




























































































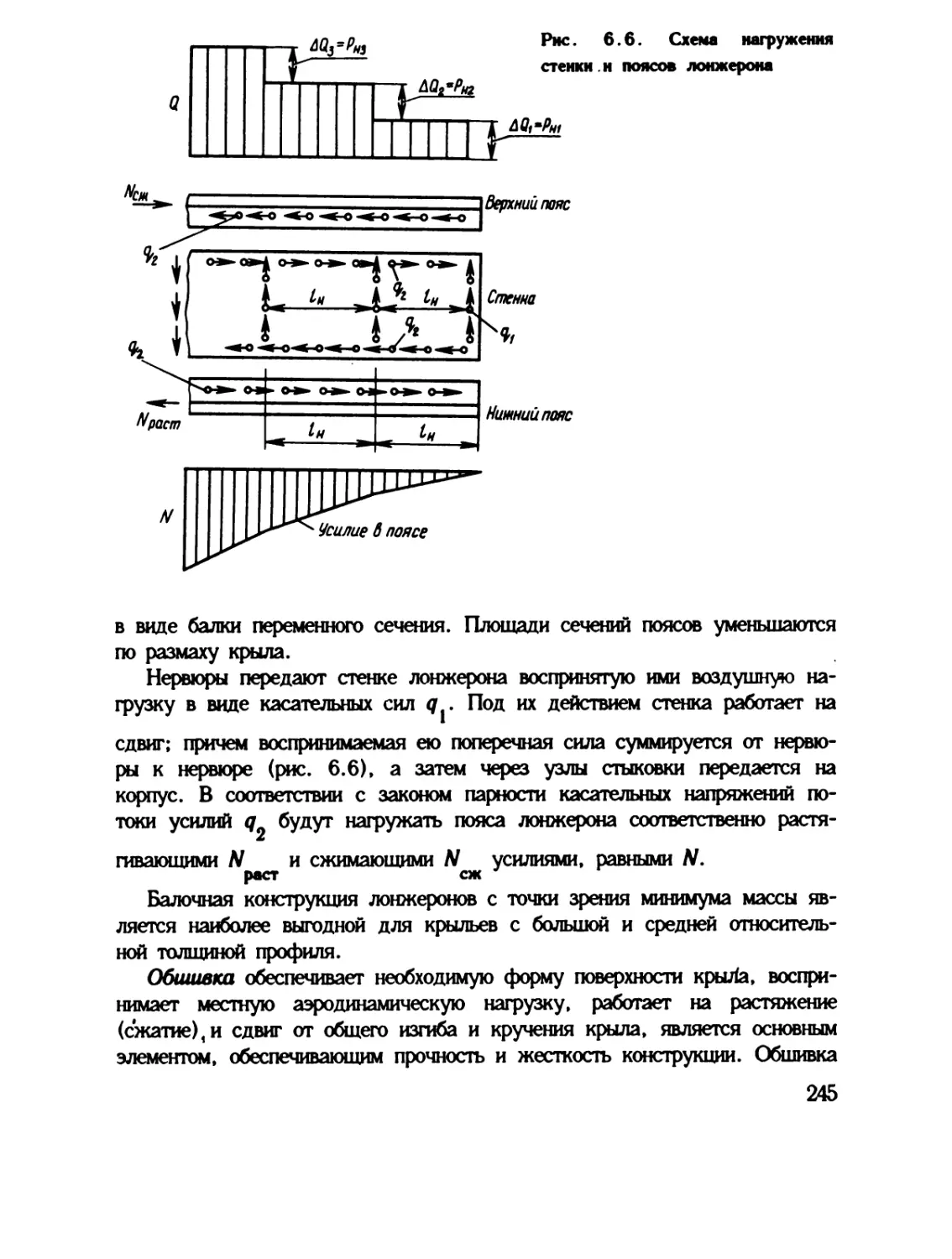
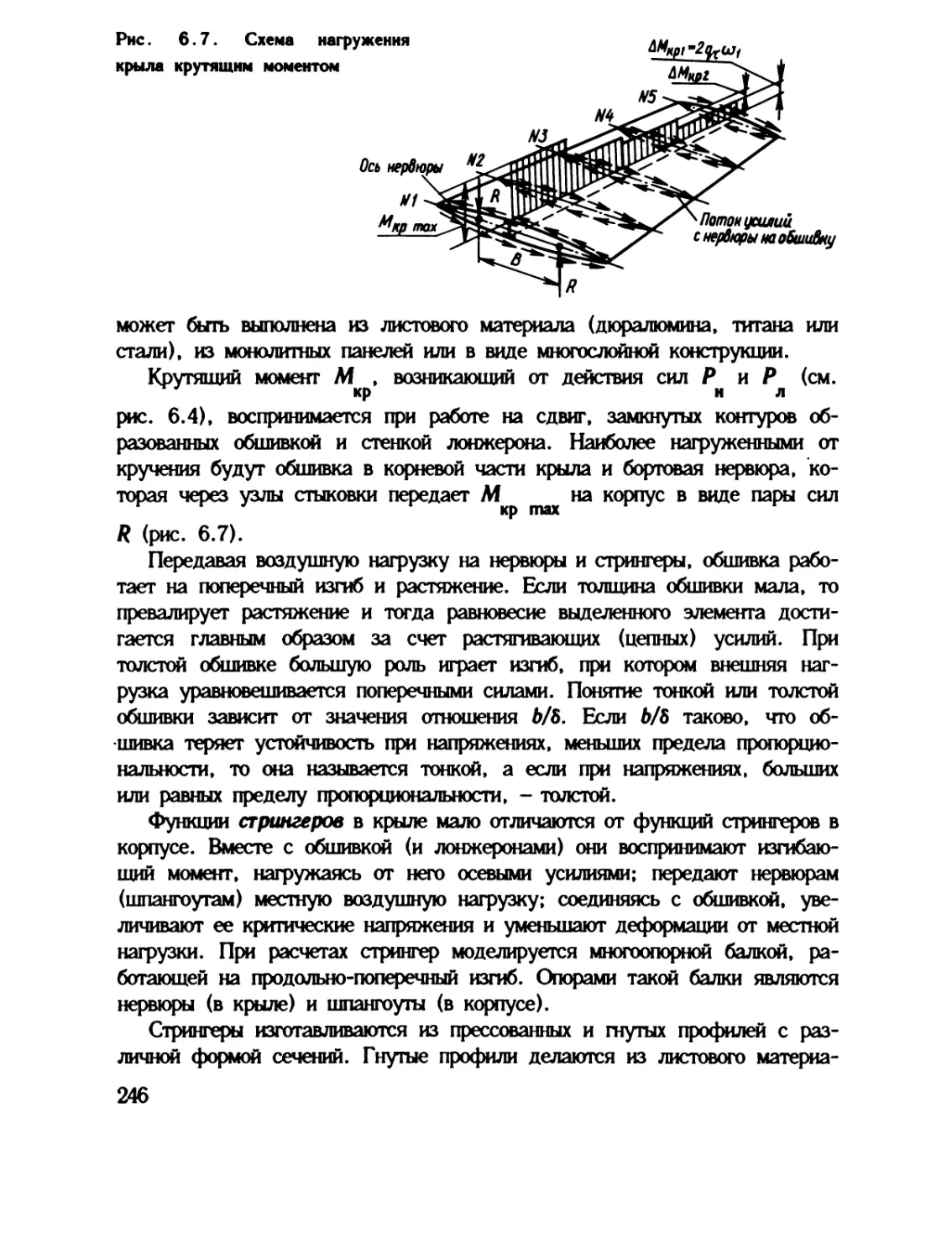









































































































Author: Самарин А.В. Голубев И.С.
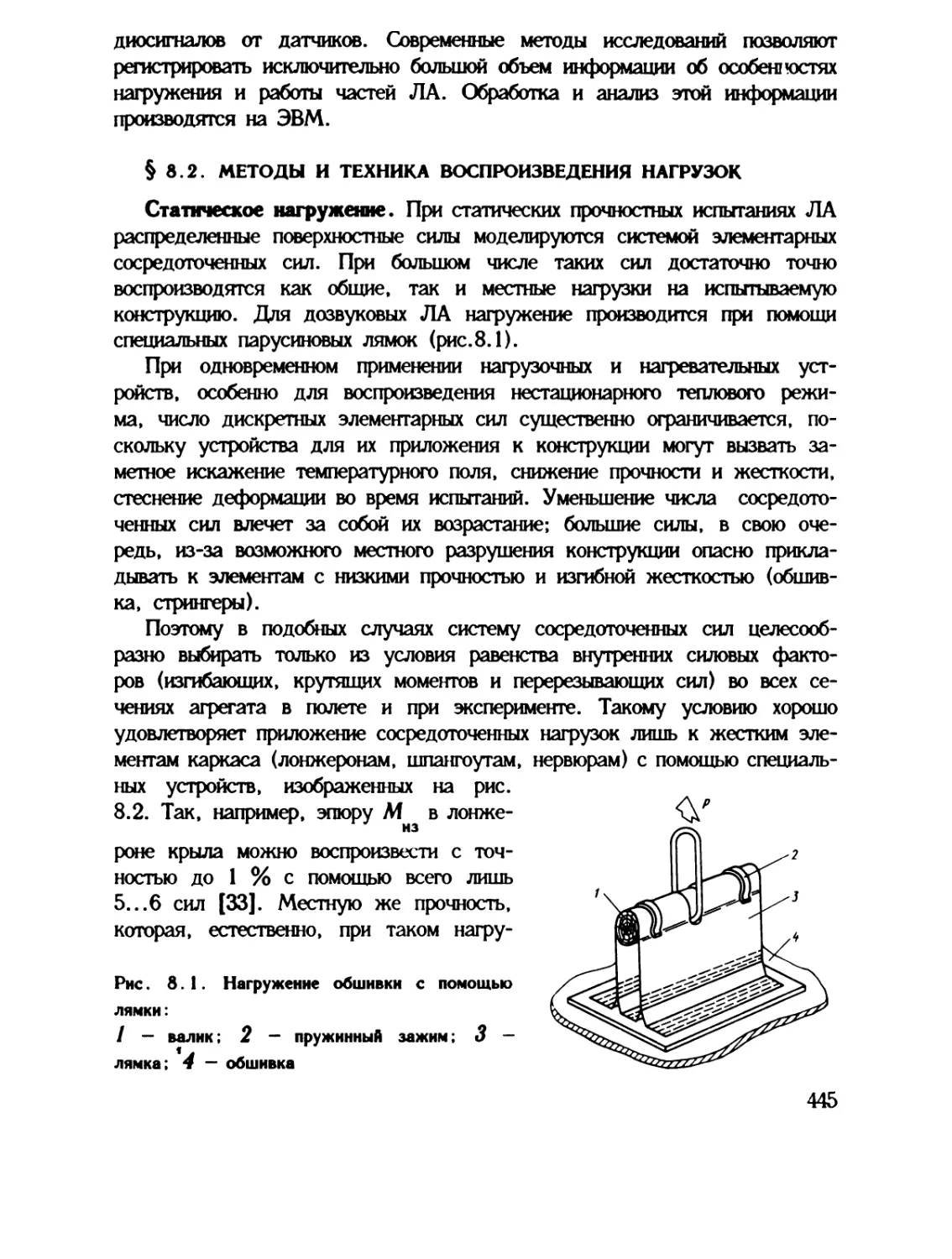
Tags: авиация и космонавтика летательные аппараты ракетная техника космическая техника воздушный транспорт авиация и воздушные соединения воздушные линии и аэропорты инженерия авиация конструирование авиационное оборудование учебник для вузов издательство машиностроение
ISBN: 5-217-01041-X
Year: 1991




для вузов
п.с.
А.В. Сахарин
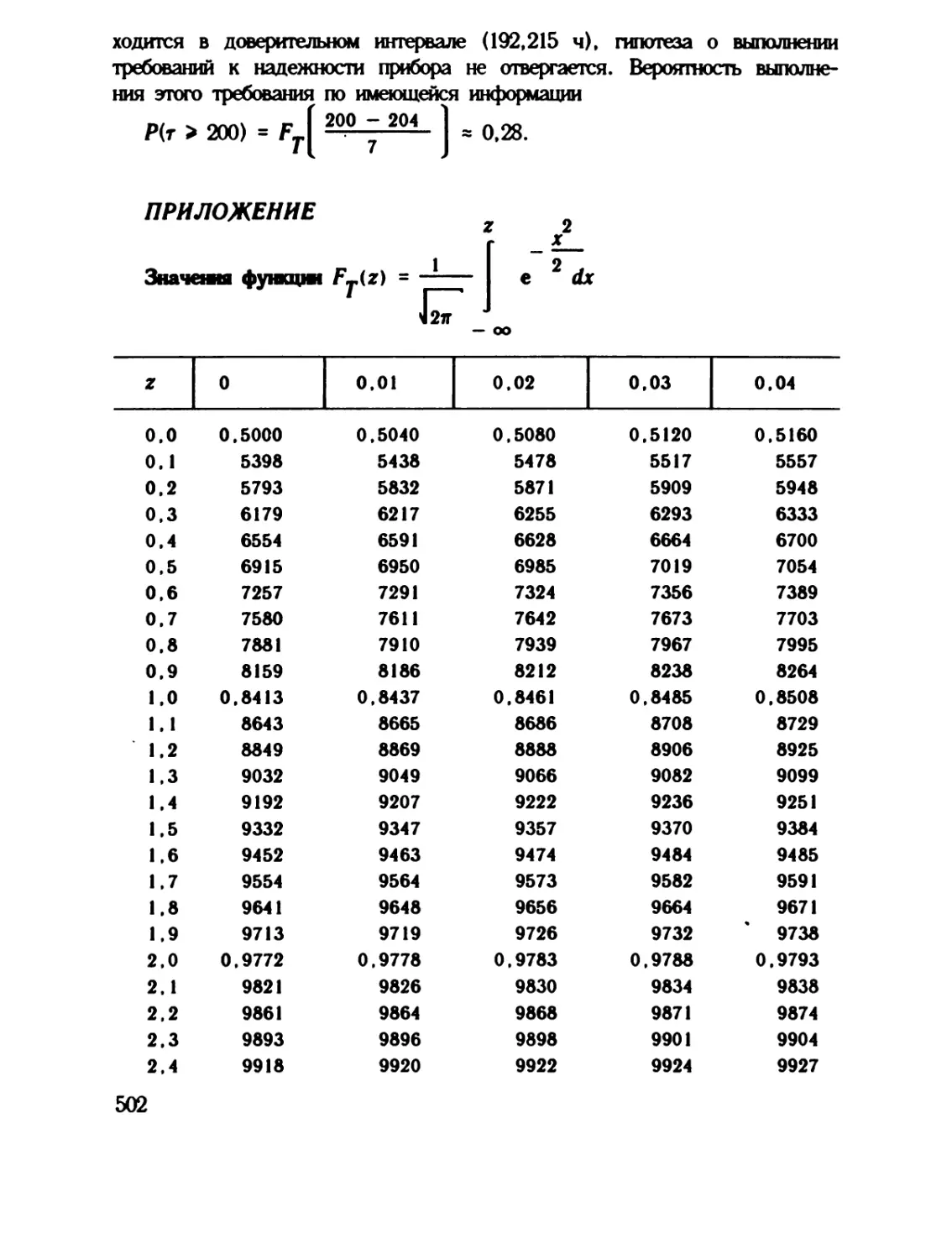
Пргж--'ЗВАНИЕ
КОЕ7Г.. -АЦИЙ
ЛЕТАТЕЛЬНЫХ
АППАРАТОВ
МАШИНОСТРОЕНИЕ
ДЛЯ ВУЗОВ
И.С. Голубев
А.В. Самарин
ПРОЕКТИРОВАНИЕ
КОНСТРУКЦИЙ
ЛЕТАТЕЛЬНЫХ
АППАРАТОВ
Допущено Государственным комитетом СССР по
народному образованию в качестве учебника для
студентов высших технических учебных заведений
МОСКВА
«МАШИНОСТРОЕНИЕ»
1991
ББК 39.52-02я73
Г62
УДК 629.73.001.66(075.8)
Рецензенты: кафедр3 "Конструкция и проектирование лета-
тельных аппаратов” Казанской авиационного института и кафедра
’’Прочность элементов Летате/<ьных аппаратов из композиционных ма-
териалов" Московского авиаиИ0™0110 техноло™ческого института
Голубев И.С., Самарин А.0’
Г62 Проектирование КонструкИ^ летательных аппаратов: Учебник для
студентов втузов. — Дд . ^а^шностроение, 1991. — 512 с.: ил. 229.
ISBN 5-217-01041-х
Изложены прннцИпы проектирования конструкций автоматических
летательных аппарат^ вопр00- выбо₽а " оптимизации параметров
конструкций. Пока»Цц объективная необходимость автоматизации
проектно-конструкторсиМх раб^' области первоочередной автомати-
зации н пути ее • Большое внимание уделено физическим
моделям работы снлпма, цсНструиинй. неформальным н приближенным
методам их проектмр._______При атом задачи синтеза тесно увязаны
с задачами анализ*, yЧитЫ*л,otш”в, П»евоваиия прочности. жесткости.
технологии производства и 9кслЛгатации летательных аппаратов.
2705140400-401 пе
Г ' 038(00-91 ' 96-90
ББК 39.52-02я73
ISBN 5-217-01041-Х
© И.С. Голубев. А.В. Самарии,
1991
ПРЕДИСЛОВИЕ
Конструкторская подготовка студентов - одно из наиболее трудных
направлении в инженерном образовании. Это связано с тем, что в облас-
ти создания летательных аппаратов (ЛА) быстро развиваются новые тен-
денции и направления, пришедшие на смену традиционным подходам к ме-
тодам проектирования и производства, которые в настоящее время оказа-
лись во многом исчерпанными и начали тормозить дальнейшее повышение
технического уровня авиационной техники.
Новые возможности в этом смысле открываются на основе более
глубокого использования результатов научно-технического прогресса и
внедрения в инженерную практику систем автоматизированного проекти-
рования и конструирования.
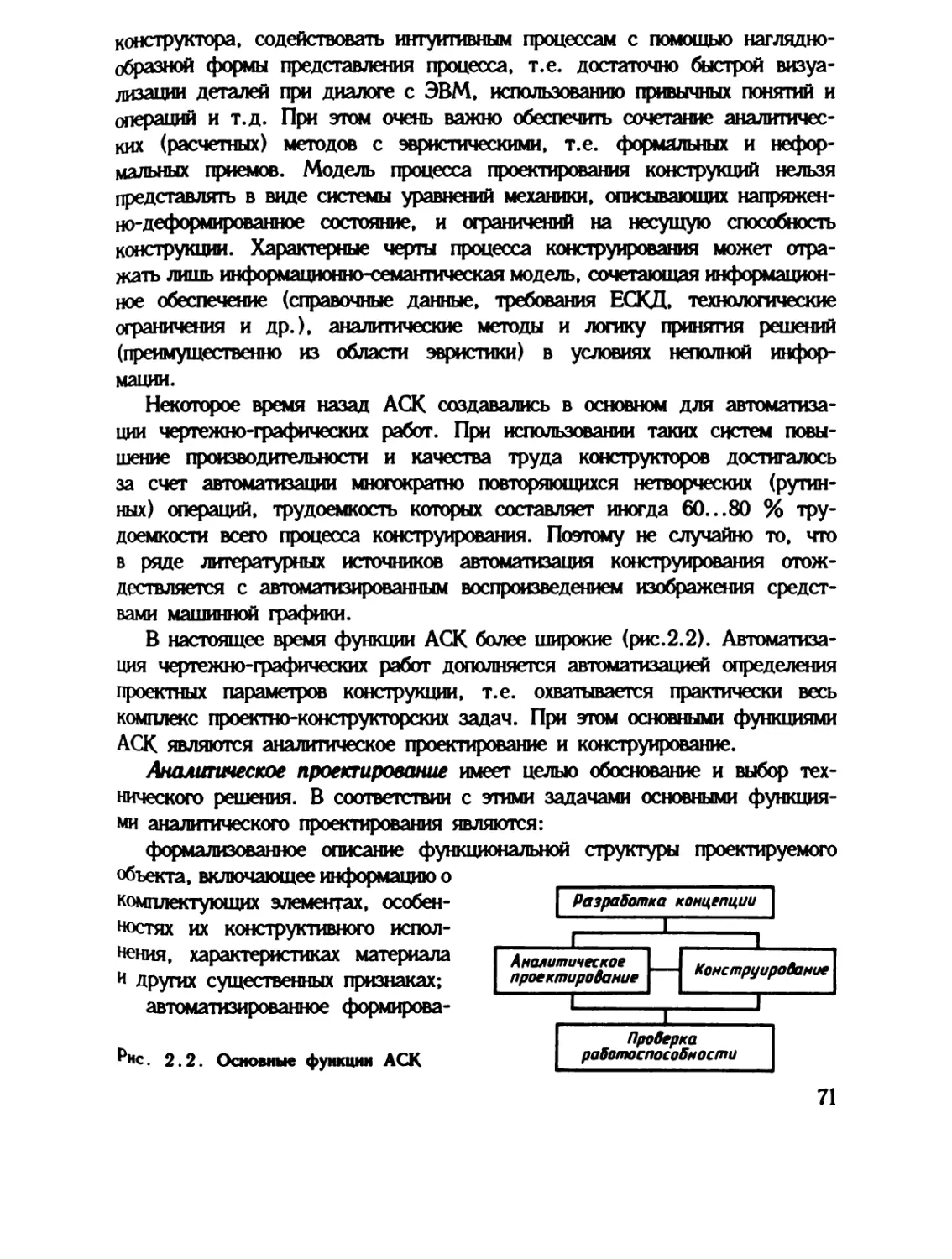
При рассмотрении процесса проектирования особо выделены две взаи-
мосвязанные группы задач: аналитическое проектирование и конструиро-
вание. Аналитическое проектирование имеет целью обоснование и выбор
технического решения. Конструирование - это заключительный этап про-
ектирования, включающий в себя конструктивно-технологическую прора-
ботку конструктивной схемы, выбранной на предыдущем этапе, и выпуск
рабочих чертежей. Задачи конструирования в учебнике изложены с пози-
ций требований и возможностей машинной графики. Особое внимание уде-
ляется организации диалога конструктор - ЭВМ. Одновременно показыва-
ется и роль неформального аспекта при проектировании конструкций.
В соответствии с программой курса учебник включает в себя три раз-
дела: методологию проектирования, инженерные методы проектирования и
пути обеспечения надежности конструкций. Первый раздел отражает ос-
новные концепции, на которых базируется современная теория проектиро-
вания конструкций. Во втором разделе изложены практические рекоменда-
ции по конструированию основных агрегатов планера ЛА и двигательной
установки. При этом основное внимание уделяется физическим моделям,
разъяснению смысловых положений с учетом того, что применение строгих
математических моделей - это особый этап проектирования конструкций,
содержание которого с точки зрения обучения конструированию менее ин-
формативно. Третий раздел содержит вопросы обеспечения надежности
конструкций при проектировании и экспериментальной отработке.
3
Методы решения задач проектирования, как известно, принципиально
отличаются от методов решения задач математики, механики и других
точных наук. Опыт показывает, что усвоение сути системного подхода,
учет неопределенности условий функционирования, разноречивости требо-
ваний к конструкциям происходят легче на конкретных примерах. Поэтому
в учебнике им уделяется значительное внимание. Взаимная увязка общего
и частного, иллюстрации концептуальных положений конкретными приме-
рами и одновременно выявление общих закономерностей на основе рас-
смотрения частных методик и рецептур является общеметодическим
приемом, широко используемым в настоящем учебнике.
Курс "Проектирование конструкций ЛА" является завершающим в цикле
конструкторской подготовки студентов. Он базируется на предшествующих
общеинженерных дисциплинах (материаловедение, сопротивление материа-
лов, детали машин и др.), а также специальных дисциплинах (основы
устройства ЛА, прочность ЛА, аэродинамика). Знание основ этих дисцип-
лин совершенно необходимо при изучении настоящего курса.
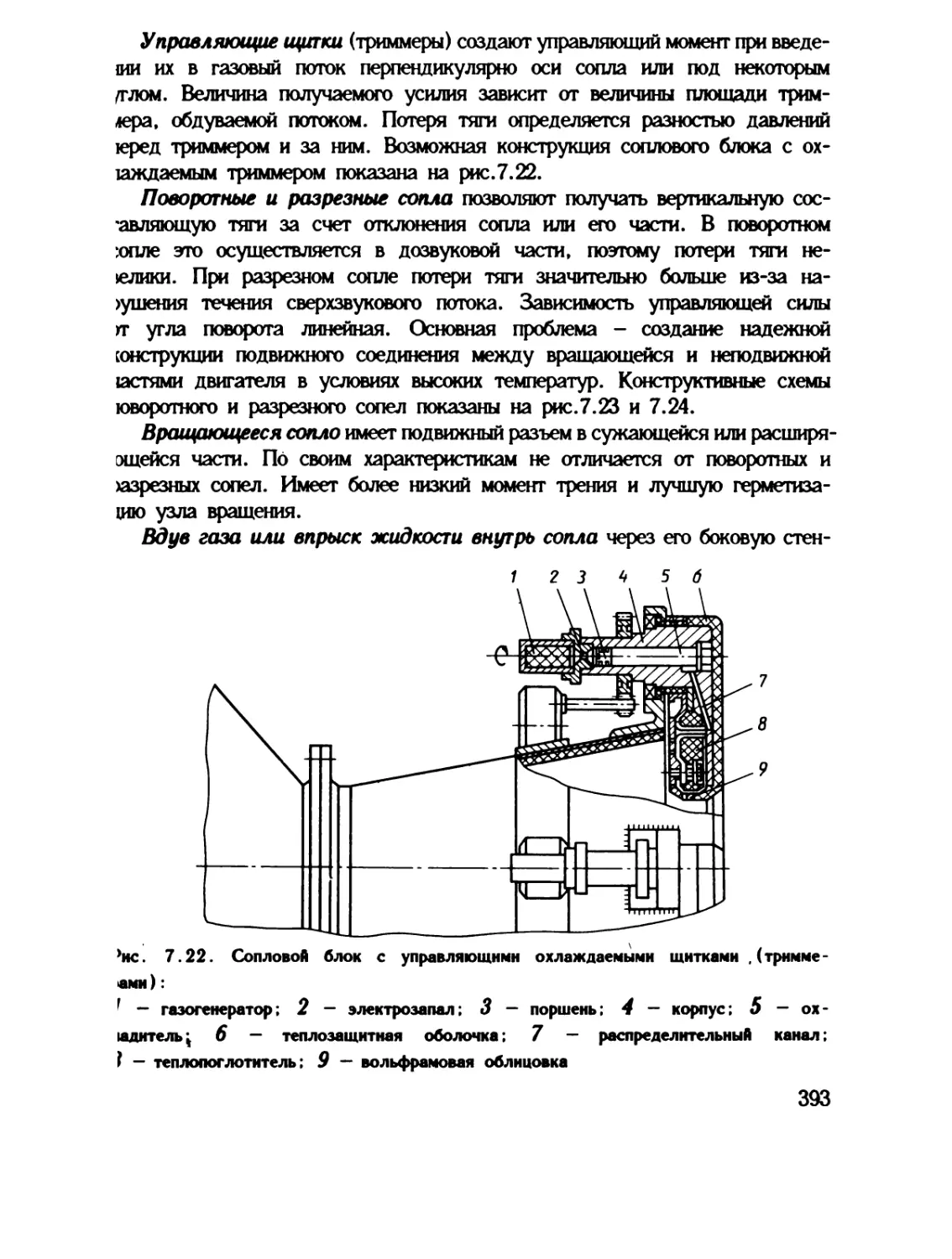
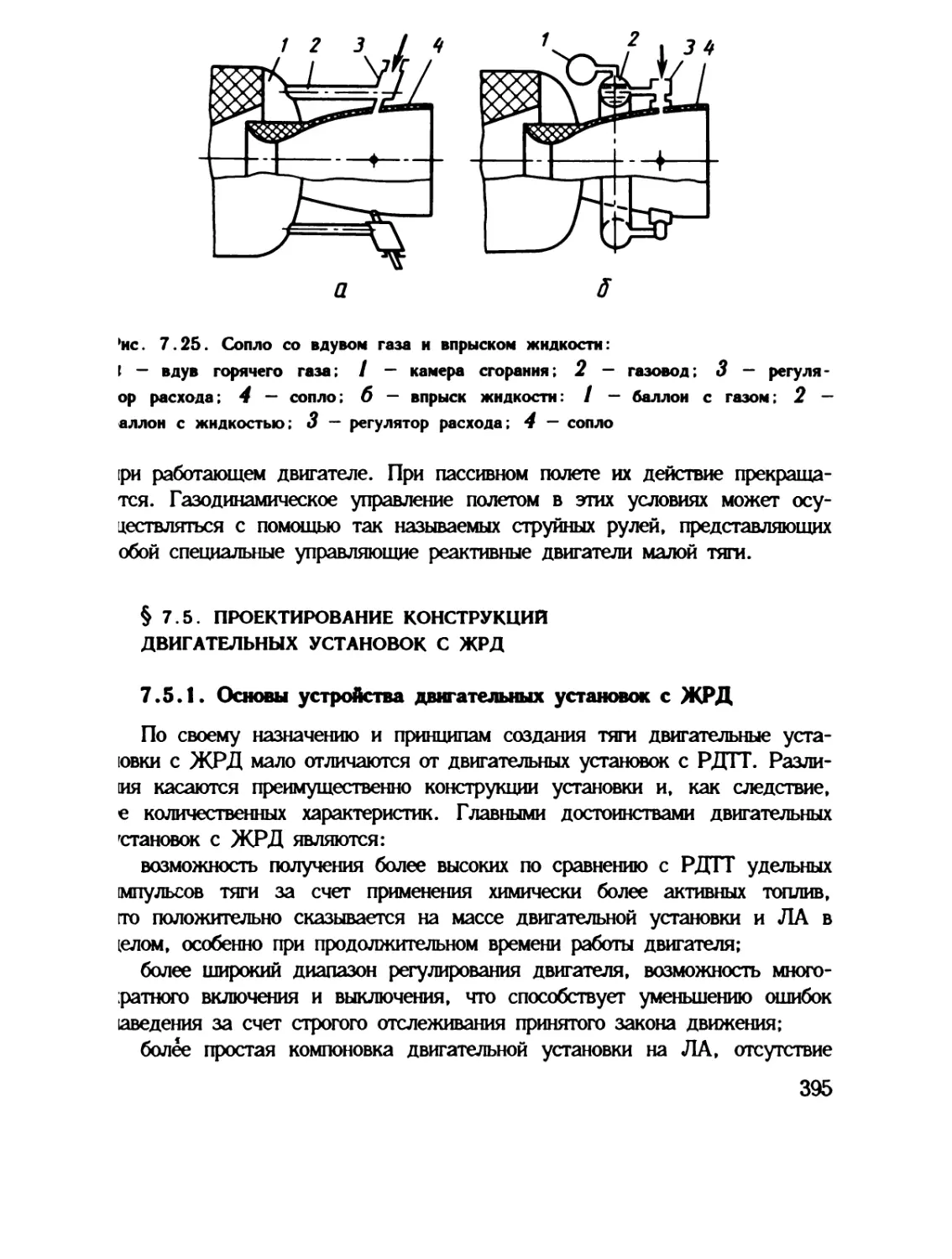
Предисловие, гл.1, 2, 3, 4, 9 и §§ 5.1...5.4, 7.5 и 7.6, написаны
И.С.Голубевым; гл.6, 8 и §§ 5.5, 5.6, 7.1...7.4 написаны А.В.Сама-
риным.
Авторы выражают благодарность д-ру техн.наук Б.М.Авхимовичу и
канд.техн.наук В.В.Андрееву, И.А.Егорову, Р.Е.Либерзону, И.К.Туркину
за помощь, оказанную при подготовке рукописи книги, и коллективам
кафедр "Прочность элементов ЛА из композиционных материалов" МАТИ,
"Конструкция и проектирование ЛА" КАИ и их руководителям чл.-корр.
АН СССР, д-ру техн.наук, проф. В.В.Васильеву и д-ру техн.наук, проф.
В.Г.Шатаеву за большую работу по рецензированию рукописи и ряд
конструктивных замечаний и методических советов, которые были учтены
при окончательной доработке рукописи.
Авторы признательны Машиностроительному конструкторскому бюро
"Радуга", выступившему спонсором данного издания.
Раздел I. МЕТОДОЛОГИЯ ПРОЕКТИРОВАНИЯ
КОНСТРУКЦИЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Глава!. ОБЩАЯ ПОСТАНОВКА ЗАДАЧИ
ПРОЕКТИРОВАНИЯ КОНСТРУКЦИЙ.
ОСНОВНЫЕ ТРЕБОВАНИЯ
К КОНСТРУКЦИЯМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
§1.1. ОСНОВНЫЕ ЭТАПЫ СОЗДАНИЯ ЛА
И ЗАДАЧИ. РЕШАЕМЫЕ НА КАЖДОМ ЭТАПЕ
Создание летательного аппарата - это сложный, многогранный про-
цесс, в котором участвуют многие коллективы промышленных предприятий,
конструкторских бюро и научных организаций. Центральное место в этом
процессе занимает этап проектирования.
Трудно сказать, когда зародилась наука о проектировании техничес-
ких систем. Любая машина, любое техническое средство проходят стадию
проектирования: рассматриваются альтернативные варианты, выбирается
решение, разрабатывается проект конструкции. Практическое проектиро-
вание и, надо полагать, основы теории своими истоками уходят в глуби-
ну человеческой истории. В течение очень продолжительного периода
процесс проектирования технических систем не требовал особых научных
методов - люди обходились опытом, традиционными навыками, интуицией.
С течением времени по мере накопления опыта появились статистические
обобщения в виде совокупности рецептур - рекомендации и руководства
по проектированию, которые в дальнейшем стали базироваться не только
на опыте, но и на теории. В настоящее время проектирование ЛА - это
научная дисциплина. Ее цель - создание проекта ЛА, обеспечивающего
выполнение заданных требований. Теоретическим фундаментом этой
дисциплины является системный анализ.
В соответствии с ГОСТом проектирование - это процесс составления
описания, необходимого для создания в заданных условиях еще не сущес-
твующего объекта, на основе задания на проектирование. Такое описание
включает в себя:
конструкторскую документацию в виде схем, чертежей, методик, алго-
ритмов и программ, отражающих функционирование объекта, выбор и опти-
мизацию его параметров и характеристик;
технологическую документацию - описание и расчет технологических
процессов, технологические карты и другие документы, определяющие (и
описывающие) процесс производства создаваемого объекта;
5
эксплуатационную документацию в виде инструкции и методических
указании по эксплуатации проектируемого объекта.
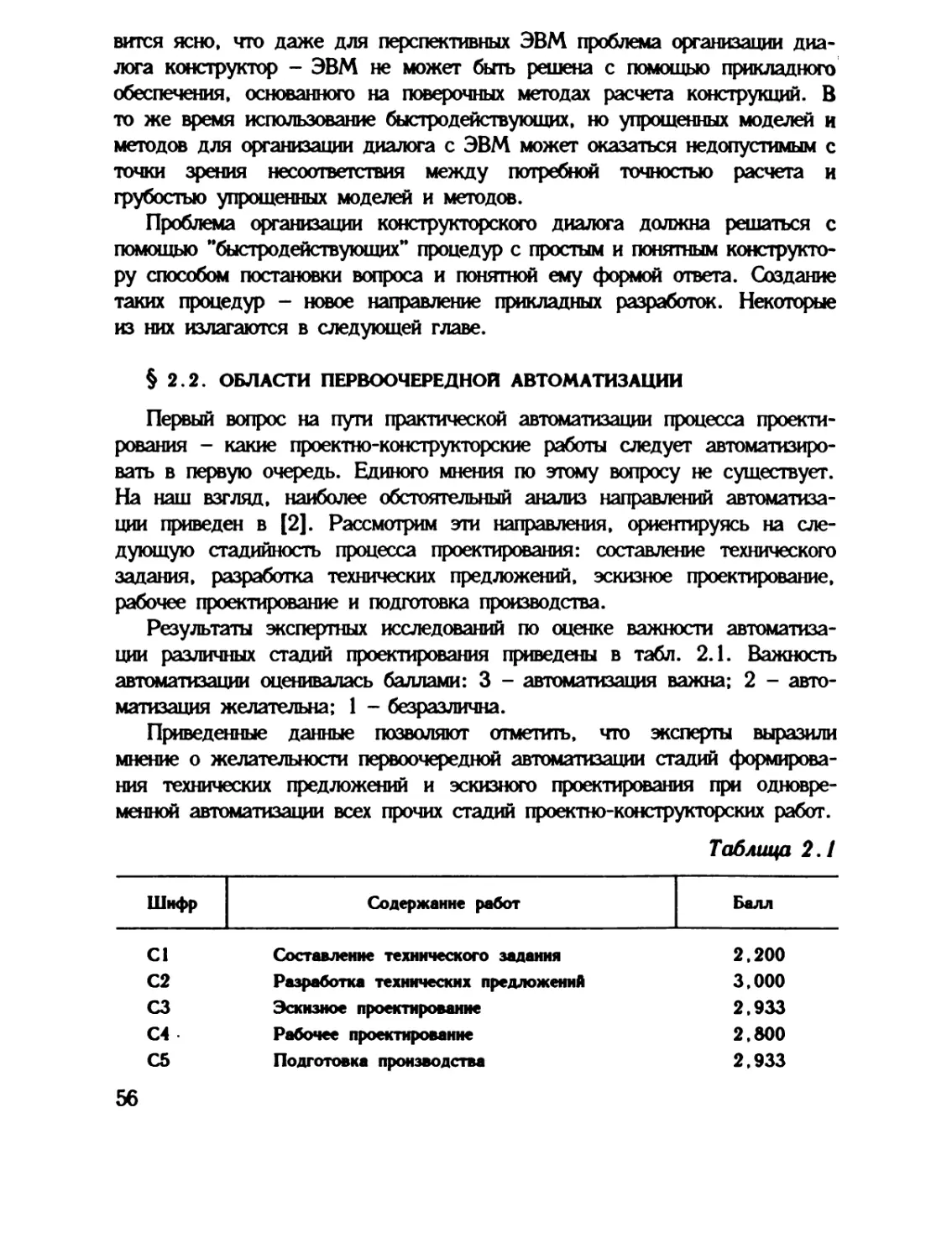
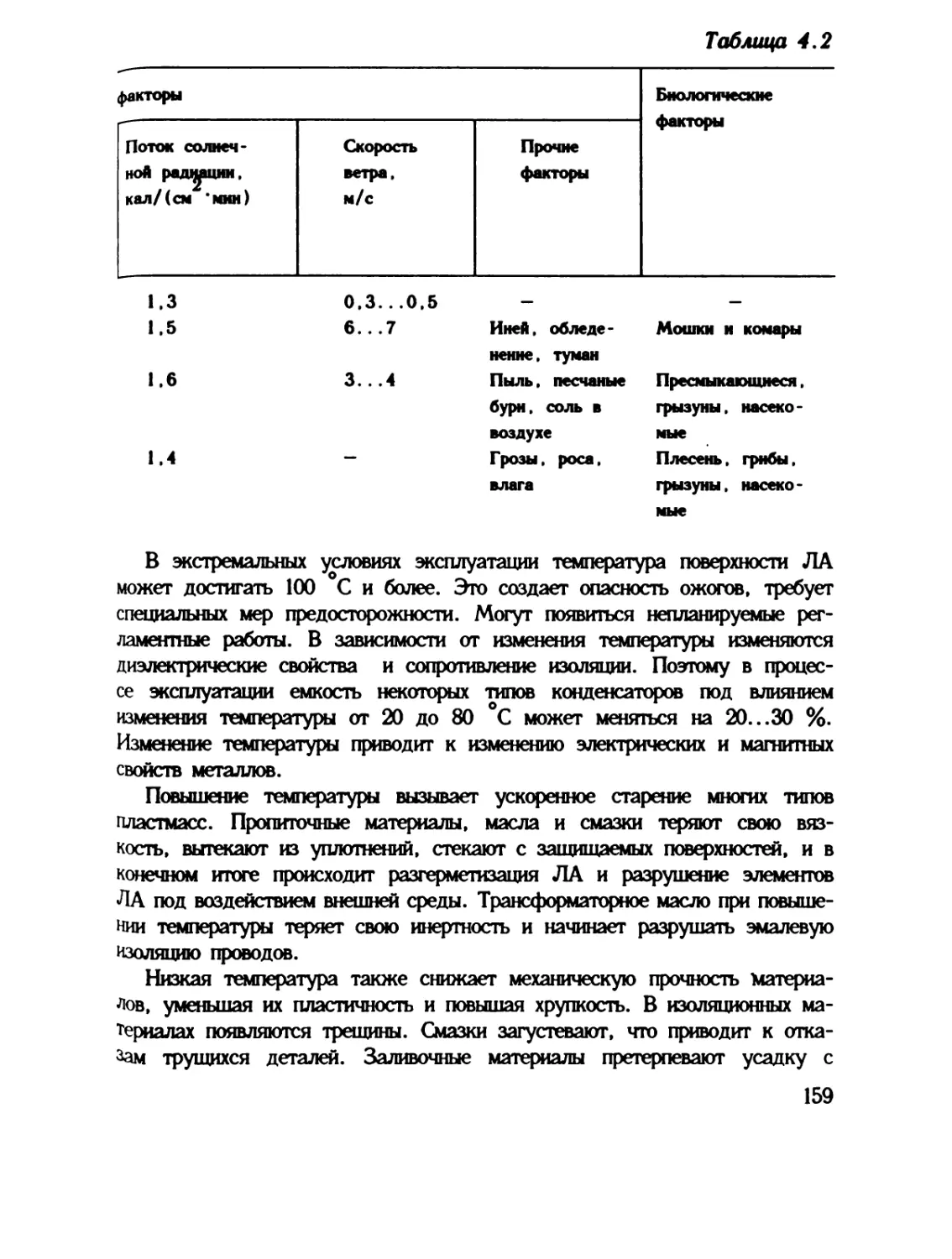
Важность решаемых задач и высокая капиталоемкость ЛА требуют
всесторонней апробации принимаемых решений, что достигается благодаря
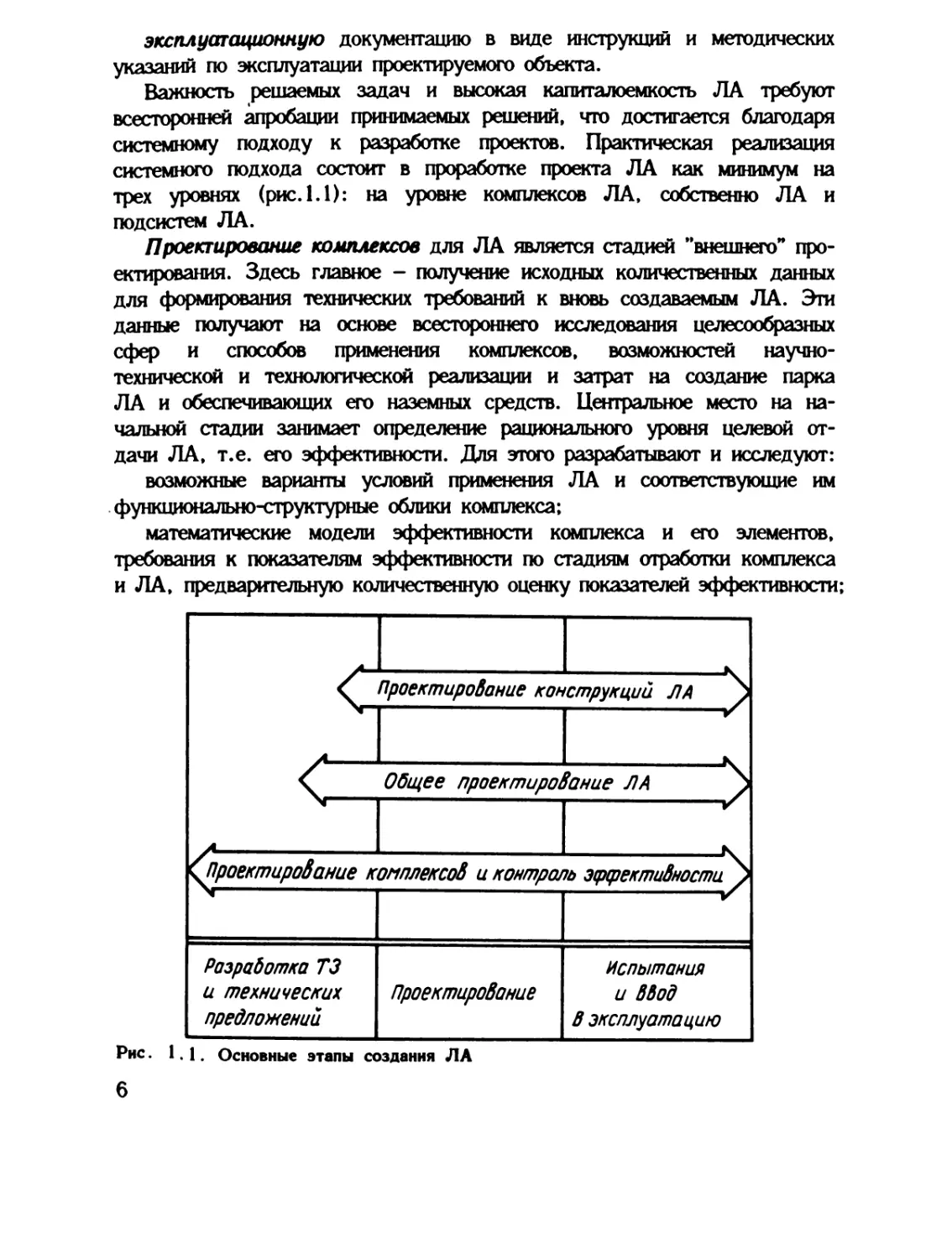
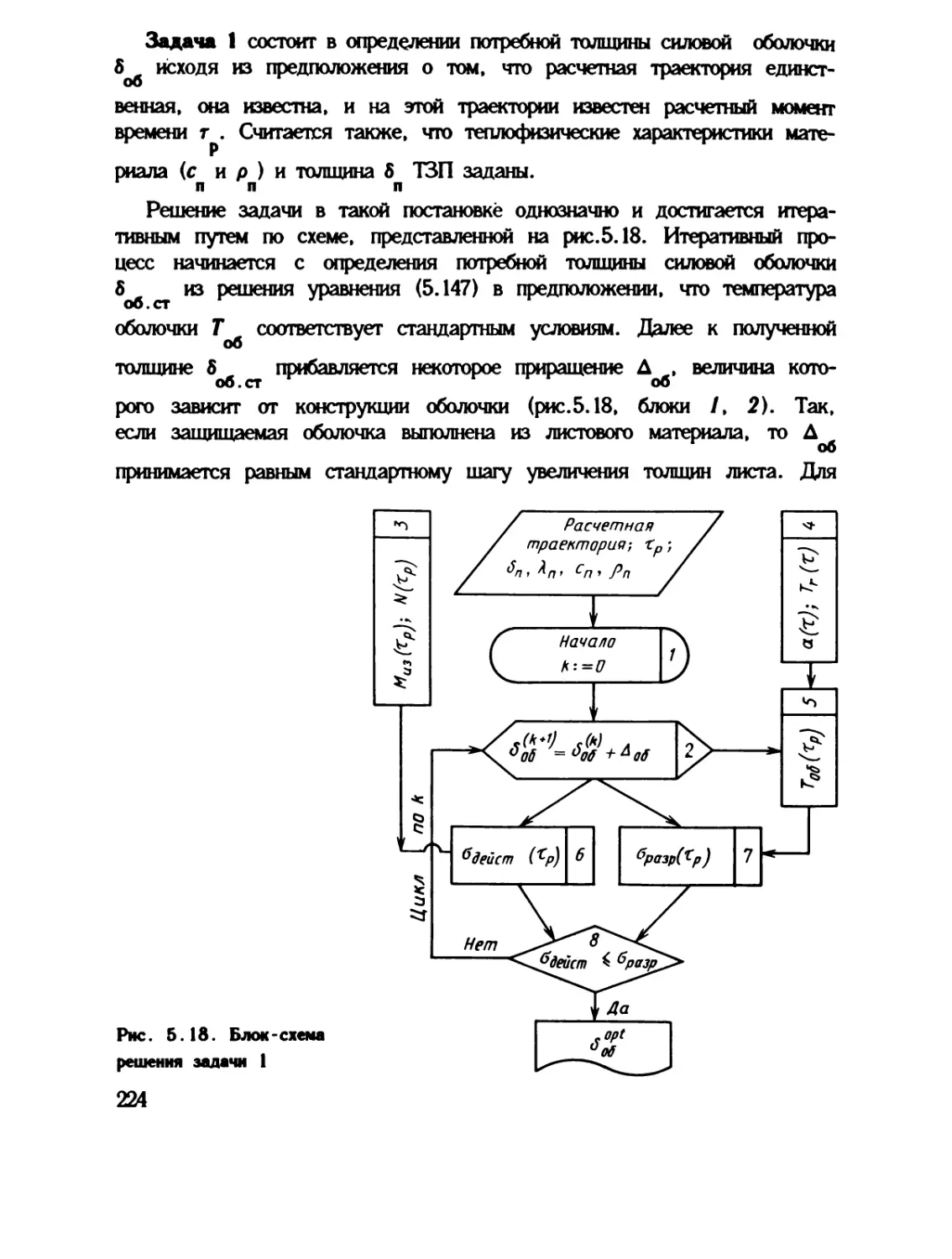
системному подходу к разработке проектов. Практическая реализация
системного подхода состоит в проработке проекта ЛА как минимум на
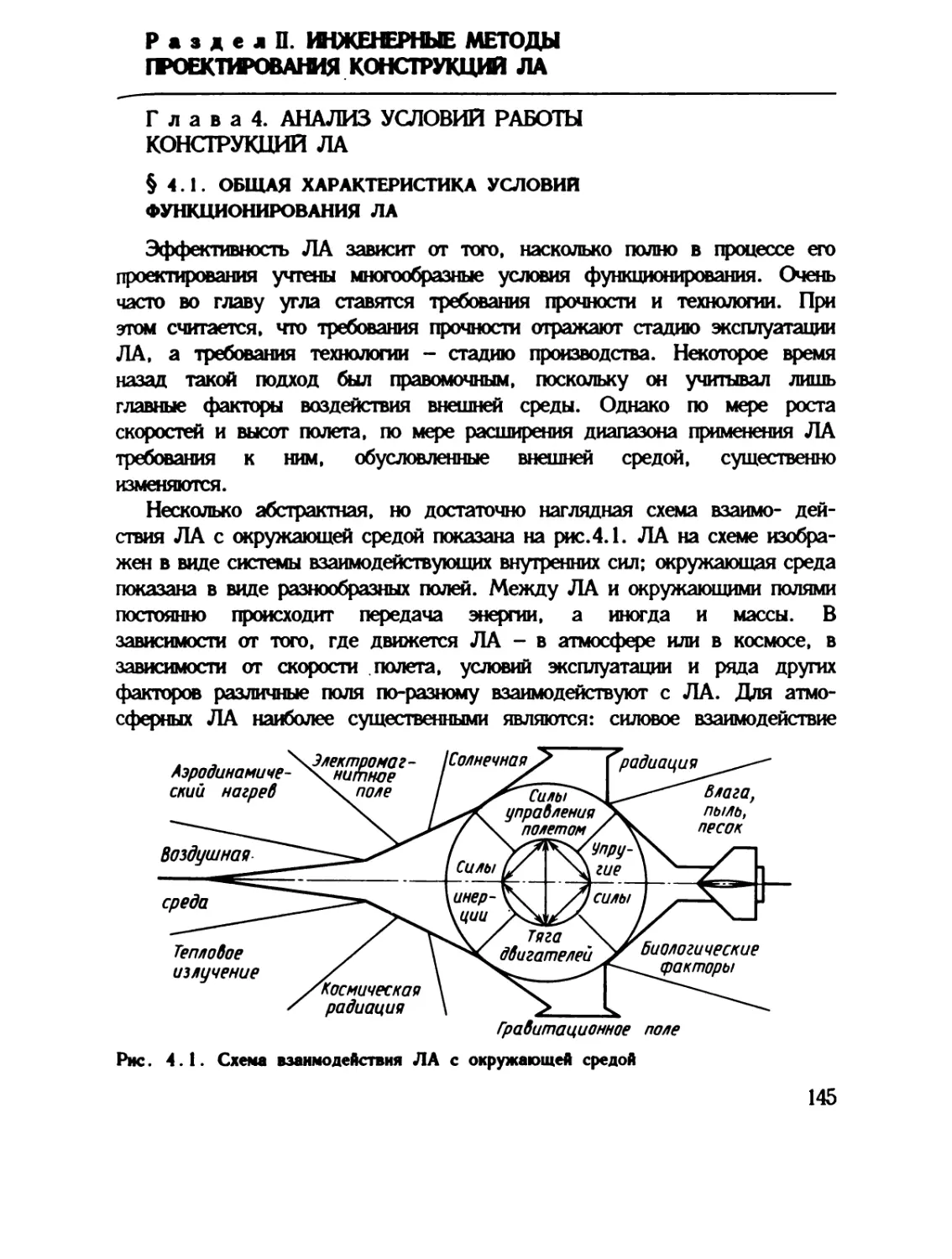
трех уровнях (рис.1.1): на уровне комплексов ЛА, собственно ЛА и
подсистем ЛА.
Проектирование комплексов для ЛА является стадией ’’внешнего” про-
ектирования. Здесь главное - получение исходных количественных данных
для формирования технических требований к вновь создаваемым ЛА. Зги
данные получают на основе всестороннего исследования целесообразных
сфер и способов применения комплексов, возможностей научно-
технической и технологической реализации и затрат на создание парка
ЛА и обеспечивающих его наземных средств. Центральное место на на-
чальной стадии занимает определение рационального уровня целевой от-
дачи ЛА, т.е. его эффективности. Для этого разрабатывают и исследуют:
возможные варианты условий применения ЛА и соответствующие им
функционально-структурные облики комплекса;
математические модели эффективности комплекса и его элементов,
требования к показателям эффективности по стадиям отработки комплекса
и ЛА, предварительную количественную оценку показателей эффективности;
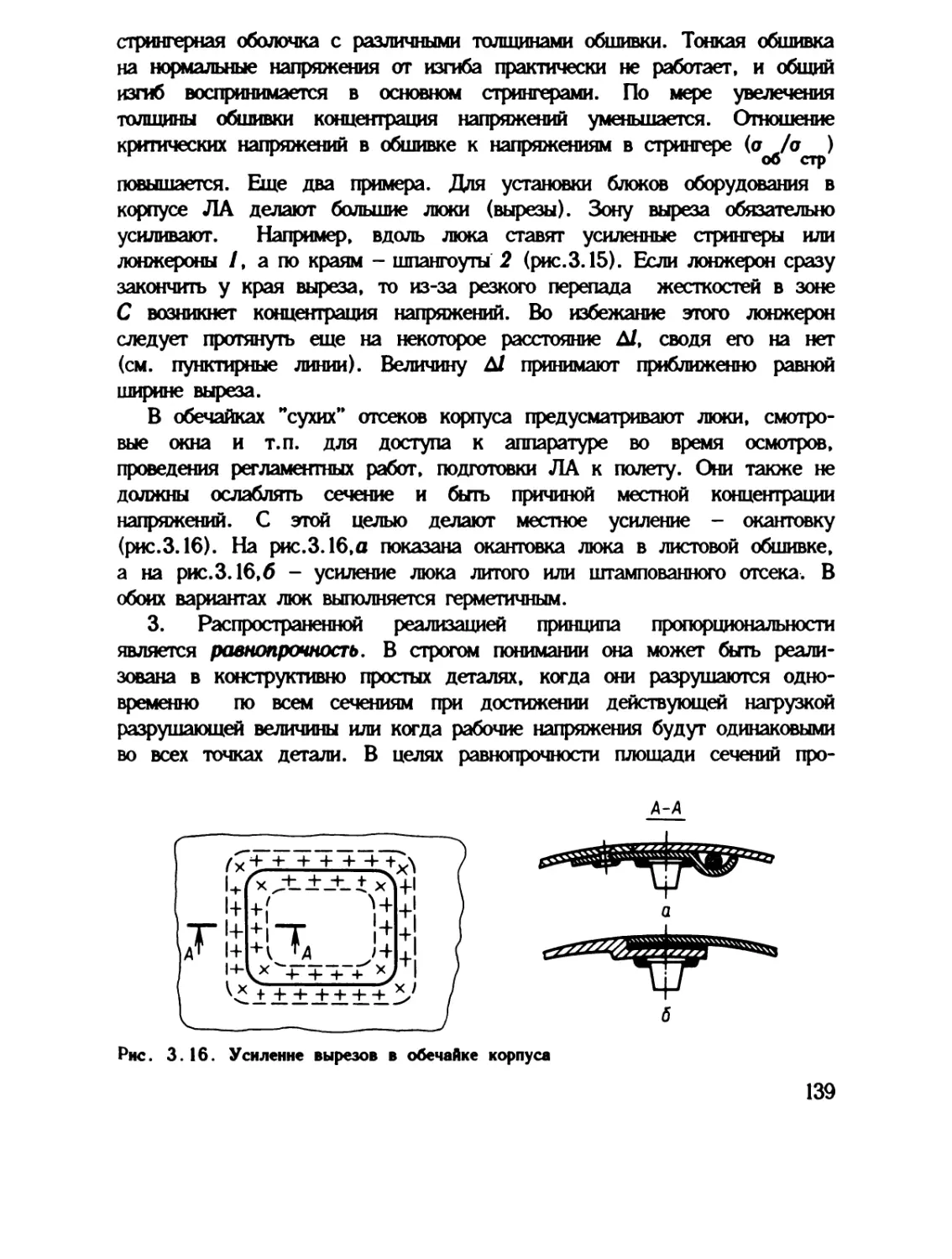
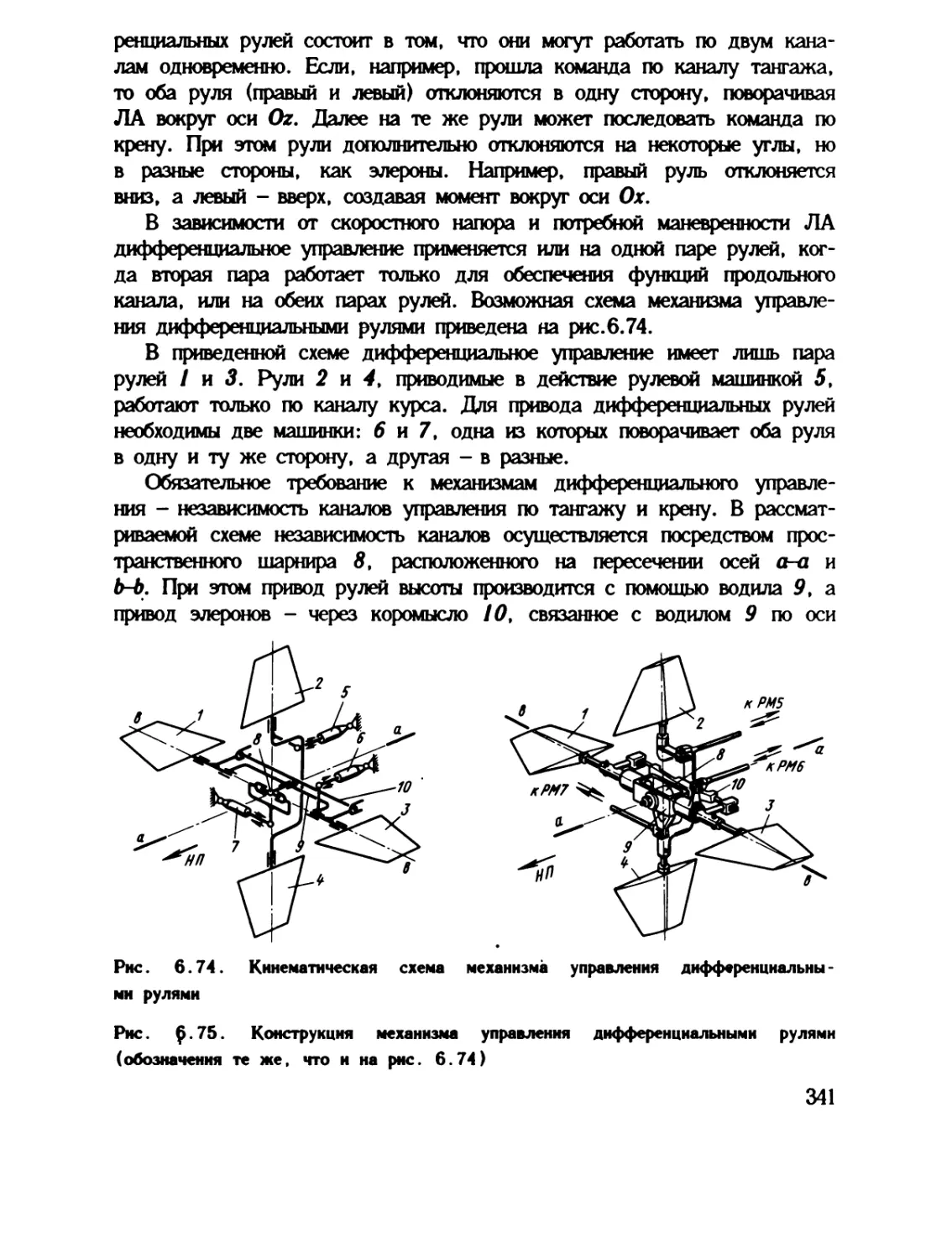
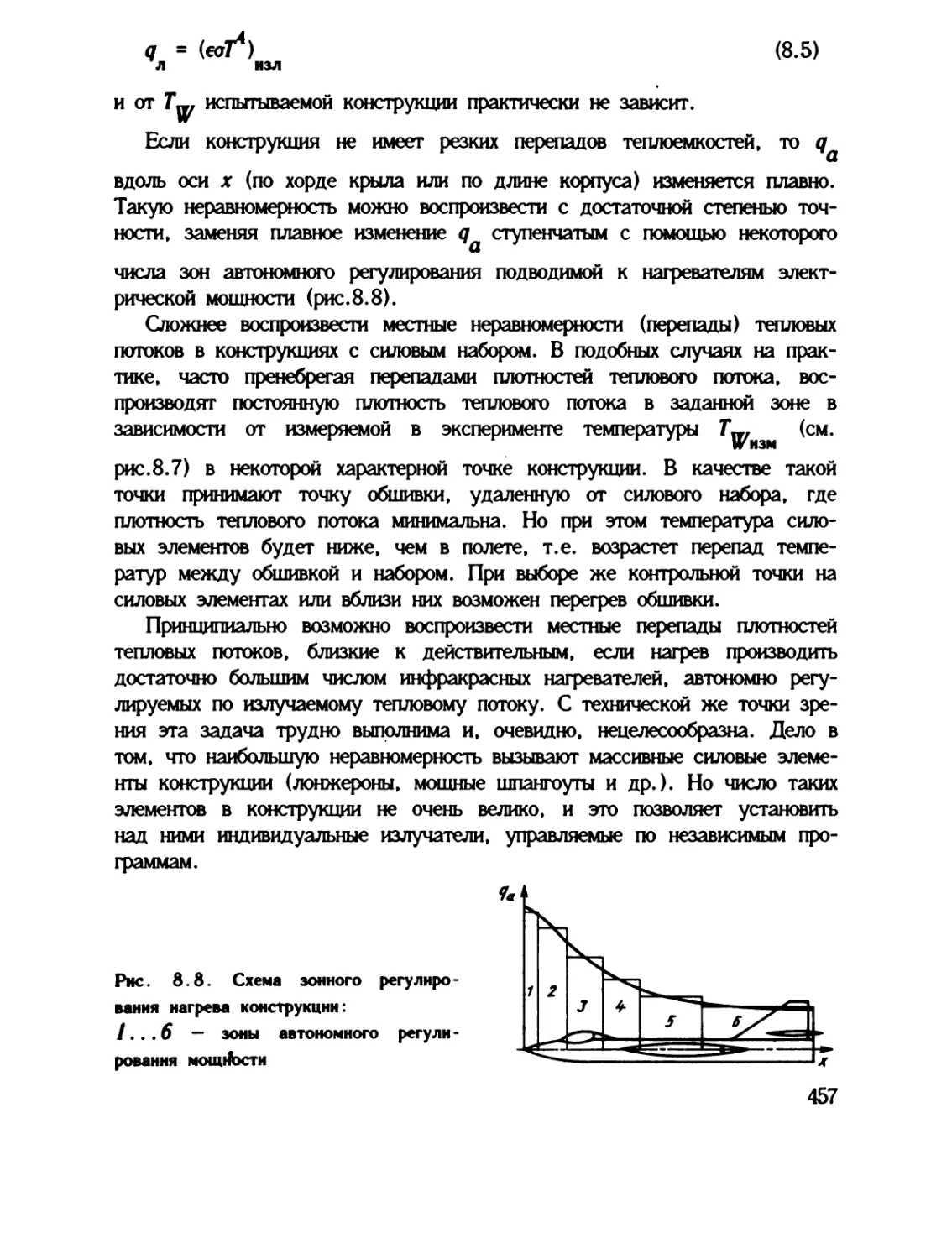
Проектирование конструкций ЛА
Общее проектирование ЛА
Проектирование комплексов и контроль Эффективности
Разработка ТЗ
и технических
предложений
Проектирование
Испытании
и ввод
в эксплуатацию
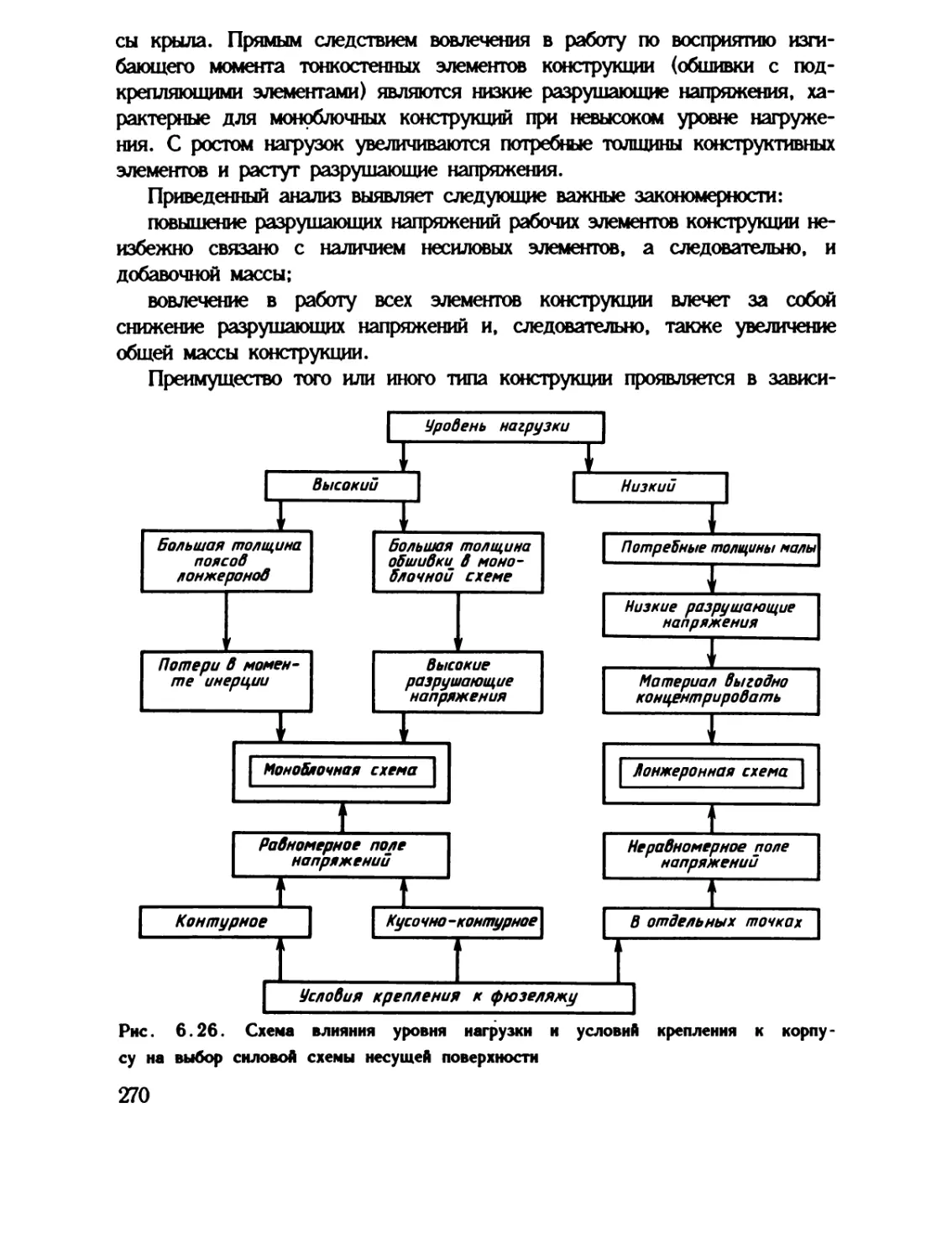
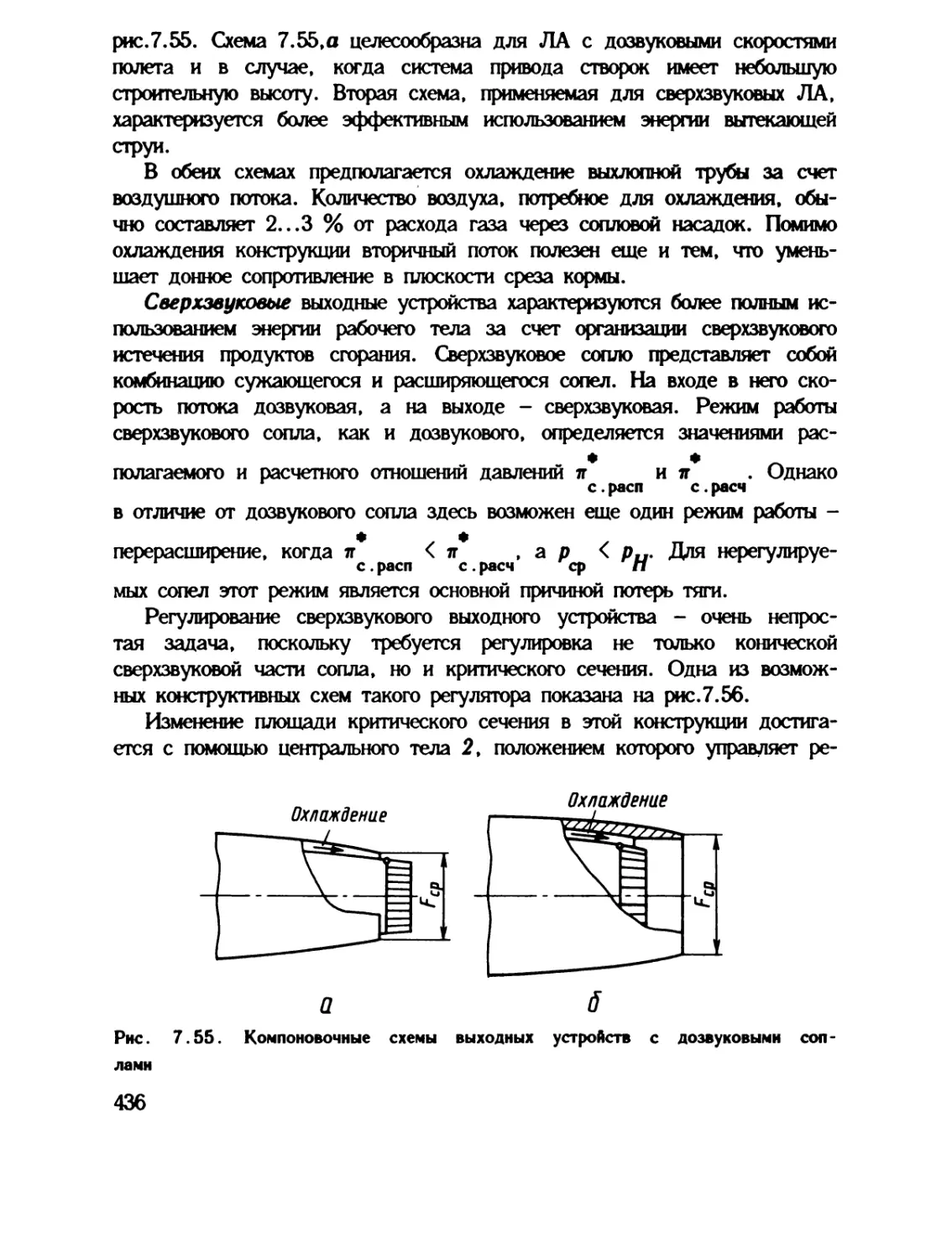
Рис. 1.1. Основные этапы создания ЛА
6
оптимальные по критерию эффективность - стоимость варианты облика
комплекса.
Все эти работы ведутся совместно и параллельно заказчиком и разра-
ботчиком - опытным конструкторским бюро (ОКБ). Основным результатом
исследований являются в основном согласованные обеими сторонами так-
тико-технические требования (ТТТ) к новому ЛА.
После этого начинается собственно проектирование ЛА на отраслевом
уровне (в ОКБ). Одновременно продолжаются исследование комплекса
заказчиком, проведение сравнительного анализа различных способов
обеспечения эффективности с учетом реально принимаемых технических
решении, уточнение показателей эффективности по результатам макети-
рования ЛА и экспериментальной отработки элементов комплекса и т.д.
В ОКБ начальная стадия проектных изысканий состоит в разработке
технических предложений. Здесь прорабатываются возможные принципы
реализации поставленной цели, условия применения, изготовления,
монтажа и эксплуатации ЛА. При этом широко используются информация о
достижениях научно-технического прогресса и обобщенные статистические
данные по изделиям-прототипам. Выявляются возможные принципиальные
схемы, общие виды, компоновки и летно-технические характеристики ЛА.
Стадия технических предложений - особо ответственный период.
Ошибка в выборе схемы и облика ЛА не может быть исправлена на
последующих этапах. Поэтому просматриваются по возможности все
практически реальные варианты, число которых может достигать
нескольких сот. Изыскания ведутся, как правило, с помощью систем
автоматизированного проектирования (САПР) на базе широкого исполь-
зования вычислительной техники. Результатом изысканий являются
несколько рациональных вариантов ЛА. Обликовые, летно-технические и
эксплуатационные характеристики этих вариантов в качестве аванпроекта
представляются на рассмотрение компетентных органов для принятия
решения о целесообразности дальнейшей разработки проекта.
Следующим этапом является эскизное проектирование ЛА. На этом
этапе уточняются полученные ранее параметры и характеристики, прово-
дятся широкие теоретические и экспериментальные исследования функцио-
нирования ЛА. Разрабатываются имитационные модели ЛА и его систем. На
базе вычислительной техники с использованием отдельных натурных
блоков бортовых систем моделируются условия применения, исследуются
характеристики устойчивости и управляемости. В аэродинамических
трубах продувается ряд моделей и на основе полученных данных
уточняются аэродинамическая схема и аэродинамические характеристики.
Выбираются и реализуются в конструкторско-технологической документа-
7
ции основные способы обеспечения эффективности ЛА за счет как
конструктивно-технологических и схемных решений, так и выбора
оптимальных способов организации эксплуатации и применения комплекса.
Параллельно с решением вопросов общего проектирования ЛА ведется
разработка конструкций планера и двигательной установки, т.е.
проектирование собственно конструкций ЛА (см. рис.1.1.). Для основных
агрегатов ЛА разрабатывается комплект рабочих чертежей. На
специальных стендах отрабатываются элементы двигательной установки и
отдельные новые элементы конструкций планера и его систем.
Формально завершающим этапом проектирования являются рабочее про-
ектирование и подготовка производства. Он повторяет все стадии эскиз-
ного проектирования, но характеризуется более детальной проработкой.
Основные изыскания на этом этапе связаны с экспериментальной провер-
кой практически всех нововведений. Здесь уточняется и выпускается вся
техническая документация, необходимая для изготовления ЛА.
Фактически завершающим этапом проектирования является стадия
опытного производства и испытаний ЛА. Очень важно выявить и устранить
все дефекты именно на этой стадии, чтобы исключить доработку ЛА в
период эксплуатации. Главное при этом - подтвердить выполнение
установленных в технических требованиях заказчика характеристик
эффективности. По данным опытного производства и испытаний вносятся
изменения в проект, дорабатываются рабочие чертежи и технология
изготовления ЛА. По результатам этого этапа принимается решение о
запуске ЛА в серийное производство и передаче его в эксплуатацию.
Процесс проектирования, как правило, протекает в условиях жестких
ограничений по срокам. В то же время принятые решения определяют
функциональное совершенство ЛА на весь период его существования и
обычно являются необратимыми. Широкий фронт работ, взаимодействие
различных организаций, большой объем используемой информации в
условиях сжатых сроков приводят к необходимости:
а) параллельного выполнения работ по формированию облика летатель-
ного аппарата и по разработке конструкций агрегатов планера, хотя
исходные данные для проектирования конструкций отработаны не
полностью; это обеспечивает расширение фронта работ и сокращение
сроков проектно-конструкторских проработок;
б) широкого использования накопленного опыта путем внедрения в
новые конструкции унифицированных модулей, положительно себя
проявивших на других изделиях;
в) параллельного выполнения проектных и экспериментальных работ и
проведения параметрического анализа, что позволяет, с одной стороны,
8
расширить область возможных решении, а с другой - обеспечить
надежность проектируемых изделий.
Проектирование современных ЛА представляет собой многогранный,
непрерывно усложняющийся процесс. Широкое использование возможностей
автоматизированного проектирования здесь сочетается с творческой
деятельностью высококвалифицированных специалистов, их опытом,
инициативой, талантом конструкторов. Формализованные математические
процедуры и экспертные оценки проверяются и дополняются с помощью
экспериментов.
Всесторонний анализ всего процесса проектирования летательного
аппарата выходит за рамки курса "Проектирование конструкций ЛА".
Отметим лишь наиболее характерные особенности, относящиеся непосред-
ственно к стадии конструкторских разработок.
§ 1.2. ОСОБЕННОСТИ ЭТАПА
КОНСТРУКТОРСКИХ РАЗРАБОТОК
Проектирование конструкций - важнейший этап создания любого
технического средства, будь то летательный аппарат, наземное транс-
портное средство, станок с программным управлением или какое-либо
технологическое устройство. В общем случае этот этап включает в себя
решение нескольких различных по своему типу задач. Перечислим
основные из них.
1. Поиск технических идей, решений и физических принципов дейст-
вия. На основе исследований достижений научно-технического прогресса
задачи такого рода позволяют выявить множество допустимых реализаций
конструкции (опорных вариантов), из которых затем выбирают наилучшее
решение.
2. Выбор рационального технического решения при заданном
физическом принципе действия. Техническим решением называют конструк-
тивное описание функциональной структуры проектируемого объекта,
включающее информацию о функциональных элементах (блоки, узлы,
детали), их взаимном расположении и взаимосвязи, особенностях
конструктивного исполнения, геометрической форме, конструкционных
материалах и других существенных признаках, в том числе и о
соотношениях значений параметров. Технические решения являются как бы
материализацией выбранной технической идеи и, как следует из
определения, могут отличаться формой функциональных элементов и
материалом, из которых они изготовлены, числом элементов, способом их
соединения и другими признаками.
9
3. Определение оптимальных значений параметров выбранного техни-
ческого решения. К параметрам обычно относят размеры элементов,
расстояние между ними, массу, температуру, частоту колебаний,
напряжение, характеристики надежности и ряд других показателей. Выбор
оптимальных значений параметров - наиболее разработанный класс задач,
что объясняется тем, что эти задачи лучше других формализуются и на
сегодня имеют довольно хорошее математическое обеспечение в виде
методов линейного, нелинейного, динамического, стохастического
программирования, а также различных методов дискретной оптимизации.
4. Конструирование и выпуск технической документации и рабочих
чертежей. В настоящее время этот этап проектирования конструкций,
особенно выпуск рабочих чертежей, является одним из самых трудоемких.
Здесь преобладают неформализованные методы работы, пока еще мало
автоматизации, но вместе с тем довольно много трудоемких рутинных
работ, что ставит автоматизацию графических работ в число
первоочередных.
5. Планирование и проведение натурного эксперимента и обработка
его результатов. Главная цель этих исследований состоит в подтверж-
дении работоспособности конструкции и расчетных показателей
эффективности. Очень важно, чтобы простота и убедительность
экспериментальной проверки сочетались с малой трудоемкостью и
экономичностью. Разнообразные условия функционирования проектируемой
системы целесообразно имитировать в лабораториях на специальных
стендах и здесь же проводить всестороннюю проверку конструкций. Такой
подход позволяет обеспечить более высокий уровень надежности
создаваемой системы и существенно сокращает объем и стоимость
полнонатурных экспериментальных исследований на заключительном этапе.
Здесь мы привели теоретический перечень задач. В реальных условиях
могут быть отклонения и изменения в этом перечне. Они зависят от
проектируемого объекта, традиций конструкторского бюро, квалификации
коллектива конструкторов, тематического научно-технического задела и
других факторов. ЛА - особо динамичные системы. Их проектирование
связано с целым рядом специфических особенностей, учет которых
является важным условием повышения качества проектов. Рассмотрим эти
особенности.
Первая особенность - необходимость сочетания формального и
неформального подходов при проектировании. В настоящее время заметно
усиление внимания к математической стороне процесса проектирования.
Особенно бурное развитие формальных методов проектирования началось
после 50-х годов, когда на основе теорий эффективности, игр и
10
массового обслуживания появилась синтетическая дисциплина
исследование операции, которая затем постепенно переросла в системный
анализ.
Системный анализ - это техническая дисциплина, развивающая методы
проектирования сложных технических и народнохозяйственных систем,
организационных структур и т.д. Системный анализ как дальнейшее
развитие теории исследования операций включает в себя последнюю со
всем арсеналом средств, развитых в ее рамках. Поскольку любой анализ
сложных систем невозможен без использования ЭВМ, то, когда говорят о
методах системного анализа, имеют обычно в виду процедуры, основанные
на использовании ЭВМ.
Современная теория проектирования технических систем имеет
обширный инструментарий, включающий в себя развитой математический
аппарат и современные вычислительные системы. И все же какие бы
успехи не делала теория проектирования с помощью этих новейших
современных методов, опирающихся на формализованное описание
ситуаций, все еще остаются необходимыми, а подчас играют решающую
роль, традиционные приемы анализа, использующие опыт и интуицию,
способность человека к ассоциациям и многое другое, что лежит вне
математики и пока еще не присуще искусственному интеллекту.
Создание новых конструкций - это прежде всего акт творческий, и он
никогда не может быть до конца формализован. Иногда говорят, что этот
акт творчества в значительной степени может быть заменен специально
организованной системой обработки статистического материала.
Статистическая обработка параметров существующих (или возможных)
конструкций, конечно, очень важна, и ее ни в коем случае не следует
недооценивать. Но ее недостаточно в принципе. Использование только
одного статистического материала позволяет создать конструкцию, лишь
имеющую аналоги в отдельных технических решениях, т.е. подобную (или
близкую) уже существующим. Оригинальные конструкции, базирующиеся на
качественно новых технических решениях, конструкции завтрашнего дня
всегда требуют нетрафаретного мышления, смелости и таланта; их нельзя
получить на основе статистики.
Возникает вопрос, какова же роль системного анализа, т.е. формаль-
ных процедур, чем и как они могут быть полезны конструктору? Ответ на
этот вопрос можно сформулировать так. Основная задача научного анали-
за - выделить реальные альтернативы из множества мысленно допустимых,
сформировать принципы их отбора. Проблема математического моделирова-
ния состоит в описании этих принципов отбора в терминах тех перемен-
ных, которые согласно взглядам исследователя наиболее полно характе-
11
ризуют изучаемый предмет. Принципы отбора сужают множество допустимых
вариантов, отбрасывая те, которые не могут быть реализованы.
Вторая особенность - неопределенность будущих целей и условий
функционирования ЛА и его подсистем. Эта особенность связана с
большим промежутком времени, проходящим с начала проектирования ЛА до
его применения. За это время возможно существенное изменение условий
применения, а также места и значимости проектируемого ЛА в более
общей системе, составной частью которой он является.
Неопределенность обусловлена также особенностями параметров самой
проектируемой системы (ЛА, двигательной установки, конструкции
планера и др.). Например, для системы, разработанной в сжатые сроки
при ограниченном гарантийном сроке эксплуатации (случай модернизации
существующей системы), степень неопределенности будет существенно
ниже, чем для вновь разрабатываемой системы. Чем эффективнее
разрабатываемая система, тем более существенную реакцию на ее
появление можно ожидать, что, в свою очередь, также приводит к
возрастанию степени неопределенности.
Применение систем происходит, как правило, в условиях противодейс-
твия, которое направлено на уменьшение эффективности системы. Хотя
противодействие связано с неопределенными ситуациями, его учет должен
отражаться конкретно в виде некоторой совокупности таких свойств сис-
темы, которые перекрывают широкий спектр неопределенных ситуаций.
Неопределенность - это объективная реальность, с которой нельзя не
считаться. Широко распространенные оптимизационные расчеты, основы-
вающиеся на детерминированном, однозначном характере исходных данных
и условий функционирования, все в большей мере приходят в противо-
речие с реальной действительностью, поскольку те условия, для которых
данное решение оптимально, в жизни, как правило, не реализуются.
Можно, конечно, усовершенствовать существующие оптимизационные модели
и включить неопределенные факторы в число оптимизируемых параметров,
расширив их общее число. Однако подобный подход, как показывают
исследования и опыт, не оправдывает себя из-за чрезмерного усложнения
и неизбежного загрубления расчетных моделей. Более конструктивным
оказывается путь расширения неформального анализа при проектировании.
Неформальные процедуры в первую очередь связывают с прогнозирова-
нием сценариев будущих условий функционирования системы. Сценарии
строятся на базе определенных концепций - гипотез развития систем
высшего уровня. Ориентируясь на эти гипотезы, можно выявить совокуп-
ность характеристик внешних условий, целей и факторов, оказывающих
наиболее существенное влияние на облик проектируемой системы. Для
12
каждого из неопределенных факторов дается оценка его наиболее вероят-
ного значения, а также указывается возможный диапазон неопределеннос-
ти - минимальное и максимально возможные значения. Сценарии функцио-
нирования описывают возможное, а не наиболее вероятное будущее. Их
назначение - выявление ситуаций, таящих в себе угрозу для существую-
щих тенденций развития парка систем, или благоприятных возможностей
для их полного развития. Результатом анализа сценариев функционирова-
ния являются количественная оценка влияния совокупности неопределен-
ных факторов на парк систем в целом и конкретная рабочая гипотеза,
закладываемая в процесс проектирования данной системы.
Учет фактора неопределенности выдвинул в число наиважнейших требо-
ваний к системам - адаптивность, т.е. способность системы приспосаб-
ливаться к изменяющимся и неопределенным условиям функционирования.
Формы проявления адаптивности могут быть весьма разнообразны: это и
исключение экстремальных нагрузок на конструкцию, и автоматическая
коррекция работы двигательной установки, и адаптация к условиям
эксплуатации и т.д., но цель одна - снизить или исключить вредное
влияние неопределенных факторов и противодействия функционированию
системы.
Третья особенность - необходимость исследования большого числа
вариантов проектируемого элемента. Проектирование - это творческий
процесс, при котором варианты генерируются для поиска лучших
технических решений. Как правило, улучшение одного параметра за счет
перераспределения ограниченных ресурсов приводит к ухудшению других,
поэтому необходимо постоянное сопоставление вариантов. Чем больше
вариантов анализируется, тем качественнее исследование и больше
уверенность в достижении поставленной цели. По этой причине выбор и
рассмотрение альтернативных вариантов - суть наиглавнейшая задача
процесса проектирования. Ошибка в исходных позициях не может быть
потом исправлена ни совершенством расчетных моделей, ни эксперимен-
том, ни использованием станков с программным управлением.
Вместе с тем очевидно, что чем шире исследуемая область возможных
решений, тем больше трудоемкость проектных работ. Детальная прора-
ботка каждого варианта требует большого объема сложных работ. Как
правило, детально проработано может быть лишь ограниченное число
вариантов. Чтобы это ограниченное множество было представительным,
нужно, с одной стороны, строить его на основе просмотра большого
числа вариантов с помощью упрощенных методик, доступных широкому
кругу специалистов. Это следует выполнять на ранних стадиях
проектирования. С другой стороны, результаты исследований по детально
13
проработанным вариантам должны позволять делать суждения не только о
конкретном варианте, но и о некоторой области возможных решении. С
этой целью для детальной проработки могут быть заданы опорные
варианты элемента, выявленные на ранних стадиях проектирования. Под
опорным вариантом в данном случае понимается такой вариант
проектируемого элемента, который детально проработан в конструктивном
плане и является типовым для ряда других возможных вариантов.
Для построения дополнительных вариантов на базе опорного требуется
параметрически трансформируемая модель агрегатов, комплектующих про-
ектируемый элемент. Такие модели позволяют генерировать дополнитель-
ное множество вариантов в окрестностях опорного для выбора из них ра-
ционального варианта. Для формирования исходного множества вариантов
необходимо:
на основе анализа результатов научно-технического прогресса уста-
новить границы области допустимых решений;
выявить для конструкторской проработки необходимое число опорных
вариантов;
на основе параметрического анализа сформировать дополнительные
варианты в области допустимых решений;
после определения рационального варианта провести корректирующую
детальную конструкторскую проработку исходного опорного варианта.
В число особо важных принципов формирования альтернативных вариан-
тов следует выделить унификацию систем и их элементов. Под унифика-
цией понимается такое приведение к единообразию систем, их подсистем
и модулей, которое придает им универсальные свойства с точки зрения
их назначения, функционирования, эксплуатации и обеспечения. Универ-
сальные свойства, в свою очередь, при наличии ограниченного набора
унифицированных конструктивно-функциональных модулей позволяют на их
базе собирать в требуемой номенклатуре системы многоцелевого назначе-
ния с добавлением (или даже без добавления) некоторого ограниченного
числа оригинальных (индивидуальных) элементов.
. Широкое использование принципов унификации позволяет сократить
объем конструкторских работ в процессе проектирования, сроки создания
нового оборудования, снизить стоимость освоения новых изделий, повы-
сить уровень механизации и автоматизации производственных процессов.
Четвертая особенность этапа проектирования конструкций - итератив-
ность процесса. Имеется в виду не математический метод проектирова-
ния, а смысловое содержание самого процесса. Эго связано с непрерыв-
ным накоплением информации в ходе проектирования, получением резуль-
татов более тонкого анализа и эксперимента, выявлением несоответствий
14
и рассогласований. Подобная ситуация существует постоянно, но это не
значит, что процесс проектирования тоже должен находиться в условиях
непрерывно изменяющихся исходных данных и постоянной переделки выпол-
ненной работы. Чтобы не было безответственности и неразберихи при
проектировании систем, в качестве обязательной процедуры предусматри-
вается корректировка результатов и документации в определенные сроки
по заранее согласованным технологиям. Объем и организация подобных
процедур регламентируются специальными планами координации проектно-
конструкторских и научно-исследовательских работ с учетом результатов
работ, проводимых всеми участниками.
Вместе с тем нужно подчеркнуть, что технология итерационного про-
ектирования пока еще несовершенна, особенно в части увязки процесса
проектирования с результатами летных испытаний. Когда полностью отра-
ботана вся документация и по ней изготовлена технологическая и час-
тично эксплуатационная оснастка, объективно трудно вводить какие бы
то ни было изменения. Помимо экономических причин это объясняется еще
и тем, что изменение почти любой характеристики системы влечет за со-
бой бесчисленное число корректировок. Если все их не произвести, то
возникнут новые рассогласования. Предполагается, что в перспективе
комплексная корректировка системы по результатам испытаний будет
возложена на систему автоматизированного проектирования. Разработка
соответствующей методологии является одной из важных задач теории
проектирования.
§ 1.3. СИСТЕМНЫЙ ПОДХОД -
ОБЩЕМЕТОДОЛОГИЧЕСКАЯ ОСНОВА ПРОЕКТИРОВАНИЯ
Принцип системности, суть главная методологическая основа исследо-
ваний в любой области знаний. Рассматривается ли машина, живой
организм, общество или какая-либо его часть - все они представляют
собой системы. "Вся доступная нам природа, - писал Ф.Энгельс, -
образует... некую совокупную связь тел, причем мы понимаем здесь под
словом "те|ю" все материальные реальности, начиная от звезды и кончая
атомом..."
Разработка методологии системного подхода к исследованию объектов
различной природы как больших систем является задачей философской
науки. В задачах прикладного характера принцип системности используют
Маркс К., Энгельс Ф. Соч. , 2-е изд., т. 20. С. 392.
15
как отправную методологическую базу и на этой основе вырабатывают
конкретные методы анализа и синтеза. Главной особенностью и положи-
тельной стороной практической реализации системного подхода является
то, что решение частных задач выбирается в интересах более общих за-
дач; в соответствии с этим его сущность состоит в выявлении всех ос-
новных взаимосвязей между переменными факторами и в установлении их
влияния на поведение всей системы как единого целого. Системный под-
ход предполагает, что взаимосвязь и взаимодействие элементов придают
новые свойства исследуемому объекту, которые не присуши его отдельным
элементам или их совокупности без системного объединения.
В практике проектирования системный подход применялся всегда.
Однако сейчас его роль особенно существенна. Эго объясняется, с одной
стороны, резким усложнением технических конструкций, устройств,
технологий, для которых увязка взаимодействия отдельных элементов во
многом определяет функциональное совершенство изделия в целом. А с
другой стороны, причин^ новой роли системного подхода - возможность
практической реализации. В век ЭВМ эти возможности, как известно,
исключительно большие. Отсюда, как следствие, стремление к изучению
явлений во всей их полноте, в связи с другими явлениями.
Основными логическими элементами системного подхода при
проектировании ЛА и их конструкций являются, во-первых, объект
проектирования, трактуемый как большая система, во-вторых, цели и
задачи, которые нужно решать при проектировании и, в-третьих,
математическая модель процесса функционирования проектируемого
объекта. Рассмотрим эти логические элементы.
Объект проектирования - большая система. Понятие "большая система"
возникло как выражение системного подхода к постановке и решению за-
дач проектирования и управления объектов большого масштаба. Впослед-
ствии это понятие стали применять более широко. В наших исследованиях
под системой будем понимать совокупность элементов, находящихся в оп-
ределенных отношениях друг с другом в интересах достижения поставлен-
ной цели. Несмотря на разную природу технических систем, они обладают
множеством общих характерных свойств. Такими свойствами являются:
определенная целостность как единство системы, т.е. наличие общей
цели, общего назначения, что, в свою очередь, позволяет количественно
оценивать систему с помощью единого показателя - критерия эффектив-
ности;
высокая размерность системы по числу частей и выполняемых функций,
обусловленная наличием сложных переплетающихся материальных,
энергетических и информационных связей между элементами;
16
неопределенность условий функционирования, стохастический харак-
тер возмущений, наличие противодействия, состязательных и конкурирую-
щих сторон;
сложная иерархическая структура организации системы, наличие
управляемых и управляющих подсистем, способность к самоорганизации и
адаптации;
слабая структуризация решаемых системой задач и высокая степень
неопределенности информации, необходимой для принятия решений;
принципиальная невозможность полного и точного математического
описания закона развития и функционирования системы.
Система может функционировать нормально лишь в случае
органического взаимодействия всех ее элементов, несмотря на то, что
каждый из них играет самостоятельную роль в реализации целей системы.
Каждый элемент представляет некоторую обособленную часть системы,
причем структурообразующую ее часть, поскольку все элементы находятся
в определенной иерархической зависимости. Из этого вытекает
возможность членения системы на подсистемы и элементы или, как
говорят, декомпозиции системы. Смысл этой процедуры в том, что
сложная проблема (труднообозримая, неформализуемая) расчленяется на
ряд более простых. Человек способен проанализировать ситуацию лишь
тогда, когда требуется учесть относительно небольшое число
обстоятельств или взаимных связей. При этом следует иметь в виду, что
декомпозиция системы сугубо неформальная процедура, зависящая как от
природы системы, так и от квалификации исследователя.
В основе расчленения должен быть четкий принцип, ориентированный
на получение конечного результата. Большие подсистемы должны
объединять более мелкие, которые необходимы для объяснения поведения
системы в целом. Подсистемы должны быть увязаны с поведением всех
элементов системы и постоянно отражать взаимодействие элементов и их
связь с окружающей средой. Под окружающей средой при этом понимается
не только физическая внешняя среда, но и взаимодействующие с данной
системой другие системы, в том числе и высшего ранга.
Требует пояснения еще одно очень важное свойство систем -
адаптивность. Адаптивность следует рассматривать как главное
требование к системам, используемым в современной теории и практике
проектирования конструкций. Это связано со следующим.
Реальные системы (т.е. конструкции ЛА) по условиям применения
являются стохастическими системами с весьма большим уровнем
неопределенности. В процессе проектирования условия применения
системы предсказать практически невозможно. В лучшем случае речь
17
может идти о некотором диапазоне внешних условии. Если при этом
ориентироваться на экстремальные условия, которые могут встретиться
при функционировании, и по ним устанавливать расчетные случаи, то
конструкция неизбежно окажется нерациональной.
При традиционных методах анализа и нормативно заданных нагрузках
возможности уменьшения массы авиационных конструкции за счет совер-
шенствования силовых схем практически исчерпаны. Дальнейший прогресс
в этом направлении обеспечивается адаптацией летательных аппаратов к
внешним силовым и тепловым воздействиям через адаптивные системы уп-
равления, что позволяет исключить экстремальные условия нагружения,
приспособиться к реальным условиям, а в результате снизить потребную
массу конструкции и одновременно расширить зону применения. Сюда же
следует отнести задачи адаптивной увязки характеристик системы со
смежными системами, в частности, с системой эксплуатации.
Целевая проработка проектируемой системы. Определение целей явля-
ется основой разработки любой системы. Целевая проработка включает в
себя: ретроспективный анализ проблемы, исследование аналогичных дей-
ствующих систем, определение целей и задач проектируемой системы.
Отправной точкой этой стадии проектирования является целевая установ-
ка, обычно формулируемая в исходном техническом задании. Первичный
анализ проблемы имеет целью оценить достигнутый технический уровень
действующих аналогичных систем. Далее проводится перспективный ана-
лиз, связанный с изучением и оценкой степени достижения основной
цели. При этом реализация основной цели просматривается в нескольких
аспектах: научно-техническбм, производственном, эксплуатационном,
экономическом и организационном.
Научно-технические цели и соответствующие им задачи определяют
функциональное совершенство создаваемого изделия, являются основой
его качества. Эти цели отражают возможные технические и научные
нововведения, использование новых схем и принципов работы, новых
материалов и т.д. Производственные цели предопределяют разработку
таких конструкций, которые ориентированы на прогрессивные техно-
логические процессы, низкую трудоемкость изготовления, короткие сроки
освоения производства новых изделий. Эксплуатационные цели отсле-
живают возможные сценарии функционирования системы. Цели экономи-
ческого характера связаны в основном с ограничениями ресурсов. Они
ориентируют на достижение высоких конечных результатов при мини-
мальных затратах трудовых, материальных и финансовых ресурсов. Ор-
ганизационные цели устанавливают сроки проектных работ и органи-
зационную структуру, предусматривают прогрессивные формы организации
18
и стимулирования труда, повышение эффективности производства и ка-
чества работы.
По форме представления цели могут задаваться в виде количественных
и качественных показателей. Желательно, чтобы система целей
определялась минимальным числом показателей. Наглядным представлением
системы целей служит граф, или дерево целей.
Система целей может быть представлена также в виде таблицы, в
которой они группируются по определенным разделам. Следует подчерк-
нуть, что в разработке системы целей принципиальное значение имеет не
форма представления структуры, а содержательная сторона системати-
зации и упорядочения целей. Дело в том, что разбиение цели на поДцели
в общем случае не удается осуществить однозначным образом. Различные
разбиения могут использоваться в равной мере, если они обеспечивают
объективное и полное отображение целевой совокупности. Кроме того,
из-за отсутствия формализованных методов и процедур разбиением целей
занимаются проектировщики, что накладывает на целевую структуру
отпечаток индивидуального или группового подхода. Не менее сложна и
задача выражения целей в количественно измеримых показателях,
определения их предпочтительности и уровня значимости.
Моделирование проектируемой системы. Понятие "модель" допускает
много различных трактовок. В нашем изложении речь идет о математичес-
ких моделях, используемых в процессе проектирования. Моделирование
систем и условий их применения всегда играло важную роль при проекти-
ровании. Однако в последнее время в связи с необходимостью тонкого
анализа при создании новой техники и широкими возможностями современ-
ных ЭВМ эта роль стала, пожалуй, наиглавнейшей.
Усложнение конструкций, рост числа взаимосвязанных параметров и,
как следствие этого, расчленение при проектировании сложных систем на
более простые влекут за собой новую проблему - проблему согласования
характеристик отдельных частей системы, т.е. синтеза, который должен
давать возможность представлять конструкцию в целом, оценивать ее
разнообразные качества и соответствие исходным требованиям.
Реализация этих функций в значительной мере возлагается на
математические модели, что и придает им в современных условиях
исключительно важное значение. От качества моделей во многом зависит
судьба всего проекта системы.
Построение моделей - процедура неформальная, во многом определяе-
мая опытом, интуицией и талантом исследователя. Работая с одним и тем
же материалом, разные исследователи могут представлять его различным
образом, что отражает феноменологическую основу процесса моделирова-
19
ния. Основная задача (и трудность) моделирования - выделить реальные
ситуации из множества допустимых, сформулировать принципы их отбора,
описать эти принципы в тех терминах и переменных, которые наиболее
полно характеризуют проектируемый объект. Принципы отбора сужают мно-
жество допустимых решений, отбрасывая те, которые не могут быть реа-
лизованы. Чем* более совершенна модель, тем уже становится множество
реальных решений, тем точнее оказывается прогноз.
Моделирование объекта следует рассматривать не как метод расчета,
а как метод мышления, как средство формулирования понятий, целей,
возможностей. В соответствии с этим моделирование - суть звено при
переходе от содержательного к формальному описанию процесса
функционирования системы с учетом воздействия окружающей среды.
Широкий класс задач проектирования силовых конструкций ЛА связан с
линейными моделями вида
К5 = ф (1.1)
где К - функциональный оператор, отражающий жесткостные свойства
конструкции (конструкционный оператор); 5 - вектор, характеризующий
распределение материала в конструкции; q - вектор обобщенной
нагрузки, действующей на конструкцию.
Поскольку распределение материала выбирается в рамках определенных
конструктивно-силовых схем, а нагрузки ограничены условиями полета,
то искомый вектор 8 и обобщенная нагрузка q, очевидно, являются лишь
частью некоторых метрических пространств А и Q, удовлетворяющих в
общем случае уравнению (1.1), т.е.
бед, q G Q. (1.2)
Решение уравнения (1.1) сводится к обращению оператора К при
удовлетворении условий (1.2):
5 = к'ч. (1.3)
Приведенные математические соотношения представляют собой матема-
тическую схему, отражающую лишь структурную сторону задачи. На основе
этих схем разрабатываются рабочие модели. На практике используют два
вида моделей: приближенные и более точные. Первые ориентированы на
начальный этап проектирования, цель которого - установить лишь целе-
сообразность того или иного варианта. Эти модели отражают самые ос-
новные взаимосвязи параметров обычно при функционировании в экстре-
мальных условиях. Здесь широко используются статистические и экспери-
20
ментальные соотношения; аналитические зависимости, содержащие неболь-
шое число варьируемых параметров; приближенные решения, допускающие
безмашинную реализацию. Использование упрощенных методик позволяет
оценить большое число вариантов и отсеять заведомо худшие.
Вторая группа моделей применяется для уточнения параметров и
характеристик выбранных опорных вариантов. Для этой цели используются
по возможности наиболее точные математические модели. Решения, как
правило, выполняются с помощью ЭВМ. Здесь уместно обратить внимание
на одну особенность решений вида (1.3) применительно к задачам второй
группы. Дело в том, что задачи в форме (1.1)...(1.3) чаще всего
оказываются некорректно поставленными. Эго связано, в частности, с
тем, что обратный (интегральный в наших задачах) оператор К может и
не быть непрерывным (в метрике пространства Д), хотя дифференциальный
оператор К - вполне непрерывный. Тогда решение (1.3) может оказаться
неустойчивым. Подобного рода задачи являются предметом пристального
внимания математиков. Для эффективного решения неустойчивых задач к
настоящему времени созданы специальные методы регуляризации некор-
ректных задач, с которыми можно познакомиться в специальной
2
литературе .
§ 1.4. ОБЩАЯ ПОСТАНОВКА ЗАДАЧИ ПРОЕКТИРОВАНИЯ
КОНСТРУКЦИИ ЛА
Известно, что каждый ЛА создается для решения конкретных задач. Но
их решение может быть осуществлено с различной степенью успешности: в
одних случаях используются последние достижения научно-технического
прогресса, тщательно отрабатывается каждое нововведение, в других -
базируются преимущественно на ранее достигнутых результатах. Разные
подходы к проектированию приведут к различным уровням совершенст-
ва ЛА.
Эти обстоятельства выдвигают на современном этапе одну из
важнейших проблем в области проектирования и производства ЛА -
создание таких объектов, которые не просто выполняют поставленную
задачу, а выполняют ее, достигая возможно больших результатов с
возможно меньшими затратами ресурсов. Разработка путей и методов
См. Тихонов А. Н., Арсенин В. Я. Методы решения некорректных задач.
М. , Наука. 1979. 285 с.
21
решения проблемы создания ЛА, которые удовлетворяют указанному
требованию, предполагает комплексное рассмотрение вопросов проекти-
рования, технологии изготовления, обслуживания и применения ЛА с
учетом их роли в экономике народного хозяйства.
Характерной особенностью задач, возникающих при проектировании
конструкций ЛА, является противоречивость требований, подлежащих
реализации. Такие противоречия возникают, например, между требованием
минимальной массы и требованиями повышения живучести, выносливости,
надежности. Известно, что чем меньше излишней массы в конструкции,
тем она, как правило, дороже в изготовлении. Уменьшение излишней
массы позволяет повысить полезную нагрузку ЛА, но вместе с этим
возрастают производственные затраты на ЛА. Аналогичное положение
возникает и при повышении надежности и выносливости конструкции, так
как это достигается применением более дорогих технологических процес-
сов или более дорогих конструкционных материалов.
Стремление разобраться в противоречиях, обозреть проблему проекти-
рования в целом и выбрать нужные пути выдвигают на первый план задачу
комплексной оценки совершенства ЛА. С позиций системного подхода
такая комплексная оценка должна проводиться с точки зрения техни-
ческой новизны, во-первых, и прогрессивности по полезному действию,
во-вторых. Первой оценке соответствует технический уровень ЛА, вто-
рой - его эффективность. Эти два свойства ЛА самые общие, но одно-
временно наиболее информативные и потому наиважнейшие. Рассмотрим их.
Технический уровень ЛА. Понятие ’’технический уровень” относится к
наиболее общим свойствам ЛА, в числе которых на первом месте стоит
качество как форма проявления потребительной стоимости ЛА, т.е. спо-
собности ЛА удовлетворять определенные потребности людей. Технический
уровень ЛА - это характеристика новизны ЛА, использования последних
достижений научно-технического прогресса, которая придает ЛА новое
качество, позволяет улучшить функциональное совершенство или эконо-
мичность, или то и другое.
Специфической чертой технического уровня является его относи-
тельный характер. Эго означает, что для его оценки необходимо иметь
базу для сравнения. Обычно такой базой является реально достижимый
перспективный образец, обобщающий передовой научно-технический опыт
отечественных предприятий, лучших зарубежных фирм и обеспечивающий
его своевременное внедрение в практику.
Вышеизложенное дает основание определить технический уровень (ТУ)
как относительную характеристику качества ЛА, основанную на
сопоставлении значений показателей, характеризующих техническое
22
совершенство оцениваемого ЛА, с соответствующими базовыми значениями.
Новые прогрессивные свойства практически любых технических средств
справедливо связывают с научно-техническим прогрессом. Однако на пер-
вых порах новая техника чаще всего бывает экономически невыгодной из-
за недостаточной надежности» дорогой и трудоемкой доводки» неизбеж-
ность которой обусловлена самой новизной. При этом чем более передо-
выми в техническом отношении являются разрабатываемые и внедряемые
образны новой техники» тем значительнее становится накопление научных
и производственно-технических знании и опыта» которые необходимы для
перехода к следующим» более совершенным конструкциям летательных ап-
паратов и обслуживающих систем. Отсюда вытекает объективная потреб-
ность в неэкономической оценке технических систем на каких-то этапах
их жизненного цикла. Основным содержанием неэкономической оценки» ви-
димо» должно быть определение уровня научно-технического прогресса,
т.е. уровня новизны технической системы» что по своей природе отвеча-
ет смысловому содержанию оценки технического уровня.
Количественная оценка ТУ стимулирует применение наиболее перспек-
тивных конструкций, систем и методов эксплуатации и необходима при
прогнозировании облика перспективных систем. В ее основе лежит срав-
нение совокупности показателей ТУ рассматриваемого ЛА с соответству-
ющей совокупностью показателей базового образца (совокупностью базо-
вых значений показателей). Базовым образцом называется реально дости-
жимая совокупность значений показателей ТУ, принятых для сравнения.
Совокупность базовых значений показателей должна характеризовать оп-
тимальный ТУ ЛА на некоторый заданный период времени.
Исследование и оценка ТУ систем является первичной и наиболее
важной частью комплексной задачи - управления техническим уровнем,
которое, в свою очередь, является сердцевиной управления эффектив-
ностью. Поэтому не случайно то, что с понятием ТУ в последние годы мы
сталкиваемся все чаще и чаще. Будучи ранее объектом внимания лишь
специалистов, оно перешло на страницы важнейших директивных
документов. С ним тесно ассоциируются такие понятия, как "техническое
развитие”, "техническое перевооружение", "интенсификация производ-
ства” и др.
Управление ТУ должно производиться на всех стадиях жизненного
цикла ЛА. С методической точки зрения этот цикл целесообразно
расчленить на два этапа: первый - создание ЛА (этап проектирования
конструкции) и второй - эксплуатация. На первом этапе выявляются
основные рычаги научно-технического влияния, т.е. имеет место
непосредственное управление техническим уровнем. На втором этапе
23
проверяется соответствие достигнутого ТУ проектному, проводится
доработка ЛА и его сертификация. Оценка достигнутого ТУ используется
для определения направления дальнейшего совершенствования ЛА, а также
для уточнения временных и материальных затрат на его развитие.
Эффективность ЛА. В настоящее время термин ’’эффективность” - один
из самых распространенных. Исследованию эффективности технических
систем посвящена обширная литература, однако единого понимания сути
эффективности пока нет. Смысловое содержание эффективности определя-
ется как мера успешности человеческой деятельности, результаты кото-
рой весьма многообразны. Этим можно объяснить значительное разнооб-
разие встречающихся в литературе определений эффективности и аспектов
его рассмотрения.
В самом общем виде эффективность следует определять как категорию,
выражающую взаимосвязь ”цель-результат-затраты”. Причем эта взимо-
связь, как указывается в трудах классиков марксизма-ленинизма, состо-
ит в том, что общество должно ’’производить данный продукт с возможно
меньшими затратами сил и средств,... экономно расходовать свои ауты и
достигать производственной цели с наименьшей затратой средств” . В
данном определении - суть эффективности любой системы. В соответствии
с этим под эффективностью ЛА следует понимать его свойство обеспечи-
вать достижение необходимой конечнойцели при минимальных затратах
Подчеркнем одновременно, что эффективность как характеристика,
соизмеряющая цель, результат и затраты, пока не получила приемлемой
расчетной формы и потому, видимо, не нашла достаточно заметного внед-
рения. В теории и на практике в качестве самостоятельных направлений
развиваются две формы эффективности: техническая (боевая) - соизме-
ряющая цель и фактический результат, и экономическая - соизмеряющая
результат и затраты.
Трудно установить, кто и когда впервые ввел термин ”эффектив-
ность”; из анализа известных авторам источников очевидно, что пробле-
ма оценки эффективности существует с незапамятных времен, однако ши-
рокое развитие теория эффективности получила срвнительно недавно.
Первым известным трудом по теории боевой эффективности является
работа русского артиллериста В.Н.Шкларевича ”О средствах к установле-
нию правильного взгляда на свойства огнестрельного оружия” (1871 г.),
в которой сформулированы основные положения и общие принципы оценки
боевой эффективности вооружения. Под эффективностью оружия В.Н.Шкла-
Маркс К., Энгельс Ф. Соч., 2-е изд., т.26, ч.П. С. 608.
24
ревич предложил понимать "способность этого оружия к достижению
известного тактического результата". Этим трудом было положено начало
развитию теории эффективности вооружения и военной техники, которая
благодаря трудам русских и советских ученых превратилась в теорию
эффективности сложных технических систем. Становлению и развитию этой
теории посвящены многочисленные труды Е.С.Вентцель, Ю. В. Чуева,
Н.П.Бусленко, А.А.Червоного, А.В.Ильичева и ряда других советских
ученых.
В области экономической эффективности ЛА широко известны исследо-
вания Д.Л.Томашевича, А.В.Гличева, С.А.Саркисяна, С.М.Егера и др. В
качестве обобщенного показателя экономической эффективности чаще
всего используют соотношение
Э = Y/U (1.4)
либо
Э - Щ (1.5)
где У - целевая отдача ЛА; У - суммарная целевая отдача всего парка
ЛА данного типа; U, U - затраты на изготовление и поддержание
работоспособности в период эксплуатации одного ЛА и всего парка ЛА
данного типа соответственно.
Итак, ЛА характеризуется двумя колмплексными показателями: эффек-
тивностью и техническим уровнем. Эффективность отражает результатив-
ность ЛА и является показателем функционального совершенства. По
значению этого показателя можно сравнивать и выбирать ЛА. Однако при
всей своей представительности эффективность не дает информации о тех
свойствах ЛА, которые позволили получить заданную результативность.
Эту сторону отражает техническое совершенство ЛА, степень внедрения
результатов научно-технического прогресса, определяемые техническим
уровнем ЛА.
Чтобы новое поколение ЛА было совершеннее существующего, необходи-
мо обеспечить более высокий технический уровень новых образцов. Это
условие необходимое. Оно станет и достаточным, если при этом повысит-
ся и эффективность. Обеспечение взаимосвязи "технический уровень -
эффективность" - это главный вопрос проектирования и конструирова-
ния ЛА.
