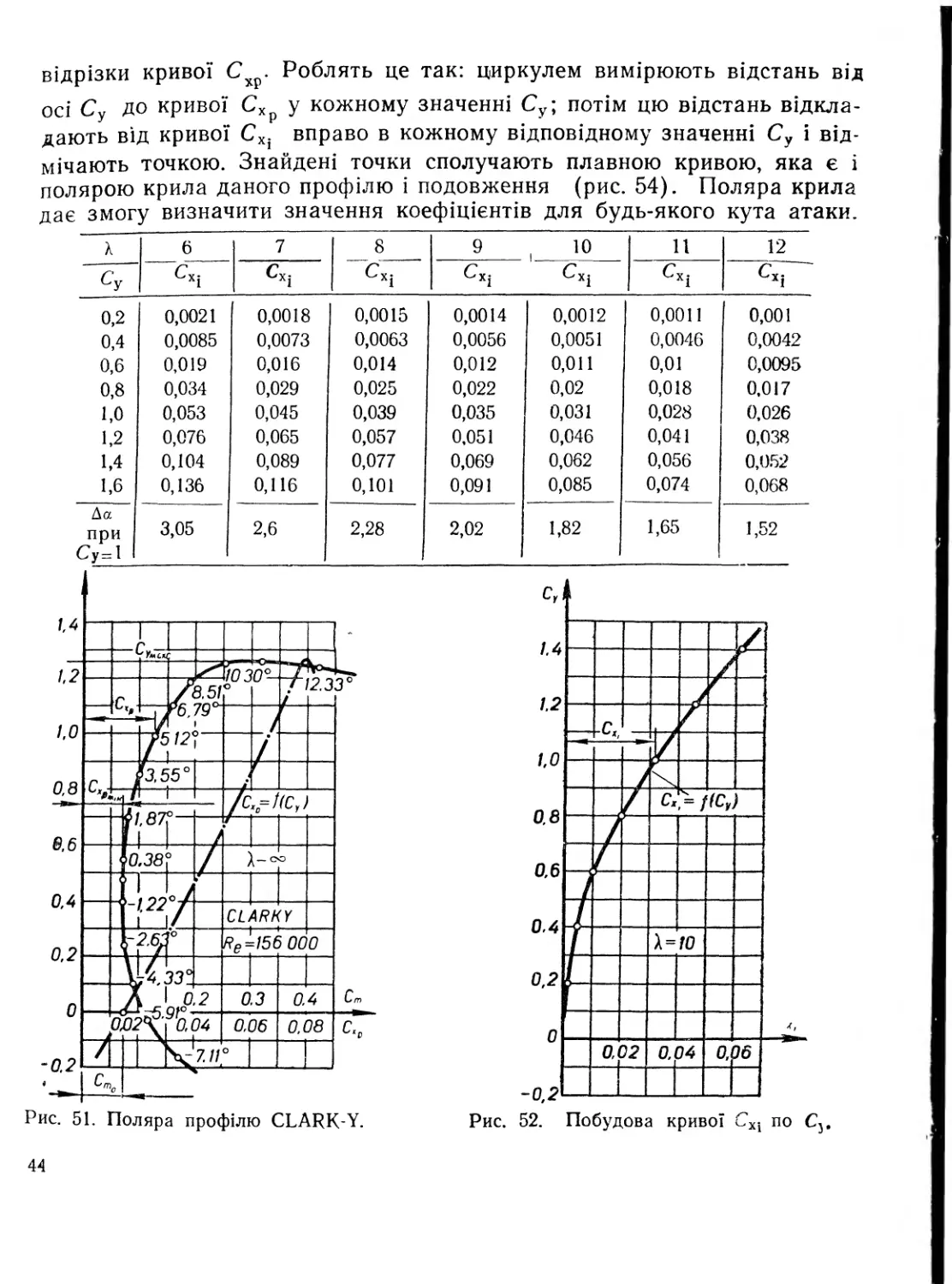
У цій формулі обидві величини в пра-
вій частині залежать від Су. Коефіцієнт
профільного опору СХр звичайно задають
у вигляді так званих профільних поляр,
поданих у кінці книжки. Це не що інше,
як криві Схр по Су, тобто Схр— /(Су).
Коефіцієнт індуктивного опору можна
визначити за формулою (34) або взяти
з таблиці (подано нижче) чи з рис. 38.
Користуючись таблицею, за відпо-
відними даними Сх. для обраного X
(наприклад, Л= 10), будують криву. Ро-
бити це краще на кальці (рис. 52).
Якщо користуються графіком (рис.
38), то кальку накладають на
і перекреслюють координати і
подовженню. Побудований на кальці графік з кривою Сх.
на графік профільної поляри крила обраного профілю (рис. 51), стежачи,
щоб координатні осі обох графіків збіглися. Потім акуратно перекрес-
люють на кальку криву СХр по Су (рис. 53).
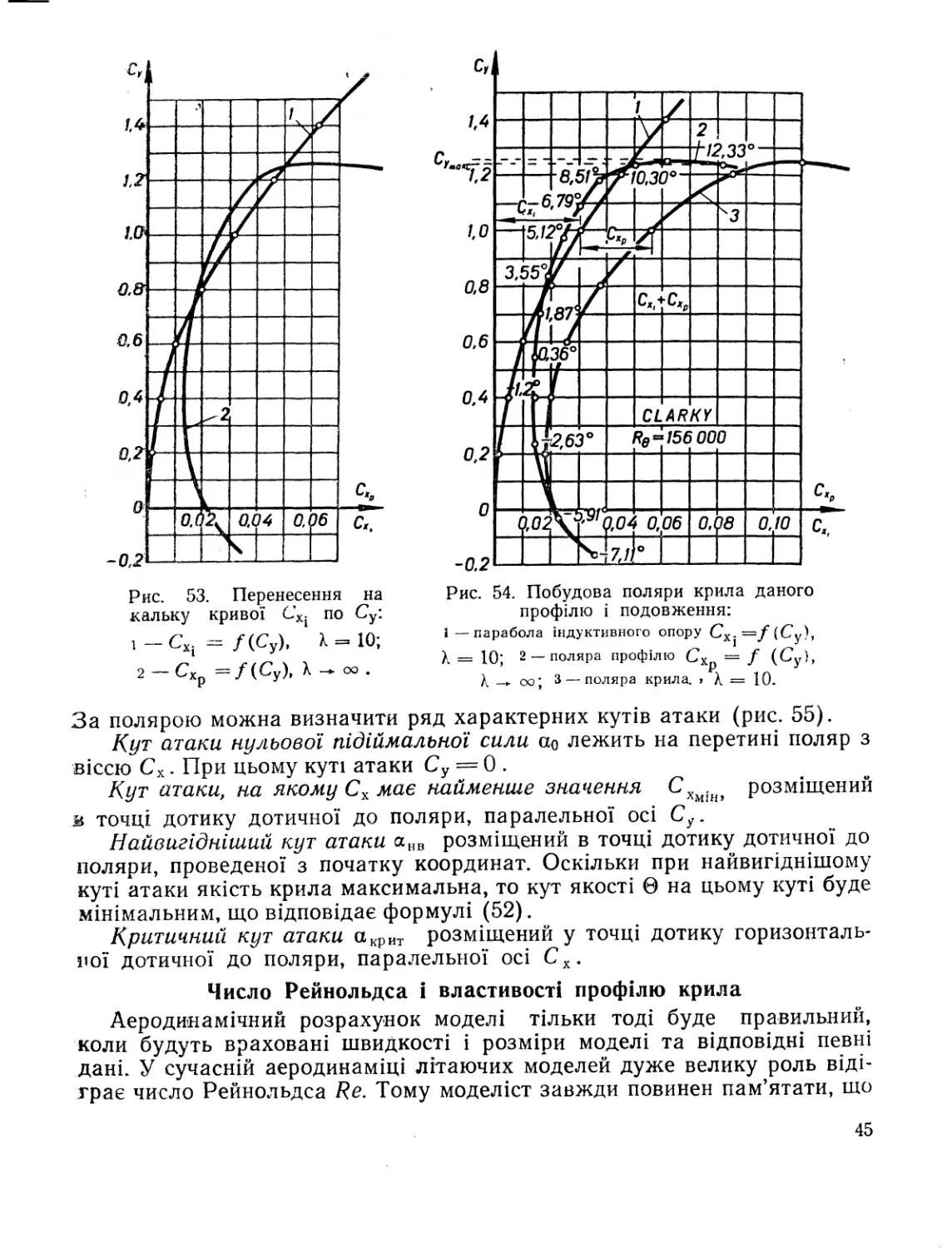
Після цього за допомогою циркуля до кризої Сх. додають відповідні
нього
криву,
43
відрізки кривої схр. Роблять це так: циркулем вимірюють відстань від
осі Су до кривої СХр у кожному значенні Су; потім цю відстань відкла-
дають від кривої Сх. вправо в кожному відповідному значенні Су і від-
мічають точкою. Знайдені точки сполучають плавною кривою, яка є і
полярою крила даного профілю і подовження (рис. 54). Поляра крила
дає змогу визначити значення коефіцієнтів для будь-якого кута атаки.
X 6 7 8 9 , 10 11 12
Схі Сх| Схі Сх; Сх, Сх-
0,2 0,0021 0,0018 1 0,0015 0,0014 0,0012 0,0011 0,001
0,4 0,0085 0,0073 0,0063 0,0056 0,0051 0,0046 0,0042
0,6 0,019 0,016 0,014 0,012 0,011 0,01 0,0095
0,8 0,034 0,029 0,025 0,022 0,02 0,018 0,017
1,0 0,053 0,045 0,039 0,035 0,031 0,028 0,026
1,2 0,076 0,065 0,057 0,051 0,046 0,041 0,038
1,4 0,104 0,089 0,077 0,069 0,062 0,056 0,052
1,6 0,136 0,116 0,101 0,091 0,085 0,074 0,068
Да при 3,05 2,6 2,28 2,02 1,82 1,65 1,52
Су=1
44
Рис. 53. Перенесення на
кальку кривої СХі по Су:
і-Сх. - /(Су), X = 10;
2-СХр =/(Су),
Рис. 54. Побудова поляри крила даного
профілю і подовження:
І —парабола індуктивного опору Сх^=/(Су),
X = 10; 2 — поляра профілю Сх = / (Су),
X —> оо" 3 — поляра крила, > X = 10.
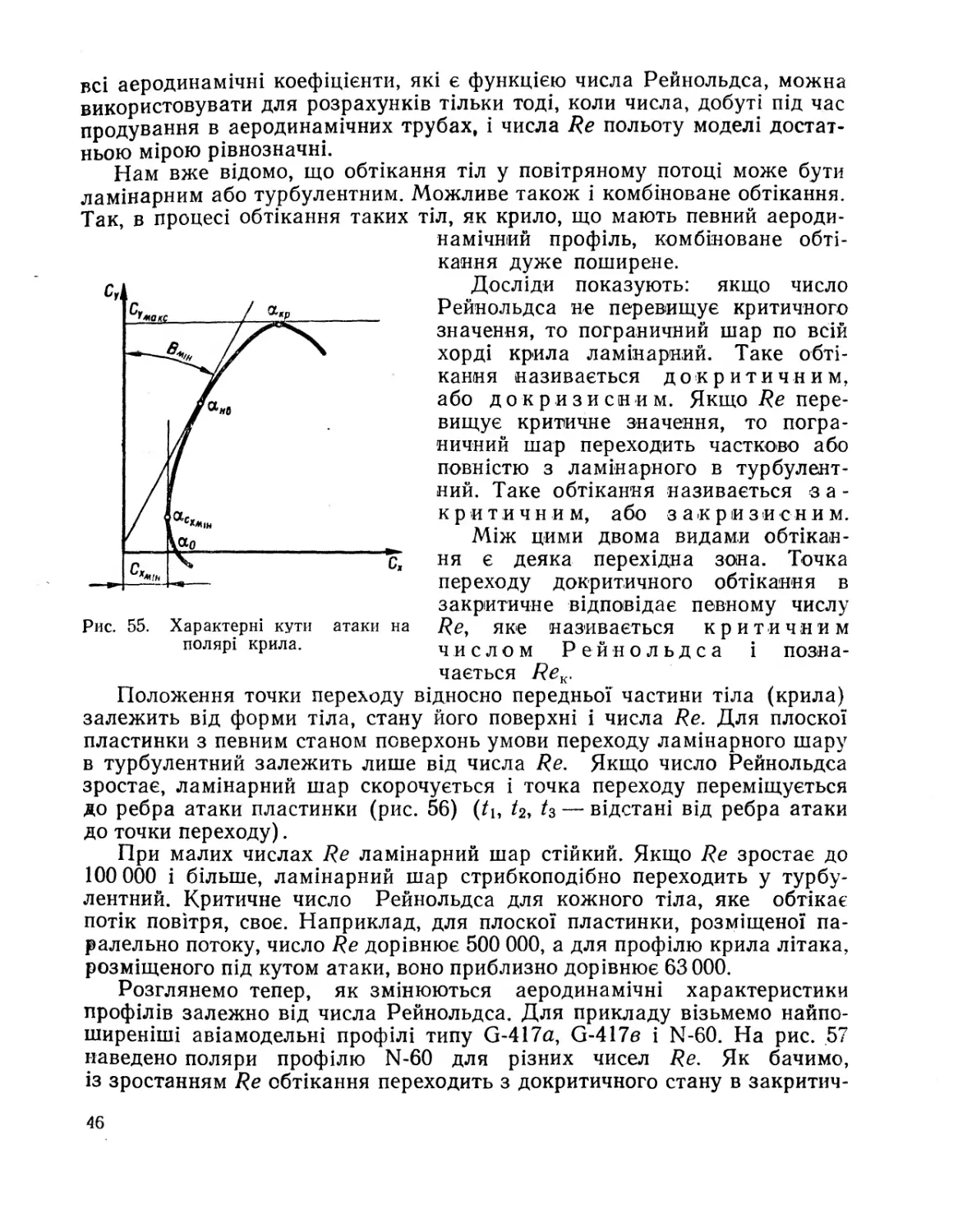
За полярою можна визначити ряд характерних кутів атаки (рис. 55).
Кут атаки нульової підіймальної сили а0 лежить на перетині поляр з
віссю Сх. При цьому куті атаки Су = 0 .
Кут атаки, на якому Сх має найменше значення розміщений
в точці дотику дотичної до поляри, паралельної осі Су.
Найвигідніший кут атаки анв розміщений в точці дотику дотичної до
поляри, проведеної з початку координат. Оскільки при найвигіднішому
куті атаки якість крила максимальна, то кут якості 0 на цьому куті буде
мінімальним, що відповідає формулі (52).
Критичний кут атаки акрит розміщений у точці дотику горизонталь-
ної дотичної до поляри, паралельної осі Сх.
Число Рейнольдса і властивості профілю крила
Аеродинамічний розрахунок моделі тільки тоді буде правильний,
коли будуть враховані швидкості і розміри моделі та відповідні певні
дані. У сучасній аеродинаміці літаючих моделей дуже велику роль віді-
грає число Рейнольдса Яе. Тому моделіст завжди повинен пам’ятати, що
45
всі аеродинамічні коефіцієнти, які є функцією числа Рейнольдса, можна
використовувати для розрахунків тільки тоді, коли числа, добуті під час
продування в аеродинамічних трубах, і числа Ке польоту моделі достат-
ньою мірою рівнозначні.
Нам вже відомо, що обтікання тіл у повітряному потоці може бути
ламінарним або турбулентним. Можливе також і комбіноване обтікання.
Так, в процесі обтікання таких тіл, як крило, що мають певний аероди-
намічний профіль, комбіноване обті-
кання дуже поширене.
Досліди показують: якщо число
Рейнольдса не перевищує критичного
значення, то пограничний шар по всій
хорді крила ламінарний. Таке обті-
кання називається докритичним,
або до кризи сним. Якщо Ке пере-
вищує критичне значення, то погра-
ничний шар переходить частково або
повністю з ламінарного в турбулент-
ний. Таке обтікання називається з а -
критичним, або закризисним.
Між цими двома видами обтікан-
ня є деяка перехідна зона. Точка
переходу докритичного обтікання в
закритичне відповідає певному числу
Ке, яке називається критичним
числом Рейнольдса і позна-
Рис. 55. Характерні кути атаки на
полярі крила.
С,
чається Кек.
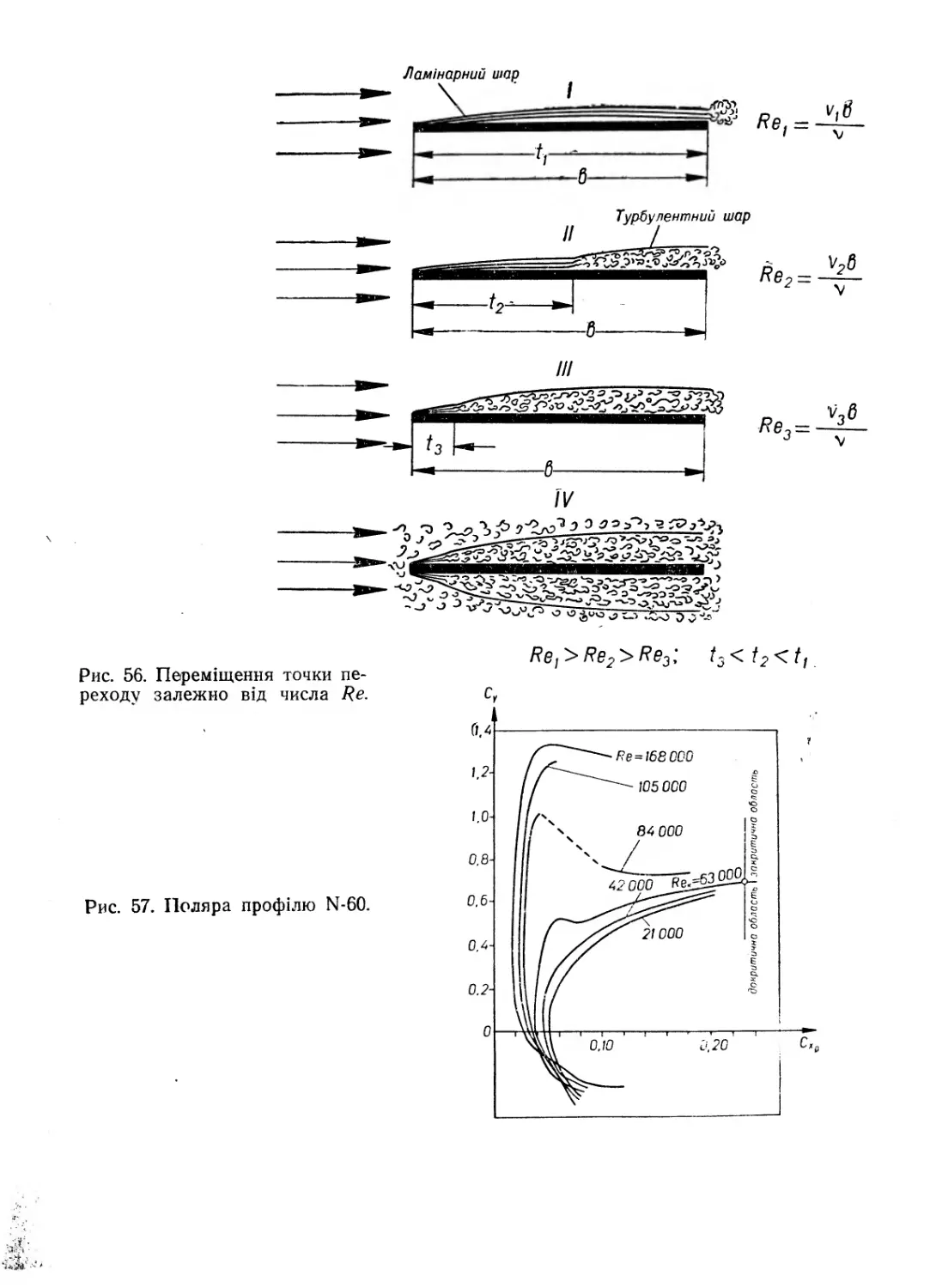
Положення точки переходу відносно передньої частини тіла (крила)
залежить від форми тіла, стану його поверхні і числа Ке. Для плоскої
пластинки з певним станом поверхонь умови переходу ламінарного шару
в турбулентний залежить лише від числа Ке. Якщо число Рейнольдса
зростає, ламінарний шар скорочується і точка переходу переміщується
до ребра атаки пластинки (рис. 56) (/і, /2» — відстані від ребра атаки
до точки переходу).
При малих числах Ке ламінарний шар стійкий. Якщо Ке зростає до
100 000 і більше, ламінарний шар стрибкоподібно переходить у турбу-
лентний. Критичне число Рейнольдса для кожного тіла, яке обтікає
потік повітря, своє. Наприклад, для плоскої пластинки, розміщеної па-
ралельно потоку, число Ке дорівнює 500 000, а для профілю крила літака,
розміщеного під кутом атаки, воно приблизно дорівнює 63000.
Розглянемо тепер, як змінюються аеродинамічні характеристики
профілів залежно від числа Рейнольдса. Для прикладу візьмемо найпо-
ширеніші авіамодельні профілі типу <3-417а, <3-417в і N-60. На рис. 57
наведено поляри профілю N-60 для різних чисел Ке. Як бачимо,
із зростанням Ке обтікання переходить з докритичного стану в закритич-
46
Рис. 56. Переміщення точки пе-
реходу залежно від числа
/?Є/> Ре2> Ке3;
І2<І1
Рис. 57. Поляра профілю N-60.
1,0
0.8-
0,6-
0,4-
0.2-
а
а
Рис. 58. Вплив числа на Су (а) і на Сх (б)
профілю 0-417а при різних кутах атаки.
ний і характеристики Су і Схр різко змінюються. Таку саму картину спо-
стерігають для моментних характеристик профілю N-60.
Експериментальні криві зміни Су =:/(/?£) при різних кутах атаки
профілю 6-417а мають вигляд паралельних або злегка нахилених до
осі абсцис прямих. Це свідчить про те, що для малозігнутої пластинки,
якою по суті є профіль 6-417а, Су від числа Ке майже не залежить
{рис. 58, а). Аналогічно і для коефіцієнта Сх (рис. 58, б).
Зовсім інша картина спостерігається в профілю N-60. Під час пере-
ходу з докритичного в закритичний стан на кривій Су бачимо різкий
стрибок, який із збільшенням кута атаки переміщується на дедалі більші
числа Ке, а також збільшується за величиною. Таку картину ми бачимо
до критичного кута атаки, тобто кута, при якому на верхній поверхні
профілю утворюється зрив потоку і Су не залежить від числа Ке.
У товстих профілів кризисні явища особливо помітні, а плоска пла-
стинка майже не реагує на число Ке.
На відміну від продування профілю 6-417 а, для якого вгнутість не-
значна (/ = 5,8%) і профіль^майже не чутливий до зміни числа Ке, більш
зігнутий профіль 6-417в (/=8,7%) не чутливий лише при /?е=100 000.
Якщо число /?е = 42 000, крива Су має вже чіткий мінімум, а якщо Ке<
<42 000, Су різко збільшується. Такий незвичайний вигляд мають криві
Сх^НКе) профілю 6-417а. Так, якщо /?е=84000, Сх зростає повільно,
якщо /?е<42 000, цей коефіцієнт різко збільшується.
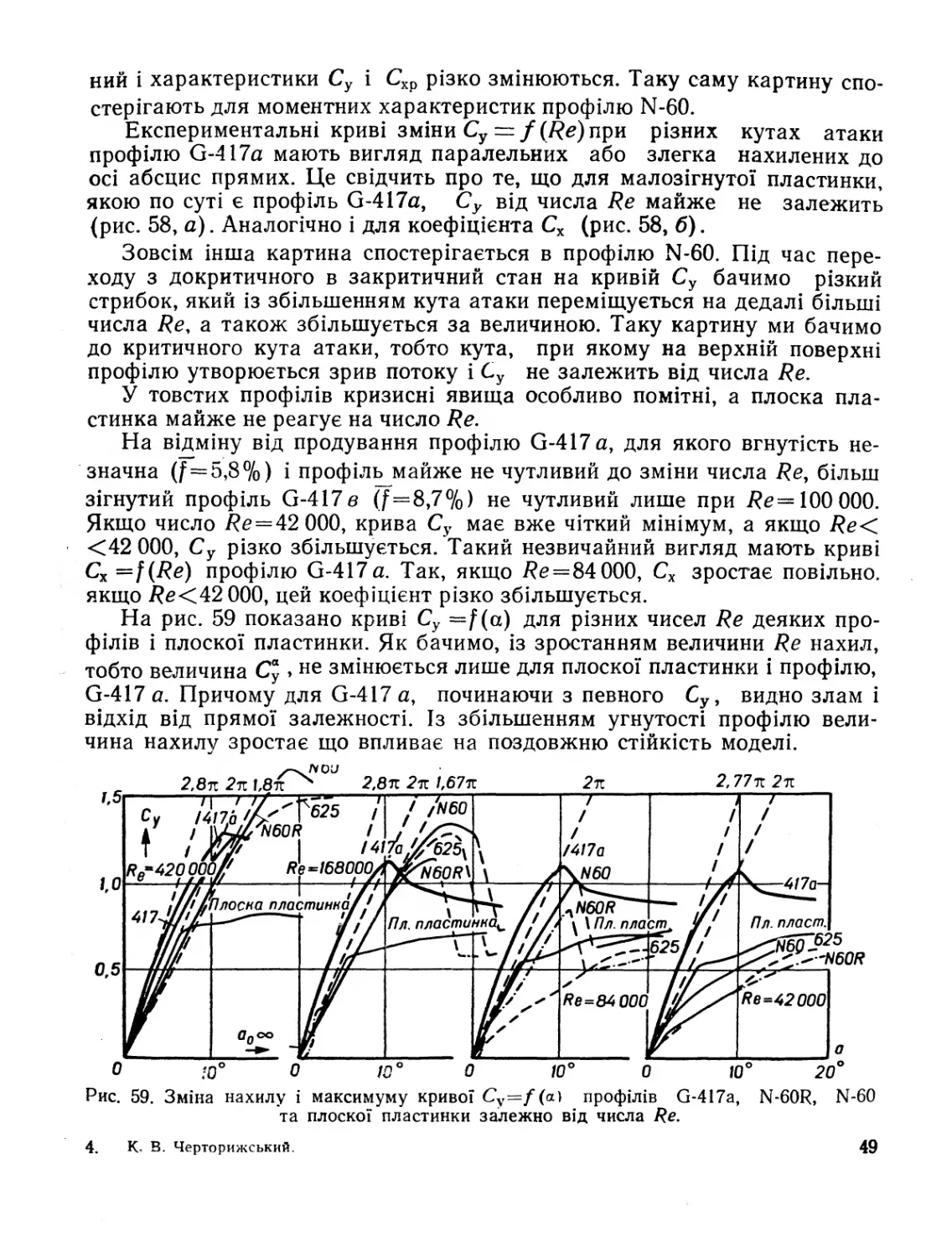
На рис. 59 показано криві Су =/(а) для різних чисел Ке деяких про-
філів і плоскої пластинки. Як бачимо, із зростанням величини Ке нахил,
тобто величина Су » не змінюється лише для плоскої пластинки і профілю,
6-417 а. Причому для 6-417 а, починаючи з певного Су, видно злам і
відхід від прямої залежності. Із збільшенням угнутості профілю вели-
чина нахилу зростає що впливає на поздовжню стійкість моделі.
Рис. 59. Зміна нахилу і максимуму кривої Су=/(а) профілів С-417а, N-601?, N-60
та плоскої пластинки залежно від числа
4. К. В. Черторижський.
49
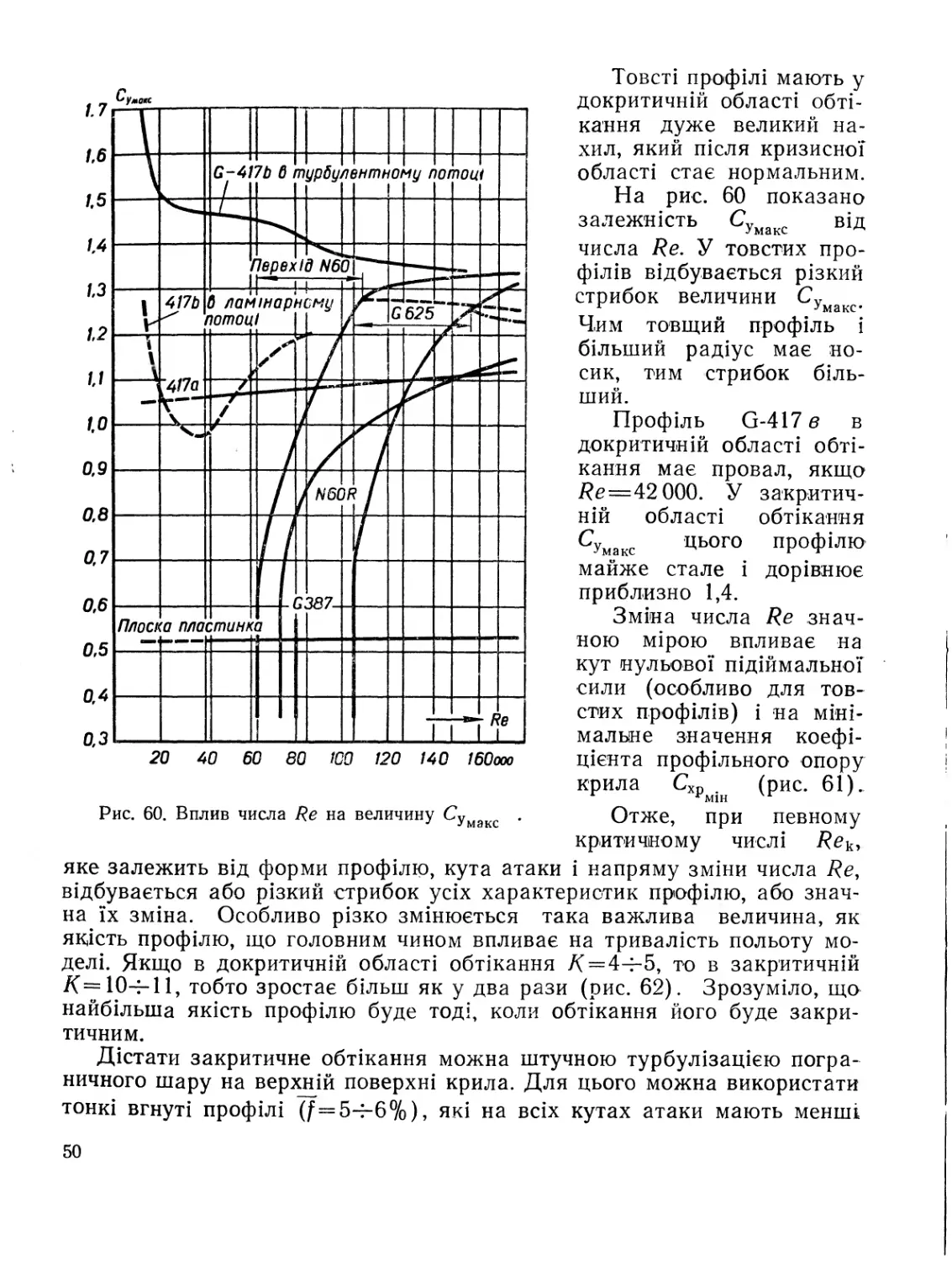
Рис. 60. Вплив числа ІЇе на величину Єумакс •
Товсті профілі мають у
докритичній області обті-
кання дуже великий на-
хил, який після кризисної
області стає нормальним.
На рис. 60 показано
залежність СУмакс від
числа Ке. У товстих про-
філів відбувається різкий
стрибок величини Су
1 -Умане*
Чим товщий профіль і
більший радіус має но-
сик, тим стрибок біль-
ший.
