/






















































Author: Лебедев А.А. Чернобровкин Л.С.
Tags: авиация летательные аппараты беспилотные летательные аппараты
Year: 1962




Text
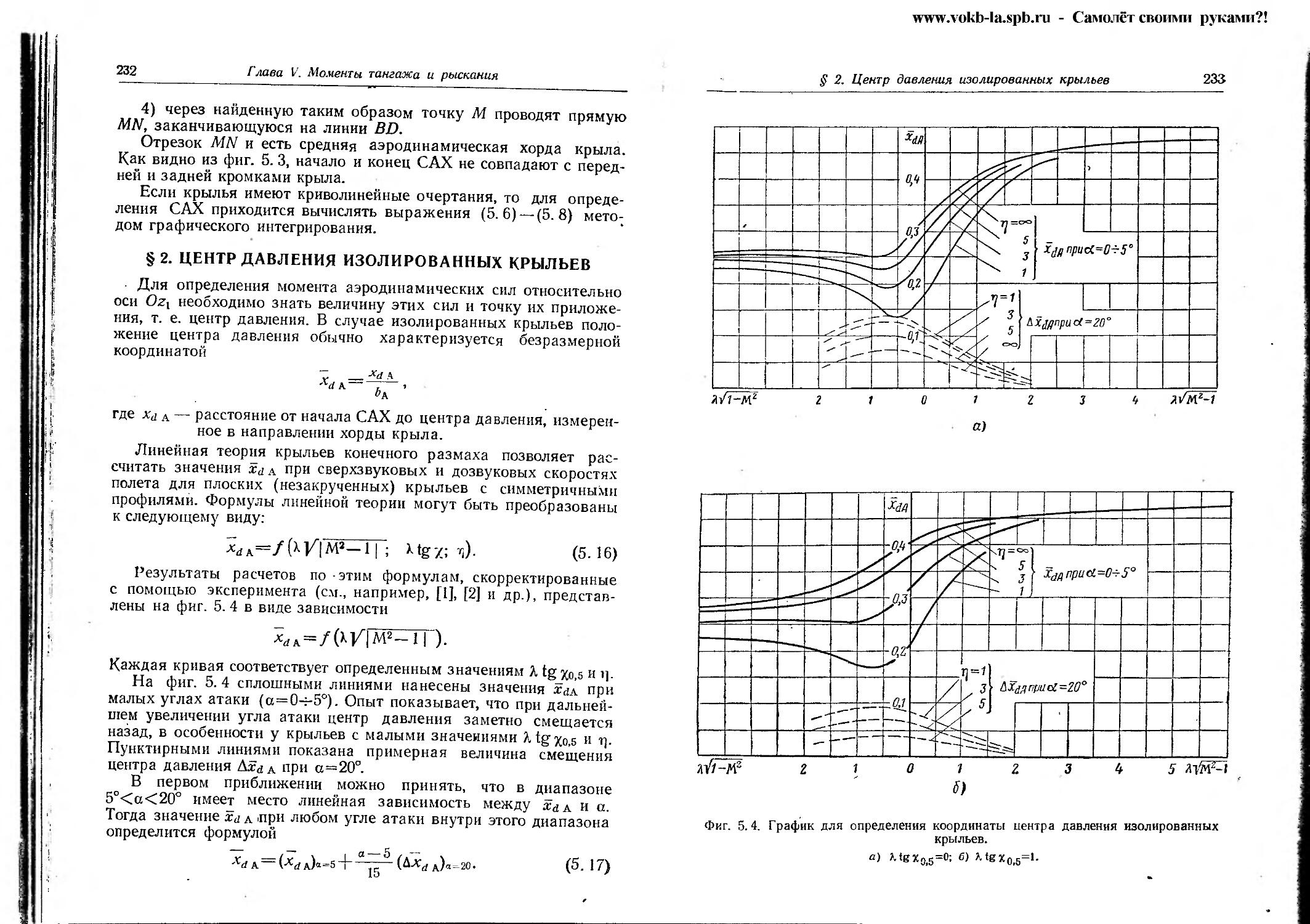
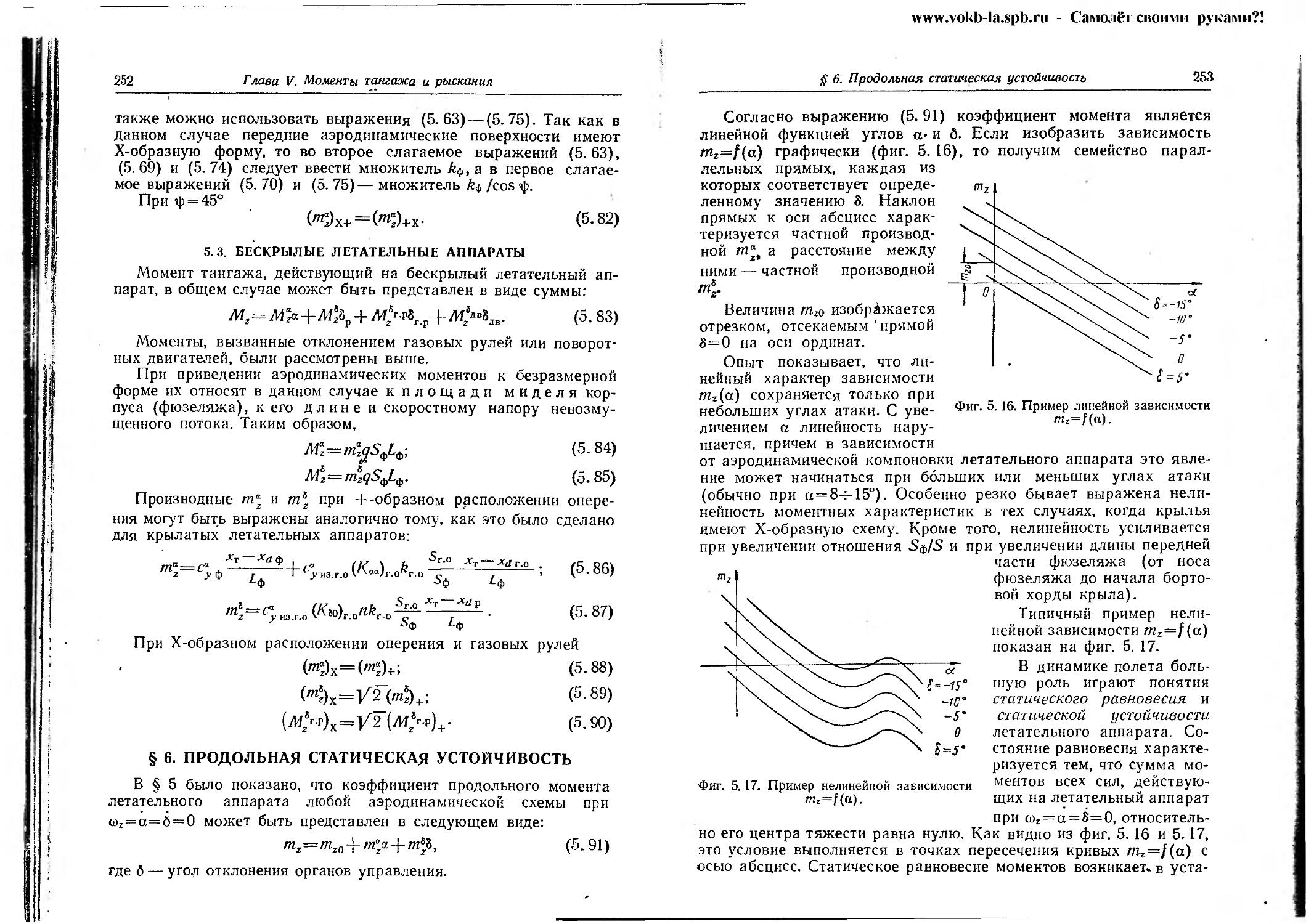
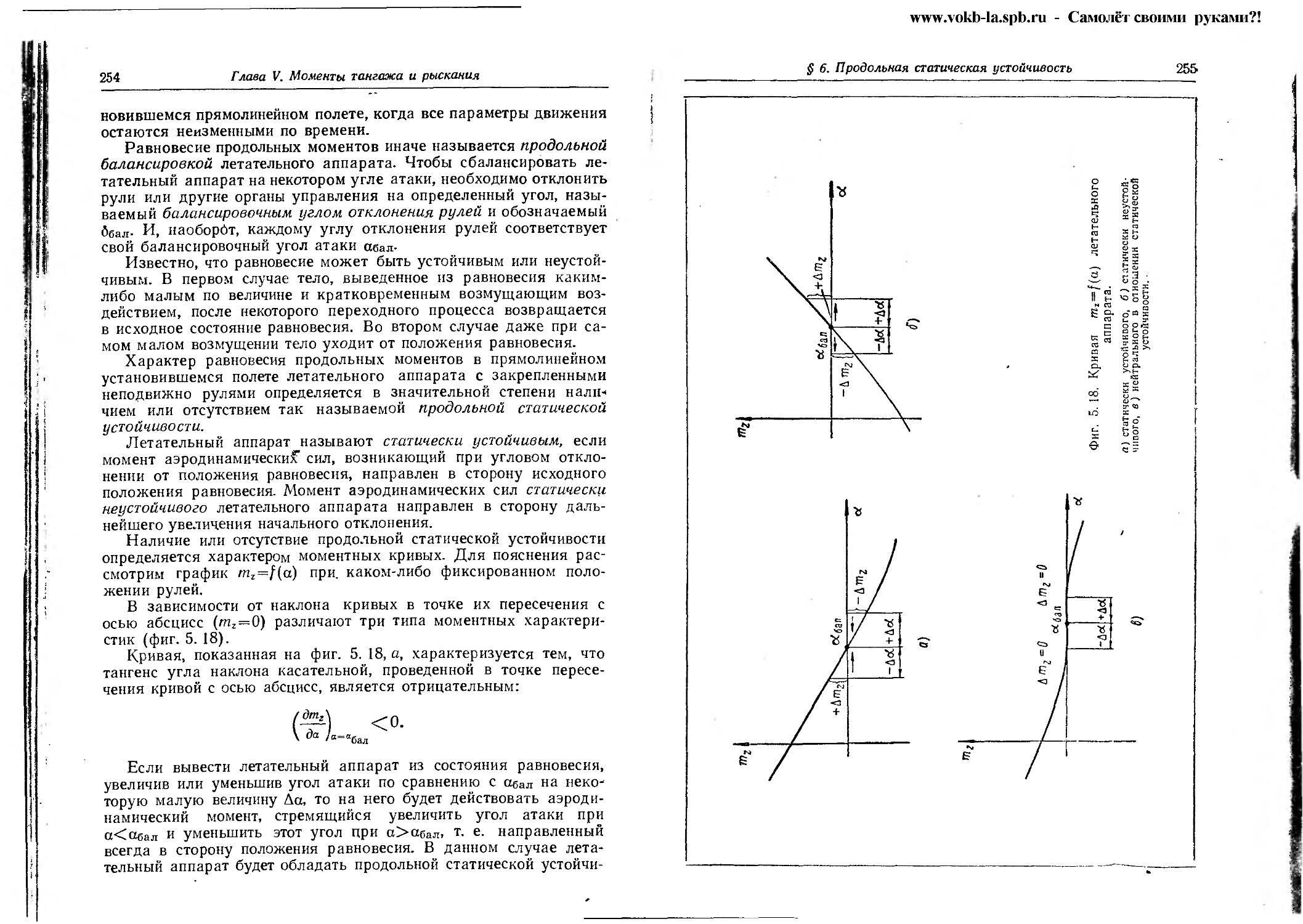
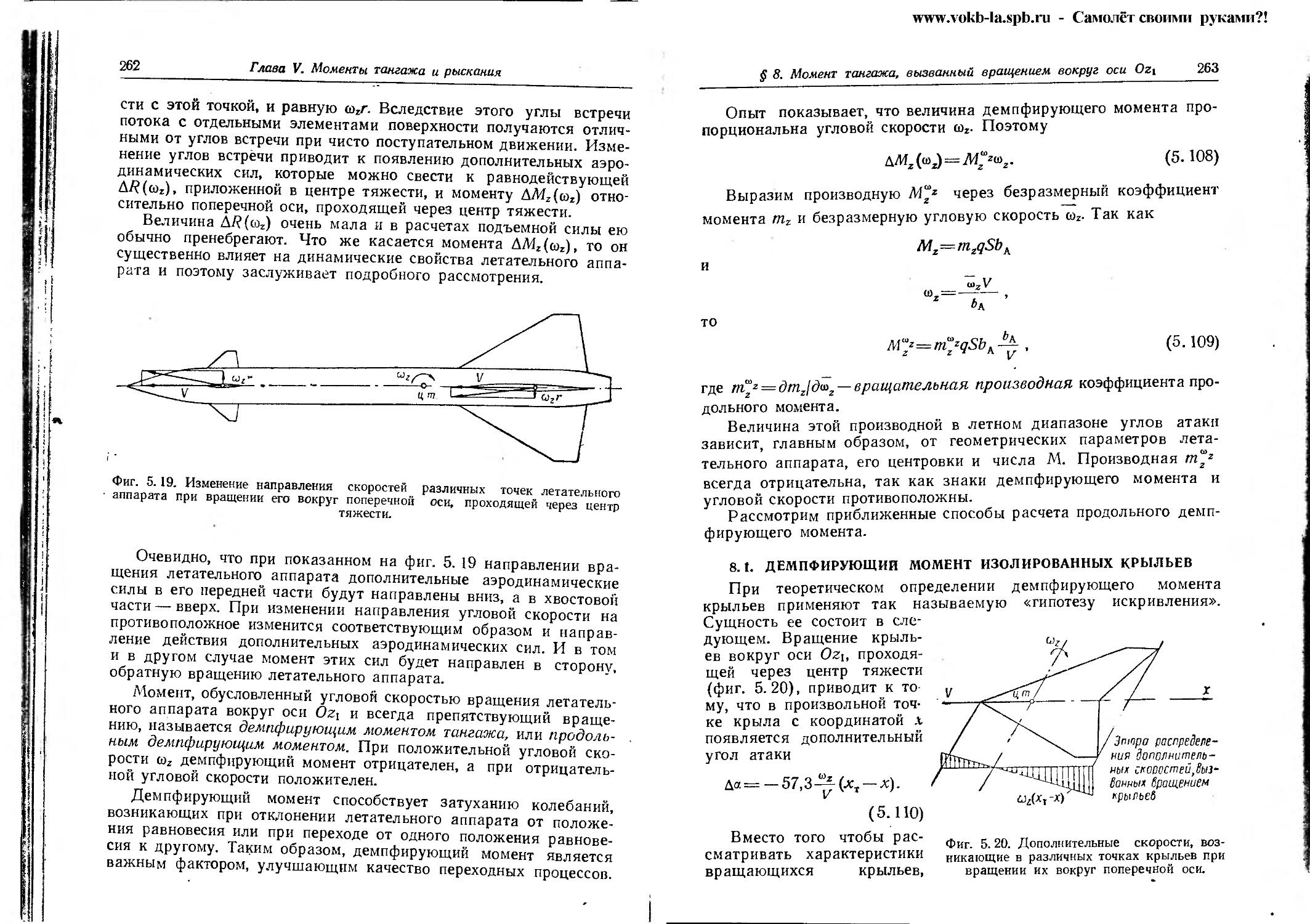
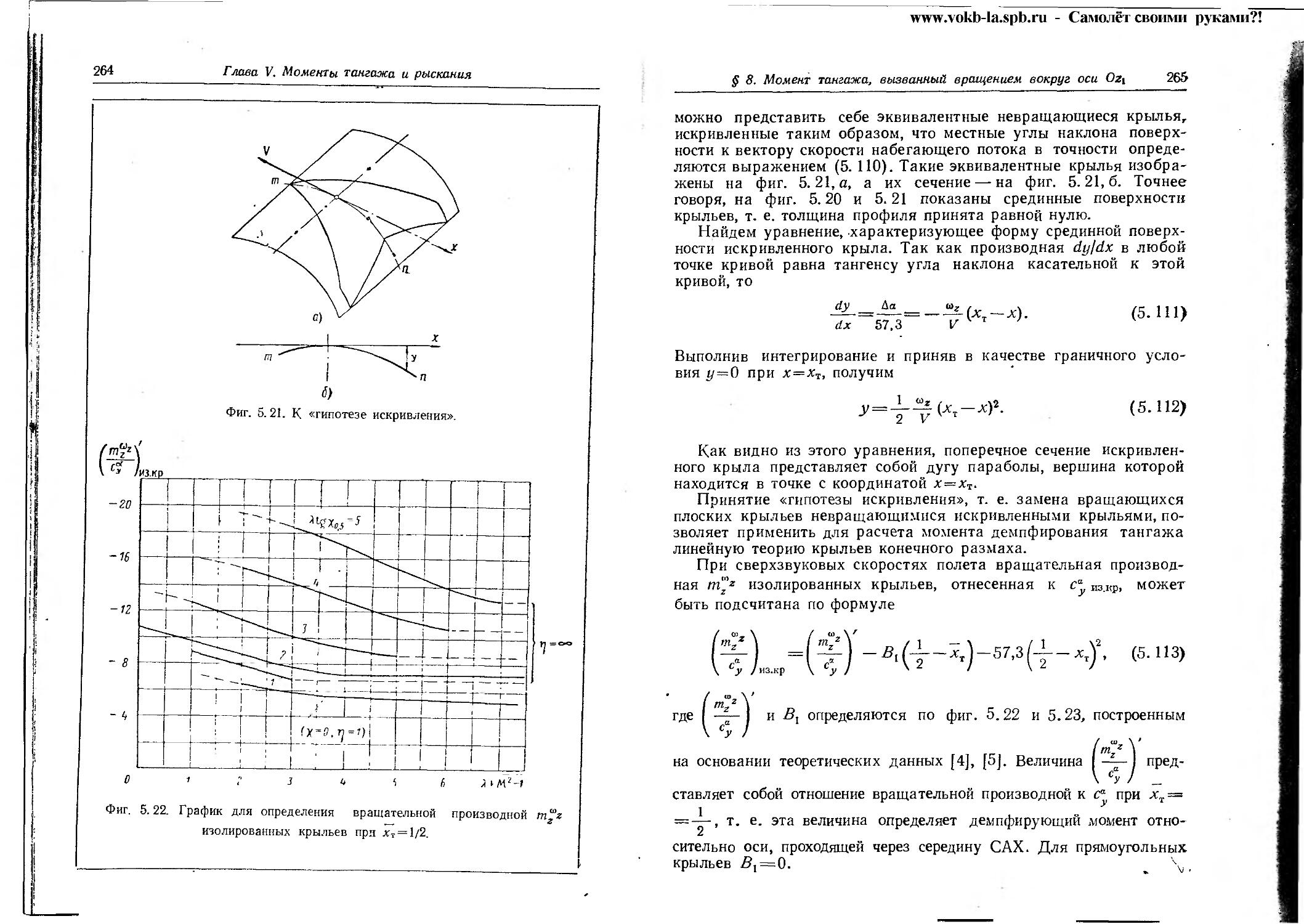
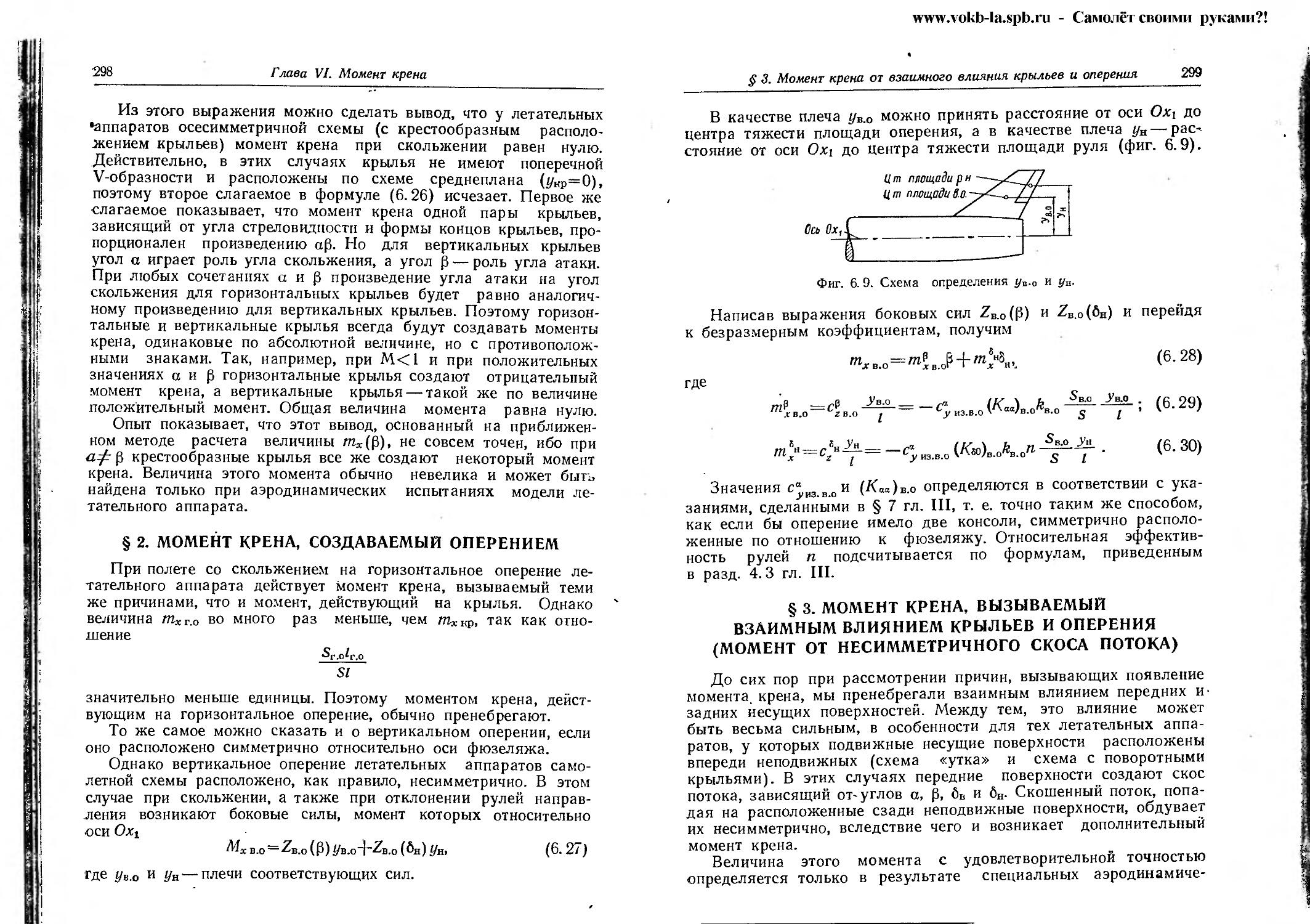
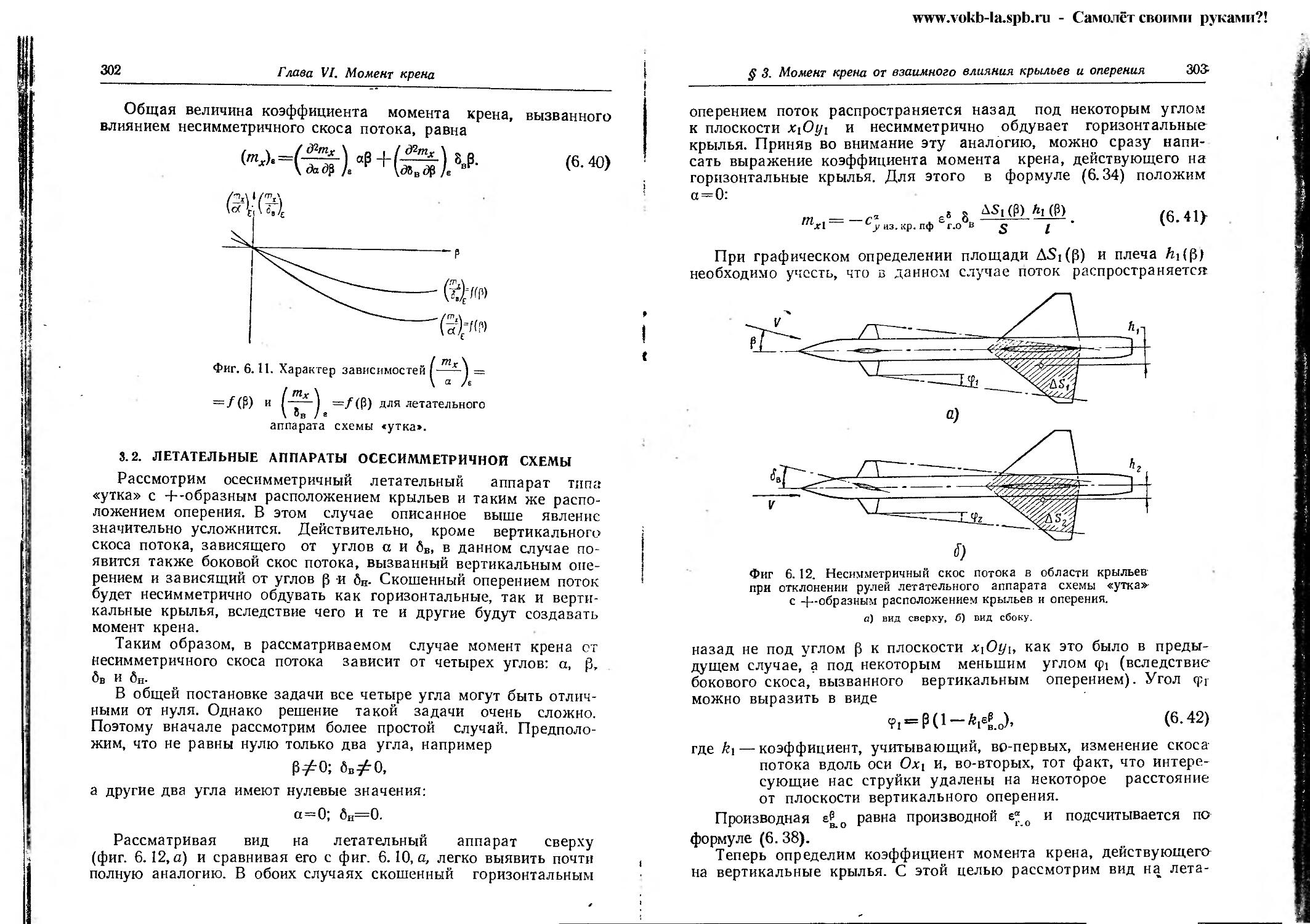
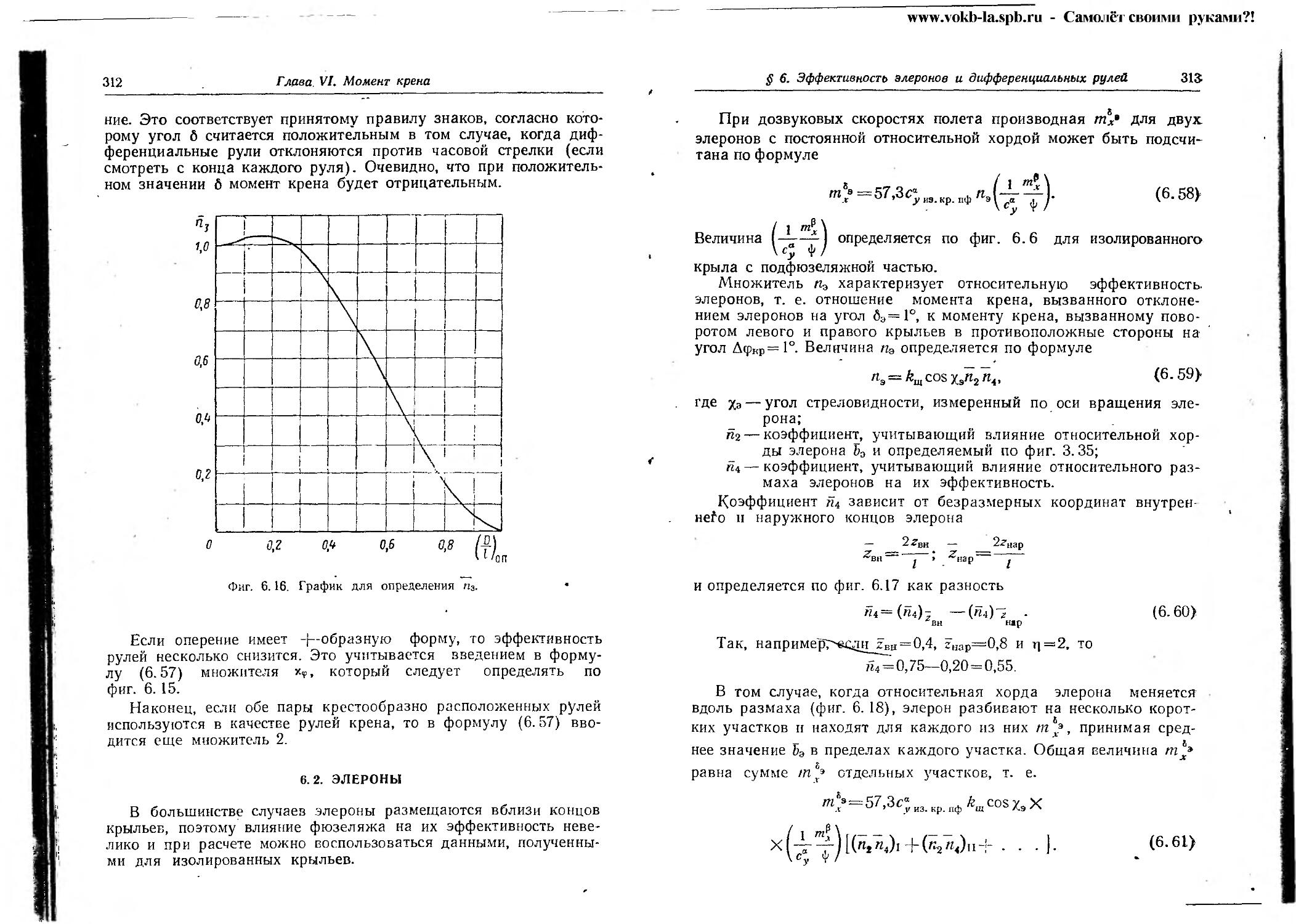
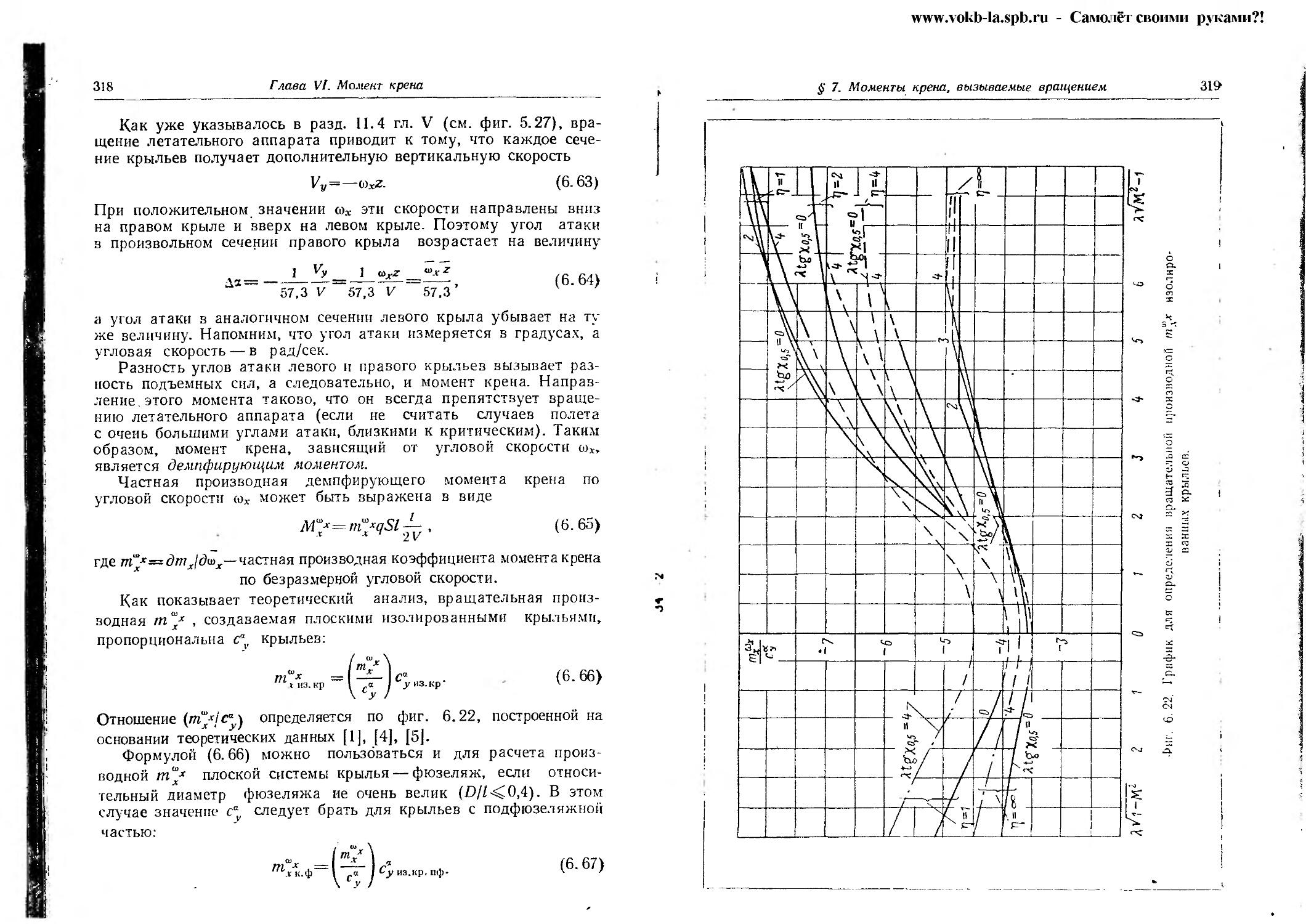
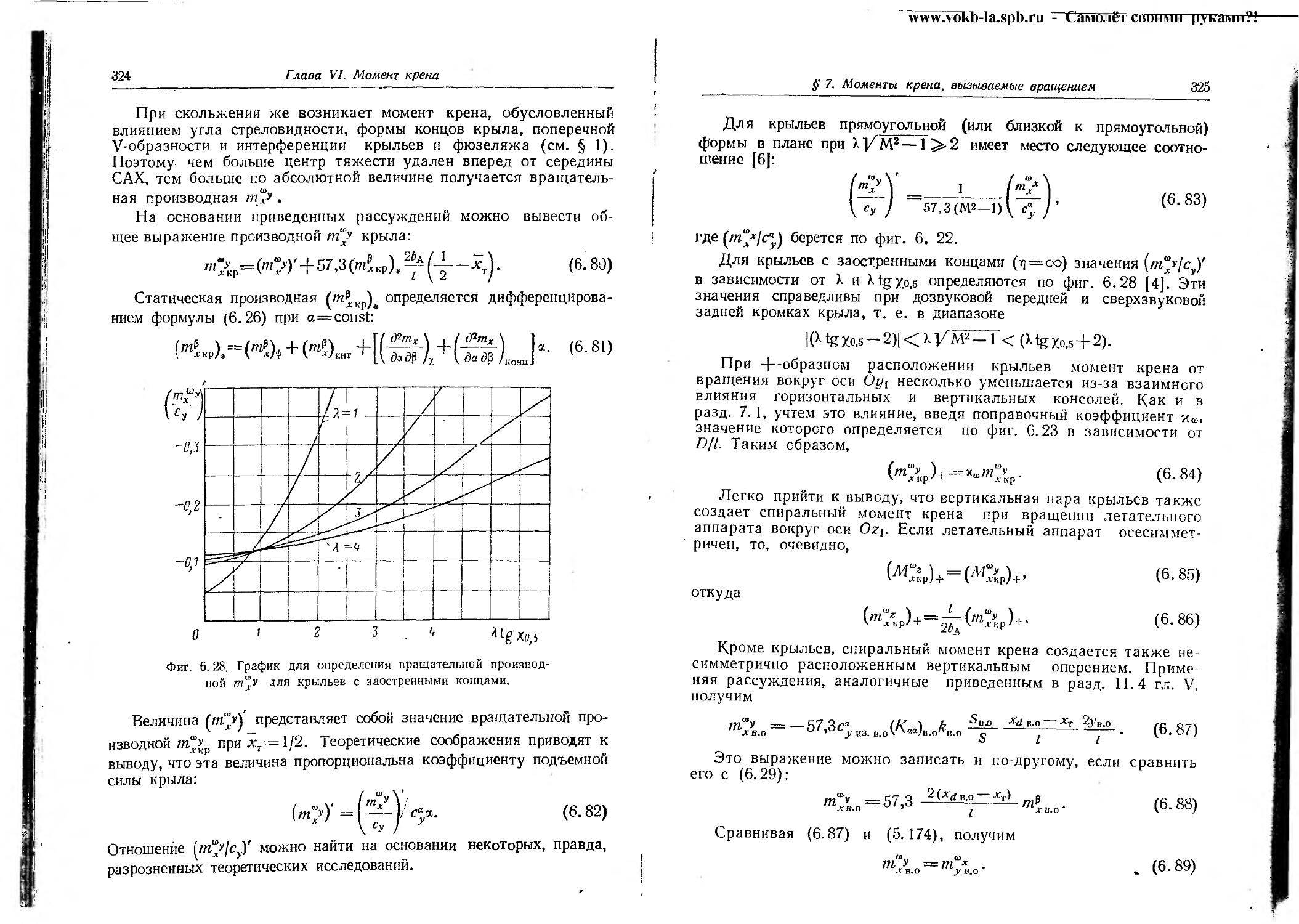
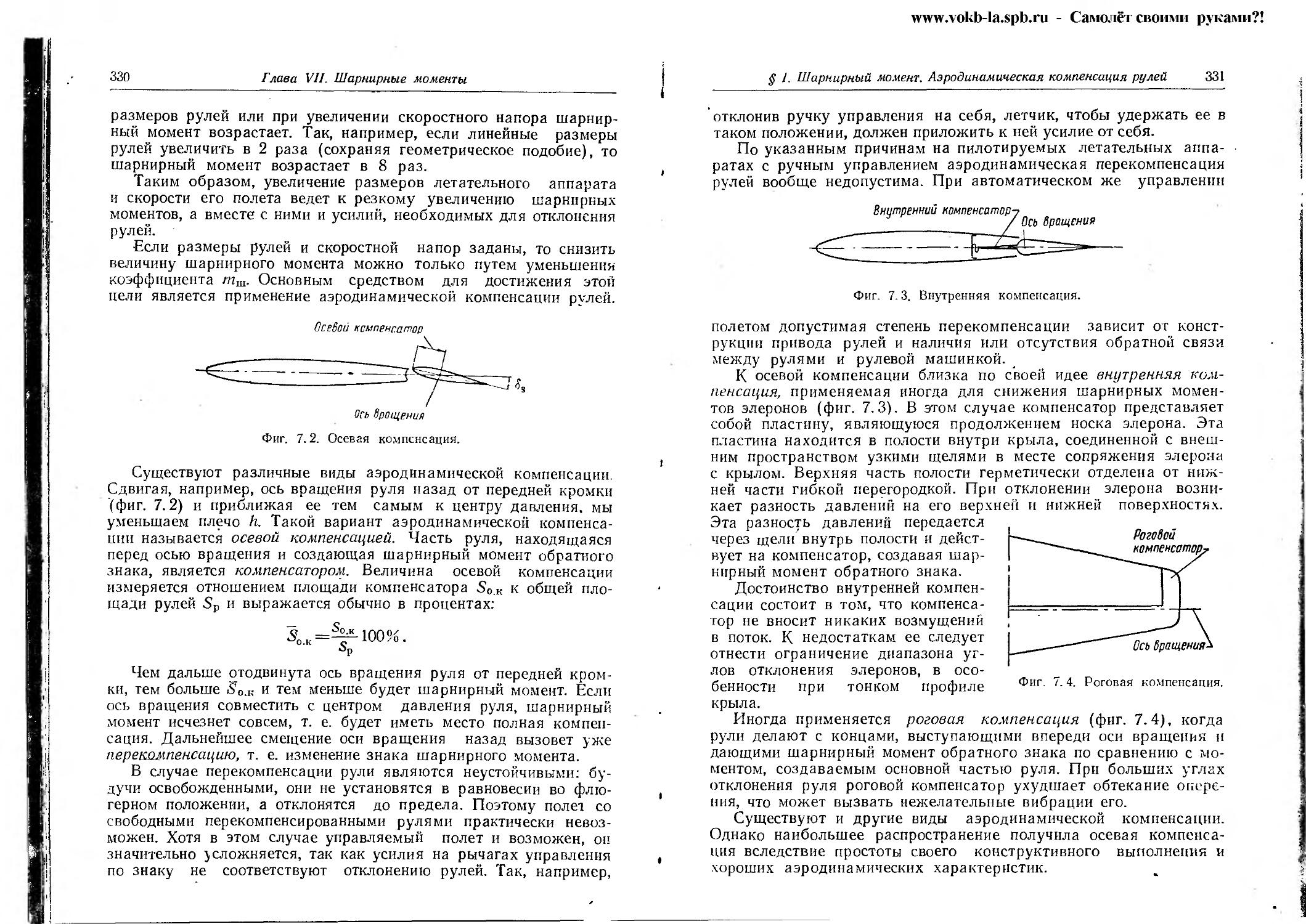
www.vokb-la.spb.ru - Самолёт своими руками?!
А. А. ЛЕБЕДЕВ и Л. С. ЧЕРНОБРОВКИН .
ДИНАМИКА ПОЛЕТА БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Под редакцией докт. техн, наук, проф. А. А. Лебедева
Допущено
Министерством высшего и среднего специального образования РСФСР в качестве учебного пособия для авиационных вузов
ГОСУДАРСТВЕННОЕ
НАУЧНО-ТЕХНИЧЕСКОЕ ИЗДАТЕЛЬСТВО' ОБОРОНГИЗ
Москва 1962
4"
Предисловие
Для учебных целей очень важно располагать хотя бы грубо приближенными методами расчета основных аэродинамических характеристик летательных аппаратов различных схем в широком диапазоне чисел М. В гл. III—VII излагаются такие методы для определения аэродинамических характеристик летательных аппаратов при малых углах атаки, малых углах скольжения и отклонения органов управления, когда аэродинамические характеристики можно считать линейными.
Эти методы основаны на теоретических и экспериментальных работах, опубликованных в иностранной печати.
Расчетные формулы составлены применительно к наиболее ча-. сто встречающимся за рубежом схемам летательных аппаратов: обычной схеме (с задним расположением рулей), схемам «утка» и «бесхвостка», схеме с поворотными крыльями, с различными вариантами крыльев и оперений (монопланные, +- и Х-образные). При отборе материала предполагалось, что формы крыльев, оперения и фюзеляжа характерны для сверхзвуковых летательных аппаратов (тонкие симметричные профили и пр.).
Поскольку изучению курса динамики полета предшествует изучение основ теоретической и экспериментальной аэродинамики, авторы считали возможным при написании гл. III—VII в ряде случаев ограничиться самым кратким изложением материала, сделав упор на чисто прикладную сторону рассматриваемых вопросов.
В гл. VIII—X полет летательного аппарата исследуется в предположении, что система управления работает идеально, а летательный аппарат является безынерционным во вращательном движении. Это позволяет рассматривать полет летательного аппарата как движение управляемой материальной точки. В гл. XI и XII изучаются динамические свойства летательного аппарата как линейного звена системы управления. При этом предполагается, что читатель знаком с основами теории автоматического регулирования.
Весь конкретный цифровой материал, приведенный в тексте книги и использованный при составлении расчетных графиков и формул, заимствован авторами из иностранной литературы и в большей своей части имеет учебный характер.
При подготовке рукописи к печати авторами были учтены замечания рецензентов Я. Е. Ткаченко, Д. Л. Томашевича и Н. А. Хейфеца, а также В. А. Карабанова и М. Д. Пестова, просмотревших отдельные главы рукописи. Авторы выражают им свою благодарность.
Авторы будут весьма признательны всем читателям, которые своими критическими замечаниями помогут улучшить содержание книги.
www.vokb-la.spb.ru - Самолёт своими руками?!
ОСНОВНЫЕ ОБОЗНАЧЕНИЯ
а — скорость звука в м]сек-,
Роо,... ,а13,... — динамические коэффициенты летательного аппарата в продольном движении;
b— хорда крыльев в м\
Ьо — корневая хорда (в плоскости симметрии летательного аппарата) в м;
by—концевая хорда в м\
Ьу0,..., bi3,... — динамические коэффициенты летательного аппарата в движении рыскания;
SK i>cp=~ — средняя геометрическая хорда консоли крыльев в м; ‘к
be — бортовая хорда в м;
Ь\— средняя аэродинамическая хорда крыльев с подфюзеляжной частью в м;
бд.к— средняя аэродинамическая хорда консолей крыльев в м;
Ь/^р — средняя аэродинамическая хорда рулей в м;
с — относительная толщина профиля, измеренная в сечении, параллельном плоскости симметрии летательного аппарата;
F
ср = —— — коэффициент подсасывающей силы;
4s
ср — коэффициент поверхностного трения;
X
сх ———- — коэффициент лобового сопротивления летательного 9s
аппарата;
Сд-0—коэффициент лобового сопротивления при су = 0;
сх в — коэффициент волнового сопротивления;
сх/— коэффициент индуктивного сопротивления;
схр — коэффициент профильного сопротивления; Г
Су = ——- — коэффициент подъемной силы летательного аппарата;
Z
сг = —— — коэффициент боковой силы летательного аппарата;
СуД—удельный расход топлива в кГтопл[кГ тяги-час; Р
ср = ——— — коэффициент тяги ПВРД;
6
Основные обозначения
с11> с\2,... — динамические коэффициенты летательного аппарата в движении креиа;
D—диаметр миделевого сечения фюзеляжа в м;
</нос—диаметр носового среза фюзеляжа в м;
^корм — диаметр кормового среза фюзеляжа в м;
F — подсасывающая сила в кГ;
Гф — омываемая потоком поверхность фюзеляжа в л2;
f—собственная частота колебаний летательного аппарата в гц;
G — вес летательного аппарата в кГ;
Св.сек — секундный весовой расход воздуха через двигатель в кГ/сек;
Осек» От. сек—секундный весовой расход топлива в кГ/сек;
g—ускорение силы тяжести в м/сек2;
Н — высота полета в м;
1Х, 1у, 1г—моменты инерции летательного аппарата относительно связанных осей Ох\, Оу\, Ozx в кГ-м-сек2'.
Кш, ^бо» ^80 — коэффициенты, учитывающие взаимное влияние несущих поверхностей (крыльев, оперения) и фюзеляжа иа подъемную силу:
/ Гкр \ / гк \
к _ I-----— | h — I-------|
'аа I у I » аа I у I •
V из.кр/акр=аф V из.кр/акр=«ф
/ ^кр \ / Гк \
К — I I ' А" - I----I
80 Х^из.кр/аКр-8; Яф=0 60 \КИ3. кр/“кр“*’ аф”°
К,'Кк, Кн, Кэ — передаточные коэффициенты летательного аппарата;
k, ko, kt, #2> • • • — поправочные коэффициенты;
kon= — коэффициент торможения потока у оперения;
kT0<kBO — то же для горизонтального и вертикального оперений; (Гкр)х
Лф = —----- — коэффициент, учитывающий влияние угла ф на подъ-
^кр
емкую силу Х-образных крыльев;
£ф — длина фюзеляжа в м;
Днос — длина носовой части фюзеляжа в м;
А.корм—длина кормовой части фюзеляжа в м;
I—полный размах крыльев в м;
/к —размах двух консолей крыльев в М;
V
М = — — число Маха; а
Мкр—критическое число М;
Мх — момент крена в кГ-м;
Му — момент рыскания в кГ-м;
Mz — момент тангажа в кГ-м;
Мш — шарнирный момент органов управления в кГ-м;
Мшр — то же при а = 8 = 0;
www.vokb-la.spb.ru - Самолёт своими руками
Основные обозначения
т — масса летательного аппарата в кГ-сек’1м\
тсек — массовый секундный расход топлива в кГ-сек[м;
Мх
тх = -———коэффициент момента крена;
qSl
Му
ту — ——----коэффициент момента рыскания;
qSl
Mz
тг — —-— — коэффициент момента тангажа;
mz0 — то же при а = 8 = шг=а=8 = 0;
Мш
тш = ----—-——коэффициент шарнирного момента;
tfon-SpOp
тошо—коэффициент шарнирного момента при а = 8 = 0;
п — коэффициент относительной эффективности рулей; нормальная перегрузка;
Пу, пг; пх, Пу^, nzif—проекции вектора перегрузки на скоростные и полу-скоростные оси;
Прасп> Лурасп> nzpacn— располагаемые нормальные перегрузки;
лпотр> ЛуСотр. nz потр—потребные нормальные перегрузки;
Р — сила тяги двигателей в кГ\
Ро—статическая тяга ТРД (при V = О, Н = 0); тяга на поверхности Земли (/У = 0);
Рул— удельная тяга ракетного двигателя в к Г тяги- сек] к Г топл;
р— давление воздуха нли газов в кГ!м2', оператор Лапласа; отношение скорости летательного аппарата к сксрэсти цели (р — V/ Уц);
Ра—давление газов в выходном сечении сопла двигателя в кГ1м2;
IZ2
q = р “т-—скоростной напор в кР^м2;
/?эф— эффективная тяга реактивного двигателя в кГ;
_ VL
Re = —— — число Рейнольдса (L — характерная длина; например, для крыльев — Аср, для фюзеляжа—£* и т. д.);
n Vxt
Re< =————переходное число Рейнольдса;
г—радиус кривизны траектории; расстояние между центрами тяжести летательного аппарата и цели; расстояние между центром тяжести летательного аппарата и командным пунктом в м",
S — площадь крыльев с подфюзеляжной частью в м2‘,
SK — площадь двух консолей крыльев в л2;
5ф — площадь миделевого сечения фюзеляжа в м2\
Здв— площадь миделевого сечения двигателя в м2\
Здн — площадь дойного среза фюзеляжа в м2;
$оп> Зц.о> 5Г.О—площадь консолей оперения в м2;
Sp—площадь рулей в м2;
Sct—площадь стабилизаторов в м2; “
8
Основные обозначения
Ss — площадь элеронов в м2;
Sa—площадь выходного сечения сопла реактивного двигателя в м2;
Т, Тв, Та, Т9, Т 1в, Тщ — постоянные времени летательногоХаппарата в сек.;
Т’соб — период собственных колебаний в сек.;
Т° — абсолютная температура воздуха (Т° =273° +/°);
t—время в сек.;
t°—температура воздуха в °C;
V—скорость центра тяжести летательного аппарата относительно воздуха (при отсутствии ветра скорость относительно Земли); скорость невозмущенного воздушного потока в м1сек;
W — передаточная функция;
1ГНОС— объем носовой части фюзеляжа в мл;
wa — средняя скорость истечения газа через выходное сечение сопла реактивного двигателя в м/сек;
X— лобовое сопротивление летательного аппарата в кГ;
Хо— лобовое сопротивление при К=0 в кГ;
Xt — индуктивное сопротивление в кГ;
^Хв в — добавочное сопротивление воздухозаборника в кГ;
х — обобщенное обозначение какого-либо параметра движения; координата вдоль оси Oxi (от носа фюзеляжа) в м; координата центра тяжести летательного аппарата вдоль земной оси Ах0 в м;
xd— расстояние от носа фюзеляжа до центра давления ч • (до точки приложения подъемной силы) в м;
ха р— расстояние от начала САХ до центра давления крыла (в долях САХ);
хр — расстояние от-носа фюзеляжа до фокуса летательного аппарата в м;
хт — расстояние от носа фюзеляжа до центра тяжести летательного аппарата в м;
хр — безразмерная координата фокуса летательного аппарата;
%т— безразмерная координата центра тяжести летательного аппарата;
Xt — безразмерная координата точки перехода;
Y — подъемная сила летательного аппарата в кГ;
Y o— подъемная сила летательного аппарата при а = 8в= О в кГ;
Y K— подъемная сила консолей в присутствии фюзеляжа в кГ;
Гкр — сумма потъемной силы консолей и подъемной силы индуцируемой крыльями на фюзеляже, в кГ;
ж — подъемная сила, индуцируемая крыльями на фюзеляже, в кГ;
у—координата центра тяжести летательного аппарата вдоль земной оси Дуд в м;
ур — плечо силы тяги относительно центра тяжести летательного аппарата в м;
www.vokb-la.spb.ru - Самолёт своими руками?!
Основные обозначения 9
Z — боковая сила летательного аппарата в кГ;
z — координата вдоль оси в м; координата центра тяжести летательного аппарата вдоль земной оси Лг0 в м.',
2г
2= —— — безразмерная координата вдоль оси Ozt;
а — угол атаки летательного аппарата;
3—угол скольжения летательного аппарата;
7—угол крена летательного аппарата;
7С—угол крена в скоростной системе координат;
Д— приращение, отклонение какой-либо величины;
6, 8р — угол отклонения органов управления;
8В —угол отклонения органов управления тангажом (рулей высоты);
— угол отклонения органов управления рысканием (рулей направления);
8Э — угол отклонения органов управления креном (элеронов);
8ЛВ — угол отклонения поворотного двигателя;
®зап — запас отклонения органов управления;
®потр — потребный угол отклонения органов управления;
г — ошибка системы управления; угол скоса потока;
С — угол пеленга цели;
Р
С = —— — относительная тяга ТРД;
т] — угол упреждения;
т] = — — сужение крыльев с подфюзеляжной частью;
*1
тк =---—сужение консолей крыльев;
*1
г1корм — сужение кормовой части фюзеляжа;
т]нос— сужение носовой части фюзеляжа;
tjc — коэффициент, учитывающий влияние относительной толщины крыла на его профильное сопротивление;
т]и — курсовой угол;
в — угол наклона траектории к горизонту;
S — угол тангажа;
х — поправочный коэффициент; параметр, характеризующий режим работы двигателя;
X — удлинение крыльев с подфюзеляжной частью;
Хк— удлинение двух консолей крыльев;
Хф—удлинение фюзеляжа;
ХНос — удлинение носовой части фюзеляжа;
\<орм—удлинение кормовой части фюзеляжа;
р— коэффициент вязкости воздуха в кГ-сек [м2; р
у— — —кинематический коэффициент вязкости в мР/сек-^
10
Основные обозначения
SB> Ен — относительный коэффициент демпфирования летательного аппарата;
р — плотность воздуха или газов в кГ- сек2[м4;
а — перерегулирование (относительная величина заброса перегрузки, угла атаки и т. д.);
— угол между линией визирования летательного аппарата или цели и земной осью Ах0; сдвиг фазы вынужденных колебаний; коэффициент расхода воздуха;
--дв— угол установки двигателя относительно фюзеляжа; ?кр — угол установки крыльев относительно фюзеляжа;
?ст — угол установки стабилизатора относительно фюзеляжа; /о — угол стреловидности по передней кромке;
• /05—то же по линии середин хорд;
/л — т0 же п0 залней кромке;
• /р — то же по оси вращения руля;
уэ—-то же по оси вращения элерона;
- /с —то же по линии максимальных толщин сечений крыла;
ф —угол между плоскостью крыльев Х-образной схемы и осью Ог(; угол поперечной V-образности крыльев;
ф —угол рыскания;
>Г — угол поворота траектории;
о>у, <az — проекции вектора угловой скорости летательного аппарата на связанные оси координат Охг; Oyi, Ozl в рад/сек;
— <1>г1 — tovl — 0>z6A
tor= ' '“г~—y~ — безразмерные проекции угловой
* летательного аппарата на связанные оси;
и> — угловая частота колебаний летательного в рад/сек;
шс — собственная частота колебаний летательного в рад/сек.
Частные производные от сил и моментов и их коэффициентов метрам движения обозначаются верхним индексом, например:
скорости
аппарата
аппарата
по пара-
Ос у ш дМ у
Л1 х — —----- и т. д.
