/





Tags: электротехника исследование операций электроэнергетика электроника инженерия энергоиздат
Year: 1982




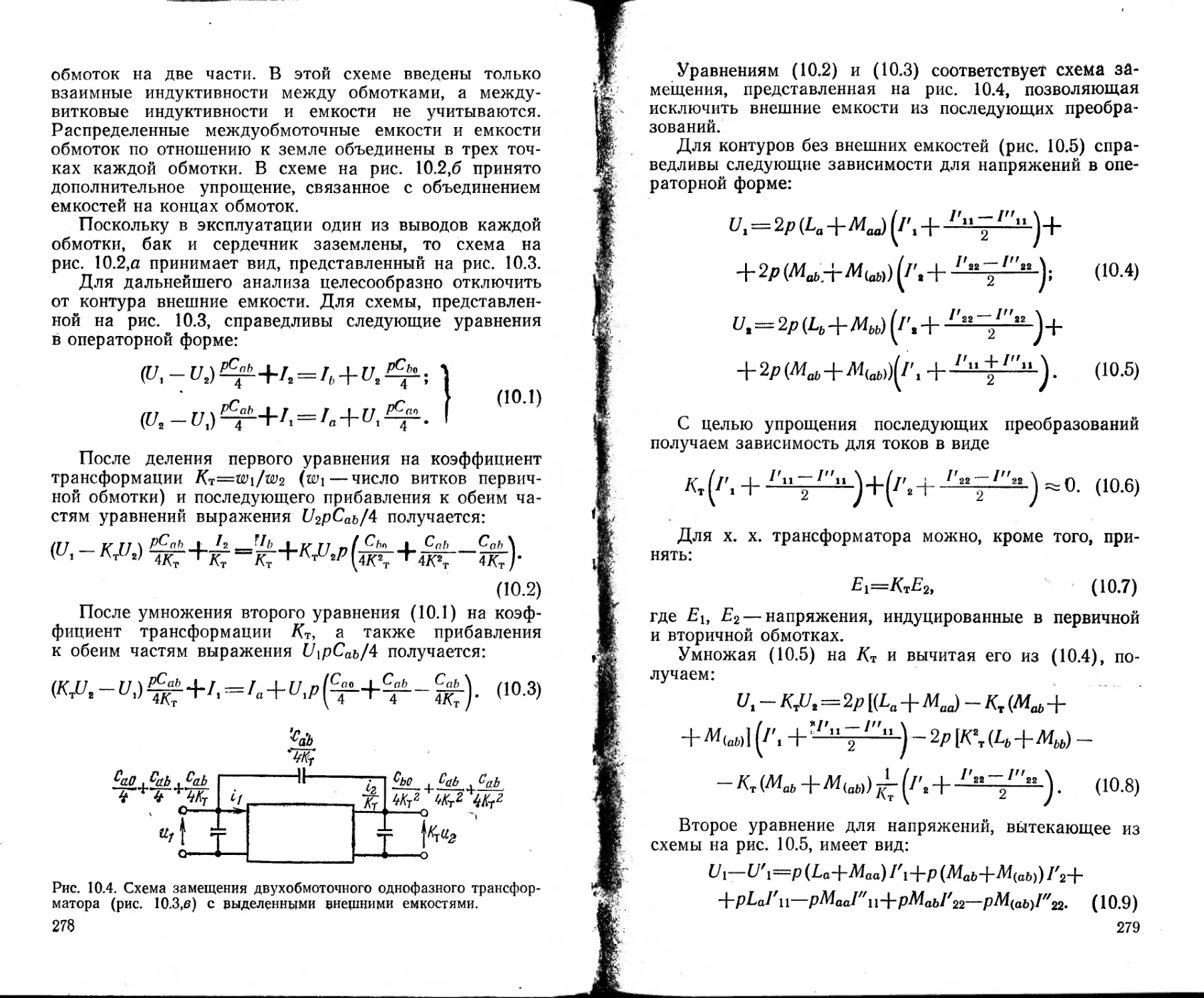
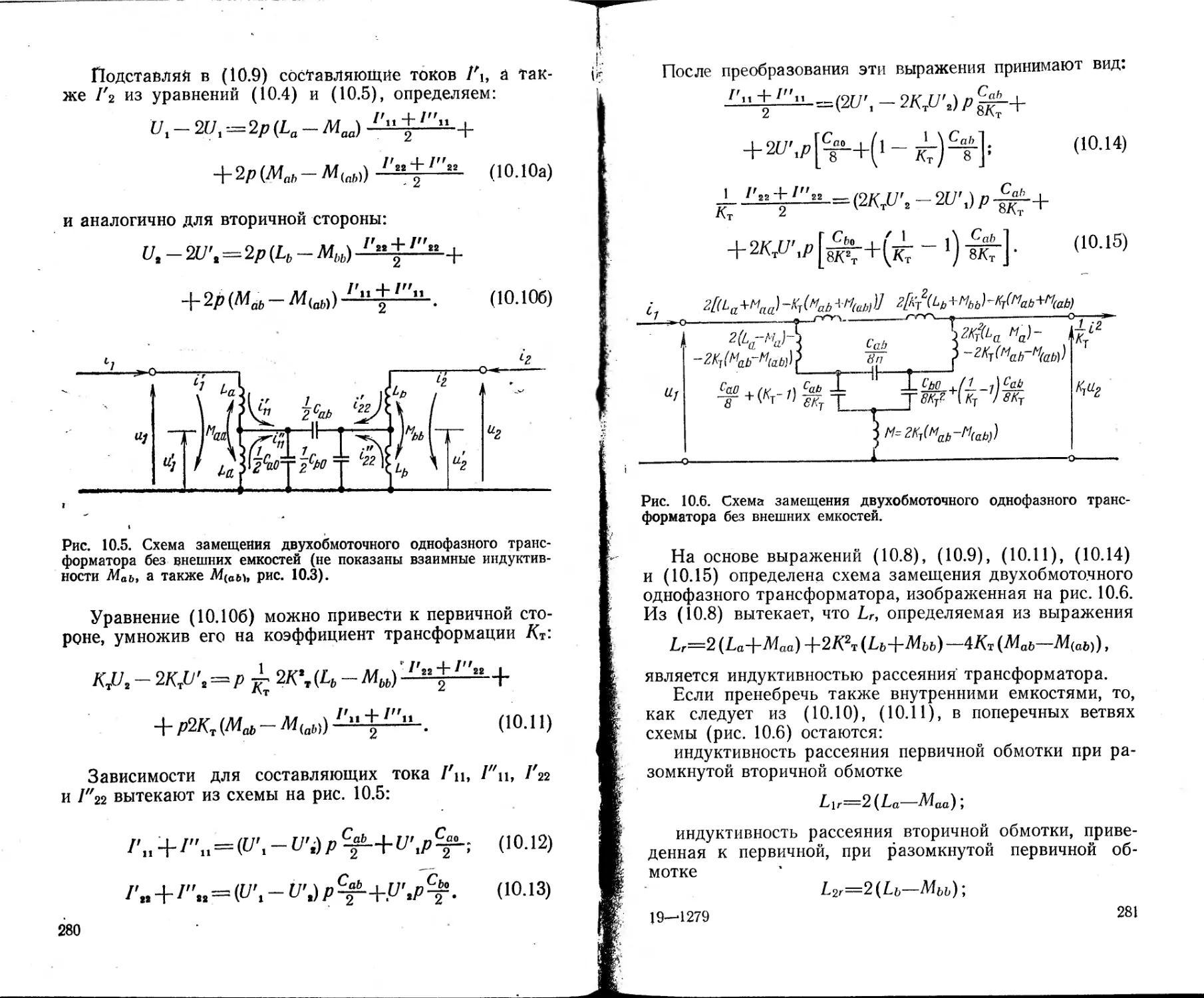
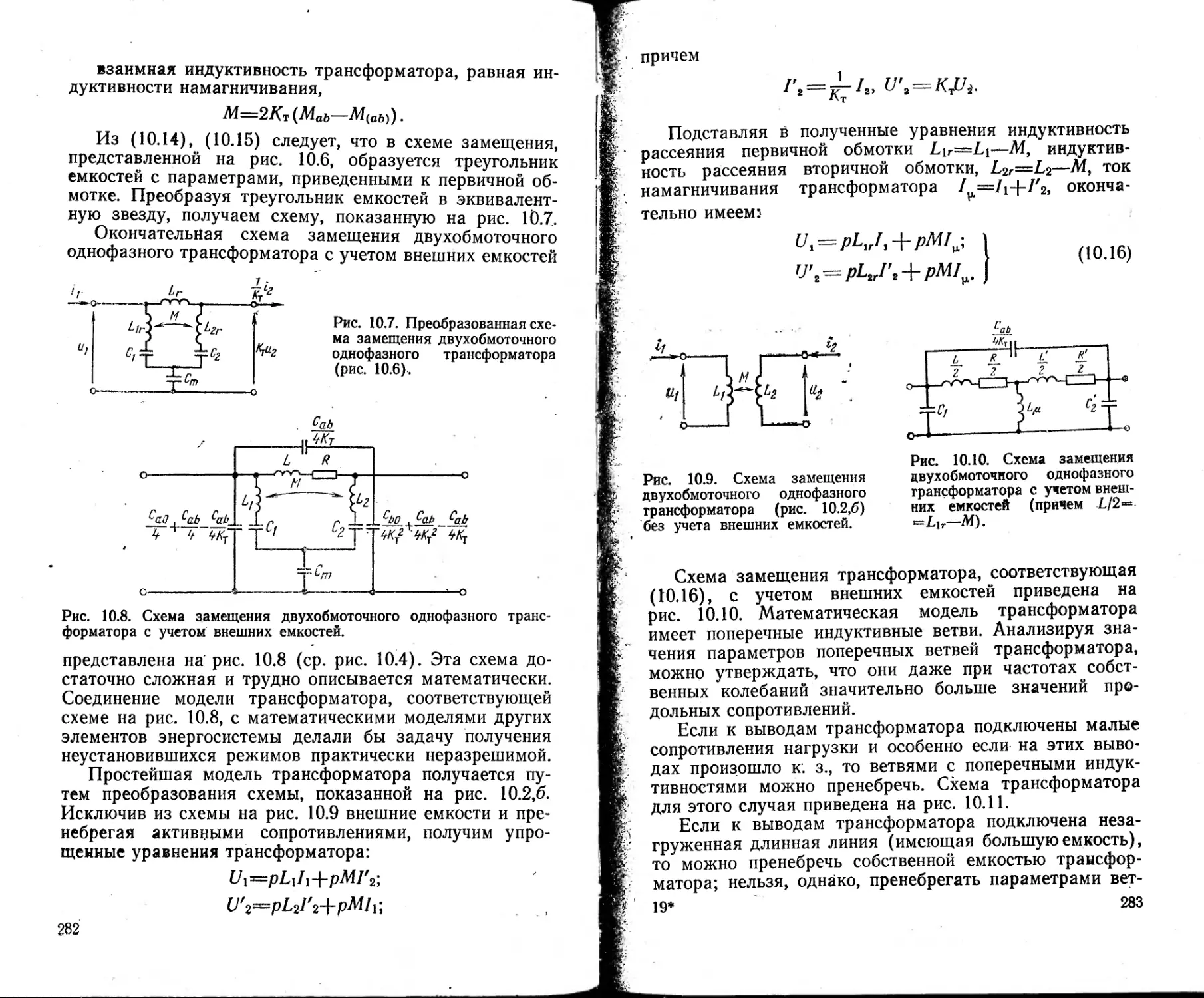
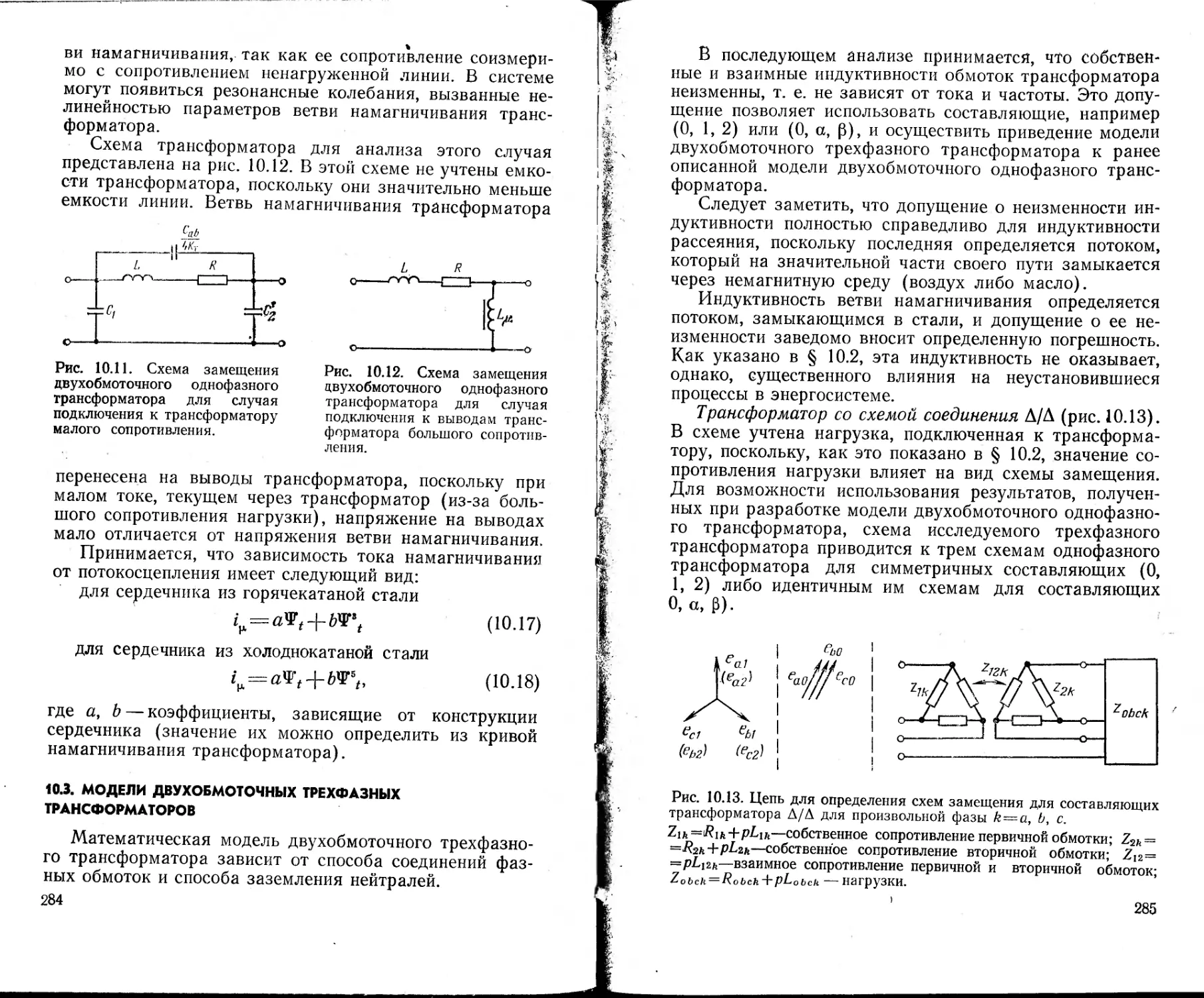
Text
*
С F EPHAC, З.ЦЁК
МАТЕМАТИЧЕСКИЕ МОДЕЛИ ЭЛЕМЕНТОВ
ЭЛЕКТРОЭНЕРГЕТИЧЕСКИХ СИСТЕМ
С.БЕРНАС
З.ЦЁК
Математические
модели
элементов
электро-
энергетических
систем
Перевод с польского Э. В. Турского.
Н. Н. Шелухина
ЕЭ
МОСКВА ЭНЕРГОИЗДАТ 1982
Cl
ББК 31.^7-05
Б51 \
УДК 621.311.001.572:519.86
Рецензент В. А. Семенов
BERNAS S„ СЮК Z.
MODELE MATEMATYCZNE ELEMENTOW SYSTEMU ELEKTRO
ENERGETYCZNEGO.
Варшава, ВНТ, 1977.
Бернас С., Цёк 3.
Б 51 Математические модели элементов электроэнер-
гетических систем: Пер. с польск- — М.: Энергоиз-
дат, 1982. — 312 с., ил.
В пер. 1 р. 20 к.
В книге известных польских энергетиков рассмотрены математи-
ческие модели, а также схемы замещения электрических линий, син-
хронных машин, имеющих регулирование возбуждения и скорости,
и трансформаторов. Модели предназначены для исследования устано-
вившихся и переходных режимов электроэнергетических систем- при
промышленной частоте и частотах, близких к частоте собственных ко-
лебаний элементов.
Предназначена для инженеров и научных работников, занимаю-
щихся вопросами моделирования и расчетов электроэнергетических
систем. Может быть полезной студентам вузов соответствующих спе-
циальностей.
*2302040000-129 _ ББК 31.27-05
Б 051(01)-82 46-81----------------1 6П2.11
г. Кировоград I
вивлистекА !
С. Бернаси& ЛДЦта {
МАТЕМАТИЧЕСГ^ ТОВ
ЭЛЕКТРОЭНЕРГЕТИЧЕСКИХ СИСТЕМ
Редактор В. А. Семенов
Редактор издательства Э, К. Биленко
Технический редактор В. В, Хапаева
Корректор 3. Б. Драновская
ИБ № 3045
4
Сдано в набор 17.09.81 Подписано в печать 01.12.81 Формат 84.Х 108*/32
Бумага типографская № 2 Гарнитура литературнат Печать высокая
Усл. печ. л. 16,38 Уч.-изд. л. 16,03 Тираж 3500 экз. Заказ 1279 4
Цена 1 р. 20 к. i
Энергоиздат, ‘Г.13114, Москва, М-'1Г4, Шлюзовая наб., 40
Московская типография № 10 Союзполиграфпрома при Государствен-
ном комитете СССР по делам издательств, полиграфии и книжной
торговли. 113114, Москва. М-114, Шлюзовая паб., 10
@ Перевод на русский язык, Энергоиздат, 1982,
шерено I
Г
предисловие к Русскому изданию
Интенсивное развитие энергосистем и широкое при-
менение для управления ими средств вычислительной
техники вызвали появление больших достижений в раз-
„' витии методов математического описания поведения от-
» „ дельных элементов энергосистем и решения получаемых
при этом систем нелинейных уравнений высокого поряд-
' ка. Этому вопросу посвящена и книга известных поль-
ских ученых-энергетиков С. Бернаса и 3. Цёка, в кото-
рой рассматриваются вопросы математического модели-
рования основных элементов энергосистем.
Исследование процессов и разработка моделей ве-
дутся авторами для двух существенно отличающихся
диапазонов частоты: для нормальной, т. е. близкой к но-
минальной, и для частот электромагнитных переходных
процессов в элементах энергосистем, т. е. близких к ре-
зонансной. Совершенно очевидно, что как математиче-
ское описание, так и соответствующие им схемы заме-
щения ВЛ, генераторов, трансформаторов и т. п. будут
существенно отличаться в этих двух случаях.
Авторы ставили перед собой задачу не только раз-
работать модели отдельных элементов, но и составить
каталог моделей элементов, предназначенных для ис-
пользования в зависимости от условий и целей исследо-
вания.
Ими разработаны и доведены до алгоритмической
формализации методы преобразования нелинейных ал-
гебраических и дифференциальных уравнений, описыва-
ющих процессы в элементах энергосистем, которые по-
зволяют, с одной стороны, унифицировать сами преоб-
разования, с другой — представить модели элементов и
системы уравнений в виде, удобном для расчетов на
ЭВМ.
Материал каждой главы книги строится единообраз-
но: сначала рассматриваются основные физические свой-
ства элемента и соответствующие им математические
описания, затем к полученным уравнениям применяется
з
аппарат преобразования для систематизации и упроще-
ния последних. Конечной целью преобразований являет-
ся получение математических соотношений, которым
можно поставить в соответствие электрическую схему
замещения элемента.
Интересным является предложение авторов получать
модель сети энергосистемы как совокупность моделей
отдельных элементов, что существенно сокращает объем
расчетных схем (рорядок систем алгебраических урав-
нений) .
Методы и результаты исследований, полученные
в книге, будут безусловно полезными специалистам, за-
нимающимся вопросами моделирования энергосистем
при эксплуатации и проектировании последних и систе-
матизации преподавания соответствующих курсов в энер-
гетических вузах.
Можно надеяться, что книга будет с интересом встре-
чена читателями. Ваши отзывы и пожелания просим
присылать по адресу: 113114, Москва, М-114, Шлюзовая
наб., 10, Энергоиздат.
Редактор
ОТ АВТОРОВ
В энергетических системах используются разнообраз-
ные вычислительные методы для проведения электриче-
ских и технико-экономических расчетов. Эти методы,
предназначенные для исследования установившихся ре-
жимов и переходных процессов в энергосистемах, ис-
пользуют как детерминированные, так и вероятностные
подходы к решению задачи. Широкое применение
в энергосистемах ЭВМ привело к формализации мето-
дов, используемых для электротехнических и энергети-
ческих расчетов, и обобщению их на основе математи-
ческих методов. Так, например, расчеты токов к. з.
устойчивости энергосистем, экономические расчеты ба-
зируются на теории цепей, теории автоматического ре-
гулирования, методах поиска экстремумов функций и
функционалов в ограниченных областях переменных со-
ответственно.
Накопленный опыт позволяет классифицировать,
с одной стороны, математические модели процессов, раз-
работанные для проведения различных расчетов, с дру-
гой— методы цифровых вычислений. Поскольку в ма-
тематических моделях всевозможных процессов будут
проявляться физические свойства элементов систем, не-
обходимо классифицировать математические модели
элементов системы.
Требуется также классифицировать тип расчета
(оптимизационный расчет установившегося режима, ис-
следование переходных процессов и т. п.), характер пе-
ременных (случайные или детерминированные), харак-
тер зависимости (линейные или нелинейные), симметрию
систем, характер возникающих колебаний и т. п.
При выполнении расчетов необходимо подобрать из
каталога моделей по заданным точности расчетов и со-
ставу параметров соответствующие математические мо-
дели элементов, цифровой метод, в наибольшей степени
подходящие для расчета рассматриваемого процесса.
5
Ё книге классифицированы некоторые математич€а
ские модели элементов энергосистемы.
Под математической моделью элемента в настоящей
книге понимается совокупность математических уравне-
ний, их коэффициентов и неравенств, описывающих
определенное состояние или процесс (или группу про-
цессов) в элементе.
В большинстве расчетов вместо упоминаемых выше
уравнений можно использовать схемы замещения эле-
ментов, а следовательно, электрические цепи, имеющие
компоненты с интересующими нас свойствами. Такая
электрическая цепь всегда будет следствием математи-
ческой модели.
Нет универсальных математических моделей элемен-
тов. В модели обычно выделяют те свойства элемента,
которые доминируют в рассматриваемом процессе, и
пренебрегают свойствами, мало влияющими на резуль-
тат расчетов. Например, синхронная машина в точных
расчетах устойчивости представляется системой нели-
нейных дифференциальных уравнений, а в расчетах то-
ков к. з.— индуктивностью, при расчетах кратковремен-
ных перенапряжений — индуктивностью и емкостью или
только емкостью обмоток, не учитываемой в двух пре-
дыдущих моделях.
Основным допущением, относящимся ко всем элемен-
там, рассматриваемым в книге, является фазная сим-
метрия элементов. Допущение это справедливо для
электрических машин, трансформаторов, кабельных ли-
ний и является приближением для воздушных линий
электропередачи. Приближение это, однако, в рассмат-
риваемых случаях допустимо, что подтверждается прак-
тикой расчетов.
Второе допущение, применяющееся в данной книге
в некоторых случаях,— это линейность параметров эле-
ментов. Это допущение позволяет широко использовать
удобные линейные преобразования, значительно облег-
чающие расчеты, но для генераторов, трансформаторов
и линий оно может оказаться слишком грубым и потре-
бовать некоторой корректировки расчета.
Книга состоит из двух частей. В первой части рас-
сматриваются математические модели элементов систе-
мы для расчетов установившихся и квазистационарных
режимов при частоте, близкой к номинальной. В этой
части основное внимание уделено методу получения ма-
6
тематических моделей для трехфазных элементов.
В ней нет числовых значений параметров модели, так
как они хорошо известны. Разделам о моделях элемен-
тов предшествует описание моделей сети, в которых
даны способы формирования моделей сети из моделей
элементов энергосистемы, подчеркнута роль линейных
преобразований при создании моделей, а также приве-
дены примеры некоторых преобразований самой модели
сети, требуемых в типовых расчетах.
‘Во второй части рассматриваются математические
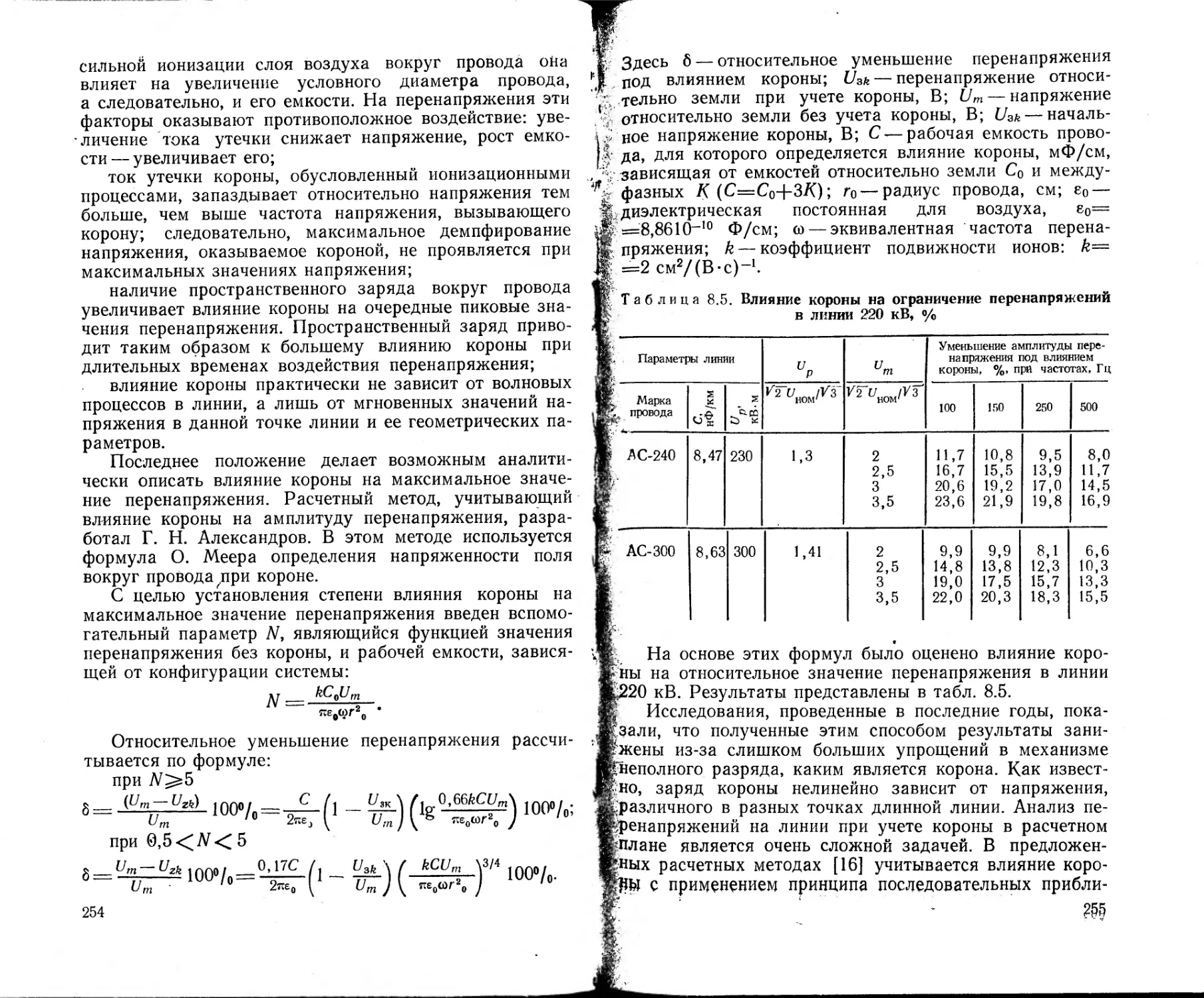
модели элементов энергосистемы для определения пере-
напряжений в электрических сетях, а следовательно,
неустановившихся режимов, в которых имеются собст-
венные колебания, частота которых, как правило, зна-
чительно превышает номинальную частоту энергосисте-
мы. Модели такого рода всегда прйводятся к электри-
ческой схеме, представляющей собой цепочечное соеди-
нение контуров RJLC. В этой части обращено особое
внимание на сами схемы и их параметры.
Авторы использовали в книге не только материалы
из литературы, но и выводы из собственных работ.
Авторы считают, однако, что "они не исчерпали темы да-
же в рамках указанных двух частей, так что работа над
вопросами моделирования должна продолжаться.
Часть первая
МАТЕМАТИЧЕСКИЕ МОДЕЛИ ЭЛЕМЕНТОВ
ЭНЕРГЕТИЧЕСКИХ СИСТЕМ
ДЛЯ ИССЛЕДОВАНИЯ
УСТАНОВИВШИХСЯ РЕЖИМОВ ПРИ
ЧАСТОТЕ, БЛИЗКОЙ К НОМИНАЛЬНОЙ
1. МАТЕМАТИЧЕСКИЕ МОДЕЛИ ЭЛЕКТРИЧЕСКОЙ СЕТИ
ДЛЯ РАСЧЕТОВ УСТАНОВИВШИХСЯ РЕЖИМОВ
1.1. МАТРИЦА ПРОВОДИМОСТЕЙ УЗЛОВ СЕТИ
Основные допущения. При расчете установившегося
режима для частоты, близкой к номинальной, электри-
ческая сеть будет рассматриваться состоящей из пас-
сивных статических элементов. Разделение элементов
энергосистемы на статические и динамические является
искусственным и неточным, как и разделение на пассив-
ные и активные элементы. Элемент можно описать в од-
них расчетах статической и пассивной моделью, в дру-
гих— динамической и активной.
Необходимость представления элементов электриче-
ской сети статическими моделями вытекает из много-
мерности задачи, определяемой большим числом сете-
вых элементов, которые требуется учитывать в расчетах.
Это заставляет обычно принимать допущение, что в сети
имеют место только установившиеся процессы (квази-
стационарные) с основной частотой. Так поступают при
определении токов к. з., вызванных источниками ЭДС,
при определении движения системы в случае исследова-
ния динамической устойчивости, а часто и статической
устойчивости, т. е. в типовых расчетах анализа динами-
ки системы. При этом каждый из элементов сети и вся
сеть представляются многополюсниками. Предполагает-
ся симметрия фаз, а также линейность элементов.
Допущение о симметрии фаз элементов энергосисте-
мы и их линейности позволяет эффективно использовать
метод симметричных составляющих или
так называемое преобразование (0, 1, 2) при расчетах
несимметричных электрических режимов (несимметрич-
ные к. з., обрывы проводов).
§
Допущение о линейности свойств элементов дает воз-
можность применять при расчетах режимов электриче-
ской сети как типовые методы решения контурных урав-
нений, так и определенные специфические линейные
преобразования. Из двух основных методов определения
состояния сети — контурных токов и узловых напряже-
ний— в последнем используются параметры, более
близкие к параметрам реальной сети.
Метод узловых напряжений. С электрическим конту-
ром, который здесь называем сетью, связаны два поня-
тия: ветви и узла. Ветвь — это путь для тока между дву»
мя узлами. Узел — точка сети, из которой выходит одна
или несколько ветвей. Каждой ветви соответствует пара
узлов, при этом один и тот же узел может принадле-
жать нескольким ветвям. Узлам сети присваиваются
порядковые номера в виде целых чисел, составляющие
ряд, обозначаемый здесь Wo. Номера узлам сети не обя-
зательно присваивать строго по порядку; однако, как
правило, при выполнении конкретного задания узлы ну-
меруются по порядку. Таким образом номера ряда Wo
узлов состоят из целых чисел от 0 до W, W является
числом «самостоятельных» узлов в данном задании.
Буквой W также обозначается ряд независимых узлов.
Базисному узлу (узлу отсчета) присваивается номер 0.
Ветви сети также можно пронумеровать, и тогда но-
мера ветвей создают ряд целых чисел G, о котором
можно сказать, что это ряд порядковых номеров от 1
до G; таким образом, G является числом ветвей в ре-
шаемой задаче.
Ветви можно упорядочить в ряд Wg пар целых чисел
(* *—/’) таких, что i^W, а также Такие пары чисел
определяют одновременно топологию (или конфигура-
цию) сети и, следовательно, способ соединения узлов
сети между собой. Если номер узла повторяется в т па-
рах, то это значит, что из этого узла отходят т ветвей.
Ряды Wo и Wg определяют совместно неориентиро-
ванный граф сети*. Понятие графа и его связи с мат-
рицей проводимостей, помогающие вычислению этой
матрицы, часто употребляются в электроэнергетике.
В данной книге нет необходимости в применении теории
графов.
* В теории графов определения ветвей и узлов значительно точ-
нее, приведенные здесь определения не конкурентоспособны с эти-
ми определениями, хотя в них и не различаются начало и конец
ветви.
9
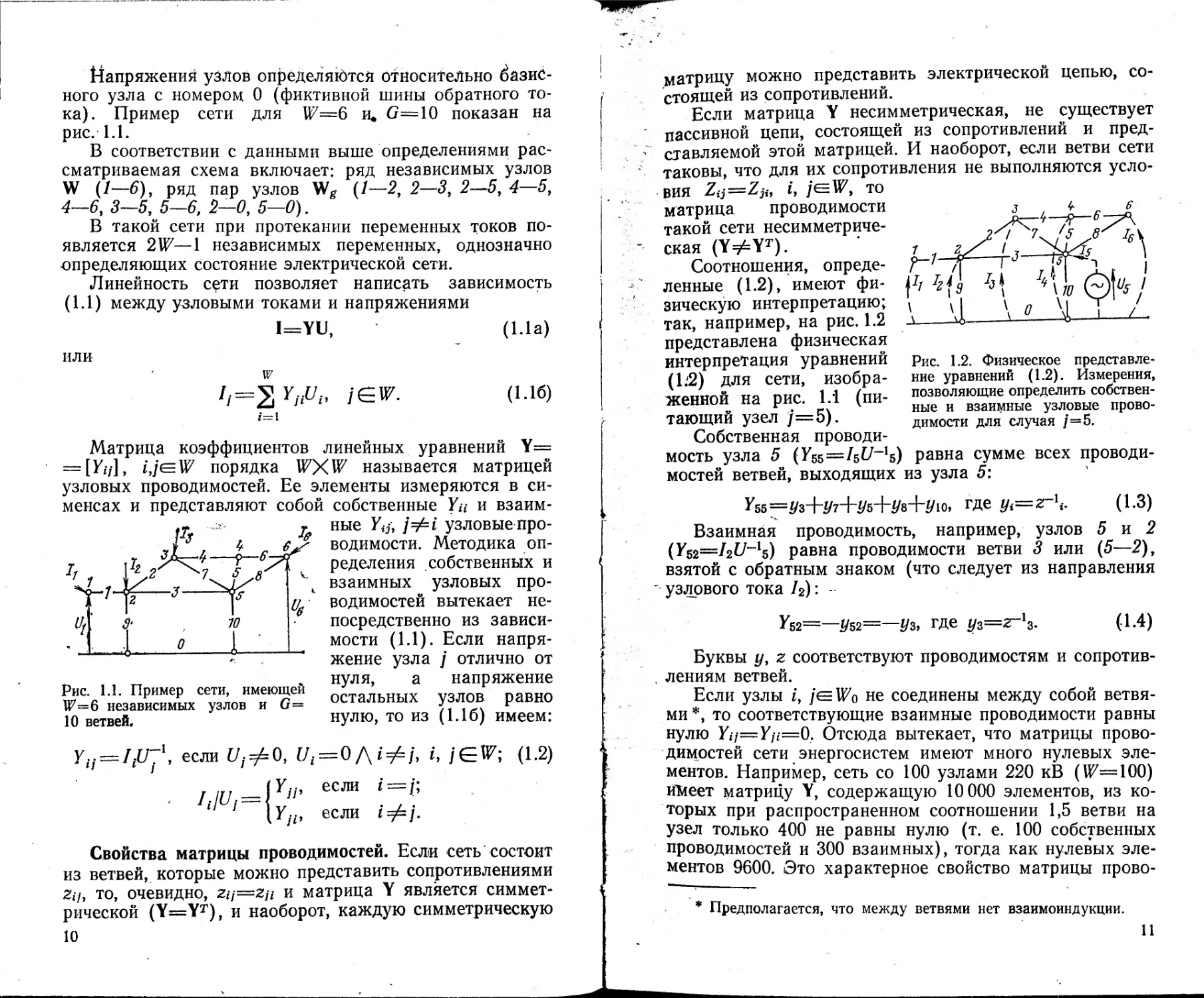
Напряжения узлов определяются относительно базис-
ного узла с номером 0 (фиктивной шины обратного то-
ка). Пример сети для W=6 и. 6=10 показан на
рис. 1.1.
В соответствии с данными выше определениями рас-
сматриваемая схема включает: ряд независимых узлов
W (1—6), ряд пар узлов Wg (/—2, 2—3, 2—5, 4—5,
4—6, 3—5, 5—6, 2—0, 5—0).
В такой сети при протекании переменных токов по-
является 2W—1 независимых переменных, однозначно
определяющих состояние электрической сети.
Линейность сети позволяет написать зависимость
(1.1) между узловыми токами и напряжениями
I=YU, (1.1а)
или
W
i—\
(Мб)
Матрица коэффициентов линейных уравнений Y=
= [Yi/], i,j^W порядка называется матрицей
узловых проводимостей. Ее элементы измеряются в си-
менсах и представляют собой
Рис. 1.1. Пример сети, имеющей
IF=6 независимых узлов и G=
10 ветвей.
собственные Yu и взаим-
ные Yij, jy=i узловые про-
водимости. Методика оп-
ределения собственных и
взаимных узловых про-
водимостей вытекает не-
посредственно из зависи-
мости (1.1). Если напря-
жение узла j отлично от
нуля, а напряжение
остальных узлов равно
нулю, то из (1.16) имеем:
Yli = ltU-', если Д^=0, Д=0Дi^j, i, /G»7; (1.2)
' . если ‘=*
7 U/i’ если
Свойства матрицы проводимостей. Если сеть состоит
из ветвей, которые можно представить сопротивлениями
Zij, то, очевидно, гц=гц и матрица Y является симмет-
рической (Y=Yr), и наоборот, каждую симметрическую
10
матрицу можно представить электрической цепью, со-
стоящей из сопротивлений.
Если матрица Y несимметрическая, не существует
пассивной цепи, состоящей из сопротивлений и пред-
ставляемой этой матрицей. И наоборот, если ветви сети
таковы, что для их сопротивления не выполняются усло-
вия i, то
матрица проводимости
такой сети несимметриче-
ская (Y#=YT).
Соотношения, опреде-
ленные (1.2), имеют фи-
зическую интерпретацию;
так, например, на рис. 1.2
представлена физическая
интерпретация уравнений
(1-2) для сети, изобра-
женной на рис. 1.1 (пи-
тающий узел /=5).
Собственная проводи-
мость узла 5 (y55=/5t7-15
мостей ветвей, выходящих
Рис. 1.2. Физическое представле-
ние уравнений (1.2). Измерения,
позволяющие определить собствен-
ные и взаимные узловые прово-
димости для случая /=5.
равна сумме всех проводи-
из узла 5:
У55—Уз~\-У7-\-У5~]-у8-\~У10, где yi—Z~li. (1.3)
Взаимная проводимость, например, узлов 5 и 2
(У52—равна проводимости ветви 3 или (5—2),
взятой с обратным знаком (что следует из направления
узлового тока /2):
Уб2=— УЪ2=— Уз, где ^з=2“1з. (1.4)
Буквы у, z соответствуют проводимостям и сопротив-
лениям ветвей.
Если узлы i, j^Wo не соединены между собой ветвя-
ми *, то соответствующие взаимные проводимости равны
нулю Yij=Yji=Q. Отсюда вытекает, что матрицы прово-
димостей сети энергосистем имеют много нулевых эле-
ментов. Например, сеть со 100 узлами 220 кВ (№=100)
имеет матрицу Y, содержащую 10 000 элементов, из ко-
торых при распространенном соотношении 1,5 ветви на
узел только 400 не равны нулю (т. е. 100 собственных
проводимостей и 300 взаимных), тогда как нулевых эле-
ментов 9600. Это характерное свойство матрицы прово-
* Предполагается, что между ветвями нет взаимоиндукции.
11
димостей электрической сети, известно под названием
слабозаполненной матрицы.
Если не учитываются ветви, соединяющие узлы сети
с базисным узлом (ветви i—0), то матрица является осо-
бенной, det Y=0.
Используя симметричные составляющие (прямой, об-
ратной, нулевой последовательностей) или, иными сло-
вами, однофазное представление системы, можно соз-
дать элементы, отсутствующие в реальных электрических
цепях, как, например, однофазный трансформатор с ком-
плексным коэффициентом трансформации.
Выбор матрицы Y как математической модели сети
обоснован следующими обстоятельствами.
Состояние сети определяют чаще всего, как показано
на рис. 1.1, заданием узловых нагрузок и напряжений
(например, W—1 узловых активных и реактивных мощ-
ностей, т. е. мощностей нагрузок и генераций), а также
модуля напряжения в одном из узлов системы. Часто
вместо некоторых реактивных мощностей узлов задают-
ся модули напряжений.
Матрица проводимостей строится просто, если
известны сопротивления (или проводимости) ветвей. По
ненулевым элементам матрицы легко определить конфи-
гурацию сети. Матрица проводимостей узлов таким об-
разом становится моделью электрической сети.
Однако это не значит, что при расчетах пользуются
непосредственно этой матрицей в ее первоначальном
виде. Для большинства расчетов необходимо выполнять
ее инверсию (обращение) и определять узловую матрицу
сопротивлений Z, особенно когда это касается опреде-
ления узловых напряжений:
I=YU->U=Y-4=ZI, если detY^O; Z=Y1.
Матрица Z электрической сети в отличие от матри-
цы Y является полной матрицей; нулевые элементы по-
являются в ней очень редко.
При наличии симметрической матрицы проводимо-
стей можно легко создать соответствующую ей электри-
ческую цепь:
у у— проводимость ветви i=j, соединяющей незави-
симые узлы, равна элементу ij матрицы, умноженному
на —1,
Уц — i, j EzW',
(1.5a)
12
yiQ— проводимость ветви, соединяющей узел i с ба-
зисным узлом 0, равна сумме элементов строки i (или
столбца I) матрицы
1.2. ЗАМЕНА УЗЛОВ И ВЕТВЕЙ НА УЗЛЫ И ЭЛЕМЕНТЫ СИСТЕМЫ
(1.56)
Определение матрицы проводимостей энергосистемы.
Матрицу узловых проводимостей Y сети энергосистемы
можно строить иначе, чем матрицу электрических цепей.
Для этой цели следует, однако, сеть сформировать не-
сколько в другом виде, чем показано на рис. 1.1, а имен-
но: представить сеть из узлов и элементов системы. Эле-
мент системы не всегда соответствует ветви, так как
элемент может создавать больше путей для токов, чем
имеется между двумя узлами.
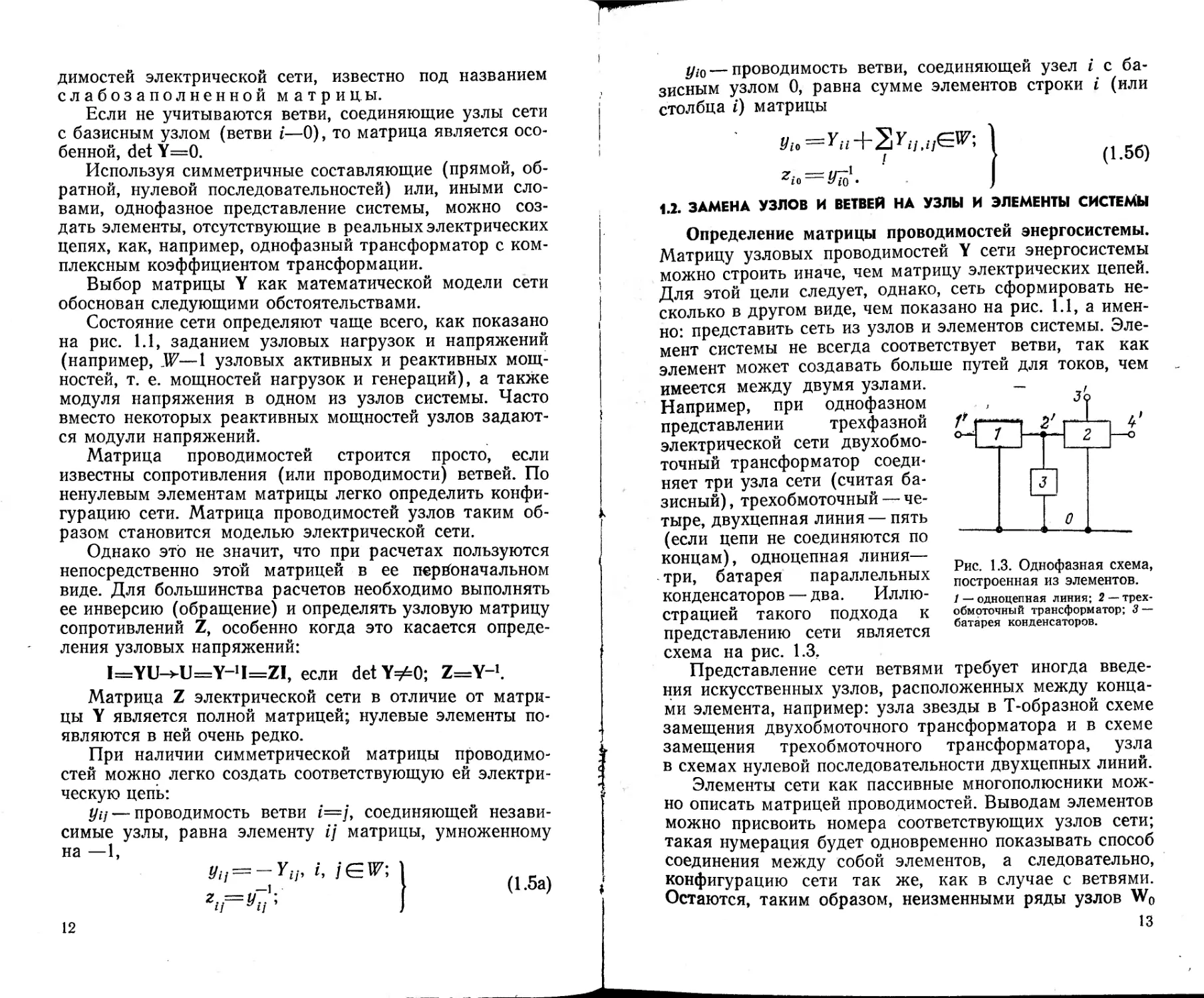
Например, при однофазном
представлении трехфазной
электрической сети двухобмо-
точный трансформатор соеди-
няет три узла сети (считая ба-
зисный) , трехобмоточный — че-
тыре, двухцепная линия — пять
(если цепи не соединяются по
концам), одноцепная линия—
три, батарея параллельных
конденсаторов — два. Иллю-
страцией такого подхода к
представлению сети является
схема на рис. 1.3,
Представление сети ветвями
Рис. 1.3. Однофазная схема,
построенная из элементов.
/ — одноцепная линия; 2 — трех-
обмоточный трансформатор; 3 —
батарея конденсаторов.
требует иногда введе-
ния искусственных узлов, расположенных между конца-
ми элемента, например: узла звезды в Т-образной схеме
замещения двухобмоточного трансформатора и в схеме
замещения трехобмоточного трансформатора, узла
в схемах нулевой последовательности двухцепных линий.
Элементы сети как пассивные многополюсники мож-
но описать матрицей проводимостей. Выводам элементов
можно присвоить номера соответствующих узлов сети;
такая нумерация будет одновременно показывать способ
соединения между собой элементов, а следовательно,
конфигурацию сети так же, как в случае с ветвями.
Остаются, таким образом, неизменными ряды узлов Wo
13
и W; ряд ветвей G заменяется на ряд элементов Е, ряд
пар узлов Wg на ряд пар, троек и т. д. узлов We, отве-
чающих последовательно соединяемым элементам i^E.
Номера узлов в элементах ряда We могут повторять-
ся, что означает совмещенные узлы и характеризует од-
новременно конфигурацию сети.
Зная матрицу проводимостей элементов и ряд We,
можно создать матрицу сети, например, для рис. 1.3.
Предположим, что математическими моделями эле-
ментов являются узловые матрицы проводимостей, со-
ставленные таким образом, что узловые напряжения,
входящие в зависимости I==YU, измерены относительно»
земли, и что эти базисные узлы — общие во всех моде-
лях. Матрицы проводимостей элементов для рис. 1.3 за-
писываются следующим образом: х
Г" У 2 V 2 у 2
1 22 1 23 1 21
уг у2 уг
7 32 1 33 1 34
1^21 К‘22
Y3=y322 (одноэлементная матрица равна скаляру).
Индекс вверху обозначает номер элемента, два ин-
декса ‘ внизу — номера узлов, соединенных элементом..
Строки и столбцы матрицы сетевых элементов таким об-
разом имеют номера узлов, соединенных элементом, что.
необходимо иметь в виду при расчетах на ЭВМ.
Матрица проводимостей Y всей сети (U7=4) будет
иметь порядок 4X4. Она составляется следующим обра-
зом: вначале следует поставить нули На
месте каждого элемента матрицы Y, а за-
тем взять в произвольном порядке матри-
цы элементов и их элементы подставлять
в матрицу Y с теми же самыми нижними индексами.
В соответствии с этим правилом имеем:
Y=[y;/], i, je=W',
Уц=У’п; У12=У112; У1з=0; У14=0;
Ь^У^К ^22=У122_|-У222Н-У322; У23=У2235 Y24==Y224‘,
Уз1=0; У32=У2з2; Узз=У2зз; Уз4-У2з4;
у41=0; у42=у242; у4з=у24з; у44=у244.
Легко доказать, опираясь на определения метода
узловых напряжений, что такие действия правомерны
(см. приложение П1).
14
• Трехфазноств системы. Энергетическая система явля-
< ется трехфазной, и основой возможных представлений
как математических моделей сети, так и моделей отдель-
ных ее элементов должны быть трехфазные цепи. 1акие
цепи характеризуются электромагнитными и электриче-
скими связями.
Допущение о симметрии и линейности сети позволяет
эффективно применять в расчетах преобразования в сим-
метричные составляющие — преобразования (0, 1, 2),
что будет видно из следующих разделов книги. В свою
очередь это преобразование позволяет применять не
- трехфазные модели сети со взаимным влиянием между
<. цепями фаз, а три более простые схемы прямой, обрат-
ной и нулевой последовательностей, в которых подобное
влияние проявляется только в схеме нулевой последова-
тельности. Например, одноцепная линия цли двухобмо-
точньщ трансформатор должны быть представлены
в трехфазной модели матрицей проводимостей порядка
' бХб, т, е. 36 элементами; после выполнения преобразо-
вания (0, 1, 2) получим три матрицы- проводимостей1
(прямую, обратную и нулевую) степени 2Х^> т. е. co-i
стоящую из четырех элементов, в результате имеем
12 параметров вместо 36.
Известно, что, если нагрузка сети симметрична, то
. составляющие обратной и нулевой последовательностей
всех токов и напряжений равны нулю, а состояние трех-
фазной сети определяется электрическим состоянием
схемы прямой последовательности; токи и напряжения
этой сети при этом равны токам и напряжениям фазы А.
Указанный подход называется обычно однофазным пред-
ставлением трехфазной сети, что не является строгим
определением, но хорошо отражает суть модели, Преоб-
разование (0, 1, 2) и предложенный метод формирова-
ния матрицы проводимостей сети из матриц элементов
позволяют последовательно без упрощений создавать
модели сети.
1.3. ЛИНЕЙНЫЕ ПРЕОБРАЗОВАНИЯ, ПРИМЕНЯЕМЫЕ
ПРИ СОЗДАНИИ МАТЕМАТИЧЕСКИХ МОДЕЛЕЙ ЭЛЕМЕНТОВ
ЭНЕРГОСИСТЕМ
Линейные преобразования токов и напряжений при-
меняются в расчетах электрической сети для уменьше-
ния вычислительной работы. Оценивая целесообразность
- преобразования, следует отдавать себе отчет в том, что
15
каждое преобразование — это дополнительная расчетная
работа, которую нужно выполнять в два этапа: сначала
преобразовывать перед выполнением расчетов, затем —
после (обратное преобразование), чтобы вернуться к не-
преобразованным величинам. Преобразование линейно,
когда оно однородно и аддитивно [24]. Ниже приводят-
ся некоторые линейные преобразования, часто исполь-
зуемые для упрощения электрических расчетов:
преобразование (0, d, q) —заменяющее линейные па-
раметрические дифференциальные уравнения неустано-
вившихся режимов в цепях синхронной машины уравне-
ниями с постоянными коэффициентами;
преобразование (0, 1, 2)—диагонализирующее под-
матрицы матриц проводимостей и сопротивлений трех-
фазных симметричных элементов, благодаря чему во
много раз уменьшается число действий над комплекс-
ными числами при определении падений напряжения
в ветвях сети;
«приведение» (относительные единицы, смена мас-
штаба) — облегчающее упорядочение схем сети, симмет-
рирующее матрицы проводимостей и сопротивлений эле-
ментов энергосистемы, а также уменьшающее диапазон
значений токов и напряжений в сетях с трансформатор-
ными связями.
ч Преобразования Фурье-и Лапласа являются инте-
гральными и имеют довольно сложную теорию. Первое
из них применяется главным образом для исследования
сигналов, поэтому в данной книге не будет рассматри-
ваться. ‘ Второе — преобразование Лапласа — широко
применяется при описании динамических свойств эле-
ментов цепи посредством введения операторной формы
представления элементов.
Преобразования (0, 1, 2), (0, d, q) и «приведение»
основаны на преобразовании системы координат. В их
основе лежит умножение векторов токов и напряжений
на квадратные матрицы коэффициентов. Общим свой-
ством (кроме уже упоминаемых) является сохранение
свойств линейности решаемых зависимостей В=СА или
А=ТВ, Т==С-1, если det С=/=0; при этом А, В — векторы
переменных; С, Т — квадратные матрицы коэффициен-
тов.' Эти зависимости представляют собой закон Ома
в матричной форме, если вместо В подставить токи, вме-
сто А — напряжение, вместо Т и С — проводимости и со-
противления (собственные и взаимные), или закон маг-
16
нитно-связайных цепей — если вместо А подставить пол*
ное потокосцепление цепей, вместо В — токи, вместо Т —
собственные и взаимные индуктивности цепей. Эта зави-
симость может представлять также различные линейные
соотношения между переменными.
Преобразование, называемое сменой системы коор-
динат, как известно, производится умножением векторов
на квадратные неособенные матрицы коэффициентов.
Пусть такими матрицами будут С и Т (det С#=0, det Т#=
=#0):
I'=CI; U^TU-HssC-1!'; U=T-'U'. (1.6а)
Связь между преобразованными векторами Г, U'
получается из линейной зависимости I=YU с помощью
левостороннего умножения на матрицу С и подстанов-
ки u=t-4J'
C^CYT-UJ'-H^Y'U', (1.66)
где Y^CYT-1; U', Г, Y'— векторы и преобразованные
матрицы, выраженные в новых координатах. Матрицы
преобразования С и Т подбираются так, чтобы придать
матрице Y' необходимые свойства, например симметрию,
.диагональность, постоянство элементов.
Выполнив инверсию матрицы проводимостей Y', по-
лучаем преобразованную матрицу сопротивлений:
Y'(-i)=TY-1C-1->Z'=TZC-1. (1.7)
Зависимость (1.7) выражает упоминавшееся выше
свойство преобразования: неизменность состояния ли-
нейной зависимости.
Матрицы преобразований С, Т могут быть прямо-
угольными, что соответствует изменению координат,
связанному с уменьшением их числа. А поскольку пря-
моугольные матрицы не имеют обратных матриц, такое
преобразование необратимо. Можно доказать, что такие
преобразования могут уменьшить размер задачи (число
независимых переменных) и никогда его не увеличивают.
Частным и довольно важным случаем является преобра-
зование, при котором используется скалярное произведе-
ние, постоянной величиной которого является полная
мощность S:
S=UtI*=U,tI*=UtTtC*I*
Из этого соотношения следует условие неизменности
мощности, так как Тт=С*(-1).
2-1279 &59&Ч0
Г. Кировоград
БИБЛИОТЕКА
института
С/х ъашиностроеня^
17
Преобразование (0, 1, 2) относится к классу диаго-
нальных преобразований матриц порядка 3X3, являю-
щихся линейной комбинацией единичной матрицы и цик-
лических матриц [27], а следовательно, структура мат-
рицы:
К=Л+И4-с1г,
(Г.8)
где d, b, с — произвольные комплексные числа;
1 — единичная матрица, 1= о
J Li
1 — цикли-
0-
откуда
ческая матрица,
О 1
Допустим, что. обе матрицы преобразования одинако-
вы Т=С; тогда (1.66) примет вид:
(TI) = (TKT-1)(TU) или I'=K'U',
где
К'^ТКТ1 =
1 1 I ' ~l Г1 1 1 '
т= f af a2f — f Ila a2
Lg a2g L. a2 a ~
(1-9)
(1.9а)
I
$
(
С
причем а=е/2я/3; /, f, g— произвольные комплексные
числа, отвечающие условию det T^=G-^lfg=^O, что озна-
чает существование бесконечного количества матриц,
диагонализирующих матрицу К.
Рассматриваемое преобразование осуществляет три-
ангуляцию только матрицы типа а, следо-
вательно, в случае с—Ь, когда образуется матрица вида
~d Ь Ь'
b d b
-b b d-
(1.10)
18
создающая еще более обширный класс матриц
'III
Т= f g — (f + g) >
h k — (h + k) -
(1.10a)
причем I, f, g, h, k — произвольные комплексные числа,
отвечающие условию det Т#=0.
Из бесконечного множества диагонализирующих мат-
риц выбирается матрица S преобразования (0, 1, 2), от-
вечающая условию l=f=g=i/3 [см. (1.9а)]:
ж
S— —
з
1
1
1
'1
1
-1
1
а
а2
1
а2
= Ks=SKS-‘;;
s-’=
1 1
«2 \а
а а2
K' =
(1.11)
величины Ко, К\,
в табл. 1.1.
K2 в (1.9) заменены приведенными
st
К’
Таблица 1.1
Матрица коэффициентов Ks в преобразовании (0, 1, 2)
Коэффициент Выражение К. по формуле
(1.8) (1-10)
Ко d + Ъ + с d4-2b
Ki d -j- а2Ь d — b
к2 d 4~ вб 4~ а2с d — b
Примечание, d, Ь, с
/тс/З
— элементы непреобразованной матрицы К; а=е‘
Преобразование (0, 1, 2) матриц коэффициентов всех
типов, приведенных в этой книге, дано в приложении П4.
Матрица К при Ь=с характеризует элементы систе-
мы, не содержащие вращающихся частей (статичные),
и выступает как подматрица в матрицах проводимостей
трехфазных сетевых элементов.
• Преобразование (0, 1, 2) векторов токов и напряже-
ний приводит к следующим зависимостям:
[Л
su=u;=
То'-’
Lt72 J
l/8
2*
19
Из зависимости US=ZSIS вытекает, что для опреде-
ления симметричных составляющих напряжений в трех-
фазной цепи, описанной матрицей Zs порядка 3X3,
нужно выполнить только трехкратное умножение двух
сопряженных чисел, в то время как в фазных состав-
ляющих— девять умножений и шесть сложений.
Легко показать, что трехфазный ток I, симметричные
составляющие которого имеют значения /1=#0, /о=Л=
=0, является симметричным и соответствует току пря-
мой последовательности фаз; трехфазный ток I с состав-
ляющими /2=7^0, /1=/о=0, является симметричным и со-
ответствует току обратной последовательности фаз;
ток I с составляющими /о=#О, h=I2=0, имеет фазные
токи, одинаковые по модулю и фазе. То же справедливо
и для напряжений. Можно показать, кроме того, что
если в элементе системы, симметричном по фазам, про-
текают трехфазные токи, соответствующие Ь, то напря-
жения его узлов составляют трехфазные системы, соот-
ветствующие иь однако определенные в этих условиях
матрицы сопротивлений и проводимостей элемента либо
его схема замещения являются матрицами и схемами
прямой последовательности.
В расчетах симметричных режимов сети применяют-
ся, следовательно, модели и схемы прямой последова-
тельности. Из разложения Is на простые составляющие
и умножения обеих частей уравнения на S-1 получается
I=Io-Mi+l2-
Следовательно, трехфазный несимметричный ток
можно разложить на три трехфазные симметричные.
Применение преобразования (0, 1, 2) эффективно
только тогда, когда все элементы энергосистемы симмет-
ричны по фазам. Выражением симметрии фаз элемента
системы является специфичная структура его матрицы
проводимостей (сопротивлений) и особенно возможность
разложения на квадратные подматрицы порядка 3X3
типа (1.10) и, только как исключение, типа (1.8).
Для несимметричных элементов преобразование (0,
1,2) не дает сокращения объемов расчетов несимметрич-
ных режимов.
20
Матрицы и схемы сети прямой, обратной, нулевой по-
следовательностей. При расчетах удобно ввести понятие
сетей прямой, обратной и нулевой последовательностей.
Строится сеть, состоящая из трехфазных элементов,
и составляется узловая матрица проводимостей Y этой
сети [19]. Если взять такую же нумерацию узлов, как
в однофазной схеме, то каждому номеру соответствует
три фазных узла (например, ia, ib, ic, i^W), а в векто-
рах токов и напряжений каждому узлу соответствует
три тока и три узловых напряжения:
I = YU,
Матрица Y составлена из матриц трехфазных элемен-
тов по уже приведенным правилам. Фазная симметрия
элементов служит причиной того, что подматрицы по-
рядка 3X3 этих элементов имеют структуру матриц
(1.10).
Преобразование (0, 1, 2) относится ко всем трехфаз-
ным узловым токам и напряжениям I», 1Л-, которые
представляются зависимостью
si=sYs-1sU или IS==YSUS,
причем
1 . . .W
rs I 1
. , S — как в (1.11).
s w
Таким образом, каждая из подматриц Y//, i, j^W
порядка 3X3 в матрице Ys=sYs~1 заменится произведе-
нием YI7S=SYt/S~1, являющимся диагональной матрицей;
преобразованные узловые токи и напряжения будут
иметь новые индексы
LfM-1
21
Из диагональности подматрицы Y//s вытекает, что
зависимости Is»==YslJs можно разделить на три незави-
симые группы по индексам 0, 1, 2 при токах. Оказыва-
ется, что правые части этих зависимостей включают так-
же напряжения и проводимости только с такими же
индексами
Lso=YsoUso; lsi=YsiUg1; Is2=Ys2Us2-
Полная независимость этих групп соотношений по-
зволяет поставить в соответствие матрицам Yso, Ysi,
Ys2, если они симметричны, независимые электрические
цепи с собственным базисным узлом.
Цепи эти можно назвать схемами нулевой, прямой и
обратной составляющих, а матрицы Ys0, Ysi, Ys2 можно
также назвать нулевой, прямой, обратной. Следует под-
черкнуть, что первичным понятием является здесь мат-
рица, вторичным — схема составляющих. Эти схемы
в случае несимметричных матриц могут в классическом
смысле вообще не существовать.
Прямые, обратные и нулевые матрицы сети можно
формировать также из прямых, обратных и нулевых
матриц отдельных элементов. Это непосредственно выте-
кает из приведенных правил формирования сетевой мат-
рицы и раздельности матричного умножения на сумму
матриц.
Преобразование (0, 1, 2) имеет определенные недо-
статки. Одним из них является то, что оно не содержит
выражения для кажущейся мощности
S==UrI*=/=UrsI*s==4-S.
О
При расчетах несимметричных режимов сети приме-
няются еще и другие диагонализирующие преобразова-
ния, которые получаются главным образом из семейства
матриц, представленного матрицей (1.10а), например
преобразование- (а, р, 0), (а, р, Z) и др.
Преобразование (0, 1, 2) будет главным инструмен-
том при упорядочении математических моделей элемен-
тов энергосистем для анализа электрических режимов
при частотах, близких к Номинальной.
«Линейное преобразование «приведение». «Приведе-
ние», или «относительные единицы», или «смена мас-
штаба» являются линейными преобразованиями со сле-
дующими свойствами:
матрицы преобразования токов С и напряжений
22
Ж:'t U'=1riJ) являются диагональными, невЫрОЖ-
Й, денными, поскольку не создаются линейные комбинации'
'«старых» координат;
чаще всего преобразование это унитарное, т. е. со-
Храняющее скалярное произведение, а следовательно,
для сети — сохраняющее мощность; матрицы этого пре-
-Ш' образования [25] удовлетворяют условию С-^Т*.
Следовательно, получается: I'=CYT-1U', 1'=
« ^(T^-’VT-’U', а также U'=TZT*I', так как- Y-’=Z;
преобразованные матрицы коэффициентов имеют, следо-
*&;вательно, вид:
Ж; Z'=TZT*; (1.12)
•Ж/ Следует вспомнить, что левостороннее умножение на
WP диагональную матрицу равносильно умножению каж-
дого выражения строки, а правостороннее — умножению
А выражения столбцов на ненулевое значение соответст-
вующей строки диагональной матрицы.
В сетевых преобразованиях диагональным выраже-
ниям матрицы Т, как правило, можно поставить в соот-
ветствие схемы блока трансформатор — линия, что
. устраняет неудобства расчета, связанные с перепадом
напряжения при переходе «через трансформаторы.
Преобразование «приведение» может применяться
в других целях, например для симметрирования опреде-
ленных матриц; тогда унитарностью можно пренебречь.
14. ТИПОВЫЕ ПРИМЕРЫ ПРЕОБРАЗОВАНИЙ МАТРИЦ
ПРОВОДИМОСТЕЙ СЕТИ
-г"• Преобразования матрицы проводимостей сети энер-
; госистем связаны с подробными типовыми расчетами:
потокораспределения, токов к. з., устойчивости, оптими-
с?, зационными и т. д.
%' Как правило, обращается прямая матрица сети. Для
. примера приводятся следующие преобразования:
v инверсия матрицы —для расчетов токов к. з., опти-
мального потокораспределения;
х исключение узлов — для исследования устойчивости;
эквивалентирование—для исследования устойчивости.
При выводе формул промежуточные выкладки сокра-
щены в пределах, не затрудняющих понимание преобра-
зований.
23
Инверсия матрицы Y. Матрица узловых сопротивле-
ний Z. Во многих расчетах, например в расчетах токов
к. з., применяются матрицы узловых сопротивлений Z.
Так как Z=Y-1, для определения матрицы Z следует
выполнить инверсию матрицы Y. Инверсия — это дли-
тельный и неточный расчет, так как при этом накапли-
ваются ошибки от округлений. Однако большое число
нулевых элементов в матрице Y очень облегчает рас-
четы.