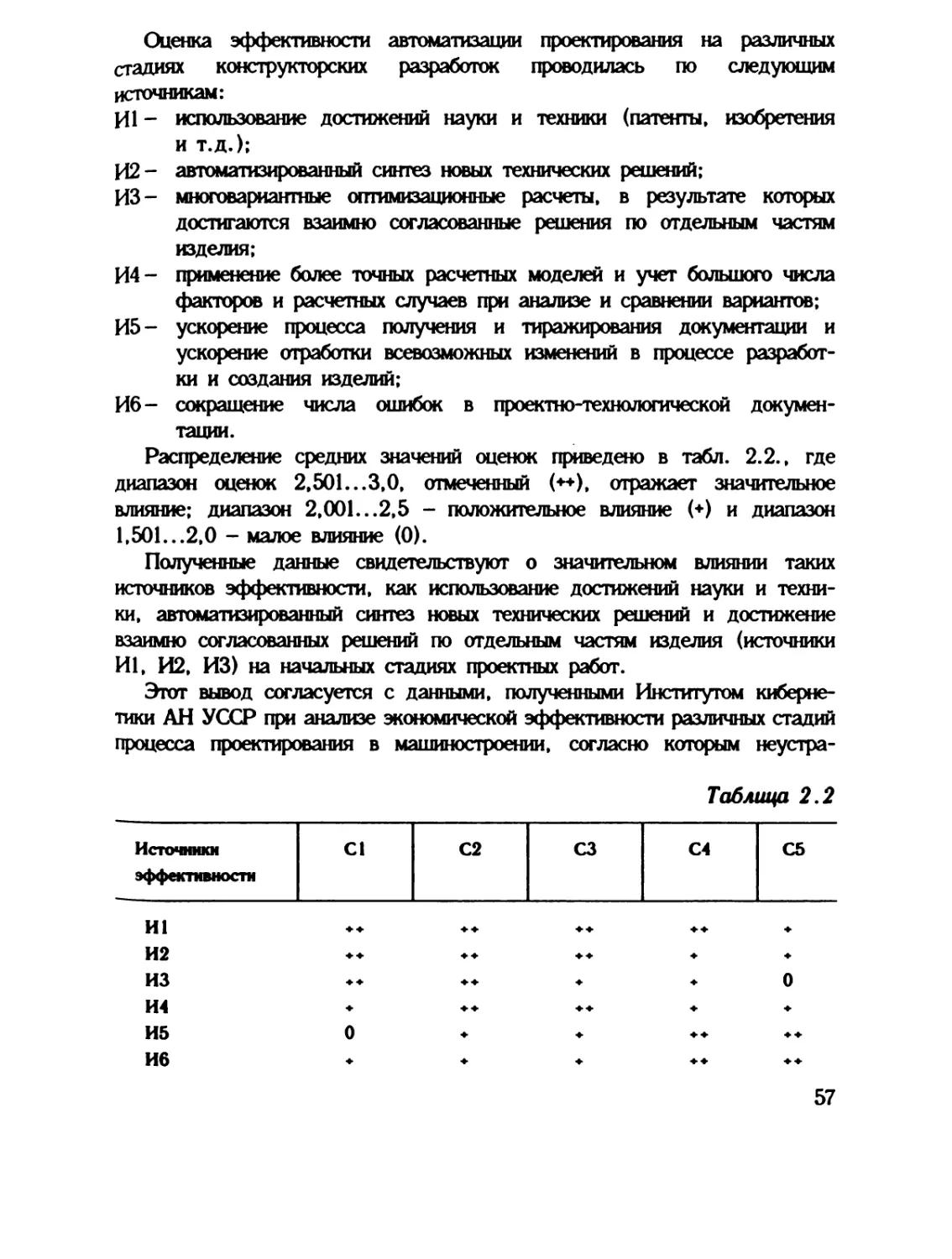
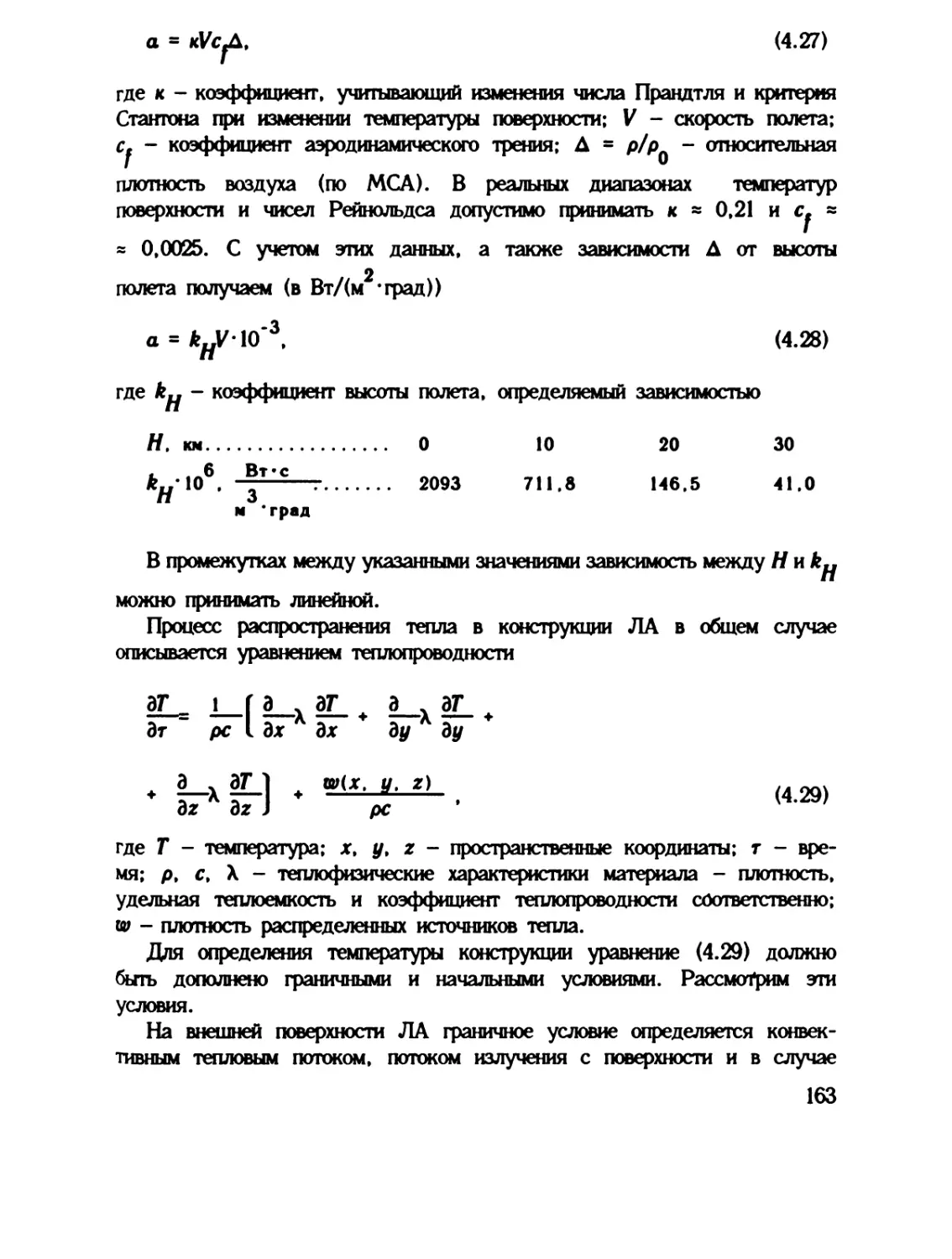
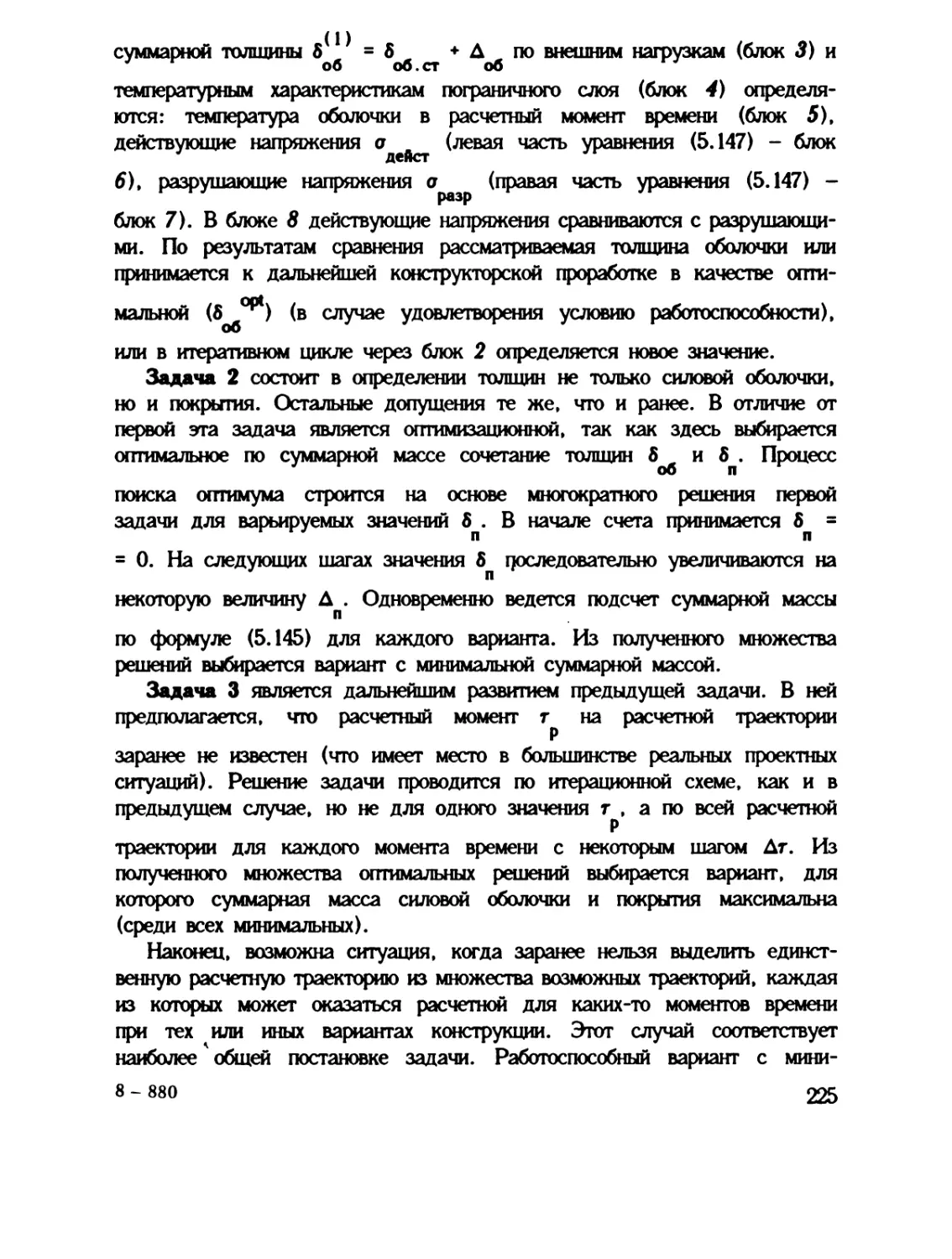
При заданных ресурсах (затратах) функциональное совершенство ЛА
определяется исключительно его техническими свойствами, прогрессив-
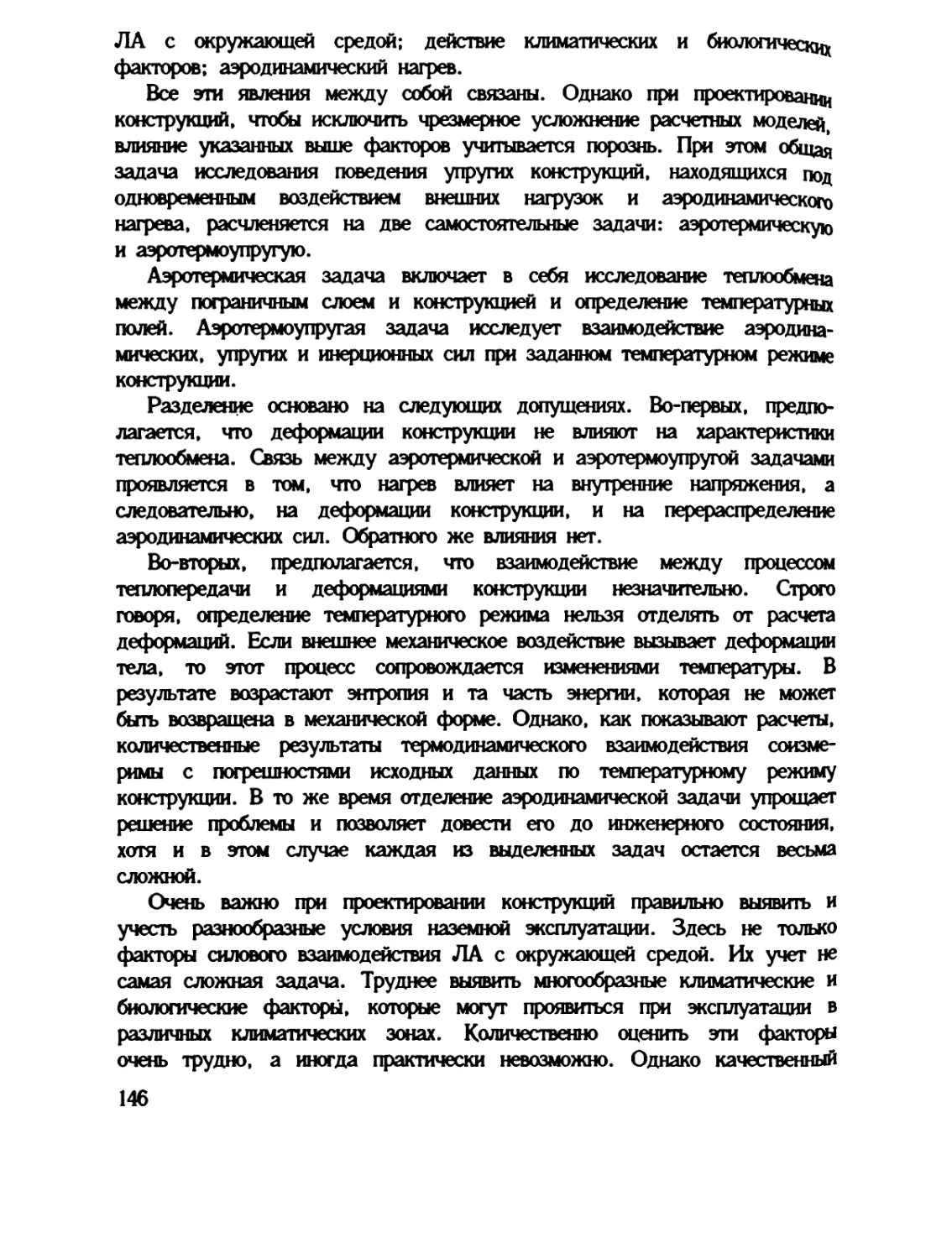
25
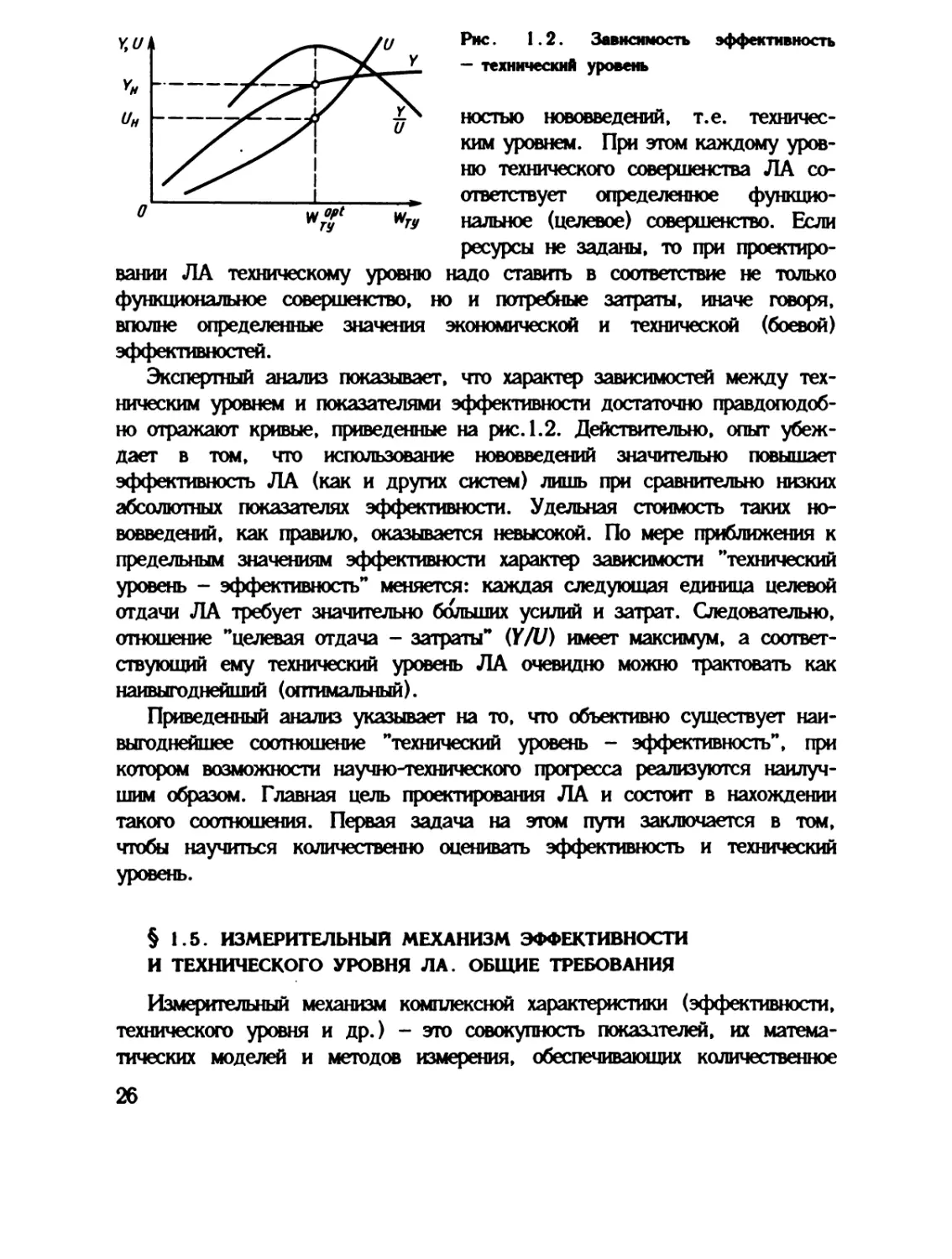
вании ЛА техническому уровню
Рнс. 1.2. Зависимость эффективность
— технический уровень
ностью нововведений, т.е. техничес-
ким уровнем. При этом каждому уров-
ню технического совершенства ЛА со-
ответствует определенное функцио-
нальное (целевое) совершенство. Если
ресурсы не заданы, то при проектиро-
вало ставить в соответствие не только
функциональное совершенство, но и потребные затраты, иначе говоря,
вполне определенные значения экономической и технической (боевой)
эффективностей.
Экспертный анализ показывает, что характер зависимостей между тех-
ническим уровнем и показателями эффективности достаточно правдоподоб-
но отражают кривые, приведенные на рис. 1.2. Действительно, опыт убеж-
дает в том, что использование нововведений значительно повышает
эффективность ЛА (как и других систем) лишь при сравнительно низких
абсолютных показателях эффективности. Удельная стоимость таких но-
вовведений, как правило, оказывается невысокой. По мере приближения к
предельным значениям эффективности характер зависимости ’’технический
уровень - эффективность” меняется: каждая следующая единица целевой
отдачи ЛА требует значительно больших усилий и затрат. Следовательно,
отношение "целевая отдача - затраты” (Y/U) имеет максимум, а соответ-
ствующий ему технический уровень ЛА очевидно можно трактовать как
наивыгоднейший (оптимальный).
Приведенный анализ указывает на то, что объективно существует наи-
выгоднейшее соотношение "технический уровень - эффективность”, при
котором возможности научно-технического прогресса реализуются наилуч-
шим образом. Главная цель проектирования ЛА и состоит в нахождении
такого соотношения. Первая задача на этом пути заключается в том,
чтобы научиться количественно оценивать эффективность и технический
уровень.
§ 1.5. ИЗМЕРИТЕЛЬНЫЙ МЕХАНИЗМ ЭФФЕКТИВНОСТИ
И ТЕХНИЧЕСКОГО УРОВНЯ ЛА. ОБЩИЕ ТРЕБОВАНИЯ
Измерительный механизм комплексной характеристики (эффективности,
технического уровня и др.) - это совокупность показателей, их матема-
тических моделей и методов измерения, обеспечивающих количественное
26
определение исследуемой комплексной характеристики. Наиболее общие
требования к измерительному механизму состоят в том, чтобы оценки
эффективности и технического уровня ЛА по своей сути были комплекс-
ными и системными. Системный подход ориентирует на анализ каждой
проблемы во всей ее полноте, во всех ее взаимосвязях. Он требует уче-
та органического единства технических, экономических, организационных
и других аспектов при поисках эффективного решения проблемы.
Как показывает опыт, формирование показателей может быть проведено
по различным основаниям. Главное в том, чтобы совокупность показате-
лей была полной и в то же время не содержала дублирующих показателей.
Система показателей эффективности (технического уровня) ЛА представ-
ляется образно в виде пирамиды, в основании которой находятся показа-
тели самого нижнего уровня (образующие» единичные показатели), кото-
рые отражают характеристики и возможности конструкционного материала,
деталей, соединений. Вершиной пирамиды является обобщенный показа-
тель. Между основанием и вершиной такой пирамиды может быть несколько
уровней комплексных показателей, характеризующих подсистемы ЛА.
Заполняющая пирамиду совокупность показателей должна иметь строгую
иерархическую структуру, соответствующую структуре исследуемой комп-
лексной характеристики. Только в этом случае может быть осуществлена
последовательная свертка единичных показателей в комплексные и обоб-
щенный, а также декомпозиция обобщенного показателя на составляющие
вплоть до единичных показателей. Другие требования состоят в том,
чтобы эти показатели:
имели количественное выражение, лучше всего в виде относительных
величин;
отражали качественные сдвиги, характеризующие развитие ЛА, борто-
вых систем и способов применения ЛА;
обеспечивали оценку эффективности и технического уровня ЛА с уче-
том влияния систем высшего и низшего уровней;
обеспечивали решение практических задач проектирования и конструи-
рования;
имели физический смысл и были статистически устойчивыми.
Система показателей само по себе еще не является полной характе-
ристикой измерительного механизма. Необходима взаимоувязка показате-
лей с помощью математических моделей. Наилучшие модели - это те, ко-
торые отражают физическую функциональную зависимость между показате-
лями. Подобным образом может описываться, например, зависимость массы
ЛА от уровней технического совершенства агрегатов планера и двига-
тельной установки, которые, в свою очередь, являются функциями
27
проектных параметров. Физические соотношения могут быть дополнены
экспериментальными или основанными на статистике связями. Чаще,
однако, из-за различной физической основы функциональные связи между
показателями отсутствуют. Тогда можно рекомендовать формально-
математический подход к описанию взаимосвязи показателей, при котором
моделируемый показатель представляется в виде некоторой средней
взвешенной величины.
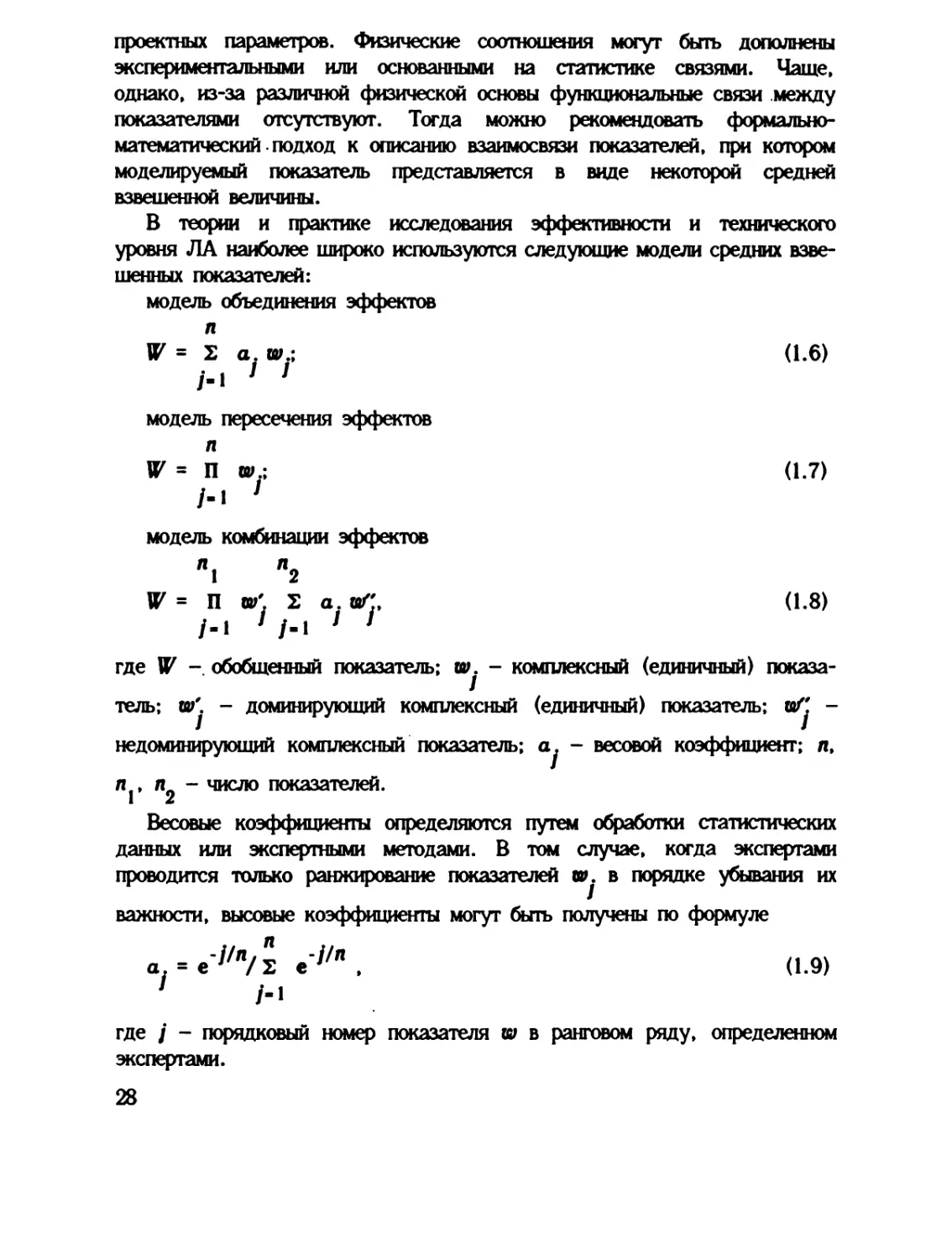
В теории и практике исследования эффективности и технического
уровня ЛА наиболее широко используются следующие модели средних взве-
шенных показателей:
модель объединения эффектов
п
W = 2 а. ш.; (1.6)
м ' '
модель пересечения эффектов
п
W = П ».; (1.7)
/-1 '
модель комбинации эффектов
Л1 Л2
W = П w' 2 a. иГ, (1.8)
/-1 1 /-1 1 '
где W обобщенный показатель; w. - комплексный (единичный) показа-
тель; w'. - доминирующий комплексный (единичный) показатель; юГ -
недоминируюший комплексный показатель; - весовом коэффициент; л,
л^, л^ - число показателей.
Весовые коэффициенты определяются путем обработки статистических
данных или экспертными методами. В том случае, когда экспертами
проводится только ранжирование показателей w. в порядке убывания их
важности, высовые коэффициенты могут быть получены по формуле
а. = е'//л/2 е1/П , (1.9)
' /-1
где / - порядковый номер показателя w в ранговом ряду, определенном
экспертами.
28
Заслуживает внимания еще одна сторона измерительного механизма.
Речь идет о взаимосвязи показателей и критериев эффективности. В
литературе термины "критерий§ ** и "показатель** нередко используются как
синонимы. Однако такое отождествление далеко не во всех случаях
допустимо. Показатель» как следует из изложенного выше, характеризует
с количественной стороны какое-либо свойство объекта или процесса.
Назначение критерия несколько иное.
Критерий - это признак, на основе которого производится оценка,
определение или классификация чего-либо. Это есть мера, с помощью ко-
торой может быть вынесено суждение об относительной выгодности дан-
ного варианта системы. Критерий является интегральным признаком, воп-
лощающим в себе все наиболее существенные стороны эффективности. Он
выражает главные взаимосвязи факторов, определяющих эффективность, и
является основным признаком, отражающим главную цель, которую решает
рассматриваемая техническая система.
В процессе проектирования ЛА и его агрегатов обычно принимается во
внимание целый ряд целей (например, минимум затрат, минимум массы,
максимум целевой отдачи и т.д.). В таких ситуациях критериев оказыва-
ется много, однако и в этих случаях объективно существует принци-
пиальная возможность построения обобщенного, интегрального критерия
эффективности, соответствующего главной цели функционирования ЛА.
§ 1.6. ИЗМЕРИТЕЛИ ТЕХНИЧЕСКОГО УРОВНЯ ЛА
В качестве измерителей (показателей) технического уровня ЛА следо-
вало бы принимать характеристики нововведений. Эта была бы прямая
оценка технической новизны изделий. В отдельных случаях такой подход
используется на практике, однако чаще степень новизны оценивается
косвенно: через характеристики конструктивного совершенства изделия,
его эксплуатационные качества и технологичность.
Если какая-то характеристика ЛА по своей природе является обобщаю-
щей, то по ее уровню, как правило, и оценивают техническое совершен-
ство. Исключительно представительной характеристикой технического
уровня любого летательного аппарата является масса конструкции. Это
вполне понятно, так как вся конструкция суть вынужденный добавок к
полезному транспортируемому грузу. Массу конструкции ЛА условно можно
представить состоящей из трех частей. Первая часть массы конструкции
обеспечивает выполнение целевого назначения ЛА, это необходимая
масса.
Вторая часть массы обусловлена технологическими и экономическими
29
соображениями. Например, какая-то деталь ЛА делается прочнее, чем это
требуется для обеспечения безопасности и надежности полета, так как
для ее изготовления применен материал стандартной толщины, или какой-
то элемент конструкции выполняется постоянного сечения, чтобы избе-
жать трудоемкой обработки по длине для получения необходимого по
прочности переменного сечения, или делаются разъемы, которые не будут
использоваться в эксплуатации, но введение которых упрощает и удешев-
ляет технологический процесс. Эта часть массы является технологичес-
ким ’’довеском”, она может быть увеличена или уменьшена при соответст-
вующем упрощении или усложнении конструкции.
Наконец, третью часть массы составляют дискретные конструктивные
элементы, а также косынки, накладки, крепежные детали и т.д. Это кон-
структивный ”довесок”, который так же, как и технологический, не
является необходимым для работы конструкции. Вторая и третья части
массы составляют излишнюю массу. Доля излишней массы характеризует
массовое (весовое) совершенство ЛА, уровень отработки его конструк-
ции. Массовое совершенство ЛА во много раз выше, чем изделий в обыч-
ном машиностроении, хотя характер нагружения и другие условия для ЛА
значительно менее выгодные.
Нужно вместе с тем отчетливо представлять, что при всей представи-
тельности отдельных характеристик или параметров ЛА оценка техничес-
кого уровня по одному признаку всегда будет лишь приближенной. Осно-
вываясь на анализе основных функций и состояний, присущих ЛА на раз-
личных стадиях жизненного цикла, правомерно предположить, что комп-
лексная оценка технического уровня должна базироваться на анализе
конструктивного, эксплуатационного и производственно-технологического
совершенства ЛА.
Конструктивное совершенство - одна из самых представительных обоб-
щенных характеристик ЛА, включающая в себя: массовое, аэродинамичес-
кое, энергетическое и экологическое совершенство. Этим понятием опре-
деляют совокупность свойств и характеристик, присущих непосредственно
ЛА и мало зависящих от технологии производства и условий эксплуатации.
Производственно-технологическое совершенство (иначе - технологич-
ность) характеризует такие свойства конструкции, которые обеспечивают
достижение наиболее высоких производственных показателей: малой тру-
доемкости, простоты обработки, коротких сроков освоения производства
изделия, высокой степени автоматизации и механизации производственных
процессов.
Эксплуатационное совершенство отражает приспособленность ЛА к про-
цессу эксплуатации. К числу основных факторов, определяющих уровень
30
эксплуатационного совершенства ЛА, относят эксплуатационную техноло-
гичность и транспортабельность.
В соответствии с изложенным интегральная характеристика техничес-
кого уровня ЛА будет функцией указанных трех факторов:
(1.10)
(к) тта (п/т)
где w - показатель конструктивного совершенства ЛА; -
ТУ ТУ
(э)
показатель производственно-технологического совершенства; -
ТУ
показатель эксплуатационного совершенства.
Каждый из этих показателей в свою очередь определяется рядом пока-
зателей более низкого уровня. Интегральная оценка (1.10) технического
уровня ЛА производится с помощью комплексного, дифференциального или
смешанного метода. Комплексный метод оценки ТУ основан на применении
обобщенного показателя. При использовании дифференциального метода о
ТУ системы судят непосредственно по единичным показателям ТУ. Смешан-
ный метод оценки ТУ основан на совместном применении единичных и
комплексных показателей.
Комплексный метод оценки ТУ с использованием главного показателя,
отражающего функциональное совершенство системы. Во всех случаях,
когда имеется необходимая информация, определяют главный показатель и
устанавливают его функциональную зависимость от исходных показателей.
Функциональные соотношения могут быть дополнены экспериментальными
или основанными на статистике связями. Все эти зависимости необхо-
димы потому, что только по одному главному параметру функционального
совершенства нельзя судить о ТУ системы. Нужно сравниваемые системы
(исследуемую и базовую) поставить в сопоставимые условия, что дости-
гается путем уравнивания показателей обеих систем, определяющих функ-
циональное совершенство. Далее рассчитывается приведенный обобщающий
показатель, сопоставляя который с базовой характеристикой, и судят о
ТУ системы. Для примера, следуя В. И. Протопопову, проведем анализ ТУ
транспортного самолета .
Сравним два самолета, один из которых будем называть базовым
(индекс "б.с"), другой - рассматриваемым. Пусть в начале сравнения у
См. сб. 'Вопросы обеспечения технического уровня самолетов граж
Дакской авиации'. М.: МИИ ГА, 1984. С. 341.
31
обоих самолетов были одинаковые летные характеристики, взлетные мас-
сы, коммерческие нагрузки и, следовательно, одинаковые технические
уровни. Пусть далее у рассматриваемого самолета за счет более высо-
кого уровня аэродинамического совершенства, совершенства двигательной
установки, конструкции планера повысилась коммерческая нагрузка при
неизменных летно-технических характеристиках (ЛТХ). Тогда, если оце-
нивать ТУ по главному показателю функционального совершенства, техни-
ческий уровень рассматриваемого самолета будет определяться характе-
ристикой
V = Д /д . (1.11)
ТУ ком ком
б.с
где ^ком = Шком^Ш0 отн^ительная масса коммерческой нагрузки, mQ -
начальная масса ЛА.
Как правило, ситуация бывает более сложная: за счет технических
нововведений улучшаются ЛТХ, а коммерческая нагрузка может и не
изменяться. Однако и в этом случае улучшение ЛТХ условно может быть
оценено приращением коммерческой нагрузки на величину Am . При этом
вместо истинного значения т = т при оценке ТУ следует
ком ком^ J
б.с
учитывать приведенную коммерческую нагрузку
т = т + Ат , (1.12)
ком ком
б.с
а летные характеристики рассматриваемого и базового самолетов считать
одинаковыми. Технический уровень рассматриваемого самолета в соответ-
ствии с (1.11) и (1.12) будет определяться выражением
JV = 1 * = 1 * 0.13)
ТУ ком ком
б.с б.с
Заметим, что при такой трактовке величина Ад является функцией
только удельных параметров, определяющих уровень развития науки и
техники. В общем случае следует предусмотреть возможность использова-
ния полученного в результате улучшения удельных параметров приведен-
ного приращения относительной массы коммерческой нагрузки Ат не
только для улучшения летных характеристик, но и для увеличения реаль-
ного значения относительной массы коммерческой нагрузки Дком» т.е.
32
изменения и Я1ком« Однако, поскольку первопричиной изменения д
являются изменения удельных параметров, постольку, несмотря на воз-
можные изменения и тком> в первом приближении можно считать, что
величина Дт является функцией только удельных параметров X. и расчет
^ТУ сводигся к определению зависимости Дт = f(X^.
Если предположить, что удельные параметры X. независимы, то вели-
чину Дт можно определить как полный дифференциал относительной массы
коммерческой нагрузки:
Эд Эд.
= * йф (114>
Здесь
Д = 1-Ед=1-д-д - д -д -д , (1.15)
КОМ у/ т д.у см об к
где д , д , д , д . д - относительные массы топлива, двигатель-
т д.у си об к
ной установки, снаряжения, оборудования и конструкции соответственно.
В первом приближении
с L
д = : Д ~ k Д = ~— + Ь;
т KV д.у 7 О к р0
д = const; д = const; (1.16)
сн об
х1 = {Суд’ К’ * а' Ь' ₽0}>
где с - упетмт часовой расход топлива; L - дальность полета; К. -
аэродинамическое качество; V - скорость полета; д0 - тяговооружен-
ность самолета на земле; - удельная нагрузка на крыло; k^, 7, а,
Ь - статистические коэффициенты.
2 - 880
33
Эд
г-2—Дс
ос уд
УД
Дс
УД
с
ул
= д
ЭДт к _ ЬК_
ьк ** ’ дт к :
Эд
ду
Эу
Ду = д
А.У
А? Ч . ДЬ ф
(1.17)
Эд . Эд Дрл
к л а_____Дд к ж а г0
т---ал = — -----: z----ар = — — -------.
Эй ₽л а 0 Рл Рл
г0 г0 г0 О
Если пренебречь влиянием /лит на относительные массы д., то
r г 0 ком /
Эд Эд Эд Эд
КОМ _ КОМ _ КОМ______КОМ _ . /1 1С
Эд. Эд " Эд ’ Эд ’ “ L и,1й
/ т к ДУ
Подставив выражения (1.14), (1.17) и (1.18) в исходную зависимость
(1.13), после преобразовании получим искомую связь характеристики
технического уровня самолета с удельными параметрами, определяющими
уровень развития науки и техники,
Комплексный метод оценки ТУ с использованием среднего взвешенного
показатели. Средние взвешенные показатели при комплексном методе
оценки ТУ применяют в тех случаях, когда затруднительно определение
главного показателя и установление его функциональной зависимости от
исходных показателей ТУ. Конкретные соотношения между единичными и
комплексными показателями в этом случае выбирают в соответствии с
моделями (1.6)...(1.9).
Дифференциальный метод оценки ТУ. Дифференциальным называется
метод, основанный на использовании единичных показателей технического
34
уровня w.. При этом определяют, достигнут ли уровень базового изделия
в целом, по каким показателям он достигнут, какие показатели наиболее
сильно отстают от базовых.
Единичные показатели ТУ при дифференциальном методе рассчитывают
по формуле
х/4
если необходимо иметь
х. >
/
(1.20)
если необходимо иметь
z 6
х/< хг
где х. - значение /-го единичного показателя ТУ оцениваемого изделия;
б « *
х, - соответствующий базовый показатель.
При использовании дифференциального метода оценки ТУ принимаются
следующие решения:
ТУ оцениваемого технического средства соответствует современным
требованиям, если все относительные значения единичных показателей ТУ
больше или равны единице;
ТУ оцениваемого технического средства не соответствует современным
требованиям, если все относительные значения показателей ТУ меньше
единицы.
В случаях, когда часть относительных значений показателей ТУ боль-
ше или равна единице, а часть меньше единицы* следует применять комп-
лексный или смешанный метод оценки.
Смешанный метод оценки ТУ основан на совместном применении единич-
ных и комплексных показателей. Его применяют в случаях:
когда совокупность единичных показателей ТУ является достаточно
обширной и анализ значений каждого показателя дифференциальным мето-
дом не позволяет получить обобщающих выводов;
когда комплексный (главный) показатель функционального совершен-
ства в комплексном методе недостаточно полно учитывает все существен-
ные свойства изделия и не позволяет получить выводы относительно не-
которых определенных групп свойств.
Применение смешанного метода оценки состоит в следующем. Вначале
часть единичных показателей объединяют в группы и для каждой группы
определяют соответствующий комплексный (групповой) показатель. От-
дельные, как правило, важные показатели допускается не объединять в
35
группы, а применять их при дальнейшем анализе наряду с групповыми.
Затем на основе полученной совокупности комплексных (групповых) пока-
зателей оценивается ТУ изделия дифференциальным методом.
§ 1.7. ЦЕЛЕВАЯ ОТДАЧА ЛА И ЕЕ ИЗМЕРЕНИЕ
По своей сути целевая отдача - это характеристика результативности
выполнения той задачи, ради которой создан ЛА. Многообразие целевых
задач, различные условия применения ЛА практически исключают возмож-
ность использования единого измерителя для оценки целевой отдачи
(следовательно, и эффективности) ЛА различных типов. На практике для
беспилотных ЛА и военных самолетов целевая эффективность понимается
как боевая эффективность, т.е. результативность боевого применения,
для гражданских самолетов - как производительность полетов. Причем то
и другое называют эффективностью ЛА, хотя более правильно было бы
трактовать указанные величины не как эффективность, а как эффект (ре-
зультат действия).
Есть еще одна особенность показателей целевой отдачи. Она обуслов-
лена тем, что успешный полет является случайным событием, так как
предсказать его с полной достоверностью не представляется возможным.
Однако, когда общее число полетов в данных условиях достаточно вели-
ко, т.е. когда использование ЛА как транспортного средства является
массовым, решаемые им задачи и условия применения достаточно одноооб-
разны и типичны для каждого ЛА, случайные события имеют вполне опре-
деленные закономерности, изучаемые в теории вероятностей.
Пользуясь методами теории вероятностей, можно исследовать самые
различные стороны целевой отдачи ЛА; проверять при проектировании,
насколько гармонично увязаны между собой боевые качества и проектные
параметры ЛА; определять, в каких условиях, против каких целей и
каким образом целесообразно использовать данный ЛА; наконец, сравни-
вать между собой боевые качества различных ЛА, способных решать ана-
логичные задачи.
При решении подобных задач будем исходить из того, что, во-первых,
из-за большого разнообразия решаемых целевых задач практически невоз-
можно иметь универсальную систему показателей. В каждом конкретном
случае должен быть выбран свой, наиболее целесообразный показатель
(измеритель) целевой отдачи, в наибольшей мере отвечающий характеру
данной задачи. Во-вторых, следует учитывать, что не все обстоятель-
ства,. влияющие на ведение военных действий, поддаются математическому
анализу. Отсюда следует, что численным значениям принятых показателей
36
нельзя приписывать абсолютный смысл. Эти значения пригодны только для
сравнительной оценки различных вариантов ЛА или различных способов их
применения. Рассмотрим наиболее представительные типовые задачи, ре-
шаемые ЛА, и соответствующие им трактовки целевой отдачи.
Случай 1. Рассматривается ЛА или комплекс ЛА, целью функционирова-
ния которых является достижение некоторого вполне конкретного резуль-
тата при некоторых строго установленных ресурсах. Желаемый результат
(например, поражение какого-то военного объекта, сбитие самолета, вы-
вод из строя корабля, подбитие танка и т.п.) моежт быть достигнут при
расходе выделенных ресурсов, а может быть и не достигнут в зависимос-
ти от того, в каком сочетании будет действовать множество случайных
факторов. Успешность операции оценивается по схеме "да-нет” ("все или
ничего"); промежуточные результаты являются несущественными. При та-
кой постановке задачи конечный результат функционирования ЛА (целевая
отдача) выражается случайным событием
А = (У > Y ), (1.21)
н
где У - возможный случайный (в общем случае) результат функциониро-
вания системы; У^ - необходимый результат для выполнения поставленной
задачи.
Поскольку цель функционирования ЛА достигается при наступлении
события А, то показателем целевой отдачи ЛА в рассматриваемом случае
очевидно является вероятность наступления этого события
Р(А) = Вер {У > У }, (1.22)
где ВЕР - оператор вероятности.
Если Р(А) = 1, то с достоверностью можно утверждать, что цель
функционирования будет достигнута. При Р(А) = 0 определенно цель не
может быть достигнута. Наконец, при 0 < Р(А) < 1 о возможности дости-
жения цели можно говорить лишь с некоторой вероятностью. Если, напри-
мер Р(А) = 0,8, то это означает, что среди множества случайных факто-
ров, влияющих на возможность достижения цели, 80 % таких, которые
благоприятствуют наступлению целевого события, и 20 % факторов, дей-
ствующих в противоположном направлении.
Конкретные формы зависимости (1.22) определяются, как было сказано
выше, конкретными задачами и условиями применения ЛА. Методики полу-
чения этих зависимостей излагаются в курсах "Теория вероятностей" и
’Исследование операций". Общий подход состоит в следующем.
37
Весь процесс функционирования ЛА расчленяют на отдельные фазы. Ти-
повыми фазами обычно считают: - дежурство или ожидание: А? - под-
готовка к применению и полет; А - воздействие внешней среды (проги-
О
водействие); А* - поражение заданной цели. Событие А, означающее, что
ЛА успешно функционирует, состоит в совместном проявлении указанных
независимых событий А, и согласно законам теории вероятностей являет-
ся произведением событий А
А = АААА. (1.23)
1^04
Искомая вероятность события А определяется на основании теоремы
умножения вероятностей:
Р(А) = Р(А )Р(А )Р(Д )Р(Л ). (1.24)
1 z 3 4
Введем обозначения:
Р(А) = Р; Р(А) = *; Р(А) = Р ;
I г 2 над
Р(А) = Р ; Р(А ) = Р , (1.25)
3 ну 4 усл
где k? - коэффициент боеготовности ЛА, иначе, вероятность того, что в
момент поступления заявки на применение ЛА находится в установленной
готовности; - характеристика надежности ЛА, т.е. вероятность
безотказной работы всех систем и агрегатов ЛА на протяжении всего
полета (или цикла функционирования); Р - вероятность неуязвимости
ЛА от средств противодействия противника; Р - условная вероятность
поражения цели.
Тогда формула (1.24) может быть записана в следующем виде:
Р = kP Р Р . (1.26)
г над ну усл
Вероятности k, Р , Р , Р являются основными показателями
г над ну усл
целевой отдачи зенитных управляемых ракет, ЛА класса ’’воздух-воздух”,
противокорабельных и противотанковых ракет и некоторых других типов
38
дд. Наиболее распространенные расчетные модели для этих показателей
приводятся в следующем параграфе.
Случай 2. Рассматривается ЛА или совокупность ЛА. целью функциони-
рования которых является получение максимально возможного среднего
результата, например максимального ущерба при действии по целям, за-
нимающим большую площадь, или многочисленным целям. Ресурс считается
заданным. При этом конечный результат очевидно будет представлять со-
бой случайную величину. В случае применения обычных ЛА цель не обяза-
тельно выводится из строя, поэтому термин "поражение цели" здесь
теряет смысл.
Смысл и основной показатель целевой отдачи ЛА для рассматриваемого
случая очевидно будут иными. В данном случае необходимо суммировать
частные результаты, что, как известно, отвечает сути математического
ожидания случайного результата. Напомним, что математическое ожидание
М[У] случайной величины Y равно сумме парных произведений всех воз-
можных значений случайной величины и соответствующих им вероят-
ностей
п
M[Y] = 2 уР (1.27)
I-1
где л - число частных значений случайной величины.
При обстреле группы одиночных целей или групповой цели частным
значением случайной величины у^ является число t сбитых целей, а ве-
роятности появления этих частных значений случайной величины - ве-
роятности поражения цели Р^. Число частных значений случайной величи-
ны л равно числу обстрелянных целей N^. Следовательно, в общем случае
математическое ожидание числа уничтоженных целей можно определить по
формуле
N
п
М[У] = Z и» (1.28)
i-1
Рассматриваемый случай функционирования ЛА характерен не только
Для ракет, в равной степени он относится и к самолетам. Их целевую
отдачу представляют как математическое ожидание работы, выполняемой
за единицу времени или полет. Эта характеристика называется произво-
дительностью самолета. Для гражданских самолетов, в частности, она
Рассчитывается по формуле
39
М[Г] = TG V , (1.29)
ком р '
где М[У] - производительность самолета в сутки (месяц, год), т*км; Т
- налет часов в ту же расчетную единицу времени; - коммерческая
нагрузка самолета, т; V - рейсовая скорость, км/ч.
Случай 3. Рассматривается ЛА или совокупность ЛА, целью функциони-
рования которых является обязательное получение некоторого заданного
конечного результата, независимо от того, сколько потребуется израс-
ходовать ресурсов. При этом конечный результат функционирования будет
представлять собой достоверное событие, а расход ресурсов для выпол-
нения задачи в общем случае будет случайной величиной U.
Подобного рода задачи характерны для многих типов ЛА как военного,
так и гражданского назначения. В качестве основного показателя целе-
вой отдачи таких ЛА естественно принять математическое ожидание рас-
хода ресурсов
m
M[U] = Z uJ>(u.). (1.30)
1
где и. - возможное значение расхода ресурсов на выполнение задачи при
Z-м цикле функционирования системы; Р(и^ - вероятность получения
значения и..
i
Рассмотренные три случая являются наиболее типичными. Опыт показы-
вает, что реальные задачи или совпадают с ними, или занимают промежу-
точное положение по отношению к рассмотренным случаям, не неся прин-
ципиально новых постановок. Эти три случая являются как бы вершинами
некоторого "треугольника эффективности", внутри которого находятся
все другие встречающиеся в практике исследования эффективности
случаи.
Таким образом, можно утверждать, что три показателя Р(А), М[У] и
М[1/] позволяют производить достаточно полную оценку целевой отдачи ЛА
в интересах решения широкого круга задач. Показатель Р(А) характери-
зует целевую боеспособность (надежность) ЛА, М[У] - целевую
производительность и М[1/] - целевую экономичность. В соответствии с
этим в самом общем случае модель обобщенного показателя целевой
отдачи ЛА W может быть представлена как система перечисленных трех
комплексных показателей:
40
w = {Р(Л), М[Г], (1.31)
На основе этой общей модели формируют индивидуальные (частные)
ноказатели для различных типов ЛА. (Эти показатели изучаются в смеж-
ных курсах по общему проектированию ЛА и их комплексов.) Для автома-
тических ЛА показатель целевой отдачи обычно отождествляется с пока-
зателем целевой надежности, важнейшей составляющей которого, как
следует из (1.26), является показатель надежности ЛА.
$ 1.8. НАДЕЖНОСТЬ ЛА И ЕГО СИСТЕМ
Основными показателями надежности ЛА являются: вероятность безот-
казной работы P(f); вероятность отказа Q(f); плотность распределения
вероятности отказов /(/); интенсивность отказов Х(/); среднее время
безотказной работы Т .
ср
Вероятность безотказной работы - это вероятность того, что за
определенное время функционирования системы в заданных условиях
эксплуатации отказ не произойдет:
Р(0 = Вер {Г > /}, (1.32)
т.е. Pit) представляет вероятность того, что случайное время
безотказной работы Т больше заданного времени функционирования t.
Вероятность отказа Q(t) - это событие, противоположное Р(/), т.е.
Q(t) = Вер {Г < /}. (1.33)
Сумма вероятностей безотказной работы и появления отказа как про-
тивоположных событий равна единице, т.е.
Р(0 * Q«) = 1. (1.34)
Определение Р(/) и Q(f) производится на основе обработки информа-
ции об отказах и неисправностях технических систем. Во всех отраслях,
эксплуатирующих сложные технические системы, существует единая для
всех предприятий система сбора, учета и обработки информации об отка-
зах и неисправностях техники. Первичным документом информации для
анализа надежности является карточка учета неисправностей установлен-
ной формы. Карточки заполняют на основании технической документации,
гДе приводятся первоначальные записи об отказах и неисправностях.
Оформленные карточки пересылаются в организации, которые занимаются
проведением статистической обработки и анализом, а также подготовкой
Рекомендаций по повышению надежности.
41
Обозначим через W) число безотказно работающих в течение времени
t однотипных технических устройств, n(t) - число отказавших за это
время устройств, а через N° - число однотипных технических устройств,
поступивших в эксплуатацию,
N = W) * n(t). (1.35)
о
Тогда статистическая вероятность безотказной работы
= N(t)/N . (1.36)
О
С ростом N° эта функция сходится к P(t) и имеют место приближенные
равенства
Р*(П = Р«) (1.37)
И
Q*(0 = n(t)/N • Q«). (1.38)
О
Надежность элементов не всегда удобно характеризовать вероятностью
безотказной работы, так как для малых периодов времени работы элемен-
тов значения P(t) будут близкими к единице. Поэтому наряду с вероят-
ностью P(t) в качестве характеристики надежности используется плот-
ность распределения вероятности отказов /(/).
Статистическая плотность распределения вероятности отказов f* (/)
есть отношение числа отказов Дл^ однотипных технических устройств в
единицу времени, взятых для данного отрезка времени ДЛ, к числу
технических устройств N , поступивших на эксплуатацию, т.е.
♦ Дя(
h - лГдЬ • <L39)
о i
Если перейти от дискретного спектра плотности распределения ве-
роятности отказов к непрерывному распределению, т.е. принять Д/ -> О,
то
ДО = дг • (L40)
42
Следующая характеристика надежности - интенсивность отказов Х(/).
Она определяется числом отказов Дл^ в единицу времени, отнесенным не
ко всему числу технических устройств, первоначально взятых под наблю-
дение, а к числу исправно действующих в данный момент технических
устройств Nrf т.е.
х- = ±<_
При Д/. -*0 из выражения (1.41) получим
Х(П = N'(t}
dnlt)
di
Подставляя сюда выражения (1.40) и (1.36). имеем
(1.41)
(1.42)
(1.43)
XU) =
Ш)
Pit) •
По смыслу интенсивность отказов является условной вероятностью
того, что элемент, проработавший безотказно до момента t, откажет в
последующую единицу времени. Исходя из того, в теории надежности ха-
рактеристику Х(() иногда называют опасностью отказа.
Приведенные характеристики надежности связаны между собой функцио-
нальной зависимостью. Действительно, из уравнений (1.34), (1.38).
(1.40) и (1.43) имеем
МЛ - - рЬг «•">
Проинтегрировав это уравнение, получим
P(t) = exp
г t
- J Х«)Л
(1.45)
В соответствии с (1.47) и (1.49) имеем
fit) - Х(/)ехр
г t
- J \(t)dt
о
(1.46)
43
Еще одной важной характеристикой надежности является среднее в[
безотказной работы, представляющее собой математическое ожид;
времени безотказной работы. В общем случае
оо оо
Г = f Pit)dt = [ exp
ср J J
0 0
r t
- J Х(/)Л
0
(1.47)
Опыт эксплуатации и результаты исследований показывают, что в те-
чение периода нормальной эксплуатации (т.е. после отработки системы),
когда влияние законов распределения весьма незначительно, можно без
большой для практики погрешности считать, что интенсивность отказов
технических устройств от времени не зависит и практически является
постоянной величиной, т.е.
Х(/) = X = const. (1.48)
При этом вероятность безотказной работы описывается экспонен-
циальным законом
Pit) = exp (- X/). (1.49)
Существенно упрощаются и другие показатели надежности:
fit) = \it)Pit) = Хехр (- Xt); (1.50)
ОО оо
Т = f Pit) = f exp (-Х/) dt = 1A. (1.51)
ср J J
о о
Учитывая выражения (1.51), зависимость (1.49) можно представить в
виде
Pit) = exp (- tfT ).
ср
Если t < Т , то
ср
Pit) = 1 -tfT = 1 - X/;
ср
Q(0 = tfT = X/.
ср
(1.52)
(1.53)
44
Погрешность при таком упрощении не превышает 0.5//Т .
q>
Надежность силовой конструкции ЛА. Изложенные выше показатели
надежности в своей основе ориентированы на математические (формаль-
ные) методы расчета. При использовании этих методов принимают, что
изменение надежности подчиняется некоторым статистическим закономер-
ностям, которые определяются лишь экспериментально. При этом нельзя
выяснить причины отказов и непосредственно определить возможности их
устранения. Подобным образом оценивают надежности ЛА в целом, элект-
ромеханических агрегатов, пиротехнических устройств, деталей машин и
механизмов, работоспособность которых лимитируется изнашиваемостью
частей и др.
В последние годы актуальной стала задача количественной оценки на-
дежности силовых конструкций. Эго связано с тем, что по мере накопле-
ния опыта проектирования и повышения культуры конструирования при
расчете конструкции на прочность стало возможным уменьшение коэффи-
циента безопасности до 1,35 и даже 1,25. Следствием уменьшения коэф-
фициента безопасности является снижение не только массы силовой
конструкции, но и надежности. Так, если при коэффициенте безопасности
f = 1,5 надежность конструкции представляет чисто теоретический инте-
рес: настолько она велика по сравнению с надежностью других частей ЛА
(системы управления, двигательной установки и т.д.), то при коэффи-
циенте безопасности 1,25 надежность конструкции становится соизмери-
мой с надежностью остальных частей ЛА.
.Для оценки надежности силовых конструкций в большинстве случаев
наиболее подходящи не формальные математические методы, а методы,
учитывающие физические причины отказов. При этом надежность конструк-
ции, по существу, понимают как вероятностную прочность. Показателем
надежности при таком подходе является вероятность превышения несущей
способности конструкции над действующими нагрузками. И несущая спо-
собность конструкции, и действующие нагрузки рассматриваются как слу-
чайные величины.
В общем случае под несущей способностью конструкции понимается
случайная характеристика
R(f) = a (OS, (1.54)
доп
гДе а (О - допускаемое напряжение в конструкции; S - функция
доп
геометрических параметров.
Случайный характер несущей способности конструкции обусловлен не-
45
однородностью структуры и прочностных характеристик конструкционных
материалов, допусками при изготовлении конструкции, влиянием фактора^
времени. При длительном хранении ЛА ухудшаются механические характер
ристики материалов, вследствие коррозии изменяются геометрически^
размеры силовых элементов, при действии повторно-статических нагрузок
возникает опасность усталостного разрушения. При длительном аэродина-
мическом и лучистом нагреве наблюдается ползучесть материала.
Характер внешней нагрузки N(t) определяется взаимодействием ЛА с
окружающей средой. В условиях полета основное влияние на конструкцию
оказывает воздушный поток, случайный характер течения которого связан
с турбулентностью атмосферы и обтекания, аэроупругостью, а также с
работой системы управления. Важную роль играет аэродинамический и лу-
чистый нагрев конструкции. В ряде случаев весьма существенной оказы-
вается нагрузка при транспортировке ЛА, которая также носит случайный
характер.
Показатель надежности конструкции с позиции вероятностной проч-
ности
Vh = Вер {R(t) > W)}.
(1.55)
На этапе проектирования допустимо рассматривать не весь случайный
процесс (за все время полета ЛА), а лишь сечение случайного процесса
в расчетных случаях нагружения, определяемых при расчете на проч-
ность. Для этих условий, предположив, что распределения случайных ве-
личин RhN подчиняются нормальному закону, показатель надежности си-
ловой конструкции может быть рассчитан по известной формуле А.Р. Ржа-
ницына
W = 1/2 * Ф(у),
н
(1.56)
где Ф(?) - функция Лапласа; 7 - характеристика безопасности.
M(R) -M(N)
M(R), M(N) - математические ожидания R и N; а„, - средние
квадратические отклонения этих же величин.
Более общий метод расчета надежности, основанный на теории мно-
жеств, создан В. В. Болотиным. Согласно этому методу вводятся некото-
рое пространство качества системы, область допустимых состояний сис-
46
темы и траектория изменения качества системы по времени. Выход этой
траектории из области допустимых состояний трактуется как отказ сис-
темы. Характеристикой надежности является вероятность невыброса слу-
чайного поля или процесса за заданный уровень.
§ 1.9. ОСНОВНЫЕ ТРЕБОВАНИЯ К КОНСТРУКЦИЯМ ЛА
Выше было показано, что новые свойства технических систем получают
благодаря научно-техническому прогрессу. При заданных ресурсах (за-
тратах) эффективность ЛА и их комплексов определяется исключительно
прогрессивностью нововведений, т.е. техническим уровнем. Это значит,
что основное требование к ЛА и его конструкции состоит в том, чтобы
при проектировании и производстве ЛА обеспечить максимально высокий
технический уровень. Это требование, в свою очередь, как следует из
(1.10), представляет собой совокупность требований конструктивного,
производственно-технологического и эксплуатационного совершенств.
Требования конструктивного совершенства. Эти требования охватывают
наиболее широкий круг проблем, важнейшие из которых: массовое, аэро-
динамическое, энергетическое и экологическое совершенства.
Массовое (весовое) совершенство отражает уровень конструктивно-
прочностной проработки системы. Чем меньше масса при реализации за-
данных характеристик целевого назначения, тем более технически совер-
шенен и экономически эффективен ЛА. Поэтому снижение массы конструк-
ции является наиглавнейшей задачей конструктора. Массовое совершенст-
во характеризуется относительной массой конструкции, представляющей
собой отношение массы конструкции ЛА (или отдельного элемента) к
полной (начальной) массе изделия.
Аэродинамическое совершенство ЛА - это интегральная характеристика
аэродинамического сопротивления, подъемной силы, аэродинамического
качества, скорости и дальности полета. Аэродинамика оказывает непо-
средственное влияние на все характеристики ЛА: чем выше аэродинами-
ческое качество, тем при прочих равных условиях требуется меньшая тя-
га двигателей, меньший запас топлива для полета на заданное расстоя-
ние, тем, следовательно, меньше масса всего ЛА. Все это ставит аэро-
динамическое совершенство в число наиважнейших составляющих техничес-
кого уровня ЛА.
К показателям аэродинамического совершенства относятся коэффи-
циенты лобового сопротивления и подъемной силы и аэродинамическое
качество. Поскольку аэродинамическое совершенство оказывает непосред-
ственное влияние на энергозатраты, необходимые для выполнения полета,
47
то они (или величины, им пропорциональные) могут выступать в качестве
обобщенного показателя. В частности, для летательных аппаратов
большой дальности, как следует из формулы Бреге. ।
L = ^-ih j i . (1.58) |
уд T I
при заданных энергетических ресурсах дальность полета тем больше, чем
больше произведение XV. которое, следовательно, может быть принято в
качестве показателя аэродинамического совершенства. В формуле (1.58)
обозначено: К - аэродинамическое качество; V - скорость полета; -
удельный часовой расход топлива; - относительный запас топлива.
Энергетическое совершенство ЛА связывают с расходом топлива. В
свою очередь, расход топлива определяется, с одной стороны, уровнем
потребных энергозатрат, обусловленных траекторией движения ЛА и его
аэродинамическим совершенством, и с другой - совершенством двигатель-
ной установки, включая характеристики топлива, массовые (весовые) ха-
рактеристики конструкции двигателя, его термодинамические качества.
Конкретные показатели определяются типом двигательной установки.
Однако во всех случаях в числе показателей технического уровня должны
фигурировать удельная тяга или удельный расход топлива и относитель-
ная масса конструкции двигательной установки.
Экологическое совершенство ЛА отражает его влияние на окружающую
среду. Защита окружающей среды в наше время становится межгосударст-
венной проблемой, обостряющейся с развитием техники. Новые виды энер-
гетики, использование космического пространства становятся предметом
международных соглашений и ограничений. Экологические показатели осо-
бенно важны для пилотируемых летательных аппаратов.
Требования производственно-технологического совершенства. Термином
"производственно-технологическое совершенство" определяют такие
свойства конструкции, при помощи которых в процессе производства ЛА
можно достигнуть наиболее высоких производственных показателей. Повы-
шению технологичности способствуют: расчленение конструкции на агре-
гаты. отсеки и панели; простота конструкции; минимальное число дета-
лей; простые конфигурации деталей, допускающие применение высокопро-
изводительных процессов; правильный выбор конструкционных материалов
с учетом их технологических свойств; минимальный расход материалов.
Поясним эти требования.
Современный уровень и масштабы производства ЛА требуют комплекс-
48
ного решения вопросов проектирования конструкции, разработки техноло-
гии и организации производства. Одним из важнейших результатов такого
комплексного подхода является широкое применение принципов расчлене-
ния конструкции на отдельные сборочные единицы. Тщательно продуманная
система разъемных и неразъемных соединений дает возможность повысить
производительность труда при производстве ЛА и его ремонте. Это
достигается за счет узкой специализации рабочих и особенно за счет
создания лучших условий труда на каждой из операций (так, например, в
зависимости от позы, которую вынужден принимать рабочий, производи-
тельность его труда может изменяться в два-три раза). Расчленение
конструкции позволяет организовать узкую специализацию производства,
создать специализированные цехи и заводы и на этой основе значи-
тельно сократить производственный цикл за счет параллельного изготов-
ления отдельных частей ЛА. Большие преимущества в эксплуатации дает
модульность конструкции, позволяющая значительно уменьшить простои и
сократить трудоемкость при техническом обслуживании и ремонте. Пре-
имущества модульности сказываются также на числе потребных типоразме-
ров ЛА, а следовательно, и на интегральных экономических характерис-
тиках системы.
Простота конструкции, пожалуй, самая комплексная характеристика
технологичности. Создать простую конструкцию всегда труднее, чем
сложную, но зато такая конструкция всегда значительно лучше осваива-
ется производством. Упрощение конструкции достигается за счет целого
ряда факторов: важное значение имеют простая конфигурация деталей,
использование стандартных и нормализованных деталей, применение мини-
мальных числа типоразмеров и номенклатуры материалов и полуфабрика-
тов. Большие возможности упрощения конструкции открывает также
использование ранее освоенных в производстве и апробированных в
эксплуатации узлов и деталей. Простота и технологичность конструкций
существенно зависят от метода получения заготовок.
Значительное влияние на технологические свойства ЛА оказывает при-
меняемый материал. Механические и физические свойства материала
должны обеспечивать минимальную массу конструкции, допускать примене-
ние высокопроизводительных технологических процессов. Материалы
должны быть коррозионно-стойкими, иметь низкую стоимость и недефицит-
ное сырье. С точки зрения технологии производства и эксплуатации
очень важно, чтобы конструкционный материал не имел склонности к
образованию трещин и хорошо обрабатывался. Эти качества материала тем
лучше, чем выше его пластичность, которая свидетельствует о способ-
ности материала поглощать энергию при деформировании и потому являет-
49
ся важнейшей характеристикой работоспособности, а следовательно, |1
ресурса конструкции. I
Производственно-технологическое совершенство ЛА зависит также и от
общего технического уровня производства - степени освоения передовых
методов обработки материалов, состояния станочного парка, уровня
автоматизации и механизации производственных процессов и т.п. Техно-
логичность конструкции ЛА проявляется на этапе его создания черфз
трудоемкость и себестоимость производства. На последующих стадиях
жизненного цикла ЛА технологичность конструкции ЛА влияет на его
эффективность через такие эксплуатационные факторы, как удобство
контроля состояния, обслуживания и ремонта, надежность и долговеч-
ность и т.п.
Интегральная оценка производственно-технологического совершенства
ЛА на сегодняшний день является нерешенной задачей. На практике
применяются следующие показатели: время освоения производства нового
ЛА; удельная трудоемкость производства, представляющая отношение
суммарных затрат времени на изготовление ЛА к массе пустого ЛА;
степень преемственности конструкции, представляющая отношение числа
деталей, использованных в предыдущих модификациях, к общему числу
деталей; степень расчленения конструкции, характеризуемая максималь-
ными габаритными размерами неразъемного агрегата (панели); удельная
материалоемкость, равная отношению массы готовой конструкции к
суммарной массе заготовок.
Требования эксплуатационного совершенства. Под эксплуатационным
совершенством понимают совокупность свойств ЛА, характеризующих его
приспособленность к эксплуатации. К числу основных требований, опре-
деляющих уровень эксплуатационного совершенства ЛА, относят эксплуа-
тационную технологичность и транспортабельность.
Эксплуатационная технологичность характеризует приспособленность
конструкции и бортовых систем к прогрессивным, высокоэкономичным ме-
тодам технического обслуживания и ремонта. Решающее влияние на
эксплуатационную технологичность оказывают контролепригодность,
доступность, легкосъемность, взаимозаменяемость и унификация систем и
агрегатов.
Контролепригодность - это приспособленность ЛА к проведению конт-
роля параметров и характеристик различными средствами и методами.
Данные контроля, характеризующие состояние конструкции и бортовых
систем, являются основой для управления процессом эксплуатации. Важ-
нейшая задача контроля заключается в диагностировании состояния ЛА,
его систем, агрегатов и деталей. Трудоемкость ее решения зависит от
50
уровня автоматизации контроля, которая позволяет значительно расши-
рить область контроля при одновременном сокращении времени его прове-
дения. Развитие автоматизации идет как по линии создания специализи-
рованных подвижных наземных измерительных установок, так и по линии
расширения и совершенствования систем встроенного контроля. Контроле-
пригодность оказывает решающее влияние на внедрение в практику новых,
более эффективных методов технического обслуживания и ремонта.
Очень важно, чтобы конструкции узлов крепления оборудования обес-
печивали легкосъемность, т.е. возможность замены блоков оборудования
с минимальными затратами труда и времени. Важную роль играет взаимо-
заменяемость комплектующих изделии и деталей. Она способствует сокра-
щению затрат труда, материалов и простоев ЛА при техническом обслужи-
вании и ремонте. От этого фактора зависит успешное проведение агре-
гатно-узлового ремонта, а также обслуживания по состоянию.
Еще одним важным фактором, определяющим эксплуатационную техноло-
гичность летательных аппаратов, является унификация элементов и от-
дельных узлов. Унифицированными считаются:
составные части изделия, выпускаемые по стандартам данного пред-
приятия, если они используются хотя бы в двух различных изделиях,
изготовляемых этим предприятием;
составные части изделия, не изготовляемые на данном предприятии, а
получаемые им в готовом виде в порядке кооперирования;
заимствованные составные части изделия, ранее спроектированные для
конкретного изделия и примененные в двух или более других изделиях.
При выполнении требований унификации эксплуатация ЛА различного
типа будет иметь много общего, что упрощает и удешевляет эксплуата-
цию, способствует повышению ее качества, сокращает потребную конт-
рольно-проверочную аппаратуру, уменьшает номенклатуру запасных
частей.
На практике эксплуатационная технологичность оценивается рядом
обобщенных показателей, основные из которых: затраты времени на
техническое обслуживание и ремонт; трудоемкость технического обслужи-
вания и ремонта; номенклатура и стоимость потребных запасных частей;
уровень унификации. Затраты времени на техническое обслуживание и
ремонт зависят от характера отказов и их интенсивности и определяются
в соответствии с моделью функционирования ЛА. При этом определяющим
фактором является модульность конструкции; показателем трудоемкости -
затраты живого труда на каждую регламентную форму обслуживания.
Номенклатура и стоимость запасных частей зависят от потребного уровня
технической готовности ЛА и ресурса комплектующих изделий. Наконец,
51
показатели унификации характеризуются
филированных и оригинальных составных стандартных’ У™"
Транспортабельность характеризует г?стеи ® ЛА’
тированию, т.е. к перемещению в про'^пособленность ЛА к .
целевым использованием, а также к по^™6’ ** «хфовождающемус
операциям, связанным с транспортирован?*0^^ и
К подготовительным операциям относк 1
B=IW тару, довивание.
разборка изделия, защита от воздействкМе™3аиия* П0?>УЗК.’ частачная
и т.п. Заключительными операц™'’ У^Р03 и зибРации* крепление
транспортного средства, распаковывание, НаПрИМвР’ Р^У3*®
Как правило, транспортные операции ^^орка и т.п.
цесса функционирования ЛА. При угоц',вля,отся час™° "Р0"
группами измерителей: показателями <k*“ 0UfiHKa "Р0"3®0®"™ ДВУМЯ
временными и стоимостными затратами совершенства и
выполнение подгоговигельно-заключигелы? Л^портарование изделия и
зателей рассматривается обычно относите* Р^’ Вторая ГруППа
рования, одной перевозки, доставки и t.i>ho единицы "У™ 1Ранспорти-
Г л а в а 2. ПРИНЦИПИАЛЬНЫЕ Qp„„,
АВТОМАТИЗИРОВАННОГО ПРОЕККг^
КОНСТРУКЦИЙ ЛА ИРОВАНИЯ
§2.1. ЦЕЛИ И ЗАДАЧИ АВТОМАТИЗМ
ПРОЕКТНО-КОНСТРУКТОРСКИХ РАБОг1ЛИИ
Автоматизированное проектирование ГС\~_
тавления описания еще несуществующей)^ 0ПРеделяет как пРоцесс сос"
преобразования описаний объекта и (или?6*9™* К<ГТ“ ОТДелЬНЫе
ния или алгоритма процесса, а также пр^ алгоРи™а ФУ^«Шюнирова-
ных языках осуществляются с взаимодей^ДсгавлениЯ °™C^X Р^'
Автоматизация проектирования в начу6** человека и ЭВМ.
необходимостью. Эго направление в про< СЧИГаеГСЯ неоспоРимои
пективное практически во всех ивдустрта ТиРовании признается как пере-
тих сложные образцы новой техники. rWn>H0 развиП“ СфаНа*’ аВДаЮ'
тающего внимания к автоматизации "Р^ непРеРывно ВО^'
видимо, связана с все усложняющейся н>ектио-конс^укгорских работ,
циалисгов. в ведущих отраслях промышл^^6*10®^- П° 0ЦеНКЗМ
число различных классов технических ^юсти:
через каждые 10 лег; в ^Днем
52
сложность изделии по числу деталей и узлов возрастает в два раза
через 15 лет;
объем научно-технической информации, используемой в конструк-
торских разработках, удваивается через 8 лет;
время создания новых изделий уменьшается в два раза примерно через
25 лет, одновременно сокращается время морального старения изделий.
В итоге объем проектно-конструкторских работ в последнее время
возрастает примерно в 10 раз через каждые 10 лет. Значит, если техно-
логия проектирования не будет изменяться, то необходимы такие же тем-
пы увеличения числа специалистов, что нереально. Необходима интенси-
фикация и значительное повышение производительности конструкторского
труда. Проектирование, пожалуй, единственная область деятельности че-
ловека, в которой с момента ее возникновения и до наших дней достиг-
нуты самые минимальные результаты в повышении производительности тру-
да. Так, в технически развитых странах производительность труда в
производстве с 1900 по 1960 год выросла в среднем на 1000 %, а в кон-
струировании - лишь на 20 %. Магистральный путь интенсификации
проектно-конструкторских работ - их автоматизация.
Усложнение проектируемых конструкций затрудняет целостное обозре-
ние и должную увязку входящих подсистем, поэтому на повестку дня вы-
двигается проблема изменения технологии проектирования конструкций,
особенно в части обработки информации, представления ее в таком виде,
который освобождает конструктора от рутинных, нетворческих работ и
тем самым предоставляет дополнительные возможности для научно-
технического творчества. В этом одна из важных функций автоматизации
проектных работ.
Еще одним следствием усложнения конструкций является, как извест-
но, расчленение при проектировании сложных систем на более простые,
что влечет за собой новую проблему - проблему согласования характе-
ристик отдельных частей системы, т.е. синтеза, который должен давать
возможность представлять конструкцию в целом, оценивать ее разнооб-
разные качества и соответствие исходным требованиям. Решение этой за-
дачи, практически невозможное без ЭВМ, на сегодня является также важ-
нейшей функцией автоматизации проектных работ.
Автоматизированное проектирование конструкций - это качественно
новый уровень проектирования, позволяющий:
повысить производительность конструкторского труда и облегчить
сам труд за счет исключения ручных рутинных работ и благодаря расши-
рению возможностей проявления творческого потенциала конструктора;
повысить качество проектов благодаря внедрению более совершенных
53
методологии и технологии проектирования, что возможно лишь в условиях
автоматизации процесса проектирования;
снизить стоимость разработки проекта вследствие уменьшения кон*
цептуальных ошибок, свойственных начальному периоду проектирования.
Тенденции развития вычислительной техники и средств машинной гра-
фики позволяют рассчитывать на то, что в недалеком будущем потреб-
ность в освоении конструктором тонкостей программирования в основ-
ном отпадет. Программы станут проще, более широко будет использо-
ваться естественный язык диалога с машиной; существенно упростятся
программы логических операций и т.д.
В этих условиях особо значимыми становятся методология проекти-
рования, обобщение процессов конструирования, выявление необходимых
при автоматизации возможностей упорядочения процессов. Причем это от-
носится не только к информационно-справочной базе, но и к расчетным
режимам, математическим моделям, принципам выбора вариантов и т.д.
Изложение этих вопросов с акцентом на новые задачи для конструкторов
в условиях автоматизированного проектирования и является основным со-
держанием настоящей главы.
Термин "автоматизированное" проектирование (а не автоматическое)
подчеркивает тот факт, что в процессе проектирования ведущая роль
остается за конструктором. Автоматизация относится к работе с банками
данных, включая хранение, оперативную коррекцию и выдачу данных в
нужных форматах, документирование данных и др.
Учитывая то, что в процессе проектирования основное время затрачи-
вается именно на получение данных, их переработку, обмен информацией,
нельзя не согласиться с тем, что автоматизация всех видов работы с
данными имеет решающее значение для повышения производительности тру-
да проектировщика и, в частности, позволяет избежать тех больших вре-
менных затрат и ошибок, которыми сопровождается сегодня обмен инфор-
мацией между подразделениями и исполнителями. В связи с этим уместно
отметить еще то, что преимущества автоматизированной работы с данными
проявляются, очевидно, тем отчетливее, чем больше объем и сложнее
структура обрабатываемой информации, чем больше информационных связей
между пользователями и чем шире круг этих пользователей.
Вернемся к функциям проектировщика. Его роль, как указано выше,
ведущая. Все неформальные процедуры, когда требуется интуиция и опыт,
когда нужно принимать решения в условиях неопределенности, возлагают-
ся на человека. Это общий принцип. Чтобы его реализовать, современные
автоматизированные системы строятся на основе диалога человек - ЭВМ.
Режим диалога с ЭВМ (так называемый интерактивный режим) в целом
54
ряде случаев открывает качественно новые возможности для решения не-
формализуемых проектных задач и существенно повышает производитель-
ность труда инженера. С помощью пульта управления проектировщик может
вводить исходную информацию, корректировать параметры, геометрические
размеры, менять последовательность вычислений, повторять циклы расче-
тов и т.д. При этом в целях контроля вся информация как цифровая, так
и графическая может отображаться на экранах дисплеев. При проектиро-
вании объектов со сложной геометрией на экране можно получать прост-
ранственное изображение всей конструкции, ее различные сечения, от-
дельные виды и т.д. Режим диалога удобен и тем, что пользователь не
обязан знать языки программирования, так как вся информация на экране
дисплея отображается на языке, близком к естественному.
Здесь необходимо сделать одно замечание. Может сложиться такое
представление: через какое-то время появятся ЭВМ следующего поколе-
ния, имеющие быстродействие, измеряемое десятками миллионов операций
в секунду, расширятся возможности терминальных устройств, будет соз-
дано мощное общеинженерное математическое обеспечение, и все проблемы
будут решены. Это - глубокое заблуждение.
Конечно, без хороших вычислительных машин не будет хороших систем
автоматизированного проектирования. В еще большей степени это отно-
сится к системам математического обеспечения. Но в конечном счете все
это лишь технические устройства - инструмент. Надо еще уметь им поль-
зоваться. Чем сложнее инструмент, тем труднее им пользоваться, тем
выше должна быть научная и инженерная культура пользователя.
Задача не только в том, чтобы уметь использовать современный инст-
рументарий, но и в том, чтобы его совершенствовать, лучше приспосаб-
ливать к инженерным задачам. В первую очередь это относится к про-
граммам диалога. Их совершенствование возможно лишь на основе объеди-
нения усилий математиков и конструкторов. Причем потребное содержание
диалога может сформулировать лишь конструктор. Разработка содержа-
тельной части диалога, т.е. специальной системы правил и алгоритмов,
отражающих процедуры выявления, оптимизации и изображения технических
решений, - это одна из важнейших функциональных обязанностей инжене-
ра-конструктора.
Основная трудность конструкторского диалога связана с очень боль-
шой размерностью задач, описывающих функционирование конструкции.
Расчеты на прочность и аэроупругую устойчивость силовых конструкций
ЛА занимают часы процессорного времени даже на ЭВМ с быстродействием
в миллионы операций в секунду. Если выбирать параметры конструкции ЛА
с учетом воздействия спектра тепловых и силовых нагрузок, то стано-
55
вится ясно, что даже для перспективных ЭВМ проблема организации диа-
лога конструктор - ЭВМ не может быть решена с помощью прикладного
обеспечения, основанного на поверочных методах расчета конструкций. В
то же время использование быстродействующих, но упрощенных моделей и
методов для организации диалога с ЭВМ может оказаться недопустимым с
точки зрения несоответствия между потребной точностью расчета и
грубостью упрощенных моделей и методов.
Проблема организации конструкторского диалога должна решаться с
помощью ’’быстродействующих** процедур с простым и понятным конструкто-
ру способом постановки вопроса и понятной ему формой ответа. Создание
таких процедур - новое направление прикладных разработок. Некоторые
из них излагаются в следующей главе.
§ 2.2. ОБЛАСТИ ПЕРВООЧЕРЕДНОЙ АВТОМАТИЗАЦИИ
Первый вопрос на пути практической автоматизации процесса проекти-
рования - какие проектно-конструкторские работы следует автоматизиро-
вать в первую очередь. Единого мнения по этому вопросу не существует.
На наш взгляд, наиболее обстоятельный анализ направлений автоматиза-
ции приведен в [2]. Рассмотрим эти направления, ориентируясь на сле-
дующую стадийность процесса проектирования: составление технического
задания, разработка технических предложений, эскизное проектирование,
рабочее проектирование и подготовка производства.
Результаты экспертных исследований по оценке важности автоматиза-
ции различных стадий проектирования приведены в табл. 2.1. Важность
автоматизации оценивалась баллами: 3 - автоматизация важна; 2 - авто-
матизация желательна; 1 - безразлична.
Приведенные данные позволяют отметить, что эксперты выразили
мнение о желательности первоочередной автоматизации стадий формирова-
ния технических предложений и эскизного проектирования при одновре-
менной автоматизации всех прочих стадий проектно-конструкторских работ.
Таблица 2.1
Шифр Содержание работ Балл
С1 Составление технического задания 2,200
С2 Разработка технических предложений 3,000
СЗ Эскизное проектирование 2,933
С4 Рабочее проектирование 2,800
С5 Подготовка производства 2,933
56
Оценка эффективности автоматизации проектирования на различных
стадиях конструкторских разработок проводилась по следующим
источникам:
И1 - использование достижении науки и техники (патенты, изобретения
и т.д.);
И2- автоматизированный синтез новых технических решений;
ИЗ- многовариантные оптимизационные расчеты, в результате которых
достигаются взаимно согласованные решения по отдельным частям
изделия;
И4- применение более точных расчетных моделей и учет большого числа
факторов и расчетных случаев при анализе и сравнении вариантов;
И5 - ускорение процесса получения и тиражирования документации и
ускорение отработки всевозможных изменений в процессе разработ-
ки и создания изделий;
И6 - сокращение числа ошибок в проектно-технологической докумен-
тации.
Распределение средних значений оценок приведено в табл. 2.2., где
диапазон оценок 2,501...3,0, отмеченный (*♦), отражает значительное
влияние; диапазон 2,001...2,5 - положительное влияние (+) и диапазон
1,501...2,0 - малое влияние (0).
Полученные данные свидетельствуют о значительном влиянии таких
источников эффективности, как использование достижений науки и техни-
ки, автоматизированный синтез новых технических решений и достижение
взаимно согласованных решений по отдельным частям изделия (источники
И1, И2, ИЗ) на начальных стадиях проектных работ.
Этот вывод согласуется с данными, полученными Институтом киберне-
тики АН УССР при анализе экономической эффективности различных стадий
процесса проектирования в машиностроении, согласно которым неустра-
Таблица 2.2
Источники эффективности С1 С2 СЗ С4 С5
И1
И2
ИЗ
И4
И5
И6
57
ненная ошибка на стадии исследований стоимостью всего 1 руб. оборачи-*
вается десятью рублями потерь на этапе конструирования, сотней - при
изготовлении опытного образца, тысячей - в процессе эксплуатации.
Применение более точных расчетных моделей и учет большого числа
факторов и расчетных случаев при анализе и сравнении вариантов
(источник И4) оказывает значительное влияние на стадии эскизного
проектирования. На заключительных этапах, связанных с процессом раз-
работки конструктивно-технологической документации, наибольший эффект
ожидается от использования средств машинной графики в интерактивном
режиме (источники И5, И6). Существенное влияние на трудоемкость тех-
нологической подготовки производства оказывает ранняя технологическая
проработка изделий и обеспечение технологичности конструкций на всех
стадиях проектирования и особенно на начальных.
Общий вывод из приведенного анализа состоит в том, что автоматизи-
рованное проектирование должно охватывать не только заключительные
этапы, но и поисковые работы, поскольку без ЭВМ обозреть и как-то
оценить большое число возможных идей и технических новшеств практи-
чески невозможно.
Как показывает опыт, наиболее рациональным методом, позволяющим
автоматизировать поисковое конструирование, является морфологический
подход. Морфологический подход - это разновидность системного анали-
за, представляющая собой метод логической организации идей и приемов
(в основном эвристических), позволяющий добиться комплексного обзора
всех возможных вариантов решения рассматриваемой задачи. В основе ме-
тода - упорядочение идей (вариантов) на базе логического мышления и
опыта.
Основными этапами морфологического подхода являются: строгое опре-
деление области автоматизации; точная и четкая формулировка цели (за-
дачи); изучение факторов и параметров, определяющих объект проектиро-
вания, и установление основ для сравнения; определение свойств каждо-
го параметра и количественное выражение основы сравнения (построение
"морфологического ящика" свойств); определение функциональной ценнос-
ти всех допустимых решений; построение параметрического ряда ва-
риантов.
§ 2.3. ПРИНЦИПЫ ПОСТРОЕНИЯ И СТРУКТУРА САПР
Общая характернстжа САП*. В современных условиях автоматизиро-
ванное проектирование выполняется с помощью специальных систем авто- ’
матизированного проектирования. Согласно ГОСТ САПР представляет собой '
58
организационно-техническую систему, состоящую из комплекса средств
автоматизации проектирования, взаимосвязанного с подразделениями
проектной организации, и выполняющую автоматизированное проектирова-
ние. Главной особенностью САПР является взаимосвязь конструктор -
ЭВМ, позволяющая осуществлять процесс проектирования с оптимальным
распределением функцией между человеком и ЭВМ и с максимальной авто-
матизацией всех проектных процедур.
Функция САПР состоит в том, чтобы обеспечить переход от использо-
вания ЭВМ лишь в качестве вычислителя (большого арифмометра) к
использованию в качестве рабочего органа, т.е. исполнителя специально
к тому приспособленной технологии проектирования. В соответствии с
этим на САПР возлагается:
автоматизированное накопление, хранение, оперативная коррекция и
выдача данных, используемых в процессе проектирования;
автоматизированное использование информации в машинном представле-
нии, полученной на некоторой стадии проектирования, и других стадиях
без ручной обработки;
автоматизированный выпуск технической и чертежной документации;
планирование и проведение натурного эксперимента и обработка его
результатов;
автоматизированное управление ходом разработки и др.
Облик системы автоматизированного проектирования определяется со-
держанием решаемых задач. Основными звеньями САПР являются подсисте-
мы, организованные в многоуровневую структуру. Каждая подсистема
обеспечивает получение законченных проектных решений и соответствую-
щих проектных документов.
Структура САПР, как правило, отражает многоэтапностъ проек-
тирования как принцип перехода от грубых моделей при решении широкого
круга принципиальных вопросов облика будущей конструкции к более
точным на тех стадиях, когда уточняются (оптимизируются) проектные
параметры. Такая иерархия обеспечивает возможность на каждом этапе
получать решение соответствующей задачи, не загромождая его обилием
несущественных для данной фазы деталей.
Принципиальным для САПР является наличие обратных связей, отражаю-
щих итеративный характер процесса проектирования, а также обеспечение
совместимости подсистем и сохранение открытой структуры системы в це-
лом. Это позволяет реализовать развитие САПР без коренной перестройки
путем наращивания подсистем (на всех уровнях) и за счет влючения всей
системы в более сложную систему.
Начало работ по созданию САПР относят к середине шестидесятых го-
59
дов. Именно к этому времени был накоплен определенный опыт использо-
вания вычислительной техники для решения инженерных задач и получили
необходимое развитие средства вычислительной техники. По первоначаль-
ным замыслам предполагалось, что САПР ЛА должны строиться по объек-
товому признаку и объединять все этапы проектно-конструкторских ра-
бот, важнейшими из которых, как указано в гл. 1, являются:
исследование эффективности и проектирование комплексов;
общее проектирование ЛА;
проектирование конструкций ЛА;
технологическая подготовка производства.
Опыт создания САПР ЛА подкорректировал первоначальные замыслы.
Более целесообразным оказалось создание САПР, ориентированных по ви-
дам проектно-конструкторских работ, когда каждому этапу проектирова-
ния соответствует своя САПР. В настоящее время задачи исследования
эффективности и проектирования комплексов решаются с помощью автома-
тизированных систем научных исследований (АСНИ); задачи общего проек-
тирования ЛА - с помощью так называемых обликовых САПР ЛА; вопросы
проектирования конструкций возлагаются на автоматизированные системы
конструирования (АСК); технологическая подготовка производства - на
автоматизированные системы технологической подготовки производства
(АСТПП). В перспективе же все эти четыре системы должны работать как
единая интегрированная САПР на единой информационной основе.
Как любую сложную систему, САПР можно представить в виде совокуп-
ности отдельных частей - компонентов САПР, каждый из которых предназ-
начен для выполнения определенных функций и обладает определенной са-
мостоятельностью. Такими компонентами являются методическое, информа-
ционное, техническое, программное, математическое, лингвистическое и
организационное обеспечения.
Методическое обеспечение САПР - наиболее важная с точки зрения
проектировщика составляющая. Это методология и методики проек-
тирования, ориентированные на автоматизированный процесс. Накопленный
опыт в области проектирования пока что еще недостаточно приспособлен
к автоматизации. Дело не только в том, что при автоматизированном
проектировании видоизменяется метод работы с информацией. Видоизме-
няется технологический процесс проектирования, и это главное.
Информационное обеспечение включает в себя совокупность сведений,
необходимых для автоматизированного проектирования. Компонентами
информационного обеспечения являются также регламенты, которые опре-
деляют набор правил и стандартов, описывающих порядок выполнения ра-
60
бот, принципы взаимодействия элементов системы, правила хранения и
обработки информации и др.
Техническое обеспечение САПР - это ЭВМ, терминальные пункты с
устройствами ввода-вывода графической и текстовой информации, аппара-
тура связи и передачи данных, средства для организации банков данных.
Совокупность устройств технического обеспечения образует комплекс
технических средств САПР.
Программное обеспечение САПР включает в себя документы с текстами
программ на одном из алгоритмических языков, программы на машинных
носителях и инструкции по эксплуатации отдельных программ и программ-
ных комплексов.
Математическое обеспечение включает в себя модели, методы и прие-
мы, реализующие прикладные проектные и поверочные расчеты, процедуры
поиска и оптимизации проектных параметров, а также воспроизведение
графического изображения.
Лингвистическое обеспечение САПР представляет собой совокупность
используемых терминов и языков программирования.
Организационное обеспечение САПР - это организационно-правовая
подсистема, включающая в себя инструкции, положения, регламенты, при-
казы, квалификационные требования и другие документы, предписывающие
функциональные обязанности и распределение ответственности исполните-
лей на всех этапах создания, эксплуатации и развития САПР.
Ниже приводится более подробная характеристика основных компонен-
тов САПР.
Комплекс техммеских средств САПР. Состав и структура комплекса
технических средств в значительной степени зависят от специфики кон-
кретной САПР. Такие факторы, как объем и характер информации, перера-
батываемой системой, способ взаимодействия пользователя с системой,
время реакции на запросы при диалоге ЭВМ - оператор, характер решае-
мых задач и форма представления конечного результата, а также многое
другое существенно влияют на состав и характеристики технических
средств.
Обычно технический комплекс САПР имеет двухуровневую структуру.
Верхний уровень системы - это процессорная часть, т.е. основные вы-
числительные ресурсы. Эти функции в современных САПР выполняют боль-
шие универсальные ЭВМ. Нижний уровень образуют периферийные устройст-
ва, с помощью которых обеспечивается ввод-вывод информации и органи-
зация диалога пользователя с ЭВМ. Основным техническим средством это-
го уровня являются алфавитно-цифровые и графические дисплеи.
Связь ЭВМ с периферийными устройствами осуществляется через конст-
61
руктивно обособленные устройства обмена, называемые каналами. Сущест-
вуют два типа таких каналов: селекторный и мультиплексный. Каждый из
них работает по специальным программам, предварительно введенным в
основную память машины. Селекторный канал предназначен для обслужива-
ния быстродействующих внешних устройств таких, как устройства управ-
ления накопителями на магнитной ленте, магнитном барабане и магнитном
диске. Мультиплексный канал обслуживает устройства ввода-вывода
информации, работающие с относительно малой скоростью передачи
данных.
Большинство периферийных устройств (управления памятью, перфокар-
точные, перфоленточные, печатающие, подготовки данных и др.) входит в
основной комплекс ЕС ЭВМ. Исключение составляют технические средства
машинной графики. В связи с этим при создании САПР на базе универ-
сальных ЭВМ необходимо доукомплектование их графическими устройства-
ми, описание которых приводится в следующем параграфе.
Технический комплекс крупных интегральных САПР рационально строить
в виде трехуровневой системы, в которой между указанными выше уровня-
ми вводится промежуточный вычислительный ресурс в виде мини- или мик-
ро-ЭВМ. Такая ЭВМ, размещаемая непосредственно на рабочем месте
проектировщика (а не в вычислительном центре), позволяет уменьшить
объемы информации, передаваемые по каналам связи с большой ЭВМ, и тем
самым организовать дистанционную работу терминалов по низкоскоростным
дешевым каналам связи. Наличие двух типов ЭВМ позволяет экономно рас-
ходовать вычислительные ресурсы. При этом центральная ЭВМ выполняет
преимущественно программы, требующие больших вычислительных мощнос-
тей, а запросы от средств диалога воспринимаются и обрабатываются
мини-ЭВМ.
При невозможности доступа к центральной ЭВМ терминальная станция,
в составе которой имеется мини-ЭВМ, способна продолжить решение задач
в автономном режиме с сохранением результатов работы и последующей их
пересылкой в большую машину. По этому же принципу работают широко
распространенные автономные диалоговые вычислительные подсистемы J
автоматизированные рабочие места (АРМ) проектировщиков.
В авиационной и ракетной технике широко применяют различные моди-;
фикацци АРМ-М (место проектировщика в машиностроении). АРМ-М - это,
по существу, автономная терминальная станция (нижний уровень техни-
ческого комплекса САПР), ориентированная на разработку несложных
конструкции с возможностью ввода графической и алфавитно-цифровой
информации, ее редактирования, оперативного отображения и выпуска до-
кументации на машинных носителях.
62
Ядром АРМ является мини-ЭВМ, связанная общей шиной с периферийным
оборудованием, а иногда - и с большой ЭВМ. Периферийное оборудование
включает в себя до четырех терминалов подготовки и ввода графических
данных и один или два графопостроителя.
Информационное обеспечение САПР. Под информационным обеспечением
САПР понимается совокупность всех сведений, необходимых для автомати-
зированного проектирования. Основная масса этих сведений существует
сейчас в виде отчетов, архивов, чертежей, схем, справочников и других
подобных документов, форма которых рассчитана на восприятие человеком
и совершенно не приспособлена для работы в автоматизированном режиме.
По статистике конструктор в среднем треть своего времени затрачивает
на работу в библиотеке, техническом архиве, группе информации или
других аналогичных подразделениях [2].
Автоматизированное информационное обеспечение имеет целью, во-
первых, значительно расширить предлагаемый объем информации и, во-
вторых, облегчить конструктору доступ к этой информации и тем самым
сократить время работы с информацией и повысить качество информацион-
ного обслуживания. В память современных ЭВМ могут быть введены все
справочные материалы по профилю создаваемого объекта, стандартные ме-
тоды расчета, типовые проектные решения, чертежи прототипов и целый
ряд других источников.
Информационное обеспечение проектирования, записанное на внешних
носителях в виде файлов, образует базу данных САПР. База данных пред-
ставляет собой информационную модель объектов проектирования. Чем она
полнее и достовернее, тем выше качество проектирования. Создание по-
добной базы при наличии соответствующих технических и программных
средств положительно сказывается на сроках проектирования, исключает
дублирование однотипных конструкторских разработок, способствует
внедрению унификации в проектно-конструкторские работы.
В соответствии с ГОСТ база данных САПР состоит из оперативной,
условно-постоянной и постоянной информации. Оперативная информация
содержит сведения об условиях решения данной задачи проектирования.
Ее подготавливают для каждого конкретного процесса автоматизированно-
го проектирования; в памяти системы не хранят.
Условно-постоянная информация является частью сведений, хранимых в
памяти системы. Это различные справочные данные, текстовые и графи-
ческие описания стандартных и унифицированных деталей и узлов и т.д.
Изменения и дополнения условно-постоянной информации входят в функции
системы, но не влияют на функциональные возможности САПР.
Постоянная информация является частью сведений, хранимых в памяти
63
машины в течение длительного времени (например, сведения о машинных
программах автоматизированного проектирования). Изменение и дополне-
ние постоянной информации не входят в функции системы.
Следует заметить, что хотя современные операционные системы вклю-
чают специальные программные комплексы для формирования баз данных,
автоматизация информационного обеспечения остается одной из наиболее
трудных задач создания САПР. В настоящее время отчетливо просматрива-
ются две концепции организации информационного обеспечения.
Первая концепция характеризуется индивидуальной для каждой САПР
формой хранения и использования данных, когда едва ли не каждой зада-
че соответствует своя подпрограмма. Это позволяет учесть специфику
задачи и технических устройств, структуру данных и др. Кроме записи
информации в архив и организации доступа к ней подпрограмма может вы-
полнять различные служебные функции такие, как печать каталога архи-
ва, дублирование его с одного носителя на другой, охрана от несанк-
ционированного доступа и т.п. Недостатком этой формы является жесткая
привязка к конкретной САПР, что затрудняет, а подчас и исключает
вовсе обмен данными между задачами, особенно при изменении структуры
данных.
Вторая концепция автоматизации информационного обеспечения, отли-
чающаяся централизованной формой хранения и использования данных,
свободна от указанных недостатков. Однако универсальные программные
комплексы формирования баз данных весьма сложны в эксплуатации (осо-
бенно для пользователей - непрограммистов), связаны с перерасходом
памяти и часто неполностью удовлетворяют потребностям проектировщиков.
Одним из основных свойств базы данных является независимость дан-
ных и использующих их прикладных программ друг от друга в том смысле,
что изменение одних не приводит к изменению других. Указанное качест-
во базы данных позволяет систематически расширять информационное
обеспечение, упрощает корректировку как прикладных программ, так и
исходных данных, что очень заманчиво, но трудно реализуемо. В настоя-
щее время не существует баз данных с полной независимостью данных от
программных систем. Именно это обстоятельство является основным тор-
мозом на пути создания интегрированных САПР, объединяющих АСНИ, обли-5
ковые САПР, АСК и АСГ11П.
Разработка баз данных является одной из важнейших задач создания
САПР, решение которой связано не только с формальными, но и нефор-*
мальными аспектами. Неформальная сторона задачи состоит прежде всего!
в задании физической и логической структур базы данных. Логическая
структура отражает основные массивы (файлы) данных и их взаимосвязь
64
(файловый состав), соподчинение отдельных данных и формы выражения
этих соподчинений. Очень часто соподчинение данных выражают в реля-
ционной форме, т.е. в виде двумерной таблицы данных. Возможны также
иерархическая, сетевая и смешенная структуры данных.
Физическая структура базы данных определяет ее организацию в
памяти ЭВМ и на машинных носителях. От выбора той или иной физической
и логической структур зависят экономия памяти, избыточность данных,
время ответа на запрос, восстановление данных и др.
Программное обеспечение САПР. Компонентами программного обеспече-
ния (ПО) являются документы с текстами программ на исходном языке
программирования, эксплуатационные документы, обеспечивающие функцио-
нирование САПР, и программы на машинных носителях. Программное обес-
печение - наиболее важная подсистема САПР. Именно программное обеспе-
чение определяет технический уровень и возможности автоматизированной
системы. Во многом программное обеспечение определяет также и стои-
мость САПР. Причем наблюдается тенденция постоянного увеличения объе-
ма и стоимости программного обеспечения при снижении стоимости техни-
ческого комплекса. Программное обеспечение САПР принято делить на два
больших класса: прикладное и системное (рис.2.1).
Прикладное ПО САПР является программной реализацией математических
моделей объектов проектирования и алгоритмов решения проектных задач.
Прикладные программы отражают сугубо технические проблемно-
ориентированные задачи. В процессе проектирования конструкций ЛА та-
Рис. 2.1. Структура ПО САПР
3 - 880
65
кими задачами являются: определение силовой схемы, выбор закона рас-
пределения материала по сечениям, проверка статической и динамической
прочности, расчет режимов аэротермоупругости и др.
Существует два способа организации прикладного ПО: библиотека го-
товых программ и библиотека прикладных модулей. Под готовой програм-
мой понимается заранее разработанная и отлаженная программа для реше-
ния конкретной задачи или группы однородных задач. Примером готовой
программы может служить программа выбора проектных параметров ЛА
определенного класса. В других типах САПР используются готовые про-
граммы проектирования внешних обводов ЛА, расчета внешних нагрузок с
учетом деформированного состояния конструкции, автоматизации техноло-
гической подготовки производства и др. Готовые программы хранятся на
магнитных дисках в виде библиотек загрузочных модулей подобно тому,
как хранятся книги в библиотеке.
Такой способ организации, удобный для отдельного пользователя, ре-
шающего ту или иную задачу, нельзя признать удачным с точки зрения
системного подхода. Во-первых, потому что всякая библиотека слишком
избыточна и это ведет к нерациональному использованию памяти ЭВМ. Во-
вторых, потому что при такой организации можно решать только отрабо-
танные задачи и всякая новая постановка задачи требует разработки но-
вой программы.
Организация прикладного ПО в виде библиотеки прикладных модулей
имеет целью придать программному обеспечению многоцелевой характер.
Модуль прикладного ПО - это упорядоченное множество операторов, имею-
щее уникальное имя; обычно это функционально завершенная часть общей
программы. Расчленение общей программы на отдельные заранее заготов-
ленные блоки позволяет упростить работу конструктора-непрограммиста
при программировании сложных вычислительных процедур, сосредоточить
его усилия на прямых проектировочных вопросах.
Отказ от традиционного способа программирования и замена его сбор-
кой программ сложной структуры из заранее заготовленных элементов
придает гибкость процессу автоматизированного проектирования. При
этом способе из ограниченного числа модулей можно сформировать мно-
жество законченных программ, суммарный объем которых будет значитель-
но превосходить объем бибилиотеки модулей.
Системное ПО САПР - это программные средства, выполняющие функции
посредника между пользователем и техническим комплексом (см.
рис.2.1). В числе этих функций синтез сложных вычислительных про-
цедур, организация режима диалога, управление базами данных, органи-
зация воспроизведения изображения и др. Системное ПО имеет инвариант-
66
ный характер, его структур^ практически не зависит от содержания ре-
шаемых прикладных задач.
Системное ПО дает возможность участвовать в разработке сложных вы-
числительных процедур широким массам конструкторов и проектировщиков,
слабо владеющих тонкостями программирования. Одновременно с этим при-
менение системного ПО существенно экономит вычислительные ресурсы
благодаря более компактному представлению рабочих программ. Рассмот-
рим основные компоненты системного ПО САПР.
Средства синтеза программ сложной структуры можно рассматривать
как надстройку над операционной системой в виде комплекса специализи-
рованных программ. (В некоторых САПР эта надстройка может отсутство-
вать; функции синтеза программ тогда возлагаются на операционную
систему.) Ядром специализированного комплекса является управляющая
программа, называемая монитором, находящаяся постоянно в оперативной
памяти ЭВМ.
Управляющая программа реализует диалог пользователя с ЭВМ по
принципу "меню", когда пользователю предлагается выбрать один из
перечисленных на экране дисплея вариантов действий. Содержание этих
вариантов отражает последовательность операций по созданию закон-
ченного программного продукта, в числе которых: формулировка задачи,
планирование структуры программы, генерация программы, компиляция и
редактирование связей.
Средства обеспечения режима диалога - это тоже мониторная система.
По существу, диалоговые мониторы являются программами-интерфейсами,
позволяющими конструкторам и проектировщикам на доступном им языке
обмениваться информацией с прикладными программами при решении
широкого круга технических задач.
В результате прямого контакта пользователя с вычислительной систе-
мой, как указывалось выше, существенно расширяются возможности авто-
матизированного проектирования. Конструктор с помощью терминала в
процессе решения задачи (т.е. в реальном масштабе времени) может
изменять массивы исходных данных, корректировать последовательность
вычислительных операций, обращаться к различным прикладным программам
и т.д. В соответствии с этими задачами основными функциями диалогово-
го монитора являются:
ввод исходных данных и их корректировка;
вывод результатов расчета и справочных данных на экран дисплея;
обмен информацией между пользователем, базами данных и прикладными
программами;
запись информации в базы данных;
67
выполнение ряда сервисных программ таких, как вывод на экран пра-
вил работы с монитором, содержания библиотек и архивов, диагностичес-
ких и информационных сообщений.
Средства управления базами данных (СУБД) представляют собой про-
граммный комплекс, реализующий функции создания базы данных, ее
обновления, хранения, защиты и выборки данных. Совокупность базы дан-
ных и СУБД называют банком данных.
Основу СУБД составляют специальные языки описания структуры данных
и управления базой данных. Управление с помощью этих языков
реализуется в виде набора макрокоманд или операторов вызова. Сами
операторы могут рассматриваться как расширение одного из тради-
ционных языков программирования (КОБОЛ, ФОРТРАН, ПЛ/1) либо как
самостоятельный язык. Последнее используется чаще.
В настоящее время существует значительное число СУБД, которые мо-
гут быть использованы в САПР. Выбор того или иного СУБД должен учиты-
вать соответстивие между характером решаемых задач и набором средств,
представляемых СУБД. Пока такое соответствие не всегда соблюдается,
поэтому создаются проблемно-ориентированные системы. Однако общая
тенденция состоит в том, чтобы СУБД были универсальной системой,
приемлемой для самых разнообразных САПР.
Средства машинной графики - это совокупность программ, описывающих
представление и преобразование графической информации с помощью
вычислительной техники. В числе основных задач машинной графики:
построение модели и генерация изображения;
преобразование модели и изображения;
идентификация объекта и извлечение информации.
Здесь под моделью понимается абстрактное описание геометрии объек-
та, которое может быть понято ЭВМ и преобразовано в соответствующее
изображение на картинной поверхности. Тип и форма представления моде-
ли являются основой программного обеспечения, главным фактором, опре-
деляющим эффективность системы в целом, т.е. ее функциональные воз-
можности, сложность алгоритмов и быстродействие.
К настоящему времени разработано довольно много типов моделей.
Среди них:
аналитические модели, использующие аналитические зависимости, в
частности кривые второго порядка или семейства развертывающихся
поверхностей;
каркасные модели, в основе которых два семейства пространственных
линий, параллельных координатным плоскостям, или совокупность точек
пересечения этих линий;
68
"проволочные” модели в виде каркаса из линии, соединяющих по
некоторому закону точки поверхностей;
модели, аппроксимирующие поверхности многогранниками;
модели, аппроксимирующие поверхности базовыми элементами форм
(ломаная, эллипс, цилиндр, тор и т.п.);
векторные и тензорные модели, использующие представление форм
объектов в виде систем векторных или тензорных уравнений (матриц ко-
эффициентов).
Однозначно определить лучший тип моделей не представляется возмож-
ным, так как реализация системы на основе сложной модели требует зна-
чительных трудозатрат и высокого быстродействия используемой ЭВМ, что
может не оправдать цели создания такой системы.
Важной характеристикой интерактивной графической системы является
форма организации диалога. Современные системы имеют не только не-
сколько форм диалога, но и возможность их комбинации и адаптации к
конкретному пользователю с учетом роста его квалификации по мере на-
копления опыта общения с системой. Наиболее удобной формой для начи-
нающего пользователя является диалог типа "меню”.
"Меню” может быть реализовано с помощью карт, наложенных на план-
шет с изображенными командами (проектными операциями) и графическими
элементами. Выбор осуществляется указанием электронным пером условно-
го символа или команды.
Более эффективной формой диалога для подготовленного пользователя
является диалог на командном входном языке или на языке символов.
Командный входной язык представляет собой набор команд, определяющих
требуемые действия системы, а также соответствующие информационные и
диагностические сообщения системы. Язык символов аналогичен командно-
му, но более эффективен, поскольку пользователю вместо набора синтак-
сически правильных команд, набираемых с помощью алфавитно-цифрового
дисплея, достаточно ”нарисовать” на графическом планшете условный
символ, что вызовет выполнение системой соответствующей операции. Еще
более эффективным средством является речевой ввод команд. Для связи
прикладных программ с графическими устройствами практически для каж-
дого из них разработаны пакеты графических программ, выполняющие пре-
образование команд с языка высокого уровня в приказы данного
устройства.
На практике системное ПО САПР часто представляют в виде па-
кетов программ, которые можно определить как комплекс взаимо-
связанных программных средств для решения группы задач, относящихся к
некоторой предметной области. В общем случае пакет программ состоит
69
из трех компонентов: тела пакета, системы управления и входного
языка.
Тело пакета отражает содержание задачи данной предметной области и
представляет собой библиотеку программных модулей и архива. Система
управления включает системные средства, предназначенные главным обра-
зом для сборки сложных программ из модулей, организации диалога и вы-
полнения сервисных программ. Входной язык служит средством первичного
описания алгоритма. Обычно это проблемно-ориентированный язык, опери-
рующий содержательными понятиями предметной области.
Примером пакета, в котором имеются все перечисленные компоненты,
может служить пакет машинной графики (обычно называемый системой ма-
шинной графики). Общая характеристика одного из таких пакетов приво-
дится ниже в п.2.4.3.
§ 2.4. ОСОБЕННОСТИ
АВТОМАТИЗИРОВАННЫХ СИСТЕМ КОНСТРУИРОВАНИЯ
2.4.1. Функциональная структура АСК
Автоматизация конструирования наиболее трудная проектно-конструк-
торская задача. На сегодняшний день здесь успехи более скромные, чем
в области САПР по определению облика и основных параметров ЛА.
Объясняется это тем, что эвристические приемы конструктора трудно
формализовать. Многие из них еще недоступны машине, но это не значит,
что автоматизация конструирования малореальна. Современная вычис-
лительная техника и ее программное обеспечение уже позволяют реали-
зовать сложнейшие логико-смысловые задачи, обеспечивают наглядно-
образную форму оперирования с информацией, близкую к той, которой
пользуются конструкторы в обычных условиях.
Однако единой точки зрения, какой должна быть система автоматизи-
рованного конструирования, пока нет. Это связано с тем, что еще долж-
ным образом не отработан (формализованно) в обобщенном виде процесс
конструирования, который должен быть в основе автоматизированной сис-
темы. Добавим к этому то, что конструкторов не удовлетворяют графи-
ческие возможности технических и программных средств существующих
АРМ-М; беден арсенал изобразительных средств, не хватает наглядности,
трудно сочетаются задачи аналитического проектирования с непосредст-
венной конструкторской проработкой.
Обобщенный процесс конструирования и соответствующая ему автомати-
зированная система должны отражать характер и содержание деятельности
70
конструктора, содействовать интуитивным процессам с помощью наглядно-
образной формы представления процесса, т.е. достаточно быстрой визуа-
лизации деталей при диалоге с ЭВМ, использованию привычных понятий и
операций и т.д. При этом очень важно обеспечить сочетание аналитичес-
ких (расчетных) методов с эвристическими, т.е. формальных и нефор-
мальных приемов. Модель процесса проектирования конструкций нельзя
представлять в виде системы уравнений механики, описывающих напряжен-
но-деформированное состояние, и ограничений на несущую способность
конструкции. Характерные черты процесса конструирования может отра-
жать лишь информационно-семантическая модель, сочетающая информацион-
ное обеспечение (справочные данные, требования ЕСКД, технологические
ограничения и др.), аналитические методы и логику принятия решений
(преимущественно из области эвристики) в условиях неполной инфор-
мации.
Некоторое время назад АСК создавались в основном для автоматиза-
ции чертежно-графических работ. При использовании таких систем повы-
шение производительности и качества труда конструкторов достигалось
за счет автоматизации многократно повторяющихся нетворческих (рутин-
ных) операций, трудоемкость которых составляет иногда 60...80 % тру-
доемкости всего процесса конструирования. Поэтому не случайно то, что
в ряде литературных источников автоматизация конструирования отож-
дествляется с автоматизированным воспроизведением изображения средст-
вами машинной графики.
В настоящее время функции АСК более широкие (рис.2.2). Автоматиза-
ция чертежно-графических работ дополняется автоматизацией определения
проектных параметров конструкции, т.е. охватывается практически весь
комплекс проектно-конструкторских задач. При этом основными функциями
АСК являются аналитическое проектирование и конструирование.
Аналитическое проектирование имеет целью обоснование и выбор тех-
нического решения. В соответствии с этими задачами основными функция-
ми аналитического проектирования являются:
формализованное описание функциональной структуры проектируемого
объекта, включающее информацию о
комплектующих элементах, особен-
ностях их конструктивного испол-
нения, характеристиках материала
н других существенных признаках:
автоматизированное формирова-
ние. 2.2. Основные функции АСК
Разработка концепции
71
ние опорных вариантов конструкции, отражающих возможности научно-тех-
нического прогресса;
выбор технического решения и оптимизация проектных параметров
конструкции.
Конструирование включает в себя конструктивно-технологическую про-
работку схемного решения, полученного в результате аналитического
проектирования. Здесь преобладают трудноформализуемые методы работы,
что обусловлено самой природой требований производственной и эксплуа-
тационной технологичности, реализуемой на этом этапе. Результатом
процесса конструирования является изготовление комплекта рабочих чер-
тежей.
В перспективе можно ожидать, что АСК объединится с подсистемой
технологической подготовки производства. При этом существенно изме-
нятся носители конструкторско-технологической документации: за счет
широкого использования информации на магнитных лентах уменьшится по-
требное число чертежей, а сам процесс технологической подготовки
будет составлять неотъемлемую часть конструирования ЛА.
2.4.2. Технические средства машинной графики
Технические средства машинной графики объединяют две группы
устройств - общесистемные и специальные. Общесистемные устрой-
ства обслуживают АСК в целом. Эго - центральный процессор, опе-
ративное и внешнее запоминающие устройства, интерфейс связи внешних
устройств с машиной. Краткая характеристика этих устройств приведена
в § 2.3.
Специальные устройства - это графическая рабочая станция, включаю-
щая один или несколько графических дисплеев (ГД), алфавитно-цифровой
дисплей (АИД) и устройства ввода и вывода информации (джойстик, гра-
фический планшет, световое перо, устройства снятия твердых копий с
экрана ГД и др.). Структура графической станции и перечень возможных
устройств ввода-вывода ин^юрмации показаны на рис.2.3. Станция назва-
на гипотетической, так как в конкретной станции обычно используются
лишь некоторые из перечисленных устройств (не дублирующие друг
друга).
Устройства ввода информации. Основным устройством ввода информации
является алфавитно-цифровой дисплей, состоящей из электронно-лучевой
трубки и клавиатуры, напоминающей клавиатуру пишущей машинки, но с
большим числом символов. С помощью клавиатуры пользователь может на-
бирать необходимую информацию и вводить ее в память ЭВМ. Он может
72
также корректировать выведенную на экран информацию и отсылать ее ли-
бо на устройство печати, либо снова в ЭВМ.
Очень часто для ввода информации применяется световое перо (от
англ, lightpen). Световое перо воспринимает высвечиваемые символы или
графические элементы на экране дисплея благодаря наличию в нем свето-
диода или фототранзистора в качестве чувствительного элемента. С по-
мощью светового пера могут быть реализованы две функции в интерактив-
ном режиме человек - машина: указание и следящее перекрестье. Функция
указание может быть использована, например, для выбора на экране
дисплея элемента изображения или цифры, или указания, куда поместить
эти элементы. Функция следящего перекрестья служит для обозначения
концов отрезков прямой, центров окружностей, а также для черчения и
рисования.
Следующую группу устройств для ввода информации составляют пози-
ционно-детектирующие устройства такие, как специальные потенциометры,
реализующие движение перекрестья раздельно по осям X и У, координат-
ные ручки (типа джойстик), следящий шар и устройства типа "мышь”.
Каждое из устройств - координатная ручка, "мышь” и шар - производит
вращение двух потенциометров (X и У), напряжения которых аналого-
цифровыми преобразователями преобразуются в цифровые (по форме) сиг-
налы, позволяющие перемещать перекрестье в необходимом направлении.
Основное достоинство этих устройств - высокое быстродействие.
Графическая станция
Алфавитно-цифровой дисплей
Световое перо
Позиционно-детектирующие
устройства
Планшет
Сколка (диджитайзер)
Векторный
Растровый
Гоафопостроитель
Устройства снятия
твердых копий
Устройства изготовления
микрофильмов
Рис. 2.3. Структурная схема гипотетической графической станции
73
Одним из главных вспомогательных устройств графической рабочей
станции является графический планшет, часто называемый таблетом (от
англ, tablet). Планшет представляет собой электрический прибор с
плоской сенсорной поверхностью, прикосновение к которой специальной
указкой позволяет получить сигнал (природа его может быть электричес-
кая или акустическая), преобразуемый в перемещение точки в определен-
ное положение в прямоугольной системе координат планшета, отмеченное
перекрестьем на экране дисплея в какой-либо условной (машинной) пря-
моугольной системе координат. Число чувствительных точек, образован-
ных сеткой из взаимно перпендикулярных горизонтальных и вертикальных
линий, зависит от функционального назначения планшета и может быть
весьма большим (например, 1024x1024 = 1048576). Размеры планшета - от
20x14 см до 1x1 м.
Наиболее эффективное использование планшета имеет место при графи-
ческом диалоге между человеком-оператором и ЭВМ. Для организации та-
кого диалога на планшет накладывается расчлененная на квадраты карта,
в каждом квадрате которой нарисованы базовые (многократно повторяю-
щиеся) элементы конструкции и другие символы, соответствующие той или
иной прикладной области знаний (например, основные требования ЕСКД).
а также написаны различные команды управления процессом синтеза изоб-
ражений. При наличии соответствующих программ в системе, указывая на
изображенные команды и символы, можно эффективно вести процесс проек-
тирования по блочной схеме, оперируя не только простейшими графичес-
кими изображениями (прямая, дуга и т.д.), но и конструктивными
модулями.
Примерно подобные же функции может выполнять диджитайзер (от англ,
digitizer - оиифровыватель). Диджитайзер, иначе сколка, представляет,
по существу, такое же устройство, как планшет, но только большего
размера, например такого, так чертежная доска типа "кульман”. Диджи-
тайзеры предназначены для введения в память ЭВМ практически любой
графической информации (чертежей, графиков, блок-схем и т.п.). Для
введения графической информации в ЭВМ оператор, закрепив лист с
изображением на рабочей плоскости устройства, устанавливает начало
координат и требуемые признаки с помощью функциональной клавиатуры, а
затем, подводя визир или световое перо к нужной точке изображения,
нажимает на кнопку или педаль ввода. При этом координаты визира счи-
тываются и фиксируются на машинном носителе. В результате многократ-
ного повторения описанной операции формируется последовательность
координат и признаков, отражающих исходное изображение, которые в
дальнейшем могут быть обработаны специальной прикладной программой.
74
Графические дисплеи. Графический дисплей - это устройство
преобразования графической информации. С его помощью осуществляются
формирование, отображение и редактирование графической, а также
алфавитно-цифровой информации на экране электронно-лучевой трубки
(ЭЛТ). Графические дисплеи являются основным терминальным устройством
АСК. Именно они позволяют организовывать в АСК оперативное
графическое взаимодействие человека-оператора с остальной частью
системы.
Графический дисплей состоит из процессора, устройства отображения
и индикатора. Процессор предназначен для ввода-вывода информации, а
также для синхронизации работы дисплея в течение вычислительного
процесса. Устройство отображения обеспечивает работу алфавитно-циф-
ровой клавиатуры, светового пера и других управляющих устройств. Блок
индикации служит для отображения на экране графической и
алфавитно-цифровой информации в соответствии с законом изменения
сигналов, поступающих с устройства отображения.
Одной из важнейших характеристик графических дисплеев является
способ формирования изображения на экране ЭЛТ. В отечественных
дисплеях чаще всего применяется векторный генератор символов. В таких
дисплеях луч описывает траекторию (определяемую программой пользо-
вателя), представляющую собой ломаную, полученную в результате
линейной интерполяции кривых, составляющих изображение. Так как след
луча на экране ЭЛТ быстро исчезает, то требуется организация
повторных движений луча по той же траектории с достаточной частотой,
т.е. обеспечение регенерации изображения.
Регенерация изображения может быть реализована либо повторным
выполнением части программы пользователя, определяющей параметры
изображения, либо организацией зацикленной программы движения луча,
сохраняемой в специальной памяти регенерации дисплея. В первом случае
на регенерацию тратятся ресурсы главной ЭВМ, с которой связан
векторный дисплей; во втором случае регенерация вдет автономно от
главной ЭВМ, но для этого требуется специальная память, объем которой
ограничивает допустимую сложность выводимого изображения. Более
широкое распространение получил второй путь, несмотря на усложнение
оборудования.
Процесс отображения информации в дисплее происходит следующим
образом. От центральной ЭВМ на процессор графического дисплея
выводится массив, представляющий собой программу, состоящую из
графических команд, обеспечивающих вычерчивание изображения, и команд
управления. Графические команды позволяют управлять электронным лучом
75
и засвечивать на экране точки, векторы и символы. Команды управления
предназначены для организации прерывания процесса считывания
информации из памяти, передачи управления по указанному в команде
адресу, установления режима отображения. В частности, в режиме
указания на экране ЭЛТ отображается маркер (точка). Координаты
последнего задаются с клавиатуры или с планшета, и с его помощью
выделяется элемент изображения, подвергающийся преобразованиям
(сдвигам, поворотам, перемещению, стиранию и др.).
Устройства вьвода информации. Основным устройством для получения
выходных документов в графической форме является автоматический
цифровой графопостроитель (ГП). Графопостроители делятся на
планшетные, рулонные и барабанные.
Планшетные ГП имеют плоскую рабочую поверхность, на которую
накладывается любая по качеству бумага нужного формата, фиксируемая
либо электростатическим напряжением, либо с помощью вакуума.
Относительно бумаги движется пишущий элемент. Каретка, на которой
имеются один или несколько цветных пишущих элементов, движется по оси
Y вдоль направляющей, которая сама перемещается вдоль стола по оси X.
Одновременное движение пишущего элемента по осям X и Y позволяет
вычерчивать различные кривые. Движение по оси Z используется для
прерывания записи. Планшетные ГП - наиболее распространенные. В
качестве пишущих элементов в ГП используются самые различные устрой-
ства: баллоны шариковых ручек, стеклянные колбы с тушью, игольчатые
перья, фломастеры обыкновенного и шарикового типов и т.д. Широко
применяются цветные пишущие элементы. В некоторых типах ГП таких
элементов может быть довольно много (до 10). Скорость черчения лежит
в пределах от 5... 10 см/с до 1 м/с, погрешность - 0,1...0,01 мм.
В рулонных графопостроителях специально изготовленной рабочей
поверхности черчения нет. Ею является рулон бумаги (движение по
координате У). Каретка с пишущими элементами, имеющими одну степень
свободы (движение по координате Z), движется вдоль рулона (по
координате X). Специально перфорированная бумага (белая или "милли-
метровка") может иметь ширину от 0,4 до 1,2 м. Рулонные
графопостроители, в отличие от планшетных, компактны, недороги,
обеспечивают удовлетворительную точность при изготовлении небольших
чертежей и разнообразных графиков. Поэтому основная область их
применения - обработка графической информации при массовых расчетах
на ЭВМ.
Барабанные графопостроители сочетают в себе достоинства ГП план-
шетного и рулонного типов. Рабочая поверхность черчения - барабан, на
76
который наматывается лист бумаги размером один-два формата АО. В
«таких ГП достигаются высокие скорости черчения (до 1 м/с) и высокая
«точность (погрешность около 0.01 мм).
Графопостроители могут работать непосредственно под управлением
ЭВМ и рядом с ней (режим on line). Однако такой режим не очень
удобен, так как ГП - "медленное" устройство, занимающее канал ЭВМ.
Поэтому довольно часто черчение осуществляется через специальную
стоику управления с магнитофоном, на которую ставится пленка с
накопленными магнитофонными записями графической информации (режим
off line). Иногда ГП связывают с ЭВМ дистащюнно на значительном
расстоянии (режим телесвязи).
Малогабаритные выходные изображения получают с помощью устройств
снятия твердых копий. Твердой называется копия изображения с экрана
ГД, полученная на обычной бумаге, фотопленке, цветном пластике типа
астролон и т.п. Физические принципы работы этих устройств, положенные
в основу получения изображения, бывают различными. Изображения могут
микрофильмироваться с помощью специального прибора. Микрофильмы
изготавливаются с целью хранения большого объема чертежей в компакт-
ном виде.