да У ои>х
www.vokb-Ia.spb.ru - Самолёт своими руками?!
ВВЕДЕНИЕ
§ 1. ПРЕДМЕТ КУРСА ДИНАМИКИ ПОЛЕТА БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Основным содержанием курса динамики летательных аппаратов является составление и исследование уравнений движения летательного аппарата, изучение общих закономерностей полета, а также его особенностей в различных частных случаях. При составлении и исследовании уравнений движения беспилотных летательных аппаратов опираются на основные положения теоретической механики, аэродинамики, теории автоматического регулирования и ряда других дисциплин.
Задача, исследования полета беспилотного летательного аппарата в самой общей постановке весьма сложна. Действительно, летательный аппарат с фиксированными рулями имеет, как всякое твердое тело, 6 степеней свободы, и его движение в пространстве описывается системой 12 дифференциальных уравнений первого порядка. Динамика же такой сложной электромеханической системы, как, например, управляемый по радио летательный аппарат, описывается значительно большим числом дифференциальных уравнений. Исследование подобной системы требует совместного интегрирования уравнений движения летательного аппарата и уравнений механических и электрических процессов, протекающих во всех элементах системы управления полетом. Ввиду чрезвычайной сложности задачи исследования полета любого летательного аппарата ее обычно решают по частям, разбивая исследование на несколько этапов и постепенно переходя от менее трудных задач к более трудным.
На первом этапе исследования во многих случаях оказывается вполне допустимым рассматривать движение летательного аппарата как движение управляемой материальной точки. Как известно, движение твердого тела в пространстве раскладывается на (вижение центра тяжести тела и на вращение его вокруг центра 1яжести. Для изучения основных закономерностей полета вращательное движение при определенных условиях можно не рассматривать. Тогда движение тела (в данном случае летательного аппарата) представляется как движение материальной точки, масса мтторой равна массе летательного аппарата и к которой прило
12
Введение
жены сила веса, сила тяги двигателя и аэродинамические силы. Соответственно схематизируется и работа системы управления: на движение центра тяжести летательного аппарата накладываются связи, описывающие идеальную работу системы управления.
Следует отметить, что даже при такой упрощенной постановке задачи в ряде случаев приходится учитывать моменты сил, действующих на летательный аппарат, и потребные углы отклонения органов управления; так как в противном случае невозможно установить однозначную зависимость, например, между подъемной силой и углом атаки, боковой силой и углом скольжения. Это в первую очередь относится к таким схемам летательных аппаратов, у которых подъемная и боковая силы существенно изменяются при отклонении органов управления (схема с поворотными крыльями, «бесхвостка»).
На втором этапе детально исследуются уравнения движения летательного аппарата с учетом его вращения вокруг центра тяжести. Здесь обычно ограничиваются рассмотрением линеаризованных уравнений. Задачей этого этапа является изучение динамических свойств аппарата, рассматриваемого как элемент системы управления. При этом главным образом интересуются реакцией летательного аппарата на отклонения органов управления и на воздействия различных внешних возмущений.
Лишь после такого изучения можно перейти к заключительному и наиболее сложному этапу — исследованию динамики замкнутой системы' управления, включающей в себя среди ряда других элементов и сам летательный аппарат (объект управления).
Одной из основных задач последнего этапа является исследование точности полета, характеризуемой величиной и вероятностью отклонений летательного аппарата от требуемой траектории. Эти отклонения (ошибки) возникают вследствие того, что в действительности все элементы системы управления работают не идеально точно, летательный аппарат не идеально следит за отклонениями органов управления и, кроме того, в полете на летательный аппарат и его систему управления воздействуют случайные возмущения. Для изучения вопросов точности управления необходимо движение летательного аппарата и процессы в системе управления описывать достаточно полно дифференциальными уравнениями и, кроме того, учитывать случайные возмущения. В результате требуется исследовать системы обыкновенных дифференциальных уравнений весьма высокого порядка, которые могут быть нелинейными, с правыми частями, явно зависящими от времени, с запаздывающими аргументами, со случайными функциями в правых частях и т. д. Для исследования таких уравнений можно использовать все методы, которыми располагает современная наука и техника, в частности, методы математического анализа, теории вероятностей и случайных процессов, численного анализа, теории
www.vokb-la.spb.ru - Самолёт своими руками?!
f
§ 2. Общие сведения об управлении полетом
13
автоматического регулирования, математического моделирования, вычисления на электронных-цифровых машинах.
Настоящая книга охватывает круг вопросов, относящихся лишь к первым двум этапам исследования полета, т. е. в ней рассматривается только динамика самого летательного аппарата.
§ 2. ОБЩИЕ СВЕДЕНИЯ ОБ УПРАВЛЕНИИ ПОЛЕТОМ
Управляемым летательным аппаратом называется объект, движущийся в пространстве и обладающий средствами изменения направления движения.
Примерами управляемых летательных аппаратов могут служить самолет, управляемый снаряд, ракета для исследования верхних слоев атмосферы, ракета-носитель искусственного спутника Земли, ракета для межпланетных полетов и т. д.
Под управлением полетом понимается изменение направления движения летательного аппарата, а также изменение скорости движения в целях выполнения задачи полета.
Траектории полета пилотируемых летательных аппаратов могут быть самыми разнообразными, так как они произвольно определяются летчиком. В случае же автоматически управляемого летательного аппарата траектория должна быть подчинена определенным закономерностям или связям. Только при этом условии система управления полетом будет способна привести летательный аппарат в заданную точку, т. е. обеспечить его встречу с целью.
Все траектории беспилотных летательных аппаратов можно условиться делить на две группы:
1) программные траектории;
2) траектории наведения.
В первом случае летательный аппарат движется по заранее заданной траектории, причем в процессе полета эта траектория уже не может быть изменена. Такой метод сближения летательного аппарата с целью называется полетом по программе, а соответствующая траектория полета — программной.
Во втором случае траектория полета заранее не определена. Направление полета летательного аппарата в каждый момент времени устанавливается в зависимости от направления и скорости движения цели с таким расчетом, чтобы обеспечить встречу летательного аппарата с целью. Существует целый ряд методов определения направления полета, обеспечивающих встречу летательного аппарата с целью. Их обычно называют методами наведения. В этом случае траектории полета можно называть траекториями наведения.
2.1. СИЛЫ, ДЕЙСТВУЮЩИЕ НА ЛЕТАТЕЛЬНЫЙ АППАРАТ
При полете какого-либо летательного аппарата на него могут действовать следующие силы:
1) вес летательного аппарата G; »
102
Глава II. Методы исследований-уравнений, движения
характеристики являются приблизительно линейными функциями этих углов *.
Ввиду сложности задачи в книге не учитывается влияние упругих деформаций конструкции летательного аппарата на величину аэродинамических сил и моментов, хотя в ряде случаев оно может быть существенным.
Необходимо предупредить читателя, что многие из приведенных в гл. ПГ—VII зависимостей имеют весьма приближенный характер. Поэтому результаты расчетов желательно проверять и уточнять, пользуясь экспериментальными исследованиями по различным вопросам аэродинамики летательных аппаратов.
ЛИТЕРАТУРА
1. Мерилл Г., Исследование операций, Серия «Основы проектирования управляемых снарядов», ИЛ, 1959.
2. Горощенко Б. Т., Динамика полета самолета, Обороигиз, 1954.
3. Крылов А. И., Лекции о приближенных вычислениях, ГИТТЛ, 1954.
4. Без и кович Я. С., Приближенные вычисления, ГИТТЛ, 1949.
5. Милн В. Э., Численный анализ, ИЛ, 1951.
6. К о р н Г. и Корн Т„ Электронные моделирующие устройства, ИЛ, 1955.
7. Этерман И. И., Математические машины непрерывного действия, Машгиз, 1957.
8. К о г а н Б. Я., Электронные моделирующие устройства и их применение для исследования систем автоматического регулирования, ГИФМЛ, 1959.
9. Китов А. И. и К р и н и и к и й И. А., Электронные цифровые машины и программирование, ГИФМЛ, 1961.
10. Иi?oземцев Н. В., Авиационные газотурбинные двигатели, Оборон-гиз, 1955.
И. Стечкин Б. С. и др., Теория реактивных двигателей, Оборонгиз, 1958.
12. Синярев Г. Б., Добровольский М. В., Жидкостные ракетные двигатели, Обороигиз, 1957.
13. Феод ось ев В. И., Синярев Г. Б., Введение в ракетную технику, Оборонгиз, 1960.
* Заметим, что понятие о «малых» и «больших» углах является условным. Считается, что аэродинамические характеристики многих летательных аппаратов являются линейными во всем летном диапазоне их углов атаки. В этих случаях на этапе предварительного проектирования можно полностью использовать методику расчета, приведенную в гл. III—VII.
www.vokb-la.spb.ru - Самолёт своими руками?!
Глава III
ПОДЪЕМНАЯ СИЛА
Как известно из курса аэродинамики, подъемную силу Y принято выражать через безразмерный коэффициент подъемной СИЛЫ Су.
Y=cyqS.
У крылатых летательных аппаратов большая часть подъемной силы создается крыльями. Поэтому, приступая к изучению зависимости подъемной силы от различных факторов, целесообразно прежде всего рассмотреть такую зависимость для изолированных крыльев. После этого можно будет рассмотреть подъемную силу изолированного корпуса (фюзеляжа), подъемную силу, вызванную интерференцией крыльев и корпуса, подъемную силу оперения (с учетом влияния на нее крыльев и корпуса) и в заключение подъемную силу всего летательного аппарата.
§ 1. ПОДЪЕМНАЯ СИЛА ИЗОЛИРОВАННЫХ КРЫЛЬЕВ
При малых углах атаки а коэффициент подъемной силы плоских (незакрученных) крыльев с симметричным профилем пропорционален .величине а:
Су из.кр Су из. кр а (3.1)
Коэффициентом пропорциональности является частная производная
, / дСу из. кр \
S из.кр Д=о’
которая зависит, главным образом, от числа М и от формы крыльев в плане, характеризуемой для трапециевидных крыльев удлинением Z, сужением т] и углом стреловидности у. Таким образом,
С>И3.КР=/(М-Х^>Х)- (3.2)
При сверхзвуковых скоростях полета производная с^из.кр с достаточной степенью точности определяется линейной теорией
104
Глава III. Подъемная сила
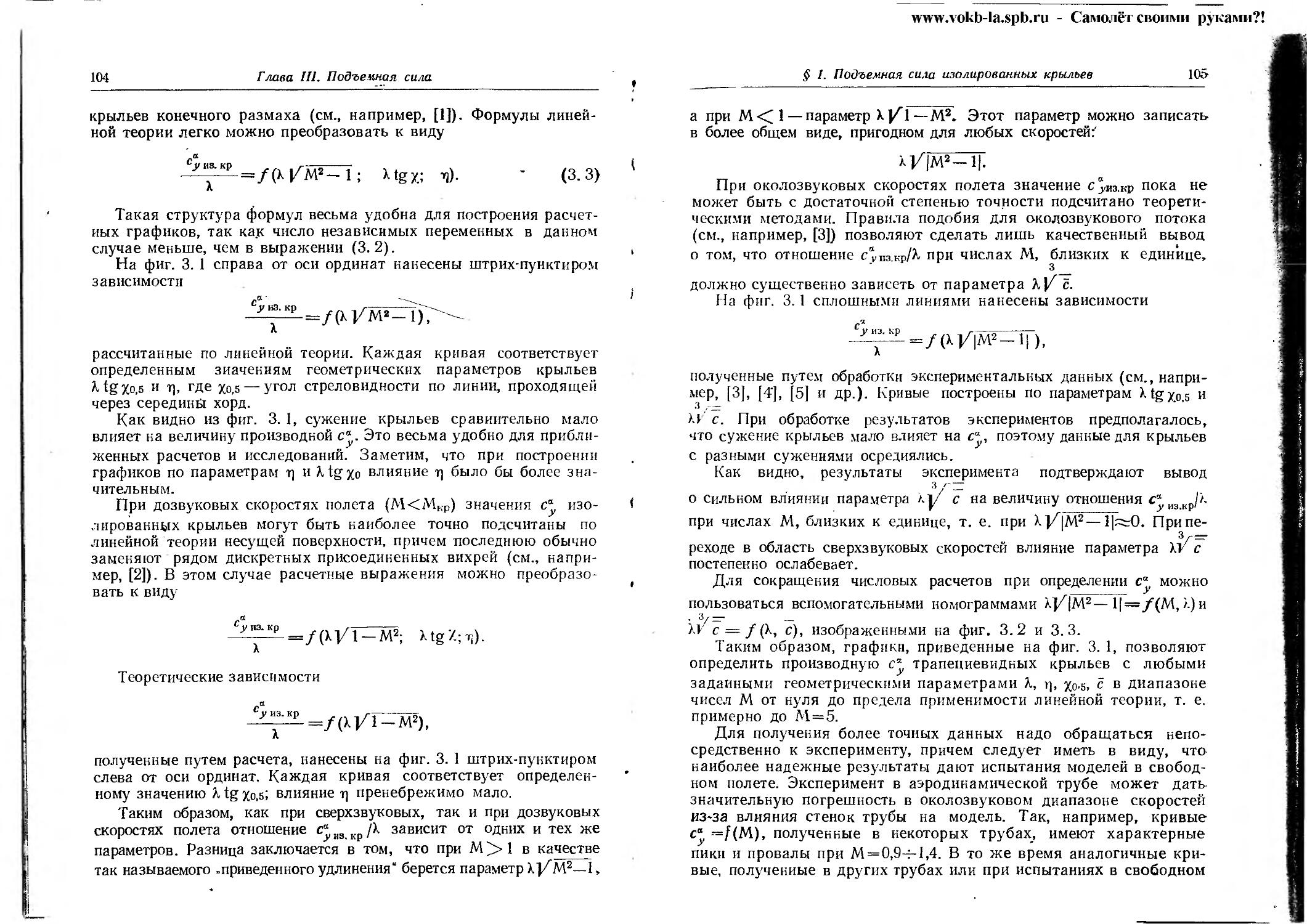
крыльев конечного размаха (см., например, [1]). Формулы линейной теории легко можно преобразовать к виду
с“ i
Xtgz; Ч). - (3.3) 1
' Такая структура формул весьма удобна для построения расчет-
ных графиков, так как число независимых переменных в данном случае меньше, чем в выражении (3.2). ,
На фиг. 3. 1 справа от оси ординат нанесены штрих-пунктиром зависимости
Л
рассчитанные по линейной теории. Каждая кривая соответствует определенным значениям геометрических параметров крыльев ZtgXo.s и т], где %о,5 — угол стреловидности по линии, проходящей через середины хорд.
Как видно из фиг. 3. 1, сужение крыльев сравнительно мало влияет на величину производной с“. Это весьма удобно для приближенных расчетов и исследований. Заметим, что при построении графиков по параметрам т] и Ztg%0 влияние т] было бы более значительным.
При дозвуковых скоростях полета (М<Мкр) значения с“ изо- < лированных крыльев могут быть наиболее точно подсчитаны по линейной теории несущей поверхности, причем последнюю обычно заменяют рядом дискретных присоединенных вихрей (см., например, [2]). В этом случае расчетные выражения можно преобразовать к виду
xtg-Z;^).
Теоретические зависимости
I с“
I
| полученные путем расчета, нанесены на фиг. 3. 1 штрих-пунктиром
| слева от оси ординат. Каждая кривая соответствует определен-
| ному значению Ztg/o.s; влияние т] пренебрежимо мало.
I Таким образом, как при сверхзвуковых, так и при дозвуковых
I скоростях полета отношение с“из кр/Х зависит от одних и тех же
параметров. Разница заключается в том, что при М>1 в качестве
( так называемого „приведенного удлинения" берется параметр Х]/М2—1,
www.vokb-la.spb.ru - Самолёт своими руками?!
$ I. Подъемная сила изолированных крыльев 105
а при М<1 — параметр К1 — М2. Этот параметр можно записать в более общем виде, пригодном для любых скоростей:'
При околозвуковых скоростях полета значение с^Из.кр пока не может быть с достаточной степенью точности подсчитано теоретическими методами. Правила подобия для околозвукового потока (см., например, [3]) позволяют сделать лишь качественный вывод о том, что отношение с“ц3кр/Х при числах М, близких к единице, з___________________________________________
должно существенно зависеть от параметра Х|/ с.
На фиг. 3. 1 сплошными линиями нанесены зависимости
-=/(X ЗГ),
полученные путем обработки экспериментальных данных (см., например, [3], [4], [5] и др.). Кривые построены по параметрам X tgу015 и
XI с. При обработке результатов экспериментов предполагалось, что сужение крыльев мало влияет на сау, поэтому данные для крыльев с разными сужениями осредиялись.
Как видно, результаты эксперимента подтверждают вывод о сильном влиянии параметра Х|/ с на величину отношения изкр/Х при числах М, близких к единице, т. е. при Х]/|М2—1|^0. При переходе в область сверхзвуковых скоростей влияние параметра ХУ с постепенно ослабевает.
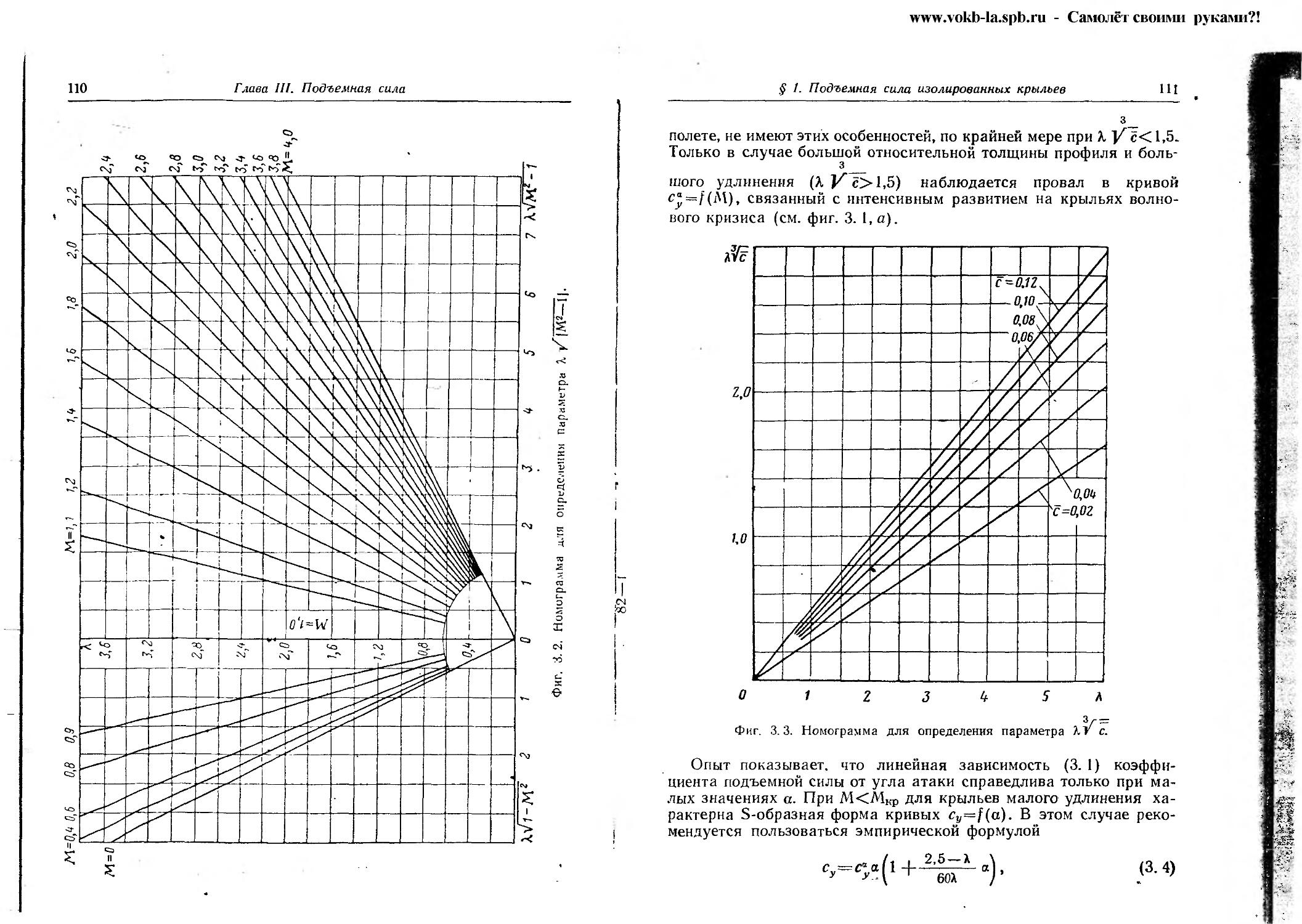
Для сокращения числовых расчетов при определении с“ можно пользоваться вспомогательными номограммами Хр^М2—1|=/(М, X) и . 3/- — __
ХУ с = /(X, с), изображенными на фиг. 3.2 и 3.3.
Таким образом, графики, приведенные на фиг. 3. 1, позволяют определить производную с* трапециевидных крыльев с любыми заданными геометрическими параметрами X, ц, хо5, с в диапазоне чисел М от нуля до предела применимости линейной теории, т. е. примерно до М = 5.
Для получения более точных данных надо обращаться непосредственно к эксперименту, причем следует иметь в виду, что наиболее надежные результаты дают испытания моделей в свободном полете. Эксперимент в аэродинамической трубе может дать значительную погрешность в околозвуковом диапазоне скоростей из-за влияния стенок трубы на модель. Так, например, кривые с“ -=f(M), полученные в некоторых трубах, имеют характерные пики и провалы при М=0,9-1-1,4. В то же время аналогичные кривые, полученные в других трубах или при испытаниях в свободном
www.vokb-la.spb.ru - Самолёт своими руками?!
106
Глава 111. Подъемная сила
§ I. Подъемная сила изолированных крыльев
107
Фиг. 3.1. Графики для расчета подъемной силы изолированных крыльев. °) ‘г Хо.5^°: х tg ?-0,5~ *
108
Глава III. Подъемная сила
www.vokb-Ia.spb.ru - Самолёт своими руками?!
$ /. Подъемная сила изолированных крыльев
109
1
E
?,7 f/
i 1 V/
1 — - —
и
//
i L
-
0,5
fy из.кр 1 es* -— s C; —
\\
A
Теория^ \ \
\ I
Фиг. 3.1. Графики для расчета подъемной силы изолированных крыльев. «)*tgZo5-2; г) XtgZo5-3-
по
Глава III. Подъемная сила
1Л=и,ч О,
Фиг. 3.2. Номигра.чма для определения Параметра X ^(М2—1|.
www.vokb-la.spb.ru - Самолёт своими руками
§ 1. Подъемная сила изолированных крыльев
111
_____ •
3__
полете, не имеют этих особенностей, по крайней мере при Л. V с<1,5. Только в случае большой относительной толщины профиля и боль-
шого удлинения (Л У с>1,5) наблюдается провал в кривой £“=/(М), связанный с интенсивным развитием на крыльях волнового кризиса (см. фиг. 3. 1,п).
Опыт показывает, что линейная зависимость (3. 1) коэффициента подъемной силы от угла атаки справедлива только при малых значениях а. При М<Л1кр для крыльев малого удлинения характерна S-образная форма кривых cy=f(a). В этом случае рекомендуется пользоваться эмпирической формулой
2,5 —X 60Х
(3. 4)
а
112
Глава HI. Подъемная сила
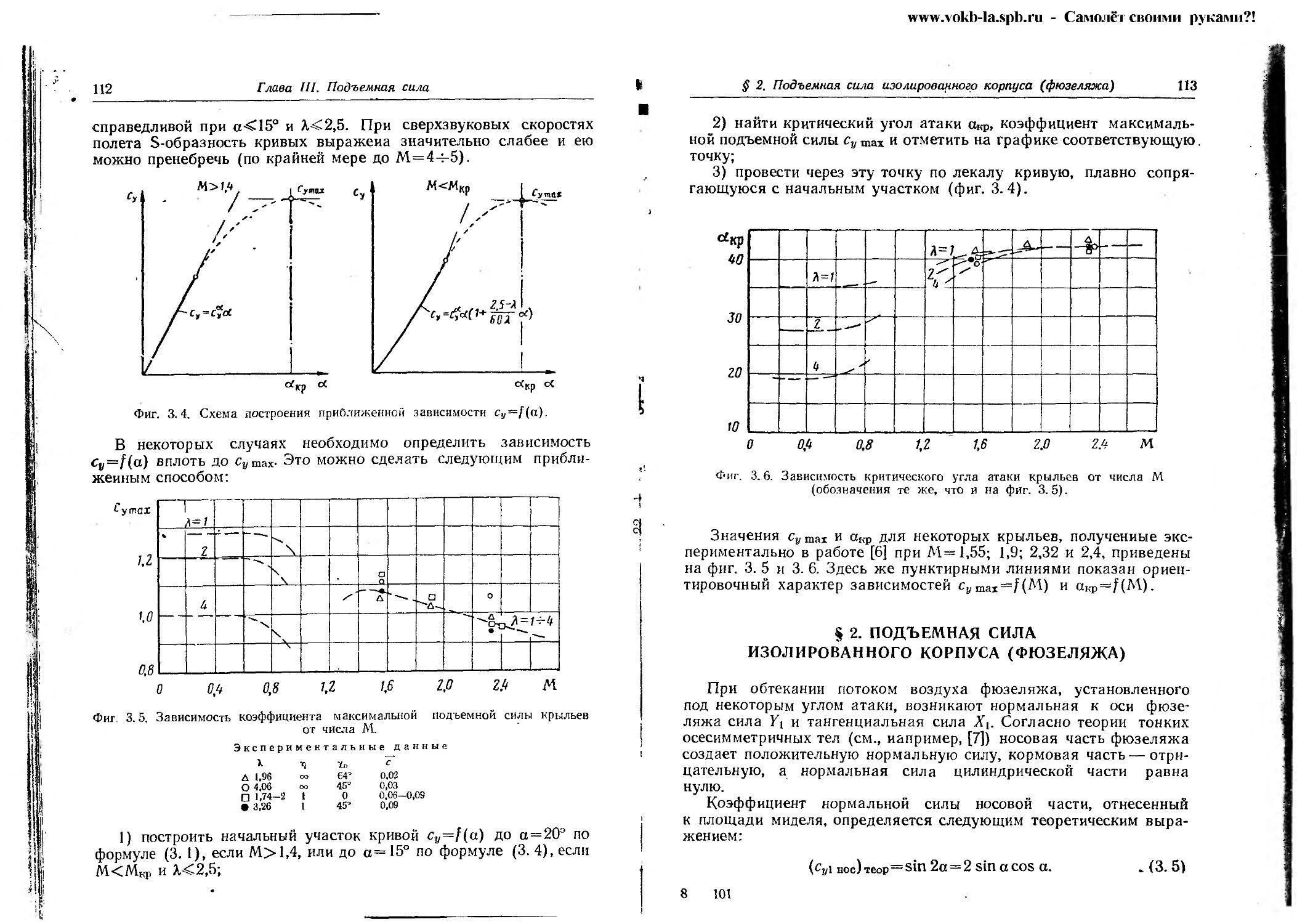
справедливой при а<15° и Л<2,5. При сверхзвуковых скоростях полета S-образность кривых выражена значительно слабее и ею можно пренебречь (по крайней мере до М.=4ч-5).
Фиг. 3.4. Схема построения приближенной зависимости cy—f(a).
В некоторых случаях необходимо определить зависимость cv=/(a) вплоть до Сушах- Это можно сделать следующим приближенным способом:
Фиг 3.5. Зависимость коэффициента максимальной подъемной силы крыльев от числа М.
Экспериментальные данные
к "П Хо с
Д 1.96 оо 64’ 0,02
О 4.06 оо 45’ 0,03
□ 1,74-2 1 0 0.06-0,09
• 3.26 1 45’ 0,09
1) построить начальный участок кривой cy=f(a) до а = 20э по формуле (3. 1), если М>1,4, или до а— 15° по формуле (3. 4), если М<МКр и Л<2,5;
www.vokb-la.spb.ru - Самолёт своими руками?!
$ 2. Подъемная сила изолированного корпуса (фюзеляжа) 113
2) найти критический угол атаки аКр, коэффициент максимальной подъемной силы су тах и отметить на графике соответствующую точку;
3) провести через эту точку по лекалу кривую, плавно сопрягающуюся с начальным участком (фиг. 3.4).
Фиг. 3.6. Зависимость критического угла атаки крыльев от числа М (обозначения те же, что и на фиг. 3.5).
Значения cv mai и акр для некоторых крыльев, полученные экспериментально в работе [6] при М=1,55; 1,9; 2,32 и 2,4, приведены на фиг. 3. 5 и 3. 6. Здесь же пунктирными линиями показан ориентировочный характер зависимостей cymax=f(M) и ctKp=f(M).
§ 2. ПОДЪЕМНАЯ СИЛА ИЗОЛИРОВАННОГО КОРПУСА (ФЮЗЕЛЯЖА)
При обтекании потоком воздуха фюзеляжа, установленного под некоторым углом атаки, возникают нормальная к оси фюзеляжа сила Yt и тангенциальная сила Х{. Согласно теории тонких осесимметричных тел (см., например, [7]) носовая часть фюзеляжа создает положительную нормальную силу, кормовая часть — отрицательную, а нормальная сила цилиндрической части равна нулю.
Коэффициент нормальной силы носовой части, отнесенный к площади миделя, определяется следующим теоретическим выражением:
(cyi нос) теор~ sin 2ct=2 sin ct cos ct. M (3.5)
8 101
114
Глава III. Подъемная сила
Из этого выражения следует, что производная
<^У1 нос
>1нос да
равна
о <^1нос)„ор«^ = 0,035.-о/ ,о
Так как (--------) 1 , то в дальнейшем будем обозна-
\ да /а-О \ да )а=о
чать эти производные через с“ нос.
В отличие от теории тонких тел опыт показывает, что при сверхзвуковых скоростях потока цилиндрическая часть тела вращения (в основном сечения, прилегающие к носовой части) также создает некоторую нормальную силу, примерно пропорциональную углу атаки. Методически удобнее не выделять ее в виде отдельного слагаемого, а рассматривать обе силы совместно. Таким образом, в понятие «нормальная сила носовой части» и в обозначение с’Н0С будем включать и нормальную силу цилиндрической части.
Результаты испытаний в аэродинамической трубе серии моделей тел вращения, представляющих собой сочетание конической носовой части с цилиндром, свидетельствуют о том, что значение Cjhoc зависит от удлинения носовой и цилиндрической частей, а также "от числа М [8]:
£унос ^нос» ^цил)’
Число независимых переменных можно уменьшить до двух, если представить результаты эксперимента в форме
у нос
Такая зависимость изображена на фиг. 3. 7.
Значения с“н0С тел вращения с оживальной головкой [9] близки к приведенным на фиг. 3. 7.
Учитывая результаты эксперимента, можно вместо теоретического выражения (3.5) написать полуэмпирическую формулу
сУ1нос=57,Зс“ HOCsinacosa, (3.6)
в которой Су нос определяется по кривым фиг. 3. 7.
www.vokb-la.spb.ru - Самолёт своими руками?!
$ 2. Подъемная сила изолированного корпуса (фюзеляжа)
115
Для коэффициента нормальной силы кормовой части имеется следующее теоретическое выражение:
(гу1корм)теор=—Sin2a0 _^‘)=_2sinacosa(l-712opst), (3.7)
где З’д,, — площадь донного среза фюзеляжа;
/5
-— — сужение кормовой части фюзеляжа.
•Зф
В действительности же из-за утолщения пограничного слоя и отрыва потока в суживающейся кормовой части нормальная сила получается значительно меньшей, чем по теории. Это можно учесть введением в формулу (3. 7) поправочного коэффициента gft:
Cyl корм= - sin a cos a (1 - ^орм). (3. 8)
Значение зависит от чисел Re и М, формы кормовой части, наличия или отсутствия хвостового оперения и т. д. Ориентировочно можно принимать
^«0,154-0,20.
Кроме нормальной силы, создаваемой носовой и кормовой частями фюзеляжа, при больших углах атаки необходимо учитывать дополнительную нормальную силу, возникающую вследствие обтекания тела вращения поперечной составляющей потока вязкого газа. Коэффициент этой силы выражается эмпирической формулой [10]
Дсу1 0,624X2 Сх цил sin2 а tg a .(3.9)
8*
116
Глава III. Подъемная сила
Входящее сюда значение коэффициента лобового сопротивления цилиндра при обтекании его поперечным потоком принимается равным:
а) при турбулентном пограничном слое* сХВД1л=0,35;
б) при ламинарном пограничном слое сХШ1П=1,2.
Суммируя выражения (3.6), (3.8) и (3.9), получим ф=[57,3^ нос - 2^(1 - т£орм)] sin a cos «+
+ 0,624 цил sin2 a tg а. (3. 10)
Найдем коэффициент подъемной силы, т. е. проекции полной аэродинамической силы фюзеляжа на ось Оу, перпендикулярную вектору скорости:
Су ф Cyi ф COS' Ct— Cxi ф 31П Ct (3.11)
или
ф=[57,3 нос - 2^ (1 - т32орм) I sin a cos2 а +
ф-0,624).2 сх цил sin3 а — сж) ф sin а. (3. 12)
Если расчет ведется при малых углах атаки (а<84-10°), выражение (3. 12) можно упростить и оно принимает вид
схФ~суФа’ (3-13)
где
^Ф=^Нос -0,035^(1 - С₽.м)-0.0175^ф. (3. 14)
Значения с“ нос определяются по фиг. 3.7, а коэффициент тангенциальной силы сХ1 Ф близок по своей величине к коэффициенту лобового сопротивления при нулевом угле атаки схОф (см. гл. IV).
На фиг. 3. 8 и 3. 9 представлено сравнение экспериментальных значений су| ф с расчетными значениями, полученными по формуле (3. 12). Как видно из этого сравнения, формула обеспечивает удовлетворительную точность расчета в широком диапазоне углов атаки при удлинениях фюзеляжа от 4 до 21 и при числах М от 0,26 до 2,64.
Приведенные выше данные относятся к фюзеляжам круглого сечения. Если поперечное сечение имеет овальную форму, то расчет Су ф следует вести по формуле
СУ Ф ~ ф)круг • (3.15)
где (Суф)круг — определяется, как указано выше;
В — ширина миделевого сечения фюзеляжа;
5ф — площадь миделя, к которой отнесен коэффициент подъемной силы cv ф.
* Необходимо иметь в виду, что состояние пограничного слоя на поверхности фюзеляжа определяется не поперечной составляющей скорости потока,
VZ-Ф
а полной скоростью, т. е. числом Рейнольдса Кеф =- (см. гл. IV).
www.vokb-la.spb.ru - Самолёт своими руками?!
f 2. Подъемная сила изолированного корпуса (фюзеляжа) 117
Фиг. 3.8, Сравнение экспериментальных и расчетных значений тел вращения.
Число М Аф
/ 2 21,1
2 2 13,1
3 0,26 7
ХнОс Форма носовой части
5,75 Оживальная [71
5,75 . 17]
2 Коническая (10]
Фиг. 3. 9. Сравнение экспериментальных [9] и расчетных значений тел вращения.
М=2,64; ^нос^с*» форма носовой
части оживальная.
118
Глава III. Подъемная сила
Добавочная подъемная сила воздухозаборника. Если в носовой части фюзеляжа или гондолы находится воздухозаборник ТРД или ПВРД, возникает добавочная подъемная сила вследствие изменения направления струи воздуха при входе в канал. Пусть секундный расход воздуха через двигатель равен GB.ceK, а угол атаки двигателя равен адв (обычно адв~а). Тогда при повороте на угол а струя воздуха приобретает секундное количество движения вдоль оси Оу, равное
1/-^-=ДГв.3( (3.16)
g g 57,3
где ДЕв.з — подъемная сила, действующая на внутренние стенки воздухозаборника.
Найдем коэффициент подъемной силы, отнесенной к площади входа:
Таким образом, суммарный коэффициент подъемной силы фюзеляжа с воздухозаборником будет
с\ф—(суф)с=о+Дсув.з^- ’ (3- 18)
и» иен Оф
где (су ф)Св сек=0 можно определять, пользуясь формулами (3. 12) —(3.14).
Секундный расход воздуха через двигатель GB.ceK зависит от геометрии воздухозаборника, числа М и других параметров. В частности, на расчетном режиме работы воздухозаборника
Ов.сек=ё Р ^вх (8- 19)
и
Дсу в.з=0,035 а. (3. 20)
На нерасчетных режимах расход воздуха меньше, чем на расчетном, и определяется выражением
Св.сек^Ф ё Р VSBI, (3.21)
где ф— коэффициент расхода воздуха (зависимость ф от различных факторов рассмотрена в § 2 гл. IV).
С учетом (3.21) выражение (3. 17) принимает вид
Ьсу в.з=0,035 фа. (3.22)
§ 3. ПОДЪЕМНАЯ СИЛА СИСТЕМЫ КРЫЛЬЯ-ФЮЗЕЛЯЖ
При аэродинамическом расчете дозвуковых самолетов обычно принимают, что подъемная сила системы крылья—фюзеляж равна подъемной силе условных изолированных крыльев, образованных продолжением передней и задней кромок консолей до плоскости
www.vokb-la.spb.ru - Самолёт своими руками?!
§ 3. Подъемная сила системы крылья—фюзеляж
119
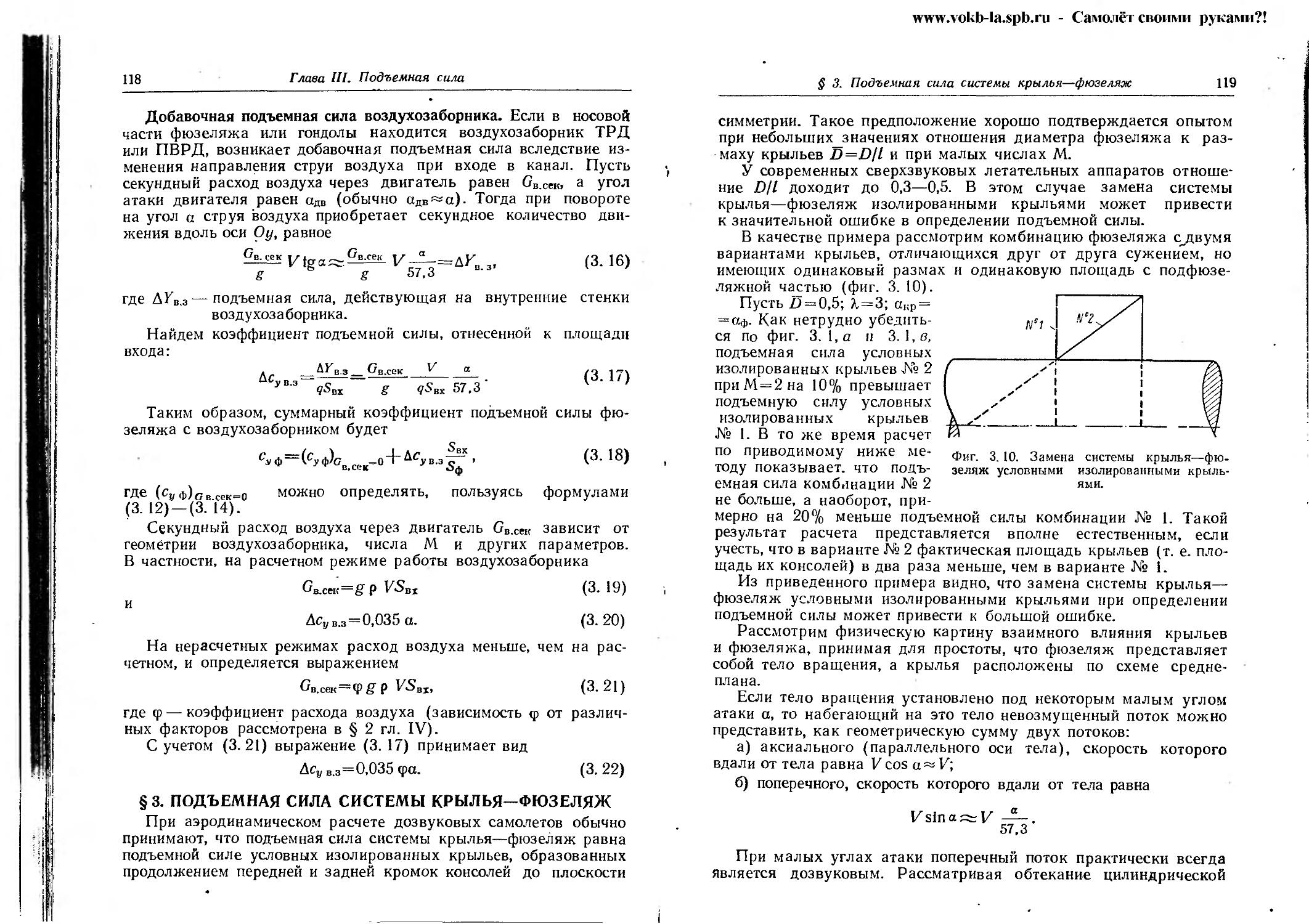
Фиг. 3. 10. Замена системы крылья—фюзеляж условными изолированными крыльями.
симметрии. Такое предположение хорошо подтверждается опытом при небольших_значениях отношения диаметра фюзеляжа к размаху крыльев D=DH и при малых числах М.
У современных сверхзвуковых летательных аппаратов отношение D/1 доходит до 0,3—0,5. В этом случае замена системы крылья—фюзеляж изолированными крыльями может привести к значительной ошибке в определении подъемной силы.
В качестве примера рассмотрим комбинацию фюзеляжа с_двумя вариантами крыльев, отличающихся друг от друга сужением, но имеющих одинаковый размах и одинаковую площадь с подфюзеляжной частью (фиг. 3. 10).
Пусть 25 = 0,5; ^=3; акр = = аф. Как нетрудно убедиться по фиг. 3. 1, а и 3. 1, в, подъемная сила условных изолированных крыльев №2 приМ = 2на 10% превышает подъемную силу условных изолированных крыльев № 1. В то же время расчет по приводимому ниже методу показывает, что подъемная сила комбинации № 2 не больше, а наоборот, при
мерно на 20% меньше подъемной силы комбинации № 1. Такой результат расчета представляется вполне естественным, если учесть, что в варианте № 2 фактическая площадь крыльев (т. е. площадь их консолей) в два раза меньше, чем в варианте № 1.
Из приведенного примера видно, что замена системы крылья— фюзеляж условными изолированными крыльями при определении подъемной силы может привести к большой ошибке.
Рассмотрим физическую картину взаимного влияния крыльев и фюзеляжа, принимая для простоты, что фюзеляж представляет собой тело вращения, а крылья расположены по схеме средне-плана.
Если тело вращения установлено под некоторым малым углом атаки а, то набегающий на это тело невозмущенный поток можно представить, как геометрическую сумму двух потоков:
а) аксиального (параллельного оси тела), скорость которого вдали от тела равна V cos a~V;
б) поперечного, скорость которого вдали от тела равна
V sin а И ---.
57.3
При малых углах атаки поперечный поток практически всегда является дозвуковым. Рассматривая обтекание цилиндрической
120
Глава III. Подъемная сила
части тела поперечным потоком (фиг. 3.11), можно прийти к выводу, что в точках, лежащих на линии z—z, местные скорости потока больше, чем V—Так, согласно теории идеальной несжи-57,3
маемой жидкости на линии z—г местная поперечная скорость
—fl+^-V (3.23)
° 57,3\ 4z2 )
где D — диаметр цилиндрической части тела; z—расстояние от оси цилиндра.
Фиг.* 3.11. К объяснению взаимного влияния крыльев и фюзеляжа.
В частности, в точках Л и В на поверхности тела (z=Z)/2) поперечная скорость Vn=2V
57,3
Увеличение поперечной составляющей скорости приводит к тому, что суммарный вектор скорости отклоняется вверх, т. е. возникает отрицательный скос потока еф. Величина его определяется выражением
(3.24)
из которого видно, что наибольшего абсолютного значения, равного а, угол скоса потока достигает в точках А и В.
Если на теле вращения в плоскости z—z установлены крылья, то их фактический угол атаки будет
а* = а—еф. (3.25)
Следовательно, подъемная сила консолей в присутствии фюзеляжа будет больше подъемной силы аналогичных изолированных крыльев, размеры которых совпадают с размерами консолей. Обозначим подъемную силу консолей через Ёк в отличие от подъемной силы изолированных крыльев Уиз.кр (1к> ЕИз.кр).
www.vokb-la.spb.ru - Самолёт своими руками?!
§ 3. Подъемная сила системы крылья—фюзеляж
121
Консоли крыльев, в свою очередь, оказывают воздействие на подъемную силу фюзеляжа. Действительно, разности давлений Др=р—роо, возникающее на верхней и нижней поверхностях крыльев, распространяются и на соответствующие поверхности фюзеляжа в пределах винтовых линий Маха *, выходящих из начала бортовой хорды каждой консоли (см. фиг. 3. 11). Это приводит к появлению на фюзеляже некоторой подъемной силы, которую в дальнейшем будем называть индуцированной подъемной силой фюзеляжа У,- $, поскольку она индуцируется (вызывается) крыльями.
Суммарная подъемная сила, обусловленная наличием крыльев, будет
Укр=Ук+Ъф- (3.26)
Помимо подъемной силы Укр, необходимо учесть собственную подъемную силу фюзеляжа, приблизительно равную подъемной силе изолированного фюзеляжа Уф. Таким образом, общая величина подъемной силы системы крылья—фюзеляж
Ук.ф= Укр + Уф = Ук+Tf ф +Уф- (3.27)
При определении Укр могут встретиться три случая:
1) случай «аа», когда геометрические углы атаки крыльев и фюзеляжа равны между собой:
акр = аф = а;
2) случай «60» («дельта—нуль»), когда угол атаки фюзеляжа равен нулю, а крылья повернуты относительно его оси на угол 6:
аф=0, акр = 6;
3) общий случай, когда фюзеляж имеет угол атаки а, а крылья отклонены относительно его оси на угол 6:
аф = а, акр = а + 6.
Рассмотрим последовательно все эти случаи. Случай «аа». Введем безразмерную величину
представляющую собой отношение подъемной силы, обусловленной наличием крыльев, к подъемной силе изолированных крыльев, составленных из двух консолей. С учетом Л™ можно написать
(Укр) аа = УиЗ.Кр^Саа • (3. 28)
* Угол наклона этих линий- к образующим цилиндра равен углу Маха.
122
Глава III. Подъемная сила
Отнеся подъемную силу к площади крыльев с подфюзеляжной частью S и к скоростному напору q, получим
<?
(Сукр)<и' = суиз.кр^а“_^‘• (3.29)
Значения суиз.кр определяются так, как указано в § 1, причем геометрические параметры X, т], хо,5, с берутся равными параметрам консолей.
Величина К™ в первом приближении определяется по теории тонких тел (см., например, [11]):
(3.30)
Эта зависимость изображена на фиг. 3. 12. Здесь же нанесены экспериментальные значения /(„. Экспериментальные данные обрабатывались по формуле
5ф
СУ К.ф 6уф S
(3.31)
са — у из. кр £
причем значения СуК.ф были взяты по результатам испытаний моделей без оперения в аэродинамических трубах при М=0,7-j-3, а значения Суиз.кр и Су фопределялись по формулам и графикам, приведенным в § 1 и 2.
В большинстве случаев мало меняется с изменением числа М, колеблясь вокруг некоторого среднего значения. Диапазоны колебаний показаны на фиг. 3. 12 вертикальными отрезками прямых, а средние значения — кружочками.
Из числа геометрических параметров крыльев наибольшее влияние на 1\„Л оказывает сужение консолей т)к. На фиг. 3. 13 нанесена зависимость
из которой видно, что при увеличении т]к значение /\м несколько возрастает. Чтобы учесть это обстоятельство, введем в теоретическую формулу поправку, сводящуюся к тому, что вместо D/1 будем , D /. о 0,2\ брать -у-^1,2---
Тогда формула (3. 30) принимает вид
/С„=Г1 + ^-(1,2-О^уг. (3.32)
L I \ Ik/J
www.vokb-la.spb.ru - Самолёт своими руками
§ 3. Подъемная сила системы крылья—фюзеляж
12а
Фиг. 3.12. Теоретические и экспериментальные значения Яа|х
124
Глава HI. Подъемная сила
Зависимость (3.32) изображена на фиг. 3. 14, где нанесены также н средние экспериментальные значения.
Случай «60». По аналогии с введем безразмерную величину
с учетом которой
’ (Гк.ф)ю = (Ккр)го=Гиз.кр^о. (3. 33>
Величину Л«о можно определить в первом приближении по теории тонких тел [12]. Приведем простую формулу, хорошо аппроксимирующую теоретическое выражение:
(К»)теор = -^[(2 + -у)2+ 1] - (3-34>
Фиг. 3.13. Зависимость отношения Каа/(Коо)теор от сужения консолей.
Зависимость (3.34) изображена на фиг. 3. 15, где нанесены тайже значения Къо, полученные в результате обработки экспериментальных данных. Как показывает эксперимент, Кт значительно колеблется при изменении числа М, но эти колебания носят незакономерный характер и объясняются, вероятно, погрешностями эксперимента и неточностью эмпирических графиков (см. фиг. 3. 1),. используемых в процессе обработки эксперимента. Средние значения Л'го располагаются несколько выше
теоретической кривой.
Аналогично тому, как это было сделано для Каа, введем эмпирическую поправку, учитывающую сужение консолей. Тогда выражение (3. 34) принимает вид
^=-±-([2+-у(1.2-—)]2+1)-5 (L I \ Чк /J J
(3.35)
Эта зависимость представлена на фиг. 3. 16, где нанесены также и экспериментальные точки.
Выражение (3. 35) справедливо при отсутствии щели между консолями и фюзеляжем, т. е. в тех случаях, когда крылья неподвижно закреплены с некоторым углом заклинения <рКр = б- Если же при
www.vokb-la.spb.ru - Самолёт своими руками?!
§ 3. Подъемная сила системы крылья—фюзеляж
125
отклонении крыльев относительно фюзеляжа образуется щель, как, это имеет место в случае поворотных крыльев, то перетекание воздуха должно привести к некоторому уменьшению подъемной силы.
Существуют теоретические решения задачи о влиянии щели на подъемную силу, но, поскольку ширина щели обычно соизмерима с толщиной пограничного слоя, эти решения, основанные на теории идеального газа, имеют малую практическую ценность.
126
Глава III. Подъемная сила
< ।
А
тп-
> (г+г) 2 + 1
10 5
О 0,1 0.Z 0,3 0/f 0,5 0,6
www.vokb-la.spb.ru - Самолёт своими руками?!
§ 3. Подъемная сила системы крылья—фюзеляж
127
Эксперименты, результаты которых представлены на фиг. 3. 15 и 3. 16, проводились на моделях, у которых щель между фюзеляжем и крыльями не замазывалась. Несмотря на это, большинство экспериментальных точек легло даже несколько выше теоретической кривой. Отсюда, казалось бы, можно сделать вывод о том, что наличие щели не вызывает снижения подъемной силы. Однако надо учитывать, что опыты проводились при малых числах Рейнольдса, когда влияние вязкости сказывается сильнее, чем в реальных условиях. Кроме того, углы отклонения крыльев в опытах были небольшими (4—8Р). При увеличении угла отклонения крыльев шйрина щели быстро возрастает, а отношение УКр/Киз.кР, по-видимому, несколько убывает.
На основании сказанного можно написать:
(^к.ф)го ~ (ККр)го — Уиз.кр A so (3. 36)
или
(^У К.ф)гО G"y Кр)®0 из.кр^м^щ ” > (3.37)
где /гщ — поправочный коэффициент, учитывающий влияние щели. Его ориентировочные значения следующие:
kltl = 0,95-?-1,0 при М>1,4;
&щ=0,8 при М<Мкр.
Общий случай. Пусть угол атаки фюзеляжа равен а, а крылья установлены относительно его оси под углом <ркр. Легко видеть, что общий случай есть комбинация двух ранее разобранных случаев. При небольших значениях а и <ркр зависимости cy—f(a) и cy=f((pHP) допустимо считать линейными. Тогда
Су кр~СУ кра4~ Сукр?кр, (3.38)
где
(3.39)
4кР=сауиз.кр^~-- (3-40)
Значения Суиз.кр определяются для изолированных крыльев, образованных из двух консолей.
Общий коэффициент подъемной силы системы крылья—фюзеляж
Сук.ф (ук.фа^~С‘у к.фТкр’ (3-41)
где
Sa с;к.Ф=сукР+суф-т-; (3-42)
о
^к.Ф»г’кр. J3.43)
128
Глава III. Подъемная сила
В случае поворотных крыльев коэффициент подъемной силы принято относить к площади двух консолей SK. Кроме того, необходимо учесть влияние щели. Поэтому выражения (3.38)—(3.40) принимают такой вид:
с — са ct -1- В
сукр — I сукр •
где
с^р=^нз.Кр^ (3.44)
^кр^изжр^щ- (3.45)
В этом случае в выражениях (3.41) и (3.43) надо заменить обозначение <рКр на 6.
Если, кроме фюзеляжа, имеются гондолы двигателей, то их подъемная сила может быть учтена введением в выражение (3. 42)
„ Sr слагаемого —
в котором с“ г определяется, как и с“ ф, по фор
мулам (3. 14), (3. 18), (3.22) и фиг. 3.7, a Sr представляет собой
суммарную площадь миделя гондол.
Иногда может возникнуть необходимость в определении не только общей подъемной силы Укр, но и ее составляющих в отдельности. С этой целью введем два новых безразмерных коэффици
www.vokb-la.spb.ru - Самолёт своими руками?!
§ 4. Подъемная сила оперения
129
ента, представляющих собой отношения подъемной силы консолей к подъемной силе аналогичных изолированных крыльев:
1 к
ив.кр
Согласно теории тонких тел (с учетом эмпирической поправки)
(3.46)
(3- 47)
На фиг. 3. 17 нанесены значения k,,.. и йво, подсчитанные по формулам (3.46) и (3.47), а также некоторые экспериментальные точки.
Пользуясь коэффициентами /С, Кк, k„, Лго, кщ легко выразить подъемную силу консолей и индуцированную подъемную силу фюзеляжа для общего случая при условии, что зависимости cy=f(a) и cy=f(6) линейные:
из-кр (^а 4~ &оМ)
I ф = из.кр а 4" (^0 ^8°)
(3. 48)
(3. 49)
§ 4. ПОДЪЕМНАЯ СИЛА ОПЕРЕНИЯ
4. 1. скос И ТОРМОЖЕНИЕ ПОТОКА
Воздушный поток, обтекающий поверхность летательного аппарата, оказывает на него силовое воздействие, выражающееся в появлении аэродинамических сил. Летательный аппарат оказывает ответное воздействие на воздух, отбрасывая его в сторону, противоположную вектору полной аэродинамической силы R. При этом секундное количество движения отброшенной массы воздуха равно R.
Поскольку вектор полной аэродинамической силы принято разлагать на подъемную силу и лобовое сопротивление, то и вектор количества движения отбрасываемого воздуха удобно разложить на два компонента, один из которых перпендикулярен, а другой параллелен направлению невозмущенного потока. Таким образом, можно сказать, что возникновение подъемной силы связано с отбрасыванием массы воздуха вниз (вдоль оси Оу), а возникновение лобового сопротивления — с отбрасыванием массы воздуха вперед (вдоль оси Ох). Первое явление вызывает изменение направления
9 101
130
Глава III. Подъемная сила
набегающего потока, или скос потока, а второе — уменьшение скорости, т. е. торможение потока.
Скос и торможение потока наиболее сильно выражены в области хвостовой части летательного аппарата, позади крыльев.
Величина скоса потока характеризуется скоростью отбрасывания потока вниз, или скоростью скоса, vy и углом скоса потока е (фиг. 3. 18). Обычно считают vv и е положительными в том случае, когда поток отбрасывается в сторону, обратную направлению оси Оу. При этом условии положительной подъемной силе будут соответствовать положительные значения скорости скоса и угла скоса потока.