Правила обращения матрицы Y основаны на «сете-
вом» подходе, т. е. на присоединении узлов и ветвей.
Можно показать [3], что присоединение узлов является
сетевым эквивалентом известного метода обращения
матрицы путем расширения [10], настолько общего,
что не требуется симметрия матрицы. Формулы по ме-
тоду расширения матрицы посредством присоединения
ветвей будут представлены для этапа расчета, когда
уже определены выражения усредненной матрицы сте-
пени m'Xm, а следовательно, учтено m независимых
узлов, составляющих ряд Mg (где g— число учтенных
ветвей), и добавляется новая ветвь g-J-1. Здесь разли-
чают следующие случаи добавления ветвей к сети, со-
стоящей из уже учтенных ветвей:
ветвь соединяет новый узел k с базисным узлом 0,
ktf=Ms. К матрице дописывают новую строку и стол-
бец, не меняя вида выражений старой матрицы
Zm+li/n+1=2fe,o, где Zk,o — сопротивление добавленной вет-
ви, причем большие буквы означают выражения элемен-
тов матрицы, малые — сопротивления ветвей. Выраже-
ние элементов
Z/.m+i—Zm+1,1—0, i—1, •••» (133)
ветвь соединяет новый узел k со старым узлом I
(k Mg, l^Mg). К матрице дописывают новую строку
и столбец, не меняя выражений старой матрицы
Zm+\,m+\—Zll~\-2kl
(где Zki — сопротивление добавленной ветви).
При этом
/ —L •••> W
^i, m+i i> i= аг.
(1.14)
ветвь соединяет узел k с узлом /. причем оба узла —
старые узлы k, l^.Mg, в этом случае меняется не размер
24
матрицы, а только значения ее элементов
7 7
г'tj=Z"(1.15)
где Zll — новый диагональный элемент:
ZLL^^Zkk-^-Zll-2Zkl + Zkl
(zki — сопротивление добавленной ветви);
ветвь соединяет старый узел k с базисным
узлом О. В этом случае, который является особым слу-
чаем операции (1.15), также не меняется порядок мат-
рицы, а только значения ее выражений
0-»6)
где Zko — сопротивление добавленной ветви.
Легко видеть, что этот «сетевой» метод обращения
матрицы является общим методом обращения симметри-
ческих матриц, а при его применении можно пользовать-
ся выражениями обращенной матрицы Y, помня, что со-
противление ветви выражается через значения элемен-
тов матрицы Y как
м
Z^' = 2Y'“’ гы = -У-’, gecjm Ykl^0,
1=1
причем М — степень матрицы Y.
В [Ю] представлены формулы для обращения мат-
риц. (без требования их симметричности) методом рас-
ширения матрицы. Рассматривается m-й шаг расчета,
т. е. уже обращена матрица Y"1-1, отвечающая (т—1)-му
главному минору матрицы Y, известна обратная матри-
ца Z"1-1 и прибавляются строка и столбец, соответству-
ющие m-му минору. В матрице Zm определяются следу-
ющие выражения:
измененные значения выражений старой матрицы
Z". = zm-' + YTO.₽,„Zm , i, j = 1 ... m - 1;
tj tj 1 ’ j ’
новые дописываемые выражения строки и столбца Zm-1
Z” = fi.Zm ; Zm=ymiZm , Z, /=1, 1;
tm tnm mt 'mi mm 5
дописываемое выражение главной диагонали
т— 1 т— 1
= 2 YrAn = YmmA- 2 Y(1-17)
{=1 f=l
25
1
В этих формулах
т— 1 т— 1
.₽/m=3z7ly'-; u=3z7'r-
i=l *i=l
Верхние индексы означают, что выражения обратной
матрицы взяты из расчетного шага с этим индексом.
Расчеты по этому методу технически выполняются
с помощью слабозаполненных матриц, минуя нулевые
выражения матрицы Y.
Исключения узлов в матрице сопротивлений, осно-
ванные на допущении, что токи исключаемых узлов рав-
ны нулю, заключается в удалении из матрицы Z строк
и столбцов, соответствующих этим узлам. Если не нуж-
ны значения токов во всех узлах (это бывает, как пра-
вило, в расчетах токов к. з.), то соразмерно «обраще-
нию» матрицы исключаются ненужные узлы при усло-
вии, что учтены все ветви, отходящие от таких узлов,
т. е. что все ненулевые выражения строки матрицы Y
находятся в левой, если считать от собственной прово-
димости, части строки. Это значительно сокращает вре-
мя расчета и уменьшает требуемую память в ЭВМ.
В [11] представлен экономичный способ расчета (спо-
соб ветвей) с разделением исключаемых узлов на груп-
пы или, вернее, с разделением системы на подсистемы.
В [3] дается систематизированный способ исключения
узлов; представляется, что этот способ наиболее эффек-
тивен (в [3] приведены также соображения об оптими-
зации вычислений при расчетах токов к. з.).
Следует добавить, что способ ветвей применим для
исследования влияния отключения ветвей сети. При этом
нужно применять формулы для подключения ветвей
между учтенными узлами, изменив в них знак для со-
противления.
Исключение узлов. Исключение выполняется на осно-
ве использования выражений для добавочных связей,
появляющихся в рассматриваемых режимах между
узловыми токами или узловыми напряжениями, преиму-
щественно в узлах потребления сети. Эти связи могут
быть довольно сложными.
Целью рассмотрения является определение зависи-
мостей между узловыми токами оставшихся узлов и на-
пряжениями только этих узлов.
Полезно зависимость между узловыми токами и на-
пряжениями I=YU записать, разбивая матрицы на под-
матрицы, связанные с оставшимися узлами (индекс Е)
и исключаемыми (индекс L):
придем к, Е— токи и напряжения оставшихся узлов,
например генераторных; k, — токи и напряжения
исключаемых узлов, например узлов потребления; Y£,
Yel, Vle, Yb — подматрицы матрицы Y, отвечающие из-
ложенному разделению узлов.
Эту зависимость можно записать, разбив ее на две
группы:
k^YjsE+Y^Ub; (1.19)
k=YbKE+YbUb->Ub=Y-kk-Y-1bYI(EE, (1.20)
если det Yb¥=0. Отсюда зависимость, соответствующая
сети с исключенными узлами, а следовательно, зависи-
мость, объединяющая токи и напряжения оставшихся
узлов, может быть получена путем подстановки 1Д по
(1.20) в выражение (1.19):
IE=(YE-YELY-kYbE)E+
+Y£bY-1bk=Y'E+Iw, (1.21)
где Iw=YJEiJY-,Lk — матрица собственных токов узлов.
Дополнительные зависимости между переменными
получаются во время выполнения упрощений типа
«энергетического».
Допущение о замещении нагрузок линейными прово-
димостями YOb, определенными из узловых токов и на-
пряжений перед нарушением режима:
где L — число исключенных узлов.
Проводимости на землю Y0.l можно сложить с соб-
ственными проводимостями подматрицы Yb
Yby=Yb+YOz.,
27
и Тогда узловые токи этих узлов будут равны Нулю 1ь—
=0. Формула (1.21) приобретет вид:
b=YrE, где Yr=Y£-YJEbY-1XiyYbE. (1.22)
Матрица Yy соответствует сети с исключенными
узлами, полученной для условий замещения нагрузки со-
противлениями. Это часто применяемое преобразование
имеет следующие недостатки:
операции с комплексными числами, даже если мат-
рица Y имеет чисто мнимые элементы, т. е. если не учи-
тываются активные сопротивления ветвей сети;
взаимные проводимости в преобразованной матрице
Yy включают проводимость нагрузки. Последнее затруд-
няет расчеты и является существенным препятствием
в написании функции Ляпунова при методах исследова-
ния устойчивости, основанных на втором методе Ля-
пунова.
Допущение о постоянстве собственной мощности ге-
нераторных узлов. Собственные мощности генераторных
узлов определяются из выражения (1.21). Полные мощ-
ности S, подходящие к генераторным узлам, выражают-
ся зависимостью
S=EEI*je,
где EE=diagEr, i=l, ..., G (G — число генераторных
узлов);
После подстановки в это выражение 1^, подсчитан-
ного по (1-21), получается
S==EEY,*E*4-EEI*W=SM+Svr, (1.23)
причем
Sm=EEY'*E*
— вектор взаимных мощностей генераторных узлов;
SVy=EEI*1y=EEY%jL(Y*L)-4*b
— вектор собственных мощностей генераторных узлов;
отсюда Ivr=(EE*)-1S*w.
Принимается постоянство значений собственных мощ-
ностей
Sw=SWo=EE0Y*£L(Y*b)-1I:i:ro=const;
28
индекс 0 указывает, что значения напряжений генерато--
ров и токов нагрузки взяты из предшествующего ре-
жима.
Эквивалентирование генераторных узлов. Эквива-
лентирование генераторных узлов основывается на за-
мещении определенного числа узлов одним новым искус-
ственным узлом, т. е. не существующим в исходной сети.
Основой эквивалентирования являются требования со-
хранения соотношений между током и напряжением
в эквивалентных узлах.
В рассматриваемом примере имеет место замещение
части источников энергосистемы одним источником с та-
кими динамическими свойствами, что влияние этого
источника на остальную часть энергосистемы такое же,
как объединенное влияние замещенных генераторов;
подобное преобразование значительно уменьшает коли-
чество дифференциальных уравнений при исследовании
неустановившихся электромеханических процессов и
устойчивости энергосистемы.
Как известно, механическая постоянная времени
эквивалентного генератора является средневзвешенной
постоянных времени замещенных генераторов
м
2 'С'^ном i
rjy ~_ 1=1
1 М >
2 *^ном i
i-1
при этом Ti, Shomz — механическая постоянная времени,
номинальная мощность i-ro генератора; М — число заме-
щенных генераторов.
Способ соединения эквивалентного генератора
с остальной частью энергосистемы устанавливается в хо-
де последующих рассуждений.
Часть энергосистемы (подсистема) соединяется в К
точках с оставшейся большей частью энергосистемы.
В подсистеме работает M=N—К генераторов.
Следует заместить их одним эквивалентным генера-
тором с напряжением Ее, соединенным с узлами 1, ..., К
рядом элементов, описываемых матрицей проводимостей
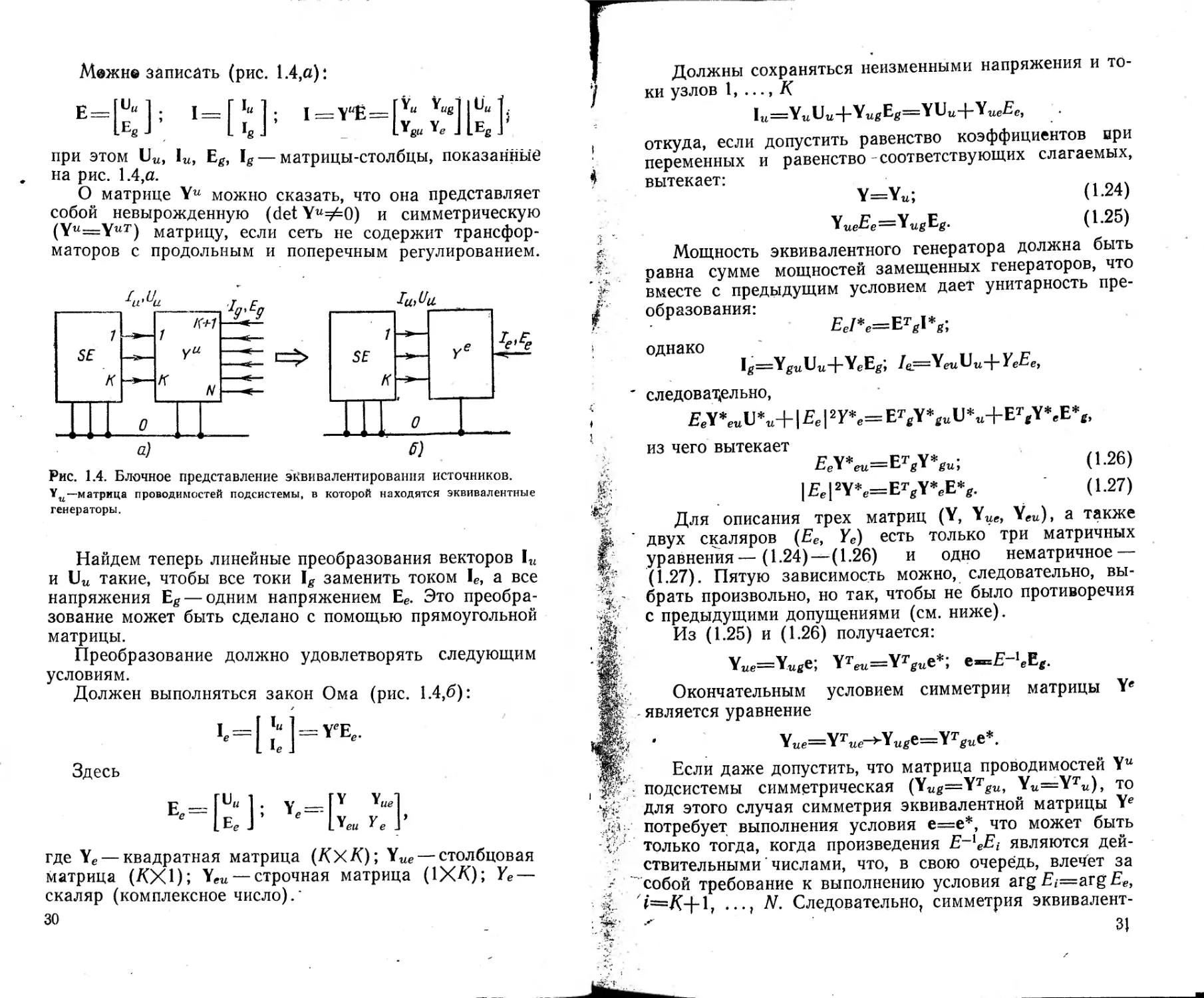
Vе (рис. 1.4).
Матрица Vе соответствует подсистеме с исключенны-
ми узлами потребления.
29
Мвжне записать (рис. 1.4,а):
Е==
Eg
I YE =
Y
‘и
V
*g«
Y«gj I 1
YeJ|EgP
при этом UM, lM, Eg, Ig— матрицы-столбцы, показанные
на рис. 1.4,а.
О матрице Yu можно сказать, что она представляет
собой невырожденную (det YM=A0) и симметрическую
(Yu=Ywr) матрицу, если сеть не содержит трансфор-
маторов с продольным и поперечным регулированием.
Рис. 1.4. Блочное представление эквивалентирования источников.
—матрица проводимостей подсистемы, в которой находятся эквивалентные
генераторы.
Найдем теперь линейные преобразования векторов
и Uu такие, чтобы все токи 1g заменить током 1е, а все
напряжения Eg— одним напряжением Ее. Это преобра-
зование может быть сделано с помощью прямоугольной
матрицы.
Преобразование должно удовлетворять следующим
условиям.
Должен выполняться закон Ома (рис. 1.4,6):
1е = [ Iu] = YeEe.
L Ц J
Здесь
где Ye — квадратная матрица (7<Х/С); Чие— столбцовая
матрица (7<Х1); У ей— строчная матрица (1Х^); Ye—
скаляр (комплексное число).’
30
Должны сохраняться неизменными напряжения и то-
ки узлов 1, ..., К
I и — Yn U и -{- Vug Eg=Y и и 4" ^иеЕе,
откуда, если допустить равенство коэффициентов ври
переменных и равенство соответствующих слагаемых,
вытекает:
Y=YU; (1.24)
Yue£e=Y^Eg. (1.25)
Мощность эквивалентного генератора должна быть
равна сумме мощностей замещенных генераторов, что
вместе с предыдущим условием дает унитарность пре-
образования:
Ee/*e=E^I*g;
однако
Ig==YguUw4-YeEg; 4=YewUw+yeEe,
' следовательно,
£eY*euU%+1 Ее 12У%= E^Y*guU*u+E^Y*eE%,
из чего вытекает
£eY*eu=ErgY*gu; (1.26)
|£e|2Y*e=ETgY*eE*g. (1.27)
Для описания трех матриц (V, Yvc, Yeu), а также
двух скаляров (Ее, Уе) есть только три матричных
уравнения—(1.24)—(1.26) и одно нематричное —
(1.27). Пятую зависимость можно, следовательно, вы-
- брать произвольно, но так, чтобы не было противоречия
с предыдущими допущениями (см. ниже).
Из (1.25) и (1.26) получается:
Yue==Yuge; YTeii=Yrgue*j e=£~IeEg.
Окончательным условием симметрии матрицы Ye
Г - является уравнение
* Yue=Y-rue—^"YugC='lVTgue*.
; Если даже допустить, что матрица проводимостей \и
подсистемы симметрическая (Ywg=Yrgu, YU==YTU), то
для этого случая симметрия эквивалентной матрицы Ye
; потребует выполнения условия е=е*, что может быть
только тогда, когда произведения E~xeEi являются дей-
ствительными ’ числами, что, в свою очередь, влечет за
собой требование к выполнению условия arg£t—arg£e,
^4-1, ..., N. Следовательно, симметрия эквивалент-
31
ной матрицы Ye является особым случаем (равенство
аргументов ЕД и нельзя это удобное свойство принимать
в качестве допущения.
Искомые подматрицы матрицы Ye выражаются сле-
дующими зависимостями, в которых появляется матрица
e^E-^Eg, содержащая в качестве сомножителя неиз-
вестное напряжение Ее:
Y=YW; YMe=Y^e; Yeu=e^Ygw; ¥е==е*ПГее.
Как видно из формул, единственным неизвестным
является эквивалентное напряжение Ее. Именно его
значение удобно выбрать произвольно, так чтобы упро-
стить расчеты. Например, можно предположить, что оно
равно напряжению одного (m-го) из замещенных гене-
раторов
Ее=Ет me {К+1, ..., N}. (1-28)
Элементы эквивалентной матрицы проводимостей Ye
не зависят от напряжений и токов Iu внешних узлов.
Они не зависят также от изменений напряжений Е^,
если эти изменения синхронные, а следовательно если
аргументы Et имеют одинаковые приращения и моду-
ли Ei имеют одинаковые относительные приросты. Дру-
гими словами, они не чувствительны к умножению на-
пряжений Ei на тот же самый комплексный сомножи-
тель k.
Синхронность и одинаковые относительные изменения
модулей напряжений (когерентность) являются, следо-
вательно, конечными условиями для превращения груп-
пы генераторов в эквивалентный.
Эквивалентная матрица Ye несимметрическая, следо-
вательно, не существует ряда, состоящего из сопротив-
лений либо проводимостей, описанных этой матрицей.
Это свойство не создает существенных трудностей при
исследовании устойчивости энергосистем, если пользо-
ваться ЭВМ; однако создает значительные трудности
при исследованиях на физических моделях.
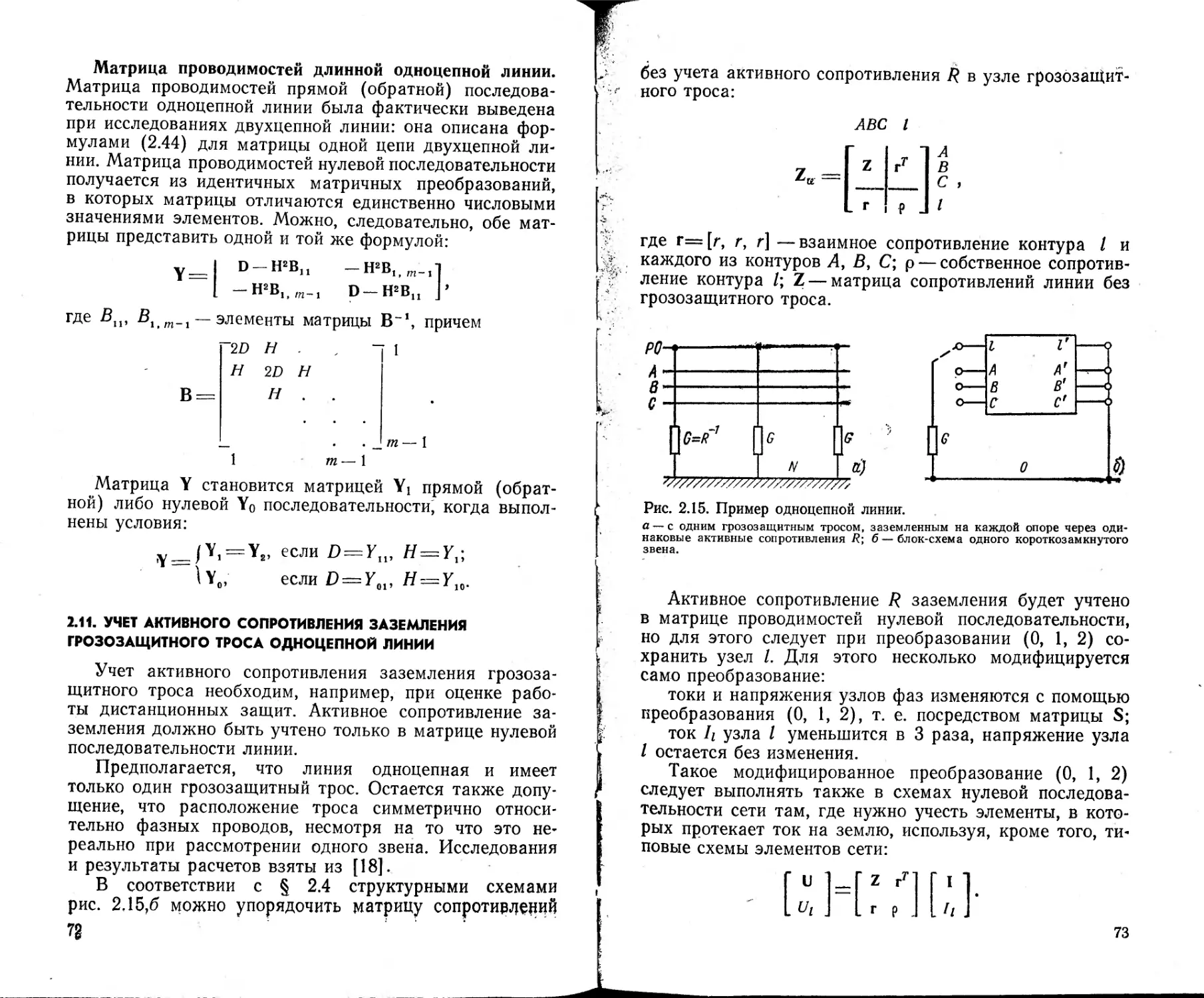
2. МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ЛИНИИ
ЭЛЕКТРОПЕРЕДАЧИ В УСТАНОВИВШИХСЯ РЕЖИМАХ
2.1. ОСНОВНЫЕ ДОПУЩЕНИЯ
В этом параграфе матрицы проводимостей линии
электропередачи выводятся в общем виде, т. е. линия
представляется в виде многополюсника с внешними вц-
32
водами, число которых равно числу внешних узлов.
Основное выражение (2.1а) основано на допущении ли-
нейности параметров линии. В окончательном виде эле-
менты полученных матриц должны быть выражены че-
рез параметры элементарных цепей линии.
Целью анализа является получение матриц узловых
проводимостей (прямой, обратной и нулевой), описыва-
ющих свойства линии в электрических режимах при ча-
стотах, близких к номинальной, а также схем замеще-
ния прямой, обратной, и нулевой последовательностей.
Эта задача реализуется с учетом следующих допу-
щений, облегчающих вычисления:
а) ток утечки линии через емкости, сосредоточенные
на ее концах, определяется отдельно;
б) линия является линеаризованным элементом, т. е.
характеризующие ее токи и напряжения связаны линей-
ными соотношениями;
в) земля, составляющая цепь тока, который прохо-
дит по фазным проводам, рассматривается как элемент
модели линии; цепи заземления не входят в модель
линии;
г) линия симметрична по фазам, положение прово-
>дов относительно друг друга и земли одинаково, други-
ми словами, собственные и взаимные индуктивности
фазных цепей провод — земля одноцепной линии одина-
ковы. Провода защитных тросов также симметричны,
а следовательно, отстоят одинаково от проводов одно-
цепной линии;
д) линия симметрична относительно своих концов;
е) основной анализ будет вестись без рассмотрения
грозозащитных тросов и расщепления проводов. Влия-
ние последних, состоящее лишь в изменении свойств
элементов матрицы, будет учтено отдельным преобразо-
ванием;
ж) элементы матрицы проводимостей и схем замеще-
ния должны быть поставлены в зависимость от геомет-
рических параметров цепей провод — земля и парамет-
ров проводов;
з) изменение параметров линии, связанное с волно-
выми процессами, а следовательно, влияние длины ли-
нии на ее параметры будет учтено разбиением линии на
«короткие» отрезки.
Двухцепную линию без учета емкостной утечки при
указанных допущениях можно представить цепью, со-
3—1279 33
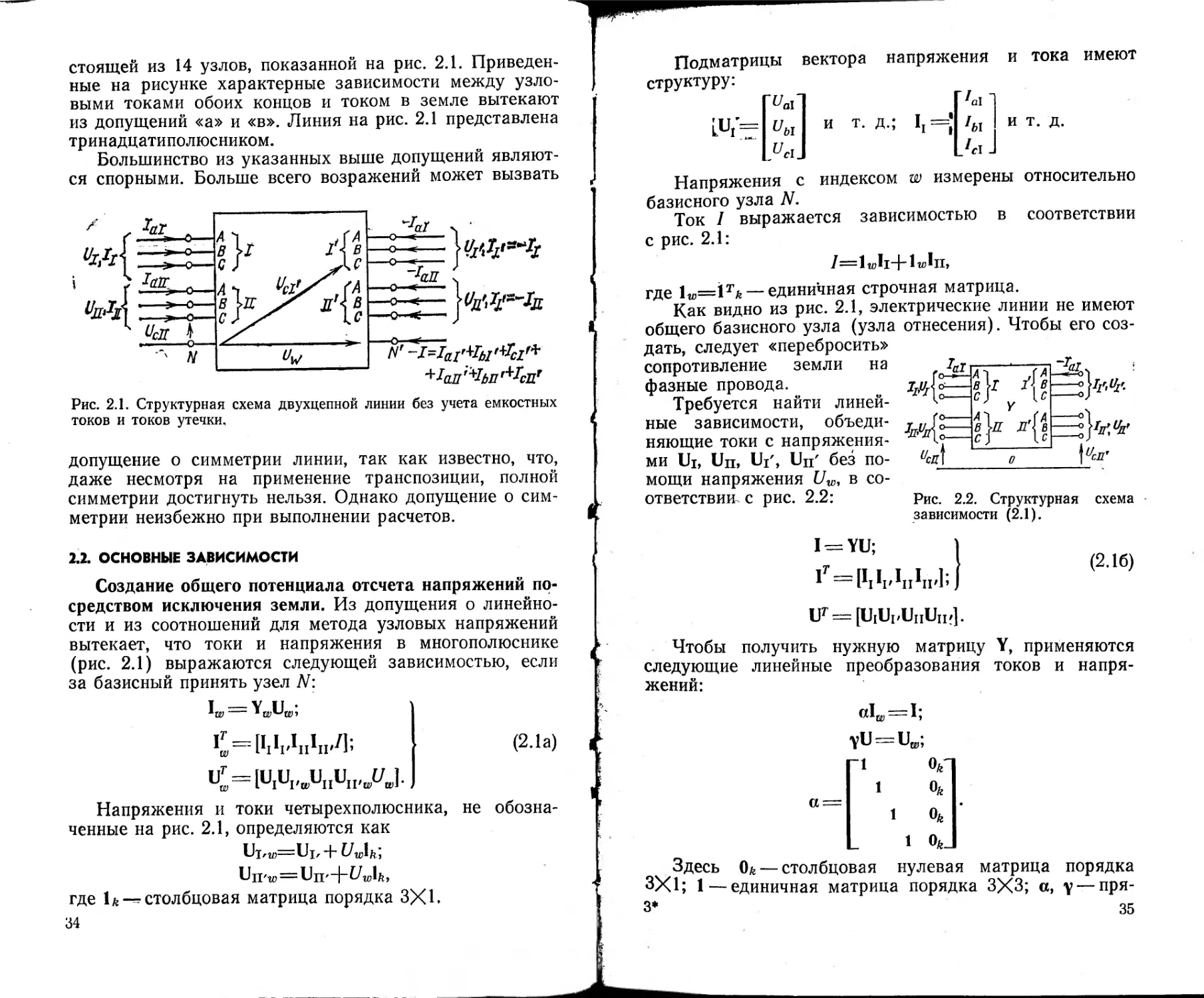
стоящей из 14 узлов, показанной на рис. 2.1. Приведен-
ные на рисунке характерные зависимости между узло-
выми токами обоих концов и током в земле вытекают
из допущений «а» и «в». Линия на рис. 2.1 представлена
тринадцатиполюсником.
Большинство из указанных выше допущений являют-
ся спорными. Больше всего возражений может вызвать
Рис. 2.1. Структурная схема двухцепной линии без учета емкостных
токов и токов утечки.
допущение о симметрии линии, так как известно, что,
даже несмотря на применение транспозиции, полной
симметрии достигнуть нельзя. Однако допущение о сим-
метрии неизбежно при выполнении расчетов.
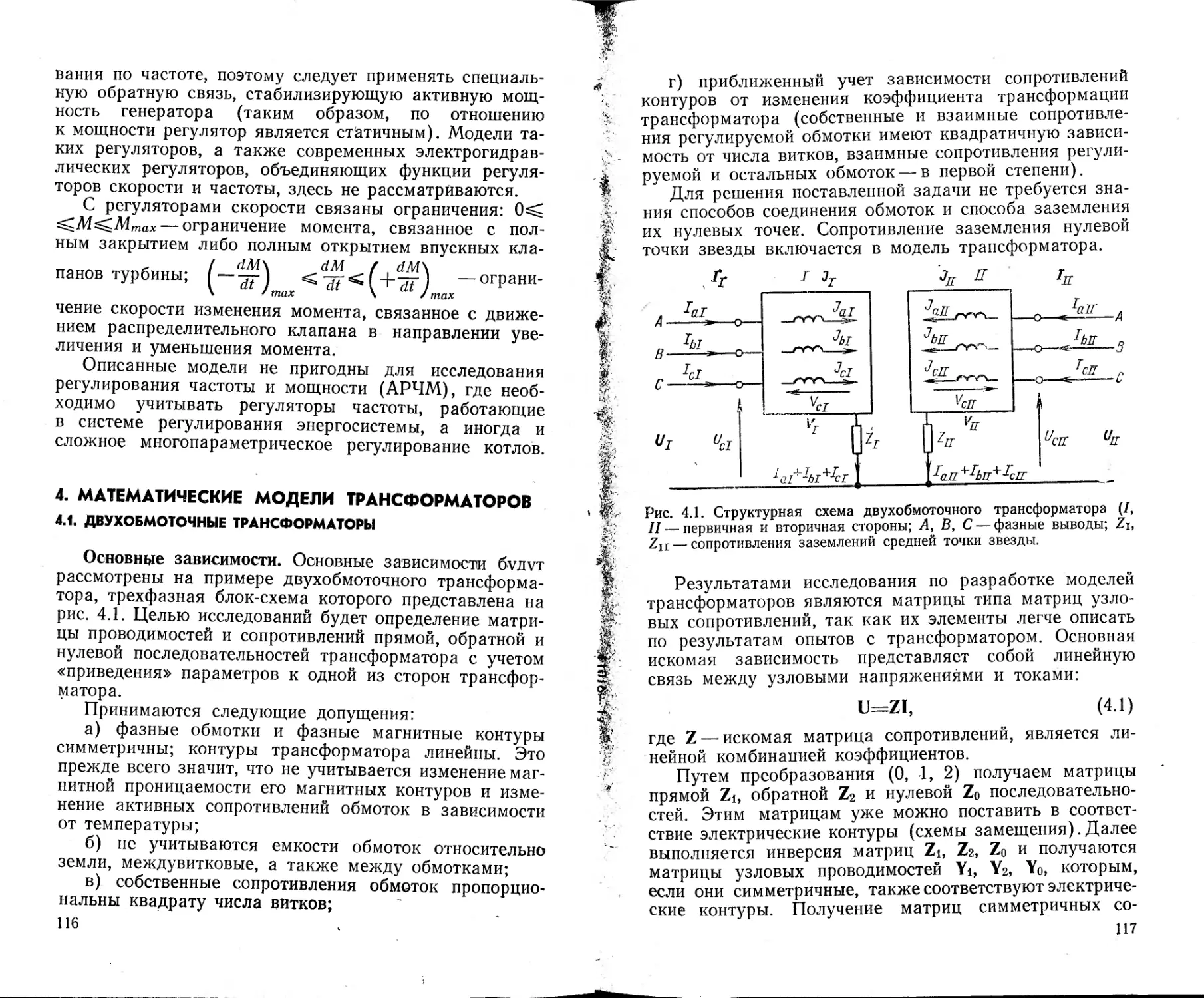
2.2. ОСНОВНЫЕ ЗАВИСИМОСТИ
Создание общего потенциала отсчета напряжений по-
средством исключения земли. Из допущения о линейно-
сти и из соотношений для метода узловых напряжений
вытекает, что токи и напряжения в многополюснике
(рис. 2.1) выражаются следующей зависимостью, если
за базисный принять узел N:
I =Y U •
Ill'll llr J1
ur=ruTuT, UTrUTT, U 1.
w I I I'w II II'w td
(2.1а)
Напряжения и токи четырехполюсника, не обозна-
ченные на рис. 2.1, определяются как
Ui,w=Ui< + Uw\h-,
U itw=Uip-]-
где П— столбцовая матрица порядка 3X1.
34
Подматрицы вектора напряжения и тока имеют
структуру:
Ш'
’^Г
Ubi
Uel.
и т. д.;
И т. д.
Напряжения с индексом w измерены относительно
базисного узла N.
Ток I выражается зависимостью в соответствии
с рис. 2.1:
1== 1 w II-}-1 w III,
где \w=iTk — единичная строчная матрица.
Как видно из рис. 2.1, электрические линии не имеют
общего базисного узла (узла отнесения). Чтобы его соз-
дать, следует «перебросить»
сопротивление земли на
фазные провода.
Требуется найти линей-
ные зависимости, объеди-
няющие токи с напряжения-
ми Ui, Un, Uf, Un' без по-
мощи напряжения Uw, в со-
ответствии с рис. 2.2:
Рис. 2.2. Структурная схема
зависимости (2.1).
I YU;
ir=lii«P>,J,.,];
(2.16)
lp-=[UiUpUnUnf].
Чтобы получить нужную матрицу Y, применяются
следующие линейные преобразования токов и напря-
жений:
:: I,
yU^U,;
Г1 °я
L 1 ofeJ
Здесь Ой — столбцовая нулевая матрица порядка
3X1; 1—единичная матрица порядка 3X3; а, у — пря-
3* 35
моугольные матрицы порядка 13X12 и 12X13 соответ-
ственно, создающие связи между токами и напряжения-
ми (см. рис. 2.1, 2.2).
Труднее определить матрицу у. Получается она из
следующих выкладок:
Здесь
Utp=pU-(-6lJw.
(2.1в)
где 0w=0Tfc — строчная нулевая матрица;
---[0иДад0го1ад1 ] .
Из зависимости (2.1а) можно получить ток I, подхо-
дящий к узлу N': I=NWWVW, Nww — последняя строка
матрицы Yw; /=Y„;w(flU-]-6Llw,).
Из рис. 2.1 следует, что ток 1 является суммой токов
в проводах обеих цепей:
/==,vlw, где —jv=: [OwlwOwlwO],
или
/=vYwUw=vYw(pV-|-dlJw).
Отсюда
Uw= {[ (vYw—Yww) 6] -1 (Yww-vYw) p} U=flU.
и после подстановки в (2.1 в) получается:
Uw=yU;
Искомая зависимость (2.16) следующая [см. (2.1а)]:
I=(aYw) (yU)->Y=aY№Y,
где матрица Y — порядка 12X12; матрица Yw — порядка
13X13; напряжения Ilf, Un' измерены относительно ба-
зисного узла N (на рис. 2.2 обозначен цифрой 0).
Полученные выражения соответствуют модели линии
с учетом «земли». Вышеизложенное преобразование
с помощью прямоугольных матриц является необрати-
мым; из этого вытекает невозможность разделения об-
щего падения напряжения на потери напряжения на
проводе и земле, т. е. определение напряжения Uw.
Из сказанного следует, что учет емкости и утечек
линии ничего не меняет в выводах, поскольку допуще-
36
ния, на которых основаны преобразования, будут таки-
ми же.
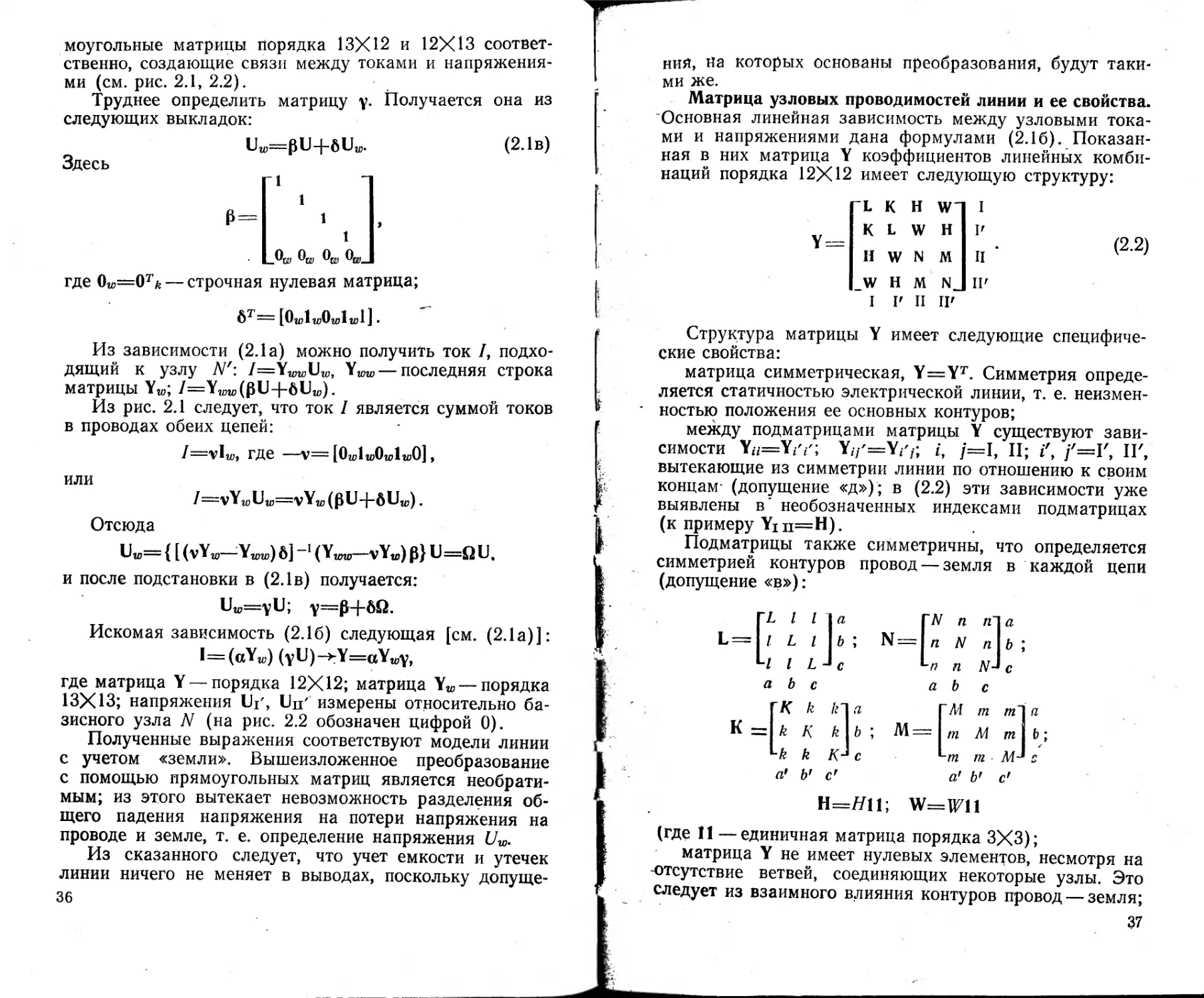
Матрица узловых проводимостей линии и ее свойства.
Основная линейная зависимость между узловыми тока-
ми и напряжениями дана формулами (2.16). Показан-
ная в них матрица Y коэффициентов линейных комби-
наций порядка 12X12 имеет следующую структуру:
L К Н WT I
К L W Н I'
Н W N М II
_W Н М N J II'
I I' II IP
(2.2)
Структура матрицы Y имеет следующие специфиче-
ские свойства:
матрица симметрическая, Y=YT. Симметрия опреде-
ляется статичностью электрической линии, т. е. неизмен-
ностью положения ее основных контуров;
между подматрицами матрицы Y существуют зави-
симости Yt7=Yi'zz; Y//'=Yi'j; i, /=1, II; j'=V, II',
вытекающие из симметрии линии по отношению к своим
концам- (допущение «д»); в (2.2) эти зависимости уже
выявлены в' необозначенных индексами подматрицах
(к примеру Yui=H).
Подматрицы также симметричны, что определяется
симметрией контуров провод — земля в каждой цепи
(допущение «в»):
к k 1г' a ~M tn Hi- a
к = k К k b ; M = m M rn b;
-k k c '-m m M- 5
а’ b’ c' a' b' cr
Н=Я11; W=W11
(где 11 —единичная матрица порядка 3X3);
матрица Y не имеет нулевых элементов, несмотря на
-отсутствие ветвей, соединяющих некоторые узлы. Это
следует из взаимного влияния контуров провод — земля;
37
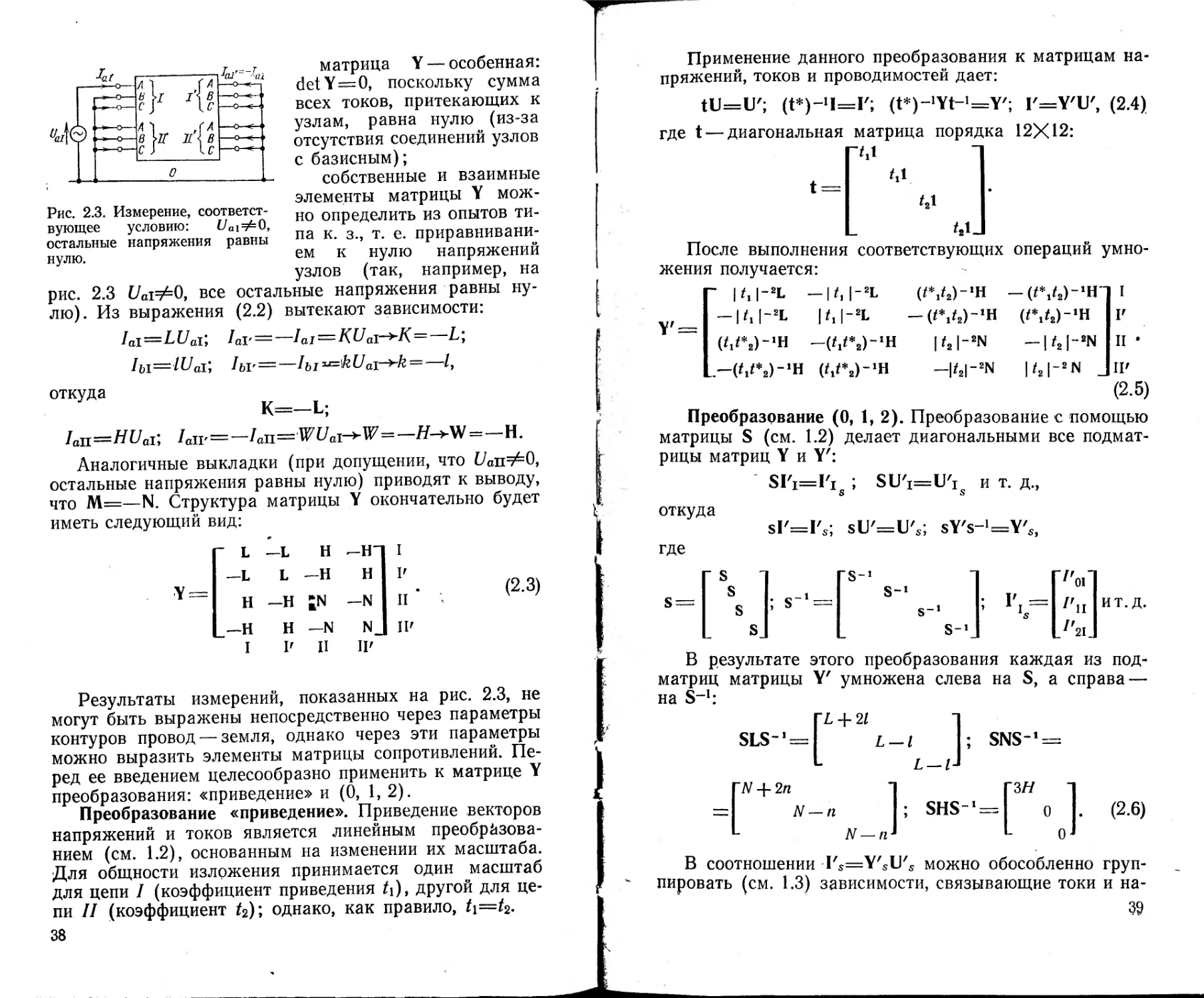
Рис. 2.3. Измерение, соответст-
вующее условию: f7ai¥=0,
остальные напряжения равны
нулю.
матрица Y — особенная:
det У = 0, поскольку сумма
всех токов, притекающих к
узлам, равна нулю (из-за
отсутствия соединений узлов
с базисным);
собственные и взаимные
элементы матрицы У мож-
но определить из опытов ти-
па к. з., т. е. приравнивани-
ем к нулю напряжений
узлов (так, например, на
рис. 2.3 t/ai=#0, все остальные напряжения равны ну-
лю). Из выражения (2.2) вытекают зависимости:
Iai=LUal- 1аГ=-1а1=Киаг-^К=-~Ц
IbI=lUal’, hl' ——Ibl^^ual-*~k = —I,
откуда
K=—L;
IalI=HUar, Ialr=-Ian=WUal^W=-H^=-n.
Аналогичные выкладки (при допущении, что С/стц=И=0,
остальные напряжения равны нулю) приводят к выводу,
что М=—N. Структура матрицы У окончательно будет
иметь следующий вид:
~ L —L Н ^-НТ I
—L L H Н I'
У = • (2.3)
1 н — Н *N — N II v 7
_н Н —N NJ IP
I Р II IP
Результаты измерений, показанных на рис. 2.3, не
могут быть выражены непосредственно через параметры
контуров провод — земля, однако через эти параметры
можно выразить элементы матрицы сопротивлений. Пе-
ред ее введением целесообразно применить к матрице У
преобразования: «приведение» и (0, 1, 2).
Преобразование «приведение». Приведение векторов
напряжений и токов является линейным преобразова-
нием (см. 1.2), основанным на изменении их масштаба.
Для общности изложения принимается один масштаб
для цепи / (коэффициент приведения 6), другой для це-
пи II (коэффициент /2); однако, как правило,
38
Применение данного преобразования к матрицам на-
пряжений, токов и проводимостей дает:
tU=U'; (t*)-,Yt-1=Y'; I'=Y'U', (2.4)
где t — диагональная матрица порядка 12X12:
~М
М
t
М
MJ
Y' =
После выполнения соответствующих операций умно-
жения получается:
|G|-2L -|M-2L ~(/М2)-’Н" I
-|M~2L [M-2L -(/*iM-’H (/*iM-‘H I'
(M*2)-1H -(М%)-*Н |G|-2N -|/2|-2n II •
-(М*2)-*н (M*»)-’H -|/2|-2n |/2|-2n _ IP (2.5)
Преобразование (0, 1, 2). Преобразование с помощью
матрицы S (см. 1.2) делает диагональными все подмат-
рицы матриц Y и Y':
SI'i=I,is ; SU'i=U'is и т. д.,
откуда
sl'=l's; sU'=U's; sY's-^Y's,
где
/'oi
/'и
_/Л21_
ИТ.Д.
В результате этого преобразования каждая из под-
матриц матрицы Y' умножена слева на S, а справа —
на S-1:
'L + 21
SLS~’ = £_/
SNS~’ —
Г ЗЯ
SHS-1
(2.6)
N — n
В соотношении I,S=Y'SU,S можно обособленно груп-
пировать (см. 1.3) зависимости, связывающие токи и на-
39
пряжения нулевой, прямой и обратной последователь-
ностей. Матрицы этих коэффициентов являются матри-
цами проводимостей соответственно нулевой, прямой и
обратной последовательностей:
Y'o =
" (L+21) _|#1|-«(L+2/) (/*,#,)-* ЗН —’ll
— I tt Г» (L+21) | «|-» (L+2i) — (#•,#,)-» 3H (t\ta) 3H I' .
(ttt*a)-'3H — (tat*»)^3H ГЛГ»(Л^4-2п) — |М’я(ЛЧ-2п) II’
_ —(G<*S)-‘3H _| /2|-а(Д/+2п) pa|-»(W+2n) .. П'
(2.7)
(L—1) 0 0 I
-К1Г«(Ь-П. |G|-»(L-n 0 0 !,' • (2-8)
0 0 1 ta Г> (N-n) — | ta |“« (N—n) II 4
о I 0 I' (N-n) | ta |-» (N-n) _ II' II'
При принятых допущениях в матрицах проводимо-
стей прямой и обратной последовательностей нет взаим-
ных проводимостей между цепями линии электропере-
дачи, поэтому можно пользоваться матрицами каждой
из цепей независимо.
Для определения выражений L-\-2l, N-\-2n, L—I,
N—n, H нужно, как уже упоминалось, рассмотреть мат-
рицу узловых сопротивлений линии.
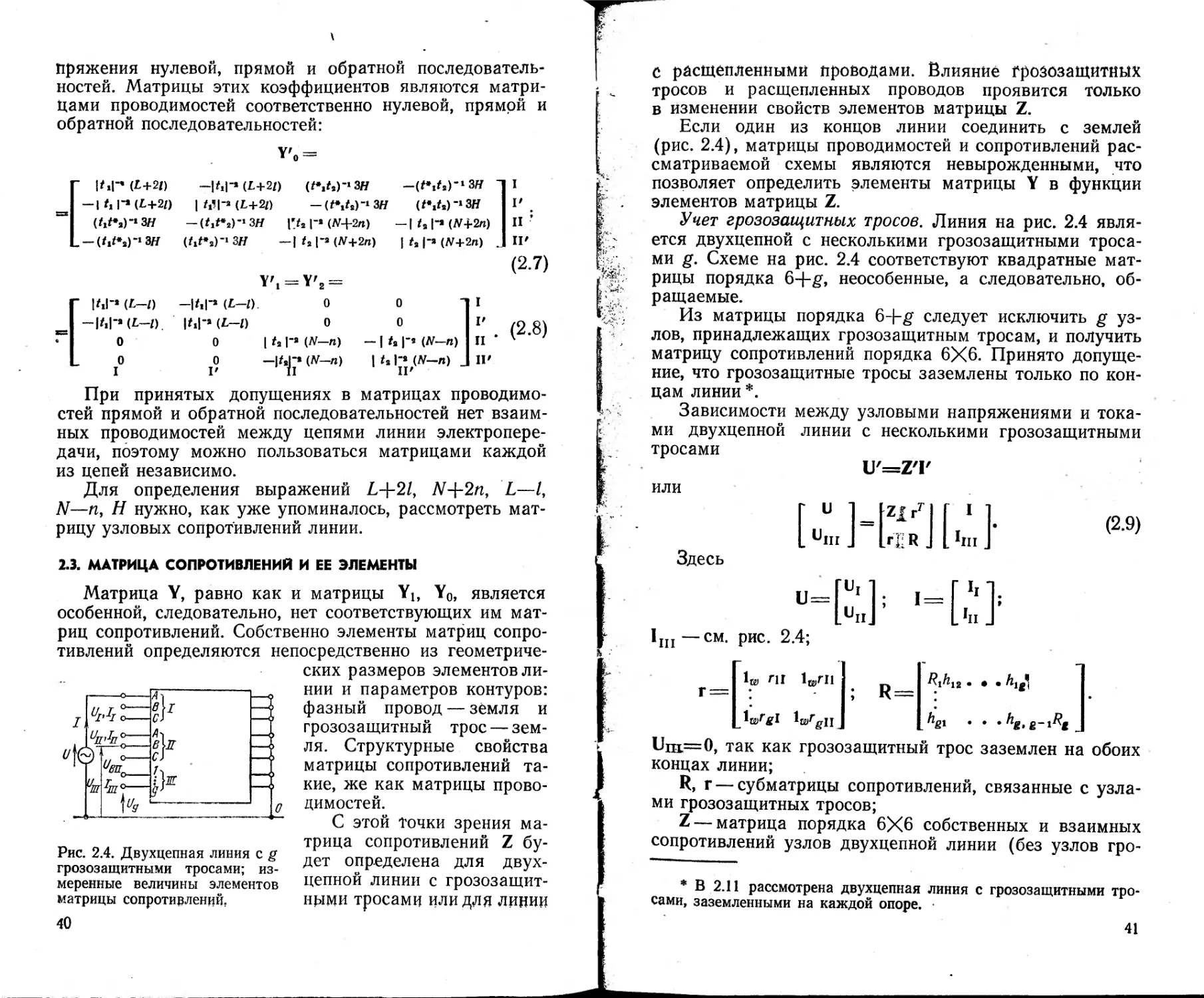
2.3. МАТРИЦА СОПРОТИВЛЕНИЙ И ЕЕ ЭЛЕМЕНТЫ
Матрица Y, равно как и матрицы Yb Yo, является
особенной, следовательно, нет соответствующих им мат-
риц сопротивлений. Собственно элементы матриц сопро-
тивлений определяются непосредственно из геометриче-
Рис. 2.4. Двухцепная линия с g
грозозащитными тросами; из-
меренные величины элементов
матрицы сопротивлений.
40
ских размеров элементов ли-
нии и параметров контуров:
фазный провод — земля и
грозозащитный трос — зем-
ля. Структурные свойства
матрицы сопротивлений та-
кие, же как матрицы прово-
димостей.
С этой точки зрения ма-
трица сопротивлений Z бу-
дет определена для двух-
цепной линии с грозозащит-
ными тросами или для линии
с расщепленными пронодами. Влияние грозозащитных
тросов и расщепленных проводов проявится только
в изменении свойств элементов матрицы Z.
Если один из концов линии соединить с землей
(рис. 2.4), матрицы проводимостей и сопротивлений рас-
сматриваемой схемы являются невырожденными, что
позволяет определить элементы матрицы Y в функции
элементов матрицы Z.
Учет грозозащитных тросов. Линия на рис. 2.4 явля-
ется двухцепной с несколькими грозозащитными троса-
ми g. Схеме на рис. 2.4 соответствуют квадратные мат-
рицы порядка 6-|-£, неособенные, а следовательно, об-
ращаемые.
Из матрицы порядка 6-|-g следует исключить g уз-
лов, принадлежащих грозозащитным тросам, и получить
матрицу сопротивлений порядка 6X6. Принято допуще-
ние, что грозозащитные тросы заземлены только по кон-
цам линии *.
Зависимости
ми двухцепной
тросами
между узловыми напряжениями и тока-
линии с несколькими грозозащитными
U'=Z'I'
или
I
Здесь
и
иш
U=
Ц
ип
ZIrr
.rTIR J ’hi
Г Ч.
Ju J
(2.9)
1 =
IIn—см. рис. 2.4;
1» /’ll 1юш
Ищ=0, так как грозозащитный трос заземлен на обоих
концах линии;
R, г — субматрицы сопротивлений, связанные с узла-
ми грозозащитных тросов;
Z — матрица порядка 6X6 собственных и взаимных
сопротивлений узлов двухцепной линии (без узлов гро-
* В 2.11 рассмотрена двухцепная линия с грозозащитными тро-
сами, заземленными на каждой опоре.
41
Зозащитных тросов), имеет структуру, аналогичную мат-
рице проводимостей, что следует из симметрии по фа-
зам линии и свойств элементов матрицы сопротивлений:
Здесь
D=dl.L (2.10)
А, В — матрицы собственных и взаимных сопротивле-
ний узлов отдельных цепей линии; D — матрица взаим-
ных сопротивлений узлов разных цепей. Элементы мат-
рицы сопротивлений можно определить из опыта х. х.
(рис. 2.4) или выражения (2.9): A—U/I — сопротивле-
ние контура фаза — земля; а=Иы/1— взаимное сопро-
тивление междуфазного контура одной и той же цепи;
d=Uaii/I — взаимное сопротивление междуфазного кон-
тура разных цепей; rn—Ui/I — взаимное сопротивление
контура фаза цепи / и контура i-й грозозащитный
трос — земля.
Собственные и взаимные сопротивления узлов фаз
цепи II и узлов грозозащитных тросов определяются из
аналогичных опытов. Собственные и взаимные сопро-
тивления контуров провод — земля можно вычислить,
зная геометрические размеры контуров и постоянные
параметры, по известным формулам (см. приложе-
ние П2).
Исключение g узлов, т. е. учет влияния грозозащит-
ных тросов. Такое’ исключение, как известно, эквива-
лентно определенным операциям, выполняемым на под-
матрицах матрицы Z. Из (2.9) следует:
U=ZI-|-rTlin; 0=rI-|-RInb Im=R~lrI,
а также
U=(Z—rrR-!r) I=ZgI;
Zg=Z—rTR-1r; (2.11)
где Zg — матрица сопротивлений линии после исключе-
ния g узлов грозозащитных тросов.
Токи в грозозащитных тросах 1щ можно определить
следующим образом:
Iin==R-1rI. (2.11а)
42
В случае двух грозозащитных тросов получается:
где
rrR-,r =
е 1 1 f 1 11
/11 v 1 1J’
(2.12)
г2Р— 2rph-\- p2R
RP — h2i ’
__ pr (P 4- R) — h (r2 + A2)
— PP _ h2 ;
p2R — 2prh r2R
v— RP — h2
При этом принято: гц=Г2П=г, p=r2i—гщ, h=h\2=
=/г2ь а также сделано допущение, что Ri=R, P=Rz.
Отсюда
^£=2---
ГА — е 1 1 D — f 1 11
[D — f 11 В — v 1 1J
(2.13)
В случае одного грозозащитного троса при допуще-
нии гц=Г1п==г (симметричное положение троса) и обо-
значении r2/R\=c матрица сопротивлений приобретает
вид [см. (2.11)]:
zs=i
А —с 1 1 D — с 1 11
D — с 1 1 В — с 1 1J’
(2.14)
В дальнейшем для простоты будут использоваться
параметры линии без грозозащитных тросов, т. е. будут
применяться обозначения Z, A, D, В. Если рассматрива-
ются линии с грозозащитными тросами, нужно соответ-
ственно вместо Z подставить Zg=2 (если линия имеет
два троса) либо Zg=1 при наличии на линии одного
троса.
Нередко на линиях сверхвысокого напряжения один
из двух грозозащитных тросов заземлен на каждой опо-
ре, другой же делится на отрезки, заземленные только
на одном конце; при этом второй конец, изолированный
от опоры, защищен искровым промежутком. Только на
подходах к электростанции (на расстоянии около 5 км)
заземляют одинаково оба троса.
Строго говоря, модель такой линии следует изменять
в зависимости от места к. з., однако, как правило, ее
рассматривают как линию с одним грозозащитным
тросом.
43
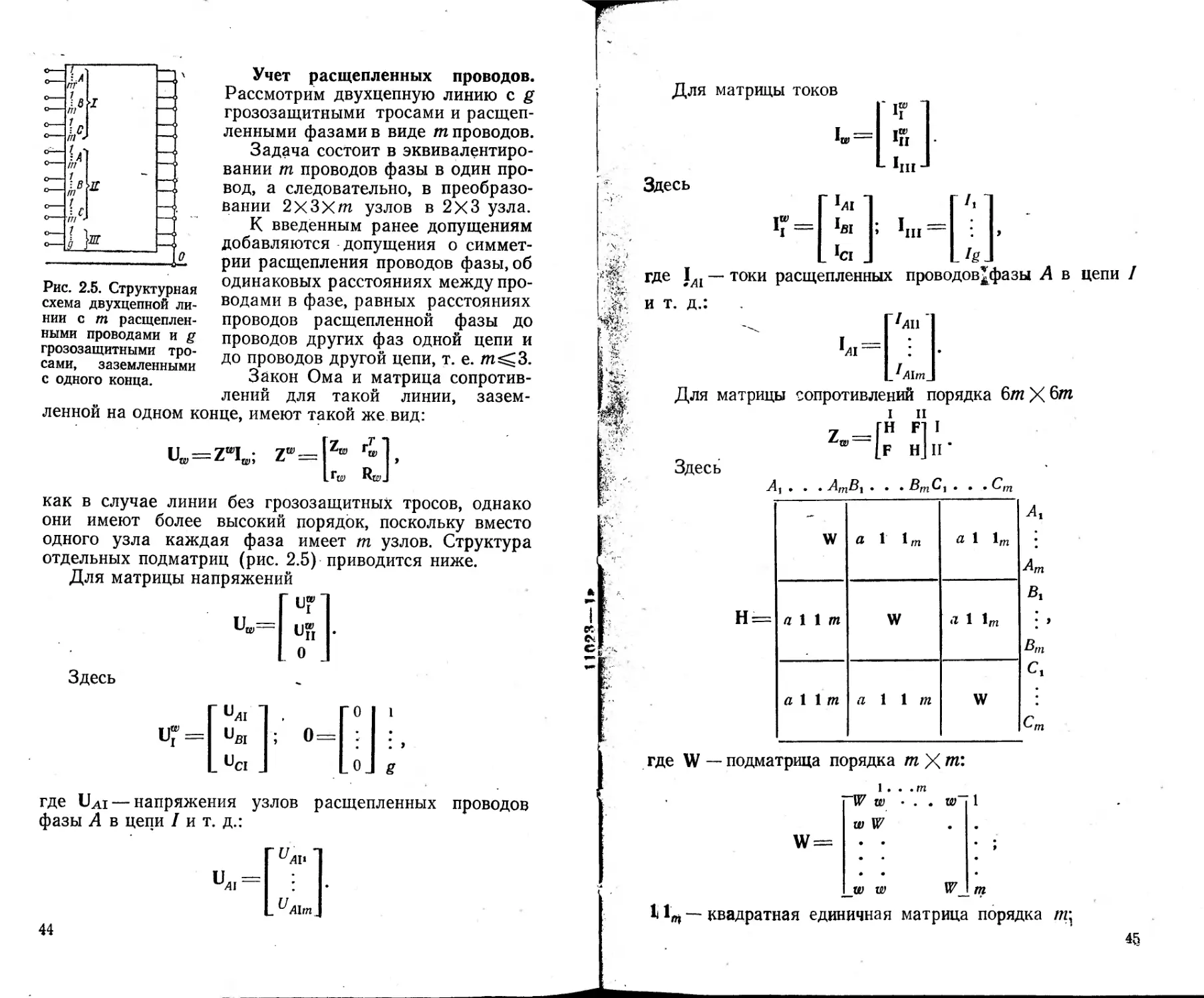
Рис. 2.5. Структурная
схема двухцепной ли-
нии с тп расщеплен-
ными проводами и g
грозозащитными тро-
сами, заземленными
с одного конца.
Учет расщепленных проводов.
Рассмотрим двухцепную линию с g
грозозащитными тросами и расщеп-
ленными фазами в виде т проводов.
Задача состоит в эквивалентиро-
вании tn проводов фазы в один про-
вод, а следовательно, в преобразо-
вании 2хЗХт узлов в 2X3 узла.
К введенным ранее допущениям
добавляются допущения о симмет-
рии расщепления проводов фазы, об
одинаковых расстояниях между про-
водами в фазе, равных расстояниях
проводов расщепленной фазы до
проводов других фаз одной цепи и
до проводов другой цепи, т. е. /п^З.
Закон Ома и матрица сопротив-
зазем-
лений для такой линии,
ленной на одном конце, имеют такой же вид:
гТ 1
*®
как в случае линии без грозозащитных тросов,
они имеют более высокий порядок, поскольку
одного узла каждая фаза имеет т узлов. Структура
отдельных подматриц (рис. 2.5) приводится ниже.
Для матрицы напряжений
UW=ZWIW; Zw =
.Гц;
однако
вместо
Здесь
и?
и,=
и®'
II®
0
ГО
0 =
1
_ Uci
bfcVl I
_0_
g
где Uai — напряжения узлов расщепленных проводов
фазы А в цепи / и т. д.:
ГС
др
Чи=
^А1т^
44
Для матрицы токов
Здесь
ш J
где 1Л1 — токи расщепленных проводов^фазы А в цепи /
т. д.:
'Л1 —
Л1П
_Alm_
Для матрицы сопротивлений порядка б/zz X I п 7 „ГН F] I ® [F HJII’ Здесь . . . АтВ1 ... ВтС1 ... Ст
н= W а 1 1m л 1 1m Ат Вг • » Вщ Сг Ст
а 1 1 т W 1 ifn
а 1 1 т а 1 1 т W
где W — подматрица порядка т X т'.
1 . . .т
W W - . . W 1
W W . .