В последнее время получили распространение устройства черно-белой
и цветной растровой печати небольшого формата. Их целесообразно
использовать тогда, когда необходимо получить твердую копию
пространственного тонового изображения какого-либо объекта, например
детали сложной конфигурации, механизма, летательного аппарата и т.д.
2.4.3. Система интерактивной машинной графики
Система машинной графики (СМГ) - это пакет взаимосвязанных
программ, предназначенный для решения задач синтеза геометрического
изображения объекта. В настоящее время создано большое число
разнообразных по устройству систем интерактивной машинной графики. Их
применяют для проектирования конструкций ЛА, электрических, оптичес-
ких, радиотехнических приборов, в строительстве и т.д. Такие системы
необходимо рассматривать как универсальный инструмент инженера-проек-
тировщика, которым он должен уметь пользоваться для реализации своих
замыслов при проектировании той или иной конструкции. Ниже дано
краткое описание получившей большое распространение СМГ ANVIL-4000. С
Другими СМГ читатель может познакомиться в [16].
Общая характеристика СМГ. Система ANVIL-4000 работает на 32-раз-
Рядных супермини-ЭВМ, имеющих быстродействие 1...2 млн оп./с.
77
оперативную память 1...2М байт, внешнюю память 132...1000М байт,
рабочие станции, включающие несколько ГД различных типов ц
вспомогательные устройства, описанные в п.2.4.2. Прикладное
программное обеспечение написано на языке Fortran, однако
пользователь этого может и не знать, так как общается с системой на
естественных входных языках.
СМГ ANVIL-4000, а также созданная на базе ее первых версий СМГ
CDM-300 предназначены для проведения проектно-конструкторских работ,
основанных на программах развитой интерактивной машинной графики,
общеинженерных расчетов, изготовления проектной документации и там,
где это возможно, для прямого управления ЭВМ станками с ЧПУ.
Имеющаяся в СМГ программа позволяет создавать описательную модель
объекта проектирования, включая геометрические, технологические и
производственные данные и спецификации.
Для унификации представления информации в СМГ введено понятие
"объект”. Объект характеризуется некоторой совокупностью данных,
позволяющих выделить его из ряда других объектов. Всего в СМГ
присутствуют 84 типа объектов. Программы для графического изображения
манипулируют графическими функциями и их выходными параметрами. При
изображении объекта используются такие характеристики, как цвет,
толщина линии, тип линии, яркость и т.п.
СМГ позволяет наряду с автоматическим построением любой
стандартной проекции выбрать произвольное направление проецирования,
предоставляет пользователю возможность выбрать число и перечень
проекций (включая и изометрию), с которыми он будет работать
одновременно. Это достигается за счет того, что все геометрические
объекты в СМГ представляются в трехмерном пространстве, которое
условно называют модельным или мировым пространством. Имеется
возможность в любой момент времени выполнить операцию ”окно”, которая
наряду с изменением глубины позволяет расположить экран дисплея
произвольным образом в модельном пространстве и отобразить затем это
пространство на экран в любом масштабе.
Наиболее часто употребимые функции такие, как операция ’’окно”,
"растяжение” изображения в произвольном направлении и целый ряд
других, могут быть осуществлены в любой момент времени независимо от
режима работы системы. Указанные процедуры выполняются с помощью
функциональных ключей. Функциональный ключ - это определенная клавиша
на клавиатуре ГД, нажатие которой приводит к немедленному выполнению
соответствующей операции.
Объекты, воспроизводимые СМГ, наряду с геометрической информацией,
78
описывающей их форму и положение в пространстве, могут содержать
дополнительную информацию, представляющую пользователю системы новые
возможности, которых у него не было при обычной работе за кульманом.
В качестве дополнительной информации могут выступать цвет объекта
(что особенно удобно при проектировании пространственных объектов),
тип и толщина линий, информация о том, "погашен” данный объект или
нет (удаление объекта), номер уровня (слоя), перечень объектов,
использованных при построении данного объекта.
Функция ”погашен/не погашен” позволяет временно удалить с экрана
дисплея объекты, указанные пользователем, которые он в данный момент
изменять не будет и которые не нужны для определения облика других
объектов. Это упрощает изображение и облегчает его восприятие: не от-
влекается внимание на второстепенные в данный момент детали изображе-
ния. (Такой возможности у конструктора при работе за кульманом нет.)
Другим не менее важным удобством в работе СМГ является то, что
объекты могут быть "приписаны” к определенному иерархическому уровню.
Всего в системе может быть 1024 уровня. Использование номера уровня в
сочетании с функцией "погашен/не погашен” позволяет из одних и тех
же объектов компоновать различные виды конструкторских документов.
СМГ представляет пользователю возможность выбирать способ синтеза
геометрии объекта, позволяющий ему работать в том стиле, к которому
он привык при работе за кульманом, т.е. СМГ не навязывает
конструктору какой-либо определенной последовательности выполнения
проектных операций.
Структурно ядро СМГ включает в себя следующие пять комплексов
(подсистем):
монитор (управляющая программа);
система управления базами данных;
система взаимодействия с пользователем;
система взаимодействия с устройствами (драйверы);
система преобразования объектов.
Монитор управляет работой СМГ и состоит из головной программы
управления и специальной программы, осуществляющей передачу управ-
ления по адресу, указанному системой.
СУБД обеспечивает обмен информацией между СМГ и базой данных и
предоставляет пользователю специальный режим (при наличии
соответствующей привилегии) - режим администратора базы данных. В
этом режиме возможно выполнение операций, связанных с сопровождением
базы данных, а также получение информации о наличии свободного места
и другой дополнительной информации.
79
Взаимодействие СМГ с пользователем осуществляется с помощью
специального диалогового языка, включающего в себя: информационные
сообщения и сообщения состояния, вопросы, инструкции, "меню”
(альтернативные возможности), редактируемые таблицы, пояснения,
индикаторы (маркеры), предупреждающие сообщения и сообщения об
ошибках.
Информационные сообщения и сообщения состояния информируют
пользователя системы о том, в каком режиме работы он находится и чем
система загружена в данный момент.
Вопросы - это специальные сообщения системы в вопросительной
форме, на которые пользователь должен ответить: "да” или "нет".
Инструкции - сообщения системы в повелительном наклонении,
содержащие указание о действиях, которые пользователь должен
выполнить в данный момент.
"Меню" - перечень возможных в данный момент действий, из которых
пользователь должен выбрать одно и указать его номер.
Редактируемая таблица - перечень числовых данных, которые
пользователь системы может менять. Каждому числу, как правило,
предшествует краткое смысловое описание в терминах, принятых в
системе.
Пояснения - сообщения системы, разъясняющие пользователю возможные
действия, которые он должен или может предпринять в данный момент
времени.
Индикаторы (маркеры) - специальные знаки, которыми система
помечает выбираемые в режиме селекции объекты. В некоторых ГД вместо
маркеров выбранные объекты отмечаются мерцанием.
Предупреждения - сообщения системы, появляющиеся каждый раз, когда
результаты ее дальнейшей работы могут привести к некорректным дейст-
виям. После выдачи на экран предупреждения о возможной ошибке система
прекращает выполнение операции и после нажатия на соответствующую
клавишу на клавиатуре ГД возвращается в состояние, в котором она на-
ходилась до начала выполнения операции, приведшей к ошибке.
СМГ ANVIL-4000 предоставляет пользователю возможность осуществлять
следующие преобразования над объектами: афинные преобразования;
операцию "окно"; "растяжение" изображения в произвольном направлении;
выравнивание объектов; удаление невидимых линий; объединение
объектов; изменение признаков объектов.
База данных состоит из шести подразделов, включающих в себя файлы
с различной организацией:
библиотеки фрагментов;
80
библиотеки типовых изображении;
библиотеки UTF;
нейтрального дисплейного файла;
рабочей области;
’’стираемой” области.
Последние три подраздела являются вспомогательными и заводятся си-
стемой автоматически на время сеанса работы с пользователем. Резуль-
таты работы хранятся в трех первых подразделах. Помимо этого пользо-
вателю СМГ предоставляется возможность котирования в базу данных ин-
формации, находящейся во внешних по отношению к системе файлах.
Библиотека фрагментов - самая большая по объему часть базы данных
40 %). Здесь хранятся синтезированные пользователем изображения и
дополнительная информация, представляющие собой конкретное конструк-
тивное решение разрабатываемого агрегата конструкции.
Библиотека типовых изображений (~ 5 %) содержит встречающиеся в
различных конструкциях типовые изображения.
Библиотека UTF (~ 5 %) содержит различные типы функциональных
файлов, например созданные пользователем таблицы символов (чертежные
шрифты), заготовки графиков, перечень переменных и т.п.
Рабочая область (~ 20 %) - это область, отводимая пользователю для
работы, где хранятся данные той части проекта, над которой ведется
работа в текущий момент. Если пользователь пожелает сохранить
созданные данные, они из рабочей области котируются в библиотеку
фрагментов.
’’Стираемые” области (~ 20 %) используются для операций уплотнения
библиотек фрагментов, типовых изображений и UTF, а также для штрихов-
ки плоских областей, подготовки данных для станков с ЧПУ и вычисления
геометрических и массовых характеристик.
Нейтральный дисплейный файл (дисплейный буфер) содержит
графические приказы и данные для вывода информации на экран ГД
(используется в основном для дисплеев на запоминающих трубках).
Программное обеспечение. Основой программного обеспечения синтеза
геометрии являются следующие объекты (примитивы).
1. Точки, прямые линии и отрезки, окружности и дуги. Синтез гео-
метрии этих объектов возможен в любом режиме работы СМГ с помощью
специальных функциональных ключей. Для каждого из этих объектов СМГ
предлагает большой выбор способов их задания.
81
2. ’’Строки”. Эта функция предоставляет пользователю удобный режц^
работы, особенно полезный, когда на существующем изображении необхо
димо что-либо дорисовать. Создаваемые с использованием этой функции
объекты обладают тем свойством, что конец одного объекта является
началом другого.
3. Кривые. СМГ предоставляет пользователю большой спектр выбора
всевозможных двух- и трехмерных кривых: сплайнов, конических сечений,
линий пересечения поверхностей, очерковых линий, многоугольников,
эквидистант и составных кривых.
4. Поверхности. СМГ обеспечивает возможности по синтезу следующих
поверхностей: плоскостей, поверхностей вращения, линейчатых поверх-
ностей, поверхностей, ’’натянутых” на семейство кривых, сопряжений
поверхностей, сплайнов, цилиндрических поверхностей, конических
поверхностей, тороидальных поверхностей, проекций одной поверхности.
СМГ представляет пользователю возможность генерировать векторы
различными способами и осуществлять над ними такие операции, как
сложение, умножение и т.п. Программное обеспечение оформления
чертежей позволяет создавать полностью завершенные рабочие чертежи в
соответствии со стандартами ANSI (Американский национальный институт
стандартов), BSI (Британский институт стандартов), JIS (Японский
институт стандартов), а также с любыми другими стандартами, которые
пользователь введет в систему.
Большинство информации, присутствующей на рабочем чертеже,
характеризуется тем, что ее параметры постоянно меняются в процессе
работы. Оперативное изменение таких параметров, как размер шрифта,
автоматическое вычисление размерной величины или задание ее
пользователем, выравнивание размерных линий, выбор типа и размеров
стрелок, чертежного масштаба, характера штриховки, необходимой
таблицы чертежного шрифта обеспечивается системой.
При оформлении чертежей СМГ ANVIL-4000 предоставляет пользователю
целый ряд дополнительных возможностей таких, как:
местное увеличение масштаба;
нанесение на чертеж технических требований и другой текстовой
информации;
изменение чертежных масштабов;
задание положения секущих плоскостей;
нанесение знаков обработки поверхности;
создание выносных элементов;
нанесение знаков предельного отклонения формы и непараллельных
поверхностей и др.
82
Программное обеспечение анализа и расчетов позволяет автоматически
выполнять расчеты, связанные с вычислением геометрических характе-
ристик объектов, а также производить анализ плоских сплайнов. Для
кривых СМГ обеспечивает вычисление их длины и производной в любой
точке. Для плоских областей, ограниченных замкнутым контуром, система
вычисляет периметр этого контура, площадь, центр масс.
Иллюстрация возможностей СМГ. В качестве примера приведем
формирование графического изображения отсека корпуса с помощью СМГ
ANVIL-4000. Предполагается, что проектирование конструкции проведено,
необходимые расчеты выполнены, конструкция ясна. Требуется выполнить
чертеж отсека.
Для сокращения числа рисунков графически не иллюстрируются многие
проектные операции (в виде последовательности команд), которые
пришлось использовать в примере. Последовательность этапов синтеза
изображения, вообще говоря, произвольна. В данном примере приводится
Рис. 2,4. Этапы формирования
главного вида
83
один из возможных вариантов этой последовательности. Формирование
изображения заняло меньше одного рабочего дня.
Процесс реализован следующим образом. Вначале проводятся осевые
линии, затем операторами входного языка "отрезок" и "дуга" задается
верхняя половина изображения проекции мест стыка с крылом. Применение
операции "зеркальное отражение" относительно горизонтальной оси
симметрии позволяет не создавать специально нижнюю половину
изображения. Узлы стыковки отсеков были изображены вначале в одном
экземпляре, а затем с помощью операций "копирование", "зеркальное
отражение" и "перенос" расположены в нужных местах (рис.2.4,а, б).
Так как формирование стыкового узла отсека с использованием операции
сопряжения дугой двух перпендикулярных отрезков в небольшом масштабе
затруднительно, то использовалась операция "окно", позволяющая
рабочую часть изображения задать в увеличенном конструктором
масштабе.
Операция штриховки стенок корпуса отсека в разрезе осуществлялась
путем укзания на чертеже перемещаемым курсором всех замкнутых
Рис. 2.6. Этапы формирования се-
чения В—В
84
контуров (рис.2.4л). При сложном контуре эта операция выполняется
для верхней, так и для нижней части изображения, так как при
зеркальном отображении направление штриховки изменяется на противопо-
ложное.
Описание этапов синтеза сечений приведено в порядке возрастания их
сложности. Процесс последовательного формирования сечения Б-Б
представлен на рис. 2.5. Сначала были сформированы однотипные
фрагменты сечения (рис.2.5,а, б, в), которые затем скопированы путем
поворота относительно центра окружности (рис.2.5,г). Как видно из
рис.2.5,б, формирование фрагмента реализуется операцией сопряжения
двух дуг. Выбор шага штриховки (рис.2.5,б) имеет свою особенность:
при малом шаге изображение выглядит неэстетично, при большом появля-
ются незаштрихованные области.
Формирование сечения В-В (рис.2.6) практически не отличается от
синтеза сечения Б-Б.
Процесс формирования сечения А-А (рис.2.7) несколько отличается от
Рнс. 2.8. Крыльевой отсек корпуса ЛА
85
двух предыдущих, так как верхняя и нижняя части не являются зеркаль
ным отображением друг друга. Вначале (см. рис.2.7,а) изображается
левая верхняя четверть сечения, синтезируемая из отрезков. Здесь
крестики - положения курсора на экране ГД, помечающие начальные и
конечные точки отрезков. На втором этапе производится автоматическое
удаление перекрестий, а затем строится зеркальное отображение
относительно вертикали. На третьем этапе осуществляется отображение
верхней части относительно горизонтали (см. рис.2.7,в), и это
рационально, так как фрагменты верхней и нижней частей сечения
одинаковы. Следующий этап формирования сечения состоит из сопряжений
отрезков дугами. При этом конструктор при необходимости визуально
подбирает радиусы сопрягающих дуг. Этот этап разбивается на две части
- для верхней и нижней половин отдельно. На последнем этапе
представлена завершающая операция: штриховка контура левой верхней
четверти сечения. В остальных четвертях она выполняется аналогично.
Окончательный облик отсека изображен на рис.2.8.
2.4.4. Перспективы развития АСК
Выше было показано, что основные трудности создания АСК связаны с
неформальными аспектами процесса проектирования конструкций, эвристи-
ческими способностями человека, наличием элемента неопределенности
при проектировании. Прогнозируется, что в системах следующих поколе-
ний эти проблемы должны быть решены. По мнению зарубежных специа-
листов, в перспективе АСК будут способны воспринимать множество фор-
мальных и эвристических профессиональных знаний от конструкторов, а
затем на основе накопленных знаний с использованием принципов искус-
ственного интеллекта решать проектировочные задачи, получать выводы и
принимать решения, приближающиеся по своей точности и эффективности к
решениям, которые под силу только человеку-специалисту высокого
класса.
Прогнозируется, что новое поколение автоматизированных систем
проектирования и конструирования станет поколением экспертных систем,
которые возьмут на себя многие интеллектуальные проблемы и задачи,
решение которых традиционно считается привилегией человека. Подобного
рода системы можно рассматривать как метод записи и демонстрации
человеческой компетенции, позволяющий осуществить рациональное пове-
дение в специфических обстоятельствах. Экспертные системы являются
попыткой ввести в ЭВМ жизненный опыт человека. Взяв на себя некоторые
функции принятия решений, ЭВМ уменьшает нагрузку на проектировщика.
86
По сравнению с существующими АСК перспективные системы представ-
ляются более гибкими и предназначаются для решения задач с элементами
неопределенности, неоднозначности и неточности. Такие системы
способны сначала определить наиболее важные аспекты решаемой
проблемы, а затем выделить на их решение основную часть
вычислительных ресурсов.
Основной эффект экспертных систем состоит в:
использовании большого объема знаний, который человеческий интел-
лект не способен реализовать в силу физиологической ограниченности;
повышении систематичности работы со знаниями, выявлении новых
результатов и направлений использования;
увеличении скорости и точности вычислений.
Принципиально новые автоматизированные системы с использованием
искусственного интеллекта могут быть реализованы за счет увеличения
ресурсов ЭВМ, совершенствования операционных систем и математического
обеспечения. В настоящее время зарубежные АСК в основном реализуются
на мини- и микроЭВМ. Наибольшей популярностью пользуются мини-ЭВМ
VAX-11/780/750 фирмы DEC и персональные компьютеры семейства IBM PC.
Перспективные разработки ориентированы на ЭВМ пятого поколения.
Отличительной особенностью машин этого поколения, как следует из
зарубежных публикаций , является наличие трех главных компонентов:
базы знаний системы;
системы логических выводов;
интеллектуального интерфейса системы.
База знаний - это совокупность правил, позволяющая синтезировать
разнообразные конкретные предложения и концептуальные выводы, харак-
теризующие предметную область. В традиционных автоматизированных
системах база знаний как бы "встроена" в алгоритм процесса
проектирования, т.е. является частью инструкций, которые ЭВМ
использует для выполнения предложенных ей процедур. При этом порядок,
в котором выполняются процедуры, заранее фиксирован программистом,
правила (знания) здесь внедрены как управления.
В экспертных системах на основе машин пятого поколения база знаний
отделена от механизма получения логических выводов. Механизм логики
здесь самостоятельная подсистема; он отвечает лишь за управление: за
Fuchi К., Revisiting Original Phioeophy of the Fifth Generation
Computer Systems Project. - Proceedings of the ICFGCS-84, Japan.
Tokyo. Nov. 1984. P. 1-3.
87
порядок, в котором рассматриваются правила, за принятие решении 0
порядке переходов и направлении движения в процессе доказательства
какого-либо факта и т.д. При этом база знаний оказывается ’’раскрепо-
щенной”, что позволяет наиболее полно использовать ее потенциальные
возможности, в том числе и в эвристическом плане.
Отличительной особенностью логических систем является ориентация
на символьные процедуры, внедрение механизма данных абстрактного
типа. Предполагается, что это будет достигнуто прежде всего за счет
существенного усложнения аппаратных средств. На уровне аппаратных
средств вместо использования процедур традиционных языков будут
применяться логические программные языки для получения логических
выводов (например, методом проб и ошибок). При этом будет
использоваться параллельная обработка данных.
Внешний интерфейс систем будет упрощаться. Он будет становиться
более интеллектуальным, более удобным для проектировщиков. Взаимодей-
ствие пользователей с ЭВМ предполагается в основном на естественном
языке. Обработка информации будет выполняться с помощью систем, обла-
дающих функциями проблемного решателя очень высокого уровня. Ведутся
исследования по развитию методов и средств хранения графических дан-
ных, более эффективных, чем память ЭВМ. С этой целью изучается приме-
нение специальных видеодисков, управляемых ЭВМ.
Одной из объявленных возможностей компьютеров пятого поколения
является ориентация их аппаратных средства на обработку языков типа
PROLOG, которые будут их ’’машинным кодом”. Языки высокого уровня
позволят использовать большое количество запасенного знания из очень
больших баз данных, чтобы помочь в выполнении заданий типа понимания
речи.
Обзор зарубежной печати показывает, что в настоящее время все без
исключения основные исследовательские программы выделяют искусст-
венный интеллект и экспертные системы как ключевые темы. Эго свиде-
тельствует о том, что в ближайшее время следует ожидать новых важных
научных и практических результатов в этих бурно развивающихся
областях.
88
г л а в a 3. ТЕОРЕТИЧЕСКИЕ ОСНОВЫ
ИНФОРМАЦИОННОЙ ТЕХНОЛОГИИ
ПРОЕКТИРОВАНИЯ КОНСТРУКЦИЙ
§ 3.1. ОСНОВНЫЕ СЛАГАЕМЫЕ
ТЕОРИИ ПРОЕКТИРОВАНИЯ КОНСТРУКЦИИ
По определению одного из творцов кибернетики Клода Шеннона, все
задачи, которые людям приходится решать в своей повседневной
деятельности, можно разделить на два класса: точные и неточные. К
точным относятся задачи, в которых существует точная постановка, т.е.
известна функция цели, набор определяющих параметров и связи между
ними; известен математический аппарат решения и ожидаемые результаты.
В неточных задачах целевые функции многозначны, функциональные связи
содержат элемент неопределенности; для них не существует надежного
математического аппарата решений и весьма приблизительно известны
ожидаемые результаты.
Конструкторские задачи, как правило, относятся к классу неточных
задач. Их нельзя полностью формализовать и возложить на ЭВМ. Лишь че-
ловек с его эвристическими способностями может принимать решения в
условиях неполной исходной информации. (Эго, заметим, одна из пре-
град, стоящая на пути широкой автоматизации проектно-конструкторских
работ.) Но человеческий мозг плохо приспособлен для запоминания и вы-
полнения большого объема вычислений. Компенсировать эти недостатки
призваны, как известно, ЭВМ, но они не ’’умеют” решать неточные зада-
чи. Идеальной формой взаимодействия человек - ЭВМ является такая, при
которой недостатки сторон взаимно компенсируются. Чтобы организовать
подобное взаимодействие, необходимо наличие гибко спланированного ди-
алогового режима работы, при котором человек может на любом этапе
вмешиваться в процедуры выдачи информации, вычислений и принятия ре-
шений. Одновременно с этим необходимо хорошо организованное информа-
ционное обеспечение, построенное на количественной основе.
Для организации диалога необходимо иметь специальные прикладное
математическое и программное обеспечения, состоящие из систем
процедур с относительно простой формой постановки вопроса и анализа
ответа, которая дает возможность конструктору с помощью ’’быстродейст-
вующих” приемов обработки информации получать ответ о рациональности
своих предложений и принимать решение. В этом заключается главное
требование ко всем средствам, реализующим диалог конструктор - ЭВМ, и
особенно к прикладному математическому обеспечению. В основе ’’быстро-
89
действующих** приемов лежит технология проектирования конструкций,
отражающая совокупность выполняемых конструктором процедур. Описание
этих процедур полезно во всех случаях (особенно в учебных целях) и
совершенно необходимо в условиях автоматизированного проектирования,
поскольку на ЭВМ можно возложить лишь количественный анализ и
упорядочение информационных массивов, а цели 1^сследования, варианты
конструкций, приемы (методы) анализа остаются за человеком.
Современная теория проектирования конструкций объединяет обе
стороны процесса проектирования: формальную и неформальную. Концеп-
туальной основой этой теории является информационная технология
проектирования, которую можно определить как прикладную отрасль
науки, изучающую общие закономерности технологии на базе информатики.
Применительно к проектированию конструкций ЛА технология - это
совокупность процедур (операций) процесса проектирования. Хотя эти
процедуры весьма индивидуальны для каждого конструктора и для каждого
объекта проектирования, определенная типизация и упорядочение их
совершенно необходимы. Без этого невозможна автоматизация проектиро-
вания. Наиболее общая декомпозиция процесса проектирования, как
указано выше, предусматривает следующие обобщенные процедуры:
1) выбор физического принципа действия и наиболее общих
характеристик конструкции (выбор опорных вариантов);
2) выбор технического решения и оптимизация проектных параметров
конструкции;
3) конструирование и выпуск технической документации.
Информационная сторона технологии проектирования (информатика) -
это совокупость всех сведений, необходимых для проектирования, и
вопросов, связанных с их передачей, обработкой и хранением. С
некоторой долей условности процесс проектирования можно представить
как процесс переработки информации. Эго предопределяет особую
важность требований к информационному обеспечению проектных работ.
Содержательная часть работы с информацией на каждой техно-
логической операции проектирования определяется системой функцио-
нальных связей, которая объединяет математические модели, методы
расчета и процедуры принятия решений. Таких связей, как известно,
бесчисленное множество. Искусство конструктора заключается в умении
ориентироваться в этом море расчетных методик, в умении ранжировать
их по степени важности.
Более того, конструктор современных ЛА должен не только хорошо
разбираться в существующих расчетных методах, но и уметь в случае не-
обходимости создавать новые математические модели и расчетные методы.
90
Кроме знания предмета конструирования он должен хорошо разбираться в
зычислительной технике, в тонкостях методов механики и математики,
хорошо знать технологию производства, быть эрудированным в вопросах
оценки экономической эффективности - словом, он должен быть, по выра-
жению академика В.М. Глушкова, "кибернетическим полиглотом".
С общих позиций функциональные связи и соответствующие им
математические модели, применяемые при проектировании конструкций ЛА,
условно можно разбить на два вида. К связям первого вида относят:
связи и модели, получаемые при помощи уравнений механики
деформируемых сред, условий статической и динамической прочности,
жесткости, статической и динамической устойчивости и условий
отстройки от заданного спектра собственных частот конструкции;
конструктивно-технологические связи и модели, а также связи и мо-
дели, определяемые условиями применения и технической эксплуатации ЛА
Для получения связей и моделей первого вида необходимо иметь
полную информацию о поведении конструкции при заданном спектре
внешних воздействий. Эта информация заключается в выявлении уровня
концентрации статических и динамических напряжений, определении
статических и динамических критических нагрузок при потере устойчи-
вости, исследовании спектра собственных частот. После определения
этих факторов уравнения связи получаются из задаваемых в виде
нестрогих неравенств условий прочности, жесткости, устойчивости и их
условий отстройки от заданного спектра частот.
Для каждой из перечисленных проблем известно большое число
математических моделей и расчетных методов.* Использовать все
известные данные при проектировании конструкций, по-видимому, не
удастся никогда. Да это и не нужно. Обычно разбивают все многообразие
связей на группы определяющих связей и вспомогательных.
Под определяющими связями будем понимать сравнительно узкий круг
соотношений, получаемых на основе простых расчетных схем и позволяю-
щих достаточно быстро определять основные параметры конструкции. Так,
например, к определяющим связям для корпуса ЛА можно отнести:
1) условие прочности, составленное для статических напряжений,
рассчитанных по балочной теории (корпус ЛА заменяется балкой
постоянной или переменной жесткости) или по любому из вариантов
теории оболочек;
2) условие статической устойчивости, составленное с учетом
статических напряжений, действующих в конструкции, и критических
напряжений потери устойчивости, рассчитанных по тому или иному
варианту теории устойчивости оболочек;
91
3) условия, накладываемые на определяющие параметры конструкции с
использованием конструктивно-технологических и эксплуатационных
ограничений. Сюда относятся ограничения, накладываемые на минимальную
толщину обечайки; ограничение на число болтов фланцевого стыка
(8... 16), выбираемое из условий удобства эксплуатации (стыковка,
расстыковка отсеков, обеспечение соосности, герметичности); ограни-
чения, накладываемые на форму поперечного сечения шпангоутов и стрин-
геров, определяемые существующим сортаментом типовых сечений и т.д.
Вспомогательные связи в основном служат для проверки выбранных
определяющих параметров. В отдельных случаях их используют и при
оптимизации опорного варианта. К наиболее часто применяемым
вспомогательным связям можно отнести ограничения, накладываемые на
спектр собственных частот (спектр собственных частот должен
максимально отличаться от заданного множества частот); ограничения,
накладываемые на картину динамического напряженно-деформированного
состояния (НДС) (так, например, при компоновке носового отсека для
правильного расположения датчиков скорости и ускорения конструктору
важно знать расположение узлов и пучностей стоячих волн); ограничения
на уровень температурных напряжений, вносящих существенный вклад в
общую картину напряженного состояния конструкции и т.д.
Одним из компонентов искусства конструктора является умение
формировать совокупность определяющих и вспомогательных связей.
Причем эти совокупности не есть нечто застывшее. Конструктор должен
уметь при необходимости переводить те или иные связи из одной
категории в другую или совсем исключать их и оценивать при этом
возможные последствия.
Несколько подробнее рассмотрим связи и модели второго вида,
поскольку именно они являются основным слагаемым аналитического
проектирования конструкций. Связи (модели) второго вида - это
математические и логические модели, позволяющие выбирать
(рассчитывать) параметры конструкции, удовлетворяющие связям первого
вида. В инженерной практике связям (моделям) второго вида
соответствуют два типа задач (моделей): прямые и обратные.
В прямых задачах физические и геометрические параметры конструкции
и внешнее воздействие задаются на основе конструкторской интуиции или
статистических данных, а отыскивается НДС. Далее в соответствии с
требованиями прочности, жесткости или какими-либо другими коррек-
тируется распределение материала и отыскивается новое НДС. Алгоритм
целенаправленного выбора конструктивных параметров в соответствии с
тем или иным комплексом требований в таких задачах отсутствует.
92
Строго рассуждая, прямые задачи нельзя считать проектировочными,
поскольку их решение не дает ответа о степени совершенства проекта,
оценить которую можно лишь на основе сравнения выполненного проекта с
оптимальным.
Оптимальные конструкции находят в результате решения обратных
задач, т.е. таких, в которых параметры конструкции определяются в
соответствии с тем или иным заданным критерием выбора, математически
представленным в виде критериальной функции или функционала. Внешние
нагрузки при этом могут быть функциями искомых параметров
конструкции.
Обратные задачи (иначе их называют задачами оптимального
проектирования) характеризуются большим разнообразием постановок. Это
объясняется тем, что и уравнения, определяющие нагружение и деформи-
рование конструкции, и требования, предъявляемые к механическим
характеристикам, существенно различаются при рассмотрении различных
типов конструкции (балок, стержней, пластин, оболочек), реологических
свойств (упругости, пластичности, ползучести), внешних воздействий
(поверхностных и объемных сил, статических и динамических нагрузок,
консервативных нагрузок и сил, зависящих от поведения самой
конструкции, тепловых воздействий), видов переменных оптимизации
(формы конструкции, распределения физических свойств по конструкции),
предположений о степени полноты информации, об условиях работы
конструкции. Точность модели и исходных данных также влияет на
постановку задачи.
Накопленный к настоящему времени значительный опыт в постановке и
решении прикладных задач оптимизации относится главным образом к
исследованию относительно простых конструкций. В более сложных слу-
чаях характерным пока остается такой подход, когда на основе дополни-
тельных допущений, при том не всегда строгих, задача существенно
упрощается и сводится к ряду слабо взаимосвязанных задач проектирова-
ния отдельных агрегатов, использующих упрощенные расчетные модели и
неполный набор ограничений. В то же время современные достижения в
исследовании НДС сложных конструкций, развитии математических методов
оптимизации и прогресс в области вычислительной техники и математи-
ческого обеспечения ЭВМ создают предпосылки для решения проблемы оп-
тимизации на качественно новом уровне в рамках системы автоматизиро-
ванного проектирования с рассмотрения сложной конструкции как единой
системы с необходимой степенью детализации, с учетом всего комплекса
основных требований к ней.
Цель многих исследований по оптимальному проектированию состоит в
93
том, чтобы выявить наиболее эффективный из способов оптимизации.
Обычно при оптимальном проектировании конструкции имеется широкий
выбор конструктивных параметров, варьированием которых можно влиять
на критерий качества. Например, уменьшение массы конструкции может
быть достигнуто в результате рационального распределения толщин,
управления анизотропией материалов, армирования, создания предвари-
тельного напряженного состояния и т.д. Важно знать, какие способы
оптимизации или их комбинация приводят к большему выигрышу по
функционалу. Даже в тех случаях, когда по причинам большой стоимости
или трудностей технологического характера возможности создания
оптимальных конструкций ограничены, исследование оптимальных проектов
имеет важное значение, так как позволяет теоретически оценить
качество традиционных неоптимальных конструкций.
Так, конструкции минимальной массы, получающиеся в результате
решения задач оптимального проектирования, не всегда приемлемы в
технологическом отношении. В некоторых случаях выигрыш массы опти-
мальной конструкции столь незначителен по сравнению с обычно
употребляемыми конструкциями, что изготавливать ее нет смысла. Однако
возможность получения оптимального решения чрезвычайно важна. Оно
представляет собой эталон, с помощью которого проектировщик
сравнивает работоспособные варианты конструкции и выбирает лучший,
наиболее близкий к оптимальному. Кроме того, оптимальное решение
указывает пути совершенствования конструкции и в том случае, когда
оптимальный проект сложен в изготовлении, но имеется возможность
спроектировать технологичную конструкцию несколько большей массы, чем
оптимальная.
Задачи оптимального проектирования решают аналитическими и
численными методами. Среди аналитических методов наибольшее значение
имеют методы дифференциального и вариационного исчислений, а также
принцип максимума. Иногда эти методы сочетаются с вычислительными
процедурами. Для оптимального проектирования реальных конструкции
применимы в основном численные методы. За аналитическими методами
следует сохранить, пожалуй, лишь роль поставщика эталонов для
проверки точности численных методов. В числе последних наибольшее
значение имеют методы математического программирования, так как в
большинстве случаев задача поиска оптимального проекта может быть
сведена к задаче математического программирования, заключающейся в
определении экстремального значения целевой функции при заданных
ограничениях на проектные параметры. Условия связи и ограничения в
таких задачах - функциональные модели первого вида, т.е. уравнения
94
строительной механики, условия прочности, жесткости, аэроупругости,
^ежности и др.
Отличительная особенность задач проектирования состоит в том, что
по своей природе многоуровневые. Даже в условиях узкой
спецнализаиии проектных задач в конструкторских бюро (см. § 1.1) при
проектировании конструкции необходима как минимум двухуровневая
проработка. Первый уровень - решение схемной (структурной) задачи по
выбору конструктивно-силовой схемы, второй - оптимизация параметров
выбранной схемы. В целом же задача оптимального проектирования
конструкций представляется в виде задачи структурно-параметрической
оптимизации.
В настоящее время существует несколько подходов к проведению
структурно-параметрической оптимизации авиационных конструкции.
Наиболее общий подход предполагает декомпозицию структурно-парамет-
рической задачи на три задачи [4]: 1) синтез оптимальной
конструктивно-силовой схемы; 2) оптимизация конструкции в пределах
выбранной силовой схемы при заданных допустимых напряжениях; 3)
оптимизация элементов конструкции.
Первая задача - завязка силовой схемы, определение общего облика
конструкции. Это исключительно ответственная задача, поскольку
реализованную в чертежах недостаточно проработанную схему очень
трудно исправить и довести до уровня рациональной. Подобная задача
достаточно сложна вследствие трудности математического описания
конструкции, поэтому ее решают при введении ряда не всегда
обоснованных допущений относительно поведения конструкции.
Две следующие задачи решаются применительно к выбранной силовой
схеме. При оптимизации, как правило, задается класс допустимых
конструкций путем варьирования некоторых параметров уже вполне
определенного скелета конструкции с заданным типом элементов,
составляющих эту конструкцию, поэтому число варьируемых параметров
несколько меньше и решение таких задач относительно проще с
математической точки зрения. Задачу оптимизации параметров самих
элементов конструкции в связи со спецификой описания поведения
элементов конструкции и для значительного уменьшения числа
неизвестных, определяющих конструкцию, выделяют как самостоятельную.
Другим возможным подходом к решению задач структурно-параметри-
ческой оптимизации авиационных конструкций является использование
интерактивных процедур идентификации. Существенная особенность
Удобных процедур заключается в разделении задачи структурно-парамет-
Рнческой оптимизации конструкции на два самостоятельных этапа: 1)
95
получение методами математического программирования эталонного
решения, которое представляет собой оптимальный закон распределения
массово-инерщюнных и жесткостных характеристик в конструкции
минимальной массы, отвечающей требованиям прочности и жесткости, и 2)
сравнение * альтернативных вариантов конструкции с эталоном с помощью
процедуры идентификации. При этом трудоемким, т.е. требующим
существенных затрат машинного времени, является первый этап, так как
условия связи в этом случае представляют собой сложные систем*
уравнений, описывающих поведение конструкции в статике и динамике.
Существенное достоинство рассматриваемого подхода заключается в
том, что для рассматриваемого класса конструкций эталонное решение
получают только один раз, поэтому принципиально не имеет особою
значения затраченное при этом машинное время, так как возможен
пакетный режим работы с ЭВМ. Последнее обстоятельство делает
возможным получение оптимальных законов распределения массово-инер-
ционных и жесткостных характеристик в конструкции минимальной массы
при выполнении целого ряда эксплуатационных ограничений и, в первую
очередь, таких, как статическая прочность, статическая и динамическая
устойчивость конструкции. Возможность рассмотрения широкого спектра
эксплуатационных ограничений значительно повышает информационную
ценность эталонного решения.
Другим не менее важным достоинством данного подхода является то
обстоятельство, что второй этап не требует (в отличие от первого
этапа) больших затрат машинного времени, так как при оптимизации
параметров конструкции в качестве ограничений выступают алгеб-
раические неравенства, а функциональные связи отсутствуют. Поэтому
при оптимизации параметров имеется возможность организовать интераЮ*
тивный режим работы конструктора с ЭВМ, и следовательно, становятся
возможными проведение сравнения большого числа альтернативна
вариантов конструкции с эталоном и выбор наиболее рациональных.
Таким образом, рассматриваемый подход к решению задач
структурно-параметрической оптимизации с помощью интерактивным
процедур идентификации позволяет оценивать совершенство проектируемы!
конструкций (так как имеется эталон) и просматривать широкий спектр
альтернативных вариантов с целью выбора наиболее рационального^
Одновременно заметим, что при любом методе реализации структурно-паН
раметрическая оптимизация позволяет получать более совершенны!
конструкции, чем при традиционном проектировании, основанном на ceprt
прямых расчетов на прочность. Однако точность решения обратных задач*
как правило, ниже, чем прямых. Поэтому спроектированную с помошьЫ
96
методов структурно-параметрической оптимизации конструкцию необходимо
подвергнуть дополнительному тщательному и всестороннему анализу с
помощью поверочных расчетов на прочность методом конечных элементов
или экспериментальным путем.
Ниже излагаются содержание основных этапов проектирования
конструкции ЛА и характеристики используемых математических моделей.
§ 3.2. ВЫБОР ОПОРНЫХ ВАРИАНТОВ КОНСТРУКЦИИ
Задача этого этапа проектирования состоит в том, чтобы сформиро-
вать множество альтернативных вариантов, отражающих возможности
научно-технического прогресса, и затем выбрать из этого множества
один или несколько опорных вариантов. Последние, как указано в гл. 1,
должны в основном удовлетворять поставленным целям и быть основой для
дальнейшей проработки. Варианты проектируемой конструкции - это
область возможных решений, в которой ищется оптимальное решение. Чем
больше вариантов содержит эта область, тем выше вероятность
обоснованного решения. Важно, чтобы все значимые и в принципе
применимые к рассматриваемой задаче достижения научно-технического
прогресса были просмотрены и представлены в виде некоторой
совокупности конструктивных вариантов.
Процесс генерации вариантов существенно неформальный. Именно здесь
проявляются творчество конструктора, его талант, умение обобщить
предыдущий опыт. При этом нужно учитывать, что с течением времени, по
мере развития техники, конструкторское и особенно технологические
решения претерпевают своеобразную "переоценку”: невозможное вчера
сегодня становится наиболее рациональным. Это не значит, что все
варианты должны строиться исключительно на последних достижениях
науки и техники. Должно быть разумное сочетание новейшего и
положительно себя зарекомендовавшего.
Варианты конструкций, использующие нововведения, должны
подвергаться особо тщательному анализу. Очень полезно при этом
исследовать потенциальные возможности внедряемого нововведения. Если
Достигнутый уровень близок к теоретическому, то вряд ли можно ожидать
при внедрении значительных результатов, особенно если учесть, что
всякое новшество встречает активное противодействие со стороны
отживающего.
Многообразие конструкций ЛА и его систем не позволяет провести
Конкретный анализ целесообразных нововведений в рамках настоящего
Учебника. Особо подчеркнем лишь то, что новую технику нельзя
4 - 880 97
создавать по прототипам путем обработки статистических данных. Новая
техника - это обязательно акт творчества с использованием ново-
введений.
Наиболее добротная информация о новинках - патенты и авторские
свидетельства. Они и должны анализироваться в первую очередь.
Подразделения патентной информации должны не только обеспечивать
конструкторов необходимыми сведениями о новых технических решениях,
найденных изобретателями у нас и за рубежом, но и прогнозировать
изобретательскую деятельность на 10... 15 лет вперед, подсказывая
конструкторам, в каких направлениях следует искать новые решения,
куда движется конструкторская мысль, а где поиски бесперспективны.
Целесообразно, чтобы область возможных решений представляла собой
упорядоченную структуру, ибо только в таком случае можно применять
интерактивный режим работы конструктора с ЭВМ. При этом автомати-
зированное формирование вариантов выполняют в несколько стадий.
Первая стадия имеет целью формально описать множество материальных
реализаций элементов, отражающее возможности научно-технического
прогресса. Особо подчеркнем, здесь речь идет об элементах, т.е. о
составных частях альтернативных вариантов. Такими элементами могут
быть, например, узлы, из которых собираются агрегаты конструкции
планера (панели из композиционных материалов, подкрепленные панели,
штампованные перекрестные балки, фермы и т.д.). Необходимо, чтобы
конструктивная реализация элемента была совершенно ясной и
параметрически определенной.
Поскольку конструкций элементов может быть довольно много, а
базирующихся на них альтернативных вариантов неизбежно еще больше, то
возникает проблема - как, используя множество материально реализуемых
элементов, описать всю возможную совокупность альтернативных
вариантов. Основная трудность всех этих процедур связана с тем, что
генерация вариантов требует от проектировщика умения анализировать и
прогнозировать широкий круг сложных задач, в том числе и таких, с
которыми он встречается впервые. Может оказаться, что компетенции
проектировщика недостаточно для того, чтобы представить варианты
реализации той или иной исходной цели. Человек способен проанализи-
ровать ситуацию лишь тогда, когда требуется учесть относительно
небольшое число обстоятельств (взаимных связей). Поэтому, если
решение сложной задачи вызывает серьезные затруднения, задачу надо
расчленить на ряд более простых.
Принцип расчленения, т.е. декомпозиции системы, при формировании
вариантов конструкции является основополагающим. Следует, однако,
98
иметь в виду, что общепринятых рекомендаций о способах разделения
проблемы нет. В задачах проектирования конструкций декомпозиция
системы наиболее удобно описывается с использованием иерархической
древесной структуры. Иерархическая схема определяет взаимное
отношение элементов (подсистем), является основой и необходимым
инструментом для описания логической структуры базы данных, позволяет
организовать интерактивный режим работы проектировщика с ЭВМ.
Обобщая, можно сказать так: на основе иерархической схемы
декомпозиции системы осуществляется формализация всего процесса
проектирования.
Возможная иерархическая схема декомпозиции показана на рис.3.1.
Проектируемую конструкию ЛА целесообразно представлять четырьмя
иерархическими уровнями.
1-й уровень занимает конструктивно-компоновочная схема аппарата,
представляемая совокупностью параметров, характеризующих структуру,
геометрию аппарата* аэродинамическую схему, компоновку оборудования,
внешние нагрузки, функциональное совершенство и т.д.
2-й уровень отражает основные концепции, которые должны быть
просмотрены при проектировании и которым могут соответствовать
различные варианты конструктивной реализации ЛА в целом. Например,
могут быть заданы к проработке с последующим сравнением модульная и
7-J уровень
2-й уровень
3-й уровень
Ь-й уровень
Рис. 3.1. Возможная иерархическая схема декомпозиции системы
неразъемная (ампульная) модификации конструкции корпуса ЛА.
Подсистемы следующего уровня для рассматриваемых модификаций,
очевидно, будут существенно различными.
3-й уровень составляют подсистемы, образованные, как правило,
функциональному признаку. Для конструкций ЛА - это отсеки корпуса
(фюзеляжа), крыло, двигательная установка и т.д. В отдельные
подсистемы могут быть выделены связанные с конструкцией системы
оборудования. В числе основных характеристик, рассматриваемых на этом
уровне, должны быть: материал силовых и несиловых элементов, тип
конструкции и способ соединения элементов.
4-й уровень составляют узлы и модули подсистем, отражающие
возможные конструкции панелей, сечения силовых элементов, особенности
технологии и т.д.
На второй стадии проводится упорядочение массива вариантов. Ориен-
тируясь на использование ЭВМ, эту процедуру выполняют с помощью спе-
циальных морфологических таблиц, в которые по определенным правилам
заносится информация о всех известных и возможных реализациях
элементов или подсистем, т.е. данные предыдущей стадии. В качестве
примера ниже приводится форма такой таблицы для 3-го уровня.
Таблица 3.1
Подсистемы Варианты реализации подсистем
1 2 3 4 5 п
Носовой отсек 1111 1 Рулевой отсек 1 1 1 Приборный отсек 1111 1 Крыло 111 1 и т.д.
В таблице помещают все подсистемы и информацию о вариантах их
технической реализации. Цифра ”Г в строке говорит о том, что вариант
реализуем. Для носового отсека, например, могут рассматриваться
радиопрозрачные обтекатели, выполненные из различных материалов; для
рулевого отсека варианты могут отличаться типом конструкции
(монолитная, наборная, из композиционных материалов) и т.д. Если
число возможных комбинаций вариантов подсистем оказывается достаточно:,
обозримым, то желательно в табл. 3.1 для каждого варианта системы''
100
предусматривать лишь совместимые (реализуемые) комбинации подсистем.
Эго требование можно и не выполнять, но тогда число вариантов,
подлежащих анализу, значительно увеличивается.
Пронумеровав далее подсистемы в принятой последовательности их
просмотра и присвоив порядковые номера разным подсистемам одного
назначения, получим двумерный численный массив, который отражает все
множество возможных вариантов. Аналогичным образом формируются
Таблица 3.2
Крылье-
вой от- -----------
сек кор-
пуса --------------
101
массивы информации на 4-м уровне. Результаты также оформляются в виде
морфологических таблиц, число которых равно числу подсистем.
Далее следует третья стадия анализа альтернативных вариантов -
отсеивание . несовместимых и явно нерациональных вариантов (по-
скольку общее число вариантов может оказаться астрономически
большим). Здесь опять вступает в силу неформальный анализ. Стра-
тегия обзора, распознавание приемлемых вариантов, анализ множества
решений возлагаются на проектировщика. Чтобы отсеять несовместимые
варианты, составляется так называемая матрица совместимости в виде
табл. 3.2.
Цифрой ”Г в таблице отмечают реализуемые варианты. По идее эта
матрица должна отражать все иерархические уровни, но тогда ее
размерность может оказаться весьма значительной. Основываясь на
опыте, проектировщик может неформально проанализировать верхние
иерархические уровни и оставить в матрице лишь часть вариантов,
относящихся к 3-му и 4-му уровням. Явно нерациональные варианты при
этом рассматриваются как несовместимые.
Итогом третьей стадии является перечень возможных вариантов с
описанием самых общих характекристик. Далее возникает ряд вопросов:
как определить облик и параметры каждого варианта, следует ли
детально прорабатывать конструкцию каждого варианта, допустимо ли
применение различных критериев при локальной оптимизации параметров и
т.д. Все эти вопросы являются содержанием следующей (четвертой)
стадии решения задачи о выборе опорных вариантов.
Выбор опорных вариантов производится на основе количественного
анализа. Отличительной особенностью проектирования конструкций
является иерархическая схема проектирования. Даже при неизмен-
ной (заданной) конструктивно-компоновочной схеме системы ее кон-
струкция прорабатывается на двух уровнях: нижний уровень образует
задача выбора параметров и характеристик вариантов конструкции, а
верхний - сравнение вариантов. Причем исследования на нижнем уровне в
связи с большим числом допустимых вариантов, как правило, проводятся
в два приближения. Вначале варианты рассчитываются и оцениваются с
помощью упрощенных методик, и только после существенного ограничения
числа вариантов детально прорабатываются оставшиеся (опорные) ва-
рианты.
Использование упрощенных методик удобно тем, что позволяет оце-
нить большое число вариантов и отсеять заведомо худшие. Жела-
тельно, чтобы такой анализ проводился с позиций единого критерия
или единой системы критериев, что обеспечивает сопоставимость условий
102
при сравнении вариантов. Однако это требование не всегда реально и к
тому же оно ограничивает эвристические способности конструктора,
которые на этом этапе играют исключительно важную роль. О
неформальной стороне пректирования здесь еще раз говорится потому,
что для новых сложных технических систем далеко не всякая задача
анализа системы, и тем более ее проектирования, может быть аккуратно
поставлена математически. Качество проекта новой системы во многом
зависит от того, насколько удачно конструктор сумел вписать в
неформальную по существу процедуру создания проекта формальные
математические методы.
Аналитическое определение проектных параметров конструкции, как
указано в § 3.1, базируется на моделях двух видов. Первый вид - это
модели, яьляющкся аналттоским описанием расчетных схем конструкций
и отражающие функциональные связи между проектными параметрами.
Определяющее влияние на эти связи оказывают напряженно-деформирован-
ное состояние и устойчивость конструкции. Второй вид моделей - модели
математического программирования, предназначаемые для интегральной
количественной оценки вариантов конструкций. Приведем общую харак-
теристику тех и других моделей.
К наиболее часто встречающимся моделям первого вида следует
отнести модели, описывающие следующие расчетные схемы конструкций:
1. Прямолинейные балки и стержни, работающие на изгиб, растяжение
и продольно-поперечный изгиб. Эти схемы пригодны для анализа
напряженно-деформированного состояния корпуса ЛА и стрингеров в
подкрепленных отсеках.
2. Круговые кольца, работающие на изгиб и кручение в своей
плоскости и в направлении прямой, перпендикулярной соприкасающейся
плоскости. Эти схемы хорошо моделируют НДС стыковых и нормальных
шпангоутов и даже иногда целых отсеков (для расчетных случаев,
связанных с высокоинтенсивными ударными нагружениями).
3. Подкрепленные и неподкрепленные плоские пластины. Эти схемы
можно применять при определении НДС криволинейных панелей,
опирающихся на продольно-поперечный набор, а также обечаек отсеков
для расчетных случаев, в которых обечайка отсека воспринимает нагруз-
ку, лежащую в плоскости, перпендикулярной срединной поверхности.
4. Подкрепленная и неподкрепленная цилиндрические оболочки,
напряженно-деформированное состояние которых можно определять исходя
из уравнений теории оболочек (безмоментная, полубезмоментная оболочка
с недеформируемым поперечным контуром, моментная). Модели этих схем
являются наиболее сложными для решения. При надлежащем выборе
103
граничных условий и нужного варианта теории оболочек они хорошо
описывают НДС конструкций.
В моделях второго вида - математического программирования - суть
задачи состоит в отыскании экстремума функции fix) на некотором
множестве С, т.е.
fix) — extr, (3.1)
х е G
где fix) - целевая функция, ах- вектор, описывающий параметры
конструкции.
Условие х € G означает принадлежность вектора х некоторому
ограниченному замкнутому множеству G, которое в общем случае может
иметь сколь угодно сложную природу, определяемую структурой модели.
Обычно это условие представляют в виде одного или нескольких
уравнений связи (например, уравнений существования, условий
равновесия и т.д.) типа
£.(х) = 0; i = ГТ (3.2)
и ряда ограничений типа неравенств
fly < gfM <b-, j = ГТ (3.3)
отражающих ресурсные требования, ограничения по нагрузкам,
температурам, напряжениям и пр.
Если целевая функция, условия связи и ограничения линейны, а
переменные управления х неотрицательны, то задача (3.1)...(3.3) реша-
ется с помощью хорошо разработанных методов линейного программи-
рования.
Наиболее трудный вопрос на рассматриваемой стадии проектирования
состоит в выборе критерия оптимальности и формировании целевой
функции. Во многих случаях объективно трудно сформулировать одну
единственную четко определяемую цель функционирования. В подобных
ситуациях критериев оказывается много, и чтобы привести задачу к
стандартной форме, необходимо привлечь дополнительные гипотезы
(иногда даже не вытекающие из постановки задачи). Некоторые из таких
подходов излагаются ниже [23].
Введение комплексного критерия. Этот способ, вероятно, самый
простой и поэтому довольно распространенный. Целесообразные модели
104
свертки частных критериев - пересечения эффектов, объединения
эффектов и комбинации эффектов - нами рассмотрены в гл. 1 (см.
(1.10)...(1.12)).
В некоторых случаях совокупность частных критериев на основе
экспертного анализа заменяется одним основным критерием, а для
остальных критериев также экспертным путем назначаются допустимые
границы и тем самым они переводятся в ограничения.
Использование нормативных показателей. Ранее было показано, что
исследование эффективности технических систем в качестве исходной
базы и одновременно в качестве результата предполагает наличие норма-
тивов - контрольных показателей. Пусть такие нормативы Ц, .............
f . Требуется выбрать вектор х (параметры конструкции), обеспечи-
п
вающий максимальные значения функциям Щх), f^(x)........... f^(x) одно-
временно.
В подобных задачах целевую функцию удобно представлять в виде
fjx)
F(x) = min —-— (3.4)
и искать вектор х, который обеспечивает максимальное значение Fix).
Условие Fix) —» шах, максимизируя значение наихудшего из
относительных локальных критериев if.ix)/f^), означает выбор такой
системы конструктивных параметров х, которая обеспечивает приближение
к единице каждого отношения f^(x)/f., что и требуется по условию
задачи.
Весьма важным качеством критерия в форме (3.4) является то, что в
случае линейных функций f^x) задача максимизации Fix) сводится к
задаче линейного программирования. Эго легко показать, используя
овую переменную
fAx)
Н = min -£-—. (3.5)
1 h
105
Очевидно, что должны быть введены ограничения
f/x) > Hf*. i = 1, п.
(3.6)
с учетом которых приходим к следующей задаче линейного программиро-
вания: определить максимум по х скаляра Н, удовлетворяющего
ограничениям (3.6).
Введение меры близости в пространстве локальных критериев.
Стремление свести задачу к одному критерию вполне закономерно,
поскольку в этом случае можно рассчитывать на простое решение. В
связи с этим множеству целей, а следовательно, и критериев на
практике пытаются удовлетворять дифференциально, т.е. по отдельности.
Если такие решения известны, т.е. найдены л оптимальных векторов
х^. то совокупность соответствующих им критериев определит в
пространстве критериев некоторую точку, которую можно рассматривать в
качестве абсолютного экстремума. Поскольку оптимальные векторы х^*
неизбежно различны, то, очевидно, не существует такого х, который
позволил бы достичь точки абсолютного экстремума.
Положительная величина
р = Jx [f .(х) - ]2 , (3.7)
i
представляющая собой евклидово расстояние от точки (fix), f^(x).......
f (х)) до точки (/"1ах, f™*........ f™*) в пространстве критериев,
fl 1 2 fl
может рассматриваться как мера близости решений f.(x) и Эта
мера может быть принята в качестве обобщающего критерия, минимизация
которого дает конструктору определенную полезную информацию:
показывает, насколько рассматриваемое решение отстоит от абсолютного
максимума.
Принцип Парето. В предыдущих случаях задача с многими критериями
тем или иным способом сводилась к однокритериальной задаче. Но к
анализу многокритериальных задач можно подойти и с других позиций:
попытаться сократить множество исходных вариантов, т.е. исключить из
неформального анализа те варианты решений, которые заведомо будут
плохи. Один из таких путей предложен итальянским экономистом В. Паре-
то в 1904 г.
106
рис. 3.2. Иллюстрация множества
Парето
Принцип Парето состоит в том,
что выбирать в качестве решения
следует лишь вектор х, который
принадлежит множеству Парето, ха-
рактеризующемуся тем, что в нем
исключены заведомо нелучшие решения. Смысл этого множества поясним на
примере. Пусть цели исследуемой системы характеризуются двумя одно-
значными функциями
f^x) -► шах;
f2(x) -► max.
(3.8)
Тогда каждому допустимому значению вектора х на плоскости Ц,
соответствует одна точка, и равенства
f\ = Z1(X>: f2 = f2M (39>
параметрически задают некоторую кривую abed в этой плоскости
(рис.3.2). Множество Парето образуют участки аа' и cd. Участок Ьс не
принадлежит этому множеству, поскольку любая точка $ хуже точки с,
для которой обе целевые функции и и имеют большие значения.
Следовательно, варианты, соответствующие участку Ьс, должны быть
сразу исключены из рассмотрения. Участок а" Ь не принадлежит множеству
Парето на том основании, что для каждой его точки е найдется точка,
принадлежащая участку cd, в которой значения обеих функций (Ц и f%)
больше, чем в точке е.
Принцип Парето не выделяет единственного решения, он только сужает
множество альтернатив. Окончательный выбор решения является задачей
следующего этапа. Пока речь идет о формировании опорных вариантов.
Приближенное построение множества Парето относится к числу очень
важных и одновременно довольно трудных задач аналитического проекти-
рования. Наиболее простой метод построения такого множества - это
метод огибающей. Его суть в следующем.
Пусть исследуемая задача характеризуется двумя целевыми функциями
и Оптимальное решение соответствует условию
107
fAx) —► max;
1 х е G
х
fAx) —► max.
2 xeG
X
Каждой точке x € G*
(3.10)
соотношения (3.9) ставят в соответствие
некоторую точку f 6 Gj в плоскости критериев f(. f?. Другими словами,
можно сказать так: критериальные функции (3.9) отображают множество
G на множество G.
х f
(рис.3.3), называемое множеством достижимости, или
множеством предельных значений. Заметим, что множество Парето
представляет собой лишь часть границы множества достижимости. На
рис. 3.3 множеством Парето будет огибающая АСВ.
Приближенное построение огибающей (множества Парето) сводится к
последовательному решению ряда задач математического программиро-
вания. Вначале, ориентируясь на экспертные данные и опыт проектиро-
вания, задают предполагаемые значения критериев и
fl=Ci: f2=C2- (311)
Далее решают две оптимизационные задачи:
f,(x) —► max, f = с л (3.12)
’ x€G 2 2
х
L(x) —> max. ft = c.. (3.13)
2 xeG 1 1
x
Решение этих задач (точки а и b на рис.3.4) дает простейшую
аппроксимацию множества Парето в виде прямой, соединяющей точки а и
Рис. 3.3. Исследуемые по Парето множества
Рис. 3.4. Схема приближенного построения огибающей (множества Парето)
108
b. Для уточнения аппроксимации следует задать принадлежащие области
достижимости
‘t «•“>
и решить еще две задачи:
Е(х) —► max, L = с а (3.15)
’ ХбС 2 4
х
Цх) —► max, f=c,. (3.16)
2 x€G 1 3
х
Получим еще две точки - с и d. Проведя через точки а, с, d, Ь ломаную
линию (рис.3.4), получим следующее приближение для огибающей.
Процедура уточнения аппроксимации может быть продолжена, однако и два
приближения дают достаточную информацию для рассматриваемого этапа
проектирования. Описанный способ можно распространить и на случай
большего числа критериев.
Изложенные выше методы относятся к первому этапу аналитического
проектирования, когда основная роль принадлежит неформальному
анализу. Здесь очень важно найти разумное сочетание количественных
(математических) и неформальных процедур. Количественный анализ в
основном должен быть ориентирован на линейные зависимости. Нецеле-
сообразно увлечение "строгими” методами решений. Особенно тщательным
должен быть подход к постановке и решению оптимизационных задач.
Нельзя забывать об итерационное™ процесса проектирования. Если сразу
использовать сложную целевую функцию и реальную систему ограничений,
то задача может потребовать больших затрат машинного времени. А так
как в процессе выбора параметров задачу отыскания экстремумов
приходится проводить многократно, то трудоемкость решения строгой
задачи может оказаться решающим фактором всего исследования.
Поэтому имеет смысл, как уже отмечалось, вначале строить
упрощенную модель и решать некоторую другую, близкую задачу
*>(х) —► max, (3.17)
х € G
В которой учитывается лишь часть условий связи и ограничений
(например, лишь требования статической прочности). Достоинством такой
задачи является незначительная трудоемкость решения и возможность
простого диалога конструктора с ЭВМ.
109
§ 3.3. ВЫБОР ТЕХНИЧЕСКОГО РЕШЕНИЯ
И ОПТИМИЗАЦИЯ ПРОЕКТНЫХ ПАРАМЕТРОВ КОНСТРУКЦИИ
3.3.1. Содержание работ
Настоящий (второй) этап аналитического проектирования конструкций
относится к ограниченному множеству проектных вариантов. Здесь
анализируются опорные варианты. Их расчет проводится уже на основе
использования более строгих методов, учитывающих требования не только
прочности, но и жесткости, массы, технологии производства и т.д. Суть
проектировочной задачи при этом сводится к выбору одной из структур
конструкции, найденной на предыдущем этапе, и оптимизации параметров
структуры. С точки зрения математики такие задачи можно определить
как задачи структурно-параметрической оптимизации.
Особенность этих задач состоит в том, что при структурных вариа-
циях изменяются число и характер переменных. В результате полная
формализация задачи оказывается невозможной, что создает серьезные
препятствия на пути использования методов математического программи-
рования и автоматизации процесса. В этих условиях наиболее перспек-
тивной является интерактивная процедура проектирования, в которой
формализуемая часть задачи решается на ЭВМ автоматически, а неформа-
лизуемая выполняется конструктором в диалоге с ЭВМ. Один из возможных
способов построения диалога конструктор - ЭВМ для решения задачи
структурно-параметрической оптимизации будет рассмотрен ниже.
Вначале, однако, требует уточнения само понятие "структура конст-
рукции". Чаще всего под структурой конструкции понимают конструктив-
но-силовую схему (КСС). Такое представление сложилось в самом начале
становления теории проектирования, когда об автоматизации проектиро-
вания и современных расчетных методах даже и не мечтали. Бесспорно
то, что КСС - самая простая структурная модель конструкции, но далеко
не полная. Она не отражает важнейшего качества конструкции - ее тех-
нологичности. Объединение обоих признаков, т.е. силовой схемы и тех-
нологических свойств, образует более информативную структуру конст-
рукции - конструктивно-технологическое решение (КТР). Такого рода
структура максимально приближена к конечному результату. КТР отражает
материал, форму, расположение и способ образования элементов констру-
кции (с учетом требований стандартизации и унификации), а также хара-
ктер соединений и связей между элементами. Основными параметрами КТР
помимо параметров, определяющих расположение элементов в пространст-
ве, являются геометрические характеристики сечений силовых элементов
и их сортамент.
НО
Существующие методы проектирования конструкций ЛА обычно основаны
на поиске КСС с последующим преобразованием ее в КТР. Смысл такой
технологии проектирования состоит в следующем. Вначале отыскивают
оптимальное распределение силового материала в конструкции, например
на основе принципа равнопрочности или из условия минимума массы
конструкции с учетом ограничений на жесткость. Далее, используя
траектории главных напряжений оптимального варианта, или каким-то
другим способом формируют варианты КСС. На заключительной стадии
(конструирования) КСС трансформируется в КТР.
Существенный недостаток такой технологии проектирования заключает-
ся в том, что дополнительная масса, реализующая переход от КОС к КТР,
составляет до 40 % от массы КТР. При этом несомненно изменяются мас-
совые, жесткостные и инерционные свойства конструкции. Устранение
этого рассогласования с помощью поверочных расчетов означает переход
на метод "заплат”, т.е. отказ от строгого обоснования КТР.
На наш взгляд, условия эксплуатации современных ЛА. требующие
применения быстроразъемных соединений, складывающихся несущих
поверхностей, модульных унифицированных конструкций, а также
вычислительные возможности конструкторских бюро ставят под сомнение
целесообразность поиска "силовой массы” и ориентацию преимущественно
на КСС. Основным объектом аналитического проектирования и его
автоматизации должны быть КТР.
Однако при этом следует учитывать и то, что ориентация на КТР
наряду с плюсами влечет за собой и минусы. Главный минус - расширение
размерности задачи. Для обоснованного выбора рационального КТР
необходимо анализировать широкий спектр вариантов и их параметров,
что требует базы данных КТР большой мощности. Как следствие, возни-
кает целый ряд проблем технического, математического и программного
обеспечений автоматизации. Камнем преткновения в обсуждаемой проблеме
является большая размерность вектора конструктивных параметров (в
пределах 103...105).
Под множеством конструктивных параметров понимают совокупность
геометрических параметров КТР, с помощью которой однозначно
определяются топология проектируемого объекта, а также производные от
нее - жесткостные, массово-инерционные, технологические и эксплуата-
ционные характеристики. Роль конструктивных параметров не будет
преувеличена, если утверждать, что все составляющие технического
уровня конструкции ЛА (см. гл. 1) определяются в конечном счете
совокупностью конструктивных параметров.
111
Проблема размерности и неформализуемость многих из факторов,
влияющих на выбор конструктивных параметров, приводят к тому, что
задача оптимизации КТР не решается обычными методами математического
программирования. Причем этот вывод имеет отношение и к декомпози-
ционным структурам. Требуется понижение размерности задачи. Наиболее
перспективным видится путь использования специальных приемов струк-
турно-параметрической оптимизации, позволяющих учитываемые
(оптимизируемые) конструктивные параметры группировать для отдельных
стадий проектирования. Ниже излагается методика выбора КТР в соответ-
ствии с указанным подходом.
Суть задачи, как указано выше, состоит в выборе рационального
технического решения и определении совокупности оптимальных конструк-
тивных параметров этого решения. Внешние нагрузки, температурный
режим, геометрические формы и компоновочная схема проектируемого
объекта считаются заданными. Задача решается в несколько стадий.
Рассмотрим их.
3.3.2. Формирование эталонного ретене
Под эталонным понимается решение, в котором воплощено оптимальное
с точки зрения минимума массы распределение жесткостных и
массово-инерционных характеристик по сечениям при условии обеспечения
работоспособности конструкции и согласованности ее параметров с
параметрами системы управления. Эталонное решение не учитывает техно-
логические ограничения и, следовательно, не содержит добавочной
массы.
Такое решение, хотя непосредственно и не позволяет выбрать КТР.
однако имеет высокую информационную ценность, поскольку отражает с
позиций общих требований оптимальные механические свойства конструк-
ции. В числе этих требований, во-первых, традиционные для конструкций
ЛА эксплуатационные ограничения, обеспечивающие работоспособность
упругой механической системы в аэродинамическом потоке (статическая
прочность, аэроупругая устойчивость). А во-вторых, группа требований,
вытекающая из ограничений, связанных, в частности, с влиянием
упругости на работу системы управления (что проявляется через
частоты, формы колебаний и перемещения).
Эталонное решение получают с помощью методов математического
программирования. Соответствующие процедуры могут быть полностью
формализованы и автоматизированы. Однако для сложных конструкций
ограничиться единой математической моделью, как правило, не удается.
112
рис. 3.5. Силовые факторы ани-
зотропной цилиндрической обо-
лочки
M*Z *“ ^zz
Mzz-Mzi
Требуется построение определенной иерархии моделей, адекватных
реальной конструкции в отношении тех или иных ее наиболее важных
свойств. Опыт показывает, что первую группу требований целесообразно
учитывать в проектировочном плане, а вторую - в поверочном. При этом
задача нахождения эталонного решения расчленяется на две самостоя-
тельные задачи.
Первая задача состоит в определении оптимального закона распреде-
ления материала в конструкции по критерию минимума массы при условии
выполнения эксплуатационных ограничений. При решении этой задачи ана-
лизируемые конструкции предполагаются неограниченно упругими, нагруз-
ки считаются заданными; в качестве эксплуатационных ограничений при-
нимаются статическая прочность и отсутствие общей потери устойчивости.
Напряженно-деформированное состояние тонкостенных авиационных
конструкций, как правило, описывают с помощью безмоментной (или
полубезмоментной) теории оболочек, погалая, что деформации конструк-
ций полностью описываются деформациями их срединных поверхностей. Для
большинства конструкций ЛА используются сравнительно простые
геометрические формы. Эго, прежде всего, цилиндрические оболочки (для
корпусов) и пластины переменной толщины (для крыльев и рулей).
Расчетные зависимости для таких конструкций получают из анализа НДС
анизотропной цилиндрической оболочки переменной толщины (рис.3.5) на
основании гипотезы Кирхгоффа - Лява и допущений тех}у<ческой терии
оболочек. Исходные уравнения для этого случая следующие :
См., например, С.А. Амбарцумян. Общая теория анизотропных оболо-
чек. М.: Наука. 1974. 448 с.
ИЗ
уравнение совместимости деформаций
Э2е
dz
Э € by
—1-------♦ J-v = 0-
a 2 dxdz R Xx
dx
(3.18)
уравнения равновесия
а2м
____X
Эх2
а2м
___X
dz2
д*М
+ о xz
dxdz
z
* N
х
Я2ш
О w
dx
z
Я2ш
О w
—
bz
xz
о w
dxdz '
(3.19)
<*z
dM
xz
dx
ЬМ
__z
bz
«ж
ЬМ
__х_
Ьх
dM
xz
dz
Компоненты
перемещений:
деформации, как
известно.
связаны
компонентами
е
х
= ах :
е
z
ao w_
s dz * R :
yxz
Ьи
= bz
bv
bx :
Хх
а2»
О W
7'
a2»
XZ ~ a 2 ’
dz
а2»
(3.20)
*xz ~ dxdz ‘
Соотношения упругости имеют вид
Я
= Be ♦ В,ле ♦ В, -у - N- ;
11 х 12 z 16 xz Тх
N
z
- B,<e ♦ B„e ♦ B y - NT ;
12 X 22 Z 26 XZ Tz
XZ
= В,е ♦ Be ♦ В«л7 - NT :
16 х 26 z 66 xz Txz
М = .X * D * * 2D y - AL ;
х 11Ах \zz 16Axz IX
(3.21)
Мг ‘ “А ‘ ‘ 2DKX« - "к
м
xz
= D,_y * Ц._Х * 2D__y
16АХ 26AZ 66aXZ
114
Здесь = J E^dy и Оц = J E.^f2dy ~ соответственно жесткости
A h
растяжения - сжатия и изгибные жесткости; N^.. = J и ^77 =
Г л
= I af^y ~ термические усилия и моменты соответственно.
Л
Решив соотношения упругости относительно компонентов деформаций,
найдем
е = b AN ♦ NT) ♦ b AN ♦ NT) ♦ b(N ♦ NT );
x lx Tx 2 x Fz 3 xx Txx
€ = b(N * NT) * bAN * AL.) + bAN ♦ NT );
X 2 X Tx 4 X Tx 5 XX Txx
7 = bAN * NT) ♦ bAN ♦ NT) * bAN * NT ).
'xx 3 x Tx 5 x Tx 5 xx Txx
где
= aK. I = 1....6;
a =B В -В2; a = B В - В В ;
1 22 66 26 2 16 26 12 66
a = В В -В В ; а = В В -В2;
3 12 26 22 16 4 11 66 16’
а = В В — В В ; а = В В — В2 ;
6 12 16 11 26 6 11 22 12
(3.22)
(3.23)
к ~__________!_________
ill 12 2 16 3
С учетом зависимостей (3.20) выражения для моментов (3.21) можно
представить в следующем виде:
М
х
^2
п о w _ aw __ aw
+ р + 2D х——
11.2 12 , 2 16 ЭхЭх
Эх дх
115
м = -
z
(3.24)
D £sL.D ^S-.2D Й-
12 , 2 22 . 2 26 bxbz
. Эх dz
= - К. 7T • °2. ~T • “e. LL
I Эх 3z
Введем функцию усилий >р(Х, Z), тогда
N = * N*. N* = - [ Xdx ;
x bz2 X X J
N = N* = - f Zdz;
z . 2 z z J
dx
N
xz bxbz
(3.25)
Здесь X и Z - распределенная внешняя нагрузка, отнесенная к
единице площади.
Используя соотношения (3.22) и (3.24). получим систему двух
разрешающих уравнений относительно функции усилий и прогиба W:
уравнение совместности деформаций
-2b ^--2b -^- =
5 bx3bz 3 bxbz3
b2
[ a2 a2
b -V ♦ ba -V - b .
1*2 2.2 3 bxbz
L bz bx
b Л_ь Л-] [л^д, 1 _
2.2 4.2 5 bxbz I Z Tz J
I bz bx
[a2 a2 a2 1 a2»
Л О Л О Л в Л7
°3 л2 * % .2 % bxbz NTxz R . 2 :
L dZ oX dX
(3.26)
116
уравнение равновесия
D <LSL + о <L“L + 2(D ♦ 2D )
11-4 22-4 '12 66
Эх Эх
Э а>
. 2. 2
Эх Эх
* 4D
16
_3j®_
> 3-
Эх Эх
♦ 4Олв
26
- - 3
ЭхЭх
э2м_ э2м_ э2м_
lx Тх _ _ Тхх
- 2 - 2 ЭхЭх
Эх Эх
,2
♦ N
х
Эх2
4-^
Эх
Э2ю>
Эх2
.2
♦ N
х
Эх2
л2
♦ 2
ЭхЭх
л2«,
d w
ЭхЭх
Э2и>
Эх2
(3.27)
R
(для
при
= D = D
16 1
Приведенные выше соотношения
лочки) значительно упрощаются
мндрической оболочке (В,- = Влв
16 26
^изотропной пластине (R = оо).
Граничные условия на стыковых шпангоутах модели удобно
дставлять в усилиях (рис.3.6). Стыковые шпангоуты нагружаются
дольными и поперечными силами и изгибающими и крутящими моментами,
ходящими с отброшенных носовой
востовой частей корпуса ЛА. В
дем случае определение этих
лий является задачей многокра-
анизотропной цилиндрической
। переходе к ортотропной-
= AL = АС = 0) или
26 Txz 7xz
3.6. Граничные условия
шях
117
тно статически неопределимой. На практике обычно вводят упрощающее
предположение, в соответствии с которым значения и характер распреде-
ления этих усилий находятся по балочной теории. Тогда граничные усло-
вия для стыкового шпангоута модели (края анизотропной цилиндрической
оболочки, который определяется координатной линией х = xQ = const)
имеют вид
N = N; N + 5-М = N ; Q ♦ = Q; М = М. (3.28)
х xz R xz х dz х '
где N. N , Q, М - усилия и момент, приложенные к рассматриваемому
краю. Некоторые из них могут быть равны нулю. Так, для свободного
края оболочки граничные условия имеют вид
dM
N =0; N * тгМ = 0; Q + = 0: М =0. (3.29)
х xz R xz х dz х
Следует учитывать тот факт, что в случае замкнутой оболочки
граничные условия по замкнутым координатным линиям (z = const)
заменяются условиями периодичности. Периодичность обеспечивает одно-
значность перемещений и деформаций в любой точке рассматриваемой
замкнутой линии координат.
Для получения решения необходимо зафиксировать хотя бы одну точку
оболочки в перемещениях по осям Ох, Оу, Oz и повороте в двух
плоскостях (см. рис.3.6). Соответствующие граничные условия имеют вид
и. = 0; W . = 0; V . = 0; = 0; = 0. (3.30)
A A A dx dz
Итак, задача по определению НДС анизотропной оболочки переменной
толщины описана. Ее решение, как известно, может быть достигнуто
одним из приближенных аналитических или численных методов.
При решении задачи расчетная модель упругой системы представляется
в виде сеточной области с N узлами. Расписывая с помощью уравнений
конечных разностей уравнения совместности деформаций и уравнения
равновесия для каждого из внутренних узлов сеточной области, а для
контурных узлов - соответствующее граничное условие либо условие
периодичности, получают систему алгебраических уравнений порядка п =
= 2xtf
118
C11X1 * C12X2
.. + C, X
1Л Л
рё
:21X1
* ♦ ••• * x = P-,
22 2 2Л Л 2
(3.31)
которая в матричном виде может быть представлена следующим образом:
[С](х) = (Р). (3.32)
где [С] - матрица коэффициентов; (х) - вектор неизвестных; (Р) -
вектор правых частей уравнений.
Чтобы ненулевые элементы матрицы коэффициентов полученной системы
алгебраических уравнений располагались около главной диагонали, для
нечетных узлов записываем уравнения совместности деформаций, а для
четных - уравнения равновесия. Тогда
х. в i - 1, 3..........л - 1;
i i
(3.33)
х^ = w^, i = 2, 4......л.
По найденным деформациям определяются эквивалентные напряжения
в узлах сеточной области и сравниваются с разрушающими
Для обеспечения статической прочности отсека необходимо, чтобы
эквивалентные напряжения во всех узлах сеточной области не превышали
Допустимые (о . < а ).
экы разр
Далее следует удовлетворить требованиям аэроупругой устойчивости
конструкции. Эту задачу можно решать несколькими способами. Наиболее
общие подходы состоят в применении динамического и статического
критериев.
Согласно динамическому критерию исследование устойчивости состоит
в исследовании движения системы, вызываемого некоторыми малыми возму-
щениями начального равновесного состояния. Если малые возмущения
вызывают динамические перемещения (колебания) системы, лежащие в
определенных пределах, то начальное состояние является устойчивым.
Точнее, при наличии устойчивости всегда можно подобрать такие
119
начальные возмущения, чтобы при последующем движении сист^цц
перемещения ее точек не вышли за некоторые, наперед заданные границы.
Критерием потери устойчивости при этом является обращение в нуль
частоты собственных колебаний.
Статический критерий потерю устойчивости связывает с состоянием
системы, когда наряду с начальным состоянием равновесия возникают
новые равновесные формы. При этом определение минимальной критической
нагрузки сводится к нахождению точки разветвления (бифуркации)
равновесных форм.
Рассматриваемую задачу целесообразно решать динамическим методом,
поскольку статический подход применим лишь к консервативным системам.
Кроме того, при использовании метода конечных разностей динамический
метод удобно сочетается с задачей определения НДС, что придает
стройность математической модели задачи в целом.
Уравнения малых колебаний рассматриваемой упругой системы получают
из уравнений равновесия (3.27) заменой статической нормальной
нагрузки q на динамическую и инерционную. В соответствии с линейным
приближением поршневой теории аэродинамическое давление имеет вид
КрН [ Эш + v Эю)
^дин а„ I dt дх J’
(3.34)
где - давление невозмущенного потока газа; - скорость звука в
невозмущенном потоке; V - скорость невозмущенного потока; к = -
показатель политропы.
Инерционная нагрузка
(3.35)
где р - плотность материала; h - толщина оболочки.
Используя выражения для нагрузок (3.34) и (3.35)
вместо статического прогиба в уравнение равновесия
прогиб
— St
u»(x, z, t) - w(x, z)e ,
и подставляя
динамический
(3.36)
где S - комплексные частоты, получим уравнения малых колебаний
4““
_ ди» г. д W Л._ Л_. . д и»
D х-=- + р + 2(D + 2D ) — +
11 * 4 22 * 4 12 6б' . 2. 2
дх dz дх dz
120
+ 4D
16 зх3аг
4Dne
26
а а>
3x3 х3
rc— „ 3w ]
---- ♦ V т—
I Эх J
*2
+ N
~ 2 Z
2— 2 2—
Э w + 2 Э Э w
~ 2 * 1 ЪхЪг ЪхЪг
(3.37)
Заметим, что функция усилий определяется при совместном решении
уравнений равновесия, неразрывности деформаций и граничных условий в
статической задаче. Поэтому она содержит информацию о термонапряжен-
ном состоянии упругой системы в статическом равновесии, устойчивость
которого исследуется.
Уравнение малых колебаний (3.37) рассматривают для всей сеточной
области через конечные разности и получают систему линейных
однородных алгебраических уравнений порядка N (N - число узлов
сеточной области), т.е. в два раза меньшего порядка, чем система
уравнений в статике
(с — \ )w * с w *...*с w =0;
11 11 12 2 1Л Л *
- XJttL * ... * сл w = 0;
21 1 22 2 2 2л л /о
с ♦ с ♦ ... ♦ (с - X )w = 0,
л1 1 л2 2 лл л л
где
А. = - pftS2 - кр^/а^. (3.39)
су - коэффициенты матрицы жесткости (»„ / = 1, л).
В матричной форме данная система уравнений имеет вид
[С - XE](w) = 0. (3.40)
121
Для практического решения системы уравнении (3.40) пренебрегают
аэродинамическим демпфированием. Тогда нетрудно показать, что иссле-
дуемая система уравнений преобразуется к виду
[D - \E](w) = 0,
(3.41)
где D = С - динамическая матрица; М - диагональная матрица масс,
элементами которой являются рД; X = - 1/S2 - параметр, определяющий
S. = -
спектр собственных значений динамической матрицы;
комплексные частоты; w - формы колебаний.
Из равенства нулю характеристического определителя системы
уравнений (3.41) методом парабол определяются значения комплексных
частот колебаний. По знакам и значениям действительных и мнимых
частей комплексных частот определяются состояние конструкции
(устойчива или нет) и характер этого состояния (статический или
динамический). Если действительные части всего спектра частот
отрицательны (Re(S) < 0), то конструкция устойчива. На практике
ограничиваются исследованием нескольких низших тонов колебаний.
На основе приведенных выше зависимостей математическая
формулировка рассматриваемой (первой) задачи о нахождении
оптимального распределения конструкционного материала {S}^ в узлах
сеточной области при ограничениях на статическую прочность и
устойчивость сводится к следующему. На множестве {6}, отвечающем
условию упругого равновесия в статике
[С](х) = (Р) (3.42)
и динамике
[D - ХЕ]М = 0 (3.43)
и удовлетворяющем условиям прочности
о . < а
жв1 разр
и устойчивости
Re(S) < 0,
(3.44)
(3.45)
122
(4<и. «ля kowpoto масса ««оружши
N
М = Z pSF (3.46)
/- 1
принимает наименьшее значение.
Здесь р. - плотность конструкционного материала; й. - приведенная
толщина оболочки в i-м узле (для однослойной оболочки 5 = й, для
разнесенной обшивки 6 - это удвоенная толщина несущего слоя); F. -
площадь поверхности оболочки вокруг /-го узла.
Сформулированная задача является типичной задачей нелинейного про-
граммирования и решается соответствующими методами, например методом
случайного поиска. Однако получаемое решение еще нельзя считать эта-
лонным. поскольку в рассматривемой задаче не учтен ряд требований,
связанных с деформацией ЛА как единой упругой системы. На аэроупругую
устойчивость несущих поверхностей существенное влияние оказывают уп-
ругие деформации корпуса. Следовательно, массово-инерционные и жест-
костные параметры корпуса и несущих поверхностей должны быть взаимно
согласованы и выбраны таким образом, чтобы предотвратить возникнове-
ние корпусных форм флаттера. Определенные ограничения на характер де-
формации корпуса накладывает система управления. Исследование всех
этих вопросов является содержанием следующей (второй) задачи по уточ-
нению эталонного распределения материала в конструкции.
Вторая задача - это задача согласования массово-инерционных и
жесткостных характеристик всех агрегатов ЛА. Как указывалось выше,
такую задачу целесообразно решать в поверочном плане из-за
громоздкости математического описания поведения ЛА как единой упругой
системы. Опыт показывает, что для рассматриваемых целей вполне
приемлема схематизация корпуса ЛА балкой, а крыла пластиной. Тогда
трехмерная задача аэроупругости вырождается в двухмерную, что заметно
облегчает поиск решения. Для этого случая обобщенные уравнения дви-
жения свободного от связей упругоколеблющегося ЛА имеют вид1
M^s НГ& Оу S. г • (3.47)
См. , например, Фершинг Г. Основы аэроупругости / Пер. с нем. М. :
Машиностроение, 1984. 600 с.
123
(3.48)
(3.49)
Qj = j j Др(х, г)Ф^(х, z)dxdz, (3.50)
F
где M$, Gj, Qj - обобщенные масса, жесткость и сила, соответствующие
S-й форме колебаний; mix, z) - удельная масса единицы площади
проекции поверхности ЛА на плоскость xz\ Ьр(х, z) - нестационарное
аэродинамическое давление; Ф^(х, z) и - собственные функции и
собственные частоты ЛА соответственно; - обобщенное
демпфирование; q? и q$ - обобщенные координаты, соответствующие S-й и
г-н формам колебаний.
Очевидно, что система уравнений (3.47) может быть решена лишь
приближенно: бесконечное число степеней свободы практически учесть
невозможно. Наиболее простым методом аппроксимации системы является
так называемый метод заданных форм. Его суть в том, что в качестве
собственных функций аэроупругих колебаний принимаются сравнительно
просто определяемые формы собственных колебаний ЛА в пустоте и без
учета конструкционного демпфирования. Причем в большинстве случаев
для описания аэроупругих явлений бывает достаточно относительно
небольшого числа низших форм собственных колебаний.
При использовании метода заданных форм в предположении справедли-
вости поршневой аэродинамической теории (что оправдано в диапазоне
1,5 < М < 3,5) система уравнений (3.47) приводится к следующему
матричному виду:
[M](i') ♦ [H](q) ♦ [D](g) * [G](q) ♦ [В](</) = 0. (3.51)
где [М] и [G] - матрицы масс и жесткости конструкции; [Я] - матрица
конструкционного демпфирования; [В] и [D] - аэродинамические матрицы
жесткости и демпфирования; iq) - вектор обобщенных координат.
При решении настоящей системы уравнений определенные трудности
связаны с нахождением параметров конструкционного демпфирования,
124
достоверные значения которых можно получить лишь экспериментальным
путем. В задачах проектирования конструкционное демпфирование можно
представлять как вязкое трение. В этом случае элементы матрицы (Н]
можно определять как
vl ------
h.t = i. i = 1. я,
ij 'Ц
(3.52)
где и - логарифмический декремент и частота /-го тона колебаний
конструкции; <7^ - элементы матрицы жесткости конструкции.
Логарифмические декременты колебаний берутся из статистики или
принимаются равными нормативному значению (v ~ 0,05) и уточняются
затем экспериментальными методами.
Эквивалентная (3.51) система уравнений первого порядка имеет вид
В = [Л](В),
где
(3.53)
- M'l(G * В)
о
(3.54)
Подставляя частное решение
В = и<&
(3.55)
в исходное уравнение (3.53), получают алгебраическое матричное
однородное уравнение
SU = AU. (3.56)
собственные значения S которого - комплексные частоты,
(3.57)
•Sy = Ду + Ьу / = 1. я,
где Ду - коэффициенты затухания; - частоты колебаний.
Величины Ду определяют устойчивость решения. Каждому значению
соответствует комплексный вектор перемещений - форма колебаний
125
конструкции в аэродинамическом потоке. Для устойчивости системы
требуется, чтобы все коэффициенты затухания были отрицательными:
Ду < 0, / = .1, л. (3.58)
При известном решении (3.55) нетрудно ввести любые ограничения на
перемещение корпуса (например, в связи с требованиями системы
управления):
иф. < и. (3.59)
Перемещение корпуса в точке I определяется через заданные формы Ф*. и
найденные обобщенные координаты
л
“*/ = д ФЛ. <3.в»
В случае невыполнения условий (3.58) или (3.59) следует вернуться
на уровень первой задачи и изменить массово-инерционные и жесткостные
характеристики конструкции путем введения дополнительных ограничений.
Далее вновь следует решить вторую задачу. Этот итерационный процесс
продолжается до тех пор, пока не будут выполнены требования по
устойчивости и удовлетворены ограничения на перемещения упругого
корпуса ЛА. Решение, удовлетворяющее требованиям обеих задач,
представляет собой эталонное распределение материала в конструкции.
3.3.3. Определение
оптимальных конструктивных параметров
Без учета ограничений конструктивного и технологического характера
эталонное решение следует рассматривать как гипотетическое, поскольку
его, как правило, нельзя реализовать. Однако и такое решение
представляет практический интерес, так как дает конструктору
информацию о нижних границах для массы и жесткости проектируемой
конструкции. Главная же роль гипотетического варианта состоит в том,
что он является отправной базой для нахождения реально-оптимального
конструктивно-технологического решения.
Переход от схемы-эталона к реальной конструкции представляет собой
формализованную процедуру нахождения закона распределения материала,
удовлетворяющего всем реальным конструктивным и технологическим
ограничениям, и одновременно максимально близкого к оптимальному.
126
Чтобы решить эту задачу, нужно, во-первых, четко определить понятие
близости двух вариантов решения и количественно оценить эту близость
и, во-вторых, разработать процедуру формализованного перехода от
параметров эталонного (эт) решения к параметрам реальных (реал)
конструктивных решений. Рассмотрим эти вопросы.
Наши исследования показывают, что при использовании для эталонного
и реального вариантов одних и тех же дифференциальных операторов на
одной и той же области определения в соответствии с методом конечных
разностей необходимым и достаточным условием совпадения НДС в статике
и динамике является равенство матриц жесткостей и динамических матриц
([DJ = [С] '(М]) сравниваемых вариантов, т.е. [С] = [С] и
эт реал
[D] = [D] .
эт реал
Из-за конструктивных и технологических ограничении на геометричес-
кие параметры силовых элементов конструкций невозможно добиться пол-
ного совпадения законов распределения масс и жесткостей рассматривае-
мых вариантов. Поэтому неизбежны различия в указанных матрицах. Как
следствие, возникает необходимость оценки рассогласования вариантов.
На первый взгляд кажется, что в качестве меры близости эталонного
и реально-оптимального вариантов следует принять некоторую
интегральную характеристику, отражающую близость соответствующих
элементов матриц. При этом в качестве количественной меры близости,
т.е. в качестве критерия идентификации, может быть принята величина
Практические расчеты с использованием критерия (3.61) показывают,
что близкие значения К не всегда соответствуют близким законам
распределения жесткостей и масс сравниваемых вариантов конструкций.
Оказывается, что идентификация вариантов с использованием критерия
(3.61) является неустойчивой процедурой формирования (восстановления)
матриц реальной конструкции по их эталонным значениям.
Используя теорию решения некорректно поставленных задач, В. В. Анд-
реев разработал устойчивую процедуру идентификации эталонного и
127
реального вариантов конструкции, представляющую собой задачу
условный экстремум с минимизацией рассогласования между матрица^
жесткости и динамическими матрицами сравниваемых вариантов. Предл^.
женная процедура некорректную задачу приводит к корректной постанов-
ке. Смысл процедуры состоит в следующем.
Если учесть однородность структур сравниваемых матриц, то в
качестве приближенного условия их равенства можно полагать почленное
равенство элементов главных диагоналей. При этом вместо соотношения
(3.61) целесообразно использовать функционал
Минимум функционала (3.62) реализует выполнение условий оптималь-
ного решения, накладываемых на законы распределения жесткостных и
массовых характеристик. Близость масс оптимального и реального
вариантов оценивается функционалом
__ЛГ-Л-ЛГ (3 63.
Мэт
минимум которого реализует дополнительное условие, накладываемое на
варьируемые параметры реального варианта, заключающееся в совпадении
масс сравниваемых вариантов.
С точки зрения теории решения некорректно поставленных задач
функционалы (3.62) и (3.63) представляют собой аналоги невязки и
стабилизирующего функционала соответственно. Соотношение между этими
функционалами выражает параметр регуляризации
а = f(*. П), (3.64)
определяемый численным экспериментом.
Критерий идентификации представляет собой сглаживающий функционал
Ф = Ф2 ♦ а£2. (3.65)
Практика применения этого критерия подтверждает устойчивость
решений и корректность процедуры идентификации в отношении эксплуата-
ционных ограничений аэроупругой устойчивости и статической прочности,
а также в отношении требования минимальной массы конструкции.
Собственно процедура идентификации состоит в сопоставлении эталона
128
и опорных вариантов. Варьируемыми параметрами при этом являются
конструктивные параметры, которые должны удовлетворять целому ряду
конструктивно-технологических ограничении. Задача идентификации
формулируется следующим образом: для каждого опорного варианта / (/ =
= 1, т) конструктивно-технологического решения определить вектор
параметров /?, удовлетворяющий условиям
г. . < г. < г. , r.e R, i = 1, /, (3.66)
I mm I l max l
для которого функционал (3.65) принимает наименьшее значение.
Решение этой задачи достигается методом случайного поиска. Однако
поскольку на данном этапе нет функциональных ограничений, а имеются
только геометрические, то решение требует незначительного машинного
времени, что позволяет организовать интерактивный процесс выбора кон-
структивно-технологического решения. Конструктор совместно с техноло-
гом для каждого опорного варианта, ориентируясь на приближенные реше-
ния, назначают интервалы изменения параметров (3.66). Далее в режиме
диалога с ЭВМ, в памяти которой сохраняются характеристики эталонного
решения, получают для каждого из альтернативных вариантов вектор па-
раметров Rt минимизирующий функционал (3.65). Причем режим диалога с
ЭВМ позволяет провести не только оценку выбранной конструктивно-
технологической концепции, но и выявить влияние отдельных параметров
силовой схемы и технологических ограничений на качество конструкции в
целом, что для конструктора не менее важно, чем интегральная оценка.
Итак, мы рассмотрели основное содержание аналитического проектиро-
вания конструкций. Главная его особенность - сочетание формальных
методов и неформальных процедур. Совокупность изложенных выше поэтап-
но решаемых формальных и неформальных задач суть методология
аналитического проектирования. В обобщенном виде эта методология
представлена на рис.3.7. Приведем краткие характеристики основных
стадий проектирования.
Первой стадией является формирование области возможных решений.
Главная задача этой стадии - обозреть достижения научно-технического
прогресса и представить эти достижения в виде некоторой совокупности
конструктивных вариантов. Целесообразно, чтобы область возможных
решений представляла собой упорядоченную структуру, ибо только в
этом случае можно применить интерактивный режим работы конструктора
с ЭВМ.
Множество вариантов, подлежащих анализу, может быть довольно
широким. Предварительный анализ этого множества и отсев заведомо
худших вариантов составляют содержание второй стадии проектирования.
5 - 880 129
Количественный анализ вариантов на этом уровне проводится» как
правило, на основе методов математического программирования. Причем
используются в основном упрощенные методики, позволяющие рассматри-
вать и оценивать большое число вариантов с малыми затратами времени.
Результатом исследований на этом этапе является отбор небольшого
числа опорных вариантов.
Далее проводятся тщательный анализ и оптимизация параметров
опорных вариантов с учетом широкого круга требований к изделию в
целом, что достигается на основе использования математических моде-
лей, достаточно полно отражающих реальные условия функционирования
ЛА. Как правило, такие модели относятся к числу оригинальных; их
разработка и совершенствование являются актуальнейшими задачами
теории проектирования систем.
Заключительным этапом аналитического проектирования является
процедура сравнения субоптимальных вариантов по методике, изложенной
Рис. 3.7. Схема процесса проектирования конструкций ЛА
130
в гл. 1. Варианты для сравнения могут быть подготовлены на разной
методической основе. В числе сравниваемых могут быть варианты, в
основе которых творческие нововведения, построенные по прототипу или
разработанные в соответствии с принципами аналитического проектирова-
ния и т.д. Поэтому главная задача - обеспечить сопоставимость вариан-
тов, т.е. четко определить критерий эффективности, который должен
отражать функциональное совершенство проектируемой конструкции. Далее
следует установить интегральный показатель технического уровня,
аналитически или графически расположить варианты на плоскости
эффективность - технический уровень и провести анализ с целью
принятия решения, т.е. выбора единственного варианта. Эта операция,
пожалуй, самая творческая. При выборе варианта конструктор нефор-
мально учитывает неопределенные ситуации, фактор времени, техноло-
гические и другие трудности, сопоставляет возможные потери и, только
обстоятельно взвесив все факторы, принимает решение.
Выбранный вариант конструктивно-технологического решения - это еще
не окончательная конструкция проектируемого изделия, а лишь тщательно
отработанная конструктивная схема. Далее требуется эту схему оконча-
тельно материализовать с учетом требований ГОСТов, производства,
эксплуатации и довести до рабочих чертежей. Эти операции составляют
содержание этапа конструирования, которым заканчивается разработка
проекта изделия. Рассмотрим основные задачи этого этапа.
$3.4. ЗАДАЧИ КОНСТРУИРОВАНИЯ
3.4.1. Содержание этапа конструирования
На практике термин ’’конструирование” имеет две трактовки: широкую
и узкую. Широкая трактовка относится ко всей совокупности задач
проектирования конструкций. В нашем изложении используется узкая
трактовка. Под конструированием понимается этап проектирования, вклю-
чающий в себя конструктивно-технологическую проработку конструктив-
ной схемы, выбранной на предыдущем этапе, и выпуск рабочих чертежей.
Основное содержание этого этапа состоит в материализации схемного
решения, насыщении его информацией, отражающей требования функцио-
нального назначения, производственной и эксплуатационной технологич-
ности. Результатом процесса конструирования является изготовление
рабочей конструкторской документации или других носителей информации,
необходимых для изготовления деталей и сборки узлов, агрегатов и
всего ЛА в целом.
131
Конструирование по своей природе - это всегда некоторая
эвристическая процедура, требующая не только знаний, но и
изобретательства. Здесь решающим является способность человеческого
мозга синтезировать неформальные задачи, умение выявлять необходимые
смысловые (семантические) ориентиры, устанавливать их последователь-
ность и связь по неконкретно обозначенным признакам, которые уже
имели место в практике.
Поскольку для повышения производительности конструкторского труда
и качества проектов процесс конструирования целесообразно автоматизи-
ровать, то возникает задача формализованного описания этого процесса.
Это самое сложное. Творческий характер конструирования, наличие
неформальных процедур затрудняют формализацию; такой процесс
невозможно до конца описать с помощью системы алгебраических,
интегральных, дифференциальных или статистических уравнений и
неравенств, т.е. представить в виде информационно-цифровых моделей.
Здесь нужен иной подход. Основой должны быть не функциональные связи
между конструктивными параметрами (как это использовалось на
предыдущих этапах), а типовые базовые элементы конструкции и самого
процесса конструирования.
Конструктор мыслит категориями технологически исполнимых деталей
(узлов), каждую из которых он представляет в терминах восприятия
внешних воздействий и выбирает их форму, размеры и взаимное располо-
жение на основании расчетов или опытным путем (интуитивно) таким об-
разом, чтобы комплексно удовлетворить требованиям функционального на-
значения, производственной и эксплуатационной технологичности. Типо-
вые базовые элементы, очевидно, должны отражать указанную технологию,
использовать накопленный опыт, но так, чтобы не только закреплять
достигнутое, но и получать при проектировании новые качества.
Последнее требование чрезвычайно важное: без этого не будет
прогресса в технике. Однако надо учитывать и то, что не бывает
конструкций целиком из новых деталей и узлов. Статистика показывает,
что при создании новых технических устройств экономически оправдано
не более 20...25 % оригинальных деталей. Остальные детали и даже
многие узлы повторяют ранее реализованные конструкции. Это повторение
в процессе проектирования должно быть разумно организовано.
Представляется целесообразным в качестве типовых базовых элементов
использовать:
стандартизованные элементы конструкции;
многократно встречающиеся в различных изделиях стыковые узлы и
отдельные детали;
132
типовые технологические операции.
Применение типовых элементов существенно повышает производитель-
ность конструкторского труда, высвобождает время у конструкторов на
разработку принципиально новых решений, способствует повышению
качества проектов. Исключительно важной стороной унификации является
снижение многономенклатурности производства и, как следствие,
повышение его серийности, технического уровня и экономичности. К
сожалению, существующие экономические и другие методы оценки качества
проектов не очень чувствительны к уровню унификации и, видимо, потому
масштабы унификации пока недостаточны. Желает лучшего информационное
обеспечение по типовым элементам и организация их использования.
Можно ожидать, что автоматизация конструирования (в самой основе
которой модульность и упорядочение процессов) внедрит как обязатель-
ную операцию использование типовых базовых элементов. Это очень
реально. Важно, однако, и не переусердствовать в этом вопросе, не
создать заслон новому. Чтобы типизация не оказалась тормозом на пути
прогресса, необходимо, во-первых, существенно улучшить информационное
обеспечение по типовым базовым элементам и, во-вторых, отработать и
внедрить количественные оценки последствий унификации и типизации.
Целесообразно, чтобы специальные службы и предприятия Госстандарта и
других ведомств занимались не только разработкой типовых базовых
элементов, но и ввели их периодическую аттестацию.
Схема процесса конструирования с использованием типовых базовых
элементов показана на рис.3.8. Исходными данными для конструирования
являются: во-первых, результаты, полученные на более высоком уровне
проектирования конструкции (теоретическая схема, нагрузки,
конструктивно-силовая схема и др.); во-вторых, данные о типовых
базовых элементах. Конструкция разрабатывается итерационным путем в
несколько приближений.
Вначале в основном эвристически формируется конструктивная схема,
отражающая функциональное назначение проектируемого изделия. Далее
выявляются и анализируются самые разнообразные ограничения, обуслов-
ленные наличием прототипов, базовых конструктивных элементов,
производственной специфики, ГОСТов и т.д. Принимаются решения о
нерасчетных конструктивных и технологических параметрах, об
использовании ранее внедренных узлов и деталей, о технологии
изготовления и сборки изделия.
Затем следует вторая итерация - подетальное конструирование. На
этой стадии уточняются (интуитивно или расчетным путем) все до
единого конструктивные параметры, исключаются условность и схематич-
133
Формирование теоретичес-
кой схемы на основе дан-
ных предыдущего этапа
проектирования
Анализ типовых
вазовых элементов
Синтез конструктивной
схемы
(Задание нерасчетных
конструктивно - техноло-
гических параметров
Выбор стандартизованных
элементов и нормализован-
ных конструктивно - техно -
логических параметров
Подетальное
конструирование
о^—— Выбор заготовки и технологии изготовления——>
< > Конструирование силовых элементов---------<>
Трансформация типовых элементов
о-------(параметрическое конструирование) ---------°
< )-----Формирование базы расчетных данных----------< •
< -----Расчет на прочность силовых элементов —>
Выпуск рабочих
чертежей
Рис. 3.8. Схема процесса конструирования
ность. Здесь же проводится окончательное согласование принятых
решений со смежными службами.
Практически все эти же операции имеют место и при автоматизирован-
ном конструировании. Причем результат автоматизации находится в пря-
мой зависимости от уровня информационного обеспечения и организации
процесса конструирования. Очень важно предоставить в распоряжение
конструктора удобный файл модульных конструктивных примитивов,
стандартных изображений, типовых элементов. Необходимо, чтобы
процедуры конструирования силовых элементов могли сопровождаться
расчетами, реализуемыми в интерактивном режиме. Оперирование
модулями, блоками, узлами - это обязательное требование при автомати-
зации конкретных процессов, ибо только в этом случае можно
рассчитывать на повышение производительности конструкторского труда.
134
3.4.2. Общие принципы
авиационного конструирования
В конструкции ЛА широко используют тонкостенные оболочки различных
очертаний, подкрепленные силовым каркасом. Несмотря на многообразие
форм и размеров конструктивных элементов, среди них можно выделить,
как отмечено выше, типовые, т.е. повторяющиеся с несущественными
изменениями в различных узлах и частях конструкции. На них
распространяется ряд общих принципов и требований, выработанных
многолетней практикой проектирования, производства и эксплуатации ЛА.
Одним из основных принципов конструирования ЛА является
обеспечение минимальной массы элементов конструкции при необходимых
прочности и жесткости. От массы конструкции зависят стоимость самого
ЛА и стоимость его эксплуатации. Масса конструкции влияет и на
летно-тактические характеристики ЛА. Перетяжеление конструкции при
заданной стартовой массе ЛА вызывает уменьшение полезной нагрузки и,
следовательно, снижение его эффективности или возрастание стартовой
массы и, как следствие, стоимости при неизменной полезной нагрузке.
Наоборот, снижение массы конструкции возволяет уменьшить стоимость
аппарата и улучшить его летно-тактические данные.
Ниже рассматриваются некоторые принципы и положения конструи-
рования, позволяющие обеспечить минимум массы проектируемых изделий.
Принцип прямоточное™. В его основе заложена правильная
организация силового потока в конструкции. Нарушение этого принципа
сопровождается нежелательными деформациями изгиба, сдвига и кручения.
Приведем несколько примеров реализации этого принципа.
1. Передана сил по кратчайшему пути. Например, при конструировании
узлов крепления крыла к корпусу надо стремиться располагать моментный
(главный) узел 2 (рис.3.9) ближе к центру давления 3 (ац д = min),
cho обеспечивает наименьший изгибающий момент и минимум массы
силовых элементов, в том числе шпангоута / корпуса, к которому
крепится крыло.
Рис. 3.9. Расположение узла сты-
ковки крыла с корпусом, обеспечи-
вающее наименьшую массу
135
2. Исключение изгиба, сопровождающего растяжение (сжатие). При
передаче силы Р вдоль стержня АВ (рис.3.10,а) последний будет иметь
минимальную массу, так как нормальные напряжения а по сечению
распределены равномерно и его материал работает полностью.
Конструкция, показанная на рис.3.10,6, в этой же задаче имеет элемент
CD, работающий на изгиб, в котором с полной отдачей работают только
наиболее удаленные от оси стержня волокна, а остальные недогружены.
Стержень будет перетяжелен. Аналогичная картина имеет место и в
случае соединения двух элементов встык и внахлестку (рис.3.10,8, г).
Из принципа прямоточности следует, что материал детали, находящий-
ся вне основного силового потока, может быть удален как неработающий.
Из рис.3.11 видно, что стрингер не сразу, а постепенно, через срез
г
Возможные причины появления дополнительных изгибных напря
Рис. 3.10.
жений
Рис. 3.11. Рациональная конструкция стрингера:
а — неработающий материал стрингера; б - эпюра осевых нагрузок стрин-
гера
136
рис. 3.12. Пример замыкания сило-
вого контура
заклепок собирает с обшивки силу
Р . Заштрихованный участок стри-
стр
нгера не работает, и его следует
удалить.
3. Разновидностью принципа пря-
моточности является разгрузка кон-
струкции. Давление наддува топлив-
ных баков ЖРД, давление в камере
двигателя твердого топлива разгру-
жают их конструкции от действия
внешних сил и повышают критические
напряжения.
4. Замыкание силового контура,
когда в конструкцию вводятся спе-
циальные элементы, направляющие силы по кратчайшему пути. На примере
подкосной балки / (рис.3.12), установленной в крыльевом отсеке корпу-
са, показано, что от действия изгибающего момента А^3 бортовая нервю-
ра и лонжерон нагружаются меньшими усилиями. Изгибающий момент лонже-
рона 2 М нарастает лишь на участке до подкосной балки /, а дальше он
л
падает, обращаясь в нуль в шарнирном узле 3 (при отсутствии подкоса
в узле 3 будет максимальным). Подкосная балка нагружена сосредото-
ченной силой в узле 4. Благодаря меньшей длине балки (а^ < а^ ее из-
гибающий момент М будет меньше, чем у лонжерона, т.е. М < М
б бтах лтах
5. Принцип компактности, т.е. экономии поверхностей, объемов,
длин, числа конструктивных элементов. Он во многом определяется
опытом и эрудицией конструктора.
Прмщип пропорциональности предусматривает равномерное распреде-
ление силовых потоков и напряжений в конструкциях, что достигается
симметрией, плавными формами, отсутствием местных концентраторов
напряжений. Рассмотрим случаи применения этого принципа на часто
встречающихся в практике конструирования ЛА примерах.
1. Передача сосредоточенной силы в виде распределенной нагрузки.
Основная особенность тонкостенной неподкрепленной конструкции -
низкие местная изгибная жесткость и прочность. На рис.3.13 показано
137
действие на оболочку внешней силы Р, нормальной к поверхности оболоч-
ки, и силы Р', лежащей в срединной поверхности оболочки. Под действи-
ем этих сил может произойти прогиб или разрыв (смятие) (см. рис.
3.13,а) соответственно. Предотвратить разрушение можно путем включе-
ния в работу всего сечения оболочки. В случае действия нормальной си-
лы Р следует поставить диафрагму со стойкой или шпангоут, которые
по отношению к Р обладают большой жесткостью и передают на контур
оболочки силу Р в виде погонной нагрузки (см. рис.3.13,б).
Тангенциальную сосредоточенную силу Р' можно передать на оболочку
с помощью продольной балки (стрингера, лонжерона), опирающейся своими
концами на шпангоуты (см. рис.3.13,6), также в виде распределенной
силы q%.
2. Исключение концентраторов напряжений в конструкциях, имеющих
перепад жесткостей. Резкий перепад жесткостей является причиной
возникновения концентрации напряжений. На рис.3.14 показана
Рис. 3.13. Передача сосредоточенной силы на оболочку
Рис. 3.14. Распределение нормальных напряжений в обшивке и стрингерах
Рис. 3.15. Усиление большого выреза
в корпусе
138
стрингерная оболочка с различными толщинами обшивки. Тонкая обшивка
на нормальные напряжения от изгиба практически не работает, и общий
изгиб воспринимается в основном стрингерами. По мере увелечения
толщины обшивки концентрация напряжений уменьшается. Отношение
критических напряжений в обшивке к напряжениям в стрингере (а /а )
об стр
повышается. Еще два примера. Для установки блоков оборудования в
корпусе ЛА делают большие люки (вырезы). Зону выреза обязательно
усиливают. Например, вдоль люка ставят усиленные стрингеры или
лонжероны /, а по краям - шпангоуты 2 (рис.3.15). Если лонжерон сразу
закончить у края выреза, то из-за резкого перепада жесткостей в зоне
С возникнет концентрация напряжений. Во избежание этого лонжерон
следует протянуть еще на некоторое расстояние Д/, сводя его на нет
(см. пунктирные линии). Величину Д/ принимают приближенно равной
ширине выреза.
В обечайках "сухих” отсеков корпуса предусматривают люки, смотро-
вые окна и т.п. для доступа к аппаратуре во время осмотров,
проведения регламентных работ, подготовки ЛА к полету. Они также не
должны ослаблять сечение и быть причиной местной концентрации
напряжений. С этой целью делают местное усиление - окантовку
(рис.3.16). На рис.3.16,а показана окантовка люка в листовой обшивке,
а на рис. 3.16,6 - усиление люка литого или штампованного отсека. В
обоих вариантах люк выполняется герметичным.
3. Распространенной реализацией принципа пропорциональности
является равнопрочность. В строгом понимании она может быть реали-
зована в конструктивно простых деталях, когда они разрушаются одно-
временно по всем сечениям при достижении действующей нагрузкой
разрушающей величины или когда рабочие напряжения будут одинаковыми
во всех точках детали. В целях равнопрочности площади сечений про-
Рис. 3.16. Усиление вырезов в обечайке корпуса
139
дольного набора и толщина обшивки ЛА делаются переменными. Однако
реальные конструкции не являются равнопрочными в полном смысле.
Статические испытания показывают, что разрушение конструкций проис-
ходит не повсеместно, а в какой-то одной зоне. Тем не менее в каж-
дом конкретном случае, учитывая характеры нагружения и деформации, к
равнопрочности конструкции, путь даже с некоторыми отклонениями, надо
стремиться всегда. Равнопрочные рамы, шпангоуты, стрингеры и т.п.
могут быть легче конструкций с постоянными сечениями в 3...4 раза.
На рис.3.17 приведены простейшие примеры, иллюстрирующие реализа-
Рис. 3.17. Примеры равнопрочных конструкций:
а. б — консольные балки, работающие на поперечный
Р
dx = dmax
в
изгиб; в — полый
стержень, работающий на сжатие
Рис. 3.18. Рациональная схема расположения стыков нормального шпан-
гоута:
а — схема нагружения: б — эпюра и схема расположения стыков: в "
эпюра М шпангоута
140
цию равнопрочности соответствующим подбором конфигурации силового
элемента. Для более сложных конструкций равнопрочность может быть
обеспечена за счет проектирования на заниженные нагрузки (0,8...0,9
от расчетных) с последующей доработкой по результатам испытаний, а
также путем оптимизации распределения материала.
Различного рода концентраторы напряжений (вырезы, местные ослабле-
ния, стыковые узлы и т.д.) располагают с учетом требований равнопроч-
ности. Один из таких примеров показан на рис.3.18. При изгибе корпуса
на нормальный шпангоут действуют самоуравновешивающиеся сжимающие по-
гонные усилия (см. рис.3.18,б). Эти усилия изгибают шпангоут,
эпюра показана на рис.3.18,в. При необходимости изготовления
шпангоута из нескольких элементов его стыки следует располагать в
наименее нагруженных зонах, соответствующих минимальному ЛК
4. Важным проявлением принципа пропорциональности является требо-
вание равной устойчивости. В этом случае размеры сечения силового
элемента выбираются из условия равенства критических напряжений мест-
ной и общей потерь устойчивости: а = о . Для продольных эле-
кр. м кр. обш
ментов (стержней) - стрингеров, лонжеронов, ребер в монолитной конст-
рукции - общая потеря устойчивости соответствует искривлению оси
стержня без искажения формы поперечного сечения (рис.3.19,а). При
д
Рис. 3.19. Формы потери устойчивости:
а, в — общая потеря устойчивости: б. 2, д — местная потеря устойчи-
вости
141
(3.67)
о = с
Ф
этом критические напряжения стержня определяются по формуле Эйлера
п2Е
(Hi)2 ’
где с - коэффициент, учитывающий закрепление концов стержня
(шарнирное опирание - с = 1; при заделке с = 4; с учетом
поддерживающего влияния обшивки с = 2); Е - модуль упругости; I -
длина стержня между шпангоутами; i - радиус инерции сечения.
В случае местной потери устойчивости ось стержня остается прямоли-
нейной; искривляются отдельные элементы стержня, искажая поперечное
сечение (см. рис.3.19,6). При этом каждый элемент работает, как
сжатая пластина, закрепленная на соседних элементах и
Критические напряжения пластины находятся по формуле
= kE
К₽ (6/S)2
где коэффициент k, определяемый по справочникам,
отношения сторон а/Ь.
При работе на сжатие известные преимущества имеют
панели с заполнителем. При общей потере устойчивости таких
конструкций (рис.3.19,в) расстояние й между несущими слоями остается
неизменным. Уравнение для определения критических напряжений общей
потери устойчивости оболочки с учетом сдвига заполнителя имеет вид
Е(й ♦ 6) . Ей
О “ n 1 *
* R 2G R
3
по торцам.
(3.68)
зависит от
оболочки и
(3.69)
где /? - радиус оболочки; G^ - модуль сдвига заполнителя.
Местная потеря устойчивости может происходить без искривления
срединной поверхности оболочки (см. рис.3.19,6), но может быть
связана и с искривлением срединной поверхности (рис.3.19,г). Опасное
последствие местной потери устойчивости - отрыв несущего слоя от
заполнителя. Соответствующие критические напряжения приближенно
определяют по формуле
(3.70)
где k* - экспериментальный коэффициент; Е^ - модуль упругости
заполнителя.
142
Рис. 3.20. Распределе-
ние функций между сило-
выми элементами балки
Пршцип специали-
зации. Для выполнения
отдельных функции в
конструкции ЛА должны
использоваться специ-
альные, наиболее целе-
сообразные силовые элементы. Реализацию этого принципа можно показать
на примере двухпоясной балки (лонжерон корпуса, крыла), работающей на
изгиб и воспринимающей поперечную погонную нагрузку (рис.3.20). Здесь
каждый элемент наиболее полно выполняет свою функцию: пояса / балки
воспринимают изгибающий момент, стенка 3 - поперечную нагрузку, стой-
ки 2 - сжимающие усилия, увеличивая одновременно критические напряже-
ния сдвига стенки.
Разновидностью специализации является принцип местного качества,
когда в соответствии с местными условиями работы конструктор предус-
матривает ряд мер, улучшающих работоспособность конструкции без
увеличения массы и габаритов. На рис.2.31 показано несколько примеров
усиления отсеков корпуса, выполненных из стеклопластиков, в наиболее
нагруженных местах: на торце отсека устанавливается металлический
шпангоут, через который осуществляется соединение с соседними отсе-
ками (рис.3.21,о, в); армировка металлическими иглами включает в
имя: г — применение местных вкладышей
143
Рис. 3.22. Пример реализации принципа
многофункциональности
работу слои, расположенные по глубине
конструкции и увеличивает ее прочность
на срез (рис.3.21,6, в); для малонаг-
руженных соединении отсеков применяют-
ся местные металлические вкладыши с
резьбой (рис.3.21,г).
Принцип многофункциональности. Его
зации, но не отрицает,
идея противоположна принципу специали-
а дополняет этот принцип. Суть принципа -
стремление использовать одни и те же силовые элементы для передачи
разных нагрузок и выполнения нескольких разнородных функций. Это поз-
воляет уменьшить массу конструкции. Например, несущий топливный бак
ЛА, очевидно, является не только емкостью для жидкого компонента, но
и частью силовой конструкции корпуса, которая воспринимает все внеш-
ние силовые факторы, внутреннее давление и температурные напряжения.
Иногда рулевой отсек корпуса ЛА используется для установки камеры ЖРД
(рис.3.22). Здесь два шпангоута 1 и 2 и четыре продольных балки 3
полностью обеспечивают восприятие нагрузок как от рулей, так и от
двигателя. Подобных примеров эффективного совмещения функций в конст-
рукциях ЛА чрезвычайно много.
Прмщт оптимальности. Он заключается в обеспечении соответствия
размеров и форм силовых элементов конструкции величине и характеру
действующих на них нагрузок. Так, нормальные напряжения при
поперечном изгибе обратно пропорциональны моменту сопротивления
изгиба W. В этом случае наиболее целесообразным оказывается
двутавровое сечение силового элемента (см. рис.3.20). При восприятии
крутящего момента наилучшими являются замкнутые полые круглые сечения
возможно большего диаметра. Однако практические задачи авиационного
конструирования являются более сложными, когда конструктор должен
удовлетворить ряду противоречивых требований при действии широкого
спектра нагрузок и с учетом различного типа ограничений. В каждом
конкретном случае конструктор вынужден принимать компромиссное
решение. Эти задачи, как указано выше, наиболее полно решаются при
нахождении геометрических параметров агрегатов ЛА, отыскании
наивыгоднейшего закона распределения конструкционного материала в
силовых сечениях и выборе конструктивно-технологического решения.
144
Раздел! ИНЖЕНЕРНЫЕ МЕТОДЫ
ГРОЕКТИРОВАНИЯ КОНСТРУКЦИЙ ЛА
Г л а в а 4. АНАЛИЗ УСЛОВИИ РАБОТЫ
КОНСТРУКЦИИ ЛА
§ 4.1. ОБЩАЯ ХАРАКТЕРИСТИКА УСЛОВИЙ
ФУНКЦИОНИРОВАНИЯ ЛА
Эффективность ЛА зависит от того, насколько полно в процессе его
проектирования учтены многообразные условия функционирования. Очень
часто во главу угла ставятся требования прочности и технологии. При
этом считается, что требования прочности отражают стадию эксплуатации
ЛА, а требования технологии - стадию производства. Некоторое время
назад такой подход был правомочным, поскольку он учитывал лишь
главные факторы воздействия внешней среды. Однако по мере роста
скоростей и высот полета, по мере расширения диапазона применения ЛА
требования к ним, обусловленные внешней средой, существенно
изменяются.
Несколько абстрактная, но достаточно наглядная схема взаимо- дей-
ствия ЛА с окружающей средой показана на рис.4.1. ЛА на схеме изобра-
жен в виде системы взаимодействующих внутренних сил; окружающая среда
показана в виде разнообразных полей. Между ЛА и окружающими полями
постоянно происходит передача энергии, а иногда и массы. В
зависимости от того, где движется ЛА - в атмосфере или в космосе, в
зависимости от скорости полета, условий эксплуатации и ряда других
факторов различные поля по-разному взаимодействуют с ЛА. Для атмо-
сферных ЛА наиболее существенными являются: силовое взаимодействие
радиация
^Силы^
управления
полетом /
Влага,
пыль,
песок
Воздушная
Упру-
к гие
среда
опер-
ации
Тепловое
излучение
Тяга
двигателей
Космическая
радиация
биологические
(рок торы
Гравитационное поле
Рис. 4.1. Схема взаимодействия ЛА с окружающей средой
145
ЛА с окружающей средой; действие климатических и биологических
факторов; аэродинамический нагрев.