Скорость неОозмущенносв потока IL.
Результирующая скорость
Фиг. 3. 18. Изменение скорости в результате скоса и торможения потока.
Из приведенных рассуждений видно, что для данного летательного аппаратаскорость и угол скоса потока пропорциональны подъемной силе.
Торможение потока приводит к возникновению за телом так называемой спутной струи (следа), внутри которой скорости меньше, чем скорость невозмущенного потока. Размеры следа и величины снижения скорости внутри него зависят от формы тела, чисел Re и М, угла атаки и т. д. Величину торможения потока принято характеризовать отношением скоростного напора в данной точке к скоростному напору невозмущенного потока.
Распределение скоростей за изолированными крыльями может быть найдено экспериментально или теоретически. Экспериментальные исследования являются более точными, чем теоретические, по зато последние дают возможность выявить основные закономерности.
Поле скоростей за крыльями в присутствии фюзеляжа обычно изучается экспериментально, так как теоретические исследования в этом случае чрезвычайно сложны.
Скос потока за изолированными крыльями
При сверхзвуковых скоростях полета углы скоса потока рассчитываются с помощью линейной теории крыльев конечного размаха.
www.vokb-la.spb.ru - Самолёт своими руками?!
$ 4. Подъемная сила оперения 131
Фиг. 3. 19. Области около треугольных крыльев с различным характером течения.
В сверхзвуковом потоке, обтекающем треугольные крылья, можно выделить три области (фиг. 3. 19). Область / ограничена волнами Маха, отходящими от задней кромки крыльев; область II расположена между волнами Маха, отходящими от передних и задних кромок; область III находится перед областью II. В области III поток не возмущен и, очевидно, скос потока отсутствует.
Теоретические исследования позволяют рассчитать углы скоса потока в области I. Для определения положения какой-либо точки потока относительно крыльев используем скоростную систему координат, начало которой совмещено с задней точкой средней аэродинамической хорды крыльев; ось Ох направлена назад, параллельно вектору скорости невозмущенного потока. Бу
дем предполагать, что вихревая пелена, сбегающая с крыльев, лежит в плоскости xOz.
Производная от угла скоса потока по углу атаки в точках, лежащих на оси Ох(у = 0; z = 0), определяется формулой
С
Л
(3. 50)
где kt—коэффициент, зависящий от параметра кУ М2—1 и безразмерной координаты х=х/Ь0 (х — координата точки, в которой ищется скос потока, а Ьо — корневая хорда крыльев).
Значения ks при сверхзвуковых скоростях даны на фиг. 3. 20 справа от оси ординат. С помощью фиг. 3. 20 можно сделать сле
дующие выводы:
1) при X=const скос потока уменьшается с ростом числа М, так как при этом уменьшается ;
2) при M = const скос потока уменьшается с ростом X, так как отношение c“/Z при этом падает (см. фиг. 3. 1);
3) при возрастании х скос потока увеличивается.
На фиг. 3. 21 показано распределение скоса потока за треугольными крыльями в нескольких сечениях, параллельных оси Oz. Характерно, что при z=l производная е“ меняет знак, т. е. в точках с координатой ?> имеет место обратный скос потока..
у*
132
Глава III. Подъемная сила
При удалении от вихревой пелены вверх или вниз скос потока уменьшается приблизительно по линейному закону. Поэтому для точек с координатой г/#=0 можно написать
By), (3.51)
- I 2у I где_у = -у- ;
Фиг. 3.20. График для определения угла скоса потока за изолированными крыльями треугольной формы в плане.
Формулой (3.51) можно пользоваться при (/<0,7. Кроме того, все написанные выражения справедливы только в области / (см. фиг. 3. 19), т. е. при
~ х
/ЛР— 1
В области // направление потока определяется углом наклона элементов поверхности крыльев, поэтому при переходе из области I в область II угол скоса потока скачкообразно изменяется.
Хотя фиг. 3.20 и 3.22 получены для треугольных крыльев (Х1=0), их можно рекомендовать в грубом приближении и для крыльев бесконечного сужения, задняя кромка которых имеет небольшой угол стреловидности (не более ±20°).
Если крылья имеют конечное сужение, то величина и характер распределения скоса потока вдоль оси Oz существенно изменяются. Так, например, на фиг. 3. 23 показаны эпюры распределения скоростей скоса потока в нескольких сечениях, проведенных позади прямоугольных крыльев параллельно оси Oz. В этом случае скос потока при i/ = 0 возникает только в пределах конусов Маха, выходящих из концов крыльев. В области 1-2-3 за крыльями угол скоса потока равен нулю. При z>//2, как и для треугольных крыльев, скос потока имеет обратное направление.
www.vokb-la.spb.ru - Самолёт своими руками?!
$ 4. Подъемная сила оперения
133
Хо-бО’; М-1,66; у-0.
Трапециевидные крылья (1 <т]<эо) по величине создаваемого ими скоса потока занимают промежуточное положение между треугольными и прямоугольными. Для грубых прикидок можно принимать
(kt)n+ca = (k^=MA, (3.52)
где (ЛЕ)г„те — определяется по фиг. 3. 20;
А — определяется по фиг. 3.24, если угол стреловидности задней кромки крыла невелик (|xi I <20°).
Производная еи в этом случае по-прежнему подсчитывается в соответствии с формулами (3.50) и (3.51).
При дозвуковых скоростях полета (М<МКр) скорость скоса потока в плоскости xOz далеко позади крыльев (теоретически в бесконечности) определяется выражением
168
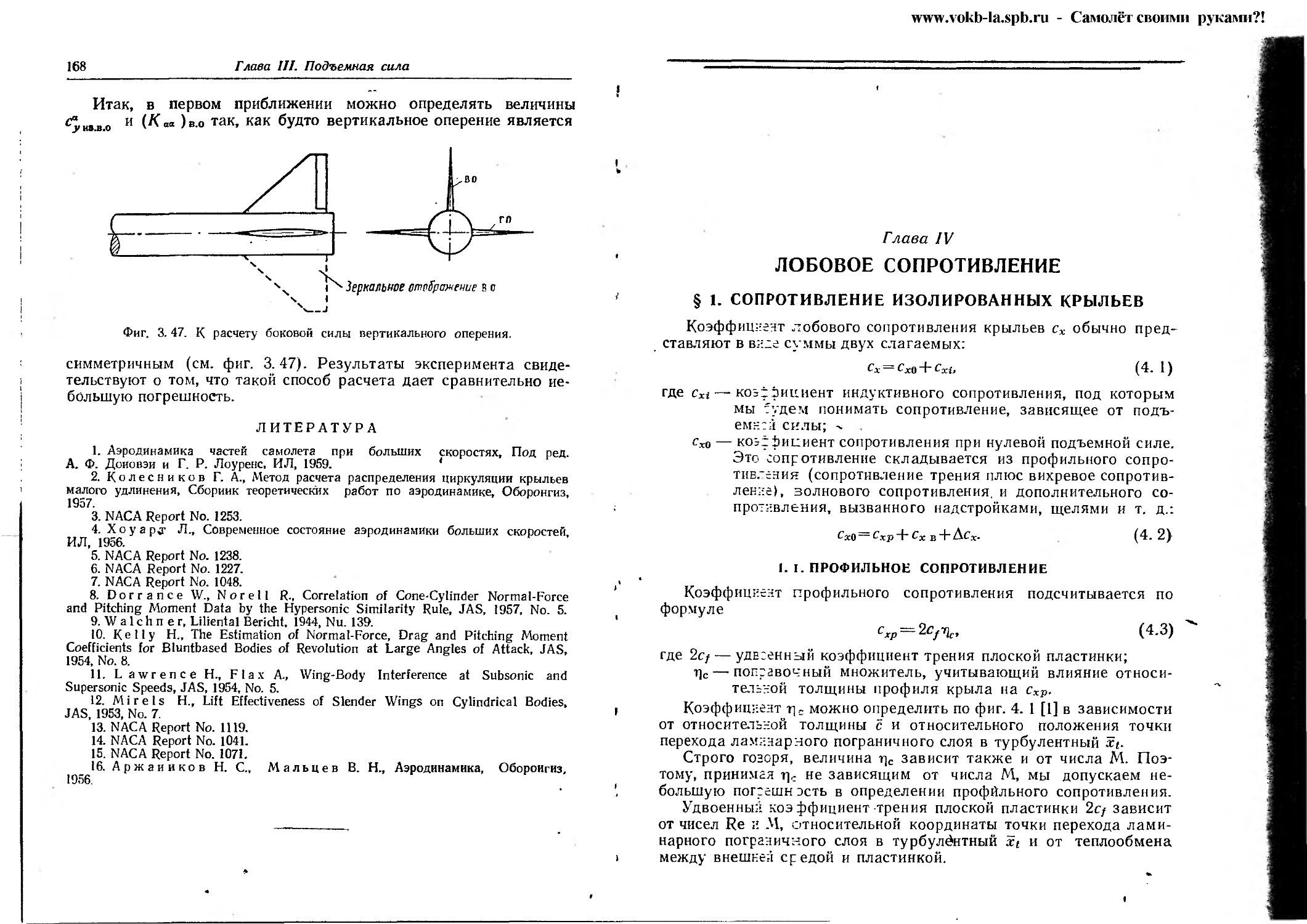
Г лава III. Подъемная сила
Итак, в первом приближении можно определять величины ‘э-ивво и )в.о так, как будто вертикальное оперение является
Фиг. 3. 47. К расчету боковой силы вертикального оперения.
симметричным (см. фиг. 3.47). Результаты эксперимента свидетельствуют о том, что такой способ расчета дает сравнительно небольшую погрешность.
Л ИТЕРАТУРА
1. Аэродинамика частей самолета при больших скоростях, Под ред.
А. Ф. Доиовэи и Г. Р. Лоуренс, ИЛ, 1959. *
2. Колесников Г. А., Метод расчета распределения циркуляции крыльев малого удлинения, Сборник теоретических работ по аэродинамике, Оборонгиз, 1957.
3. NACA Report No. 1253.
4. Хоуард- Л., Современное состояние аэродинамики больших скоростей, ИЛ, 1956.
5. NACA Report No. 1238.
6. NACA Report No. 1227.
7. NACA Report No. 1048.
8. Dorrance W., Nor ell R., Correlation of Cone-Cylinder Normal-Force and Pitching Moment Data by the Hypersonic Similarity Rule, JAS, 1957, No. 5.
9. Walchner, Liliental Bericht, 1944, Nu. 139.
10. Kelly H„ The Estimation of Normal-Force, Drag and Pitching Moment Coefficients for Bluntbased Bodies of Revolution at Large Angles of Attack, JAS, 1954, No. 8.
11. Lawrence H., Flax A., Wing-Body Interference at Subsonic and Supersonic Speeds, JAS, 1954, No. 5.
12. M i r e I s H., Lift Effectiveness of Slender Wings on Cylindrical Bodies, JAS, 1953, No. 7.
13. NACA Report No. 1119.
14. NACA Report No. 1041.
15. NACA Report No. 1071.
16. A p ж а и и к о в Н. С., Мальцев В. Н., Аэродинамика, Обороигиз, 1956.
www.vokb-la.spb.ru - Самолёт своими руками?!
Глава IV
ЛОБОВОЕ СОПРОТИВЛЕНИЕ
§ 1. СОПРОТИВЛЕНИЕ ИЗОЛИРОВАННЫХ КРЫЛЬЕВ
Коэффициент лобового сопротивления крыльев сх обычно представляют в виде суммы двух слагаемых:
Cx=cx0 + cXi, (4. 1)
где cxi — коэффициент индуктивного сопротивления, под которым мы тудем понимать сопротивление, зависящее от подъемней силы; -
схо — коэффициент сопротивления при нулевой подъемной силе. Это сопротивление складывается из профильного сопротивления (сопротивление трения плюс вихревое сопротивление), волнового сопротивления, и дополнительного сопротивления, вызванного надстройками, щелями и т. д.:
схо=схр+сх В+Дсх. (4. 2)
1. I. ПРОФИЛЬНОЕ СОПРОТИВЛЕНИЕ
Коэффициент профильного сопротивления подсчитывается по формуле
= (4.3)
где 2с/ — удвоенный коэффициент трения плоской пластинки;
т]с — поправочный множитель, учитывающий влияние относительной толщины профиля крыла на схр.
Коэффициент т]с можно определить по фиг. 4. 1 [1] в зависимости от относительной толщины с и относительного положения точки перехода ламинарного пограничного слоя в турбулентный
Строго гозоря, величина т]с зависит также и от числа М. Поэтому, принимая тр не зависящим от числа М, мы допускаем небольшую погрешность в определении профйльного сопротивления.
Удвоенный коэффициент трения плоской пластинки 2с/ зависит от чисел Re и М, относительной координаты точки перехода ламинарного пограничного слоя в турбулентный xt и от теплообмена между внешней средой и пластинкой.
170
Глава IV. Лобовое сопротивление
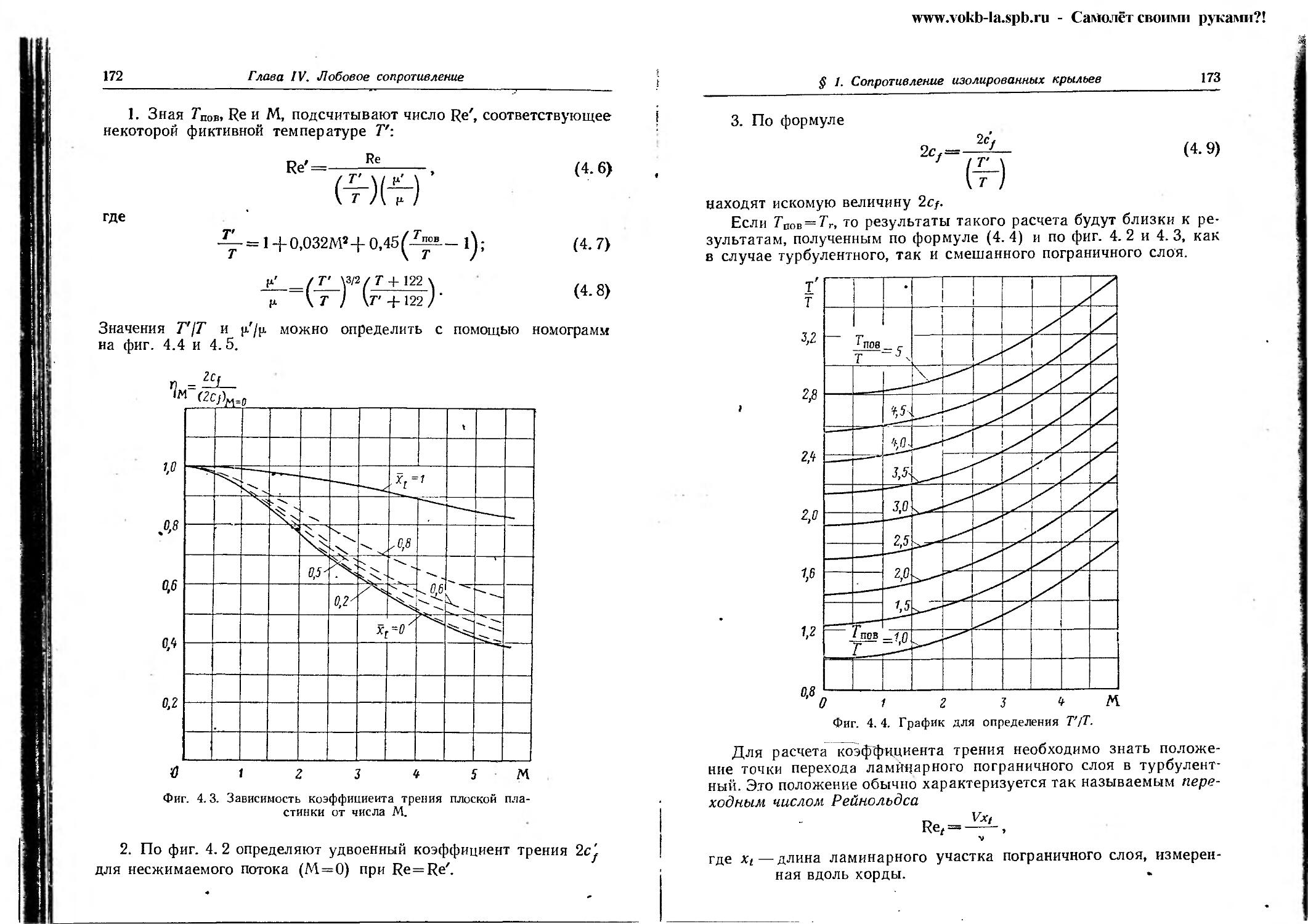
На фиг. 4.2 представлен график зависимости 2c/=f(Re, xt) для М=0 (несжимаемый поток). Как видно из графика, коэффициент трения снижается при увеличении числа Re и увеличении xt. При практическом использовании фиг. 4. 2 число Re обычно подсчиты-
Фиг. 4.1. График для определения поправочного коэффициента Т]с.
Увеличение числа М также приводит к снижению коэффициента трения пластинки, в особенности при полностью турбулентном пограничном слое. При М-/-0
2с/=т]м (2с/)м=0. (4.4)
Множитель т]м почти не зависит от числа Re и определяется по фиг. 4. 3 в зависимости от М и
Графики, представленные на фиг. 4. 2 и 4.3, справедливы только при отсутствии теплообмена между пограничным слоем и телом, т. е. в том случае, когда абсолютная температура поверхности тела Люв равна так называемой температуре восстановления * Тг:
Г'=7+Г^=Г(1 + '’'0’2М2)’ <4-5)
где Т — абсолютная температура окружающей среды;
г—коэффициент восстановления температуры, равный 0,845 при ламинарном и 0,88 при турбулентном пограничном слое.
* Эта температура иногда называется также температурой адиабатической или теплоизолированной стенки, собствеииой температурой тела и т. д.
www.vokb-la.spb.ru - Самолёт своими руками?!
§ 1. Сопротивление изолированных крыльев
171
Практически равенство ТПОВ = ТГ может иметь место только в том случае, когда полет длительный, установившийся и, кроме того, потери тепла от излучения с поверхности тела равны притоку тепла от солнечного излучения и от работающего двигателя.
Фиг. 4.2. Зависимость удвоенного коэффициента трения плоской пластинки от числа Re и Xi при М=0.
При кратковременном полете или при наличии системы охлаждения температура поверхности летательного аппарата не достигает значения, определяемого выражением (4.5), вследствие чего происходит теплоотдача от пограничного слоя к телу. Опыт показывает, что в этом случае коэффициент трения заметно возрастает и графики фиг. 4.2 и 4.3 становятся непригодными.
Существует приближенный способ расчета 2су, позволяющий одновременно учесть влияние чисел Re и М, а также теплообмена между пограничным слоем и телом [2]. Этот способ применим в том случае, когда из каких-то расчетов (хотя бы грубо приближенных) известна средняя температура поверхности летательного аппарата Тпов- Тогда 2cf определяется следующим образом:
172
Глава IV. Лобовое сопротивление
1. Зная Гпов, Re и М, подсчитывают число Re', соответствующее некоторой фиктивной температуре Т'-.
Re'= -Л , (4.6)
—
\ Т /\ (1 )
где
^=1-Ь0,032М2 *-Ь0,45(-^- 1); (4.7)
И \ т ) \Г +122 / 7
Значения Т'/Т и р-'/р- можно определить с помощью номограмм на фиг. 4.4 и 4.5.
2. По фиг. 4. 2 определяют удвоенный коэффициент трения 2с ?
для несжимаемого потока (М=0) при Re = Re'.
www.vokb-Ia.spb.ru - Самолёт своими руками?!
§ 1. Сопротивление изолированных крыльев
173
3. По формуле
2с'=7ГТ (4’9)
( 7 /
находят искомую величину 2cf.
Если Таов = Тг, то результаты такого расчета будут близки к результатам, полученным по формуле (4. 4) и по фиг. 4. 2 и 4. 3, как в случае турбулентного, так и смешанного пограничного слоя.
Для расчета коэффициента трения необходимо знать положение точки перехода ламинарного пограничного слоя в турбулентный. Это положение обычно характеризуется так называемым переходным числом Рейнольдса
Re, = -^-
где xt—длина ламинарного участка пограничного слоя, измеренная вдоль хорды.
174
Глава IV. Лобовое сопротивление
Значение Re( зависит от многих факторов: чисел Re и М, чистоты поверхности тела, градиента давления вдоль тела (т. е. от формы тела), теплообмена между пограничным слоем и телом (т. е. от температуры тела) и, наконец, от турбулентности набегающего потока. Совместное влияние этих факторов на Re, еще недостаточно изучено, поэтому приводимые ниже данные следует расценивать как ориентировочные.
На фиг. 4. 6 нанесены значения переходного числа Рейнольдса для гладких (тщательно отполированных) тел с нулевым градиентом давления. Эти результаты получены в аэродинамических трубах непрерывного действия [3], [4], [5], [6]. Температура моделей во всех случаях была близка к температуре восстановления, т. е. теплопередача отсутствовала. Несмотря на большой разброс точек, объясняемый, вероятно, различной формой тел, различной степенью турбулентности в трубах и т. п., фиг. 4. 6 показывает определенную тенденцию изменения Re; по числам М (пунктирная линия).
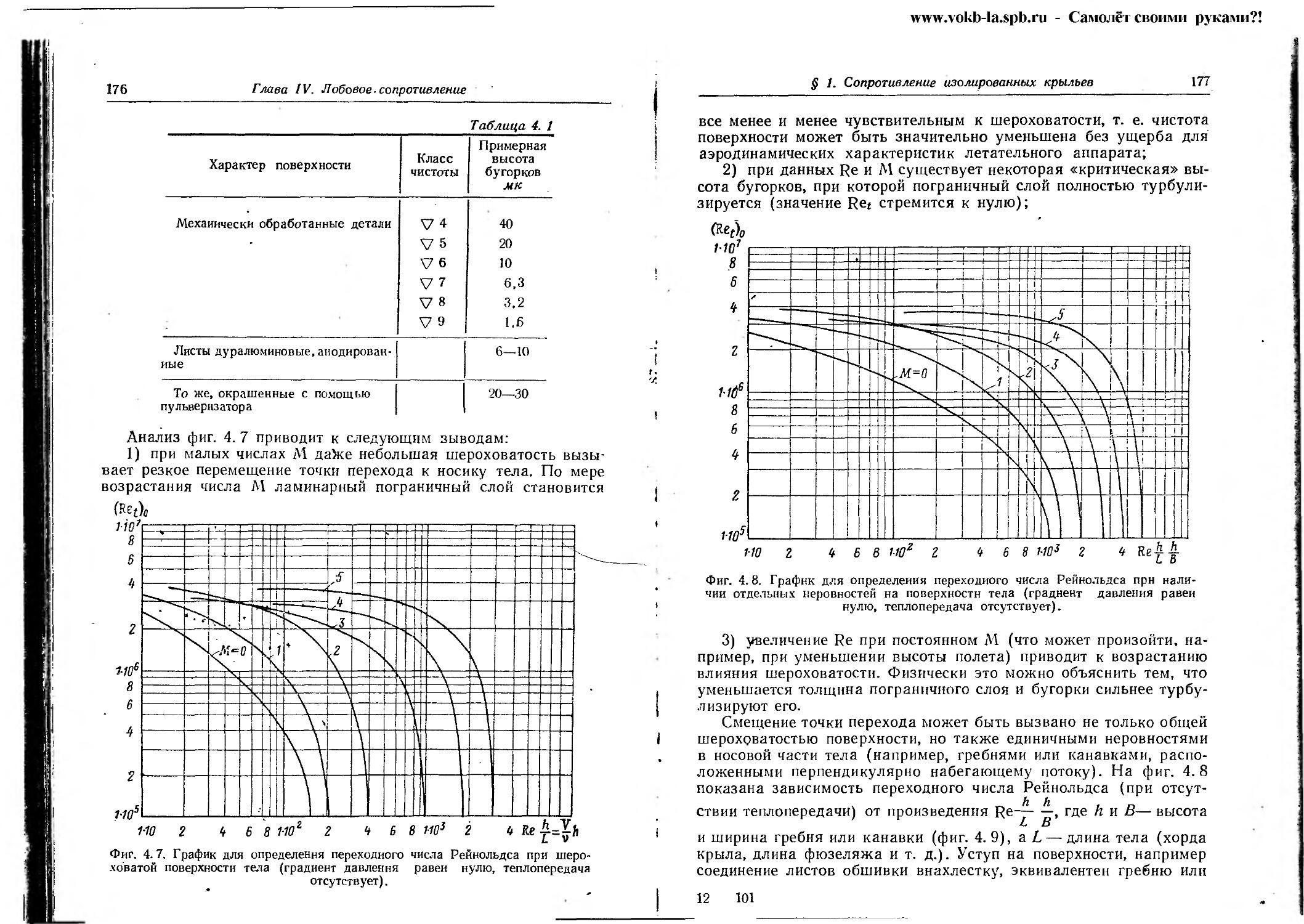
Реальные летательные аппараты всегда имеют шероховатую поверхность. Некоторые данные о высоте бугорков шероховатости в зависимости от технологического процесса обработки поверхности приведены в табл. 4. 1.
Шероховатость турбулизирует пограничный слой и смещает точку перехода к носику тела. Это иллюстрируется фиг. 4. 7, построенной на основе некоторых экспериментальных данных [7], [8]. По
www.vokb-la.spb.ru - Самолёт своими руками?!
£ /. Сопротивление изолированных крыльев 175
оси ординат отложено переходное число Рейнольдса при отсутствии теплопередачи (Ref)0, а по оси абсцисс—произведение числа Re данного тела и относительной высоты бугорков — (L — длина тела).
Фиг. 4.6. Переходное число Рейнольдса для гладких тел с нулевым градиентом давления при отсутствии теплопередачи.
О конус с углом при вершине 10э [3 J;
• то же, [4|;
А конус с углом при вершине S' (5J;
□ цилиндр (51;
X пластина [6]»
Фиг. 4.6 и 4>7 относятся к заостренным конусам, плоским пластинам, а также к полым цилиндрам, ось которых параллельна направлению набегающего потока. Следует отметить, что в последних двух случаях передняя кромка должна быть тщательно скруглена. При заостренной передней кромке пластины или цилиндра происходит преждевременная турбулизация пограничного слоя и, как показывает опыт, переходное число Рейнольдса снижается примерно вдвое по сравнению со значениями, показанными на фиг. 4. 6 и 4. 7.
176
Глава IV. Лобовое-сопротивление
Таблица 4. 1
Характер поверхности Класс чистоты Примерная высота бугорков мк
Механически обработанные детали V 4 40
V 5 20
V 6 10
V 7 6,3
V 8 3.2
V 9 1.6
Листы дуралюминовые, анодированные 6—Ю
То же, окрашенные с помощью пульверизатора | 20—30
Анализ фиг. 4. 7 приводит к следующим выводам:
1) при малых числах М да>ке небольшая шероховатость вызывает резкое перемещение точки перехода к носику тела. По мере возрастания числа М ламинарный пограничный слой становится
Фиг. 4.7. График для определения переходного числа Рейнольдса при шероховатой поверхности тела (градиент давления равен нулю, теплопередача отсутствует).
www.vokb-la.spb.ru - Самолёт своими руками?!
§ 1. Сопротивление изолированных крыльев
177
все менее и менее чувствительным к шероховатости, т. е. чистота поверхности может быть значительно уменьшена без ущерба для аэродинамических характеристик летательного аппарата;
2) при данных Re и М существует некоторая «критическая» высота бугорков, при которой пограничный слой полностью турбули-зируется (значение Ret стремится к нулю);
Фиг. 4.8. График для определения переходного числа Рейнольдса при наличии отдельных неровностей на поверхности тела (градиент давления равен нулю, теплопередача отсутствует).
3) увеличение Re при постоянном М (что может произойти, например, при уменьшении высоты полета) приводит к возрастанию влияния шероховатости. Физически это можно объяснить тем, что уменьшается толщина пограничного слоя и бугорки сильнее турбу-лизируют его.
Смещение точки перехода может быть вызвано не только общей шероховатостью поверхности, но также единичными неровностями в носовой части тела (например, гребнями или канавками, расположенными перпендикулярно набегающему потоку). На фиг. 4.8 показана зависимость переходного числа Рейнольдса (при отсут-, „ h h , г>
ствии теплопередачи) от произведения Re-----, где п и В— высота
L В
и ширина гребня или канавки (фиг. 4.9), a L — длина тела (хорда крыла, длина фюзеляжа и т. д.). Уступ на поверхности, например соединение листов обшивки внахлестку, эквивалентен гребню или
12 101
178
Глава IV. Лобовое сопротивление
канавке такой же высоты с отношением hlB=Q,5. Ряд заклепок с выступающими головками дает примерно такой же эффект, как гребень, высота и ширина которого равны соответственно высоте и диаметру головки заклепки. Следует отметить, что даже при потайной клепке головки заклепок несколько выступают над поверхностью обшивки (приблизительно на 5% диаметра головки).
Практически можно считать, что если на ламинарном участке находятся соединения отсеков, панелей или листов обшивки в стык или внахлестку, а также сварочные швы, ряды винтов или заклепок, то в этих местах происходит немедленный турбулентный пере-
Фиг. 4.9. Примеры отдельных неровностей на поверхности тела.
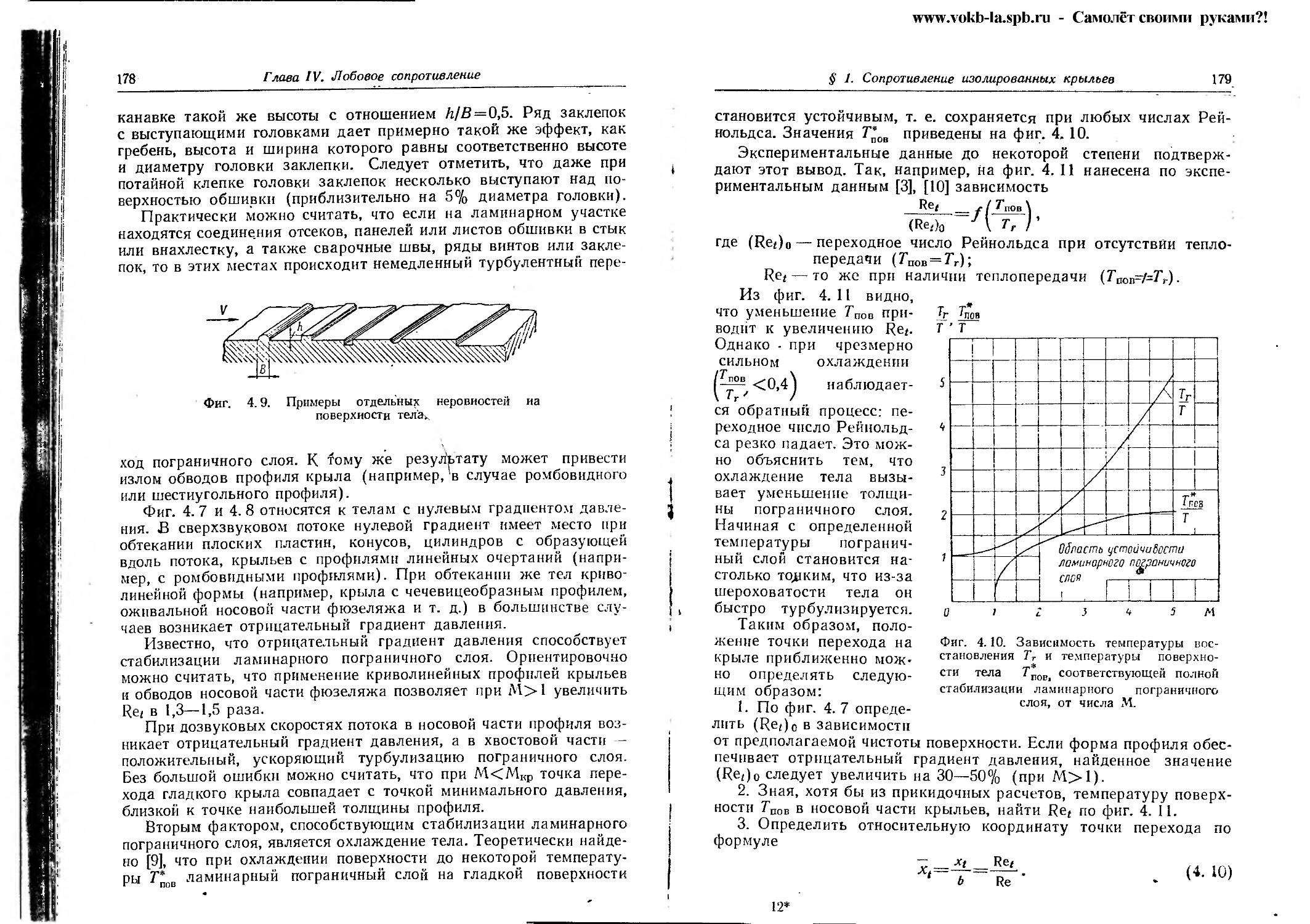
ход пограничного слоя. К тому же результату может привести излом обводов профиля крыла (например, в случае ромбовидного или шестиугольного профиля).
Фиг. 4. 7 и 4. 8 относятся к телам с нулевым градиентом давления. В сверхзвуковом потоке нулевой градиент имеет место при обтекании плоских пластин, конусов, цилиндров с образующей вдоль потока, крыльев с профилями линейных очертаний (например, с ромбовидными профилями). При обтекании же тел криволинейной формы (например, крыла с чечевицеобразным профилем, оживальной носовой части фюзеляжа и т. д.) в большинстве случаев возникает отрицательный градиент давления.
Известно, что отрицательный градиент давления способствует стабилизации ламинарного пограничного слоя. Ориентировочно можно считать, что применение криволинейных профилей крыльев и обводов носовой части фюзеляжа позволяет при М>1 увеличить Re/ в 1,3—1,5 раза.
При дозвуковых скоростях потока в носовой части профиля возникает отрицательный градиент давления, а в хвостовой части — положительный, ускоряющий турбулизацию пограничного слоя. Без большой ошибки можно считать, что при М<Мкр точка перехода гладкого крыла совпадает с точкой минимального давления, близкой к точке наибольшей толщины профиля.
Вторым фактором, способствующим стабилизации ламинарного пограничного слоя, является охлаждение тела. Теоретически найдено [9], что при охлаждении поверхности до некоторой температуры Г*ов ламинарный пограничный слой на гладкой поверхности
www.vokb-la.spb.ru - Самолёт своими руками?!
§ 1. Сопротивление изолированных крыльев
179
Фиг. 4. 10. Зависимость температуры восстановления Тт и температуры поверхности тела Тпов> соответствующей полной стабилизации ламинарного пограничного слоя, от числа М.
становится устойчивым, т. е. сохраняется при любых числах Рейнольдса. Значения Г‘ов приведены на фиг. 4. 10.
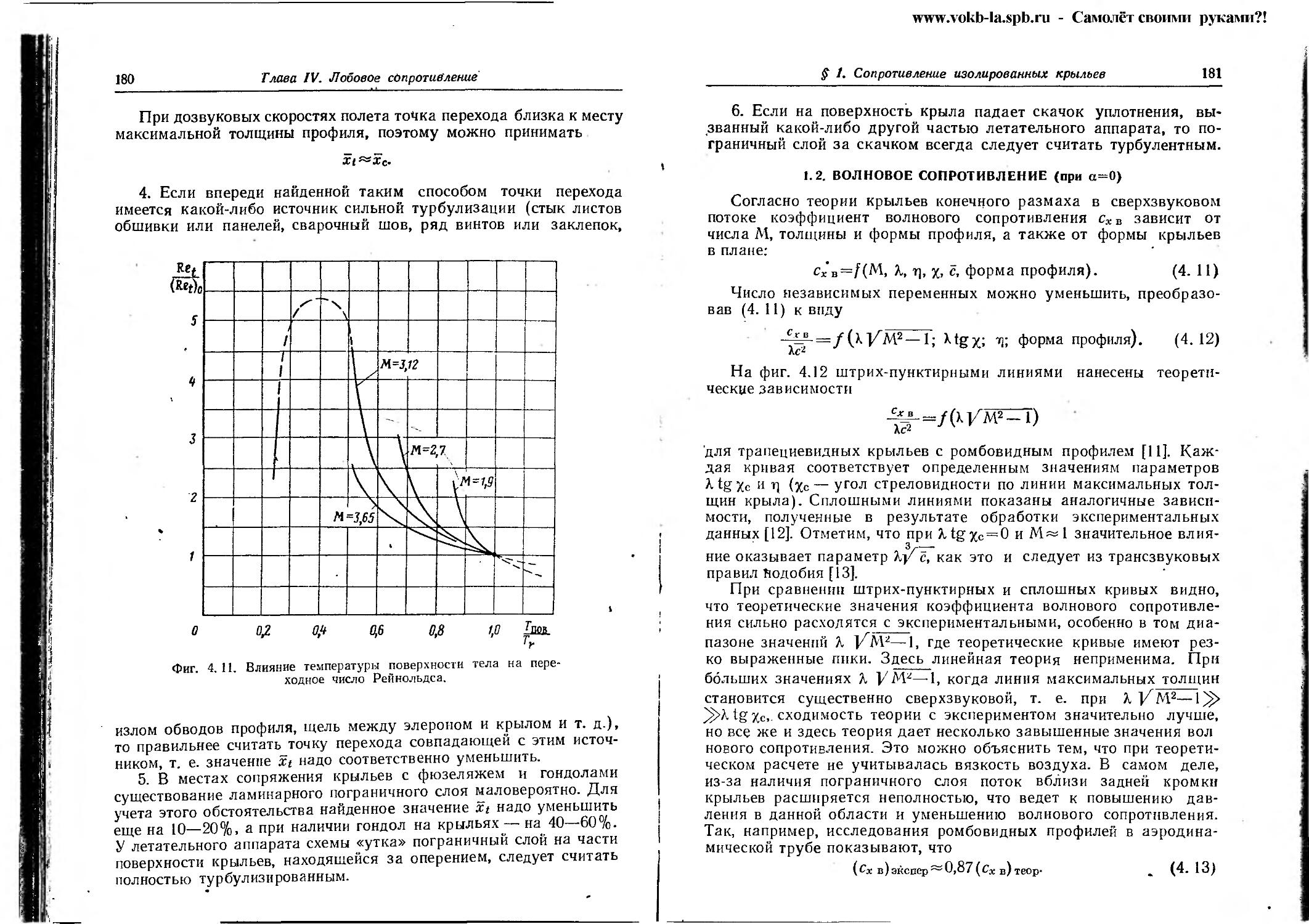
Экспериментальные данные до некоторой степени подтверждают этот вывод. Так, например, на фиг. 4. 11 нанесена по экспериментальным данным [3], [10] зависимость
Re< __л / Т пов \
(Re.Oo ~J\Tr)' где (ReJo — переходное число Рейнольдса при отсутствии теплопередачи (Тпов = Тг);
Ret — то же при наличии теплопередачи (7'пов-/-7',.).
Из фиг. 4.11 видно, что уменьшение Tn0D приводит к увеличению Re«. Однако - при чрезмерно сильном охлаждении
<0’4^ наблюдается обратный процесс: переходное число Рейнольдса резко падает. Это можно объяснить тем, что охлаждение тела вызывает уменьшение толщины пограничного слоя. Начиная с определенной температуры пограничный слой становится настолько тонким, что из-за шероховатости тела он быстро турбулизируется.
Таким образом, положение точки перехода на крыле приближенно можно определять следующим образом:
1. По фиг. 4. 7 определить (Re()0 в зависимости
от предполагаемой чистоты поверхности. Если форма профиля обеспечивает отрицательный градиент давления, найденное значение (Rez)0 следует увеличить на 30—50% (при М>1).
2. Зная, хотя бы из прикидочных расчетов, температуру поверхности ТПОВ в носовой части крыльев, найти Re( по фиг. 4. И.
3. Определить формуле
относительную координату точки перехода по
xt __Re<
b ~ Re
(4. 10)
12*
180
Глава IV. Лобовое сопротивление
При дозвуковых скоростях полета точка перехода близка к месту максимальной толщины профиля, поэтому можно принимать
Xt~Xc-
4. Если впереди найденной таким способом точки перехода имеется какой-либо источник сильной турбулизации (стык листов
Фиг. 4. 11. Влияние температуры поверхности тела на переходное число Рейнольдса.
излом обводов профиля, щель между элероном и крылом и т. д.), то правильнее считать точку перехода совпадающей с этим источником, т. е. значение xt надо соответственно уменьшить.
5. В местах сопряжения крыльев с фюзеляжем и гондолами существование ламинарного пограничного слоя маловероятно. Для учета этого обстоятельства найденное значение xt надо уменьшить еще на 10—20%. а при наличии гондол на крыльях — на 40—60%. У летательного аппарата схемы «утка» пограничный слой на части поверхности крыльев, находящейся за оперением, следует считать полностью турбулизированным.
www.vokb-la.spb.ru - Самолёт своими руками?!
$ 1. Сопротивление изолированных крыльев 181
6. Если на поверхность крыла падает скачок уплотнения, вызванный какой-либо другой частью летательного аппарата, то пограничный слой за скачком всегда следует считать турбулентным.
1.2. ВОЛНОВОЕ СОПРОТИВЛЕНИЕ (при а=0)
Согласно теории крыльев конечного размаха в сверхзвуковом потоке коэффициент волнового сопротивления сх в зависит от числа М, толщины и формы профиля, а также от формы крыльев в плане:
Сх*в=/(М, X, т], %, с, форма профиля). (4. 11)
Число независимых переменных можно уменьшить, преобразовав (4. 11) к виду
-CLE —/(X ]ЛМ2—1; Xtgx; форма профиля). (4.12) Хе2
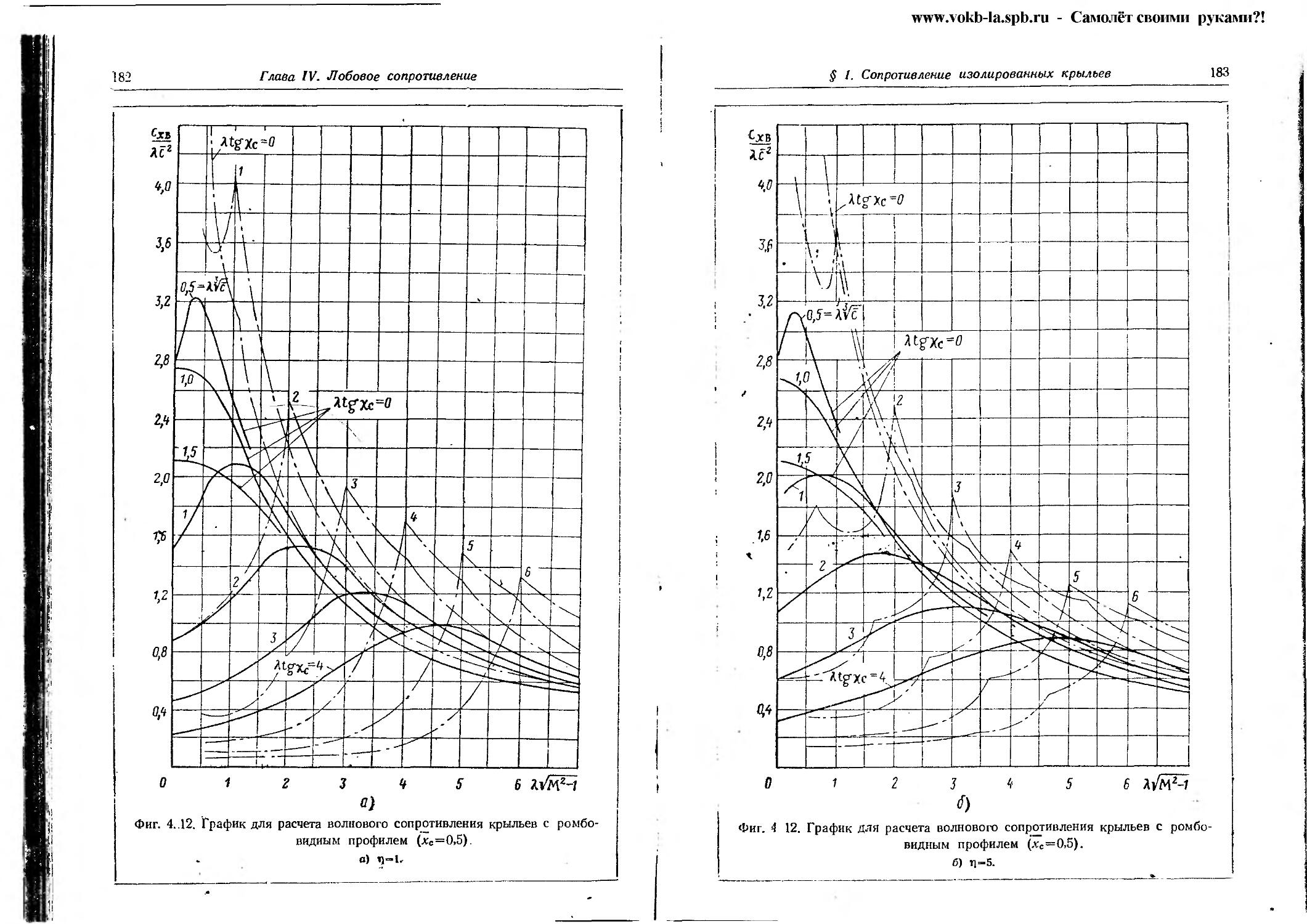
На фиг. 4.12 штрих-пунктирными линиями нанесены теоретические зависимости
-^-=/(х/Ж=Т)
для трапециевидных крыльев с ромбовидным профилем [11]. Каждая кривая соответствует определенным значениям параметров XtgXc и ц (хс— угол стреловидности по линии максимальных толщин крыла). Сплошными линиями показаны аналогичные зависимости, полученные в результате обработки экспериментальных данных [12]. Отметим, что при XtgXc = O и М~1 значительное влия-з,—-
ние оказывает параметр Ху с, как это и следует из трансзвуковых правил Подобия [13].
При сравнении штрих-пунктирных и сплошных кривых видно, что теоретические значения коэффициента волнового сопротивления сильно расходятся с экспериментальными, особенно в том диапазоне значений X ]/М2—1, где теоретические кривые имеют резко выраженные пики. Здесь линейная теория неприменима. При больших значениях X VМ2—-1, когда линия максимальных толщин становится существенно сверхзвуковой, т. е. при X VМ2—1^> ^>Х tg Хс,. сходимость теории с экспериментом значительно лучше, но все же и здесь теория дает несколько завышенные значения вол нового сопротивления. Это можно объяснить тем, что при теоретическом расчете не учитывалась вязкость воздуха. В самом деле, из-за наличия пограничного слоя поток вблизи задней кромки крыльев расширяется неполностью, что ведет к повышению давления в данной области и уменьшению волнового сопротивления. Так, например, исследования ромбовидных профилей в аэродинамической трубе показывают, что
(с.г в)экспер~ 0,87 (сх в) теор- . (4-13)
182
Глава IV. Лобовое сопротивление
О)
Фиг. 4..12. График для расчета волнового сопротивления крыльев с ромбовидным профилем (%с=0.5)
а) Ч“Ь
www.vokb-la.spb.ru - Самолёт своими руками?!
£ /. Сопротивление изолированных крыльев
183
184
Глава IV. Лобовое сопротивление
www.vokb-la.spb.ru - Самолёт своими руками?!
$ 1. Сопротивление изолированных крыльев
185
При изменении относительной толщины профиля по размаху крыла расчет сжв следует вести по средней эквивалентной тол-
щине
^экв
1
I 2 _ “12
J c^bdz
О
Z/2
J bdZ
(4- 14>
Для грубых прикидок в качестве с0Кв можно принимать среднее арифметическое относительных толщин на конце и в корне крыла (при наличии фюзеляжа —в бортовом сечении):
^кв~—— • (4.15)'
Как уже указывалось, данные фиг. 4. 12 применимы только-для крыльев с ромбовидным профилем. Влияние формы профиля на волновое сопротивление крыльев бесконечного размаха' в настоящее время хорошо изучено. В табл. 4. 2 приведены сравнительные характеристики некоторых симметричных профилей, полученные теоретическим путем (см., например, [14]) и хорошо подтверждаемые экспериментом. Эти характеристики выражены в виде коэффициента К, представляющего собой отношение сх в профиля данной формы к схв ромбовидного профиля.
Влияние формы профиля на волновое сопротивление крыльев конерного размаха оказывается несколько иным. На фиг. 4. 13 нанесены теоретические зависимости
^-=/(х/м^Т) АС-!
для крыльев с двумя четырехугольными профилями, отличающимися положением максимальной толщины: хс=0,5 (ромб) и хс=0,3. Как видно, при XV М2—KXtg^c (дозвуковая линия максимальных толщин) кривые с одинаковыми значениями параметров Xtg%c и 1] почти совпадают; при XV М2—l>XtgXc (сверхзвуковая линия максимальных толщин) ординаты кривых находятся примерно в том же отношении, что и значения схв крыльев бесконечного размаха с соответствующими профилями (1 : 1,19).
Изучение экспериментальных данных приводит к аналогичным выводам и позволяет сформулировать некоторые общие положения о влиянии формы профиля на волновое сопротивление крыльев конечного размаха:
1) при дозвуковой линии максимальных толщин (X }/М2—1< <Х tg у с) крылья с одинаковыми значениями параметров 15, X tg %с w
186
Глава IV. Лобовое сопротивление
з _
с независимо от формы профиля имеют почти одинаковое волновое сопротивление *;
2) при существенно сверхзвуковой линии максимальных толщин X }/М2—tg/c влияние формы профиля на схв примерно такое же, как и по теории крыльев бесконечного размаха.
* Имеются в виду профили с заостренной задней кромкой и с конфигурацией, характерной- для скоростных летательных аппаратов.
Фиг. 4. 13. Влияние положения максимальной
а) 4=1-
www.vokb-la.spb.ru - Самолёт своими руками?!
§ 1. Сопротивление изолированных крыльев
187
Исходя из этого, можно рекомендовать следующую формулу для расчета сх в крыльев с произвольным симметричным профилем:
Сх в — ( Сх в) ромб [1 (К 1) ],
(4. 16)
где (схв)ромб определяется по фиг. 4. 12 в зависимости от пара-
3.—-
метров т], Xtgxc и у с, причем угол /с отсчитывается по линии максимальных толщин крыла с дан-> • ным профилем (а не с ромбовидным);
/С определяется по табл. 4. 2;
<р определяется по фиг. 4. 14 в зависимости от разности (X gM2=T-xtgZc).
188
Глава IV. Лобовое- сопротивление
Таблица 4.2
Профиль
Эскиз
Ромбовидный
Четырехугольный
Шестиугольный
Синусоидальный
Образованный дугами окружностей или парабол
Дозвуковой
При дозвуковой и звуковой линии максимальных толщин \(kVM^=T-ktgZc<o) значение <р принято равным нулю; при )(k]/M2^T-ktgxc)->oo ?->1.
Сравнение расчета по формуле (4. 16) с экспериментом дано на фиг. 4. 15. Экспериментальные данные были получены путем испытания в свободном полете моделей крыльев, укрепленных на цилиндрической части корпуса [12].
Формула (4. 16) позволяет рассчитать и построить зависимость Схв=/(М) при М>1. В диапазоне Мкр<М<1 эта зависимость строится приближенно таким образом, чтобы при М = Мкр выполнялись два условия: схв=0 и дсжв/дМ.=0, т. е. кривая была бы касательна к оси абсцисс.
www.vokb-la.spb.ru - Самолёт своими руками?!
§ 1. Сопротивление изолированных крыльев
189
Фиг. 4. 14. График вспомогательной функции гр для расчета волнового сопротивления крыльев с произвольным профилем.
1.3. КРИТИЧЕСКОЕ ЧИСЛО М
Значение Мкр зависит, главным образом, от относительной толщины и формы профиля, угла стреловидности, удлинения и коэффициента подъемной силы крыльев.
На фиг. 4. 16 приведены теоретические зависимости МКр=/(су) для нескольких серий симметричных дозвуковых профилей, отличающихся положением максимальной толщины [15]. Критические числа М сверхзвуковых чечевицеобразных профилей на 3—5%, а ромбовидных на 10—12% ниже.
Для перехода от Мкр профиля к М1;р крыльев необходимо ввести поправки на конечность размаха и на стреловидность крыльев по линии максимальных толщин *:
МкР= (МкР)проф"Ь + АЛ4кр^. (4. 17)
Значения этих поправок можно в первом приближении считать не зависящими от су и определять по фиг. 4. 17 и 4. 18 [16].
Часто возникает необходимость найти связь непосредственно между Мкр и а. С этой целью надо построить график су = ДМ) для различных углов атаки (фиг. 4. 19) и на этот график нанести зависимость Мкр=/(ср), рассчитанную по формуле (4. 17). Точки пересечения кривых cp=f(M) и AiKp=f(cp) определяют критические числа М при выбранных углах атаки.
* Точнее говоря, значение Мкр определяется углом стреловидности по линии минимальных давлений, которая прн са=0 в большинстве случаев близка к линии наибольших толщин.
www.vokb-la.spb.ru - Самолёт своими руками?!
£ /. Сопротивление изолированных крыльев 191
1,72 ——
1 II
90'0 0,09
192
Г лава IV. Лобовое сопротивление
0,7 0,8 0,9 (Мцр)проф.приСу’О
I
Фиг. 4. 17. Изменение критического числа М I в зависимости от удлинения крыльев
I (сУ=0).
Фиг. 4. 18. Изменение критического числа М в зависимости от угла стреловидности крыла по линии максимальных толщин (Ср=0).
www.vokb-la.spb.ru - Самолёт своими руками?!
§ 1. Сопротивление изолированных крыльев
193
Фиг. 4. 19. Схема графического определения значений МКр при разных углах атаки.
1.4. ИНДУКТИВНОЕ СОПРОТИВЛЕНИЕ
При сверхзвуковых скоростях полета сопротивление, обусловленное подъемной силой, по существу состоит из двух частей:
1) волнового сопротивления, связанного с потерями механической энергии потока в головных и хвостовых скачках уплотнения, й
2) сопротивления, связанного с образованием вихревой пелены и аналогичного по физической сущности индуктивному сопротивлению при дозвуковых скоростях полета.
Однако методически проще такое деление не 1проводить, поэтому под индуктивным сопротивлением будем понимать все сопротивление, обусловленное подъемной силой.
Механизм образования индуктивного сопротивления можно представить следующим образом. При сверхзвуковой передней кромке (М> —-—]и тонком профиле крыла индуктивное сопро-\ cosyo /
тивление есть не что иное, как проекция силы У], нормальной к плоскости крыльев, на направление невозмущенного потока;
Xi=Y] sin a = Y tga;
(4- 18)
cxi=Cytga. (4.19)
При дозвуковой передней кромке^М<—-—кроме нормаль-\ cos уо /
ной силы, возникает подсасывающая сила F, направленная приблизительно навстречу невозмущенному потоку. Поэтому
Xt = Ytga—F; (4.20)
Cxi —Су tg а—ср. (4.21)
13 101
194
Глава IV. Лобовое сопротивление
Возникновение подсасывающей силы объясняется тем, что при обтекании крыла составляющей потока, перпендикулярной к передней кромке и имеющей дозвуковую скорость V cos /о, в окрестности передней кромки возникает разрежение. Это разрежение тем больше, чем больше угол атаки.
Теоретическая величина cF пропорциональна с2у. Отношение Ср!с2у для крыльев с заостренными концами (т] = оо) определяется по графику фиг. 4..20, построенному на основании теоретических исследований. Этим же графиком приходится пользоваться в первом приближении и для крыльев конечного сужения. Как видно из фиг. 4. 20, при возрастании числа М значение сР1с2у убывает и при |/ М2—l=tg’xo (звуковая передняя Громка) обращается в нуль.
Опыт показывает, что фактическое значение подсасывающей
силы значительно меньше
теоретического, особенно при больших углах атаки. Это можно объяснить тем, что при достижении определенной степени разрежения в окрестности передней кромки происходит местный отрыв потока, после чего дальнейший рост разрежения прекращается. Чем меньше радиус кривизны носика профиля, тем сильнее должно быть выражено это явление.