Профіль (3-417 в в
докритичній області обті-
кання має провал, якщо
/?е=42 000. У закритич-
ній області обтікання
СУмакс Пього ПрофІЛЮ
майже стале і дорівнює
приблизно 1,4.
Зміна числа Ке знач-
ною мірою впливає на
кут нульової підіймальної
сили (особливо для тов-
стих профілів) і на міні-
мальне значення коефі-
цієнта профільного опору
крила СХрм.н (рис. 61).
Отже, при певному
критичному числі Кек,
яке залежить від форми профілю, кута атаки і напряму зміни числа Ке,
відбувається або різкий стрибок усіх характеристик профілю, або знач-
на їх зміна. Особливо різко змінюється така важлива величина, як
якість профілю, що головним чином впливає на тривалість польоту мо-
делі. Якщо в докритичній області обтікання /<=44-5, то в закритичній
К= 104-11, тобто зростає більш як у два рази (рис. 62). Зрозуміло, що
найбільша якість профілю буде тоді, коли обтікання його буде закри-
тичним.
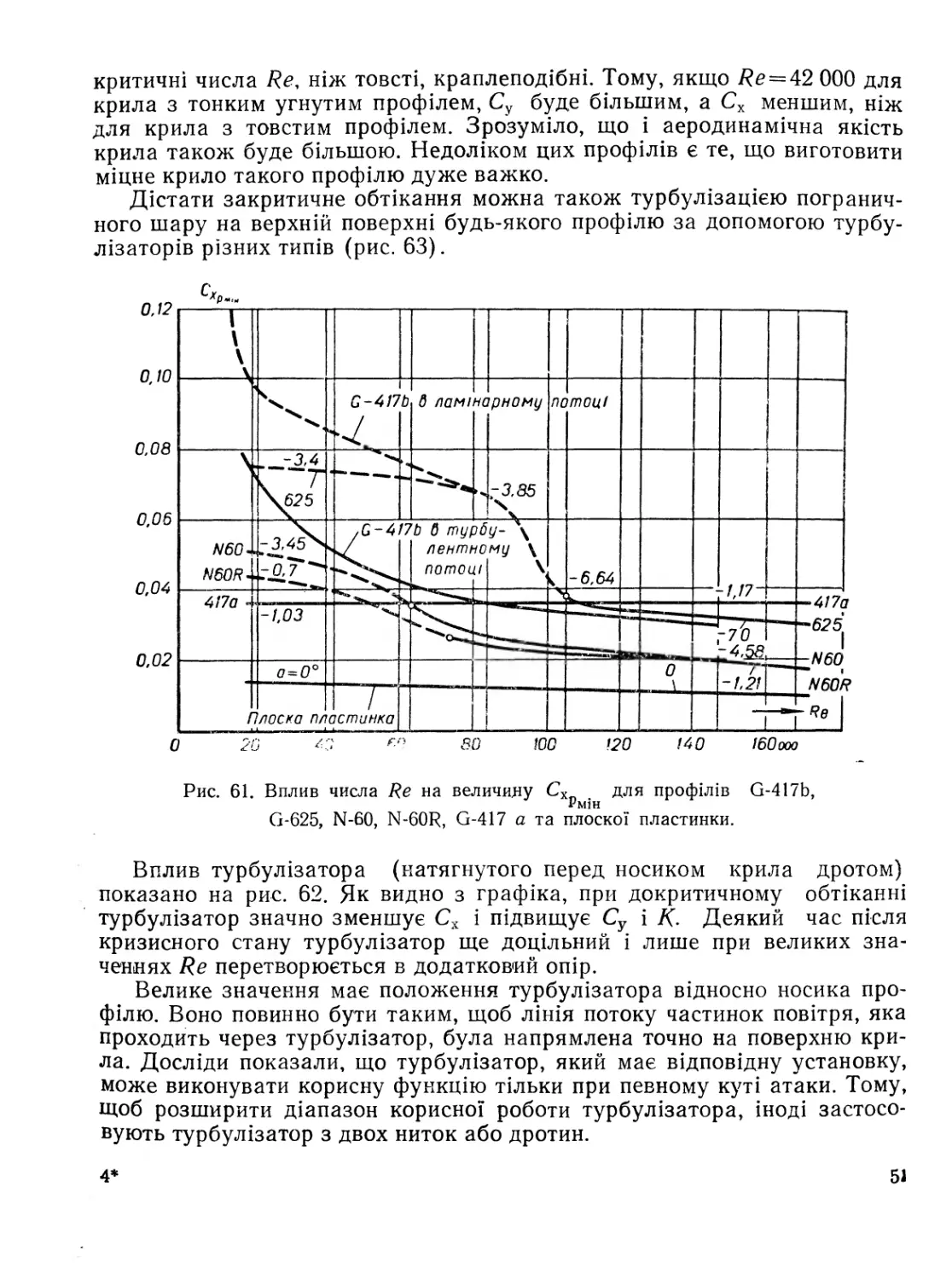
Дістати закритичне обтікання можна штучною турбулізацією погра-
ничного шару на верхній поверхні крила. Для цього можна використати
тонкі вгнуті профілі (/=54-6%), які на всіх кутах атаки мають менші
50
критичні числа Ке, ніж товсті, краплеподібні. Тому, якщо /?е = 42 000 для
крила з тонким угнутим профілем, Су буде більшим, а Сх меншим, ніж
для крила з товстим профілем. Зрозуміло, що і аеродинамічна якість
крила також буде більшою. Недоліком цих профілів є те, що виготовити
міцне крило такого профілю дуже важко.
Дістати закритичне обтікання можна також турбулізацією погранич-
ного шару на верхній поверхні будь-якого профілю за допомогою турбу-
лізаторів різних типів (рис. 63).
Рис. 61. Вплив числа %е на величину Сх для профілів
Рмін
Сі-625, N-60, И-60К, 0-417 а та плоскої пластинки.
О-417Ь,
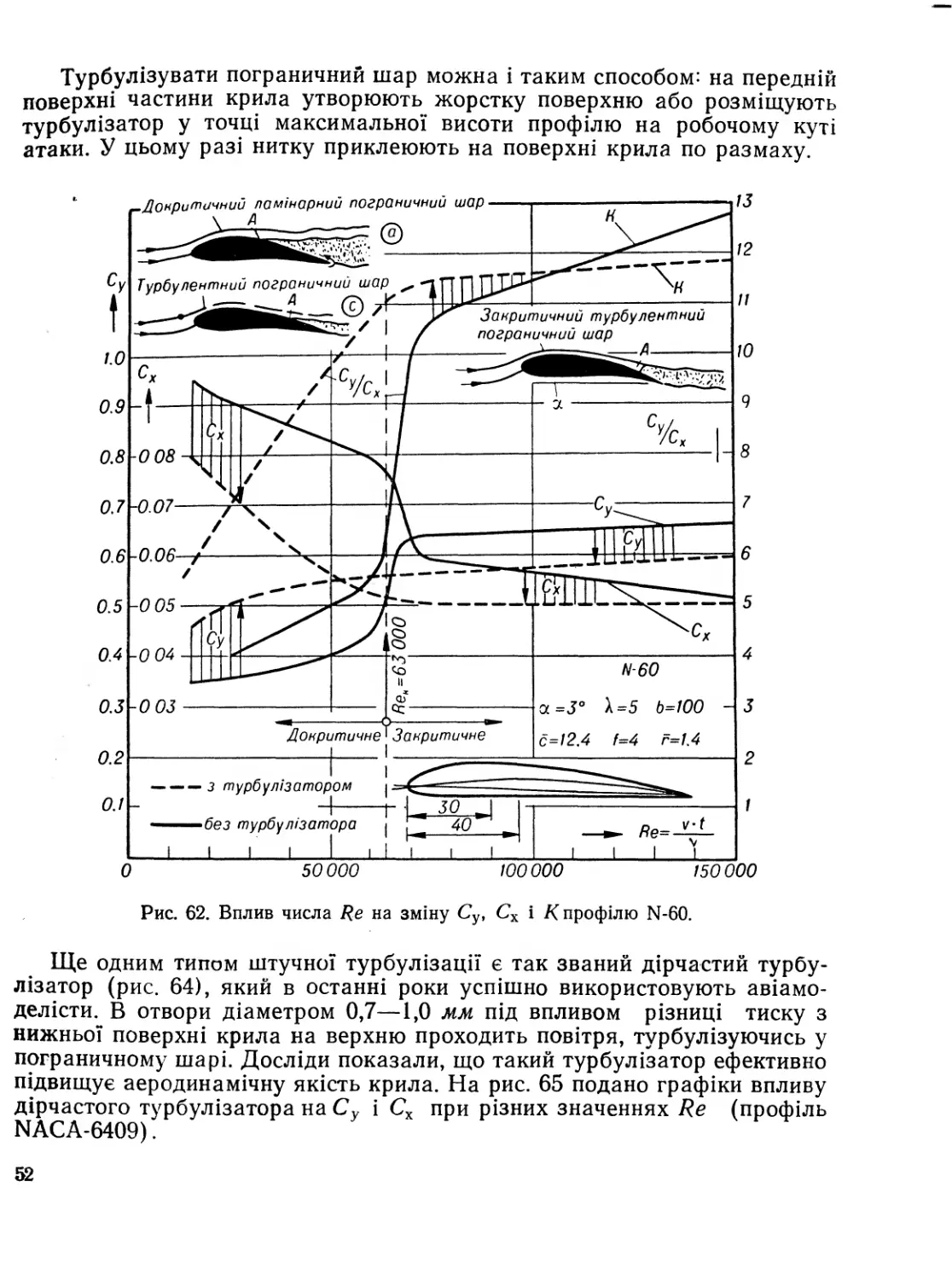
Вплив турбулізатора (натягнутого перед носиком крила дротом)
показано на рис. 62. Як видно з графіка, при докритичному обтіканні
турбулізатор значно зменшує Сх і підвищує Су і /С Деякий час після
кризисного стану турбулізатор ще доцільний і лише при великих зна-
ченнях Ке перетворюється в додатковий опір.
Велике значення має положення турбулізатора відносно носика про-
філю. Воно повинно бути таким, щоб лінія потоку частинок повітря, яка
проходить через турбулізатор, була напрямлена точно на поверхню кри-
ла. Досліди показали, що турбулізатор, який має відповідну установку,
може виконувати корисну функцію тільки при певному куті атаки. Тому,
щоб розширити діапазон корисної роботи турбулізатора, іноді застосо-
вують турбулізатор з двох ниток або дротин.
4*
51
Турбулізувати пограничний шар можна і таким способом: на передній
поверхні частини крила утворюють жорстку поверхню або розміщують
турбулізатор у точці максимальної висоти профілю на робочому куті
атаки. У цьому разі нитку приклеюють на поверхні крила по размаху.
Донритичний ламінарний пограничний шар
12
11
10
9
8
7
6
5
4
2
1
50000
100000
150000
Рис. 62. Вплив числа на зміну Су, Сх і /(профілю N-60.
13
Су
1.0
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
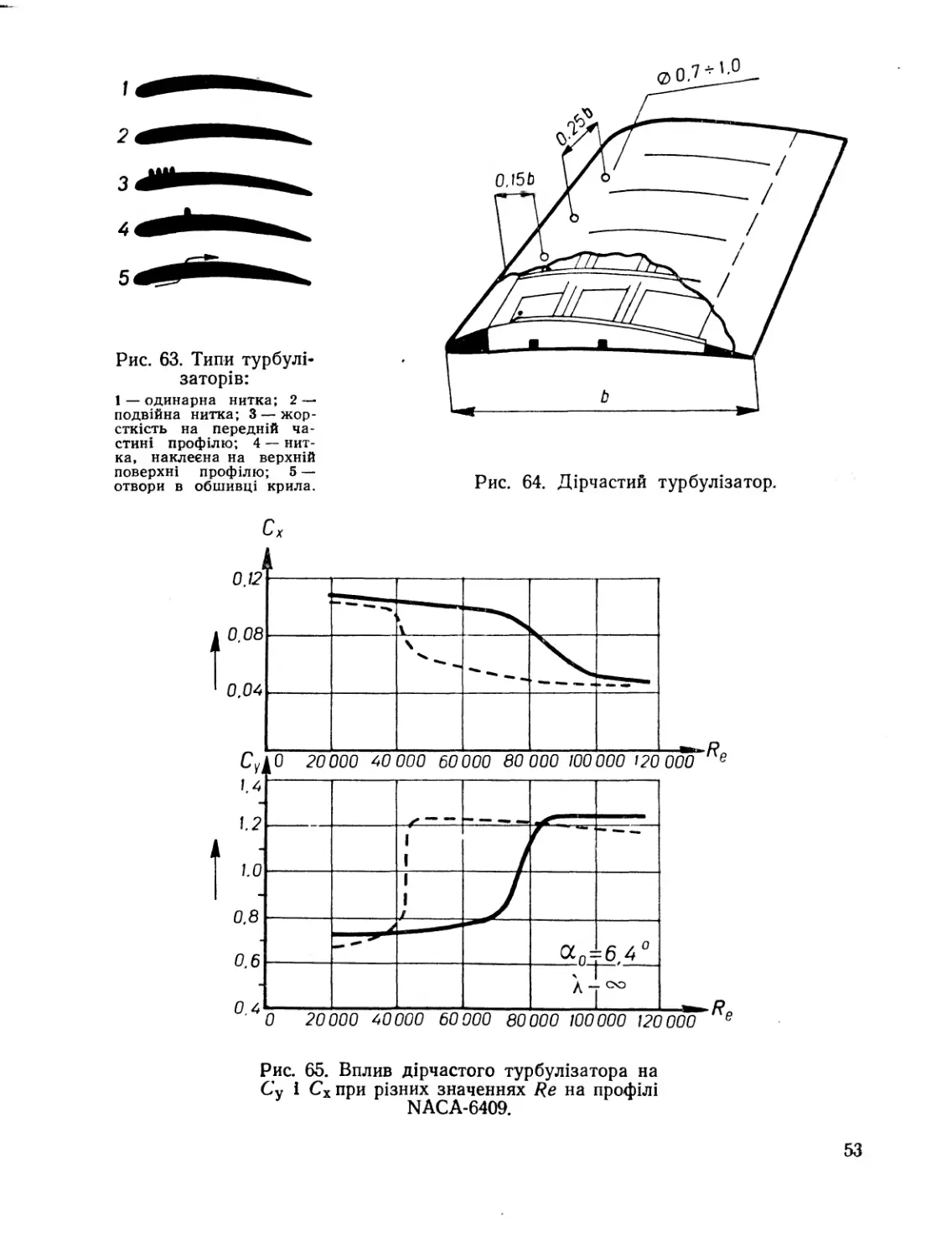
Ще одним типом штучної турбулізації є так званий дірчастий турбу-
лізатор (рис. 64), який в останні роки успішно використовують авіамо-
делісти. В отвори діаметром 0,7—1,0 мм під впливом різниці тиску з
нижньої поверхні крила на верхню проходить повітря, турбулізуючись у
пограничному шарі. Досліди показали, що такий турбулізатор ефективно
підвищує аеродинамічну якість крила. На рис. 65 подано графіки впливу
дірчастого турбулізатора на Су і Сх при різних значеннях Ке (профіль
ИАСА-6409).
52
Рис. 63. Типи турбулі-
заторів:
1 — одинарна нитка; 2 —
подвійна нитка; 3 — жор-
сткість на передній ча-
стині профілю; 4 — нит-
ка, наклеєна на верхній
поверхні профілю; 5 —
отвори в обшивці крила.
Рис. 64. Дірчастий турбулізатор.
Рис. 65. Вплив дірчастого турбулізатора на
Су і Схпри різних значеннях на профілі
№СА-6409.
53
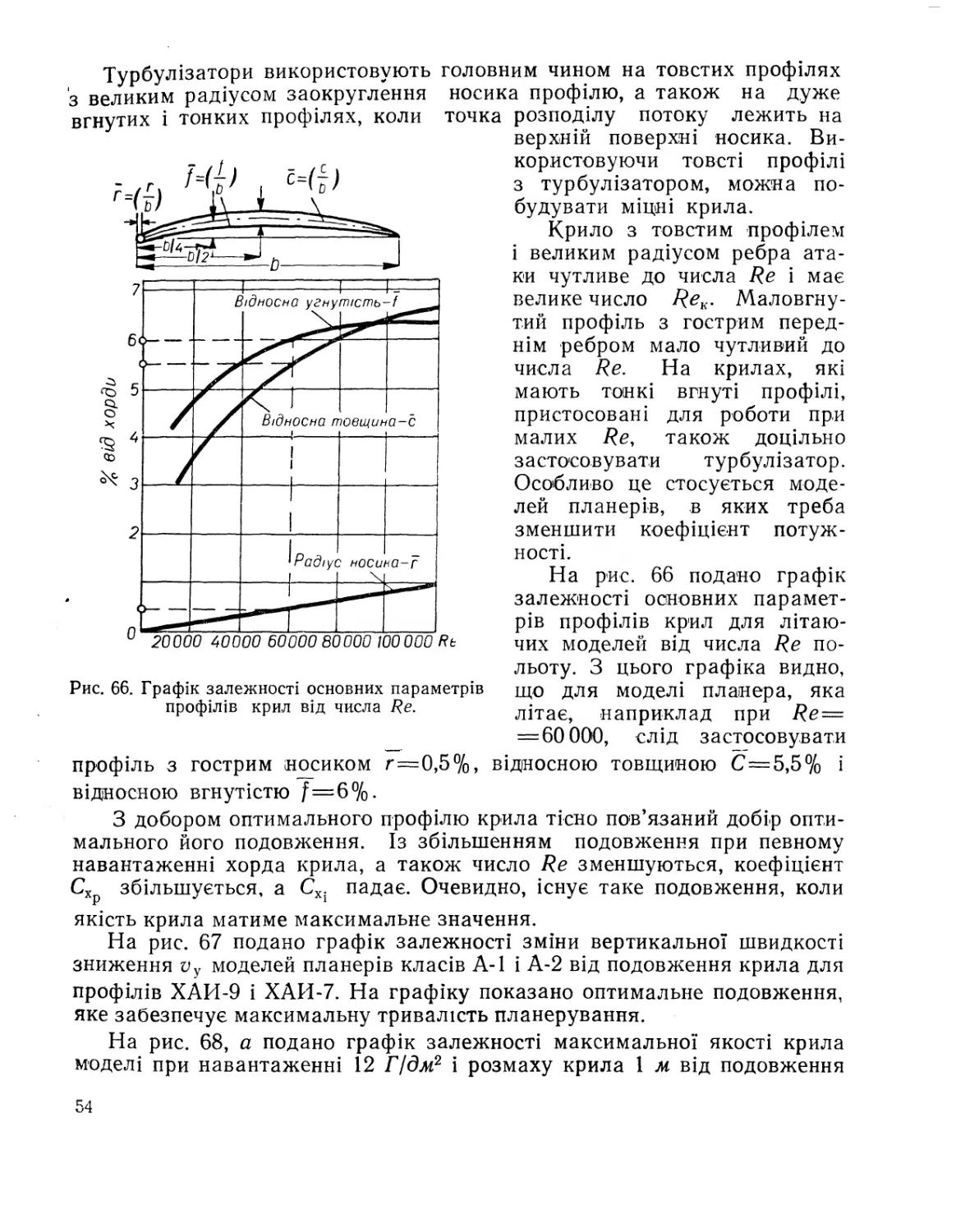
Турбулізатори використовують
з великим радіусом заокруглення
вгнутих і тонких профілях, коли
головним чином на товстих профілях
носика профілю, а також
точка
Рис. 66. Графік залежності основних параметрів
профілів крил від числа Ке.
профіль з гострим НОСИКОМ ґ = 0,5%,
відносною вгнутістю /=6%.
на дуже
розподілу потоку лежить на
верхній поверхні носика. Ви-
користовуючи товсті профілі
з турбулізатором, можна по-
будувати міцні крила.
Крило з товстим профілем
і великим радіусом ребра ата-
ки чутливе до числа Ке і має
велике число Кек. Маловгну-
тий профіль з гострим перед-
нім ребром мало чутливий до
числа Ке.
мають тонкі
пристосовані
малих Ке,
застосовувати
Особливо це стосується моде-
лей планерів, в яких треба
зменшити коефіцієнт потуж-
ності.
На рис. 66 подано графік
залежності основних парамет-
рів профілів крил для літаю-
чих моделей від числа Ке по-
льоту. З цього графіка видно,
що для моделі планера, яка
літає, наприклад при Ке=
= 60 000, слід застосовувати
відносною товщиною С=5,5% і
На крилах, які
вгнуті профілі,
для роботи при
також доцільно
турбулізатор.
З добором оптимального профілю крила тісно пов’язаний добір опти-
мального його подовження. Із збільшенням подовження при певному
навантаженні хорда крила, а також число Ке зменшуються, коефіцієнт
СХр збільшується, а Сх; падає. Очевидно, існує таке подовження, коли
якість крила матиме максимальне значення.
На рис. 67 подано графік залежності зміни вертикальної швидкості
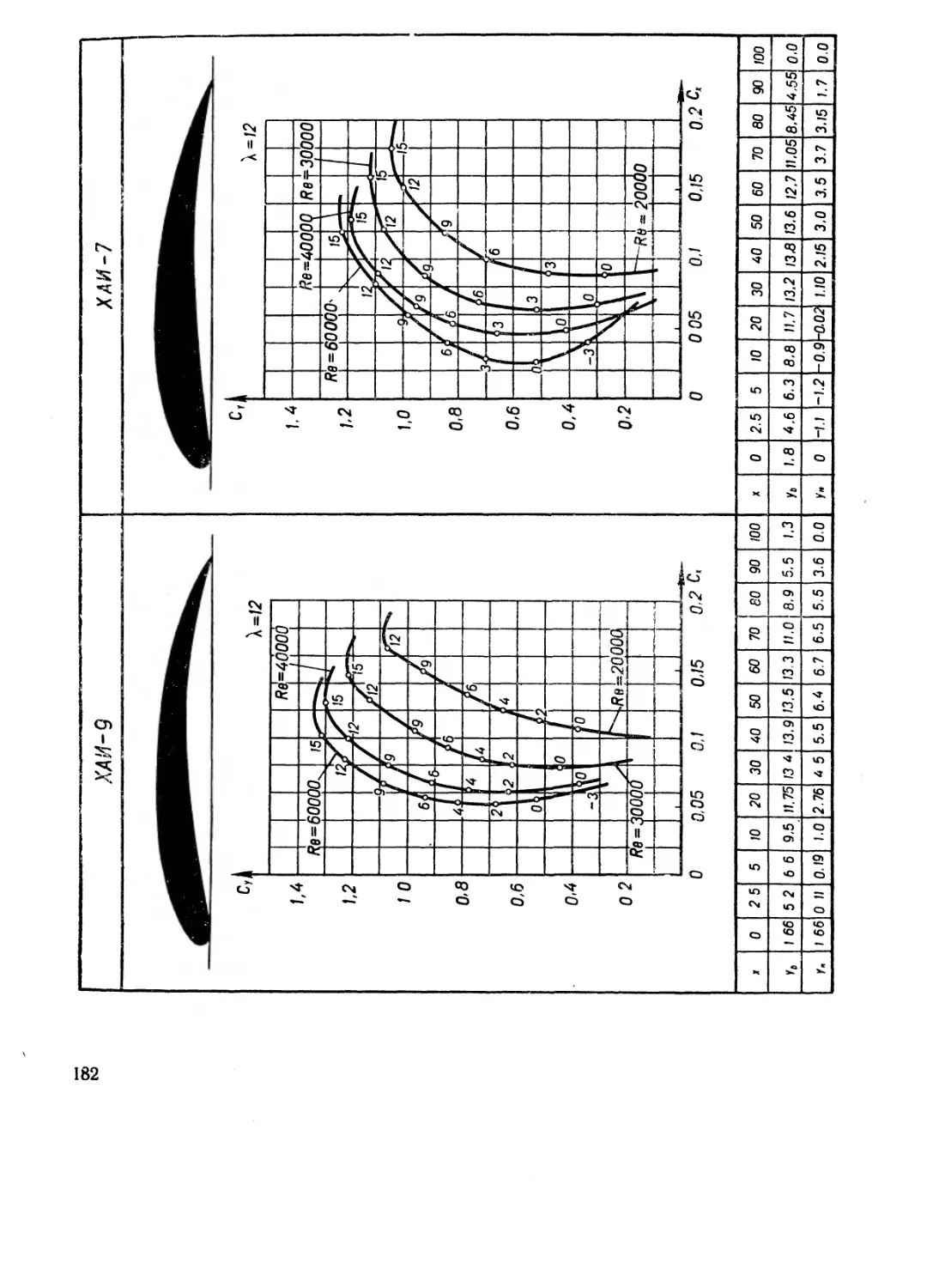
зниження иу моделей планерів класів А-1 і А-2 від подовження крила для
профілів ХАИ-9 і ХАИ-7. На графіку показано оптимальне подовження,
яке забезпечує максимальну тривалість планерування.
На рис. 68, а подано графік залежності максимальної якості крила
моделі при навантаженні 12 ГІдм2 і розмаху крила 1 м від подовження
54
Рис. 67. Залежність зміни ї/у від подовження
Х (Схшк - 0,005).
Рис. 68. Залежність К крила моделі при навантаженні 12 ГІдм2 і
розмаху крила 1 м від подовження X (а) і величин X, К, їу та опти-
мальної швидкості при різних розмахах І і числа (б).
55
Л, а на рис. 68, б — графік залежності А, К, т»у та оптимальної швидкості
і/для моделі, що має крило з профілем N-60 при різних розмахах і
значеннях Ке.
Планеруючий політ та аеродинамічна якість моделі
Основним параметром, що визначає якісні характеристики більшості
сучасних спортивних моделей, є тривалість польоту. Особливо це стосу-
ється таких класів літаючих моделей, як планери, моделі літаків з гумо-
вими моторами і таймерні моделі літаків з поршневими двигунами.
Якщо розглядати поетапно весь політ моделі, то планерування є
одним з основних і найбільш результативних етапів польоту. •
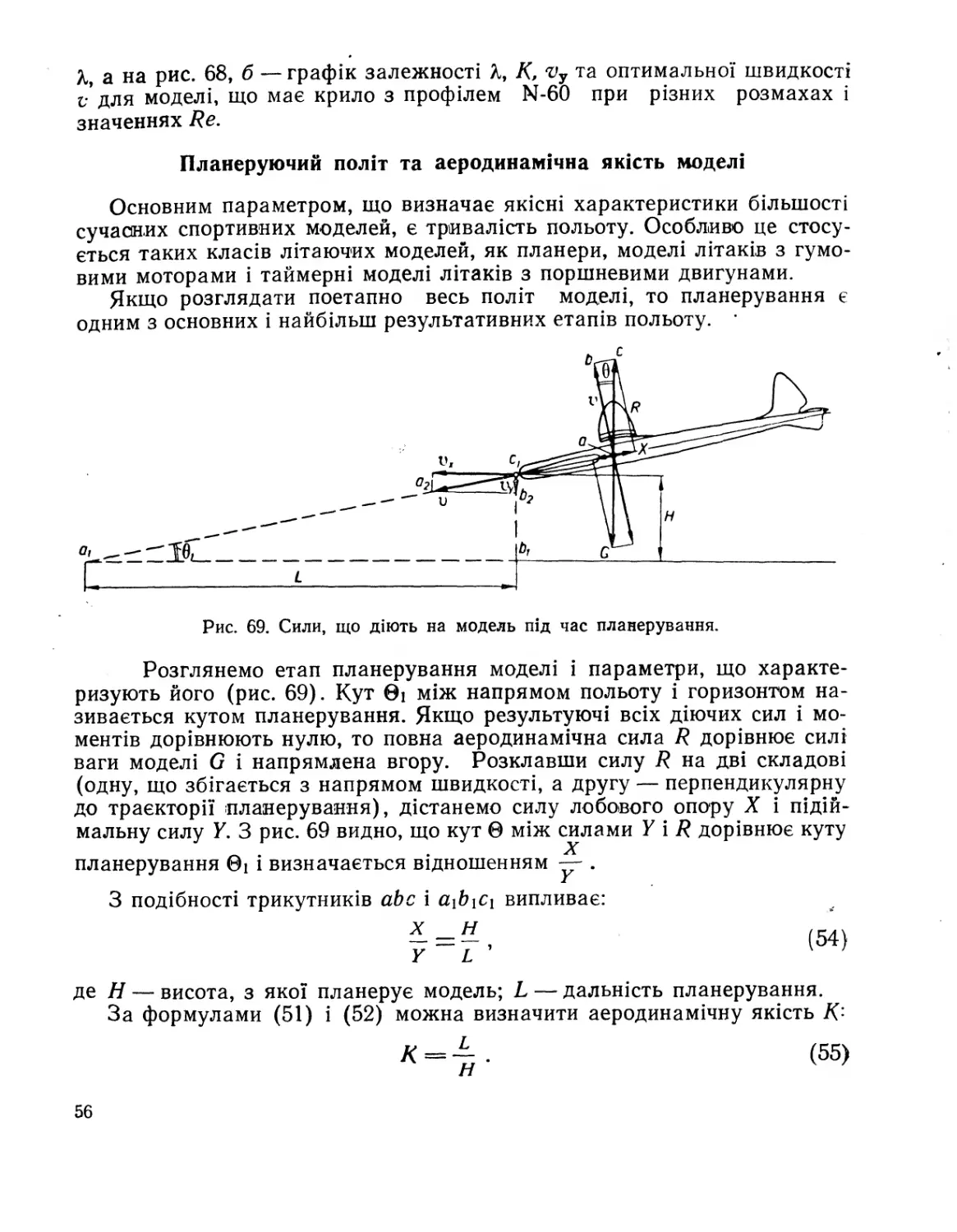
Рис. 69. Сили, що діють на модель під час планерування.
Розглянемо етап планерування моделі і параметри, що характе-
ризують його (рис. 69). Кут 0і між напрямом польоту і горизонтом на-
зивається кутом планерування. Якщо результуючі всіх діючих сил і мо-
ментів дорівнюють нулю, то повна аеродинамічна сила 7? дорівнює силі
ваги моделі С і напрямлена вгору. Розклавши силу і? на дві складові
(одну, що збігається з напрямом швидкості, а другу — перпендикулярну
до траєкторії планерування), дістанемо силу лобового опору X і підій-
мальну силу У. З рис. 69 видно, що кут 0 між силами У і 7? дорівнює куту
планерування 0! і визначається відношенням — .
З подібності трикутників аЬс і а\Ь\С\ випливає:
(54)
де Н — висота, з якої планерує модель; Ь — дальність планерування.
За формулами (51) і (52) можна визначити аеродинамічну якість К’
(55)
56
З подібності трикутників авс і випливає:
Л —
X иу *
(56)
Якщо врахувати, що кути планерування для літаючих моделей неве-
ликі (54-8), тоді практично і
V
V?'
а
(57)
Звідси швидкість зниження моделі:
V
к
(58)
З цієї формули видно, що для того, щоб швидкість зниження моделі
була меншою, треба, щоб збільшилась аеродинамічна якість моделі і
зменшилась швидкість її польоту.
Як відомо, під час планерування сили, що діють на модель, зрівно-
важені, а саме: 6 = /?. Оскільки кути планерування невеликі, рівняння
можна записати так-’ 6х¥. Підставивши значення У (див. формулу 27),
дістанемо:
а = сур~-5.
у 2
Звідси можна визначити і швидкість польоту моделі:
= V 4 (59>
О
де — — р — навантаження на крило моделі.
Підставивши в формулу (59) значення густини повітря, дістанемо
формулу для визначення швидкості польоту моделі під час планерування
в остаточному вигляді:
(м І
сек]
(60)
Визначити швидкість польоту моделі при планеруванні можна і за
допомогою графіка (рис. 70). Пунктиром на графіку показано визна-
чення швидкості для Су =1; р=12 Г/дм2, яка за цих умов дорівнює
4,5 м/сек.