и
_w w W_ т
1 Ip, — квадратная единичная матрица порядка т\
45
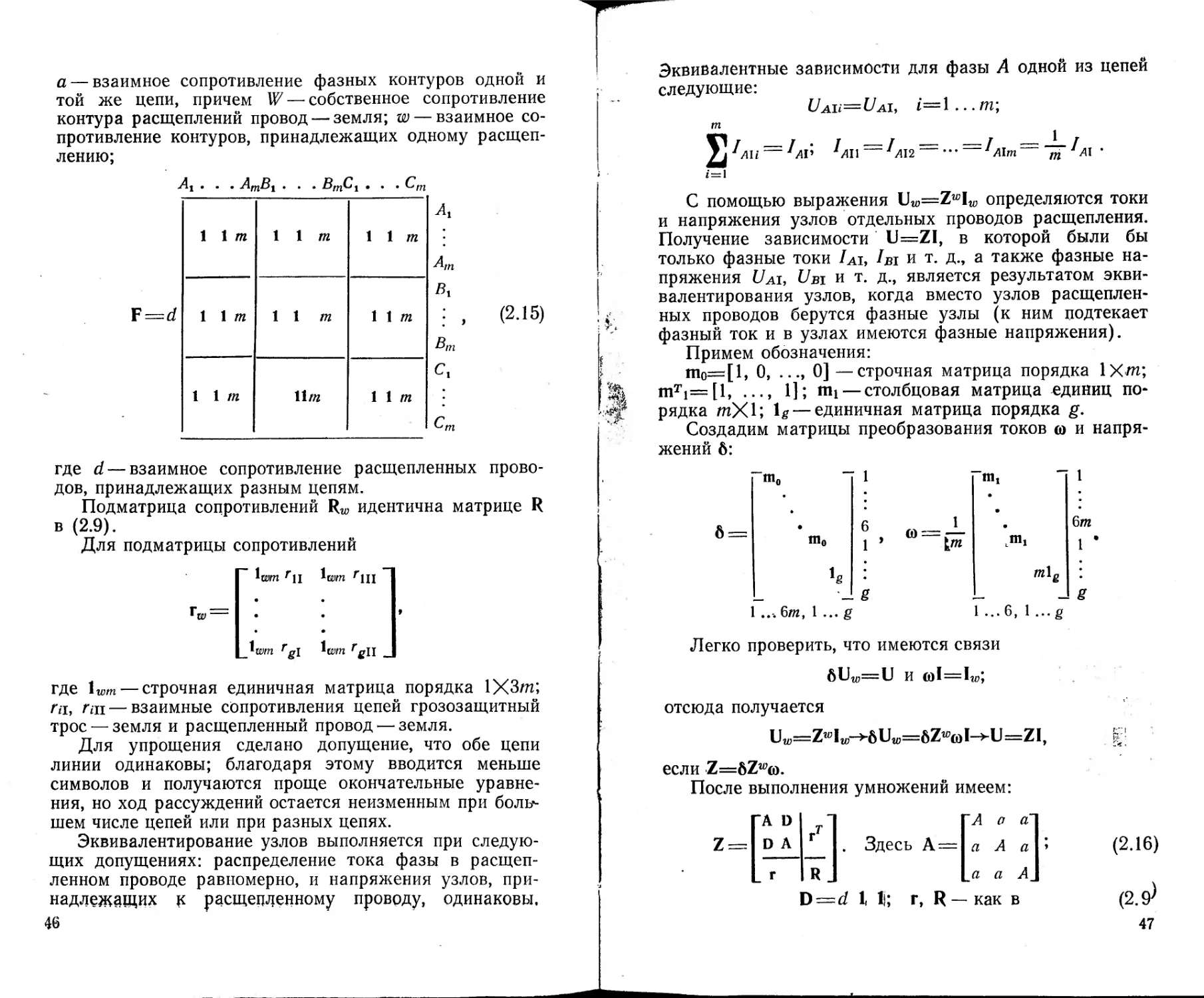
a — взаимное сопротивление фазных контуров одной и
той же цепи, причем W — собственное сопротивление
контура расщеплений провод — земля; w — взаимное со-
противление контуров, принадлежащих одному расщеп-
лению;
Л1 . . . АтВ1 . . . ВтСх . Г •
1 1 т 1 1 т 1 1 т л, Ат
F=d 1 1 т 1 1 т 1 1 т в. Вщ (2.15)
- 1 1 т Нт 1 1 т С. Ст
где d — взаимное сопротивление расщепленных прово-
дов, принадлежащих разным цепям.
Подматрица сопротивлений Rw идентична матрице R
в (2.9).
Для подматрицы сопротивлений
^wm гц rin
rgi ^win rgU
где lwm— строчная единичная матрица порядка 1ХЗт;
гц, гщ — взаимные сопротивления цепей грозозащитный
трос — земля и расщепленный провод — земля.
Для упрощения сделано допущение, что обе цепи
линии одинаковы; благодаря этому вводится меньше
символов и получаются проще окончательные уравне-
ния, но ход рассуждений остается неизменным при боль-
шем числе цепей или при разных цепях.
Эквивалентирование узлов выполняется при следую-
щих допущениях: распределение тока фазы в расщеп-
ленном проводе равномерно, и напряжения узлов, при-
надлежащих к расщепленному проводу, одинаковы.
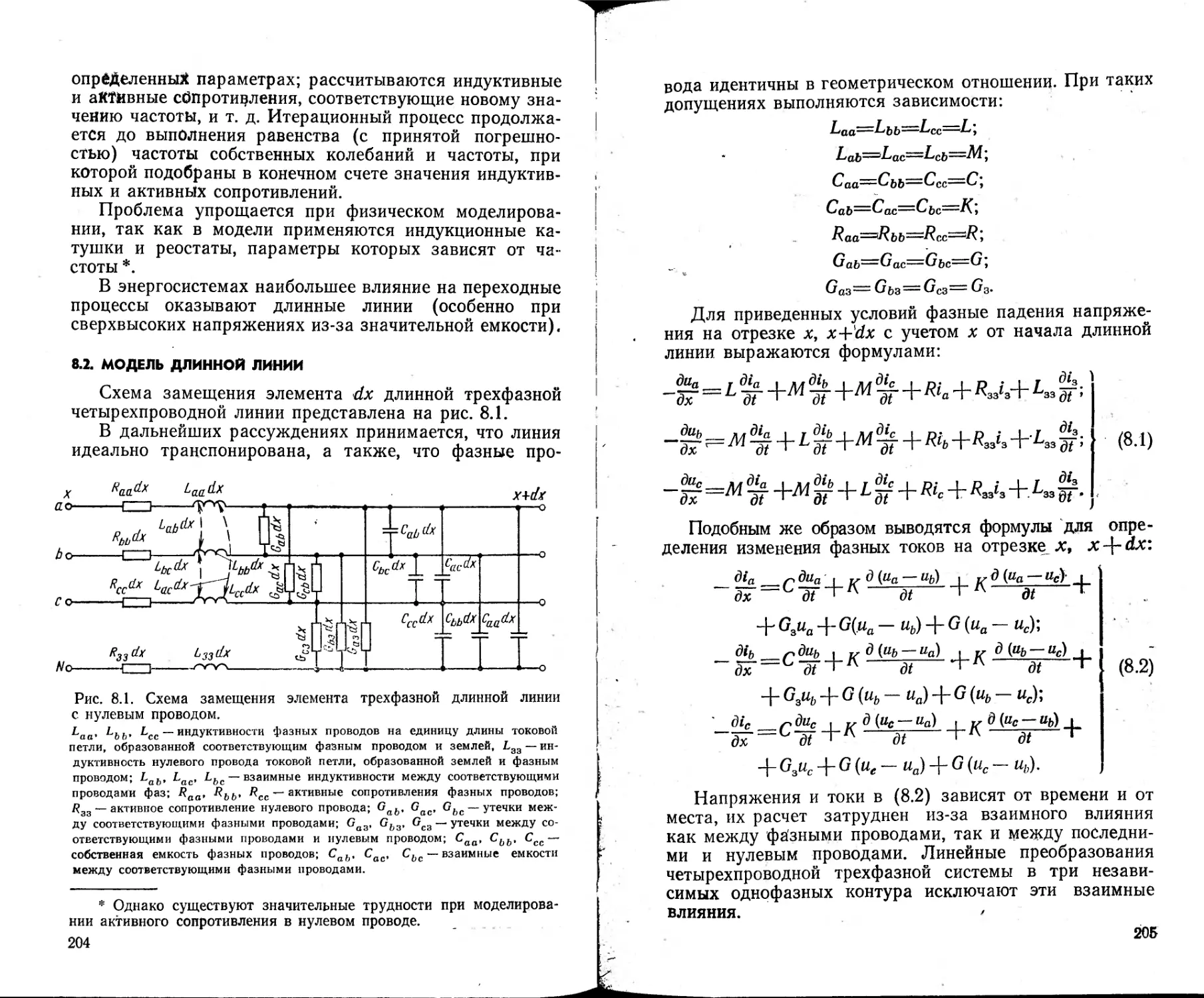
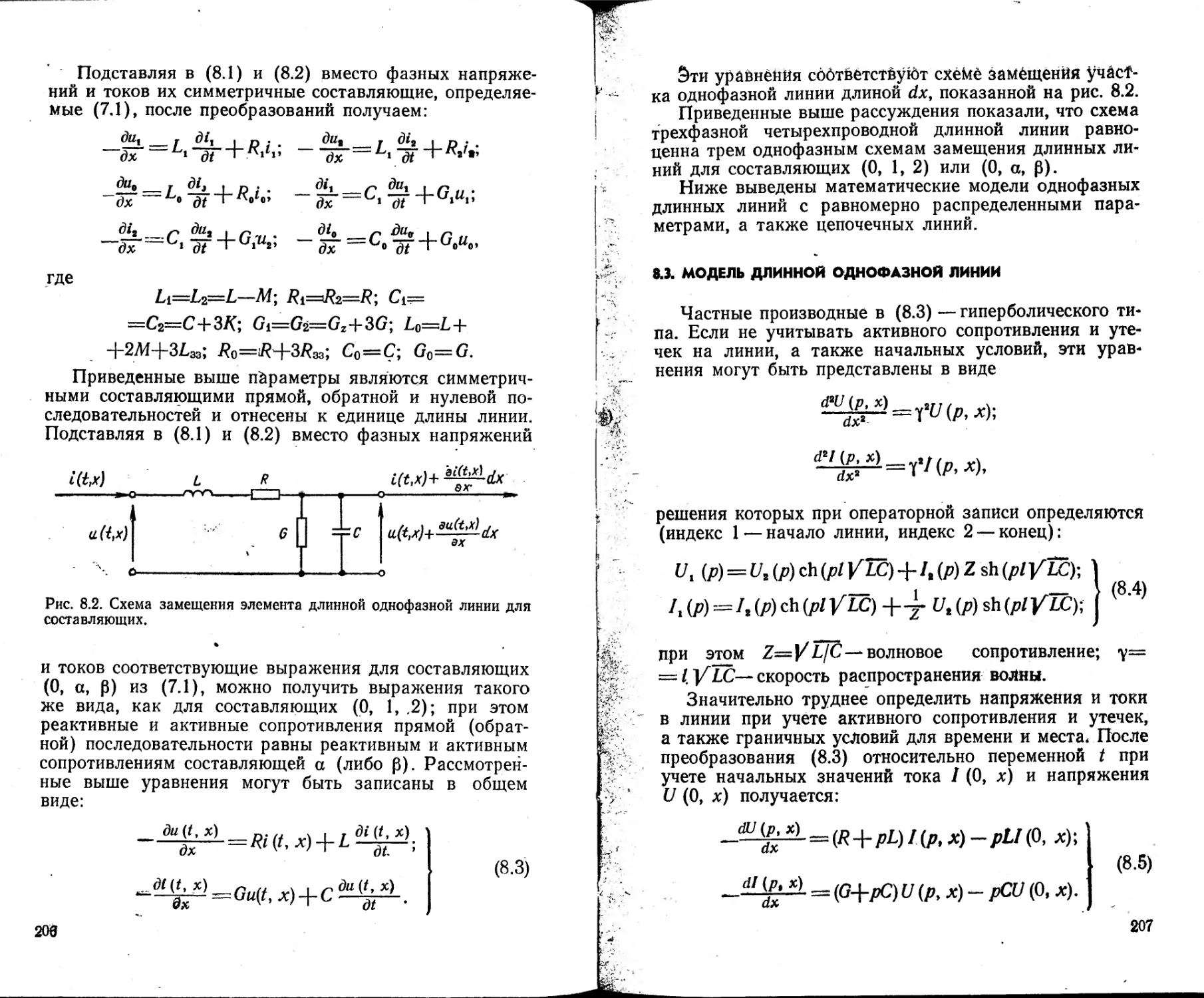
46
Эквивалентные зависимости для фазы А одной из цепей
следующие:
Uaii=Uai,
т
Лш = Лр Ли ~ Л112 = •• • = Лгт ~ "да" Ли •
t=l
С помощью выражения UW=ZWIW определяются токи
и напряжения узлов отдельных проводов расщепления.
Получение зависимости U=ZI, в которой были бы
только фазные токи Iai, /вт и т. д., а также фазные на-
пряжения Uat, Ubt и т. д., является результатом экви-
валентирования узлов, когда вместо узлов расщеплен-
ных проводов берутся фазные узлы (к ним подтекает
фазный ток и в узлах имеются фазные напряжения).
Примем обозначения:
т0=[1, 0, ...» 0]—строчная матрица порядка 1Хт;
mTi=[l, ..., 1]; пн — столбцовая матрица единиц по-
рядка mXl; к — единичная матрица порядка g.
Создадим матрицы преобразования токов о и напря-
жений 6:
1
«=== —
6m
1 *
mlg
I... Gm, 1 ... g
- g
1 ...g
Легко проверить, что имеются связи
6l_J^=U И 0)1 —
отсюда получается
Uw=Z^Im,->6Uw=6Z«’(dI->U=ZI,
если Z=6Zwg).
После выполнения умножений имеем:
А о а
Здесь А= а А а
D=d 1 1|; г, R — как в
(2.16)
(2.9^
47
где
А — W-|-- w; И/, w, at d — как в (2.16).
Из рассмотренного следует, что преобразование рас-
щепленных проводов в эквивалентный провод фазы
можно выполнить, не учитывая грозозащитных тросов,
поскольку их наличие не влияет на конечный вид фор-
мул. Грозозащитные тросы можно учесть по формулам
(2.11) —(2.13).
Преобразование (0, 1, 2) матрицы Z. В результате
преобразования (0, 1, 2) матрицы Z получается:
: Zs=SZS- = ^»4, (2.17)
L J
где
'A 4- 2tz
A — a
A — a-
В + 2b | ’
B — b
B — b-
отсюда
A —a 0
0 B — b
Г A -j- 2л
[ 3d
Z, = ZI =
[3d 1. (2.18)
В + 2b J v 7
2.4. МАТРИЦЫ ПРОВОДИМОСТЕЙ
Матрицы Z, Zi, Z2, Zo не вырожденные, а следова-
тельно, имеются их обратные матрицы, т. е. матрицы
проводимостей:
v v Г7* 0 1 0 1
1° И?] о (B-b)-'J
Y -лИ01 Y 1 -
/ *onj
= [H+j2a)(B+?26)-9Ds]-‘[B+^ ~^1. (2.19)
Вводятся следующие обозначения: А—a=Zi — сопро-
тивление прямой последовательности цепи / линии;
В—b—Zn — сопротивление прямой последовательности
цепи II линии; X4~2a=Zoi — сопротивление нулевой по-
48
бледовательности цепи 1 линии; В+26=20п— сопротив-
ление нулевой последовательности цепи II линии; 3t/=
=Z— взаимное сопротивление нулевой последователь-
ности цепей линий. После этого выражение (2.19) при-
нимает вид:
[Д 1 0 1 1 Zq п —Z
v.=*.= ' 7_. s V.=(^OIZOII-Z’) -
. 0 J Н. Z0 I .
(2.20)
Тем самым неприведенные матрицы проводимостей
(6=/2=1)> полученные из матрицы (2.7) посредством
исключения строк и столбцов I', II", имеют следующие
элементы:
V —:[L“Z
1 [о
0 1 у, р + 2/ 37/ 1
N — nJ’ °- I 3/7 JV+2nJ
(2.21)
Непосредственные связи между элементами матрицы
Y и параметрами контуров, составляющих линии, сле-
дующие [в соответствии с (2.18) — (2.21)]:
У1 = £-/=(Д_о)-- = 271; У„ =
= W-re = (B —=
У01 = L+2/=(В + 2b) M-' = ZmiM~; (2 22)
Уоп =N + 2n = (A + 2a)M-'=zolM-'; 1
Y=3ff=-3dM~' = -ZM-';
M = (A+^a) (B+2b) - 9d!= ZMZ0 Z*.
Очевидно, что в собственных проводимостях прямой
и обратной последовательностей ничего не изменится,
если учесть наличие заземленных грозозащитных тросов.
Матрицы проводимостей линии (2.7), следовательно,
окончательно имеют следующий вид:
1 । ----- I 2 ------
— 0 0 I
|71|-2У1 0 0 I'
0 0 р2|-27ц -|/2|-27п п; (2-23)
0 0 -Hal-’l'll 11'
4—1279
49
Vo-
* IM-%I -IM% “I
-И1I"2 yOi IM“%i -(^Л)-1у и
(W)~lY |/«|-2r0II -N-2yon 11
.-(M*8)-1*' (M*a)-xr ~I*2|-2Yoii Р8|-%п_ П'
I I' П II'
2.5. СХЕМЫ ЗАМЕЩЕНИЯ ЛИНИИ
Матрицы проводимостей Yj, Y2 — симметрические
независимо от подбора коэффициентов приведения; сле-
довательно, им можно поставить в соответствие схемы
замещения [см. (2.23) и (2.22)], как показано на
рис. 2.6.
Рис. 2.7. Схема замещения ну-
левой последовательности двух-
цепной линии 2W=ZoiZon—3Z2.
27о------е=1--------
Я/
Рис. 2.6. Схемы замещения
прямой и обратной последова-
тельностей двухцепной линии.
Матрица же проводимостей нулевой последователь-
ности симметрическая при одинаковых аргументах
у коэффициентов приведения, а также при неравных зна-
чениях коэффициентов приведения, если они являются
действительными числами. Последнему допущению соот-
ветствует схема нулевой последовательности линии,
представленная на рис. 2.7. В случае двухцепных линий
с разными номинальными напряжениями
Когда цепи на одном конце соединены, получаются
схемы замещения, которые при условии, что t\=t2—t,
представлены на рис. 2.8.
Указанные на рисунке сопротивления определяются
следующим образом:
'Л ___ М >71 _ м
OI-"2OII-Z; ^оп —z0I-Z’
(2.24)
50
что непосредственно следует из соединения узлов I и II
на рис. 2.6, а также из преобразования треугольника
(рис. 2.8,6) в звезду (рис. 2.8,в).
Рис. 2.8. Схемы замещения двухцепной линии с цепями, соединен-
ными на одном конце.
а —прямая (обратная) последовательность; б, в —нулевая трех-и четырех-
узловая.
-|'Г2^п
Г, II
Соответствующие матрицы проводимостей:
у =у =
л — ’а
| Z1 2 (Zj 1 -|" Zjj1) -UI-2ZP1 -nr2^1' i, и
— -nrV \tr2^1 0 p . (2.25)
_-nr2^ 0 ПГ22п_ IP
I, n p ip
'И-2(2'оТ + г'0-п)
Yo =
-РГ2^1 -1'Г’^'Гп “ьп
9 / 1 Z\ Z
-И-гм Р
~1И 2л IN 2^,oii+ai) П'
р IP
(2.26)
В случае, если цепи соединены на обоих концах, по-
лучаются схемы замещения (рис. 2.9). При этом сопро-
тивления могут быть определены из выражений:
Z 'N'Ni . у __________Z'oi—Z'qh___________М________
+ ’ 02 Z'o t-f-Z'p.jj Zo 14- Zo у —• 2Z
4 *
51
•' ltl2z2 М22ог
------оДд' х,ло-----------------C=J--------oi',u'
. -----------21-------- a} ' --------21--------- л
Рис. 2.9. Схемы замещения двухцепной линии, цепи которой зам-
кнуты на обоих концах.
а —прямая (обратная) последовательность; б — нулевая.
Соответствующие матрицы проводимостей имеют вид:
IC2zr’
-Id2^1
i, и
IC2^1
_ I t \2^o2
— \t pz^1 ] I, II
|f|2Z^ J I', IP ’
I', II'
|f|2Z^ J I', II' *
(2.28)
2.6. ОДНОЦЕПНАЯ ЛИНИЯ
Матрица сопротивлений одноцепной линии при к. з.
на землю на конце /' содержит только одну подматрицу
сопротивлений двухцепной линии. Все зависимости и
схемы замещения при этом упрощаются:
Соответствующая ей матрица проводимостей:
Отсюда преобразованная матрица проводимостей ли-
нии:
V -zr1-
-V гг1.
52
а после разделения на составляющие проводимости
(2.29)
Соответствующие схемы замещения отличаются, сле-
довательно, от схем рис. 2.9 только значениями пара*
метров элементов.
2.7. МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ВЛ С УЧЕТОМ
СОСРЕДОТОЧЕННЫХ ЕМКОСТЕЙ
Частичные емкости и коэффициенты Максвелла. Со-
{ередоточенные емкости линии — в соответствии с допу-
щением «а» в § 2.1—в узлах по концам линии можно
* Представить в виде конденсаторов (рис. 2.10).
?Рис. 2.10. Система частичных емкостей двухцепной линии электро-
упередачи без грозозащитного троса.
z ” Линейную зависимость между узловыми токами и
''напряжениями можно записать в следующем виде:
Г7*!
где Ij—- /е1
, причем Ц=
^В1
(2.30)
^ст
аналогичную структуру имеют подматрицы 1ц и Иц.
53
Матрицу собственных и взаимных емкостей можно
представить в виде
С= C12I
-С12 C22J
где С j Cj Cj
Сц = Cj С j С j ;
Cj Cj С j
аналогично записывается зависимость для С22;
С12=С11,
причем П 1 Г
11|= 1 1 1 .
-1 1 1-
Емкостную проводимость, а следовательно, и частич-
ные емкости можно найти из структуры матрицы про-
водимостей, например из опыта к. з. 1/атУ=0; все осталь-
ные напряжения равны нулю
1BI = jtoCfUАХ,
откуда
С‘. = . = 2С'. + ЗС'+С.;
1 II I зР
• — /fil — Г' •
I— ivUAl — ~GP
где С' — см. на рис. 2.10.
Частичная емкость одного провода по отношению
к земле либо к другому проводу определяется, когда
остальные провода заземлены. Сложность рассматривае-
мой системы электродов затрудняет определение емко-
стей.
Удобнее пользоваться коэффициентами Максвелла,
так как они соответствуют простым системам электро-
дов: провод — земля (цилиндр — плоскость), провод —
провод (цилиндр — цилиндр). Из линейной зависимости
потенциала V' электродов от их электрических зарядов
Q‘ вытекает:
V—FQ’. (2.31)
Для двухцепной линии с двумя грозозащитными- тро-
сами и расщепленными проводами (рис. 2.11) прини-
54
маем следующие допущения: нее т
водов имеют одинаковые потенциал
грозозащитного троса равен нулю.
расщепленных про-
и заряд; потенциал
Рис. 2.11. Система коэф-
фициентов Максвелла
в случае двухцепной ли-
нии электропередачи с
неодинаковыми цепями.
Обозначены только те
узлы проводов фаз, на
которых необходимо по-
казать коэффициенты
с различными числовыми
значениями.
Для такой системы имеем:
Здесь
v-.= ^bi m
1В1
^С1
VCI _
55
(аналогичные зависимости получаются для VjJ;
Q41 1
Чи
®В1
т
такие же зависимости для Q n;
@В1
®С1
Qci
где
Р, = рх\\т (аналогичные зависимости получаются для
к,,).
56
• где 1 lm — квадратная матрица единиц порядка м/т;
*1 = ~dt g2 1 . , 6 n — Si 1 . > [Si b 1 Ь 5a 1
-di g2 - 3/и -Si d2 _ 3m
1 2 1 2
В приведенных выше подматрицах q\, q2— заряды
тросов, a s, b, р, г, z, w, d, g — коэффициенты Макс-
велла.
Коэффициенты Максвелла определяются в простых
системах электродов в соответствии с (2.31). Когда за-
ряд одного из электродов не равен нулю, а заряды
остальных электродов равны нулю, то получается:
^Al~Zi^AV =
и
Коэффициенты Максвелла имеют, следовательно, ту
же размерность, что F-1, и не зависят от заряда Q, так
как потенциал пропорционален Q. Формулы для опре-
деления «собственных» и «взаимных» коэффициентов
приведены в приложении П2.
Эквивалентирование т узлов расщепленных проводов
в один фазный узел. В основе эквивалентирования лежат
допущения:
напряжения расщепленных проводов одинаковы и
равны фазному, а следовательно,
. Uijh=Uih, i=A, В, С, j=l ... т, k = I, II;
заряды расщепленных проводов одинаковы, т. е.
Qijk=m-lQik, i =А, В, С, k—I, II.
Из последнего допущения следует: с
т
2 <?«*=<?«, i = A, В, С, ft=I, II.
/=•
Эти допущения позволяют заместить т узлов рас-
щепленных проводов одним фазным узлом путем после-
дующего линейного преобразования векторов напряже-
ний и зарядов.
57
Пусть
А
1 0 ... О
D = 1
1 . . . т
В С
- А
О ... О В;
1 О ... 0-1 С
Л
Тогда получается:
Qfe=MQfe, 6=1, II,
Г V
Vft=DVfe, 6=1, II;
где
Ak ®Ak
rBk , k—-l, 11; Qs = ®Bk
'ck _ ^Ck
6 = 1, II.
vA =
При учете расщепленных проводов соотношения при-
58
где
Pi
IFj
Pi‘
Pi
pi
Wj= A
IFi = [?! 4-(m — l)a\]m-*;
Pi Pi
Wn =
i P2 P2
P2 ^11 P2
p2 P2
— К + И — 1) m~ ’.
В приведенных матрицах gi, gn отличаются от gi,
g ii тем, что имеют в т раз меньше строк.
Эквивалентирование расщепленных проводов не ме-
няет вида выражений, а только изменяет порядок под-
матрицы, связанной с грозозащитными тросами, что
следует из структуры F’ (F’ соответствует неэквивален-
тированным расщепленным проводам) в уравнении
ДЛЯ Fg.
Исключение узлов грозозащитных тросов. Исключе-
ние узлов 1, 2 [см. (1.22)] является операцией, выпол-
няемой с подматрицами матрицы Fg, и основано на до-
пущении, что потенциалы этих узлов равны нулю.
В результате исключения получается:
WT rll ‘
П1 W„
Si У
Матрицу А можно считать поправкой к коэффициен-
там Максвелла, необходимой из-за наличия грозозащит-
Si
g"‘
= F' —А. (2.33)
F
ных тросов; она не зависит от того, расщеплен или нет
провод фазы. Матрица F' является подматрицей матри-
цы Fg и соответствует линии без грозозащитных тросов.
Свойства поправок будут выявлены, если ввести до-
пущение о симметрии грозозащитных тросов двухцепной
линии, т. е. di==d2=d-, gi=g2=g', si=s2=s:
А —
г ли Bill
[ви ли]
где А —
s (d2 4- g2) — 2bdg
s2 — b2
B 2dgS-b(d2-g2)
s2 — b2
(2.34)
59
В случае одноцепной линии с двумя симметричными
грозозащитными тросами получается:
А11. (2.35)
s 4- Ь '
И, наконец, в случае одноцепной линии с одним грозо-
защитным тросом:
А = ~-11. (2.36)
ч
В результате получается следующее выражение:
V=FQ;
причем
V,
. Vn
‘ Qi
. Qn
; Q =
F F' A
Далее предполагается, что матрица коэффициентов
Максвелла F симметрическая, а свойства ее элементов
зависят от того, расщеплены провода или нет, а также
от числа грозозащитных тросов.
Матрицы емкостей прямой, обратной и нулевой после-
довательностей. Из зависимости V=FQ следует:
Q = F-1V = CV — -LQ = I = /шЕ- >Ц
где
1 d.
V = /<»U; C = F_1.
Умножая матрицу частичных емкостей, определен-
ных при наличии заземленных проводов, слева на s,
а справа на s-1, получаем выражение:
sCs-1=sF-1s-1=(sFs~1)-1,
из которого следует, что вместо того, чтобы применять
преобразование (0, 1, 2) к обратной матрице F-1, мож-
но обращать преобразованную матрицу Fs, что. значи-
тельно проще, поскольку матрица F$ — квазидиагональ-
ная.
Матрица s преобразования, (0, 1, 2) имеет структуру:
а матрица F =
ГН1
[fll
fll -
HII.
60
Тогда после применения преобразования (0, 1, 2)
-3
0 ;
о.
Fs
Н81=
|HsI f30
[f30 н,
//j + 2/zj
— h\
и Hsu. После выделения
нулевой последовательно-
, где 30'
lsII.
Аналогично записывается
матриц прямой, обратной и
стей имеем:
му! —о
0
Отсюда непосредственно
одинаковы, т. е.
Н1=Н11=Н,
F, = Fa =
Hl + 2Л, 3f
3f 77п 4- 2ЛП
вытекает, если обе цепи
hi=hiv=h,
то
I
С.=
0 (Н — 1г)-1 J II’
I II
С, = [(Н+2Л)2-9/г]-‘ \Н + ™
L — <ч -
I
(2.37)
— 3f 11
H + 2h jll
II
Здесь И — собственный коэффициент Максвелла фаз-
ного провода; h — взаимный коэффициент Максвелла
проводов фаз одной цепи; f — взаимный коэффициент
Максвелла проводов фаз разных цепей. Коэффициенты
И, h, f определяются, если необходимо, с учетом рас-
щепления проводов [см. (2.32)] и наличия грозозащит-
ных тросов [см. i(2.33) ].
Из (2.37) можно определить частичные емкости пря-
мой (и равной ей обратной) и нулевой последовательно-
стей:
емкость прямой (обратной) последовательности цепи
С^Н— Л)-1;
собственная емкость нулевой последовательности
цепи *
Coz— (Н+2h-{-3f);
* Собственная емкость цепи определена здесь, как сумма выра-
> женин строки 1 матрицы Со, что соответствует в схеме замещения
емкости, присоединенной' к узлу 1 и базисному узлу.
61
взаимная емкость нулевой последовательности цепей
С0=3/[(Я+2А)-9/2]-1.
Анализ выражений матрицы Ci и Со приводит к сле-
дующим выводам:
не существует емкостных связей в прямой (обратной)
последовательности между цепями;
наличие другой цепи не влияет на свойства емкости
прямой (обратной) последовательности каждой из
цепей;
наличие грозозащитных тросов не меняет емкости
прямой и обратной последовательностей цепей (одина-
ковая поправка в выражениях Н и h), меняет лишь
емкость нулевой последовательности;
собственная емкость нулевой последовательности це-
пи зависит от наличия другой цепи.
Реактивное емкостное сопротивление и проводимость.
Емкостные схемы замещения. После преобразования (О,
1, 2) получаются зависимости:
11—/coCiUi; Io==./wCqU()
либо
Ii—y'BiUi; l2—/B2U2; I0=/B0U0,
где
zn
Ли
; B2 — Bt; B0 = wC0.
Аналогичные зависимости получаются для I2, Ub U2.
В приведенных выше выражениях Вь В2, Во — реактив-
ные проводимости, соответствующие емкостям.
Потери активной мощности (утечки, корона) пред-
ставляются, как правило, системой одинаковых актив-
ных шунтов, размещенных между узлами фаз и базис-
ным узлом
g
g-
g^g^g^g-
Не учитываются утечки между проводами фаз одной
и той же цепи.
62
Полный узловой ток является суммой емкостных то-
ков и токов утечки в шунтах:
1,=У.Ц. ¥1=Гй + /“С'1 ° 1;
L ° gii+/wCni.
Ia = Y2U2, y2=yi;
. YIJ y pi + /® (coi + — J'wC0
— 1&CO £n + /° (Cqh + Co)
(2.38)
На рисунках опущены шунты в схемах замещения,
а следовательно, это схемы замещения чисто реактив-
ные, соответствующие матрицам проводимостей Y. Схе-
I П
° °
-=(z cnz~
Qi ...
а)
I
o-
-r% ‘ZZZT--
°0
9-------II----
„ t2C0Ux
о0
Рис. 2.13. Емкостные схемы
двухцепной линии (приведен-
ные с помощью коэффициентов
с одинаковыми аргументами).
а — прямой (обратной) последова-
тельности; б — нулевой.
Рис. 2.12. Емкостные схемы
двухцепной линии.
а — прямой (обратной) последова-
тельности; б — нулевой.
мы с емкостями, соответствующие матрицам (2.38), по-
казаны на рис. 2.12. Для дальнейшего анализа опреде-
ляем:
Yi=gi+/®Ci; Уп=£п+/(оСп; yoi=^i+/<°(Qi4-^o);
Уоп=£п“Ь/®(Од-Ь^о) » Уо——/®Со. (2.39)
Тогда в случае приведения токов и напряжений
обеих цепей получаем:
1Л1-2уо1
(ММ-’П И2|-2^оп J
(2.40)
Только в случае, когда t\, /2 имеют равные аргумен-
ты, а также при действительных t\, /2, существует схема
замещения, соответствующая матрице нулевой последо-
63
вательности (рис. 2.13). Отсутствие схемы замещения
в случае приведения с помощью комплексных коэффи-
циентов с разными аргументами затрудняет расчеты то-
ков к. з.
Можно выделить специфические случаи работы двух-
цепной линии: одна из цепей (//) отключена, но не за-
землена; одна из цепей (//) отключена и заземлена.
В первом случае узловой ток 1ц=0, откуда следует,
что 1п«=0, а следовательно, /1П:==/2п==/оп==О. Получа-
ются выражения для симметричных составляющих:
Г 6)1 У01 Уо Ц)1 1
L 0 . . Г0П , . Ц)П I
из которых очевидно:
при £71п=772п=О емкости прямой и обратной после-
довательностей одной цепи нечувствительны к наличию
напряжения на другой;
при /о1=(УО1—^оУ-’оп)^! напряжение £70и=
=—УоУ-1опСо1, что можно интерпретировать как заме-
ну емкости нулевой последовательности первой цепи Сга
на C'oi;
при См = У01 - У’.УП' получим С 01 =см +
что непосредственно видно из схемы на рис. 2.12,6.
Во втором случае 7/ni=C2ii==t/on=O, поэтому /ц=
—YiUn, l2ii=YiU2i — емкость прямой последовательно-
сти не чувствительна к заземлению отключенной цепи;
Ioi=YoiUgi, откуда следует замена емкости нулевой по-
следовательности на C oi==Coi-f-Co, а следовательно^ уве-
личение на Со емкости нулевой последовательности це-
пи / после заземления цепи //, что также непосредст-
венно видно из схемы на рис. 2.12,6. Таким образом
снятие напряжения с цепи II меняет емкость нулевой
последовательности только цепи I, увеличивая ее
в обоих случаях, однако больше при заземленной це-
пи II.
2.8. ЕМКОСТЬ ОДНОЦЕПНОЙ ЛИНИИ
Основное выражение в случае одноцепной линии без
грозозащитных тросов имеет вид:
ГVfl 1 rU h Й 1 rQa л
vb — IhH й I Qb =HQ.
L vc J 1 h h H J L Qc J
Выражения для матрицы коэффициентов Максвелла?
Н следующие:
_( т~' [z -]-(т — 1)оу] для т расщепленных проводов
I z для одного п рода,
где z — собственный коэффициент провода; w — взаим-
ный коэффициент двух проводов расщепления; h — вза-
имный коэффициент двух проводов из разных расщеп-
лений либо двух проводов фаз.
При наличии грозозащитных тросов от каждого из
выражений матрицы Н следует вычесть поправку, опре-
деляемую по следующим формулам:
2<f
— при двух симметричных тросах;
Д== dl
----при одном симметричном тросе,
л- 5
| где s — собственный коэффициент грозозащитного троса;
| b — взаимный коэффициент грозозащитных тросов;
взаимный коэффициент без троса и без провода одной
Ц фазы.
| После преобразования (0, 1, 2) и обращения матри-
Р цы получаем:
К? емкость прямой (обратной) последовательности
у? линии
В' емкость нулевой последовательности линии
В Со= (Я+2Л-ЗА)-1. (2.41)
к Емкость нулевой последовательности одноцепной ли-
В' нии без грозозащитного троса C0=(H-{-2h)-1 меньше,
L чем емкость системы провод — земля, равная Н~1.
I 2.9. МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ЛИНИИ С УЧЕТОМ ЕМКОСТЕЙ
Е При учете емкости в модели линии последователь-
Ef ность преобразований аналогична таковой при получе-
5-1^79 65
нии матрицы проводимостей сети из матрицы проводи-
мостей элементов: суммируются элементы матрицы, обо-
значенные теми же номерами, что и узлы. Следователь-
но, порядок матриц не меняется, меняются только зна-
чения собственных проводимостей в матрицах прямой и
обратной последовательностей линий (одноцепных и
двухцепных), а также собственных и взаимных — в мат-
рице нулевой последовательности двухцепной линии.
В схемах с сопротивлениями — это суммирование
емкостей, включенных между каждым узлом линии и
базисным узлом, и только в схемах нулевой последова-
тельности двухцепной линии — также добавление меж-
узловых емкостей.
Матрицы проводимостей и сопротивлений, получен-
ные таким способом, являются неособенными, так как
легко проверить, что сумма внешних токов не равна
нулю.
2,10. МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ДЛИННОЙ ЛИНИИ
В УСТАНОВИВШЕМСЯ РЕЖИМЕ
Длина электромагнитной волны в воздухе при часто-
те 50 Гц составляет примерно 6000 км. Волновые коле-
бания 50 Гц в установившемся режиме линии учитыва-
ются, как известно, посредством изменения активных,
емкостных и индуктивных сопротивлений линии, причем
эти изменения существенно проявляются, если только
длина линии превышает 400 км.
Длинная линия представляется цепью соединенных
отрезков, настолько коротких, что можно в них не учи-
тывать волновых процессов. В соответствии с допуще-
нием «з» из § 2.1 длинная линия будет представлена как
цепь из т коротких линий (рис. 2.14). Длина их может
быть принята, например, 250 км.
ТТТТТТТТТТТТТТТГТТТТ;
Рис. 2.14. Длинная линия в виде цепи из коротких линий (одноли
нейная схема).
to
£
к-
r -
F
Такой способ применяется при исследованиях энер-
госистем с помощью расчетных столов и физических мо-
делей.
Электрический контур, представленный на рис. 2.14,
является многополюсником, описываемым матрицей про-
водимостей порядка 6(m-|-l)X6(m+l) Для двухцепной
линии и —3(m+l)X3(m+l) для одноцепной линии.
Эту матрицу формируют из т матриц порядка 12X12
(либо 6X6) отрезков линии после задания соответству-
ющих номеров узлам отрезков: с каждым i-м отрезком
связаны две группы фазных узлов начала и конца от-
резка; в соседних отрезках фазные узлы конца г-го от-
резка, а также начала (iH-l)-ro имеют одни и те же но-
мера (см. рис. 2.14), это значит, что узлы непосредст-
венно связаны между собой. Исключение всех
внутренних узлов (остаются только крайние — из груп-
пы I и Г), а следовательно, доведение матрицу прово-
димостей до порядка 12X12 (либо 6X6 — одноцепная
линия) соответствует учету влияния длины линии. При
исключении принимается допущение, что узловые токи
внутренних исключаемых узлов равны нулю.
Операцию исключения узлов можно провести от-
дельно для матриц прямой (обратной) и нулевой после-
довательностей линии. Такая возможность определяется
квазидиагональным видом преобразованной матрицы
проводимостей.
Матрицы прямой (обратной) последовательности от-
резка двухцепной линии симметричны, квазидиагональ-
ны [см. (2.23)], если fi=/2=l, т. е. если матрица явля-
ется неприведенной:
И
. Y.
Y.=
y22
12
Л 1II
• Y —
12 ’ 22
Hl
^22
Y2
112
У, III
Y.
22 .
112’
(2.42)
где II, 112 и т. д.— узлы цепей /, II.
Элементы Гц, У22 и У2 определяются следующим
образом:
У^П+О.бУ'Т; У^-УТ; У22=У'п+0,5У"ц;
У2=-У'п,
где Уг, Уц — продольные проводимости по (2.22); Ух1=
=Уь У,п=Уп; У'Т, Y"n — поперечные проводимости
линии, определяемые емкостными токами и токами утеч-
5* 67
%.
ки, имеют равные значения и разнесены по концам от
резка. Они вычисляются по (2.37) и (2.39):
Y"!=Yi; У"п=Уп-
Матрица нулевой последовательности двухцепной
линии является полной и симметричной [см. (2.23)]:
У01=У'01+0,5У"01; Ую=-У'оь Уо2=У'оп+0,5У"оц; У2о=
=-У'оп; Уоо=У+О,5Уо,
где y'oi=yoi; У'оп=Уоп; Уот, Уоп, У определяются по
(2.22); У"О1=Уо1; У"оп=Уоп; Уот, Уоп-по (2.37),
(2.39); Уо —по (2.37).
Матрицы Yb Yo — это модели одного отрезка линии,
из которых составляется длинная линия.
Матрица проводимостей прямой последовательности
длинной двухцепной линии. Искомой матрицей является
матрица Yw порядка 2(m+l)X2(m-]-l), составленная
из т одинаковых матриц порядка 2X2 по формуле
(2.42)? Если узлы, принадлежащие к определенной цепи
линии, пронумерованы по порядку, то получается мат-
рица следующей структуры:
где
1 2 ... т т +1
Iw
------J
2У1г‘
2У„ j
j
-----1
Yr I
1
2
3
т
т 4- 1
68
Матрица Yhw имеет аналогичную структуру; связан-
ные с ней узлы имеют номера т-\-2... 2т-[-2.
Принимая во внимание квазидиагональное построе-
ние матрицы Yw, исключение узлов 2... т, а также
т-\-2>... 2m+1, т. е. сохранение только крайних узлов 1,
m-j-1 в цепи I и т-\-2, 2т-{-2 в цепи II, можно выпол-
нить отдельно. Сначала 2... т в цепи /, а следователь-
но, в матрице Yjw, затем m-f-3 ... 2т-\-\ в матрице Ynw
так, как если бы это были отдельные линии. Исключение
удобно начинать, например, в матрице Yiw с перестанов-
ки строки и столбца т-]-1 на вторую позицию, переме-
щая последующие строки и столбцы на одну позицию:
1 т-\-1 2 3 4 т — 1т
2УПУ,
У.2У,,/,
У, У,2УП
1
т + 1
2 г Тл
— ГА сП
3 [с В 1‘
4
т — 1
772
Исключение узлов 2... т основано, как известно, на
следующих матричных операциях:
Y1==A—С7В!С; (2.44)
2...да
А = У„
1
У, + 1
Здесь В —матрица порядка (т— 1)Х(т—1), трех-
диагональная с одинаковыми элементами на главной
диагонали, равными 2Уц, на смежных двух диагона-
лях— одинаковыми и равными Уь
Легко проверить, что матрица В-1 — симметрическая,
а также что Вц=Вт_1>т_1 (через Bi/ обозначены выра-
жения матрицы В-1):
Уи-У2А,
-У\в1>т-г
Уи-У^Вм J
(2.45)
W Ун, У1 определяются по (2.42) и их следствиям.
69
Если m=2, т. е. линия состоит из двух Отрезков, тс
для того, чтобы воспользоваться (2.45), следует принять
Вп=В1,т_1=(2У1)-1.
Из специфического построения подматрицы С, кото-
рая содержит только два ненулевых элемента, при ква-
зидиагональной матрице Yw следует, что если бы даже
исключение узлов цепи I производилось на всей матри-
це Yw, то элементы подматрицы цепи II не изменились
бы, и наоборот.
Матрица проводимостей нулевой последовательности
длинной двухцепной линии. Аналогично вышерассмотрен-
ному следует преобразовывать матрицу нулевой после-
довательности, однако из-за наличия взаимного влияния
между цепями линии исключение узлов следует выпол-
нять одновременно в обеих цепях. Результирующая мат-
рица нулевой последовательности YOw при нумерации
узлов, когда нечетные номера присваиваются поочеред-
но узлам одной цепи, а четные — другой, имеет вид, по-
казанный ниже, и состоит из двух типов подматриц по-
рядка 2X2 [см. (2.43)]:
Для исключения промежуточных узлов удобнее сна-
чала сгруппировать оставляемые узлы
70
1 2т + 1 3
Я-
В
_ [А
С
сП
в г
£
преоб-
fe
Исключению узлов соответствуют следующие
разования матрицы YOw:
Yo=A—СгВ’С.
Матрица В1 имеет следующий вид (нумерация со-
ответствует не узлам, а строкам и столбцам подмат-
рицы) :
в,
Bi, m-i
1
в1—
Bffi—
1
• Вт-1, т-1
т — 1
J т — 1
где
При
B/n-l./n-l---^11» ®Pl-l
= В1.пг-
нумерации, соответствующей узлам, получается
NB^^-.N 1
Yn = A —
NBUN
I NB^.JM
1 2
М — NBnN
L -NB^^N
NBnN
2m 4- 1 2m 4- 2
-NBbOT
М — NBnN
N 1 1
___2
2m4-l*
_ 2m 4-2
(2.46)
, т
Схемы замещения длинных линий отличаются, таким
образом, от схем коротких линий только значениями со-
противлений.
71
£
Матрица проводимостей длинной одноцепной линии.
Матрица проводимостей прямой (обратной) последова-
тельности одноцепной линии была фактически выведена
при исследованиях двухцепной линии: она описана фор-
мулами (2.44) для матрицы одной цепи двухцепной ли-
нии. Матрица проводимостей нулевой последовательности
получается из идентичных матричных преобразований,
в которых матрицы отличаются единственно числовыми
значениями элементов. Можно, следовательно, обе мат-
рицы представить одной и той же формулой:
D- Н2Вц
-Н2В1>ОТ_
D—Н2ВП
где Вп, В, . т_1 — элементы матрицы В-1, причем
~2D Н .
Н 2D Н
в = Н .
• _ т — 1
1 т — 1
Матрица Y становится матрицей Yi прямой (обрат-
ной) либо нулевой Yo последовательности, когда выпол-
нены условия:
y==JY,=-Y2, если D = Yn, H = YX-
' ~'(Y0, если D = Yol, H = Yi0.
2.11. УЧЕТ АКТИВНОГО СОПРОТИВЛЕНИЯ ЗАЗЕМЛЕНИЯ
ГРОЗОЗАЩИТНОГО ТРОСА ОДНОЦЕПНОЙ ЛИНИИ
Учет активного сопротивления заземления грозоза-
щитного троса необходим, например, при оценке рабо-
ты дистанционных защит. Активное сопротивление за-
земления должно быть учтено только в матрице нулевой
последовательности линии.
Предполагается, что линия одноцепная и имеет
только один грозозащитный трос. Остается также допу-
щение, что расположение троса симметрично относи-
тельно фазных проводов, несмотря на то что это не-
реально при рассмотрении одного звена. Исследования
и результаты расчетов взяты из [18].
В соответствии с § 2.4 структурными схемами
рис. 2.15,6 можно упорядочить матрицу сопротивлений
70
без учета активного сопротивления R в узле грозозащит-
ного троса:
ABC I
где г=[г, г, г] —взаимное сопротивление контура I и
каждого из контуров А, В, С; р — собственное сопротив-
ление контура /; Z — матрица сопротивлений линии без
грозозащитного троса.
Рис. 2.15. Пример одноцепной линии.
а — с одним грозозащитным тросом, заземленным на каждой опоре через оди-
наковые активные сопротивления R; б — блок-схема одного короткозамкнутого
звена.
Активное сопротивление R заземления будет учтено
в матрице проводимостей нулевой последовательности,
но для этого следует при преобразовании (0, 1, 2) со-
хранить узел /. Для этого несколько модифицируется
само преобразование:
токи и напряжения узлов фаз изменяются с помощью
преобразования (0, 1, 2), т. е. посредством матрицы S;
ток Ц узла I уменьшится в 3 раза, напряжение узла
I остается без изменения.
Такое модифицированное преобразование (0, 1, 2)
следует выполнять также в схемах нулевой последова-
тельности сети там, где нужно учесть элементы, в кото-
рых протекает ток на землю, используя, кроме того, ти-
повые схемы элементов сети:
U 1 Г Z /
Ui J [гр
73
Модифицированные преобразования (О, 1, 2) в этом
случае имеют вид:
0Ю = 10 0 0]; 0А —(f .
Для преобразованных напряжений и токов справед-
ливы следующие матричные соотношения:
где
Z 75 гг
; Z,=
rs Зр.
Г.=4-Л; z<«=
rz°
- z,
rs==[3r, 0, 0].
Элементы Zo, Z\ — сопротивления подматрицы Zs ну-
левой и прямой последовательностей цепи без грозоза-
щитного троса.
. Из матрицы Zis выделяется далее матрица сопротив-
лений нулевой последовательности:
у __ ГZo ЗгI
19 ~ [Зг Зр]
и выполняется ее инверсия:
г 'у—1 ____ Ro У 1 v _____ Зр v ____ Zo v _ —Зг
/о yj; ° й • ’ Д ’
где A=3pZ0—9г2.
Отключение к. з. с одного конца отрезка линии
удваивает порядок матрицы проводимостей; матрица
нулевой последовательности порядка 4X4, соответству-
ющая линии без к. з., строится из элементов матрицы
У/о; индекс сприм» обозначает конец линии, на Котором
74
ранее было к. з.:
Уо -Уо У —у ~ 1
—Уо Уо —У У 1'
Y»,= У —У У/ -У/ 1
—У У -У/ У/ V
1 и 1 /'
К узлу /' теперь можно присоединить шунт g=/?-1
(рис. 2.15), что соответствует увеличению собственной
проводимости узла I на #/3. В конечном счете получа-
ется матрица проводимостей Уд0 отрезка линии между
звеньями, учитывающая активное сопротивление зазем-
ления узла I' грозозащитного троса:
Г Уо —Уо У —Y
-Y Y —У/ , Yr
Дальнейшие действия аналогичны действиям при
учете длины линии в § 2.10; следовательно, необходимо:
в матрице ¥до перегруппировать узлы так, чтобы
узлы 1', I' занимали в матрице позиции 3 и 4;
создать из матрицы для звена матрицу всей линии
соединением т одинаковых звеньев в цепь;
исключить узлы 3... 2т—2.
Матрица цепи из т звеньев имеет вид (узлам линии
даны очередные нечетные номера, узлам грозозащитного
троса — четные):
1 2/п + 1 3 2т — I
‘ '75'
где
Г1; М-Г 2У
Г/]’ [2У Ур + Уд
[Уо У
Ly YR'
Проводимость
1
3R' >
R'
Рис. 2.16. Кривые изменения удельных активных /?0 и реактивных Хо
сопротивлений нулевой последовательности линии 220 кВ (на' сталь-
ных опорах с одним заземленным грозозащитным тросом сечением
70 мм2) в функции от числа звеньев т длиной 400 м.
1—R—4 Ом; 2—R=30 Ом (за 100% приняты значения активного и реактивного
сопротивлений линии при заземлении грозозащитного троса только на концах
линии). '
Рис. 2.17. Кривые изменения удельных активных 7?0 и реактивных Хо
сопротивлений нулевой последовательности линии 220 кВ (на сталь-
ных опорах с двумя грозозащитными тросами сечением 120 мм2)
в функции от числа звеньев т длиной 400 м.
/ — активное сопротивление /?=4 Ом; 2 — /?=30 Ом (за 100% приняты значения
активного и реактивного сопротивлений линии при заземлении грозозащит-
ного троса только на концах линии).
76
где R'— активное сопротивление контура заземления
станции, значение которого значительно меньше, чем
активное сопротивление заземления опоры линии.
В соответствии с результатами, полученными
в § 2.11, матрица проводимостей Yo выражается в виде
I 2 2/ra-j-l 2w+2
ГМд —NBnN
Nil
2
2w4-l
Ye=а —сгв_1с==
, т
_—NBlf m-iN Мд — NBnN 2nz~p2
где Вц, Bj.m-i — подматрицы порядка 2X2 матрицы В-1
с порядковыми индексами, соответствующими нуме-
рации:
i/=l, ..., т— 1.
Меняя m, можно проследить за влиянием активного
сопротивления заземления линии на вид матрицы нуле-
вой последовательности.
На рис. 2.16 и 2.17 показаны такие изменения на при-
мере одноцепной линии 220 кВ с одним и двумя грозо-
защитными тросами [18].
3. МАТЕМАТИЧЕСКАЯ МОДЕЛЬ СИНХРОННОГО
ГЕНЕРАТОРА
3.1. ФОРМУЛИРОВКА ЗАДАЧИ. УРАВНЕНИЕ ДВИЖЕНИЯ РОТОРА
Неустановившиеся режимы синхронных машин опре-
деляются переходными процессами в энергосистемах,
вызванными к. з., качаниями, асинхронными режимами
и т. п. Частота таких процессов близка к номинальной.
Для их расчетов необходима динамическая модель син-
хронного генератора. К ней часто присоединяют матема-
тические модели системы возбуждения с регулятором
возбуждения и с регулятором частоты вращения турби-
ны. В сетевых расчетах две последние модели обычно
существенно упрощается.
Математическая модель машины без регуляторов со-
стоит из двух частей: дифференциальных уравнений дви-
жения ротора машины и дифференциальных уравнений
неустановившихся режимов в замкнутых контурах ро-
тора.
В некоторых инженерных расчетах (например, в рас-
четах токов к. з.) машина замещается постоянными
77
ЭДС и сопротивлениями, полученными из динамической
модели. Здесь рассматриваются математические модели
машины разной степени точности.
Угловое ускорение синхронной машины пропорцио-
нально сумме моментов, действующих на роторы турби-
ны и генератора:
(3.1)
где J — момент инерции роторов турбины и генератора;
у — угол поворота ротора; Мт— вращающий момент
турбины; Мэ— тормозной электромагнитный момент ге-
нератора.
Момент инерции J изменяется в широком диапазоне
в зависимости от типа и мощности агрегата; поэтому
обычно его заменяют другим параметром: механической
постоянной времени Tj либо постоянной инерции Н.
Механические скорости машин разные, и для удобства
расчетов их заменяют электрической скоростью со. Мо-
менты заменяют мощностями.
Постоянная инерции И равна кинетической энергии
ротора, вращающегося с номинальной скоростью ЙНом,
деленной на номинальную полную мощность £Ном гене-
ратора:
Н ~ _ 0,5JQ2HOM
(3 2)
*^иом ’
где Li—— — угловая скорость ротора.
В литературе встрёчаются также понятия «время
ускорения» либо «время выбега» Т, определяемое как
время, необходимое для увеличения скорости от Q=0
до номинальной QHom под воздействием номинального
неизменного вращающего момента. Можно показать, что
механическая постоянная времени определяется време-
нем выбега при вращающем моменте, равном номиналь-
ной полной мощности Shom, деленной на номинальную
скорость Tj=2H.
Для того чтобы математическая модель синхронной
машины не зависела от номинальных скоростей турбо-
агрегата, углы поворота, угловые скорости и моменты
агрегатов «приводятся» к скорости со, равной номиналь-
ной электрической скорости:
Q= -у-; <о =
М
где р— число пар полюсов; <о — приведенная угловай
скорость.
Тогда
t t
т = jW = -L wdt ~ 0 —> 0 = py
6 o'
— приведенный электрический угол поворота.
Уравнение движения ротора (3.1), следовательно,
принимает вид:
(3.3)
откуда
*Р D •^НОмТ' d(O_Г) Г)
®2НОМ dt_____________________________^э-> Ыном dt /-э,
если (о соном,
где Рц, Р3— мощности турбины и генератора; Рсг1 —
момент при угловой скорости со.
Выражая эту зависимость в относительных единицах
при базисной мощности Рб=5ном, допуская, что измене-
ния скорости малы (со ж соНом), а также вводя дополни-
тельную переменную, обозначаемую символом s — отно-
сительный прирост скорости ротора (скольжение с об-
ратным знаком):
получаем нормальный вид уравнения скорости:
•^-=«w; * = т-(3.5)
где P*t~PtS~‘ном, P*3—P&S-1hom — мощности турбины и
генератора в относительных единицах.
Вид формулы (3.5) не зависит от того, в чем выра-
жено время — в секундах или в относительных едини-
цах. Это существенно, так как в математической модели
синхронной машины обычно .применяется так называе-
мое синхронное время, т. е. единица времени /б=й>_1ном-
При расчетах неустановившихся электромеханических
процессов угол 0 идентичен углу 6 ЭДС Ёч на ком-
плексной плоскости, который отсчитывается относитель-
но синхронно вращающейся оси.
79
3.2. УРАВНЕНИЯ ПЕРЕХОДНЫХ ПРОЦЕССОВ В КОНТУРАХ
РОТОРА
Допущения. При создании сравнительно подробной
математической модели переходных процессов в син-
хронном генераторе (для сетевых расчетов) вводятся
следующие допущения:
линейность электрических и магнитных контуров ма-
шины— грубое приближение, от чего иногда приходится
отказываться, вводя простые способы учета насыщения;
фазная симметрия машины;
учет только основных гармоник зависимости собст-
венных и взаимных индуктивностей контуров от угла,
образованного осями ротора и обмоток статора;
отсутствие емкости контуров;
бесконечно большая скорость распространения элек-
тромагнитных волн;
отсутствие неустановившихся колебаний тока в стали
ротора — важное упрощение, от которого иногда отка-
зываются, рассматривая этот контур как обмотку (т. е.
контур, в котором объемное распределение плотности
тока не принимается во внимание).
Несмотря на эти упро-
щения, вывод уравнений для
моделирования генератора
довольно сложен.
Рассматриваемая здесь
модель предназначается для
исследования переходных
процессов в энергосистеме;
для исследования же про-
цессов в самой машине дан-
ная модель непригодна.
Собственные и взаимные
индуктивности контуров син-
хронной машины. На рис. 3.1
условно представлена син-
хронная машина, точнее, си-
Рис. 3.1. Оси обмоток статора
и ротора.
стема геометрических осей
обмоток статора и ротора:
оси фазных обмоток статора а, Ь, с, оси контуров ро-
тора d, q, обмотка возбуждения f, D, Q — демпферная
обмотка в осях d и q соответственно.
Обмотки ротора вращаются с угловой скоростью со,
равной в установившемся режиме частоте юНом- Симво-
80
Лом 0 обозначен угол, образованный осями d ротора Й
фазы а статора. Угол 0 является функцией времени:
в=|»<а+»;
О
где О — угол, от которого начинается отсчет времени.
При вращении ротора возникает реакция магнитного
потока цепи статора в связи с периодическим измене-
нием магнитного сопротивления контура.
Положение ротора, в котором совпадают оси d и а,
соответствует наименьшему значению сопротивления
контура для магнитного потока фазы а; позиция же,
в которой с осью фазы а совпадает ось q, — наибольше-
му магнитному сопротивлению. Поскольку это соотно-
шение не зависит от скорости вращения ротора, магнит-
ное сопротивление будет достигать максимума и мини-
мума 2 раза за один оборот ротора.
По определению собственные и взаимные индуктив-
ности цепей статора и ротора рассчитываются при ра-
зомкнутых цепях статора и ротора за исключением ис-
следуемой. Такое определение непосредственно вытекает
из зависимости (3.10).
Собственные и взаимные индуктивности являются
достаточно сложными периодическими функциями угла
положения ротора; для исследований берется их разло-
жение в тригонометрический ряд и в соответствии с при-
нятыми допущениями отбрасываются члены высших
гармоник (см. выше).
Собственные индуктивности отдельных фаз можно
представить в следующем виде:
£aa = £’ + Lcos20;
£fcb = £°-]-£cos (20 -j- а),
Lcc — L° -f- L cos (20 — a).
a = 2it/3;
(3.6)
Взаимные индуктивности цепей статора можно вы-
разить зависимостями:
Lab=Lba=м‘ + L cos (20 — a);
Lbc = Lcb=M" -I- L cos 20;
£ca = £o<:=7M" + Lcos(20 + a).
(3.7)
Взаимная индуктивность отрицательна, что вытекает
из сопоставления направлений потоков в обеих обмотках
6—1279 81
и осей этих обмоток (Af°<0). Ёе абсолютное значение
наименьшее, когда ротор симметрично располагается
между рассматриваемыми обмотками, так как при этом
наименьшая часть магнитного потока питающей обмот-
ки проникает в сопряженную с ним обмотку; на рис. 3.2
показано положение ротора, при котором Ьъс макси-
мальна, на рис. 3.3 — Ьаъ максимальна, на рис. 3.4 —
Ьаъ минимальна.
Рис. 3.2. Максимум Lbc.
Взаимные индуктивности обмоток статора и обмоток
ротора в осях d и q изменяются синусоидально с перио-
дом, равным времени полного оборота ротора; из
рис. 3.5 следует, например, что Lao достигает максиму-
ма (положительного), когда оси а и d совпадают и
имеют одинаковое направление; минимума (отрицатель-
ного) — когда . противоположное; равна нулю — когда
Рис. 3.4. Минимум Lab-
82
ось q совпадает с осью а; когда же противоположное —
меняются величины LaQ-
Таким образом, взаимные индуктивности контуров
статора и ротора синхронной машины выражаются фор-
мулами:
Laf==Lfa — lf cos 0;
Lbf = Lfb = lf cos (0 — a);
Lcf === Lf'v = lf cos (0 a);
LaD~LDa = lD cos 0;
^bD ~ ^Db — COS (0 a) J
LrD = LDf==ZDC0S(e+a)’
^()а~ S^n
^bQ~Lqb~ /q sin (0 a);
LcQ = Lqc^- 1q sin(0 + a).
(3.8)
Взаимные и собственные индуктивности цепей рото-
ра при тех же допущениях являются величинами по-
стоянными, причем
LfD^Lnf, LfQ=LQf—LDQ—LQD=O. (3.9)
Преобразование (0, d, q). Для описания переходного
процесса в цепях синхронной машины нужно определить
токи и напряжения этих цепей. Направление тока мож-
но выбирать произвольно, помня, однако, что они опре-
деляют знаки в выражениях
для напряжений цепей.
Условные положительные
направления токов прини-
маются в соответствии с
рис. 3.6.
Потокосцепления, свя-
занные с отдельными конту-
рами, линейно зависят отто-
ков во всех контурах; коэф-
фициентами пропорциональ-
ности являются собственные
и взаимные индуктивности
контуров:
W=LI, (3.10)
6*
Рис. 3.6. Направления токов
в обмотках статора и ротора.
83
где I, Чг — векторы (множества) токов и потокосцепле-
нии контуров (см. рис. 3.1, 3.6):
Векторы, входящие в (3.10), имеют следующую
структуру:
ITs= [/а, ib, ic]; 1тн= [if, Id, ip] — токи цепей стато-
ра и ротора, аналогично выражаются потокосцепления;
Lss=[Lij], i, j=a, b, с — матрица собственных и
взаимных индуктивностей цепей статора, определяемых
по (3.6), (3.7);
LsR=[Lij], i—a, b, с\ j=f, D, Q — матрица взаим-
ных индуктивностей цепей статора и ротора, определяе-
мых по (3.8);
ЬдД= [£//], ij=f, D, Q — матрица собственных и вза-
имных индуктивностей цепей ротора.
Матрица L — симметрическая, что следует из свойст-
ва взаимности индуктивности. Для того чтобы избавить-
ся от зависимости выражений матрицы L от времени,
следует преобразовать токи и магнитные потокосцепле-
ния путем умножения их на матрицу преобразования В
такую, чтобы токи и потокосцепления фазных цепей вы-
разить в системе координат 0, d, q (матрица преобра-
зования Ь), токи же и потокосцепления цепей ротора
оставить без изменения:
В1=1в, lrB=[io, id, i<7, if, Id, Ц?] = [Л>Л?] (3.11)
(аналогичными индексами обозначаются преобразован-
ные потокосцепления).
Матрица В имеет следующую структуру:
ГЬ 001 в^-ДЬ-1 00 1
|00 1 ]* [00 1 J
(3.12)
причем Ь, Ь-1 — матрицы преобразования (0, d, q).
Это преобразование соответствует мгновенным зна-
чениям напряжений и токов. Матрица b такого преобра-
84
зования имеет элементы, являющиеся тригонометриче-
скими функциями времени:
1 1 1
3 3 3
2 2 2
у cos 0 -у cos (0 — а) -у cbs (О 4-а)
2 2 2
—у sin 0 — — sin (0—а) — -у sin (0-|-а)
(3.12a)
cos 0 — sin 0
cos (0 — а) — sin (0 — а)
cos (0 + а) — sin (0 + а) _
где 0=(о/-|-'О’ — угол между осями фазных обмоток и
осью ротора, отсчитываемый от оси а\ а=2л/3.
С помощью матрицы b преобразуются напряжения,
токи и потокосцепления фазных контуров. Справедливы
следующие зависимости:
If,=bljs; Ufc=bUs; 4pb=b4ps: Is=b Ч&;
Us=b-‘Ub;
В этих зависимостях вектор тока, например, имеет
новые коэффициенты, которые обозначены индексами О,
d, q и выражаются через старые координаты следующим
образом:
2
= — [iocos0 + t6 cos (0 — а) -{— ic cos (©+«)];
,(3.126)
2
i4 = — у К sin0 4- ib sin (0 — а) + ic sin (0 + a)].
Старые же координаты являются следующими функ-
циями новых координат:
+ id cos 0 — iq sin 0;
ib = it id cos (0 — a) — i sin (0 — a);
ic = Z0 + h cos (0 + a) — s in (0 + a).
(3.12b)
85
Фактически — это преобразование Блонделя, приме-
няемое для определения симметричных установившихся
режимов синхронных машин и значительно облегчаю-
щее понимание явлений, происходящих в машине (тео-
рия двух реакций). Оно исключает также функции вре-
мени из собственных и взаимных индуктивностей цепей
синхронной машины, благодаря чему дифференциальные
уравнения, описывающие электромагнитные переходные
процессы в этих машинах, становятся уравнениями
с постоянными коэффициентами, что облегчает их ре-
шение.
Преобразование b в отличие от симметрического пре-
образования S, не унитарно, а следовательно, -выраже-
ние мощности (скалярное произведение) не является не-
изменным при преобразовании:
р — Ua^-\-Ubib~\-llcic — 2UQiQ--[-Udid’}~Uqiq U$iq-{-Udid + Uqiq.
Характерной особенностью этого преобразования
является то, что координаты 0, d, q трехфазных симмет-
ричных токов, напряжений и потоков имеют в устано-
вившемся режиме постоянные значения (независимые
от времени). Если
ia = У"21 cos <о/; ib = У27 cos («rf — а);
ic — 21 cos'(«tf + а),
то
io=0; id~']/r21 cos&; iq = — }/‘21 sin ft
и
Фо=0; cos-ft; Ф9=—Фт sin ft.
Отсюда следует ценное достоинство рассматриваемо-
го преобразования для исследования симметричного
установившегося режима работы машины: один из со-
ставляющих потоков вращается вместе с осью d ротора,
другой — с осью q и оба они неподвижны относительно
ротора.
Из (3.10) следует:
B'F=BLB-1BI^Tb=LbIb. (3.13)
86
В этой формуле LB—BLB-1 как раз является преоб-
разованной матрицей индуктивностей:
О d q f D Q
^9
^d Ldf LdD
Lq
Lfd Lf Ljd
LDd LDf LD
LQ<i
d
LqQ ?
f ’
D
lq Q
(3.14)
где
£,=£,+2jM; £„=£•-A4’ +-^-L-
L^L‘-M°-^-L- L,=Lff, Ld^Ldd- L^L^,
^df=Lfd - — I/', £dD =/= LDd — — lD’,
4ct=l<l^=Lca==~ lQ’ 4o = LDf
Преобразованная матрица Lb (3.14) содержит соб-
ственные и взаимные индуктивности, ни одна из которых
не является функцией времени. Имеются три группы,
контуров, магнитно не связанных между собой (связаны
между собой только контуры, входящие в одну группу):
контур 0 (не сопряжен ни с одним из контуров), конту-
ры d, f, D и контуры q, Q.
Обычно магнитно не связанные контуры представля-
ются в виде катушек со взаимно перпендикулярными
осями. Такое представление подходит к рассматриваемо-
му случаю и показано на рис. 3.7. Фазным обмоткам
статора после преобразования (0, d, q) соответствуют,
следовательно, фиктивные обмотки 0, d, q, неподвижные
относительно ротора (т. е. соответствующие им собст-
венные и взаимные индуктивности не зависят от време-
ни), расположенные в соответствующих осях: 0, d и q.
Подобные рисунки облегчают понимание преобразова-
ния (в данном случае — то, что новые координаты син-
хронно вращаются с ротором).
87
Рис. 3.7. Наглядное представ-
ление замещенных обмоток
синхронной машины.
Три контура в оси d, магнитно-связаннЫе между со-
бой, напоминают однофазный трехобмоточный транс-
форматор. В этом трансформаторе, однако, нет изотроп-
ных взаимных индуктивностей, т. е. Ldf^Lja, LdD^Lnd',
изотропной является лишь
взаимная индуктивность
LfD—LDf. То же самое мож-
но сказать о паре контуров
В ОСИ Q\ LqQ=j^= Lqq.