Обозначим через g отношение экспериментального значения подсасывающей силы к теоретическому. Ориентировочный вид зависимости g=f(cy) для профилей с закругленным и заостренным носиками показан на фиг. 4.21.
В итоге общее выражение коэффициента индуктивного сопротивления при М>1, справедливое в широком диапазоне углов атаки вплоть до акр, принимает вид
(с \
-%- рл
су /
(4.22)
Для расчета по формуле (4.22) необходимо предварительно построить графики зависимости cy=f(!A) при различных углах атаки.
www.vokb-la.spb.ru - Самолёт своими руками?!
§ 1. Сопротивление изолированных крыльев
195
Если углы атаки малы, можно положить
tga=—~ .
S 57,3
При этих условиях выражение (4. 22) принимает вид
или
(4.23)
(4. 24)
где с“ определяется по фиг. 3. 1, a g из графика на фиг. 4. 21.
Из изложенного выше видно, что для получения наименьшей величины индуктивного сопротивления при М< —— целесооб-cosyo
разно применять профили с закругленным носиком. С другой сто-
13*
196
Глава IV. Лобовое сопротивление
роны, в разд. 1.2 было показано, что при дозвуковой линии максимальных толщин гМ< --------} форма носика профиля почти не
\ cos хс /
влияет на волновое сопротивление. Если сопоставить эти результаты, то можно прийти к следующим выводам:
1) при дозвуковой линии максимальных толщин, т. е. при
М<—-—, наименьшее сопротивление дают профили с закруглеи-cosxc
ным носиком;
2) при сверхзвуковой линии максимальных толщин, но дозву-
ковой передней кромке, т. е. в диапазоне---<М< —-—, выбор
COS Ze COSXo
формы носика зависит от соотношения индуктивного и волнового сопротивлений. Для отыскания лучшего варианта надо в каждом
отдельном случае произвести сравнительные расчеты;
3) при сверхзвуковой передней кромке, т. е. при М> —-—, наи-cos хо
меньшее сопротивление дают профили с. заостренным носиком.
В этих выводах не учтен тот факт, что при заостренной передней кромке крыльев сильно снижается значение Reb вследствие чего растет сопротивление трения. Это обстоятельство дополнительно свидетельствует в пользу применения закругленных перед-
них кромок.
Индуктивное сопротивление крыльев при дозвуковых скоростях полета можно рассчитывать по эмпирической формуле
X
, __ O.38cJ, cos xo,s
xi X — 0.8cj,(X — 1) Х+4
(4. 25)
справедливой в диапазоне 0<М<Мкр. Значения Мкр при разных углах атаки определяются так, как указано в разд. 1.3.
Индуктивное сопротивление, найденное по формуле (4.25), включает в себя и величину изменения профильного сопротивления при переходе от су=0 к Cy=i-Q.
Индуктивное сопротивление Х-образных крыльев при заданном
угле атаки а можно определить исходя из следующих рассуждений. При сверхзвуковой передней кромке крыльев, когда отсутствует подсасывающая сила, имеем:
а) для плоских крыльев
Xi=ytga, (4.26)
Cxi = cvi^a\ (4-27)
б) для Х-образных крыльев при том же угле атаки
(Х{)х = (У)х tga=&4, У tg a=k^Xi, (4. 28)
(Гх1‘)х==^ф Cxi- (4.29)
Соотношение (4.29) приближенно сохраняется и при малых числах М.
www.vokb-la.spb.ru - Самолёт своими руками?!
£ 2. Сопротивление изолированного фюзеляжа (корпуса)
197
§ 2. СОПРОТИВЛЕНИЕ ИЗОЛИРОВАННОГО ФЮЗЕЛЯЖА (КОРПУСА)
Коэффициент лобового сопротивления фюзеляжа, отнесенный к площади миделя, обычно выражают в виде суммы:
Сх ф = СхОф 4~ Cxi ф, (4. 30)
где
СхОф = Сх тр+ Сх нос + сх корм + СХ да Ч-Дсх. (4- 31)
В формуле (4.31) введены следующие обозначения:
Сх тр — коэффициент сопротивления трения;
сх пос'— коэффициент сопротивления давления носовой части при а=0;
Схкорм — коэффициент сопротивления давления кормовой части при а=0;
Схдн—коэффициент донного сопротивления;
Ас х -— коэффициент дополнительного сопротивления, вызванного надстройками, щелями и т. д.
2.1. СОПРОТИВЛЕНИЕ ТРЕНИЯ
Пренебрегая влиянием кривизны поверхности на силу трения, а также наклоном отдельных элементов поверхности к оси фюзеляжа, можно написать
бф 2гу
хтр Cf 5Ф 2 5Ф ’
(4-32)
где Гф — площадь смоченной поверхности фюзеляжа (без площади донного среза).
Удвоенный коэффициент трения 2с/ определяется по графикам и формулам, приведенным в разд. 1. 1, только в данном случае Re подсчитывается по длине фюзеляжа, а
(4-33) бф
где Ft — часть поверхности фюзеляжа, обтекаемая ламинарным пограничным слоем.
Для определёния отношения (4. 33) поступают следующим образом:
1) по фиг. 4.7, 4.8, 4. 11 находят Rei, следуя указаниям, изложенным в разд. 1. 1;
2) подсчитывают координату линии перехода
x,= Re,5;.
(4-34)
198
Глава IV. Лобовое сопротивление
Если впереди линии перехода, найденной таким способом, имеется источник сильной турбулизации (например, стык листов обшивки или отсеков фюзеляжа, излом обводов, носовое оперение и т. д.), то правильнее считать линию перехода совпадающей с этим источником;
3) определяют по-чертежу величину поверхности Ft, расположенной впереди линии перехода, и отношение xt=FtlF^.
2.2. СОПРОТИВЛЕНИЕ НОСОВОЙ ЧАСТИ
При обтекании тела вращения сверхзвуковым потоком на поверхности носовой части тела устанавливается повышенное давление. Равнодействующая сил избыточного давления называется сопротивлением носовой части.
Фиг. 4. 22. Зависимость коэффициента сопротивления носовой части с параболическими обводами от числа М.
Наоборот, при обтекании тела дозвуковым потоком на большей части поверхности носовой части устанавливается пониженное давление, вследствие чего возникает подсасывающая сила, направлен-
www.vokb-la.spb.ru - Самолёт своими руками?!
$ 2. Сопротивление изолированного фюзеляжа (корпуса) 199
ная против набегающего потока. Другими словами, сопротивление носовой части получается отрицательным.
На фиг. 4.22 и 4.23 представлены графики зависимости сх B0C=-=f(M) для тел вращения с заостренным носиком. Данные фиг. 4. 22 относятся к носовой части параболической формы, уравнение образующей которой имеет вид
(4.35)
а данные фиг. 4. 23 —к носовой части конической формы. При построении этих графиков использованы результаты теоретических и
Фиг. 4.23. Зависимость коэффициента сопротивления носовой части конической формы от числа М.
экспериментальных исследований. Участки кривых в области М>1,6 (сплошные линии) представляют собой теоретические значения Схнос (см., например, [17]). Участки кривых в области М<1,6 (пунктир) построены на основании обработки результатов некоторых экспериментов, в которых замерялось распределение давления по носовой части тела (см., например, [18]). Так как количество экспериментальных данных было недостаточным, то пунктирные кривые следует рассматривать как ориентировочные.
200
Г лава IV. Лобовое сопротивление
Если в носовой части фюзеляжа имеется скругление или плоский срез (без протока), лобовое сопротивление резко возрастает, особенно при больших числах М. Это видно из фиг. 4. 24, на которой нанесена зависимость АсХНОс=/:(М) (Асхнос — разность между нос тела со скругленным или срезанным носиком и сХНОс исходного тела с заостренным носиком). Графики на фиг. 4. 24 построены
Фнг. 4.24. Зависимость приращения коэффициента сопротивления носовой части, вызванного затуплением носика, от числа М.
по результатам испытаний модели снаряда с оживальной носовой частью, удлинение которой в исходном варианте было равно Хвое=2,5 [19].
Значения сХц0С при эллиптической форме обводов носовой части могут быть приближенно найдены по фиг. 4. 25, построенной также на основании экспериментальных данных.
2.3. СОПРОТИВЛЕНИЕ НОСОВОЙ ЧАСТИ С ВОЗДУХОЗАБОРНИКОМ
Рассмотрим тело вращения с размещенным внутри него воздушно-реактивным двигателем (ТРД или ПВРД). Пусть воздухозаборник двигателя представляет собой простой диффузор без центральной иглы (фиг. 4.26).
www.vokb-la.spb.ru - Самолёт своими руками?!
§ 2. Сопротивление изолированного фюзеляжа (корпуса)
20 Г
Фиг. 4.25. Зависимость коэффициента сопротивления носовой части с эллиптическими обводами от числа М.
Фиг. 4 26. Простой диффузор на расчетном (а), и нерасчетном (б) режимах работы.
202
Глава IV. Лобовое сопротивление
Как показывает опыт, сопротивление такого тела при сверх-" звуковых скоростях полета сильно зависит от безразмерного коэффициента расхода воздуха через двигатель, представляющего собой отношение действительного секундного расхода к максимально возможному расходу:
б?в-сек Р1 Sqq
g-Рзо KSbx Pc V S|
(4.36)
В этом выражении индексом «оо» обозначены параметры струи
воздуха, проходящей через двигатель, в невозмущенном потоке
Фиг. 4.27. График для расчета сопротивления носовой части тела вращения с параболическими обводами и протоком при
<р=1.
(сечение 0-0 на фиг. 4. 26), а индексом «1»—-те же параметры на входе в двигатель (сечение 1-1).
Величина коэффициента расхода влияет на характер обтекания носовой части тела. Если <р=1, to5i=5oo; wt = V; р1 = рсо, т. е. поток остается невозмущенным до сечения 1-1 (см. фиг. 4. 26, а). Если же <р< 1, то <Soo<5[, т. е. еще до входа в диффузор начинается торможение потока. При этом перед носовой частью тела возникает отсоединенный скачок уплотнения (см. фиг. 4.26,6).
При <р=1 коэффициент сопротивления носовой части тела вращения с протоком можно определить по графикам фиг. 4. 27 и 4. 28, построенным на основании приближенной теории [20].
www.vokb-la.spb.ru - Самолё г своими руками?!
§ 2. Сопротивление изолированного фюзеляжа (корпуса) 203
Графики построены в форме зависимостей
^НОсСд. нос
УМ2—1 ^нос
причем каждая кривая соответствует определенному сужению носовой части Т]пос=^иос/О-
При <р< 1 разделение силы тяги и лобового сопротивления сопряжено с некоторыми трудностями, связанными с появлением, с одной стороны, подсасывающей силы и, с другой стороны, добавочного сопротивления воздухозаборника.
Фиг. 4.28. График для расчета сопротивления носовой части тела вращения с прямолинейными обводами и протоком при Ф=1.
Подсасывающая сила. Выше было отмечено, что при <р<1 перед телом вращения возникает отсоединенный скачок уплотнения, при прохождении через который поток становится дозвуковым. Обтекание таким потоком выпуклой носовой части тела приводит к тому, что вблизи передней кромки воздухозаборника давление понижается. Следовательно, сопротивление носовой части в этом случае будет меньше, чем при <р—1.
Разность
(^-Н4с)к1=<, (4.37)
назовем подсасывающей силой воздухозаборника. На фиг. 4.29 приведены теоретические значения коэффициента подсасывающей силы, отнесенного к площади входа [21]. Необходимо отметить, что эти теоретические значения могут быть полностью реализованы только при закругленных кромках воздухозаборника и*при криво
204 Глава IV. Лобовое сопротивление
линейных обводах носовой части тела. При заостренных кромках и прямолинейных обводах носовой части величина подсасывающей силы, по-видимому, будет значительно меньше теоретической.
Добавочное сопротивление. Кроме подсасывающей силы, уменьшающей внешнее сопротивление фюзеляжа или гондолы, при <р< 1 возникает так называемое добавочное сопротивление воздухозаборника ДХ8.з. Для объяснения сущности этого сопротивления введем понятие эффективной тяги двигателя /?Эф (см. гл. I). Под
Фиг. 4. 29. Зависимость коэффициента подсасывающей силы воздухозаборника от коэффициента расхода воздуха.
эффективной тягой будем понимать равнодействующую всех сил давления и трения, приложенных к внутренним и внешним поверхностям двигательной установки:
^внутр "Ь ^внешн" (4.38)
Первое слагаемое можно найти из уравнения количества движения, написанного для сечений 1-1 и а-а струи воздуха, проходящей через двигатель (см. фиг. 4. 26):
О _____ Ов.сек + Отсек Оц.сек ! с „ о , „ пгл
О внутр Wll^cPa ^iPl' (4.39)
О S
Следует отметить, что величина У?Впутр не равна силе тяги. Действительно, общепринятое выражение силы тяги воздушно-реактивного двигателя имеет вид
p=G5xeK±..gI.eeK (4 4())
о
www.vokb-la.spb.ru - Самолёт своими руками?!
£ 2. Сопротивление изолированного фюзеляжа (корпуса) 205
Следовательно,
/?в„утр=^ + -^ (V-^SaPx -SlPl. (4.41)
Равнодействующая сил трения и давления, приложенных к внешней поверхности тела, связана с внешним лобовым сопротивлением таким равенством:
А\,нешн= ~[^внешн+(^а —(4.42)
Наличие слагаемого (Sa—Si)Pco объясняется тем, что под внешним сопротивлением принято понимать равнодействующую сил трения и избыточного давления Др=р—
Подставив (4.41) и (4.42) в равенство (4.38), получим
^=/’-^0HCblH-pI(p-<pJ-^(V-®1)]. (4.43)
Как видно из этого выражения, эффективная тяга не равна разности между тягой двигателя и внешним сопротивлением. Величина
A^B3=5,(A-pJ—(И-w.) (4.44)
может рассматриваться как уменьшение тяги двигателя по сравнению со значением, определяемым по формуле (4.40), или как некоторое сопротивление, приложенное к внутренним поверхностям двигателя. Обычно пользуются второй трактовкой и называют ДЛ'в.з добавочным сопротивлением воздухозаборника *.
Очевидно, что при <р= 1 добавочное сопротивление отсутствует, так как в этом случае wt = V; pi=Prx>.
На фиг. 4. 30 представлены теоретические значения коэффициента добавочного сопротивления, отнесенного к площади входа. Как показано в работе [22], эти значения хорошо подтверждаются опытом.
Общее выражение коэффициента сопротивления носовой части тела вращения с воздухозаборником имеет вид
СХ нос = нос)? -1 + (Д^х в.з - CF в.з) nF . (4-45)
где SBX=Si — площадь входа воздухозаборника;
(сХцос)?-1 определяется по фиг. 4.27 и 4.28.
Как показывают теоретические расчеты, при дозвуковых скоростях полета Дст в.3.=Ср в.з. Поэтому
(Гхнос)?+* =(^'хвос)?“1* (4.46)
* В литературе встречаются также равнозначные термины: волновое сопротивление диффузора, дополнительное сопротивление и т. д.
206
Глава IV. Лобовое сопротивление
Соотношение (4. 46) справедливо в том случае, когда подсасывающая сила реализуется полностью, т. е. при закругленных кромках воздухозаборника.
Фиг. 4. 30. Зависимость коэффициента добавочного сопротивления простого Диффузора от коэффициента расхода воздуха.
Для расчета подсасывающей силы и добавочного сопротивления при сверхзвуковых скоростях необходимо знать коэффициент расхода воздуха ср. Из выражения
^вх
следует, что при выбранной площади входного сечения коэффициент расхода пропорционален 6в.сек- Для существующих двигателей зависимость 6в.сек от режима полета иногда дается вместе с другими характеристиками (тягой, расходом топлива и т. д.). Если эти характеристики неизвестны или же двигатель, например ПВРД. проектируется одновременно с летательным аппаратом, то Ов.Сек определяется расчетным путем. Для турбореактивных двигателей можно принимать в первом приближении
где 1° — температура атмосферы на данной высоте в °C.
Все рассуждения относились к воздухозаборникам, выполненным в форме дозвукового диффузора. При числах М, превышаю
www.vokb-la.spb.ru - Самолёт своими руками?!
§ 2. Сопротивление изолированного фюзеляжа (корпуса) 207
щих 1,8—2, целесообразно применять многоскачковые диффузоры, простейший из которых схематически изображен на фиг. 4. 31.
Основными геометрическими параметрами такого диффузора являются угол выноса центрального конического тела относительно передней кромки воздухозаборника р и полуугол при вершине ко-
I »
I
Фиг. 4.31. Диффузор с центральным конусом на расчетном (а) и нерасчетных (б, в, г) режимах работы.
нуса Цо- Геометрические параметры диффузора и число М определяют положение косого скачка уплотнения и величину максимально возможного расхода воздуха через двигатель.
Если косой скачок проходит через переднюю кромку воздухозаборника или входит внутрь него, т. е.цск^Р (см. фиг. 4. 31, а и б), то максимально возможный секундный расход
Св.сек jnax = £PcoKSBx,
где SBX=——площадь круга, образованного передней кромкой
воздухозаборника.
08 Глава IV. Лобовое сопротивление
Если же косой скачок проходит впереди кромки воздухозаборника, т. е. т]кс>Р (см. фиг. 4. 31, в), то бв.секшах уменьшится вследствие отклонения струек воздуха за косым скачком.
Назовем отношение
ф—(4.48)
предельным коэффициентом расхода. Значения Ф определяются по формулам конических течений в зависимости от т]0, 0 и М. Результаты расчетов по этим формулам приведены на фиг. 4. 32. [22].
Фактический коэффициент расхода воздуха
^в.сек
зависит от конструктивных параметров двигателя и режима его работы. Величина ф определяет положение замыкающего скачка уплотнения. Еслиф=Ф, то замыкающий скачок находится во входном сечении или внутри диффузора (см. фиг. 4.31 а, б, в); если же •ф<Ф, то. скачок располагается перед срезом диффузора (см. фиг. 4. 31, г).
На основании тех же рассуждений, что и для случая диффузора без центрального тела, можно прийти к выводу, что при ф<1 появляется добавочное сопротивление воздухозаборника.
На фиг. 4.33 приведены графики зависимости Дсхв.3=[(ф), полученные расчетным путем по методу, изложенному в работе [22]. Коэффициент Дсх в,3 отнесен к площади среза диффузора SBX и скоростному напору невозмущенного потока. Каждая сплошная кривая на фиг. 4. 33 соответствует определенным значениям М и Ф. Пунктирные кривые определяют минимально возможные значения коэффициента добавочного ’ сопротивления, получающиеся при Ф=Ф.
Для нахождения Дсх в,3 необходимо прежде всего выбрать геометрические параметры ц0 и 0, обеспечивающие наилучшую работу двигателя на каком-либо расчетном режиме полета (например, на маршевом режиме, на режиме разгона и т. п.). Иногда выбирают «компромиссные» параметры, дающие удовлетворительные характеристики на крайних режимах полета. Затем по фиг. 4. 32 определяют значения предельного коэффициента расхода воздуха Ф во всем диапазоне чисел М. Путем расчета характеристик двигателя находят зависимость секундного расхода воздуха от числа М и высоты полета, после чего по формуле (4. 36) подсчитывают значения коэффициента расхода ф. Зная ф и Ф, легко определить Дсх в,3 по фиг. 4. 33.
Следует заметить, что при ф<Ф (см. фиг. 4. 31, г) работа двигателя может быть неустойчивой (начинается так называемый «помпаж диффузора»). Во избежание этого явления обычно регулируют подачу топлива таким образом, чтобы ф~Ф.
www.vokb-la.spb.ru - Самолёт своими руками?!
£ 2. Сопротивление изолированного фюзеляжа (корпуса) 209
Поскольку воздухозаборники с центральным телом имеют, как правило, заостренную переднюю кромку, подсасывающая сила невелика и при приближенных расчетах ее можно не учитывать. Таким образом, в рассматриваемом случае
^нос~(^ноЛ=1 + А^в.з^. (4.49)
Оф
где (сХНос)т=1 определяется по графикам фиг. 4.27 и 4.28.
13 101
www.vokb-la.spb.ru - Самолёт своими руками?!
§ 2. Сопротивление изолированного фюзеляжа (корпуса) 211
от коэффициента расхода воздуха, a) б) i)o=2O’; в) т;-=>25’; г) ц «30
13*
216
Глава IV. Лобовое сопротивление
Таким образом, коэффициент донного сопротивления тела вращения, отнесенный к площади миделя, можно подсчитывать по формуле
(4-54)
где (рдн)^! определяется по фиг. 4.35, a kr,— <по фиг. 4.36.
Выражение (4. 54) не учитывает таких факторов, как температура тела и др. Для оценки влияния температуры можно привести результаты одного из опытов £23]: при переходе от /Пов = 0° к 4гов = 200°С значение р№ тела вращения при М=3,24 изменилось от —0,091 до —0,085.
Если из донного среза вытекает реактивная струя (при работающем двигателе). схди рассчитывается также по формуле (4. 54), но в этом случае за принимается площадь кольца, заключенного между внешней окружностью донного среза и окружностью среза сопла. Следует отметить, что такой расчет весьма грубый, так как не учитывается влияние струи на р 1W- В большинстве случаев давление в струе на срезе сопла значительно превышает величину донного давления. Это повышенное давление будет передаваться в какой-то степени и на застойную область вокруг струи, что приведет к уменьшению сх№. Количественная оценка влияния струи может быть дана только в результате экспериментальных исследований.
• 2.6. ИНДУКТИВНОЕ СОПРОТИВЛЕНИЕ
В первом приближении можно считать, что индуктивное сопротивление фюзеляжа представляет собой проекцию нормальной силы на направление невозмущенного потока. Однако результаты опытов указывают на тот факт, что при сс =#= 0, кроме нормальной силы, появляется дополнительная тангенциальная сила ДХ;, связанная в основном с перераспределением давления на носовой и кормовой частях фюзеляжа, а также с изменением донного разрежения. Поэтому более точное выражение коэффициента индуктивного сопро-тивного будет иметь вид
Cxi ф=сУ1 ф sin а+Дсх1 ф cos а. (4.55)
Значение Асл1ф приблизительно пропорционально квадрату угла атаки. Выразим его в следующем виде:
АСх1ф = ?(Су1нос4“Су1корм)51П О. (4. 56)
Как показывает результат эксперимента,
——— при М>1,2;
1 + ^нос
С^-0,2 при М^0,2.
www.vokb-la.spb.ru - Самолёт своими руками?!
$ 2. Сопротивление изолированного фюзеляжа (корпуса)
217
Таким образом, при сверхзвуковых скоростях полета дополнительная тангенциальная сила положительна, а при дозвуковых отрицательна.
Подставив в равенство (4.55) выражения (3.10) и (4.56), после некоторых преобразований получим
СХ1 ф = (1 4- 9 [57,3с; нос - 2,-к (1 - r£opM)] sin2 a cos a -f-
+ 0,624ХфСЛ.цил sin3 а tga,
(4-57)
где значение схиа.т берется в зависимости от состояния пограничного слоя так, как указано в § 2 гл. III.
Фиг. 4.37. Сравнение экспериментальных и расчетных значений с», ф тел вращения.
а) обозначения те же, что и на фиг-3-8: б) М=2.64; ^нОс=2,5; форма носовой части ожиьальная.
При малых углах атаки можно принять
sin а % tg а ~ —— ; cosa^l
57,3
и пренебречь вторым слагаемым. Тогда выражение (4. 57) упростится:
Ф~d+9157,Зс;нос-2,%(1 - ^ )] U-Y. (4.58)
\О / j О/
Как видно из фиг. 4. 37, на которой сравниваются экспериментальные значения сх,ф с расчетными, найденными по формуле (4.57), формула (4.57) обеспечивает приемлемую для практики точность расчетов в широком диапазоне углов атаки. »
218
_~^дгс IV. Лобовое
СОПРОТИВЛЕНИЕ СИСТЕ.МЪ! КРЫЛЬЯ—ФЮЗЕЛЯЖ
3.1. СОП7ОТИВЛЗЯЕ ПРИ НУЛЕЗ*С>Н ПОДЪЕМНОЙ СИЛЕ
Если крылья сдгттгзются с ци.тзгз-дгтз^юской частью фюзеляжа и расположены до ддасе дреднеплдн.з.. то непротивление системы крылья—фЕделяж дчитать д дж ыы'с сумме сопротивлений
изолированны: хрыаез я язолиров з_=:з д~ фюзеляжа:
Отсюда
х i—Л'опз.кр — ’•=-
(4. 59)
(4. 60)
При нал.“я гтадд.т дздгателеё вить к нашыеый г.те.
•Фиг, 1.38. Пгг.ь; г?—:—.? .-~<ры плс-
J—исходный фиги-тт. J——tr=3. ("зфицирс-ваннк! —
зеляжа, и дгт?де.~ ~ п.*.:~ади, в.<“ поперечного ы—дт -ттыльез. монте * ления плошддеё гд дззелянтз дей состоит д дтд .отлучен:: -системы крызд—д.-пат.-:-. норма ?~ мерно такой не. гатд здащент: -Следователь?: з те: едд-х. где в се--ляж должен гадь гы-: дм. фиг -
Правило гтдыдаг за г? дзет из : звуковых те-енпя. Х'лддеэ этой дед системы крыы—д ::а'.?.ж завис?:-поперечных ыены гдетечы в сы сопротивление яс-же: сзестл к ~. вращения.
Эксперимент :-:д-а.—ьыо подтаете
гдг. пн "противление надо доба-
тдп т.лтгрованных крыльев, гео-щвть. параметрам консолей гзе § 1).
- ели крылья имеют +-:__.п Х-образную схему, то в за.-~чину 25к необходимо да- т чить площадь всех че-—нгт^х консолей.
правило площадей. При - : - озвуковых скоростях по--е_д можно значительно .е.егьшить сопротивление а- —амы крылья—фюзеляж, —еняя так называемое т т дз ило площадей [27].
~ эоведя ряд сечений, тет--вндикулярных оси фю-— - з < щие в себя и площади - : д—роить эпюру распреде-
4. 38). Правило площа-э д еньшего сопротивления г д =—юры должна быть при-5 д д- . еньшего сопротивления, за'те ~эпадают крылья, фюзе-г т.озиция 2).
: “Дженной теории около-т дэлновое сопротивление ~ т : определения площадей г д расчет ее волнового . з-е~ эквивалентного тела дщ~ з“э положение.
www.vokb-la.spb.ru - Самолёт своими руками?!
§ 3. Сопротивление системы крылья—фюзеляж
219
На фиг. 4. 39 показан характер экспериментальных зависимостей <сок.ф=/(М) для двух вариантов фюзеляжа в сочетании с кры-
I
льями:
1 — исходного фюзеляжа цилиндрической формы с оживальной носовой частью;
2 — фюзеляжа, модифицированного по правилу площадей.
Из фиг. 4.39 видно, что применение правила площадей дает наибольший эффект в диапазоне 0,8<М<1,4. При дальнейшем увеличении числа М этот эффект уменьшается.
Фиг. 4.39. Характер зависимости Схок-ф — =f(M) для модели, изображенной на фиг. 4. 38.
3.2. ИНДУКТИВНОЕ СОПРОТИВЛЕНИЕ
В настоящее время нет достаточно строгого метода расчета индуктивного сопротивления системы крылья—фюзеляж. Приближенная методика для чисел М, превышающих единицу, может быть получена на основании следующих рассуждений.
Случай <аа». Согласно выражению (3. 27)
Ук.ф—Уф + Укр-
В соответствии с этим
^к.ф=Х.ф+Хгкр=Х»ф+ГкР1да-Е (4.61)
Подъемную силу Укр и подсасывающую силу консолей можно выразить в виде
^кР=^Из.Л^к: ' <4-62)
F=cFqSK = Е (-^Л (са аз KpkaatfqSK. (4. 63)
\ су /
Подставим выражения (4.62) и (4.63) в (4.61) и перейдем к коэффициенту индуктивного сопротивления:
= = (4.64)
где
кр= - 57.36 (а) i . (4.65)
Величина сх{ф подсчитывается по формулам, приведенным в разд. 2. 6.
220
Глава IV. Лобовое сопротивление
Отношение (cF/c^,) и поправочный коэффициент § можно в первом приближении принимать такими же, как для изолированных крыльев (см. разд. 1.3).
При наличии гондол двигателей в выражение (4.64) необхо-димо добавить слагаемое cxi г —, причем cXi г подсчитывается так
же, как и сх<-ф.
Для Х-образной системы крылья—фюзеляж выражение (4. 65) принимает вид
(Сл< к.ф)х—
а2 3 u ___к
57,3 3
(4.66)
(^из.кр^)’]
Случай «60». Поскольку в этом случае фюзеляж имеет нулевой угол атаки, индуктивное сопротивление создается только консолями. Окончательное выражение для cxi, выведенное тем же способом, что и (4.65), будет иметь вид
Су из.кр^О^ш
(^Из.Кр^М’
Fvl к.ф Ori кр
82 SK
57,3 7s
(4. 67)
Значения с“из.Кр подсчитываются для изолированных крыльев, геометрические параметры которых равны параметрам консолей.
Общий случай. Пусть угол атаки фюзеляжа равен а, а крылья отклонены относительно оси фюзеляжа на угол <ркр. Тогда
Хг кР= tg(a+<f>Kp)— F+Yi ф tg а,
(4. 68)
где Ук и У(-ф определяются из выражений (3.48) и (3.49) при условии, что зависимости су=/(а) и су=/(6) линейные;
F — подсасывающая сила:
= ? [с*у из кр (^а-г ^о^кр)]2^. (4. 69)
\ су /
Подставив выражения (3.48), (3.49) и (4.69) в равенство (4.68)
и перейдя к коэффициенту индуктивного сопротивления, получим
JV а | у S
Сх1 кр~ s — С“ ПЗ.КР "7 ^АцТкр) г о Р О
/ \ S.
~ (~л~) [<> из.кр (^а + ^го^щ?Кр)]2 ~т~ +
\ Су / °
5
+ „з.кр[(^-k^) * + (<^о -ММкр] • (4. 70)
О t t <j о
I
www.vokb-la.spb.ru - Самолёт своими руками?!
§ 4. Сопротивление оперения
221
Изложенную методику расчета индуктивного сопротивления нельзя распространить на дозвуковые скорости, так как при М<1 величина подсасывающей силы неизвестна. Для прикидочных расчетов в диапазоне М<Мкр можно рекомендовать формулу
Cxi кр — Cxi из.кр.пф»
где с~Хг Из.кр.пф — коэффициент индуктивного сопротивления изолированных крыльев с подфюзеляжной частью, определяемый по формуле (4.25).
Фиг. 4.40. Схема графического определения сх к.ф в околозвуковом диапазоне чисел М.
Индуктивное сопротивление в околозвуковом диапазоне чисел М можно определить лишь весьма грубо. Прежде всего строят зависимость схОк.ф=/:(М). Затем для заданного угла атаки подсчитывают сжг-к.ф в дозвуковом и сверхзвуковом диапазонах чисел М и наносят эти значения на график, добавляя их к схОк.ф. После этого проводят недостающий участок кривой в диапазоне Л4кр<Л4<1, добиваясь плавного, сопряжения его с соседними участками. Пример такого построения показан на фиг. 4. 40. Коэффициент индуктивного сопротивления, очевидно, равен разности (сх—сх0)к.ф-
§4. СОПРОТИВЛЕНИЕ ОПЕРЕНИЯ
Коэффициент лобового сопротивления оперения при нулевой подъемной силе подсчитывается по аналогии с коэффициентом лобового сопротивления крыльев. При этом необходимо учитывать, что число М у оперения равно М0П~М V &оп- Если оперение расположено позади крыльев и их плоскости совпадают, то пограничный
222
Глава IV. Лобовое сопротивление
слой следует считать целиком турбулентным, т. е. принимать xt—0.
На величину индуктивного сопротивления оперения оказывает влияние выбранный тип рулей. Наиболее широкое распространение для сверхзвуковых летательных аппаратов получило поворотное оперение, вся площадь которого используется в качестве рулей. Найдем cxi- горизонтального оперения такого типа в схеме «утка», причем будем предполагать, что оперение расположено на цилиндрической части фюзеляжа (xi=0), а ось вращения рулей перпендикулярна оси фюзеляжа.
Если угол атаки фюзеляжа равен а, а горизонтальное оперение (рули высоты) отклонено на угол бр, то
а + sp у а 57,3 ,ф57.3
(4. Л)
где Ур — подъемная сила рулей;
Угф — подъемная сила, индуцируемая рулями на фюзеляже;
Fp — подсасывающая сила на передней кромке рулей (для простоты будем пренебрегать ею).
Пользуясь выражениями
КР=су из.р [(Мр а + (МРМ₽] QSp, (4. 72)
^i Ф~Су из.р Ао~)ра(А го ^р, (4- 73)
аналогичными выражениям (3.48) и (3.49), и принимая (А’го)р~1; &щ~1; (Ata )р~ (Ao-Jp, после некоторых преобразований получим
а \ a r J О1 ,о
Отношение 6р/а определяется по балансировочным зависимостям (см. гл. V). Для прикидочных расчетов можно принимать среднее значение
1,4.
Числовые расчеты по формуле (4.74) показывают, что у летательного аппарата схемы «утка» индуктивное сопротивление оперения может составлять значительную долю общего сопротивления, поэтому его надо обязательно учитывать. При обычной же схеме, когда знаки а и 6рдал противоположны, индуктивное сопротивление оперения в большинстве случаев пренебрежимо мало.
www.vokb-la.spb.ru - Самолёт своими руками?!
5. Сопротивление летательного аппарата в целом 223
§ 5. СОПРОТИВЛЕНИЕ ЛЕТАТЕЛЬНОГО АППАРАТА В ЦЕЛОМ
Лобовое сопротивление летательного аппарата
Х^Х0+Хг, (4.75)
откуда Сх = СхО “f~ Cxi- (4.76)
Входящий сюда коэффициент лобового сопротивления при нулевой подъемной силе
СхО—1'1 (КсСиз.кр
_£$_4_г ъ st ° с ь Sb-° g • Сх0г.О Г.О £ 1 ^-ГОВ.О^В.О £
(4-77)
Множитель М введен в формулу (4.77) для учета возможных погрешностей, допущенных при определении сопротивления крыльев, фюзеляжа и оперения *.
Коэффициент индуктивного сопротивления зависит от угла атаки и угла отклонения рулей высоты, т. е. от двух, в общем случае независимых переменных. Однако для практических целей наибольший интерес представляет расчет сопротивления летательного аппарата в том частном случае, когда углы а и бр связаны между собой условием балансировки (см. гл. V). При этом условии коэффициент индуктивного сопротивления для заданного числа М является функцией только одного переменного, например угла атаки.
Рассмотрим особенности расчета коэффициента индуктивного сопротивления в режиме балансировки для различных схем летательных аппаратов.
Е 5.1. ОБЫЧНАЯ СХЕМА
I
и Как уже указывалось, индуктивное сопротивление горизонталь-
ного оперения летательного аппарата обычной схемы в режиме балансировки мало, поэтому без большой ошибки можно принять
cxi ~сх1к.ф — Сх1ф~^ + Сх1 кр- (4.78)
5.2. СХЕМА «УТКА»
В данном случае коэффициент индуктивного сопротивления складывается из трех частей:
== сх1 ф -4-Cxir.0^5-4- cxiкр. (4. 79)
О о
* Сопротивление газовых рулей учитывается обычно путем соответствую щего снижения тяги двигателя.
224 Глава IV. Лобовое сопротивление
Величины cxi ф и cxi г.о подсчитываются по формулам (4.58) и (4. 74). Для определения cxf кр будем применять тот же метод, что и в разд. 3.2 настоящей главы, но вместо геометрического угла атаки а в формулы (4. 62) и (4. 63) будем подставлять величину
представляющую, собой фактический средний угол атаки в области крыльев. Не приводя промежуточных выкладок, напишем выражение для расчета cxi кр в окончательном виде:
Входящие.сюда производные в’ и е’р подсчитываются по формулам (3. 124) и (3. 125). Отношение 6р/« определяется по балансировочным зависимостям (см. гл. V). Для прикидочных расчетов можно принимать бр/а~1,4.
5.3. СХЕМА «БЕСХВОСТКА»
При наличии дестабилизаторов коэффициент индуктивного сопротивления ’
где cXi ф определяется по формуле (4.58), а седеет— по формуле (4. 74), в которой угол 6Р надо принять равным нулю:
Сxi пест С у дест (^“’)дест г7 о ' (4‘ 8^)
J tJi , о
Коэффициент индуктивного сопротивления крыльев подсчитывается по формуле (4. 80) при 6р=0:
Сх1 кр из.кр^"“а (1 X [Су из.кгА’^ —’ £ 6ср) 57,3;f 2 нг] а2 V ср J 157.3 S
Прирост коэффициента индуктивного сопротивления, вызванный отклонением рулей, может быть найден с помощью следующих
www.vokb-la.spb.ru - Самолёт своими руками?!
§ 5. Сопротивление летательного аппарата в целом 225
'рассуждений. При бр=О рули, являющиеся в схеме «бесхвостка» частью крыльев, создают индуктивное сопротивление
(A;p)SM)=(Kp+yZ(i))8=o-^--, (4.84)
где
- (^р)г =о ~ гк —=с’ из (1 е“р) qSp; (4. 8о)
(X ф)г -о ~ су из.кр (А'аа kaa) л (1 s’p) qSp. (4.86)
Если же рули отклонены на угол 6Р, то они создают индуктивное сопротивление
(4.87) где
Гр = (^Р)а-о + ,13.р (feo)pMp^; (4- 88)
X ф — (X ф)«»о 4- С’ из.р (АГво — fee) &1Д£СТ. (4. 89)
Так как индуктивное сопротивление рулей при 6р=0 входит в индуктивное сопротивление крыльев и, следовательно, уже учтено выражением (4.83), прирост сопротивления при отклонении рулей
(^P)«*o — (A'f p)s-o- (4. 90)
Произведя необходимые подстановки и приняв для простоты (Ыр~1; 1, получим '
ъ / \ 2 1
(^)₽+т^Т^(1-еср) - 5р;ст. (4. 91)
Для приближенных расчетов можно брать среднее значение
5.4. СХЕМА С ПОВОРОТНЫМИ КРЫЛЬЯМИ
Индуктивное сопротивление стабилизаторов в этой схеме обычно невелико, так как их угол атаки, равный (а—ек.ф), близок к нулю. Поэтому можно принимать
__ ^Ф ,
Сxi ^xi ф ~Г Сxi кр •
К
(4. 92)
Для определения схг-кр воспользуемся выражением (4.70). Так как аэродинамические коэффициенты летательного аппарата 15 101
226
Глава IV. Лобовое сопротивление
с поворотными крыльями принято относить к площади двух консолей, то SK/S=1. После некоторых преобразований получим
5ф
^х/ ф из.кр
к
-+А
а
(4.93)-
где
/\=к«я-57л/-£-)А£,;
\ с, /
(4. 94)
(4. 95)
С
/?з=#гоАщ
1 — 57,3? (—£- j £го&щ
(4. 96)
Отношение б/a для прикидочных расчетов можно принимать равным 5—6.
5.5. РАСЧЕТ ИНДУКТИВНОГО СОПРОТИВЛЕНИЯ ПРИ ПОЛЕТЕ С УГЛАМИ АТАКИ И СКОЛЬЖЕНИЯ
При пространственном маневре или, например, при развороте в горизонтальной плоскости без крена летательный аппарат создает одновременно подъемную и боковую силы. В этом случае коэффициент индуктивного сопротивления, обусловленный углом атаки, складывается с коэффициентом индуктивного сопротивления, обусловленным углом скольжения:
Cxi = Гц' (й) 4“ Cxi (Р). (4.97)
Величина cxt(₽) подсчитывается так же, как и сх,(я) для летательного аппарата, условно повернутого на 90° вокруг продольной оси.
Л И Т Е Р А Т У Р А
1. Горощенко Б. Т., Расчет максимальной скорости полета, Оборонена, 1944.
2. Sommer S., Short В., Free-Flight Measurements of Skin Friction of Turbulent Boundary Layers with High Rates of Heat Transfer at High Supersonic Speeds, IAS Preprint, 1955, No 518.
3. Ван-Драйсt, Проблема аэродинамического нагрева, «Вопросы ракетной техники», 1957, № 5.
4. Е v v а г d J. and others., Transition-Point Fluctu itions in Supersonic Flow, JAS, 1954, No. 11.
5. Lange H. and others., Variations of Transition Reynolds Number with Mach Number, JAS, 1953, No. 10.
6. Korkegi R., Transition Studies and Skin—Friction Measuremepts on an Insulated Flat Plate at a Mach Number of 5, 8, J/ S, 1956, No. 2.
7. G a s 1 e у C., Boundary—Layer Stability and Transition in Subsonic and Supersonic Flow, JAS, 1953, No. 1.
www.vokb-la.spb.ru - Самолёт своими руками?!
§ 5. Сопротивление летательного аппарата в целом 227
8. Luther М., Fixing Boundary—Layer Transition on Supersonic Wind— Tunnel Models, JAS, 1957, No. 8.
9. Van Driest E., Calculation of the Stability of the Laminar Boundary— Layer in a Compressible Fluid on a Flat—Plate with Heat Transfer, JAS, 1952, No. 12.
10. NACA T. N. No. 4094.
11. ARC Current Papers, No. 116, 1953.
12. ARC Current Papers, No. 145, 1954.
13. 'NACA Report No. 1253.
14. Аэродинамика частей самолета при больших скоростях, Под ред. А. Ф. Доиовэна и Г. Р. Лоуренса, ИЛ, 1959.
15. NACA Report No. 824.
16. Левинсон Я. И., Аэродинамика больших скоростей, Оборонгиз, 1948.
17. Краснов Н. Ф., Аэродинамика тел вращения, Оборонгиз, 1958.
18. X о у а р т Л., Современное состояние аэродинамики больших скоростей, ИЛ, 1956.
19. W а 1 с h и е г, Liliental Bericht, 1944, Nu. 139.
20. ARC Current Papers, 1953, No. 136.
21. Вайатт Д., Аэродинамические силы, действующие на входную часть турбореактивной установки, «Вопросы ракетной Техники», 1953, № 2.
22. NACA Report No. 1187.
23. К у р ц в е г X., Связь между пограничным слоем и донным вакуумом, «Механика», 1952, № 4.
24. NACA Т. N. No. 3819.
25. NACA Report No. 1036.
26. NACA Report No. 1160.
27. NACA Report No. 1273.
15*
i • Глава V
МОМЕНТЫ ТАНГАЖА И РЫСКАНИЯ
§ 1. ОБЩЕЕ ВЫРАЖЕНИЕ МОМЕНТА ТАНГАЖА. СРЕДНЯЯ АЭРОДИНАМИЧЕСКАЯ ХОРДА
При изучении моментов сил, действующих на летательный аппарат, в частности, моментов тангажа, будем пользоваться связанной системой координат Напомним, что в связанной
системе начало координат совпадает с центром тяжести летательного аппарата; ось Oxi направлена вперед, параллельно оси фюзеляжа, ось Оу\ — вверх, перпендикулярно оси Ох\, а ось Oz\ — вправо, перпендикулярно к осям Ох\ и Оу\.
Момент тангажа, или продольный момент, вызывается аэродинамическими силами и реактивными силами двигателей. Рассмотрим момент аэродинамических сил. Как известно, в аэродинамике обычно пользуются безразмерным коэффициентом момента
(5-0
Здесь S и Од — площадь и средняя арифметическая хорда крыльев с подфюзеляжной частью. В качестве S и ЬА для летательных аппаратов с поворотными крыльями принимают площадь и среднюю аэродинамическую хорду консолей крыльев. Продольный момент бескрылых летательных аппаратов относят чаще всего к площади миделя и длине корпуса (фюзеляжа).
Величина аэродинамического момента Afzl при данной скорости и высоте полета зависит от ряда факторов и прежде всего от угла атаки и угла отклонения органов управления (рулей, поворотных крыльев и т. д.). Кроме того, на величину продольного момента влияет угловая скорость вращения летательного аппарата вокруг оси Ozt (Огь а также скорости изменения угла атаки и отклонения поворотных крыльев или рулей, характеризуемые производными daldt=a и db!dt=i). При малых значениях а, б, в, S и ог1 эти зависимости близки к линейным, благодаря чему можно написать следующее общее выражение продольного момента:
МЛ=Я10+Л£1«+ М',8+М 4- Маг1& + м& (5.2)
где Afzi, Л/’] и т. д. —частные производные момента тангажа по соответствующим параметрам.
www.vokb-la.spb.ru - Самолёт своими руками?!
$ 1. Общее выражение момента тангажа. САХ
229
Строго говоря, величина момента Mzl зависит и от некоторых других параметров, как, например, угла скольжения, угла отклонения элеронов, угловой скорости вращения летательного аппарата вокруг оси 0%1 и т. д. Обычно влияние этих факторов незначительно, поэтому при расчете аэродинамических характеристик им пренебрегают.
Безразмерный коэффициент момента mzi является функцией только безразмерных параметров. Так как величины cozi, а и б имеют размерность 1/сек, то вместо них вводят безразмерную угловую скорость
и безразмерные производные
<xiA А с/'а
---: о — —— V--V
(5-4)
После этого можно написать общее выражение коэффициента продольного момента:
mzi = mzio + й + (5.5)
Входящие сюда производные m^, т“г1, m*v mJ,, а также
mzio (коэффициент аэродинамического момента при a=8 = wzl = d= =6 = 0) зависят, главным образом, от числа М и геометрических форм летательного аппарата.
Отметим, что производные коэффициента момента по какому-либо углу принято называть статическими производными, а производные по скорости изменения того или иного угла — вращательными производными. Таким образом, в выражении (5.5) mazl и ^-статические производные, a mzf, т^, т^ — вращательные производные.
Для упрощения записи величин, входящих в выражения (5.2) и (5.5), индекс =1» будем в дальнейшем опускать. Кроме того, будем опускать черточки в обозначениях частных производных mzl и m6zV Таким образом, т/- будет частной производной коэффициента момента mzl по безразмерной угловой скорости «>г1, а 7И“г— частной производной момента 7Иг1 по размерной угловой скорости <»zi и т. д.
Средняя аэродинамическая хорда. Как известно, под средней аэродинамической хордой (САХ) крыльев произвольной формы в плане понимают хорду равновеликих прямоугольных крыльев, моментные характеристики которых приблизительно совпадают с моментными характеристиками данных крыльев. Величина САХ
I
230 Глава V. Моменты тангажа и рыскания
и ее координаты относительно начала корневой хорды (фиг. 5. 1) определяются следующими выражениями *:
Z/2
(5-6)
О
Z/2
(5.7)
6
Z/2
Ук=~^Ьус1г. (5.8)
О
Середина средней аэродинамической хорды всегда совпадает с центром тяжести площади крыльев.
!i Фиг. 5.1. К определению средней аэродинамической
i; хорды крыльев произвольной формы.
; Для трапециевидных крыльев интегралы можно найти аналн-
: тическим путем, так как для них справедливы такие соотношения:
— -г); (5.9)
(5.10)
•«“«tg'Xo. (5.11)
y=ztg^, (5.12)
где ф —угол поперечной 1/-образности крыла;
* Эти выражения получены в предположении, что характеристики сечения крыла (cvi<;e4. Cxiccw, Сто) ие изменяются вдоль его размаха.
www.vokb-la.spb.ru - Самолёт своими руками?!
$ 1. Общее выражение момента тангажа. САХ
231
Подставив выражения (5.9) — (5.12) в (5.6)— (5.8), после интегрирования получим
h — 4 5 f 1 - 1 1. (15.13)
А 3 I [ 01+I)1 2 3 J’
(5'14)
<515)
Существует простой графический способ определения САХ трапециевидного крыла. Для этого необходимо проделать следующие построения (фиг. 5.2):
Фиг. 5.2. Графический способ определения САХ трапециевидного крыла.
Фиг. 5.3. Определение САХ крыла сложной формы в плане с линейными очертаниями.
1) провести линию АВ, делящую хорды крыла пополам;
2) на продолжении концевой хорды отложить отрезок CD = b0, а на продолжении корневой хорды — отрезок EF—bi. Концы этих отрезков соединить между собой; точка G пересечения линий АВ и DF будет центром тяжести площади трапеции (крыла);
3) через точку G провести хорду MN, которая и будет средней аэродинамической хордой.
Если крыло имеет более сложную форму в плане (см., например, фиг. 5.3), то поступают следующим образом:
1) разбивают крыло на две части с площадями S, и S2, каждая из которых представляет собой трапецию или треугольник;
2) находят САХ каждой части описанным выше способом и концы САХ соединяют прямыми АС и BD-,
3) отрезок АС делят обратно пропорционально площадям S| и S2, т. е. согласно условию
AM S2 .
СМ ~ Si ’
232
Глава V'. Моменты тангажа и рыскания
4) через найденную таким образом точку М проводят прямую MN, заканчивающуюся на линии BD.
Отрезок MN и есть средняя аэродинамическая хорда крыла. Как видно из фиг. 5. 3, начало и конец САХ не совпадают с передней и задней кромками крыла.
Если крылья имеют криволинейные очертания, то для определения САХ приходится вычислять выражения (5.6) — (5.8) методом графического интегрирования.
§2. ЦЕНТР ДАВЛЕНИЯ ИЗОЛИРОВАННЫХ КРЫЛЬЕВ
Для определения момента аэродинамических сил относительно оси Oz{ необходимо знать величину этих сил и точку их приложения, т. е. центр давления. В случае изолированных крыльев положение центра давления обычно характеризуется безразмерной координатой
з xd л
где х<! А — расстояние от начала САХ до центра давления, измеренное в направлении хорды крыла.
Линейная теория крыльев конечного размаха позволяет рассчитать значения xj а при сверхзвуковых и дозвуковых скоростях полета для плоских (незакрученных) крыльев с симметричными профилями. Формулы линейной теории могут быть преобразованы к следующему виду:
; Mg/; vi). (5.16)
Результаты расчетов по - этим формулам, скорректированные с помощью эксперимента (см., например, [I], [2] и др.), представлены на фиг. 5. 4 в виде зависимости
*aA = /(>V|M2-l| ).
Каждая кривая соответствует определенным значениям X tgxo.s и 1].
На фиг. 5.4 сплошными линиями нанесены значения хал при малых углах атаки (а=0-е-5о). Опыт показывает, что при дальнейшем увеличении угла атаки центр давления заметно смещается назад, в особенности у крыльев с малыми значениями Ztgxo,5 и тр Пунктирными линиями показана примерная величина смещения центра давления Дхад при а=20°.
В первом приближении можно принять, что в диапазоне 5°<а<20° имеет место линейная зависимость между xdA и а. Тогда значение xj а при любом угле атаки внутри этого диапазона определится формулой
ха А = (-Х<г a)®=s4 77 а)*^20- (5. 17)
15
www.vokb-la.spb.ru - Самолёт своими руками?!
§ 2. Центр давления изолированных крыльев
233
б)
Фиг. 5.4. График для определения координаты центра давления изолированных крыльев.
a) Xtgx05=0; б) MgX0r5=l.
234
Глава И. Моменты тангажа и рыскания
0,5
Ofi 5
3 1 ' х,]длриа= 0^2 4°
0.3
0,1
0,1
L . zo~O
г 1 о 1 г ? 4 л л/чЧ
г)
Фиг. 5.4. Г рафик для определения координаты центра давления изолированных крыльев.
в) J.tgx0 s=2; г) ».tgx0r5=3.
www.vokb-la.spb.ru - Самолёт своими руками?!
3. Центр давления изолированного фюзеляжа
235
Согласно правилам подобия для околозвукового потока суще-ственное влияние на xdA должен оказывать параметр Ху с. Это подтверждается графиком фиг. 5.5, где приведены результаты обработки испытаний серии прямоугольных крыльев [1]. Характерно, что при больших значениях X с в области М=0,8-т-0,9
з _
Фиг. 5.5. Влияние параметра на положение центра давления прямоугольных крыльев.
имеют место резкие перемещения центра давления (кривая 1,85), что, по-видимому, связано с интенсивным развитием волнового кризиса вначале на верхней, а затем на нижней поверхности крыльев.
Из-за недостатка экспериментальных данных выявить влияние параметра Ху/'ё для других форм крыльев в плане пока не удается. Кривые, представленные на фиг. 5.4, соответствуют значениям к ^1=0,54-0,8.
§3. ЦЕНТР ДАВЛЕНИЯ ИЗОЛИРОВАННОГО ФЮЗЕЛЯЖА
В § 2 гл. III было показано, что нормальная сила фюзеляжа складывается из трех составляющих:
Су 1ф = Су 1пос"ЬСу 1корм+АСу1. (5. 18)
Назовем точки приложения этих составляющих центрами давления носовой, кормовой и цилиндрической частей и обозначим их
236 Глава V. Моменты тангажа и рыскания
координаты относительно носика фюзеляжа через xdnoc, Хцкорм, Xd цил-
Согласно теории тонких тел вращения
^Нос=^ос-^, (5.19)
i -Ч
где IFhoc — объем носовой части тела.
Выражение (5. 19) дает удовлетворительную точность при ма-l лых числах М.
Фиг. 5. 6. График для расчета смещения центра давления фюзеляжа, вызванного изменением числа М.
Опыт показывает, что при увеличении числа М центр давления носовой части тела вращения смещается назад, причем тем сильнее, чем больше удлинение цилиндрической части тела. Это можно объяснить тем, что при больших числах М цилиндрическая часть тоже создает некоторую нормальную силу, не учитываемую теорией. Смещение центра давления носовой части в долях длины носовой части тела показано на эмпирическом графике фиг. 5. 6 [3]. С учетом Алд формула (5. 19) принимает вид
^нос=Д.ос--т^ + Д^- (5.20)
I
www.vokb-la.spb.ru - Самолёт своими руками?!
§ 3. Центр давления изолированного фюзеляжа
237
Координата центра давления кормовой части определяется теоретическим выражением
о г _____TF7
г Ф ^корм w корм_/ с Q1 \ •^т/корм_______________________ее ’ ' *
•^ф *^ди
в котором Покори — объем кормовой части тела.
В § 2 гл. III было отмечено, что при ci-АО в кормовой части происходит отрыв потока. Вследствие этого картина распределения давления изменяется и формула (5.21) теряет силу. Учитывая, что нормальная сила кормовой части невелика и ошибка в определении Ха корм не отразится сильно на координате общего центра давления фюзеляжа, можно приближенно принять
Xd корм ~ Тф 0,5 Акорм,
(5. 22)
т. е. считать, что центр давления кормовой части расположен на се-
редине ее длины.
Центр давления цилиндрической .части находится вблизи центра тяжести площади проекции фюзеляжа в плане. В среднем
можно принять
Xd цнл — 0,6 Еф.
(5. 23)
Если в фюзеляже расположен воздухозаборник ТРД или ПВРД, в выражение (5. 18) необходимо включить слагаемое Acj/ib.3 —, учитывающее добавочную нормальную силу воздухо-8ф заборника. Поскольку эта сила мала, то точку ее приложения можно находить грубо приближенным способом, считая ее, например, расположенной на срезе воздухозаборника.
Координата общего центра давления фюзеляжа
8ВХ
СУ1 H0e*rf нос + СУ1 KOpM-^rf корм + ACylXd цил + Асу 1 В.З £ -*вх ^ф=-----------------------------------------------------------ё------—---------• (5.24)
SBX
Cyl нос + Су1 корм 4* ^су1 4* Асу 1 B.3~Z
Эф
Входящие в (5.24) величины определяются формулами (3.6), (3.8), (3.9), (3.22), (5.20), (5.22) и (5.23).
На фиг. 5.7 экспериментальные значения xa^/D сравниваются с расчетными, найденными по формуле (5.24). Как видно из приведенных данных, формула обеспечивает удовлетворительную
точность расчета в широком диапазоне углов атаки.
При малых углах атаки можно пренебречь подъемной цилиндрической части, обусловленной вязкостью воздуха, формула (5. 24) несколько упрощается:
SBX
Cyl HOcXrf нос 4“ Cyl корм-^й корм + Дс у I в.з ~ Хвх •Эф
xd ф ~ —————————————-. | А °вх
су\ нос т Cyl корм в.з Q
СИЛОЙ Тогда
(5. 25)
238
Глава V. Моменты тангажа и рыскания
www.vokb-la.spb.ru - Самолёт своими руками?!