Отже, щоб зменшити швидкість польоту, треба зменшити наванта-
ження або збільшити коефіцієнт підіймальної сили. Але зменшувати
навантаження більше, ніж 12 Г/дм2, не можна за існуючими технічними
57
вимогами для літаючих моделей. Таким чином, зменшити швидкість
польоту можна лише за рахунок збільшення величини Су до оптимальної.
Зменшення швидкості польоту моделі пов’язано із зменшенням швид-
кості зниження, тобто з визначенням режиму мінімальної швидкості
Рис. 70. Графік залежності швидкості польоту
моделі при планеруванні від навантаження і
коефіцієнта Су.
зниження гіУмін моделі. Для цього треба дістати таке співвідношення
швидкості V і аеродинамічної якості /С, при якому їх відношення буде
мінімальним. Нам відомо, що швидкість і аеродинамічна якість визна-
чаються кутом атаки і коефіцієнтом Су, тобто:
58
Якщо в формулу (58) підставити ці значення, матимемо:
-Ру = — = --- ? Су = ?’27^- = 1,27 Ур , (61)
* _£уУА
Є*. Сх
с
де —----величина, яка називається коефіцієнтом потужності. Міні-
С3/а
У ...
пальному значенню швидкості зниження відповідає мінімальний коефі-
цієнт потужності:
= 1,27 Ур (--х-
7 2 / МІН
(62)
який залежить лише від Схі Су. Польоту моделі на режимі ^Умін відпо-
відає певне значення Су , яке називається оптимальним і позначається
Поляра літаючої моделі
Поляра літаючої моделі подібна до поляри крила, тому і побудова її
аналогічна до побудови поляри крила. Щоб побудувати поляру літаючої
моделі, треба до всіх точок поляри крила цієї моделі додати величину
коефіцієнта шкідливого опору СХщк .
Лобовий опір моделі, крім лобового опору крила, складається ще з
опору інших частин моделі: фюзеляжу, хвостового оперення, гвинтомо-
торної установки, шасі тощо. Вплив сили лобового опору фюзеляжу, опе-
рення та інших частин моделі на поляру крила визначаємо за формулою
для сили лобового опору моделі:
• ___р‘0~‘ л
мод — -уу ’^кр схмод ,
де СХмод — коефіцієнт лобового опору всієї моделі, віднесений до площі
крила.
Або:
X _р_£!с ,г
^МОД— 2 °кр ^хкр
Визначимо Сх
о ; Р^2 е р
9 °Ф ьхф~Г 2 °оп ьхоп
•^ф'бхф 4- ^оп‘б^хоп +•••
мод Акр
Ввівши прийняті позначення, матимемо:
г ____ ^Ф ^Хф4-5опСХоп + ...
хшк
59
ЧАСТИНА МОДЕЛІ СХЕМА с.
Фюзеляж прямокутного або шестигроного перерізу — - — - Г7’ -ц—£ 0.27
Фюзеляж обального перерізу Л V 0.20
Фюзеляж прямокутного перерізу з кабіною 0,34
Колесо з пневматиком 0.45
Дротяний стояк 1,50
й V * - 5мід Г(1
Стояк обтічного перерізу 1 V СЗ “ $иій~ Пр 0.40
Високий пілон кріплення крила 0.22
Оперїння з симетричним профілем 0.020
Стабілізатор з несучим профілем 0.045
Рис. 71. Значення коефіцієнта Сх для деяких частин моделі»
Якщо позначити суму буквою X (сігма),
вигляд:
__ МЕСХчаст-$част
Схшк— 5кр
формула матиме такий
(63)
де 1,1 — коефіцієнт, який враховує взаємний вплив частин моделі між
собою.
Сх різних частин моделей визначать в аеродинамічних трубах. На
рис. 71 подано значення Сх для деяких частин літаючих моделей, а на
рис. 72 — графіки залежності Сх різних модельних фюзеляжів від швид-
кості V.
Коефіцієнт лобового опору моделі тепер можна виразити такою фор-
мулою:
п п 1,1Еб?Хчаст 5Част
Отже, конструюючи і будуючи літаючі моделі, слід завжди прагнути
до зменшення міделя частин моделі і поліпшення аеродинамічних форм
і якості поверхні.
Тепер повернемось до побудови поляри моделі. Як уже зазначалось,
для цього коефіцієнт шкідливого опору треба додати до поляри крила
моделі, тобто відкласти відрізок добутої величини СХщк від поляри кри-
ла праворуч по всіх ординатах Су і точки сполучити плавною кривою.
Маючи поляру моделі, неважко визначити СУопт і . За да-
\ СУ /мін
ними наведеної нижче таблиці для кожного значення Су слід обчислити
Сх Сх
значення —і побудувати криву по с ( 74)>; за нею
Су Су У
визначити найменшу величину коефіцієнта потужності і значення Суопт,
що йому відповідає.
Для моделі, поляра якої побудована на рис. 73, маємо:
Су =1,0
ІОПТ ’
і -7^г- =0,072.
\ Су /я / МіН
Ці значення можна дістати і за допомогою графіка (рис. 75). Для
цього кальку з полярою моделі накладаємо на графік (осі координат
повинні точно збігатися) і знаходимо криву, що дотикається до поляри.
Спроектувавши точку дотику на вісь Су, знайдемо Суопт , що відповідає
мінімальному значенню коефіцієнта потужності.
Знаючи навантаження на крило і Су опт, можна за графіком (рис. 70)
визначити швидкість планерування. А використовуючи формулу (60) і
61
с.
0,4
Фюзеляж овальний.
0,2
^о- -о Полірований
Полірований
--Г-1~Т-Т—|-----г
=0,00275 м 2 сп_~
=0,00190 м 2
'Фюзеляж
—ромбовидний
0
5
С.
0,44
0,40
0,36
0,32
0,28
0,24
0,20
0,16
0,12
20 и, м/сек
Рис. 73. Поляра моделі.
~ТТ—Г“-р---1--1---1-г-
ДДерев я ний полірований
—ї1 " Iі ... Г І—'
Iі Iі
«0,00384 м
Круглий
Прямокутний
Дерев* який
0,08Нванни
0,04
0,00
20 и, м/сек
Рис. 72. Графік залежності Сх різних фюзеляжів
літаючих моделей від швидкості польоту.
Су
Рис. 74. Поляра моделі і крива коефіцієнта потужності.
Рис. 75. Графік для визначення коефіцієнта потужності і значення Суопт.
(Су, \
знаючи значення —> неважко визначити мінімальну швидкість
\ СУ /мін
зниження моделі за формулою:
^Умін- 1 ’27 К/Ц Суа/, /мін '
І Сх \
Якщо І=0,072, навантаження на крило моделі р=12,2, то
\ £у2 /мін
^Умін Дорівнює:
^Умін = !>27 КЖ2 • (0,072) ^0,32 м/сек.
Для спрощення розрахунку значення у р можна взяти з таблиці,
наведеної нижче.
Досвід проектування і побудови моделей показує, що в добре спроек-
тованих моделей швидкість зниження лежить у таких межах: для моде-
лей планерів — 0,264-0,35 м/сек\ для моделей літаків з гумовими мото-
рами — 0,44-0,5 м/сек.
ПОВІТРЯНИЙ гвинт
Модель літака може набирати висоти або летіти горизонтально тільки
тоді, коли вона матиме рушій. Таким найпростішим рушієм є повітряний
гвинт з гумовим мотором.
Повітряний гвинт перетворює роботу мотора в роботу руху моделі.
За рахунок реакції повітря, що відкидається гвинтом назад, утворюється
сила тяги, величина якої залежить в основному від маси повітря, яке від-
кидається гвинтом за 1 сек.
Основними геометричними параметрами повітряного гвинта є крок і
форма лопаті як у її перерізах, так і за виглядом у плані. Форма перерізу
лопаті повітряного гвинта аналогічна до форми профілю крила. Проте
лопать працює у складніших умовах, ніж крило.
Розглядаючи будь-який переріз лопаті гвинта під час обертання на
моделі, яка рухається, можна побачити, що цей елемент рухається разом
з моделлю з певною швидкістю і обертається відносно осі гвинта із
швидкістю
и — (64)
де 7? — відстань від осі обертання до перерізу лопаті (центра тиску еле-
мента) ; п — число обертів.
Таким чином, кожний переріз (елемент) лопаті гвинта рухається по
гвинтовій лінії з певною результуючою швидкістю ау, яка є геометричною
сумою швидкості V поступального руху і лінійної швидкості и оберталь-
ного руху. Кожний елемент лопаті має різну за величиною і напрямом
результуючу швидкість (рис. 76).
64
СЛ
*
со
Таблиця значень С“ і Су'а
. Черторижський.
Су Су су Су Са Г'3/а Су Су Са У Ьу ^У Са Су У
0,00 0,0 0,0 0,45 0,203 0,302 0,9 0,81 0,855 1,35 1,822 1,57
0,05 0,0025 0,0112 0,5 0,25 0,324 0,95 0,903 0,926 1,4 1,96 1,657
0,1 0,01 0,0316 0,55 0,303 0,409 1,0 1,0 1,0 1,45 2,102 1,75
0,15 0,0225 0,058 0,6 0,36 0,465 1.05 1,102 1,076 1,5 2,25 1,84
0,2 0,04 0,0865 0,65 0,423 0,525 1,1 1,21 1,153 1,55 2,402 1,932
0,25 0,0625 0,125 0,7 0,49 0,586 1,15 1,322 1,237 1,6 2,560 2,025
0,3 0,09 0,165 0,75 0,563 0,65 1,2 1,44 1,317 1,65 2,722 2,12
0,35 0,123 0,207 0,8 0,64 0,718 1,25 1,562 1,4 1,7 2,89 2,215
0,4 0,16 0,253 0,85 0,722 0,785 1,3 1,69 1,482 1,75 3,062 2,32
8
4і н—* 4і 4 4 * 00 ОО ОО оо оо оо ОО оо оо оо ТО то _то то то ю * N0 ьо }о р,Г/дм2
о сл 00 ТО О со оо "•'4 оо СЛ 4* 00 ’ю о СС5 00 05 СЛ 4^ оо то
ОО оо ОО ОО 00 о: оо 00 оо ОО оо оо 00 оо Оо 00 оо 00 00 оо 00 Ом Ом оо О0 О0 Ур
00 00 00 "*ч4 Ч^ •Ч4Д Ч^ •ч^ Ччд •чч} "оо "*О5 *О5 05 05 05 05 СЛ сл сл СЛ сл сл сл 4^ 4*
Оо то оо сл 4 оо то ссо 05 СЛ О0 ТО со оо 05 сл 4^ то 0 оо
*чч] -4 о сл оо сл ОО 05 05 05 05 СЛ Сл сл СЛ * сл т—• сл ►—* сл »—* ‘91 сл 4^ Р,Гідм2
4^ Ос “то >— О со оо <] оо сл *4 оо ТО •— О со 05 05 сл 4» оо сл N0 о СО 00
4і 4» 4^ 4 4 4 4 4 г ру 4і 4- 00 О0 00 со 00 00 05 0^ О0 оо ОО оо —
* и—• Н-А о О О О о о О О "со <О о <£> со со СС5 со до со 00 оо V Р
*<1 оо сл 4- то н-• (£5 а> СЛ 4 со 00 05 СЛ то н— со С5 сл
то о о СО •3 О * со <—* о со оо оо 00 00 и—• 00 00 00 18, г—* оо >—• Г—* -о р,Г/дм2
о о 00 •ЧІ со сл 4 “ОО “то ь—* о со оо —4 05 сл 4і оо ТО о со 00 "*ч4 05 сл
4» 4* 4» 4- 4 4,4 4 4 4 00 4 О0 4 00 4 00 4 ОО 4,3 00 4,3 4,3 4*> 60 4,2 то 4,2 4,2 N3 4і ТО “то 4* 4» Ур
о СЛ 4 00 то О 00 05 сл 00 го г—* О оо 05 СЛ 4і 00 то СС5 оо
Таблиця значень
66
У правильно спроектованому повітряному гвинті всі перерізи лопаті
зустрічають потік повітря під деяким найвигіднішим кутом. При цьому
на лопаті утворюється сила Р, подібна до аеродинамічної сили крила.
Ця сила складається з двох складових: сили тяги Рл і опору Л4Х, який
називається моментом, потрібним для обертання гвинта.
Шлях, який проходить елемент лопаті в напрямі польоту за один
оберт (при & = 0), називається кроком гвинта і позначається Н. Відно-
шення:
(65)
називається відносним кроком і позначається 1г (О — діаметр гвинта).
Якщо крок гвинта для всіх перерізів лопаті однаковий, то такий
гвинт називається гвинтом постійного кроку. У гвинтів перемінного кроку
крок перерізів лопаті неоднаковий; він зменшується до кінця лопаті.
Найпоширенішими в авіамоделізмі є повітряні гвинти з постійним кро-
ком, які мають нескладну технологію виготовлення. Визначаючи крок
гвинта, ми не враховували ковзання гвинта. Гвинт під час обертання в
повітрі ковзає і тому за один оберт проходить шлях, трохи менший, ніж
теоретичний крок. Цей фактичний шлях називається ходом гвинта і
позначається ЛЛу. Нп = ~. Різниця між кроком і ходом називається
п
ковзанням гвинта і позначається 5. Для спрощення розрахунків кори-
стуються відносним ходом Л і відносним ковзанням 5:
в
Кут встановлення лопаті ф в будь-якому перерізі лопаті можна визна-
чити за формулою:
<68)
Звичайно кут ф на графіках подають на відстані 0,5 /? або 0,75 /?.
Знаючи діаметр гвинта і відносний крок, можна визначити кут вста-
новлення лопаті на будь-якій відстані 2? від осі гвинта:
ід<р = = , (69)
БТ 2кгл/? 2лгл/? 4 ’
— відповідний радіус лопаті від 7? (наприклад, 0,1; 0,25; 0,5 і т. д.).
5* §7
Кут атаки лопаті майже завжди менший, ніж кут встановлення, за
винятком роботи гвинтів на місці (рис. 77). Кут атаки будь-якого пере-
різу лопаті залежить від поступальної і лінійної швидкостей оберталь-
ного руху. Лінійні швидкості обертання для кожного перерізу гвинта
різні, тому у гвинта, лопаті якого за довжиною мають однаковий кут
встановлення, при поступальному русі кути атаки в перерізі будуть різні.
Такий гвинг працює погано, утворюючи малу силу тяги. Це пояснюється
тим, що тільки в якомусь одному перерізі кут атаки буде найвигіднішим,
тобто оптимальним.
Рис. 77. Кут атаки лопаті гвинта при різних умовах роботи:
а — робота на місці; б — робота в моторному польоті; в — на плане-
руванні (лопаті гвинта не складаються).
Щоб лопать працювала однаково по всій довжині, тобто щоб кути
атаки для всіх перерізів наближались до оптимальних, треба робити так
звану крутку лопаті. Чим ближче розміщений переріз до осі обертання,
тим менша його лінійна швидкість. Тому кут встановлення має бути
більший. І навпаки, чим далі від осі розміщений переріз, тим меншим
має бути його кут встановлення.
Кут атаки перерізу лопаті подібний до кута атаки крила, і для гвин-
тів з гумовим мотором його добирають залежно від форми перерізу
(профілю) лопаті у межах 14-6°. Чим більша вгнутість профілю, тим
меншим повинен бути кут атаки.
Як правило, лопаті гвинтів з гумовим мотором в гумомоторних моде-
лях мають опукло-вгнуті профілі. Для таких лопатей найкраще викори-
стати профіль 6-417а, тонкі профілі Бенедека. Непогані результати
дають гвинти з профілями серії №АСА.
Аеродинамічні характеристики повітряних гвинтів визначають в
аеродинамічних трубах на спеціальному гвинтовому приладі.
Тягу, яку утворює повітряний гвинт, можна обчислити за формулою:
Ргв — ар£Нп2, (70)
де а — коефіцієнт тяги, який залежить від відносного ходу X, відносного
кроку Н, форми і кількості лопатей.
68
Потужність, потрібна для обертання гвинта, виражається формулою:
75
(71)
де (3 — коефіцієнт потужності.
Момент, потрібний для обертання гвинта:
Л, = . (72)
Відношення роботи, яку затрачає гвинт на рух моделі за одиницю
часу, до роботи, затраченої у той самий час на його обертання, нази-
вається коефіцієнтом корисної дії гвинта ц. Його визначають за фор-
мулою:
Ру арО4П2У аУ а у
ТП —-----=------------ — —— = — А. (7о)
Кут встановлення лопаті ф дають на відстані 0,75 радіуса,
а значення а, р, т) і Л залежно від X. Іноді значення а у графіках не
дають, тому що його можна обчислити за формулою (73). Залежність
а, Р і ц від А показано на графіку (рис. 78).
Рис. 78. Графік залежності а, р і т) $ід А.
За результатами дослідів будують графіки у вигляді «сіток» —
характеристик певної серії гвинтів (рис. 79, 80).
Щоб упевнено користуватись характеристиками гвинтів, треба пам’я-
тати про критерії подібності за числом Для повітряних гвинтів число
дорівнює:
=2^ = 0,216-106/іО2. (74)
69
Конструюючи моделі, слід мати на увазі, що на характеристики
гвинта дуже впливає форма і розміри фюзеляжу, які значно погіршують
параметри гвинта в разі великих розмірів моделі і поганої обтічності.
Враховуючи вплив фюзеляжів на характеристики гвинта, треба кое-
фіцієнт т), узятий з сітки характеристик, помножити на коефіцієнт /<ф:
/<ф^0,98^,
де А"ф беремо з графіка (рис. 81), добутого експериментально, залежно
від відношення (ІеІВ моделі:
4 = 1,120,
де 4 — діаметр еквівалентної площі міделя Ц біля гвинта.
Коефіцієнт корисної дії гвинта можна значно підвищити, правильно
підібравши геометричні параметри. Дуже важливим параметром, який
треба враховувати, є так зване покриття гвинта:
__ ^макс__
(75)
де к — кількість лопатей гвинта; ^макс — відносна максимальна ширина
(хорда) лопаті.
Чим менша величина покриття, тим вищий к. к. д. можна дістати.
Звичайно, це робити можна до певної межі, тому що питання міцності
лопатей — не другорядна справа. Слід також мати на увазі, що багато-
лопатеві гвинти знижують к. к. д.
Рис. 79. Характеристика серії гвинтів ЗСМВ-2.
70
Рис. 80. Характеристики гвинта Ратьє.
Щоб виготовити гвинт постійного кроку, треба мати відповідні шаб-
лони, які можна дістати геометричною побудовою, маючи такі пара-
метри: хорда лопаті &макс, відносна товщина профілю с діаметр гвинта
О, відносний крок Н або кут вста-
новлення (р на радіусі =0,75/?.
На аркуші цупкого паперу про-
водять лінію ааІ9 взявши її за вісь
обертання гвинта (рис. 82). У верх-
ній частині аркуша креслять роз-
гортку лопаті так, щоб її вісь вві
була перпендикулярна до осі ааі. З
точки в, центра обертання відкла-
дають відстань перерізів лопаті за
такою схемою: 0,3/?; 0,5/?; 0,75/?;
0,9/? і /? проводять лінії, перпенди-
кулярні до осі вві. На лінії перерізу
(0,75/?) будують максимальну хор-
ду & макс лопаті.
Рис. 81. Графік впливу поправки к. к. д.
гвинта на фюзеляж.
71
Загальний бигляд лопаті
о.
Рис. 82. Побудова шаблонів лопаті гвинта:
1 — розгортка лопаті; 2 — визначення перерізів; 3 — побудова шаблонів; 4 — шаблон лопаті
за виглядом збоку, перерахований на периметр шаблону за виглядом зверху.
72
Розмістивши &макс (див. рис. 82), залежно від обраної форми лопаті
будують інші хорди і, сполучивши їх кінці плавною кривою, дістають
загальний контур (рис. 82, 1). Закінчивши побудову розгортки, почи-
нають визначати перерізи. Для цього будують вісь ссі і на ній відкла-
дають відстані перерізів, як на рис. 82, 1. З точки с вгору відкладають
відрізок, що дорівнює і точку с2 сполучають з точками перетину пере-
різів з віссю сс\ (рис. 82, 2). Потім відкладають розміри хорди в кожно-
му перерізі відповідно до розмірів розгортки лопаті.
Побудувавши прямокутники (на рис. 82, 2 два перші заштриховані),
дістають розміри для побудови шаблонів за виглядом зверху і збоку'
Користуючись ними, на від-
повідних ОСЯХ М[ І ЄЄі крес-
лять контури цих шаблонів
(рис. 82, 3).
Оскільки під час виготов-
лення гвинта із заготовки
насамперед обробляють
брусок за шаблоном за виг-
лядом зверху, враховуючи
дійсну відстань між перері-
зами до периметру першого
шаблону, слід внести відпо-
відні корективи на бічний
шаблон, вимірюючи дійсні
розміри по контуру (рис. 82,
4). Для точнішого виготов-
лення лопаті доцільно при-
готувати шаблони кожного
з перерізів відповідно до
Рис. 83. Форми лопатей та вплив на них аеродина-
мічних сил:
а — нормальна лопать; б — шаблеподібна лопать з віссю
обертання біля ребра атаки; в — шаблеподібна лопать з.
віссю обертання біля ребра обтікання.
обраного профілю лопаті.
Як було встановлено,
швидкість польоту моделі
можна вважати сталою на
весь час моторного польоту,
чого не можна сказати про оберти гвинта. Спочатку розкручування гумо-
вого мотора, коли момент сили деформованої гуми великий, оберти гвин-
та теж великі, а в міру зменшення моменту — оберти зменшуються. Тому
під час польоту корисно застосувати гвинти із змінним кроком. Є кілька
способів змінювання кроку повітряного гвинта в польоті. Найпоширені-
шими є механічне змінювання кроку гвинта і змінювання за рахунок дії
аеродинамічних сил. Розглянемо останній спосіб, як найдоступніший.
На рис. 83, а зображено нормальну лопать, у якої вісь обертання
проходить через маточину і всю лопать. У цьому разі йдеться про пово-
рот усієї лопаті навколо цієї осі. На переріз лопаті а—а діє сила тяги
73
Рл і опір X. У нормальної лопаті ці сили прикладені біля осі обертання
і тому не утворюють моиента, який міг би деформувати лопать.
Лопать, показана на рис. 83, б, відрізняється від попередньої формою
і тим, що вісь обертання в неї проходить біля ребра атаки. Аеродинаміч-
ні сили, що утворюються на такій лопаті, викликають значний момент
відносно осі обертання, який зменшує кут встановлення лопаті, тобто
зменшує крок лопаті.
Аналогічну за формою лопать показано на рис. 83, в, але тут вісь
обертання проходить біля ребра обтікання, тому момент аеродинамічних
сил намагається збільшити кут встановлення лопаті, тобто збільшити
крок.
Простежимо за роботою цих трьох лопатей у міру розкручування
гумового мотора. На початку розкручування момент мотора і оберти
гвинта значно більші, віж в кінці. Тому лопать б на початку розкручу-
вання зменшить свій крок, а лопать в збільшить. У нормальної лопаті
крок не зміниться. Таким чином, якщо крок гвинта на початку розкру-
чування зменшується, сберти і к. к. д. гвинта збільшуються, що в свою
чергу значно збільшує силу тяги як на початку польоту, так і протягом
усього періоду розкручування гумового мотора. Таку форму лопаті, як
показують досліди, слід використовувати на моделях, в яких гумові мото-
ри працюють 1 хв і більше. Оскільки ці моделі підіймаються під малими
кутами, швидкість польоту на гумовому моторі в них майже стала.
Якщо лопать на початку розкручування збільшує крок, треба для
нормальної роботи гвинта в початковий момент польоту збільшити
швидкість моделі. Такий режим роботи гвинта найпридатніший для мо-
делей, в яких мотори працюють менш як 1 хв. Ці моделі підіймаються
під великим кутом, що дає можливість набирати великої висоти.
Питання про механічне змінювання кроку гвинта розглянуто в роз-
ділі «Технологія виготовлення літаючих моделей».
ГУМОВІ МОТОРИ ДЛЯ ЛІТАЮЧИХ МОДЕЛЕЙ
Гумовий мотор являє собою пучок (джгут) гумових смужок певного
перерізу. Однією з основних характеристик гуми є її питома енергія є,
яка дорівнює відношенню роботи, виконаної цією гумою, до її ваги:
, (76)
^Г.М
де А — робота; Ог.м — вага гуми
Робота, яка виконується під час скорочення розтягнутого джгута гу-
ми, характеризується питомою енергією скорочення, а під час розкручу-
вання — питомою енергією розкручування. Питома енергія розкручуван-
ня менша від питомої ваги енергії скорочення. Це пояснюється тим, що
під час роботи гуми в джгуті виникає тертя між окремими смужками, на
74
яке витрачається частина енергії. Крім того, при закручуванні джгута
гумові смужки натягуються нерівномірно.
' Питома енергія розкручування залежить від товщини джгута гуми:
вона зменшується із збільшенням товщини і навпаки. Це зумовлюється
не тільки збільшенням сил тертя, а й характером роботи гуми в закру-
ченому джгуті. Справа в тому, що в джгуті гуми при закручуванні окремі
смужки працюють на розтяг. Смужки, розміщені на поверхні джгута,
розтягуються більше ніж смужки,
які лежать усередині джгута.
Чим товщий джгут гуми, тим
більша різниця в розтягуванні
зовнішніх і внутрішніх смужок і
тим менше використовуються
смужки, які знаходяться усереди-
ні джгута. Щоб джгут не розір-
вався, його закручують на таку
кількість обертів, при якій мак-
симально розтягуються зовнішні
смужки. Смужки, розміщені все-
редині, розтягуються не повністю.
Отже, товстий джгут гуми має
меншу питому енергію розкручу-
вання, ніж тонкий.
Питома енергія гуми значною
мірою залежить від її сорту, тем-
ператури і мастила. Залежно від
сорту є має такі значення: вітчиз-
няна гума 1X4 мм — 320-4-360
кГ мікі\ угорська сіра — 400-4-
-4-440 кГм!кГ\ угорська чорна —
500-4-520 кГмікГ-, «Пірелі» і
«Денлоп» — 550-4-600 кГмікГ. На
рис. 84 подано графік залеж-
ності є різних сортів гуми від
Рис. 84. Графік залежності питомої енергії є
різних сортів гуми від температури і ма-
стила:
1 —«Пірелі», «Денлоп» з риб’ячим жиром; 2 —
вітчизняна з риб’ячим жиром; 3 — угорська з
риб’ячим жиром; 4 — «Пірелі» без мастила; 5 —
«Денлоп» без мастила; 6 — «Пірелі» з рициновим
мастилом; 7 — угорська без мастила; 8 — вітчиз-
няна без мастила; 9 — вітчизняна з рициновим
мастилом.
температури і мастила.
Працездатність гуми залежить від її зберігання, підготовки до роботи
та змащення. Гуму звичайно пересипають тальком і зберігають у темній
посудині з щільною пробкою. Перед використанням її старанно проми-
вають у теплій воді з дитячим милом. Влітку гуму змазують рициновою
олією, взимку — риб’ячим жиром.
Новий гумовий мотор використовувати відразу не можна. Його спо-
чатку слід «обробити», знявши внутрішні напруги в гумі. Для цього мотор
кілька разів розтягують у 4—5,5 раза або послідовно закручують на 5,
10, 20, 40, 60 та 80% максимально допустимої кількості обертів. Оброб-
лену гуму кладуть у герметично закриту банку і витримують 10—12 діб.
75
Максимальне розтягування гуми, яке показує, у скільки разів порів-
няно з початковою довжиною може бути розтягнута гумова смужка до
розриву, визначає кількість обертів, на яку можна завести мотор. Для
вітчизняної гуми ця величина в середньому дорівнює 6,5 раза, угорсь-
кої — 5,54-6,5, «Пірелі» і «Денлоп» — 7 разів. Кількість обертів, на яку
можна закрутити гумовий мотор, прямо пропорціональна його довжині і
обернено пропорціональна квадратному кореню площі поперечного пере-
різу:
п = Кх , (77)
Рис. 85. Графік максимальної кількості
обертів залежно від перерізу і сорту
гуми.
Кіль- кість сму- жок, 1x4 мм 5, см2 Мср, кГм 1, см п, обер- ти Кіль- кість сму- жок, 1 х4 мм і 5, см2 -Мер, кГм /, см л, обер- ти
12 0,48 0,305 108,5 903 20 0,84 0,718 65,0 437
13 0,52 0,348 100,0 863 21 0,88 0,765 61,8 418
14 0,56 0,364 92,5 778 22 0,92 0,801 59,0 394
15 0,60 0,533 86,5 732 23 0,86 0,895 56,5 359
16 0,64 0,448 81,3 619 24 1,0 0,964 54,3 344
17 0,68 0,528 76,3 580 25 —" — 1,041 51,9 306
18 0,72 0,608 70,4 563 26 1,04 1,093 50,0 268
19 0,76 0,675 68,7 506
76
де І — довжина мотора; 5 — площа поперечного перерізу гумового мото-
ра; /Сі — коефіцієнт, що залежить від сорту гуми і попередньої витяжки
мотора в 2,5 раза. (Для вітчизняної гуми Кі ~4,15-4-5,5; для угорської —
Аі ~5,5 ? 6, для «Пірелі» і «Денлоп» — Кі «6,5—7).
Формула (77) визначає кількість обертів, що становлять 80% руй-
нуючих. Максимальну кількість обертів, на яку можна закрутити
гумовий мотор, можна дістати з графіка (рис. 85) і таблиці, поданої
нижче. В таблиці подано значення середнього обертаючого момента і
максимальну кількість обертів гумового мотора залежно від перері-
зу і довжини гумового джгута.
Під час розкручування гумовий мотор віддає енергію нерівномірно.
Тому другою важливою характеристикою гуми є крива розкручування,
тобто залежність обертаючого
момента Мгр від часу роботи або
кількості обертів, на яку закру-
чено гумовий мотор (рис. 86).
Середній обертаючий момент Мср
можна обчислити за формулою:
/Иср = К-УЗ*, (78)
це — коефіцієнт, що залежить
від сорту гуми і попередньої ви-
тяжки в 2,5 раза. (Для вітчизня-
ної гуми К2«0,8, угорської —
Кг—ІД «Пірелі» і «Денлоп»—
Рис. 86. Графік, що характеризує
розкручування гумового мотора.
К2-1,2).
На рис. 87 (за даними Е. Смирнова) подано криві Аїср залежно від
кількості обертів, на яку закручено гумовий мотор. З цього графіка
можна визначити питому енергію гумового мотора залежно від сорту
гуми. Робота, яку виконує гумовий мотор при розкручуванні, в певному
масштабі дорівнює площі фігури, обмеженої осями Л4ср, п і кривою роз-
кручування. Площу і масштаб визначають за співвідношенням:
Д=2теЛ4СрП, (79)
де А — робота, яку виконує обертаючий момент на шляху, що дорівнює
п обертів. Наприклад, для гуми «Пірелі» при розкручуванні перших 25
обертів обертаючий момент змінився від 7Имакс=4,5 до /Имін =2,7 кГ • см.
Середній обертаючий момент за ці 25 обертів дорівнює А1ср =3,3 кГ • см.
За формулою (79) знаходимо: А = 6,28 • 3,3 • 25 = 518,1 кГ-сл< = 5,181 кГ-м.
Так само можна визначити роботу мотора і під час дальшого його роз-
кручування. Повну роботу можна визначити як суму робіт при розкру-
чуванні кожних 25 обертів; у нашому прикладі £А = 29,1 кГ • м. Питома
енергія розкручування дорівнюватиме:
А _ 29,1
Сг м ~ 0.05
= 582
кГ м
кГ
77
Рис. 87. Графік залежності Л40е різних сортів гуми від кількості обертів п.