Все эти явления между собой связаны. Однако при проектировании
конструкций, чтобы исключить чрезмерное усложнение расчетных моделей,
влияние указанных выше факторов учитывается порознь. При этом общая
задача исследования поведения упругих конструкций, находящихся под
одновременным воздействием внешних нагрузок и аэродинамического
нагрева, расчленяется на две самостоятельные задачи: аэротермическую
и аэротермоупругую.
Аэротермическая задача включает в себя исследование теплообмена
между пограничным слоем и конструкцией и определение температурных
полей. Аэротермоупругая задача исследует взаимодействие аэродина-
мических, упругих и инерционных сил при заданном температурном режиме
конструкции.
Разделение основано на следующих допущениях. Во-первых, предпо-
лагается, что деформации конструкции не влияют на характеристики
теплообмена. Связь между аэротермической и аэротермоупругой задачами
проявляется в том, что нагрев влияет на внутренние напряжения, а
следовательно, на деформации конструкции, и на перераспределение
аэродинамических сил. Обратного же влияния нет.
Во-вторых, предполагается, что взаимодействие между процессом
теплопередачи и деформациями конструкции незначительно. Строго
говоря, определение температурного режима нельзя отделять от расчета
деформаций. Если внешнее механическое воздействие вызывает деформации
тела, то этот процесс сопровождается изменениями температуры. В
результате возрастают энтропия и та часть энергии, которая не может
быть возвращена в механической форме. Однако, как показывают расчеты,
количественные результаты термодинамического взаимодействия соизме-
римы с погрешностями исходных данных по температурному режиму
конструкции. В то же время отделение аэродинамической задачи упрощает
решение проблемы и позволяет довести его до инженерного состояния,
хотя и в этом случае каждая из выделенных задач остается весьма
сложной.
Очень важно при проектировании конструкций правильно выявить и
учесть разнообразные условия наземной эксплуатации. Здесь не только
факторы силового взаимодействия ЛА с окружающей средой. Их учет не
самая сложная задача. Труднее выявить многообразные климатические и
биологические факторы, которые могут проявиться при эксплуатации в
различных климатических зонах. Количественно оценить эти факторы
очень трудно, а иногда практически невозможно. Однако качественный
146
анализ соответствующих факторов и введение специальных мер защиты ЛА
от их вредного взаимодействия совершенно необходимы. Если этого не
предусмотреть, то возникают отказы, снижается эффективность ЛА,
появляются непредвиденные регламентные работы, возрастает трудоем-
кость технического обслуживания и т.д.
§ 4.2. НАГРУЗКИ. ДЕЙСТВУЮЩИЕ НА ЛА
Нагрузки, которые испытывает ЛА при эксплуатации, могут быть
статическими и динамическими. Статическими нагрузками называются
такие, время приложения которых значительно больше времени периода
собственных колебаний основного тона конструкции ЛА. Быстроизменяю-
шиеся нагрузки, время приложения которых соизмеримо с периодом
колебаний основного тона конструкции, называют динамическими. Такие
нагрузки возникают, например, при пуске и отсечке двигателя, от
действия ветра, при транспортировке, при резком открытии или закрытии
топливных клапанов и в ряде других случаев.
При выборе опорных вариантов конструкция ЛА обычно считается абсо-
лютно жесткой. В действительности же его конструкция обладает упру-
гостью, и под действием изменяющихся во времени внешних нагрузок она
будет совершать упругие колебания. Эти колебания вызовут дополнитель-
ные динамические нагрузки на конструкцию аппарата. Их учет при проек-
тировании производится, как правило, на заключительном этапе в пове-
рочном плане при установлении допустимых режимов нагружения.
Дополнительные динамические нагрузки возникают не всегда. В
рационально спроектированной конструкции автоколебаний не будет, а
потому не будет и вызванных ими сил. Так как динамические нагрузки
зависят главным образом от соотношения частот изменения действующих
сил и собственных частот системы, то конструктор там, где это возмож-
но, должен так подбирать жесткости и распределять массы, чтобы эти
частоты были по возможности различными. (Это так называемая проблема
максимальной отстройки спектра собственных частот конструкции от
заданного спектра частот.)
При проектировании конструкции все силы, действующие на ЛА, делят
на две категории: поверхностные и массовые. Поверхностные силы, как
говорит их название, приложены к поверхности ЛА. Это аэродинамические
силы, тяга двигателей, силы реакции опор (при транспортировке ЛА),
силы взаимодействия отдельных частей аппарата. К массовым относятся
силы тяжести и инерционные. Они пропорционально массе распределены по
всему объему аппарата. Силы, действующие на агрегаты, расположенные
147
регрузка, представляющая собой
Рис. 4.2. Силы, действующие на ЛА
в полете
вне и внутри ЛА, делятся на те же
категории. При этом поверхностными
являются силы реакции, передающие-
ся на данный агрегат через узлы
его крепления к аппарату.
Наиважнейшей характеристикой
нагруженности ЛА является его пе-
отношение равнодействующей всех
поверхностных сил к силе тяжести. Поскольку эта характеристика
векторная, то обычно пользуются проекциями перегрузки л*, л^ и п? на
оси координат х, у, z или, как говорят, перегрузками в направлении
осей х, у, z. При этом перегрузкой в заданном направлении называют
отношение проекции всех поверхностных сил на это направление к силе
тяжести ЛА. В соответствии с этим определением, как следует из
рис.4.2, где показаны силы, действующие на ЛА при движении в
вертикальной плоскости, перегрузки в направлении осей скоростной
системы координат Ох у z будут
Pcosa - X У ♦ Psi па . ..
л л = —— --------; л = ——--------------, (4.1)
х mg у mg
где Р - тяга двигателя; a - угол атаки; m - масса ЛА; У и X -
подъемная сила и лобовое сопротивление ЛА.
В задачах проектирования конструкций силы и перегрузки
рассматривают в связанной системе координат Oxyz-.
Р -X У
л = ----; л = --.
х mg У mg
(4.2)
Из рассмотрения перегрузок л* и л^ как векторов, направления
которых совпадают с положительными направлениями осей х, у (см.
рис. 4.2), можно получить следующие формулы, связывающие перегрузки в
рассмотренных системах координат:
л = л cosa ♦ л sina;
х * ♦
X у
л = л cosa - л sina.
9 у х
(4.3)
148
В первом приближении
X* «X; У* = Y. (4.4)
При этом
л = п п = rt. (4.5)
х ♦ у ♦
х 9 у
С физической точки зредая перегрузка ЛА представляет собой
ускорение в данном направлении от действия поверхностных сил,
измеренное в долях g. В этом нетрудно убедиться, если учесть, что
равнодействующая поверхностных сил в соответствии с принципом
Даламбера равна и направлена противоположно равнодействующей массовых
сил. При движении ЛА в вертикальной плоскости (см. рис.4.2), из этого
принципа следует:
Pcosa - л - mgsind - Nx = 0;
# (4.6)
У ♦ Psina - Ny- mgcosO = О,
где N* = mj* и Ny = mjy - осевая и нормальная составляющие
инерционных сил; в - угол наклона траектории.
Разделив каждое из уравнений (4.6) на т, с учетом (4.1) получим
0» ф = L * ffosfc
У *
(4.7)
gn ф = jx ♦ gsinfl.
X
В приведенных уравнениях левые части представляют собой ускорения
в направлениях соответствующих осей от действия поверхностных сил, а
правые - ускорения от действия массовых сил.
Если учесть, что
'Л",-» <4-8’
то выражения (4.7), очевидно, можно рассматривать в качестве
уравнений связи между перегрузками и кинематическими параметрами
траектории:
149
I Л'
'. = г 5Г • “*
X *
Для маневренных ЛА прочность конструкции и соответственно
распределение материала определяются нормальными перегрузками. Если
траектория полета известна (задана), то, как следует из (4.9), можно
определить перегрузки, которые должен иметь ЛА при движении по данной
траектории. Эти перегрузки принято называть потребными. Наибольшие
значения перегрузок, развиваемых ЛА в состоянии балансировки,
определяются максимальными значениями углов отклонения органов
управления. Соответствующие перегрузки называют располагаемыми.
Сравнивая потребные перегрузки с располагаемыми, можно установить
возможность или невозможность полета ЛА по данной траектории. Чтобы
полет по заданной траектории был возможным, необходимо обеспечить
условие
п >п * Дл , (4.10)
расп потр зап
которое означает, что при полете в реальных условиях при наличии слу-
чайных возмущений необходимо располагать некоторым запасом пере-
грузок.
При проектировании конструкций необходимо учитывать и тот факт,
что перегрузки (4.9) соответствуют установившимся (балансировочным)
параметрам движения. В реальных условиях полета неизбежны возмущения
за счет неидеальной работы системы управления, эксцентриситета тяги,
турбулентности атмосферы и ряда других факторов. Эти возмущения
приводят к появлению дополнительной перегрузки - динамической
составляющей Дл^. Следовательно, максимальная перегрузка при
проектировании конструкций определяется как
п = п * Дл * Дл (4.11)
max потр зап дин
Наибольшее влияние на перегрузки обычно оказывает система
управления ЛА, поэтому перегрузку Дл часто отождествляют с
дин
забросом перегрузки при совершении маневра, требующего перекладки
рулей. Характер изменения перегрузки при таком маневре показан на
рис.4.3. Величина Дл зависит от аэродинамической схемы ЛА и
дин
150
Рис. 4.3. Характер изменения пе-
регрузки при маневре ЛА
характеристик системы управле-
ния. Чем медленнее будет изме-
няться угол отклонения органов
управления, тем меньше будет
значение заброса перегрузки при
маневре. Однако при этом реали-
зуемая траектория полета может оказаться неприемлемо отличной от пот-
ребной. Желательно, чтобы время неустановившегося движения по возмож-
ности было минимальным. Для частного случая, когда система управления
реализует практически мгновенную перекладку рулей, динамическая сос-
тавляющая нормальной перегрузки определяется по формуле
а z vct 0\ “Аг//?
Дл = (/г - п )е
удин у у
Здесь обозначено
I------Г Ya
/? = мВ - А ; 2А = рЦ В =
mv i
z
(4.12)
z
nN
.(4.13)
где nt, V - масса, массовый момент инерции и скорость ЛА
соответственно; У® и А4^ - производные подъемной силы и момента
тангажа по углу атаки а; - производная момента тангажа по угловой
скорости вращения ЛА cd.
В полете и при наземной эксплуатации на ЛА действует целый спектр
разнообразных нагрузок. При проектировании конструкций весь спектр
нагрузок должен быть проанализирован и выбраны расчетные условия
нагружения, соответствующие наиболее опасным комбинациям нагрузок и
аэродинамического нагрева. При существующем разнообразии ЛА и условий
их применения практически невозможно заранее выявить расчетные
условия нагружения, не привязываясь к конкретному ЛА.
Для маневренных ЛА чаще всего расчетные условия определяются
поперечными нагрузками и температурным режимом. Если снижением
механических характеристик материала с ростом температуры можно
пренебречь, то расчетные условия рассматриваются как расчетная точка
на траектории, в которой подъемная сила У максимальна:
151
(4.14)
r S (л G) ,
max ymax max
где G = я*ЛА1? - сила тяжести ЛА.
При сильном нагреве конструкции, когда снижением механических
свойств материала уже нельзя пренебречь, необходимо рассматривал)
возможные сочетания изменяющихся нагрузок и температуры. Расчетный
режим здесь может наступить при меньших нагрузках, так как запас
прочности конструкции будет уменьшаться пропорционально:
(а )т
, = Р-Р Т (4 |5)
где
(а )т
разр Т
- разрушающее напряжение в элементе конструкции при
температуре Г; (Р - расчетное напряжение в этом элементе.
Снижение запаса прочности в т? раз при постоянной нагрузке
равносильно соответствующему увеличению нагрузки (т.е. в I/17 раз) при
постоянном запасе прочности. Поэтому, если считать, что прочность
конструкции определяется пределом прочности материала и что
нагрев отражается только на изменении механических свойств, то можно
принять, что наиболее тяжелые условия нагружения будут тогда, когда
о
произведение п G --------- будет максимальным. При этом расчетный
1Дпах
режим, как это видно из рис.4.4, может наступить по времени т позже,
чем без учета нагрева.
Наконец, возможна еще и третья ситуация, когда работа материала в
конструкции характеризуется ин-
тенсивным ростом деформаций
ползучести. Помимо температуры
и внешних нагрузок здесь необ-
ходимо учитывать время пребыва-
ния конструкции в состоянии на-
гружения и нагрева. Выбор соот-
ветствующих расчетных условий и
Рис. 4.4. Расчетные условия на-
гружения конструкции при нор-
мальной температуре (/) и наг-
реве (2)
152
Таблица 4.1
режим А1-сплавы Ti-сплавы
20...150 °C 150...200 °C > 200 °C 20...300 °C
I ♦ ♦ П Ш Продолжение табл. 4.1
Режим Ti-сплавы Стали
300...450 °C > 450°С 20...350 °C 350...500°С > 500 °C
I
П
Ш
их количественный анализ представляют собой наиболее сложную задачу,
пока еще не имеющую надежных методов решения.
Ориентировочные диапазоны температур, соответствующие различным
расчетным условиям, для некоторых часто применяемых конструкционных
материалов приведены в табл. 4.1. I режим, указанный в таблице,
соответствует случаю, когда допустимо не учитывать влияние нагрева;
П режим учитывает лишь снижение при нагреве механических свойств
материала; Ш режим соответствует условиям, когда необходимо
учитывать ползучесть материала.
Приближенная оценка силового взаимодействия ЛА с окружающей средой
обычно проводится с учетом ограниченного числа факторов. В каждом
расчетном случае выделяются лишь основные нагрузки. В качестве приме-
ра на рис.4.5 показаны эпюры основшх учитываемых нагрузок, действую-
щих на корпус маневренного ЛА. В их числе аэродинамические силы, тяга
двигателя, силы, приходящие от крыла и оперения, и массовые силы от
закрепленных в корпусе грузов и собственной массы. Все эти нагрузки
могут быть как симметричными относительно вертикальной плоскости Оху,
так и несимметричными. В проектировочных расчетах, как правило, счи-
тают, что равнодействующая нагрузок лежит в плоскости симметрии ЛА.
Аэродинамические силы (силы давления и разрежения) при полете ЛА в
атмосфере с нулевыми углами атаки являются самоуравновешиваюшимися и
153
Рис. 4.5. Нагрузки, действующие на корпус ЛА
не приводят к образованию поперечных нагрузок q^. Но они влияют на
прочность и местную жесткость носового и хвостового отсеков, что не-
обходимо учитывать при проектировании.
При угле атаки, не равном нулю, давление распределяется по пери-
метру корпуса неравномерно; появляются поперечные нагрузки q * 0.
0
При малых углах атаки (а < 10 ) при М < 4 дополнительные нагрузки
154
возникают в основном в носовой части корпуса и определяются на основе
линейной аэродинамической теории по формуле
V2
У =са а^—F , (4.16)
корп укорп корп
а а ~
где с = с ; г - площадь миделевого сечения корпуса.
ДОорп 1/нос корп
Точка приложения этой силы (центр давления) находится на расстоя-
нии х от носка корпуса, которое определяется выражением
ц. д.корп
W
. нос
X = L Б-----------,
ц. д. корп нос г
корп
где L - длина носовой части корпуса (см. рис.4.5); W
нос нос
носовой части корпуса.
При больших углах атаки (а > 10 ) на корпус ЛА действует
тельная погонная аэродинамическая нагрузка
(4.17)
- объем
дополни-
Д<7
аэр
рУ2 2
1.2 ^-Da\
(4.18)
где D - диаметр корпуса в рассматриваемом сечении. При этом
предполагается, что несущая способность ЛА определяется в основном
центральной частью корпуса ЛА.
Аэродинамическое сопротивление корпуса при анализе его работоспо-
собности и массовых зависимостей в расчетах первого приближения не
учитывают из-за большой разницы моментов сопротивления изгибу в про-
дольном и поперечном направлениях.
Тяга двигателя обычно приложена к силовым элементам корпуса в кор-
мовой или средней его части в зависимости от расположения двигателя в
корпусе и направлена вдоль его оси. Точками приложения тяги считаются
узлы крепления двигателя к силовым элементам - шпангоутам, соединен-
ным с усиленными стрингерами.
На корпус приходят нагрузки от крыла и оперения - изибающий, кру-
тящий моменты и перерезывающая сила. Они определяются режимом полета
ЛА. Их распределение по корпусу зависит от конструктивно-сиЛовой схе-
мы соединения крыла и оперения с корпусом. Значения узловых нагрузок
находятся при прочностном расчете консолей крыла и оперения. Суммар-
ное воздействие крыла на корпус можно представить, как показано на
155
рис.4.5, действием поперечной силы Y - т вп ; осевой силы т gn -
кр кр® у кр® х
X ; моментов М и М . Здесь т - масса крыла.
кр X X кр
Массовые нагрузки считают распределенными по длине корпуса пример-
но пропорционально площади его поперечного сечения. Такое допущение
на начальной стадии проектирования предполагает, что массы располо-
женных в корпусе грузов распределены равномерно и также равномерно
выполнено соединение их с конструкцией корпуса. На рис.4.5 показаны
инерционные нагрузки при криволинейном полете. При этом погонная на-
грузка qm = qmX ♦ q^. Наличие двух нагрузок {qm{ и q^ обусловлено
двумя видами ускорений ЛА при криволинейном полете.
Нагрузка возникает от действия поперечной перегрузки л^,
одинаковой для всех масс конструкции:
„ *корпУ%
(4.19)
где ф - коэффициент распределения массы в. ЛА, определяемой по
формуле
2m
' =1--------—
корп
(4.20)
- масса грузов, расположенных вне корпуса (крылья, оперение,
двигатели, если они вне корпуса); - начальная масса ЛА; - длина
условного цилиндра, у которого диаметр и объем равны соответственно
диаметру и объему действительного корпуса.
Нагрузка q^ возникает при наличии углового ускорения t? летатель-
ного аппарата, появляющегося при действии маневренной нагрузки на
оперение ДУ^.
ДУ L
Ф = on on (4 21)
х
2
где - плечо оперения относительно центра масс ЛА; I* = пи* - нас-
156
рис. 4.6. Определение инерционной
н-фуэю.
совый момент инерции ЛА относи-
тельно оси z, - радиус инерции
ЛА относительно оси z, приближен-
но может быть принято i = 0,16 L
Z к
Максимальное значение нагрузки
г , изменяющейся в первом прибли-
/П2
жении по линейному закону (рис.4.6), как это следует из условия рав-
новесия ЛА, определяется выражением
ЗДУ
а _ ________оп
7И2тах
(4.22)
Определив нагрузки на корпус, можно построить эпюры перерезывающих
сил и изгибающих моментов по его длине, как показано на рис.4.5. Виды
эпюр Q и на участке крыла зависят от способа его крепления к
корпусу (на рис.4.5 крепление крыла к корпусу принято в одной точке).
При действии осевой перегрузки п* распределенная масса корпуса
(вместе с грузами), равная Чт^п » создает инерционные силы
п
ж. х
N = q . —х„
х ml п I
У
где х^ - расстояние от носка корпуса до рассматриваемого сечения.
Силы N* нарастают по линейному закону от носка до сечения, где
приложена тяга двигателя.
(4.23)
§ 4.3. КЛИМАТИЧЕСКОЕ И БИОЛОГИЧЕСКОЕ ВОЗДЕЙСТВИЕ
ВНЕШНЕЙ СРЕДЫ НА ЛА
Климатическое и биологическое воздействие окружающей среды сущест-
венно зависит от географической зоны. Пои проектировании ЛА следует
принимать во внимание наличие четырех довольно различных климатичес-
ких зон: с умеренным, холодным, жарким (сухим) и тропическим (влаж-
ным) климатом. Типичные значения основных факторов, характеризующих
указанные зоны, приведены в табл. 4.2.
157
Тип Климатические
1Я Температура, о С Относительная влажность, %
пределы годовой ход суточный ход средняя макси- мальная
Умеренный ± 40 80 20 80 90
Холодный -70...>30 100 40 60 80
Жаркий -30...>50 80 40 40 80
(сухой)
Тропичес- 0...>40 40 10 20 100
кий (влаж-
ный)
Рассмотрим физические процессы, имеющие место при эксплуатации ЛА
в различных климатических зонах.
Действие солнечной радиации зависит от энергии фотонов и опреде-
ляется длиной световой волны. Длинноволновая составляющая солнечных
лучей (инфракрасные лучи) вызывает нагрев конструкции ЛА. Коротковол-
новая составляющая солнечных лучей (ультрафиолетовые лучи) является
очень энергичным катализатором реакций окисления, вызывающих разложе-
ние кислородсодержащих и хлорсодержащих материалов: полиэтилена, по-
листирола, полихлорвинила, фторопласта и других пластмасс. Фотохими-
ческое действие солнечной радиации на окрашенную поверхность приводит
к выцветанию, а переменное действие солнечного света и дождя - к так
называемому "мелению" окраски.
Солнечная радиация является также причиной образования озона из
кислорода воздуха. Озон разрушающе действует на резиновые изделия,
особенно на изготовленные из натуральных каучуков. Синтетические ре-
зины значительно устойчивее к действию коротковолновых солнечных лу-
чей. Стойкость некоторых пластмасс повышается при введении стабилизи-
рующих составляющих (например, газовой сажи). Ряд пластмасс, например
политетрафторэтилен, силиконовые пластмассы, а также дерево вообще не
чувствительны к действию солнечной радиации.
158
Таблица 4.2
факторы Биологические факторы
Поток солнеч- ной рад^цнн, кал/(см 'мин) Скорость ветра, м/с Прочие факторы
1.3 1.5 0,3...0,5 6.. .7 Иней, обледе- нение, туман Мошки и комары
1.6 3...4 Пыль, песчаные Пресмыкающиеся,
бури, соль в грызуны, насеко-
воздухе мые
1.4 — Грозы, роса. Плесень, грибы.
влага грызуны, насеко-
мые
В экстремальных условиях эксплуатации температура поверхности ЛА
может достигать 100 С и более. Это создает опасность ожогов, требует
специальных мер предосторожности. Могут появиться непланируемые рег-
ламентные работы. В зависимости от изменения температуры изменяются
диэлектрические свойства и сопротивление изоляции. Поэтому в процес-
се эксплуатации емкость некоторых типов конденсаторов под влиянием
изменения температуры от 20 до 80 С может меняться на 20...30 %.
Изменение температуры приводит к изменению электрических и магнитных
свойств металлов.
Повышение температуры вызывает ускоренное старение многих типов
пластмасс. Пропиточные материалы, масла и смазки теряют свою вяз-
кость, вытекают из уплотнений, стекают с защищаемых поверхностей, и в
конечном итоге происходит разгерметизация ЛА и разрушение элементов
ЛА под воздействием внешней среды. Трансформаторное масло при повыше-
нии температуры теряет свою инертность и начинает разрушать эмалевую
изоляцию проводов.
Низкая температура также снижает механическую прочность Материа-
лов, уменьшая их пластичность и повышая хрупкость. В изоляционных ма-
териалах появляются трещины. Смазки загустевают, что приводит к отка-
зам трущихся деталей. Заливочные материалы претерпевают усадку с
159
образованием воздушных мешков, что может привести к электрическим пе-
рекрытиям и пробоям.
Линейное изменение размеров деталей при изменении температуры при-
водит к изменению посадочных и установочных размеров и зазоров, может
привести к разрушению паяных и других соединений, к возникновению
значительных напряжений, вызывающих деформацию деталей, к отслоению и
расслоению покрытий и т.д.
Влага, постоянно содержащаяся в воздухе атмосферы, так же как и
высокая температура, существенно влияет на работоспособность ЛА. Она
вызывает коррозию металлов (особенно в морской атмосфере) и изменение
механических и электрических свойств диэлектриков. Последние увеличи-
вают свои линейные размеры, что приводит к изменению зазоров, поса-
дочных размеров и к короблению материалов. Из-за расширения воды при
замерзании образуются трещины и происходят разрывы изоляции.
Сочетание высокой температуры с высокой влажностью характерно для
приморских районов тропической и субтропической зон. Оно может при-
вести к резкой активизации процессов коррозии металлических поверх-
ностей, к растрескиванию, потере эластичности и отслаиванию от обшив-
ки лакокрасочных покрытий.
Сочетание низких температур воздуха с высокой влажностью также
крайне неблагоприятно влияет на состояние ЛА в процессе эксплуатации
и может вызывать снижение физико-механических характеристик уплотни-
тельных и изоляционных материалов, разрушение лакокрасочных покрытий,
обледенение и обмерзание электрических контактов, примерзание элект-
рических контактов и элементов кинематических пар.
Пыль и песок способствуют быстрому, износу движущихся частей. В
результате попадания пыли и песка на шарнирные соединения резко ухуд-
шается качество их смазки. На контактных поверхностях могут возник-
нуть задиры и, как следствие, возможно заклинивание кинематических
звеньев. Пыль вызывает интенсивное разрушение покрытий всех видов и,
адсорбируя влагу, способствует коррозии деталей. Шарикоподшипники
особенно чувствительны к воздействию пыли. Заклинивание шарикоподшип-
ников - основное следствие попадания в них пыли. Заклинивание поршней
и штоков силовых приводов нередко также является следствием попадания
пыли. Обладая высокрй гигроскопичностью, пыль и песок изменяют режим
работы аппаратуры и снижают поверхностное сопротивление изоляции, что
может привести к ее пробою.
В отдельных районах земного шара в почве содержится 12...35 % по
объему водорастворимых солей. Попадая на агрегаты ЛА, соли создают
тяжелые коррозионные условия. Влага, адсорбируемая из воздуха части-
160
нами соли, образует электролит, в котором процессы коррозии много-
кратно ускоряются. (Этот процесс протекает даже в пустынях, так как и
там ночью в результате больших перепадов температур, свойственных
континентальному климату, выпадает обильная роса и частицы соли раст-
воряются. ) Процесс коррозии в этих условиях протекает настолько
интенсивно, что даже в течение межрегламентного периода могут возник-
нуть большие очаги поражения. Разрушаются не только металлы и их по-
крытия, но и пластмассы. Вода, применяемая для технических нужд, в
отдельных местностях может содержать так много ионов хлора, кальция и
натрия, что становится агрессивной средой, вызывающей коррозию.
Существенное значение при эксплуатации имеют атмосферные осадки.
На ЛА отрицательно действуют все виды атмосферных осадков (дождь,
снег, морось, ледяной дождь, снежная крупа, град). Наиболее опасными
являются ливневые осадки и осадки, выпадающие в виде мелкодисперсного
снега, который обладает высокой проникающей способностью.
Особую роль при эксплуатации играет статическое электричество. ЛА
может приобретать значительный электрический заряд в результате тре-
ния об обшивку частиц песка, сухого снега и воздушного потока, трения
топлива о стенки трубопроводов и баков при заправке. Заряды в конст-
рукции движутся в сторону острых кромок, откуда стекают в атмосферу.
Если все детали ЛА хорошо соединены между собой, это явление не вызы-
вает осложнений. Однако в местах, где есть зазоры, не проводящие
электрические заряды, возникают коронные разряды и искрение, что
может привести к взрыву топливовоздушной смеси в баках ЛА с ЖРД или
ВРД, а также к самопроизвольному срабатыванию пиропатронов,
пирозапалов.
Плесени в процессе жизнедеятельности выделяют продукты обмена
веществ, которые содержат органические кислоты, вызывающие коррозию
металлов и разложение диэлектриков.
Из насекомых наиболее опасны для элементов ЛА термиты, широко рас-
пространенные в тропическом поясе (Австралия, Северная и Центральная
Африка и Южная и Центральная Америка). В СССР термиты живут на юго-
западе Украины, в Молдавии и на Кавказе. Красные муравьи, тараканы,
так же как и термиты, поедают детали из органических материалов.
Пауки обволакивают паутиной элементы конструкции, что приводит к
скоплению пыли и влаги. Грызуны съедают и разрушают изоляционные
материалы, могут повредить кабели. Так, крысы и белки скусывают
изоляцию, в том числе резиновую и хлорвиниловую.
161
6-880
§ 4.4. ВНЕШНИЕ ТЕМПЕРАТУРНЫЕ УСЛОВИЯ
РАБОТЫ ЛА
Поверхность ЛА в полете находится в конвективном тепловом взаимо-
действии с пограничным слоем и в лучистом взаимодействии с окружающим
пространством. Конвективный тепловой поток при неразрушающейся по-
верхности ЛА определяется законом Ньютона
Va(r> ТчАТг{т) <4‘24)
где а(т, Г^) - коэффициент теплдоотдачи, зависящий от времени полета
т, температуры поверхности Ту в рассматриваемой точке, а также от
местных условий обтекания ЛА; 7^.(т) - температура восстановления.
Определение величины а в каждой точке и в каждый момент полета ЛА
составляет основное содержание внешней задачи аэродинамического на-
грева, которая из-за большой сложности и трудоемкости решается в пол-
ном объеме лишь при поверочных расчетах конструкции. На ранних этапах
проектирования конструкций нужны приближенные, более простые оценки.
Для этого используются экспериментальные результаты изучения особен-
ностей обтекания ЛА в разных его зонах. Так, установлено, что на
внешней границе пограничного слоя на удалении от скачков уплотнения
вдоль линии тока, равном примерно двум диаметрам корпуса, для атмо-
сферных ЛА можно полагать, что температура и число М мало отличаются
от соответствующих характеристик набегающего потока. При этом темпе-
ратура восстановления может быть описана следующими приближенными
зависимостями:
для ламинарного пограничного слоя -
Г = Т (1 * 0.17М2); (4.25)
Г оо оо
для турбулентного пограничного слоя -
Т = Т (1 ♦ 0.18М2). (4.26)
Г оо оо
Установлено также, что для рассматриваемых ЛА вдали от головного
обтекателя а слабо изменяется вдоль линии тока и почти не зависит от
температуры поверхности. Приближенно
162
(4.27)
где к - коэффициент, учитывающий изменения числа Прандтля и критерия
Стантона при изменении температуры поверхности; V - скорость полета;
Cj - коэффициент аэродинамического трения; Д = р/р^ - относительная
плотность воздуха (по MCA). В реальных диапазонах
поверхности и чисел Рейнольдса допустимо принимать к = 0,21
= 0,0025. С учетом этих данных, а также зависимости Д от
2
полета получаем (в Вт/(м 'град))
а = *„У10‘3,
п
температур
и =
высоты
(4.28)
где - коэффициент высоты полета, определяемый зависимостью
/7, км................ 0 10 20 30
“TLL£—г....... 2093 711,8 146,5 41,0
м * град
В промежутках между указанными значениями зависимость между Н и
можно принимать линейной.
Процесс распространения тепла в конструкции ЛА в общем случае
описывается уравнением теплопроводности
аг 1 г а_ аг + э_ аг +
Эт " pc I дх А Эх * ду К ду
• Ь Я . У». I- » . (4.29)
дх дх J рс
где Т - температура; х, у, х - пространственные координаты; т - вре-
мя; р, с, X - теплофизические характеристики материала - плотность,
удельная теплоемкость и коэффициент теплопроводности соответственно;
w - плотность распределенных источников тепла.
Для определения температуры конструкции уравнение (4.29) должно
быть дополнено граничными и начальными условиями. Рассмотрим эти
условия.
На внешней поверхности ЛА граничное условие определяется конвек-
тивным тепловым потоком, потоком излучения с поверхности и в случае
163
аблирующей поверхности - скоростью уноса материала. Для неаблирующей
поверхности с учетом допущения о независимости а от температуры по-
верхности справедливо условие
- х : - гг 1 - «4 « ЭД
где п - внутренняя нормаль к поверхности; W - индекс, означающий
принадлежность величины к наружной поверхности ЛА; е - коэффициент
излучения; а - постоянная Стефана - Больцмана.
На аблирующей поверхности может быть рассчитана температура абля-
ции и граничное условие на подвижной поверхности имеет вид
TW - Т^.М- <4-3|>
Между внутренними поверхностями силовой конструкции и бортовым
оборудованием осуществляются конвективный и лучистый теплообмены, ко-
торые наряду с собственным тепловыделением оборудования определяют
его температурный режим. Допустимые температуры для бортового обору-
дования обычно не превышают 100 С. Эго предопределяет требование
низкой интенсивности теплообмена внутри корпуса, что, в свою очередь,
приводит к слабому влиянию этого процесса на температурное поле сило-
вой конструкции. Поэтому на стадии разработки конструкции ее внутрен-
ние поверхности вполне допустимо полагать теплоизолированными.
Начальным условием для уравнения (4.29) является распределение
температуры в конструкции в начальный момент времени (при г = 0)
Г(х, у, 2, 0) = Г0(х, у, 2). (4.32)
При равномерном начальном распределении температуры в конструкции
Т0(х, у, 2) = TQ = const. (4.33)
Решение уравнения (4.29) в общем виде практически невозможно. Даже
для простых расчетных схем получение решения требует значительных
затрат машинного времени. При проектировании ЛА обычно пользуются
приближенными решениями. Наибольшее распространение получили так на*
зываемые сплошные и тонкостенные расчетные модели. Рассмотрим их.
Сплошную расчетную модель используют для расчета температурного
поля в тех частях конструкции, для которых можно пренебречь пере-
164
рис. 4.7. Сплошная расчетная модель
теканием тепла вдоль поверхности ЛА,
вследствие чего задача теплопроводно-
сти оказывается одномерной. Это может
быть обшивка корпуса с наружным и
(или) внутренним теплозащитными пок-
рытиями или многослойный головной об-
текатель вдали от подкрепляющих эле-
ментов и др.
При использовании сплошной модели рассматриваемая конструкция
заменяется системой дискретных теплоемкостей, разделенных термичес-
кими сопротивлениями. С этой целью каждый из конструктивных слоев
условно разделяется на несколько элементарных расчетных слоев. Для
неметаллических оболочек (изоляции) число расчетных слоев следует
брать не менее трех. Металлическую обшивку ввиду ее большого коэффи-
циента теплопроводности X можно считать за один слой. Предполагается,
что для каждого элементарного слоя температура постоянна, т.е. дей-
ствительный температурный профиль по толщине оболочки заменяется при-
ближенным ступенчатым.
Расчетная модель для оболочки корпуса, защищенной с обеих сторон
изоляцией, представлена на рис.4.7. Индексы на рисунке означают:
”внш” - внешний слой; ”внт” - внутренний слой; ”п” - покрытие; "об” -
обшивка.
Расчетная система уравнений для рассматриваемого случая представ-
ляет собой разностную аппроксимацию граничного условия (4.30) и урав-
нения теплового баланса для каждого расчетного слоя (контактными тер-
мическими сопротивлениями пренебрегают):
Х1 ^/2 * ’ а(т) 1ГА> TW 1 eW°TW‘
R dT
R2 ^2 I I
~'r, -
W 1.2 2.3
165
V-W”.
/h-1
dr .
/1—1
dr
1
ГЛ-2. Л-1
(r^
-T .
л-1
(4.34)
где R^ - радиус кривизны срединной поверхности i-го слоя; г -
термическое сопротивление между слоями i и k.
Для неграничных слоев вычисляется по формуле
ri.k~ 2ХАТ.) * 2Х,(Г.) :
II К К
для наружного граничного слоя "Г
*1
rw. 1 " «X (Г ) •
(4.35)
(4.36)
Множители в левой части уравнений (4.34) учитывают изменение
теплоемкости слоев за счет их кривизны. Как показали исследования,
такой учет иилиндричности модели приемлем по точности определения
температурного поля для Я/Я^ > 0,8, что для корпусов ЛА практически
всегда выполняется.
Для численного решения систему (4.34) нужно представить в разност-
ном виде по неявной разностной схеме, что обеспечивает абсолютную
устойчивость решения. Разностный аналог системы (4.34) с шагом интег-
рирования Дт имеет вид
Tk*\рЫ
\ w , ,, ' = «<»> [Г - Ту' ] - |4-37’
166
*1 г
—!—- Т^*1) -
4 иг '1 '
V.i w 1
1.2
(4.37)
*^5)
л-1
п-1 Л-1
Дг
’ . ' Л-2
л-2. л-1
1
Л-1. Л
Л
п п 1
Дг
• Л—1 Л *
Л-1.Л
где индексы k и fe+1 означают предшествующий и последующий моменты
времени соответственно.
Систему алгебраических уравнений (4.37) относительно неизвестных
путем приведения подобных членов можно представить в
температур
виде
А Т * 1 * D Т * 1
МГ1Г-1 vrw
* Vt 1 = FW'
А]**\ * ВТ^‘ * с/’’ = F.;
t t-i и I 1.1 I
(4.38)
i = 1. л,
где Ау = 0.
Полученная система уравнений имеет трехдиагональную матрицу
коэффициентов, поэтому для ее решения можно применить эффективный
167
метод прогонки, который сводится к следующему. Сначала вычисляются
вспомогательные величины - прогоночные коэффициенты и К:
Ci
Х‘ ° ’ В/ • V.-I
у _ ‘ i I i-l
(4.39)
Затем определяются искомые температуры
V - vti * Yi-
(4.40)
Причем коэффициенты (4.39) вычисляются, начиная с первого, а
температуры (4.40) - начиная с последнего слоя. В расчетной практике
первую процедуру называют прямым ходом, а вторую - обратным.
Если теплозащитное покрытие является аблирующим, то до момента
достижения на поверхности температуры абляции Т расчет
абл
нестационарного температурного поля ведется по приведенным выше
зависимостям. После достижения начинается унос массы. В случае
относительно небольшой толщины уносимой части покрытия (что обычно
имеет место для атмосферных ЛА) можно воспользоваться средне-
интегральной по времени толщиной уносимого слоя 5^ Значение
6 вычисляется по известным графикам 6 (т).
ун. ср ум
При расчете температуры найденное значение вычитается из
начальной толщины покрытия. Оставшаяся часть покрытия разбивается на
элементарные расчетные слои так же, как и в случае неаблирующего по-
крытия. Первые уравнения в системах (4.34), (4.37) и (4.38) становят-
ся ненужными, а во вторых уравнениях вместо подставляется
Интегрирование полученной таким образом системы ведется также методом
прогонки, но с начальным условием, соответствующим распределению тем-
пературы в конструкции в момент начала процесса уноса массы.
Рассмотрим далее вторую приближенную модель - тонкостенную. Эта
модель используется при расчете температурного поля в тонкостенных
конструкциях, подкрепленных сосредоточенными силовыми элементами. Для
подобных конструкций температурное поле зависит от характера процесса
168
Рис. 4.8. Тонкостенная расчетная
модель
перетекания тепла между оболочкой
и подкрепляющими элементами. Наи-
более существенно этот процесс
проявляется в нетеплозашищеннных
конструкциях. Типичным узлом конс-
трукции ЛА, работающим в таких ус-
ловиях, является панель обшивки, соединенная со шпангоутом или нервю-
рой (рис.4.8).
Как и в предыдущем случае, .конструкция разбивается на ряд расчет-
ных элементов таким образом, чтобы границы стыкующихся элементов сов-
падали. Все расчетные элементы считаются термически тонкими в направ-
лении меньшего измерения. Процессами теплообмена во внутреннем прост-
ранстве отсека пренебрегают.
С учетом указанных допущений система дифференциальных уравнений
теплового баланса для дискретной модели, состоящей в данном конкрет-
ном случае из семи дискретных теплоемкостей, разделенных термическими
сопротивлениями, записывается в виде
аг s
", -г, 1 - - ^7,г. - г2>:
dr
- • А-|Г, - Г2> - <-(Г2 - V
1.2 2.3
dT,
'з’^’з dT~ 'заз<г| - Гз1 -
-'з'Хз • А-,Г2 - Гз'- Г7<гз -
2.3 3.4
169
Wr> - r,l -
- '.X • ^7,Г3 - Г? - - r5> - - V
*5 ^5 54
* <441>
W 4,5
«7 *5
+ r {T7 ~ U " r (7\ - Г«):
f7,5 7 5 f5.6 5 6
dT_
I7<^)7 I7«7w[r7« - r7] -
6
- '7X • Гу<Г4 - Г7>;
«6 Л’. Ss
^'e^’e ST* 7^0-, - V
Множители Rj/Ryy в 4-м, 5-м и 7-м уравнениях здесь так же, как и в
(4.34), учитывают цилиндричность конструкции.
Вычисление термических сопротивлений ведется по формуле
i.j 2\. + 2Х. 5.
< / /
(4.42)
Для численного решения системы (4.41) ее так же, как и в предыду
щем случае, нужно представить в разностном виде по неявной схеме от-
170
носители» линейных слагаемых и получившуюся таким образом систему
алгебраических уравнении относительно неизвестных 7^*1 привести к
нормальному виду.
Матрица коэффициентов в данном случае получается неособенная. По-
этому для ее обращения непосредственно применить метод прогонки
нельзя. Чтобы это стало возможным, полученная система уравнений опре-
деленным образом должна ^бытъ преобразована и сведена к нескольким
трехдиагональным матрицам1. Можно, однако, применить и прямой путь
решения системы алгебраических уравнений. Для этого следует восполь-
зоваться любым из стандартных методов обращения неособенных матриц
(например, методом Гаусса), которые хотя и требуют большого объема
памяти ЭВМ, однако могут оказаться более приемлемыми, так как имеют
стандартное программное обеспечение.
Объединением рассмотренных выше расчетных моделей (сплошной и тон-
костенной) можно получить более сложную модель, например модель рас-
чета тонкостенной подкрепленной конструкции с теплозащитным покрытием
на поверхности. Процедура составления алгоритма для расчета темпера-
турного поля в такой конструкции в принципе не отличается от рассмот-
ренных. Главной особенностью объединенных моделей является значитель-
ный рост размерности задачи и соответственно потребных памяти и
быстродействия ЭВМ.
На ранних этапах проработки вариантов конструктивно-технологичес-
ких решений конструктор должен иметь возможность приближенно, но
быстро оценить тот или иной вариант по температурным режимам основных
конструктивных элементов. Особенно чувствительной к аэродинамическому
нагреву является обшивка ЛА с теплозащитным покрытием или без него.
Для этого конструктивного элемента наиболее простое приближенное ре-
шение можно получить непосредственно из уравнения теплового баланса,
если пренебречь теплоемкостью слоя покрытия и предположить, что об-
шивка термически тонкая (т.е. нет температурного градиента по ее тол-
щине), начальная температура ^0^) = 7^, абляция теплозащитного
покрытия отсутствует, а температура его поверхности в каждый момент
времени т близка к равновесной температуре ТЧт).
В этом случае уравнение теплового баланса можно представить в виде
См. Яненко Н. Н. Методы дробных шагов решения многомерных задач
Математической физики. СО АН СССР. М.: Наука „ 1967.
171
ОТ х
1 • «•*»
где г^об = Q^r| * ~ термическое сопротивление между поверх-
п
ностью и обшивкой; 7Чт) - временная функция мгновенной равновесной
температуры, определяемая из уравнения
а(т)[Г (т) - Т ] - еаГ4 = 0. (4.44)
L г р J р
Уравнение (4.43) можно решать численно по явной разностной схеме
t 17*> - £ 1 • 14451
При постоянных условиях полета (а = const, Г. - const) уравнение
(4.43) имеет аналитическое решение
Г = Т ♦ (Г - 1 1 " ех₽ I " 7------------У-*' I • <4 46>
ов ° ₽ ° ( L г^об(рс8)об JJ
позволяющее получать ориентировочное значение температуры обшивки в
любой момент времени полета.
Г л а в а 5. ПРОЕКТИРОВАНИЕ КОНСТРУКЦИЙ
КОРПУСОВ ЛА
§ 5.1. АНАЛИЗ КОНСТРУКТИВНЫХ СХЕМ
КОРПУСОВ ЛА
Корпус ЛА служит для размещения в нем оборудования, топлива, целе-
вого груза, определяемого назначением ЛА, и во многих случаях - для
расположения двигательной установки. В силовом отношении корпус явля-
ется базой - опорой для крепления крыла и органов управления. Он
представляет собой тонкостенную подкрепленную оболочку, нагруженную
распределенными и сосредоточенными силами.
Идеальной формой корпуса является тело вращения, геометрические
параметры которого зависят от числа Маха. Обычно корпус имеет цент-
172
ральную цилиндрическую часть, коническую, параболическую, оживальную
или сферическую носовую и коническую или оживальную кормовую части.
При гиперзвуковых скоростях полета (М > 5) корпус может иметь форму
конуса.
Важными безразмерными геометрическими параметрами корпуса (см.
рис.4.5) являются X = L ID - удлинение корпуса; X =
корп корп J нос
= L /D — удлинение носовой части корпуса; X = L ID - удлине-
нос корм корм
ние кормовой части корпуса; Пкорм = Did - сужение кормовой части
корпуса.
Обобщенной характеристикой корпуса является его конструктивная
схема, отражающая взаимное расположение основных силовых элементов
конструкции (обшивки, продольного и поперечного силового набора),
которые воспринимают нагрузки, действующие на корпус; их конструк-
тивное оформление; методы изготовления и соединения этйх элементов
между собой. По силовой схеме и конструкции корпус является наиболее
сложным агрегатом планера ЛА. Это объясняется разнородностью воспри-
нимаемых им нагрузок, особенностью размещения грузов и оборудования и
жесткими требованиями к использованию его объема.
Конструктивные схемы корпусов можно разделить на две группы: лон-
жеронные и моноблочные. В лонжеронных конструкциях (рис.5.1,а), сос-
тоящих из обшивки, мощных лонжеронов и слабого набора стрингеров и
шпангоутов, изгибающий момент и осевая сила воспринимаются преиму-
щественно продольными элементами, а обшивка работает на сдвиг от пе-
ререзывающей силы и крутящего момента.
Такие силовые схемы могут быть использованы в корпусах средних и
больших диаметров для приборных отсеков, отсеков для размещения целе-
вого груза. Они часто имеют различные вырезы и люки больших размеров
для подходов при монтажных и проверочных работах. Чтобы исключить
ослабление жесткости оболочки и уменьшить концентрацию напряжений в
зонах вырезов, люков, их окантовывают силовыми элементами в виде лон-
жеронов (силовых стрингеров), проходящих по всей длине корпуса (отсе-
ка). Для восприятия и передачи значительных сосредоточенных осевых
сил (например, от узлов подвески двигателя) лонжеронная схема являет-
ся наиболее целесообразной.
При больших скоростях полета возрастают потребные толщины обшивок.
Поэтому корпуса современных ЛА выполняют, как правило, по моноблочной
схеме, когда жесткая обшивка совместно с элементами каркаса воспри-
нимает все силовые факторы. В зависимости от степени подкрепления
173
обшивки стрингерами и шпангоутами различают корпуса стрингерной
(полумонококовой) и бесстрингерной (монококовой) конструкции. Рас-
смотрим особенности этих конструктивно-силовых схем.
Стрингерный корпус (рис.5.1,6, в) выполняется в виде тонкостенной
оболочки, подкрепленной стрингерами и шпангоутами. Изгибающий момент
и осевая сила воспринимаются в основном стрингерами. Обшивка, прида-
вая корпусу заданные обводы, воспринимает местные нагрузки, перерезы-
вающую силу, крутящий момент и частично осевые силы. По такой схеме
при помощи заклепочных, сварных, клеевых и клеесварных соединений мо-
гут быть выполнены хвостовые, приборные и баковые отсеки корпуса. В
последнее время в стрингерной конструкции корпуса широко применяют
монолитные прессованные или горячештампованные панели и оболочки,
когда обшивка выполняется заодно с силовым набором.
При работе стрингерного корпуса обшивка может потерять устойчи-
вость при сжатии осевой силой или изгибающим моментом. Однако это еще
не означает разрушения конструкции, ибо продолжают работать стринге-
ры. Разрушение наступит при потере прочности или устойчивости стрин-
герами.
Разновидностью стрингерной схемы являются вафельные конструкции
(рис.5.1,г), под которыми понимают конструктивно-ортотропные оболочки
с часто расположенным подкрепляющим набором, изготовленным заодно с
Рис. 5.1. Конструктивно-силовые схемы корпусов:
а ~ стрингерно-лонжеронная; б, в — стрингерная; г — вафельная; д
однослойный монокок; е — многослойный монокок
174
обшивкой. Такие оболочки обеспечивают снижение массы по сравнению с
гладкими в 1,5...2 раза; критическая нагрузка вафельной оболочки в
2,25...4 раза больше, чем равной ей по массе гладкой оболочки.
Вафельные конструкции могут быть изготовлены штамповкой, химичес-
ким травлением, механическим и электроимпульсным фрезерованием. От
способа и точности изготовления сильно зависит массовое совершенство
конструкции. Применение вафельных оболочек ограничивается технологи-
ческими возможностями и предельными механическими свойствами конст-
рукционного материала. При сравнительно малых нагрузках и небольших
габаритах оболочки расчетные размеры стенки и ребер, расстояние между
ребрами могут оказаться меньше некоторого технологического предела,
т.е. выполнение таких размеров практически невозможно. Поэтому они
находят применение в основном на ЛА с большим диаметром корпуса (топ-
ливные баки, переходные отсеки и др.).
Самые простые по конструкции - бесстрингерные корпуса из однород-
ного металлического или неметаллического материала. Они состоят лишь
из двух элементов: обшивки и шпангоутов (рис.5.1,д). Причем во многих
случаях шпангоуты используются только для стыковки отсеков корпуса, а
нормальные шпангоуты оказываются излишними. Все силовые факторы (по-
перечные силы, изгибающий и крутящий моменты) воспринимает обшивка,
т.е. на нее перекладываются функции стрингеров (лонжеронов). Обшивка
может быть изготовлена из листа, литьем вместе со шпангоутами или ме-
тодом прессования. В настоящее время находят применение отсеки корпу-
сов из различных неметаллических материалов. Их изготавливают намот-
кой или методом прессования в разъемных пресс-формах.
Основное применение такие конструкции находят на автоматических ЛА
малых калибров. Это объясняется тем, что с увеличением диаметра D
критические напряжения оболочки = 0,6E5^/D уменьшаются. При
больших значениях D материал такой конструкции работает с невысокой
отдачей и ее масса растет. Поэтому при больших диаметрах переходят к
другой силовой схеме.
Более высокой несущей способностью (при той же массе) обладают
бесстрингерные конструкции с многослойной обшивкой (рис.5.1,е). Обыч-
но применяют трехслойные обшивки, состоящие из двух разнесенных тон-
ких несущих слоев из прочного материала (металла или пластика), сое-
диненных между собой сравнительно малопрочным, но легким заполните-
лем. В качестве заполнителя используются пенопласты и ребристые
конструкции - соты, гофры из пластиков, алюминиевой или стальной
фольги и др.
175
Достоинствами трехслойных конструкций являются их высокая жест-
кость, гладкая поверхность (следовательно, малое аэродинамическое
сопротивление), хорошие теплозащитные свойства, низкая масса. По
сравнению с наборными (каркасными) конструкциями выигрыш в массе мо-
жет достигать 15 и даже 20 %. Однако по надежности и технологичности
они пока еще уступают наборным конструкциям.
Особое место в конструкции корпуса занимают носовые антенные обте-
катели. Внешне - это очень простые конструкции, а по существу - наи-
более сложные, поскольку они должны удовлетворять весьма противоречи-
вым требованиям. Действительно, высокие скорости полета требуют, что-
бы обтекатели имели хорошую аэродинамическую форму, большое удлине-
ние, но такая форма не удовлетворяет требованиям, предъявляемым бор-
товыми радиолокационными станциями и тепловыми головками самонаведе-
ния. Также противоречивы требования прочности и радиопрозрачности,
технологии и прочности и т.д. К этому нужно добавить и то, что усло-
вия работы носовых обтекателей - самые экстремальные. В числе опасных
воздействий:
тепловой удар - аэродинамический нагрев с очень высоким градиентом
температуры по времени, следствием чего является возникновение темпе-
ратурных напряжений в конструкции, а также изменение электрических
свойств материала обтекателя;
эрозия обтекателя - постепенное разрушение внешней поверхности
вследствие плавления, сублимации и уноса материала стенки обтекателя
при значительном аэродинамическом нагреве, а также при полете сквозь
полосу осадков (даже с умеренными скоростями) вследствие воздействия
дождевых капель, снега или града;
электризация внешней поверхности обтекателя вследствие трения с
атмосферой, что нарушает нормальную работу бортовой радиолокационной
станции (из-за импульсных разрядов);
проникновение влаги во внутрь, обледенение обтекателя, что
приводит к ухудшению радиотехнических характеристик антенн.
В идеальном случае обтекатель не должен вносить искажений в поле
электромагнитной волны, излучаемое или принимаемое антенной. Но это
нереально, стенка обтекателя неизбежно вносит амплитудные и фазовые
искажения в параметры проходящих волн. Речь, следовательно, может
идти лишь о нахождении компромиссного решения при удовлетворении тре-
бований аэродинамики, теплофизики и прочности и обеспечении соответ-
ствующих физико-химических свойств конструкционных материалов и
радиотехнических характеристик. Именно по этой причине проектирование
и изготовление обтекателей, несмотря на кажущуюся простоту конструк-
176
тивно-силовой схемы, является более сложной задачей по сравнению с
проектированием и изготовлением других ’’сухих” отсеков корпуса ЛА.
Для эффективного прохождения электромагнитной энергии антенные
обтекатели изготавливаются из радиопрозрачных диэлектрических мате-
риалов с высокими прочностными характеристиками. Наибольшее примене-
ние в настоящее время получили стеклопластики, керамопластики и
керамические материалы. Каждый из этих материалов рационален для
конкретного класса ЛА. Достоинством стеклопластиков является высокая
механическая прочность; они эффективно работают при умеренных
скоростях полета при температурах до 300...350 °C. Приблизительно
одинаковые коэффициенты линейного расширения позволяют сравнительно
легко соединять стеклопластики с металлами. Недостатками стеклоплас-
тиков являются большой разброс, нестабильность и значительное сниже-
ние при нагреве физико-механических и диэлектрических характеристик.
Изготавливаются обтекатели из стеклопластиков следующими, методами:
автоклавным, прямого прессования, вакуумным, пропитки под давлением.
Керамопластиковые обтекатели обладают лучшей стойкостью к эрозии,
более высокой прочностью соединения с металлом: их температурный диа-
пазон эффективного применения также более широкий - до 700... 1000 °C.
Однако их электрические характеристики по своей стабильности намного
уступают керамическим материалам. Обтекатели из керамопластиков изго-
тавливаются методом литья под давлением с большой точностью, почти не
требующей механической обработки.
Для высокоскоростных ЛА в настоящее время широко внедряются обте-
катели из окисной керамики, ситаллов, нитридов бора и кремния. Эти
материалы обладают высокой термостойкостью и стабильностью диэлект-
рических характеристик при очень высоких температурах (ситаллы - до
1200... 1400 С, кварцевая керамика - до 3000 С), достаточной
устойчивостью к радиации, пылевой и дождевой эрозии. Достоинством
керамических и стеклокристаллических материалов является незначитель-
ное (близкое к нулю) влагопоглощение; такие обтекатели сохраняют свои
радиотехнические характеристики в любых погодных условиях без
применения влагозащитных покрытий. Но они имеют очень низкую пластич-
ность и ударную вязкость. Поэтому проектирование, изготовление и
эксплуатация антенных обтекателей из таких материалов сопряжены с
определенными трудностями.
Практически для всех обтекателей их конструктивное исполнение оп-
ределяют три основные зоны: радиопрозрачная (или инфракраснопрозрач-
ная) оболочка различной формы (коническая, параболическая, оживаль-
177
I
ная, полусферическая и др.); наконечник обтекателя и узел стыкрвки
оболочки со смежным отсеком корпуса. i
Радиопрозрачные оболочки выполняют однослойными или многослойными.
Однослойные оболочки проще по конструкции и технологичнее. Такие
оболочки подразделяются на тонкостенные, когда толщина стенки 5 зна-
чительно меньше длины волны в свободном пространстве (8 = (0,05...
0,1)XQ), и толстостенные с толщиной стенки, равной или кратной полу-
волне радиоизлучения. Преимуществами тонкостенных обтекателей являют-
ся слабое влияние 5 на радиотехнические характеристики, высокая ра-
диопрозрачность в широком диапазоне частот, малая чувствительность к
углу падения электромагнитной волны, недостатками - низкая механичес-
кая прочность и хрупкость. Если бортовая радиолокационная станция ра-
ботает в сантиметровом диапазоне с длинами волны порядка 3 см, то
требуемая толщина стенки обтекателя оказывается всего лишь
1,5...3 мм, что обычно не удовлетворяет требованиям прочности. В дли-
нноволновой части сантиметрового диапазона (XQ = 8... 10 см), когда
5 = 6...8 мм, такие оболочки могут успешно использоваться. Однако для
обтекателей с однослойной стенкой чаще всего применяются полуволновые
оболочки.
Многослойные оболочки, как правило, более легкие по сравнению с
однослойными. Их стенки выполняют из двух, трех и более слоев. Наибо-
лее простая двухслойная конструкция с несущим тонким наружным слоем и
поддерживающим толстым внутренним слоем из пористого материала типа
пеностекла. Внутренние слои выполняют две функции: обеспечивают проч-
ность и жесткость оболочки и улучшают (согласовывают) электрические
характеристики обтекателя.
Производство многослойных обтекателей - трудоемкая и сложная тех-
нологическая операция, так как необходимо формовать и подгонять друг
к другу сразу несколько оболочек сложной конфигурации, к тому же из
разнородных материалов. Надежное сочленение этих оболочек с сохране-
нием электрической однородности стенки не менее сложная техническая
задача.
Стремление повысить прочность и жесткость оболочки обтекателя
(особенно из керамических материалов) вызвало появление конструкций с
жестким металлическим каркасом, который воспринимает основную нагруз-
ку. При рациональном выборе формы ребер каркаса, их размеров и взаим-
ного расположения можно достаточно эффективно скомпенсировать их
влияние на характеристики поля проходящих через обтекатель радио-
волн. При полной замене диэлектрического обтекателя металлическим ра-
178
диопрозрачность обеспечивается системой специальным образом подобран-
ных излучающих щелей различной формы: прямоугольной, круглой, кресто-
образной и т.п. На рис.5.2 приведены примеры обтекателей со стенками,
усиленными металлическим каркасом (а, б), и обтекателя с цельнометал-
лической стенкой (в).
Наличие наконечника / из металла или другого прочного материала в
обтекателе связано с предохранением его от расслаивания и разрушения
набегающим потоком. Зачастую это связано и с технологическими труд-
ностями получения замкнутой остроконечной оболочки вращения, а иногда
и с необходимостью установки в носовой части корпуса приемника воз-
душного давления. Один из вариантов конструктивного оформления носка
показан на рис.5.3.
Передняя торцевая часть оболочки / с целью снижения в ней концент-
рации напряжений охватывается металлическим наконечником 3 через
упругую прокладку 4. С помощью конической втулки 2 создается поджи-
мающее усилие за счет затяжки гайки 6 и тарельчатых пружин или пру-
жинных шайб 5 тарировочным ключом. Применение отдельного носка там,
где оно не вызывается особыми требованиями, нежелательно. Его наличие
нарушает цельность оболочки обтекателя; на стыке с носком в оболочке
возникает концентрация напряжений от внешних аэродинамических на-
грузок.
Наиболее ответственным и опасным элементом обтекателя при восприя-
тии внешних силовых факторов является его оболочка, особенно из
хрупких материалов на основе керамики. Поэтому в конструкции обтека-
теля должны быть предусмотрены специальные меры, обеспечивающие его
нормальное функционирование при наземной эксплуатации и в полете. Это
относится прежде всего к соединениям керамических оболочек с металли-
ческими шпангоутами. При существенно различных коэффициентах темпера-
Рис. $.2. Конструктивные схемы армиро-
ванных обтекателей
/
Рис. 5.3. Конструкция носка
обтекателя
179
турного линейного расширения а будет иметь место значительная разница
в деформациях этих двух элементов, что может повлечь за собой возник-
новение температурных напряжений вплоть до разрушающих, если не пре-
дусмотреть специальные меры. В частности, очень эффективно применение
для шпангоутов специальных металлических сплавов с а, близким к а
керамики.
Нежелательны резкие перепады толщины керамической оболочки. Из-за
низкого коэффициента теплопроводности они приводят к градиенту темпе-
ратуры и, как следствие, температурным напряжениям и неоднородности
по радиопрозрачным свойствам. Надо стремиться к тому, чтобы темпера-
турное поле по образующей и по периметру обтекателя было по возмож-
ности примерно постоянным.
В конструкциях хрупких оболочек должны быть исключены концентрато-
ры напряжений, особенно в сильно нагруженных сечениях. Опасными кон-
центраторами напряжений являются болтовые и винтовые соединения лю-
бого типа. Для керамических оболочек такие соединения неприемлемы.
Концентрация напряжений в хрупкой оболочке значительно уменьшается,
если ее торец свободен от нагрузок. Тогда напряжения, обусловленные
действием края шпангоута, рассредотачиваются на более обширную зону.
Конструктивно свободный торец реализуется в виде напуска, т.е. про-
должения оболочки за торец шпангоута в сторону второго отсека
корпуса.
Возможная конструкция соединения хрупкой оболочки со стыковым
шпангоутом, реализующая указанные выше требования, показана на
рис.5.4. Оболочка / со стыковым шпангоутом 3 соединяется через проме-
жуточное кольцо 2, изготавливаемое из сплава с температурным коэффи-
циентом линейного расширения, близким к соответствующему коэффициенту
у хрупкого материала. Для снижения концентрации напряжений кольцо 2,
приклеенное к оболочке / эластичным клеем 8, имеет уменьшающуюся к
переднему краю толщину. Шпангоут 3 изолирован теплозащитным покры-
тием 4. Имеется напуск оболочки 1 над кольцом 2 перед шпангоутом 3,
т.е. применен принцип свободного торцевого сечения. Жесткое защемле-
/ Z J 4
Рис. 5.4. Конструкция узла стыковки обтекателя со смежным отсеком
180
Рис. 5.5.
J 4 s
в
Конструкции соединений сферических обтекателей со смежными
отсеками
ние оболочки по ее торцу в эоне шпангоута 3 исключено за счет зазора
и упругих шнуров 7. Герметизация стыка выполнена с помощью герме-
тика 6.
Примеры конструктивных решений по сочленению сферических обтекате-
лей, защищающих инфракрасные тепловые головки, со смежными отсеками
корпуса ЛА показаны на рис.5.5. На рис.5.5,а теплопрозрачный обтека-
тель / по своей цилиндрической поверхности посажен на клею 2 в корпус
3 из стеклопластика или керамического материала. Рис.5.5,б иллюстри-
рует обтекатель /, вмонтированный в металлическую конструкцию 3 при
помощи завальцовки. Герметизация соединения обеспечивается герметиком
2. На рис.5.5,я показано более сложное сочленение обтекателя / с кор-
пусом 5 из нематаллического материала. Промежуточное металлическое
кольцо 2 завальцовывается по обтекателю и в специальное углубление
корпуса. Пылевлагонепроницаемость обеспечивается герметиком 4 и
уплотнительной прокладкой 3.
§ 5.2. ИНЖЕНЕРНЫЕ МЕТОДЫ ПРОЕКТИРОВАНИЯ
БЕССТРИНГЕРНЫХ КОРПУСОВ
5.2.1. Расчетная модель
Конструктивное оформление отсеков корпусов, как показано в преды-
дущем параграфе, отличается большим разнообразием. Расчетная модель
на этапе формирования опорных вариантов - это модель первого прибли-
жения, учитывающая главные, наиболее характерные особенности конст-
рукции. Для бесстрингерных конструкций отсеков корпуса этому требова-
нию соответствует расчетная схема в виде гладкой цилиндрической обо-
лочки, подкрепленной стыковыми шпангоутами фланцевого типа с точечны-
ми узлами стыковки (рис.5.6). Эта же расчетная схема может быть рас-
181
рузки стыковые шпангоуты изгибаются
Рис. 5.6. Расчетная модель
отсека корпуса
пространена на телескопичес-
кие стыки, а также применена
для приближенного анализа
стрингерных корпусов.
Основная расчетная нагруз-
ка - изгибающий момент и осе-
вая сила, причем изгибающий
момент обычно превалирует.
Под действием указанной наг-
и закручиваются. При этом в обе-
чайке отсека возникает плоское напряженное состояние, обусловленное
изгибом шпангоута, и напряженное состояние типа краевого эффекта,
обусловленное закручиванием шпангоута. Напряжения, обусловленные за-
кручиванием шпангоута, можно существенно уменьшить, применив в ка-
честве стыковых шпангоуты двутаврового поперечного сечения, имеющие
вертикальную стенку в виде гофрированной поверхности, описываемой
функцией полярной координаты, подобранной из условия минимума угла
закручивания сечения шпангоута.
Компоненты плоского напряженного состояния в обечайке зависят от
соотношения изгибной жесткости шпангоута и жесткости обшивки на рас-
тяжение-сжатие (а в случае применения в конструкции отсека обечайки
переменной толщины и от параметров, характеризующих закон изменения
толщины). Максимальные напряжения (концентрации напряжений) в стыко-
вом шпангоуте и в обечайке отсека будут возникать в окрестности наи-
более нагруженного болта. Эти напряжения зависят от жесткостных ха-
рактеристик стыка и силы Р ; на них практически не оказывают влия-
тах
ния силы, приложенные к остальным болтам. Поэтому для упрощения рас-
четов можно считать стыковой шпангоут загруженным периодической сис-
темой сосредоточенных сил Р , определяемых выражением
max
бМ и - <рл - tg</> л *
П нз 0 0 „ . 2 0
Р - ~П— Z-----------------—------2sm -— . (5.1)
max Dn 2tg^ - sin2^ 2
Здесь - угловая координата нейтральной линии сечения (см.
рис.5.6), определяемая из уравнения
182
W»o £ (“да .f„, - 1 ] • <S-2>
шп К 6 J
где h* - ширина кольца, по которому происходит контакт стыковых
шпангоутов соседних отсеков; D - диаметр окружности, на которой
расположены болты стыка; л - число болтов; Е&, - модули упругости
материалов болтов и шпангоутов соответственно; F - площадь сечения
б
болта.
Стыковые шпангоуты передают сосредоточенные силы на обечайку в ви-
де распределенной нагрузки. Рациональная конструкция отсека должна
быть такой, чтобы распределение напряжений в обечайке по окружности
было бы близко к равномерному. В коротких отсеках стрингеры как сред-
ство передачи продольных сосредоточенных сил малоэффективны. В таких
отсеках для уменьшения концентраций напряжений имеет смысл применять
стыковые шпангоуты с относительно большой жесткостью на изгиб в на-
правлении прямой, перпендикулярной к соприкасающейся плоскости шпан-
гоута. Следовательно, для обоснованного выбора конструктивных пара-
метров требуется выявить уровень концентрации напряжений в окрестнос-
ти наиболее нагруженного болта.
Чтобы получить достаточно простое и точное решение, приемлемое для
практического использования, следует выбрать математическую модель,
позволяющую определять концентрации напряжений в отсеке ЛА, подкреп-
ленном стыковыми шпангоутами. Для подобных целей приемлемы модели: 1)
плоского напряженного состояния пластины с подкрепленным краем, на-
груженным циклической системой сосредоточенных сил; 2) подкрепленной
торцевым шпангоутом цилиндрической оболочки с недеформируемым конту-
ром и 3) полубезмоментной и моментной цилиндрических оболочек.
Анализ числовых данных, проведенный для этих моделей, показывает,
что максимальные напряжения, вычисленные на основе различных вариан-
тов теорий оболочек, с погрешностью порядка 10 % совпадают с макси-
мальными напряжениями, вычисленными при помощи 1-й и 2-й моделей, во
всем практически важном диапазоне жесткостей шпангоута. Эта погреш-
ность обусловлена неучетом изгибных напряжений в обечайке отсека,
возникающих вследствие закручивания сечений шпангоута.
Таким образом, если пренебречь изгибными напряжениями в обечайке
(а их уровень, как указывалось выше, может быть значительно снижен
подбором» рационального сечения шпангоута), то при определении макси-
мальных напряжений в отсеках, нагруженных изгибающим моментом, допус-
183
тимо заменять реальный отсек идеализированной расчетной схемой, пред-
ставляющей собой плоскую пластину с подкрепленным краем, который на-
гружен циклической системой сил, равных максимальной растягивающей
силе, действующей на стыковой шпангоут.
Приведем постановку задачи и окончательные результаты для
выбранной модели.
Как известно, плоское напряженное состояние описывается:
а) бигармоническим уравнением относительно функции напряжений
= о, (5.3)
где
2
Л
а = —т"; °
‘ э? *
б)
а/ ’
соотношениями Коши,
.2
Э ф
т = - ;
ху bxby
(5.4)
связывающими деформации и перемещения,
- а« _ Эр _ ди Эр
ех ~ Эх ’ *у ~ ду ’ Уху ~ ду Эх ’ ' ' ’
где а, р - перемещения в направлениях осей х и у.
в) законом Гука, связывающим деформации и напряжения,
I I 11 • *,rw
ех = -'V 'у ‘ ^у--------Ё---- <5 И
Уравнение изгиба балки можно представить в виде
d4 р
Е I —Н12-------Г(х) ♦ q(x), (5.7)
шп шп
где Т(х) - функция внешней нагрузки; q(x) - реакция взаимодействия
балки и пластины.
Так как внешняя нагрузка Т(х) - периодическая с периодом, равным
шагу болтов, то естественно отыскивать решения этой системы в виде
рядов Фурье по координате х. Подставляя разложения всех искомых функ-
ций и внешней нагрузки в систему уравнений (5.3)...(5.7), получим
систему обыкновенных дифференциальных уравнений относительно коэффи-
циентов разложений, построение общего решения которой не представляет
особого труда.
Для определения произвольных констант интегрирования следует
184
воспользоваться граничными условиями и условиями "склейки” решений
по линии контакта пластины и балки. В системе координат, связанной с
балкой, можно записать:
при у = оо о(х, оо) = —--
У об
при у = 0 о (х, 0) = ; v = 1>0; и = 0,
об
(5.8)
(5.9)
где t - шаг болтов; 5 - толщина обечайки,
об
После выполнения всех необходимых преобразований окончательное ре-
шение можно представить в виде
а
х
о t8
X об
2Ц- (t
д* Е
л- 1
2я
-улу
3 ~ *
1 ♦ х«
in
совл у-ж; (5.10)
о
У
о /5
У об =
1 * Е
л- 1
Л ч 2тг
2 ♦ (1 ♦ д)л —у
i 3 е
1 ♦ хп
2тг
t V 2тг /г
совл —х\ (5.11)
т
ХУ
оо 1 - д - (1
Е
л- 1
д)л т~у -
з е
• ♦ Xя
2п
t У . 2п /с ,о.
siflfl -j—х, (5.12)
где
х = 4я3(3 - д)(1
* д)
Е I
шп шп
Е S ?
об об
(5.13)
т (8 *
_ xy об
Отсюда следует,
значений при у = 0;
что нормальные напряжения достигают максимальных
х = kt (k = 0. ± 1. ± 2 ...):
-max -max , o _ л
о , = о = 1 ♦ 2 Е ------------—.
у об , , 3
’ Л- * х”
(5.14)
185
Максимальные напряжения, действующие в балке, моделирующей работу
шпангоута, определяются по формуле
_ . оо
-max _ 1 Pl — П
^шп 2 W * 3
2я Л- 1 1 ♦ \П
(5.15)
Наличие рядов в выражениях (5.14), (5.15) создает вычислительные
трудности при параметрическом анализе результатов. Более удобные
зависимости можно получить на основе асимптотического представления
рядов в этих выражениях при помощи теоремы Коши о вычетах для вспомо-
гательных функций комплексного переменного
(5.16)
Применив эту теорему для правой полуплоскости комплексной перемен-
ной z, в которой сумма вычетов вспомогательных функций f^z) и f^(z)
оо
в полюсах z = k есть соответственно суммы членов рядов 2 ------—и
л-1 1 ♦ хп
оо
Я
S -------—, можно получить
п-1 1 * х"
max ..
а /3
-max об об 4 43 Я 1 2,44 /г-
%. р-------------—5—
*х *х
max.- .2 -
о *5 гт^ t 6 ____
-щах шп об М3 об Зг~^
’шл Р------------• (518)
где Е^, д, 5^ - модуль упругости, коэффициент Пуассона и толщина
обечайки соответственно; W - момент сопротивления сечения шпангоута.
5.2.2. Определеже конструктшшх параметров корпуса
Проектирование конструкций, как известно, является задачей ’’внут-
реннего" проектирования, когда общие геометрические параметры и ком-
поновочная схема ЛА уже определены. Искомые конструктивные параметры
для бесстрингерного корпуса на этом этапе представляют собой геомет-
рические и массовые характеристики стыковых шпангоутов и обечайки. В
186
качестве критерия для их определения целесообразно принимать массу
отсека
т = т ♦ т = 4irR(F р ♦ 5 Lp ), (5.19)
отс шп об шп шп об об
где т , т ~ - массы стыковых шпангоутов и обечайки соответственно;
шп об
R - радиус отсека корпуса; F^ ” площадь поперечного сечения
шпангоута; р^, р^ - плотности материалов шпангоута и обечайки
соответственно; L - половина длины отсека.
Оптимальные параметры конструкции отсека соответствуют минимуму
т при соблюдении условий прочности для обечайки отсека
отс
<ГХ < (5.20)
об об
и шпангоута
а™ < арвз₽ . (5.21)
ШП шп
а также условия устойчивости обечайки
а™х < о , (5.22)
об кр
где а - критическое напряжение.
Найдем сначала минимум суммарной массы отсека без учета ограниче-
ния по устойчивости. Для удобства дальнейшего изложения перейдем к
безразмерным величинам:
_ т ____ ________
т = —2—— = р F ♦ 8 L. (5.23)
4яЯ Р л
ОО
Здесь
Р = р /р F = F Н?-, 8 = 6 /R; L = L/R. (5.24)
шп об шп об
Подставляя в (5.20) выражение (5.17) с учетом (5.13) и переходя к
безразмерным величинам, получим условие прочности для обечайки
5 0,193 (5.25)
’ Е I
187
Здесь Р = Р /(а₽аз₽/?2) - безразмерная сила, приложенная к
max об
максимально нагруженному болту; Е = “ редукционный коэффи-
циент; / = - безразмерный момент инерции сечения шпангоута.
Сравнивая максимальные нормальные напряжения с разрушаемыми для
материала шпангоута, получаем условие прочности для шпангоута
.3
в > 1,56’10 3 Е
lo W
разр
(5.26)
где
= ораз₽/араз₽ ; W = W/R.
об
а
разр шп
Обозначив
W = I /h ; Л = Л /Я; 7 = F 7®; 7 = i/R, (5.27)
ШП ШП шп шп шп шп
где - строительная высота сечения шпангоута, a I - радиус
инерции поперечного сечения шпангоута, условия (5.25) и (5.26) можно
представить в виде
, -=3 >.0.5
б > 0,193 [ 7-7-I 7-; (5.28)
1 Е F J i
8 > 1,56’10 3
(5.29)
Рис. 5.7. Область допустимых по прочности
значений параметров F, S:
I — условие прочности обечайки; П — усло-
вие прочности шпангоута
188
Неравенства (5.28) и (5.29) на плоскости F, 5 определяют область
допустимых по прочности значений параметров F и 6 (область £2,
рис.5.7). Эта область ограничена кривыми
« = AF °’5; (5.30)
8 = BF '2, (5.31)
где - 3 - 3 -
р1.5 Р3Л3£
Л = 0,193 ! - В = 1,56-10 л , ш"—. (5.32)
В 0,5 V *т 4 3
Е i la
разр
Решив систему (5.30), (5.31), найдем координаты точки излома
границы области Я
(5.33)
(5.34)
В дальнейшем при определении минимальной массы отсека будем варьи-
ровать только параметры F и 6. Строительная высота сечения шпангоута
Лщп задается из конструктивно-технологических соображений; для типо-
вых отсеков каждого класса ЛА ее можно считать постоянной. Редукцион-
ные коэффициенты £ и а для применяемых конструкционных материалов
(алюминиевых и магниевых сплавов, стали, титана, бериллия) могут при-
нимать несколько дискретных значений. Для каждой пары конструкционных
материалов оптимизацию следует проводить отдельно. Значение радиуса
инерции сечения шпангоута i того же порядка, что и половина строи-
тельной высоты сечения шпангоута (для сечений, близких к двух-
поясному, они практически совпадают).
Так как критериальная функция т, определяемая выражением (5.23),
монотонно возрастает по переменным F и 8, то минимум функции т будет
достигаться при значениях F и 8, принадлежащих границе области Я.
I
Следовательно, для нахождения минимума функции т внутри области Я
189
Рис. 5.8. Определение условного
экстремума массы отсека
необходимо найти условные экст-
ремумы т при условиях (5.30) и
(5.31) и значение т в точке из-
лома границы области Q, а затем
из этих трех значений выбрать
наименьшее. _______
Значение функции m(F, 6) в
точке (F , 8 ) соответствует
равнопрочной конструкции, так
как в этой точке выполняются
условия прочности и для шпанго-
ута, и для обечайки. Подставив выражения (5.33) и (5.34) в (5.23),
получим формулу для безразмерной массы равнопрочной конструкции
= Р
рп
0,0402 ^-е-
а
разр
г ,2 Т -
h La
+ 0>965 _ Р*3Р
i h Е
ШП
(5.35)
Условные экстремумы функции т при условиях (5.30) и (5.31) можно
искать методом неопределенных множителей Лагранжа. При этом возможны
случаи, когда экстремум будет достигаться в точках кривых I и П,
лежащих ниже границы области Q (см. рис.5.7). В этих случаях условный
экстремум очевидно будет совпадать со значением функции т в точке
(F*, 8*).
Поскольку функция т в трехмерном пространстве т, 8, F представляет
собой плоскость, то отыскание условного экстремума удобно производить
следующим образом. Проведем в плоскости т семейство горизонталей
(рис.5.8). Уравнение проекции этого семейства на плоскость 8, F будет
иметь вид
р F * L 8 = С.
(5.36)
Пусть С - такое значение произвольного параметра С, при котором
соответствующая прямая этого семейства касается границы области Q. В
зависимости от значения отношения р/I касание может происходить в
190
трех точках: а) в точке А, лежащей на кривой I; б) в точке излома
границы В; в) в точке Д9 лежащей на кривой П.
Рассмотрим эти случаи.
Случай а соответствует условному экстремуму функции (5.33) при
условии 8 = AF °’5. Согласно методу неопределенных множителей
Лагранжа будем искать безусловный экстремум функции
Ф = рГ + 1в + Х(в-ЛГ ’°-5). (5.37)
Приравнивая нулю частные производные функции Ф по F, 8, X, получим
систему трех уравнений относительно неопределенного множителя X и
оптимальных параметров 5 , F
ОПТ опт
ЭФ - ХЛ = -1.5 л
— = Р * Т-Р = 0:
3F 2
^=1 + Х = 0;
95
(5.38)
- V 0 5 - о.
оЛ
Ее решение будет
X = - L;
F = 0.21Р
опт
-.2/3
_L_ g -1/3 .
I Р
(5.39)
6 = 0.421Р
ОПТ
1
7 2/3.1/3
I I*
Подставив (5.39) в (5.23). получим формулу для массы отсека,
определенной по критерию минимума массы при выполнении условия
прочности для обечайки
191
т = 0.631Р
опт
2
1/3
(5.40)
Интересно отметить, что для оптимального отсека отношение масс
стыкового шпангоута и обечайки
т pF
_ _2"т = 0,5, (5.41)
nt Li
об опт
что хорошо совпадает с результатом В.П. Соколова ^т1Ш/тоб = 0*44).
полученным для шпангоута двухпоясного сечения.
Случай 6t как было отмечено выше, соответствует равнопрочной кон-
струкции. Из рис.5.8 следует, что этот случаи будет реализовываться
тогда, когда значение тангенса угла наклона проекции горизонтали
плоскости т на плоскость 6, F будет заключено между значениями тан-
генсов углов наклона касательных к кривым I и П в точке В(Ъ , F ),
т.е.
а 3 -2 - а 3 -2
48,75 TV > ?"> 12 “Г- (5.42)
£ 2 Л 3 L Е2 h 3
ШП шп
Отсюда получаем ограничение, накладываемое на длину отсека L,
при которой параметры отсека следует выбирать по критерию равно-
прочное™
Р 2 - Л 3 _ р 2 - Л 3
0,02 < L < 0,083 ^-—£- . (5.43)
- 3 7 2 - 3 т 2
0 1 at
разр разр
Количественный анализ ограничений (5.43) показывает, что для
реальных соотношений параметров L, , /, £, р, проектировать
отсек по критерию равнопрочное™ стыкового шпангоута и обечайки не
следует. Равнопрочный отсек, как видно из (5.35) и (5.40), получается
192
перетяжеленным по сравнению с отсеком, параметры которого выбраны по
критерию минимума массы. Отношение масс этих отсеков определяется
выражением
т- ч2
г - Л - а
______ Ь Р шп , I разр
0,0637 ♦ 1,53 ------_
т а 2 i ft Е
= _________________________________________ /5 дл)
m /Т/ТЛ/З-/BJ/3 ’ '
опт (L/Z) (р/Е)
где т , т - массы равнопрочного и выбранного по критерию минимума
рп опт
массы отсеков соответственно.
Если материалы шпангоута и обечайки одинаковы, а поперечное
сечение шпангоута близко к двухпоясному (т.е. « /), то из (5.44)
получим
т
-E!L_
т
опт
0,637 . 1.53L//I
----- ом ШП 8 ‘-53
(L/ft )2/3
шп
.1/3
L
. Л
шп
(5.45)
Для реальных конструкций величина L меняется в пределах от 0,5 до
4, а Л - от 0,1 до 0,12, следовательно,
ШП
т /т = 1,6...3,4. (5.46)
рп опт
Случай в, соответствующий минимально возможной прочности шпангоу-
та, принципиально не отличается от рассмотренного случая б. Здесь
даже более высокий уровень концентрации напряжений в оболочке и, как
следствие, большая масса отсека.
Общий вывод состоит в том, что параметры конструкции отсека следу-
ет определять по критерию минимума массы, ориентируясь на минимальный
запас прочности оболочки. При этом напряжения в шпангоутах нужно сни-
жать, т.е. проектировать их перетяжеленными. Использование в конст-
рукции шпангоута высокопрочных материалов, как правило, нецелесо-
образно. Масса равнопрочной конструкции отсека, параметры которой
определяются из условия равенства максимальных и допускаемых напряже-
ний для шпангоутов и оболочки, получается завышенной в несколько раз
7 - 880 193
шп шп
Рис. 5.9. Зависимость коэффициента за-
паса прочности шпангоута от конструк-
ционных параметров отсека
по сравнению с массой отсека, парамет-
ры которого определяются по критерию
минимума массы.
Коэффициент запаса прочности для
шпангоута, как следует из (5.18) и
(5.39), определяется выражением
1/3
(5.47)
где
а
и = __ЕШ_____
ТГ2/3 —1/3
с р
(5.48)
Зависимость коэффициента 17 от приведенной длины отсека для
различных значений конструкционного параметра Н, связывающего геомет-
рические, прочностные и жесткостные характеристики шпангоута, приве-
дена на рис.5.9.
5.2.3. Учет потери устоЛчивоста
Как известно, тонкостенные оболочечные конструкции часто выходят
из строя не из-за нарушения условий прочности, а из-за потери устой-
чивости. Критические напряжения, т.е. напряжения, при которых цилинд-
рическая оболочка теряет устойчивость при осевом сжатии, определяются
по формуле
Е8 .
сж . об ...
а при действии изгибающего момента -
194
Е6 л
% = k2 IT-' <5 М>
где * = 0,24...0,35; k? = 0,3.
При совместном действии изгибающего момента и осевого сжатия усло-
вие потери устойчивости может быть записано в виде формулы П.Ф.
Папковича
сж из
+ ° деЯст = ,
СЖ из
а а
кр кр
Если принять = 0,3, то эта формула примет вид
а .
дейст
Е* А
=03
к
(5.52)
Здесь стдеЛст _ суммарные сжимающие напряжения от действия осевой
сжимающей силы N* и изгибающего момента М^. Их можно определить
приближенно по формуле
м
из
а =---------------
лейст nR28
об
N
х
2irRS
об
где
к = N R/M .
X из
(5.53)
Подставляя (5.52) и (5.53)
получим
в ограничение по устойчивости (5.22),
(5.54)
Ограничение (5.54) сужает область допустимых значении параметров
F и 6 (область Q). Как видно из рис.5.10, если 6 < б , то
уст опт
явление потери устойчивости в оптимальном отсеке отсутствует. Отсюда
с учетом (5.1) и (5.39) получаем условие применимости критерия (5.40)
195
4М -к
из
2М ♦ к
ИЗ
(5.55)
Здесь
М
из
м
из
Е R3
О б
Е
1,735 ——
об
—2
I
1/3
л 1/3
Е
а =
Р
Неравенство (5.55) выявляет две области, первая из которых
М > 0,25к (5.56)
из
соответствует применимости условия (5.54), а вторая
М > т—(4к ♦ а ♦ 124ак ♦ а ) (5.57)
из 16
соответствует условию (5.40) (при котором потерю устойчивости
учитывать не нужно).
График зависимости Л4^(к/а), определяемой выражением
М = — * 1 ♦ J 24 — * 1 1 , (5.58)
из а 16 I a a J
Рис. 5.10. Область допустимых
по прочности и устойчивости значений
параметров F, 5:
I — условие прочности обечайки; П — условие прочности шпангоута;
Ш — условие устойчивости обечайки
Рис. 5.11. Области применимости различных критериев оптимизации
196
приведен на рис.5.11. Эта кривая является границей области значений
нагрузок и N*t при которых результаты предыдущего параграфа
справедливы.
При отсутствии продольной силы (к = 0) получаем предельное значе-
ние изгибающего момента, до которого можно пользоваться формулами
(5.39), (5.40), (5.47):
М = а/8. (5.59)
из
В случае 6 > 6 т.е. при
уст ОПТ
М < т—(4к ♦ а + 1 24ак * а2 ), (5.60)
из 16
определяющим при проектировании отсека будет расчет на устойчивость.
При этом в качестве оптимальных параметров должны быть выбраны толщи-
на обечайки определяемая формулой (5.54), и площадь поперечного
сечения шпангоута F, определяемая из (5.29) с учетом (5.54), т.е.
— Р"3
F = 0,0358 =---------(5.61)
М (1 ♦ J-) ЕГ
из 2
В ряде случаев бывает достаточной приближенная оценка проектных
параметров, учитывающая тот факт, что в оптимальном по массе отсеке
шпангоут следует проектировать перетяжеленным. Поскольку такой шпан-
гоут будет иметь достаточно высокую изгибную жесткость, то правомерно
предположить, что усилия по высоте сечения отсека распределяются по
закону плоскости. Тогда вместо зависимостей (5.1) и (5.2) для опреде-
ления максимальной силы, приложенной к наиболее нагруженному болту
стыка, получим более простое соотношение
2М
Р = —(5.62)
лк
где л - число болтов фланцевого стыка.
Соответственно упростятся и результирующие зависимости. Подставляя
(5.62) в (5.61) и приводя к безразмерному виду, получим формулу для
определения площади поперечного сечения шпангоута, при которой масса
отсека будет минимальной при наличии ограничения по устойчивости
197
_ М2
об
(аР"Р)3
об
1
Зтгт
л Е i
(5.63)
Подставляя (5.54) и (5.63) в (5.23), получим формулу для массы
отсека, нагруженного изгибающим моментом и осевой силой,
т = 0,286
м 2
из
1 ♦ к/2
* 1.02М 0,5 f 1 ♦ Я°‘5Ь.
из I 2 J
(5.64)
§5.3. ОСОБЕННОСТИ ПРОЕКТИРОВАНИЯ КОНСТРУКЦИИ
АНТЕННЫХ ОБТЕКАТЕЛЕЙ
5.3.1. Выбор конструктивной схемы
На этапе разработки конструкции обтекателя внешняя геометрия ЛА
определена. Однако уточнение обводов и даже схемы ЛА вполне возможно,
если конструктивная проработка показывает целесообразность подобного
изменения. С учетом этой обратной связи проектирование конструкций
антеш|ых обтекателей можно представить как совокупность следующих
задач :
1) анализа условий эксплуатации антенны, выработки требований к
электродинамическим, прочностным и прочим параметрам обтекателя, вы-
бора его конструктивной схемы, наиболее полно отвечающей этим требо-
ваниям;
2) инженерного расчета основных конструктивных параметров обте-
кателя;
3) расчета влияния обтекателя на электродинамические характерис-
тики защищаемой антенны и проверки допустимости искажения радиотехни-
ческих свойств.
Замятии В. И., Ключников А. С. , Швец В. И. Антенные обтекатели:
конструктивно-радиотехнический расчет с учетом метеофакторов. Минск:
Изд-во БГУ им. В.И. Ленина, 1980.
198
Центральный вопрос первой задачи - синтез конструктивной схемы
обтекателя, т.е. выбор рациональной формы обтекателя, материала стен-
ки, числа слоев стенки, их взаимного расположения; разработка конст-
рукции носка обтекателя и узла стыка с корпусом ЛА. Конструктивная
схема обычно выбирается на основе качественного анализа большого
числа факторов, в числе которых:
принцип целенаправленного формирования напряжений в конструкции
сообразно прочностным характеристикам материала, соответствие дефор-
маций всех элементов конструкции, минимальная концентрация напряжений;
тепловая однородность сопрягаемых элементов, минимальные темпера-
турные напряжения в оболочке;
постоянство радиотехнических свойств обтекателя в условиях нагрева
и при длительных эксплуатации и хранении.
Наиболее часто применяются обтекатели с монолитной стенкой, толщи-
на которой соответствует набегу фазы в полволны (полуволновая стен-
ка). Такие обтекатели наиболее просты и технологичны в производстве и
способны обеспечить выполнение требований по угловым ошибкам пеленга-
ции и радиопрозрачности в полосе частот порядка 1...3 % от средней
рабочей частоты РЛС, что удовлетворяет требованиям ряда бортовых
систем.
При прохождении электромагнитной волны через слой диэлектрика на
границе его раздела возникают отраженные и преломленные волны, обра-
зованные за счет многочисленных отражений от всех границ раздела
слоев. Для сред без потерь может существовать бесконечное число таких
парциальных волн с амплитудами, убывающими с ростом номера порядка
волны, и с фазами, определяющимися порядком волны, углом падения вол-
ны на стенку и электрической толщиной стенки или соответствующего
слоя. В конечном итоге все парциальные волны будут образовывать вол-
ну, прошедшую через слой диэлектрика, и волну, отраженную от него, а
полная энергия падающей волны разложится на две основные части: на
энергию волны, отраженной от слоя, и энергию волны, прошедшей через
слой.
При учете отражений от внутренних границ раздела диэлектриков,
получаются следующие соотношения между амплитудами падающей EQ,
прошедшей Е и отраженной Е волн:
пр от
Е = ER; (5.65)
от О
199
|*Г • in2 =
где Т и R - коэффициенты прохождения и отражения волны по амплитуде
соответственно.
Величины Т й R зависят от электрических параметров слоя, длины
волны, толщины слоя, угла падения волны на слой и выражаются фор-
мулами
1 - г2
Г = 1 г : (5.66)
J( 1 - Г2)2 ♦ 4r2sin2^
R = 2fsinv> , (5.67)
Г" 2~2 2,2
4(1 - Г ) ♦ 4Г sin V?
в которых г - коэффициент Френеля, определяемый через показатель
преломления л как
г = , (5.68)
а - электрическая толщина слоя диэлектрика,
V) = Je - sin2e . (5.69)
A
Показатели преломления электромагнитной волны п различаются для
параллельной и перпендикулярной поляризаций, и выражения для них
соответственно имеют вид
е — sin2®
le - sin20
Здесь е - диэлектрическая проницаемость слоя; 8 - его толщина; X -
длина волны бортовой РЛС; в - угол падения волны на слой.
Анализ выражений для Г и R показывает, что коэффициент отражения
от однородного слоя диэлектрика без потерь будет иметь нулевое значе-
200
ние, а коэффициент прохождения - максимальное значение при электри-
ческой толщине слоя = far (k - целое число), что соответствует гео-
метрической толщине слоя
6 = k —— Х , k = 0, 1.2....................................... (5.72)
2 Je - sin20
т.е. для осуществления наилучшего прохождения электромагнитной волны
через стенку обтекателя необходимо выбирать ее толщину кратной
целому числу полуволн в материале стенки (с учетом угла падения
волн).
При нормальном падении электромагнитной волны на слой (О = 0)
60 = JtV(2 ). (5.73)
Цель инженерного расчета конструктивных параметров обтекателя
заключается в выборе толщины оболочки и размеров конструктивных эле-
ментов обтекателя исходя из радиотехнических и прочностных требова-
ний. Решающий фактор при расчете толщины стенки обтекателя - обеспе-
чение ее достаточной механической прочности. Определив из прочностных
соображений необходимую толщину оболочки, производят проверку, удов-
летворяет ли она требованиям радиопрозрачности. Если условия макси-
мальной радиопрозрачности не выполняются, то производят коррекцию па-
раметров слоя диэлектрика (толщины и диэлектрической проницаемости).
В соответствии с изложенным толщина стенки однослойного обтекателя
должна удовлетворять условиям
М
о (6) = * ат < о ;
max W / разр
2М tga
Т (5) = < т ; (5.74)
max 2тгЯ5 Jg Р®зр
6 = k Х . k = 1. 2, ...
2 Je - sin20
где Л4^ и Q - изгибающий момент и перерезывающая сила соответственно
в опасном сечении оболочки; W - момент сопротивления опасного
201
сечения; - температурные напряжения от аэродинамического нагрева;
а, Л, 6 - угол наклона образующей обтекателя к его оси, радиус и
толщина оболочки соответственно в опасном сечении.
Выбор толщины 6 в соответствии с (5.74) состоит в выборе минималь-
ного k (k = 1, 2, ...), при котором максимальные действующие напряже-
ния в оболочке обтекателя о и т меньше или равны разрушающим
max max
напряжениям а и т для материала стенки. Если по условиям
разр разр 7
прочности оказывается, что толщина стенки обтекателя меньше 0,03 дли-
ны волны в материале, т.е.
8 < 0,03 Х , (5.75)
Je - sin%
то такой обтекатель (называемый тонкостенным) не требует согласования
толщины 6 с длиной волны. В большом диапазоне углов падения волны он
удовлетворяет требованиям радиопрозрачности.
Толщина и электрические параметры многослойного обтекателя подби-
раются таким образом, чтобы обеспечить максимально возможное согласо-
вание стенки обтекателя с эквивалентным свободным пространством в за-
данной полосе частот. Наиболее эффективное согласование получается
для стенок с симметричной структурой. В качестве примера такой конст-
рукции может служить трехслойная стенка, имеющая плотные тонкие
поверхностные слои и менее плотный слой большой толщины между ними.
Пакет из соединенных вместе двух трехслойных стенок с общей плотной
внутренней прослойкой получил название пятислойной конструкции. Ана-
логично может быть составлена более сложная семислойная конструкция.
В зависимости от соотношения толщины плотных и менее плотных слоев
эти стенки подразделяются на конструкции с тонкими или толстыми внеш-
ними обшивками.
Для зашиты обтекателя от воздействия внешней среды предусматри-
вается нанесение на его поверхность антистатических покрытий, проти-
воэрозионных слоев, лакокрасочных, герметизирующих и биологически
стойких покрытий, а также установка молниезащитных устройств.
Наличие градиента температур по толщине стенки обтекателя вызывает
разброс диэлектрических параметров материала по толщине стенки.
Неравномерно нагретая стенка может быть представлена как много-
слойная, причем в зависимости от температуры каждый слой имеет свою
диэлектрическую проницаемость е и свои диэлектрические потери tg5.
202
Обтекатель всегда вносит в поле излучения антенны амплитудные и
фазовые искажения» которые приводят к снижению коэффициента направ-
ленного действия антенны» расширению главного лепестка диаграммы на-
правленности антенны и одновременно повышению уровня боковых лепест-
ков» потерям мощности излучения, смещению равносигнального направле-
ния и появлению пеленгационной ошибки. В результате снижается эффек-
тивность антенны.
Расчет диаграммы направленности антенны с учетом обтекателя прово-
дится с помощью так называемого метода вынесенного раскрыва, включаю-
щего в себя нахождение искаженных обтекателем амплитудных и фазовых
характеристик прошедшей волны и расчет по этим характеристикам диа-
граммы направленности в дальней зоне. В основе метода - интегрирова-
ние полей элементарных излучателей (с учетом коэффициентов прохожде-
ния волн) по амплитуде поля и вносимой стенкой обтекателя фазовой
задержке. Соответствующий расчет и оценку допустимости искажений»
вносимых обтекателем, проводят радиоинженеры.
5.3.2. Определение температурных напряжений
в оболочке обтекателя
Температурные напряжения оказывают существенное, а иногда решающее
влияние на работоспособность антенных обтекателей. Это объясняется
рядом причин:
антенные обтекатели подвергаются наиболее интенсивному неравномер-
ному нагреву;
из-за низкой теплопроводности материала в оболочке обтекателя
возникают наибольшие температурные градиенты;
хрупкость материала оболочки практически исключает компенсацию
температурных деформаций за счет пластических зон.
Определение температурных напряжений на стадии выбора параметров
опорных вариантов, как указывалось выше, целесообразно проводить с
помощью приближенных решений. При этом надо учитывать и то, что опре-
деление толщины обечайки обтекателя на основе зависимостей (5.74)
связано с необходимостью многократного расчета температурных на-
пряжений.
Приемлемое по точности упрощение расчетной модели для обтекателя
вдали от заделки достигается с помощью метода местных цилиндров, ког-
да в расчетном сечении обтекателя строится эквивалентный круглый ци-
линдр, геометрические характеристики которого соответствуют геометри-
ческим характеристикам обтекателя в данной точке (рис. 5.12). Распре-
203
деление температуры по толщине эквивалентного цилиндра такое же, как
у обтекателя в рассматриваемом сечении; в окружном и продольном на-
правлениях цилиндра температура считается постоянной. Оболочка обте-
кателя может быть многослойной с произвольным числом разнородных
слоев.
Для численного решения задачи о температурных напряжениях в
указанной постановке каждый из разнородных слоев конструкции условно
разделяется на несколько элементарных расчетных слоев со средними
радиусом R^ и температурой Т. (в зависимости от потребной точности
решения) таким образом, чтобы границы элементарных слоев совпадали с
границами конструктивных слоев. Уравнения равновесия для элементарных
слоев:
л
* -Л= °=
(5.76)
где л - число элементарных слоев; - кольцевое и меридиональ-
ное напряжения для /-го слоя; 5^ - толщина /-го элементарного слоя.
Условия совместности деформаций слоев в кольцевом и меридиональном
направлениях имеют вид
ею = *(/♦ 1 )0’
€<л 1
I = 1, п - 1 .
Рис. 5.12. Расчетная модель для малотеплопроводного обтекателя вдали
от соединения с корпусом ЛА:
1 — обтекатель; 2 — м&ивалентный цилиндр
(5.77)
204
Соотношения Гука в рассматриваемой задаче удобно представлять в
виде зависимости деформации - напряжения:
е№ ' • */<” “Л ] :
(5.78)
% % “ V» • EiM ali 1
где E^fi) и E^ip) - средние по толщине /-го элементарного слоя модули
упругости материала в окружном и меридиональном направлениях соответ-
ственно при температуре слоя - коэффициент линейного тем-
пературного расширения и коэффициент Пуассона /-го слоя.
С учетом этих соотношений условия совместности деформаций можно
записать в виде
Е^9) “Л 1 = Е(. [°(М)в -
ДМ°(М)у> * аМГМ 1 :
(5.79)
ф-1% - Д/Ъ * Е№ ] = -
- ДМ°(М)в + амгм Ь 1 = h "-1-
Решение системы (5.79) совместно с (5.76) позволяет найти
напряжения и а^. В частном случае для изотропного материала,
когда Е.(<р) = Е.(в) = £. и о.Л = о. = а., для двухслойного
I I I Ш Up I
обтекателя (л = 2) из (5.76) и (5.79)
а 6 * а 8 =0;
11 2 2 ’
. . (5.80)
£-[«,<1 - др . Е)в1Г, ] = £-[«2<1 - «2> . ЕЛТ2 ] .
где а й а - средние по слоям температурные напряжения.
1 Л
205
Решение этой системы
ffl " С2 в( ’
ff2
Е а Т - Е а Г
111 222
«2 £1
^-(1 _#i).^-(i-m2>
(5.81)
В случае "теплового удара** наружный прогретый слой оказывается
очень тонким. Если этот прогретый слой считать за расчетный элемен-
тарный слой толщиной $2 в конструктивно однослойном обтекателе, то в
(5.81) можно положить ® и Тогда выражение для
напряжения в поверхностном прогретом слое при "тепловом ударе" полу-
чает вид
а = - Е а Т —------ .
2 2 2 2 1 - д2
(5.82)
Можно показать, что температура поверхности обтекателя при ’’тепло-
вом ударе” обратно пропорциональна коэффициенту теплопроводности ма-
териала Л. Стойкость материала к термоудару определяется его пределом
прочности о*. С другой стороны, из (5.82) следует, что ”тепловая на-
грузка” пропорциональна произведению Еа. Таким образом, соотношение
защитных и разрушительных факторов характеризуется показателем
а X
Л = /— , (5.83)
СА
называемым коэффициентом термической стойкости материала. Чем больше
Л, тем большую температуру пограничного слоя (7^) может выдержать
материал обтекателя в условиях ”теплового удара”.
Другой чувствительной к температурным напряжениям зоной конструк-
ции обтекателя, как уже отмечалось, является соединение неметалличес-
кого (керамического) головного обтекателя с металлическим корпусом.
При решении задачи о теплонапряженном состоянии такого соединения
будем использовать уравнения для цилиндрической оболочки, эквивалент-
ной по геометрическим характеристикам реальному обтекателю в зоне
206
соединения со смежным отсеком. Такое допущение помимо упрощения реше-
ния полезно еще и тем, что дает возможность использовать его как для
головных обтекателей, так и для цилиндрических отсеков. Расчетная
модель соединения представлена на рис.5.13.
При математическом описании модели вначале рассматриваются отдель-
но периферийная часть оболочки толщиной 8 и поперечный элемент с
об
прилегающей частью оболочки. Найденные решения для каждой части затем
стыкуются. Температурное состояние периферийной части оболочки описы-
вается некоторой средней по толщине оболочки температурой Г^, кото-
рая считается постоянной как в окружном, так и в продольном направле-
ниях. Температурное состояние поперечного элемента описывается тремя
температурами: Т , Т и Г (см. рис.5.13,6), которые в конструкции
1 л 3
металлическая обшивка - подкрепляющий шпангоут являются средними тем-
пературами соответственно наружного пояса с прилегающей частью обо-
лочки, стенки и внутреннего пояса шпангоута. В случае стыка керами-
ческого обтекателя с корпусом эти температуры являются средними тем-
пературами соответственно прилегающей части оболочки, некоторого пе-
реходного элемента и стыкового шпангоута.
Уравнение, описывающее деформированное состояние оболочки в
окрестности сочленения при отсутствии внешних нагрузок, можно пред-
ставить в виде
= С. (5.84)
dx4
где w - радиальное перемещение; С - произвольная постоянная; 0 -
геометрическая характеристика конструкции, определяемая из условия
6
a S
Рис. 5.13. Расчетная модель теплонапряженного состояния подкрепленной
оболочки:
а — исходные конструкции; б — расчетная модель; 8 — расчлененная
расчетная модель с компенсирующими реакциями
207
4 , 12(1 - /)
об
(5.85),
Искомое напряженное состояние должно затухать при удалении от
стыка с корпусом (т.е. при х = оо), а при х = 0 удовлетворять условию
dw
= 0.
dx
(5.86)
Решение уравнения (5.84) с такими граничными условиями имеет вид
w = Ae^X{cos0x * sin/3x) - а Т R , (5.87)
об об об
где А - постоянная интегрирования.
Для определения А рассмотрим напряженное состояние зоны сочлене-
ния. На поперечный элемент корпуса, представляющий собой в соответст-
вии с принятой расчетной моделью трехслойное кольцо, действуют равно-
мерная поперечная нагрузка интенсивности q и собственные температур-
ные напряжения. Напряженное состояние кольца описывается уравнением
равновесия для окружных напряжений (осевые и радиальные напряжения
пренебрежимо малы)
Р = - qR*. (5.88)
об
Здесь Р - сумма всех сил, действующих в сечении трехслойного кольца.
Она определяется через напряжения в слоях:
3
Р = 2 ошЬ£., (5.89)
1-1
где о.д - среднее по толщине 6. кольцевое напряжение в Z-м слое,
а.=Е.(е.-аТ.), /=1.3. (5.90)
10 i i i i
Учитывая, что радиусы слоев отличаются незначительно, деформации
слоев е допустимо считать одинаковыми и выражать через прогиб оболоч-
ки в начале координат:
е = ш(0)/Я. (5.91)
об
208
Интенсивность поперечной нагрузки q, уравновешивающей кольцевые
напряжения а.„, .в зависимости от прогиба определяется как
ш
(5.92)
х-о
Подставив далее в исходное уравнение (5.88) выражения для входящих
в него величин из (5.87). (5.89)...(5.92), найдем
4fl3D * а<лТ<л В J ’
BR2 .
об
где
33 Е Х«3Х
В= Е 8/>£.; S = Е 8ab£T.; D =---------об °* .
М М 12(1 -д2)
(5.93)
(5.94)
При известной функции
продольном (о^) и окружном
прогибов ш(х) напряжения в оболочке в
(о J направлениях определяются по формулам
v
(5.95)
Е г г 'i J2 1 Е а Т
об I w Г - z I a GV I об об <
’«';—И «Т ‘ «7 *" 77 “Г7Г
1 - д L об об ах J
где
z = ± 0,55 .
об
Здесь знак плюс соответствует напряжениям на внешней поверхности
оболочки, а минус - на внутренней.
Окружные напряжения в кольцевых слоях поперечного элемента в
соответствии с (5.90) и (5.91) будут
г S — qRл ____________
’» = I-В-^-- “Л ] ''•3. <5.9в>
209
где
Я = - • (5.97)1
п* 00
об
§5.4. ПРОЕКТИРОВАНИЕ ОТСЕКОВ КОРПУСОВ.
ПОДКРЕПЛЕННЫХ СИЛОВЫМ НАБОРОМ
5.4.1. Вафелыше отсеки корпусов
Применвемле конструкции. Вафельный отсек корпуса представляет со-
бой конструктивно-ортотропную оболочку с часто расположенным подкреп-
ляющим набором, изготовленным заодно со стенкой. Наибольшее примене-
ние находят три конструктивные разновидности вафельных отсеков
(рис.5.14): с продольно-кольцевым набором, у которых ширина и шаг
продольных и кольцевых ребер примерно одинаковы, т.е. а = Ь и с = $;
с перекрестным набором ребер, расположенных под углом 45 к образую-
щей; с перекрестно-кольцевым набором, у которых перекрестные ребра
расположены под углом 30 к образующей, а их ширина s = с.
Сечение стенки вафельной оболочки описывается четырьмя основными
параметрами: толщиной стенки 5, высотой ребра (вместе со стенкой) Л,
шагом ребер Ь и их шириной с. Расчетные зависимости обычно выражают
двумя безразмерными параметрами:
ф = Л/5; = 2тгс/6. (5.98)
Форма подкрепляющих элементов зависит от способа изготовления от-
сека. Распространенные конфигурации ребер показаны на рис.5.15,а. б;
Рис. 5.14. Схемы вафельного оребрения:
а — продольно-кольцевое; б — перекрестное; 8 — перекрестно-кольцевое
210
иногда применяются ребра таврового сечения (рис.5.15,в). Последние
при расчете приводятся к ребрам прямоугольного сечения по формуле
с = с(1 - &}3). (5.99)
ЭКВ
где
f = 2d/c; 17 = Л*/Л. (5.100)
Главное достоинство вафельных конструкций - их высокое совершен-
ство по массе. Количественно эта характеристика оценивается коэффи-
циентом k , показывающим, какую часть составляет масса вафельной обо-
ш
лочки от массы равноустойчивой гладкой оболочки:
k = 6 /д ,
т экв гл
(5.101)
где 6 - эквивалентная по массе толщина вафельной оболочки; 6 -
экв гл
толщина гладкой равноустойчивой оболочки.
Для оптимальной по массе оболочки с ребрами, показанными на
рис. 5.15, а, справедливо соотношение [22]
. k,J£ - 2 5) (5,102)
Для оболочки с прямоугольными ребрами аналогичная зависимость имеет
вид
, =. (5.1(B)
* с* -1,2
Зависимостям (5.102) и (5.103) соответствуют минимальные (наивы-
с
Рис. 5.15. Распространенные поперечные сечения ребер:
а — со скруглениями; б — прямоугольного сечения; в — таврового сечения
211
Рис. 5.16. Зависимость коэффициента
совершенства по массе вафельных обо-/
лочек от безразмерного параметра ф
годнейшие) значения коэффициента k ,
ш
показанные на рис.5.16. Анализ зави-
симости k (ф) позволяет сделать не-
ти
сколько важных практических выводов,
которые следует иметь в виду конструктору [22].
1. При ф < 3 вафельные оболочки не имеют ощутимых преимуществ по
массе по сравнению с гладкими.
2. Интенсивное снижение массы оболочки имеет место при увеличении
ф от 3 до 5. При ф - обеспечивается снижение массы приблизи-
тельно в 1,5 раза. С дальнейшим увеличением ф выигрыш в массе для
оболочек с прямоугольными ребрами будет менее заметным, а для оболо-
чек со скругленными ребрами его вообще нет. Поскольку трудоемкость и
стоимость изготовления конструкции с повышением ф возрастают, то на
практике применение вафельных оболочек с прямоугольными ребрами огра-
ничивается ф < 8, а для оболочек со скругленными ребрами - ф < 6.
3. Оболочки со скругленными ребрами (изготовленные химическим
травлением) проигрывают в массе оболочкам с прямоугольными ребрами
при ф = 5...6 в среднем около 10 %, а при ф = 8 - до 25 %. Оболочки с
ребрами таврового сечения дают уменьшение массы до 5 %. Их применение
целесообразно при большой высоте ребра и ф > 6.
4. При изменении <р в пределах 0,2...0,6 изменение массы оболочки
не превышает 6 %. Это дает основание выбирать в широком диапазоне и
более рационально использовать параметры подкрепления с учетом
конструктивных и технологических факторов.
Несущая способность цнлмццжчесхих отсеков. Исчерпание работоспо-
собности вафельных отсеков корпуса связывают с потерей прочности или
потерей устойчивости. Более характерным и распространенным является
случай потери устойчивости. Рассмотрим его.
Для вафельных конструкций наблюдается общая потеря устойчивости
(выпучивание стенки вместе с подкрепляющими ребрами) и местное выпу-
чивание стенки, ограниченной ребрами. Местная потеря устойчивости
ребер, имеющая существенное значение для наборных конструкций, ва-
фельным оболочкам обычно не свойственна. На конструкции вафельного
типа практически не влияют местные несовершенства формы, не превышаю-
щие половины толщины исходного листа.
212
Критическая сила общей потери устойчивости для цилиндрических обо*
лочек с продольно-кольцевым, перекрестным и перекрестно-кольцевым на-
борами определяется по формуле
Р = йгЛЕв2 [ 1 ♦ МФ - I)2 ]. (5.104)
кр J
где k и 0 - экспериментальные коэффициенты устойчивости.
Для оболочек со скругленными ребрами
I - 0,42 « 7-^--0,6S; <5.105)
47 347
для оболочек с прямоугольными ребрами
f - — • ----0.54- (5.106)
47 347
Коэффициент устойчивости k от формы ребер практически не зависит.
Наибольшее влияние на него оказывает отношение R/S . При R/S < 200
пр пр
и 2,5 < ф < 8, как показывает эксперимент,
k = 0,28...0,34, (5.107)
что примерно в два раза меньше теоретического значения.
Критическая сила местной потери устойчивости зависит от размеров
подкрепляющей клетки и ее ориентации по отношению к образующей
отсека. При а = Ь и с = s расчетная зависимость имеет вид
* м = йг*1£ —~—Н1 + (5108)
* (Ь - С - 2D
где экспериментальные коэффициенты устойчивости и имеют
следующие значения:
= 6 при продольно-кольцевом и перекрестно-кольцевом расположе-
ниях ребер; = 3/cos 45° при перекрестном расположении ребер; =
= 0,26 для оболочек со скругленными ребрами; = 0,16 для оболочек с
прямоугольными ребрами.
Порядок проектировочного расчета. Выбор конструктивных параметров
213
вафельных отсеков нельзя полностью формализовать. Ряд решений прини-
мается на основе статистики исходя из требований конкретной производ-
ственной базы, эксплуатационных условий и других факторов. Поэтому
излагаемый ниже алгоритм расчета следует рассматривать как ориенти-
ровочный.
Подготовка исходных данных. Конструктор имеет дело с двумя группа-
ми исходных данных. Первую группу составляют результаты предыдущего
этапа проектирования ЛА. В их числе - внешние нагрузки, габариты от-
сека, компоновочная схема, применяемый материал и др. Вторая группа
данных - конструктивные ограничения, вытекающие из опыта проектирова-
ния. Для рассматриваемых конструкций такими данными являются: значе-
ния параметров ф и схема расположения и форма ребер, соотношения
параметров, характеризующих подкрепления в продольном направлении и
по окружности.
В соответствии с приведенными выше рекомендациями при первоначаль-
ной разработке конструкции отсека целесообразно ориентироваться на
прототип или статистику и для оболочек с прямоугольным сечением
ребер принимать ф = 6...8, а при Л = г ф = 5...6. Следует также
иметь в виду, что для 0,2 < < 0,6 масса оболочки определяется
преимущественно параметром ф. Целесообразно принимать следующие
соотношения параметров продольного и поперечного подкреплений: а = 6,
с = $. Схема расположения и форма ребер могут варьироваться.
Определение толщины оболочки. Вначале по формуле (5.105) или
(5.106) определяется коэффициент 0. Далее с учетом того, что внешняя
нагрузка Р равна критической, вычисляется толщина оболочки:
Р
__________ВИ
2irkE[\ *_- I)2]
(5.109)
Если по технологическим или эксплуатационным соображениям необхо-
димо увеличить толщину стенки, следует принять уменьшенное после
чего, определив 0, вычислить скорректированное значение 5. Одновре-
менно необходимо определить высоту ребра:
Л* = 6(ф - 1) (5.110)
и ее соответствие технологическим требованиям. При необходимости
снижения Л следует принять уменьшенное ф и определить новое значение
8. Масса конструкции при этом несколько возрастает.
214
Определение шага и ширины ребер. Шаг и ширина ребер при продольно-
кольцевом и перекрестном расположениях ребер определяются по формулам
b =
1
' "2»
[ М£
2г ♦ 2,56 I б1—
6
экв
(5.111)
2я
(5.112)
где
с -
6
экв
= « [1 * - 1) ] •
(5.113)
Для оболочек с перекрестно-кольцевым расположением ребер
* = -!-
1 ~ Зя
2г ♦ 2,56
k RE
----5
ВИ
(5.114)
Зя
(5.115)
Проверка работоспособности
том, что критические напряжения
текучести oQ 2- При этом следует иметь в виду, что
отсека. Вначале следует убедиться в
оболочки не превышают условный предел
а =к—
Ч> 2яДб
ЭКВ
(5.116)
где к - коэффициент, учитывающий характер нагружения отсека. Дело в
том, что неравномерность распределения сжимающих напряжений оказывает
чистом изгибе критические
заметное влияние на а . Так, при
Ф
напряжения на 25 % превышают величину,
сжатию (к = 1,25). В общем случае
2,5 * RP/M
___________из
2 ♦ RP/M
И 3
где Р - осевое усилие; - изгибающий
соответствующую равномерному
момент.
(5.117)
к -
215
Если а > а . то из (5.116), положив а = а . надо найти
кр 0,2 кр 0.2
новое значение 6^ и в соответствии с ним увеличить 6 и (или) ф.
Далее производится проверка условия Р > Р . При невыполнении
кр.м кр
этого условия нужно уменьшить шаг ребер Ь.
5.4.2. Стрингерные отсеки корпусов
Подкрепленные стрингерами отсеки применяют в основном при сравни-
тельно больших диаметрах корпусов, когда моноблочные конструкции
оказываются малоприемлемыми из-за большой массы. Проектные параметры
таких отсеков, как правило, определяются требованиями устойчивости
обшивки и (или) элементов подкрепляющего набора. Исследуем эти тре-
бования.
Найдем сначала усилия, воспринимаемые стрингерами и обшивкой в до-
критическом состоянии. Пусть N - осевая сжимающая сила, действующая
на стрингерный отсек; и - силы, воспринимаемые обечайкой и каж-
дым из п стрингеров соответственно. Чтобы найти силы и нужно
воспользоваться уравнением равновесия и уравнением совместности пере-
мещений, которое получается из равенства удлинений обечайки и стрин-
геров, нагруженных соответственно силами и N%:
N I Nt
Ni * ^2 = * МЯТ- - 7Г-Т- <5л,8)
об с тр
Отсюда
Nt = t N Na = • — . (5.119)
1 1 ♦ пХ 2 1 ♦ лХ
где
I Е F
X = -_____£!£_ С—
Л 2я £ R8 •
об
(5.120)
Критические усилия для гладких цилиндрических оболочек можно опре-
делять по формуле
№* = 2nkE в2. (5.121)
кр об
216
Коэффициент k зависит от многих трудно учитываемых факторов: вели-
чины и формы начальных неправильностей, граничных условий, эксцентри-
ситета приложения нагрузки, неоднородцрстей материала оболочки и т.д.
На основании экспериментальных данных1 для всего практически важного
диапазона толщин оболочек (R/b = 150...750) можно рекомендовать сле-
дующую расчетную зависимость:
k = 0,06
R/b
Rib
1925
475 *
(5.122)
Сравнивая теперь усилие Л^, воспринимаемое обечайкой, с критичес-
ким усилием, определяемым уравнением (5.121), получим условие устой-
чивости для обечайки
N
1 ♦ naFlb
(5.123)
Аналогично из (5.119) и известной формулы Л. Эйлера для критичес-
кой силы сжатого стержня получим условие устойчивости для стрингера
Я < CF- (5.124)
о/г ♦ ап
В условиях (5.123) и (5.124) приняты обозначения
г 2с -2
Е я Е i
а - Аг b - 2nkE ; с =--------------------. (5.125)
2я/? £ об ,2 ' '
об I
Введем безразмерные величины
2 2 2
£"=—£; N; Г=—. (5.126)
С С С
Тогда условия устойчивости (5.123) и (5.124) можно переписать в
виде
— лГ —
nF* (5.127)
5
Прочность, устойчивость, колебания: Справочник в 3-х т. / Под
ред. И. А Биргера, Я. Г. Пановко. М.: Машиностроение, 1963. Т. 3.
С. 140.
217
Граница области
устойчивости
обшивки
° Vn N
Граница области
устойчивости
стрингеров
Рис. 5.17. Расчетные случаи для
стрингерного отсека корпуса
nF > N - 5. (5.128)
Условия (5.127) и _(5.128) на
плоскости координат nF, S опре-
деляют области допустимых по ус-
тойчивости значений конструктив-
ных параметров nF и 8 (рис.
5.17).
Если параметры nF и 8 таковы, что соответствующая им точка
находится выше линии АСЕ, то конструкция является устойчивой; если -
на кривой АС, то теряет устойчивость обечайка; если - на линии СЕ, то
теряют устойчивость стрингеры. Точка С соответствует случаю равно-
устойчивой конструкции, точка Е - бесстрингерной конструкции, точка
А - конструкции с минимально допустимой по соображениям технологич-
ности толщиной обечайки.
Если по условиям эксплуатации недопустим выход из строя какого-
либо элемента конструкции, то параметры nF, 8 нужно выбирать так,
чтобы соответствующая точка находилась на линии АС или СЕ.
Параметры nF, 6 будем выбирать из условия минимума массы отсека,
нагруженного осевой силой W. Эта масса определяется выражением
т = /(2яр 6R ♦ р nF).
об стр
(5.129)
С учетом (5.125) и (5.126) выражение (5.129) можно переписать в
виде
т = ifi ♦ nF, (5.130)
где
. . Е, р * Е
— п ml об об стр /с
т-~Т-----------(5131)
2п р I К стр стр об
ст р
Отыскание оптимальных параметров будем проводить приемки,
аналогичным приему, использованному в § 5.2. Так как функция т в
218
трехмерном пространстве nF, S, т является монотонно возрастающей, то,
проектируя семейство горизонталей плоскости т на плоскость nF, 6,
заключаем, что оптимальным параметрам соответствует случай касания
проекции какой-либо горизонтали линий АС или СЕ.