§ 4. Центр давления крыльев в системе крылья—фюзеляж 239
Необходимо отметить, что при сильном сужении кормовой части фюзеляжа значение х& ф иногда получается отрицательным, т. е. центр давления фюзеляжа расположен впереди его носика. Это объясняется тем, что на кормовой части возникает отрицательная подъемная сила. Хотя эта сила и очень мала, но вызванное ею смещение общего центра давления вперед может быть значительным.
§ 4. ЦЕНТР ДАВЛЕНИЯ КРЫЛЬЕВ
В СИСТЕМЕ КРЫЛЬЯ—ФЮЗЕЛЯЖ
4 1. РАСЧЕТ КООРДИНАТЫ ЦЕНТРА ДАВЛЕНИЯ В СЛУЧАЕ «аа»
Подъемная сила крыльев с учетом взаимного влияния крыльев и фюзеляжа может быть представлена в следующем виде:
(Гкр) аа ~ Хк+ Ф= УиЗ.Кр + АУк + ¥г ф> (5. 26)
где АУК=(УК—УИз.кр) — дополнительная подъемная сила консолей, вызванная влиянием фюзеляжа.
Фиг. 5. 8. К определению координаты центра давления крыльев в системе крылья—фюзеляж.
В соответствии с такой разбивкой подъемной силы на отдельные слагаемые напишем выражение суммы моментов относительно носика фюзеляжа (фиг. 5. 8) и приравняем эту сумму моменту равнодействующей Укр:
(Укр %d кр) ««— Уиз.кр^а из.кр4- АУК -^-ад 4- У» ф ф- 27)
940 Глава V. Моменты тангажа и рыскания
Из этого уравнения легко получить расчетную формулу для определения Xd кр-
(XdKp)aa = ~^~~ из.кр 4" О"*''*4 4~ ^)Xdi ф]. (5. 28)
*'аа
Входящая в выражение (5.28) координата центра давления изолированных крыльев равна
Xd H3.KP = 'VA.K"t~^A.K-^tI А» (5.29)
где хА.к—расстояние от носа фюзеляжа до начала САХ консоли; Xd а определяется по фиг. 5. 4.
Координата точки приложения дополнительной подъемной силы консоли Xdi. может быть приближенно найдена следующим способом.
Согласно теории тонких тел распределение подъемной силы по размаху консоли характеризуется следующим выражением:
?К=Р (1 -г2) [1 -(^/], (5.30)
pl’2 и где ^к=сусеч——рсеч —погонная нагрузка, т. е. подъемная сила, приходящаяся на единицу размаха;
D=— ; I - 2z z =—. I Для изолированного крыла, размеры которого равны размерам консоли, выражение (5. 30) принимает вид
& • (5.31)
Произведя замену
lK=l—D и z —z—-- , к К 2 г
получим
?из.Кр = P^2«Z (1 -D)]Л-(г~£)2- (5.32)
Дополнительная погонная нагрузка, вызванная влиянием фюзеляжа на консоли, равна разности выражений (5. 30) и (5. 32):
А?к = ?к ?из.кр- (о. 33)
Имея зависимости AqK=f(z) и дяз.^=1(г), можно найти расстояние вдоль оси Oz между центром давления изолированного
www.vokb-la.spb.ru - Самолёт своими руками?!
$ 4. Центр давления крыльев в системе крылья—фюзеляж , 241
крыла А и точкой приложения дополнительной подъемной силы консоли В (фиг. 5.9). Обозначим это расстояние через Д. Значения fi, выраженные в долях размаха консоли /к/2, нанесены на фиг. 5.10.
Фиг. 5.9. Схема, поясняющая смысл величины fi.
Фиг. 5. 10. График для определения fi.
Примем приближенно, что линия, соединяющая точки А и В (см. фиг. 5.9), наклонена к оси Oz под углом х0>5. При таком предположении искомая координата
ха д =Xd из.кр f i tg Xo,s • (5- 34)
Теперь рассмотрим величину xj,- ф, т. е. координату точки приложения подъемной силы Yi ф, индуцируемой консолями на фюзеляже. Эта сила сосредоточена, главным образом, в промежутке между винтовыми линиями Маха *, выходящими из начала и конца бортовой хорды каждой консоли (фиг. 5.11, заштрихованная область).
Проведем через центр давления бортового сечения крыла винтовую линию Маха MN. Если предположить, что в любом сечении а-а характер распределения индуцированной подъемной силы такой же, как и в бортовом сечении, то эта винтовая линия будет линией центров давления сечений заштрихованной области фюзеляжа. Общий центр давления заштрихованной области находится в некоторой точке F, причем эта точка, вообще говоря, не лежит на линии MN. Развернем цилиндрическую поверхность фюзеляжа на плоскость чертежа. При этом винтовая линия MN превратится в прямую MN', а центр давления переместится из точки F в точку F', лежащую на прямой MN'.
* Угол наклона этих линий к образующим цилиндра равен углу Маха.
16 101
242
Глава V. Моменты тангажа и рыскания
Найдем расстояние от точки F' до борта фюзеляжа. Согласно теории тонких тел распределение вдоль оси Oz подъемной силы, индуцируемой двумя консолями, характеризуется выражением
(5.35)
Произведя замену переменных по формуле z=—~cos0 или
z=—Z>cos0, получим закон распределения погонной нагрузки по окружности цилиндра или по ширине развертки (см. фиг. 5. 11):
9,ф=2рГ’«/о[|/ (1^)’
+sln20
— sin 0
(5. 36)
Для определения f2 необходимо знать распределение погонной нагрузки от одной консоли (например, левой). Эта нагрузка, которую мы обозначим через qb может быть выражена формулой, подобранной 1аким образом, чтобы выполнялись следующие условия:
Д(0) = ?/ф(0);
/ Л \ 1 г / Я \
?i (©) + ?! = ?,Ф Сх-
одна из возможных формул, удовлетворяющих перечисленным условиям (последнее из них выполняется приближенно), имеет вид
q.=?V2al{\-D) (14-D)-
e2D(K-9) e*D—\ *
1 + D------------------
(5.37)
Зная q{, можно определить /2:
j <7,9^9 f __ D о
2 «
f 91^9
о
(5. 38)
www.vokb-la.spb.ru - Самолёт своими руками?!
§ 4. Центр давления крыльев в системе крылья—фюзеляж 244
Значения 2fJD приведены на фиг. 5. 12.
Прежде чем написать выражение для расчета хщ ф, отметим следующие положения:
1) расстояние от начала бортовой хорды до точки М (центра давления в бортовом сечении) по некоторым расчетным данным приблизительно равно
к>ъ(ха а+0,02Хк tgxo.s)1 (5.39)
2) экспериментальные исследования показывают, что концы крыла индуцируют на фюзеляже отрицательную подъемную силу,
величина которой примерно пропорциональна У, ф и обратно пропорциональна сужению консолей т]к:
—. (5.40)
где Aj — коэффициент пропорциональности; в первом приближении можно принять
Л, «0,2.
Расстояние от точки F до точки F] приложения силы ДУ, ф (фиг. 5. 13) будет
(5-41)
Хотя сила ДУ,ф незначительна, она вызывает заметное смещение центра давления вперед
Хо.5 + . (5.42)
‘ I ф Z71K
Теперь можно перейти к определению координаты xdi ф. Она складывается из расстояния Хб от носа фюзеляжа до начала бортовой хорды, расстояния от начала бортовой хорды до точки М,'
16*
244
Глава V. Моменты тангажа и рыскания
Фиг. 5. 13. Схема, показывающая область влияния концов крыльев.
определяемого выражением (5.39), расстояния от точки М до точки F, измеренного вдоль оси Ох и равного М2—1, и, наконец, по-
правки Дхщф. Сложив эти расстояния и приняв во внимание геометрическое соотношение
1 ’’к +1
(5’43)
получим
*Лф=*б+Цо,О2-
“ t-j К tg Хо,5 + bf>xd А “Г (Л-^/к)/М^Т. (5.44)
При М< I последнее слагаемое в этом выражении надо принимать равным нулю.
4.2. РАСЧЕТ КООРДИНАТЫ ЦЕНТРА ДАВЛЕНИЯ В СЛУЧАЕ «60»
Путем аналогичных рассуждений можно вывести расчетную формулу для определения xd кр в том случае, когда фюзеляж имеет нулевой угол атаки, а крылья отклонены по отношению к его оси на угол 6 (или фКр):
(ха кр)го= Т- ~L из.кр + ‘) Xd^ 4~ (^го ^го) ^w.xdi ф! • (5- 45)
Величины Хйиз-кр, хак и Xdi ф определяются так же, как и в случае «аа».
4.3. РАСЧЕТ КООРДИНАТЫ ЦЕНТРА ДАВЛЕНИЯ В ОБЩЕМ СЛУЧАЕ
При линейном характере зависимостей cy=f(a) и cy=f(b) можно написать
сукр=с“кра + с1кР8' (5-46)
Первое слагаемое представляет собой коэффициент подъемной силы, вызванный углом атаки. Точка приложения этой силы характеризуется координатой (ха кр)«« Второе слагаемое определяет коэффициент подъемной силы, зависящий от отклонения крыльев;
www.vokb-la.spb.ru - Самолёт своими руками?!
§ 5. Момент тангажа при ыг=а=д=О 245
эта сила приложена в точке с координатой (XdKp)so - Таким образом, координата общего центра давления крыльев в. системе крылья—фюзеляж выразится в виде
Су кр“ (Xd кр)аа 4" Су кр® (Х4 кр)го /Г Л7\
*аКр~------------—------------• (°-4'}
су кр
Величины, входящие в это выражение, подсчитываются по формулам (3.39) или (3.44), (3.40) или (3.45), (5.28), (5.45) и (5. 46).
Метод расчета координаты центра давления оперения с учетом взаимного влияния оперения и фюзеляжа ничем не отличается от метода, изложенного выше для крыльев, при условии, что позади оперения имеется достаточно длинная часть фюзеляжа. Если же оперение, как это часто бывает, расположено на самом конце фюзеляжа, то центр давления можно без большой ошибки считать совпадающим с центром давления консолей изолированного оперения.
§5. МОМЕНТ ТАНГАЖА ПРИ сог=а=6=О
Рассмотрим величину продольного момента, действующего на летательный аппарат, при условии, что угловая скорость сог равна нулю, а угол атаки и угол отклонения органов управления остаются неизменными по времени. Полный момент складывается из момента аэродинамических сил, момента силы тяги двигателей и момента, создаваемого газовыми рулями.
Момент силы тяги. Если Р — сила тяги, a hP—ее эксцентриситет относительно центра тяжести, то момент силы тяги
Мгд8 = — Php. (5.48)
Величина hP считается положительной, если линия тяги проходит выше центра тяжести.
В том случае, когда двигатель служит органом управления (поворотный двигатель), общая величина эксцентриситета силы тяги (фиг. 5. 14)
ЛР==Л>-(хт-хдв)^, (5.49)
О/,о
где хдв — расстояние от носа фюзеляжа до оси вращения двигателя;
6дВ — угол отклонения двигателя (знак 6ДВ определяется по таким же правилам, как у соответствующих рулей);
уР — начальный эксцентриситет силы тяги при 6ДВ=.О.
246
Глава V. Моменты тангажа и рыскания
Таким образом, в общем случае момент силы тяги двигателя
Ядв-^лв + ^Мв. (5.50)
где ^одв=-^₽; (5-51)
Л4>=РХт~Хд-°.. (5.52)
г 57,3 7
Момент газовых рулей. Умножив подъемную силу Уг.р на плечо газовых рулей относительно центра тяжести летательного аппа-
-*дв
Фиг. 5. 14. К определению эксцентриситета силы тяги поворотного двигателя.
рата, найдем момент, создаваемый газовыми рулями. Пользуясь приближенной формулой (3.107), можно написать
(5.53) где
Мг5г.р=Г5гр(хт-xd г.р)» 8005г.р (хт-xd г р); (5.54)
*дг.р — координата центра давления газовых рулей.
Кроме прямого влияния на момент тангажа, вызываемого эксцентриситетом силы тяги и отклонением газовых рулей, реактивные двигатели могут
Фиг. 5. 15. Влияние струи реактивного двигателя на обтекание оперения.
оказывать и косвенное влияние. Дело в том, что струя, выходящая из сопла двигателя, подсасывает воздух, изменяя направление окружающего потока (фиг. 5. 15). Если вблизи струи расположено хвостовое оперение, то его фактические углы атаки, а следовательно, подъемная сила и момент тангажа изменяются. Тео
ретический анализ этого явления весьма сложен, так как конфигурация струи и дополнительные углы скоса потока, создаваемые
www.vokb-la.spb.ru - Самолёт своими руками?!
§ 5. Момент тангажа при со1=а=б=О
241
ею, зависят от многих факторов: степени расширения сопла, температуры газов, скорости истечения, скорости полета, угла атаки, положения оперения по отношению к оси струи и к срезу сопла, размаха оперения и т. д. Поэтому во всех случаях, когда реактивная струя проходит в окрестности хвостового оперения, необходимо эксцериментально определять влияние струи на моментные характеристики летательного аппарата.
Все дальнейшие выкладки проведены в предположении, что реактивная струя не влияет на обтекание хвостового оперения.
При определении аэродинамического момента будем пренебрегать моментами тангенциальных сил поскольку равнодействующая этих сил обычно проходит вблизи центра тяжести летательного аппарата. Кроме того, нормальные силы будем принимать равными подъемным силам У. Имея выражения для определения подъемных сил отдельных частей летательного аппарата (см. гл. III) и зная координаты соответствующих центров давления (§ 2, 3 и 4 настоящей главы), можно определить моменты тангажа для летательных аппаратов различных аэродинамических схем.
5.1. ЛЕТАТЕЛЬНЫЕ АППАРАТЫ С ГОРИЗОНТАЛЬНЫМ РАСПОЛОЖЕНИЕМ КРЫЛЬЕВ
Обычная схема
Составим выражение продольного момента всего летательного аппарата относительно оси Ozb проходящей через его центр тяжести. Этот момент представляет собой алгебраическую, сумму моментов, создаваемых фюзеляжем, гондолами, крыльями, горизонтальным оперением, силой тяги двигателей и газовыми рулями. В дальнейшем для упрощения формул не будем учитывать моменты газовых рулей и поворотных двигателей, поскольку такое допущение не имеет принципиального значения. Момент гондол также будем в дальнейшем опускать. В случае необходимости моменты, создаваемые газовыми рулями и поворотными двигателями, можно подсчитать по формулам (5.52) и (5.54), а момент гондол определить аналогично моменту фюзеляжа.
Таким образом, суммарный момент тангажа
Mz—Mz ф+Л12 кр-bMz r.o-t~Mzo дв» (5.55)
где
Л42 ф = Уф (х^ Xd ф) » (5. 56)
М2 кр= Укр(^т—Ха кр)» (5. 57)
М2 г.о = УГ-О (хт—Xd г.о); (5. 58)
Л1гОдв=-Р£/Р. • (5.59)
248
Глава V. Моменты тангажа и рыскания
Здесь Xt — координата центра тяжести (центровка) летательного аппарата, отсчитываемая от той же точки, что и координаты центров давления фюзеляжа, крыла и оперения, т. е. от носика фюзеляжа.
Подставив равенства (5.56) — (5.59) в выражение (5.55) и перейдя к безразмерным коэффициентам, получим
ф X? Xrf ф Хт Xrf |ф
m‘=c^-s—
(5.60)
5 z>A qSbA
Величины сУф, cvvp, су r.o, Xd кр выразим с помощью формул (3.13), (3.38), (3.93) и (5.47). После некоторых преобразований выражение (5. 60) примет следующий вид:
/raz=/nzo+/raza + /razSp> (5.61)
где
m _ Лт-(^кр)го . , Sr.o хт —xjr.o Рур .
-----------+^ГЛО1---------------(5.62)
(5.63)
(5. 64)
Если летательный аппарат симметричен относительно плоско-
сти XiOzi, т. е. д>кр=<рст=фг=О и Ур=0, то znzo=O. В этом случае
тг=таа-{-т^р.
(5.65)
Входящая в выражение (5. 64) координата центра давления рулей Xdy совпадает с Xdr.o> если рули выполнены в виде поворотного оперения. Если же хорда руля составляет некоторую долю общей хорды оперения, то положение центра давления рулей можно принимать ориентировочно: при М>1,3 — на 50% САХ руля, а при М<Мкр — в начале САХ руля.
Схема «утка»
Путем аналогичных рассуждений можно получить формулы для расчета момента тангажа и в схеме «утка». При этом надо учитывать, что на крылья действует дополнительная отрицательная
www.vokb-la.spb.ru - Самолёт своими руками?!
§ 5. Момент тангажа при <о1=а=б=О
249
подъемная сила, вызванная скосом потока за оперением. Как следует из § 6 гл. Ш, величина ее определяется выражением
Цкр = -^кр(еосР + Еасра+8’р8р)- ' (5- 66>
Точку приложения этой силы будем приближенно считать совпадающей с центром давления крыльев для случая «аа». При этих
условиях
где
mz = mzo + тга +
$г.о ^уОг.о
. хт (-*акр)го
4- ф -------------———
Г J,KP-KP 6д
Ьк
XT — (XdKp)m Рур qSbA
с
vкр 0ср
^Г.О ХТ Xd г.о
X X Sr0 -ч —*dp mi=cs ----------- —
г -vr-° S ьк
Лт (Xd кр)ая
са е8 ------------------
Укр ср
(5.67)
(5.68)
(5. 69)
(5. 70)
Схема «бесхвостка»
В этом случае сохраняют силу выражения (5.68) и (5.69), в которых величины с индексом «г.о» относятся к дестабилизаторам. Обычно значение т1й равно нулю, так как <рКр=фст=!/р=О.
Выражение для определения /га® имеет вид
' ; • (5. 71)
Коэффициент относительной эффективности рулей п подсчитывается по формулам (3. 101) или (3.107), причем в последнюю вместо ^,из.оп и (Я«п подставляется ^из кр и Кю.
Положение центра давления рулей, как было указано выше, можно принимать ориентировочно: при М>1,3 — на 50% САХ руля, а при М<Мкр — в начале САХ руля.
Схема с поворотными крыльями
Выражения момента тангажа для летательных аппаратов с поворотными крыльями выводятся тем же способом, что и для летательных аппаратов обычной схемы. Необходимо учитывать,, что в данном случае коэффициент момента относят к площади двух
250
Глава V. Моменты тангажа и рыскания
консолей и к САХ консолей. Кроме того, вместо <ркр будет рировать угол отклонения крыльев б, а угол отклонения бр будет равен нулю. В результате получим
фигу-рулей
где
^А.к
ХТ (xd Кр)аа ^А.к
mz0— СуОст^ст
*^ф хт Хд ф
г Уф SK *А.к УКР
I h ^ст Xd ст -i Lу ст ст ~ А »
®А.к
г_ , -Ут — (^кр)го , 5СТ лт—х, т~су^ ьА.к су^ S ЬК.К
(5.72)
(5.73)
(5.74)
(5.75)
В большинстве случаев у летательных аппаратов с поворотными крыльями znzo=0.
5.2. ЛЕТАТЕЛЬНЫЕ АППАРАТЫ С +- И Х-ОБРАЗНЫМ РАСПОЛОЖЕНИЕМ КРЫЛЬЕВ
Как уже указывалось в § 6 гл. III, летательные аппараты с +- или Х-образными крыльями обычно делаются симметричными относительно плоскости x\Ozx. Поэтому для них mzO=0 и
тг=тага-\-тъЪ. (5.76)
Рассмотрим особенности расчета величин, входящих в это выражение, для различных вариантов расположения крыльев и оперения.
Вариант « + +». Так как вертикальные поверхности не влияют на подъемную силу, а следовательно, и на момент тангажа, расчет момента тангажа следует вести так же, как и для летательных аппаратов с горизонтально расположенными крыльями и оперением.
Вариант «XX». Результаты некоторых исследований показывают, что центр давления изолированных Х-образных крыльев приблизительно совпадает с центром давления аналогичных плоских крыльев:
(Xd а)х ~%d А- (5. 77)
Так как характер взаимного влияния Х-образных и плоских крыльев с фюзеляжем примерно одинаков, то центры давления этих крыльев при наличии фюзеляжа также должны приблизительно совпадать:
(xd кр)х —xd кр.
(5.78)
§СТ X-f~~* Xfj СТ .
www.vokb-la.spb.ru - Самолёт своими руками?!
§ 5. Момент тангажа при <в2=а=б=О 251
причем это относится как к случаю «аа», так и к случаю «60». Равенства (5.77) и (5. 78) справедливы и для оперения.
Расчетные формулы для определения коэффициента продольного момента летательного аппарата с Х-образными крыльями и онемением можно получить из аналогичных формул для летательного аппарата с горизонтальным расположением крыльев и оперения^ С этой целью во второе и третье слагаемые выражений (5.63), (5.69), (5.74) и во второе слагаемое выражений (5.70) и (5. 75) необходимо ввести множитель . Кроме того, для учета одновременного отклонения всех четырех рулей в выражения (5.64), (5.71) и в первое слагаемое выражений (5.70) и (5.75) следует ввести множитель Лф/соэф.
Производные угла скоса потока должны определяться с учетом замечаний, сделанных на стр. 163 (вариант «XX»).
Легко убедиться в том, что при ф = 45°, когда плоскости крыльев (так же, как и плоскости оперения) взаимно перпендикулярны, для всех аэродинамических схем справедливы равенства
("гг)хх==("гг)++ = "гг; (5- 79)
(т6г)хх=У2(т^++=У2т6г. (5-80)
Вариант «+Х». Для расчета производных mz и в Данном случае можно воспользоваться выражениями, выведенными применительно к летательным аппаратам с горизонтально расположенными крыльями и оперением. Чтобы учесть Х-образность задних несущих поверхностей, необходимо в последнее слагаемое выражений (5.63), (5.69), (5.70), (5.74) и (5.75) ввести множитель £ф. В тех случаях, когда задние Х-образные поверхности являются рулями (обычная схема и «бесхвостка»), их эффективность отличается от эффективности горизонтально расположенных рулей в Лф/соэф раз. Этот множитель надо ввести в выражения (5. 64) и (5. 71).
При определении угла скоса потока следует принимать во внимание тот факт, что плоскости задних поверхностей наклонены на угол ф по отношению к плоскости вихревой пелены. Поэтому, как уже указывалось на стр. 162, в расчетных формулах для определения производных е“, е*, е”р, s’p необходимо принимать
y0=-~- — sin<p<^0,7, (5.81)
2 Ц
где 1\ —полный размах передних, а /г — полный размах задних несущих поверхностей.
Вариант «Х+». Если учесть замечания по поводу расчета производных угол скоса потока, сделанные на стр. 164 (вариант «Х+»), то для определения коэффициента mz в рассматриваемом варианте
252 Глава V. Моменты тангажа и рыскания
также можно использовать выражения (5.63) — (5.75). Так как в данном случае передние аэродинамические поверхности имеют Х-образную форму, то во второе слагаемое выражений (5.63), (5.69) и (5.74) следует ввести множитель Лф, а в первое слагаемое выражений (5.70) и (5.75)—множитель /cos ф.
При ф = 45°
И)х+=Н)+х- (5.82)
5.3. БЕСКРЫЛЫЕ ЛЕТАТЕЛЬНЫЕ АППАРАТЫ
Момент тангажа, действующий на бескрылый летательный аппарат, в общем случае может быть представлен в виде суммы:
Мг=Ма&+М\ + М^Г ,р + мМдв. (5.83)
Моменты, вызванные отклонением газовых рулей или поворотных двигателей, были рассмотрены выше.
При приведении аэродинамических моментов к безразмерной форме их относят в данном случае к площади миделя корпуса (фюзеляжа), к его длине и скоростному напору невозмущенного потока. Таким образом,
(5.84)
Mlz=mlzqS^. (5.85)
Производные т‘ и т* при +-образном расположении оперения могут быть выражены аналогично тому, как это было сделано для крылатых летательных аппаратов:
^=^Ф^^ + ^из.г.о(^)гА.о ’ <5-86>
Оф £ф
"4=^из.г.о (5. 87)
Л Оф
При Х-образном расположении оперения и газовых рулей
И)х=("£)+; (5.88)
(/гаЬх=/2~(^)+; (5-89)
(Л/>р)х = Г^Иг-р)+- (5.90)
§ 6. ПРОДОЛЬНАЯ СТАТИЧЕСКАЯ УСТОЙЧИВОСТЬ
В § 5 было показано, что коэффициент продольного момента летательного аппарата любой аэродинамической схемы при <oz=a=6 = O может быть представлен в следующем виде:
(5.91)
где б — угол отклонения органов управления.
www.vokb-la.spb.ru - Самолёт своими руками?!
£ 6. Продольная статическая устойчивость
253
Согласно выражению (5.91) коэффициент момента является линейной функцией углов а- и б. Если изобразить зависимость mz=f(a) графически (фиг. 5. 16), то получим семейство парал-
лельных прямых, каждая из которых соответствует определенному значению 8. Наклон прямых к оси абсцисс характеризуется частной производной т*, а расстояние между
ними — частной производной лф
Величина mz0 изображается отрезком, отсекаемым ‘прямой 8=0 на оси ординат.
Опыт показывает, что линейный характер зависимости mz(a) сохраняется только при небольших углах атаки. С увеличением а линейность нару
Фиг. 5. 16. Пример линейной зависимости
шается, причем в зависимости
от аэродинамической компоновки летательного аппарата это явление может начинаться при больших или меньших углах атаки (обычно при а=8ч-15°). Особенно резко бывает выражена нелинейность моментных характеристик в тех случаях, когда крылья
имеют Х-образную схему. Кроме при увеличении отношения S$/S и
Фиг. 5. 17. Пример нелинейной зависимости тег=/(а).
того, нелинейность усиливается при увеличении длины передней части фюзеляжа (от носа фюзеляжа до начала бортовой хорды крыла).
Типичный пример нелинейной зависимости mz=f(a) показан на фиг. 5. 17.
В динамике полета большую роль играют понятия статического равновесия и статической устойчивости летательного аппарата. Состояние равновесия характе-
ризуется тем, что сумма моментов всех сил, действующих на летательный аппарат при <ог = а=8=0, относитель-
но его центра тяжести равна нулю. Как видно из фиг. 5. 16 и 5. 17, это условие выполняется в точках пересечения кривых с
осью абсцисс. Статическое равновесие моментов возникает, в уста-
254 Глава V. Моменты тангажа и рыскания
новившемся прямолинейном полете, когда все параметры движения остаются неизменными по времени.
Равновесие продольных моментов иначе называется продольной балансировкой летательного аппарата. Чтобы сбалансировать летательный аппарат на некотором угле атаки, необходимо отклонить рули или другие органы управления на определенный угол, называемый балансировочным углом отклонения рулей и обозначаемый йбал- И, наоборот, каждому углу отклонения рулей соответствует свой балансировочный угол атаки абал-
Известно, что равновесие может быть устойчивым или неустойчивым. В первом случае тело, выведенное из равновесия каким-либо малым по величине и кратковременным возмущающим воздействием, после некоторого переходного процесса возвращается в исходное состояние равновесия. Во втором случае даже при самом малом возмущении тело уходит от положения равновесия.
Характер равновесия продольных моментов в прямолинейном установившемся полете летательного аппарата с закрепленными неподвижно рулями определяется в значительной степени нали-< чием или отсутствием так называемой продольной статической устойчивости.
Летательный аппарат называют статически устойчивым, если момент аэродинамически? сил, возникающий при угловом отклонении от положения равновесия, направлен в сторону исходного положения равновесия. Момент аэродинамических сил статически неустойчивого летательного аппарата направлен в сторону дальнейшего увеличения начального отклонения.
Наличие или отсутствие продольной статической устойчивости определяется характером моментных кривых. Для пояснения рассмотрим график mz=f(a) при. каком-либо фиксированном положении рулей.
В зависимости от наклона кривых в точке их пересечения с осью абсцисс (mz=0) различают три типа моментных характеристик (фиг. 5. 18).
Кривая, показанная на фиг. 5. 18, а, характеризуется тем, что тангенс угла наклона касательной, проведенной в точке пересечения кривой с осью абсцисс, является отрицательным:
Если вывести летательный аппарат из состояния равновесия, увеличив или уменьшив угол атаки по сравнению с аеал на некоторую малую величину Да, то на него будет действовать аэродинамический момент, стремящийся увеличить угол атаки при а<абал и уменьшить этот угол при а>асал> т. е. направленный всегда в сторону положения равновесия. В данном случае летательный аппарат будет обладать продольной статической устойчи-
www.vokb-Ia.spb.ru - Самолёт своими руками?!
§ 6. Продольная статическая устойчивость
255
чивого, в) нейтрального в отношении статической устойчивости.-
256
Глава V. Моменты тангажа и рыскания
вестью. Аэродинамический момент, вызванный отклонением от положения равновесия и направленный в сторону равновесия, иногда называют восстанавливающим. Коэффициент восстанавливающего момента
Д/тгг==<16алДа. (5.92)
В случае, изображенном на фиг. 5. 18, б, тангенс угла наклона моментной кривой в точке ее пересечения с осью абсцисс положителен: ‘ 1
В этом случае имеет место продольная статическая неустойчивость, так как при отклонении летательного аппарата в любую сторону от положения равновесия возникает момент, направленный всегда в ту же сторону. Такой момент называют иногда опрокидывающим. Величина его также определяется формулой (5.92).
Наконец, можно представить третий тип моментной кривой, показанный на фиг. 5. 18, в. В этом случае
и при малом отклонении угла атаки от балансировочного не возникает ни восстанавливающего, ни опрокидывающего момента. Летательный аппардт, имеющий такую моментную характеристику, называют нейтральным в отношении статической устойчивости.
Таким образом, можно сформулировать следующие выводы:
а) статически устойчивый летательный аппарат имеет отрицательную величину частной производной при а = аеал> т. е.
(та\ <0;
' г'а=ябал
б) статически неустойчивый летательный аппарат имеет положительную величину пг*:
1 г/“-“бал
в) нейтральный летательный аппарат характеризуется равенством
=0-' бал
Производная (/га“) , от которой зависит абсолютная величина
v ' “бал
восстанавливающего или опрокидывающего момента, называется степенью продольной статической устойчивости.
Так как су и а связаны в большинстве случаев линейной зависимостью, то часто наряду с кривыми т2(а) строят кривые тг(с ).
www.vokb-la.spb.ru - Самолёт своими руками?!
§ 7. Фокус и нейтральная центровка летательного аппарата 257
Частная производная , как и производная (ml)_ ,
г у~‘у бал бал
дает качественную и количественную оценку статической устойчивости летательного аппарата и поэтому также называется степенью продольной статической устойчивости. Эти производные связаны между собой равенством
тсу=^г_=0т^^=^1 ' (5.93)
z дсу да дсу сау
Некоторый интерес представляет вопрос о влиянии угла отклонения рулей на степень устойчивости. Из фиг. 5. 16 ясно, что при линейной зависимости коэффициента момента mz от угла атаки степень устойчивости не зависит от угла отклонения рулей, так как все кривые пересекают ось абсцисс под одинаковым углом. Такой же вывод можно сделать и из выражений для m*t приведенных в § 5, в которые угол отклонения рулей не входит.
Однако в случае нелинейной зависимости тг от а (см. фиг. 5. 17) наклон моментных кривых в точках их пересечения с осью абсцисс получается различным при разных углах отклонения рулей. Это означает, что степень продольной статической устойчивости летательного аппарата в различных режимах прямолинейного установившегося полета будет неодинаковой. В некоторых случаях может оказаться, что летательный аппарат, статически устойчивый при полете на малых углах атаки, будет статически неустойчивым при полете на больших углах. Это заставляет ограничивать летный диапазон углов атаки сравнительно малыми значениями, при которых зависимость mz от а близка к линейной. Одна из важнейших задач конструктора при проектировании летательного аппарата состоит в том, чтобы путем правильной аэродинамической компоновки расширить летный диапазон углов атаки и тем самым увеличить несущую способность летательного аппарата.
§ 7. ФОКУС И НЕЙТРАЛЬНАЯ ЦЕНТРОВКА ЛЕТАТЕЛЬНОГО АППАРАТА
В гл. III было показано, что подъемная сила летательного аппарата может быть представлена в виде суммы трех слагаемых, одно из которых пропорционально углу атаки, второе пропорционально углу отклонения органов управления, а третье является постоянной величиной, вызванной несимметричностью летательного аппарата относительно плоскости XjOzy.
Y=Yaa + Ys6 + Y0. (5.94)
Каждая из составляющих подъемной силы приложена в определенной точке. Назовем фокусом летательного аппарата точку лрило-
17 101
258 Глава V. Моменты тангажа и рыскания
жения той части подъемной силы, которая обусловлена углом атаки *.
Как видно из данного определения, фокус в общем случае не совпадает с центром давления летательного аппарата, т. е. с точкой приложения всей подъемной силы. Координата центра давления Xd зависит от углов а и 6, от углов установки крыльев <ркр и стабилизатора <рСт'И т. д., в то время как координата фокуса не зависит от этих параметров. Только в одном частном случае, а именно—при д—0 и полной симметрии летательного аппарата относительно плоскости XiOzi, когда Y=Yaa, центр давления совпадает с фокусом.
Можно дать и другое определение понятия фокуса. Представим, что поперечная ось Ozx проходит через фокус, и вычислим момент аэродинамических сил относительно этой оси при закрепленных в определенном положении органах управления (6=const). Легко убедиться в том, что этот момент будет постоянным, не зависящим от угла атаки. Действительно, первая составляющая подъемной силы в выражении (5. 94) приложена в фокусе и поэтому не создает момегЛа, а вторая и третья составляющие при 6 = const дают момент постоянной величины.
Следовательно, фокусом можно назвать точку, лежащую в плоскости симметрии летательного аппарата и обладающую тем свойством, что при закрепленных органах управления момент аэродинамических сил относительно оси Oz{, проходящей через эту точку, не зависит от угла атаки.
Обозначим продольную координату фокуса, измеренную от носа фюзеляжа, через xF. Так как фокус представляет собой точку приложения равнодействующей подъемных сил, обусловленных углом атаки, то в самом общем виде можно написать
где Yf — подъемная сила, создаваемая той или иной частью летательного аппарата (с учетом влияния на нее других частей) ;
Xdi — координата точки приложения этой силы.
На основании равенства (5. 95) сформулируем правило, с помощью которого легко можно выразить координату фокуса любого летательного аппарата: надо взять развернутое выражение производной летательного аппарата данной схемы, умножить каждое слагаемое этого выражения на соответствующую координату центра давления, т. е. на (лдкр)аа , xdom и сумму полученных произведений разделить на б?.
* Строго говоря, здесь надо было бы рассматривать не составляющие-Подъемной силы, а составляющие полной аэродинамической силы.
www.vokb-la.spb.ru - Самолёт своими руками?!
§ 7. Фокус и нейтральная центровка летательного аппарата 259
Так, например, для летательного аппарата обычной схемы с горизонтально расположенными крыльями и оперением, пользуясь выражением (3. 118), найдем
р
са СхФ 5 -’сафН“с>кр(-Л'акр)м4“с^ г.о^г.о $ хаг.о|"
(5.96)
Для схемы «утка» [5 "1
С\ Ф “Г *4 ф + Сау г.о “г.о + Сау кр( 1 - е“р) кр)«а .(5. 97)
Формула (5.97) сохраняет силу и для схемы «бесхвостка», только в этом случае индекс «г. о» относится к дестабилизаторам.
Для летательного аппарата с поворотными крыльями
1 S tj Q
= у • (5.98)
Ly L °к *^к
Подобным же способом составляются выражения координаты фокуса и в тех случаях, когда крылья и оперение имеют + - или Х-образную схему.
Можно показать, что степень продольной статической устойчивости летательного аппарата зависит от взаимного положения его фокуса и центра тяжести. С этой целью возьмем выражение т* летательного аппарата какой-либо аэродинамической схемы, например выражение (5.63), и перепишем его в следующем виде:
__La 5ф Л</Ф I са ^Xd | £ Sr.O -^r.ol ,r qq, p* S ЙА • bK +Sr.oftr.o s p.99)
При сравнении выражения (5.99) с равенствами (3.118) и (5. 96) убеждаемся, что величина, заключенная в круглые скобки, есть не что иное, как производная с* летательного аппарата, а величина в квадратных скобках равна са — .
у
Тогда выражение (5. 99) принимает вид
ЛТ~7 Л/?- ‘ (5-ЮО)
у од
При определении положения фокуса и центра тяжести часто пользуются безразмерными координатами
(5.101)
, (5. 102)
где хА — расстояние от носа фюзеляжа до начала САХ крыла.
17*
260
Глава V. Моменты тангажа и рыскания
Величины хт и х? представляют собой координаты фокуса и центра тяжести, измеренные от начала САХ и выраженные в долях (или процентах) САХ, Величина -хт, так же как и хт, называется центровкой летательного аппарата.
Выразив хт пхР из равенств (5. 101), (5. 102) и подставив эти выражения в (5.. 100), получим
^=c“(xT-xf), (5.103)
или
mcy~xT—xF. (5.104)
Выражения (5. 100), (5. 103) и (5. 104) справедливы для летательных аппаратов любой аэродинамической схемы.
Теперь можно по-другому сформулировать условия продольной статической устойчивости. Очевидно, что для обеспечения статической устойчивости центр тяжести должен находиться впереди фокуса летательного аппарата. Если центр тяжести лежит позади фокуса, то летательный аппарат статически неустойчив. И, наконец, если центр тяжести совпадает с фокусом, то летательный аппарат нейтрален.
Центровка, при которой летательный аппарат является нейтральным в отношении статической устойчивости, называется нейтральной и обозначается через хт.н. Из сказанного ясно, что понятия нейтральной центровки и координаты фокуса совпадают:
Х^д —Xjr. (о, 100)
Пользуясь понятием фокуса, можно дать очень наглядное геометрическое толкование степени устойчивости. Как следует из выражения (5.104), степень продольной статической устойчивости mczy равна расстоянию между центром тяжести и фокусом, выраженному в долях САХ.
Формулой (5.104) удобно пользоваться для пересчета степени устойчивости на другую центровку. Пусть при центровке х? летательный аппарат имеет степень устойчивости
{тсу}' =х'т — Хр. (5.106)
Вычитая из (5. 104) равенство (5. 106), получим
т^у — (т^у\—хт—х'т. (5.107)
Зная степень устойчивости (ттг^у) при центровке хт, по формуле (5.107) легко найти при любых других значениях хт.
Так как многие из величин, входящих в выражения (5.96) — (5. 98), являются функциями числа М, то фокус летательного ап
www.vokb-la.spb.ru - Самолёт своими руками?!
§ 8. Момент тангажа, вызванный вращением вокруг оси Ozx 261
парата изменяет свое положение при изменении числа М. Особенно заметно выражено смещение фокуса в околозвуковом диапазоне скоростей. Это объясняется, главным образом, большим перемещением центра давления крыльев при переходе от дозвуковых к сверхзвуковым скоростям полета (см. фиг. 5.4). Кроме того, при неудачной аэродинамической компоновке величины с” кр, kT.o и др. претерпевают резкие изменения из-за интенсивного развития волнового кризиса в области сопряжения крыльев с фюзеляжем, что приводит к серьезному нарушению устойчивости, а иногда и к полной потере ее.
Конструктор летательного аппарата может обеспечить желаемую степень статической устойчивости различными способами.
Первый способ — это изменение внешних форм летательного аппарата. Например, сдвинув крылья назад и увеличив тем самым (xd кр) аа, можно переместить фокус относительно центра тяжести (который при этом почти не смещается, так как вес крыльев невелик) и увеличить степень устойчивости. Такой же результат получается при увеличении площади хвостового оперения. Наоборот, в схеме «утка» увеличение площади оперения приводит к смещению фокуса вперед и к уменьшению статической устойчивости. В некоторых случаях в передней части корпуса специально устанавливают неподвижные поверхности — дестабилизаторы, чтобы сместить фокус вперед.,
Второй способ заключается в изменении внутренней компоновки летательного аппарата при неизменных внешних формах. Путем соответствующего расположения грузов внутри корпуса можно в некоторых пределах изменять центровку летательного аппарата, а следовательно, и степень его статической устойчивости.
В практике проектирования обычно используются оба способа.
В заключение отметим, что понятия фокуса и нейтральной центровки, являясь весьма удобными, имеют в то же время ограниченную область применения. Они применимы только в том диапазоне углов атаки, где зависимость mz=f(cy) линейная. При больших углах атаки, когда линейность моментных характеристик нарушается, эти понятия теряют смысл.
§ 8. МОМЕНТ ТАНГАЖА, ВЫЗВАННЫЙ ВРАЩЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА ВОКРУГ ОСИ Ozx
Рассмотрим летательный аппарат, летящий со скоростью V и одновременно вращающийся вокруг своей поперечной оси с угловой скоростью <bz (фиг. 5. 19).
При вращении летательного аппарата каждая точка его поверхности приобретает дополнительную скорость, направленную перпендикулярно к радиусу-вектору г, соединяющему центр* тяже
262 Глава V. Моменты тангажа и рыскания
сти с этой точкой, и равную <ozr. Вследствие этого углы встречи потока с отдельными элементами поверхности получаются отличными от углов встречи при чисто поступательном движении. Изменение углов встречи приводит к появлению дополнительных аэродинамических сил, которые можно свести к равнодействующей A^(coz), приложенной в центре тяжести, и моменту AMz(g_>z) относительно поперечной оси, проходящей через центр тяжести.
Величина Д/?(юг) очень мала и в расчетах подъемной силы ею обычно пренебрегают. Что же касается момента AMz(coz), то он существенно влияет на динамические свойства летательного аппарата и поэтому заслуживает подробного рассмотрения.
Фиг. 5.19. Изменение направления скоростей различных точек летательного • аппарата при вращении его вокруг поперечной оси, проходящей через центр тяжести.
Очевидно, что при показанном на фиг. 5. 19 направлении вращения летательного аппарата дополнительные аэродинамические силы в его передней части будут направлены вниз, а в хвостовой части — вверх. При изменении направления угловой скорости на противоположное изменится соответствующим образом и направление действия дополнительных аэродинамических сил. И в том и в другом случае момент этих сил будет направлен в сторону, обратную вращению летательного аппарата.
Момент, обусловленный угловой скоростью вращения летательного аппарата вокруг оси Ozi и всегда препятствующий вращению, называется демпфирующим моментом тангажа, или продольным демпфирующим моментом. При положительной угловой скорости демпфирующий момент отрицателен, а при отрицательной угловой скорости положителен.
Демпфирующий момент способствует затуханию колебаний, возникающих при отклонении летательного аппарата от положения равновесия или при переходе от одного положения равновесия к другому. Таким образом, демпфирующий момент является важным фактором, улучшающим качество переходных процессов.
www.vokb-la.spb.ru - Самолёт своими руками?!
§ 8. Момент тангажа, вызванный вращением, вокруг оси Ozt 263
Опыт показывает, что величина демпфирующего момента пропорциональна угловой скорости coz. Поэтому
ДМ, (<».)==/И>г. (5.108)
Выразим производную через безразмерный коэффициент момента mz и безразмерную угловую скорость wz. Так как
Mz—m2qSbK и
то
M^m^qSb^ , (5.109)
где m™z — dmzld(»2 — вращательная производная коэффициента продольного момента.
Величина этой производной в летном диапазоне углов атаки зависит, главным образом, от геометрических параметров летательного аппарата, его центровки и числа М. Производная т™г всегда отрицательна, так как знаки демпфирующего момента и угловой скорости противоположны.
Рассмотрим приближенные способы расчета продольного демпфирующего момента.
8. t. ДЕМПФИРУЮЩИЙ МОМЕНТ ИЗОЛИРОВАННЫХ КРЫЛЬЕВ
^(Xj’X)
Фиг. 5. 20. Дополнительные скорости, возникающие в различных точках крыльев при вращении их вокруг поперечной оси.
'Эпюра распределения дополнительных скоростей,Вызванных Вращением крыльеб
При теоретическом определении демпфирующего момента крыльев применяют так называемую «гипотезу искривления». Сущность ее состоит в следующем. Вращение крыльев вокруг оси Ozlt проходящей через центр тяжести (фиг. 5.20), приводит к то му, что в произвольной точке крыла с координатой х появляется дополнительный угол атаки
да==-57,3-^(х-л).
(5.110)
Вместо того чтобы рассматривать характеристики вращающихся крыльев,
264
Глава V. Моменты тангажа и рыскания
Фиг. 5.21. К «гипотезе искривления».
Фиг. 5.22. График для определения вращательной производной т“г изолированных крыльев при хт=1/2.
www.vokb-la.spb.ru - Самолёт своими руками?!
£ 8. Момент тангажа, вызванный вращением вокруг оси Ozi 265
можно представить себе эквивалентные невращающиеся крылья, искривленные таким образом, что местные углы наклона поверхности к вектору скорости набегающего потока в точности определяются выражением (5. 110). Такие эквивалентные крылья изображены на фиг. 5.21, а, а их сечение — на фиг. 5.21,6. Точнее говоря, на фиг. 5.20 и 5.21 показаны срединные поверхности крыльев, т. е. толщина профиля принята равной нулю.
Найдем уравнение, характеризующее форму срединной поверхности искривленного крыла. Так как производная dy/dx в любой точке кривой равна тангенсу угла наклона касательной к этой кривой, то
dy ___ Ла
dx 57,3
(5.111)
Выполнив интегрирование и приняв в качестве граничного условия t/ = 0 при х=хт, получим
(5.112)
Как видно из этого уравнения, поперечное сечение искривленного крыла представляет собой дугу параболы, вершина которой находится в точке с координатой х=хт.
Принятие «гипотезы искривления», т. е. замена вращающихся плоских крыльев невращающимися искривленными крыльями, позволяет применить для расчета момента демпфирования тангажа линейную теорию крыльев конечного размаха.
При сверхзвуковых скоростях полета вращательная производная пг”’г изолированных крыльев, отнесенная к са Из,кр. может быть подсчитана по формуле
где I —I и Вх определяются по фиг. 5.22 и 5.23, построенным \ су /
(ш \
т z I
~~ I пред-
су / _
собой отношение вращательной производной к с* при е. эта величина определяет демпфирующий момент
ставляет
хт =
отно-
сительно оси, проходящей через середину САХ. Для прямоугольных крыльев Z?j=O. \
266
Глава V. Моменты тангажа и рыскания
производной
(“z\
Hl* 4
——- I , легко подсчитать и величину вращательной
С /
у / из.кр
^z из.кр
(“г \
m2 1
—— I С“
г “ / У из.кр у /из.кр
(5.114)
Значения с^из.кр определяются по фиг. 3. 1. Необходимо иметь в виду, что угловая скорость всюду выражается в рад/сек, а угол атаки — в градусах.
Фиг. 5.23. График для определения коэффициента Bt для крыльев с заостренными концами.
Графики, приведенные на фиг. 5.22 и 5.23, относятся только к некоторым формам крыльев в плане, а именно — к прямоугольным (т]=1; Х=0) и к крыльям с заостренными концами (т]=оо), имеющим произвольный угол стреловидности. Для расчета демпфирующего момента крыльев другой формы в плане можно заменить эти крылья условными, близкими им по форме, для которых
www.vokb-la.spb.ru - Самолёт своими руками?!
8. Момент тангажа, вызванный вращением вокруг оси Ozi 267
применимы фиг. 5. 22 и 5. 23. При этом надо стремиться к тому, чтобы геометрические параметры A, tgxo,5 и <S условных крыльев совпадали с аналогичными параметрами действительных крыльев.
Примерные значения производной т“г пз.кр при дозвуковых скоростях полета могут быть подсчитаны по формулам, приведенным в книге [6].
8.2. ДЕМПФИРУЮЩИЙ МОМЕНТ ИЗОЛИРОВАННОГО ФЮЗЕЛЯЖА
В гл. III было показано, что почти вся подъемная сила фюзеляжа сосредоточена в его носовой части. Пользуясь этим, можно применить следующий приближенный способ определения демпфирующего момента фюзеляжа. Предположим, что дополнительная подъемная сила, вызванная вращением, приложена в центре дав-
Фиг. 5.24. К определению дополнительного угла атаки носовой части фюзеляжа при вращении летательного аппарата вокруг оси Ozi.
ления носовой части фюзеляжа, а величина этой силы определяется приращением угла атаки Да в этой же точке. Как видно из фиг. 5. 24,
^=~57,3^(xI-xdHOC). (5.115)
Дополнительная подъемная сила будет равна
ДГ=с;носДа^ф, (5.116)
а момент этой силы ДЛД=ДУ(хт—Ханое)- (5.117)
Выполнив необходимые преобразования и перейдя к безразмерным коэффициентам, получим
<'*= -57.3г.. (5.118)
\ "А /
Если в передней части фюзеляжа расположен воздухозаборник ВРД, то при определении с“Ное и Ханое необходимо учесть добавочную подъемную силу воздухозаборника.
Аналогичным способом определяется демпфирующий момент гондол двигателей.
268
Глава V. Моменты тангажа и рыскания
8.3. ДЕМПФИРУЮЩИЙ МОМЕНТ КРЫЛЬЕВ В ПРИСУТСТВИИ ФЮЗЕЛЯЖА
Из приведенных выше формул видно, что величина демпфирующего момента какой-либо части летательного аппарата пропорциональна производной подъемной силы этой части по углу атаки. Поэтому можно написать такое приближенное соотношение:
• м”' Уа
(5-И9) ^гиз-кр 'из.кр
из которого после преобразований найдем
(5.120)
Величина /»“*зкр подсчитывается для изолированных крыльев, размеры которых равны размерам консолей. При этом безразмерная координата центра тяжести измеряется относительно средней аэродинамической хорды консолей:
__хт ХА. к
Т~ *А.к
Эффект Х-образности крыльев можно в первом приближении учесть введением множителя k.^ в выражение (5. 120).
8.4. ДЕМПФИРУЮЩИЙ МОМЕНТ ОПЕРЕНИЯ
Строго говоря, демпфирующий момент горизонтального оперения должен определяться таким же методом, как и для крыльев, т. е. с помощью формул (5. 113), (5. 114) и (5. 120). При использовании этих формул необходимо учитывать следующие особенности:
1) величина .гт должна быть взята относительно САХ консолей оперения, т. е.
77 _ -*т — -^А.г.о .
лт— А ’
*А.г.о
2) в формулы (5. 114) и (5.120) вместо с“и3кр, Каа, SK и &А к надо подставить с“изг0, (ЛА)Г.О, Sro и ЬАго. Так как демпфирующий момент пропорционален первой степени скорости [см. выражение (5. 109)], то в формулу (5. 120) необходимо также ввести множитель V^г.о > учитывающий торможение потока в области оперения.
В большинстве случаев плечо горизонтального оперения относительно центра тяжести велико по сравнению с его хордой, поэтому можно ограничиться более грубым способом расчета, аналогичным изложенному выше способу расчета демпфирующего
www.vokb-la.spb.ru - Самолёт своими руками?!
§ 8. Момент тангажа, вызванный вращением вокруг оси Oil 269
момента фюзеляжа. Примем приближенно, что дополнительный угол атаки Да, вызванный вращением летательного аппарата, во всех точках горизонтального оперения имеет одну и ту же величину, равную значению Да в центре давления оперения (фиг. 5. 25):
Фиг. 5.25. К определению дополнительного угла атаки горизонтального оперения при вращении летательного аппарата вокруг оси Ozi.
Вследствие изменения угла атаки изменится и подъемная сила оперения на величину
kY-C*? из.г.о (^Ог.оД’^г.сЛ.о* (5.122)
Момент этой силы будет
ДЛ12=ДУ(хт—Xdr.o). (5.123)
Перейдя к безразмерным коэффициентам, получим
^(-T~^--f- (5- 124)
При Х-образной схеме оперения в написанное выражение необходимо ввести множитель k^,.
Демпфирующий момент оперения составляет значительную часть общего демпфирующего момента летательного аппарата. Характерно, что этот момент в более сильной степени, чем восстанавливающий момент, зависит от плеча оперения относительно центра тяжести. Действительно, отношение (хт—XdT.o)lbA входит в выражение т“ в первой степени [см., например, (5.63) и (5.69)], а в выражение —в квадрате. Следовательно, при одной и той же степени продольной статической устойчивости большим демпфирующим моментом будет обладать тот летательный аппарат, у которого меньше площадь оперения, но больше плечо. Летательные аппараты с «длинным хвостом» имеют лучшие демпфирующие характеристики, чем аппараты с «коротким хвостом».
070 Глава V. Моменты тангажа и рыскания
8.5. ДЕМПФИРУЮЩИЙ МОМЕНТ ВСЕГО ЛЕТАТЕЛЬНОГО АППАРАТА
После рассмотрения демпфирующих моментов, создаваемых отдельными частями летательного аппарата, можно написать общие выражения вращательной производной w“z для летательных аппаратов различных схем.
Обычная схема
В этом случае демпфирующий момент всего летательного аппарата равен сумме демпфирующих моментов его частей:
+ (5.125)
Схема «утка»
В этой схеме необходимо учитывать дополнительный эффект, вызываемый скосом потока. При вращении летательного аппарата вокруг оси Ozi угол атаки оперения изменяется на величину
да== -57,3^-(xT-xdrJ. (5.126)
Приращение угла атаки оперения сопровождается соответствующим приращением среднего угла скоса потока в области крыла
АгсР=£срДа- (5- 127)
Подъемная сила крыла при этом также изменяется на величину
дГ (е) = - cj K3'KpK««tecpqSK, (5. 128)
что приводит к появлению дополнительного момента
ДЛ4г(е) — АУкр[Лт (•*-</Kp)®J. (5.129)
После необходимых преобразований получим
Д<2(в)=-57,3С;из.кр^]Д(5. 130)
При Х-образном расположении крыльев или оперения производную е“ необходимо определять с учетом замечаний, сделанных в разд. 6.2 гл. III (варианты «XX», «+Х» и «Х+»).
Кроме того, при Х-образном расположении крыльев в выражение (5. 130) следует ввести множитель k^.
Таким образом, общая величина вращательной производной в схеме «утка» будет
^=/П4 + /^0П + ^р + д^(е). (5. 131)
www.vokb-la.spb.ru - Самолёт своими руками?!
§ 8. Момент тангажа, вызванный вращением вокруг оси Ozi ‘ZTl
Так как (jcT-jcdon) >0, а (хт — xdKp)<0, то Дт"г(е)>;о’[Следовательно, учет скоса потока приводит к некоторому уменьшению демпфирующего момента тангажа.
Строго говоря, влияние скоса потока надо было бы учитывать и в обычной схеме. Но там это влияние выражено значительна слабее, так как центр давления крыльев, как правило, расположен вблизи центра тяжести и вращение летательного аппарата не приводит к заметному изменению подъемной силы крыльев и угла скоса потока.
Схема «бесхвостка»
При наличии дестабилизаторов расчет производной т“2 ведется по формуле (5. 131). Если же дестабилизаторов нет, то
. <5-|32>
Схема с поворотными крыльями
В этом случае вращательная производная т“2 подсчитывается по формуле (5. 125), но при определении входящих в нее слагаемых следует принимать S=SK; 6А=6д.к-
8.6. ВНУТРЕННИЙ МОМЕНТ КОРИОЛИСОВЫХ СИЛ I'
Если внутри вращающегося летательного аппарата движутся потоки жидкости или газа (фиг. 5.26), то возникает момент кориолисовых сил, пропорциональный угловой скорости враще-
Фиг. 5.26. К определению момента кориолисовых сил.
ния «г. Для определения этого момента рассмотрим один из внутренних потоков. Выделим элемент потока, движущийся от центра тяжести, длиной dx и с площадью поперечного сечения Sn. Пусть проекция средней скорости в этом поперечном сечении на ось Ох равна wx, а средняя плотность элемента равна р. Если летательный аппарат вращается с угловой скоростью <р2, то ко
272
Глава К, Моменты тангажа и рыскания
риолисово ускорение рассматриваемого элемента будет равно ЗюгЬУх и направлено в сторону вращения. При этом элементарный момент кориолисовой силы будет направлен в сторону, противоположную вращению. Так как масса элемента равна pSndx, то элементарный момент кориолисовой силы будет
dMz кор“ х) Р*5П dx ~2(DzZ7lceK(-Гт ~x)dx, (5. 133)
где пгСек=р5п®х — секундный массовый расход жидкости или Таза в данном сечении.