Іноді треба визначити переріз гумового мотора за моментом, потріб-
ним для обертання гвинта. Цей параметр визначають за формулою:
з ___
5 = ^/^, (80)
де Лі — коефіцієнт, що залежить від сорту гуми і попередньої витяжки
в 2,5 раза. Для вітчизняної гуми ~ 1,2, угорської — 1,0, «Пірелі»
і «Денлоп» — 0,9
Закручений гумовий мотор розвиває велику стискуючу силу, що діє
на фюзеляж моделі. Тому числове значення цієї сили потрібне для проек-
тування фюзеляжу. В середньому вона дорівнює 7,55 кГ.
Гума має ще одну важливу властивість — вона «стомлюється». Якщо
гумовий мотор був закручений повністю, то повторне закручування вже
забезпечує питому енергію лише в межах 804-85 % попереднього. Тому
протягом деякого часу гумовий мотор повторно використовувати не слід.
Найдоцільніше кожний політ робити на свіжому або «відпочилому»
моторі.
78
Угорська гума «втомлюється» мало і швидко набуває своїх поперед-
ніх властивостей. Гума «Пірелі» після першого закручування втрачає
близько 20—25% своєї питомої енергії. Для відновлення цієї втрати їй
потрібно 18 діб.
ПОЛІТ МОДЕЛІ
Політ вільно літаючої моделі планера класів А-1, А-2 або літака
класів В-1, В-2 складається з трьох етапів: злітання з набиранням висоти,
горизонтального польоту, або планерування і парашутування. Горизон-
тальний політ існує в моделі літака, але діапазон цього польоту дуже
малий. Під час планерування вільно літаючих моделей відбувається 1
ширяння, тобто цей стан може мати змішаний характер. Останній етап —
парашутування — хоча і не відповідає умовам справжнього польоту
моделі, але відбувається під час перебування моделі в повітрі, тому при
певних умовах його можна вважати як складову частину загального
польоту моделі.
Злітання моделі планера
Сучасні моделі планерів класів А-1 і А-2 відповідно до умов змагань
запускають за допомогою буксирного леєра завдовжки 50 м.
Розглянемо дію сил під час запускання моделі на леєрі. Коли центр
ваги моделі і точки прикладання повної аеродинамічної сили і сили на-
тягу леєра збігаються, дістають замкнений трикутник сил (рис. 88). Як
Дотична до траєкторії
Рис. 88. Сили, що діють на модель планера під час запускання його
на леєрі.
79
бачимо, рівнодійна аеродинамічних сил під час буксирування моделі
повинна зрівноважувати силу ваги і силу натягу леєра.
Політ по траєкторії відбувається з швидкістю, яка перевищує швид-
кість планерування моделі, а кути атаки крила значно більші, ніж при
планеруванні. Внаслідок цього коефіцієнт підіймальної сили має знач-
ний приріст, бо крило працює в закритичній зоні чисел Ке, де приріст Су
із збільшенням а значно більший, ніж у докритичній зоні.
Швидкість моделі відносно повітря складається з: швидкості вітру,
швидкості руху авіамоделіста, який запускає модель, і лінійної швид-
кості руху планера по дузі з радіусом, який дорівнює довжині леєра.
Щоб скоротити довжину розгону, модель запускають під кутом 454-
4-60°, надаючи їй початкової швидкості, яка відповідає швидкості руху
Рис. 89. Розміщення буксирного гачка для Рис. 90. Розміщення буксирного гачка
запускання моделей у вітряну погоду. для запускання моделей у безвітряну
погоду або при невеликому вітрі.
по траєкторії злітання. Робити це слід тоді, коли швидкість вітру —
14-4 місек. При більших швидкостях і поривах вітру кут злітання треба
зменшити до 204-30°.
Про швидкість руху і кути атаки можна судити із ступеня натягу
леєра. Послаблення натягу показує, що модель зменшила швидкість або
збільшився кут атаки. Тому під час запускання моделі треба стежити,
щоб сила натягу леєра була сталою. Найбільша висота буксирування
моделі залежить від довжини леєра. Але цю висоту можна збільшити
на 3—5 м, застосовуючи спеціальне буксирування і відчеплення, так
званий «динамічний старт». Коли модель досягла найвищої точки злі-
тання, моделіст замість того, щоб погасити її швидкість і довести до
швидкості планерування, ще більше розганяє модель і так відчіплює
леєр, щоб вона зійшла з розворотом. Звільняючись від леєра, модель
відразу злітає вгору, набираючи при цьому додатково 3—5 м.
Найбільшої висоти при буксируванні моделі планера можна досягти
тільки тоді, коли вона сходитиме з леєра точно над головою моделіста.
Відхід моделі від прямолінійної траєкторії в будь-який бік з крутим
креном, що переходить у пікірування, може бути викликаний розміщен-
ням буксирного гачка далеко за центром ваги або неправильним відхи-
ленням тримера на кілі. До цього призводить також перекіс горизон-
80
тального оперення відносно крила. Недостатній кут поперечного V крила
при малій площі кіля може спричинитися до крутого звалювання моделі
в спіраль ще під час запускання її на леєрі. Щоб запобігти цьому, треба
збільшити площу кіля.
Глибока спіраль після
кана інерцією важких
консолей крила, якщо
модель зійшла з леєра з
нахилом.
Щоб модель на леєрі
не розгойдувалась, іноді
застосовують стабіліза-
тори з негативною Г-по-
дібністю, а буксирний га-
чок розміщують поблизу
центра ваги. Розміщува-
ти гачок спереду центра
ваги більш як на 30%
не слід, бо модель розгой-
дуватиметься на
кут набирання
зменшиться.
Для моделей,
крило розміщене
над фюзеляжем,
положення гачка
вибрати за рис. 89.
точки перетину лінії а—а
з вертикальною прямою,
що проходить через центр
ваги
дугу,
рівнює відстані від реб-
ра обтікання крила до
лінії а—а. Перетин дуги з лінією а—а дає положення точки контакти
гачка з кільцем леєра. Таке положення гачка рекомендують для запу-
скання моделей при швидкості вітру 74-10 м/сек. Якщо швидкість вітру
досягає 4 м/сек, гачок розміщують так, щоб лінія, яка сполучає точку
контакти і точку В, утворювала з вертикаллю кут 30° (рис. 90).
сходження моделі
з леєра може бути викли-
Рис. 91. Сили, що діють на модель літака під час
моторного польоту з набиранням висоти.
леєрі, а
висоти
В ЯКИХ
високо
місцепо-
можна
З
Рис. 92. Максимальна висота польоту
моделі.
моделі,
радіус
описують
якої де-
Злітання моделі літака з гумовим мотором
Під час злітання моделі літака з гумовим мотором повітряний гвинт
розвиває силу тяги, потрібну для подолання лобового опору і складової
проекції ваги моделі на напрям польоту (рис. 91).
в. к. В. Черторижський.
81
Отже, сила тяги, потрібна для польоту моделі з набиранням висоти
під кутом 0, дорівнюватиме:
/> = —+ О8іп0, (81)
де К — аеродинамічна якість моделі.
Оскільки кут 0 лежить у межах 204-30°, то його треба враховувати,
визначаючи підіймальну силу У=6со80. Тоді формула для визначення
сили тяги матиме вигляд:
Р = О/'^-4-8іп0Ї
\ К /
(82)
Робота гумового мотора дорівнюватиме добутку шляху, який прохо-
дить модель, на силу тяги (рис. 92):
А=ІиР,
аб° л=£мо(^- + 8іп0). (83)
Висота польоту моделі становитиме//=АМ зіпО. Набираючи цієї ви-
соти, гумовий мотор виконує роботу А = СГмЄЇ2 • Порівнявши роботу, за-
трачену на політ, з роботою, виконану гумою, дістанемо:
+ 81пб) = ОГМЄ7],
аб° <84>
- + 8ІП0
А
де 0 — середній кут набирання висоти; б — відносна вага гумового мо-
тора; є — питома енергія гуми; К — аеродинамічна якість моделі; т] —
коефіцієнт корисної дії гвинта.
Розглянемо вплив кожного з членів формули (84) на величину мак-
симальної висоти польоту моделі.
Коефіцієнти б і є визначають запас енергії гумового мотора, тобто
потенціальну висоту /7, на яку він може підняти модель, якщо вважати,,
що т] = 100% і Л=10. З рис. 93, побудованого з урахуванням цих умов,
видно, що для моделей з гумовим мотором вагою 40 Г і питомою енер-
гією 650—700 кГ • мікГ потенціальна висота польоту приблизно дорівнює
904-100 м.
Зрозуміло, що практично досягти такої висоти без використання
висхідних потоків повітря не можна.
Щоб відносна вага гумового мотора б була найбільшою, треба побу-
дувати модель відповідно до технічних вимог, не перевищуючи її ваги —
190 Г і ваги змащеного гумового мотора 40 Г.
82
Вплив кута © і якості К на
моторного по-
загальну висоту
льоту у моделі характеризує
вираз:
—----------= Кп. (85)
СО80
—— 4- 8ІП0
Для наочності цей вираз
подано у вигляді графіка (рис.
94), на якому показано три
криві для різних значень аеро-
динамічної якості.
Моделіст повинен знати, що
після припинення роботи мото-
ра починається другий дуже
відповідальний етап — плане-
Рис. 93. Графік висоти, яку може набрати
модель (без врахування втрати енергії).
рування, де вплив аеродинаміч-
ної якості моделі на швидкість
зниження, а отже, і на трива-
лість польоту, дуже великий.
Величина Кп залежить і від значення 8іп0, але при збільшенні кута
понад 30° приріст коефіцієнта Ки незначний.
Силу тяги, потрібну для набирання висоти під кутом 0, можна вира-
зити формулою:
р + Ом8іпЄ, (86)
або визначити за графіком (рис. 95).
Рис. 94. Графік впливу 0 і К на коефіцієнт Кн.
6*
83
Порівнюючи графіки
(рис. 94 і 95) і враховуючи
нерівномірність обертаючо-
го момента гумового мото-
ра, можна зробити висновок,
що оптимальним середнім
кутом © буде кут 254-30°.
Відомо, що модель може
злітати і при великих кутах
(до 90°), але такий режим
злітання триває 2—3 секун-
ди. Моделістам не слід праг-
нути до великого значення
середнього кута 0, бо при
цьому потрібна буде значно
більша тяга і балансування
моделі під час злітання уск-
ладниться.
Рис. 95. Графік потрібної тяги для польоту моделі Вплив коефіцієнтів б, є І
з певним кутом підйому. /Сн на величину максималь-
ної висоти польоту моделі
ми розглядали при умові постійного значення коефіцієнта корисної
дії. Насправді, коефіцієнт т] повітряного гвинта під час польоту
моделі змінюється, і це, безумовно, впливає на величину максимальної
висоти польоту. Щоб з’ясувати причини зміни к. к. д. гвинта під час
польоту, розглянемо деякі параметри, що під час роботи мотора харак-
Рис. 96. Пікіруючий момент від складової сили тяги гвинта:
а — автоматичне зміщення вала гвинта: б — визначення пікіруючого
момента гвинта.
84
теризують рух моделі. З рис. 91 випливає, що У=6со8©, тобто із збіль-
шенням кута набирання висоти підіймальна сила повинна зменшуватись.
Якщо цього не буде, модель перейде в петлю.
Щоб зменшити підіймальну силу, треба перебалансувати модель на
менші кути атаки. Звичайно, це роблять за рахунок зміщення вала гвин-
та на 2—3° униз (рис. 96, а). Завдяки цьому найкрутішу частину траєк-
торії польоту модель проходить з меншими кутами атаки.
Пікіруючий момент (рис. 96, б) від сили тяги Р можна виразити
формулою:
^Пік = ^2 ’ (87)
де ар — відстань від центра ваги моделі до площини обертання гвинта;
Р2 — складова сили тяги.
Отже, пікіруючий момент ТИпік пропорціональний силі тяги, він авто-
матично збалансує модель на ділянці набирання висоти до кута 0 = 254-
4-30°, бо на цій ділянці кут © змінюється майже за лінійним законом.
Якщо модель злітає на кутах 0>25°, то сила тяги Р не змінюється за
лінійним законом і збалансувати модель, зміщуючи вал гвинта, не мож-
на. У цьому разі вал гвинта треба зміщувати до 34-4°, але на ділянці
траєкторії з ©<254-30° сила тяги від гвинта дасть пікіруючий момент,
що збільшує швидкість польоту, зменшує к. к. д. гвинта і різко зменшує
кут ©. Це, безумовно, погіршить умови польоту моделі і знизить його
результат.
Отже, самоперебалансування моделі зміщенням напряму тяги неви-
гідне, тому що воно забезпечує сприятливий режим польоту тільки на
окремих ділянках траєкторії або на спеціальних аеродинамічних схемах
моделей, де найбільший кут набирання висоти дещо перевищує 30°. Не-
зважаючи на значні недоліки, такий спосіб перебалансування моделей
літаків з гумовими моторами поширений у сучасному авіамоделізмі,
оскільки він нескладний. Треба сказати, що при правильному доборі
повітряного гвинта і грамотній схемі моделі такий спосіб дає добрі
наслідки.
Правильно підібраним гвинтом вважається такий, який більшу ча-
стину польоту працює на найвигіднішому режимі, що забезпечує макси-
мальний к. к. д.
Відомо, що найбільший к. к. д. буде тоді, коли різниця між відносним
кроком Н і відносним ходом гвинта К дорівнює 0,2 (й — І=5).
Під Час розкручування перших витків гумового мотора, коли обер-
таючий момент великий, гвинт робить вільні оберти (в 1,5—2 рази більші
від середніх обертів). У цей час, якщо швидкість моделі стала, £>0,2 і
к. к. д. гвинта малий. У кінці розкручування оберти зменшуються, внаслі-
док чого збільшується А (£<0,2) і к. к. д. гвинта знову падає. Розрахун-
ки показують, що середній к. к. д. сучасних моделей літаків з гумовим
мотором лежить у межах 504-65%. З графіка (рис. 97) видно, що при
збільшенні к. к. д. гвинта від 50 до 80% висота польоту може досягти
904-100 м, притому без істотної зміни кута 0.
85
Щоб з’ясувати, як можна забезпечити сталість к. к. д., розглянемо
таке рівняння:
Л — к = —----— , або Л — X = — [н — ( — 'і.
£) пО О \ \ п /
Відомо, що т] буде найбільшим тоді, коли Н — 2і = О,2. А щоб цього до-
обертів п, збільшити ШВИДКІСТЬ V
моделі. Можна зберегти сталу
сягти, треба, збільшуючи кількість
Рис. 97. Графік впливу к. к. д. гвинта і кутів
набору © на загальну висоту моторного
польоту.
кількість обертів п. Для цього
слід використати гвинти, крок
яких збільшується в перший
момент польоту. Хоч це і нега-
тивно впливає на к. к. д. в цей
момент польоту, деякий виг-
раш є внаслідок збільшення
к. к. д. на другій ділянці траєк-
торії польоту, коли к. к. д. ста-
новить близько 604-70%.
Щоб повністю використати
енергію гуми, треба політ
проводити на найвигіднішому
к. к. д., використовуючи для
цього різні автомати переба-
лансування моделі під час мо-
торного польоту. У сучасному
авіамоделюванні найчастіше
застосовують два типи таких
автоматів.
Перший тип — це автомат
для зміщення вала гвинта
(рис. 98), який під час збіль-
шення осьового зусилля гумо-
вого мотора стискує пружину,
розміщену в нижній частині носової бобишки, зміщуючи вал гвинта до-
низу. Під час розкручування гуми осьове зусилля зменшується, внаслідок
чого зменшується і нахил осі гвинта.
Другим типом є автомат перебалансування моделі в будь-який мо-
мент польоту моделі за допомогою відповідних кутів атаки крила, що
насамперед впливає на швидкість польоту моделі. Цей автомат (рис. 99)
має датчик обертаючого момента, за допомогою якого здійснюється
перебалансування моделі. У перший момент польоту швидкість моделі
збільшується, а потім падає до швидкості планерування, внаслідок чого
Т| = СОП8І.
Під час польоту моделі повітряний гвинт спричинює крен моделі в бік,
протилежний обертанню гвинта. Це явище викликає реакція гвинта, яку
86
можна усунути, відхиляючи вал гвинта вбік. Регулюючи модель, можна
ліквідувати і дію повітряного струменя, який закручується гвинтом.
Ці два види впливу гвинта на політ моделі визначаються в основному
його силою тяги. Крім того, на політ моделі
впливає також вага лопатей. Як правило,
більшість моделей літаків з гумовими мото-
рами набирають висоти не по прямій лінії,
а по спіралі. В зв’язку з цим гвинт, який
швидко обертається, змінює балансування і
траєкторію польоту моделі. Відомо, що
гвинт має певну вагу і обертається із знач-
ною швидкістю, він є своєрідним махови-
ком. Будь-який поворот осі обертання махо-
вика зумовлює появу так званого гіроско-
Рис. 98. Автомат для зміщення
вала гвинта.
пічного момента, напрям якого залежить
від напряму обертання гвинта і напряму
польоту моделі. Якщо гвинт має праве
обертання, а модель розвертається вправо, то гіроскопічний момент на-
магається опустити ніс моделі, тобто є пікіруючим. Якщо гвинт має
праве обертання, а модель розвертається вліво, то гіроскопічний момент
намагається підняти ніс моделі, тобто є кабрируючим.
На сучасних моделях класу В-2 гіроскопічний момент досить вели-
кий — 500-4-550 Г • см. Це рівнозначно навантаженню у носовій частині
вагою близько 20 Г на відстані 300 мм від центра ваги. Тому іноді буває,
що при повністю закрученому гумовому моторі модель пікірує, або каб-
Рис. 99. Автомат для перебалансування моделі під час моторного польоту.
87
рирує, або, у кращому разі, літає, не набираючи висоти. Тут відчувається
вплив гіроскопічного момента гвинта, якого конструктор не врахував.
Гіроскопічний момент гвинта слід зменшити до величини, потрібної
для балансування моделі під час злітання.
Ширяння моделі
Ширянням називається політ моделі з непрацюючим мотором без
втрачання висоти. Ширяючий політ моделі відбувається лише при наяв-
ності термічних або динамічних висхідних потоків повітря.
Щоб краще з’ясувати механізм ширяючого польоту моделей, спини-
мось на умовах утворення в повітрі термічних і динамічних висхідних
потоків. Термічні висхідні потоки утворюються внаслідок нерівномір-
ного нагрівання сонячним промінням земної поверхні (оголеного грунту,
луків, лісних масивів, водоймищ тощо). Внаслідок цього більш нагріте
повітря підіймається вгору, утворюючи термічний висхідний потік, а
більш холодне рухається вниз. Таким чином утворюється конвекція по-
вітря, яка має як висхідні, так і низхідні потоки. Отже, запускаючи мо-
дель, слід намагатись того, щоб її політ відбувався в зоні висхідних
потоків.
Рівень конвекції і висхідних термічних потоків тим більші, чим біль-
ше нагріте повітря біля землі і чим більша різниця падіння температури
повітря навколо конвекційного потоку. Температура навколишнього по-
вітря на кожні 100 м висоти знижується в середньому на 0,65° С, а вліт-
ку біля землі ця різниця може досягати більш як 1° С.
Коли конвекційний потік досягає висоти, на якій температура і тиск
знижуються настільки, що в повітрі з’являються крапельки води, утворю-
ються купчасті хмари. Вертикальні переміщення в таких хмарах збері-
гаються і розвиваються, захоплюючи великі простори: заввишки до
5 км і завширшки 500-4-1000 м. У них розвивається конвекція, що досягає
приземного шару.
В усіх конвекційних потоках вертикальна швидкість біля країв може
різко змінювати величину і напрям, що дуже впливає на політ моделі.
Вимірювання, проведені метеорологами, показують, що висхідні термічні
потоки середньої величини, що утворюються над пересіченою місцевістю
середньої смуги УРСР, мають вертикальну швидкість у межах 0,25-4-
0,65 місек, ширину від 50 до 300 м і висоту близько 3 км.
Літаючі моделі ширяють і під окремими купчастими хмарами, іноді
входять у них і проносяться разом з ними.
Крім вертикальних потоків, майже завжди існують горизонтальні
переміщення повітряних мас, тобто вітер. Горизонтальний і вертикальний
рух повітря проходить одночасно, тому утворюється складний рух повіт-
ря, схематичне зображення якого подано на рис. 100.
Повітряні маси, які рухаються в горизонтальному напрямі з різною
швидкістю і на певній висоті, відхиляють вертикальні потоки в напрямі
88
Періоди
Рис. 100. Схема утворення конвекції під хмарою під час вітру.
свого руху. Тому в верхній частині з надвітряного боку конвекція галь-
мується, а в нижній частині — прискорюється. Внаслідок цього тут швид-
кості руху мас повітря, захопленого конвекцією, додаються до швид-
кості вітру. З іншого боку потоку утворюється зворотне явище — зона
затишку, яку неважко помітити і визначити її розміри за середньою
швидкістю вітру і часом періоду затишку, що настає під час проходжен-
ня хмари.
Якщо швидкість вітру становить 24-3 м/сек, тривалість затишку дорів-
нює 304-40 сек, тому розмір зони затишку може дорівнювати добутку
швидкості вітру на час затишку, тобто 604-120 м. Звідси визначають і
потужність висхідного потоку, ширину якого можна взяти рівною подвій-
ній ширині зони затишку.
Сприятливий час для запускання ширяючої моделі можна визначити
досить точно по затишку, який завжди буває при наближенні висхідних
термічних потоків. Якщо хмара пливе невисоко над землею, то і висхідні
потоки проходять поблизу поверхні землі і ними легше скористатись.
Користуючись схемою, поданою на рис. 100, можна визначити час,
коли слід запускати модель при підході купчастої хмари до місця польо-
тів. Якщо стояти в точці А, відчувається зменшення вітру, тому що утво-
рюється зона затишку. Як видно із схеми, другий період відповідає цент-
ру всіх потоків і найвигіднішому часу для запускання моделей. Після
цього періоду слід чекати посилення вітру, при якому хоч і будуть ви-
східні потоки, але запускання моделі ускладнюється. Потім вітер стає
рівнішим і слабшим, але висхідних потоків вже не буде.
89
Хмари, що плинуть на різних висотах, утворюють багатоярусну хмар-
ність, в якій у нескінченній різноманітності поєднуються різні повітряні
течії., Тому основне завдання авіамоделістів, які конструюють ширяючі
моделі, — знайти такі аеродинамічні якості, які сприяють входу моделі у
Рис. 101. Схема утворення динамічних
висхідних потоків повітря біля схилу.
Вертикальну швидкість висхц
чити за формулою:
висхідні термічні потоки і перешкод-
жають виходу її з них.
Другим типом висхідних потоків
повітря є так звані динамічні пото-
ки, які утворюються внаслідок обті-
кання повітряними масами схилів
горбів і гір. Іноді такі потоки нази-
вають висхідними потоками обтікан-
ня. Горизонтальні течії повітря змі-
нюють свій напрям, натрапляючи на
підвищену місцевість або великі спо-
руди і огинаючи їх. Внаслідок цього
утворюються висхідні потоки, нап-
рямлені вгору або частіше з деяким
нахилом до горизонту. (Суто верти-
кальні перешкоди в природі майже
не трапляються).
Величина сприятливої для ши-
ряння області залежить від профілю
схилу (гори) і швидкості вітру. Ця
область невелика і розміщується
вздовж надвітряного схилу; висота
її звичайно досягає однієї-двох
висот самого схилу.
)го потоку біля схилу можна визна-
^В.ср ^Ср 8ІПСССр ,
де V в.ср — середня вертикальна швидкість потоку в області ширяння;
Сср —середня швидкість вітру; аср —середній кут крутості схилу.
Так, якщо швидкість вітру V ср *=5 м/сек і кут схилу аср =30°, то вер-
тикальна ШВИДКІСТЬ потоку V в.ср =2,5 м/сек. При збільшенні висоти над
схилом вертикальні швидкості динамічного потоку повітря стають мен-
шими, крім того, швидкість вітру також зменшується (рис. 101).
Відомо: якщо модель, ширяючи над схилом, досягає висоти в області,
де можливе ширяння у висхідних потоках, вона ніби досягає своєї стелі.
Але якщо модель з цієї висоти летить у бік долини, то вона може потра-
пити в інший висхідний потік конвекційного характеру, збільшуючи ви-
соту польоту і його тривалість.
Ознайомившись з основними питаннями утворення висхідних повіт-
ко
V горизонт. 4 місек
V горизонт. 4 місек
•• аеро^Й
102 Схема Я" а^о**е*ИЯ
рис
,ла модел' П'Д 430
кр^ла
11** у
ПОТ^-
ряних потоків, розглянемо тепер питання про здатність літаючих моделей
утримуватися в цих потоках.
Висхідні повітряні потоки не постійні: вони переміщуються і їх потуж-
ність змінюється. На змаганнях можна часто спостерігати, як деякі мо-
делі планерів після запускання з леєра летять по прямій, іноді починають
ширяти і, не досить використовуючи висхідні потоки, поступово знижу-
ються. І хоч такі моделі мають високу аеродинамічну якість, вони не
Рис. 103. Поляра моделі планера з крилом профілю М-60Е.
можуть досягти максимального залікового часу — 3 хв. Це пояснюється*
тим, що модель не реагує на висхідний потік і не входить у нього, а про-
скакує цю сприятливу зону. Інші моделі в цих самих умовах набирають
висоти, починають кружляти, попадають у висхідні потоки і довгий час
ширяють. Причиною успішного польоту цих моделей є здатність «відчу-
вати» висхідний потік і утримуватися в ньому. Адже, попадаючи в нього,
кінці крила перебувають у різних умовах обтікання (рис. 102).
Розглянемо такий приклад. Модель з розмахом крила близько 3 м
пролітає по краю висхідного потоку з швидкістю 4 м/сек. При такому
розмаху різниця швидкостей висхідного потоку біля правого і лівого кін-
ців крила становить 0,2-е-0,3 м/сек. Якщо швидкість висхідного потоку
біля лівого кінця крила дорівнює 0,25 м/сек, а біля правого — 0,5 м/сек,
то фактичний кут атаки лівого крила певний час становитиме 5,5°, а пра-
вого — 9°.
На полярі моделі з профілем крила N-601?, поданої для двох чисел Ке
(рис. 103), що дорівнюють 84 000 і 63 000, бачимо, що при такій зміні
кутів атаки коефіцієнт підіймальної сили Су кінців крила змінюється
мало і його можна вважати сталим, а коефіцієнт лобового опору Сх для
обох чисел Ке правої і лівої частин крила дуже збільшується.. Отже,
завдяки гальмуванню правого кінця крила модель розвертатиметься
вправо, тобто в бік висхідного потоку.
На основі цього прикладу можна зробити такі висновки: 1) щоб мо-
дель могла розвертатись у бік висхідного потоку і кружляти в ньому,
вигідним буде крило більшого розмаху; 2) число і профіль крила
повинні бути такими, щоб при збільшенні кута атаки на 2—3° коефіцієнт
Су крила не змінювався, а коефіцієнт Сх різко зростав.
Такі властивості мають крила з опукло-вигнутими профілями на чис-
лах при яких точка початку падіння Су міститься на 2—3° вище від
польотних кутів атаки.
Якщо Т?е<70 000, поляра крила полога і не має різко визначеного
падіння Су на кутах, що наближаються до польотних. Тому чутливішими
є крила з числами що наближаються до критичних. У цьому разі
точка початку падіння Су наближається до льотних кутів атаки крила
моделі.
Третім важливим фактором, який впливає на здатність моделі входи-
ти в потік, є вагові властивості моделі. Сили, що забезпечують входжен-
ня моделі в потік, дуже малі. Тому, чим легша модель, тим краще вона
входитиме у висхідний потік і виходитиме з низхідного потоку. Щоб мо-
дель була чутливішою до потоку, її треба виготовляти якомога легшою,
а вагу моделі підганяти за рахунок баласту, вміщуючи його біля центра
ваги моделі і балансувального вантажу в носовій бобишці. Зосередже-
ність вантажу біля центра ваги моделі не зменшує її чутливості до ви-
східних потоків.
Літаючі моделі однакової ваги і форми можуть мати різну рухомість
залежно від розподілу в них ваги, який характеризується величиною, що
називається моментом інерції (7):
У = т/?2,
де т — маса частинки тіла; 7?— відстань частинки тіла від точки обер-
тання.
Момент інерції тіла (деталі) відносно точки обертання дорівнює сумі
моментів інерції всіх його частинок відносно цієї точки:
де /Т — момент інерції тіла; ]п — моменти інерції частинок тіла відносно
точки обертання. Такою точкою моделі є центр ваги. Тому момент інер-
ції моделі можна визначити як суму моментів усіх частин (деталей) мо-
делі відносно її центра ваги.
Бажаним було б таке положення, при якому момент інерції моделі
був би найменшим. Отже, щоб підвищити чутливість моделі, треба до-
биватися, щоб частини, які розміщуються на найбільшій відстані від
центра ваги (кінці крила, оперення, хвостова частина фюзеляжу), були
найлегшими.
93
Парашутування моделі
Парашутування літаючих моделей застосовують в основному на мо-
делях, призначених для змагань.
Примусова посадка моделі передбачена умовами змагань: політ мо-
делі має тривати 3 хв. Зрозуміло, що для 3-хвилинного польоту модель
повинна мати певні пристосування. Принцип примусової посадки
нескладний. Він грунтується на тому, що співвідношення сил, які діють
на модель під час її планеруючого польоту і балансування, порушують
за допомогою спеціальних пристроїв у певний момент часу. Модель
втрачає швидкість і планеруючий політ її вже не може продовжуватись
нормально — вона переходить на режим парашутування. У такому разі
крило працює в закритичній зоні кутів атаки, а стабілізатор — у докри-
тичній (рис. 104). Модель матиме невстановлений рух до тих пір, поки не
збалансується на кутах атаки, при яких сума моментів зовнішніх сил
дорівнюватиме нулю. Такий встановлений рух може відбуватись по пря-
молінійній траєкторії без обертання навколо вертикальної осі і з обер-
танням, тобто в режимі штопора. Безпечна посадка моделі можлива
тільки тоді, коли немає штопора.
Самообертання моделі, яке призводить до штопора, починається
майже завжди із звалювання на крило. На крилі моделі, що летить на
закритичних кутах атаки, утворюються зриви потоку. Несиметричність
зривів спричинює опускання однієї з консолей крила, що викликає само-
обертання моделі. Щоб усунути це негативне явище, треба добиватися,
щоб зрив потоку під час парашутування розвивався не з кінців крила,
а з його середини. Для цього кінцеві перерізи крила повинні мати
від’ємну закрутку. Кінцеві зриви можна також зменшити, якщо на кін-
цях крила встановити передкрилки або зробити профільовані щілини.
Змінювати положення центра ваги не слід, бо це погіршить планеруван-
ня моделі. Найкращим способом усунення штопорних явищ є збільшення
кута відхилення стабілізатора.
Рис. 104. Сили, що діють на модель при парашутуванні.
94
Зведення до мінімуму величини моментів інерції — також надійний
спосіб запобігання самообертанню моделі. Слід звертати увагу на вагу
деталей, віддалених від центра ваги моделі.
Балансування та стійкість моделі
Крім знання основ аеродинаміки і вміння якісно будувати літаючі
моделі, моделіст повинен знати умови балансування і стійкості моделі
під час її польоту.
На відміну від справжнього планера або літака, літаюча модель,,
якою безпосередньо ніхто не керує, має багато специфічних особливостей.
Рис. 105. Система осей обертання літаючої моделі.
Стійкість моделі під час польоту має забезпечуватись автоматично при
незмінному положенні керм (якщо вони є), при поривах вітру і змінній
силі тяги. З механіки відомо, що при рівномірному русі всі сили, які
діють на модель, повинні перебувати в рівновазі.