Симметрирование матри-
цы LB. Несимметрия матри-
цы индуктивностей LB озна-
чает, что реально отсутст-
вуют неподвижные контуры
с индуктивностями, как
в LB. Для симметрирования
должна быть выполнена
операция «приведения» по-
токов и токов, при которой,
однако, не сохраняются свой-
ства формулы мощности,
т. е. унитарность этого пре-
образования. Элементы мат-
риц К (преобразование потоков) и D (токов) подбира-
ются таким образом, чтобы получить симметрию приве-
денной матрицы индуктивностей (матрицы К и D, как
известно из гл. 1, диагональные).
Применив такие преобразования к контурам d (вто-
рая группа), можно записать:
Здесь и
приведенные
дальше рассматриваются
величины.
исключительно
88
Как видно, индуктивности будут изотропны, если
к каждому контуру удастся подобрать коэффициенты
приведения такие, чтобы kf—2/3df, kn—2/3dD. Тогда
получим:
4d Ld df Ldf 1 LdD id
~df Ldf 1 2_ d2f 3 Lf 1 T if
— LfD
1 dD LdD 1 1 3
dDdf Hd
После выполнения подобного преобразования с груп-
пами контуров можно записать для всей машины:
Чрв=Ьв1в.
Матрица LB теперь симметрическая. Простейший вид
формул получается тогда, когда коэффициенты приве-
дения подобраны таким образом, чтобы выполнялись
зависимости:
— J ~ —— 7 — 1 7
df df ~~ dD dD ~~ dDdf fD-
Приведенную индуктивность Ldf/df обозначают сим-
волом Lad и называют реакцией якоря в оси d. При не-
обходимости более точного представления собственных
индуктивностей используются следующие выражения:
Ld—Lad~\~Lal‘,
Здесь Lai, Lfi, Лв/— приведенные индуктивности рас-
сеяния в оси d контуров статора, возбуждения и демп-
ферного.
Собственные индуктивности Lf и LD обмоток f и D
имеют коэффициенты приведения такие же, как и для
активных сопротивлений этих обмоток, в связи с чем по-
стоянные времени обмоток не меняют значения при пре-
образовании (постоянная преобразования): Tf=LflRf=;
—Lf/Rj (аналогично для Td).
Группу контуров по оси q можно анализировать ана-
логично,
89
Приведение с помощью относительных единиц. Все
параметры, характеризующие поведение синхронной ма-
шины при переходных процессах, можно привести к це-
пям статора, подобрав' соответствующую систему базис-
ных единиц.
Для цепей статора выбираются три основные базис-
ные единицы: /б=/ном, £/б=б4ом, (0б=(оНОм-
В качестве единицы мощности принимается номи-
нальная мощность машины: Рб==5Ном=^б/б.
Единица сопротивления — это номинальная единица
сопротивления: 7?б=6^юм/£ном==6гб//б, единица време-
ни: /б=1/(Оном=1/(2л-50) с.
При использовании приведенных величин выбор ба-
зисных единиц для цепей ротора зависит от выбранных
базисных единиц статора:
/'б = у-; t/'6=^=4^e;
причем d, k — коэффициенты приведения тока и напря-
жения исследуемого контура (элементы матриц D и К).
Выбранная нами система единиц позволяет привести
параметры цепей ротора к цепям статора и одновремен-
но симметрирует матрицу LB.
Следует отметить, что уравнения, представленные
в относительных единицах, могут не удовлетворять прин-
ципу однородности размерности: например, Х=£, если
(0б=<Лном£=Л1, еСЛИ Ю=(0ном и т. д.
Уравнения связи между напряжениями и токами син-
хронной машины. Необходимо составить уравнения, из
которых могут быть сформированы нужные математи-
ческие модели синхронной машины.
Уравнения для потокосцеплений и токов выведены
выше [см. (3.13)]. После приведения и преобразования
эти зависимости принимают вид (3.15). При этом под-
ставляется L=X, так как X—aL, (оном=1:
=
W=Xqiq^Xa^
^f^Xadid + Xfif + XadiD;
— X adh + Xad!f + XD
— Xa^ + XQ ZQ-
$
Требуется вывести зависимости между преобразован-
ными напряжениями, токами и потокосцеплениями. При-
меняя общее правило для магнитно-связанных контуров
(см. рис. 3.6), имеем:
11=-JL-V-RI,
lit
(3.16)
где U — матрица напряжений на выводах обмоток ста-
тора и ротора; R — матрица активных сопротивлений
всех контуров статора и ротора в виде R=diag Ri, i—a,
a, a, f, D, 'F — матрица ЭДС, индуцированных
в контурах статора и ротора.
Подстановка в уравнение (3.16) U^B-’Ub, 4**=
1=В-Чв дает:
B-Us = -A(B--iFg)_RB--l8.
Матрицы В и В-1 имеют элементы, являющиеся
функциями времени,- которые, следовательно, также под-
лежат дифференцированию:
в- 4=- 4 <в- ’> Тв - в-’ 4 W - RB V
Отсюда
= - В А (В - ) - А (V8) - BRB- Ч8.
Полученные матричные произведения имеют вид:
-в4(В-’) = <о = И,-],
io, если i~d, j = q',
— (о, если i = q, j=d;
О на оставшихся местах;
/, /=0, d, q, f, D, Q; “> = ^; BRB“1 = R.
91
fe конечном счете получается так называемое урав-
нение связи между напряжениями и потокосцеплениями:
VB = «'lPe-4<4rB)-RI«- (ЗЛ7а)
Матрица <о ==ш = (1 -|-s) wH0MJ называется матри-
цей вращения, так как первый член в правой части урав-
нения (3.17а) представляет собой ЭД С вращения.
Поскольку демпферные обмотки короткозамкнуты
(uD=uQ=0), можно записать (3.17а) в развернутом ви-
де, которое при переходе к относительным единицам
получает вид уравнений связи между напряжениями и
потокосцеплениями:
— dW0
и. —•------
0 dt
nd = (l+s)^--/-/?azd;
= “ (1 + s) ~
— dWf
uf ~ Rfif'
(3.176)
dvn
~dF
где s — относительный прирост частоты вращения рото-
ра, определяемый (3.4).
Эти уравнения вместе с уравнениями связи между
потокосцеплениями и токами (3.15) описывают электро-
магнитный переходный процесс машины.
Уравнение связи между напряжением и током полу-
чается подстановкой Tb=LbIb в (3.17а):
и,=(вЦ-Ю1,-114ад. (3.18)
Развернутое выражение зависимости в относитель-
ных единицах между напряжением и током при со=
₽=(оНом=1 имеет следующий вид:
92
di0
dt •
- Ud=idR - i,X, (1 + s)-^ (1+s) +%a 4
dif din
+ + dF:
dia dio
+ X< ~dt Xati ~dT ’
did dif dip
uf ~ ifRf H“ Xad ~f h Xf ~dt Xad dt '
did dif , ,, diD
0 — “Ь Xad ~f 1“ Xad “h X D df ’
disb
0 = iQRQ 4- Xaq -dfA-Xq
(3.19)
Из (3.19) видно, что не все токи являются независи-
мыми переменными: из двух последних уравнений мож-
но определить, например, токи iD и Iq в функции осталь-
ных токов.
Выбор подходящих зависимостей для модели маши-
ны должен быть выполнен с учетом ее назначения.
Обычно задачи, в которых используются модели син-
хронных машин, разделяют на следующие группы:
расчет электромагнитных переходных процессов, при
которых не учитываются изменения скорости машин
s=const (например, расчеты токов к. з.);
расчеты электромеханических переходных процессов,
в которых существенную роль играет изменение скоро-
сти синхронных машин (исследования устойчивости,
асинхронного режима качаний и т. п.).
. Первая группа задач описывается системой диффе-
ренциальных линейных уравнений с постоянными коэф-
фициентами и выражается обычно системой уравнений
в операторной форме. Вторая группа задач описывается
системой нелинейных дифференциальных уравнений,
когда операторное исчисление неприменимо. Нелиней-
ность вносит уравнение движения ротора, содержащее
момент либо мощность, которые являются нелинейной
функцией от токов и напряжений.
Прежде чем получить окончательный вид зависимо-
сти, следует связать составляющие токов и напряжений
93
ё координатах О, d, q с изменениями токов и напряже-
ний при симметричной нагрузке синхронной машины
в координатах d, q на комплексной плоскости.
3.3. МАТЕМАТИЧЕСКИЕ МОДЕЛИ ГЕНЕРАТОРА
В СИММЕТРИЧНОМ УСТАНОВИВШЕМСЯ РЕЖИМЕ.
ПРОСТРАНСТВЕННЫЕ ОСИ d, q РОТОРА И НАПРАВЛЕНИЯ d, q
НА КОМПЛЕКСНОЙ ПЛОСКОСТИ
Составляющие 0, d, q токов и напряжений при уста-
новившемся симметричном режиме машины ((о=соном,
Zo:==io=tQ=0; 1?а=0).
1) Определяются фазные токи и напряжения для
случая, когда трехфазный симметричный ток имеет пос-
ле преобразования составляющие:
io—ij^2 0, iq—О-
Фазные токи легко находятся из обратного преобра-
зования [см. (3.12в)]: ia—id cos 0, ib—id cos (0—a),
ic=id cos (04~cc)> a следовательно, это симметричная си-
стема токов (0=o)i-H9j.
Напряжения определяются из (3.19) с учетом того,
что это установившееся состояние, а следовательно, все
токи неизменны (не зависят от времени), а токи в демп-
ферных обмотках равны нулю:
uo=O; Ud=0; —Uq=ifXad-]-idXd', Uf=—iffy.
После перехода к фазным координатам: иа=
—ifXad sin0-|-idXd sin 0.
В комплексной форме обозначаем: ia=la, ua==Ua,
а также ifXad sin ®—Ёд— синхронная ЭДС по оси q.
Поскольку sin 0=cos(0-Ht/2), а Ёч опережает по фазе
ток 1а на угол л/2, ток 1а имеет индуктивный характер.
Тогда напряжение фазы а генератора будет равно:
0 а==Ёд—jlaXd.
Токи и напряжения в остальных фазах:
Ub—Q?id а> Ос— а\ lb—О? lai
Трехфазные токи образуют, следовательно, систему
токов прямой последовательности; их фаза сдвинута
относительно фазы ЭДС Ёд на угол —л/2.
2) Определяются фазные токи и напряжения при
условии io=0; r»d=0; iq=/=0.
94
Трехфазные токи [см. (3.12в) ] имеют вид:
ia——iq sin 0, ib=—iq sin (О—a), tc=—iq sin(04-a).
Составляющие напряжений [см. (3.19)]
Wo = 0; ttj— iqXq] llq— ifXadt
откуда
Ua==iqXq COS 0—[T/^Gid Sin 0.
Переходя к комплексным величинам и принимая во
внимание, что cos 0=—sin(0—л/2), можно записать:
a—^Eq—jlaXq.
Отсюда видно, что фаза тока совпадает с фазой
ЭДС Eq.
3) Решается обратная задача, т. е. определяются со-
ставляющие (0, d, q) вектора трехфазного симметрич-
ного тока ta—К21 cos cot; ib—У21 cos (cat—a); tc=
= У 21 cos (atf-f-a), получим: id=У 21 cos 0; iq=
=—У21 sin ft.
Если потоки реакции якоря пропорциональны токам,
формулы приведенные выше, означают, что преобразо-
ванный поток неподвижен относительно ротора. По ним
можно определить составляющие этого потока по
осям d, q.
Из рассмотренного выше следует, что в случае п. 1
О'=О, в случае п. 2 ft=—л/2. Полный поток реакции
якоря, следовательно, в случае п. 1 располагается по
оси d ротора, в случае п. 2 — по оси q.
В выражениях для тока по п. 3 угол О не является
углом отсчета времени, что для установившихся состоя-
ний не имеет значения. Он определяет положение оси d
относительно обмотки фазы а в момент прохождения
тока этой фазы через максимум. Можно упорядочить
направление тока обмотки фазы а на комплексной пло-
скости так, чтобы направление оси d ротора имело отно-
сительно него угол О. Отсюда следует, что на комплекс-
ной плоскости направление оси q ротора соответствует
направлению Eq. Не следует, однако, считать идентичны-
ми оси в геометрическом пространстве и на плоскости
комплексных чисел.
. 4) Как правило, приведенные направления на ком-
плексной плоскости выбираются так, что направление
реи q совпадает с направление оси d сдвинуто на
•—л/2. Проекции токов и напряжений на эти направле-
ния имеют индексы q, d и трактуются часто как веще-
ственные числа: Id, Iq, Ud, Uq.
Они выражаются также в относительных единицах:
/б=/ном, {7б=£7ном/|/3, связанных с номинальными
параметрами синхронной машины. В случае представле-
ния величин в относительных единицах справедливы
соотношения:
Id—id', Iq—iq', Ud==Ud', Uq==:llq.
Зависимости типов Ed(Id, Iq), Eq(Id, Iq) и 6d(id, iq),
eq{id, iq), т. e. фазных величин и их составляющих
в осях d, q, имеют одинаковый вид.
Если обозначить:
то каждый симметричный ток I нагрузки синхронной
машины можно разложить на составляющие векторы:
Тогда в фазе а
если за действительную ось выбрать на-
правление
lq — jld> если за действительную ось выбрать на-
правление q (рис. 3.8).
Формулы, объединяющие отдельные величины, выте-
кают из рис. 3.9:
Uq=U cos б; t/d=(/sin6; Iq=I cos 6; Zd==/sin б;
Eq—Uq-[-ElXd.
Зависимость E=O-]-jIXq служит для определения на-
правлений осей d, q, когда известны О, 1, поскольку Ё
направлена по оси «у; E—Eq, если Xq=Xd, и только
в этом случае синхронную машину можно представлять
в виде ЭДС и постоянного сопротивления.
96
В симметричном установившемся режиме Ed = ®, если
машина имеет обмотку возбуждения только в оси d;
в неустановившемся режиме (квазистационарном) Ed=
=0 только тогда, когда нет замкнутого контура в оси q
ротора, в противном случае так как уравнитель-
ные токи в этих контурах намагничивают ротор в оси q.
Рис. 3.8. Диаграммы для 1а =
(а) и для /в=0+
+/Л (б).
Рис. 3.9. Диаграмма для /в =
— Id ~\~jlq-
В расчетах переходных процессов аргументы векто-
ров токов и напряжений определяются относительно
оси q; угол 6 между напряжением О генератора и
осью q называется углом мощности. Угол О при этом
обычно не используется.
Выражение для ЭДС в составляющих d, q:
=UQ-\-id^d'
5) Поскольку каждый генератор представляется со-
ставляющими параметров по своим осям d, q (Id, Iq),
а сетевые расчеты выполняются при общих осях ком-
плексной плоскости для всех токов (I'-\-jI") и напря-
жений, ниже приведены зависимости между составляю-
щими в обеих системах отсчета (рис. 3.10):
а) дано, la, Iq определяются по выраже-
ниям:
Id=I' sin 8—I" cos 6; Iq=r cos бД-/" sin 6;
6) I—Id-\-jIq дано, Г, Г определяются по выраже-
ниям:
Г—Id sin 6Д-Д cos б; /"=—Id cos §-\-Iq sin 6.
Математические модели и схемы замещения машины
для расчетов установившихся режимов. Модели машины
7—1279 97
для расчетов установившихся и квазистационарных ре
жимов при синусоидальных изменениях величин выте-
кают из положений, сформулированных выше. В общем
виде формулы для цепей статора, записанные в собст-
венной системе координат d, q машины, имеют следую-
Рис. 3.10. Ток 1 и его состав-
ляющие при осях отсчета -ф> j
и d, q.
Л - Х°
Q-----------------о
Рис. 3.11. Схема замещения
синхронной машины, подклю-
чаемая к сети энергосистемы.
I
(
J
(3.20а)
(3.206)
щий вид (принято, что активное сопротивление R фаз-
ных обмоток отнесено к внешней сети):
- E^=Uq+IdXd.
Таблица 3.1
Искомые ЭДС генератора и соответствующие им параметры
по зависимостям (3.20а), (3.206) на схеме на рис. 3.11
для расчетов установившихся и квазистационарных режимов
Если то не существует активного четырех-
полюсника (схемы замещения), реализующего обе зави-
симости. Поэтому элементарная схема замещения
(рис. 3.11) дополняется алгебраическими зависимостями
(3.20), чем создается модель машины. Схема замеще-
ния машины подключается к схеме сети, а необходимые
ЭДС генератора определяются из дополнительных зави-
симостей в соответствии с табл. 3.1.
Если Ed=Ed, Eq=Eq, то схема замещения (рис. 3.11)
полностью, без дополнения ее алгебраическими зависи-
мостями, отражает необходимые свойства синхронной
машины; если одно из этих равенств не выполняется, то
требуются дополнительные зависимости.
3.4. МОДЕЛЬ СИНХРОННОГО ГЕНЕРАТОРА ДЛЯ РЕЖИМА К. 3.
При расчетах токов к. з. угловая скорость обычно
считается постоянной o)(/)=const или s(/)=const.
К формулам (3.19) применяется преобразование Лапла-
са — Карсона:
00
FAp) = P {f(t)e~ptdt = pFL(p)^f,
о
где f(/)—преобразуемая функция времени; Ес(р),
FL(p)—преобразования по Лапласу — Карсону и Ла-
пласу; j— символ преобразования функции f(t).
Преобразование дифференциальных уравнений при-
водит к появлению начальных условий в момент /==0+,
что ограничивает общность формул.
Введем начальные условия, предполагая, что к. з.
происходит в симметричном установившемся режиме,
а следовательно, из режима /=0_*:
iG(/=0.) = i2,(/=0_) = ZQ(/=0_)=0; 1
if (t = 0_) = ZfoT^O; / (3.21)
tq --0-)---4/o’ Q-/ == Ido- J
f Тогда можно записать в матричном виде 1в(/=0) =
р?==1во-
Удобный вид уравнений получается при введении
в зависимости значений напряжений из режима, пред-
шествующего К. 3.
* Введение начальных условий в момент /=0_, т. е. перед воз-
мущением, не достаточно строго.
Из (3.18) вытекает, что в симметричном установив-
шемся режиме
Ubo—Ив (/=0) = (wLb—R)Ib0. (3.22)
Зависимости (3.18) после применения преобразова-
ния Лапласа — Карсона принимают вид: •
Ив (р) = (юЬв—R) 1в (р) —рЬв (1в (р) —1во) •
Вычитая подученное соотношение из обеих частей
равенства (3.22), получаем:
АИв(р) — Ив(р) —Иво— (<bLb—R—рЬв) X
X (1в (р) -1во) =Х-1в (р) Мв (р), (3.23а)
г
откуда, если det Хв(р)=#0,
AIb(p)=X-’b(p)AUb(p). (3.236)
Условия к. з. формулируются теперь в отношении
к преобразуемой величине; например, трехфазное к. з.
на выводах машины выражается зависимостями:
Uo (р) =Ud (р) =ид (р) =0,
откуда следует:
А«о(р)=О; A«d(p)=—Ud(0); Aw(?(p)=—«^(0).
Не вдаваясь в детали преобразования, можно сразу
записать уравнения для отклонений трех наиболее часто
определяемых токов:
Afd (р) = {At/d (р) (pXq (р) -j-7?a) +
4-Aw<7 (р) Xq (р) (14-5) —Ди/ (р) G (р) ([р2+
4-(14-5)2]Х9(р)+ред}Л-1(р); i
A=(pXd(p)-\-Ra) (pXq(p)-\-Ra)-[- '
4-*4рНИр)(Н-5)2; i
Xiq (P) =— {Д«<7 (P) (pXd (P) 4-tfa) — XUd (p)Xd(p)X
X (14-5) -Ан/ (P) G (p) Ra (14-5)} Д-’ (P);
Azf (/?) =
_ [p4XadXD-^ad) + pXadRD]Md(p) + ^uf(P) (pXD + RD)
(pXf-\-Rf)(pXD-}-RD) — pzX2ad
(3.24) i
100
Здесь
Xd (р) =Xd-{/f‘ (XDX\d - 2X‘ad + X, Xlad) + '
+ Ма0Л«о+«/)} в-' (/>);
В (p) = p‘ (XDXf - X\d) + p (XDR, + XfRB) + I (3 25)
+W
X, (p) — X,— px +p
“C 'X
где Ad(p), X?(p)—сопротивления синхронной машины
в операторной форме; обычно их описывают прибли-
женными формулами (3.34); G(p) = {p(XadXD—XadXf-[-
+XadRD)}EH(p).
Влияние регулятора возбуждения на характер пере-
ходного процесса при к. з. можно определить, подклю-
чив его операторные уравнения Аи/(р) =G (р)Аи(р) [см.
(3.41) и (3.42)].
Иногда в операторном виде употребляются уравне-
ния с исключенными токами гЪ(р), iq(p) при нулевых
начальных условиях. В случае 1во=О уравнения (3.23)
приобретают вид:
Ub(/?) = (g)Lb—ркв—R)Ib(p). (3.26)
Из двух последних уравнений можно определить
id(p) и Zq(p) и подставить их в преобразованные урав-
нения (3.15). Получаются зависимости:
(р) = Xdo (р) id (р) 4- Xdf (р) if (р);
xpq(P)=Xq(p)iq(p);
Vf (Р) = Xdf (р) id (р) 4- Х[ (р) if (р),
(3.27)
где Xdo(p), Xdf(p), Х/(р) —собственные и взаимные опе-
раторные сопротивления; Хд(р) — по формулам (3.25);
Xdo(p) —операторное сопротивление d при разомкнутой
обмотке возбуждения.
Из уравнений (3.26) представляют интерес теперь
только следующие уравнения [обычно вводится z0(n) =
=0]:
= (I -г 5) (Р) - p^d (р) - Raiq (РУ
(р) = - U-Н) (р) -Pwq(р) - Raiq (^);
uf (Р) = - Л (р) - Rfif (Р)-
(3.27а)
101
При короткозамкнутом контуре возбуждения, когд&
Uj(p)=0, зависимости (3.27) приобретают вид:
^d(p)=Xd(p)id(p)- ЧМр)=ЗДр)Мр). (3.28)
где Xd(p)—операторное сопротивление по оси d при
короткозамкнутом контуре возбуждения, выражаемое
формулой (3.25).
3.5. МАТЕМАТИЧЕСКАЯ МОДЕЛЬ СИНХРОННОЙ МАШИНЫ
ДЛЯ ИССЛЕДОВАНИЯ РЕЖИМОВ ПРИ ПОСТОЯННОМ
СКОЛЬЖЕНИИ
Принимается фазная симметрия нагрузки но=О.
Скорость вращения ротора равна: (0==(1+«)(0Ном, соНом—
номинальная скорость вращения; иа=У 2 U cos((dHOm/4-
+'&), а поскольку при установившемся режиме началь-
ный угол Ф в выражении для 0 не влияет на получен-
ные результаты, принимается, что он равен фазному
углу напряжения. Из уравнений [1] ua—Ud cos 0—
—Uq sin 0 и
ua— V 2 U cos (coHOMж>)-=
= ]X2 U COS (sWhomO cos 0-|-Sin (sCOhom/) sin 0,
где
(Оном^~|-'в’==:0—SCOhom^,
следует:
wd=/2t7cos(s<oHOM0; uq= — Usin($<%,/).
В комплексном виде полученные соотношения можно
представить следующим образом:
(7<7=О-|- j U.
Отсюда следует, что составляющие напряжений d, q
(возмущение) и токов (реакция) в установившемся
асинхронном режиме будут иметь скольжение s (в отно-
сительных единицах).
Следовательно, их можно представить комплексными
числами посредством умножения на js. Таким способом
получаются зависимости, аналогичные (3.27), (3.27а):
1>а=(1+ «)*<,-/««•«- | (3 29)
102
I ' = -/sT,
Ijs ®d = '>C;«0's)4i + ^tdf(/s)A; (3.30)
I %=x,(/s)/4; |
К T, = A-rff(/s)/d + Xf(js)/f. )
К , В случае короткозамкнутой обмотки возбуждения
Б Z7/=0
|> Wd=Xd(js)ld, ^Q=Xq(js)iq. (3.31)
Зависимости (3.29) после подстановки в них (3.31)
Е приобретают вид:
I f7d=(i+s)X,(/s)/,-(№(/s)+^)4=y; 1 332
L Из уравнений (3.32) можно непосредственно получить
токи, протекающие в статоре, когда ротор вращается
с постоянным скольжением s, а статор питается напря-
I жением номинальной частоты. Если £//У=0, следует ре-
? шать уравнения (3.27) и (3.29); это можно выполнить
| [25] методом суперпозиции, т. е. сначала найти решение
при короткозамкнутом контуре возбуждения, потом при.
U подпитке напряжением Uf и замкнутых контурах ста-
тора.
| В обоих случаях необходимо знание частотных ха-
|£, рактеристик реактивных сопротивлений Xd(js), Xq(js)
£ и др.
pf Можно показать [1], что если ввести Ra=®, то зави-
Р симости (3.32) примут вид:
£ ’> -
1 (з.зз)
. l/, = -Xrf(/s)7rf=jl/J
При разомкнутом и неподпитываемом контуре воз-
буждения if=0 в (3.32) или (3.33) необходимо вместо
Xa(js) взять Xdo(js), что следует из формул (3.30), и
дополнить зависимости выражением U/——jsXdf(js)ld,
из которого получается напряжение, индуцируемое на
РНРодах контура возбуждения,
103
3.6. РЕАКТИВНЫЕ СОПРОТИВЛЕНИЯ СИНХРОННОЙ МАШИНЫ
В ОПЕРАТОРНОЙ ФОРМЕ
Сопротивления синхронной машины в операторной
форме определяются из опытов при работе последней
в двигательном режиме, т. е. операторные проводимости
определяются, как отношение реакции тока к возмуще-
нию (напряжению), когда ротор вращается, а контур
возбуждения замкнут.
Для определения сопротивлений машины использу-
ются формулы (3.33), представленные ниже в оператор-
ном виде:
где Xd(p)Xq(p)—операторные сопротивления синхрон-
ной машины (активные сопротивления фазных обмоток
Ra не учитываются), определяемые по формулам (3.25).
Эти сопротивления определяются измерениями, они
не строго соответствуют формулам (3.25), так как в них
проявляется влияние вихревых токов в стали ротора, не
учтенных в этих формулах. Из (3.33) очевидно, что ча-
стотные характеристики отвечают подстановке p=js
в формулы (3.25), так как мнимая часть сопряженной
частоты является скольжением ротора относительно
угловой скорости магнитного поля. Если не пренебре-
гать Ra, получается:
Zd(js) =Ra+jXd(js)^Xd(js) =jRa—jZd(js);
X/G's) =jRa—jZq(js).
Частотные характеристики параметров синхронной
машины определяются измерениями. Обычно определя-
ются реактивные проводимости X-^tjs), X~lq(js)-, они
показаны на рис. 3.12 для турбогенератора 200 МВт ти-
па ТГВ-200 по [23].
В расчетах операторные сопротивления выражаются
менее сложными формулами [22], чем (3.25):
у Чп\ -J 0 + ^)0+^) у .
~ (1+л.)(1+х"л)
1 + рТ"а
Xq 1 + pT"qo
с ( \ 1 + pTni *nd
(i+rde)(i+z?n^) pf •
(3.34)
104
Рис. 3.12. Частотные проводимости турбогенератора 200 МВт типа ТГВ-200, полученные экспериментальна.
' Здесь
ч 1 q'
Ч
Т Dl Т • Т'1
1 di XD D' 1 <?0
T'q, T'd, T"d, T"q — постоянные времени синхронной ма-
шины при короткозамкнутом контуре возбуждения.
Для предельных случаев: сверхпереходные сопротив-
ления Xd(^=0)=Xd(p=oo)==X//d, Х7(/=О)=Х,,<7—; син-
хронные сопротивления A'd(/=oo)=Xd(p=0)=Xd,
Xq(t—Co}^=Xq.
jXfi, s RaXfral
Рис. 3.13. Приближенные схемы замещения синхронной машины при
постоянном скольжении по [5] в оси d (а) и в оси q (б).
Оригинальное преобразование можно получить из
теоремы разложения:
1 / 1 1 \ -W'd
Xd(t) X'd Je +
+AJ_______LA e-tlT'd+J_.
^\x'd xd)e ^xd>
_____LA e-t/r"4j.A_
xq(t)-[x"q xq)e • xq-
Для некоторых исследований, например анализа
установившегося асинхронного режима, применимы схе-
мы замещения синхронной машины, например, такие,
как представлены на рис. 3.13 [5].
Выражения сопротивлений и коэффициентов, приме-
ненных в рассмотренных формулах и схемах замещения,
но не объясненных в тексте, приведены в приложении
ПЗ как функции основных параметров синхронной маши-
ны, полученных при измерениях, т. е. Xai, Xd, Xq, X'd, X'q,
X"d, X"q, T'd, T'q, T"d, T"q.
Ветвь схемы замещения, отображающая влияние
стали ротора (монолитный ротор турбогенератора, мас-
106
сивные полюсы гидрогенератора), представляет собой
сопротивление /?/в(1+/0,6) Vs. Активное сопротивление
Rfe зависит от насыщения значительно больше, чем
активное сопротивление R/ обмотки возбуждения
(в 20...50 раз). Наличие этой ветви в схеме замещения
особенно важно, когда контур возбуждения оказывает-
ся разомкнутым (такая ситуация может иметь место,
в частности, в ионных возбудителях при кратковремен-
ном изменении на обратное направление тока if).
В турбогенераторах Xc>Xi/, следовательно, Хг/>0;
в машинах с роторами, набранными из листовой стали
и без демпферных контуров, Xc=Xai, следовательно,
Xri=0\ в гидрогенераторах с демпферными контурами
XcCXai, следовательно, Xrz<0 (Хс, X,i — см. приложе-
ние ПЗ).
В случае отсутствия некоторых данных о парамет-
рах, связанных с осью q машины, принимается [5]:
Г'9«10Т"9; X'q&<2X"q.
Легко заметить, что если принять Xc—Xat (Xri—ty,
схема замещения соответствует допущению Xdf=XdD=
—XfD, а следовательно, получена из операторных сопро-
тивлений (3.34) путем подстановки p=js.
Сопротивление обратной последовательности Х2 син-
хронной машины. Из выражения (3.33) можно получить
сопротивление обратной последовательности синхронной
машины Х2, имея в виду, что скольжение ротора в от-
ношении поля статора будет равно 2, если якорь питать
трехфазным напряжением обратной последовательности
U2 либо током 12. Отношение напряжения к току каж-
дой фазы является тогда сопротивлением обратной по-
следовательности Z2. Аналогичное явление имеет место,
если приложено напряжение прямой последовательно-
сти, а ротор вращается в обратном направлении со ско-
ростью со, т. е. s=—2.
Целесообразно сначала оценить операторное сопро-
тивление при s=—2 из следующих выражений (в кото-
рых постоянные времени выражены в секундах):
у ~ istd»o^rd) п ~f~ у
d[} ' (Н/ХоЛо) (l+/>W''<fo) rf’
^(-/2)^^^=^,
если допустить, что 1—/2юИОм7п^~/2<о1гам7'.
107
Аналогично можно показать, что Xq(—j2)zxX"q.
Для определения Х2 принимаем: s=—2, питание на-
пряжением U1, 7?а=0, Па==]/2{/сО8(сйном/4-'0').
При этом из (3.33) следует iq—UIX"q, id=—jU/X"d,
а после перехода к мгновенным значениям:
• __/1/о7 Л/5а)“0м^ \ _^2t/ . Q ,
(г 27) — Yrr. S П 2(ОноьД
a
lq X" q COs2(oHob/
получается ток в фазе а
При учете только основной гармоники тока
^X"dX"q
f^X"d + X"q
|(3.35)
Можно показать, что при питании обмоток статора
синусоидальным трехфазным током третья гармоника
появится в напряжении, а сопротивление обратной по-
следовательности, полученное из основной гармоники на-
пряжения, будет равно:
(3.36)
Сопротивление нулевой последовательности Хо син-
хронной машины. Сумма трех одинаковых магнитных
потоков, смещенных относительно друг друга на угол
2л/3, равна нулю. Из этого следует, что поток, созда-
ваемый током нулевой последовательности 10, не сцеп-
лён с контурами ротора и замыкается исключительно по
путям рассеяния статора. Таким образом, Хо близко
к сопротивлению рассеяния.
Сопротивление Хо в типовых системных расчетах
обычно не находит применения.
108
3.7. МАТЕМАТИЧЕСКИЕ МОДЕЛИ СИНХРОННОЙ МАШИНЫ
ДЛЯ ИССЛЕДОВАНИЯ ЭЛЕКТРОМЕХАНИЧЕСКИХ ПЕРЕХОДНЫХ
ПРОЦЕССОВ
Подобные модели содержат выведенные ранее урав-
нения переходных процессов в контурах машины (обыч-
но упрощенные), а также уравнения моментов, действу-
ющих на ротор:
d8
rtf №ном^»
где 6 — угол на комплексной плоскости; s — относи-
тельный прирост скорости (скольжение); Мт, Ма— мо-
менты турбины и генератора, отн. ед., при Мб—
=Shom , Т — механическая постоянная времени в тех
же единицах, что и время t.
Можно показать [23, 34], что электромагнитный мо-
мент, действующий на ротор машины, вращающийся
с приведенной скоростью и возникший благодаря на-
личию токов во всех цепях ротора, в относительных еди-
ницах равен:
M==Wdiq—Wqid. (3.37)
*
Мощность, выдаваемая генератором в сеть, отн. ед.:
Р—Ud id “Г Uq lq 2 UqI о .
*
В симметричном установившемся режиме [см.
(3.176)]:
М= (ud-pRaid) (Uq-{-Raiq) iq=PRa (i2d~\~Pq) ,
а если активные сопротивления статора Ra отнести
к внешней сети М=Р. Часто при расчетах переходных
* *
процессов момент вычисляется по выходной мощности
генератора Р=М; при этом, конечно, допускается опре-
деленная ошибка.
Кроме отмеченных выше, при формировании расчет-
ных моделей делаются следующие допущения.
Обычно не учитываются электромагнитные переход-
ные процессы в сети. Схема энергосистемы, следователь-
но, рассматривается как статичная; в ней представля-
ются вынужденные квазистационарные режимы с часто-
тами 50 Гц.
109
В уравнениях (3.176) можно пренебречь так называе-
мыми ЭДС трансформации, т. е.
Аф . — A if =о
dt d dt ч
Сопротивление рассеяния Xai и активное сопротивле-
ние статора Ra выносятся во внешнюю схему сети. Из
уравнений (3.176) получается тогда так называемая
ЭДС зазора Es, модуль которой определяет насыщение.
Принимается фазная симметрия токов и напряже-
ний: цо=О и fo=O.
При этих допущениях из (3.176), а также из (3.15)
с помощью исключения токов /л, Iq, if получается удоб-
ная для численного интегрирования система уравнений:
А У, =AllWi+AfD4D+Bidid-uf, (3.38а)
+ (3-386)
4’Fq=Vq+Bq,«',; (3.38в)
(3.38г)
(3.38Д)
^=(%<>„7’)-'(Рт-Рэ-4); (3.38е)
* * * *
4 = s; (3.38ж)
ESd=WM(l+s); (3.38з)
Es,=—(1+s); (3.38п)
Es=E's-\-jE'rs=(Esq-\-jEsq) (sin 6—/ cos 6), (3.38k)
причем коэффициенты А, В выражаются через парамет-
ры машины по формулам из приложения ПЗ; Рт, Ро—
* *
мощности турбины и генератора, отн. ед.; /эб=5ном; Рг—
мощность потерь от составляющих тока в активных со-
противлениях машины, опущенных в уравнениях; E's,
E"s — действительные и мнимые составляющие ЭДС за-
зора Es по соответственным направлениям приведения
«сетевых» элементов, отн. ед.; Еь=ином /Г3; Т — меха-
ническая постоянная времени; t — время, отн. ед.;
tf>—со_1ном; при интегрировании следует об этом пом-
ПО
Нить и соответственно пересчитывать длину Шйга инте-
грирования.
В расчетах электромеханического переходного про-
цесса при интегрировании дифференциальных уравнений
обычно на первом шаге интегрирования определяются
токи и мощности генераторов. Для этой цели осущест-
вляются расчеты потокораспределения подстановкой
вектора Е в линейные уравнения I==YE, Pt=3Re
либо в нелинейные уравнения Р(Е, 6), Q(E, б); /<=
= (Л—jQi)/3Ei- При этом получается также информа-
ция о напряжениях, подаваемых к регуляторам возбуж-
дения, воздействующим на изменение напряжения щ
[см. выражение (3.38)]. Таким образом, имеется воз-
можность учета дифференциальных уравнений регуля-
тора возбуждения.
Выражения (3.38е) и (3.38ж) можно дополнить диф-
ференциальными уравнениями регулятора скорости ли-
бо регулятора частоты.
Следующая разновидность модели получается из
уравнений (3.176), если не учитывать переходные про-
цессы в демпферных контурах (/^=^==0). Из уравне-
ния ,(3.38а), соответствующего контуру возбуждения,
следует:
-h = Rfif Xadif =
d
dt
Xgd jUT
--ГГ" fe /
а поскольку Xf/Rf=a)H0MTf и xEfXad/Xf=e'q— составля-
ющая q переходной ЭДС, следовательно,
~uf у • у _ т d .
<d f & q-
Теперь уже можно перейти к фазным величинам и
времени в секундах, не забывая, что в установившемся
режиме произведение i/Xad можно заменить на Eq. Тог-
да —UfXad/Rf трансформируется в синхронную ЭДС,
пропорциональную напряжению щ, которую обозначим
символом Eqe. Получается
dEa . „ X’
~dF ~ Tf (Eqe ~ Eq) XdT’d ~ (3-39a)
111
По аналогии, учитывая отсутствие контура возбуж-
дения по оси q, можно записать:
dEd , X’
<3-39б>
В установившемся режиме: Eqe=Eq, Ed=Q.
В этой модели синхронную машину можно предста-
вить активным четырехполюсником, а также соответст-
вующими дополнительными алгебраическими зависимо-
стями по табл. 3.1.
В относительных единицах Eqe численно равна напря-
жению возбуждения щ, если w/i6=W/>x в опыте холосто-
го хода.
К приведенным выше уравнениям добавляются вы-
ражения:
dt “ном5;
№
dt
= '(PT-P,-KSll),
7 * *
(3.40)
в которых t — время, К — коэффициент демпфирования;
? -1 d?iu
S“- “ном dt ’
№=4 U2a™ T"d°sinS 8“ +
+(x~"+*4 T''vcos28“] = sin“8“+cos'8«>
причем U — напряжение узла, соединенного с узлом ма-
шины сопротивлением Хи (в относительных единицах
машины); 8и — угол между напряжением U и осью q
машины; Kd, Kq — коэффициенты, значения которых
ясны из уравнения, приведенного выше.
В упрощенных расчетах не учитываются зависимости
коэффициента К от угла 8и и принимается К==0,5 (Kd-f-
+К«).
Как и в предыдущей модели, здесь можно учесть
дифференциальные уравнения регулятора скорости.
Передаточная функция регулятора скорости опреде-
ляется обычно как
G(/7)^=
АРТ (р) _
s(p) *
112
из граничных условий следует, что в установившемся ре*
жиме:
ДРТ= — —,
а >
где о — значение статизма регулятора (0,02—0,06),
а Рт — мощность турбины: Рт=Рт0-}-ДРт=Рт0-----
Тогда (3.40) принимает вид:
7Г = 7" [рто - Ра - (к + 4j 5j •
Это упрощение, однако, может дать чрезмерное демп-
фирование качаний.
Простейшая математическая модель получается при
неучете изменений модуля переходной э. д. с. Е'\
Е'9==const; E'e^const.
Здесь уже нельзя учесть действие регулятора воз-
буждения, остается лишь уравнение движения ротора
(3.40) и возможен учет регуляторов скорости.
Приближенная математическая модель регулятора
возбуждения. Регуляторы возбуждения генераторов —
очень сложные устройства и соответственно сложна ма-
тематическая модель, необходимая для описания самих
регуляторов. Степень сложности этой модели не позво-
ляет применять ее в системных расчетах, кроме специ-
альных случаев. Поэтому математические модели регу-
ляторов возбуждения для типовых системных расчетов
сильно упрощаются.
Математическая модель регулятора возбуждения —
это операторная функция, описывающая как сам регу-
лятор, так и систему возбуждения. Часто регуляторы
имеют большое количество входных сигналов, например:
U, I, dU/dt, di/dt, db/dt и только один на выходе — на-
пряжение возбудителя щ. Ниже очень кратко будет опи-
сан регулятор напряжения.
Такой регулятор описывается передаточной функ-
цией:
G(P)
ДнДр)
Д«(р) ’
где A«f —прирост напряжения возбуждения в относи-
тельных единицах; если за единицу принять напряжение
8—1279 ИЗ
возбуждения из опыта х. х., то Uf=Eqe (в номинальных
единицах генератора); Ац=н—wOd— разница между на-
пряжением в точке измерения и приведенным напряже-
нием в относительных единицах; ц — составляющая на-
пряжения прямой последовательности.
Простейший вид представления статического регуля-
тора применяется при малых коэффициентах усиле-
ния Ки.
(3.41)
где Те — постоянная времени системы возбуждения (при
машинных возбудителях равна постоянной времени об-
мотки возбуждения возбудителя); Ки — коэффициент
усиления.
При больших коэффициентах усиления такой простой
вид представления регулятора может вызвать локаль-
ную неустойчивость исследуемых синхронных машин.
В этом случае необходимо принять более сложную ма-
тематическую модель регулятора:
G (р) = (3.42)
/ Ар2 4- Вр-]-1 ’ v
ч — 1000(2/?+ 1)
например: G(/>) = + .
Для некоторых исследований, например анализа
демпфирующего действия регулятора при качаниях ро-
торов машин, необходимо более детальное описание ре-
гулятора.
С регуляторами возбуждения связаны два ограниче-
ния, из-за которых возникает нелинейность задачи:
|Ди|<Лцтох; Ацта*>0
— вызвано ограничителем входного сигнала;
Н/ min max-
Здесь Uf max — так называемый потолок напряжения
возбудителя (представляется обычно в относительных
единицах); при номинальной нагрузке; W/ min
обычно равно нулю, хотя для некоторых типов синхрон-
ных машин нельзя исключить развозбуждения «встреч-
ным потоком» и тогда щ min < 0.
Приближенная математическая модель регулятора
скорости турбины. Так же как и в случае с регулятором
114
Ш(р)
возбуждения, для описания регулятора скорости приме-
няются по возможности простейшие модели. Передаточ-
ные функции, представляющие собой регулятор и тур-
бину, определяются как
G (р) - -7-Г- ,
" s(p) >
где ЛЛ4— относительный прирост, момента турбины; s==
==Дсо/й)ном — относительный прирост скорости ротора
турбины.
Простейшая модель для случая паровой турбины без
промежуточного перегрева пара:
G(p) = -^^—,
tsp + ° 1
(3.43)
где Ts — постоянная времени, значение которой близко
к времени полного открытия клапанов; о — средний ста-
тизм регулятора, определяемый как тангенс угла накло-
на линеаризованной характеристики частота — мощность
/(Р) турбоагрегата, взятый с обратным знаком.
Турбина с промежуточным перегревом пара и с ре-
гулятором описывается в простейшем представлении
функцией
G(n) = TT т-, (3.44)
" ТаТпР + (Гпа + Т5)д+а» ' 7
где Ts, о то же, что и выше; Гп— постоянная времени,
представляющая собой инерцию пара в трубах паропе-
регревателя (в среднем Тп=7 с); \k — отношение момен-
та, создаваемого головной частью турбины ко всему мо-
менту турбины (Л=0,25-=-0,3).
Гидротурбина вместе с регулятором скорости в про-
стейшем варианте описывается функцией (3.44), так как
в регуляторах гидротурбин кроме пропорциональной
обратной связи, как в регуляторах паровых турбин, при-
меняется изодромная связь (катаракта): большие по-
стоянные времени вызывают необходимость увеличения
усиления (уменьшение статизма до 0,02), что повышает
вероятность нестабильной работы, которую предотвра-
щает катаракта (Ts в 3—5 раз. больше, чем в паровых
турбинах, при низких наклонах и до 10 раз — при сред-
них; так называемое изодромное время составляет
5—30 с).
Регулятор скорости и воздействующий на него регу-
лятор частоты создают астатическую систему регулиро-
8* 1
вания по частоте, поэтому следует применять специаль-
ную обратную связь, стабилизирующую активную мощ-
ность генератора (таким образом, по отношению
к мощности регулятор является статичным). Модели та-
ких регуляторов, а также современных электрогидрав-
лических регуляторов, объединяющих функции регуля-
торов скорости и частоты, здесь не рассматриваются.
С регуляторами скорости связаны ограничения:
^М^Мтах — ограничение момента, связанное с пол-
ным закрытием либо полным открытием впускных кла-
I —ограни-
тах
панов турбины; I—^-1
\ ‘max
чение скорости изменения момента, связанное с движе-
нием распределительного клапана в направлении уве-
личения и уменьшения момента.
Описанные модели не пригодны для исследования
регулирования частоты и мощности (АРЧМ), где необ-
ходимо учитывать регуляторы частоты, работающие
в системе регулирования энергосистемы, а иногда и
сложное многопараметрическое регулирование котлов.
4. МАТЕМАТИЧЕСКИЕ МОДЕЛИ ТРАНСФОРМАТОРОВ
4.1. ДВУХОБМОТОЧНЫЕ ТРАНСФОРМАТОРЫ
Основные зависимости. Основные зависимости будут
рассмотрены на примере двухобмоточного трансформа-
тора, трехфазная блок-схема которого представлена на
рис. 4.1. Целью исследований будет определение матри-
цы проводимостей и сопротивлений прямой, обратной и
нулевой последовательностей трансформатора с учетом
«приведения» параметров к одной из сторон трансфор-
матора.
Принимаются следующие допущения:
а) фазные обмотки и фазные магнитные контуры
симметричны; контуры трансформатора линейны. Это
прежде всего значит, что не учитывается изменение маг-
нитной проницаемости его магнитных контуров и изме-
нение активных сопротивлений обмоток в зависимости
от температуры;
б) не учитываются емкости обмоток относительно
земли, междувитковые, а также между обмотками;
в) собственные сопротивления обмоток пропорцио-
нальны квадрату числа витков;
116
г) приближенный учет зависимости сопротивлений
контуров от изменения коэффициента трансформации
трансформатора (собственные и взаимные сопротивле-
ния регулируемой обмотки имеют квадратичную зависи-
мость от числа витков, взаимные сопротивления регули-
руемой и остальных обмоток — в первой степени).
Для решения поставленной задачи не требуется зна-
ния способов соединения обмоток и способа заземления
их нулевых точек. Сопротивление заземления нулевой
точки звезды включается в модель трансформатора.
Рис. 4.1. Структурная схема двухобмоточного трансформатора (/,
II— первичная и вторичная стороны; А, В, С — фазные выводы; Zi,
Zu — сопротивления заземлений средней точки звезды.
Результатами исследования по разработке моделей
трансформаторов являются матрицы типа матриц узло-
вых сопротивлений, так как их элементы легче описать
по результатам опытов с трансформатором. Основная
искомая зависимость представляет собой линейную
связь между узловыми напряжениями и токами:
U=ZI, (4.1)
где Z — искомая матрица сопротивлений, является ли-
нейной комбинацией коэффициентов.
Путем преобразования (0, 1, 2) получаем матрицы
прямой Zb обратной Z2 и нулевой Zo последовательно-
стей. Этим матрицам уже можно поставить в соответ-
ствие электрические контуры (схемы замещения). Далее
выполняется инверсия матриц Zi, Z2, Zo и получаются
матрицы узловых проводимостей Yi, V2, Yo, которым,
если они симметричные, также соответствуют электриче-
ские контуры. Получение матриц симметричных со-
117
ставляющих трансформатора, а также соответствующих
электрических схем замещения и является предметом
исследований, приведенных ниже.
Матрицы (4.1) делятся на подматрицы, связанные
с обмотками трансформатора:
и =
где Hi, Un — векторы (матрицы порядка 3x1) фазных
напряжений на выводах первичной и вторичной обмоток
(узловых напряжений); 1Ь 1ц — векторы (матрицы по-
рядка 3X1) узловых токов первичной и вторичной об-
моток; Zu, Z12 и т. д. — подматрицы (порядка 3X3) ма-
трицы узловых сопротивлений.
Узловые токи и напряжения показаны на рис. 4.1.
Чтобы получить зависимости типа (4.1), нужно опре-
делить основные электромагнитные связи, имеющиеся
в трансформаторе: линейные зависимости между токами
Ji, Ju и напряжениями Vb ¥ц обмоток (см. обозначения
на рис. 4.1), получающиеся непосредственно из допуще-
ния о линейности трансформатора. Тогда уравнение
(4.1) можно переписать в виде
vr f М
vnj LL
Ji'
Jir _
= KJ.
(4.2)
L '
N
Здесь не учитываются нелинейности, вызванные на-
сыщением стали.
Вначале следует описать связи между узловыми то-
ками I, прдтекающими к трансформатору, и токами J
в обмотках, а также между фазными напряжениями U
на выводах трансформатора (узловыми) и напряже-
ниями V обмоток, позволяющие зависимость (4.2) пре-
образовать в искомую зависимость (4.1).
Токи в обмотках являются линейной функцией узло-
вых токов:
J = Ci;
где С —матрица порядка 6x6; Си, Cj2 и т. д. — подмат-
рицы порядка 3X3.
Матрица С зависит от способа соединений обмоток
фаз, и ее можно назвать матрицей соединений обмоток.
118
Узловые напряжения U линейно зависят не ТОЛЬКО
от напряжений V фазных обмоток, но также от напря-
жений на сопротивлениях заземления нулевых точек
звезды обмоток
U==TV-|-GI;
ТЧ. G= 1
т22 ’ оо
0 О
2ц1 1
(4.4)
(il
где Zj, Zn — сопротивления в общих точках звезды об-
моток; Т — матрица порядка 6x6, зависящая от способа
соединений обмоток; Тн, Т22И т. д. — подматрицы по-
рядка 3x3 матрицы Т; 11 — матрица порядка 3X3, со-
ставленная из единиц; 00 — матрица нулей порядка
3X3.
Получается зависимость (см. рис. 4.1):
Zjl 1 0 0 * ' Il Ife2! (Jal + 1
0 0 Znl 1 1ц. + + ’
(4.5)
где lft —столбцовая матрица единиц порядка 3X1;
GI— столбцовая матрица напряжений на сопротивле-
ниях в общей точке звезды обмоток трансформатора.
Матрицы С и Т, как упоминалось выше, зависят толь-
ко от способа соединений обмоток трансформатора. На-
пример, в трансформаторе со схемой соединения Yo/Yo
подматрицы соединений:
СП=С22 = 1; |
С,2 —С21 = 00, J
(4.6)
где 1—единичная матрица порядка 3X3.
Для трансформатора со схемой соединения Yo/A
(рис. 4.2) справедливы соотношения:
Сц=1; Ci2=00.
Значения C2i и С22 можно определить из следующих со-
ображений.
Из зависимости, следующей из рис. 4.2, можно запи-
сать:
1ц —
” 1
о
—1
—1 0"
1 —1
0 1
Jn — k Jn,
119
ио нельзя определись СОНИ Лц, так как detkT=O. Ра-
зобьем токи Лц на две составляющие: „
Лц=Л,п+Joillft
такие, что lwJ'n=0 (lw — строчная матрица единиц),
т. е. сумма этих токов равна нулю, /оп одинаковы для
каждой фазы Лц и, следовательно, сокращаются в уз-
ловых токах.
Отсюда следует:
1п=ктЛ'п,
что позволяет определить токи Л'ц: ;
(4.7) ]
Рис. 4.2. Трансформатор со схемой соединения У/Л(7=/а1+/61+
+ /cl).
Неизвестный ток /Оп можно определить из зависимо-
сти между напряжениями Vn (рис. 4.2), а именно:
lwVn=0 (сумма напряжений в замкнутом треугольнике
равна нулю). Из (4.2) следует: Vn=LJr+NJn или
lwVn= lwLJi-|-lwN (Л,ц-]-/о п 1 fe) =0.
С учетом специфики построения матриц L и N [см.
(4.Ю)] получается:
(L+2Z) lwII+3(ZV+2n)/on=0, 1
откуда
т 1 4*2/ . 1
•'oil— 3 N + 2n
так как l№lft=3.
120
Окончательно можно записать:
Jji — J n + ^oii^fe з kIn +
। I 1 £ + 2/>\i i i —
C2,=M1; C!2 = 4-k; b=- 4U=H.
Аналогичным способом можно определить матрицу Т
в выражении (4.4):
при соединении обеих обмоток звездой (трансфор-
матор Y/Yo), получается Тц = 1, Ti2=00, Т21=Ш, Т2г=1;
для трансформатора У/A (рис. 4.2) справедливы за-
висимости:
Vn==kUn; lwVn=0.
Если напряжения Un разложить подобно токам Jn
на составляющие Un—UTi+ Uolft, так что lwU'n=0, по-
лучим:
U'„ = 4- krV; Ц,=4 к^п + С/.Ц. (4.8)
Составляющую ’ t70U необходимо связать с состав-
ляющей GI. Чтобы это выполнить, делается допущение
о том, что обмотка, соединенная в треугольник, зазем-
лена через сопротивление, равное бесконечности:
Г Zfll 001
G = 1
[ 00 со 11
Из произведения GI получим подматрицу ооШп,
а поскольку lwIn=0 (сумма фазных токов стороны II
равна нулю) имеем:
11 111== Од,
где Ол — столбцовая матрица нулей.
Получается столбцовая неопределенная матрица оо0,
которую можно обозначить как
ooOft=U0lft. (4.9)
Такой подход обязателен в случае, когда Zi—оо, т. е.
когда обмотка, соединенная в звезду, не заземлена.
1?1
В общем виде способ заземления сторон трансформато-
ра можно учесть зависимостями:
• Zjll 00
00 Znll
Il
1ц
причем если обмотка соединена в треугольник или
в звезду с незаземленной нулевой точкой, соответствую-
щие сопротивления заземления равны бесконечности,
а получающаяся при этом неопределенность выражается
зависимостью (4.9).
В конечном счете матрица Т исследуемого трансфор-
матора имеет вид:
г 1 00 л—
Структура матрицы К. Матрица К также требует
объяснения, так как значения ее элементов, имеющих
размерность и характер сопротивлений, зависят от кон-
струкции сердечника трансформатора. Из допущения
о симметрии трансформатора, а следовательно, и о сим-
метрии распределения потоков в его сердечнике сле-
дует:
I II
а
b
с
(4.10)
где М, N — собственные сопротивления фазных обмоток
сторон I и II; т, п — взаимные сопротивления обмоток
соответственно сторон I и II; L — взаимные сопротивле-
ния обмоток разных сторон одних и тех же фаз; I —
взаимные сопротивления обмоток разных сторон и раз-
ных фаз.
Для собственных и взаимных сопротивлений харак-
терно следующее:
если сердечник трехстержневой, собственные и вза-
имные реактивные сопротивления в матрицах М, N, L
имеют разные знаки;
№2
если трансформатор имеет три разных сердечника
/=0), между обмотками разных фаз отсутству-
ют связи.
Решение задачи. Основная зависимость, объединяю-
t щая узловые токи и напряжения трансформатора^ име-
ет вид:
V = KJ — TV = TKCI->U=(TKC4-G)I; 1 И)
Перед определением элементов матриц Z и Y—Z-1
целесообразно выполнить «приведение» токов и напря-
жений, а также преобразование (0, 1,2).
Преобразование «приведение». «Приведение» токов
и напряжений является линейным преобразованием (см.
§ 1.2), равноценным в определенном смысле изменению
системы единиц, и основано, как известно, на
нии напряжений на диагональную матрицу t,
на матрицу (t*)-4.
Обозначим:
U'=tU; I'=(t*)-*I; Z'=tZt*;
Здесь
умноже-
а токов
U'=ZT.
G1 001
оо м ]’
где А, /2— коэффициенты приведения
ветственно первичной и вторичной
случае — комплексные числа.
С учетом принятых обозначений получаем:
00
оо IG
t =
напряжении соот-
сторон, в общем
Z' tTKCt*
. (4.12)
Преобразование (0, 1, 2). Это преобразование фаз^
ных токов и напряжений каждой стороны трансформато-
ра с помощью матрицы S, приводящее к диагонализации
всех подматриц матрицы Z. Результаты преобразований
приведены в — - -
приложении П4. Матрицы
S — —
з
1
1
1
а
а2
1 '
а2
а
; s-’=
1
1
1
1
а2
а
а
а2
, (a=ei2nl3}
Ш. используются для формирования матрицы преобразова-
ния s, которая для двухобмоточного трансформатора
. 132
имеет порядок 6x6 и структуру*.
г s 00 1 , rs-1 оо 1
S —" I • $ -—• |
[ оо s ’ [ оо s-1.
Тогда
Is = sl; Us=sU; Zs = sZs-’;
(4.13)
Is =
UIIs
2
Аналогичные зависимости можно записать и для дру-
гих токов и напряжений. Отсюда получается линейная
зависимость, относящаяся к приведенным величинам:
U'6=Z'SI'S, (4.14)
где Z's—stTKCt*s-1 + stGt*s-1;
|/1|2ZI30 00
00 p2|2Zn30j:
stGt*s~’ =
30 =
3
0
0.
В некоторых случаях удобнее пользоваться другим
видом зависимости (4.14), получающимся из равенства:
a (be.. .)a~1=(aba-1) (аса-1) ...,
с учетом того, что преобразование (0, 1,2) не изменяет
диагональных матриц:
Z's=tTsKsCst*+tGst*. (4.14а)
Матрица сопротивлений прямой, обрат-
ной и нулевой последовательностей. Для
построения указанных матриц группируются строки
в зависимостях US=ZSIS по индексам при напряжениях
симметричных составляющих (0, 1, 2) и таким способом
получается три группы матричных зависимостей, объ-
единяющих составляющие токов и напряжений отдельно
по прямой, обратной и нулевой последовательностям.
Свойство это вытекает из специфической структуры ма-
трицы Z:
J
а
1
i
1
^21
/211
124
(первый индекс относится к составляющей 0, 1,2, вто-
рой— к стороне трансформатора).
Подробные преобразования, приводящие к матрицам
сопротивлений и проводимостей прямой, обратной и ну,-
левой последовательностей, а также к схеме замещения,
будут выполнены при рассмотрении конкретных видов
матриц соединений обмоток (С, Т), а следовательно,
для определенных типов двухобмоточных трансформато-
ров. Поскольку параметры трансформатора определяют-
ся из результатов опытов, производимых, как правило,
при симметричных напряжениях, комплексные коэффи-
циенты трансформации, сопротивления намагничивания
и сопротивления рассеяния будут связаны с выраже-
ниями матрицы К, при рассмотрении конкретных типов
трансформаторов. Так как сопротивление намагничи-
вания Z^ значительно больше, чем сопротивление рас-
сеяния трансформатора Z, представляется целесообраз-
ным использовать формулы для выражений матрицы и
элементов упрощенных схем замещения прямой после-
довательности, основанные на допущении Z[x=oo; в слу-
чае необходимости можно учесть токи намагничивания,
считая Zu сопротивлением ветви, соединяющей произ-
вольный узел трансформатора с базисным узлом, либо
разнося его на все узлы.
Трансформаторы с различными типами соединения
Для трансформатора со схемой соединения Y/Yo, ну-
левые точки обмоток которого заземлены через сопро-
тивления Zi и Zn соответственно, справедливы соотно-
шения:
'->11 VJ22 * 11 *22 *>
С]2 = С21 = Т12 = Т21=00;
KiPM + Zjl/J2!! M*2L
(4.15)
Рассчитаем Z's по (4.14) (необходимые вспомога-
тельные выражения помещены в приложении П4). Ма-
трица
Zs = sZs_1 =
h ^(M^ + ZjSO)
Zi*/2Ls
/1/*2Ls
l^l2(Ns + 2n30)
125
Матрицам (4.18) соответствует схема замещение
прямой (и обратной) последовательности так называе-
мая полурезонансная схема (рис. 4.3).
Рис. 4.3. Схема замещения пря-
мой (обратной) последователь-
ностей двухобмоточного транс-
форматора Y/Y.
[Л, В, С —по формулам (4.21),
в зависимости от того, какая из об-
моток имеет регулировку].
Матрица нулевой последовательности Z'o при коэф- .
фициентах приведения /1=1, 4=Л-/0 имеет следующий
вид:
r =.p + 2w + 3Zi ^ + 2/> 1 (419)
0 '[ t(L + 2l) /2(^+2« + 37п) ]’ '
Разности М—т, N—п, L—I определяются из опытов
к. з. и х. х. трансформатора. В случае п=т=1=0, что
справедливо только для группы из трех однофазных
трансформаторов, матрица нулевой последовательности
отличается от матрицы прямой последовательности со-
ставляющими 3Zi и 3/2Zn в выражениях главной диаго-
нали.
Сопротивление намагничивания, комплексный коэф-
фициент трансформации, сопротивления. Трансформатор
обычно испытывается симметричным напряжением (со-
ставляющие обратной и нулевой последовательностей
токов и напряжений равны нулю), следовательно, мож-
но рассматривать только неприведенные зависимости,
касающиеся составляющих прямой последовательно-
сти — Ui=ZiIi. Испытания проводятся при номинальном
коэффициенте трансформации.
Опыты х. х. Для этого случая справедливы сле-
дующие зависимости:
a) —т)Ном7ц; Uai=(L—Z)HomJii;
б) 7ц=0->(7ц= (L—Z) ном/щ; Uщ= (N—п)номАп-
Г Сопротивления намагничивания: ZT = UnI = (М —
ОТ)ном> II II’ еСЛИ ^1 1~^ном I’ ^1 II ~^ном II’
1£/11~^р.1’ Ап = ^1Г
Комплексный коэффициент трансформации Кт здесь
определяется как среднегеометрическое значение коэф-
фициентов трансформации, полученных из опыта х. х.,
1?7
что не противоречит общепринятым понятиям коэффици-
ента трансформации и приводит к простым завивимостям:
XT = ‘|/'XTaXTj,; = —из опыта „а“;
XT/, = [7nf7“[ — из опыта „б“;
Кта==(М—т) ^b=(L—l)
(М—т) (N—n) -1.
Отсюда (см. § 4.1) следует с учетом упрощения «г»:
X2 = Z TZ~’
т.ноч Р-1 р. П’
причем Хт.ном — номинальный комплексный коэффи-
циент трансформации, а также
Z ТТ=/ГЙ Z , Z = 7 .. (4.20)
Р-П т.ноч р.’ р. р.1 ' '
Для трансформатора со схемой соединения Y/Y мо-
дуль коэффициента трансформации близок к отноше-
нию числа витков обмоток, а аргумент — к нулю. По-
этому принимается, что коэффициент трансформации
Хг — действительное число, равное отношению числа
витков.
Опыты к. з.
£Лп=0-п= (Л1 m)HoM/ii+ (^—Оном^ш;
0= (L—/)ном/п + (N—п) помЛц-^^11=
= [ (Л4 ш) ном (£ /)2ном (^ ft) Siom] ^ii-
Сопротивление рассеяния Zin=Z выражается зависи-
мостью Z=t7]j^ !Ц=(М —/п)ном (^ 02ном(^—п)~Sjom
при номинальном коэффициенте трансформации Хт=
==Лт.ном-
Отсюда номинальное взаимное сопротивление прямой
последовательности: (L - /)2НОМ = (М- w)HOM (N - «)„ом -
- Z (N - n)„0M=Z^ZM - ZZ^„ = K;2Zl (1 - zz;'), а еле-
довательно, (L — /)ном =s= K~x (Z^—0,5Z), поскольку ZZ“’c
<1 (по правилам приближенных расчетов ]/1 — x
1 — 0,5л, если x<^_ 1).
Влияние изменения коэффициента трансформации
на матрицу сопротивлений. Влияние действительного
относительного значения коэффициента трансформации
P=KtX-1t.hom на матрицу зависит от того, какая из об-
моток регулируется и, следовательно, имеет переменное
число витков, причем регулируемая обмотка меняет соб-
ственное и взаимное сопротивления пропорционально р2,
если с ростом р число витков увеличивается, и пропор-
ционально р~2, если с ростом р число витков умень-
шается. Меняется также взаимное сопротивление меж-
ду фазными обмотками I и II пропорционально первой
степени р (это относится к сопрстивлениям прямой по-
следовательности). В рассматриваемом трансформаторе
увеличение р может быть вызвано увеличением числа
витков обмотки / либо уменьшением числа витков об-
мотки II. Таким образом, получаются следующие зави-
симости:
(I);
I \ ДО;
( A'-2 Zu (I);
JV—n = J т-1’™
l/?’2A"2 Z (II);
v г т.ном Iх
£-Z=J<™(Z^°’5Z) (1,;
А’»
(4-21)
(I, П — регулируемая обмотка).
Матрицы трансформатора и схемы замещения. При-
веденные матрицы прямой Z'i и обратной Z'2 последова-
тельностей имеют следующий вид (при допущении, что
4=1, h=t — действительное число):
Z\ = Z'2 =
г А
I В
В .
С ’
л== zu (II); Рг\ (I);
в= hp-'(Z^-0,5Z) (П); hp(Z^ — 0,5Z) (I);
с= h‘p~^ (II); (I).
(4.22)
9—1279
129
В формулах приведенных выше, Z, сопротивле-
ния рассеяния и намагничивания стороны I; t — коэф-
фициент приведения; Кт.ном— номинальный коэффици-
ент трансформации; р==ХтК~’ом— относительное зна-
чение коэффициента трансформации; —отно-
сительный коэффициент приведения.
Симметрическим матрицам Z'i, Z'2 можно поставить
в соответствие пассивный контур. Легко показать, что
когда то Im (Л—В)<0, a Im (С—В)>0 (либо
наоборот). Таким образом, в контуре существуют усло-
вия для резонанса.
Когда сердечник трансформатора трехстержневой,
мнимые части взаимных сопротивлений I, п, т отрица-
тельны и составляют почти половину мнимых частей,
соответственно L, N, М\ иными словами, элементы ма-
трицы нулевой последовательности значительно меньше,
чем элементы матрицы прямой последовательности.
В дальнейшем не будет учитываться влияние изменений
коэффициентов трансформации на значение выражений
матрицы нулевой последовательности. Поэтому прибли-
женно:
Z, =A14-2m; JV+2«=A~2 Z •
р-0 I ’ I т.ном P-0’
£-1-2/ =/Г1 (Z. —0,5Z),
* т.ном' Р-0 0/
где Z^o— сопротивление намагничивания током нулевой
последовательности; Zo — сопротивление рассеяния нуле-
вой последовательности.
Окончательно очень приближенно получается:
Z' =
’ ^о + 321 А^о-О.бА)-
?(^o-0,5Z0) ^о + З^ц .
(4-23)
На рис. 4.4 приведена Т-образная схема замещения
нулевой последовательности.
Значения сопротивлений заземления Zi и ZTI могут
изменяться от 0 до оо, что соответствует непосредствен-
ному заземлению нулевой точки звезды и изолирован-
ной нейтрали соответственно.
130
В последнем случае в схеме нулевой последователь-
ности появляется разрыв, а составляющие токов нулевой
последовательности через трансформатор не протекают.
Рис. 4.5. Схема замещения
прямой (и обратной) последо-
вательности двухобмоточного
трансформатора в виде П-об-
разного четырехполюсника.