Уравнение проекций горизонталей плоскости т на плоскость nF, S
будет
ifi~*nF=c, (5.132)
где с - произвольное число, подбираемое из условия касания
горизонтали линий АС и СЕ.
Из рис.5.17 видно, что это касание может произойти в точках A, G,
С или Е. Рассмотрим эти случаи.
1. Касание в точке Е. Этот случай соответствует гладкой бесстрин-
герной конструкции. При этом масса отсека будет
т = 1А, (5.133)
а оптимальная толщина
Г= № (5.134)
Очевидно, что случай бесстрингерной конструкции будет реализовы-
ваться при
П < 1. (5.135)
2. Касание в точке С. Этот случай соответствует равноустойчивой
конструкции, когда стрингеры и обечайка теряют устойчивость одновре-
менно. Масса отсека, спректированного из условия равноустойчивости,
будет
т = п*Ы~-\. (5.136)
а оптимальные параметры
Г= 1; пГ = N~ - 1. (5.137)
Этот случай будет реализовываться при
1<П<ЛГ*1. (5-138)
3. Касание в точке G. В этом случае нужно решать задачу на
условный экстремум функции т при условии
219
nF = “zt" - 8. (5.139)
5
Решая систему уравнений (5.132) и (5.139), из условия единствен-
ности решения системы (это условие и соответствует условию касания
проекции горизонтали кривой AGC) найдем
т = 2 J Мп - О ;
Г= 1 N/(n - 1) ; (5.140)
лГ= 2 J Ми - О - И J ~ О •
Естественно, что формулами (5.140) можно пользоваться только при
И > 1. (5.141)
Случай 3 будет реализовываться, если
— АГ
N ♦ 1 < и < — ♦ 1. (5.142)
5
техн
4. Касание в точке А. Этот случай соответствует конструкции отсека
с минимально допустимой толщиной обечайки 5 Из рис.5.17 и
техн
соотношений (5.127) и (5.130) следует, что здесь
Г= Г ;
техн
— лГ —
nF = —--------8 ; (5.143)
5
техн
т = ijT ♦ —-----------Г .
техн — техн
о
техн
220
Случаи 4 будет реализовываться, если
АГ
V > — * 1. (5.144)
5
техн
При проектировании отсека для заданных N и и разных q нужно
из четырех вариантов массы отсека, определяемой выражениями (5.133),
(5.136), (5.140) и (5.143), выбрать наименьшую массу и далее, ориен-
тируясь на нее, найти соответствующие оптимальные значения толщины
обечайки и площади поперечного сечения стрингеров.
§ 5.5. ЗАДАЧИ ПРОЕКТИРОВАНИЯ
ТЕПЛОЗАЩИТНЫХ ПОКРЫТИЙ СИЛОВЫХ КОНСТРУКЦИЙ
Важной составной частью современных высокоскоростных ЛА являются
так называемые системы обеспечения температурного режима (СОТР).
Проектирование СОТР связано с решением целого ряда специфических за-
дач, рассмотрение которых выходит за рамки настоящего курса. В данном
параграфе в конспективной форме излагаются проектировочные задачи,
относящиеся к наиболее распространенным и отработанным средствам теп-
лозащиты, какими являются теплозащитные покрытия (ТЗП) силовых конст-
рукций.
В настоящее время основными материалами ТЗП являются волокнистые
пластики (главным образом стеклопластики), так как они сочетают в
себе высокие теплозащитные свойства с хорошей технологичностью. В за-
висимости от потребной механической прочности они могут выполняться с
различными плотностью и структурой армирующих волокон (в частности, с
объемным плетением волокон). При малых потребных толщинах покрытия
(0,1...0,7 мм) более технологичными оказываются напыляемые керамичес-
кие покрытия из окислов алюминия или циркония (А1 О или ZrO ), а
О
также напыляемые композиционные материалы. При больших потребных тол-
щинах покрытия более целесообразны многослойные ТЗП, использующие
эффекты фазовых превращений.
При выборе теплозащитного материала на начальном этапе проектиро-
вания обычно пользуются обобщенными характеристиками материала, по-
добными (5.83). Однако при этом не должны оставаться без внимания не-
посредственные характеристики прочности материала покрытия. Потребная
механическая прочность ТЗП, как известно, зависит от интенсивности
механического воздействия набегающего потока, которая, в свою оче-
221
редь, определяется градиентом давления вдоль линии тока. Наибольшее
разрушительное действие на ТЗП оказывает отрицательный градиент дав-
ления на головных частях ЛА. Поэтому механическая прочность ТЗП на
головных обтекателях должна быть существенно выше, чем на боковых по-
верхностях корпуса, что может быть достигнуто применением объемного
плетения волокон для ТЗП из волокнистых пластиков, повышением плот-
ности ТЗП (для стеклопластиков, например, плотность может меняться в
3
диапазоне от 600 до 1800 кг/м ), а также применением многослойных
покрытий с более плотным наружным слоем. В производственных условиях
количественная оценка достаточности прочности ТЗП проводится, как
правило, на основе данных газодинамического эксперимента.
Особенностью конструкций, работающих в условиях нестационарных
температурных режимов, является то, что для них за счет соответ-
ствующего подбора толщин и формы силовых элементов в сочетании с ТЗП
могут быть использованы почти любые конструкционные материалы незави-
симо от их теплопрочностных характеристик и от внешних температурных
условий работы. Поэтому при проектировании ТЗП материал силовой
конструкции обычно считается известным, и задача состоит в определе-
нии материала ТЗП и сочетания толщин покрытия и силовых элементов,
обеспечивающих минимум суммарной массы единицы площади защищаемой по-
верхности, определяемой выражением
/ги = Ь р + 5 р , (5.145)
2/ об об п п
где 5 , 5 - толщина обшивки и покрытия; р , р - плотности
об п об п
материала обшивки и покрытия.
В качестве условия связи при решении этой задачи используется
условие работоспособности конструкции, отражающее непревышение дейст-
вующими напряжениями (адейст> значений разрушающих напряжений (о )
для всех возможных траекторий полета в любой момент времени т, т.е.
о (тХо (т). (5.146)
дейст разр
Эти напряжения здесь трактуются как обобщенные, т.е. предполагает-
ся, что условие (5.146) должно выполняться для всех напряжений, опре-
деляющих работоспособность конструкции (нормальных, касательных и
эквивалентных). При необходимости условия связи могут быть расширены,
например за счет введения ограничений технологического и эксплуата-
ционного характера.
222
В такой общей постановке решение задачи может быть найдено методом
перебора материалов покрытия и разных сочетаний значений 8 и 6 с
об п
проверкой условия (5.146) по всем расчетным траекториям и моментам
времени. На начальных этапах проектирования конструкций столь
громоздкие задачи себя не оправдывают. На этой стадии целесообразно
учесть, что для "сухих" отсеков корпусов атмосферных ЛА определяющими
являются меридиональные напряжения, и следовательно, в расчетной
модели можно учитывать только нагрузки Af^(r) и N(r). Тогда условие
работоспособности (5.146) оболочки корпуса (без учета подкрепляющего
влияния ТЗП) упрощается и принимает вид [3]
2М (т) ♦ N(r)R
из
(5.147)
где
(5.148)
а
9
1 х___об
°*= */в« ’
об
1 ♦ 1,25 -2М (т )/[Af(T)R]
k = ------------------------------
1 1 ♦ 2Мнз (T)/[N(r)«]
k = O,6(J1 + 0.005Я/8 ’ - J0.005R/8 ’ ).
2 об об
Здесь и - статистические коэффициенты. Первый из них учиты-
вает неравномерность сжимающих напряжений по сечению от и
N(t). второй - влияние начальных несовершенств оболочки.
Дальнейшая конкретизация и упрощение задачи (5.145)...(5.147) свя-
заны с учетом внешних условий работы ЛА. В зависимости от точности
соответствующих моделей возможно несколько постановок задачи, разли-
чающихся трудоемкостью решения. Рассмотрим эти постановки задачи в
порядке возрастания их сложности.
223
Задача 1 состоит в определении потребной толщины силовой оболочки
исходя из предположения о том, что расчетная траектория единст-
венная, она известна, и на этой траектории известен расчетный момент
времени т^. Считается также, что теплофизические характеристики мате-
риала (с и р ) и толщина 6 ТЗП заданы.
п п п
Решение задачи в такой постановке однозначно и достигается итера-
тивным путем по схеме, представленной на рис.5.18. Итеративный про-
цесс начинается с определения потребной толщины силовой оболочки
5 из решения уравнения (5.147) в предположении, что температура
об. ст
оболочки соответствует стандартным условиям. Далее к полученной
толщине 5 прибавляется некоторое приращение Д . величина кото-
об.ст об
рого зависит от конструкции оболочки (рис.5.18, блоки /, 2). Так,
если защищаемая оболочка выполнена из листового материала, то Д^
принимается равным стандартному шагу увеличения толщин листа. Для
Рис. 5.18. Блок-схема
решения задачи 1
224
суммарной толщины 8°^ = $об ст * ^об 00 внешним нагрузкам (блок 3} и
температурным характеристикам пограничного слоя (блок 4) определя-
ются: температура оболочки в расчетный момент времени (блок 5),
действующие напряжения адейст (левая часть уравнения (5.147) - блок
6), разрушающие напряжения а (правая часть уравнения (5.147) -
разр
блок 7). В блоке 8 действующие напряжения сравниваются с разрушающи-
ми. По результатам сравнения рассматриваемая толщина оболочки или
принимается к дальнейшей конструкторской проработке в качестве опти-
мальной (fio6°₽t) (в случае удовлетворения условию работоспособности),
или в итеративном цикле через блок 2 определяется новое значение.
Задача 2 состоит в определении толщин не только силовой оболочки,
но и покрытия. Остальные допущения те же, что и ранее. В отличие от
первой эта задача является оптимизационной, так как здесь выбирается
оптимальное по суммарной массе сочетание толщин 8 и 8 . Процесс
об п
поиска оптимума строится на основе многократного решения первой
задачи для варьируемых значений 6 . В начале счета принимается 6 =
п п
= 0. На следующих шагах значения 5 последовательно увеличиваются на
п
некоторую величину Д^. Одновременно ведется подсчет суммарной массы
по формуле (5.145) для каждого варианта. Из полученного множества
решений выбирается вариант с минимальной суммарной массой.
Задача 3 является дальнейшим развитием предыдущей задачи. В ней
предполагается, что расчетный момент на расчетной траектории
заранее не известен (что имеет место в большинстве реальных проектных
ситуаций). Решение задачи проводится по итерационной схеме, как и в
предыдущем случае, но не для одного значения т , а по всей расчетной
траектории для каждого момента времени с некоторым шагом Дт. Из
полученного множества оптимальных решений выбирается вариант, для
которого суммарная масса силовой оболочки и покрытия максимальна
(среди всех минимальных).
Наконец, возможна ситуация, когда заранее нельзя выделить единст-
венную расчетную траекторию из множества возможных траекторий, каждая
из которых может оказаться расчетной для каких-то моментов времени
при тех или иных вариантах конструкции. Этот случай соответствует
наиболее общей постановке задачи. Работоспособный вариант с мини-
8-880 225
мальной массой здесь отыскивается по схеме предыдущей задачи для каж-
дой из возможных траекторий. В качестве оптимального решения принима-
ется вариант, соответствующий максимальной массе силовой оболочки
вместе с ТЗП.
В рассмотренных задачах, как уже было отмечено, предполагалось,
что ТЗП не участвует в силовой работе корпуса. Это в большинстве слу-
чаев оправдано сравнительно низкими прочностными характеристиками
теплозащитных материалов, а также возникающими проблемами надежности
при попытках включить ТЗП в работу корпуса на прочность. В то же вре-
мя включение ТЗП в силовую схему ЛА возможно и, видимо, в ряде слу-
чаев целесообразно. Это реальный резерв для повышения массового со-
вершенства конструкции. При рассмотрении конструкций с работающими в
силовой схеме ТЗП можно пользоваться приведенными выше зависимостями,
если в условии работоспособности (5.147) учесть силовое влияние ТЗП.
Еще несколько замечаний, касающихся возможных областей применения
рассмотренных расчетных моделей. Если имеет место заметный унос массы
с поверхности ТЗП и известна его характеристика по времени полета, то
этот эффект можно учесть в приведенных выше задачах, вводя в расчет
температуры обшивки среднюю по времени полета толщину оставшегося
ТЗП. При этом в расчет суммарной массы по формуле (5.145) очевидно
следует включать полную толщину слоя ТЗП.
Учет особенностей теплопрочностных характеристик основных конст-
рукционных материалов во многих случаях с приемлемыми потерями
точности позволяет упростить процедуры определения оптимальных
параметров. Дело в том, что многие конструкционные материалы при
температурах до Т снижают свои прочностные характеристики весьма
незначительно. При повышении температуры свыше Г наблюдается резкое
ухудшение прочностных характеристик. Как показывают расчеты,
оптимальные по массе теплозашищенные конструкции обычно работают при
температурах, близких к Г (для алюминиевых сплавов ~ 170 С, маг-
ниевых сплавов - 200 °C, титана ~ 450 °C). Учитывая это, расчетную
температуру силовой конструкции можно сразу задавать равной Г . Тог-
да приближенная процедура вычисления потребной для теплозащищен-
ной оболочки в рассмотренных выше задачах сводится к решению уравне-
ния (5.147) относительно 5^ в расчетный момент времени при =
= Т^, которое имеет вид
226
L_L------E_ = a (T ) —!_L2L_
2itR?8 B Kp 1 ♦ v ♦ p2
об
где
а (Г )
в кр
р --------с—
а
(5.149)
(5.150)
k k Е(Т )
1 2 кр
Л/5 х
об
а
9
Расчетный момент времени в рассматриваемых задачах приближенно
можно определять из условия
п т -* max,
У
(5.151)
где и т - соответственно текущие значения нормальной перегрузки и
массы ЛА на траектории.
Для полученной из (5.149) толщины силовой оболочки далее нужно
определить такую потребную толщину ТЗП, которая в действительности
обеспечивала бы температуру = Т^. Процедуру определения этой
толщины целесообразно строить по итерационной схеме, используя зави-
симость (4.45). В случае, если полет происходит с постоянной ско-
ростью на постоянной высоте (а = const, Т = const), то, как сле-
равн
дует из (4.43) и (4.46), искомая толщина ТЗП будет определяться вы-
ражением
8 = - X
п
п
________J____________+ 1
Г -Г а
(рсб) In /а,н J*
равн 0
(5.152)
§5.6. КОНСТРУИРОВАНИЕ СТЫКОВ ОТСЕКОВ КОРПУСА
5.6.1. Требования к стыкам
Членение корпуса ЛА на отсеки, обусловленное различием цх конст-
рукций, требованиями производства, эксплуатации и хранения, приводит
к неизбежности использования разъемных соединений (стыков). Стыки
являются наиболее ответственными элементами конструкции и должны от-
вечать ряду требований. К этим требованиям относятся:
227
строгое обеспечение взаимного положения соединяемых отсеков отно-
сительно друг друга в целях сохранения геометрической формы корпуса;
передача всех силовых факторов от одного отсека к другому при
минимальной концентрации напряжений (минимальной массе);
быстроразъемность для обеспечения сборки и разборки в процессе
обслуживания при минимальной затрате времени на эти операции;
взаимозаменяемость и максимальное исключение подгоночных работ при
стыковке;
герметичность или пылевлагонепроницаемость;
минимальные габариты конструкции стыка для обеспечения наибольшей
плотности компоновки оборудования при монтаже его со стороны торцов
отсека и др.
Нетрудно убедиться, что перечисленные требования имеют противо-
речивый характер. Рассмотрим возможные принципы и конкретные пути
реализации этих требований.
Выполнение первого требования осуществляется путем удержания в
заданных пределах таких конструктивных параметров, как погрешности по
перекосу осей Д^ стыкуемых отсеков, по их смещению Да и по закручи-
ванию отсеков относительно друг друга Д^ (рис.5.19).
Назначение допусков на изготовление и сборку ЛА выполняет конст-
руктор на основе анализа возможных последствий, к которым может при-
вести нарушение заданной формы ЛА. Неточность изготовления и стыковки
нарушает аэродинамическую симметрию ЛА, влечет за собой эксцентри-
ситет тяги двигателя и т.д. Все это обусловливает отклонение от рас-
четных условий функционирования ЛА, возникновение дополнительных
погрешностей и, как следствие, снижение эффективности ЛА.
Для ЛА с головкой самонаведения радиолокационного типа часто диа-
метр зеркала антенны определяет размер внутреннего диаметра носового
обтекателя. Зазор между зеркалом и внутренним обводом обтекателя
составляет обычно всего несколько миллиметров. Если при стыковке
Рис. 5.19. Возможные погрешности при стыковке отсеков корпуса
228
обтекателя со вторым отсеком корпуса не регламентировать допуски по
и Да, то может произойти "заклинивание** антенны при ее сканирова-
нии. Аппарат не выполнит возложенную на него задачу.
Реализация силовых функций стыков обычно оказывается наиболее
трудной задачей. Суть этой задачи в том» чтобы распределенные по
конструкции потоки усилий собрать с помощью стыковых узлов и передать
на смежный отсек с минимальной концентрацией напряжений при минималь-
ной массе стыкового узла. Чем меньше концентрация напряжений» тем
выше надежность стыка и конструкции в целом. Для различных типов кор-
пусов ЛА эта задача решается с помощью разнообразных конструктивных
мероприятий» некоторые из которых рассматриваются ниже при анализе
конкретных конструкций стыковых узлов.
Быстроразъемность стыков» обусловленная требованиями эксплуатации
ЛА» обеспечивается в основном за счет наружного подхода к стыковым
элементам (гайкам, винтам» шпилькам» болтам и т.д.)» а также путем
снижения числа этих элементов при прочих равных условиях.
Требование взаимозаменяемости стыков связано прежде всего с серий-
ным производством ЛА. Операция соединения отсеков между собой выпол-
няется на поточной линии. Стыковка отсеков должна проходить быстро»
без задержки хода потока. Подгоночные работы здесь практически не до-
пускаются. При проектировании конструкции стыков необходимо заботить-
ся о том» чтобы к месту соединяемых элементов был обеспечен удобный
доступ руками и сборочно-монтажными приспособлениями и инструментом с
одновременной возможностью осмотра и контроля места стыка.
Герметичность - это необходимое условие защиты блоков и элементов
бортового оборудования и целевого груза» расположенных в соответ-
ствующих отсеках» а также самой конструкции ЛА от вредных воздействий
внешней среды. Герметизация обеспечивается непроницаемостью влаги»
пыли» газов и т.д. через обшивку» стенки отсеков, но главным образом
через разъемные соединения корпуса. Вместе с тем она обусловливает
не только пылевлагонепроницаемость, но также способствует сохранению
электрической прочности изоляции при работе ЛА с негерметичными
аппаратурными блоками на больших высотах, когда пробивное напряжение
воздуха резко снижается.
По типу конструктивного оформления и способу передачи нагрузок
стыки разделяются на фланцевые и телескопические.
5.6.2. Фланцевые стыки
Фланговые стыки являются наиболее распространенными. Они применимы
для отсеков любых диаметров. Соединение двух отсеков может быть вы-
229
полнено при помощи болтов, шпилек, сухарей, стяжных хомутов или лент,
клиношпоночных деталей. Фланцевые стыки подразделяются на точечные и
контурные. Те и другие, в свою очередь, могут быть с наружным и внут-
ренним доступом к соединительным элементам.
На рис.5.20 показаны схема нагружения и конструкция точечного
фланцевого стыка с наружным подходом к гайкам. Соединение состоит из
стыковых шпангоутов / и б, шпилек 2, гаек 3, контровочных шайб 4,
ленты 5 и уплотнительного герметизирующего шнура 7. В таком соедине-
нии часть шпилек (обычно две-три) проектируются по скользящим посад-
кам седьмого квалитета. Они воспринимают и передают поперечные на-
грузки от крутящего момента и перерезывающей силы. Эти же шпильки
обеспечивают точность по смещению осей Да и закручиванию отсеков Дф.
Остальные шпильки в соответствии с требованиями взаимозаменяемости,
удешевления конструкции и сборочной оснастки устанавливаются с гаран-
тированным зазором. Шпангоуты 1 и 6 в местах расположения точек креп-
ления имеют местные приливы для резьбовых отверстий под шпильки и
для гнезд ("карманов”), в которых размешаются гайки. Требуемая точ-
ность по Др достигается торцовкой плоскости фланцев с допуском на
неперпендикулярность к оси корпуса ЛА порядка 0,05/100.
Ниже рассматриваются схемы и конструкции различных фланцевых сты-
ков с наружным подходом к соединительным элементам. Для всех них
Рис. 5.20. Схема нагружения н конструкция точечного фланцевого стыка
230
соблюдение точности по параметрам Да, и Дф обеспечивается соответ-
ственно обработкой ведущих центрирующих поясков сопряженных диаметров
по скользящим посадкам, разделкой торцов стыкуемых отсеков с допуском
на неперпендикулярность к продольной оси корпуса порядка 0,05/100,
сверлением радиальных отверстий под винты (болты), по кондуктору или
установкой радиальных фиксаторов (штифтов).
На рис.5.21 представлен стык с закладными болтами. Болт 2 вставля-
ется через прорезь b в углубления в приливах шпангоутов 1 и 4. Голов-
ка болта имеет форму, предотвращающую проворачивание болта. Гайка 3
имеет цилиндрический поясок, которым она садится при закручивании в
специальное гнездо шпангоута 4. Это гнездо препятствует выпаданию
болта из прорези.
Конструкция фланцевого соединения с наклонно расположенными болта-
ми показана на рис.5.22. Такое соединение обладает повышенной быстро-
разъемностью.
Для слабонагруженных отсеков малых диаметров конструкция стыка по-
казана на рис.5.23. Здесь, как правило, в четырех точках по контуру
на шпангоутах 1 и 5 привариваются бобышки 3 и 4 для установки стяжных
болтов 2. С целью уменьшения сопротивления выступающие за контур кор-
пуса элементы размещаются за крыльями или рулями, а болт 2 имеет ко-
ническую головку.
Применяются фланцевые стыки с винтами (болтами), оси которых имеют
Рис. 5.21. Конструкция фланцевого стыка с закладными болтами
Рис. 5.22. Конструкция фланцево-
го стыка с наклонно расположен-
ными болтами:
1 — шпангоут; 2, 4 — уплотнение;
3 — втулка; 5 — болт; 6 — лента
231
Рис. 5.23. Конструкция фланцевого стыка с наружным расположением болтов
Рис. 5.24. Конструкция фланцевого
стыка с радиальным расположением
болтов
Рис. 5.25. Схема нагружения и конструкция быстроразъемного фланцевого
соединения:
1,5- шпангоуты; 2 — стяжные хомуты; 3 ~ штифт; 4 — уплотнение; 6 —
стяжные болты
232
радиальное направление (рис.5.24). В этом случае соединение стыковых
шпангоутов 1 и 3 осуществляется сухарями 4 с конусными поверхностями
и винтами 2, стягивающими фланцы шпангоутов по соответствующим
конусным поверхностям.
Пример контурного фланцевого стыка при помощи быстросъемных стяж-
ных хомутов показан на рис.5.25,а. Стяжные болты 6 обычно размещают
под бортовыми нервюрами крыла или в гаргротах для топливных и энерге-
тических магистралей. Нагрузка с одного отсека на другой передается
по всему периметру, заставляя обшивку работать полностью и рав-
номерно.
При нагружении корпуса растягивающие погонные нагрузки на стык q
(рис.5.25,б) вызовут давления р со стороны шпангоутов на поверхность
контакта с хомутом и давление трения др в плоскости контакта. Сумма
проекций этих нагрузок на горизонталь равна q, т.е.
pcosd * дряпб = <7, (5.153)
откуда
Р = —Г"2-----ГГ. (5.154)
r COS® ♦ Д51П0
где д - коэффициент трения.
Вертикальная составляющая р&, действующая на хомут, будет опреде-
ляться выражением
Рв = 2p(sinfl - pcosfl). (5.155)
Коэффициент д может быть близок к нулю (например, при наличии
смазки стыка), в этих условиях величины р и р* определяют по
приближенным формулам
" - = (5.156)
При конструировании хомута следует учитывать контактные напря-
жения, а также изгибные деформации, возникающие от действия погонного
момента, максимальное значение которого (в среднем сечении)
составляет т = qh.
Для лонжеронных конструкций корпусов следует учитывать то, что
основные нагрузки воспринимают и передают лонжероны (усиленные стрин-
геры). При конструировании стыкового узла здесь должна быть обеспече-
на прямоточность усилий, т.е. непосредственная стыковка лонжеронов,
как это показано на рис.5.26.
233
Рис. 5.26. Конструкция стыкового узла отсеков корпуса лонжеронной схемы:
1, 4 — стыковой шпангоут: 2, 5 — лонжерон; 3 — фитинги; 6 — стяжные
болты
Стыковые шпангоуты в подобных конструкциях собирают распределенные
касательные усилия с обшивки и передают их в виде сосредоточенных
сил через стыковые узлы. Выбор геометрических параметров стыковых
шпангоутов производится на основе расчета шпангоута как плоской рамы,
нагруженной сосредоточенными силами в своей плоскости. Уравнове-
шиваются эти силы распределенными касательными усилиями, приходящими
от обшивки.
5.6.3. Телескопические стыки
Телескопические соединения (рис.5.27) применяются на ЛА малых и
средних диаметров (D * 250...-650 мм). Шпангоуты 2 и 4 стыкуемых
отсеков в местах соединения с обшивками 1 и 5 в этом случае имеют
меньший перепад жесткости, чем у точечных фланцевых стыков и, следо-
вательно, меньшую концентрацию напряжений. Число винтов 3 и анкерных
гаек 6 выбирается из условий прочности (шаг винтов ориентировочно
30...60 мм), причем все винты ставятся в отверстие с зазором. Люфты
при этом не возникают, т.к. имеется разброс зазоров в разные стороны.
Стыковочные поверхности обоих шпангоутов обрабатываются по
234
Рис. 5.27.
телескопического
ния на винтах
Конструкция 12 3 4 5
диаметру D в
допусках Этой же обработкой, соосной наружной
поверхности летательного аппарата, обеспечивается точность по смеще-
нию Да осей отсеков. Сверление отверстий под винты по кондуктору
обеспечивает точность по закручиваю (Дф). Для получения требуемой
точности по перекосу (Д^) плоскость осей винтов должна быть нормальна
к продольной оси отсека с допуском на неперпендикулярность порядка
0,05/100.
Описанное соединение хорошо передает крутящий и изгибающий моменты
и осевую силу. От их действия винты соединения работают на срез, а
материал шпангоута под винтами - на смятие. Перерезывающая сила с
одного отсека на другой передается при работе шпангоута на срез.
Винты вследствие наличия зазоров нагружаются неодинаково. Поэтому в
расчетах надо вводить коэффициент неравномерности работы винтов
(0,3...0,7).
Герметичность стыка обеспечивается резиновыми жгутами или
прокладками 7 и с помощью постановки самоконтряшихся герметичных
анкерных гаек 6 с последующим нанесением слоя герметика 8.
Особой разновидностью телескопических стыков являются резьбовые
соединения. Их целесообразно применять для корпусов малых диаметров,
так как при больших диаметрах и мелкой резьбе возможен ее срыв (D <
< 200 мм). Высота резьбы Л ~ 0,010.
Торцевые поверхности 3 на соединяемых отсеках (рис. 5.28, а)
обеспечивают точность по перекосу (Д^). Цилиндрические поверхности 4,
называемые ведущими поясками, обеспечивают точность по смещению (Да).
Поверхности 3 и 4 на каждом отсеке выполняются за одну установку на
станке. Добиться точности соединения на одной резьбе без поверхностей
3, 4 невозможно, так как резьба всегда несколько перекошена. Герме-
тизация соединения выполняется резиновым валиком 2. Для контровки
служит винт /.
Резьбовой стык не может обеспечить точность соединения отсеков по
закручиванию (Дф), потому что невозможно подогнать начала входа и вы-
хода резьб на обоих отсеках. Если же необходимо выдерживать Дф в пре-
235
Рис. 5.28. Конструкции резьбовых соединений отсеков корпуса
делах заданных допусков, применяется резьбовое соединение, показанное
на рис.5.28,б. Здесь в качестве упора соединения по торцу использует-
ся контргайка /, имеющая запас хода е, больший одного витка резьбы,
которым гайка выбирает погрешность по закручиванию. Приведенное сое-
динение не обеспечивает точности по перекосу осей (Д^). поскольку не
имеет торцевого ведущего пояса. Взаимозаменяемость резьбовых соедине-
ний обеспечивается резьбой, выполняемой с отклонениями, не превышаю-
щими допуск скользящей посадки по седьмому квалитету.
При передаче изгибающего момента и осевой силы с одного отсека на
другой имеют место изгиб, срез и смятие резьбы. Возникающие при этом
напряжения при проектировании стыка рассчитывают приближенно, прини-
мая равномерное распределение усилий как по виткам, так и по высоте h
резьбы.
Соединение стыковых шпангоутов с обшивкой в большинстве практичес-
ких приемов выполняется герметической шовной сваркой (газовой,
электродуговой, роликовой) или в дискретных точках (точечной сваркой,
клепкой, винтами). При дискретной заделке шпангоута в обшивке шаг шва
или заклепок выбирается из условий прочности и отсутствия коробления
(хлопунов) между точками крепления. По статистике это условие выпол-
няется при шаге t < 20 мм.
236
Г л а в a 6. ПРОЕКТИРОВАНИЕ КОНСТРУКЦИЙ КРЫЛЬЕВ,
РУЛЕЙ И МЕХАНИЗМОВ УПРАВЛЕНИЯ
§ 6.1. КОНСТРУКЦИИ НЕСУЩИХ ПОВЕРХНОСТЕЙ
И РАБОТА ИХ ЭЛЕМЕНТОВ
6.1.1. Классификация несущих поверхностей
Несущие поверхности ЛА - это крылья, оперение, рули, дестабилиза-
торы. Они служат для создания нормальных (к траектории) сил и управ-
ляющих моментов, обеспечивающих полет по заданной траектории. Несущие
поверхности - это сильно нагруженные и весьма сложные по конструктив-
но-технологической реализации агрегаты ЛА. На их долю приходятся зна-
чительные части массы и аэродинамического сопротивления ЛА. Ориенти-
ровочно т (с S)
д = = 0,05 ... 0,15; 7---с-,-Р = 0.3 ••• 0.5.
41 "о (сЛл
где меньшие значения относятся к автоматическим ЛА, а большие - к са-
молетам.
Нагрузки, их распределение, работа элементов конструкций крыла и
оперения во многом идентичны. Поэтому при анализе несущих поверхнос-
тей мы будем ориентироваться преимущественно на крыло, полагая, что
получаемые выводы и рекомендации справедливы и для оперения.
При проектировании конструкции формы и геометрические параметры
крыла предполагаются известными. Они находятся на предыдущем этапе
при формировании облика ЛА и определении его основных проектных пара-
метров. Задача проектирования конструкции крыла состоит в выборе ма-
териала, конструктивно-силовой схемы, способа производства и опреде-
лении конструктивных параметров в соответствии с требованиями прочно-
сти, аэроупругости, технологии производства, экономики, надежности и
ДР* о
Основными геометрическими параметрами крыла являются: X = Г/S -
удлинение крыла; 17 = 6^/6* - сужение крыла; х - угол стреловидности
по характерным линиям_ крыла (по передней кромке, по линии максималь-
ных толщин и т.п.); с = (с/Ь)’ 100 % - относительная толщина профиля;
форма профиля и форма крыла в плане.
Здесь I - размах крыла; S - площадь крыла; - центральная хорда
крыла (по оси ЛА); Ь* - концевая хорда крыла; с - максимальная толщи-
на профиля крыла.
237
Геометрия крыла и прежде всего форма в плане является важнейшим
классификационным признаком несущей поверхности. Это обусловлено тем,
что геометрические параметры тесно связаны с аэродинамическими харак-
теристиками крыла, т.е. с его основной функцией - аэродинамической
несущей способностью. Стремление наилучшим образом реализовать эту
функцию предопределило весьма различные геометрические очертания
крыльев на дозвуковых и сверхзвуковых скоростях полета. На дозвуковых
скоростях выгодно иметь крыло большого удлинения (2 < X < 6); на
сверхзвуковых - малого удлинения (X < 2). Эти две разновидности
крыльев - основные.
Существенное влияние на аэродинамические характеристики оказывают
число крыльев и их форма при виде спереди. Наибольшее распространение
получили монопланные крылья. Наряду с монопланными крыльями, как по-
казывают конструкторские проработки и экспериментальные исследования,
возможны и в ряде случаев более целесообразны иные геометрические
формы крыльев. Особенно привлекательными для конструкторов представ-
ляются полипланные решетчатые крылья и рули благодаря их малым габа-
ритам и массе.
Планы решетчатых крыльев позволяют получать плавное обтекание до
углов атаки 40 ... 50 . На сверхзвуковых скоростях планы решетки мож-
но расположить достаточно близко друг от друга без их взаимного влия-
ния и получить большую суммарную площадь решетчатого крыла в малом
объеме. Поэтому подъемная сила решетчатого крыла оказывается в не-
сколько раз большей, чем подъемная сила монопланного крыла при равных
объемах: при М = 4 подъемная сила решетки примерно в три раза превы-
шает подъемную силу соответствующего монопланного крыла.
Еще одной важнейшей классификационной характеристикой несущей по-
верхности является конструктивная схема, отражающая взаимное располо-
жение основных силовых элементов, их конструктивное оформление, мето-
ды изготовления и соединения этих элементов между собой. С этой точки
зрения наибольшее влияние на облик крыла оказывает степень участия
обшивки в восприятии изгиба. По этому признаку конструктивные схемы
крыльев делят на две большие группы: лонжеронные и моноблочные.
К лонжеронным конструкциям относятся такие, у которых пояса лонже-
ронов воспринимают основную часть изгибающего момента, а сравнительно
тонкая, слабо подкрепленная обшивка преимущественно работает на сдвиг
от действия крутящего момента и перерезывающей силы. В моноблочных
крыльях картина иная: продольные силы от изгиба здесь воспринимаются
главным образом обшивкой совместно с подкрепляющими элементами. Роль
продольных элементов в работе таких крыльев на изгиб невелика, вслед-
238
Рис. 6.1. Классификация несущих поверхностей
ствие чего площади их поперечных сечений соизмеримы с площадями сече-
нии других подкрепляющих элементов.
С учетом указанных выше наиболее характерных признаков на рис. 6.1
показана возможная классификация несущих поверхностей. Рассмотрим
распространенные конструкции крыльев и особенности их работы.
в.1.2. Крылья большого удлинения
Прямые крылья. Крылья большого удлинения (2 < X < 6) применяют на
ЛА, функционирующих в плотных слоях атмосферы на дозвуковых и неболь-
ших сверхзвуковых скоростях. Основные разновидности таких крыльев пе-
речислены на рис. 6.1.
Прямые крылья обычно имеют трапециевидную форму в плане с неболь-
шим углом стреловидности (х = 5 ... 15 ), определяемым требованиями
центровки ЛА. Такому крылу выгодно придавать большое сужение, так как
с увеличением сужения при сохранении одинакового удлинения значение
максимального изгибающего момента у корня крыла будет уменьшаться
вследствие перемещения центра давления к корню. Кроме того, увеличе-
ние корневой хорды при той же относительной толщине профиля ведет к
увеличению строительной высоты крыла, что дает возможность более эф-
фективно использовать силовые элементы и, следовательно, позволяет
уменьшить массу конструкции крыла.
Различают конструктивно-силовые схемы прямых крыльев двух типов:
лонжеронную и кессонную. Из лонжеронных схем для прямых крыльев наи-
более распространенными являются одно- и двухлонжеронные схемы
(рис.6.2), хотя на практике встречаются и многолонжеронные крылья.
Кроме лонжеронов в силовой набор таких крыльев могут входить нервюры
и стрингеры.
Однолонжеронное крыло имеет один лонжерон и одну (заднюю) или две
(переднюю и заднюю) стенки (см. рис. 6.2, а, б). Лонжерон располага-
ется обычно в зоне максимальной толщины профиля, так как в этом
случае требуется меньшая площадь поясов, а значит и меньшая масса.
В двухлонжеронном крыле (см. рис. 6.2, в) ось переднего лонжерона
располагается на 25 ... 30 % хорды, ось заднего - на 60 ... 70 %, так
что средняя часть крыла с наибольшей толщиной остается свободной. Та-
кое крыло несколько тяжелее однолонжеронного. Однако жесткость у него
выше и оно выгоднее по свободным объемам.
Достоинством лонжеронных крыльев является удобство стыковки с кор-
пусом ЛА, так как стыковочные узлы требуются в основном по поясам
лонжеронов. По сравнению с крыльями других конструкций они в меньшей
240
2
JLL
Рис. 6.2. Конструкции лонжеронных крыльев:
(Q д, б - однолонжеронное; в - двухлонжеронное со стрингерами; 1 - лонжерон; 2 — задняя стенка; 3 — стрингер; 4 - об-
Й шив к а
Рис. 6.3. Основные сило-
вые элементы лонжеронно-
го крыла
мере подвержены коробле-
нию и воздействию темпе-
ратурных напряжений при
нагреве вследствие не-
значительного стеснения лонжеронов тонкой обшивкой.
Для лонжеронных крыльев характерна функциональная определенность
каждого силового элемента, что способствует адекватности расчетной
схемы реальным условиям работы и, как следствие, высокой надежности
конструкции. Основные функции силовых элементов удобно рассмотреть на
примере однолонжеронного крыла (рис. 6.3), состоящего из обшивки 4,
лонжерона /, стрингеров 2 и нервюр 3. Последовательная передача сил
элементами крыла в общих чертах происходит так же, как и в любой тон-
костенной оболочке, подкрепленной продольным и поперечным набором.
Нормальные нервюры служат для сохранения формы профиля крыла, а
также участвуют в его общей работе, подкрепляя обшивку и продольный
набор. Эти же функции выполняют и усиленные нервюры, но они в основ-
ном предназначены для восприятия сосредоточенных сил. Каждая нервюра
с помощью обшивки и стрингеров собирает воздушную нагрузку с полосы
крыла шириной, равной шагу нервюр I* (см. рис. 6.3). Таким образом,
на нервюру действует погонная нагрузка q* = ДрС равнодействующая
которой равна Р* (рис. 6.4). От действия q* нервюра стремится пере-
меститься, но этому препятствуют стенка лонжерона и обшивка, с кото-
рыми нервюра соединена. В результате нервюра работает как балка на
изгиб в своей плоскости (в рассматриваемом случае как двухконсольная
балка).
В стенке лонжерона возникнет усилие Р , равное по величине равно-
л
действующей Р*, но направленное в противоположную сторону:
Ь
(6.1)
242
Рис. 6.4. Нагрузки, дей-
ствующие на нервюру
Линия действия силы Р* не проходит через центр жесткости сечения
(лонжерон); следовательно, возникнет крутящий момент М^, который
уравновешивается реактивным потоком касательных сил q? со стороны об-
шивки, определяемым из уравнения равновесия моментов
2ох? = Р(х - х ). (6.2)
Т ц.д л
Откуда
Р(х - X )
_______Ц.д л
" 2со
(6.3)
где - площадь, ограниченная контуром нервюры.
Для восприятия изгиба нервюру выполняют в виде двухпоясной балки.
Сдвиг, сопровождающий изгиб, воспринимается стенкой нервюры, которая
с целью повышения устойчивости может подкрепляться стойками. Типовые
нормальные нервюры, как правило, выполняются в виде сплошных стенок
из листового материала. Их пояса образуются или отбортовками стенок,
или специальными профилями. Часто условиям прочности удовлетворяют
очень тонкие стенки нервюр, не позволяющие получить качественных сое-
динений. Поэтому толщину стенки увеличивают, но в целях облегчения в
ней делают отверстия с отбортованными краями для увеличений жесткос-
ти. По контуру нервюра может иметь вырезы для стрингеров. В этом слу-
чай роф> пояса нервюры выполняет только присоединенная к ней обшивка.
Стрингеры крепятся к нервюре с помощью либо податливых отогнутых ла-
243
гкж, либо специальных уголков (рис. 6.5, а), а иногда не крепятся во-
обще. Со стенками лонжеронов нервюры соединяются посредством уголков
(рис.6.5, б), выполняющих роль стоек на стенке лонжерона, или отбор-
тованными участками стенок нервюр.
Функции стенки, подкрепленной стойками, хорошо выполняет гофриро-
ванная стенка, одновременно позволяющая снизить температурные напря-
жения в конструкции при аэродинамическом нагреве.
В местах действия сосредоточенных сил ставятся усиленные нервюры с
более мощными поясами. Эти нервюры воспринимают и передают на лонже-
роны дополнительные сосредоточенную нагрузку и крутящий момент. Такие
нервюры обязательно должны соединяться и с обшивкой крыла, и со стен-
ками лонжеронов.
Лонжероны воспринимают изгибающий момент и поперечную силу Q.
Момент воспринимают пояса лонжеронов, в которых возникают осевые
силы N. Стенки лонжеронов берут на себя практически всю силу Q и ра-
ботают на сдвиг. Совместно с обшивкой стенки образуют замкнутые кон-
туры, воспринимающие крутящий момент М^. Кроме стенок как составных
элементов лонжеронов в крыльях часто применяются так называемые про-
дольные стенки, пояса которых значительно слабее поясов лонжеронов.
Конструктивно лонжерон современного ЛА выполняется в виде двухпо-
ясной балки с тонкой стенкой, подкрепленной стойками. В некоторых
конструкциях применяются лонжероны, у которых пояса и стенки выполне-
ны с помощью штамповки или литья как одно целое. Разнесение поясов на
максимальное расстояние от нейтральной оси обеспечивает минимальную
площадь поперечного сечения при заданном моменте М^.
Пояса балочных лонжероне» делаются из специальных профилей, сече-
ния которых весьма разнообразны. Эти профили обычно изготавливаются
из высококачественных сталей, сплавов алюминия, титана и других высо-
копрочных материалов. Из условия равнопрочное™ лонжерон выполняется
6
Рис. 6.5. Соединение силовых элементов крыла
244
N
Усилие б поясе
в виде балки переменного сечения. Площади сечений поясов уменьшаются
по размаху крыла.
Нервюры передают стенке лонжерона воспринятую ими воздушную на-
грузку в виде касательных сил Под их действием стенка работает на
сдвиг; причем воспринимаемая ею поперечная сила суммируется от нервю-
ры к нервюре (рис. 6.6), а затем через узлы стыковки передается на
корпус. В соответствии с законом парности касательных напряжений по-
токи усилий q% будут нагружать пояса лонжерона соответственно растя-
гивающими W и сжимающими W усилиями, равными Л/.
раст сж
Балочная конструкция лонжеронов с точки зрения минимума массы яв-
ляется наиболее выгодной для крыльев с большой и средней относитель-
ной толщиной профиля.
Обшивка обеспечивает необходимую форму поверхности крыЛа, воспри-
нимает местную аэродинамическую нагрузку, работает на растяжение
(сжатие),и сдвиг от общего изгиба и кручения крыла, является основным
элементом, обеспечивающим прочность и жесткость конструкции. Обшивка
245
Рис. 6.7. Схема нагружения
крыла крутящим моментом
Ось нервюры
М*р тах ^
4 Поток усилий
с нервюры на обшивку
может быть выполнена из листового материала (дюралюмина, титана или
стали), из монолитных панелей или в виде многослойной конструкции.
Крутящий момент М , возникающий от действия сил Р и Р (см.
J кр ил
рис. 6.4), воспринимается при работе на сдвиг, замкнутых контуров об-
разованных обшивкой и стенкой лонжерона. Наиболее нагруженными от
кручения будут обшивка в корневой части крыла и бортовая нервюра, ко-
торая через узлы стыковки передает М на корпус в виде пары сил
кр max
R (рис. 6.7).
Передавая воздушную нагрузку на нервюры и стрингеры, обшивка рабо-
тает на поперечный изгиб и растяжение. Если толщина обшивки мала, то
превалирует растяжение и тогда равновесие выделенного элемента дости-
гается главным образом за счет растягивающих (цепных) усилий. При
толстой обшивке большую роль играет изгиб, при котором внешняя наг-
рузка уравновешивается поперечными силами. Понятие тонкой или толстой
обшивки зависит от значения отношения b/д. Если b/d таково, что об-
шивка теряет устойчивость при напряжениях, меньших предела пропорцио-
нальности, то она называется тонкой, а если при напряжениях, больших
или равных пределу пропорциональности, - толстой.
Функции стрингеров в крыле мало отличаются от функций стрингеров в
корпусе. Вместе с обшивкой (и лонжеронами) они воспринимают изгибаю-
щий момент, нагружаясь от него осевыми усилиями; передают нервюрам
(шпангоутам) местную воздушную нагрузку; соединяясь с обшивкой, уве-
личивают ее критические напряжения и уменьшают деформации от местной
нагрузки. При расчетах стрингер моделируется многоопорной балкой, ра-
ботающей на продольно-поперечный изгиб. Опорами такой балки являются
нервюры (в крыле) и шпангоуты (в корпусе).
Стрингеры изготавливаются из прессованных и гнутых профилей с раз-
личной формой сечений. Гнутые профили делаются из листового материа-
246
ла, имеют малую толщину. Их применяют в основном в зонах сложной кон-
фигурации. В большинстве же случаев используют прессованные профили
как наиболее технологичные и дешевые.
Выбор формы сечения стрингера определяется многими факторами, в
том числе относительной толщиной крыла, величиной и характером рас-
пределения в нем температуры, условиями общей и местной потерь устой-
чивости, технологией сборки и др.
Для малоразмерных крыльев и рулей, имеющих строительные высоты,
соизмеримые со строительными высотами стрингеров, усиление обшивки с
помощью стрингеров малоэффективно. Поэтому такие крылья обычно бес-
стрингерные. Для крыльев больших размеров, наоборот, стрингеры вместе
с обшивкой являются основными силовыми элементами. При этом лонжерон-
ная схема как таковая вырождается: лонжероны развиваются на всю зону
максимальной строительной высоты профиля, образуя кессон (см.
рис. 6.2, в), воспринимающий практически все нагрузки. Носовая и хво-
стовая части крыла в основном служат для создания аэродинамической
формы, восприятия местных нагрузок и частично крутящего момента. Ма-
териал, затрачиваемый в лонжеронных крыльях на пояса лонжеронов, в
кессонных используется для усиления стрингеров и обшивки с целью по-
вышения их критических напряжений.
К достоинствам кессонных крыльев следует отнести меньшую массу по
сравнению с лонжеронными, высокие прочность и жесткость, наиболее
целесообразное использование материала. Недостатки таких крыльев
выражаются в сложности (а иногда и невозможности) создания вырезов,
больших температурных напряжениях, сложности крепления крыла к кор-
пусу.
Для всех рассмотренных схем характерны близкие геометрические фор-
мы крыльев и примерно одинаковый характер работы конструктивных эле-
ментов. Расчетные схемы прямых крыльев большого удлинения наиболее
отработаны. Без большой ошибки в проектировочных расчетах можно пола-
гать, что весь изгибающий момент воспринимается полками лонжеронов (в
лонжеронном крыле) или подкрепленными панелями (в кессонном крыле),
перерезывающая сила - вертикальными стенками, а крутящий момент -
замкнутыми контурами, образованными обшивкой и стенками крыла. При
наличии нескольких лонжеронов, стенок и замкнутых контуров работа
элементов конструкции не изменяется. Однако возникает задача распре-
деления силовых факторов между конструктивными элементами. При проек-
тировании крыльев эта задача решается следующим образом.
Крутящий момент между замкнутыми контурами распределяется пропор-
ционально их жесткости на кручение:
247
<GI ).
м .= M - 7-лУ -г~ . (6.4)
кр» кр 2 (и/ ).
. кр/
где (б/^)*. - жесткость на кручение х-го контура сечения,
(G/ ). = 4ы2/# , (6.5)
кр I I G.8.
где - площадь Z-го контура сечения; S - длина контура.
Поток касательных усилий q?. в i-м контуре определяется как
v(2“?- " |6-6)
В лонжеронном крыле потоки q?. в отдельных контурах близки по зна-
чению и в промежуточных стенках взаимно уничтожаются, поэтому счита-
ют, что поток касательных сил в обшивке и задней стенке
q = М /<2£ со.), (6.7)
V кр < i
где Бсо. - сумма площадей всех замкнутых контуров сечения.
i ‘
При приближенном распределении изгибающего момента и перерезываю-
щей силы по конструктивным элементам крыло предполагается абсолютно
жестким на сдвиг. В этом случае изгибающий момент и перерезывающая
сила распределяются между участками конструкции пропорционально их
жесткостям на изгиб:
(£/), (£/).
Ч = «ПЁ7Г. <68>
I 1 I 1
где (EI). - изгибная жесткость Z-го элемента (лонжерона или участка
моноблочного крыла), воспринимающего изгибающий момент.
Так как в проектировочном расчете еще неизвестны геометрические
параметры конструктивных элементов, то приближенно полагают, что мо-
мент инерции пропорционален квадратам строительных высот. Тогда
(ЕЯ2) (ЕЯ2)
М . = М ----------т-2- ; Q. = Q-------. (6.9)
и3' 1,3 Б (ЕЯ2)f ‘ 2 (ЕЯ2),.
i i
248
Центр жесткости сечения определяется также в соответствии с гипо-
тезой плоских сечений:
х = (ГП— • (6.10)
ц.ж S \tl).
I 1
Приближенно
? Е^.
где х, - координата /-го лонжерона или /-го участка, на которые ус-
ловно разбито сечение крыла.
Стреловидные крылья. Особенности конструкции и работы стреловидных
крыльев определяются их корневыми частями, т.е. участком 1-2-3, непо-
средственно прилегающим к корпусу (рис. 6.8). Конструктивно эта зона
может быть выполнена с изломом осей продольных силовых элементов по
бортовой хорде или без излома, но с подкосной балкой. В том и другом
случаях может применяться как лонжеронная, так и кессонная схемы.
Особенности работы корневых частей стреловидных крыльев, связанные
с передачей на узлы крепления крыла к корпусу изгибающего и крутящего
моментов и поперечной силы, сводятся к следующему.
Рис. 6.8. Схемы стреловидного крыла:
а — с изломом осей продольных элементов; б — с подкосной балкой; в —
нагрузки на корневой треугольник крыла
249
Во-первых, все стреловидные крылья для передачи изгибающего момен-
та должны иметь дополнительные по сравнению с прямыми крыльями сило-
вые элементы. Крылья с изломом осей продольных элементов в местах из-
лома в качестве таких элементов имеют бортовые силовые нервюры 1-2
(см. рис. 6.8, а). У крыльев без излома осей продольных элементов та-
кими дополнительными силовыми элементами являются подкосные балки 2-4
(см. рис. 6.8, б).
Во-вторых, все лонжеронные крылья обязательно должны иметь корне-
вые нервюры 2-3 для передачи крутящего момента. Это связано с особен-
ностями работы на сдвиг обшивки корневого треугольника l-2-^З (см.
рис. 6.8, в). Для передачи погонных касательных усилий от сечения 2-3
к сечению 2-1 из условий равновесия необходимо, чтобы в сечении 2-1
развивались нормальные погонные усилия q . Но эти усилия в лонжерон-
ном крыле существовать не могут, так как сечение 2-1 является свобод-
ным краем обшивки. Следовательно, участок обшивки l-2-^З работать на
сдвиг не может и для снятия крутящего момента в сечении 2-3 необходи-
мо установить силовую нервюру.
В-третьих, в кессонных стреловидных крыльях с изломом силовых па-
нелей в корневых частях происходят концентрация нормальных напряжений
в силовых элементах, расположенных вблизи задней стенки (см.
рис. 6.8, а), и догружение поперечной силой этой стенки за счет разг-
рузки передней стенки. Это объясняется различными длинами (и, следо-
вательно, различными жесткостями) волокон передних и задних элементов
силовых панелей: I 0_|_3 > ^0_2 • По той же причине в двухлонжеронном
крыле с изломом осей лонжеронов у борта корпуса в корневой части про-
исходит подобное же перераспределение изгибающих моментов и попереч-
ных сил между передним и задним лонжеронами.
В стреловидных крыльях нервюры могут быть расположены по норма-
ли к оси жесткости крыла или по потоку. На силовую схему крыла
расположение нервюр практически не влияет: поперечная сила,
изгибающий и крутящий моменты воспринимаются одинаково при любом рас-
положении нервюр.
Рассмотрим работу силовых элементов стреловидных крыльев типичных
конструктивных схем.
На рис. 6.9 показана силовая схема однолонжеронного крыла, включа-
ющая лонжерон, заднюю стенку, две силовые нервюры - бортовую 1-2 и
корневую 2-3-4, обшивку, подкрепленную стрингерами, и набор нормаль-
ных нервюр. Консоль крыла стыкуется с корпусом ЛА моментным узлом в
точке / л шарнирным - в точке 2. Бортовая нервюра в точке / моментно
увязана с лонжероном, а в точке 2 закреплена шарнирно. Корневую нер-
250
Рис. 6.9. Схема передачи изгибаю-
щего момента в однолонжеронном
стреловидном крыле
вюру при расчетах считают шарнир-
но опертой в точках 2 и 3, в ко-
торых ее стенка связана со стен-
ками соответственно бортовой нер-
вюры и лонжерона.
К корневому сечению крыла со
стороны концевой части подходят
поперечная сила и изгибающий мо-
мент по лонжерону и крутящий мо-
мент в виде потока касательных
усилий q по замкнутому контуру,
образованному обшивкой крыла и задней стенкой.
Крутящий момент с замкнутого контура снимается корневой нервюрой
2-3-4 и передается ею в виде пары сил в узле 2 и в точке 3. Сила,
воспринятая лонжероном, изгибом последнего передается в узел /. Кор-
невая нервюра 2-3-4 при этом работает на изгиб: в ее сечениях дейст-
вуют поперечная сила и изгибающий момент. Следовательно, конструктив-
но корневая нервюра должна быть выполнена в виде двухпоясной балки.
Поперечная сила от корневого сечения передается в узел / участком
лонжерона 1-3. В точке / изгибающий момент лонжерона М раскладывает-
ся на две составляющие (см. рис. 6.9): М - М cosx и М = М sinx-
б л ил
Момент М передается на корпусный участок лонжерона 1-1 и уравно-
б
вешивается (при симметричном нагружении крыла) таким же моментом,
подходящим к нему с другой консоли крыла.
Бортовая нервюра является одним из наиболее нагруженных элементов
рассматриваемого крыла: при больших углах стреловидности х максималь-
ный изгибающий момент нервюры по величине близок к максимальному мо-
менту лонжерона, а ее поперечная сила может быть даже больше попереч-
ной силы лонжерона. Поэтому бортовая нервюра должна иметь толстую
стенку и мощные пояса, причем последние, как правило, имеют сечения,
с площадями, пропорциональными общему изгибающему моменту, и
обязательно должны быть связаны с поясами лонжерона для передачи
момента М .
и
251
Опорные реакции крыла в узлах крепления к корпусу находят из усло-
вия равновесия (равенство нулю суммы моментов всех сил относительно
осей 2-2, 1-1 и 1-2), что дает
С * ^1-9
R=P-T—-. R=P—М *Рх . (6.12)
1 I 2 1 б ц.д
1-2 1-2
где Р - равнодействующая аэродинамических и массовых сил консоли
крыла.
Двухлонжеронное крыло практически не отличается от рассмотренного
однолонжеронного крыла. Следует лишь должным образом распределить
между лонжеронами изгибающий момент и перерезывающую силу Q кры-
ла. Приближенно считают, что эти силовые факторы распределяются про-
порционально изгибным жесткостям лонжеронов:
М f Q (El) .
л 1 л! л!
М о = Q о = (Е1) о
л2 л2 л2
(6.13)
Особенностью кессонных стреловидных крыльев (рис. 6.10), как ука-
зывалось выше, является концентрация нормальных напряжений в силовых
элементах, расположенных вблизи задней стенки кессона. Этот эффект
проявляется в сечениях, удаленных от корневого сечения 2-3 на рассто-
яние г < /
2-3
Рис. 6.10. Схема нагружения кес-
сонного крыла
Рис. 6.11. Схема нагружения стре-
ловидного крыла с внутренним подкосом
252
При проектировании конструкций напряжения в корневом сечении пане-
ли рассчитывают по формулам
где М - изгибающий момент в корневом сечении крыла; Н , L „ и 5 -
из р 2—3 к
расчетная высота кессона, ширина панели и приведенная толшина панели
в корневом сечении соответственно; х = х/1 - относительная коорди-
£ *5 __
нага точек корневого сечения, отсчитываемая от точки 2; I - приведен-
ная длина, определяемая по формуле
D \ соз^у + 1___________
21, - »1пХ * »вХ
ф
(6.15)
где 8
ф
Из
- приведенная толшина панели в корпусной части кессона.
(6.14) следует, что у заднего лонжерона (х = 0) нормальные нап-
ряжения а больше, чем у переднего. Концентрация напряжений растет с
— -О
увеличением стреловидности крыла. Расчеты показывают, что при х = 60
напряжения а вблизи заднего лонжерона могут возрасти на 70 % по
сравнению с напряжениями а . Следовательно, с точки зрения лучшего
ср
использования материала (уменьшения массы) целесообразно перераспре-
делять материал, сделав обшивку более толстой и стрингеры более мощ-
ными вблизи заднего лонжерона корневой части крыла.
Стреловидные крылья с внутренним подкосом (рис. 6.11) в качестве
силовых элементов имеют лонжерон, подкосную балку, корневую нервюру,
заднюю стенку.
Крепление лонжерона и задней стенки - шарнирное. Лонжерон как
двухопорная балка шарнирно опирается на узел / крепления консоли кры-
ла к корпусу и на подкосную балку в точке 2.
Изгибающий момент воспринимается лонжероном и подкосом. При этом
нарастает лишь на участке лонжерона до подкосной балки (точки 2),
а дальше падает до нуля в точке /. Подкосная балка нагружена сосредо-
точенной силой в узле 2. Из-за небольшой длины балки (а^ < aj ее
максимальный момент оказывается небольшим (NI < М ). Таким
б max л шах
253
образом, бортовая нервюра и лонжерон сравнительно мало нагружа-
ются М .
из
Крыло рассматриваемой схемы несколько легче крыла без подкоса. Это
обусловлено отсутствием бортовой нервюры и разгрузкой лонжерона в
подкосном крыле, что дает выигрыш в массе, превышающий затрату массы
на подкосную балку. Стреловидные крылья с внутренним подкосом могут
быть выполнены как по лонжеронной, так и по моноблочной схемам.
Малоразмерные крылья большого удлинения. Такие крылья находят
применение на небольших ЛА с дозвуковыми скоростями и малыми высотами
полета. Часто эти крылья делают складывающимися. Примером такой кон-
струкции может служить убирающееся в корпус прямое крыло, показанное
на рис. 6.12. Конструктивно крыло выполнено по лонжеронной схеме с
одним лонжероном, снабженным шарнирным узлом. Каркас крыла включает в
себя также нервюры, расположенные по потоку, и обшивку из алюминиево-
го сплава.
Аналогичное крыло из композиционных материалов показано на
рис. 6.13. В этом случае каркас изготовлен методом формования из уг-
лепластика. Обшивка состоит из нескольких слоев эпоксидного углеплас-
тика. Слои укладываются на лентоукладочной машине. Собранный пакет
(форма и заготовка) помещается в вакуумный мешок и отверждается в ав-
токлаве.
Рис. 6.12. Малоразмерное складывающееся крыло большого удлинения:
/• — поворотная консоль крыла; 2 — шарнирный узел; 3 — фиксатор; 4 —
силовой привод
254
Рис. 6.13.
Малоразмерное складывающееся крыло большого удлинения из
композиционных материалов
Рис. 6.14. Конструктивная схема малоразмерного стреловидного крыла
большого удлинения
Конструктивная схема малоразмерного стреловидного крыла большого
удлинения показана на рис. 6.14. Крыло, также убирающееся (складыва-
ется под корпусом ЛА), выполнено по кессонной схеме. Кессон представ-
ляет собой верхнюю и нижнюю панели, соединенные между собой передней
и задней стенками. Панели сделаны монолитными с продольными элемента-
ми. Передняя и задняя зоны крыла выполнены из алюминиево-магниевого
сплава.
6.1.3. Крылья малого удлинения
Каркасные (лонжеронные) крылья. Крылья малого удлинения, подобно
другим тйпам крыльев, разделяют на две большие группы: каркасные
255
(лонжеронные) и моноблочные. В каждой из этих групп можно выделить
целый ряд разновидностей (см. рис. 6.1). Главный отличительный
признак, лежащий в основе такой классификации, - характер работы
обшивки. В этом плане крылья малого удлинения во многом схожи с
рассмотренными ранее конструкциями: в каркасных (лонжеронных) схемах
большая часть нагрузки воспринимается и передается каркасом, а в
моноблочных - обшивкой.
Подчеркнем одновременно, что эта классификация отражает еще один
очень важный признак конструкции - ее технологичность. Технологич-
ность конструкции является вторым после массового совершенства крите-
рием оптимальности конструкции, а в ряде случаев - даже основным.
Каркасные конструкции, как правило, наборные, т.е. имеют многоде-
тальный силовой набор (каркас) и обшивку постоянной или переменной
толщины. Между собой элементы конструкции соединяют клепкой или
сваркой, реже склеивают. Каркасные крылья имеют минимальную добавоч-
ную массу, обусловленную технологией изготовления, однако они не ори-
ентированы на высокопроизводительные технологические процессы, что
свойственно моноблочным конструкциям, изготавливаемым методами литья,
штамповки, прессования.
Преимуществом каркасных крыльев является также простота узлов сты-
ковки с корпусом. Стыковые узлы в этом случае делаются в основном на
лонжеронах, в то время как моноблочные крылья стыкуются с корпусом по
контуру. В условиях нагрева температурные напряжения в каркасных кры-
льях меньше, чем в моноблочных. Стеснение температурным деформациям в
каркасных крыльях создают преимущественно сосредоточенные силовые
элементы, сравнительно тонкая обшивка практически не препятствует
температурному расширению.
Наиболее распространенные силовые схемы каркасных крыльев показаны
на рис. 6.15.
Однолонжеронные крылья (см. рис. 6.15, а, б) имеют высокую техно-
логичность, простую конструкцию стыковых узлов, обеспечивающую их
взаимозаменяемость. В условиях нагрева такие конструкции имеют мини-
мальные температурные напряжения, так как каркас является статически
определимой системой. Схема с подкосной балкой обычно применяется при
больших нагрузках на крыло.
С уменьшением удлинения крыла и с увеличением длины бортовой нер-
вюры однолонжеронные крылья становятся все менее выгодными из-за
большой податливости и массы. В этих условиях целесообразнее много-
лонжеронные схемы.
Лонжероны в крыльях могут быть сходящимися (расположенными по
256
линии одинаковых процентов хорд) или перпендикулярными оси ЛА (см.
рис. 6.15, в, г). Крылья с параллельными лонжеронами легче и жестче
по сравнению с другими типами конструкций крыльев малого удлинения. В
этих крыльях стыковочные узлы простые, мощная бортовая нервюра не
нужна, а продольный набор имеет наименьшую длину; следовательно, наг-
рузки передаются с крыла на корпус кратчайшим путем. Недостатком схе-
мы является криволинейность поясов лонжеронов и стрингеров, что ус-
ложняет технологию изготовления и сборки крыла.
Нервюры в многолонжеронных крыльях выгодно располагать по потоку,
носки же нервюр - перпендикулярно передней стенке (см. рис. 6.15, г).
Носовая часть крыла в этом случае может быть изготовлена в виде от-
дельной сборочной единицы.
Схемы с веерообразным и решетчатым силовыми наборами (см.
Рис. 6.15. Силовые схемы каркасных крыльев:
Q — однолонжеронное; б — с подкосом; в — со сходящимися лонжеронами;
г — с параллельными лонжеронами; д — с веерообразным силовым набором;
е — с решетчатым силовым набором; / — лонжерон; 2 — стрингер; 3 -
нервюра; 4 — шпангоут или сквозная балка; 5 — подкос
9-880
257
рис. 6.15, д, е) чаще всего применяют в крыльях сравнительно неболь-
ших размеров и рулях. Преимущество этих схем состоит в том, что силы
от любой точки поверхности крыла к узлам стыковки с корпусом переда-
ются кратчайшим путем, что является необходимым условием для получе-
ния конструкции минимальной массы.
Примером конструктивно-технологического решения каркасного крыла
может служить конструкция, представленная на рис. 6.16, где показано
клепаное крыло с V-образным расположением лонжеронов.
Основной лонжерон расположен по линии максимальных толщин профиля
крыла. Вспомогательный лонжерон, расположенный под некоторым углом к
бортовой нервюре, придает необходимую жесткость задней части крыла. В
крыле наряду с лонжероном имеется несколько стенок, которые вместе со
стрингерами образуют опорную клетку для обшивки. Нервюры в данном
крыле отсутствуют; их функции выполняют продольные стенки и стринге-
258
ры, расположение которых выбирается таким образом, чтобы обеспечить
одинаковую жесткость крыла как по его хорде, так и по размаху.
На рис. 6.17 представлено многолонжеронное крыло с параллельным
расположением лонжеронов и развитой бортовой хордой. Крыло имеет три
мощных лонжерона, которые передают все силовые факторы с крыла на
корпус. Вспомогательные стенки повышают жесткость обшивки и каркаса.
Хвостовая часть крыла выполнена с заполнителем, который поддерживает
обшивку и исключает тем самым потерю устойчивости.
Монобло"мые крылья. Основные достоинства моноблочных крыльев -
способность нести большие нагрузки, высокие жесткость, технологич-
ность, качество наружной поверхности.
Такие крылья, как показано на рис. 6.18, обычно изготавливаются из
отдельных панелей. Тип панели и ее параметры определяются характером
напряженного состояния крыла и значением максимальной осевой нагруз-
ки. Стрингерные и монолитные панели с параллельными ребрами применяют
в тех зонах конструкции, где напряженное состояние мало отличается от
одноосного. Максимальные нагрузки при критических напряжениях, близ-
ких к пределу текучести, лучше всего передают штампованные и прессо-
ванные панели (см. рис. 6.18, а, б). Трехслойные и подкрепленные
стрингерами панели (см. рис. 6.18, в, г) с высокой отдачей по массе
работают в диапазоне небольших нагрузок.
Конструкции с подкреплением в виде гофра (см. рис. 6.18, д) могут
оказаться выгодными по массе и в технологическом отношении, если по
расчету шаг стрингеров получается весьма малым. Для крыльев, работаю-
щих в условиях нагрева, иногда приходится применять стальную обшивку,
подкрепленную гофром малой толщины и малого шага. Такие панели в оп-
iiniilill
Рис. 6.18. Сечения моноблочных крыльев:
Q — из двух штампованных панелей; б — из прессованных блоков; в — из
панелей с заполнителем; а — подкрепленное стрингерами; д — подкреп-
ленное гофром
259
ределенном диапазоне температур имеют наименьшую массу. Соединение
гофра с обшивкой производится точечной сваркой.
Для высокоскоростных ЛА с малыми толщинами крыла панели, подкреп-
ленные силовыми элементами, занимающими часть высоты профиля, оказы-
ваются невыгодными, так как потребная высота подкрепляющих элементов
равна высоте профиля. Вследствие этого часть материала силовых элеме-
нтов при изгибе крыла работает с малыми напряжениями, что невыгодно
по массе.
Ниже приводятся несколько конструктивных схем, которые можно реко-
мендовать для тонких крыльев. На рис. 6.19 показано крыло из двух
штампованных панелей. На рис. 6.20 - крыло, отлитое в виде единого
агрегата, без механической обработки поверхности. Заслуживают внима-
ния конструкции крыльев с заполнителем (рис. 6.21). Такие крылья тех-
нологичны, обладают высоким совершенством по массе.
Лонжероны в крыльях с заполнителем не имеют мощных поясов и служат
лишь для передачи перерезывающей силы. Основным силовым элементом та-
кого крыла является обшивка, воспринимающая нормальные и касательные
260
усилия. При этом заполнитель воспринимает поперечные силы, препятст-
вуя волнообразованию обшивки. В качестве заполнителя могут применять-
ся легкие пластмассы и соты.
Широкое применение для крыльев с малой относительной толщиной на-
ходят многостеночные конструкции (рис. 6.22). Они позволяют избавить-
ся от стрингеров и нервюр, и за счет этого при одной и той же массе
может быть несколько увеличена толщина обшивки. Это повышает жест-
кость крыла на кручение и сдвиг. Наличие большого числа стенок суще-
ственно разгружает обшивку от касательных напряжений. Вся перерезыва-
ющая сила практически воспринимается стенками. При установке элерона
по задней кромке такого крыла ставят утолщенную обшивку.
При очень малых толщинах (с = 0,02...0,025), когда другие кон-
струкции не обеспечивают необходимую жесткость, применяют целиковые
(сплошные) крылья, представляющие собой литую или штампованную профи-
лированную пластину, механически обработанную в зоне сопряжения с
корпусом. По массе сплошные крылья уступают крыльям других схем, но
их перетяжеление компенсируется малой трудоемкостью и низкой стоимос-
тью изготовления.
Проектировочный анализ прочности для крыльев малого удлинения
представляет определенные трудности, поскольку такие крылья можно мо-
делировать балкой лишь при введении грубых допущений. В общем случае
крыло малого удлинения следует представлять в виде оболочки или плас-
тины переменной жесткости. Однако соответствующие расчетные модели
в-в А-А
Рис. 6.21. Конструкция моноблочного крыла со сплошным заполнителем
261
Рис. 6.22. Схема многостеночного крыла
ориентированы на машинную реализацию и малопригодны для параметричес-
кого проектного анализа.
Для учебного процесса в целях изучения физики работы силовых эле-
ментов конструкции будем использовать хотя и грубую, но наиболее наг-
лядную балочную модель. Отметим, что такая модель дает очень неплохие
результаты для крыльев малого удлинения с лонжеронами, перпендикуляр-
ными оси корпуса.
Крылья с силовым набором, перпендикулярным корпусу, условно разре-
заются на отдельные части вдоль размаха крыла, включающие один лонже-
рон или стенку с прилегающей к ней обшивкой. Каждая такая часть рас-
сматривается как балка, нагруженная приходящимися на нее воздушной и
массовой нагрузками. Строя по полученным балкам эпюры изгибающих мо-
ментов, получают значения изгибающих моментов Распределяя из-
гибающий момент, действующий в сечении крыла, между лонжеронами в со-
ответствии с их изгибными жесткостями (см. 6.8), получают значения
М ..
ж1
Приближенное значение фактического изгибающего момента в
заделки лонжерона определяют как среднее между . и М*
М.п = г- (At • * М .).
10 2 бал I ж I О
Разность моментов AM. = (М. - Л4^.)о уравновешивается
касательных сил в обшивке
ьц. = длу(2/*\
сечении
Г
(6.16)
потоком
(6.17)
где - площадь сечения крыла по /-му лонжерону в продольном нап-
равлении (вдоль размаха).
Текущие значения перерезывающей силы и изгибающего момента вдоль
/-го лонжерона могут быть найдены по формулам
Q.U) =
I бал l II
M.(z) = М .(z) * 2Д47/? (z),
I бал I II отс
(6.18)
где H.(z) - строительная высота в рассматриваемом поперечном сечении
лонжерона; ^₽OT<;(Z) “ площадь отсеченной части рассматриваемого про-
дольного сечения.
263
Потоки касательных сил в обшивке и стенке бортовой нервюры в про-
извольном продольном сечении крыла очевидно будут определяться выра-
жением
q = 2 ДМ/(2/*р), (6.19)
I 1
где S ДМ. - сумма разностей моментов, действующих в рассматриваемом
I 1
продольном f-м сечении крыла; Ллр - площадь этого сечения.
Распределение изгибающего момента вдоль участка заделки для крыла
моноблочной схемы также можно определять в соответствии с формулой
(6.16). При этом крыло условно разрезается вдоль размаха на некоторое
число продольных частей.
В случае, если крыло имеет один лонжерон и набор продольных сте-
нок, то весь изгибающий момент передается на корпус лонжероном, а пе-
ререзывающая сила - лонжероном и стенками. Так же, как и в предыдущем
случае, крыло условно разрезается на продольные участки, содержащие
лонжерон или стенку с примыкающей к ним обшивкой. Каждый продольный
участок рассчитывается изолированно от других как консольная балка
под действием приложенной к ней распределенной нагрузки, при этом оп-
ределяются значения и Поскольку стенка не может переда-
вать на корпус изгибающий момент, она передает его на лонжерон по-
средством сдвига обшивки, от чего возникает поток касательных усилий
в сечении f-й стенки
Ч- = А/*2^ (6.20)
I 6ал1 О I
где - площадь продольного сечения крыла по /-й стенке.
Силовые факторы в сечении /-й стенки определяются по формулам
Q. = (Z . - Д?Л.;
I 6ал1 I I
(6.21)
М. = М . - 24^/7.
I баМ I I
В бортовом сечении лонжерон нагружен полным изгибающим моментом
Л4^, который передается на лонжерон с обшивки погонными касательными
силами
264
bq .) /(2Fn₽), (6.22)
л . баМ 0 л
где 2 “ сумма изгибающих моментов изолированных продольных
балок в сечении заделки.
Перерезывающая сила и изгибающий момент в сечении лонжерона опре-
деляются по формулам
О = * Ч"/
М = М • 2Д? F"₽ . <6 23)
нз бал л л.отс
где А4 . (Э - изгибающий момент и перерезывающая сила изолирован-
бал бал
ного лонжерона.
При распределении силовых факторов в сечении крыла малого удлине-
ния (треугольного) со сходящимся продольным набором (см. рис. 6.15) и
использовании гипотезы плоских сечений можно применить следующие фор-
мулы:
cos3*.
Q. = Q ----------— ;
I I
I
„2 3
П . COS Y.
M . = M —4--------;
H3< 1,3 S № cos3X.
I I
I
2 H?.x. cos^x*
i l i
l
x = --------;----;— •
Ц Ж 2 H*. cos3X.
i 1 1
(6.24)
где %. - угол стреловидности i-ro лонжерона.
6.1.4. Решетчатые крылья [32]
Схематически решетчатое крыло можно представить как набор тонких
планов, собранных в окантовывающую их коробку. Эти планы в коробке
могут быть ориентированы произвольно, однако чаще всего применяют
рамное и сотовое расположения планов (рис. 6.23).
265
Рис. 6.23. Схема ре-
шетчатого крыла:
Q ~ рамное расположе-
ние планов: б — сото-
вое расположение пла -
нов; /, 2 — концевой
и корневой планы; 3 —
боковина
Основными геомет-
рическими параметрами
решетчатого крыла яв-
ляются хорда крыла b
- расстояние между
наиболее удаленными
друг от друга точками
профиля плана; размах крыла I - расстояние между крайними боковинами
решетчатого крыла и высота Н - расстояние между верхним и нижним
планами, замеренное по оси крыла. К основным геометрическим парамет-
рам относится также шаг крыла t - расстояние между соответствующими
точками двух соседних планов. Ему соответствует безразмерный геомет-
рический параметр - относительный шаг крыла t = t/b.
Число планов и боковин определяется в процессе конструирования в
зависимости от того, в каком направлении нужно реализовать наибольшие
несущие свойства.
С точки зрения строительной механики решетчатое крыло представляет
собой короткую консоль большой строительной высоты, соизмеримой с
размахом крыла и значительно превышающей хорду. При таком соотношении
размеров максимальные расчетные нагрузки действуют в плоскости наи-
большей жесткости крыла, что выгодно отличает решетчатое крыло от
традиционного монопланного.
Так, например, наибольшая из аэродинамических сил, сила У, вызыва-
ет изгиб в плоскости наибольшей жесткости решетчатого крыла У/, тогда
как в случае монопланного крыла эта сила действует в плоскости наи-
меньшей жесткости. Сопоставление решетчатого крыла с монопланным при
одинаковых размахах и несущих площадях показывает, что прочность ре-
шетчатого крыла при изгибе силой Y без учета лобового сопротивления
превышает прочность монопланного крыла той же массы примерно в
H/t раз, а жесткость - примерно в Я2//2 раз.
В конструктивном отношении решетчатое крыло можно рассматривать
266
<ак окаймленную по краям полипланную панель. При этом продольные
жаймляюшие планы (боковины) 1-2, 4-3 (рис. 6.24) решетчатого крыла
выполняют роль поясов лонжеронов монопланного крыла, а планы - роль
зтенки лонжерона. Помимо перечисленных силовых элементов крыло имеет
корневой и концевой планы и узлы крепления крыла к ЛА. расположенные
обычно в местах пересечения корневого плана с боковинами.
В связи с тем, что жесткость на сдвиг панели с сотовой решеткой
планов значительно превышает жесткость рамной панели, решетчатое кры-
ло сотового типа существенно выгоднее рамного.
Другой характерной особенностью решетчатого крыла, определяющей
его высокую массовую эффективность, является тот факт, что в отличие
от монопланного. силовой набор которого расположен под обшивкой и в
создании аэродинамических сил не участвует, в решетчатом крыле сило-
вой набор находится в потоке и. следовательно, составляет несущую
площадь крыла. Иными словами, все элементы решетчатого крыла выполня-
ют двойную роль - и силовой конструкции, и аэродинамической поверх-
ности.
Решетчатые крылья конструируются из однотипных элементов и отлича-
ются тонкостенностью и ажурностью. Наиболее сложной в конструктивном
и технологическом отношениях является зона сочленения планов с окан-
товкой. отличающаяся разнотолщинностью соединяемых элементов. Так,
при толщине планов 0.5 мм толщина окантовки может быть до 10 мм. т.е.
отношение толщин 1:20.
На рис. 6.25 приведены наиболее распространенные типовые соедине-
Рис. 6.24. Конструктивная схема
решетчатого крыла
Рис. 6.25. Типовые соединения эле-
ментов решетчатого крыла
267
ния элементов решетчатых крыльев. Здесь также показано, что возможно
соединение из гофрированных пластин, собранных в сотовую конструкцию.
Решетчатые крылья являются технологичными изделиями, хорошо приспо-
собленными к условиям серийного производства при экономном использо-
вании конструкционных материалов (коэффициент использования материа-
лов лежит в пределах 0,5...0,9).
Поскольку решетчатые крылья представляют собой совокупность тонких
пластин, ориентированных определенным образом между собой, то очевид-
но, что наиболее рациональной формой заготовки для изготовления этих
изделий является листовой материал. Это положение не может не повли-
ять на выбор марки конструкционного материала, так как не все сплавы,
даже из числа деформируемых, могут прокатываться в листы и фольгу. В
выполненных конструкциях решетчатых крыльев нашли широкое применение
стали: 12Х1810Т (Я1Т), 08Х25Н16Г7АР (ЭИ835); 09Х15Н8Ю (ЭИ904, СН2),
09Х15Н7ЮМ2 (СН4, ЭП35) и алюминиевый сплав АМгб. Эти материалы отли-
чаются высокой коррозионной стойкостью, могут подвергаться любым ви-
дам холодной и горячей обработки, включая различные способы сварки и
пайки.
§6.2. ПРАКТИЧЕСКИЕ РЕКОМЕНДАЦИИ ПО ПРОЕКТИРОВАНИЮ
КОНСТРУКЦИЙ НЕСУЩИХ ПОВЕРХНОСТЕЙ
6.2.1. Выбор конструктивно-силовой схемы
Отличительная особенность задач проектирования конструкций ЛА сос-
тоит в том, что они по своей природе многоуровневые. Даже в условиях
узкой специализации проектных задач в конструкторских бюро при проек-
тировании конструкций необходима как минимум двухуровневая проработ-
ка. Первый уровень - выбор конструктивно-силовой схемы, второй - оп-
ределение конструктивных параметров в пределах выбранной схемы и их
оптимизация. Ниже излагается решение указанных задач применительно к
первому этапу проектирования ЛА, когда просматривается большое число
альтернативных вариантов конструкции. При этом используются достаточ-
но приближенные модели, отражающие наиболее важные свойства конструк-
ции и требования к ним.
Конструктивно-силовая схема несущей поверхности - это структурная
характеристика конструкции, отражающая способ передачи силовых факто-
ров и характер работы силовых элементов, а также их состав и располо-
жение. Аналитическое описание конструктивно-силовой схемы как всякой
структурной характеристики весьма громоздко и по этой причине мало-
268
приемлемо на начальных этапах проектирования. Предварительный выбор
схемы состоит в определении ее типа и самой общей характеристики рас-
положения силовых элементов. В предыдущем параграфе приведена качест-
венная характеристика распространенных разновидностей конструктивно-
силовых схем. Продолжим этот анализ с привлечением количественных
оценок.
Тип силовой схемы, как указано выше, определяется в основном спо-
собом передачи нагрузок и характером работы элементов конструкции.
Причем главным силовым фактором является изгибающий момент, на вос-
приятие которого может затрачиваться свыше 50 % массы несущей поверх-
ности. В зависимости от того, каким образом передается изгибающий мо-
мент и как обеспечивается работоспособность элементов конструкции в
сжатой зоне крыла, получают различные конструктивно-силовые схемы.
Особенностью лонжеронной схемы является сосредоточение материала в
поясах лонжеронов: применение толстостенных элементов.хорошо работаю-
щих на сжатие. Обшивка даже в наиболее нагруженной зоне (вблизи бор-
тового сечения) практически полностью исключается из работы по вос-
приятию изгибающего момента, т.е. здесь имеет место четкое разграни-
чение функций силовых элементов. Одни элементы (лонжероны) восприни-
мают изгибающий момент и передают его на корпус, выполняя основную
задачу конструкции, а другие (обшивка с подкрепляющими элементами)
образуют необходимую аэродинамическую форму несущей поверхности и
воспринимают крутящий момент. Ввиду того, что толщина обшивки, пот-
ребная для восприятия крутящего момента, невелика, а возможности
уменьшения толщины ограничены конструктивно-технологическими сообра-
жениями и требованиями обеспечения гладкости поверхности, обшивка яв-
ляется несиловым элементом конструкции, а ее масса - добавочной. Воз-
растание массы лонжеронной конструкции происходит также из-за прибли-
жения материала поясов лонжеронов к нейтральной оси при уменьшении
толщины несущей поверхности или увеличении нагрузки. Вблизи нейтраль-
ной оси материал работает неэффективно, и для восприятия изгибающего
момента требуется увеличение площади поясов лонжеронов сверх значе-
ний, полученных без учета снижения эффективности.
В моноблочных наборных конструкциях отражено стремление использо-
вать для восприятия изгибающего момента все элементы продольного на-
бора: обшивку, стрингеры, продольные стенки. Главным силовым элемен-
том в таких конструкциях выступает обшивка или подкрепленные панели
(для больших по площади несущих поверхностей). Потеря устойчивости
обшивки (панели) означает потерю работоспособности всей несущей по-
верхности. Масса обшивки в таких конструкциях составляет до 60 % мас-
269
сы крыла. Прямым следствием вовлечения в работу по восприятию изги-
бающего момента тонкостенных элементов конструкции (обшивки с под-
крепляющими элементами) являются низкие разрушающие напряжения, ха-
рактерные для моноблочных конструкции при невысоком уровне нагруже-
ния. С ростом нагрузок увеличиваются потребные толщины конструктивных
элементов и растут разрушающие напряжения.
Приведенный анализ выявляет следующие важные закономерности:
повышение разрушающих напряжений рабочих элементов конструкции не-
избежно связано с наличием несиловых элементов, а следовательно, и
добавочной массы;
вовлечение в работу всех элементов конструкции влечет за собой
снижение разрушающих напряжений и, следовательно, также увеличение
общей массы конструкции.
Преимущество того или иного типа конструкции проявляется в зависи-
Рис. 6.26. Схема влияния уровня нагрузки и условий крепления к корпу-
су на выбор силовой схемы несущей поверхности
270
мости от целого ряда факторов, главными из которых являются: уровень
действующих нагрузок; строительная высота профиля; ограничения на ми-
нимальные толщины конструктивных элементов (рис.6.26).
Уровень нагрузок и строительная высота профиля определяют разруша-
ющие напряжения в моноблочной конструкции и эффективность работы ма-
териала по восприятию изгибающего момента. Ограничения на минимальную
толщину определяют добавочную массу лонжеронной конструкции и сужают
зону возможных решений моноблочных конструкций.
Хотя условия крепления несущей поверхности к корпусу являются
следствием применяемого типа конструкции, на схеме 6.26 они выделены
в виде самостоятельной группы факторов, так как в ряде случаев они
задаются по конструктивно-эксплуатационным соображениям.
Исследуем количественные соотношения.
При больших строительных высотах крыла Н можно пренебречь соб-
ственным моментом инерции обшивки и влиянием толщины обшивки на пере-
несенный момент инерции. В этом случае погонный момент инерции разне-
сенной обшивки может быть оценен формулой
/ = 6H*/2. (6.25)
т
В общем же случае погонный момент инерции определяется зависимостью
/ = -&Н ♦ 63. (6.26)
£ о
Влияние строительной высоты профиля можно оценивать относительным
моментом инерции /, равным отношению действительного момента инерции
I к моменту инерции, определяемому по формуле (6.25),
Г= 1 - Г* Г2. (6.27)
«5
где 5 = 25/Я. При 5=1, что соответствует сплошному сечению, / =
= 1/3. При 5 = О (Н > 5) I = 1. Это значит, что от рационального
размещения материала можно выиграть в вели-
чине момента инерции не более чем в три
раза.
На рис.6.27 изображена зависимость, опи-
сываемая выражением (6.27). Из расчетов
следует, что определение момента инерции по
Рис. 6.27. Зависимость относительного мо-
мента инерции от относительной толщины об-
шивки моноблочной несущей поверхности
Рис. 6.28. Зависимость относительной тол-
щины поясов лонжерона от относительного
момента инерции лонжерона
формуле (6.25) с точностью до 5 % можно
проводить только при 5 < 0,05; до значений
8 = 0,3 с той же точностью можно пользо-
ваться упрощенной зависимостью
о
I = - ГН. (6.28)
При 8 > 0,3 необходимо использовать соотношение (6.26).
Проиллюстрируем влияние относительной толщины полки лонжерона на
эффективность работы материала на примере лонжерона таврового се-
чения.
На риСдб. 28 показано изменение относительной толщины поясов
лонжерона 8 = 28 /Н в зависимости от относительного момента инерции
лонжерона
/
л
12/
л
(6.29)
в н3
л
- момент инерции лонжерона; В - ширина полки лонжерона. Изо-
л
где /
Л
браженная зависимость описывается формулой
Г = 1 - (1 - / ),/3.
л л
(6.30)
Из графика видно, что по мере увеличения Iдля получения
одинаковых приращений относительного момента инерции необходимо все
более значительно наращивать площадь сечения лонжерона.
Эффективность работы материала поясов лонжерона можно оценить
производной
Э8"
=---------- 1 . (6.31)
а/ , зГ~ ; .2
л 3 М(1 - / )
л
Чем больше эта производная, тем менее эффективно работает материал
поясов лонжерона. В качестве границы заведомо нерационального исполь-
272
зования материала лонжеронов можно принять точку, в которой 35/3/ =
л л
= 1, т.е. когда равны относительные приращения момента инерции и тол-
щины пояса лонжерона. Эффективность использования материала при этом
в три раза хуже, чем при малых 5 (при I = О 35 /Э/ = 1/3).
л л л л
Условие 35 /3/ = 1 соответствует значениям I = 0,8075 и 5 =
л л ~ л л
= 0,43. При увеличении / от 0,8075 до 1, т.е. всего в 1,24 раза,
площадь сечения лонжерона нужно увеличить в 2,32 раза. На рис.6.28
изображены также сечения, для которых эффективность использования
материала снижена при 5^ = 0,3 вдвое по сравнению с указанным выше
значением 35 /3/ = 1/3 и при 5 = 0,18 - в полтора раза. Приведенные
л л л
на рис.6.28 зависимости можно использовать для грубой оценки рацио-
нальности формы поперечного сечения лонжерона в функции строительной
высоты профиля.
Моноблочная схема в рассматриваемом отношении предпочтительней
лонжеронной в силу большей удаленности конструкционного материала,
воспринимающего изгибающий момент, от нейтральной оси изгиба. Для
подтверждения этого положения рассмотрим отношение площади попе-
речного сечения участка несущей поверхности шириной В лонжеронной
конструкции к площади поперечного сечения F* аналогичного участка мо-
ноблочной конструкции при условии равенства моментов инерции кон-
струкций сравниваемых вариантов. Строительные высоты профилей несущих
поверхностей принимаются также одинаковыми и постоянными на ширине В.
Наращивание конструкционного материала для моноблочной схемы
производится на всей ширине В за счет увеличения толщины обшивки 5, а
для лонжеронной конструкции - на ширине полки лонжерона В^ увеличе-
нием толщины полки 5^. При этом справедливо соотношение
F 8 В
Л = • <6-32>
г оВ
м
Толщина обшивки 8, как следует из (6.26), определяется формулой
6 =*у- (Н - 3J/? - 12/ ).
(6.33)
273
В предположении равенства моментов инерции лонжеронного и моно-
блочного крыльев (IB = I ) толщина полки лонжерона 6 будет опреде-
л л
литься выражением
6
л
(6.34)
где / - погонный момент инерции обшивки толщиной 5; В* = В^/В.
С учетом (6.33) и (6.34) соотношение (6.32) можно представить в
виде
1 -3J1 - 6f(8)
В
Л
(6.35)
где 6 = 28///; f(6) = Г2 - 36 + 3.
Рис. 6.29. Влияние степени приближения конструкционного материала к
нейтральной оси несущей поверхности на эффективность моноблочной и
лонжеронной силовых схем: __
а - F /F - ^(5); б - F /F - ^(5 )
л м л м л
274
относительную толщину 5 следует рассматривать как характеристику
уровня нагрузки.
При заданной строительной высоте И отношение F /F показывает, во
сколько раз площадь поперечного сечения лонжеронного крыла больше
аналогичной площади сечения моноблочного крыла при передаче одного и
того же изгибающего момента при условии равенства разрушающих
напряжений для обоих типов конструкции.
Как видно из графиков рис.6.29,а, эффективность использования
строительной высоты профиля для конструкции лонжеронного типа быстро
падает с уменьшением Верхняя кривая на рис.6.29, а, ограничивающая
область зависимостей FyF* = f(5. В), определяется отношением площа-
ди поперечного сечения лонжеронной конструкции с лонжеронами прямо-
угольного сплошного сечения к площади F .
Если задавать уровень внешней нагрузки через относительную тол-
щину полки лонжерона 5 = 26 /Я, то после преобразований, аналогич-
л л
ных вышеприведенным, вместо выражения (6.35) получим следующую за-
висимость:
F Bi
=--------л . (6.36)
м i — 3 J i — BTfts )
л л л
Рассмотрение зависимости (6.36), изображенной на рис.6.29,б,
показывает, что проигрыш 15...20 % площади поперечного сечения лон-
жеронной конструкции по сравнению с_моноблочной соответствует значе-
нию 6 ~ 0,2 независимо от параметра В .
л л
Проведенное сравнение лонжеронной и моноблочной схем не является
исчерпывающим, так как отражает влияние лишь одного фактора -
эффективности использования строительной высоты профиля при создании
момента инерции, потребного для восприятия приложенного изгибающего
момента. Несущая способность сечения определяется помимо момента
инерции разрушающими напряжениями, которые для лонжеронной и моно-
блочной схем различны. Массовые характеристики моноблочной конструк-
ции зависят еще и от способа подкрепления обшивки.
Продолжим сравнение лонжеронной и моноблочной конструктивно-
силовых схем с учетом перечисленных факторов на примере тонкой несу-
щей поверхности, для которой существенными оказываются потери в мо-
менте 1 инерции из-за приближения конструкционного материала к нейт-
ральной оси.
275
Рис. 6.30. Возможные варианты конструк-
ции тонкой несущей поверхности:
а - лонжеронная конструкция с редким
расположением лонжеронов, В - 0,1; б —
л
лонжеронная конструкция с частым распо-
ложением лонжеронов. В* - 0,2; в — мо-
ноблочная конструкция с обшивкой, под-
крепленной стенками; г — моноблочная
конструкция с обшивкой. подкрепленной
сотами; д— моноблочная конструкция с обшивкой, подкрепленной пено-
пластом
Сравниваемые конструктивные варианты изображены на рис.6.30.
Строительная высота профиля полагается постоянной на всей ширине
рассматриваемого участка конструкции.
Если материал, из которого изготовлены конструктивные элементы,
одинаков для всех сравниваемых вариантов, то сравнение типов конст-
рукций по массам можно заменить сравнением по площадям поперечных се-
чений, потребных для восприятия одинакового изгибающего момента:
F 25 В * 28 В
л л л о.л 1С
где &о л ~ толщина обшивки лонжеронной несущей поверхности; н “
площадь подкрепляющего набора.
Для конструкции, подкрепленной стенками (см. рис.6.30,в),
F = ?- [26 В * (Я - 26)6], (6.38)
П.Н О с с
где Ъ - шаг подкрепляющих элементов; 8^ - толшина подкрепляющего эле-
мента; В - ширина полки подкрепляющего элемента.
с
Шаг подкрепляющих элементов целесообразно определять из условия
отсутствия потери устойчивости обшивки. Если принять, что
(6.39)
то шаг Ь будет определяться формулой
276
b = 8 1— = 6 P— .
a €
кр кр
(6.40)
где k - коэффициент, учитывающий способ подкрепления сторон пластинки
(обшивки); € - относительное удлинение, при котором пластинка теря-
ет устойчивость. '
Вводя обозначения 5 =25 /Я; В = 2В /Н\ А = le /k и пола-
c.л о.л с с кр
гая 5^ = 6, выражение (6.37) с учетом (6.38) можно записать в безраз-
мерном виде
F В1~ * Г
7Г- = 37*-----———--------- . (6.41)
М 5 * А(В - 5* 1)
с
Здесь 5 - относительная толщина обшивки моноблочной конструкции,
потребной для восприятия изгибающего момента, передаваемого лонжерон-
ной конструкцией с относительной толшиной_ полок лонжеронов, равной
5 . В общем случае 5 является функцией 5 , В , шага подкрепляющих
л л л
элементов, их площади и конфигурации. _____
Нагрузка в формуле (6.41) задается произведением В 5 , которое
л л
одновременно определяет и эффективность лонжеронной конструкции^ в
смысле использования строительной высоты профиля. Величина 5
о. л
учитывает массу ненесущей обшивки лонжеронной несущей поверхности.
Параметр А задает частоту подкрепляющего набора и, следовательно,
уровень критических напряжений моноблочной конструкции.
Характер зависимости F /F = , В ) показан на рис. 6.31. Изо-
л м л л
браженные кривые представляют собой огибающие семейства зависимостей,
построенных для различных значений А.
ф Из графиков видно, лонжеронная с^ема перестает быть выгодной при
5 = 0,35 ... 0,4 для В = 0,1 и 5 = 0,15 ... 0,25 для В = 0,2
л л л л
(меньшие значения указанных диапазонов соответствуют большим значени-
ям 5 ). 5 оказывает слабое влияние на 5 , но сильно сказывается
о.л о.л л
на степени_выгодности лонжеронной схемы при малых нагрузках (малых
значениях 5 ). При 5 >0,1 лонжеронная схема становится невыгодной
4 л о.л
во всем диапазоне нагрузок.
277
Рис. 6.31. Зависимость
эффективности моноблоч -
ной и лонжеронной схем
от уровня нагрузки, оп-
ределяемого потребной
относительной толщиной
поясов лонжеронов при:
а - 5 - 0.02; б -
___ о.л
-8 - 0.08
О. Л
На рис.6.32 изображены зависимости от безразмерной нагрузки
/Г= Мт/(Н*Е) . где - погонный изгибающий момент; Е - модуль упру-
гости. Из графиков видно, что по мере увеличения нагрузки число лон-
жеронов выгодно увеличивать.
При сравнении лонжеронного крыла с крылом, имеющим подкрепление
Рис. 6.32. Зависимость эффективности моноблочной и лонжеронной схем
от безразмерной нагрузки р
278
обшивки заполнителем (см. рис.6.30,г, д), расчетное соотношение для
F IF в соответствии с (6.37) представляют в виде
л м
F ВТ * Г
л = л л о . л (6 42)
н 6 + (1 - /р
3
где р^ - плотность заполнителя; р - плотность материала обшивки.
Хотя строительная высота профиля в явном виде в выражении (6.42)
не присутствует, она оказывает сильное влияние на степень выгодности
конструкции с заполнителем, так как с ростом Н при одинаковых
значениях воспринимаемого изгибающего момента уменьшаются значения 6,
5,5 и возрастает влияние члена р /р.
л о.л з __
На рис.6.32 представлены зависимости F IF от р для сотовой
3 л м
конструкции с Рз = 0,056 г/см для различных Н. При построении этих
зависимостей принималась 5 = 0,3 ... 1,5 мм. Как видно из приведенных
графиков, для малых строительных высот профиля применение сотовой
конструкции выгодно практически во всем диапазоне нагрузок, причем
степень выгодности возрастает с уменьшением Н, так как при этом
уменьшается масса заполнителя. Особенно выгодным оказывается
применение заполнителя для слабо нагруженных крыльев и рулей. В этом
случае толщина обшивки может быть 0,2 ... 0,3 мм, что нельзя
реализовать в конструкциях других типов.
Конструкции с заполнителем из пенопласта обладают большей массой
по сравнению с сотовыми конструкциями при прочих равных условиях
з
вследствие большей массы заполнителя (р = 0,1 ... 0,3 г/см ). По-
3
этому область их рационального применения ограничена малыми строи-
тельными высотами профиля (Н < 20 мм).
Приведенные зависимости могут быть использованы для исключения из
рассмотрения заведомо невыгодных конструктивных вариантов и ориенти-
ровочного выбора рационального опорного варианта. Если преимущества
одного варианта конструкции перед другим выражены недостаточно опре-
деленно (F^/F^ = 0.9 ... 1,1), то лонжеронный и моноблочный типы кон-
струкций можно считать конкурентоспособными, и определение предпочти-
тельности одного перед другим требует более тщательного анализа. В
частностц, в проведенном анализе не учитывалось ограничение по проги-
бам обшивки, удовлетворение которому может потребовать установки
279
дополнительных подкрепляющих элементов, что в свою очередь может по-
влечь за собой снижение выгодности применения лонжеронной кон-
струкции.
Общие тенденции развития рациональной по массе конструкции по мере
увеличения нагрузки показаны на рис. 6.33 на примере тонкой несущей
поверхности.
Схема 1 (см. рис. 6.33) соответствует условиям, когда нагружен-
ность несущей поверхности весьма низкая. Напряжения, действующие в
обшивке, имеющей минимально допустимую по конструктивно-
технологическим соображениям толщину (5 . ), значительно меньше о
min в
материала обшивки. Число подкрепляющих элементов в моноблочной кон-
струкции определяется исходя из условий обеспечения необходимых кри-
тических напряжений либо из требований ограничения максимального про-
гиба обшивки (во избежание значительного увеличения аэродинамического
сопротивления). Материал обшивки в такой конструкции используется не-
эффективно, но в рамках данного конструктивно-технологического реше-
ния нельзя достичь более эффективного его использования. Снижение
массы конструкции возможно за счет рациональной расстановки подкреп-
ляющих элементов, которые также имеют толщину 5 . .
min
Значительный выигрыш в массе можно получить, применяя сотовую кон-
струкцию с заполнителем на всей толщине сечения. Значение 6^ для
сотовых конструкций существенно меньше, чем для наборных (0,2 ...
0,3 мм по сравнению с 0,8 ... 1 мм), а критические напряжения
обшивки выше. Поэтому материал обшивки будет работать при более высо-
ких напряжениях. Пенопластовый заполнитель для таких конструкций так-
Рис. 6.33. Тенденции развития рациональной по массе конструкции тон-
кой несущей поверхности при увеличении нагрузки
280
же приемлем, однако его массовые характеристики несколько хуже, чем у
сотового заполнителя.
Наряду с рассмотренными конструкциями для малонагруженных крыльев
целесообразной может оказаться и лонжеронная конструкция с редким
расположением лонжеронов.
Схема 2 соответствует более нагруженным конструкциям, потреб- ные
толщины которых превышают минимально допустимые значения. Во избежа-
ние потери устойчивости подкрепляющих элементов их толщина также уве-
личивается. При определенном уровне нагрузок конструкции с заполните-
лем становятся неприемлемыми. Для сохране- ния эффективности работы
материала поясов лонжеронов в тонких крыльях целесообразным становит-
ся увеличение числа лонжеронов. При разных сочетаниях конкретных зна-
чений действующих в сечении изгибающих моментов и толщины сечения
одинаково целесообразными по массе могут оказаться как лонжеронная,
так и моноблочная схемы, однако с ростом нагрузки лонжеронная схема
становится все менее эффективной.
Схема 3 соответствует сильно нагруженным конструкциям. В этих ус-
ловиях применяют в основном моноблочные схемы. Потребная толщина об-
шивки здесь значительная, и не требуется частого подкрепляющего набо-
ра. Ввиду того, что материал полок стенок из-за большой толщины об-
шивки приближен к нейтральной оси и работает неэффективно, целесооб-
разно применение монолитных конструкций.
Схема 4 соответствует очень тонким высоконагруженным несущим по-
верхностям. Для восприятия действующего изгибающего момента необходи-
мо сплошное заполнение сечения, что означает исчерпание рациональных
сечений силовых элементов. Материал работает неэффективно, так как
значительная часть его находится в районе нейтральной оси.
Обобщая изложенное, можно сформулировать следующие практические
рекомендации, которыми целесообразно руководствоваться при выборе ти-
па конструктивно-силовой схемы.
1. Сотовые конструкции обладают явным преимуществом по массе перед
лонжеронными и моноблочными наборными конструкциями при Н < 60 мм во
всем диапазоне их применения (6 < 1,5 мм). Аналогичное утверждение
можно сделать для конструкций с заполнителем из пенопласта лишь при
Н < 15 мм.
2. При 5 >0,1 применение лонжеронной схемы невыгодно во всем
л
диапазоне нагрузок.
3. Если потребные 8^ превышают 8д = 0,04/В^. то лонжеронная схема
281
утрачивает свое преимущество по массе перед моноблочной наборной
схемой.
После того как на основе приведенных (или аналогичных им) количе-
ственных и качественных оценок выбран тип конструкции, решается сле-
дующая задача - формируется структура силовой схемы несущей поверх-
ности. Структура силовой схемы определяется составом и расположением
конструктивных элементов, служащих для восприятия силовых факторов,
стыковки отдельных сборочных единиц, а также для выполнения эксплуа-
тационных функций (складывания несущих поверхностей, размещения ка-
ких-либо устройств и др.).
На начальном этапе проектирования структурные задачи решаются лишь
качественно на основе ранее приведенных общих рекомендаций и конкрет-
ных конструктивных ограничений, указанных в техническом задании. Ес-
ли, например, выбран лонжеронный тип конструкции, то структурная за-
дача состоит в определении числа лонжеронов, стенок, нервюр, в выборе
схемы их расположения. В качестве общих рекомендаций при этом целесо-
образно учесть следующее.
В однолонжеронных крыльях лонжерон располагается в зоне максималь-
ной строительной высоты профиля (у дозвуковых ЛА - на 30...40 % хор-
ды, у сверхзвуковых - на 45...60 % хорды). Для получения контура,
способного воспринимать кручение, и базы для крепления элеронов и
средств механизации на 65...70 % хорды располагается продольная стен-
ка. Иногда с целью увеличения жесткости на кручение ставится еще и
передняя продольная стенка (на 10... 15 % хорды). В малоразмерных кры-
льях обычно ограничиваются лишь бортовой нервюрой, которая служит для
трансформации крутящего момента в пару сил в узлах крепления несущей
поверхности к корпусу. При прочих равных условиях масса однолонжерон-
ного крыла обычно меньше масс двух- и многолонжеронных крыльев, так
как последние не используют максимальную строительную высоту профиля
для рационального размещения конструкционного материала.
Применение двухлонжеронной схемы может оказаться выгодным для тон-
ких несущих поверхностей при больших нагрузках. В этом случае перед-
ний лонжерон располагается на 20...30 % хорды, задний - на 60...70 %.
Аналогичным образом устанавливается структура силовой схемы и для
других типов конструкции.
6.2.2. Инженерные методы определения
конструктивных параметров несущих поверхностей
Лонжеронные крылья большого удлинения. В крыльях лонжеронной схемы
обшивка в передаче изгибающего момента практически не участвует. Ее
282
функция состоит в восприятии местных нагрузок и крутящего момента. По
этой причине толщину обшивки целесообразно выбирать из условия проч-
ности крыла на кручение, а затем проверять значения прогибов от дей-
ствия местной нагрузки.
Предположив, что аэродинамическая нагрузка пропорциональна хор-
дам и
Г = = 0,14 = const;
кр О и
т = 0,50 о ,
в в
где х их - координаты центров жесткости и давления
ц.ж ц.д
соответственно; Ь - хорда сечения крыла, из условия прочности
(6.43)
сечения
обшивки
на кручение получим
8 = 0.0378 5^- [1 - I—I . (6.44)
об б — 1 — 1/1? I 3 I
где - толщина обшивки в наиболее нагруженном (корневом) сечении;
Ь - бортовая хорда; р - удельная нагрузка на крыло; л - расчетная
6 ___ Р
перегрузка; X, 17, с - удлинение, сужение и относительная толщина про-
филя крыла соответственно.
Потребная толщина обшивки в других сечениях крыла несколько мень-
ше, однако чаще всего принимают 8 = const. Это улучшает аэроупругие
об
характеристики конструкции и целесообразно по технологическим сообра-
жениям.
При проектировании лонжеронов их пояса следует максимально удалять
от нейтральной плоскости крыла, а сечение пояса делать вытянутым по
ширине. При этом оказывается необходимым учитывать местную потерю ус-
тойчивости пояса, критические напряжения которой зависят от отношения
ширины пояса к его толщине. Общей потери устойчивости пояса не проис-
ходит, так как он подкреплен в двух направлениях (обшивкой и
стенкой).
Считая, что изгибающий момент воспринимается только поясами лонже-
рона, потребную толщину пояса лонжерона можно определять по формуле
(6.34): ________________
8д = £-(Я - Мя3 - 12/^ ). (6.45)
где Н - высота лонжерона; В* - ширина полки лонжерона; - потребный
моме н т1 инерции Л
283
м .н.
• <646>
разр
Поскольку при проектировочном расчете еще не известны размеры
конструктивных элементов, от которых зависят изгибающий момент /-го
лонжерона М . и разрушающее напряжение о , равное а , то
изХ г разр кр.мест
значения Л4^ . и вначале определяют по приближенным формулам
(ЕН2) .
М = М ---------------; о = 0,9» . (6.47)
“ 1 нз S (ЕН2).
I
После получения 8 определяется
а -о ----------------“
кр.мест в . 2
г 1 + V + V
(6.48)
где v = о* - эйлерово значение критических напряжений, опреде-
ляемое выражением
а _ 1 1б£
9 [В /(28 )]2
Л л
(6.49)
Далее по необходимости уточняются а , и проводится
расчет следующего приближения.
Проектирование растянутого пояса лонжерона ведется по напряжениям
о = kk а , (6.50)
разр 1 2 в
где - коэффициент, учитывающий уменьшение площади поперечного се-
чения за счет наличия отверстий под болты (tJ = 0,9); - коэффи-
циент, учитывающий концентрацию напряжений при наличии отверстий. Для
стали k = 0,95; для алюминиевых сплавов k = 0,9; для магниевых
£ *
сплавов = 0,8.
Для сварных конструкций
а = 0,8а . (6.51)
разр в
284
Если оба пояса в процессе полета в равной степени нагружаются как
растягивающими, так и сжимающими усилиями, то за нужно прини-
мать меньшее из значений, получаемых по формулам (6.48), (6.50). Поя-
са лонжеронов в этом случае выполняются одинаковыми.
После определения потребных толщин поясов лонжеронов следует под-
считать их изгибные жесткости Е1 и уточнить по формулам (6.8) распре-
деления изгибающего момента и перерезывающей силы по лонжеронам. В
случае значительных расхождений нужно повторить расчет по определению
толщин полок лонжеронов. Конструктивные параметры лонжеронов опреде-
ляются в нескольких сечениях крыла. На основе полученных данных с
учетом требований технологии принимают закон изменения толщины полки
и ее ширины по длине лонжерона.
Потребная толщина стенки лонжерона
6 = Q/(Ht ). (6.52)
ст разр
Разрушающими напряжениями для стенки обычно являются критические нап-
ряжения
где
v = г /т ; т = kE/(b/8)2. (6.54)
в э э
Для шарнирно опертой пластины
k = 4,85 <• 3,6/(а/6)2, (6.55)
где а и b - соответственно длинная и короткая стороны пластины.
Для повышения стенки лонжерона могут подкрепляться стойками.
При подборе сечения стоек исходят из условия
F /(aS ) = 0.5, (6.56)
с ст
где F? - площадь сечения стойки; а - расстояние между стойками.
Аналогичные расчеты проводятся и для других элементов балочного
типа (подкосов, силовых нервюр).
Кессонше крылья. Для кессонных крыльев основным силовым элементом
является кессон, образованный верхней и нижней панелями и двумя боко-
выми сменками (рис.6.34). Панели кессона воспринимают осевые усилия
285
Рис. 6.34. Схема крыла кессонного типа
N = М /Н от действия изгибающего момента М ; стенки передают пере-
из из
резывающую силу Q и совместно с панелями участвуют в передаче крутя-
щего момента В конструктивном отношении панели кессона обычно
представляют собой тонкостенную оболочку (пластину), подкрепленную
силовыми элементами. Проектные параметры таких конструкций, как пра-
вило, определяются требованиями устойчивости. Исследуем эти тре-
бования.
Пусть N - осевая сжимающая сила, действующая на панель; и N? -
силы, воспринимаемые обшивкой и каждым из п стрингеров соответствен-
но. Чтобы найти силы и нужно воспользоваться уравнением равно-
весия и уравнением совместности перемещений, отражающим гипотезу
плоских сечений при совместной деформации обшивки и стрингеров:
" гвг- = Нт (667>
к об стр
где толщина обшивки кессона 6* и площадь сечения стрингера F - иско-
мые проектные параметры панели.
Из (6.57) следует, что
N, = ------------------: N = -------------------------. (6.58)
Е г (Е* 5 1
стр п Г_____ I об п к I
1 * Е В 6 п I Е В F J
об к стр
Для суждения о работоспособности конструкции помимо действующих
усилий надо знать еще разрушающие (критические) усилия. Если предпо-
ложить, что расстояние между нервюрами I в кессонном крыле в несколь-
286
ко раз больше расстояния между стрингерами b (что подтверждается
стр
статистикой), то критические напряжения обшивки панели правомерно оп-
ределять по формуле
Г >i2
I к I
Сравнивая усилие Л^, воспринимаемое обшивкой панели, с критическим
усилием
kE л
Л/*р = В8 а = -б25- 6(л - 1Г. (6.60)
1 к кр о к
получим условие устойчивости для обшивки
- N Г
F > =—2-----------------— . (6.61)
й л(л - 1)2 "
К
Для стрингеров критические усилия определяются формулой Эйлера
2Г .2
я Е I
№ = —Г*— Г (6.62)
2 z2
При этом условие устойчивости Л^р > приводит к неравенству
- ЛГ
F > --------— . (6.63)
Л л
Условия (6.61) и (6.63) записаны в безразмерной форме, где
На плоскости координат F, 8 условия (6.61) и (6.63) определяют
области допустимых по устойчивости значений конструктивных параметров
F и 8*. < Эти области такие же. как и для стрингерного корпуса (см.
287
рис. 5.17.). Если параметры F и 6* таковы, что соответствующая им
точка находится выше линии АСЕ, то конструкция является устойчивой,
если - на кривой АС, то теряет устойчивость обшивка, если - на линии
СЕ, то теряют устойчивость стрингеры. Точка С соответствует случаю
равноустойчивой конструкции, точка Е - бесстрингерной конструкции,
точка А - конструкции с минимально допустимой по соображениям техно-
логичности толщиной обшивки панели.
Чаще всего искомые параметры F и 6* определяют из условия равноус-
тойчивости. Этот подход отражает известный в конструировании принцип
пропорциональности, обеспечивающий в большинстве случаев минимум мас-
сы конструкции. Исходя из условия равноустойчивости, т.е.
местно (6.61) и (6.63), получаем
Г = 1/(л - 1);
РУ
Г = — - 1
ру П П(П - 1)
решая сов-
(6.65)
(6.66)
С учетом обозначений (6.64)
для определения искомых параметров
панели окончательно получим
л = — — .
ру р I Л — 1 *
(6.67)
(6.68)
Входящий в эти формулы радиус инерции сечения стрингеров i опреде-
ляется путем проб по сортаменту профилей для стрингеров. По статисти-
ке для слабонагруженных панелей целесообразны стрингеры уголкового
сечения, а для сильнонагруженных - закрытые П-образные.
Другие возможные условия работоспособности панели, определяющие ее
конструктивные параметры, студентам предлагается исследовать самосто-
ятельно в процессе выполнения учебно-исследовательской работы.
Малоразмерные моноблочные крылья. В малоразмерных крыльях основ-
ным силовым элементом является обшивка, которая воспринимает
большую часть изгибающего и крутящего моментов. С целью повышения
разрушающих напряжений обшивку в таких крыльях подкрепляют дис-
кретным силовым набором или заполнителем. Рассмотрим вначале
конструкции несущих поверхностей с обшивкой, подкрепленной силовым
набором.
288
Рис. 6.35. Типовая диаграмма
а - €
Вследствие малости строитель-
ной высоты сечений крыла подкре-
пляющие элементы обычно выполня-
ют в виде стенок. Толщины стенок
по технологическим соображениям
выгодно принимать одного порядка
с толщиной обшивки. Силовые функции стенок состоят в обеспечении об-
щей жесткости крыла и восприятии перерезывающей силы и крутящего мо-
мента. В передаче основного силового фактора - изгибающего момента -
их роль незначительна.
Основными конструктйвными параметрами для таких крыльев являются:
толщина обшивки (в общем случае переменная по площади несущей поверх-
ности); число подкрепляющих элементов и схема их расположения.
Как указывалось выше, критические напряжения пластины при отноше-
нии сторон а/b > 3 (рис. 6.35), определяемые по формуле
о = ЛЕ(5/6)2. (6.69)
кр
мало зависят от условий заделки по ширине 6 и длины пластины. Следо*
вательно, обшивку целесообразно подкреплять лишь силовыми элемента-
ми, располагаемыми параллельно вектору сжимающей силы. При этом поло-
жение силовых элементов определяется одним параметром - расстоянием
между стенками Ь.
Для определения значения Ь обратимся к типовой диаграмме о - е
(см. рис.6.35). Для большинства конструкционных материалов диаграмма
а - е может быть аппроксимирована двумя прямолинейными участками. На
первом участке (примерно до значения ^) подкрепление обшивки весь-
ма эффективно: небольшому приращению
€ = W5/W2. (6.70)
Ч>
т.е. небольшому увеличению отношения 5/6, здесь соответствует
значительное приращение а* . На втором участке (от 2 до aj для
небольшого повышения несущей способности обшивки требуется значитель-
ное увеличение отношения 5/6, т.е. значительное сгущение подкреп-
ляющих элементов и увеличение их числа (тангенс угла наклона прямой
АВ равен касательному модулю упругости). Эффективность подкрепления в
этой зонё примерно в 100 раз меньше, чем на участке ОА.
10- 880
289
Рис. 6.36. Зависимость средней
толщины панели тонкой моноблочной
несущей поверхности от уровня на -
грузки:
1 — 8 - 0,8 мм; 2 — 6 - 1мм; 3 —
8 - 1,5 мм
Учитывая изложенные обстоя-
тельства, а также то, что для не-
сущих поверхностей малых размеров
толщины обшивок зачастую являются
избыточными вследствие действия
ограничения 8 > 8 . , при проек-
та!
тировании целесообразно принимать
Ь > 8 2 . (6.71)
Для условий шарнирного опирания продольных кромок панелей это соот-
ветствует неравенству
b > 306. (6.72)
На рис.6.36 приведены зависимости средней толщины панели обшивки_с
учетом площади подкрепляющих элементов от относительной нагрузки р =
= подтверждающие справедливость рекомендации (6.72).
Потребную толщину обшивки 6 для тонкого крыла, как указано выше,
можно определять по формуле
6 = т- (Н3 - J//3 - 12/ /В ), (6.73)
2 об
где В - ширина рассматриваемого участка крыла (рис.6.37); - мо-
мент инерции обшивки крыла шириной В.
Рис. 6.37. Сечение тон-
кой наборной несущей по-
верхности
290
При расчете следует учитывать, что момент инерции I, определя-
емый по формуле
М Н
/ = . (6.74)
20
разр
является функцией не только обшивки, но и подкрепляющих элементов
(стенок), т.е.
/ = / + / .
об ст
В соответствии с (6.75)
/ = / - л Ь 8 (Н - 28)2 - b в2 (Я -
об ст 2 ст ст ст ст
- 28) * zr b 83 +т—8 (Я - 28)3 ,
3 ст ст 12 ст
(6.75)
(6.76)
где л - число стенок на участке сечения шириной В; b - ширина
ст ст
полки стенки. __
Для прикидочных расчетов при 8 = 28/Я < 0,2 вместо зависимости
(6.76) можно использовать формулу
/ =------------------------------------------, (6.77)
об г
где b = b/Ь и b = b /Н.
ст ст
Найденные по формуле (6.73) значения толщин 6 затем корректируются
в соответствии с требованиями технологии производства. Для несущих
поверхностей небольших размеров обшивка часто изготавливается из лис-
та постоянной толщины, значение которой рассчитывается из условия
обеспечения работоспособности в наиболее нагруженной зоне (вблизи за-
делки крыла). Такая конструкция очевидно будет перетяжеленной. Если
потребные по условиям прочности толщины вблизи заделки превышают зна-
чение 5 . , то целесообразно применять обшивку переменной толщины,
шп
что наиболее просто реализуется путем усиления зоны заделки дополни-
тельными листами, которые привариваются к основной обшивке.
291
Крылья с сотовым заполнителем. Для этого типа конструкций харак-
терно наличие двух основных конструктивных элементов - обшивки и со-
тового заполнителя, занимающего весь объем между обшивками. Парамет-
рами, характеризующими такую конструкцию, являются толщина обшивки 5,
форма ячейки соты, ее характерный размер г и толщина фольги 5
Ф
(рис.6.38).
Для упрощения и удешевления конструкции 5, 5 и г могут быть пос-
Ф
тоянными для всей несущей поверхности. Однако возможно, и в ряде слу-
чаев целесообразно, применять обшивку переменной толщины (изготавли-
вается с применением метода химического травления) и заполнитель пе-
ременной жесткости (достигается изменением гиб
Ф
по площади несущей
поверхности).
Наиболее распространенной формой сотового заполнителя являются ше-
стигранные соты (см. рис.6.38,а), которые обеспечивают высокие харак-
теристики прочности и устойчивости и сравнительно просты в изготовле-
нии. Иногда применяются квадратные соты (см. рис.6.38,б), еще реже
соты прямоугольной и вытянутой шестигранной форм. Размер г сотового
заполнителя, применяемого в отечественной промышленности, обычно ра-
вен 2; 3; 5 или 6 мм. Соединение несущих слоев с сотовым заполнителем
и элементами каркаса осуществляется с помощью склеивания, пайки или
сварки.
В сотовых конструкциях существует тесная связь между применяемыми
материалами и технологией изготовления. Каждому конкретному типу со-
товой конструкции (клееной, паяной или сварной) соответствуют опреде-
ленные группы материалов для несущих обшивок, заполнителя и соедине-
ния (клей, припой), обеспечивающие надежность изготовления конструк-
Рнс. 6.38. Геометрические характеристики сотового заполнителя
292
I
ими в целом. Изменение хотя бы одного материала из группы без предва-
рительной технологической отработки и испытаний недопустимо, так как
это может повлечь за собой резкое ухудшение прочностных и эксплуата-
ционных характеристик конструкции, особенно прочности соединения об-
шивки с заполнителем и коррозионной стойкости.
В настоящее время наиболее употребительными являются следующие со-
четания материалов [12]. В сотовых конструкциях из алюминиевых спла-
вов обшивка изготавливается из материала Д16АТВ или Д19АТВ толщиной
0,2... 1,5 мм, сотовый заполнитель - из сплава АМг2-Н высотой
5...400 мм и толщиной 0,03...0,06 мм. Соединение обшивки с заполните-
лем осуществляется с помощью клеев ВК-32-200 (диапазон рабочих темпе-
ратур до 80 °C). ВК-31 (до 120 °C) или ВК-36 (до 160 °C). Толщина
пленки клея 0,18...0,3 мм.