Під стійкістю будь-якого тіла або системи взагалі розуміють здат-
ність їх повертатись у попереднє положення під дією зовнішньої сили.
Так, літаюча модель буде стійкою тоді, коли внаслідок пориву вітру,
який порушив рівновагу, вона зможе повернутись у своє попереднє по-
ложення.
Режим стійкого польоту може бути при таких умовах, по-перше,
якщо моменти сил, що діють на модель, будуть зрівноважені на цьому
режимі. Ця умова називається балансуванням літаючої моделі.
По-друге, якщо модель, кут атаки якої змінився під дією будь-якої зов-
нішньої причини, зможе повернутись до балансувального кута атаки. Ця
умова називається стійкістю літаючої моделі.
95’
Літаюча модель під час польоту може рухатись у трьох напрямах і
обертатись навколо трьох взаємно перпендикулярних осей (X, У, 2)
тобто вона має шість ступенів свободи (рис. 105).
Якщо модель обертається навколо поперечної осі 7, вона здійснює
поздовжні коливання; обертаючись навколо вертикальної осі У— коли-
вання шляху, а обертаючись навколо осі X — поперечні коливання. Отже,
щоб добитися стійкості в польоті, треба, щоб модель мала поздовж-
ню і поперечну стійкість, а також стійкість шляху, тобто вона
має бути збалансована у шляховому і поперечному відношенні.
Існує тісний зв’язок між стійкістю шляху і поперечною стійкістю, тому
їх іноді називають бічною стійкістю.
Центр ваги моделі і її центрування
Центром ваги будь-якого тіла називається точка, до якої прикладена
рівнодійна сил ваги всіх його частин. Під час польоту центр ваги моделі
повинен постійно міститись в одній точці. Переміщення його негативно
впливає на політ моделі, іноді спричиняючи аварію.
Проектуючи модель, дещо важко визначити точне положення центра
ваги, тому що точна вага частин моделі і положення їх центрів ваги іноді
невідомі. Визначити центр ваги моделі можна приблизно. Для цього
креслять вигляд її збоку (рис. 106) і позначають центри ваги окремих її
частин. Центр ваги крила міститься приблизно на 354-40% його серед-
ньої хорди і на 40% вгору від хорди; відстань лічать від хорди до кінців
крила. Центр ваги фюзеляжу міститься на 354-40% його довжини; хвос-
тового оперення — 40% середньої хорди; гумового мотора — 50%; гвин-
та — 40%.
Вагу моделі можна визначити по частинах. Для моделей планерів:
вага фюзеляжу — 504-55%, крила — 354-40%, хвостового оперення —
Рис. 106. Визначення центра ваги моделі за кресленням.
*96
44-7% ваги всієї моделі; для моделей літаків з гумовими моторами: вага
фюзеляжу — 454-50%, крила — 184-25%, оперення — 3,54-6%, гвинта з
підшипником — 184-22% ваги моделі.
Проводячи взаємно перпендикулярні осі, визначають координати
центрів ваги всіх частин моделі. Ці дані заносять до таблиці:
Частини моделі яага О частин моделі Г Абсциса центра ваги час- тини, см X Ох Ордина- та цен- тра ваги частини, см у Су
Фюзеляж 64 53,4 3417,6 23,6 1510,4
Крило 42 36,7 1541,4 29,3 1230,6
Стабілізатор 6 125,7 754,2 25,2 151,2
Кіль 4 120,5 482,0 29,3 117,2
Гвинт з під-
шипником 48 4,3 206,4 22,5 1080,0
Гумовий
мотор 40 43,0 1720,0 22,5 900,0
Вантаж 28 24,6 1088,8 20,9 585,2
6мод==232 Г; Е<дх =9210,4; Ебу =5574,6
Положення центра ваги визначають за формулою:
^Сх _ 9210,4 __оа 7
------ — ---------.— оУ./
Смол 232
_ Жу - §.574’6 = 24,02
ц-в ~
'-'мод
цв
см;
232
см.
Положення центра ваги більшості моделей знаходиться у межах
354-55% середньої аеродинамічної хорди крила.
Для зручності порівняння різних типів моделей положення центра
ваги визначають відносно САХ. Як відомо, положення центра тиску ви-
значають відносно ребра обтікання крила, тому і положення центра
ваги зручніше визначати також відносно ребра атаки САХ. Визначивши
положення САХ, та її розмір, будують з центра ваги моделі перпендику-
ляр до САХ і дістають відстань від центра ваги моделі до хорди на ви-
сопУц ві До ребра А'ц.в- Ордината Гц в буде позитивною, якщо центр
ваги знаходиться вище від САХ, і негативною, якщо центр ваги
міститься нижче від САХ.
Якщо величини визначають у частинах або процентах від САХ, то
їх позначають Хц в або Уц.в. Наприклад Лц.в==25%. Це означає, що центр
ваги моделі міститься на відстані 25% довжини САХ від її ребра атаки.
7. К- В. Черторижський
97
Положення центра ваги моделі, визначене у частинах або процентах від
САХ, називається центруванням моделі. Центрування моделі
25% і менше називається переднім, 25—30%—середнім, більш
30%—заднім. Положення центра ваги моделі відносно САХ дуже
впливає на стійкість моделі в польоті.
Якщо при конструюванні не дістали потрібного центрування, крило
або балансувальні вантажі треба перемістити і розрахунки повторити.
Змінити положення центра ваги можна балансувальним вантажем, вели-
чину якого можна визначити за формулою:
ДО = , (88)
-^б.в
де їм— відстань, на яку треба перемістити центр ваги моделі; гб.в — пле-
че балансувального вантажу.
Центр ваги моделі визначають, підвішуючи її у трьох різних поло-
женнях. Оскільки центр ваги міститься в площині симетрії моделі, підві-
шувати її треба в точках, які лежать на цій площині. Підвісивши модель
у такій точці (рис. 107), закріплюють в ній висок і на бічній грані моделі
відмічають лінію нитки виска. Потім так само відмічають лінії висків
з двох інших точок і дістають трикутник, центр ваги якого буде центром
ваги моделі.
Центр ваги моделі літака з гумовим мотором, у якої лопаті повітря-
ного гвинта складаються під час планерування, визначають двічі, тобто
із складеним гвинтом, і гвинтом, лопаті якого розгорнуті.
Поздовжня стійкість моделі
Поздовжньою стійкістю моделі називається здатність моделі само-
стійно відновляти порушену поздовжню рівновагу.
Порушення поздовжньої рівноваги відбувається внаслідок зміни кута
атаки і швидкості польоту. Зміна кута атаки а на величину Дсс при по-
рушенні рівноваги викликає зміну підіймальної сили моделі на ДУ, тому
відношення підіймальної сили до ваги моделі, що називається пере-
вантаженням (п), змінюється порівняно з вихідним режимом:
___ У+ ДУ V /оп\
Л = ------------------------------------Г- > Т (89)
Сг Сг
Фізичну суть поздовжної стійкості моделі краще з’ясувати, викори-
стовуючи поняття фокуса крила і фокуса моделі. Численними дослідами
і теоретичними дослідженнями встановлено, що на лінії хорди крила є
така точка, відносно якої момент аеродинамічних сил не змінюється при
зміні кута атаки. Так, при куті атаки ои підіймальна сила Уі утворює від-
носно точки Ф певний момент (рис. 108, а).
При збільшенні кута атаки до «2 підіймальна сила збільшується, а
плече а внаслідок переміщення центра тиску зменшується до ал
98
ваги моделі методом
Рис. 107. Визначення центра
підвішування.
(рис. 108, 6). Новий момент може бути більший або менший, ніж попе-
редній. Це залежить від зміни співвідношення між величиною підіймаль-
ної сили і плеча.
Доведено, що можна знайти таку точку Ф, відносно якої величина
підіймальної сили змінюється обернено пропорціонально плечу, тоді як
момент відносно цієї точки залишиться той самий при зміні кута атаки
а. Точка, відносно якої момент крила /И2кр при зміні кута атаки зали-
шається сталим, називається фокусом крила і позначається Ф.
У більшості профілів фокус міститься на відстані 25—30% хорди від
ребра атаки крила.
7*
99
Рис. 108. Фокус крила літаючої моделі.
З усього сказаного можна зробити висновок, що в фокусі прикладені
додаткові аеродинамічні сили, які утворились при зміні кута атаки.
Так, силу У2=Уі + ДУ, прикладену до Ц. Т2, можна розкласти на силу
Уь прикладену до Ц. Ть і силу ДУ, прикладену до фокуса Ф (рис. 108, в).
Тому що момент сили ДУ відносно точки Ф дорівнює нулю, то момент
крила при куті атаки а2 буде такий самий, як і при куті атаки ои.
Вплив положення центра ваги моделі вздовж САХ крила на поздовж-
ню стійкість моделі можна з’ясувати, якщо пригадати залежність перемі-
щення положення центра тиску від кутів атаки а. Із збільшенням кута
атаки центр тиску переміщується вперед, із зменшенням—назад. Мо-
мент /И2 , який виникає внаслідок дії підіймальної сили У відносно
кр
центра ваги моделі, намагається повернути крило, а разом з ним і всю
модель в той або інший бік (рис. 109).
Момент, який збільшує кут атаки крила, є позитивним і називається
к а б р и р у ю ч и м; момент, який зменшує кут атаки, є негативним і
називається пікіруючим.
Величина і напрям момента Мг залежить від положення центра
ваги моделі відносно САХ, через який проходить вісь 7.
Горизонтальне оперення—стабілізатор моделі, як і крило, має свій
фокус. При зміні кута на ньому також утворюється додаткова підій-
мальна сила, прикладена відповідно до фокуса (рис. ПО). Рівнодійна цих
додаткових сил ДКкр і ДКг.о прикладена на відстанях від них, обернено
Рис. 109. Зміна поздовжнього момента М2 , що діє на крило
кр
при різних кутах атаки.
100
пропорціональних величинам цих сил. Точка прикладання рівнодійної
додаткових сил Д Укр і ДКг.о називається фокусом моделі.
Зрозуміло, що момент додаткових сил відносно фокуса моделі дорів-
нює нулю, отже, ПОЗДОВЖНІЙ момент моделі М 2МОД відносно її фокуса не
змінюється при зміні кута атаки.
Поздовжню стійкість моделі визначають виключно взаємним розмі-
щенням центра ваги і фокуса моделі.
З’ясуємо потрібну умову поздовжньої стійкості моделі. Припустимо,
що порив вітру порушив поздовжню рівновагу моделі і кут атаки збіль-
шився на величину Да. Це, безумовно, викличе приріст підіймальної сили
моделі на величину ДКмод, яка дорівнює:
А ^МОД = ^кр А Гг. о • (90)
Приріст ДКмод буде прикладений в фокусі моделі.
Рис. 110. Фокус літаючої моделі.
Якщо центр ваги моделі міститься позаду її фокуса, то сила АКМОд
відносно центра тиску утворює дестабілізуючий (кабрируючий) момент,
який намагається відвести модель від вихідного режиму рівноваги
(рис. 111, б). Неважко пересвідчитись, що при зменшенні кута атаки
сила ДУмод утворює пікіруючий момент, також дестабілізуючий
(рис. 111, в).
Зовсім інша картина буде тоді, коли центр ваги моделі міститься
попереду фокуса. При збільшенні кута атаки сила ДКмод утворює пікі-
руючий момент, який намагається зменшити кут атаки, а при зменшенні
кута атаки — кабрируючий момент, який збільшує кут атаки, тобто в
обох випадках утворюється стабілізуючий момент (рис. 112).
Із сказаного можна встановити такі умови поздовжньої стійкості:
якщо центр ваги моделі міститься попереду її фокуса, то модель поз-
довжньо стійка; якщо центр ваги моделі міститься позаду її фокуса, то
модель не має поздовжньої стійкості; якщо центр ваги моделі збігається
з її фокусом, то модель перебуває в індиферентній рівновазі.
Центрування моделі, при якому центр ваги збігається з її фокусом,
називається критичним. Зрозуміло, якщо фактичне центрування мо-
101
Рис. 111. Поздовжня стійкість моделі, якщо її фокус міститься перед
центром ваги:
а — первинний розподіл сил у польоті; б — розподіл сил і моментів при збіль-
шенні кута атаки; в — розподіл сил і моментів при зменшенні кута атаки.
102
Рис. 112. Поздовжня стійкість моделі, якщо її фокус міститься за
центром ваги:
а — первинний режим польоту; б — розподіл сил і моментів при збільшенні
кута атаки; в — розподіл сил і моментів при зменшенні кута атаки.
м
' 'е.с
делі Хф більше, ніж критичне лкрит,( модель буде нестійка, якщо Хф<
<^крит> модель буде стійка.
Різниця між критичним і фактичним центруванням називається за-
пасом центрування. Чим більший запас центрування, тим краща поздов-
жня стійкість. Щоб модель не перебувала в стані індиферентної рівно-
ваги, але була стійка, звичайно встановлюють гранично заднє експлуата-
ційне центрування. Мінімально можливий запас центрування дорівнює
в середньому 15-5-20%.
103|
Для попередньої приблизної ОЦІНКИ ступеня СТІЙКОСТІ величину X ф.
(відстань від центра ваги до фокуса моделі) ділять на САХ. Це відно-
•^Ф
шення — виражають у процентах до хорди і називають центру-
ьк
в а ння м по хорді відносно фокуса крила:
хф = ^.100%, (91)
а відношення — центруванням по висоті відносно фокуса крила:
Ьк
У* =£4.100%,
(92)
З них випливає, що є такі
де_у*— відстань по висоті від центра ваги до фукуса крила.
Щоб визначити ступінь в поздовжньої стійкості, користуються графі-
ками залежності поздовжнього момента моделі Л12 від кутів атаки крилат
добутими під час продування в аеродинамічній трубі. При побудові цих
графіків умовились вважати пікіруючі моменти негативними, а кабри-
руючі — позитивними. На рис. 113 подано графіки И2=/(а) для трьох
характерних випадків.
кути атаки, при яких поздовжній момент
моделі 7И2 перетворюється в нуль, тобто
момент крила дорівнює моменту стабілі-
затора. На графіках це відповідає точці
перетину кривої М2 = /(а) з віссю аб-
сцис (вісь а). Кут атаки, при якому по-
здовжній момент моделі дорівнює нулю
(М2 = 0) , називається балансувальним,
бо модель при цьому куті атаки перебу-
ває в стані рівноваги.
Розглянемо тепер, як за цими графіка-
ми можна визначити, стійка чи нестійка
модель і який ступінь цієї стійкості.
Проаналізуємо графік а. Припусти-
мо, що модель летить при балансу-
вальному куті абал і випадковий по-
рив вітру збільшив кут атаки на ве-
личину Да. Тоді одночасно змінюються
деякі діючі сили. Найбільше зміниться
підіймальна сила через приріст ДУ. При-
ріст цієї сили, як нам відомо, буде при-
кладено до фокуса моделі, який містить-
ся на відстані хф від центра ваги моделі,
моделей.
я
Рис. 113. Графіки залежності
поздовжнього момента від ку-
тів атаки для нестійкої (а),
стійкої (б) і нейтральної (в)
104
Тоді утворюється додатковий пікіруючий поздовжній момент—Д/И2, який
намагається повернути модель у попереднє положення рівноваги. Вели-
чина цього момента дорівнюватиме АКМОд ^ф-
Якщо при випадковому зменшенні кута атаки на величину — Да
утвориться додатковий кабрируючий момент 4- Д/И2, то він також повер-
татиме модель у попереднє положення рівноваги. Отже, графік о харак-
теризує модель, що має поздовжню стійкість.
Рис. 114. Ступінь стійкості двох моделей:
1 — менш стійка модель; 2 — більш стійка модель.
На графіку б крива поздовжнього моментаМ2=ї(а) на ділянці від аг
до аг збігається з віссю абсцис. Якщо модель летить при куті атаки,
розміщеному в межах між аі і аг, то при випадковій зміні цього кута на
величину ±Да поздовжній момент моделі не зміниться, тобто він дорів-?
нюватиме нулю. Отже, на кутах атаки від аі до аг модель перебуватиме
в стані індиферентної рівноваги.
Неважко впевнитися, що графік в характеризує нестійку в поздовж-
ньому напрямі модель.
Графік залежності поздовжнього момента моделі від кутів атаки дає
можливість також судити про ступінь стійкості даної моделі. Розглянемо
дві криві /И2=/(а), які відповідають двом різним моделям (рис. 114),
Ці моделі мають поздовжню стійкість. Але при випадковому збільшенні
або зменшенні кута атаки на однакову величину Да поздовжній момент
першої моделі змінитись на меншу величину, ніж другої: ДЛ421 <с
Таким чином, друга модель відновить порушену рівновагу швидше, ніж
перша, отже, вона буде стійкішою.
Отже, ступінь поздовжньої стійкості моделі характеризується кутом
нахилу кривої М2 до осі абсцис (кут ф). Чим більший цей кут, тим біль-
ший ступінь стійкості. Тангенс цього кута дорівнює відношенню зміни
момента ДЛ42 до зміни кута атаки Да, тому ступінь стійкості характерн-
ий
ЛЛЇ 2 гт . <» . ДЛ4г »
зується також величиною------. Для стійкої моделі -----<0, для неи-
Да Да
.. ДЛ42 п • -м ДЛЇ2 _ А
тральної ----• = 0 і для нестійкої --> 0.
г Да Да
Щоб забезпечити поздовжню стійкість моделі, крім правильного до-
бору положення центра ваги відносно середньої аеродинамічної хорди
крила, велике значення має момент горизонтального оперення (стабілі-
затора). Зміна моментів стабілізатора при зміні кутів атаки крила по-
винна бути більшою, ніж зміна моментів самого крила. Момент стабілі-
затора відносно центра ваги моделі залежить від кута атаки стабіліза-
тора, його площі, відстані до центра ваги моделі і впливу обдування
повітряним гвинтом.
У випадку, коли модель знаходиться в планеруючому польоті, момент
стабілізатора дорівнюватиме:
ЛІГ.О == >
2
^г.о= - £г.оСУгЛ)^5г.о, (93)
де Аг.о — плече стабілізатора; 5Г.О — площа стабілізатора.
Знак «—» стоїть тут тому, що при Кг ,0, напрямленій вгору, момент
буде пікіруючий, який прийнято вважати негативним.
Слід зауважити, що швидкість стабілізатора при планеруванні буде
трохи менша, ніж швидкість польоту моделі, внаслідок гальмування по-
вітря частинами моделі.
У моторному польоті швидкість потоку біля стабілізатора зростає
внаслідок обдування повітряним гвинтом і зменшується внаслідок
гальмування повітря частинами моделі. Ці фактори слід враховувати,
визначаючи швидкість стабілізатора в моторному польоті.
Користуючись формулою (93), можна визначити коефіцієнт момента
стабілізатора. Для цього праву і ліву частини рівняння слід поділити на
'9“дкр"А •
г.0 = (—У СУг-0, (94)
де т г — коефіцієнт момента стабілізатора; ^^г.о — коефіцієнт
0 дкрЛА
ефективності стабілізатора, який для сучасних моделей лежить у межах
0,754-1,2; = Кф—коефіцієнт гальмування швидкості потоку біля
стабілізатора під час планерування, який коливається в межах 0,85-4-0,95;
£уг.о — коефіцієнт підіймальної сили стабілізатора.
Коефіцієнт підіймальної сили стабілізатора СУг о можна визначити
за формулою: \
106
с
Уг.О ^Т.О ®Т.О’
де аг.о —тангенс кута нахилу дотичної до СУго = /(аг.0)в певній точці;
<аг.о — кут атаки стабілізатора.
Кут атаки стабілізатора (рис. 115) дорівнює аг.0= а—аОг о — Да Ц- <рг.о
і може бути визначений як зовнішній кут трикутника авс.
Кут <рг.о — це кут деградації стабілізатора відносно хорди крила.
Він дорівнює різниці між кутом встановлення стабілізатора і кутом
Рис. 115. Кути стабілізатора.
встановлення крила. Якщо цей кут відкласти вниз, то він матиме знак
« — ».
^г.о == Тг.о.вст Ткр.вст •
У більшості моделей стабілізатор знаходиться в потоці, який відхи-
ляється крилом. Кут скосу потоку крилом визначають за формулою (29),
не враховуючи впливу форми крила в плані.
Якщо підставити всі ці величини у формулу (94), дістанемо:
^2Г.О- Аг.о ^ф ^г.о (аГ.О а0г.О ^Г'о) ’ (95)
або
^2г,0 ~ ^Г.О Су .
Врахувавши середні статистичні дані сучасних моделей, матимемо:
= — 0,88Су.
Кут встановлення стабілізатора легко знайти так. Припустимо, що
?г.о =0, ТОДІ
^2г,0 = ^г.о ^ф Яг.о (аг.о Да). (96)
Тут аг.о треба брати залежно від подовження стабілізатора (див.
табл.).
X 2 3 4 5 6 8 10 12 і 14 16
Л-С« -0,109 0,055 0,065 0,078 0,078 0,082 0,087 0,091 0,094 0,096 0,097
107
Залежність коефіцієнта момента стабілізатора від коефіцієнта його
підіймальної сили т,г /(Су) визначають так. При Кц.в = ±0,1 і сталому
Ст0 беруть дві величини Су, наприклад Су=0 і Су~1 . Обчисливши зна-
чення /И2го, на координатних осях (рис. 116) відкладають добуті зна-
чення Су і тгг 0. Знайдені точки сполучають прямою. Якщо Кц.в> + 0,1,
то точніше цей графік можна побудувати, взявши більше точок. Тоді
лінія т2г0 = /(Су) вже не буде прямою. Користуючись цією залежністю,
можна визначити потрібний кут встановлення стабілізатора.
Рис. 116. Залежність
Ю2 =/(Су)
Рис. 117. Балансувальні криві Су—/(<рг.о) при
різних центруваннях по САХ.
З формули (95) випливає, що переміщення стабілізатора на 1° ви-
кликає зміну коефіцієнта момента на величину А^гг0=—Лг0 Кфага
Під час польоту, що встановився на певному Су, /И2=0, тоді і коефіцієнт
момента стабілізатора також дорівнює нулю. Щоб збалансувати модель,
тобто звести т2г0 до нуля, треба перемістити стабілізатор від срг.о = 0 у
положення <рг.0 - --------, де /7?2Г О (0) беруть при тому значенні СУбал>
Д/И7Г.О
при якому треба збалансувати модель. Обчисливши <?г.о для ряду Су6ал
будують графік залежності балансувального коефіцієнта підіймальної
СИЛИ Субал ВІД ~ с?г.О.
Зв’язок між параметрами, що характеризують режим польоту моделі,
і потрібними відхиленнями кута встановлення стабілізатора при різному
центруванні можна встановити за допомогою балансувальних кривих
(рис. 117). З наведеного графіка видно, що переміщення центра ваги по
САХ до ребра обтікання дає можливість дістати потрібні значення Су
при позитивних кутах встановлення стабілізатора. Це, звичайно, вигідно
з точки зору розвантаження крила. Проте, як показує досвід, щоб забез-
печити стійкий політ, допустиме центрування повинно бути на 15“20°/о
меншим за критичне.
108
Кути деградації с?г.о бувають різними залежно від величини запасу
поздовжньої стійкості моделі. Для добору кутів деградації можна ско-
ристатись графіком, поданим на рис. 118. Проте слід зауважити, що
криві графіка не можуть дати точного значення <рг.о для будь-якої моделі,
вони лише обмежують границі центрування і кутів, в яких слід регулю-
вати побудовану модель. Точне положення центра ваги моделі і значення
<рг.о можна знайти під час регулювальних польотів моделі.
Балансування моделі під
час роботи мотора істотно змі-
нюється. Насамперед з’являєть-
ся момент від тяги гвинта, тому
що здебільшого вісь гвинта не
проходить через центр ваги мо-
делі. Струмінь повітря від
гвинта, який попадає на стабі-
лізатор, змінює скіс потоку біля
нього, а тим самим і кут атаки
стабілізатора. Крім того, обду-
Рис. 118. Графік визначення кутів деградації
і положення центра ваги залежно від Д.
вання стабілізатора змінює кое-
фіцієнт гальмування потоку бі-
ля стабілізатора, який може
бути більший ніж одиниця. На гвинті, що стоїть під кутом атаки до по-
току, з’являються поперечні сили. Таким чином, коефіцієнт момента в
польоті можна визначити так:
т2 = т2 + т7 + пг2 •-+- т'2 ,
Лмод Лкр ' хг.о 1 р ' Р ’
(97)
де — коефіцієнт момента від тяги гвинта; т 'г? — коефіцієнт момента
від косого обдування гвинта.
При обчисленнях -^7м0Л коефіцієнт т£кр залишається таким самим,
як і при планеруванні; коефіцієнт т2г 0 зміниться.
Розглянемо докладніше, як знайти окремі величини формули (97).
За аналогією із структурною формулою підіймальної сили крила (27)
для тяги гвинта можна записати:
2 гв ’
де ВГ&-коефіцієнт навантаження на гвинт; РГВ—площа, яку описує
ГВИНТ Г1а =------ .
[ 4 /
Звідси
2Р
109
Рис. 119. Визначення зміни скосу потоку від повітряного гвинта.
Знаючи Вгв, можна знайти коефіцієнт прискорення руху потоку.
Швидкість потоку за гвинтом дорівнює:
^гв — 1 І" Вгв.
Підставимо це рівняння у вираз для коефіцієнта
потоку за гвинтом:
прискорення руху
— 14~ Вгв.
Врахувавши гальмування потоку від фюзеляжу,
коефіцієнт прискорення руху потоку:
знайдемо повний
мот
гв »
Якщо діаметр гвинта менший за розмах стабілізатора, тобто стабілі-
затор обдувається неповністю, то, врахувавши поправки на площину, яку
обдуває струмінь, що дорівнює діаметру гвинта, матимемо:
^МОТ Кф (ІТ 5г.о £*гв) 5
де —відносна площа стабілізатора, яку обдуває гвинт.
5г.о
Зміна скосу потоку біля стабілізатора (рис. 119) внаслідок обдування
повітряним гвинтом дорівнює
8ІП (^г.о 4~ Тгв.уст)
€/04-2^соз(аг.0 + <ргв.уст>
(98)
де 2т/='(70(К14-^гв — 1) —збільшення швидкості потоку за гвинтом;
<ргв.уст —кут встановлення осі гвинта відносно хорди крила. Він буде
мати знак «—», якщо вісь гвинта нахилена донизу.
Кут аг 0 —|— <ргв.уст рідко перевищує 104-12°, тому можна вважати, що:
А&МОТ >
8ІП (аг>0 4“ ^Ргв.уст)
&г.о ’Ргв.уст »
С08 (аг,0 —^гв.уст) 15^ •
не
Тоді кут скосу потоку біля стабілізатора становитиме:
Д^Г.О = Вгв — (аг.о 4- <Ргв.уст) • (99)
К1 + Вгв
Якщо врахувати тільки частину площі стабілізатора, яку обдуває
гвинт, формула (99) матиме такий вигляд:
Даг.о = ^1;+ Вгв^- (аг.о + <ргв.уст) 5Г.О. (100)
/1+Вгв
Таким чином, остаточний вираз коефіцієнта момента стабілізатора
буде такий:
^2Г.0.М0Т - Г,° ^г,° 1 ^гв) (аг.о ~Ь АямОт “Ь ?г.о)« ( 101 )
Тепер слід визначити момент сили тяги повітряного гвинта:
М 2 ~ >
1г
де ар— плече сили тяги відносно центра ваги моделі. Знак « —» буде тоді,
коли вісь гвинта проходить під центром ваги моделі, а знак « + » — коли
вище від центра ваги.
Рис. 120. Визначення коефіцієнта момента від
тяги гвинта.
гт р^2 о
Поділивши обидві частини на —-—, дістанемо:
2 а
2Р сір ___ р &р р
Р — ри25 6 а Ьа
Якщо виразити ар (рис. 120), як ар=хгв <р'гв *-’де хгв— відстань від
о 7
втулки гвинта до центра ваги моделі; </гв — кут між віссю гвинта і лі-
нією, ЩО сполучає втулку 3 центром ваги моделі (ф'гв = ?гв “ ?гво)‘»?гв.о—
кут срГв , коли він проходить через центр ваги моделі, то остаточний вираз
коефіцієнта момента сили тяги повітряного гвинта буде такий:
111
Зміна коефіцієнта момента стабілізатора при зміні нахилу осі гвинта
на 1° дорівнюватиме:
= _ Аг оК
^т.о
і
57Д
Вгв
^гв-^гв
8Ьа
/1 + Вгв - 1
(103)
Тут перший член враховує зміну скосу потоку біля стабілізатора, а
другий — зміну коефіцієнта момента сили тяги гвинта.
Коефіцієнт момента від косого обдування гвинта т' враховують
тільки тоді, коли гвинт досить великий. Визначають його за формулою:
т’г
р
=0,0245/Ооє
Ргв^гв
де % — кут, між віссю гвинта і повітряним потоком; —покрит-
тя гвинта (к — кількість лопатей; 6макс — максимальна ширина лопаті;
О — діаметр гвинта), є^х(ф) — 0,364-0,45.
Бічна стійкість літаючих моделей
Бічна стійкість моделі складається із стійкості шляху і поперечної
стійкості моделі, які тісно пов’язані між собою. Отже, бічна стійкість
моделі визначається взаємодією моментів шляху і поперечних моментів,
які існують завдяки дії вертикального оперення — кіля і поперечного V
крила моделі.
Під час ковзання крило моделі завдяки поперечному V, що викликає
різниці в кутах атаки, створює поперечний момент, який намагається
вивести модель з ковзання. У цей самий період сила, що утворюється під
час ковзання, діє і на кіль моделі, намагаючись теж повернути її у ви-
хідне положення. Виходячи з цього, можна зазначити, що в польоті
модель може зазнавати спіральної і коливальної нестійкості. Щоб доби-
тися потрібної спіральної стійкості моделі, треба дібрати певний кут
поперечного V крила і відповідний ефективний кіль.
Розглянемо спочатку вплив момента шляху і його визначення. Слід
зауважити, що крило моделі практично не має ніякого впливу на момент
шляху.
Якщо фюзеляж моделі з кілем (рис. 121) перебуває у повітряному
потоці під деяким кутом ковзання р, то під час обтікання його утворю-
ються відповідні сили. На носову частину фюзеляжу діє сила 2ф, яка
намагається збільшити кут р, тобто сприяє шляховій нестійкості моделі.
На хвостову частину фюзеляжу діє сила 7Ф ,яка, навпаки, намагається
зменшити кут р, тобто сприяє стійкості шляху моделі. На кіль моделі діє
сила 2К • яка також сприяє стійкості шляху моделі. Взаємодія всіх цих
112
Рис. 121. Обтікання фюзеляжу і кіля моделі під кутом ковзання (3.
сил характеризується моментом шляху при зміні кута ковзання 0. Ця
характеристика визначається коефіцієнтом момента пгі за формулою:
= туф -ф- ^Іук , (104)
де —коефіцієнт момента фюзеляжу; т* —коефіцієнт момента
кіля.
Коефіцієнт ту залежить від відстані центра ваги моделі від центра
бічного тиску на фюзеляж, від бічної площі фюзеляжу, довжини фюзеля-
жу і його подовження і може бути визначений за формулою:
З — бф/ф
уф“ т~г
°кр*кр
(105)
де 8Ф — площа бічної поверхні фюзеляжу; /ф — довжина фюзеляжу;
5кр— площа крила; /Кр— розмах крила; х'ф—відстань між центром ваги
моделі і центрОхМ бічного тиску на фюзеляжі; лф—подовження фюзе-
ляжу:
8. К- В. Чертори ясський.