а —• полурезонансная [формулы
(4.24а)]; б —при допущении h-1,
р=1.
а 1 1=1
I -T *
Рис. 4.4. Схема замещения полу-
резонансная нулевой последова-
тельности трансформатора Y/Y.
Матрицы проводимостей можно определить с помо-
щью инверсии матриц (4.17) и (4.18). Возможность осо-
бой инверсйи матриц Z'i, Z'o вытекает из квазидиаго-
нального построения матрицы Zfi; квазидиагональный
вид получается после соответствующего преобразования
строк и столбцов в Z's. Для случая, когда регулируемой
обмоткой является обмотка II трансформатора, получа-
ется:
____£н_____
(2^-0,252)2
-(2и-0,52)р
h (2^ —0,252)2
-(2^-0,52)77 “I
/г (2^ — 0,252)2
V
/г2 (2^ —0,252)2
Приближенные значения выражений матрицы можно
оценить следующим образом (при тех же условиях):
(4.24а)
Матрице (4.24а) можно поставить в соответствие
электрический контур; схема замещения прямой (обрат-
9* 131
ной) последовательности трансформатора со схемой со-
единения Y/Y приведена на рис. 4.5. В этой схеме:
Ую — + ^12 —~~мГ +
П ’ hZ * 4А2И ’
______у I у P(p—h) । p(p + h)
Уно 122 । 112 wz ’ 4/z2Z
У„, У22, У12-см. Y\.
(4.246)
J
Если, кроме того, исключается ток намагничивания
(Z =оо), получаются упрощенные формулы:
н*
Р и -h~P „ -^P(P~h> f4 94r1
yill = hZ ’ y^~'~hZ~i ^no — A2Z • (4-24в)
Когда h=l, Р=\, т. е. приведение осуществляется
через номинальный коэффициент трансформации (изме-
нения коэффициента трансформации не учитываются),
получаются следущие приближенные выражния:
У\ п ~ J Ую~Упо ==2Z^’* (4.24г)
Для случая, когда регулируемой является обмотка /,
соответствующие формулы, как это видно из (4.21),
можно получить, умножая зависимости для сопротивле-
ний на р2, для проводимостей — на р~2.
Получается упрощенная матрица проводимостей пря-
мой (обратной) последовательности:
(4.24д)
1 / 1 । 1 \ 1 / — 1 1 X
hp[z 4Z^j
1/1 1 \ 1 / 1 I 1 X
hp Z 4Z^) h2 [z '4Ztx )
а также проводимости 1 в схеме 1 зам( гщения:
У1 п — phz h — p 4/2/?/^ ’ I h + p. (4.24e)
Pio— p*hZ p — h 1 ^hp2Z^ > 1
^IIO ph2Z Если Z^^oo, to z/j 4hzpZ^ 1 и “’ phZ ’ • Ую _ h — p p—h p2hZ ’ ^no p№Z’
132
Если h=\, р=\, то у{ и=-Г, Ую = Уно ==^~-
~ р*
Соответствующие схемы замещения показаны на
рис. 4.5.
Матрица проводимостей нулевой последовательности.
Матрица проводимостей нулевой последовательности
Y'o получается с помощью инверсии матрицы (4.23).
Следует отметить, что выражения матрицы Z'o получе-
ны без учета влияния изменений коэффициента транс-
формации. Принимая коэффициенты приведения /1=1,
/2=/.-}-/0, получаем:
*'•=<"' = [? у'Ч; И, = Д-,(/г!2и0 + ЗГ2п);
L 1 12 1 22 J
гя=д-(ги,+зг1);
У1г = -Д-’Л(2и(1-0,52.);
A = /i!ZlU)(3№r.HOMZn + 3ZI +
+9№I.M„Z-,Z,Zn+Z0 - 0.25Z-,Z=.)=A!Z^
либо в несколько иной форме:
=г
" VZyo+3Z,)-’,
.__1 + ^Z^ ZT
22 AM »
1
если Z1 = oo;
если Zn = oo;
, _/(^ + 3Zn)-\
22 >0,
если Zl = oo;
если Zn = oo;
(4.26)
l-O.SZ^'Z,
hA
У12 = 0, если Zl(Zn) = oo,
где Z^Q, Zq — сопротивления нулевой последовательно-
сти намагничивания и рассеяния соответственно;
Ат.НОМ-- номинальный коэффициент трансформации
133
трансформатора; t — коэффициент приведения;
=//Хт.ноМ; Zi, Zu — сопротивления заземления нулевых
точек звезды обмоток I и II.
Элементы схемы замещения, соответствующие матри-
це (4.25), вычисляются следующим образом:
ветвь / — II (см. рис. 4.5), #ni=—У12;
элементы, подключенные к узлу приведения, являют-
ся суммой строк этой матрицы
^10=Уп + У12 =
А 1 + ЗА№Тдюм^рио 4~ 6,5Z^q Zo
hA ’
{0, если ZI = oo;
(Z^+SZ,)--, если Z„ = oo;
_____у । у ___1 — А4--PO.SAZ^qZo
У ПО Г22~ГГ12— ;
_ Р^^+^Т.ном2!!)"1» еСЛИ Zj^OQ;
^110 ~ 1 л v
10, если Zn=oo.
(4-27)
(4.28)
Наиболее частым случаем является непосредствен-
ное заземление одной из нулевых точек звезды обмоток
(Zi=0, Zn=°° — либо наоборот); соответствующие фор-
мулы получаются из уже выведенных подстановкой Zj=
=0, Zn=oo (либо Zi=oo, Zn=0). Схемы замещения ну-
левой последовательности, соответствующие полученной
матрице проводимостей, показаны на рис. 4.6.
Рис. 4.6. Схемы замещения нулевой последовательности двухобмо-
точного трансформатора Y/Y.
а— общий случай, значения элементов по формулам (4.26), (4.27); б —
Zjj—OO; в-Zj = OO.
134
Трансформатор со схемой соединения
Y/Д-П (при заземлении нулевой точки
звезды через Zj). Для такого трансформатора необ-
ходимые выкладки уже были выполнены [см. (4.7),
(4.8) и рис. 4.2] и справедливы следующие соотношения:
Сп=1; С12—00; С22=-|- к; С21=М1;
,__ 1 £ + 2/
3 N-\-2п :
Т„=1; Т1! = Т11 = 00;
Zn=oo; lwIn=0; Znllln=
(к, 1й, 11 —см. приложение п. 4).
Приведенная матрица сопротивлений рассматривае-
мого трансформатора выражается формулой
41 оо
оо 41
"1 00 1 гм L
1 т
00 тк J LL N
IGpZjii 001
00 coll]
1
bll
00 1
(4.29)
Согласно зависимостям и обозначениям из приложе-
ния П4 после выполнения преобразования (0, 1, 2) полу-
чается:
Z's=sZ's_,=
| 4 |2MS 4- b (L + 21) 30 4f*2 (L — I) a
1 1
— t\t2(L-l)a — |4|2(/V —л)01
7| 4 |2Zj30 001
[ 00 oo30J’
где
(4.30)
135
Теперь можно выделить матрицы сопротивлений ну-
левой, прямой и обратной последовательностей:
Z'o =
| I2 (Zo + 3Z)j
о
0 ], Zo = 714 4-2/тг
со I
(L-P2Z)2
2V 4-2/2 ;
е^е"1”16, e+1 = e+MQ-,
Г 1tt I2 GW — m)
2= e ]
JV8p==(^-0 — \t^{N-n)
(4.31)
Выражение Zo=7Vf + 2m—(L + 2Z)2(jV+2ц)-1 имеет
простую физическую интерпретацию: это сопротивление
рассеяния нулевой последовательности, полученное в ре-
зультате приложения трехфазного напряжения нулевой
последовательности Ui=(70lfc к обмотке /, при к. з. либо
х. х. в обмотке II (в обоих случаях ток 1п=0), при не-
посредственно заземленной нулевой точке звезды Zi=0.
Из анализа формулы для Zo вытекает:
Zo^Z
для группы трансформаторов, или если сердечник имеет
оболочку, а также для
четырех- и пятистержневых трех-
фазных трансформаторов (Z —
сопротивление рассеяния I—II),
поскольку взаимные сопротивле-
ния т, I, п имеют отрицательные
значения, равные либо близкие
к нулю;
Z0<Z, если трехфазный транс-
форматор имеет трехстержневой
сердечник, это следует из того,
что т, I, п имеют отрицательные
значения меньшие, чем M/2, L/2,
[см. Z в опытах к. з. (4.20)].
Рис. 4.7. Схема замеще-
ния нулевой последова-
тельности трансформато-
ра Y/A; O^Zi^oo; Zo —
по формуле (4.31).
М/2 соответственно
Матрице сопротивлений нулевой последовательности
Z'o можно поставить в соответствие схему замещения на
рис. 4.7.
136
Сопротивление намагничивания, комплексный коэф-
фициент трансформации, сопротивление рассеяния.
Опыты холостого хода*:
а) ^111 = 0 >(/^ = (714 ^)ном^ц»
II ~ OhOM^IP
Ul II “ № ^)homAi 1.
Сопротивление намагничивания
Zp,i == =(Af 7?i)H0M, ц = “ ^)ном-
Номинальный комплексный коэффициент трансформа-
ции Кт.НОМ
IS __ (7И Ж)|1ОМ l/O/: . IS _ № Оном 1ЛО~Л
Л’“- а-о™ у3е-" ^--(«-п)иом г3е-
Кт.„„ = К К,аК,ь = ]/'(№- (N - л)-'м узе _
Отсюда (см. приближение г из § 4.1):
I IZ 12 _ О т)ном _____ 7 7—1 7 _ .Л- I - 2 7
|Ат.ном1 ° (W—п)ном ~~ U1 НИ ИII — 1Л Т.ном I
Опыт К. |з. l/j п = 0
иц = (М- т)^ + e^(L- Wi
°=(i - Wu + 4f* - «w> II - z=
^11 1
- /71)HOM - (L - /)2H0M (N - n)-\
— сопротивление рассеяния co стороны / трансформа-
тора.
После подстановки результатов опытов х. х.
(L- /)1ЮМ = /3 I<„„!- - 0,5Z). (4.32)
* Опыты проводятся при номинальном коэффициенте трансфор-
мации, поэтому присутствует индекс «ном» при отдельных сопро-
тивлениях.
137
Приведенные зависимости отлйчаются от выражений
(4.20), относящихся к трансформатору со схемой соеди-
нения Y/Yo, только тем, что вместо коэффициента транс-
формации Т^т.ном участвует его модуль |^т.ном|; можно,
следовательно, воспользоваться готовыми формулами.
Матрицы сопротивлений прямой и обратной после-
довательностей при регулировании в обмотке I имеют
вид:
z\ =
1 G |2P2Zp, ^*8|^т.ном1~1 Р (^ц, 0,5Z) С-]
~|/*Л| Кт.ном |-’P (Z^-0,5Z)e+1 I /2|2Кт.ном |-2Zp
(4.33)
Матрица обратной последовательности Z'2 получает-
ся из матрицы прямой последовательности Z'i, если по-
менять местами e-t и e+i. Матрицы сопротивлений Z'i,
Z'2 трансформаторов со схемами соединений Y/Y и
Y/Д отличаются только сомножителями e+i, e~i во вза-
имных сопротивлениях.
При формировании схем замещения прямой и обрат-
ной последовательностей встречаются определенные
трудности. В общем случае матрицы 1\ и Z'2 — несим-
метрические, а следовательно, им нельзя поставить в со-
ответствие электрический контур, состоящий из сопро-
тивлений. Однако можно так подобрать коэффициенты
приведения 4, £2> чтобы одну из этих матриц (например,
Z'i) сделать симметрической. Предполагается, что при-
ведение выполняется на стороне /, т. е. /i = l-j-/0, а /2
подобрано так, чтобы коэффициент при сомножителе
—0,5Z) во взаимных сопротивлениях был действи-
тельным числом:
l2=te-i->а rg arg /<т,
где t — действительное число.
После подстановки в (4.33) ^|ХТном|~1=Л получается
матрица, идентичная (4.18) [см. также (4.22)]:
Г
рц^-о.бг)
^(Z^-O.SZ) '
/i2zlx
(4.34)
которой соответствует схема замещения прямой последо-
вательности на рис. 4.3. Относительный коэффициент
138
приведения h является действительным числом, близ-
ким к 1.
При данных коэффициентах приведения матрица со-
противлений обратной последовательности остается не-
симметрической:
Z^p2 ph (7И — 0,5Z) г+2’
е +2
g±/"/3t
(4.35)
Несмотря на то что не существует схемы замещения,
соответствующей матрице Z'2, для расчетов можно ис-
пользовать схемы прямой последовательности вместо
схем обратной последовательности: эта возможность вы-
текает из того, что группы соединений трансформаторов,
объединяющих две схемы сети, одинаковы.
Матрицу Z'2 можно сделать симметрической, допол-
нительно приводя только составляющие обратной после-
довательности всех напряжений и токов и оставляя без
изменений составляющие нулевой и прямой последова-
тельностей сети, питаемой обмоткой трансформатора,
соединенной в треугольник. Коэффициент дополнитель-
ного приведения в сети II на стороне треугольника
трансформатора со схемой соединения Y/A:
*ЦС+2 —с .
(4.36)
для остальных сетей коэффициент приведения равен 1.
Легко проверить, что после такого приведения Z"2=Z'i
[Z'i по (4.34)]; все же нетрансформаторные элементы
схемы обратной последовательности стороны II имеют
дополнительный коэффициент приведения, равный 1.
Отсюда следует, что, вводя в схему обратной последо-
вательности стороны II трансформаторы У/Д сопротив-
лениями прямой последовательности, можно получить
токи и напряжения обратной последовательности, кото-
рые для применения в дальнейших расчетах нужно по-
вернуть на угол — л/3 на стороне треугольника транс-
форматора. Этот прием, как правило, применяется при
расчетах токов к. з.
Неприведенные дополнительно составляющие токов
и напряжений прямой последовательности повернуты
трансформатором на угол л/6, составляющие обратной
последовательности — на угол —л/6 (следовательно,
если векторы токов или напряжений прямой последова-
139
тельности совпадают на стороне звезды, на стороне тре-
угольника вектор тока прямой последовательности опе-
режает вектор тока обратной на угол л/3).
Матрица проводимостей прямой последовательности,
полученная путем обращения матрицы (4.34), идентична
матрице (4.24е), а соответствующая ей схема замеще-
ния— схеме на рис. 4.5.
Матрицу проводимостей нулевой последовательно-
сти, равную обратной матрице Z'o [см. (4.31)], можно
записать без расчетов в связи с диагональностью Z'o
(с учетом того, что £±=1-Н/0):
Y, —[(Zo + SZj)-» 0 1
0 I о о J*
(4.37)
Соответствующая ей схема замещения, очевидно,
идентична схеме на рис. 4.7 [см. (4.31)].
4.2. ТРЕХОБМОТОЧНЫЕ ТРАНСФОРМАТОРЫ
Общие зависимости. На рис. 4.8 представлена блок-
схема трехобмоточного трансформатора, на которой при-
ведены параметры, необходимые для формирования ос-
новных зависимостей между токами и напряжениями.
Рис. 4.8. Структурная схема трехобмоточного трансформатора.
Эти зависимости, связывающие параметры самих
обмоток, создают систему из девяти линейных уравне-
ний вида V=KJ.
Аналогично тому, как это делалось ранее для двух-
обмоточного трансформатора, определяются зависимо-
сти U=ZI при известных V=KJ, а затем выполняются
140
преобразования «приведение» и (0, 1, 2). Обозначаем
(рис. 4.8):
Vi
V„
vin
Матрицы К, Z — квадратные,
ка 9x9 следующей структуры:
‘М L
К = L N
W F
I II
W
F
R
III
rz„
'21
Z31
I
I
II ; Z = Z.
и т. д.
(4.38)
симметрические поряд-
Z12
Z22
Z32
II
z/p
I (4.39)
HI ’
^23
Z33 -
III
Ш
где
Подматрицы L, W, N, F, R, при i, /=1, 2, 3 имеют
подобную структуру.
Выполняются линейные преобразования токов и на-
пряжений обмоток в узловые токи и напряжения анало-
гично тому, как это делалось в случае двухобмоточного
трансформатора:
U=TV+GJ; J=Cl->
"Zjll
— U=(TKC + G)I; G =
znll
zmll
(4.40)
(4.41)
•где 11 — квадратная матрица единиц порядка 3X3.
Симметричное преобразование (0, 1, 2) выполняется
посредством матрицы:
s~
s-1
s-1
s-1
(4.42)
преобразование
вом матрицы:
«приведение» напряжений — посредст-
(4.43)
s =
S
S ;
s
Hi
Применение этих преобразований к векторам U, 1
в зависимости U=(TKC + G)I дает в результате выра-
жение, объединяющее токи и напряжения, в виде, иден-
тичном (4.14):
Z's==stTKCt*s-1+stGt*s-i (4.44)
либо
Z's=tTsKsCst*+tGst*. (4.44а)
Матрицы С, Т порядка 9x9 зависят от схемы соеди-
нений обмоток, поэтому конечные формулы будут связа-
ны с конкретными типами трехобмоточных трансформа-
торов. К особым случаям трехобмоточных трансформа-
торов относятся трехобмоточные автотрансформаторы,
а также двухобмоточные трансформаторы, одна из об-
моток которых соединена в зигзаг. Условно считая по-
следний трансформатор трехобмоточным с особым со-
единением двух из трех обмоток, можно унифицировать
исследования.
Ниже будут рассмотрены трансформаторные ком-
плексы, содержащие трехобмоточный трансформатор,
объединенный с последовательным регулировочным
трансформатором.
Трехобмоточный трансформатор со схемой соедине-
ния Y/Yo/A-11. Принимается, что обмотки I и II соеди-
нены в звезду, а III — в треугольник. Сопротивление
заземления ZnI=oo. Регулируемая обмотка I.
Матрица С принимает вид:
’ 1 00
00 1
dll bll
0 —1
1 о
— 1 1
(4.45)
Коэффициенты d, b можно получить из зависимости
V=KJ, учитывая, что обмотка /// соединена в треуголь-
ник (lwVin=0). При этом выполняется разложение век-
тора тока Jin=J'in+A)iiih такое, что lwJ'ni=0:
1 wVin=l w [ WJi -b FJn + R (J'ш+/onilk)] =
={W+2ay) 1wJi+ lwJn+
+ (/? + 2r) 3Jo ш=0->-
r __ 1 W + 2w . 1 F + 2f , .
pill 3 R + 2r Iu,lI 3 -f-2r “’ ll,
142
я, следовательно, в (4.45) можно подставить следующие
величины:
1 Г + й~' 3 R + 2r . А__ 1' f + 2f (4.45а)
’ 3 Я + 2г*
Матрица Т определяется следующим образом:
Г 1 00 00 1
т оо 1 00 1 V • (4.46)
00 00 О —
В результате действий по (4.44) и разделения матри-
цы Zzs на матрицы прямой, обратной и нулевой после-
довательностей получаем:
| tr |2 (/И — т) ttt\ (L-l) fi/*3 FT*07- - w) ^_J
z\= -0 М212 (N-n) rrl 1 ts I2 f)^-l >
_Уз ' 1 Gl2 (М -w) е+1 — /и) P=(^-f)^ + 1 {L-i) ’+-(^- Кз k -r) w) e+ (4. 47)
z.= (L- t3t*t -0 R2|2(^-n) /2/*8 №F- 11312 f)^+i 9
77=^ (Г _Из ' - р= -|/1|2(/7-f-3ZI) t.t\Q 3-(«- 0 ’ ~r) (4. 48)
где Z'o = f.tfi 0 |/2|«p+3Zn) 0 0 oo _ 9 (4.49)
н^м+ъп—
,=£+2/_(<+у+ ^> .
0=^+2„-Ш.
А "р Zf
143
В сетевых задачах с трансформаторами исследуемого
типа Y/Y0/A-ll можно принять arg/i = argZ2; коэффи-
циент /3 при этом может иметь отличающийся аргумент.
Сопротивления намагничивания, номинальные ком-
плексные коэффициенты трансформации, сопротивления
рассеяния.
Опыт х. х.:
а) All “A III = (-М — m)rnJIP
Чп ^)номЛр Цщ ~(W — w)HOM ~у=-;
б) /ц — A HI — 0—= (С /)homAip
Цп = (JV - /г)ном/ш; ziin = (F - f)H0M ;
в) /п =/1П =0—>t7n —(U7 t^)HOMj^==/lin;
^111 — (F /)ном ^iiii r)номЛш*
Сопротивление намагничивания:
Z)U = Z^ = (M — w)H0M; ZptII = (N A0HOM,
Z|1III — "з” Оном-
Комплексные коэффициенты трансформации:
р- ___т j т 7—1_ (Л4 ирном
Лт2а —^11(71П— (£-/)ном ’
К^и^'т= (УV^e-~ - в опыте "а“;
= оп«е
^и=^цСТш = (gZr^1 ^g- - в опыте ”в“-
В связи с этим
К'т2ном •А'тга-^тгб — 1/ ~7 ’
Г Р-П
К К к ~\/ е
*'тзном “ 2'T3aJ'T3B —|/ у ^-1-
f -^u-III
144
Отсюда следует (см. допущение „г“ из § 4.1):
^р.11 “ I ^тгном f ^р111“1^тзном1 ^р,
где Лтгном — действительное число.
Опыты к. з. Короткое замыкание между обмотка-
ми I и II:
^111 =0’ ^Ц = (^ ^OhomAi ~h Оном Л Ц»
Q~(L~ 1)юы In-\-(N — n)mtA /ш —> ZI2 =
— (М — т\____________(£—/)2ном
[ 'ном (/v-n)H0M ’
причем Z12 — сопротивление рассеяния обмоток / и //;
короткое замыкание между обмотками I—III:
All и^ = (М ^)Ном^цЧ“
+ 0^ Ч^ном jz^Aup
0 = (U7 о/)ном^==/ц — (R НномЛш ~* z«=
= (Al-'»U-<^r2SL-
причем Z13 — сопротивление рассеяния обмоток I и III;
короткое замыкание между обмотками II и III
^пи — 0, Zjj = O: = (Л/Г ^IhomAiiH-
О = (F — f)H0M /1П -[-—(/? r)H0M /1Ш —* Z23 =
{ (Н-Г)ном ’
причем Z23 — сопротивление рассеяния обмоток II и IIL
Отсюда, допуская, что собственное сопротивление
пропорционально квадрату числа витков обмотки,
10—1279 145
а взаимное — произведению числа витков обмоток, по-
лучаем:
м-т=L-l^p\I-1 (2И-0.5ZJ;
N-n = \K^Z^ W — w =
^/3‘/’|Хтм™Г'(^-0,52„);
-|-(Я-г)=|кТИИ1Г,2и; F-f =
=» /3] КпнсмГ ’ I Кт.ком Г' (2И - о ,5Z'„),
(4.50)
где 7,2з=22зК2т2ном — приведенное сопротивление Z2s; Р=
=Кт2/^Ст2ном. В трехобмоточном трансформаторе не все
обмотки имеют одинаковую мощность. Поэтому отноше-
ния R/Х в разных обмотках разные. В сопротивлениях
рассеяния это учтено, так как они определяются из из-
мерений, на отношения же Z^/Z^, Z^i/^in указан-
ное различие влияет незначительно, так как активные
составляющие этих сопротивлений обусловлены потеря-
ми в сердечнике, а не в обмотках.
Приведенными формулами описаны все основные
элементы матриц прямой и обратной последовательно-
стей. Для основных элементов матрицы нулевой после-
довательности можно сделать те же допущения, что и
в случае двухобмоточного трансформатора, а именно:
в (4.50) подставить М+2т вместо М—т, L+21 вместо
L—I и т. д.» а вместо Z^ подставить Z^,
Матрицы и схема замещения прямой последователь-
ности. Матрица прямой последовательности (4.47) трех-
обмоточного трансформатора при допущении, что «при-
ведение» выполняется к стороне /, а коэффициенты
приведения подобраны так, чтобы матрицу Z't сделать
симметрической, т. е. /1=е^°, f2=4ej°, h—he-u приобре-
тает вид:
рМ2и-0,5212) h\Z
_phz (Z^ — 0,5Z13) hah3 (Z^ — 0,52'23)
pha — 0,52ls)
hth3 (Z^ 0,52'23) •
(4.51)
При этом р=Т<т2/Кт2ном — относительный прирост коэф-
фициента трансформации; h2=t2/RT2BOM, h3=t3/RT3HOM~
относительные коэффициенты приведения.
146
Чтобы определить матрицу проводимостей, нужно
выполнить инверсию матрицы Z't:
detZ'^-L^'.H^-B);
4Z • (4.52)
Y'l = (Z',)-’ = -524-g[a(y] = [ri,.[, i, i=l, 2, 3,
где
„ __ yr Z23 2. „ _____L n__ /7 Z'23Zlg\ 1 — I
^11 Z 23 42 ’ ^l2 ^21 f Z3 4Z ) \ '
H* * P* /
a„=a„=- (z, - h-'p~'-
a — (z — Z2'3\h~2-
«22 —^!3 4ZRj 2 ’
a =(z — —} h~2'
a>3 4ZpJ з ’
5=Z,2gZi2Zi3; A=4 (Z1Z2+Z1Z3+Z2Z3);
Zi=0,5 (Z12+Z13—Z'23) \ Z2=0,5 (Z12 +
+Zf23—-Z13); Z3=0,5 (Z13+ZZ23—Z12).
Вводятся дальнейшие упрощения:
принимаем, что выражениями с коэффициентом Z~2
можно пренебречь. Тогда для элементов матрицы Y'i
справедливы формулы:
r4Z'23 1 Z23 .(ЛИ 7r A\-
ргА {‘io l, 23/i;,
4Z13 h\A + z13 (4B-Zn4);
Y — 4Z12 I Z12 (4B-Z.,4);
1 33 ЛМ ' Z Л2Й%
-Г12 --Г21 4Z3 h2pA "J Z^A^p 23213^)> (4.53)
-Л. = -К31 4Z2 h3pA -+z^(iZ‘B-Z'“Z^
у 4ZJ 1 1 (47 R Z Z A}
' 23 ~ h9h9A 1 Z^2M/
|0* 147
Из (4.53) легко получаются зависимости для элемен-
тов матрицы, соответствующие случаю пренебрежения
сопротивлением намагничивания Z^=co.
В схеме замещения сопротивления между узлами I,
II, III являются величинами, обратными взаимным про-
водимостям, взятыми со знаком минус. Проводимости
yio, соединяющие эти узлы с базисным узлом, — это сум-
мы выражений соответствующей строки матрицы Y'i:
,,____у । у IV __________ 4 (h2h3Z'23— h3pZ3— h2pZ2) ।
^10 —------------------------------------------------ -H
Z A2h2h3p2 (^2^3Z 23 h3PZ3 h2pZ2) —
> - ^23 (Мз^З - h3PZi3 ~ MZ12)1 ‘
Поскольку имеются зависимости Z'23—Z3—Zz=0,
Z'23——Zi3=—2Zi, можно записать:
—
4Д-1 (/r2Z'23 — h~lp~lZ3 — h~lp~lZs)^ если Z^oo; ’
z если hs=h3 = p=l (приведение осуще-
ствляется через номинальный коэффициент
трансформации);
0, если /г2=Л,= л=1, а также Z—оо.
2 3 Г » р, j
(4.54а)
Рис. 4.9. Схемы замещения прямой последовательности трехобмоточ-
ного трансформатора.
а —полная, по формулам (4.54); б — упрощенная, 2ц =°°, h2=‘h3=l, р=1; Ь —
то же, что и для упрощенной, но схема звезды.
148
#iio=‘ ’
0,
Аналогично
4 h2h3Z3 h2pZx) .
#по — Ah22h3p ' +
Z^A2h22h3p ftB(h3pZx3 — — KpZi) ~
— AZ13 (h3pZl3 - h2h3Z'23 - h2pZi2}\.
Тогда
AA~' (h~2Zl3- h~lp~%-h2haZA, если Z =oo;
'2 2 / a a 0 i/ ' I
2Z)3Z2 j « _____ ___i
- 1 — если h2 ~h3 — p=l,
если h2 = h3 = p=l,
а также Z^^oo;
(4.546)
~ \ -1 a_ <a—<s ci i / ।
#nio Ah23h2p '
+ Z^A2h\h2p [4^ (^2^12 — h 2^2 ~ ^spZ^) —
- AZx2 (h2pZi2 - h\Z'23 — h3pZx3)]
или
#1110“
4Д-1 (/172Z„ — tr'p-'z,—h~'h~'z,), если Z^oo;
^1^, если ft! = ft,=p=l;
0, если hs = h3=p=\,
а также Z^~oo.
(4.54b)
Схемы замещения, соответствующие матрице прово-
димостей, представлены на рис. 4.9
Матрица проводимостей и схемы замещения нулевой
последовательности. Приведенная матрица сопротивле-
ний нулевой последовательности Z'o имеет в своих вы-
ражениях [см. (4.49)] элементы, обозначенные символа-
ми Н, Q, D. Так же, как и в случае двухобмоточного
трансформатора, здесь не учтено влияние изменения
коэффициента трансформации на выражения матрицы
сопротивлений нулевой последовательности. Имеем:
1) Н=М + ‘2т- (117Д22г)г =Z01,
(4.55а)
149
— сопротивление рассеяния нулевой последовательности
пары обмоток I—III;
2) .D=W + 2«-^ffi.=Z0„
(4.550)
— то же, но пары II и III.
Сопротивление Q оценивается двумя способами;
3) из опыта к. з. одновременно обмоток II и III при
подведении к обмотке / трехфазного напряжения нуле-
вой последовательности:
yM=4i+Q4n • 0=0414-
+D/on-zom=^=H-^-';
_ 7 7 •
023 ^0121^023’
4) из опыта к. з. обмоток I и II при размыкании тре-
угольника стороны III; тем самым создается двухобмо-
точный трансформатор Y/Yo, что позволяет воспользо-
ваться готовыми результатами предыдущих исследова-
ний [см. (4.23)]
L+2/^/(_1Т2ном (Z^q—0,5Z0i2).
Для дальнейших преобразований [см. (4.49)] ис-
пользуются соотношения (4.55а) и (4.556):
y=(M + 2m^H)(N+2n-D^
=(4» -Сл -z^. (4-Кв)
откуда
Q^K~'
T2HOM
’ ___ Z0i3Zf023
оз 47
где
Z03 = 0,5(Z'0234-Z013-Z012);
2'о2з=2о2зХ2т2ном — приведенное сопротивление рассеяния
нулевой последовательности пары обмоток II и III (при-
няты приближения типа
~ O,5Zol3 и т. д.).
150
^013 *г?огз ^г^оз^г^и
I С=3~“Г а
IjVw
1 0о ______
Окончательно 6 упрощённом биде получим;
<4-55г)
Опыты 1, 2, 3 можно провести в условиях эксплуата-
ции.
Независимо от наличия результатов опытов (4.55)
дают возможность проводить оценку необходимых вы-
.. ражений матрицы, например подстановкой значений па-
раметров прямой последова-
тельности, что, однако, при-
водит к некоторым погреш-
ностям.
После введения допуще-
ний, что fi = l, a h — дей-
ствительное число, и обозна-
чения /2X-1t2hom=^2, матри-
ца сопротивлений нулевой
последовательности приоб-
ретает вид:
Рис. 4.10. Схема замещения ну-
левой последовательности трех-
обмоточного
(Т-образная)
из (4.56).
трансформатора
сопротивления Z
r z.
^3 + 3Zt
/j2Z03
О
ft2Z03
(22 (Z023 + SZjj)
о
(4.56)
co
О -
о
Схема замещения нулевой последовательности транс-
форматора Y/Yo/A-ll, соответствующая матрице Z'o,
имеет вид, показанный на рис. 4.10.
Матрица проводимостей нулевой последовательности
. . фОрМИруется путем инвер-
структуру:
трансформатора Y'o=(Z,o)“1
сии матрицы (4.56) и имеет
о
о
о
712
К22
О
К,2
о
(4.57)
где
о,
. (Z,„ + 3ZI)-1
если Zj = oo;
если Zn = oo;
О если Zj = oo либо Zn=-oo;
151
.д-ч^. + зг,);
' = j 0, если Z„ = oo;
I Г2 (Z 3Zuyl, если ZT = oo.
2 \ и л. л । 11' 1
Здесь Д=/22 (Zois + 3Zi) (Zo23 + 3Zn)—hzZos’, Zi, Zn— со-
противления заземления нулевой точки звезды обмоток
I и II\ Z013, Z023 — ПО формулам (4.55); /г2—^/Кт2ном —
относительный коэффициент приведения, связанный
с обмоткой II.
Рис. 4.11. Схемы замещения нулевой последовательности трехобмо-
точного трансформатора Y/Y/A.
а — общий случай, проводимости у по формулам (4.57), (4.58); б — Zj=°°; в —
zii=o°; г —zI=zII=°°.
Схема замещения нулевой последовательности, соот-
ветствующая матрице (4.57), показана на рис. 4.11.
В этой схеме проводимости на землю равны соответст-
венно [обозначения по (4.57)]:
гЛ =
У°п =
о,
(Z,1, + 3ZI)-1,
д-’^-йЛ.+зг,);
' о,
I C2(^!. + 3Z|I)-1,
если Zj —оо;
если Zn = oo;
если Zn =оо;
если Zj = оо;
(4.58)
У12--- ^12'
4.3. АВТОТРАНСФОРМАТОР СО СХЕМОЙ СОЕДИНЕНИЯ
Y/Yo/A-11
Блок-схема соединений обмоток автотрансформатора
показана на рис. 4.12. Различие между автотрансформа-
тором и трехобмоточным трансформатором состоит
прежде всего в наличии электрической связи обмоток /
152
и II и только одного со-
противления заземления
нулевой точки звезды об-
мотки Н\ более сложны-
ми становятся также вы-
ражения комплексных ко-
эффициентов трансфор-
мации. Легко проверить,
что в основных зависи-
мостях V—KJ и U ZI
возникают соотношения
[см. (4.45) и (4.46)]:
U = TV-]-GI; J =
Рис. 4.12. Схема соединений авто-
трансформатора Y/Y/A.
- 1 1 00 ’
00 1 00
’ 1— 1 т ’
00 00 тг к7
_ О —
- 1 00 00
1 1 00
1
_ dll fell —к
-Znll Z„ll
znll Znll
00 00
00
00
roll
(4.59)
Обозначения приведены в приложении П4. Матрицы
К, Z имеют структуру в соответствии с (4.39).
Коэффициенты d и b определяются так же, как для
трехобмоточного трансформатора. Разница состоит
в том, что ток Лц равен сумме токов Ii+hi-
Следовательно,
= J шН- А)П1^’ 111=0»
а из условия l№Vni=0 следует:
= + 6=-4-£±|. (4.60)
о 1\ Zr г о -f- zr
После выполнения операций «приведение» с помо-
щью матрицы t [см. (4.43)] и преобразования (0, 1, 2)
с помощью матрицы s [см. (4.42)] получается:
Ги'ь
u's=z'srs; и\= U'm ; I\ = 1'ш
“'ills I'lIIs
Z's=tsT KCs - ‘t*+tsGs -’t*. (4.61)
Подматрицы токов и напряжений представлены на
рис. 4.12.
153
Напомним, что матрица К составлена из подматриц
порядка 3x3:
К= L
гм
L W
N F
F R.
со структурой: М =
~М
т
т
И т. п.
W
т т
М т
т М
Получается:
Z„ = Ms+2Ls + Ns+(U7 + 2tti + F-|-2f)d3O;
Z,, = Ls+Ns + («7 4- 2w+F + 2f) 630;
Z„=4 (U7-»+F-f)a, zsi = -L(W-w+F-f)a.*-,
Z!s = Ns + (F4-2f)630;
Z„ = 4-(f-f)a, Z„=4-(F-f)a*;
z„=4-(/?-r)oi.
(4.62)
Обозначения — по приложению П4, подматрицы раз-
мера 3x3 матрицы Z's обозначены символами Zjj, i, j=
=1, 2, 3.
После выделения матриц сопротивлений прямой, об-
ратной и нулевой последовательностей имеем:
Z\ =
- [Л1—w+2 (£—/)+ +/V-n]IM2 (L-/+/V-/O (W-t»+r-fjx ’ ХЙ=/,'’а
= (L—l+N—n) (Л^-л)|/212 9
{W—w+F—f)X 4" (*-r) 1G l!
(4.63)
Z'2 получается из Zj подстановкой e+i вместо e-i и на-
оборот:
(Л + зг^п.р (B + 3Zn) М*2
(B + 3Zn)t\t2 (С + 3Zn)|/212
О
О
о '
о
СО
(4.64)
154
где
А =Л1 + 2т+ 2 (L 4- 2Z) 4- + 2п—
— (W+2w + F+2f)2(R + 2r)~l-
B=N + 2п + L + 21—
- (Р+2р) (W+2w+F+2f) (R+2r) ;
C=N + 2п- (F + 2f)2 (R + 2r) .
Сопротивления намагничивания, комплексные коэф-
фициенты трансформации, сопротивления рассеяния.
Так же, .как в предыдущих разделах, здесь элементы
матрицы К будут выражены посредством данных, полу-
чаемых ‘из опытов для автотрансформатора.
Опыты х. х.:
а) Ли==Лш=0: Ц, = [Л1-т + 2(£-/) +
-J-./V я]номАр ==(Ь l-\~N —
6)Ai=Aiii=0: Un = (L-/4-JV-«)ном/1П; Цп =
= (N — п)ном/1П; = ^)ном
в) Ai=An =°: Лш;
^111 — ПномуГ^Лш’’ г)номАш •
Сопротивления 1намагничивания:
I = =(М — /п)ном 4* 2 (£ — /)ном -|- (N — /г)ном;
Zy. II == ^)ном>
III = "з“ (^ ~ Ином-
Номинальные комплексные коэффициенты трансфор-
мации (определения и способы получения рассмотрены
в §4.1 и 4.2):
т> __ ______. г> __________ (F--I A- N-я)ном
Атга — {L _ z + N _ /7)ном » Лт2б — п ;
= д^_ю + г_01|ом V3е-
155
1
(W-w + F-t)
тзв‘ гг
^Т8 ном = 1/^таа^Т2б = V II II = ^т2 „ом^н’
Л'т2 ном — действительное число (упрощение);
Атз ном ^тза^'тзв |/^ AjAu 111 & - i * 111
= | Атз ном I
(в соответствии с допущением «г» из § 4.1).
Опыты к. з. Замкнуты обмотки I и II: I
^1п=0; /ini=o-^t7Ii=z/1i+(L^/4-iv-^)I]OM/1i1 у
° --= (£ - I + - «Wi I + (^ - 'СномЛ IP
у ____. I__у (L — N л)2ном
,2~/ц“ н (ZV-n)HOM '
Сопротивление Zi2 такое же, как и для трансформа-
тора, потому что в этом опыте электрическое соединение
обмоток I и II ие играет роли.
Замкнуты обмотки I—III:
^ип=о; Л п=о-^ i^Z т+
0 = (IF - ® + F - /,, + 4- (R - ,
у ___у w 4~ F — f)2HO\t
13 “ H (Я-Г)ном
Замкнуты обмотки // и III:
Цш = °; А1 = 0-*Цц = (^-«)номЛп +
Ч- (^ “ Dhom"^ А ПР
О = (F - f)„0M £±Г /, п +4 (/? - г)ном/1 ш;
у — (N — п\_______(F ~1Р2н°^..
23 ~ 1 Ц,ОМ (Я —Ином ’
156
23 --Т2 НОМ^гз ---- Т2 ном I ^тз ном I
-- f)2HOM
3Z.
откуда получается:
[УИ-т + г^-О + ^-^ном^^^;
(N ^)ном ~ ^т2 нсА’
(Я — г)ном = 3 I ^тз ном I 2^р.’
(£ _ /+JV - /г)ном (Z|b - 0,5Z12);
- fU | Ктзном Г1 (2И - 0,5Z't3);
(Г - w + F - fU /31 Ктз ном |-1 (Zu - 0,5Z13).
Величины взяты при номинальном коэффициенте
трансформации, т. е. р=1.
Изменение относительного значения р коэффициента
трансформации и зависимость выражений матрицы от
коэффициента трансформации. Относительное измене-
ние р коэффициента трансформации необходимо связать
с относительным изменением числа витков обмоток. Ко-
эффициенты трансформации, определенные из опытов
х. х., строго говоря, являются неточными, несмотря на
это, они будут использоваться, так как ошибка обычно
очень мала. При этих условиях имеем:
IF, + W„
гл ______ I НОМ 11 ном
•'''Т2 НОМ- ПТ J
**11 ном
I jf [ -] /"q I НОМ п II НОМ
I ^ТЗ НОМ I V & >
w III ном
где Кт2ном, |Хтзном|—модули номинальных комплекс-
ных коэффициентов трансформации; WjHom, Whom,
Win ном — числа витков обмоток I, II, III при номиналь-
ном коэффициенте трансформации.
В последующих выкладках также принято:
а) обмотка / регулируемая; б) обмотка II регулируе-
мая; й— относительное число витков регулируемой
обмотки:
Ч7/!*7,™ для »а“:
wnlwnM« Д"я »б“-
157
Относительные изменения коэффициентов трансфор-
мации выражаются следующим образом:
A Т2 НОМ
(V,ra«7nL.+ 1)(«71ЯМ«7П1™+ 1)"’ (случай ,а«);
(V^^nL+lX^^L+l)-1 (случай „6“);
А =
__I ^ТЗ I
I Ктз НОМ I
р (случай „а“);
&р (случай „б").
Поскольку ^1номГ111ном=^2ном- 1, следовательно,
(случай иа“);
2'Т2 НОМ- 1
(случай иб“).
ГАТ2 НОМ- 1
Относительное число витков обмоток г+1/-.
ном + ном ,
~w,—-------------=р (случаи
I НОМ “ II ном
.а“);
НОМ WII НОМ _____ Р (Кт2 НОМ - О
^1 ном + ^11 ном Р^тг ном — 1
'(случай „б’).
(4.66а)
Относительное число витков обмотки II:
0=1 (случай «а»);
»= (случай ,б«).
/?Лт2 НОМ- 1
(4.666)
Теперь можно получить зависимость выражений ма-
трицы Z'i [см. (4.63)] от относительных изменений ко-
эффициента трансформации, трактуя выражения L—1+
~\-N—п как взаимные сопротивления обмоток 1-\-П и III,
выражения W—w+F—f — как сопротивления обмоток
I+II и ///, выражения F—f— как сопротивления обмо-
ток II и III.
158
(4.67)
(Z^ —0,5Z'23);
В случае «б» получается система 'приближенных вы-
ражений:
• 41 + 2(£-/) + '
ДГ _ И ~ (^Т2 НОМ 1 )2 7 .
(рТСт2 НОМ D2^2T2 НОМ **’
, Я-г = 3|К11ко„[-’ги;
Г - г+Л/ - /г = 1?Р_ - (Z - 0,5Z„);
^Ат2 Н-ОМ */ Ата НОМ г
К3 (^Т2 НОМ 1)
{рКц
НОМ 1)ЯТ2
ном I ^тз ном I
.^^^ном-Пр zZ -0,6Z13).
| ^ТЗ НОМ |(Р^Т2 НОМ 0 **
В случае па“, т. е. когда получается другая система
приближенных зависимостей:
М - т + 2 (£-/) + N - п = pzZ^;
ЛГ-л = Л”2 z-
Т2 НОМ Н
/?-Г = Зкт,ком|-!2й;
i-_Z+JV_„^^m^-0,5Z8);
W-w + F-f^VSplK^-'^-O.bZ,);
F — f = V3K-'um|К„Г1 (Z^- 0,5Z'„).
(4.68)
Подстановка зависимости (4.68) в выражения матри-
цы (4.63) при допущении t\=e&, t2=t2e^, t3=t3e~fKl& при-
водит к матрице, вид которой идентичен (4.51). Следо-
вательно, 'матрицы сопротивлений и проводимостей пря-
мой и обратной последовательностей автотрансформатора
Y/Yo/Д-И и трансформатора с такой же группой
V соединения идентичны; то же самое можно сказать отно-
г сительно схем замещения [см. (4.51) —(4.54) и рис. 4.9].
< • Матрицы, сопротивлений и проводимостей нулевой по-
следовательности, схема замещения нулевой последова-
тельности. Для описания выражений матрицы сопротив-
лений нулевой последовательности нужно определить
- [см. (4.64)] величины А, В, С. Если принять, что t=l,
159
a Zn=O (нулевая точка звезды глухо заземлена), то при
условиях:
а) А) п — 0’ Цы —— Zol3
(Z013 — сопротивление рассеяния нулевой последователь-
ности I—шу,
б) /о1 = 0; L'on=C/on^C = Zra
(Zo23 — сопротивление рассеяния нулевой последователь-
ности II и Шу
в) иоц~^', К. з. обмоток II и III
^0I==^0lH-^0lI’ ^ = ^0i4“^0II~*7^7 =
^0123
Bs
с
(Z0,^3 — сопротивление рассеяния I—II, III).
Отсюда
в=уде - z0123c=j/z013z023 — z0123z023
' Z
Т2 НОМ 031
Zo3 = (^013 + ^023 ~ ^012)’
где Z012 — сопротивление рассеяния нулевой последова-
тельности обмоток I и II при разомкнутом контуре тре-
угольника обмотки III.
Приближенное равенство получается из формул
(4.55).
При отсутствии данных можно произвести оценку со-
противлений рассеяния нулевой последовательности,
подставляя в формулы сопротивления прямой последо-
вательности.
Матрица сопротивлений нулевой последовательности
приобретает вид (принято, что /1=1, /2 — действительное
число):
^013 + SZjf + 3/2Zjj 0
^2^03 + 3/2ZjJ t22 (^23 4“ 3Zjj) 0
0 0 со
(4.69)
Схема замещения нулевой последовательности, соот-
ветствующая этой матрице, показана на рис. 4.13.
160
^2^023 ^2^03^^П^2 ^2 &
jo-----------CZZJ-----------1-----------О-------------О
П &
||^Z<7J+J^^ZZ
Оо Т
Рис. 4.14. Схема замещения нулевой по-
следовательности автотрансформатора
Y/Y/Л [у 12, Ую, Уно по формулам (4.70)].
Рис. 4.13. Схема замещения нулевой последовательности трехобмо-
точного трансформатора У/У/Д для случая Zn<oo.
Матрица проводимостей нулевой последовательности:
^2 (^023 + 3Z„)
-- (^2^03 + 3^2^п)
I о
--- (^2-^иЗ + 3/2Zn) 0
^ou + SZjj о ,
о о .
(4.69а)
где
Д —-12 Z013Z023
- hi Z2+3t2 Z.. (Z„,+ Z —2K~' Z„).
Z (Jo ‘ Z 11 V 0-so I ou T2 IIGM Vrf/
Схема замещения показана на рис. 4.14, ее элементы
выражаются следующими формулами:
z/12—Д (^2^оз ^г^ц)> У12 ^2 ^оо ’ если Z„ —оо,
У. 0 = У„ + У12 Д-1 [f22Zo23-A2Z034-3f2Zn (f2 - 1)];
»IO = (1-C')zro> ссли Z„ = oo;
уи „ = У2! + У12 = д-1 [Z01> - h,Z„ + 3Z„ (1 - f2)];
Упо~^2 ^2 0 ^00 ’ еСЛИ —
Z.. = Z.„ + ZOI,-2X_' Z„.
<jv Ойб 1 ulo Т2 НОМ и*5
(4.70)
При незаземленной нулевой точке звезды Zn=oo нет
разрыва контура для составляющей нулевой последова-
тельности тока в сети по обеим сторонам автотрансфор-
матора.
11-1279 161
4.4. ТРАНСФОРМАТОР СО СХЕМОЙ СОЕДИНЕНИЯ Y/Z
Математические модели трансформаторов со схемой
соединений обмоток звезда — зигзаг будут представлены
на примере трансформатора Y/Z-5 (рис. 4.15).
Рис. 4.15. Структурная схема
трансформатора Y/Z-5
Ход рассуждений анало-
гичен приведенному выше:
представляется линейная за-
висимость V=KJ, соответ-
ствующая трем группам об-
моток; следует определить
зависимость U=ZI, соответ-
ствующую двум группам об-
моток, и ее линейно преоб-
разовать, чтобы определить
матрицы сопротивлений и
проводимостей прямой, об-
ратной и нулевой последова-
тельностей.
Вначале определяются матрицы Т и Сиз выражений:
U=TV+GI; J=CI.
Здесь, однако, матрицы Т, С прямоугольные, так как
обмотки II и III объединены:
т г 1 00 00 1
1 00 1 —1]
" 0 1 0 '
1= 0 0 1 •
1 0 0
1 00
00 1г
00 —1
(4.71)
“HZj 00
00 lizn
что непосредственно вытекает из схемы на рис. 4.15.
Как известно, ' м L W
Г м т т ‘
Z = TKC4-G; К = L N F ; ДО— т М т и т. д.
W F R т т М
162
find трансформатора Y/Z-5 справедливы соотношений
N=R, L=W, что следует из одинакового числа витков
обмоток II и III. Тогда
М L(Ir — 1)
(I —1)L 2N — FIr — IF
Преобразование (0, 1, 2) дает:
Zs = sZs_
Mg -J- Zj30
— a*Ls
L5a
2Ns-FsA*-AFs + Zn30
10 0"
0 a2 0
0 0 a
где
я = е/2"/3; s = [ss]; a, 30—см. приложение П4.
Приведение матрицы Zs:
. Z' —tZ t*- t= Pi1 1
S-- » 1-- I Ц ’
откуда
Z' ^=[ ^*г(Т-/)КЗг+5 I
Lull's (L-0Узе-5 [2(Л4 —/О + F-f] R2|2 J’
(4.72)
Матрица сопротивлений обратной последовательности
получается из матрицы прямой последовательности по-
средством перемены местами е+5 и е_5.
Матрица сопротивлений нулевой последовательности:
r f (^ + 2/7z + 3Zi)|Z,|2 0
0 [2(ДА + 2лг) — 2(F —2f)4-3Zn] |/а|« ’
(4.73)
Сопротивление намагничивания, комплексный коэф-
фициент трансформации, сопротивление рассеяния, ма-
трицы сопротивлений и проводимостей. Если допустить,
что изменения коэффициента трансформации выполня-
ются посредством изменения числа витков обмотки I, то
11* 163
на основе предыдущих исследований можно сразу за-
писать:
M-m = p*Z*, Z^Z^-
2(W-») + F-f = ZMI.
Комплексный коэффициент трансформации:
zp. —(L —
(L-i)V3 е~‘' К"‘" е-‘;
К-г иоМ — |ЛКтаК16 = II е - S- (4.74}
Из опыта к. з./—//: (L—Г)^р\К~' |(Z„ — 0,5Z)
(где Z — сопротивление рассеяния обмоток 1 и II).
Ю-------. ।-----or
J, Л Рис. 4.16. Схема замещения ну-
Z n+JZri (Z..n,+JZJ4* левой последовательности
A U L1 " трансформатора Y/Z-5.
Отсюда следует, что при допущении 6=1, 6=^+5 по-
лучаются матрицы сопротивлений и проводимостей пря-
мой последовательности, а также схемы замещения,
идентичные схемам для двухобмоточного трансформа-
тора.
Опыты х. х. при подаче трехфазного напряжения ну-
левой последовательности дают следующие результаты:
M + 2m = ZvJ>;
2(N+2n)-2(F+2f) = Z^.
Здесь — сопротивление намагничивания нулевой
последовательности, по величине такое же, как у транс-
форматора со схемой соединений Y/Y; Z^Q2—то же
обратной последовательности. Оно имеет малое значе-
ние, близкое к значению сопротивления рассеяния обмо-
ток III—II. Окончательно
Z'n =
rZp.o + 3ZI
L 0
о
(Z^ + SZn)^
(4.75)
Следует обратить внимание на отсутствие взаимного
сопротивления — результат .компенсации потоков нуле-
вой последовательности в вертикальных стержнях сер-
дечника, вызванных током /Оц1 h-
164
Матрицу проводимостей нулевой последовательности
и схему замещения (рис. 4.16) можно определить из
(4.75):
Y'o--=ZO
г (z п 4- 3ZT) -1 О 1
и° 1 (4.76)
0 (^оз + ^п)-1*-2 J
4.5. МАТРИЦА УЗЛОВЫХ ПРОВОДИМОСТЕЙ ТРАНСФОРМАТОРА,
ОСНАЩЕННОГО УСТРОЙСТВОМ РЕГУЛИРОВКИ КОМПЛЕКСНОГО
КОЭФФИЦИЕНТА ТРАНСФОРМАЦИИ
Описание трансформаторного комплекса и формули-
ровка задачи. Трансформаторный комплекс состоит из
трех трансформаторных единиц, помещенных в двух ба-
ках. Первая единица — главная, трехобмоточный авто-
трансформатор; вторая и третья, которые размещаются
в отдельном баке, — это регулировочный автотрансфор-
матор и последовательный регулировочный трансфор-
матор.
Принципиальная схема трансформаторного комплек-
са показана на рис. 4.17. Комплекс работает следующим
образом: последовательно' к выводам II (220 кВ) глав-
ного автотрансформатора АТГ подключена обмотка VII
последовательного регулировочного трансформатора ТД,
у которого первичная обмотка VI питается от регули-
ровочного автотрансформатора АРД, .подключенного
к выводам обмотки III главного автотрансформатора,
соединенной треугольником. С выводов III питаются соб-
ч . ственные нужды электростанции и при необходимости
местная нагрузка (ток/щ).
: Регулировочный автотрансформатор может бытьпод-
' ключей через переключатель фазы <р к выводам III, так
что фаза «добавочных» напряжений Пуп может изме-
няться (дискретно) .в пределах л/3, 0, —л/3. Значение
.Ж этих напряжений регулируется установкой соответствую-
щего коэффициента трансформации регулировочного
ж автотрансформатора, а знак напряжения — переключате-
.. Ш направления а. Регулировочные отпайки расположе-
Ж. ны на всей обмотке регулировочного автотрансформато-
Ж ра АРД *.
Узлы I, III, VII — это внешние узлы всего трансфор-
/ГМ' матерного комплекса, необходимо, следовательно, найти
Ж —-------------
'Ш' * Такой комплекс фирмы English Electric работает в польской
Ж; сети 400 кВ.
i Ж 165
матрицы проводимостей .прямой, обратной и 'нулевой по-
следовательностей относительно этих узлов и, если это
окажется возможным, представить соответствующие им
схемы замещения. Определяются следующие зависи-
мости:
I2=Y2U2; Io=YoUo, (4.77)
Рис. 4.17. Структурная схема автотрансформатора Y/Y/A и регули-
ровочных автотрансформаторов.
где
Yi, Y2, Yo — искомые матрицы проводимостей прямой,
обратной и нулевой последовательностей трансформа-
166
тора.
Чтобы определить (4.77), следует описать каждый из
составляющих элементов зависимостями типа I=YU и
исключить токи и напряжения, не содержащиеся
в (4.77).
Принимается как допущение, что преобразование (О,
1, 2) можно применить к векторам трехфазных токов и
напряжений, подробно описывающим все элементы после
исключения переменных. Это позволяет оперировать от-
дельно маломерными зависимостями, объединяющими
одноименные составляющие.
В матрицах проводимостей вводится упрощение, вы-
текающее из допущения, что сопротивление намагничи-
вания — бесконечно большая величина (Z =оо). Это
допущение приводит к своеобразному виду матрицы про-
водимостей. Учет сопротивления намагничивания может
быть выполнен на последнем этапе.
Для использования в практических расчетах будут
определены только матрицы прямой и нулевой последо-
вательностей.
Матрицы проводимостей отдельных трансформаторов
Главный автотрансформатор АТГ. Упро-
щенные матрицы проводимостей прямой, обратной и ну-
левой последовательностей трансформатора АТГ даются
в «неприведенном» виде без учета изменения коэффици-
ента трансформации.
Матрица проводимостей прямой последовательности
[см. (4.53)] *
Yrl=^-'X
Здесь
A=Z122+Z1Z3+Z2Z3;
zi==0,5 (zi2~bzi3—2'23);
^2=0,5 (г^+^'гз—-21з);
2з=0,3 (2/23+243—242),
* В эти формулы следует подставить Z =оо, Л2=/(_1т2, h3—
г*
==|^“1тз|“1, р=1. Это означает, что не учитываютсяя токи намагни-
чивания, приведение и регулировка коэффициента трансформации
отсутствует, сопротивление рассеяния в этом разделе обозначается
строчными буквами.
где 212, Zi3 — сопротивления рассеяния пар обмоток (на-
пряжение подано на обмотку /); z'23=K2t2Z23— приве-
денное к обмотке / сопротивления рассеяния обмоток
II, III (напряжение подано на обмотку /7); если Z23 да-
но в процентах, «приведение» не нужно; Кт2, | Хтз | —
коэффициенты трансформации, определенные как отно-
шение номинальных напряжений стороны 7 соответст-
венно к сторонам II и III (действительные числа); e±h=
j-ikn/Q —/тс/6
— , а следовательно, e^1 = e ! , e+1 = e J .
Матрица проводимостей обратной последовательно-
сти Yr2 отличается от прямой Yri только тем, что коэф-
фициенты e+i и е-l поменялись местами.
Матрица проводимостей нулевой последовательности
[см. (4.69а), (4.70) и (4.78)]
ГО
*323 + З/ц ------- (7^*03 4- З/ц) о
— (Т^тз^оз 4" 3Zn) *013 + 3Zjj 0
0 0 0 -
(4.79)
Здесь
В = z0I3z'023 — K~2z2 3Znz0 ;
z00 — zc23 4- z013 — 27(~1z •
U U v 6 «5 1 UliJ T2 I'®'
203—0,5 (Zoi3~F2'o23—Z012) ,
где 2ШЗ, z023, 2'023, 2012 — сопротивления рассеяния нуле-
вой последовательности; z'023 — это сопротивление 202з,
приведенное к стороне 7; z0i2 получено при разомкнутом
контуре III треугольника; Zu— сопротивление заземле-
ния средней точки звезды; остальные обозначения такие
же, как в формуле (4.78).
В случае изолированной нейтрали (Zu=°°) получа-
ется:
Y = z~‘
1 ГО 4)0
1—1 0 -
—1 1 0
ООО
(4.79а)
Регулировочный автотрансформатор
АРД. Это автотрансформатор с обмотками, соединенны-
ми в треугольник, причем вся обмотка является регули-
рующей (рис. 4.18). Переключатель фазы <р подключа-
158
ёт эти обмотки в соответствии с рис. 4.19; осноёным по-
ложением считается включение, соответствующее на
рис. 4.19 положению «О» переключателя.
Заданной считается линейная зависимость между на-
• пряжениями Vjv, Vv обмоток IV и V и токами Jrv, Jv
в этих обмотках:
V=*RJ. (4.80)
Рис. 4.18. Структурная схема
регулировочного автотранс-
форматора АРД. (Числа вит-
ков обмоток IV и V меняются
так, что их сумма остается по-
стоянной) .
Здесь
Рис. 4.19. Способ подключения
через переключатель <р обмоток
регулировочного автотрансфор-
матора АРД.
Jiv
М L '
L N
; R =
где
tn
m m
M m
m M
При этом R имеет характер матрицы сопротивлений,
а ее элементы зависят от регулирования коэффициента
трансформации /Ст.
Определяются зависимости:
U =HI; U’ =
' U'iv"
. V’v.
MV
!v
(см. рис. 4.17). (4.81)
1=
Обозначим V‘iv = Viv-|-Vv— напряжение на обмотке
автотрансформатора.
1 т
Появляется зависимость: U’IV = -^-k V’lv, причем
U‘IV—фазные напряжения, полученные после вычитания
169
вектора трехфазного напряжения нулевой последова-
тельности (УоЪь нетрансформированного через трансфор-
маторы (трехфазное напряжение нулевой последователь-
ности из сети 30 кВ):
l)IV = UIV-f/ols; lwU'lv=0;
U=[I i Ч; Ь=С
Следовательно, справедлива зависимость
U TV;
кг 4- кг
00 1
Здесь 00 — нулевая матрица порядка 3X3; 1 — еди-
ничная матрица порядка 3X3.
Из токов Jiv выделяется также трехфазный ток ну-
левой последовательности, что позволит выразить Jiv
через узловые токи Iiv и 1у:
так как lwJiv=0.
Ток Jo можно определить из зависимости lwV'iv=0;
[см. (4.80)]:
lwV'iv= lw(Viv+Vv) =3(Al+2m-|-LH-2/)/o-f-
+ (L+2/+W+2n) 1U v=0.
Из баланса токов в узлах переключателя отпаек О’
(рис. 4.17) имеем:
Jv=JlV"Hv
и, следовательно,
. j —____— 1 I
J 0-- lw V’
где r=L+2Z-F^+2n; f=Af+2/n+2 (£+2Z)+^+2n; L, I,
M, m, N, n — элементы подматриц L, M, N матрицы R.
Теперь можно выполнить следующие действия:
170
определить ток Jiv:
Jjv^-g- kliv з”Ш'
так как lfelw=ll — единичная матрица порядка 3X3;
описать токи J в обмотках через узловые токи I:
J = CI; 1 =
!IV
, !V
Jiv
_JV .
1
3 к
1
-о- кН —
о oj
3f 11
описать матрицу H в зависимости (4.81)
V =RJ—>U’ = TRCI—>H = TRC.
После выполнения умножений получается:
Г d
— 21
— кг
3 к
г2
~3T" + N
(4.82)
где
d = M - m^N -n H-2 (L—l),
g=L—l-\-N—n\ '
21 =
Преобразование (0, 1, 2), примененное к векторам
трехфазных ' , “ '' .
дает:
токов и напряжений в зависимости (4.80),
sU"= (sHs-1)sI—>U’S=HSIS,
(4.83)
где
S 1
S’
U IV s
VVs
JIVs
IVO
Vs
IV s
IV 1
IV 2 _
H =
; J =
3 к
’ 2
—1
—1
s =
; C =
—1
2
—1
—Г
—1
2
X Аналогичные зависимости можно записать для Ivs.
:v U:iVs, Vvs-
171
Матрица Hs имеет структуру:
(4.84)
при этом S, 01, 30, Ns — по приложению П4.
После разделения зависимостей (4.83) на три груп-
пы по индексам 0, 1, 2 получается:
U2=H2I2; и0=Н010, (4.85)
где
IV1;
Viv J
~ d g ~
—
H1== ;
1 s.
-тг=. N — n
Из 1
- о 0
H = r2
° L °------Г +М + 2П ’
Аналогично записываются зависимости для U2, Uo,
Io, Ii, Ь; для H2 — как для Нь Но e+i и e-i меняются
местами: e+l = e~i .
Элементы матрицы Hs и результаты испытаний
трансформатора, зависимость элементов от коэффициен-
та трансформации Кт. Принимается, что опыты прово-
дятся при симметричном напряжении прямой последо-
вательности и коэффициенте трансформации Ат—
=Ат.ПОМ^0,5.
Опыт х.х. /1V = O^I/1IV=^/,IV-»^=Z (где
Z — сопротивление намагничивания).
Аналогично, когда /1IV=0, (N—n)mM=Zy— значе-
ние параметра при коэффициенте трансформации Ат.Ном.
Коэффициент трансформации определяется как
Кт
Wv
^IV +
(где IF—число витков; IFIV-|-lFv=const).
172
Из допущения о пропорциональности собственных со-
противлений квадрату числа витков, а взаимных — про-
изведению чисел витков рассматриваемых обмоток сле-
дует:
N-n=-i^-Zv = 3K‘^.
Коэффициент 3 появляется из условия, что отноше-
ние t/nv/Aiv в три раза меньше сопротивления обмотки
(IV и V).
Опыт к. з.
^IV=0 (Кт==Кт.ном) 5
U 1 IV IV + IV ’
0 = ^e.,/,IV + ^-«)roM/IV,
отсюда сопротивление рассеяния:
~__1 IV ___ 7____g2HOM__- __
С Z . QJf2 7 &НОМ
*1 IV yA т.ном^
=3KT.H0Mzyi-zz-1,
а поскольку gmM=(L—/)ном+(^—«)иом, ТО
(L- /)hom--=3Kt.homZ (Vl-zZ-*- Кт.ном)
^ЗКт.НОМ^ ( 1 Кт.НОМ-0,5zZ—1).
Число витков обмотки IV изменяется от коэффициен-
та трансформации в (1—Кт)/(1—Кт.ном) раз, обмотки
V — в Кт/Кт.ном раз по отношении к числу витков при
номинальном коэффициенте трансформации; взаимное
сопротивление (L—I) этих обмоток изменяется в соот-
ветствии со следующим выражением:
= ЗКТ (1 - кт.ном - 0,5zZ- ’) Z = 3ZK, (1 - Кт) q,
1 Ат. нОм
где
___. «
9 2(1
173
Тогда
g^L-l-^-N-n 3Z[KT(1 - Кт) ?+KT,
откуда
pj 1 / 3 фе+1
|Узф£-1 3№Т J’
Ф = ^[(1-Лт)^+Кт].
(4.86)
Теперь можно определить матрицу проводимостей
прямой последовательности:
Y —3/С2т 1/ЛЗфб,+1
[—Кзф<?-1 1 J*
limlF = 3№TT^=^-z; НтФ = Кт.
Z->00 ‘ Лт.ном z-»oo
11016—2Э
Следовательно,
Y^z"
1 ^т.ном
1-Кт
^Т.НОМ 1
КЗКТ(1-КТ)
^Т.НОМ 1
Кзкт(1-кт) е
1 ^т.ном
3№т(1 -Кт)
Д<?+1 1
А J
и уравнение узловых напряжений принимает вид:
I^YUp , (4.87)
Поскольку detY=O, не существует соответствующей
ей матрицы сопротивлений. Не существует также схемы
замещения, если принять во внимание несимметрию ма-
трицы Y. При /Сг=1 все элементы матрицы Y, а при
Кт=0— только взаимные принимают бесконечно боль-
шие значения. Это подтверждает отсутствие перепада
напряжения на трансформаторе, у которого Лт=1, а на-
пряжение вторичной стороны равно 0; если Лт=0, то,
если рассматривать вопрос лишь формально, зависи-
мость I^YUi в этих особых условиях теряет смысл.
Переключатель фазы ф и направления а. Переклю-
чатель фазы ф выполняет две функции: в положении
«—л/3» изменяет схему соединений обмоток трансфор-
матора АРД согласно рис. 4.19, а в положении
«-|-л/3» изменяет дополнительно способ подключения
174
Трансформатора АРД к обмотке III трансформатора
АТ Г (см. рис. 4.17).
Суммарный результат этих изменений в матрице пря-
мой последовательности следующий:
для положения «—л/3» изменение группы соедине-
ний соответствует замещению матриц Hi и Yi матрица-
ми Н2 и Z2 (перемена местами e+i и a_t);
для положения «-J-jt/З» — напряжения Uih=1U’iv,
токи 1ш=—Нь где
О
О
1
1 о
О 1
о о
матрицы сопротивлений и проводимостей Н и Y — как
при положении «—л/3». После применения преобразова-
ния (0, 1, 2) получается:
t/iiii=e_4t7nv; /"1ш=е -Дич.