Рассматривая элемент потока, движущийся к центру тяжести (х<хт), приходим к выводу, что направление элементарного момента кориолисовой силы совпадает с направлением вращения летательного аппарата.
Таким образом, поток, движущийся к центру тяжести, создает момент, способствующий вращению летательного аппарата, а поток, движущийся от центра тяжести, создает демпфирующий момент.
Общая величина момента определяется суммированием интегралов выражения (5.133) по всем потокам жидкости и газа:
^кор-^Х^’ <5-134)
где
ЧШкор = 22.[ (хт- x)dx. (5.135)
о
При полете летательного аппарата в плотных слоях атмосферы внутренний момент кориолисовых сил обычно мал по сравнению с демпфирующим моментом от аэродинамических сил. Поэтому при исследовании полета в плотных слоях атмосферы моментом кориолисовых сил можно пренебречь. Однако этот момент приобретает самостоятельное значение при полете ракеты в разреженных слоях атмосферы или за ее пределами.
§ 9. ПРОДОЛЬНАЯ БАЛАНСИРОВКА В УСТАНОВИВШИХСЯ РЕЖИМАХ ПОЛЕТА
Назовем установившимся движением такое движение летательного аппарата, при котором кинематические параметры движения (скорость полета, углы атаки, скольжения и крена, а также угловые скорости Юх, &у и ыг) остаются неизменными с течением времени. Вообще говоря, строго установившегося движения у летательного аппарата не бывает, так как даже при прямолинейном горизонтальном полете с постоянной скоростью вследствие изменения веса летательного аппарата из-за выгорания топлива изменяется его угол атаки. Поэтому в строгой постановке задачи мож-
www.vokb-la.spb.ru - Самолёт своими руками?!
§ 9. Продольная балансировка в установившихся режимах полета 273
но говорить об установившемся движении только по отношению к одному или нескольким параметрам, например, о помете с по* стоянной скоростью, о полете с постоянным углом атаки и т. п.
Однако, если ограничиться рассмотрением движения летательного аппарата за небольшой отрезок времени, то можно пренебречь такими факторами, как изменение веса аппарата и изменение плотности воздуха в связи с изменением высоты. При этих условиях можно выделить определенный класс движений, близких к установившимся: прямолинейный равномерный полет по горизонтальной, наклонной или вертикальной траектории; установившийся вираж, т. е. равномерный полет по дуге окружности, лежащей в горизонтальной плоскости; установившаяся спираль, т. е. равномерный полет по винтовой линии с набором или потерей высоты. К этому классу движений можно также отнести равномерный полет по любой криволинейной траектории с постоянным радиусом кривизны, т. е. с постоянной угловой скоростью, если дополнительно пренебречь изменением проекций силы веса на скоростные оси координат. Такое допущение оправдывается в тех случаях, когда в пределах рассматриваемого отрезка времени угол наклона траектории изменяется незначительно.
Определенное сочетание значений параметров V, а, и т. д. характеризует режим установившегося полета. Каждому режиму полета соответствуют определенные положения органов управления.
При установившемся полете угловые скорости вращения летательного аппарата сох, ыу, ыг постоянны, т. е. угловые ускорения равны нулю. Отсюда следует, что при установившемся полете существует равновесие моментов относительно осей Oxlt Оу} и Ozlt проходящих через центр тяжести, или, иначе говоря, летательный аппарат находится в положении балансировки.
Рассмотрим условия продольной балансировки летательного аппарата.
Пользуясь равенством (5.5) и принимая во внимание, что при установившемся полете а=0 и 6=0, запишем это условие в следующем виде:
/nz04-/n“a-J-/n4> + m“zwz—0. (5.136)
Отсюда легко найти угол отклонения рулей, необходимый для балансировки летательного аппарата на заданном режиме полета (характеризуемом значениями а и ю2):
8бал= —Аг (mzo + /«:« + (5. 137)
Большинство крылатых летательных аппаратов обладает значительной степенью продольной статической устойчивости. В этом случае, как показывают числовые расчеты, роль последнего члена
18 101
274
Глава К Моменты тангажа и рыскания
в выражении (5. 137) невелика, поэтому можно ограничиться бо ' лее простым выражением:
8бал~----+
(5.138)
Это приближенное, равенство становится точным в случае прямолинейного установившегося полета летательного аппарата.
Если летательный аппарат симметричен относительно плоскости XiOzi, то тг0=0 и выражение (5.138) еще более упрощается:
S* ______ z
бал mz
(5.139)
Отсюда
(5.140)
или
(5.141)
Подъемная сила при условии балансировки. В гл. III было показано, что общее выражение коэффициента подъемной силы летательного аппарата имеет такой вид:
(5. 142)
При расчете траекторий движения летательного аппарата обычно принимают, что углы а и б однозначно связаны между собой условием продольной балансировки. Это допущение позволяет значительно упростить расчет, почти не снижая его точности.
При продольной балансировке коэффициент подъемной силы летательного аппарата
Су бал—с^8бал,
(5. 143)
причем балансировочный угол отклонения рулей определяется одним из выражений (5. 137), (5. 138) или (5. 139).
Как видим, для определения сУбал необходимо знать коэффициенты mz0, т”, т'ит“г. Между тем, расчет траекторий зачастую выполняется на одном из начальных этапов проектирования, когда моментные характеристики летательного аппарата еще неизвестны. Поэтому желательно иметь хотя бы грубые, прикидочные способы расчета субал, не требующие предварительного определения моментных характеристик. /
www.vokb-la.spb.ru - Самолёт своими руками?!
$ 10. Моменты тангажа при неустановившемся движении 275
Пренебрегая продольным демпфированием и пользуясь тем, что cv0 и тл обычно равны нулю или малы, на основании равенства (5.143) можно написать
бал = Суа+ Су8бал = [С“у + Су 1 у L у - \ . балJ
(5.144)
Ориентировочные значения отношения (6/а)бал. полученные расчетом, указаны в табл. 5. 1.
В некоторых случаях можно еще более упростить расчет су бал-Так, например, без большой ошибки можно принимать
субал=^уК.фа< (5.145)
где Л=0,92 — для летательного аппарата обычной схемы;
k~ 1,03 — для схемы «утка»;
k — 0,75 — для схемы «бес-хвостка».
Таблица 5.1
Ориентировочные значения отно-/ 8 \
шения!—I для летательных
\ а / бал аппаратов различных аэродинамических схем
Схема летательного
* аппарата
Обычная
,Утка“ »Бесхвостка“
С поворотными крыльями
—1,2
1.4
—2,5
5—6
§ 10. ДОПОЛНИТЕЛЬНЫЕ МОМЕНТЫ ТАНГАЖА ПРИ НЕУСТАНОВИВШЕМСЯ ДВИЖЕНИИ ЛЕТАТЕЛЬНОГО АППАРАТА
Методы расчета подъемной силы, лобового сопротивления и момента тангажа, рассмотренные в гл. Ill, IV и в § 1—9 настоящей главы, строго говоря, справедливы только для частного случая — установившегося движения летательного аппарата.
В общем же случае полет летательного аппарата представляет собой неустановившееся движение, при котором кинематические параметры движения, а следовательно, и величины аэродинамических сил и моментов являются функциями времени. При этом надо иметь в виду, что характер обтекания частей летательного аппарата неустановившимся потоком может отличаться от характера обтекания их стационарным, установившимся потоком. Различие же в условиях обтекания вызывает различие и в аэродинамических силах и моментах. При быстром изменении кинематических параметров эти различия могут быть весьма существенными. Например, быстро колеблющиеся в вертикальной плоскости крылья могут создавать силу тяги, тогда как в стационарных условиях те же крылья создают силу лобового сопротивления.
Таким образом, при неустацовившемся движении летательного аппарата коэффициенты аэродинамических сил и моментов* зави
18*
276
Глава V. Моменты тангажа и рыскания
сят не только от значений а, 6, coz, М и других параметров в данный момент времени, но и от характера их изменения по времени.
Определение аэродинамических сил и моментов в неустановив-шемся движении при строгой постановке задачи является весьма сложным делом, поэтому приходится вводить упрощающие гипотезы. Обычно при полете летательного аппарата кинематические параметры движения изменяются сравнительно медленно. В этих случаях нестационарность потока слабо влияет на характер обтекания, и, следовательно, можно принять в первом приближении, что силы и моменты, действующие на летательный аппарат в неустановившемся полете, определяются кинематическими параметрами движения в данный момент времени.
Сформулированное положение носит название гипотезы стационарности. Основываясь на этой гипотезе, можно распространить результаты, полученные в гл. III и IV, а также в § 1—9 настоящей главы не только на установившееся, но и на неустановив-шееся движение летательного аппарата. В частности, согласно гипотезе стационарности коэффициент момента тангажа при неустановившемся полете зависит от значений а, б, wz и М в данный момент времени.
Применение гипотезы стационарности чрезвычайно упрощает анализ и поэтому является весьма плодотворным. Как правило, величины аэродинамических сил и моментов, найденные с помощью этой гипотезы, весьма близки к действительным.
Однако можно указать некоторые практически важные случаи, когда гипотеза стационарности неприменима. Эти случаи характеризуются явлением запаздывания скоса потока.
Пусть летательный аппарат обычной схемы совершает полет с некоторой скоростью Уис изменяющимся по времени углом атаки. В соответствии с изменением угла атаки изменяется и скос потока за крыльями. Однако поток, отклоненный крыльями, достигает оперения не мгновенно, а через некоторый промежуток времени, зависящий от расстояния между крыльями и оперением и от скорости потока:
(5.146)
Поэтому можно считать, что угол скоса потока в области оперения в некоторый момент времени t при неустановившемся полете такой же, как угол скоса потока при установившемся полете, но при другом угле атаки, а именно — при угле атаки, соответствующем моменту времени
д/.
~WW5V.vokb-la.spb.ru - Самолёт своими руками?!
$ 10. Моменты тангажа при неустановившемся движении 277
приводит
(5.149)
(5.150)
(5.151)
Угол атаки в момент времени отличается от угла атаки в момент времени t на величину
Да= -57,3 — М= -57,3d Xd . (5.147)
dt ' W kT,o
Множитель 57,3 введен в связи с тем, что производную dajdt—a по аналогии с угловой скоростью coz принято выражать в рад/сек, в то время как угол атаки выр 1жается в градусах. Изменение угла скоса потока при неустановившемся движении по сравнению с углом скоса потока при установившемся движении равно
Да = е“_фДа. (5.148)
Таким образом, при полете с переменным углом атаки имеет место запаздывание скоса потока. Это 'запаздывание к появлению дополнительной подъемной силы оперения
А^Г.О Cj, из.г.о 0Sr 0
и дополнительного момента тангажа
ДЛ42 ==: Д 7г,о (А*т г.о.) •
Коэффициент дополнительного момента тангажа
Дтпг=—= 57,3<^, из r 0 (Mz«)r.os’ ф<х р kr 0 X
X/ ^Г~° А7?Г.О -ХТ Г.О ха Кр
5 6А Да
— d/>A где .
Взяв производную коэффициента момента по а, найдем
= ~ 57>ЗГ> — X
%d г.о %d кр
(5. 152)
Как видно из полученного выражения, производная т“ всегда отрицательна. Это значит, что дополнительный момент от запаздывания скоса потока всегда препятствует изменению угла атаки.
278
Глава V. Моменты тангажа и рыскания
Для летательного аппарата обычной схемы с некотором приближением можно принять
%d г.о %d кр^-^d г.о <^т>
после чего формула (5. 142) примет вид
т^-57,3^,,г.р^_)г.АфКА7^-(^^-)!. (5.153) Л О \ Од /
Сравнивая формулы (5.153) и (5.124), видим, что величины т“ и m™foy летательных аппаратов обычной схемы связаны между собой таким соотношением:
ma ~ т z еа .. z zr.o к.ф
(5. 154)
Дополнительный момент от запаздывания скоса потока имеет место и в схеме «утка». Нетрудно убедиться, что в данном случае
„ xd кр ХТ xd кр xd г.о -------------------------. (5.155)
Этим же выражением можно пользоваться и для схемы «бес-хвостка» с дестабилизаторами.
Для летательных аппаратов с поворотными крыльями справедливы выражения (5. 153) и (5. 154), причем в первое из них вместо S и Ьа следует подставить SK и bA.v.
В тех случаях, когда крылья и оперение имеют или Х-образ-ное расположение, для расчёта производной также можно воспользоваться выведенными выше формулами. При этом необходимо учитывать следующие особенности:
1) производные угла скоса потока е“ф и е“р необходимо определять с. учетом взаимного расположения плоскостей крыльев и оперения (см. стр. 162—164, варианты «XX», «+Х» и «Х + »);
2) если задние несущие поверхности имеют Х-образную схему, то в формулы (5. 153) и (5. 155) надо ввести множитель k$.
Явление запаздывания скоса потока возникает не только при изменении угла атаки, но в некоторых случаях и при изменении угла отклонения органов управления. Рассмотрим, например, летательный аппарат с поворотными крыльями. Если угол отклонения крыльев 6 изменяется с течением времени, то примерно так же, но с запаздыванием будет изменяться и скос потока в области стабилизаторов. Величина запаздывания определяется формулой (5. 146). Рассуждая далее таким же образом, как и раньше, приходим к выводу, что при полете с изменяющимся по времени углом отклонения крыльев появляется дополнительный момент
www.vokb-la.spb.ru - Самолёт своими руками?!
§11. Момент рыскания
279
тангажа, всегда препятствующий изменению 6. Коэффициент этого момента
(5.156) где
/ к \
; (5.157)
Z Z ра I д' / ’ х '
ьк.ф Х^аа/ст
V
Подобное же явление наблюдается и в схеме «утка». В этом случае
е«
= (5.158)
еср
Подводя итоги, можно сделать вывод, что момент тангажа при неустановившемся движении летательного аппарата складывается из момента, найденного на основе гипотезы стационарности при мгновенных значениях параметров а, б, со2, М, и из дополнительных моментов, зависящих от а и б и объясняемых запаздыванием скоса потока.
§ 11. МОМЕНТ РЫСКАНИЯ
П.1. ОБЩЕЕ ВЫРАЖЕНИЕ МОМЕНТА РЫСКАНИЯ
Существует полная аналогия между моментом рыскания Му, т. е. моментом относительно связанной оси Оу\, и моментом тангажа. Момент тангажа вызывается в основном подъемными силами, а момент рыскания — боковыми силами, действующими на различные части летательного аппарата — фюзеляж, крылья, оперение и т. д. В гл. III отмечалось, что физическая картина возникновения подъемных и боковых сил одинакова и что для расчета боковой силы следует пользоваться выражениями подъемной силы, написанными применительно к летательному аппарату, условно повернутому вокруг продольной оси на 90°.
Применяя такой же прием и для расчета моментов рыскания, можно написать
Му= (Mz)9o« , (5. 159)
где (Л4г)эо° —момент тангажа условного летательного аппарата, полученного путем поворота данного летательного аппарата на 90° вокруг скоростной оси Ох в сторону правого крыла.
В § 1 настоящей главы были перечислены параметры, от которых зависит момент тангажа (а, б, сог, а, б и др.). Очевидно, что
280
Глава V. Моменты тангажа и рыскания
момент рыскания зависит от аналогичных параметров: угла скольжения 0, угла отклонения органов управления рысканием (например, рулей направления) б, от производных этих углов по времени 0 и б, от угловой скорости и т. д. Однако степень влияния отдельных параметров на моменты тангажа и рыскания может быть различной.
Летательные аппараты не всегда симметричны относительно плоскости X[Ozi. Симметрия может нарушаться установкой крыльев и стабилизаторов под некоторым углом к оси фюзеляжа, односторонним расположением вертикального оперения и т. п. Отсутствие симметрии приводит к возникновению момента тангажа Afzo. В то же время все летательные аппараты практически симметричны относительно плоскости jqCh/i, вследствие чего момент рыскания Му0 равен нулю.
Далее, мы пренебрегли влиянием вращения вокруг продольной оси на момент тангажа (см. § 1). Аналогичное допущение в отношении момента рыскания является уже неприемлемым в тех случаях, когда вертикальное оперение расположено несимметрично. Действительно, при вращении летательного аппарата вокруг оси Oxi вертикальное оперение, находящееся, например, над фюзеляжем, будет создавать боковую силу, а следовательно, и момент относительно оси Оу\.
Отклонение элеронов также вызывает некоторый момент рыскания. Это объясняется тем, что при отклонении элеронов возникают дополнительные тангенциальные силы на левом и правом крыльях, которые, вообще говоря, неодинаковы, особенно при больших углах атаки, и поэтому их момент относительно оси Оух не равен нулю. Заметим, что отклонение элеронов на вертикальной паре крыльев при наличии угла скольжения вызовет аналогичный момент тангажа. У современных летательных аппаратов моменты рыскания и тангажа, вызываемые отклонением элеронов, очень малы и ими обычно пренебрегают.
Таким образом, при заданных скорости и высоте полета момент рыскания летательного аппарата зависит от параметров 0, б, йх, соу, 0 и б. При небольших значениях перечисленных параметров эти зависимости близки к линейным, благодаря чему можно написать следующее общее выражение момента:
мшу^х+мюууШу + л4р4-лтг. (5.160)
Введем безразмерные величины:
а) коэффициент момента
www.vokb-la.spb.ru - Самолёт своими руками?!
§11. Момент рыскания 28!
б) безразмерные угловые скорости
в) безразмерные производные
Подставив эти величины в (5. 160), получим общее выражение коэффициента момента рыскания
+ (5.161)
где mV и шъу — статические производные;
т<ух' т<уУ' т^’ ту—вращательные производные.
Величина всех этих производных зависит в основном от внешних форм летательного аппарата и числа М.
Переход от безразмерных коэффициентов к размерным производным, входящим в выражение (5. 160), осуществляется по следующим формулам:
а) для статических производных
My = niyqSl; My — n^yqSl\
б) для вращательных производных
M^=m^qSl-^- M^n^qSl-^ и т. д.
Рассмотрим особенности расчета каждой из производных, входящих в выражение (5.161).
11.2. СТАТИЧЕСКИЕ ПРОИЗВОДНЫЕ т$у и ту
По аналогии с понятием продольной статической устойчивости введем понятие статической устойчивости пути. Наличие или отсутствие устойчивости пути определяется знаком момента, возникающего при скольжении летательного аппарата.
Если момент Му, появившийся в результате скольжения, при положительном значении угла р отрицательный, т. е. направлен в сторону уменьшения р (восстанавливающий момент), то летательный аппарат обладает статической устойчивостью пути. Если же при положительном р момент Му также будет положительным, т. е. действующим в сторону увеличения р (опрокидывающий момент), имеет место статическая неустойчивость пути.
282
.Глава V. Моменты тангажа и рыскания
Степень устойчивости пути характеризуется статической производной /nJ. При т9у <Т) летательный аппарат статически устойчив, при znJ>0 неустойчив, а при т₽=0 нейтрален в отношении устойчивости пути.
Термин «устойчивость пути» является весьма условным. В самом деле, речь идет не о выдерживании заданного направления полета, а об устранении угла скольжения. Летательный аппарат, обладающий устойчивостью пути, при действии различных возмущений, приводящих к изменению направления полета, не возвратится к прежнему направлению, а лишь повернется носом в сторону нового вектора скорости. С этой точки зрения более удачен термин «флюгерная устойчивость», который, однако, не получил широкого распространения.
В § 7 при рассмотрении продольной статической устойчивости было введено понятие фокуса летательного аппарата как точки приложения подъемной силы, обусловленной углом атаки. По аналогии с этим можно ввести понятие о боковом фокусе, т. е. точке приложения боковой акты, обусловленной углом скольжения (Z₽p). Координату бокового фокуса будем обозначать через в отличие от координаты продольного фокуса, которую можно обозначить X Ра .
Пользуясь понятием бокового фокуса, можно выразить степень статической устойчивости пути в следующем виде:
т9у=-^ (5.162)
или
Таким образом, наличие или отсутствие статической устойчивости пути зависит от взаимного положения центра тяжести и бокового фокуса летательного аппарата. Заметим, что в силу принятого правила знаков производная тсуг статически устойчивого летательного аппарата положительна.
Для расчета величины /и₽ можно воспользоваться выражениями т“, приведенными в § 5 настоящей главы. Так как коэффициент момента рыскания относят к размаху крыльев, а коэффициент момента тангажа — к средней аэродинамической хорде, то
^=-у-(т’)90=. (5. 164)
При схеме с поворотными крыльями вместо &А следует подставлять &А.к. Производная (пг“)эо» подсчитывается так, как указано в § 5, причем все величины в расчетных формулах берутся для
www.vokb-la.spb.ru - Самолёт своими руками?!
§ 11. Момент рыскания
283
условного летательного аппарата, полученного путем поворота заданного летательного аппарата на 90° вокруг продольной оси. Исключение составляет лишь площадь крыльев S, к которой отнесены аэродинамические коэффициенты (а в случае поворотных крыльев — SK). Величина S имеет один и тот же смысл как при расчете т“, так и при расчете т₽.
Аналогичным способом подсчитывается и статическая производная ть, характеризующая эффективность органов управления рысканием:
(5.165)
11.3. ВРАЩАТЕЛЬНЫЕ ПРОИЗВОДНЫЕ п?у
Момент рыскания, вызываемый вращением летательного’ аппарата вокруг оси Оуь всегда направлен в‘сторону, обратную вращению, и поэтому получил название демпфирующего момента рыскания. Поскольку этот момент аналогичен демпфирующему моменту тангажа, то
= (5.166)
При переходе к безразмерным коэффициентам необходимо помнить, что
г у '
_
После несложных преобразований выражения (5. 166) получим
/п“у=2 (т“г)ж-
(5.167)
Рассуждая точно таким же образом в отношении вращательных производных Шу и т*у, приходим к выводу, что
ту^2 (Т-)2 (тг)90Э-
ту =2 (^)2
(5.168)
(5.169)
Вращательные производные т“у, т? и тьу всегда отрицательны.
284
Глава V. Моменты тангажа и рыскания
г прав
CJjZ
Фиг. 5.27. Дополнительные скорости и дополнительные тангенциальные силы при вращении крыльев вокруг оси Oxt.
11.4. ВРАЩАТЕЛЬНАЯ ПРОИЗВОДНАЯ
Момент Му, зависящий от угловой скорости (рх, иногда называют спиральным моментом рыскания, так как под действием этого момента летательный аппарат, летящий с некоторой скоростью V и вращающийся вокруг оси Oxi, получает вращение также и вокруг оси .Оу^. При некоторых условиях такое движение летательного аппарата напоминает движение по спирали.
Спиральный момент рыскания создается крыльями и оперением.
Вращение летательного аппарата вокруг оси Ох\ приводит к тому, что каждое сечение крыла получает дополнительные вертикальные скорости (фиг. 5.27). При положительном значении эти скорости направлены вниз на правом крыле и вверх на левом крыле. Следовательно, угол атаки правого крыла возрастает, а угол атаки левого крыла уменьшается.
Приращения углов атаки приводят не только к появлению момента крена, но и момента рыскания, т. е. момента тангенциальных сил. Разница в тангенциальных силах левого и правого крыла зависит, главным образом, от изменения подсасывающих сил на передних кромках этих крыльев. Ранее
было выяснено, что подсасывающая сила изменяется пропорционально квадрату угла атаки. Поэтому на правом (опускающемся) крыле подсасывающая сила возрастает, а на левом уменьшается, в результате чего на летательный аппарат действует положительный момент рыскания.
Можно показать (см., например, [6]), что этот момент пропорционален углу атаки или коэффициенту подъемной силы.
Следует отметить, что горизонтальные крылья создают спиральный момент рыскания, а вертикальные крылья — аналогичный спиральный момент тангажа Мг(юх).
При сверхзвуковой передней кромке спиральный момент рыскания, создаваемый крыльями, равен нулю, так как подсасывающие силы отсутствуют. Но даже и при дозвуковой передней кромке этот момент очень мал по сравнению с другими составляющими момента рыскания. При больших углах атаки спиральный момент крыла мог бы достигнуть заметной величины, если бы подсасывающая сила была равна ее теоретическому значению. Однако, как было показано в гл. III, действительная величина подсасывающей силы при больших углах атаки составляет лишь незначительную долю теоретической величины, особенно при за
www.vokb-la.spb.ru - Самолёт своими руками?!
$ 11. Момент рыскания
285
остренной передней кромке крыльев. По этой причине теоретические способы определения спирального момента рыскания крыльев являются ненадежными. Достоверные значения могут быть получены только экспериментально.
В большинстве практических случаев влиянием крыльев на спиральный момент рыскания можно пренебречь. То же самое можно сказать и о влиянии горизонтального оперения.
Фиг. 5.28. к определению спирального момента рыскания вертикального оперения.
Что касается вертикального оперения, то очевидно, что при симметричном расположении его относительно фюзеляжа спиральный момент рыскания равен нулю; в случае же несимметричного расположения оперение может создавать значительный момент. Для определения этого момента воспользуемся следующим упрощенным способом. При вращении летательного аппарата вокруг оси Oxt в различных сечениях вертикального оперения (фиг. 5. 28) возникают дополнительные углы скольжения
Д₽=57,3
(5.170)
где у — расстояние от оси фюзеляжа до выбранного сечения.
Вместо того чтобы рассматривать оперение с переменным по размаху углом скольжения, примем приближенно, что угол скольжения постоянен и равен углу скольжения в центре тяжести площади оперения, находящемся на расстоянии ув.о от оси фюзеляжа:
Д?ср=57,3-^-ув.о. (5.171)
286
Глава V. Моменты тангажа и рыскания
Тогда на вертикальное оперение будет действовать боковая сила из.в.о (^иа)в.о^?ср7^в.с'5'в.о• (5. 172)
Эта сила приложена на расстоянии (лдв.о—хт) от оси OyY и создает момент рыскания
. (xj в.о Хт) • (5. 173)
Перейдя к коэффициенту момента^ взяв его производную по безразмерной угловой скорости крена сох, найдем
"'"У' . (5.174)
Входящие сюда величины с^изв о и (Каа)во определяются в соответствии с указаниями, данными в § 7 гл. III, т. е. точно таким же способом, как если бы оперение имело две консоли, расположенные симметрично относительно фюзеляжа.
11.5. БОКОВАЯ БАЛАНСИРОВКА ПРИ ПОЛЕТЕ БЕЗ КРЕНА
Рассмотрим установившееся криволинейное движение летательного аппарата в плоскости xOz при угле крена, равном нулю. Такое движение может возникнуть при боковом маневре летательного аппарата, стабилизированного по крену с помощью автопилота.
Условием установившегося движения является равенство нулю коэффициента момента рыскания:
/иу=^р + т®3 + /п“уа>у=0. (5.175)
Отсюда найдем угол отклонения рулей, необходимый для балансировки летательного аппарата на данном режиме полета, характеризуемом углом скольжения р и угловой скоростью
8баЛ=----V + т“Ушу) (5. 176)
ту
В большинстве случаев летательные аппараты обладают значительной степенью статической устойчивости пути, и тогда роль второго слагаемого в скобках оказывается весьма малой. Пренебрегая им, получим
гп°
86aa=--f?. (5.177)
ту
Это приближенное равенство становится точным в случае прямолинейного установившегося полета со скольжением.
www.vokb-la.spb.ru - Самолёт своими руками?!
£ 11. Момент рыскания 287 '
ЛИТЕРАТУРА
1. NACA Report No. 1253.
2. ARC R&M No. 2785.
3. Dorrance W., N о r e i I R., Correlation of Cone—Cylinder Normal— Force and Pitching Moment Data by the Hypersonic Similarity Rule, JAS, 1957r No. 5.
4. NACA T. N. No. 1761.
5. NACA Report No. 925.
6. О с т о с л а в с к и й И. В., Аэродинамика самолета, Оборонгиз, 1957.
7. NACA Report No. 1056.
8. NACA Report No. 1088.
9. NACA Report No. 1041.
10. NACA Report No. 1052.
11. Мартынов А. К., Экспериментальная аэродинамика, Оборонгиз, 1958.
12. Бонни Э. А., Аэродинамика, Серия «Основы проектирования управляв* мых снарядов», Физматгиз, 1960.
Глава VI
МОМЕНТ КРЕНА
Момент относительно продольной оси летательного аппарата -Охь или момент крена, возникает при несимметричном обтекании аппарата набегающим потоком воздуха. Симметрия обтекания может нарушиться при полете со скольжением, при отклонении тех или иных органов управления, при вращении летательного аппарата вокруг осей Охь Оу{ и Ozt. Наконец, к нарушению симметрии приводят производственные ошибки, например, различие в углах установки левого и правого крыльев, левого и правого стабилизаторов и т. д.
Как и при анализе других аэродинамических сил и моментов, в дальнейшем будем чаще рассматривать не абсолютную величину момента , а безразмерный коэффициент момента крена
Этот коэффициент зависит от многих факторов, к числу которых относятся в первую очередь геометрические формы летательного аппарата, кинематические параметры его движения, а также число М. Как будет показано ниже, для данного летательного аппарата, при заданном числе М
тх=/(а, ₽, 8В, 8Н, 88, <«z). (6. 1)
Изучение зависимости коэффициента момента крена от различных факторов, а также изложение приближенных методов его расчета и составляет предмет данной главы. Как и в гл. V, сначала рассмотрим величину момента при cox=:<Bi/ = <Bz=O, а затем — дополнительные моменты крена, вызванные вращением летательного аппарата.
*> Для упрощения записи будем опускать индекс «1» в обозначении момента относительно оси Ох\,
www.vokb-la.spb.ru - Самолёт своими руками?!
$ 1. Момент крена, создаваемый крыльями при скольжении 289
§ 1. МОМЕНТ КРЕНА, СОЗДАВАЕМЫЙ КРЫЛЬЯМИ ПРИ СКОЛЬЖЕНИИ
1.1. ВЛИЯНИЕ СТРЕЛОВИДНОСТИ И ФОРМЫ концов крыльев НА МОМЕНТ КРЕНА
Фиг. 6. I. Изменение параметров правого крыла при полете со скольжением. Пунктиром показано зеркальное отображение правого крыла относительно плоскости хОу.
Представим себе плоские изолированные крылья, угол стреловидности которых по линии, соединяющей середины хорд, равен х0,5. Если воздушный поток набегает на них под некоторым углом скольжения 0 (фиг. 6. 1), то условия обтекания правого и левого крыльев получаются неодинаковыми, что приводит к возникновению момента крена.
Приближенный способ определения этого момента может быть получен на основе следующих соображений.
Ввиду того, что плоскость симметрии крыльев х\Оу\ повернута на угол 0 по отношению к направлению набегающего потока, фактические углы стреловидности, а также удлинения правого й левого крыльев будут различными. В гл. III было показано, что подъемная сила крыльев зависит от X и у0-5-Следовательно, при скольжении левое и правое крылья будут создавать неодинаковую подъемную силу.
Рассмотрим этот вопрос более подробно. Если угол скольжения равен 0 (см. фиг. 6. 1), то фактический угол стреловидности правого крыла будет
Хправ = Хо,5 0- (6-2)
Считая угол 0 малым и выражая его в радианах, получим
tgxnpaB= (6-3)
р 1 + ₽ tg Хо.5
Удлинение правого крыла также изменится по сравнению с удлинением нескользящего крыла. Нетрудно вывести следующее выражение для определения удлинения Хправ условных крыльев, показанных пунктиром на фиг. 6.1:
Z2
ХпРав = -^- = Ч1 + 0 tg Х0,5)’. (6. 4)
о u
19 101
290
Глава VI. Момент крена
Отсюда
АХ=Хщрав—Х=Х[(1-(-Р tgxo.s)2—1]~2рХ tgyo.s- (6.5)
Найдем приращение параметров X]/|M’ —1| и Xtgx0i5, от которых, как известно из гл. III, зависит отношение с“/Х:
A (X /|ЛР=Л|) - АХ /|М2-1| = 2₽Х tg х0,5 /|Ж^Т| ; (6. 6)
A(Xtgxo,s) — Хправ tg Хправ X tg Хо,5~РХ (tg2Xo,5— 1). (6. 7)
Изменение этих параметров приведет к соответствующему изменению величины с“/Х:
<Э(Х/|М2_ 1|)
д(хУ|М2-1|)
tg Хол>
Д(х tgXo,s)=
44) _________
44)
\ X / Л /I_Л1
^(XtgXo.s) °'5\tg2Xo.5 Л
Определим приращение производной с“:
(6.8)
(6.9)
Пользуясь выражениями (6.5) и (6.8), найдем
= 2₽Х tgхо.5(-^-) [l ~Dx + -----l)l ’
У \ X /L 2 V tg2 xo.5 /J
где
d Cy
D X/|M2-1| \ X /
1 d(X/|M2-l|) ’
\ x /
(6.10)
(6.11)
0 ——
X tg xo,5 \ X /
<X(XtgXo,5>
X /
(6. 12)
www.vokb-la.spb.ru - Самолёт своими руками?!
$ 1. Момент крена, создаваемый крыльями при скольжении 291
Частные производные
---;-' ... — И --------— d(xy|M2-l|) d(Xtgxo,s)
можно определить графически по фиг. 3. 1, если предположить, что подъемная сила правого скользящего крыла равна половине подъемной силы условных нескользящих крыльев с геометриче-
скими параметрами Хправ и лПрав- Найденные таким образом зависимости
XtgZo>5) и
£>а=/(Х]/|М2—11; ktgxoj
представлены на фиг. 6.2 и 6.3.
Зная приращение подъемной силы на правом крыле, вызванное скольжением, и считая, что такое же приращение (но с обратным знаком) будет иметь место на левом крыле, легко найти момент крена
Мх=— b.c-aqSz^ (6.13)
где zR — координата точки приложения приращения подъемной силы правого крыла.
Как видно из (6. 13) и (6. 10), момент крена, вызванный скольжением стреловидных крыльев, пропорционален углу атаки и углу скольжения. Поэтому введем безразмерный коэффициент (дЪпх \
---где индекс «х» показывает, что рассматриваемая сода др /-/
19*
292
Глава VI. Момент крена
ставляющая момента крена обусловлена стреловидностью крыльев.
Подставив выражение (6.10) в (6.13) и выразив угол р в градусах, получим
(тзг) =“ftUgXo’5[1“A+Tz?2(“^-------OlAr)-(6-14)
\дад?57,3 1 2 \ tg2Xo.S /J\ А /
Значение гЛ=2гя11 колеблется в относительно узких пределах в зависимости от геометрических параметров крыльев и числа М. В среднем можно принимать:
2д=0,4 при т] = 1;
z„=0,36 при т] = оо.
Фиг 6.3. График для определения йг.
В большинстве случаев производная (д-тх1да <9р)х, найденная по формуле (6. 14), получается отрицательной. Но если угол стреловидности крыльев не очень большой (у0-5<45°; tgxo.5<l), а число М велико (Z?i~ 1), то знак производной меняется на обратный.
Помимо стреловидности, при расчете коэффициента момента крена, создаваемого крыльями, необходимо учесть и концевой эффект. Дело в том, что при полете со скольжением боковая кромка впереди идущего крыла начинает играть роль как бы передней кромки, поскольку она составляет с направлением набегающего потока угол р (см. фиг. 6. 1). Известно, что при обтекании дозвуковой передней кромки вблизи нее возникает местное разрежение, тем большее, чем больше угол атаки. Аналогичное разрежение возникает и в окрестности боковой кромки при скольжении. В результате должен появиться момент крена, пропорциональный углу скольжения и углу атаки. Частная производная коэффициента этого момента по углам атаки и скольжения
www.vokb-la.spb.ru - Самолёт своими руками?!
$ 1. Момент крена, создаваемый крыльями при скольжении 293
----£) определяется эмпирической формулой, полученной пуда ’конц
тем обработки результатов экспериментов в дозвуковых аэродинамических трубах:
/ d2wx \ 0.04 t су Igv
\дадр/коац (l+D3 *
Эту формулу можно использовать в первом приближении и
при сверхзвуковых скоростях.
Выражение (6. 15) относится к крыльям, боковые кромки которых параллельны плоскости симметрии летательного аппарата. Опыт показывает, что, когда концы крыльев имеют сильно закругленную форму в плане (фиг. 6.4), концевой эффект исчезает, т. е.
Фиг. 6.4. Крылья со скругленными концами.
д2тх \ да др /конц
=0.
1.2. ВЛИЯНИЕ ПОПЕРЕЧНОЙ V-ОБРАЗНОСТИ КРЫЛЬЕВ НА МОМЕНТ КРЕНА
В разд. 1. 1 был разобран случай, когда углы атаки левого и правого крыльев при скольжении одинаковы. Рассмотрим теперь
Фиг. 6.5. Определение составляющей вектора скорости, нормальной к плоскости крыла с поперечной V-образностью, при полете со скольжением.
крылья произвольной формы в плане, имеющие некоторый угол поперечной V-образности, т .е. угол между плоскостью консоли крыла и осью Oz\ (угол ф. на фиг. 6.5). Для простоты рассуждений предположим, что угол атаки нескользящих крыльев равен нулю.
Легко убедиться в том, что при полете со скольжением на правом и левом крыльях появляются дополнительные углы атаки противоположных знаков. В самом деле, пусть направление скорости набегающего потока составляет угол р с плоскостью симметрии крыльев. Разложим вектор скорости на компоненты V sin р и V cos р, параллельные осям Oz и Ох, а вектор V sin р, в свою очередь, разложим на компоненты V sin р sin ф и V sin р cos ф, лежащие в плоскости уОг (см. фиг. 6.5).
294 Глава VI. Момент крена
Из полученных трех составляющих вектора V одна направлена по нормали к плоскости правого крыла (Vsinpsinif), а две другие параллельны этой плоскости. Следовательно, угол атаки правого крыла определяется из такого выражения:
sin %рав=V -n ^.s—-=sin р sin ф. (6.16)
Полагая, что углы а, р и ф малы, получим
(6.17)
Такое же приращение угла атаки, но с обратным знаком будет и на левом крыле:
Плев= Оправ-
Как видно из приведенных рассуждений, эффект поперечной V-образности эквивалентен повороту левого и правого крыльев в разные стороны на угол Да = рф/57,3.
Момент крена, возникающий вследствие разности углов атаки, при дозвуковых скоростях полета можно определять по методу, изложенному в работе [1]. Результаты представлены на фиг. 6.6 слева от оси ординат в виде зависимости
4--г=/(к'И1-м2).
Су Ф
построенной при различных значениях параметров крыльев т] и ?. tg хо,5- (Угл.ы а, риф выражены в градусах).
www.vokb-la.spb.ru - Самолёт своими руками?!
£ /. Момент крена, создаваемый крыльями при скольжении 295
Таким образом,
Момент крена при больших сверхзвуковых скоростях может быть приближенно найден с помощью следующих рассуждений. Правое крыло имеет угол атаки аПрав, поэтому оно создает подъемную силу
19)
и момент относительно оси Ох\
Л1жправ = — Тправ^ц.пл» (6. 20)
где 2ц.пл—'координата центра тяжести площади правого крыла.
Такой же момент создает и левое крыло, поэтому суммарный момент крена
-2Гправгц.пл= Д д&ц.пл. (6.21)
О/ о
Введя обозначение ~ __2-гц, пл
~ц.пл j
и перейдя к безразмерным коэффициентам, получим
. (6.22)
с“ 2-57,3 ' 7
Для крыла трапециевидной формы в плане справедливо ра-
венство цпл 3 1+1’ (6. 23)
откуда I тх _ 1 1 + 2 (6. 24)
с“ ф 6-57.3 1+1’
Формула (6.24) справедлива только при очень больших значениях параметра К У М2— 1, когда производную су во всех сечениях крыла можно считать одинаковой, а взаимным влиянием двух крыльев можно пренебречь. При малых значениях А. У М?—1 эти допущения теряют силу.
На фиг. 6.6 справа от оси ординат нанесен ориентировочный график зависимости
су +
296
Глава VI. Момент крена
которым и рекомендуется пользоваться для практических расчетов. При А, р^М2—1 -> оо все кривые стремятся к пределу, определяемому формулой (6.24), а при Л k М2—1=0 они плавно сопрягаются с соответствующими кривыми в дозвуковой области графика.
1.3. ВЛИЯНИЕ ИНТЕРФЕРЕНЦИИ КРЫЛЬЕВ И ФЮЗЕЛЯЖА НА МОМЕНТ КРЕНА
Фюзеляжи современных летательных аппаратов по своей форме близки к телам вращения и сами по себе не могут создавать момента крена. Однако фюзеляж изменяет характер обтекания прилегающих к нему частей крыльев, вследствие чего при полете со скольжением появляется момент крена от интерференции.
Фиг. 6.7. Влияние интерференции крыльев и фюзеляжа на момент крена при скольжении.
а) верхнее расположение крыльев, б) нижнее расположение крыльев.
При верхнем расположении крыльев (фиг. 6.7, а) в зоне сочленения фюзеляжа и правого крыла образуется дополнительный подпор, поэтому на нижнюю поверхность крыла действует повышенное давление. Напротив, в зоне сочленения левого крыла с фюзеляжем возникает разрежение. В результате создается момент крена, стремящийся накренить летательный аппарат влево.
В случае нижнего расположения крыльев (фиг. 6.7, б) дополнительный. подпор справа от фюзеляжа и дополнительное разре
www.vokb-la.spb.ru - Самолёт своими руками?!
£ 1. Момент крена, создаваемый крыльями при скольжении 297
жение слева от него будут действовать уже не на нижнюю, а на верхнюю поверхность крыльев. Возникающий при этом момент* крена будет стремиться накренить летательный аппарат вправо.
Эффект интерференции может быть подсчитан с помощью эмпирической формулы:
Н)ииТ=-0,22с(-5-)3/\, (6.25}
где £ определяется по фиг. 6. 8 в зависимости от расстояния укр между осью фюзеляжа и корневой хордой крыльев. Значение укр.
положительно, если крылья смещены вверх от оси фюзеляжа. При !/кр<0 значение £ также определяется по фиг. 6.8, но берется со знаком минус.
Хотя формула (6.25) и фиг. 6.8 относятся к дозвуковым скоростям полета, в первом приближении их можно использовать и при небольших сверхзвуковых скоростях.
1.4. МОМЕНТ КРЕНА +-ОБРАЗНЫХ КРЫЛЬЕВ
Напишем суммарное выражение коэффициента момента крена, создаваемого одной парой крыльев при полете со скольжением:
+(w)J +(“SU1 ?• (6-
298 Глава VI. Момент крена
Из этого выражения можно сделать вывод, что у летательных •аппаратов осесимметричной схемы (с крестообразным расположением крыльев) момент крена при скольжении равен нулю. Действительно, в этих случаях крылья не имеют поперечной V-образности и расположены по схеме среднеплана (укр=0), поэтому второе слагаемое в формуле (6.26) исчезает. Первое же слагаемое показывает, что момент крена одной пары крыльев, зависящий от угла стреловидности и формы концов крыльев, пропорционален произведению ар. Но для вертикальных крыльев угол а играет роль угла скольжения, а угол (3 — роль угла атаки. При любых сочетаниях аир произведение угла атаки на угол скольжения для горизонтальных крыльев будет равно аналогичному произведению для вертикальных крыльев. Поэтому горизонтальные и вертикальные крылья всегда будут создавать моменты крена, одинаковые по абсолютной величине, но с противоположными знаками. Так, например, при М<1 и при положительных значениях аир горизонтальные крылья создают отрицательный момент крена, а вертикальные крылья — такой же по величине положительный момент. Общая величина момента равна нулю.
Опыт показывает, что этот вывод, основанный на приближенном методе расчета величины тх(Р), не совсем точен, ибо при аф р крестообразные крылья все же создают некоторый момент крена. Величина этого момента обычно невелика и может быть найдена только при аэродинамических испытаниях модели летательного аппарата.
§ 2. МОМЕНТ КРЕНА, СОЗДАВАЕМЫЙ ОПЕРЕНИЕМ
При полете со скольжением на горизонтальное оперение летательного аппарата действует момент крена, вызываемый теми же причинами, что и момент, действующий на крылья. Однако величина тхг.о во много раз меньше, чем тхкр, так как отношение
•$г.ой.о
SI
значительно меньше единицы. Поэтому моментом крена, действующим на горизонтальное оперение, обычно пренебрегают.
То же самое можно сказать и о вертикальном оперении, если оно расположено симметрично относительно оси фюзеляжа.
Однако вертикальное оперение летательных аппаратов самолетной схемы расположено, как правило, несимметрично. В этом случае при скольжении, а также при отклонении рулей направления возникают боковые силы, момент которых относительно оси Oxi
АГ.Х B.O = Zb.o (Р) Ув.о4~2в.о (бн) Ун> (6. 2/ )
где ув.о и !/н — плечи соответствующих сил.
www.vokb-la.spb.ru - Самолёт своими руками?!
У 3. Момент крена от взаимного влияния крыльев и оперения 299
В качестве плеча уъ.о можно принять расстояние от оси Oxi до центра тяжести площади оперения, а в качестве плеча ун— расстояние от оси Oxi до центра тяжести площади руля (фиг. 6.9).
Оси Ох,
Ц m площади р н Цт площади в.о
Фиг. 6. 9. Схема определения ув.о и ун-
Написав выражения боковых сил ZB0 (Р) и ZB0(6H) и перейдя к безразмерным коэффициентам, получим
^в.о=^в.оР + /7гН>. (6-28)
где
...«4... = - ‘‘у...... : (6-29)
. (6.30)
I о I
Значения с“извои (Каа)в.о определяются в соответствии с указаниями, сделанными в § 7 гл. III, т. е. точно таким же способом, как если бы оперение имело две консоли, симметрично расположенные по отношению к фюзеляжу. Относительная эффективность рулей п подсчитывается по формулам, приведенным в разд. 4.3 гл. III.
§ 3. МОМЕНТ КРЕНА, ВЫЗЫВАЕМЫЙ ВЗАИМНЫМ ВЛИЯНИЕМ КРЫЛЬЕВ И ОПЕРЕНИЯ (МОМЕНТ ОТ НЕСИММЕТРИЧНОГО СКОСА ПОТОКА)
До сих пор при рассмотрении причин, вызывающих появление момента крена, мы пренебрегали взаимным влиянием передних и задних несущих поверхностей. Между тем, это влияние может быть весьма сильным, в особенности для тех летательных аппаратов, у которых подвижные несущие поверхности расположены впереди неподвижных (схема «утка» и схема с поворотными крыльями). В этих случаях передние поверхности создают скос потока, зависящий от-углов а, £, 6В и бн- Скошенный поток, попадая на расположенные сзади неподвижные поверхности, обдувает их несимметрично, вследствие чего и возникает дополнительный момент крена.
Величина этого момента с удовлетворительной точностью определяется только в результате специальных аэродинамиче
300
Глава VI. Момент крена
ских испытаний модели летательного аппарата. Если же экспериментальные данные отсутствуют, то можно пользоваться грубо приближенным способом расчета, приводимым ниже. Этот1 способ дается применительно к схеме «утка», для которой моменты крена от несимметричного скоса потока имеют наибольшие значения.
3.1. ЛЕТАТЕЛЬНЫЕ АППАРАТЫ С ГОРИЗОНТАЛЬНЫМ РАСПОЛОЖЕНИЕМ КРЫЛЬЕВ
Рассмотрим условия обтекания крыльев летательного аппарата, изображенного на фиг. 6. 10. Предположим, что а^АО, ру^О и 0. В этом случае горизонтальное оперение создает скос потока
ег.о = ег.оа + е'г.о8в- (6.31)
Скошенный оперением поток распространяется по направлению вектора V, т. е. под углом р к плоскости симметрии летательного
Фиг. 6. 10. Несимметричный скос потока в области крыльев при скольжении летательного аппарата схемы «утка» с горизонтальным расположением крыльев.
а) вид сверху, б) вид сбоку«
аппарата. Попадая на крылья, этот поток создает переменный по размаху угол атаки, вследствие чего возникает дополнительный момент крена. Как видно из фиг. 6.10, при положительных значениях а, р и бв момент крена отрицательный. Заменим для простоты рассуждений систему крылья—фюзеляж изолированными крыльями с подфюзеляжной частью; предположим также, что в любой точке заштрихованного участка крыльев с площадью AS угол скоса потока имеет постоянное значение, а на остальной части крыльев скос потока отсутствует.
www.vokb-la.spb.ru - Самолёт своими руками
§ 3. Момент крена от взаимного влияния крыльев и оперения 301
Из-за скоса потока на заштрихованном участке крыльев возникает дополнительная подъемная сила
(дг).= (6.32)
момент которой относительно оси Oxi будет
(Мж). = (ДУ)е h. (6.33)
Величина площади Д5, зависящая от угла р, определяется графическим способом. Плечо Л(р) также можно определить графически как расстояние от оси фюзеляжа до центра тяжести площади Д5(Р).
Подставив (6.32) в (6.33) и перейдя к коэффициенту момента, получим
AS(p) А(Р)
S Z
(mJ. = - из.кр.пф (^.0« + е*.08в)
или
где
(6.34)
(6. 35)
(6. 36)
(6. 37)
Для определения производных е“о и е*0, входящих в выражения
(6.36) и (6.37), можно воспользоваться следующими формулами (см. стр. 136):
8а
г.о из-г.о.пф
а (К \ ^Г’° а ^ф
СУИЗ.Г.О' aa)r.O о “Ь £ V НОС с
°г.о.пф ° г.о. пф
у из г.э-пф
(6. 38)
Су ИЗ.Г-0 (^80)г.О Q
, °г.о.пф
е8 ~ е* ------------------------------------
г.о из. г.о.пф а
су из-г.о.пф
(6. 39)
Величины и /—^-J зависят от угла скольжения р нели-\ а /е \ 8 /е
нейно, так как при изменении р меняются одновременно плечо h (р) и площадь Д5(р). Пример таких зависимостей изображен на фиг. 6.11. При небольших углах р эти зависимости можно спрямить и найти графически приближенные значения частных производных
302 Глава VI. Момент крена
Общая величина коэффициента момента крена, вызванного влиянием несимметричного скоса потока, равна
(6.40) \ CfaOp /е \оВвдр /е
— ------------------р
---------®.'«»
Стх \ ---) — а Л
(тх \
---I =/(₽) для летательного /«
аппарата схемы <утка».
3.2. ЛЕТАТЕЛЬНЫЕ АППАРАТЫ ОСЕСИММЕТРИЧНОЙ СХЕМЫ
Рассмотрим осесимметричный летательный аппарат типа «утка» с +-образным расположением крыльев и таким же расположением оперения. В этом случае описанное выше явление значительно усложнится. Действительно, кроме вертикального скоса потока, зависящего от углов а и 6В, в данном случае появится также боковой скос потока, вызванный вертикальным оперением и зависящий от углов р и бн- Скошенный оперением поток будет несимметрично обдувать как горизонтальные, так и вертикальные крылья, вследствие чего и те и другие будут создавать момент крена.
Таким образом, в рассматриваемом случае момент крена от несимметричного скоса потока зависит от четырех углов: а, р, бв И бц*
В общей постановке задачи все четыре угла могут быть отличными от нуля. Однако решение такой задачи очень сложно. Поэтому вначале рассмотрим более простой случай. Предположим, что не равны нулю только два угла, например
Р#"0; бв^-0,
а другие два угла имеют нулевые значения: а=0; бн=0.
Рассматривая вид на летательный аппарат сверху (фиг. 6.12, а) и сравнивая его с фиг. 6.10, щ легко выявить почти полную аналогию. В обоих случаях скошенный горизонтальным
www.vokb-la.spb.ru - Самолёт своими руками?!
§ 3. Момент крена от взаимного влияния крыльев и оперения 303
оперением поток распространяется назад под некоторым углом к плоскости XiOt/i и несимметрично обдувает горизонтальные крылья. Приняв во внимание эту аналогию, можно сразу написать выражение коэффициента момента крена, действующего на горизонтальные крылья. Для этого в формуле (6.34) положим а=0:
/^1=-^113.кр.пф егЛ
Д31 (Р) (Р)
S I ’
(6.41>
При графическом определении площади ASi(p) и плеча fti(P) необходимо учесть, что в данном случае поток распространяется
Фиг 6. 12. Несимметричный скос потока в области крыльев при отклонении рулей летательного аппарата схемы «утка» с +-образным расположением крыльев и оперения. а) вид сверху, б) вид сбоку.
назад не под углом р к плоскости Х\Оу\, как это было в предыдущем случае, а под некоторым меньшим углом <pi (вследствие бокового скоса, вызванного вертикальным оперением). Угол срг можно выразить в виде
?1=₽(1-М.о). (6.42)
где k\ — коэффициент, учитывающий, во-первых, изменение скоса потока вдоль оси Ох\ и, во-вторых, тот факт, что интересующие нас струйки удалены на некоторое расстояние от плоскости вертикального оперения.
Производная е₽ равна производной е“ о и подсчитывается по формуле (6. 38).
Теперь определим коэффициент момента крена, действующего на вертикальные крылья. С этой целью рассмотрим вид на лета
304
Глава VI. Момент крена
тельный аппарат сбоку (см. фиг. 6.12,6). Момент крена возникает вследствие того, что скошенный вертикальным оперением поток распространяется назад род некоторым углом <р2 к плоскости XiOt/i и обдувает вертикальные крылья несимметрично. Угол <р2 зависит от величины дв:
?2 ~ ^2епо^в> (6.43)
где k2 имеет тот же смысл, что и ki. В первом приближении можно принять
ki~ &2а«0,5.
По аналогии с (6.41) напишем выражение коэффициента момента крена, действующего на вертикальные крылья:
______са е₽ о(М /g 1х2 \уиз.кр. пф в.оР * (О.
Величины А5г(6в) и Лг(дв), входящие в это выражение, определяются графически.
При суммировании коэффициентов тх1 и тх2 необходимо учесть взаимное влияние вертикальных и горизонтальных крыльев, которое приводит к уменьшению момента крена. Поэтому суммарный коэффициент момента от несимметричного скоса потока в области крыльев может быть выражен в следующем виде:
(«х)е = хт [mxl(p, 6B)4-7raX2(P, 6в)]- (6.45)
Множитель , учитывающий взаимное влияние крыльев, равен примерно 0,75 (см. также фиг. 6.15).
Напомним, что все приведенные рассуждения относились к случаю, когда (3-^0; двуН); й=0; бн=0. Нетрудно убедиться, что аналогичная картина будет наблюдаться и при р=0; бв=0;
и бн-^0. Комбинация этих двух случаев может дать наибольшее значение момента крена от несимметричного скоса потока.
Зависимость момента крена от углов а, р, 6В и бн нелинейная. Однако при небольших значениях углов зависимость можно спрямить, после чего выражение коэффициента момента крена приобретает вид
(тх)е=В(абн—Рбв)- (6.46)
Знак минус перед вторым слагаемым в скобках показывает, что при р>0 и бв>0 момент крена от несимметричного скоса по тока получается отрицательным.
Коэффициент
В —(д?тх \
\<?а <?8Н )г \<Э₽ дЪв )е
www.vokb-la.spb.ru - Самолёт своими руками?!
£ 4. Поперечная статическая устойчивость
305
является функцией геометрических параметров летательного аппарата и числд М. Для отыскания этого коэффициента надо построить кривые (mx).=f(p, бв) по формуле (6.45) и определить графически их средний наклон в летном диапазоне углов р и бв-
Интересно отметить, что при отклонении рулей высоты и рулей направления на балансировочные углы момент крена от несимметричного скоса потока в области крыльев равен нулю. В самом деле, на режиме балансировки
(6-47)
(6-48)
Шу
Для осесимметричного летательного аппарата
откуда
(абн) ба л= ( Рбв ) бал. (6.50)
или
(ттгх). =0.
Все рассуждения, относившиеся к летательному аппарату схемы «++», полностью справедливы и для схемы «XX». Момент крена от несимметричного скоса потока можно несколько уменьшить, установив оперение и крылья в разных плоскостях (схемы «-}-X» или «Х + »).