В титановых сотовых конструкциях обшивка изготавливается из спла-
вов ВТ16, ВТ23 толщиной 0,2... 1,5 мм, заполнитель - из сплава ВТ15
толщиной 0,06; 0,08; 0,1 мм и высотой 7... 100 мм. Соединение элемен-
тов конструкции производится посредством пайки с припоем ВПр-15 (тол-
щина слоя 0,05...0,1 мм). Диапазон рабочих температур - до 450 С.
Титановые конструкции могут также изготавливаться с применением
диффузионной сварки. В отличие от предыдущего случая для обшивки ис-
пользуется материал ОТ4 толщиной 0,3... 1 мм.
Стальные конструкции, работающие при температурах до 700 С в кор-
розионно-активных условиях, выполняются посредством пайки с припоем
ВПр-13 (толщина слоя 0,05...0,1 мм). Материал обшивки и заполнителя
сталь 07Х15Н710М2 (ЭП35) или 12Х18Н10Т. Толщина обшивки в первом слу-
чае 0,15... 1,5 мм, фольги - 0,03...0,1 мм; во втором случае 5 -
= 0,2...0,8 мм, 6 - 0,03...0,08 мм. Высота заполнителя 5... 120 мм.
♦ о
Конструкции, работающие при температурах до 1000 С, изготавливают
также с применением пайки. Припой - ВПр-10 (толщина слоя 0,1 мм),
материал обшивки - сталь ХН60ВТ (ЭИ868), заполнителя - 12Х18Н10Т; 6 =
0,3... 1 мм, 6 = 0,04...0,1 мм.
4»
В клееных сотовых конструкциях применяются обшивки из стеклоплас-
тиков КАСГ-ВС, СП 1-6, ВОСТ-1 и композиционных материалов на основе
углеродных и борных волокон КМУ и КМБ. Заполнитель для таких конст-
рукций изготавливается из стеклопластиков, пластмассы на основе хлоп-
чатобумажной ткани, полимерной бумаги, пропитанных различными смо-
лами.
Длц силовых элементов, входящих в состав сотовой конструкции
(окантовки, профилей для присоединения панели к смежной конструкции,
293
кронштейнов и т.д.) и присоединяемых к обшивкам и заполнителю в про-
цессе склейки, пайки или сварки, применяют материалы, аналогичные ма-
териалу обшивки, за исключением паяных конструкций из стали ЭП35,
когда для изготовления силовых элементов применяются прутки и поковки
из стали ЭП288.
Расчет на прочность сотовых конструкций, а следовательно, и выбор
параметров таких конструкций осложнен невозможностью получения в на-
стоящее время достоверных расчетных значений разрушающих напряжений и
модулей упругости сотовых заполнителей из-за существенного разброса
характеристик применяемых материалов и отклонений технологических па-
раметров, неизбежно возникающих при изготовлении заполнителей в пре-
делах существующих технических условий и допусков. Поэтому расчетные
зависимости могут быть использованы в основном для проведения пара-
метрических исследований и предварительного проектирования, позволяю-
щего выбрать опорный вариант конструкции. Окончательный вывод о до-
пускаемых напряжениях и модуле упругости заполнителя должен делаться
по результатам испытаний.
В оптимально спроектированном крыле масса сотового заполнителя
составляет 30...35 % общей массы, поэтому при проектировании сотовой
конструкции следует стремиться к использованию обшивки малой толщины,
обеспечивая ей высокие разрушающие напряжения соответствующим выбором
параметров сотового подкрепления. Однако следует иметь в виду, что
обеспечение критических напряжений, превышающих предел пропорциональ-
ности, требует весьма существенного подкрепления, что влечет за собой
увеличение массы заполнителя и крыла в целом.
С учетом изложенных соображений последовательность проектирования
несущей поверхности сотовой конструкции можно строить по следующему
алгоритму.
1. Выбрать значение разрушающего напряжения а для обшивки.
Ориентируясь на приближенную диаграмму сжатия материала обшивки (см.
рис.6.35), можно принять %.
2. Определить потребную толщину обшивки
« = ^-(Н - Ми3 - 12/ ), (6.78)
где / = М Н/(2а ) - потребный погонный по сечению момейт инерции
из разр __
для восприятия изгибающего момента М - М /В. При изготовлении
г из из
обшивки из листа стандартной толщины (без применения химического
294
травления) значение 5 следует округлить до стандартного (0,3; 0,5;
0,8; 1,0; 1,2; 1,5 мм) в большую сторону.
3. Определить размер ячейки г. Из условия потери устойчивости
обшивки в пределах одной ячейки
г = « J*E/a (6.79)
где k - коэффициент устойчивости, для шестигранной ячейки k - 3,26
при сжатии вдоль оси Ох и k = 2,92 при сжатии вдоль оси Оу; для
квадратной ячейки k - 3,71. Полученное значение г нужно округлить до
стандартного (2; 2,5; 3; 5; 6 мм) в меньшую сторону.
4. Выбрать толщину фольги S для изготовления сот. Толщина фольги
ф
должна быть стандартной: 8” - 0,03; 0,04; 0,05; 0,06 мм. Поскольку
♦
во все прочностные зависимости входит отношение 6 /г, то 5 можно
♦ ♦
принимать постоянной, а для обеспечения прочности варьировать пара-
метром г. С точки зрения оптимальных массы, прочности и жесткости
конструкции выгодно уменьшать
%
и г. Однако, чем меньше толщина
фольги, тем в большей степени конструкция подвержена влиянию различ-
ных производственных погрешностей. Это обстоятельство на практике
оказывается определяющим, в силу чего толщина фольги выбирается из
технологических соображений.
5. Проверить обшивку на потерю устойчивости. При расчете обшивка
крыла с заполнителем моделируется пластиной на упругом основании. В
случае сплошного заполнителя наиболее опасной является местная потеря
устойчивости с симметричным волнообразованием. При этом
о = 0,82 JeE п—; Е = 1,54 Е. (6.80)
кр у Н у г ф
3
где Н - глубина упругого основания, т.е. высота заполнителя; Е -
модуль упругости материала, из которого сделаны соты.
В случае, когда меньше ранее принятого значения следует
уменьшить размер сот г или увеличить толщину стенки сот 5 . Первый
Ф
путь предпочтительнее, так как уменьшение г одновременно повышает
прочность конструкции во всех звеньях: возрастают критические напря-
жения потери устойчивости обшивки в пределах одной ячейки и критичес-
кие напряжения обшивки как пластины на упругом основании, увеличивав
295
ется прочность соединения обшивки с заполнителем и, наконец, увеличи-
вается прочность самого заполнителя.
6. Проверить прочность сотового заполнителя. Несущая способность
заполнителя существенно зависит от технологии его изготовления. При
прочих равных условиях наибольшей прочностью обладает заполнитель с
проклеенной или пропаянной двойной гранью. Заполнитель сварных пане-
лей, ленты фольги которого соединяются между собой точечной или роли-
ковой электросваркой, не образует монолитной двойной грани и имеет
меньшую прочность (в 1,25... 1,5 раза) по сравнению с клееным или пая-
ным заполнителем. В связи с этим надежные данные могут быть получены
только на основе систематических испытаний. Для приближенных оценок
разрушающих напряжений можно использовать следующие зависимости:
Е
а = а
У разр кр .ф Е
Ф
акр.ф
(6.81)
где k = 14,5 для граней сот двойной толщины и k = 3,6 для граней сот
одинарной толщины.
Напряжения, действующие в заполнителе в направлении, перпендику-
лярном обшивке,
°У Н (а /а — 1)
3 кр
(6.82)
где а<р и а - критические и действующие напряжения в обшивке соответ-
ственно; - амплитуда начальной симметричной волнистости обшивки,
w < 0,16.
0
Если условие прочности сот а <
а не выполняется, то необходи-
разр
мо уменьшить г или увеличить
V
7. Проверить прочность соединения заполнителя с несущими слоями.
Прочность равномерного отрыва несущих слоев от сотового заполнителя
должна быть больше прочности на разрыв заполнителя. Наименее надежны-
ми являются клеевые соединения. Статистика показывает, что для кле-
еных конструкций прочность соединения при расчетах необходимо обеспе-
чивать с коэффициентом запаса не меньше двух. Если прочностные харак-
теристики клея не позволяют реализовать такие запасы, то необходимо
уменьшить размер ячейки г.
296
(6.83)
Напряжения отрыва несущих слоев от сотового заполнителя рекоменду-
ется определять по формуле
6
1 ел кл
а = 1,64--------т ,
отр Г в
где 6 - размер клеевой галтели; т - предел прочности клея при
кл в
сдвиге.
При проектировании сотовой конструкции с постоянными 8, 5 иг та-
Ф
кой расчет проводится для наиболее нагруженной ее части. При перемен-
ных значениях 8 и 8 /г расчет проводится для нескольких зон. При не-
Ф
обходимости изменение 6 и 6 /г от зоны к зоне осуществляется по опре-
Ф
деленному закону. Например, линейное изменение для 8 и ступенчатое -
для 8 /г. В последнем случае ступенчато может меняться как размер г,
Ф
так и толщина сот 8 .
Ф
§6.3. ПРОЕКТИРОВОЧНЫЕ МОДЕЛИ УЧЕТА
АЭРОУПРУГИХ ЯВЛЕНИЙ,
ОСНОВАННЫЕ НА БАЛОЧНОЙ ТЕОРИИ
6.3.1. Консольные балки,
ииипфующие характерное сечете крыла
Рассмотренные выше проектировочные модели позволяют определить па-
раметры конструкции крыла лишь в самом первом приближении. Следующим
шагом конструктивной проработки несущей поверхности является учет
жесткости конструкции и аэроупругих явлений и связанное с этим опре-
деление ограничений на конструктивные параметры. Как и ранее, рас-
сматриваются расчетные модели, которые представляют интерес преимуще-
ственно с точки зрения физики исследуемых процессов. Этому требованию
наилучшим образом удовлетворяет балочная расчетная модель, имитирую-
щая практически любую несущую поверхность.
Крылья большого удлинения принято представлять в виде консольных
балок, заделанных по борту корпуса или в плоскости симметрии ЛА. Для
одно- и двухлонжеронных крыльев малого удлинения, где важное значение
имеет деформация хордовых сечений, первоначальный выбор потребной
жесткости крыла может быть сделан по так называемому характерному
сечению, отстоящему от корневого сечения на расстоянии 50...65 %
297
Рис. 6.39. Консольная балка под
действием поперечной нагрузки
полуразмаха. Характерное сече-
ние представляют в виде двух-
консольной балки с заделкой по
лонжеронам. В качестве консоль-
ных балок следует рассматривать
также основные силовые элементы конструкции крыла - нервюру и лон-
жерон.
Помимо прикладного значения исследование балок полезно еще и с
точки зрения методики, так как облегчает понимание более сложных
задач, относящихся к двухмерным конструкциям. Вначале рассмотрим
консольную балку, работающую на изгиб (рис.6.39).
Формулировка задачи. Предполагается, что балка состоит из двух
одинаковых полок единичной ширины и тонкой стенки. Высота поперечного
сечения балки Н(х) считается известной. Нагрузка представляет собой
аэродинамическое давление р, которое является функцией условий полета
и упругой деформации ш(х) нейтральной оси. Рассматриваемая балка яв-
ляется моделью консольной части нервюры крыла малого удлинения или
характерного сечения.
Задача проектирования такой балки состоит в нахождении толщины
полки 5(х), удовлетворяющей условию минимума массы балки. Соответст-
вующий функционал (целевая функция) будет
т = &(w)dx.
(6.84)
О
Для балок зависимость нагрузка - деформация выражается известным
уравнением
<Е1 ) = р. (6.85)
dx2 dx2
Если 5 < Н, то / = и уравнение (6.85) принимает вид
^4“ E/fW) = р. (6.86)
dx2
298
Отсюда
х х
в(ю) = —;----
Е/ГвГ .
pdxdx.
(6.87)
В случае приближенного анализа конструкций нагрузку р целесообраз-
но находить по методу несущей полосы, в соответствии с которым
Р = M(aw * = ₽ *
ff ж ж у
(6.88)
где q - скоростной напор; d* - исходный угол атаки; <р -
дополнительный угол атаки, обусловленный деформацией конструкции.
После подстановки выражений (6.87) и (6.88) функционал (6.84)
принимает вид
х х
(а ♦ <p)dxdx
Ж
Перейдем к безразмерной форме, обозначив
О
*= I
X 77 Н
н-т
а
— ]
a = —
ж к
При этом имеем
dw — к —
ф = - з— = - кхш'; ttf' = -г- иГ.
* dx I
В результате функционал приводится к виду
X X
(а - w' )dxdx
1 ж
Н 2ю"
о
(6.89)
(6.90)
(6.91)
(6.92)
О О
W =
W
wo
299
Настоящая вариационная задача будет определенной лишь при наличии
условий связи, которым должна удовлетворять варьируемая функция w(x)
или ее производные. Самая легкая конструкция очевидно та, для которой
экстремаль функционала (6.92) удовлетворяет условию отсутствия дивер-
генции. В прикладных задачах условия связи чаще формулируют в виде
ограничения по напряжениям
а < о (6.93)
max разр
или в виде ограничения по прогибам
w < tv . (6.94)
max доп
___В итоге задача формулируется следующим образом. В классе функций
tv(x), непрерывных вместе со своими производными до четвертого порядка
включительно, удовлетворяющих условиям (6.93) и (или) (6.94), найти
экстремаль tv (х), определяющую наивыгоднейшее распределение
материала:
S
Ч*
2caql
SL____
X X
(а - tv ' )dxdx.
Ж
(6.95)
О о
Нахождение общего решения сформулированной задачи имеет значитель-
ные трудности. Приведем ряд частных решений, представляющих опреде-
ленную практическую и методическую ценность [6].
Оптимальные балки без учета аэроупругости. 1. Валка минимальной
массы при заданном максимальном прогибе к. Для балки, высота которой
изменяется по произвольному закону Н(х), распределение материала и
масса определяются следующими зависимостями:
Ь1
6(х) = 1хф ; (6.96)
2 ..2
т = —plb.
к 1
где
2М
из
ЕН2
(6.97)
(6.98)
О
300
Если нагрузка балки представляет собой давление р постоянной ин^
тенсивности, а высота балки изменяется по линейному закону Н = Н х,
max
то
2р/3 I X
п * / »
(6.99)
При этом
5(х) =
(6.100)
ь = -
1 3
8
т " 9
РР1
ЕН2 к
max
cv = wQ(l - Зх + 2х ^2 ).
(6.101)
(6.102)
2. Балка минимальной массы при заданном угле поворота на конце
Распределение материала по длине балки и ее масса в этом случае
описываются формулами
8(х) = ; (6.103)
%
m = Z-pb2, (6.104)
где
I
b2= & dx. (6.105)
0
3. Консольные балки максимальной жесткости. Так будем называть
балки, перемещения которых минимальны при заданной массе конструкции.
Задача по отысканию зависимости 5 = 5(х), обеспечивающей минимум
перемещения в каких-то сечениях при заданной массе, может быть сведе-
на к задаче, рассмотренной выше. Такая возможность обусловлена прин-
ципом взаимности изопериметрических вариационных задач, из которого
301
следует, что экстремали в задаче о минимуме массы при заданном пере-
мещении совпадают с экстремалями в задаче о минимуме перемещения при
заданной массе. Учитывая это, из уравнений (6.96), (6.97), (6.104) получим: (6.103) и
а) для балки с минимальным прогибом на конце eW = 2P7», (6.106)
* ’ m (6.107)
б) для балки с минимальным углом поворота на конце
Д С ‘ е = — pb2 т 2 (6.108) (6.109)
Оптимальные балки с учетом аэроупругости. 1. Равнопрочная балка.
Для клиновидной балки интегрирование условия равнопрочности а = а = EH(x)vf'lx) = const разр 2 (6.110)
приводит к соотношениям: w = 1 ♦ х 1пх - х; = 2а Р/(ЕН ). 0 разр max (6.111)
Подставив эти выражения в уравнение (6.95), найдем распределение
материала, отвечающее условию равнопрочности:
с Qi* ( 1 5 (*) = — 1 о * а - 1пх |, рп £77 2 [ 2 ж J max и массу равнопрочной балки: (6.112)
2fcJ>‘ Г, 1 -1 т = о I1 +Га • рп £77 L 2 max (6.113)
2. Балка минимальной массы. Представим функционал (6.92) в виде
т = т * т , осн доп (6.114)
302
где первое слагаемое
dx
(6.115)
О
отражает основную массу конструкции, а второе
х х
1
4 (- w' )dxdx
т
ДОП
О
О
dx
(6.116)
о
- дополнительную массу, обусловленную аэроупругой нагрузкой
р = ca<fp. (6.117)
доп у1 Ф ф
Так как величина т меньше т , то приближенно деформации кон-
доп осн
струкции можно определять путем минимизации не всего функционала
(6.114), а только основного слагаемого т . Эта задача значительно
ОСН
проще: при ее решении могут быть использованы приведенные выше точные
аналитические зависимости. Например, для балки, максимальный прогиб
которой заранее задан, в качестве оптимальной можно считать деформа-
цию, определяемую выражением (6.102). Тогда распределение материала с
учетом аэроупругости рассчитывается по формуле (6.95), в которой ве-
личина w вычисляется по формуле (6.102).
Уточнение решения, т.е. учет слагаемого т , достигается за счет
доп
уточнения нагрузки по результатам первоначального решения с помощью
итерационного метода. Итерационный процесс выполняется по очень
простой схеме.
В соответствии с деформацией, найденной из выражения (6.102) без
учета аэроупругости, по формуле
х х
^(2) _ а -.gp'jfafa
из у ж
(6.118)
0 0
303
определяют изгибающий момент второго приближения. Затем, принимая
(2)
М в качестве исходного, записывают новые выражения для функций
(2) (2)
ф (ж) и Ь (х) и по формуле (6.100) определяют распределение
материала второго приближения.
Далее вычисления повторяются. Интегрируя выражение
2М(2)(х) .(2),
НЗ _ ф \Х)
ЕН2(х)6(2>(х) 8(2)(х)
находят прогиб
х х
dxdx ♦ С х ♦ С .
JJ 8(2>(х) * 2
(6.119)
(6.120)
0 0
где С и С
1
- и>(/) = 0.
*<3>(х); 8
- коэффициенты, определяемые из граничных условий ш' (/) =
(3)
После этого в третьем приближении рассчитывают (х);
^3\х); 6<3\х) и т.д. Обычно этот процесс быстро сходится.
поэтому достаточно двух-трех приближений.
Заметим, что условия связи, принимаемые при решении задачи, суще-
ственно влияют на характер распределения материала. Так, если предпо-
ложить, что максимальный относительный прогиб к численно равен углу
атаки а (т.е. а = 1), то минимальная масса клиновидной балки оказы-
вается равной 1,288 р/х» в то
время как равнопрочная балка име-
ет массу 1,50 р/х- Здесь обозна-
чено
х = 2caqi/(En ). (6.121)
у max
Выигрыш в массе составляет
16,5 %. Распределение материала
6/х = fU) для сравниваемых балок
приведено на рис. 6.40.
Рис. 6.40. Характер распределения
материала по длинам равнопрочной
(/) и оптимальной (2) балок при
304
6.3.2. Консольные балки, имитирующие
прямые крылья большого удлинения
Рассмотрим консольную балку, ось жесткости которой прямолинейна и
перпендикулярна к плоскости заделки (рис. 6.41). В конструктивном от-
ношении балка представляет собой замкнутую тонкостенную коническую
оболочку. Подобным образом схематизируются при расчете прямые крылья
большого удлинения.
Отличительной особенностью рассматриваемых балок является незави-
симость изгибных и крутильных деформаций, что позволяет разделить об-
щее исследование работы конструкции на две самостоятельные задачи:
расчет на изгиб и расчет на кручение. Данное обстоятельство целесооб-
разно учитывать и в проектировочном анализе. В соответствии с этим
распределение материала необходимо выбирать дважды: вначале из расче-
та на кручение, затем из расчета на изгиб.
Результатом первого этапа решения задачи является закон распреде-
ления материала, удовлетворяющий требованиям аэроупругости и принятым
ограничениям. Этот закон устанавливает оптимальную жесткость балки на
кручение (GJ ) . Здесь же определяются внешние нагрузки с учетом
аэроупругого взаимодействия сил. На втором этапе найденные нагрузки
принимаются в качестве расчетных. Так как изгибные деформации не из-
меняют местных углов атаки, то задача второго этапа решается без уче-
та аэроупругости.
В итоге получают две оптимальные зависимости: (GJ ) и (EJ) .
кр opt opt
Если толщина оболочки, найденная по величине (GJ ) ,не обеспечива-
кр opt
be
Рис. 6.41. Консольная балка, имитирующая прямое крыло большого у дли
нення
305
ет (EJ)^, то вводят продольные силовые элементы, которые, не изме-
няя ^кр’ позволяют увеличить жесткость EJ до требуемого значения.
Учитывая, что методика расчета оптимальной изгибной жесткости извест-
на из предыдущего параграфа, ограничимся рассмотрением первого этапа
решения задачи. 1
Деформация балки при кручении в принятой системе координат описы-
вается дифференциальным уравнением
М
аО _ кр
dz = ~ GJ
кр
(6.122)
Для замкнутого тонкостенного сечения момент инерции при кручении вы-
ражается формулой
J = 4сЛ/х, (6.123)
кр
где со - площадь контура сечения по средней линии; s - длина контура.
Приближенно
со = vbc =
s = (2,7с * 2)ft,
где с = с /Ь - относительная толщина
max
вающий полноту профиля (для сечения,
- 0,667).
С учетом приведенных зависимостей
что
(гдс-2^) Мкр
~ 2.3—2 6' '
aGv Ь с
(6.124)
балки; v - коэффициент, учиты-
образованного синусоидами, v =
из уравнения (6.122) следует,
(6.125)
Масса балки, соответствующая этой толщине оболочки, будет
L L
(2,7с"2 ♦ 2)2 м кр J, (6.126)
т-р Soaz * <G„2 .2—2 Ь С 0'
0 0
306
Учитывая, что является функцией угла закручивания 0:
z
М = q саЬАх(а + 6)dz, (6.127)
Кр уж
О _
где Дх = х - х , и полагая, что относительная толщина с по длине
ц.ж Ц.Д
балки не изменяется (что характерно для реальных крыльев), выражение
(6.126) для массы балки можно представить в следующем виде:
. са Г2Дх(а ♦ 0)dz
1 у ж
3 —2 2 Г
pqL (2,7с * 2) 0
4Gv2c~2 ь^о7
О
dz.
(6.128)
Здесь обозначено:
(6.129)
Принимая, как и ранее, в качестве критерия оптимальности массу
конструкции, очевидно, что выражение
, са Г2 Дх(а + 0)dz
1 у Ж
°------------------dT
Г2г
о
(6.130)
можно рассматривать как функционал. Экстремаль О (?) определяет
функцию распределения материала, необходимого для передачи крутящего
момента,
307
S = - P ca ft-2Дх <a * 0*)<fc,
6
(6.131)
и оптимальный закон изменения жесткости на кручение по длине балки
.2.2 J qL b F
(GJ ) = ca F"2Ax(a ♦ 6*)dz,
кр opt *♦, ] у ж
(6.132)
—2 2
i =27с • <б1зз>
4Gvb с
ср
Для равнопрочной балки вариационная задача, как таковая, вырожда-
ется. Деформация балки в этом случае определяется из уравнения
которое с помощью выражений (6.122), (6.123) и (6.124) представляют в
виде
т = - «И0№)Г(Д
(6.135)
2vcb (6.136)
где ( = ср
(2.7F2 * 2>L
Отсюда
ей т = к? b(z) (6.137)
где С - постоянная интегрирования.
После интегрирования, принимая
Ь&) = Г[1 * T(ri - 1)],
где Ь - концевая хорда балки; ~ бортовая хорда; rj = b&/b*
сужение балки, и учитывая граничное условие 0 (1) = 0, получают
308
(6.138)
(6.139)
0 = ----ПВЗ__ (6.140)
К
Жесткость на кручение для равнопрочной балки определяется
уравнением (6.132), в которое следует подставить найденное выражение
(6.139) и конкретные зависимости с* = с^(х) и Дх = Дх(х).
В общем случае оптимальный закон изменения жесткости балки
находится из решения вариационной задачи, функционал которой (6.130).
Сопоставляя этот функционал с рассмотренным ранее функционалом
(6.92), нетрудно установить, что по физическому смыслу входящих
величин функционалы (6.92) и (6.130) аналогичны. Деформации иГ в
(6.92) соответствует угол закручивания 0 в (6.130), относительному
прогибу к - величина высоте Н - хорда b и т.д.
В обоих функционалах первое слагаемое характеризует массу констру-
кции без учета дополнительной аэроупругой нагрузки. Его роль опреде-
ляющая. Это дает основание в оценочных расчетах второе слагаемое учи-
тывать приближенно подобно тому, как делалось ранее. Ограничения,
вводимые при минимизации функционалов, обычно также одни и те же (по
деформациям или по напряжениям). Указанные обстоятельства позволяют
рассматриваемую задачу решать методами, изложенными выше, примени-
тельно к балке, нагруженной изгибающим моментом.
§ 6.4. ЭЛЕМЕНТЫ КОНСТРУКЦИЙ НЕСУЩИХ ПОВЕРХНОСТЕЙ
И ИХ ПРОЕКТИРОВАНИЕ
6.4.1. Механизмы раскладывания несущих поверхностей
Требования к системам раскладывания. Масса и габариты ЛА всегда
были и будут главнейшими показателями его технического уровня. Одним
из эффективных путей уменьшения габаритов ЛА является фименение
складывающихся несущих поверхностей. Наибольшее распространение полу-
чили две схемы складывания несущих поверхностей:
1. Консоли несущей поверхности складываются относительно оси, па-
309
раллельной продольной оси ЛА. Такая схема целесообразна для крыльев и
рулей малого удлинения.
2. Консоли складываются относительно оси, перпендикулярной плос-
кости хорд. Схема применяется чаще всего для несущих поверхностей
большого удлинения.
Раскладывание несущих поверхностей в рабочее положение осуществля-
ется по команде устройством (блоком раскладки), установленным на бор-
ту ЛА, как правило, после физического разделения ЛА с наземной пуско-
вой установкой или пусковой установкой носителя, т.е. в автономном
полете. Для обеспечения стабилизации и управления ЛА в процессе раз-
деления с носителем иногда осуществляют раскладывание некоторых аэро-
динамических поверхностей (обычно горизонтального оперения и нижнего
киля) непосредственно перед началом процесса разделения. '
Облик системы раскладывания аэродинамических поверхностей опреде-
ляется жесткими техническими требованиями. В их числе:
компоновка механизма раскладывания в ограниченном объеме, чаще
всего внутри аэродинамического профиля крыла или оперения, имеющих
малые строительные высоты и воспринимающих большие внешние нагрузки;
жесткое ограничение времени раскладки консолей, исчисляемого доля-
ми секунды, с целью обеспечения устойчивого движения ЛА на стартовом
участке при значительных и разнообразных по характеру внешних на-
грузках;
обеспечение динамической прочности и жесткости элементов конструк-
ции механизма раскладывания и консолей несущей поверхности;
обеспечение надежной фиксации консолей в сложенном положении и в
автономном полете.
Структурная схема системы раскладывания в общем случае включает в
себя в качестве составных взаимосвязанных звеньев следующие элементы:
силовой привод, демпфер или регулятор скорости раскладывания, переда-
точный механизм, фиксирующие устройства сложенного и разложенного по-
ложений консолей.
Источником энергии может служить бортовой пневмоаккумулятор давле-
ния с зарядным, пусковым и контрольным устройствами. Однако его при-
менение ограничивается невозможностью увеличить рабочее давление выше
35 МПа. В настоящее время отработаны и широко применяются пороховые
приводы (пиротехнические газогенераторы), объединяющие источник энер-
гии, демпфер и собственно привод, с рабочим давлением газа под порш-
нем порядка 100 МПа и более при устойчивом горении порохового заряда.
Это существенно повысило компактность и удельную мощность систем рас-
кладывания.
310
Простейшим приводом могут служить пружина и торсион. В качестве
передаточных механизмов в системах раскладывания широко применяются
плоские или пространственные шарнирно-рычажные и ползунно-кривошипные
механизмы, а также винтовые пары. Роль механизма фиксации часто вы-
полняют пружины того или иного типа, досылающие специальный элемент
(боек, шток и т.п.) в гнездо фиксации.
Конструктивные схемы механизмов раскладывание. Рассмотрим воз-
можные варианты конструктивных решений механизмов для складывающихся
несущих поверхностей на основе различных по физической природе при-
водов.
На рис.6.42 показана конструкция руля, приводимого в рабочее (по-
летное) положение с помощью механизма раскладывания и фиксации на ос-
нове торсиона. Руль состоит из двух частей: неподвижного основания /
и складывающейся консоли 4. Механизм раскладывания и фиксации распо-
ложен на оси вращения консоли в обтекаемых утолщениях основания и
консоли.
2 3 Ь 5 6 Т 89
а
д
Рис. 6.42. Конструкция складывающегося руля с торсионом:
а — общий вид; б — элементы механизма раскладывания; в — полетное
состояние механизма; 2 — сложенное состояние механизма; д - рули в
сложенном положении
311
Торсион 2 за очень короткое заданное время должен создавать необ-
ходимый момент для перевода руля в полетное положение и вместе с тем
удовлетворять условию прочности на кручение. Для выполнения этих тре-
бований материал тореиона должен обладать высоким пределом текучести,
чему отвечают высоколегированные стали и титановые сплавы.
Механизм раскладывания устроен следующим образом (см. рис.6.42,а).
По оси вращения консоли 4 расположены две бронзовые втулки 6 и 10,
жестко соединенные с основанием / штифтами 7 и 9. Вместе с запрессо-
ванными в консоль 4 обоймами 5 и 11 втулки образуют подшипники сколь-
жения. Внутри втулок проходит торсион. Своим левым концом он жестко
закреплен в консоли руля с помощью штифта 3, а правым - в принадлежа-
щей основанию втулке 10 штифтом 8. Втулка 10 на своем правом торце
имеет зуб 12 (см. рис.6.42,а, б), который входит в зацепление с выс-
тупом в фигурном хвостовике 14. Хвостовик закреплен в консоли руля
двумя штифтами 13. Поэтому поворот консоли на втулках 6 и 10 ограни-
чен зубом 12 втулки 10 и выступом в хвостовике 14.
Полетное и сложенное (контейнерное) состояния механизма расклады-
вания и фиксации показаны на рис.6.42,в, г соответственно. В сложен-
ном положении сухарь 17 входит в паз на хвостовике 14, и в этом поло-
жении рули удерживаются струбцинами. При раскладывании консоли под
действием толкающей пружины 16 сухарь частично выходит из паза хвос-
товика и упирается боковой гранью в зуб 12 втулки, тем самым фиксируя
крыло в полетном режиме. Для складывания консоли вновь следует воз-
вратить сухарь 17 в паз хвостовика. Для этого в сухарь ввинчивают
технологический винт 15. Он сжимает пружину 16 и возвращает сухарь в
паз хвостовика.
Торсионный механизм раскладывания представляет собой наиболее про-
стую и весьма надежную конструкцию, которую следует рекомендовать для
малоразмерных несущих поверхностей. Основными параметрами этого меха-
низма являются диаметр d, длина I и угол предварительного закручива-
ния 6 . При их определении действующие на торсион нагрузки считаются
заданными. К этим нагрузкам относятся поверхностные силы поворотной
части несущей поверхности и инерционные нагрузки, обусловленные дви-
жением ЛА в целом. Очевидно, определяющим для выбора параметров тор-
сиона будет случай, когда эти нагрузки противодействуют процессу рас-
кладывания агрегата.
Положение поворотной части несущей поверхности при ее враще-
нии вокруг неподвижной оси определяется углом 0 (рис. 6.43).
Дифференциальное уравнение движения несущей поверхности при
раскладывании имеет вид
312
J ё= М, (6.141)
/п
где / - массовый момент инерции поворотной части несущей поверхности
/п f
относительно оси раскладывания; 0 - угловое ускорение вращения несу-
щей поверхности; М - сумма моментов внешних нагрузок и упругих
сил самого торсиона М относительно оси вращения,
М = М *М. (6.142)
вн у
Будем считать, что = const, а М? в процессе раскладывания
несущей поверхности меняется по линейному закону
GJ
м = м - е, (6.143)
У У0 <
где - упругий момент при 0 = 0; G - модуль сдвига материала тор-
сиона; - полярный момент инерции поперечного сечения торсиона.
Для рассматриваемого случая нагружения решениями уравнения (6.141)
при нулевых начальных условиях будут
О =
где
п =
(1 - cos/rf); 0 = sin/rf,
При завершении процесса раскладывания
в момент времени t несущая поверхность
будет иметь угол раскладывания 0 , угло-
вую скорость 0 и обладать кинетической
Рис. 6.43. Схема раскладывания несущей
поверхности:
/ — сложенное положение; 2 — полетное по-
ложение; <3 — торснон; 4 — корпус ЛА; 5 —
механизм фиксации; 6 — гнездо фиксации
(6.144)
313
i г ;2
энергией К = — J (L.
2 т ♦
Если принять, что предварительный угол закручи-
вания торсиона
9 = (6.146)
У ♦
то из
ё2
уравнений (6.144)...(6.146) следует, что
М Л * 2МЛ Мл
уО 0 О
” >---------------' л и
т у 0 + MQ
(6.147)
В соответствии с этими зависимостями и известными соотношениями
сопротивления материалов можно определить
М Л = J ё2/6 - 2М ;
уО т ♦ ♦ О
d = 116М /пт ;
уО разр
I = Gd/2r 9.
(6.148)
(6.149)
(6.150)
(6.151)
где = О.ба^ - разрушающее напряжение материала торсиона на
кручение.
В механизмах раскладывания другого типа в качестве силового приво-
да используют пружину. Возможная конструкция такого механизма показа-
на на рис.6.44 и 6.45.
Рис. 6.44. Складывающийся стабилизатор с пружинным механизмом
О
314
На рис.6.44 показаны общий вид несущей поверхности с пружинным ме-
ханизмом (а) и хвостовая часть ЛА с раскрытыми (б) и сложенными (в)
несущими поверхностями. Каждая несущая поверхность состоит из корне-
вой части / и консоли 2. Корневая часть имеет продольные фланцы 3,
закрепленные на приливах к корпусу ЛА, и два выступа 4 и 5, в соосных
отверстиях которых запрессованы вкладыши 6. Между выступами 4 и 5
расположен стопорный механизм 9 с продольной осью, перпендикулярной
оси ЛА. Корневая часть и консоль несущей поверхности соединены осью
7, законтренной шпилькой 8.
Стопорный механизм (рис.6.45) состоит из цилиндрической гильзы /,
имеющей на верхнем конце фланец 3. Внутри гильзы расположен палец 2 с
закругленным верхним концом 4 и продольной щелью 10. Гильза имеет две
противоположные вертикальные прорези II, куда входит направляющая
шпилька 13. Шпилька необходима для того, чтобы ограничить ход пальца
и предотвратить его проворачивание. Между нижним концом пальца и ниж-
ним дном гильзы находится пружина 15. Через продольную щель 10 в
пальце, прорезь II в гильзе / и отверстие 14 в корневой части стаби-
лизатора инструментом 12 можно сдавить пружину.
Выступ 7 плоскости стабилизатора 9 имеет эксцентриковую поверх-
ность, радиус которой уменьшается от максимума на верхнем конце до
минимума на нижнем. Неглубокая круглая впадина 5 и глубокая трапецие-
Рнс. 6.45. Пружинный сто-
порный механизм
Рис. 6.46. Складывающийся руль с пневмо-
гидравлическим механизмом
315
видная впадина 6 на эксцентриковой поверхности выступа 7 служат для
фиксации стабилизатора в сложенном и раскрытом состояниях соответ-
ственно.
В начальном (сложенном) состоянии конец пальца 4 находится во впа-
дине 5. Сила действия пружины на палец достаточна, чтобы удержать
стабилизатор в закрытом положении до тех пор, пока не подействуют
раскрывающие усилия. После этого палец выдавится из впадины, что поз-
волит плоскости стабилизатора поворачиваться вокруг своей оси 8. Ког-
да плоскость раскладывается, палец скользит по эксцентриковой поверх-
ности. Значение этой поверхности состоит в том, чтобы обеспечить
плавное движение плоскости при раскрытии, а стопорной поверхности 6 -
чтобы надежно закрепить ее в разложенном положении. Для стабилизато-
ров больших размеров можно увеличить число выступов с эксцентриковой
поверхностью.
При высоких нагрузках на несущие поверхности в процессе складыва-
ния - раскладывания чисто механические приводы оказываются недоста-
точно надежными. В этих условиях более целесообразны пороховые приво-
ды. Возможная конструкция руля с пневмогидравлическим механизмом и
пиротехническим газогенератором показана на рис. 6.46.
Руль, состоящий из неподвижной / и поворотной 3 частей, складыва-
ется вокруг оси О-О. Соединение частей 1 и 3 между собой производится
с помощью двух шарнирных узлов 2 и 4 полуразъемного узла 5, который в
рабочем положении обеспечивает передачу изгибающего момента руля. Ме-
ханизм раскладывания размешается в пустотелом валу б, с помощью кото-
рого руль устанавливается в корпусе ЛА и стыкуется с силовым приво-
дом. Источником энергии для механизма раскладывания служит пиротехни-
ческий газогенератор (ГИТ) 7, вмонтированный с помощью резьбового со-
единения в верхнюю часть вала. Для доступа к ГИТ в неподвижной части
руля предусмотрен лючок.
Механизм раскладывания (рис. 6.47) имеет неподвижный цилиндр / и
шток 2 с поршнем, размещающиеся внутри пустотелого вала 3. Двумя шар-
нирными узлами 4 и 5 шток 2 через тягу 6 соединен с подвижной частью
руля. Причем в сложенном положении руля неподвижность соединения обе-
спечивается срезным стопором 7 в шарнирном соединении 4.
Переход подвижной части консоли в рабочее состояние осуществляется
следующим образом. От импульса электрического тока воспламеняется
шашка ШТ. Под высоким давлением (до 150 МПа) продукты сгорания попа-
дают в полость пустотелого вала между цилиндром / и поршнем. Посколь-
ку цилиндр / прочно связан с валом 5, то шток 2 с поршнем, срезая
фиксирующий стопор 7, начинает перемещаться вниз. Для предотвращения
316
Рис. 6.47. Пневмогидравлический
механизм раскладывания руля
разрушающего конструкцию удара
предусмотрено двухтактное гидрав-
лическое демпфирование.
При движении штока 2 с поршнем
вниз жидкость, находящаяся под
поршнем, попадает в его внутрен-
нюю полость через дроссельное от-
верстие //и наполняет эластичную
оболочку 8. При заправке рабочей
жидкостью полость под поршнем ва-
куумируется.
На первом этапе ускоренному
движению поршня препятствует ма-
лый расход жидкости через дрос-
сельное отверстие. На конечном
этапе движения при входе иглы 9
демпфера в дроссельное отверстие
расход жидкости сокращается с
уменьшением площади свободного
вследствие чего происходит дополни-
сечения между отверстием и иглой,
тельное торможение поршня. Процесс демпфирования должен быть рассчи-
тан так, чтобы кинематика механизма раскладывания обладала достаточ-
ной кинетической энергией для запирания механического замка 10, но
недостаточной для разрушения конструкции.
После завершения процесса раскладывания, который происходит в доли
секунды, соединение подвижной части консоли с валом обеспечивает пе-
редачу крутящего и изгибающего моментов, поскольку оба узла крепления
подвижной части консоли (замок и ось поворота) крепятся к неподвижной
внешней поверхности вала. Элементы механизма раскладывания в восприя-
тии нагрузок не участвуют.
Приведем конструктивную схему еще одного пневмогидравлического ме-
ханизма раскладывания (рис.6.48), которая может быть применена для
синхронной раскладки консолей крыла ЛА из транспортировочного положе-
ния в полетное.
Механизм содержит блок раскладки /, газогенератор 9, рычажно-
ползунный механизм (состоящий из тяг 2 и 3, качалок #, ползуна 5,
рельса б), замки разложенного положения 7 и замки сложенного положе-
317
ния, выполненные в виде срезных болтов 8. Блок раскладки представляет
собой силовой цилиндр, закрепленный на корпусе ЛА, шток 10 цилиндра
соединен с ползуном 5.
Механизм работает следующим образом.
По команде на раскладку срабатывает газогенератор 9, продукты сго-
рания которого поступают в газовую полость блока раскладки и создают
в ней давление. Под действием давления поршень силового цилиндра на-
чинает перемешаться и посредством штока 10 толкает ползун 5 по рельсу
6. В процессе перемещения ползуна тяги 2 поворачивают качалки 4, а
последние при помощи тяг 3 - консоли крыла. В первый момент происхо-
дит срез болтов 8, а затем - раскладка консолей крыла в полетное по-
ложение. Поршень в процессе своего движения вытесняет масло из гид-
равлической полости через дроссельное отверстие в приемник жидкости,
вследствие чего осуществляется демпфирование процесса раскладки. В
конце раскладки консоли крыла фиксируются в полетном положении замка-
ми 7. Механизм обеспечивает раскладку консолей крыла за 0,2 с.
Системы раскладывания несущих поверхностей с пневмогидравлическим
механизмом и пиротехническим газогенератором более полно удовлетворя-
ют требованиям к подобного рода устройствам. Однако конструктивное
исполнение таких систем намного сложнее систем с торсионными и пру-
жинными механизмами.
Рис. 6.48. Пневмогидравлический механизм раскладывания консолей крыла
318
Проектирование пневмогидравлической системы раскладывания состоит
, определении переменных во времени давлений газа и жидкости в полос-
и силового гидроцилиндра и перемещения штока поршня с учетом задан-
иях помогающих или препятствующих факторов внешнего нагружения несу-
них поверхностей аэродинамическими и инерционными силами. Определение
ггих параметров связано с решением системы нелинейных уравнений дви-
кения поршня, рабочих процессов поступления газов от порохового газо-
генератора в гидроцилиндр и истечения жидкости через демпфирующее
[дроссельное) отверстие под давлением поршня. При этом основная труд-
юсть состоит в необходимости привлечения экспериментальных данных
три ограниченной статистике.
6.4.2. Конструкции стыковых узлов крыла
с корпусом
Взаимосвязь конструкции стыковых узлов с силовыми схемами крыла и
корпуса. Все внешние силовые факторы, воспринимаемые крылом, переда-
ются на копус ЛА посредством разъемных соединений - стыковых узлов.
Стыковые узлы самые нагруженные элементы, от качества их конструкции
существенно зависит надежность ЛА. В большинстве случаев разрушение
конструкции происходит именно по стыковым узлам или вблизи них. Обес-
печение прочности ЛА - важнейшая функция стыковых узлов. Кроме того,
стыки обеспечивают строгое взаимное расположение крыла и корпуса и в
значительной мере определяют технологические и эксплуатационные свой-
ства ЛА.
Рациональная конструкция соединения крыла с корпусом может быть
найдена только при их совместном проектировании. Это обусловлено ря-
дом факторов. Рассмотрим их.
Для получения достаточной жесткости крыла (при его минимальной
массе) выгодно, чтобы все элементы конструкции были нагружены равно-
мерно и усилия с крыла на корпус передавались с помощью стыка по все-
му контуру крыла. Изгибающий момент в этом случае будет передан
на корпус в виде распределенных, нормальных к поверхности его обшивки
сил (рис.6.49,а), а перерезывающая сила Q и крутящий момент - в
виде потока касательных усилий q^ и q% по контуру обшивки
(рис.6.49,б, в).
Если крыльевой отсек корпуса обладает малой изгибной жесткостью,
то могут возникнуть недопустимые деформации отсека и поворот крыла в
заделке1 относительно продольной оси ЛА (рис.6.50). Следовательно,
319
крыльевой отсек в целом необходимо сделать более жестким, увеличив,
например, толщину его обшивки, или применив центроплан, который явля-
ется как бы продолжением крыла в корпусе, или установив ряд близко-
расположенных друг к другу шпангоутов. Но тогда отсек будет тяжелым.
Другой тип стыковки - точечная (узловая) стыковка крыла с корпу-
сом - не вызывает трудностей с обеспечением необходимых прочности и
жесткости корпуса (например, с помощью усиленных шпангоутов); проще в
этом случае обеспечить и взаимозаменяемость стыкового узла. Однако
нагружение элементов силового набора крыла при этом будет неравномер-
ным, отчего масса крыла возрастет.
Итак, возможны два типа стыков крыла с корпусом: контурный и то-
чечный. Выбор того или иного из них зависит от конструктивно-силовой
схемы крыла и от жесткости крыльевого отсека корпуса. Моноблочное
крыло, требующее контурного крепления, будет выгодным по массе только
при наличии необходимой жесткости крыльевого отсека корпуса. Лонже-
ронная схема, обусловливая точечную стыковку, требует применения в
конструкции корпуса усиленных шпангоутов или центроплана.
При конструировании соединения крыла с корпусом очень важно пра-
Рис. 6.49. Схемы передачи изгибающего момента (а), перерезывающей си-
лы (б) и крутящего момента (в) с крыла на корпус
Рис. 6.50. Схема деформации при малой изгибной жес-
ткости крыльевого отсека
Рис. 6.51. Схема стыковки крыла малого удлинения с корпусом
320
вильно выбрать места расположения узлов стыковки. Следует обращать
внимание на характер общей деформации крыла, обеспечивать кратчайшие
пути передачи сил и четкую специализацию каждого силового элемента.
Для крыльев малого удлинения с одним моментным узлом / (рис.6.51)
необходимо предусматривать дополнительные точки крепления 2 в перед-
ней и хвостовой частях бортового сечения, уменьшающие отгиб передней
и задней частей крыла. Эти узлы выполняются в виде катковых опор, ис-
ключающих стеснение температурных деформаций крыла вдоль хорды при
аэродинамическом нагреве, но надежно воспринимающих нагрузки от пере-
резывающей силы Q и крутящего момента М .
Конструкции стыковых узлов и определение их параметров. Соединение
с помощью цапфы целесообразно для сравнительно тонких крыльев с
относительной толщиной профиля с порядка 0,015...0,02 и для цельнопо-
воротных рулей (независимо от толщины). Цапфу можно выполнять> как
силовой элемент лонжерона крыла или крыльевого шпангоута корпуса. В
сопряженную деталь цапфа устанавливается по скользящей посадке. На
рис.6.52 показано соединение с помощью цапфы, являющейся законцовкой
лонжерона крыла.
Изгибающий момент с крыла на корпус передается за счет смятия
цапфы и шпангоута. При этом контакт цапфы со шпангоутом может быть
или по всей длине цапфы (рис.6.52,б), или по специальным посадочным
пояскам шириной а (рис.6.52,в). В первом случае интенсивность распре-
Рнс. 6.52. Соединение крыла с помощьк? цапфы:
О — сх^ма соединения; б — схема нагружения по всей длине цапфы; в —
схема нагружения цапфы по посадочным пояскам
11 -880
321
деленной нагрузки от момента Л4^ может быть принята изменяющейся
по закону треугольника и определена из условия равновесия моментов
о
0,5g *0,5/ I = М . (6.152)
Ц1 ц 3 Ц ИЗ
Во втором случае, когда длина контакта а мала по сравнению с дли-
ной цапфы интенсивность на ширине а можно считать постоянной.
Тогда
aq (I -а) = М . (6.153)
ц2 ц из
Давление от перерезывающей силы Q крыла распределяется по цапфе
равномерно и для названных двух ев равно соответственно
Q
ц
2а
Q
, Ц г
1 I ’ ^ц2
и
Соединение с помощью цапфы технологично, удобно в эксплуатации, । а
при наличии катковых опор в дополнительных узлах практически исключа-
ет возникновение температурных напряжений в крыле.
Из условия работы на изгиб цапфу выгодно располагать в зоне
максимальной толщины с профиля крыла и принимать ее диаметр = с;
длину следует определять по смятию соединения от силы Q и момента
М . В соответствии со схемой рис.6.52,б и соотношениями (6.152) и
из _
(6.154) наибольшее напряжение смятия будет определяться выражением
d« (2d
U и
длина цапфы определяется из условия а.* <
разрушающее напряжение смятия соединения. Откуда
Q ♦ Iq2 + 24М d ffpa3p
_ ц_________ц_______из ц см
\ ц’ 2d аР“ 3 ₽
ц см
При длине а частичного контакта имеем
^ц2 * ^ц2
d
ц
(6.154)
О
см
Q
ц
I d
ц ц
(6.155)
Искомая
о
см
М Q
из ♦ ц ^разр
a(l - a)d 2 ad см *
ц ц и
где оразр -
СМ
(6.156)
(6.157)
322
а длина цапфы
2М
I = а ♦ -------52--------. (6.158)
ц 2а/а₽азр-(?
ц С м ц
Размеры сечений дополнительных опор 2 (см. рис.6.51) выбираются из
условия их работы на срез от приходящихся на них поперечных нагрузок.
Комлевую заделку и "гребенку", выполняемые заодно с крылом, можно
рассматривать как разновидность цапфы. Такое соединение (рис.6.53)
применяют для монолитных (целиковых) крыльев, а также изготовленных
из штампованных и литых панелей. Принцип передачи силовых факторов с
крыла на корпус здесь такой же, что и при стыковке с цапфой, но он
осуществляется по более широкой, чем базе Ь* заделки. При этом
уменьшается концентрация напряжений.
Потребная минимальная ширина комля в первом приближении может быть
определена из условия его прочности от изгибающего момента по
формуле
6М
Ь = ------, (6.159)
3.2
k с а
пл разр
где с - максимальная толщина профиля крыла в зоне стыка (см.
Рис. 6.5^. Соединение крыла с корпусом по широкой базе:
а, б — комлевая заделка; в — заделка 'гребенкой'
323
рис.6.53,а); k - коэффициент пластичности материала комля при рабо-
ПЛ
те на изгиб (k = 1,5 - для деформируемых алюминиевых сплавов и ста-
пл
лей; k = 1,0 - для малопластичных литейных и хрупких материалов);
пл
а - разрушающее напряжение материала комля при растяжении,
разр
Конструкция комлевой заделки почти однозначно зависит от констру-
ктивно-силовой схемы крыльевого отсека корпуса: она может быть сплош-
ной (непрерывной) (см. рис.6.53,б) или в виде "гребенки” (см.
рис.6.53,в). В последнем варианте при определении прочности заделки
величина е из размера должна быть исключена.
Длина комля в случае непрерывной (сплошной) заделки определяется
по аналогии с (6.156):
Q + Jq2 + 24М b аразр
I > —--------2--------нз 3 см— , (6.160)
3 см
а для заделки в виде ’’гребенки” - по аналогии с (6.158):
2М
I > ---------52------- . (6.161)
3 2аЬаразр-(?
3 С М 3
где - доля перерезывающей силы крыла, воспринимаемая непосредст-
венно комлевой заделкой.
Фланцевые стыки позволяют осуществить точечную и контурную стыков-
ки, одновременно увеличить строитель-
ную высоту узла крепления и упрос-
тить технологию эксплуатации. При то-
чечной стыковке (рис.6.54) в крылье-
вом шпангоуте 1 корпуса устанавлива-
ются две шпильки 2; одна из них - по
классной посадке (работает на срез,
передавая на корпус силу Q), а вторая
- с гарантированным зазором, обеспе-
чивая взаимозаменяемость стыка.
Рис. 6.54. Фланцевое соединение крыла
324
При проектировании любого соединения особое внимание следует уде-
лять расчету параметров резьбовых деталей. Учитывая, что одна из шпи-
лек фланцевого соединения воспринимает не только осевую силу, но и
работает на срез, условие прочности для таких элементов представляют
в виде
М i2
b F I
ш ш
о
экв
* Зг2
о
разр
(6.162)
' J *
ш
Откуда
4
тга
Разр
м2
из
ь2
ш
(6.163)
d
ш
где F
ш
- площадь поперечного сечения и диаметр
Глубина завинчивания шпильки рассчитывается
резьбы от действия силы Р = М /Ь :
ш из ш
шпильки.
из условия среза
витков
из ш
_____ш________
itd Н pk
ш ш т
< Т
разр
(6.164)
и
ш
* 0,6а
разр
- разрушающее напряжение при срезе; р - коэффи-
т
где т
разр
циент полноты заполнения резьбы, Р = 0,8 - для метрической резьбы,
Р = 0,65 - для трапецеидальной резьбы; - коэффициент, учитывающий
неравномерность распределения нагрузки по виткам, = 0,56 - болт и
гайка (корпус) из одинаковых материалов, - 0,75 - болт стальной,
корпус из алюминиевого сплава.
Параметры фланца стыкового узла определяются в основном значением
изгибающего момента
М = Р с = М с/b .
из. ф ш из ш
(6.165)
По этой нагрузке из условия прочности рассчитывается мо-
мент сопротивления изгибу наиболее нагруженного сечения фланца:
325
м
V =—S*— т— . (6.166)
фа о
р азр ш
Толщина фланца Л определяется из условия среза фланца или его
Ф
смятия под шпилькой от силы Q. Ширина фланца обычно принимается
равной ширине пояса лонжерона: Ь = В .
ф л
Контурный фланцевый стык выполняется с помощью уголковых профилей
или специальных фитингов и шпилек (винтов, болтов). Расчетной для
шпилек и фитингов здесь является нагрузка Р = М /(Ь л) (л - чис-
ш из ш
ло шпилек) от действия изгибающего момента М крыла в бортовом
сечении. Эта сила должна быть меньше разрушающей нагрузки для шпильки
(болта).
Усиковые соединения крыла с корпусом выполняются в нескольких вари-
антах: с наружными проушинами на крыле; с наружными проушинами на
корпусе; одноболтовое соединение; л-болтовое соединение. Выбор типа
стыка определяется главным образом условиями нагружения и конструк-
тивно-силовыми схемами крыла и корпуса.
На рис.6.55 показано ушковое соединение крыла с корпусом моноблоч-
ной схемы с наружной корпусной проушиной. Основные геометрические па-
раметры соединения, такие как толщина и ширина проушин корпуса и кры-
ла, диаметр болта, находятся из условий прочности при нагружении мо-
ментом и силой Q: 1) на разрыв проушины крыла; 2) на смятие
проушины крыла под болтом; 3) на разрыв проушины корпуса; 4) на
смятие проушины корпуса под болтом; 5) на срез болта.
Во избежание люфтов в соединении болты и отверстия под них должны
выполняться по высококлассным посадкам.
Узловое соединение типа ухо-вилка
(рис.6.56) применяют для лонжеронных
крыльев сравнительно больших размеров,
со значительной строительной высотой
профиля. Из показанных на рисунке двух
конструкций отдают предпочтение схеме
б, у которой оси болтов параллельны
хорде. Этот выбор особеннс оправдан для
Рис. 6.55. Ушковое соединег ' крыла:
/ — корпус; 2 — составн болт; 3 —
проушина; 4 — крыло
326
2
Рис. 6.56. Соединение крыла типа ухо-вилка:
fl — оси болтов перпендикулярны хорде; б — оси
болтов параллельны хорде
Рис. 6.57. Быстроразъемное соединение
327
многолонжеронных крыльев, работающих в условиях нагрева, так как по-
добный стык не создает стеснения в направлении хорды. Ось отверстия
под болты, с целью исключения дополнительного изгиба должна быть на
одной линии с осью пояса. Болты и отверстия под них выполняются в до-
пусках квалитетов Н8, Ь7. Крутящий момент воспринимается как основны-
ми, так и дополнительными опорами.
Передача нагрузок через стыковой узел типа ухо-вилка в лонжеронных
крыльях происходит по схеме: осевые силы N с поясов 2 лонжеронов (см.
рис.6.56,б) через башмаки / узла передаются на стыковые болты и от
них - на ответные башмаки корпуса. Поперечные силы Q со стенок 4 лон-
жерона и бортовой нервюры передаются на стойку 3, от нее - на башма-
ки; далее местным изгибом башмаков - на стойку ответного узла на кор-
пусе ЛА.
Быстроразъемное соединение. В условиях наземной эксплуатации важ-
ным фактором являются затраты времени на стыковку и расстыковку крыла
с корпусом. Это обстоятельство вызвало появление в конструкциях ЛА
быстроразъемных стыков. Возможный вариант конструктивного исполнения
такого стыка показан на рис.6.57. Из рисунка следует, что на крылье-
вом отсеке корпуса закрепляется специальный кронштейн / с несколькими
наклонными пазами примерно под углом 45 к оси ЛА. В бортовом основа-
нии крыла как ответном элементе в продольных пазах установлены профи-
лированные штифты 2 или шпильки, которые при стыковке крыла с корпу-
сом входят в наклонные пазы кронштейнов / и жестко фиксируются конт-
ровочным болтом 3, расположенным в хвостовой части крыла. Уравновеши-
вание моментов показано на рисунке. Недостатком соединения является
то, что уравновешивание и передача изгибающего момента происходят
только на некоторой части строительной высоты крыла, что вызывает пе-
ретяжеление конструкции.
§ 6.5. КОНСТРУКЦИИ И ОСОБЕННОСТИ ПРОЕКТИРОВАНИЯ
ОРГАНОВ УПРАВЛЕНИЯ
Органы управления служат для образования переменных по величине и
направлению аэродинамических сил и создания относительно центра масс
ЛА управляющих и стабилизирующих моментов, обеспечивающих заданные
режимы его полета. Функционально органы управления связаны с механиз-
мами управления. В состав органов и механизмов управления полетом
входят рули, силовая проводка (силовая передача) управления, механиз-
мы раскладывания рулей, изменения передаточного числа (МИПЧ), стопо-
рения рулей и другие устройства.
328
Принципы работы, устройства и проектирования каждого из перечне-
юнных элементов различны. Соответственно к каждому из них предъявля-
ется свои специфические требования. Общими требованиями к органам и
механизмам управления являются: простота конструкции и надежность
действия при любых возможных положениях летательного аппарата в про-
ггранстве; обеспечение необходимых устойчивости и управляемости ЛА на
юех режимах его полета; независимость действия продольных и попереч-
<ых каналов управления и стабилизации друг от друга; минимальная дли-
коммуникаций и наименьшие упругие деформации звеньев проводки
/правления; обеспечение допустимых зазоров (люфтов), исключающих воз-
{икновение значительных динамических нагрузок в местах подвижных сое-
динений, передающих силы и моменты; обеспечение наименьших сил трения
з узлах соединения проводки управления.
Органы управления подразделяются на аэродинамические и газодинами-
ческие. Газодинамические органы управления, одновременно являющиеся
элементами управления вектором тяги двигателя ЛА, рассматриваются ни-
же, в гл. 7. Разновидности аэродинамических органов управления пока-
заны на рис. 6.58.
На ЛА, имеющих околозвуковую или небольшую сверхзвуковую скорость,
применяются органы управления в виде горизонтального и вертикального
оперений, каждое из которых может состоять из неподвижной (стабилиза-
торы, кили, крылья) и подвижной (рули высоты и направления, элероны)
Рис. 6.58. Аэродинамические органы управления:
О — рулр на задних кромках несущих поверхностей: б — цельноповоротньке
рули; 6 — концевые рули; 2 — интерцепторы; д — роллероны
329
частей. Конструкция неподвижных частей оперения аналогична конструк-
ции крыла. Типичная конструкция руля показана на рис.6.59. Основной
силовой элемент конструкции - лонжерон П-образного сечения, который в
местах больших изгибающих моментов подкрепляется дополнительными пол-
ками. Опоры лонжерона расположены так, чтобы абсолютные величины по-
ложительных и отрицательных изгибающих моментов были примерно одина-
ковы. Обшивка может быть подкреплена нервюрами или наполнителем. Эле-
роны имеют подобную же конструкцию. Отличие в том, что опоры на крыле
считаются жесткими по сравнению с опорами на стабилизаторе, так как у
крыла строительная высота больше.
При проектировании рули и элероны представляют в виде многоопорных
неразрезных балок, схему нагружения которых иллюстрирует рис.6.60.
При сверхзвуковых скоростях полета ЛА наиболее эффективными по
Рис. 6.59. Конструкция
руля. подвешенного на
неподвижном стабилиза -
торе:
/ — кронштейн подвес -
ки; 2 — рычаг управле-
ния; 3 — обшивка; 4 —
лонжерон; 5 — нервюра;
6 — окантовка; 7 — ве-
совой компенсатор
Рис. 6.60. Схема наг-
ружения трехопорного
элерона
330
аэродинамической несущей способности являются рули типа поворотного
оперения (цельноповоротные рули). Их конструктивная и функциональная
особенность состоит в том, что элементы соединения руля с корпусом ЛА
должны обеспечить передачу всех силовых факторов с одновременным вра-
щением при маневренном движении ЛА.
Цельноповоротные рули сравнительно большого размера (бортовая хор-
да порядка 500 мм и более) чаще всего имеют лонжеронную конструкцию с
тонкой обшивкой, подкрепленной элементами продольного и поперечного
набора или заполнителем. Чтобы обеспечить вращение рулей, в конструк-
ции обязательно должна быть предусмотрена балка-ось, которая может
быть неподвижно связана либо с консолями рулей, либо с конструкцией
корпуса ЛА. В первом случае подшипники соединения и привод устанавли-
ваются в корпусе ЛА, во втором - на консолях рулей. Приведем некото-
рые примеры.
На рис.6.61 представлена силовая схема однолонжеронного руля с
подкосной балкой. Эта схема заманчива тем, что здесь конструктивно
легко обеспечить нужное плечо е аэродинамической силы относительно
оси вращения. Однако в отличие от крыла с подкосной балкой руль
должен иметь усиленную бортовую нервюру 1-4 для передачи на балку-ось
2-2' сил от лонжерона из точки 1 и от корневой нервюры из точки 4.
Вращение оси руля обеспечивается рулевой машинкой (РМ).
Конструктивно-силовая схема цельноповоротного руля с изломом его
Рис. 6.61. Цельноповоротный
ройный руль с подкосной балкой
однолонже-
Рис. 6.62. Цельноповоротный руль с изломом осн у борта ЛА
331
оси у борта ЛА (рис.6.62) от предыдущей схемы отличается способом пе-
редачи изгибающего момента. В первой схеме изгибающий момент переда-
ется (воспринимается) за счет изгиба балки-оси. Во второй схеме бал-
ка-ось помимо изгиба нагружается еще кручением от составляющей М
На сверхзвуковых скоростях полета при больших углах стреловидности
лонжерона эта составляющая может быть значительной, и, как следствие,
массовое совершенство второй схемы более низкое по сравнению с пер-
вой. При малых углах стреловидности лонжерона обе схемы примерно рав-
ноценны. Возможная конструкция однолонжеронного руля с изломом оси у
борта с сотовым заполнителем показана на рис.6.63.
Лонжерон в подобных конструкциях целесообразно делать в форме дву-
тавра, балку-ось - в виде трубы (поскольку она нагружена не только
изгибом, но и кручением). Хотя соединение трубы с двутавром ведет к
увеличению массы, однако в целом конструкции, подобные рассмотренным,
достаточно технологичны и надежны. Для удобства монтажа руля внутри
корпуса ЛА балка-ось выполняется разъемной.
Иногда по условиям компоновки пропустить сквозь корпус сплошную
ось, как показано на рис. 6.61 и 6.62, мешают газовод двигателя, ме-
ханизм дифференциального управления рулями и др. Приходится усложнять
схему установки руля. С этой точки зрения заслуживает внимания схема
с разрезными валами крепления, показанная на рис. 6.64. Она может
иметь место в тех случаях, когда в конструкции корпуса удается поста-
вить опорные подшипники вала руля на достаточной базе. Схема конст-
Рис. 6.63. Однолонжероиный руль с изломом осн у борта:
/ — ось руля; 2 — бортовая нервюра; 3 — обшивка; 4 — лонжерон; 5 —
сотовый заполнитель
332
руктивно несложна, но ее применение ведет к дополнительному увеличе-
нию массы. Каждая консоль здесь управляется автономно, что позволяет
легко применить дифференциальное управление рулями.
На многих классах автоматических ЛА потребные площади рулевых по-
верхностей невелики. В этом случае более рациональной оказывается не
каркасная (лонжеронная), а моноблочная конструктивно-силовая схема
цельноповоротных рулей из штампованных или литых панелей со сплошным
сотовым заполнителем или из пластин сплошного сечения. Лонжероны
здесь практически отсутствуют, а главную роль в восприятии основной
нагрузки - изгибающего момента - и обеспечении несущей способности
конструкции руля играет обшивка. Такие рули выполняются из высоко-
прочных алюминиевых, титановых сплавов, композиционных материалов и
сталей.
Панельные конструкции характеризуются более высокими прочностью и
жесткостью; они технологичны, имеют хорошее качество наружной поверх-
ности, допускают применение обшивки переменной толщины. Выбор типа
конструкции панели определяется характером напряженного состояния об-
шивки. Максимальные нагрузки при критических напряжениях, близких к
Рис. 6.64. Схема рулей с инди-
видуальными приводами
Рис. 6.65. Конструкция моно-
блочного f руля большого удлине-
ния
333
пределу текучести, лучше всего передают штампованные и прессованные
панели.
На рис. 6.65 изображена сборная конструкция руля большого удлине-
ния, применяемого на ЛА нормальной схемы. Руль состоит из консоли /,
выполненной из двух штампованных панелей, и цапфы 2, посредством ко-
торой консоль соединяется с рулевым отсеком корпуса. Панели между со-
бой соединяются заклепками, а затем вставляются в вильчатый наконеч-
ник цапфы и крепятся в нем также с помощью заклепок. Вилка цапфы (см.
разрез Д - Д) имеет перемычку для увеличения ее прочности и жесткости
при восприятии с консоли.
Рис. 6.66 иллюстрирует аналогичную конструкцию руля малого удлине-
ния. В наиболее нагруженных местах соединение панелей осуществлено
заклепками через конические отверстия, что увеличивает прочность на
смятие заклепок и на отрыв их головок.
Целиковые (сплошные) рули применяются при малых относительных тол-
щинах профиля (с = 0,015...0,02), когда другие конструкции не обеспе-
чивают необходимую жесткость. В отношении массы сплошные рули уступа-
Рис. 6.66. Конструкция моноблочного руля малого удлинения
334
ют рулям других схем, но их перетяжеление компенсируется малой трудо-
емкостью и низкой стоимостью изготовления.
В зависимости от нагруженности руля консоль руля и цапфа могут вы-
полняться как одно целое или в виде двух самостоятельных деталей. Ча-
ще консоль и цапфа выполняются порознь. Цапфу как наиболее нагружен-
ную деталь делают из высокопрочного материала, а консоль руля штампу-
ют, отливают или фрезеруют из легких алюминиевых или магниевых спла-
вов. Обе разновидности целиковых рулей представлены на рис.6.67.
Ось вращения руля целесообразно располагать по возможности ближе к
центру давления консоли; при этом получается наименьший шарнирный мо-
мент и, следовательно, уменьшаются потребная мощность и масса силово-
го привода - рулевых машинок. В некоторых же случаях, наоборот, центр
давления сознательно отодвигают от оси (увеличивая шарнирный момент),
что улучшает качество обратной связи по шарнирному моменту в контуре
управления с целью уменьшения поперечных перегрузок при маневре ЛА в
плотных слоях атмосферы. В этих случаях консоль руля приходится вы-
полнять из высокопрочных материалов (преимущественно из стали) и уве-
личивать мощность рулевого привода.
Особую разновидность органов управления составляют интерцепторы и
роллероны.
Интерцептор - это подвижная пластинка, установленная вдоль задней
кромки крыла (стабилизатора) или на его поверхности перпендикулярно
набегающему потоку (рис. 6.68). Во время полета интерцептор работает
Рис. 6.67. Конструкции целиковых (сплошных) рулей:
а — цапфа выполнена заодно с консолью; б — консоль и цапфа выполнены
порознь
335
в вибрационном режиме, отклоняясь в обе стороны от срединной плоскос-
ти несущей поверхности. При несимметричном отклонении по углу и (или)
времени пребывания в одном из крайних положений на крыле возникает
управляющая сила соответствующего знака. Достоинствами интерцепторов
являются отсутствие шарнирных моментов, простота конструкции, удобст-
во эксплуатации. Недостаток - большое аэродинамическое сопротивление.
Поэтому интерцепторы применяются в основном на ЛА, для которых лобо-
вое сопротивление не имеет существенного значения (например, на уп-
равляемых авиационных бомбах).
Роллерон представляет собой комбинацию обычного элерона и гироско-
па (рис.6.69). Он состоит из поворотной обоймы (собственно элерона) и
Рис. 6.68. Конструкция интерцептора (обтекатель снят):
/ — вкладыш; 2 — качалка; 3 — ось; 4 — интерцептор; 5 — обтекатель;
6 — стабилизатор ЛА
Рис. 6.69. Конструкция роллерона:
/ — обойма; 2 — ротор гироскопа; 3 — стопор нейтрального положения;
4 — стабилизатор ЛА
336
ротора (гироскопа). Ротор выступает за контур обоймы и предваритель-
но, до старта ЛА, раскручивается до угловой скорости 500... 1000 об/с.
Если угловая скорость вращения ЛА относительно оси Ох равна нулю,
то роллероны самопроизвольно устанавливаются по направлению потока и
не создают никаких моментов относительно оси Ох ЛА. При наличии воз-
мущающего момента М* и соответствующей ему угловой скорости ЛА со*
возникает прецессия гироскопа. При этом, как известно из теории гиро-
скопов, плоскость ротора будет вращаться так, чтобы вектор угловой
скорости ротора со совместился с вектором угловой скорости вращения
аппарата со* по кратчайшему пути. В результате плоскость роллерона
развернется относительно своей оси вращения на некоторый угол к набе-
гающему потоку и на роллеронах возникнут управляющие силы, направлен-
ные в разные стороны, которые создадут стабилизирующий момент, нап-
равленный против возмущающего момента М*.
В отличие от элеронов роллероны не имеют приводов управления, т.е.
являются пассивными органами стабилизации. Роллероны не могут полнос-
тью ликвидировать вращение ЛА, а только уменьшают его угловую ско-
рость до скорости, значительно меньшей, чем у ЛА без роллеронов. При
хранении и транспортировке роллерон фиксируется с помощью стопора 3
(см. рис. 6.69). Стопор выходит из зацепления и освобождает роллерон
в момент начала работы двигателя ЛА.
§6.6. МЕХАНИЗМЫ УПРАВЛЕНИЯ И ИХ ЭЛЕМЕНТЫ
Механизмы управления предназначены для передачи энергии от рулевых
машинок к исполнительным органам системы управления ЛА - рулям. В эту
группу устройств входят: силовая проводка управления, механизмы рас-
кладывания консолей рулей, механизмы дифференциального управления,
изменения передаточного числа, стопорения рулей и др. Рассмотрим ос-
новные элементы механизмов управления.
Проводка управления - это совокупность устройств, выполняющих пе-
редачу командных сигналов системы управления на органы управления ЛА.
Конструкция проводки управления может быть гибкой, жесткой и сме-
шанной.
Гибкая проводка выполняется с помощью возвратно-поступательного
движения тросов, работающих только на растяжение. Такую проводку при-
меняю^ в основном в несиловой части механического привода. При жест-
кой проводке управляющее воздействие передается возвратно-
337
поступательным движением тяг, работающих на растяжение - сжатие (пос-
тупательная проводка), или вращательным движением валов, работающих
на кручение (вращательная проводка). В системах с поступательным дви-
жением тяг трудно компенсировать влияние деформации конструкции агре-
гатов ЛА при их нагружении и нагреве. Вращательное движение тяг и ва-
лов влияние этих деформации практически исключает. Однако узлы и де-
тали такой проводки несколько сложнее и обычно тяжелее.
На автоматических ЛА наиболее широко используется жесткая проводка
управления с поступательным движением тяг. Ее составными элементами
являются приводные валы, тяги, рычаги, качалки, кронштейны, направля-
ющие устройства.
Приводной вал (ось рулей) служит соединительным элементом двух
противоположно расположенных консолей рулей и последним звеном в ки-
нематической схеме передачи командного усилия от рулевых машинок на
рули. Концы вала устанавливаются на свободно вращающиеся подшипнико-
вые опоры (рис. 6.70). Сам вал проектируется и рассчитывается как
двухопорная балка на вращающихся опорах, нагруженная сосредоточенными
силами, изгибающим и крутящим моментами от рулей и рулевых машинок.
Тяга - основной элемент механической передачи многих систем управ-
ления. Обычно тяги выполняются и^дюралюминиевых, а иногда из сталь -
Рис. 6.70. Варианты установки рулей на корпус:
а — вал проходит через корпус; б — вал не проходит через корпус; / —
консоль руля; 2 — шпангоут корпуса: 3 — уплотнение; 4 — подшипник;
5 — хвостовик руля; 6 — шайба; 7 — приводной вал; 8 — болт; 9 — гай-
ка; 10 — уплотнитель; 11 - рычаг управления; 12 — втулка
338
ных стандартных труб. На торцах тяг устанавливаются наконечники типа
ухо или вилка для шарнирного соединения с другими элементами проводки
управления. Примеры конструкций законцовок тяг показаны на рис.6.71.
Они выполняются из тех же материалов, что и тяги, в виде отдельной
привариваемой, приклепываемой или ввинчиваемой детали. Шарнирные узлы
наконечников могут иметь одну (простой шарнир, см. рис.6.71,а, б, в,
г), две (двойной шарнир, см. рис.6.71,д) или три (универсальный шаро-
вой шарнир, см. рис.£.71,е) степени свободы.
Наконечники тяг могут быть жестко скрепленными с тягой или регули-
руемые. Последние представляют собой стакан с осевым отверстием и
резьбой для ввинчивания ушкового или вильчатого болта. Такая конст-
рукция обеспечивает возможность изменять в достаточных пределах рас-
стояние между центрами шарнирных концов тяги, что значительно упроща-
ет сборку и регулирование длины проводки управления.
Для длинных тяг применяют специальные направляющие в виде обоймы с
тремя или четырьмя роликами. Соединение отдельных тяг между собой, а
также с рулями и валами рулей производится с помощью рычагов и ка-
чалок.
Рычаги - это звенья в кинематической цепи, работающие на изгиб.
е
Рис. 6.71. Варианты законцовок тяг н типы шарниров:
а, б, в, г — простой: д — двойной; в — универсальный: / — обойма; 2 —
вкладыш; 3 — усик; 4 — прорезь
339
Они обычно ставятся непосредственно на элеронах, рулях, приводных ва-
лах рулей и т.п. Два типа конструкции рычагов показаны на рис.6.72.
Качалки бывают трех типов. К первому типу относятся поддерживающие
(несиловые) качалки, служащие лишь для подвески тяг при их большой
длине (рис.6.73,а). Второй тип качалок (силовые) используется для из-
менения направления и плоскости действия усилий в тягах (рис.6.73,б).
И, наконец, третью группу как разновидность второй составляют коромы-
словые качалки, изменяющие расположение тяг проводки управления
(рис.6.73,в), сообразуясь с силовой схемой соответствующего агрегата
ЛА.
Еще одним элементом механизмов управления являются кронштейны. Они
служат для навески элеронов и рулей на неподвижных несущих поверхнос-
тях, установки качалок, рычагов и других механизмов и деталей на
силовых элементах планера ЛА.
Наиболее сложными в конструктивном отношении являются механизмы
управления дифференциальными рулями. Отличительная особенность
Рис. 6.73. Разновидности кача-
лок:
а — поддерживающая; б — изме-
няющая направление и плоскость
действия усилий в тягах; в —
коромысловая; / — стенка
340
ренциальных рулей состоит в том, что они могут работать по двум кана-
лам одновременно. Если, например, прошла команда по каналу тангажа,
то оба руля (правый и левый) отклоняются в одну сторону, поворачивая
ЛА вокруг оси Oz. Далее на те же рули может последовать команда по
крену. При этом рули дополнительно отклоняются на некоторые углы, но
в разные стороны, как элероны. Например, правый руль отклоняется
вниз, а левый - вверх, создавая момент вокруг оси Ох.
В зависимости от скоростного напора и потребной маневренности ЛА
дифференциальное управление применяется или на одной паре рулей, ког-
да вторая пара работает только для обеспечения функций продольного
канала, или на обеих парах рулей. Возможная схема механизма управле-
ния дифференциальными рулями приведена на рис.6.74.
В приведенной схеме дифференциальное управление имеет лишь пара
рулей / и 3. Рули 2 и 4, приводимые в действие рулевой машинкой 5,
работают только по каналу курса. Для привода дифференциальных рулей
необходимы две машинки: 6 и 7, одна из которых поворачивает оба руля
в одну и ту же сторону, а другая - в разные.
Обязательное требование к механизмам дифференциального управле-
ния - независимость каналов управления по тангажу и крену. В рассмат-
риваемой схеме независимость каналов осуществляется посредством прос-
транственного шарнира S, расположенного на пересечении осей а-а и
b~b. При этом привод рулей высоты производится с помощью водила 9, а
привод элеронов - через коромысло 10, связанное с водилом 9 по оси
Рис. $.75. Конструкция механизма управления дифференциальными рулями
(обозначения те же, что и на рис. 6.74)
341
вращения коромысла а-а. Конструктивное выполнение рассматриваемого
механизма показано на рис.6.75.
Наряду с механическими дифференциалами широкое применение находят
электрические дифференциалы, представляющие собой, по сути дела, уп-
равляющие устройства рулевых машинок. Такие дифференциалы, имея ма-
лые габариты, особенно удобны в тех случаях, когда часть рулевого от-
сека не может быть использована для размещения механической проводки
управления. В электрическом дифференциале каждый руль имеет индивиду-
альный привод; при этом не требуются сквозные оси, а синхронизация
отклонения рулей осуществляется через автопилот.
Опыт проектирования механизмов управления для самых разнообразных
ЛА обобщен в виде целого ряда ОСГов и отраслевых нормалей. Полезная
информация по этому вопросу содержится в работе [21]. В качестве ос-
новных практических рекомендаций конструктору целесообразно отметить
следующее:
1. Качество механизма управления зависит прежде всего от совершен-
ства кинематической схемы механизма. Обеспечение кратчайшего пути си-
лового потока, исключение нерасчетной нелинейности и дифференииально-
сти, уменьшение трения, повышение точности, исключение деформации
конструкции планера - это задачи, которые должны быть в поле зрения
конструктора и решаться при разработке кинематической схемы.
2. Основные конструктивные и технологические элементы механизмов
управления - это унифицированные детали и операции. Именно их следует
применять в первую очередь при конструировании механизмов управления.
3. Выбор диаметра и толщины трубы для тяг управления следует про-
изводить по графикам, приведенным в справочных материалах, используя
в качестве исходных данных длину тяги между точками ее крепления в
проводке и усилие на тягу, полученное из расчета на прочность провод-
ки управления в соответствии с ее кинематической схемой. Поскольку
при перемещениях звеньев механизма управления усилия в его элементах
изменяются, то для определения расчетных значений усилий следует рас-
сматривать как минимум три положения механизма (нейтральное и два
крайних).
4. Чертеж механизма управления должен быть сборочно-установочным и
содержать всю информацию, необходимую как для сборки самого механиз-
ма, так и для его установки на ЛА. Элементы механизма на чертеже изо-
бражают в нейтральном положении с указанием двух крайних положений
(линиями условного контура) и значений линейных перемещений входных и
выходных звеньев. На чертеже указываются также предельно допустимые
зазоры между подвижными элементами механизма и конструкцией планера.
342
Глава 7. ПРОЕКТИРОВАНИЕ КОНСТРУКЦИЙ
ДВИГАТЕЛЬНЫХ УСТАНОВОК
§ 7.1. ОБЩИЕ СВЕДЕНИЯ
О ДВИГАТЕЛЬНЫХ УСТАНОВКАХ
7.1.1. Классификация и области применения
двигательных установок
Двигательная установка - это двигатель с совокупностью устройств,
обеспечивающих функционирование двигателя на борту ЛА. Она включает в
себя устройства входа и выхода, топливную систему, систему регулиро-
вания тяги по величине и направлению, узлы крепления двигателя, соб-
ственно двигатель.
Двигательная установка создается для определенного ЛА, имеющего
заданное целевое назначение; этим предопределяются проектные парамет-
ры двигательной установки. Однако принципиальная схема и облик двига-
тельной установки являются функцией типа двигателя. По типу двигателя
классифицируют и всю двигательную установку.
На ЛА различного назначения применяют (рис. 7.1):
двигательные установки с ракетными двигателями;
двигательные установки с воздушно-реактивными двигателями;
двигательные установки с гидрореактивными двигателями.
Рис. 7.1. Классификация реактивных двигателей
343
Напомним основные свойства указанных типов двигателей и области их
применения.
В ракетных двигателях (РД) рабочим телом являются продукты сгора-
ния топлива, состоящего из горючего и окислителя, которые полностью
размещаются на борту ЛА. Благодаря этому РД могут создавать тягу в
любой среде - воздушной, водной, в космосе, что исключается для дру-
гих типов двигателей. По способу образования рабочего тела РД разде-
ляются на химические и нехимические. В химических двигателях тяга
создается с помощью отброса газообразных продуктов, образовавшихся в
результате химических превращений (реакций горения) топлива в камере
сгорания. К химическим двигателям относятся: ракетные двигатели твер-
дого топлива (РДТТ), у которых рабочие компоненты (горючее и окисли-
тель) находятся непосредственно внутри камеры сгорания; жидкостно-
ракетные двигатели (ЖРД), работающие на жидких компонентах топлива,
подаваемых в камеру сгорания специальными системами подачи из топлив-
ных баков; гибридные ракетные двигатели, использующие твердо-жидкое
топливо.
Области применения РД весьма широкие. К первой группе относятся
основные (маршевые) двигатели, используемые практически во всех клас-
сах ЛА: на ЛА специального назначения, объектах для исследовательских
и экспериментальных целей, носителях космических ЛА, двухсредных ап-
паратах, многоразовых транспортно-космических системах и пр. Вторую
многочисленную группу составляют вспомогательные РД. Это прежде всего
ускорители, сообщающие ЛА большую начальную скорость при его разгоне,
тормозные, управляющие (верньерные) двигатели, двигатели ориентации,
стабилизации и коррекции космических ЛА, генераторы газа в системах
подачи топлива из баков в камеру сгорания ЖРД. К третьей группе РД
относятся двигатели для силовых установок полигонного типа или для
экспериментального и технологического оборудования.
Ракетные двигатели, создающие тягу за счет отброса массы вещества,
но использующие для ускорения этой массы другие (помимо химической)
формы энергии, называются нехимическими. Такими двигателями являются:
ядерные РД (ЯРД), тяга которых получается в результате истечения из
сопла теплоносителя (рабочего тела), нагреваемого в ядерном реакторе;
электроракетные двигатели - плазменные (ПлРД) и ионные (ИРД). В ПлРД
тяга создается потоком плазмы, образующейся газом, нагретым до очень
высоких температур (более 5000 К). В ИРД тяга получается за счет по-
тока ионов, создаваемого с помощью электростатического поля. ЯРД мо-
гут быть безопасно использованы во вторых и следующих ступенях ракет,
запускаемых с Земли, или на ракетах, запускаемых с орбиты искусствен-
344
ного спутника. Недостатком ПлРД и ИРД является малая тяга. Они могут
использоваться в системах ориентации и коррекции спутников и косми-
ческих ЛА (КЛА), а также для их длительного разгона и торможения.
В воздушно-реактивных двигателях (ВРД) основным компонентом рабо-
чего тела является атмосферный воздух. Использование воздушной среды
позволяет значительно сократить запас рабочего тела на борту ЛА по
сравнению с РД. Бортовой запас топлива здесь выполняет в основном
функции носителя химической энергии для получения тепла, реализуемого
в термодинамическом цикле. Доля этого компонента в общем количестве
рабочего тела невелика и составляет у двигателей распространенных
схем не более 2...6 %.
ВРД делятся на две большие группы: газотурбинные (компрессорные) и
прямоточные (бескомпрессорные). Газотурбинные двигатели (ГТД) - наи-
более распространенные. Их широко применяют на самых разнообразных
атмосферных ЛА. Прямоточные воздушно-реактивные двигатели (ПВРД)
предназначаются в основном для сверхзвуковых и гиперзвуковых полетов.
ВРД отдельных типов могут быть конструктивно объединены друг с
другом или с ракетными двигателями в единой двигательной установке.
Такие комбинированные двигательные установки совмещают в себе положи-
тельные качества объединяемых двигателей, что позволяет, как правило,
расширить рабочий диапазон двигательной установки.
В энергетических установках двухсредных ЛА и подводных объектов,
работающих в условиях отсутствия атмосферного воздуха, можно исполь-
зовать в качестве окислителя окружающую водную среду. Примером таких
установок являются гидрореактивные двигатели, в которых вода, проте-
кающая через двигатель, ускоряется в нем с помощью механических или
тепловых устройств.
7.1.2. Основные параметры и характеристики
двигательных установок
Тяговые параметры н характеристики. Основной характеристикой любо-
го реактивного двигателя является тяга. Она представляет собой ре-
зультирующую силу давления продуктов сгорания на внутреннюю поверх-
ность камеры двигателя за вычетом силы давления окружающей среды на
ее наружную поверхность. Тяга определяет летные возможности ЛА по
дальности, скорости и высотности полета.
В общем случае (при использовании атмосферного воздуха), когда
давление на срезе сопла не равно давлению окружающей среды на
расчетной высоте полета, тяга определяется как
345
Р = (т * m)W -mV ♦ ip - pu)F ,
в т а в ana
(7.1)
где m* - секундный расход воздуха, поступающего в двигатель; /Лт -
секундный расход топлива, сжигаемого в камере сгорания; WQ - скорость
истечения газов из сопла на его срезе; V - скорость воздуха перед
двигателем; F^ - площадь среза сопла.
Для ракетных двигателей т* = 0 и тяга Р на высоте Н, как следует
из (7.1), будет
Р = т W * (р - pu)F .
та а ГН а
(7.2)
Первые слагаемые в формулах (7.1), (7.2) являются энергетической
характеристикой собственно двигателя. Эти слагаемые основные. Послед-
ние слагаемые (статическая составляющая тяги), учитывают организацию
истечения продуктов сгорания. Они определяются конструкцией сопла.
Приближенно тяга может оцениваться по упрощенным формулам:
для ВРД Р = т W ; (7.3)
в а
для РД Р = т W , (7.4)
т а
из которых следует, что тяга определяется в основном секундным расхо-
дом рабочего тела и скоростью истечения продуктов сгорания.
Помимо абсолютных значений тяги важным параметром, оценивающим
экономичность использования рабочего тела, является удельный импульс
тяги / , представляющий собой отношение полного (суммарного) импуль-
са тяги I =
Pdt к массе продуктов сгорания, истекающих за время т,
О
или, что равнозначно, отношение средней тяги к массовому секундному
расходу рабочего тела:
346
Pdt
mdt
0
где m = m для ВРД и m = m для РД.
в . т
Как следует из (7.3) и (7.4), / определяется в основном скоростью
истечения продуктов горения из сопла, зависящей от теплотворной
способности топлива и термодинамических характеристик двигателя.
В общем случае величины Р, т и являются переменными. От точнос-
ти соблюдения программы работы двигателя Р = f(r) и абсолютной вели-
чины суммарного импульса I зависят высота и максимальная скорость
л*
или дальность полета ЛА. Значение же тяги в каждый данный момент за-
висит от секундного расхода рабочего тела и эффективности его исполь-
зования для развития тяги, т.е. от / .
Связь энергетических параметров двигателя с его геометрией выража-
ется через коэффициент тяги. Для ракетных двигателей этот коэффициент
выражается следующим отношением:
кР - (7.6)
к кр
где Р - полная тяга двигателя; р - давление в камере сгорания; F
к кр
площадь критического сечения сопла; pF - тяга, создаваемая камерой
к кр
сгорания без сверхзвукового сопла. Значение kp показывает, во сколько
раз полная тяга двигателя со сверхзвуковым соплом превышает составля-
ющую тяги без сопла. При полетах ЛА в пустоте коэффициент тяги k1^ ха-
рактеризует скорость разгона продуктов истечения в сопле и зависит
только of степени расширения газов в сопле € = р /р :
347
1 Л-1
(7.7)
где k - показатель политропы.
н
Коэффициент тяги kp на любой расчетной высоте можно определить че-
рез коэффициент ftp по формуле
Л _.п . р_н_ .
кР~кР~ ар^ ' (7 8)
где степень расширения сопла fa = F JF^ задается по статистике в
зависимости от высоты применения ДУ: для невысотных (ускорителей)
fa = 4...6: для высотных (маршевых) fa = 7...10.
Параметры эконо*огаюста. Для оценки экономичности двигателей
обычно пользуются удельным расходом топлива, понимая под ним
отношение часового расхода топлива к тяге:
3600m
или с
У
3600
/
У
(7.9)
Для РДГГ с = 1,35... 1,8 кг/(Н ч); для ЖРД с = 0,9... 1,5 кг/(Н ч):
У У
для ВРД = 0,6...0,8 кг/(Н’ч). В практических расчетах удобно иметь
секундный удельный расход топлива. В соответствии с (7.9) секундный
удельный расход
348
1//.
У
с
У
(7.10)
Его размерность кг/(Н*с).
Системше характернстжм. В качестве системных (комплексных) ха-
рактеристик двигательных установок принимают: массу и габариты уста-
новки, ее компактность, простоту и технологичность конструкции, на-
дежность, живучесть, эксплуатационное совершенство, стоимость и др.
Наиболее употребительными параметрами являются удельная масса двига-
теля р и коэффициент массового совершенства а
где m - масса двигателя; Р - максимальная тяга двигателя; m
дв max д.у
масса неснаряженной двигательной установки; m - масса топлива,
размещаемого в двигательной установке.
Важной безразмерной характеристикой ЛА и его ДУ является тягово-
оруженность Р, представляющая собой отношение тяги двигателя к стар-
товому весу ЛА m^g:
Р
Р
т08
(7.12)
7.1.3. Задачи проектирования двигательных установок
Двигательные установки с реактивными двигателями создаются, как
правило, для определенного типа ЛА, имеющего заданное целевое назна-
чение. Поэтому процесс проектирования двигательной установки не отде-
лим от процесса общего проектирования ЛА, в котором двигательная ус-
тановка рассматривается как часть единого целого - ЛА. Проектирование
двигательной установки включает в себя решение трех групп задач.
Первая группа задач имеет целью определение облика двигательной
установки. Эти задачи решаются одновременно с проработкой обликовых
характеристик ЛА. Важнейшими параметрами, определяемыми на этом эта-
пе, являются тяга двигателя и потребный запас топлива. Их нахождение
составляет основное содержание баллистического проектирования ЛА,
имеющего целью обосновать необходимую энерговооруженность ЛА на всех
режимах полета. На основе данных баллистического проектирования выби-
рают значения максимальной и минимальной тяг, а затем определяют ори-
349
ентировочные значения практически всех параметров двигательной уста-
новки.
Так, например, по значению максимальной тяги определяют размеры
камеры двигателя и сопла, мощность системы подачи топлива и ее габа-
риты. Соотношение между максимальной и минимальной тягами обычно поз-
воляет выбрать способ управления вектором тяги, число камер в двига-
теле, а также обосновать необходимость применения ускорителей и др.
Вторая группа задач относится к исследованию рабочих процессов и
характеристик двигателя. На этом этапе рассчитываются расходная
(дроссельная) и высотная характеристики; проводится термодинамический
расчет двигателя. Цель этого расчета - получить более точные исходные
данные для определения удельного импульса тяги, размеров камеры, ха-
рактеристик теплообмена и системы теплозащиты конструкции. В эту же
группу задач входит исследование газодинамики процессов в камере и
режимов работы двигателя, на основе которого выбирается высотность
сопла и уточняются параметры камеры.
Третья группа задач - собственно проектирование конструкций двига-
тельной установки. На этом этапе разрабатывается детальная конструк-
ция всех основных узлов - топливных баков с арматурой, камеры двига-
теля, системы подачи топлива и др.
Первые две группы задач являются схемно-аналитическими, третья
группа - конструкторско-технологические задачи. Их особенность - ори-
ентация на производство и эксплуатацию, учет всех неформальных
факторов.
§ 7.2. РАКЕТНЫЕ ДВИГАТЕЛИ ТВЕРДОГО ТОПЛИВА
7.2.1. Конструкции РДТТ
Ракетные двигатели твердого топлива находят широкое применение во
многих областях авиационно-космической техники. По энергетическим ха-
рактеристикам они вплотную приблизились к ЖРД, превосходя их по мно-
гим параметрам. Они отличаются простотой конструкции и высокой надеж-
ностью, что объясняется отсутствием топливных баков, систем подачи и
регулирования расхода топлива; способны создавать большой суммарный
импульс тяги за короткое время; обеспечивают длительный срок хранения
в снаряженном виде и, следовательно, постоянную готовность к пуску
при незначительном времени на его подготовку; просты и недороги в
эксплуатации, т.е. обладают высокой эксплуатационной технологичнос-
тью; имеют низкую стоимость по сравнению с двигателями других типов.
350
К недостаткам РДГГ относятся: меньший, чем у других двигателей,
удельный импульс тяги; более сложное регулирование тяги по величине и
направлению; трудность осуществления многократного запуска; значи-
тельное влияние внешних условий, особенно начальной температуры заря-
да, на нормальную работу двигателя; чувствительность двигателя к де-
фектам заряда, следствием которой могут быть срывы пусков и аварийные
ситуации.
Основная особенность РДГГ, отличающая его от других РД, состоит в
том, что топливо находится в твердой фазе и располагается непосредст-
венно в камере сгорания в виде специального заряда.
Несмотря на большое многообразие, обусловленное целевым назначени-
ем, все РДГГ имеют общие конструктивные элементы. Основными элемента-
ми являются (рис.7.2): заряд твердого топлива 7; корпус (обечайка) 5
с теплоизоляцией 6; переднее 3 и заднее (сопловое) 9 днища; сопловой
блок (сопло 11 и сменный вкладыш 10); воспламенитель 2 с электрозапа-
лом 1. Обечайка, герметично соединенная с сопловым и передним днища-
ми, образует камеру сгорания (КС). Вспомогательные элементы (решетка
S, заглушка /2, передний упор 4 и др.) в ряде конструкций могут от-
сутствовать; их назначение - обеспечение работоспособности основных
элементов.
По способу установки заряда топлива в КС двигатели делятся на два
класса: с вкладным и жесткоскрепленным зарядами. Их особенности опре-
деляются в основном назначением ЛА. Эти две основные конструктивные
разновидности РДГГ являются базовыми для всех существующих в настоя-
щее время двигателей твердого топлива.
Стартовый РДТТ с вкладным зарядом, горящим по всей поверхности,
может быть одношашечным и многошашечным. Время его работы невелико
(от десятых долей до нескольких секунд), стенки КС не успевают прог-
реться, поэтому теплозащитное покрытие на них, как правило, не нано-
сится. Для изменения площади критического сечения сопла при различных
начальных температурных условиях (настройки двигателя) применяются
сменные вкладыши. Отличительной особенностью конструкции является на-
личие решетки, удерживающей заряд при наземной эксплуатации и во вре-
мя работы, а также обязательного разъема по переднему или заднему
днищам для установки одношашечного заряда в камеру сгорания. Сопло,
как правило, коническое.
Маршевый двигатель с жесткоскрепленным зарядом (рис. 7.3) характе-
ризуется хорошей адгезией твердого топлива со стенками камеры сгора-
ния. Поскольку само топливо является хорошим теплоизолятором, то при
горении заряда по внутреннему каналу на обечайку КС слой ТЗП не нано-
351
Рис. 7.3. РДТТ с жесткоскрепленным зарядом:
1пиропатрон; 2 - воспламенитель; 3 — ТЗП; 4 — переднее днище; 5 — текстолитовая обечайка; 6 — заряд твердого топ-
лива (ТТ); 7 — заднее днище; 8 — сменный вкладыш; 9 — сопловой раструб; 10 - заглушка; 11 - кормовой обтекатель
сится. При торцевом горении поверхности КС, которые в процессе выго-
рания топлива оголяются, обязательно теплоизолируются. Заднее днище,
входную часть сопла и его внутренние поверхности облицовывают термо-
эрозионно стойким материалом. Корпус делается литым, штампованным,
сварным, точеным или с помощью намотки (очень часто с неразъемными
днищами); заливка топлива в КС в этом случае производится через соп-
ловое отверстие. Материал камеры - высокопрочные стали, титановые,
алюминиевые сплавы или армированные стеклопластики. Сопло профилиру-
ется по нелинейной образующей, что позволяет иметь некоторое увеличе-
ние удельного импульса тяги.
Маршевый двигатель с вкладным зарядом, горящим по внутренним по-
верхностям (рис.7.4), имеет бронированные негорючим веществом внешние
поверхности заряда. На рассматриваемом двигателе между камерой сгора-
ния и соплом установлена удлинительная труба - газовод, которая
позволяет разместить камеру сгорания ближе к центру масс ЛА из
соображений устойчивости ЛА в продольном движении. В остальном конст-
рукция этого двигателя не отличается от двигателя с вкладным зарядом,
показанного на рис.7.2, и от двигателя с жесткоскрепленным зарядом.
Маршевые двигатели с жесткоскрепленным зарядом применяют в основ-
ном для маломаневренных ЛА. Поскольку топливо является плохим провод-
ником тепла, заряд защищает стенки камеры сгорания от воздействия вы-
сокотемпературного газового потока, что позволяет уменьшить толщину
стенки. Обечайка и переднее днище часто изготавливаются из композици-
онных материалов.. Такие двигатели, обычно большой тяги, имеющие зна-
чительные габариты, выгодно делать с соплом, частично утопленным во
внутрь камеры сгорания. Достоинство этой компоновочной схемы - ком-
пактность РДТТ и ЛА в целом, что дает выигрыш в массе; недостаток -
сложная организация теплозашиты соплового блока.
Конструктивная реализация утопленного соплового блока может быть
разнообразной. Пример возможного решения показан на рис.7.5. Утоплен-
ная часть сопла размещена в специальном углублении, сделанном в заря-
де. Сопло профилированное, облицовано термоэрозионно стойким материа-
лом; наряду с основной функцией движителя РДТТ в данной конструкции
сопло выполняет роль газодинамического органа управления.
Двухрежимные РДТТ широко применяются на современных, особенно ма-
логабаритных ЛА. Идея состоит в том, что каждому из двух режимов тяги
(стартовому и маршевому) обеспечиваются наиболее благоприятные усло-
вия. Двухрежимные РД ГГ подразделяются на двухкамерные и однокамерные,
причем у первых одна камера создает тягу на стартовом режиме, дру-
гая - на маршевом. Возможна совместная работа камер на стартовом ре-
12 - 880 353
354
Рис. 7.4. РДТТ с вкладным зарядом, горящим по внутренним поверхностям:
1 — переднее днище; 2 — трубчато-щелевой заряд ТТ; 3 — газовод; 4 — сопловой блок; 5 — амортизирующая прокладка
Рис. 7.5. Конструкция соплового блока с разрезным со-
плом, частично утопленным в камеру сгорания:
/ — входной вкладыш; 2 — неподвижная часть сопла; 3 —
вкладыш критического сечения; 4 — выходной вкладыш;
5— фланец; 6 — линия разъема; 7 — ТЗП; 8 — рулевой
привод; 9 ~ карданное кольцо; Ю — сильфон
жиме. Тогда в создании стартовой тяги участвуют обе камеры, а марше-
вой - только одна. Ступенчатое регулирование тяги в двухрежимных дви-
гателях осуществляется за счет изменения секундного расхода твердого
топлива.
Двухкамерные двигатели выполняются в виде конструкции с боковыми
соплами (рис.7.6) или с удлинительным газоводом (рис.7.7), а однока-
мерные - с двухслойными зарядами, вложенными один в другой (рис.7.8),
или с двумя отдельными зарядами, каждый из которых обеспечивает свой
режим (рис.7.9).
Преимущества двухкамерных РДГГ: практически неограниченный диапа-
зон изменения тяги при переходе от стартового к маршевому режиму ра-
боты; возможность обеспечить наивыгоднейшие условия работы каждой ка-
меры вследствие их независимости друг от друга. Недостатками являются
повышенная масса и увеличенные габариты из-за наличия днищ между ка-
мерами, удлинительных газоводов, сопловых блоков и воспламенителей в
каждой камере и др. Кроме того, в схеме с боковыми соплами имеют мес-
то потери тяги из-за наклона сопел и повышенный эксцентриситет тяги,
обусловленный разнотяговостью сопел. Вариант с газоводом сложнее в
конструктивном и технологическом отношениях, что снижает его надеж-
ность и приводит к некоторой потере удельного импульса тяги.
В однокамерных двухрежимных РДГГ маршевая и стартовая тяги обеспе-
чиваются одной и той же камерой. Хотя внутренний объем двигателя схе-
мы рис.7.9 разделен внутренней диафрагмой на две камеры, передняя из
них играет практически роль газогенератора. В ней сжигается маршевое
топливо, газы через отверстие истекают в основную камеру и при ее до-
статочной длине почти полностью тормозятся. Тяга создается лишь соп-
лом основной камеры за счет давления, устанавливающегося в ней. Вари-
ант однокамерного двухрежимного двигателя с авторегулируемым соплом
(рис.7.8) обеспечивает наивыгоднейшие условия работы двигателя по
давлению в КС на стартовом и маршевом режимах. Однако наличие регули-
руемого сопла приводит к увеличению его габаритов и массы и снижает
надежность РДГГ. Вариант рис.7.9 в конструктивном и технологическом
отношениях проще и надежней варианта рис.7.8, но удельный импульс тя-
ги у него ниже.
7.2.2. Параметры и характеристики РДТТ
Основные параметры и характеристики РДТТ те же, что и для всех ре-
активных двигателей (см. § 7.1). Наряду с ними при проектировании
двигательных установок с РД ГГ используют ряд дополнительных парамет-
ров, отражающих специфику этих двигателей.
355
1 — переднее днище; 2 — соединительная рейка; 3 — маршевый заряд ТТ; 4 — бронировка; 5 - воспламенитель стартовой
камеры; 6 - боковое сопло; 7 - стартовый заряд ТТ; 8 - направляющая (прокладка); 9 - сопло&ой^ярк
Рис. 7.7. Двухрежимный двухкамерный РДТТ с удлинительным газоводом:
1 — маршевый заряд ТТ; 2 — проволочный катализатор горения; 5, 5 — воспламенительное устройство; 4 — газовод; 6 —
многошашечный стартовый заряд ТТ; 7,8 — сопловые блоки стартовой и маршевой камер
Рис. 7.8. Двухрежимный однокамерный РДТТ с двухслойным зарядом:
1 - воспламенительное устройство; 2 - заряд ТТ стартового режима; 3 - заряд ТТ маршевого режима 4 - кронштейн;
5 — двухпозиционное центральное тело; 6 — сопло; 7 — обтекатель
Рис. 7.9. Двухрежимный однокамерный РДТТ с перегородкой:
1 - переднее днище; 2 - ТЗП; 3 - бронировка; 4 - заряд ТТ маршевого режима; 5 - перегородка; 6 - заряд ТТ стартового
режима; 7 - заднее днище; 8 - сопловой блок; 9 - обтекатель
Коэффициент использования объема камеры сгорания (плотность заря-
жания):
Д = У/У, (7.13)
т к
где У^ - объем заряда твердого топлива; У* - внутренний объем камеры
сгорания.
Значение Д зависит от типа заряда, а также от условий обеспечения
его устойчивого горения в камере сгорания. Для зарядов торцевого
горения Д = 0,95; для других форм зарядов Д = 0,75...0,85.
Критерий проф. Ю. А. Победоносцева
к = S^/F^ (7.14)
где S - суммарная начальная площадь поверхности горения заряда;
F - свободная площадь поперечного сечения камеры для прохода про-
св
дуктов горения.
При проектировании РДТТ по этому критерию производится оценка ус-
тойчивости горения заряда. Для каждой марки топлива при заданном дав-
лении в камере сгорания существует предельно допустимое значение
к ; при к > к топливо горит неустойчиво. Значения к для
пред пред ' пред
двух марок топлива приведены в табл. 7.1.
Таблица 7.1
Зависимость к от давления в камере и марки топлива
пред
Марка топлива Давление. МПа
8 10 12 14 16 18 20 22 24
Н 120 146 156 178 186 192 196 — —
НМ-2 146 168 184 198 210 222 232 240 250
Для зарядов трубчатой формы, горящих по наружной и внутренней бо-
ковым поверхностям, критерий к рассчитывается отдельно для внутренних
и наружных каналов для прохода газов.
Удельный импульс давления 1 (расходный комплекс) соответствует
удельному импульсу тяги без расширяющейся части сопла при условии
постоянства давления в камере сгорания:
358
P F
I = . (7.15)
P mT
Учитывая, что
m = F W p ; (7.16)
т кр кр кр
W = ; (7.17)
кр к ♦ 1 к
1
f 2 Рк
P = Hr , (7.18)
кр I k ♦ 1 I кГ
к
де W - скорость истечения продуктов сгорания в критическом сечении
опла; р - плотность газов в том же сечении, можно записать
кр
Г К
г.е. удельный импульс давления полностью определяется термодинамичес-
кими характеристиками процесса горения.
Комплексный показатель эффективности, тюзволяюшял сравнивать между
собой и выбирать некоторые параметры (например, давление в камере
сгорания) с учетом их влияния на массовые и энергетические характери-
стики двигательной установки:
's
К ж = --------------= 7------^77----- • (7.20)
эф m + m _ (а + I )m
дв тЕ дв тЕ
т.е. К - это критерий эффект - затраты, где эффект - суммарный им-
эф
пульс / , а затраты - масса двигательной установки, обеспечивающая
получение этого импульса.
359
§ 7.3. ГАЗОДИНАМИЧЕСКОЕ ПРОЕКТИРОВАНИЕ РДТТ
7.3.1. Твердые ракетные топлива (ТРТ)
Характеристика. ТРТ. Современные твердые топлива по химическому
составу и физической структуре подразделяются на две группы: баллис-
титные (двухосновные) и смесевые.
Под баллиститными топливами понимают твердые растворы нитратов
целлюлозы в специальных растворителях с небольшим количеством доба-
вок. Основой топлива является нитроклетчатка - продукт нитрации цел-
люлозы. В чистом виде в качестве топлива нитроклетчатка не может быть
использована из-за ее пористо-волокнистой структуры, которая вызывает
объемное горение вещества, обычно переходящее в детонацию (взрыв).
Исключение детонации достигается обработкой нитроклетчатки малолету-
чим растворителем - вторым компонентом ТРТ (например, нитроглицери-
ном); в результате получают пластифицированную (желатинообразную)
массу. Последующей обработкой этой массе придают требуемые термопроч-
ность и форму.
Разновидностью баллиститного ТРТ является модифицированное (нитро-
зольное) топливо, состоящее из слабонитрированной целлюлозы, нитро-
глицерина, перхлората аммония с добавкой измельченного алюминия.
Большое содержание кислорода в нем позволяет получить более высокий
удельный импульс по сравнению с обычными баллиститными и некоторыми
смесевыми топливами.
Заряды из баллиститных топлив изготавливаются путем прессования.
Основной метод в настоящее время - метод проходного прессования. От-
ливка топливных зарядов непосредственно в камеру или в специальные
формы сопряжена с трудностями вследствие низких литейных свойств
двухосновных порохов.
Важным шагом в развитии ракетной техники явилось создание смесевых
топлив. Они представляют собой механические смеси из минеральных
окислителей и органических горюче-связующих веществ. В качестве окис-
лителя в современных смесевых ТРТ наибольшее применение получил пер-
хлорат аммония Na^ClO^. В качестве горюче-связующих веществ - поли-
эфирные, фенольные, эпоксидные смолы, пластмассы, синтетические кау-
чуки. Большинство смесевых ТРТ разработано на основе полиуретанового
каучука.
Смесевые топлива хорошо отливаются. Формование заряда производится
непосредственно в корпусе двигателя или в специальной изложнице мето-
дом свободного литья или литьем под давлением. Конфигурация внутрен-
360
ней поверхности изложницы должна соответствовать внутренней конфигу-
рации корпуса РДГГ.
Смесевые топлива позволяют создавать весьма большие по размерам
двигатели, причем их снаряжение возможно непосредственно на стартовой
позиций.
При выборе твердого топлива необходимо анализировать совокупность
физико-химических параметров и эксплуатационных качеств топлив, опре-
деляемых их физическими и механическими свойствами и энергетическими
характеристиками.
К физическим свойствам твердых топлив относят плотность, тепло-
проводность, теплоемкость, температуропроводность, коэффициенты ли-
нейного и объемного температурного расширения и др. Большинство из
этих свойств изменяется под влиянием времени при длительном хранении,
от перемены температуры и влажности. К физическим свойствам относится
также гигроскопичность топлива. Для предохранения твердотопливных
зарядов от воздействия влаги при проектировании конструкции камеры
сгорания РДГГ необходимо обеспечить полную ее герметичность.
Механические свойства твердых топлив оцениваются прочностью при
растяжении (сжатии), ударной вязкостью, относительным удлинением, мо-
дулем упругости, коэффициентом Пуассона и др. Следует отметить, что
для топлив характерным является резкое изменение механических свойств
в узкой области минусовых температур, когда топливо превращается из
мягкого и эластичного в твердое и хрупкое. Температура, при которой
наблюдается такое изменение, называется температурой стеклования.
Основные физические и механические характеристики твердых топлив
приведены в табл. 7.2. Для сравнительной оценки там же указаны осред-
ненные свойства стали.
Таблица 7.2
Физические и механические свойства твердых топлив
Характеристика Баллистнтные топлива Смесевые топлива Сталь
Коэффициент теп - 0,16... 0,27 лопроводностн X, Вт/ (м * К) 0,3...0,89 78,0
Удельная тепло- емкость С, кДж/(кг'К) 14.6 12,6 0,46
Коэффициент тем- пературопроводности а, м /с 0,215 0.3 31,0
361
Продолжение табл. 7.2
Характеристика Баллистнтные топлива Смесевые топлива Сталь
Коэффициент ли- (1,2...2.0)* 10 (0.5.. .1,5)10 1,2*10
нейного температур-
ного расширения а. 1/К -3 -3
Коэффициент объем- 0,3’10 (0.3.. .0,4)10 —
ного температурного
расширения. 1/К з з з
Плотность р . кг/м т (1.6...1.7)•10 (1.7.. . 1.9) 10 7.8*10
Предел прочности 10.0 0.9 1000...1500
при растяжении а . МПа
Ударная вязкость — 20,0 120
а при 20 С. Дж/кг к
Относительное уд- До 40 До 60 10
линение 6 при 20 С. % к
Модуль упругости 1.0...3.0 0.1.. . . 0.2 2,1*10
Е. МПа
Коэффициент Пуас- 0,35...0.5 0,35.. .0.5 0,25...0.3
сона Д
Энергетические и баллистические характеристики твердых топлив
Тип топлива Наименование топлива Удельный импульс / , м/с У
♦
Баллистит- Н. НМ-2, Т-6 2040.. .2058*
ные М-8, М-13 2210.. .2260
Смесевые Битумное с перхлоратом калия 1820.. .2000
Полисульфидный каучук и перхлорат аммония 2300.. .2400
Топливо на основе нитрата аммония 1000.. . 1800
Полиуретановый каучук и перхлорат 2400.. .2870
аммония
Полибутадиеновый каучук и перхлорат 2450.. .2900
аммония
362
Энергетические характеристики топлива зависят от природы горючего
окислителя и от отношения их масс а. Для баллиститных топлив а =
0,58...0,7, а для смесевых - а = 0,7...0,85. Важнейшей энергетичес-
ой характеристикой твердого топлива является удельный импульс тяги
I. У современных смесевых топлив выше, чем у баллиститных, причем
н может быть еще повышен за счет введения в состав топлива металли-
4ских присадок (порошка алюминия, магния, бора и др.). В табл. 7.3
^ны энергетические и баллистические характеристики некоторых баллис-
итных и смесевых твердых топлив. Значения удельных импульсов по-
рчены при степени расширения е = 70, а отмеченные звездочкой - при
*= 40.
Механизм горения ТРТ. Существуют разнообразные теории горения. По
□временным воззрениям, горение твердого топлива происходит парал-
ельными слоями. Процессу горения предшествует газификация топлива,
явственно горение происходит в газообразной фазе. Схема этого про-
веса иллюстрируется на рис.7.10.
Воспламенитель топливного заряда выделяет достаточное количество
епла для начала горения, которое затем поддерживается автоматически,
(а рис.7.10 вертикаль /-/ соответствует границе условно твердой
оверхности, влево и вправо от которой можно выделить характерные
эны, в которых происходит процесс газификации топлива.
1-2 - зона постепенного разложения топлива, в которой в результате
Таблица 7.3
емпература горения Т, К Скорость горения. U Показатель степени
при р - 7 МПа, мм/с V в законе горения
200...2300 3.9 0.6
100...3200 19.6 0,69...0.7
500...2000 36...38 0.7
000...2400 8... 12 0.3...0.4
500 20...25 0.1...0.5
350 5...18 0.1...0.2
250 t 8...9 0.2...0.5
363
рения твердого топ
лива <
i
I
I
I
химических реакции температура повышается до некоторой величины
порядка 300...350 °C; !
2-3 - зона предварительного нагрева заряда до температуры начала
устойчивых химических реакции;
3—0 - зона начальной температуры топлива 7^.
К вертикали /-/ примыкает зона I, в которой происходит разложение
топлива и переход из твердой фазы в жидкую и газообразную ("кипящая”
зона), т.е. здесь имеются вещества смешанного агрегатного состояния с
переменной температурой.
Зона П является зоной подготовки к горению, или индукционной зо-
ной. В ней происходит накопление промежуточных продуктов горения (NO,
СО, и др.), которые затем энергично реагируют и образуют конечные
продукты сгорания. Скорость газообразования зависит от свойств топли-
ва, давления в камере и температуры продуктов горения. Зоны I и П
являются несветяшимися (темными).
Зона Ш - зона горения, или пламенная зона, где происходит завер-
шение всех химических реакций при максимальной температуре Т
шах
Разложение топлива на поверхности и образование горючей газовой
смеси является основной стадией процесса, определяющей скорость го-
рения.
Скорость горения и твердого топлива - это линейная скорость пе-
ремещения фронта горения поверхности заряда по нормали к ней в едини-
—3 —3
цу времени. Она колеблется в пределах и = Г10 ...50*10 м/с.
Одним из основных параметров, влияющих на а, является давление р*
в камере сгорания. С его увеличением скорость горения ТРТ возрастает.
При давлениях р до 15 МПа, наиболее характерных для современных
364
ДТТ, зависимость и = f(pj при некоторой базовой (стандартной) тем-
ературе t заряда (обычно t = ♦ 15 °C) хорошо описывается стелен-
СТ ст
ым законом горения
I и = ар, (7.21)
К
же а - единичная скорость горения, зависящая от природы ТРТ; v -
сказатель степени, выбираемый по табл. 7.3.
Другим важным фактором, влияющим на величину скорости и, выступает
ачальная (эксплуатационная) температура t заряда, отличная от стан-
дартной (при проектировании РД1Г в СССР принимают диапазон изменения
= ± 50 °C). Ее можно учесть с помощью функции температурной чувст-
игельности в виде
u/u(t ст) = exp [Dt(t - О]. (7.22)
де ui4 \ “ скорость горения заряда при температуре t ; D. =
(Гст/ ст I
- (dlna/df) = ) - температурный коэффициент скорос-
р =const ст
к
ги горения, задаваемый в характеристиках ТРТ (D^ = 0,003...0,005 -
цля баллиститных топлив; = 0,0015...0,0025 - для смесевых).
С учетом (7.21) и (7.22) скорость горения заряда твердого топлива
представляется в виде
и = <yexp[D.(/ - t )]. (7.23)
К I ст
7.3.2. Выбор типа топливного заряда
При выборе типа заряда руководствуются накопленным опытом проекти-
рования и отработки аналогичных РДТТ, полагая, что заряд должен обес-
печить: необходимый закон изменения тяги двигателя; максимальную
плотность заполнения камеры сгорания; потребную скорость движения га-
зов по каналу заряда; минимальное тепловое воздействие газов на стен-
ки корпуса; минимальные неиспользуемые остатки топлива; минимальные
напряжения в заряде; надежное крепление заряда в камере сгорания
и др.
Наиболее распространенные типы зарядов, применяемые на ЛА, разде-
ляются на три группы (рис.7.11): 1) заряды торцевого горения
(рис.7.11,а, б, в); 2) заряды, горящие по боковым поверхностям, па-
365
раллельным продольной оси двигателя (рис.7.11,г.. .к); 3) заряды а
комбинированными поверхностями горения (рис.7.11,о, п). По характерам
изменении по времени поверхности горения, расхода продуктов сгорания
и, следовательно, тяги двигателя различают заряды с постоянной (нейР
тральной), увеличивающейся (прогрессивной) и уменьшающейся (дегрес-
сивной) поверхностями. Применяются также заряды, дающие ступенчатое
изменение тяги. Для защиты поверхностей заряда, горение которых необ-
ходимо исключить, чтобы обеспечить требуемые расход газов и закон ею
изменения, применяются бронирующие покрытия. Они состоят из негорюч» х
пластических материалов, насыщенных нейтральным огнеупорным наполни-
телем.
Заряды торцевого горения применяются для маршевых двигателей ЛА с
длительным временем работы, а также для вспомогательных устройств ти-
Рис. 7.11. Распространенные формы твердотопливных зарядов
366
। газогенераторов; они обеспечивают самое высокое использование
>ъема камеры сгорания (Д ~ 1). По мере выгорания заряда стенки каме-
j сгорания вступают в контакт с потоком газа, поэтому их надо тепло-
юлировать, что приводит к увеличению массы двигателя.
Заряды второй группы позволяют получить самые разнообразные законы
вменения тяги, причем заряды внутреннего горения (см.
ис.7.11,е...ж, и) полностью исключают омывание стенок камеры продух-
ами сгорания, делая ненужной ее теплоизоляцию. Форма канала у них
озволяет иметь большие периметр и поверхность горения и обычно выби-
ается из условия сохранения постоянства этой поверхности (в течение
сего времени работы двигателя). В то же время заряды наружного горе-
ия требуют надежной теплоизоляции камеры сгорания, что приводит к
ъеличению пассивной массы двигателя. Наиболее широкое применение из
арядов второй группы в настоящее время получили заряды внутреннего
□рения со звездообразным каналом различных модификаций (см.
ис.7.11,д, е, ж). Их недостатки, такие как возможный распад шашки в
онце горения на дегрессивно горящие элементы, концентрация напряже-
ий в углах звезды, сравнительно легко устраняются. Общим недостатком
арядов этой группы является сравнительно низкая плотность заряжания.
Заряды третьей группы имеют поверхности горения как параллельные
уси двигателя, так и непараллельные. Некоторые поверхности этих за-
рядов выполняются в виде конуса, сферы либо в виде пропилов (щелей).
Чаще применяются трубчато-щелевые заряды с одновременным горением по
внутреннему каналу и по щелям. При этом суммарная поверхность горения
подбирается таким образом, чтобы получить программу работы двигателя
с постоянной тягой. Варьируя число щелей в заряде и их относительную
длину, можно обеспечить заданную программу изменения площади горящей
поверхности. Одно из достоинств таких зарядов - отсутствие дегрессив-
но горящих остатков топлива в конце горения заряда, а необходимость
теплозащиты камеры и концентрации напряжений в донышках щелей - нега-
тивная сторона.
7.3.3. Выбор рабочего давления в камере сгорания
Давление р* в камере сгорания является наиважнейшим параметром
РДГГ, определяющим устойчивость его работы и основные характеристики,
связанные с эффективностью ЛА. Как показывает статистика, рациональ-
ные значения давления р лежат в диапазоне 4... 15 МПа: для РДГГ малых
к
диаметрбв (примерно 0,15 м) р* = 8... 15 МПа, для двигателей с диамет-
367
ром 0,3...0,5 м р* = 5...7 МПа, а для диаметров порядка 1 м р* =
- 4...7 МПа. I
При выборе давления следует учитывать, что его влияние на ЛА про-
является двояко. С увеличением р* повышается удельный импульс тяги;
следовательно, уменьшаются потребный запас топлива и масса двигателя.
Но одновременно возрастает потребная толщина оболочки двигателя, а
значит, и его масса. Оба эти фактора можно сопоставить с помощью кри
терия (7.20), минимальное значение которого и определяет оптимальное
давление в камере РДТГ.
Выбранное значение р* соответствует стандартной температуре заряда
t . Поскольку эксплуатационные условия неизбежно отличаются от стан-
ет
дартных, то возникает необходимость корректировки номинального давле-
ния и проверки его допустимости. Это объясняется следующим.