Если в зависимости (4.87) токи и напряжения 7цу,
Unv заменить токами и напряжениями /пн, t/ini, то,
как легко показать, уравнение I—YU примет вид:
-'"мн] ’ J Л
=z
'i V J A3e-x-<f
Л3е1+<р и. П1
4» , V
(4.88)
где
А\, Аг, Аз — см (4.87);
О в положении „0“;
—2
1+2
в положении
в положении
«/3“;
„-рп/З".
Переключатель направления а изменяет зависимости
между токами Iv и Ivi, а также напряжениями Vv и
Vyi по следующему закону:
Ivi=—<xlv, Vyi—<xVy;
__ -|-1 в положении „4~“;
— 1 в положении
Указанные зависимости появляются между составля-
ющими прямой последовательности токов и напряже-
ний.
175
Положение переключателя а можно учесть, если
в выражении (4.88) токи и напряжения стороны V заме-
нить токами и напряжениями стороны VI. При этом по-
лучается:
Л ш 4 Г А «A*i+<₽
| — — z
.Л VI J А
A ш
l/l VI . ’
(4.89)
где
__ 1 -Кт.НОМ Д ______ Аг.НОМ 1
4 1-KT : з№т(1-/ст)
[ _ ^Сг.НОМ 1
3“ Кзхт(1— кт)‘
Матрицу сопротивлений нулевой последовательности
трансформатора АРД [см. (4.85)] можно представить
в виде
и _то о
0 4.0 №Tz0.
(4.90)
При этом Zo — сопротивление намагничивания нуле-
воой последовательности обмоток IV-j-V (либо обмотки
V при коэффициенте трансформации Лт=1).
Матрица (4.90) описывает только одну зависимость:
Vov=K2t^o/ov или ]/ovi=—KWovi. (4.90а)
Трансформатор ТД. Фазы обмоток обеих сторон
(VI и VII) этого трансформатора не соединены между
собой. Его можно описать матрицей проводимостей точ-
но такой, какой описывается двухобмоточный трансфор-
матор со схемой соединения Y0/Y0 с непосредственно за-
земленными обеими нейтралями [Z^=oo — бесконечно
большое сопротивление намагничивания, см.
(4.25) и (4.78)]:
Yff, = Yda = z
(4.24а),
1 Кт '
_—Кт
(4.91)
1
У(1-0,25z0Z-')~'X
«т
—к, 1
№т Г
о
1
176
где Kt=^homvi/^homVii— номинальный коэффициент
трансформации; 20, Zo— сопротивления рассеяния и на-
магничивания нулевой последовательности со стороны
VI', z — сопротивление рассеяния прямой последователь-
ности со стороны VI.
Матрица проводимостей трансформаторного ком-
плекса. Матрицу проводимостей комплекса можно опре-
делить на основании математических моделей отдельных
трансформаторов, а также обобщенных зависимостей:
UVn — Uji + Vyip
®VII=^II= ^VIP
1 —Г —I"
МП III III’
(4.92)
Л вытекающих непосредственно из рис. 4.17.
Матрица проводимостей прямой последовательности
трансформаторного комплекса. В этом разделе будут
опущены индексы 1, обозначающие составляющие пря-
мой последовательности. Там, где это будет необходимо,
величины, связанные с отдельными трансформаторами,
будут обозначены дополнительными индексами: г —
главный автотрансформатор АТГ, г — регулировочный
автотрансформатор АРД, d — последовательный регули-
ровочный трансформатор ТД.
Необходимо найти зависимости Ii==YiUI [см. (4.77)],
объединяющие токи h, 1щ, Ivu с напряжениями 1Д, иш,
? t/vn, при известных зависимостях между токами и на-
пряжениями отдельных трансформаторов:
где Vr определяется по (4.78);
1"н1 ___у
_zvi . Г У VI
(4.94)
12—1279
177
Где Vr определяется по (4.89);
ZVI_____v f Vvi
/ V
L'viiJ _ L vvn
(4.95)
где Yd определяется no (4.91).
Уравнения (4.92) для составляющих прямой после-
довательности имеют вид:
^vn —“h vii’
Am “Ai ~ Ап»
I =/' — I"
1III --1 III 1 ш,
отсюда, в частности,
U^—ll уд—Ууц.
(4.96)
(4.96а)
Определяется зависимость I^YiUi или, если рас-
крыть Ii, Ui
Л Г^1
zvn =YX (7VII
Ап J L ^ni _
(4.97)
Порядок расчетов следующий.
1) Из (4.94) и (4.95) определяется 7vi, а из полу-
ченного равенства находится Vvi=Pt/m+QVvii;
Р — Yrsi
7rfll Y f22
г\__ ^di2
4~~Ydll-Yri2
(4.98)
(Yr2i — элемент матрицы Yr, расположенный на пози-
ции 2;1 (строка 2, столбец 1); аналогично обозначены
выражения других матриц).
2) Из (4.95) определяется /уц, а из (4.93) /ц=/уц,
производится их подстановка в (4.96а) и из полученного
равенства определяется I/уц: Vvii=G^iH~7f£/vii-}-X(7ni;
6=Уг21£; H=Yf22E- K=(YF23-Yd2lP)E; £=(Уг22+
+ Уй210+Уй22)-1-
178
Это позволяет получить матричные зависимости:
-Гг ' 1 0 О' -[/i ’
J&K - —” -G 1 -н —К ^VII ^ХЦ, (4.100)
0 0 1
.^ вытекающие из (4.96а) и (4.99).
3) Бесконечно большие значения выражений матри-
® цы Yг [см. (4.89) и (4.87)] при /Ст=1, 7<т=0 делают не-
ll' возможным применение двух вышеприведенных подхо-
к дов для определения тока /"щ. Этот ток является функ-
цией тока /уп, а последняя, несмотря на то что не учи-
д? тываются ветви намагничивания, точно определяет ко-
эффициенты трансформации трансформаторов ТД и
АРД. Чтобы избежать ошибки, зависимости между то-
ками будут определяться в режиме к. з. трансформа-
I* тора:
из (4.95) при Vvn=0:
I —Lail —_____—J •
VI Ydil 7vii— KTd 7vii’
из (4.94) при VVI=0:
I" in — yr21 Ari —
Тогда окончательно
I бп=-^Л=»». НЛО!)
4) Искомая зависимость Ii^YiUi получается из
g (4.93), (4.100) и (4.102):
? ' I1=f2YrXUi=YiU1,
где
Y!=J}YrX. (4.103)
.?zt2* 179
Выражения матрицы Yi следующие для матрицы Yr
по формулам (4.78):
Y12 — (H—i')KT2z3A~1;
Yi3=A:^KKT2z3-\KT3\z2e_^
Y2l^-A-l(KT2z3-[-GK\2zl3)-,
Y22 = (\-H)K^zl3A-^,
Y23 = - (Kn | KT9\zte_ ^KKzriz13) A~
Y3i = A-1 (- | KT31z2e+1 + 6KT21KT31zte+i +
+ FKT2z3 + GF№T2z13);
y32 = (tf - 1) (KT21 Ктз 121e+l + F№T2z13) A-
У33 = Л-1(|КТзГ + 212 + ^т2|Ктз|г1^1 +
+ FWT2z13 + KKT2|7<T3|^+1).
(4.104)
Символы, обозначенные большими буквами, опреде-
ляются по следующим выражениям [см. (4.98), (4.99) и
(4.101)]:
р ^3 (Кт ном 1) -1 - 4 .
ък\(\-Ктиг+(\-Кт)^ ’
р___ 0 , если Кт = 0;
-f3ae_j , если FT=1;
0 =_______ZK\(\-KAKTd*r
ЗК2т (1 — Кт) Хг + (1 — Кт ном) zd
ф 10, если Л’т —0;
|0, если Кт=1;
£ _________АЯд__________
Кгт2^1 3zd — AKTdQ Ч~ AK\d
Е Е _lET к
G—~~^12Z3 А ’ H=Kt2Z13^a', F— a^d Т £+1-НГ
__f Ктг I Ктз | ^i^-i । A-rrf р\
\ A xd J
При этом А, 21з определяется по формулам (4.78);
приведенная матрица проводимостей прямой последова-
ло
тельности имеет следующие элементы:
у\3-ГЛ)-’К13;
|Z2|-2y22; У'23=(^з)~*У2з;
I d I • <s«s \ £> л/ ла’
(4.104a)
У'=(/*/,)"‘У 81; У'32=(/*л)_1^2; у'33 = и3|-2у33,
где Ya, i, /=1, 2, 3 — no (4.104); ti, i—\, 2, 3 — коэффи-
циенты приведения напряжений такие, что U'i=tiUi
в общем случае комплексные числа; если приведение
выполняется на стороне I, то t\—1—|—/0.
Соответствующий подбор комплексных коэффициен-
тов приведения создает возможность сделать симмет-
ричной матрицу таких трансформаторов, как Y/Y, Y/Y/A
и т. д. В исследуемом случае такое симметрирование
возможно только в случае, когда переключатель ср
установлен в положении «0». В остальных положениях
переключателя матрица Y несимметрическая. Следова-
тельно, не существует схемы замещения трансформатор-
ного комплекса.
Матрица проводимостей нулевой последовательности
трансформаторного комплекса. Составляющие нулевой
последовательности токов и напряжений объединяют
следующие зависимости:
-Гго[У701 L (4.105)
I со II.
' 01
, Л) VII
где Y‘r0 — подматрица порядка 2X2 ненулевых элемен-
тов матрицы Yr0 в (4.79);
V0vi=-7<2TZor/ovi (4.106)
[см. (4.90)];
ZOr — сопротивление намагничивания нулевой последова-
тельности обмоток IV и V трансформатора АРД. Анало-
гично:
А VI
Л) VII.
Vo VI
Ц) VII
Ydo — по (4.91). (4.107)
Из (4.107) и (4.108) определяется Z0VI, а затем Vovi:
17 __ 17
0VI“*o.l+KVor 0VIP
отсюда и из (4.107)
К2
т ____р \ т . р •*' тЛ
'о VII —°0v0VH’ °* — god+ №TZor
(4.108)
181
Из (4.108), (4.105), а также (4.92) имеем:
где
Vo vii—Е о Uо 1 +^0 Uо vii,
*03 + ЗКтг^п
Ктг (ВВ0 + г013 + 3Zjj)
Р ___ *013 + 3Zjj
°” BBo + *oi, + Z3n’
(4.109)
Я, z01s, гоз> zn — по формулам (4.79).
Таким образом, получается зависимость:
/Л) i 1 Г 1 0 1 Г I 1 п
,, — , так как (7П11 =
Уо II J [— Ео 1— F0J L^OVUJ
= ^ovn ^ovn- (4.110)
Подстановка (4.110) в (4.105) дает зависимость:
‘ 1
-Ео
О
1-Л>
Ци =у и°1
Ц)УП. J4)VII_
Добавляя к матрице Y“ro третью строку и столбец,
состоящие из нулей, получаем искомую зависимость:
lo=Y0U0, (4.111)
где Ito=[IoiIoviiIoiii=0];
VTo=[t/oi^ovn^oni];
L О
Ylz
YZ2
О
0“
о
0-
элементы матрицы проводимостей нулевой последова-
тельности Yo следующие:
= [z023 + K~]Eozb3 + 3Z„ (1 + £0)| В-1;
K12 = (Fo - 1) (KT>03 + 3Zn) B-1 = У21;
У22=(1-Г0) (zoi3+3Zn)B-b
Тз1 = Уз2=УзЗ=Т23=У13=0,
(4.1'12)
где В, 2оз, 2oi3, 2023, Zu, Кт2 —по формулам (4.79); Во,
Ео — по формулам (4.109).
1.82
Р Приведение матрицы проводимостей нулевой посЛё*
довательности идентично приведению матрицы прямой
। последовательности, следовательно, элементы матрицы
(4.112) будут иметь коэффициенты приведения, идентич-
ные формулам (4.104):
I У'п=Н1|-2Уц; у'22=П2|-2у22.
I 5. МАТЕМАТИЧЕСКИЕ МОДЕЛИ НАГРУЗКИ «
Г 5.1. ХАРАКТЕРНЫЕ ОСОБЕННОСТИ НАГРУЗКИ
L Нагрузка в узле энергосистемы является случайной
f ' переменной величиной, а изменение мощности в узле во
L времени — процессом стохастическим. Поскольку в кни-
ге ставится ограниченная задача рассмотрения детерми-
нированных явлений и процессов, к приведенным ниже
Е зависимостям следует относиться лишь как к некоторым
достаточно реальным приближениям.
Нагрузки являются нелинейными и динамичными
д ' элементами. Нелинейность выражается в том, что мощ-
ность нагрузки в установившемся режиме зависит от то-
Г ка и напряжения во второй степени; динамика выража-
ется в том, что новое установившееся состояние нагруз-
ки наступает после определенного времени, что может
Ц иметь существенное влияние на протекание неустановив-
К шегося режима в энергосистеме.
Е; 5.2. СТАТИЧЕСКИЕ МОДЕЛИ НАГРУЗКИ
КПростейшая, наиболее часто применяемая модель на-
jfc грузки основана на замещении последней линейной про-
Ек водимостью, которая вычисляется по мощности и напря-
Рис. 5.1. Линейная статическая
модель нагрузки (5.1).
Л/
жению в выбранном исходном режиме, обозначенном ин-
дексом 0 (рис. 5.1):
Ss==P0+/Q. = 3y./*0 = 3|yopr*->r=G+/B=
. Л______; Qo____> __ Л> . D____ , Qo /г 1 \
~“3|Ц>|2 У3|£70|2 3|Ц>|2 ’ 3|(/0|2-^Л'
183
Кажущаяся мощность в этой модели пропорционалы
на квадрату напряжения:
TJ |2
S = P + /Q=3| £/|!Г* = -У (Р. + А), (5.2)
с о |
а следовательно, это линейная модель нагрузки; именно
так изменяется мощность, отбираемая линейной прово-
димостью.
Мощность нагрузки в установившемся режиме зави-
сит от напряжения U узла и частоты f в энергосистеме:
P(U, f), Q(U, f).
Эти зависимости называются статическими характе-
ристиками нагрузки. Чаще, однако, применяются харак-
теристики P(U), Q(U) при f=const, а также P(f), Q(f)
при U=const; это так называемые статические характе-
ристики нагрузки по напряжению и по частоте. Их вид
зависит от состава нагрузки узла, а также от времени
суток и времени года.
Исследуя относительно небольшие изменения узло-
вых напряжений, можно [27] аппроксимировать стати-
ческие характеристики по напряжению линейными либо
квадратичными зависимостями:
Р=р0+Рг;1/, £7е=[0,9 1,1]; (5.3)
С/ен[0,95 1,05]; (5.4)
Q=a-^bU^-cU\ IAe [0,9 1,1], (5.5)
*
где р, q, а, b, с — коэффициенты статических характери-
стик нагрузки по активной и реактивной мощности (еди-
ницей мощности является мощность нагрузки при номи-
нальном напряжении); коэффициенты уравнений удов-
летворяют условию
PQ~\~Pu=qo~{~qu=:::u-[-b-[-c= 1.
Коэффициенты наклона прямых (5.3) и (5.4) опреде-
ляются в общем как
п _dP (U) [1/б] . __dQ(U) [<7б]
,dU [Рб] ’ Чи dU [(?б]
и называются коэффициентами наклона статических ха-
рактеристик нагрузки по напряжению или регулирующи-
ми эффектами нагрузки по напряжению. Следует отме-
184
1
тить, что регулирующий эффект можно определить, не
вводя относительных единиц:
= МВт/кВ; = МВ-А/кВ. (5.6а)
Ниже указан диапазон изменения регулирующих эф-
фектов нагрузки для зимнего периода времени
$
2, З-нЗ,1;
^2, 6;
. 1,5-нЗ, 5;
Рц=
0,6 и- 0,7 — на промышленных
предприятиях [27];
1,4-т-1,7 — в городах [27];
0,3-т- 0,75 — в сетевых узлах [34]*
Ш'
Данные по [27] относятся в основном к узлам сети
6 кВ. Меньшие значения коэффициента qu, который
определен при малых изменениях напряжения (±5%),
проявляются при слабой степени компенсации реактив-
ной мощности нагрузки с помощью батарей статических
конденсаторов; увеличение степени компенсации увели-
, чивает этот коэффициент.
Заметим, что регулирующий эффект нагрузки, заме-
щенной линейной проводимостью, равен 2, т. е. ри=2 и
qu=2-
Характеристики по частоте р(ср), </(ф), где (p=f/fH0M
при постоянном напряжении [7=const можно аппрокси-
мировать линейными зависимостями:
P—Po~\~Pf4>', <pG=E [0,92 1,04], (5.7)
в которых коэффициенты удовлетворяют соотношению
pQ-\-pf=q0-\-qf=\. Коэффициенты pf, qf в (5.7) характе-
ризуют наклон не только прямых, но также точных не-
линейных зависимостей в точке
п __dP (П Нб] . п ______dQ (П 14б1 . г?_гz 75 81
Pf~~ df [Рб] ’ df [QfJ ’ U~
где
/б—/ном’, Рб—P (f-/ном) ; Q6=Q(f—/ном)-
Эти коэффициенты можно также выразить в едини-
цах СИ:
Л=, МВт/Гц; Q, , МВ • А/Гц.
185
Аналогично характеристикам по напряжению они
также носят название регулирующих эффектом нагруз-
ки по частоте.
Зависимость мощности от частоты, однако, значи-
тельно сложнее, так как частота влияет и на значения
узловых напряжений: Р= Р [/, Q=Q [f,
Регулирующие эффекты по частоте обозначим Pftu, qt,u,
они выражаются более сложными зависимостями
дР . дР dU . 1
Pfu ду + 6U де ~~ Pf "Ь Р^иР'
.. __dU (f) /ном
df (7H0M;
dQ । dQ dU ।
4fu 'cLT d^
(5.9)
Коэффициент и/ наклона характеристики U(f) зави-
сит от целого ряда факторов, в том числе от типа регу-
ляторов возбуждения генераторов, их чувствительности
к изменениям частоты; наличия вращающегося резерва
и т. п. Подробный анализ этих зависимостей и соответ-
ствующие формулы приводятся в [4]. На значение щ
влияет также сеть, а именно соотношение Х/Р ее вет-
вей, поэтому коэффициенты щ зависят и от распределе-
ния нагрузки в энергосистеме. Решающим, однако, явля-
ется изменение напряжения на шинах электростанций,
а следовательно, свойств регуляторов возбуждения. Ко-
эффициент щ в зависимости от напряжения на шинах
электростанции колеблется в довольно широких преде-
лах (0,6—1,1). При регуляторах возбуждения, нечувст-
вительных к изменениям частоты, щ может достигать
значений, меньших чем 0,6.
Коэффициенты pf и наклона характеристик р(<р),
7(q?) для вечернего максимума нагрузки равны:
-2,3ч-3,1;
1,5ч-3
на промышленных
предприятиях [27];
в городах [27];
в сетевых узлах [34].
Характеристики P(f), Q(f) определяются измерения-
ми. Следует считать, что эти характеристики для сете-
186
вых узлов косвенно учитывают также изменения напрй
жений, а следовательно, что — это коэффициенты
Qfu, pfu-
Приведенные здесь числовые значения следует рас-
сматривать как ориентировочные, так как они основаны
на измерениях, проведенных много лет назад. Подобные
испытания необходимо проводить периодически для кор-
ректировки коэффициентов.
Рис. 5.2. Структурная схема
динамической характеристики
нагрузки (активная мощность
в функции напряжения и вре-
мени).
I — действительное инерционное
звено; II — нелинейное безынерци-
онное звено, представляющее собой
статическую характеристику на-
грузки.
5.3. ДИНАМИЧЕСКИЕ МОДЕЛИ НАГРУЗКИ
Динамические характеристики нагрузки. Электро-
двигатели (прежде всего, асинхронные) обычно, состав-
ляют' большую часть мощности нагрузки узла энерго-
системы. Изменения напряжения и частоты вызывают
изменение скольжения этих электродвигателей и часто-
ты вращения их роторов и приводимых ими в дви-
жение механизмов. В соответствии с моментной харак-
теристикой новый стацио-
нарный режим устанавлива-
ется только через опреде-
ленное время, которое в не-
которых расчетах нельзя не
учитывать. Семейства харак-
теристик p(t/), q(U), р(ср),
«/(ф)', параметром которых
является время, называются
динамическими характери-
стиками нагрузки. Смысл
динамической характеристи-
ки нагрузки по напряжению
раскрывает рис. 5.2.
Приведенная механическая постоянная времени Т,
значение которой находится эмпирически, имеет значе-
ния 1—3 с, сами же электродвигатели с небольшой на-
грузкой— 0,5—1 с, сильно загруженные — 8—10 с [34].
Математическая модель асинхронного двигателя для
системных расчетов. При расчетах электромеханических
переходных процессов в энергосистеме (качания син-
хронных машин) следует подробно учитывать поведение
нагрузки, в которой преобладают двигатели. Целесооб-
разно представить их поведение системой дифференци-
. альных уравнений аналогично моделированию синхрон-
ных машин, а следовательно, с применением преобразо-
вания (0, d, q).
187
^установившиеся режимы в цепях двигателя описы-
вает система дифференциальных и алгебраических
уравнений. Если активные сопротивления обмоток ста-
тора перенести во внешнюю сеть, то получится следую-
щая система уравнений [35] в относительных единицах:
ud = ~^‘, uq = ^d,
%riD + ~dt "Ь S^Q ~ °’
^rtQ ~dt ~ = °’
^ = Xsid + X^ (5-10)
% = Xfiq H-
+ XriD',
~ ^p/<7 H- Xrig, }
где Xaq—Xad= A" ; XD=XQ=Xr-, s=Xti)/a) — скольжение
вращающегося поля относительно ротора, следователь-
но, s>0; направление токов и напряжений отдельных
контуров выбрано обратным принятому на рис. 3.6 (со-
ответственно двигательному режиму работы).
Вводя обозначения e'q = <]>DX^X~l, e'd—~ ^QX^X~{
и исключая токи iD, iQ ротора, получаем:
Л-e’^ae’^se^-^bi^
dLe'd = ae'd- se’q— biq.
В соответствии с примечанием в § 3.1, сделанным
при рассмотрении переходных режимов в синхронных
машинах, можно непосредственно перейти к переходным
э. д. с. и токам статора (с частотой сети) E'd, Е'д, Id, 1д.
Поскольку их действительные и мнимые составляющие
Е', Е", Г, I" с учетом направления осей приведения сети
равны им (система осей d, q связана с вращающимся
полем, а не с ротором), то уравнения можно записать
сразу в сетевых координатах:
Е’=аЕ' + sE" + Ы" -^E" = sE' + аЕ"- ЬГ, (5.11)
188
причем Ё=Е'-\]Е” \ а=—Rr/Xr-, Ь=РГ X* /Х2Г\ все вели-
чины — в номинальных относительных единицах электро-
двигателя.
Время t здесь также выражено в относительных еди-
ницах, /б=с«~^ ; при численном интегрировании правые
стороны следует умножать на соном=314.
Исключение и ф\ из двух первых уравнений (5.10)
дает зависимости: Е'—U'=—X'I"\ Е"—U"=X'I"\ X'—
=XS—Х\Хг~1 — сопротивление рассеяния двигателя.
Приведенным уравнениям соответствует схема замеще-
ния на рис. 5.3.
Рис. 5.3. Схема замеще-
ния асинхронного двига-
теля, соответствующая
зависимости (5.12); X' —
реактивное сопротивле-
ние рассеяния; Е — пере-
ходная ЭДС.
Поскольку система уравнений (5.11) не содержит на-
пряжения U, сопротивление X' можно включить в мо-
дель сети.
Уравнения (5.11) дополняются уравнением движения
ротора электродвигателя и приводимого им механизма
с учетом изменения момента последнего в функции уг-
ловой скорости:
|-=:ф[Р-РД1+? + ^-Чв+']. (5.12)
где t — время, с; Т — механическая постоянная времени
ротора электродвигателя и приводимого механизма, с;
Р, Ро — электрическая мощность в относительных еди-
* *
ницах, потребляемая электродвигателем в произвольный
момент времени и в режиме перед повреждением (при
Рб=РН0М электродвигателя); s0, s— скольжение магнит-
ного поля ротора электродвигателя в исходном и ава-
рийном режимах (so>0); |3 — показатель степени зави-
симости тормозного момента от частоты вращения; ф—
относительное изменение частоты.
Часть вторая
МАТЕМАТИЧЕСКИЕ МОДЕЛИ ЭЛЕМЕНТОВ
ЭНЕРГОСИСТЕМ ДЛЯ РАСЧЕТОВ
ЭЛЕКТРИЧЕСКИХ РЕЖИМОВ ПРИ ЧАСТОТАХ
СОБСТВЕННЫХ КОЛЕБАНИЙ
6. ОБЩИЕ СВЕДЕНИЯ
В стационарном режиме энергосистемы вырабатыва-
емая в ней электроэнергия потребляется нагрузкой, бла-
годаря чему устанавливается равновесие электромагнит-
ных процессов.
Коммутация и аварийные возмущения в энергосисте-
ме вызывают нарушение равновесия электромагнитных
процессов. Новое электромагнитное состояние, к которо-
му приходит энергосистема после коммутаций или воз-
мущений, вызывает обмен энергии между магнитными
полями в индуктивностях и электрическими в емкостях,
который протекает с частотами собственных колебаний
системы (резонансными частотами).
Быстро протекающие процессы обмена электромаг-
нитной энергией в элементах энергосистемы вызывают
перенапряжения и перегрузки, происходящие на боль-
ших частотах. Исследование перенапряжений и перегру-
зок элементов необходимо для выбора защитных
устройств (молниеотводов, активных сопротивлений,
встроенных в выключатели, параллельных реакторов
и т. д.), мест их размещения в энергосистеме и парамет-
ров настройки. На основании этих исследований опреде-
ляются также испытательные напряжения для электри-
ческих машин, трансформаторов, реакторов и т. д.
Таким образом, изучение режимов энергосистемы при
частотах, равных частотам собственных колебаний или
близких к ним, соответствует практическим задачам
эксплуатации и проектирования энергосистем.
Для исследования процессов изменения напряжений
и токов в энергосистеме необходимо прежде всего рас-
смотреть математические модели отдельных ее элемен-
тов при рассматриваемых случаях коммутационных пе-
реключений или аварийных повреждений. Зная эти мо-
дели, можно выполнить расчеты, применяя численные
методы, либо создать физическую модель для исследо-
190
г вания переходных режимов в энергосистеме при часто-
Е. тах собственных колебаний.
К Расчеты коммутационных процессов либо аварийных
Е возмущений связаны с решением систем линейных или
К нелинейных (в случае учета влияния стали в генерато-
S рах или трансформаторах, влияния короны, а также не-
Елинейных сопротивлений) дифференциальных уравнений,
ж а также разностных уравнений (в случае появления
длинных, линий).
S.* Возможности расчета исследуемых переходных про-
К цессов в энергосистеме ограничиваются быстродействием
ш и объемом памяти современных ЭВМ либо числом со-
Е'вместно работающих операционных усилителей в АВМ.
Ж В физических моделях отдельные элементы энерго-
системы (генераторы, трансформаторы, длинные линии
Е- и т. д.) формируются с помощью дросселей, активных
Е сопротивлений и конденсаторов, соединенных в соответ-
eL ствии с их схемами замещения. Физическая модель ис-
В следуемой энергосистемы. реализуется соединением мо-
№ делей ее отдельных элементов в соответствии с конфи-
Е гурацией схемы сети. Искомые токи и напряжения изме-
Е ряются в соответствующих точках физической модели
Е при коммутации или повреждениях.
Е Расчеты, выполняемые вычислительными методами,
1а также измерения на физических моделях имеют изве-
Е стные погрешности, связанные главным образом с точ-
Ц^ностью воспроизведения процессов. Эти погрешности
Ш можно ограничить, создавая гибридные системы, соеди-
Е няющие вычислительную технику с физической моделью,
ж,’ Главную трудность в определении математических ^
Е моделей элементов энергосистемы в рассматриваемом
Ж.диапазоне частот представляет необходимость учета ем-
Жккости линий и равномерного распределения ее электри-
jw ческих параметров.
жГ Во второй части книги рассматривается в первую оче- -
Цредь математическая модель при коммутациях (включе-
я№йие и отключение), а также однократная несимметрия
«fee произвольным чередованием фаз. Далее приводится
^^Математическая модель длинной линии, которая для
жЙнализа проще, чем модели генераторов и трансформа-
Ж^горов. На основе этой модели можно с учетом опреде-
•Жленных допущений представить и другие элементы
Ж|нёргосистемы (генераторы, трансформаторы и т. д.).
ДЙолученные таким образом модели генераторов и
191
ж
трансформаторов сложнее модели длинной линии.
Во второй части также описаны и выведены модели
синхронного генератора, трансформатора, реактора, из-
мерительных трансформаторов и молниеотвода.
При формировании моделей отдельных элементов
энергосистемы принятые допущения подтверждаются
опытами на реальных элементах.
Проводимые в этой части исследования направлены
главным образом на формирование схем замещения, ко-
торые могут быть непосредственно использованы при
создании физических моделей; последние, как уже упо-
миналось, являются главным источником информации
о переходном режиме энергосистемы при частотах соб-
ственных колебаний.
В книге не дается общих уравнений, описывающих
конечный вид схемы замещения. Определение соответ-
ствующих зависимостей (например, в матричной форме)
для схем типа четырехполюсника или многополюсника,
не представляет больших трудностей, однако, потребо-
вало бы введения сравнительно сложных выражений.
Моделирование элементов энергосистемы для частот
собственных колебаний (либо близких к ним) не явля-
ется полностью решенной проблемой. Уточнений и иссле-
дований требуют следующие проблемы: моделирование
короны при быстро протекающих процессах; моделиро-
вание явлений, сопутствующих протеканию тока в зем-
ле; моделирование процессов в гидрогенераторах и
трансформаторах, особенно для составляющих нулевой
последовательности. Следует иметь в виду, что в от-
дельных случаях конкретное исполнение элементов
энергосистемы (например, специальное исполнение
трансформаторов) может потребовать уточнения отдель-
ных моделей (преимущественно физических).
7. МАТЕМАТИЧЕСКИЕ МОДЕЛИ КОММУТАЦИИ
И ВОЗМУЩЕНИИ
Колебания напряжений и токов, составляющие кото-
рых имеют частоты, близкие или равные частотам соб-
ственных колебаний, возникают в результате коммута-
ций либо возмущений в энергосистемах.
В трехфазных четырехпроводных цепях коммутации
и возмущения могут происходить одновременно либо
в разные моменты времени; они создают постоянную или
проходящую асимметрию в энергосистеме. Чтобы опре-
192
делить электрический режим системы в этих условиях,
необходимо -разработать модель, учитыващую коммута-
ционные операции — выключение либо включение —
с произвольной последовательностью размыкания (за-
мыкания) фаз в трехфазной системе. Аналогично необ-
ходимо определить математическую модель возможных
аварийных возмущений также с учетом неодновремен-
ности их возникновения.
Для определения указанных моделей наиболее целе-
сообразно применение преобразования (О, а, р), реже —
(О, 1, 2). Применение составляющих при формировании
математической, модели, коммутаций и возмущений, вы.-
звано тем, что уравнения для элементов энергосистемы
(генераторы, трансформаторы, длинные линии и т. д.)
при разложении на составляющие имеют значительно
более простые математические выражения и соответст-
венно схемы замещения, чем при трехфазном представ-
лении.
Зависимости между фазными величинами с индек-
сами а, Ь, с и величинами для составляющих с индек-
сами (О, а, ;р) или (0, 1, 2) выражаются матричными
формулами:... ... ...
(7.1)
f §-1279
193
Таблица 7.1а.
а а—Ь
L Р П — L /г Д—
II II II ООО Е* **• г*. гГ II II II о©о
•»= «в «~ II II II ° 6? I • ***. °; «а =-Ze rtt=l/K3ip иа +3 «р = 2м0
L ' Р сС pvC /‘7 4 ?•
0 \Х/
/ ° ° -</>>- (
0.^ 8 , оо- II II II •q -4 :»? _ в .Jn'
(lo)p [1 1 0] 0a)p =0 (z{3 )р 1 1 01Г(/.)р1 о-Гз 1 (;а)р =0 ООО (Zp )р
0 0 1 (Ц>)^, (Мо)р —2 0 1 (иа )L—(ua)p = о _ 0 0 U |_("р )l~(“₽)pJ 1-2 1 Кз ] X
194
Зависимости составляющих (б, <*, £) дЛя операции включений
195
Таблица 7.16
£с = О
«а = 0
«Ь = 0
ib= О
zc = О
Ча = 0
(^o)l — Оо)р
(*а )/, = (*а )/>
(*0 )jL = (Гр )₽
~2 I 0-|Г(Го)р “1 = 0 [2 1 -Гз]Х
ООО ('а)р
0 0 1 )р
(мо)/, (ио)р
(“a)l-(aa)p
(ио)л (ио)/>
[110] Ml~Mp
(ир)1 (ар)р
= 0
’1 1 0'
о Кз 1
ООО
(uf)b (и$)р
196
Зависимости составляющих (0, а, $,) для операции отключений
(*о)р
(Za )р
О’₽ )р
г о о о -
—2 1—КГ
_Кз о 1 .
(Ио)/,' (ио)р
Ml-Mp
(u?)l
1 0 Dir (и©)л (ио)р
О 1 0 (uah— Мр
О 0 1 —(«р)р
197
Фабл ицa f.2. Зависимости Составляющих (а, 6) для разлив
Короткие замыкания
(wo)l — (мо)р
(«а )£=(«а )р
(Hf )l = (ир )р
“1 О О'
О /з-1
ООО
Kh
"1 о О'
О 1 о
О 0 1
198
яых возмущений
Пауза Нагрузка
а—b a—b—c — —
L Р *—1 - а. д 1 а 1 п •• L —T c b- a n р L Р С о о Ь—О О— й—-в 0 Л- * Z с 1—I-. ь с=4 а. czzh п * •
£+<г- 11 а* II Йй 11 ° о г'а + lb + *'c = 0 ^CL == Щ) ua = uc n*'c-’’sT‘ II II II О О о а а <• а с 111|!! сГ’ЛГ’Б NSjN
Г- ₽й <г- II II и О 3 ТО Й то О ° о II II II e о а 3 а **. *». о .то Р II II II I 000 3 то S II II II о то4' я N N
£ Р<3- ос 0 5ZZ Р г- 1_ L^P IX 0 л_1_ (К о^'~~ о""1 *"1 Zfi /Г4"] Zo и»
(«о) А (tto)p («а )л = («а )р (мр )р = (мз )р
[о — Уз 1 '(«o)l ' X (uah h ]X =0 X Ю0‘ 010 _0 0 1 (йо)р К к (мр)р X = 0 — —
199
Продолжение табл. 7.2
Короткие замыкания
’2 1
О О
О О
(*о)£~НА))р
(QrHU.p
[2 1 Гз ]Х
^а)р
(*₽)р
где
В приведенных формулах параметр <р может отра-
жать такие электрические величины, как, например,
ЭДС, напряжение, ток, магнитосцепление.
Зависимости для токов и напряжений фаз во время
коммутаций либо возмущений определяют, как показано
дальше, соответствующие зависимости между составля-
ющими, а по последним, в свою очередь, можно соста-
вить схемы соединений отдельных составляющих. При
коммутациях и возмущениях наиболее простые зависи-
мости получаются для составляющих (0, а, р), посколь-
ку при переходе к фазным величинам выполняется ариф-
метическое суммирование, а не геометрическое, как
в случае симметричных составляющих (0, 1, 2).
При разработке математической модели коммутаций
учтены включения и отключения в одной, двух и трех
фазах, что показано в табл. 7.1. Коммутации неодновре-
менные или состоящие из двух операций (включение
либо отключение через активное сопротивление) явля-
ются элементарными случаями, представленными в таб-
лице.
При расчетах токов и напряжений, возникающих при
неодновременных коммутациях или возмущениях, на-
чальными условиями очередного состояния является
2Q9
Короткие замыкания Пауза Нагрузка
а—Ь a—b—c — —
X* X "1 0 О' о Уз 1 ООО (А>)ь Оо)р (Qb- (Qi X 3 =s0 — X '1 0 O' 0 1 0 0 0 1 (zo)b (Ql X = 0 (мо)д Ml = L(up)z. _ TZoOO-l = 40 x L°°2p X (QL Lop)/,.
значения токов или напряжений на момент конца преды-
дущего состояния.
В первой строке табл. 7.1 даны схемы, иллюстрирую-
щие состояние данного соединения, при этом на схемах
указаны фазные токи, а также напряжения на входных
и выходных выводах включателя каждой фазы. Стрел-
кой с буквой L на схемах показана часть энергосисте-
мы, подключенная к входным выводам выключателя,
а с буквой Р — часть энергосистемы, подключенная
к выходным выводам. Эти же обозначения относятся и
к схемам для составляющих (0, а, р).
Для математических преобразований обязательным
является указание на то, какие из напряжений на выво-
дах выключателя каждой из фаз или токов, протекаю-
щих в этих фазах, равны нулю. Эти зависимости для
определенных видов несимметрии представлены во второй
строке табл. 7.1. Зная фазные величины, можно с по-
мощью формул (7.1) определить зависимости для со-
ставляющих [в данном случае (0, а, р), которые пред-
ставлены в третьей строке таблицы]. В четвертой стро-
ке даны схемы замещения для составляющих (0, а, р),
реализующие определенные виды коммутаций. В этих
Схемах применены идеальные трансформаторы, коэффи-
циенты трансформации которых определяются соотноше-
нием чисел витков обмоток. Указанные схемы отвечают
зависимостям, данным в третьей строке табл. 7.1 для
составляющих (0, а, р). На основании зависимостей и
схем, представленных в строках 3 и 4, можно определить
токи и напряжения на выводах для составляющих, а из
(7.1) —для соответствующих фаз.
201
Мри анализе переходных процессов Могут преДстай-
лять интерес также значения напряжений по отношению
к земле и междуфазные в разных точках энергосистемы.
Для их определения необходимо знать токи и напряже-
ния по обеим сторонам выключателя.
Расчеты значений напряжений по отношению к зем-
ле и междуфазных облегчают зависимости, приведен-
ные в пятой, шестой и седьмой строках табл. 7.1. Из
анализа схем, приведенных в четвертой строке, вытекают
зависимости для составляющих тока (0, а, р) по обеим
сторонам выключателя, приведенные в пятой строке таб-
лицы. Зависимости в шестой строке для составляющих
вытекают из зависимостей для фазных токов, составлен-
ных в шестой строке. В седьмой строке табл. 7.1 даны
зависимости для составляющих напряжения, удовлетво-
ряющих условиям, приведенным во второй строке дан-
ной таблицы.
В табл. 7.2 включены математические модели для
аварийных возмущений и изменения нагрузки. Зависи-
мости, приведенные в табл. 7.2, выведены аналогично
рассмотренным выше в табл. 7.1.
8. МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ДЛИННОЙ ЛИНИИ
8.1. ОБЩИЕ СООБРАЖЕНИЯ
Электрические параметры трехфазной длинной линии
(индуктивности, емкости, активные сопротивления линий
и сопротивления утечки) равномерно распределены по
всей ее длине. Длинная линия однородна, поскольку зна-
чения параметров на единице длины постоянны.
Большинство параметров линии практически не зави-
сит от режима работы — напряжений и токов (кроме
проводимостей, зависящих от короны), поэтому можно
привести трехфазную модель четырехпроводной линии
к трем однофазным моделям.
В этом разделе описаны две модели длинной линии:
основанная на методе бегущих волн, при котором
искомый в данном месте процесс представляет собой
сумму волн, добегающих до этого места в разные мо-
менты;
основанная на методе стоячих волн, при котором ис-
комый в данном месте параметр процесса представляет
собой сумму параметров процессов всех гармониеских
составляющих, имеющиеся в данный момент.
202
Существует ряд модификаций метода бегущих волн,
предназначенных для расчетов на цифровых и аналого-
вых машинах.
Применение метода стоячих волн дает возможность
представлять действительную линию цепочечной линией,
что используется при физическом моделировании. Фи-
зические модели часто применяются для анализа пере-
ходного процесса энергосистемы при коммутациях либо
возмущениях.
Допущение о линейности параметров линии право-
мерно если только не учитывать корону. Это явление,
как известно, возникает на линии, когда напряженность
электрического поля превышает определенное значение.
Анализ линии с учетом короны приводит к нелинейным
уравнениям частных производных, которые до сих
пор аналитически не решены даже для простейших схем
энергосистемы. Влияние короны учитывается введением
поправок в данные для процессов изменения токов и на-
пряжений, полученных при линейной постановке задачи.
; При таком способе учета короны пользуются цепочечной
моделью линии, и в точках соединения элементов линии,
разделенной на четырехполюсники или многополюсники,
вводится математическая модель короны.
Расчет длинной линии затрудняется также наличием
поверхностного эффекта в проводах. Это явление опре-
деляет рост значений-активных сопротивлений в зависи-
мости от частоты, в меньшей степени оно влияет на зна-
' чение индуктивности и не влияет на значение емкости.
Частота имеет сравнительно большее влияние на зна-
чения электрических параметров земли, чем на значения
/' параметров фазных проводов и грозозащитных тросов.
Зависимость значений электрических параметров от ча-
, стоты при различных конфигурациях линии и разных
£ грунтах определяется экспериментально.
В расчетах можно учесть влияние частоты на значе-
; ния параметров посредством предварительной оценки
частоты рассчитываемого процесса и принятия в расче-
; те соответствующих значений активных сопротивлений и
индуктивностей для этой частоты.
Применяя ЭВМ, можно уточнять расчеты за счет вве-
дения итеративного процесса. При этом задается значе-
ние частоты и определяются соответствующие ей значе-
‘ Ния индуктивных и активных сопротивлений; затем рас-
считывается частота собственных колебаний схемы при
203
определенных параметрах; рассчитываются индуктивные
и активные сопротивления, соответствующие новому зна-
чению частоты, и т. д. Итерационный процесс продолжа-
ется до выполнения равенства (с принятой погрешно-
стью) частоты собственных колебаний и частоты, при
которой подобраны в конечном счете значения индуктив-
ных и активных сопротивлений.
Проблема упрощается при физическом моделирова-
нии, так как в модели применяются индукционные ка-
тушки и реостаты, параметры которых зависят от ча-
стоты *.
В энергосистемах наибольшее влияние на переходные
процессы оказывают длинные линии (особенно при
сверхвысоких напряжениях из-за значительной емкости).
8.2. МОДЕЛЬ ДЛИННОЙ ЛИНИИ
Схема замещения элемента dx длинной трехфазной
четырехпроводной линии представлена на рис. 8.1.
В дальнейших рассуждениях принимается, что линия
идеально транспонирована, а также, что фазные про-
Рис. 8.1. Схема замещения элемента трехфазной длинной линии
с нулевым проводом.
Laa, Lbb, Lcc — индуктивности фазных проводов на единицу длины токовой
петли, образованной соответствующим фазным проводом и землей, L33 — ин-
дуктивность нулевого провода токовой петли, образованной землей и фазным
проводом; Lab, Lac, Lbc — взаимные индуктивности между соответствующими
проводами фаз; Raa, ^ъь< #сс — активные сопротивления фазных проводов;
/?33 — активное сопротивление нулевого провода; Gab. Gac, Gbc — утечки меж-
ду соответствующими фазными проводами; Ga3, Gb3, Gc3 — утечки между со-
ответствующими фазными проводами и нулевым проводом; Саа, Сьь, Ссс —
собственная емкость фазных проводов; СаЬ, Сас, СЬс — взаимные емкости
между соответствующими фазными проводами.
* Однако существуют значительные трудности при моделирова-
нии активного сопротивления в нулевом проводе.
204
вода идентичны в геометрическом отношении. При таких
допущениях выполняются зависимости:
Laa—L'bb'—•L'cc—>
• Lab—Lac-—^-‘cb—M J
Caa—G^b-—Ccc—G\
Cabz=Gac==Gbc=zK't
Raa—‘Rbb—~Rcc—'R j
Gab'—Gac—Gjjc.-—G\
Gas:== Gb3 = Gc3= G3.
Для приведенных условий фазные падения напряже-
ния на отрезке х, x+'dx с учетом х от начала длинной
линии выражаются формулами:
=L Ж > +м >+«« + ^,+ Г:
_ ди,,
дх
Ri”+R^+£3= I-
(8.1)
-&=мъ +m^+^+R‘c+^+.^.
Подобным же образом выводятся формулы для опре-
деления изменения фазных токов на отрезках, x-]-dx:
dia__г" I w d (иа иь) । jzd (иа ис)- ।
дх ~~С dt 'К dt dt *"
(8.2)
+ G3Ua + G(“a - »b) + G (“a ~
dib___r> dti-h 1 v- d (iib ua) 1 v- d (ub uc) [
dx ~C dt + dt dt '
*4“ G3Ub 4" G (Ub Ua) ~]rG(ub uc)'i
dic duc . d (uc ua) > d (uc u^)
dx~ dt dt "T- dt *
H- G3Uc ~kG(Ue — ua) ~\~G (Uc~~ ub)-
Напряжения и токи в (8.2) зависят от времени и от
места, их расчет затруднен из-за взаимного влияния
как между фазными проводами, так и между последни-
ми и нулевым проводами. Линейные преобразования
четырехпроводной трехфазной системы в три незави-
симых однофазных контура исключают эти взаимные
влияния.
205
Подставляя в (8.1) и (8.2) вместо фазных напряже-
ний и токов их симметричные составляющие, определяе-
мые (7.1), после преобразований получаем:
дх 1 dt 1 1 ** dut дх
ди0 ~~дх дх =C,%+G,u,-,
dia дх дх =c.^+ga,
где
£1=£2=^—Л4; Ri=^R2=R', Ci=
=С2=С+3/(; Gi=G2=Gz4-3G; Lq=L-\-
-|-2Л14-3£зз; 7?о=^?_|_3/?зз; Gq=C; Gq=G.
Приведенные выше параметры являются симметрич-
ными составляющими прямой, обратной и нулевой по-
следовательностей и отнесены к единице длины линии.
Подставляя в (8.1) и (8.2) вместо фазных напряжений
i(t,x) L R
Рис. 8.2. Схема замещения элемента длинной однофазной линии для
составляющих.
i(t,x)+ ~~dx
-О------------------Я
4= с u(t,x)+^^dx
1 ' эх
и токов соответствующие выражения для составляющих
(О, а, ₽) из (7.1), можно получить выражения такого
же вида, как для составляющих (0, 1, .2); при этом
реактивные и активные сопротивления прямой (обрат-
ной) последовательности равны реактивным и активным
сопротивлениям составляющей а (либо 0). Рассмотрен-
ные выше уравнения могут быть записаны в общем
виде:
ди (t, х)
дх
= Gu(t, X)+С .
(8.3)
200
~)ти уравнения соответствует схеме замещения участ-
ка однофазной линии длиной dx, показанной на рис. 8.2.
Приведенные выше рассуждения показали, что схема
трехфазной четырехпроводной длинной линии равно-
ценна трем однофазным схемам замещения длинных ли-
ний для составляющих (0, 1, 2) или (0, а, р).
Ниже выведены математические модели однофазных
длинных линий с равномерно распределенными пара-
метрами, а также цепочечных линий.
8.3. МОДЕЛЬ ДЛИННОЙ ОДНОФАЗНОЙ ЛИНИИ
Частные производные в (8.3) — гиперболического ти-
па. Если не учитывать активного сопротивления и уте-
чек на линии, а также начальных условий, эти урав-
нения могут быть представлены в виде
^^=fU(p,xy,
И^.^Ч(р,х),
решения которых при операторной записи определяются
(индекс 1 — начало линии, индекс 2 — конец):
V, (p) = U1(p)ch(plVrT£j + I,(p)Zsh(plVL£y, 1
г— 1 /— I (8.4)
UMsh{plVLC)\ j
при этом Z=|/L/C—волновое сопротивление;
= 1. VLC— скорость распространения волны.
Значительно труднее определить напряжения и токи
в линии при учете активного сопротивления и утечек,
а также граничных условий для времени и места* После
преобразования (8.3) относительно переменной t при
учете начальных значений тока I (0, х) и напряжения
U (0, х) получается:
S^L=(R+pL)/(p,x)-pU(O, X)-,
= (О+рС) U (р, х) - pCU (0, х).
(8.5)
207
В последующих преобразованиях вводятся Пара-
метры: >
г у — коэффициент распространения волны; ZB— вол-
новое сопротивление; оба параметра в общем случае
являются функцией комплексной переменной р:
Y=|/(^ + pb)(G + pCj;
—У G + pC’
После дифференцирования (8.3) относительно х и
подстановки вместо dU(p, x)/dx и dl(p, x)/dx соответ-
ствующих зависимостей из (8.5) получаем:
+ pL)U(0,x) + pL^-I(0,x)-,
(РЦр.х) sl, . , ,г I
- - Y I (p,x) = -pL(G+
+pW<P,x)+pC±U(O,x).
Уравнения (8.7) — в частных производных второго
порядка,-которые при пренебрежении активным сопро-
тивлением, утечками и начальными условиями, были
решены д’Аламбером и Бернулли; Новое решение пред-
ложил позднее Фурье. Решения Бернулли и Фурье очень
близки и основаны на введении так называемых собст-
венных значений, при этом конечный результат имеет
вид ряда. Решение. д’Аламбер а известно в технике, как
решение .с . помощью «блуждающих волн».
Уравнения. (8.7) можно решать как линейные диф-
ференциальные уравнения, пользуясь, классическим ме-
тодом замены переменных. Результат решения (8.7) бу-
дем искать в виде
и (р, х)=А, (х) ev+А (X) ё~1Х; 8
Чтобы однозначно описать четыре , неизвестные:
Ai(х), Аг(х), Bi(x) и Bz(x), следует два исходных урав-
208
ненйя (8.?) дополнить зависимостями. Для определения
двух дополнительных уравнений дифференцируются за-
висимости (8.8):
I ^2 (X) -IX
' dx
\А,(х)е
di (р, х) dBt (х)
dx ~ dx
-ХВ2(х)е т*.
Полученные зависимости упрощаются с учетом со-
отношений:
(х) тх. dAa (х) —\х _ п.
dx е dx е “и’
dBt (х) ух dBa (х) n
dx e '' dx c ~
(8.9)
Вышеприведенные уравнения предназначены для
определения четырех искомых коэффициентов. При при-
нятых допущениях выражения производных напряжения
и тока относительно переменной х примут вид:
=тА (х) тЛ (*) е
После повторного дифференцирования этих зависи-
мостей относительно х получается:
d2(7 (р, х) „ \dAv (х) чх dA2 (х) л_Тх] (
dx2 “»[ dx е dx е J +
d2I (р_, х) Г^В1 (X) eVc _ dBa (х) -ixl
dx2 * [ dx dx J *
14—1279
209
Сравнивая соответствующий выражения Иослёдййй
двух уравнений и (8.7), а также учитывая (8.9), полу-
чаем:
"4^- &+PLW^-%r^I (°- *)]
^=[£ (Я+^)£/(°,х) + ^А /(0, х)]е^;
^-=[^(« + p£)t/(0,x)-^A /(о,дф".
После интегрирования этих уравнений получаем ис-
комые коэффициенты:
Д (Л-) =»Д+4- 4- pL {е-'Ч (О, х) - I (0,0)1 +
+4-j [pL/ (0, х) - U (О, X)] е~^‘dx;
О
Д(х)=Д- 4-4-рЛ1е"/(О,х)-/(О, 0)1 +
+4- j [pli (°. *)+С7‘(0’ х)] e'Xdx’
О
В,(х)=В,+4- у рС[е'ии(°, x)-U(0, 0)] +
+4-f \pCU (0, х) - — 1 (°- Л')] e~vdx-,
о
В, (X) = в,- 4- 4- рС [е^и(0, х) - и(0,0)] +
I
+4~ j [/€£/ (0. х) + pL (° * 1 (°. •«)] eUdx-
о L
210
Подставляя эти коэффициенты в (8.8) и проводя пре-
образования, получаем:
СЦр^^А^
0)shTx +
+J [pLI (°, £) ch у (л — $) —
о
U (0, Е) sh у (х - Е)1 dE;
f
t?
I (р, х) = В^Х + В2е-'х - U (0, 0) sh
(8.10)
С
+J (0,5) ch у (х — Е) — £±<2±рС1 X
о
XI(0, Е) shT(x-Е)]
dE.
В
интегральных выражениях появляется перемен-
ная £, изменяющаяся на отрезке линии от 0 до х. По-
стоянные Ai, Л2, Bi, В2 можно исключить, сделав их sa-
fe, висимыми от напряжения и тока в начале длинной ли-
Й нии:
ность
L после
новки
U(p, 0)=^!+^2; 1{р, 0)=B,+B2.
Два дополнительных уравнения, дающие возмож-
определения искомых постоянных, получаются
дифференцирования уравнений (8.10) и подста-
их в уравнение (8.5). Принимая х=0, получаем:
I (0, 0) = - А, + А, - (В,+В£);
“ Y и (о, 0) = - В,+В, - (Л, + А).
Следовательно, постоянные Л1, А2, Bi, В2 будут:
1
^7(0, 0) —ZBI(p,0)-\-U (р, 0) ;
А=4-[(/(Л 0)- 1 (0, 0) + (р, 0)];
z [ I
Вв == -1
8 2
(8.Н)
14*
211
После подстановки этих коэффициентов в (8.10) . и
после преобразований получим:
U (р, x) — U (р, 0) ch ух — ZBI (р, 0) sh ух -ф-
+J[pL/(0,5)chY(x-e)~
-pCzBu(o,i)Shy(x-^'di-, (8I2)
ZBI (p, x) = ZBI (p, 0) ch yx — U (p, 0) sh yx
+ f [pCZJJ (0Д) ch T(x-E)-
6
-pLI(0, £)shy(x-$)]<
Уравнения (8.12) представляют собой преобразован-
ные зависимости напряжений и. токов в произвольной
точке длинной линии U(p, х), I (р, х) от преобразован-
ных напряжения и тока в начале линии U(p, 0), /(р,0).
На интегральные выражения в (8.12) оказывают влия-
ние напряжения и токи в начале линии. Для нахож-
дения этих интегралов необходимо знать выражение
начальных напряжения £7(0, £) и тока /(0, |) (в момент
времени /=0) в произвольной точке длинной линии, от-
стоящей на величину % от ее начала.
При дальнейших преобразованиях уравнений относи-
тельно переменной (времени) возникают существенные
трудности в связи с иррациональностью выражений для
волнового сопротивления ZB, коэффициента распростра-
нения волны у, а также гиперболических функций.
Активное сопротивление реальной длинной линии
в интервале частот от 50 Гц до частоты собственных ко-
лебаний значительно меньше реактивного сопротивле-
ния, а активная проводимость значительно меньше реак-
тивной. Благодаря этому можно упростить разложение
в ряды выражения волнового сопротивления и постоян-
ной распространения волны. После преобразования вы-
ражение волнового сопротивления примет вид:
7 — + 1/1 ,/д + Ж —
^в~У в + рС~~Г С V p+G/C^
212
HOW—
Далее, используя разложение бинома Ньютона, по-
лучаем:
7 —1/ JL. 1 Л j д_ (2L _2_\ Д______
V с |/ с) р —
Г С [1 I 2 U С J р J
сопротивлениеуможно представить формулой
+ (8.13)
Подобным образом преобразуется формула для вы-
ражения постоянной распространения волны:
Y=/JZ(/?+/>/) (G+pC)=//ZC х
х |/Нк#+4)=1х
Ху Р +руг+-)+т-с^
= I |ZZC ]//>’+/>(4+т)=piVTZ х
Xj/’+jF (4+4) =
=a/)/vzc[i+±(4+4)]-
- । | X Qj \
Обозначая ^c~lyLC, b=— , получаем
формулу постоянной распространения волны в следующем
виде:
Т = Лс(1 + 4“У (8.14)
\ •* /
Подставляя в (8.12) приближенные зависимости для
волнового сопротивления и постоянной распространения
213
волны, получаем уравнения связи тока и напряжения
в операторной форме в произвольный момент времени
в любом месте линии:
v(P,x)=u (р, о) ch [(6+х] - zc (1 + х
X / (р, 0) sh |№ 4- х] + J \pLI (0,5) ch [(6 -|- рус) (х —
- ?)] - pCZc (1 + -£-) U (0,5) sh [(6 + ръ) (х - 5)] I <Й;
\ * / /
4 (1 + -у) / (А = 4 (i + (р, 0) ch [(6- ръ) Л| -
X
-U(p, 0)shl(6 + pYc)] + J|pCZc(l +лу (0, J)X
о
х ch [fc — p^c (*-5)] — pLI (0,5) sh [(6 4- pyc) (x - 5)]| t/5.
Обратное преобразование приведенных выше уравне-
ний в операторной форме связано с серьезными трудно-
стями. Относительное упрощение дальнейших преобра-
зований дает ограничение, при котором напряжение в
ток однофазной длинной линии (с учетом потерь и на-
чальных условий) определяются только на ее концах,
т. е. в начале и конце. Принятие этого ограничения
вполне допустимо на практике.
Упрощение записи уравнений напряжений и токов
длинной линии можно также получить, добавляя к обе-
им частям этих зависимостей выражения (8.12), в кото-
рых принято х=1, и вычитая из обеих частей этих за-
висимостей выражения (8.12), в которых х=0.
Учитывая, кроме того, зависимости
ch y+sh у=еУ\
ch у—sh у=е~у,
получаем:
и(р, l)-\-Zllpl=e~'“ [I/(р, 0) + ZI(р, 0)1 +
I
+ f [LI (0,5) + ZCU (0, 5)| ре~' и~^ сП;
О
214
U(p,b)-Zt(p,O) = е~п |f7 (p, t) - Zt (p, /)! + -
+ ( [CZU (0, E) - LZI (0, ЕЯ pe~'ldi.
0
После учета упрощенных зависимостей (8.13) для
волнового сопротивления и постоянной распространения
(8.14) волны приведенные выше формулы примут вид:
и (р, I) + ZCI (р, I) + Zfi -j-1 (р, I) =
= [U(p, 0) + Zcl(p, 0) + Zca-Ll(p, 0)]|+
/
+J[£/(0, i) + ZcCU(0, i) + ZcC у (7(0, E) e
0 J
-Тсъ (l-V
► ь
Xpe n‘U 61 dE; (8.15a)
U (p, 0) - ZCI (p, 0) - Zca -LI (p, 0) = e V'x
X [(/ (p, l)-Zcl (p, I) -Zca±I (p, /)] +
Г [CZ<U (0, E) + Zfia -j U (0, E) - LI (0, E)j e^X
I
X pe~ncidZ. (8.156)
В операторных уравнениях (8.15) появляются члены
затухания е с , а также фазного сдвига е с . Для
решения поставленной задачи необходимо записать эти
уравнения в функции времени.
Отдельного рассмотрения требуют преобразования
интегральных выражений. Интегралы в уравнениях
(8.15) содержат импульсные функции первой степени
от р с сомножителями е с либо е с .
215
Импульсная функция первой степени обозначается
следующим образом:
0 для t<0;
оо для / = 0;
0 для
i
при этом J 8 (/) dt — 1.
оо
Учитывая члены временного сдвига, эту функцию
можно записать:
Р1 Г И Л Г. /1
ре = 8 (/-£)];
Из определения импульсных функций следует, что
б[/—ус(1—£)]=0 Для всех t=£yc(l—£), аналогично
6(/—т4)=0 для t=£y<£.
С учетом свойства импульсной функции интегральное
выражение в формуле (8.15а) преобразовано:
£= J [l/(0, e) + Zc№(0, i) + ZcCa-^U(0, Е)]х
О
У e^cbl ~ ^е~^с б-t) p^=J и _|_
о
4-ZcCl/(0, i) + ZcC-—U(O,
-ь (/-?)]<
Принимая t = t — ус (I — £), получаем:
t
Е= f [U [О, / —L(/_,)l+ ZcCU[О, /-
J I L L
1с j р L *с JJ
216
Из определения импульсных функций первого поряд-
ка следует, что эта функция отличается от нуля для т=
=0. Выражение Е отличается от нуля для t=yc(l—£).
Из этой зависимости следует, что при £, изменяющемся
в пределах .£=£ ... /, переменная t находится в диапа-
зоне t=yc(l—l) ...0.
Для дальнейших преобразований воспользуемся так
называемым фильтрующим действием импульсных функ-
ций, что может быть представлено в виде
?Л(/-г)«(т)Л=Л(7). (8.16)
—00
Данное уравнение следует интерпретировать следую-
щим образом: интеграл произведения функции h(\t—т) и
' импульсной функции 6(т) (при т, содержащемся в ин-
тервале интегрирования) равен значению функций h(‘t)
[26].
При использовании зависимости (8.16) последнее
интегральное выражение для Е принимает вид:
Е = [— Lilt), I- —i\+—ZcCUE), 1- — Л4-
[Ye \ Yc J ГЛс Ye J~
j^zcc— — u(o, l
= e-M[zc/(o, /-£<)+
^-a~-e-blufo, /-^-/Y|. (8.17)
Аналогично преобразован интеграл в выражении (8.156)
; ' 1
.. F=f[cZc<7(0, t)+CZcaj-U(0, Е)-£/(0, Е)1х
О
I
х е“,Л’е"’Л’Л= j [czcu (0,5) + CZca j- U(0,?)-
б
•„ -4/(0, 5)1 e 6 (Z - тД) di.
^4 ?17
После подстановки t — t — в последнее уравнение
получается:
F = f {czju Го, - ^j-f-CZ^ -1-Х
t
Х1/Г°- — X)]—i/Го,
I Ye L ‘с JJ ,с
Интеграл приведенного выражения отличается от ну-
ля для т—О и, следовательно, для /=ус£. Подобно пре-
дыдущему интегралу выражение F равно нулю для £>1.
Учитывая (8.16), получаем:
F=e-btl—CZlulo, -L.f\-l-—CZca4-UX
(Yc С \ Чс Г Чс С Р
-Zc/(o, l-A^ae-^ulo, 2-ф. (8.18)
\ 1с J Р \ IC ])
В выражениях (8.17)
определены для времени
Рис. 8.3. Вспомогательный ри-
сунок для вывода формулы
(8.19).
и (8.18) граничные условия
/=0 и точки £0 на длинной
линии, тогда как в (8.15а) и
(8.156) граничные условия
определены для времени £=0
и начала длинной линии.
В целях унификации за-
писи выражение (8.17) при-
ведено к началу длинной ли-
нии, а выражение (8.18) —
к ее концу. Основные свойст-
ва полученных преобразова-
ний иллюстрирует рис.. 8.3;
точка Р соответствует нача-
лу линии, точка К — ее кон-
цу. Выражение (8.17) учи-
тывает начальные условия, т. е. ток и напряжение, имев-
шие место в момент /=0 на расстоянии £0 от начала
линии. По истечении времени /1=/=ус(/—£0) значение
выражения (8.17) появится на коцце длинной линии.
218
Таким образом, учитывая соответствующее запаздыва-
ние во времени, граничные условия (8.17), приведенные
к концу длинной линии, можно представить в виде
Е
= |<r“ [zc7(0, Z-£)+Z/(o, l-
+a^-e-t‘u(o,l- —
P V Yc .
Чс
=e-M[V(z„ /)+£/(<.. 01 +
Р
Yc
\t=tt
Чтобы привести выражение к началу линии, следует
учесть время пробега волны от начала к концу линии,
равное t=lyc (рис. 8.3):
E^tr-„e=-e Н<‘ V>lZc/(lt-lfcO) +
+£/(/,- ZT.0)] + a
Р \ IC
Для промежуточных значений времени 0<:
^ус(/—£о) формула принимает окончательный вид:
£(=e-i’('+',-^[Z£/(Z1 + Z-ZT., 0) +
+Z/(Z+Z1-ZYc, 0)1+ а |± e'b,U (о, Z-
(8.19)
Время t находится в диапазоне:
Тс£о^+/1^ус.
За этими пределами времени значение всего выра-
Л жения Е равно нулю. Поступая аналогичным образом,
£ можно граничные значения в выражении (8.18) свести
началу длинной линии (рис. 8.4), что соответствует
сдвигу отдельных членов выражения (8.18) на время
। /i==/=-Yc£0.
219
В результате отйесёйия граничных значений к нача-
лу длинной линии получаем:
e~bt
Ft=t =
и (о, —\-~ZJ (о
I Чс J с к
A_a±e-^u(ot =e~bt\U{tv 0) —
P \ Yc J t=ti
-ZcI(t„0)] + a\-^e-Mul0,
| P \ Yc /
Определяя время относительно конца линии, следует
учесть время пробега волны от конца к началу линии,
равное t=ycl, тогда
F, = e bU'
-ZJlt.-fcl, 01 + « — e-uU(0, -Д1 , , •
c v 1 ,c 71 1 p \ Yc/ P=fi=*Tc
Рис. 8.4. Вспомогательный ри-
сунок для вывода формулы
(8.20).
Для промежуточных значений времени 0^/sC
определяемых относительно времени на конце
линии, получаем:
Ft = e b{,+t' 'т«’[(7(/ + /1_Тс/, l)-ZcI(t +
+1. - То 01 + e~-U (0, . (8.20)
Здесь время, как следует из рис. 8.4, находится
в следующих границах:
Тс(/—+
за этими границами F=0. После подстановки (8.19) и
(8.20) в (8.15) и перехода от операторных выражений
220
1 ip к интегральным йолучаём окончательные формулы
для расчета напряжения в начале и конце длинной ли-
нии в зависимости от времени (при учете активного со-
противления и утечки, а также ненулевых начальных
условий)
(t, aZc J i(t,l)dt~e le'‘x
о
u{t — ycZ, O)+ZC/(Z—yc/, 0) + aZc
i(t—ycl,tydt
+ e ”',+'‘ V’ |« (Z + Z, - YcZ, 0) + Zci (t + f, - Y,Z, 0)] +
-\-a f e~btu(o, I——V//;
J \ Yc )
lclo
t=ici
и (t, 0) — Zci (/, 0) — Zca J i (t, 0) dt —
о
= e~^cbl u(t — ycl, I) — Zci (t — yc/, 0) —
-aZc f Z(Z-YcZ, Z)dz|+e H'+'‘ V’X
0 J
x мт - u о - (m - yc/, о] -
1C(Z-W
(8.21)
Здесь i (if, I) — ток на конце длинной линии в момент
времени /; u(t—ycl, I), i(t—ycl, I)—напряжение и ток
на конце длинной линии в момент времени t—ycl\ u(tt
0), i(t, 0) —напряжение и ток в начале длинной линии
в момент времени /; u(t—yclf 0), i(t—ycl, 0) — напряже-
221
ййё и той в йачалё длинной линий в момент ёрёмёнй
t—Yc/; w(/+'/i—ус/, 0), /(/ + /1—Yc/, 0) — напряжение и ток
в начале длинной линии в момент времени /, предшест-
вующий расчетному времени /1—усЦ либо начальные на-
пряжения и ток в произвольной точке длинной линии,
отстоящей на £==yc/i от ее начала, причем ус1— время
пробега волны от начала до конца длинной линии;
—ycl, I), —ус1, /)—то же, только напряже-
ние и ток отнесены к концу длинной линии, где
—y<J, /)=w(0, /—£==/—Yc^i)»
/(/ + /1—ycl, l)=i(Q, I—Z==l—YcM-
Уравнения (8.21) определяют токи и напряжения
в начале и конце длинной линии с учетом.продольных
и поперечных активных сопротивлений, а также произ-
вольных начальных условий для тока и напряжения
вдоль линии либо ее части. Решение этих уравнений,
однако, достаточно трудоемко, поэтому они обычно под-
вергаются дальнейшим упрощениям.