§4. ПОПЕРЕЧНАЯ СТАТИЧЕСКАЯ УСТОЙЧИВОСТЬ
Поперечная статическая устойчивость имеет большое значение для летательных аппаратов самолетной схемы. Чтобы уяснить это понятие, рассмотрим, например, прямолинейный горизонтальный полет самолета. Представим, что самолет по какой-либо причине внезапно накренился вправо на угол
Так как вектор подъемной силы Y всегда лежит в плоскости симметрии х\Оу\, то при крене самолета возникнет горизонтальная проекция подъемной силы (фиг. 6. 13), которая вначале ничем не уравновешена. Под действием этой силы самолет получит дополнительную скорость движения вбок, т. е. будет лететь со скольжением. В примере, показанном на фиг. 6. 13, самолет будет скользить на правое крыло (|Т>0).
Одновременно с появлением угла скольжения р возникает момент Л1х относительно продольной оси самолета. Если при положительном угле р момент Мх отрицательный, то согласно приня
20 101
зоб
Глава VI. Момент крена
тому правилу знаков под действием этого момента самолет накренится на левое крыло. Другими словами, момент Мх будет стремиться ликвидировать возникший первоначально крен самолета.
Принято говорить, что в этом случае самолет обладает поперечной статической устойчивостью, а момент крена является вос
станавливающим.
Фиг. 6. 13. Возникновение скольжения при крене самолета
Если же при положительном угле скольжения возникает положительный момент крена, то под действием этого момента первоначальный крен самолета увеличивается. В этом случае имеет место поперечная статическая неустойчивость, а момент крена является опрокидывающим.
Напишем общее выражение коэффициента момента крена, обусловленного углом скольжения. Для этого просуммируем выражения (6.26), (6.28) и (6.40), выбрав из них те члены, кото рые зависят от р. В результате получим
К^)ф+(тл)иит + J ₽ +
www.vokb-la.spb.ru - Самолёт своими руками?!
fi 4. Поперечная статическая устойчивость
307
Возьмем частную производную от этого выражения по углу 0 при некоторых фиксированных значениях а и 6В:
= (™’)ф + + Ив. о +
, 17 (flmx \ . [ д?тх \ I (ftmx \ 1 . / &тх \ # _ Ко.
+ 1\^^/х+(дай₽}конц + (йас)₽/еГ^(с)ав£)₽А в' ( '
Индексом «*» подчеркивается тот факт, что производная тх по 0 берется при значениях а и <%, отличных от нуля. Это необходимо сделать потому, что символом в данной книге обозначена производная тх по 0 при а=0 = бв = бн=О.
Вернемся теперь к определению понятия поперечной статической устойчивости.
Из приведенных ранее рассуждений видно, что наличие или отсутствие поперечной устойчивости зависит от знака частной производной (т₽)*. При летательный аппарат обладает попе-
речной статической устойчивостью, а при (/«₽)*> О летательный аппарат неустойчив. Производная называется степенью поперечной статической устойчивости.
Рассматривая выражения слагаемых, входящих в формулу (6.52), можно сделать вывод, что у летательных аппаратов обычной схемы степень поперечной статической устойчивости состоит из двух частей: одна часть зависит только от геометрических параметров крыльев X, г], %, <J>, укр, а другая часть, также зависящая от параметров крыльев, кроме того, пропорциональна углу атаки. Зависимость от а наиболее заметно выражена у летательных аппаратов со стреловидными крыльями. Вследствие этого степень поперечной статической устойчивости получается неодинаковой для разных режимов полета: при малых углах атаки устойчивость мала, а при больших углах атаки она может быть чрезмерно велика.
Во избежание излишней поперечной устойчивости самолетов стреловидные крылья часто делают с отрицательной поперечной V-образностью. Наоборот, крыльям без стреловидности приходится придавать положительную поперечную V-образность.
j В схеме «утка» из-за влияния несимметричного скоса потока в области крыльев зависимость (/и₽)* от угла атаки выражена еще сильнее, чем в обычной схеме. В некоторых случаях при установившемся полете с большими углами атаки и углами отклонения рулей высоты момент крена может достигать такой величины, что его не удается парировать с помощью элеронов.
Отмеченная особенность является одним из недостатков схемы «утка» и одной из причин сравнительно редкого применения такой схемы для летательных аппаратов с горизонтальным расположением крыльев.
20*
308
Глава VI. Момент крена
§ 5. МОМЕНТ КРЕНА ОТ ПРОИЗВОДСТВЕННЫХ ОШИБОК
Различные погрешности, допущенные в процессе изготовления и сборки летательного аппарата, приводят к его асимметрии и могут явиться причиной возникновения момента крена. Из числа этих погрешностей наибольшее влияние на момент крена оказывают ошибки в установке крыльев.
Пусть левая и правая консоли крыльев закреплены так, что каждая из них в результате производственных ошибок получила дополнительный угол установки Д<ркр, который для упрощения будем считать одинаковым для обеих консолей. Знак угла Д<ркр зависит от случайных причин. Рассмотрим наихудший случай, когда знаки Д<ркр на левом и правом крыльях противоположны.
Для определения возникающего момента крена Мх0 можно воспользоваться аналогией между влиянием неточной установки крыльев и влиянием поперечной V-образности.
Действительно, ранее было показано, что эффект поперечной V-образности при полете со скольжением эквивалентен повороту левого и правого крыльев в разные стороны на угол
^р=±Д- <6-53)
Коэффициент момента крена, вызванный влиянием поперечной V-образности крыльев, равен
’ / I \
(/ИЛ)ф из. кр. пф I —а Г I
V /
Учитывая соотношение (6.53), можно написать, что
/ 1 т\ \
тхо=± 57,3д?кре“ из> кр I—-М. (6.54)
V/
/ 1 г \
Величина |-----1, входящая в это выражение, определяется по
\ с у 4 /
фиг. 6. 6.
Если крылья имеют -|— или Х-образную схему, то в выражение (6.54) надо ввести множитель 2, так как все четыре консоли могут быть установлены с ошибкой Д<гкр. Кроме того, необходимо учесть взаимное влияние крыльев.
Для объяснения механизма взаимного влияния рассмотрим фиг. 6. 14. Пусть в результате неправильной установки горизонтальной пары крыльев на консоли 1 появилась дополнительная подъемная сила, направленная вниз, а на консоли 2— такая же сила, направленная вверх. Эти силы вызваны разностью давлений на верхних и нижних поверхностях консолей. Но повышенное давле
www.vokb-la.spb.ru - Самолёт своими руками?!
§ 5. Момент крена от производственных ошибок
309
ние, возникшее над консолью 1, будет в некоторой степени воздействовать на левую сторону консоли 3, а разрежение, возникшее над консолью 2,— на правую сторону консоли 3. Поэтому на консоли 3 появится индуцированная боковая сила, направленная вправо. По тем же причинам на консоль 4 будет действовать
Фиг. 6. 14. К объяснению взаимного влияния крестообразных крыльев при возникновении момента крена.
сила, направленная влево. Таким образом, на вертикальной паре крыльев возникнет индуцированный момент крена, противоположный по знаку моменту, создаваемому горизонтальной парой крыльев.
Из этих рассуждений видно, что взаимное влияние крыльев уменьшает момент крена. Эффект взаимного влияния _ можно
310
Глава Vf. Момент крена
учесть введением в расчетную формулу множителя хф. Тогда формула для расчета тх0 летательного аппарата с крестообразным расположением крыльев приобретает такой вид:
"1х0=±2-57,ЗхРД?крСуИ3.кр. Пф
(6.55)
Значение х9 можно найти по фиг. 6. 15, построенной иа основании теории тонких тел [21.
§ 6. ЭФФЕКТИВНОСТЬ ЭЛЕРОНОВ И ДИФФЕРЕНЦИАЛЬНЫХ РУЛЕЙ
В зависимости от количества и расположения крыльев разворот летательного аппарата влево или вправо может быть выполнен двумя различными способами. Если летательный аппарат имеет или Х-образные крылья, то необходимая для разворота боковая сила создается отклонением корпуса по отношению к вектору скорости на некоторый угол скольжения р. В этом случае органы управления креном (элероны, дифференциальные рули и т. п.) должны обеспечить стабилизацию летательного аппарата относительно оси Ох\, т. е. сохранять угол крена в течение всего полета равным нулю или близким к нему. Размеры элеронов (или дифференциальных рулей) подбираются так, чтобы с их помощью можно было парировать моменты крена, возникающие вследствие скольжения, отклонения рулей высоты и направления, производственных ошибок и т. п. Кроме того, необходимо иметь некоторый запас отклонения элеронов, чтобы реакция летательного аппарата на управляющие сигналы была достаточно быстрой.
Летательные аппараты с горизонтальным расположением крыльев также могут совершать боковой разворот за счет угла скольжения. Но такой способ пригоден только для тех летательных аппаратов, от которых не требуется высокой маневренности в плоскости xOz, так как боковая сила, создаваемая фюзеляжем, гондолами и вертикальным оперением, обычно мала.
Для того чтобы совершить разворот с меньшим радиусом кривизны, применяют другой способ, а именно: накреняют летательный аппарат на некоторый угол у и увеличивают угол атаки. Тогда вектор подъемной силы У дает боковую проекцию У sin Y, под действием которой траектория полета искривляется в нужную сторону.
В этом случае элероны должны обеспечить не только стабилизацию по крену, которая, разумеется, также необходима, но и управление углом крена. Для выполнения последней задачи эле-
www.vokb-la.spb.ru - Самолёт своими руками?!
$ 6. Эффективность элеронов и дифференциальных рулей 311
ромы должны создавать значительные скорости вращения летательного аппарата вокруг оси Ох\.
Рассмотрим приближенную методику расчета эффективности дифференциальных рулей и элеронов.
6.1. ДИФФЕРЕНЦИАЛЬНЫЕ РУЛИ
Момент крена, создаваемый одной парой рулей, отклоняющихся в противоположные стороны, можно рассчитать таким же способом, как и момент от неправильной установки крыльев (см. §5). Но в данном случае необходимо учесть некоторые особенности.
1. Как было показано на стр. 146, отклонение руля на угол б эквивалентно изменению угла его установки относительно оси фюзеляжа на величину
Дф = Лщсо5Хрб. (6.56)
2. Поскольку коэффициент момента .крена относят к площади крыльев S и размаху крыльев I, то при использовании выражения (6.54) для дифференциальных рулей в него надо ввести множитель
$0П.пф4>п.пф
si
где 5оп.Пф и /0П.пФ — площадь и размах двух рулей с подфюзеляжной частью.
Кроме того, для учета торможения потока у оперения надо , , / 1
ввести множитель kGn, а производную с’и1 оп пф и величину! ——— 1 ________________________________ Г У -on
определять при числе Моп=МрА0„.
3. Отношение диаметра фюзеляжа к размаху рулей \
'' оп может быть довольно значительным, поэтому нельзя пренебрегать влиянием фюзеляжа. Для учета влияния фюзеляжа на эффективность дифференциальных рулей введем множитель л3. Зависимость пз от относительного диаметра фюзеляжа, найденная по теории тонких тел [2], представлена на фиг. 6. 16.
Пользуясь формулой (6.54) и учитывая сделанные замечания, получим следующее выражение эффективности дифференпиаль ных рулей:
т\ = 57,Зс’ . k...cos уп /г, I-1 kr„ —------. (6.57)
.V ’ Jf из. on. пф Ш \ с® Ф / 0,1 SZ \ '
У * 'on
Производная mt всегда отрицательна, так как множитель / 1
I — —jon, определяемый по фиг. 6.6, имеет отрицательное значе
312
Глава VI. Момент крена
ние. Это соответствует принятому правилу знаков, согласно которому угол 6 считается положительным в том случае, когда дифференциальные рули отклоняются против часовой стрелки (если смотреть с конца каждого руля). Очевидно, что при положительном значении 6 момент крена будет отрицательным.
Фиг. 6.16. График для определения п3.
Если оперение имеет -(--образную форму, то эффективность рулей несколько снизится. Это учитывается введением в формулу (6.57) множителя х¥, который следует определять по фиг. 6. 15.
Наконец, если обе пары крестообразно расположенных рулей используются в качестве рулей крена, то в формулу (6.57) вводится еще множитель 2.
6.2. ЭЛЕРОНЫ
В большинстве случаев элероны размещаются вблизи концов крыльев, поэтому влияние фюзеляжа на их эффективность невелико и при расчете можно воспользоваться данными, полученными для изолированных крыльев.
www.vokb-la.spb.ru - Самолёт своими руками
6. Эффективность элеронов и дифференциальных рулей 313
При дозвуковых скоростях полета производная т8» для двух элеронов с постоянной относительной хордой может быть подсчитана по формуле
'и>=57,3^вя кр пф пэ
,₽
(6.58} изолированного эффективность.
определяется по фиг. 6.6 для крыла с подфюзеляжной частью.
Множитель пэ характеризует относительную
У
элеронов, т. е. отношение момента крена, вызванного отклонением элеронов на угол 6Э=Г, к моменту крена, вызванному поворотом левого и правого крыльев в противоположные стороны на угол Дфкр=1°. Величина пэ определяется по формуле
лэ = £щсоз хэп2п4,
(6.59}
где Хэ — угол стреловидности, измеренный по оси вращения элерона;
«2 — коэффициент, учитывающий влияние относительной хорды элерона Ьэ и определяемый по фиг. 3.35;
— коэффициент, учитывающий влияние относительного размаха элеронов на их эффективность.
Коэффициент зависит от безразмерных координат внутреннего н наружного концов элерона
— — 2^нар
~вн > ^нар
и определяется по фиг. 6.17 как разность
ni= (ги)~ —(ги)~г .
вн нар
Так, напримерг^ли_£вИ = 0,4, гнар=0,8 и /г4 = 0,75—0,20 = 0,55.
(6.60)
ц=2. то
В том случае, когда относительная хорда элерона меняется вдоль размаха (фиг. 6. 18), элерон разбивают на несколько коротких участков и находят для каждого из них m \3, принимая среднее значение Ьэ в пределах каждого участка. Общая величина гп 8» б равна сумме /п отдельных участков, т. е.
от>=57,3с“ из кр пф cos X
(6.61)
314
Глава VI. Момент крена
Фиг. 6.18. Замена элерона с переменной относительной хордой двумя короткими элеронами с постоянной относительной хордой.
www.vokb-la.spb.ru - Самолёт своими руками?!
$ 6. Эффективность элеронов и дифференциальных, рулей 315
Для расчета эффективности элеронов при сверхзвуковой передней кромке элерона можно воспользоваться теоретическими данными, приведенными в работе [3]. При отклонении двух элеронов появляется коэффициент момента крена, производная которого равна
—^coszJ;(z7BH +Л7~)£СТ, (6.62)
4
— 2Z
где/э =——относительный размах элеронов (/э —размах одного элерона);
-ст подсчитывается по формуле (3. 104).
Величины L и N, входящие в выражение (6.62), зависят от формы элерона в плане и числа М. Для элеронов без сужения, г. е. с постоянной по размаху хордой, значения £ и /V определяются по фиг. 6. 19, на которой через \э=1э1Ьэ обозначено удлинение одного элерона. Фиг. 6. 19, а относится к тому случаю, когда элерон находится на конце крыла, а фиг. 6.19,6 соответствует случаю, когда элерон не доходит до конца крыла, причем линия Маха, выходящая из начала концевой хорды элерона, пересекает заднюю кромку крыла.
Если хорда элеронов меняется вдоль размаха, то можно применить прием, аналогичный описанному выше, т. е. разбить элерон на несколько коротких участков, в пределах каждого из которых хорду можно считать постоянной. Общая величина /п*э равна сумме гпх3 отдельных участков.
Выражения (6.58) и (6.62) справедливы для летательных аппаратов с горизонтальным расположением крыльев. При или Х-образной схеме расположения крыльев эффективность элеронов несколько уменьшается, так как отклонение элеронов на одной паре крыльев приводит к появлению индуцированного момента крена обратного знака на второй паре крыльев. Взаимное влияние крыльев можно приближенно учесть введением в выражения (6.58) и (6.62) множителя х9, при определении которого по фиг. 6.15 следует откладывать по оси абсцисс отношение Хвн/гцар вместо D/1.
Иногда элероны устанавливаются на всех четырех консолях. Тогда в выражения (6.58) и (6.62), кроме х?, необходимо ввести множитель 2.
Изложенный выше метод расчета пригоден и в том случае, когда для создания момента крена применяются концевые элероны (фиг. 6.20). При этом
пэ=^щ cosxani;
£ст== 1-
Так как обычно концевые элероны имеют переменную хорду, то для использования формулы (6.62) и фиг. 6. 19 приходится
316
Глава VI. Момент крена
а)
а) ^нгф”1, гнар <
www.vokb-la.spb.ru - Самолёт своими руками?!
§ 7. Моменты крена, вызываемые вращением
317
разбивать элерон на 2—3 коротких участка, в пределах каждого из которых хорду можно считать постоянной. Общая величина пг*» равна сумме тхэ отдельных участков.
Если концевые элероны находятся не на крыльях, а на оперении, то в расчетные формулы необходимо дополнительно ввести множитель
^оп.пф^оп.пф
Фиг 6.20. Концевые элероны.
SI
В некоторых случаях позади дифференциальных рулей или элеронов расположены неподвижные плоскости (стабилизаторы, крылья). При этом эффективность элеронов значительно уменьшается из-за скоса потока, возникающего при отклоне
нии элеронов, так как скошенный поток попадает на стабилизаторы (фиг. 6.21) и вызывает на них момент крена обратного знака.
Фиг. 6. 21. Влияние отклонения элеронов на обтекание расположенных позади них стабилизаторов.
Величину этого момента можно приближенно определить, пользуясь приведенными в гл. III данными по расчету угла скоса потока.
§ 7. МОМЕНТЫ КРЕНА,
ВЫЗЫВАЕМЫЕ ВРАЩЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА
7.1. ВРАЩАТЕЛЬНАЯ ПРОИЗВОДНАЯ т°х
При вращении летательного аппарата вокруг связанной оси Охл возникает момент крена, происхождение которого аналогично происхождению продольного демпфирующего момента. Главная часть этого момента крейа создается крыльями.*
318
Глава VI. Момент крена
Как уже указывалось в разд. 11.4 гл. V (см. фиг. 5.27), вращение летательного аппарата приводит к тому, что каждое сечение крыльев получает дополнительную вертикальную скорость
Vv=—-o)xz. (6.63)
При положительном, значении эти скорости направлены вниз на правом крыле и вверх на левом крыле. Поэтому угол атаки в произвольном сечении правого крыла возрастает на величину
57,3 V 57,3 V 57,3’ ' '
а угол атаки в аналогичном сечении левого крыла убывает на ту же величину. Напомним, что угол атаки измеряется в градусах, а угловая скорость — в рад/сек.
Разность углов атаки левого и правого крыльев вызывает разность подъемных сил, а следовательно, и момент крена. Направление, этого момента таково, что он всегда препятствует вращению летательного аппарата (если не считать случаев полета с очень большими углами атаки, близкими к критическим). Таким образом, момент крена, зависящий от угловой скорости является демпфирующим моментом.
Частная производная демпфирующего момента крена по угловой скорости (ох может быть выражена в виде
(6.65)
где т^х—дтх1дшх—частная производная коэффициента момента крена по безразмерной угловой скорости.
Как показывает теоретический анализ, вращательная производная mWjc , создаваемая плоскими изолированными крыльями, пропорциональна с“, крыльев:
(wx \
и;Вз.кр- - с6-66)
су /
Отношение (ni/icyy определяется по фиг. 6.22, построенной на основании теоретических данных [1], [4J, [5].
Формулой (6.66) можно пользоваться и для расчета производной гп/ плоской системы крылья — фюзеляж, если относительный диаметр фюзеляжа не очень велик (£>//<: 0,4). В этом случае значение с“ следует брать для крыльев с подфюзеляжной частью:
CU \
/ т Л ।
™?к.ф= 7гЬ;из.кР.пф. (б-67)
www.vokb-la.spb.ru - Самолёт своими руками?!
<£' 7. Моменты крена, вызываемые вращением
31»
4>иг. 6.22. График для определения вращательной производной ш\х изолированных крыльев.
•320
Глава VI. Момет крена
При +- или Х-образном расположении крыльев в выражение (6.67) надо ввести множитель 2'и поправочный множитель учитывающий взаимное влияние крыльев.
Таким образом, ^киз.кр.ПФ- (6-68)
СУ /
Значения определяются по фиг. 6. 23 [2] в зависимости от относительного диаметра фюзеляжа.
Демпфирующий момент крена, создаваемый оперением, обычно невелик по сравнению с моментом, создаваемым крыльями. Это объясняется тем, что величина демпфирующего момента пропорциональна произведению S12, а
с /2 доп‘оп । SI
Поэтому вращательная производная rri“* всего летательного аппарата без большой ошибки может приниматься равной значению той же производной для системы крылья — фюзеляж:
(6-69)
Исключение составляют летательные аппараты с поворотными крыльями, у которых размеры стабилизаторов соизмеримы с размерами крыльев. В этом случае
<Л=2 (МкР <;3. кР. пф ^4-
4-2 (МсХ'из. ст.пфО -е:.ф) ~f • (6. 70)
Другим исключением являются некоторые летательные аппараты самолетной схемы, имеющие весьма большое вертикальное
www.vokb-la.spb.ru - Самолёт своими руками?!
$ 7. Моменты крена, вызываемые вращением
321
оперение (фиг. 6.24). Демпфирующий момент, создаваемый таким оперением, следует добавить к демпфирующему моменту системы крылья — фюзеляж:
(6.71)
При расчете гп“хвл можно воспользоваться фиг. 6.22, рассматривая вертикальное оперение как одну из консолей условных крыльев. Кроме того, можно применить более грубый способ расчета, основанный на рассуждениях, приведенных в разд. 11.4 гл. V. Как видно из формул (5.171) и (5. 172), при вращении летательного аппарата вокруг оси Ох\ на вертикальное оперение действует боковая сила
(6. 72)
^в.о— 67,3<?“ из в 0(А’аа)в 0 * ув.о<7^в OSB о.
Фиг. 6.24. Летательный аппарат с несимметричным вертикальным оперением.
Эта сила удалена от оси Ох{ на расстояние, примерно равное f/в о, и создает момент крена
Мх В.О=^В.о!/в.О- (6.73)
Отсюда вращательная производная
“X.л'ад...«... ^-(^)г • («• щ
Сравнивая (6.74) с (6.29), можно получить и другое выражение:
<1о=57,322^щ₽во. (6.75)
7. 2. ВРАЩАТЕЛЬНЫЕ ПРОИЗВОДНЫЕ nty И /п“г
Момент Мх, зависящий от угловых скоростей и ы2, иногда называют спиральным моментом крена. Этот момент создается крыльями и оперением.
Рассмотрим нестреловидные крылья (фиг. 6.25) и предположим, что они вращаются вокруг оси Oylt проходящей через середину САХ (хт=1/2). Вследствие вращения каждое сечение крыла получает дополнительную скорость вдоль оси Oxt
AV=G>yz. * (6.76)
21 11)1
322
Глава VI. Момент крена
Если coy^>0, то дополнительная скорость направлена вперед на правом крыле и назад на левом крыле. Таким образом, скорость обтекания правого крыла возрастает, а левого уменьшается.
Фиг. 6.25. Возникновение дополнительных скоростей и дополнительных углов атаки в сечениях иестреловид-ных крыльев при вращении их вокруг оси Оу\, проходящей через середину САХ.
При этом углы атаки сечений также изменяются. Из фиг. 6.25 видно, что дополнительный угол атаки в произвольном сечении крыла равен
д\'л
Уч- ДУ
А V wyZ . — —
---а—-----------а= — w.,za.
У У у
(6.77)
Значение Да отрицательно на правом крыле и положительно на левом.
Изменение скоростных напоров и углов атаки сечений на ле вом и правом крыльях вызывает разность подъемных сил, а сле-
Фиг. 6.26. Дополнительные скорости в различных сечениях стреловидных крыльев при вращении их вокруг оси Oyi, проходящей через середину САХ.
www.50kb-la.spb.ru - Самолёт своими руками?!
$ 7. Моменты трена, вызываемые вращением
323
довательно, и момент рости ыу момент крена
крена. При положительной угловой ско-всегда отрицателен, т. е.
<о (iai, __, f.
Если крылья имеют стреловидную форму в плане (фиг. 6.26), то явление несколько усложняется. В этом случае при вращении крыльев вокруг оси Оу{, проходящей через середину САХ, внешние сечения правого крыла получают дополнительную боковую скорость, направленную вправо, а внутренние сечения- -скорость, направленную влево. На левом крыле картина будет обратной. Другими словами, в каждом сечении крыльев появляется некоторый угол скольжения, что вызывает дополнительный момент крена.
Фиг. 6. 27. Вращение крыльев вокруг оси Oylt не проходящей через середину САХ.
Если ось Оу\ не проходит через середину САХ (фиг. 6.27), вращение крыльев вокруг этой оси с угловой скоростью ыу можно представить как сумму двух движений:
1) вращения вокруг оси, проходящей через середину САХ, с той же угловой скоростью;
2) бокового перемещения крыльев вдоль оси Ozt со скоростью
^г = шу(^А+4'&А-Хт)==и)^А(т~^Т)’ (6’78)
которое, складываясь с основным движением вдоль оси Ох. приводит к скольжению крыла под углом
^57,3v = 57,3^-(^—хт). (6.79)
324
Глава VI. Момент крена
При скольжении же возникает момент крена, обусловленный влиянием угла стреловидности, формы концов крыла, поперечной V-образности и интерференции крыльев и фюзеляжа (см. § 1). Поэтому чем больше центр тяжести удален вперед от середины САХ, тем больше по абсолютной величине получается вращательная производная •
На основании приведенных рассуждений можно вывести общее выражение производной крыла:
<>Kp=«y)' + S7,3(mLP)* • (6.80)
Статическая производная (^кр)4 определяется дифференцированием формулы (6.26) при a=const:
(m₽ )==(/«₽) +(щ₽) Ъ (6.81)
• .«кр/* V Л/ИНТ Г)-Щ3/7 \ <9В /K0HUJ
Фиг. 6.28. График для определения вращательной производной zn“y для крыльев с заостренными концами.
Величина (/«/)’ представляет собой значение вращательной производной тп“х прихт=1/2. Теоретические соображения приводят к выводу, что эта величина пропорциональна коэффициенту подъемной силы крыла:
/ m°y Y'
(m^) = М- />«. (6.82)
\ Су J *
Отношение (тп“у/су)' можно найти на основании некоторых, правда, разрозненных теоретических исследований.
www.voRb-la.spb.ru - Самолёт своими руками?!
§ 7. Моменты крена, вызываемые вращением
325
Для крыльев прямоугольной (или близкой к прямоугольной) формы в плане при ХуМ2—1^-2 имеет место следующее соотношение [6|:
_____1 ____
57,3 (М2—1)
(6.83)
где берется по фиг. 6. 22.
Для крыльев с заостренными концами (т] = оо) значения (ntylcy в зависимости от X и Xtgyo.s определяются по фиг. 6.28 [4]. Эти значения справедливы при дозвуковой передней и сверхзвуковой задней кромках крыла, т. е. в диапазоне
|(х tg хо.5 - 2)1 < х VЖ-Г < (X tg Z0.5+2).
При -[—образном расположении крыльев момент крена от вращения вокруг оси Oyt несколько уменьшается из-за взаимного влияния горизонтальных и вертикальных консолей. Как и в разд. 7. 1, учтем это влияние, введя поправочный коэффициент хш, значение которого определяется по фиг. 6.23 в зависимости от D/1. Таким образом,
(mX)+ = x“/zzX- (6-84)
Легко прийти к выводу, что вертикальная пара крыльев также создает спиральный момент крена при вращении летательного аппарата вокруг оси 0Z{. Если летательный аппарат осесимметричен, то, очевидно,
«:Р)+=«г,)+. (6.85)
откуда
(6-86)
Кроме крыльев, спиральный момент крена создается также несимметрично расположенным вертикальным оперением. Применяя рассуждения, аналогичные приведенным в разд. 11.4 гл. V, получим
<ув.о = -57,3с; иэ. в.о(/<ад)в.о^.о . (6. 87)
Это выражение можно записать и по-другому, если сравнить его с (6. 29):
= 57,3 ,б 88)
Сравнивая (6.87) и (5.174), получим
Ш
шу х в.о
m х у в.о
. (6.89)
326
Глава VI. Момент крена
Влияние горизонтального оперения на производную ш“у обычно невелико и им можно пренебречь. Исключение составляют летательные аппараты с поворотными крыльями, у которых площадь стабилизаторов соизмерима с площадью крыльев. Спиральный момент крена, создаваемый стабилизаторами, может быть подсчитан таким • же способом, как и ' момент, создаваемый крыльями.
§ 8. ОБЩЕЕ ВЫРАЖЕНИЕ КОЭФФИЦИЕНТА МОМЕНТА КРЕНА
В предыдущих параграфах была рассмотрена зависимость момента крена от различных факторов. Теперь можно написать общее выражение коэффициента момента крена. Составим это выражение так, чтобы кинематические параметры движения а, р, бБ, би, 6э, Wx, были в нем в явном виде.
С этой целью выпишем все составляющие коэффициента tnx в том порядке, в котором мы их рассматривали:
а) коэффициент момента крена, создаваемого крыльями при скольжении,
+ [(^)ф+(^)11Н1]Р; (6-90)
б) коэффициент момента крена, создаваемого вертикальным оперением при скольжении и отклонении руля направления,
тх в.о (Р >8н) = в.о ₽ + m VH Sh‘>
(6.91)
в) коэффициент момента крена, вызываемого взаимным влиянием крыльёв и оперения,
тх
«5Н; (6.92)
г) коэффициент момента крена от производственных ошибок тм', \
д) коэффициент момента крена, возникающего при отклонении элеронов или дифференциальных рулей,
mv(M = mSv4;
(6. 93)
www.vokb-la.spb.ru - Самолёт своими руками?!
8. Общее выражение коэффициента момента крена
327
е) коэффициент демпфирующего момента крена, создаваемого крыльями и оперением,
ГПХ (“х )
(6. 94)
ж) коэффициент спирального момента крена, возникающего при вращении летательного аппарата вокруг осей 0у1 и Oz{. Этот момент создается крыльями [выражения (6.80), (6.81), (6.82), (6.84), (6.86)] и вертикальным оперением [выражение (6. 87)]:
, д2тх да дшу ‘ да>г Просуммировав все перечисленные составляющие и подобные члены, получим следующее общее выражение циента момента крена летательного аппарата:
тх= тх0-фт₽ р + /пМи -ф гп^э + +
тх (а> Р, “у, ~ тУшу 4
(6.95)
приведя коэффи-
д-тх Л , д2т,- ш .
—~ аои 4-----— 4-т ,Л'Шт, y“v 4"
ЙайЗн “ Гйр<Э8в в 1 Л 1 ' л у
д д2тх да дыу
д2тх о"
14-
dp ди>;
(6. 96)
ЛИТЕРАТУРА
1. NACA Report No. 1056.
2. NACA Report No. 1088.
3. NACA Report No. 1041.
4. NACA T. N. No. 1761.
5. NACA Report No. 1052.
6. .NACA Report No. 925.
Глава VII
ШАРНИРНЫЕ МОМЕНТЫ
§ 1. ПОНЯТИЕ О ШАРНИРНОМ МОМЕНТЕ.
АЭРОДИНАМИЧЕСКАЯ КОМПЕНСАЦИЯ РУЛЕЙ
В предыдущих главах рассматривались аэродинамические силы и их моменты относительно осей, проходящих через центр тяжести летательного аппарата. Эти силы и моменты непосредственно входят в уравнения движения, поэтому от них зависит характер движения летательного аппарата, форма его траектории.
В данной главе будут рассмотрены так называемые шарнирные моменты, т. е. моменты аэродинамических сил, действующих на органы управления (рули, элероны), относительно их осей вращения. Хотя шарнирные моменты в явном виде и не фигурируют в уравнениях движения, они также оказывают значительное влияние на характер управляемого полета.
Для того чтобы отклонить те или иные рули, необходимо преодолеть их шарнирный момент. Чем больше величина команды, вырабатываемая системой управления, тем больше требуемое отклонение рулей и тем большую мощность должен развить силовой привод рулей — рулевая машинка. Но поскольку мощность рулевой машинки ограничена, то может наступить такое положение, когда при увеличении команды рули перестанут отклоняться. Другими словами, угол отклонения рулей в этом случае будет определяться не величиной команды, а мощностью привода. Это внесет ограничение в величину располагаемых перегрузок, т. е. в маневренность летательного аппарата. Очевидно также, что чем больше величина шарнирного момента, тем меньшей получится скорость отклонения рулей и тем медленнее будет реакция летательного аппарата на команду управления.
Таким образом, величина шарнирных моментов влияет на маневренные свойства летательного аппарата и на точность управления его полетом.
Рассмотрим схему возникновения шарнирного момента (фиг. 7.1)*. Пусть Nv — нормальная к плоскости рулей состав
* Для определенности будем рассматривать рули высоты, имея в виду, что аналогичные соображения справедливы и для других органов управления.
www.vokb-la.spb.ru - Самолёт своими руками?!
$ 1. Шарнирный момент. Аэродинамическая компенсация рулей 329
ляющая аэродинамической силы, действующей на рули, А —расстояние от центра давления руля до оси вращения, причем А>0, если центр давления расположен позади оси вращения.
Фиг. 7.1. Схема возникновения шарнирного момента.
Условимся считать шарнирный момент положительным в том случае, когда он стремится отклонить руль в положительном направлении. Тогда
Мш=—Nph. (7. 1)
Так как подъемная сила руля, перпендикулярная вектору скорости полета, равна
yp~jVpcos(a-r6B), (7.2)
то при достаточно малых значениях а и 6В
YP^NP и поэтому
МШ =—УРЬ. (7.3)
Шарнирный момент органов управления принято выражать через безразмерный коэффициент шарнирного момента тш:
= /Лш^оп^рАл.р=(7.4)
где Sp и Ад.р — площадь и средняя аэродинамическая хорда руля.
Из (7.3) и (7.4) следует, что
Ур h h
/пш—----—- ---=— с -----. (7.5)
qktmSp бд.р бд.р
Коэффициент шарнирного момента зависит от типа рулей (см. разд. 4.3 гл. III) и их формы, от положения оси вращения, числа М набегающего потока, угла атаки летательного аппарата а и угла отклонения рулей 6В (а для вертикально расположенных рулей— от р и 6н).
Формула (7.4) показывает, что при соблюдении геометрического и аэродинамического подобия, т. е. при сохранении неизменными формы руля, числа М, углов а и бв, но при увеличении
330
Глава VII. Шарнирные моменты
размеров рулей или при увеличении скоростного напора шарнирный момент возрастает. Так, например, если линейные размеры рулей увеличить в 2 раза (сохраняя геометрическое подобие), то шарнирный момент возрастает в 8 раз.
Таким образом, увеличение размеров летательного аппарата и скорости его полета ведет к резкому увеличению шарнирных моментов, а вместе с ними и усилий, необходимых для отклонения рулей.
•Если размеры рулей и скоростной напор заданы, то снизить величину шарнирного момента можно только путем уменьшения коэффициента тш. Основным средством для достижения этой цели является применение аэродинамической компенсации рулей.
Существуют различные виды аэродинамической компенсации. Сдвигая, например, ось вращения руля назад от передней кромки (фиг. 7.2) и приближая ее тем самым к центру давления, мы уменьшаем плечо /?. Такой вариант аэродинамической компенсации называется осевой компенсацией. Часть руля, находящаяся перед осью вращения и создающая шарнирный момент обратного знака, является компенсатором. Величина осевой компенсации измеряется отношением площади компенсатора S0K к общей площади рулей Sp и выражается обычно в процентах:
5о.к=^М00%.
Чем дальше отодвинута ось вращения руля от передней кромки, тем больше .$'0.к и тем меньше будет шарнирный момент. Если ось вращения совместить с центром давления руля, шарнирный момент исчезнет совсем, т. е. будет иметь место полная компенсация. Дальнейшее смещение оси вращения назад вызовет уже перекомпенсицию, т. е. изменение знака шарнирного момента.
В случае перекомпенсации рули являются неустойчивыми: будучи освобожденными, они не установятся в равновесии во флюгерном положении, а отклонятся до предела. Поэтому полет со свободными перекомпенсированными рулями практически невозможен. Хотя в этом случае управляемый полет и возможен, он значительно усложняется, так как усилия на рычагах управления по знаку не соответствуют отклонению рулей. Так, например,
www.vokb-la.spb.ru - Самолёт своими руками?!
$ I. Шарнирный момент. Аэродинамическая компенсация рулей 331
отклонив ручку управления на себя, летчик, чтобы удержать ее в таком положении, должен приложить к ней усилие от себя.
По указанным причинам на пилотируемых летательных аппаратах с ручным управлением аэродинамическая перекомпенсация рулей вообще недопустима. При автоматическом же управлении
Внутренний компенсатор
Ось Вращении
Фиг. 7.3. Внутренняя компенсация.
полетом допустимая степень перекомпенсации зависит от конструкции привода рулей и наличия или отсутствия обратной связи между рулями и рулевой машинкой.
К осевой компенсации близка по своей идее внутренняя ком-
пенсация, применяемая иногда для снижения шарнирных моментов элеронов (фиг. 7.3). В этом случае компенсатор представляет собой пластину, являющуюся продолжением носка элерона. Эта пластина находится в полости внутри крыла, соединенной с внеш-
ним пространством узкими щелями в месте сопряжения элерона с крылом. Верхняя часть полости герметически отделена от нижней части гибкой перегородкой. При отклонении элерона возникает разность давлений на его верхней и нижней поверхностях.
Эта разность давлений передается через щели внутрь полости и действует на компенсатор, создавая шарнирный момент обратного знака.
Достоинство внутренней компенсации состоит в том, что компенсатор не вносит никаких возмущений в поток. К недостаткам ее следует отнести ограничение диапазона углов отклонения элеронов, в особенности при тонком профиле
Фиг. 7.4. Роговая компенсация.
крыла.
Иногда применяется роговая компенсация (фиг. 7.4), когда рули делают с концами, выступающими впереди оси вращения и дающими шарнирный момент обратного знака по сравнению с моментом, создаваемым основной частью руля. При больших углах отклонения руля роговой компенсатор ухудшает обтекание оперения, что может вызвать нежелательные вибрации его.
Существуют и другие виды аэродинамической компенсации. Однако наибольшее распространение получила осевая компенса
ция вследствие простоты своего конструктивного выполнения и хороших аэродинамических характеристик.
332
Глава VII. Шарнирные моменты
§ 2. ОПРЕДЕЛЕНИЕ КОЭФФИЦИЕНТОВ ШАРНИРНЫХ МОМЕНТОВ
При сравнительно небольших углах атаки и отклонения рулей зависимость коэффициента шарнирного момента от а н бв в большинстве случаев близка к линейной и может быть выражена в виде
/гаш=/гашо4-^а + /?гш8в- (7-6)
Однако следует иметь в виду, что на шарнирный момент оказывают заметное влияние многие, порой незначительные особенности геометрии руля (например, форма носка руля, форма и размеры щели между рулем и стабилизатором, форма и толщина профиля стабилизатора и руля), причем степень их влияния зависит от числа М, углов а, бв, от относительной площади осевой компенсации и т. п. Если непосредственно перед рулем расположена неподвижная поверхность (стабилизатор или крыло), то линейный характер зависимости тш (а, бв) иногда нарушается даже при малых значениях а и бв.
Стремясь уменьшить шарнирный момент, ось вращения располагают весьма близко к центру давления руля. При таких условиях любая незначительная погрешность в определении положения центра давления приводит к большой ошибке в величине шарнирного момента. Так, например, если /?=0,056д.р, а координата центра давления определена путем расчета с точностью до ±0,02йд.р, то ои/ибка в величине Мш составляет ±40%.
Из всего сказанного можно сделать вывод, что единственно надежным способом определения шарнирных моментов является экспериментальное исследование модели летательного аппарата в аэродинамической трубе или в полете.
С помощью расчета может быть получен только порядок величины шарнирных моментов. Несмотря на это, расчетные способы определения А1ш полезны и даже необходимы на начальной стадии проектирования летательного аппарата, так как они позволяют хотя бы ориентировочно выбрать мощность силовых приводов рулей, определить нагрузки на рули и механизмы управления. Все эти данные должны быть обязательно уточнены после испы-'таний модели летательного аппарата.
Рассмотрим приближенные способы определения шарнирных моментов для различных типов органов управления и различных схем летательных аппаратов.
2.1. ПОВОРОТНОЕ ОПЕРЕНИЕ
Из выражения (7.5) следует, что для расчета коэффициента шарнирного момента необходимо знать коэффициент подъемной силы рулей и. плечо этой силы относительно оси вращения.
www.vokb-la.spb.ru - Самолёт своими руками?!
§ 2. Определение коэффициентов шарнирных моментов 333
Общий коэффициент подъемной силы оперения суг.о определяется выражениями (3.93) — (3.98). Из общей подъемной силы, включающей и подъемную силу, индуцированную на фюзеляже, надо выделить лишь ту часть, которая приложена непосредственно к консолям оперения, т. е. к рулям. Учитывая .равенства (3.48) и (3.49), легко прийти к выводу, что для этого надо в формулах (3.93) — (3.98) заменить коэффициенты )г.о и (Л’«о )г.о соответственно на (#аа)г.о и (&ю)г.о- Таким образом получим
су р=суо ₽ + суРа+сур'°- (7- 7)
В выражении (7.7) отдельные величины определяются в зависимости от схемы летательного аппарата;
а) для оперения, расположенного в хвостовой части летательного аппарата (обычная схема).
су0р=с;нз.г.о(Мг.о(?ст-<.ф?кр); (7- 8)
Сур~Су нз. г.о(^аа)г.о (1 ®к.ф)’ (7- Q)
с1р=^нэ.г.о(Мг.о«; (7-10)
б) для оперения, расположенного в передней части фюзеляжа' (схема «утка»),
СуОр Су из. г.о (^8о)г.оТст> (7‘ 11)
Сур = Су НЗ. Г.О (^Ог.о- (7.12)
Выражение сур для схемы «утка» имеет тот же вид, что и (7.10). В гл. III было показано [см. формулу (3.99)], что относительная эффективность рулей для поворотного оперения
/?. =/сщ СОЗ/р.
Зная коэффициент подъемной силы рулей, находим
^o=-Sop~ ’ (7-13)
сл.р
л &Л.р
где haa и /г го —расстояния от оси вращения до центра давления рулей для случаев «сш» и «60».
334
Глава VII. Шарнирные моменты
Положение центра давления рулей можно определить таким же способом, как и для крыльев [см. выражения (5.28), (5.45)]. В случае «аа» координаты центра давления будут
(xdp)™~ .. , [хаиз. г.о + (^ l)r.o-*<*A г.о]; (7. 16)
( ''''/г.о
fed р)аа /. Г fed из. г.о Т (^аа 0 (~б/из. г.о J^Ir.o)!" (С ^0
(Мг.6
В этих формулах координата z.t отсчитывается от бортового сечения; /1г.о берется по фиг. 5. 10; 2?из. г. 0 определяется по кривой распределения подъемной силы вдоль размаха руля. При более грубом определении величины гйнз г 0 можно считать, что центр давления лежит в середине промежутка между средней аэродинамической и средней геометрической хордами руля.
Если принять (^оо )г.о~1, то в случае «60»
(Х<1р)го =Л'4из.г.о> (/.18)
(2dp)so~ zd из.г.о- (7. 19)
Здесь не учтено влияние щели, возникающей при отклонении руля, на распределение подъемной силы по размаху.
Формулами (7. 10) — (7. 19) можно пользоваться и при расчете шарнирного момента поворотных крыльев. Тогда все величины в формулах, относящиеся к оперению (рулям), следует определять для поворотных крыльев.
2.2. КОНЦЕВЫЕ РУЛИ
Коэффициент шарнирного момента концевых рулей определяется по формулам (7)6), (7.13) — (7.15), в которых величина Сур отнесена к площади рулей. Сделаем некоторые допущения, позволяющие упростить решение задачи.
1. Предположим, что подъемная сила оперения, зависящая от угла атаки а, угла установки крыльев фКр и угла установки стабилизаторов (пилонов) <рст, распределяется между рулями и пи-'лонами пропорционально их площадям. При этом условии коэффициенты Суор и с“р будут определяться теми же выражениями, что и для поворотного оперения, т. е. выражениями (7.8), (7.9), (7. 11), (7.12).
2. Подъемную силу рулей, вызванную их отклонением на угол 6, примем равной подъемной силе условных изолированных крыльев, размеры которых равны размерам рулей, а угол атаки равен пб = ^щСО8хРб. Тогда
^p=c;H3.PA:uicosXp. . (7-20)
www.vokb-la.spb.ru - Самолёт своими руками?!
§ 2. Определение коэффициентов шарнирных моментов
335
3. Центр давления концевых рулей будем приближенно определять по графикам для изолированных крыльев и считать, следовательно, что h аа- Асо.
При этих допущениях легко вычислить все величины, входящие в формулы (7.13) — (7.15).
2.3. РУЛИ, РАСПОЛОЖЕННЫЕ ПОЗАДИ СТАБИЛИЗАТОРОВ
При дозвуковых скоростях полета шарнирный момент рулей, расположенных позади стабилизаторов, можно приближенно подсчитать по формулам, взятым из книги [1] (с некоторыми изменениями) :
а) для летательного аппарата обычной схемы
= — 0,12Fp (1 — 3,65О К) Су из г 0 (fe0)r.o (?ст -гк.ф?кр)> (7- 21)
= - 0,12bp (1 - 3,65О.К) су ш гДМг.о (1 - в’ ф). (7.22)
<= -0,14(1 -6,55^) су из г0 (&0)г о A^cos Zp; (7. 23)
б) для летательного аппарата схемы «утка»
— 0,12 £р (I -3,650.к)с’из.^(Мг.о'Рст- (7.24)
К = —0,126р (1 - 3,65О.К) су и3. г о (Мг.о- (7- 25)
Производнаяопределяется по формуле (7.23). Для схемы „бесхвостка“ справедливы формулы (7. 23)—(7.25), нов них величины су, km, ks0 и о должны относиться не к оперению, а к крылу. В большинстве случаев в схеме „бесхвостка" ?кр=0, поэтому и тшо=°-
При сверхзвуковой передней кромке рулей производную сур можно найти из выражения (3. 105), заменив в нем /До на k&0 и умножив его на отношение .S'r O/S (так как коэффициент сур отнесен к площади рулей). При этих условиях получим
С1р = из.р (Мр^Щ C°S Хр^ст- (7. 26)
Поправочный множитель gCT подсчитывается по Формуле (3.104).
Если предположить, что подъемная сила, зависящая от углов а, <рСт и фкр, распределяется между стабилизатором и рулем пропорционально их площадям, то можно было бы написать следующие соотношения:
__ /^50
СуО р Су0 г.о I Д
\
\
— . (7.28)
*'аа/Г.О ш
336
Глава VII. Шарнирные моменты
В действительности же подъемная сила распределяется по хорде оперения неравномерно, убывая по направлению к задней кромке. Это обстоятельство будем приближенно учитывать, введя в формулы (7.27) и (7.28) поправочный множитель 0,8 gc-r- Кроме того, примем во внимание равенства (3.94), (3.95), (3.97) и (3.98). Тогда формулы приобретут такой вид:
а) для летательного аппарата обычной схемы
СуОр „3. г.о (^60)г.о (?СТ £к.ф^кр) ^ст> Ц-29)
^р=0,8с’И3.ГЛ(МГ.О(1 -ек.ф)^; (7- 30)
б) для летательного аппарата схемы «утка»
СуОр —г.о (^о)г.ос?ст^ст> (Z • 31)
^р“0,8^из-го(Мг.о^ст- (7.32)
Коэффициент шарнирного момента определяется по-прежнему выражениями (7.6) и (7.13) — (7.15), в которых можно принять Центр давления руля при сверхзвуковой передней кромке близок к центру тяжести его площади, т. е. к середине САХ руля.
2.4. ЭЛЕРОНЫ
Коэффициент шарнирного момента элеронов при дозвуковых скоростях полета можно рассчитать по формулам, аналогичным (7.23) —(7.25):
' ^шо=-о,12&э(1-з,б5;.к)^из.крмКр; (7.зз)
= -0.12Я (1 - 3,650.к) Н,КЛ«; (7. 34)
<= - 0,14 (1 -6,5С) ^из.кр^щсо8х8. (7. 35)
При сверхзвуковой передней кромке элерона по аналогии с (7.31), (7.32) и (7.26) напишем:
So из.кр (7.36)
су э=0>8 су из.кр^ст; (7- 37)
Суэ^Су из.ЛЛи cos ХЛт- (7• 38)
Считая центр давления элерона совпадающим с центром тяжести его площади и пользуясь формулами (7.6), (7.13) — (7. 15), определяем коэффициент шарнирного момента элеронов.
www.vokb-la.spb.ru - Самолёт своими руками?!
| §2. Определение коэффициентов шарнирных моментов 337
2.5. ГАЗОВЫЕ РУЛИ
। Коэффициент шарнирного момента газовых рулей пропорцио-
i нален углу их отклонения. Поэтому можно написать
тш.г.р тш.г.р ^г.р» где
= (7-39)
уА.г.р
Значение производной Cj,r.p было найдено в § 5 гл. III. В среднем можно принимать (см. стр. 154)
г.р = 0’019 •
Центр давления руля определяется по графикам для изолирован-
ных крыльев (см. фиг. 5.4—5.7).
Полная величина шарнирного момента
^ш.г.р=<г.р (7.40)
Шарнирный момент газовых рулей не зависит ни от скорости, ни от высоты полета.
ЛИТЕРАТУРА
1. О сто ела век ий И. В., Аэродинамика самолета, Оборонгиз, 1957.
22 101
Глава VI/1
МАНЕВРЕННЫЕ СВОЙСТВА ЛЕТАТЕЛЬНОГО АППАРАТА
В гл. I были составлены уравнения движения летателоИого аппарата. Для исследования этих уравнений и расчета траекторий полета необходимо знать зависимости аэродинамических сил и моментов, а также силы тяги от кинематических параметров движения. Эти зависимости были рассмотрены в гл. III—VII. Теперь можно приступить непосредственно к исследованию движения летательного аппарата.
§ 1. ПОНЯТИЯ о МАНЕВРЕННОСТИ И ПЕРЕГРУЗКЕ ЛЕТАТЕЛЬНОГО АППАРАТА
Важнейшим свойством управляемого летательного аппарата является его маневренность. Содержание этого понятия за последние 20—30 лет претерпело ряд изменений (см., например, [1]). При формулировке понятия маневренности будем исходить из общих свойств управляемого летательного аппарата, рассмотренных во введении.
Как известно, любой управляемый летательный аппарат должен обладать способностью изменять направление полета, при этом многие летательные аппараты могут изменять также и величину скорости полета.
Под маневренностью летательного аппарата будем понимать возможную для него быстроту изменения скорости полета по величине и направлению.
Теперь необходимо условиться, как мы будем оценивать маневренность летательного аппарата. Прежде всего очевидно, что быстрота изменения скорости по величине и направлению характеризуется тангенциальным и нормальным ускорениями. Но поскольку нас интересует свойство летательного аппарата создавать ускорения, мы должны при оценке маневренности аппарата исключить из рассмотрения ускорение силы тяжести. В результате мы приходим к понятию о перегрузке и к оценке маневренности летательного аппарата возможными для него перегрузками по нормали и касательной к траектории полета.
www.vokb-la.spb.ru - Самолёт своими руками?!
£ 2. Перегрузки, действующие на летательный аппарат в полете 339
Пусть N — равнодействующая всех сил, действующих на летательный аппарат, за исключением силы тяжести. Тогда ускорение центра тяжести аппарата а можно представить в виде
(8.1) m
Если в качестве единицы измерения взять величину ускорения силы тяжести, то получим относительное ускорение, равное
Вектор
(8.3) и
представляющий собой отношение к весу'летательного аппарата геометрической суммы всех сил, действующих на аппарат, кроме силы тяжести, принято называть вектором перегрузки.
Направление вектора перегрузки а совпадает с направлением вектора силы N, а модуль вектора перегрузки показывает, во сколько раз вектор силы N больше веса летательного аппарата. Другими словами, вектор перегрузки .характеризует величину и направление той силы N, изменяя которую мы управляем полетом.
Понятием о векторе перегрузки можно пользоваться для оценки маневренных свойств летательного аппарата.
§ 2. ПЕРЕГРУЗКИ, ДЕЙСТВУЮЩИЕ НА ЛЕТАТЕЛЬНЫЙ АППАРАТ В ПОЛЕТЕ
2.1. ИЗМЕРЕНИЕ ПЕРЕГРУЗОК
Нетрудно показать, что вектор перегрузки определяет силы, которые действуют, помимо силы тяжести, на летательный аппарат и его отдельные части (агрегаты, детали, приборы), а также на тело летчика или пассажира.
Очевидно, что на любой агрегат действуют его сила тяжести (7г=/и,-§ и силы реакции креплений, равнодействующую которых обозначим через Рщ. Найдем силу Рщ приближенно, пренебрегая вращением летательного аппарата вокруг своего центра тяжести. При этом условии ускорение а, агрегата, неподвижного относительно летательного аппарата, будет равно ускорению а центра тяжести аппарата:
(8.4) r?ii m
* Модуль вектора перегрузки является безразмерной величиной.
22*
340
Глава VIII. Маневренные свойства летательного аппарата
Отсюда получим
FRl=N^-, (8.5)
m
ИЛИ ' = (8-6)
Из формулы (8.6) следует, что ^действующая на агрегат равнодействующая реакций креплений Fm равна вектору перегрузки летательного аппарата,
умноженному на вес агрегата.
Формула (8.6) показывает также, что для определения перегрузки_м надо найти реакцию Fm крепления какого-либо груза Gt. На этом и основан принцип измерения проекций перегрузок, который мы рассмотрим на примере простейшего акселерометра — прибора для измерения перегрузок.
Фиг. 8.1. Схема простейшего акселеро- Такой прибор устроен
метра. следующим образом. Груз
весом 6а, прикрепленный к пружине, может перемещаться вдоль направляющих, параллельных некоторому направлению s (фиг. 8. 1). На этот груз вдоль направляющих действует, помимо проекции силы тяжести, только сила реакции пружины F (силой трения, создаваемой направляющими, будем пренебрегать). Проектируя (8.6) на направление s.
получим, что проекция перегрузки
F
Q
Сила реакции пружины F пропорциональна перемещению груза, которое измеряется с помощью шкалы. Таким образом, положение груза вдоль шкалы прибора определяет проекцию перегрузки на заданное направление.
Зная проекцию перегрузки можно определить соответствующую проекцию ускорения as. Учитывая, что N=mgn, перепишем (8. 1) в виде _
(8.7)
a=gn-|- g.
www.vokb-la.spb.ru - Самолёт своими руками?!
$ 2. Перегрузки, действующие на летательный аппарат в полете 341
Спроектировав это векторное равенство на направление s, получим
as=gns-srgs. (8.8)
Акселерометры простейшей схемы теперь почти не применяются из-за недостаточной точности измерений, обусловленной трением направляющих, и некоторых других недостатков. В настоящее время используются более сложные схемы приборов, основанных, однако, на таком же принципе: перемещение груза на упругой подвеске.
Акселерометры широко применяются для изучения движения летательного аппарата путем измерения перегрузок, для определения нагрузок, действующих на летательный аппарат, его агрегаты и аппаратуру, а также в качестве элементов системы управления полетом.
2.2. ПРОЕКЦИИ ВЕКТОРА ПЕРЕГРУЗКИ
В полете на летательный аппарат, помимо силы тяжести, действуют сила тяги и аэродинамические силы, являющиеся, как известно, поверхностными силами. Следовательно, в данном случае вектор перегрузки представляет собой отношение равнодействующей поверхностных сил к весу летательного аппарата.
Величина и направление вектора перегрузки обычно определяются его проекциями на оси какой-либо системы координат.