113
Центр бічного тиску на фюзеляж можна визначити як центр ваги фі-
гури фюзеляжу за виглядом збоку (рис. 122). Якщо центр бічного тиску
міститься поза центром ваги моделі, величина має знак « —»; навпа-
ки, якщо попереду центра ваги — знак « + ».
Коефіцієнт Шу визначають за формулою:
к
т? =-(1,26+ 1,17 Хк.)Вк, (106)
у к
де — продовження кіля; Вк — коефіцієнт стійкості шляху:
^к = фф--, (107)
*^кр ^кр
де5к— площа кіля; 4—відстань від центра ваги моделі до половини
середньої хорди кіля; 5кр— площа крила; /Кр — розмах крила.
Рис. 122. Визначення положен-
ня центра бічного тиску фюзе-
ляжу.
Отже, коефіцієнт ті
моделі дорівнює:
5ф/ф / 0,023 +0,34
•$кр ^кр \
(1,26 4-І,17ХК)£К.
(108)
У моделей літаків з гумовими моторами, в яких бічні поверхні фюзе-
Рис. 123. Вертикальні гребені на моделях
планерів.
ляжу поза центром ваги моделі і
перед ним приблизно рівні, форма і
розміри фюзеляжу мало впливають
на бічну стійкість, тому що момен-
ти, утворені передньою і хвостовою
частинами фюзеляжу, незначні і
компенсують один одного.
У моделей планерів хвостова
балка фюзеляжу, незважаючи на її
незначну бічну площу, утворює під
час ковзання момент відносно осі У,
який не завжди можна повністю
компенсувати носовою частиною
фюзеляжу. Тому на цих моделях
найчастіше спостерігається спіраль-
на нестійкість.
Одним з найефективніших спосо-
бів усунення спіральної нестійкості
114
є збільшення бічної площі перед центром ваги моделі. Цього досягають
встановленням тонкого вертикального гребеня (рис. 123).
Великий вплив має також підйом крила над фюзеляжем. Наприклад,
підйом крила над центром ваги моделі на 15 мм аналогічний до збіль-
шення поперечного V крила приблизно на 2°.
Кут поперечного V крила моделі найкраще визначати за графіком
(рис. 124), складеним на підставі розрахунків бічної динамічної стій-
кості літаючих моделей планерів. Якщо кут поперечного V крила по роз-
маху змінний (рис. 125) або крило в центральній частині не має К-по-
Рис. 124. Графік добору кута поперечного V крила.
8*
115
дібного зламу, а має так звані «вушка», тоді кут V визначають як се-
реднє його значення, пов’язане з поперечним V окремих ділянок крила:
, 57'Ф'+5'7"6" 4-
4<р— (5' + 5" + .„>гА
(Ю9)
де 5' і 5" — ділянки площі крила, в яких кути поперечного V відповідно
дорівнюють я|/ і ф"; /' і І"— відстані від поздовжньої осі моделі до САХ
тих частин крила, в яких кути поперечного V відповідають ф' і ф"; гд —
відстань уздовж розмаху від поздовжньої осі моделі до САХ, накресленої
на половині крила.
Дуже важливими параметрами, які забезпечують бічну стійкість мо-
делі, є її моменти інерції відносно центра ваги. Величина цих моментів
залежить від розміщення мас моделі. Іноді моделі, в яких правильно
дібрані співвідношення стабілізуючих і несучих поверхонь, літають
нестійко внаслідок перевантаження кінців крила або неправильного роз-
міщення вантажу (баласту) в фюзеляжі. Найрезультативнішим буде
таке положення, коли центри ваги всіх частин моделі будуть розміщені
біля центра ваги моделі.
В останні роки багато авіамоделістів запроваджують на моделях
планерів так зване ресорне кріплення консолей крила (рис. 126). Слід
зазначити, що характеристики стійкості моделей з еластичним кріплен-
ням консолей крила поліпшуються, а реальна швидкість зниження в
турбулентній атмосфері наближається до ідеальної. Конструктивно таке
крило роблять з двох частин (консолей), які кріплять до фюзеляжу за
допомогою стальних пружних штирів діаметром 2,54-3,5 мм, довжина
яких приблизно дорівнює . Найкращі результати дають моделі
Рис. 125. Визначення середнього кута поперечного V крила.
116
Рис. 126. Крило з ресорним кріпленням крила.
планерів з таким кріпленням, коли центр ваги міститься на 504-60% хор-
ди, а деградація кутів крила і стабілізатора становить 3,54-4°.
На моделях літаків з гумовими моторами на стійкість і балансування
значно впливає повітряний гвинт. Великі кути злітання сучасних моделей
свідчать про наявність значно більшої сили тяги порівняно з польотною
вагою моделі. Косе обдування гвинтом при зміні кута атаки і ковзанні
моделі викликає поперечну силу, яка погіршує поздовжню стійкість і
стійкість шляху моделі. Оскільки на цих моделях, як правило, викори-
стовують повітряні гвинти великого діаметра відносно розмаху крила,
дестабілізація тут велика внаслідок дії на гвинт поперечної сили. Хоча
втрата стійкості шляху і поздовжньої стійкості деякою мірою і компен-
сується за рахунок збільшення швидкості потоку від гвинта в області
хвостового оперення, проте, щоб усунути нестійкість, яка виникає зав-
дяки дії гвинта, треба збільшувати на 604-80% коефіцієнти ефективності
стабілізатора Дг.о і кіля Вк.
Під час планерування ці моделі мають деякий надлишок поздовжньої
стійкості і стійкості шляху. Однак це не заважає їх польоту. Нахиляючи
вісь гвинта на певний кут донизу, можна виправити положення моделі
до нормального. Плече сили тяги при цьому слід брати в межах 0,14-0,12
від хорди крила.
Наявність потоку від гвинта в області стабілізатора дає можливість
змінювати поздовжнє балансування моделі в моторному польоті порів-
няно з планеруванням. Чим більший кут злітання моделі, тим більша є
можливість здійснити політ моделі на меншому Су. Отже, розраховуючи
поздовжнє балансування моделі, слід враховувати збільшення швид-
кості потоку біля оперення, а також різке збільшення профільного опору
крила (у разі зігнутого профілю) на малих Су.
ПРОЕКТУВАННЯ ЛІТАЮЧОЇ МОДЕЛІ
Проектування літаючої моделі — одне з важливих питань, які дово-
диться розв’язувати авіамоделісту в процесі створення моделі. Від про-
ектування і залежать наслідки його дальшої роботи.
Першим етапом проектування моделі є добір її схеми, яку слід визна-
чити на підставі ознайомлення із статистичними даними вже побудованих
моделей, і виготовлення попереднього ескіза. Потім проектування можна
здійснити за такою схемою: а) визначити основні розміри моделі; б) ви-
готовити креслення моделі в масштабі (три проекції) і провести попе-
редній розрахунок льотних характеристик моделі та її стійкості.
Якщо попередній розрахунок задовільний, можна перейти до наступ-
ного етапу роботи: в) виготовити креслення моделі в трьох проекціях в
натуральну величину; г) визначити конструкцію моделі в цілому; д) ви-
значити конструкцію частин моделі; е) скласти робочі креслення моделі
в натуральну величину, старанно розробивши конструкції окремих час-
тин, вузлів і деталей моделі.
Розглянемо проектування моделі на прикладі планера класу А-1.
ВИЗНАЧЕННЯ ОСНОВНИХ РОЗМІРІВ МОДЕЛІ
Виходячи з того, що сумарна площа (5кр + 8г.о) для моделей плане-
рів класу А-1 має становити 174-18 дм2, для нашої моделі беремо сумар-
ну площу, яка дорівнює 17,9 дм2.
Площа крила звичайно становить 754-88% сумарної площі. Для
моделі беремо, наприклад, площу крила, яка дорівнює 80,5% сумарної
площі 5 кр =0,805-17,9= 144 дм2. Тоді площа стабілізатора
5г 0 =17,9—14,4 = 3,5 дм2.
Розмах крила моделей класу А-2 лежить у межах 15004-
4-2000 мм, класу А-1 — 11004-1300 мм. Для нашої моделі беремо розмах
крила, який дорівнює 1160 мм.
Подовження крила визначається за формулою (21):
11,6^
р 14,4 дм*
Це відповідає діапазону подовжень для моделей планерів класу А-1,
яке звичайно лежить у межах 94-11. (Для моделей класу А-2 X =124-
4-14).
118
Форма крила в плані повинна мати вигляд прямокутника із заокруг-
леннями на кінцях. Найкращими є еліптичні заокруглення, але д^я
спрощення конструкції ми візьмемо лише округлені кути.
Середню хорду можна визначити за формулою:
0,99/“
.............^1,25 дм = 125 мм.
0,99-11,6 дм
Тепер визначаємо розмах і хорду горизонтального оперення ст^^ілі
затора:
5г.о = 3,5 дм2.
Подовження стабілізатора моделей планерів лежить у ^ежах
44-7. Беремо подовження лг.о =4,8, тоді розмах стабілізатора Стано-
витиме:
/г.о = Ґ\.95г.о = К4,8-3,5 дм2 ^410 мм.
Стабілізатор за формою в плані подібний до крила, отже, середня
хорда
ср .г.о
°г-°— = ’ — — 0,88 = 88 мм.
0,97/г.о 0,97-4,1 дм
Площу кіля визначають як 2,54-5,5% площі крила, а подовже^ня__________
у межах 1,04-1,8.
Для нашої моделі площа кіля дорівнює 5,3% площі крила, тобто
5К — 14,4-0,053 = 0,76 дм\
Взявши подовження кіля 1,3, визначимо висоту кіля:
//=1/Х73к = 1/’1,3-О,76^ 1 дм.
Щоб визначити довжину моделі, слід користатись статистично^ фор-
мулою:
^мод <+ 0,63&ср.г.о, (1Ю)
де С — коефіцієнт, значення якого лежить у межах 5,54-8,5 (для моделей
планерів класу А-1 С = 5,84-6,9, а для класу А-2 С=6,94-7,5); Ьо~-цент-
ральна хорда крила; £Ср-г 0 — середня хорда стабілізатора.
Коефіцієнт С = 6,6; довжина моделі
£мод = 6,6-1,25 + 0,63-0,88 8,8 дл/ = 880 мм.
Довжина носової частини фюзеляжу £ и =174-25% повної довжини
моделі, тобто
ЛНф = 880-0,17 ^150 мм.
Щоб визначити польотну вагу моделі, треба сумарну площу ізрила
стабілізатора помножити на навантаження моделі. Як відомо, мінімальне
1К
навантаження для такої моделі становить 12 Г/дм2. Взявши наванта-
ження 12,3 Пдм2, матимемо:
Смод = 17,9-12,3^220 Г.
Попередній розрахунок моделі
Вибравши схему моделі і визначивши основні її розміри, виготов-
ляють креслення моделі в масштабі 1 : 5 (рис. 127).
Починаючи розрахунок моделі, особливу увагу приділяють добору
профілю крила і стабілізатора. Для моделей планерів рекомендують
такі профілі: МУА-123, МУА-301, МУА-342, С-342, С-123, МАСА-4409,
Рис. 127. Креслення моделі планера класу А-1 в масштабі.
120
ЖСА-6412, К-2, В-6398, В-6358, В-8306, В-8356, В-6457-е, В-74576/2-е,
В-7505-е, В-8505-е, В-83566, «С. П.», «Костенко», Мах Наскііпсіег, Нап8
Нап8еп8 і ін.
Добираючи профіль і користуючись профільними полярами чи іншими
аеродинамічними характеристиками, насамперед визначають число Ке
моделі.
Швидкість польоту моделі можна приблизно визначити за графіком
(рис. 77), якщо Су=1.
Середню хорду крила визначають за формулою (стор. 40). Таким
чином, для моделі число Рейнольдса дорівнюватиме: 7?е = 69г’, =69-
•4,5-125 — 38812. Отже, Ке лежатиме в межах 38000-4-40000.
Для крила такої моделі використовують профіль ИАСА-6412, перера-
хований на відносну товщину 6%. Зміна (перерахування) відносної тов-
щини профілю, або зміна відносної його товщини і відносної вгнутості,
називається модифікацією профілю. Цей процес докладно описано на
стор. 161.
Для стабілізаторів моделей рекомендують такі профілі: СЕАРК-Т,
N-60, НАГ-32, В-10355, 6-301, НАСА-4409 та ін. Відносна товщина про-
філю стабілізатора лежить у межах 44-6%. Тому, якщо вихідний профіль
має с>6%, то його треба модифікувати на задане значення с.
Для нашої моделі візьмемо профіль NАСА-4409 з с = 5%.
Для кіля моделей використовують симетричні профілі: ИАСА-0009,
6-443, (3-445, (3-459, Н00006-30, МІ та ін.* Іноді застосовують рівну пла-
стинку з радіусом носика г = 0,5. Для кіля нашої моделі використовуємо
профіль 6-443.
Побудова поляри крила і поляри моделі
Користуючись профільною полярою профілю ИАСА-6412 (див. дода-
ток 2), будуємо поляру крила. Для нього на аркуші кальки спочатку
побудуємо криву індуктивного опору Сх. за Су у масштабі і на коорди-
натних осях, аналогічних до мас-
штабу і осей профільної поляри КТАСА-6412. Користуючись формулою (34), сх хі ^У Су. і
обчислюємо значення СХі за Су
при подовженні крила Акр =9,4: 0,1 0,00034 0,8 0,022
2 С 2 0,2 0,0014 0,9 0,027
СХІ = -у- = —-у-— = 0,034 С¥2. 0,3 0,0031 1,0 0,034
' лХ. 3,14-9,4 у 0,4 0,0054 1,1 0,037
Для побудови графіка складає- 0,5 0,0085 1,2 0,041
мо таблицю: 0,6 0,012 1,3 0,044
Потім позначаємо ці точки і спо- 0,7 0,017 1,4 0,047
лучаємо їх плавною кривою. На-
12!
Рис. 128. Одержання поляри крила і моделі:
1 — поляра крила; 2 — поляра моделі.
клавши кальку на профільну
поляру ^СА-6412, розхилом
циркуля додаємо до кривої
СХі відстані, що дорівнюють
СХр при відповідних значен-
нях С у. Сполучивши знайдені
точки кривою, дістанемо по-
ляру крила (рис. 128).
Щоб побудувати поляру
моделі, треба визначити коефі-
цієнт шкідливого опору всієї
моделі. За формулою (стор.
59) визначаємо С*хмоц , який
приблизно дорівнює 0,006. На
величину цього відрізка від-
кладаємо зліва направо від
поляри крила всі відповідні
точки, і сполучаємо їх лінією
(рис. 129).
Визначення оптимального
значення СУопт і коефіцієнта
. Сх
потужності
Використовуючи таблицю
на стор. 59, обчислюємо зна-
чення коефіцієнта потужності
і складаємо таку таблицю:
Су Сх Су СХ Су3'2
Су3'2
0.3 0,212 0,9 0,0603
0,4 0,142 1,0 0,0555
0,5 0,117 1,2 0,0601
0,6 0,0903 1,3 0,0668
0,7 0,0767 1,4 0,111
0,8 0,0704
122
За добутими даними побудуємо криву (рис. 129), за якою
/ Сх \
обчислити мінімальне значення коефіцієнта потужності
' Су , МІН
відний йому оптимальний коефіцієнт підіймальної сили СУотп.
Для нашої моделі
можна
і відпо-
— \
Л'а
У /мін
у =1Д
Уотп ’
Визначення швидкості планерування і вертикальної швидкості моделі
Користуючись графіком, поданим на рис. 77, визначаємо швидкість
планерування. Якщо навантаження моделі дорівнює 12,3 Г/дм2 і Су =
= 1,0, швидкість планерування моделі становитиме 4,5 м/сек.
Вертикальну швидкість визначаємо за формулою (62), в яку підста-
/ Сх \
зимо такі значення: р~ 12,3 Г/дм2, “17“ =0,0555. Користуючись таб-
\ Су /мІН
лицею на стор. 65, знаходимо, що ]/ 12,3 = 3,51. Отже, вертикальна
швидкість моделі дорівнює:
. = 1,27 • 3,51 - 0,0555 = 0,24 м/сек.
У мін 1 ’
Визначення оптимального кута атаки крила
а —
о-
Оптимальний кут атаки крила визначаємо за формулою:
23 \ ,
^кр
Подовження крила моделі Хкр =9,4, а кут атаки нульової підіймальної
сили «0 = 4,5, отже:
а = /ю -і- • 1,0 - 4,5 = 7,9°.
\ 9,4/
Кут встановлення крила <руст має бути на 2—3° меншим, ніж а, тобто
<Руст =7,9° -2,9° = 5°.
Визначення величини і положення САХ
Величину САХ можна визначити за кресленням моделі (вигляд звер-
ху) відповідно до правил, поданих на стор. 38.
Для нашої моделі, крило якої має форму прямокутника (не врахо-
вуючи закінцівок), САХ =125 мм\ вона знаходиться на 50 мм вище, ніж
середня хорда крила.
Якщо САХ визначена, її треба перенести на вигляди моделі спереду і
123
збоку. Ці операції і визначають положення САХ відносно інших части?
моделі.
На кресленні САХ крила має бути чітко визначена і паралельна
центральній хорді крила.
Визначення центра ваги моделі
Центр ваги моделі визначаємо так, як описано на стор. 96. Для цього;
на бічній проекції моделі визначаємо центри ваги її окремих частин.
Вагу окремих частин моделі беремо такою:
крило — 45 Г
стабілізатор — 10 Г
фюзеляж — 75 Г
кіль — 5 Г
баласт (ван-
таж) — 85 Г
польотна ва-
га — 220 Г
Накресливши координатні осі, визначаємо координати центрів ваги
окремих частин і складаємо таблицю, подібну до таблиці на стор. 97.
Положення центра ваги моделі визначаємо за відповідними форму-
лами і дістаємо певні значення Лц.в і Кц.в. За цими даними знаходимо
положення центра ваги моделі на бічній проекції. Відносно САХ по дов-
жині (Хц,в) він має бути розміщений на 60% ребра атаки і зміщений
донизу (Кц.в) на 8%.
Щоб досягти поздовжньої стійкості моделі, визначаємо гранично
заднє положення її центра ваги безпечного щодо аперіодичної нестій-
кості
Робимо це за допомогою графіка (рис. 130). На горизонтальній осі
відкладаємо значення коефіцієнта Иг.о (див. стор. 106), а на вертикаль-
ній— значення заднього допустимого поздовжнього центрування Хц.в.3-
Біля кожної з похилих прямих позначаємо положення центра ваги мо-
делі по висоті Кц,в.
Для нашої моделі, в якої Аг.о = 1,25, а Кц.в—“8%. Хі.в.з ~90%.
При більш задньому центруванні є загроза, що модель буде аперіо-
дично нестійкою. Щоб визначити положення гранично переднього цент-
рування, можна також скористатись графіком (рис. 131). Гранично
переднє центрування визначаємо так: з точки, що відповідає Аг.о модель
проводимо вертикальну пряму до перетину з однією з кривих, біля якої
відмічено значення відносного плеча стабілізатора Лг.о, яке можна об-
числити за формулою:
їго = ^о =^!£~5,о.
ьк 1.25
1 Аперіодична нестійкість характеризується тим, що модель, яка втратила рівно-
вагу, сходить з вихідного кута атаки, безперервно збільшуючи, це відхилення до тих.
пір, поки не звалиться на крило.
124
Рис. 130. Графік визначення гранично заднього
положення центра ваги моделі.
125
Потім на горизонтальній осі знаходимо точку, що відповідає заданому
значенню Уц.в , і проводимо перпендикуляр до перетину з похилою пря-
мою, що лежить у лівій частині графіка. Цей відрізок за допомогою
циркуля переносимо в праву частину графіка і додаємо до точки пере-
тину перпендикуляра з кривою Аг,0. Провівши з кінця даного відрізка
пряму справа наліво до перетину з вертикальною віссю графіка, знахо-
димо значення гранично переднього центрування.
Для моделі, яку МИ Проектуємо, Хд.в.п =51 %.
Визначення коефіцієнта ефективності стабілізатора
Як відомо, коефіцієнт ефективності стабілізатора Лг.о визначають за
формулою (стор. 106). Його величина лежить у межах 0,8—1,3. Для.
нашої моделі він дорівнює:
Визначення коефіцієнта стійкості шляху
За формулою (107) визначаємо коефіцієнт стійкості шляху:
£к~. _А7±1_^0 02.
14,4-11,6
Він цілком відповідає вимогам, які за статистикою побудови моделей'
планерів визначили величину коефіцієнта Вк у межах 0,014-0,02.
Визначення поперечного V крила
Щоб модель не мала спіральну нестійкість, треба правильно дібрати
кут поперечного V крила. Його значення знаходимо, користуючись гра-
фіком (рис. 124). Нам відомо, що для даної моделі Вк =0,02, а ік =5
(на графіку подано значення £к, яке визначено у частках розмаху крила,
тобто (£к=7— ). Для нашої моделі Лк = 0,431 і кут V крила має дорівню-
/кр
вати 11,4°. «Вушки» крила повинні мати кут відносно площини середньої
частини крила, який дорівнює 22,8°.
Визначення коефіцієнта поздовжнього момента крила
Для розрахунку поздовжнього балансування моделі треба визначити
величину коефіцієнта поздовжнього момента крила т*кр . Якщо відоме
центрування моделі, значення оптимального Су, якій відповідає ^умін*
126
і
обрано профіль крила, то за формулою (50) можна визначити величину
коефіцієнта т/кр відносно центра ваги моделі.
_ Модель, в якої Лц.в =0,6, Рц.в = 0,08, Су = 1,0, профіль ИАСА-6412
с=6%, /=6%,^ =-0,135, С =0,023 і а0=—4,5°, т2кр = -0,135 +
+ (0,6-0,23) • 1,0-[0,023- —1,0- (-Ь213]- (-0,08) «0,221.
57,3 5,5
Визначення потрібного значення кута атаки стабілізатора
Знаючи величину коефіцієнтів т2 і Аг.о
тора Хг.о, за формулою
та подовження стабіліза-
т
2кр_____
/ О.ІХг.о
\ Г.О "І” 2,2
аг.О---
0,9Лг.о
для симетричного профілю визначаємо кут атаки стабілізатора аг>0»
потрібний для забезпечення поздовжнього балансування моделі. Якщо
профіль стабілізатора несиметричний, то кут аг<0 відкладаємо від кута
нульової підіймальної сили ао-
Для даної моделі з профілем стабілізатора ИАСА-4409, де а0= —2,9°,
/и2 = +0,221; Аг.о = 1,25; Хг.о =4,8, тоді:
кр
Враховуючи, що ао=—2,8°, остаточне значення кута атаки стабіліза-
тора аг.о =4-0,07°.
Розрахунок скосу потоку біля стабілізатора
Кут скосу потоку Аа визначаємо за формулою (29).
Якщо для моделі Су = 1,0» Хкр =9,4 і 0,215, то
Да —57,3- — (1 + 0 = 57,3-------’’° (1 +0,215) «3,2°.
4 3,14-9,4 У ’
Визначення кута встановлення стабілізатора
Кут встановлення стабілізатора, потрібний для поздовжнього балан-
сирування, його можна визначити за формулою-
^Г.О - аг.О ®кр “Н Аа.
Підставивши добуті дані, дістанемо:
?г,9 = 0,07°— 7,9° + 3,2° ~ - 4,7°.
127
Добір положення гачка для запускання моделі на леєрі
Щоб модель добре злітала на леєрі, гачок треба розмістити біля цент-
ра ваги моделі (рис. 132).
Рис. 132. Схема розміщення буксирних гачків.
Положення першого гачка (від носової частини моделі) рекомен-
дують для стартів, коли швидкість вітру дорівнює 74-10 місек. При мен-
шій швидкості слід користуватись другим гачком.
Визначивши основні параметри моделі, переходимо до креслення
моделі в натуральну величину і розробки її конструкції.
КОНСТРУКЦІЇ ЛІТАЮЧИХ МОДЕЛЕЙ
Конструкції літаючих моделей, як і справжні авіаційні конструкції,
повинні мати достатню міцність, жорсткість і мінімальну польотну вагу.
Розглянемо конструкції основних частин літаючих моделей.
ФЮЗЕЛЯЖ
Конструкція фюзеляжу має відповідати загальній компановці літаю-
чої моделі, яка визначається її схемою, аеродинамічними характеристи-
ками, умовами льотної експлуатації і міцністю.
Конструкція фюзеляжу, як і моделі в цілому, значною мірою зале-
жить від технології її виготовлення і використаних матеріалів.
Для моделей планерів фюзеляжі майже завжди виготовляють як
одне ціле. Багато моделей планерів мають фюзеляжі, виготовлені разом
із вертикальним оперенням — кілем.
Найпростіші конструкції фюзеляжів виготовляють з деревини м’якої
породи (бальзи, липи, вільхи, осики). Такі фюзеляжі (рис. 133, а) нази-
вають довбаними, бо їх порожнину видовбують стамесками.
Міцність і жорсткість їх відповідають технічним нормам, аеродинаміч-
ні характеристики задовільні, оскільки ці фюзеляжі мають добру поверх-
ню. Досвід побудови моделей показує, що фюзеляжі цього типу можуть
бути виготовлені з цілком прийнятною вагою.
Другим типом простої конструкції є фюзеляжі, склеєні з окремих
пластин, укріплених іноді переділками-шпангоутами (рис. 133, б). Такі
фюзеляжі також мають добру поверхню. Аеродинамічні характеристики
і міцність їх не поступаються перед довбаними фюзеляжами.
Іноді фюзеляжі обтягують довговолокнистим папером, щоб надати
їм більшої міцності і красивого вигляду. Папір покривають 2—3 шарами
нітролаку або нітроемалі, що добре поліруються. Можна нанести лак
або емаль просто на деревину Прозорий безколірний лак надає фюзе-
ляжу приємного вигляду.
Дуже поширені фюзеляжі шпангоутно-стрингерної конструкції
(рис. 133, в). Поздовжніми елементами такого фюзеляжу є стрингери, а
поперечними — шпангоути. Стрингери звичайно виготовляють з легкої і
міцної деревини (бальзи, сосни тощо), а шпангоути — з авіаційної фане-
ри відповідної товщини. Іноді шпангоути виготовляють з березового,
липового або вільхового шпона способом гнуття в кілька шарів.
9. К- В. Черторижський. / ' 129
Рис. 133. Конструкції фюзеляжів:
а— довбаний; б — склеєний з пластин; в — шпангоутно-
стрингерннй; г — фермовий; д — шкаралупчастий.
Фермові фюзеляжі (рис.
133, а) подібні до шпангоут-
но-стрингерних, але замість
шпангоутів поперечні еле-
менти в них зроблені з реє-
чок.
З технологічного боку
складання таких фюзеляжів
також відрізняється від
шпангоутно-стрингерного ти-
пу. Ферми складають окре-
мо на спеціальних рівних
дошках — стапелях, а потім
з’єднують між собою. Крім
поперечних елементів, ана-
логічних до шпангоутів, фер-
мові фюзеляжі мають ще
розпірки.
Фюзеляжі шкаралупчас-
того типу (монокок) (рис.
133, д) виклеюють з паперу,
стружки, шпона, тонкої фа-
нери на спеціальних болван-
ках-формах, які мають роз-
міри, що відповідають внут-
рішнім розмірам фюзеляжу.
Міцність і жорсткість фюзе-
ляжів типу монокок зале-
жать від матеріалу і клею.
Використовуючи сучасні
клеї (казеїновий В-107, ніт-
роцелюлозний АК-20, фенол-
формальдегідний КБ-3,
БФ-2, БФ-4 і клеї на основі
епоксидних смол ЕД-5, ЕД-6
Е-40), можна виготовити
фюзеляжі підвищеної міц-
ності при невеликій вазі.
У сучасному авіамоделіз-
мі дуже поширені фюзеляжі
мішаної конструкції (рис.
134), які іноді мають майже
всі елементи окремих типів
конструкцій.
130
Передня частино -
тонкостінно
Рис. 134. Фюзеляжі мішаної конструкції.
Для моделей літаків з гумовими моторами використовують фюзеляжі
майже всіх типів, що і для планерів, але відрізняються вони тим, що
всередині фюзеляжу є мотор, який під час роботи створює значні наван-
таження на фюзеляж (наприклад, осьове зусилля закрученого гумового
мотора досягає 6-4-10 кГ). Тому передня частина фюзеляжу, яку іноді
виготовляють окремо, повинна задовольняти зазначені умови роботи.
На рис. 135 показано типову конструкцію сучасної моделі літака з
гумовим мотором.
9*
131
Бояьза
Бальза
Передній шпангоут
фюзеляжу (Електрон)
Дротяний упор
Мд стабілізатор
17
5
6
20
14
ма
10 13
01,3
15
21
7 8
Електрон
Роеулюбалмші
гбинт
Штирок
ОВС02
Хбостоба частина
фюзеляжу
(Бальза}
Переріз стик обачного
бузла фюзеляжу
Бальза
19
22 Гвинт 1 СтальМ4
21 Стопор 2 Сталь Ф /
20 Кок 1 Дюраль
19 Цвях 2 СтальФО£
/в Гвинт 2 Сталь М2
17 Втулка лоп. 2 Електрон Полірув-
16 Гвинт 2 Сталь М2
15 Маточина 1 Електрон Полірув-
14 Втулка 1 Електрон Полірув.
ІЗ Ролик 1 Електрон Полірув-
12 Гвинт 2 Сталь М2
II Вщико 1 0ВСФ1.5
Ю Шпонка і Сталь
9 Гачка 1 Сталь
8 Шпилько 1 Сталь
7 Болт стоо&н $
б Втулка і Електрон
5 Підшипник 2
4 Втулка 1 Електрон
3 Пружина 1 08СФ0.5]
Заклепка 2 Дюраль
1 Вал 1 Сталь
N9 Найменування Кіл Матеріал Примітка
г
Рис. 135. Типова конструкція моделі літака з гумовим мотором.
КРИЛО 1 СТАБІЛІЗАТОР
Від конструкції крила і якості виконання залежать його міцність і
жорсткість, а також аеродинамічні характеристики. Крило виготовляють
так, щоб після обтягування профіль його в усіх перерізах був максималь-
но близький до розрахункового. Каркас крила під час польоту не пови-
132
нен прогинатись, тому що деформація викривлює профіль, тим самим
погіршуючи аеродинамічну якість крила.
Незалежно від конструкції елементів, крила поділяють на три типи:
безлонжеронне, однолонжеронне і багатолонжеронне (рис. 136).
Лонжеронами називаються поздовжні силові елементи конструкції
крила. їх виготовляють у вигляді рейок, розміщених уздовж крила, на
яких монтують нервюри. Лонжерони можуть бути прості (у вигляді
рейки) і набірні різного перерізу (рис. 137). Виготовляють їх з прямо-
шарової сосни або бальзи.
Кромки крила і заокруглення утворюють контур крила.
Кромки повинні бути прямими, а в своєму перерізі продовжувати форму
профілю: передня — носик профілю, задня — хвостик.
Крім лонжеронів і кромок, крило може мати ще додаткові поздовжні
елементи — стрингери, які забезпечують точний контур профілю крила.
Рис. 136. Конструкції крила:
а— без лонжерона; б — однолонжеронні; в — багатолонжеронні.
133
Лонжерони
Рис. 137. Конструкції лонжеронів:
а — рейковий; б — двополичний (типу швелера); в — двополичний фермовий; г —
двополичний (типу двотавра); д — коробчастий.
134
Рис. 138. Закінцівки крила з окремих елементів.
Закінцівки виготовляють як з окремих елементів (рис. 138, а, б,
в, г), так і способом вигинання і склеювання (рис. 139).
Нервюрами називаються поперечні елементи крила, що забез-
печують його певний профіль. Виготовляють їх із пшона, фанери, пла-
стин бальзи, липи, вільхи і навіть металу. На рис. 140 подано конструкції
нервюр.