Для поддержания требуемого давления в камере двигателя необходимо
обеспечить баланс прихода - расхода газов, при котором количеств)
образовавшихся в камере газов в единицу времени равно количеству
истекающих газов из камеры через сопло за то же время. Это условий
записывается в виде
pF
uS^ = -J-5*- , (7.24)
р
где S_ - площадь поверхности горения заряда; р - плотность заряда;
л* Т
/ - расходный комплекс (см. (7.19)).
Учитывая, что скорость горения и также зависит от давления (см.
(7.23)), очевидно, что для определения р* уравнения (7.23) и (7.24)
надо решать совместно. Схема графического решения этой системы урав-
нений показана на рис. 7.12. При необходимости можно воспользоваться
аналитическим решением
'к/
где
гателя
= Р k., (7.25)
к Г
- коэффициент, характеризующий разброс давления в камере дви-
при изменении температуры заряда,
D.
k. = exp
-----(/ - t ) .
1 — Р ст
(7.26)
368
Рис. 7.12. Графи-
ческое решение
уравнений (7.23) и
(7.24)
При минимальной эксплуатационной температуре заряда (/ = - 50 °C)
давление найденное по (7.25), не должно быть ниже некоторой
границу допустимого давления р* гарантирующего устойчивое горе-
ние топлива (р* = 2,0...3,5 МПа задается в характеристиках ТРТ),
тогда
* ^доп (7 27)
к к . .
imin
Максимальное эксплуатационное давление Рк^тах> соответствующее
начальной температуре заряда t = ♦ 50 °C, определяет расчетные
условия для прочности оболочки. При этом
•ехр
35D^
1 - V
(7.28)
Приведенные зависимости распространяются на РД ГГ, не имеющие смен-
ных вкладышей в критическом сечении соплового блока. Оценив диапазон
изменения эксплуатационного давления в КС в интервале температур
± 50 С, принимают решение о целесообразности применения набора смен-
ных вкладышей или регулировочной ’’груши”. При использований указанных
устройств коэффициент разброса давления определяется следующей
i
зависимостью:
369
ч_,
exp Dt(ti - ti x)
(7.29)
где ДЛ = Л - - перепад эксплуатационных температур заряда в
пределах Z-го интервала;
F j, F . - площади критического сече-
ния сопла при температурах Л и
соответственно.
Разбивая эксплуатационный диапазон начальных температур твердотоп-
ливного заряда на ряд интервалов, можно получить любое наперед задан-
ное значение k^. Однако следует учитывать, что числу интервалов со-
ответствует число вкладышей (или позиций ’’груши”). Чем их больше, тем
ниже эксплуатационная технологичность двигателя и ЛА в целом.
7.3.4. Определение геометрических параметров
соплового блока
/ Основными геометрическими параметрами соплового блока являются
степень расширения fa = Fс/?^' ПЛОщадь критического сечения F*^
площадь среза F^ сопла и конфигурация сопла.
Степень расширения сопла влияет на удельный импульс и массу РДТТ.
Повышение fQ вплоть до расчетного значения (когда = р^) увеличива-
ет массу конструкции двигателя, но вместе с тем приводит к возраста-
нию удельного импульса тяги и, следовательно, снижает потребную массу
топлива. Теоретическое значение расчетной степени расширения сопла
(при которой давление на срезе сопла равно атмосферному) вычисляется
по формуле
1 1
где X - приведенная скорость газового потока в выходном сечении
расчетного сопла при расчетном атмосферном давлении (отношение ско-
рости потока в выходном сечении к скорости звука в критическом сече-
нии сопла):
370
(7.31)
Практические значения обычно несколько меньше расчетных. Это
1ает некоторый выигрыш в массе двигателя. В среднем fQ = 3...5 - для
тгонных двигателей, работающих у земли; = 4...8 - для маршевых
?ДТГ. При проектировании высотных двигателей степень расширения сопла
ложет быть выбрана очень большой (10...12 и более). Однако, если та-
<ой двигатель должен эксплуатироваться и на малых высотах при атмос-
ферном давлении р„ , значительно превышающем расчетное значение
^//расч* ТО буДеГ иметь место перерасширение потока и, как следствие,
недопустимый отрыв потока от стенок сопла.
Предельное значение степени расширения сопла, при котором наступа-
ет отрыв потока, определяется эмпирической зависимостью
— b( Р t - 10,612
f = I • 0,33 *‘m"1------1.78 . (7.32)
где k - показатель политропы.
Площадь критического сечения сопла при выбранном давлении р* явля-
ется функцией тяги двигателя. Соответствующая зависимость имеет вид
Р = [f Z(X ) - янГ]р F . (7.33)
кр а п а к кр
Откуда
F =------------------—-----. (7.34)
КР [f z(\) - *„f]p
кр а п а к
Здесь
Г 2 ?"*
f = 2 7-f— « 1,24; (7.35)
кр I * ♦ 1 J
z(X ) = 0.5 Х + т— I
a I а X I
*• а '
- газодинамические функции; - приведенная скорость газового потока
371
в выходном сечении сопла (определяется из условия сохранения массы в
сечениях по длине двигателя); = Рц/р* ~ отношение наружного
атмосферного давления к давлению в камере РДГГ.
Площадь среза сопла рассчитывается по формуле
F = F f . (7.36)
а кр а
Если при этом окажется, что Fq больше конструктивно допустимой
(например, больше площади миделевого сечения РДГГ), то следует_или
увеличить давление р*, или уменьшить степень расширения сопла и
повторить вычисления.
Конфигурация сопла и соплового блока определяется преимущественно
на основе эксперимента. В учебном процессе профилирование сопла и со-
плового блока можно проводить с учетом следующих рекомендаций
(рис.7.13).
Угол входного конуса 0** целесообразно выбирать в пределах
40...60°. С увеличением этого угла растут теплопотоки к днищу РДГГ и
увеличивается унос теплоизоляции. Радиусы скруглений на входе в кри-
тическое сечение и на выходе из него следует выбирать в соответствии
с диаметром критического сечения D^:
D .... до 50 мм 50...70 мм свыше 70 мм
кр
г .... D 0.5D 0,3D
1 кр кр кр
г .....(0.5...DD (1...2)D (2...3)D
2 кр кр кр
Длина конической части сопла определяется углом 0 . По статисти-
Рис. 7.13. Конфигурация сопла и соплового блока
372
се 0^х = 6...20° Сокращения длины и массы сопла, а также потерь тяги
j сопле можно добиться профилированием сопла (см. рис.7.13,6). Яри
этом 0 не должен превышать 25 , а 0 следует выбирать в пределах
э...7°.
7.3.5. Определение параметров камеры двигателя
и твердотопливного заряда
Основными исходными данными при выборе геометрических параметров
РДТТ являются: суммарный импульс тяги двигателя, характеристики выб-
ранного топлива, время работы и программа изменения тяги двигателя.
Кроме того, считаются известными масса топлива = /^//^ и Диаметр
D корпуса ЛА. Все эти данные определяются на стадии общего проектиро-
вания ЛА. Геометрические параметры вначале рассчитываются для опорно-
го варианта РДТТ, а затем, по мере накопления информации, параметры
уточняются итерационным путем.
Геометрические параметры камеры сгорания определяют через объем
заряда V и коэффициент использования объема камеры сгорания А:
«о2
”,х = 1'Л° ~Т~ <7 37>
где D* и L* - внутренний диаметр и длина камеры сгорания соответ-
ственно (рис. 7.14).
Рнс. 7.14. Геометрические параметры камеры сгорания и зарядов
373
При разработке опорного варианта двигателя можно принимать D =
= 0.97D (3 % выделяется на толщину обечайки и теплоизоляции камеры).
Тогда в соответствии с (7.37) удлинение камеры сгорания X* будет оп-
ределяться формулой
з
O,947rD
Переходя к безразмерным параметрам ЛА, получим
ДтХУРср
к 0.94 Д ’
где - средняя плотность компоновки ЛА:
з
1800 кг/м - для ЛА, имеющего < 100 кг,
Рс ’ 3
ср 1300 кг/м - для ЛА, имеющего > 300 кг;
(7.38)
(7.39)
Х^ - удлинение цилиндра диаметром D, равновеликого по объему с данным
корпусом ЛА.
Геометрические параметры заряда (наружный и внутренний диаметры,
длина, площадь поверхности и толщина свода горения) определяются как
функции найденных выше геометрических и газодинамических параметров
РДТТ. Проиллюстрируем это на примере трубчатого заряда с бронирован-
ными торцами, горящего по наружной и внутренней поверхностям. Предва-
рительно заметим, что при проектировании канальных зарядов определяю-
щим часто оказывается условие безэрозионного горения. Оценка характе-
ра горения при ручном счете обычно производится с помощью критерия
Ю. А. Победоносцева (7.14).
Установим связь между геометрическими параметрами заряда и крите-
рием (7.14). Как следует из рис.7.14, для наружной поверхности заряда
S 4L D
н н
К = г---- = ----Г" •
н F« D2 - D2
К н
(7.40)
374
। для внутреннего канала заряда
как
де и d - соответственно наружный диаметр заряда и диаметр внут-
реннего канала.
Используя (7.40) и (7.41), получим
D
D = --------5; (7.42)
к н
d = 4Х D /к . (7.43)
к к вн
Здесь принято удлинение заряда Х^ = X*.
Длина заряда, исходя из его объема, с учетом (7.42) и (7.43) будет
определяться выражением
4m _ 4m _ 1 + 4Х /к
L* --------?—----------------------------L-J!V • (7.44)
пр (D -<Г) пр D2 1 - (4Х /к )2
TH т к к вн
Потребный свод горения е топливной шашки выражается зависимостью
(Р 7
К I дв
“7“ 777
^5 J 100
(7.45)
где - время работы двигателя, с; а - коэффициент, см/с; р* - дав-
ление в камере, Па.
В случае, когда свод е, найденный по формуле (7.45), окажется
больше располагаемого свода е горения проектируемого заряда (е >
> е^), заряд выбранного типа при данном давлении в камере р* не вы-
полнит свою функцию. Необходимо или уменьшить р*, или перейти на за-
ряд другой формы с большим располагаемым сводом горения.
В анализируемом варианте заряда (см. рис.7.14) располагаемый свод
горения определяется из условия
4е <= D -d.
Р и
(7.46)
375
После подстановки в это условие зависимостей (7.42) и (7.43) получим
D (1 - 4Х /к )
V * К >Н- • (7.47)
4 11 ♦ 4\ /к
к н
Потребная площадь поверхности горения S определяется из условия
обеспечения баланса прихода - расхода газов (т = S up ):
т т т ( Р
S„ = -1— = -т д> = т • 100/ ар ±—
Е ир^ ер^ т рт [ 105 J
(7.48)
где т - секундный расход топлива, вычисляемый по формуле (7.15).
С учетом (7.5) зависимость (7.48) перепишется в виде
(7.49)
где / - стандартный удельный импульс тяги, Н*с/кг; Р - тяга, Н;
У-ст 3
р - плотность топлива, кг/м .
т
Для рассматриваемого варианта заряда (см. рис.7.14) располагаемая
площадь поверхности горения должна удовлетворять условию
= ir(D - d)L = тт /ер . (7.50)
Z н т дв т
Если условие (7.50) не удовлетворяется, следует подкорректировать
размеры заряда или изменить давление в камере РДТГ.
7.3.6. Особенности газодинамического проектирования
двухрежнмных двигателей
Как указано в § 7.2, двухрежимные двигатели бывают однокамерные и
двухкамерные. Каждой из этих разновидностей свойственны свои особен-
ности проектирования.
В двухрежимных однокамерных двигателях обеспечение стартового и
маршевого режимов осуществляется с помощью стартового и маршевого
топливных зарядов. Если стартовый заряд экранирует маршевый, то заря-
ды горят последовательно. Однако чаще применяют одновременно горящие
376
аряды. При этом на стартовом режиме образуется смесь продуктов горе-
ия обоих зарядов, а на маршевом режиме, который начинается после вы-
орания стартового заряда, горит только маршевый заряд.
Проектирование таких двигателей начинается с определения парамет-
юв маршевого режима (по изложенной выше методике проектирования од-
юрежимных двигателей). Расчет стартового режима проводится в предпо-
южении, что при совместном горении стартового и маршевого топливных
«рядов продукты их горения образуют газовую смесь, теплофизические
тараметры которой рассчитываются как средневзвешенные по расходу зна-
гения соответствующих параметров составляющих продуктов горения.
Важной задачей проектирования двухрежимных однокамерных двигателей
шляется выбор способа управления тягой. Применяют регулируемые и не-
регулируемые сопла. В двигателях с нерегулируемым в полете соплом
(см. рис.7.9) изменение (уменьшение) тяги на маршевом режиме происхо-
дит вследствие падения давления в камере сгорания и уменьшения секун-
дного расхода топлива. При этом отношение тяг на стартовом и маршевом
режимах практически совпадает с отношением давлений. Поскольку для
нормального устойчивого горения ТРТ на маршевом режиме давление в ка-
мере должно быть не менее 3 МПа, то при большом перепаде тяг давление
на стартовом режиме может оказаться очень высоким, что вызовет значи-
тельное увеличение массы конструкции РД ГГ. Поэтому РД ГГ с нерегулиру-
емым соплом имеют максимальное отношение тяг порядка 3,5...5.
Другим недостатком нерегулируемого сопла является снижение удель-
ного импульса тяги двигательной установки вследствие нерасчетных ус-
ловий работы сопла на одном из режимов. Действительно, если, напри-
мер, на стартовом режиме степень расширения сопла оптимальна, то на
маршевом режиме будут иметь место перерасширение потока, а значит, и
потери удельного импульса. Если же степень расширения сопла оптималь-
на для маршевого режима, то на стартовом режиме имеют место недорас-
ширение потока и опять же потери удельного импульса.
Примерно расчетных условий работы сопла на обоих режимах можно до-
стичь путем удаления (отстрела) в полете той части раструба сопла, на
которой имеет место перерасширение потока. Но это мероприятие, есте-
ственно, усложнит конструкцию соплового блока, увеличит его массу и
снизит надежность двигательной установки.
В однокамерных двухрежимных двигателях с регулируемым соплом (см.
рис. 7.8) изменение тяги достигается за счет изменения секундного рас-
хода топлива. Переключение стартового режима полета на маршевый вы-
полняется автоматически по команде системы управления полетом ЛА пу-
тем изменения (уменьшения) площади критического сечения сопла с помо-
377
шью центрального тела ("груши”). При этом давление в камере остается
практически неизменным на разных режимах или может изменяться по оп-
ределенному закону.
Однако и в этом случае уменьшение площади F^ сопла связано с рос-
том его степени расширения на маршевом участке полета пропорционально
изменению (уменьшению) тяги и, следовательно, с потерей удельного им-
пульса / . Сохранение / маршевой (высотной) ступени и даже некоторое
его увеличение может быть достигнуто при использовании сопел изменяе-
мой в полете геометрии (см., например [34]), когда сопло в нерабочем
положении имеет компактную укладку и небольшие габариты по длине дви-
гателя, а в рабочем - изменяет габаритные размеры (удлиняется) и при-
обретает заданный профиль. Перевод сопла в рабочее положение может
выполняться специальным приводом или за счет энергии истекающих из
двигателя газов.
Двухрежимные двухкамерные РДТТ (см. рис.7.6 и 7.7) при нахождении
их проектных параметров и характеристик рассматриваются в виде двух
независимых однорежимных двигателей.
§ 7.4. ПРОЕКТИРОВАНИЕ КОРПУСА РДТТ
7.4.1. Выбор расчетных условий
При разработке конструкции корпуса РДТТ невозможно учесть все раз-
нообразие сочетаний внешних и внутренних механических и тепловых наг-
рузок, действующих на него в различных режимах эксплуатации. Поэтому
для двигателей ЛА того или иного класса целесообразно рассматривать
наиболее свойственные ему режимы нагружения.
Для маломаневренных ЛА наиболее характерным является случай нагру-
жения корпуса РДТТ внутренним давлением, при этом расчетное давление
определяется следующим образом:
р = fkkp (/), Ъ (7.51)
к.расч 1 2 к max
где f - коэффициент безопасности; - коэффициент, учитывающий раз-
брос давления от партии к партии в зависимости от технологии изготов-
ления топлива, = 1,1; - коэффициент, учитывающий всплеск давле-
ния при воспламенении заряда топлива и степень регулирования сопла,
= 1,2... 1,4 (меньшее значение при регулируемом критическом сечении
378
опла, большее - при нерегулируемом); р* maxW _ максимальное давле-
ме в камере сгорания при максимальной температуре эксплуатации.
При проектировании конструкций двигателей высокоманевренных ЛА не-
)бходимо одновременно учитывать влияние внешних силовых факторов
[прежде всего изгибающего момента и осевой силы) и внутрикамерного
давления.
В обоих вариантах нагружения при полете на сверхзвуковых скоростях
5ольшие трудности в проектировочные расчеты вносит аэродинамический
нагрев и связанная с ним необходимость определения температурных по-
лей и напряжений.
В зависимости от аэродинамической компоновочной схемы ЛА и места
расположения РДТТ на ЛА на обечайку и днища двигателя, являющегося
частью несущего корпуса всего ЛА, могут приходить большие локальные
нагрузки в виде М^, М* , Q, N* от закрепляемых на нем крыльев, ста-
билизаторов, двигателей и других агрегатов. Они должны быть также уч-
тены при проектировании элементов корпуса.
Конструкция двигателя существенно зависит от технологии его заря-
жания, которая предопределяет наличие и расположение разъемных стыков
в корпусе двигателя, обеспечивающих установку твердотопливного заря-
да. Для РДТТ со скрепленным зарядом переднее и заднее днища выгодно
делать неразъемными, а при заливке топлива в камеру, установке и пос-
ледующем удалении формообразующих стержней использовать центральные
сопловые отверстия или отверстия для монтажа воспламенителей в соот-
ветствующих днищах. По такой же схеме можно выполнять и корпуса двух-
камерных РДТТ со скрепленными зарядами в обеих камерах сгорания.
Заряжание двигателей с вкладными зарядами, как правило, требует
разъемного стыка по переднему или заднему днищу. Выбор места соедине-
ния зависит от расположения РДГГ по длине корпуса ЛА, от числа камер
сгорания, схемы соплового блока (с боковыми соплами, с удлинительным
газоводом) и т.д.
7.4.2. Проектирование обечайки и днищ
Расчетная схема обечайки - тонкостенная осесимметричная оболочка,
нагруженная внешними силами и моментами и внутренним давлением. По
форме обечайки РД1Г делятся на цилиндрические, конические и сферичес-
кие. Проектирование обечайки сводится к выбору конструкционного мате-
риала, «технологического процесса изготовления и определению ее тол-
щины.
379
Для изготовления обечайки применяются высокопрочные стали, титано-
вые и высокопрочные алюминиевые сплавы и композиционные материалы.
Каждый из перечисленных материалов обладает рядом физико-механических
и технологических особенностей, которые определяют их применение в
той или иной конструкции. Металлические обечайки изготовляются мето-
дами вальцовки из листового материала с последующей сваркой продоль-
ным или спиральным швом; сварки по образующей с предварительной вы-
садкой кромок листа; механической обработки заготовок; намотки и
сварки или склейки тонкой металлической ленты; глубокой вытяжки; ро-
тационного выдавливания. При изготовлении обечайки применяют упрочне-
ние металлической конструкции стеклопластиками, сборно-клеевые кон-
струкции.
Потребная толщина обечайки маломаневренного ЛА выбирается из усло-
вия прочности по кольцевым напряжениям при действии внутрикамерного
расчетного давления (меридиональные напряжения в два раза меньше)
Р D
к.расч к .
----с------ < О »
оо
(7.52)
где а = а
разр в/
Тогда
Для маневренных ЛА, когда кроме давления р* на обечайку действуют
Mhs И N л г помимо кольцевых напряжений а^, определяемых по (7.52), не-
обходимо учитывать меридиональную составляющую напряжения
Р D
к.расч
45 <
об
4М
из X
n2- * TTD6 ж
яО 6 об
об
При этом потребную толщину обшивки следует находить из условия проч-
ности по эквивалентному напряжению
J~2 2^
ол - ола * а < а
экв 0 р разр
(7.54)
(7.55)
а
Нетеплоизолированная обечайка проектируется с учетом влияния тем-
пературных напряжений, зависящих от перепадов температур и характе-
ристик поперечного сечения камеры сгорания,
380
max
де a - коэффициент линейного температурного расширения материала
тенки; д - коэффициент Пуассона; k(D9 6) - функция стеснения дефор-
мации, определяемая экспериментально;
ДГ = (Г - Г ) , (7.57)
max внутр нар max
внутр’ ^нар ~ температуры на внутренней и наружной поверхностях обе-
1айки соответственно.
Толщина теплонагруженной стенки определяется из условия
В задачу проектирования днищ входит определение наивыгоднейщих
[юрмы и толщины. Обычно днища имеют постоянную толщину по всей повер-
ности. Применяемые конфигурации днищ: сферические, эллиптические,
оросферические, днища Бицено, плоские и др. На практике наибольшее
грименение получили эллиптические и плоские днища. Металлические дни-
ца изготовляются: штамповкой из одной заготовки или штамповкой клино-
видных сегментов с последующей сваркой; вытяжкой из листа; ротацион-
1ым выдавливанием; механической обработкой.
Эллиптическое днище позволяет иметь более благоприятную компоновку
ТА при массе, примерно равной массам днищ других форм. В эллиптичес-
ких днищах напряжения обычно максимальны в их центре и определяются
ю формуле
Р
к.расч
а = и = -------с----
Ч> в 26
(7.59)
де Я - радиус обечайки (большая полуось эллипса); Ь - малая полуось
шлипса.
На кромке днища, в зоне сопряжения с обечайкой
(7.60)
Приближенное значение толщины эллиптического днища можно опреде-
1ять по формуле
381
P R
_ к.расч
дн <7 _
Z?2
6b2
(7.61)
По статистике значение отношения полуосей эллипса R/b лежит в диапа-
зоне 1,5...2,5. Наиболее употребимое значение 1,59.
Плоское днище используется при жестких ограничениях на длину ЛА и
при малых диаметрах корпуса РДТТ. Расчетная схема днища - плоская
круглая пластина, защемленная по краю и нагруженная давлением
р* . Изгибные деформации и напряжения в месте перехода от днища к
обечайке для такого днища наибольшие по сравнению с днищами всех ос-
тальных форм. Напряжения, действующие на наружном контуре и определя-
ющие прочность плоского днища,
3 R2
a = — р -------------------
max 4 к.расч «2
д
АН
приближенное выражение для вычисления толщины днища
« = 0,9/?!^^-.
дн a
в
(7.62)
(7.63)
Важнейшей задачей проектирования обечайки и днищ является выбор
теплозащитного покрытия. Такое покрытие может защищать всю внутреннюю
поверхность камеры сгорания или ее часть. В качестве ТЗП используются
эластичные материалы на основе каучуков и жесткие покрытия из тексто-
литов и пресс-материалов. Промежуточными между этими группами являют-
ся прорезиненные ткани и наполненные материалы. В зависимости от сос-
тава теплозащитные материалы выпускаются в виде листов, гранул, по-
рошков. Нанесение ТЗП на внутренние поверхности корпуса двигателя
производится механическим или ручным методами: напылением порошков,
центробежным нанесением паст, выкладыванием и наклеиванием листов,
засыпкой гранул.
Толщина ТЗП 5^ может быть определена совместно с толщиной обечайки
камеры сгорания двигателя на основе приближенного решения уравнения
теплопроводности Фурье в одномерной постановке. Для нетеплоизолиро-
ванной обечайки камеры уравнение теплопроводности имеет вид
382
(7.64)
эг Г х 1 ajF
Эт ’ I L by*
ле т - время работы двигателя; с, р, X - соответственно удельная
еплоемкость, плотность и коэффициент теплопроводности материала.
Рассматривая обечайку как термически тонкую (т.е. когда нет темпе-
ратурного градиента по ее толщине), не учитывая излучения с ее внут-
ренней поверхности и зависимость теплофизических характеристик мате-
риала от температуры, после интегрирования уравнения (7.64) от 0 до
(при соответствующих начальных и граничных условиях) получим ура-
об
нение теплового баланса для определения средней по толщине обечайки
емпературы
аг А
(рсб) = а(Т - Г ),
об ат г об
де Г - температура обечайки; Т - температура газообразных продук-
об г
ов в зоне обечайки.
Температурный режим обечайки с ТЗП можно описывать тем же уравне-
мем (7.64), если полагать, что теплоемкость покрытия намного меньше
еплоемкости обечайки, и не учитывать абляцию ТЗП. Решение уравнения
7.64) в этом случае будет
аг А
(рсб) = а (Г - Т ).
об ат э г об
(7.65)
1десь - эквивалентный коэффициент теплоотдачи с учетом термическо-
о сопротивления, получаемого по правилу сложения термических сопро-
ивлений для слоистых стенок,
_______1________
% " (1/а * « А ) •
п п
Решением уравнения (7.65) является выражение
(7.66)
Tq - начальная температура обечайки), которое совместно с (7.53) или
383
аналогичным ему соотношением позволяет найти сочетание толщин обечай-
ки и ТЗП. Оптимальные значения этих величин соответствуют минимуму
погонной массы
т = * 5 Р •
об об п п
(7.67)
Обязательным элементом конструкции РДГГ являются стыковые узлы,
основными из которых являются узлы для соединения обечайки и днищ. На
практике наибольшее применение находят сварные, резьбовые, болтовые
соединения и соединения с помощью гибкой рейки.
Самым экономичным, простым и надежным является сварное соединение.
Оно технологичнее и легче любого разъемного соединения. Однако его
нельзя рассматривать как универсальное хотя бы по той причине, что
соединение одного из днищ с обечайкой чаще всего должно быть разъем-
ным. Разновидности разъемных соединений приведены на рис.7.15...7.17.
Резьбовые соединения (рис.7.15) включают следующие элементы: шпан-
гоут 3; переднее днище 6 или сопловой блок; обечайку камеры сгорания
4; смежный отсек /, анкерные гайки 2, уплотнительную прокладку 5.
Резьба не герметизирует соединение и не обеспечивает требуемую
точность по перекосу осей соединяемых элементов. Для герметизации
применяют уплотнительные прокладки, а для повышения точности делаются
цилиндрические пояски, обработанные по допускам 7-го или 8-го квали-
тета. Этим обеспечивается хорошая соосность соединяемых элементов
конструкции, уменьшается эксцентриситет тяги. Наиболее часто соедине-
ния такого вида применяются для двигателей сравнительно небольших ди-
аметров (D < 500 мм).
Для РДГ1 больших диаметров применяют фланцевое (болтовое, шпилеч-
ное) соединение, представленное на рис.7.16, которое включает заряд
твердого топлива 5, обечайку камеры сгорания 4, шпангоут 3, крышку
(переднее днище) 3, шпильку (или болт) 2, уплотнительную прокладку /,
Рис. 7.15. Резьбовое соединение
обечайки и днища РДТТ
Рис. 7.16. Фланцевое соединение
обечайки и днища РДТТ
384
Рис. 7.17. Сое-
динение с помо-
щью гибкой рейки
упорное кольцо 7 (фиксатор заряда), резиновые прокладки (амортиза-
торы) 6.
Шпангоут 3, как и в случае резьбового соединения, выполняется от-
дельно от обечайки 4, так как его толщина больше толщины обечайки.
Затем элементы 3 и 4 свариваются. Осадку трубы для этих целей делать
нецелесообразно. Шаг шпилек (болтов) выбирается из условия обеспече-
ния герметизации (обычно не более 60 мм). Уплотнительные прокладки /
выполняются из алюминия или меди. Шпильки 2 устанавливаются с зазо-
ром, иначе сложно обеспечить сборку соединения.
Соединение с помощью гибкой рейки (рис.7.17) включает обечайку /,
шпангоут 2, днище 3, уплотнительный шнур 4 и гибкую рейку 5. Такое
соединение легче фланцевого болтового. Его недостатки: трудности гер-
метизации и концентрация напряжений в зоне кольцевой канавки.
Значительная роль в улучшении характеристик и параметров РДТТ при-
надлежит композиционным материалам. Современные композиционные мате-
риалы обладают не только высоким уровнем прочностных, теплофизических
и других свойств, выгодно отличающих их от традиционных материалов,
но и способностью к направленному изменению этих свойств в соответ-
ствии с назначением конструкции. Составными элементами композиционных
материалов являются высокопрочные волокна и матрица. Однако свойства
композиционных материалов зависят не только от характеристик волокон
и матрицы, но и от способа армирования. С этой точки зрения различают
композиционные материалы однонаправленные, армированные тканями, с
хаотическим и пространственным армированием. Характеристики компози-
ционных материалов с однонаправленным расположением волокон приведены
в табл. 7.4. Там же для сравнительной оценки даны характеристики ме-
таллических конструкционных материалов.
Из табл. 7.4 видно, что существенным недостатком композиционных
материалов являются их низкие механические свойства при поперечном
нагружении и сдвиге.
Технология производства конструкций из композиционных материалов
опираете^ на прессовый, вакуумный, автоклавный методы и метод намот-
13 ~ 880 385
Физико-механические свойства однонаправленных композиционных
' *—Материал Характеристика " Стекло- пластик Угле- пластик Органо- пластик
—3 3 Плотность* 10 , кг/м 2,1 1,5 1,38
Предел прочности при растяжении вдоль 1750 1100 1800
волокон, МПа Предел прочности при сжатии вдоль во- 650 450 280
локон, МПа Удельная прочность при растяжении 833 733 1300
—3 2 2 вдоль волокон * 10 , м /с Модуль упругости вдоль волокон 57 180 72
•10-3. МПа Удельная жесткость вдоль волокон 27,1 120 52,2
.-6 2.2 * 10 .м/с Предел прочности при растяжении попе- 34 33 28
рек волокон, МПа Модуль упругости поперек волокон 9 6,2 4,9
Ю~3. МПа Предел прочности при сдвиге, МПа 48 27 42
-3 Модуль сдвига * 10 , МПа 5.2 5,0 2,0
ки. Первые три метода используются для изготовления деталей, включая
и крупногабаритные тонкостенные детали со сложным рельефом. Метод на-
мотки позволяет получить оболочки вращения, в том числе корпуса РДГГ
различной формы, раструбы сопел и др.
Обычно намотка выполняется армирующими нитями, жгутами, лентами,
пропитанными связующим. Наиболее распространенным видом намотки счи-
тается геодезическая (различают еще полярную, радиальную, продольно-
поперечную), при которой армирующий материал подается на вращающуюся
оправку и укладывается по геодезическим (спиральным) линиям под неко-
торым расчетным углом к оси вращения, что позволяет получить равно-
прочную конструкцию. Поэтому один из основных принципов конструирова-
ния состоит в одновременной совместной разработке конструкции и
материала с регулируемой анизотропией. Таким образом, процесс проек-
386
материалов
Таблица 7.4
Боро- пластик Углеалю- миний Боралю- мииий Алюминиевый сплав Титановый сплав Легированная сталь
2,0 2,25 2,64 2,8 4,5 7.8
1600 1100 1400 440 1100 1500
2400 600 2000 — - -
800 489 530 157 240 190
210 200 230 72 115 200
105 88,9 87.1 25,7 25,5 25,6
65 45 140 — — —
19 — 140 — — —
102 45 84 - — —
6,2 — 63,0 — — —
тирования РДГ1 из композиционных материалов, получаемых намоткой,
требует одновременного анализа не только параметров и характеристик
двигателя, но и выбора внутренней структуры конструкционного материа-
ла (числа и порядка чередования слоев, углов ориентации, вида армиру-
ющего материала и др.).
Спиральная намотка позволяет изготавливать корпус РД11 заодно с
днищами. При этом укладка непрерывной ленты или нити на оправку веде-
тся сначала по спирали (при этом образуется цилиндр с днищами), а за-
тем цилиндрическая часть усиливается укладкой армирующего материала в
кольцевом направлении. После получения необходимых толщины и структу-
ры оболочки производится полимеризация связующего^ а оправка удаляет-
ся. Окончательный вид корпуса двигателя показан на рис.7.18.
В элементе слоистой оболочки из композиционного материала, армиро-
387
Рис. 7.18. Схема корпуса РДТТ,
образованного методом непрерыв-
ной намотки
ванной симметрично относительно
образующей, средние напряжения с
напряжениями в слоях связаны
следующими соотношениями [24]:
I . о ,
sin 2р.):
12
(7.68)
J Т/ i • 2 * 2 I . „ <
= Z sm <p. + a2cos + r^sm 2^.),
i=l
где k - число пар слоев с углами армирования ± ф*.; aj и - нормаль-
ные напряжения вдоль и поперек волокон соответственно; - напряже-
ния сдвига в плоскости армированного слоя; 8. = 8^/8 - относительная
толшина i-го слоя.
Рассмотрим находящуюся под давлением цилиндрическую обечайку кор-
пуса двигателя, состоящую из слоя спиральной намотки толщиной 8^ с
углом армирования 1 Фс и слоя кольцевой намотки толщиной 8* ^см-
рис.7.18). При проектировании такой обечайки работу связующего можно
не учитывать.
Тогда согласно (7.68), имея в виду, что здесь а? = = 0, полу-
чим
— 2 — 2 —
а = 8 a cos ф ; а = 8 a sin ф * 8 а ,
ф с с с U сс с кк
(7.69)
где ас и - нормальные напряжения вдоль спиральных и кольцевых во-
локон соответственно. С другой стороны,
р D р D
а = к.раем к краем к
Ф 48 0 28
Предположив, что при некотором предельном р напряжения а и
к. расч с
388
а одновременно достигают предела прочности однонаправленного компо-
зиционного материала а^^^, с учетом (7.69) и (7.70) получим
Р D
к.расч к
46
7“ 2
= а. 8 cos <р ;
1 разр с с
р D
к.расч к
28
(7.71)
= а. (8 Sin2^ + 8 ).
I разр с с к
Из первого равенства (7.71) определяется толщина спирального
Р о
8 = 8~8 = "расч к . .
с с 2
4а. cos ф
1 разр с
а из второго - толщина кольцевого слоя
_ р D
8=88 = --------" раСЧ ------ (3cos% - 1).
к к 2 с
4а. cos ф
1 разр с
Суммарная толщина цилиндрической обечайки
6 = 6 * 6 = Зр D /4а
с к к.расч к 1 разр
а 2 2
Из уравнения (7.73) следует, что cos > 1/3. При cos
с с
т.е. когда = 54 44*. 6* = 0, и цилиндрическая обечайка может
быть образована только спиральными слоями. Следовательно, 0 < <
с
< а при спиральные слои должны быть усилены не кольцевы-
ми, а продольными слоями, но такая структура является менее техноло-
гичной.
Толщина днища в i-м сечении может быть найдена по приближенной
зависимости
слоя
(7.72)
(7.73)
(7.74)
= 1/3.
(7.75)
D 6 COStf
6 . = -------
I п
где d. - диаметр днища в /-м сечении; d - диаметр полярного отвер-
I п
стия 'днища; D - диаметр цилиндрической части камеры.
389
7.4.3. Проектирование соплового блока
Сопловой блок образуется задним днищем, решеткой (диафрагмой), ус-
тройством для регулирования критического сечения сопла и раструбом
сопла. Конструктивное решение блока зависит от способа настройки дви-
гателя на температурный режим эксплуатации, назначения ЛА и самого
двигателя, времени его работы, места расположения РДТТ по длине кор-
пуса, способа создания управляющих моментов и др. С учетом перечис-
ленных факторов применяются односопловые и многосопловые блоки, со
сменными вкладышами или центральным телом (’’грушей”), с боковыми соп-
лами или удлинительным газоводом, с моноблочным, разрезным, поворот-
ным или качающимся раструбом, с частично утопленным, с коническим или
профилированным (по дуге окружности или параболы) соплом и др.
Проектирование конструкций сопловых блоков существенно неформаль-
ная процедура. Многие конструктивные вопросы сопел решаются экспери-
ментальным путем. Ниже излагаются некоторые опытные рекомендации.
Конструкция металлического соплового блока для небольших РДГГ с
малым временем работы может быть выполнена в виде единого конструк-
тивного элемента, иногда вместе с задним днищем. Для крупногабаритных
РДГГ металлическое сопло целесообразно изготавливать сварным с раска-
танным листовым раструбом и точеными кольцеобразными торцами. Для
теплоизоляции критического сечения может использоваться напыление
вольфрама или других тугоплавких и эрозионно стойких материалов.
Сопла, работающие короткое время (6...9 с), могут прессоваться из
конструкционного пластика. Сопла, работающие десятки секунд, изготов-
ляют намоткой из композиционных материалов или делают стальными с пе-
ременной по длине сопла толщиной теплоизоляции. В критическом сечении
неразъемного сопла помещается вставка из силицированного графита или
наборная конструкция из композиционных материалов.
Сопловые блоки со сменными вкладышами делаются разъемными
(рис.7.19). Вкладыш помещается в цилиндрическом стакане между днищем
и раструбом сопла. Все зазоры между вкладышем, сопловой втулкой и ра-
струбом сопла должны тщательно герметизироваться во избежание прогара
Рис. 7.19. Сопловой блок со смен -
иым вкладышем:
/ — для нормальной температуры:
2 — для высокой температуры; 3 -
для низкой температуры
390
сопла. Необходимо также обеспечить точность и соосность соединения
элементов сопла, чтобы не возник эксцентриситет тяги.
Определяющее влияние на конструкцию соплового блока оказывает спо-
соб регулирования вектора тяги. Распространенные варианты газодинами-
ческого управления показаны на рис.7.20. Рассмотрим эти варианты и
некоторые конструктивные схемы их реализации.
Гаэовые рули - это профилированные пластины, устанавливаемые в га-
зовой струе маршевого двигателя. Их эффективность линейно связана с
углом отклонения руля примерно до 20 . Достоинства: простота изготов-
ления и эксплуатации, возможность создания управляющих моментов по
всем трем каналам управления (при дифференциальной схеме рулей). Не-
НаименоВание
органа
управления
Эскиз
Наименование
органа
управления
Газовые
рули
Поворотное
сопло
Рис. 7.20. Схемы газодинамических органов управления вектором тяги
391
достатки: потеря тяги двигателя на 1,5...2,0 %, обгорание рулей в по-
токе газа, большие шарнирные моменты.
Дефлекторы представляют собой кольца, расположенные вокруг среза
сопла и отклоняемые относительно одной или двух взаимно перпендику-
лярных осей. В исходном положении дефлектор находится вне газовой
струи. При подаче управляющего сигнала дефлектор вводится в газовый
поток, вызывая скачок уплотнения, за которым создается зона повышен-
ного давления, изменяющая направление вектора тяги. Недостатки: нели-
нейность зависимости управляющего момента от угла отклонения дефлек-
тора; более низкая эффективность по сравнению с . газовыми рулями; для
создания момента крена требуется минимум два сопла. Достоинства: кон-
структивная простота и высокая надежность; незначительное обгорание
конструкции в связи с тем, что контакт со струей происходит только
при отклонении дефлектора; сравнительно небольшие шарнирные моменты.
Конструкция дефлектора в карданном подвесе показана на рис.7.21.
Сопловые насадки являются разновидностью дефлекторов. Насадок пре-
дставляет собой поворотное кольцо, достаточно плотно прилегающее к
соплу и являющееся как бы его продолжением. Эффективность насадка
значительно выше, чем дефлектора, однако и шарнирные моменты более
существенные.
Рис. 7.21. Сопловой блок с дефлектором в карданном подвесе:
/ — рулевые машинкн; 2 — поджимное устройство; 3 — вольфрамовая обли
цовка; 4 — теплопоглотитель; 5 — несущий корпус дефлектора
392
Управляющие щитки (триммеры) создают управляющий момент при введе-
ши их в газовый поток перпендикулярно оси сопла или под некоторым
тлом. Величина получаемого усилия зависит от величины площади трим-
мера, обдуваемой потоком. Потеря тяги определяется разностью давлений
юред триммером и за ним. Возможная конструкция соплового блока с ох-
таждаемым триммером показана на рис.7.22.
Поворотные и разрезные сопла позволяют получать вертикальную сос-
'авляющую тяги за счет отклонения сопла или его части. В поворотном
:опле это осуществляется в дозвуковой части, поэтому потери тяги не-
велики. При разрезном сопле потери тяги значительно больше из-за на-
хушения течения сверхзвукового потока. Зависимость управляющей силы
гг угла поворота линейная. Основная проблема - создание надежной
конструкции подвижного соединения между вращающейся и неподвижной
истями двигателя в условиях высоких температур. Конструктивные схемы
юворотного и разрезного сопел показаны на рис.7.23 и 7.24.
Вращающееся сопло имеет подвижный разъем в сужающейся или расширя-
ющейся части. По своим характеристикам не отличается от поворотных и
хазрезных сопел. Имеет более низкий момент трения и лучшую герметиза-
1ИЮ узла вращения.
Вдув газа или впрыск жидкости внутрь сопла через его боковую стен-
>нс. 7.22. Сопловой блок с управляющими охлаждаемыми щитками , (тримме-
амн):
1 — газогенератор; 2 — электрозапал; 3 — поршень; 4 — корпус; 5 — ох-
1адитель* 6 — теплозащитная оболочка; 7 — распределительный канал;
J — теплопоглотитель; 9 — вольфрамовая облицовка
393
ку также обеспечивает отклонение газовой струи и возникновение управ-
ляющего момента. Достоинством такого способа является отсутствие под-
вижных элементов двигателя или его сопла. Возможная конструкция сопла
показана на рис.7.25.
Общий недостаток рассмотренных способов газодинамического управле-
ния (за исключением газовых рулей) - невозможность создания управляю-
щих моментов крена при наличии одного сопла или одной камеры. Кроме
того, все эти устройства, включая и газовые рули, действуют только
Рис. 7.23. Сопловой блок с
поворотным соплом и подвиж -
иым центральным телом:
/ — сопло; 2 — рулевая ма-
шинка; 3 — заднее днище; 4 —
сильфон; 5 ~ корпус цент-
рального тела; 6 — централь-
ное тело; 7 — гндроцнлнндр;
8 — поршень; 9 — пилон; 10 —
фланец сопла; 11, 12 — опор-
ная поверхность
Рис. 7.24. Сопловой блок с разрезным соплом в карданном подвесе:
/ — неподвижная часть сопла; 2 — вкладыш с теплопоглотителем;
3 — сферическое кольцо; 4 — сальники; 5 — рулевой привод; 6 — рас-
труб сопла
394
’нс. 7.25. Сопло со вдувом газа и впрыском жидкости:
I — вдув горячего газа; / — камера сгорания; 2 — газовод; 3 — регуля-
ор расхода; 4 — сопло; б — впрыск жидкости: / — баллон с газом; 2 —
аллон с жидкостью; 3 — регулятор расхода; 4 — сопло
[ри работающем двигателе. При пассивном полете их действие прекраща-
тся. Газодинамическое управление полетом в этих условиях может осу-
ществляться с помощью так называемых струйных рулей, представляющих
обой специальные управляющие реактивные двигатели малой тяги.
§7.5. ПРОЕКТИРОВАНИЕ КОНСТРУКЦИИ
ДВИГАТЕЛЬНЫХ УСТАНОВОК С ЖРД
7.5.1. Основы устройства двигательных установок с ЖРД
По своему назначению и принципам создания тяги двигательные уста-
новки с ЖРД мало отличаются от двигательных установок с РД1Т. Разли-
мя касаются преимущественно конструкции установки и, как следствие,
е количественных характеристик. Главными достоинствами двигательных
остановок с ЖРД являются:
возможность получения более высоких по сравнению с РДТТ удельных
нмпульсов тяги за счет применения химически более активных топлив,
гго положительно сказывается на массе двигательной установки и ЛА в
[елом, особенно при продолжительном времени работы двигателя;
более широкий диапазон регулирования двигателя, возможность много-
ратного включения и выключения, что способствует уменьшению ошибок
введения за счет строгого отслеживания принятого закона движения;
более простая компоновка двигательной установки на ЛА, отсутствие
395
газоводов, более простая конструктивная реализация устройств управле-
ния вектором тяги.
Недостатки установок с ЖРД обычно связывают с низкой эксплуатаци-
онной технологичностью. Из-за агрессивности жидкого топлива ЛА с ЖРД
имеют ограниченное время хранения в заправленном состоянии. Как след-
ствие, снижается техническая готовность ЛА, возникает необходимость
иметь громоздкую систему наземного обеспечения. Техническое обслужи-
вание ЛА с ЖРД более трудоемко, что также связано с ограничениями,
налагаемыми агрессивностью химических топлив.
Основными конструктивными элементами двигательной установки с ЖРД
являются: камера двигателя; топливная система; системы управления,
запуска и остановки двигателя.
Камера ЖРД является наиболее сложным элементом, что связано с вы-
соконапряженным динамическим и температурным нагружением ее конст-
рукции. Камера двигателя состоит из головки с форсунками, камеры сго-
рания и сопла. Головка камеры предназначена для смешивания компонен-
тов топлива. Распыление и перемешивание компонентов топлива обеспечи-
ваются форсунками. От совершенства процессов смесеобразования, а так-
же от правильности выбора геометрических форм и размеров камеры сго-
рания и сопла зависят удельный импульс тяги, устойчивость и надеж-
ность работы двигателя.
Топливная система включает в себя баки с арматурой, систему подачи
топлива, систему наддува баков и топливные магистрали. Конструктивный
облик двигательной установки с ЖРД во многом определяется типом и
конструкцией системы подачи топлива, которые, в свою очередь, зависят
от тяги и времени работы двигателя.
По типу агрегата, создающего давление подачи, различают газовытес-
нительные и турбонасосные системы подачи с турбонасосными агрегатами
(ТНА). Газовытеснительные системы подачи основаны на принципе созда-
ния в топливных баках высокого давления газов, обеспечивающего вытес-
нение компонентов топлива из баков в двигатель. В зависимости от типа
аккумулятора, из которого поступают газы, вытесняющие компоненты топ-
лива из баков, различают: газобаллонные системы подачи топлива с воз-
душным аккумулятором давления (ВАД) (рис.7.26,а и б); с пороховым ак-
кумулятором давления (ПАД) (рис.7.26,в); с жидкостным аккумулятором
давления (ЖАД) (рис.7.26,г).
Газовытеснительные системы подачи конструктивно проще, чем турбо-
насосные. Однако их недостатком является то, что для создания высоко-
го давления в камере сгорания двигателя требуется наддув топливных
баков до более высоких давлений, вследствие чего масса двигательной
396
установки оказывается больше, чем при турбонасосной подаче топлива.
Поэтому газовытеснительные системы находят в основном применение в
двигателях небольшой тяги, рассчитанных на малое время работы.
а
6
6
д
Рис. 7.26. Принципиальные схемы систем подачи топлива:
а — с ВАД; б — с ВАД с подогревом; в — с ПАД; г — с ЖАД; д — с ТНА:
/ — камера сгорания; 2 — бак с горючим; 3 — бак с окислителем; 4 —
воздушный аккумулятор давления; 5 — газогенератор; 6 - топливо для
газогенератора; 7 - камера подогрева; 8 — редуктор; 9 - ТНА
397
Турбонасосные системы подачи (см. рис.7.26,д) способны обеспечи-
вать более высокие энергетические характеристики двигателя. Это объ-
ясняется тем, что высокие давления в камерах ЖРД создаются без увели-
чения массы топливных баков.
Система управления двигателем предназначена для стабилизации тяги
или ее изменения с целью обеспечения заданного режима движения ЛА.
Управление вектором тяги можно осуществить тремя способами: изменени-
ем секундного расхода топлива, изменением площади критического сече-
ния сопла и выключением части работающих камер в многокамерных двига-
телях.
Изменение секундного расхода топлива (дросселирование двигателя)
достигается: а) изменением давления перед форсунками путем уменьшения
числа оборотов ТНА (при насосной системе подачи) или изменением дав-
ления в баках (при газовытеснительных системах); б) перекрытием части
форсунок; в) закольцовкой топливной магистрали, когда часть топлива
из магистрали высокого давления (за насосом) возвращается в магист-
раль низкого давления (до насосов); г) путем изменения соотношения
расходов основных компонентов топлива.
Дросселирование двигателя осуществляется наиболее просто. Это важ-
ное преимущество указанного способа. Однако при этом ухудшаются хара-
ктеристики и условия работы двигателя вследствие отклонений режимов
форсунок и сопла от расчетных. Кроме того, из-за уменьшения количест-
ва топлива, используемого для охлаждения камеры сгорания, может про-
изойти перегрев или даже прогар двигателя. По этим причинам дроссели-
рование двигателя допускается в ограниченных пределах с изменением
тяги не более чем в 3...4 раза.
При регулировании тяги путем изменения площади критического сече-
ния сопла используется центральное регулирующее тело (профилированная
игла). Способ сложен в конструктивном плане: трудно обеспечить охлаж-
дение иглы. Третий способ - отключение части камер - допускает только
ступенчатое регулирование тяги. По массовым характеристикам этот спо-
соб, как правило, уступает предыдущим.
Рассмотренные выше элементы не исчерпывают всех устройств двига-
тельных установок. Обычно в их составе предусматривается еще целый
ряд вспомогательных систем и устройств, среди которых: системы запус-
ка и отключения двигателя, наддува и дренажа баков, регуляторы раз-
личных параметров и др. Однако эти системы мало влияют на проектные
параметры основных элементов конструкции двигательной установки. При
желании с устройством вспомогательных систем читатель может познако-
миться в специальной литературе.
398
7.5.2. Конструкции и проектирование камер ЖРД
Устройство камер ЖРД определяется особенностями процессов, проте-
кающих в камерах сгорания, которые характеризуются высокими теплона-
пряженностью и давлением и малым временем пребывания топлива в каме-
ре. Рабочий процесс в камере сгорания ЖРД можно разделить на пять зон
(рис.7.27): в первой, непосредственно примыкающей к форсункам, проис-
ходит распыление компонентов топлива; во второй - подогрев, испарение
и смешение топлива; в третьей - процесс сгорания, в результате чего
резко возрастает температура газа. В сопле камеры двигателя (четвер-
тая и пятая зоны) происходит сжатие, расширение и разгон продуктов
сгорания, т.е. превращение тепловой энергии, полученной в камере сго-
рания, в кинетическую энергию движения газов.
Конструктивно камера ЖРД представляет собой тонкостенную оболочку,
на одном из торцов которой располагается головка с форсунками, а на
другом - сопло (рис.7.28).
В связи с необходимостью защиты стенок камеры от перегрева в каме-
рах ЖРД обычно применяется регенеративный способ охлаждения, для чего
камеры сгорания и сопла выполняются двухстенными (рис.7.29). В от-
дельных случаях находят применение трубчатые конструкции, в которых
охлаждающий компонент пропускается через трубки, являющиеся силовыми
стенками камеры. Одностенные конструкции камер без охлаждения приме-
няются редко, так как допустимое время работы таких камер очень мало.
Головки камер обычно выполняются с тремя стенками и отдельными полос-
тями между стенками для горючего и окислителя. Эти полости соединены
с камерой сгорания через форсунки.
Выбор параметров камеры - одна из важнейших задач проектирования
двигательных установок. Основными конструктивно-компоновочными пара-
метрами камер ЖРД являются их форма и геометрические размеры.
По форме камеры сгорания могут быть шарообразными, цилиндрически-
ми, коническими и кольцевыми. Шарообразные камеры имеют наименьшую
поверхность при заданном объеме и минимальную потребную толщину сте-
нок, что делает их наиболее легкими. Такие камеры обычно применяются
на двигателях больших тяг. Недостатком шарообразных камер является
то, что они имеют увеличенные поперечные размеры и их изготовление
несколько сложнее по сравнению с другими типами камер.
Цилиндрические камеры сгорания нашли наибольшее распространение в
двигателях, так как они более просты в изготовлении и имеют наимень-
шие поперечные размеры, что облегчает их компоновку на ЛА, особенно в
многокамерных двигательных установках. Недостатком цилиндрических ка-
399
Рис. 7.27. Изменение параметров газо-
вого потока по длине камеры ЖРД:
р — давление; W — скорость; Т — тем-
пература ; q — удельный тепловой поток
л*
Рис. 7.28. Конструкции камер ЖРД:
а — цилиндрическая; б — сферическая;
/ — головка камеры; 2 — форсунки; 3 —
входной патрубок горючего; 4 — камера
сгорания; 5 — сопло; 6 — входной пат-
рубок окислителя; 7 — кронштейн узла
крепления камеры
мер по сравнению с шарообразными являются несколько большая масса и
худшие условия для охлаждения стенок.
Конические камеры отличаются простотой в изготовлении, они устой-
чивы к колебаниям процесса горения, но неэкономичны вследствие излиш-
400
не больших скоростей продуктов сгорания по длине камеры. Кольцевые
камеры с использованием тарельчатых сопел позволяют значительно
уменьшить длину двигателя. Но они сложны в изготовлении, имеют боль-
шие поверхность охлаждения и массу по сравнению с обычными камерами.
Кольцевые камеры целесообразны лишь для двигателей больших тяг.
Потребный объем камеры сгорания, обеспечивающий полное сгорание
топлива, зависит от рода применяемого топлива, соотношения его компо-
нентов, секундного расхода топлива, температуры и давления в камере
сгорания, системы смесеобразования и ряда других факторов. Прибли-
женно
RT
V = т т —— , (7.76)
к пр Т Р*
где V* - объем камеры сгорания; R, р* - параметры газа в камере;
т - массовый секундный расход топлива; г - потребное время превра-
т пр
щения жидкого топлива в газообразное- состояние. Ориентировочно т =
ПР
- 0,003...0,005 с.
Геометрические размеры камер ЖРД выбирают на основе эксперимен-
тальных и статистических данных. Как показывает опыт, обеспечение до-
статочной полноты сгорания и устойчивости процесса горения достигает-
ся при длине камеры сгорания
L = 0,25...0,40 м. (7.77)
к
Рис. 7.29. Схемы соединения оболочек камер ЖРД при регенеративном ох-
лаждении :
а — соединение сваркой по выштамповкам; б — соединение пайкой с помо-
щью ребер; в — соединение пайкой через промежуточную оболочку; 2 —
соединение пайкой из отдельных трубочек
401
Диаметр камеры выбирается так, чтобы он в 2...3 раза превышал диаметр
критического сечения сопла. При этом создаются условия для изобари-
ческого истечения продуктов сгорания и получаются малые потери в
удельном импульсе.
Площадь поперечного сечения камеры определяют по значению ее объе-
ма. Для цилиндрической камеры
F = (2,5...3,5)V ; (7.78)
к(цил) к
для шаровой камеры
F . = 1.2У2/3. (7.79)
к(ш) к
Площадь критического сечения сопла F^ зависит от секундного рас-
хода топлива давления в камере сгорания р* и термодинамических
характеристик продуктов сгорания топлива, выраженных через удельный
импульс давления (расходный комплекс) / :
/
г = т
кр т
Площадь
(7.80)
рк
выходного сечения сверхзвуковой части сопла Fq опредеЛяет-
(выбранной) площадью критического сечения F^ и
ся заданной
геометрической степенью расширения сопла обеспечивающей
степень расширения газов в сопле р^Р^
выбранной
расчетную
а а кр
(7.81)
7.5.3. Проектирование топливных баков
Проектирование конструкций топливных баков включает в себя следую-
щие задачи: выбор компоновочной и конструктивно-силовой схем баков;
определение проектных параметров силовой конструкции; конструирование
и разработку чертежной документации.
В качестве исходных данных при проектировании топливных баков при-
нимаются: облик ЛА и его компоновочная схема; основные расчетные слу-
чаи и значения эксплуатационных нагрузок; индивидуальные конструктив-
ные особенности баков и конструктивные ограничения (местные вырезы.
402
словия крепления, ограничения по габаритам и т.п.), в ряде случаев
адается материал баков и его механические характеристики; технологи-
еские условия и ограничения.
Выбор компоновочной н конструктивно-силовой схем баков во многом
пределяется заданным обликом ЛА. Особенно это относится к компоно-
эчной схеме, определяющей геометрию баков и их расположение на ЛА.
[ри выборе конструктивно-силовой схемы (КСС) основные ограничения
вязаны с требованиями прочности, технологии производства, эксплуата-
ии и стоимости конструкции. Все эти требования в равной мере выпол-
ить нельзя. Чему отдать предпочтение, решает конструктор, который
существляет анализ прогрессивных решений и тенденций, предшест-
ующего опыта с рассмотрением возможных вариантов и новых идей, осно-
энных на достижениях материаловедения, технологии и пр. Как указыва-
ось в гл. 3, этот этап проектирования особенно важен. При недоста-
эчной проработке силовой схемы реализованную в техническом проекте
есовершенную конструкцию в дальнейшем практически невозможно довести
о уровня рациональной.
Рациональной является схема, в которой действующие силы замыкаются
а возможно более коротком участке при помощи элементов, работающих
реимущественно на растяжение или сжатие, а не на изгиб. Важным приз-
аком рациональной конструкции является ее компактность. Полезное ис-
ользование объема уменьшает габариты и массу баков.
Заметим попутно, что понятие рациональности не следует отождеств-
ять с оптимальностью. Оптимальность связана с решением задачи мате-
атического программирования, в то время как рациональность - это ка-
ественная характеристика, основанная обычно на неформальном анализе
елого ряда противоречивых требований.
Топливные баки, применяемые на ЛА (рис.7.30), могут являться конс-
руктивной частью корпуса или крыла или устанавливаться внутри ЛА. В
ервом случае баки подвергаются воздействию внешних сил и нагрузок,
в сбрасываемые
403
действующих на аппарат, и называются несущими. Во втором случае баки
не воспринимают внешних нагрузок, поэтому называются ненесущими. Та-
кие баки применяются обычно в тех случаях, когда необходимо теплоизо-
лировать конструкцию баков.
Иногда топливные баки подвешиваются под ЛА (см. рис.7.30,в) и
сбрасываются после опорожнения, что позволяет уменьшить массу и аэро-
динамическое сопротивление ЛА. Такие баки называются сбрасываемыми
или отделяемыми.
Наиболее распространены баки цилиндрической формы, так как при за-
данном объеме у них наименьшая площадь поперечного сечения. Шаровые
баки легче цилиндрических, но они неудобны с точки зрения крепления
на ЛА. В некоторых случаях по требованиям компоновки ЛА могут приме-
няться эллипсоидальные, тороидальные или более сложные топливные
баки.
КСС баков образуются обечайкой, днищами, шпангоутами и узлами кре-
пления. Обечайка представляет собой тонкостенную оболочку, выполняе-
мую обычно из листового материала штамповкой и сваркой. Продольный
набор в баках нерационален, так как устойчивость обечайки обеспечива-
ется внутренним избыточным давлением, которое уменьшает сжимающие ме-
ридиональные напряжения, возникающие в обечайке бака под действием
внешних силовых факторов. Однако наличие поперечных элементов - шпан-
гоутов - оказывает влияние на устойчивость обечайки.
Днища баков выполняются в виде эллипсоидов вращения (обычно с со-
отношением осей 1:2:2), что позволяет рационально использовать объем
корпуса и получать днища, толщина которых мало отличается от толщины
обечайки. Днища баков изготавливаются подобно обечайке.
Шпангоуты в баках применяются для придания баку необходимой формы
и повышения его жесткости и устойчивости. В баках больших удлинений
шпангоуты работают на сжатие, возникающее вследствие деформации кор-
пуса при изгибе. Расстояние между шпангоутами выбирается с учетом ме-
стной и общей потерь устойчивости обечайки бака.
При выборе материала для топливных баков помимо механических ха-
рактеристик следует особо обращать внимание на коррозионно-стойкость
по отношению к применяемым компонентам топлива. Для баков, предназна-
ченных для хранения окислителей, используются алюминиевые сплавы
АМгЗ, АМгб-Т, АМЦ и др., коррозионно-стойкие стали, легированные хро-
мом и никелем, типа Х18Н9Т, а также титановые сплавы ВТ1-Д, ВТ2, ВТ5
и др. Баки для неагрессивных компонентов топлива изготавливают из
АМгб-Т, 25ХГСА, CH-2, СН-4А, ВТ6 и других сплавов.
Параметры силовой конструкции баков являются функцией их наг-
404
ружения. Наибольшие нагрузки испытывают несущие баки, поскольку кроме
нагрузок от топливной системы (внутреннего давления) они воспринимают
внешние нагрузки (изгибающий момент Af^, перерезывающую силу Q и осе-
вую силу N*), действующие на ЛА.
Внутреннее давление в баке рл складывается из давления наддува
б
р и гидростатического давления р :
над гидр
Р=Р ♦ р (7.82)
б над гидр
Давление наддува р в баках с газовытеснительными системами подачи
над 5
обычно составляет (25...50)*10 Па, а в баках с турбонасосными
5
системами подачи = (2...6) *10 Па. Гидростатическое нагружение
баков зависит от продольной перегрузки л*:
р = gp h п , (7.83)
ггидр х х
где - плотность топлива; Л* - расстояние от свободной поверхности
жидкости до расчетного сечения.
Под действием внутреннего давления и внешних нагрузок оболочка ба-
ка деформируется. Вдали от днищ и шпангоутов деформированная поверх-
ность обычно не имеет резких изменений кривизны, поэтому напряжения в
стенке баков с достаточной степенью точности можно считать по безмо-
ментной теории, а в тех зонах, где деформация обечайки стеснена шпан-
гоутами или днищами либо возникают резкие изменения температуры обе-
чайки, следует пользоваться моментной теорией оболочек и учитывать
изгибные напряжения.
В соответствии с безмоментной теорией меридиональные напряжения в
обечайке цилиндрического бака, нагруженного одновременно осевыми си-
лами, изгибающим моментом и внутренним давлением, будут
М N pR
% " я/?2в 2irR5 25 ’
а кольцевые напряжения
5 •
где R и 5 - радиус и толщина обечайки бака.
(7.84)
(7.85)
405
Кольцевые напряжения в обечайке, нагруженной избыточным внутренним
давлением, всегда положительные (растягивающие). Меридиональные на-
пряжения могут быть как положительными, так и отрицательными. Причем
в последнем случае возможна потеря устойчивости оболочки. При этом
расчетный случай может определяться значений При высоких давле-
ниях в баках может оказаться, что несущая способность обечайки будет
определяться кольцевыми напряжениями.
Таким образом, толщина обечайки 5 должна удовлетворять условиям
прочности по меридиональным и кольцевым напряжениям
М N рЯ
из X * б .
яЯ25 25 араз|>
в р (7.86)
У*
5 Яраэр
и условию устойчивости
М N рЯ
ИЗ + X _ б
* 2тгЛб 26 %>’
(7.87)
Критические напряжения ПРИ совместном воздействии сжатия и да-
вления определяют по формуле
, ЕЬ
а = к уг-
кр р R
(7.88)
Экспериментальные исследования показывают, что при действии внутрен-
него давления критические сжимающие напряжения вначале повышаются, а
начиная с некоторого значения давления р уменьшаются. Эго объясняет-
ся тем, что при наличии давления изменяется характер вмятин, образую-
щихся при потере устойчивости. При нагружении только осевой силой об-
разуются ромбовидные вмятины, а при высоких давлениях возникают коль-
цевые складки, что соответствует осесимметричной форме потери устой-
чивости.
Экспериментальные зависимости коэффициента
значений отношения R/8 представлены на
=(р /£)(Л/6) - безразмерный параметр давления.
б
k? от р для различных
рис.7.31. где р =
Параметры днищ баков выбирают исходя из внутреннего давления в ба-
406
Рис.
k от
Р
ческнх
оболочек
7.31.
р "
7.32.
части
Рис.
ценной
О
(7.89)
а
ке, т.е. из
шними натру
пренебрегают.
ряжений и 00 в днище бака произвольной формы используют уравнения
равновесия и Лапласа
Ф(П)
~ 2
2w5/?^sin Q
%
где Ф(Я) - осевая составляющая всех внешних сил, действующих на
отсеченную часть оболочки; R^ и R? - главные радиусы кривизны; П -
угол между осью х и радиусом R?.
Для осесимметричных оболочек произвольной формы, как следует из
рис.7.32, осевая составляющая
а
Ф(Я) = 2я р г.г sirkocoscodw,
6 12
(7.90)
О
407
где г и - радиусы главной кривизны произвольной точки отесеченной
части оболочки; - угловая координата произвольной точки.
В соответствии с (7.89) и (7.90) напряжения в оболочке, возникаю-
щие в результате воздействия давления р , описываются следующими за-
висимостями: для цилиндрической оболочки
РЙЯ ря
% = 25 : ° в = 5 :
для сферической оболочки
= РЛ.
% °0 26
(7.91)
(7.92)
для конической оболочки (рис.7.33)
(7.93)
для торообразной оболочки (рис. 7.33)
(2/? » г sinQ) _ ?6Г
° у 26 (R * Г sinfl) ’ ° в 26
для эллиптической (эллипсоидальной)
оболочки
(7.95)
Рб Г 2, 2 2. 2
W 5Г{а ~Г) + Г
Рис. 7.33. Геометрические параметры
оболочек
5
конической (а) и торообразной (б)
408
в
2 2
9 _ т а__________________
2Z 2 2ч 2
L т (а - г ) * г
(7.95)
т = а/b (а и Ь - большая и малая полуоси эллипса); г - радиус
х/гного сечения эллипсоида.
В зоне сопряжения днищ с обечайкой бака, как следует из приведен-
зависимостей, неизбежно возникают скачки напряжений. В частности,
и днище эллиптическое, а обечайка цилиндрическая, то в зоне их со-
нения (г = R) напряжения будут (рис.7.34):
нище
P6R 2
°е = V2 - т (7 96)
бечайке
(7.97)
Скачок напряжений влечет за собой местные деформации. Для их уст-
ения в сечении перехода от обечайки к днищу в больших баках могут
анавливаться шпангоуты, которые вследствие разницы деформации дни-
и обечайки нагружаются погонными растягивающими усилиями. Наличие
<маюших кольцевых напряжений в днище (см. рис.7.34) приводит к не-
ьцевых напряжений в оболочке бака
. 7.35. Заправочное устройство:
- заправочный штуцер; 2 — заглушка; 3 — корпус; 4 — клапан; 5 -
к; 6 — сальник
409
обходимости в отдельных случаях устанавливать на днище промежуточные
шпангоуты, исключающие потерю устойчивости днища.
Потребная толщина днищ обычно определяется исходя из напряжений в
зонах их сочленений с обечайкой. Для сферических днищ
’ = <’*»
для эллиптических (при т = 2)
’ = PJUp„ 2. <7.99)
Этап конструирования и разработки чертежной документации в основ-
ном связан с конструированием арматуры и соединений элементов топлив-
ных баков. Арматура предназначена для заправки, слива, хранения и на-
дежной подачи топлива в двигатель и состоит из заборных устройств,
заправочных и сливных горловин, дренажных и предохранительных клапа-
нов, датчиков уровней, штуцеров, монтажных и технологических лючков
и т.п.
Конструирование арматуры трудноформализуемый процесс. Основные
требования к арматуре мало связаны с ее прочностью или устойчивостью.
Здесь требования более комплексные, в их основе эксплуатационные и
технологические ограничения. Поэтому при конструировании арматуры
важная роль отводится прототипу, положительно зарекомендовавшему себя
в эксплуатации. Несколько таких конструктивных схем показано ниже.
На рис. 7.35 показано заправочное устройство. При размещении зап-
равочных устройств на топливном баке необходимо учитывать положение
ЛА в момент заправки, а также особенности заправляемых компонентов
топлива: для высококипящих топлив заправочная горловина может распо-
лагаться в любом месте бака; для низкокипяших компонентов топлива за-
правка должна осуществляться в нижней части баков, что уменьшает
потери на испарение топлива. Для слива топлива используются либо зап-
равочные устройства, либо специальные сливные горловины, располагае-
мые в нижней точке бака. При сливе топлива из бака необходимо обеспе-
чивать дренаж.
Заборные устройства топливных баков чрезвычайно разнообразны. Про-
стейшее устройство - отверстие (’’окно”) в заднем днище бака с профи-
лированным входом в трубопровод. Для устранения воронки на входе в
отверстие могут быть установлены специальные воронкогасители. Подоб-
ного рода заборники могут быть применены лишь на маломаневренных ЛА,
поскольку они не гарантируют бесперебойной подачи топлива при колеба-
ниях уровня топлива и его отливе от заднего днища.
410
Для маневренных ЛА применяют следящие заборные устройства, содер-
жащие подвижную часть, которая отклоняется под действием инерционных
ил в сторону отлива топлива (рис. 7.36). Поворот подвижной части за-
орника достигается с помощью гибкого сильфона или шарнира. Заборники
сильфоном из-за жесткости сильфона имеют некоторое запаздывание во
ремени по отливу топлива, однако благодаря простоте конструкции они
ашли широкое применение. Для того чтобы шарнирный заборник не имел
юртвых зон при знакопеременной нагрузке, его необходимо выполнять с
свумя степенями свободы.
Наиболее высокая надежность подачи топлива при отрицательных пере-
рузках может быть получена при разделении топлива и вытесняющего га-
*а с помощью поршней, вытеснительных мешков, эластичных диафрагм и
г.п. Одна из конструктивных схем газовытеснительных систем подачи
гоплива показана на рис.7.37.
Для того чтобы эластичный мешок 8 не скручивался, его целесообраз-
но закреплять и укладывать вокруг центральной перфорированной трубы
5, проходящей через бак. Тогда поступающий в бак воздух будет разду-
вать мешок, который, в свою очередь, будет вытеснять топливо из бака
через сливной коллектор 4.
В конструкциях баков обычно имеется целый ряд люков, лючков, шту-
рме. 7.36. Следящее заборное устройство с сильфоном:
1 — обечайка бака; 2 — неподвижная часть заборника; 3 — сильфон; 4 —
подвижная часть заборника; 5 — пластина демпфера
411
Рис. 7.37. Схема топливного бака высокоманевренного ЛА с вытеснитель-
ным мешком:
/ — переднее днище; 2 — обечайка; 3 — заднее днище; 4 — коллектор для
слива топлива; 5 — задний фланец со сливным отверстием; 6 — перфори-
рованная труба; 7 — передний фланец со штуцером; 8 — вытеснительный
мешок
церов и других устройств. Их устройство, назначение и расположение на
баках иллюстрируются на конструктивно-компоновочных схемах баков, по-
казанных на рис.7.38 и 7.39.
7.5.4. Выбор некоторых комплексных проектных параметров
двигательных установок с ЖРД
Наиболее важными комплексными параметрами двигательной установки
являются эффективность установки, давления в камере сгорания и баках,
тип системы подачи топлива, способ регулирования вектора тяги, разме-
щение двигательной установки на ЛА и др. Большая часть комплексных
параметров выбирается при формировании облика ЛА. Однако это не иск-
лючает необходимости анализа и уточнения этих параметров в процессе
проектирования собственно двигательной установки. Некоторые наиболее
тесно связанные с конструкцией параметры анализируются ниже.
Выбор давления в камере сгорания. Как следует из статистики, наи-
меньшая относительная масса двигательных установок с газовытеснитель-
5
ными системами подачи имеет место при р = (10... 12) 10 Па, с турбо-
' * 5
насосными системами подачи - при р = (30...40) 10 Па. Однако, если
412
иЗ
Рис. 7.38. Конструкция топливного бака мало маневренного ЛА:
1 - переднее днище; 2 - штуцер; 3 - передний стыковой шпангоут; 4 - упорный кронштейн; 5 - обечайка; 6 - сильфонный
компенсатор; 7 - шпангоут; 8 - дренажная труба; 9 - туннельная труба; 10 - хомуты крепления; 11 - заднее днище;
12 - задний стыковой шпангоут; 13 - фланец сливного отверстия; 14 - конус воронкогасителя; 15 - указатель наполне-
ния; 16 - фланец люка
Рис. 7.39. Конструкция топливного бака высоко маневренного ЛА с подвижным заборником:
1 — обечайка бака; 2 — газопровод наддува бака; 3 — диафрагма; 4 — дренажный газопровод; 5 — неподвижная часть забор-
ника; 6 — фланец трубопровода; 7 — фланец заднего лючка; 8 — заднее днище; 9 — подвижная часть заборника; 10 — запра-
вочно-сливная горловина; 11 — такелажный узел крепления бака; 12 — фланец переднего лючка; 13 — переднее днище
Рис. 7.40. Зависимость оптимального
давления в камере сгорания от типа
системы подачи топлива:
— — — открытая схема; -------х----схема с
дожиганием
учесть, что давление в камере сгора-
ния оказывает влияние не только на
массу двигательной установки, но и на
величину удельного импульса двигате-
ля, то, очевидно, приведенные значе-
ния давления в камере с позиций комп-
лексного анализа могут оказаться да-
леко не оптимальными.
Комплексная оценка
основе критерия
двигательной установки может производиться на
представляющего собой отношение суммарного
импульса, создаваемого двигателем, к массе двигательной установки с
топливом:
/у 1
К = ---------------------= —
эф (т + т а
д.у т2 ср д.у
(7.100)
где а = т /т „ - относительная масса двигательной установки;
д.у д.у тХ
m _ - суммарная масса топлива, находящегося в баках полностью
заправленного ЛА.
Зависимости эффективности двигательных установок от давления в
камере сгорания приведены на рис.7.40. Анализ этих зависимостей
позволяет сделать следующие практические выводы.
1. Для двигательных установок с газовытеснительными системами по-
дачи наилучшие характеристики получаются при давлениях в камере его-
5
рання р = (20...25)*10 Па. Значения оптимальных давлений воз-
KOpt
растают при увеличении работоспособности газов, используемых для над-
дува баков (переходя от ВАД к ПАД и ЖАД), и при уменьшении времени
работы двигателя (при этом возрастает доля массы камеры двигателя и
агрегатов в общей массе двигательной установки).
2. Для двигательных установок с турбонасосными системами подачи
наибольшая эффективность получается при давлениях в камере: для от-
415
5
крытых схем работы = (60...80)*10 Па; для закрытых схем с до-
жиганием р = (120... 150)* 105 Па. Увеличение глубины дросселиро-
вания тяги во всех случаях требует увеличения начального давления в
камере сгорания.
Выбор давления наддува топливных баков. Давление наддува баков при
газовытеснительных системах подачи определяется выбранным давлением в
камере сгорания. С учетом гидравлических потерь, возникающих в топ-
ливных магистралях и камере двигателя, давление наддува при газовыте-
5
сиятельных системах обычно выбирают р = р = (30...40) 10 Па.
над б
Дальнейшее повышение давления наддува вызывает ощутимое утяжеление
топливных баков.
Давление наддува баков при турбонасосных системах подачи топлива в
основном определяется условиями обеспечения бескавитационной работы
насосов и зависит от кавитационных характеристик насосов, физических
свойств перекачиваемых компонентов топлива, гидравлических потерь в
топливных магистралях и ряда других факторов. Обычно р = р =
над б
= (1,5...5)1(Г Па.
Для маломаневренных ЛА выбор давления наддува баков при турбона-
сосных системах подачи может производиться также из условий обеспече-
ния устойчивости обечаек баков, нагружаемых сжимающими усилиями от
внешних нагрузок.
Выбор типа системы подачи топлива. Тип системы подачи топлива за-
висит от назначения ЛА, требований по регулированию тяги и продолжи-
тельности работы двигателя.
Вытеснительные системы подачи в целом проще турбонасосных, но их
масса обычно больше и существенно растет при увеличении давления по-
дачи топлива. Турбонасосные системы способны обеспечивать более глу-
бокое дросселирование тяги, имеют меньшую относительную массу при
больших потребных расходах топлива и времени работы двигателя.
Комплексный анализ двигательных установок с учетом массы и энер-
гетики показывает, что для каждого типа системы подачи существует об-
ласть рационального применения, определяемая в основном значением тя-
ги и продолжительностью работы двигателя. Ориентировочные области це-
лесообразного применения различных систем подачи показаны на
рис.7.41.
Выбор способа изменения направления вектора тяги. При газоди-
намическом управлении ЛА для создания управляющих сил и моментов ис-
416
Рис. 7.41. Области целесообраз-
ного применения различных систем
подачи топлива
Рис. 7.42. Схемы создания управ-
ляющей силы путем воздействия на
газовую струю:
а — газовые рули; б — дефлектор;
6 — секторные рули; г — щитки;
д “ инжекция газа или жидкости
пользуются следующие способы изменения направления вектора тяги ЖРД:
поворот двигателя;
воздействие на газовую струю, истекающую из двигателя (рис.7.42);
рассогласование тяг в камерах многокамерного двигателя.
Выбор одного из указанных способов производится обычно на основе
неформального анализа. При этом учитываются возможности способа, пот-
ребное время управления, типы приводов управления и источников пита-
ния, а также характерные конструктивные особенности ЖРД: высокая теп-
лонапряженность конструкции камеры двигателя и наличие регенеративно-
го охлаждения камеры, что затрудняет применять в ЖРД поворотные и
разрезные сопла, дефлекторы, секторные рули, используемые в РДТТ.
Имеются определенные трудности использования в ЖРД газодинамического
воздействия на закритическую часть сопла (см. рис.7.42,д). Поэтому
наибольшее распространение здесь имеют газовые рули, поворотные каме-
ры и рассогласование тяг в камерах многокамерных двигателей.
14 - 880
417
§7.6. ПРОЕКТИРОВАНИЕ КОНСТРУКЦИЙ
ДВИГАТЕЛЬНЫХ УСТАНОВОК С ВРД
7.6.1. Общая характеристика
двигательных установок с ВРД
Типы ВРД и области их применения. Общим недостатком рассмотренных
выше двигательных установок с ракетными двигателями является сравни-
тельно низкая экономичность вследствие размещения на борту ЛА как го-
рючего, так и окислителя. Воздушно-реактивные двигатели, в отличие от
ракетных двигателей, на борту ЛА имеют незначительный запас рабочего
тела, поскольку в качестве основного компонента рабочего тела исполь-
зуют атмосферный воздух.
Воздух в этих двигателях выполняет три функции. Во-первых, он яв-
ляется основным компонентом рабочего тела для термодинамического цик-
ла, в котором происходит преобразование тепловой энергии в механичес-
кую; во-вторых, кислород воздуха используется как окислитель для пре-
образования химической энергии горючего в тепловую и, наконец,
в-третьих, воздух, получая ускорение в двигательной установке, прини-
мает участие в создании тяги.
Использование воздуха позволяет уменьшить массу ЛА, повысить его
экономичность и топливную эффективность. К этому надо добавить, что в
условиях атмосферного полета уменьшается потребная тяга. Наличие не-
сущих поверхностей позволяет осуществлять полет с тягой в 5...20 раз
меньшей, чем сила тяжести ЛА. И только в тех случаях, когда требуется
придать ЛА высокие маневренные свойства, тяга становится соизмеримой
с силой тяжести ЛА или превышает ее.
Отмеченные и другие положительные качества ВРД делают их почти не-
заменимыми для атмосферных ЛА. Однако наличие атмосферы и ее свойства
приводят также к некоторым ограничениям и негативным явлениям: это
аэродинамические сопротивление и нагрев, с одной стороны, и ограниче-
ния по подъемной силе, вызванные чрезмерной разреженностью атмосферы
на больших высотах, - с другой, т.е. возможной для полетов оказывает-
ся довольно ограниченная зона высот и скоростей.
Как отмечалось выше (см. рис.7.1), обычно выделяют три типа ВРД:
газотурбинные двигатели, прямоточные воздушно-реактивные двигатели и
комбинированные ВРД.
Гаэотурбинные двигатели наиболее распространены. Характерной осо-
бенностью ГТД является наличие турбокомпрессорного агрегата для сжа-
тия воздуха в цикле, служащем для преобразования тепловой энергии в
механическую. Существует несколько разновидностей ГТД, среди них:
418
турбовинтовые двигатели (ТВД), в которых часть полезной энергии тран-
сформируется непосредственно в тягу двигателя, а другая часть переда-
ется винту и трансформируется в тягу косвенно - в результате взаимо-
действия винта с окружающей средой; турбореактивные двигатели (ТРД) -
это классический вариант ГТД; турбореактивные двигатели с форсажной
камерой (ТРДФ), в которой к потоку газов, покидающих турбину, подво-
дится дополнительное тепло от сжигания топлива; двухконтурные турбо-
реактивные двигатели (ТРДД). Последняя разновидность двигателей, бла-
годаря высокой экономичности, в последнее время становится основной.
Напомним устройство и принцип работы ТРДД.
Двухконтурным турбореактивным двигателем называется газотурбинный
двигатель, тяга которого образуется в двух, как правило, соосных кон-
турах (трактах) - газовом и воздушном. Двигатель работает следующим
образом (рис.7.43). Воздух из атмосферы поступает в двигатель через
входное устройство /, которое в зависимости от типа ЛА может быть до-
звуковым или сверхзвуковым. Давление и температура воздушного потока
во входном устройстве увеличиваются, причем тем в большей степени,
чем выше скорость полета. Далее воздух поступает в вентилятор 2, ра-
ботающий на оба контура. В вентиляторе температура и особенно давле-
ние воздуха возрастают. Далее воздушный поток разветвляется по внут-
реннему и внешнему контурам.
Воздух, поступивший во внутренний контур, попадает вначале в ком-
прессор низкого давления 3, а затем в компрессор высокого давления 5.
(В отдельных схемах двигателей компрессор 3 может отсутствовать.) На
выходе из компрессора давление воздуха достигает максимального для
данного двигателя значения, температура его также существенно уве-
личивается по сравнению с начальной. Затем сжатый и подогретый воздух
поступает в камеру сгорания 6, куда через форсунки подается топливо.
В результате сгорания топлива температура смеси продуктов сгорания
Рис. 7.43. Схема ТРДД
419
топлива и воздуха достигает высокого значения и значительно превышает
температуру воздуха за компрессором. Давление рабочего тела (смеси)
по длине камеры сгорания несколько уменьшается из-за гидравлического
и теплового сопротивлений камеры.
Из камеры сгорания газы поступают в турбину 7 высокого давления, а
затем в турбину 8 низкого давления. Здесь происходит процесс расшире-
ния газов, в результате которого совершается механическая работа, ис-
пользуемая для привода компрессоров внешнего и внутреннего контуров.
Температура и давление газа в турбине уменьшаются, однако давление
газа за турбиной превышает атмосферное. При последующем расширении
рабочего тела в выходном устройстве 10 - реактивном сопле - газовый
поток разгоняется, и его скорость на выходе из сопла превосходит ско-
рость потока воздуха, поступающего в двигатель через входное устрой-
ство, в результате чего создается реактивная тяга внутреннего
контура.
Воздух, поступивший из вентилятора во внешний контур 4, расширяет-
ся в выходном устройстве 9 этого контура. Тяга внешнего контура соз-
дается благодаря различию скорости истечения потока воздуха из реак-
тивного сопла этого контура и скорости полета. Суммарная тяга двига-
теля складывается из тяг внутреннего контура и внешнего контура, при-
чем в зависимости от параметров двигателя и режима его работы соотно-
шение тяг изменяется в широких пределах.
Распределение воздуха по контурам характеризуется степенью двух-
контурности двигателя, являющейся отношением расхода воздуха во внеш-
нем контуре к расходу воздуха во внутреннем контуре. Степень двухкон-
турности в значительной мере определяет удельные параметры двигателя,
его характеристики и конструктивную схему. Частным случаем ТРДД мож-
но считать двигатель с нулевой степенью двухконтурности, когда внеш-
ний контур отсутствует и двухконтурный двигатель превращается в ТРД.
Как уже отмечалось, ТРДД экономичнее ТРД. Разница в экономичности
объясняется в основном различием температур выхлопных газов у ТРДД и
ТРД. У ТРД выхлопные газы имеют температуру порядка 700...900 С, а у
ТРДД - не более 300...400 С. Следовательно, использование тепловой
энергии в ТРДД лучше, чем в ТРД, причем оно повышается с увеличением
степени двухконтурности.
В настоящее время у нас и за рубежом создано и эксплуатируется
значительное число ТРДД самого разнообразного назначения. Одна из на-
иболее простых конструкций ТРДД, применяемая на крылатых ракетах аме-
риканских фирм “Боинг” и "Дженерал Дайнемикс”, показана на рис.7.44.
Масса двигателя 57,7 кг, длина 800 мм, диаметр миделевого сечения
420
305 мм, тяга 2700 Н, удельный расход топлива ориентировочно
0,8 кг/(даН*ч).
Прямотонные воздушно-реактивные двигатели относятся к ВРД беском-
прессорного типа. С одной стороны, при высоких скоростях полета тур-
бокомпрессорный агрегат становится малоэффективным, а с другой сторо-
ны, для необходимого повышения давления в цикле ВРД оказывается дос-
таточно динамического сжатия воздуха за счет скоростного напора. В
этих условиях потребность в компрессоре и турбине практически отпада-
ет, и схема двигателя существенно упрощается. Основными конструктив-
ными элементами ПВРД являются диффузор / с центральным телом 2, каме-
Рис. 7.44. Конструктивная схема малогабаритного ТРДД:
/ — воздухозаборник; 2 —
двухступенчатый осевой вен -
тилятор; 3 — осевые компрес-
соры ; 4 — внешний контур;
5 — центробежный компрессор;
6 — внутренний контур; 7 —
камера сгорания; 8 — турби-
ны; 9 — выхлопное сопло
Рис. 7.45. Принципиальная
схема ПВРД и график измене-
ния параметров потока по
тракту
421
ра сгорания 5 с форсунками 3 и стабилизаторами пламени 4 и сопло 6
(рис.7.45).
Набегающий поток воздуха попадает в диффузор, где его скорость па-
дает, а давление, плотность и температура возрастают. Так, например,
при скорости полета, соответствующей М = 3, давление в конце диффузо-
ра повышается примерно в 25 раз. Поджатый в диффузоре воздух поступа-
ет в камеру сгорания и смешивается с горючим, впрыскиваемым через
форсунки. Образовавшаяся смесь поджигается и сгорает, а продукты сго-
рания вытекают через сопло со скоростью, большей, чем скорость набе-
гающего потока. Вследствие возрастания количества движения воздуха
при протекании через канал двигателя (за счет сжигания горючего в
кислороде воздуха и выделения тепла) создается тяга.
В начале камеры сгорания обычно устанавливается стабилизатор пла-
мени, турбулизирующий поток и образующий затененные зоны, в которые
поступает топливовоздушная смесь. Здесь она при запуске двигателя
поджигается с помощью внешнего источника воспламенения. В процессе
установившейся работы двигателя горение топлива поддерживается авто-
матически.
В камере сгорания скорость движения смеси дозвуковая. Чтобы уве-
личить количество движения смеси, ее скорость выгодно максимально
увеличивать. Эту функцию выполняет сверхзвуковое сопло, в котором
происходит расширение продуктов сгорания при сверхкритическом перепа-
де давлений. Классическая форма сопла - сужающаяся при разгоне проду-
ктов сгорания до скорости звука и расширяющаяся при дальнейшем увели-
чении скорости потока.
ПВРД может создавать реактивную тягу только тогда, когда скорост-
ной напор достаточен для образования повышенного давления в диффузо-
ре. При малых скоростях полета степень сжатия воздуха, получаемая за
счет использования скоростного напора, оказывается незначительной,
вследствие чего звуковые ПВРД имеют низкий КПД и не находят практиче-
ского применения.
Целесообразная область применения ПВРД - сверхзвуковые ЛА: зенит-
ные ракеты, самолеты-машины. Рассматривается применение ПВРД на
сверхзвуковых самолетах большой дальности с М = 4...6. Благодаря вы-
сокой экономичности может оказаться выгодным применение гиперзвуко-
вых ПВРД (Г11ВРД), работающих при числах М более 6...7. Это позволит
создать более легкие и экономичные (по сравнению с ракетными) системы
запуска спутников и других космических объектов.
Комбинированные двигатели представляют собой конструктивно объеди-
ненную совокупность нескольких различных реактивных двигателей. Такие
422
.вигатели совмещают в себе положительные качества исходных простых
.вигателей. Так, например, комбинация ПВРД и ракетного двигателя поз-
оляет сочетать возможность самостоятельного старта и расширение ра-
очего диапазона высот за счет ракетного двигателя и повышение эффек-
ивности за счет ПВРД. Группа комбинированных двигателей включает
ольшое число схем и вариантов. В их числе ракетно-прямоточные, тур-
опрямоточные и ракетно-турбинные двигатели. При высоких сверхзвуко-
вое скоростях полета наиболее перспективными могут оказаться ракетно-
рямоточные двигатели.
Ракетно-прямоточный двигатель (РПД) представляет собой комбинацию
*Д и ПВРД, в которой РД играет роль эжектора ПВРД - струйного нагне-
ателя, дополнительно сжимающего воздух, поступающий в камеру сгора-
ия ПВРД. Сочетания ракетного и воздушного циклов могут быть весьма
азнообразными. В простейшем случае эжектируемый воздух является как
ы вторым контуром двигателя (подобно второму контуру ТРДД), чаще,
днако, применяют дожигание продуктов сгорания ракетного двигателя в
рямоточном контуре. В обоих случаях использование атмосферного воз-
духа в качестве дополнительного компонента рабочего тела ракетного
двигателя существенно повышает его экономичность.
Наиболее трудными проблемами при создании РПД являются подбор топ-
ив с высокими энергетическими характеристиками и обеспечение надеж-
ого смешения продуктов сгорания с воздухом в пределах длины камеры
горания. Топливо для РПД выбирается таким образом, чтобы получить
достаточно высокий импульс двигателя, что достигается при устойчивом
роцессе дожигания в прямоточном контуре продуктов сгорания ракетного
двигателя (газогенератора). В РПД могут использоваться жидкие, твер-
дые и гибридные топлива. В соответствии с этим различают ракетно-
рямоточные двигатели жидкого топлива (РПДЖТ), ракетно-прямоточные
двигатели твердого топлива (РПДТТ) и ракетно-прямоточные двигатели
ибридного топлива (РПДГТ) (рис.7.46).
В РПДЖТ удается осуществить оптимальное регулирование состава сме-
и по траектории полета, обеспечивающее достижение максимальных зна-
ений удельного импульса на всех участках траектории. В то же время
еобходимость создания специальной системы подачи топлива, усложняю-
щей конструкцию двигательной установки, эксплуатационные трудности,
вязанные с использованием токсичных и криогенных компонентов жидкого
оплива, ограничивают использование РПДЖТ на ЛА. РПДГТ, и особенно
>ПДТТ, по экономичности уступают РПД ЖТ; ниже и возможности их регули-
ювания, Однако эти двигатели конструктивно более просты, более на-
дежны и допускают длительное хранение.
423
Рассмотренные типы двигателей не исчерпывают всего многообразия
типов воздушно-реактивных двигателей, которые могут быть использованы
в двигательных установках ЛА. Ориентировочные области применения раз-
личных ВРД по скорости и высоте полета показаны на рис.7.47. Наиболь-
шее распространение в настоящее время имеют ТРДД, применяются сверх-
звуковые ПВРД (СПВРД) и некоторые простейшие комбинированные двигате-
ли. Однако можно ожидать, что в перспективе типаж двигателей расши-
рится, могут появиться двигатели принципиально новых схем.
Рис. 7.46. Принципиальные
схемы РПД:
а - РПДЖТ; б - РПДТТ; 6 -
РПДГТ; / - воздухозабор-
ник; 2 — бак с окислите-
лем; 3 — бак с горючим; 4
— газогенератор жидкого
топлива; 5 — сопло газоге-
нератора; 6 — камера сме-
шения и сгорания; 7 — соп-
ло; 8 — газогенератор
твердого топлива; 9 — га-
зогенератор гибридного
топлива; 10 — насос; // —
бак жидкого компонента
Рис. 7.47. Ориентировочные области применения ВРД различных типов:
/ - вертолетные ГТД; 2 - ТВД; 3 - ТРД н ТРДД; 4 - РПД н СПВРД; 5 -
ГПВРД
424
Реактивные топлива. В качестве основного топлива для ВРД современ-
ых ЛА применяются углеводородные топлива, наиболее распространенным
редставителем которых является керосин. Новое поколение топлив пред-
олагает использование жидких синтетических углеводородов. Синтети-
еские топлива примерно на 15 % эффективнее керосина за счет более
ысокой плотности. Такие утяжеленные топлива готовят из определенных
<идких химических соединений, состоящих только из углерода и водоро-
а, с очень высоким отношением числа атомов углерода к числу атомов
одорода.
Основные требования к реактивному топливу следующие:
максимальная объемная теплота сгорания, обеспечивающая минимальный
бъем топливного бака и соответственно минимальную массу всего ЛА;
возможно низкая температура замерзания (ниже -54 С), чтобы топ-
иво выдерживало воздействие низких температур при длительном полете
а большой высоте;
высокая испаряемость, чтобы обеспечивать надежное воспламенение
ильно охлажденного топлива при запуске двигателя;
низкая вязкость, соответствующая высокой текучести и прокачиваемо-
ти топлива по магистралям при температуре ниже - 54 С;
высокая стабильность характеристик и чистота топлива на протяжении
ятилетнего срока хранения.
Для гиперзвуковых ЛА, а в будущем, возможно, и для сверхзвуковых и
озвуковых самолетов будут применяться криогенные топлива (жидкие во-
ород, метан), которые позволят получить повышенную дальность полета
примерно пропорциональную теплотворной способности топлива).
Использование водорода связано с определенными трудностями, так
ак температура его кипения не превышает - 253 С, а плотность сос-
авляет всего 0,086 плотности керосина. В то же время водород имеет
аиболыиие теплотворную способность и удельную теплоемкость, т.е. на-
больший хладоресурс. Эти качества позволяют рассматривать водород
ак одно из наиболее перспективных топлив для ЛА, требующих интенсив-
ого охлаждения конструкции в полете.
Топлива ракетно-прямоточных двигателей практически те же, что и
,ля ракетных двигателей. В качестве жидких топлив в РПД могут исполь-
оваться как однокомпонентные (окись этилена, гидразин и др.), так и
вухкомпонентные топлива (кислород + керосин, азотная кислота * керо-
ин и др.). Твердыми топливами РПД могут служить баллиститные пороха
основой на базе нитроклетчатки с нитроглицерином и смесевые топли-
а, представляющие собой механическую смесь минерального окислителя с
ысокомолекулярным органическим соединением на основе углеводорода.
425
Удельные параметры ВРД. Для сравнительной оценки ВРД на практике
широко пользуются относительными величинами, характеризующими техни-
ческий уровень двигателей. Эти величины (называемые удельными параме-
трами двигателя) делятся на три группы:
тяговые параметры - удельный импульс и коэффициент тяги;
параметры экономичности - удельные расход и импульс топлива;
параметры, характеризующие массу и объем двигателя.
Удельный импульс тяги ВРД (/ ) равен тяге, приходящейся на один
килограмм воздуха, проходящего через двигатель в единицу времени, и,
следовательно, определяется отношением тяги, развиваемой двигателем,
к секундному расходу воздуха:
/ = — . (7.101)
у Ш
в
Размерность удельного импульса тяги - Н*с/кг или м/с (1 Н =
2
= 1 кг-м/с ), т.е. удельный импульс тяги имеет размерность скорости.
Удельный импульс тяги - один из наиболее важных параметров ВРД.
Чем больше удельная тяга двигателя данного типа, тем большую абсолют-
ную тягу он будет иметь при заданных условиях полета, размерах и мас-
се двигательной установки.
Коэффициент тяги - это безразмерный коэффициент, представляющий
отношение лобовой тяги двигателя (т.е. тяги, которую можно получить с
2
1 м площади миделевого сечения двигателя) к скоростному напору набе-
гающего потока, т.е.
ср-Н4- • <71о2)
mid
Коэффициент тяги обычно используется для оценки ПВРД и РПД, приме-
няемых на ракетах. Если площади миделевых сечений двигателя и ракеты
равны, то коэффициент тяги Ср можно непосредственно сравнивать с ко-
эффициентом лобового сопротивления с*. При этом избыточная тяга, рас-
ходуемая на разгон и подъем ЛА, определяется разностью этих коэффици-
ентов:
ДР = Р - X = (cD - с )Fa. (7.103)
Р X mid
Удельный расход топлива двигателя определяется отношением се-
кундного или часового массового расхода топлива к тяге, развиваемой
двигателем:
426
с = т IP = q /I [кг/Н с]
у т ту
или (7.104)
с = 3600 q /I [кг/Н-ч],
У ту
где = шт/шв _ отношение секундных расходов топлива и воздуха в
двигателе.
Удельный импульс топлива ВРД - это параметр (аналогичный соответ-
ствующему параметру ракетных двигателей), характеризующийся тягой
двигателя, которая образуется при сжигании одного килограмма топлива
в секунду, т.е. является величиной, обратной удельному расходу топ-
лива:
/<т) = Р/т = Мс . (7.105)
У ту
Удельный вес двигателя определяется отношением веса двигателя к
его тяге на максимальном режиме работы двигателя на земле при нулевой
скорости полета:
р =gm /Р. (7.106)
дв дв 0
Для ПВРД относительный вес конструкции оценивают по лобовому весу,
т.е. весу конструкции, отнесенному к площадям миделевого сечения или
площади входного отверстия диффузора:
Р р = gm IF : р Р = gm IF . (7.107)
дв г дв mid дв г дв вх
7.6.2. Конструкции элементов двигательных установок
и их проектирование
Двигательная установка с ВРД включает в себя:
двигатель с агрегатами и системами (маслосистемой, противообледе-
нительной, охлаждения, контроля работы двигателя и др.);
входные и выходные устройства;
топливную систему;
средства установки и крепления двигателей.
Особенность двигательных установок с ВРД заключается в том, что
двигатель здесь конструктивно обособлен от ЛА. Он выполняется в каче-
стве самостоятельного агрегата, часто используемого на нескольких ти-
пах ЛА. Согласование характеристик ЛА и двигателя достигается за счет
входных и выходных устройств, топливной системы и системы управления
427
двигателем. Наиболее чувствительными к специфике ЛА являются воздухо-t
заборники, которые можно рассматривать не только как элементы двигав
тельной установки, но и как часть конструкции планера ЛА.
Входом устройства. Основными элементами входных устройств являют-
ся воздухозаборники и подводящие каналы. Воздухозаборники служат для
преобразования кинетической энергии набегающего потока в давление.
Подводящие каналы обеспечивают связь воздухозаборников с двигателем.
При дозвуковых скоростях полета повышение давления воздуха в трак-
те двигателя происходит в основном в компрессоре ВРД (приблизительно
в пять раз больше, чем в воздухозаборнике). По мере увеличения ско-
рости полета функции компрессора постепенно переходят к воздухозабор-
нику. При М = 1,2... 1,4 воздухозаборник и компрессор уже в одинако-
вой степени сжимают поток. При больших сверхзвуковых скоростях полета
(М > 3) роль компрессора становится уже несущественной, а степень
сжатия во входном устройстве достигает порядка 40:1, т.е. более целе-
сообразным становится воздушно-реактивный двигатель без компрессора
(ПВРД).
Процесс торможения потока во входном устройстве сопровождается
необратимыми потерями, определяющими качество воздушного тракта и
всей двигательной установки. Это качество характеризуется коэффициен-
том восстановления полного давления а , равным отношению давления
♦ вх
торможения на выходе из диффузора к давлению торможения в невоз-
мущенном потоке р^:
а = р* /р*И = —1 * Ц-1- mJ . (7.108)
вх вых п Ptf 2 п
где р^ и - давление и число М невозмущенного потока.
Чем больше необратимые потери энергии в процессе торможения, тем
меньше значение а^. Если кинетическая энергия набегающего потока те-
ряется полностью, то * = р^; если же потери кинетической энергии
отсутствуют, то р = р„ и о =1.
вых л t вх
Вторым важным параметром диффузора является коэффициент расхода
равный отношению площади сечения струи в невозмущенном потоке к
площади входного устройства:
Ф = (7.109)
428
Фактически этот коэффициент представляет собой отношение действитель-
ного расхода воздуха через двигательную установку к расходу, опреде-
ляемому по площади входного устройства и параметрам невозмущенного
потока.
Наконец, третьим параметром входного устройства является коэффици-
ент лобового сопротивления определяемый тремя составляющими:
сопротивлением диффузора, сопротивлением подводящих каналов с** и со-
противлением, обусловленным интерференцией воздухозаборника с плане-
ром с
Г Хшп
С = С + с * с
Хв. у Хвх Хк Хинт
(7.110)
Существует большое разнообразие конструктивных схем воздухозабор-
ников. Воздухозаборники подразделяются в зависимости от:
расчетной скорости полета - на дозвуковые и сверхзвуковые;
расположения воздухозаборника - на ЛА на лобовые и боковые;
режима работы - на регулируемые, нерегулируемые и убирающиеся.
Конструктивные схемы дозвукового и сверхзвукового воздухозаборни-
ков приведены на рис.7.48 и 7.49.
Проектирование воздухозаборника на этапе разработки конструкции
при выбранной общей схеме ЛА включает в себя решение двух групп за-
дач. Первая группа - определение параметров проточной части и вто-
рая - выбор конструктивной схемы и ее параметров. Поскольку вторая
группа задач мало отличается от задач проектирования корпусов ЛА, ог-
раничимся рассмотрением лишь специфики воздухозаборников.
Форма проточной части определяется скоростью воздушного потока. В
общем виде соответствующая связь описывается уравнением
W2H - 1) , (7.111)
где - число М полета на высоте Я; V и F - скорость потока и
площадь сечения проточной части по энергоизолированному тракту.
Поскольку назначение входных устройств состоит в преобразовании
кинетической энергии в потенциальную, такие устройства при любом зна-
чении скорости набегающего потока, очевидно, должны иметь отрицатель-
ное приращение скорости движения потока dV по каналу. Чтобы обеспе-
чить это условие, площадь проходного сечения канала диффузора должна
изменяться по определенному закону (рис.7.50). При этом профилирова-
429
ние канала должно обеспечивать безотрывное обтекание, что соответ-
ствует углу полураствора канала 0 < 4...5 (см.рис.7.51). Если канал
। к
имеет повброты и изгибы, то изменение площади поперечных сечений ка-
Рис. 7.48. Конструктивная схема дозвукового воздухозаборника:
/ — топливный бак; 2 — топливо; 3 — воздухозаборник; 4 — канал возду-
хозаборника ; 5 — трубопровод; 6 — редукционный клапан; 7 — эластичная
мембрана
Рис. 7.49. Конструктивная схема сверхзвукового воздухозаборника
430
ала должно быть плавным, а на последнем участке (перед двигателем)
сь канала должна совпадать с осью компрессора.
Профилирование внешних обводов воздухозаборника должно обеспечить
му минимальное лобовое сопротивление. Поэтому наружные обводы профи-
мруются независимо от внутренних. Особо ответственным элементом диф-
фузора является передняя кромка. Теоретические исследования этой зоны
ie очень надежны, поэтому на практике предпочитают пользоваться экс-
ериментальными данными.
Для дозвуковых воздухозаборников (рис.7.51), как показывают иссле-
дования, целесообразно принимать
г . = (0,04...0,05) 4F ;
mm вх
0 = 22 J1/F - 1 ,
ВХ ВХ
(7.112)
де V = V /V„ = 0,3...0,7 - относительная скорость воздуха на вхо-
вх вх п __
ie в воздухозаборник. Меньшие значения величины принимаются для
шинных каналов (чтобы иметь небольшие гидравлические потери), боль-
иие - для коротких каналов.
Значение площади входа F** определяют по заданному значению расхо-
да массы воздуха. Если тип двигателя известен, то приближенно диаметр
№. 7 <51. Схема дозвукового возду-
озаборника
431
входа можно определить как функцию диаметра двигателя по компрессору
D с помощью формулы
дв ________________
1 “ мн
D = 1.4D ------+ 1. (7.113)
вх дв । _ у- 2
вх
Параметры сверхзвуковых воздухозаборников существенно зависят от
способа организации торможения потока. В зависимости от положения
скачков уплотнения различают три типа воздухозаборников: внешнего,
внутреннего и смешанного сжатия. Если процесс торможения на расчетном
режиме осуществляется до входного сечения, то такой диффузор будет
диффузором внешнего сжатия, а если процесс торможения осуществляется
за входным сечением, то получим диффузор с внутренним сжатием. Если
сжатие осуществляется как до, так и за входным сечением, то будем
иметь диффузор смешанного сжатия.
Диффузоры внешнего сжатия по сравнению с диффузорами других типов
имеют несколько большее аэродинамическое сопротивление и меньший ко-
эффициент восстановления давления. Однако они проще в конструктивном
отношении, хорошо регулируются, не требуют сложной системы запуска,
обладают меньшими массами. Поэтому такие воздухозаборники нашли наи-
большее применение.
Воздухозаборники проектируются таким образом, чтобы скорость и
давление на выходе удовлетворяли требованиям того устройства, которое
находится за диффузором. Если за входным устройством располагается
турбокомпрессорный агрегат, то обычно принимают ~ 0,5; если же
за входом располагается камера сгорания прямоточного типа, то прини-
мают М ~ 0,3. Эти требования удовлетворяются соответствующим под-
бором геометрических параметров воздухозаборника, достигаемым с помо-
щью аэродинамического расчета входного устройства.
Конфигурация центрального те-
ла выбирается таким образом,
чтобы на расчетном режиме возду-
хозаборника косые скачки уплот-
нения фокусировались на передней
кромке обечайки (рис.7.52). Чис-
Рис. 7.52. Схема сверхзвукового
воздухозаборника (расчетный ре -
жим)
432
ло поверхностей сжатия должно обеспечивать получение максимального
коэффициента восстановления давления. Целесообразно, чтобы
V, -- v,", -- W = ••• = Wt (7114>
где - скорость невозмущенного потока; V. - скорость за t-м косым
скачком. Скорость потока перед прямым (замыкающим) скачком должна со-
ответствовать - 1,2.
Для учебного процесса можно рекомендовать следующие параметры для
сверхзвуковых воздухозаборников, работающих в диапазоне М =
= 2,5...3,5: 2
площадь входа (в м )
а рн(\ ♦ 0.2М2)3 I ’
д- вх п_____________ I 2оо
в.пр |0,|4У//7/
- приведенный расход воздуха через двигатель, кг/с;
-2 1/ П
вх
<7.115)
где М
в. пр
давление набегающего потока, даН/см^; - скорость невозмущенного
потока, м/с; - температура на высоте полета. К;
площадь горла
F = (0,3...0,33)F ; (7.116)
г вх
углы центрального тела
В = 11...15°; fl = fl = ... =8...10°;
1 Л о
5 = 8...10°.
(7.117)
Положение центрального тела относительно плоскости входа определя-
ется углами конуса Маха, соответствующими расчетному режиму работы
воздухозаборника.
Выходные устройства. На современных ЛА выходное устройство - это
сложный элемент двигательной установки, объединяющий реактивное сопло
и системы для его регулирования и охлаждения. Выходные устройства
предназначены для преобразования тепловой и потенциальной энергии га-
зов в кинетическую энергию вытекающей струи. Течение рабочего тела в
выходных устройствах из-за неоднородности структуры потока и многооб-
разия энергетических процессов трудно поддается аналитическому анали-
зу. Поэтому газодинамический расчет сопел и выбор параметров выходных
433
устройств проводится на основе экспериментальных данных. Анализ этих
вопросов выходит за рамки настоящего курса.
Дозвуковые выходные устройства применяют на ГТД для ЛА со скорос-
тями полета, соответствующими М < 2,0...2,5. Такое выходное устройст-
во (рис. 7.53) представляет собой канал, заканчивающийся сужающимся
нерегулируемым или регулируемым насадком. Режим работы выходного уст-
ройства определяется^соотношенрем располагаемого* и расчетного отноше-
ний давлений, т.е. я и я , где я = р /р„; р - давление
с. расп с. расч с ср п ср
торможения в выходном сечении сопла; р^ - давление окружающей среды.
Если я = я , то имеет место расчетный режим работы выход-
c. расп с. расч *
ного устройства, если же я * я , то режим истечения из
с. расп с. расч
сопла нерасчетный.
Дозвуковое сопло может работать на режимах с полным расширением и
с недорасширением. На режиме с полным расширением давление газа на
срезе сопла равно давлению в окружающей среде (р = ри); скорость на
ср If
срезе меньше скорости звука. Границей между первым и вторым режимами
является расчетный режим работы, для которого скорость исте^ния из
сопла равна скорости звука. На режиме с недорасширением (я >
* с. расп
> я ) давление на срезе больше давления окружающей среды, а ско-
с. расч
рость истечения равна скорости звука.
При работе выходного устройства в нерасчетном режиме снижаются ра-
сход рабочего тела, протекающего через сопло, и (или) скорость исте-
чения, следствием чего является уменьшение тяговой эффективности вы-
ходного устройства. Количественно тяговая эффективность оценивается с
помощью коэффициента тяги сопла, представляющего собой отношение дей-
Рис. 7.53. Выходные устройства ВРД:
в — обычное; б — с удлинительной трубой; в — с форсажной камерой; / -
обтекатель; 2 — выхлопная труба; 3 — реактивный насадок; 4 — удлини-
тельная труба; 5 — форсажная камера; 6 — регулируемое сопло
434
ствителыюй тяги сопла Р к идеальной Р , т.е. соответствующей
с. д с. нд
расчетным условиям и без учета потерь:
Р = Р /Р (7.118)
с с. д с. нд
Регулирование выходного устройства имеет целью уменьшить потери
тяги в сопле. Но при этом конструкция двигательной установки неизбеж-
но становится более сложной. Опыт показывает, что нерегулируемый на-
садок целесообразно применять на двигательных установках с высокона-
порным компрессором при отсутствии форсажной камеры для ЛА с числами
М полета до 1,7. Длина такого сопла обычно (0,2...0,4)©в, а =
= 10... 12° (см. рис.7.53).
При наличии форсажной камеры необходимо регулировать выходное се-
чение сужающегося насадка в широких пределах. В качестве регулируемо-
го насадка применяется устройство, образованное створками, укреплен-
ными на шарнирах, и управляемое гидравлической системой (см.
рис.7.53,в).
Выхлопная труба обычно бывает сварной, выполняется из листовой жа-
ропрочной стали и имеет два фланца, один из которых крепится к корпу-
су турбины. В ряде случаев наружные стенки выхлопной трубы защищаются
от перегрева с помощью специального теплоизоляционного покрытия.
Удлинительная труба имеет аналогичную конструкцию. Узлы крепления
удлинительной трубы к выхлопной должны допускать осевые и угловые
смещения. Возможные конструкции таких узлов приведены на рис.7.54. В
задней части удлинительная труба подвешивается при помощи роликов,
вращающихся на осях, прикрепленных к трубе. Тем самым обеспечивается
ее перемещение при нагреве вдоль направляющих, закрепленных в корпусе
ЛА или гондоле двигателя.
Возможные схемы компоновки выходных устройств показаны на
Рис. 7.54. Сферическое
(а) и фланцевое (б) сое*
динення удлинительной
трубы с выхлопной:
/ — кожух двигателя; 2 —
соединительный фланец;
3 — соединительное коль*
цо; 4 f — сферическое
кольцо
435
рис.7.55. Схема 7.55,а целесообразна для ЛА с дозвуковыми скоростями
полета и в случае, когда система привода створок имеет небольшую
строительную высоту. Вторая схема, применяемая для сверхзвуковых ЛА,
характеризуется более эффективным использованием энергии вытекающей
струи.
В обеих схемах предполагается охлаждение выхлопной трубы за счет
воздушного потока. Количество воздуха, потребное для охлаждения, обы-
чно составляет 2...3 % от расхода газа через сопловой насадок. Помимо
охлаждения конструкции вторичный поток полезен еще и тем, что умень-
шает донное сопротивление в плоскости среза кормы.
Сверхзвуковые выходные устройства характеризуются более полным ис-
пользованием энергии рабочего тела за счет организации сверхзвукового
истечения продуктов сгорания. Сверхзвуковое сопло представляет собой
комбинацию сужающегося и расширяющегося сопел. На входе в него ско-
рость потока дозвуковая, а на выходе - сверхзвуковая. Режим работы
сверхзвукового сопла, как и дозвукового, определяется значениями рас-
полагаемого и расчетного отношений давлений я и я . Однако
с. расп с.расч
в отличие от дозвукового сопла здесь возможен еще один режим работы -
перерасширение, когда я < я , а р < ри. Для нерегулируе-
с.расп с.расч ср П
мых сопел этот режим является основной причиной потерь тяги.
Регулирование сверхзвукового выходного устройства - очень непрос-
тая задача, поскольку требуется регулировка не только конической
сверхзвуковой части сопла, но и критического сечения. Одна из возмож-
ных конструктивных схем такого регулятора показана на рис.7.56.
Изменение площади критического сечения в этой конструкции достига-
ется с помощью центрального тела 2, положением которого управляет ре-
7.55. Компоновочные схемы выходных устройств с дозвуковыми соп-
Рис,
ламн
436
Рис. 7.56. Регулируемое сверх-
звуковое выходное устройство
гулятор /, отслеживающий давле-
ния на входе и выходе из сопла.
Коническая часть сопла регулиру-
ется створками 4, перемещаемыми
с помощью гидропривода 3, Недос-
татком схемы является трудность
охлаждения центрального тела и
конструктивная сложность выпол-
нения регулируемых элементов.
Устройства крепления двигателей на ЛА. При установке ВРД на ЛА
должны удовлетворяться следующие основные требования:
обеспечение удобства монтажа и демонтажа двигателей, а также лег-
кого доступа ко всем агрегатам в процессе технического осмотра и об-
служивания;
исключение возможности нагружения силовых элементов двигателя при
деформациях корпуса ЛА;
обеспечение температурной компенсации при нагреве двигателя и
(или) корпуса ЛА;
обеспечение поглощения вибраций двигателя.
Конструкции крепления двигателей, удовлетворяющие указанным требо-
ваниям, весьма разнообразны и зависят как от типа двигателей, так и
от их расположения на ЛА. При любых компоновочных схемах узлы крепле-
ния следует располагать в плоскости, перпендикулярной оси двигателя и
проходящей вблизи его центра масс, и разносить на максимально возмож-
ное расстояние. Фиксацию двигателя вдоль оси рекомендуется произво-
дить только в одной плоскости (перпендикулярной к оси двигателя), а в
поперечном направлении - только в одном из узлов, расположенных в
данной плоскости.
Конструктивная схема одного из вариантов крепления в корпусе ЛА
двигателя с центробежным компрессором приведена на рис.7.57.
В данной конструкции все узлы крепления расположены в одной плос-
кости, перпендикулярной оси двигателя. Ответные узлы расположены так-
же в одной плоскости - на силовом шпангоуте корпуса. В одном из узлов
крепления (/ или 2) двигатель зафиксирован, чтобы исключить перемеще-
ния в трех направлениях. Остальные узлы не препятствуют температурным
деформациям. Узлы / и 2 воспринимают тягу, нагрузки, действующие в
437
вертикальной плоскости, и моменты, действующие в горизонтальной плос-
кости. Моменты в вертикальной плоскости воспринимаются узлами /, 2,
3 и 4.
При наличии удлинительной трубы (или форсажной камеры) на ней ус-
танавливаются вспомогательные узлы, воспринимающие нагрузки от трубы,
но не препятствующие ее осевым перемещениям.
На рис.7.58 представлена схема крепления ВРД с осевым компрессо-
ром. Основные узлы крепления 1 и 2 расположены на силовом шпангоуте
корпуса в зоне среднего подшипника двигателя. Вспомогательные узлы
крепления 4 и 5 расположены в зоне переднего подшипника. В одном из
основных узлов двигатель зафиксирован, чтобы исключить какие бы то ни
было перемещения. Тяга передается боковыми узлами / и 2. Силы и мо-
4
компрессором в корпусе ЛА
Рис. 7.58. Схема крепления ВРД
с осевым компрессором в корпу-
се ЛА
438
менты, действующие в вертикальной плоскости, воспринимаются узлами /,
2 и 4. Моменты в горизонтальной воспринимаются узлами /, 2,
4 и 5. Балки б. 7. соединяющие пальцы 3 с узлами 4 и 5, при этом ра-
ботают на изгиб. Для распределения сосредоточенных в узлах нагрузок
по силовому шпангоуту и уменьшения местного изгиба введены стержни
8 и 9.
Раздел Ш.ПРИНЦИПЫ И МЕТОДЫ
ОБЕСПЕЧЕНИЯ НАДЕЖНОСТИ КОНСТРУКЦИЙ
Глава 8. ЭКСПЕРИМЕНТАЛЬНА МЕТОДЫ
КОНСТРУКТОРСКОЙ ОТРАБОТКИ
§ 8.1. СОДЕРЖАНИЕ ЭКСПЕРИМЕНТАЛЬНОЙ
ОТРАБОТКИ КОНСТРУКЦИЙ И ОСНОВНЫЕ ВИДЫ ИСПЫТАНИЙ ЛА
8.1.1. Задачи экспериментальных исследований
Проектирование конструкции ЛД базируется на специальных теоретиче-
ских и экспериментальных методах исследовании, на использовании обоб-
щений прошлого опыта и результатов экспериментов. Повышение эффектив-
ности ЛА неразрывно связано с поисКОМ и реализацией новых конструкти-
вно-технологических решений и, Как следствие, новых методов анализа
их работоспособности. Хотя сущесгВуЮщИе теоретические расчеты позво-
ляют получать достаточно надежнее результаты, тем не менее объем экс-
периментальных исследований по цере развития техники непрерывно рас-
ширяется. Чем сложнее новая техник тем больше неопределенности при
ее создании и случайностей при Эксплуатации. Если же учесть, что но-
вая техника не только сверхслоио^, но и очень дорогая, становится
понятным стремление конструкторских бюро минимизировать степень рис-
ка, учесть при создании новых ЛД самые разнообразные ситуации и труд-
ноформализуемые факторы, обычно оцениваемые лишь экспериментальным
путем.
Экспериментальные исследования бывают методического характера и
связанные с отработкой натурных конструкций. Методические испытания
проводят с целью проверки и уточнения новых теоретических зависимос-
тей, а также для проверки принципиально новых конструкций. Такие ис-
пытания обычно проводятся на модельных образцах. Модель изготавлива-
ется, как правило, в уменьшенном масштабе с соблюдением подобия на-
турной конструкции по основным параметрам. Конструктивные элементы,
несущественные для прочности, не воспроизводятся.
439
Эксперимент на моделях, хотя и уступает по точности натурному экс-
перименту, однако является исключительно информативным, так как прос-
тые и недорогие модели можно изготовить и испытать в нужном количест-
ве в течение небольшого промежутка времени. Широкомасштабный экспери-
мент на моделях позволяет проверить закономерности используемых тео-
рии, оценить надежность конструктивных элементов, провести проверку
нескольких конструктивных вариантов и выбрать наиболее рациональное
решение.
Методические испытания имеют важное общенаучное и познавательное
значение, которое заключается в проверке, практическом апробировании
и совершенствовании расчетных схем и методов, систематизации и обоб-
щении причин разрушений и другого статистического материала.
Испытания натурных конструкций и их узлов проводятся с целью опре-
деления минимального уровня несущей способности конструкции и под-
тверждения принятого при расчетах коэффициента безопасности, факти-
чески представляющего собой меру надежности конструкции.
Коэффициент безопасности, как известно, не поддается аналитическо-
му определению. Его значение зависит от требований по жесткости конс-
трукций (ограничения по перемещениям, отсутствия или допустимости ос-
таточных деформаций и др.), стабильности механических свойств матери-
ала, точности определения внешних нагрузок, степени новизны расчетной
схемы, технического уровня изделия и производства и ряда других фак-
торов. При проектировании коэффициент безопасности устанавливается
как некоторый нормативный запас прочности или рассчитывается по за-
данному уровню надежности ЛА. Снижение коэффициента безопасности яв-
ляется наиболее действенным способом уменьшения массы конструкции.
При этом надо учитывать, что уменьшение коэффициента безопасности
влечет за собой снижение надежности конструкции и, как показывает
статистика, при f = 1,25... 1,30 надежность силовой конструкции стано-
вится соизмеримой с надежностью остальных частей ЛА.
Проектирование ЛА и экспериментальная отработка его конструкции
происходят чаще всего параллельно. Если в процессе отработки достига-
ется нормативный уровень надежности составных частей, то переходят к
испытаниям ЛА в целом. Если же в процессе испытаний обнаруживаются
какие-либо отказы, то путем обработки имеющейся информации делается
попытка установить причину, вызвавшую появление отказа.
Основную информацию составляют измеренные напряжения и перемеще-
ния, а также характер разрушения конструкции. По этим данным проводи-
тся анализ работы конструкции, заново рассматриваются принятые ранее
расчетные схемы, допущения, и при существенном расхождении с экспери-
440
ентом вносится корректировка, направленная на устранение предполага-
мых или установленных причин появления отказов. При анализе резуль-
атов испытании необходимо особенно внимательно исследовать характер
истинные причины разрушения, так как часто один вид разрушения яв-
яется следствием другого. Ошибочность анализа может привести к не-
ерной тактике доработки конструкции, усложнению и удорожанию экспе-
имента.