Пренебрегая условием равномерного распределения
активного сопротивления, а также начальными условия-
ми, приходим к известным уравнениям:
u(t, l)-\--Zci(t, l) = u(t—ycl, 0)+'
+ ze‘(t-U,0); .R99
и (Z, 0) — Zci (Z, 0) = u (Z — уе/, Z)— ' ' 1
-Zci(t-fcl, I).
Влияние затухания можно приближенно учесть, вводя
в начале и конце длинной линии или ее части концен-
трированные активные сопротивления. В [16] утверж-
дается, что результат, близкий к полученному при рав-
номерно распределенных активных сопротивлениях,
дает введение сосредоточенных компенсирующих ак-
тивных сопротивлений как минимум на четырех от-
резках.
Дальнейшее упрощение заключается в том, что в мо-
мент времени /=0 заряд на всей линии принимается
постоянным, т. е. что w(0, £)=const=£/ (0, 0), что соот-
222
ветствует i(0, £)=0. Тогда (8.21) можно представить
в виде
u(t, /)4“zct(z> ОН-azc j*г(z> Оdt==
6
= е U(t-lcl, O)+Zci(t-ycl, О) +
TJ
-\-aZc J i(/-YcZ, O)dt + U(O, О)
о
V
u(t, O) — Zci(t, 0) — aZc J i(t, O)dt =
о
= e~lcbl (t - icl, I) - Zci (t~ycl, 0) -
^cl
~aZc J — O)dt + U(O, 0)
о J'
(8.23)
Рис. 8.5. Структурная схема аналоговой машины, реализующей
уравнения (8.23).
223
Уравнения (8.23) можно относительно просто смоде-
лировать на аналоговой машине. Эта модель представ-
лена на рис. 8.5.
Расчеты напряжения и тока в произвольной точке
линии, отстоящей на расстоянии от ее начала, могут
быть произведены только при известных напряжениях
и токах в начале и конце этой линии. Эти напряжения
и токи можно привести к точке на линии, используя
(8.23) и вводя допущение о нулевых граничных усло-
виях на линии:
М(О, 0)=0, Г(0, 0)=0.
После преобразования получаем:
*=тс (/—Ь)
/)4-Zcf(/, /)Ч-л£ж J l)dt=
о:
= |U р - Тс (Z - {,), у + Zci р -
-тср-и. у+
Т„ «~Ы
+«4 [ qz-Yjz-y, е.]л :
6
1(^0
u(t, l,)-Zci(t, W-aZc J i(t, l)dt =
6
= 0)—
— aZc | i(t — тД,, O)dt .
(8.24)
Для трехфазных четырехпроводных длинных линий
уравнения (8.21) — (8.24) следует интерпретировать, как
уравнения для составляющих. Зная процессы для со-
ставляющих, наличие которых зависит от рассматривае-
мых коммутаций или повреждений в соответствии с дан-
ными табл. 7.1- (7.2), можно характеризовать фазные
параметры режима в соответствии с основными форму-
лами (7.1), связывающими фазные величины и состав-
ляющие.
324
8.4. МОДЕЛЬ ОДНОФАЗНОЙ ЦЕПОЧЕЧНОЙ ЛИНИИ
В исследованиях электрического режима энергоси-
стемы при коммутациях либо аварийных возмущениях
часто применяется замещение реальной длинной линии
(с равномерно распределенными параметрами) равно-
ценной цепочечной линией.
Использование математической модели цепочечной
линии является неизбежным, например, при изучении
влияния короны в расчетах перенапряжений; аналогич-
но при создании модели длинной линии на физических
моделях, широко применяемых для исследования пе-
реходных режимов в энергосистемах, единственной воз-
можностью представления длинной линии является це-
почечная схема.
В переходном процессе, который возникает непосред-
ственно после коммутации либо аварии в контуре, вклю-
чающем длинную линию, появляется бесконечное число
гармонических составляющих напряжений и токов, при
этом: чем больше в данном процессе собственная часто-
та соответствующей гармоники, тем меньше ее ампли-
туда. В цепочечной схеме замещения линии число гар-
монических составляющих конечно и равно количеству
звеньев цепочечной линии.
Результаты, полученные из расчета энергосистемы
с цепочечной моделью линии, содержат, следовательно,
ошибку, зависящую от числа участков, принятых для
представления реальной линии.
Число звеньев (четырехполюсников) зависит от того,
какую разницу частоты и амплитуды данной гармоники
в цепочечной схеме по отношению к её частоте и ампли-
туде в реальной линии можно принять.
На различия амплитуды и частоты влияют как вид
четырехполюсника, так и вид коммутации или наруше-
ния режима. Ниже будут рассмотрены цепочечные ли-
нии, составленные из четырехполюсников типов П, Т иГ.
При этом анализ будет проведен для характерных ком-1
мутаций и аварийных ситуаций, таких как отключение
длинной линии с к. з.; включение длинной линии на
х. х.; отключение длинной линии, работающей на х. х.
Остальные коммутации приводятся к вышеуказан-'
ным.
При оценке эквивалентности длинной и цепочечной
линии для указанных коммутаций не учитываются ак-
тивные сопротивления линий и утечки. Это значительно
|5—127§
упрощает достаточно сложные и трудоемкие расчеты
Например, из простого анализа одночастотного контура
[31] следует, что активные сопротивления линии и утеч-
ки, имеющие место в реальных линиях, влияют на зна-
чения частот собственных колебаний и их амплитуды.
Если при подборе числа четырехполюсников в эквива-
лентной цепочечной линии решающую роль играет от-
клонение частоты, то неучет активного сопротивления
линии и утечки практически не влияют на качество
четырехполюсников. Если при выборе числа звеньев
Рис. 8.6. Схема замещения
однофазной длинной линии.
Рис. 8.7. Схема замещения
длинной однофазной цепочеч-
ной линии.
необходимо выдержать погрешность в отклонении ам-
плитуды, то можно показать, что неучет активного со-
противления линии и утечки незначительно увеличива-
ют число требуемых четырехполюсников.
В обоих случаях пренебрежение активным сопротив-
лением линии и утечками (при их реальных значениях)
можно считать допустимым.
Основы расчетных методов. Напряжение и ток в на-
чале и конце длинной линии (рис. 8.6) выражаются фор-
мулами:
(Р) == (Р) ch (р VLcCc) 4- Zc/2 (р) sh (р VLcCc);
Ц (P)=Ut (P)iZc sh )+Л (P) ch (рУЦ&),
(8-25)
в которых Lc, Cc — полные индуктивность и емкость
длинной линии.
Напряжения и токи в начале и конце цепочечной
линии (рис. 8.7) выражаются формулами:
У (р) = Ап (р) иг (р) 4-Вп (р) Л (р); |
Л (Р) = Сп (р) Щ (р) 4- Dn (р) 7, (р), J
(8.26)
226
где
Л (р) = l/ Ch ng;
* ^СЧ2
^11 (P) сщ^сч2 sh fig,
Сп(Р) = у-^—у sh ng;
' z-C41ZyC42
Dn (р) =--1/ch ng, (8.27)
причем ZC4i, ZC42— характеристические сопротивления
цепочечной линии, зависящие от типа четырехполюсника
[Zc41 и Zc42=f(p)]; п — число четырехполюсников; g —
постоянная распространения волны одного четырехпо-
люсника (g=f (/?)).
Рис. 8.9. Схема замещения че-
тырехполюсника типа Т.
Рис. 8.8. Схема замещения че-
тырехполюсника типа П.
Характеристические сопротивления цепочечной линии
равны:
у \/ Ап (Р) Вп[р). у | / Bn (р) Dn{р) ,q ло\
V Cn(p) Dn(p)’ V Сп(р)Ап(р)'
Для одного четырехполюсника (п=1) (8.26) примут
вид:
U1(p) = Al(p)U2(p)ArB1(p)I2(p); |
Ц(р)=Сг(р)иг(р)-гО1(р)Ц(р). J
(8.29)
При этом
А (/>) = ch g; В, (р) = /ZC„ZOT, sh g-
ot(P)=Y^chs-
“ Acqi^c42
1 5
227
В четырехполюснике типа И при данных
на рис. 8.8 обозначениях зависимости между токами и
напряжениями на входе и на выходе имеют вид:
(Р) = «!<Р)г1“ Zl^J)) ’
/. (р) =Ц- Y YZ +.2) + 4-Zr) Z. ,
(8.29а)
Иа сравнения (8.29) и (8.29а) следует, что для четы-
рехполюсника типа П Л1=£>1*. Из (8.28) следует, что
Рис. 8.10. Схема замещения че-
тырехполюсника типа Г.
В четырехполюснике типа Т (рис. 8.9) соот-
ветствующие зависимости между напряжениями и тока-
ми можно записать в виде
. <Ш=(1 + 4угрА(Р)+4-2(2+ ^-Yzj 1.(рУ, '
I, (р) = YU2 (р) + (| + 4- YZ\I, (р).
(8.30)
В этом случае выполняются равенства Д1(р)=Р1(р)
(Дп (р) =Dn (р) ) и ZC41=ZC42.
Для четырехполюсника типа Г (рис. 8.10)
справедливы выражения
UAp) = (^ZY)UAp)^ZI2(p)\
IAP)=YU,(P) + 1,(P).
Четырехполюсник типа Г — несимметричный, поэто-
му Ai(p)=£Di(p) И ^’сч1=^^сч2«
В дальнейших исследованиях для единичного четы-
рехполюсника цепочечной линии сделано допущение:
Z= »I' = pA-
7 п ’
(8.31)
* Что можно обобщить: Ап (р) =Dn (р).
228
Здесь L', С' — индуктивность и емкость единичного
Четырехполюсника; Lc, Сс — индуктивность и емкость це-
почечной линии; п — число четырехполюсников.
Выражения при £72(р) и h(p) в (8.29а) — (8.31) рав-
ны коэффициентам Ai(p), Bi(p)t СДр), Dt(p) в (8.29).
Коэффициенты для четырехполюсников типов П, Т, Г
приведены в табл. 8.1.
Для проведения расчетов необходимо знание харак-
теристических сопротивлений цепочечной линии Zc4i и
ZC42 в зависимости от типа четырехполюсника и от его
параметров Z и Y. Сопротивления можно определить из
(8.28).
Для четырехполюсника типа П характеристическое
сопротивление:
2 —z —Л/ В1
СЧ1 ^Сч2 ^Сч -- у С1(р)
Подставляя соответствующие выражения из табл. 8.1,
получаем:
Это выражение требует последующего преобразова-
ния, так как его знаменатель имеет достаточно сложный
вид, При преобразованиях можно использовать зависи-
мости, приведенные в табл. 8.1:
Д (/>) = <*£=! -\-~YZr
так как
ch2 gr/2=0,5 (ch g +1)=1 + YZ/4.
Следовательно,
/i+4yz=ch^2-
7 > Тогда характеристическое сопротивление четырехпо-
. люсника типа П можно выразить зависимостью
Ч- Z —1/ Z 1
сч~ V Y ch £/2
229
Таблица 8.1а Расчетные формулы длй определения Параметров
Вид и расчет- ные выражения коэффициента А (Г) Bi (р) С1(Р)
Симметричные
Вид chg Zc4 sh g 1 ~2—shg
Расчетные вы- ражения для четырехпо- люсника типа П 1 РсСс PLC n 1 pCc ! 1 2 n (2^X I.C. X X V + 2J
Т 1 LcCc 1 P^c — 2 4- 2 [n ф ~ , BcCc X + 2 n2 J PCc n
Несимметричные
Вид »/ ^СЧ1 , > У 7—ch£ ^^СЧ1^СЧ2 sbg X ZC41ZC42
Расчетные вы- ражения для четырехпо- люсника типа Г ВсСс 14-Р2 п. Вс р п Сс р~г
Это выражение, а также нужные в последующих рас-
четах выражения chg/2 и shg/2 помещены в табл. 8.1.
Выполняя аналогичные преобразования, можно опреде-
лить характеристические сопротивления четырехполюс-
ников типов Т и Г (табл. 8.1).
Полученные уравнения, связывающие напряжения и
токи в начале и конце линии, записаны в операторной
форме, причем искомые выражения для напряжения или
тока можно представить в виде
?(Р)
—
рВ (р) *
230
четырех полюсников
Pl (р) -4 Of 7 7 ^7 СЧ1 СЧ2 СЧ
четырехполюсники
chg — — —
1 LcCc 1 + 2 р2 л2 2 п ¥ с с / 1 рсСс 1/ i + f~Lc 1 F Сс 1 chyg
1 , рсСс ‘ 1 + 2 р п* — — Vlc 2 п v с с Г 1 L.C. ./i? 1 Г c7chT«
четырехполюсники
/ Zc4i L jr у Ё » ^счг shg chg ^C41 ^C42
1 n c c z L C J/ ./z? И —chg i/E _L F Cc chg
Для перехода от операторной формы записи к зави-
симостям от времени применяется формула Хевисайда:
00
Е-уЛ(А\-------ekt, (8.32)
~ В (л)
«-• dp \Р=Рк
>' где pk— корни уравнения В(р)—0.
Выбор числа четырехполюсников для случая отклю-
чения к. з. цепочечной линии, присоединенной к источни-
ку бесконечной мощности. Искомое количество четырех-
полюсников в замещенной цепочечной линии будет по-
?3|
лучено на основе сравнения формул для обратного
напряжения при отключении реальной длинной линии
(рис. 8.11) и отключении цепочечной линии, состоящей
из п четырехполюсников (рис. 8.12).
Обратное напряжение Ua-a' (р) подсчитывается по
формуле Нортона:
Ua-a(p)==Ia*a'(p)Za_a'(p) ПрИ Е (р)=0, (8.33)
где 1а-а(р) —ток, текущий через контакты выключате-
ля а—а' перед отключением к. з.; Za.a' (р)—сопротив-
ление на выводах а—а' при короткозамкнутом источни-
ке напряжения (£=0).
Рис. 8.11. Вспомогательная схе-
ма для вычисления обратного
напряжения при отключении
короткого замыкания на длин-
ной линии.
ния при отключении короткого замыкания на цепочечной линии.
Ток, текущий через контакты а—а' перед отключе-
нием, имеет частоту источника.
Этот ток можно определить из (8.25), помня, что р=
=j(i) и источник (71 (со/) — У 2Е cos со/— бесконечной
мощности; при к. з. Uzfat)—®. При этих условиях:
(7, (со/) = У2 Е cos ад/ — Zc/2 (otf) sh (/со УLcCc),
откуда искомый ток:
4 (со/) = sinotf =У2 I sin со/ =
Лс sin co V LcCc
__ /ГЕ____________co
Zc sin w К LcCc P2 + “2
Сопротивление на выводах a—а' можно определить
также по (8.25), принимая, что контур подпитывается
током /1(р), подтекающим к выводу а при короткозам-
Кнутом источнике напряжения Ё (р)=и2(р)=(), который
создает на выводах а—а' падение напряжения Ui(p).
Искомое сопротивление:
^(Р)=^=гс1Ь(руЩ). •
Остаточное обратное напряжение при отключении
реальной длинной линии в операторной форме записы-
вается следующим образом:
Uaa,(p)= - yLl-^.Zc £ , th (р/LA)-
aG sincolQcCc c p2+<*>2 c c’
Переход от операторной формы записи к зависимости
от времени производится по формуле Хевисайда (8.32).
В соответствии с правилами преобразования Хевисайда
.следует сначала определить корни функции знаменате-
ля, т. е.
<Р ~ i<°) (р+» ch (р УLcCc) = 0.
Как видно, эта функция имеет два корня, отвечаю-
щих частоте источника напряжения:
p2=—j(i).
Эти корни определяют вынужденные составляющие
обратного напряжения. Частоту свободных составляю-
щих можно определить, приравнивая к нулю последний
сомножитель знаменателя:
ch (р У LcCc) = ch (/v, У LcCc) =
“ cos (v9 УLcCc) = cos (2q — 1) j—0,
откуда
v«==‘Ti77=F(2?^1) <7=1. 2, 3...'
Зная значения комплексных корней р и пользуясь
Уравнением (8.32), можно определить соответствующие
им аплитуды. Для р=№ получаем:
А =_______________________osh(рУЦСс)_________ _
sin (ш *%<?<.) d [(р_/ш) +
" р= j<o
— УТ Е sh (jto/I^Q) _ УТЕ
sin (<о У LcCc) 2/ ch (/со VLcCc 2 cos со УLcCс
233
Аналогично амплитуда составляющей, соответствую-
щей корню р——jet:
А __ £
2 2 cos (со ИLcCc)
Приведенные выражения для At и А2 определяют
вынужденную составляющую обратного напряжения
с частотой (о:
и , (vat} = ---_-/--------!---------—-— COS О)/ .
а'а cos (to VLcCc) 2 cos (co КLcCc)
Аналогично можно рассчитать амплитуды гармоник
свободных составляющих, имея в виду, что pq—±jvq.
При p=jvq
д ,. ч__ v^2 Е со
а при p= — jvq
A z___. ч_ /2 £_____________co_______
} J/z7;(_v29 + (o2) ’
Свободная составляющая обратного напряжения
будет:
14о £
2ю 1 у
VlcccC-v% + “2) А
I К2А
sin (со К£сСс)
;<=-----------COS V.t.
Г£сСс(-^ + «2) *
Суммируя выражения для вынужденной и свободной
составляющих обратного напряжения, получаем форму-
лу для определения напряжения при отключении к. з.
длинной линии:
“а-а-Ю = /2£
cos со/
cos (coKLcCc)
2со VI 1 z j
77=-------У “7------------Г COS Vtt .
V[LcCc sin (co К£cCc) ZJ v 9 — “ /
9=1
(8.34)
234
В этой формуле свободная частота
Аналогично можно вывести формулы для определе-
ния обратных напряжений цепочечной линии, состоя-
щей из п четырехполюсников типов П, Т и Г, при к. з. На
основании (8.26) ток, идущий через выводы а—а' перед
отключением, равен:
i,K) = VT£sm<rf —=L—— • (8.35)
К ZC41Zc42 sh ng V с c
n
Сопротивление цепочечной линии, отнесенное к вы-
водам а—а':
Z^P)^^ = Zn,thng. (8.35а)
Анализ четырехполюсников типа П. Под-
ставляя в (8.35) выражение для характеристического
сопротивления Zc4 из табл. 8.1, а также принимая во
внимание, что при частоте источника питания напряже-
ния g = ]/£сСс, получаем:
_ cos [-^-co/AcCcj
i2 (<«/) =: у2 Е ——=------—— s in <о/ =
1/ &- sin («/£сСс)
г Ос
cos ( 15-со КLccJ
^У2Е—^----------------------
г Г г ,___ гр со2
У/ sin (to У LcCc)
Т с
Аналогично сопротивление:
7 , .___ / Lc 1 sh ng
a-а' 'А) у Сс ch g/2 ch ng ’
Формула для определения обратного напряжения
в операторной форме цепочечной линии с к. з., состоя-
щей из четырехполюсников типа П, имеет вид:
со cos (& У LcCc^
U /V 2___________________________L________ЛЕЕ_____
а.а> У Zb sin (w (Р2 + ch g/2 ch ng •
(8.36)
235
Из этого уравнения видно, что в обратном напряже-
нии имеется вынужденная составляющая с частотой
источника напряжения (поскольку pi,2—±/со), а также
свободные составляющие с частотами, определяемыми
из равенств:
ch g/2=ch /л /2 (2k—1) =0,
откуда частота свободной составляющей
gk=j(2k—1)л для k=[, 2, 3 ...
Амплитуда, соответствующая этой комплексной ча-
стоте, получается из формулы Хевисайда:
Ak = У 2 Е------~ J X
sin(coK£cCc) 74
V ___________shng________
Х d
j- (р* + со2) ch ng ch g/2
P *=Pk
Как следует из анализа формулы Хевисайда, произ-
водная в знаменателе принимает значение, отличаю-
щееся от нуля относительно производной того выраже-
ния, для которого определена пульсация. В связи с этим
можно записать:
Ak=V2E-
<о cos <о V Lccc
sin (wKlcCc) 74
sh ng |
d I *
(P2 + о2) ch ng j- (ch g/2)
p le=pk
Имеющаяся в знаменателе производная
— ch <т/2 —— sh — —
dp cn£/z — 2 sn 2 dp >
а после учета g=j(2k — 1)т:
1 ; /_1 \S+1 dg
dp 2 И 4 dp'
Производную dg/dp можно получить для четырехпо-
люсника типа П из зависимостей, данных в табл. 8.1;
„L ____ 1 | 1 2 kcCc
. 1
J 2
. 2k — 1 '
sin—g
236
откуда
LcCc
dp ____ LcCc , dp _ V nZ
dp ns * dp ~~ shg
Подставляя полученные зависимости в формулу для
амплитуды Ak, соответствующей частоте, полученной
приравниванием к нулю функции ch i =0, легко пока-
зать, что для g=j(2k+V)H, эта амплитуда всегда будет
равна нулю.
Сомножитель ch ng в знаменателе выражения для
обратного напряжения в операторной форме (8.36) опре-
*. деляет частоты свободных составляющих этого напря-
жения, амплитуды которых не будут равны нулю.
Равенство
ch ng—0
2k__1
выполняется для g=f я при 2, 3 ...
Для четырехполюсника типа П (по табл. 8.1):
сЬг=1 + 4-л*^. •
Подставляя вместо g определенное выше выражение,
после преобразований, аналогичных тем, что были вы-
* , полнены для функции ch-|-=O, получаем формулу для
определения частоты свободной составляющей:
' sin 2\~1 гс,~ fe= 1, 2, 3...
k VbcCc 4n
р.; Анализируя полученную формулу, можно утверж-
> ’ дать, что число гармонических составляющих в обрат-
Ь; ном напряжении для цепочечной линии равно числу ее
четырехполюсников. Определяя амплитуды, соответст-
вующие этим частотам (способом, аналогичным тому,
£ что был представлен выше для реальной либо цепочеч-
J ной линии при частотах, соответствующих уравнению
У. ch 4-=о), получаем формулу для обратного напряже-
к
ния на цепочечной линии с к. з., состоящей из четырех-
полюсников типа П:
в>я,(о=т[С(В(>^ cos.f~
L 237
(co V"LcCc \ 2co 1
C0S ~2ii J V^sin (co/Z^) L 42-^2 C°S Vkt'
k=\
(8.37)
где vk<=2 — ”. sin^—!-т. для k=l, 2, 3...
Л v LcCc 4n
Анализ четырехполюсников типа T. По-
ступая подобно изложенному выше, можно определить
формулу для .обратного напряжения цепочечной линии,
состоящей из п четырехполюсников типа Т. Эта форму-
ла в операторной форме может быть записана как
_ 1 сп -Q- sh ng
(Р)= /2 Е ch ng ’
V. iL 2л? ' ь с /
Переходя по (8.32) к дригиналу, получаем:
а, (0 — V2 Е ------Л---- cos tot —
аа cos (со К£сСс )
______________2со_____________Р cos2 (—йГ ") cos
------ со VLcCc .г------ v2b — to2 *
V LcCc cos--------------------------------—-sin (cor LcCc) k=i
(8.38)
причем vr определяется, как в (8.37).
Анализ четырехполюсника типа Г. Вос-
пользовавшись (8.35) и (8.35а), а также табл. 8.1, за-
пишем обратное напряжение в цепочечной линии, со-
стоящей из п четырехполюсников типа Г:
U , (л) = 1/2 Е-----\---------ch ц.
а а Р У sin(coKl,Cc) Ря + ь)2 ch ng
Это уравнение, выраженное в функции времени, имеет
вид:
u,(t):=V2E
а-а' v '
cos
________! V
VLcCc sin (со VLcCc)
—-— - COS со/ —
cos (со V LcCc )
/26—1 \
п cos2
( 2n
V»t-^ c°sv,,z- (8.39)
238
Таблица 8.2. Зависимости частот и амплитуд гармоник обратного напряжения при отключении к.
длинной линии
239
fe приведенной выше формуле Vk можно определить
следующим способом. Известно, что ch ng=Q для
Из табл. 8.1:
откуда
/’=/v‘=T^sh^
и окончательно:
-я, fc==l, 2, 3... (8.40)
k V LcCc 2л К '
В табл. 8.2 собраны формулы для определения ча-
стот свободных составляющих обратного напряжения,
а также соответствующих им амплитуд для реальной
длинной линий и эквивалентной цепочечной линии, со-
стоящей из четырехполюсников типов П, Т, Г. Из этих
формул видно, что как частоты, так и соответствующие
им амплитуды в реальной длинной линии отличаются
от аналогичных параметров замещающей цепочечной
линии.
Относительная разница частот
6v=-l—Ll°°»/0 (8.41)
Q
и амплитуд
Sa=^F^-100’/„. (8.42)
Приведенные погрешности одинаково являются как
функциями ряда гармонической k, так и числа четырех-
полюсников /г. Требуемое число четырехполюсников
можно определить из данных формул, задавая допусти-
мые отклонения частоты и амплитуды. На рис. 8.13 и
8.14 даны, зависимости отклонений для данной &-й гар-
моники в функции числа четырехполюсников цепочеч-
ной линии п.
240.
Выбор числа четырехполюсников для моделирования
включения ненагруженной длинной линии к источнику
^бесконечной мощности. Определение числа четырехпо-
люсников базируется на сравнении свободных состав-
г.. Рис. 8.13. Зависимость отклонения частоты от числа четырехполюс-
ников цепочечной линии, состоящей из четырехполюсников типов П,
Т и Г для различных гармоник обратного напряжения.
..Рис. 8.14. Зависимость отклонения амплитуды от числа четырехпо-
люсников цепочечной линии, состоящей из четырехполюсников типов
п, Т, Г, для разных гармоник напряжения.
16—1279 241
ляющих гармоник напряжения в конце включаемой *
длинной линии и замещающей ее цепочечной линии, со- v *
стоящей из п четырехполюсников типов П, Т и Г. При- g
пято, что питающее напряжение изменяется по закону: g
е (t) == ]/2 Е cos tot. *
На выбор числа четырехполюсников не влияет то х
обстоятельство, что включение линии принимается при ф
максимуме питающего напряжения, а не при произ-
вольной его фазе. £*
Рис. 8.15. Вспомогательная схе-
ма для расчета напряжения на
конце включаемой длинной ли-
нии без нагрузки.
При включении ненагруженной длинной линии
(рис. 8.15) напряжение на ее конце определяется из
зависимости (8.25) при /2(р)=0
X
«с
о
£
2
§
а
ф
•W
I
св
X
U„(p) = V2E
L [cos со/]
ch (р КLcCc) ‘
Рис. 8.16. Вспомогательная схема для расчета напряжения на кон- gj
це включаемой цепочечной линии без нагрузки. £
При расчетах напряжения на конце включаемой це-
почечной линии без нагрузки (рис. 8.16) используется
(8.26) при допущении 12(р)=0:
UJ№fc=V2E . (8.43)
l/^-chng
Г ^СЧ2
Для симметричных четырехполюсников У ZC4JZC42= 1; ”.
для несимметричного четырехполюсника соответствую-
щие зависимости Zc4i и Zc42 приведены в табл. 8.1. Для ' »
перехода к зависимостям от времени используются (8.32). ®
Появляющаяся в ходе преобразований производная -'о
242 ь
243
Рис. 8.17. Зависимость отклонения частоты гармоник напряжения
на конце включаемой линии без нагрузки от числа четырехполюсни-
ков П, Т и Г цепочечной линии.
Рис. 8.18. Зависимость отклонения амплитуды гармоник напряжения
от числа четырехполюсников типов П, Т и Г для включаемой линии
без нагрузки замещенной цепочечной линии.
244
dgldp определяется на основе приведенных в табл. 8.1
зависимостей между chg и параметрами отдельного че-
тырехполюсника соответствующего типа.
Полученные зависимости для частот и соответствую-
щих им амплитуд свободных составляющих напряжения
на конце реальной и цепочечной линий на х. х. помеще-
ны в табл. 8.3. На основе этих формул можно опреде-
лить искомое число четырехполюсников определенного
типа, задавая допустимое отклонение частоты и ампли-
туды конкретной k-й гармоники.
и2
Рис. 8.19. Вспомогательная схема
для расчета напряжения на зажи-
мах выключателя при отключении
длинной линии без нагрузки.
Соответствующие кривые даны на рис. 8.17 и 8.18.
В случае выхода за пределы кривых соответствующие
расчеты могут быть произведены с использованием фор-
мул, приведенных в табл. 8.3.
Выбор числа четырехполюсников для моделирова-
ния отключения ненагруженной линии, подключенной
к источнику бесконечной мощности. Выбор производит-
ся сравнением напряжения на выводах выключателя
при отключении реальной длинной линии (рис. 8.19) и
цепочечной линии, состоящей из п четырехполюсников
типов П, Т и Г (рис. 8.20). Это напряжение рассчитыва-
ется по формуле Нортона (8.33). Ток отключения для
реальной длинной линии в (8.33) можно определить из
(8.25) при частоте источника p-ja
/а-аД<О0 = К2 Е -^-tg(<oV4Q) SlW.
Сопротивление на выводах выключателя а—а' опре-
деляется также из (8.25):
(P)=T^-=ZC Cth (р VT&).
Рис. 8.20. Вспомогательная схема для расчетов напряжения на за-
жимах выключателя при отключении цепочечной линии без нагрузки.
245
Отсюда напряжение на выводах выключателя, опре-
деленное по формуле Нортона, записывается в опера-
торной форме следующим образом:
(,)= 1/2 Е tg «о VLcCc)
Применяя (8.32), получаем зависимость от времени.
Опустив промежуточные преобразования, приведем
в табл. 8.4 формулы для частот и амплитуд свободных
составляющих напряжения на выводах выключателя при
отключении длинной линии на х. х.
При рассмотрении цепочечной линии ток отключения
определяется из (8.26), при /г(р)=0 и частоте, равной
частоте источника p—jat:
cos <оЛ
Сопротивление на выводах а—а' определяется из
уравнения (8.26):
Za-a' (Р) = J^-=Z64, CthKg,
а напряжение на выводах а—а' выключателя, отклю-
чающего цепочечную линию на х. х.,
V^,(P)=V4E
\L [cos utf] ZC4l cth ng. (8.45)
В зависимости от типа четырехполюсников, состав-
ляющих цепочечную линию, вместо Zc41 и ZC42 следует
подставить соответствующие выражения из табл. 8.1.
После выполнения математических преобразований,
аналогичных рассмотренным выше, определяется напря-
жение на выводах а—а' при отключении цепочечной ли-
нии на х. х. В табл. 8.4 помещены выражения для опре-
деления частот, а также амплитуд составляющих напря-
жения на выводах а—а' в зависимости от типа четырех-
полюсников. На их основе определены относительные
отклонения частот (рис. 8.21) и амплитуд (рис. 8.22)
гармоник. При другом диапазоне параметров, отличаю-
щемся от данного на рис. 8.21 и 8.22, соответствующие
246
Рис. 8.21. Зависимость отклонения частоты для гармонических со-
ставляющих напряжения на зажимах выключателя от числа четы-
рехполюсников типов П, Т, Г цепочечной линии при ее отключении
без нагрузки.
Рис. 8.22. Зависимость отклонения амплитуды от числа четырехпо-
люсников цепочечной линии типов П, Т, Г для гармонических со-
ставляющих напряжения на зажимах выключателя при отключении
линии без нагрузки.
247
248
расчеты можно выполнить, пользуясь непосредственно
формулами табл. 8.4.
Выбор гармоник для определения на их основе числа
четырехполюсников цепочечной линии. Число четырех-
полюсников цепочечной линии, которые замещают ре-
альную, зависит от принятых допустимых отклонений
частот и амплитуд для выбранных гармоник переходно-
го процесса. Критерием выбора гармонической состав-
ляющей является степень ее влияния на неустановив-
шийся процесс.
Из анализа формул для амплитуды гармонических
составляющих, представленных в табл. 8.2—8.4, следу:
ет, что амплитуды гармонических составляющих для
реальной длинной линии уменьшаются приблизительно
в первой степени либо в квадрате от частоты.
На рис. 8.23 даны соответствующие зависимости:
п
Рис. 8.23. Вспомогательный рисунок для подбора гармонической
при определении требуемого количества четырехполюсников заме-
щенной цепочечной линии [процесс соответствует уравнению a(t)~
п
==(_i)fe+i^ _LC0SV^j,
Из этих кривых видно, что амплитуды функций,
являющихся суммой 2-й — 7-й гармоник, изменяются
незначительно. В то же время изменяется начальная
крутизна. Поэтому следует принимать 7-ю или 9-ю гар-
монику.
Рис. 8.24. Вспомогательный рисунок для подбора гармонической при
определении требуемого числа четырехполюсников цепочечной линии
процесс соответствует уравнению
п
at-= (— l)k+1 ^cosv^
k=i
Очевидно, что для функций, соответствующих при-
ближенно уравнению
п
а (/) = (-!)*+1 J^cosv^,
fe-i
приведенных на рис. 8.24, изменения амплитуд гармоник
и их крутизны позволяют принять в расчетах 2-ю или
3-ю гармонику.
Модель трехфазной четырехпроводной цепочечной
линии. Реальную трехфазную четырехпроводную длин-
ную линию, как указано выше, можно представить одно-
фазными схемами замещения для составляющих (0, 1,
2) либо (0, а, р). Применение отдельной модели для
каждой составляющей требует их объединения в зави-
симости от рассматриваемого вида коммутации либо
?50
возмущения, что, естественно, затрудняет использование
модели.
В большинстве случаев, особенно при физическом
моделировании, необходимо обратное преобразование и
приведение схем составляющих к схеме фазных величин.
Ниже даны математические преобразования для по-
строения такой модели.
Для упрощения математических выкладок отдельно
рассмотрены схемы продольных и поперечных сопротив-
лений линии ограниченной длины — одного четырехпо-
люсника однофазной цепочечной линии.
Из теории симметричных составляющих известно,
что:
(р) (р) —(р) а (р);
t/2(p)=0-Z2(p)/2(p); •
£7о(р)=О—Z0(p)/0(p).
Индекс а означает, что исследования относятся к фа-
зе а, Еа(р) соответствует вынужденной составляющей
э. д. с. фазы а, выраженной в операторном виде. Следу-
_ет подчеркнуть, что Еа(р) появляется только в схеме
прямой последовательности.
Складывая левые и правые части вышеприведенных
уравнений, получаем для фазы а\
Ua(p)=dJi (р)+1/2(р) +Щр) =
=Еа (р) — Zj (р) Ij (р) —Z2 (р) /2 (р) —Zo (р) /0 (Р) •
Для длинных линий Zi(p)=Z2(p), в связи с этим
Еа (p)~Ua (р)==г, (р) [Д (р) +Z2(р) ] +Z0 (р)/0(Р). (8.46)
Сумма фазных токов равна току в нулевом проводе:
1а (р) +1ъ (р) +/с (р) =In (р) =3/о (р) ,
а сумма составляющих токов равна току фазы:
Л (Р) +МР) +/о(р)=/а(р)-
После подстановки этих зависимостей в (8.46) полу-
чаем:
Еа (р) - Uа (р)=А (р) /а (р) + /„ (/>) (8.47)
Подобные рассуждения можно провести также для
фаз b и с. В конечном счете схема для продольных со-
противлений будет иметь вид, показанный на рис. 8.25.
251
у Lfdx X+dx
IL Q---nnn__----о
Ltdx
f)Q----ГСО------О
L]dx
СФ—----nnn------о
Z/C-----nm-------О
Рис. 8.25. Схема за-
мещения продольных
сопротивлений трех-
фазной длинной ли-
нии с нулевым прово-
дом.
Поперечные сопротивления, Т. е.
емкости и утечки между фазами и
нулевым проводом, можно предста-
вить, как показано на рис. 8.26. При
моделировании с учетом числа эле-
ментов удобнее воспользоваться
схемой, приведенной на рис. 8.27.
В этой схеме составляющие тока
прямой и обратной последователь-
ностей замыкаются через фазные
провода. Через емкость Cd, а также
сопротивления утечки Gd токи со-
ставляющих прямой и обратной по-
следовательностей не протекают.
Схема таким образом аналогична приведенной на
рис. 8.26. Токи составляющей нулевой последователь-
ности протекают как через так и через Cd, Gd.
Поскольку эти токи протекают в одном направле-
нии, а сопротивления фазной системы симметричны, по-
тенциалы составляющей нулевой последовательности
в точках А, В, С (рис. 8.26, 8.27), будут одинаковы.
Рис. 8.26. Схема поперечных сопротивлений трехфазной длинной ли-
нии с нулевым проводом.
Чтобы обе схемы были равноценны, необходимо выпол-
нение равенств:
1 1 । 1 1 1 । 1 '
ЗСО — зс\ + Cd ; 3G0 — 3G. + Gd
Из вышеприведенных уравнений можно определить
формулы для дополнительных емкости и утечки:
cd— c0-c, > g^-g;- <8-48)
Полная трехфазная схема замещения элемента длин-
ной линии показана на рис. 8.28. Соответствующие точ-
252
Йси этой схемы относятся к фазам а, Ь, с и нулевому про-
ходу N. Напряжения в этих точках и токи, протекаю-
щие через них, пропорциональны напряжениям'и токам
реальной длинной линии. Это существенно при модели-
Рис. 8.27. Схема замещения попе-
речных сопротивлений трехфазной
Длинной линии с нулевым прово-
зом.
Рис. 8.28. Схема замещения
элемента трехфазной длинной
линии с нулевым проводом.
ровании энергосистемы, в которой могут присутствовать
„-нелинейные элементы (например, трансформаторы либо
•разрядники с параметрами, нелинейно зависящими от
^мгновенных значений фазных или междуфазных напря-
жений) .
К Полученную модель можно использовать также в ис-
следованиях, при которых учитывается корона. Матема-
тическая или физическая модель короны вводится тогда
йв точках разделения длинной линии на элементы.
.5. МОДЕЛЬ КОРОНЫ
„ Пространственный заряд, появляющийся вокруг про-
ода при превышении определенного значения напря-
женности электрического поля, вызывает рассеяние
асти энергии электромагнитного поля; уменьшение же
нергии поля ограничивает амплитуду перенапряжения.
, Влияние короны на ограничение коммутационных
еренапряжений очень сложно и до конца еще не иссле-
овано. Данные, полученные из анализа результатов
Змерений в реальных линиях и в схемах замещения,
озволяют сформулировать следующие положения:
, корона вызывает увеличение тока утечки линии, за-
Исящего нелинейно от напряжения. Одновременно из-за
253
сильной ионизации слоя воздуха вокруг провода она
влияет на увеличение условного диаметра провода, *
а следовательно, и его емкости. На перенапряжения эти
факторы оказывают противоположное воздействие: уве-
личение тока утечки снижает напряжение, рост емко- j
сти — увеличивает его;
ток утечки короны, обусловленный ионизационными
процессами, запаздывает относительно напряжения тем
больше, чем выше частота напряжения, вызывающего
корону; следовательно, максимальное демпфирование ;
напряжения, оказываемое короной, не проявляется при
максимальных значениях напряжения;
наличие пространственного заряда вокруг провода *
увеличивает влияние короны на очередные пиковые зна-
чения перенапряжения. Пространственный заряд приво- >
дит таким образом к большему влиянию короны при
длительных временах воздействия перенапряжения;
влияние короны практически не зависит от волновых .
процессов в линии, а лишь от мгновенных значений на-
пряжения в данной точке линии и ее геометрических па- U
раметров.
Последнее положение делает возможным аналити-
чески описать влияние короны на максимальное значе-
ние перенапряжения. Расчетный метод, учитывающий
влияние короны на амплитуду перенапряжения, разра-
ботал Г. Н. Александров. В этом методе используется
формула О. Меера определения напряженности поля (
вокруг провода .при короне.
С целью установления степени влияния короны на
максимальное значение перенапряжения введен вспомо-
гательный параметр N, являющийся функцией значения
перенапряжения без короны, и рабочей емкости, завися- ;
щей от конфигурации системы:
дг kC0Um
Относительное уменьшение перенапряжения рассчп- Л
тывается по формуле:
при
s=—10°%= 2^(1 -ТГ-)100%; ’
при 0,5<М< 5
8=Ц?-^ |(Jljo/ f2i2Z£/' 1 _ |3;4100%.
Um 2тге0 Um J \ о /
254
i; Здесь 6 — относительное уменьшение перенапряжения
I под влиянием короны; U3k — перенапряжение относи-
’ тельно земли при учете короны, В; Um — напряжение
$ относительно земли без учета короны, В; U3k— началь-
. * ное напряжение короны, В; С — рабочая емкость прово-
& да, для которого определяется влияние короны, мФ/см,
Ч; зависящая от емкостей относительно земли Со и между-
v фазных К (С=С0+ЗА); г0— радиус провода, см; е0 —
Ж диэлектрическая постоянная для воздуха, е0=
Д =8,8610"10 Ф/см; со — эквивалентная частота перена-
Е пряжения; k — коэффициент подвижности ионов: k—
|=2 см2/(В-с)-1.
Таблица 8.5. Влияние короны на ограничение перенапряжений
в линии 220 кВ, %
Параметры линии UP ит Уменьшение амплитуды пере- напряжения под влиянием короны, %, при частотах, Гц
Марка провода С, нФ/км ир’ кВ-м 100 150 250 500
А С-240 8,47 230 1,3 2 2,5 3 3,5 11,7 16,7 20,6 23,6 10,8 15,5 19,2 21,9 9,5 13,9 17,0 19,8 8,0 11,7 14,5 16,9
АС-300 8,63 300 1,41 2 2,5 3 3,5 9,9 14,8 19,0 22,0 9,9 13,8 17,5 20,3 8,1 12,3 15,7 18,3 6,6 10,3 13,3 15,5
I На основе этих формул было оценено влияние коро-
ft ны на относительное значение перенапряжения в линии
^220 кВ. Результаты представлены в табл. 8.5.
| Исследования, проведенные в последние годы, пока-
зали, что полученные этим способом результаты зани-
ркены из-за слишком больших упрощений в механизме
^'неполного разряда, каким является корона. Как извест-
но, заряд короны нелинейно зависит от напряжения,
различного в разных точках длинной линии. Анализ пе-
ренапряжений на линии при учете короны в расчетном
|плане является очень сложной задачей. В предложен-
|ных расчетных методах [16] учитывается влияние коро-
вы с применением принципа последовательных прибли-
Рис. 8.29. Зависимость заря-
да короны от напряжения
при определенной конструк-
ции линии и частоте напря-
жения.
жений. На конечном этапе расчета влиянием короны |
пренебрегают. Для определенных напряжения и частоты I
подбирается соответствующая характеристика короны, J
с учетом которой затем корректируется перенапряжение |
и свободная частота. Далее подбирается новая характе-
ристика короны и рассчитывается очередное перенапря- I
жение и частота. Расчеты ведутся до тех пор, пока из- (
менение частоты от итерации к итерации не станет рав- I
но заданной точности расчета. 1
Как следует из описанного |
хода расчета, такой способ тя- ;
желый и трудоемкий. Здесь ’
обязательно необходимо знать J
характеристики заряда короны [
в функции напряжения q —
=f(w), показанные в виде
примера на рис. 8.29. Эти ха- |
рактеристики отличаются для
разных частот перенапряже-
ния. Характеристики q=f(u)
имеют вид, аналогичный петле
гистерезиса, площадь которой
соответствует потерям актив-
ной мощности.
Следует также подчеркнуть, что нет исчерпывающих i
данных по характеристикам q=f(u) для разных конст-
рукций линий, значений перенапряжения и частоты.
Значительно проще физическое моделирование. Для
этих измерений используется трехфазная модель длин-
ной линии, выполненная в виде цепочечной линии,- кото- •
рая позволяет непосредственно подключать физические
модели короны к каждому звену этой линии. Модели
короны выполняются как электронные модели, реализу-
ющие заданную петлю гистерезиса явления короны, j
Модели одновременно реализуют логическую функцию j
появления короны при напряжениях выше заданного.
8.6. ПАРАМЕТРЫ ДЛИННОЙ ЛИНИИ — ЗАВИСИМОСТЬ
АКТИВНОГО И ИНДУКТИВНОГО СОПРОТИВЛЕНИЙ ОТ ЧАСТОТЫ ’
Активные и индуктивные сопротивления проводов
длинных линий и земли зависят от поверхностного
эффекта. Это явление основывается на вытеснении тока
к внешним слоям провода и зависит от частоты измене-
ния магнитного потока.
256
* -Ч
Поскольку как затухание, так и частота гармониче-
ских составляющих переходного процесса зависят от
активного сопротивления, то при несоответственно подо-
бранных значениях этих параметров полученные резуль-
таты будут содержать ошибки.
Влияние на зависимость активного сопротивления от
частоты оказывает глубина проникновения электромаг-
нитной волны в материал провода:
(8.49)
где Цо — магнитная проницаемость в вакууме: рх0=
=4л-10~7 В-с/(А-м)-1; щ— относительная проницае-
мость материала провода; у — удельная проводимость
материала провода; f — частота.
ч Активное сопротивление проводов круглого сечения
выражается формулой
где г — радиус провода; / — длина провода; у —удель-
ная проводимость материала провода.
Активные сопротивления трубчатых проводов
с внешним радиусом гг и внутренним^ при (гг — г<с)<
<rz/2определяются по формуле
На воздушных линиях обычно применяются стале-
алюмнниевые провода. Математический анализ влияния
частоты на изменение активного сопротивления в связи
с этим сопряжен со значительными трудностями. Этот
'анализ можно упростить, если не учитывать влияния
' 17—1279 257
тока, протекающего и стальной петле. Это допустимо,
поскольку этот ток меньше 5% значения тока, проте-
кающего в алюминии. При таком допущении сталеалю-
миниевый провод можно рассматривать как трубчатый
провод, состоящий исключительно из внешнего слоя алю-
миния. Активное сопротивление сталеалюминневых про-
водов можно рассчитать, используя формулы для труб-
чатых проводов.
Активное сопротивление земли выражается фор-
мулой
^^[1-2,22^+2,74^ для А <0,3;
^-v[°’48-t-°'19(-^)!]^ V>1’6’
(8.52)
где ро=4л’1О-7 — магнитная проницаемость вакуума,
Гн/м; -V—частота волнового процесса; 6г=1,85/]/|АДг/—
глубина проникновения электромагнитного поля для
земли; у3 — средняя проводимость земли; h — высота
подвески провода над
Рис. 8.30. Зависимость постоянной
времени составляющих прямой по-
следовательности от частоты для
разных сечений фазных сталеалю-
миниевых проводов длинных ли-
ний.
землей (расстояние зер-
кального отображения об-
ратного провода от по-
верхности земли).
Влияние поверхност-
ного эффекта на индук-
тивное сопротивление
фазных проводов и грозо-
защитных тросов при
практически встречаю-
щихся геометрических ха-
рактеристиках этих про-
водов и частотах, кото-
рые следует еще учиты-
вать в переходном про-
цессе, невелико.
Значительно более
трудоемки расчеты зави-
симости индуктивного со-
противления земли от ча-
стоты. Индуктивность
земли, Гн/км:
Lz = 2 In
0,178
hVWz
10"4,
(8.53)
258
где уз — удельная проводимость земли, См/см; h — вы-
сота подвески фазного провода над землей, м; f — ча-
стота процесса, Гц.
Зависимости активного и индуктивного сопротивле-
ний проводов линий от частоты выражаются обычно как
Рис. 8.31. Зависимость активного и индуктивного сопротивлений зем-
ли от частоты.
зависимости постоянных времени переходных процессов
в этих проводах от частоты r=tp(f). Примеры этих за-
висимостей для составляющих прямой последовательно-
сти даны на рис. 8.30. На рис.
мости активного и индуктив-
ного сопротивлений земли
от частоты.
Активные и индуктивные
сопротивления для состав-
ляющих нулевой последова-
тельности зависят как от
активных и индуктивных со-
противлений фазных прово-
дов, так и от сопротивле-
ния нулевого провода, обра-
зованного землей.
Параметры линии для
составляющих нулевой по-
следовательности имеют сле-
дующий вид:
8.31 приведены зависи-
Рис. 8.32. Зависимость постоян-
ной времени для составляющей
нулевой последовательности в
функции частоты.
1 — для линии 380 кВ; 2 — для ли-
нии 500 кВ.
^0— ~ +
17*
259
где Raa — активное сопротивление фазного провода при
заданной частоте; Rz — активное сопротивление земли
при заданной частоте; Laa — индуктивность фазного
провода в петле фазный провод — земля; Lz— индуктив-
ность, земли при заданной частоте.
На рис. 8.32 приведены кривые постоянной времени
для составляющей нулевой последовательности линии
в функции частоты.
9. МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ГЕНЕРАТОРА
9.1. ОБЩИЕ СООБРАЖЕНИЯ
Синхронный генератор имеет трехфазную симметрич-
ную обмотку статора и обмотку возбуждения, располо-
женную на роторе. Обмотки обладают собственными и
взаимными индуктивностями (между катушками и меж-
ду фазами), а также емкостями (междукатушечными,
междуфазными и к сердечнику статора или ротора),
активными сопротивлениями и имеют утечки изоляции
(к сердечнику статора и междуфазные). Перечисленные
индуктивности и активные сопротивления зависят от ча-
стоты и тока, причем в эти зависимости вносит свои осо-
бенности наличие стали.
Из-за сложных зависимостей между электрическими
параметрами при математическом моделировании син-
хронного генератора необходимо принимать упрощаю-
щие допущения. Критерием правильности принимаемых
упрощений является удовлетворительное совпадение мо-
делируемых и реальных переходных процессов в энерго-
системе в определенном диапазоне частот.
При частотах, близких к частоте собственных коле-
баний контуров генератора (от нескольких до десятков
килогерц), уже следует учитывать емкости генератора,
а также пространственную распределенность его пара-
метров.
Режимы энергосистемы, при которых возникают пе-
реходные процессы с такими большими частотами, явля-
ются мгновенными, длительностью порядка сотых долей
секунды. Они происходят при внезапном нарушении
равновесия электромагнитного процесса, вызванном ком-
мутациями либо аварийными возмущениям-и.
Малая длительность переходного процесса позволяет
считать магнитный режим генератора неизменным и
260
□
равным режиму, предшествующему переходному. Кроме
того, обычно пренебрегают влиянием изменения кинети-
ческой энергии вращающихся масс генератора и турби-
ны. Последнее допущение равносильно допущению
о постоянстве оборотов во время протекания указанных
переходных процессов: моделирование статичной систе-
мы значительно проще.
9.2. МОДЕЛЬ ТРЕХФАЗНОГО СИНХРОННОГО ГЕНЕРАТОРА
Схема замещения элемента фазной обмотки генера-
тора длиной dx показана на рис. 9.1. Используемый ин-
декс п обозначает одну из произвольно выбранных фаз
а, Ь, с генератора. Генератор имеет следующие парамет-
ры на единицу длины: собственную индуктивность об-
Рис. 9.1. Схема замещения фазного элемента обмотки генератора
длиной dx.
мотки статора Ln\ взаимную индуктивность между ка-
тушками обмотки одной фазы Mk‘, взаимную индуктив-
ность между обмотками статора и обмоткой ротора
Жяш; взаимную индуктивность между обмотками фаз
статора Mns; активное сопротивление обмотки статора
Rn, эквивалентные индуктивности рассеяния и намагни-
чивания стального ярма статора £г, активное сопро-
тивление, представляющее собой потери в стали стато-
ра утечки изоляции обмотки статора относительно
18—1279 261
стали Gn', утечки изоляции между фазой статора и дру-
гими фазными обмотками Gns; емкость обмотки статора
относительно стали Сп; емкость между катушками об-
мотки одной фазы Ck\ емкость между обмоткой статора
й обмоткой ротора Спт; емкость между обмотками ста-
тора Cns', напряжение, индуцированное в обмотке ста-
тора от тока возбуждения ротора 1/еп= Mnwdlf/dt.
Часть перечисленных... параметров зависит от частоты
(L„, Rn^RJ, часть - отГтока (L„, Mk, Mns, LJ.
Представленная на рис. 9.1 схема фазы обмотки ге-
нератора непригодна для вывода уравнений трехфазного
генератора с целью определения его математической мо-
дели. Для реализации поставленной задачи следует
принять, упрощающие допущения, приемлемые в рас-
сматриваемом диапазоне частот.
Основным является допущение о том, что параметры
генератора неизменны, т. е. не зависят от частоты и то-
ка. Косвенно влияние частоты на параметры генератора
можно учесть, если принять в расчетах значения этих
параметров на частоте исследуемого процесса. Следует
подчеркнуть, что частота прежде всего влияет на значе-
ния активного сопротивления (Rn, RJ и в меньшей
степени на значения собственных и взаимных индуктив-
ностей.
Второе допущение заключается в том, что влияние
тока на собственную и взаимную индуктивность не учи-
тывается, что может приводить к ошибкам в значениях
этих параметров (более десяти процентов) в режимах
энергосистемы, характеризующихся предельными тока-
ми (например, к. з. на выводах генератора).
Следующее упрощение касается учета влияния изме-
нений параметров режима обмоток ротора на неуста-
новившиеся режимы в фазах статора. Возможность
пренебрежения этим влиянием при определении неуста-
новившихся значений токов и напряжений обмоток ста-
тора обосновывается следующими соображениями. Маг-
нитное сопротивление при прохождении магнитного
потока, определяющего собственную индуктивность об-
мотки статора, через сердечник статора и воздушный
зазор над пазом меньше, чем при прохождении потока
через сердечник статора, воздушные зазоры (размером
несколько сантиметров) между ротором и статором и
262
сбрдёчйик ротора. Аналогичные соотношения имеют
место для емкостей между обмотками статора, а также
статора и ротора.
Допущение о пренебрежении влиянием ротора на
высокочастотные процессы согласуется также с упроще-
ниями для ЭДС, индуцированных в фазных обмотках
статора.
Дальнейшее упрощение схемы, представленной на
рис. 9.1, сводится к пренебрежению индуктивностью кон-
тура, образованного сердечником статора, а именно
индуктивностями Lr и L . Такое допущение возможно,
поскольку индуктивность Lr значительно меньше индук-
тивности L^, которая в свою очередь значительно боль-
ше шунтирующей ее собственной индуктивности обмот-
ки Ln-
Схема замещения элемента фазной обмотки генера-
тора, удовлетворяющая принятым допущениям, показа-
на на рис. 9.2.
С целью дальнейших преобразований схемы емкость
Ck и активное сопротивление можно представить как
распределенные емкость Cp=Ck/l и активное сопротив-
ление Rp—IR^ включенные между началом и концом
фазной обмотки длиной /.
Схема фазной обмотки генератора при этих условиях
изображена на рис. 9.3. Основной трудностью при фор-
мировании математической модели такой схемы являет-
i Рис. 9.2. Схема замещения элемента фазной обмотки генератора без
учета контура стали статора.
И18* 263
ся наличие междуфазных индуктивностей и емкостных
связей.
При обозначениях, принятых на схеме рис. 9.3, фаз-
ные падения напряжения на отрезке х, x^-dx выража-
ются формулами:
%г+мь
Эх’=^'! ~dt~^~Mna~dT +Mnc-fjj--\-RM
~^=L-^+Mk ^-+Mna^+M,tb^+R„ic.
(9.1)
i(t,x)
--------o-
-----o-
Рис. 9.3. Схема размещения элемента фазной обмотки генератора,
принятая для преобразования трехфазной системы в три схемы для
составляющих.
Аналогичные выражения можно записать для измене-
ний фазных токов:
__ dia_r диа r д(иа—иь) г д (и^ — ис) . Гт .. .
dx п dt * nh dt + пс dt
dib _r dub.r d{ub — ua) , r d(ub — uc) t n .
dx ~^n dt ’ na dt dt ~runub,
die _r' duc । ' d (uc — ua) । d {uc — ub) । л w,
dx ~~ n dt^ na dt . ' nb dt Типис- j
(9.2)
Для симметричной конфигурации генератора:
^nb==Afnc=AfbcJ Cnb=Cnc^=Cab‘
Для исключения междуфазных связей применяются
линейные преобразования (7.1), позволяющие привести
трехфазную четырехпроводную систему к трем незави-
264
симым контурам, рассматриваемым как отдельные по-
следовательности.
После подстановки в (7.1) вместо фазных напряже-
ний— напряжений для составляющих, а в (9.2) вместо
фазных токов — токов для составляющих получаем:
ди, дх ~Ll
диг т дх 1
___ __ г дх — ° dix й -Н.4; (9.3)
дх —
—Г^-=С, дх 1 ди» I п
_ di° —С дх —°0 । z> ir+G."..
где
—Мпъ‘, Ri=Rn‘, С\=Сп-^-ЗСпъ', Gi==Gnb'i
Ь^=Ьп-\-^^пъ\ Со=Сп‘, G0=Gn.
Эти параметры отнесены к единице длины
обмотки.
Из (9.3) следует, что они имеют одинаковый
всех составляющих:
х) =Ri(t, х)х) ;
daft, х)
dt
схема
фазной
вид для
дх
х)+С-
Уравнениям (9.4) соответствует
показанная на рис. 9.4.
(9.4)
замещения,
c(t,x) { Ldx Rdx
---—*о—I——/ТУЧ------г~~т-
i(t,x)+^&^dx
—о >
\Gdx
dx
Рис. 9.4. Схема замещения элемента фазной обмотки для составляю-
щих (0, 1, 2) [идентичная для составляющих (0, а, »₽)].
265
Решение системы уравнений (9.4) с учетом затуха-
ния представляет значительные трудности (решение да-
но при анализе схемы замещения длинной линии
в §8.2).
Из анализа изменения в переходном процессе обрат-
ного напряжения короткозамкнутого генератора (см.
Рис. 9.5. Осциллограмма про-
/ v V/V*—- цесса изменения обратного на-
/ ' пряжения выделенного синхрон-
/ л ного генератора мощностью
_£_____________________X- 50 МВт.
осциллограмму на рис. 9.5), частота переходных процес-
сов в контурах которого близка к частоте собственных
колебаний, следует, что колебание напряжения близко
к одночастотным колебаниям. Причиной этого является
Рис. 9.6. Упрощенная схема фазной обмотки генератора для состав-
ляющих в виде однородной длинной линии.
значительное затухание высших гармонических. Отсюда
возникает также предположение о возможности пред-
ставления модели генератора для составляющих в виде
одночастотной схемы замещения длинной линии. Чтобы
упростить анализ схем замещения длинной линии
<>А
Рис. 9.7. Одночастотная
схема замещения.
(рис. 9.6) и одночастотного контура (рис. 9.7), затуха-
ние не учитывается (будет введено в окончательных
схемах. Схему длинной линии можно описать сле-
дующими уравнениями, вытекающими из решения
266
уравнений (9.4):
U, (Р)=U, (р) ch (pl J/LC) + /, (p)Ze sh(/>Z/£C);
/, (P) = Л (p) ch (pl VLC) + U, (p) sh (pl j/£C),
(9.5)
где Zc = yf L]C — волновое сопротивление; L, С —индук-
тивность и емкость на единицу длины одной фазы гене-
ратора; I — длина обмотки.
Сопротивление генератора, выводы которого закоро-
чены, можно определить, принимая [/2(р)=0 в уравне-
ниях (9.5):
^,(/’)=^-=zcth(pZ/ZE). (9.6)
Сопротивление, приведенное к выводам одночастот-
ной схемы (рис. 9.7), выражается в виде
^(Р)=т+^с7- (97)
Если контуры одинаковые, то сопротивления, опре-
деляемые по (9.6) и (9.7), должны быть равными для
определенной частоты собственных колебаний v^, т. е.
^а-а' (z7) = %A-Af О7)*
Из (9.6) следует, что эта линия имеет бесконечное
число частот собственных колебаний, поскольку функ-
ция в знаменателе выражения для сопротивления
(ch pl КLC) имеет бесконечное число корней. Одноча-
стотный контур замещения может быть подобран только
для одной частоты собственных колебаний длинной
линии.
Параметры замещенной линии будут получены для
первой гармонической собственных колебаний длинной
линии. Поскольку обе рассматриваемые схемы не содер-
жат активного сопротивления, можно принять p=jv=
=jvi (где Vi—частота первой гармонической собствен-
ных колебаний длинной линии).
Приравнивая отдельные части (9.6) и (9.7) и под-
ставляя последнюю зависимость для частоты, получаем:
r-Xb7==Zcth(/v‘<v7g)- (9'8)
В (9.8) появляются две неизвестные' величины: Lz
и Сг. Для их определения принимаем, что цндуктивно-
267
сти обоих контуров равны, или
LZ=LL (9.9)
Это допущение определяется равенством токов
(в данном случае токов к. з.) обоих контуров.
Из (9.8) и (9.9) следует, что замещенная емкость
г 1 — vj VlC ctg (vj ИLC)
C2= — ^\LC
Раскладывая выражение ctg (v, УLC) в ряд и учитьГ
вая первые три члена этого ряда, получаем:
1—Vi/Kicf-—гг==;—— vj(l VlC)3—...
b2— : (v2i/LC)2 * 1
1 — 1 + 4- i’.PLC + -L-iy.PLCy + ...
X ic=---------------^rc-----------------zc=
==(4-+-4rv!>Z’IC+-)ZC-
Из приведенного выше выражения видно, что для ча-
стоты первой гармонической vj, удовлетворяющей зави-
симости < IУLC можно принять:
Сг = ~1С. (9.10)
Такой случай имеет место, когда частота принуди-
тельных колебаний, вызванных коммутацией либо нару-
шением режима, меньше частоты собственных колеба-
ний контуров генератора.
Если частота первой гармонической
замещенную емкость для первой гармонической можно
получить из уравнений для частоты собственных коле-
баний генератора, представляя его схемой длинной
линии с равномерно распределенными параметрами.
Собственные частоты длинной линии можно опреде-
лить из (9.6), приравнивая знаменатель этого выраже-
ния нулю ch pl У LC =0. Подставляя в него p=jvk, по-
лучаем:
ch (/vft/ /1С) = cos (ykl УСС) = 0;
vklVLC = (2/г-1)^-,
11023-2».
268
а следовательно, собственные частоты контура длинной
линии
п=(24-1)-|--1=, *=1,2,3... (9.11)
х I г LC,
Частота первой гармонической k=\
л 1
V =:-------
* 2 iVlc'
Аналогично рассчитывается частота одночастотного
замещенного контура:
Рис. 9.8. Схема замещения фаз-
ной обмотки генератора, приня-
тая как одночастотная.
Приравнивая соответствующие части двух последних
уравнений, а также учитывая, как и ранее, LZ—IL, по-
лучаем формулу для замещенной емкости:
= /С=0,406/(7. (9.12)
Одночастотная схема замещения генератора, эквива-
лентная для первой гармонической схеме длинной линии,
. показана на рис. 9.8.
Приведенные выше методы справедливы для состав-
ляющих (0, 1, 2) либо (0, а, р) и относятся к однофаз-
ным контурам, к которым приведены трехфазные четы-
рехпроводные реальные контуры синхронного генератора.
Переход от зависимостей для составляющих к фазным
обеспечивают (7.1).
В отдельных случаях, например при физическом мо-
делировании, требуется получение схемы синхронного
генератора как трехфазного четырехпроводного контура.
Здесь можно привести рассуждения, аналогичные рас-
смотренным в гл. 8 при анализе элемента длинной трех-
фазной линии.
При допущении равенства сопротивлений в обеих
осях синхронного генератора (d и q) сопротивления
269
прямой и обратной последовательностей будут одинако-
вы: Z1(p)=Z2(p).
В этих условиях схема замещения трехфазного гене-
ратора для продольных сопротивлений примет вид, по-
казанный на рис. 9.9. Допущение о равенстве сопротив-
лений прямой и обратной последовательностей прием-
лемо, если сопротивление генератора меньше сопротив-
лений элементов энергосистемы, подключенных к его
выводам.
n
a I
——Ф-
|
—>
।/ci
Lf R1
77 л
CZZ3-.<?
L,) l(R0 Rr) ।
—* Рис. 9.9. Схема замещения для
1е продольных сопротивлений эле-
мента обмоток генератора с уче-
ие том трех фаз и нулевого провода.
6
При анализе переходных процессов в обособленном
генераторе следует использовать схемы последователь-
ностей (0, а, р) и далее переходить к фазным величи-
нам в соответствии с допущениями (7.1).
Рис. 9.10. Схема замещения для
поперечных сопротивлений эле-
мента обмоток генератора с уче-
том трех фаз и нулевого провода.
Отдельных преобразований требуют поперечные вет-
ви, образованные емкостями и сопротивлениями утечки.
Поскольку активное сопротивление изоляции, представ-
ляющее собой утечку, для реальной машины велико (по-
рядка десятков мегаом), пренебрегаем им в последую-
щих рассуждениях.
Система емкостей прямой и нулевой последователь-
ностей представлена на рис. 9.10. Уменьшение емкостей
до 1/34-4/л2 их значения определяются приведением
контура длинной линии к замещенной одночастотной си-
стеме.
Из схемы синхронного генератора с учетом трех фаз
и нулевого провода, представленной на рис. 9.11, видно,
что нулевой провод имеет сопротивление, равное
(Zo—Zi)/3. Поскольку индуктивность генератора для
270
нулевой составляющей меньше, чем для прямой состав-
ляющей, получаем отрицательную индуктивность в нуле-
вом проводе, что создает дополнительные трудности
в расчетах и особенно при физическом моделировании.
На практике, однако, эта трудность не возникает, по-
скольку нейтраль синхронного генератора изолирована
или заземлена через трансформатор напряжения, сопро-
Рис. 9.11. Схема замещения трехфазного синхронного генератора
с учетом нулевого провода.
тивление которого на несколько порядков выше сопро-
тивления нулевой последовательности генератора.
Достаточно сложным является определение ЭДС,
введенной в схему замещения на рис. 9.11. В неустано-
вившихся режимах в контурах с реактивными сопротив-
лениями ЭДС изменяется в соответствии с выражением
__t ___t_
e(t)=(E"d-E'd)e T"d-(E'd-Ed)e T'd-Ed, (9.13)
где E"d, E'd, Ed — ЭДС сверхпереходная, переходная и
синхронная соответственно; T"d, T'd — постоянные вре-
мени— сверхпереходная и переходная соответственно.
Электромагнитные процессы в энергосистемах, при
которых возникают частоты собственных колебаний,
длятся около сотых долей секунды (за это время состав-
ляющие с большими частотами затухают). При рассмот-
рении такого короткого отрезка времени ЭДС в схеме,
представленной на рис. 9.11, будут равны сверхпереход-
ным ЭДС:
еа (/) =е”а (/) =Е" sin со/;
eb(t) =е"ъ(t) —Е" sin((dt—120°);
ec(t)=e"c(t)=E" sin (of—240°).
Как показано в гл. 7, при расчетах электрических
режимов целесообразно применять составляющие (0,
271
а, P). Ниже определена математическая модель син-
хронного генератора для этих составляющих с учетом
неравенства индуктивностей в осях машины d и q. При
выводе уравнений учтены только индуктивности и актив-
ные сопротивления машины (как показано ранее, емко-
сти и утечки можно представить сосредоточенными и
подключенными к зажимам генератора).