Здебільшого крило виготовляють з двох частин — консолей, але іноді
воно може бути і суцільним.
Конструкція стабілізатора майже не відрізняється від конструкції
крила (такі самі конструктивні елементи і вимоги щодо міцності, жорст-
кості та аеродинамічної якості).
КОНСТРУКЦІЇ ГВИНТОМОТОРНИХ ГРУП
Більшість сучасних моделей літаків з гумовими моторами мають дво-
лопатеві повітряні гвинти, лопаті яких складаються під час планеруючогс
польоту.
Гвинтомоторна група моделі літака з гумовим мотором, крім мотора,
складається з таких частин: повітряного гвинта з пристроєм для скла-
дання лопатей; передньої бобишки з підшипником для вала гвинта; вала
гвинта і стопорного пристрою. Іноді авіамоделісти застосовують ков
гвинта, який закриває маточину.
13.'
Рис. 139. Гнуті закінщвки крила і кіля.
Виготовлення гумового мотора і заправлення його на вал гвинта і
хвостовий елемент кріплення нескладні (рис. 141).
Лопаті повітряних гвинтів для моделей літаків з гумовими моторами
виготовляють з легких порід деревини: липи, осики, тополі, вільхи,
бальзи.
Лопаті виготовляють з цілого бруска — заготовки відповідних розмі-
рів, на якій розмічають осі симетрії. На заготовку наносять контури ло-
патей (рис. 142). Щоб точніше виготовити повітряний гвинт, заготовку
спочатку ретельно обробляють за шаблоном лопаті в плані, а потім за
шаблоном «вигляд збоку», перерахованому на периметр шаблона «виг-
136
Папероба смужка Легка задня кромка
Суцільна бальза
уиільна бальза
Рейко з тбердого дереба
Нербюри з бальзи
Нербюра з шпону
а
Рис. 140. Конструкції нервюр:
а — звичайні нервюри; б — полегшені нервюри; в — посилені нервюри.
137
Способи з&язубання кіииіб гумової нитки та стрічки
Рис. 141. Виготовлення гумового мотора і конструкції заправ-
лень.
ляд зверху». Обробивши заготовку за цими контурами, починають про-
філювання гвинта. Це найвідповідальніший етап роботи. Спочатку
обробляють верхню опуклу частину лопаті, а потім нижню — вгнуту.
Щоб полегшити цю роботу, можна спочатку зробити кілька поперечних
прорізів, а також провести лінію найбільших опуклостей профілів, що
утворюють лопать. Контролювати якість виготовлення гвинта найкраще
за допомогою шаблонів. Після остаточної доробки гвинт перевіряють на
зрівноваженість — балансують. Виготовити гвинт можна і з окремих ло-
патей. Такий спосіб раціональніший: він заощаджує час і матеріал.
Найчастіше лопаті роблять з липи, осики або твердої бальзи. Лопать
виготовляють з дощечки, товщина якої дорівнює найбільшій відносній
138
товщині профілю лопаті с. Об-
роблену за контуром шаблону в
плані дощечку пропарюють у га-
рячій воді, протирають і бинтом
або тасьмою щільно примотують
до шаблону, який має форму
нижньої поверхні лопаті. В тако-
му положенні лопать висушують,
а потім обробляють за відповід-
ним профілем (рис. 143).
Для проведення цієї відпові-
дальної операції доцільно виго-
товити комлі лопатей відповідно
до конструкції гвинта. Найчасті-
ше комлі виготовляють з твердих
порід деревини (вільхи, берези,
бука) або клеєної авіаційної фа-
нери. Іноді гвинти, щоб надати
їм більшої міцності, обтягають
довговолокнистим папером або
легкими тканинами, використо-
вуючи для цього нітро- або епок-
сидні лаки.
Приклади побудови шаблонів,
способів розмічування і профілю-
вання лопатей повітряного гвин-
та для моделей з гумовими мото-
рами подано на рис. 144.
Раніше йшлося про балансу-
вання — зрівноваженість гвинта.
Справа в тому, що повітряний
гвинт, обертаючись з певною
швидкістю, при неправильній
зрівноваженості утворює вібра-
цію, яка призводить до нестійкого
польоту, а іноді й до аварії моделі.
профілю лопаті
Рис. 142. Виготовлення повітряного гвин-
та з цілого бруска — заготовки.
Є три види незрівноваженості повітряних гвинтів (рис. 145): статична,
яка виникає тоді, коли одна з лопатей важча за іншу; динамічна —
центри ваги лопатей містяться не на одній площині; аеродинамічна, яка
виникає внаслідок неточності контурів профілів лопаті і різниці кутів
встановлення, а також внаслідок різної форми лопатей гвинта.
Повітряні гвинти літаючих моделей звичайно балансують тільки ста-
тично; цього цілком досить для того, щоб запобігти вібрації моделі в
польоті. Балансування проводять на осі, що проходить через отвір у
139
Рис. 143. Виготовлення повітряного гвинта з дощечки,
втулці гвинта. Вісь установлюють на леза балансувального пристрою*
(рис. 146), розташованого строго горизонтально; леза ножів розміщені,
в одній площині.
Правильно відбалансований гвинт зберігає будь-яке задане йому по-
ложення, погано відбалансований — завжди намагається повернутись
так, щоб важча його частина опинилась внизу.
Тепер докладніше розглянемо деякі конструкції маточин, гвинтів,
шарнірів, складання лопатей, передніх бобишок, стопорних пристроїв та
певних конструкцій гвинтомоторних груп.
Найпростішу конструкцію мають маточини (рис. 147). Маточину
(рис. 147, а) виготовляють з деревини, до якої щільно примотують
нитками з клеєм жерстяну пластинку з пропаяними вушками. До пла-
стинки в центрі через отвір пропускають вал гвинта, який також про-
паяний. У вушка встановлюють дротяні скоби із загостреними і відіг-
нутими кінцями, ввіткнутими в комель лопаті і щільно примотаними:
нитками з клеєм.
Конструкція цієї маточини має такий недолік: з часом вушко пластин-
ки розбивається, лопать починає гойдатись у площині обертання і пере-
міщатися вздовж осі вушка, внаслідок чого повітряний гвинт матиме
биття. Але, незважаючи на це, таку конструкцію слід рекомендувати
моделістам для використання її на першій найпростішій фюзеляжній
моделі літака з гумовим мотором.
Більш жорстку конструкцію шарніра з маточиною показано на
рис. 147, б. Вона аналогічна до передньої, але довговічніша.
Найчастіше використовують авіамоделісти конструкцію, показану на
рис. 147, в. Тут маточина виготовлена з твердої деревини у вигляді пря-
но
Визначення розмірів брусна
Рис. 144. Приклади виготовлення повітряних гвинтів:
а — побудова шаблонів лопаті з дощечки; б — спосіб розмічування бруска для
виготовлення повітряного гвинта з трикутними лопатями; в профілювання
лопатей.
Рис. 145. Три види неврівноваженості Рис. 146. Балансування повітряного гвинта
повітряного гвинта: на спеціальному пристрої.
а — статична; б — динамічна; в — аероди-
намічна.
мокутного бруска, до якого клеєм і заклепками закріплені дві металеві
щоки, виготовлені із сталі або дюралюмінію. Заправити комелі лопатей
можна целулоїдними або металевими накладками.
Конструкцію шарніра з маточиною з дюралюмінієвої трубки показа-
но на рис. 148. Кінці трубки мають вигляд вилки, в нижній частині якої
встановлюють обмежувач, що запобігає надмірному відхиленню лопаті
вперед під час роботи гвинта. До комля кожної лопаті приклеєні (клей
БФ-2) і примотані нитками інші частини шарніра у вигляді щік. Поверх-
ня щік, яка суміщається з комлем лопаті, має насічку для більш надій-
ного з’єднання.
Усі ці конструкції маточин з шарнірами не дають змоги змінювати і
регулювати кут встановлення лопаті, тобто крок гвинта. Конструкцію,,
яка дає можливість це зробити, показано на рис. 149. При такій конст-
142
рукції легко замінити лопать у разі її поломки. Маточина тут аналогічна
до поданої на рис. 160, в, а деталь шарніра має розрізну перехідну втул-
ку, що з’єднується з маточиною за допомогою осі, виготовленої із сталь-
ного дроту. На кінці осі з обох боків надіто шайби, пропаяні з віссю.
Комелі лопатей виготовляють відповідної форми і розмірів; вставляють
їх у втулки і закріплюють за допомогою стяжних гвинтів.
Рис. 147. Найпростіші конструкції маточин і шарнірів повітряного гвинта моделі з гу-
мовим мотором.
143
Лопать
Рис. 148. Конструкція шарніра
з маточиною з дюралюмінієвої
трубки.
Рис. 149. Шарнір, яким можна змінювати кут
встановлення лопаті.
144
Латунні шаиди < паяти до осі оловом)
а О
Рис. 150. Конструкції шарніра з подовженою маточиною.
В останні роки набула поширення схема повітряних гвинтів з подов-
женою маточиною. Ця схема (рис. 150) забезпечує складання лопатей
на певній відстані від фюзеляжу, завдяки чому обтікання його не погір-
шується. При такій схемі шарнір конструктивно можна виконати в двох
варіантах: без зміни кута встановлення лопаті (рис. 150, а) та із зміною
його (рис. 150, б).
Конструкції шарніра складання однолопатевих гвинтів нескладні і
аналогічні до конструкцій дволопатевих гвинтів. Подовжені дротяні
маточини і шарніри однолопатевих гвинтів найпростіших конструкцій
подано на рис. 150 і 151.
Складають однолопатевий гвинт тільки в горизонтальному положенні,
незважаючи на деякий невеликий момент крену від балансира. В усіх
випадках складання лопатей вздовж фюзеляжу обов’язково встановлю-
10. к. В. Черторижський.
145
Лопать
Балансир
Гума, то притискас
лопать до фюзеляжу
^Вал гбинта
(дріт ОСВ Ф2мм)
Обмотати мідним дротом
і паяти олобом
Латунні шайби
(паяти до
осі олобом)
Лопать
Целулоїдні шічки
(приклеїти до лопаті
емалі том)
а ланейр
Рис. 151. Конструкції шарнірів однолопатевих гвинтів.
Латунні шайби
(паяти до осі олобом)
ють гумові смужки (пружинки), бо сила опору повітря недостатня для
нормального складання лопатей.
Особливу увагу при виготовленні шарнірів приділяють легкості скла-
дання лопатей. Перед кожним польотом перевіряють стан шарнірів і
усувають можливі недоліки. Від того, як працюватимуть шарніри скла-
дання, іноді залежить «життя» моделі.
Не можна запускати модель, яка має хоч трохи пошкоджені шарніри,
бо відцентрові сили під час роботи гвинта дуже великі, внаслідок чого
можуть поламатись шарніри, відірватись лопаті, статись аварія моделі.
Передня бобишка з підшипником на моделях літаків з гумовим мото-
ром майже завжди знімна. її встановлюють у передній частині фюзеляжу
і фіксують пристроями типу шпонок або шліців. У передній бобишці
монтують підшипник для вала гвинта, який слід робити з бронзи; вико-
ристовують також стандартні шарикопідшипники.
Бронзовий підшипник виготовляють у вигляді втулки з упорним
вінчиком або упорними шайбами. У разі використання шарикопідшип-
ників краще користуватись радіально-упорними підшипниками. Іноді
авіамоделісти виготовляють саморобні шарикопідшипники, використо-
вуючи для цього готові стальні кульки. Найпридатніші для викори-
стання на літаючих моделях такі шарикопідшипники:
№ підшипника Зовнішній Внутрішній Ширина ГОСТ
діаметр діаметр
1 000 093 8 мм 3 мм 3 мм 8338-57
36 023 10 » 3 » 3 » 7831-54
36 024 13 » 4 » 5 » 7831-54
146
Д Е Р Е В’Я н І Б О Б Я Ш К И
МЕТАЛЕВІ Б ОБ И ШКИ
Рис. 152. Конструкції передніх бобишок.
Гайка
Вал
.. 'Стопорний гвинт
Мотошино
Паяти оловом
Пружина__
Обмотати дротом
і паяти оловом
^Зусилля мотора
Зусилля пружини
Вигляд по стрілці ,
а
Положення при стопорінні
б
мідним дротом
та паяти оловом
Рис. 153. Конструкції стопорних пристроїв.
Бобишки виготовляють з дерева або металу. Металеві бобишки ши-
роко використовують у сучасному моделізмі. їх в основному виготовля-
ють з алюмінієвих сплавів (Д-1, Д-16Т, В-95) і магнієвих (МА-3, МА-4,
МА-8). Вага металевих бобишок майже не перевищує ваги дерев’яних,
а іноді буває й меншою. Виготовлення бобишок потребує від авіамоде-
ліста точності і ретельності. Вони повинні бути міцними і жорсткими.
Будь-яка деформація їх може викликати зміну положення вала гвинта,
що негативно впливає на політ моделі.
Не можна допускати люфта вала відносно підшипника; водночас вал
під дією пружини стопора повинен легко переміщатись уздовж осі.
На рис. 152 подано найпоширеніші конструкції передніх бобишок мо-
делей літаків з гумовими моторами.
148
Щоб зупинити гвинт у певному положенні відносно фюзеляжу, коли
гумовий мотор ще не повністю розкручено, використовують стопорні
пристрої.
Для якісного планеруючого польоту моделі велике значення має скла-
дання лопатей у певному положенні. Складені лопаті дуже впливають на
політ моделі. Якщо модель відрегульована на планерування на певному
положенні лопатей відносно фюзеляжу, то інше положення складених
лопатей різко впливатиме на політ моделі. Наприклад, замість польоту з
правим віражем модель може планерувати майже по прямій лінії або з
лівим віражем.
На рис. 153 подано найпоширеніші конструкції стопорних пристроїв.
Надійною і зручною є конструкція, показана на рис. 153, в, яка не має
недоліків попередніх конструкцій. Тут відсутні удари стопора перед пов-
ною зупинкою роботи двигуна. Гвинтовий стопор під дією обертаючого
момента гумового мотора вкручується в бобишку до упору, внаслідок
чого повітряний гвинт зупиняється м’яко і в строго визначеному поло-
женні.
Виготовляючи гвинтовий стопор, особливу увагу слід приділяти
різьбі. Щоб запобігти зриву різьби, крок її треба робити не дуже малим.
Зрозуміло, що при правому обертанні гвинта різьба повинна бути пра-
вою, при лівому — лівою.
Для чіткої роботи стопора велике значення має правильний добір
пружини. Для стопорних пристроїв можуть бути використані циліндричні
пружини стискання (рис. 153, а) або скручування (рис. 153, в). Ці пру-
жини при правильному регулюванні працюють добре, але пружину скру-
чування відрегулювати значно простіше. Щоб запобігти поламці пружи-
ни, треба не доводити її до повного стискання або скручування. Для
цього корисно використовувати втулки-обмежувачі, які встановлюють на
валу гвинта.
Перед кожним польотом слід перевіряти роботу стопорного пристрою,
бо під час посадок в попередніх польотах може бути зігнуто вал гвинта,
забруднено втулку, пружину тощо.
Вал гвинта майже завжди виготовляють із стального дроту діамет-
ром 2—2,5 мм. Іноді вали виточують з легованих сталей (ЗОХГСА,
35ХГСА, 40Х та ін.). Проте міцність виточеного вала значно менша, ніж
вала з дроту. На передньому кінці вала роблять вушко для заведення
гумового мотора. Задній кінець вала може бути різної форми. Це зале-
жить від кріплення гумового мотора (рис. 141) і його заправляння.
Найкращим варіантом є з’єднання мотора з валом за допомогою дюра-
люмінієвої котушки. Поверхню котушки, яка контактується з мотором,
слід полірувати.
Усі можливі пайки вала треба робити старанно і міцно. Для цього,
застосовуючи паяльну кислоту, слід промотувати місця пайки тонким
мідним дротом (якщо це можливо за конструкцією). Після паяння вал
149
ма і розміри якого залежать
Дерев'яний кок
треба промити водою з милом або слабким розчином соди, щоб нейтра-
лізувати залишки кислоти. Просушений вал слід змастити.
Виготовляти вал треба точно і якісно. Допущене зміщення центра
кільця або котушки відносно осі вала призводить до биття, яке спричи-
нює вібрацію всієї моделі.
Щоб поліпшити обтікання моделі, іноді гвинт постачають коком,
від форми передньої частини моделі і
розмірів бобишки. Виготовляють ко-
ки з різних матеріалів, але найкра-
ще для цього використовувати легкі
сплави АМЦ, АМГ, МА8. Способів
кріплення коків є багато. На рис.
154 подано конструкції швидкознім-
них коків, а на рис. 155 і 156 — кон-
струкції гвинтів (передніх боби-
шок), які можуть бути прототипами
під час конструювання цих вузлів
для моделей літаків з гумовими мо-
торами.
ПОВІТРЯНИЙ гвинт
ЗМІННОГО КРОКУ
Конструкція повітряного гвинта
змінного кроку складна, тому вона
вимагає старанного і точного виго-
товлення і регулювання.
На рис. 157 подано конструкцію
механізму зміни кроку гвинта за-
лежно від обертаючого момента гу-
мового мотора. Маточина гвинта
вільно обертається на валу. У неї
вкручено упор, що має отвір для ві-
дігнутого кінця вала гвинта.
Лопаті вільно, але без люфтів кріплять на двох Г-подібних осях. Це
дає їм змогу обертатись в маточині. Осі лопатей кріплять в маточині з
одного боку шайбою, припаяною до осі, а з другого — гайкою і контр-
гайкою. Таке кріплення осей дає можливість легко знімати лопаті разом
з осями.
До кожної осі припаяно палець, за допомогою якого здійснюється її
поворот. Для заведення гумового мотора вал гвинта має вушко і відіг-
нутий по дузі кола кінець з центром, що збігається з віссю обертання
вала. Цей кінець вільно рухається в отворі упора.
До вала гвинта припаяно кулісу, яка має подовжені отвори для паль-
ців осей лопатей.
Металевий кок
Рис. 154. Кок гвинта і способи його
кріплення.
150
Пружину, встановлену на відігнутому кінці вала, добирають експери-
ментально. Механізм зміни кроку в польоті працює так. Обертальний
момент мотора, прикладений до вала повітряного гвинта, стискає пру-
жину механізму; чим більший обертаючий момент, тим сильніше сти-
скається пружина. Отже, мотор обертає гвинт через попередньо стиснуту
пружину. Оскільки куліса припаяна до вала, то будь-яка зміна положен-
ня вала відносно маточини викликає поворот лопатей.
На початку розкручування мотора, коли обертаючий момент великий,
пружина сильніше стискається і лопаті повертаються на менший кут
встановлення, тобто гвинт має менший крок. При дальшому розкручу-
ванні мотора крок гвинта збільшується внаслідок меншого стискання
пружини і збільшення кутів встановлення лопатей. Попереднє встанов-
лення лопатей на обраний крок краще робити, користуючись спеціаль-
ним приладом для перевірки і добору кроку повітряних гвинтів
(рис. 158), прикладаючи до вала гвинта момент, що дорівнюєМср
(рис. 159). Цей момент неважко визначити за формулою (78). Добирати
жорсткість пружини найкраще під час регулювальних запусків моделі.
Якщо на початку польоту гвинт, розкручуючись, робить багато обертів,
а кут піднімання моделі незначний, слід замінити пружину на жорсткішу
Рис. 155. Конструкція гвинта з гвинтовим стопором, валом з дроту та двох шарикопід-
шипників.
151
Рис. 156. Конструкція гвинта з валом, виточеним із сталі ЗОХГСА.
Рис^ 157. Конструкція механізму зміни кроку гвинта.
Панель приладу для гбинтід діаметром до
і
а б
Рис. 158. Прилад для перевірки і добору кроку повітряних гвинтів:
а — конструкція приладу; б — лімб приладу для гвинтівО< 750 мм.
Крок, СМ
Рис. 159. Засіб прикладання
момента при встановленні
лопатей повітряного
гвинта змінного кроку.
ня мотора, а через певний час крок
і навпаки. Замінювати пружину
можна тільки перевіряючи крок
гвинта за середнім обертаючим
моментом.
Щоб добитися нормальної ро-
боти механізму зміни кроку гвин-
та в польоті, треба, щоб вісь по-
вороту лопаті проходила через
лінію центрів тиску лопаті. Меха-
нізм, що збільшує крок гвинта на
початку розкручування гумового
мотора, побудований на принципі
зміни його осьового зусилля, яке
не пропорціональне ні зміні обер-
тового момента, ні зміні швид-
кості обертання гвинта; тому цей
принцип не можна застосовувати
для зміни кроку гвинта протягом
усього часу польоту моделі з пра-
цюючим мотором.
Цей механізм збільшує крок
гвинта на початку розкручуван-
гвинта зменшується до розрахунко-
вого і залишається сталим до кінця роботи мотора.
Збільшення кроку гвинта в початковий період польоту порівня-
но з оптимальним викликає падіння к. к. д. гвинта, отже, і його сили
тяги, що, безумовно, спрощує регулювання моделі з потужним гумовим
мотором. На рис. 160 подано одну з можливих конструкцій описаного
механізму.
ОБТЯГУВАННЯ МОДЕЛЕЙ
Виготовлення моделі закінчується її обтягуванням і оздобленням.
Іноді добре виготовлену модель можна зіпсувати неправильним і неохай-
ним обтягуванням.
Добір матеріалів для обтягування моделі залежить від ваги моделі,
міцності каркаса, конструктивних і експлуатаційних вимог. Технічні дані
деяких сортів паперу і тканин, які застосовують для обтягування моде-
лей, наведено в таблиці.
Є кілька способів обтягування моделей. Обтягування папером сухим
способом виробляють на козеїновому клею або на аеролаку (АІН). Спо-
чатку треба приготувати робоче місце. Працювати краще на великому
154
столі, де, крім потрібного для
роботи інструменту, нічого зай-
вого немає. Стіл має бути чистий
і сухий. Температура повітря у
приміщенні — 15-^25°С.
Приготувавши клей, папір, по-
різаний на клапті потрібного роз-
міру (з припуском ЗО—40 мм),
наждачний папір і пензлі, можна
починати обтягування.
Каркас крила нижньою сторо-
ною вгору кладуть на рівну дош-
ку відповідного розміру і кноп-
ками прикріплюють до неї. Потім
пензлем наносять клей від одного
кінця до іншого, на нервюри і
кромки. Якщо клей просохне
(особливо на торцях), ці місця
слід змазати ще раз. Потім до
змазаного каркаса прикладають
аркуш паперу з одного кінця,
розправляють його і притирають
до елементів каркаса, поступово
накладаючи весь аркуш паперу
на нього. Виконуючи цю опера-
цію, треба стежити, щоб папір
Матеріал Товщина, мм Вага 1 дм\Г
Конденсаторний папір Цигарковий «філі- гранний» папір з 0,02 0,12
водяними знаками Цигарковий папір гладкий, без водя- 0,03 0,18
них знаків 0,03 0,19
Газетний папір 0,08 0,53
Крафт-папір 0,13 0,75
Півватман в аркушах 0,23 1,78
Ватман в аркушах Мікасмужковий (дов- говолокнистий) па- 0,21 1,80
пір 0,03 0,19
Тканина міткаль 0,23 1,1
» перкаль 0,18 1,02
» ситець » шифон 0,18 1,03
(шовк) 0,1 0,3
» капрон — 0,25
був добре натягнутий і не мав зморщок. Після підсихання залишки
паперу з країв каркаса знімають наждачним папером. Роблять це так.
Наждачний папір, натягнутий на невеликий дерев’яний брусочок, ру-
хають в одному напрямі — з боку обтягнутої поверхні, щоб не пошко-
дити обшивки. Після цього так само обтягують верхню частину крила.
Така послідовність обтягування зменшує короблення.
Коли весь каркас просохне, папір рівномірно змочують водою за
допомогою пульверизатора. Під час висихання папір дуже натягується і
невеликі зморшки вирівнюються. Обтяжка надає каркасу жорсткості
але водночас навантажує і деформує його.
Щоб запобігти коробленню крила під час висихання, його притис-
кують по кромках до дошки важкими металевими лінійками або само-
робними фанерними притискачами. В такому положенні обтяжка має
висохнути повністю.
Коли обтягують мікастрічковим папером, нітроклею, який наносять
на елементи крила, дають просохнути, а потім натягують папір на каркас
і зверху наносять рідкий клей на місця склеювання. Клей добре прохо-
дить крізь папір і, висихаючи, приклеює його до каркаса. На рис. 161
155
Рис. 160. Механізм, що збільшує крок гвинта на початку розкручування гумового мотора.
показано обтягування консолі крила цигарковим і мікастрічковим па-
пером.
Обтягування мокрим способом відрізняється тим, що папір рівномір-
но змочують водою або емалітом. Змочують його рівномірно за допомо-
гою пульверизатора, тампона або пензля. Каркас змазують клеєм. Якщо
обтягують мікастрічковим папером, клею дають просохнути. Якщо кар-
кас не досить міцний, можливе короблення і навіть поламка його. Щоб
запобігти зсовуванню паперу під час обтягування, роблять ряд невеликих
надрізів. Якщо модель обтягують мікастрічковим папером, найкраще
просочити його емалітом за допомогою пензля, поклавши аркуш паперу
на скло відповідного розміру. Товстими сортами паперу або тканинами
обтягують ті місця, де потрібна підвищена міцність або де є подвійна
кривизна. Щільні сорти паперу витягуються мало, тому обтягувати
треба секційно. При обтягуванні тканинами користуються аеролаком
АІН або нітролаком АК-20. Для натягування тканини аеролак АІН
наноситься кількома шарами.
Накладання цигаркового паперу но каркас
та просушування обтяжки
Обтягування міколентним папером
Рис. 161. Обтягування консолі крила моделі.
157
ПРОФІЛІ ЛІТАЮЧИХ МОДЕЛЕЙ
Аеродинамічні дослідження профілів проводять не ДЛЯ ОДНОГО ЯК(
гось профілю, а для цілої групи — серії. Кожний профіль даної сер
залежно від того, де створена і досліджена серія, має своє буквене пс
значення, яке крім цифр характеризують геометрію профілю, покг
зує установу, де створено профіль, або ініціали конструктора. Подаєм
розшифровку буквецих позначень серій профілів.
ЦАГІ— Центральний аерогідродинамічний інститут (СРСР);
NАСА — Маііопаї Асіуізіогу Сотшііее ої Аегопаиіісз (Нацюнальни
консультаційний комітет з аеронавтики — США) ;
МУА— МобеІ УегзисЬапзіаІІ (Сбйіп§еп) (Дослідний інститут Геї
тінген — ФРН);
КАР—Коуаі Аігсгаїі Расіогіе (Королівські авіаційні заводи -
Англія);
N — Иауу Уагсі, \¥асЬіп§іоп (Військово-морський дослідний центр
Вашінгтон — США);
С — 6бШп£ЄП (Дослідний інститут — ФРН);
І8А— ІпзШиїо Зрегішепіаіе Аегопаиііко— Італія;
Р — Тівадар Безхажи (конструктор профілів — Угорщина);
Сгапі — Черлз Грант (конструктор профілів — США) ;
В — д-р Бенедек (конструктор профілів — Угорщина);
81 — Сігурд Іззксон (конструктор профілів — Данія);
Сіагк — Вірджініус Кларк (конструктор профілів — США);
М — д-р Макс Мунк (конструктор профілів — США).
ШИФРУВАННЯ ПРОФІЛІВ
Щоб за умовними позначеннями профілю мати уявлення про йог<
основні геометричні дані, деякі профілі позначають особливим цифро
вим шифром. Профілі серії МАСА позначають, наприклад, так
ИАСА-4409, ИАСА-23012, ИАСА-6412. При чотирицифровому шифр
(наприклад, 6412), перша цифра — це відносна вгнутість профілю в про-
центах від хорди /; друга цифра—положення максимальної вгнутост
відносно носика профілю в десятих частках хорди хг, останні дві циф-
ри — відносна товщина профілю в процентах від довжини хорди_с. Отже
ИАСА-6412 розшифровуються так: / = 6%, Хї =0,4 (40%), с=12%:
N АС А-6409 — / = 6 %, Хі = 0,4 (40 %), с = 9 % • Аналогічно розшифровують
усі чотирицифрові шифри серії МАСА.
158
П’ятицифрові шифри (наприклад, NАСА-23012) розшифровують так:
перша цифра — відносна вгнутість /; друга і третя — подвоєна величина
положення максимальної вгнутості відносно носика профілю в процентах
від довжини хорди хг ; останні дві цифри — відносна товщина профілю в
процентах до хорди с. Отже, NАСА-23012 буде: / = 2%, =Л2=2,5%,
с = 12 %, МАС А-24012 — 7= 2% = у = 20%, с= 12% •
Профілі серії 81 розшифровують подібно до профілів NАСА. На-
приклад, профіль 51-53009 розшифровується так: 5/30/09; відносна
вгнутість / = 5%, положення максимальної вгнутості відносно носика
профілю / = 30%, відносна товщина профілю с = 9%.
Профілі Г. Бенедека розшифровують так: перші дві (або одна) циф-
ри — відносна товщина профілю с; друга пара цифр — положення від-
носної вгнутості відносно носика профілю; остання цифра — відносна
вгнутість профілю. Всі величини дають у процентах від довжини хорди.
Наприклад, шифр В 12358& означає: с= 12%, =35%,/ = 8%. У табли-
цях профілів Г. Бенедека подано також радіус носика профілю в про-
центах від довжини хорди (наприклад, г = 0,6).
Правильний добір профілю крила і стабілізатора має велике значення
для льотних показників моделей. В додатках подано аеродинамічні
характеристики — профільні поляри, геометричні дані і контури профі-
лів, які можна використати для моделей планерів класів А-1, А-2 і мо-
делей літаків з гумовими моторами класів В-1,В-2. На цих рисунках по-
дані зображення профілів з табли-
цями, в яких вміщено ряд чисел, по-
трібних для побудови профілю на
певну хорду.
Розміри профілю нервюри відкла-
дають на двох осях (рис. 162): гори-
зонтальній (X) і вертикальній (У).
Хорду нервюри відкладають на осі X.
Взявши її за 100%, на осі відкладають
відстані, що дорівнюють числу процен-
тів, зазначених у графі «абсциса»
(х%), тобто 0; 1,25; 2,5; 5 і т. д. Щоб
відкласти ці відрізки в міліметрах,
треба визначити, чому дорівнює 1%
від повної хорди. Наприклад, хорда
прямокутного крила дорівнює 110 мм,
отже, 1% відповідає 1,1 мм. Тоді
1,25% хорди становитиме 1,25 X 1,1 =
Абсцисо Х°/о 0 1.25 2.5 5 0І
Ординато у6°/0 1,125 2.5 375 5.56
Ордината % 1,125 0 0.37 0.87
Рис. 162. Побудова профілю нервюри
159
= 1,375 мм «1,4 мм; 2,5 %—2,5X1,1 = 2,75 лж — 2,8 мм і т. _д. Діставши
кожне значення х в міліметрах, відкладають ці відрізки від нуля (по-
чатку координат). Після чого обчислюють і відкладають ординати точок
верхнього _ув і нижнього пн контурів профілю.
Кожному значенню х відповідає значення ординат уи і у„ . Так, точ-
Рис. 163. Побудова профілю косої нервюри.
кам, що лежать оіля початку
координат (точка х = 0), відпо-
відають ув = 1,125 і ун = 1,125.
Обчисливши дані ординат в мі-
ліметрах, дістають: ув = 1,125Х
X1,1 мм = 1,2373 мм 1,2 мм.
Точкам, що містяться на осі X
на відстані 1,25%, відповіда-
ють _ув=2,5% і Д/н = 0- Провів-
ши відповідні розрахунки, діс-
тають: ув =2,5X1,1 лш = 2,75
лш~2л8 мм; г/н=0Х 1,1 мм = 0.