Если причины появления отказов установлены правильно, то доработка
онструкции повышает ее надежность. Испытания продолжаются до тех
ор, пока не будет достигнут приемлемый или заданный (нормативный)
ровень надежности. Указанный процесс можно рассматривать как некото-
ую последовательность этапов отработки конструкции, на каждом из ко-
орых она выступает с различным уровнем надежности.
Для простых элементов конструкции, стоимость производства и испы-
аний которых невысока, достигнутый уровень надежности можно опреде-
ять после каждой доработки на основе испытаний достаточного числа
бразцов; затем по этим данным принимать решение о продолжении или
рекращении доработок. Однако для сложных, дорогостоящих конструкций
озникает проблема сокращения необходимого числа образцов для прове-
ения испытаний. Основой для решения этой задачи должны служить спе-
иально разработанные методы определения надежности по малому числу
спытаний с тем, чтобы при минимально возможном числе испытаний можно
ыло своевременно делать выводы о достигнутом уровне надежности и
боснованно подтверждать завершенность отработки.
Этап отработки условно может быть разделен на две стадии. Первая
тадия - конструкторская отработка - характеризуется интенсивными до-
аботками, связанными с изменениями конструктивно-технологических и
хемных решений с целью обеспечения заданного уровня надежности. Этой
тадии присуща ярко выраженная зависимость достигнутого уровня надеж-
ости от объема проведенных испытаний.
Вторая стадия - зачетные испытания. Они не дают подробной количе-
твенной оценки надежности, а устанавливают с некоторой доверительной
ероятностью лишь тот факт, что достигнутый уровень надежности конст-
укции не ниже некоторого значения. По данным этих испытаний делаются
кончательные выводы об эффективности проведенных доработок и оконча-
ии процесса отработки элементов конструкции.
Конструкторская отработка может быть автономной для каждой части
онструкции (основного элемента) или комплексной, когда отрабатывает-
я конструкция в целом без предварительной отработки ее основных эле-
1ентов. На практике оба способа иногда объединяют: вначале проводится
441
автономная отработка основных элементов до достижения определенного
уровня их надежности, а окончательная доработка и зачетные испытания
проводятся для конструкции в целом. Однако заметим, что даже в случае
автономной отработки каждый основной элемент (крыло, руль, отсек кор-
пуса и др.) может допускать некоторое множество возможных состояний,
поскольку обычно представляет собой сложную техническую систему. Поэ-
тому методический подход к оценке надежности и работоспособности как
для автономной, так и для комплексной отработки базируется на одних и
тех же моделях.
Развитие математического обеспечения экспериментальных исследова-
ний является исключительно актуальной задачей. В настоящее время ма-
тематическое и методическое обеспечение эксперимента явно недостаточ-
но, особенно в части надежности. А в ряде случаев надежность констру-
кции экспериментально не подтверждается вообще. Дело здесь не в том,
что унжальные ЛА изготавливаются малыми сериями и для них практичес-
ки невозможно поставить специальный эксперимент по проверке надежнос-
ти. Испытаний отдельных отсеков и агрегатов производится достаточное
число. Причина в том, что плохо планируется эксперимент, а результаты
эксперимента не обрабатываются должным образом.
Все испытания конструкций целесообразно использовать для оценки
надежности. Требуется повысить информативность эксперимента путем
учета при испытаниях не только факта отказа - неотказа элемента, но и
значений случайных величин, при которых произошел отказ. Обеспечение
надежности за счет чрезмерного увеличения коэффициента безопасности
(т.е. за счет массы конструкции) - это порочный путь; положение можно
исправить с помощью нормирования надежности с последующим подтвержде-
нием проектного значения коэффициента безопасности.
В качестве обобщения подчеркнем следующее. Исследование и обеспе-
чение надежности должны вестись на всех стадиях жизненного цикла ЛА.
Существует положение, согласно которому необходимая надежность закла-
дывается при проектировании, достигается путем экспериментальной
отработки, обеспечивается в процессе производства и поддерживается
при эксплуатации.
8.1.2. Основные виды
экспериментальной отработки конструкций
В ходе опытной отработки ЛА выполняется значительное число испыта-
ний, отличающихся задачами, объектами исследования и условиями (режи-
мами) проведения; различают два основных вида испытаний: наземные
(стендовые) и летные.
442
На этапе наземной отработки конструкцию ЛА испытывают в специаль-
ых лабораториях на действие статических и динамических нагрузок. При
том основными видами испытаний считаются:
статические испытания полноразмерных конструкций (натурных образ-
цов);
вибрационные (частотные) испытания;
теплопрочностные статические испытания ЛА;
аэротермоупругие испытания;
динамические (ударные) испытания отдельных агрегатов.
Кратко охарактеризуем перечисленные виды испытаний.
Статические испытания полноразмерных конструкций (натурных об-
эазцов) основными задачами имеют:
определение напряженно-деформированного состояния силовых элемен-
тов конструкции при действии внешних нагрузок и температур и сравне-
яие его с рассчитанным теоретически. Оценка НДС производится на ос-
тове измерения деформаций, линейных и угловых перемещений, температур
4 ряда других параметров;
определение несущей способности конструкции, т.е. максимальной
нагрузки, выдерживаемой ЛА при определенных условиях; конструкцию при
этом доводят до разрушения с фиксацией разрушающих нагрузок;
оценку рациональности конструкции с точки зрения прочности, жест-
кости и устойчивости.
При статических испытаниях нагрузку на конструкцию или увеличивают
ступенчато, или применяют плавное медленное нагружение. Испытанию мо-
гут подвергаться как отдельные элементы, так и целые агрегаты вплоть
до ЛА с имитацией всех нагрузок, действующих на него в полете.
Вибрационные (частотные) испытания проводят для того, чтобы оп-
ределить частоты и формы собственных колебаний и формы вынужденных
колебаний с целью последующего уточнения критических скоростей авто-
колебаний и устранения возможных резонансов. Испытания проводятся на
вибростендах или с помощью мощных вибраторов, устанавливаемых на из-
делия. Вибродатчики позволяют измерить параметры процесса колебаний,
установить природу возникновения резонансов. При необходимости по ре-
зультатам испытаний производится доработка конструкции (увеличивается
жесткость, изменяются конфигурация отдельных элементов и распределе-
ние масс в конструкции).
Теплопрочностные испытания проводятся с целью выявления вредного
влияния аэродинамического нагрева на несущую способность конструкции
ЛА. При этом, как правило, к испытываемому объекту прикладываются од-
новременно с нагревом статические или динамические внешние нагрузки.
443
Определяется сложное НДС объекта от действия такого комбинированного
нагружения. Иногда ограничиваются чисто тепловыми испытаниями, кото-
рые имеют целью определение температурных напряжений в элементах кон-
струкций, исследование коробления, изменения механических характерис-
тик конструкционных материалов, а также изучение явлений ползучести
при длительном воздействии повышенных температур.
Аэротермоупругие статические испытания, являясь частным случаем
теплопрочностных испытаний, позволяют решать очень важную задачу -
изучение влияния деформированного состояния на нагружение конструк-
ций, т.е. учет перераспределения нагрузок вследствие упругих деформа-
ций при совместном (или раздельном) действии внешних сил и темпера-
турного поля. Взаимосвязь между нагрузкой и деформацией, воспроизво-
димая специальными устройствами при эксперименте, устанавливается за-
ранее на основе той или иной аэродинамической теории.
Динамические (ударные) испытания имеют целью проверку прочности и
устойчивости элементов натурных конструкций при раздельном или совме-
стном приложении тепловых и силовых импульсов. Одновременно выявляет-
ся область опасных резонансных и самовозбуждающихся колебаний. На-
грузка на исследуемый объект при ударных испытаниях возрастает до
максимального значения за очень короткий промежуток времени (мгновен-
но), что является спецификой и основной трудностью такого экспе-
римента.
Летные испытания - наиболее полные и сложные натурные испытания
всего комплекса ЛА. В ходе летной отработки проверяют работоспособ-
ность комплекса в условиях полигона при подготовке ЛА к пуску, выпол-
нении пуска и в полете; вскрывают и устраняют причины отказов или не-
исправностей путем доработки конструкции, технологии производства и
эксплуатации составляющих элементов комплекса; оценивают степень со-
ответствия основных характеристик комплекса требованиям технического
задания. Круг задач, решаемых в летных испытаниях для исследования
работоспособности конструкции ЛА, весьма широк. Сюда входят: опреде-
ление нагрузок, действующих на конструкцию при основных режимах поле-
та; изучение НДС отдельных силовых частей конструкции; определение
общих деформаций конструкции; выяснение распределения температур по
элементам конструкции; определение параметров колебаний и др.
Для осуществления вышеперечисленных функций на борту ЛА устанавли-
вают большое число датчиков для измерения температуры, давления, пе-
регрузок, частот и амплитуд колебаний, линейных и угловых перемещений
и т.д., а также телеметрическую и записывающую аппаратуру. При теле-
метрических измерениях используется передача с борта ЛА на Землю ра-
444
диосигналов от датчиков. Современные методы исследований позволяют
регистрировать исключительно большой объем информации об особей юстях
нагружения и работы частей ЛА. Обработка и анализ этой информации
производятся на ЭВМ.
§ 8.2. МЕТОДЫ И ТЕХНИКА ВОСПРОИЗВЕДЕНИЯ НАГРУЗОК
Статическое нагружение. При статических прочностных испытаниях ЛА
распределенные поверхностные силы моделируются системой элементарных
сосредоточенных сил. При большом числе таких сил достаточно точно
воспроизводятся как общие, так и местные нагрузки на испытываемую
конструкцию. Для дозвуковых ЛА нагружение производится при помощи
специальных парусиновых лямок (рис.8.1).
При одновременном применении нагрузочных и нагревательных уст-
ройств. особенно для воспроизведения нестационарного теплового режи-
ма, число дискретных элементарных сил существенно ограничивается, по-
скольку устройства для их приложения к конструкции могут вызвать за-
метное искажение температурного поля, снижение прочности и жесткости,
стеснение деформации во время испытаний. Уменьшение числа сосредото-
ченных сил влечет за собой их возрастание; большие силы, в свою оче-
редь, из-за возможного местного разрушения конструкции опасно прикла-
дывать к элементам с низкими прочностью и изгибной жесткостью (обшив-
ка, стрингеры).
Поэтому в подобных случаях систему сосредоточенных сил целесооб-
разно выбирать только из условия равенства внутренних силовых факто-
ров (изгибающих, крутящих моментов и перерезывающих сил) во всех се-
чениях агрегата в полете и при эксперименте. Такому условию хорошо
удовлетворяет приложение сосредоточенных нагрузок лишь к жестким эле-
ментам каркаса (лонжеронам, шпангоутам, нервюрам) с помощью специаль-
ных устройств, изображенных на рис.
8.2. Так. например, эпюру М*3 в лонже-
роне крыла можно воспроизвести с точ-
ностью до 1 % с помощью всего лишь
5...6 сил [33]. Местную же прочность,
которая, естественно, при таком нагру-
Рис. 8.1. Нагружение обшивки с помощью
лямки:
/ — валик; 2 — пружинный зажим; 3 —
лямка; 4 — обшивка
445
жении не исследуется, можно проверить на отдельных отсеках, создав
внутри них (предварительно загерметизировав) или снаружи избыточное
давление.
Помимо отмеченного нагревание конструкции при испытаниях наклады-
вает и ряд других специфических требовании на методику нагружения и
измерения. Во-первых, режим нагружения конструкции эксплуатационными
силами во избежание появления деформаций ползучести по возможности
должен быть близким к режиму реального времени. Во-вторых, синхрон-
ность нагружения и нагрева в момент достижения нагрузкой максимально-
го значения должна быть тем выше, чем больше скорость нагревания ис-
пытываемой конструкции. Это обстоятельство подтверждается следующим
примером. При испытании дюралюминиевой конструкции, нагреваемой со
скоростью 10 К/с в диапазоне температур 500...600 К, погрешность
во времени приложения максимальной нагрузки в 1 с может привести к
погрешности в определении несущей способности порядка 5 %, т.е. не-
синхронность нагрева и нагружения, большая 1 с, недопустима. Из ска-
занного очевидно, что при тепловых статических испытаниях должна ис-
пользоваться автоматизированная система экспериментальных исследова-
ний с программным управлением.
При испытании отдельного агрегата ЛА ответственную роль играет
приспособление (переходник), на которое агрегат устанавливается и
закрепляется. Неправильный выбор материала (прежде всего по коэффици-
енту линейного расширения и характеристикам жесткости) приспособле-
ния, имитирующего смежную конструкцию при испытаниях, может стать
причиной возникновения больших температурных напряжений и недопусти-
мого нарушения НДС испытываемой конструкции.
Воспроизведение сосредоточенных инерционных сил от грузов и обору-
О'
1 2 3
Рис. 8.2. Устройство для нагружения теплонапряженных конструкций:
/ — шайба со сферической выемкой; 2 — сферическая гайка; 3 — стержень
446
дования, устанавливаемых на узлах крепления к силовым элементам кар-
каса, осуществляется путем замены их соответствующими макетами с эк-
вивалентными жесткостными и теплоемкостнымии харктеристиками.
Инерционные распределенные нагрузки от топлива и собственной массы
конструкции планера заменяются системой сосредоточенных элементарных
сил, которые с учетом их знака суммируются с сосредоточенными сила-
ми, имитирующими аэродинамические поверхностные силы, и прикладывают-
ся к шпангоутам, лонжеронам, нервюрам. Давление топлива на обшивку
при этом, конечно, не имитируется.
Нагружающие устройства. Число сосредоточенных сил, имитирующих
распределенную воздушную нагрузку, может быть весьма большим (исчис-
ляемым иногда сотнями). Поэтому индивидуальное управление и контроль
за каждой силой практически невозможны. Грамотно упростить и решить
задачу помогают рычажные системы нагружения, объединяющие большие
группы элементарных сосредоточенных сил и сводящие их к одной равно-
действующей силе Р . (рис.8.3).
При создании рычажной системы требуется учитывать тот факт, что
неправильно спроектированная ее конструкция может привести к ошибкам
в воспроизведении изгибающих и крутящих моментов. Дело в том, что при
деформации испытываемой конструкции (см. рис.8.3) рычаги поворачиваю-
тся в направлении действия моментов внешних сил, и в шарнирах возни-
кают моменты трения т^, которые противодействуют прикладываемым к
конструкции моментам. Поэтому при составлении программы испытаний из-
делия расчет рычажной системы представляет собой самостоятельную от-
447
Рис. 8.4. Схема стенда статического нагружения ЛА с применением инф-
ракрасных нагревателей:
/ — дисплей; 2 — контрольные приборы; 3 — пульт управления; 4 — сис-
тема автоматического управления нагружением; 5 - насосная станция;
6 — распределительное устройство; 7 — коллектор гидросистемы; 8 — ре-
дуктор давления; 9 — силовозбуднтель; 10 — динамометр; 11 — рычажная
448
ветственную задачу. В качестве рычагов обычно используются пакеты из
стандартных дюралюминиевых или стальных уголков и швеллеров.
Создание равнодействующих сил в рычажных системах осуществляется
гидравлическими, реже пневматическими, силовозбудителями. При поста-
новке тепловых испытаний монтаж рычажной системы всегда желательно
выполнять вне зоны нагрева.
Схема системы нагружения крыла ЛА при тепловых статических испыта-
ниях показана на рис.8.4.
Статическое аэроупругое нагружение. Применение тонких упругих
конструкций на больших сверхзвуковых скоростях полета связано со зна-
чительными деформациями их срединных поверхностей. Приращения местных
углов атаки, обусловленные этими деформациями, становятся соизмеримы-
ми с исходным углом атаки, вследствие чего происходит перераспределе-
ние нагружения несущей поверхности: при положительных углах атаки пе-
редние зоны догружаются, задние - разгружаются. Система нагрузка -
деформация становится неконсервативной, т.е. между нагрузкой и дефор-
мацией появилась обратная связь.
При моделировании аэроупругого нагружения в лабораторном экспери-
менте аэродинамическая распределенная нагрузка также заменяется сово-
купностью элементарных сосредоточенных сил, но при этом для каждой
1-Й
силы Р.
/упр
упругой конструкции должно быть учтено влияние местной
деформации той элементарной площадки AS.,
к которой эта сила при-
ложена.
Равнодействующая аэродинамических сил, создаваемых несущей поверх-
ностью, на практике часто считается заданной и постоянной (У =
= const). Для этого случая установлена следующая связь между нагруз-
кой и деформацией [6]:
Да.
р. = р. 1 + —
lynp 1ж а
(8.1)
система; 12 — инфракрасный нагреватель; 13 — испытываемое крыло; 14 —
датчик температуры или теплового потока; 15 — коммутатор тензодатчи-
ков; 16 — коммутатор датчиков температуры; 17 — регулятор электричес-
кой мощности; 18 — система управления нагревом; 19 — измерительное
устройство; 20 — устройство связи; 21 — автономный накопитель инфор-
мации; 22 — управляющий вычислительный комплекс
15 - 880
449
где Р. - сосредоточенная элементарная сила на х-й площадке упругой
конструкции; Р.* - то же на жесткой, недеформированной конструкции;
Да. - дополнительный угол атаки в х-й точке, обусловленный упругой
де<|)ормацией площадки AS.; а - угол атаки жесткой, недеформированной
конструкции.
При эксперименте задача статического аэроупругого нагружения в со-
ответствии с зависимостью (8.1), в том числе и при одновременном при-
менении нагревательной системы для воспроизведения температурного по-
ля, возлагается на автоматическое решающее устройство, связанное с
силовым приводом. Решающее устройство отслеживает фактические дефор-
мации и вырабатывает управляющий сигнал, а силовой привод воспроизво-
дит нагрузку, соответствующую измеренной деформации конструкции.
Импульсное нагружение. Воспроизведение в лабораторных условиях им-
пульсного воздействия на ЛА, имитирующего различные ударные волны, -
задача чрезвычайной сложности. В исследовательских целях возможно мо-
делирование условий, близких к реальным, только на образцах элементов
конструкций (панелях, оболочках и др.), например посредством импуль-
сов перепада давлений Ар.
Дело в том, что поведение образца целиком определяется перепадом
давлений на внешней и внутренней поверхностях, поэтому нет необходи-
мости создавать нагружение с наружной стороны, тем более, что такая
задача трудновыполнима с технической точки зрения, ибо требуется в
одном объеме объединять системы нагрева и нагружения. Значительно
удобнее получить перепад давлений Ар на образце созданием разрежения
на внутренней поверхности. Конечно, этот способ приемлем в случаях,
когда потребное значение Ар < 10 Па, что для большинства тонкостен-
ных авиационных конструкций обычно включает весь диапазон разрушающих
нагрузок.
Воспроизведение импульсного воздействия может производиться следу-
ющим образом. Испытываемый образец устанавливается на герметичную ка-
меру. Камера с помощью быстродействующего клапана соединена с емкос-
тью, в которой создается вакуум, а вторым клапаном - с атмосферой.
При открытии первого клапана начинается закритическое истечение газа
из камеры в емкость (баллон), и давление в камере быстро падает до
необходимого. Закрыв первый клапан и открыв второй, гораздо меньшего
проходного сечения, можно за желаемое время восстановить давление в
камере до атмосферного.
Создание первого клапана с большим проходным отверстием, который
можно было бы открыть и затем закрыть за сверхкороткое время (не бо-
450
. 8.5.’Схема стенда импульсного нагружения
451
лее 1 мс), исключительно сложно. Поэтому оказалась вполне приемлемой
система, у которой используются и закритическая, и докритическая вет-
ви истечения. Однако в этом случае для срабатывания системы надо от-
крыть только первый, основной клапан, а второй клапан заменить посто-
янно открытым отверстием, так как перетекание воздуха через него за
время действия максимального давления ничтожно мало.
Конструктивная схема системы импульсного нагружения (разработанная
Б. М. Клименко и Б. П. Румянцевым), использующая описанный принцип,
показана на рис.8.5. Система смонтирована на силовой раме 5. На каме-
ре 2 герметично установлен испытываемый образец /. Камера имеет два
отверстия 3 и 12; с помощью отверстия 3 она соединяется с вакуумируе-
мым баллоном 6, а отверстием 12 - с атмосферой. Проходное сечение по-
следнего может регулироваться вентилем 4, шкала которого градуирована
в секундах и показывает длительность спада давления.
Перед экспериментом отверстие 3 перекрывается мембраной 10, и из
баллона 6 вакуум-насосом откачивается воздух. При прорыве мембраны
кольцевым ножом //, приводимым в действие по команде быстродействую-
щим электропневмоклапаном через штуцера 9, в камере 2 под образцом /
практически мгновенно создается разрежение, которое имитирует перед-
ний фронт импульса давления. Одновременно начинается истечение возду-
ха из атмосферы в камеру через отверстие 12. Когда давления в камере
и баллоне сравняются, истечение через отверстие 12 прекращается, дав-
ление в камере поднимается, образуя спад давления. Максимальное время
разрежения в камере 2 зависит от предварительного разрежения в балло-
не 6. При помощи силовых гидроцилиндров 7 и 8 баллон 6 выводится из
контакта с камерой (см. пунктир) для установки мембраны 10, после че-
го он возвращается в рабочее положение.
§8.3. МОДЕЛИРОВАНИЕ АЭРОДИНАМИЧЕСКОГО НАГРЕВА
Аэродинамический нагрев вызывает многие явления и процессы, кото-
рые существенно снижают несущую способность и надежность конструкции
ЛА. Сюда относятся: снижение удельной прочности и жесткости конструк-
ционных материалов; появление ползучести, следствием которой являются
накопление остаточных деформаций и изменение НДС конструкции; короб-
ление конструкции; температурные напряжения и др.
Расчетным путем все эти явления можно оценить лишь приближенно.
Главная роль при этом отводится эксперименту. Нагревание конструкций
при исгытаниях предъявляет ряд дополнительных, специфических требова-
ний к существующим, традиционным требованиям и методам испытаний. Как
452
пература ^пот О') сравнивается с измеренной
ледствие усложняются технические средства эксперимента и методы мо-
делирования внешних условии. Особо сложной задачей является воспроиз-
едение нестационарных тепловых режимов конструкции, соответствующих
еальным полетным условиям. Рассмотрим основные составляющие этой за-
дачи.
Грающие условия моделирования. Удельный тепловой поток q^,
аккумулируемый конструкцией при неустановившемся полете ЛА в момент
времени т, определяется из уравнения теплового баланса:
- «Тг - TW} ~ “TW * <8-2>
де а - коэффициент теплоотдачи; Т- температура восстановления;
- температура поверхности; а - постоянная Стефана-Больцмана,
** —8 2 4
>авная 5,67*10 Вт/(м -К ); е - коэффициент излучения (степень
юрноты поверхности); q - удельный поток солнечной радиации (при
с
юлете в плотной атмосфере его можно не учитывать).
Распространение тепла внутри конструкции (температурное поле) оп-
ределяется процессом теплопроводности, а также начальными и граничны-
ми условиями. Основная сложность воспроизведения температурных полей
i натурной конструкции ЛА при испытаниях состоит в воспроизведении
/словий теплообмена на ее границах. В теории теплопроводности разли-
чают три рода граничных условий, когда на поверхности исследуемой
-конструкции могут быть заданы как функции координат и времени:
1) распределение температуры;
2) распределение плотности теплового потока чер^з каждый элемент
поверхности;
3) температура окружающей среды и коэффициент теплоотдачи.
В лабораторных условиях сравнительно просто можно воспроизвести
граничное условие 1-го рода, когда испытываемая конструкция нагрева-
ется по заранее составленной (рассчитанной) программе изменения тем-
пературы ее поверхности. Схема одного канала устройства, применяемого
при таком методе, показана на рис. 8.6. Программная (потребная) тем-
Г1Гизм(т) и3 испытываемом
образце, и по их разности вырабатывается сигнал для регулятора мощ-
ности нагревательного устройства; последнее изменяет количество под-
водимой теплоты к конструкции, приводя в соответствие и
^1Гизм^’ Недостатками метода являются:
453
погрешность расчета программы
Wr)
, обусловленная неточностью
методов определения температурных полей, которая полностью воспроиз-
водится при эксперименте;
при значительной теплоемкости
инерции имеет место ’’запаздывание”
конструкции вследствие тепловой
что затрудняет управле-
ние процессом нагревания;
для конструкций из композиционных материалов сложно измерить тем-
пературу поверхности;
в наборной конструкции при нестационарном режиме нагрева возникают
значительные местные неравномерности температуры по поверхности, ко-
торые сложно рассчитать и воспроизвести при эксперименте.
При использовании граничных условий 2-го рода точность воспроизве-
дения температурного поля в испытываемой конструкции может быть более
высокой. В этом случае плотность теплового потока q* аккумулируе-
мого конструкцией, определяется выражением (8.2), а плотность конвек-
тивного теплового потока из пограничного слоя к поверхности конструк-
ции - по формуле Ньютона
«а = “<Гг - W
(8.3)
В качестве регулируемого параметра здесь будет уже не температура
испытуемого объекта, а плотность теплового потока q^. Но в (8.3)
также входит приближенно определяемая величина =
= f(r), где Тфр - расчетная температура на поверхности; погреш-
ность ДГ^ - результат неточности расчета. Однако относительная погре-
шность вычисления плотности теплового потока Aq^ = ± - Г^)
нагреватель
Регулятор —о
мощности —о
Рис. 8.6. Схема системы управления температурным полем конструкции
454
(8.4)
удет_меньше относительной погрешности расчета температуры поверхнос-
и ДГ^ = ± ДГ^/(Г^ - Го> (Го - начальная температура поверхности),
ели
Tr ~TW
тГ---т~ > 1.
‘W ‘о
Следовательно, величина q^ будет рассчитана с большей точностью,
юм и потому управление процессом нагревания выгоднее вести по
Причем точность моделирования можно значительно повысить, если
юпользовать результаты непосредственного измерения температуры
[ля расчета с помощью цифровых или аналоговых ЭВМ в ходе экспе-
римента. Такая схема моделирования нагрева иллюстрируется на рис.8.7.
Значения ^изм^т) конструкции вводятся в счетно-решающее устройство,
де для задаваемых программой значений Т^т), а(т) и вычисляет-
:я величина q^t которая затем сравнивается с плотностью лучистых
ютоков q^ и измеряемых соответствующими датчиками в эксперимен-
те. В зависимости от значения и знака их разности регулируется режим
работы нагревателя.
>ис. 8.7. Схема системы управления процессом нагрева конструкции
455
Главным недостатком использования граничных условий 2-го рода
является отсутствие добротных (утвержденных ГОСТом) датчиков лучис-
того потока для измерения q^.
Самым совершенным и точным является метод моделирования аэродина-
мического нагрева при реализации граничных условий 3-го рода, когда
воспроизводятся температура окружающей среды и коэффициент теплоотда-
чи. Однако он может бытиь реализован только на основе конвективного
теплообмена путем создания искусственного воздушного потока, напри-
мер в аэродинамических трубах с предварительным подогревом воздуха.
При этом трудности возникают при измерении коэффициента теплоотдачи.
Способы нагревания испытываемых объектов. В зависимости от ха-
рактера температурного поля (стационарное, нестационарное, равномер-
ное или неравномерное и т.д.), воспроизводимого в конструкции при
экспериментальных исследованиях, возможны три способа нагревания:
нагрев внешними источниками; нагрев прямым пропусканием электротока
через конструкцию; индукционный нагрев. Нагрев внешними источниками,
в свою очередь, может осуществляться контактным или конвективным
способом и лучистым теплообменом между нагревателем и испытываемой
конструкцией.
В силу ряда причин контактный, индукционный, конвективный способы
нагрева и нагрев пропусканием электротока не могут обеспечить воспро-
изведение всего многообразия режимов нагрева различных ЛА. Поэтому
они находят ограниченное применение.
Воспроизведение температурных полей с помощью источников лучистой
энергии, работающих в диапазоне инфракрасного спектра длин волн, бла-
годаря универсальности и сравнительной простоте установок получило
наиболее широкое распространение при проведении тепловых статических
и динамических испытаний в нашей стране и за рубежом.
Однако необходимо помнить, что тепловые потоки, возникающие на по-
верхности ЛА вследствие аэродинамического нагрева в полете и подводи-
мые от инфракрасных нагревателей при лабораторных испытаниях, по сво-
ей физической природе различны. Первый, определяемый выражением
(8.3), подчиняется закону теплоотдачи вынужденной конвекцией, сильно
зависит от коэффициента теплоотдачи а и температуры и, следова-
тельно, на поверхности конструкции непостоянен: на участках с меньшей
температурой он больше, и наоборот. Плотность же теплового потока
q , создаваемого инфракрасными излучателями, определяется законом
л
лучистого теплообмена излучателя
456
q = (еаГ4)
Л изл
(8.5)
и от Тур испытываемой конструкции практически не зависит.
Если конструкция не имеет резких перепадов теплоемкостей, то q&
вдоль оси х (по хорде крыла или по длине корпуса) изменяется плавно.
Такую неравномерность можно воспроизвести с достаточной степенью точ-
ности, заменяя плавное изменение ступенчатым с помощью некоторого
числа зон автономного регулирования подводимой к нагревателям элект-
рической мощности (рис.8.8).
Сложнее воспроизвести местные неравномерности (перепады) тепловых
потоков в конструкциях с силовым набором. В подобных случаях на прак-
тике, часто пренебрегая перепадами плотностей теплового потока, вос-
производят постоянную плотность теплового потока в заданной зоне в
зависимости от измеряемой в эксперименте температуры (см.
рис.8.7) в некоторой характерной точке конструкции. В качестве такой
точки принимают точку обшивки, удаленную от силового набора, где
плотность теплового потока минимальна. Но при этом температура сило-
вых элементов будет ниже, чем в полете, т.е. возрастет перепад темпе-
ратур между обшивкой и набором. При выборе же контрольной точки на
силовых элементах или вблизи них возможен перегрев обшивки.
Принципиально возможно воспроизвести местные перепады плотностей
тепловых потоков, близкие к действительным, если нагрев производить
достаточно большим числом инфракрасных нагревателей, автономно регу-
лируемых по излучаемому тепловому потоку. С технической же точки зре-
ния эта задача трудно выполнима и, очевидно, нецелесообразна. Дело в
том, что наибольшую неравномерность вызывают массивные силовые элеме-
нты конструкции (лонжероны, мощные шпангоуты и др.). Но число таких
и это позволяет установить
управляемые по независимым про-
элементов в конструкции не очень велико,
над ними индивидуальные излучатели,
граммам.
Рис. 8.8. Схема зонного регулиро-
вания нагрева конструкции:
1...6 — зоны автономного регули-
рования мощности
457
Рис. 8.9. Стационарная уста*
новка инфракрасного излучения
для исследования работы отсеков
корпусов ЛА с зонным регулирова-
нием теплового потока:
/, 2, 3, 9 — автономно управляе-
мая нагревательная панель с зон-
ным регулированием теплового по-
тока: 4 - верхнее опорное коль-
цо: 5 — верхний узел подвески
нагревательных панелей: 6 — на-
ружная обшивка установки: 7 —
нижнее опорное кольцо: 8 — ниж-
ний узел подвески нагревательных
панелей: 10 — секции нагревате-
лей для отдельных зон нагрева
Инфракрасные нагреватели.
Они обладают следующими положи-
тельными свойствами: позволяют
управлять лучистым потоком по
времени; создают возможность
планируемого распределения плот-
ности теплового потока по по-
верхности испытываемого объекта; позволяют наблюдать за поведением
конструкции в процессе эксперимента, поскольку устанавливаются на не-
котором удалении от ее поверхности; могут применяться для нагрева
конструкций с различной формой поверхности, выполненных из разных
конструкционных материалов; создают лучистые потоки с большой поверх-
ностной плотностью.
В качестве источников инфракрасного излучения в нагревателях могут
быть использованы; трубчатые и ленточные излучатели из фольги метал-
лов, имеющих высокое электрическое сопротивление (хромоникелевые и
жаропрочные стали, молибден, вольфрам), силитовые и графитовые стерж-
ни, трубчатые кварцевые с вольфрамовой спиралью лампы, а также газо-
разрядные лампы. Выбор того или иного излучателя определяется харак-
тером теплового режима, воспроизводимого в эксперименте (стационар-
ный, нестационарный и т.д.), уровнем температуры поверхности испыты-
ваемой конструкции, удобством монтажа, эксплуатации, требованиями
техники безопасности и др.
458
Нагревательные устройства бывают следующие: стационарная установка
д конкретный тип конструкции (крыло, корпус и др.), когда излучате-
[ монтируются на едином силовом каркасе с общим или индивидуальными
ражателями (рефлекторами) лучистой энергии (рис.8.9); нагреватель-
блоки (модули), объединяющие небольшое число излучателей, из ко-
рых в дальнейшем могут создаваться универсальные нагревательные па-
ли различных конфигураций; индивидуальные нагреватели из одного из-
чателя с отражателем, позволяющие устанавливать их при эксперименте
особых местах конструкции и осуществлять индивидуальное управ-
ние.
Основными характеристиками инфракрасных нагревателей являются:
отность создаваемого ими падающего на испытываемый объект теплового
тока; степень неравномерности плотности создаваемого лучистого
тока; инерционность, определяемая теплоемкостью, рабочей температу-
й и степенью черноты поверхности излучателя; скорость нагрева; срок
ужбы.
Электроснабжение установок инфракрасного излучения осуществляется
источников постоянного или переменного тока регулируемой мощности,
качестве регулирующих систем используются: автотрансформаторы, ма-
<нные и магнитные преобразователи, ртутные выпрямители, игнитроны,
с. 8.10. Нагревательный стенд конвективного теплообмена
459
тиристорные преобразователи. Управление нагревом может осуществляться
вручную и автоматически.
Установки конвективного теплообмена. При воспроизведении ста-
ционарных тепловых режимов используются термокамеры, нагревание в ко-
торых производится конвективной теплоотдачей от горячего воздуха,
движущегося с невысокой скоростью (2...5 м/с), и лучеиспусканием от
нагретых стенок камеры. Для нагрева воздуха используются электричес-
кие воздухонагреватели. Возможная конструкция термокамеры прямоуголь-
ного сечения показана на рис.8.10.
Весьма эффективной установкой конвективного теплообмена является
дозвуковая аэродинамическая труба с предварительным подогревом пото-
ка. Моделирование условий полета по тепловому режиму в такой установ-
ке обеспечивается регулированием температуры и скорости потока возду-
ха по времени. Известны также сверхзвуковые аэродинамические трубы с
относительно большими габаритными размерами рабочих камер и рабочих
частей. Например, в научно-исследовательском центре в США гиперзвуко-
вая труба имеет диаметр рабочей камеры 7900 мм, диаметр ядра потока
2440 мм, максимальный диаметр испытываемой конструкции с острым нос-
ком равен 1020 мм, а с затупленным - 610 мм.
§8.4. МЕТОДЫ И ТЕХНИЧЕСКИЕ СРЕДСТВА ИЗМЕРЕНИЙ
В настоящее время в экспериментальной механике наиболее широкое
применение имеют датчики с преобразователями неэлектрических сигналов
в электрические. Они позволяют проводить измерения лишь в отдельных
точках исследуемого объекта, но широко используются и применительно к
натурному эксперименту, и при испытаниях масштабных моделей. Выходная
информация электрических датчиков, будучи удобной для последующего
преобразования (усиления, интегрирования), дистанционной передачи и
регистрации, дает возможность создавать современные измерительные
Рис. 8.11. Схема информационно-измерительной системы
460
комплексы с максимальной автоматизацией обработки результатов экспе-
римента.
Схема информационно-измерительной системы на основе электрических
средств измерений дана на рис.8.11.
Рассмотрим методы измерений различных параметров электрическими
датчиками.
Измерение температуры. Для измерения температуры при испытаниях
используются в основном термопары. В отдельных случаях применяются
терморезисторы, оптические, радиационные, цветовые пирометры и др.
Принцип действия термопары основан на возникновении термоЭДС в месте
соединения двух металлических проводников с различными физико-
механическими свойствами. ТермоЭДС зависит от материала термоэлектро-
дов (проводников) и температуры в месте их соприкосновения. На прак-
тике чаще всего применяются следующие термопары: хромель-алюмель
(максимальная температура Т = 1400 К - длительно; Т = 1600 К -
max max
кратковременно, погрешность измерения ± 1 %); хромель-копель (дли-
тельно Т = 900 К; кратковременно Т = 1100 К; погрешность
max max
± 1 %). Для измерения температур выше 1500 К можно использовать тер-
мопары с термоэлектродами из платины, вольфрама, молибдена и их спла-
вов. Термоэлектроды должны иметь контакт только в рабочем спае, а на
Рис. 8.12. Конструкция термопары:
а — типовая термопара; б — наклеиваемая термопара; / — испытываемая
конструкция; 2 — рабочий спай; 3 — термоэлектроды; 4 — дополнительное
крепление; 5 — внутренняя изоляция; 6 — внешняя изоляция; 7 — вывод-
ные провода; 8 — стеклоткань; 9 — накладка; 10 — связующее; 11 — диэ-
1
лектрическая подложка
461
остальной длине их необходимо изолировать друг от друга (рис.8.12,а).
Точность и надежность измерения, как показывает опыт, существенно за-
висят от способа и качества крепления термопар, выполняемого при по-
мощи конденсаторной или точечной электросварки, путем зачеканки или
приклейки. При массовом термометрировании натурных конструкций целе-
сообразно применять наклеиваемые термопары (рис.8.12,6).
Для исследования температурных полей по толщине неметаллических
материалов используются термометрические пробки, изготовленные из то-
го же материала, в которых на разных уровнях от поверхности нагрева в
высверленные отверстия устанавливаются термопары, после чего отверс-
тия заливаются связующим исследуемого неметалла. Готовая пробка на
том же связующем устанавливается в сделанное для нее отверстие.
Измерение плотности лучистых потоков. Для измерения плотности лу-
чистых потоков используются малоинерционные датчики, основанные на
измерении перепада температур на специальном элементе, одна часть ко-
торого охлаждается, а другая подвергается нагреву. Схема такого дат-
чика представлена на рис.8.13. Здесь в качестве чувствительного эле-
мента поставлен терморезистор из тонкой фольги или проволоки из спла-
ва Н50КЮ, наклеенной на термостойкую диэлектрическую основу в ваде
пленки из лака ВЛ-9 или конденсаторной бумаги. Терморезистор укрепля-
ется на охлаждаемом теплообменнике, что обеспечивает создание темпе;
ратурного перепада по толщине терморезистора, пропорционального плот-
ности падающего на него инфракрасного лучистого потока. Принцип дей-
а б
Рис. 8.13. Конструктивная (а) и электрическая (б) схемы датчика лучи-
стого потока:
/ — рабочий терморезистор: 2 — защитная слюдяная крышка: 3 — теплооб-
менник: 4 — компенсационный терморезистор: R — резистор измерительно-
го моста: U — источник питания
462
ствия терморезистора основан на свойстве материала изменять электри-
ческое сопротивление с изменением температуры.
Измерение нагрузок. Для замера усилий, передаваемых на конструкцию
при испытаниях, могут быть применены динамометры, непосредственно из-
меряющие силы, или датчики давления, измеряющие давление рабочего те-
ла в силовозбудителе. В настоящее время предпочтение отдается динамо-
метрам. Они подразделяются на пружинные, гидравлические и электри-
ческие.
Пружинный стрелочный динамометр с визуальным отсчетом показаний -
прибор, принцип действия которого основан на деформации пружины при
действии на нее нагрузки. По форме пружины они подразделяются на ди-
намометры с плоской и цилиндрической пружиной.
В гидравлических динамометрах силовое звено заполнено жидкостью.
Во время работы измеряемая сила преобразуется в гидростатическое дав-
ление, которое фиксируется по манометру или регистрируется самопишу-
щим прибором, установленным на расстоянии.
Электрические динамометры имеют встроенные в силовое звено упругие
чувствительные элементы с установленными на них тензорезисторами.
Тензорезисторы, соединенные в мостовую схему, преобразуют деформацию
упругого элемента в электрические сигналы. При этом измеряемые усилия
регистрируются посредством магнитоэлектрического осциллографа или са-
мопишущего гальванометра. Электрические динамометры в основном пред-
назначаются для дистанционного измерения усилий. Для обеспечения од-
новременно выдачи сигналов регистрирующему прибору и автомату нагру-
жения на упругом элементе установлено два тензометрических полумоста.
Измерение перемещений при теплопрочностных испытаниях производится
для получения информации о прогибах, углах закручивания, а также для
изучения коробления обшивки и силовых элементов. Достаточно успешно
подобные задачи решаются с помощью дистанционных датчиков линейных
перемещений и фотометрического метода измерения.
Создание универсального датчика с высокими точностью и надежностью
измерений в большом диапазоне перемещений (порядка 0...1000 мм) прин-
ципиально сложно. Поэтому широко применяемые дистанционные датчики
имеют границы измерений в более узких диапазонах. В датчиках линейно-
го перемещения с ходом до 200 мм в качестве преобразователя перемеще-
ния в электрический сигнал используется упругий элемент с наклеенным
на него тензорезистором (рис.8.14). В зависимости от измеряемого пе-
ремещения применяются механические преобразователи различных схем. В
датчиках с диапазоном измерения до 1000 мм ставятся проволочные рео-
статы. ’
463
Простым и надежным способом измерения больших перемещений при экс-
периментах в тепловых камерах и трубах является фотометрический ме-
тод. Для измерения угловых величин при статических испытаниях приме-
няются маятниковые угломеры и оптические квадранты.
Измерение деформаций. Исследование сложного напряженного состоя-
ния, в котором находится конструкция ЛА, сводится к измерению относи-
тельных деформаций по крайней мере по трем направлениям в дискретных
точках с последующим вычислением напряжений в этих точках конструк-
ции. Следовательно, в каждой такой точке должно устанавливаться мини-
мум три измерителя деформации. Число же точек измерения для авиацион-
ных конструкций может исчисляться несколькими тысячами штук, т.е. из-
мерение относительных деформаций носит массовый характер. В подобных
случаях наиболее надежными и широко применяемыми в экспериментальной
механике измерителями являются наклеиваемые на конструкцию тензоре-
зисторы, представляющие собой универсальные малогабаритные, с малой
массой устройства преобразования деформации твердых тел в электричес-
кий сигнал.
Тензорезисторы используются для измерения деформаций при нормаль-
ных и повышенных температурах (до 870 К). Основной характеристикой
тензорезистора является коэффициент тензочувствительности k^t пред-
ставляющий собой отношение изменения выходного сигнала А/?//? к вызвав-
шей его относительной деформации е, направленной вдоль оси тензоэле-
мента; k = (ДЯ//?)/е.
т
Тензорезистор состоит из тензочувствительной решетки, диэлектри-
ческой основы и выводных проводов. Его работа основана на изменении
Рис. 8.14. Схема электромеханического преобразователя датчиков линей-
ных перемещений:
а — с ходом до 10 мм; б — с ходом 50...200 мм; / — упругий элемент;
2 — тензорезистор; 3 — подвижный конус; 4 — возвратная пружина; 5 -
наклонная пластина
464
не. 8.15. Схема прово -
очного петлевого теизо -
взисгора:
— подложка; 2 — клеевой
лой; 3 — чувствительная
ешетка; 4 — выводы
лектрического сопротивления тензочувствителыюй решетки при ее де-
формировании вместе с испытуемой конструкцией. Для изготовления тен-
очувствительной решетки в основном применяется тонкая проволока диа-
(етром 10...25 мкм или фольга толщиной 2...5 мкм из константана или
келезохромоалюминиевого сплава 0Х21Ю5ФМ.
Проволочные тензорезисторы (рис.8.15) - наиболее распространенные.
)ни могут быть выполнены с многовитковой петлевой решеткой, с много-
итковой беспетлевой решеткой и одновитковыми. Кроме того, применяют-
я многоэлементные тензорезисторы (розетки). На рис.8.16 показаны три
арианта розеток - двухэлементная а, трехэлементная б и четырехэле-
«ентная в соответственно с углами расположения чувствительных элемен-
хж 45, 90 и 135°.
Фольговые тензорезисторы (рис.8.17) изготавливаются из константа-
>ис. 8.16. Схемы проволочных мно-
оэлементиых теизорезнсторов (ро-
етки)
>мс. 8.17. Схема тензорезистора с
фольговым чувствительным элементом:
f — чувствительная решетка; 2 —
выводы; 3 — подложка; 4 — клеевой
лой *
465
новой фольги фотолитографическим способом. Позволяют получить плот-
ность питающего тока в 3...4 раза большую, чем у проволочных тензоре-
зисторов и, следовательно, больший выходной сигнал. Обладают низкой
поперечной чувствительностью благодаря увеличению площади петель, вы-
сокой технологичностью изготовления и возможностью получения чувстви-
тельных элементов с очень малой базой (до 0,3 мм) практически любой
формы.
Полупроводниковые тензорезисторы в качестве чувствительного элеме-
нта имеют монокристаллический полупроводник толщиной 20...50 мкм, ши-
риной до 0,5 мм и длиной 2... 12 мм. Наиболее пригодными для изготов-
ления тензорезисторов признаны германий и кремний, используются и
другие элементы.
Высокий коэффициент тензочувствительности (примерно в 60 раз боль-
ше, чем у проволочных тензорезисторов) позволяет получать на выходе
мостовой схемы сигнал порядка нескольких вольт мощностью в сотни мил-
ливатт, что иногда исключает применение сложных и дорогих усилителей.
Полупроводниковые тензорезисторы применяются при измерении малых
деформаций, а также в преобразователях механических величин в качест-
ве чувствительных элементов.
§ 8.5. АВТОМАТИЗАЦИЯ ЭКСПЕРИМЕНТАЛЬНЫХ ИССЛЕДОВАНИЙ
Регистрация получаемой в эксперименте информации при больших ско-
ростях и объемах ее поступления, необходимость ее обработки не после
завершения, а в процессе эксперимента, потребность в накоплении и
хранении опытных данных, управление ходом эксперимента по заданной
программе (алгоритму) немыслимы без широкого привлечения современной
вычислительной техники. Добавим к этому: экспериментальные установки
и стенды, работающие совместно с ЭВМ, намного увеличивая диапазон
воспроизводимых явлений и процессов, обеспечивают обработку измери-
тельной информации в режиме реального времени. Применение ЭВМ в экс-
периментальных исследованиях, позволяя решать перечисленный круг про-
блем, определяет понятие автоматизация эксперимента.
В состав современного автоматизированного экспериментального ком-
плекса входят измерительная аппаратура эксперимента (см. § 8.4), вы-
числительные устройства и средства связи измерительной аппаратуры с
вычислительными устройствами.
Вычислительные устройства. В автоматизированных эксперимен-
тальных системах принципиально возможно использование ЭВМ любого типа
- от больших и средних ЭВМ до мини- и микромашин. Однако выбор машины
466
должен быть строго согласован прежде всего с теми функциями, которые
возлагаются на ЭВМ в эксперименте, с соответствием ее вычислительной
мощности сложности, объему программы испытаний и необходимой скорости
обработки информации в ходе измерений; нужно учитывать гибкость
взаимодействия ЭВМ с измерительной аппаратурой, эффективность исполь-
зования ЭВМ и, безусловно, ее стоимость.
На практике в качестве вычислительных и управляющих средств при
экспериментальной отработке конструкций ЛА в основном используют уни-
версальные мини- и микроЭВМ. Они обеспечивают должное взаимодействие
с внешними устройствами, в том числе и с измерительной аппаратурой
эксперимента. Наибольшее применение получили мини- и микроЭВМ с
единой системной магистралью ("общей шиной"), укомплектованные разным
базовым набором стандартных внешних устройств, системным программным
обеспечением, трансляторами с языков программирования различных уров-
ней. Все они программно совместимы от младших моделей к старшим, и,
что очень важно, для этих машин промышленностью выпускаются средства
сопряжения (связи) с измерительной аппаратурой.
Семейство мини-ЭВМ данного типа включает такие машины, как СМ-
1300, СМ-1302, СМ-4, Электроника 100/25, MERA-125, MERA-1300 (произ-
водство ПНР) и др. Группу микромашин представляют ЭВМ типа ДЗ-28,
Электроника-60, MERA-60, а также одноплатные машины Электроника МС
1201 01, МС1201 02, МС 121, в которых на одной монтажной плате выпол-
нены все основные элементы ЭВМ.
В последнее время ориентация ведется на применение специализиро-
ванных вычислительных устройств. По мнению специалистов, такие ЭВМ
экономичнее и надежнее универсальных машин.
Средства связи ЭВМ с измерительной аппаратурой. Взаимодействие
между измерительной аппаратурой и ЭВМ можно установить двумя путями:
1) с помощью стандартных устройств сопряжения, входящих непосред-
ственно в структуру мини- и микромашин; 2) на основе специализиро-
ванных устройств связи - так называемых интерфейсов. Под интерфейсом
понимают совокупность аппаратурных и программных средств, позволяющих
входящим в экспериментальную систему приборам принимать, понимать и
посылать информационные (приборозависимые) сообщения. Хорошо разрабо-
танный стандартный интерфейс в системе автоматизации, по существу,
играет ту же роль, что и системное обеспечение в универсальных ЭЦВМ.
В нашей стране и за рубежом наиболее распространенными являются
два типа стандартных интерфейсов с машино-независимыми магистралями
для программированных приборов: КАМАК и МЭК-625.
Главным достоинством системы КАМАК является то, что ее электронная
467
часть выполнена в виде отдельных функционально и конструктивно завер-
шенных устройств - модулей, что позволяет организовать самый разнооб-
разный обмен информацией между ЭВМ и измерительной аппаратурой. При-
чем число функциональных модулей может быть каким угодно (единицы,
десятки и даже сотни). Все механические конструкции КАМАК жестко нор-
мализованы.
Функциональные модули размешаются в специальном каркасе - крейте,
который имеет 25 ячеек для их установки. Две крайние правые ячейки
занимает контроллер крейта - специальный модуль, который управляет
работой функциональных модулей в крейте и организует обмен информа-
цией между модулями и ЭВМ. В самом крейте взаимодействие между конт-
роллером и модулями осуществляется по многолинейному (86 линий) ско-
ростному каналу связи - магистрали крейта - с раздельными шинами для
передачи команд, адресов, данных.
Использование в модулях КАМАК современной элементной базы дает
возможность иметь в них высокую функциональную плотность, что обеспе-
чивает организацию весьма сложных измерительных систем в рамках даже
одного крейта. Перечисленные особенности стандарта КАМАК определяют
область его рационального применения: это - сложные дорогостоящие
эксперименты, связанные с интенсивными высокоскоростными потоками ин-
формации больших объемов. При этом конструкция крейтов и модулей
КАМАК позволяет плотно скомпоновать значительное количество аппарату-
ры в малом объеме, обеспечивая небольшую протяженность коммуникаций.
Интерфейс МЭК-625 служит также для объединения на основе магист-
рального принципа различных стандартных измерительных приборов и
средств вычислительной техники. Он рассчитан на меньшую интенсивность
потоков информации, чем КАМАК, имея магистраль из 16 линий, но при
большей их протяженности. Здесь передача адресов, команд, данных осу-
ществляется по одним и тем же линиям с временным разделением и приме-
нением специальных кодовых модификаторов. Линии запросов общие; для
них применяется способ последовательного поиска источника информации.
Принципиальным преимуществом стандарта МЭК по сравнению со стан-
дартом КАМАК является отсутствие ограничений на механические кон-
струкции, способы построения и объединения в систему любых приборов,
отвечающих требованиям интерфейса. Стандарт МЭК определяет магист-
раль, по которой происходят обмен информацией, синхронизация и управ-
ление. Соединительная магистраль полностью пассивна, а все активные
цепи, позволяющие вырабатывать управляющие сигналы, передавать и вос-
принимать информацию, находятся на интерфейсных картах. Сочетание ак-
тивных цепей и магистрали собственно и образует интерфейс МЭК-625.
468
Глава 9. МЕТОДЫ НОРМИРОВАНИЯ
И ОБЕСПЕЧЕНИЯ НАДЕЖНОСТИ КОНСТРУКЦИИ ЛА
§9.1. НОРМИРОВАНИЕ НАДЕЖНОСТИ КОНСТРУКЦИЙ ЛА
9.1.1. Общая схема решения задачи
Нормирование и контроль надежности конструкции являются важнейшими
элементами обеспечения эффективности ЛА. По существу, они определяют
содержательную часть управления эффективностью, поскольку норматив
есть не что иное, как конкретизированная цель функционирования, кото-
рую нужно обеспечить. Подтверждение норматива является функцией конт-
роля. В практическом плане суть этой проблемы заключается в том, что
для каждой стадии жизненного цикла ЛА необходимо выбрать научно обос-
нованную совокупность показателей, характеризующих его эффективность,
затем для каждого показателя установить обоснованное значение (норма-
тив) и, наконец, выработать правила проверки соответствия фактических
значений показателей установленным проектным нормативам. Вначале рас-
смотрим проектный этап - задачу формирования норматива.
В общем случае, как показано в гл. 1, показатель эффективности ЛА
определяется показателем целевой надежности целевой производи-
тельностью W и целевой экономичностью W , т.е. W = {IF ; W ; W }. Для
п э н п э
автоматических ЛА основной составляющей технической (боевой) эффекти-
вности является показатель целевой надежности
W = kP Р Р , (9.1)
н г над ну усл
где k? - коэффициент боеготовности ЛА; - обобщающий показатель
надежности ЛА; Р^ - вероятность неуязвимости ЛА от средств противо-
действия противника; Р^ - условная вероятность поражения цели.
Показатель надежности конструкции Р^°” является одной из составля-
ющих Р . В свою очередь, Р*°н является комплексной характеристикой,
над над
обобщающей показатели надежности р. отдельных частей (отсеков) конст-
рукции. В соответствии с этим логическая цепочка взаимосвязи показа-
теля надежности конструкции с другими показателями эффективности
представляется в следующем виде:
469
W {W ,W ,W} {k. Р ; P ; P } —
и п » г над ну усл
ЦН = <9-2)
НоД •
где индекс / относится к основным составным частям ЛА (силовая
конструкция, двигательная установка, система управления и т.д.), а
индекс i - к составным частям (элементам) конструкции.
С точки зрения надежности элементом конструкции может быть любая
совокупность конструктивных частей, которой присуща некоторая общ-
ность при функционировании, что обычно отражается в расчетных моде-
лях. Например, топливный бак состоит из переднего днища, обечайки и
заднего днища. Каждая часть рассчитывается на прочность как одно це-
лое по соответствующим формулам с учетом своих действующих нагрузок и
своих расчетных случаев нагружения с определением своих наиболее наг-
руженных сечений. Исходя из этих соображений принимают, что бак сос-
тоит из трех конструктивных элементов: двух днищ и обечайки. При этом
тот факт, что каждая из этих частей может состоять из десятков элеме-
нтов, при анализе надежности обычно не учитывается.
Зависимости (9.1) и (9.2) дают общую трактовку надежности ЛА и ее
связь с другими составляющими эффективности. Для каждой составной
части ЛА показатели надежности имеют свое конкретное содержание. Так,
для одноразовых автоматических ЛА, как отмечалось в § 1.8, надежность
конструкции - это безотказность, т.е. свойство конструкции непрерывно
сохранять работоспособность в течение некоторого времени или некото-
рой наработки.
Для количественной оценки надежности применяют математические (фо-
рмальные) методы и методы, учитывающие физические причины отказов.
Для конструкций ЛА предпочтение отдается методам второй группы, в ко-
торой надежность рассматривается как вероятностная прочность. При
расчете вероятностной прочности учитываются: коэффициент безопаснос-
ти, т.е. фактически масса конструкционного материала, воспринимающего
действующие нагрузки; случайные величины - прочность материала, гео-
метрические параметры сортамента и внешние нагрузки; предельные слу-
чаи нагружения при эксплуатации конструкции; физические причины отка-
зов конструкции в предельных случаях нагружения; число конструктивных
элементов и зависимость между ними по надежности; технология изготов-
ления конструкции и условия ее эксплуатации.
Наибольшее влияние на надежность оказывает коэффициент безопаснос-
ти, определяемый для каждого конструктивного элемента в отдельности.
Значимость этого коэффициента усиливается тем, что при детерминиро-
470
ванных расчетах на прочность массу силового материала, по существу,
также определяет коэффициент безопасности. Выбирая в процессе проек-
тирования значение этого коэффициента, конструктор тем самым устанав-
ливает определенный уровень надежности. Исследуем, каким должен быть
этот уровень для каждого конструктивного элемента.
Первая задача, которая стоит на пути, - это формализация структуры
конструкции ЛА, т.е. определение конструктивных элементов и зависимо-
сти между ними по надежности. Если элементы конструкции полагать не-
зависимыми, то
/*** = Пр.. (9.3)
над (. I
В действительности же, вследствие статической неопределимости силовых
схем, элементы конструкции по прочности и надежности обычно зависимы.
Для таких структур строгих формул для определения показателей
надежности не существует. Приближенно надежность в этом случае может
быть оценена через коэффициент корреляции (взаимосвязи) по надежности
основных элементов г(0 < г < 1):
J*0" = Пр. * г(р - Пр.), (9.4)
над i I ♦ . I
где р. - показатель надежности /-го конструктивного элемента: р* -
показатель надежности наименее надежного элемента.
Нормирование надежности следует рассматривать как задачу много-
уровневой оптимизации, основные уровни которой соответствуют логичес-
кой модели (9.2). Оптимизация начинается сверху. На самом верхнем
уровне показатель эффективности W выбирается на основе технико-
экономического анализа альтернативных вариантов проектов системы пу-
тем соизмерения технического уровня и эффективности системы (напри-
мер, по схеме, показанной на рис. 1.2).
Для каждого следующего уровня задача нормирования состоит в рас-
пределении заданной эффективности (надежности) между основными эле-
ментами данного уровня. Эго значит, что на этапе разработки конструк-
ции ЛА показатель общей надежности принимается равным норматив-
ной величине и требуется выбрать такую комбинацию значений пока-
„ (н) rJCOH .
зателей надежности конструктивных элементов р^ , при которой Р^ >
> и одновременно достигается минимум критерия G, отражающего
затраты на достижение требуемого уровня надежности .
471
Заметим, однако, что в некоторых частных случаях возможны более
простые постановки задачи. Так, в случае полной взаимозависимости от-
казов конструктивных элементов (т.е. при г = 1) из (9.4) следует, что
нормативное значение комплексного показателя надежности полностью оп-
(н)
ределяется нормативным значением показателя надежности наиме-
нее надежного конструктивного элемента. Очевидно, что в этом случае
нормирование надежности сводится к выявлению наименее надежного эле-
мента и определению конструктивных решении, обеспечивающих значение
показателя его надежности, равное требуемому значению комплексного
d(h)
показателя Р
В том случае, когда отказы конструктивных элементов можно считать
независимыми (г = 0), соотношения (9.3) и (9.4) совпадают, и задача
нормирования показателей р. сводится к задаче математического про-
граммирования:
G(p.) -> min;
пр. = р(и); (9.5)
i 1
0 < Р. < 1.
где G(p.) - целевая функция, минимальное значение которой при ука-
занных ограничениях определяет оптимальные (т.е. нормативные) значе-
(н)
ния р. .
В общем случае, когда имеет место частичная зависимость между кон-
структивными элементами (0 < г < 1), задача нормирования показателей
надежности может быть решена следующим образом. Сначала решается воп-
рос о возможном уровне надежности наименее надежного элемента. Оче-
видно, что этот уровень должен быть выше нормативного значения комп-
п(н) (н) ч
лексного показателя Р , т.е. должно выполняться условие р >
к п(н) тт (н)
> Р . Далее, предположив значение рф известным и приняв, как и
ранее, Р*°н = Р'п , формулу (9.4) можно представить в виде
р(н) _гр(н)
"Р, = —* = Р™. (9.6)
<
472
d(h)
де гф может рассматриваться в качестве такого же норматива, как и
комплексный показатель надежности . Тогда задача по определению
(и) ,
юрмативных значении р. дуя рассматриваемого случая формулируется
«алогично (9.5):
G(p.) -> min;
Пр. = Р^Н>; (9.7)
i
рм у ры. 0 < < L
По математической сути модели (9.5) и (9.7) идентичны, что означа-
ет то, что общая задача нормирования показателей надежности конструк-
ивных элементов сведена к случаю независимых отказов, для которого в
классической теории надежности математический аппарат нормирования
достаточно хорошо разработан. Такое обобщение задачи достигается за
d(h)
:чет перехода от заданного нормативного комплексного показателя Р
с условному показателю Рфн\ рассчитываемому по формуле (9.6), и вво-
ia дополнительного ограничения в модель (9.7).
Для практического решения задачи (9.7) помимо норматива Р'
юобходимо знать коэффициент г и иметь аналитическую зависимость
?(рр. В классической теории надежности в качестве основополагающей
тринимается гипотеза о независимости отказов элементов. На практике
ке трудно найти такую систему, для которой эта гипотеза не вызывала
>ы сомнений. Принятие этой гипотезы как аксиомы вряд ли себя
итравдывает. В том случае, когда нет оснований принимать г = 0 или
= 1 и нет информации для определения действительного значения г,
юлее целесообразно принимать г = 0,5 и задачу нормирования решать в
юстановке (9.7).
В отношении функции G(p.) могут быть выдвинуты следующие допу-
цения.
Во-первых, при фиксированном начальном значеню^ показателя
идежности /-го элемента в интервале значений (р? р\ ) функция
7(р.) является неубывающей дифференцируемой функцией, удовлетворяющей
условию
473
G(p., p'.M) ♦ с(р;.(и). pJH)) = G(p., ₽JH>)
(9.8)
, (h) . (h)
при всех p . < p. .
* 1 (h)
Во-вторых, числовые значения функции в интервале (р., р. )
удовлетворяют условиям
G(p.) > 0 при р. < //.н>;
( \ 0.9)
G(p.) = 0 при р. > p;.н,.
В-третьих, критерии системы G (т.е. затраты на повышение надежнос-
ти конструкции с уровня Р до уровня Р ) удовлетворяет равенству
G(P, Р(и)) = 2 G(p., pjH>). (9.10)
При сделанных выше допущениях для решения задачи (9.7) может быть
использован метод неопределенных множителей Лагранжа, применение
которого приводит к следующей системе уравнений:
dG(pp
а_(">
Эр<
(9.11)
Пр(н) = р<"> = j N
где X - неопределенный множитель Лагранжа.
Аппроксимировав функцию G(p.) в интервале (р., р. ') прямой ли-
нией, получим
3G(p.)
0,= -----ГГ- (912)
Тогда искомые нормативные значения показателей надежности конструк-
тивных элементов определятся по формуле
474
р("> = a (9.13)
где _________
b. = М П 0. . (9.14)
‘ /=1 1
Коэффициенты 0. линейной аппроксимации G(p.) могут быть определены
на основе опыта разработки аналогичных элементов существующих ЛА.
9.1.2. Нормирование надежности конструктнвшх элементов
на основе зависимости надежность - масса
Наиболее распространенным критерием при оптимизации показателей
надежности так же, как и при оптимизации других проектных параметров,
является масса конструкции. Иногда в качестве критерия используется
стоимость конструкции. Расчеты показывают, что оба критерия в боль-
шинстве случаев дают близкие результаты, но расчет по массовому кри-
терию проще, а результаты более достоверные.
Чтобы сформировать целевую функцию, как указывалось выше, нужно
установить зависимость между показателем надежности и критерием. На
практике для этих целей используют рабочие гипотезы, основанные на
общих соображениях, расчетах и данных статистики. Увеличение показа-
теля надежности конструкции, как правило, приводит к увеличению ее
массы. Показатель надежности конструктивного элемента (отсека), рав-
ный единице, достигается при массе отсека, равной бесконечности. При
уменьшении показателя надежности масса отсека уменьшается, и при по-
казателе надежности, равном нулю, масса отсека близка к нулю. Эти об-
щие соображения подтверждаются расчетами и экспериментом. Зависимость
между показателем надежности конструкции Р и массой т при Р > 0,5
приближенно может быть представлена в виде [20]
m = k(l-P)~a. (9.15)
Здесь неизвестными величинами являются коэффициенты k и а. Чтобы
найти их, следует определить массу отсека при двух значениях показа-
теля надежности. Пусть
mj = *(1 - РрЛ т2 = *(1 - Р2)Л (9.16)
475
Отсюда
СТ1 т2
(1 - Pj)-® (1 - Pj*
(9.17)
Чтобы найти а, разделим на и прологарифмируем отношение:
(9.18)
Откуда
lg(m1/m2)
Л = ~ lg[(l - Р, >/<1 -Р2)] ‘
(9.19)
Если такие расчеты не могут быть выполнены априорно, можно для
очень приближенных расчетов принять k = 0,67 mQ, а - 0,01, где mQ -
масса конструкции при коэффициенте безопасности - 1,5.
Учитывая, что масса конструкции примерно пропорциональна коэффици-
енту безопасности, т.е.
т = р- f. (9.20)
Т0
(9.15) можно записать
f = f~r- т = *(1 - = *.(1 - Р)Л (9.21)
m0 m0 f
(н)
При оптимальном значении показателя надежности Р очевидно, что
f* = yi - Р(н)Г°. (9.22)
•
Изложенный метод нормирования надежности и приведенные функцио-
нальные связи между надежностью и массой конструкции проиллюстрируем
на примере [20].
Рассматривается одноступенчатый ЛА. В целях простоты вычислений
предполагается, что конструкция ЛА состоит из трех отсеков: приборно-
476
го, крыльевого с топливными баками и хвостового с двигателем. Показа-
тель надежности определен на более высоком уровне проектирова-
ния. Требуется распределить Р между отсеками так, чтобы получить
при этом минимальную массу общей конструкции.
Хотя из общих соображений и очевидно, что указанные отсеки зависи-
мы между собой по надежности, но на этапе предварительной проработки
конструкции допустимо считать, что г = 0. Тогда
₽<и) = Wv (923)
1 л» о
Здесь и далее индекс ”Г соответствует приборному отсеку; ”2” -
крыльевому; ”3” - хвостовому.
Зависимости между массами отсеков и показателями надежности в
соответствии с (9.15) имеют вид
т1 = *1° р|)_а1:
т2 = *2П " Р2^2; 0.24)
m, = kAl - рГ*з.
О О «э
В первом приближении коэффициенты k. можно определять из соотно-
шения
- "Л,- »•»
где - коэффициент безопасности, принятый при расчете конструкции
Z-го отсека на прочность; т$. - масса конструкции отсека, соответ-
ствующая принятому коэффициенту безопасности
Значения показателей а. определяют из статистики или из расчетов
по формулам, аналогичным (9.19). Приближенно а = а = а = 0,01.
Задача формулируется следующим образом. Определить значения пара-
(н) (н) (н)
метров надежности отсеков р . р и р , обеспечивающие минимум
I Z *5
массы конструкции т = т * т* т при условии, что зависимость между
I о
массами инструкций отсеков и показателями надежности определяется
соотношениями (9.24).
477
Решение этой задачи методом неопределенных множителей Лагранжа в
соответствии с (9.11) приводит к следующей системе уравнений:
= 0:
k а (1 - р TV1 - Хрр = 0:
£ £ £ 1 О
k.a (1 - /> )^3“‘ - \р р = 0; (9.26)
О О О 1 4»
Р.Р,Р3 = ₽(н)‘
Исключив из уравнений X путем деления первого уравнения системы на
второе, а затем первого уравнения - на третье и приняв а. = 0,01, по-
лучим систему нелинейных уравнений
. /1 Л.01 . Z1 Л,01 л
~P2k2{i ~р1} =0:
рД(1 -р/'01 - РАД1 -рУ ’01 = 0: (9.27)
11 О О О 1
7Л - рМ ‘ °’
решение которой дает оптимальные (нормативные) значения р. и,
следовательно, позволяет найти оптимальные значения массы каждого
отсека (по формулам 9.24).
По нормативным значениям показателей надежности конструкции отсе-
ков определяются оптимальные коэффициенты безопасности:
С* =
/2* = W1 ~Р2^2; (928)
= kf^ - p!"^3.
«5 /О О
При этом коэффициенты kf. определяются по статистике или из пред-
'* f
• о
картельного расчета. В первом приближении, учитывая, что k. = — k,
' mo
k = 0,67/n^, = 1,5, можно принимать k^. = 1,0.
478
с. 9.1. Характер зависимостей
и) п(н)
от г
Характер итоговых зависимое-
(и) п(н)
и р. от Р , получаемых из
авнений (9.27), показан на
с.9.1. Приведенные зависимос-
соответствуют следующим ис-
цным данным [20]:
/л = 0,376 т; /л л = 2,622 т;
01 02
тп = 0,360 т;
03
а1 = а2 = % = °>01: ki = °’67т0Г
kfl = kf2 = kf3 = 1,L
§ 9.2. ОБЕСПЕЧЕНИЕ НАДЕЖНОСТИ КОНСТРУКЦИИ ЛА
В ПРОЦЕССЕ ОТРАБОТКИ
9.2.1. Содержание задачи
Летательный аппарат проектируется при наличии значительной неопре-
ленности относительно ожидаемых внешних условий и нагрузок, возни-
юших в процессе его применения, а также относительно применяемых
ггериалов и технологических процессов, характеристики которых неиз-
жно имеют случайную составляющую. Могут иметь место и конструктив-
ie ошибки и недоработки. В результате опытные образцы не лишены не-
статков и до внедрения в серийное производство требуют отработки. В
щем случае конструкторская отработка может проводиться по следующим
ум схемам.
1. Выделяются п образцов системы, которые проходят цикл испытаний
з доработок. По результатам испытаний определяются характеристики
дежности системы и производится проверка выполнения требований по
дежности. Если требования не выполняются, то проводится доработка
стемы, изготавливается новая партия модифицированных систем и их
пытания повторяются.
479
2. Число образцов системы, подлежащих испытаниям на одном цикле,
заранее не определяется. Испытания без доработки системы проводятся
на одном образце и продолжаются до наблюдения первого отказа. По ре-
зультатам испытании, определяются характеристики надежности и обосно-
вывается решение о продолжении или прекращении процесса отработки. В
случае продолжения испытании цикл повторяется.
Расчеты и практика конструкторской отработки показывают, что вто-
рая схема более приемлема. Здесь меньше потребное число образцов, так
как информация по каждому отказу используется для доработки конструк-
ции, в то время как в первом случае доработка системы проводится по
данным всех отказов, имевших место во всей партии.
Аналитическое описание процесса конструкторской отработки предста-
вляет собой довольно сложную стохастическую задачу. Заинтересованный
читатель общее решение этой задачи может найти в работе [35]. Учиты-
вая то, что определение характеристик надежности на основе общих за-
висимостей сопровождается большим объемом вычислений, на практике
обычно используют приближенные методы расчета. Соответствующие зави-
симости для расчета характеристик надежности в процессе конструкторс-
кой отработки определяют некоторую зону возможных результатов. Грани-
цы этой зоны описываются следующим образом:
верхняя границ а -
Р. < Р - (Р - Рл)[а - (1 - а)Рл]1-, (9.29)
I оо оо О О
нижняя границ а -
(Р - Р.) - Р (1 - Р)ехр[(1 - а)(1 - Р И]
р > _22________2_____22______2___________________00 (9 30)
t (Р - Р) - ( 1 —Р)ехр[(1 -а)(1 -Р )<] ’
оо 0 0 оо
где Р. - уровень надежности после i-го испытания; - уровень надеж-
ности системы до доработки; Р°° - предельный уровень надежности, кото-
рый может быть достигнут в процессе отработки (в общем случае этот
d(h)
уровень может отличаться от нормативного значения Р вследствие не-
полного соответствия проектных и экспериментальных условий); а - экс-
периментальный коэффициент, лежащий в диапазоне (0,1), учитывающий
информативность отказов и эффективность проведения доработок.
С учетом, что 0 < а < 1, из выражений (9.29) и (9.30) следует, что
при i = 0 и i = оо верхний и нижний пределы совпадают и равны соответ-
ственно и Р°°. Характер зависимости Р^ = P.(i), описываемой нера-
480
Рис. 9.2. Границы показателей надежности:
/ — верхняя; 2 — нижняя
венствами (9.29) и (9.30) при PQ = 0,
Р°° = 0,95 и а = 0,75, показан на рис.9.2.
Из рисунка следует, что пределы доста-
точно быстро сходятся. Это определяет
практическую ценность приведенных нера-
венств для оперативного прогнозирования
характеристик надежности систем в процессе
называет, что процесс отработки ряда систем
ми значениями параметров надежности:
испытаний. Статистика по-
характеризуется следуюши-
Рл = 0,05...0,3; Р = 0,90...0,99; а = 0,70...0,95.
0 оо
Наиболее существенным параметром модели, определяющим скорость
роста параметров надежности, является коэффициент а. Уменьшение этого
параметра в определенном диапазоне способствует сокращению числа об-
разцов системы, необходимых для проведения ее конструкторской отра-
ботки.
Сопоставление экспериментальных данных по надежности систем с ре-
зультатами расчетов надежности по проектным материалам показывает,
что для конструктивно отработанных систем характеристики надежности,
полученные по результатам эксплуатации, достаточно хорошо согласуются
с проектными характеристиками надежности. При этом наблюдается при-
мерное равенство значения Р^ с проектной характеристикой Р'
9.2.2. Определение необходимого числа образцов
для отработки конструкции
Достигаемый уровень надежности конструкции и ее элементов в про-
цессе отработки существенным образом зависит от параметров и числа
проводимых доработок. Если до проведения или в процессе испытаний оп-
ределены исходные параметры Р& Р°° и а, то по их значениям может быть
определено число образцов, необходимое для достижения заданного уров-
ня надежности.
Наиболее простой путь определения исходных данных основывается на
исследовании статистических данных с помощью метода наименьших квад-
ратов. В этом случае для нахождения параметров Р& Р°° и а необходимо
решить систему уравнений
16 - 880 481
эг
ЗР
= 0.
(9.31)
Здесь
k
Y = S
< = 1
л.
t
л.+1
i
а */> ♦ (1 - а *)Р
0 оо
(9.32)
где л^ - число успешных испытаний изделия от (i - 1)-й до <-й
доработки (т.е. до первого отказа после (t - 1)-й доработки); k -
число проведенных доработок конструкции.
На основании системы (9.31) для определения искомых параметров
получаем систему уравнений вида
а*'-'
.• = _ /-» 1_______________________________________
00 k *i-\ ч
2 (1 - а1 *)
(9.33)
k
/=1L
P. + a1 l(P -Рл) -P a
j oo 0 oo
= 0,
где P^, a - статистические оценки параметров P°°, a; P. -
статистическая оценка вероятности безотказной работы системы, опреде-
ляемая по формуле
п.
Р. = ^ . <9.34>
1
При известных значениях PQ, Р^ и а необходимое число образцов для
отработки конструкции может быть определено на основе неравенств
482
(9.29) и (9.30). При этом следует задать требуемый уровень надежности
Р . Обычно этот уровень мало отличается от оптимального проектного
П<") *
значения Р . Отработка системы считается законченной, если
Р. > Р . (9.35)
< тр
где Р. - достигнутый уровень надежности после испытаний.
В соответствии с (9.29) достаточным условием выполнения требования
(9.35) является неравенство
п
Р <Р - (Р - Р)[а - (1 - а)Р 1 тр. (9.36)
тр оо оо 0 0
где п - число образцов, необходимое для отработки системы (равное
тр
числу испытаний).
Решение неравенства (9.36) относительно п устанавливает верхнюю
в
границу п требуемого числа испытаний для достижения заданного
уровня надежности:
Характер зависимости лв = п(Р ) при
ТР тр
различных значениях параметра а показан
следует, что максимальное число испытаний
Р = 0,1; Р = 0,98 и
0 оо
на рис.9.3, из которого
для достижения заданного
лв = п(Р У
тр тр
лн = п(Р )
Тр тр
483
уровня надежности существенно зависит от параметра а и с уменьшением
его убывает. Минимально допустимое число испытаний определяется
нижней границей уровня надежности (9.30). Откуда
<Р - Рп) - Р (1 - Р )ехр[(1 - а)(1 - Р )п ]
р . оо 0 оо___________________0 _______________00 тр
тр (Р - Р ) - ( 1 - Рл)ехр[(1 - а>(1 - Р Л >]
г оо О 0 оо тр
(н) 1
тр (1 - а)(1 - Р >
г оо
(9.38)
(9.39)
Вид зависимости от заданного уровня надежности представлен на
рис.9.4.
Таким образом, требуемое число испытании для достижения заданного
уровня надежности в процессе конструкторской отработки должно удов-
летворять условию
In
Р - Р 1 - Р
оо 0 тр
Р - Р 1 - Р
оо тр _____________О
( 1 - а)( 1 - Р )
(9.40)
При этом некоторое гарантированное число испытаний дает правая часть
неравенства (9.40).
§ 9.3. МЕТОДЫ ОПРЕДЕЛЕНИЯ УРОВНЯ НАДЕЖНОСТИ
И РАБОТОСПОСОБНОСТИ КОНСТРУКЦИЙ
ПО ДАННЫМ ИСПЫТАНИЙ
9.3.1 • Сущность статистических методов обработки
экспериментальных данных. Выборочная функция
Любое экспериментальное исследование завершается изложением ре-
зультатов, формулировкой выводов и выдачей рекомендаций. Анализ, сис-
тематизация и обобщение данных эксперимента являются весьма ответ-
ственной частью исследований. В основе такого анализа лежат методы
теории вероятностей, поскольку в реальной действительности, как из-
вестно, приходится иметь дело фне с истинным значением исследуемого
показателя си, а с его оценкой си = w + &и, где - случайная ошибка.
484
Причем это относится не только к вероятностным показателям надежнос-
ти, но и к детерминированным величинам, определяющим несущую способ-
ность конструкции, поскольку и в этом случае, даже если проводится
очень ограниченное число комплексных испытании, статистический анализ
имеет место, так как при обобщении результатов неизбежно учитываются
данные испытаний образцов, отражающие разброс механических характе-
ристик материала, геометрических параметров сечений, технологических
параметров и др.
Сущность статистических методов обработки экспериментальных данных
сводится к упорядочению экспериментальной информации (сглаживанию,
выравниванию, установлению закономерностей, исключению сомнительных
данных и т.п.) с помощью так называемой выборочной функции. Напомним
из теории вероятностей основные свойства этой функции.
В общем виде л-мерный случайный вектор
X = (Хг Х2...........X.........Хп) (9.41)
определяется л случайными величинами X., совокупность которых образу-
ет генеральную совокупность результатов измерений (наблюдений). Вы-
борка
х = (х., хЛ..х..... х )
12 / л
(9.42)
является реализацией случайного вектора X в данном проведенном испы-
тании. Если величины X. независимы друг от друга и имеют одну и ту же
функцию распределения F(x), то функция распределения X будет опреде-
ляться соотношением
FJx, х.........х ) = FJxJFJxJ ... FJx ). (9.43)
Л 1 2 Л A 1 A 2 Л Л
Отсюда следует, что каждая из рассчитанных по результатам наблюде-
ний (9.42) оценка представляет собой реализацию случайной величины,
которая от выборки к выборке может принимать различные значения. Та-
кая случайная величина
Г = Г(Х1, .....X......X) (9.44)
12 / Л
называется выборочной функцией.
Как всякая случайная величина выборочная функция имеет закон рас-
пределения (зависящий от закона распределения случайных величин X.),
знание которого совершенно необходимо при обработке статистических
485
данных. Ниже рассматриваются законы распределения выборочных функций,
особенно широко используемые на практике.
Нормальное распределение выборочной функшм. Если дано л случайных
величин X.(j = 1,л), каждая из которых имеет нормальное распределение
J 2
с математическим ожиданием д и дисперсией а , т.е. имеет ^есто выбор-
ка объема л из нормальной генеральной совокупности N(n, а ), то спра-
ведливы следующие положения.
1. Выборочная функция
- 1 П
X = — S X. (9.45)
Я /=1 1
распределена нормально с параметрами д и а /п.
2. Если случайная величина X распределена нормально с параметрами
2 .
д и а , то выборочная функция
Z = Х ~ М , (9.46)
О___
X
где
а_____= а/1гГ, (9.47)
X
также распределена нормально с параметрами д^ = 0 и = 1.
Для проведения исследовании с использованием выборочных функций
(9.45) и (9.46) в приложении приведены две таблицы. В табл. П.1 даны
значения функции
z
Fr(z) = —L
2
X
2
(9.48)
е
2я
где z = (х - д)/а; х - частное значение случайной величины X; д и о -
математическое ожидание и среднее квадратическое отклонение величины
X.
Функция распределения F^tz) (рис.9.5), как известно, является пол-
ной характеристикой случайной величины. С физической стороны она вы-
ражает связь между возможными значениями случайной величины и вероят-
486
ностыо их появления в данном исследовании, т.е. это вероятность реа-
лизации частного значения х случайной величины X.
В табл. П.2 приведены
квантили нормального распределения z?t опре-
деляемые из
соотношения
z
Р
2
1
О'
е
2
dx.
(9.49)
2ir
Квантиль
распределения (рис.9.6), как следует из (9.49), - это
числовая характеристика распределения случайной величины, соответ-
ствующая наперед заданной вероятности F^(-). В практических расчетах
эта характеристика используется исключительно широко.
Распределение Стъюдента. Это распределение имеет выборочная функ-
ция
Г =
где
а__
X
(9.50)
X
— X X: <г„ =
" /-! 1 Х
1
1 " 2
—2 (X - д)2 ;
/=1 '
(9.51)
Xj - случайная величина,
ческим ожиданием д.
имеющая нормальное распределение с математи-
fW
Рис. 9.5. Плотность f(Z) и функция
нормального распределения FjAz) слу-
чайной величины
Рис. 9.6. Квантиль нормального рас*
пределения
487
Выборочная функция (9.50) имеет непрерывную функцию распределения
fc+1
X X
f^x)dx =
F/x) =
(9.52)
где k = п - 1 - число степеней свободы; - коэффициент, зависящий
только от k.
Плотность распределения Ц(х) протабулирована. Значения квантилей
распределения Стьюдента приведены в табл. П.З приложения.
Распределение Такое распределение имеет выборочная функция
•2
(л - 1)0
2
X
(9.53)
2
а
где
♦2
а
п
- 2 (X - ХГ;
/=1 7
(9.54)
- 1 "
X = — S
" /=1
Функция распределения случайной величины х имеет вид
х
X..
/
(9.55)
k—2
F 2(Х)
X
f 2(x)dx = Df
X
k'
(9.56)
1
л -
х
2
х
О
О
где k = п - 1; - коэффициент, зависящий только от числа степеней
свободы k.
Характер функции f ^(х) показан на рис.9.7. Значения этой функции
Х 2
протабулированы. Квантили распределения х > необходимые для
практических расчетов, приведены в табл. П.4 приложения.
Распределение Фишера. Пусть по двум выборкам с объемами п и л
1 £
построены функции
488
Х2
1
"1
1
Я2
"1
2
7=1
Л2
2
•2
°1
♦2
°2
1
л,-1
Я1
£
7=1
(X,. - X,)2;
(9.57)
1
"г"*
П2
2
/=1
<х2/ - х/.
(9.58)
*1
ХЧ-
Если
малыю с
совокупности распределены Нор-
H. кроме того, выполняется соот-
соответствующие генеральные
параметрами д^, и д2> а %
2 2
ношение а( - а %, то выборочная функция
г *2 , *2
F = л, /л2 .
(9.59)
•2 х *2
где Oj > а2 ,
имеет непрерывную функцию распределения и ее плотность
(9.60)
где В - коэффициент, определяемый значениями k = л - 1; k =
11 £
\ -I-
Вид функции fp(x) показан на рис.9.8. Распределение (9.60) называ-
ется F-распределением. Квантили этого распределения приведены в табл.
П.5 приложения.
Рис. 9.7. Вид функции f ^(х)
X
Рис. 9.8. Вид функции fp(X)
489
9.3.2. Статистические модели
оценки результатов испытаний
Под статистической моделью оценки какого-либо показателя понимает-
ся математическое соотношение в виде выборочной функции, позволяющее
определять данный показатель по статистическим данным. На практике
используются следующие статистические модели: точечные и интервальные
оценки показателей, статистическая проверка гипотез о показателях и
функциях распределения, объединение статистической информации и др.
Точечные оценки параметров. Обозначим через w интересующий нас па-
раметр, истинное значение которого неизвестно. Предположим, что для
определения w проведено п независимых и свободных от постоянной пог-
решности испытаний и получены результаты
ю , ш.......w.......w , (9.61)
12 / п
точность которых характеризуется квадратическими отклонениями
а , а ..а ...а ,
и/ и/ w. w
12 / п
(9.62)
(9.63)
Задача состоит в том, чтобы по результатам испытаний (9.61) найти
такую выборочную функцию
w = f(w.t а *), / = 1,л,
' "I
которая может быть принята в качестве приближенного значения ш. Вели-
чину w , определяемую в соответствии с (9.63), принято называть то-
чечной оценкой (или* просто оценкой) этого параметра. *
Принимая w = w , мы допускаем случайную ошибку to = w - ш. Оче-
видно, что выборочная функция должна обеспечивать минимум ошибки to.
Это условие, как показывает практика, удовлетворяется при выполнении
следующих требований:
аналитическое выражение выборочной функции должно быть достаточно
простым и удобным для расчетов^
оценка искомого показателя w должна быть несмещенной;
- оценка от должна быть эффективной, т.е. обладать минимальной дис-
персией.
Чтобы удовлетворить первому требованию, целесообразно взять выбо-
рочную функцию (9.63) линейной, т.е.
490
♦ п ф
w = Е cjbv..
/=1 1 1
(9.64)
Второе условие будет выполнено, если имеет место равенство
ф л
M[tv ] = Е сЛ1[и>.] = и>,
/=1 1 1
где М - оператор математического ожидания. Поскольку
*
задачи результат ш. не содержит постоянных погрешностей,
= tv. При этом равенство (9.65) будет выполняться лишь при
(9.65)
по условию
то M[tv.] =
л
Е с;
’ Г
= 1.
/
Третье условие будет справедливо при
(9.66)
♦ " 2 ♦
D[(v ] = Е с ,D[w.] -» min,
/=» 1 1
где D - оператор дисперсии.
В итоге математическая модель для определения выборочной функции
будет иметь вид
п 2 ♦ П
Z - Ъ c.D[w.] —► min; Е с. = 1,
/=1 7 1 м1
где неизвестными величинами являются коэффициенты с..
Сформулированная нелинейная задача математического программирова-
ния наилучшим образом решается методом неопределенных множителей Лаг-
ранжа. Его применение приводит к следующему результату:
(9.67)
п
с = а/ Е q, (9.68)
' '/=1
где
q. = 1/D[(Z] = 1/а2ф. (9.69)
I 1 w
i
Подставив найденные значения с. в зависимости (9.64) и (9.66), по-
лучим искомые соотношения:
491
ф л ф л
w = Е qwJ Е о.; (9.70)
/=1 ' ' /=1 1
П
а = 1Л1 Е q. . (9.71)
Wy /=1 7
Определяемая по этим формулам оценка w является несмещенной и об-
ладает минимальной дисперсией а .
от
В частном случае, когда оценки (9.70) равноточны, т.е. а = а,
рабочие зависимости упрощаются:
= — 2 им а = а/1/Г. (9.72)
" /=1 ' W*
Достоинством точечных оценок являются их простота и удобство ис-
пользования при обработке больших массивов статистической информации.
С точечными оценками на практике часто обращаются так же, как с точ-
ными значениями величины. Однако это допустимо не всегда. Нельзя за-
бывать о том, что с помощью точечных оценок могут быть получены лишь
приближенные значения интересующих нас параметров. Их недостатком яв-
ляется то, что они не содержат информацию о границах интервала, в
пределах которого находится истинное значение исследуемого параметра,
т.е. с помощью точечц{ях оценок нельзя определить ошибку приближен-
ного равенства w ~ w . Ответ на этот вопрос может быть получен с по-
мощью интервальных (доверительных) оценок.
Интервальные оценки параметров вероятностного распределения. Ис-
ходная математическая модель для определения доверительных оценок па-
раметра w может быть представлена в следующем виде:
7 = Вер {w - е < w < w + е}, (9.73)
♦ ♦
где у - уровень достоверности оценки w ; w - точечная оценка
параметра е - погрешность оценки w (е > 0). Графическая
интерпретация этой модели показана на рис.9.9.
Поскольку оценка w является случайной величиной, границы интерва-
492
Рис. 9.9. Доверительные границы
интервальной оценки параметра
ла (w - е; w + е) очевидно так-
же случайные величины. Пределы
этого интервала называются дове-
рительными границами. Они обозна-
чаются символами ш (нижняя гра-
ница) и йГ (верхняя граница):
♦ —♦
де = де — е; w = w + е.
О w* w*+e w
(9.74)
С учетом (9.74) модель (9.73) может быть представлена в следующем
виде:
7 = Вер{и/ < w < йГ}. (9.75)
Случайный интервал (w_, w ) называется доверительным интервалом
для неизвестного параметра ш. Его ширина 2е. Вероятность
а = а + а=1-7 (9.76)
представляет собой вероятность ошибки утверждения, что истинное зна-
чение параметра w находится в интервале (и>_, w ), а а и а_- вероятно-
сти того, что истинное значение параметра w находится за верхним или
«
нижним пределом w соответственно.
Если распределение ошибок несимметрично, то а_* а. При симмет-
ричном распределении ошибок 6и> справедливо равенство
а_= Г= y = Г <1 - 7). (9.77)
Интервальные оценки, основанные на использовании модели (9.75),
называются двухсторонними интервальными оценками. При решении многих
практических задач используются и односторонние оценки:
нижняя интервальная оценка ш (рис.9.10,а)
7 = Вер{и» > иГ}; (9.78)
493
(9.80)
верхняя интервальная оценка от (рис.9.10,6)
у = Bep{w < w*}. (9.79)
Из рис.9.10 следует, что односторонние нижняя и верхняя оценки -
квантили уровней а и у соответственно. Следовательно, если известна
функция распределения точечной оценки w и имеется таблица квантилей
К , то
Р
— = ^А=а; W = ^=у’
Для двухсторонних оценок (рис.9.11) нижний предел интервала иГ
определяется с помощью таблицу квантилей по входу р = (1 - у)/2 = а/2
и верхний w - по входу р = (1 ♦ у)/2 = 1 - а/2; р - вероятность,
которой соответствует квантиль К?.
Таким образом, доверительная оценка параметра может быть получена
с помощью квантилей распределения точечной оценки w . Для этого нужно
определить функцию распределения указанной оценки, что может быть
сделано с помощью ранее рассмотренных стандартных распределений
выборочных функций. Рассмотрим наиболее типичные случаи.
1. Пусть для определения искомого параметра w произведено п
независимых равноточных и свободных от постоянной погрешности
494
испытаний, результаты которых представляют собой ряд оценок ш. с
постоянным средним квадратическим отклонением о . Эти результаты,
w
очевидно, можно рассматривать как выборку объема п из бесконечной
генеральной совокупности, дисперсия которой известна. В этом случае
♦
математическое ожидание w и среднее квадратическое отклонение о
w
определяются по формулам (9.72). При этом выборочная функция
Z= — ~ -- (9.81)
о
от
имеет нормальное распределение (см. (9.46)). Интервальные оценки в
соответствии с (9.81) находятся из соотношения
w = w tzo . (9.82)
? w
где z - квантиль нормального распределения, определяемая с помощью
табл. П.2 приложения. Входом в таблицу, как указано выше, является
порядок квантили р = (1 ♦ у)/2, где достоверность у является заданной
величиной.
2. Результаты ш., как и в первом случае, рассматриваются как
2
выборка п из бесконечной генеральной совокупности, но дисперсия а
неизвестна. Тогда математическое ожидание w определяется, как и
ранее, по первой формуле (9.72), а в формуле для а ф неизвестная (по
от
условию) величина а должна быть заменена ее оценкой
а* = —2 (ш* - )2. (9.83)
П ’ 1 /=1 7
При этом выборочная функция
Т = (ш* - иО/а*ф (9.84)
w
имеет распределение Стьюдента. Интервальные оценки находятся из соот-
ношения
495
w = w ± t a . (9.85)
7 w
где t - квантиль распределения Стьюдента, определяемая по табл. П.З.
Входами в эту таблицу являются порядок квантили р и число степеней
свободы k = п - 1.
3. В рассмотренных случаях интервальные оценки относились к
математическому ожиданию w исследуемого параметра от. При неизвестной
дисперсии а интервальные оценки целесообразно распространять и на
средние квадратические отклонения. В том случае, когда точечная оцен-
ка о определяется по формуле (9.83), интервальная оценка может быть
найдена с помощью неравенства
a* J < о < a* J 0.86)
где х их ~ квантили х распределения, определяемые по табл. П.4
7 _7
—♦2
приложения. При нахождении х входами в таблицу являются р = (1 +
У *2
+ у)/2 и k = п - 1, а при определении х^ соответственно р = (1 -
- у)/2 и k = п - 1.
9.3.3. Математические модели объединения информации
В практике экспериментальной отработки конструкций ЛА часто встре-
чаются случаи, когда для определения оценки интересующего нас пара-
метра w имеется не один, а несколько источников информации, и возни-
кает необходимость определения оценки w с учетом информации, давае-
мой всеми источниками. Так, например, для оценки надежности ЛА на
стадии государственных испытаний имеются данные о надежности, полу-
ченные на стадиях проектирования и конструкторской отработки ЛА, а
также данные, полученные непосредственно в процессе государственных
испытаний. Возникает вопрос: как использовать указанную информацию.
В общем виде задача объединения информации формулируется следующим
образом. Пусть для определения w имеется т частных оценок w.t точ-
ность которых характеризуется средними квадратическими отклонениями
496
Из
выше,
х . Оценки w. могут быть найдены путем непосредственной обработки
w.
i
экспериментальных данных или получены аналитическими методами. Требу-
ется найти общую точечную и интервальную оценки искомого параметра.
условий несмещенности оценки и минимума дисперсии, как показано
следует
tv
т т
= Z <, ш /I,
1=1 1=1
т ♦
а ф = 1/4 Е q.
w < = il
(9.87)
(9.88)
от = w ± z а
7 W
(9.89)
<7* = 1А*ф.
W.
(9.90)
где w - общая оценка параметра; о - среднее квадратическое откло-
• • w
нение оценки w ; w. - частная оценка параметра даваемая i-м источ-
информации; о - среднее квадратическое отклонение частной
ником
Wi
w q. - весовой коэффициент частной оценки z^ - коэффи-
достоверности интервальной оценки; у - уровень достоверности
оценки
циент
интервальной оценки.
Необходимым условием использования приведенных соотношений являют-
ся независимость частных оценок отсутствие в них постоянной (пов-
торяющейся) ошибки и принадлежность всех частных оценок к одной и той
же генеральной совокупности. Независимость частных оценок определя-
ется экспертным путем или с помощью специальных методов корреляцион-
ного анализа. Отсутствие постоянных ошибок и принадлежность частных
оценок к одной и той же генеральной совокупности определяются метода-
ми статистйческой проверки гипотез. Рассмотрим суть этих методов.
497
Статистическая проверка гипотез производится для закона распреде-
ления генеральной совокупности. По выборке информации делается опре-
деленная гипотеза о неизвестном вероятностном законе распределения
F(w) и его параметрах, которая обозначается символом (основная ги-
потеза). Далее (по мере необходимости) проверяется справедливость
этой гипотезы относительно альтернативной гипотезы Н*, которая может
быть либо простой, когда устанавливается одно альтернативное решение,
либо сложной, когда рассматривается несколько альтернативных решений.
Здесь нужно уяснить различие между проверкой гипотез и процедурой
оценивания параметров. При оценивании нужно определить, каково значе-
ние искомого параметра, а при проверке гипотезы необходимо выяснить,
существенно ли отличается значение параметра от гипотетического, т.е.
от значения, предписанного гипотезой.
Предположим, что нас интересует конкретный параметр w генеральной
совокупности. Примем в качестве основной гипотезы предположение, что
этот параметр равен Если эта гипотеза проверяется дополнительно с
помощью простой альтернативной гипотезы, например то эту проверку
описывают следующим образом:
Н = w - основная гипотеза;
о о
Н :ш = - альтернативная гипотеза.
Если основная гипотеза проверяется с помощью сложной альтернатив-
ной гипотезы, то
Н = w - основная гипотеза;
о о
Н * w или Н -.w > w , или Н < w - альтернативная
а о а о а о
гипотеза (возможны и другие альтернативы).
Правило, по которому отвергается или не отвергается основная гипо-
теза Н , основывается на статистическом критерии, представляющем со-
о
бой количественный показатель меры рассогласования между выбранной
теоретической функцией Т и результатом статистического эксперимента.
Функция Г, называемая статистикой критерия, является случайной вели-
чиной.
Если закон распределения Т известен, то может быть найдено такое
значение что при Т > гипотеза отвергается. Если же имеет
498
место отношение Г < то гипотеза не отвергается. В соответствии
с этим значение определяется из условия
а = Вер{|Г| >Г0}, (9.91)
где а = 1 - 7 - уровень значимости гипотезы Н .
о
В качестве статистики Т используются выборочные функции, рассмот-
ренные в п. 9.3.1. На основе этих функции проверка гипотезы о принад-
лежности двух оценок и к одной и той же генеральной совокупнос-
ти производится с использованием статистического критерия
z* = |иГ - fiZl/Ja2.., * а2 > z , (9.92)
1 2
или
/* = |w* - wTl/Jff2* * а2 > t l, (9.93)
1 1 2* ♦ ♦ a,k
ГЫ гы
1 2
где z& и J* “ коэффициенты значимости гипотезы
определяемые по табл. П.2 и П.З приложения соответственно; и -
математические ожидания оценок и
Если выполняется церавецство (9.92) или (9.93), то гипотеза о при-
надлежности оценок и к одной и той же генеральной совокупности
отвергается. В противном случае указанная гипотеза не отвергается (но
и не подтверждается!). Если неравенство (9.92) или (9.93) не выполня-
ется, то вычисляют вероятность
и по значению а делают заключение о возможности принятия или неприня-
тия выдвинутой гипотезы (т.е. вероятность а - это уровень риска при
отклонении гипотезы). Значение функции берется из табл. П.1 прило-
жения. ,
Формула (9.94) применяется в случае,
когда проверка гипотезы о
499
принадлежности двух оценок к одной и той же генеральной совокупности
производится по критерию (9.92). Если же проверка указанной гипотезы
производится с помощью критерия (9.93), то в случае неотклонения ги-
потезы величину а следует рассчитывать по формуле
а = Sy,||ov* - w*|/Ja2* ♦ 1. (9.95)
пи п» *
1 2
где Sj,( •) - табличная функция Стьюдента.
Условия применения критериев (9.92) и (9.93) те же, что и моделей
(9.82) и (9.85). При определении коэффициентов z^ и входом в
табл. П.2 и П.З приложения служит квантиль р = 1 - а/2. При использо-
вании критерия (9.93) число степеней для входа в табл. П.З приложения
определяют по формуле
k = пх * п2 - 2, (9.96)
где Л| и л2 - числа результатов испытаний, по которым определялись
оценки W] и
В том случае, когда возникает необходимость проверки принадлежнос-
ти к одной и той же генеральной совокупности более двух оценок, необ-
ходимо произвести попарную оценку принадлежности к одной и той же ге-
неральной совокупности всех оценок. Данные оценки принадлежат к одной
и той же генеральной совокупности тогда и только тогда, когда все они
попарно принадлежат к одной и той же генеральной совокупности.
Порядок объединения двух источников информации с применением про-
верки гипотезы = W2 покажем 113 примере.
Пример. По результатам конструкторских испытаний прибора определе-
на оценка среднего времени безотказной работы
т* = 200 ч и а ф = 8 ч.
Т1
По результатам государственных испытаний получено
тл = 220 ч и а ж = 15 ч.
2 ♦
Т2
В технических требованиях задано время безотказной работы прибора
500
> 200 ч. Требуется оценить соответствие надежности прибора уста-
новленным требованиям.
Решение. 1. Проверяем гипотезу о принадлежности оценок г и
к одной и той же генеральной совокупности. Эту проверку производим
в следующем порядке:
вычисляем выборочную функцию по формуле (9.92):
г = |200 - 220|/]в2 * 152 = 1,17;
задаемся уровнем значимости гипотезы (уровнем риска) а = 0,10,
вычисляем р = 1 - а/2 = 0,95, по значению р по табл. П.2 приложения
определяем z& = 1,64;
устанавливаем, что z < т.е. в соответствии с критерием (9.92)
гипотеза не отвергается.
2. В соответствии с формулой (9.87) определяем общую оценку
времени безотказной работы
♦ 2 *2
Т1а ♦ * Т2а ♦
т т 2 2
♦ 2 1 200’15 * 220’8
т = ---------------- = ------------------ s 204 ч.
3. В соответствии с формулой (9.88) определяем среднее квадратиче-
ское отклонение оценки т = 204 ч:
а а
т т
1 2 815 _
а ф = --------------= -------------= 7 ч.
' J.2. . J.2 . is2
Т| Т2
4. По формуле (9.89) определяем интервальную оценку времени безот-
казной работы прибора:
т = 204 ± 1,64-7 = 204 ± 11,5 ч;
192,5 < т < 215,5 ч.
Поскольку заданное в технических требованиях время г = 200 ч на-
501
ходится в доверительном интервале (192,215 ч), гипотеза о выполнении
требований к надежности прибора не отвергается. Вероятность выполне-
ния этого требования по имеющейся информации
Р(т > 200) = 200 ~ 204 ] = 0,28.
ПРИЛОЖЕНИЕ
Значешя фужцш Fj.(z) =
Z 0 0.01 0.02 0,03 0.04
0,0 0.5000 0.5040 0.5080 0.5120 0.5160
0,1 5398 5438 5478 5517 5557
0,2 5793 5832 5871 5909 5948
0.3 6179 6217 6255 6293 6333
0.4 6554 6591 6628 6664 6700
0.5 6915 6950 6985 7019 7054
0.6 7257 7291 7324 7356 7389
0.7 7580 7611 7642 7673 7703
0.8 7881 7910 7939 7967 7995
0.9 8159 8186 8212 8238 8264
1.0 0.8413 0,8437 0.8461 0.8485 0.8508
1.1 8643 8665 8686 8708 8729
1.2 8849 8869 8888 8906 8925
1.3 9032 9049 9066 9082 9099
1.4 9192 9207 9222 9236 9251
1.5 9332 9347 9357 9370 9384
1.6 9452 9463 9474 9484 9485
1.7 9554 9564 9573 9582 9591
1.8 9641 9648 9656 9664 9671
1.9 9713 9719 9726 9732 9738
2.0 0,9772 0,9778 0,9783 0.9788 0,9793
2.1 9821 9826 9830 9834 9838
2,2 9861 9864 9868 9871 9874
2.3 9893 9896 9898 9901 9904
2.4 9918 9920 9922 9924 9927
502
Следовательно, на основании результатов обработки имеющейся инфор-
мации лишь с вероятностью 0,28 можно утверждать, что надежность при-
бора соответствует установленным требованиям. Как видим, достовер-
ность гипотезы Н :т > 200 ч низкая. Необходимо продолжить испытания.
Таблица П. 1
0,05 0,06 0,07 0,08 0,09
0,5199 0,5239 0,5279 0,5319 0,5359
5596 5636 5675 5714 5753
5987 6026 6064 6103 6141
6368 6406 6443 6480 6517
6736 6772 6808 6844 6879
7088 7123 7157 7190 7224
7421 7454 7486 7517 7549
7734 7764 7793 7823 7852
8023 8051 8078 8106 8133
8289 8315 8340 8365 8389
0,8531 0,8554 0,8577 0,8599 0,8621
8749 8770 8790 8810 8830
8943 8962 8980 8997 9015
9115 9131 9149 9162 9177
9265 9279 9292 9306 9319
9394 9406 9418 9429 9441
9505 9515 9525 9535 9545
9599 9608 9616 9625 9633
9678 9686 9693 9699 9707
9744 9750 9756 9761 9767
0,9798 0,9803 0,9807 0,9812 0,9817
9842 9846 9850 9854 9857
9878 9881 9884 9887 9890
9906 , 9909 9911 9913 9916
9929 9930 9932 9934 9936
503
Z 0 0.01 0.02 0.03 0.04
2,5 9938 9940 9941 9943 9945
2.6 9953 9955 9956 9957 9958
2.7 9965 9966 9967 9968 9969
2.8 9974 9975 9976 9977 9977
2.9 9981 9982 9982 9983 9984
3.0 0.9986
3.1 9990
3.2 9993
Кванпим z^ нормального распределения
Таблица П.2
р г Р р г Р р Z р
0.50 0 0.69 0,496 0.88 1.175
0.51 0.025 0,70 0.524 0.89 1,226
0.52 0.050 0.71 0,553 0.90 1.282
0.53 0.075 0.72 0,583 0.91 1.341
0.54 0.100 0.73 0,613 0,92 1,405
0.55 0.126 0.74 0,643 0.93 1.476
0.56 0.151 0.75 0,674 0,94 1.555 -
0.57 0.176 0.76 0.706 0,95 1,645
0.58 0.202 0.77 0,739 0.96 1.751
0.59 0.228 0.78 0.772 0.97 1,881
0.60 0.253 0.79 0,806 0.975 1.960
0.61 0.279 0,80 0.842 0.98 2.054
0.62 0.306 0,81 0,878 0,99 2.397
0.63 0.332 0,82 0,915 0.995 2,572
0.64 0.358 0.83 0.954 0.999 3,100
0.65 0.385 0.84 0,994
0.66 0.412 0.85 1,036
0,67 0.440 0,86 1,080
0.68 0.468 0.87 1,126
504
Продолжение табл. П. 1
0.05 0.06 0.07 0.08 0.09
9946 9948 9949 9951 9952
9960 9961 9962 9963 9964
9970 9971 9972 9973 9974
9978 9978 9980 9980 9981
9984 9985 9985 9986 9986
Таблица П.З Квантили распределения Стъюдента
k Р k р
0,95 0,975 0.99 0.995 0.95 0,975 0,99 0.995
1 6.314 12.701 31.821 63.657 14 1.761 2.145 2.624 2.977 5 2.015 2.571 3.365 4.032 16 1.746 2.120 1.583 2.878 6 1.943 2.447 3.143 3,707 18 1.734 2.101 2,552 2.921 7 1,895 2,365 2.998 3,499 20 1.725 2.086 2,528 2.845 8 1.860 2.306 2,896 3.355 22 1,717 2.074 2,508 2.819 9 1.833 2,262 2.821 3,250 30 1.697 2,042 2.457 2.750 10 1,812 2,228 2.764 3,169 оо 1,645 1.960 2,236 2.576 12 1,782 2.179 2.681 3.055 2 2 Таблица П.4 Квантили Хр^ распределения х
k р
0,01 0,05 0.1 0,90 0.95 0,99
1 0.00016 0,004 0,716 2,71 3.84 6,63 2 0,02 0,10 0,211 4,61 6.99 9,21 3 0,12 0,32 0,594 6,25 7,81 11.3 4 О.ЗО' 0.71 1.06 7,78 9,49 13,3
505
Продолжение табл. П.4
k р
0.01 0.05 0.1 0.90 0.95 0.99
5 0.55 1.15 1.61 9.24 11.1 15.1
6 0.87 1.64 2.20 10.6 12.6 16.8
7 1.24 2.17 2.83 12.0 14.1 18.5
8 1.65 2.73 3.49 13.4 15.5 20.1
9 2.09 3.33 4.17 14.7 16.9 21.7
10 2.56 3.94 4.87 16.0 18.3 23.2
11 3.05 4,57 5,58 17.3 19.7 24.7
12 3.57 5.23 6.30 18.5 21.0 26.0
13 4.11 5.89 7.04 19.8 22.4 27.7
14 4.66 6.57 7.79 21.1 23.7 29.1
15 5.23 7.26 8.55 22.3 25.0 30.6
16 5.81 7.96 9.31 23.5 26.3 32.0
17 6.41 8.67 10.1 24.8 27.6 33.4
18 7.01 9.39 10.9 26.0 28.9 34.8
19 7.63 10.1 11.7 27.2 30,1 36.2
20 8.26 10.9 12.4 28.4 31.4 37,6
21 8.9 11.6 13.2 29.6 32.7 38.9
22 9.54 12.3 14.0 30.8 33.9 40.3
23 10.2 13.1 14.8 32.0 35.2 41.6
24 10.9 13.8 15.7 33.2 36.4 43.0
25 11.5 14.6 16.5 34.4 37.7 44.3
26 12.2 15.4 17.3 35.6 38.9 45.6 .
27 12.9 16.2 18.1 36.7 40.1 47.0
28 13.6 16.9 18.9 37.9 41.3 48.3
29 14.3 17.7 19.8 39.1 42.6 49.6
30 15.0 18.5 20.6 40.3 43.8 50,9
506
СПИСОК ЛИТЕРАТУРЫ
1. АВДОНИН А. С., ФнгуровСКИЙ В. И. Расчет на прочность летатель-
ных аппаратов. М. : Машиностроение, 1985. 440 с.
2. Автоматизация поискового конструирования (искусственный интел-
лект в машинном проектировании)/А. И. Половинкин, Н. К. Бобков,
Г. Я. Буш и др. ; Под ред. А. И. Половинкина. М. : Радио и связь, 1981.
344 с.
3. Балабух Л. И., Алфутов Н. А., Уаокин В. И. Строительная механи-
ка ракет. М. : Высшая школа, 1984. 391 с.
4. Бирюк В. И., Липин Е. К., Фролов В. М. Методы проектирования
конструкций самолетов. М. : Машиностроение, 1977. 232 с.
5. Гиммельфарб А. Л. Основы конструирования в самолетостроении.
М. : Машиностроение, 1980. 367 с.
6. Голубев И. С. Аналитические методы проектирования конструкций
крыльев. М.: Машиностроение, 1970. 287 с.
7. Голубев И. С. Соизмерение технического уровня и эффективности
при проектировании конструкций летательных аппаратов. М. : МАИ, 1986.
90 с.
8. Голубев И. С., Андреев В. В., Нестеренко Г. С. Автоматизация
проектирования конструкций ЛА. М. : МАИ, 1986. 78 с.
9. Гребеньков О. А. Конструкции самолетов. М. : Машиностроение,
1984. 239 с.
10. ДЖОНС Дж.К. Методы проектирования/ Пер. с англ. М. : Мир, 1986.
326 с.
И. Егер С. М., Лнсейцев Н. К., Самойлович О. С. Основы автомати-
зированного проектирования самолетов. М. : Машиностроение, 1986.
232 с.
12. Ендогур А. И., Вайнберг М. В., Иерусалимский К. М. Сотовые
конструкции. М. : Машиностроение, 1986. 199 с.
13. Зарубин В. С. Температурные поля в конструкции летательных ап-
паратов. М. : Машиностроение, 1978. 82 с.
14. Инженерные методы проектирования конструкций корпусов ЛА и их
отсеков/ И. С. Голубев, Б. М. Авхнмович, Р. Е. Либерзон и др.; Под
ред. И. С. Голубева. М. : МАИ. 1987. 90 с.
15. Инженерные методы проектирования крыльев летательных аппара-
тов/ И. С. Голубев, А. В. Самарин, И. К. Туркин, И. А. Егоров. М. :
МАИ. 1988. 80 с.
16. Керимов 3. Г., Багиров С. А. Автоматизированное проектирование
конструкций. М.: Машиностроение, 1985. 224 с.
507
17. КОМАРОВ В. А. Проектирование силовых схем авиационных констру-
кций// Актуальные проблемы авиационной науки и техники. М. : Машино-
строение. 1984. С. 114—129.
18. Конструкция н отработка РДТТ/ А. М. Ваннцкнй. В. Т. Волков.
И. Г. Волковицкнй и др.; Под ред. А. М. Ваницкого. М.: Машинострое-
ние, 1980. 230 с.
19. Конструкция и прочность самолетов/ В. Н. Зайцев. Г. Н. Ночев-
кнн, В. Л. Рудаков и др. Киев: Вища школа. 1978. 486 с.
20. Кузнецов А. А. Надежность конструкции баллистических ракет.
М.: Машиностроение. 1978. 256 с.
21. Лещин А. В., Попов Ю. И., Черняков Н. С • Конструирование уз -
лов. М. : МАИ. 1985. 85 с.
22. ЛИЗИН В. Т., ПЯТКИН В. А. Проектирование тонкостенных констру-
кций. М.: Машиностроение. 1985. 344 с.
23. Моисеев Н. Н. Математические задачи системного анализа. М. :
Наука. 1981. 488 с.
24. ОСНОВЫ проектирования и изготовления конструкций летательных
аппаратов из композиционных материалов/ В. В. Васильев, А. А. Добря-
ков. А. А. Дудченко и др. М. : МАИ. 1985. 218 с.
25. Основы теории и расчета жидкостных реактивных двигателей/
А. П. Васильев. В. М. Кудрявцев. В. А. Кузнецов и др. ; Под ред.
А. П. Васильева. М. : Высшая школа. 1983. 703 с.
26. Панин В. Ф. Конструкции с сотовым заполнителем. М. : Машино-
строение, 1982. 152 с.
27. Пономарев Б. А. Настоящее и будущее авиационных двигателей.
М. : Воениздат. 1982. 238 с.
28. Проектирование конструкций самолетов/ Е. С. Войт, А. И. Ендо-
гур, 3. А. Мелик-Саркисян, И. М. Алявдин. М. : Машиностроение. 1987.
416 с.
29. Проектирование оптимальных конструкций. Сб. трудов КуАИ. вып.
ХХХП. 1968. 154 с.
30. Проектирование самолетов/ С. М. Егер. В. Ф. Мишин. Н. К. Ли-
сейцев и др. ; Под ред. С. М. Егера. М. : Машиностроение. 1983.
616 с.
31. Пригода Б. А., Кокунько В. С. Обтекатели антенны летательных
аппаратов. М. : Машиностроение. 1978. 120 с.
32. Решетчатые крылья/ С. М. Белоцерковский, Л. А. Одновол,
Ю. 3. Сафин н др.; Под ред. С. М. Белоцерковского. М. : Машинострое-
ние. 1985. 320 с.
33. Статические испытания на прочность сверхзвуковых самолетов/
508
A. H. Баранов, Л. Г. Белозеров, Ю. С. Ильин и др. М. : Машиностроение,
1974. 344 с.
34. Фахрутдинов И. X., Котельников А. В. Конструкция и проектиро-
вание ракетных двигателей твердого топлива. М. : Машиностроение, 1987.
328 с.
35. Червоный А. А., Лукыпценко В. И., Котин Л. В. Надежность слож-
ных систем. М. : Машиностроение, 1976. 288 с.
36. Шейнин В. М •, КОЗЛОВСКИЙ В. И. Весовое проектирование и эффек -
тивность пассажирских самолетов. М. : Машиностроение, 1984. 552 с.
ОГЛАВЛЕНИЕ
Предисловие.................................................................. 3
Раздел I. Методология проектирования конструкций летательных
аппаратов.................................................................... 5
Глава 1. Общая постановка задачи проектирования конструкций.
Основные требования к конструкциям летательных аппаратов..................... 5
§ 1.1. Основные этапы создания ЛА и задачи, решаемые на каждом
этапе 5
§ 1.2. Особенности этапа конструкторских разработок................ 9
§ 1.3. Системный подход — общеметодологическая основа проекти-
рования 15
§ 1.4. Общая постановка задачи проектирования конструкций ЛА. . 21
§ 1.5. Измерительный механизм эффективности и технического
уровня ЛА. Общие требования............................................. 26
§ 1.6. Измерители технического уровня ЛА.......................... 29
§ 1.7. Целевая отдача ЛА и ее измерение........................... 36
§ 1.8. Надежность ЛА и его систем................................. 41
§ 1.9. Основные требования к конструкциям ЛА...................... 46
Глава 2. Принципиальные основы автоматизированного проекти-
рования конструкций ЛА..................................................... 52
§ 2.1. Цели и задачи автоматизации проектно-конструкторских
работ 52
§ 2.2. Области первоочередной автоматизации..................... 56
§ 2.3. Принципы построения и структура САПР..................... 58
§ 2.4. Особенности автоматизированных систем конструирования.. 70
509
Глава 3. Теоретические основы информационной технологии
проектирования конструкций.................................................. 89
§3.1. Основные слагаемые теории проектирования конструкций . . 89
§ 3.2. Выбор опорных вариантов конструкции............................. 97
§ 3.3. Выбор технического решения и оптимизация проектных
параметров конструкции................................................... ПО
§ 3.4. Задачи конструирования......................................... 131
Раздел П. Инженерные методы проектирования конструкций ЛА...................145
Глава 4. Анализ условий работы конструкций ЛА.............................. 145
§4.1. Общая характеристика условий функционирования ЛА....... 145
§ 4.2. Нагрузки, действующие на ЛА................................... 147
§ 4.3. Климатическое и биологическое воздействие внешней среды
на ЛА ............................................................... 157
§ 4.4. Внешние температурные условия работы ЛА..................... 162
Глава 5. Проектирование конструкций корпусов ЛА.................... 172
§ 5.1. Анализ конструктивных схем корпусов ЛА........................ 172
§ 5.2. Инженерные методы проектирования бесстриигерных корпу-
сов 181
§ 5.3. Особенности проектирования конструкций антенных обтека-
телей 198
§ 5.4. Проектирование отсеков корпусов, подкрепленных силовым
набором................................................................. 210
§ 5.5. Задачи проектирования теплозащитных покрытий силовых
конструкций............................................................. 221
§ 5.6. Конструирование стыков отсеков корпуса........................ 227
Глава 6. Проектирование конструкций крыльев, рулей и меха-
низмов управления.......................................................... 237
§6.1. Конструкции несущих поверхностей и работа их элементов. 237
§ 6.2. Практические рекомендации по проектированию конструкций
несущих поверхностей.................................................... 268
§ 6.3. Проектировочные модели учета аэроупругих явлений, осно-
ванные на балочной теории.............................................. 297 *
§ 6.4. Элементы конструкций несущих поверхностей и их проекти-
рование 309
§ 6.5. Конструкции и особенности проектирования органов управ-
ления 328
§ 6.6. Механизмы управления и их элементы........................... 337
510
Глава 7. Проектирование конструкций двигательных установок. . 343
§7.1. Общие сведения о двигательных установках...................... 343
§ 7.2. Ракетные двигатели твердого топлива........................... 350
§ 7.3. Газодинамическое проектирование РДТТ.......................... 360
§ 7.4. Проектирование корпуса РДТТ................................... 378
§ 7.5. Проектирование конструкций двигательных установок с ЖРД 395
§ 7.6. Проектирование конструкций двигательных установок с ВРД 418
Раздел Ш. Принципы и методы обеспечения надежности конструкций.439
Глава 8. Экспериментальные методы конструкторской отработки. 439
§8.1. Содержание экспериментальной отработки конструкций и
основные виды испытаний ЛА............................................. 439
§ 8.2. Методы и техника воспроизведения нагрузок..................... 445
§ 8.3. Моделирование аэродинамического нагрева....................... 452
§ 8.4. Методы и технические средства измерений....................... 460
§ 8.5. Автоматизация экспериментальных исследований.................. 466
Глава 9. Методы нормирования и обеспечения надежности кон-
струкций ЛА............................................................... 469
§9.1. Нормирование надежности конструкций ЛА........................ 469
§ 9.2. Обеспечение надежности конструкции ЛА в процессе отра-
ботки 479
§ 9.3. Методы определения уровня надежности и работо-
способности конструкций по данным испытаний............................ 484
Приложение................................................................ 502
Список литературы......................................................... 507
511
Раз
г л
Учебник,
Голубев Иван Семенович,
Самарин Александр Васильевич
ПРОЕКТИРОВАНИЕ КОНСТРУКЦИЙ
ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Редактор И. Е. Елизарьев
Художественный редактор В. В. Лебедев
Технический редактор Н. В, Павлова
Корректор Е.В. Сабынич
ИБ № 6076
Г HH3I Сдано в набор 25.07.89. Формат 60хв8 1/16. Усл.печ.л. 31,36. Тираж 3000 экз. Подписано । Бумага офсетная № 2. Усл. кр. -отт. 31,36. Заказ№880. । печать 05.12.90. Печать офсетная Уч.-изд.л. 29,73 Цена 4 р.
Ордена Трудового Красного Знамени издательство "Машиностроение". 107076, Москва, Стромынский пер., 4
Отпечатано в московской типографии № 8
Государственного комитета СССР по печати,
101898, Москва, Хохловский пер., 7
с оригинала-макета, изготовленного в издательстве "Машиностроение"
на персональных ЭВМ по программе "Астра-Н", разработанной НИИЦЭВТ
51(