Так, например, проекции перегрузки на полускоростные оси координат равны
rtJC=-^-(PcosacosP —А); ।
= -1- [(Р Sin a 4- У) cos Тс - (-Р cos a sin ₽ -)-Z) sin | (8.9)
nz*=— [(Psin a K) sin Tc-f- (— Pcos a sin ₽ + Z) cos J. |
)
Если в равенствах (8.9) положить ус=0, то получим проекции перегрузки на скоростные оси координат:
Р cos a cos В — X п = .------•----•
_ —Р cos a sin(B 4* Z I
Пг— G . |
Подставив выражения (8.10) в (8.9), найдем связь между проекциями перегрузок на полускоростные и скоростные оси:
«№ = Scos Тс — «2 sin Тс'. nz,==nysin Tc + ^COSTC.
(8.И)
342
Глава VIII. Маневренные свойства летательного аппарата
Отсюда получим
"у = «у, cos Tc+n^sin-rj пг = — пу, sin тс 4-лг, cos ic.
(8. 12)
Когда полет совершается без крена, т. е. ус=0, соответственные проекции равны друг другу: nv = nVt и nz—nz,.
Для расчета летательного аппарата на прочность необходимо знать проекции перегрузки на связанные оси. Пользуясь табл. 1.4, получим
nxi=пх cos a cos р+пу sin а—nz cos a sin Р; nyi = —п-х. sin а cos р + пу cos a-j-nz sin а sin р; nzl=ntsin р 4- nz cos p.
(8. 13)
Проекции вектора перегрузки пх и пх| будем называть продольными перегрузками.
Проекции вектора перегрузки пи, nz и пу*, nZt назовем нормальными перегрузками (нормальными к вектору скорости полета).
Обычно пользуются приближенными выражениями для проекций перегрузок. Эти выражения можно получить, положив в фор-
мулах (8.9), (8.10) и (8.13) cos а == cos р«г 1, sin а»—-—
57,3
Если тяга Р мала, иногда можно пренебрегать ее проекциями на оси Оу и Oz. Тогда
(8. 15)
www.vokb-la.spb.ru - Самолёт своими руками?!
£ 2. Перегрузки, действующие'на летательный аппарат в полете 343
2.3, СВЯЗЬ МЕЖДУ ПЕРЕГРУЗКАМИ И КИНЕМАТИЧЕСКИМИ ЭЛЕМЕНТАМИ ТРАЕКТОРИИ
стемы
Пользуясь понятием перегрузки, динамические уравнения си-(2.5) можно записать в следующей безразмерной форме:
1 dV . „
-------= пг — sin 0;
g dt
v ае Q
-------=ny, — cos 0;
g dt
-----cos 0 —= пг^, g-----dt
(8. 16)
ИЛИ
1 dV . о
—------— sin в;
g dt
— — П.. cos T. — nz sin 7. — cos 0;
g dt > lc г ic
V „ dW .
— COS 0------— n„SinTc4- rt.cos 7C.
g dt v lc
I
(8.17)
Левые части уравнений (8.16) и (8.17) содержат безразмерные (относительные) проекции ускорения центра тяжести летательного аппарата на полускоростные оси.
Уравнения (8. 16) и (8. 17) дают связь между величинами относительных ускорений и перегрузок.
Разрешив уравнения (8. 16) относительно проекций перегрузок, получим выражения перегрузок через кинематические параметры движения V, 0, ЧЛ
1 dV . . п l==------4- sin 0;
X g dt
v de . Q — 4-COS0;
g dt
V Q d'V ——cos 0— .
* g dt
(8. 18)
Поскольку параметры V, 0, Чг определяют вектор скорости полета (его величину и направление), а правые части выражений (8. 18) содержат производные от этих параметров по времени, то нетрудно прийти к выводу, что проекции вектора перегрузки характеризуют способность летательного аппарата изменять величину и направление скорости полета.
344 Глава VIII. Маневренные свойства летательного аппарата
С помощью безразмерных уравнений движения (8.16) легко установить связь между величинами проекций перегрузок и характером траектории летательного аппарата.
Полет летательного аппарата является в данный момент времени равномерным, если пж=51п0, ускоренным, если пж^>51п0, и замедленным, если nx<sin0.
Рассматривая проекцию траектории летательного аппарата на вертикальную плоскость хОу* полускоростных осей координат (фиг. 8.2), находим; что при n№>cos0 ее вогнутость направлена
Фиг. 8. 2. Связь между нормальной перегрузкой пу* и характером траектории.
вверх, при nj,,<cos0 — вниз, а при nJ4=cos0 проекция траектории имеет нулевую кривизну.
Характер проекции траектории на координатную плоскость xOz*, наклоненную к горизонту под углом 0, определяется следующими условиями (фиг. 8.3): при вогнутость кривой
направлена вправо, т. е. в сторону правого крыла, при и25!<0—влево, а при nZf = 0 проекция траектории имеет нулевую кривизну.
Очевидно, что при полете в вертикальной плоскости пг.к=0, а при полете в горизонтальной плоскости п№=1. В случае прямолинейного полета пу* = cos 0 = const и =0. При горизонтальном прямолинейном полете Пу,= 1 и п?* =0, а при горизонтальном прямолинейном равномерном полете nx = 0, nv* — 1, nZtt =0.
www.vokb-la.spb.ru - Самолёт своими руками?!
Фиг. 8.3. Связь между нормальной перегрузкой пг* и характером траектории.
Радиусы кривизны и угловая скорость касательной к траектории
Как уже было сказано выше, угловая скорость касательной к траектории определяется нормальными перегрузками. Из (8. 16) имеем
de
dt
=^-(%.-cos0);
(8.19)
dW 1 g dt cos в V
(8. 20)
Чем выше нормальные перегрузки Пу* и nZt, тем больше соответствующие им угловые скорости касательной к траектории.
Выражение (8. 19) показывает, в частности, что угловая скорость касательной к траектории, вызванная нормальной силой Ny*—rtyfi,
(Г
равна — пу*, а угловая скорость касательной к траектории, обус-
ловленная силой тяжести, равна —~ cos 0.
Составим выражения для радиусов кривизны траектории. В зависимости от направления поворота траектории радиус кри-
346 Глава VIII. Маневренные свойства летательного аппарата
визны может быть как положительным, так и отрицательным. Будем рассматривать радиус кривизны г—ОС (фиг. 8.4) как отрезок, направленный от точки траектории О к центру круга кривизны С.
Фиг. 8. 4. К определению радиуса кривизны траектории.
Тогда естественно приписывать этому радиусу знак плюс, если он откладывается в положительном направлении соответствующей оси Оу* или Oz*, и знак минус — в противоположном случае.
Напишем выражения радиусов кривизны:
гу*=^ = —(8.21) у* . de aeidt v ' X- Лки- <8-22>
В эти выражения подставим dQjdt и d^ldt из уравнений (8. 19) и (8.20). Тогда получим
_______И2 .
Гу* —cosH) ’
(8. 23)
г-, = —— при cos 0 = 1. (8. 24)
Как видно, величины радиусов кривизны траектории определяются нормальными перегрузками. С увеличением перегрузок пу, и nz„ радиусы кривизны уменьшаются.
Рассмотрим особо один из частных случаев полета — маневр в горизонтальной плоскости, выполняемый без скольжения (0—0. Р=0 и пг=0). Определим скорость изменения направления поле-
www.vokb-la.spb.ru - Самолёт своими руками?!
$ 2. Перегрузки, действующие на летательный аппарат в полете 347
та d'Vldt и радиус кривизны rz*. Учитывая (8.11), перепишем выражения (8.20) и (8.24) в виде
(8.25)
(8.26)
rfT g
gny sin Tfc
Эти выражения показывают, что, увеличивая угол крена, можно увеличить угловую скорость касательной к траектории dxV!dt и уменьшить радиус кривизны гг*.В выражениях (8.25) и (8.26) еще не учтено условие горизонтальности полета. Из (8. 11) следует, что при горизонтальном полете без скольжения
I пу=------
cos ус
(8. 27)
т. е. нормальная перегрузка пи растет вместе с углом крена ус. Отсюда найдем
я2 — 1
sin 7с — -4------. (8.28)
Пу
Выразив в (8.25) и (8.26) sin ус через перегрузку пу, получим формулы для угловой скорости касательной к траектории и радиуса кривизны траектории:
2 dt — V
r^±-sV^-
Отсюда вытекает, что при одном и том же значении перегрузки пу угловая скорость касательной к траектории уменьшается, а радиус кривизны траектории увеличивается по мере возрастания скорости полета.
Увеличить угловую скорость касательной к траектории и уменьшить радиус кривизны траектории при данной скорости полета можно, только увеличив перегрузку.
2.4. ЗАВИСИМОСТЬ НОРМАЛЬНЫХ ПЕРЕГРУЗОК ОТ УГЛОВ АТАКИ. СКОЛЬЖЕНИЯ И ОТКЛОНЕНИЯ ОРГАНОВ УПРАВЛЕНИЯ
Нормальные перегрузки, действующие на летательный аппарат при данных значениях скорости и высоты полета, определяются углами атаки, скольжения и углами отклонения органов управления.
348
Глава VIII. Маневренные свойства летательного аппарата
Составим формулы для определения нормальных перегрузок, действующих на сбалансированный летательный аппарат. Предположим, что при летных углах атаки и скольжения летательный аппарат обладает линейными аэродинамическими характеристиками. Тогда будем иметь
У=Ув + Уаа+Угбв; (8.31)
Z=Zp₽ + Z88h. (8.32)
Условия балансировки (/и2=0 и ту=0) запишем, пренебрегая членами /и“г<ог и т“у<ву [см. (5.136) и (5.175)]:
т20+™га+"г’8в=О; (8-33)
^? + ^8H=0. (8.34)
Возьмем следующие исходные формулы для перегрузок пу и пг-
а Р 4-Г 57,3 ' (8. 35)
пу G
пг В _р_г_ 1 z 57,3 ‘ G (8.36)
Исключив-из выражений (8.31) и (8.32) углы органов управления с помощью соотношений (8.33) подставив (8.31) в (8. 35), а (8.32) в (8.36), получим отклонения и (8.34) и
Пу бал ' П'у бала+ (Пу бал)а=о> (8.37)
nz бал г£бал?> (8.38)
где
пуба.1=-^ LL_+r-4r8); \57,3 mz ) (8. 39)
“г бал q | ( р а т^, Д ——+z₽ £-Z* ; ( 57,3 т\] (8.40)
бал)а -0 _ 1 / y v$\ 1 0 5 1 * G \ mz ) (8.41)
Аналогичным образом можно исключить углы а и р из выражений (8.31) и (8.32) и получить следующие зависимости для перегрузок:
S бал = «убал8в + бал)8=0; (8- 42)
www.vokb-la.spb.ru - Самолёт своими руками?!
$ 2. Перегрузки, действующие на летательный аппарат в полете 349
где
бал бал^н»
(8.43)
(8.44)
(8.45)
(8.46)
В дальнейшем иногда будем пренебрегать членом (и^бал) г-о, учитывая, что обычно он либо равен нулю, либо мал по сравнению с п^,ба,бв- В случае необходимости не представит труда при конкретных расчетах учесть перегрузку (Лубал)г_0.
Если летательный аппарат аэродинамически осесимметричен,
то
Тогда
о „ г г
_21__21 г ~ г •
ил ту
п? , — — И* , , z бал У бал
П2 бал Пу бал
(8.47)
(8. 48)
(8.49)
(8. 50)
Если размеры рулей малы по сравнению с размерами крыльев, иногда оказывается возможным в формулах (8. 39) —(8.41), (8.44), (8.45) пренебречь членами, содержащими У8 или Z . В некоторых случаях пренебрегают слагаемым Р/57,3 по сравнению с У°или Z$. Возможность того или иного упрощения определяется конкретными условиями рассматриваемой задачи.
Уравнения (8.37), (8.38), (8.42), (8.43) описывают связь между перегрузками пу, nz и углами а, бв, р, б;: для состояния равновесия (балансировки) летательного аппарата. Коэффициен-ТЫ П^бал> Пгбал» П^бал> Плбал> 3аВИСЯЩИе 0Т ЭЭрОДИНаМИЧеСКИХ И конструктивных параметров летательного аппарата, от скорости и высоты полета, характеризуют важнейшие динамические свойства летательного аппарата.
350
Глава VIII. Маневренные свойства летательного аппарата
Если известны нормальные перегрузки пу и nz, то углы атаки и скольжения можно найти с помощью формул (8:37) и (8.38):
Лу (Пубал)а=о ,o абал = ! (8.51) пу бал
nz ?бал==~₽ • (8.52)
nz бал
Углы отклонения органов управления тангажом и рысканием определяются аналогичными формулами, полученными на основании выражений (8.42) и (8.43):
Пу (Лубал)г=о ,o oB- , ; (8.53) ny бал SH~ 0 • (8.04) ".’бал
В случае аэродинамически осесимметричного летательного аппарата
(8.55)
(8.56)
(8.57)
(8. 58)
§ 3. ПОТРЕБНЫЕ И РАСПОЛАГАЕМЫЕ НОРМАЛЬНЫЕ ПЕРЕГРУЗКИ
3.1. ПОТРЕБНЫЕ ПЕРЕГРУЗКИ
2 =--------
% бал
— ГО
3 =-------
* а ’ пу бал
, «У
пу бал
, ~Пг
°н — Т -пу бал
Предположим, что траектория полета и все ее элементы заданы, например заданы V(t), 0(г), Чт(/), ус(0- Тогда, учитывая (8. 12) и (8. 18), получим формулы для определения пу и nz:
(V de . гЛ . ( V tyd^'\ .
nv—l-------1- cos ен cos ~ +--cos (4 — sin -r'
y \g dt I ( g dt) lc’
/ V de . Q\ . . ( V ,,
n,= — (------h COS 0 I Sin T. -4- (-cos H — 1 COS y..
\g dt ' / \ e dt J lc
www.vokb-la.spb.ru - Самолёт своими руками?!
3. Потребные и располагаемые нормальные перегрузки 351
По известным элементам траектории можно вычислить нормальные перегрузки пу и nz, которые должен развивать летательный аппарат при полете по данной траектории. Эти перегрузки будем называть ПОТребнЫМи (Пу потр И nz потр) •
Потребные перегрузки характеризуют определенные свойства траектории полета, например ее радиусы кривизны.
3.2. ПРЕДЕЛЬНО ДОПУСТИМЫЕ ЗНАЧЕНИЯ УГЛОВ АТАКИ, СКОЛЬЖЕНИЯ И ОТКЛОНЕНИЯ ОРГАНОВ УПРАВЛЕНИЯ
Перегрузки пу и пг, развиваемые летательным аппаратом, пропорциональны его углам атаки и скольжения [см. (8.37) и (8.38)] или углам отклонения органов управления [см. (8.42) и (8.43)]. Предельно допустимые значения этих углов определяются рядом соображений, рассматриваемых обычно в курсе проектирования летательных аппаратов. Остановимся лишь на некоторых из них.
С возрастанием углов а (или р) степень статической устойчивости обычно уменьшается, и при больших углах атаки (скольжения) летательный аппарат может стать даже неустойчивым (см. фиг. 5. 17). При таком характере изменения статической устойчивости создание системы управления угловыми движениями аппарата становится затруднительным, так как для получения удовлетворительных характеристик автопилота на различных режимах полета желательно, чтобы моментные характеристики летательного аппарата mz=f(a) и my=f(p) были линейными.
Вследствие этого приходится ограничивать балансировочные углы а и р сравнительно небольшими значениями (обычно 8—12°), при которых моментные характеристики близки к линейным. Предельно допустимые с этой точки зрения значения абал.лоп и Рбал.доп зависят от аэродинамической компоновки летательного аппарата и числа М.
Углы отклонения органов управления такхсе должны быть ограничены, так как при слишком больших отклонениях рулей могут-возникнуть явления, затрудняющие управление летательным аппаратом. Например, при больших значениях зависимость тиг(6в) становится нелинейной, при этом заметно понижается эффективность рулей, характеризуемая приращением момента тангажа при отклонении их на угол Д6В:
Дшг=т* ДбЕ.
Кроме того, при больших углах отклонения рулей значительно возрастает индуктивное сопротивление.
Предельно допустимый угол отклонения рулей зависит от угла атаки (скольжения) и числа М. Его значение достаточно надежно можно определить лишь в результате аэродинамических испытаний модели проектируемого летательного аппарата. При отсутствии необходимых данных допустимый угол отклонения рулей
352
Глава VIII. Маневренные свойства летательного аппарата
иногда можно определить приближенно. Возьмем для примера летательный аппарат с органами управления типа поворотного оперения. Средний угол атаки такого оперения, равный а—£к.ф+6в, не должен превышать некоторого допустимого значения. Можно рекомендовать, например, чтобы выполнялось условие
Пг.о^-(0,7-?-0(75) акр.г.о» (8.59)
где акр.г.о — критический угол атаки оперения, определяемый по фиг. 3.6.
Это условие можно переписать так: для обычной схемы
8доп<(0,7 ^0,75)акр.г.о-абал.яоп(1-е“ф) (8.60)
и для схемы «утка»
бдоп (0,7-5-0,75) Скр.г.о Обал.доа- (8.61)
Соотношением (8.61) можно пользоваться и при определении допустимого угла отклонения поворотных крыльев. Так, например, если при М=2,5 акр=42° (см. фиг. 3.6), а абал.доп=8°, то
6д0П< (0,7-0,75) •42-8=21—24°.
В гл. VI было показано, что у некоторых летательных аппаратов (в частности, у летательных аппаратов схемы «утка») в полете возникают моменты крена, вызванные несимметричным скосом потока в области задних несущих поверхностей. Эти моменты, пропорциональные произведениям ар, абн и р6в [см. выражения (6.40) и (6.46)], могут стать недопустимо большими при увеличении углов а, р, бв и бн и затруднить тем самым стабилизацию летательного аппарата по крену. В таких случаях приходится дополнительно ограничивать максимальные значения указанных углов.
Предельно допустимые (с точки зрения аэродинамики) углы атаки, скольжения и отклонения рулей устанавливаются в большинстве случаев на основании анализа результатов испытаний модели летательного аппарата в аэродинамической трубе. Помимо аэродинамических требований, в процессе проектирования летательного аппарата могут возникнуть и другие требования к предельно допустимым значениям а (или р), связанные с условиями работы воздушно-реактивных двигателей, системы управления и т. п.
В дальнейшем мы будем считать, что предельно допустимые значения балансировочных углов атаки и скольжения и углов отклонения органов управления тангажом и рысканием заданы как функции числа М.
www.vokb-la.spb.ru - Самолёт своими руками?!
§ 3. Потребные и располагаемые нормальные перегрузки 353
3.3. РАСПОЛАГАЕМЫЕ НОРМАЛЬНЫЕ ПЕРЕГРУЗКИ
Наибольшие величины перегрузок, развиваемых летательным аппаратом в состоянии балансировки, определяются, с одной стороны, предельно допустимыми значениями углов атаки и скольжения (абал.доп И рбал.доп) и, с другой стороны, предельно допустимыми отклонениями органов управления бЕ.ДОп и бн.Яоп-
Максимальные углы отклонения органов управления бвта1 и битах должны быть подобраны так, чтобы всегда выполнялись следующие условия:
I amax | | абал. доп I » (8 • 62)
I Ртах | -С | Рбал.доп II (8- 63)
I З3 max I | 8в.доп Н (8.64)
I % max I -С I %.доп I- (8.65)
Первые два из этих условий могут быть записаны в несколько иной форме. Поскольку в полете углы а, 0, бв и бн связаны балансировочными зависимостями, то допустимые значения асал.лоп и Рбал.доп ограничивают соответственно максимальные значения углов отклонения органов управления битах и битах- Пусть, например, зависимость mz(a, бв) является линейной. Тогда максимальные углы отклонения органов управления тангажом должны удовлетворять неравенству
Ьв max |
т.абал.доп 4" niZQ
(8.66)
Аналогично этому можно написать
т?,
8 Рбал. доп
(8. 67)
Нормальную перегрузку, которую может создать сбалансированный летательный аппарат при максимальном отклонении органов управления, будем называть располагаемой перегрузкой.
Принимая во внимание выражения (8.42) и (8.43), можно написать
Пу расп”71’, бал °" гаах 4" (Пу бал)в-О, 68)
Пг расп — П\ бал^н 1,1 •
(8.69)
Располагаемая перегрузка характеризует важнейшие маневренные качества летательного аппарата, а именно: его способность создавать нормальную к траектории силу, управляющую полетом. Величины пу расп1 и 1-^- nz расп | представляют собой
23 101
354
Глава VIII. маневренные свойства летательного аппарата
максимальные угловые скорости касательной к траектории, которые может обеспечить летательный аппарат.
Как видно из выражений (8.44) и (8.45), (8.68) и (8.69), располагаемая перегрузка пу (или nz) зависйт от значений аэродинамических коэффициентов с’, с®, пГг, т* (ср, с®, тру, m6v) , от силы тяги Р, скоростного напора q и от максимально возможного ОТКЛОНеНИЯ органов управления бвтах (битах)-
Следует специально отметить роль статической устойчивости. Увеличение степени статической устойчивости (при неизменных значениях остальных параметров) приводит к снижению располагаемой перегрузки и ухудшению маневренности летательного аппарата. С этой точки зрения свойства устойчивости и маневренности являются противоречивыми.
При полете на малых высотах основная часть располагаемой перегрузки летательного аппарата создается аэродинамическими силами Y и Z и лишь небольшая часть — проекцией силы тяги на нормаль к траектории Psina или Psinp. По мере увеличения высоты полета плотность воздуха падает и обеспечение маневренности становится все более и более трудной задачей. Для увеличения располагаемых перегрузок на больших высотах можно было бы увеличивать скорость полета и площадь крыльев. Одна ко эти способы применимы только до известных пределов, так как увеличение скорости ограничивается возможностями двигателей, аэродинамическим нагревом и т. д., а увеличение площади крыльев приводит к чрезмерному возрастанию веса и размеров летательного аппарата.
По этим причинам роль аэродинамических сил в создании перегрузок на больших высотах уменьшается, а роль проекции силы тяги возрастает. Очевидно, что в пустоте единственным источником создания перегрузок может служить только использование реактивных сил.
3.4. СООТНОШЕНИЕ МЕЖДУ ПОТРЕБНЫМИ И РАСПОЛАГАЕМЫМИ ПЕРЕГРУЗКАМИ
Потребная перегрузка характеризует траекторию полета, в то время как располагаемая перегрузка характеризует свойства летательного аппарата в рассматриваемой точке траектории. Сравнивая потребную перегрузку с располагаемой, можно установить возможность полета летательного аппарата по заданной траектории или возможность наведения летательного аппарата на цель (при заданных начальных условиях, методе наведения и законе движения цели). Рассмотрим пример.
Предположим, что из некоторой точки в направлении движущейся цели запущен управляемый снаряд. Пусть метод наведения состоит в том, что вектор скорости снаряда все время направ-
www.vokb-la.spb.ru - Самолёт своими руками?!
<$ 3. Потребные и располагаемые нормальные перегрузки
355
лен на цель. Так как цель движется, то вектор скорости снаряда должен непрерывно поворачиваться — следить за целью.
Для поворота вектора скорости снаряда с требуемой угловой скоростью необходима определенная нормальная перегрузка, которую мы условились называть потребной перегрузкой.
С другой стороны, данный снаряд имеет определенные размеры и аэродинамические формы и на каждой высоте способен создать ограниченную нормальную силу, т. е. ограниченную нормальную перегрузку. Может наступить такой момент, когда рули снаряда отклонятся на максимальный угол (угол атаки снаряда при этом будет максимальным), а величина возникшей нормальной перегрузки окажется недостаточной для поворота вектора скорости снаряда с нужной угловой скоростью. Начиная с этого момента снаряд будет лететь по так называемой предельной кривой, т. е. по кривой, радиус которой соответствует максимальной нормальной перегрузке. Вектор скорости снаряда не будет успевать поворачиваться за целью, и наведение на цель фактически прекратится.
Как видно, полет летательного аппарата по требуемой траектории возможен только в том случае, если он способен во всех точках этой траектории развивать нормальную перегрузку, не меньшую по величине, чем потребная перегрузка.
Так как располагаемая перегрузка — это максимально возможная перегрузка сбалансированного летательного аппарата, то в идеальном случае можно было бы осуществить полет по требуемой траектории при условии равенства располагаемых и потребных перегрузок.
При полете в реальных условиях, т. е. при наличии случайных возмущений, для управления полетом необходимо располагать еще некоторым запасом нормальной перегрузки. Величину этого запаса можно определить в результате исследования динамики системы управления, если известны возмущения, действующие на систему.
Изложенные соображения можно записать в виде таких условий:
I расп I I Ду потр I Н- Пу зап ($• 70)
И
I Пг расп | 1 ^гпотр 1 + Да зап» (8.71)
Где Ну зап>0 И Игзап>0-
Для аэродинамически осесимметричного летательного аппарата вместо неравенств (8.70) и (8.71) удобно записать
I ^расп I I Дютр1 ~Ь Дап' (8- 72)
Эти же условия можно записать в виде соотношений между максимальными и потребными углами отклонений органов управ
356
Глава VIII. Маневренные свойства летательного аппарата
ления. Ограничимся случаем аэродинамически осесимметричного летательного аппарата.
Угол отклонения органов управления, необходимый для получения перегрузки «потр и равный
(8.73) пбъч
назовем потребным углом отклонения органов управления.
Максимальный угол отклонения органов управления связан с располагаемой перегрузкой формулой [см. (8. 68) ]:
8тах = ^. (8.74)
Лбал
Учитывая (8.73) и (8.74), неравенство (8.72) можно переписать в виде
|8noTp|+S3an, (8.70)
где озап = изап/и?ал ~запас отклонения органов управления*.
Таким образом, в каждой точке любой из траекторий полета данного летательного аппарата должно выполняться условие (8.72) или (8.75).
Это условие определяет нижние границы располагаемой перегрузки и максимального отклонения органов управления. Оно налагает определенные требования на параметры летательного аппарата. Параметры крыльев, оперения, органов управления, а также центровка аппарата должны быть выбраны так, чтобы обеспечить выполнение неравенства (8.72) или (8.75).
Так, например, площадь крыльев должна быть выбрана в соответствии с неравенствами (8. 72) или (8. 75)* **. Поскольку располагаемая перегрузка зависит от эффективности органов управления [m^B, rnfy и максимального угла их отклонения, необходимо соответствующим выбором размеров и расположения оперения и органов управления обеспечить выполнение условий (8.72) и (8.75). Если площадь крыла уже определена, а эти неравенства в какой-либо точке траектории не выполняются из-за того, что летательный аппарат не может быть сбалансирован на достаточно больших углах атаки, то следует увеличить или максимальный угол отклонения органов управления, или их размеры.
» У пилотируемых самолетов аналогичный запас отклонения рулей всегда требуется при посадке и обычно лежит в пределах 5—8° [2].
** Размеры крыльев определяются при проектировании летательного аппарата исходя из ряда условий. Неравенства (8.72) и (8.75) определяют лишь одно из этлх условий.
www.vokb-la.spb.ru - Самолёт своими руками?!
£ 3. Потребные и располагаемые нормальные перегрузки 357
3.5. ШАРНИРНЫЕ МОМЕНТЫ, НЕОБХОДИМЫЕ ДЛЯ СОЗДАНИЯ НОРМАЛЬНЫХ ПЕРЕГРУЗОК
Для создания нормальной перегрузки необходимо отклонить на определенный угол те или иные органы управления. При этом соответствующая рулевая машинка должна преодолеть шарнирный момент органов управления и обеспечить достаточно большую скорость их отклонения. Очевидно, что для правильного выбора размеров рулевых машинок и создаваемого ими усилия надо знать максимальные шарнирные моменты, которые могут возникнуть в полете данного летательного аппарата по любой из требуемых траекторий.
Расчет шарнирных моментов, действующих на рули высоты и направления, проведем для летательного аппарата, находящегося в состоянии балансировки. При отклонении рулей высоты будут справедливы следующие соотношения:
^zo+,?zza~r,?zz%=0; (8.76)
™ш='гашо + "гша + тшв3в- (8.77)
Исключив из (8.77) угол а с помощью (8.76), получим
6В / а \
т,,, I т,„ \
8в. (8- 78)
\ 'V/
где
' (8.79)
тг
Выражение, стоящее в скобках в формуле (8.78), имеет простой физический смысл. Вычислим момент тангажа, действующий на летательный аппарат:
mz= тл + +ш^в, (8. 80)
при условии, что рули высоты свободны. В этом случае рули занимают положение равновесия, при котором шарнирный момент равен нулю:
'«шо + ^ша + тшнгв=0- (8-81)
Исключив с помощью (8.81) угол 6В из выражения (8.80), получим
mzcB~-=rnzQ св + щ“сва> (8.82)
где
св(8.83)
«шВ ’
358 Глава VIII. Маневренные свойства летательного аппарата
(8-84)
Рассуждая, как и в § 6 гл. V, приходим к выводу, что при /и’св<0 летательный аппарат со свободными рулями статически устойчив. Поэтому величину /п“св называют степенью продольной статической устойчивости со свободными рулями.
Таким образом,
/ла
"гш.в = (^ш.бал)5=о + 4^-ТОш5в- (8- 85)
,пг
Для коэффициента шарнирного момента, действующего на рули направления, получим аналогичную формулу:
(8.86) где
^св=^-^и-*-- (8.87)
m н ’ ш
От коэффициентов тш перейдем к самим шарнирным моментам, умножив (8.85) и (8.86) соответственно на kroqSBbu и kB.oqSHbH. Тогда получим
ТЛ — J-
Л4ш.в=(Мш.6ал)6=о+-^ <В8В. (8.88)
(8.89)
Формулы (8.88) и (8.89) определяют шарнирные моменты, действующие на органы управления (воздушные рули, поворотные крылья) сбалансированного летательного аппарата при отклонении их на произвольные углы 6В и бн. Чтобы найти шарнирные моменты, необходимые для создания заданных нормальных перегрузок, нужно в эти формулы подставить углы отклонения рулей
бв = 6в .потр“{“бв.зап
И
бп= ба.потр-Ь^н.зап-
Тогда получим
,rt«
Л1ш.в=(Мш.бм)5=о + -^-М’в(8в.пОТр+8в.зап), (8.90)
www.vokb-la.spb.ru - Самолёт своими руками?!
§ 3. Потребные и располагаемые нормальные перегрузки 359
т₽
= <" (8н.потр-Нн.зап). (8- 91)
ту
ИЛИ
(8.92) тг пу бал
<8-93) ту пг бал
Величины шарнирных моментов, определяемых по этим формулам, изменяются вдоль траектории в зависимости от скорости и высоты полета и потребной перегрузки. В некоторой точке каждой траектории полета шарнирный момент достигает максимального значения Мштах (фиг. 8.5). Наибольшее значение Мишах Для всех возможных траекторий обозначим через Мш шах max-
Фиг. 8.5. К определению максимального значения шарнирного момента.
Очевидно, что размеры рулевых машинок должны подбираться так, чтобы максимальный момент, создаваемый ими на валу рулей, был не ниже Л4Шшахтах-
ЛИТЕРАТУРА
1. Калачев Г. С., Показатели маневренности, управляемости н устойчивости самолетов, Оборонгиз, 1958.
2. Остославский И. В., Аэродинамика самолета, Оборонгиз, 1957.
3. Бонни Э. А., Аэродинамика, Серия «Основы проектирования управляемых снарядов», Физматгиз, 1960.
4. Мер илл Г., Исследование операций, Серия «Основы проектирования управляемых снарядов», ИЛ, 1959.
ПРИЛОЖЕНИЯ
I. ТАБЛИЦА СТАНДАРТНОЙ АТМОСФЕРЫ ДО ВЫСОТЫ 30 км
Высо- та Н км Барометрическое давление Р кГ[м? Температура 7’ °абс. Массовая плотность р к Г •м~^сек2- Относительная плотность д= —— Ро Кинематический коэффициент вязкости м21сек~^ Скорость звука а М'Сек~{ Скоростной напор прн V—а Яа кГ-м~2
—0,5 10960,0 291,3 0,1311 1,0489 •>•105 1,4042 342,1 7677,3
0,0 10332,3 288,0 0,1250 1,000 1,4598 340,2 7233,5
0,5 9734,0 284,8 0,1191 0,9529 1,5188 338,3 6821,0
1,0 • 9164,2 281,5 0,1134 0,9074 1,5408 336,4 6416,5
1,5 862*1,7 278,3 0,1079 0,8637 1,6465 334,4 6038,5
2,0 8105,4 275,0 0,1027 0,8216 1,7138 332,5 5682,6
2,5 7614,5 271,8 0,0976 0,7810 1,7862 330,5 5330,4
3,0 7148,0 268,5 0,0927 0,7421 1,8626 328,5 5003,9
3,5 6704,8 265,3 0,0880 0,7046 1,9428 326,5 4692,6
4,0 6284,2 262,0 0,0836 0,6686 2,0274 324,5 4399,4
4,5 5885,2 258,8 0,0792 0,6340 2,1171 322,5 4120,7
5,0 5507,0 255,5 0,0751 0,6008 2,2111 320,5 3856,1
6,0 4809,5 249,0 0,0673 0,5384 2,4171 316,3 3365,5
7,0 4185,3 242,5 0,0601 0,4811 2,6475 312,2 2929,9
8,0 3628,4 236,0 0,0535 0,4286 2,9072 308,0 2540,4
9,0 3133,1 229,5 0,0475 0,3805 3,1998 303,7 2193,3
10,0 2694,0 223,0 0,0421 0,3367 3,5306 299,4 1886,0
11,0 . 2306,1 216,5 0,0371 0,2969 3,9067 295.0 1614,3
12,0 1969,5 216,5 0,0317 0,2536 4,5737 295,0 1378,5
13,0 1682,0 216,5 0,0271 0,2166 5,3562 295,0 1177,4
14,0 1436,5 216,5 0,0231 0,1850 6,2717 295.0 1006,0
www.vokb-la.spb.ru -
Самолёт своими
руками
?!
II. Характеристики стандартной атмосферы 539'
Продолжение
Высота Н км Барометрическое давление Р кГ/м2 Температура Т °абс. Массовая плотность Р к Г -м—^секХ Относительная плотность д=-₽-Ро Кинематический коэффициент вязкости V м2сек~1 Скорость звука а м*сек~~1 Скоростной напор при Qa кГ-м~2
15,0 1226,9 216,5 0,0197 0,1580 7,3424 295,0 858,9
16,0 1047,8 216,5 0,0169 0,1349 8,5967 295,0 733,6
17,0 894,8 216,5 0,0141 0,1152 10,065 295,0 626.6
18,0 764,2 216,5 0,0123 0,09839 11,784 ' 295.0 535,0
19,0 652,7 216,5 0,0105 0,08403 13,804 295,0 456,9
20,0 557,4 216.5 0,0090 0,07177 16,162 295,0 390,2
21,0 476,1 216,5 0,0077 0,06129 18,924 295,0 333,3
22,0 406,6 216,5 0,0065 0,05234 22,159 295,0 284.6
23,0 347,2 216,5 0,0056 0,04470 25,942 295,0 243,1
24,0 296,5 216,5 0,0048 0,03818 30,379 295,0 207,6
25,0 253,3 216,5 0,0041 0,03261 35,568 295,0 177,4
р-104 Д-104 104
26,0 216,8 219,5 34,40 275,2 4,2525 297,2 151.5
27,0 186,1 222,4 29,14 233,1 5,0872 299,0 129,9
28,0 160,3 225,4 24,76 198,1 6,0541 301,0 111,9
29,0 138,1 228,4 21,07 168,5 7,1927 303,0 96,51
30.0 119,3 231,4 । 17,96 143,7 8,5295 305,0 83.32
II. ХАРАКТЕРИСТИКИ АТМОСФЕРЫ НА ВЫСОТАХ 404 30 ДО 100 км*
н км Р Ро Д=^- Ро н км Р Ро A=U- Ро 1Л V т
0 1,000 1,000 1,000 35 0,563 0,679 1,098
30 0,0118 0,0145 1,109 36 0,487 0,573 1,084
31 0,0102 0,0125 1,107 37 0,423 0,485 1,071
32 0,876-10-2 0,0107 1,105 38 0,369 0,413 1,058
33 0,756 0,919—10-2 1,102 39 0,322 0,352 1,046
34 0,652 0,790 1,100 40 0,283 0,302 1,034
* В. И. Ф е о д о с ь е в и Г. Б. С и н я р е в, Введение в ракетную Технику, Оборонгиз, 1960.
540
Приложения
Продолжение
H P A=-P- iZ— H P Д=-^ |/.д
KM Po Po У T KM Po Po У T
41 0,249 0,260 1,022 55 0,508 0,473 0,963
42 0,219 0,224 1,011 60 0,284 0,282 0,997
43 0,194 0,194 1,000. 65 0,152 0,163 1,034
44 0,172 0,168 0,999 70 0,774-10—4 0,895-IO"4 1,075
45 0,153 0,147 0,979 75 0,372 0,468 1,122
46 0,136 0,128 0,969 80 0,167 0,229 1,176
47 0,122 0,112 0,960 85 0,721-10-s 0,990-10-5 1,176
48 0,109 0,984-10-3 0,951 90 0,310 0,429 1,176
49 0,977-10-3 0,866 0,942 95 0,134 0,185 1,176
50 0,878 0,764 0,933 100 0,580-10-6 0,800-10-6 L1,176
Ill. НЕКОТОРЫЕ ГЕОМЕТРИЧЕСКИЕ СООТНОШЕНИЯ
1. Формулы для определения основных размеров крыльев (фиг. III. 1)
Z=/5k; ZK = ]/5KkK;
' b ' S 2 r, *0 / 11’ 4 -Sk ~flK . Ik ’Ik + 'I T,K- '
2. Соотношения между геометрическими параметрами консолей и крыльев с подфюзеляжной частью
Выражение параметров консолей через параметры крыльев с подфюзеляжной частью
D
/
/К=/-Д
h h li —1 D
bfr=bQ[\--------
\ TQ I
D . ,,
yh—!);
www.vokb-la.spb.ru - Самолёт своими руками?^
///. Некоторые геометрические соотношения
541
1 —д/г
Т] —1 D Tj-f-l I
Фиг. III. 2. Величина и положение САХ.
Фиг. III. 1. Основные размеры крыльев.
Выражение параметров крыльев с подфюзеляжной частью через параметры консолей
\ Чк + 1
riK —1 D
’he +1 /
- U-1);
/к
14-Д/4
k=kK
. . Чк-1 D
К
3. Величина и положение САХ (фиг. III. 2)
h 4 s
Ь^~Г-7
4
(1 +1)2
I
___ 4 Sk I ।__________rtK 1.
з iK I hx-f-i)2]’
Ik '"Ik + 6^+1
542
Приложения
4. Углы стреловидности крыла по различным линиям (фиг. Ш. 3)
Фиг. Ш. 3. Углы стреловидности крыла по различным линиям.
tg 7.0,25 =tgy0— т- Try ; Ак т1к+ 1
, ♦ 2 Ск— 1
tgzo^tgz»-^^;
'gz.i=igz.— Лк fiK Г *
Общее выражение:
tg 7.m = tg /.0-— -i-—=tg Zo-— -2——
Л|< Ск -г I Л г, -г 1
где m — расстояние в долях хорды от передней кромки до линии, по которой определяется угол % (0<т<1).
5. Отношение площади миделя фюзеляжа к площади крыльев (фюзеляж круглого сечения)
•$ф _ я / £>\2 '^'ф _ я -) [ Р\-
SK—T‘kUk/
6. Отношение поверхности фюзеляжа к площади миделя х
F&
2 [2Хф Хнос (1 Снос) ^корм (t ’’Скорм) ] •
7. Объем заостренной носовой части фюзеляжа
Носовая часть конической формы:
^HOC^V1»^’ о
Носовая часть с параболическими обводами:
t^noc = 0,533 Lh.OCS<j>.
www.vokb-la.spb.ru - Самолёт своими руками?!
ОГЛАВЛЕНИЕ
Стр.
Предисловие .... ... ...... .... 3
Основные обозначения .... 5
Введение........................................... . . 11
§ 1. Предмет курса динамики полета беспилотных летательных аппаратов ...........................................• . II
§ 2. Общие сведения об управлении полетом........... 13
2.1. Силы, действующие на летательный аппарат .. 13
2.2. Органы управления летательным аппаратом..... 19
2.3. Система управления летательным аппаратом.... 24
Литература .......................... 25
Глава I. Уравнения движения реактивного летательного аппарата ... 26
§ 1. Основные теоремы динамики системы переменного состава ... 26
1.1. Кинематические соотношения ..... . . 26
1.2. Теорема о количестве движения .... . . 29
1.3. Теорема о моменте количеств движения ... 31
1.4. Принцип затвердевания..................................... 32
§ 2. Сила тяги реактивного двигателя............................... 32
§ 3. Принцип составления уравнений движения . . .......... 37
3.1. Уравнения движения центра инерции......................... 38
3.2. Уравнения вращательного движения относительно центра инерции ....................................................... 40
§ 4. Оси координат. Геометрические и кинематические соотношения 42
4.1. Оси координат............................................. 42
4.2. Связь между углами Чг, 0, у с и 4’. О, у, Р, а............ 47
4.3. Кинематические уравнения, описывающие вращение летательного аппарата относительно земных осей......................... 48
4.4. Кинематические уравнения движения центра тяжести летательного аппарата............................'................. 50
§ 5. Составление системы уравнений движения летательного аппарата 55
5.1. Динамические уравнения.................................... 55
5.2. Система уравнений движения летательного аппарата .... 59
§ 6. Связи, накладываемые на. движение летательного аппарата системой управления .- . .................................. 62
Лите ратура . . . ..... 71
Глава II. Методы исследования уравнений движения.................... . 72
§ 1. Основные методы упрощения уравнений движения.................... 72
1.1. Разделение общего движения летательного аппарата на продольное и боковое............................................... 72
1.2. Разделение общего движения летательного аппарата на движение центра тяжести и вращение вокруг центра тяжести 77
1.3. Упрощенное исследование уравнений движения центра тяжести....................................................... 82
544
Оглавление
Стр.
§ 2. Общие сведения о методах решения уравнений движения ... 85
§ 3. Численное интегрирование методом Эйлера..................... 88
§ 4. Исходные данные для решения уравнений движения......... 91
4. 1. Вес летательного аппарата.............................. 92
4. 2. Зависимость силы тяги и расхода топлива от скорости и высоты полета . ............................................... 93
4. 3. Замечания об определении аэродинамических сил и моментов 101
Литература . ............... . 102
Глава fff. Подъемная сила . . 103
§ 1. Подъемная сила изолированных крыльев .................... . 103
S 2. Подъемная сила изолированного корпуса (фюзеляжа) 113
§ 3. Подъемная сила системы крылья—фюзеляж 118
§ 4. Подъемная сила оперения . . 129
4. 1. Скос и торможение потока ........... 129
4.2. Подъемная сила оперения при неотклоненных рулях .... 138
4.3. Подъемная сила оперения при отклоненных рулях. Относительная эффективность рулей . ......... 145
§ 5. Подъемная сила газовых рулей............................... 152
§ 6. Подъемная сила летательного аппарата в целом................154
6. 1. Летательные аппараты с горизонтальным расположением крыльев................................................ 154
6.2. Летательные аппараты с +- и Х-образными крыльями . . 158
6.3. Бескрылые летательные аппараты . ... 164
§ 7. Боковая сила........................... . . . . 166
Литература 168
Глава IV. Лобдвое сопротивление 169
§ 1. Сопротивление изолированных крыльев .............. . 169
1. 1. Профильное сопротивление.............................. 169
1.2. Волновое сопротивление (при а=0) ...................... 181
1. 3. Критическое число М . . 189
1.4. Индуктивное сопротивление .... ... 193
§ 2. Сопротивление изолированного фюзеляжа (корпуса)............ 197
2. 1. Сопротивление трения.................................. 197
2.2. Сопротивление носовой части............................ 198
2. 3. Сопротивление носовой части с воздухозаборником 200
2.4. Сопротивление кормовой части . . . . . 212
2.5. Донное сопротивление . . . . 213
2.6. Индуктивное сопротивление ............................. 216
§ 3. Сопротивление системы крылья—фюзеляж...................... 218
3. 1. Сопротивление при нулевой подъемной силе ... 218
3. 2. Индуктивное сопротивление . .......................... 219
§ 4. Сопротивление оперения....................... . 221
§ 5. Сопротивление летательного аппарата в целом . . . 223
5.1. Обычная схема............. ... 223
5.2. Схема «утка» ... 223
5.3. Схема «бесхвостка» ............................... 224
5.4. Схема с поворотными крыльями........................... 225
5.5. Расчет индуктивного сопротивления при полете с углами атаки и скольжения.................................... 226
Литература....................................................... 226
www.vokb-la.spb.ru - Самолёт своими руками?!
Оглавление
545
Глава V. Моменты тангажа и рыскания.............................
§ 1. Общее выражение момента тангажа. Средняя аэродинамическая хорда .....................................................
§ 2. Центр давления изолированных крыльев...................
§ 3. Центр давления изолированного фюзеляжа.................
§ 4. Центр давления крыльев в системе крылья — фюзеляж......
4.1. Расчет координаты центра давления в случае «аа» . .
4.2. Расчет координаты центра давления в случае «60» . . . . 4.3. Расчет координаты центра давления в общем случае .
§ 5. Момент тангажа при <о.=а=д=О...........................
5.1. Летательные аппараты с горизонтальным расположением крыльев.................................................
3.2. Летательные аппараты с +- и Х-образиым расположением крыльев.................................................
5.3. Бескрылые летательные аппараты.....................
§ 6. Продольная статическая устойчивость....................
§ 7. Фокус и нейтральная центровка летательного аппарата....
§ 8. Момент тангажа, вызванный вращением летательного аппарата вокруг ОСИ OZ[.............................................
8. 1. Демпфирующий момент изолированных крыльев.........
8. 2. Демпфирующий момент изолированного фюзеляжа.......
8.3 . Демпфирующий момент крыльев в присутствии фюзеляжа 8.4. Демпфирующий момент оперения.......................
8.5 . Демпфирующий момент всего летательного аппарата . . , 8.6. Внутренний момент кориолисовых сил.................
§ 9. Продольная балансировка в установившихся режимах полета § 10. Дополнительные моменты тангажа при неустановившемся движении летательного аппарата .................................
§11. Момент рыскания .......................................
» 11. 1. Общее выражение момента рыскания ...
11.2. Статические производные ту и тьу..................
11.3. Вращательные производные туу. ni?y, т6у ..........
°>х
11.4. Вращательная производная ту.......................
11.5. Боковая балансировка при полете без крена .
•Литература .........................I.
Глава VI. Момент крена..........................................
§ 1. Момент крена, создаваемый крыльями при скольжении .... I. 1. Влияние стреловидности и формы концов крыльев на момент крена . . . . . .............................................
1.2. Влияние поперечной V-образиости крыльев на момент крена ..................................................
1.3. Влияние интерференции крыльев и фюзеляжа на момент крена.............................................. . .
1.4. Момент крена -(--образных крыльев............... .
§ 2. Момент крена, создаваемый оперением....................
'§ 3 . Момент крена, вызываемый взаимным влиянием крыльев и оперения (момент от несимметричного скоса потока) ..............
3. 1. Летательные аппараты с горизонтальным расположением крыльев . ......................................
3. 2. Летательные аппараты осесимметричной схемы
§ 4. Поперечная статическая устойчивость................
§ 5. Момент крена от производственных ошибок ........... .
Стр.
228
228
232
235
239
239
244
244
245
247
250
252
252
257
261
263
267
268 'ч
268
270
271
272
275
279
279
281
283
284
286
287
288
289
289
293
296
297
298
299
300
302
305
308
5-16
Оглавление
Стр.
§ 6. Эффективность элеронов и дифференциальных рулей......... 310
6.1. Дифференциальные рули............................... 311
6.2. Элероны . ..................................... 312
§ 7. Моменты крена, вызываемые вращением летательного аппарата 317
7. 1. Вращательная производная mх.........................317
ш о>г
7. 2. Вращательные производные m х и mх ................. 321
§ 8. Общее выражение коэффициента момента крена 326
Литература ... . .... . 327
Глава VII. Шарнирные моменты..................................... 328
§ 1. Понятие о шарнирном моменте. Аэродинамическая компенсация рулей ........................................... • . 328
§ 2. Определение коэффициентов шарнирных моментов 332
2. 1. Поворотное оперение . . 332
2. 2. Концевые рули......................................... 334
2. 3. Рулн, расположенные позади стабилизаторов 335
2.4. Элероны . . ....... . 336
2.5. Газовые рули 337
Литература . 337
Глава VIII. Маневренные свойства летательного аппарата . . . . 338
§ 1. Понятия о маневренности и перегрузке летательного аппарата 338
§ 2. Перегрузки, действующие на летательный аппарат в полете . . . .339
2.1. Измерение перегрузок ... . 339
2.2. Проекции вектора перегрузки............................ 341
2. 3. Связь между перегрузками и кинематическими элементами траектории.................................................. 343
2'4. Зависимость нормальных перегрузок от углов атаки, скольжения и отклонения органов управления ....... 347
§ 3. Потребные и располагаемые нормальные перегрузки . . .. 350
3. 1. Потребные перегрузки.................................. 350
3. 2. Предельно допустимые значения углов атаки, скольжения и отклонения органов управления .............................. 351
3. 3. Располагаемые нормальные перегрузки................... 353
3. 4. Соотношение между потребными и располагаемыми перегрузками ................................................... 354
3. 5. Шарнирные моменты, необходимые для создания нормальных перегрузок ...... ...... 357
Литература . . . 359
Глава IX. Расчет полета по программе . ... 360
§ 1. Полет по программе в вертикальной плоскости ...... 361
1. 1. Полет с заданным углом тангажа илн углом атаки . . 363
1.2. Полет с заданной перегрузкой.......................... 367
1.3. Полет с заданным углом наклона траектории 368
§ 2. Полет по программе в горизонтальной плоскости . 370
2. 1. Угол атаки в горизонтальном полете ... . . 371
2.2. Маневр без крена ... . ...................372
2.3. Маневр без скольжения . . ........................ 374
2.4. Прямолинейный полет ................................... 376
§ 3. Приближенные методы определения скорости, высоты и дальности полета. Примеры расчета......................................... 377
3. 1. Зенитный управляемый снаряд........................... 378
www.vokb-la.spb.ru - Самолёт своими руками?!
Оглавление 547
Стр.
3. 2. Снаряд класса «воздух—воздух»......................... 383
3. 3. Построение зоны возможных атак снаряда класса «воздух— воздух» ................................................ 388
Литература .................................... ... 393
Глава X. Расчет и исследование траекторий наведения................. 394
"§ I. Кинематический метод исследования основных свойств траекторий иаведення ... 394
§ 2. Методы наведения 39&
2. 1. Метод погони......................................... 397
2. 2. Наведение с постоянным углом упреждения .............. 403
2. 3. Наведение в мгновенную точку встречи — параллельное сближение ............................................... 408
2. 4. Пропорциональное сближение 413
2. 5. Метод совмещения 416
2. 6. Угловой метод....................................... 422
2. 7. Наведение с постоянным углом пеленга цели . ..... 423
2. 8. Классификация методов наведения....................... 425
§ 3. Расчет траекторий наведения............................... 425
3. 1. Наведение в вертикальной плоскости . . ............' 425
3. 2. Наведение в горизонтальной плоскости.............. . 428
Литература . ......... ...... 428
Глава XI. Уравнения возмущенного движения летательного аппарата . . 429
§ 1. Линеаризация уравнений движения летательного аппарата . . . 431
1. 1. Невозмущенная и возмущенные траектории................ 431
1. 2. Методика линеаризации дифференциальных уравнений . . . 432
1.3. Линеаризация выражений аэродинамических сил н моментов 435
1.4. Линеаризация уравнений движения........................ 438
1.5. Разделение возмущенного движения на продольное и боковое 443
1.6. Свойства устойчивости и управляемости летательного аппарата ...................................................... 445
§ 2. Анализ и методы упрощения уравнений продольного возмущенного движения ... .................... . 448
2. 1. Уравнения продольного движения........................ 448
2. 2. Общий характер свободного возмущенного движения летательного аппарата . 4^2
2. 3. Анализ свободного возмущенного движения............... 457
2. 4. Уравнения короткопериодического этапа возмущенного движения ...................................................... 463
§ 3. Анализ н методы упрощения уравнений бокового возмущенного движения................................................... ... 465
3. 1. Уравнения бокового движения....................... . 465
3. 2. Характер свободного возмущенного движения . . 468
3. 3. Упрощение уравнений бокового движения . . 473
§ 4. Определение динамических коэффициентов . . . 475
Литература .. .................. 479
Глава XII. Летательный аппарат как линейный объект автоматического управления ................................................ . . 480
§ 1. Прием «замораживания» коэффициентов....................... 481
§ 2. Передаточные коэффициенты летательного аппарата . . 482
§ 3. Передаточные функции летательного аппарата . . 486
3. 1. Движение креиа....................................... 486
3. 2. Движения тангажа и рыскания......................... * 487
548
Оглавление
Стр.
§ 4. Переходные процессы при ступенчатом отклонении органов управления........................................................ 504
4.1. Переходный процесс при отклонении органов управления креном ....................................................... 504
4. 2. Переходные процессы при отклонении органов управления тангажом и рысканием......................................... 505
§ 5. Частотные характеристики летательного аппарата ............. 517
5.1. Обгциё сведения......................................... 517
5.2. Движение крена.......................................... 523
5.3. Движение тангажа и рыскания летательного аппарата с закрепленными крыльями.......................................... 525
5. 4. Примеры частотных характеристик летательного аппарата с поворотными крыльями . ... 533
Литература ............. 537
Приложения:
I. Таблица стандартной атмосферы до высоты 30 км ... 538
II. Характеристики атмосферы на высотах от 30 до 100 км 539
III. Некоторые геометрические соотношения....................... . 540
Александр Александрович Лебедев и Лев Семенович Чернобровкин
ДИНАМИКА ПОЛЕТА
Издательский редактор Н. А. Горцуева Техн, редактор В. П. Рожин
Г-81322 Подписано в печать 6/IX 1962 г. Учетно-изд. л. 29,93
Формат бумаги 60х92*/16=17,13 бум. л—34,25 печ. л.
Цена 1 р. 20 к. Тираж 7000 экз. Заказ 101/1686
Типография Оборонгиза
www.vokb-la.spb.ru - Самолёт своими руками?!
Замеченные опечатки
Стр. Строка Напечатано Должно быть
49 8 снизу (ыу cos 7 — cos 7) (ыу cos 7 — wzsin 7)
228 17 сверху арифметическая аэродинамическая
377 7 сверху Третье Второе
Ю6 21 сверху •>] >90° •>] <90°
427 13 сверху “Л+1 ал+1
439 6 сверху пренебречь произведе- пренебречь их произве-
ниямн дениями
(дМ°« |
145 14 сверху + —— 1 +
448 3 снизу
449 3 сверху . (10.32) (11.32)
449 8 сверху
466 11 сверху cos 04' = cos 0-W =
473 5 снизу
474 3 сверху с12 с'и
474 5 сверху
482 6 сверху (11.63) (11.61)
484 16 сверху а4а -|- а58 = а42а Ч ==
491 3 снизу (12.30) (12.31)
Формула ,, “13 + °11а43 а1з+«11а43
' . , --
(12.61) «И + а12 ~ а42 °11 Т- °]2 + °42
493 Формула (72р2 —2£7>-J- 1) (Т2р2 Р2£7р-1- 1)
(12.69)
в знаменателе
502 I—3 снизу Откуда получаем, что в с8
среднем у аппаратов с = =^0,3 <0,4.
поворотными крыльями °42 су
Откуда получаем, что в
-^- = -^-=к0,3<0,4; среднем у аппаратов с
°42 Су поворотными крыльями
503 2 сверху (12.118) (12. 120)
506 2 сверху) 0 (4
6 сверху/
510 Формула к. АО
(12. 156)
518 Формула (Т2р2 _|_ 2ZTp 4- 1) X 7^x4 2с7’х х
(12. 176)
522 5 сверху СО
Заказ 1061686