Добуті розміри відклада-
ють по осі У по перпендикуля-
рах, поставлених у відповідних
точках осі X, тобто відрізок
1,2 мм з точки О (початок ко-
ординат), відрізок 2,7 мм з
точки на відстані 2,7 мм від
початку координат і т. д.
Так само обчислюють і від-
кладають всі інші ординати то-
чок верхнього і нижнього контурів профілю. Потім нанесені
точки сполучають плавною кривою і дістають профіль на задану хорду.
Найзручніше будувати профіль на міліметровому папері (міліметровці).
Іноді моделісти використовують у конструкції нервюри, що перехре-
щуються. Профіль такої нервюри потребує додаткової побудови, яка є
проекцією нервюри на площу, розміщену під якимось заданим кутом до
неї. Коли нервюри перехрещуються під кутом 45°, побудову косої нервю-
ри проводять так (рис. 163). На аркуші паперу креслять вихідний про-
філь, наприклад на хорду 6 = 80 мм. Під кутом 45° до хорди з початку
координат проводять відрізок Ьх = 115 мм (хорда косої нервюри). Розмі-
тивши хорду вихідної нервюри (80 мм) по осі X відповідно до даного
рисунка, проводять паралельні прямі з точок розмітки до перетину з
хордою косої нервюри (115 мм). У точках перетину будують перпенди-
куляри до хорди косої нервюри, на яких потім позначають значення X,
спроектованого на хорду в 115 мм і відкладають значення відповідних
в та ун вихідного профілю. Знайдені точки сполучають плавною кривою
і дістають потрібний профіль.
.160
МОДИФІКАЦІЯ ПРОФІЛЮ
Для модифікації (перерахунку) профілю за товщиною спочатку трег
ба визначити коефіцієнт модифікації:
= (Ш)
с
де с — відносна товщина вихідного профілю; Сі — відносна товщина мо-
дифікованого профілю.
Для прикладу модифікуємо вихідний профіль ИАСА-6412, який має
с=12% на профіль з відносною товщиною с=6%. Тоді/С =6 : 12 = 0,5.
Потім слід перерахувати всі ординати вихідного профілю, помножив-
ши їх на коефіцієнт модифікації. Якщо ординати вихідного профілю
_ув і ун , то нові ординати будуть: у'в ==увКс і у'н = УнКс.
Перераховуючи ординати, для зручності складають таблицю:
X Ув У^УвА’с Ун Ун“Ун А-с
2,5 3,80 1,90 — 1,64 — 0,82
5 5,36 2,68 — 1,99 — 0,99
10 7,38 3,64 — 1,99 — 0,99
20 10,34 5,17 — 1,25 — 0,63
ЗО 11,65 5,82 — 0,38 — 0,19
40. 11,80 5,90 0,20 0,10
50 11,16 5,58 0,55 0,27
60 9,95 4,97 0,78 0,39
70 8,28 4,14 0,85 0,43
80 6,63 3,32 0,73 0,36
90 3,33 1,66 — 0,39 0,19
100 — 0,12 — 0,06 — 0,12 — 0,06
Діставши значення нових ординату'в і у'Иі будують профіль на від-
повідну хорду.
При цій модифікації зміниться не тільки відносна товщина профілю,
а й відносна вгнутість, причому в такому самому відношенні, тобто
/Сс =0,5, тоді ^1=0,5.
Відносна вгнутість вихідного профілю ИАСА-6412 була: / = 6%, отже,
відносна вгнутість добутого профілю стала: =/-0,5 = 6-0,5 = 3%.
Профілі, модифіковані за цим способом, мають аеродинамічні харак-
теристики, які відрізняються від характеристик вихідного профілю, бо
зміна відносної вгнутості значно впливає на аеродинамічні характе-
ристики профілю.
Ц. к. в. Черторижський.
161
За другим способом модифікації профілю аеродинамічні характе-
ристики залишаються майже незмінними, тому що відносна вгнутість
також незмінна. При цій модифікації також визначають коефіцієнт моди-
фікації Хс, а потім перераховують ординати профілю за формулами:
л___Ув (1 + Хс) 4-Уи (І 4" Хс) __Ув (і Хс) + .Ун (1 4“ Хс)
У в — о » У н о
Якщо /Сс =0,5, то
— 1>5.Ув -ь 0,5ун
З7 в 2
0,5ув + 1,5ун
Для зручності перерахунку складають таблицю.
X і Ув / Ув* 1»^"НУн'О5 Ун и.__Ув-0,5 + ун-1,5 Ун 2
Ув— 2
2,5 3,80 2,03 — 1,64 — 0,25
5 5,36 4,5 — 1,99 — 0,3
10 7,58 5,19 — 1,99 — 0,49
20 10,34 7,44 — 1,25 1,65
ЗО 11,65 8,64 — 0,38 2,62
40 11,8 8,9 0,2 3,36
50 11,16 8,5 0,55 3,23
60 9,95 7,65 0,78 3,7
70 8,28 6,41 0,85 2,7
80 6,63 5,15 0,73 2,2
90 3,33 2,59 0,39 1,12
100 — 0,12 0,12 — 0,12 0,12
с=б%; ^б%
Рис. 164. Модифікація профілю.
На рис. 164 показано вихідний профіль ИАСА-6412, а також модифі-
ковані профілі за першим і другим способами.
ДОДАТКИ
КЛАСИ ЛІТАЮЧИХ МОДЕЛЕЙ
Авіаційний моделізм як один із видів позакласної роботи учнів має основною метою
розвинуту технічну творчість учнів, що грунтується на глибокому і міцному знанні
основ наук та вмінні застосовувати ці знання на практиці.
Авіамоделізму, як і багатьом іншим галузям технічного новаторства, властивий
яскраво виражений спортивний елемент. Тому не випадково його часто називають тех-
нічним видом спорту.
Виготовлені з додержанням певних технічних вимог літаючі моделі можна порів-
нювати за наслідками випробувань у польоті. Ці наслідки безумовно пов’язані з якістю
моделей, їх льотними можливостями, які залежать від майстерності і конструкторських
здібностей юних авіамоделістів.
Відповідно до існуючого «Авіамодельного кодексу» ФАІ1 і правил, встановлених
Федерацією технічних видів спорту, ДТСААФ СРСР літаючі моделі в нашій країні
діляться на дві основні категорії: моделі, призначені для змагань, і моделі для вста-
новлення рекордів. Ці класи моделей відрізняються між собою технічними вимогами.
Крім цих двох основних категорій, існують ще моделі експериментального типу.
ЛІТАЮЧІ МОДЕЛІ ДЛЯ ЗМАГАНЬ
Загальними вимогами до цих моделей є, по-перше, суворе додержання технічних
вимог, передбачених правилами проведення змагань з авіамодельного спорту в СРСР 2.
Розміри моделей обмежуються площиною несучих поверхонь, польотною вагою,
навантаженням та робочим об’ємом або вагою двигунів. Несуча поверхня — це загальна
площа крила і горизонтальних або нахилених площин хвостового оперення. Сюди
включають також поверхні, які є ортогональними проекціями на горизонтальну площину
відповідних поверхонь у положенні горизонтального польоту моделі.
Коли крило (крила) або площини хвостового оперення прилягають до фюзеляжу
моделі, до несучої поверхні треба включати весь центроплан фюзеляжу (фюзеляжів).
Для цього контури площин умовно продовжують до зустрічі з площиною симетрії моделі.
Мінімальна польотна вага моделі — це її вага без пального; максимальна польотна
вага — це вага моделі разом з пальним.
Мінімальне навантаження на несучі поверхні визначають без пального.
Усі моделі для змагань мають бути повністю виготовлені; окремі елементи їх конст-
рукцій — надійно з’єднані. Кожна модель має пізнавальні знаки, які складаються з
трьох букв (перша буква прізвища учасника та його ініціали) та довільного набору
цифр. На крилах моделі висота пізнавальних знаків становить понад 20% довжини
середньої хорди, а на розбірних моделях, на хвостовому оперенні і фюзеляжі — не
менш як 1 см.
Пізнавальні знаки на крилі наносять на будь-яку консоль, але зверху. Виключення
мають тільки моделі-копії, позначення яких відповідають позначенням літака, який
копіюється.
1 ФАІ — Міжнародна авіаційна федерація.
2 Правила соревнований. Авиамодельньїй спорт, М., Изд-во ДОСААФ, 1968.
II*
163
Літаюча модель може мати гумовий, поршневий (внутрішнього згоряння) або
реактивний двигуни.
Робочий об’єм циліндрів поршневих двигунів визначають за формулою:
= —-— (см--),
4
де Р— діаметр циліндра двигуна; 5 — хід поршня, см; Ь — кількість циліндрів.
Діаметр циліндра і хід поршня вимірюються з точністю до 0,05 мм.
На всіх літаючих моделях заборонено використовувати повітряні гвинти з метале-
вими лопатями.
ЛІТАЮЧІ МОДЕЛІ ДЛЯ ВСТАНОВЛЕННЯ РЕКОРДІВ
Для моделей цього типу загальні вимоги стосуються в основному технічних вимог,
які майже для всіх класів ідентичні. Розміри моделей обмежуються також площиною
несучих поверхонь, польотною вагою, навантаженням та робочим об’ємом двигуна. Про-
те старт цих моделей відрізняється від старту спортивних. Якщо спортивні моделі
запускають з рук, то старт моделей для встановлення рекордів передбачено із землі або
води за винятком моделей планерів, які в обох випадках стартують з леєра певної
довжини.
Особливий тип становлять експериментальні моделі, які виготовляють авіамоделісти.
Нижче наведено основні класи літаючих моделей, технічні вимоги до них та
рекорди авіамоделістів Української РСР, зареєстровані на 1 січня 1968 р.
Спортивні моделі
Моделі планерів класів А-1 і А-2
Загальна несуча поверхня, дм2
Мінімальна польотна вага, Г
Старт з леєра довжиною, м
клас А-1
174-18
220
50
клас А-2
324-34
410
50
164
Моделі літаків з гумовими моторами класів В-1 і В-2
Загальна несуча поверхня, дм2
Мінімальна польотна вага, Г
Вага гумового мотора, Г
Старт
клас В-1
12-4-14
170
за
з рук
клас В-2
17-4-19
230
40
з рук
Таймерні моделі літаків з поршневими двигунами внутрішнього згоряння
Мінімальна вага моделі в грамах
повинна дорівнювати 300-кратному
об’єму циліндра двигуна, вираженому
в кубічних сантиметрах (V цХ300) Г.
Максимальний об’єм циліндра дви-
гуна — 2,5 см*.
Час роботи двигуна в польоті —
не більш як 10 сек.
Старт моделі — з рук.
Швидкісні кордові моделі літаків з поршневими двигунами внутрішнього згоряння
Мінімальна площа несучих повер-
хонь повинна дорівнювати 2 дм2 пом-
ноженим на об’єм двигуна, вираже-
ний у кубічних сантиметрах (наприк-
лад, 2X2,5=5 дм2).
Максимальний об’єм циліндра.—
2,5 см*.
Максимальне навантаження —
100 Г/см2.
Довжина корду— 15,92 м.
Старт із землі; дозволяється ски-
дання шасі.
165
Швидкісні кордові моделі літаків з реактивними двигунами
Максимальна вага реактивного дви-
гуна — 0,5 кГ.
Загальна польотна вага моделі —
не більш як 1 кГ.
Максимальне навантаження —
100 Пдм2.
Довжина корду — 19,90 м.
Двигун повинен бути прямої дії,
за винятком ракетного, який роз-
виває потужність внаслідок згоряння
твердого, рідкого або газоподібного
палива або за рахунок розширення
рідини, під дією якої виникає тиск
на пристрої, що обертаються, пуль-
сують, або пристрої, що утворюють
швидкісний напір (прямоточні, пуль-
суючі, турбореактивні двигуни).
Пілотажні кордові моделі літаків
Максимальний об’єм двигуна (дви-
гунів) — 10 дм3.
Максимальне навантаження на не-
сучу поверхню — 50 ГІдм2.
Міцно закріплене шасі забезпечує
нормальне злітання і посадку моделі.
Під час польоту його можна при-
брати, але перед посадкою шасі по-
винно займати своє вихідне поло-
ження.
Гоночні кордові моделі літаків
Максимальний об’єм двигуна —
2,5 см3.
Загальна несуча поверхня — не
менш як 12 дм2.
Моделі повинні належати до типу
«півмакет», а загальні їх контури на-
гадувати справжній літак.
На моделі має бути кабіна з пе-
реднім оглядом для розміщення в
ній пілота-манекена.
Мінімальні розміри фюзеляжу в
перерізі розміщення пілота: висота—
100 мм, ширина — 50 мм. Мінімальна
площа перерізу — 39 см2.
Шасі не повинно скидатись після
злітання.
166
Мінімальний діаметр колеса — 25 мм.
Максимальна вага моделі — 700 Г.
Максимальний запас пального — 7 см3.
Модель повинна бути обладнана для польоту проти годинникової стрілки.
Кордові моделі-копії літаків
Загальна несуча поверхня — не
більш як 150 дм2.
Навантаження на несучу поверх-
ню — не більш як 100 Г)дм2.
Масштаб —довільний. Розмах
крил — не менш як 1 м.
Максимальний об’єм поршневих
двигунів — 20 см3.
Вага реактивного двигуна (двигу-
нів) — не більш як 500 Г.
Повітряні гвинти — довільної фор-
ми й діаметра.
Максимальна польотна вага—7 кГ.
Довжина корду— 154-20 м.
Кордові моделі літаків «повітряного бою»
Максимальне навантаження на не-
сучу поверхню — 50 ГІдм2.
Максимальний об’єм циліндра дви-
гуна — 2,5 см3.
Довжина корду — 15,92 м.
Модель повинна бути обладнана
для польоту проти годинникової
стрілки.
Літаючі моделі, керовані по радіо
Максимальна несуча поверхня —
150 дм2.
Максимальна польотна вага—5 кГ.
Максимальне навантаження на не-
сучу поверхню — 75 ГІдм2.
Максимальний об’єм двигуна —
10 см3.
167
8
Спортивні розрядні норми
Таблиця 1
Клас моделі Комплекс випробування моделі в польоті Майстер спорту Кандида' в май- стри спорту г І роз- ряд II роз- ряд III роз- ряд Юнацькі розряди
І II III
Модель планера кла- сів А-1 і А-2 П’ять запусків на трива- лість польоту з обмеженням фіксації до 3 хе з доставкою моделі на старт за обмеже- ний час (в очках) 1 900 875 800 600 400 300 200 100
Моделі літаків з гумо- вим мотором класів В-1 і В-2 » 900 875 800 600 400 300 200 100
Таймерні моделі літа- ків з поршневим двигу- ном внутрішнього згорян- ня 900 875 800 600 , 400 300 200 100
Швидкісні кордові мо- делі літаків з поршневим двигуном внутрішнього згоряння Пілотування моделі на дистанції 1000 м (швид- кість, км/год) і 205 190 170 140 і 100 90 75 50
Швидкісні кордові мо- делі літаків з реактивни- ми двигунами Пілотування моделі на дистанції 1000 м (швидкість, км/год) 200 190 170 140 100 90 75 50
Пілотажні кордові мо- делі літаків Виконання фігур пілотажу за обмежений час — 7 хв (в очках) 1900 1700 1550 1200 800 600 400 150
Гоночні кордові моде- лі літаків Одночасна гонка трьох екіпажів на дистанції 10 000 м 4,75 хв 5,25 хв 5,25 хе | 7,5 хв 9,5 хв 10 хв 12 хв 15 хв
1 Тривалість польоту оцінюється в очках: 1 сек польоту— 1 очко.
Продовж, табл. 1
Клас моделі Комплекс випробування моделі в польоті Майстер спорту Канди- дат в майстри спорту І роз- ряд 11 роз- ряд III роз ряд Юнацькі розряди
І II III
Кордові моделі-копії літаків Пілотування моделі на якість польоту за спеціаль- ним комплексом (в очках) 400 365 325 275 200 175 150 100
Кордові моделі літаків повітряного «бою» Повітряний спортивний «бій» моделей двох учасни- ків в обмежений час (в оч- ках) 1000 900 800 650 450 300 250 100
Літаючі моделі, керо- вані по радіо Пілотування моделі на якість виконання комплексу фігур вищого пілотажу за обмежений час (в очках) 3000 2600 2100 1500 800 600 400 200
Моделі вертольотів П’ять запусків на трива- лість польоту з обмеженням фіксації до 3 хе з достав- кою моделі на старт за об- межений час (в очках) 900 875 800 600 400 300 । 200 100
52
''і
Рекордні
Модель
Клас моделі
Технічні вимоги
Клас Ф-1-Б.
Моделі літа-
ків і гідроліта-
ків з гумовими
моторами
Загальна несуча по-
верхня — 150 дм2 * * * * *.
Загальна польотна ва-
га — 5 кГ.
Навантаження — 124-
50 Г/дм2.
Вага гумового мотора
необмежена.
Старт — із землі або
води
Клас Ф-1-С.
Моделі літа-
ків і гідроліта-
ків з поршне-
вими двигуна-
ми внутріш-
нього згоряння
Максимальна несуча
поверхня—150 дм?.
Максимальна польотна
вага — 5 кГ.
Навантаження — 124-
4-50 Г/дм2.
Робочий об’єм двигу-
на — не більше як 10 см8.
Старт — із землі або
води
Клас-ФІ-Е.
Моделі вер-
тольотів з пор-
шневими двигу-
нами внутріш-
нього згоряння
Максимальна несуча
поверхня— 150 дм2 (пло-
ща, що описується гвин-
том).
Максимальна польотна
вага — 5 кГ.
Навантаження на несу-
чу поверхню — 12-т-
4-50 Г/дм*.
Робочий об’єм двигу-
на — 10 см8.
(70
моделі
Таблиця 2
Вид рекорду Для авіамоделістів віком понад 17 років Для авіамоделістів віком до 17 років
Тривалість 29 хв Б. Коваленко, Харків, 1957 р. 23 хв 20 сек В. Вишняков, Львів, 1958 р.
Дальність по пря- мій 19 км Б. Коваленко, Харків, 1957 р. 10,2 км В. Вишняков, Львів, 1958 р.
Висота 1497 м 0. Алехінцев, Дніпропетровськ, 1948 р. 100 м
Швидкість по пря- мій 39,9 км/год В. Вишняков, Львів, 1957 р. 35 км/год Д. Ліпницький, Львів, 1964 р.
Тривалість 6 год 1 хв І. Кулаковський, Одеса, 1952 р. 2 год 10 хв В. Пржепюрко, Дніпропетровськ, 1951 р.
Дальність по пря- мій 370 км І. Кулаковський, Одеса, 1957 р. 98 км В. Чикурін, Хмельницький, 1951 р.
Висота 2813 м Л. Липський, Харків, 1951 р. 2200 м В. Пржепюрко, Дніпропетровськ, 1951 р.
Швидкість по пря- мій 58,064 км/год Є. Кучеров, Харків, 1951 р. (25 км/год)
Тривалість 1 год ЗО хв 29 сек В. Найдовський, Харків, 1962 р., рекорд СРСР 1 год 11 хв А. Кусков, Харків, 1965 р., рекорд СРСР
Дальність по пря- мій 81 км Б. Паценкер, Харків, 1963 р. 16,7 км В. Кусков, Харків, 1965 р., рекорд СРСР
171
Модель 1 і Клас моделі । Технічні вимоги
Модель не повинна ма- ти нерухомих несучих поверхонь. Дозволяється застосовувати горизон- тальний стабілізатор площею не більше як 1,5% від повної площі, що описується несучим гвинтом. Старт — із землі.
Клас Ф-1-А. Моделі плане- рів Максимальна несуча поверхня — 150 дм2. Максимальна польотна вага — 5 кГ. Навантаження — 124- 4-50 Г/дм2. Старт — із руки або леєра завдовжки 100 м..
Клас Ф-З-С. Моделі літа- ків і гідроліта- ків з поршневи- ми двигунами, керовані по ра- діо Максимальна несуча поверхня—150 дм2. Максимальна польотна вага — 5 кГ. Навантаження — 124- 4-50 Г/дм2. Робочий об’єм двигу- на— не більше 10 см3. Старт із землі або во- ди.
Клас Ф-З-Д Моделі плане- рів, керовані по радіо Максимальна несуча поверхня—150 дм2. Максимальна польот- на вага — 5 кГ. Навантаження — 124- 4-50 Г/дм2.
172
Продовж, табл. 2
Вид рекорду Для авіамоделістів віком понад 17 років Для авіамоделістів віком до 17 років
Висота 1997 м В. Найдовський, Харків, 1962 р., рекорд СРСР 1550 м А. Кусков, Харків, 1965 р., рекорд СРСР
Швидкість по пря- мій (10 км/год) (5 км/год)
Тривалість 2 год 1 хв Д. Ткач, Черкаси, 1956 р. 2 год 1 хе Д. Ткач, Черкаси, 1956 р.
Дальність по пря- мій 57 км А. Свідельський, Черкаси, 1956 р. 25 км Ю. Кудрявцев, Харків, 1961 р.
Висота 1700 м Д. Ткач, Черкаси, 1956 р. 1700 м Д. Ткач, Черкаси, 1956 р.
Тривалість 13 хе 40 сек Л. Теплов, Харків, 1953 р. 5 хе 20 сек В. Івасенко, Харків, 1966 р.
Дальність по пря- мій 0 (2 км) 0 (1 км)
Висота 0 (200 м) 0 (100 М)
Швидкість по пря- мій 151 км/год Б. Паценкер, Харків, 1967 р., рекорд світу 0 50 км/год
Тривалість 29 хв В. Орєхов, Харків, 1959 р. 0 (5 хв)
173
Модель і Клас моделі Технічні вимоги
Старт із руки або з* леєра довжиною 100 м.
V 1 Клас Ф-2-А. Кордові мо- делі літаків з поршневими двигунами внут- рішнього зго- ряння І категорія — робочий’ об’єм двигуна—до 2,5 см3', II категорія — робочий об’єм двигуна — до 5 см3; III категорія — робо- чий об’єм двигуна — до 10 см3.
Клас Ф-2-А. Кордові мо- делі літаків з поршневими двигунами
Примітка. В дужках подано мінімальні результати польоту моделі для*
фіксації як рекорду Української РСР.
Продовж, табл. 2
Вид рекорду Для авіамоделістів віком понад 17 років Для авіамоделістів віком до 17 років
Дальність по пря- мій 3860 м В. Орєхов, Харків, 1959 р. 0 (500 м)
Висота 0 (200 м) 0 (100 м)
Швидкість по колу 223 км/год К. Миронов, Харків, 1964 р. 201 км/год В. Молчанов, Харків, 1964 р.
— 196 км/год Н. Ахоян, Харків, 1961 р. 151 км/год В. Молчанов, Харків, 1964 р.
— 138 км/год В. Васильчвнко, Дніпропетровськ, 1953 р. 123 км/год В. Іванов, Дніпропетровськ, 1963 р.
Швидкість по колу 244 км/год В. Ткачов, Харків, 1962 р. 0 (100 км/год)
1/5
176
ИАСА 23012
МСА 4402
С^О.ОІ
X 0 2.5 5 Ю 20 ЗО 40 50 60 70 80 90 100 хорди 0 2,5 5,0 10 20 ЗО 40 50 60 70 80 90 ЮО
уо 0,0 3.61 4.91 6,43 7.50 7,55 7,14 6,41 5,47 4,36 3,08 1,68 0,13 Верх 0 2,96 4,30 6,31 8,88 10,13 10,35 9,81 8,78 7,28 5,34 2,95 0
уи 0,0 -1,71 2,26 -2.92 3.97 -4.46 -4,48 -4,17 3.67 3.0 -2,16 -1,89 -0.13 Низ 0 -1,11 -1,18 -0,88 -0,17 -1.12 -1,65 -1,86 -1,92 -1,76 -1.36 •0,74 0
ьо
я
от
МАСА 6412
N60
. Черторижський.
х% 0 2.5 5 10 20 ЗО 40 50 60 70 80 90 100 х% 0 2,5 5 10 20 ЗО 40 50 60 70 80 90 100
0 3,8 5,36 7,58 10,34 11,65 11,8 11,16 9,95 8,28 6,63 3,33 0,12 3,4 6,76 8,24 10,14 11,98 12,41 12,03 11,06 9,55 7,66 5,5 3,04 0,40
у«% 0 -1,64 -1,99 ~1,99 -1,25 -0,38 -0,2 -0,55 -0,78 -035 -0,73 -0,39 -0,12 Ун% 3,4 1,46 0,96 0,40 0,04 0,04 0,22 0,48 0,71 0,78 0,64 0,37 0,0
оо
МУ А -123
Су
/,б
/,4
1.0
0,8
0.4
0,6
0,2
х% 0 2.5 5 10 20 ЗО 40 50 60 70 80 90 100
г,% 4,5 7.1 8.4 10,1 11.9 12.5 12.5 12.6 11,1 9.7 7.9 5.8 3.7
У.°/о 4,5 3.7 4.1 5.1 6.3 7.1 7.1 6.7 6.1 5.5 4.8 42 3.5
М\/А~ ЗОЇ
Г
г...— Г‘
10 15
X 0,0 2.5 5,0 10 20 ЗО 40 50 60 70 80 90 100
У> 4.3 8,3 9.9 12.0 14.2 14.9 14.7 13.9 12.5 Ю.в 8.6 6.2 3,3
У» 4,3 3,1 3,3 3,7 4.6 5.2 5.4 5.3 5.2 4.9 4.3 3.8 зЛ
N3
*
<0
х% 0 2.5 5,0 10 20 ЗО 40 50 60 70 80 90 100 X 0 2.5 5 10 20 ЗО 40 50 60 70 80 90 100
У(% 1 5 4.55 5.39 7.94 10,06 11,27 11.55 10,91 10,2 8,86 7.17 585 1,5 1.45 3.65 4.7 6.3 7.75 8.6 8.8 8.45 7.89 6 9 5.7 4.25 1.45
У„% /5 0.47 2.09 4.44 6.56 7.77 8.05 7.41 6.70 5,36 3.67 1.55 1.5 У“ 1.45 0.45 1,55 3.3 4.85 5 7 5 9 5.55 4.95 4 0 2.8 ІЗ 1.45
В-8505-е
В-6457-е
1,4
1,2
1,2
13'
1,0
1,0
о,б
ОВ
0,4
0,2
/?е= 801 ОО-н
071
2.9° 1 Ь] 11° / ^^е=(. 000 0
8 ,2 р / Сі ),9П 0 чР” 2° 11.4°
Г і 9,5е 8і = 4 тс )
8. г ° 1 ж 13,7'
• }.4° 20С 00
6. 7° 1 6,9 > 7.0° 3,6°
5.: 1° 15,4 0 V * .4°
5,5° 1
4,1 )°' 1 » 4,0° г Л.2-
2- 4° к 5° >2,6‘
С ,9 4 V Г 2.9е 1.
,*н 0 V* 5°
0.5 Ч’ ^0,3° Д 0.2°
О 0.04 0,09 0,12 0,16 0,20
0.6
0,4
0,2
11.9° \ 9,8 — 0
\9^ ^,5’ 10° 12. Г
6.4° 3,2°
“675 ^5 4 го Л
5,. 1 І5. 2°Л .3° “9^
7.7
3,9° 4,0° >4,Г
<2,9‘ 6.2°
2У 1 /з, 4.1 7
/1,7 > 3,3°. ' я і=2 1001
X1 V /,8° е=б )ОСС 0
,0°
1 Ог5° 0<7с
/?8 = ЗОС 90 /?е= 40С 00
0 0,04 0,09 0,12 0.16 0.20 0,24
С:р
Сір
X 0 2.5 5,0 10 20 ЗО 40 50 60 70 80 90 100 X 0 2.5 5,0 10 20 ЗО 40 50 60 70 80 90 100
1.7 4,5 5,7 7,4 9,2 9,75 9,35 8.35 6.8 5.15 3.5 1,75 0 Уа 0.8 3.45 4.85 6.7 8.6 9.15 9,0 0.25 7.1 5,5 3.75 1.9 0
-/.7 -0,2 0 0.3 1,2 2,15 3,0 3,5 3.9 3,95 3.3 1,75 0 /м -0.8 0 0,3 1.0 2.5 3.75 4.8 5.5 6.0 5.3 3 75 1.9 0
8-7457-^2 „Купфер
X 0 2.5 5.0. 10 20 ЗО 40 50 60 70 80 90 100 х% 0 2.5 5.0 10 20 ЗО 40 50 60 70 80 90 100
Уь 0.9 3.55 5.2 7.2 9,25 10 9.85 9.25 8,1 655 4.9 2,8 0.5 У>°/о 1 3.5 5.0 7,0 9,2 10.2 11.0 11.0 10,2 8,5 6,4 4,0 0.30
У* -0.9 0.1 0.3 0,9 2.1 3.25 4,25 4,9 4.9 4,3 3.15 1,75 0 У„°/о 1 0,3 1.2 3.0 5,0 6.0 6.8 7,0 6.5 5>5 4,0 2.2 0.0
00
№
X 0 2 5 5 10 20 ЗО 40 50 60 70 80 90 100 X 0 2.5 5 10 20 ЗО 40 50 60 70 80 90 100
1 66 5 2 6 6 9.5 11.75 ІЗ 4 13.9 13.5 13.3 11.0 8.9 5,5 1.3 Уб 1.8 4,6 6,3 8,8 11.7 13.2 13^ 13.6 12.7 11.05 8.45 4,55 0.0
У, 1 66 0 II 0.19 1.0 2.76 4 5 5,5 6.4 6.7 6.5 5.5 3.6 0.0 Ун 0 -1.1 -1.2 -0.9 -0.02 1.10 2.15 3.0 3.5 3.7 3.15 1.7 0.0
X % 0 25 5.0 10 20 ЗО 40 50 60 70 80 90 100 0 2.5 5.0 10 20 ЗО 40 50 60 70 80 90 100
0,4 3,0 4.4 6,1 8,0 8.5 8.6 8.3 7,7 6.6 4.9 2 9 0.2 У0°/о 1.2 4.1 5.8 8.2 10.2 10.5 9.9 8.8 7.5 5,8 4.1 2.3 0.30
0.4 0,3 0 7 1.5 2 9 3.4 3.7 3.8 3.5 3,1 2.2 1,1 0.0 У„°/° 1 2 0 0.10 0.6 2.1 28 3.0 2.9 2.6 2.2 1.5 0.8 0.0
Модель планера А-2 конструкції Я. Фріднера (м. Умань).
184
1220
РЕГУЛ Н) ВАЛЬНИЙ ГВИНТ
Модель планера А-2 «Аист» конструкції А. Шахата (м. Саратов).
185
455
186
юю
680
Гвинт знято
8кр~14,2 дм2
8ст- 4,8 дм2
134
&мот 50 Г
5зсг Ю дм2
Смо0-24ОГ
Л--І2.6Г/0М2
^заг
Модель літака з гумовим мотором В-2 конструкції А. Кочергіна
(м. Васильків).
187
ЛІТЕРАТУРА
А. Б ол онкин, Теория полета летающих моделей, М., 1962.
V V О
М. Ноге]*8і, Аегосіупатіка ІеіарсісЬ тосіеіи Ргайа, 1957.
И. Костенко, Проектирование и расчет моделей планеров, М., 1958.
Авіаційний моделізм, К., 1966, 1967.
XV. N е з і о і, Ьеіа іасе тосіеіе 82уЬо5¥со\¥, ХУагзхаша. 1957.
Н. 8 с Ь і 1 2 е, Оіе Аегодіпатік ипд дав Ріи^тосіеіі, Вегііп, 1956.
В. Г о т е с м а н, Профилн летающих моделей, М., 1958.
А. Кравец, Характеристика авиационньїх профилей, М., 1939.
О. Г а е в с к и й, Авиамоделирование, М., 1964.