Для определения схемы замещения генератора для
составляющих (0, а, р) используются уравнения Пар-
ка— Горева для потокосцеплений:
Фа = К2 Е" cos (со/ + 0) — [-—q 4-
i - cos 2 к +0)]------------Sin 2(«rf+0) /e;
sinH + 0) -
U'd—L1' 1 L"d — L"
----2---— sin 2(W + 0) j ----------2—~ cos 2(<»/+0)
Фо ^0^0’
где E"— сверхпереходная ЭДС синхронного генератора;
L"d, L"q — сверхпереходные индуктивности в осях d и q;
Lo — индуктивность нулевой составляющей; to — частота
источника, 1/с; 0— угол напряжения в момент измене-
ния режима контура.
frr 1 7 f ir ,
^(LfL.q)casZ(a)t-e)
(f) e^V^E"cos(a>t^0)_______________
Рис. 9.12. Схема замещения синхронного генератора для составляю-
щих (а, 0,0).
272
Уравнения для напряжений на зажимах генератора,
выраженные через составляющие, имеют вид:
и
и,
<7ф3
3 ~~di
где 7?i, 7?о — активные сопротивления прямой и нулевой
последовательностей синхронного генератора. После
преобразования получаем:
— /2 Е" sin (<oZ + 0) — p^L-d^L q -f- ।
•+ L dt.£* cos 2 («rf 4-0) ] ia _
Lnd — L"o
P----2------ Sin 2 +0) S “ '
\L"d + L"q (9.14)
= у 2 E COS (co/ 4~ 6)— P ---2------
L"d — L"a
-------g--— cos 2 (ю/ -|-0) —
Lr,d — I"
— P ———~ sln 2 И +0) «a ~
wo = O — pL.i. — Roio. J
Уравнениям (9.14) соответствует схема замещения
генератора для составляющих (а, р, 0), показанная на
рис. 9.12. Из вышеприведенных уравнений получаются
также ЭДС источника:
— —- ]Л2 Е" sin (о>/ 4~ ®);
^ = 1/2 Е" cos (atf 4~ 0);
^о = 0.
(9.15)
Подключенные к выводам генератора в схемах заме-
щения поперечные ветви состоят из емкостей и шунтов
утечки, величины которых определяются в соответствии
с формулами (9.10) либо (9.12).
273
При расчете электрического режима сети энергоси-
стемы параметры генератора не играют большой роли,
поэтому можно принять равенство сверхпереходных ин-
дуктивностей L"d=L"q. Это упрощает схему замещения
генератора, делая независимыми схемы составляющих.
Учет же неравенства этих индуктивностей обязателен
при анализе условий резонанса для генератора, работа-
ющего на ненагруженную длинную линию.
9.3. ПАРАМЕТРЫ ГЕНЕРАТОРА — ЗАВИСИМОСТЬ АКТИВНОГО
И ИНДУКТИВНОГО СОПРОТИВЛЕНИЙ ОТ ЧАСТОТЫ
Индуктивность и активное сопротивление генератора
зависят в значительной мере от частоты. При анализе
электрического режима энергосистемы следует прини-
мать значения этих параметров при частоте неустано-
вившегося процесса. Зависимость активного и индуктив-
ного сопротивлений от частоты трудно учитывать анали-
Рис. 9.13. Пример зависимости
фазных индуктивностей син-
хронного генератора мощно-
стью 16 МВт от частоты.
0,1
Рис. 9.14. Область изменения постоянных времени для составляю-
щих, соответствующих большим синхронным генераторам от частоты.
Эти зависимости обычно определяются эксперимен-
тально. На рис. 9.13 показана зависимость индуктивно-
сти генератора от частоты, а на рис. 9.14 — зависимость
от частоты постоянной времени для составляющих пря-
мой последовательности. Из диаграммы на рис. 9.14
следует, что постоянная времени генератора быстро
уменьшается с частотой, что вызвано наличием стали
статора.
274
L
I 10. МАТЕМАТИЧЕСКИЕ МОДЕЛИ ТРАНСФОРМАТОРОВ
1 , 10.1. ОБЩИЕ СООБРАЖЕНИЯ
в: Формирование модели трансформатора для анализа
электрических режимов при частотах, близких или рав-
В ных частоте его собственных колебаний, является чрез-
вычайно сложной проблемой, что объясняется:
№ необходимостью учета разложения электрических па-
gt- раметров, таких как собственные индуктивности, емко-
сти по отношению к земле, междуфазные и междувит-
р' ковые емкости, а также активные сопротивления, пред-
В ставляющие собой потери в обмотках и сердечнике;
Ку зависимостью индуктивностей и активных сопротив-
gi лений от частоты неустановившихся процессов;
& зависимостью индуктивностей, особенно взаимных,
В». от магнитного насыщения сердечника.
В; Дополнительные трудности в моделировании создает
Е разнотипность исполнения трансформаторов (число фаз
» и обмоток, способы их соединения, конструкция сердеч-
I ника).
К Учитывая сложность поставленной задачи, прежде
Ц всего выводят уравнения для двухобмоточного однофаз-
R;. ного трансформатора, на примере которого даются не-
Цг. - обходимые упрощения и области их применения. Далее
Вк определяются модели двухобмоточных и многообмоточ-
В: ных трехфазных трансформаторов с разными схемами
.соединений.
к Следует отметить, что в ходе проводимого далее ана-
Ь лиза ставится задача определения математической мо-
еГ дели трансформатора как элемента энергосистемы,
••• а следовательно, определяются только электрические
величины (например, ток или напряжение) на выводах
Ц трансформатора. Анализ распределения напряжения или
тока вдоль обмотки, представляющий интерес, напри-
К мер, при расчетах изоляции, здесь не приводится.
Н? 10.2. МОДЕЛЬ ДВУХОБМОТОЧНОГО ОДНОФАЗНОГО
ТРАНСФОРМАТОРА
№ Схема двухобмоточного однофазного трансформато-
Кура представлена на рис. Ю.1: первичная обмотка обозна-
чена буквой а, а вторичная — Ь.
№. Необходимо заметить, что значения приведенных на
кН схеме индуктивностей и активных сопротивлений зави-
R' 275
сят от частоты, а взаимных индуктивностей также и от
тока.
Принятая на рис. 10.1 схема замещения трансформа-
тора приводит к формулам, которые практически невоз-
можно использовать в расчетах электрических режимов
Рис. 10.1. Схема замещения элемента обмоток трансформатора дли-
ной dx.
Параметры на единицу длины: Ln, Lm — собственные индуктивности первич-
ной п и вторичной т обмоток; Мпт — взаимная индуктивность первичной и
вторичной обмоток; Мпп, Мтт — взаимные междувитковые индуктивности
первичной и вторичной обмоток; Сп, Ст — междувитковые емкости (продоль-
ные) первичной и вторичной обмоток; СЭТ7П — взаимная емкость первичной и
вторичной обмоток; Сп0, CmQ—емкости по отношению к земле первичной
и вторичной обмоток; Rn, Rm — активные сопротивления первичной и вторич-
ной обмоток; R'n, R'm — активные сопротивления, представляющие собой по-
тери в сердечнике.
энергосистемы. Поэтому необходимо принять упрощаю-
щие допущения:
не учитывается активное сопротивление, что обычно
приводит к некоторому завышению рассчитываемых на-
пряжений и токов. Эти погрешности можно уменьшить
вводом дополнительных активных сопротивлений в окон-
чательные схемы;
не учитывается влияние изменения магнитного со-
стояния сердечника на взаимоиндукцию, что равнознач-
но постоянству собственных и взаимных индуктивностей.
Следует подчеркнуть, что допущение о постоянстве
вполне правомерно при расчетах электрических режи-
мов непосредственно после коммутаций либо аварийных
ситуаций. Это допущение неправомерно, если коммута-
ция или нарушение режима ведут к возникновению фер-
276
рорезонанса, что объясняется нелинейностью зависимо-
сти взаимных индуктивностей от тока. Математические
модели трансформатора для последнего случая рассмат-
риваются ввиду их сложности в сокращенном объеме.
Анализ процессов в двухобмоточном однофазном
трансформаторе проведен для двух схем замещения, по-
казанных на рис. 10.2,а и б. В схеме на рис. 10.2,а до-
полнительно принято разделение первичной и вторичной
Рис. 10.2. Упрощенная схема замещения двухобмоточного однофаз-
ного трансформатора (а) при разделении обмоток на две части;
б — при рассмотрении обмоток трансформатора как одного элемента.
La^Lnp' — собственные индуктивности половины первичной и вто-
ричной обмоток соответственно; МаЪ — взаимная индуктивность между проти-
воположными частями первичной и вторичной обмоток; Л1(оЬ) — взаимные ин-
дуктивности между накрест лежащими частями первичной и вторичной обмо-
ток; Co0=Cn0Z, Cb0=Cm0Z —емкости по отношению к земле первичной и вто-
ричной обмоток соответственно; La=Lnl, Lb =Lml — собственные индуктивно-
сти первичной и вторичной обмоток соответственно; Afab=Ltnn Z—взаимная
индуктивность первичной и вторичной обмоток; Co0=Cn0Z» Cb<j—CmeZ — емко-
сти на землю первичной и вторичной обмоток соответственно; Cab=CnmZ —
междуфазная емкость.
, Рис. 10.3. Преобразованная схема замещения двухобмоточного од-
•нофазного трансформатора (рис. 10.2,о) при заземлении концов обе-
их фазных обмоток.
277
обмоток на две части. В этой схеме введены только
взаимные индуктивности между обмотками, а между-
витковые индуктивности и емкости не учитываются.
Распределенные междуобмоточные емкости и емкости
обмоток по отношению к земле объединены в трех точ-
ках каждой обмотки. В схеме на рис. 10.2,6 принято
дополнительное упрощение, связанное с объединением
емкостей на концах обмоток.
Поскольку в эксплуатации один из выводов каждой
обмотки, бак и сердечник заземлены, то схема на
рис. 10.2,а принимает вид, представленный на рис. 10.3.
Для дальнейшего анализа целесообразно отключить
от контура внешние емкости. Для схемы, представлен-
ной на рис. 10.3, справедливы следующие уравнения
в операторной форме:
(С/1_(72)^+Л = Л + г7,^; )
Г 1 (Ю.1)
После деления первого уравнения на коэффициент
трансформации /CT=wi/^2 (wi—число витков первич-
ной обмотки) и последующего прибавления к обеим ча-
стям уравнений выражения и^рСаъ/^ получается:
(TJ _ К TJ \ | ^2 _I у г г n ( Cbn | Cnb СдЬ \
Лт1У2' 4кт 'кт “X “т^(4№т Тдаг 4КтД
(Ю.2)
После умножения второго уравнения (10.1) на коэф-
фициент трансформации Кт, а также прибавления
к обеим частям выражения U\pCab/4 получается:
(*А - У,) ^+Л=4+и,р . (10.3)
ЧЛу
t Pg.b , ^ab
К;
о-
Рис. 10.4. Схема замещения двухобмоточного однофазного трансфор-
матора (рис. Ю.3,в) с выделенными внешними емкостями.
278
Уравнениям (10.2) и (10.3) соответствует схема за-
мещения, представленная на рис. 10.4, позволяющая
исключить внешние емкости из последующих преобра-
зований.
Для контуров без внешних емкостей (рис. 10.5) спра-
ведливы следующие зависимости для напряжений в опе-
раторной форме:
и, = 2р(/', + )+
+ 2/>(Alai,.+Mto,)(/',+ /,2а7—^); (Ю.4)
U,=2p(Lb+Mu,')(T,+ )+
+ 2р(Ж^+Л4(ой))(/'.+Д114Д41.). (10.5)
С целью упрощения последующих преобразований
получаем зависимость для токов в виде
к^\ + /'“1/"")+(л+ (Ю.6)
Для х. х. трансформатора можно, кроме того, при-
нять:
£1=Кт£2, (10.7)
где £i, Е2— напряжения, индуцированные в первичной
и вторичной обмотках.
Умножая (10.5) на Кт и вычитая его из (10.4), по-
лучаем:
и, - ВД=2р [(£„+Маа) - кг (Мл+
+м «1 (/'. + |/<\ (Ц +мьь) -
- КТ(МЛ + М(м) Д (/', + Д" ~ z"“ ). (10.8)
2\Т k z у '
Второе уравнение для напряжений, вытекающее из
схемы на рис. 10.5, имеет вид:
U1—U'\~P (Ea-j-^aa) А+р (7Иоь-|-^(аЬ))
+pLaI'l\—рМааГ'1 l+pMabJ'22—pM(ab)I"22, (10.9)
279
Подставляй в (10.9) составляющие токов Г\, а так-
же Г2 из уравнений (10.4) и (10.5), определяем:
и, - 2U, = 2р (La - Маа) +
+ 2р(МаЬ-М(М) + (Ю.Юа)
и аналогично для вторичной стороны:
и, - а/',=2/> (4 - м№) +
+ 2/>(/И0„-М«)Лц^и-. (10.106)
Рис. 10.5. Схема замещения двухобмоточного однофазного транс-
форматора без внешних емкостей (не показаны взаимные индуктив-
ности Маь, а также М(аЬъ рис. 10.3).
Уравнение (10.106) можно привести к первичной сто-
роне, умножив его на коэффициент трансформации /Ст:
KJUt-2KJJ’,=p ± 2K\(Lb-M№)'l'”%'"a +
*\Т
+ р2Х1(Ма|,-Л4(„„))^" + /''Ц-. (10.11)
Зависимости для составляющих тока Гц, /"ц, /'22
и Г'22 вытекают из схемы на рис. 10.5:
= ({/', - V'i) р ^+U',P %-; (10.12)
+1"., = (У'. - U'.)p ^+U',P^. (Ю.13)
280
После преобразования эти выражения принимают вид:
+ - 2KTU'S) р ^-+
247\р[%-+(1 - £)^]; (Ю.14)
। = &KJU, _ 2U.t) p Cg,
I\T Z OAt
67
“1
+ 2Kt(7\/2
Cab
8K?
(10.15)
z[(La +«„„)~K^nabЩаЫ)] г[к/(ььлгМ№)-Кт(па1,+п№Ы
--------~/~Г-Г\-M_-------------0-7
• - ' 1-
4
2(L t“A7,J~’S r ,
‘ tZ a7 J Ca0
~^^\^ab~^(nb^t
I-----
ca0 , /k- _ i\ cab J_
-g-+(Ar О ёкг T
__________________________i------------------
} ~^(МаГМ1л1,})
tilt
'7
^iu2
Рис. 10.6. Схема замещения двухобмоточного однофазного транс-
форматора без внешних емкостей.
На основе выражений (10.8), (10.9), (10.11), (10.14)
и (10.15) определена схема замещения двухобмоточного
однофазного трансформатора, изображенная на рис. 10.6.
Из (10.8) вытекает, что Lr, определяемая из выражения
Lr=2 (£аЧ~Л1аа) -}~2/(2т (Lb-j-M^b)-4Кт (МаЬ—М(аЬ)) ,
является индуктивностью рассеяния трансформатора.
Если пренебречь также внутренними емкостями, то,
как следует из (10.10), (10.11), в поперечных ветвях
схемы (рис. 10.6) остаются:
индуктивность рассеяния первичной обмотки при ра-
зомкнутой вторичной обмотке
L\r=2 (La—^аа) 5
индуктивность рассеяния вторичной обмотки, приве-
денная к первичной, при разомкнутой первичной об-
мотке
L2r=2(Lb—Мьъ);
19—1279
281
взаимная индуктивность трансформатора, равная ин-
дуктивности намагничивания,
М==2Кт (МаЬ—М(аЪ)) .
Из (10.14), (10.15) следует, что в схеме замещения,
представленной на рис. 10.6, образуется треугольник
емкостей с параметрами, приведенными к первичной об-
мотке. Преобразуя треугольник емкостей в эквивалент-
ную звезду, получаем схему, показанную на рис. 10.7.
Окончательная схема замещения двухобмоточного
однофазного трансформатора с учетом внешних емкостей
Рис. 10.7. Преобразованная схе-
ма замещения двухобмоточного
однофазного трансформатора
(рис. 10.6).
СдЬ
Рис. 10.8. Схема замещения двухобмоточного однофазного транс-
форматора с учетом внешних емкостей.
представлена на рис. 10.8 (ср. рис. 10.4). Эта схема до-
статочно сложная и трудно описывается математически.
Соединение модели трансформатора, соответствующей
схеме на рис. 10.8, с математическими моделями других
элементов энергосистемы делали бы задачу получения
неустановившихся режимов практически неразрешимой.
Простейшая модель трансформатора получается пу-
тем преобразования схемы, показанной на рис. 10.2,6.
Исключив из схемы на рис. 10.9 внешние емкости и пре-
небрегая активными сопротивлениями, получим упро-
щенные уравнения трансформатора:
V\^=pL\I г\-рМ1'2;
282
причем
s=^-/a, У',=ад.
Подставляя в полученные уравнения индуктивность
рассеяния первичной обмотки L\r=L\—М, индуктив-
ность рассеяния вторичной обмотки, £2г=^2—М, ток
намагничивания трансформатора оконча-
тельно имеем:
U,^=pLlr/.+pMI^ 1
U\=pL!r/', + pM/^ |
(10.16)
Рис. 10.9. Схема замещения
двухобмоточного однофазного
трансформатора (рис. 10.2,6)
без учета внешних емкостей.
Рис. 10.10. Схема замещения
двухобмоточного однофазного
трансформатора с учетом внеш-
них емкостей (причем £/2=
^Цг-М).
Схема замещения трансформатора, соответствующая
(10.16), с учетом внешних емкостей приведена на
рис. 10.10. Математическая модель трансформатора
имеет поперечные индуктивные ветви. Анализируя зна-
чения параметров поперечных ветвей трансформатора,
можно утверждать, что они даже при частотах собст-
венных колебаний значительно больше значений про-
дольных сопротивлений.
Если к выводам трансформатора подключены малые
сопротивления нагрузки и особенно если на этих выво-
дах произошло к. з., то ветвями с поперечными индук-
тивностями можно пренебречь. Схема трансформатора
для этого случая приведена на рис. 10.11.
Если к выводам трансформатора подключена неза-
груженная длинная линия (имеющая большую емкость),
то можно пренебречь собственной емкостью трансфор-
матора; нельзя, однако, пренебрегать параметрами вет-
19* 283
ви намагничивания, так как ее сопротивление соизмери-
мо с сопротивлением ненагруженной линии. В системе
могут появиться резонансные колебания, вызванные не-
линейностью параметров ветви намагничивания транс-
форматора.
Схема трансформатора для анализа этого случая
представлена на рис. 10.12. В этой схеме не учтены емко-
сти трансформатора, поскольку они значительно меньше
емкости линии. Ветвь намагничивания трансформатора
Рис. 10.11. Схема замещения
двухобмоточного однофазного
трансформатора для случая
подключения к трансформатору
малого сопротивления.
Рис. 10.12. Схема замещения
цвухобмоточного однофазного
трансформатора для случая
подключения к выводам транс-
форматора большого сопротив-
ления.
перенесена на выводы трансформатора, поскольку при
малом токе, текущем через трансформатор (из-за боль-
шого сопротивления нагрузки), напряжение на выводах
мало отличается от напряжения ветви намагничивания.
Принимается, что зависимость тока намагничивания
от потокосцепления имеет следующий вид:
для сердечника из горячекатаной стали
V = + (10.17)
для сердечника из холоднокатаной стали
= + (Ю.18)
где а, b — коэффициенты, зависящие от конструкции
сердечника (значение их можно определить из кривой
намагничивания трансформатора).
10.3. МОДЕЛИ ДВУХОБМОТОЧНЫХ ТРЕХФАЗНЫХ
ТРАНСФОРМАТОРОВ
Математическая модель двухобмоточного трехфазно-
го трансформатора зависит от способа соединений фаз-
ных обмоток и способа заземления нейтралей.
284
В последующем анализе принимается, что собствен-
ные и взаимные индуктивности обмоток трансформатора
неизменны, т. е. не зависят от тока и частоты. Это допу-
щение позволяет использовать составляющие, например
(О, 1, 2) или (0, а, Р), и осуществить приведение модели
двухобмоточного трехфазного трансформатора к ранее
описанной модели двухобмоточного однофазного транс-
форматора.
Следует заметить, что допущение о неизменности ин-
дуктивности полностью справедливо для индуктивности
рассеяния, поскольку последняя определяется потоком,
который на значительной части своего пути замыкается
через немагнитную среду (воздух либо масло).
Индуктивность ветви намагничивания определяется
потоком, замыкающимся в стали, и допущение о ее не-
изменности заведомо вносит определенную погрешность.
Как указано в § 10.2, эта индуктивность не оказывает,
однако, существенного влияния на неустановившиеся
процессы в энергосистеме.
Трансформатор со схемой соединения Д/Д (рис. 10.13).
В схеме учтена нагрузка, подключенная к трансформа-
тору, поскольку, как это показано в § 10.2, значение со-
противления нагрузки влияет на вид схемы замещения.
Для возможности использования результатов, получен-
ных при разработке модели двухобмоточного однофазно-
го трансформатора, схема исследуемого трехфазного
трансформатора приводится к трем схемам однофазного
трансформатора для симметричных составляющих (0,
1, 2) либо идентичным им схемам для составляющих
0, а, (3).
Рис. 10.13. Цепь для определения схем замещения для составляющих
трансформатора Д/Л для произвольной фазы k—a, b, с.
—собственное сопротивление первичной обмотки; Z2fe =
=R2k+pL2k—собственное сопротивление вторичной обмотки; Zi2=
=pLi2ft—взаимное сопротивление первичной и вторичной обмоток;
ZObck = Robch+pLobcil — нагрузки.
285
При определении схем трансформатора для состав-
ляющих будет использовано выражение сопротивления
системы трансформатор — нагрузка, обозначенного на
рИС. 10.13 Zobck"
Сопротивление прямой (обратной, нулевой) последо-
вательности выражается отношением приложенного на-
пряжения прямой (обратной, нулевой) последовательно-
сти к полученному току от этой составляющей.
Приложенные составляющие напряжения нулевой,
прямой и обратной последовательностей (для которых
будут определены токи) показаны на рис. 10.13.
На первом этапе преобразований и расчетов прене-
брегаем емкостями трансформатора. Эти емкости будут
учтены в схемах замещения в соответствии с положе-
ниями, изложенными в § 10.2 для двухобмоточного
однофазного трансформатора.
При определении схемы замещения для составляю-
щей прямой последовательности трансформатора Д/Д
принято, что индекс соответствует фазным величинам
или параметрам (k=a, b, с).
При питании системы симметричным напряжением
прямой последовательности можно рассчитать токи,
текущие в произвольной фазе. Сопротивление составля-
ющей прямой последовательности (равное сопротивле-
нию составляющей обратной последовательности):
7 __7 ( Еа — ^а-1 Afe ^2i2fe
^АР) — ^АР) Ia lai- з + .^obck .
Подставляя в это уравнение
Afe , 2 I £ • - £ I • 7 _______ V' Aafe
3 --^irk~r t'pk’ 3 --L2rkT —Лт 3 >
после преобразования получаем:
7 ( \______7 I ^V-k W*rk + 3Z'ofofe)
АР)— ^k-t^k + Z'2rk + 3Z'obck
(10.19)
где Zirk, Zitk — сопротивления рассеяния первичной и
вторичной обмоток фазы соответственно; Z^k — сопро-
тивление ветви намагничивания фазы; Zi2k — взаимное
сопротивление фаз; k=a, b, с; Z' — сопротивление вто-
ричной обмотки, приведенное к первичной стороне;
/Ст — коэффициент трансформации (витковый).
286
Из (10.19) видно, что схемы замещения каждой из
фаз а, Ь, с рассматриваемого трансформатора для со-
ставляющих прямой последовательности одинаковы.
В схеме замещения на рис. 10.14,а дополнительно учте-
ны емкости обмоток на землю и между обмотками од-
ной фазы.
-г—
Рис. 10.14. Схема замещения трансформатора Д/Д.
а—для составляющей прямой (обратной) последовательности: б— для состав-
ляющей нулевой последовательности.
Поскольку в обмотках трансформатора со схемой со-
единения Д/Д токи нулевой последовательности не про-
текают, его сопротивление бесконечно велико:
Zo(p) =/?о+рЬ0=оо.
Схема замещения нулевой последовательности будет
состоять только из емкостей на землю обмоток транс-
форматора (см. рис. 10.14,6).
Трансформатор со схемой соединения Д/Yo
(рис. 10.15). В этой схеме не учтены емкости. Сопротив-
ление прямой последовательности описывается следую-
щим выражением:
Рис. 10.15. Цепь для определения схем замещения для составляющих
трансформатора Д/Уд.
287
Выражая собственные и взаимные сопротивления
трансформатора как функцию сопротивления рассеяния
фазы (k=a, b, с) первичной Z\rk и вторичной Z2rk сто-
роны и от сопротивления ветви намагничивания Z k
отдельной фазы, получаем:
__7 | 7 . 7 ___ 7 • । ♦ 7 __ у
^3 —z'ir*_rz'|Xfe, Лр./г—
К —
т Кзг8*
Тогда формула для сопротивления прямой (обрат-
ной) последовательности системы запишется в виде
F F Z„b(Z'rk + Z'bck)
Z, (p) = ^L=^=Zlrt + { . (10.20)
7 a Jai ^p,k obck
Здесь Z' — сопротивление вторичной обмотки, пере-
считанное к первичной стороне, с учетом зависимости
Z’ 2=Z2IK?w
Рис. 10.16. Схемы замещения трансформатора A/Yo.
а — для составляющей прямой (обратной) последовательности; б — для состав-
ляющей нулевой последовательности.
В соответствии с (10.20) можно заключить, что схе-
ма замещения для составляющей прямой последова-
тельности трансформатора со схемой соединения Д/Yq,
представленная на рис. 10.16,а, подобна схеме для со-
ставляющей прямой последовательности трансформато-
ра со схемой соединения Д/Д, показанной на рис. 10.14,а.
Отличия касаются сопротивления нагрузки и расчетного
коэффициента трансформации.
Так же как и трансформатор со схемой соединения
Д/Д, трансформатор со схемой Д/Yp не пропускает тока
нулевой последовательности индуктивного характера,
вынужденные токи нулевой последовательности могут
288
замкнуться только через емкость. Схема составляющей
нулевой последовательности для емкостных токов дана
на рис. 10.16,6.
Трансформатор со схемой соединения Yo/A
(рис. 10.17). Для этой системы определяем сначала то-
ки прямой (обратной) последовательности, затем соот-
ветствующие сопротивления по формуле
7 ( п\_ __.Ди — 7
Л \Р) — I —~1------— 7~; о/ г к .
1а 1 аг °^obck
Выражая сопротивления, как описано выше:
7 у । 7 . Zzk 7 । •
t'lrk Г ’ 3 I д2тр’
7 __ ТА Й ^12k . ТА _Wl
Z,xfe—М—’
получаем:
Z. (Р)=Z. (р) = Z,rt + /* • (10.21)
На основе (10.21) для сопротивления прямой после-
довательности двухобмоточного трехфазного трансфор-
матора составлена схема замещения прямой последова-
тельности, приведенная на рис. 10.18,а. В этой схеме
учтены емкости для составляющих прямой последова-
тельности первичной и вторичной обмоток, а также
междуфазные емкости.
Для определения сопротивления нулевой последова-
тельности рассматриваемого трансформатора следует
рассчитать вынужденный ток в нем от напряжения ну-
левой последовательности. При известном токе нулевой
последовательности определяется сопротивление нуле-
вой последовательности:
Z.=^-=Z,. + 3Z
яао
До ’
где Zio — собственное сопротивление первичной обмотки;
Z2o — собственное сопротивление вторичной обмотки;
Z120 — взаимное сопротивление первичной и вторичной
обмоток; Z3 — сопротивление заземления нулевой точки
первичной стороны трансформатора.
289
Рис. 10.17. Цепь для определения схем замещения для составляющих
трансформатора Yo/Д.
Рис. 10.18. Схемы замещения трансформатора Yo/Д.
а — для составляющей прямой (обратной) последовательности: б — для состав-
ляющей нулевой последовательности.
Рис. 10.19. Цепь для определения схем замещения для составляющих
трансформатора Yo/Yo.
Рис. 10.20. Схемы замещения трансформатора Yo/Yo.
а — для составляющей прямой (обратной) последовательности; б — для состав-
ляющей нулевой последовательности.
290
Подставляя в последнее уравнение выражение
7 7 I 7/ . «^20 7 । . у Кт 7
— z'iro’T~z'р.0’ 3 ^оТ ’ ^р,о
где Ziro, Z2r0— сопротивления рассеяния первичной и
вторичной обмоток соответственно; Z^o — сопротивле-
ние ветви намагничивания; Z'2— сопротивление вторич-
ной обмотки, приведенное к первичной стороне, полу-
чаем:
^уХ^'ъГо
•^у.0 ~t~ ' 2 ГО
z.(p)=z„,4-3Zs4
(10.22)
На рис. 10.18,6 дана схема замещения нулевой по-
следовательности трансформатора со схемой соединения
Yo/Д. На этой схеме показаны также емкости для со-
ставляющих прямой последовательности.
Трансформатор со схемой соединения Yo/Yo. Посту-
пая подобно предыдущему, определяем сопротивление
прямой последовательности системы, представленной на
рис. 10.19:
Z, (р) = #=z,k —.
I a lai + Zobck
Подставляя в приведенное выше выражение
^lk = Zlrk Ч~ ^2ft = ^Zrk + ^7 ’ ^V.k===
получаем:
Z,W=Z,(^Z„> + (10.23)
Уравнению (10.23) соответствует схема замещения,
представленная на рис. 10.20,а. На схеме указаны до-
полнительно емкости трансформатора для составляю-
щей прямой последовательности.
Сопротивление для составляющей нулевой последо-
вательности
Z,(/>)=Z,. - 3Z„-y........
4 го । 04 зз “г ^obco
291
Аналогично рассмотренному, подставляя в это выра-
жение
7
210 = 21ГО + ^0; Z2o = Z2ro-| Z^-K^Z^,
получаем:
Z П (&2Го 3Zf32 -1- ZrohCn}
z. (Р) = Z,n + 3Z, + 2 1 z, . 3Z, + /; • (10.24)
Схема замещения, удовлетворяющая (10.24), дана на
рис. 10.20,6. В схеме указаны емкости для составляю-
щей нулевой последовательности трансформатора, а так-
же емкости обоих заземлений.
Из анализа схем замещения можно определить влия-
ние ветви намагничивания на точность моделирования
изучаемых процессов в зависимости от величины сопро-
тивления нагрузки Zobc. Так, для режима короткого за-
мыкания, когда Zobc<Z^ ветвь намагничивания (сопро-
тивление ZJ не оказывает практического влияния на
результаты, и поэтому трансформатор можно вполне
считать элементом линии.
Если сопротивление нагрузки велико (в предельном
случае Zo&c->oo), то ветвь намагничивания трансформа-
тора влияет на коммутационные процессы. В особых
случаях, когда вероятна возможность наступления фер-
рорезонанса, следует учитывать также нелинейность
параметров этой ветви.
10.4. МОДЕЛЬ ТРЕХОБМОТОЧНОГО ТРЕХФАЗНОГО
ТРАНСФОРМАТОРА
При формировании математической модели трехоб-
моточного трехфазного трансформатора используются
модели двухобмоточных трехфазных и однофазных
трансформаторов.
Пользуясь допущением о независимости электриче-
ских параметров трансформатора от тока, трехфазную
систему можно преобразовать в три однофазные схемы
для составляющих. Схема замещения трехобмоточного
трансформатора получается путем наложения схем для
этих составляющих, определенных для соответствующих
пар обмоток двухобмоточного трансформатора в § 10.3.
На рис. 10.21—10.25 представлены исходные схемы
трехобмоточных трансформаторов для составляющих
292
Рис. 10.21. Трансформатор Д/Д/Д.
а—цепь для определения схем замещения для составляющих: б — схема заме-
щения для составляющей прямой (обратной) последовательности; в — схема
замещения для составляющей нулевой последовательности.
Рис. 10.22. Трансформатор Уо/Д/Д.
а —цепь для определения схем замещения для составляющих; б— схема заме-
щения для составляющей прямой (обратной) последовательности; в — схема
замещения для составляющей нулевой последовательности.
> 293
Рис. 10.23. Трансформатор Yo/Yo/A.
а —контур для определения схем замещения для составляющих; б —схема
замещения для составляющей прямой (обратной) последовательности; в — схе-
ма замещения для составляющей нулевой последовательности.
Рис. 10.24. Трансформатор Y0/Y0/Y0.
а — цепь для £пределёння схем замещения для составляющих; б — схема заме-
щения для составляющей прямой (обратной) последовательности; в — схема
замещения для составляющей нулевой последовательности.
294
Прямой (обратной) и Пулевой последовательностей прй
разных схемах соединений обмоток.
Поскольку витковые коэффициенты трансформации,
пересчитанные для разных схем соединений, могут быть
разные, на схемах указаны также коэффициенты транс-
формации идеальных трансформаторов, связывающих
данную пару обмоток с нагрузкой.
Рис. 10.25. Автотрансформатор с заземленной нулевой точкой и об-
моткой, соединенной треугольником.
а — цепь для определения схем замещения для составляющих; 6 — схема за-
мещения для составляющей прямой (обратной) последовательности; в — схема
замещения для составляющей нулевой последовательности.
Чтобы не усложнять схемы, на них не показаны
емкости, которые могут быть добавлены для соответст-
вующей пары обмоток в соответствии с принципами,
изложенными в § 10.3.
Сопротивления рассеяния Zr в приведенных схемах
могут быть посчитаны для соответствующей пары обмо-
ток (при допущении, что третья обмотка не нагружена).
Тогда
Zrl2—Zrl3—Zir-f-Z^ri Zr23=^2r4~Z,3r,
295
откуда
%1Г --~ (^Г12 4~ ~ Z'rtoK
Z'2r = ~ (Zri2-}-Z'r23 — Zri3);
зг — ~ (^Г18 4“ Z'r23 4" ^ria)-
(10.25)
Числовые индексы в формулах относятся к номеру об-
мотки.
Следует заметить, что сопротивление рассеяния од-
ной из вторичных обмоток трехобмоточного трехфазного
трансформатора может иметь отрицательное значение.
10.5. ПАРАМЕТРЫ ТРАНСФОРМАТОРОВ
Параметры трансформатора в схемах замещения мо-
гут быть определены на основе заводских данных (это
относится, главным образом, к индуктивностям) либо
измерены (емкости).
При определении индуктивности и активного сопро-
тивления следует помнить, что они в значительной мере
зависят от частоты. При частотах,
близких к частотам собственных ко-
Рис. 10.26. Зависи-
мость постоянной вре-
мени для составляю-
щих прямой последо-
вательности больших
трансформаторов от
частоты.
лебаний, индуктивности рассеяния
обмоток уменьшаются примерно до
80% значения этих же индуктивно-
стей при 50 Гц; активные же сопро-
тивления могут возрастать почти на
порядок.
Зависимость постоянной време-
ни от частоты для составляющих
прямой последовательности круп-
ных трансформаторов показана на
рис. 10.26. Эта зависимость указы-
вает на быстрое затухание состав-
ляющих напряжения в переходном
процессе либо тока больших частот,
что подтверждает правомочность
принятых упрощений, которые при-
водят схему трансформатора к одно-
частотному контуру.
296
11. МАТЕМАТИЧЕСКИЕ МОДЕЛИ ОСТАЛЬНЫХ
ЭЛЕМЕНТОВ ЭНЕРГОСИСТЕМЫ
11.1. МОДЕЛЬ РЕАКТОРА
В энергосистемах устанавливаются два вида реак-
торов:
последовательные — для ограничения токов к. з., вы-
полненные без сердечника;
параллельные (поперечные) —для компенсации за-
рядной реактивной мощности длинных линий.
Оба вида реакторов однофазные, что дает возмож-
ность пренебречь фазной взаимоиндукцией.
Схема замещения реактора для анализа переходных
процессов при частотах, близких к частотам собственных
колебаний, может быть представлена в виде однородной
длинной линии, показанной на рис. 11.1.
Ln.d)(
r/i^=r
dx
Рис. 11.2. Схема замещения ре-
актора в виде четырехполюсни-
ка типа П с сосредоточенными
параметрами.
L— индуктивность: R — активное со-
противление; С3 — емкость по отно-
шению к земле; Ср — междувитко-
вая емкость.
Рис. 11.1. Схема замещения
элемента реактора длиной dx
в виде однородной длинной ли-
нии.
Параметры на единицу длины: Ln—
собственная индуктивность; Rn —
активное сопротивление; Сп — ем-
кость по отношению к земле; Cw —
междувитковая емкость.
Анализируя процессы изменений токов и напряже-
ний на выводах схемы замещения реактора, представ-
ленного в виде длинной линии, можно привести ее
к четырехполюснику П-типа с сосредоточенными пара-
метрами (рис. 11.2).
Наличие в схемах последовательных реакторов при-
водит к возникновению в энергосистеме в процессе из-
менения напряжений и токов гармонических высокой ча-
стоты, поскольку емкость реактора в сравнении с емко-
стями других элементов системы очень мала. Эти
20—1279 297
частоты имеют порядок от нескольких килогерц до де-
сятков килогерц.
Параллельные реакторы подключаются к длинным
линиям непосредственно либо через трансформаторы.
Это обстоятельство дает возможность пренебречь их
емкостью по отношению к земле, значение которой мало
в сравнении с емкостью линии. Наличие малой емкости
между катушками вызывает и в этом случае возникно-
вение процессов с высокими частотами около десятков
килогерц.
Высокочастотные колебания в реакторах влияют на
увеличение их активных сопротивлений тем значитель-
нее, чем выше гармоническая колебаний (при замеще-
нии реактора в виде длинной линии появляется теорети-
чески бесконечное число гармонических). Принципиаль-
но это дает основание рассматривать реактор как эле-
мент с сосредоточенными параметрами, так как высшие
гармонические в переходном процессе затухают.
11.2. МОДЕЛЬ ИЗМЕРИТЕЛЬНОГО ТРАНСФОРМАТОРА
Индуктивные трансформаторы напряжения, подклю-
ченные к линиям, способствуют ограничению перенапря-
жений, в частности, за счет создания путей стекания
емкостного заряда с линии. В этом случае трансформа-
тор напряжения моделируется с помощью его ветви на-
магничивания.
Емкостные делители напряжения могут также влиять
на перенапряжения при наличии схем с короткими от-
резками линий (например, линии с к. з.). В этом случае
делитель моделируется его емкостью. В других случаях
наличие емкостного делителя напряжения в энергосисте-
ме в расчетах может не учитываться.
Трансформаторы тока моделируются их емкостями
относительно земли. В особых случаях (например, при
подключении емкостных делителей) определенное влия-
ние может оказать индуктивность трансформатора тока.
11.3. МОДЕЛЬ ВЕНТИЛЬНОГО РАЗРЯДНИКА
Вентильные разрядники применяются для ограниче-
ния перенапряжений. Современные конструкции разряд-
ников дают также возможность ограничивать скачки
напряжения при коммутациях длинных линий, характе-
298
ризующихся большими запасами электромагнитной
энергии.
Вентильный разрядник состоит из искрового проме-
жутка и столба, обладающего переменным активным
сопротивлением.
Искровой промежуток подключает столб с изменяю-
щимся активным сопротивлением к контуру, в котором
должны быть ограничены перенапряжения после повы-
шения в последнем напряжения до определенного зна-
чения, а также прерывает ток, протекающий через раз-
рядник, при переходе его через нулевое значение. Столб
с изменяющимся активным сопротивлением ограничи-
вает перенапряжения и амплитуду тока до значений,
при которых происходит гашение дуги в искровом про-
межутке.
Рис. 11.3. Схема замещения разрядника с учетом логических элемен-
тов, отвечающих перекрытию разрядника и гашению результирую-
щего тока.
Рис. 11.4. Характеристика из-
менения во времени напряже-
ния искрового промежутка при
гашении дуги в магнитном
поле.
В старых конструкциях разрядников падение напря-
жения на искровом промежутке во время протекания
тока было очень мало в сравнении с полным напряже-
нием на разряднике, и вся энергия практически выде-
лялась в столбе с изменяющимся активным сопротивле-
нием. В новых конструкциях искровые промежутки со-
вмещаются с элементами гашения дуги в магнитном
поле, на которые приходится около половины полного
напряжения на разряднике. Этим способом столб с из-
меняющимся активным сопротивлением разгружается,
что дает возможность протекать через разрядник токам,
имеющим большие амплитуды,
20* 299
Не вникая в конструкцию вентильных разрядников,
на основе приведенного выше краткого описания прин-
ципов их работы можно утверждать, что модель разряд-
ника должна содержать:
логический элемент, обеспечивающий подключение
разрядника к контуру после превышения уставки по на-
пряжению (перекрытие);
элемент, моделирующий падение напряжения на
искровом промежутке во время прохождения результи-
рующего тока;
элемент, моделирующий вольт-амперную характери-
стику столба с переменным активным сопротивлением;
Рис. 11.5. Вольт-амперная ха-
рактеристика разрядника с из-
меняющимся активным сопро-
элемент, обеспечиваю-
щий отключение разрядника
в момент прохождения его
тока через нулевое значение.
Схема замещения раз-
рядника дана на рис. 11.3.
Логический элемент сравни-
вает значение напряжения
на разряднике со значением
разрядного напряжения и3.
Если |rz|<w3, то разрядник
не подключен к контуру,
если же |ц|^ц3, разрядник
тивлением. проводит ТОК.
В случае, когда разряд-
ник имеет катодный искровой промежуток, падение на-
пряжения на промежутке очень мало в сравнении с пол-
ным напряжением и им можно пренебречь.
Результаты опытов над искровыми промежутками
с магнитным дутьем показывают, что характеристика
изменения напряжения во времени, представленная на
рис. 11.4, идеализирована. Начальный отрезок характе-
ристики с неизменной ординатой соответствует значению
падения напряжения на искровом промежутке при про-
хождении тока. Далее под воздействием магнитного по-
ля дуга на рогах искрового промежутка удлиняется, что
вызывает возрастание падения напряжения на нем во
времени. Крутизна нарастания напряжения на этом от-
резке зависит от напряженности магнитного поля, удли-
няющего дугу. В предельном положении горящая дуга
в искровом промежутке имеет постоянную длину, что
представлено третьим отрезком характеристики.
зоо
Для разных конструкций разрядников характеристи-
ка дуги во времени задается числовыми значениями ли-
бо при физическом моделировании набирается на про-
граммной модели.
Характеристика столба с изменяющимся активным
сопротивлением показана на рис. 11.5. Эта характери-
стика может быть аппроксимирована отрезками прямой.
В математической модели характеристика активного
сопротивления задается числовыми значениями, а в фи-
зической модели — получается с помощью программной
модели.
В модели разрядника показана также индуктивность.
Учет этой индуктивности в модели обязателен во избе-
жание скачка тока при перекрытии. При отсутствии
в модели индуктивности ток определяется из зависи-
мости
R
и имеет скачок.
Значение индуктивности в математической модели
должно быть возможно меньшим, причем критерием ее
подбора является стабильность результатов расчета.
Последним элементом в схеме, приведенной на
рис. 11.3, является логическая система, проверяющая
ток, протекающий через разрядник. В момент первого
прохождения тока через нуль расчет должен быть пре-
рван, что соответствует в реальной системе погасанию
дуги в разряднике.
ПРИЛОЖЕНИЕ т
ОБОСНОВАНИЕ ПРАВОМЕРНОСТИ ПРАВИЛА ПОСТРОЕНИЯ
МАТРИЦЫ СЕТИ ИЗ МАТРИЦЫ ПРОВОДИМОСТЕЙ ЭЛЕМЕНТОВ
Исходные условия. Два элемента, характеризуемых
своими матрицами проводимостей Y1, Y2, имеют т\, т%
независимых узлов соответственно, общий узел приведе-
ния и соединяются между собой в k узлах. Зависимости
для узловых токов отдельных элементов имеют вид:
I^YHJ1, или [р;1 Yn .Yftl Y,< ^kk. Г u* 1UV
I2=Y2U2, или V - п- - |Y22 У 2k U2
. IV YV. .u2fe
(П1.1)
В этих зависимостях векторы токов и узловых на-
пряжений в обоих элементах, а также матрицы прово-
димостей элементов, разбиты на подматрицы, соответст-
вующие k общим узлам, сгруппированным на последних
позициях. После объединения узлов токи и напряжения
будут удовлетворять зависимостям (П 1.2). Матрица Y
в этом выражении является искомой матрицей проводи-
мостей сети, образованной двумя элементами, и опреде-
ляется исходя из условий, что напряжения общих узлов
одинаковы, а узловые токи равны сумме токов:
[Ij ’
12
id
(П1.2)
где
lPft=U2ft==Uft;
Ь=1Ч+12*.
Правило определения матрицы проводимостей сети
из матрицы проводимостей элементов вытекает из Струк-
туры матрицы Y,
302
Решение. Зайисимости (Ш.1) для отдельных элемен-
тов можно объединить:
Y1 012
02i у2
(П1.3)
I I2
где О12, О21 — матрицы нулей порядка лщХтг и m2Xwi..
После перестановки зависимости токи общих узлов за-
нимают последнее место
I
"Il- ~Nu Ott ^lk ®lk ~ Ui “
ls Ofi Ntt Ofk \tk U2
rfe Nkt °az Y’/^O^
-I2*- Nkt Okk N2kk-
= Y'U', (П1.4)
£
(П1.5)
г
I
у-
г
где О»/, Nij — подматрицы нулей и проводимостей поряд-
ка ZX/; i, j=k, I, t\
l=mi—k, t—m2—k.
Линейное преобразование *
CI'=CY'DU
трансформирует (П1.4) в (Ш.2), если
CI'=I, DU=U'.
Из (П1.6) вытекает:
fJ/ I
Jz
JftJd
(П1.6)
c =
D —
Jz
Jk
h J
/=Л, /, t.
где J/ — единичные матрицы порядка /X/,
После выполнения умножений получаем искомую матри-
“ цу проводимостей:
Y = CY'D =
ll Vlk
Ofi Nti Ntk .
LVftZ Nkt Y/d
где Nu, Ntt, Nik, Nki, Ntk, Nkt — как в (П1.4); Nkk=
=Nlkk+N2kk.
Из (П1.7) непосредственно вытекает правило форми-
рования матрицы проводимостей сети из матрицы эле-
ментов (см. § 1.2).
Здесь не требуется симметрии матрицы, что является
дополнительным достоинством описанного способа фор-
мирования матрицы сети.
(П1.7)
303
ПРИЛОЖЕНИЕ П2
СОБСТВЕННЫЕ И ВЗАИМНЫЕ СОПРОТИВЛЕНИЯ
И КОЭФФИЦИЕНТЫ МАКСВЕЛЛА КОНТУРОВ ПРОВОД—ЗЕМЛЯ
Единичное собственное сопротивление контура про-
вод— земля, Ом/км,
«уд.п-3 = RP + kf + /4ГС10-Ч In , (П2.1)
где Rp— активное сопротивление провода, Ом/км; f —
частота, Гц; k — коэффициент, равный 10~3 Ом/(км-Гц);
Dn~660 ]/p/f либо Z)n«93]/p, м, если /=50 Гц;
р= (100... 1000) Ом • м — удельное сопротивление грун-
та, мокрого и сухого соответственно; г0— замещенный
луч (отрезок) провода, м [г0= (0,81...0,825)г в случае
сталеалюминиевых проводов с несколькими слоями алю-
миниевых проволок, причем г — луч провода].
В соответствии с (П2.1) определяются элементы А,
В, Ri в матрицах из формул (2.9) и (2.10), а также
W — из (2.15).
Единичное взаимное сопротивление двух контуров
провод — земля, Ом/км,
Dn
*ед.п-з = kf + /4^10-*/
(П2.2)
где D — расстояние между осями проводов, м.
Вместо D подставляется среднегеометрическое рас-
стояние между осями проводов одной цепи либо между
проводами разных цепей и т. п.
По (П2.2) определяются элементы a, b, d, гц, hi,
в матрицах из формул (2.9) и (2.10), а также из (2.15).
Отсюда, например, вытекает:
единичное сопротивление прямой последовательности
цепи линии, Ом/км,
*уд.п-з - *ед.п-з = RP + /4я10 ’ V 1п
единичное собственное сопротивление нулевой после-
довательности цепи линии, Ом/км,
£)3
*уд.п-з + Чя.п-Э = W In 7^-,
304
’ единичное взаимное сопротивление нулевой последо-
вательности двух цепей линии, Ом/км,
i 2уд;а—зо==32ед.п—з.
. Собственный коэффициент Максвелла схемы про-
вод— земля, км/мкФ:
2h
у = 181п —. (П2.3)
* Здесь h — расстояние провода от земли либо среднее
i геометрическое средней высоты подвески проводов цепи
J над землей, м; г — луч провода, м.
По (П2.3) подсчитываются элементы z, Zi, z2, s, Si,
t s2 матрицы F* в формуле (2.31).
; Взаимный коэффициент Максвелла схемы провод —
земля, км/мкФ,
i 7j=181n-£j-. (П2.4)
/ Здесь Н — расстояние провода от своего зеркального
Р отображения либо среднегеометрическое расстояний
проводов цепи от их зеркальных отображений, м; D —
р расстояние между двумя проводами либо среднегеомет-
i рическое расстояний проводов цепи. По (П2.4) рассчи-
!тываются элементы wi, w2, р, pi, р2, b, d, di, d2 матри-
цы F в (2.31).
Отсюда вытекает следующее:
емкость прямой последовательности одноцепной ли-
нии без грозозащитных тросов, мкФ/км,
с _ с _ _1___________1________1
12 Y — 7J ~ 2hD ~~ D ’
1 18 In —
Емкость нулевой последовательности одноцепной ли-
нии без грозозащитных тросов, мкФ/км,
Г __ 1 — 1
° Y + 2т] 2МН ’
18 In
! ПРИЛОЖЕНИЕ ПЗ
РЕАКТИВНЫЕ СОПРОТИВЛЕНИЯ И ПОСТОЯННЫЕ ВРЕМЕНИ
СИНХРОННОЙ МАШИНЫ, ВЫРАЖЕННЫЕ ЧЕРЕЗ ПАРАМЕТРЫ
i МАШИНЫ
г Параметры машины:
f Ха, Х'а, X"d — реактивные сопротивления в оси d:
[ синхронное, переходное и сверхпереходное;
305
Xq, X'q, X"q — реактивные сопротивления в оси q:
синхронное, переходное и сверхпереходное;
T'd, T"d — постоянные времени процессов в оси d:
переходная и сверхпереходная;
T'q, T"q — то же только процессов в оси q;
Ха1 — реактивное сопротивление рассеяния контуров
статора;
Ra— активное сопротивление контуров статора.
Величины и коэффициенты в формулах, приведенные
к контурам ротора:
Xad—Xd—Xai — реактивное сопротивление реакции
якоря в оси
Xaq=Xq—Xai — то же, но в оси q",
Xfi — — реактивно® сопротивление рас-
сеяния контура возбуждения;
XDi==^z^-^x’d~^ai)~^ же, но демпфер-
ного контура D;
= Х ц~~Xal X —реактивное сопротивление рас-
w Xq — X'q
сеяния контура, замещающего массивный ротор (в оси q)\
XQ2 = Xqr= X'q-X^' (X'<i - xal) ~ реактивное со-
противление рассеяния демпферного контура Q либо мас-
сивных наполюсников (башмаков):
n 1 X'd X2ad
Rf г---— активное сопротивление
' “ном/ d xd Xd — X'd r
контура возбуждения;
п 1 X"d (X’d — XoiY
RD ~ <0 ” активное сопротивле-
“ном7 а Л d Л d Л d
ние демпферного контура D;
n X'q x*aq
R =------——тА —-------------активное сопротивление
“ноли q ^q ^q q
контура для случая, аналогичного XQl ;
г X"q (X'q~Xaly
----тгг -y7~ ~vt—yf, активное сопротивле-
“ном7 q -X q X q q
ние контура для случая, аналогичного XQ2;
ЗОЬ
Xf — Xad-[~Xfl, xD=xad-\-xDh XQ=Xaq-]- xQlt
Xqz—Xaq-{-XQl — собственное реактивное сопрстивле-
Ние возбуждения, демпферного D, демпферного Q и заме-
щенного контуров в оси Q:
гп _ Xf * ____D . гр ______ , гр________
ЫНОМ^£) ® WHOM^Q
XQz
=-----р,----постоянные времени контуров, приведенных
t0HOM/'Ql
выше;
Т7 Т I Т • Т" (л 2qc^ D
1 do — 1 f ~Г 1 D' do ^1 — XfX^J Tf + Td ’
pt —Xd pt .
1 do X'd d'
pn X'd ptr . pn _________Q_ pn . pt ___4 pt
1 ' do X"d 1 d' 1 qo Xnq q-> 1 X q' <!'
Обозначено: С-^ХрХ/—X2ad, получается:
Afi — — RiXDC; A/d= RfXaJC’ ^ld — ^f^ad^Dp’
= ^DD=-/?DX(C; BDd-^RDXadXtlC-,
X“q< Adl = dP’ AdD=XtP<
Bdd = Xad[\ - %„,(%,j + A^X^X',
D Y f 1 Xgq \
DqqT~ ^aq\L xqJ‘
Допущение XdD=X/D=Xad (определение токов рото-
>ра) по [5] неприемлемо, если:
фиктивное реактивное сопротивление рассеяния ста-
-тора
Хс = fTdXd,
где коэффициент экранирования Hd=.l--------xdXf'D '
Следует иметь в виду, что значение pd, полученное
по данному выражению, является приближенным, по-
скольку массивность ротора не позволяет произвести его
измерений. Реактивное сопротивление Хс можно опре-
делить из основных конструктивных параметров маши-
ны либо путем усредненных измерений с применением
307
приближенной формулы:
< __ (Xd — X'dY Хд — Х’д X"d — Хс
аХ'glr'rfWIIOM ^"d Х'д Ас
Здесь а = -—; /( — амплитуда периодической состав-
ив
ляющей тока возбуждения в первый момент трехфазно-
го к. з. на зажимах генератора; Оо — ток возбуждения
перед к. з.
Фиктивное реактивное сопротивление рассеяния кон-
туров ротора
Xrt = (Xc-[Xal)
*ad
ixd-xc-
Из измерений следует (данные расчетов в [5]), что
Xri=0,07-ч-0,016 у турбогенераторов мощностью 722-4-
222 МВ-А соответственно и —0,0155-4—0,0525 у гидро-
генераторов 118 и 86 МВ-А.
Следовательно, в турбогенераторах Хгс>0, а Хс>
>XoZ; в гидрогенераторах Xrc<0, a Xc<XaZ; в турбо-
генераторах без демпферных контуров и гидрогенерато-
рах с полюсами, набранными из листового железа,
Xrc£^0, Xc^Xai.
Величины, полученные из формул, приведенных
в первой части приложения ПЗ, будут обозначены
с точкой:
xDl=x-Dlk-, ;
, ___ X\d । (Xad-j-Xrc)z
•OD— xdxD~ sfD X,XD •
TI^X\rd + T"d(l-
d \
X’d
X'fd
sdD \
sfD J
T'dT"d .
SfDTf
p D
D “hom^ d
^HOM' f
308
ПРИЛОЖЕНИЕ П4
ОСНОВНЫЕ ЧАСТИЧНЫЕ ПРЕОБРАЗОВАНИЯ
ПРИ ИСПОЛЬЗОВАНИИ ПРЕОБРАЗОВАНИЯ (0, 1, 2)
Обозначения:
S =
'1
А = о
о
11 =
1
а ।
а2
о-
0
1
1
1
1
а2
а
; а =
Г
1 ;
1.
" 1
к = —1
о
о
1— а
О
’ 1 '
1
1
о
1
о
о
1
—1
о
о
1— о2
I 1W
ГО
—и
О ; 1= 1
1
; В
.1
в
ь
ь
1
о
о
ь
в
ь
о
1
о,
b '
ь
в
Г 1
1
1
о
а2
О
’1
1
.1
0„ = [0 0 0]; е±; =е±/г*/с; е.,=е^"/с;
'О
00= о
.0
2
—1
— 1
21 =
о
О ; 01 О
О
о
о
о
о
—1
2
—1
—1 -
—1
2
о
1
о
ГЗ
О'
о ;
1
; 30= о
о
о
о
о
о
о
0.
Зависимости между матрицами:
В + 26
О
О
Г1
S_1= 1
1
,2
а
1
а ; SBS ’ =
о
в—ь
о
О
О
В—Ь
SkS-1 = a;
=BS;
а* =
,2
S11S 30; S21S , = 3 01;
SkTS“1 = a*; 1юк = 1№кт = Ою; 1^=3;
detkT = detk = O; 1-Г = к; I“1 = IT; к11 = 11к =
= кт11 = 11кт = 00;
кЦ = кт1& = 00; 11 Ц = 31А В11 = (В-{-26) 11;
Bl& = (B-|-26)lfe; кВ = Вк = (В -6) к;
ктВ = Вкт = (В - 6) кт;
ктк = ккт = 21; ктВк=кВкт= (В—6)21;
111 = 111 = 1т11=:111т=11; IkIT = k;
О
-а2
О
~ о
о
о
о
о
1—1
1 — a = V3e
309
аа* — а*а= 1;
SIS’=A; SITS-1 = A*; AA*=1;
SIBS’ = SI S ’ S В S-’=A Bs;
SBITS~’=BSA* =
"B + 26 0
0 a (B — b)
0 0
0
0
a2 (B—b)
IBI' B;
Bs A 4" ABS —
2 (B + 2b)
-(B-b)
~{B~b) J
A—1 = —a*; A*—1 = —a.
СПИСОК ЛИТЕРАТУРЫ
1. Adkins В.: The General Theory of Electrical Machines. London,
1959.
2. Auges P.: La matrice des impedances de transfert d’un reseau et
ses applications. BSFE IV. t. II seria 8, nr 16.
3. Bienkowski J.: Automatyzacja obliczen pnjdow zwarcia w duzych
ukladach elektroenergetycznych, Rozprawa doktorska, 1975 Poli-
technika Warszawska.
4. Bogucki A.: Wspolzaleznosc zmian czgstotliwosci i napigcia w
systemie elektroenergetyczriym. Zeszyt Naukowy 273, Politechnika
Sljjska Elektryka 1969 z. 26.
5. Canay M.: Experimentalle Ermittlung der Ersatzschemate und der
Parameter einer idealisierten Synchronmaschine. Bull, des Schwei-
zerischen Elektrotechnischen Vereins. Bd 63,- 1972, s. 1137—1146.
6. Cholewicki T.: Elektrotechnika teoretyczna, wyd. II. Warszawa,
WNT 1972.
7. Cholewicki T.: Elektryczne linie dlugie i uklady drabinkowe nie-
jednorodne. Warszawa, PWN 1974.
8. Ciok Z.: Przepigcia Iqczeniowe w ukladach elektroenergetycznych.
Warszawa, PWN 1972.
9. El Abiad С. H.: Digital Calculation of Line — to — Ground Short
Circuits by Matr ix Method. Trans. AIEE, cz. Ill PAS t. 79,
1960.
10. Fadiejewa W. N.: Metody numeryczne algebry liniowej. Warsza-
wa, PWN 1955.
11. Filipek Z.: Metoda stopniowej eliminacji wgzlow przy obliczaniu
zwarc w syst emach elektroenergetycznych. Energetyka 1975 Nr. 5.
12. Hammarlund P.: Transient Recovery Voltage. Stockholm, Gene-
ralstabens Litografiska Anstalts Forlag 1946.
13. Heller B., Veverka A.: Surge Phrnomena in Electrical Machines.
Praha, Academia 1968.
14. lasicki Z.: Zjawiska nieustalone wukladach elektroenergetycznych.
Warszawa, WNT 1970.
15. Jezierski E.: Transformatory. Warszawa, WNT 1965.
310
16. Караев Р. И. Переходные процессы в линиях большой протя-
' женности.— М.: Госэнергоиздат, 1963.
^7. Анормальные режимы работы крупных синхронных машин/
: Казовский Э. Я- и др.— Л.: Наука, 1969.
18. Kobosko S.: Analiza wplywu przewodow odgromowych na po-
miar impedancji przez zabezpieczenie odleglosciowe wysokich
napigc. Rozprawa doktorska na Wydziale Elektrycznym Politech-
< niki Warszawskiej 1975.
19. Koenitz. H., Pundt H.: Matematische Grundlagen und Netzpara-
meter. Leipzig, VEB Deutscher Verlag 1968.
20. Коганов 3. Г. Волновые напряжения в электрических маши-
нах.— М.: Энергия, 1970.
21. Kolek W., Pawluk К.: Systematyka zapisu rownan maszyn elek-
trycznych (na przykladzie maszyny synchronicznej). Przeglgd
Elektrotechniczny 1962 z. 12.
22. Laible T.: Die Theorie der Synchronmaschine im nichtstationaren—
Betrieb ... Berlin, Springer 195'2.
23. Latek W.: Turbogeneratory. Warszawa, WNT 1973.
24. Mostowski A., Stark M.: Algebra liniowa. Warszawa, WNT 1958.
25. Pawluk K-, Bednarek S.: Rozruch i stany asynchroniczne silni-
kow synchronicznych. Warszawa, WNT 1968.
26. Van der Pol B., Bremmer H.: Operational Calculus. Cambridge,
1965.
2?7. Praca ukladow elektroenergetycznych. Warszawa, WNT 1965.
28. Przyluski A.: Przeksztalcenia liniowe symetrycznych obwodow
trojfazowych eliminuj^ce opornosci wzajemne. Arch. Elektrot.
* 1956 z. 3.
29. Rachwalski J.: Impedancje zerowe autotransformatordw najwyz-
j szych napi§c. PE 1964 nr 9.
30. Rydzewski Z., Majcher J.: Analiza macierzowa obci^zen niesymet-
rycznych transformatorow. PE 1973 nr. 6.
31. Slamecka E., Waterschenk W.: Schaltvorgange in Hoch und Nie-
derspannungsnetzen. Siemens Aktiengesellschaft 1972.
32. Страхов С. В. Переходные процессы в электрических цепях, со-
держащих машины переменного тока. — М.: Госэнергоиздат,
1960.
33. Tiney W. F., Peterson М. М.: Steady State Security Monitoring.
Handschin E.: «Real-Time Control of Electric Power Systems».
London, Elsacier 1972.
. 34. Веников В. А. Переходные электромеханические процессы в
электрических системах. — М.: Высшая школа, 1970.
35. WNIIE publikacja wewnetrzna, Moskwa 1967. Opis programu
RUEN — 1/67—M—220.
СОДЕРЖАНИЕ i
Предисловие к русскому изданию............;
От авторов................................||
Частьпервая । !
МАТЕМАТИЧЕСКИЕ МОДЕЛИ ЭЛЕМЕНТОВ ' <
ЭНЕРГЕТИЧЕСКИХ СИСТЕМ ДЛЯ ИССЛЕДОВАНИЯ у
УСТАНОВИВШИХСЯ РЕЖИМОВ ПРИ ЧАСТОТЕ,
БЛИЗКОЙ К НОМИНАЛЬНОЙ
1. Математические модели электрической сети для расчетов
установившихся режимов...................................... 8
1.1. Матрица проводимостей узлов сети................
1.2. Замена узлов и ветвей на узлы и элементы системы
1.3. Линейные преобразования, применяемые при созда-
нии математических моделей элементов энергосистем
1.4. Типовые примеры преобразований матриц проводи-
мостей сети..........................................
2. Математическая модель линии электропередачи в устано-
вившихся режимах..........................................
2.1. Основные допущения . . .............
2.2. Основные зависимости.............................
2.3. Матрица сопротивлений и ее элементы . . . .
2.4. Матрицы проводимостей............................
2.5. Схемы замещения линии............................
2.6. Одноцепная линия.................................
2.7. Математическая модель ВЛ с учетом сосредоточен-
ных емкостей.........................................
2.8. Емкость одноцепной линии.........................
2.9. Математическая модель линии с учетом емкостей .
2.10. Математическая модель длинной линии в установив-
шемся режиме..........................................
2.11. Учет активного сопротивления заземления грозо-
защитного троса одноцепной линии .....................
8
3
;з
I'
'2
।
.4
0
13
65
65
66
72
3. Математическая модель синхронного генератора ... 77
3.1. Формулировка задачи. Уравнение движения ротора 77
3.2. Уравнения переходных процессов в контурах ротора ₽0
3.3. Математические модели генератора в симметричном
установившемся режиме. Пространственные оси d, q
ротора и направления d, q на комплексной плоскости 94
3.4. Модель синхронного генератора для режима к. з. . 99
3.5. Математическая модель синхронной машины для ис-
следования режимов при постоянном скольжении . Ю
3.6. Реактивные сопротивления синхронной машины в опе-
раторной форме........................................104
3.7. Математические модели синхронной машины для ис-
следования электромеханических переходных процес-
сов ..................................................109
4. Математические модели трансформаторов..................U6
4.1. Двухобмоточные трансформаторы.....................И~
4.2. Трехобмоточные трансформаторы . . '. . . . 140
312
4.3. Автотрансформатор со схемой соединения Y/Yo/Д-П 152
4.4. Трансформатор со схемой соединения ... 162
4.5. Матрица узловых ~ проводимостей трансформатора,
оснащенного устройством регулировки комплексного
коэффициента трансформации...........................165
5. Математические модели нагрузки 183
5.1. Характерные особенности нагрузки.................183
5.2. Статические модели нагрузки......................183
5.3. Динамические модели нагрузки.....................187
Часть вторая
МАТЕМАТИЧЕСКИЕ МОДЕЛИ ЭЛЕМЕНТОВ
ЭНЕРГОСИСТЕМ ДЛЯ РАСЧЕТОВ ЭЛЕКТРИЧЕСКИХ
РЕЖИМОВ ПРИ ЧАСТОТАХ СОБСТВЕННЫХ
КОЛЕБАНИЙ
6. Общие сведения.........................................190
7. Математические модели коммутаций и возмущений . . . 192
8. Математическая модель длинной линии ...................202
8.1. Общие соображения . . ....................202
8.2. Модель длинной линии.............................204
8.3. Модель длинной однофазной линии..................207
8.4. Модель однофазной цепочечной линии .... 225
8.5. Модель короны....................................253
8.6. Параметры длинной линии — зависимость активного
и индуктивного сопротивлений от частоты . . . 256
9. Математическая модель генератора.......................260
9.1. Общие соображения................................260
9.2. Модель трехфазного синхронного генератора . . . 261
9.3. Параметры генератора — зависимость активного и ин-
дуктивного сопротивлений от частоты . . . . . 274
10. Математические модели трансформаторов.................275
10.1. Общие соображения................................275
10.2. Модель двухобмоточного однофазного трансформа-
тора .................................................275
10.3. Модели двухобмоточных трехфазных трансформато-
ров ..................................................284
10.4. Модель трехобмоточного трехфазного трансформатора 292
10.5. Параметры трансформаторов..................296
11. Математические модели остальных элементов энергоси-
стемы .................................................. 297
11.1. Модель реактора............................297
11.2. Модель измерительного трансформатора .... 298
11.3. Модель вентильного разрядника..............298
Приложение П1. Обоснование правомерности правила построе-
ния матрицы сети из матрицы проводимостей элементов . . 302
Приложение П2. Собственные и взаимные сопротивления и
коэффициенты Максвелла контуров провод — земля . . . 304
Приложение ПЗ. Реактивные сопротивления и постоянные вре-
мени синхронной машины, выраженные через параметры
машины....................................................305
Приложение П4. Основные частичные преобразования при
использовании преобразования (0, 1, 2)...................300
Список литературы ....................................... 319